












































































































































Author: Мхитарян А.М. Лазнюк П.С. Максимов В.С. Межлумян Р.А. Тотиашвили Л.Г. Баскакова А.Г.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты авиация динамика аэродинамика авиатехника авиационная промышленность издательство машиностроение
Year: 1978




ДИНАМИКА
ПОЛЕТА
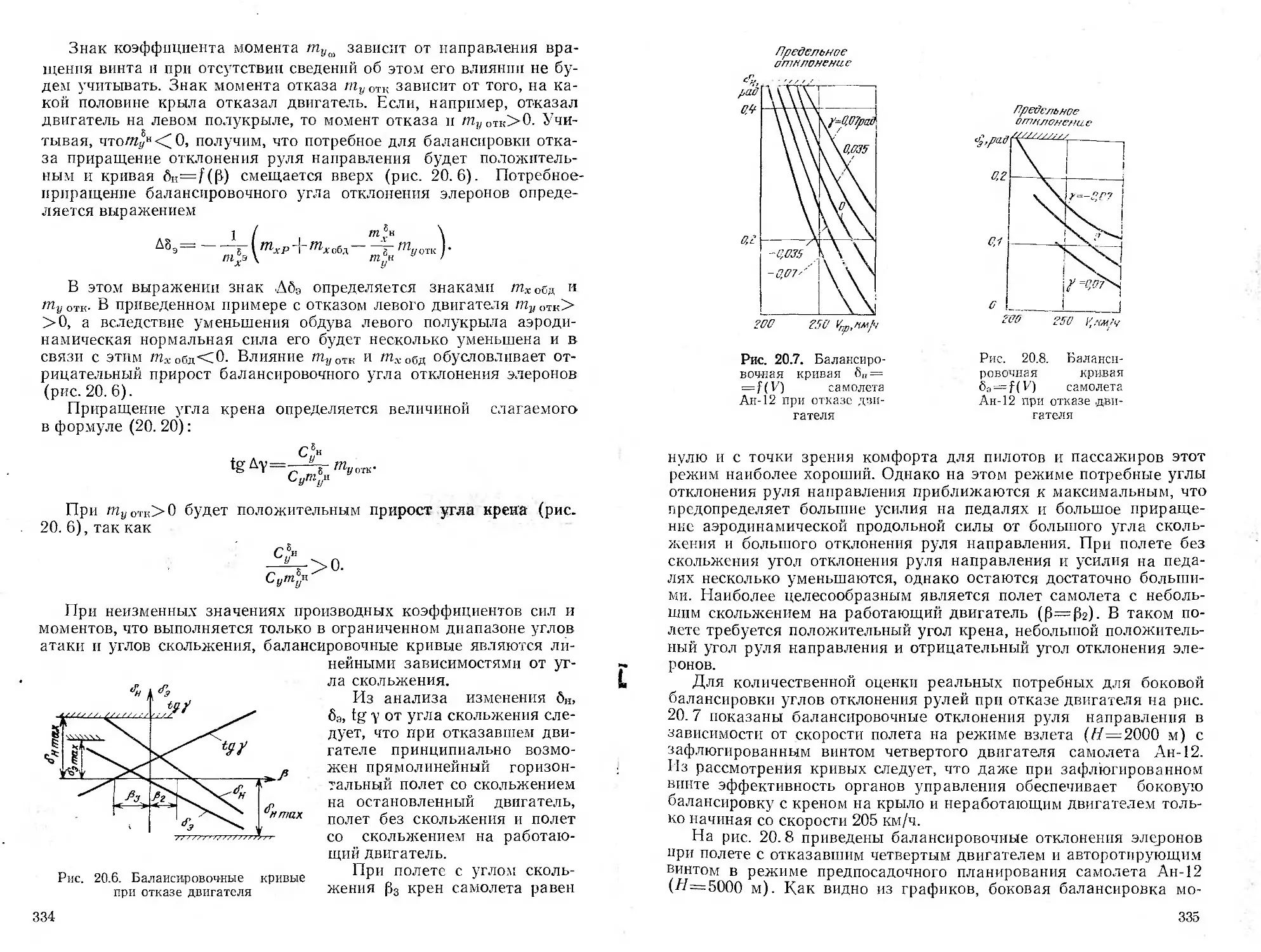
ДИНАМИКА
ПОЛЕТА
Под редакцией д-ра техн, наук проф. А. М. Мхитаряна
ИЗДАНИЕ ВТОРОЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено
Министерством высшего и среднего специального образования СССР -
в качестве учебника
для студентов авиационных специальностей
высших учебных заведений
Москва «Машиностроение» 1978
-&БК-39.52—
Д46 6
УДК 629.7.015 (075.8)
Авторы: А. М. Мхитарян, П. С. Лазнюк, В. С. Максимов,
Р. А. Межлумян, Л. Г. Тотиашвили, А. Г. Баскакова
Научный редактор д-р техн, наук проф. Н. М. Лысенко
Рецензент кафедра «Аэродинамика и конструкции летательных аппаратов»
Академии гражданской авиации
Динамика полета: Учебник для авиационных вузов/
Д46 А. М. Мхитарян, П. С. Лазнюк, В. С. Максимов и др. —
2-е изд., перераб. и доп. — М.: Машиностроение, 1978. — 424 с.,
ил.
В пер.: I р. 30 к.
В учебнике рассмотрены уравнения движения самолета, характеристики гори-
зонтального полета, набора высоты и снижения, криволинейного движения, взлета
и посадки, дальности и продолжительности полета, а также вопросы устойчивости и
управляемости самолета и вертолета.
Во втором издании (1-е изд. 1971 г.) многие главы переработаны и дополне-
ны, в него включен новый материал по устойчивости и управляемости самолета при
взлете и посадке, в особых ситуациях, устойчивости и управляемости самолета при на-
личии автоматических устройств, динамике самолета в турбулентной атмосфере,
принципам контроля режимов летной эксплуатации.
Кроме своего прямого назначения книга может быть рекомендована инженерам
гражданской авиации и авиационной промышленности.
31808-182 ББК 39.52
----------—182-78
038(01 )-78 6Т5.1
ИБ № 1870
Арташес Мелконович Мхитарян, Петр Семенович Лазнюк, (
Валентин Сергеевич Максимов, Рафик Арташесович Межлумян,
Леван Георгиевич Тотиашвили, Алла Григорьевна Баскакова
ДИНАМИКА ПОЛЕТА
Редакторы В. Г. Гатагогу и В. В. Корженевская
Технический редактор В. И. Орешкина
Корректор Е. П. Карнаух
Переплет художника А. Ю Литвиненко
Сдано в набор 19.06.78. Подписано в печать 17.10.78. Т-18038
Формат 60X907ie. Бумага типографская № 1 Гарнитура литературная.
Печать высокая. Усл. печ. л. 26,5. Уч.-изд. л. 28,35.
Тираж 8500 экз. Заказ 776.Цена 1 р, 30 к.
Изд-во «Машиностроение», 107885, Москва, ГСП-6, 1-й Басманный пер., 3.
Московская типография № 8 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
Хохловский пер.. 7.
I
^Издательство | Машиностроение», 1978 г..
(
Предисловие
С момента выхода в свет учебника «Динамика полета», соот-
ветствующего программе одноименного с ним курса, читаемого сту-
дентам, обучающимся по специальности «Эксплуатация самолетов
и двигателей» в вузах Министерства гражданской авиации СССР
и на факультетах гражданской авиации вузов Министерства выс-
шего и среднего специального образования СССР, прошло семь
лет. За это время курс «Динамика полета» значительно расширил-
ся. В соответствии с этим учебник переработан и дополнен новы-
ми разделами.
Полет самолета как управляемого тела является совокупно-
стью движения его центра масс и вращения самолета вокруг этого
центра в атмосфере Земли. Математическое описание движения
самолета, выбор систем координат и определение параметров по-
лета и характеристик устойчивости и управляемости выполнены в
соответствии с ГОСТ 20058—74. Системы дифференциальных урав-
нений движения самолета как управляемого твердого тела приве-
дены к единой системе координат, что позволяет использовать сов-
ременные точные и приближенные математические методы для ис-
следования режимов полета и возмущенного и управляемого
движений.
Книга написана коллективом авторов: гл. 1, 9, 10,
14, 15 написаны проф. Р. Л. Межлумяном; гл. 2, 7 и 8 —
проф. В. С. Максимовым: гл. 3, 5, 17, 20, 24 — доц. П. С. Лазнюком;
гл. 4 — проф. А. М. Мхитаряном, канд. техн, наук А. Г. Баскако-
вой: гл. 6 — канд. техн, наук А. Г. Баскаковой: гл. 11, 12, 16, 18, 19
и 23 —доц. Л. Г. Тотиашвили; гл. 13 — совместно проф.
Р. А. Межлумяном и доц. Л. Г. Тотиашвили: гл. 21, 22 — проф.
А. М. Мхитаряном.
Авторы выражают искреннюю благодарность коллективу ка-
федры «Аэродинамика и конструкции летательных аппаратов»
Академии гражданской авиации за рецензирование рукописи и
научному редактору д-ру техн, наук проф. Н. М. Лысенко за боль-
шой труд по редактированию рукописи.
Глава 1
Уравнения движения самолета
§ 1.1. Механическая модель самолета.
Уравнения движения самолета в векторной форме
Современный самолет является совокупностью деформируемых
твердых тел переменной в общем случае массы, совершающих в
пространстве как общее переносное, так и взаимные относительные
движения. Исследование динамических свойств такой системы
весьма сложно, поэтому соответствующим упрощением ее заменя-
ют механической моделью.
Обычно рассматривают упрощенную модель самолета, пред-
ставляя ее в виде управляемого твердого тела постоянной массы,
имеющего шесть степеней свободы. Силы и моменты, обусловлен-
ные функционированием двигателей, закрылков, элеронов, рулей
высоты и направления приложены к твердому телу (механической
модели самолета) и участвуют в осуществлении и управлении его
движения. Чаще всего такое представление оказывается вполне
приемлемым для изучения движения самолета; в тех случаях, ког-
да относительные движения роторов, воздушных винтов, закрыл-
ков, элеронов, рулей высоты и направления и т. п., деформация
конструкции или изменение массы самолета влияют на его динами-
ческие свойства значительно, необходимо пользоваться другой,
более сложной механической моделью.
Говоря о движении тела, подразумевают его перемещение в про-
странстве и во времени относительно какого-либо другого тела, на-
зываемого системой отсчета. Положение рассматриваемого тела
относительно системы отсчета определяется соответствующими
кинематическими параметрами.
В механике различают инерциальные и неинерциальные систе-
мы отсчета. Первая из них есть система координат, связанная с
так называемыми «неподвижными» звездами или с телами отсчета,
перемещающимися в пространстве по инерции (прямолинейно с
постоянной скоростью) относительно «неподвижных» звезд. Систе-
мы, не удовлетворяющие этим условиям, называются неинерциаль-
ми. В неинерциальных системах закон инерции не имеет места.
В инерциальной системе отсчета движение механической систе-
мы описывается двумя векторными уравнениями:
(1-1)
4
где q=VotzVz—суммарный вектор количества движения сис-
темы-Ж= (г/х —суммарный вектор момента количе-
ства движения системы относительно выбранного начала отсчета;
pi —. внешняя сила, действующая на элементарную массу тр, Гг —
вектор, определяющий положение элементарной массы mz относи-
тельно выбранного начала отсчета.
В соответствии с принятой механической моделью самолета как
абсолютно твердого тела постоянной массы уравнения (1.1) при-
нимают вид
(1.2)
dt dt
где V — вектор скорости движения выбранного начала отсчета
относительно воздушной среды, не возмущенной летательным ап-
паратом; F — суммарный вектор внешних сил, действующих на са-
молет, включая гравитационные силы и силы, возникающие при
контакте с Землей; т— масса всего самолета; Л4— суммарный
вектор момента внешних сил, действующих на самолет относитель-
но выбранного начала отсчета.
Система дифференциальных уравнений (1.2), представленная
в векторном виде, определяет изменение кинематических парамет-
ров движения самолета в целом под действием заданных внешних
сил. Если начало отсчета совместить с центром масс, то суммарный
вектор внешних сил F и суммарный вектор момента М относитель-
но центра масс будут определять изменение скорости движения
центра масс и угловой скорости вращения самолета вокруг него.
Положение самолета в пространстве определяется интегрирова-
нием дифференциальных уравнений (1.2) при заданных начальных
условиях и внешних силах.
Для изучения движения самолета обычно систему дифференци-
альных уравнений в векторном виде (1.2) представляют в скаляр-
ной форме, т. е. рассматривают ее в проекциях на оси той или
иной системы координат. Вид скалярных дифференциальных урав-
нений во многом зависит от системы координат. В зависимости от
характера решаемой задачи производится выбор системы коорди-
нат с таким расчетом, чтобы облегчить процесс исследования по-
ведения самолета в голете.
§ 1.2. Системы координат.
Параметры полета и кинематические соотношения
Системы координат, принятые нами в соответствии с действу-
ющим государственным стандартом (ГОСТ 20058—74), прямо-
угольные правые связаны либо с Землей, либо с летательным ап-
паратом.
Земная система координат O0X0Y0Z0 (рис. 1.1, а). На-
чало О0 и оси фиксированы по отношению к Земле и выбираются
в соответствии с задачей.
5
Рис. 1.1. Земная система координат:
а—произвольная; б—нормальная
Вертикаль
Рис. 1.2. Связанная сис-
тема координат
Нормальная земная система 'координат O0XgYgZg
(рис. 1.1, б). Начало О0 фиксировано по отношению к Земле, ось
О0У6 направлена вверх по местной вертикали, а направление осей
O0Xg и O0Zg выбирается в соответствии с задачей.
Связанная система координат OXYZ (рис. 1.2).
Начало О помещено на летательном аппарате, обычно в центре
масс. Продольная ОХ, нормальная OY и поперечная OZ оси жестко
связаны с летательным аппаратом. Продольная ось ОХ лежит в
плоскости симметрии или в плоскости, параллельной ей, если нача-
ло координат помещено вне плоскости симметрии, направлена па-
раллельно средней аэродинамической хорде крыла от хвостовой к
носовой части летательного аппарата.
Нормальная ось OY также лежит в плоскости симметрии или в
плоскости, параллельной ей, если начало координат помещено вне
плоскости симметрии; направлена к верхней или эквивалентной
этому понятию части летательного аппарата. Поперечная ось OZ
перпендикулярна плоскости симметрии и направлена к правой час-
ти летательного аппарата (к правому крылу).
Скорость начала О связанной системы координат относительно
воздушной среды, не возмущенной летательным аппаратом, назы-
вается воздушной скоростью V летательного аппарата.
Скорость начала О связанной системы координат относительно-
выбранной системы координат, связанной с Землей, называется
земной скоростью летательного аппарата VK.
Скоростная система координат OXaYaZa (рис. 1.3).
Начало О помещено на летательном аппарате, обычно в центре
масс. Скоростная ось ОХа совпадает с воздушной скоростью лета-
тельного аппарата (V); ось подъемной силы OYa лежит в плоско-
сти симметрии или в плоскости, параллельной ей, если начало ко-
ординат О помещено вне плоскости симметрии, направлена к верх-
ней части летательного аппарата. Боковая ось OZa образует со
скоростной осью и осью подъемной силы правую систему коор-
динат.
6
Вертикаль
Рис. 1.3. Скоростная система координат:
а—углы, определяющие направление воздушной скорости относительно
связанной системы координат; б—углы между осями скоростной сис-
темы координат и нормальной земной системы координат
Траектории ая система координат 0УкУк7к (рис.
1.4). Начало О помещено на летательном аппарате, обычно в цент-
ре масс. Ось ОХК совпадает с земной скоростью летательного ап-
парата Ук, ось ОУК лежит в вертикальной плоскости, проходя-
щей через ось ОХК, и направлена обычно вверх от поверхности
Земли. Ось OZK образует с осями ОХК и ОУК правую систему коор-
динат.
Движение самолета как твердого тела определяется совокупно-
стью движения центра масс и вращения вокруг него. Оно происхо-
дит в атмосфере Земли, характеризуется определенными парамет-
рами и называется полетом.
Движение центра масс определяется линейными скоростями:
воздушной V, земной Ук и путевой Уп- Определение первых двух
(V и Ук) дано выше. Путевая скорость Уп — проекция земной
скорости летательного аппарата на горизон-
тальную плоскость OXgZg.
Воздушная скорость играет основную
роль в создании аэродинамических сил и
моментов, действующих на самолет в поле-
те, а земная и путевая скорости использу-
ются при решении навигационных задач.
В табл. 1. 1 приведены направляющие
косинусы для перехода от одной системы
координат к другой. С помощью этой таб-
лицы можно определить проекции векторов
воздушной V и земной 1Д скоростей на оси
используемых в учебнике систем координат.
Направление воздушной скорости лета-
тельного аппарата в связанной системе КО-
Рис. 1.4. Траекторная
система координат
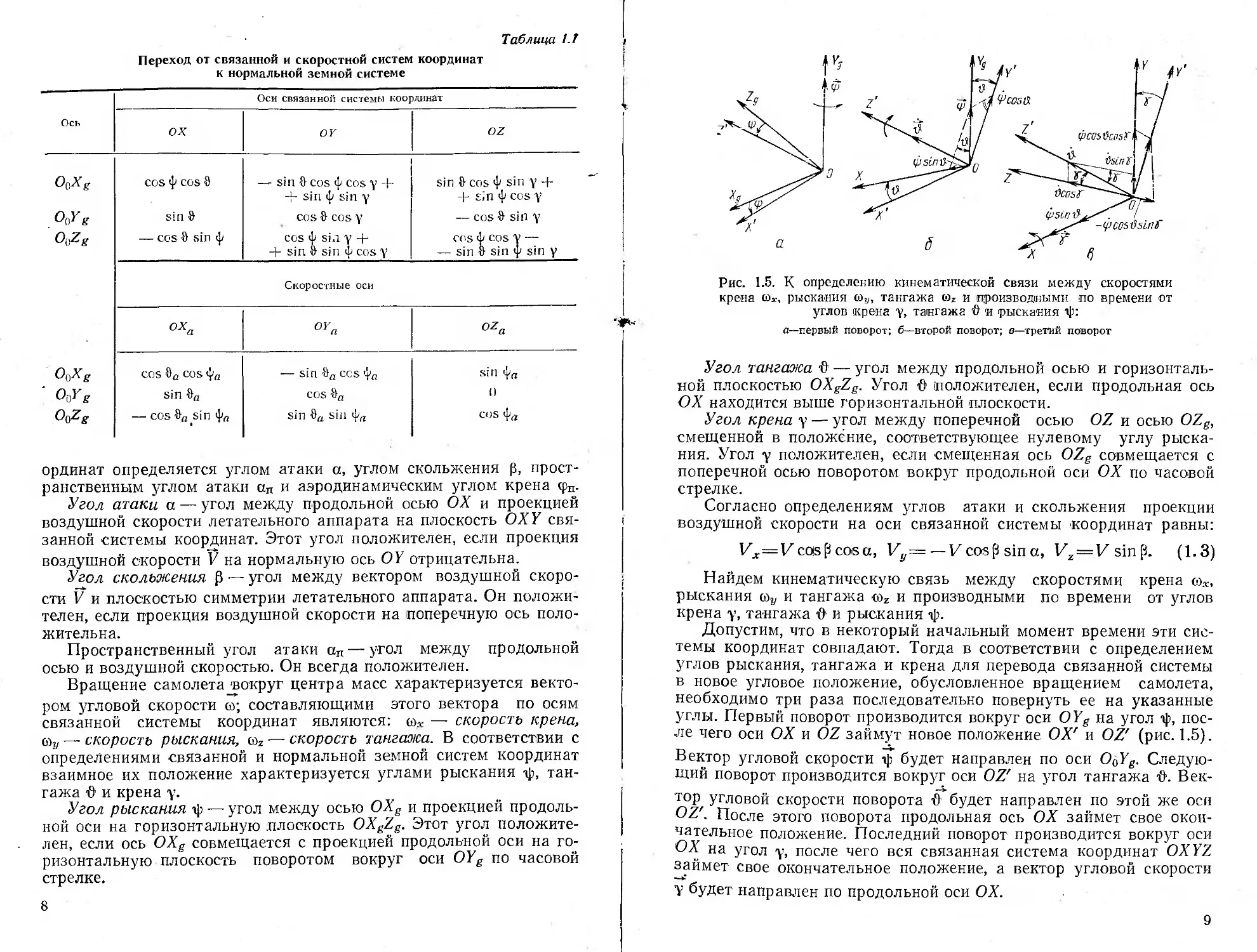
Таблица 1.Т
Переход от связанной и скоростной систем координат
к нормальной земной системе
Оси связанной системы координат
Ось ox or OZ
cos ф cos 8 — sin 8 cos ф cos у + -j- sin ф sin у sin 8 cos ф sin у + + sin ф cos у
OqY g sin 8- cos 8 cos у — cos 8 sin у
oyzg — cos 8 sin ф cos ф sin у + + sin 8 sin ф cos у cos ф cos Y — — sin 8 sin ф sin у
Скоростные оси
0Xa 0Ya
o0xg cos 8a cos фя — sin 8a cos фп sin ф„
' O0Yg sin 8n cos 8a I)
OfjXg — cos 8O sin фа sin 8a sin ф„ cos фЛ
ординат определяется углом атаки а, углом скольжения р, прост-
ранственным углом атаки ап и аэродинамическим углом крена фп.
Угол атаки а — угол между продольной осью ОХ и проекцией
воздушной скорости летательного аппарата на плоскость OXY свя-
занной системы координат. Этот угол положителен, если проекция
воздушной скорости V на нормальную ось OY отрицательна.
Угол скольжения р — угол между вектором воздушной скоро-
сти V и плоскостью симметрии летательного аппарата. Он положи-
телен, если проекция воздушной скорости на поперечную ось поло-
жительна.
Пространственный угол атаки ап — угол между продольной
осью п воздушной скоростью. Он всегда положителен.
Вращение самолета вокруг центра масс характеризуется векто-
ром угловой скорости со; составляющими этого вектора по осям
связанной системы координат являются: — скорость крена,
а>у — скорость рыскания, со2 — скорость тангажа. В соответствии с
определениями связанной и нормальной земной систем координат
взаимное их положение характеризуется углами рыскания ф, тан-
гажа й и крена у.
Угол рыскания ф — угол между осью OXg и проекцией продоль-
ной оси на горизонтальную плоскость OXgZg. Этот угол положите-
лен, если ось OXg совмещается с проекцией продольной оси на го-
ризонтальную плоскость поворотом вокруг оси OYg по часовой
стрелке.
8
Рис. 1.5. К определению кинематической связи между скоростями
крена <Вх, рыскания ы,;, тангажа coz и производными по времени от
углов крена у, тангажа & и рыскания гр:
а—первый поворот; б—второй поворот; в—третий поворот
Угол тангажа О’ — угол между продольной осью и горизонталь-
ной плоскостью OXgZg. Угол О положителен, если продольная ось
ОХ находится выше горизонтальной плоскости.
Угол крена у— угол между поперечной осью OZ и осью OZg,
смещенной в положение, соответствующее нулевому углу рыска-
ния. Угол у положителен, если смещенная ось OZg совмещается с
поперечной осью поворотом вокруг продольной оси ОХ по часовой
стрелке.
Согласно определениям углов атаки и скольжения проекции
воздушной скорости на оси связанной системы координат равны:
VJt.=Vcoisp cosa, Vy= — Vcoep sin a, Vz = Vsinp. (1.3)
Найдем кинематическую связь между скоростями крена <ож,
рыскания и тангажа oz и производными по времени от углов
крена у, тангажа & и рыскания чр.
Допустим, что в некоторый начальный момент времени эти сис-
темы координат совпадают. Тогда в соответствии с определением
углов рыскания, тангажа и крена для перевода связанной системы
в новое угловое положение, обусловленное вращением самолета,
необходимо три раза последовательно повернуть ее на указанные
углы. Первый поворот производится вокруг оси OYg на угол ip, пос-
ле чего оси ОХ и OZ займут новое положение ОХ' и OZ' (рис. 1.5).
Вектор угловой скорости чр будет направлен по оси О0Уе. Следую-
щий поворот производится вокруг оси OZ' на угол тангажа &. Век-
тор угловой скорости поворота О’ будет направлен по этой же оси
OZ'. После этого поворота продольная ось ОХ займет свое окон-
чательное положение. Последний поворот производится вокруг оси
ОХ на угол у, после чего вся связанная система координат OXYZ
займет свое окончательное положение, а вектор угловой скорости
У будет направлен по продольной оси ОХ.
9
Проектируя векторы угловых скоростей поворотов на оси свя-
занной сйстемы координат, получим
«\=У+ Ф sin &;
<'у=ф cos ft cos sin у; (1.4)
wz = & cos у — ф cos& sin у,
отсюда
У=юЛ — (юу cosy — ш7 siny)tg&;
&—o^sin y-J-wz cos у; (1.5)
ф== (w^cos у — u>z sin у) sec ft.
Заметим, Что точкой обозначены производные йо времени.
§ 1.3. Уравнения движения самолета
в связанной системе координат
Любой заданный в пространстве вектор не зависит от выбора
систем координат (является инвариантным к ним), поэтому век-
торные уравнения (1.2) можно представить в скалярном виде в
проекциях на оси любой из рассмотренных в § 1.2 систем коорди-
нат.
В связанной системе координат вектор скорости движения цен-
тра масс самолета можно представить в виде
V^iVx+lVy+kVz, (1.6)
где i, j, k — единичные векторы, определяющие направления соот-
ветственно продольной ОХ нормальной OY и поперечной OZ осей.
Производная от вектора скорости V по времени
+ (1.7)
dt dt dty'dt dt dt dt ' '
Единичные векторы i, j, k вращаются с угловой скоростью со,,
’поэтому их производные по времени соответственно равны:
di — di Г dk -* ? ...
—=<uXZ, —=(i)XA. (1.8>
dt dt dt '
Подставляя (1.8) в (1.7) ,получим
Tt = *+ Vx («7x7) + Vу (;x ;) + Vz (7xl).
(1-9)
Первые три слагаемые в равенстве (1.9) характеризуют быст-
роту изменения вектора скорости V, воспринимаемую наблюдате-
Ю
лем, вращающимся вместе с системой координат-Они определяют
так называемую локальную производную
^Л-^£-+7 —+1^-. (1.10)
dt м 1 at dt
Исходя из свойства произведения двух векторов вторые три
слагаемые в равенстве (1.9) можно записать так:
Ид. (<> X i) "р Vу ( “> X J ) ( w X k} = ш X И, (1.11)
Подставляя (1.10) и (1.11) в (1.9), получим
^=ZK_i_«xP. (1.12)
dt dt
Соотношение (1-12) устанавливает связь между абсолютной —
dt
и локальной — производными вектора скорости V. Аналогич-
ен
ным путем определяем зависимость между абсолютной и локалы
ной производными от вектора момента количества движения К.
по времени:
(1.13)
dt dt '
Подставляя (1.12) и (1.13) в (1.2), получим уравредия движе-
ния в следующем виде:
ml— +aXv\==F-, ^+<оХ/С=М. (1.14)
/ dt
Проектируя в уравнениях (1.14) векторные величины на оси
связанной системы координат, получим следующую систему диф-
ференциальных уравнений движения самолета в скалярном виде:
dhл/с
^+»xKy-»yKx~Mz.
Здесь Fx, Fv, Fz— проекции суммарного вектора внешних сил на
продольную, нормальную и поперечную оси; Мх, Му, Mz— проек-
ции суммарного вектора момента внешних сил относительно нача-
ла связанной системы координат на продольную, нормальную и
поперечную оси; Кх, Ку, Kz— проекции суммарного вектора момен-
та количества движения относительно начала О связанной систе-
мы координат на продольную, нормальную и поперечную оси.
11
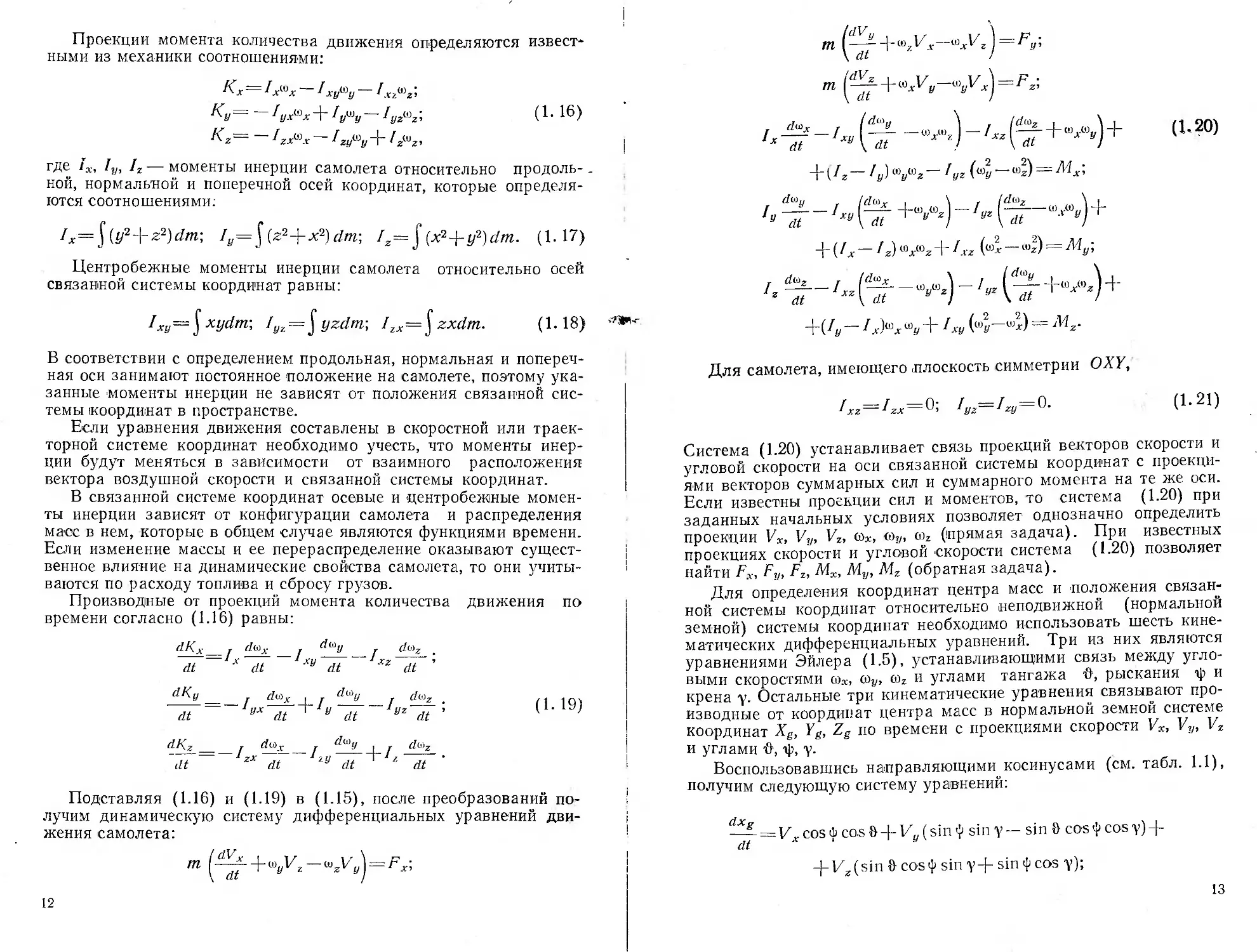
Проекции момента количества движения определяются извест*
ними из механики соотношениями:
Кх = ^хшх Iхую у — !х/.юг>
Ку=~ ^Ухшх + 7 уи>у—Iyz^z; (1 • 16)
К г~ Цхых — 1гую у + 12tuz>
где 1Х, 1У, Iz — моменты инерции самолета относительно продоль-.
ной, нормальной и поперечной осей координат, которые определя-
ются соотношениями:
^=J(f/2 + 22)rf/n; Iy=\(z2-\-x2)dtn-, (x2-}-y2)dm. (1.17)
Центробежные моменты инерции самолета относительно осей
связанной системы координат равны:
Ixy—^xydm; Iy2.—^yzdm; Izx=^zxdm. (1-18)
В соответствии с определением продольная, нормальная и попереч-
ная оси занимают постоянное положение на самолете, поэтому ука-
занные моменты инерции не зависят от положения связанной сис-
темы координат в пространстве.
Если уравнения движения составлены в скоростной или траек-
торной системе координат необходимо учесть, что моменты инер-
ции будут меняться в зависимости от взаимного расположения
вектора воздушной скорости и связанной системы координат.
В связанной системе координат осевые и центробежные момен-
ты инерции зависят от конфигурации самолета и распределения
масс в нем, которые в общем случае являются функциями времени.
Если изменение массы и ее перераспределение оказывают сущест-
венное влияние на динамические свойства самолета, то они учиты-
ваются по расходу топлива и сбросу грузов.
Производные от проекций момента количества движения по
времени согласно (1.16) равны:
dKx_ dt _r d“x r x dt xy dt r dl”z • 1 Xz ,, ' dt
dKy dt r I , dv>u yx dt 1 y dt -Iyzd-^ (1-19)
d/\z ______ Г г | Г </<•>?
dt zX dt гу dt ' ' dt
Подставляя (1.16) и (1.19) в (1.15), после преобразований по-
лучим динамическую систему дифференциальных уравнений дви-
жения самолета:
\ at /
12
Для самолета, имеющего .плоскость симметрии OXY,
Z / 0; / / 0. (1-21)
-Л A ' У А ~У ' z
Система (1-20) устанавливает связь проекций векторов скорости и
угловой скорости на оси связанной системы координат с проекци-
ями векторов суммарных сил и суммарного момента на те же оси.
Если известны проекции сил и моментов, то система (1.20) при
заданных начальных условиях позволяет однозначно определить
проекции Vv, Vz, сох, му, coz (прямая задача). При известных
проекциях скорости и угловой скорости система (1.20) позволяет
найти Fx, Fv, Fz, Мх, Mv, Mz (обратная задача).
Для определения координат центра масс и положения связан-
ной системы координат относительно неподвижной (нормальной
земной) системы координат необходимо использовать шесть кине-
матических дифференциальных уравнений. Три из них являются
уравнениями Эйлера (1.5), устанавливающими связь между угло-
выми скоростями а>х, а>у, a>z и углами тангажа &, рыскания ф и
крена у. Остальные три кинематические уравнения связывают про-
изводные от координат центра масс в нормальной земной системе
координат Azg, Yg, Zg по времени с проекциями скорости Vx, Vy, Vz
и углами &, ф, у.
Воспользовавшись направляющими косинусами (см. табл. 1.1),
получим следующую систему уравнений:
==1/д.созф co.s&4-I/J/(sin ф sin у — sin & cos ф cos у) ф-
4-I/2(sin & созф sin уф- sin ф cos у);
13
sin ft1/^ cos& cos у — Vz cos& sin у; (1- 22)
dzg i
---= — Vx cos & sin фф-КДсоэф sin у 4-sin & sin Ф cos у)4~
dt-y
H_^z(CQS'?cosY— sin & simp sin y).
Для интегрирования этой системы дифференциальных уравнений
необходимы начальные условия и правые части; они определяются -
в зависимости от постановки задачи. При решении обратной зада-
чи начальные значения координат xg0, yg0, zg0 определяют с помо-
щью оптических и радиотехнических средств. По данным бортовых
регистраторов определяют V, а, р, О', ф, у в функции времени. Имея
V, а, р, по кинематическим соотношениям (1.3) определяем Vx, Vv,
Vz в функции времени. По найденным Vx, Vv, Vz и замеренным
О, ф, у определяем правые части системы дифференциальных урав-
нений (1.22). Координаты центра масс в нормальной земной систе-
ме координат находим интегрированием системы дифференциаль-
ных уравнений (1.22) при заданных начальных условиях и извест-
ных правых частях:
t
xg=xg0 [ Vx cos ф cos & 4" Vy (sin Ф sin T ~ sin ® cos Ф cos Y)+
o
4-Vz(sin йсоэф sin уф- sin ф cos у )]<//;
t
Hg—ygo^r 4 s’n + cos & cosy —V2 cosO sin y)af/; (1.23)
о
t
2-g=z^o4- J" [ — Vx cosO sin ф4-УДсоэф sin у 4* sin & sin фсоэу)4-
4- Vz (cos ф cos у — sin 0 sin ф sin y)] dt.
Система (1.20) содержит неизвестные Vx, Vv, Vz, (ox, ау, <oz, ин-
тегрированием ее при заданных начальных условиях найдем ука-
занные неизвестные функции. Однако на практике наиболее важ-
ными кинематическими параметрами движения самолета являются
скорость V, углы атаки а, скольжения р, крена у, тангажа &, рыс-
кания ф и их производные по времени V, а, р, у, &, ф. В такой пос-
тановке задача решается, если к динамической системе дифферен-
циальных уравнений (1.20) присоединить кинематические соотно-
шения (1.3) и (1.4), позволяющие перейти от старых переменных
14, Vv, Vz, (Oy.'toz к новым V, а, р, у, &, ф.
После перехода получим новую систему дифференциальных
уравнений второго порядка относительно углов крена, тангажа и
рыскания, для интегрирования которой необходимы девять началь-
ных условий: Ко, а0, Ро, Yo, 'б’о, фо, Уо, <>о, фо.
Таким образом, динамические уравнения (1.20) вместе с кине-
матическими соотношениями (1.3) и (1.4) образуют замкнутую
14
систему дифференциальных уравнений, интегрированием которой
при заданных Начальных условиях и внешних силах определяют
кинематические .параметры движения V, а, р, у, •&, ф в функции
времени.
Объединенная система динамических уравнений (1.20) вместе
с кинематическими соотношениями (1.3) и (1.4) лежат в основе
исследования режимов летной эксплуатации самолета, его устой-
чивости движения и управляемости.
Динамические уравнения (1.20) в соответствии с соотношения-
ми (1-21) упрощаются и вместе с кинематическими уравнениями
(1-4) составляют единую систему дифференциальных уравнений:
т (+“Л х — )=^;
h — (1.24)
4 Э +^)+(Л-Л)‘0А=Л1,;
/2 ^+(Л- /л)+/ху -4)=<;
dy , М . Q
Л dt ' dt
dty а 1 d%
—— cos & cos у 4-sin y;
y dt ' dt
d$ dii « • '
ok — — cos у -—cos & sin y.
dt dt
Кинематические соотношения (1.3) используют для перехода :от
К», Vv, Vz к переменным V, а, (3.
§ 1.4. Разделение движения самолета
на продольное и боковое
Решение единой системы дифференциальных уравнений (1.24)
связано с определенными трудностями. В общем случае она реша-
ется численным методом с применением ЭВМ, что затрудняет ана-
лиз и обобщение полученных результатов. В связи с этим возни-
кает необходимость в упрощении системы (1.24) путем отыскания
приемлемого допущения. Одно из них основано на наличии у са-
молета продольной плоскости симметрии ОХУ и заключается в
раздельном рассмотрении продольного и бокового движения. При
этом систему (1.24) представляют в виде двух самостоятельных
систем дифференциальных уравнений, описывающих раздельно
продольное и боковое движение самолета.
15
В продольной плоскости симметрии OXY действуют силы Fx,
Fy и пара сил момента тангажа Mz, которые составляют продоль-
ную группу обобщенных сил. Им соответствуют обобщенные коор-
динаты: углы атаки а и тангажа & и перемещение, обусловленное
проекцией вектора скорости на плоскость симметрии OXY.
Две другие плоскости OXZ и OYZ называются боковыми. Угло-
вые и линейные перемещения в этих плоскостях, обусловленные
скоростями крена сиА-, рыскания и проекцией вектора скорости
на поперечную ось К в совокупности называются боковым движе-
нием.
После перехода от Vx, Vv, V2 к переменным V, а, р в соответст-
вии с (1.3) систему (1.24) представим двумя группами дифферен-
циальных уравнений:
(И cos ? cos sin Р + И<о2 cos ? sin °- j = F/,
COS® S^n C0,S? C0S sin ? j = (1-25)
Zz—+(Z„ —Л)«М>„+Л„ («>2 —v2\=Mz;
z dt xj x у \ \ у xf
m (V sin p) — cos & sin a — Va>& cos p cos a =/7z;
/x -/ЦIy)^z=Mx-, (1.26)
Легко заметить, что в (1.25) и (1.26) правыми частями являют-
ся соответственно продольные и боковые обобщенные силы.
Как это видно, левые части обеих групп уравнений содержат
кинематические параметры как продольного, так и бокового дви-
жения, поэтому их раздельное рассмотрение приводит к погрешно-
стям. Оценка погрешностей производится разложением левых и
правых частей этих уравнений в ряд Тейлора по кинематическим
параметрам движения. Подробное рассмотрение этого вопроса вы-
ходит за рамки настоящего курса.
При малых значениях и приращениях а, 10, сож, а>у, сог, когда
можно пренебречь квадратами и произведениями этих кинемати-
ческих параметров и их приращений группы уравнений (1.25) и
(1.26) принимают вид
m—=Fх, mvLZ~~—\=FU; /2^=/Иг; (1.27)
at \ dt) у dt v ’
(1.28)
16
Системы дифференциальных уравнений (1.27) и (1.28) содер-
жат кинематические параметры соответственно продольного и бо-
кового движений.
Система (1.27) приближенно описывает продольное движение и
при равновесии боковых обобщенных сил позволяет с достаточной
точностью решать практические задачи.
Вопросы для повторения
1. Какая механическая модель самолета принята ® динамике полета?
2. Какие системы координат приняты для изучения движения самолета?
3. Какие кинематические параметры определяют движение самолета?
4. Назовите отличие между воздушной и земной скоростями самолета.
5. В чем состоит сущность прямой и обратной задач динамики полета?
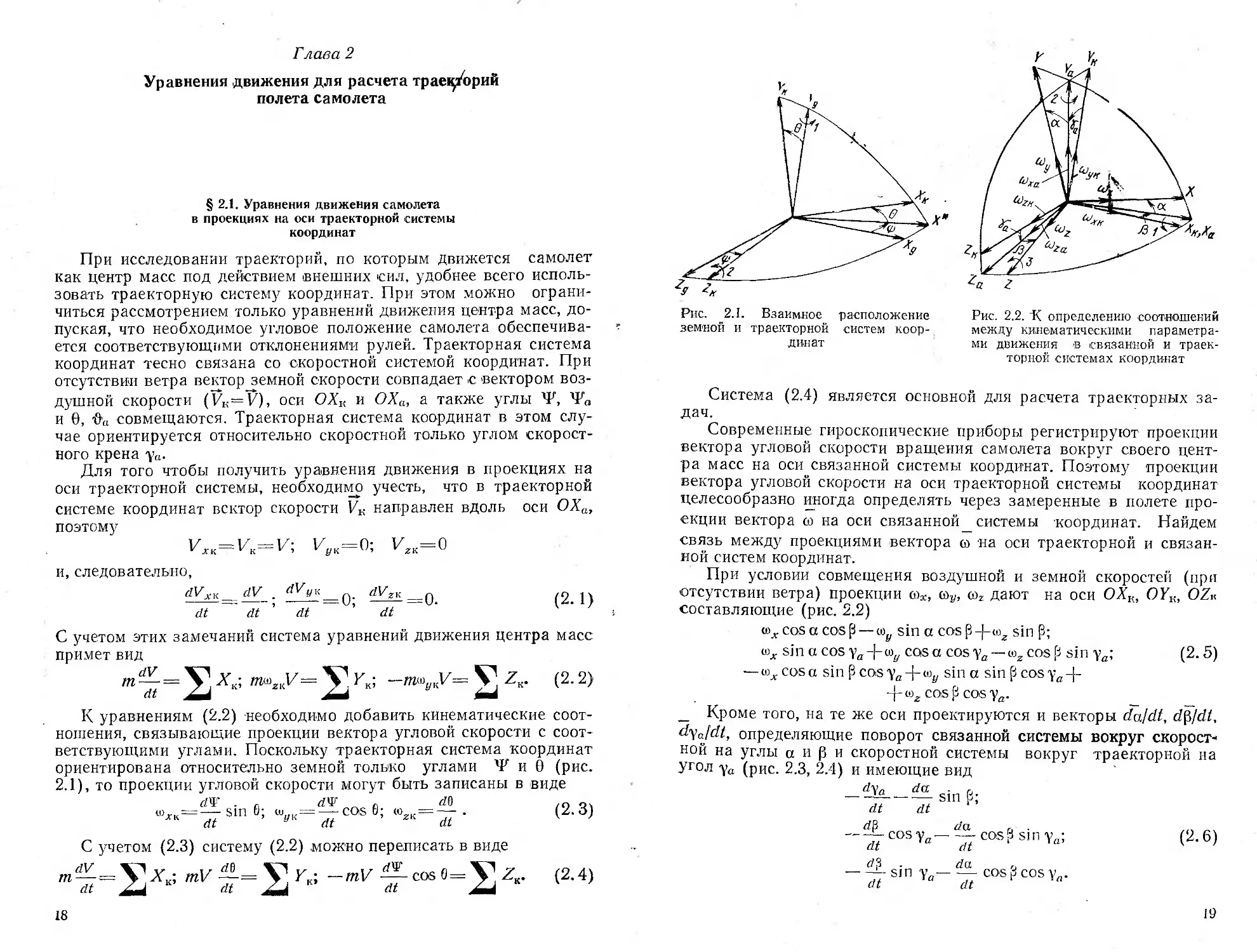
Глава 2
Уравнения движения для расчета трае^/орий
полета самолета
§ 2.1. Уравнения движения самолета
в проекциях на оси траекторной системы
координат
При исследовании траекторий, по которым движется самолет
как центр масс под действием внешних сил, удобнее всего исполь-
зовать траекторную систему координат. При этом можно ограни-
читься рассмотрением только уравнений движения центра масс, до-
пуская, что необходимое угловое положение самолета обеспечива-
ется соответствующими отклонениями рулей. Траекторная система
координат тесно связана со скоростной системой координат. При
отсутствии ветра вектор земной скорости совпадает с вектором воз-
душной скорости (VK=V), оси ОХк и ОХа, а также углы V,
и 6, Фа совмещаются. Траекторная система координат в этом слу-
чае ориентируется относительно скоростной только углом скорост-
ного крена уа.
Для того чтобы получить уравнения движения в проекциях на
оси траекторной системы, необходимо учесть, что в траекторной
системе координат вектор скорости Ук направлен вдоль оси ОХа,
поэтому
VXi.= VK=V- V,K=0; Угк=0
и,следовательно,
dVхк dV . dVу к dVгк q (21)
dt ~ dt ’ dt — ’ dt ' I • /
С учетом этих замечаний система уравнений движения центра масс
примет вид
т = У У У Г, -т^у= У ZK. (2.2)
dt М
К уравнениям (2.2) необходимо добавить кинематические соот-
ношения, связывающие проекции вектора угловой скорости с соот-
ветствующими углами. Поскольку траекторная система координат
ориентирована относительно земной только углами и 6 (рис.
2.1), то проекции угловой скорости могут быть записаны в виде
бПГ . с ДЧ" с df) /о
ш =—Sin о; ш„и=—cos о; (о_.; =—. (2.6)
хк dt УК dt ZK dt V >
С учетом (2.3) систему (2.2) можно переписать в виде
(2-4)
18
Рис. 2.1. Взаимное расположение
земной и траекторной систем коор-
динат
Рис. 2.2. К определению соотношений
между кинематическими параметра-
ми движения в связанной и траек-
торной системах координат
Система (2.4) является основной для расчета траекторных за-
дач.
Современные гироскопические приборы регистрируют проекции
вектора угловой скорости вращения самолета вокруг своего цент-
ра масс на оси связанной системы координат. Поэтому проекции
вектора угловой скорости на оси траекторной системы координат
целесообразно иногда определять через замеренные в полете про-
екции вектора со на оси связанной системы координат. Найдем
связь между проекциями вектора и на оси траекторной и связан-
ной систем координат.
При условии совмещения воздушной и земной скоростей (при
отсутствии ветра) проекции соу, со2 дают на оси ОХК, OYK, OZ«
составляющие (рис. 2.2)
со^. cos a cos р— со^ sin а cosf-J-o^ sin Р;
sin а cos cos а cos уа — <uz cos р sin уа; (2.5)
— cos а sin р cos уа sin а sin р cos уа
4* cos р cos уа.
_ Кроме того, на те же оси проектируются и векторы daldt, dfildt,
dyddt, определяющие поворот связанной системы вокруг скорост-
ной на углы а и (j и скоростной системы вокруг траекторной на
угол уа (рис. 2.3, 2.4) и имеющие вид
dya da . r,
---——•— sin р;
dt dt
— — cos у. — — cos p sin у •
dt dt
da r,
----sin y„ cos 3 cos y„.
dt dt
(2.6)
19
У
Рис. 2.3. К определению проек-
ций вектора угловой скорости
вращения связанной системы
координат вокруг скоростной
Рис. 2.4. К определению проек-
ций вектора угловой скорости
вращения скоростной системы ко-
ординат вокруг траекторной
Суммируя (2.5) и (2.6), получим связь (ожк, ыу к, oiZK с сох, toy,
со2 в виде
<»r„=o) cos a cos В—<»„ sin a cos 84-w_ sin 8—
Л К Л 'У 1 I /5 •
dya da . а
dt dt
to„v=tox sin a cos y„ -4-0),. cos a cosv„— «ы cosB sin ya—
— — cosy — — cos 8 sin ya; (2.7)
dt dt -a
w,k.= —o),.cosa sin 8 cosy„ -I-or, sin a sin 8 cosy.,4-
Z К X * * Cl I у * • Cl I
I о <78 . da n
4~ 0)_ cos 8 cos y„-- sin y„ — — cos p cos y„.
dt dt
Если полет осуществляется без скольжения и крена, соотноше-
ния (2.7) значительно упрощаются, принимая вид
o)v„=o) cosa — or, sin a; o)„„=o)r sin а4-о)„ cos а; (2.8)
da
“гк=“г — — •
dt
§ 2.2. Силы, действующие на самолет
На самолет, движущийся на относительно небольших расстоя-
ниях от земной поверхности (именно такие и будем в дальнейшем
рассматривать), действуют три основные группы сил: а) массовые
силы, обусловленные земным притяжением; б) аэродинамические
силы, возникающие в результате взаимодействия самолета, с обте-
кающим его потоком воздуха; в) тяга двигателей, установленных
на самолете.
20
к массовым силам, обусловленным земным притяжением, отно-
сится сила тяжести mg, равная произведению массы тела на уско-
рение свободного падения g.
Ускорение свободного падения в различных точках земного
шара различно, что вызвано неравномерностью распределения
масс внутри объема Земли, а также ее сплющенностью в мериди-
альных сечениях. Так, например, на экваторе значение g у поверх-
ности Земли составляет в среднем 9,78 м/с2, а у полюсов —
9,83 м/с2. По мере удаления от Земли ускорение свободного паде-
ния уменьшается в связи с ослаблением гравитационного поля
Земли.
В задачах, связанных с полетами самолетов на небольших вы-
сотах, обычно пренебрегают изменениями ускорения свободного па-
дения, полагая его постоянным и равным 9,81 м/с2.
Аэродинамические силы зависят от формы тела, величины и
направления вектора скорости полета относительно тела, а также
характеристик окружающей среды. В нижних слоях атмосферы
(Я<30 км), где плотность воздуха достаточно велика, аэродина-
мические силы могут достигать больших значений, поэтому при
полетах на этих высотах аэродинамические силы могут быть опре-
деляющими. В верхних слоях атмосферы (Я>70 км) плотность
воздуха резко падает, величина аэродинамических сил уменьшает-
ся и их влиянием иногда можно пренебречь.
Связь между аэродинамическими силами и факторами, их
определяющими, устанавливается экспериментальной аэродинами-
кой:
Za=Cza-^-S, (2.9)
где q — плотность среды, в которой осуществляется полет; S — ха-
рактерная площадь (обычно в качестве характерной площади при-
нимают площадь крыла); Сха, Суа, Сга — коэффициенты аэродина-
мических сил, которые определяют по результатам испытаний мо-
делей самолетов в аэродинамических трубах или в летных испы-
таниях. Имеются также теоретические методы определения коэф-
фициентов аэродинамических сил *.
Тяга движителей зависит от режима работы двигателей, режи-
ма полета (скорости, высоты) и других факторов. Направление тя-
ги считают совпадающим с направлением оси двигателя, хотя это
и не всегда так (например, при работе двигателя в режиме косой
обдувки направление тяги двигателя может не совпадать с его
осью). При наличии на самолете нескольких двигателей следует
учитывать суммарную тягу всех двигателей и возможную несим-
метричность их работы.
* Мхитарян А. М. Аэродинамика. М., Машиностроение, 1976.
21
Рис. 2.5. Высотно-скоростные ха-
рактеристики турбореактивного
двигателя
На современных самолетах
гражданской авиации применяют-
ся в основном три типа двигате-
лей: турбореактивные (ТРД),
турбовинтовые (ТВД) и поршне-
вые (ПД). Эффективность того
или иного двигателя определяется
величиной создаваемой им тяги
(или мощности); экономии-*
ность — удельным расходом топ-
лива, представляющим собой рас-
ход топлива на единицу тяги (или
на единицу мощности) в единицу
времени.
Характеристики двигателей
задаются в виде зависимостей
между тягой двигателя и скоро-
стью полета, его высотой и сте-
пенью дросселирования двигате-
лей. '
Турбореактивные двигатели (ТРД) в отличие от ПД
и ТВД реализуют тягу Р непосредственно в виде реакции струй
газов из сопла двигателя. Пример относительной высотно-скорост-
ной характеристики ТРД приведен на рис. 2.5, где Рс, — стати-
ческая тяга двигателя на высоте Н=0.
Турбовинтовые двигатели (ТВД) в отличие от ПД и
ТРД реализуют часть мощности в виде реактивной мощности, кото-
рая создается реакцией струй газов, выходящих из сопел двигате-
лей, и составляет ~ 10—20% полной мощности ТВД. Поэтому ха-
рактеристики ТВД обычно задаются для условной, или эквивалент-
ной мощности Л'в, учитывающей мощность на валу двигателя NB и
реактивную мощность ANR.
Система регулирования ТВД на всех эксплуатационных режи-
мах, близких к максимальному, обеспечивает выполнение двух тре-
бований: сохранение эквивалентной мощности постоянной до высо-
ты полета Яогр (зона ограничения мощности) и поддержание тем-
пературы газов перед турбиной постоянной в зоне высот, больших
/Дгр. Типичные для ТВД диаграммы изменения мощности и темпе-
ратуры газов перед турбиной Д приведены на рис. 2.6. С увеличе-
нием скорости полета мощность ТВД имеет тенденцию к возраста-
нию благодаря скоростному напору, повышающему давление в воз-
духозаборнике и увеличивающему массу проходящего через двига-
тель воздуха. Однако в зоне ограничения мощности система регу-
лирования «срезает» избыток мощности (рис. 2.6, б). Выше Ногр
мощность увеличивается с ростом скорости.
Поршневые двигатели (ПД) конструктивно могут быть
выполнены с системой наддува и без нее. Система наддува позво-
ляет повышать давление в цилиндрах двигателя и тем самым уве-
личивать его мощность. Наддув ПД осуществляется обычно при-
22
Рис. 2.6. Высотно-скоростные характеристики турбовинтового двига-
теля:
а — изменение мощности и температуры газов перед турбиной по высоте; б •—
изменение мощности ТВД по скорости
Рис. 2.7. Высотно-скоростные характеристики поршневого двигателя:
а — невысотный; б — с односкоростным нагнетателем; в — с двухскоростным нагнетателем
водными центробежными нагнетателями (ПЦН), обеспечивающи-
ми постоянство наддува до определенной высоты Яв, называемой
границей высотности.
Типичные для ПД диаграммы изменения мощности N и давле-
ния наддува Рк по .высоте без учета влияния скорости полета при-
ведены на рис. 2.7. При учете скорости полета мощность двигателя
будет увеличиваться благодаря усилию наддува из-за скоростного
напора и повышения границы высотности.
В практике аэродинамических расчетов приходится иметь дело
с так называемыми располагаемой тягой и мощностью, под кото-
рыми понимаются максимальные тяга и мощность, развиваемые
двигателем в данных условиях. Для ПД располагаемую мощность
можно определить по формуле
N^Nn-^N^B^-LNR, (2.10)
где Ncs — мощность, снятая с характеристики двигателя и исправ-
ленная на скоростной наддув; ДЛ'Ы— мощность, потерянная в ре-
23
зультате увеличения противодавления на выхлопе; XNR — мощ-
ность, создаваемая реакцией газов на выхлопе; т]в — КПД винта.
Для ТВД
^л=^в11в + Д^,
(2-11)
где 7VB — мощность, передаваемая на винт; AjVh — мощность, реа-
лизуемая на выходе из сопла вследствие реакции струй газов.
Располагаемая гяга ТРД снимается непосредственно с харак-
теристик двигателя.
Аэродинамические силы и тяга двигателя определяют пере-
грузку, являющуюся характеристикой нагруженности самолета.
Обычно под перегрузкой понимается вектор п, равный отношению
результирующей силы R к произведению массы ЛА на ускорение
свободного падения:
(2.12)
Под результирующей силой понимается равнодействующая
аэродинамических сил и тяги.
Проекция вектора п на координатную ось ОХ связанной систе-
мы координат называется продольной перегрузкой пх, на ось OY —
нормальной перегрузкой пу, на ось OZ — поперечной перегрузкой
nz.
Вектор перегрузки можно выразить также через ускорение
dV/dt посредством формулы
dV
п~—
g
(2.13)
§ 2.3. Уравнения движения центра масс
самолета в свободном полете
Как было показано в § 2.1, система уравнений движения цент-
ра масс в свободном полете определяется уравнениями системы
(2.4).
В правые части уравнений системы (2.4) .входят суммы проек-
ций на оси траекторной системы координат аэродинамических сил,
тяги двигателей и силы тяжести самолета. Эти силы могут быть
заданы в разных системах координат: аэродинамическая сила
обычно задается в скоростной системе координат, тяга — в свя-
занной, сила тяжести — в нормальной. Аэродинамическая сила в
общем случае полета со скольжением и креном имеет проекции на
все три оси скоростной системы координат; тяга — только на оси
ОХ и OY, поскольку оси двигателей всегда лежат в плоскостях,
параллельных плоскости симметрии самолета (при этом они могут
быть установлены под углом <рДБ к оси ОХ); сила тяжести всегда
24
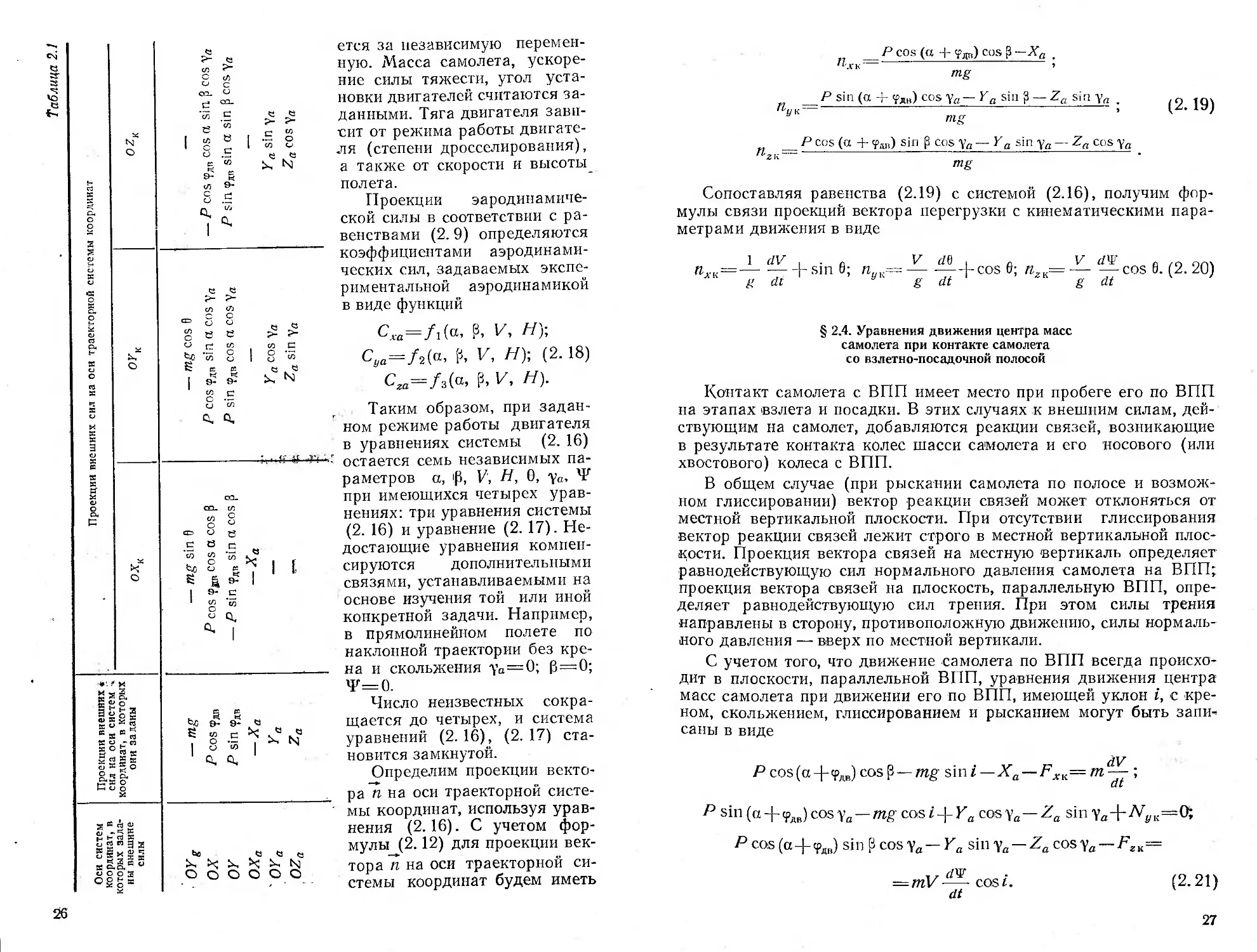
направлена вдоль оси OXg вниз. С учетом сказанного в табл. 2.1
приведены проекции внешних сил на оси траекторной системы ко-
ординат.
С учетом данных табл. 2.1 уравнения (2.4) примут вид
т = — Ха — mg sin 0 -|-Р (cos <рлв cos a cos р — sin <рлв sin a cos 3);
dt
mV = C0S Ya ~COS ° _ ^‘а sin Ya + (cos “да sin a cos Ya +
+ sin олв cos a cos ya); (2. 14)
— mV-----cos 0=r„ sin y„4-Z„ cos y. —
dl
— J3 (cos a>An cos a sin p cos ya — sin <pOT sin a sin p cos yfi).
Если учесть, что
cos срлв cos a + sin <рлв sin a=cos (a + срД11);
cos срлв sin a + sin <рдв cos a = sin (a + cpAB),
то систему (2.14) можно переписать в виде
/3cos(a + (pw)cosp-mgsin6 — Ха=т ~ ;
dt
Р sin (a 4- <р ) cos vfi — mg cos 6 + Ya cos ya—Za sin ya=mV^--,(2. 16)
dt
P cos (a + срлв) sin fj cos ya — Ya sin ya — Za cos ya=mV cos 6.
dt
Система уравнений (2.16) соответствует общему случаю неуста-
новившегося полета самолета по криволинейной траектории при
произвольном положении его в пространстве. В явном виде в урав-
нения системы (2.16) входят 14 величин: Р, Ха, Ya, Za, т, g, <рдв, a,
₽. 6, Y, ya, V, t.
Кроме того, решение системы (2.16) будет зависеть от высоты
полета Н, связанной с параметрами V, 6, t кинематической связью
dll
dt
V sin 6.
(2.17)
Следовательно, система (2.16) содержит 15 величин. При ре-
шении системы (2.16) одна из величин (обычно время t) принима-
25
:ы координат N о е ется за независимую перемен- > ную. Масса самолета, ускоре- 8 с ние силы тяжести, угол уста- <£. новки двигателей считаются за- « .Е £ данными. Тяга двигателя завп- 1 « в I .Е о снт от режима работы двигате- 8 .Е щ % ля (степени дросселирования), J ® 1x1 а также от скорости и высоты « £ полета. ° ~ Проекции эародинамиче- о, ской силы в соответствии с ра- 1 венствами (2. 9) определяются
яешннх сил на оси траекторной систем и о коэффициентами аэродинами- ческих сил, задаваемых экспе- е риментальной аэродинамикой « g в виде функций 1 В ё £ £ cxa=f^a, ₽, v, ну, -й 8 1 8 | C,fl=/2(a, ₽, V, ну, (2. 18) к: е 1й <3 v Iff N Сгй=х/3(а, ?, V, Н). с -Е £ г Таким образом, при задан- ном режиме работы двигателя в уравнениях системы (2. 16)
Проекции bi и о .....а ,м. ,j (остается семь независимых па- раметров а, ф, V, Н, 6, уо, Чт и- при имеющихся четырех урав- Т с нениях: три уравнения системы <= 8 е (2. 16) и уравнение (2. 17). Не- « достающие уравнения компен- tc 8 в | | сируются дополнительными s J э- 1 связями, устанавливаемыми на I g -й основе изучения той или иной “ конкретной задачи. Например, 1 в прямолинейном полете по наклонной траектории без кре- ня и скольжения уа — О’ р—-О-
Проекции внешних « сил на оси систем координат, в которых они заданы Т=0. в Число неизвестных сокра- е? э- е щается до четырех, и система । о .Е । n уравнений (2. 16), (2. 17) ста- ' о, новится замкнутой. Определим проекции векто- ра п на оси траекторной систе-
Оси систем координат, в которых зада- ны внешние силы мы координат, используя урав- нения (2. 16). С учетом фор- ч> о е с мулы (2.12) для проекции век- о о о о о Т0Ра п на оси траекторной си- , - • стемы координат будем иметь
26
___P cos (а + улп) cos fl —Xa ,
mg
_Psin(a + fw)cosYa—rasinfl —Zcsiny„ .
bUK-- >
nig
P cos (a + <t>№) sin fl cos уа — Г д sin ya — Za cos ya
(2.19)
Сопоставляя равенства (2.19) с системой (2.16), получим фор-
мулы связи проекций вектора перегрузки с кинематическими пара-
метрами движения в виде
1 dV . . fl V dfi , 0 V
п,.к=----------В sin □; пик—— ----------cos 6; п,к=—
g dt * g dt g
— cos e. (2.20)
dt
§ 2.4. Уравнения движения центра масс
самолета при контакте самолета
со взлетно-посадочной полосой
Контакт самолета с ВПП имеет место при пробеге его по ВПП
на этапах взлета и посадки. В этих случаях к внешним силам, дей-
ствующим на самолет, добавляются реакции связей, возникающие
в результате контакта колес шассн самолета и его носового (или
хвостового) колеса с ВПП.
В общем случае (при рыскании самолета по полосе и возмож-
ном глиссировании) вектор реакции связей может отклоняться от
местной вертикальной плоскости. При отсутствии глиссирования
вектор реакции связей лежит строго в местной вертикальной плос-
кости. Проекция вектора связей на местную вертикаль определяет
равнодействующую сил нормального давления самолета на ВПП;
проекция вектора связей на плоскость, параллельную ВПП, опре-
деляет равнодействующую сил трения. При этом силы трения
направлены в сторону, противоположную движению, силы нормаль-
ного давления — вверх по местной вертикали.
С учетом того, что движение самолета по ВПП всегда происхо-
дит в плоскости, параллельной ВПП, уравнения движения центра
масс самолета при движении его по ВПП, имеющей уклон i, с кре-
ном, скольжением, глиссированием и рысканием могут быть запи-
саны в виде
Р cos (a+<РЛВ) cos Р — mg sin i - Xa — FXK= m ~ ;
at
P sin (a (рдв) cos ya — mg cos i -ф Ya cos yfl—Za sin \a -ф Ny K=(X
Pcos(a + (pw) sin pcosya — Ya sin ya — Za cosya — F3K=
=mV^~ cost. (2.21)
27
Для ВПП, не имеющей уклона, при отсутствии скольжения,
глиссирования, крена, рыскания уравнения (2.21) значительно уп-
рощаются, принимая вид
Р cos (а 4-<рдв)— Ха — ДЛК=т~~;
dt
Р sin (аД-<рдв)—/ге5’-|-КаД-Л74,к=0; (2.22)
Za=0.
Эти уравнения обычно и используются при расчете движения
самолета по ВПП.
§ 2.5. Уравнения движения центра масс
в частных случаях полета
Неустановившиеся полеты с креном и скольжением редко встре-
чаются в практике полетов самолетов гражданской авиации. Чаще
всего самолеты гражданской авиации осуществляют свои полеты в
местной вертикальной и горизонтальной плоскостях, поэтому пред-
ставляет интерес рассмотреть уравнения движения в отдельных
частных случаях.
Полет в вертикальной плоскости (Чг=0). При по-
лете в вертикальной плоскости движение самолета вдоль оси
•отсутствует, поэтому проекции внешних сил на ось OZK должны
быть сбалансированы. Система уравнений в этом случае примет
вид
Р cos (а Д- ср ) cos р — mg sin 6 — Ха=т ;
dt
Р sin (а Д- <рдв) cos уа — mg cos в Д_ Ya cos уа — Za sin ya=mV ~;
(2. 233
P cos (a Д- срдв) sin p cos ya — Ya sin ya — Za cos ya=0.
Ее можно упростить, если принять
sin(a-|-<pAB)^0; сов(аД-<рД1,)^ 1,0. (2.24)
Эти допущения вполне приемлемы, поскольку основные режи-
мы полета протекают при сравнительно небольших углах атаки;
угол установки двигателей также обычно мал. С учетом (2.24)
уравнения (2.23) перепишем в виде
Pcosp-mg sin 6 — Ха=т--------;
dt
— mg cos 6Д-Еа cos ya—Za sin ya=mV (2.25)
P sinP cosya--Ka sin ya—Zacos,ya=XY
При отсутствии крена и скольжения система (2.25) упрощает-
ся, принимая вид
Р — mg sin 6 — Ха=т~— ; —mg cos ft-\-Ya—mV . (2.26)
28
В случае полета без крена и скольжения по прямолинейной тра-
ектории (0=const) уравнения движения принимают вид
Р— mg sin6 — Ха=т-^~; — mg cast)-}-Ya=0. (2.27)
dt
Если полет установившийся, то dVldt=Q и (2.27) преобразуют-
ся к виду
Р —mg sin 6—Xfl = 0; — mg cos ft-\-Ya=О (2.28)
Полет в горизонтальной плоскости (0 = 0).
В этом случае отсутствует движение вдоль оси ОУК и сбалансиро-
ванными должны быть проекции внешних сил на ось ОУК. Систе-
ма уравнений принимает вид
Р cos (а + <рлв) cos В - Ха=т ;
Р sin (а + <рлв) cos уа — mg + Ya cos уа — Za sin ya=0; (2.29)
P cos (а + сряв) sin p cos ya — Ya sin ya — Za cos ya=mV =—.
С учетом (2.24) ее можно переписать в виде
п о v dV
Р cosp — X а—т —;
dt
— mg + Ya cos ус — Za sin ya=0; (2.30)
P sin t3 cos ya — Ya sin ya — Za cos ya=mV — .
dt
В случае движения с постоянной скоростью система (2.30) бу-
дет иметь вид
Pcosp—Хв=0;
— mg + Ya cos ya — Za sin Ya=0; (2.31)
P sin ₽ cos ya — Ya sin ya — Za cos ya=mV .
dt
Наличие правой части в третьем уравнении системы (2.31) по-
казывает, что угол пути при движении по криволинейной траекто-
рии непрерывно изменяется. Если совершается установившийся
полет без крена и скольжения по прямолинейной траектории в го-
ризонтальной плоскости (горизонтальный полет), то (2.31) прини-
мает совсем простой вид:
P-Xa=0; — mg-[-Ya—0; Za=0. (2.32)
Система (2.32) показывает, что в горизонтальном установив-
шемся полете тяга уравновешивается силой лобового сопротивле-
ния, сила тяжести — аэродинамической подъемной силой, аэроди-
намическая боковая сила отсутствует.
29
§ 2.6. Приближенные методы решения
уравнений движения
Дифференциальные уравнения (2.16), наиболее полно описыва-
ющие полет самолета как перемещение материальной точки, нели-
нейны. Способы их решений в аналитическом виде до настоящего
времени не разработаны; обычно для этой цели используются ме-
тоды численного интегрирования уравнений (2.16) с помощью
счетно-решающих устройств, поэтому в практике аэродинамических
расчетов получили распространение различные приближенные ме-
тоды решения уравнений движения. Наиболее тщательно разрабо-
таны и широко используются графоаналитические методы решения
систем уравнений (2.27) и особенно (2.28), (2.32). Сущность их
заключается в следующем.
Преобразуем первое уравнение системы (2.28) таким образом,
чтобы тяга Р оказалась в левой части равенства, а остальные чле-
ны уравнения в правой:
P—Xa-{-nig sin 6. (2.33)
Тяга, стоящая в левой части уравнения (2.33), необходима для
обеспечения движения с постоянной скоростью. Такая тяга назы-
вается потребной тягой и обозначается Рп.
Если располагаемая тяга определяется характеристиками дви-
гателей, то потребная тяга определяется характеристиками само-
лета. С учетом второго уравнения системы (2.28) для потребной
тяги можно получить выражение
Pn = 2^L(cose+KsinO), (2.34)
К
связывающее потребную тягу с аэродинамическим качеством К и
углом 0. В установившемся прямолинейном полете потребная тя-
га равна располагаемой, поэтому если построить графики измене-
ния потребных и располагаемых тяг в зависимости от какого-либо
характерного параметра, то решение уравнения (2.32) будет опре-
деляться точкой пересечения этих кривых. Обычно в качестве та-
кого параметра принимается скорость полета V. Кривые распола-
гаемых тяг строятся по высотно-скоростным характеристикам дви-
гателя, кривые потребных тяг — по уравнению (2.34). Скорость по-
лета, необходимую для обеспечения полета по прямолинейной тра-
ектории, иногда называют потребной скоростью. Величина этой ско-
рости может быть определена из второго уравнения системы (2.28)д
После подстановки в него выражения для подъемной силы (2.9}
получим
(2.35>
|/ QSCgn
Из выражений (2.34), (2.35) следует, что для построения графи-
ка изменения потребной тяги от скорости необходимо иметь аэро-
динамические характеристики самолета.
30
Величины располагаемых и потребных тяг зависят от скорости
4 и высоты полета. Потребная тяга, кроме того, зависит от угла 0, а
располагаемая — от степени дросселирования двигателя. Поэтому
графики потребных и располагаемых тяг строятся для постоянных
значений 6, Н и степени дросселирования двигателя. Описанный
метод решения уравнений движения получил название метода тяг.
Он используется при расчете установившихся режимов полета са-
молетов с ТРД, поскольку высотно-скоростные характеристики
ТРД задаются в виде зависимости между тягой двигателя и скоро-
стью полета, его высотой и степенью дросселирования двигателей.
Высотно-скоростные характеристики самолетов с винтомоторной
группой (ВМГ),. как уже было сказано, задаются в виде зависи-
мости, связывающей мощность двигателя со скоростью и высотой
полета. Поэтому при расчете установившихся режимов полета са-
молетов с ВМГ удобнее иметь дело с мощностью, а не с тягой.
Умножим почленно уравнение (2.33) на скорость полета V. Тогда
в левой части получим располагаемую мощность Nv, а в правой —
потребную мощность Nn, которую с учетом выражения (2.34) мож-
но записать в виде
I 7Vn=g^(cos6+Msin6). (2.36)
—• л
Построив по высотно-скоростным характеристикам и выражени-
ям (2.35), (2.36) графики изменения располагаемой и потребной
мощностей и определив соответствующие точки их пересечения,
можно так же, как и в методе тяг, найти все параметры установив-
шихся режимов полета самолетов с ВМГ. Этот метод получил наз-
вание метода мощностей.
Разновидностью описанных графоаналитических методов явля-
ется метод Н. Е. Жуковского, позволяющий определить парамет-
ры установившихся режимов движения самолетов также с помо-
щью графических построений. Рассмотрим систему уравнений
(2.28), описывающую установившийся прямолинейный полет без
крена и скольжения. В векторной форме ее можно записать в виде
P+mg+^A=0, (2.37)
где /?Л — аэродинамическая сила планера.
Разделив каждую из сил Р, mg, Ра
получим уравнение (2.37) в безразмерной форме:
Ср+Сг+Сд=0. (2.38)
На основе уравнения (2.38) строится силовой треугольник, из ко-
торого^графически определяется величина потребного коэффици-
ента Ср, а следовательно, и потребной тяги. Так как каждому ре-
жиму полета соответствует свое соотношение между векторами,
входящими в уравнение (2.38), то силовой треугольник должен
строиться для каждого режима полета. Построение силового тре-
31
Полира
летательного
аппарата
Линия действия силы тяжести, летательного, аппарата.
Рис. 2.8. Построение силового треугольника в прямолинейном установившемся
полете
угольника выполняется следующим образом (рис. 2.8). Принимая
за ось Сха маправлеиие, противоположное направлению полета,
строят поляру самолета, откладывая Сха и Суа в одинаковых мас-
штабах. Для полета с заданным углом атаки а можно построить
луч CR из начала координат в точку поляры, соответствующий за-
данному углу а, и провести лучи Cg и Ср, направления которых
известны (Cg направлен всегда по вертикали вниз, Ср — по линии
действия тяги под углом а±<рдв к направлению полета). Точка пе-
ресечения линий действия Ср и Cg образует искомый силовой тре-
угольник для данного режима полета, из которого и определяются
значения Ср и Cg. Величина потребной тяги определяется ра-
венством
Pa=^mg, (2.39)
вытекающим из подобия треугольников сил Р, mg, РА или их без-
размерных коэффициентов Ср, Cg, Ся.
В практике аэродинамических расчетов используется также
энергетический метод, предложенный Н. Е. Жуковским и сущест-
венно развитый В. С. Пышновым. Метод основан на известном из
курса теоретической механики положении, утверждающем, что при
движении твердого тела в силовом поле работа внешних сил равна
изменению кинетической энергии тела.
Энергетический метод позволяет просто найти некоторые лет-
ные характеристики. Применение энергетического метода на конк-
ретных примерах рассмотрено в последующих главах. Здесь же мы
остановимся только на некоторых общих принципах этого метода.
Полная механическая энергия Е движущегося тела в потенци-
альном поле выражается суммой кинетической и потенциальной
энергий:
Е—Ек-\-Еи.
Если самолет движется со скоростью V на высоте Н, то его ки-
нетическая энергия Ек = пгУ2/2, а потенциальная En=mgH.
Таким образом, полная механическая энергия самолета, летя-
щего на высоте Н со скоростью V, будет равна
(2.40)
Разделив величину полной энергии самолета Е на силу тяже-
сти mg, найдем энергию единицы силы тяжести самолета, т. е.
удельную механическую энергию. Величина удельной механической
энергии измеряется в линейных единицах и получила поэтому наз-
вание энергетической высоты. Энергетическая высота в соответст-
вии с формулой (2.40) будет равна
• _ Е2
Э~ 2g
(2.41)
Физически энергетическая высота представляет собой наи-
большую высоту, на которую может подняться самолет при посто-
янных значениях полной энергии при падении скорости до нуля.
Практически подъем самолета на высоту Нэ неосуществим, по-
скольку самолет с аэродинамическими органами управления при
малых скоростях полета становится неуправляемым.
Рассмотрим применение энергетического метода на следующем
примере. Допустим, что нам необходимо найти время подъема са-
молета с высоты Hi на высоту Н2. Скорости полета на высотах Нх
и Н2 соответственно равны Vi и V2. На отрезке dl самолет совер-
шает работу, равную произведению разности сил тяги и сопротив-
ления на dl, и эта работа должна равняться изменению полной
энергии самолета. Таким образом, имеем
dE=(P-Xa)dl. (2.42)
Разделив левую и правую часть уравнения (2.42) на силу тяже-
сти самолета, получим выражение для изменения энергетической
высоты:
dH- = nxadl,
р__
где пха———а — тангенциальная перегрузка.
32
2 776
33
Так как dl=Vdt, то можно записать
dHa=Vnxadt,
откуда следует, что
"э2
/ = Г (2.43)
"э!
V2 V2
где Яэ2==-А + Я2.
2g 2g
Зная закон изменения скорости и перегрузки с высотой V—
—Л(^э), Пха=}2(Н3), можно по формуле (2.43) определить время
подъема самолета с одной высоты на другую.
' Вопросы для повторения
1. Какие силы действуют на самолет при его полете?
2. Почему при полетах в верхних слоях атмосферы влиянием аэродинамиче-
ских сил можно пренебречь?
3. Когда может возникнуть отрицательная перегрузка?
4. В чем состоит различие располагаемых мощностей турбовинтового и порш- _
невого двигателей?
5. Когда применяется метод тяг, а когда метод мощностей и почему?
Задача
Самолет летит на высоте //=10 км со скоростью 720 км/ч. Найти его удель-
ную механическую энергию.
Ответ: 12038 м.
Глава 3
Горизонтальный полет
Движение центра масс самолета рассматривается в траектор-
ной системе координат при полном отсутствии движения воздуш-
ной среды относительно Земли.
В соответствии с этим воздушная скорость самолета равна зем-
ной скорости. При таком предположении полет самолета, при кото-
ром высота не изменяется, называется горизонтальным. В общем
случае траектория горизонтального полета может быть криволи-
нейной, при этом самолет может лететь с креном и скольжением.
В частном случае траектория может быть прямолинейной и само-
лет не будет иметь крена и скольжения (рис. 3.1).
Для самолетов гражданской авиации горизонтальный полет яв-
ляется основным эксплуатационным режимом. При рассмотрении
характеристик неустановившегося горизонтального полета восполь-
зуемся преобразованными (6=0) уравнениями (2.27), при рас-
смотрении установившегося — уравнениями (2.32). Рассмотрим
сначала характеристики установившегося горизонтального полета,
при этом воспользуемся графоаналитическими методами расчета.
§ 3.1. Потребная скорость горизонтального полета
Скорость, необходимая для прямолинейного горизонтального
полета самолета относительно воздуха при заданных полетной
массе и угле атаки, называется потребной. Выразив подъемную
2*
35
силу во втором уравнении системы (2.32) через коэффициент аэро-
о .. „ (Э/2
динамической подъемной силы Суа, скоростной напор и пло-
щадь крыла 5,
- се^2
c.aS—=mg,
(3-1)
получим выражение для определения потребной скорости горизон-
тального полета:
17=1 f (3.2)
V SQCya
. Отсюда следует, что при mg)S= р с увеличением угла атаки до
критического значения потребная скорость уменьшается. С увели-
чением высоты полета плотность воздуха q уменьшается, поэтому
при неизменных угле атаки и удельной нагрузке на крыло скорость
V должна увеличиваться. Для того чтобы при увеличении высоты
скорость полета оставалась постоянной, необходимо увеличивать
угол атаки.
Режим горизонтального полета на данной высоте и при данной
полетной массе обычно задается не воздушной (истинной), а при-
борной скоростью. Приборная скорость Vnp связана с истинной
скоростью полета через индикаторную скорость Уг- соотношением
v=ViiVl, (3.3)
где &—Qh/qo — относительная массовая плотность воздуха.
Индикаторная скорость — это скорость, которую показал бы
идеальный, не имеющий погрешностей, указатель скорости. Инди-
каторная скорость V, связана с приборной Улр следующими соот-
ношениями:
К-=^3+8ИСЖ, (3.4)
^з=171ф+817нни+В1/8ап+8УЛ,. (3.5)
где 6VCjk — поправка на сжимаемость. Эффект сжимаемости при-
водит к завышению измеряемого скоростного напора, поэтому поп-
равка бИсж имеет отрицательное значение; Кз — земная индикатор-
ная скорость, по которой производится градуировка шкалы указа-
теля скорости; бУивст — инструментальная поправка; 614ап — по-
правка, учитывающая запаздывание показаний прибора; 6Va —
аэродинамическая поправка, учитывающая взаимовлияние самоле-
та и насадки для замера скоростного напора, а также собственное
поле давлений насадки.
При полете у земли (//=0, Л=1) индикаторная и воздушная
скорости совпадают. С увеличением высоты различие между воз-
душной скоростью И и индикаторной V, увеличивается. Так, на вы-
соте /7=10000 м воздушная скорость превосходит индикаторную
в 1,72 раза.
При полете на различных высотах с одной и той же индикатор-
ной скоростью скоростной напор на всех высотах одинаков. Следо-
36
вательно, в этом случае у самолета с постоянной массой согласно
соотношению (3.1) коэффициент подъемной силы, а значит, и угол
атаки должны быть 'неизменными.. Если коэффициент подъемной
силы уменьшается, то скоростной напор, а следовательно, и инди-
каторная скорость должны увеличиваться. Благодаря такой связи
между индикаторной скоростью, за которую в первом приближе-
нии можно принять приборную скорость, и коэффициентом подъем-
ной силы упрощается контроль за режимом полета по указателю
приборной скорости.
§ 3.2. Потребная тяга двигателей
для горизонтального полета
Из уравнения (2.32) следует, что в установившемся горизон-
тальном полете потребная тяга определяется выражением
Рп=Ха. (3.6)
Подставляя вместо силы лобового сопротивления ее выражение
по формуле экспериментальной аэродинамики, получим
Pn=CxaS^. (3.7)
Другую формулу для потребной тяги можно получить, разде-
лив почленно первое уравнение системы (2.32) на второе:
Ха __ CxaSQV2-2 = ; 1
rng Ya CyaSQV^-2 к ’
откуда Pn=mglK, (3.8)
где К— аэродинамическое качество самолета.
Проанализируем изменение потребной тяги по скорости полета
при прочих постоянных параметрах. Из формулы (3.7) следует, что
потребная тяга будет зависеть от изменения коэффициента лобо-
вого сопротивления по скорости и от квадрата скорости V2. Коэф-
фициент сопротивления, как известно из курса аэродинамики, оп-
ределяется выражением
Рха — Рхт,р-\-Сх1-гСхв-}-^Рх- (3-9)
Коэффициент индуктивного сопротивления в горизонтальном
прямолинейном полете определяется формулой
С — АС2 — А ( 2mg ?
\SqV2 )
При малых скоростях и больших углах атаки коэффициент ин-
дуктивного сопротивления Cxi является основной величиной в сум-
ме (3.9) и при некоторых углах атаки (а>аНаив) больше коэффи-
циента профильного сопротивления. С увеличением скорости коэф-
фициент индуктивною сопротивления уменьшается по зависимости
Стг~1/К4, соответственно и сила индуктивного сопротивления с
увеличением скорости значительно уменьшается (Х4~1/У2).
37
Рис. 3.2. Зависимость пот-
ребной тяги дозвукового
самолета от скорости
Коэффициент профильного сопротив-
ления СХПр с увеличением скорости не-
сколько уменьшается, но сила профиль-
ного сопротивления с ростом скорости
увеличивается.
Коэффициент ДСХ в формуле (3.9)
связан с возникновением дополнительно-
го сопротивления вследствие возникнове-
ния местных срывов потока при выходе
крыла на большие углы атаки.
Таким образом, при числах полета
М<Мкр, когда коэффициент волнового
сопротивления Схп и сила волнового со-
противления равны нулю, изменение силы
сопротивления самолета или потребной
тяги в режиме установившегося горизонтального полета определя-
ется изменением силы профильного сопротивления, индуктивного
•сопротивления и силы сопротивления срыва (рис. 3.2, а). Из рас-
смотрения графиков на рис. 3. 2, а следует, что в начале полета с
увеличением скорости ввиду интенсивного уменьшения Xi и АХ
суммарная сила сопротивления (см. рис. 3.2, б) вначале падает,
а в дальнейшем, начиная со скорости, соответствующей полету на
а=:ана11Е, сила сопротивления увеличивается, так как АХ=0, —»-
—>0, а сила профильного сопротивления возрастает пропорцио-
нально V2.
Если воспользоваться формулой (3.8), то потребная тяга зави-
сит только от качества К, изменение которого при увеличении ско-
рости (при уменьшении угла атаки) позволяет получить ту же са-
мую зависимость.
Из курса аэродинамики известно, что аэродинамическое каче-
ство имеет максимальное значение при наивыгоднейшем угле ата-
ки кнаив. Это определяет характер зависимости потребной тяги от
скорости полета. При скорости полета, соответствующей некоторо-
му углу атаки, аэродинамическое качество невысокое. На рис. 3.2.
а=:акр=0,3 рад. При увеличении скорости угол атаки уменьшает-
ся, качество увеличивается и потребная тяга падает, достигая ми-
нимального значения при K=Kmax (a=0,J5 рад, см. рис. 3.2). При
дальнейшем увеличении скорости и соответствующем уменьшении
угла атаки качество уменьшается, а потребная тяга начинает уве-
личиваться.
Кривая зависимости потребной тяги от скорости полета назы-
вается кривой Жуковского.
Если скорость полета такова, что М>Мкр и возникает волновое
сопротивление, то коэффициент волнового сопротивления Сх в с
увеличением скорости интенсивно растет.
Коэффициент волнового сопротивления можно представить фор-
мулой
С х в х вО х в;0
38
т. е. он определяется коэффициен-
том волнового профильного Схв0 и
индуктивного Сжв/ волнового сопро-
тивления. Качественное влияние
волнового сопротивления на измене-
ние общей силы сопротивления са-
молета удобно показать на примере
изменения коэффициента профиль-
ного сопротивления Схв0 по чис-
лам М.
На рис. 3. 3, а показано измене-
ние коэффициента профильного со-
противления самолета с прямым
крылом или малой стреловидностью
в функции числа М полета, из кото-
рого следует, что в области транс-
звуковых скоростей полета (в обла-
сти Мкр<М<1,2) коэффициент
Рис. 3.3. Зависимость коэффици-
ента профильного сопротивления
и потребной тяги в области транс-
звуковых и сверхзвуковых скоро-
стей
профильного сопротивления интен-
сивно возрастает, что обусловлива-
ет интенсивный рост силы сопротив-
ления в области рассматриваемого
изменения чисел М (см. рис. 3. 3, в
участок кривой АВ, соответствую-
щий участку кривой АВ на графике рис. 3.3, а). Для самолетов
со сверхзвуковыми скоростями полета коэффициент волнового со-
противления в сверхзвуковой области уменьшается пропорцио-
нально 1/Км1— 1, в связи с чем сила сопротивления, т. е. по-
требная тяга, в этом диапазоне растет менее интенсивно.
На рис. 3.3, б показано изменение профильного коэффициента
сопротивления (с учетом коэффициента профильного волнового
сопротивления Сх в0) для самолета со стреловидным крылом в до-
звуковом, трансзвуковом и сверхзвуковом диапазонах скоростей.
Возрастание коэффициента сопротивления на участке АВ обуслов-
лено интенсивным ростом Сх в0 фюзеляжа и гондол двигателей, а
на участке СД— интенсивным ростом коэффициента Сх в0 крыла и
оперения.
В связи с этим на кривой потребной тяги (см. рис. 3, в) для
сверхзвукового самолета наблюдаются две зоны интенсивного воз-
растания — соответственно АВ и СД.
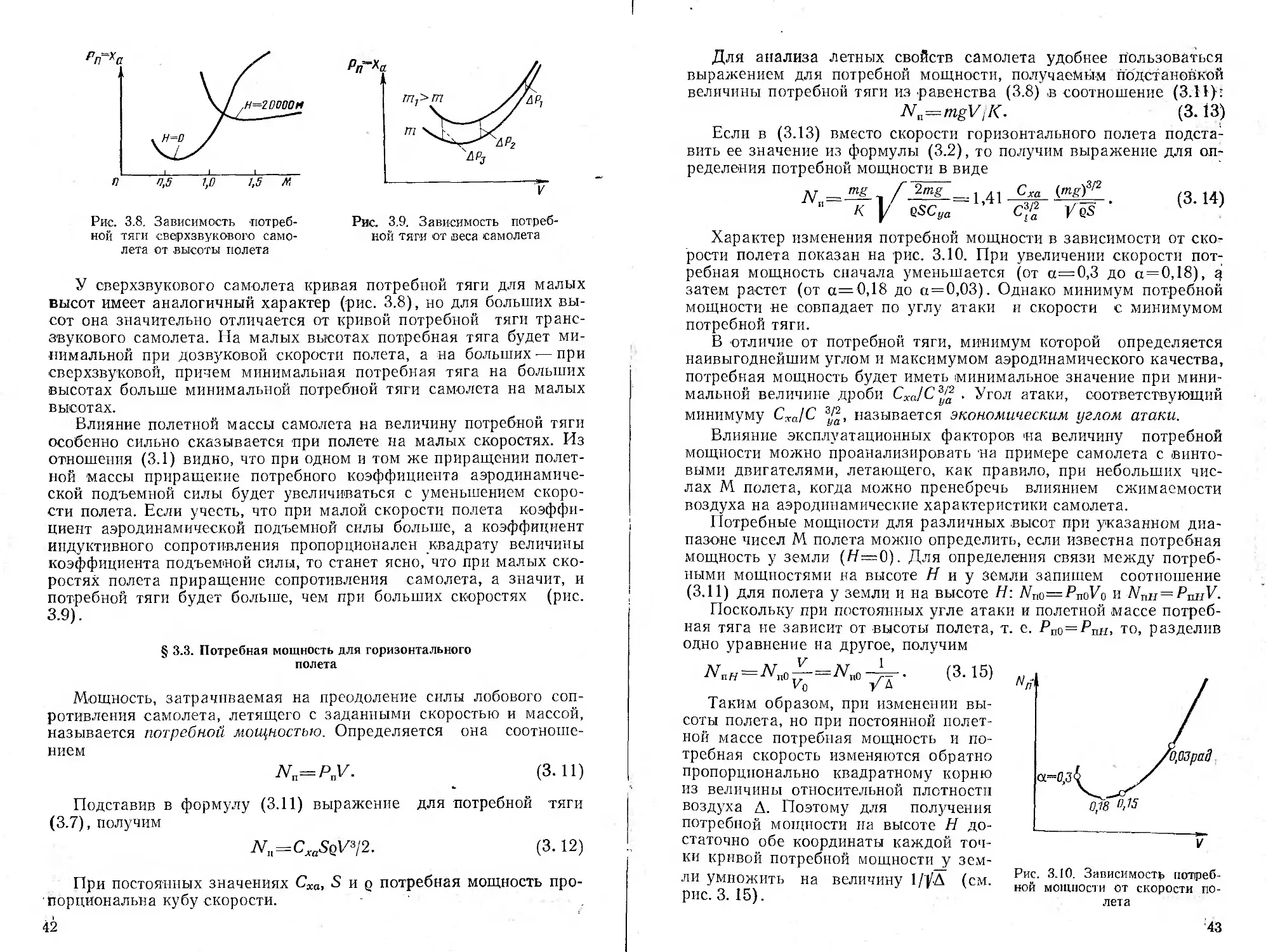
Рассмотрим, как влияет высота полета на зависимость потреб-’
ной тяги (силы сопротивления) от скорости полета. Будем пред-
полагать, что полет осуществляется на докритических скоростях.
Из формулы (3.8) следует, что при полете на постоянном угле ата-
ки (Х= const) потребная тяга не изменяется с изменением высоты,
т. е. Рп от высоты не зависит. Однако из формулы (3.1) следует,
что для того чтобы осуществлять горизонтальные полеты с посто-
янным углом атаки на различных высотах, необходимо постоянство
39
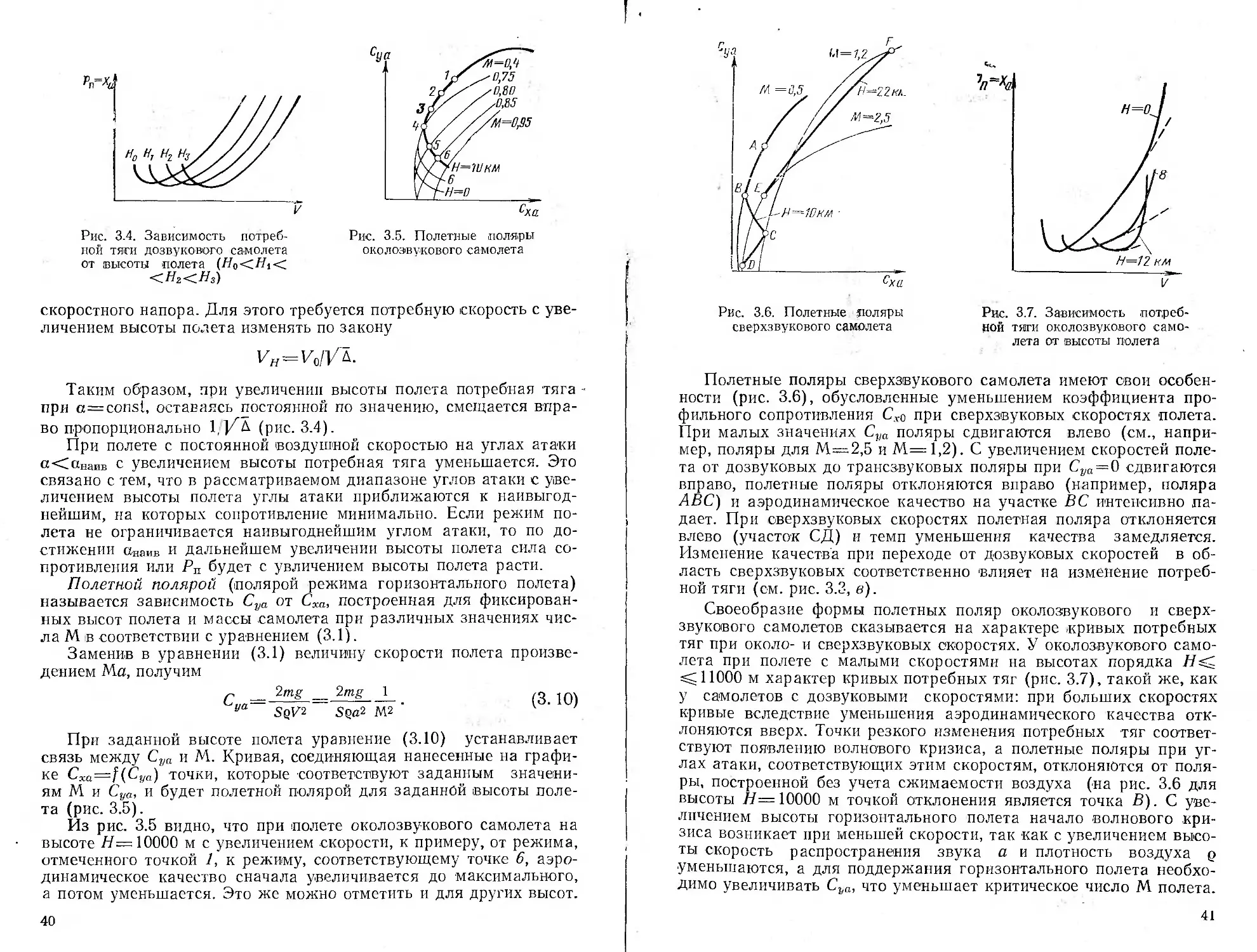
Рис. 3.4. Зависимость потреб-
ной тяги дозвукового самолета
от высоты полета (//0</Л<
Рис. 3.5. Полетные поляры
околозвукового самолета
скоростного напора. Для этого требуется потребную скорость с уве-
личением высоты полета изменять по закону
Таким образом, при увеличении высоты полета потребная тяга -
при а=const, оставаясь постоянной по значению, смещается впра-
во пропорционально (рис. 3.4).
При полете с постоянной воздушной скоростью на углах атаки
«<ссиаив с увеличением высоты потребная тяга уменьшается. Это
связано с тем, что в рассматриваемом диапазоне углов атаки с уве-
личением высоты полета углы атаки приближаются к наивыгод-
нейшим, на которых сопротивление минимально. Если режим по-
лета не ограничивается наивыгоднейшим углом атаки, то по до-
стижении анаив и дальнейшем увеличении высоты полета сила со-
противления или Рп будет с увличением высоты полета расти.
Полетной полярой (полярой режима горизонтального полета)
называется зависимость Суа от Сха, построенная для фиксирован-
ных высот полета и массы самолета при различных значениях чис-
ла М в соответствии с уравнением (3.1).
Заменив в уравнении (3.1) величину скорости полета произве-
дением Мп, получим
С __2^=2^£__L. (3.10)
va SqE2 SQe2 М2
При заданной высоте полета уравнение (3.10) устанавливает
связь между Суа и М. Кривая, соединяющая нанесенные на графи-
ке Cxa=f(C?/Q) точки, которые соответствуют заданным значени-
ям М и Суа, и будет полетной полярой для заданной высоты поле-
та (рис. 3.5).
Из рис. 3.5 видно, что при полете околозвукового самолета на
высоте //—10000 м с увеличением скорости, к примеру, от режима,
отмеченного точкой /, к режиму, соответствующему точке 6, аэро-
динамическое качество сначала увеличивается до максимального,
а потом уменьшается. Это же можно отметить и для других высот.
40
Рис. 3.6. Полетные поляры
сверхзвукового самолета
Рис. 3.7. Зависимость потреб-
ной тяги околозвукового само-
лета от высоты полета
Полетные поляры сверхзвукового самолета имеют свои особен-
ности (рис. 3.6), обусловленные уменьшением коэффициента про-
фильного сопротивления Cv0 при сверхзвуковых скоростях полета.
При малых значениях Суа поляры сдвигаются влево (см., напри-
мер, поляры для М—2,5 и М=1,2). С увеличением скоростей поле-
та от дозвуковых до трансзвуковых поляры при Суа=0 сдвигаются
вправо, полетные поляры отклоняются вправо (например, поляра
АВС) и аэродинамическое качество на участке ВС интенсивно па-
дает. При сверхзвуковых скоростях полетная поляра отклоняется
влево (участок СД) и темп уменьшения качества замедляется.
Изменение качества при переходе от дозвуковых скоростей в об-
ласть сверхзвуковых соответственно влияет на изменение потреб-
ной тяги (см. рис. 3.3, в).
Своеобразие формы полетных поляр околозвукового и сверх-
звукового самолетов сказывается на характере кривых потребных
тяг при около- и сверхзвуковых скоростях. У околозвукового само-
лета при полете с малыми скоростями на высотах порядка
1ЮОО м характер кривых потребных тяг (рис. 3.7), такой же, как
у самолетов с дозвуковыми скоростями: при больших скоростях
кривые вследствие уменьшения аэродинамического качества отк-
лоняются вверх. Точки резкого изменения потребных тяг соответ-
ствуют появлению волнового кризиса, а полетные поляры при уг-
лах атаки, соответствующих этим скоростям, отклоняются от поля-
ры, построенной без учета сжимаемости воздуха (на рис. 3.6 для
высоты Н= 10000 м точкой отклонения является точка В). С уве-
личением высоты горизонтального полета начало волнового кри-
зиса возникает при меньшей скорости, так как с увеличением высо-
ты скорость распространения звука а и плотность воздуха р
уменьшаются, а для поддержания горизонтального полета необхо-
димо увеличивать Суа, что уменьшает критическое число М полета.
41
Рис. 3.8. Зависимость потреб-
ной тяги сверхзвукового само-
лета от высоты полета
Рис. 3.9. Зависимость потреб-
ной тяти от веса самолета
У сверхзвукового самолета кривая потребной тяги для малых
высот имеет аналогичный характер (рис. 3.8), но для больших вы-
сот она значительно отличается от кривой потребной тяги транс-
звукового самолета. На малых высотах потребная тяга будет ми-
нимальной при дозвуковой скорости полета, а на больших — при
сверхзвуковой, причем минимальная потребная тяга на больших
высотах больше минимальной потребной тяги самолета на малых
высотах.
Влияние полетной массы самолета на величину потребной тяги
особенно сильно сказывается при полете на малых скоростях. Из
отношения (3.1) видно, что при одном и том же приращении полет-
ной массы приращение потребного коэффициента аэродинамиче-
ской подъемной силы будет увеличиваться с уменьшением скоро-
сти полета. Если учесть, что при малой скорости полета коэффи-
циент аэродинамической подъемной силы больше, а коэффициент
индуктивного сопротивления пропорционален квадрату величины
коэффициента подъемной силы, то станет ясно, что при малых ско-
ростях полета приращение сопротивления самолета, а значит, и
потребной тяги будет больше, чем при больших скоростях (рис.
3.9).
§ 3.3. Потребная мощность для горизонтального
полета
Мощность, затрачиваемая на преодоление силы лобового соп-
ротивления самолета, летящего с заданными скоростью и массой,
называется потребной мощностью. Определяется она соотноше-
нием
7Vn-PnE. (3.11)
Подставив в формулу (3.11) выражение для потребной тяги
(3.7), получим
N^CxaSQV^2. (3.12)
При постоянных значениях Сха, S и о потребная мощность про-
порциональна кубу скорости.
42
Для анализа летных свойств самолета удобнее пользоваться
выражением для потребной мощности, получаемым подстановкой
величины потребной тяги из равенства (3.8) в соотношение (3.11);
Nn=mgVjK. (3.13)
Если в (3.13) вместо скорости горизонтального полета подста-
вить ее значение из формулы (3.2), то получим выражение для оп-
ределения потребной мощности в виде
П К у QSCya
1,41
Сха
С^а
KqS
(3.14)
Характер изменения потребной мощности в зависимости от ско-
рости полета показан на рис. 3.10. При увеличении скорости пот-
ребная мощность сначала уменьшается (от а=0,3 до а = 0,18), a
затем растет (от а=0,18 до а = 0,03). Однако минимум потребной
мощности не совпадает по углу атаки и скорости с минимумом
потребной тяги.
В отличие от потребной тяги, минимум которой определяется
наивыгоднейшим углом и максимумом аэродинамического качества,
потребная мощность будет иметь минимальное значение при мини-
мальной величине дроби Сха/СгД • Угол атаки, соответствующий
минимуму Сха/С 3&, называется экономическим углом атаки.
Влияние эксплуатационных факторов >на величину потребной
мощности можно проанализировать на примере самолета с винто-
выми двигателями, летающего, как правило, при небольших чис-
лах М полета, когда можно пренебречь влиянием сжимаемости
воздуха на аэродинамические характеристики самолета.
Потребные мощности для различных высот при указанном диа-
пазоне чисел М полета можно определить, если известна потребная
мощность у земли (Я=0). Для определения связи между потреб-
ными мощностями на высоте Я и у земли запишем соотношение
(3.11) для полета у земли и на высоте Н: NnO=P-noVo и Nhh = PuhV.
Поскольку при постоянных угле атаки и полетной массе потреб-
ная тяга не зависит от высоты полета,
одно уравнение на другое, получим
= (3.15)
Vo уд
Таким образом, при изменении вы-
соты полета, но при постоянной полет-
ной массе потребная мощность и по-
требная скорость изменяются обратно
пропорционально квадратному корню
из величины относительной плотности
воздуха Д. Поэтому для получения
потребной мощности на высоте Н до-
статочно обе координаты каждой точ-
ки кривой потребной мощности у зем-
ли умножить на величину 1/VA (см.
рис. 3.15).
т. е. Рпо=^пн, то, разделив
Рис. 3.10. Зависимость потреб-
ной мощности от скорости по-
лета
43
Точки, расположенные на разных кривых потребных мощностей,
но соответствующие одному и тому же углу атаки, лежат на луче,
выходящем из начала координат. В частности, все кривые имеют
одну общую касательную. Точки касания соответствуют полет}' на
наивыгоднейшем угле атаки. Действительно, в этих точках отно-
шение потребной мощности к скорости полета будет минимальным.
Поскольку это отношение в соответствии с формулой (3.11) равно
потребной тяге полета, то в точке касания потребная тяга будет
минимальной, что возможно только при полете с наивыгоднейшим
углом атаки, т. е. с максимальным качеством.
Влияние полетной массы на величину потребной мощности про-
является сильнее, чем влияние на потребную тягу, поскольку с уве-
личением массы растет не только потребная тяга, но и потребная
скорость полета.
§ 3.4. Характерные скорости горизонтального
полета
К 'номенклатуре скоростей горизонтального полета, или скоро-
стей полета по маршруту, относятся скорости сваливания при по-
летной конфигурации, минимальная скорость, максимальная ско-
рость, максимально допустимая скорость, расчетная предельная
скорость и др. Кроме того, используя сетки кривых потребных и
располагаемых тяг и мощностей на рассматриваемых высотах,
графически можно определить некоторые другие характерные ско-
рости. К этим скоростям можно отнести наивыгоднейшую скорость
Кнаив, экономическую скорость Кэк, так называемую крейсерскую
скорость Ккр. Однако следует отметить, что Кнаив, Кэк, VKD не отно-
сятся к номенклатуре скоростей, регламентированных нормами
летной годности (НЛГС) и ГОСТ 20058—74.
Скорость сваливания определяется началом сваливания само-
лета при заданной конфигурации самолета, его полетной массе и
режиме работы двигателей. Под сваливанием понимаются возник-
шие в результате развития отрыва потока на крыле непроизволь-
ные апериодические или колебательные движения самолета отно-
сительно любой из трех его осей со сравнительно большими, замет-
ными для пилота средней квалификации амплитудами угловых
скоростей или ускорений, не парируемые без уменьшения угла ата-
ки самолета. Скорость сваливания можно определить, если извес-
тен коэффициент подъемной силы начала сваливания Суа с.
Минимальная скорость горизонтального полета определяется
величиной максимально допустимого угла атаки и соответственно
величиной максимально допустимого коэффициента аэродинамиче-
ской подъемной силы. Полагая в формуле (3.2) Суа = Суа доп, по-
лучим ____________
Vmln=V^mglCyaRonSQ. (3.16)
Иногда говорят о теоретической Гтпцп> определяемой по фор-
муле (3.16) При ПОДСТаНОВКе Су ДОп=Су max-
Наивыгоднешией называется скорость установившегося прямо-
линейного горизонтального полета с наивыгоднейшим углом атаки,
44
V,
Рис. 3.11. К определению
СКОрОСТеЙ 1Лгш1п, Уиаив,
VKp для самолетов с ТРД
Рис. 3.12. К определению
скоростей Ут mln, V3K,
Рнаив для самолетов с
ТВД и ПД
а значит, с минимальной потребной тягой. Графически режим по-
лета с наивыгоднейшей скоростью для самолета с турбореактивным
двигателем определяется точкой касания прямой, параллельной оси
абсцисс, и кривой потребных тяг (рис. 3.11). Для самолета с вин-
товым движителем режим полета с нанвыгоднейшей скоростью
графически определяется абсциссой точки касания прямой, прове-
денной из начала координат, и кривой потребных мощностей (рис.
3.12).
Наивыгоднейшая скорость для самолетов с двигателями любых
типов вычисляется по формуле
V^^mg/C^SQ. (3.17)
Если полетные поляры данного самолета построены, то значе-
ния Суанаив можно определить графически как ординаты точки
касания прямой, проведенной из начала координат, с кривой поляр.
При определении наивыгоднейшей скорости по соотношению
(3.17) последнее можно преобразовать так, чтобы оно позволило
оценивать влияние конструктивных факторов. Выразим коэффици-
ент сопротивления известной из курса аэродинамики формулой
— (3. 18)
где ХЭф — эффективное удлинение крыла. Тогда аэродинамическое
качество выразится равенством 1^—Суа1Сха—Суа1{Схй-\-Суа1л\э^).
В полете с наивыгоднейшим углом атаки аэродинамическое ка-
чество будет максимальным, производная dKjdCya будет равна
нулю. Тогда, приравнивая производную дК[дСуа нулю, получим
Ц/янаив— — V ^эф/ОгО- (3.19)
После подстановки этого значения в формулу (3.17) получим
vm..= ]/ —^4=. (3.20)
45
Экономическая скорость УЭк самолетов с винтовыми двигателя-
ми соответствует минимальной потребной мощности (см. рис. 3.12).
Аналитически величину экономической скорости можно вычислить,
как и в предыдущих случаях, по формуле
2mgj
С уа 3kQS
(3-21)
Учитывая, что потребная мощность при полете с экономической
скоростью минимальна, т. е.
^пнп = (ЛУ)т1п.
н используя равенство (3.14), получим
С ха
С3/2
уа
se
Приравнивая производную д/дСуа (CxajC3^) нулю, находим
значения коэффициента Суа эк и экономической скорости:
г/лэк хО эф, эк у 5е/ЗСхсЛХЭф
При определении Уэк аналитический метод дает менее точные
результаты, чем при определении Гнаив, так как экономическая
скорость соответствует большим углам атаки, при которых поляра
уже не аппроксимируется квадратичной параболой.
Из сравнения величин Суа я&пв и Суа эк, а также Унаив и Гэк за-
мечаем, что Суа ж в УЗ раз больше, чем Суа наив, а Гэк в 1,73 раз
меньше, чем Гнаив.
Крейсерская скорость самолетов с ТРД характеризуется мини-
мальным отношением тяги к скорости и при слабой зависимости
удельного расхода от скорости полета близка к режиму минималь-
ного километрового расхода топлива.
Графически крейсерская скорость определяется абсциссой точ-
ки касания прямой, проведенной из начала координат (см. рис.
3.12), к кривой потребной тяги.
Используя равенства (3.8) и (3.2), после преобразований по-
лучим
(3.22)
Следовательно, полет с крейсерской скоростью осуществляется
на угле атаки, при котором отношение Сд-а/С1^ минимально.
Приравнивая производную д1дСуа(Сха1С11^) нулю, получим
д ( С ха д / Сд-о + С^а/лХЭф \ ЗС^д/лХэф—Схо п
' \С%) ~ 2С%
46
откуда
С
^ракр
2mg
3SQ
(3.23)
Рис. 3.13. К определению
максимальной скорости са-
молета с ТРД
Полученная по (3.23) крейсерская
скорость полета является скоростью, при
которой километровый расход минималь-
ный в предположении постоянства
удельного расхода топлива. Обычно рей-
совые крейсерские скорости самолетов
гражданской авиации выше, чем скорость, определенная по форму-
ле (3.23).
Характерной скоростью для всех самолетов является также
максимальная скорость горизонтального полета. Для турбореак-
тивного пассажирского самолета при полете на максимальной ско-
рости сила лобового сопротивления равна располагаемой тяге дви-
гателей при их работе на номинальном режиме*. Максимальная
скорость самолета определяется точкой пересечения кривых распо-
лагаемой и потребной тяг (рис. 3.13).
Максимальные скорости современных турбореактивных граж-
данских самолетов находятся либо в дозвуковом диапазоне
Утах=700-4-1000 км/ч, либо в границах, значительно превышаю-
щих скорость звука (7И^ 1,84-2,0); при полете на трансзвуковых
скоростях из-за сильного возрастания волнового сопротивления по-
лет оказывается неэкономичным.
Для самолета с винтовыми двигателями режим полета на мак-
симальной скорости удобно определять по кривым потребных и
располагаемых мощностей: этому режиму соответствует точка пе-
ресечения кривых потребной и располагаемой мощностей при ра-
боте двигателей на номинальном режиме.
Максимальные скорости современных турбовинтовых транспорт-
ных самолетов составляют 700—800 км/ч.
§ 3.5. Влияние условий эксплуатации
на характерные скорости горизонтального
полета
Влияние высоты на характерные скорости полета удобнее все-
го проанализировать с помощью кривых потребных и располагае-
мых тяг и мощностей, построенных для различных высот полета
* В летной практике различаются следующие режимы работы двигателей са-
молета:
взлетный, соответствующий предельно допустимой частоте вращения двига-
теля и его максимальной тяге Рвал;
номинальный, с несколько меньшей частотой вращения и меньшей тягой
Рвом, составляющей около 0,9 РВЗл',
крейсерский, определяемый дальнейшим уменьшением частоты вращения и
тяги; Ркр находится в пределах от 0,75 до 0,5 Рвал-
47
Рис. 3.14. Располагаемые и потребные
тяги самолета Ту-104 (/те = 70000 кг ре-
жим работы двигателя максимальный)
N,kBt
Рис. 3.15. Располагаемые и
потребные мощности самолета
Ан-24 (т—16000 кг, режим
работы двигателя 0,85 номи-
нала)
(рис. 3.14 и 3.15). При отсутствии волнового кризиса для опреде-
ления минимальной, экономической, наивыгоднейшей и крейсер-
ской скоростей на различных высотах полета можно воспользовать-
ся формулой (3.3), если известны соответствующие скорости для
высоты Н=0.
Так, например, для наивыгоднейшей скорости получим
наив= Онаив' г-т" • (3- 24)
у Д
Аналогичным путем можно получить выражения для минималь-
ной, экономической и крейсерской скоростей. В § 3.1 было показа-
но, что если независимо от высоты полета коэффициент Суа наив
будет постоянным,
V
Рис. 3.16. Изменение
скоростей горизон-
тального полета с вы-
сотой
то наивыгоднейшая индикаторная приборная
скорость будет одинаковой для всех высот.
Следовательно, чтобы летать на любой высоте
с наивыгоднейшей скоростью, пилоту достаточ-
но удерживать одну и ту же скорость по при-
бору (с поправкой на его показания), а это
значительно облегчает пилотирование самоле-
та. То же самое можно сказать о минималь-
ной, экономической и крейсерской скоростях.
Соответствующие нм индикаторные скорости
показаны пунктиром на рис. 3. 16.
Если при больших скоростях полета появ-
ляется волновой кризис, влияющий на величи-
ны Сха и Суа, то коэффициент аэродинамиче-
ской подъемной силы, соответствующий опре-
48
деленной характерной скорости, будет изменяться с высотой. Закон
изменения минимальной скорости может на больших высотах поле-
та изменяться из-за уменьшения располагаемых тяг и мощностей.
На большой высоте кривые потребных тяг и мощностей могут пере-
секаться с располагаемыми в двух точках (см. рис. 3. 14 и 3. 15),
причем точка пересечения, соответствующая меньшей скорости, мо-
жет оказаться на угле атаки, меньшем допустимого. Это значит, что
минимальная скорость полета ограничивается уже не только аэро-
динамическими условиями полета, но и тягой (мощностью) двига-
телей. По этой причине на кривой появляется излом
(см. рис. 3. 16).
Величина максимальной скорости на разных высотах определя-
ется по точкам пересечения располагаемых тяг или мощностей (см.
рис. 3.14, 3.15). Поскольку при полете с максимальной скоростью
располагаемая и потребная мощности равны, то из формул (3.7)
и (3.12) можно получить выражения для определения Ртах-:
1 /
Итах=|/ Сх^
(3.25)
27Vp
CxaSQ
(3.26)
Для полета с ТРД согласно формуле (3.25) максимальная ско-
рость зависит от изменения по высоте отношения Pv/CxaQ. На высо-
тах до 11000 м при отсутствии влияния сжимаемости Сха мало из-
меняется по высоте; отношение Pv[q возрастает с высотой и соот-
ветственно возрастает Ртах- На больших высотах отношение Pv/q
мало зависит от высоты, но возрастает Сха и Ртах падает. Если
при увеличении высоты полета возникает волновое сопротивление,
то Сха возрастает и Ртах с увеличением Н уменьшается.
Для самолетов с винтовыми двигателями согласно формуле
(3.26) Ртах зависит от изменения по высоте отношения Nv/CxaQ.
На самолетах с ТВД, располагаемая мощность двигателей кото-
рых до высот 4000—5000 м, так же как и Сха самолета, сохраня-
ется примерно постоянной, отношение NpIq возрастает с высотой и
соответственно возрастает Ртах- На больших высотах располагае-
мая мощность начинает уменьшаться и Ртах падает.
Область значений скоростей, при которых возможен горизон-
тальный полет при фиксированной массе самолета и высоте поле-
та, называется диапазоном скоростей горизонтального полета. Для
каждого самолета имеется высота, на которой диапазон скоростей,
уменьшаясь по мере увеличения высоты, стягивается в точку (рис.
3.16). На этой высоте Pmin= Рнаив = Ртах- Такую высоту называют
теоретическим потолком самолета. Иными словами, теоретическим
потолком самолета называется наибольшая высота, на которой
еще возможен установившийся горизонтальный полет. На этой вы-
соте кривая располагаемой тяги (или мощности) не пересекает
кривую потребной тяги (или мощности), а лишь касается ее.
49
Рис. 3.17. Потребные и располагаемые
тяги сверхзвукового самолета
Максимальная скорость
для сверзвукового самолета
определяется, как и для до-
звуковых самолетов с ТРД,
характером кривых распола-
гаемых и потребных тяг на
различных высотах. Если
кривые располагаемых тяг
с увеличением высоты сме-
щаются вниз (рис. 3.17), ма-
ло изменяя свою конфигу-
рацию, то кривые потреб-
ных тяг с увеличением вы-
соты деформируются весьма значительно. Это приводит к тому, что
в некотором диапазоне высот максимальная скорость начинает
резко увеличиваться, достигая наибольшего значения на высоте
порядка 11000 м.
Чтобы показать, как влияют эксплуатационные факторы на ве-
личину максимальной скорости, прологарифмируем, а затем про-
дифференцируем выражения для определения максимальной ско-
рости (3.25) и (3.26), предварительно заменив в формуле (3.26)
располагаемую мощность самолета произведением КПД винта т)
на мощность Л'да. на валу винта:
^Е,гаХ __ 1 / dQ dS dCxa \
Emax 2 \ Рр Q S Сха I
1 / d^дв . dy dQ dS dCxa \
Ещах 3 \ Л^дв *] Q S Cxa /
(3.27)
(3.28)
Из формулы (3.27) следует, что изменение тяги и коэффициен-
та лобового сопротивления самолета с ТРД на 2% приводит к из-
менению максимальной скорости на 1%.
Для самолетов с винтовыми двигателями [см. формулу (3.28)]
относительное изменение максимальной скорости составляет толь-
ко треть относительного изменения мощности двигателя, КПД
винта и коэффициента сопротивления.
Полученные количественные соотношения справедливы только
в том случае, если влияние сжимаемости на характер обтекания
самолета не проявляется. В противном случае влияние величии
Сха и Рр будет особенно существенно для самолетов, у которых
кривые потребных и располагаемых тяг пересекаются под малым
углом, т. е. когда dPJdM мало отличается от dPnldM. В свою оче-
редь, на параметры Рр, N;№, т), Сха оказывают значительное влия-
ние такие эксплуатационные факторы, как изменение в большом
диапазоне температуры наружного воздуха (влияет на PD, N№),
загрязнение или обледенение поверхности самолета (влияет на ц,
Сха) и т. п.
50
§ 3.6. Первые и вторые режимы
горизонтального полета
Равенство располагаемой и потребной тяг (или мощностей),
необходимое для сохранения постоянства скорости полета, дости-
гается дросселированием двигателя (уменьшением подачи топли-
ва).
Равенство располагаемой и потребной тяг еще не всегда обеспе-
чивает устойчивое равновесие этих величин. Многое определяется
характером изменения кривых располагаемых и потребных тяг в
точках их пересечения. Если, например, самолет с ТРД летит со
скоростью VA (рис. 3.18, а) и потребная тяга равна располагаемой,
то при случайном уменьшении скорости горизонтального полета
сопротивление самолета становится меньше тяги двигателя, не-
смотря на увеличение пилотом угла атаки для обеспечения равен-
ства Ya=mg, появляется избыток тяги, под действием которой ско-
рость полета будет увеличиваться, пока не достигнет величины VА.
При случайном увеличении скорости избыток тяги будет отрица-
тельным и в результате отрицательного ускорения скорость умень-
шится до первоначального значения. Следовательно, в точке А ве-
личина скорости поддерживается автоматически, равновесие сил
сопротивления и тяги двигателей устойчиво. Заметим, что в точке
А имеет место неравенство
дРп дрр
dV dV ’
(3. 29)
т. е. в этой точке темп роста потребной тяги выше темпа роста
располагаемой тяги.
При полете со скоростью Ев (точка В на рис. 3.18) равновесие
сил не будет устойчивым, так как, например, при случайном умень-
шении скорости полета потребная тяга превысит располагаемую.
Поэтому величина скорости не только не вернется к своему преж-
нему значению, но будет еще более от него отклоняться. В точке В
имеет место неравенство
дРи дрр
dV dV
(3. 30)
Если в процессе случайных изменений скорости угол атаки кры-
ла остается постоянным, то увеличение скорости на этом режиме
приводит к набору высоты полета, а уменьшение скорости — к сни-
жению. Для режимов полета, определяемых точками А и В, харак-
терно еще одно принципиальное отличие. Для увеличения скорости
полета, например, от VA до Vc достаточно увеличить тягу двигате-
ля так, чтобы кривая располагаемой тяги прошла через точку С.
Появившийся избыток тяги приведет к постепенному увеличению
скорости от Va до Vc, причем новая величина скорости будет
удерживаться устойчиво. Для уменьшения скорости по сравнению
с VA надо уменьшить тягу двигателя.
Для увеличения скорости полета от Ув до Vd 'Необходимо сна-
чала создать положительное ускорение увеличением тяги (кривая
51
Рис. 3.18. К определению режимов полета
1 на рис. 3.18, d). Koi да в процессе разгона скорость достигает ве-
личины Vd, потребная тяга оказывается меньше располагаемой,
поэтому для сохранения новой скорости необходимо уменьшить тя-
гу двигателя так, чтобы уравновесить потребную и располагаемую
тяги (кривая 2). Значит, для изменения скорости Кв требуется
двойное изменение режима работы двигателя, а для сохранения
новой скорости Кр ввиду неустойчивого режима полета необходимо
непрерывно изменять режим работы двигателя.
На кривой потребных тяг можно выбрать точку, слева от кото-
рой условия полета будут подобны условиям полета в точке В, а
справа — условиям полета в точке А. В точке Е темп роста потреб-
ных и располагаемых тяг одинаков, т. е.
0Рп _дрр
dV dV
(3.31)
Точка Е делит весь диапазон скоростей от Knin до Ктах на две
части. Режимы полета, для которых удовлетворяется условие
(3.29), называются первыми режимами полета; режимы полета,
для которых удовлетворяется условие (3.30), называются вторыми
режимами полета.
Полет на втором режиме нежелателен, так как на этом режиме
существенно усложняется управление самолетом, что при близо-
сти к углам атаки сваливания небезопасно. Опасность повышается
еще из-за того, что на малых скоростях самолет сравнительно
быстро теряет скорость. Кроме того, на таких режимах экономиче-
ски невыгодно летать: при неизменном режиме работы двигателя
самолет может осуществлять полет на первом режиме на сущест-
венно большей скорости.
Анализируя в такой же последовательности условия полета са-
молета с винтовыми движителями, можно получить неравенства
др' (первый режим);
ВТ0Р°й Режим)-
52
Поскольку полет дозвукового самолета на втором режиме не-
желателен, то практически минимальной скоростью горизонталь-
ного полета является скорость на границе двух режимов. В летной
практике для дозвуковых пассажирских самолетов нижний предел
скорости обычно устанавливается справа от границы двух режи-
мов, для того чтобы иметь некоторый запас по скорости и не допу-
скать выхода на второй режим.
Скорости, заключенные между максимальной и практически
минимальной, составляют эксплуатационный диапазон скоростей
горизонтального полета.
Границей двух режимов дозвукового самолета с ТРД для всех
высот является скорость, весьма близкая к наивыгоднейшей. Это
объясняется тем, что располагаемая тяга ТРД слабо зависит от
скорости полета (см рис. 3.18, а), поэтому условие (3.31) выполня-
ется в той точке, где потребная тяга минимальна. Границей
двух режимов самолета с винтовыми двигателями для всех высот
является скорость, близкая к экономической. Поскольку и наивы-
годнейшая, и экономическая скорости полета увеличиваются с вы-
сотой, диапазон эксплуатационных скоростей горизонтального по-
лета по мере увеличения высоты сначала незначительно изменя-
ется, увеличиваясь или уменьшаясь, а выше границы высотности
двигателя быстро сокращается и становится равным нулю на высо-
те теоретического потолка.
У сверхзвуковых самолетов возможны два первых и два вторых
режимов полета, по одному в дозвуковой и сверхзвуковой зонах
(см. рис. 3.18, б). Второй режим в сверхзвуковой зоне, хотя и от-
вечает условию (3.32) и требует двойного изменения режима ра-
боты двигателя при изменении скорости полета, но из-за сравни-
тельно медленного изменения скорости на сверхзвуковых числах М
и сохранения хорошей управляемости самолета опасности не пред-
ставляет. На больших высотах полет сверхзвукового самолета вы-
полняется, как правило, на втором режиме.
§ 3.7. Разгон и торможение самолета
в прямолинейном горизонтальном полете
Целью расчета полета самолета с разгоном или торможением
является определение интервала времени, необходимого для задан-
ного изменения скорости й определения пути, который при этом
пройдет самолет. Для таких расчетов удобно воспользоваться сис-
темой уравнений (2.27) (0=0). Разделив все члены первого урав-
нения на силу тяжести самолета и умножив их на скорость V, по-
лучим
(3.32)
mg g dt
Анализируя формулы (2.41—2.43) заметим, что правая часть
уравнения (3.32) равна скорости изменения энергетической высо-
53
(3.35)
ты во времени (энергетической скороподъемности), т. е. будет
иметь место соотношение
dHэ Р — Кд рг
di mg
Обозначив скорость изменения энергетической высоты
(з.зз)-
получим
V*y= Р~Ха V=—. (3.34)
mg mg
Из соотношения (3.34) следует, что скорость изменения энерге-
тической высоты Уу* зависит от режима полета и режима работы
двигателей. Для самолета с винтовым двигателем
— Mi ддг
— —
mg mg
Разности ДР=Р—Ха и ДМ=МР—Nn в формулах (3.34) и (3.35)
называются избытком тяги и избытком мощности соответственно.
Величина скорости изменения энергетической высоты положи-
тельна при разгоне, так как в этом случае располагаемая тяга (или
мощность) превышает потребную. Медленный разгон можно
представить как подъем самолета с энергетической высоты На1,
соответствующей скорости полета V), на энергетическую высоту
На2, соответствующую скорости полета V2.
Разделив переменные в уравнении (3.33) и проинтегрировав по-
лученное выражение, найдем время разгона
t= J dHJVy. (3.36)
"э1
Величина интеграла находится обычно численным или графи-
ческим методом.
Величина скорости изменения энергетической высоты Vv* отри-
цательна при торможении, т. е. энергетическая высота уменьшает-
ся вследствие уменьшения кинетической энергии (Hs2<zHal).
Более простая зависимость получается для таких случаев тор-
можения, когда располагаемую тягу или мощность можно принять
равной нулю и равенство (3.34) принимает вид
В этих случаях согласно второму уравнению системы (2.32)
получаем
(3.37)
* а -
54
Если это значение Vy* подставить в интеграл (3.36) с учетом
dH3=™L,
то время торможения с нулевой тягой определится интегралом
1'2 V,
— \ KdV=— \KdV.
g i g J
t=
Для определения пути разгона или торможения надо подста-
вить в формулу (3.33) dt—dl[V и проинтегрировать полученное
после подстановки выражение:
v ai
Тогда путь разгона или торможения выразится интегралом
I— \ га/73
~ J V*
н у
С учетом зависимости (3.34) выражение для определения пути
разгона или торможения можно записать в виде
Нэ2 Щ
dH3 Г VdV
—-—=т \ -
'-ха J Р-Х
(3.38)
I
(3.39)
a
"э1
При торможении с тягой, равной нулю, длину участка разгона
или торможения можно определить подстановкой в интеграл
(3.38) величины скорости Vv* согласно формуле (3.37):
/= J KdH3.
"Э2
(3.40)
Интегралы (3.36), (3.38), (3.39) и (3.40) определяются числен-
ными или графическими методами.
Проанализируем полученные зависимости для определения вре-
мени и длины пути разгона или торможения. Эти величины в ос-
новном определяются величиной Vv*. Чем больше Vy* при разго-
не, тем меньше время и путь разгона. У самолетов с винтовым дви-
жителем величина Vv* будет наибольшей при максимальном из-
бытке мощности: АЛ'=Л/Р—Nn [см. формулу (3.35)], что обычно
имеет место при полете с экономической скоростью. У самолетов
с ТРД величина Vy* будет наибольшей при скорости, несколько
превышающей наивыгоднейшую. У сверхзвуковых самолетов мак-
симальная величина произведения АРУ и соответственно макси-
мальная скорость изменения энергетической высоты наблюдаются
при сверхзвуковых скоростях (см., например, рис. 3.17).
Если скорость полета приближается к максимальной, то избы-
ток тяги (мощности) стремится к нулю, следовательно, до нуля
55
уменьшается и скорость Ку*. Тогда величина интеграла (3.36) не-
ограничено возрастает, т. е. в горизонтальном полете самолет ни-
когда не достигает максимальной скорости.
Для более быстрого торможения скорость отрицательная
по знаку, должна иметь возможно большую абсолютную величину.
Чтобы достичь этого, необходимо либо уменьшить тягу двигателя,
либо увеличить сопротивление самолета. Последнее достигается с
помощью специальных аэродинамических тормозов. Согласно вы- _
ражению для определения пути торможения с нулевой тягой (3.40)
чем меньше среднее аэродинамическое качество самолета на пути
торможения, т. е. чем больше его сопротивление, тем короче путь
торможения.
§ 3.8. Эксплуатационные ограничения
скорости полета
В процессе эксплуатации самолетов действуют различные огра-
ничения нижнего и верхнего предела скорости цолета.
Ограничения по углу атаки связаны со срывом потока с несу-
щих поверхностей самолета при выходе его на большие околокри-
тические углы атаки. Выход на околокритические углы атаки при-
водит, как правило, к последующему сваливанию самолета на
крыло, если своевременно пилотом не будут приняты меры по его
ликвидации.
Современные тяжелые скоростные самолеты со стреловидными
и треугольными крыльями имеют больше предпосылок к непроиз-
вольному выходу на критические углы атаки, чем самолеты с пря-
мыми крыльями. Связано это с тем, что зарождение срыва потока
происходит на концевых частях крыла и это способствует умень-
шению продольной устойчивости самолета и соответственно выходу
самолета на критические углы атаки. Таким образом, самолеты со
стреловидными крыльями при полете на больших углах атаки пред-
расположены к самопроизвольному выходу на большие углы атаки
(так называемый «подхват самолета»), В связи с этим для само-
летов указываются конкретные допустимые углы атаки адоп, выход
за которые строго ограничивается в летной практике, или скорость
сваливания ]/с. Не следует, однако, представлять поведение само-
лета таким образом, что при превышении адоп (или ClJapfln) долж-
но произойти сваливание самолета. Может оказаться, что по мере
выхода самолета на большие углы атаки и расширения зоны сры-
ва по всему крылу самолет может стать устойчивым в продольном
отношении. Кроме того, используя руль высоты и управляемый
стабилизатор, пилот при своевременном их отклонении обеспечит
уменьшение угла атаки и сможет вывести самолет на безопасный
режим. Обычно значение Ci/a доп для конкретных самолетов опреде-
ляется по результатам летных испытаний. На некоторых самоле-
тах приближение к углу атаки сваливания сопровождается появ-
лением вибрации и аэродинамической тряски, которые в некото-
ром случае могут быть ограничением коэффициента Суа, т. е. Суа доп =
= Суа тр, где Суа тр — коэффициент аэродинамической подъемной;
56
силы, при котором возникает аэродинамическая тряска конструк-
ции.
Так как Суа1аах зависит от числа М, то от числа М будет зави-
сеть и Суа доп- Величина Суа доп определяет при заданных высоте и
массе самолета величину допускаемой скорости, которая, конечно,
будет больше теоретической минимальной скорости.
Следует оговориться, что для установления допустимого угла
атаки или скорости сваливания существует более строгая регла-
ментация, которая изложена в нормах летной годности самолетов.
Если с увеличением угла атаки отсутствует сваливание, то за ниж-
ний предел скорости Vc может быть принята определяемая из лет-
ных испытаний скорость, равная наименьшей скорости прямоли-
нейного полета без крена, соответствующая полному отклонению
штурвала на себя, или скорость, равная или меньшая 0,90 скоро-
сти возникновения предупреждающих признаков сваливания (ес-
тественных или искусственных). В качестве естественных призна-
ков могут быть тряска конструкции или рычагов управления, пока-
чивание самолета по курсу или тангажу. При отсутствии естест-
венных предупреждающих признаков используются искусственные
признаки, искусственно возбуждается тряска штурвала управле-
ния, создаются импульсные толчки штурвала вперед, срабатывает
световая или звуковая сигнализация.
Ограничения верхнего предела скорости вводятся по различ-
ным причинам: для обеспечения прочности и жесткости конструк-
ции, для сохранения устойчивости и управляемости самолета (ско-
ростная тряска, флаттер), на случай попадания в вертикальные
воздушные порывы, для смягчения перепада давлений в ударной
волне и др.
Ограничение верхнего предела скорости по числу М следует ли-
бо из условия прочности, либо из условия обеспечения устойчиво-
сти и управляемости самолета. На малых высотах максимальное
значение скорости полета определяется допустимыми значениями
внешних нагрузок, пропорциональных скоростному напору <Д'2/2.
Для самолетов с большими дозвуковыми скоростями на больших
высотах допустимое значение скорости определяется критическим
числом М, при превышений которого наблюдается интенсивное
изменение основных аэродинамических характеристик, устойчиво-
сти и управляемости.
Для сверхзвуковых самолетов существуют ограничения верхне-
го предела скоростей по самопроизвольному кренению и реверсу
элеронов, связанные с возникновением упругих деформаций конст-
рукций самолета, а также по кинетическому нагреву.
Для каждого типа самолетов устанавливается свое предельное
число М. Так, например, для самолета Пл-18 МПр=0,63; для само-
лета Ан-12 МПр = 0,7; для самолета Ту-134А Мпр=0,82; для самоле-
та Ту-154 Мир=0,9.
Зависимость предельно возможной скорости полета на данной
высоте от предельного числа М выражается соотношением
= Мпр,
57
где ан — скорость звука на рассматриваемой высоте. Из этого со-
отношения следует, что с увеличением высоты Vnp падает *.
Ограничение верхнего предела скорости по
кинетическому нагреву характерно для сверхзвуковых са-
молетов. Оно связано с ухудшением механических свойств матери-
алов при нагреве поверхности самолета в связи с увеличением ско-
рости полета, а также с необходимостью поддержания температур-
ного режима в кабинах экипажа, с опасностью закипания топлива
в баках и т. д.
Предельное значение числа М по кинетическому нагреву может
быть определено по приближенной формуле
где Тпр—предельная для поверхности самолета абсолютная тем-
пература обшивки; Т-—абсолютная температура окружающего-
воздуха; k — коэффициент адиабаты (6=1,4); г — коэффициент
восстановления температуры в пограничном слое, для ламинар-
ного пограничного слоя принимается г=0,85, для турбулентного
г= 0,88=0,9.
Ограничение верхнего предела скорости по
скоростному напору вызывается соображениями прочности
конструкции самолетов и обычно действует на малых высотах, не
превышающих 5000—6000 м. Если на этих высотах скоростной
напор, ограничиваемый местной прочностью, будет чрезмерно
большим, то напряжения в деталях и узлах самолета превысят до-
пускаемые, что может привести к нежелательным деформациям
конструкций и даже к их разрушению. Обычно предельное значе-
ние скоростного напора <?Пр. принимаемое при расчете конструк-
ции, определяется по формуле
Япр шах’
где r/Itiax — максимально допустимое значение скоростного напора
в горизонтальном полете, зависящее от класса самолета;
k — коэффициент, зависящий от режима полета; в горизонталь-
ном полете он равен единице.
У самолетов гражданской авиации предельная скорость, как
правило, ограничивается общей прочностью из условия полета в
болтанку.
Для самолета Ил-18 c/mav« 12500 Н/м2; для самолета Ту-104
7шах= 19000 Н/м2; значение k в режиме планирования для самоле-
та Ил-18 равно 1,4.
* Предельная скорость падает до 77=11000 м, после чего Vnp=const, так
как при 11000Н 24000 м скорость звука постоянна.
58
Предельный скоростной напор с/11Г и предельная скорость поле-
та Упр связаны зависимостью
, z I / __ И(-пр
пр У /Д *
Предельная индикаторная скорость, как указано выше, посто-
янна для всех высот, что облегчает контроль за режимом полета.
Другой причиной ограничения скоростного напора является уп-
ругость конструкции, вследствие чего ухудшается эффективность
органов управления либо возникают нарастающие изгибно-кру-
тильные колебания (флаттер). Для обеспечения надежной управ-
ляемости скоростной напор ограничивается таким образом, чтобы
скорость полета была бы меньше критической скорости реверса,
т. е. скорости, при которой орган управления полностью теряет
свою эффективность.
Для предотвращения флаттера максимально допустимая ско-
рость ограничивается скоростью, меньшей критической скорости
флаттера на 25—30%. Критическая скорость флаттера определяет-
ся как скорость, при которой энергия изгибно-крутильных колеба-
ний становится равной рассеивающей энергии демпфирования.
Ограничение ускорения по перегрузке вызвано
влиянием перегрузок на психофизическое состояние экипажа и
пассажиров, а также на прочность конструкции самолета. Влия-
ние перегрузки на психофизическое состояние человека зависит
от величины перегрузки, направления и продолжительности ее дей-
ствия. Наибольшая допускаемая перегрузка — в направлении спи-
на — грудь, наименьшая — в направлении голова—таз. У пассажир-
ских самолетов перегрузка ограничивается обычно прочностью са-
молета.
Ограничение высоты полета по звуковому
удару связано с тем, что при полете самолета со сверхзвуковой
скоростью возникает скачок уплотнения, вызывающий скачкооб-
разное повышение давления на поверхности земли. Интенсивность
звукового удара зависит от высоты полета, скорости, объема само-
лета, угла атаки и т. п. По мере удаления самолета от поверхно-
ности земли интенсивность звукового удара уменьшается. Макси-
мально допустимое избыточное давление над населенными района-
ми не должно превышать значения 100 Н/м2.
Указанная величина перепада давлений в ударной волне опре-
деляет высоту, на которой самолет может совершать полеты со
сверхзвуковой скоростью. Так, например для самолета Ту-144 эта
высота равна 10000—14000 м.
Вопросы для повторения
1. В каком случае .минимальная потребная тяга остается постоянной при из-
менении высоты и в каком случае она может изменяться?
2. Почему на рис. 3.4 правые части кривых потребных тяг для различных
высот не пересекаются, а на рис. 3.7 пересекаются?
3. Какой характер имеет зависимость Н = f(Vmax) для самолетов с ТРД и
ТВД и как она выражается графически?
59
4. Нарисуйте и объясните, какой характер имеет зависимость Vmax =
при различных значениях удельной, нагрузки (p=mg/S) трансзвукового самоле-
та (Мщах^Мкр).
5. Когда практический диапазон скоростей горизонтального полета больше —
с выпущенными или убранными шасси?
6. Как отражается загрязнение поверхности самолета на скорости полета?
Задачи
1. Определите максимальное качество и значение Суа напв самолета Ту-104 -
на высоте Я=4 км, считая 0x0=0,018 (при решении воспользоваться данными
рис. 3.15).
Ответ: Kmas — 17,5, Суа наив—0,63.
2. Коэффициент сопротивления самолета при Суа=0 вследствие загрязнения
поверхности самолета увеличился на 25%. Определить максимальную скорость
загрязненного самолета на высоте 6000 м, если известна максимальная скорость
«чистого» самолета (см. рис. 3.15). Известно также, что индуктивное сопротив-
ление самолета Ан-24 на режиме I'm ах составляет 15% от общего сопротивле-
ния.
Ответ: Vmax = 446 км/ч
Глава 4
Набор высоты
§ 4.1. Уравнения движения. Потребная скорость,
тяга и мощность для установившегося полета
по наклонной траектории
Одним из важнейших режимов полета является набор высоты.
В общем случае набор высоты является неустановившимся криво-
линейным движением в вертикальной плоскости.
В полете по наклонной траектории на самолет действуют силы,
приложенные в центре масс самолета: аэродинамическая подъем-
ная сила Ya, сила лобового сопротивления Ха, тяга двигателя Р.
Набор высоты характеризуется воздушной скоростью летатель-
ного аппарата V и углом наклона траектории 0 (угол между осью
ОХа и горизонтальной плоскостью).
Тангенс угла наклона траектории 0 называется градиентом
набора высоты т]н и выражается в процентах
i]H=tg 6-100%.
Согласно НЛГС полный градиент набора высоты т]п.н самолета
при нормальной работе всех двигателей должен быть не менее 5%
на этапе набора высоты 120 м.
Движение самолета при наборе высоты определяется положи-
тельным значением скоростного угла тангажа, а следовательно, и
вертикальной скорости.
В главе 2 получены уравнения неустановившегося движения
центра масс самолета как одного недеформируемого твердого те-
ла по криволинейной траектории в скоростной системе координат
(2.16). При полете без крена и скольжения в соответствии с опре-
делением режима набора высоты (траектория полета лежит в
плоскости XaOYa) уравнения (2.16) принимают вид при Z„=0:
Рсоз(а+<рда)—mg ,
Р sin (а + <ряв)+Уа — mg cos 0=mV .
at
В ряде случаев траектория движения самолета при наборе вы-
соты имеет большой радиус кривизны. Поэтому при расчете набо-
ра 'высоты движение можно рассматривать приближенно прямоли-
нейным: dQldt=d. Кроме того, при малых углах атаки а и уста-
новки двигателя <рдв значения
cos (а + ¥да)~ 1,0; sin (а + <рдв)^0.
61
Тогда уравнения предыдущей системы примут вид:
Р — Ха— nig sin b—mdV'dt, Ya—mg cos 0=0. (4.1)
Если при наборе высоты скорость полета увеличивается
(dV/dt>0), происходит полет с разгоном; если уменьшается
(dV/dt<iOy - происходит полет с торможением; если скорость не
изменяется (dV/dt—O)—происходит установившийся набор вы-
соты.
В определенном диапазоне высот, в котором обычно выполняют
набор высоты дозвуковые пассажирские и транспортные самоле-
ты, в первом приближении можно пренебречь изменением воздуш-
ной скорости самолета по времени, т. е. считать dV]dt=Q. Тогда
уравнения прямолинейного установившегося полета по наклонной
траектории принимают следующий вид:
Р — Xa~mg sin 0, Ya=--mgcos. 6. (4.2)
Первое уравнение системы (4.2) характеризует условие посто-
янства по модулю скорости движения самолета по траектории на-
бора высоты, второе — условие прямолинейности полета.
Таким образом, в режиме установившегося набора высоты тяга
двигателей должна уравновешивать не только силу лобового соп-
ротивления, но и составляющую силы тяжести /yrgsinB, т. е. в
этом режиме тяга двигателей должна быть выше, чем в режиме го-
ризонтального прямолинейного полета. Для выполнения условия
прямолинейности полета аэродинамическая подъемная сила дол-
жна уравновешивать составляющую силы тяжести mg cos 6, по-
этому при наборе высоты подъемная сила несколько меньше, чем
в горизонтальном полете. Очевидно, что величина подъемной силы
при данной массе самолета определяется величиной угла наклона
траектории.
Зависимость коэффициента аэродинамической силы от 0 мож-
но проследить с помощью второго уравнения системы (4.2), пере-
писав его следующим образом:
QY'2 е с
---5 =nig cos 0.
(4.3)
Тогда Cya=2nig CO’S 0,qIz2S.
Чем больше угол 0, тем требуется меньший коэффициент аэро-
динамической подъемной силы, и, следовательно, будет меньше ин-
дуктивное сопротивление и вместе с ним полное сопротивление X,,.
Однако это заметно лишь при крутом наборе высоты на малых ско-
ростях. У транспортных и пассажирских самолетов набор высоты
происходит по пологой траектории и поэтому принимают Ха~
~Хат.а. В соответствии с принятым допущением для таких углов
величина cosG очень мало отличается от единицы, поэтому угол ата-
ки, коэффициент аэродинамической подъемной силы и особенно
подъемная сила сравнительно мало зависят от угла наклона траек-
тории и в приближенных расчетах можно считать cos6« 1. Однако
при больших значениях угла наклона траектории (0>О,15 рад) при
62
определении потребной тяги или потребной мощности делают соот-
ветствующую поправку.
Между углом 0, углом тангажа & и углом атаки а существует
следующая зависимость '& = 0 + а.
Из сравнения формулы (2.35) с формулой (3.2) следует, что
при движении по наклонной траектории потребная скорость
при неизменном угле атаки а (при одинаковых Суа и прочих рав-
ных условиях) будет в фДозО раз меньше, чем при горизонталь-
ном полете, возрастая до величины потребной скорости горизон-
тального полета по мере приближения траектории к горизонталь-
ной.
Уменьшение скорости при движении по наклонной траектории
при неизменном Суа объясняется тем, что при наборе высоты аэро-
динамическая подъемная сила Yn, перпендикулярная вектору воз-
душной скорости должна уравновешивать не всю силу тяжести
mg самолета, а часть, mg cos 0.
Если аэродинамическая подъемная сила станет больше
mg cos 0, то прямолинейное движение превращается в криволи-
нейное, так как возникает центростремительная сила, равная
Ya—mgcos0, которая создает ускорение, нормальное к траекто-
рии движения. Таким образом, условие Ya>mg cos 0 является ус-
ловием искривления траектории движения самолета в вертикаль-
ной плоскости. В процессе набора высоты должно выполняться
условие Ya=mg cos 0.
Для определения характеристик набора высоты с турбореактив-
ными двигателями обычно применяются кривые потребных тяг. Ве-
личина потребной тяги для установившегося полета самолета по
наклонной траектории, как следует из первого уравнения системы
(4.2), может быть определена по формуле
Рп=Ха+mg sine. (4.4)
Таким образом, при полете с набором высоты тяга двигателей
должна быть больше силы лобового сопротивления на величину
составляющей силы тяжести mg sin 0. При 0 = 0 имеем горизонталь-
ный полет.
Составляющая силы тяжести mg sin 0 не зависит от скорости
полета, поэтому на i рафике располагаемых и потребных тяг зави-
симости потребных тяг от скорости полета при 0 = const изобра-
жаются эквидистантными кривыми (рис. 4.1). Эти кривые дают
возможность определить потребную тягу при различных значени-
ях скорости полета и угла наклона траектории. Если на кривые по-
требных тяг нанести кривую расоплагаемой тяги Рр, то точки пере-
сечения этих кривых определят режим набора высоты с максималь-
ной скоростью по траектории при различных углах 0.
Анализ полета самолетов с поршневыми и турбовинтовыми
двигателями производится по кривым потребных мощностей. Умно-
жив обе части уравнения (4.4) на величину воздушной скорости,
получим выражение
РПУ=X-Д mg sin 6-1/.
63
Рис. 4.1. Потребные тяти при полете по
наклонной траектории
Рис. 4.2. Потребные .мощности при
полете по наклонной траектории
Произведение силы лобового сопротивления Ха на воздушную
скорость V соответствует потребной мощности в горизонтальном
полете 2Vn.r.n (см. гл. 2). Таким образом, полученное уравнение
можно записать в виде
2Vn=^.rjI+^sin6.K (4.5)
где Nn=PnV — потребная мощность при полете по наклонной тра-
ектории.
Пользуясь уравнением (4.5), можно построить кривые потреб-
ных мощностей для полета по наклонной траектории, которые, од-
нако, уже не будут являться эквидистантными, так как разница
между потребной мощностью при наборе высоты и потребной мощ-
ностью в горизонтальном полете будет увеличиваться по мере рос-
та воздушной скорости (рис. 4.2).
§ 4.2. Вертикальная скорость при наборе высоты
Вертикальная составляющая воздушной скорости самолета в
нормальной системе координат равна скорости изменения высоты
полета и называется вертикальной скоростью; поэтому при наборе
высоты вертикальная скорость не совпадает с осью OYa скоростной
системы координат, составляя с ней угол 6, который определяет
взаимное расположение оси ОХп, OYg скоростной и нормальной
систем координат (прит|1 = 0).
Очевидно, что воздушная скорость, вертикальная скорость и
угол наклона траектории 6 связаны соотношением
Vy=V sin 0. (4.6)
Вертикальная скорость Vy изменяется с изменением воздушной
скорости (рис. 4.3). Граница первого и второго режимов соответст-
вует анаив для самолетов с ТРД.
64
Величины угла наклона тра-
ектории и вертикальной скорости
при изменяющейся воздушной
скорости определяются по перво-
му уравнению системы (4.1) под-
становкой в него величины sin 0
из соотношения (4.6):
Vy=P~X-±V — — — . (4.7)
mg g dt
При установившемся полете
по траектории, когда dV/d/=0,
выражение (4.7) для определе-
ния вертикальной скорости при-
мет вид
I/ =-.-Р ~ Ха v=(4. 8)
mg mg
,гл!с
vy
8
6
О
2
100 1 ПО 300 Ш У,КМ/ч
Рис. 4.3. Зависимость вертикальной
скорости от скорости полета
где АР=Рр—Рп.г.п —превышение
располагаемой тяги над тягой,
потребной для горизонтального
4.4, а).
полета (избыток тяги) (рис.
Для самолетов с винтовыми двигателями формулы для опреде-
ления вертикальной скорости можно получить в -более удобной фор-
ме. Если учесть, что произведение потребной тяги на скорость есть
потребная мощность при полете по наклонной траектории, а про-
изведение силы лобового сопротивления на скорость есть потребная
мощность при горизонтальном полете, то выражения (4.7) и (4.8)
можно соответственно записать в виде
v 77p — ЛГп.г.п V dV bN V dV .
mg g dt mg g dt
Vy^~Na-rM=^L, (4.10)
mg mg
где AN—избыток мощности (рис. 4.4, б).
Угол наклона траектории при установившемся полете можно
определить воспользовавшись формулой (4.4):
. , ДР дм ,л ...
sin 6=--—--------, (4.11)
mg mgV
где АР=Рр—Рп.г.п— избыток тяги. Если АР>0, то 6>0, т. е. са-
молет совершает набор высоты, при ДР = 0 угол 6 = 0 — самолет
совершает горизонтальный полет.
Из рис. 4.4 видно, что при V<Vmax ДР>0, следовательно, при
этих скоростях на этой высоте возможен набор высоты. Это свиде-
тельствует о том, что достижение скоростей V>Vmax при заданной
располагаемой мощности возможно только при снижении. Ско-
рость, при которой АР = (ДР) max определяет режим набора вы-
3
776
65
Рис. 4.4. К определению избытка тяги (о) и.
мощности (б)
соты с максимальным углом наклона траектории 0 = 0тах, так
как
(sin 6),nax=APmax/mg.
Для околозвуковых самолетов с ТРД режим набора высоты с
0тах соответствует скорости, близкой по величине наивыгодней-
шей скорости горизонтального полета. У сверхзвуковых самолетов
с ТРД и комбинированными силовыми установками скорость при
наборе высоты с 0тах может значительно отличаться от нанвыгод-
нейшей.
§ 4.3. Максимальная вертикальная
и наивыгоднейшая скорости набора высоты
Вертикальная скорость характеризует быстроту роста высоты
полета или его скороподъемность. Очевидно, что максимальная вер-
тикальная скорость Рушах соответствует режиму в рассматрива-
емый момент времени, при котором быстрота нарастания высоты
полета наибольшая. Величина максимальной вертикальной ско-
рости зависит от режима работы двигателя. В зависимости от из-
бытка тяги или мощности двигателя набор высоты с Vy max можно
проводить на номинальном или 0,95 от номинального режима рабо-
ты, нб при условии A7V>0, ДР>0.
Как правило, набор высоты с Рушах осуществляется прп той
воздушной скорости, при которой значения АЛ/ или АРР макси-
мальны.
Воздушная скорость при наборе высоты, соответствующая
Ру=Рутах, называется наивыгоднешией скоростью набора высо-
ты, или просто скоростью набора Рпаб-
У дозвуковых самолетов с ТРД кривая располагаемых тяг поч-
ти параллельна оси абсцисс (см. рис. 3.13) и избыток тяги АР при
наборе высоты
LP=Pv—mg sin 6 —Рп г п,
или ДР*—Рр—mg sin 6 — (mgIК)
будет меньше чем в горизонтальном полете, поэтому наивыгодней-
шая скорость набора высоты Рваив.наб, соответствующая тому же
значению (АРР)тах. будет немного больше наивыгоднейшей ско-
66
рости горизонтального полета V, при которой достигается макси-
мальное аэродинамическое качество самолета.
Практический интерес представляет изменение вертикальной
скорости Vj/max и скорости набора высоты 1/Наб с изменением высо-
ты полета, так как эти характеристики определяют режим наибо-
лее быстрого набора высоты. Очевидно, что режимы набора высо-
ты с бщах и со скоростью Vy max соответствуют различным воздуш-
ным скоростям.
Максимальные вертикальные скорости самолетов Ту-134 и
Ту-154 у земли составляют 17—20 м/с, а на высоте 8000 м — 84-
10 м/с, самолета Ил-62 на соответствующих высотах — 124-15 м/с
и 54-8 м/с.
Скороподъемность самолета характеризуется величиной макси-
мальной вертикальной скорости набора и временем набора высо-
ты на режиме наиболее быстрого подъема.
Для пассажирских самолетов величина максимальной верти-
кальной скорости ограничивается не только избытком тяги, но и до-
пустимым перепадом давлений в кабине (из условий комфорта пас-
сажиров).
Как показано на рис. 4.1, точки пересечения кривых потребных
тяг с кривой располагаемой тяги позволяют установить зависи-
мость между воздушными скоростями установившегося полета и
углами набора высоты. У самолета с винтовым двигателем это
соответствие удобнее определять по точкам пересечения кривых
потребных и располагаемых мощностей (см. рис. 4.2).
Зависимость между воздушной скоростью при наборе высоты,
углом наклона траектории и вертикальной скоростью можно изо-
бразить графически (см. рис. 4.3), где радиус-вектором является
скорость полета при соответствующем угле атаки. Кривая, соединя-
ющая концы вектора скорости, называется полярой скоростей набо-
ра высоты самолета. На поляру скоростей обычно наносятся углы
атаки, как это сделано на рис. 4.3. Для удобства представления
графика вертикальная скорость набора высоты по оси Vy отложе-
на в м/с, а горизонтальная составляющая воздушной скорости V —
в км/ч.
Если известны располагаемые тяги или мощность для различ-
ных режимов работы двигателя, то для каждых из этих режимов
можно построить соответствующую ему поляру скоростей, причем
чем больше режим работы двигателя отличается от номинального,
тем ниже расположится поляра скоростей. Начиная с определенного
режима работы (примерно 0,5 номинального) вертикальная сос-
тавляющая скорости везде будет отрицательная, т. е. при любой
скорости полета будет выполняться снижение.
Известно, что с изменением высоты располагаемые и потреб-
ные тяги также изменяются, поэтому можно построить серию по-
ляр скоростей набора высоты по наклонной траектории для раз-
личных высот.
Рассмотрим более подробно поляру скоростей набора высоты
(см. рис. 4.3). Режим набора высоты, при котором достигается
3*
67
максимальная вертикальная скорость V,ymax, определяется ордина-
той точки касания прямой, параллельной осп абсцисс, с полярой
скоростей подъема. Точка пересечения поляры скоростей набора
высоты с осью абсцисс соответствует режиму горизонтального по-
лета с максимальной скоростью Vmax- Вертикальная скорость на
этом режиме полета становится равной нулю, потому что вся рас-
полагаемая тяга затрачивается на преодоление силы лобового
сопротивления.
Угол наклона касательной, проведенной к поляре скоростей
подъема из начала координат, соответствует максимальному углу
набора высоты 0тах, точка касания является границей двух режи-
мов набора высоты: первого и второго. На первых режимах набора
высоты, соответствующих правой части полярной диаграммы, воз-
душная скорость с увеличением угла атаки уменьшается, а угол
набора высоты увеличивается; на вторых режимах, соответствую-
щих левой части графика, при увеличении угла атаки уменьшается
угол набора высоты, скорость полета и Vy. Воздушная скорость V
при 0гаах меньше скорости V при Рутах- Значит, уменьшив угол и
увеличив воздушную скорость при наборе высоты по сравнению с
той, при которой угол 0 максимален, можно увеличить вертикаль-
ную скорость набора высоты.
Режим более быстрого набора заданной высоты выполняется
при использовании поминального режима работы двигателей на
углах атаки, которым соответствует максимальное значение произ-
ведения АРР и Рутах, а не 0тах- По мере набора высоты угол
атаки, которому соответствует Vy max, увеличивается. Набор высо-
ты с максимальным углом 0 представляет интерес лишь в опреде-
ленных частных случаях, например при необходимости перелета
через препятствия.
Из рис. 4.1 следует, что при 0тах кривая потребных тяг Р„ не
пересекает, а касается кривой располагаемых тяг. Для околозвуко-
вых самолетов, у которых Pv мало изменяется с изменением скоро-
сти, это касание происходит при скорости, близкой к наивыгодней-
шей. Поэтому режим набора высоты с 0тах и граница между пер-
вым и вторым режимами будут соответствовать наивыгоднейшей
скорости.
Следует отметить, что набор высоты на втором режиме не толь-
ко не дает никаких преимуществ в отношении вертикальных ско-
ростей, но и существенно усложняет управление траекторией, тре-
буя, например, для увеличения угла 0 двойных движений штурва-
ла: сначала от себя—-для увеличения скорости, затем на ^ебя —
для увеличения 6. Путь, пройденный самолетом при наб >ие высо-
ты на втором режиме, уменьшается, сам полет происходи на ма-
лых скоростях, больших углах атаки, при пониженной эффективно-
сти рулей, поэтому установившиеся наборы высоты на вторых ре-
жимах не используются.
Характер изменения Vy по воздушной скорости для самолетов с
ТВД и ТРД показан на рис. 4.5, из которого следует, что возмож-
ности набора высоты при прочих равных условиях у самолетов с
68
Рис. 4.5. Изменение вертикальных скоростей вин-
тового (/), дозвукового с ТРД i(2), сверхзвуко-
вого ла малых высотах три М<1 (3) и сверх-
звукового на больших высотах при Л1>1 (4) са-
молетов от скорости полета
ТРД (2) значительно больше, чем с ТВД (/), да и вертикальная
скорость значительно больше. В отличие от дозвуковых самолетов,
имеющих один режим максимальной скороподъемности на всех
высотах, у сверхзвуковых самолетов на малых высотах может быть
один режим максимальной скороподъемности (3), а на средних и
больших высотах их может быть два: дозвуковой и сверхзвуко-
вой (4).
§ 4.4. Барограмма подъема. Теоретический
и практический потолок
Зная вертикальные скорости при наборе высоты можно опреде-
лить время, необходимое для набора самолетом заданной высоты
полета.
Аналитически время перехода от одного режима полета, харак-
теризуемого энергетической высотой Нэ1, к другому с энергетиче-
ской высотой Нэ2 при неустановившемся полете можно определить
из выражения (3.36):
Яэ2
41
Этот интеграл вычисляется приближенно численными или гра-
фическими методами.
При установившемся наборе высоты dH^=dH, Vv*~Vv и при-
веденная формула определения t примет следующий вид:
/= f arfiVy.
Hr
При неустановившемся полете время набора высоты определя-
ется изменением энергетической высоты и энергетической’ скоро-
подъемностью Vy*.
69
Рис. 4.6. Барограмма подъема самолета
Як-40 на номинальном режиме
Графическая зависимость
набора высоты от времени оп-
ределяется по так называемо!!
барограмме набора высоты.
Это название сложилось исто-
рически и объясняется тем, что
Рис. 4.7. Барограмма набора вы-
соты сверхзвукового самолета
барограмма может вычерчиваться барографом, т. е. барометром-
самописцем. Так как высота и давление воздуха взаимосвязаны, то
барограф можно проградуировать не по давлению, а по высоте, и
запись прибора будет изображать зависимость высоты от времени.
Барограмма набора высоты дозвукового самолета показана на
рис. 4.6, сверхзвукового — на рис. 4.7. Барограмма, показанная на
рис. 4.7, имеет горизонтальную площадку, соответствующую раз-
гону самолета в горизонтальном полете до сверхзвуковых скоро-
стей. Современные сверхзвуковые самолеты, как правило, имеют
большую тяговооруженность, что позволяет им при наборе высоты
осуществлять и разгон. Такой набор высоты может быть продик-
тован необходимостью уменьшения воздействия ударной волны.
Если требуется определить время подъема начиная с момента
взлета, то время, отсчитанное по барограмме, будет примерно на
1-—1,5 мин меньше истинного времени подъема. Это объясняется
тем, что скорость отрыва меньше скорости наивыгоднейшего подъ-
ема, поэтому в начале подъема самолет двигается ускоренно, его
вертикальная скорость в начале траектории меньше максимальной.
Практический интерес представляет, «очевидно, барограмма, по-
казывающая зависимость между минимальным временем набора
и высотой Н. Для построения такой барограммы необходимо знать
зависимость V?/ шах — f (7/)
Если максимальные вертикальные скорости для различных вы-
сот определены, можно построить график зависимости Н=
=ИЫ (РИС. 4.6, 4.8).
Потребная мощность при постоянном угле атаки изменяется
пропорционально V1/Д. Следовательно, по мере увеличения высо-
ты величина ДА' должна уменьшаться, что и вызывает падение
вертикальной скорости. С уменьшением полетной массы самолета
70
Рис. 4.8. Изменение максимальных вер-
тикальных скоростей с высотой для
дозвукового самолета с ТРД (а) и
сверхзвукового самолета (б)
Vj/max увеличивается. Измене-
ние полетной массы показано
на рис. 4.6.
Располагаемая тяга ТРД
обычно убывает с высотой, и в
этом случае график функции
H=f(Vymax) изменяется по за-
кону, близкому линейному. Для
высотного турбореактивного
самолета график H=f(Vymax)
имеет точку перелома на высо-
те Н = 11 000 м, так как начиная
с этой высоты тяга двигателя
уменьшается более интенсивно
из-за постоянства температуры
воздуха в стратосфере (см.
рис. 4.8).
Точка пересечения кривой Я=/(Пг/тах) с осью ординат опре-
деляет теоретический потолок ^(1/^=0). Теоретический потолок
реально не может быть достигнут самолетом при установившемся
полете, так как для достижения его требуется бесконечное время
из-за быстрого уменьшения вертикальной скорости. Поэтому высот-
ность различных самолетов сравнивается по их практическому по-
толку Дцр. Практический потолок самолета со всеми работающими
на номинальном режиме двигателями определяется в виде баро-
метрической высоты в зависимости от эксплуатационных масс са-
молета и температуры воздуха и принимается равным высоте, на
которой вертикальная скорость равна 0,5 м/с при скоростях набо-
ра высоты, соответствующих режиму максимальной скороподъем-
ности самолета (но не менее 1,2 скорости сваливания). Эти дан-
ные выбраны из условия точности приборов, определяющих скоро-
подъемность.
Потолок эффективной скороподъемности самолета следует оп-
ределять при тех же условиях, что и практический потолок. Пото-
лок эффективной скороподъемности принимается равным высоте,
на которой полный градиент набора высоты цн составляет не ме-
нее 2% от максимального скоростного угла тангажа.
У сверхзвукового самолета в некотором диапазоне высот избы-
ток тяги АР может иметь значительные максимумы с заметными
«провалами» между ними, что является причиной довольно слож-
ного изменения V^niax с высотой (см. кривую 1 на рис. 4.8, б).
Это означает, что самолет может иметь два значения теорети-
ческого потолка (см. рис. 4.8, б, кривая 2): дозвуковой (Пт2) и
сверхзвуковой (Нт1). При подъеме такого самолета на высотах,
меньших дозвукового потолка, необходимо сначала благодаря из-
бытку тяги разгоняться в горизонтальном полете до сверхзвуковой
скорости, а затем уже продолжать подъем.
Самолет с поршневым двигателем имеет максимальную верти-
кальную скорость на границе высотности двигателя (рис. 4.9, а).
Рис. 4.9. Изменение вертикаль-
ной скорости с высотой для
самолета с поршневыми (а) и
турбовинтовыми (б) двигате-
лями:
1—невысотный ПД; 2—ПД с пред-
варительным наддувом (Нт отк —
теоретический потолок многомо-
торного турбовинтового двигателя
с одним отказавшим двигателем);
3 — граница высотности двигателя
Рис. 4.10. К определению рас-
стояния, проходимого само-
летом за время набора задан-
ной высоты
Характер изменения максимальной вертикальной скорости с высо-
той для четырехмоторного турбовинтового самолета приведен на
рис. 4.9, б.
Длину установившегося набора высоты можно определить при-
ближенно, если известна скорость набора высоты:
/наб=[ Псоз0^^1/С!/. (4.12)
6
Воздушная скорость дозвуковых самолетов с высотой изменяет-
ся, поэтому ее можно осреднить и вынести из-под знака интеграла.
Кроме того, при сравнительно малых углах набора высоты можно
положить cos 0 = 1. Более точно длину установившегося набора
высоты можно найти, построив траекторию набора (рис. 4.10).
Современный дозвуковой пассажирский самолет набирает высоту
10000—11000 м за 18—25 мин, пролетая расстояние 250—300 км и
расходуя 1500—5000 кг топлива.
Если набор высоты совершается не на номинальном режиме
ТРД, то длина набора высоты сильно возрастает, так как время
набора увеличивается значительно сильнее, чем уменьшается воз-
душная скорость, соответствующая набору высоты с максималь-
ным значением Vv. При полетах самолетов с ТРД на больших вы-
сотах значительная часть времени может падать на набор высоты,
совершаемый в ряде случаев на режимах, меньших номинальных.
72
Дать единую методику расчета траектории для общего случая
криволинейного набора высоты трудно, так как приходится ре-
шать сложные вариационные задачи, которые выходят за рамки
настоящего курса. Характер изменения Vi/max многомоторного са-
молета при отказе одного из двигателей показан на рис. 4.9, б.
В этом случае, если самолет находится на //>Дпр*, самолет будет
снижаться, пока не достигнет потолка, определенного с учетом ос-
тавшихся в работе двигателей, 7/т.отк,
§ 4.5. Набор высоты с разгоном
На величину вертикальной скорости при наборе высоты значи-
тельное влияние оказывает изменение воздушной скорости [см. вы-
ражения (4.7), (4.9)]. Если, например, при наборе высоты скорость
полета увеличивается, то энергия двигателей расходуется не толь-
ко на преодоление силы лобового сопротивления и увеличение по-
тенциальной энергии, но и на увеличение кинетической энергии
[см. (4.1)]. Значит, в полете с разгоном вертикальная скорость, а
соответственно и угол наклона траектории, будут меньше, чем при
установившемся полете. Подобный режим полета применяется при
наборе высоты турбореактивными и турбовинтовыми самолетами
после взлета; после отрыва от земли современный скоростной са-
молет разгоняют до наивыгоднейшей скорости набора высоты в по-
лете с набором высоты; с уменьшением скорости в процессе набора
высоты вертикальная скорость возрастает, так как часть кинетиче-
ской энергии переходит в потенциальную, увеличивая высоту по-
лета.
Учитывая, что отношение ускорения по траектории clV/dt к ус-
корению свободного падения g численно равно тангенциальной пе-
Р— Ха I/ ,
регрузке по траектории пха, а выражение —------ V согласно фор-
муле (4.8) равно вертикальной скорости установившегося поле-
та, соотношение (4.7) можно записать в виде
(4.13)
Формула (4.13) дает возможность количественно оценить зави-
симость вертикальной скорости от перегрузки пха и изменение воз-
душной скорости. Если, например, самолет летит со скоростью
250 м/с, а тангенциальная перегрузка пха= —0,1, то за одну секун-
ду скорость уменьшается примерно на 25 м/с, а вертикальная ско-
рость увеличивается на 1 м/с. Как видим, увеличение вертикаль-
ной скорости настолько большое, что им нельзя пренебрегать.
Для оценки влияния изменения кинетической энергии на вели-
чину вертикальной скорости сделаем ряд вспомогательных преоб-
разований:
V dV V dV dH -
Vn —--------—------------.
g dt g dH dt
73
но dH/dt— К;,
поэт ому
Vn =—— I/=Vv — / —
ха g dH J y dH \2y
Теперь выражение (4.13) примет вид
отсюда
(4- 14)
Второе слагаемое знаменателя определяет скорость изменения
с высотой удельной кинетической энергии самолета.
Из соотношения (4.14), как и из (4.13), следует, что при набо-
ре высоты с ускорением (или торможением) вертикальная ско-
рость становится меньше (или больше) вертикальной скорости
при установившемся наборе высоты по прямолинейной траектории.
Рассмотрим влияние изменения энергетической высоты Нэ на
величину вертикальной скорости, для чего сначала продифферен-
цируем выражение (2.41) по высоте И:
^ = 14--А_/Е1']1 (4.15)
dH 1 dH \2g ) v
а затем, учитывая, что знаменатель в (4.14) является выражени-
ем производной dH3l'dH, получим
Vy=V*y^.
у J dH
(4. 16)
Из соотношений (4.15) и (4.16) следует, что если набор высоты
осуществляется с постоянной скоростью, то На—Н и Vy = Vy*.
У сверхзвукового самолета набор высоты после взлета проис-
ходит с ускорением, поэтому для него различие между Vy и Vv*
может быть довольно значительным. С увеличением высоты поле-
та Vy* уменьшается, вследствие этого на больших высотах разгон
сверхзвукового самолета может происходить в горизонтальном по-
лете или даже со снижением.
§ 4.6. Влияние эксплуатационных факторов
на скороподъемность самолета
Несколько преобразовав полученные ранее соотношения, мож-
но проанализировать влияние эксплуатационных факторов на ха-
рактеристики набора высоты.
Выполнив в правой части почленное деление соотношения (4.8)
на mg и учитывая, что при малом скоростном угле тангажа во вто-
ром члене правой части этого соотношения можно принять mg^
я»Уа, получим выражение для определения скороподъемности
*____
mg~ у а.
Р
где р.=—- —тяговооруженность самолета.
mg
74
Таким образом, на скороподъемность оказывают влияние тяго-
вооруженность и аэродинамическое качество самолета. Очевидно,
что увеличение тяговооруженности и аэродинамического качества
самолета приводит к увеличению скороподъемности. Изменение
взлетной массы при заданной тяге и изменение тяги при заданной
массе сказывается па величине вертикальной скорости при набо-
ре высоты вследствие изменения тяговооруженности. На средних
высотах изменение тяги двигателя на один процент приводит к
изменению вертикальной скорости с тем же знаком на 1,5—2%,
т. е. существенное влияние на скороподъемность оказывает режим
работы двигателей. При этом чем больше нагружен самолет, тем
значительнее влияние изменения тяги (или мощности) на верти-
кальную скорость.
Следует отметить, что существенное влияние на скороподъем-
ность оказывает изменение взлетной массы тяжелых реактивных
самолетов, поскольку из-за большого количества топлива, а также
значительной целевой нагрузки их взлетная масса при различной
заправке и загрузке может измениться на 40—50%, что существен-
но сказывается на взлетной тяговооруженности.
При малых взлетных массах тяжелый самолет может превра-
титься в непривычный для пилота самолет с высокой тяговоору-
женностыо, быстро набирающий высоту. Такой самолет требует со-
вершенно иного способа пилотирования, а незнание пилотами этих
особенностей в ряде случаев, имевших место в летной практике,
приводило к тяжелым последствиям.
Уменьшение вертикальной скорости приводит к уменьшению
теоретического и практического потолков самолета. Изменение мас-
сы на 1% вызывает изменение потолка на 60—70 м, если высота
потолка превышает 11000 м. На меньших высотах влияние массы
примерно в два раза больше.
Из метеорологических условий наиболее сильно влияют на ско-
роподъемность давление и температура наружного воздуха, дейст-
вующие на тягу двигателей. Для одного и того же реактивного са-
молета скороподъемность может изменяться примерно в два раза
при его эксплуатации зимой п летом, поскольку изменение тяги
при неизменной частоте вращения может быть приближенно выра-
жено формулой
Р=--Р0A .zk,
7Н
где Ро— тяга при условиях СА у земли; A=qh/q0 — относитель-
ная плотность воздуха; Го и Гн — соответственно температура у
земли и в условиях полета. Относительная плотность и температу-
ра убывают с высотой, причем до высоты 11000 м падение плотно-
сти происходит быстрее падения температуры, поэтому для самоле-
тов с малой тяговооруженностью (пассажирских самолетов) из-за
падения тяги на высокогорных аэродромах взлет может быть не
обеспечен. На высотах более 11000 м уменьшение тяги становится
интенсивнее, так как на этих высотах температура постоянна, а
75
плотность продолжает уменьшаться. Для ТВД характер изменения
мощности в зависимости от температуры аналогичный.
Для СА (ГОСТ 4401—64) отношение = для различ-
но т и
ных высот имеет следующее значение
Н, м 0 2000 4000 6000 8000 10000
Д^ тн 1,0 0,86 0,735 0,684 0,583 0,434
Вопросы для повторения
1. Каким образом уравновешиваются силы в режиме набора высоты?
2. Что такое вертикальная скорость, наивыгоднейшая скорость набора высо-
ты, скороподъемность?
3. Какое влияние оказывает высота на скороподъемность самолета?
4. Чем объяснить наличие двух потолков у сверхзвукового самолета?
5. Какое различие в понятии теоретического и практического потолков?
6. В каком режиме полета при наборе высоты вертикальная скорость будет
больше — в установившейся или неустановившемся?
7. Чем отличаются первый и второй режимы набора высоты?
Задачи
1. Определить максимальную вертикальную скорость Vv max самолета Ан-24
у земли, если эквивалентная мощность одного двигателя 2^=1880 кВт, размах
крыла /=29,2 м, площадь крыла 5 = 72,46 м2, коэффициент сопротивления
Схо=0,022, КПД винта при рассматриваемых скоростях полета т]в=0,7, эффек-
тивное удлинение крыла меньше геометрического на 30%.
Ответ: Vy max=7,4 м/с.
2. Определить высоту теоретического потолка самолета с ТРД, если у зем-
ли коэффициент тяговооруженности Ро=0,29, коэффициент сопротивления
Схо=0,02, эффективное удлинение крыла ХЭф=7,7. Тяга с высотой изменяется
Рн Л
по следующему закону: = a •
1 н
Ответ: /Д = 9000 м.
Глава 5
Снижение самолета
§ 5.1. Характеристики снижения
Под снижением будем подразумевать движение самолета отно-
сительно Земли с отрицательным углом наклона траектории 0, по-
лагая, что движение воздушных масс относительно Земли полно-
стью отсутствует *. Очевидно, что вертикальная скорость при этом
будет отрицательна и равна Vsin 0 (Ук= V). Достичь этого мож-
но или уменьшением тяги силовой установки, или переводом само-
лета на меньшие углы атаки, при которых вертикальная составля-
ющая результирующей силы будет меньше силы тяжести самолета,
или тем и другим одновременно.
Снижение самолета при нулевой тяге называется планировани-
ем. Планированием можно назвать также полет на режиме, когда
тягой двигателей можно пренебречь.
Снижение самолета по сильно наклоненной к горизонту траек-
тории называется пикированием (0>О,5 рад).
Снижение самолета с эшелона с целью захода на посадку на-
чинается примерно за 250—300 км от аэродро-
ма посадки. Угол наклона траектории сниже-
ния с высоты 9000—11000 м составляет 0 =
= — (0,04-4-0,07) рад. В процессе снижения с
эшелона угол наклона не остается постоянным
и изменяется на 1—2°. Вертикальная скорость
снижения зависит от скорости полета по тра-
ектории и от угла наклона и обычно состав-
ляет 10—15 м/с.
Снижение пассажирских самолетов во мно-
гом отличается от снижения других самолетов.
При установленном перепаде давлений в гер-
метической кабине снижение с высоты эшело-
на до высоты 400—600 м может быть выпол-
нено за строго определенное время, которое
называется предельным временем снижения.
Рис. 5.1.
времени
высоты
примере
Зависимость
снижения от
полета (на
самолета
Ту-154)
Предельное время снижения определяется ско-
ростью изменения перепада давлений в герме-
тической кабине, которое по требованиям ком-
форта для пассажиров составляет 0,18 мм
* При больших скоростях ветра производится соответствующая поправка с
учетом динамических свойств самолета.
77
Выпуск закрыл-
ковна промеж у- у о/пуск Снижение t,
к:о/ныи угол шасси_______/ эшелона
3-й.. _ зВоро / Z-й. разворот
разворот/
Пред посада чноё7
снижение
Н=в00еБ00м
Выпуск
закрылков
на посадочный
угол
B~0,0e^0fi65pad ВПП
Рис. 5.2. Схема захода самолета на посадку
П-й разворот
рт. ст./с. Начиная с высЪты // = 40004-7500 м (Я = 4000 м для са-
молетов типа Ан-24, Н«7500 м для самолетов типа Ту-154) и ни-
же высотные системы пассажирских самолетов поддерживают дав»
ление в пассажирской кабине, равное атмосферному давлению на
высоте // = 0. В соответствии с этими условиями самолет может
снижаться мгновенно с указанной высоты (рис. 5.1, а, на примере
самолета Ту-154).
На самом деле снижение осуществляется практически по кри-
вой Ь (рис. 5.1) с равномерным распределением времени снижения
по высоте полета.
В процессе снижения самолета в район аэродрома .воздушную
скорость снижают до допустимой для выпуска шасси. Выпуск шас-
си производится при полете по прямоугольному маршруту (по
кругу), недолетая до третьего разворота (рис. 5.2). При полете по
прямоугольному маршруту самолет подготавливается к завершаю-
щему этапу полета — предпосадочному снижению по глиссаде.
Если при снижении выполняется большой прямоугольный мар-
шрут, то его пролет осуществляется с одновременным снижением.
В начале снижение с высоты подхода (//«4000 м) до высоты
2800 м (в район первого разворота) производят по прямой. С вы-
соты 2800 м и до 1200 м при снижении самолет выполняет первый
“ полете от второго разворота до момента
выпуска шасси самолет снижается еше
на 400—600 м. До момента выпуска шас-
си или за несколько километров снижение
должно быть закончено и скорость пога-
шена до допустимой для выпуска шасси.
При заходе на посадку со снижением
в район третьего разворота снижение
высоты и скорости должно быть законче-
но до момента выпуска шасси. В принци-
пе может осуществляться заход на по-
садку и с прямой. При заходе с прямой
самолет снижается на высоту прямо-
угольного маршута на расстоянии, вели-
чина которого зависит от типа самолета
и второй развороты. При
Рис. 5.3. Схема сил, дейст-
вующих на самолет при
снижении
78
(примерно 25—30 км для некоторых пассажирских самолетов).
Характеристиками снижения являются воздушная скорость,
путь, пролетаемый самолетом, время снижения и угол наклона тра-
ектории.'Для расчета характеристик снижения пользуются уравне-
ниями движения самолета, представленными в скоростной систе-
ме коордийат (2.27). Уравнения движения при прямолинейном
снижении подобны уравнениям движения при подъеме и отличают-
ся от них только тем, что проекция силы тяжести на ось OX,L
уменьшает потребную тягу самолета (рис. 5.3), в то время как при
наборе эта же составляющая увеличивает Рп- С учетом упрощений
(2.24) при неустановившемся движении по прямолинейной траек-
тории уравнения имеют вид
т^-—Р — Ха — mg sin 6; 0~Ya— mg cos&.
Угол наклона траектории при снижении отрицательный.
При установившемся движении по прямолинейной траектории
уравнения имеют вид
0=Р — Ха — mg sin 6; 0=Ка—mg cos 0.
Рассмотрим характеристики снижения. Для определения угла
наклона траектории воспользуемся уравнениями неустановившего-
ся движения по прямолинейной траектории, которые приведем к
виду
P — X„— tn =mg sin 6; Y.=mg cos 6.
at
Разделив первое уравнение системы (5.1) на второе, получим
~ „ dV
dt
(5.1)
tg6
Подставляя вместо силы лобового сопротивления Ха и аэродинами-
ческой подъемной силы Yn их значения
У _р С бР2 у _у с сП2
а' —2 ’ 1 а—%
и обозначая ускорение dV/dt=jx, после элементарных преобразо-
ваний найдем
= (5-2)
* а *\ * а
Согласно второму уравнению системы (5.1) потребная скорость
прямолинейного снижения определится из уравнения
V CyaSQ •; 7
Из схемы рис. 5.3 дальность снижения равна —H/L=tgQ.
79
Рис. 5.4. Потребные и располагаемые тяги (а) и
мощности (б) самолета при снижении
откуда
_ и ___________я_______
tg в 1 т Р
—- + Jx —
К Yajx Ya
При известных воздушной скорости и угле наклона траектории оп-
ределяются вертикальная скорость снижения и время снижения,
поскольку
dH\dt=V у. (5.5)
Для установившегося движения угол снижения, скорость и
дальность снижения можно определить по формулам (5.2), (5.3) и
(5.4), подставив в (5.2) и (5.4) dV[dt=Q, т. е. /ж = 0.
Для расчета характеристик снижения используются графоана-
литические методы, в частности упрощенный метод тяг и мощно-
стей. На рис. 5.4, а для высоты Н=const приведены кривые распо-
лагаемой и потребной тяг в режиме горизонтального полета и сни-
жения. Из уравнений установившегося движения по прямолиней-
ной траектории потребная тяга при установившемся снижении
(6<0)
= (5.6)
По мере увеличения отрицательного угла 9 потребная тяга
уменьшается по сравнению с тягой горизонтального полета на ве-
личину mg sin 0. Как известно, установившиеся скорости можно
определить точкой пересечения кривых потребных и располагаемых
тяг. Для самолетов с винтовыми двигателями объяснения анало-
гичны, так как с помощью уравнения (5.6) легко можно перейти к
уравнению
PuV=XaV + mgV sin 0,
т. е. Nn=Nn.rjI+mgV{sin6. (5.7)
Из уравнения (5.7) следует, что с увеличением угла наклона тра-
ектории по модулю при снижении потребная мощность уменьшает-
(5-4)
80
ся (см. рис. 5.4, б), максимальные скорости установившегося дви-
жения при снижении при этом увеличиваются.
Из формулы (5.5) следует, что для уменьшения времени сни-
жения необходимо увеличить вертикальную скорость снижения,
что, в свою очередь, требует увеличения скорости по траектории и
увеличения по модулю угла наклона траектории. Из формулы (5.2)
следует, что для увеличения угла наклона траектории при посто-
янной скорости необходимо уменьшать тягу двигателя и увеличи-
вать силу лобового сопротивления (уменьшать качество самолета).
Однако при снижении современных пассажирских самолетов,
двигатели не всегда переводят на режим малого газа. Связано это
с тем, что для обеспечения нормальной работы противообледени-
тельной системы и для поддержания скорости изменения перепада
давлений в герметической кабине зачастую воздух отбирается от
компрессоров маршевых двигателей. Так, например, на самолете
Ту-154 снижение осуществляется на режиме не менее 0,4 номиналь-
ного режима работы двигателей.
Анализируя формулу (5.2) можно прийти также к выводу, что
современные самолеты, имеющие стреловидные крылья, и особен-
но сверхзвуковые, имеющие крылья малого удлинения, снижаются
на планировании по более крутой траектории, чем самолеты с не-
стреловидными крыльями, что можно объяснить меньшим аэроди-
намическим качеством у этих самолетов. Однако при использова-
нии тяги при снижении эти самолеты летают даже по более поло-
гой траектории, что особенно необходимо для экономии летного
времени.
С целью увеличения силы лобового сопротивления, уменьшения
качества и увеличения угла наклона траектории отклоняются ин-
терцепторы или гасители подъемной силы. По достижении высоты
полета по кругу или начала маневра для захода на посадку по-
ложение интерцепторов определяется в соответствии с руководст-
вом по летной эксплуатации данного самолета.
Использование интерцепторов и гасителей дает возможность
получить требуемые характеристики снижения. Так согласно нор-
мам летной годности должна обеспечиваться возможность экстрен-
ного снижения самолета с крейсерской высоты до высоты 4000 м
за время, не превышающее 3,5 мин. При этом должны удовлетво-
ряться все требования к безопасности полета, характеристикам
управляемости и устойчивости во всем эксплуатационном диапазо-
не масс и центровок самолета. При необходимости экстренного
снижения двигатели переводятся на холостой ход и самолет при
плавном отклонении штурвала от себя переводится на режим пла-
нирования. При этом нормальная скоростная перегрузка пуа не
должна быть меньше 0,5, а воздушная скорость — не больше пре-
дельной, определяемой предельным скоростным напором. При экст-
ренном снижении траектория будет состоять из криволинейного
участка и снижения самолета по прямой. На втором участке при
выдерживании постоянными предельного числа Л4пр и предельного
скоростного напора скорость полета не будет постоянной. Для рас-
81
Рис. 5.5. Изменение па-
раметров самолета при
экстренном снижении
чета радиуса траектории, изменения высо-
ты полета, скорости снижения и времени
при экстреныом снижении на криволиней-
ном участке полета необходимо воспользо-
ваться формулами, описывающими криво-
линейное движение в вертикальной плоско-
сти (см. гл. 7).
При расчете характеристик экстренного -
снижения на прямолинейном участке ис-
пользуют систему уравнений, описывающую
неустановившееся движение по прямолиней-
ной траектории. Максимальное значение уг-
ла наклона траектории определяется из
формулы (5.2). Из этой формулы следует,
что значение угла наклона траектории бу-
дет тем больше, чем больше потребная тяга
и соответственно чем меньше качество са-
молета.
Качество самолетов ухудшается приме-
нением интерцепторов и сопротивлением
выпущенного шасси. На рис. 5.5 [84] показа-
но изменение параметров полета при экст-
ренном снижении с убранными (сплошные
кривые) и выпущенными (штриховые ли-
нии) шасси. Из рис. 5.5 следует, что несмот-
ря на некоторый первоначальный набор
высоты и потерю скорости, необходимую
для более быстрой постановки шасси па
замки, после 50-й секунды полета вертикальная скорость снижения
при выпущенных шасси становится значительно больше, чем при
убранных шасси; высота Я=4000 м при этом достигается за более
короткое время.
§ 5.2. Планирование самолета
Планирование — режим полета с нулевой или близкой к нулю
тягой. Для современных пассажирских самолетов снижение с за-
дросселированными двигателями практически используется только
в аварийном случае разгерметизации кабины или при отказе двига-
телей. Как естественный режим планирование используется в по-
лете планером.
Наши советские планеристы на планерах конструкций О. К-Ан-
тонова добились выдающихся успехов в спортивном освоении воз-
душного пространства, нм принадлежат многие мировые рекорды
в этом мужественном виде спорта.
Однако интерес к режиму планирования современных самоле-
тов объясняется отнюдь не спортивными соображениями. Хоро-
шие характеристики планирования самолета — залог безопасности
полета, так как квалифицированному пилоту они позволяют совер-
шить уверенное приземление в случае отказа двигателей.
82
Рис. 5.6. Схема сил, дейст-
вующих на самолет при
планировании
Рис. 5.7. Поляры скоростей планиро-
вания
Планирование выполняется по прямолинейной траектории без-
крена и скольжения, поэтому уравнения движения (5.1) запишутся
в следующем виде:
т — Ха— mg sin 0; Q=Ya— mgcosf). (5.8)
dt
При установившемся планировании уравнения (5.8) упроща-
ются:
Ха = — mg si n 6; Ya=mg cos 0. (5.9)
Уравнения (5.8) и (5.9) можно получить непосредственно из-
соотношения между силами, действующими на самолет при плани-
ровании (рис. 5.6).
Все характеристики планирования — угол наклона, вертикаль-
ная скорость и т. д. — можно определить из полученных ранее за-
висимостей для полета по наклонной траектории, приравнивая ну-
лю тягу двигателей, а также из уравнений движения при планиро-
вании.
Для определения угла наклона при установившемся планирова-
нии надо почленно разделить первое уравнение системы (5.9) на
второе, тогда
to0=____________________L
Ь Уа Суа К
Угол планирования и соответствующую ему воздушную ско-
рость полета можно определить по точкам пересечения кривых пот-
ребных тяг или мощностей с осью абсцисс (см. рис. 5.4, а и 5.4, б),
поскольку тяга и мощность в этом случае равны нулю. Если угол
планирования известен, то скорость можно определить по форму-
ле (5.3). Так как воздушной скорости самолета соответствует оп-
(5.10)
83
ределенныи угол планирования, то, откладывая вектор скорости
из начала системы координат, как из полюса, под соответствующим
углом планирования, можно получить полярную диаграмму (поля-
ру) скоростей планирования (рис. 5.7).
Угол планирования имеет минимальную абсолютную величину
при максимальном аэродинамическом качестве, т. е.
|6|mm=arctg——.
A max
Вертикальную и горизонтальную составляющие воздушной ско-
рости можно найти из соотношений
IZr=IZcose, = V sin 6= —-= (5.11)
В летной практике углы планирования обычно не превышают
0,07—0,10 рад и в этих случаях можно принять Уг~ V.
На поляре скоростей планирования точка касания прямой, про-
веденной из начала координат, с полярой скоростей планирования
определяет режим наиболее пологого планирования (Опип). Наи-
высшая точка поляры соответствует | Vjjmin, т. е. наиболее медлен-
ному снижению. Для дозвуковых пассажирских самолетов скоро-
сти наиболее пологого планирования (|0|min) и наиболее медлен-
ного снижения ((Kjmin) мало отличаются друг от друга.
При больших углах установившегося планирования (0~
~0,5 рад), т. е. при пикировании, скорость планирования удобно
определять из условия (см. рис. 5.6) R = mg, из которого следует:
2mgiC #Sq,
где • C/j =
При отвесном пикировании Суа=0 и воздушная скорость выра-
жается формулой ?
V = ]/r2mgiCxaSQ.
Скорость полета при планировании увеличивается с уменьшени-
ем плотности воздуха, поэтому различным высотам будут соответ-
ствовать разные полярные диаграммы скорости (см. рис. 5.8). При
выпуске механизации крыла и шасси происходит, с одной стороны,
увеличение коэффициента аэродинамической подъемной силы, п
это приводит к уменьшению воздушной скорости при заданном уг-
ле атаки, с другой, — увеличение коэффициента лобового сопро-
тивления и уменьшение качества самолета, что способствует уве-
личению отрицательного угла наклона траектории и, в частности,
увеличению минимального угла 0.
Дальность прямолинейного установившегося планирования
можно определить из соотношения
Z — ~Hzig^ = KH. (5.12)
При неустановившемся движении планирования, т. е. при пла-
нировании с разгоном или торможением, необходимо учитывать
84
изменение кинетической энергии. Если при установившемся полете
потенциальная энергия положения расходуется на совершение ра-
боты по преодолению сил сопротивлений, то при планировании с
разгоном она затрачивается кроме того и на увеличение кинетиче-
ской энергии. Значит, при планировании с разгоном угол наклона
траектории будет более крутым, чем при установившемся планиро-
вании, а при планировании с торможением — более пологим. Соот-
ветственно изменяется и дальность планирования.
Длина траектории при планировании определяется путем пре-
образований и интегрирования дифференциального уравнения
dl—dS cos в —V cos Gdt, (5.13)
где dS — элемент траектории, пролетаемый за отрезок времени
dt, a dl — горизонтальная проекция этого элемента.
Подставляя в ранее полученное соотношение V^—dHJdt зна-
чение V,,* согласно формуле (5.11), найдем
dt=-J^~.
'V cos’fl
Подставляя это значение dt в (5.13), определим dl
dl— —KdH3
"э2 "э1
или 1= ~ J KdH3 — J KdHa. (5.14)
Нэ1 Нэ2
В приближенных расчетах величину аэродинамического качест-
ва можно осреднить и вынести ее из-под знака интеграла. Тогда
получим
/ у2__у2\
/^/<ср(Яэ1-Яэ2)=/<ср ^-^ + 4—2 . (5.15)
\ 2g /
При Vi = V2 формула (5.15) примет вид ранее полученной фор-
мулы (5.12). Дальность планирования будет наибольшей, если ре-
жим планирования для каждой высоты будет выдерживаться с
максимальным качеством. Максимальное качество дозвукового са-
молета практически одинаково на всех высотах. При расчетах око-
лозвукового самолета /Стах для разных высот необходимо осред-
нить.
Более точные значения максимальной дальности планирования
получаются графоаналитическим методом, если известны кривые
потребных тяг горизонтального полета для серии высот.
Имея кривые потребных тяг и задавшись рядом значений ско-
рости, можно определить для каждой высоты и скорости полета
значения аэродинамического качества и энергетической высоты:
нэ=н + —,
Рл э 1 2g
после чего построить графики зависимости K=f(H, Нв). Их при-
мерный вид показан на рис. 5.8. Огибающая кривая является гра-
85
Рис. 5.8. Графики функций K=f(H, На)
фическим изображением подын-
тегральной функции интеграла
(5.14) для оптимальных режимов
планирования на всех высотах.
Наибольшая дальность планиро-
вания определяется площадью,
ограниченной соответствующими
энергетическими высотами, гра- .
фиком подынтегральной функции
и осью абсцисс.
Во всех уравнениях взята воз-
душная скорость самолета, кото-
рая включает в себя скорость дви-
жения центра масс относительно
Земли и скорость, обусловленную движением воздушных масс от-
носительно Земли. Последняя при наличии сильного ветра может
составить заметную часть суммарной скорости. Направление ис-
тинной (суммарной) скорости самолета относительно Земли опре-
деляют с учетом динамических свойств самолета, скорости и на-
правления ветра.
§ 5.3. Влияние эксплуатационных
и конструктивных факторов на характеристики
снижения и планирования
Влияние конструктивных и эксплуатационных факторовна ха-
рактеристики снижения можно показать на примере вертикальной
скорости установившегося снижения, определяемой выражением
\ mg К )
Последнее равенство позволяет сделать вывод, что уменьшение тя-
ги и увеличение сопротивления приводят к увеличению вертикаль-
ной скорости снижения. Из формулы следует, что с уменьшением
тяги двигателей влияние полетной массы на вертикальную скорость
уменьшается. На планировании влияние полетной массы на верти-
кальную скорость проявляется через воздушную скорость [см. фор-
мулу (5.3)] и качество самолета [см. формулу (5.11)].
Из метеорологических условий наиболее сильно влияют на вер-
тикальную скорость давление и температура наружного воздуха,
от которых зависят тяга (мощность) двигателя и плотность окру-
жающей среды; последнее влияет также на скорость снижения.
Количественно влияние изменения метеорологических условий
показано в § 4.6. Следует указать об особенностях полета самоле-
та в режиме предпосадочного снижения, связанных с выходом са-
молета на вторые режимы полета. С развитием скоростной авиа-
ции характерным является увеличение скоростей, разделяющих
1-й и 2-й режимы полета. На рис. 5.9 приведен пример изменения
потребных тяг дозвукового с прямым крылом, околозвукового
и сверхзвукового самолетов и показаны примерные диапазоны
скоростей захода на посадку. Из графиков на рис. 5.9 следует,
86
Рис. 5.9. Изменение потреб-
ной тяги при выпуске шас-
си и механизации крыла:
7—Vc для различных конфигу-
раций; "-Ит1пдоп для раз-
личных конфигураций самоле-
та по НЛГС; 1, 2, 3—потреб-
ные тяги соответственно сверх-
звукового, околозвукового и
дозвукового самолетов
что для современных пассажирских само-
летов характерным является перемеще-
ние диапазона скоростей захода на по-
садку в сторону вторых режимов (на ри-
сунке для сверхзвукового самолета в об-
ласти вторых режимов). Это вносит опре-
деленные сложности в управление на
режиме снижения, связанные с необхо-
димостью вмешиваться в управление,
чтобы выдержать заданную траекторию и
скорость полета. При полете на втором
режиме потребуется прибегать не только
к управлению рулем высоты, но и к не-
прерывному использованию тяги двига-
телей.
Сложность пилотирования в режиме
предпосадочного снижения и полета на
вторых режимах усугубляется при вы-
пуске закрылков. Современные пасса-
жирские самолеты, как правило, имеют
развитую механизацию крыла, исполь-
зование которой необходимо для улуч-
шения взлетно-посадочных характерис-
тик. При выпуске закрылков кроме рос-
та аэродинамической подъемной силы существенно растет сила
лобового сопротивления, что согласно формуле (5.6) приводит к
росту потребной тяги самолета. Для компенсации возросшего
сопротивления требуется значительно увеличить располагаемую
тягу двигателя. В связи с большим временем приемистости двига-
телей современных самолетов увеличение сопротивления самолета
при выпуске механизации приводит к торможению самолета, пере-
ходу на вторые режимы полета и к потере высоты полета. Для
исправления такого положения используются некоторые опереже-
ния перемещением рычага управления располагаемой тягой двига-
телей с тем, чтобы к моменту выпуска закрылков двигатели раз-
вивали необходимую тягу.
На характеристики планирования, как это следует из формул
(5.3) и (5.10), (5.12), в основном влияют аэродинамическое каче-
ство и масса самолета. Масса самолета влияет на величину скоро-
сти, а аэродинамическое качество — на угол планирования. Наи-
большее аэродинамическое качество у современных пассажирских
самолетов составляет 16—17. Температура и давление воздуха ока-
зывают влияние на скорость планирования, поскольку от них зави-
сит плотность воздуха, и практически не влияют на угол и даль-
ность планирования.
Вопросы для повторения
1. Из каких условий ограничивается вертикальная скорость снижения само-
лета?
87
2. Напишите уравнения снижения самолета по прямолинейной траектории
(движение установившееся и меустановившееся).
3. На каком угле атаки будет максимальная дальность планирования само-
лета?
4. Нарисуйте поляры планирования самолета без выпущенных и с выпущен-
ными механизацией и шасси при Н= const и объясните, чем они различаются.
5. Объясните, как влияет на характеристики планирования уменьшение воз-
душной скорости при торможении в процессе снижения самолета?
Задача
Определить минимальный угол планирования при тяге двигателей и
соответствующую скорость планирования самолета Ту-124 на высоте //=2000 м,
если известно что коэффициент сопротивления самолета на этом режиме равен
0,042, эффективное удлинение крыла ХЭф = 6,15 и удельная нагрузка на крыло
= 304 кг/м2.
Ответ: 0min=3.8°; V=348 км/ч.
Глава 6
Дальность» и продолжительность полета
§ 6.1. Основные определения и понятия
Расстояние, измеренное по горизонтали, которое пролетает са-
молет от взлета до посадки, называется дальностью полета. Время,
в течение которого самолет находится в воздухе, называется про-
должительностью полета.
Путь /, пролетаемый самолетом, можно разделить на три участ-
ка (рис. 6.1): путь при наборе высоты /Наб, при снижении /сн и при
горизонтальном полете /г:
I ^наб “|" 4- “Ь ^сн‘
Участок горизонтального полета /г является основным — даль-
ность и продолжительность полета во многом определяются имен-
но этим участком полета.
На дальность и продолжительность полета каждого конкретно-
го самолета оказывают влияние различные факторы: полетная
масса, запас топлива, режим полета, режим работы двигателей, ре-
гулировка топливных агрегатов двигателей, состояние атмосферы
(наличие ветра, температура, плотность, влажность) и т. п.
В дальнейшем при расчете дальности и продолжительности по-
лета будет рассматриваться влияние только технических характе-
ристик самолета на эти параметры.
Количество топлива, расходуемого на горизонтальном участке
пути, можно определить, если из общего количества топлива вы-
честь часть его, расходуемую при наборе высоты и снижении, при
запуске, опробовании и прогреве двигателей, выруливании на
старт, при работе двигателей в ожидании старта, при взлете, при
полете по кругу перед посадкой, а также невыработанный оста-
ток топлива в топливных баках. Располагаемым запасом топлива
называется то его количество, ко-
торое можно использовать для набо-
ра высоты, горизонтального полета
и снижения. Расстояние, измеряе-
мое по горизонтали, которое может
пролететь самолет при отсутствии
ветра и полной выработке распола-
гаемого запаса топлива к моменту
посадки с нагрузкой, обусловленной
техническими требованиями, назы-
вается технической дальностью.
Рис. 6.1. Схематизированный про-
филь полета на дальность
89
Практически не весь располагаемый запас топлива расходует-
ся в полете. В расчсче всегда учитывается аэронавигационный за-
пас топлива (АНЗ), необходимый на случай осложнения метеоро-
логической! обстановки, кратковременной! потери ориентировки и
других непредвиденных обстоятельств. Дальность полета, подсчи-
танная с учетом АНЗ, называется практической дальностью поле-
та. Расчет дальности полета самолета не зависит от того, рассчиты-
вается техническая или практическая дальность полета, посколь-
ку в этих двух случаях различен только запас топлива.
Наибольшее расстояние, на которое может удалиться самолет
от места взлета с последующим возвращением на исходный аэро-
дром, называется радиусом действия.
Важными характеристиками транспортных и пассажирских
самолетов являются максимальная дальность полета, максимальная
продолжительность полета, максимальный радиус действия.
Расход топлива двигателем характеризуется величиной тяги
двигателя и удельным расходом топлива, который обозначаем ср —
для ТРД и се — для ТВД и ПД. Различия в обозначениях объяс-
няются разными размерностями: ср — удельный расход топлива в
килограммах за один час на один ньютон тяги, се — удельный рас-
ход топлива в килограммах за один час на один киловатт мощно-
сти. Удельный расход топлива зависит от типа двигателя, режима
работы (степени дросселирования), высоты и воздушной скорости.
Очевидно, что чем меньше расход топлива при прочих равных усло-
виях, тем экономичнее двигатель.
Часовым расходом топлива q4 называется количество топлива,
расходуемое двигателем самолета в килограммах за час полета:
для ТРД q4=c,P- (6.1)
для ТВД и ПД q4=ceN, (6.2)
где Р и N — соответственно тяга ТРД и мощность ТВД или ПД,
установленных на самолете.
Расход топлива па 1 км пути — километровый расход топлива
qK. Величина, обратная километровому расходу, 1/^к называется
удельной дальностью и показывает сколько километров пролетит
самолет при расходовании 1 кг топлива.
Расходуя за один час полета q4 топлива, за это же время само-
лет проходит расстояние, численно равное воздушной скорости V
(при штиле), поэтому за один километр самолет расходует коли-
чество топлива
9к=^ч-3,61/ (6.3)
(здесь скорость V выражена в м/с).
Время полета и расстояние, пролетаемое самолетом при израс-
ходовании топлива в количестве dm, можно определить по форму-
лам
dl== —dmiqK-, dt=—dm;q4. (6.4)
Отрицательный знак введен здесь потому, что масса самолета в-
90
процессе полета уменьшается на величину израсходованного топ-
лива. Интегрируя выражение (6.4), можно определить дальность
и продолжительность горизонтального полета:
тх т0
!__ С dm __ f dm
' Як ' Цк
mG mi
mi m0
= (6.5)
J Чч J Чч
mo m ]
Здесь m0 и nil — масса самолета соответственно в начале и в кон-
це участка горизонтального полета, для которого выполняется
расчет. Если в полете не сбрасывается груз, то изменение массы
самолета численно равно расходу топлива на участке горизонталь-
ного полета:
т.е=т0 — mt.
Чем меньше километровый расход топлива qK, тем большая
дальность полета самолета при данном запасе топлива. Очевидно,
что с уменьшением часового расхода топлива увеличивается про-
должительность полета.
Определение дальности и продолжительности полета для само-
летов с ТРД и самолетов с ТВД и ПД имеет свои особенности, по-
этому оба случая рассмотрим отдельно.
§ 6.2. Дальность и продолжительность
полета самолета с ТРД
Расход топлива для турбореактивного двигателя при заданном
режиме полета определяется частотой вращения ротора и положе-
нием регулируемых устройств его элементов. Регулирование ТРД
производится в большинстве случаев с таким расчетом, чтобы на
режимах, близких номинальному (92—94% от него), удельный рас-
ход был наименьший (рис. 6.2).
Удельный расход топлива с
увеличением скорости полета воз-
растает на 10—20% (рис. 6.3). В
частности, на высотах полета
10000—11000 м при М=0,754-
0,82 значения удельных расходов
двигателя Д-30 составляют
0,082—0,083 кг топл/(Н тяги • ч)
для номинального режима и
0,077—0,079 кг топл/(Н тяги-ч)
для режима, соответствующего
крейсерскому режиму полета.
Удельный расход топлива до
высоты 11000 м уменьшается и
Рис. 6.2. Зависимость удельного расхода
топлива от частоты вращения двигате-
ля для разных высот полета
91
Рис. 6.3. Изменение тяги и удельного рас-
хода топлива двигателя в зависимости от
скорости полета да разных высотах (режим
работы двигателя 'номинальный)
Рис. 6.4. Изменение тяги и удельного рас-
хода топлива в зависимости от высоты по-
лета
92
Рис. 6.5. к определению влияния скорости полета на часовой и ки-
лометровый расходы топлива
при дальнейшем увеличении высоты остается примерно постоянным
(рис. 6.4).
Из соотношения (6.1) следует, что минимальный часовой расход
топлива, а значит, и максимальная продолжительность полета бу-
дут иметь место при (ср Рп)тш, при этом потребная тяга для гори-
зонтального полета изменяется в зависимости от воздушной ско-
рости и высоты полета (см. гл. 3), а удельный расход топлива — в
зависимости от режима работы двигателя (степени дросселиро-
вания), высоты полета и воздушной скорости.
Рассмотрим влияние скорости на часовой расход топлива, а
значит, и на (срРп) при полете на одной и той же высоте.
Для осуществления установившегося горизонтального полета
необходимо, чтобы располагаемая тяга двигателя Рр равнялась
потребной тяге РП. Это значит, что для полета со скоростями, мень-
шими Ртах, необходимо двигатель дросселировать так, чтобы кри-
вая Рр проходила соответственно через точки Af, А2, А3 (рис. 6.5).
Для уменьшения воздушной скорости необходимо уменьшить час-
тоту вращения ротора двигателя, что приводит к увеличению
удельного расхода топлива. Но с уменьшением воздушной скоро-
сти до РНаив уменьшается и величина Pa=mglК. Таким образом,
вследствие дросселирования двигателя ср растет, а Рп падает, при
этом более интенсивно, чем растет ср. Поэтому с уменьшением воз-
душной скорости часовой расход уменьшается, а минимальное
значение q4 будет примерно на наивыгоднейшей скорости Кяаив, где
Pnmin=mg/^niax. При К<КнаИв Рп растет, растет также q4.
Теперь выясним влияние высоты полета на величину часового
расхода. Как показано в гл. 3, потребная тяга при фиксированных
массе и угле атаки самолета практически не изменяется с высотой
(М<Мкр), при этом возрастает величина потребной скорости,
поэтому кривые потребных тяг с увеличением высоты смещаются
93
Рис. 6.6. Влияние скорости полета на
часовой расход топлива самолета с
ТРД
в сторону больших скоростей (см.
рис. 3.2). В связи с тем, что рас-
полагаемая тяга двигателей с вы-
сотой падает, то для полета на
высоте с той же скоростью, что и
у земли, приходится увеличивать
тягу двигателей. Кроме того, на
больших высотах полет произво-'
дится при углах атаки, близких к
наивыгоднейшему, где аэродина-
мическое качество близко к мак-
симальному. Это приводит с' рос-
том высоты к значительному
уменьшению удельного и часово-
го расходов топлива.
График зависимости q4=f(V) для самолета с ТРД сходен с
трафиком потребных тяг для горизонтального полета (см. рис. 3.2
н 3.3) и лишь немного смещен в сторону увеличения воздушной
скорости (рис. 6.6), поскольку значение (срРп)тш соответствует
воздушной скорости, несколько большей, чем наивыгоднейшая.
Километровый расход топлива для самолетов с ТРД определя-
ется в соответствии с зависимостями (6.1) и (6.3):
qK=-^-=C~^ . (6-6)
3,6V 3,6V
Если в первом приближении предположить, что масса самолета
и удельный расход топлива неизменны, т. е. считать, что изменение
тяги и скорости не влияет на ср, то из выражения (6.6) следует,
что при полете на одной и той же высоте километровый расход
топлива будет минимальным при той воздушной скорости, при
которой отношение Pn/V минимально. Этот режим соответствует
полету с крейсерской скоростью, большей УнаИв.
С учетом изменения удельного расхода топлива ср при измене-
нии скорости (т. е. с учетом дросселирования двигателя) мини-
мальное значение выражения cpPnIV, а следовательно, и мини-
мальный километровый расход топлива будут соответствовать
скорости, несколько большей крейсерской и меньшей Vmax и назы-
ваемой скоростью минимального километрового расхода VQKnlin.
С увеличением высоты полета Vq к тщ возрастает.
Минимальный километровый расход топлива с увеличением вы-
соты полета довольно быстро уменьшается. Этому в значительной
мере способствует уменьшение с высотой величины Рп/Е, обуслов-
ленное ростом воздушной скорости (увеличением частоты враще-
ния ротора двигателя), и уменьшение удельного расхода топлива
Ср. Темп изменения километрового расхода падает по мере прибли-
жения к практическому потолку, и наименьшее значение километ-
рового расхода топлива соответствует полету самолета на высоте,
несколько меньшей высоты практического потолка. В частности,
.для самолета Ту-134 она примерно на 1000 м ниже практического
потолка.
04
Может показаться, что при полете
на такой высоте расходуется большое
количество топлива в процессе набора
высоты. Однако опыт показывает, что
если горизонтальный участок полета
составляет даже незначительную
часть дальности полета, то при полете
на большой высоте количество расхо-
дуемого топлива будет все-таки мень-
ше.
Влияние аэродинамического каче-
ства на километровый расход топлива
можно выяснить, преобразовав выра-
жение (6.6) с учетом (3.8):
СрР Ср та
<7,.-----=------- . (6. /)
3,6В 3,6 ЛВ
Рис. 6.7. Зависимость мини-
мального километрового рас-
хода топлива от скорости и вы-
соты полета и массы самолета
Если практический потолок выше
11000 м, то высота, на которой значе-
ние (KV)max и будет высотой наимень-
шего километрового расхода HgKmin.
Значение Hq Kmjn зависит от массы самолета. Чем больше масса
самолета, тем меньше высота наименьшего километрового расхода.
На рис. 6.7 представлена зависимость минимального километрово-
го расхода топлива от воздушной скорости, высоты полета и мас-
сы самолета.
В полете масса самолета вследствие выгорания топлива посто-
янно уменьшается и высота наименьшего километрового расхода
увеличивается. Если самолет выполняет полет на заданном эшело-
не, то наивыгоднейшие режимы полета полностью не реализу-
ются.
Для анализа влияния режима полета сверхзвукового самолета
на километровый расход топлива можно преобразовать выражение
(6.7) с учетом Е=аМ:
ЧК-о , .. д I
3,ог 3,6а Л М
Очевидно, что килотлетровый расход топлива при заданной полет-
ной массе m определяется множителем Ср/КМ.
Подставляя значения потребных тяг Рп из (3.7) и V из (3.2) в
выражение (6.6), получим
3,6 2 |/ QSCya 3,6/2 /С/z
С учетом соотношения q=qoA=E225A
выражение для qK примет вид
qK=0,68cpVM-^-. „(6.9)
г ^уа
95
Подставив это выражение в формулу (6.5), можно определять
дальность горизонтального полета
"!о
(6.10)
V S Д СрСха j/ т
Полученный интеграл решается численными или графическими
методами. Если выполнять расчет для некоторой средней величи-
ны Ср в предположении, что угол атаки и высота горизонтального
V Суа
полета не изменяются, т. е. —7=-------— const, тогда
। Д СрС ха
/=2,94 —- /mJ. (6.11)
Ср У ЗА ха
Если количество расходуемого топлива не превышает трети
массы самолета, то, как показывает практика, приближенно мож-
но провести расчет по средней полетной массе. В этом случае из
формулы (6.10) получим довольно простую зависимость
/ = (6.12)
Ср у S& (Jха /Яср
где тт— израсходованная масса топлива, или с учетом (6.8)
l=m.t!qK. (6.13)
Для достижения наибольшей дальности полета самолет дол-
жен лететь на режиме 7кт1п- Если cp=const, то ?Kmm определяет-
ся минимальным значением P/V, т. е. наибольшая дальность само-
лета с ТРД может быть достигнута при полете с крейсерской ско-
ростью. По мере выгорания топлива наибольшая дальность поле-
та возможна при постепенном увеличении высоты полета, т. е. при
полете по потолкам.
Продолжительность горизонтального полета определяется по
формуле (6.5), которую с помощью формул (6.1) и (3.8) можно
преобразовать к виду
T71q П1о Шо
__С dm I 1 dm Г К dm ^g
J ' q4 J cp P J gcp m
mi mi
Интегралы в соотношениях (6.14) решаются численными или
графическими методами. Очевидно, что при неизменных удельном
расходе топлива и угле атаки
z = 2Lln-^. (6.15)
gcp mi
Если расход топлива при горизонтальном полете не превышает
30--35% полетной массы, то расчет продолжительности полета с
некоторой степенью точности можно вести по средней полетной
96
массе. В этом случае'из соотношения (6.14) получим
(6.16)
gCp «Д-р
или / = (6.17)
Чч
Из равенства (6.16) следует, что если в первом приближении
принять cp=consl, то наибольшая продолжительность полета бу-
дет при Л=Ктах. т. е. при полете с наивыгоднейшей скоро-
стью VHanB на напвыгоднейшем угле атаки апапв. При увеличении
высоты полета q4 пцп уменьшается, а продолжительность полета
растет.
Часовой расход топлива в сверхзвуковой зоне непрерывно уве-
личивается с увеличением числа М. Наибольшая продолжитель-
ность полета сверхзвукового и околозвукового самолета чаще все-
го возможна при дозвуковых числах М, при скорости, несколько
превышающей иаивыгоднейшую скорость полета.
§ 6.3. Дальность и продолжительность
полета самолета с винтовыми двигателями
При расчете дальности и продолжительности полета самолетов
с винтовыми двигателями 'необходимо помимо характеристик дви-
гателя учитывать характеристики воздушного винта и особенно
его КПД, в значительной мере зависящий от режима полета.
Километровый расход топлива определяется с помощью соотно-
шений (6.2) и (6.3):
<7.<
9ч __.Ce 7/
3,6 V ~3,6 V ’
(6.18)
где N — мощность, развиваемая двигателем.
Практически вся мощность поршневого двигателя передается
на его вал, поэтому, зная КПД воздушного винта т)в, из формул
(6.2) и (6.18) можно определить часовой и километровый расходы
топлива у поршневых самолетов:
и . „ Се-77 п
’ ‘7к---- ОС ГТ" ’
Чв 3,6t]hV
(6. 19)
где Ап — потребная мощность в
полете.
установившемся горизонтальном
С учетом зависимости (3.13) выражения для определения ча-
сового и километрового расходов топлива для самолетов с порш-
невыми двигателями примут /вид
cemgV . _ cemg
Чч ' Чк ' 3JM
(6. 20)
При неизменных удельном расходе топлива и КПД винта, т. е.
при ce/r)B=const, из формул (6.19) следует, что минимальный ча-
совой расход топлива, т. е. максимальная продолжительность по-
лета у самолетов с ПД, соответствует минимальной потребной
4 776
97
мощности и, следовательно, как это было показано в гл. 3, полету
с экономической скоростью. При тех же условиях минимальный
километровый расход топлива и максимальная дальность полета
соответствуют полету с максимальным аэродинамическим качест-
вом, т. е. полету с наивыгоднейшей скоростью. Практически это
имеет место при полетах самолета с поршневыми двигателями.
При невысотном двигателе из-за роста удельного расхода топлива
с увеличением высоты полета дальность и продолжительность по-
лета уменьшаются.
У турбовинтового самолета с увеличением воздушной скорости
растет реактивная мощность. Кроме того, при уменьшении степени
дросселирования вместе с ростом полной мощности увеличивает-
ся КПД двигателя и уменьшается расход топлива. По характеру
изменения мощности, КПД двигателя и удельного расхода топли-
ва турбовинтовой двигатель занимает промежуточное положение
между поршневыми и турбореактивными двигателями, более при-
ближаясь к поршневому. Поэтому минимальный часовой расход
топлива для самолета с ТВД будет иметь место при скорости поле-
та, немного превышающей экономическую скорость; скорость с ми-
нимальным километровым расходом будет больше наивыгодней-
шей.
С увеличением высоты при постоянной воздушной скорости
уменьшается как удельный расход топлива се, так и часовой q4
(рис. 6.8, 6.9).
С увеличением высоты километровый расход топлива умень-
шается. Таким образом, на больших высотах двигатель работает
экономичнее: при той же воздушной скорости требуется меньший
расход топлива. Поэтому максимальная дальность при полете с
ТВД достигается на высоте, близкой к практическому потолку.
Дальность и продолжительность горизонтального полета само-
лета с винтовыми двигателями получим, подставив значения часо-
вого и километрового расходов топлива из формул (6.19) в подын-
тегральные выражения формул (6.5):
т0
/ = 3,6^*^-^; (6.21)
J gce т
т,
т0
/ = ( ЛДкЛД. (6.22)
J gceV т
ТП1
Интегралы в выражениях (6.21) и (6.22) определяются числен-
ными или графическими методами. Если в первом приближении
полагать, что сР/т)в есть величина постоянная, при полете с посто-
янным углом атаки после интегрирования получим
/=3,6f—) . (6.23)
gce \mi)
98
Рис. 6.9. Зависимость часового
расхода топлива самолета с ТВД
от высоты и скорости полета
Рис. 6.8. Зависимость удельного рас-
хода топлива самолета с ТВД от вы-
соты и скорости полета
При расчете по средней полетной массе выражение для опреде-
ления дальности полета еще более упрощается:
/=3,6^--^=^, (6.24)
Отср qK
где /пт — масса топлива.
Для определения продолжительности горизонтального полета
воспользуемся формулой (6.23), которую при осреднении подын-
тегрального выражения приближенно можно записать в виде
. (6.25)
gVce тСр q4
Точность результатов, полученных с помощью формул (6.24) и
(6.25), вполне удовлетворительна для предварительных расчетов,
если запас топлива не превышает 30—35% массы самолета.
При больших количествах расходуемого топлива расчет необ-
ходимо выполнять по участкам полета. Уменьшение массы самоле-
та в процессе полета вследствие выгорания топлива приводит к
медленному, но непрерывному изменению режима полета.
Если не вмешиваться в управление двигателями, то для удер-
жания самолета на заданной высоте приходится уменьшать угол
атаки (в этом случае уменьшается индуктивное сопротивление и
воздушная скорость возрастает). При выдерживании постоянной
приборной скорости высота полета по мере выгорания топлива по-
степенно увеличивается (полет по потолкам).
При горизонтальном полете самолета с оптимальной высотой,
при которой километровый расход топлива будет минимальным,
происходит полет по практическим потолкам. Однако по мере вы-
горания топлива масса самолета уменьшается и, следовательно,
высота полета увеличивается. Таким образом, можно положить, что
оптимальным профилем полета является не горизонтальный про-
филь, а наклонный с постоянным набором высоты. Правда, если
учесть, что при дальности полета на 3—5 тыс. >км оптимальная вы-
4*
99
сота может изменяться всего на 2—3 км, то практический полет
по потолкам можно считать горизонтальным.
Пусть самолет совершает горизонтальный полет при V= const
(или M=const), Cw= const, с учетом равновесия сил и nig
можно записать
mg=C,7CyaPHM?S,
где Рн — давление на высоте Н,
отсюда
-^ = 0,7СмМ25 = const,
Рн у
т. е. по мере уменьшения массы самолета и возрастании высо-
ты полета атмосферное давление изменяется пропорционально мас-
се самолета. Если учесть, что высота потолка меняется при выго-
рании топлива аналогично, можно записать
^-=0,7С^ iiotML =const.
(6.26)
Таким образом, для получения наибольшей дальности в полете
по потолкам нужно установить начальную высоту и скорость и, не
меняя режим двигателей, поддерживать постоянным число М.
Для расчета дальности полета при полете по потолкам исполь-
зуем дифференциальные уравнения
-------= Vcose. (6.27)
dt 3600 dt
Учитывая, что при малых углах 0 можно принять cos 6» 1, из этих
двух уравнений можно получить
dm се 1
— —=-(7К,
dl---------------3600V Юз VK
или dl= — 103— .
Як
Интегрируя в пределах от начальной массы самолета тПач до
конечной ткон, получим
/=10* \ —
J Як
ткон
(6. 28)
Учитывая, что километровый расход топлива зависит от массы
самолета, и учитывая для нашего случая, что V=const, cp=const
и К=const, получим
а Cpmg т. (6. 29)
3,6V 3,6W< /пнач
^нач
100
Подставив это выражение qK в предыдущее выражение для I, полу-
чим
тнач
/=103 \ ^=ЮЗ^!!ач.1п /^2ач\ . (6.30)
#нач • т (7нач х^кон /
777 кон
Здесь тнач и д11ач — масса самолета и километровый расход топли-
ва в начальной точке полета по потолкам. Величины тНач и ткоа
определены в соответствии с заданием на полет с помощью урав-
нения баланса топлива.
§ 6.4. Влияние конструктивных и эксплуатационных
факторов на дальность и продолжительность полета
Сделаем некоторые выводы относительно того, как влияют на
дальность полета основные конструктивные факторы.
Для повышения дальности полета необходимы двигатели с воз-
можно меньшим удельным расходом топлива (се для ПД и ТВД,
ср для ТРД) и винт (для ПД и ТВД) с высоким КПД в режиме
полета на максимальную дальность.
На дальность полета при дозвуковых режимах полета большое
влияние оказывает эффективное удлинение крыла лЭф: при увели-
чении Лэф дальность /тах увеличивается. На сверхзвуковых режи-
мах полета удлинение непосредственно не оказывает такого замет-
ного влияния, однако влияние относительной толщины крыла С су-
щественно: уменьшение С приводит к увеличению /тах-
Для увеличения дальности коэффициент минимального про-
фильного сопротивления должен быть возможно меньшим, что дос-
тигается удачной компоновкой самолета и улучшением аэродина-
мических форм. Влияние удлинения крыла на максимальную даль-
ность полета у самолетов с ТРД относительно меньше и влияние
коэффициента Сх0 больше, чем у самолетов с ТВД.
Увеличение полетной массы при неизменном запасе топлива
приводит к уменьшению дальности, так как полет в этом случае
совершается на повышенных углах атаки, и значит, при большом
коэффициенте сопротивления самолета, что вызывает увеличение
потребной тяги и потребной мощности, а следовательно, часового
и километрового расходов топлива. Однако при сравнении раз-
личных типов самолетов следует учитывать, что с увеличением га-
баритных размеров самолета располагаемый запас топлива растет
быстрее, чем полетная масса самолета, т. е. отношение m^lmcv
увеличивается, достигая у современных самолетов 0,4—0,5. Следо-
вательно, чем больше самолет, тем легче для него обеспечить уве-
личение дальности полета.
На дальность и продолжительность полета оказывает влияние
также плотность применяемого топлива. Так как весовая теплот-
ворная способность для авиационных топлив практически одина-
кова, то при одинаковой по объему заправке самолета дальность
и продолжительность прямо пропорциональны плотности топлива.
101
Рис. 6.10. Зависимость вертикальной
скорости от высоты полета для само-
летов с ТРД (а) и ПД (б) при .'полной
(/) и неполной (2) тяге
Уменьшение площади
крыла заметно сказыва-
ется только при полетах
со скоростью, близкой к
максимальной. Уменьше-
ние площади крыла, при-
водя к увеличению удель-
ной нагрузки на крыло -
mg/S, позволяет умень-
шать массу самолета при
той же величине запаса
топлива, т. е. при увели-
чении mg/S дальность
/max вначале увеличива-
ется, а затем уменьша-
ется.
Существенное влия-
ние на дальность по-
лета оказывает отказ
двигателя. При остановке двигателя для сохранения угла атаки,
соответствующего максимальному качеству, приходится увеличи-
вать тягу работающих двигателей либо в результате уменьшения
высоты полета, либо вследствие перехода двигателей на номи-
нальный режим, который разрешается для длительной эксплуата-
ции. При переходе па меньшую высоту с сохранением воздушной
скорости неизбежен проигрыш в дальности полета. Это вызывает-
ся, с одной стороны, увеличением удельного расхода топлива, с
другой, — возрастанием лобового сопротивления неработающего
двигателя, что приводит к соответствующему уменьшению аэроди-
намического качества. Так, например, для самолета с ТРД на сред-
них высотах при увеличении коэффициента Сх0 на 10% минималь-
ный километровый расход возрастает на 6—7%, что приводит к
уменьшению дальности полета. При этом уменьшается скороподъ-
емность и соответственно — потолок самолета (рис. 6.10).
На продолжительность полета оказывает также влияние изме-
нение температуры наружного воздуха. Прежде всего изменение
температуры наружного воздуха приводит к изменению плотности
воздуха, скорости распространения звука, тяговых и расходных ха-
рактеристик двигателей. При повышении температуры расход топ-
лива возрастает, так как требуется увеличивать режим работы
двигателя для поддержания Vq ч min=const. Изменение часового
расхода пропорционально Ут^зкх/Ткск, следовательно, увели-
чение температуры на каждые 5° приводит к увеличению часового
расхода примерно на 1%. Так, для самолета Ту-134 при изменении
температуры в пределах ±20р изменение расхода топлива состав-
ляет 4—5% или ±80 кг/ч.
Таким образом, продолжительность полета с ростом темпера-
туры уменьшается. Что же касается дальности полета, то она оста-
ется неизменной, если в полете сохраняется заданное число М, так
102
как в этом случае воздушная скорость растет в той же пропорции,
что и часовой расход топлива.
Для самолетов с ТВД влияние температуры на дальность и
продолжительность полета примерно такое же, как и для самоле-
тов с ТРД. Для поршневых самолетов уменьшение температуры
вызывает некоторое снижение километрового расхода топлива.
Заметное влияние на дальность и радиус действия оказывает
ветер. Поскольку километровый расход топлива равен часовому,
деленному на путевую скорость [см. формулу (6.3)], то в случае
когда скорость полета и скорость ветра параллельны, километро-
вый расход топлива определяется из соотношения
^К=9Ч/3,6 (V + U7). (6.31)
Здесь знак «плюс» соответствует попутному ветру, а «минус» —
встречному, W— абсолютная величина скорости ветра.
На дальность и продолжительность полета оказывает влияние
техническое обслуживание, режим работы двигателя. Так, пра-
вильная регулировка карбюратора, грамотное использование вы-
сотного корректора рычага шага винта и рычага газа позволяют
на крейсерских режимах полета значительно увеличить дальность
и продолжительность полета.
Вопросы для повторения
1. В чем различие технической и практической дальности полета?
2. Что называется удельным, часовым и километровым расходами топлива?
3. На каких -режимах полета и почему достигается максимальная дальность
полета самолета с ТРД и ТВД?
4. Каким образом зависит от высоты километровый расход топлива самоле-
та с ТРД?
о. На каких режимах полета и почему достигается максимальная продолжи-
тельность полета самолета?
6. Каким образом влияет температура окружающей среды -на дальность и
продолжительность полета?
7. Перечислите основные способы увеличения дальности и продолжительно-
сти полета.
Задачи
1. Определить часовой и километровый расходы топлива при температуре
—30° С, если при стандартных условиях у земли </ч=4500 кг/ч, </к=10,5 кг/км,
(C!Jtt=consf), а зависимость часового расхода топлива от температуры при пос-
/ Т
тоянном давлении описывается формулой </ч = 9чо I/
V 7 0
Ответ: <?ч=4050 кг/ч; qK= 10,5 кг/км.
2. Определить дальность полета самолета с ТРД на -горизонтальном участке
на высоте //=8000 м, летящего на крейсерской скорости V=600 км/ч, если мас-
са топлива, расходуемого -на горизонтальном участке пути, tn—10000 кг, эквива-
лентная мощность двигателя v земли =956.8 кВт удельный расход топли-
ва су = 0,414 кг/кВт ч.
Ответ: /.= 1270 км.
Глава 7
Криволинейный полет самолета
§ 7.1. Условия возникновения криволинейного
движения и его особенности
При установившемся движении самолета все действующие на
него внешние силы взаимно уравновешены. Нарушение этого рав-
новесия приводит к появлению соответствующих ускорений, обус-
лавливающих изменение характера движения, в том числе и его
направления. В общем случае вектор ускорения можно разложить
по двум направлениям: касательному к траектории полета и нор-
мальному к ней. Проекция вектора ускорения на направление, ка-
сательное к траектории полета, определяет тангенциальное ускоре-
ние /т, на направление, перпендикулярное к траектории полета,—
нормальное ускорение /„.
Тангенциальное ускорение, появляющееся при изменении тяги,
лобового сопротивления, составляющей силы тяжести по направ-
лению движения, вызывает изменение воздушной скорости (замед-
ляет или ускоряет движение самолета). Нормальное ускорение, по-
являющееся при изменении подъемной или боковой аэродинамиче-
ских сил, проекции силы тяжести на нормаль к траектории полета
приводит к изменению кривизны траектории полета. Таким обра-
зом, необходимым условием криволинейного движения является
наличие нормального ускорения.
Нормальное ускорение связано с воздушной скоростью и ради-
усом кривизны траектории соотношением
jn = V2ir, (7. 1)
из которого следует, что нормальное ускорение возрастает с уве-
личением воздушной скорости и уменьшением радиуса кривизны
траектории. Нормальное ускорение обуславливает центростреми-
тельную силу /?ц, связанную с jn формулой
Ra=mjn. (7.2)
В общем случае криволинейное движение может совершаться
по пространственной траектории. Для самолетов гражданской ави-
ации наибольший интерес представляют 1криволийные движения в
вертикальной и горизонтальной плоскостях.
§ 7.2. Криволинейный полет самолета в горизонтальной
плоскости. Правильный вираж
Криволинейный полет самолета в горизонтальной плоскости с
поворотом траектории на угол, меньший 360°, называется разворо-
104
Рис. 7.1. Схема сил, действующих на са-
молет:
а—при выполнении виража со скольжением без
крена: б—при выполнении виража с креном без
скольжения
том, с поворотом на угол
360° — виражом. Вираж мо-
жет быть установившимся и
неустановившимся и выпол-
няться как с одновременным
креном и скольжением, так
и либо с креном, либо со
скольжением. При вираже
со скольжением центрост-
ремительная сила определя-
ется разностью между аэро-
динамической боковой силой
Za, возникающей при сколь-
жении, и проекцией тяги
Р на ось OZa (рис. 7.1, а).
При вираже с креном цент-
ростремительная сила оп-
ределяется проекцией аэ-
родинамической подъемной
силы Ya на местную гори-
зонтальную плоскость (рис. 7.1,6).
Так как для выполнения виража с креном аэродинамическая
подъемная сила должна быть больше силы тяжести самолета, то
вираж с креном может быть осуществлен либо увеличением угла
атаки при сохранении скорости полета, либо увеличением скорости
полета при фиксированном угле атаки, либо одновременным уве-
личением угла атаки и скорости. Увеличение углов атаки ограни-
чивается возможностью срыва потока с крыла и недопустимым из-
менением характеристик устойчивости и управляемости, поэтому
вираж, как правило, выполняется при одновременном увеличении
угла атаки и скорости.
При виражах со скольжением и креном центростремительная
сила определяется суммой проекций аэродинамических боковой и
подъемной сил на горизонтальную плоскость. При внешнем сколь-
жении (скольжение на внешнюю по отношению к траектории по-
лета половину крыла) сила Zn увеличивает центростремительную
силу (рис. 7.2, а). При внутреннем скольжении (скольжение на
внутреннюю половину крыла) —уменьшает (рис. 7.2, б).
Основными характеристиками виража являются радиус вира-
жа гвир и время выполнения виража /Еир, величины которых зави-
сят от величины центростремительной силы. Радиус виража связан
с центростремительной силой формулой
Ra=m (П™р/гвир),
(7.3)
вытекающей из соотношений (7.2) и (7.1), откуда
V2
гвир ~,П • (7.4)
У<-Ц
105
Рис. 7.2. Схема сил, действующих на самолет при выполнении
виража с креном при внешнем (а) и внутреннем (б) сколь-
жениях
Если вираж выполняется с постоянной скоростью, то время выпол-
нения виража
. _С)„ Гв1,Р
v вир
В общем случае уравнения криволинейного движения самолета
на вираже (равно как и при развороте) определяются системой
(2.30), в которой правая часть третьего уравнения системы опре-
деляет центростремительную силу. Действительно, так как для
элемента дуги dS, проходимой самолетом за время dt со скоростью
V (рис. 7.3), справедливы равенства
dS=Vdt- dS--rdW,
rfW V
dt
и, следовательно, Для разворота в сторону положительных углов
j"=-ydTt- (7-8)
dt
Знак минус в формуле (7.8) указывает на то, что при развороте
в сторону положительных углов ф нормальное ускорение направ-
лено в сторону, противоположную положительному направлению
оси OZa. Подставляя (7.8) в (7.2), получим
Г,
dt
Подставляя (7.9) в третье уравнение системы (2.30), получим
для следующее выражение:
/<= — Р sin ₽ cos уа + Ya sin уа -ф Za cos ya.
' Из всех видов виражей наиболее распространенным является
106
(7-5)
то
(7.6)
(7.7)
(7.9)
(7. Ю)
так называемый правильный вираж — вираж
без скольжения при постоянных скорости и
крене.
Уравнения правильного виража можно по-
лучить из системы (2.30), полагая в ней р=0,
Za=0, dVldt~Q. После соответствующих пре-
образований будем иметь
V2
Р=Ха; mg=Yacasya- m~±-------Ya sin уа.
1 вир
(7.11)
Система (7.11) показывает, что при пра-
вильном вираже тяга самолета уравновешива-
ется силой лобового сопротивления, сила тя-
жести самолета — проекцией аэродинамичес-
кой подъемной силы на местную вертикальную
плоскость. Из второго уравнения системы
(7.11) можно получить связь нормальной ско-
ростной перегрузки с углом крена в виде
Рис. 7.3. Схема для ус-
тановления связи между
изменением угла пути,
скоростью и радиусом
виража
^a=l/COSYc,
(7.12)
из которой следует, что с увеличением угла крена должна увели-
чиваться и нормальная скоростная перегрузка.
Система (7.11) дает возможность определить все характеристи-
ки правильного виража через пуа- Так, разделив почленно третье
уравнение на второе и учитывая, чтоtg ус = г —-1, получим
гвир = вир/g Пуа — 1. (7.13)
Подставив это значение гвир в (7.5), получим выражение для
определения времени выполнения правильного виража:
/вир = 2л—7^=. (7.14)
£ Ии* -1
Если задан коэффициент подъемной силы на вираже, то можно
определить скорость, необходимую для выполнения правильного
виража с заданной перегрузкой пуп. С этой целью воспользуемся
очевидным соотношением
вир ____
^уа вир ' — mgtlyai
откуда получим следующее выражение для потребной скорости на
вираже:
Кир Е^2пг§'иг/й,/рСг/авир S. (7.15)
Если вираж выполняется с тем же коэффициентом Суа, что и
горизонтальный прямолинейный полет (Суа ВЩ)=Суа г.п), то, учиты-
вая, что
107
получим =У пуа. (7.16)
V” г.п
Таким образом, для выполнения правильного виража с тем же
Суа, что и в горизонтальном полете, скорость на вираже в Vпуа _
раз должна быть больше соответствующей скорости горизонталь-
ного прямолинейного полета.
Увеличение скорости полета приводит к увеличению потребной
мощности на вираже. Для установившегося виража, как это сле-
дует из (7.11),
Т^п.вир — а вир > — У а вир V,а ’
ИД-Хд вир
отсюда 7>п-вир=----------
^авир cos У а
или с учетом (7.12)
Л..вир=-^^. (7.17)
^•вир
При одних и тех же углах атаки и малых числах М аэродинамиче-
ское качество в прямолинейном горизонтальном полете и на вира-
же будет одинаковым, поэтому
р
-----=пуа, (7. 18)
* н.г.п
т.е. тяга, потребная для выполнения правильного виража, в пуа
раз больше тяги, потребной для выполнения горизонтального по-
лета.
Так как потребная мощность Afn=PnVn, то
Таким образом, потребная мощность, необходимая для выпол-
нения правильного виража в раз больше потребной мощно-
сти, необходимой для выполнения прямолинейного горизонтально-
го полета.
§ 7.3. Предельный вираж
Как следует из выражений (7.13) и (7.14), уменьшить время и
радиус правильного виража можно, увеличив пуа. Увеличение пуа
приводит к увеличению потребной для выполнения криволинейного
полета тяги (мощности), которая может превысить располагаемую
тягу (мощность) двигателей. Поэтому, чтобы судить о возможности
выполнения криволинейного полета с той или иной п1!а, на сетке
потребных тяг (мощностей), выполненной для горизонтального
108
полета, строится сетка потребных
и располагаемых для выполнения
виража тяг (мощностей). Л
Согласно выражениям (7.16) и ви^пр
(7.19) потребную мощность на ви-
раже можно выразить так:
V2
TV ;=N вир- (7 2f)i N
л * и.вир п.г.п ’ V' • nfl
v г
Каждому углу атаки соответст-
вует вполне определенное значение
Рис. 7.4. Определение скорости
правильного виража с помощью
кривых располагаемой и потреб-
ной мощностей для горизонталь-
ного полета
отношения
= Л(а),
которое можно найти по кривой по-
требной мощности для горизон-
тального прямолинейного полета (рис. 7.4). Поэтому выражение
(7.20) можно переписать в виде
М,.ВИР-ЛПВ2ИР. (7.21)
Па сетку мощностей, используя выражение (7.16) и (7.21),
можно нанести кубическую параболу ab (рис. 7.4), характеризую-
щую изменение потребной мощности для выполнения виража с за-
данным углом атаки. Очевидно, что каждому углу атаки будет
соответствовать определенная парабола, а каждой точке параболы
от а до b будет соответствовать вполне определенное значение пуа-
В точке b потребная для виража мощность будет равна пре-
дельно возможной располагаемой мощности для данной высоты.
Значение пуа, соответствующее этой точке, определится из выра-
жения
И2
и ________ вир. пр
пр V2
(7. 22)
п будет предельным, с которым можно осуществить правильный
вираж с заданным углом атаки на заданной высоте. Вираж, выпол-
няемый с Ира пр, называется предельным. Соответствующие уоПр,
Лгпр.пр, ^виР.пр могут быть определены по формулам:
Tfl„p—arccos пуапр (7.23)
Пуапр (7-24)
^"вир.пр , 5 , S V «рппр-1
/В11Р.пр=2.^1/(7.25)
Для анализа возможных режимов виража во всем диапазоне
скоростей и углов атаки строится сетка парабол (рис. 7.5). Выбрав
109
на каждой параболе точки, соответствующие определенному углу
крена, можно построить кривые потребных мощностей для различ-
ных углов крена, которые позволяют проанализировать все воз-
можные режимы виража на данной высоте. Так, к примеру, из
рис. 7.5 видно, что правильный вираж с креном уа=1,15 рад осу-
ществить на данной высоте невозможно.
Пользуясь графиком рис. 7.5 и формулами (7.23) — (7.25)
можно рассчитать значения уппр, Гвир.пр, Дир.пр и построить ди- .
аграмму их зависимости от скорости на вираже.
На практике виражи и развороты обычно осуществляются с
п!/а, меньшими, чем предельные. Это диктуается повышенными тре-
бованиями безопасности полета, предъявляемыми к пассажирским
самолетам, а также требованиями обеспечения комфорта пассажи-
ров. Кроме того, значения пуа могут ограничиваться и по другим
признакам (прочности, сваливанию, тряске и т. д.).
Таким образом, у каждого типа самолета имеется свой диапа-
зон эксплуатационных пуа. В качестве примера на рис. 7.6 приведен
диапазон изменений пуп для самолета Ан-24.
§ 7.4. Криволинейный полет самолета
в вертикальной плоскости
Криволинейные движения самолетов гражданской авиации в
вертикальной плоскости имеют место при переходе от горизонталь-
ного полета к снижению, от снижения к набору высоты при уходе
на второй круг, а также на этапе выравнивания при посадке само-
лета. Движения самолета на этих этапах полета, как правило,
являются неустановившимися.
Уравнения движения в общем случае неустановившегося кри-
волинейного полета самолета в вертикальной плоскости определя-
ются системой (2.25). Вектор нормального ускорения в случае из-
менения угла 6 в положительном направлении с учетом аналогич-
ного уравнению (7.7) соотношения
dbldt—Vjr (7.26)
имеет величину
dt
и, следовательно,
R=mV—. (7.28)
dt
Сопоставляя (7.28)со вторым уравнением системы (2.25), полу-
чим для центростремительной силы следующее выражение:
/?ц= — mg cos 64-Ya cos ya — Za sin ya. (7.29)
Преобразуем систему (2.25) с учетом выражения (7.26), пред-
110
Рис. 7.5. Кривые потребных мощно- Рис. 7.6. Эксплуатационные перегрузки
стой для правильного виража самолета Ан-24.
Ill
варительно разделив уравнения системы почленно на mg, к виду
Р • П 1 <tV „ 1 Г2 „
sine =— — ; п COS 6=---. (7.30)
mg----------------------------------------------К g dt g Г
Первое уравнение системы (7.30) позволяет определить измене-
ние скорости на криволинейном участке, второе — радиус кривиз-
ны траектории полета.
Рассмотрим полет на выравнивании. Решая второе уравнение
системы (7.30) относительно г, будем иметь:
И2
г=—----------.
g(.nya~ c°s 6)
(7.31)
При расчете характеристик выравнивая радиус кривизны обыч-
но принимают постоянным, равным полусумме его значений в на-
чале (Р=Рпл, 0 = 0пл) и в конце (Р = Увыр 0 =0) выравнивания,
1 / V2
1 I пл
\ tiya — cos 0ИЛ
У2
выр
пуа 1
(7.32)
Это упрощение позволяет проинтегрировать первое уравнение
системы (7.30) в конечном виде и получить сравнительно простые
приближенные формулы для характеристик выравнивания.
Найдем воздушную скорость в конце выравнивания. С этой
целью преобразуем первое уравнение системы (7.30) с учетом
(7.26) к виду
Р . д пуа И dV
-----sin 6 =-----------
mg---К gr di
После разделения переменных получим
dV*=2gr sinS -^1]
(7.33)
df),
(7.34)
интегрируя которое в пределах от 6 = 0П.-, до 0Выр и от П=ППл до
ИВЬ)Р в предположении постоянства P/mg, г, пуа, К, получим
Р
К
Инл Пвыр—2g гср-выр
1 (е,ь1-евЫР)+(со«епл-совеВЬ1Р).
ср
(7.35)
Полагая в уравнении (7.35) Овыр = 0, получим выражение для
скорости в конце выравнивания:
I Р "уа
' mg К
Найдем теперь время, необходимое для изменения угла накло-
на траектории от 0 = 0ПЛ до 0 = 0. Из выражения (7.26) имеем
/ = ( f л
вцл
L\mg
vLP=vL-2grCp
(1 —COS0,,,,) . (7.36)
(7.37)
112
Если считать; что выравнивание ведется с некоторой средней
скоростью
(Ч+Ч1Р),
то из выражения (7.37) можно получить простую формулу для
определения времени /выр:
(7.38)
* ср
Изменение высоты на выравнивании можно определить как
dh = sin QdS (7.39)
или с учетом равенства
tlS-rufi (7.40)
как п7г = г sin 0zZ0. (7.41)
Интегрируя выражение (7.41) в пределах 0=0ПЛ до 6 = 0 и от
до Й=ЯВыр, получим
ДЯ=Нпл — Явыр = rcp (1 — cos 6пл). (7.42)
По формулам (7.32), (7.36), (7.38), (7.42) можно приближенно
рассчитать все характеристики выравнивания.
Анализ формул (7.32), (7.36) и (7.42) показывает, что с ростом
скорости и угла планирования возрастает высота начала выравни-
вания. Ее можно уменьшить путем увеличения пуа или уменьшения
скорости планирования. Так как значение допустимого пуа обычно
бывает ограничено, то уменьшения высоты начала выравнивания
добиваются уменьшением скорости планирования, выполняя вы-
равнивание с выпущенными в посадочное положение закрылками
и другими приспособлениями, увеличивающими несущие свойства
самолета.
При экстренном снижении криволинейное движение полета осу-
ществляется на участке перехода от горизонтального полета к сни-
жению по прямой.
Угол в при этом изменяется от 0=0 в начале экстренного сни-
жения до О=0СН в конце криволинейного участка, скорость — от
V = Vr.n до Е = Есн- Подставляя эти значения в формулу (7.32), по-
лучим для среднего радиуса кривизны траектории выражение
__ 1
ср.сн~—
У2 У2
Г.п ( v сн
Пуа 1 Пуа COS 6СН
(7.43)
Подставляя выражение (7.43) в уравнение (7.34) и интегрируя
Р ГУ
его в предположении постоянства величин —, п , К, получим
mg у
для скорости в конце криволинейного участка выражение:
ср.сн \
L \nig
Пуа 1
АС / ср
6CH + cosecH-l . (7.44)
113
Найдем время, в течение которого осуществляется криволиней-
ный полет, из выражения (7.26):
®СИ
\ г
о
или, если принять Уср=-^-(Нг.п + Нсн),
(7.45)
1==- е„. Ц46)
ср
Перепад высот определится из формулы (7.41):
Д//=Л/ГЛ1 —/7СН= — rcp(l — cos6CH). (7.47)
Формулы (7.43), (7.44), (7.46), (7.47) позволяют рассчитать
все характеристики на криволинейном участке экстренного сниже-
ния в первом приближении. При необходимости более точного их
расчета следует интегрировать, выражения (7.34), (7.41), (7.26)
с учетом характера изменения величин Plmg, пуа, К в процессе
криволинейного движения.
Вопросы для повторения
1. Какие условия необходимы для искривления траектории полета самолета?
2. Как влияет угол скольжения на радиус виража?
3. Почему потребные для выполнения виража тяга и мощность больше, чем
при горизонтальном полете?
4. Почему нельзя выполнить правильный вираж с углом крена зт/2 рад?
5. Чем отличается криволинейный полет при экстренном снижении от криво-
линейного полета при выравнивании?
Задачи
1. Самолет летит горизонтально с воздушной скоростью К=500 км/ч. Какую
необходимо создать нормальную скоростную перегрузку пуа, чтобы выполнить
правильный вираж с радиусом гВИр — 4000 im? Какое потребуется время для вы-
полнения с этой перегрузкой полного виража?
Ответ: пуа=1,15; t=2 мин 16 с.
2. Самолет совершает на высоте //=4000 м правильный вираж с радиусом
гВир=5000 м. Определить, насколько следует увеличить его крен, чтобы умень-
шить радиус виража до величины /'вир = 4200 м? Коэффициент аэродинамической
подъемной силы, необходимый для выполнения на этой высоте установившегося
горизонтального полета, принять равным Суа г.п=0,3; нагрузка на крыло
mgjS=3920 Н/м2.
Ответ: на 0,105 рад.
Глава 8
Взлет и (посадка самолета
§ 8.1. Взлет самолета. Основные этапы
Взлет самолета является наиболее ответственной частью поле-
та, требующей от пилота предельного внимания и точности. В про-
цессе взлета самолет разгоняется, отрывается от земли и набирает
заданную высоту полета. При этом параметры полета по мере-
взлета изменяются, так что движение самолета на взлете является
неустановившимся.
Взлет современных самолетов обычно разбивают на два основ-
ных этапа — собственно взлет и начальный набор высоты, которые,,
в свою очередь, состоят из ряда этапов (рис. 8.1). На этапе разбега
осуществляется разгон самолета по взлетно-посадочной полосе
(ВПП). Основная задача разбега — приобрести на возможно ко-
роткой длине такую скорость, которая обеспечила бы безопасный
отрыв самолета от ВПП. Эта скорость носит название скорости от-
рыва Вотр. Расстояние, проходимое самолетом с момента страги-
вания на линии старта до момента его отрыва от ВПП, называ-
ется длиной разбега Lv.
Разбег современных самолетов начинается «с тормозов»: для
уменьшения длины разбега пилот отпускает тормоза лишь после
того, как двигатели выведены на взлетный режим. В зависимости
от типа шасси разбег осуществляется по-разному. У самолетов с
носовым колесом разбег до скоростей ~ (0,6—0,7) Ротр произво-
дится на трех колесах; затем пилот, выбирая ручку на себя, отры-
вает носовое колесо и продолжает разбег на главных колесах.
Отрыв носового колеса допускается при достижении скорости, обес-
печивающей устойчивость и управляемость самолетом, посредст-
Рис. 8.1. Этапы взлета самолета
115
вом аэродинамических органов управления тангажом, креном и
рысканием. У самолетов с хвостовым колесом пилот непосредст-
венно после начала разбега, отдавая ручку на себя, опускает нос
самолета и отрывает хвостовое колесо, так что большая часть раз-
бега совершается на главных колесах.
В конце разбега, когда скорость самолета достигает значения
Уотр, пилот плавно увеличивает угол атаки и отрывает самолет от
земли.
Для уменьшения длины разбега механизация крыла приводится
в положение взлетной. Использование механизации на взлете поз-
воляет увеличить аэродинамическую подъемную силу самолета,
уменьшить скорость отрыва, а соответственно и длину разбега. При
этом необходимо считаться с тем, что отклонение механизации при-
водит к росту лобового сопротивления самолета и, следовательно,
к более медленному наращиванию скорости его движения по ВПП.
Обычно механизация устанавливается в такое положение, которое
обеспечивает оптимальный компромисс между ростом коэффици-
ентов подъемной, с илы и лобовогл. сопротивления.. Установленная
во взлетное положение механизация крыла вместе с выпущенными
шасси определяет так называемую взлетную конфигурацию са-
молета.
На первом воздушном этапе самолет разгоняется до безопас-
ной скорости взлета V2* с одновременным набором минимальной
высоты полета, которая согласно НЛГС составляет 10,7 м. Рассто-
яние по горизонтали, на котором происходит изменение скорости
от Ротр ДО V2 и набор минимальной высоты, называется длиной
разгона L\.
Сумма длин разбега и разгона составляет длину взлетной дис-
танции самолета Свзл-
Каждому типу самолета соответствует своя длина взлетной
дистанции. Эта длина является важнейшим параметром, так как
она определяет размеры ВПП, а следовательно, и размеры аэрод-
рома. В процессе первого воздушного этапа, как правило, начина-
ется уборка шасси, которое, создавая дополнительное сопротивле-
ние в полете, мешает разгону самолета.
Длина разбега, разгона, взлетная дистанция, скорость отрыва
и безопасная скорость взлета входят в число так называемых
взлетных характеристик самолета.
На втором, третьем, четвертом воздушных этапах скорость са-
молета увеличивается до величины, близкой к наивыгоднейшей
скорости Пиэев, а высота полета достигает примерно 400 м. Соот-
ветственно изменяются и другие параметры — угол атаки, угол на-
клона траектории, конфигурация самолета.
В конце второго этапа достигается скорость, обеспечивающая
безопасный набор высоты с выпущенной механизацией; на третьем
этапе самолет разгоняется до наименьшей допустимой скорости
* Г2 — наименьшая скорость полета, при которой еше допускается .набор вы-
соты в условиях продолжения взлета с отказавшим двигателем до высоты, необ-
ходимой для осуществления последующей посадки самолета.
116
Рис. 8.2. Распределение дав-
ления по поверхности кры-
ла при одном и том же
угле атаки:
/—вдали от земли; 2—вблизи
земли
Рис. 8.3. Зависимость Си0 =
=/(а) вдали от земли (/) и
вблизи земли (2)
начала уборки механизации с одновременным выходом на высоту
120 м; на четвертом — завершается уборка механизации и переход
к полетной конфигурации.
Длина по горизонтали, которую самолет проходит на втором,
третьем и четвертом воздушных участках составляет длину на-
чального набора высоты £н.н, а сумма длин взлетной дистанции и
начального набора высоты — полную взлетную дистанцию
На протяжении всей полной взлетной дистанции наклон траек-
тории полета не должен иметь отрицательных углов, а сама траек-
тория должна проходить выше линии ограничения препятствия.
Профиль начального набора высоты определяется классом аэ-
родрома, с которого осуществляется взлет, и зависит от рельефа
прилегающей к аэродрому местности. Это вызвано тем, что вблизи
земли условия обтекания самолета воздушным потоком, а следо-
вательно, и формирование аэродинамических сил в значительной
мере отличаются от таковых при полетах вдали от земли. Если
сравнить распределения давления на крыле при полете вблизи зем-
ли и вдали от нее при одном и том же угле атаки, то окажется, что
при полете вблизи земли разрежение на верхней поверхности кры-
ла и давление на нижней возрастают (рис. 8.2), что приводит к
увеличению подъемной силы. Влияние земли на характер обтека-
ния крыла можно объяснить торможением потока в пространстве
между крылом и землей и соответственным уменьшением пропуск-
ной способности этого пространства, что приводит к увеличению
местных скоростей над крылом и уменьшению их под ним.
С другой стороны, рост пика разрежения, на верхней поверх-
ности крыла приводит к увеличению продольного градиента давле-
ния в задней его части. Из курса аэродинамики известно, что чем
больше пик разрежения на верхней поверхности крыла, тем рань-
ше наступает отрыв пограничного слоя. Таким образом, при полете
вблизи земли следует ожидать уменьшения критического угла ата-
117
ки а1;р и максимального коэффициента аэродинамической подъем-
ной СИЛЫ Суа max-
Типичный график изменения Сул крыла вблизи и вдали от зем-
ли приведен на рис. 8.3.
Крутизна траектории взлета характеризуется так называемым
градиентом набора высоты, численно равным тангенсу угла накло-
на траектории к горизонту, задаваемому в процентах. Различают
полный и чистый градиенты набора высоты. Полный градиент со- _
ответствует предельно допустимому на данном самолете в рассмат-
риваемых условиях эксплуатации градиенту набора высоты, чис-
тый -- практически применяемому при массовой эксплуатации дан-
ного самолета в данных условиях эксплуатации градиенту набора
высоты.
Взлет называется нормальным, если от начала страгивания са-
молета на старте до выхода на высоту полета по маршруту он
осуществляется при нормальной работе всех двигателей, систем и
агрегатов с использованием предусмотренной руководством по лет-
ной эксплуатации (РЛЭ) техники пилотирования. Если в процессе
взлета произошел отказ двигателя, то в зависимости от того, в ка-
кой точке взлетной дистанции произошел отказ, пилот может либо'
продолжить взлет, либо прервать его.
Взлет называется продолженным (завершенным), если до мо-
мента отказа двигателя он протекает как нормальный, а затем
после отказа двигателя завершается с отказавшим (неработаю-
щим) двигателем.
Взлет называется прерванным, если до момента отказа двига-
теля он протекает как нормальный, а затем после отказа двигателя
начинается прекращение взлета с последующим торможением до
полной его остановки на ВПП.
§ 8.2. Расчет взлетной дистанции
В случае нормального взлета движение самолета вдоль оси
OZo отсутствует. Уравнения движения в этом случае определяются
системой (2.22). От уравнений движения в свободном полете они
отличаются наличием членов, учитывающих силы трения F и силу
N, возникающую в результате контакта с землей (ВПП). Силу
трения F, как известно, можно выразить через коэффициент тоения
[ и силу N посредством формулы
F=fN. (8.1)
С учетом (8.1), а также равенств (2.24) систему (2.22) ’ можно
переписать в виде
P~Xa-fnpN=m^; -mg + Ya^N=Q, (8.2)
где через fnp обозначен коэффициент трения, отнесенный к равно-
действующей сил трения F (приведенный коэффициент трения).
118
Преобразуем систему (8.2). Из второго уравнения системы
имеем
N=mg — Ya, (8.3)
кроме того,
dV dV dl ,rdV 1 ..
dt dl dt dl 2 dl v
‘С учетом (8.3), (8.4), а также равенств (2.9) вместо системы (8.2)
получим уравнение
Р f । бИ25 f , р р . 1 dV^ г.
mg 2mgUnp уа xa}~2g dl ’ ’
Интегрируя (8.5) в пределах от И=0 до Р=Ротр, получим для
длины разбега следующее выражение:
_____________dV?_____________
Р qV^S
mg ~ /пр + 2mg С™>
(8-6)
Чтобы вычислить интеграл (8.6), необходимо знать зависимость
параметров Р, Сха, Суа от скорости V на взлете. Обычно такие
зависимости задаются в виде соответствующих графиков. В прак-
тических расчетах можно использовать приближенные формулы,
полученные из (8.6) на основе тех или иных допущений. Так, по-
лагая
X ~ — mB3Jlg V — _L т сг
Хкаср.взл'^> q /z ’ «ср.взл'^ Q "‘'вэло ’
& ^хвзл О
получим после подстановки в (8.6) и интегрирования
Г _ 1 Готр
P~2g Pep 1 1 2
mB3ng 3 Квзл 3 /пр’взл
(8-7)
(8-8)
где /Свзл — аэродинамическое качество самолета при взлете.
Скорость отрыва и среднюю тягу в формуле (8.8) можно опре-
делить по формулам:
— для самолета с ТРД
Vg.,.p^ 1,82 m”3i'g,S ; (8.9)
С (/corp
7^0,93/^; - (8.10)
— для самолета с ТВД
Потр ~ 1,36 m^/S. (8 л i)
С у а отр
Лр^ЭДЗА^. (8.12)
В формулах (8.9) — (8.12) тягу и силу тяжести следует брать
в ньютонах, мощность — в киловаттах, скорость'—в метрах в се-
кунду.
119
Второй этап взлета, как уже указывалось, предназначен для
разгона самолета до безопасной скорости полета V2 и одновремен-
ного набора минимальной (10,7 м) высоты. Существует несколько
методов расчета длины этого этапа. Наиболее простым из них
является энергетический метод.
Полная энергия самолета в момент отрыва его от ВПП
Е1 ~ тевзл^отр-
На высоте 10,7 м полная энергия самолета
Е2=" тюлУ22-\- WJmH3J1g.
Изменение энергии самолета происходит вследствие работы
сил тяги двигателя и силы лобового сопротивления, действующих
в направлении движения; их разность соответствует избыточной
тяге ДР, работа которой
Если за ДР принять некоторое среднее ее значение, равное, к
примеру, полусумме избытков тяги в начале и в конце разгона, то
изменение полной энергии самолета будет равно произведению
средней избыточной тяги на длину Li.
Д^взл = — Е1 =
откуда получаем формулу для L\ в виде
/ Т/2 г-2 \
L _2--------------ю,71. (8.13)
ДРср \ 2g ) v 1
Из формулы (8.13) следует, что при расчете L\ по среднему
значению избытка тяги ДРср безразлично, по какой траектории
самолет набирает минимальную высоту.
Суммируя длину разбега по формуле (8.8) и длину разгона по
формуле (8.13), получим длину взлетной дистанции
1 С2
г 1 ._______________ отр__________|
взл 2g Рс? 1 1 2
mB3^g 3 Л'взл“ 3 /првЗЛ
-------------^_|_107у (8.14)
ДРср \ 2g----I k !
Для расчета длины начального набора высоты можно восполь-
зоваться формулой (8.13), в которой следует учесть соответствую-
щие скорости и высоту набора.
§ 8.3. Параметры, характеризующие взлет
К таким параметрам относятся скорости взлета, градиенты на-
бора высоты, длины соответствующих этапов взлета. Параметры
взлета, с одной стороны, должны обеспечивать его оптимальность
120
в смысле выхода самолета на высоту полета по маршруту за крат-
чайшее время, с другой, — гарантировать безопасный полет.
Скорость отрыва самолета от ВПП определяется формулой
К>тр=1/ (8.15)
Как следует из формулы (8.15), скорость отрыва находится в
прямой зависимости от нагрузки на крыло mB3^g/S. Нагрузка на
крыло современных дозвуковых пассажирских самолетов в 4—5 раз
возросла по сравнению с самолетами тридцатых — сороковых годов,
что привело к соответствующему увеличению скоростей отрыва.
По условиям безопасности полета Еотр должна превышать не
менее чем на 10% минимальную скорость сваливания Ес во взлет-
ной конфигурации и должна быть несколько больше минимальной
ЭвОЛЮТИвНОй СКОРОСТИ ВЗЛета Eminon*-
Безопасная скорость взлета, как уже указывалось, достигается
в конце набора минимальной высоты. Согласно НЛГС она должна
превышать Ес на 20% для самолетов с двумя двигателями и на
15% при большем числе двигателей и Emmas — на 10—15%.
Градиент набора высоты т]н определяется формулой
4<=tg ен 100%,
где 0п — угол наклона траектории взлета к горизонту.
Минимальные значения регламентируются для воздушных
участков взлета. Согласно НЛГС полный градиент набора высоты
»]п.н при нормальном взлете должен быть не менее 5% на третьем
и 3%) на четвертом этапах начального набора высоты.
В зависимости от уровня профессионального мастерства пилота
и метеорологических условий длина разбега самолета данного типа
при массовой его эксплуатации может оказаться различной. В лю-
бом случае она не должна превышать так называемую располагае-
мую длину разбега, под которой понимается длина ВПП, умень-
шенная на длину участка выруливания. Потребная дистанция взле-
та также не должна превышать располагаемой, которая принима-
ется равной сумме располагаемой длины разбега и свободной зоны
полосы воздушных подходов (см. рис. 8.1).
§ 8.4. Посадка самолета. Расчет посадочной дистанции
Посадка является заключительной частью полета и состоит из
двух основных этапов: захода на посадку и собственно посадки
(рис. 8.4). В процессе снижения и предпосадочного маневрирова-
ния осуществляется выпуск шасси и предварительный выпуск за-
крылков: скорость при этом снижается до скорости захода на по-
садку Е3.п, а высота — примерно до уровня 400 м. Этот уровень
высоты считается начало.м глиссады, при входе в которую закрыл-
ки отклоняются в посадочное положение и самолет начинает плав-
* Гщщ эв — минимальная скорость полета, при которой в условиях отказа од-
ного .из двигателей еще с беспечивается управляемость самолетом в прямолиней-
ном полете с креном не белее 0,087 рад.
121
Рис. 8.4. Этапы посадки самолета
но снижаться, приближаясь
к ВПП. Уровень высоты
15 м над ВПП считается
концом этапа захода на по-
садку. С этого уровня вы-
соты начинается собственно
посадка самолета. На этом
этапе происходит дальней-
шее торможение самолета с
одновременным его сниже-
нием до плавного касания
ВПП; скорость полета при
этом уменьшается до вели-
чины посадочной скорости
Vnoc- По достижении Упос
пилот прекращает отклонение штурвала на себя, величина аэро-
динамической подъемной силы вследствие продолжающегося
уменьшения скорости становится меньше силы тяжести самолета и
самолет парашютирует на ВПП, касаясь его колесами шасси. Про-
бегом самолета по ВПП до полной его остановки заканчивается
этап посадки. Самолеты с хвостовым колесом осуществляют по-
садку на главные колеса и хвостовое колесо одновременно, с носо-
вым колесом — на главные колеса при несколько приподнятом но-
совом колесе.
Длина по горизонтали от начала захода на посадку до полной
остановки самолета на ВПП составляет полную посадочную дис-
танцию Ln,n. Длина по горизонтали от точки выхода самолета на
уровень 15 м над ВПП до полной его остановки на ВПП составляет
посадочную дистанцию Цтс. Расстояние, которое самолет пробе-
гает по ВПП в процессе посадки, составляет длину пробега
В процессе выполнения посадки по тем или иным причинам мо-
жет возникнуть необходимость отказаться от посадки. В этом слу-
чае осуществляется маневр ухода на второй круг. Может случиться,
что в процессе захода на посадку произойдет отказ двигателей и
тогда пилоту приходится принимать решение — продолжать посад-
ку или уходить на второй круг с неработающим двигателем. При
уходе на второй круг посадка считается прерванной, при продол-
жении посадки — завершенной.
Длину воздушного участка посадки с высоты 15 м над уровнем
ВПП до точки касания можно определить, используя энергетичес-
кий метод. Изменение полной энергии самолета на этом участке.
^пос ™nocg
V2 — V2
пл пос
(8. 16)
где Р’пл — скорость в конце глиссады планирования (скорость пе-
ресечения входной кромки ВПП).
Работа силы лобового сопротивления
д __________________________v г
2*иос '1 гг^в.п»
122
где Lnni — длина воздушного участка при посадке.
Приравнивая оба выражения и полагая приближенно /nnocg~
получим следующую формулу для определения Lnm:
/ V2 — V2 \
(8.17)
где Кер — среднее аэродинамическое качество на участке планиро-
вания — парашютирования.
Скорость планирования и посадочную скорость можно опреде-
лить по формулам
(8.18)
|/ (ЛЭ G уа пл
ц,„=1/^=£Z- (8-19)
Значения КСр, С^апос, Суапя следует брать из аэродинамичес-
ких характеристик самолета, полученных в посадочной конфигура-
ции. Ориентировочно можно принять
/Сср=6-ь7,5,
Суаил — (0,5 0,7) Суасиж,
Суатс — (0,7 -Г-0,8)Сг/аспос.
При пробеге на самолет действуют те же силы, что при разбеге
только при очень малом или отрицательном значении (реверс) си-
лы тяги. Следовательно, уравнение для расчета длины пробега
можно получить из (8.5). Полагая в нем Р=0, будем иметь
д_ Ql/2S I f С С 'i— 1 dV2
"Г ' '-'ха) 2g dl •
(8. 20)
Интегрируя (8.20), получим
7-ир
f пр
rfl’2
QV2S
(8.21)
(fnpCya — Сха)
Как и в случае разбега, для вычисления интеграла (8.21) необ-
ходимо знать зависимость )пр, Суа, Сха от скорости V на посадке.
Полагая в (8.21) средние значения сил Ха, ¥а на посадке
J_ '«посД . у ^_Lm Q-
Лср.пос'^ з дг ’ дср.пос^^^ з /,<гпось »
(8. 22)
где Кст — аэродинамическое качество самолета при угле атаки аст,
можно для Lnp так же, как и в случае разбега, получить прибли-
женную формулу:
т __________К?ос
"Р 1 1 2
3 К„ + 3 'п₽
(8. 23)
123
Аср\ ' zg ' Г 2g д____________L_l2
3 Кст ‘ 3
При расчете Lnp по формуле (8.23) приведенный коэффициент
трения можно принимать в пределах /щ, пос = 0,154-0,30, а посадоч-
ную скорость вычислять по формулам (8.9), (8.11) соответственно
для посадочных значений Суа.
С учетом формул (8.17), (8.23) полную длину посадочной дис-
танции можно представить в виде
-----. (8.24)-
f пр.пос
§ 8.5. Характеристики посадки
Скорость захода на посадку У3.п должна обеспечивать предус-
мотренное эксплуатацией маневрирование самолета в зоне подхода
к глиссаде и по условиям безопасности превышать минимальную
эволютивную скорость посадки Рщщзв* на 5—1О°/о и скорость сва-
ливания в рассматриваемой конфигурации на 25—30%. По усло-
виям прочности конструкции Уз.п не должна превышать максималь-
но допустимую для данной конфигурации самолета скорость.
Снижение по глиссаде, как правило, производят с постоянной
скоростью Упл=1/'3.п и только после пересечения входной кромки
ВПП начинается интенсивное торможение самолета до посадочной
скорости Vnoc, поэтому длина воздушного участка посадки зависит
от разности Уз.п—Кпос-‘ чем больше эта разность, тем больше длина
пролета самолета над ВПП, тем больше при прочих равных усло-
виях длина посадочной дистанции.
Как и в случае набора высоты, наклон глиссады характеризу-
ется градиентом снижения т]сн, который определяется абсолютной
величиной тангенса угла наклона глиссады к горизонту и задается
в процентах. Рекомендуемые НЛГС углы наклона глиссады долж-
ны лежать в пределах от минус 2°40' до минус 3°; градиент сни-
жения при подходе к высоте 15 м не должен превышать при
этом 5%.
На предпосадочном планировании пилот дросселирует двигате-
ли, переводя их в минимальный режим. Тяга, которую при этом
развивают двигатели, уменьшает угол наклона траектории плани-
рования в соответствии с формулой
tge=—Х~Р^а (8.25)
Это уменьшение угла наклона траектории (особенно существен-
ное для самолетов с ТРД) можно компенсировать соответствую-
щим отклонением механизации крыла и уменьшением аэродинами-
ческого качества самолета, например благодаря использованию
воздушных тормозов. Обычно планирование выполняется с закрыл-
ками, отклоненными на угол б3= 0,52-4-0,70 рад.
* Vmin эв — скорость, обеспечивающая при отказе двигателя на посадке воз-
можность с помощью одних только аэродинамических рулей восстанавливать
управление самолетом п затем сохранять установившийся прямолинейный полет.
124
Увеличение угла атаки с целью сохранения подъемной силы
при уменьшающейся скорости полета допустимо до углов, на 0,04—
0,06 рад меньших угла сваливания, определенного в посадочной
конфигурации самолета. Превышение указанных пределов угла
атаки может привести к несимметричному срыву потока с крыла и
сваливанию самолета. При этом следует помнить, что для самоле-
тов, имеющих хвостовые колеса, угол атаки перед парашютирова-
нием не должен превышать стояночного угла аст, а для самолета
с носовым колесом должно быть обеспечено расстояние в 0,2—-
0,3 м между нижней кромкой хвостовой части самолета и ВПП.
Длина посадочной дистанции зависит от величины Vn<>c- У сов-
ременных самолетов посадочные скорости возросли, поэтому воз-
росла и длина посадочной дистанции. Для тяжелых транспортных
самолетов она составляет 1,5—2,0 км. По требованиям безопасно-
сти длина посадочной дистанции должна быть меньше длины ВПП
в 1,5 раза и в случае отказа какой-либо из систем, влияющих на
потребную длину посадочной дистанции, не должна превышать
располагаемой длины летной полосы, включающей ВПП и конце-
вые полосы безопасности (КПБ).
§ 8.6. Влияние эксплуатационных условий
на взлетно-посадочные характеристики
Условия эксплуатации — состояние атмосферы (давление, тем-
пература, ветер), место расположения ВПП над уровнем моря,
уклон ВПП, состояние ее поверхности и т. п. — оказывают замет-
ное влияние на взлетно-посадочные характеристики самолета. Так,
изменение температуры и давления среды, с одной стороны, влияет
на располагаемую тягу при взлете, с другой, — на скорости отрыва,
набора высоты, планирования и посадки.
Плотность воздуха, температура и давление связаны между
собой уравнением состояния:
" (8-26)
из которого, к примеру, следует, что при увеличении давления
воздуха при постоянной температуре происходит увеличение плот-
ности, что приводит к увеличению тяги двигателей и уменьшению
скоростей отрыва и посадки. В результате взлетная и посадочная
дистанция в соответствии с формулами (8.14), (8.24) сокращаются.
Наоборот, увеличение температуры приводит к уменьшению плот-
ности воздуха, а следовательно, к уменьшению тяги двигателей и
увеличению скоростей, что, в свою очередь, вызывает увеличение
взлетной и посадочной дистанций.
Заметное влияние на характеристики взлета и посадки оказы-
вает ветер. При встречном ветре земная скорость уменьшается по
сравнению с воздушной, а при попутном ветре — увеличивается;
поэтому при встречном ветре длина взлетной и посадочной дистан-
ций сокращается, при попутном — увеличивается. Влияние ветра
тем больше, чем больше отношение скорости ветра к скорости по-
125
лета. Сильный попутный или
встречный ветер может сущест-
венно затруднить взлет и посадку,
а при определенных условиях
сделать их даже невозможными.
Место расположения ВПП над
уровнем моря и ее уклон также
оказывают влияние на длину ди-
станций взлета и посадки. С уве-
личением абсолютной отметки
ВПП уменьшается плотность воз-
Рис 8.5. К влиянию уклона ВПП на духа и, следовательно, увеличи-
величину тангенциальной силы „ „ , „У,,,.,,,
' ваются взлетная и посадочная ди-
станции. При взлете и посадке на
ВПП, имеющей уклон в направле-
нии оси ОХа, начинает действовать дополнительная сила mg sin./,
определяемая проекцией силы тяжести на направление движения
(рис. 8.5). При движении самолета под уклон эта сила приводит
к уменьшению разбега и увеличению пробега; при движении само-
лета на подъем, наоборот, — к увеличению разбега и уменьшению
пробега.
Состояние ВПП влияет на величину коэффициента fnv. Умень-
шение /Пр приводит к увеличению длины пробега и сокращению
.длины разбега, увеличение — к увеличению длины разбега и сокра-
щению длины пробега. Изменение коэффициентов трения может
быть вызвано различными причинами (дождь, обледенение ВПП и
др.). Например, обледенение ВПП приводит к уменьшению коэф-
фициента fnp в 1,5—2,0 раза и увеличению длины пробега на 30—
50%; увеличение коэффициента /др с 0,03 до 0,06 увеличивает дли-
ну разбега на 15—20%.
§ 8.7. Влияние конструктивных факторов
на взлетно-посадочные характеристики
К числу конструктивных факторов, влияющих на взлетно-поса-
дочные характеристики, относятся нагрузка на крыло mglS, тяго-
вооруженность Pimg, механизация крыла и система торможения
колес шасси. Влияние указанных факторов непосредственно следу-
ет из формул (8.14) и (8.24), определяющих длину взлетной и по-
садочной дистанций. Заменив в этих формулах Вг, В0Тр, Вил, ВПос
соответствующими выражениями, запишем формулы (8.14) и (8.24)
в следующем виде:
^взл
1 rnB3J1g _________________________________________
Qg S Рвзл 1 1 2
т cr Ч К Ч *^ПР’ВЗЛ
"гвзл& ° Авзл °
1
Рвзл/^взл^Г
' 1 1 10,7g у
.^г/гснаб С у а отр m33nglS /.
(8.27)
126
1 mnocg
6-,' S
VC ya noc
i i jF
3 + 3 /up.noc
(8.28)
Из выражений (8.27) и (8.28) следует, что взлетная и посадоч-
ная дистанции увеличиваются с ростом нагрузки на крыло mglS.
Нагрузка на крыло современных пассажирских самолетов возрос-
ла, что привело к ухудшению их взлетно-посадочных характе-
ристик.
Тяговооруженность самолета имеет значение только для его
взлетных характеристик. Из формулы (8.30) следует, что с ростом
тяговооруженности взлетные характеристики самолета улучшаются.
Тяговооруженность современных самолетов гражданской авиации
возросла примерно в 1,5—2,0 раза и достигла величины 0,3—0,35.
Однако это ие привело к значительному улучшению взлетных ха-
рактеристик самолетов из-за более интенсивного по сравнению с
тяговооруженностью роста нагрузки на крыло.
Механизация крыла является мощным средством, влияющим на
взлетно-посадочные характеристики.
На всех современных пассажирских самолетах используется в
той или иной мере механизация крыла на режимах взлета — посад-
ки. Применение механизации позволяет повысить Суа отр и Суа пос
и тем самым сократить длину разбега и пробега. Как показывают
наблюдения, длина пробега с использованием механизации сокра-
щается на 25—35%, а разбега на 10—15%. Различие в эффекте
механизации на пробеге и разбеге объясняется тем, что отклонение
закрылков на большие углы приводит к значительному уменьшению1
аэродинамического качества в результате роста силы лобового со-
противления. Уменьшение аэродинамического качества приводит к
увеличению £взл и уменьшению £пл- Поэтому закрылки на взлете
не рекомендуется отклонять на углы б3>0,264-0,35 рад, тогда как
на посадке закрылки отклоняются на углы б3=0,854-1,4 рад.
Торможение колес на пробеге определяет величину приведенно-
го коэффициента трения /щ,. С ростом интенсивности торможения
коэффициент /Пр растет и соответственно уменьшается длина про-
бега. Опыт показывает, что применение торможения позволяет со-
кратить дистанцию пробега в 1,5—2,0 раза.
У самолетов с хвостовым колесом торможение можно начинать
непосредственно после посадки на ВПП. При этом надо иметь в
виду, что чрезвычайно интенсивное торможение может привести
к капотированию, если равнодействующая сил трения и нормаль-
ного давления пройдет позади центра масс самолета. Возмож-
ность капотирования накладывает ограничение на интенсивность,
торможения.
У самолетов с носовым колесом начальная фаза пробега осу-
ществляется на главных колесах при приподнятом носовом колесе.
На этом этапе пробега использование торможения нежелательно.
127
во избежание резкого опускания самолета на носовое колесо. Обыч-
но торможение самолета такого типа начинается после того, как
носовое колесо коснется ВПП. Возможность капотирования у са-
молетов с носовым колесом отсутствует, а интенсивность торможе-
ния ограничивается разогревом тормозов колес и повышением из-
носа пневматикой.
Опыт эксплуатации показывает, что увеличение коэффициента
торможения допустимо в пределах ^=0,25=0,30; при более силь-
ном торможении колесо начинает проскальзывать по поверхности
ВПП.
§ 8.8. Пути улучшения взлетно-посадочных
характеристик
Проблема взлетно-посадочных характеристик современных са-
молетов является в настоящее время достаточно острой. От успеш-.
него ее решения во многом зависит конкурентная способность воз-
душного транспорта в будущем, так как ухудшение взлетно-поса-
дочных характеристик привело к увеличению размеров и стоимости
аэродромов и к сужению сети аэродромов, на которых могут эк-
сплуатироваться современные самолеты.
Выше было сказано, что основными параметрами, влияющими
на длину взлетной и посадочной дистанций, являются mg/S, Суас.,
P/mg, К, fnp- Эти параметры по существу и определяют возможные
пути улучшения взлетно-посадочных характеристик. Рассмотрим
лх более подробно.
Уменьшение удельной нагрузки на крыло является наиболее
эффективным путем улучшения взлетно-посадочных характеристик.
Однако этот путь является и наименее приемлемым, поскольку
увеличение максимальной скорости и дальности требует повыше-
ния, а не понижения нагрузки на крыло. Кроме того, понижение
нагрузки на крыло приводит к уменьшению полезной весовой отда-
ли, что ухудшает экономичность эксплуатации самолета.
Увеличение Суас является достаточно эффективным средством
улучшения взлетно-посадочных характеристик. Связано оно с по-
вышением эффективности механизированного крыла. У всех сов-
ременных самолетов имеется та или иная механизация крыла.
За последние 15—20 лет эффективность механизации была значи-
тельно повышена благодаря применению щелевых и многощелевых
выдвижных закрылков, предкрылков, отклоняемых носков крыла
и т. д. Это позволило значительно повысить величину Суа с- Даль-
нейшее повышение эффективности механизации связано с разра-
боткой способов борьбы со срывом потока в области отклоняемых
закрылков, возникающим при отклонении закрылков на большие
углы. Для борьбы с этим явлением в настоящее время все шире
начинают использоваться методы управления пограничным слоем
|(УПС). Физическая сущность методов УПС заключается в таком
воздействии на поток, которое приводит к ликвидации его отрыва
и восстановлению плавности обтекания отклоняемых на большой
угол закрылков. Существует несколько методов УПС. Наиболее
исследованными из них являются отсос и сдув пограничного слоя.
128
Рис. 8.6. Влияние отсоса пограничного слоя -на зону срыва потока на
крыле:
а—отсос отсутствует; б—отсос имеется
Отсасывание пограничного слоя из зоны отрыва (рис. 8.6)
внутрь крыла или закрылка с помощью специального насоса спо-
собствует притягиванию оторвавшегося потока и восстановлению
безотрывного обтекания. Исследования показали, что при наличии
больших зон отрыва, имеющих место над отклоненными закрылка-
ми, отсос имеет небольшую эффективность и поэтому он применя-
ется преимущественно для ламинаризации пограничного слоя в
задней части крыла на крейсерских режимах полета.
Сдув пограничного слоя более эффективен. С использование^м
сдува безотрывное обтекание над закрылками можно получить
вплоть до углов б3= 1,44-1,55 рад. Физическая картина обтекания
профиля крыла в условиях УПС сдувом показана на рис. 8.7. При
отклонении закрылка на большой угол над закрылком возникает
отрыв потока (рис. 8.7,а). В зоне отрыва давление изменяется
очень мало, градиент давления dpfdx близок к нулю. Вдувание
струи в зону срыва приводит к восстановлению безотрывного обте-
кания, характеризующегося градиентом dptdx>Q. При этом кри-
визна линий тока на верхней поверхности профиля увеличивается
и соответственно увеличивается разрежение.
При интенсивном вдувании кривизна линий тока может увели-
чиваться настолько, что произойдет отрыв потока у передней кром-
ки профиля (рис. 8.7,6). Для ликвидации отрыва у передней кром-
ки профиля применяется дополнительный сдув с передней кромки
(рис. 8.7, в).
Эффективность сдува зависит от величины импульса выдувае-
мой струи, характеризуемого коэффициентом интенсивности сдува
С,
mVc
QV2
I
где т — секундная масса выдуваемого воздуха; Ус— скорость вы-
дува; —скоростной напор набегающего потока; S —'пло-
щадь крыла, обслуживаемая УПС (рис. 8.8).
Приращение коэффициента подъемной силы, получаемое в ре-
зультате применения сдува, пропорционально коэффициенту интен-
сивности Ср, однако характер его возрастания различен при раз-
ных Ср, (рис. 8.8). При малых Ср имеет место довольно энерги-
5 776
129
Рис. 8.7. Влияние срыва пограничного слоя иа распределение давления на
крыле и зону срыва потока:
а—сдув отсутствует; б—сдув с носка закрылка; в—сдув с носка крыла и носка
закрылка
чное возрастание АСУ, а затем после некоторого значения Сц=
= Сцд интенсивность возрастания ЛСУ падает. Объясняется это
явление тем, что вначале по мере увеличения Ср ликвидируется
зона срыва над закрылком и восстанавливается безотрывное обте-
кание. К моменту Ср. Ср./^ безотрывное обтекание восстанавли-
вается полностью. При Cp.>CliA увеличение происходит лишь в
результате усиления циркуляции вокруг крыла и поэтому интен-
сивность прироста ДСУ уменьшается.
На практике коэффициенты Ср реализуются лишь до значений
Ср. =Ср.А . Получаемые при этом приращения АС,, составляют
50—80% от значений Суа без УПС. Таким образом, применение
сдува позволяет принципиально увеличить эффективность механи-
зации в 1,5—2,0 раза. Практическая реализация этого эффекта
может быть ограничена эффективностью рулей высоты.
является проверенным в экс-
плуатации средством улучше-
ния взлетных характеристик.
Оно связано с совершенство-
ванием силовых установок и
достигается путем форсирова-
ния режимов двигателя на
взлете. В режиме форсажа
взлетная тяга может быть.уве-
личен а на 20—30%.
Уменьшение аэродинамиче-
ского качества на пробеге поз-
воляет существенно сократить
длину пробега. Чтобы макси-
мально уменьшить аэродина-
Увеличение взлетной тяги Рвзл
Рис. 8.8. К влиянию интенсивности
сдува на прирост коэффициента
аэродинамической подъемной силы
130
мическое качество, необходимо увеличить Сха и уменьшить Суа.
Для этой цели используются интерцепторы, воздушные тормоза,
тормозные парашюты, реверс тяги и др.
Одним из эффективных средств уменьшения аэродинамического
качества является установка на крыльях интерцепторов — плоско-
стей, способных выдвигаться в поток. При выдвижении интерцепто-
ров резко падает аэродинамическая подъемная сила (вследствие
срыва потока за интерцептором) и увеличивается сила лобового
сопротивления. Интерцепторы позволяют уменьшить аэродинами-
ческое качество в 8—10 раз. Следует учитывать при этом, что
уменьшение подъемной силы приводит к увеличению нормальной
реакции колес шасси и, как следствие, к увеличению силы трения
колес с землей.
Воздушные тормоза, как и интерцепторы, представляют собой
выдвигающиеся в поток площади, устанавливаемые, как правило,
на фюзеляже. При установке тормоза эффект уменьшения подъем-
ной силы не реализуется и аэродинамическое качество уменьшает-
ся только из-за роста силы лобового сопротивления. Такой же
эффект создают тормозные парашюты, применяемые на очень мно-
гих самолетах.
Значительное уменьшение длины пробега может быть получено
при использовании реверса тяги. У самолетов с ТВД она созда-
ется благодаря переводу лопастей винта во время пробега на ма-
лый шаг, осуществляемому снятием лопастей винта с промежуточ-
ного упора после того, как самолет коснется ВПП носовым коле-
сом. Применяются также так называемые реверсные винты, кото-
рые кроме обычных режимов могут работать в режимах реверса
тяги, когда лопасти винта устанавливаются системой реверса та-
ким образом, чтобы поток набегал на них под отрицательными
углами атаки. Создаваемая при этом тяга будет по знаку совпадать
с направлением обратной тяги, а по величине может регулировать-
ся системой реверса.
Реверс тяги на ТРД получается в результате поворота выходя-
щей из сопла струи. Применение реверса тяги дает возможность
сократить длину пробега на 25—30%. Особенно эффективным ока-
^р^. Сухой аэродром
Без реверса тяги.
Рис. 8.9. К влиянию реверса тяги та длину пробега
Обледеневший.
э аэродром
5*
131
зывается применение реверса тяги при посадке на обледеневшую
ВПП (рис. 8.9).
Вопросы для повторения
1. Почему движение самолета при взлете и посадке является неустановив-
шимся?
2. Как влияет близость земли из скорости отрыва Котр и посадки КПОс?
3. Какие факторы влияют на длину взлетной и посадочной дистанций? Ка-
кие из них приводят к их сокращению?
Задачи
1. Используя систему уравнений (8.2) и выражения для средних значений
сил сопротивления и аэродинамической подъемной силы на разбеге (8.7), пока-
зать, что полное время разбега самолета по ВПП можно определить по формуле
1 ^отр
S ^*СР 1 1 _ 2
m^g ~ 3 Квзл “ 3 /пр'взл
2. Длина пробега самолета в условиях горизонтальной ВПП составляет
1000 м. Определить, на сколько процентов уменьшится длина пробега у того же
самолета, если он сядет ла ВПП, имеющую положительный уклон (=0,087 рад.
Значение приведенного коэффициента трения и качества при стояночном угле
атаки принять равным /Пр.пос = 0,15; Кст=12.
Решение
При пробеге но ВПП, имеющей уклон (, система уравнений в соответствии
с (2.21), (8.1) и (8.3) преобразуется в уравнение
m
Zc + zn^ sin г +/пр (zng cos z —Гс)=(1)
Интегрируя уравнение (1) с учетом выражений для сил Ха и Уа на посадке
(8.22), получим для Впр формулу
о ]/2
L = —-----------------------—--------------- (2)
^“Р‘¥=о 2g 1 ' ' ’
—— + 3 sin i + /пр.пос (3cos i — 1)
Лет
Из сопоставления формул (2) и (8.23) следует, что
Aip Z-AO___________1 + 2/пр.пос^ст______
^up z=o 1 [/пр.пос (3cos ( 1) 4~ 3sin (]
Подставив в формулу (3) необходимые данные задачи, получим
0,596.
^пр /=0
Таким образом, длина пробега при посадке самолета иа ВПП, имеющую по-
ложительный уклон (=0,087 рад, уменьшается на 40%.
Глава 9
Продольная статическая устойчивость
§ 9.1. Основные понятия
Понятие статической устойчивости вытекает из общего опреде-
ления устойчивости движения и равновесия, которое будет изложе-
но в гл. 14. Здесь этот вопрос рассматривается в предположении,
что самолет сбалансирован и движется по инерции. В такой по-
становке под статической устойчивостью понимается способность
самолета восстанавливать состояние балансировки после прекра-
щения действия факторов, нарушавших равновесие действующих
на него внешних сил и моментов. Поэтому изучение статической
устойчивости начинаем с определения внешних сил и моментов,
действующих на самолет, и условий, при которых они уравно-
вешены.
Точкой приведения внешних сил является центр масс самолета,
т. е. начало О связанной системы координат. Момент силы тяжес-
ти относительно этой точки равен нулю. Следовательно, равенство
нулю суммарного вектора момента внешних сил Мр эквивалентно
равенству нулю результирующего момента. В соответствии с этим
условие балансировки самолета определяется уравнениями
Х=0; Мк=0, (9. 1)
где Мд — результирующий момент.
В соответствии с определением результирующей силы и резуль-
тирующего момента условие балансировки (9.1) принимает вид
/?Л+Ох=0; ^ + 0^=0; Мг=0, (9.2)
где Rx, Rv — продольная и нормальная силы; Mz—момент тан-
гажа.
В развернутом виде условия продольной балансировки (9.2)
таковы:
Г+^ + G^O; < + ^='0, (9.3)
где X — аэродинамическая продольная сила; У — аэродинамичес-
кая нормальная сила; Рх и Ру — проекции тяги на продольную и
нормальную оси; Mz — аэродинамический момент тангажа; Мр^—
момент тангажа от тяги силовой установки. °
В последующих параграфах излагаются методы определения
указанных выще сил и моментов.
133
§ 9.2. Аэродинамический момент тангажа
Аэродинамический момент тангажа самолета
Л4г = /Игб.г.о + 7ИЛГ.О, (9.4)
где Л/гб.г.о — аэродинамический момент тангажа самолета без го-
ризонтального оперения; УИ2Г.О— аэродинамический момент танга-
жа горизонтального оперения.
Аэродинамический момент тангажа самолета без горизонталь-
ного оперения равен сумме
^?б.г.о = ^гкр + ^гф + ^гг.д-|-А12ш4-..., (9.5)
где Мцф — аэродинамический момент тангажа крыла; Л'12ф— аэро-
динамический момент тангажа фюзеляжа; ТИ2Г.д—аэродинамичес-
кий момент тангажа гондол двигателей; MZV1 — аэродинамический
момент тангажа шасси.
Для вычисления аэродинамического момента тангажа возьмем
вспомогательную связанную систему координат, начало которой
расположено в носке профиля крыла, а ось ОХ направлена назад
(рис. 9.1). Согласно принятому правилу знаков аэродинамический
момент тангажа положителен, если он вращает самолет в сторону
кабрирования, т. е. увеличения углов атаки и тангажа.
Пусть центр масс самолета расположен над хордой профиля
крыла и имеет в этой системе координат абсциссу хт и ордина-
ту Ут.
Простое и наглядное определение аэродинамического момента
тангажа крыла основано на понятии фокуса, введенного академиком
С. А. Чаплыгиным. Фокусом называется точка, расположенная на
линии пересечения плоскости OXZ связанной системы координат с
плоскостью симметрии, относительно которой аэродинамический
момент тангажа остается постоянным при малых изменениях угла
атаки (дМг/да=0). Существование такой точки облегчает вычис-
ление аэродинамического момента тангажа, который для крыла с
постоянной хордой Ьл равен
ЛТ2=7И20-(х/г-л:1)Г-^Х, (9-6)
где Л420 аэродинамический момент крыла относительно оси Z, про-
ходящей через фокус; Хг —абсцисса фокуса (см. рис. 9.1).
Разделив обе части соотношения (9.6) на произведение qS\,
получим
^гкр find У fix’ (9-7)
где Ст0=-^_- хР=^-, х.с=^-, (9.8)
qSbf, bk оА сА
Относительная абсцисса центра масс самолета ,гт играет
большую роль при изучении устойчивости и управляемости само-
лета. Она называется центровкой и является важным фактором,
влияющим на характеристики устойчивости и управляемости само-
лета. Центровка исчисляется в долях хорды крыла (например,
хт—0,18). Допустимые из условия безопасности полетов пределы
134
ее изменения обеспечи-
вают соответствующей за-
грузкой самолета.
Относительная ордина-
та центра масс ут оказы-
вает существенное влия-
ние на величину момента
^zo
Рис. 9.1. К определению аэродинамического
момента тангажа крыла
тангажа только при про-
дольной силе X, соизме-
римой с нормальной Y,
например, на сверхзвуко-
вых и особенно гиперзвуковых скоростях.
Для исследования продольной устойчивости самолета важное
значение имеет определение фокуса, данное В. С. Пышновым, со-
гласно которому фокус крыла является точкой пересечения равно-
действующей приращения аэродинамической подъемной силы ДУа,
обусловленного изменением угла атаки, с хордой профиля. Эта за-
кономерность позволяет определить величину и направление при-
ращения аэродинамического момента тангажа, обусловленного из-
менением угла атаки и положения центра масс самолета.
Теперь переходим к определению аэродинамического момента
тангажа крыла сложной формы. Предполагается, что в общем
случае крыло имеет одну плоскость симметрии, совпадающую с
плоскостью симметрии самолета, параметры: размах I, местная
хорда b(z), центральная хорда bG, местный угол стреловидности
% (г), местный угол поперечной V крыла ^(z), местный угол
крутки фкр(г), площадь S, удлинение X, средняя аэродинамическая
хорда ЬА и угол установки ф0. Определение указанных параметров
дано в ГОСТ 20058—74. Здесь мы приводим одно из них — опреде-
ление средней аэродинамической хорды крыла, величина которой
определяется из соотношения
&А==У \ ^(z)dz.
о
(9.9)
Если крыло произвольной формы заменить прямоугольным со
средней аэродинамической хордой ЬА и заданной площадью S, то
аэродинамические момент тангажа и продольная и нормальная си-
лы исходного и эквивалентного крыльев будут соответственно рав-
ны между собой. Именно из этих условий получено соотношение
(9.9). Например, длина средней аэродинамической хорды трапеци-
евидного крыла в соответствии с определением (9.9) равна
(9.10)
з (Т) + 1)2
где b* — -fo = — сужение; Ьи — концевая хорда трапе-
2 рк
Циевидного крыла.
В дальнейшем все характеристики продольной статической ус-
135
тойчивости п управляемости будут отнесеньг.к средней аэродинами-
ческой хорде крыла. Например, коэффициент аэродинамического
момента тангажа
§ 9.3. Аэродинамический момент тангажа фюзеляжа
Фюзеляжи (корпусы) современных самолетов представляют
собой тела вращения или тела, близкие к ним. Фюзеляж имеет сле-
дующие параметры: длина Аф, площадь мпделевого сечения 5М,
эквивалентный диаметр ds и удлинение Хф, определение которых
дано в ГОСТ 20058—74.
Аэродинамический момент тангажа фюзеляжа (рис. 9.2)
^ф-Кф^-Хд.ф), (9.12)
где Хд.ф — абсцисса центра давлений фюзеляжа.
Аэродинамическая нормальная сила фюзеляжа
Y^=Cy^SK. (9. 13)
Здесь СУф — коэффициент аэродинамической нормальной силы
фюзеляжа, который определяется соотношением
^ф=С“ф(а-?0), (9.14)
где С“ ф=дСг/ф/<9а; <р0 — угол нулевой нормальной силы.
В соответствии с соотношениями (9.12) — (9.14) аэродинамичес-
кий момент тангажа фюзеляжа
А42ф=С^ф (а ср0)(хт -^д.ф)?£М" (9. 15)
Этот момент можно определить как произведение:
А12ф=т2ф^А, (9. 16)
где т2ф —коэффициент аэродинамического момента тангажа фю-
зеляжа.
Из уравнений (9.15) и (9.16) находим
^2ф=Сф(а —ф0)^-(лт —х"д.ф). (9.17)
Рис. 9.2. К определению аэродинамическо-
го момента тангажа фюзеляжа
где' хд,ф=~^-. (9.18)
В эксплуатационном диа-
пазоне изменения углов
атаки коэффициенты
аэродинамической нор-
мальной силы Су и аэро-
динамической подъемной
силы Суа с достаточной
для практики точностью
принимаются .равными:
136
Су=Суа. (9.19)
Пользуясь этим допущением, угол атаки крыла выразим через ко-
эффициент аэродинамической нормальной силы по формуле
«=-^+«о- (9-20)
Подставляя это выражение в уравнение (9.17), получим
mz*=^*(clo~?o)v' (Х1-Л*д.ф)+
•э
~CW
•^Д.ф) Су
(9.21)
Первое слагаемое не зависит от коэффициента аэродинамичес-
кой нормальной силы, т. е. оно равно коэффициенту аэродинами-
ческого момента тангажа фюзеляжа при нулевом значении коэф-
фициента аэродинамической нормальной силы (^=0). В соответ-
ствии с этим уравнение (9.21) представим в виде
где
«z ф ^гОф "К АфСу
т20ф=Сау ф (а0 — ?о) (*
Са 9
(9.22)
(9.23)
(9.24)
Коэффициент аэродинамического момента тангажа крыла вмес-
те с фюзеляжем без учета их взаимного влияния в соответствии с
соотношениями (9.7) и (9.22) равен:
^z кф—4" пг2оф+(-^г "^Гкр + -Aj>) Су — У fix' (9 • 25)
Компоновка современных самолетов такова, что ут значительно
меньше хт и при дозвуковых скоростях Сх намного меньше Су, по-
этому в уравнении (9.25) можно пренебречь последним слагаемым.
После этого допущения уравнение (9.25) примет вид
^гкф CmQ -J- И20ф ~Г (-^1 ЛкрН- ^ф) С'у (9.26)
Учет влияния интерференции на аэродинамические характерис-
тики сочетания крыла с фюзеляжем производится при аэродинами-
ческом расчете самолета по данным испытаний модели в аэроди-
намической трубе. Изменение коэффициента аэродинамического
момента тангажа сочетания крыла с фюзеляжем, обусловленное
интерференцией, при расчетах учитывается смещением фокуса
крыла на Дх^ф, которое зависит от формы крыла и числа М полета
137
§ 9.4. Аэродинамический момент таигажа
горизонтального оперения
Аэродинамический момент тангажа горизонтального оперения
>И2Г.о=-Гг.о£г.о, (9.27)
где Уг.о — аэродинамическая нормальная сила горизонтального
оперения; £г.<,— плечо горизонтального оперения (рис. 9.3). Плечо
горизонтального оперения, строго говоря, равно расстоянию меж--
ду центром давления горизонтального оперения и центром масс
самолета. Ввиду изменения положения центра давления по углу
атаки такое определение непригодно для практических расчетов.
Для горизонтального оперения, выполненного в виде одного управ-
ляемого стабилизатора, целесообразно в качестве £г.о взять рас-
стояние между фокусом стабилизатора и центром масс самолета.
Плечо горизонтального оперения, имеющего руль высоты, обычно
принимают равным расстоянию между осью подвески руля и цент-
ром масс самолета.
Аэродинамическая нормальная сила горизонтального оперения
^г.о==^г.о9'г.о^г.о> (9.28)
где Су г.о, <7го., Sr.o — соответственно коэффициент аэродинамичес-
кой нормальной силы, скоростной напор и площадь горизонтально-
го оперения.
В соответствии с соотношениями (9.27) и (9.28) аэродинамичес-
кий момент тангажа горизонтального оперения
CyrMqt_oSrMLrM. (9.29)
Разделив это на произведение qSb&, получим коэффициент аэ-
родинамического момента тангажа горизонтального оперения
^zr.o ^Ц/г.о^'г.о'^г.о" (9.30)
Здесь коэффициент kT,o=qr.olq. Он характеризует торможение
потока крылом и фюзеляжем в области горизонтального оперения.
Величина этого коэффициента зависит от расположения горизон-
тального оперения на самолете.
Рпс. 9.3. К определению аэродинамическо-
го момента тангажа горизонтального опе-
рения при фи'ксировамном руле высоты:
а—самолет обычной схемы- б—схема «утка»; в—
схема «бесхвостка»
138
Рис. 9.4. К определению угла атаки горизонталь-
ного оперения
Коэффициент Лг.о представляет собой безразмерный статичес-
кий момент площади горизонтального оперения относительно цент-
ра масс самолета и является важным конструктивным параметром,
обеспечивающим продольную устойчивость и управляемость само-
лета. Наибольшее значение коэффициента kTX) имеет горизонталь-
ное оперение у самолета, выполненного по схеме «утка» (/гг.о=1)',
наименьшее (&г.о=0,7) имеет горизонтальное оперение сверхзву-
кового самолета, расположенное позади центра масс.
Величина Дг.о у современных самолетов обычно находится в
пределах 0,18—0,6, а сам коэффициент определяется соотношением
А.о=-^*-. (9.31)
На горизонтальных оперениях современных самолетов в основ-
ном применяются симметричные профили, и поэтому выражение
для коэффициента аэродинамической нормальной силы можно за-
писать в виде
Суг.о—^/r.oOCr<0, (9.32)
где аг.о — угол атаки горизонтального оперения; СуГ.о —производ-
ная от коэффициента аэродинамической нормальной силы горизон-
тального оперения по углу атаки.
Угол атаки горизонтального оперения (рис. 9.4)
аг.0=а+<р—е^, (9.33)
где а — угол атаки крыла; <р — угол установки стабилизатора (угол
между хордами крыла и стабилизатора); еу — угол скоса потока у
горизонтального оперения.
Для определения угла скоса потока у горизонтального оперения
наибольшее применение в расчетной практике получила следующая
полуэмпирическая формула:
so- (9.34)
Здесь ео — зависящий от угла атаки крыла угол скоса потока, соз-
даваемый фюзеляжем; D — коэффициент скоса дозвукового пото-
139
Рис. 9.5. К определению угла
скоса потока у горизонтально-
го оперения
ка, определяемый соотношением:
£>=^х, (9.35)
где X — эффективное удлинение кры-
ла; х — коэффициент, зависящий от
взаимного расположения горизонталь-
ного оперения и крыла, а также от-
раопределения циркуляции по размаху
крыла.
В любой точке, находящейся на
расстоянии L от носка центральной
хорды и на высоте у от базовой плос-
кости крыла, угол скоса сверхзвуково-
го потока можно определить по кри-
вым, приведенным на рис. 9.5 (значе-
ние параметра р дано в курсе аэроди-
намики).
Угол скоса сверхзвукового потока
у горизонтального оперения можно
определить формулой (9.34), в кото-
рой
(9.36)
^у
где е — определяется по графикам на рис. 9.5; Сау —производная
от коэффициента аэродинамической нормальной силы по углу
атаки крыла.
Подставляя значение еу согласно (9.34) в соотношение (9.33),
получим выражение для определения угла атаки горизонтального
оперения в виде
«г.0=а+? — DCy~ ео- (9.37)
С учетом формул (9.32) и (9.37) из соотношения (9.30) получим
выражение для определения коэффициента аэродинамического мо-
мента тангажа горизонтального оперения при нейтральном поло-
жении руля высоты:
Wzr.0= — Сг/гЛАоНф-Dcy — ео)- (9.38)
В правой части выражения (9.38) переменными величинами в
общем случае являются Су, а, <р, причем Су и а связаны зависи-
мостью
Су—С у (а Оо),
поэтому формулу (9.38) можно представить в виде
Шгг.о~ гдЛАл(а0 ео) г.сЛг.оА.0^ с<1 X
X Су Су Г Аг.оА.О?] •
(9.39)
140
Поскольку в формуле (9.39) все переменные только в первой
степени, то его можно записать в виде
т2 г.о—т2ог.0 4- mCzyr.0Cy+(9-40^
ГДе mzOr.o~ ~~ Суг.о^Т,0АТМ ((Iq eo)i
\ Ьу )
mzr.o = —Cyr.okcoACM.
§ 9.5. Аэродинамический момент тангажа планера
Аэродинамический момент тангажа планера самолета
Afz=A4z6j>04-A4zr.o, (9.42)
где Л1г — аэродинамический момент тангажа самолета без двига-
телей, т. е. планера; Afzc.r.o — аэродинамический момент тангажа
планера без горизонтального оперения; Л12Г.О — аэродинамический
момент тангажа горизонтального оперения при нейтральном поло-
жении руля высоты.
Разделив обе части равенства (9.42) на произведение qSb\,
получим
/иг — т2 б.г.о 4” г.о* (9.43)
Подставляя сюда выражения т2б.г.о и тгГ.о из (9.26) и (9.40),
получим
гпг=тг[1 — (xF — x.r)Ci,4-mIr.o?> (9.44)
где т20=Ст0-]-тг0ф+т2о^о; (9.45)
=^кр “ ЛФ - "4г.о" (9-46)
Коэффициент аэродинамического момента тангажа планера са-
молета при нулевых значениях углов установки стабилизатора
(<р=0) и отклонения руля высоты (бв = 0) равен
т2=тг0—(хр—'хТ)Су, (9.47)
где хр — относительная абсцисса фокуса планера самолета.
§ 9.6. Момент тангажа от тяги
Момент тангажа от тяги двигателя согласно рис. 9.6 равен
mpz= ~ р*Ур+ Рухр> (9.48)
где Рх, Ру — составляющие тяги двигателя по продольной и нор-
мальной осям; Хр, уР — проекции расстояния от центра масс само-
лета соответственно до Ру и Рх на продольную и нормальную оси.
Рассмотрим случай, когда самолет сбалансирован, т. е.
Px=X=CxqS. (9.49)
В соответствии с (9.48) и (9.49) момент тангажа от продольной
141
Рис. 9.6. Момент тангажа от тяги:
fl—турбовинтового двигателя; б—турбореактивного
двигателя
составляющей тяги Рх равен
M'pz= — CxqSyp. (9.50)-
Разделив обе части этого равенства на произведение qSbA, по-
лучим коэффициент момента тангажа от продольной составляющей
тяги
тР=— Схур, (9.51)
где г/р—Ур!Ьа.
При косой обдувке винта возникает нормальная составляющая
тяги Ру. Коэффициент момента тангажа от этой составляющей
тяги винта определяется по эмпирической формуле
mpz=0,05 -^-ЕРСу, (9. 52)
где — расстояние от центра масс самолета до плоскости враще-
ния винта; i— число винтов; D — диаметр винта.
Нормальная составляющая тяги реактивного двигателя также
обусловлена «косой обдувкой» (см. рис. 9.6). Она определяется по
теореме об изменении количества движения, согласно которой
Py=m*Vy. (9.53)
В соответствии с кинематическими соотношениями (1.3)
Vу— V cos Р sin а. (9.54)
При малых значениях углов атаки и скольжения
Vy^Va. (9.54')
Секундный расход массы воздуха т* для создания реактивной
142
тяги Р определяется по теореме об изменении количества дви-
жения:
т* =——— , (9.55)
w — V
где w — скорость истечения газов из сопла реактивного двигателя.
Из соотношений (9.53), (9.54) и (9.55) определяем
Ру=-^~. (9.56)
Момент тангажа от этой составляющей тяги
МР=-^-хР. (9.57)
Из условия балансировки самолета находим
Р cos ед=СxqS. (9.58)
Ввиду малости угла между направлением тяги и продольной
осью cos ед«1. Поэтому соотношение (9.58) можно записать в
виде
P=CxqS. (9.58')
Подставляя (9.58') в (9.57), получим
М”Р = C^-SVa хР. (9.59)
z ----- у
Разделив это на qSb&, получим коэффициент момента тангажа
от нормальной составляющей тяги реактивного двигателя:
тР =——хр, (9.60)
z W
V”1
где хр=хр/Ьк.
Суммарный коэффициент момента тангажа от тяги двигателей
тРг—mPz -|- mPz. (9.61)
В соответствии с (9.51), (9.52) и (9.61) коэффициент момента
тангажа от тяги винтового двигателя
= -С^Р+0,05 Су. (9.62)
Коэффициент момента тангажа от тяги реактивного двигателя
находим из соотношений (9.51), (9.60) и (9.61):
mPz = — СхуР -]—хр- (9-63)
Учет момента тангажа от тяги двигателей имеет важное значе-
ние в обеспечении балансировки, устойчивости и управляемости
143
самолета. Поэтому основные характеристики устойчивости и уп-
равляемости самолета определяют на всех основных режимах ра-
боты двигателей.
§ 9.7. Полный момент тангажа самолета
Момент тангажа самолета при фиксированном руле высоты в
нейтральном положении
+ (9.64)
где Л12* — аэродинамический момент тангажа планера самолета
при фиксированном в нейтральном положении руле высоты; MPz—
момент тангажа от тяги двигателей. з
Разделив обе части (9.64) на произведение qSb&, получим
mz = mz -f- mPz- (9.65)
Подставляя сюда mz* и т Pz из (9.47) и (9.63), получим
— (*д — хг) Су — Схур -I-— хр. (9.66)
W
Заменив угол атаки с помощью соотношения (9.20) и обозначив
через k отношение коэффициентов аэродинамических нормальной
“ (h Су
и продольной сил —I, получим
' Сх 1
mz=m^—{xp—x^Cv-\-C^C2y, (9.67)
где Хр—Хр+—---------; (9.68)
k
\ v )
С*=~ Хр . (9.69)
Для самолета с турбовинтовыми двигателями аналогичным пу-
тем из (9.47), (9.62) и (9.65) находим коэффициент момента тан-
гажа
тг =mz0-(xf- хг) Су, (9.70)
, • ’• * s т-
где ‘ " */=*д + ^~0,05^. (9.71)
При малых значениях коэффициента аэродинамической силы
Су и множителя С* формулы (9.67) можно упростить, полагая
последнее слагаемое в правой части равным нулю:
mz=mz0—(хр—х^Су. (9.72)
144
§ 9.8. Продольная статическая устойчивость
по перегрузке при фиксированном руле высоты
Способность самолета восстанавливать и сохранять продольную
балансировку проявляется как отношение между приращениями
момента тангажа, продольной и нормальной сил, с одной стороны,
и угла атаки и скорости, с другой. Продольная статическая устой-
чивость есть стремление самолета ликвидировать эти приращения
независимо от того, какие из них раньше возникли. Для ее сущест-
вования необходимо, чтобы положительные приращения угла атаки
и скорости вызвали отрицательные приращения момента тангажа,
продольной и нормальной сил. Нейтральность есть случай, когда
эти приращения независимые.
При фиксированном значении скорости полета наличие про-
дольной статической устойчивости означает, что приращения угла
атаки и момента тангажа противоположны по знаку. В такой по-
становке продольную статическую устойчивость можно рассматри-
вать как способность сохранения нормальной перегрузки, соответ-
ствующей исходному состоянию равновесия момента тангажа.
При фиксированном значении скорости полета коэффициент
аэродинамического момента тангажа зависит от угла атаки. Знак
приращения момента тангажа определяется производной от коэф-
фициента аэродинамического момента тангажа по углу атаки. Для
удобства проведения исследования сделаем следующее преобразо-
вание:
дтг
да
dmz dCy
дСу da
С aCtJ
=шу--------.
da
(9.73)
Производная dCv!da в эксплуатационном диапазоне изменения
углов атаки положительна, поэтому знак производной дт^да опре-
деляется знаком производной dmJdCy. В соответствии с этим усло-
вие продольной статической устойчивости самолета по перегрузке
при фиксированном руле высоты будет следующим:
< 0 — устойчив;
mczy=0 — нейтрале н;
> О — неустойчив.
(9.74)
Граница между устойчивостью и неустойчивостью есть нейт-
ральность, при которой производная от момента тангажа по коэф-
фициенту аэродинамической нормальной силы равна нулю. Ранее
были получены зависимости коэффициента момента тангажа от
коэффициента нормальной силы для различных случаев.
При нелинейной зависимости между этими коэффициентами в
соответствии с (9.67) граница между устойчивостью и неустойчи-
востью определяется уравнением
= - (^_xj + 2С*Су = 0, (9. 75)
145
откуда находим
x.tM-xP=~2C*Cy (9.76)
или x.tM=xP—2C*Cy. (9.77)
Центровка, соответствующая нейтральности самолета, называ-
ется нейтральной центровкой, величина ее определяется соотноше-
нием (9.77).
Практическое выполнение условия (9.75) затруднительно, так
.как оно требует, чтобы для каждого значения Су имелось соответ-
ствующее взаимное расположение фокуса и центра масс. Однако
.зависимость между коэффициентами момента тангажа и аэродина-
мической нормальной силы на основных режимах полета линейная.
.Для самолета с ТРД она определяется уравнением (9.72), соглас-
но которому имеем следующее условие нейтральности:
^=_^_лг)=0, (9.78)
•откуда находим нейтральную центровку
х.см=хР. (9.79)
В эксплуатационном диапазоне изменения углов атаки и уста-
новившемся режиме полета можно с достаточной степенью точно-
сти принимать коэффициент аэродинамической нормальной силы
равным коэффициенту аэродинамической подъемной силы, и кроме
того, считать, что момент тангажа самолета при фиксированном
руле высоты равен аэродинамическому моменту тангажа. Тогда из
(9.78) следует, что если начало связанной системы координат сов-
падает с точкой, расположенной на линии пересечения плоскости
OXZ (связанной системы координат) с плоскостью симметрии,
имеющей абсциссу xF* относительно его прежнего положения, то
.аэродинамический момент тангажа относительно нее не будет за-
висеть от малых изменений коэффициента аэродинамической подъ-
емной силы при фиксированном руле высоты, когда движение са-
молета можно считать квазиустановившимся криволинейным дви-
жением в вертикальной плоскости с постоянной скоростью. Эта
почка называется точкой нейтральности по перегрузке при фикси-
рованном руле высоты.
Пусть в исходном состоянии балансировки самолета нормаль-
ная перегрузка равна единице («^=1). При нарушении баланси-
ровки характер изменения перегрузки зависит от взаимного распо-
ложения центра масс и точки нейтральности по перегрузке. Если
почка нейтральности по перегрузке при фиксированном руле высо-
ты расположена сзади центра масс, то любое приращение угла
.атаки (будет ли оно положительным или отрицательным — безраз-
лично) вызовет такое изменение аэродинамической нормальной
силы и аэродинамического момента тангажа, которое способствует
восстановлению исходного значения нормальной перегрузки и про-
дольной балансировки самолета. Имеет место обратная картина,
когда точка нейтральности по перегрузке при фиксированном руле
146
высоты расположена впереди центра масс. В этом случае любое
приращение угла атаки способствует дальнейшему изменению нор-
мальной перегрузки.
В соответствии с изложенным условие продольной статической
устойчивости по перегрузке определяется соотношениями:
х*? > х* — устойчив;
xp=x.t — нейтрален; (9.80)
Л/? х.с — неустойчив.
Для обеспечения безопасности полетов существенен не только
сам факт наличия устойчивости самолета по перегрузке при нейт-
ральном руле высоты, но и ее степень или мера.
У устойчивого самолета по перегрузке точка нейтральности F
расположена позади центра масс. Очевидно, что чем больше будет
расстояние между этими точками, тем больше будет восстанавли-
вающий момент.
§ 9.9. Продольная статическая устойчивость
по скорости при фиксированном руле высоты
В установившемся прямолинейном полете изменения скорости
(числа М) и коэффициентов аэродинамического момента тангажа
и аэродинамической подъемной силы взаимно обусловлены. Поэто-
му способность самолета сохранить скорость (число М) исходного
состояния балансировки определяется двумя факторами: враще-
нием вокруг центра масс под действием дополнительного аэродина-
мического момента тангажа и приращением числа М полета, выз-
ванными случайными факторами (например, пульсацией ветра).
Первый из них приводит к изменению угла атаки, а следовательно,
и коэффициентов аэродинамического момента тангажа и аэродина-
мической подъемной силы, а второй — есть влияние сжимаемости
воздуха на эти же коэффициенты. В такой постановке наличие
способности самолета сохранить скорость исходного состояния
балансировки определяется сравнением знаков полных прираще-
ний аэродинамического момента тангажа и аэродинамической нор-
мальной силы, зависящих от угла атаки и числа М полета. Если
знаки этих приращений противоположны, то самолет устойчив по
скорости при фиксированном руле высоты. Следовательно, условие
продольной статической устойчивости по скорости при фиксиро-
ванном руле высоты определяется следующими соотношениями:
d^ACy, М)
-----------< 0 — устойчив;
dCy
dmz {Сц, М)
----------= 0 — нейтрален;
dCy
dmz(Cu, М)
---------- > 0 — неустойчив.
dCy-
(9.81)
147
Полная' производная от коэффициента аэродинамического мо-
мента тангажа по-коэффициенту аэродинамической нормальной
силы равна:
dmz(Cy, М)
dCy
dmz idmz / ДМ \
дСу ДМ \dCy /л^-const
(9. 82)
Первое слагаемое в правой части (9.82) есть степень продоль-
ной статической устойчивости по перегрузке при фиксированном
руле высоты, а второе — определяется из условия постоянства нор-
мальной скоростной перегрузки, т. е. аэродинамической подъемной
силы (ya=const):
- _Q«2M2
а— g
(9.83)
Аэродинамическая подъемная сила является функцией от ко-
эффициента Суа и числа М, поэтому производная от нее равна:
1, (9.84)
2 I ‘ у \dCya]ny=^t\' '
•откуда находим
ДМ X
dCya]ny^^i
м
2С^О
(9. 85)
На основании соотношения (9.19) эту производную запишем в
виде
ДМ X
ДСу /n^-const
м
2СУ ’
(9.86)
В соответствии с (9.82), (9.73) и (9.86) степень продольной ста-
тической устойчивости по скорости при фиксированном руле высо-
ты равна
где
Дтя
ДС^
тсу
Z
м
Жу
mz
dmz
дМ '
(9.87)
(9.88)
У современных самолетов на околозвуковых скоростях с увели-
чением числа М полета возникает отрицательный момент (в сторо-
ну пикирования), т. е. частная производная тг <0, поэтому в пра-
вой части уравнения (9.87) второе слагаемое положительное.
С другой стороны, при наличии продольной статической устойчи-
вости по перегрузке при фиксированном руле высоты частная про-
изводная шсу отрицательна (ш^<(0). Таким образом, в правой
части (9.87) имеются два слагаемых, первое из которых отрица-
тельное, а второе — положительное. Если первое слагаемое по аб-
солютной величине больше второго, то самолет, обладающий про-
дольной статической устойчивостью по перегрузке при фиксирован-
ном руле высоты, будет обладать и продольной статической устой-
чивостью по скорости при фиксированном руле высоты. Наоборот,
148
Рис. 9.7. Зависимость коэффициента
момента тангажа от коэффициента
нормальной силы при фиксированном
руле высоты
когда по абсолютной величине второе слагаемое больше первого,
то самолет, обладающий продольной статической устойчивостью
по перегрузке при фиксированном руле высоты, будет неустойчи-
вым по скорости. На рис. 9.7 точка А соответствует продольной
статической устойчивости по скорости при фиксированном руле
высоты, а точка В — случаю неустойчивости по скорости.
ВойДВсы 'дЛя пдёторения
1. Что понимается под продольной статической устойчивостью?
2. Напишите условия продольной балансировки самолета.
3. Каким свойством обладает фокус крыла?
4. В чем различие понятий продольной статической устойчивости по пере-
грузке и скорости?
5. Чем определяется степень продольной статической устойчивости по пере-
грузке при фиксированном руле высоты?
Задача
Определить коэффициент Лг.о по следующим данным: Sr.0=22 м2, Лг.0 =
—8,6 м, S=100 м2 и ЬЛ=4,2 м.
Ответ: АГО=0,45.
Глава 10
Продольная статическая управляемость
§ 10.1. Управляющие силы и моменты
Переход от одного режима полета к другому, а также восста-
новление нарушенной продольной балансировки осуществляются
дополнительными силами и моментами, создаваемыми органами
управления. В соответствии с этим управляемость можно рассмат-
ривать как способность самолета реагировать на воздействие,
предназначенное для перехода от.одного-.режпма полета к друго-
му. Это понятие включает в себя возможность выполнения маневра,
продольной балансировки самолета и восстановления нарушенно-
го равновесия продольных сил и моментов.
Продольная балансировка самолета при фиксированном руле
высоты возможна только в одном определенном режиме полета.
Следовательно, для балансировки самолета при других режимах
необходимо устранить неуравновешенный момент тангажа соот-
ветствующим управляющим воздействием, например отклонением
руля высоты.
Определение момента тангажа самолета при фиксированном
в нейтральном положении руле высоты изложено в гл. 9.
На современных самолетах продольная балансировка осущест-
вляется органами управления тангажом и соответствующим выбо-
ром режима работы двигателей. Управление тангажом дозвуковых
и околозвуковых самолетов производится отклонением руля высо-
ты и дискретным изменением положения стабилизатора. На сверх-
звуковых пассажирских самолетах, не имеющих специального го-
ризонтального оперения, эта функция выполняется элевонами.
Условие продольной балансировки самолета задано соотноше-
ниями (9.3). Рассмотрим его выполнение.
Аэродинамический момент тангажа самолета без горизонталь-
ного оперения, обладающего продольной статической устойчиво-
стью по перегрузке, на основных режимах полета отрицателен. Для
продольной балансировки самолета необходимо, чтобы аэродина-
мическая нормальная сила горизонтального оперения, расположен-
ного за центром масс, была направлена вниз. Это достигается со-
ответствующим выбором угла установки стабилизатора и отклоне-
нием руля высоты или другого органа управления тангажом.
Пусть под действием случайных факторов нарушается равнове-
сие момента тангажа, возникает положительный (кабрирующий)
момент. Очевидно, для восстановления продольной балансировки
150
самолета необходимо парировать (компенсировать) этот момент
отклонением органа управления тангажом вниз, т. е. созданием
уравновешивающего пикирующего (отрицательного) момента.
Уравновешивание пикирующего момента тангажа производится от-
клонением органа управления тангажом вверх.
Отклонение органа управления тангажом эквивалентно измене-
нию угла атаки горизонтального оперения:
Дав=«Л, (Ю.1)
где пв— коэффициент эффективности органа управления танга-
жом; бв — угол отклонения органа управления тангажом; Аав —
приращение угла атаки горизонтального оперения.
Орган управления тангажом предназначен для продольной
управляемости самолета (компенсации неуравновешенного момен-
та тангажа или создания дополнительного момента тангажа для
перехода на другой режим полета), поэтому принято, что его поло-
жительному отклонению ( + бв) соответствует отрицательный аэро-
динамический момент тангажа (—А'Л1г). .....
При отклонении органа управления тангажом аэродинамичес-
кая нормальная сила горизонтального оперения изменяется на ве-
личину
Д1Лв=ДСг/в7г.0У,0. (Ю.2)
Приращение коэффициента аэродинамической нормальной си-
лы, обусловленное отклонением органа управления тангажом,
равно
ДС^д^С^гоДсХд. (10.3)
Эквивалентное приращение угла атаки горизонтального опере-
ния, вызванное отклонением органа управления тангажом, опреде-
ляется соотношением (10.1).
Из соотношений (10.1), (10.2) и (10.3) находим
Д^в = У Г-О^В^В#’Г.О^Г.О • ( 10 - 4 )
Приращение аэродинамического момента тангажа при откло-
нении органа управления тангажом
ДМгв=-ДКв£,0. (10.5)
Из (10.4) и (10.5) получим уравнение, определяющее прираще-
ние аэродинамического момента тангажа, обусловленное отклоне-
нием руля высоты:
Д-44/в= ^yr.oH-B^K<^r.oSr.oLr.o‘ (10.6)
Разделив обе части этого уравнения на произведение qSbA, по-
лучим приращение коэффициента аэродинамического момента тан-
гажа
Д^гв— ^г.о^г.о^г.о^Д,» (10.7)
где Дг.о определяется соотношением (9.31). Коэффициент эффек-
тивности аэродинамического органа управления тангажом пв опре-
151
деляется экспериментально, продувкой модели в аэродинамичес-
кой трубе. Приращение аэродинамической нормальной силы гори-
зонтального оперения,. выполненного в виде одного управляемого-
стабилизатора, равно
ДГ9=ДС^г.Л.о- (10.8)
Изменение коэффициента аэродинамической нормальной силы
оперения, вызванное отклонением управляемого стабилизатора, _
можно представить в виде
ДС^=С“Г.О?В, (10.9)
где срв — угол отклонения управляемого стабилизатора; С^г.о —
эффективность отклонения управляемого стабилизатора.
Приращение аэродинамического момента
ДТИ2¥=-ДГЛ.о, '10.10)
где Lr.o — расстояние между фокусом управляемого стабилизатора
и центром масс самолета.
Подставляя (10.8) и (10.9) в (10.10), получим прйращение
аэродинамического момента тангажа, обусловленное отклонением
управляемого стабилизатора:
ДТИ2(р= CyrJjfBgTOSTOLT0. (10. II)
Разделив на произведение qSb&, получим
L.niz^,= ктлАтлС уТЛ<?в, (10.12)
где Дт2Ч> —приращение коэффициента аэродинамического момен-
та тангажа при отклонении управляемого стабилизатора.
§ 10.2. Усилие на штурвале, потребное
для продольной балансировки самолета
Рассмотрим один из видов органа управления тангажом — руль
высоты. Равнодействующая аэродинамических сил руля высоты
Rr. приложена на расстоянии dB. от оси подвески (рис. 10.1). Мо-
мент ее относительно оси вращения, называемый шарнирным мо-
ментом,
Мш=-/?в4. (10.13)
Такое определение шарнирного момента наглядно, но неудобно
для практических расчетов, так как расстояние dB является функ-
цией от углов отклонения руля высоты бв и атаки аг.о, а также от
числа М полета. Поэтому шарнирный момент руля высоты опре-
деляют экспериментально, пользуясь законом аэродинамического
подобия:
М^пгшдГ'08вЬв, (10.14)
где тш — коэффициент шарнирного момента руля высоты; SB> Ьв—
площадь и хорда руля высоты.
152
Рис. 10.1. К определению шарнирного момента. Основные типы
аэродинамической компенсации:
а—осевая; б—роговая; в—сервокомпенсация; г—внутренняя
На рис. 10.2 приведены зависимости коэффициента шарнирного
момента от угла отклонения руля высоты при различных значениях
угла атаки горизонтального оперения.
У современных околозвуковых и сверхзвуковых самолетов, име-
ющих большие размеры и площади руля высоты, шарнирный мо-
мент очень велик. Для его уменьшения применяется аэродинами-
ческая компенсация, цель которой заключается в сокращении рас-
стояния а'в. Наиболее распространенными видами компенсации
являются: осевая, роговая, внутренняя и триммеры (рис. 10.1). При
применении аэродинамической компенсации нельзя уменьшить
шарнирный момент до нуля, так как в этом случае пилот не будет
«чувствовать» управление и может допускать ошибки в пилотиро-
вании.
В результате обработки экспериментальных данных установле-
но, что коэффициент шарнирного момента руля высоты с достаточ-
ной для практики точностью можно считать линейной функцией
отклонения руля высоты, угла атаки горизонтального оперения и
угла отклонения триммера. Следовательно, в эксплуатационном
диапазоне углов отклонения руля высоты коэффициент шарнирно-
го момента можно определить уравнением
^ш=^1в8в4-^шг,°аГ.О+^^тв, (10. 15)
5 а t
где тв — угол отклонения триммера руля высоты; т^, тшГ-°, —
производные от коэффициента шарнирного момента по уг-
лам: отклонения руля высоты бв, атаки горизонтального опере-
ния аг.о и отклонения триммера тв;
5 dm,,, а дтт t дт.п
т*=—— ; /п„Г-°=—— ; т„в =—— .
ш <Эбв ш биг.о ш дгв
Производные от коэффициента шарнирного момента определя-
ются по следующим эмпирическим формулам:
153
Рис, 10.2. Зависимости коэффициента шарнирного момента от
отклонения руля высоты при различных значениях угла атаки
горизонтального оперения
= — о, 12 (1 -З.бМ СуГ.о-
\ /
(10.16)
(10.17)
(10.18)
где So.k — площадь осевой компенсации руля высоты; ST—площадь
триммера; Ьк— средняя хорда всего руля высоты; Ьв.с— средняя
хорда той части руля высоты, на которой расположен триммер;
Ьг— хорда триммера (рис. 10.3). С наступлением волнового кризи-
са центр давления руля высоты перемещается назад и шарнирный
момент на околозвуковых скоростях резко возрастает. Поэтому на
современных скоростных самолетах в системе управления рулем
высоты установлен гидроусилитель.
При сверхзвуковых скоростях формулы (10.16) — (!10.18) непри-
годны для определения производных от коэффициента шарнирного
момента. В этом случае производные от коэффициента шарнирно-
го момента предварительно определяют продувкой модели в аэро-
динамической трубе, а затем уточняют по данным летных испы-
таний.
Под действием шарнирного момента руль высоты стремится
вращаться вокруг оси подвески и, если его не удержать, то он зай-
мет произвольное положение. Для уравновешивания шарнирного
момента и удержания в нужном положении необходимо к рычагу
управления рулем высоты (штурвалу, ручке, штоку рулевой ма-
шинки автопилота) приложить усилие. На рис. 10.4 показана схе-
ма передачи усилия Ръ на штурвал управления рулем высоты.
Усилие на штурвале определяется с помощью принципа возмож-
ных перемещений, согласно которому работа сил, находящихся в
154
равновесии, равна нулю при любых
возможных перемещениях. Возмож-
ными перемещениями являются
отклонение руля высоты г/д„ и ли-
нейное перемещение рычага управ-
ления (штурвала) вдоль продоль-
ной оси самолета dxB, а соответству-
ющими обобщенными силами —
шарнирный момент Мш И усилие рис jq 3 Расположение триммера
Рв, приложенное к штурвалу. Соста- На руле высоты
вим уравнение работ при возмож-
ных перемещениях, пренебрегая силами трения:
ма+р^х.=о. (10.19)
Отсюда находим усилие на рычаге управления рулем высоты:
Рв=-ки1Мш, ' (10.20)
где km—df)B/dxB — передаточное отношение, размерность которого
равна 1/М.
Положительным считается давящее (от себя), а отрицатель-
ным— тянущее (на себя) усилие.
В соответствии с соотношениями (10.14), (10.15) и (10.20) уси-
лие на штурвале управления рулем высоты
= — kmkr.o («X + от “г-° аг оqSBbB. (10.21)
§ 10.3. Определение балансировочного угла
стабилизатора
Рассмотрим равновесие моментов тангажа самолета при откло-
ненном руле высоты.
Момент тангажа самолета с отклоненным рулем высоты
<=Х + Д<В, (10.22)
где Л1г* — момент тангажа самолета с горизонтальным оперением
при фиксированном руле высоты; ДЛ1гв-—приращение момента
тангажа, обусловленное отклонением руля высоты.
Разделив обе части уравнения (10.22) на произведение qSb&,
получим коэффициент момента тангажа самолета с отклоненным
рулем высоты:
mz=mz-\-^mZB. (10.23)
Рис. 10.4. Схема передачи усилия ма штур-
вал управления рулем высоты
155
В соответствии с (9.67) и (10.7) эта сумма равна
(-VF •^'т)^~Н^' Су ^г.о^г.о^-Ц/г.о^в^в’ (10.24)
где хр* и с* определяются соотношениями (9.68) и (9.69).
Условие продольной балансировки по моменту определяется
равенством нулю коэффициента момента тангажа, которое в соот-
ветствии с (10.24) имеет вид
тл - {хР-хг) Суф- с*Су-krMArMCyr.onB^B=Q. (10.25) -
Полагая в (9.40) Су=0 и учитывая соотношения (9.41), найдем
^г0==:Ст0-{-тг0ф kr oArлСуг.о (do Eq) ^г.о-'^г.о^'У r-of- (Ю. 26)
Решая совместно уравнения (10.25) и (10.26), получим угол
установки стабилизатора
<Р=4(С-о+^-ао+ео-/гв8»—(10-27>
где А=кглАглСуГ.о. (10.28)
Из уравнения (10.27) следует, что для данного самолета угол
установки стабилизатора <р зависит от коэффициента аэродинами-
ческой нормальной силы Су и угла отклонения руля высоты бв. При
изменении режима полета, определяемого коэффициентом Су, для
сохранения угла установки стабилизатора необходимо отклонить
руль высоты. Однако диапазон отклонения руля высоты ограничен
конструктивно, поэтому приходится изменять положение стабили-
затора, т. е. угол установки <р.
В случае одного управляемого стабилизатора без руля высоты,
полагая в (10.27) бЕ=0, получим
?=4’ (cmo+"W-ao + eo- “Г -у Су. (10.29)
-/1 -/1
На основных режимах полета эффект косой обдувки ТРД не-
значителен,. поэтому множитель с* можно считать равным нулю и
уравнение (10.29) можно представить в виде
.?=у- (Сто+^2оф)--ао + ео—(хр — хТ) Су. (10.30)
§ 10.4. Балансировочные кривые
По мере изменения режима полета нарушается равновесие мо-
мента тангажа при фиксированном руле высоты. Восстановление
продольной балансировки самолета производится соответствую-
щим отклонением органа управления тангажом.
Рассмотрим балансировки самолета в прямолинейном . полете
без скольжения, орган управления тангажом которого выполнен
в виде руля высоты с переставным стабилизатором. Для этого слу-
чая потребное для балансировки отклонение руля высоты находим
из (10.25):
^——[т.о-Схр-х^Су^с^Су].'- (10.31)
156
a
а—характер влияния взаимного расположения продоль-
ного фокуса и центра масс самолета .на продольную уп-
равляемость; б—балансировочные кривые при различных
центровках
Геометрическое место точек, определяемое уравнением (10.31),
называется балансировочной кривой (рис. 10.5). При постоянных
положениях центра масс, фокуса и стабилизатора самолета урав-
нение балансировочной кривой (10.31) для удобства анализа пред-
ставим в виде
^B=c-1rk1Cy-i-k2Cy, (10.32)
где с=-±-[СтО+тгОф— А(а0—е0) — А?]; (10.33)
—* —
Л1=---F-—(10.34)
Апв
k2=^. (10.35)
Пренебрегая эффектом косой обдувки ТРД, т. е. полагая с* —О,
а следовательно, и &2=Д вместо (10.32) получим следующее упро-
щенное уравнение балансировочной кривой:
вв=с+*А, (ю.Зб)
157
отсюда находим производную
=kl=~-Xp~Xr . (10.37)
dCy Апк
В соответствии с (10.34) и (10.37) критерии продольной стати-
ческой устойчивости по скорости (9.81) можно записать в виде
<С 0 — устойчив;
^-=0 —нейтрален; (10.38)
0 — неустойчив.
Условие (10.38) объясняется тем, что у устойчивого по пере-
грузке самолета фокус находится позади центра масс и при увели-
чении угла атаки, а следовательно, и коэффициента аэродинами-
ческой нормальной силы возникает пикирующий момент, для урав-
новешивания которого необходимо руль высоты отклонить вверх
(переход от положительных отклонений органа управления танга-
жем к отрицательным). Фокус неустойчивого самолета расположен
впереди центра масс, поэтому при увеличении угла атаки прираще-
ние аэродинамической нормальной силы относительно центра масс
самолета дает кабрирующий (положительный) момент, для уравно-
вешивания которого аэродинамический орган управления танга-
жем, например руль высоты, отклоняется вниз. У нейтрального по
перегрузке самолета фокус совпадает с центром масс, поэтому
угол отклонения аэродинамического органа управления тангажем
бв не зависит от коэффициента аэродинамической нормальной силы.
Теперь рассмотрим балансировочную кривую, заданную урав-
нением (10.32). Производная от угла отклонения руля высоты по
коэффициенту аэродинамической нормальной силы равна
-^-=^ + 2^. (10.39)
йСу
Определим знак этой производной в соответствии с критериями
продольной статической устойчивости самолета по скорости (9.81).
Предварительно из уравнения (10.25) находим производную
+ (10.40)
Для устойчивого самолета
да на основании соотношений
эта производная отрицательна.
(10.33) — (10.35) имеем
Тог-
Q
при tn у <( 0.
(10.41)
Следовательно, при увеличении коэффициента аэродинамичес-
кой нормальной силы устойчивого по скорости самолета руль вы-
соты перемещается снизу вверх для обеспечения продольной балан-
158
сировки. Аналогичным путем доказывается, что у неустойчивого по
перегрузке самолета
-^>0 при wA>0, (10.42)
а у нейтрального по скорости самолета
^8в _=0 при тс«/=0. (10.43)
ЛСУ z
Степень продольной статической устойчивости по перегрузке
при прочих и равных условиях зависит от центровки самолета.
С перемещением центра масс самолета назад уменьшается запас
продольной статической устойчивости по перегрузке. Когда центр
масс совпадает с точкой нейтральности по перегрузке при фикси-
рованном руле высоты, этот запас равен нулю. Дальнейшее пере-
мещение центра масс назад делает самолет статически неустойчи-
вым по перегрузке. Как это следует из соотношений (10.33)—
(10.35), перемещение центра масс самолета изменяет наклон ба-
лансировочной кривой, заданной уравнением (10.32) или (10.36),
а перевод стабилизатора на другое положение (изменение угла
установки <р) смещает ее эквидистантно.
В прямолинейном горизонтальном полете без крена коэффици-
ент аэродинамической нормальной силы
Квадрат воздушной скорости самолета заменим произведением
(10.45)
Квадрат скорости звука
a2—k — ^1,4 —, (10.46)
е е
где р — давление воздуха.
В соответствии с (10.44), (10.45) и (10.46) коэффициент аэро-
динамической нормальной силы
С ___ G cos &
у~ O.TpNfi
(10.47)
Зависимость потребного для балансировки отклонения руля вы-
соты от коэффициента аэродинамической нормальной силы, пред-
ставленная уравнением (10.36), применяется при исследовании
продольной статической устойчивости самолета. Однако для конт-
роля выполнения режимов летной эксплуатации и разработки ре-
комендаций по обеспечению безопасности полетов удобнее поль-
зоваться зависимостью потребного для балансировки отклонения
органа управления тангажем бв от воздушной скорости V или чис-
ла М полета.
Перестроение балансировочной кривой, заданной уравнением
(10.36), производится заменой коэффициента аэродинамической
159
нормальной силы скоростью пли числом М полета с использовани-
ем соотношений (10.44) или (10.47). Из уравнения (10.36) и соот-
ношения (10.44) находим
(10.48)
(10.49)
. । 2^0 cos &
esv2
Аналогичным путем из (10.36) и (10.47) имеем
। k]G cos &
в— 0,7pSM2 ‘
Для сокращения записи и удобства анализа уравнения балан-
сировочных кривых (10.48) и (10.49) представим в виде
где
(10.50)
С1 .
У2 ’
8в=г + М2’ (10.51)
2£[G cos & « С1=—i— ; Сг- kfi cos & (10.52)
QS 0,7 pS
Балансировочные кривые, заданные уравнениями (10.50) и
(10.51), являются гиперболическими зависимостями, поэтому зна-
ки их наклонов противоположны знакам коэффициентов щ и ci*,
определяемых взаимным расположением фокуса и центра масс са-
молета. Как это следует из соотношений (10.34) и (10.52), накло-
ны балансировочных кривых 6B=fi(V), бв=/2(М) у устойчивого
по перегрузке самолета положительны, неустойчивого — отрица-
тельны и нейтрального-—равны нулю.
Скорость и число М, при которых самолет балансируется в нейт-
ральном положении руля высоты (бв=0), называются балансиро-
вочными скоростью Vr и числом Мб. Полагая в уравнениях (10.50)
и (10.51) бв=0, найдем
Кб=—М1==—(10.53)
С с
При увеличении скорости полета для сохранения равновесия
нормальных сил необходимо уменьшить угол атаки и тем самым
коэффициент аэродинамической нормальной силы. У устойчивого
по перегрузке самолета фокус находится сзади центра масс, по-
этому по мере увеличения скорости (уменьшения угла атаки) при-
ращение аэродинамической нормальной силы направлено вниз и
относительно центра масс дает положительный (кабрирующий)
момент, для уравновешивания которого руль высоты необходимо
отклонить сверху вниз, чтобы создать дополнительный уравнове-
шивающий пикирующий момент. У самолета, обладающего продоль-
ной статической устойчивостью по скорости, с увеличением скоро-
сти (числа М) полета штурвал (ручка) управления перемещается
вперед (см. рис. 10.5). Это имеет место до такого значения числа М
полета, при котором фокус и центр давления начинают переме-
160
щаться назад, а коэффициент аэродинамической нормальной силы
уменьшается. В этом случае вследствие перемещения центра дав-
ления назад возникает пикирующий момент, для уравновешивания
которого требуется руль высоты отклонить снизу вверх. При около-
звуковых скоростях пикирующий момент, вызванный перемещени-
ем центра давления назад, преобладает над кабрирующим момен-
том, обусловленным уменьшением коэффициента аэродинамичес-
кой нормальной силы. Это явление особенно сильно проявляется у
самолетов с прямым крылом, у которых центр давления и фокус
резко перемещаются назад при наступлении волнового кризиса.
Уменьшение угла скоса потока у горизонтального оперения по
мере увеличения числа М полета также способствует возникнове-
нию дополнительного пикирующего момента из-за увеличения ис-
тинного угла атаки горизонтального оперения. Это явление называ-
ется «затягиванием в пикирование», которое у самолетов с прямым
крылом настолько сильно, что во многих случаях ограничивает
дальнейшее увеличение числа М полета, так как для балансировки
самолета требуются большие отклонения руля высоты вверх. У са-
молетов со стреловидными крыльями явление затягивания в пики-
рование проявляется значительно слабее, так как одновременно
с перемещением центра давления и фокуса профиля назад проис-
ходит срыв потока с концевых частей крыла, отнесенных назад.
Уменьшение аэродинамической подъемной силы концевых частей
крыла, вызванное срывом потока, смещает центр давления и фокус
стреловидного крыла в целом вперед, поэтому при числах М, близ-
ких к единице, снова возникает кабрирующий момент, для уравно-
вешивания которого необходимо руль высоты отклонить вниз. Этот
участок на балансировочной кривой (рис. 10.6) принято на прак-
тике называть «ложкой».
Балансировочные кривые самолета с управляемым стабилиза-
тором (без руля высоты) определяются уравнением (10.30) для
различных значений центровок хт. Переход от коэффициента аэро-
динамической нормальной силы к скорости или числу М полета
производится с помощью соотношений (10.44) и (10.47). После пе-
рехода уравнения балансировочных кривых принимают вид
1 , 2Gcos&(xp — хг)
Т= —(Сто + «гоф)-ао + ео-------(10.54)
1 Л , G cos & (Д — хт)
V==T (^о-+™гОф)-ао + ео 0,7HpSM2 ' (10’55)
На рис. 10.7 показаны балансировочные кривые д=((М)
сверхзвукового самолета.
Балансировочные кривые определяют по данным летных испы-
таний, полученным при различных центровках и режимах работы
двигателей. Для этого на самолет устанавливают самописцы ско-
рости, высоты, отклонения руля высоты (органа управления тан-
гажом) и нормальной перегрузки, показания которых регистриру-
ются синхронно на месте. В процессе летных испытаний пилот вы-
6 776
161
Рис. 10.6. Зависимость отклонений руля
высоты, потребных для балансировки
самолета, от числа М полета при раз-
личных углах стреловидности крыла:
------хи------Xs; —- Хз; Х1<Хг<Хз
Рис. 10.7. Зависимости потребных для
балансировки сверхзвукового самоле-
та углов отклонения управляемого
стабилизатора от числа М на различ-
ных высотах
полняет разгон на заданной высоте. По мере увеличения скорости
полета он перемещает штурвал управления тангажом вперед, от-
клоняя руль высоты вниз для балансировки самолета и сохранения
высоты полета. Имея синхронные записи регистраторов отклонения
органа управления тангажом 6B=fi(0 и скорости V=f2(0> строим
балансировочную кривую 6В=/(Ю- исключая из параметрических
уравнений время /.
Обычно балансировочные кривые строят при различных режи-
мах работы двигателя и центровках. Для определения балансиро-
вочных кривых на номинальных (максимальных) и минимальных
режимах работы двигателя с минимальной затратой топлива и вре-
мени пилот после достижения максимально возможной или допус-
тимой скорости переводит двигатель (двигатели) на минимальный
режим работы, производя торможение до минимально допустимой
скорости полета. По данным бортовых регистраторов строят ба-
лансировочные кривые для двух режимов работы двигателя при
преднамеренном изменении скорости в прямолинейном горизон-
тальном полете без крена.
Теперь рассмотрим продольную балансировку самолета при
наличии случайных факторов, изменяющих параметры полета.
Пусть под действием этих факторов при выполнении разгона или
торможения одновременно изменяются угол атаки и скорость по-
лета. Такой случай имеет место при полете в переменном поле вет-
ра, когда изменяются угол атаки и скорость полета. Однако до
настоящего времени нет надежных датчиков измерения угла атаки
в полете, поэтому он определяется косвенным путем, через нормаль-
ную перегрузку пу.
Самописцем скорости регистрируется суммарная воздушная
скорость, т. е. скорость обтекания. В исходном полетном режиме
162
нормальная перегрузка равнялась единице (/2^=1). Приращение
нормальной перегрузки обозначим через Anv. В измененном режиме
коэффициент нормальной силы
, _ 2Г _____2 (1 + Дп^) G cos &
У~ QV2S ~
(10.56)
где V — суммарная воздушная скорость самолета; Аиу —прираще-
ние нормальной перегрузки, вызванное ветром.
На основании соотношения (10.56) уравнение балансировочной
кривой (10.36) запишем в виде
(10.57)
2£jG cos & (1+ &Пу)
QSV2
Для удобства дальнейшего анализа уравнение (10.57) предста
вим в виде 8в=с+ —+ ® JZ2 с^Пу IZ2 4 (10.58)
или 8в = &ви + А8цл» (10.59)
где 8вИ = г+^-; Д8вл _С\^Пу IZ2 (10.60)
В уравнении (10.59) первое слагаемое 6В v — отклонение руля
высоты, потребное для продольной балансировки самолета при
единичной нормальной перегрузке (яу=1); второе слагаемое
Лбв п — дополнительное отклонение руля высоты, потребное для
балансировки самолета при изменении нормальной перегрузки на
величину Апу.
Продольная балансировка самолета при перегрузке, отличной
от единицы, имеет место в криволинейном квазиустановившемся
полете в вертикальной или горизонтальной плоскости (например,
в процессе выполнения виража). В этом случае в соответствии с
уравнением (10.59) потребные для балансировки самолета отклоне-
ния органа управления тангажом будут больше. Это обстоятельст-
во необходимо учесть при определении эксплуатационного диапа-
зона отклонений руля высоты.
§ 10.5. Предельные центровки самолета
Самолет эксплуатируется при различных загрузках и, если не
ограничить пределы изменения центровок, то можно лишиться воз-
можности обеспечения устойчивости и управляемости.
Предельная задняя центровка определяется по степени продоль-
ной статической устойчивости по перегрузке при фиксированном
руле высоты т^У в зависимости от класса самолета. В соответ-
ствии с соотношением (9.74) предельная задняя центровка
ххл=х*р-\-п^у. (10.61)
163
Предельная передняя центровка назначается из условия обес-
печения продольной балансировки самолета на всех режимах по-
лета.
Из уравнений (10.25) и (10.26) определяем центровку, соответ-
ствующую продольной балансировке самолета:
x.t=xF+-J- [ А (пв8в + ? + а0 — е0)—Ст0—т^} -\-с*Су, (10.62)
'-у
где А—-определяется соотношением (10.28).
Минимальное значение хТ называется предельной передней цент-
ровкой. Предельная передняя центровка обычно соответствует ре-
жиму посадки самолета с выпущенными закрылками и определя-
ется уравнением (10.62) с учетом влияния земли на коэффициент
аэродинамической нормальной силы.
§ 10.6. Характеристики продольной
статической управляемости
Уравновешивание момента тангажа, переход от одного к друго-
му режиму полета и компенсация действия случайных факторов
на продольное движение самолета осуществляется органом управ-
ления тангажом. Характеристики продольной статической управля-
емости показывают, насколько успешно выполняет свои функции
орган управления тангажом. Одной из характеристик продольной
управляемости являются балансировочные кривые 6в=Л(Ю или
бв=/2(М), построенные для различных значений эксплуатацион-
ных центровок, высот полета и нормальной перегрузки. По этим
зависимостям определяем некоторые важные характеристики про-
дольной статической управляемости: градиенты отклонения орга-
на управления тангажом по скорости, числу М полета, высоте, пе-
регрузке и центровке.
При постоянных центровках и перегрузке, равной единице, гра-
диенты балансировочного отклонения органа управления танга-
жом по скорости и числу М полета определяются из уравнения
(10.48):
r==;^__4^Geos&> 3
dV qSV3 у 7
Численные значения этих производных в настоящее время не
нормируются. Они должны быть положительными и не вызывать
«резкого» или «вялого» перемещения штурвала управления рулем
высоты по скорости и числу М полета.
При фиксированных значениях скорости, числа М и высоты
полета градиент балансировочного отклонения руля высоты по
центровке определяется из уравнения (10.48):
Й6В \ 2G cos6 dki
„const qSV2 дхс
Н = const ’.
164
Из соотношения (10.34) находим
dki _ 1
дхс Апя
Подставляя (10.65) в (10.64), получим
s, - 2G cos S
оЛт =------.
в Ллвц51/2
Аналогичным путем из уравнения (10.48) находим
^=d^dQ_==_2k1Gcos^ff 67
dQ дН Q2SJZ2 V 7
где qH=cl(j!dH, показывает изменение плотности воздуха по высо-
те и определяется по характеристике стандартной атмосферы.
Важной характеристикой продольной статической управляемо-
сти является отношение
(10.65)
(10.66)
в
которое в соответствии с уравнением (10.58) равно
(10.68)
Ъпу=-^-.
В V2
(10.68')
Согласно соотношениям (10.34) и (10.52) этот показатель про-
дольной статической управляемости
2Gcos* (xr-xf), (10.69)
в An„QSC2 ' v '
или Ъпу =-----£5°-sJ— (х> - Хт). (10. 69')
в 0,7A7b/aSM2v v '
Для устойчивого самолета по перегрузке (xf*>xt) этот гради-
ент 8”» отрицателен, т. е. для увеличения перегрузки орган уп-
равления тангажом должен иметь отрицательное отклонение (на-
пример, руль высоты перемещается снизу вверх). Чем больше рас-
стояние между фокусом и центром масс, т. е. чем выше степень
продольной статической устойчивости по перегрузке, тем больше
по абсолютной величине 8”г/. Оно возрастает по высоте полета,
так как плотность q и давление р воздуха по высоте уменьшаются.
До наступления волнового кризиса, когда эффективность орга-
на управления тангажом можно считать постоянной (нв—const), с
увеличением скорости полета 8"» по абсолютной величине умень-
шается, оставаясь отрицательным у самолета, обладающего про-
дольной статической устойчивостью по перегрузке. С наступлением
волнового кризиса коэффициент эффективности органа управления
тангажом /гв резко уменьшается, поэтому при одной и той же сте-
пени продольной статической устойчивости по перегрузке nfv
отношение 8"f по абсолютной величине становится больше при
той же скорости полета и меньшей скорости звука а. Этим объяс-
165
няется тот факт, что на больших высотах и числах М полета воз-
можность создания перегрузок, потребных для выполнения манев-
ра, ограничивается. Применение управляемого стабилизатора и ра-
кетных двигателей для управления тангажом расширяет возмож-
ности создания нормальной перегрузки.
Управление рулем высоты осуществляется приложением усилия
Pt, к штурвалу. В соответствии с уравнениями (9.53), (10.21) и
(10.36) усилие на рычаге управления рулем высоты, потребное для
продольной балансировки самолета, представим в виде
P^aq^b, (10.70)
где
а= -Мг.о^в[стшв +w“r-°(?+ao-eo) + ™>J; (10.71)
, G cos ft
b —--------—-
S
kmkT_oSabK kxtnm + m“r.o /А _ M .
\ L
При выводе уравнения (10.70) использовано условие
ния горизонтального полета по прямой без крена:
Gcos&=K; r=---os-.
“ qS
(10.72)
выполне-
(10.73)
Одной из характеристик продольной статической управляемости
является частная производная Р\ (или Р^), которая определяет-
ся из балансировочной кривой, заданной уравнением (10.70). Про-
изводная Рв (или Р^) должна быть положительной, а изменение
усилия Рв по скорости или числу М полета.— плавным.
Влияние положения центра масс на величину усилия на рычаге
управления рулем высоты, потребного для балансировки самолета,
определяется частной производной
(10.74)
Она определяется из (10.34), (10.36), (10.70), (10.73):
В л п Ч ' ’
-7»Г.О1'у р.с/'в*3
Производная Р*т называется градиентом усилия на рычаге уп-
равления рулем высоты по центровке. Величина этого градиента
зависит от передаточного отношения /?т, размеров и коэффициента
эффективности пв руля высоты. У устойчивого по перегрузке само-
лета, как уже отмечалось, производная отрицательна, поэто-
му согласно (10.75) градиент Р*т положителен, т. е. при переме-
щении центра масс самолета назад для продольной балансировки
необходимо положительное (давящее) усилие.
Определим усилие на штурвале, потребное для балансировки
самолета при перегрузке, отличной от единицы. Как мы показали
166
ранее, при изменении перегрузки требуется дополнительное откло-
нение руля высоты, определяемое соотношение (10.60). Аналогич-
ным путем находим дополнительное балансировочное усилие на
штурвале АРВ при изменении нормальной перегрузки на Лпу. Оче-
видно, что суммарное усилие на штурвале, потребное для балан-
сировки самолета,
/>в=(^-1+ДР». (Ю.76)
где (Рв)я1 — усилие на штурвале, потребное для балансировки
самолета при единичной нормальной перегрузке (иу=1).
Из уравнения (10.21) находим
ДРв=-МгХвД8в- (10.77)
Отклонение руля высоты, потребное для балансировки самоле-
та при изменении перегрузки на величину Апу, находим из (10.68):
Д811=8>Дц//. (10.78)
Из уравнений (10.77) и (10.78) находим
^=-Mr.XB8BV (10-79)
Подставляя сюда значение градиента 8”» из (10.69), получим
рПу= ДРЕ _ 2G cos ЖЛ.от,"п (л> - хт)
в Д/ly Лпве£^2 *
Это отношение называется градиентом усилия на штурвале по
нормальной перегрузке и является важной характеристикой про-
дольной статической управляемости самолета.
Производная тшв отрицательна, поэтому у устойчивого по пе-
регрузке самолета (xF^>x.c) градиент Р"у—отрицательная вели-
чина, т. е. при положительном приращении нормальной перегрузки
требуется отрицательное (тянущее) усилие для балансировки са-
молета.
Из соотношения (10.80) следует, что при увеличении степени
продольной статической устойчивости по перегрузке (AicF*>0,
Лхт<0) для балансировки самолета требуется к рычагу управле-
ния рулем высоты приложить дополнительное отрицательное
усилие.
Аналогичным путем определяется влияние на другие характе-
ристики продольной статической управляемости самолета: измене-
ния угла установки стабилизатора, угла отклонения триммера ру-
ля высоты и других параметров горизонтального оперения.
Рассмотрим продольную балансировку самолета при освобожде-
нии руля высоты. В этом случае шарнирный момент равен нулю,
поэтому, полагая в (10.15) тш= 0, находим соответствующее от-
клонение руля высоты:
в = —^(^шг-°«г.о + ^тв), (10.81)
т R
ш
167
где ёв* — отклонение органа управления тангажом при нулевом
шарнирном моменте.
Угол атаки горизонтального оперения определяется соотноше-
Сь.
нием (9.53), в котором, заменив а = — -|~а0, получим
Су
аг.о—С(/4~?4-ао — £о- (10.82)
/
Пренебрегая эффектом косой обдувки ТРД, т. е. полагая с*—'
==0, из уравнёййй (10.24) и (10.26) находим
тг = тг0 + тсгуСу-\-т^~]-т^в, (10.83)
ГДС — ^т0 “Г "М " уг.о^г.о^г.о (®0 ео)’ (10.84)
m:=-C“r.o^.0Ar,0; (10.85)
zn>=-*r.oA.oC“r.onB. (10.86)
Подставляя (10.73), (10.81), (10.82) в уравнение (10.83), после
преобразований получим
tnz=tnZf)-\-tnz«C^, (10.87)
где
* т
mZo=/n2o+mI?+/»P „------z~ [<г-°(«о + ?->о) + w>bJ; (Ю- 88)
* Si<
пги=ту-------------------dV (10.89)
z z о„ ш I z->a I ' z
[СУ 1
Здесь tnz0*— коэффициент аэродинамического момента тангажа с
освобожденным рулем высоты при Су=0.
С*
Производная mzy называется степенью продольной стати-
ческой устойчивости самолета по перегрузке при свободном руле
высоты.
Частные производные tnS, mS и mj-° отрицательны, поэто-
му при ( —----М>0 имеет место следующее неравенство:
V Су /
(10.90)
Условие продольной статической устойчивости по перегрузке при
освобожденном руле высоты аналогично с (9.83) и имеет вид
С*
mzy <С 0 — устойчив;
Q'
нейтрален;
т^У ^>0 — неустойчив;-'
.168
V ?
Вопросы для повторения
1. Чем осуществляется управление продольным движением самолета на до-
звуковых, околозвуковых и сверхзвуковых самолетах?
2. По какому принципу определяется знак отклонения руля высоты?
3. Как изменяется балансировочная кривая 6B = f(V) при изменении утла
установки стабилизатора?
4. Как изменяется балансировочное отклонение руля высоты при перемеще-
нии центра масс самолета назад?
Задача
Определить дополнительное усилие на штурвале, потребное для изменения
нормальной перегрузки на +0,4, если градиент Р?у — — 50 Н.
Ответ: АР„ = —20 Н.
Глава И
Боковая статическая устойчивость
§ 11.1. Общие понятия
Боковая статическая устойчивость может быть рассмотрена по
аналогии с продольной устойчивостью (см. гл. 9). Однако, это по-
нятие несколько сложнее, что обусловливается наличием тесных
связей между частными движениями, определяющими боковое дви-
жение. Как известно (см. гл. 1), боковое движение включает одно
поступательное вдоль оси OZ и два вращательных движения: дви-
жение крена (вращение относительно оси ОХ) и движение рыска-
ния (вращение относительно оси ОУ). Последние два движения
характеризуются тесными перекрестными связями. Более того,
при скольжении возникают как момент крена, так и момент рыска-
ния. Так что реакция самолета на изменение угла скольжения бу-
дет одновременной и по крену, и по рысканию.
Реализация чистого движения крена или рыскания в полете
связана с определенными трудностями. В связи с этим о статичес-
кой устойчивости по крену или рысканию судят по поведению са-
молета в целом. В этом смысле наиболее полно о боковой стати-
ческой устойчивости самолета можно судить по характеристикам
бокового возмущенного движения.
Несмотря на указанные особенности, в решении многих прак-
тических задач динамики полета понятие боковой статической ус-
тойчивости играет существенную роль.
Под боковой статической устойчивостью следует понимать тен-
денцию самолета к ликвидации приращения угла скольжения. Как
отмечалось выше, на изменение угла скольжения самолет реагиру-
ет креном и рысканием. В связи с этим боковая статическая устой-
чивость включает два понятия: флюгерной (путевой) устойчиво-
сти-— стремление к ликвидации приращения угла скольжения дви-
жением рыскания; и поперечной устойчивости — стремление к
ликвидации приращения угла скольжения движением крена.
Флюгерная устойчивость характеризуется величиной и знаком
частной производной от коэффициента момента рыскания по углу
скольжения (т?у — дту/д&). Поперечная устойчивость оценивается
величиной и знаком частной производной коэффициента момента
крена по углу скольжения (тх).
Для суждения о боковой статической устойчивости необходимо
знание зависимости коэффициентов тх и ту от геометрических
характеристик самолета и кинематических параметров движения.
170
§ 11.2. Влияние скольжения на распределение
аэродинамической нагрузки по самолету
При решении многих задач динамики полета можно считать,
что обычный самолет имеет плоскость геометрической, массовой и
аэродинамической симметрии и что эта плоскость есть плоскость
OXY. В этом случае возникновение боковых статических сил и мо-
ментов связано с полетом со скольжением, отклонением органов
бокового управления или полетом с несимметричной тягой. Послед-
ние два случая рассматриваются в гл. 12. Здесь же рассмотрим
влияние скольжения на распределение боковой и нормальных сил
давления по поверхности самолета при полете со скольжением.
При полете со скольжением на наветренной стороне самолета
давление повышается, а подветренной — понижается, что обуслов-
ливает появление аэродинамической нагрузки на боковую поверх-
ность. Однако характер распределения этих сил давления, особенно
в хвостовой части, существенно зависит от распределения нормаль-
ных сил давления по крылу.
Распределение нагрузки по скользящему крылу определяется
асимметричным обтеканием, которое для прямоугольного крыла
может быть представлено как результат наложения двух потоков:
нормального к передней кромке крыла и потока вдоль размаха
крыла (рис. 11.1). Распределение давления по сечению крыла опре-
деляется нормальной составляющей скорости V cos р, поэтому,
если пренебречь влиянием концов крыла, нормальная аэродинами-
ческая сила изменится пропорционально cos2 р. Боковой поток,
вследствие конечности размаха крыла, оказывает заметное влияние
па характер распределения нагрузки по крылу, особенно в его кон-
цевых сечениях. Влияние этого фактора возрастает с уменьшением
удлинения крыла.
В первом приближении влияние скольжения на распределение
давления по сечениям крыла конечного размаха можно объяснить
сложением давлений, обусловленных потоками со скоростями
V COS Р И V sin р. Для потока со ско-
ростью V sin р передней кромкой
крыла служит конец выдвинутого
крыла, а задней — конец отстающе-
го крыла. Распределение Су сече-
ний по размаху плоского прямо-
угольного крыла в этом случае ста-
новится несимметричным. Характер
-асимметрии зависит от формы за-
концовки крыла. У трапециевидного
крыла с увеличением сужения вли-
яние концевого эффекта на распре-
деление нагрузки уменьшается.
Влияние стреловидности при
скольжении стреловидного крыла
проявляется как дополнительное
асимметричное распределение на-
Рпс. 11.1. Схема обтекания
крыла при скольжении
171
Рис. 11.2. Эффективные углы атаки стреловидного крыла при
скольжении
грузки по его размаху. Проще всего это можно объяснить исходя
из рассмотрения стреловидного крыла, как скользящего. Из курса
аэродинамики известно, что для скользящего крыла распределение
давления по сечению определяется составляющей скорости течения,
перпендикулярной к передней кромке крыла Vn=V cos р. Для
стреловидного крыла эффективные углы скольжения выдвинутого
по потоку и отстающего полукрыльев различны. Для выдвинутого
полукрыла нормальная составляющая скорости (рис. 11.2) Упв=
— V cos (х—р), а для отстающего—V„0TC=V cos (х+Р), т. е.
эффективные углы скольжения полукрыльев соответственно равны:
Рэ.в=Х—₽> Рэ.отс=х+Р- Различными будут у них и эффективные
углы атаки — углы атаки в сечениях, нормальных передней кромке.
Из рис. 11.2 следует, что для выдвинутого крыла ,
cos (X — ₽)
а
а для отстающего —а( с=----------•
cos (X + ₽)
Нормальная сила, создаваемая полоской крыла шириной dz,
равна:
для выдвинутого полукрыла
dYк=Суо -^d-aKbdz=Cyo^- ba cos(x — $}dz, (11. 1)
а для отстающего
п<Гогс=С“о^йас05(х + ₽)^, (11.2),
где С“о—производная Су по углу атаки нестреловидного крыла.
Если скольжение отсутствует, то из (11.1) и (11.2) получим
Суи cos х
172
Рис. 11.3. Распределение нагрузки по нестреловидному
и стреловидному крыльям:
а—нестрсловидное крыло Л—I: а=0,1 рад; б—стреловидное
крыло %=0,72 рад; а=0,137 рад; 1—0=0; 2—0=0,19 рад
где Су —производная коэффициента нормальной силы по углу
атаки стреловидного крыла.
Из сказанного следует, что на полоске выдвинутого полукрыла
действует дополнительная подъемная сила, равная
АГ„=dY ( C°s(/ = 3)-- 11 ^4/ГЗtgх, (П-З)
\ cos х /
а на отстающем —
ДГО.,С = dY(-cos (х +-р) - Й - dY-? tg X, ' (11.4)
\ cos у )
где dY — нормальная сила, действующая на эту же полоску крыла
при отсутствии скольжения.
Из формул (11.3), (11.4) следует, что приращения ДУ нормаль-
ной силы на скользящем стреловидном крыле зависят от угла ата-
ки, так как dY функция а.
На рис. 11.3 приведены результаты экспериментального опреде-
ления распределения нагрузки по прямому (а) и стреловидному
(б) крыльям, которые наглядно иллюстрируют сказанное выше о
влиянии скольжения на распределение нормальной нагрузки по
таким крыльям.
173
Рис. 11.4. Влияние угла поперечного V на местные углы атаки
скользящего крыла:
я—определение угла атаки сечения Ъ полукрыльев при скольжении;
б—определение угла атаки сечения а полукрыльев при скольжении
Угол поперечного V(tJ?kp) оказывает существенное влияние на
распределение нормальной нагрузки по размаху крыла при его
скольжении. Угол поперечного V — это угол между плоскостью,
перпендикулярной плоскости симметрии, проходящей через корне-
вую хорду крыла, и линией 1/4 хорд полукрыла, положителен, если
эта линия расположена над указанной плоскостью (рис. 11.4).
Влияние угла поперечного V крыла на распределение нагрузки
по скользящему крылу можно объяснить, если скользящий поток
представить в виде суммы двух потоков, как это было сделано
выше. Боковой поток со скоростью V sin |3 приводит к увеличению
углов атаки в сечениях выдвинутого крыла при положительном
угле поперечного V крыла (см. рис. 11.4) и к уменьшению их в се-
чениях отстающего крыла на величину, определяемую следующим
выражением:
sin ₽ sin фКр . о • ,
Да= +----------= ±tg Р sin <1^.
COS р
Поскольку в полете углы скольжения не превышают 0,17—
0,25 рад, а углы поперечного V не больше 0,08—0,17 рад, то изме-
нение угла атаки сечений крыла приближенно равно:
Д«~±₽Фкр- (11-5)
Причем, знак «плюс» относится к выдвинутому, а «минус» к от-
стающему крылу.
Такое несимметричное распределение дополнительных углов
атаки по крыльям обусловливает несимметричный прирост нор-
мальных сил сечений. Приращение нормальной силы, создаваемой
элементом крыла, шириной dz, для выдвинутого ( + ) и отстающего
(—) крыльев при скольжении соответственно равны:
W^+cf^b'^dz. (11.6)
Из (11-6) следует, что при малых углах атаки (С^ =const)
174
Рис. 11.5. Влияние взаимного расположения кры-
ла и фюзеляжа на местные углы атаки крыла при
скольжении:
а—высокоплан: б—низкоплан
Рис. 11.6. Схема образова-
ния бокового скоса потока
в области вертикального
оперения
приращения нормальной силы, обусловленные углом поперечного
V крыла, не зависят от угла атаки.
Важной причиной возникновения дополнительной асимметрич-
ной нормальной нагрузки при полете самолета со скольжением
является интерференция между фюзеляжем и крылом, зависящая
от взаимного их расположения. При схемах «высокоплан» и «низ-
коплан», широко распространенных для транспортных самолетов,
этот эффект наиболее существен.
Для иллюстрации явления рассмотрим схематизированную кар-
тину обтекания поперечным потоком V sin р цилиндрического фю-
зеляжа достаточно большого удлинения (рис. 11.5). Как видно,
фюзеляж создает поле вертикальных скоростей потока, которые,
складываясь с основной скоростью, изменяют местные углы атаки
по размаху крыла. При схеме «высокоплан» на выдвинутом по по-
току крыле углы атаки увеличиваются,
а отстающем крыле —• уменьшаются.
В случае «низкоплана» распределение
приращений углов атаки, обусловлен-
ных интерференцией, противоположно
тому, что имеет место при верхнем
расположении крыла. Асимметричное
распределение приращений углов ата-
ки по размаху крыла приводит также
к асимметричному распределению при-
ращения нормальной нагрузки.
Эффект интерференции крыла и
фюзеляжа зависит от удлинения фю-
зеляжа, формы крыла в плане и его
расположения, поперечного сечения
фюзеляжа и числа М полета.
Наличие боковых сил давления
вдоль самолета, несимметричное рас-
пределение нормальных сил давления
- 175
по крылу приводят к возникновению бокового скоса потока по
длине самолета. Наибольшее влияние угол бокового скоса о
оказывает на обтекание вертикального оперения и хвостовой час-
ти фюзеляжа. Угол бокового скоса считается положительным,
если он уменьшает угол притекания потока к плоскости симмет-
рии самолета. Боковой скос, индуцированный распределенной не-
симметричной нормальной нагрузкой на крыле, тем больше, чем _
значительнее степень асимметрии и чем ближе равнодействую-
щая приращения нагрузки расположена к плоскости симметрии
самолета.
В связи с этим на о заметное влияние оказывают расположе-
ние крыла по высоте фюзеляжа, стреловидность и удлинение кры-
ла. Если при скольжении на выдвинутом полукрыле имеет место
положительный прирост нормальных сил сечений крыла, а на от-
стающем — отрицательный, индуцированный ими боковой скос в
области хвостового оперения будет положительным в точках, рас-
положенных выше плоскости крыла, и отрицательным — в точках,
расположенных ниже этой плоскости (рис. 11.6).
Причиной создания заметного бокового скоса потока в области
вертикального оперения может быть несимметричная относительно
продольной плоскости струя от двигателя либо струя, создаваемая
вращающимися в одну сторону воздушными винтами.
§ 11.3. Боковые силы и моменты
Проекцию результирующей сил давления на ось OZa скорост-
ной системы координатных осей Za принято называть боковой аэро-
динамической силой, а проекцию на ось OZ связанной системы ко-
ординатных осей Z — поперечной аэродинамической силой.
Причиной возникновения статической поперечной или боковой
силы является скольжение самолета. В полете углы скольжения
редко превышают 0,16—0,25 рад. В этом случае с точностью cos р
можно считать поперечную и боковую силы равными.
Основная роль в создании поперечной силы Z принадлежит фю-
зеляжу и вертикальному оперению. Может оказаться значительной
и сила, обусловленная несимметричным обтеканием гондол двига-
телей. Что же касается крыла, то его непосредственная роль в соз-
дании поперечной силы самолета незначительна и ею можно пре-
небречь.
Однако, как было показано выше, обусловленное скольжением
асимметричное распределение нормальных сил давления по крылу
может оказать заметное влияние на эффективный угол скольжения
вертикального оперения и хвостовой части фюзеляжа, и значит, на
величину поперечной силы.
Аэродинамическая поперечная сила самолета с достаточной
точностью может быть представлена в виде суммы:
Z=Z* + Z„'0 + Zt, (11.7)
176
где ZB.O, Zr — соответственно поперечные силы фюзеляжа, вер-
тикального оперения, гондол двигателей.
- При малых углах скольжения (|3<0,16-4-0,25 рад) зависимость
поперечной силы и ее составляющих от угла скольжения близка к
линейной. Поэтому можно записать:
Z=Z^=C^SP, (11.8)
где Сг —производная коэффициента поперечной силы по углу
скольжения; q — скоростной напор невозмущенного потока; S —
Площадь крыла.
Напоминаем, что в принятой правой системе координатных
осей угол скольжения считается положительным, если вектор ско-
рости центра масс повернут вправо относительно плоскости сим-
метрии, т. е. скольжение выполняется на правое полукрыло. При
таком определении знака |3 производная Cz —величина отрица-
тельная.
Аналогично поперечной силе самолета могут быть выражены
по формуле подобия и ее составляющие.
Поперечная сила фюзеляжа определяется по формуле
Z^C^S^, (11.9)
где 5ф' — характерная площадь фюзеляжа: эта либо площадь ми-
делевого сечения, либо площадь прямоугольника, в который впи-
сывается проекция фюзеляжа на плоскость симметрии.
Поперечная сила вертикального оперения
^B.o=cL.o?B.05B.()(3-oB.0)> (11. 10)
где — скоростной напор в области вертикального оперения;
5В.О— площадь вертикального оперения; ов.о— средний угол боко-
вого скоса по высоте вертикального оперения.
В общем случае поперечная сила гондол двигателей определя-
ется по формуле
Zr=cLvX(?-3r)j, (И-11)
где — скоростной напор в области расположения гондол; Sr'-—
характерная площадь гондол, определяется так же, как и для фю-
зеляжа; ог — угол бокового скоса; j — число гондол.
Из формул (11-7) — (11.11) следует, что производная Cz может
быть определена в виде суммы:
^=с^ф+с^.Л,л5в.о(1-о^)+7С^М5г(1-4), (11.12)
где &s>1„ A’sb.o, &sr —относительные площади фюзеляжа, вертикаль-
ного оперения и гондолы; &в.0=^-; ^ — — —коэффициенты тор-
можения потока в области вертикального оперения и гондол. Если
гондолы двигателей крепятся к крылу, то kr— 1 и Ог =0.
Поперечная сила создается и двигательной установкой. При по-
лете со скольжением поток воздуха попадает во входное устройст-
177
Рис. 11.7. Поперечиая сила,
создаваемая двигательной ус-
тановкой
во ТРД или подходит к плоскости
вращения винта под углом к оси
двигателя, примерно равным |3, что
сопровождается изменением им-
пульса потока по нормали к оси; в
результате возникает поперечная
сила, действующая на винт или
боковую поверхность входного уст-
ройства ТРД (рис. 11.7). Эту силу
можно определить так же, как и
поперечную силу силовой установ-
ки, обусловленную углом атаки.
На самолете с винтовыми сило-
выми установками струя воздуха,
отбрасываемая винтом, изменяет
угол скоса и йв.о в области верти-
кального оперения и тем самым ве-
личину аэродинамической поперечной силы. На самолетах с ТРД
в случае полета с несимметричной тягой струя реактивного двига-
теля также способствует изменению угла бокового скоса в хвос-
товой части самолета и, следовательно, изменению величины аэро-
динамической поперечной силы.
Поперечная сила самолета Rz— составляющая результирующей
по оси OZ системы сил (за исключением массовых), действующих
на самолет, равна сумме:
/?z = Z-f-Pz.
(11.13)
При этом аэродинамическая поперечная сила Z определяется с
учетом изменения угла бокового скоса, обусловленного влиянием
струй двигательной установки.
Статический момент рыскания обусловлен поперечной силой
Rz, действующей на самолет при полете со скольжением. Очевидно,
момент рыскания может быть представлен в виде суммы:
М^Л4У + МРУ, (11.14)
где Му — момент относительно оси ОУ, обусловленный аэродинами-
ческой поперечной силой Z; МРу— момент рыскания, обусловлен-
ный двигательной установкой. Момент МРу создается поперечной
силой двигательной установки Pz и несимметричной тягой в случае
полета с выключенным боковым двигателем.
Точку пересечения линии действия аэродинамической попереч-
ной силы с плоскостью симметрии самолета принято называть бо-
ковым фокусом самолета, обусловленным скольжением (хгр). Ана-
логично можно ввести понятие фокусов частей самолета: фюзеля-
жа Хфр, вертикального оперения хв.ор, гондол двигателей хгр (рис.
11.8). На рис. 11.8 показаны поперечные силы частей самолета при
положительном угле скольжения.
Аэродинамический статический момент рыскания можно опре-
делить по формуле
— Z (Хт —
178
с другой стороны, My=myqSl=m9y qSlft. Приравнивая правые час-
ти выражений для Му и выразив Z через коэффициент Cz в соот-
ветствии с (11.8), получим
ту= — C?z(x.e — л-Л₽)Р, (11.15)
где Хт, хг₽— координаты центра масс и бокового фокуса, выра-
женные в долях размаха крыла I.
Безразмерную координату бокового фокуса хр$ можно выра-
зить через координаты фокусов частей самолета. Так как (см.
рис. 11.8) справедливо равенство
Zx
где i принимает значения частей самолета, то после деления пра-
вой и левой частей этого равенства на qSl получим
(11.16)
Z у
Здесь — координаты фокусов фюзеляжа, вертикального опере-
ния^ гондол двигателей, выраженные в долях размаха крыла; о i —
= д(ц/д$ — производная от среднего бокового угла скоса в области
вертикального оперения (1=«ВО»), в области расположения гон-
долы двигателя (/=«Г»).
Момент рыскания, создаваемый двигательной установкой, обус-
ловлен поперечной составляющей тяги Pz и, при наличии несиммет-
ричной тяги, самой тягой двигателя.
Если координаты входного сечения
ТРД относительно носка фюзеляжа
обозначены хЗЕХ, гзвх, то момент рыс-
кания, создаваемый двигательной ус-
тановкой относительно центра масс,
будет равен:
^ру=2 i 4"
(И-17)
Если /-й двигатель выключен, то Pzj—
= 0, а Р3=ДХд, где ЛХЛ — дополни-
тельное сопротивление, создаваемое
этим двигателем. При определении
аэродинамического момента рыскания
самолета с несимметричной тягой сле-
дует учитывать боковой угол скоса,
создаваемый реактивной струей, а для
самолета с винтовой установкой —
скос, создаваемый двигательной воз-
душной струей за винтом.
Рис. 1Г.8. Схема боковых сил,
действующих на самолет при
₽>0
179
Возникновение статического момента относительно продоль-
ной оси самолета ОХ — момента крена Мх— связано с несимметрич-
ным распределением нормальной аэродинамической нагрузки по
размаху крыла и расположением бокового фокуса вертикального
оперения выше продольной оси. Как отмечалось выше, при пред-
положении геометрической, массовой и жесткостной симметрии са-
молета относительно ею продольной плоскости статический момент
крена возникает при полете со скольжением. Основными частями
самолета, создающими момент крена, являются крыло и вертикаль-
ное оперение.
В § 11.2 были рассмотрены причины асимметричного распреде-
ления нормальных сил давления по крылу. Если на элементарную
полоску крыла шириной dz действует нормальная сила
dY=Cyce4qbdz,
то момент этой силы относительно продольной оси равен
dMx = —zdY.
Произведя интегрирование этого выражения по размаху крыла,
определим момент крена, создаваемый крылом, Л4жкр. Величина
этого момента при заданном угле скольжения зависит от формы
крыла в плане, стреловидности, угла поперечного V крыла, распо-
ложения крыла по высоте фюзеляжа, так как эти факторы опреде-
ляют распределение нагрузки по крылу, при скольжении.
Момент крена крыла определяется по формуле Мх KP=mxKpqSl.
Коэффициент момента крена шхкр можно представить в виде
суммы:
тхкр = тх0 ~Ь тхх 4“ тх&
где mxo, m-x-v тх^ >пхф — коэффициенты момента крена, обуслов-
ленные соответственно формой, стреловидностью, углом поперечно-
го V, расположением крыла по высоте фюзеляжа.
Если ордината бокового фокуса вертикального оперения есть
z/B.o₽, то момент, создаваемый поперечной силой вертикальною
оперения относительно оси ОХ, равен (рис. 11.9):
^ЛВ.0 ^'b.oI/b.oP'
Если подставить сюда значение ZB.o в соответствии с формулой
(11.10) и поделить правую и левую части этого равенства на qSl,
получим следующее значение коэффициента момента крена верти-
кального оперения:
mXB.0=C?ZB.okBMkSB,0 ^ (1 - <£ 0) р. (П. 18)
При малых углах скольжения коэффициент момента крена кры-
ла является линейной функцией р. Поэтому коэффициент момента
крена самолета может быть представлен в виде
тх=тхкр + тХвм = mfy,
180
нием
0 1 V
где тх—производная коэффициента момента крена самолета по
углу скольжения. Для заданной компоновки производная т* за-
висит jot числа М и угла атаки — пример такой зависимости приве-
ден на рис. П.Ю. Интенсивное увеличение степени поперечной ус-
тойчивости для самолета с нестреловидным крылом при а>0,22 рад
связано с тем обстоятельством, что на таком крыле в случае
скольжения срыв возникает на отстающем полукрыле, в результате
чего появляется дополнительный момент крена на это полукрыло.
На самолете со стреловидным крылом с увеличением угла атаки
до определенных значений (а=0,204-0,24 рад, для х=0>5 рад и
а = 0,114-0,13 рад для %=0.75 рад) поперечная устойчивость воз-
растает. При дальнейшем увеличении угла атаки вследствие своеоб-
разного развития срыва по размаху стреловидного крыла степень
поперечной устойчивости начинает уменьшаться и самолет может
стать неустойчивым при больших углах атаки (для приведенного
примера неустойчивость имеет место при а>0,22 рад). Применение
специальных мер по предотвращению концевого срыва на стрело-
видном крыле (отрицательная геометрическая крутка крыла, от-
клоняющиеся предкрылки, перегородки и др.) сдвигает начало
возникновения поперечной неустойчивости в область больших углов
атаки.
§ Н.4. Боковая статическая устойчивость
Как отмечалось, боковая статическая устойчивость включает
два понятия: флюгерную устойчивость и поперечную устойчивость.
Рассмотрим их подробнее.
Для выяснения сущности флюгерной устойчивости предполо-
жим, самолет закреплен так, что имеет одну степень свободы —
возможность вращения относительно оси ОУ. Если на таком само-
181
лете создать положительный прирост угла скольжения Др при
нейтральном положении органов управления, возникает момент
рыскания, обусловленный скольжением АЛД. Приращение момен-
та рыскания будет разворачивать самолет относительно оси OY
вправо при ДЛ4гу<0, влево — при ДЛ4у>0 и он останется в исходном
положении, если ДЛД=0. У самолета имеется тенденция к ликви-
дации скольжения, т. е. он будет флюгерно устойчивым, если знаки
приращения угла скольжения и момента противоположны. В этом
случае самолет ведет себя как флюгер — стремится стать по пото-
ку. Математически это условие выражается неравенством
ДЛД
—^<0.
др
Так как по условию приращение момента вызвано изменением
угла скольжения (скорость полета остается неизменной), то (11.19)
выполняется, если
(11.19)
R Unit, ~
^=^г<0- (11'20)
Величина частной производной коэффициента момента рыска-
В
нпя по углу скольжения ту называется критерием или степенью
флюгерной устойчивости. При ту >0 самолет флюгерно неустой-
чив, при ту — 0 — нейтрален. Степень флюгерной устойчивости
является важной характеристикой самолета: чем более устойчив
самолет, тем он «плотнее сидит» в воздухе, меньше поддается воз-
мущающим воздействиям. Особенно важна величина критерия ту
для пассажирского самолета, имеющего, как правило, несколько
двигателей. Для самолета с большим по модулю значением т9у
отказ боквого двигателя не приведет к затруднениям в пилотиро-
вании (см. гл. 12).
Степень флюгерной устойчивости самолета в основном опреде-
ляется моментами, создаваемыми фюзеляжем и вертикальным опе-
рением, существенно зависит от расположения крыла по высоте
фюзеляжа, числа М полета. В случае планирующего полета (поле-
та без тяги) величина ту может быть вычислена по формуле
(11.15), т. е.
ту= — (А—(11.21)
При обычном полете с симметричной тягой или полете с отка-
завшим боковым двигателем следует учитывать влияние на степень
флюгерной устойчивости приращений момента рыскания, обуслов-
ленного поперечной силой Pz двигателя и влиянием струй, создава-
емых двигательной установкой.
Для пассажирских самолетов характерно равномерное распре-
деление массы вдоль фюзеляжа достаточно большого удлинения.
В связи с этим центр масс самолета располагается близко к сере-
дине фюзеляжа и, следовательно, из условия обеспечения устойчи-
вости по перегрузке крыло должно быть отнесено назад. Такая
182
компоновка способствует росту
дестабилизирующего момента
фюзеляжа и снижению флюгер-
ной устойчивости. Реальным кон-
структивным средством повыше-
ния флюгерной устойчивости яв-
ляется увеличение площади вер-
тикального оперения.
Рис. 11.12. Поведение устойчивого в
поперечном отношении самолета при
скольжении
Рис. 11.1.1. Зависимость степени флюгер-
ной устойчивости самолета ют числа М
Для транспортных и пассажирских самолетов в целях лучшего
использования фюзеляжа применяется высокое или низкое распо-
ложение крыла по фюзеляжу.
На самолетах с большими дозвуковыми или сверхзвуковыми
крейсерскими скоростями полета устанавливаются стреловидные
или Д-вндные крылья.
Как отмечалось в разд. 11.2, стреловидность, особенно при ма-
лых удлинениях крыла в схеме «высокоплан», способствует созда-
нию неблагоприятного бокового угла скоса в области вертикально-
го оперения, приводящего к снижению его эффективности и, зна-
чит, флюгерной устойчивости самолета. К аналогичному явлению
может привести и наличие наплывов у стреловидного крыла. По-
этому обеспечение необходимой степени флюгерной устойчивости
для таких самолетов требует еще большего увеличения площади
вертикального оперения, установки дополнительного киля как
сверху, так и снизу фюзеляжа, установки дополнительных шайб на
горизонтальном оперении, использования автоматических средств
повышения устойчивости и др. С этой точки зрения более удачной
является компоновка с низким расположением крыла, способству-
ющая увеличению эффективности вертикального оперения.
У сверхзвуковых самолетов с увеличением числа М уменьшает-
ся эффективность вертикального оперения (падает | С|в.о|)» в то
время как эффективность фюзеляжа (производная С|ф) изменя-
ется слабо. Это приводит к уменьшению стабилизирующего момен-
та вертикального оперения, при некотором числе М он становится
равным дестабилизирующему моменту фюзеляжа. При числах М,
183
превышающих это значение, самолет теряет флюгерную устойчи-
вость (рис. 11.11). Уменьшению флюгерной устойчивости способст-
вует и снижение эффективности вертикального оперения с увеличе-
нием угла атаки.
Под поперечной устойчивостью следует понимать стремление
самолета ликвидировать приращение угла скольжения креном без
вмешательства пилота в управление. Предположим, что степени -
свободы движения самолета ограничены и самолет может совер-
шать поступательное движение и вращательное движение только
относительно оси ОХ. При возникновении скольжения такой само-
лет под действием момента Л4Х9 накреняется (рис. 11.12). Тогда
неуравновешенная поперечная составляющая веса вызывает уско-
ренное движение вдоль оси OZ в сторону крена. К поступательно-
му продольному движению со скоростью V добавится боковое пе-
ремещение самолета со скоростью
t
smydt.
б
В результате наложения этих двух движений суммарный вектор
скорости центра масс самолета развернется в сторону крена.
Если приращение угла скольжения положительное (Др>0), а
приращение момента крена отрицательное (АЛ4х<0), то возникший
на левое крыло крен вызовет развитие поступательного движения
влево и тем самым будет способствовать ликвидации приращения
угла скольжения Ар. Нетрудно убедиться, что, если знак прира-
щения момента крена совпадает со знаком приращения угла сколь-
жения, обусловившего его, возникший крен вызовет боковое по-
ступательное перемещение, направленное на дальнейший рост угла
скольжения.
Таким образом, условие наличия у самолета стремления к лик-
видации возникшего угла скольжения движением крена сводится
к выполнению неравенства
Q
А?
пли к эквивалентному ему неравенству
тх<0. (11.22)
Производную коэффициента момента крена по углу скольжения
называют критерием или степенью поперечной устойчивости само-
лета. При Шх >0 самолет поперечно неустойчив, а при =0 —
нейтрален. Поперечно устойчивый самолет в некоторых случаях
имеет тенденцию при возникновении крена без вмешательства пи-
лота выходить из крена.
Действительно, последим за поведением самолета при возник-
шем крене в течение небольшого отрезка времени, если за исход-
ное движение принять горизонтальный полет с нулевым углом кре-
184
на. В исходном движении сумма сил, действующих по -вертикали,
равна нулю, т. е.
+ (11.23)
Если под действием возмущающих факторов самолет накренил-
ся на угол у, то, поскольку в начальный момент времени угол ата-
ки и подъемная сила не изменяются, равенство | Уа | = | mg| сохра-
няется. Однако векторное равенство (11.23) нарушается. Как отме-
чалось, под действием аэродинамической подъемной силы и веса,
суммарный модуль которых равен
+ ~ mg sin Y>
развивается поступательное движение в направлении крена со-
скоростью Vz и, следовательно, появляется скольжение на опущен-
ное крыло.
При крене на правое крыло разовьется положительное сколь-
жение (Др>0). Если <0, приращение момента AA4x=Al|-p от-
рицательное и, значит, у самолета имеется тенденция выходить из
крена. Однако <0 не приводит к появлению восстанавливаю-
щего момента крена при полете с креном, но отсутствии скольже-
ния, например, при правильном вираже.
Таким образом, о поперечной устойчивости можно судить по
поведению самолета при скольжении по крену. Если при скольже-
нии имеется тенденция к крену на отстающее крыло или при крене,
возникшем в прямолинейном установившемся полете, имеется
тенденция выхода из крена без вмешательства пилота — самолет
устойчив в поперечном отношении.
На практике поперечную устойчивость проще проверять реак-
цией самолета на умышленно созданное скольжение.
Как будет показано (см. гл. 12),
управления рулем направления впе-
ред приводит к скольжению на ле-
вое полукрыло, а противоположное
ее движение — к скольжению на
правое полукрыло. Следовательно,
если самолет кренится на полукры-
ло соответствующей педали, выдви-
нутой вперед, то он устойчив в по-
перечном отношении.
Степень поперечной устойчивости
самолета, как и коэффициент мо-
мента крена-, зависит от формы кры-
ла в плане, его геометрических ха-
рактеристик, включая угол попереч-
ного V крыла, интерференции меж-
ду крылом и фюзеляжем, угла ата-
ки и числа М. Особенностью само-
лета со стреловидным крылом явля-
ется увеличение степени поперечной
перемещение правой педали
Рис. 11.13. Влияние стреловид-
ности и угла поперечного V
крыла иа поперечную устойчи-
вость самолета
185
Рис. 11.14. Зависимость С* крыльев от числа ЛА при скольже-
нии:
а—относительно толстое крыло; б—тонкое крыло; /—впереди идущее
крыло; 2—отстающее крыло
устойчивости с ростом угла атаки до определенных значений (см.
рис. 11.10).
Излишне большая поперечная устойчивость является причиной
возникновения бокового колебательного движения, затрудняюще-
го пилотирование самолета. Наличие большой степени поперечной
устойчивости особенно опасно для самолетов с разнесенными по
размаху крыла двигателями. Отказ бокового двигателя на таком
самолете сопровождается интенсивным развитием скольжения на
полукрыло с работающим двигателем и, при наличии большой по-
перечной устойчивости, резким кренением на полукрыло с отказав-
шим двигателем.
Во избежание этих неприятных явлений стремятся обеспечить ма-
лую степень поперечной устойчивости. Удобным средством регулиро-
вания степени поперечной устойчивости является угол поперечного
V крыла: для снижения устойчивости крылу придают отрицательный
угол поперечного V, а для увеличения — положительный. Однако
угол поперечного V не является радикальным средством, обеспечи-
вающим необходимую степень поперечной устойчивости на всех ре-
жимах полета для самолета со стреловидными крыльями, так как
в полетном диапазоне углов атаки тх-ь не зависит от а, в то вре-
мя как | с ростом угла атаки увеличивается (рис. 11.13).
В полете со скольжением для самолета со стреловидным кры-
лом эффективные числа М выдвинутого и отстающего полукрыльев
различны, поэтому изменения Cg=f(M) для них не будут одина-
ковыми. Примерные графики зависимости Су =f(M.) для стрело-
видных крыльев с относительно толстым (а) и тонким (б) профи-
лями приведены на рис. 11.14. В диапазоне чисел Мг<М^М2 не-
сущие свойства отстающего полукрыла с относительно толстым
профилем больше, чем выдвинутого по потоку, т. е. в этом диапа-
зоне чисел М крылья создают дестабилизирующий момент крена,
что может привести к поперечной неустойчивости. У крыла с отно-
сительно тонким профилем такое явление не наблюдается. В диа-
пазоне чисел отличие крыльев по Су мало. Если при-
186
дать таким крыльям обратное поперечное V, то область, где само-
лет неустойчив, в первом случае расширяется, а во втором — мо-
жет появиться.
Отсутствие поперечной устойчивости — явление нежелательное,
поскольку оно приведет к обратной реакции по крену при перемеще-
нии педали управления рулем направления, затрудняющей пилоти-
рование самолетов.
На некоторых современных пассажирских самолетах со стрело-
видными крыльями обратное поперечное V(ip<0) не применяется,
а неудовлетворительные характеристики боковой устойчивости са-
молета при движении с большими углами атаки улучшаются с по-
мощью автоматических средств.
Вопросы для повторения
1. Что понимается под боковой статической устойчивостью самолета?
2. Поясните особенности распределения аэродинамической нагрузки по раз-
маху скользящих крыльев различной формы в плане (прямоугольной, трапецие-
видной, стреловидной).
3. Какое влияние оказывает угол поперечного V крыла на распределение
нагрузки по скользящему крылу, поперечную устойчивость?
4. Какие конструктивные факторы самолета влияют на величину угла боко-
вого скоса в области вертикального оперения?
5. Какие части самолета оказывают наибольшее влияние на величину попе-
речной силы и момента рыскания?
6. Объясните роль и значение степени флюгерной устойчивости в оценке бо-
кового пилотирования и безопасности полета пассажирских самолетов.
7. Поясните поведение поперечно устойчивого самолета при возникновении
крена в прямолинейном установившемся полете.
8. Каково влияние степени поперечной устойчивости на оценку пилотирова-
ния самолета при отказе бокового двигателя?
9. Что понимается под обратной реакцией по крену при отклонении руля
направления?
Задача
При предельно передней центровке самолета, равной 0,26 ЬА> т? ——0,111.
Определить т® при предельно задней центровке (хт.з=0,38), если = —1,15,
Ьа = 4,2 м, 1=30 м.
Ответ: —0,127.
Глава 12
Статическая боковая управляемость самолета.
§ 12.1. Боковые управляющие силы и моменты
Боковое управление самолетом осуществляется двумя органа-
ми: рулем направления и элеронами, предназначенными для изме-
нения углов рыскания, скольжения и крена.
Функции этих органов взаимосвязаны: отклонение руля направ-
ления приводит к повороту носа самолета и к крену, а при откло-
нении элеронов наряду с моментом крена возникает момент рыс-
кания. С целью уменьшения влияния элеронов на движение рыс-
кания на некоторых самолетах применяются дифференциальные
элероны. У таких элеронов углы отклонения вверх и вниз различ-
ны (вверх больше, а вниз меньше), что позволяет практически лик-
видировать рыскание при отклонении элеронов. На скоростных са-
молетах вместо элеронов или наряду с элеронами применяются
пластинчатые (рис. 12,1,а) или струйные (рис. 12,1,6) интерцепто-
ры, вызывающие отрыв пограничного слоя на верхней поверхности
крыла, вследствие чего нормальная аэродинамическая сила в сече-
ниях с выдвинутым интерцептором уменьшается, а продольная
увеличивается.
Рассмотрим силы и моменты, создаваемые рулем направления.
При отклонении руля направления на угол 6ц (положительный при
повороте руля вправо) изменяется распределение сил давления на
вертикальном оперении, в результате чего возникает поперечная
сила Zn, пропорциональная углу отклонения руля (рис. 12.2):
(12.1)
где С^о —производная от коэффициента поперечной силы вер-
тикального оперения по углу отклонения руля направления. Попе-
речная сила ZH создает моменты относительно осей ОХ и OY, кото-
рые соответственно равны:
^вУв.О Г2”0,?в.(ДВ.оУВ.(Al’
8 (12.2)
^1/н •^'н^-'в.о Сz д.с/7в.о'-*в.о^-'в.о®н’
Коэффициенты эффективности руля направления находим с по-
мощью формул: _
!ПХН — Cz B.otlKkBMks влув,0>
г - (12-3)
=Cz B.otinkBOkSBMLBM,
-188
if
Рис. 12.1. Схема действия пластинчато-
го (а) и струйного (б) интерцепторов
Рис. 12.2. Схема для оп-
ределения управляюще-
го момента, создаваемого
рулем 'направления
где Пя
С Sh
^2В.О
ZB.0
— коэффициент относительной эффективности руля
I / SH S„
направления; пн^ I/ ------ при дозвуковых и --------- при сверх-
*8 в,, о Sb.o
звуковых скоростях полета; 1 Д).о —“уI 2' •
Влияние сжимаемости на эффективность руля направления
обусловлено изменениями CzB.o и пп по М. Зависимости
^к, tn‘" от М аналогичны f (М) (см. гл. 10).
Рассмотрим момент, создаваемый элеронами. Элероны — руле-
вые поверхности, подвешенные на концах крыла и отклоняющиеся
в разные стороны. Согласно принятому правилу знаков положи-
тельным считается отклонение правого элерона вниз, а левого —
вверх (рис. 12.3). В полете на крыле с отклоненным вниз элероном
появляется дополнительная положительная нормальная сила ЛУЭ,
а на крыле с поднятым элероном примерно такая же по величине
189
Рис. 12.3. Схема сил и моментов, действующих на самолет
при отклонении элеронов
сила противоположного направления. Пара этих сил создает уп-
равляющий момент крена Мхд. Одновременно вследствие измене-
ния тангенциальных составляющих полной аэродинамической си-
лы крыльев возникает момент рыскания, направленный в сторону
крыла с опущенным элероном (при использовании интерцепторов
момент действует в сторону крыла с отклоненным интерцептором).
Однако при малых углах атаки и небольшом удлинении крыла мо-
мент рыскания, создаваемый элеронами, мал и им можно прене-
бречь.
Если считать Су постоянным по размаху крыла, то приращение
нормальной силы можно определить по формуле
ДГэ=С“пэ5^8э,
а коэффициент эффективности элерона из формулы
т1э—~Cyti3ksJ3, (12.4)
где Т3-~- —относительное плечо пары сил АУЭ, примерно рав-
ное расстоянию между серединами размаха элеронов, отнесенному
к размаху крыла (см. рис. 12.3); ks3=SB'/S — относительная пло-
щадь крыла, занятая элероном; пэ=Суа1Су — коэффициент отно-
сительной эффективности элеронов; tl3^VSJS'a — ПРИ дозвуковых
(М<Мкр) и n3^S3/Sg при сверхзвуковых скоростях полета.
Для того, чтобы учесть изменение Са по размаху крыла форму-
лу (12.4) необходимо дополнить поправочным коэффициентом ks,
190
который для докритических чисел М определяется по приближен-
ной формуле:
k3 0,6 + 0,066 (т] — 1),
а для сверхзвуковых скоростей полета Ла«1. На больших углах
атаки эффективность элеронов существенно снижается, особенно
на самолетах со стреловидными крыльями, что связано с отрывом
пограничного слоя на концах крыла. Повышению эффективности
элеронов способствуют применяемые на таких крыльях аэродина-
мические перегородки, прорези или «зубцы», установка на концах
крыла устойчивых к срыву профилей, концевых закрылков, прида-
ние крылу отрицательной крутки.
§ 12.2. Прямолинейный установившийся полет
со скольжением
В практике летной эксплуатации самолетов имеют место ситуа-
ции, когда необходимо выполнять прямолинейный установившийся
полет со скольжением. К таким случаям можно отнести, например,
посадочное снижение при боковом ветре, полет с несимметричной
тягой и др.
В прямолинейном установившемся полете со скольжением на
самолет, обладающий боковой статической устойчивостью, будут
действовать боковые статические силы и моменты (см. гл. 11). Для
выполнения прямолинейного полета эти силы и моменты должны
быть сбалансированы. Балансировка боковых моментов достигает-
ся соответствующим отклонением органов бокового управления
(руля направления и элеронов), балансировка поперечной силы
требует создания угла крена. Так как рассматривается полет с тя-
гой, то необходимо рассматривать проекцию результирующей силы
и результирующих боковых моментов (рис. 12.4).
Если пренебречь моментом рыскания, создаваемым элеронами
при их отклонении, то условия равновесия боковых сил и момен-
тов можно записать в виде:
AIto=AlL₽+«X+A7X=0.
л»,=Ш+л«>,=0, (125)
Fz=mg sin y4-/?^-(-Zsh8h=0,
Fy=tng cosy.
Разделив первые два уравнения на qSl, а третье на qS и исклю-
чив mg из третьего уравнения, получим условия равновесия, за-
писанные для коэффициентов сил и моментов:
+ m ®Э8Э+т ®-8н=0,
^₽+«>н=0’ (12.6)
CF1,tgY+C^₽+Cz4=0.
191
Рис. 12.4. Силы и моменты, действующие «а само-
лет при полете со скольжением
При планирующем полете в уравнениях (12.5) и (12.6) индексы
«У?» опускаются, т. е. сохраняются только аэродинамические силы
и моменты.
Определив из системы линейных алгебраических уравнений
(12.6) тангенс угла крена, углы отклонения руля направления и
элеронов как функции угла скольжения р, получим балансировоч-
ные значения этих углов для выполнения установившегося полета
- со скольжением:
гР
''Ру
cL
t\Z
(12.7)
Для статически устойчивого самолета необходимо создать
крен в сторону выдвинутого крыла, а руль направления и элероны
отклонить в сторону скольжения, т. е. элероны на выдвинутом
относительно потока крыле отклоняются вверх, а на отстающем —
вниз.
Балансировочная кривая для такого полета строится в виде за-
висимостей 6П(Р), М₽) и Т(Р)- Примерная балансировочная кри-
вая для статически устойчивого в боковом отношении самолета
приведена на рис. 12.5. На пассажирском самолете необходимость
полета со скольжением возникает сравнительно редко. Как отмеча-
лось выше, такой полет может использоваться при посадке с боко-
вым ветром.
Боковой ветер вызывает снос самолета относительно взлетно-
192
Рис. 12.5. Балансировочная
кривая при полете со скольже-
нием
Рис. 12.6. Схема предпосадочного
движения при наличии бокового вет-
ра':
а—со скольжением; б—с упреждением по
курсу
посадочной полосы; чтобы движение проходило вдоль ВПП, необ-
ходимо совладение вектора путевой скорости Ей с осью полосы, что
достигается полетом со скольжением (рис. 12,6,а) или с упрежде-
нием по курсу (рис. 12,6,6). При полете со скольжением продоль-
ная плоскость симметрии самолета направлена вдоль ВПП, а пот-
ребный угол скольжения определяется из равенства
₽«sin₽=-ir/V.
В этом случае потребные отклонения органов бокового управ-
ления могут быть найдены из условий (12.7). Для сохранения пря-
молинейности движения самолет следует накренить на наветрен-
ное крыло. Перед касанием колесами ВПП самолет выводится из
крена отклонением штурвала по направлению ветра. Если степень
поперечной устойчивости велика, то потребные отклонения элеро-
нов для балансировки момента, обусловленного скольжением, будут
значительными. На самолетах со стреловидными или треугольными
крыльями степень поперечной устойчивости увеличивается с ростом
Су, поэтому для таких самолетов при посадке с боковым ветром
потребные отклонения элеронов могут оказаться слишком боль-
шими.
Если предпосадочный полет с боковым ветром выполняется с
упреждением по курсу на угол tyf&W/V, т. е. нос самолета развер-
нут в сторону ветра, то скольжение отсутствует и, следовательно,
отпадает необходимость в балансировке боковых сил и моментов,
однако самолет необходимо развернуть по полосе либо перед каса-
нием ВПП, либо после уверенного приземления. В последнем слу-'
7
776
193
час самолет с управляемым носовым колесом сам разворачивается
вдоль полосы.
Рассмотрим условия балансировки боковых сил и моментов при
полете с несимметричной тягой. В общем случае такой полет вы-
полняется со скольжением, поэтому условия равновесия боковых
сил и моментов (12.5) сохраняют силу. Однако при определении
сил и моментов, обусловленных двигательными установками, сле-
дует учитывать, что наряду со слагаемыми, зависящими от угла
скольжения, в этом случае будут фигурировать независящие от р
составляющие.
К этим дополнительным силам и моментам следует отнести: мо-
мент рыскания, создаваемый силой тяги двигателя, симметричного
к выключенному или задросселировапному, и силой дополнитель-
ного сопротивления выключенного двигателя; приращение попереч-
ной силы вертикального оперения, обусловленное изменением
бокового скоса из-за влияния несимметричности струй двигателей;
моменты крена и рыскания, создаваемые этой силой; момент крена,
создаваемый поперечной составляющей силы тяги работающего
двигателя, а для самолетов с ТВД или ПД — также приращением
нормальной силы, возникшей вследствие несимметричного обдува
крыла винтами.
Дополнительные боковые силы и моменты (рис. 12.7) можно
определить по формулам:
шРу= -(р+да-)^+ая«.о;
ШРХ=Р^+МХО^ШХЯ^ (12.8)
дд=ддв.о,
где 2Д — координата оси выключенного двигателя.
Переходя к коэффициентам сил и моментов, получим:.-
LmP,j = — 0,5 (Ср -ф ДС J гд ф- &тувл;
ДтРл.=0,5С/3Фдгд-|-тхобд +Дтхв.о; (12.9)
'Z “ ^2В.0^в.0^5в.О°СК’
р — 2г
где Ср=-----; гл=—аск— угол бокового скоса, обусловленный
qS I
влиянием несимметричности струй, создаваемых двигательными
установками.
Теперь в условиях равновесия боковых сил и моментов (12.6)
появятся дополнительные силы и моменты, обусловленные несим-
метричной тягой (12.9):
bjnPx - tn'RX^ тхэЪэ 4- тхкЪк—0;
Д^4-т^8+т^8н=0; (12.10)
ДСг+СРу tg у + су 4-С>н=о-
Решив систему уравнений (12.10), определим потребные для
балансировки боковых сил и моментов угол крена и углы отклоне-
194
Рис. 12.7. Полет самолета с выключенным боковым дви-
гателем
ния руля направления и элеронов. В зависимости от угла скольже-
ния получим:
Ат
tgv=
Дл/;
z .
С Ry
(12.11)
8Э=Ц-
т э
Типичная для пассажирского само-
лета балансировочная кривая в слу-
чае полета с выключенным правым
двигателем представлена на рис. 12.8.
Из рисунка видно, что при наличии
определенного угла скольжения на
крыло, соответствующее выключенно-
му двигателю, возможен полет без
крена. На этом режиме силы, обус-
ловленные скольжением и балансиро-
вочным углом отклонения руля нап-
равления, образуют пару с моментом,
равным сумме ДЛГру+М^р. Режим
полета без крена наиболее благопри-
ятный, особенно при полете в сложных
метеорологических условиях. Но при
этом, если двигатели расположены на
значительном расстоянии от плоскости
симметрии, балансировочное отклоне-
ние руля направления может оказать-
ся неприемлемо большим.
6н
тх ₽ ₽'
—rm'Ry — niRx
• т*
Рис. 12.8. Балансировочная
кривая при полете с выключен-
ным двигателем
7*
195
Чтобы избежать большого отклонения руля направления на ба-
лансировку, лучше полет выполнять без скольжения или со сколь-
жением на крыло, противоположное выключенному двигателю, но
в последнем случае может существенно возрасти потребный угол
крена, что нецелесообразно.
§ 12.3. Шарнирные моменты и усилия в тягах
(рычагах) органов бокового управления
Усилия, прикладываемые пилотом к штурвалу и педалям для
отклонения или удержания элеронов и руля направления в откло-
ненном для балансировки боковых моментов положении, пропор-
циональны моментам аэродинамических сил, действующих на
руль и элероны относительно шарниров подвески этих органов
управления. Шарнирными моментами определяются также силы,
действующие в тягах управления, поэтому эти моменты необходи-
мо знать как при автоматическом управлении или применении бус-
терных приводов, так и при непосредственном участии пилота в
боковом управлении.
При отклонении элеронов на положительный угол (см. рис. 12.3,
вверх — для левого и вниз — для правого элеронов) относительно
шарниров их подвески будут действовать аэродинамические момен-
ты: отрицательный — для правого и положительный — для левого
элеронов. Эти моменты могут быть определены по формулам:
•^ш-пр = ^ш.пр^^эГ^э’ -^ш.л-^ш.л^^эГ^э»
‘где S8i, Ьэ — площадь и хорда элерона.
Из принципиальной схемы управления элеронами видно, что
усилие, действующее на штурвал (или в тягах управления), зави-
сит от разности шарнирных моментов, т. е. от величины
= (12.12)
и равно
(12.13)
Коэффициент передачи усилия от элерона к штурвалу или к ру-
левой машине
^Ш.э = ^8э/^э>
где dx3 — элементарное перемещение штурвала или тяги, переда-
ющей усилие на рулевую машину, в зависимости от того, определя-
ется ли. усилие на штурвале или в тяге.
Усилие Рэ>0, если оно направлено в сторону левого крыла.
Шарнирный момент Л4ш.э принято относить к суммарной площади
элеронов, т. е.
ЛГш.э=тш.э^5э&э, (12.14)
где 5Э=25Э1.
Коэффициент шарнирного момента тш.э согласно формуле
(12.12) равен:
^ш.»=0,5(г«ш.пр—/?гш.л). (12.15)
196
Коэффициент тш.е зависит от углов атаки и отклонения элеро-
нов, а также от числа М полета. При малых углах атаки зависи-
мость линейная и ее слагаемые могут быть представлены в виде
^ш.1ф=^ш'Пфалпр4_*гашлпр8э.пр» (12 1g)
^Ш.Л /Ишп О„л 4"^иГлл^Э.Л»
где Мшлпр; /Итлл —производные от коэффициентов шарнирного
момента элеронов, определяемые по сечениям, нормальным к ли-
нии фокусов крыла; аИПр; апл — углы атаки в этих сечениях.
Если отклонение элеронов вверх и вниз одинаково, то бэ.пр=
— бэ.л- В дальнейшем ограничимся рассмотрением этого случая.
Учитывая связь между углом атаки ап по хорде, нормальной к ли-
нии фокусов, и углом атаки а по хорде, параллельной плоскости
симметрии стреловидного крыла, а также соотношения qn=q cos2x
и 6э.п=бэ, из формул (12.16) получим следующие значения коэф-
фициентов шарнирных моментов элеронов при полете со скольже-
нием:
„ a COS (Т *— В) I 8. cos2fx—В)
=тша------4-
cos у cos2 х
т cos(?+P) 8 COS2(X+₽)
тш.л — ------------тш 6э-----—------
cos х cos2 х
Подставляя значения тш.пр и тш.л в формулу (12.15) и ограни-
чиваясь малыми значениями f> (sin р~(3, cos 0» 1), получим
"гш.э=«1э —— a₽tgx4-83). (12.17)
\ т э /
\ ш /
Из этого выражения следует, что, во-первых, при полете со
скольжением в тягах управления элеронами будут действовать
усилия даже при нейтральном их положении (6Э—0), что не наблю-
дается на самолетах с нестреловидным крылом; во-вторых, усилия,
действующие в тягах управления элеронами при отсутствии сколь-
жения, не зависят от угла атаки; на самолетах с нестреловидным
крылом и при полете со скольжением имеет место инвариантность
шарнирного момента элеронов, а следовательно, и инвариантность
усилий по углу атаки.
Коэффициенты и могут быть рассчитаны с помощью
формул (10.16) и (10.17), если 5о.к и SB заменяются S0.K.s и S:).
Величины mJ, и т6* существенно изменяются с ростом числа М.
Примерная зависимость этих величин от числа М приведена на
рис. 12.9.
Усилия, действующие на педали управления руля направления,
определяются шарнирным моментом руля. При отклонении руля
направления вправо (бн>0) возникает отрицательный шарнирный
момент Л1ш.н (рис. 12.10), для уравновешивания которого необхо-
димо приложить усилие на правую педаль. Принято считать давя-
197
щее усилие на правой педали положительным.
Тогда, исходя из принципа возможных пере-
мещений
получим
Рн^хп + Л1шй!Вн=0
Л, *
Коэффициент передачи усилия от руля к
педали
где dxn — линейное перемещение педали.
(12. 18)
Рис. 12.10. Схема уп-
равления рулем нап-
равления
Шарнирный момент руля направления может быть представлен
в виде
•^ш.н ^Ш.Н^В.о9"^Н^Д.Н’
(12.19)
где SH, Ьа.н — площадь и хорда руля направления; kB,oq— скорост-
ной напор в области вертикального оперения.
Коэффициент шарнирного момента /п.ши зависит от эффектив-
ного угла скольжения, угла отклонения руля направления, числа М
полета. При малых р зависимость тш.н(Р, 6Н) может быть записана,
в виде
^ш.н тшН®н 4“ тш?в.о>
(12. 20)
где рв о=р—ц=р(1— ); о —угол бокового скоса в районе верти-
кального оперения.
Коэффициенты т^, теш могут быть определены эксперимен-
тальным путем или расчетом по приближенным формулам.
Характер изменения и по числам М аналогичен зави-
симостям /п^=/(М) и т^==/(М), показанным на рис. 12.9.
198
Уменьшение шарнирных моментов (усилий) элеронов и руля
направления, так же как и руля высоты, достигается применением
аэродинамической компенсации. На элеронах современных скорост-
ных самолетов широко применяется внутренняя компенсация. На
элеронах и рулях направления, непосредственно управляемых пи-
лотом, устанавливается аэродинамический триммер, позволяющий
снять усилия со штурвала и педалей на заданном режиме полета.
§ 12.4. Балансировочные кривые по усилиям
в тягах бокового управления
Величины усилий, действующих на штурвал и педали при не-
посредственном управлении этими органами, могут быть записаны
с помощью формул (12.13), (12.17), (12.18) и (12.20) в виде
Рц ^ш.н'-’н^А.н^'в.о? (^шИ^и“Ь^шРв.о)’ 2{)
Рз = — ^ш.э^ зьэд (т^8э+т^ар tg у).
Рассмотрим боковую статическую устойчивость при освобожде-
нии руля направления и элеронов.
Если руль направления освобожден, то коэффициент шарнирно-
го момента тш.н=0, поэтому в соответствии с формулой (12.20)
руль направления самопроизвольно отклонится на угол
3 0
* т' пг
£=—£ЧВ.О=—£Ч1-‘₽)Р- (12-22)
т н т Н
'“ш
Подставляя это значение 6Н в выражение для коэффициента
момента рыскания (12.6), получим
tnRy = пг^уР-т Ч1 — а₽) ₽,
т н
ш
откуда степень флюгерной устойчивости самолета с освобожден-
ным рулем направления равна:
m$y=tnky — — а₽). (12.23)
т н
ш
Освобождение руля направления приведет также к изменению
степени поперечной устойчивости, величину которой можно опреде-
лить, подставив значение бн* из формулы (12.22) в соотношение
(12.6) и полагая при этом, что элероны нейтральны:
mRx=mRx — mjH(l — с?)—(12.24)
т н
ш
В соответствии с определением знака шарнирного момента
wzL<0, т^н < 0, z«®H<0» то mRx>mRx,
199
т. е. освобождение руля направления снижает степень поперечной
статической устойчивости самолета.
Подставляя в первое соотношение (12.21) значение из (12.7) и
учитывая соотношение (12.23), получим выражение для определе-
ния усилия на педали управления рулем направления:
Ря= - MkKMq т^. (12.25)
тч"
Отсюда следует, что усилие, действующее на педали при полете
со скольжением, пропорционально степени флюгерной устойчивости
самолета с освобожденным рулем направления и углу скольжения.
Рассуждая аналогично, из соотношения (12.17) можно опреде-
лить угол, на который отклонятся при скольжении освобожденные
элероны:
8:=-----^aptgx; (12.26)
при этом на самолете будет действовать момент крена
rnRx=— т*э ар tg х-
т э
U1
(Звездочка означает, что все коэффициенты взяты при освобож-
денных органах управления креном и рысканием).
Отсюда степень поперечной устойчивости с освобожденными
элеронами можно записать в виде
/22 й
m^Rx=mRx—т*» —a tg х- (12. 27)
дашэ
Таким образом, освобождение элеронов уменьшает степень
— поперечной устойчивости самолета с крылом положительной стре-
ловидности и не оказывает влияния на поперечную устойчивость
самолета с прямым крылом. На флюгерную устойчивость освобож-
дение элеронов практически не оказывает влияния.
Для усилия на штурвале можно получить более простое выра-
жение, если в формулы (12.21) подставить значение бэ из соотно-
шений (12.7) и учесть соотношение (12.27):
8.. , 8„ X
Pa=k^3S3b3q т^х----------n?Ry р. (12.28)
\ т* )
Очевидно, по формулам (12.25), (12.28) определяются усилия,
которые необходимо прикладывать к педалям и штурвалу для удер-
жания элеронов и руля направления в отклоненном положении,
обусловленном требованиями к балансировке боковых моментов
при полете со скольжением. Эти усилия носят название балансиро-
вочных, а кривые зависимости Р1Ь Рд от угла скольжения — балан-
200
справочной диаграммы (балансировоч-
ных кривых) по усилиям на рычаги
бокового управления (рис. 12.11).
Балансировочные кривые по усили-
ям являются важными характеристи-
ками боковой статической управляе-
мости. О качестве управляемости пи-
лот судит в основном по тем усилиям,
которые ему приходится приклады-
вать к рычагам управления для ба-
лансировки моментов или перехода от
одного режима полета к другому. Ис-
ходя из этого балансировочные кри-
вые должны удовлетворять следую-
щим условиям.
1. Максимальные усилия, прикла-
дываемые пилотом к рычагам, долж-
ны соответствовать его физическим
возможностям, для чего во всем диа-
пазоне возможных углов скольжения
необходимо выполнение неравенств
Рис. 12.11. Примерная балан-
сировочная кривая но усилиям
при полете со скольжением
Лпт<196Н (20 кгс); Рнтах< 1470-н 1960Н( 150-:-200 кгс).
2. Так же, как в случае продольной управляемости, усилия на
штурвале и педалях должны препятствовать изменению параметра,
характеризующего режим полета. Следовательно, положительному
приращению утла скольжения должен соответствовать отрицатель-
ный прирост усилий на педалях и положительный прирост усилий
на штурвале, т. е. должны выполняться условия
dP^ q . dP3 q
dp ’ dp
Согласно соотношениям (12.25) и (12.28) эти условия выполня-
ются в случае, если
тну<0;
ту
т. е. если самолет флюгерно устойчив при освобожденном руле на-
правления и если
Снятие усилий с рычагов бокового управления на заданном
режиме полета осуществляется аэродинамическими триммерами.
Размеры триммера руля направления и элеронов выбираются ис-
ходя из условий возможности снятия усилий с педалей и со
штурвала при наиболее неблагоприятных условиях полета (отказ
одного двигателя, полет со скольжением при сильном боковом вет-
ре и др.).
201
На закритическпх числах М усилия значительно увеличиваются
вследствие интенсивного роста и т^. Получение прием-
лемых характеристик боковой статической управляемости по уси-
лиям в широком диапазоне скоростей полета при непосредственном
управлении органами бокового управления невозможно. Поэтому
в системе бокового управления, так же как и продольного, широко
применяются ручные приводы.
При установке гидроусилителей по необратимой схеме возника-
ет необходимость включения в систему управления устройств, ис-
кусственно создающих усилия на рычаги управления. Простейшим
механизмом имитации усилий на рычаги бокового управления мо-
жет служить пружинный загружатель. При отклонении рычагов
управления элеронами или рулем направления пилот прикладыва-
ет усилия, необходимые для сжатия пружин загружателя. В уст-
ройстве загружателя предусматривается возможность изменения
положения рычагов, отвечающих нулевому усилию, и тем самым
создание триммерного эффекта.
Более совершенной системой формирования усилий на рычагах
управления является автомат регулирования управления (АРУ),
обеспечивающий получение приемлемых характеристик управляе-
мости на всех режимах полета.
§ 12.5. Характеристики боковой статической
управляемости
. При оценке боковой статической управляемости обычно рас-
сматриваются два вида управляемого движения: полет со сколь-
жением и установившееся вращение относительно продольной и
нормальной осей в результате отклонения руля направления и эле-
ронов. Качественные показатели боковой статической управляемо-
сти характеризуют эти управляемые движения. Они связывают
действие пилота, выражаемое перемещением рычагов управления
(х,,, х3) усилиями, прикладываемыми к ним (Рн, Рэ), отклонением
руля направления и элеронов (бн, 6Э), с реакцией самолета на эти дей-
ствия ПО р, у, С')у,
Рассмотрим характеристики управляемости, связанные с поле-
том со скольжением.
1. Расход усилий, прикладываемых к педалям, для изменения
угла скольжения на единицу или угла крена на единицу в пря-
молинейном полете. При этом имеется в виду, что связь между
углами скольжения и крена определяется первой из формул (12.7).
В соответствии с формулой (12.25)
«н
т^; (12.29)
в то же время расход усилий на изменение угла крена на единицу
равен:
202
где производная dfildy определяется по формуле (12.7). Как Р'н,
так и Рн должны быть отрицательными величинами.
2. Расход усилий на перемещение штурвала для изменения
угла скольжения и крена на единицу в прямолинейном полете
может быть определен по формулам (12.28) и (12.7):
р^ — Ъ- С h fi /19
ш.э^э^эт к I ftlRx 5 /> t • (12. OU)
т°н 1 dy
Эти производные, так же как и Р„, и должны быть отрица-
тельными.
Наряду с расходом усилий на перемещение педалей и штурва-
ла на создание единичного угла крена статическая управляемость
характеризуется градиентами линейного перемещения этих рыча-
гов управления по крену:
dxjd\\ dxjdy.
3. Если допустимая поперечная перегрузка nz ограничивается
условиями комфорта (для пассажирских самолетов) или прочно-
сти, то выход на такие режимы полета должен быть затруднен
необходимостью приложения к рычагам управления больших уси-
лий. Критерием оценки этого свойства самолета служит градиент
усилия по поперечной перегрузке
P’^=dPJdnz, Plx=dPJdni
гт CzqS
Принимая во внимание, что tiz=—~—
телей из формул (12.25) и (12.28)
(12.31)
Л>=-МВ.<ЛА.К
о
гэ
тш _
тхэ Сг
Pnz __Ь <? h ms
о
Сг
—, для этих показа-
ть Су
можно получить
«ш mRy .
С'г
₽» телН ₽ I
1Пх------Г tllRy .
туА J
(12.32)
1
Максимально допустимая кратковременная поперечная пере-
грузка по условиям комфорта пассажиров не должна превосходить
величину 0,5. Следовательно, усилия на штурвале и педалях при
этом значении перегрузки должны достигать величин, близких к
максимальным.
Рассмотрим характеристики управляемости, связанные с уста-
новившимся вращением. В полете при отклонении руля направле-
ния возникает скольжение на крыло, противоположное направле-
нию поворота руля. В этом случае на самолет действует момент
крена, определяемый коэффициентом момента крена:
mRx=+ тх*Ък.
Кренение самолета под действием этого момента происходит
практически с установившейся угловой скоростью сщ-уст- Тогда во
203
время движения крена имеют место соотношения
таДлР++ ^хн8„=0;
^₽+zn^8H=0,
(12.33)
где ш^сохуст — момент, обусловленный вращением (см. гл. 13).
Исключив р из формул (12.33), найдем частную производную
х 1 / s п т
wx"ct=----JT (12.34)
J тхх\ mRy'
Эта производная характеризует реакцию самолета по крену на
отклонение руля направления. Если °\“ст >0, то самолет при от-
клонении руля направления будет крениться в сторону поворота
руля; в противном случае реакция самолета на отклонение руля
направления обратная. Так как /ПхЛ<С 0, то условием прямой реак-
ции самолета по крену на отклонение руля направления является
или
тхк — трх —#->0
В Й
mRx < тля
l‘lRy тув '
(12.35)
(12.36)
. Так как производные т%>у, тхн, т.ук отрицательные, то выпол-
нение условия (12.36) возможно только при наличии поперечной
устойчивости (тх <0). При этом необходимо наличие некоторой
минимальной степени поперечной устойчивости.
Показателями боковой статической управляемости являются
также величины:
P^x=dPJd^x —градиент усилий на педалях — усилие, которое
прикладывает пилот к педалям для вращения самолета с угловой
скоростью крена 1 рад/с; Р^У—дР^дму —градиент усилий на
педалях по рысканию — усилие, которое прикладывает пилот к пе-
далям для вращения самолета с угловой скоростью рыскания <оу=
= 1 рад/с; Рэх=дРэ1длх —градиент усилий на штурвале по
крену-—усилие, которое прикладывает пилот к штурвалу для вра-
щения самолета с угловой скоростью крена 1 рад/с. Эти и некото-
рые другие показатели боковой статической управляемости могут
быть определены расчетным путем или из летных испытаний са-
молета.
Вопросы для повторения
1. В каких случаях прямолинейного полета возникает необходимость балан-
сировки боковых сил и моментов?
2. Поясните методы предпосадочного движения при наличии бокового ветра.
3. Изобразите силы и моменты, действующие на самолет при полете с вы-
ключенным левым боковым двигателем, объясните потребные отклонения орга-
нов управления для их балансировки.
204
4. Как определяется коэффициент шарнирного момента эалеронов тш.э?
5. Как повлияет освобождение педалей на флюгерную устойчивость прн не-
посредственном управлении рулем направления и при наличии необратимого бус-
терного управления? "—
6. Какое влияние на поперечную устойчивость оказывает освобождение эле-
ронов?
7. Перечислите основные показатели боковой статической управляемости.
Задача
Четырехдвигательный самолет выполняет горизонтальный полет с выключен-
ным двигателем без скольжения. Руль направления отклонен на +0,19 рад. Оп- -
ределить бэ, если = —2,45; пн — 0,6; SB.o=20 м2; =4,5; S = 140 м2;
/=35 м; /ге^9 = —0,16. С какой стороны расположен неработающий двигатель?
Ответ: 0,17 рад, слева.
Глава 13
Дополнительные моменты при неустановившемся
движении. Балансировка самолета
в криволинейном полете
§ 13.1. Нестационарные аэродинамические
силы и моменты
Возмущенное движение самолета является неустановнвшимся
(нестационарным) движением. Аэродинамические силы и моменты,
действующие на самолет в таком движении, существенно отлича-
ются от их стационарных (статических) значений. Изучение неста-
ционарных аэродинамических характеристик является предметом
специального раздела аэродинамики — нестационарной аэродина-
мики, где рассматриваются теоретические и экспериментальные
методы их определения [6]. В связи с этим ограничимся рассмот-
рением физических причин возникновения нестационарных аэроди-
намических сил и моментов, способов их задания применительно
к возмущенному движению самолета.
. Появление нестационарных сил и моментов обусловлено двумя
обстоятельствами: во-первых, образование сил давления на само-
лете вследствие изменения параметра движения запаздывает во
времени и поэтому картина распределения давлений не соответст-
вует установившейся картине; во-вторых, влияние скосов потоков,
вызываемых передними частями самолета, на части, расположен-
ные ниже по потоку, будет запаздывать на время, необходимое для
прохождения потоком расстояния между этими частями.
Принято задавать нестационарные аэродинамические силы и
моменты или через производные коэффициентов сил и моментов по
кинематическим параметрам движения и их производным, или с
помощью аэродинамических переходных и передаточных функций.
Использование аэродинамических переходных или передаточ-
ных функций основано на предположении, что зависимость коэф-
фициента аэродинамической силы или момента от кинематических
параметров движения линейная, т. е. зависимость аэродинамичес-
кого коэффициента от кинематического параметра определяется
линейным дифференциальным или интегральным уравнением.
Хотя для линейных систем задание аэродинамических характе-
ристик с помощью переходных и передаточных функций является
наиболее точной и приемлемой формой, однако из-за недостаточ-
ной разработки теоретических и экспериментальных методов их
определения эта форма не нашла еще достаточного применения.
Более распространенной формой задания нестационарных аэро-
206
динамических характеристик является представление их в виде
производных.
Б общем случае коэффициент аэродинамической силы или мо-
мента тела заданной конфигурации может быть представлен в виде
функции кинематических параметров и их производных. Практи-
чески можно эту зависимость ограничить рассмотрением в качестве
независимых параметров только кинематических параметров и их
первых производных, т. е. представить аэродинамические коэффи-
циенты в виде
Сх=с.Лд/> Cy=Cy{qj, gj); C2=C2(gJt gj);
тх=тх(д}, g^-, my=my(qj, g})-, mz=mz(qj, д}),
где gj принимает значения следующих кинематических параметров:
Ct, р, С0;о (йу, С02, V, бв> бн, бэ.
Если аэродинамический коэффициент, например тх, разложить
в ряд Тейлора в окрестности невозмущенных значений кинемати-
ческих параметров движения и ограничиться случаем малых их
возмущений, то можно записать приближенное равенство
тх ~ 2 (13. 1)
Отсюда видно, что если заданы производные коэффициента мо-
мента по кинематическим параметрам движения тх, тх, тх
и т. д., то тем самым определен момент крена в виде явной функции
вариаций параметров движения. Хотя такое представление и дает
определенные удобства при решении задач динамики, но оно не
всегда способно правильно описать нестационарную силу или мо-
мент. При быстрых изменениях кинематических параметров движе-
ния, колебаниях с высокой частотой коэффициент силы или момен-
та может оказаться функцией не только первой, но и производных
параметра более высоких порядков.
Практика решений задач динамики полета показывает, что в
диапазоне полетных углов атаки и скольжения представление ко-
эффициентов аэродинамических силы или момента в виде (13.1)
дает вполне приемлемые результаты, т. е. влияние производных
выше первого порядка пренебрежимо мало.
Представление аэродинамических коэффициентов с помощью
производных имеет кроме отмеченного выше еще одно преимущест-
во перед их представлением через переходные или передаточные
функции. Оно заключается в том, что если зависимость аэродина-
мического коэффициента от параметров движения нелинейная, то
использование переходных и передаточных функций для его описа-
ния становится непреемлемым. В то же время использование чле-
нов выше первого порядка в разложении (13.1) позволяет прибли-
женно описать нелинейную зависимость аэродинамического коэф-
фициента от параметра движения.
Аэродинамические производные коэффициентов сил и моментов
могут быть рассчитаны методами нестационарной аэродинамики,
определены из специальных экспериментов в аэродинамической
207
трубе или из летных испытаний самолета. Однако в настоящее
время для всего рабочего диапазона углов атаки и скольжения их
-достаточно надежно можно определить только из трубных испыта-
ний моделей самолета.
Аэродинамические производные по кинематическим параметрам
движения типа m4xi могут быть определены из статических испы-
таний или при испытаниях с установившимся вращением. Полу-
ченные при этих условиях аэродинамические производные являют- -
ся стационарными.
Многочисленные эксперименты свидетельствуют, что в нестаци-
онарном движении в диапазоне собственных частот движений са-
молета эти производные сохраняют свои значения. Производные
типа mwxx и т. д.) являются чисто нестационар-
ными и они существуют в неустановившемся движении.
Практика летной эксплуатации самолетов показывает, что для
исследования возмущенного движения в летном диапазоне углов
атаки нет необходимости в определении всех аэродинамических
производных. В силу наличия у самолета продольной плоскости
симметрии значения некоторых производных пренебрежимо малы
и их влиянием на возмущенное движение можно пренебречь. В этой
связи можно рассматривать раздельно нестационарные аэродина-
мические производные продольных и боковых аэродинамических
сил и моментов.
При изучении возмущенного движения при больших углах ата-
ки на срывных режимах полета к пренебрежению теми или иными
производными следует относиться осторожнее, так как величина
некоторых из них может возрасти в десятки и сотни раз.
§ 13.2. Продольные нестационарные силы и моменты
При рассмотрении продольного возмущенного движения само-
лета в летном диапазоне углов атаки наибольший интерес пред-
ставляют производные Сх, Сх, Су, Сув, m2, m2, mz, mz, mzz .
Если ограничиться описанием полета самолета как твердого тела,
то собственные частоты его колебаний таковы, что аэродинамичес-
кие производные практически не зависят от них. В этом случае не-
стационарное и стационарное значения производных по кинемати-
ческим параметрам а, бв, V, cdz совпадают.
Так как производные m2, mzB, т% и другие были рассмотрены
в гл. 9 и 10, ограничимся в основном производными, связанными с
вращением относительно оси OZ и с величиной а.
Рассмотрим момент демпфирования тангажа. При вращении
самолета относительно оси OZ с угловой скоростью сог окружная
скорость в любой точке на его поверхности перпендикулярна к
радиусу вектора lz, соединяющему ее с центром масс, и равна про-
изведению coz, lz (рис. 13.1). В результате геометрического сложе-
ния окружной скорости со скоростью движения центра масс само-.
208
Р.ис. 13,1. К определению окружной скорости при враще-
нии самолета вокруг поперечной оси
лета получаем новый вектор скорости V*, который определяется
приращением угла атаки Да и модулем V*= у V2-^-u>^z-
Изменение модуля скорости для современных самолетов незначи-
тельно, поэтому им можно пренебречь.
Суммарная аэродинамическая сила Д/?а*, обусловленная нали-
чием угловой скорости тангажа coz, по величине небольшая, поэто-
му при определении нормальной силы на малых углах атаки ею
пренебрегают. Однако момент ее относительно оси OZ существенно
влияет на динамические свойства самолета. Этот момент будет
демпфирующим, т. е. препятствующим вращению, если Су поло-
жительная, что имеет место на полетных углах атаки.
При положительном вращении (см. рис. 13.1) углы атаки обте-
каемых поверхностей, расположенных позади центра масс, увели-
чиваются, а впереди него — уменьшаются. В результате этого до-
полнительные аэродинамические силы хвостовой части самолета
направлены вверх, а носовой части — вниз. Момент тангажа этих
сил отрицателен, т. е. направлен против вращения и является демп-
фирующим или тормозящим.
Изменение местного угла атаки Да* вызвано окружной ско-
ростью V\==k)zZz. Проекция ее на нормаль к траектории движения
центра масс вызывает изменение угла атаки (рисунок 13.2):
Да* ~tg Да*—^5- .
ь V
Поэтому дополнительные аэродинамические силы и их моменты
тангажа пропорциональны угловой скорости сщ. Следовательно,
при положительном значении производной Су демпфирующий мо-
209
Рис. 13.2. Изменение местного угла атаки при вращении самолета
вокруг поперечной оси
мент тангажа пропорционален угловой скорости тангажа и его
можно представить в виде
(13.2)
Разделив обе части равенства (13.2) на произведение qSbA, по-
лучим коэффициент демпфирующего момента тангажа
7Пг = 7П“/О>г,
где шг=—--------безразмерная угловая скорость тангажа; м*г—
производная момента тангажа по безразмерной угловой скорости-
тангажа, или вращательная производная коэффициента момента
тангажа.
В диапазоне летных углов атаки 7Д“г отрицательна и зависит
о'г аэродинамической компоновки самолета и числа М полета. Для'
самолетов обычной схемы в создании демпфирующего момента тан-
гажа основную роль играют горизонтальное оперение, крыло и в;
меньшей степени фюзеляж.
Производная момента тангажа для самолета в целом определя-
ется расчетным путем по линейной нестационарной аэродинамичес-
кой теории [6] либо продувкой колеблющейся модели самолета в
аэродинамической трубе.
Приближенно демпфирующий момент тангажа горизонтального-
оперения может быть определен следующим образом. Изменение
угла атаки в фокусе горизонтального оперения при наличии угло-
вой скорости тангажа равно
Дщ.о — (хг — х>г.с) . (13. 3)
*Г.О
Приращение нормальной силы горизонтального оперения опре-
деляется из соотношения
4
ДХг.о=С*г.оДсщ oqTMST^. (13. 4)
Момент тангажа этой силы
ДМг = ДУг.о(хг--^г.о)- (13.5) t
Подставляя значения ДУГ.О и Даг.о в формулу (13.5) и разделив,
полученное равенство на qSbA, получим следующее выражение для
210
коэффициента момента тангажа горизонтального оперения:
Д/п2Г.9= -С’г.о] (хт-хГг.0)Ч. (13.6)
Отсюда найдем производную
= - Су г.о /&5Г.0 (*т - Л>г.о)2’ (13.7)
Разность хт—xFr0 есть плечо горизонтального оперения Лг.о,
поэтому формул}7 (13.7) можно записать в виде
<?.о= “ СУг.о V^Sr.o (^)2- (13. 8)
Рассмотрим определение коэффициента нормальной силы и мо-
мента тангажи горизонтального оперения, обусловленных запазды-
ванием скоса потока. При изменении угла атаки с некоторой ско-
ростью da/dt изменение угла скоса потока, создаваемого крылом,
оказывает вляние на нормальную силу оперения не сразу, а с не-
которым запаздыванием на время t3, равное времени перемещения
«самолета на длину £г.о.
Время запаздывания
^3 ' ' ^Г.о/^Г.О*
Следовательно, мгновенное значение угла скоса в области гори-
зонтального оперения отличается от его установившегося значения,
«отвечающего углу атаки в рассматриваемый момент времени на
величину
, Лг da , „ Z.. ., , da
Де =-------1 , = ----.
da dt Рг.о dt
Соответствующие приросты нормальной силы и момента танга-
жа горизонтального оперения равны:
ДПг.о=Гг.оДе = Гг.о^ — ;
^г.о dt
Сг.о dt
или в безразмерной форме:
__С" ъ ^г-° ъ а'и •
— ^ут.оКЗг.е ffr.es ~~ ,
Vr.o dt (13.9)
Дт2Е = 7П2г.о еи — •
l'r.o dt
Если ввести понятие безразмерной производной da/dt по анало-
гии с безразмерной угловой скоростью тангажа
' da Ь
а —------,
dt V
211
то из формул (13.9) получим
CJr.o=C^-o^r.o Vя ml=т*г.о Vk^°: (13.10)
А А
Полученные приближенные значения С“го и т“го выражают
часть нестационарных производных коэффициентов нормальной си-
лы и момента тангажа самолета по а, обусловленной горизонталь-
ным оперением. При изменении угла атаки нестационарные силы и
моменты тангажа создаются и другими частями самолета, например
крылом и фюзеляжем. Однако для самолета обычной схемы основ-
ная часть производных С“ и т’ при малых полетных углах атаки
обусловлена запаздыванием скоса потока в области горизонтально-
го оперения.
Практика показывает, что влияние производной Су на динами-
ческие показатели самолета при полетных углах атаки пренебре-
жимо мало, в то время как оказывает существенное влияние
на них.
Производная Щ“г0 зависит от числа М как вследствие изме-
нения несущих свойств (С^г.о), так и производной ъа по М.
Рассмотрим определение производных и , обусловлен-
ных горизонтальным оперением. При полете с ускорением dV/dt
образование скорости скоса потока Ж.о в области горизонтального
оперения происходит с запаздыванием на 4~ —— . Можно считать
*'г.о
W’r.o~eVr.o. Тогда мгновенное значение угла скоса в области опере-
ния отличается от угла скоса при такой же скорости в установив-
шемся полете на величину
д е_dWг,о р._, 1 d (£Рг.о) М.о
— vr.odt 3~VT.o dt VT.O '
ИЛИ
1 tfPr.o I dV \ Lc.o
“ £ I- I ,
yr.o dt a dt J Vr.o
(13.11)
где ©* — угол скоса в установившемся полете; а — скорость звука;
ем. — производная угла скоса в области горизонтального опере-
ния по числу М полета.
Из формулы (13.11) следует, что изменение угла скоса в обла-
сти горизонтального оперения при полете с ускорением обуслов-
лено уменьшением интенсивности циркуляции за крылом (первое
слагаемое) и изменением скоса, обусловленного сжимаемостью
(второе слагаемое). Зная Де, по аналогии с выводом формул
(13.10) можно получить производные и п%. Однако следует
отметить, что эти производные малы и их необходимо учитывать
при полетах на больших углах атаки, околонулевых скоростях дви-
жения и при больших значениях ускорений.
212
§ 13.3. Боковые нестационарные силы и моменты
На боковое возмущенное движение наибольшее влияние оказы-
вают производные боковых сил и моментов по кинематическим па-
раметрам бокового движения ,р, р, <ox, a>v и углам отклонения руля
направления бн и элеронов бэ.
Стационарные производные С%, ту, nixa, гпхэ, myR были
рассмотрены в главах 11 и 12. Здесь ограничимся рассмотре-
нием дополнительных сил и моментов при вращении самолета отно-
сительно осей ОХ и OY и моментов, обусловленных скоростью из-
менения угла скольжения р.
Рассмотрим моменты, обусловленные вращением относительно
оси ОХ. Вращение самолета относительно продольной оси ОХ с
угловой скоростью (Ох приводит к увеличению местных углов атаки
в сечениях опускающегося полукрыла и уменьшению их в сечениях
поднимающегося полукрыла (рис. 13.3) на величину .
Это вызывает увеличение аэродинамической силы и ее отклонение
вперед на опускающемся крыле и уменьшение аэродинамической
силы и ее отклонение назад на поднимающемся полукрыле. Анти-
симметричное распределение приращений нормальной и продоль-
ной составляющих этой силы обусловливает появление дополни-
тельных моментов относительно осей ОХ и OY.
Вращение с положительной угловой скоростью при летных углах
атаки приводит к появлению отрицательного момента крена, т. е.
момента, направленного против вращения. Одновременно возни-
кает момент рыскания, разворачивающий нос самолета влево. Пер-
вый момент препятствует вращению и называется моментом демп-
фирования крена, а второй принято называть спиральным момен-
том рыскания. Оба эти момента пропорциональны угловой
скорости вращения и могут быть записаны в виде
ДМ =Мшх ю • ДМ w
ш,1л-кр X’ ^У1укр уКрХ'
(13.12)
Если разделить эти равенства на произведение qSl и ввести по-
нятие безразмерной угловой скорости крена
Ых1
2V ’
то получим
выражения для коэффициентов моментов демпфирования крена и
спирального момента рыскания крыла:
^тх кр тхХку1йх ’ ^ту кр ту крш С •
Для самолета в целом на величины демпфирующего момента
крена и спирального момента рыскания заметное влияние оказы-
вает вертикальное оперение.
При врашении относительно оси ОХ появляется приращение,
угла скольжения в сечении вертикального оперения (рис. 13.4)
де
гДе Уъ.о — ордината сечения вертикального оперения. В этом же
213
Рис. 13.3. Эпюра окружных скоростей
при вращении самолета вокруг продоль-
ной оси
Рис. 13.4. Прирашепие угла скольжения (а) и запазды-
вание скоса потока (б) в сечениях вертикального опере-
ния при вращении самолета вокруг продольной оси
214
сечении имеет место боковой угол скоса из-за влияния несиммет-
ричного распределения аэродинамической нагрузки по крылу. По-
явление бокового скоса связано с вращением и направлено на
уменьшение угла скольжения. С учетом этого средний эффектив-
ный угол скольжения вертикального оперения
ДРэф~—---------
v в.о
где аш =аш-чод. — угол бокового скоса в области оперения, обус-
ловленный влиянием вращающегося крыла; z/B.o —• координата
бокового фокуса вертикального оперения.
Поперечная сила вертикального оперения, вызванная этим уг-
лом, равна
AZB.0= С|В.^В.Л.О (-ЛЛ (13.13)
\ * в.о /
В безразмерной форме это равенство можно записать так:
C>-CL.o^.ABO (13.14)
X * > ^В.О '
Поперечная сила AZB.O создает моменты относительно осей
ОХ и OY:
^ХВ.О= ^^В.оУв.о', ^^ув.о==^^’в.оЬв.о‘ (13. 15)
Исходя из формул (13.13), (13.14) и (13.15), получим следую-
щие значения производных коэффициентов момента крена и рыс-
кания:
о>„ /~»3 1 1 У в.о
>Пхв.о — ^'•гв.о^в.оШ5п.о
2^в.о __
I YKTo
т"\ = CY оК 0^в 0 — f —
«'в’° гВ.О в.о Xв.о z ИрЧ.о
(13.16)
Производные моментов крена и рыскания по угловой скорости
(Ох самолета могут определяться в виде сумм:
тШХХ = т2Р + тхХВ.0’ туХ = т^ + тув.о-
Если вращение неустановившееся, то боковой скос потока, соз-
даваемый крылом, достигает области вертикального оперения за
время , которое необходимо для перемещения потока на
в.о
расстояние £в.о. Вследствие этого в данный фиксированный момент
времени эффективный угол скольжения в области вертикального
оперения
Д8 — илДв.°____/ жудССд/ )
1Э-С₽_ Гв.о \ "'х ' at аГ
Следовательно, на вертикальное оперение будет действовать
215
дополнительная поперечная сила, обусловленная запаздыванием
бокового скоса,
azb.0=zL^^4. (13.17)
at
vftua создает дополнительные моменты крена и рыскания,
зависящие от углового ускорения их.
п , - 4tV
Определим безразмерное время в виде t —-, тогда формулу -
I
(13.17) можно записать так:
AZB.0=ZLc^^a>v, (13.18)
Рис. 13.5. К определению окружных скоростей, боковых
сил и моментов при вращении самолета вокруг нор-
мальной оси OY
где шх=шх---------безразмерное угловое ускорение.
4IZ2
Используя последнее выражение для wx, из формул (13.15) и
(13.10) определяем производные коэффициентов момента крена и
рыскания вертикального оперения по ых в виде
_ . 2£3 - (13-19)
ПТ:'х — C'zв.о VAs.o^Sb.o-— о“Х
U 12
Для некоторых компоновок самолета эти производные могут
оказывать существенное влияние на динамические характеристики
возмущенного движения.
Определим моменты, обусловленные, вращением относительно
-нормальной оси OY. Вращение с угловой скоростью а>у приводит к
увеличению скорости сечения движущегося вперед полукрыла на
величину &vz и уменьшению ее на такую же величину аналогичного
сечения движущегося назад полукрыла (рис. 13.5). Это приводит к
увеличению аэродинамической нагрузки на движущееся вперед по-
лукрыло и к ее уменьшению на отстающем полукрыле, в результа-
те чего возникает момент крена в направлении отстающего полу-
крыла.
Все точки на поверхности самолета приобретают дополнитель-
ные окружные скорости, равные <оух, что обусловливает поворот
л а "‘Vх
вектора местной скорости па угол и появление попереч-
ных сил, направленных против вращения. Момент рыскания этих
сил действует против вращения и является моментом демпфирова-
ния рыскания.
Момент крена, обусловленный вращением самолета относитель-
но оси OY, носит название спирального момента крена.
При вращении самолета относительно нормальной оси OY вер-
тикальное оперение также приобретает дополнительную окружную
скорость, в среднем равную ы>уЬв,0. В результате этого и влияния
бокового скоса потока в области оперения, обусловленного асим-
метричной нагрузкой на крыло и поперечной силой фюзеляжа,
вызванной угловой скоростью wy, появляется эффективный угол
скольжения
Юу+а dt з?
где последнее слагаемое обусловлено запаздыванием бокового ско-
са в области вертикального оперения на время -
* в.о
Поперечная сила на вертикальном оперении, вызванная
относительно осей ОХ и OY, создает моменты, зависящие от
11 (01;.
Если по аналогии с вращением относительно оси ОХ использо-
вать понятия безразмерной угловой скорости и углового ускоре-
ния рыскания, определяемые по формулам
_ /2
; и),, — —,
у 2V у dt 4V2
то получим следующие производные коэффициентов момента кре-
на и рыскания по этим величинам:
f^yyB.0 = c^.okBMqS3.0
тфу =ClB.akB.okSa.o
Лй.о
Ув'° / 2£^_. _ yyi
I \1 1Ч.о /
i \i уХ.о 1
(13.20)
2^.о^.о
а У:
Л z->8 г. » в.о о>„
т^у ==Сгв.о^Б.о%в.о-—у-з
0В.О /2
216
Производные момента крена и рыскания самолета по безраз-
мерной угловой скорости (Dy определяются в виде сумм
m y=my.4-m y : in v=m y. -t-m y ,
У УФ 1 #в.о’ x лкр > хв.о
где т^у — производная демпфирования рыскания фюзеляжем, а
— производная спирального момента крена крыла.
Рассмотрим моменты, обусловленные запаздыванием скоса. Ес-
ли угол скольжения изменяется по времени, то боковые скосы по-
тока, создаваемые поперечной силой фюзеляжа и симметрично рас-
пределенной аэродинамической нагрузкой на крыле, достигают вер-
тикального оперения за время . Поэтому эффективный
Рв.о
угол скольжения в области вертикального оперения в данный фик-
сированный момент времени равен
Дополнительная поперечная сила, обусловленная скоростью
изменения угла скольжения, равна
. AZB.0=zL-^^Z (13.21)
'в.о at
Эта сила создает дополнительные моменты крена и рыскания.
Как и ранее, введем понятие безразмерной скорости .изменения
угла скольжения в виде
1
dt 2V '
Тогда, согласно (13.21) и (13.9)
'Производные коэффициентов момента крена и рыскания по р
получим умножением С₽в0 на соответствующие безразмерные
I ^в.о ^В.о \
ллечп I —-----для тх и -у— — для ту I :
г>а iTTi. 2Лп-°^в.о р
WLo = CL.ol *в.<Лв.о—------°.
9 (13.22)
в.о= ^в-о V ^..Ав.о, —
Нестационарные боковые силы и моменты самолета не исчерпы-
ваются рассмотренными здесь силами и моментами, в основном
•создаваемыми вертикальным оперением. Необходимо учитывать
влияние и других частей самолета. Однако изложить столь же
218
просто это влияние не представляется возможным. Более точно
для самолета в целом нестационарные боковые производные могут
быть определены из эксперимента.
При рассмотрении бокового возмущенного движения к аэроди-
намическим силам и моментам следует добавить нестационарные
составляющие, обусловленные двигательной установкой. Следует
отметить, что эти вопросы изучены еще недостаточно. В некоторых
случаях нестационарные силы и моменты, обусловленные двигатель-
ной установкой, могут оказать существенное влияние на поведение
самолета в возмущенном движении.
§ 13.4. Балансировка сил и моментов
, в криволинейном установившемся полете
В криволинейном движении даже при отсутствии скольжения
появляется необходимость балансировки сил и моментов относи-
тельно всех трех осей самолета, если только траектория движения
центра масс не лежит в вертикальной плоскости. Такая необходи-
мость обусловлена вращением самолета относительно осей OX, OY,
ОХ, вследствие чего на него действуют дополнительные аэродина-
мические и массовые силы и моменты, без уравновешивания кото-
рых невозможно выполнение заданного установившегося криволи-
нейного движения.
Рассмотрим в качестве примера балансировку сил и моментов
при правильном вираже. В этом случае самолет вращается относи-
тельно вертикальной оси с постоянной угловой скоростью ю (рис.
13.6); центр масс движется в горизонтальной плоскости, а плос-
кость симметрии наклонена относительно вертикальной оси под
углом у. Составляющие угловой скорости ы по осям связанной,
системы координат соответственно равны
<0^=0) sin и>у=ш cos & cos у; <о2==—и cos & sin у. (13.23)
Если ограничиться малыми углами тангажа (при правильном
вираже й = а), формулы (13.23) можно записать в виде
w^~wcosy; — <о sin у. (13.24)
Отсюда следует, что при правильном вираже самолет вра-
щается с установившимися угловыми скоростями относительно всех
трех осей связанной системы координат. Вследствие этого дополни-
тельные моменты, вызванные вращением, будут действовать отно-
сительно этих осей.
Коэффициенты демпфирующих и спиральных моментов можно
записать в таком виде:
тхо>г=тш/шх-, .
tny<sx==m'yX&};.
Потребные, отклонения органов управления для балансировки
моментов, действующих на самолет при правильном вираже,, нахо-
дим из условия
219-
Рис. 13.6. Угло-вые скорости крена, тангажа
и рыскания при правильном вираже само-
лета
тх=т^шх-\- + /»58э=0;
ту=1Пу*»х+ mfay + т,у«Ъа= 0;
mz = тр2а+^Су+m^>z+Лв=0,
где коэффициент нормальной силы
(13.25)
с nymg
U~ qS
Решая систему алгебраических уравнений (13.25) совместно с
(13.24), определим балансировочные отклонения органов управле-
ния в зависимости от угловой скорости правильного виража ю, ко-
торая, в свою очередь, равна
где знак «+» отвечает левому, а «—» — правому виражу.
Для более точного определения отклонений органов управления
при правильном вираже в уравнения равновесия необходимо было
включить гироскопические моменты, обусловленные вращающими-
ся массами силовых установок, и моменты от кориолисовых сил,
действующих на движущиеся относительно самолета массы, напри-
мер топливо по трубопроводам, воздух в воздухозаборниках ТРД
и др. Однако для обычных самолетов эти моменты незначительны,
и ими в первом приближении можно пренебречь.
S20
Вопросы для повторения
1. Чем обусловлено возникновение нестационарных сил и моментов?
2. Каковы формы задания нестационарных аэродинамических характеристик?
3. Какие части самолета в основном создают момент демпфирования тан-
гажа?
4. Поясните причину возникновения момента, зависящего от сои.
5. Какие дополнительные моменаы действуют на самолет при вращении от-
носительно продольной оси?
6. Объясните моменты, создаваемые вертикальным оперением при вращении
самолета относительно оси ОХ.
7. Как влияет запаздывание бокового скоса в области вертикального опере-
ния на моменты крена и рыскания?
Задача
Определить изменение угла атаки в сечении крыла z=6 м при вращении са-
молета вокруг продольной оси с угловой скоростью крена wx=0,2-1 с и воз-
душной скорости V= 100 м/с.
Ответ: Да=0,012.
Глава 14
Общая постановка задачи об устойчивости
и управляемости самолета
§ 14.1. Основные понятия и определения
Полет выполняется под действием определенных внешних сил
(рис. 14.1), создаваемых в результате движения самолета как уп-
равляемого твердого тела относительно воздушной среды и работы
силовой установки (двигателя). Взаимосвязь между внешними
силами и кинематическими параметрами движения во многом опре-
деляет поведение самолета в полете. Она для общего случая дви-
жения самолета представляется зависимостями
FX=FX(V, «> i3> Y. '?> «> ?> Y, Ф, 8з> 8B’ 8н> 8Э> е);
^=^(1/, а> ?> Y, ’?> а, Y, Ф» 8з> 8л> 8в> 8н> 8э» б)1
F,=F,(.V, а, 3, у, &, ф, а, 8, у, &, ф, 83, 8Д, 8Н, 8Э, 8В, р);
(14.1)
MX=MX(V, а, з, у, ф, а, 8, у, &, ф, 8Э, 8Н, Зд, В3, 8В, р);
My=My(V, а, 3, у, », ф, а, 3, у, &, ф, 8Н, 8Э, 8Д, 83, 8В, р);
714г=Л4г(У, а, 3, у, ф, а, 8, у, &, ф, 83, 8Д, 8В, 8Н> 8Э, р),
где бд — отклонение органа управления режимом работы силовой
установки; б3 — угол откло-
Рис. 14.1. Силы и моменты, действующие
на самолет в жолете
нения закрылка.
Все аргументы, входящие
в правые части соотношений
(14.1), являются функция-
ми времени t или постоян-
ными величинами. Следова-
тельно, внешние силы и мо-
менты, действующие на са-
молет, являются функциями
времени и в частности могут
быть постоянными. Степень
зависимости сил и моментов
от отдельного аргумента оп-
ределяется по данным экс-
периментальных и теорети-
ческих исследований.
222
Внешние силы, под действием которых осуществляется полет до
заданной программе, называются основными, являются определен-
ными функциями времени. Однако в действительности под влияни-
ем случайных процессов функциональные зависимости (14.1) реа-
лизуются с вероятностью, меньшей единицы. Они также претерпе-
вают изменение под действием управляющих факторов.
В настоящее время известен широкий круг случайных процес-
сов. влияющих на поведение самолета в полете. Условно можно их
разделить на группы: атмосферные явления, отказ техники и ошиб-
ки, допускаемые при летной эксплуатации.
Управляющие воздействия создаются преднамеренно специаль-
ными органами и предназначены для изменения режима полета.
Под действием случайных процессов изменяются кинематичес-
кие параметры движения и зависящие от них внешние силы и мо-
менты, действующие на самолет. Например, попадание самолета в
зону атмосферной турбулентности сопровождается циклическим
изменением угла атаки, нестационарным обтеканием несущих и
управляющих поверхностей и искажением потока воздуха, посту-
пающего в двигатель.
Измененное под действием случайных процессов движение само-
лета называется возмущенным. Случайные процессы, обусловли-
вающие переход от исходного невозмущенного движения к возму-
щенному движению, называются возмущающими факторами. Выз-
ванные ими силы и моменты называются возмущающими.
Движение самолета изменяется также управляющими воздей-
ствиями. В этом случае изменяемое движение называется управ-
ляемым.
Самолет устойчив, если разницы между кинематическими пара-
метрами исходного невозмущенного и возмущенного движений
можно сделать сколь угодно малыми после прекращения действий
возмущающих факторов.
Кинематические параметры возмущенного движения в любой
момент времени определяются как суммы соответствующего пара-
метра невозмущенного движения и его вариации:
V—I/q-J-AV; ct=a0-|-Aa; р=р0-]-Д6; у=у0-ЬДу;
&='&о4~Д1}; ф=фо-1-Дф- (14.2)
Вариации ДЕ, Да, Др, Ду, Д-S’, Лф называются возмущениями
(например, вариация угла атаки — возмущение угла атаки), явля-
ются функциями времени, в определении которых и заключается
задача об устойчивости движения. Если после прекращения дейст-
вия возмущающих факторов вариации кинематических параметров
Движения, с течением времени уменьшаясь, становятся меньше на-
перед заданной сколь угодно малой величины, то исходное состоя-
ние движения или равновесия является устойчивым. В противном
случае оно неустойчивое.
Устойчивое или неустойчивое исходное невозмущенное движе-
ние зависит от того, какими функциями от времени будут вариа-
ции кинематических параметров движения AV(t), &a(t),
223
Рис. 14.2. Изменение параметров движения самолета по времени, регист-
рированное бортовыми самописцами в полете
Ay(t), ^(t), hty(t). Поэтому решение задачи об устойчивости дви-
жения сводится к определению этих функций. Они могут быть мо-
нотонно возрастающими или убывающими, колебательными с на-
растающей, убывающей или постоянной амплитудой и т. д. в зави-
симости от динамических свойств самолета, характера исходного
невозмущенного движения и интенсивности возмущающих факто-
ров. В качестве иллюстрации на рис. 14.2 приведены записи само-
писцев, регистрирующих изменение параметров движения самолета
Ан-24.
Простейшим исходным состоянием механической системы явля-
ется движение по инерции (установившееся движение) или равно-
224
весне. Поэтому понятие устой-
чивости сначала рассматрива-
ется на примерах маятника
(рис. 14. 3, а) и шарика в чаш-
ке (рис. 14.3,6). В нижней
точке чашки угол ф между вер-
тикалью и общей нормалью к
поверхностям шарика и чашки
равен нулю и, следовательно,
вес шарика полностью уравно-
вешивается реакцией поверхно-
сти. Если под действием возму-
щающего фактора шарик пере-
мещается вправо, то угол (р от-
личается от своего начального
нулевого значения на величину
возмущения Дф (начальное
значение угла ф равно нулю,
поэтому ф=фо+Дф=Дф).
Рис. 14.3. Устойчивое 'равновесие ма-
ятника с верхней подвеской (а) и шари-
ка во впадине на твердой поверхно-
сти (б)
После прекращения действия возмущающего фактора составляю-
щая веса mg sin ф стремится уменьшить угол ф до нуля и тем са-
мым вернуть шарик к исходному положению равновесия. Следо-
вательно, шарик в нижней точке чашки имеет устойчивую форму
равновесия.
Аналогичным образом можно доказать устойчивость равнове-
сия маятника с верхней подвеской.
Способность тела стремиться к исходному положению равнове-
сия или состоянию движения после прекращения действия возму-
щающих факторов называется статической устойчивостью. При
этом действие сил сопротивления и трения способствует восстанов-
лению исходного равновесного состояния. Под действием более
интенсивных возмущающих факторов отклонение от равновесного
положения, определяемое углом ф(ф = Дф), может быть настолько
велико, что шарик от исходного устойчивого положения перейдет к
другому (положение С на рис. 14.3, 6). Это означает, что равно-
весие шарика в точке А устойчиво по отношению к малым и неус-
тойчиво по отношению к конечным возмущениям.
Примерами неустойчивой формы равновесия может служить ша-
рик, лежащий на выпуклой поверхности (рис. 14.4, а), или маятник
в верхнем вертикальном положении (рис. 14.4, б). В этом случае
под действием малых возмущающих сил не только нарушается
равновесие, но, кроме того, касательная составляющая силы тяже-
сти после прекращения действия возмущающей силы стремится
увести тело (шарик) дальше от прежнего положения равновесия,
т. е. увеличить угол ф. С увеличением радиуса кривизны вогнутой
поверхности (см. рис. 14.3, б) величина восстанавливающей силы
/Д^8Щф уменьшается и, как следствие, снижается темп возвраще-
ния шарика в исходное положение равновесия. Увеличивая радиус
кривизны до бесконечности, получим плоскость, которая будет
8 776
225
Рис. 14.4. Неустойчивое равнове-
сие шарика на твердой выпуклой
поверхности (а) и маятника с
нижней подвеской (б)
Рис. 14.5. Изменение вариаций
кинематических параметров
по времени
границей между устойчивой и неустойчивой формами равновесия
шарика. Такая форма равновесия называется безразличной.
Статическая устойчивость является необходимым, но недоста-
точным условием общей, или так называемой динамической устой-
чивости. Она характеризует лишь начальную тенденцию к восста-
новлению исходного движения или равновесия. Можно привести
примеры, когда, несмотря на наличие статической устойчивости,
вариации кинематических параметров с течением времени возрас-
тают и возмущенное движение все больше отличается от исход-
ного невозмущенного. Поэтому для выявления наличия устойчиво-
сти исходного невозмущенного движения необходимо определить
поведение вариаций кинематических параметров во времени. Для
этого строят графики функций AV(t), ts.a(t), Др(7), Ду(7), Дб//),
Дф(7) (рис. 14.5) и по ним производят анализ возмущенного дви-
жения.
В соответствии с определением устойчивости, если возмущения
&V(t), Na(t), ДР(У), Ду(7), ЛЪ(1), Дф(7) с течением времени стре-
мятся к нулю, либо становятся меньше наперед заданной вели-
чины, сколько угодно малой, то исходное невозмущенное движе-
ние устойчиво. В противном случае оно неустойчиво. Важно не
только выявить устойчивое или неустойчивое исходное невозму-
щенное движение самолета, но и определить их степень. Степень
устойчивости определяется быстротой уменьшения, а неустойчиво-
сти — быстротой возрастания вариаций кинематических парамет-
ров движения. Чем быстрее затухают они во времени, тем выше
степень устойчивости невозмущенного движения, т. е. устойчивее
самолет.
Некоторые летательные аппараты, применяемые на практике,
например вертолет, не обладают обшей динамической устойчиво-
стью. Для них важное значение имеет выявление степени неустой-
чивости, которая определяется быстротой нарастания вариаций ки-
нематических параметров движения во времени. Чем ниже степень
неустойчивости, т. е. чем медленнее возрастают вариации кинема-
тических параметров во времени, тем удобнее для пилотирования
неустойчивый летательный аппарат.
Управляемость самолета тесно связана с изменением данного
режима полета, включая и восстановление нарушенного возмущаю-
щими факторами равновесия внешних сил и моментов. Она осу-
ществляется соответствующими органами, создающими необходи-
мые управляющие воздействия в виде внешних сил и моментов.
Возьмем установившийся горизонтальный полет, характеризуемый
движением центра масс самолета по инерции с определенной пос-
тоянной скоростью на заданной неизменной высоте. Чтобы осущест-
вить такой полет, самолету необходимо разогнаться, набрать высо-
ту и скорость полета и сохранить их постоянными. Для сохранения
высоты и скорости полета необходимо сбалансировать, т. е. урав-
новесить силы и моменты, действующие на самолет в полете, соот-
ветствующим выбором положений стабилизатора, закрылков, эле-
ронов, рулей высоты и направления и рычагов управления двига-
телями (РУД). Действие, необходимое для балансировки самоле-
та в полете, называется статической управляемостью. При наличия
возмущающих факторов статическая управляемость включает в
себя также компенсацию возмущающих сил и моментов.
Для перехода от одного режима полета к другому необходимо
изменить силы и моменты, действующие на самолет. Это осущест-
вляется с помощью отклонений органов управления тангажом, кре-
ном, рысканием и режимом работы силовой установки. Управляю-
щие воздействия отличаются от возмущающих факторов тем, что
они являются не случайными, а определенными (детерминирован-
ными) функциями от времени. Переходный процесс аналогичен
возмущенному движению только с той принципиальной разницей,
что он осуществляется не случайными, а определенными воздей-
ствиями. Динамическая управляемость есть способность самолета
реагировать на отклонения органов управления тангажом, креном,
рысканием и режимом работы двигателей, предназначенные для
изменения параметров полета.
§ 14.2. Система дифференциальных уравнений
движения самолета в вариациях
Рассмотрим возмущенное движение самолета как управляемо-
го твердого тела, полагая кинематические параметры исходного
невозмущенного движения Vo, «о, ро, То, Оо, фо известными функция-
ми от времени (движение неустановившееся) или постоянными ве-
личинами (движение установившееся), определенными интегри-
рованием системы динамических (1.25), (1.26) и кинематических
(1.4) дифференциальных уравнений при заданных начальных ус-
ловиях.
Внешние силы и моменты представлены зависимостями (14.1),
а кинематические параметры определяются суммами (14.2), поэто-
му из системы (1.25), (1.26) и (1.4) имеем следующую систему диф-
8*
227
ференциальных уравнений для описания возмущенного движения
самолета:
фг (^оН- , а0-|-Да, ЗоД-ДЗ, V'o-j-AV, «0-|-Да, ^0-Д-ДЗ, о^о~Ь
+ A(V ®го4-Ашг) = ^'л-(^/о + дК «о+да, &0 + Д&, 8з04-Д83,
8до+д8д, 8Bo+Ass> Со+Де);
Ф2(К0-{-Д1/, ao-j-Да, $о4~дЛ 1/0-ф-Д1/, а0-Д-Да, р0-|-ДЗ,
®гоТд“2’ “л-о + Д®л-)=^’£ (V'o+AV'', а0-|-Да, &0Ц-ДФ,
ОзЭ'Ь-Цр 8дэ + Д8д, °вэ + Д8к. Оо + До);
Фз(шгэ + Д“г’ ®хо + Дшх> ®Уо + Д®(/) = -/'4г( Иоф ДК, С10|-Да,
а0-|-Да, (яг04-Д<ог, Вз0 + Д83, 8|!СфД8„, 8дО-|-Д8д, q0-|-Aq);
Ф4(Ц)Н~Д1Л ?'о + д?> Ио4-Д1/, РоЧ“дл а0-|-Да, юл.0~р Дюл.,
0,1(о4“Ди)4/) = ^’г(^о+Д^> ?о + Дг*> Yo + AYi ЗяоН“Д8н, йэ!|+дОэ, Ро-фДр);
Фа(®хо + Ди’л> ®4/о + Д®4/> ®л-о + Дш.г> %3 + “го + Д®г) = ( 14-3)
= /Ил.(|/0-|- д4'> ?о + д?, ‘"л-о I д'"л-> ®j/j 4~ Д®^ йэ0-|-Д8э,
^>но~|~Дйн, ф рДц);
Ф6 = (°^э + Д®^, ®жо + Д®х> “j/o + ^V ®.го+Д®х>
^ztH' Д®2)~ Му ^ОТД?> ®{,э + Д®г/> ®ло+Д®л> °нО“ЬД8н,
8эо-гДвэ, ез+де';
®л-о 4" д®л- — Yo+ AY “Т (Фо + ДФ) sin (+ Д^);
">уо+Д=(Фо + Дф) cos (+ Д») cos (Yo Ду) +
+ (^о +Д&) sin (YoT д¥);
®ZO - b Д(°г=(®о+Д&) cos (у о + Ду) — (ф0+Дф) cos (&0+Д&) sin (у0 + Ду).
Полагая в (14.3) вариации равными нулю, очевидно, получим
систему дифференциальных уравнений исходного невозмущенного
движения. Функции Фь Ф2, Фз, ф4, Фв и Фб определяются алгеб-
раическими и тригонометрическими преобразованиями.
Исходное невозмущенное движение задано, поэтому в диффе-
ренциальных уравнениях (14.3) неизвестными функциями являют-
ся вариации кинематических параметров движения AV, Аа, Ар,
Ау, АФ, Дф. Коэффициенты при неизвестных функциях и их произ-
водных по времени определяются по заданным кинематическим па-
раметрам исходного невозмущенного движения и конструктивным
характеристикам самолета (массе, моментам инерции). Поэтому
коэффициенты дифференциальных уравнений (14.3) при неустано-
вившемся исходном невозмущенном движении есть функции време-
ни. Они постоянные величины, когда исходное невозмущенное дви-
жение установившееся.
Левые части дифференциальных уравнений (14.3) — хотя и из-
вестные, но весьма сложные функции от вариации кинематических
228
параметров движения и их производных по времени. Правые час-
ти дифференциальных уравнений (14.3) — также сложные функ-
ции от кинематических параметров возмущенного движения. Та-
ким образом, возмущенное движение самолета описывается
сложными нелинейными дифференциальными уравнениями, интег-
рирование которых даже с применением ЭВМ связано с большими
трудностями.
В гл. 1 предложен метод, позволяющий упростить дифференци-
альные уравнения, описывающие основное невозмущенное движе-
ние самолета, и оценить погрешности, обусловленные принятыми
допущениями. Этот метод применяется здесь для исследования воз-
мущенного движения самолета и также основан на представлении
обеих частей дифференциальных уравнений (14.3) рядом Тейлора
по степеням вариаций кинематических параметров движения, их
производных по времени, отклонений органов управления самоле-
том и плотности воздуха.
В зависимости от интенсивности действия возмущающих фак-
торов и возможности вычислительной техники берем нужное нам
число членов разложения. Ограничиваясь членами, содержащими
только вариации в первой степени, систему (И.З) заменяем систе-
мой линеаризованных дифферениальных уравнений. Продолжая
разложение, систему (14.3) заменим системой нелинейных диффе-
ренциальных уравнений. Очевидно, что чем дальше продолжаем
разложение, тем выше степень нелинейности.
Рассмотрим случай, когда возмущающие факторы таковы, что
вариации малы по сравнению с соответствующими кинематически-
ми параметрами исходного невозмущенного движения.
Ограничиваясь членами разложения, содержащими вариации в
первой степени, и учитывая уравнения исходного невозмущенного
движения, из (14.3) получим следующую систему дифференциаль-
ных уравнений в вариациях:
т ~dt 4“ mVоаокы2 — AV — F”x^a — Fx^b =
= F>83 + + F>8b + F°Ae + AFXB;
ma0 — mVG Ц- /иИ0Д1ог — — FvyAIZ —
dt dt
- F> -^Д&=^зД83+^^ДВд+ Де + LFy,-
I — Л1’'дv _ Д4“Да — даа — А13гДи> = А1®3Д83 4-
at
. rfAS db&
=—— cos Yo---~F~ sm у0;
dt dt
т% —mVQQ.^x — mV^u—F^KV-^ (14.4)
229
- Л2₽Д? - F1AV=F>A8H++ /^Aq + А/'г в;
£ДЫл. __ J d^L _ ,и^.АЗ - .W“-VA(O v - Л4“'/Лш —
dt y dt v x y
= Л1>А8Э + Л/>А8Н4- 'И-’Ао Ц- АЛ1VB;
~ Л|»д? - - м>“‘=л4,Д8-+
+ Л1‘-А»3 + Лфе + ЛЛ1„;
. dby , dAty . „
Aw —----- 4---— sin 8 ,;
dt dt
. л/Дф „ , dA8
Aa)„ =—— cos&ncosy04--— sin Vf,.
y dt u dt
Величины AFxb, tAFys, AFZB, AM™, АМйв, AMb являются воз-
мущениями, необусловленными изменениями кинематических па-
раметров движения. Они могут быть либо случайными функциями
изменения параметров атмосферы, либо известными функциями
времени при сливе топлива, включении ускорителя, отцепке плане-
ра и т. д.
Коэффициенты линеаризированных относительно вариаций сис-
темы дифференциальных уравнений! (14.4) являются функциями
времени, если исходное иевозмущенное движение самолета неуста-
новившееся. В этом случае она решается методом замороженных
коэффициентов, сущность которого излагается ниже.
Кинематические параметры исходного невозмущенного движе-
ния (Ко, «о, ро, Yo, 'Ao, фо), физические (m, Ix, Iv, Iz, Ixy), геометри-
ческие (S, /, bA, Lr.o ...) и аэродинамические (Cy, Cx, mx, my, mz,
Cz, /и“Л‘, m’,...), характеристики самолета — известные функции
времени или постоянные величины. Поэтому коэффициенты систе-
мы дифференциальных уравнений (14.4), содержащие их, также
будут известными функциями времени, а для конкретного момен-
та — постоянными величинами. Следовательно, взяв ряд моментов
времени tit t2, ..tn, на основе системы (14.4) можем составить п
аналогичных систем дифференциальных уравнений с постоянными
коэффициентами. При этом точки на траектории движения центра
масс, соответствующие моментам времени /ь /2, • • - tn, надо выбрать
так, чтобы наилучшим образом исследовать поведение вариации в
рассматриваемом промежутке времени.
Коэффициенты системы дифференциальных уравнений (14.4)
постоянные, когда исходное невозмущенное движение есть устано-
вившийся прямолинейный полет.
Решение системы (14.4) позволяет проследить за изменениями
вариаций кинематических параметров во времени, а также опреде-
лить эффективность управляющих воздействий, создаваемых орга-
нами управления самолетом. Однако интегрирование системы
(14.4) связано с трудностями, вызванными отсутствием достовер-
230
ных данных об интенсивностях случайных процессов и законах их
изменений в пространстве и во времени. Поэтому для исследования
общей динамической устойчивости самолета интегрируют однород-
ную систему дифференциальных уравнений (без правых частей)
возмущенного движения в вариациях (14.4) при заданных значени-
ях начальных возмущений Д Vo, Да0, Др0, Дуо, Д'Йо, Дфо, Дуо, Alio,
Д-фо, взятых из статистических данных, полученных в результате
обработки информации бортовых регистраторов эксплуатируемых
и специальных самолетов.
Для облегчения исследования устойчивости и управляемости са-
молета упрощается система (14.4) отбрасыванием в ее уравнениях
слагаемых, которые малы по сравнению с другими. При этом
сравнительная оценка производится на основании эксперименталь-
ных данных и по некоторым физическим соображениям.
§ 14.3. Продольное и боковое возмущенное движение
В гл. 1 дано определение продольного и бокового движения, ос-
нованное на наличии у самолета плоскости симметрии OXY. Как
это было показано там же, раздельное их рассмотрение связано с
допущением, приемлемым только при определенных условиях.
Рассмотрим шесть дифференциальных уравнений системы (14.4),
которые будем называть динамическими, так как в них каждое
слагаемое имеет определенный механический смысл. Слагаемые
с массой и моментом инерции можно рассматривать соответственно
как силы и моменты, обусловленные изменением определенного
кинематического параметра продольного или бокового движения.
Пусть в исходном невозмущенном движении параметры боково-
го движения р0, <t>xo, <оио, у0, фо либо малые, либо равны нулю (что
имеет место при выполнении важнейших режимов полета). Так как
рассматривается случай малых возмущений, то слагаемые, содер-
жащие кинематические параметры исходного бокового возмущен-
ного движения, можно рассматривать как малые величины более
высокого порядка по сравнению с другими, содержащими кинемати-
ческие параметры исходного продольного движения.
Экспериментально установлено, что в рассматриваемом случае
приращения продольной и нормальной сил и момента тангажа,
обусловленные малыми изменениями кинематических параметров
бокового движения, — малые величины по сравнению с прираще-
ниями этих же сил и моментов, вызванных вариациями кинемати-
ческих параметров продольного движения более высокого поряд-
ка. В свою очередь, приращения поперечной силы, моментов крена
и рыскания, вызванные малыми изменениями кинематических па-
раметров продольного движения, — малые величины более высо-
кого порядка по сравнению с их приращениями, обусловленными
вариациями кинематических параметров бокового движения.
Как это изложено в гл. 13, приращениями продольной, нормаль-
ной и поперечной сил, вызванными нестационарным обтеканием,
т. е. вариациями ДК, Да, Др, До>ж, До)у, Дсо2, можно пренебречь.
231
Существенными являются демпфирующий момент тангажа, обус-
ловленный угловыми скоростями со2 и Да, а также демпфирую-
щие моменты крена и рыскания, вызванные угловыми скоростями
А<оЛ-, Дсо^. Далее, предполагая, что исходное невозмущенное движе-
ние происходило без крена (уо=О), из четвертого и последних двух
уравнений систем (14.4) получим
—=Д(й; -^-==Д«> — Дсо tg&0; -^-=Дю sec&o- (14.5) -
dt 2 dt х !/ dt у 0 v
В соответствии с изложенным система дифференциальных урав-
нений (14.4) распадается на две самостоятельные системы, одна
содержит вариации кинематических параметров продольного, дру-
гая — бокового движения.
Система дифференциальных уравнений продольного возмущен-
ного движения в вариациях имеет следующий вид:
т OTvoao — - Л1’Д1/ - А“Да - А® Д&=
dt dt
=А>Д83+Д>Д8д+А>дв„+ДА,
mV0 —-----т\ 0 —---/да0 — Fy AV — АуДа — А^Д» —
dt dt dt
=А®зДё3 + А}<Д8д ф-А>в-'- ДАу,
/ ----Л1“2 — - Л12 ДП - Л1гДа =
2 dt2 z dt dt
= Д4>Д8, -г Ж>Д8д -V /И>Дй„+ Д//1г „.
После разделения имеем следующую систему дифференциаль-
ных уравнений бокового возмущенного движения в вариациях:
тУй— игК0а0Д<оЛ. — т\’^у —1:[ ДЗ — А^Ду —
dt
= А>Дйн+ДАгв;
/ _ Л1£дз - ЛГ*Дых — М /Д<0 =
х dt у dt х Л х У
= м >Д8Э+М >Д8Н+м ®.*Д8л + ДЛ1ХВ;
(14.7)
- - МуУ^у=
J dt и dt
- Дйн + 7И>Д8д+7И>ДВЭ + д Мув-,
Д^ = ДюЛ-Д^1ё&0;
dt
= Usso sec &0.
dt y
Слагаемые, входящие в правые части дифференциальных урав-
нений системы (14.6), являются вариациями продольной и нор-
232
мальной сил и момента тангажа, обусловленными управляющими
воздействиями и возмущающими факторами. В соответствии с этим
при интегрировании системы (14.6) необходимо иметь начальные
значения вариации кинематических параметров продольного дви-
жения ДВ0, Да0, Дйо, Дй0 и их правые части, т. е. управляющие и
возмущающие силы и моменты как заданные функции времени.
Определение начальных условий изложено ранее. Возмущающие
силы ДЛтв и AFyJ) и момент ДЛ42В являются случайными функция-
ми, их определение выходит за рамки настоящего курса. Здесь мы
рассматриваем продольное возмущенное движение после прекраще-
ния действия факторов, изменявших исходное невозмущенное дви-
жение.
Производные от продольной и нормальной сил и момента тан-
гажа по отклонениям закрылков, органа управления тангажом и
рычага изменения режима работы силовой установки определяются
экспериментально. В эксплуатационном диапазоне отклонений ор-
ганов управления эти производные — постоянные величины, по-
этому для исследования управляемого движения самолета доста-
точно знать отклонения органов управления по времени.
В дальнейшем для исследования динамической устойчивости са-
молета используются однородные системы дифференциальных
уравнений (14.6) и (14.7).
В соответствии с условием раздельного рассмотрения продоль-
ного и бокового движения угол атаки а0 в невозмущенном движе-
нии невелик, поэтому в уравнениях однородной системы слагае-
мые, содержащие его произведение с вариациями, принимаются
равными нулю:
т _ ^д у - Да - F®A& = 0;
dt
mV0(———}-F^V-Fr^a~F&M=0; (14.8)
\ dt dt J у y y v ’
/ _ л/“Да — Л/Гд V — Mz —=0.
z dti dt dt
Постановка задачи о боковой управляемости и устойчивости
аналогична задаче о продольной устойчивости и управляемости.
Исследование боковой управляемости сводится к анализу решений
системы дифференциальных уравнений (14.7), правые части и на-
чальные условия которых определяются аналогичным путем. Реше-
ние задачи о боковой устойчивости сводится к интегрированию сис-
темы дифференциальных уравнений (14.7) без правых частей при
заданных начальных значениях вариаций кинематических пара-
метров.
Полагая, что в уравнениях (14.7) правые части равны нулю, по-
лучим следующую однородную систему дифференциальных уравне-
ний бокового возмущенного движения:
mV о-^— mVоаоДсих — mV oAio„ — F^A? — Fl Ду=0;
233
fl \(0 . о
/ r-----------------ТИ^ДЗ - ЛГгАо v - MwxyДсо„ = 0;
.r dt >y dt л . л A У
d\ fl А /А Q
ly-^- -1.у ~ М“^х _ MyU^ = 0; (14.9)
^ = Au)jl.-A^tg&0;
rfAi , n
—- = !«> sec &0.
dt
Система дифференциальных уравнений (14.4) и полученные из
нее системы (14.6) и (14.7) имеют ограниченную область примене-
ния. Они получены для упрощенной модели самолета, поэтому не
учитывают ряд эффектов, обусловленных вращениями роторов дви-
гателей, относительными движениями закрылков, органов управле-
ния тангажом, креном и рысканием. Учет влияния указанных эф-
фектов на динамические свойства самолета производится на базе
более сложной механической модели самолета как системы твер-
дых тел, совершающих в пространстве общее переносное и взаим-
ные относительные движения.
Правые части системы дифференциальных уравнений (14.1)'
в основном являются следствиями изменения аэродинамических
сил и моментов. По методическим соображениям их разделяют на
следующие группы:
статические силы и моменты, зависящие только от скорости
полета, углов атаки и скольжения при полном отсутствии враще-
ния самолета вокруг своего центра масс, угловых скоростей и уско-
рений отклонения закрылков и органов управления тангажом, кре-
ном и рысканием;
силы и моменты, возникающие при вращении самолета вокруг-
своего центра масс;
возмущающие силы и моменты, обусловленные воздействием
среды на самолет в полете.
Все эти силы и моменты, в свою очередь, разделяются на про-
дольные и боковые.
В гл. 9—13 изложены методы определения этих сил и моментов
без учета влияния на полет самолета атмосферных процессов (гро-
зовая деятельность, турбулентность атмосферы, горные волны, ура-
ганы и т. д.). Определение сил и моментов, вызванных атмосфер-
ными процессами, является темой специальных исследований и вы-
ходит за рамки настоящего учебника.
§ 14.4. Общая постановка задачи исследования
устойчивости полета и управляемости.
Методы решения
Существующие методы исследования устойчивости и управляе-
мости самолета основаны на анализе решений дифференциальных
уравнений в вариациях. Эти методы подразделяются на прямые и
косвенные. Сущность первого из них заключается в отыскании и
234
последующем анализе решений систем дифференциальных уравне-
ний возмущенного движения самолета в вариациях. Применение
косвенных методов позволяет качественно определить поведение ре-
шений, не имея их. Этими методами можно качественно судить об
устойчивости невозмущенного движения самолета по коэффициен-
там дифференциальных уравнений систем (14.8) и (14.9). Преиму-
щество косвенных методов заключается в том, что они не требуют
непосредственного знания самих решений, поэтому не связаны с
интегрированием систем дифференциальных уравнений. По-срав-
нению с прямыми методами их недостаток заключается только в
качественной оценке устойчивости невозмущенного движения само-
лета. В то время как прямые методы позволяют по найденным за-
висимостям вариаций параметров движения от времени определить
степень устойчивости или неустойчивости.
Ниже излагается применение этих методов при исследовании
устойчивости невозмущенного движения самолета с помощью сис-
тем дифференциальных уравнений (14.6) и (14.7), которые для
сокращения записи приведены к виду
-----j-zTjjAV -|-пу2Дс1 fljoi
rfAS
rf/2
rfAp
Л-а23Д&=$20;
dt dt
$32 ----!“ $33 —flgjA V -j— $д2ДС1--$30,
dt dt
~г ^1гДшл- “h 4" — ^iol
dt
fj A «-.j f
——— />23-----|~ ^21^ “Г ^22^t0x + ^23^°^ = ^20’
dt dt
d^^ii r r!
~ ~ 4~ ^32 x + ^3iд? &32Д1ол. 4” ь^ьм=ьж',
dt dt
4" ^42^“л- 4“ ^43^“y “ ^40-
dt
(14-10)
(14-11)
Последнее уравнение системы (14.7) не записываем, поскольку
оно не требуется для решения предыдущих четырех.
Значения коэффициентов а.ц и Ьц приведены в табл. 14.1.
Начнем с изложения прямых методов.
Пусть возмущения малые, а исходное невозмущенное движение
неустановившееся. Тогда в соответствии с принципом применения
прямых методов необходимо найти интегральные кривые систем
линейных неоднородных дифференциальных уравнений с перемен-
ными коэффициентами (14.10), (14.11) и проанализировать их.
Для наглядности целесообразно сопоставить графики функций
14(4), «о(4)> PofO, yo(Z)> ®o(t), фо(7) с соответствующими графика-
ми функций V(t), a(t), $(t), y(t), ®(t), ty(t), где
П(/)=П0(/)4-Д1Д/); сх(ф = аоф)4 Да(/); y(/)=Yo(O + M’(/);
₽W = .W) + W); &(/)=&0 (/)-(-Д&(/); *(/)=%(/)4-Дф(4. (14. 12)
235
Значения коэффициентов продольного и бокового возмущенного движения
Здесь &V(t), Aa(t), Ajj(t), Ду(7), M(t), Лф(7) — решения систем
дифференциальных уравнений (14.10) и (14.11), удовлетворяющие
начальным условиям.
Самолет обладает общей динамической устойчивостью, если
вариации всех кинематических параметров продольного и бокового
движения, уменьшаясь с течением времени, стремятся к нулю или
становятся меньше наперед заданной сколь угодно малой величи-
ны. По графикам функций, определяемых уравнениями (14.12),
можем судить не только о наличии общей или частной динамичес-
кой устойчивости по отдельным параметрам движения, но и опре-
делить степень устойчивости и неустойчивости.
Интегрирование дифференциальных уравнений с переменными
коэффициентами связано с определенными трудностями и в основ-
ном производится численным методом с применением ЭВМ. Полу-
ченные при этом решения трудно представить аналитическими фун-
кциями, что затрудняет исследование устойчивости. Поэтому, когда
исходное невозмущенное движение неустановившееся, а коэффици-
енты дифференциальных уравнений (14.10) и (14.11) являются
функциями времени, исследование устойчивости производится ме-
тодом «замораживания» коэффициентов. Сущность этого метода
заключается в том, что вычисляются коэффициенты дифференци-
альных уравнений (14.10) и (14.11) для ряда моментов времени
Л, 4, , tn соответствующих характерным точкам траектории. Для
каждого конкретно взятого момента времени они будут определен-
ными постоянными величинами. Тогда системы (14.10) и (14.11)
для каждого конкретно взятого момента времени будут иметь опре-
деленные постоянные коэффициенты.
Решение систем линейных неоднородных дифференциальных
уравнений с постоянными коэффициентами производится в соответ-
ствии с теорией обыкновенных дифференциальных уравнений, при-
менение которой показано на примере решения системы (14.10),
описывающей продольное возмущенное движение. В соответствии
с этим общие решения неоднородной системы (14.10) с постоянны-
ми коэффициентами равны:
AV = 2Aze^+/n(0;
‘ Aa=2B/ePz4AW; (И-13)
A& = VCze^+AW-
В правых частях уравнений (14.13) первые слагаемые (суммы)
являются общими решениями однородной системы (14.10), когда
правые части ее дифференциальных уравнений aw, а20, а30 равны
нулю. Они определяют продольное возмущенное движение самоле-
та, обусловленное начальными возмущениями при полном отсутст-
вии возмущающих факторов и управляющих воздействий.
Показатели р, являются корнями следующего характеристичес-
кого уравнения, составленного из коэффициентов при неизвестных
236
237
функциях в уравнениях системы (14.10):
Р+«п
«31
^12
/> + «22
а&р ф- «за
«13
а'жр4- «2з
Р2-г«зз/?
(14.14)
Вторые слагаемые в правых частях уравнений (14.13), т. е.
функции fo(t) и f$(t), являются частными решениями систе-
мы (14.10) с правой частью, отличной от нуля.
Постоянные А<, В,-, С, зависят от начальных значений вариации
скорости АПо, углов атаки Аа0 и тангажа Д-йо, а решения однород-
ной системы (14.10), представленные первыми слагаемыми (14.13),
определяют «собственное» продольное возмущенное движение са-
молета.
Раскрывая определитель характеристического уравнения (14.14),
получим алгебраическое уравнение четвертой степени относитель-
но р:
«о/’4 + «1/’3Ч-«2Р2+«зР+«4=О> (14. 15)
где «о=«11«22«зз;
«1 =«П«22«33 “И «п«22«33 — «П«32«23 4“ «Ц«22«3з1
«2 = «11«22«33 — «11«32«23 — «п«32«23 “Г «ц«22«33 -р
-|-«Ц«22«33 — «ц«32«23 — «12«21«33! (Г4»Д|))
" а%==С1 ц«22«33 «П«32«23 «Ц«23«32 «П«32«23 «21«12«33_J~
“И «21«1з«з2 -]- «12«з1«2з — «з1«1з«22;
«4~ «И«32с23-Ь «21«13«32-Ь «31«12«23 «31«22«13-
Рассмотрим «собственное» продольное возмущенное движение
самолета, полагая в решениях (14.13) fv=fa. f»=0, т. е. считая, что
при вариациях скорости ЛЕ’О углов атаки Да0 и тангажа Дй0 дейст-
вие возмущающих факторов прекращается и управляющие воздей-
ствия полностью отсутствуют. В этом случае решения (14.13) при-
нимают вид
ЛУ"=2А/еР,7; д»=2с'е₽/- (14-17)
Поведение решений (14.17) зависит от показателей, которые, в
свою очередь, как корни характеристического уравнения (14.15)
зависят от аэродинамических, массовых и геометрических харак-
теристик самолета.
Поскольку коэффициенты характеристического уравнения п0,
«1, «2, «з. «4 являются действительными величинами, то в соответст-
вии с основной теоремой алгебры корни характеристического урав-
нения pi, рч, р3, р4 могут быть действительными или попарно сопря-
женными комплексными числами. Если все корни характеристиче-
ского уравнения действительные, то зависимость вариаций пара-
метров движения от времени носит апериодический характер и
238
возмущенное движение представляет собой сумму четырех накла-
дывающихся одно на другое частных апериодических движений.
Если при этом все корни отрицательные, то вариации скорости,
углов атаки и тангажа с течением времени убывают, стремясь к
нулю при t—>оо, и возмущенное движение асимптотически устой-
чиво; если же хотя бы один корень из этих четырех положителен,
то вариации параметров движения стремятся к бесконечности при
/—>оо и возмущенное движение асимптотически неустойчиво.
Если корни характеристического уравнения р(, ръ р3, р4 являют-
ся комплексными и взаимно сопряженными величинами, то зависи-
мости вариации параметров движения от времени носят колеба-
тельный характер (возмущенное движение представляет собой на-
ложение двух колебательных движений).
Пусть Р1 = ц+^у, тогда р2 = |т-—:iv. Колебательное движение, опи-
сываемое этой парой комплексных взаимно сопряженных корней
характеристического уравнения, будет затухающим или усиливаю-
щимся в зависимости от знака действительной части ц комплекс-
ного корня. Если действительная часть комплексных корней поло-
жительна, то амплитуды вариаций скорости, углов атаки и танга-
жа с течением времени возрастают, сремясь к бесконечности при
t—>-оо. В этом случае колебательное возмущенное движение
асимптотически неустойчиво. Если действительная часть ц отрица-
тельна, то вариации параметров движения с течением времени убы-
вают, стремясь к нулю при t—>со, и колебательное возмущенное
движение асимптотически устойчивое. Для доказательства этого
положения воспользуемся формулой Эйлера:
e(p.±zv)/_енДСО8xt+i sinv/). (14. 18)
Выражения, заключенные в скобках правой части этого равен-
ства, являются ограниченными величинами, так как sinvZ и cosvt
не могут быть больше единицы. Следовательно, показательные
функции е(и±/’Н будут возрастающими при положительных значе-
ниях действительных частей комплексных корней ц и убывающими
при отрицательных значениях.
При исследовании устойчивости продольного невозмущенного
движения самолета могут быть следующие сочетания корней ха-
рактеристического уравнения:
все четыре корня действительные;
две пары взаимно сопряженных комплексных корней pi,2 = pi±
±ZV1 И /?з,4 = Ц2±Д‘2;
два корня — действительные числа, а остальные два — взаимно
сопряженные комплексные числа.
Первому сочетанию соответствует апериодическое изменение во
времени вариаций скорости ts.V(t), углов атаки Ла(7) и танга-
жа
Во втором случае изменение каждой из этих вариаций представ-
ляет собой наложение двух колебательных движений. Последнее
сочетание соответствует продольному возмущенному движению са-
239
молета, полученному в результате наложения двух апериодических
и одного колебательного движений.
В частном случае, когда исходное невозмущенное движение са-
молета есть прямолинейный установившийся полет, коэффициенты
систем дифференциальных уравнений (14.10) и (14.11) одинаковы
для всех точек рассматриваемого интервала времени [/0, /«]- Поэто-
му отпадает необходимость рассмотрения различных вариантов
дифференциальных уравнений систем (14.10) и (14.11) с «заморо-
женными» значениями коэффициентов, вычисленными для соответ-
ствующих моментов времени.
Ограниченность области применения линеаризированных систем
(14.10) и (14.11) проявляется в случае равенства нулю действи-
тельного корня или действительной части сопряженных комплекс-
ных корней. Как это следует из решений, представленных показа-
тельными функциями (14.17), в первом случае соответствующее ча-
стное решение равно постоянной величине, а во втором — оно
описывает гармоническое колебательное движение с постоянной
амплитудой, поэтому вопрос о наличии или отсутствии асимптоти-
ческой устойчивости, остается нерешенным и исследование
возмущенного движения приходится производить с помощью не-
линеаризированных систем дифференциальных уравнений.
На основании исследования системы линеаризированных одно-
родных дифференциальных уравнений (14.10) приходим к заклю-
чению, что для асимптотической устойчивости продольного невоз-
мущенного движения необходимо и достаточно, чтобы корни харак-
теристического уравнения имели отрицательные действительные
части.
В общем случае характеристического уравнения п-й степени с
действительными коэффициентами согласно теореме Гурвица, для
того чтобы все корни алгебраического уравнения
а0Рп + «1Р"-1 + а2р’12 +. • • + ап-1Р + «,,=0
имели отрицательные но выполнить следую где вещественные ч щие условия: ^>0, д2>о,..., д1=а1; Д2 = а0 0 (Zg (7-2 асти, tZj а0 а-, б а0 необходи >0, э ... 0 ... 0 мо и достаточ- на 19) (14.20)
Для уравнения ч а2п—1 а2п—2 а2п-3 етвертой степени а2л~4 условия (14.1 9). принимают
вид
а0у>0, ал~^0, а2^>0, «з>0, с4>0;
tZi «о 0
дз — а3 а2 «1 =а3(ала2—ez0a3) — ez4«i >°- (14.21)
0 а4 а3
240
Неравенства (14.21) называются критерием Гурвица — Рауса.
Аналогично с помощью этого критерия определяется устойчи-
вость бокового возмущенного движения, описываемого системой
линеаризированных однородных дифференциальных уравнений
(14.11). Характеристическое уравнение системы (14.11) составля-
ем аналогичным путем. Как и в случае продольного возмущенного
движения, это уравнение для бокового возмущенного движения
имеет вид
р+^11 Ь\2 ^13 ^14
^21 Р~гЬГ2 ^23 0 =0.' (14.22)
^31 ^32 Р "Г’Фз.З 0
0 -1 ^43 Р
Раскрывая определитель, получим
btffi + Ь^ + + Ь3р + Ь4=О, (.14.23)
ГДе ^0=1, ^1 = />'11-| ^22 !
^2 = ^11^22 ^12^21 4~ ^11^33 ^1.3^31 ~Ф ^22^33 — ^23^321
^з^^п^гг^зз—^14^23 “Ь ^14^31^43 ^11^22^32— (14. 24)
Т ^13^21^32 Т ^12^23^31 ^13^22^31»
bi=f М31 — b21b33 + b43 (b22b3l - b21b32)] bu.
Критерий (14.19) устанавливает пределы изменения аэродина-
мических, массовых и геометрических характеристик самолета, при
которых его невозмущенное движение устойчиво. Действительно,
заменив в соотношениях (14.19) знаки неравенства знаками равен-
ства, получим уравнения, определяющие границы изменения ука-
занных характеристик самолета.
Анализ частных случаев продольного и бокового движения при-
водится в последующих главах.
§ 14.5. Операторный метод решения дифференциальных
уравнений возмущенного движения
В настоящее время существует ряд методов решения дифферен-
циальных уравнений. Ранее мы пользовались классическим мето-
дом интегрирования и исследования устойчивости решения диффе-
ренциальных уравнений возмущенного движения самолета.
н Многие задачи устойчивости и управляемости удобно решать
операторным методом, широко применяемым в теории автомати-
ческого управления полетом.
Операторный метод базируется на функциональном преобразо
t вании, в результате которого на определенном этапе решения за-
дачи вместо дифференциальных уравнений имеем дело с алгебраи-
ческими.
241
Функциональное преобразование осуществляется с помощью ин-
теграла Лапласа:
£{/(*)}= (14.25)
6
Показатель р — некоторое комплексное число:
/?=:u.-]-rv. ' (14.26)
Функция f(t) кусочно-непрерывная и ограниченная.
При этих условиях интеграл Лапласа (14.25) является функци-
ей от показателя р.
Подынтегральная функция f(t) называется оригиналом, а ее
изображение
F(pY-:L !/(/)}= \^f(t)dt. (14.27)
6
Имеется ряд способов обозначения изображения, мы будем
пользоваться следующим:
/?1А)=7(Л- (14.28)
Приведем некоторые основные с Изображение суммы функций р дельных функций. В самом деле, П со i=i б войства изображения. авно сумме изображений от- п
.1=1 dt, (14.29)
где ЛЧ/7)— б ptfAt)dt (14.30)
Справедливость соотношения (14.29) следует из свойства интег-
рала.
Найдем связь между изображениями функции f(t) и ее произ-
водной
В соответствии с определением изображения (14.27) и обозна-
чением (14.28) изображение производной
f'[t) — L{f'(t)} — (14.31)
б
Интегрируя по частям, получим
= ?+/’ [ e~~pt f(t}dt. (14.32)
о б
Согласно определению функция f(t) ограничена, поэтому при
положительной вещественной части показателя р, т. е. для ц>0,
имеем
е-ж/(/)| = _/(0).
О
(14.33)
242
Тогда соотношение (14.32) можно записать в виде
7'(0=^{/(01-/(0). (14.34)
Согласно определению (14.27) это соотношение можно предста-
вить в виде
(14.35)
Аналогичным путем определяются изображения производных
второго порядка и выше:
f"(t)=P Г/W-/(0)-^>1; (14.36)
L р J
7" (0=P’1-\f (p)-f (0) --------- (14.37)
L р рп J
Найдем изображение интеграла. Пусть
ф(/)=^/(/Ш (14.37')
О
Производная от интеграла согласно его определению равна:
ф(0)-=0. (14.37")
В соответствии с соотношениями (14.33) и (14.37)
или
(14.38)
(14.39)
Согласно определению изображения (14.27) соотношение
(14.38) или (14.39) можно записать в виде
<р(/)=7(Д=2Т£)_. (14.40)
Р Р
Аналогичным путем определяются изображения двукратного и
многократного интегралов:
(14.41)
Применение операционного исчисления основано на умении по
исходной функции f(t) определить ее изображение F(p) и, наобо-
рот, имея изображение, найти исходную функцию, т. е. оригинал.
Для этого определяют изображение наиболее важных функций и
243
составляют по ним таблицы, позволяющие осуществить переход от
оригинала f(t) к изображению F(p) и наоборот.
В качестве примера определим изображение некоторых функ-
ций.
Изображение постоянного
F{p)= § e.^ptcdt= —ср-^ъ-Р* | = ср~~1.
о о
Следовательно,
с = ср1. (14.42)
Изображение функции j(t)=t имеет вид
F (р)= j е~РЧсН.
о
Интегрируя по частям, получим
со со
Р(р)=—1е~р( |_2-е-р‘ |=—.
u' д2 \ Р2
О о
Окончательно имеем
7=—. (14.43)
Р2
Изображение показательной функции существует, если сама
функция ограничена при любом значении аргумента, включая бес-
конечность (£ = со). Этому условию удовлетворяет функция е~м при
ReZ>0. Изображение этой функции определяется следующим об-
разом:
со . . со
, , е-(л+л) t । t
F(p)= \ e~pte~~Ktdt =----------- -------;
i р + Х I p + l
о о
e-w^_±_. (14.44)
р + х
Изображение функции ек/ существует при условии Rea<0, так
как в этом случае она ограничена.
Изображение функции е"7 равно
(14.45)
или
Изображения тригонометрических функций sin nt и cos nt суще-
ствуют при любом значении аргумента t, так как они меньше еди-
244
ницы. Они определяются аналогичным путем:
cos nt -
cos ntdt =
о
е~Р‘
р% + «2
(п sin nt — р cos nt)
Jo
После подстановки пределов получим
cos nt
sin nt =
\ e-^ sin ntdt=
J p2 _|_ n2
0
e~pt
(p sin nt —n cos nt)
(14.46)
о
После подстановки пределов получим
~ , п
sin nt—----------- .
р2 + п2
(14. 47)
Переход от изображения к оригиналу заключается в определе-
нии левых частей соотношений (14.42) — (14.47) при заданных
(известных) правых частях. В соответствии с этим составлены таб-
лицы преобразования функций, имеющих прикладное значение.
Применение операторного метода к решению дифференциальных
уравнений покажем на примере системы (14.10).
Предварительно определим изображения производных вариа-
ций кинематических параметров продольного движения по форму-
лам (14.37) — (14.39):
ДЙ(/)=/?Д1/(/2) —ДИ0; Да(/)=/2Да(/?) —Да0;
Д&(/) =р№(р)~ Д&0; Л&(/)=772Д1}(/7) —/;Дф, —Д&0,
где ДУ(р), Аа(р), Д&(р) — изображения вариаций скорости, углов
атаки и тангажа; A Vo, Ассо, Д'бо, АО-о — начальные значения вариа-
ций скорости, углов атаки и тангажа, а также угловой скорости
тангажа.
Изображения правых частей системы (14.10) в соответствии с
обозначением (14.27) представим в виде
pL{a 10}=а10; pL{a^}=~aw-, pL{a^}=ax. (14.49)
Подставляя (14.48) и (14.49) в (14.10), получим изображение
системы дифференциальных уравнений продольного возмущенного
движения:
(/’+«и)дИ O) + «i+« (Р) + «1зд^(/’)=«1о+д1/'о;
«21ДИ (/’) + (/’ +«22) д« (Р) + («23/^+ «2з) д5 (/’)=«2а + Д'Го+агзД&о;
(14.50)
«з1ДИ (/’) + («з2/’+ «32) д<Ц/+г (/’2+«зз/О д» (/’)=
= «30 + Т’Д + + Д^о + «ззд + + « 32 Д«о •
245
Из этой системы алгебраических уравнений находим изображе*
ния вариаций:
Д17(/?)=М£1; да(р)=^2_. д£(р)—(14.51)
Д(р) \(р) Л (/О
Определитель системы
р + «и 012 О13
А(Р) = р + «22 023/2-4-023 (14. 52)
°31 Оз2/7-г оз2 р2 — а'ззр
Определители Ау(р), &«(р), \ь(р) получаются из (14.52) за-
меной в нем элементов соответственно первого, второго и третьего
столбцов правыми частями системы алгебраических уравнений
(14.50).
По найденным изображениям вапраций AV(p), Ла(р), &&(t)
определяем оригиналы, т. е. зависимости вариации кинематических
параметров движения от времени:
ДП^/ЛО; Да=/2(/); Д&=/3(/). (14.53)
Применение изложенного выше метода к решению конкретных
задач устойчивости и управляемости самолета будет изложено в
последующих главах.
Вопросы для повторения
1. Что понимается под возмущающими факторами?
2. Изменением каких кинематических параметров определяется продольное
возмущенное движение?
3. Какими должны быть зависимости вариации кинематических параметров
от времени для динамической устойчивости самолета?
4. В чем сущность качественной оценки устойчивости самолета?
5. Что необходимо для количественной оценки устойчивости самолета?
Задача
Напишите критерии устойчивости (14.19) для дифференциальных уравнений
в вариациях третьего порядка.
Глава 15
Продольное возмущенное движение
§ 15.1. Исследование продольного возмущенного движения
Продольное возмущенное движение самолета описывается сис-
темой дифференциальных уравнений (14.10), правые части которых
определяются в соответствии с постановкой задачи. Простейшей
задачей является исследование собственной продольной устойчиво-
сти самолета, когда правые части дифференциальных уравнений
системы (14.10) равны нулю.
Продольное управляемое движение самолета при отсутствии
возмущений описывается системой дифференциальных уравнений
(14.10), правые части которых — управляющие силы и моменты,
заданные соотношениями:
«ю =— (F>A83 + ЛМ + А8,);
111
«20-4/-^ЗД8з + ^ВД8в+^ЛД^; (15‘
«зо = 4 (Лфч + /И>Док + М'ДЗд) •
* Z
В главах 9, 10, 13 и 14 изложены основные принципы состав-
ления, определения коэффициентов и решения системы дифферен-
циальных уравнений (14.10). Рассмотрим практическое приложение
этих принципов к анализу продольного возмущенного и управляе-
мого движений самолета для конкретных случаев.
Пусть исходное невозмущенное движение самолета происходит
по прямой. Этот случай охватывает такие важные режимы полета,
как разгон, торможение и установившееся движение самолета при
наборе высоты, снижении и в горизонтальной плоскости.
В случае, когда исходное невозмущенное движение неустановпв-
шееся, решение системы дифференциальных уравнений (14.10) про-
изводится методом «замороженных» коэффициентов. Определим ко-
эффициенты этой системы для одного фиксированного момента вре-
мени Когда исходное невозмущенное движение установившееся,
эти коэффициенты постоянны для всего режима.
Масса самолета т, момент инерции Iz и воздушная скорость
в данный фиксированный момент времени — постоянные вели-
чины, определяются в процессе проектирования самолета и уточня-
ются при наземных и летных испытаниях самолета.
247
Проекции суммарного вектора внешних сил, действующих на
самолет, на продольную и нормальную оси:
Fx=Px-Cx^-S-mgsinfr, Fy=Py+Cy^-S-mgcosb. (15.2)
Отсюда находим частные производные:
CxqVS-, (15.3)
х дМ dV а \ 2 ) .
^=^к2М=Л/рМд_сме12_5')+с.И5. (15.4)
J dM dV а V J J 2 ) 1 11
тт г>М &РХ г>м дРу
Частные производные Рх = , Ру = определяются из вы-
сотно-скоростных характеристик двигателя.
Производные , Су' можно считать равными нулю в диапазо-
не чисел М, где пренебрегается влиянием сжимаемости воздуха на
аэродинамические характеристики самолета. При околозвуковых и
сверхзвуковых скоростях они определяются по критериям аэроди-
намического подобия.
Производную от момента тангажа по воздушной скорости пред-
ставим в виде
дМ, ^М^ = т^ sb ysb (15.5)
ЭМ dV а Ча a i z« а к )
Определение коэффициента момента тангажа и его производной
по числу М полета изложено в гл. 10.
В соответствии с табл. 14.1 по этим производным определяем
коэффициенты:
«п =---(15.6)
та \ 2 / т
з I .-.м е^о I Ру о /1 г-
а21 = —— Ру + Ру -д- Н-----QS-, (15.7)
maVQ \ 2 / tn
1 [т^ (Д'с \
«31=-^ — SbA +mzQV0SbA . (15.8)
О \ а 1 /
В соотношениях (15.8) — (15.10) Vo — воздушная скорость невоз-
мущенного движения самолета в данный фиксированный момент
времени принятый за начальный.
Из соотношений (15.4) находим производные:
c\^S-, (15.9)
da 2 k '
F’,y^~=P^Cy^S. (15.10) |
Как это изложено в гл. 9, проекция тяги двигателя на продоль-
248
ную ось очень слабо зависит от угла атаки, поэтому производную
Рх принимаем равной нулю (Рх=0). Из уравнений (9.70) и (9.71)
находим
Py=m*Va, (15.11)
где т* — масса воздуха, расходуемая двигателями в секунду.
Из (15.11) находим частную производную
P”y=m*V. (15.12)
В соответствии с изложенным и соотношением (15.12) уравнения
(15.9) и (15.10) можно записать в виде
(15.13)
(15.14)
Производную от момента тангажа по углу атаки представим в виде
(15.15)
дС у da 2
q
где тгУ — степень продольной статической устойчивости по пере-
грузке при фиксированном руле высоты, определение которой под-
робно изложено в гл. 9 и 10.
Используя соотношения (15.13), (15.14), (15.15) и табл. 14.1, на-
ходим коэффициенты:
av2=Cx—S-, (15.16)
2т
«22==— | (15.17)
т \ 2 /
32 2/г
Из уравнений (15.2) определяем частные производные:
F®——mg cos ft; (15.19)
(15.20)
Момент тангажа от веса равен нулю, поэтому Mz = 0. В соответст-
вии с соотношениями (15.19), (15.20) и Mz = 0, из табл. 14.1 нахо-
дим коэффициенты:
Oi3=g cos &о; а2з=Д7 sin &0; а33=0. (15.21)
Как уже было изложено в гл. 13, из нестационарных аэродина-
мических характеристик, обусловленных угловыми скоростями а и
О’, существенными являются 7И“ и 7И“г. Эти производные предста-
вим в виде
(15.18)
249
= (15.22)
г да да da V z
/И® == дМ^.==^_ lP± =Ь_Л~ (15. 23)
<4 d<*z d8 V z ’
- ba - b »г .
где a= r ; <”г=—&~»г;
ЖЖЖ2 Sh^
Z 2
wj“zqV2
M^z=-~--SbK. (15.23')
Имея формулы (15.22) и (15.23) для производных, по табл. 14.1
находим следующие коэффициенты:
«з2= —т^у-/И’:; (15.24)
4^0
а’ =—^-Ж. (15.25)
33 4V0 г 1
Определение производной 7Игв подробно изложено в гл. 10. Про-
Г? 6 п 8
изводные гх и гу* имеют существенные значения, когда в каче-
стве органа управления тангажом применяются элевоны. В этом
случае их определяют экспериментально, продувкой модели в аэро-
динамической трубе и уточняют по данным летных испытаний.
При проектировании самолета, производные Т7^, Р[л и 7Ихд
определяют по дроссельным характеристикам двигателя и уточня-
ют их значения в процессе летных испытаний. Производная Мхл
при прочих равных условиях зависит от расположения двигателей
на самолете.
После изложения методов определения коэффициентов и пра-
вых частей системы дифференциальных уравнений (14.10) пере-
ходим к исследованию продольного возмущенного движения.
Рассмотрим собственное возмущенное движение самолета после
прекращения действия возмущающих факторов, которое при задан-
ных начальных возмущениях А14, Лао, Айо, Айо определяется одно-
родной системой дифференциальных уравнений (14.10). Границы
асимптотической продольной устойчивости определяются критери-
ями (14.19). Подставляя значения коэффициентов дифференциаль-
ных уравнений (14.10), определенные соотношениями (15.6) —
(15.8), (15.16) — (15.18), (15.21), (15.24) и (15.25), в критерии
(14.19), найдем границы асимптотической продольной устойчивос-
ти для данного самолета и режима полета.
Анализ, проделанный по критериям (14.19) для коэффициентов,
определенных в этом параграфе, показывает сущность каждого
250
критерия из (14.19). Например, критерий aj>0 определяет влияние
продольного демпфирования, запаздывания скоса потока у горизон-
тального оперения, степени продольной статической устойчивости
по перегрузке, а также параметров исходного невозмущенного дви-
жения на его устойчивость.
Критерий щ>0 показывает, что наличие продольной статичес-
кой устойчивости по перегрузке и скорости является необходимым,
но недостаточным условием обеспечения продольной динамической
устойчивости самолета.
Остальные критерии (14.19) показывают влияние совокупности
указанных факторов на устойчивость продольного невозмущенного
движения.
Важное значение имеет определение влияния характера исход-
ного невозмущенного движения на свою асимптотическую устой-
чивость. Для этого анализ продольной динамической устойчивости
производится на всех характерных режимах полета при нескольких
значениях высоты и скорости полета.
Проделанный анализ, основанный на качественной теории диф-
ференциальных уравнений, позволяет выявить, есть ли продольная
асимптотическая устойчивость самолета. Однако для оценки дина-
мических свойств самолета необходимо иметь количественные ха-
рактеристики продольной динамической устойчивости и управляе-
мости.
Определение характеристик собственной продольной динамичес-
кой устойчивости производится интегрированием системы однород-
ных дифференциальных уравнений (14.10) при заданных началь-
ных условиях операторным методом.
Изображение системы однородных дифференциальных уравне-
ний (14.10), описывающих возмущенное движение самолета после
прекращения действия возмущающих факторов, получим из алгеб-
раических уравнений (14.50), полагая в их правых частях «10,
«го, «зо равными нулю:
(/?+«п)ДИ(/?) + «12Да (/’)+«1зд^(/’) = д1/о;
«21ДИ (/’) + (/? + й22)М/7)+(«23/’ + «2з) Д^(/’) = Дао + «23Д&о; (15.26)
«31 д17(/?)+(«32/?+«зг) д« (р)+(р2 + а'ззр)^ (/?)=
= Л’ДЬ'о (1 “р «зз) д&о 4“ «32 д«о) •
Решая эту систему алгебраических уравнений, найдем изобра-
жения вариаций кинематических параметров продольного движе-
ния:
лГл/ 4 (Р) ЛП, , ,1К О-7Ч
д1/(/’ =4тГ; Да = Д&(/’ =Т7Т- (15-27)
А (р) А (р) А (/?)
Определитель системы А(р) определяется соотношением (14.52).
Определители Av(p), Аа(р), A»(pj получаются из (14.52) заменой
в нем элементов соответственно первого, второго и третьего столб-
цов правыми частями системы алгебраических уравнений (15.26):
251
дп0 «12 «13
Ду(/’) = Д«0 4" «2зД$0 /?Д&0 4" (14" «зз) Д&о 4“ «згД«о /?4-Цц ДК'о Р~\- «22 «327’ 4“ «32 «23/2 4“ «23 /?2 4“ а'ззР «13 ; (15.28)
Д«(р)= «21 Дао4“«2зд&о «31 рДйо д'-(1 4’«зз) Дй(з4_«32 До-0 /?4-«11 «12 Д1/о «2з/?4~«2з ; /224~«ЗЗР (15.291
Д»(/’)= «21 7’4“ а22 Д«о4~«2зД&о «31 «327’4“ «32 Т’Д^О 4“ ( 1 4“ «Зз) Д&о 4“ «32Д«0 (15.30)
Подставляя (14.52), (15.30) — (15.32) в (15.29), получим изоб-
ражения вариаций кинематических параметров продольного движе-
ния самолета в функции от параметра преобразования Лапласа/1.
Переход от изображения к оригиналу, т. е. к самим вариациям,
производится с помощью таблиц преобразования, составленных,
как правило, для простых видов изображений. Поэтому полученные
изображения представляем в виде суммы простых алгебраических
дробей, пользуясь разложением Хевисайда.
Как это видно из (14.52), (15.28) — (15.30), определители Л,
Av, А«, А» являются алгебраическими полиномами. Определитель
системы А, равный левой части характеристического уравнения
(14.15), является алгебраическим полиномом четвертой степени от-
носительно р, коэффициенты которого а0, аъ а?, а4 определяются со-
отношениями (14.16). Как это видно из (15.28) — (15.30), другие
определители Av, А«, А» будут алгебраическими полиномами
третьей степени, поэтому изображения AV(p), /\а(р), М(р), опре-
деляемые соотношениями (15.27), будут правильными дробями.
Следовательно, изображения вариаций кинематических параметров
продольного движения можем представить как сумму простых дро-
бей:
дп= Aiv । А2к । Ази । Aiv . (15.31)
1 1 5
Р~ Pi Р—Р2 Р— РЗ Р— Pi
А. а9 Л,„ А,
Да = -^-4 2а [ 1 (15.32)
р —pi p—P'i Р~Рз Р—Pi
Д& = А» । А2» । Аз» । a4S (15.33)
Р— Pi р—Р-2 Р—Рз Р— Pi
где pi, р2, Рз, р4 — корни характеристического уравнения (14.15).
Числители дробей (15.31) — (15.33) — постоянные величины,
определяются известными из курса высшей математики соотноше-
ниями:
252
Д _ . Ди (Pl) . Aw Bl ’ д _ду (Ра) . й Ду(Рз) • Л2У , Лзу— „ В2 В3
Д Ду (Р4) . W В4 д ДИ(Р1) . . Да (Р?) В1 в2
. д« (рз) /13а , В-з д . В2 ’ (15-34) Да(д4) Мл) Bi . Д&(Рз) Д.( (Р4) , Л4Я— Дз
где Вь В2, Вя, В4 значения полинома 4«оР3+За1р2+2п2р+йз, явля-
ющегося производной от левой части характеристического урав-
нения (14.15) по р, соответственно при р=рг, p=Pz', Р=Рз', Р=р4-
Числители дробей (15.34) — постоянные величины, так как они
равны значениям определителей (15.28) -— (15.30) соответственно
при р=рг, Р=Р2', Р=рз', Р = Ра- Как это видно из (14.46), дроби
(р—Pi)-1; (р—р2)-1; (р—Рз)-1', (Р—Pi)~} являются изображениями
функции соответственно ePi/, е₽2', ePst, ePti, поэтому согласно
уравнениям (15.31) — (15.33) вариации кинематических парамет-
ров продольного движения равны:
AV—AiFePi/ +А2у^2/ + -‘43уеРз/+а41/ер‘/; (15. 35)
Аа = А1аеР1< ф-Д2аер2' -ф А3«еРз< -фА^еР**; (15.36)
д&=Д19еР1< -ф А^е^-]- Д3»еРз< -фА&е^. (15.37)
Если корни характеристического уравнения (14.15) действитель-
ные, то продольное возмущенное движение апериодическое. Если
хоть один из корней характеристического уравнения (14.15) поло-
жителен, то исходное продольное невозмущенное движение само-
лета неустойчиво. Для устойчивости продольного невозмущенного
движения необходимо и достаточно, чтобы все корни характерис-
тического уравнения (14.15) были отрицательными.
Степень устойчивости или неустойчивости продольного невоз-
мущенного движения определяется производными от вариации по
времени. У устойчивого самолета /д<0; р2<0; р3<0; р4<0. Оче-
видно, что чем больше по абсолютной величине эти показатели,
тем выше степень продольной динамической устойчивости само-
лета.
Когда хоть один из показателей положителен, например Pt>0,
продольное невозмущенное движение самолета неустойчиво. В та-
ких случаях чем меньше этот показатель, тем ниже степень про-
дольной неустойчивости летательного аппарата.
Пусть корни характеристического уравнения (14.15) комплекс-
ные и равны
± ViB Рз,4=Р- ± ^2ь
1 2
(15.38)
В этом случае продольное возмущенное движение самолета носит
периодический характер.
253
Для этого случая в соответствии с обозначениями (15.38) из
(15.35) — (15.37) можем получить:
• Д1/=£>п е1 sin (v1/+?iv) +Ave2 sin (тг/-|-<Р2г);
p.( p./
A(x = Dlael sin (v1/ + ?i^) + A«e2 sin + (15.39)
р./ Д&=А&е1 ®is) “г А&е2 sin (v^ т ф2»)»
где Ау = 2 | Av —“ V -^3V-^4V»
А«==2 J.’ AlaA-^j Ак=2 |/ДзаА4а:
ZJi&=2]/ Ai&Ao»; tp. „ _(Av —4>y)i A»—2 |' А39А49; щ о — (Азу —Лу)< . • lg^ . t„ (Л3а- А4«) 1 . (15.40)
g'1V Alr + A2v t„ _ 1
ria Д 1 Д л1а 1 .. (А» ““ Л2») z (Л3»~ Л») 1
16 т1» Л 1 д 5 т2& я 1 д Л
Как это видно из (15.39), колебательное продольное возмущен-
ное движение затухающее, если действительные части комплексных
корней характеристического уравнения (14.15) отрицательны (ц <
<0; ц/<0). Чем больше их абсолютные значения, тем быстрее са-
2
молет возвращается к исходному невозмущенному движению.
Значения начальных возмущений задаются в зависимости от ус-
ловия полета на основании статистики. В качестве примера приве-
дем результаты обработки данных летных исследований, выпол-
ненных автором на самолетах Ту-104, Ил-18, Ил-62, Ту-134 и Ан-24
в турбулентной атмосфере за период с 1966 по 1973 гг. На высоте
400 м при скорости полета К=100 м/с в среднем начальные зна-
чения вариаций кинематических параметров продольного движе-
ния указанных самолетов следующие; А1/о=6,5 м/с, А«о=О,О6 рад,.
Айо = 0,065 рад, Айо = 0,1 1/с.
Исследование управляемого движения самолета производится с
помощью неоднородной системы дифференциальных уравнений
(14.10). В этом случае правые части алгебраических уравнений
(15.26) будут содержать в качестве дополнительных слагаемых:
изображения управляющих воздействий, заданных соотношениями
(15.1). Дальнейшее исследование продольного управляемого дви-
жения производится аналогичным путем и сводится к определению-
зависимостей вариаций кинематических параметров от времени.
§ 15.2. Короткопериодическая форма движения
Систему дифференциальных уравнений продольного возмущен-
ного движения (14.10) можно упростить, пользуясь результатами
анализа данных летных испытаний, исследований и эксплуатации,
254
а также практических расчетов возмущенного движения само-
летов.
На основании многочисленных исследований установлено, из
двух пар комплексных корней характеристического уравнения,
представленных соотношениями (15.38), у одной модуль веществен-
ной части намного больше другой (| ИI I МI) • Первой паре комп-
I 2
лексных корней соответствует короткопериодическая высокочастот-
ная форма продольного возмущенного движения. Длиннопериоди-
ческое медленное возмущенное движение, соответствующее малой
по модулю вещественной части сопряженных комплексных кор-
ней, связано в основном с поступательным перемещением самолета
в пространстве. Короткопериодическое движение характеризует
изменение углов атаки и тангажа, является вращательным. Физи-
ческая основа различия этих двух видов продольного возмущенно-
го движения есть быстрота изменения во времени углов атаки и
тангажа, в то время как воздушная скорость и траектория изменя-
ются значительно медленнее, чем угол атаки. Поэтому парирование
короткопериоднческого возмущенного движения намного труднее,
чем длиннопернодического, из-за быстроты первого.
Пользуясь свойствами этих движений, в начальный период вре-
мени можно полагать вариацию скорости и ее производную по вре-
мени равными нулю и получить систему двух дифференциальных
уравнений. Полагая в двух последних дифференциальных уравне-
ниях системы (14.10) вариацию скорости и ее производную равны-
ми нулю, получим
d&a , . < , rfAS n , dha < . . й2Д& < , д!Д& „
1 «22Да + й9-< =0; ач9 На32Да-ь--ь-о„,-=0.
dt---------------------------------------------------23 dt-32 dt-' rf/2 1 зз dt
(15.41)
Характеристическое уравнение этой системы:
/?(/’2+«iP+a2)=0. (15.42)
Легко заметить, что один из корней этого уравнения равен нулю,
обозначим его рз- Тогда для определения остальных двух корней
Pi и р2 имеем следующее уравнение:
р2-\-а1р-\-а2—0, (15.43)
где — Оззф- й22—П23Я32; 0-2—^22^33—^23032. (15.44)
В соответствии с критериями (14.19) для устойчивости короткопе-
риодического продольного движения необходимо и достаточно:
Oj>>0; а2>0- (15.45)
Из соотношений (15.17), (15.18), (15.24), (15.25) и (15.44) нахо-
дим:
(15'46>
»= Sb-'- ,15Л7)
255
Пренебрегая эффектом косой обдувки двигателя, т. е. полагая т*
равным нулю, из (15.47) получим
Й2==_22лСл, (15.47')
'г
где о„ — степень продольной устойчивости самолета по перегруз-
ке, определяется соотношением
= —(15.47")
и
2/и „
где Р—— — относительная плотность самолета. Вращательные
производные Л4“2 и 7И“ — отрицательные величины, поэтому пер-
вое условие из (15.45) выполняется. Производная есть сте-
пень продольной статической устойчивости самолета по перегрузке.
У статически устойчивого самолета она отрицательна, поэтому в
этом случае второе условие из (15.45) также выполняется. Опреде-
ление степени продольной статической устойчивости по перегрузке
изложено в гл. 9 и 10.
Количественный анализ короткопернодического возмущенного
движения производится интегрированием системы однородных диф-
ференциальных уравнений (15.41) при заданных начальных усло-
виях Дсс0, Лсд, Д'в’о, Л'&о-
Исключив из системы (15.43) производные от вариации угла
тангажа, получим одно дифференциальное уравнение второго по-
рядка относительно вариации угла атаки:
—+ Л2Да=0, (15.48)
где 2|j.=<2:22 + 033—«з2«2з; ' (15.49)
Л2=аззй22 —«згой- (15. 50)
В соответствии с (15.39) общее решение дифференциального урав-
нения (15.48):
Да=.Ое~1Х< sin (v/-}~¥)> (15.51)
где v=]-+2 — р2;
/?=]/(Да0)2 + (^о..+ нЛ°оГ; tg?=vAa^a0+pAa0). (15.52)
Из первого уравнения системы (15.41) находим
Д& = Да+<Z22 f Да<//+С. (15.53)
Подставляя сюда Ла из (15.51), после выполнения интегрирования
получим
Д&= D fl — «22 —~) e-tU sin (v^ + ?) —
\ р.2 4- v2 )
sin(v/+<p) + C. (15.54)
256
Постоянную интегрирования С находим из условия при 7=0, AO =
= Д До.
Из соотношений (15.17), (15.18), (15.24), (15.25) и
(15.20) находим
1 / *, CayQV0S\ (^+<)qV0S62a
Р—— 1т*-]--------------5;
г 2т \ 1 2 / 4/z
(15.49),
(15.55)
тС^у2Л
2/г
т*-\-С“
£2 =__£_
2т/г
(15.56)
Вращательные производные т“г, — отрицательные величи-
ны, поэтому коэффициент затухания р положителен и в соответст-
вии с (15.51), (15.54) вариации углов атаки и тангажа с течением
времени уменьшаются. При t—>оо, вариация угла атаки, умень-
шаясь стремится к нулю. Чем больше р, тем быстрее уменьшается
во времени вариация угла атаки. Вариация угла тангажа при
t—>-оо стремится к постоянной интегрирования (15.54):
Д& —> 6=Д&0 — D sin ©
(ц + V) 1
р.2 v2j
(15. 57)
§ 15.3. Длиннопериодическая форма движения
Раздельное рассмотрение длиннопериодического движения пра-
вомочно только в том случае, когда установлено, что короткоперио-
дическое движение затухающее. Поэтому предварительно по фор-
муле (15.55) определяется коэффициент затухания р короткоперио-
дического движения и при положительном значении его приступа-
ют к рассмотрению длиннопериодического движения.
Полагая в первых двух уравнениях системы (14.10) вариацию
угла атаки и ее производную по времени равными нулю, получим
-^+G11Al/+auA&=0;
dt
(15.58)
a2Z Ь ^22Д“p «2йД& — 0.
Исключив вариацию угла тангажа и ее производную, по времени,
получим
d?bV , „ d^V . ,2 n
—-—|-2p------
rf/2 v dt
(15.59)
где
2(1 = ^ + ^; /г2
V аъ,
ДцД23 &21Д1Й
<z23 <z23
Общее решение дифференциального уравнения (15.59)
—
Д1/=£)ге v sin (Уу/+ ®v)>
(15.60)
равно:
(15.61)
257
9 776
где vr=l/A kv — p-2;
Dv=\f(AV0)2+ (Д1/о± ^о)2. tg^= V^°-.. (15.62)
F 'Vy AV0-+-fzAE0
V
Подставляя (15.6), (15.7), (15.21) в (15.60), получим
2[л=— (1 +^gKoS-gsil^°-; (15. 63)
та \ 2 т Vo
,2 g cos So / dm . Cl'o c\ । Ct/g cos »0
kV=----~— I *у +4 — O H---------------QO ±
\ 2 / m
-4— g sin M S ) - -Cxg s^65. (15.64)
m<zlz(l \ 2 / m
Исследование устойчивости длиннопериодического движения
производится с помощью решения (15.61) и соотношений (15.63),
(15.64). Если показатель р положителен, то вариация скорости с
v
течением времени уменьшается, стремясь к нулю при t—>оо. В этом
случае длиннопериодическое движение самолета устойчивое. В ито-
ге исследования длиннопериодического движения строят график
функции (15.61), показывающий количественные и качественные
характеристики его устойчивости.
§ 15.4. Нормирование характеристик продольной
устойчивости самолета
Продольная динамическая устойчивость характеризуется пара-
метрами переходного процесса, т. е. коэффициентами затухания р
и р и периодами колебания Т иТу короткопериодического и длин-
v
непериодического движений. Чем быстрее уменьшаются во време-
ни амплитуды колебания короткопериодического и длиннопериоди-
ческого движений, тем лучше характеристики продольной динами-
ческой устойчивости самолета. Для безопасности полета необходи-
мо исключить возможности выхода самолета на критические углы
атаки и перегрузки, ограниченные из условия прочности конструк-
ции и сваливания на крыло.
Первым требованием к характеристикам продольной динамиче-
ской устойчивости является затухание короткопериодического дви-
жения (ц>0). Однако этого требования еще недостаточно, так как
при слабом затухании короткопериодического движения экипаж и
пассажиры в течение длительного времени подвергаются знакопе-
ременным перегрузкам, что утомляет экипаж и отрицательно ска-
зывается на самочувствии. Поэтому необходимо, чтобы колебатель-
ное короткопериодическое возмущенное движение быстро прекра-
тилось.
Колебательное продольное возмущенное движение при малом
периоде большой частоты, сопровождается большой угловой ско-
2Ьв
ростью тангажа coz, что, в свою очередь, обусловливает большие
переносные, относительные и поворотные ускорения в точках, уда-
ленных от центра масс самолета, и особенно на руле высоты в про-
цессе его отклонения. Это обстоятельство создает инерционные
силы, действующие на руль высоты и другие части самолета. В ча-
стности, при определенных положениях руля высоты усилие на
штурвале от инерционных сил, действующих на руль высоты, мо-
жет оказаться значительным.
Для оценки качества короткопериодического движения приме-
няется несколько критериев. Наиболее распространенным из них
является промежуток времени /о,5, в течение которого амплитуда
колебания уменьшается вдвое, который определяется из соотно-
шения (15.51):
=2De~^t+t°’5X (15. 65)
Решая это показательное уравнение, найдем
/0,5=1112/р.=0,693/р.. (15.66)
Чем больше коэффициент затухания р, тем меньше времени по-
требуется на то, чтобы амплитуда уменьшилась вдвое.
Другим критерием оценки качества короткопериодического воз-
мущенного движения является логарифмический декремент, кото-
рый равен натуральному логарифму отношения амплитуд, измерен-
ных с интервалом времени, равным одному периоду
л е—l1Z
!^- (15.67)
В зависимости от назначения самолета и требований к безопасно-
сти полетов устанавливают время, в течение которого амплитуда
уменьшается в десять, двадцать и более раз. Формула для опреде-
ления его аналогична соотношению (15.66):
, In 10 2,3 , 1п20 3,0 ,1С „о.
/ю=—=—; /2о=----------=—- (15.68)
l>. IJ. [J. [Л
При этом число колебаний равно:
Чо=^ = ^и2о=^=^- - (15.69)
Для пассажирского самолета в целях обеспечения комфорта г3
должно быть меньше трех (Д<3).
Угловая скорость тангажа определяется как производная от
(15.54). Величина ее пока еще не нормируется. Однако она не дол-
жна превышать величины, при которой инерционные силы достига-
ют значения, ухудшающего управление самолетом и работу
приборов.
§ 15.5. Продольная динамическая управляемость
Продольная динамическая управляемость характеризуется бы-
стротой изменения кинематических параметров продольного дви-
жения самолета под действием определенных внешних сил и мо-
9*
259
ментов, созданных отклонениями руля высоты закрылков, рычага
изменения режима работы силовой установки и других средств.
В отличие от возмущенного движения управляемое движение
происходит под действием не случайных, а вполне определенных
сил, используемых для изменения кинематических параметров ис-
ходного продольного движения, описывается системой неоднород-
ных дифференциальных уравнений (14.10) с правыми частями, за-
данными как функции времени (15.1). Решение этой системы при
одновременном отклонении всех органов управления продольным’
движением самолета громоздкое, поэтому ограничиваемся рас-
смотрением управляемого движения самолета при отклонении од-
ного органа управления тангажом — руля высоты. Эффект, выз-
ванный суммарным воздействием всех управляющих факторов,
определяется суммированием вариаций соответствующих кинема-
тических параметров, обусловленных отдельными управляющими
воздействиями. Правомерность такого суммирования основана на
линейности дифференциальных уравнений системы (14.10).
Рассмотрим короткопериодическое продольное управляемое дви-
жение при отклоненном органе управления тангажом. Для его
описания возьмем два последние уравнения системы (14.10), по-
лагая в них вариацию скорости и ее производную по времени рав-
ными нулю:
«Да . ' «Д8 . . . *
------Г «23-----h «22 Да - - «23Д"—«201
dt dt
«2Д§ , d\a i ' «Д8 , .
——И «32 ——- + «зз ~— + «32Да — «зо-
d& dt dt
(15.70)
Правые части этой системы являются функциями отклонения ор-
гана управления тангажом:
* Л%Д8В
«20=-^4---
mVfy
; ^зо=—-—
* Z
(15.71)
В эксплуатационном диапазоне отклонения органа управления
тангажом, производные Дув и Л4гв — постоянные величины, по-
этому для случая, когда исходное продольное движение установив-
шееся, правые части системы (15.70) являются функциями откло-
нения органа управления тангажом:
й2о=М8в; «зо=А:3Д8в. (15.72)
Постоянные коэффициенты равны:
ks=-f~. (15.73)
mV0 Iz
В соответствии с обозначениями (15.73) система (15.70) принима-
ет вид
—— Г «23 —~~ -ф- «22Да -ф- «2зД^ — ^2Д8в;
dt dt (15.74)
«2Д8 . - d\a . ' dt№ , . _. As
—— "Г«з2 —----И «зз~——(-«32Да — «зД^в-
d& dt dt
26Э
Отклонение органа управления тангажом от своего исходного по-
ложения Лбв является функцией времени, а в частности может быть
постоянной величиной.
В исходном движении угол тангажа невелик, поэтому членом
Т? 11 можно пренебречь ввиду его малости. После
22 т\ о
этого допущения систему (15.74) приводим к одному дифференци-
альному уравнению второго порядка относительно вариации угла
атаки:
I q 6^Д(Х [ * о * я d Д ^в j л л <>
------р- 2[Л —- + Л2 Да=Aq —~ 4- А Л8В,
dt2 dt ' Щ
Ло = Л2; ^2=033^2 — Г/. 23^3-
(15. 75)
(15.76)
(15.49) и
где
Коэффициенты р, и k определяются соотношениями
(15.50).
Характеристики продольной динамической управляемости тес-
но связаны с изменением нормальной перегрузки, поэтому целесо-
образно дифференциальное уравнение (15.75) преобразовать так,
чтобы его левая часть содержала вместо вариации угла атаки ва-
риацию нормальной перегрузки.
Между вариациями угла атаки и нормальной перегрузки связь
получается из соотношения (10.44):
«цД;;
qevgs у
(15. 77)
В соответствии с принятыми допущениями, полагая Су постоянной,
cosOo=l, из (15.78) определим производные:
dAa___ 2mg d\ny a2i\a________ 2mg d^hny
dt ~ C^QV^S di~' dC ~ C^V^S dti ' ' '
Из (15.75), (15.77) и (15.78) имеем следующее дифференциальное
уравнение продольного управляемого короткопериодического дви-
жения самолета в вариациях нормальной перегрузки:
(15.79)
dfl ~ dt 1 у dt 1 в ' ’
д* СубК) Q д*
где Ао=—--------о; А=---------А. (15.80)
2mg 2mg v 7
Общее решение неоднородного дифференциального уравнения
(15.79) равно:
(15.81)
где fi(t) и f2(t) — пока неизвестные функции; t\nyl(t), t\ny2(t) —
частные решения однородного дифференциального уравнения
d2An„ d\n„
-/-+2^ + ^ = °. (15.82)
-• dt* at .
261
Л (/)=—-—\ (Ао^-Я- +аХ)
Pi ~Р2 i\ dt )
Характеристическое уравнение
^ + 2[1р4-Л2=0. (15.83)
Корни этого квадратного уравнения равны:
Pi= — —№'> Р-2——р — У^Р2— k2. (15.84)
Частные решения однородного дифференциального уравнения
(15.82) равны:
AnB1=ePiZ; ^пу2=ер^. (15.85)'
Как известно из теории обыкновенных дифференциальных урав-
нений, функции fi(i), fzlt) равны:
(15.86)
/2(/)=—1----\ f + дХ) е-₽=' Л4-С,
Рг — Pi J \ Л /
где Ci п С2 —- произвольные постоянные интегрирования, которые
определяются по начальным данным.
Из (15.85) и (15.86) определяем общее решение неоднородного
дифференциального уравнения (15.79):
ч=—Ш’о^+л^гР,'+
Pl — Р2 J \ dt )
+ -^- V (Ао^- + ХД8,3 е cZ/4-Ci epd +С2 (15.87)
Р2 — Pl J \ dt j
В общем случае, когда отклонение руля высоты от исходного по-
ложения А6В является произвольной функцией, вычисление интег-
ралов в (15.87) производится численным методом.
Этим методом определяется управляемое короткопериодическое
изменение нормальной перегрузки при любом законе отклонения
органа управления тангажом. При этом изменение угла атаки опре-
деляется из уравнений (15.77) и (15.87) простым алгебраическим
преобразованием.
Простейшим случаем продольного управляемого движения
является отклонение органа управления тангажом на постоянный
угол:
ДЗВ=const. (15.88)
При таком законе отклонения органа управления тангажом из
(15.87) получим
д* двв
Д/г„ = —1---(15.89)
PlP'2
Эффективность управления определяется приращением нормаль-
ной перегрузки за время \t—t*—to, после перевода органа управ-
ления тангажом на новое положение, определяемое постоянным от-
клонением А6В. Это условие запишем в виде при £ = /0; &ny=&nye;
t* =/0+ДЛ — Д^о + &Пу. (15.90)
‘262
При отсутствии случайных возмущающих факторов, начало отсчета
всегда можно выбрать так, чтобы й>=0, ДпрО=0. Тогда условие
(15.90) можно записать так: при /=0; Дщ, = 0
/=/*; Дл{/ = Дя*. (15.91)
В соответствии с (15.89) и (15.91) имеем следующую систему двух
алгебраических уравнений для определения произвольных постоян-
ных интегрирования:
СфС2=-^-; С1е^’+С2е₽«/*=—^2-+Дл;; (15.92)
Р1Р2 Р1Р-2
откуда находим
с (1 — ер,<*) Л*Д 8В — рхр^п* . _Ар2Ди* —(1 — е^*) Л*Д8В
1 Рьр2(ер,/*—еР1<*) ’ 2 АРг (еРа<* — ер,/*)
(15.93)
Подставляя эти значения произвольных постоянных в общее реше-
ние (15.89), получим
Д Л*ДБВ [(1 —еР!/)/*Д6„ —р1р2Дпг/]еР1''
у Р1Р2 Р\Р2^Рг^ —
[(1 _еР1^)у1*Д8в-АР2ДнПе^
--------1 (>^>
В соответствии с условием (15.91) t* есть время, в течение кото-
рого орган управления тангажом находится в отклоненном на угол
Лёв от исходного положения.
Корни характеристического уравнения (15.83) устойчивого са-
молета отрицательны, и так как в решении (15.94) переменными
являются только и е^, а остальные, в том числе и —
заданные постоянные величины, то приращение нормальной пере-
грузки, обусловленное отклонением органа управления тангажом
от своего исходного положения на постоянный угол Дбв асимптоти-
чески стремится к пределу:
Л*
НтДл„=—Кд8в. (15.95)
Р1Р2
Отсюда находим отношение, являющееся важной характеристикой
продольной управляемости:
§'гу = — Р1^2
в ИтД/г^ Л)
t-t-OO
(15.96)
Следовательно, потребное отклонение органа управления тангажом
Я-ля изменения нормальной перегрузки на единицу равно отноше-
нию pipz/Ai*, которое у устойчивого самолета отрицательно. Это
означает, что на устойчивом самолете для положительного прира-
щения перегрузки необходимо отрицательное отклонение органа
263
управления тангажом от своего исходного положения (снизу
вверх).
Решим эту задачу в другой постановке, т. е. при следующих на-
чальных условиях:
при / = 0; Д/гу—0; Ьлу = ^пу(], . (15.97)
где Anv0 •— начальное значение производной от приращения нор-
мальной перегрузки по времени, которое задается как характе-.
ристика маневренности самолета.
Из решения (15.89) определяем производную от приращения
перегрузки по времени:
dAnu
^y=—-^=ClPl^ + C2p^. (15.98)
dt
В соответствии с начальными условиями (15.97) из (15.89) и
(15.98) имеем следующую систему двух алгебраических
ний;
Л*
С1~\~С2=------Д8В; С1р1-\-С2р2—^п 0.
PlP2
Решая эту систему, находим
_ Л*Д6В + pi&hyo А,^\+р^п1Ю
1 А (А —А) ’ 2 А (А —А)
Подставляя эти значения произвольных постоянных в общее реше-
ние (15.89), найдем зависимость приращения нормальной пере-
грузки от времени:
_Л*Д8В (Л1Д8„ + АЛп1/0)е/’,<
У Р1Р2 Р1 (А — А) ' Р2 (Р2 — А)
Для устойчивого самолета при t~>со ер=*—»0, eps<—>0, поэтом}7
приращение нормальной перегрузки асимптотически стремится к
пределу:
Л*
Дга„=—5-Д8в. (15.102)
PlPl
Отсюда находим градиент отклонения органа управления танга-
жом по перегрузке:
8^=_^b_=A£L. (15.103)
Д/Zy Л1
При летных испытаниях и исследованиях отклонение органа уп-
равления тангажом на постоянный угол от исходного положения
называется «дачей» рулем высоты. В качестве примера на рис. 15.1
приведены кривые изменения нормальной перегрузки и скорости во
времени при «даче» рулем высоты.
Дифференциальное уравнение (15.80) используется для реше-
ния обратной задачи, имеющей важное значение при эксплуатации
уравне-
(15.99)
115.100)
.(15.101)
264
Рис. 15.1. Изменение скорости и нормальной перегрузки по
времени при «даче» рулем высоты. Высота полета 7280 м
воздушных судов, когда по данным бортовых регистраторов извест-
но изменение нормальной перегрузки во времени, а требуется опре-
делить отклонение руля высоты во времени. В этом случае интег-
рируется дифференциальное уравнение (15.80), полагая в нем А6В
неизвестной функцией от времени, левая часть дифференциальных
уравнений этой системы определяют по зарегистрированным при-
ращениям перегрузки, как известную функцию времени. Например,
самописец К-3-63, установленный на многих пассажирских и транс-
портных самолетах, не регистрирует отклонение руля высоты. Он
регистрирует изменения во времени нормальной перегрузки, скоро-
сти и высоты полета. Для определения отклонения руля высоты в
функции времени используется дифференциальное уравнение
(15.80).
Вопросы для повторения
1. Чем определяется собственное продольное возмущенное движение самоле-
та ат какими дифференциальными уравнениями оно описывается?
2. Какой системой дифференцированных уравнений описывается продольное
. управляемое движение?
3. Чем обусловлено различие между короткопериодическим и длиннопериоди-
ческим возмущенными движениями самолета?
4. Какими критериями определяются границы продольной динамической ус-
тойчпвости самолета?
Задача
Определить потребное отклонение руля высоты для изменения нормальной
перегрузки на +0,5, если = —0,2 рад.
Ответ: Дби== —0,1 рад или Л6П= —5.7°.
;265
Глава 16
Боковое возмущенное движение самолета
§ 16.1. Уравнения бокового возмущенного движения
Уравнения бокового возмущенного движения в вариациях кине-
матических параметров движения, т. е. в их отклонениях от исход-
ного невозмущенного движения, в общем виде были получены з
гл. 14.
Пг1?лд.'дл,?зу’ется„итго входное невозмущенное движение — ус-
тановившийся горизонтальный полет без скольжения, поэтому
действующие на самолет боковые силы и моменты равны нулю, по-
этому =“у*=0.
В соответствии с этим из (14.2) имеем р = АР; у=Ду; ф=Аф;
(ox=Awjc; ау=А>в)у, поэтому в дальнейшем индекс А опускается.
Если допустить, что возмущения малы и что в процессе боко-
вого возмущенного движения параметры продольного движения ct,
V, 0 не изменяются, то в возмущенном движении на самолет бу-
дут действовать боковые силы и моменты, зависящие от парамет-
ров бокового движения и их производных. Боковые линейные и уг-
ловые перемещения в неустановившемся возмущенном движении
обусловлены действием этих сил и моментов.
В соответствии с условиями p^=Y^=<p^=a>JW.=a>y^=O диффе-
ренциальные уравнения бокового возмущенного движения в вари-
ациях (И.4) для рассматриваемого случая можно записать в виде
mV* -------u)»'“a*u)^):=A^+(wgjz;
г da>x . dwy ____ .. _ , , dwx __j, (16-1)
lx dt Ixy dt at lxy dt ~MRy'
rjie \RZ — составляющая результирующей силы по оси OZ;
(mg)z — проекция силы тяжести на эту же ось; XMRx, XMRy —
проекции приращения результирующего момента на оси ОХ п OY.
Проекция силы тяжести на ось OZ равна
(mg)2 = mg cos & sin у ~ mgy.
К уравнениям (16.1) динамики бокового возмущенного движе-
ния следует добавить кинематическое уравнение связи (14.5):
Так как возмущенное движение есть неустановившееся неста-
266
ционарное движение, то определять Д/?2, АМВх, &МВу необходимо
из нестационарных условий движения.
Разделив первое из уравнений (16.1) на mV*, второе на Д и
третье на Iy> в виде , запишем уравнение бокового возмущенного движения ^--о)„-аАоц.-Д^, ~У==0; dt у * Л z Р* 4», 0; dt Ix dt Е С1ъ 1 у G.L 4т—°>x+tg Mi/=°> at
где
—Д/И Д/И
2 mV ? У„
§ 16.2. Анализ решения уравнений бокового
возмущенного движения
Приращения сил и моментов, фигурирующие в уравнениях
(16.2), при использовании представления коэффициентов этих сил
в виде (13.1) могут быть записаны так:
ддг=Жр+Мр+ДХ+rxx^. 4- 4- 7&Шу-,
(16.3)
В первом приближении в выражениях (16.3) сохраним только
два нестационарных слагаемых и М$._ В этом случае урав-
нения (16.2) после подстановки значений Д/?2, ДЛГЖ, ДЛ^ примут
вид
«Г V #
—-Кп=о;
dt dt х х Ix dt х у '
(16.4)
v dt у> ItJ dt !J dt y y
—4- tg М»+=°-
Введем обозначения:
267
bn=^-RU + 613===_(1+7?“J,); 614=__£_;
ь’21=-м1-, ь21=-мЪ ь22=^~мхх; ь23=-^, ь23=-му,
* X
b'^=-M^ Ь31=-М^ b32=-^L- b31=-M^-, b33=-M^,
bi2= — 1; &43=tg&*-
Применяя преобразования Лапласа к системе уравнений (16.4)
и учитывая обозначения (16.5), запишем уравнения возмущенного
движения в операторной форме при начальном возмущении углов
скольжения и крена (fl(0) =.р0 и у(0) = у0):
(Р + &и) ₽ + <Wx + Ь13иу + &14у=₽0;
(^2l/’-|-^21) Р^22) (^2.'?Л' +^2з) % = ^2l?Ci; „.
. , \ , (1b. о)
\Ь3\р 4- &31) р 4- \Ь32р 4- ь32) «х+(р+^зз) =^3iPo>
^х + ^г/Ч-^^ То-
Система линейных алгебраических уравнений (16.6) относитель-
но переменных р, co.v, соу, у совместна, если ее характеристический
определитель
Р 4-^11 b12 b13 Ь14
^21 + ^21 Р~\~Ь22 Ь2зр-\-Ь23 О
Д= , , (16. /)
feiP 4-^31 b32p-\-b32 p-\-b33 о
0 b42 bi3 p
' Раскрывая определитель (16.7), получим полином ' четвертой
степени относительно параметра преобразования Лапласа:
' ^b4p^b3p^b2p^biP4-bG, (16.8)
где коэффициенты bj зависят только от коэффициентов bjk.
Форма решения системы линейных дифференциальных уравне-
ний (16.4) зависит от корней характеристического уравнения
(16.8): вещественному корню отвечает апериодическая форма ре-
шения в виде экспоненты, а паре сопряженных комплексных кор-
ней —- колебательная форма решения.
Конструктивно аэродинамические характеристики самолетов
(bjh) таковы, что для характеристического уравнения бокового воз-
мущенного движения (16.8) реализуется случай двух вещественных
(РР, Рг) и двух комплексных сопряженных корней (рз,4 = ё±тг).
В этом случае решение уравнений (16.4) примет вид
?(/)=Z?ipe₽iZ4-S2pep»z4-£>i3e^ sin (т/-]-?₽);
u>x+ sin (vZ-j-^J;
«у (/)=В1Шу еР’* 4- В2Ыу еР‘{ 4- sin (vZ4-<рю&); (16- 9)
у (/)=е₽,/4~ B2i ep:>t 4- е5' sin (т/4_?т)-
268
Коэффициенты Вц, В2?, D?, <рр, /?1<вх и т. д. зависят от началь-
ных условий (Ро, То, ихо, (Оуо) и коэффициентов bjh.
При соответствующем выборе начальных условий возможна
реализация одного из частных решений -— форм движения.
Из двух вещественных корней р\ и р2, как правило, один по аб-
солютной величине значительно больше другого. Если веществен-
ные корни и вещественная часть комплексных корней (g) меньше
нуля, боковое движение самолета устойчиво.
Форма движения, соответствующая большему по модулю ве-
щественному корню, быстро затухает. Эту форму движения приня-
то называть движением демпфирования крена. Меньшему по мо-
дулю вещественному корню характеристического уравнения соот-
ветствует медленно затухающее движение, его принято называть
спиральной формой движения. Комплексные корни характеристиче-
ского уравнения определяют колебательную форму движения.
Для того чтобы получить более ясное представление о характе-
ристиках бокового возмущенного движения, рассмотрим пример
расчета для пассажирского самолета при следующих условиях:
0=850 км/ч; высота полета Н= 10000 м; =0,031 рад; т=40т;
/зс = 0,72 106 кг • м2; /у = 2,55 106 кг-м2; Ду = 0,114 • 106 кг-м2; S =
= 115 м2; 1=29 м; аэродинамические производные равны:
Ср = -0,745; mpx= -0,086; mpy= -0,115;
77^4=—0,41; ni?y= -0,115; zn>=-0,16;
nt,*—9,92. Принято С“*==С“у=ти₽==/?г₽==0.
У А Лг а X у
Уравнения бокового возмущенного движения (16.4) для этого слу-
чая имеют вид
^-+0,1045р - 0,035о>х - 0,0415у=0;
dt
4,585р 4-^ + 1,343со _ о, 158 0,524<оу=0;
х dt у
1,7268-0,0147^-0,0185wr4-—+0,106^=0;
1 dt ' dt у
-<^+0,035^+^-=0,
характеристическое уравнение которых есть
Д=0,993// + 1,554// 4- 2,403/?2-]- 2,502/? - 0,0208.
Корни этого уравнения, определяющие формы движения, рав-
ны:
спиральная форма движения р\ = 0,00825;
форма движения крена р2 =—1,2485;
колебательная форма Ps,4 = —0,162+1,418/.
Как видно, спиральная форма движения неустойчива (pi>0),
а остальные две формы движения устойчивы (/?2<0; £<0).
269
На основании таких расчетов можно определить показатели бо-
ковой динамической устойчивости самолета, которые рассматрива-
ются в § 16.5.
§ 16.3. Приближенные методы исследования
ферм бокового движения
Рассмотрим приближенно форму движения крена без скольже-
ния. Для этого в уравнениях (16.4) отбрасываются слагаемые, за-
висящие от |3 и — В этом случае ax=dyldt и движе-
ние крена описывается уравнением
d^Jdt —7Й“аол=О. (16.10)
Применяя преобразование Лапласа к уравнению (16.10) при
начальном возмущении угловой скорости сох(0) =<ожо, приводим
уравнение к операторной форме записи:
(Р~ мхх)шх=шхо-
Решением этого алгебраического уравнения будет:
Zx=... (16.11)
р—Мхх
где ых=ых(р) — лапласово изображение угловой скорости крена.
Как известно, такому операторному изображению соответствует
функция
—“х
«>х(/)=«хОе^Л (16.12)
в чем нетрудно убедиться, выполнив преобразование Лапласа
этой функции.
Из (16.12) видно, что_форма движения крена определяется
демпфированием крена (Мхх), носит апериодический характер
и при 7И“*<(0 затухает с течением времени.
Для рассмотренного примера (см. § 16.2) приближенное значе-
ние корня характеристического уравнения р2 согласно (16.11) есть
А— - Ь22=М“х = -1,343,
в то время как точное численное его значение определяется вели-
чиной р2=—1,2485 (см. § 16.2).
Время практического протекания движения демпфирования кре-
на, равное времени достижения ^^-—0,05, при приближенном и
“хО
точном описании этой формы движения соответственно равно:
4 ~ 2,23 с; /3=2,402 с.
Из рассмотренного примера видно, что форма движения крена
протекает в течение краткого отрезка времени (рис. 16.1) и при
высокой степени демпфирования удовлетворительно описывается
приближенным способом.
270
В боковом возмущенном движении спиральная форма в основ-
ном определяется движением центра масс самолета. Приближенно
спиральную форму движения можно описать уравнением (16.4),
если принять, что моменты сил относительно осей ОХ и ОУ сба-
лансированы и линейное ускорение по оси OZ равно нулю. При
этих допущениях следует в уравнениях (16.4) принять
^idMxldt^idMyldt~Q. Тогда приближенные уравнения спиральной
формы движения в операторной записи (16.6) при уо=?^О, (Зс = 0
примут вид
= 0; ^lP”4'^22w.v_b^23toj/ — O; 13)
М + Й32“л + ьз^у = °: 642«Д + ^4з“г/ + РУ = То-
Характеристическое уравнение этой системы линейных алгебра-
ических уравнений можно записать так:
Д,=Ар+А). (16.14)
где А = А1 (^22^33 — Мзг) + ^12 (М>31 ~ Мзз) А
А^1з(^21^32 — ^22^31)1 А~^14^21 (^33^42— ^32^4з) А
А ^14^31 (^22^43 — ААД
Корень характеристического уравнения (16.14)
Pi = —А/ -Ai-
Так как Аь как правило,— положительная величина, то знак pi
зависит от Ао:
Р1<0 при Ло>О и щ>0 при А<0.
Спиральная форма движения устойчива, если
Pi<0, т. е. при А?>0- (16.15)
Так как коэффициент Ьц— t—-^-<0, то условие (16.15) выполня-
ется при
А (^33^42 — ^32^4з) А ^31 (^22^43 — ^23^4г) А 6- (16. 16)
Если предположить, что ,0* = 0, />43=0, то неравенство (16.16)
в соответствии с (16.5) примет вид
— ^31^23 А ^21 ^33 А 6
Соотношение между степенью поперечной и флюгерной устой-
чивости зависит от компоновки и режима полета самолета. Для
самолета со стреловидным крылом это соотношение с увеличением
угла атаки растет. Поэтому на больших углах атаки спиральная
форма движения устойчива, а на малых — неравенство (16.17) мо-
жет нарушиться, что указывает на возможность возникновения
неустойчивости этой формы движения.
271
Рис. 16.1. Форма движения крепа
Рис. 16.2. Спиральная форма движения: устойчивая и неус-
тойчивая
272
Рассмотрим изменение углов р(/) и у(/) в процессе спирально-
го движения. Из решения системы (16.13) относительно изображе-
ний Р II т получим
— 14(^22*83—^23632)Л, . ~___ А
------ -------------го, г — ;—гго-
А/7 + А А\р + Ао
(16.18)
Этим операторным выражениям соответствуют функции
р(7)=—-^-(#22#зз —#2з#32)у0е А'*-, у(/)=уое (16. 19)
Отсюда видно, что при Ло/АХ) (спиральная форма движения
устойчива) в случае кренения самолета с течением времени углы
крена и скольжения стремятся к нулю апериодически (рис. 16.2).
Однако самолет не возвращается к исходной траектории полета.
Для рассмотренного в § 16.2 примера характеристики спираль-
ной формы движения принимают значения: А=2,4028; Ао—
=—0,02084; щХ),00867. Следовательно, спиральная форма движе-
ния неустойчива для этого самолета на рассматриваемом режиме
полета (Е=850 км/ч, Н= 10 км).
Колебательная форма движения является определяющей для
оценки динамических свойств самолета в боковом движении. Если
форма движения крена всегда устойчива, протекает крайне быст-
ро и практически остается не замеченной пилотом, а спиральная
форма движения развивается очень медленно и пилот легко справ-
ляется с положением вмешательством в управление, то коле-
бательное движение воспринимается неудовлетворительно и за-
трудняет точное пилотирование, даже когда оно недостаточно бы-
стро затухает.
Приближенно колебательная форма бокового возмущенного
движения может быть описана исходя из следующих допущений:
пренебречь суммой сил, действующих по оси OZ, т. е. принять
. п тГш ху dwx
пренебречь величинами «ух -Л4 ао^., —----------, как вели-
' у dt
чинами второго порядка малости.
При таких допущениях система уравнений (16.4) в оператор-
ной форме записи (16.6) примет вид
Р$—
(#21/? 4- #21) Р + {Р 4" #22) А 4~ {Ь<2зР -ф- #2з) #21poi. (16. 20)
(#31/? + #31) {р + #зз) шу — #31Ро!
Характеристический определитель системы уравнений ^16.20)
запишется как
273
ИЛИ
Рис. 16.3. Зависимость углов скольжения и крена
от времени при колебательной форме движения
р 0 -1 0
Ь‘2\р 'г ^21 р-\~ь22 W+^23 0
Ьыр-тЬ^ 0 Р “Г ^33 0
0 -1 0 Р
= (р + Ы [р2+ (^33-rfel) p + ^31L
(16.21)
Корнями этого уравнения являются щ~0; р2 ——^22; P3,4=l±vi,
где s= —0,5 (&зз 4-^31); v=]/d31 —£2.
Корень р2 определяет форму движения крена. Круговая частота
колебаний v определяется в основном степенью флюгерной устой-
чивости самолета (&31=—ТИу), а фактор затухания движения
с. — демпфированием рыскания.
Решением системы уравнений (16.20) относительно р и у при
Уо=О является
~ Р + *33 + fcgl _
Р — 77~ Р~\ “Г — Но.
р2 + (4з + 41) р -г Ь3 ]
~ ( 414з~ 41) Р + 41 (4.3 + 41) — Ь21 (633 4- ft3I)
Р (Р + ^22) [р2 + (^33 + 41) Р + 41]
Соответствующие этим изображениям функции р(/)
гут быть записаны в виде
Р(/)=Лре^ sin (v/-}-<р₽);
у (/)=Ci 4-C2e_*si/ + sir* (v^ + ?т)*
(16.22)
?o-
и y(t) мо-
(16.23)
Постоянные <рэ, Сь С2, Ау и <рт зависят от коэффициентов
bjh и р0.
Примерная зависимость Pf/j и у(1) приводится на рис. 16.3.
274
Расчет колебательной формы движения по приближенной мето-
дике для самолета, данные которого приведены в § 16.2, дает сле-
дующие значения корней характеристического уравнения:
Р1 = 0; р2 = —1,343; рм = —0,053+1,312/.
Нулевое значение первого корня указывает на пренебрежение
спиральной формой движения, второй корень соответствует форме
движения крена, а пара комплексных корней дает грубые прибли-
женные значения для колебательной формы движения. Однако для
оценки характеристик этой формы движения в первом приближении
метод может использоваться.
§ 16.4. Характеристики боковой устойчивости
Качественные характеристики бокового возмущенного движения
включают показатели форм движения. Для апериодических форм
движения (формы движения крена и спиральная) основным пока-
зателем является степень затухания движения. Это свойство оцени-
вается такими характеристиками, как время уменьшения возму-
щенного значения параметра движения вдвое и время практичес-
ки полного затухания движения.
Время уменьшения возмущенного значения параметра движе-
ния вдвое для форм движения крена или спиральной определяет-
ся по формуле
^•0,5=-----—, 16.24
Pi Pi
а время переходного процесса этих же форм движения по фор-
муле
, In 20 3 .ле. Qt-.
/Уз=-----— ~------, (16.25)
Pi Pi
где pj — вещественный корень характеристического уравнения,
определяющий соответствующую форму движения.
Если форма движения неустойчива (р5->0), то степень неустой-
чивости характеризуется временем увеличения параметра движе-
ния в два раза (/2). Очевидно,
/у2=—— при ру>0.
Строгой регламентации 4,5 и/3 для спиральной формы движения
И форм движения крена нет. Чем меньше значения этих величия
для движения крена, тем лучше.
Спиральная форма движения, как правило, — слабая форма,
т. е. она обусловливается действием малых сил. Поэтому время
4,5, значит, и 4 достигают значительных величин. Допускается и
неустойчивость этой формы движения, если только 4 достаточно
большое (исчисляется несколькими десятками секунд).
Колебательная форма движения характеризуется тесной связью
движений рыскания и крена. Соотношение амплитуд крена и рыс-
275
кания имеет важное значение в оценке динамических свойств са-
молета и комфорта пассажиров.
В качестве критериев, характеризующих колебательную форму
движения, используются:
1) время уменьшения амплитуды вдвое
/015—— 0,693Д; (16.26)
2) время практического затухания колебаний
4^-3'$; (16.27)
3) число колебаний до практически полного затухания коле-
баний
«3=4/Т^-ЗАЛ (16.28)
где Т = 2л/т — период колебаний;
4) отношение максимальных амплитуд угловых скоростей крена
и рыскания определяется из формул (16.23) и при начальных усло-
виях Р (0) ='Р0; yo=coxo=tOj/o=0 приближенно равно
z = L^lmax = *21. - 1 . (16. 29)
l“^lmax *31 , / б|2 / &зз + £>'[ \
' *31 \ *22 '
Практика эксплуатации самолетов показывает, что для по-
лучения приемлемых характеристик колебательной формы боково-
го возмущенного движения для пассажирских самолетов необходи-
мо выполнение условия: я^1-у2.
Как отмечалось в гл. 11, для самолетов со стреловидным или .
треугольным крылом характерно увеличение степени поперечной ’
устойчивости с ростом угла атаки, что приводит к увеличению х и
усложнению его пилотирования на этих углах атаки. Улучшение |
характеристик колебательной формы движения в таких случаях по- ".
требует применения автоматических устройств, позволяющих по- •
высить демпфирование рыскания. Такие устройства в настоящее
время находят широкое применение. :
§ 16.5. Динамические характеристики боковой <
управляемости '
Как и в случае продольного управления, важное значение име-
ет определение характеристик управляемого бокового движения в
течение первых нескольких секунд после отклонения органа уп- ;
равления. Для оценки реакции самолета на отклонение органов
бокового управления достаточно рассмотреть характеристики пере-
ходного процесса, возникающего при ступенчатом отклонении руля
направления или элеронов. ?
Рассмотрим переходное движение, обусловленное отклонением >
руля направления. При отклонении органов бокового управления в j
первую очередь возникают вращательные движения относительно j
осей ОХ и OY, поэтому при описании переходных движений огра- ;
276
ничимся приближенной системой уравнений бокового возмущен-
ного движения (16.20).
Предположим, что начальные возмущения параметров движе-
ния равны нулю, а возмущенное движение обусловлено отклонени-
ем руля направления или элерона. В этих условиях система (16.20)
примет вид
А3 —
(fel/’H- ^21)₽ + (p+ ^22)ШХ + (^23^+ &2з) <°у—Ь2яЪя-}~ Ь2эЪ3‘,
(16.30)
где
(fap-|- &з1) р -j- (/Н- К!3) <Оу=Ь3нЪн -|- £>3э8э;
— “л+ AV=0,
MSh М*э м’н
^2н~— ; ^2э~ "7 1 ^Зн —~7 ; &3э
]х *х *у
1У
показывают относительную эффективность органов бокового уп-
равления; определяются по формулам, рассмотренным в гл. 12.
Предположим, что возмущенное движение вызвано отклонени-
ем руля направления по закону дп(0, а бэ=0. Как известно, отно-
шение изображения выходного сигнала системы к изображению
входного сигнала есть передаточная функция. Реакция самолета на
отклонение руля связана с изменением кинематических параметров
движения (р, сох, cow, у). Рассматривая в качестве входного сигнала
6Н, а выходных — р, «х, сиу, у, введем понятие передаточных функ-
ций самолета по этим параметрам по дп в виде
W(16.31)
Разделим правые и левые части уравнений (16.30) на бп. Учитывая
зависимости (16.31), запишем систему (16.30) в виде
pW?K — =0;
(b'21P + &21) U7pH + (р 4- М UZm?i + (b'sp + й23) &2н;
(b’31p+ &31) (16. 32)
-^н+р^тн=0.
Решая систему линейных алгебраических уравнений относи-
тельно передаточных функций, находим
Ц7р ___________^Зн_____________
Д2 + (&зз + fr'j) р у- 6gl
г, , т (16.33)
__ fc2H ________ [^)2з/>2 + (&23 + ^21) Pl + ^21] Ан
ТН Р (Р + ^22> Р (Р + Ь22) [р2 + (Z>33 4. 6'j) р + &31]
Имея передаточные функции, можно определить и переходные
функции, описывающие реакцию на единичное ступенчатое откло-
нение руля. Изображение переходной функции и передаточная
функция связаны зависимостью
277
Рис. 16.4. Переходное движение рыска-
ния (<;) и крена (б) при отклонении
руля направления
поэтому
W, 1ЕТ„
ПМА)--- птн(р)=-^.
р р
(16.34)
Если осуществить переход
от изображения к оригиналу
операторных зависимостей
(16.34), получим переходные
функции по р и у в виде
П₽н(/) = Лэ-|-5ре^ sin(v/ + <pp),
Птн (/)=А+Ят/+Сте-^ +
-[-Z?7e^ sin (v/4-<pT). (16.35)
Постоянные Ар, Вр, <рр,
и т. д. выражаются через ко-
эффициенты bjh, можно их оп-
ределить также исходя из гра-
ничных условий.
Из анализа выражений
(16.35) следует:
1) переходная функция по углу скольжения идентична пере-
ходной функции по углу атаки (15.27) в продольном движении,
однако переходное движение рыскания сопровождается более зна-
чительными забросами по углу скольжения и медленным затуха-
нием (рис. 16.4, а);
2) заданное отклонение руля направления приводит к измене-
нию угла крена по линейной зависимости от времени, на которую
накладывается колебательное изменение угла крена, затухающее
с течением времени (рис. 16.4, б).
Отсюда можно сделать вывод, что приближенное рассмотрение
переходного процесса при отклонении руля направления дает до-
стоверное описание движения самолета только в начальный период
движения, т. е. в течение нескольких секунд после отклонения
руля.
Переходное движение, обусловленное отклонением элеронов
на угол бэ, определяется из системы уравнений (16.23) при бн=0.
Кроме того, пренебрежем моментом рыскания, возникшим при от-
клонении элеронов, т. е. примем &зэ~0. В этом случае после деле-
ния всех уравнений на б:) получим систему уравнений, где в каче-
стве неизвестных фигурируют передаточные функции по углу от-
клонения элеронов:
pW^-AV» Э=И,
(^р+&21)^рэ+(рН-&22)^..ч.э+(^3р+Ы м\,э=Лэ; (16.36)
(^+ 631) и7рэ + (Р + М^йэ=0;
-W^-\-pW^=O. .
278
Ъ2э
Решив эту систему относительно передаточных функций, полу-
чим
1ГРэ=0; Ж, э = 0; М7ТЭ=—-Ц—; э = —(16.37)
J Р(Р + Ь22) х Р + Ъ^
Характер движения определяется полюсами передаточной функ-
ции, т. е. нулями знаменателя выражения (16.37):
А = 0; р2=—Ь22.
Это означает, что отклонение элеронов вызывает форму движения
крена.
Изображения переходных функций крена соответственно равны:
ГЬ(^)—-2, ^э, . ; пШхЭ(//)=—4-—, (16.38)
Р2 (Р + Р22) х P(JP+ t>22)
откуда находим переходные функции времени:
Птэ=-^(1-М-е-^); Пш ==—(1—e-6ssZ)- (16.39)
Ь22 Ь22
Таким образом, ступенчатое отклонение элеронов вызывает апе-
риодическое быстро затухающее движение крена, в процессе кото-
рого угловая скорость достигает установившейся величины
юх(со)=— 8Э, а угол крена
622
увеличивается пропорциональ-
но времени (рис. 16.5).
Следует, однако, отметить,
что движение, обусловленное
ступенчатым отклонением эле-
ронов, носит более сложный
характер, чем это следует из
выражения (16.39), описываю-
щего движение в начальный
период времени. Действитель-
но, при крене под действием
составляющей силы тяжести
самолета развивается скольже-
ние на опущенное крыло и, как
следствие этого, колебательное
движение рыскания.
Динамические характери-
стики бокового управляемого
движения отражают свойства
переходного движения, пока-
зывают быстроту реакции са-
молета на управляющее воз-
действие.
Как отмечалось, движение
рыскания, обусловленное отк-
Рис. 16.5. Переходное движение крена
при отклонении элеронов
279
лонением руля направления, аналогично продольному движению,
вызванному отклонением руля высоты. Поэтому это движение так-
же характеризуется временем переходного процесса, определяемым
формулой (15.68), относительным забросом по углу скольжения
и т. д.
Однако демпфирование движения рыскания для современных
самолетов существенно меньше демпфирования продольного дви-
жения. Поэтому в процессе переходного движения рыскания воз-
можны значительные забросы по углу скольжения. Это особенно
заметно при полете на больших высотах. При этом колебания дви-
жения ощущаются в виде резких знакопеременных изменений бо-
ковой перегрузки, что затрудняет точное пилотирование, ухудша-
ет условия комфорта на пассажирских самолетах.
Как было показано выше, отклонение руля направления наря-
ду с движением рыскания сопровождается движением крена, нося-
щим также колебательный характер и отстающим от движения
рыскания по фазе на угол, близкий к-у- . Поэтому при оценке ди-
намических характеристик бокового управляемого движения необ-
ходимо учитывать критерий (см. § 16.4)
у l(l)xlmax
l“ijmax
В идеальном случае при пренебрежении спиральными момента-
ми отклонение элеронов вызывает изолированное движение крена,
носящее апериодический характер.
В качестве критерия этого движения могут быть использова-
ны величины
dP3
df»x
Режим установившегося прямолинейного полета, определяемый
высотой и скоростью, оказывает существенное влияние на дина-
мические характеристики управляемости самолета. С увеличением
высоты полета момент демпфирования рыскания уменьшается,
что приводит к увеличению времени переходного процесса. Дей-
ствительно, время переходного процесса при ступенчатом отклоне-
нии руля направления равно
f ____3 6
3 Е Ь33 + 631
24Д
да j qVS/2
(16.40)
При заданной скорости полета с увеличением высоты увеличи-
вается потребный угол атаки, что приводит к некоторому незначи-
тельному уменьшению комплекса Если ’пренебречь
этим эффектом, то с высотой изменяется обратно пропорциональ-
но плотности воздуха.
Соотношение максимальных амплитуд угловых скоростей крена
и рыскания х практически определяется соотношением —р- — .
280
С увеличением высоты полета при постоянной скорости отношение
з
т'г
___для самолета со стреловидным крылом возрастает из-за уве-
личения угла атаки. Это приводит к увеличению х.
На докритических числах М увеличение скорости полета на
заданной высоте способствует уменьшению времени переходного
процесса (16.29). Этому способствует также увеличение
В этом же интервале чисел М увеличение скорости сопровождает-
ся уменьшением х. Так, для самолета Ту-134 при выключенном
демпфере рыскания и скорости полета 270 км/ч величина х состав-
ляет 4,1, а при Е = 850 км/ч — 0,59.
При выполнении бокового маневра, как правило, применяется
координированное отклонение органов бокового управления (руля
направления и элеронов), т. е. отклонение органов управления про-
изводится по закону, исключающему появление угла скольжения.
Так, например, при вводе самолета в вираж элероны отклоняют-
ся по закону, необходимому для достижения заданного угла крена,
руль же направления отклоняется так, чтобы не возникало сколь-
жение. Очевидно, закон отклонения руля направления зависит от
собственных свойств самолета, эффективности руля направления,
физических данных пилота (определяемых скоростью реакции пи-
лота на изменение угла скольжения), а также от закона отклоне-
ния элеронов. Если собственное возмущенное движение затухает
слабо, а период колебаний соизмерим со временем запаздывания
реакции пилота на изменение угла скольжения, то выполнение коор-
динированного движения фактически становится невозможным.
Вопросы для повторения
1. При каких допущениях получены уравнения бокового возмущенного дви-
жения (16.1)?
2. Охарактеризуйте формы бокового возмущенного движения.
3. При каких допущениях могут быть приближенно определены формы боко-
вого возмущенного движения?
4. Перечислите основные количественные характеристики бокового возму-
щенного 'движения.
5. Каковы особенности переходных функций по отклонению руля направле-
ния, элеронов?
6. Как влияют высота и скорость полета на характеристики бокового возму-
щенного движения?
Задача
Рассчитать качественный показатель (7о,г>) колебательной формы бокового
возмущенного движения, если его характеристический определитель имеет вид
Р2 + 0,257 р+1,872.
О т в е т: /од=5,6 с.
Глава 17
Устойчивость ,и управляемость самолета
на взлете ,и посадке
§ 17.1. Общие особенности устойчивости
и управляемости иа взлете и посадке
Устойчивость и управляемость самолета на взлетно-посадочных
режимах имеет свои особенности. Эти особенности в основном за-
ключаются в следующем:
а) режим взлета и посадки является ярко выраженным неуста-
новившим ся движением самолета;
б) при взлете и посадке на аэродинамические характеристики
(на коэффициенты сил и моментов) влияет близость земли, вслед-
ствие чего характеристики устойчивости и управляемости будут
отличаться от таковых вдали от земли;
в) взлет и посадка происходят в условиях изменения полетной
конфигурации (выпуск шасси, закрылков, предкрылков, щитков), в
результате чего необходимо учитывать дополнительные моменты;
г) при движении по взлетно-посадочной полосе необходимо учи-
тывать дополнительные силы (силы нормального давления, боко-
вые силы и силы трения колес), обусловленные наличием жесткой
связи.
Теоретическое исследование устойчивости неустановившегося
движения связано с серьезными трудностями, которые в общем
’Случае пока неразрешимы. Основная трудность в решении этой за-
дачи связана с необходимостью исследования дифференциальных
уравнений с переменными коэффициентами, общего метода реше-
ния которых до сих пор нет.
Устойчивость и управляемость самолета при разбеге и пробеге
самолета во многом зависят от схемы шасси. У современных само-
летов наиболее распространенной схемой является трехколесное
шасси с передней опорой, у которого основная нагрузка от силы
тяжести (80—85%) воспринимается колесами главных опор, ос-
тальная — колесом передней опоры. Таким образом, при рассмот-
рении устойчивости и управляемости необходимо учитывать допол-
нительные связи самолета с ВПП.
В гл. 8 показано, что во второй части разбега, по мере увеличе-
ния эффективности руля высоты, отклонением руля высоты вверх
создается кабрирующий управляющий момент и поднимается носо-
вая часть самолета с отрывом колеса передней опоры от ВПП. На
этой части разбега и до отрыва самолет разбегается только на ко-
лесах главных опор. При движении на колесах передней и главных
282
опор управление направлением движения в основном осуществляет-
ся управляемыми колесами передней опоры либо несимметричным
торможением колес главных опор. Во второй части разбега управ-
ление осуществляется в основном рулями.
Наиболее характерными возмущениями при разбеге, которые
нарушают устойчивость движения, являются боковой ветер, непро-
извольная асимметрия торможения, асимметрия тяг силовых уста-
новок и др.
Рассмотрим особенности устойчивости и управляемости при
движении по ВПП.
§ 17.2. Уравнения движения самолета по ВПП
При составлении уравнений движения воспользуемся связан-
ной системой координат. Обычно при составлении уравнений дви-
жения самолета на колесах главных и передней опор прибегают к
значительным упрощениям. Так, пренебрегают деформацией пнев-
матиков и амортизационных стоек, что исключает вращение само-
лета в процессе движения по ВПП относительно осей ОХ и OZ.
При написании уравнений будем полагать, что ветра нет.
Из рис. 17.1 следует, что кроме известных ранее аэродинамиче-
ских сил, тяги двигателя и силы тяжести на самолет действуют си-
лы сопротивления трения Fv^v, FT Sl колес (правого и левого) глав-
ных опор и Fn колес передней опоры шасси, силы нормального дав-
Рпс. 17.1. Схема сил
при движении
ВПП
самолета по
283
ления на главные опоры Аф.пр, NT.n, переднюю опору шасси j¥n
и боковые силы на колеса главных Zr.np, Zr.n и передней опор шас-
си Zn. Последние появляются всегда, когда направление движе-
ния колес не совпадает с плоскостью его вращения. Воспользуем-
ся приближенными системами уравнений (1.27) и (1.28), которые
при движении по ВПП на колесах главных и передней опор име-
ют вид
i7i
<17Л)
При рассмотрении проекций сил трения и боковых сил, дейст-
вующих на колеса опор, будем считать, что силы трения лежат в
плоскости вращения колес, а боковые силы направлены по оси ко-
леса. Будем также полагать, что ввиду малости угла атаки при
движении по ВПП cosct«H, a sinct^O.
Суммарная сила по оси ОХ равна
2^=P-26-(Fr.lip + Fr..,)-Fncos81], (17.2)
где бп — угол поворота колес передней опоры, определяемый как
угол между плоскостью симметрии самолета и плоскостью враще-
ния колес передней опоры.
Силы трения, входящие в формулу (17.2), определяются через
нормальное давление и коэффициент трения по формуле
F==Nf. (17.3)
Значения сил трения для левой и правой тележек шасси в об-
щем случае не будут одинаковы.
Пренебрегая составляющей тяги запишем проекции сил на ось
OY в следующем виде:
2Г=ЛГг.пр + ^г.л + ^ + Г-т-. (17.4)
Из этого уравнения могут быть определены нормальные силы
^Г.пр + М..л + М.=^-У. (17.5)
При одинаковом коэффициенте трения колес главных и перед-
ней опор формула (17.5) дает возможность определить силы тре
ния
Л.пр+Л.л+/7п-^г.пр/+лгг.л/+^п/=/(^-Г). (17.6)
Проекции сил на ось OZ равны:
2Z=Z₽₽ + ZMH+Zr-Zncos8n+ZP+Fnsin8n, (17.7)
где Z^ + ZS«8H — аэродинамическая боковая сила, ZP — боковая
сила двигателей, обусловленная входом потока в двигатель под уг-
лом скольжения р, равная Z.p=Zp р.
284
Между боковыми силами Zn и Zr и аэро-
динамической боковой силой Z при отсут-
ствии ветра есть формальное сходство, по-
скольку и те и другие при малых углах
скольжения линейно зависят от угла (3 (или
для передних колес) (рис. 17.2). По-
этому формулы для их определения похожи
на формулы для определения Z, т. е.
z,=zl (р+8„), zr=(zLp+ZL) р.
(17.8)
Рис. 17.2. Изменение
коэффициента боко-
вой силы от угла
скольжения
Производные Zn и Zr могут определяться через силы нормаль-
ного давления, тогда
Zn=CzuN„, Zpr=C?zrNr. (17.9)
Боковые силы Z колеса можно представить и через коэффици-
ент боковой силы, обозначая CZK=CiK(p + 6n) или CZK = Cz'p. Ко-
эффициент боковой силы колеса Сгк при небольших углах р + 6п
(или р для колеса главных опор) линейно зависит от угла р (см.
рис. 17.2).
В формуле (17.8) выражение для боковых сил записано для
прямолинейного движения самолета. В случае движения самолета
с вращением относительно оси OY эти силы будут зависеть от угла
увода. Угол увода колеса как угол между плоскостью вращения и
направлением его движения определяется суммарным вектором
поступательной и окружной скоростей.
При отсутствии скольжения и прямолинейном движении сумма
моментов относительно оси ОХ равна нулю. При наличии скольже-
ния
= (17.10)
где AN — изменение сил нормального давления главных опор шас-
си, вызванное наличием момента поперечной статической устойчи-
вости; гш — ширина колеи шасси; Л4ЖС — суммарный момент, обус-
ловленный скольжением, отклонением органов управления, боко-
выми силами колес шасси и другими факторами.
Суммарный момент относительно оси OY при прямолинейном
Движении определится
2^=7И₽Р+Ж>8н+^>п+^г.прРхг +
+ Zl^xr-Z^xn + Z^xP+MyP-My^, (17. 11) -
где МуЗ— аэродинамический момент рыскания; 7Иун8н — момент
рыскания, создаваемый рулем направления; ТИ^П8П — момент рыс-
кания от колес передней опоры; Zr.nP₽xr, ZLiP-^r,- Zufix„—
соответственно моменты от боковых сил колес правой и левой
главных опор и передней опоры: ZPpxP — момент от перпендику-
285
лярных оси двигателя составляющих тяги, возникающих при
скольжении; МуР — моменты рыскания от асимметрии тяги двига-
телей; Муыу—момент рыскания, возникающий вследствие перерас-
пределения сил нормального давления на колеса главных опор при
наличии скольжения. Значение этого момента можно определить
по формуле
MyiK=bNfzu. (17.12)
Из уравнения (17.10) можно определить A<VzUJ, поэтому
МуШ=М/гш=Мхс/. (17.13)
При криволинейном движении по ВПП к сумме моментов (17.11)
добавляются демпфирующий момент рыскания и момент от пере-
распределения сил трения колес главных опор, вызванные пере-
распределением нормальных сил на колесах главных опор при
криволинейном движении.
Демпфирующий момент рыскания определяется по формуле
Муту = М^у + М^у, (17. М)
где М^у^у— демпфирующий аэродинамический момент рыскания,
— демпфирующий момент рыскания колес шасси, обуслов-
ленный изменением боковых сил колес при вращении с угловой
скоростью ыу. Последний можно определить по формуле
= — (Д2г.прЛ'г + д^г.Лг) — Д^п cos (17.15)
где Д2гпр, AZr.ji, AZn — приращение боковых сил колес главных
(правой и левой) и передней опор при вращении самолета с угло-
вой скоростью (лу. Значение этих сил можно определить следующим
образом (рис. 17.3):
^Zr^=Zln^ClKNr^^=ClKNt^^-, (17.16)
- - AZn=Z^=Cfn2Vn .
Подставляя (17.16) в формулу (17.15) получим
М^у= [-(C₽2r.npNr.np + C₽2r.«NrJ4-C₽znNt,^ (17.17)
7И^= - (CLnPM,np+CLjVr J л? - C^Nnxl (17.18)
При вращении самолета возникает также дополнительный момент
относительно оси OY, обусловленный изменением нормальных ре-
акций опор. Этот момент можно определить как и Л1уддг, опреде-
ляемый формулой (17.13), только вместо момента Мхс подставить
значение
ЛД С= — Z^yT — ZS (? + 8П) У„-
286
Сумма моментов относительно оси OZ. опре-
делится из уравнения
О=Maza + N„xn — (7Vr ,пр + АД,) хг —
— (Л-.пр+Л-.з)Уг ± Рур~ Л,соз8пуГ1, (17. 19)
где Alzoc — момент тангажа самолета от аэро-
динамических сил; Nnxn, (Аг.цр+Аг.л)хг — мо-
менты тангажа от сил нормального дав-
ления передней и главных опор; (/7г.пр+
+^г.л)Уг — момент тангажа от сил трения
колес главных опор, /д cos дп//п — от колес пе-
редней опоры; РуР — момент тангажа от тя-
ги двигателей.
Уравнение (17.19) можно использовать для
определения реакции главных и передней
опор. Принимая cos6n=l, ya~yr и обозначая
базу шасси хш=х:ц+хг, получим
Рис. >17.3. Схема воз-
никновения демпфи-
рования при враще-
нии са-молета на ВПП
Nn=(mg — Y) _М^а * Рур., (17. 20J
7Vr=(m<r-K) ± рУр . (17.21)
-Vui
Определив проекции сил и моментов, действующих на самолет,
запишем уравнение движения самолета по ВПП с учетом того, что
второе, четвертое и шестое уравнения системы (17.1) использова-
лись при определении соответствующих сил. С целью упрощения
будем полагать cos6n~l, sinfin~0. Тогда получим
т^- = Р-Х-/(т?-Г),
mV Vz₽8 + Z5h8h+^K>
\ dt j
(17.22)
где Zc₽=Z₽ + Zr₽ „р+Zr₽.„ + Z₽ + Z^;
== M?y + Zr?.npxr + Z₽ л xr - Z₽xn + ZpXp;
^=^-Z^n/;
M^=z*ya, z^=zl
Предполагается, что отклонение органов управления 6Н, 6П. момент
рыскания от асимметрии тяги MyF, момент Мхс и коэффициент
трения известны.
Искомыми переменными, входящими в систему (17.22), являют-
ся V, р, (ау, if. Для однозначности решения система (17.22) допол-
287
няется кинематическими соотношениями
IZz = IZsin(p-<b). (17.23)
Последнее соотношение позволяет определить боковое смещение
самолета в процессе движения по ВПП.
§ 17.3. Путевая устойчивость самолета
при движении по ВПП
Рассматривая путевую устойчивость и управляемость следует
отметить, что эти свойства в значительной степени определяют уро-
вень безопасности самолета при движении по ВНП. О трудности
аналитического решения системы уравнений неустановившегося
движения по ВПП было сказано выше. Для решения системы урав-
нений (17.22) в настоящее время используются численные методы
с использованием ЭВМ. В этом параграфе ограничимся лишь ка-
чественным рассмотрением устойчивости и управляемости и будем
полагать, что путевая устойчивость рассматривается на небольшом
участке движения, в процессе которого скорость программного дви-
жения можно считать установившейся. При этом коэффициенты
дифференциальных уравнений принимаются постоянными. Из рас-
смотрения системы (17.22) следует, что первое уравнение в первом
приближении можно рассмотреть вне связи со вторым и третьим.
Используя операторный метод решения дифференциальных уравне-
ний запишем второе и третье уравнения в виде
^21? + (Р + ^2з) шу — ^26HSH ~г ^28,8п + ^2.
Zc
где —---------—; ^23=
тУ
(17.24)
Л1“</ _|_ мШу
‘у ~ yz
ГУ
Z6H
^16 := - э
н mV
Л1®Н
Ь^ъ —--------
н 1у
Лф + Z^,uf
Z₽
^15=—; ^25 =
п mV п 1 у
Л1₽с MyP-Mxcf
*21 =--b2x="--------'г--•
‘у ‘у
Собственные динамические свойства самолета при движении его
по ВПП определяются характеристическим определителем систе-
мы (17.24)
Р\Ь1Х —1
*21 (/? + М
где коэффициент затухания и опорная частота определяются вы-
ражениями
= /?2-|-2/гор4“йо,
(17.25)
Is
1 I У ‘ yz I е
(17.26)
ЙО—^Ц^22 Ь^21~
1У
mV
(17. 27)
288
Из (17.26) видно, что коэффициент затухания определяется
суммарным демпфирующим моментом М^уД-М^у. и производной
Zc, которая увеличивает коэффициент затухания вследствие ис-
кривления траектории движения центра масс самолета при движе-
нии рыскания.
Сравнивая коэффициент затухания при движении по ВПП с
коэффициентом затухания при полете вдали от ВПП приходим к
выводу, что значения Z^, Z^ увеличивают коэффициенты
затухания.
Из формулы (17.27) следует, что частота собственных колеба-
ний в результате взаимодействия с ВПП колес главных и перед-
ней опор изменяется по-разному. Из (17.27) следует, что главные
колеса шасси способствуют увеличению частоты и путевой устой-
чивости, а переднее колесо —- уменьшению S20. Неблагоприятное
влияние переднего колеса можно уменьшить или полностью уст-
ранить, переведя его на режим самоориентирования. У такого ко-
леса боковая сила 2^0=0. В тех случаях, когда для удобства уп-
равления направлением движения переднее колесо переводится на
режим управления, дестабилизирующее влияние его приводит без
вмешательства пилота к потере путевой устойчивости при движе-
нии по ВПП. В этом случае устойчивое выдерживание направле-
ния должен обеспечить пилот соответствующим отклонением ко-
лес передней опоры, способствующим увеличению Й0- Так как
«критический» угол скольжения колеса сравнительно мал (см.
рис. 17.2), то пилот не должен допускать значительных углов от-
клонения. Последнее объясняется тем, что при превышении крити-
ческого угла скольжения боковые силы, действующие на колесо,
уменьшаются и это приводит к уменьшению стабилизирующих мо-
ментов от колес главных опор шасси, вследствие чего начавший-
ся разворот будет иметь тенденцию усиливаться.
Стремление пилота парировать разворот путем отклонения ко-
леса передней опоры приведет к уменьшению его угла скольжения,
что будет сопровождаться увеличением боковой силы колеса перед-
ней опоры, а соответственно и ростом дестабилизирующего мо-
мента.
Таким образом, при больших углах скольжения самолет может
потерять не только путевую устойчивость, но и управляемость.
Именно поэтому в процессе движения по ВПП пилот должен вни-
мательно следить за выдерживанием направления движения, свое-
временно парировать даже незначительные развороты, возникаю-
щие под действием каких-либо возмущающих причин.
По мере увеличения скорости движения силы нормального дав-
ления и боковые силы уменьшаются, поэтому роль их в устойчи-
вости и управляемости уменьшается, одновременно эффективность
аэродинамических поверхностей стабилизации и управления увели-
чивается, устойчивость и управляемость на этом этапе обеспечива-
ются аэродинамическими моментами М^Ут^, Л1^Н8Н.
•0 776
289
§ 17.4. Путевая управляемость самолета
при движении по ВПП
Вопрос о путевой управляемости особенно важен для современ-
ных самолетов, у которых двигатели далеко разнесены от плоско-
сти симметрии самолета и на взлете большое значение имеют тяги.
При использовании переднего колеса в режиме управления его
роль в обеспечении управляемости до скорости, равной 0,7—0,8
скорости отрыва, является решающей. На большей скорости колеса
передней опоры также играют существенную роль и их эффектив-
ность сохраняется достаточно высокой.
Критерием путевой статической управляемости на разбеге мож-
но считать запас угла отклонения органов путевого управления,
определяемого как разность между располагаемым и потребным
для балансировки.
Располагаемый угол отклонения переднего колеса определяется
углом, при котором С2К имеет максимальное значение. Как видно
из графика рис. 17.2, этот угол равен 8—10°. Потребный угол от-
клонения колес передней опоры можно определить из условия пу-
тевой балансировки, используя при этом третье уравнение системы
(17.22), из которого получим
8 [^ + (Z^p + Z^)X^-Z^,l + Z^P] .
8,,=--------------— м,- - - . (17.28)
Так как при движении по ВПП пилот непрерывно обеспечивает пу-
тевое управление одновременным отклонением колеса передней
опоры и руля направления, то располагаемый угол можно опреде-
лить эквивалентным углом отклонения органов управления, кото-
рый равен
8* = 8Н + ^8Г1- (17.29)
На рис. 17.4 показано значение производной d6n/d6n, полученной
по результатам летных испытаний при движении по сухой бетони-
рованной ВПП различных самолетов. Обобщение производной для
различных типов самолетов позволяет определить эквивалентный
располагаемый угол отклонения органов управления. Принято счи-
тать, что запас органов путевого управления при максимальном
потребном угле отклонения органов
управления должен составлять не ме-
нее 20% максимального значения.
Максимальные потребйые отклонения
органов управления при прочих рав-
ных условиях обычно определяются
при взлете с боковым ветром. При
этом самолет обтекается с некоторым
углом скольжения arc tg р= WzfV, зна-
чение которого зависит от составляю-
щей ветра U72. Наличие угла скольже-
ния определяет боковую- аэродинами-
Зак. 77G
Рис. 17.4. Изменение эф-
фективности путевого уп-
равления с увеличением ско-
рости движения
290
ческую силу Z|!p, стремящуюся искривить траекторию, аэродина-
мический момент рыскания Л1₽р, стремящийся развернуть самолет
навстречу ветру, и момент Л1£р, обуславливающий разные реакции
колес главных опор, силы трения и боковые силы.
Основная задача при движении самолета с боковым ветром за-
ключается в том, чтобы удержать самолет в положении, при кото-
ром путевая скорость самолета совпадала бы с осью ВПП. Такое
движение возможно при балансировке сил по оси OZ и момента
относительно оси OY. Балансировка момента относительно оси OY
осуществляется либо отклонением переднего колеса на угол бп, ли-
бо различным торможением главных колес шасси и отклонением
руля направления. Уравнение балансировки сил на ось OZ, если
пренебречь боковыми составляющими тяги двигателей, запишется
-г^=Сгс^,11р + Сгск.¥г.л + Сгск^,. (17.30)
Поскольку коэффициент боковой силы трения — скольжения Сгск
в первом приближении одинаков для всех колес, то сумму сил нор-
мального давления можно выразить через mg—Y. Учитывая это
и подставляя в формулу (17.30) вместо угла скольжения его зна-
чение, обусловленное боковым ветром получим
-CzS^ — -^=CZZK\mg-CyS^~y (17.31)
Из (17.31) находим
1/ (17.з2)
2С2СкСй * \ 2СгскС^ / SQCy
По формуле (17.32) определена скорость, при которой еще воз-
можна балансировка боковых сил при заданной величине боково-
го ветра. Если скорость движения по ВПП будет больше, чем по-
лученная по (17.32), то аэродинамическая боковая сила будет
больше боковых сил сцепления колеса и прямолинейное движение
самолета будет нарушено. Отсюда следует, что эта скорость долж-
на быть меньше скорости отрыва. Если это так, то по формуле
(17.31) легко определить максимально допустимый боковой ветер,
при котором возможен разбег без сноса;
W^0''=~c§^Smg ~ CyS (17‘33)
Из формулы (17.33) следует, что допустимая величина бокового
ветра пропорциональна коэффициенту сцепления. Поскольку ко-
эффициент сцепления и соответственно коэффициент боковой силы
трения — скольжения в значительной мере зависят от состояния
ВПП, то допустимое значение бокового ветра тоже может значи-
тельно изменяться. Влияние состояния ВПП на коэффициент CZK
и f показано в § 17.7.
Однако следует отметить, что для современных самолетов пре-
дельное значение бокового ветра далеко не всегда определяется
10*
291
у
Рис. 17.5. Схема за-
хода на .посадку при
боковом ветре
возможностью балансировки самолета. Так
для самолетов Ту-104, Ту-124, Ту-134 макси-
мально допустимая величина боковой состав-
ляющей ветра из условия сохранения путевой
управляемости может составлять 18-—20 м/с,
а из-за боковых нагрузок на конструкцию шас-
си ограничивается величиной 12—15 м/с.
Для современных самолетов характерным
является использование двух принципиальных
схем путевого управления при движении по
ВПП: 1) одновременное управление колесами
передней опоры и рулем направления; 2) раз-
дельное управление колесами передней опоры
и рулем направления. Более эффективной схе-
мой является последняя. При наличии связи
между колесами передней опоры и рулем нап-
равления пилот лишен возможности избрать
правильное соотношение между бп и бн- Так,
во время взлета с боковым ветром или нали-
чии отказа двигателя при отрыве переднего
колеса располагаемый запас эквивалентного
угла отклонения органов путевого управления резко уменьшается,
что требует энергичного увеличения отклонения руля направления,
это существенно затрудняет пилотирование и представляет угрозу
безопасности полета.
§ 57.5. Боковая балансировка в условиях захода
на посадку с боковым ветром
Выполнение посадки самолета с боковым ветром связано с
определенными особенностями пилотирования, обусловленными по-
явлением сноса самолета (рис. 17.5). Парировать снос можно дву-
мя способами: скольжением и курсом. В первом способе необхо-
димо накренить самолет в сторону ветра, отклонив элероны на
некоторый угол, и тогда боковая сила, возникающая при сколь-
жении, уравновесится проекцией силы тяжести mg sin у (рис. 17.5).
Потребные величины отклонений руля направления, элеронов и
угла крена определяются выражениями (12.7), в которых угол
скольжения выражен через величину бокового ветра Wz. Подстав-
ляя в эти формулы fiz&WJV, получим
х ту
0„= —-—»---
туя V
1 ( т1тхп
'э~тЪ \
Wz .
V ’
, 1
tgv-—
c.v
/ v '
Из приведенных формул следует, что поскольку элероны и руль
направления отклоняются на вполне определенную величину, кро-
ме того согласно нормам НЛГС по углу отклонения рулей требует-
ся 10%-ный запас, то всегда существует предельное значение бо-
292
нового ветра TFZ, при котором самолет может еще быть сбалансиро-
ванным. Эти значения можно определить по формулам
т 8н
^ПР=—vv-°’9sh-;
т1э
^гпр— в 1/-0,98этах.
(17.34)
(17.35)
При подходе к полосе пилот ликвидирует крен и осуществляет по-
садку на колеса обеих главных опор шасси.
Во втором случае снос уменьшают путем изменения посадоч-
ного курса. В этом случае при заходе на посадку пилот ведет са-
молет не параллельно оси ВПП, а под углом ip = lV/z/V; угол сколь-
жения самолета становится равным нулю и боковая сила отсутст-
вует. При подходе к ВПП изменяется курс полета и самолет са-
жают параллельно оси ВПП.
§ 17.6. Продольная устойчивость
и управляемость при движении по ВПП
Рассмотрим продольную устойчивость и управляемость на вто-
ром этапе разбега, после отрыва колес передней опоры. Самолет в
этом случае разбегается на колесах главных опор и перед отрывом
может вращаться относительно оси OZ. При составлении уравне-
ний движения самолета воспользуемся скоростной и связанной
(при определении суммы Mz) системами координат. Как и в § 17.2
уравнение на ось OY используем для определения реакций опор.
Тогда уравнения продольного движения без учета влияния дефор-
маций стоек шасси с учетом упрощений будут иметь вид
m^=P-Xa-F, (17.36)
/2 —-=7Иг — NT(xT—г/га) — Fryr,
Аг А> 1\1 1 / 1 1 »
где Мг — суммарный момент тангажа в свободном полете.
При анализе динамических свойств продольного движения вво-
дится упрощение, суть которого заключается в том, что возмущение
по углу атаки считается мало влияющим на величину Р—(Хоф-К)
и это дает возможность интегрировать первое уравнение (17.36)
при постоянном угле атаки. Тогда второе уравнение системы
(17.36) можно рассматривать отдельно, поскольку зависимость ско-
рости от времени известна из первого уравнения. Для современных
самолетов зависимость скорости на разбеге от времени практичес-
ки линейна. Второе уравнение в линеаризованном виде с учетом то-
го, что в исходном прямолинейном режиме самолет сбалансиро-
ван, запишется в виде
293
I= / UQ+JW“)Aa +
dt z dt2 1 z z 1
4- [—A'r(xr--i/ra0) + 2Vrt/r — Кг/Г] Да, (17.37)
где №=А(те^_Гсо)=х_Г’о; К_Л[(т^_Г<1о)/]=Г“о/;
да да
V = F -L ог,
аО ‘а I ‘ а-
Разделив уравнение (17.37) на 1г и использовав операторный ме-
тод решения дифференциальных уравнений, получим
р24-2«0р + е^=Д, (17.38)
где коэффициент затухания и опорная частота имеют следующие
значения:
22о= - [7И:+По (лг+/г/г)+(ий--2Ги0)уг] -L •
1Z
Так как в процессе разбега скорость изменяется, то п0 и Qo2 тоже
значительно изменятся, а уравнение (17.38) является линейным
однородным уравнением с переменными коэффициентами. Приме-
няя метод замораживания коэффициентов, можем сделать следую-
щий вывод. Из сравнения выражения для коэффициента затухания
по формуле (17.39) и этой же величины в короткопериодическом
свободном движении следует, что в продольном движении по ВПП
затухание несколько меньше (на величинуУ^о^/пВо), чем в свобод-
ном полете. Из формулы (17.39) для опорной частоты следует, что
дополнительные члены Yaa0 (xT+fyr) + (mg—2Ya0)yT уменьшают час-
тоту, а соответственно и продольную статическую устойчивость при
разбеге с поднятым колесом. Физически это явление можно объ-
яснить тем, что с увеличением угла атаки сила нормального дав-
ления Nr и, как следствие, сила трения F уменьшаются. Продоль-
ный момент от этих сил отрицательный, поэтому с уменьшением
этих сил растет положительный момент, обусловливающий неус-
тойчивость от сил N и F. Это говорит о том, что самолет в свобод-
ном полете может быть статически устойчивым, а при движении
по ВПП на колесах главных опор может оказаться неустойчивым.
§ 17.7. Особенности устойчивости и управляемости
при движении по ВПП, покрытой атмосферными
осадками
Для анализа устойчивости и управляемости при движении по ВПП, покры-
той атмосферными осадками, используют систему уравнений (17.1) или в преоб-
разованном виде систему уравнений (17.22). Изменение устойчивости и управля-
емости самолета при движении по ВПП, покрытой атмосферными осадками, оп-
ределяется тем, что при .наличии атмосферных осадков изменяются сопротивле-
ние самолета, силы трения и боковые силы колес передней и главных опор и со-
ответственно управляющий момент колес передней опоры Л1;у6„, моменты
рыскания колес главных опор (Z^Iip + ^г.л) ₽хг» Говоря о ВПП, покры-
294
той атмосферными осадками, различают следующие состояния: 1) влажная ВПП,
покрытая жидкостной пленкой без^ скопления воды на поверхности. Такая по-
верхность образуется при обильной росе, тумане или моросящем дожде, и тол-
щина осадков не превышает средней высоты шероховатости покрытия ВПП;
2) залитая водой ВПП, когда слой воды имеет толщину, превышающую среднюю
шероховатость покрытия ВПП; 3) покрытая слякотью, жидкой смесью из неболь-
ших кристаллов льда, снега и воды. Плотность жидкой смеси 1(слякотп) находит-
ся в пределах 0,4<е<0,9 г/см3; 4) заснеженная (р<0,4 г/см3); обледенелая.
Управление самолетом при движении по ВПП, покрытой атмосферными осадка-
ми, всегда было связано с определенными трудностями. Однако для современ-
ных самолетов рассматриваемый вопрос представляет собой реальную проблему.
Связано это с тем, что современные самолеты на взлете и посадке имеют боль-
шие скорости движения, что при наличии осадков на ВПП приводит к глиссиро-
ванию. Явление глиссирования связано с тем, что при некоторых параметрах
пневматиков и при определенной скорости движения по ВПП, покрытой атмо-
сферными осадками, пневмошины полностью отрываются от поверхности ВПП.
Скорость, при которой происходит отрыв пневматиков от ВПП, называется ско-
ростью глиссирования.
Физическая сущность глиссирования заключается в том, что при увеличении
скорости движения по ВПП, покрытой слоем воды пли слякотью, создается уве-
личивающееся сопротивление вытеснению воды, что приводит к образованию во-
дяного клина между поверхностью и пневматпками (рис. 17.6). Повышенное гид-
родинамическое давление определяет равнодействующую, вертикальная состав-
ляющая которой NK приподнимает пневматпк. При .равенстве NK нагрузке на
колесо пли нормальной силе скорость движения будет называться скоростью
глиссирования (акваплаипрованпя). Вследствие смещения равнодействующей гид-
родинамических сил на колесо вперед от оси колеса при отделении колеса от
ВПП при V>Vr оно тормозится, останавливается без использования тормозов.
Представляя формально зависимость равнодействующей от параметров колеса и
скорости движения так, как и для аэродинамической силы /?, получим
WK = C>So.rnQc., —, (17.40)
где С„— составляющая коэффициента сопротивления колеса на нормаль к ВПП;
<SOTn — площадь отпечатка пневматика колеса; рсл—плотность атмосферных
осадков (слякоти). Из формулы (17.40) получим скорость глиссирования
Уг = / 2NKjCySmnQC]i. (17.41)
Формула (17.41) дает некоторое качественное представление о зависимости ско-
рости глиссирования от различных параметров. Так, с увеличением ширины ко-
леса и толщины атмосферных осадков увеличивается площадь отпечатка и ско-
рость глиссирования уменьшается. С увеличением плотности уменьшается ско-
рость VT. При постоянных значениях Су и рсл эти значения можно вынести за
радикал и тогда под радикалом останется лишь удельное давление. Таким об-
разом, по структуре формула (17.41) похожа на формулу для скорости глисси-
рования, полученную на основании обработки данных летных испытаний:
Пг = 62,2/^, (17.42)
где р — давление в пневматике в кгс/см2.
Как формула (17.41), так и формула (17.42) далеко не отражают зависи-
мость коэффициента скорости глиссирования от многих конструктивных эксплу-
атационных факторов. Исследованиями установлено, что скорость Кгл зависит
от таких факторов, как давление в пневматпках, расположение колес, от пара-
метров слоя жидкости (глубина, плотность, вязкость), от шероховатости поверх-
ности ВПП и ряда других параметров.
При глиссировании появляется дополнительная сила сопротивления самоле-
та, что эквивалентно увеличению коэффициента трения.
Наличие атмосферных осадков ,на ВПП существенно влияет на боковые си-
лы колес. При наличии угла скольжения :(для переднего колеса это сумма
Р±бп) на колесо воздействует и боковая сила, и сила трения. При рассмотре-
295
Рис. 17.6. Схема движения колеса по ВПП,
покрытой атмосферными осадками:
а—обжатие пневматика при малой скорости дви-
жения; б—обжатие пневматика при скорости,
меньшей скорости глиссирования (V<Vr); в—об-
жатие пневматика при скорости, равной скорости
глиссирования V<Vr; г—обжатие пневматика при
скорости, большей скорости глиссирования V>Vr
жесткость при этом уменьшается) линейный
нпи силы ZK и силы трения F ко-
леса будем иметь в виду, что ZK
направлена по оси, перпендику-
лярной плоскости врашения коле-
са, a F лежит в плоскости враще-
ния колеса. Поскольку боковая
"лла и сила трения определяются
коэффициентом боковой силы Cz к
и коэффициентом трения f, рас-
смотрим влияние на них различ- -
ных параметров.
Из рис. 17.2 следует, что за-
висимость Czк линейна в сравни-
тельно небольшом диапазоне уг-
лов. Переход к нелинейной зави-
симости связал с появлением в зо-
не контакта колеса с поверхно-
стью ВПП скольжения. При этом
происходит деформация нижнего
каркаса протектора. Таким обра-
зом, важными эксплуатационными
факторами, которые влияют на
Cz к будут такие, которые умень-
шают поперечную жесткость про-
тектора. Поэтому с уменьшением
радиальной нагрузки (поперечная
участок зависимости CZK=f(6) сок-
ращается.
Влияние давления в пневматике на зависимость С2К=/(()) неоднозначно.
С одной стороны, увеличение давления в пневматиках приводит к увеличению
поперечной силы и это приводит к росту Сг к колеса, с другой стороны, с увели-
чением давления растет вертикальная жесткость колеса, которая приводит к
уменьшению площади отпечатка и тем самым к уменьшению CZK. В целом уве-
личение давления в пневматике приводит к увеличению коэффициента Сг к.
Как уже отмечалось выше, с увеличением угла скольжения увеличиваются
поперечные деформации и растет боковая сила. Однако для боковой силы, кото-
рую может воспринять контакт, существует предел, зависящий от коэффициента
сиеплеипя. Изменение коэффициента сцепления удобно проследить по изменению
коэффициента сцепления, определяющего силу трения F. При приложении тор-
мозного момента к колесу происходит проскальзывание колеса, внешние слои
протектора деформируются в плоскости вращения колеса. Степень проскальзыва-
ния колеса по отношению к поверхности ВПП характеризуется относительным
проскальзыванием
(17. 43)
где сос — угловая скорость колеса при свободном качении; со — угловая скорость
колеса при приложении тормозного момента.
Типичная для самолетных пневматиков зависимость коэффициента сцепления
от относительного проскальзывания показана на рис. 17.7, где нулевому значе-
нию со соответствует свободное качение пневматика, а при со=Д наступает пол-
ный юз. Из рис. 17.7 следует, что максимальное _значение коэффициента сцепле-
ния достигается при относительном скольжении со —0,14-0,2. Из рис. 17.7 следу-
ет, что при малых значениях относительного проскальзывания, которое соответ-
ствует недостаточному торможению колес, и при больших значениях со, когда
прикладывается слишком большой тормозной момент, не используются возмож-
ности тормозов. Пилоту самому практически невозможно реализовать оптималь-
ный режим торможения. Для осуществления оптимального торможения на коле-
сах современных самолетов устанавливаются автоматы торможения, позволяю-
296
Рис. 17.7. Зависимость
коэффициента сцеп-
ления от относитель-
ного проскальзывания
Рис. 17.8. Графики изменения ра-
боты силы трения при различной
методике -торможения:
/—работа сил сцепления при достиже-
нии fmax; 5—работа сил сцепления
при /<1тах
тцие реализовать значение коэффициентов сцепления при малом значении <о, что
позволяет повысить эффективность торможения и уменьшить износ протектора.
Однако использование авто-матов торможения не позволяет достигнуть мак-
симального эффекта торможения. Существующие автоматы торможения исполь-
зуют инерционный выключатель, который управляет растормаживанием колес
после достижения определенного значения проскальзывания. После отключения
системы торможения наступает этап свободного качения, на котором энергия
самолета не поглощается. Отношение времени торможения ко времени свобод-
ного вращения зависит от внешних условий и настройки системы автомата тор-
можения. Испытания -показывают, что это отношение может быть таким: 1 с тор-
можения, 5 с свободного пробега. Таким образом, работу сил трения по погло-
щению кинетической энергии самолета в процессе пробега можно представить в
виде графика (рис. 17.8). На рис. 17.8 заштрихованными участками показана
работа сил трения в процессе пробега при достижении максимального коэффици-
ента сцепления. Видимо, в том случае, когда не будет достигаться максимальный
коэффициент и колеса не будут растормаживаться, сила трения будет меньше,
но работа силы трения на определенном участке пробега будет больше (пло-
щадь, ограниченная пунктирной линией). Таким образом при использовании ав-
томатической системы торможения максимальный коэффициент сцепления ие
может быть реализован. Фактически коэффициент сцепления реализуется на 50‘>/о
от максимальных значений. Фактически реализу-
емый коэффициент скольжения и определяет ко-
эффициент трения. Влияние конструктивных и
эксплуатационных условий на коэффициент сцеп-
ления учитывают параметры, которые, с одной
стороны, влияют на упругие свойства пневматп-
ков, а с другой,— на располагаемое значение си-
лы трения. На первое свойство пневматпков влия-
ет множество факторов как конструктивного, так
и эксплуатационного характера. Располагаемая
сила трения зависит от скорости движения, нали-
чия осадков пли грязи на ВПП, геометрии про-
текторов п поверхности ВПП и других факторов.
На рис. 17.9 показана зависимость коэффи-
циента сцепления при изменении скорости движе-
ния от 9,25 до 111 км/ч. Наибольшее влияние на
коэффициент сцепления оказывают атмосферные
осадки п грязь на ВПП. На рис. 17.10, а показа-
на зависимость коэффициента сцепления для ави-
ационного пневматика от состояния поверхности
ВПП (сухая, мокрая, обледенелая ВПП). На
Рис. 17.9. Влияние скоро-
сти движения на коэффи-
циент сцепления
297
Рис. 17.10. Влияние состояния ВПП (а) и толщины осадков
(б) на коэффициент сцепления:
/—сухая ВПП; 2—мокрая ВПП; 3—обледенелая ВПП; 4—толщина
осадков на ВПП 0,38 мм; 5—толщина осадков на ВПП 1,0 мм; 6—тол-
щина осадков 1,9 мм
рис. 17.10, б показана зависимость коэффициента сцепления от толщины атмос-
ферных осадков. Из сравнения кривых f=f (to) на рис. 17.10, а, 17.10, б следует,
что наличие слоя воды на ВПП толщиной ^ = 1,9 мм приводит к уменьшению
максимального значения f примерно в пять раз.
Рассматривая изменение коэффициента боковой силы, зависящего только от
угла скольжения, проскальзывание пневматика принимали равным нулю. При
рассмотрении коэффициента трения принимался равным нулю угол скольжения.
В действительности при движении самолета по ВПП наиболее интересны случаи
посадки со сносом, когда одновременно и Р=И=О, и о>=#0. В результате совместно-
го действия углов скольжения и проскальзывания со располагаемые уровни бо-
ковой силы и силы трения существенно понижаются.
На рис. 17.11, а показана примерная взаимосвязь коэффициента трения и
коэффициента боковой силы_Сгк, значение которого при со=О определяется уг-
лом скольжения [3=4°, при соэ^О и (3=^0. Изменение силы трения и боковой си-
лы при выполнении условий ('>=#0 и Р=/=0 определяется законом, который гово-
рит о том, что равнодействующая сил ZK и F при различных сочетаниях со У-О
и Р=#0 должна примерно равняться располагаемой силе трения (пли не долж-
на превышать ее). Непосредственно функциональная связь коэффициента боко-
вой силы п коэффициента трения при различных углах скольжения и различном
относительном проскальзывании показана на рис. 17.11, б. Изменение соотно-
шения между коэффициентами С1К и f при увеличении относительного проскаль-
зывания показано стрелкой на одной из зависимостей, соответствующих углу
скольжения Р=2; при нулевом значении проскальзывания максимальное значе-
ние имеет коэффициент боковой силы£_ максимальное значение коэффициента
сцепления достигается примерно при <од&:0,2, эта точка определяется касатель-
ной, проведенной параллельно оси Cz к .(точка Л). Из рассмотрения кривых раз-
личных углов скольжения следует, что в случае выбора режимов с максималь-
ным коэффициентом сцепления пневматика с ВПП коэффициенты боковой силы
для этих режимов имеют значения, значительно отличающиеся от максимальных.
Это говорит о том, что настройка автоматов торможения должна учитывать так-
же необходимый уровень боковой силы, потребный для осуществления управ-
ляемости самолетом по курсу.
Область Cz к—f при наличии атмосферных осадков на ВПП резко сокраща-
ется (рис. 17.12), и это может привести к потере управляемости самолетом по
курсу. На рис. 17.13 приведены результаты летных испытаний, показывающие
влияние атмосферных осадков (полоса покрыта смесью воды и снега) на эф-
фективность управления .носовым колесом. Эффективность носового колеса оце-
нивалась отношением Му"[Муа, где Л4°“ = дМу'д§п — производная момента
298
Рис. 17.11. Влияние угла скольжения и gj на коэффициенты
cz к и f:
а—изменение Cz и f в зависимости от w при 0=0,07 рад; б—измене-
ние Cz к и f при различных углах 0
рыскания переднего колеса; Л4 н = дМу/дЪ„ — производная момента рыскания
g g
руля направления. Из рассмотрения кривой Му"/Му1 при наличии атмо-
сферных осадков можно сделать вывод о практически полной потере управля-
емости передним колесом при V'?«200 км/ч.
В качестве управляющего органа при движении по ВПП, особенно с боко-
вым ветром, можно использовать не только колесо передней опоры. Для того
чтобы поставить ось самолета в необходимое положение, препятствующее сносу
самолета при наличии бокового ветра, может применяться асимметрия тяг дви-
гателей, торможение колесами главных опор. Использование асимметрии тяг ха-
рактерно тем, что в этом случае колеса не тормозятся и способны развить мак-
симальную боковую силу, обеспечивающую удержание самолета от сноса. Од-
нако использование такого метода имеет некоторые недостатки, связанные с тем,
что он эффективен только для самолетов, у которых ось двигателя расположена
от оси самолета на достаточно большом плече, кроме того при увеличении тяги
одного из двигателей и уменьшении другого управление траекторией может
быть со значительным перерегулированием.
Применение несимметричного торможения дает возможность повернуть са-
молет в необходимое положение, но при этом уменьшаются боковые силы, дейст-
вующие на заторможенные колеса, и это не дает возможности удержать самолет
от сноса, т. е. траектория его остается первоначальной. Для самолетов, у которых
кабина экипажа расположена далеко от центра масс, при этом может создаться
ложное представление об исправлении траектории движения самолета, поскольку
кабина самолета приближается к оси полосы. Вместе с тем центр масс самолета
при этом может уходить от оси полосы.
Приведенный выше анализ влияния конструктивных и эксплуатационных
факторов на боковые силы, силу торможения и эффективность путевого управ-
ления относится к возникновению глиссирования при движении самолета по во-
де или смеси воды и снега. Это так называемое динамическое .глиссирование.
Условия полного динамического глиссирования отвечают также движению по
обледенелой поверхности. Различают еще два вида глиссирования, при котором
тоже происходит значительное уменьшение коэффициента боковой силы и коэф-
фициента трения. Вязкостное глиссирование возникает в условиях влажной ВПП,
когда на последней имеется очень тонкая (rf(<;0,25 мм), но прочная пленка
жидкости, через которую не может «проникнуть» пневматпк. Особенно опасными
с точки зрения вязкостного глиссирования являются гладкие поверхности или же
«сглаженные» и уплотненные остатками резины от пневматиков, пылью, сажей,
маслом. Отделение пневматиков от ВПП при этом типе .глиссирования может
происходить ,на скоростях, меньших скорости динамического глиссирования при-
299
Рис. 17.12. Влияние сос-
тояния ВПП на область
изменения коэффициен-
тов Сг к и f:
1—для сухих ВПП; 2—для
мокрых ВПП
Рис. 17.13. Влияние ат-
мосферных осадков на
путевую управляемость
самолета:
1—сухой бетон; 2—смесь во-
ды и снега
мерно на 35%. Изменения коэффициента боковой силы и трения при вязкостном
глиссировании примерно такие же, как и при динамическом глиссировании.
Глиссирование в результате размягчения резины (паровое глиссирование}
возникает в условиях наличия осадков на ВПП, когда колеса заблокированы
автоматом торможения (<о=1). Если колесо .в этом режиме остается некоторое
время, то чем больше это время, тем больше тепла выделяется от трения пнев-
матика и влажной ВПП. Вода превращается при этом в нар, давление которого
поднимает колесо над поверхностью ВПП. При таком движении колеса темпера-
тура может повышаться до 260° С, что обуславливает повреждение поверхности
пневматика, происходит размягчение резины, которая становится похожей на не-
вулканизированную. Коэффициенты трения при этом виде глиссирования такие
же, как в условиях полного динамического глиссирования, однако такое явление
может существовать при необычайно низких скоростях (в некоторых случаях
40 км/ч). В зависимости от условий все три вида глиссирования могут возникать
во время одного посадочного пробега. Возникновение любого типа глиссирова-
ния приводит к значительному ухудшению устойчивости и управляемости, и для
обеспечения безопасности необходимо знать изменение характеристик конкрет-
ных самолетов в зависимости от полетной массы, состояния ВПП и бокового
ветра.
Вопросы для повторения
1. В чем отличие условий, при которых рассматривается устойчивость само-
лета на взлетно-посадочных режимах?
2. Напишите уравнение движения самолета по ВПП.
3. Напишите выражение для боковой силы переднего колеса.
4. Нарпсуйте график изменения боковой силы колеса в зависпмоостп от уг-
ла скольжения при сухой и мокрой ВПП.
5. Каким параметром оценивается путевая управляемость самолета?
6. В чем сущность глиссирования?
7. Поясните, как изменяется коэффициент боковой силы при качении и при
движении по ВПП, покрытой атмосферными осадками.
8. Нарисуйте и поясните изменение коэффициента сцепления от относитель-
ного проскальзывания при угле увода, равном нулю,
9. Влияет ли на силу сцепления (коэффициент сцепления) скорость движе-
ния, наличие атмосферных осадков на ВПП? Каким образом?
10. Покажите, как изменяется коэффициент боковой силы и сцепления при
наличии угла увода и относительного проскальзывания.
Глава 18
Устойчивость и управляемость самолета
при наличии автоматических устройств
На современных летательных аппаратах системы автоматичес-
кого управления находят широкое применение. Круг задач, решае-
мых с их помощью, по дальнейшему повышению безопасности на-
дежности и регулярности полетов непрерывно расширяется. Борто-
вая система автоматического управления полетом самолета содер-
жит различные устройства, предназначенные для решения частных
функциональных задач управления, из которых можно выделить
такие как:
стабилизация и управление угловым положением самолета;
улучшение характеристик устойчивости и управляемости;
управление траекторией движения, обеспечение оптимальных
траекторий движения, управление заходом «а посадку и взлетом;
контроль состояния техники в полете;
получение и переработка информации о полете и выработке
команд управления;
регистрация параметров движения и т. д.
Оптимальное решение задач автоматического управления тре-
бует внедрения современных методов управления, базирующихся
на использовании принципа адаптации, применения быстродейст-
вующих бортовых цифровых устройств для формирования опти-
мального управления и алгоритма контроля, повышения точности и
надежности средств получения и переработки информации и испол-
нения команд управления.
Теория и принципы построения систем автоматического управ-
ления полетом, получившие достаточно полное развитие, излагают-
ся в курсах систем управления летательными аппаратами (10].
В предлагаемой главе рассмотрены основные понятия об использо-
вании автоматических устройств на самолетах для улучшения его
характеристик устойчивости и управляемости.
§ 18.1. Распределение функций управления между
пилотом и автоматическими устройствами
Самолет, управляемый пилотом, есть единая замкнутая систе-
ма, где самолет — объект управления, а пилот — оператор. Воз-
можность безопасного выполнения задания на полет определяется
свойствами этой системы в целом, т. е. системой пилот — самолет.
301
Так как динамические свойства человека ограничены его возмож- ’’
ностями, то оптимальное взаимодействие пилота и самолета стано-
вится возможным в том случае, если динамические характеристи-
ки самолета, включающего и некоторые автоматические устройст-
ва, подобраны с учетом возможностей человека, а пилот хорошо
знаком с динамическими свойствами объекта управления.
Современный самолет характеризуется широким диапазоном
скоростей и высот полета. Его динамические свойства, зависящие от
конструктивных и аэродинамических характеристик, также могут
изменяться в достаточно широком диапазоне. Кроме этого, собст-
венно самолет некоторыми важными для полета свойствами не
обладает, и их нельзя ему придать конструктивными средствами.
Так, например, у самолета нет курсовой устойчивости, он практи-
чески нейтрален по высоте полета, на некоторых режимах полета
может оказаться спирально неустойчивым, при превышении кри-
тического числа М может наблюдаться неустойчивость самолета
по скорости и т. д.
Система пилот — самолет в известных пределах этих недостат-
ков лишена. Пилот своими управляющими воздействиями при оп-
ределенных характеристиках самолета делает систему устойчивой.
Эти действия, направленные на повышение устойчивости системы,
при непрерывном воздействии возмущающих факторов являются
одной из основных его функций в установившемся прямолинейном
полете. Однако эту простейшую, но утомительную при длительном
полете функцию управления более успешно может выполнять ав-
томатическое устройство, обладающее большей мощностью и
большим быстродействием, чем пилот.
На маневренных этапах полета (при взлете, заходе на посадку ,
и приземлении) функции пилота усложняются. На основе перера-
ботки полученной информации с помощью приборов или визуаль-
ного наблюдения он принимает решение по выбору оптимальной
траектории движения и осуществляет точное управление с целью
выдерживания ее при наличии слабых неблагоприятных возмущаю-
щих факторов, действующих на самолет. В этих условиях в функ-
ции пилота входят способность достаточно полно воспринять ин-
формацию, осмыслить ее, принять правильное решение и осуще-
ствить точное управление.
Эти функции пилота также могут выполняться автоматически-
ми устройствами, которые должны быть способны в некоторых не-
благоприятных случаях (сильные возмущения, отказы агрегатов и
систем) выполнить достаточно сложные логические операции, но
они могут оказаться достаточно сложными и дорогими. В этих ус-
ловиях более выгодными могут оказаться полуавтоматические уст- г
ройства, т. е. устройства, облегчающие задачу управления само-
летом пилоту, не исключая его из системы управления.
Однако и в случае полностью автоматизированного управле-
ния за пилотом сохраняется функция контроля за выполнением
заданного движения, принятия решения и вмешательства в управ-
ление при необходимости. I
302
Важной функцией пилота является выбор оптимального алго-
ритма управления в аварийных ситуациях, когда автоматическая
система либо частично парализована, либо в ней не предусмотрено
управление для данной конкретной ситуации.
В качестве иллюстрации к этому положению можно привести
пример посадки самолета с разрушенной тягой управления рулем
высоты. Пилот, используя то обстоятельство, что крыльевые и фю-
зеляжные двигатели у этого самолета были по высоте разнесены,
выполнял управление движением тангажа соответствующим регу-
лированием тяг этих двигателей и совершил благополучную по-
садку, сохранив и самолет и жизнь пассажиров.
Использование быстродействующих бортовых вычислительных
машин в системах автоматического управления существенно рас-
ширяет их возможности: позволяет выполнять логические опера-
ции по оптимизации управления в зависимости от атмосферных и
полетных условий. Развитие ЦВМ, увеличение их быстродействия,
уменьшение массы и габаритов способствуют широкому внедрению
бортовых ЦВМ в САУ самолетов.
В тех случаях, когда безопасность полета и точность управле-
ния обеспечиваются участием человека как звена управления, пред-
почтение отдается полуавтоматическим системам управления.
§ 18.2. Системы улучшения характеристик
управляемости самолета
Системы улучшения характеристик управляемости относятся к
полуавтоматическим системам управления и содержат устройства
автоматизации ручного управления, системы отработки командного
сигнала и системы повышения демпфирования и устойчивости.
Рассмотрим устройство автоматизации ручного управления
самолетом на примере продольного движения. В короткопериодиче-
ской форме продольного возмущенного движения передаточная
функция самолета по углу атаки при отклонении руля высоты со-
гласно уравнениям (15.75) при &2 = 0 определяется зависимостью
=-------------
Д8В д2 4-2р.р + &2
(18. 1)
При непосредственном управлении пилотом рулем высоты уси-
лие, прикладываемое к штурвалу в первом приближении, пропор-
ционально углу отклонения руля (10.21):
ДРВ= - UXtfMA- (1&- 2)
С другой стороны, оно пропорционально нормальной перегрузке:
ДР (18.3)
В в У в mg 7
В этом случае согласно (18.1), (18.2) передаточная функция
WPa=-—=-------,
ДРВ +
зэз
где коэффициент усиления kP практически не зависит от режима
полета:
k Пг Sb*
tn^ z
Характеристики управляемости самолета определяются опорной
частотой самолета соо=^ фактором демпфирования р. и производ-
ной Р*У.
Оптимальным по управляемости считается самолет, для которо-
го (оо=3 ... 5 1/с (fo=0,5 ... 0,8 Гц), ц=0,7 . . . 0,8.
Если управление рулем высоты осуществляется с помощью не-
обратимого бустера, то усилие, прикладываемое к штурвалу, не
связано с шарнирным моментом руля, оно определяется трением в
системе управления золотником бустера.
Для того чтобы пилот «чувствовал» связь с объектом управле-
ния, необходимо в систему управления включить специальные уст-
ройства, имитирующие усилия.
Предположим, что угол отклонения руля высоты пропорциона-
лен линейному перемещению штурвала хв, т. е. Д6в=ХЛхв, и с целью
сохранения «чувства управления» необходимо сохранить пропор-
циональную зависимость усилия от нормальной перегрузки.
Пусть связь перемешения штурвала с усилием определяется за-
висимостью
При этих условиях передаточная функция (18.1) может быть пред-
ставлена в виде
Да ___ — Pks
р2 + 2р.р+*2
(18-4)
Сравнивая формулы (18.3) и (18.4), приходим к выводу, что
роль коэффициента усиления kP в последнем случае играет про-
изведение — Д-лДз- Для того чтобы сохранить в этих условиях
«чувство управления» таким же, как и при непосредственном уп-
равлении рулем, необходимо постоянство коэффициента усиления,
т. с. выполнения условия
XxXp^3=const. (18.5)
Коэффициент /?3, характеризующий эффективность руля высо-
ты, зависит от условий полета (скорости и высоты):
В связи с этим выполнение условия (18.5) требует соответствен-
ного изменения передаточных чисел ).х и /.Р. С этой целью в сис-
теме управления применяют автомат регулировки управления, осу-
ществляющий регулирование как передаточного числа 't.p, так и из-
менения передаточного числа Д. Эти устройства в зависимости от
304
q п Н способствуют выпол-
нению условия (18.5).
Системы отработки ко- н3
мандных сигналов содержат
вычислительное устройство,
в которое подаются сигналы
по угловым скоростям и ус-
корениям и стабилизирую- Рж. 18Л. функциональная схема системы
щие сигналы вместе с сигна- отработки командных сигналов
лами, определяющими ори-
ентацию самолета. Вычислительное устройство формирует управля-
ющий сигнал, который реализуется на командном приборе. Сигнал
отображается на шкале прибора в виде подвижного и неподвижно-
го индексов. Роль пилота сводится-к отклонению органов управле-
ния до тех пор, пока индексы на командном приборе не совпадут.
Функциональная схема такой системы для продольного кана-
ла приведена на рис. 18.1, где Я3, Н — заданная и фактическая вы-
я
соты.
Демпферы представляют собой замкнутую полуавтоматическую
систему управления, назначение которой — улучшение характерис-
тик управляемости. Они вызывают отклонение органов управления
пропорционально угловой скорости вращения и способствуют искус-
ственному повышению демпфирующих свойств самолета. В общем
случае основными элементами демпфера являются: чувствительный
элемент, реагирующий на угловую скорость самолета относительно
рассматриваемой оси (обычно это скоростной гироскоп); коррек-
тирующее устройство, исключающее отклонение руля при устано-
вившемся криволинейном движении; усилительное устройство и ис-
полняющее устройство (рулевая машина). В канале демпфера кре-
на корректирующего устройства нет. Демпфер устанавливается н
обратной связи самолета и автоматически повышает демпфирова-
ние движения независимо от управляющих действий пилота. Функ-
циональная схема включения демпфера в канале рыскания при-
ведена на рис. 18.2.
На современных самолетах устанавливаются одно-, двух- или
трехканальные демпферы, т. е. демпферы, реагирующие на одну.
Две или все составляющие вектора угловой скорости, например на
<оу, на со,, и (о2 или на со? и сох.
В процессе развития самолетов необходимость улучшения демп-
фирующих свойств возникла в первую очередь по каналу рыска-
ния, поэтому одноканальные демпферы, как правило, являются
Демпфером рыскания.
В качестве примера рассмотрим функционирование демпфера
рыскания. Структурная схема включения демпфера рыскания в сис-
тему управления рулем направления показана на рис. 18.3, где
о>гдн — передаточная функция самолета по угловой скорости ©у;
Ку — передаточная функция корректирующего устройства;
— коэффициент усиления демпфера; йн, Z — передаточные чис-
ла; хн — перемещение педалей управления рулем направления.
305
Рис. 18.2. Функциональная схема самолета
с демпфером рыскания
Рис. 18.3. Структурная схема уп-
равления рулем направления с
демпфером рыскания
В случае зажатых органов управления (х„ = 0) изменение уг-
ловой скорости служит причиной возникновения сигнала в чувст-
вительном элементе, который после прохождения корректирующе-
го устройства и усиления подается в рулевую машину, которая
отклоняет руль направления путем удлинения тяги управления.
Отклонение педалей непосредственно передается на руль направле-
ния, одновременно сигнал отклонения руля пропускается через кор-
ректирующее устройство, чем обеспечивается замедление в его пе-
редаче в целях уменьшения перегрузки.
Характеристики управляемости самолета с демпфером рыска-
ния определяются свойствами передаточной функции системы са-
молет — демпфер.
Исходя из рис. 18.3 получим следующее выражение для переда-
точной функции самолета по оь, при перемещении педалей пило-
том на хн:
s (*н + *ю Х1Гк.у)
У н У
^Ч'Ч^
(18-7)
Передаточная функция самолета гн согласно формуле
(16.33) равна:
U7m 8 =pW?b =-------------. (18-8)
tJ н " Р2 + (*33 + *31) Р + *31
Передаточная функция корректирующего устройства определя-
ется как
1Гку=- Тр ,
к-у Тр + 1
(18.9)
где Т — постоянная времени. 4
Соответствующим выбором ka> и постоянной времени Т можно
получить требуемый переходный процесс, т. е. обеспечить приемле-
мые характеристики управляемости самолета по каналу рыскания.
При малых скоростях полета замедления в передаче сигнала от
пилота к рулю не требуется, поэтому на этих режимах можно уста-
новить Л=0.
306
Пилот работу демпфе-
ра практически не ощу-
щает, она воспринимает-
ся им как улучшение уп-
равляемости самолета.
На рис. 18.4 показана
зависимость переходного
процесса по углу сколь-
жения самолета Ту-134 с
выключенным 1 и функ-
ционирующим 2 демпфе-
ром рыскания при полете
со скоростью V=
= 850 км/ч на высоте
10000 м. Как видно, демп-
фер существенно улучша-
Рис. 18.4. Переходный процесс рыскания
при отключенном (/) и функционирующем
(2) демпфере рыскания
ет характеристики переходного процесса.
С целью обеспечения приемлемых характеристик самолета на
всех режимах в демпферах предусматривается возможность изме-
нения коэффициентов усиления. Так, уравнение регулирования
демпфера рыскания самолета Ту-134 имеет вид
---- kyyy
Тр
УТр+\
wy “Г
В полетной конфигурации реакция на угловую скорость крена
отключается (Аш.=0), а на взлетно-посадочных режимах реак-
ция демпфера на заметно улучшает динамические свойства са-
молета.
Аналогично демпферу рыскания функционируют демпферы
тангажа и крена.
§ 18.3. Системы улучшения характеристик
устойчивости
Получение для современных самолетов приемлемых характери-
стик статической устойчивости на всех режимах полета одними
конструктивными средствами — задача неразрешимая. Так, напри-
мер, в гл. 11 отмечалось, что стреловидность крыльев способствует
увеличению степени поперечной устойчивости с увеличением угла
атаки. Придание таким крыльям отрицательного угла поперечного
V позволяет уменьшить поперечную устойчивость. Однако так как
влияние угла поперечного V крыла на поперечную устойчивость
не зависит от угла атаки, то самолет с отрицательным V может ока-
заться неустойчивым при полете с большими скоростями и малыми
углами атаки.
Вследствие влияния сжимаемости (см. гл. 9) в некотором диа-
пазоне закритических чисел М самолет становится неустойчивым
по скорости, ликвидировать которую конструктивными средствами
нельзя. При переходе от дозвуковых к сверхзвуковым скоростям
полета вследствие перемещения аэродинамического фокуса назад
307
Рис. 18.5. Функциональная (а) и структурная (6) схема самолета с авто-
матом устойчивости и демпфером тангажа
самолет становится чрезмерно устойчивым по перегрузке. Сохра-
нение приемлемой меры устойчивости требует наличия баластного
топлива и системы его перекачки для уменьшения запаса цент-
ровки.
Применение полуавтоматических средств управления степенью
устойчивости самолета позволяет обеспечить приемлемые характе-
ристики устойчивости и управляемости самолета на всех режимах
полета, снизить потерю аэродинамического качества на балансиров-
ку моментов и тем самым повысить безопасность и экономичность
полета.
Система изменения устойчивости по перегрузке включает чувст-
вительный элемент угла атаки, усилитель с корректирующим
устройством, рулевую машину.
На рис. 18.5,а приведена функциональная схема автомата устой-
чивости и демпфера тангажа, включенных в систему продольного
управления.
Структурная схема автомата устойчивости самолета показана
на рпс. 18, 5, б, где W<aK — передаточная функция самолета по уг-
лу атаки; ka—• коэффициент усиления; kB — передаточное число.
В соответствии с уравнениями продольного управляемого дви-
жения (см. гл. 15), передаточная функция самолета по углу ата-
ки при отклонении руля высоты равна:
а ._ _______________________
1е + 2р/> 4- №
(18.10)
Тогда согласно рис. 18. 5, б
автоматом устойчивости
передаточная функция самолета с
= .
в хв /)2 |- 2[Лр 4- (й2 _ kak3)
(18.11)
Статическая устойчивость колебательной системы характеризу-
ется его опорной частотой, которая для самолета без автомата
устойчивости (18.10) равна (йо='£, а для самолета с автоматом ус-
тойчивости — u>0a~V — k„k3.
Изменяя величину ka, можно регулировать степень продольной
статической устойчивости самолета по перегрузке. Можно преду-
308
смотреть регулирование величины коэффициента ka в зависимости
от условий полета (М, р). В этом случае обеспечиваются приемле-
мые характеристики устойчивости на всех режимах полета.
Рассмотрим систему путевой устойчивости. Как отмечалось ра-
нее (см. гл. 11), самолет в неуправляемом движении устойчивостью-
по курсу не обладает. Пилоту вмешательством в управление при-
ходится обеспечивать это свойство. Включение в систему управле-
ния рулем направления автомата путевой устойчивости (устойчи-
вости по курсовому углу) позволит освободить пилота от функции
обеспечения путевой устойчивости. Система путевой устойчивости
включает чувствительный элемент по углу рыскания (гироскоп),
усилитель с корректирующим устройством и рулевую машину.
Для рассмотрения этого вопроса несколько изменим первое из
допущений, сделанных при рассмотрении колебательной формы бо-
кового возмущенного движения в § 16.4. Сохраним боковое по-
ступательное движение при условии пренебрежения влиянием, со-
ставляющим силы mg, на поперечную ось.
В этом случае при отклонении только руля направления уравне-
нения управляемого бокового движения (16.30) примут вид
(/’+611)Р'-^=0,
(Ь'Пр+ + + 622)«л- + Ь,3) = 62н8н,
(bZ\p ф- 631) ф- (р ф- 6аз) шу — 63н8н,
—<«х+ДУ=0.
Отсюда находим передаточные функции по и р при отклонении
руля направления, которые имеют вид
w ~ + Ьъ"
у н 6Н р2 + Ьгр + ь0
= J-=-----,
н 6н Р2 + bip 4- Ьо
(18.13)
(18.14)
где 61 = бт+бзз — 6з161з; b0=b11b33 —- b31b13.
По формуле (18. 13) можно получить передаточную функцию,
по углу рыскания ф, если принять во внимание зависимость юи=
=Рф:
Ц7 =-4. : (Г + Ьм) ^зн
ф8" 6н Р (Р2 + Ь\Р + «о)
(18.15)
Из формул (18. 13) — (18. 15) следует, что при ступенчатом от-
клонении руля направления угол скольжения и угловая скорость
достигают со временем установившихся значений, определяемых
величинами
»„«=-=8«о; (is. 16)
В то же время угол рыскания в этих условиях будет непрерывно
расти, т. е. самолет неустойчив по углу пути.
309
Рис. 18.6. Структурная схема само-
лета с автоматом путевой (курсовой)
устойчивости
Рис. 18.7. Переходный процесс рыска-
ния самолета с автоматом путевой ус-
тойчивости (/) и без него (2)
(18. 17)
в виде
(18.18)
автомата
Теперь можно перейти к рассмотрению автомата путевой устой-
чивости. Дополним структурную схему демпфера рыскания, приве-
денную на рис. 18.3, автоматом устойчивости. Для этого добавим
цепь обратной связи с регулируемым коэффициентом усиления .
Рассмотрим свойства полученной системы самолет — автомат
устойчивости (рис. 18.6), где бн.п— отклонение руля пилотом;
Ьп. а—-отклонение руля по сигналу автомата устойчивости; —
коэффициент усиления; kn — передаточное число.
Согласно рис. 18.6 передаточная функция угла рыскания по от-
клонению педали х„ равна:
М7фЛ. = Л =-------.
Н Р-^ШуЪ^
Учитывая формулу (18.13), запишем формулу (18.17)
______________АСн (Р 4- Ci)______
уЛн рЗ + й1р2+ (60 — b3Kk^p— bnbSnk^
Сравнивая передаточные функции самолета без
устойчивости (18. 15) и при наличии автомата устойчивости
(18. 18), можно утверждать, что в последнем случае система обла-
дает свойством путевой устойчивости при А’фХ).
На рис. 18.7 приведен переходный процесс по углу рыскания ф
для самолета с функционирующим 1 и выключенным 2 автоматом
повышения путевой устойчивости.
Система самолет —- автомат устойчивости при ступенчатом от-
клонении педалей (руля направления) достигает с течением време-
ни установившегося значения угла рыскания, который согласно
(18. 18) равен:
ФУст=-- ~у- *но-
Аналогично можно изменять степень флюгерной или поперечной
устойчивости введением реакции автомата на угол скольжения.
Автоматы устойчивости находят широкое применение на совре-
менных самолетах.
310
§ 18.4. Автоматическая посадка самолета
Из всех этапов полета наиболее трудным является управление-
самолетом при посадке. Трудности существенно возрастают при
неблагоприятных погодных условиях (низкая облачность, плохая
видимость, наличие ветра, турбулентности). Сложность управления
при посадке обуславливается требованием высокой точности пило-
тирования. Особенно точным должно быть пилотирование на за-
ключительном участке посадки — выравнивания и приземления. Точ-
ность выдерживания траектории на этом участке по высоте и бо-
ковому смещению определяется соответственно цифрами ±0,5 м
и ±5 м.
В зависимости от погодных условий посадки делятся на три ка-
тегории сложности: I, II и III. При посадке по I категории допу-
стимый погодный минимум определяется высотой облачности 60 м
и горизонтальной видимостью 800 м. Для II и III категорий эти
цифры соответственно равны: 30 — 400 м и 0 — 0 м.
Выполнение посадки по всем категориям требует определенной
степени автоматизации. Заключительный этап посадки с высоты
15—20 м и до приземления по категориям I и II выполняется пи-
лотом визуально. Посадки по III категории требуют полной авто-
матизации управления вплоть до приземления. Функции пилота в
последнем случае могут сводиться к инструментальному контролю.
В настоящее время в развитии систем автоматической посадки
намечались два направления:
1) полная автоматизация посадки вплоть до уверенного призем-
ления, пилот контролирует состояние и работу автоматики;
2) автоматические системы посадки с активным участием пило-
та в управлении при применении наглядных систем индикации.
Считается, что безопасность посадки обеспечивается, если веро-
ятность возникновения опасной ситуации не превышает 10-7. На-
дежность пилота в управлении посадкой в сложных условиях при-
мерно на 1—2 порядка выше, чем современных автоматических си-
стем. В связи с этим при использовании полной автоматизации тре-
буется 3—4-кратное резервирование.
На современном этапе развития автоматических средств посад-
ки предпочтение следует отдать второму направлению, являюще-
муся более надежным. По мере развития автоматических систем
преимущество получит полная автоматическая посадка.
Рассмотрим общие принципы автоматизации посадки. Система
автоматической посадки состоит из бортовых и наземных устройств.
Наземные средства предназначены для формирования-опорной тра-
ектории посадки, а бортовые автоматические устройства —для ста-
билизации движения самолета по опорной траектории. Существу-
ют различные системы решения задачи формирования траектории
посадки. Рассмотрим одну из наиболее распространенных систем —
радиотехническую систему захода на посадку. Эта система вклю-
чает следующие основные наземные устройства выработки траек-
тории посадки (рис. 18.8): дальний радиомаяк (ДМ), сигнал ко-
торого определяет начало выхода на глиссаду; глиссадный радио-
311
Н—15м
Н-'ЛООМ
Рис. 18.8. Принципиальная схема системы захода на посадку
маяк (ГРМ), расположенный сбоку от ВПП ближе к ее концу и
вырабатывающий глиссаду захода на посадку под углом 2°40' к
.земле; ближний радиомаяк (БМ), сигнализирующий о конце этапа
захода на посадку и начало собственной посадки (Н= 15 ... 20 м);
курсовой радиомаяк (КРМ), расположенный на оси ВПП на рас-
стоянии 600—1000 м от ее конца, вырабатывает сигнал, параллель-
ный ВПП.
Бортовые устройства обеспечения движения по опорной траек-
тории состоят: из курсового радиоприемника (КРП), глиссадного
радиоприемника (ГРП), указательного прибора (УП), на котором
осуществляется индикация положения самолета относительно глис-
сады и осп ВПП, радиовысотомера (РВ), вырабатывающего сигнал
для этапа выравнивания, и радиодальномера (РД).
Сигналы, вырабатываемые этими устройствами, используются
для индикации траектории посадки и осуществления соответствую-
щего ручного управления либо передается на соответствующие ка-
налы автопилота для выполнения полностью автоматической по-
садки.
Управление по курсу осуществляется с использованием сигнала
КРМ через канал крена автопилота, канал управления рулем на-
правления используется для обеспечения путевой устойчивости.
Управление по тангажу выполняется автопилотом по сигналу
ГРМ. На этапе посадки продольное управление выполняется по сиг-
налу радиовысотомера. Закон управления с использованием РВ п
быстрота отработки заданного угла тангажа обеспечивают движе-
ние центра масс самолета на этапе выравнивания по экспоненте.
Вопросы для повторения
1. Объясните основные функции пилота в системе управления самолетом.
2. Какие полуавтоматические системы используются на самолетах с целью
улучшения характеристик управляемости?
2. Каково назначение корректирующего устройства в системе демпфера рыс-
.кания?
4. Каковы принципы работы систем повышения устойчивости?
5. Опишите основные направления развития систем автоматической посадки.
Задача
Опорная частота короткопериодической формы продольного движения рав-
на 0,1 Гц. Каким должен быть коэффициент усиления автомата устойчивости
чтобы частота стала равной 0,5 Гц при aks=—0,45?
Ответ: 6,1
Глава 19
Влияние упругих деформаций конструкции
на характеристики устойчивости
и управляемости самолета
§ 19.1. Упругие деформации. Способы оценки
их влияния на динамику самолета
Конструкция самолета допускает большие деформации, что свя-
зано с уменьшением массы конструкции. Особенно это заметно у
пассажирских и других тяжелых неманевренных самолетов, запас
прочности которых значительно ниже, чем у маневренных легких
самолетов.
В определенных условиях влияние упругих деформаций частей,
самолета на его характеристики устойчивости и управляемости до-
вольно существенно. В полете под действием аэродинамических и
массовых сил самолет деформируется. Деформации вызывают из-
менение формы самолета и, как следствие этого, аэродинамической
нагрузки. В свою очередь, дополнительная нагрузка, обусловлен-
ная деформацией, приводит к изменению деформаций.
Этот процесс может быть устойчивым или неустойчивым. В пер-
вом случае процесс устанавливается, самолет приобретает опреде-
ленную форму и его нагрузка стабилизируется. Во втором случае
деформации будут возрастать, что приведет к увеличению аэроди-
намической нагрузки и может явиться причиной разрушения конст-
рукции.
Если нагрузки, действующие на самолет, прикладываются и
изменяются очень медленно, так что в каждый момент времени
достигается равновесие внешних и упругих сил и моментов, то в
конструкции не возникает колебаний. В этих условиях можно пре-
небречь влиянием инерционных сил и рассматривать статическую
или квазистатнческую картину деформации, использовать методы
статического анализа и говорить о статической устойчивости или
неустойчивости конструкции.
К явлениям потери статической устойчивости можно отнести
дивергенцию частей самолета и реверс органов его управления.
Исходя из этого представления оценивается влияние упругих
деформаций конструкции на характеристики статической устойчи-
вости и управляемости самолетов, причем это влияние имеет место
и при режимах полета, когда статические деформации конструк-
ции устойчивы.
В возмущенном движении изменения аэродинамической нагруз-
ки нельзя считать медленными. В этом случае возбуждаются упру-
гие колебания конструкции, роль инерционных сил становится су-
щественной.
313
Неустойчивость упругих колебаний конструкции самолета или
его частей принято называть флаттером.
Влияние упругих деформаций на характеристики возмущенно-
го движения может оказаться значительным и при режимах поле-
та, когда флаттера не наблюдается, но разница между частотами
упругих степеней свободы конструкций и собственных форм движе-
ния самолета невелика. В этих случаях необходимо использовать
динамические методы анализа, которые учитывают зависимость де-
формаций от времени.
Самолет представляет собой упругое тело с распределенными
параметрами, т. е. его можно рассматривать как систему бесконеч-
ного множества элементарных масс, связанных между собой упру-
гими элементами. В таком точном представлении самолет является
телом с бесконечным множеством упругих степеней свободы, каж-
дая из которых определяет свою форму упругих колебаний. К этим
упругим формам следует добавить формы движения самолета как
твердого тела, рассмотренные в гл. 15 и 16. Решить такую задачу
практически затруднительно. Поэтому в инженерной практике при
расчете деформации используются различные приближенные мето-
ды, основанные на аппроксимации упругого самолета эквивалент-
ной системой с конечным числом степеней свободы.
При исследовании динамических характеристик упругого само-
лета наиболее часто используется метод выбранных определенным
образом упругих форм колебаний *. В этом методе каждая из вы-
бранных форм колебаний соответствует некоторой упругой степени
свободы, а амплитуда, определяющая вклад этой формы в упругие
колебания конструкции, применяется в качестве обобщенной коор-
динаты. При таком подходе дифференциальные уравнения, описы-
вающие каждую из форм колебаний, взаимно независимы. Если
пренебречь силами конструктивного демпфирования, то дифферен-
циальные уравнения упругих форм записываются в виде
4^+4^ ==<Л. (19.1)
где Ik — обобщенный массовый момент инерции /?-й формы; qh—
обобщенная координата этой формы; — круговая частота упру-
гих колебаний; Qh — обобщенная сила, которая в основном опреде-
ляется аэродинамическими силами и моментами; п — число выбран-
ных форм упругих колебаний.
Упругие деформации обусловливают появление дополнительных
аэродинамических сил и моментов, которые определяются стацио-
нарными и нестационарными производными аэродинамических ко-
эффициентов. Например, дополнительными слагаемыми, обуслов-
ленными fe-й формой колебании, для коэффициента момента танга-
жа будут:
Фын Я. Ц. Введение в теорию аэроупругости, М., ИЛ, 1959.
314
Если ввести в уравнения возмущенного движения самолета как
твердого тела дополнительные силы и моменты, обусловленные уп-
ругими колебаниями, и дополнить их п дифференциальными урав-
нениями (19.1), получим систему 6 + н уравнений второго порядка,
описывающих возмущенное движение упругого самолета. Решение
этой системы позволит определить динамические свойства самоле-
та как упругой системы.
§ 19.2. Дивергенция крыла и оперения,
реверс органов управления
Здесь будет приведен лишь качественный анализ частных вопро-
сов аэроупругости применительно к характеристикам устойчивости
и управляемости самолета, основанный на статическом методе, при
этом сделаны следующие допущения:
а) справедлива гипотеза плоских сечений, согласно которой при
деформации какой-либо части самолета конфигурация ее сечения
не изменяется;
б) пренебрежимо малы деформации частей самолета от массо-
вых сил.
Рассмотрим влияние деформации на распределение местных уг-
лов атаки стреловидного крыла. Прямое крыло можно считать ча-
стным случаем стреловидного. При сделанных допущениях крыло
можно моделировать упругой балкой с жестким креплением по кор-
невому сечению. Будем считать, что упругая ось балки (линия цент-
ров изгиба) совпадает с линией центров жесткостей сечений (цент-
ров кручения сечений).
Как деформация кручения, так и деформация изгиба приводят
к изменению местного угла атаки стреловидного крыла. Прираще-
ние угла атаки, обусловленное кручением .ДаКр, равно углу закрут-
ки (рис. 19. 1), а приращение Даизг, обусловленное изгибом, опре-
деляется согласно рис. 19. 2 выражением
Даизг ~ - 'Кр.изг tg X ~ tg х,
ds
где фкр. изг — угол поперечного V крыла в данном сечении, обус-
ловленный изгибом; у — прогиб упругой оси; s — криволинейная
координата сечения по упругой оси.
Таким образом, изменение угла атаки в сечении А—А, нор-
мальном линии упругой оси, определяется суммой
д<^=ЛсКр + Даизг~?кр— Т^Х- (19.2)
Изменение угла атаки в сечении, параллельном корневой хор-
де, находим по формуле
Дау Даау cosх=?кр cos х — —- sin х- (19.3)
В частности, для прямого крыла Дау==<р1(р.
315
Рис. 19.1. Изменение угла
атаки сечения из-за дефор-
мации кручения:
7*—линия фокусов при дозвуко-
вых скоростях полета; 2—линия
центров жесткости; 3—линия
фокусов сечений при сверхзву-
ковых скоростях полета; 4~фо-
кус сечения; а—М<Мкр; б—
М>1
Рис. 19.2. Изменение местного угла ата-
ки стреловидного крыла при изгибе:
1—линия фокусов сечений: 2—линия центров
жесткости сечений
Предположим, что среднее значение изменения угла атаки,
обусловленного упругими деформациями, равно приращению угла
атаки в сечении крыла с координатой zKp, т. е. Лау. Cp=Aay(zCp),
которое определяется моментами изгиба и кручения, действующи-
ми в этом сечении, и значениями изгибной и крутильной жестко-
сти.
Пусть крутящий момент относительно упругой оси в сечении zcp
равен Л4гкр, а изгибающий момент Л1Х1ИГ. Если полет установивший-
ся и прямолинейный, то эти моменты, будучи статическими аэроди-
намическими моментами, зависят от угла атаки сечения и при ма-
лых углах атаки могут быть выражены формулами
AfZKP= Alz0-j- ТИгкр (а -Е Дау); 7Ихизг=УИхизг (а -ф Аау)-
Если жесткость выбранного сечения на изгиб и кручение харак-
теризуется коэффициентами kK, kG, то равновесие аэродинамических
и упругих моментов в этом сечении определяется системой уравне-
ний
316
Мг0+Л1гкРа 4- /ИгкрДау — Л0©|ф = 0; (19.4)
44хиз1а + Ж-изгДау — kE ^- = Q.
ds
Используя равенство (19.3) и разрешив систему (19.4) относи-
тельно Дау, получим
= (Mw + 4i;Kpa) cos X - kGMaxllsra sin у
У Vf-^^KpCosx-^^sinx)
Аэродинамические моменты Л4гкр и Alx изг пропорциональны ско-
ростному напору, поэтому они могут быть записаны в виде
M2Kp=.M%Ktlq', АДИЗГ=Al4XK3Iq.
Как следует из формулы (19.5), с увеличением скоростного на-
пора Дау изменяется, а при некотором q, при котором знаменатель
этого выражения обращается в нуль, упругое приращение угла ата-
ки становится бесконечно большим.
Явление, при котором равновесие аэродинамических и упругих
моментов, действующих на крыло, неустойчиво п любое возмущение
приводит к беспредельному возрастанию деформаций, называется
дивергенцией крыла, а соответствующее значение скоростного на-
пора — критическим скоростным напором. Явление дивергенции
крыла более наглядно прослеживается на нестреловидном крыле,
для которого критический скоростной напор дивергенции
a =„kG ,=___________
М“/кр m^KpSbA ‘
Для стреловидного крыла из формулы (19.5) получим
Е
qn'K ^^Pc°sx—V^’3rsinX ' <'19’6'1
Производная ЛДкр равна 714^kp= hxKCyS, где Дхж=хж — xF — пле-
чо нормальной силы относительно центра жесткости (рис. 19.3).
Если центр жесткости расположен за фокусом (на современных
самолетах хж~ (0,354-0,4) Ь), то кручение вызывает увеличение
угла атаки, а изгиб — его уменьшение, и дивергенция наступает
тогда, когда деформация кручения превалирует над деформацией
изгиба, а упругий момент сечения в силу огра-
ниченности не уравновешивает аэродинами-
ческий. На сверхзвуковых скоростях фокус,
перемещаясь назад, может оказаться за цент-
ром жесткости. В этом случае деформация
кручения, так же как изгиба, снижает аэроди-
намическую нагрузку сечения и дивергенции
не будет (^д.к<0). В последнем случае qM( не
имеет физического смысла и является только
расчетным параметром.
Очевидно, выражение (19.5) с помощью
формулы (19.6) можно записать в виде
I
Рис. 19.3. Силы и мо-
менты, действующие в
сечении крыла
317
—
cos X ~r~ + q-(.Ka
л G
Aay =-------------=--------
1 Qh.k
(19.7)
где 9д к=-^-.
?l.K
Определенные приращения угла атаки горизонтального опере-
ния несколько усложняются зависимостью аэродинамической силы
горизонтального оперения от деформации крыла и фюзеляжа. Под
действием аэродинамической силы горизонтального оперения фюзе-
ляж деформируется, что приводит к изменению угла установки опе-
рения. Деформация крыла вызывает изменение угла скоса в обла-
сти горизонтального оперения и, следовательно, изменение его
истинного угла атаки.
Приращение угла атаки стреловидного горизонтального опере-
ния, обусловленное его упругостью и упругостью фюзеляжа, может
быть определено в виде алгебраической суммы:
д%г.о=Ткр.г.осозХг.о —sinxr.0+ Дсрф, (19-8)
где фКр.г.о и {dy!ds)T.o-—-деформация кручения и относительная
деформация изгиба горизонтального оперения; Афф— изменение
угла установки горизонтального оперения, обусловленное деформа-
цией изгиба фюзеляжа.
Пусть Мпзг.г. о, Мкр-г. о — изгибающий и крутящий моменты, дей-
ствующие в сечении zcp.r. 0; Аиг. о, fer.o — коэффициенты жесткости
этого сечения на изгиб и кручение, a kE ф — коэффициент жесткости
фюзеляжа на изгиб.
Тогда равновесие упругих и аэродинамических моментов, дейст-
вующих на оперение, с учетом упругости фюзеляжа запишется в ви-
де системы уравнений
(®Г.О Г Д®у.Г.о) М?Г.О?кр.Г.О 9,
+ =0; ;19.9)
\ ds /г.о
± Уг.о° (“г.о + Ц.г.о) - М?фД®ф = 0.
Знак «минус» соответствует оперению, расположенному в хво-
стовой части фюзеляжа, знак «плюс» — схеме «утка». Решение
системы (19.9) совместно с уравнением (19.8) дает изменение уг-
ла атаки горизонтального оперения, обусловленное упругостью:
Дау.г.0=-р^- ; (19. ю).
1 — ?Г.О 0Д.Г.О
где qa.T.o-—критический скоростной напор дивергенции горизон-
тального оперения,
^Д.Г.О .,<,(/ уГ,д (19. 11)
^кр.г.о изг.г.о . 1 г.о
318
если ^еф—>о°- т- е- фюзеляж абсолютно жесткий, то для крыла с
малой стреловидностью либо с малой жесткостью кручения опере-
ния дл.г. о>0, что указывает на возможности дивергенции горизон-
тального оперения.
При заднем расположении оперения и упругом фюзеляже, как
правило, ^д.г. о<0, т. е. дивергенция оперения отсутствует. Это свя-
зано с преобладающим влиянием деформации фюзеляжа, приводя-
щей с увеличением скоростного напора к уменьшению угла атаки
горизонтального оперения.
Для самолета, выполненного по схеме «утка», <7д.г.о>0, при по-
ложительном аг. о деформация фюзеляжа с ростом q способствует
увеличению угла атаки горизонтального оперения.
§ 19.3. Влияние упругих деформаций на характеристики
устойчивости и управляемости самолета
Рассмотрим влияние упругости, на степень устойчивости самоле-
та по перегрузке. Коэффициент продольного момента самолета с
учетом упругих деформаций его частей может быть записан в ви-
де суммы
тгу=:тго-(- [хг (хр-ф-^Хдг/)] Су АГЛ)ктлСуГМу, (19.12)
где — смещение фокуса крыла, обусловленное перераспреде-
лением Су сеч из-за упругих деформаций; х/ — безразмерная коор-
дината фокуса самолета без горизонтального оперения.
Приращение степени устойчивости по перегрузке определяется
согласно условию (19. 12) по формуле
где mczv, mcz^ — соответственно степень устойчивости по перегруз-
ке упругого и абсолютно жесткого самолета.
Отсюда следует, что изменение степени устойчивости по пере-
грузке зависит от смещения фокуса, обусловленного упругостью
„ Ку г.О. у т.
крыла и знаком производной ---------. Для нестреловидного крыла
ЙСу
w ОС
Д.гру=0 и влияние упругости на mcz« определяется знаком ——°'У.
Т-Г
Пренебрегая в первом приближении влиянием момента при нулевом
коэффициенте нормальной силы на деформацию частей самолета и
считая Сф«Сфкр (крыла), получим следующую зависимость
О. у ОТ Су'.
ХС ________ У* 1'-0 П .-«•)
аСдг.о.у ra U °)
Таким образом,
Яг.О | Су'г.оУг-0
-------—I------------—----
1 Яг.о 1 ^г.о
ООг.о-
Г" -
»Суг.О.у Оу Г.О J _ gr.o—?д.к
ОС у С* 1~<7Г.О
(19. 14)
319
Смещение фокуса упругого стреловидного крыла можно опреде-
лить приближенно по формуле
Дхр-у ==^.K(zcp — zA) ~~ tg х.
(19.15)
— 2zcp —
где гср=—— 5 za — безразмерные координаты выбранного сече-
ния крыла и средней аэродинамической хорды.
Следует отметить, что деформация изгиба способствует сме-
щению фокуса стреловидного крыла вперед, в то время как дефор-
мация кручения вызывает перемещение его назад.
Для самолета со стреловидным крылом и оперением картина не-
сколько усложняется ввиду изменения положения фокуса крыла и
влияния пзгибных деформаций на приращение углов атаки крыла
и оперения.
Рассмотрим влияние упругости на степень устойчивости само-
лета по скорости. Степенью устойчивости самолета по скорости слу-
жит полная производная
(dm, \
—М
^Cj, /"у 1
dM \
K=i’
Принимая во внимание (19. 12) и пренебрегая, как это делалось
при оценке влиянием изменения тг0 из-за упругости деформа-
ций, после несложных преобразований получим
. / А-м М Л—
Дч^у — а1/у—аИж— I ХХГ'у — Дх
Сур.о
с„ I м
Су г.о
-“-X
(7г.о~ ?д.к)?г.о _ л k е*м A JizzAzL . (19. 16)
(1-<7г.о)2 Сау 2 l-9r.o V
Здесь еаМ — вторая частная производная от еа по М, которая рав-
на практически нулю при М<Мкр, меньше нуля при М>Мнр. При
сверхзвуковых скоростях еаМ можно принять равной нулю. Вели-
чина Дх^у-^-----обращается в нуль, если Дхгу определить
по формуле (19. 15).
Исходя из этого можно считать, что изменение степени устой-
чивости самолета по скорости из-за влияния упругих деформаций
на всех скоростях полета, кроме трансзвуковых, в основном опре-
деляется вторым слагаемым выражения (19. 16).
В зависимости от схемы самолета (обычная, «утка», «бесхвост-
ка»), формы крыла, оперения в плане, соотношения жесткостей на
изгиб и кручение для крыла и оперения, жесткости фюзеляжа, чис-
ла М полета степень устойчивости по скорости может либо увеличи-
ваться (Лсту-у<0), либо уменьшаться (Лещ- у>0). Для каждого
конкретного случая приближенная оценка изменения civ, обуслов-
ленного величиной упругих деформаций конструкции, приближенно
может быть дана по формуле (19. 16).
320
Рис. 19.4. Изменение степени флюгерной устойчи-
вости по числу М для жесткого (пунктир) и уп-
ругого (сплошная линия) самолетов
Деформация изгиба крыла увеличивает угол поперечного V
крыла, что способствует увеличению т^х упругого самолета по срав-
нению с жестким. Кроме того, деформация изгиба фюзеляжа и де-
формация вертикального оперения под действием боковой силы
приводят в зависимости от соотношения жесткостей оперения и
фюзеляжа к увеличению пли уменьшению эффективного угла
скольжения, что способствует в первом случае увеличению, а во
втором — уменьшению т%.
На самолете со стреловидным крылом картина усложняется
вследствие изменения эффективных углов атаки крыльев при
скольжении. Поскольку на выдвинутом крыле нагрузка возраста-
ет, а эффективный угол стреловидности уменьшается, то попереч-
ная устойчивость крыла возрастает как вследствие изменения mxw,
такит.^. (см. гл. 11).
Боковая сила, действующая при скольжении на вертикальное
оперение, вызывает изгиб фюзеляжа и деформацию вертикального
оперения. Приращение угла скольжения, обусловленное упругостью
вертикального оперения и фюзеляжа, можно определить по фор-
муле (19.8) или (19. 10), предварительно заменив индекс «г. о» на
«в. о».
Тогда mly=myX------L—. (19.17)
1 — 9в.о
Если 7д.в.о<0, что имеет место для большинства самолетов, то
степень флюгерной устойчивости с ростом q уменьшается. Влияние
упругости вертикального оперения и фюзеляжа на степень флюгер-
ной устойчивости особенно неприятно для сверхзвуковых самолетов,
у которых уменьшение т% с переходом на сверхзвуковые скорости
полета и без того является причиной беспокойства пилотов.
Примерные зависимости т₽ж(М), ШуУ (М) приведены на
рис. 19.4.
Рассмотрим влияние упругости на характеристики демпфирова-
ния. В гл. 13 показано, что значительная часть продольного демп-
И 776 321
Рис. 19.5. Распределение давления по горизонтальному опере-
нию:
«—руль в нейтральном положении; б- угол отклонения положительный
фирующего момента определяется горизонтальным оперением. По-
этому ограничимся рассмотрением влияния упругости на эту часть
демпфирующего момента.
Согласно уравнению (19. 10),
СО <•> 1
' ;ЗГ.О.у Z/tZr.O.X 1 ~
1 - 7Г.0
т. е. если </д.г.о>0, то демпфирующий момент горизонтального опе-
рения увеличивается по сравнению с моментом абсолютно жесткого
самолета. Если же qR.r. о<0, что имеет место для самолетов с уп-
ругим фюзеляжем и со стреловидным оперением, то демпфирование
движения тангажа уменьшается.
Аналогичную зависимость получим для демпфирующего момен-
та рыскания и крена.
Упругость конструкции оказывает существенное влияние на эф-
фективность органов управления. Вследствие смещения центра дав-
ления оперения с отклоненным рулем высоты (рис. 19.5) возника-
ют деформации, способствующие уменьшению управляющего мо-
мента относительно центра масс самолета. Коэффициент этого мо-
мента для упругого самолета равен:
^2zBy=:= А(Хг.0.у).
(19. 18)
Тогда отношение эффективности руля для упругого и жесткого
самолета запишем в виде
5 6
mzy и„ + Дагв0..
(19. 19)
При некотором значении скоростного напора </р.г.о, называемо-
го критическим скоростным напором реверса руля, управляющий
момент обращается в нуль. Очевидно др. г. 0 может быть определен
из условия (при 7г. о=7р- г. о)
пД4-Ааг.о.у=0 (19.20)
322
Да,
Совместное решение формул (19. 10) и (19.20) позволяет найти
связь между Aar. о. у и 6В в виде
Чг.о 4\>.г.о „
—-----=---
1 Qr.o
^А^Г.о.у
и, следовательно, производную ---------.
Из выражений (19. 19), (19.21) получим
1 ~ УР-г.о
1 — ^г.о
(19.21)
(19.22)
где ffp.r.o— ^г'° 1 ^р.г.о —критический скоростной напор реверса
<7р.г.о
руля высоты.
Аналогичные зависимости имеют место для относительной эф-
фективности руля направления и элеронов.
Вопросы для повторения
1. При каких условиях оценку влияния упругих деформаций на характери-
стики устойчивости и управляемости можно вести по квазистатическому методу?
2. В чем сущность приближенных методов определения динамических дефор-
маций?
3. Как влияют упругие деформации стреловидного крыла на величину мест-
ного угла атаки?
4. Объясните явление дивергенции крыла, реверса элеронов.
5. Какое влияние оказывают упругие деформации частей самолета с нестре-
ловидным крылом на его устойчивость по перегрузке?
Задача
Степень флюгерной устойчивости абсолютно жесткого самолета туж —
— —0,045. Определить упругого самолета при скорости, равной 0,6 критиче-
ской скорости дивергенции вертикального оперения.
Ответ: —0,027.
11*
Глава 20
Устойчивость и управляемость самолетов
в особых ситуациях
§ 20.1. Основные определения параметров
безопасности полета
Безопасность полета [65] является свойством авиационной
транспортной системы, заключающимся в ее способности осущест-
влять воздушные перевозки без угрозы для жизни и здоровья лю-
дей. Под авиационной транспортной системой подразумевается са-
молет, экипаж, служба подготовки и обеспечения полета и служба
управления воздушным движением.
Уровень безопасности полетов — характеристика авиационной
транспортной системы, которая определяется вероятностью того,
что в полете не возникнет аварийная пли катастрофическая ситуа-
ция. Уровень безопасности полетов самолетов данного типа оцени-
вается в среднем по всему действующему парку самолетов этого
типа показателями безопасности полетов — количеством аварийных
и катастрофических ситуаций, приходящихся на один час полета
или на один полет. Уровень безопасности полета зависит от сово-
купности условий, возникающих в полете, так называемых особых
ситуаций. Особые ситуации возникают в полете в результате:
отказов и неисправностей отдельных элементов функциональных
систем;
воздействия неблагоприятных внешних условий;
несоблюдения правил эксплуатации функциональных систем и
ошибок в пилотировании;
проявления неблагоприятных особенностей аэродинамики, устой-
чивости и управляемости самолета и др.
По степени опасности особые ситуации разделяются на: а) ус-
ложнение условий полета; б) опасную ситуацию; в) аварийную си-
туацию; г) катастрофическую ситуацию.
Усложнение условий полета характеризуется необходимостью
повышения внимания членов экипажа к источнику ее возникнове-
ния. Усложнение условий полета не связано с немедленным измене-
нием плана полета и не требует для его благополучного завершения
каких-либо экстренных действий экипажа.
Опасная ситуация характеризуется тем, что предотвращение
перехода ее в аварийную или катастрофическую ситуацию может
быть обеспечено своевременными и правильными действиями чле-
нов экипажа, в том числе немедленным изменением плана, профиля
и режима полета. Примером может служить ситуация, возникающая
при отказе второго двигателя на режиме крейсерского полета с од
ним отказавшим двигателем на многодвигательном самолете.
324
Аварийная ситуация определяется необходимостью экстренной
посадки самолета, или ситуация, при которой предотвращение пере-
хода в катастрофическую ситуацию связано со значительным повы-
шением физических нагрузок на экипаж и требует высокого про-
фессионального мастерства членов экипажа. Примером может слу-
жить ситуация, возникающая при отказе такого количества двига-
телей на самолете, при котором горизонтальный полет на любой
высоте невозможен.
Катастрофическая ситуация — особая ситуация, при которой
предотвращение гибели людей или потери самолета оказывается
практически невероятным.
Ожидаемые условия эксплуатации — совокупность условий,
признанных допустимыми для летной эксплуатации самолетов дан-
ного типа.
Ожидаемые условия эксплуатации включают в себя:
а) параметры внешней воздушной среды: давление, плотность,
температура и влажность воздуха;
б) параметры активных воздействий внешней среды на самолет;
величины горизонтальных и вертикальных порывов воздуха и их
градиентов во времени и пространстве; параметры струйных тече-
ний и фронтов; электрические воздействия; параметры обледенения;
в) состояние ВПП;
г) параметры (режимы) полета: высота, вертикальные и гори-
зонтальные скорости полета, перегрузки, углы атаки, скольжения
и крена, а также их сочетание;
д) допустимые величины массы и центровки самолета;
е) допустимые режимы работы двигателей и продолжительность
работы на определенных режимах;
ж) возможные конфигурации — варианты геометрических форм
самолета, соответствующие различным этапам полета (взлету, на-
бору высоты, крейсерскому полету, снижению, экстренному сниже-
нию, заходу на посадку п посадке).
Для обеспечения требуемого уровня безопасности полета само-
лет не должен иметь таких особенностей в летных характеристиках
устойчивости и управляемости, которые могут явиться непосредст-
венной причиной возникновения особой ситуации. Вблизи границ
области ожидаемых условий эксплуатации допускается усложнение
условий полета. На всех этапах полета самолет не должен обла-
дать особенностями, способствующими непроизвольному опасному
выходу его за пределы ограничений, установленных для эксплуата-
ции.
Функциональные системы, отказ которых приводит к аварийной
или катастрофической ситуации, должны быть спроектированы та-
ким образом, чтобы отказ системы в эксплуатации был практически
невероятным или же после двух последовательных отказов системы
была бы возможность продолжать полет.
Основные определения и требования по безопасности полетов
изложены в нормах летной годности самолетов.
325
Согласно мировой статистике гражданской авиации наиболее
опасные ситуации и наибольшее количество катастроф возникают
на режимах взлета и посадки.
§ 20.2. Боковая устойчивость и управляемость
самолета при отказе двигателя
Отказ двигателя является одним из наиболее опасных отказов.
Особенно опасным является отказ двигателя в процессе разворота
с той стороны, куда происходит разворот, так как в этом случае
пилоту значительно труднее по поведению самолета определить
отказ.
Согласно требованиям по безопасности полета самолет должен
иметь не менее двух двигателей. Двигатели должны быть независи-
мы в том смысле, что отказ одного из них не должен приводить к
отказу другого (пли других). Отказ одного двигателя не должен
приводить к аварийной ситуации на любом этапе полета. Отказ вто-
рого двигателя в полете на самолете с тремя и более двигателями
на этапах набора высоты, крейсерского полета п снижения не дол-
жен приводить к возникновению аварийной ситуации. Несмотря на
такое строгое нормирование, наличие несимметричной тяги услож-
няет обеспечение балансировки самолета и требует большого вни-
мания и напряжения пилота в полете. Особенно усложняется управ-
ление самолетом в момент отказа критического двигателя. Крити-
ческий двигатель — это двигатель, отказ которого вызывает наибо-
лее неблагоприятные изменения в поведении самолета и условиях
его пилотирования.
В случае отказа двигателя при движении по ВПП на взлете
одновременно с уменьшением ускорения разбега происходит разво-
рот самолетов в сторону отказавшего двигателя. В соответствую-
щих ситуациях при энергичном вращении относительно осп OY са-
молет может вращаться и вокруг оси ОХ с касанием крылом ВПП,
на котором расположен отказавший двигатель. Поэтому основная
реакция пилота в этом случае — удержать самолет от разворота,
сохранить прямолинейность движения. Разворачивающий момент
рыскания от асимметрии тяги (рис. 20.1) при отказе двигателя ра-
вен
где Р —тяга работающего двигателя; ХР—-сила сопротивления
отказавшего двигателя; zP —расстояние между осью двигателя и
плоскостью симметрии.
Особенно большие значения МуР создаются при отказе у само-
летов с турбовинтовыми двигателями. Обусловлено это тем, что в
зависимости от режима полета и работы двигателя при отказе на
винте может возникать сила сопротивления (отрицательная тяга),
по своей величине сопоставимая со значениями положительной тя-
ги (рис. 20. 2). Возникновение таких отрицательных тяг обусловле-
но особенностью характеристик турбовинтовых двигателей. Одной
из особенностей регулирования ТВД является то, что заданная ча-
стота вращения турбины двигателя поддерживается регулятором,
326
Рис. 20.1. Схема сил,
действующих на самолет
при отказе двигателя
Рпс. 20.2. Изменение положитель-
ных и отрицательных тяг на при-
мере винта АВ-72
воздействующим на угол установ-
ки лопасти винта. Турбовинтовые
двигатели, которые устанавлива-
ются на гражданских самолетах,
по своей схеме одновальные. У од-
повальных ТВД компрессор и винт
связаны между собой через редуктор. Для сохранения устойчивой
работы компрессора в этом случае частота вращения винта должна
поддерживаться постоянной. Другая особенность турбовинтовых
двигателей состоит в том, что мощность, затрачиваемая на враще-
ние двигателя с заданной частотой вращения, большая. При отка-
Рис. 20.3. Схема возникнове-
ния отрицательной тяги винта
зе двигателя регулятор, стремясь под-
держать частоту вращения компрессо-
ра постоянной переводит лопасти вин-
та на отрицательный угол атаки (рис.
20.3), что и обусловливает возникно-
вение отрицательной тяги. Как видно
из рис. 20.2, отрицательная тяга зави-
сит от скорости полета. Из рис. 20.2
также следует, что отрицательная тя-
га может возникать и при подаче топ-
лива к двигателю (см. кривую при
/??т=200 кг/ч). Несмотря на то, что
при отказе двигателя защитные систе-
мы переводят лопасти винта во флю-
герное положение и не позволяют ре-
ализовать отрицательные тяги, пока-
занные на рис. 20.2, при эксплуатации
самолетов могут быть случаи, когда
отрицательные тяги будут значитель-
ными.
327
Для балансировки момента отказа МуР используют отклонение
различных органов управления. Ими могут быть: поворот передне-
го колеса, отклонения руля направления, несимметричное торможе-
ние колесами главных опор. Для определения потребных значений
отклонения управляющих органов могут быть использованы урав-
нения движения самолета по ВПП (17.22). При условии бокового
равновесия уравнения (17. 22) записываются в виде
О-Уж„,
z Лл v
которые при выдерживании прямолинейности движения и подста-
новке значений ZFz, ZMy и cos 1 запишутся следующим обра-
зом:
Z₽P4-Zsh8 4-ZSi,8 =0;
в / 6 (20.1)
Определим потребные значения утла отклонения органов управ-
ления, необходимые для удержания продольной оси самолета вдоль
оси ВПП. Рассмотрим упрощенный случай, когда нет бокового вет-
ра и, следовательно, угол скольжения (3=0. При этом различия в
силах трения .колес главных опор не будет и Л1уд2у=0, боковые си-
лы на колеса главных опор тоже будут равны нулю. Тогда из пер-
вого уравнения системы (20. 1) получим потребный угол отклонения
носового колеса
ZS”
8п=-±^8н. (20.2)
Z п
Значения угла отклонения руля направления определяются из
второго уравнения системы (20. 1):
М п
8н==---------(20.3)
8 8 Z н
Если подставить в уравнения (20. 2) и (20. 3) значения произ-
водных
m*h=z4,.o; M^=-z^Xn,
то получим выражения
; (20.4)
Z н (7в.о + *п)
Z П (7в.о Т *п)
Поскольку производная пропорциональна V2, а производная
Z н с увеличением скорости уменьшается, так как она пропорцио-
нальна силе нормального давления, которая уменьшается с увели-
328
Рис. 20.4. Изменение угла отк-
лонения руля направления и
переднего колеса при баланси-
ровке момента отказа
чением аэродинамической подъемной
силы, то из формулы (20.4) следует,
что при моменте отказа const
угол отклонения руля направления дол-
жен с ростом скорости уменьшаться, а
согласно формуле (20.5) угол поворо-
та переднего колеса должен с увеличе-
нием скорости возрастать (рис. 20.4).
Из рассмотрения кривых изменения уг-
ла отклонения руля направления и уг-
ла поворота переднего колеса можно
сделать вывод, что на малых скоростях
при принятых допущениях путевая балансировка самолета может
быть лимитирована недостаточной эффективностью руля, а на боль-
ших скоростях •— недостаточной эффективностью отклонения перед-
него колеса. Таким образом, с точки зрения обеспечения безопас-
ности при отказе двигателя на взлете необходимо в определенном
диапазоне скоростей обеспечить с помощью носового колеса эффек-
тивность путевого управления. Это определяет требование к взлету
самолета-—-для увеличения эффективности носового колеса необ-
ходимо увеличить силу нормального давления, что достигается
переводом самолета при разбеге на малый угол атаки и отклонени-
ем руля высоты вниз, обеспечивающим возрастание силы нормаль-
ного давления. Подъем носового колеса в связи с этим осущест-
вляется только в конце разбега, перед отрывом.
После путевой балансировки взлет может быть продолжен или
прекращен. В первом случае будет иметь место продолженный (за-
вершенный) взлет, во втором —• прекращенный. Выбор того или
другого варианта зависит от скорости, которую самолет имеет в
момент отказа двигателя. Если отказ двигателя произошел при ско-
ростях, близких к скорости отрыва, целесообразно взлет продол-
жить, так как в этом случае дистанция, потребная для завершения
взлета, будет меньше дистанции, необходимой для полной останов-
ки самолета.
Вопрос о величине скорости, определяющей выбор решения,
связан с понятием скорости принятия решения. Под скоростью при-
нятия решения Уц понимается наибольшая скорость, достигаемая
самолетом при взлете, при которой в случае отказа критического
двигателя одинаково возможны как безопасное продолжение взле-
та, так и безопасное прекращение взлета в пределах располагае-
мой длины взлетно-посадочной полосы. Если расстояние, проходи-
мое самолетом на продолженном взлете, обозначить А/Прод, а на
прерванном—А/прерв, то при УОТК=УЦ существует равенство
A4ipo« ^прерв'
Выразим Д/прод н А/прерв через средние ускорения /пред и /прерв-
— V2 V2
1 отк . д/ у О1К
’ Щпрерв---- Q
^/сред.прерв
V2
Ы =_.ОТР
''пред 9
^усред.ирод
(20.6)
32g
Приравнивая А/Прод=А/Прерв п УОтк=Уп, получим выражение
для скорости принятия решения:
2/сред •прерв
V2 —V?
огр 1
2/срел.прод
отр
/сред. прол.
1 +—-----------
/сред.прерв
(20.7)
С учетом введения понятия скорости принятия решения вопрос
о выборе варианта продолженного пли прекращенного взлета мож-
но рассматривать так: если то взлет целесообразно продол-
жить, если то взлет необходимо прекратить. Решение о
продолжении или прекращении взлета в момент достижения скоро-
сти 14 должно приниматься не только при обнаружении отказа
двигателя, но и в случае несоответствия контрольного времени раз-
гона фактическому.
Продолженный и прерванный взлеты характеризуются дистан-
цией продолженного (завершенного) взлета L3B и дистанцией пре-
рванного взлета Ьщ,. взл. Дистанция продолженного взлета равна
расстоянию, которое проходит самолет от начала разбега до набо-
ра высоты 10,7 м над уровнем ВПП с одновременным разгоном до
Рис. 20.5. Изменение углов крена
и скольжения при отказе двига-
теля самолета Ан-24
безопасной скорости взлета Убез-
Дистанция прерванного взлета
включает в себя расстояние от
начала разбега до полной оста-
новки самолета после прекраще-
ния взлета. В соответствии с нор-
мами летной годности потребная
дистанция продолженного взлета
должна быть не больше распола-
гаемой дистанции взлета, которая
определяется как сумма длины
ВПП, уменьшенной на длину
участка выруливания, и длины
свободной зоны полосы воздуш-
ных подходов. Последняя берется
не более 1/2 длины ВПП. Потреб-
ная дистанция прерванного взле-
та должна быть меньше распола-
гаемой дистанции прерванного
взлета, которая равна длине рас-
полагаемой летной полосы
(РЛП). уменьшенной на длину
участка выруливания. Длина
РЛП равна сумме длин ВПП и
одной концевой полосы безопас-
ности.
х
330
При отказе двигателя после отрыва под воздействием момента
Л1ур, обусловленного отказом двигателя, самолет разворачивается
в сторону отказавшего двигателя с одновременным накренением
на крыло с отказавшим двигателем. Этому способствует возникно-
вение момента крена, обусловленного поперечной устойчивостью,
и поперечного момента, вызванного асимметрией обдува полу-
крыльев: у полукрыльев с отказавшим двигателем подъемная сила
уменьшается в связи с отсутствием дополнительного обдува, а при
отрицательной тяге — из-за дополнительного торможения на крыле.
Вследствие воздействия указанных моментов самолет по истечении
нескольких секунд после возникновения отказа может изменить
свое положение настолько, что оно будет угрожать безопасности
полета.
Таким образом, для того чтобы правильно оценить вопросы безо-
пасности полета в рассматриваемом режиме, необходимо рассмот-
реть поведение самолета в первые несколько секунд после отказа
двигателя. Для количественной оценки изменения параметров боко-
вого движения можно воспользоваться уравнениями короткоперио-
дического бокового движения, которые с учетом влияния отказа
двигателя на путевой момент и при пренебрежении влиянием от-
каза на поперечный момент будут иметь вид
621ДЗ + ^- + &22сох=0; (20.8)
I л
— lvl——=0-
dt
Рассматривая первое и третье уравнения системы (20.8), полу-
чим неоднородное дифференциальное уравнение относительно угла
скольжения
^+*зз «=*зо. (20.9)
dt* dt
гДс Ь^0=Мур!1-у.
Изменение угла скольжения при отказе двигателя определяет-
ся суммой решения однородного и неоднородного уравнений. Част-
ное решение неоднородного уравнения имеет вид
д^^зо.. (20.10)
Используя выражение (16.23) для угла скольжения, определяе-
мое решением однородного уравнения, и частное решение (20. 10),
получим формулу для изменения угла скольжения:
Р = A e~zt sin («/Д’%) + *зо,'2о. (20. 11)
где 2о=*з1. <о=У*з1-^
331
Постоянные интегрирования А и <р₽ определяются по началь-
ным условиям. Так, если при /=0, (3=0, dp/d/=O,
то А = —Ц)-, = arctg — .
2о С
Подставляя значение угла скольжения по формуле (20. 11) во
второе уравнение системы (20.8), получим неоднородное диффе-
ренциальное уравнение для определения угловой скорости сох, _
а используя четвертое уравнение системы (20. 8), получим неодно-
родное дифференциальное уравнение для определения угла крена:
+ b^A sin + ??)- Ь.л - (20.12)
Из уравнения (20. 12) получим общее решение для угла крена:
у=е~ь^ —• -Ц=- е~и sin (wt 4- срз 4- <₽) X
*22
х [с - » ctg (со/ + <Р? + ср)] - t + С2, (20.13)
^0*22
где N и С — постоянные интегрирования.
На рис. 20. 5 показано изменение углов скольжения и крена при
отказе правого двигателя, рассчитанных по формулам (20. 11) и
(20.13). Из графиков следует, что в начальный момент времени
под воздействием момента МуР интенсивно растет сначала угол
скольжения, затем угол крена. По мере увеличения угла скольже-
ния растет статический восстанавливающий момент 41^ (3, препят-
ствующий росту угла скольжения. Кроме того, увеличение отрица-
тельного угла крена тоже способствует уменьшению угла скольже-
ния, что при /=1,7 с (или 2,7) и далее обусловливает некоторое
снижение угла скольжения. Из графиков следует, что основную
опасность при отказе двигателя представляет все возрастающий
крен самолета, который уже при /=3 с достигает значений у=
= 0,524-0,70 рад.
Таким образом, основная задача балансировки при отказе дви-
гателя — предотвращение крененпя путем отклонения элеронов и
уменьшение угла скольжения путем отклонения руля направления.
Потребные отклонения рулей, обеспечивающих боковую баланси-
ровку при установившемся движении, можно определить из урав-
нений боковой балансировки:
о=(Ф+c>8H) sQ^+cys^ tgy;
0= <8 + 7И>8Э + 7И>Вн+ЛКР + ^обд; ' (20. 14)
0= + 7И>Н+мур+Муо>,
где Л1Л-обд — момент, обусловленный различным обдувом полу- *
крыльев с работающим и отказавшим двигателем; Мую — момент,
обусловленный влиянием заворачивания потока от винта на верти-
332
кальное оперение; МхР — реактивный момент крена работающих
двигателей.
Подставляя вместо производных сил и моментов и вместо аэро-
динамической нормальной силы их значения через коэффициенты
сил и моментов, получим
(20.15)
(20.16)
(20. 17)
уравнениями
+ пг>8Н+тк р -ф тх о6д=0;
+ту<й + туР=0.
Система уравнений (20. 15) — (20. 17) является
боковой балансировки самолета с отказавшим двигателем. Они по-
зволяют легко получить потребные для балансировки отклонения
рулей, т. е. балансировочные кривые. Так, из уравнения (20. 17)
следует выражение балансировочных отклонений руля направ-
ления
у, >ПУ о ту^ + т
8н"=-----Г Р----------Г
тул ту
Подставляя (20.18) в уравнение (20.16), получим выражение
для потребного утла отклонения элеронов при отказе двигателя:
/ тхп
( hll — —/И₽
HlyV. У
пй*
(20. 18)
«э=
/и(.э
тхр । тх обд
' j~ (w^m —
тик
I ГПу отк)
уравнение
(20.19)
(20. 15), по-
5 (WTz/ш ।
СУту*
.1. (20.20)
Подставляя выражение (20. 18) для бн в
лучим выражение для утла крена
1 / п х кА,
Проанализируем, как будут изменяться потребные для баланси-
ровки угол отклонения руля направления, угол отклонения элеро-
нов и угол крена самолета для балансировки самолета на режимах
полета с различным скольжением.
Из выражений (20.18), (20.19) и (20.20) следует, что харак-
тер изменения балансировочных кривых будет определяться зна-
ками производных коэффициентов сил и моментов, а также знаком
моментов, возникающих при отказе двигателя. Как известно, зна-
ки всех производных коэффициентов сил и моментов самолета при
полете в летном диапазоне углов атаки отрицательны. Тогда со-
гласно формуле (20. 18) положительному приращению угла
скольжения р будет соответствовать отрицательное приращение
угла отклонения руля направления 6Н, т. е. с увеличением р угол
отклонения руля направления становится все более отрицательным.
При угле р=0 угол отклонения руля направления
ту«> + ,пу<т<
---------g---
туя
(20.21)
333
Знак коэффициента момента тУа> зависит от направления вра-
щения винта и при отсутствии сведений об этом его влиянии не бу-
дем учитывать. Знак момента отказа тутк зависит от того, на ка-
кой половине крыла отказал двигатель. Если, например, отказал
двигатель на левом полукрыле, то момент отказа и туотк>0. Учи-
тывая, 4to/tzJh<^0, получим, что потребное для балансировки отка-
за приращение отклонения руля направления будет положитель-
ным и кривая 6H=f(P) смещается вверх (рис. 20.6). Потребное-
прпращенпе балансировочного угла отклонения элеронов опреде-
ляется выражением
1 / /И®н \
I ^хР“I-сйд У- ^А/отк )•
/н“э \ т "н J >
В этом выражении знак Дбэ определяется знаками /иЖОбд и
отк- В приведенном примере с отказом левого двигателя ту отк>
>0, а вследствие уменьшения обдува левого полукрыла аэроди-
намическая нормальная сила его будет несколько уменьшена и в
связи с этим тх обд<0. Влияние туот и тхо§я обусловливает от-
рицательный прирост балансировочного угла отклонения элеронов
(рис. 20. 6).
Приращение угла крена определяется величиной слагаемого
в формуле (20. 20):
С н
При 7ПуОт1л>0 будет положительным прирост угла крена (рис.
20. 6), так как
Су»
Сут^
При неизменных значениях производных коэффициентов сил и
моментов, что выполняется только в ограниченном диапазоне углов
атаки и углов скольжения, балансировочные кривые являются лп-
Рис. 20.6. Балансировочные кривые
при отказе двигателя
неинымп зависимостями от уг-
ла скольжения.
Из анализа изменения бн,
бэ, tg у от угла скольжения сле-
дует, что при отказавшем дви-
гателе принципиально возмо-
жен прямолинейный горизон-
тальный полет со скольжением
на остановленный двигатель,
полет без скольжения и полет
со скольжением на работаю-
щий двигатель.
При полете с углом сколь-
жения р3 крен самолета равен
334
Рис. 20.7. Балансиро-
вочная кривая 6„ =
= f(V) самолета
Ан-12 при отказе дви-
гателя
Предельное
отклонена, е
Рис. 20.8. Баланси-
ровочная кривая
63 = f(V) самолета
Ан-12 при отказе дви-
гателя
нулю и с точки зрения комфорта для пилотов и пассажиров этот
режим наиболее хороший. Однако на этом режиме потребные углы
отклонения руля направления приближаются к максимальным, что
предопределяет большие усилия на педалях и большое прираще-
ние аэродинамической продольной силы от большого утла сколь-
жения и большого отклонения руля направления. При полете без
скольжения угол отклонения руля направления и усилия на педа-
лях несколько уменьшаются, однако остаются достаточно больши-
ми. Наиболее целесообразным является полет самолета с неболь-
шим скольжением на работающий двигатель (|3=(32). В таком по-
лете требуется положительный угол крена, небольшой положитель-
ный угол руля направления и отрицательный угол отклонения эле-
ронов.
Для количественной оценки реальных потребных для боковой
балансировки углов отклонения рулей при отказе двигателя на рис.
20. 7 показаны балансировочные отклонения руля направления в
зависимости от скорости полета на режиме взлета (77=2000 м) с
зафлюгпрованным винтом четвертого двигателя самолета Ан-12.
Из рассмотрения кривых следует, что даже при зафлюгпрованном
винте эффективность органов управления обеспечивает боковую
балансировку с креном на крыло и неработающим двигателем толь-
ко начиная со скорости 205 км/ч.
На рис. 20.8 приведены балансировочные отклонения элеронов
при полете с отказавшим четвертым двигателем и авторотирующим
винтом в режиме предпосадочного планирования самолета Ан-12
(77=5000 м). Как видно из графиков, боковая балансировка мо-
335
ментов, обусловленных отказом двигателя, требует больших углов
отклонения органов управления. В связи с этим для самолета Ан-12
скорости при планировании с отказавшим двигателем не должны
быть меньше 220—230 км/ч.
Балансировочные кривые по усилиям на штурвале от отклонен-
ных элеронов и на педалях от руля направления при отказе двига-
теля тоже существенно изменяются, поскольку усилие зависит от
углов отклонения элеронов и руля направления.
§ 20.3. Поведение самолета при отказах
в системе управления
Возникновение асимметричных поперечных и путевых моментов
на взлете связано не только с отказом двигателя. Такие моменты
могут возникнуть при несимметричном выпуске закрылков пли об-
рыве тяг управления и заклпненин одной из секций закрылков. При
несимметричном выпуске закрылков изменяется и продольное рав-
новесие, однако главным движением в этом случае является дви-
жение крена, которое определяет характер движения самолета в
первые несколько секунд. Для количественной оценки изменения
угла крена можно воспользоваться вторым уравнением системы
(20.8), дополненным моментом крена Мт от различных подъемных
•сил полукрыльев:
. (20. 22)
Значение момента крена Мхз определяется формулой
АД3 = ДКД3 = з — — -^3, (20- 23)
АО d d yd g 2 13 ' '
где АУ3 — разница в подъемных силах полукрыльев; z3 — расстоя-
ние от плоскости симметрии до точки приложения приращения
подъемной силы А У3.
В случае несимметричного выпуска закрылков приращение ко-
эффициента подъемной силы можно определить по формуле
ЬСуз==С^3.
Из решения неоднородного дифференциального уравнения
(20. 22) получим закон для изменения угловой скорости сох и угла
крена:
wx—C1e~b*,lt; (20.24)
Ь22,х
—Ok е-ь^+С2. (20. 25)
^22 Д b22lx
Значения постоянных интегрирования С\ и С2 определяются из
уравнений (20.24) и (20.25) с учетом условий /=0, сож=О, у—0:
/-> _Мхз _Мд'З
Х~ь221х' 2~ьух'
336
Подставляя значения постоянных интегрирования С\ и С'2 в
(20. 25), получим выражение для угла крена:
у=-‘^ 1/д__Це /W-pl (20.26)
^2’Л- L Ь 22 J
Из формулы (20. 26) следует, что нарастание угла крена при несим-
метричном выпуске закрылков зависит от момента Мх3.
§ 20.4. Особенности продольной устойчивости
и управляемости самолета при обледенении
Несмотря на то, что современные самолеты оснащены противо-
обледенительными системами, которые защищают поверхности от
обледенения на всех режимах полета, в эксплуатации все же могут
быть случаи обледенения. Наибольшую опасность представляет
обледенение передних кромок крыла, горизонтального и верти-
кального оперения. При обледенении носка крыла и горизонталь-
ного оперения изменяется геометрия профиля, что приводит к появ-
лению преждевременного срыва потока, к уменьшению критиче-
ского угла атаки и уменьшению максимального коэффициента подъ-
емной силы, к уменьшению запаса между максимальным значени-
ем Сушах и допустимым, к значительным изменениям шарнирных
моментов. Обледенение самолета сказывается на различных харак-
теристиках, однако наибольшее влияние на безопасность полетов
в условиях обледенения оказывают характеристики устойчивости и
управляемости.
Существенное изменение характеристик продольной устойчиво-
сти и управляемости отмечено для самолетов, имеющих высокие не-
сущие свойства механизированного крыла при полете в режиме
захода на посадку. Это связано с особенностями обтекания самоле-
та при выпуске механизации.
При заходе на посадку можно выделить два этапа полета, на
которых влияние обледенения на характеристики устойчивости и
управляемости существенно отличаются: 1) полет самолета в ре-
жиме захода на посадку, включая выход самолета с третьего раз-
ворота при полете его по прямоугольному маршруту. Этот этап
характеризуется тем, что в процессе захода на посадку скорость
полета уменьшается, а угол атаки увеличивается; 2) полет от
третьего разворота и до посадки. Этот этап характеризуется тем,
что полет происходит при выпущенных закрылках на малых углах
атаки крыла.
При полете на больших углах атаки на продольную устойчи-
вость и управляемость влияет только обледенение носка крыла.
Обледенение носка стабилизатора практически не влияет на про-
дольную устойчивость в связи с тем, что на этих режимах угол ата-
ки горизонтального оперения небольшой, а при небольших углах
атаки обледенение практически не влияет па зависимость Cyv, о=
==/(Цг. о) -
При возникновении срыва потока на прямых крыльях фокус
крыла смещается назад и соответственно увеличивается коордпна-
12 776 337
та фокуса самолета и продольная устойчивость возрастает. Само-
лет в этом случае имеет тенденцию к пикированию.
При обледенении носка крыла и появлении более раннего сры-
ва на стреловидном крыле фокус крыла смещается вперед, посколь-
ку ранее всего срыв возникает на концевых частях крыла. Сдвиг
фокуса вперед приводит к росту кабрпрующих моментов и умень-
шению продольной устойчивости самолета.
При выпуске закрылков происходит увеличение коэффициента
подъемной силы, изменение продольного момента самолета. По-
скольку при выпуске закрылков скорость самолета изменяется не-
значительно, то с увеличением коэффициента подъемной силы и
сохранении угла атаки возрастает перегрузка пу и соответственно
изменяется кривизна траектории. В связи с этим самолет перево-
дится на меньшие углы атаки, на которых обеспечивается полет с
nv=\. Чем на больший угол отклоняются закрылки, тем на мень-
ший угол атаки переводится самолет. Уменьшение угла атаки кры-
ла при выпуске закрылков значительно изменяет угол атаки гори-
зонтального оперения. Угол атаки горизонтального оперения опре-
деляется по формуле (9. 37)
аг.о = « - s + ® + ЛВ8В-
Из формулы следует, что при уменьшении угла атаки крыла
уменьшается угол атаки горизонтального оперения.
Угол установки стабилизатора по отношению к хорде крыла, как
правило, отрицательный, что обусловлено потребностью продольной
балансировки при выпуске закрылков, создающих дополнительный
пикирующий момент. Балансировочное отклонение руля при выпу-
ске закрылков и постоянном угле установки стабилизатора тоже
получает отрицательное приращение. Значительное отрицательное
приращение угла атаки горизонтального оперения обусловливается
также увеличением скоса потока крылом. Связано это с тем, что
при выпуске закрылков происходит перераспределение подъемной
силы по размаху крыла: на консольных частях крыла подъемная
сила уменьшается, в центральной части — увеличивается. Это при-
водит к приросту скоса потока у горизонтального оперения, нахо-
дящегося в зоне влияния закрылков. Все сказанное об угле атаки
горизонтального оперения говорит о том, что этот угол в режиме
захода на посадку отрицательный и может достигать больших зна-
чений (к примеру иг. о«0,2 рад). При различных компоновках го-
ризонтального оперения, например при высоко расположенном ста-
билизаторе у самолетов Ил-62, Ту-134 и других, отрицательные зна-
чения углов атаки несколько уменьшаются.
При наличии на носке стабилизатора обледенения, особенно
рогообразной формы, и больших отрицательных углах атаки воз-
можен срыв потока на нижней поверхности горизонтального опере-
ния. Возникновение срыва потока приводит к уменьшению отрица-
тельной подъемной силы горизонтального оперения и к нарушению
продольной балансировки. Продольная статическая устойчивость
при этом уменьшается и у самолета развивается тенденция враще-
338
Рис. 20.9. Влияние обледенения
носка стабилизатора на коэф-
фициент аэродинамического
момента тангажа
Рис. 20.10. Влияние обледенения носка
стабилизатора на балансировочную кри-
вую
ния на пикирование. Это вращение на пикирование, сопровождаю-
щееся приростом отрицательной перегрузки, получило название
«клевка». Уменьшение статической продольной устойчивости обу-
словлено тем. что при срыве потока на горизонтальном оперении
значение прироста его подъемной силы уменьшается и фокус само-
лета сдвигается вперед.
Поскольку движение самолета сопровождается вращением са-
молета, то об изменении продольной устойчивости можно судить по
изменению характеристик продольной устойчивости по перегрузке:
ап=тс,у^-—. (20.27)
в
При возникновении срыва потока на нижней поверхности гори-
зонтального оперения происходит уменьшение как так я
т'гг, поскольку nizz^ ^уг.о- Таким образом, уменьшается также
та составляющая продольной устойчивости которая опре-
деляется демпфированием тангажа. С возникновением срыва
потока и сдвигом фокуса вперед самолет может стать продольно
неустойчивым. Зависимость коэффициента момента тангажа тх--
=/(а) становится нелинейной (рис. 20.9).
Поскольку продольная статическая управляемость связана с
продольной устойчивостью, то, естественно, при наличии обтекания
и возникновения срыва потока на горизонтальном оперении проис-
ходит ее изменение. Из формулы для характеристики продольной
управляемости
в C^JTMnKAT.okT.v SqV*
(20. 28)
следует, что с уменьшением п„ расход рулей на создание перегруз-
ки уменьшается и это согласуется с изменением балансировочной
кривой при возникновении срыва потока (рис. 20. 10).
12*
339
Рис. 20.11. Распределение давления в
области расположения руля высоты
при безотрывном и орывном обтека-
нии
При. орыВе на горизон-
тальном оперении
Рис . 20.12. Влияние срыва по-
тока ata горизонтальном опе-
рении па изменение Л4Ш по уг-
лу атаки
Как уже было сказано выше, одним из наиболее важных крите-
риев продольной управляемости является градиент усилия по пере-
грузке Рпу, характеризующий прирост усилия на штурвале, необ-
ходимый для изменения перегрузки. Для анализа изменения прпро-
ста усилия на штурвале самолетов с системой прямого действия
воспользуемся формулой (10. 21), в которой отразим лишь влияние ;
шарнирного момента, обусловленного изменением угла отклонения к
руля высоты и угла атаки горизонтального оперения:
V2 '
(20.29)
При отсутствии срыва потока на горизонтальном оперении прирост
шарнирного момента по углу отклонения руля высоты почти на по-
рядок больше прироста шарнирного момента по углу атаки гори-
зонтального оперения, к тому же диапазон изменения Лбв значи-
тельно больше Ааг. о, поэтому для качественного анализа при без-
отрывном обтекании для определения усилия на штурвале можно
воспользоваться формулой
и Q ... tv пТ Д-
ДРв= -
Зависимость эта. как
диапазоне изменения бв.
Если при наличии льда на передней кромке горизонтального
оперения возникает срыв потока, то происходит некоторое перерас-
пределение соотношения между ЛК и ЛК;1. Связано это с тем, что
при срыве потока происходит значительное возрастание шарнирно-
го момента по углу атаки. На рис. 20. 11 показано, что при безот-
рывном обтекании распределение давления в области руля высоты
(20.30)
b„Sv~
в в 2
SqV-’
Суг-°явЛг.о*|
уже известно, линейная на значительном
340
Рис. 20.13. Влияние имита-
тора льда на стабилизаторе
на зависимости PB=f(Cy)
самолета Ил-18:
I—без имитатора; 2—ширина
имитатора 30—40 м.м; 3—ширина
имитатора 60 мм
Рис. 20.14. К определению
допустимых изменений уси-'
лий на штурвале:
1—желательное изменение
2~~допустимое изме-
нение Ръ=1(пу}; 3—недопусти-
мое изменение
с изменением угла атаки претерпевает незначительные изменения.
При возникновении срыва разрежение в области руля, т. е. в обла-
сти срыва, возрастает, равнодействующая тоже сдвигается к хво-
стику хорды и все это способствует росту (рис. 20. 12). В этом
случае прирост усилий необходимо определять по формуле
ДРВ= -km (т^аго + т^--------------------VBQ —• (20.31)
X ‘° ш C“r.onBHr.ofer.o Sq^2 / в в« 2 k '
Составляющая, учитывающая /ИщДа, при уменьшении угла ата-
ки дает отрицательный прирост АРВ, что приводит к изменению
характера протекания усилия на штурвале (рис. 20. 13) и производ-
ная изменяет знак. Может изменить знак и само усилие на
штурвале, что недопустимо в летной эксплуатации. С возникнове-
нием отрицательных усилий возникает режим «подхвата штурва-
ла», т. е. при отклонении штурвала возникает не сопротивление его
отклонению, а образуются тянущие усилия, что способствует раз-
витию «клевка» самолета.
Согласно нормам летной годности в процессе предпосадочного
планирования, выполнения посадки и ухода на второй круг усилия
на штурвале должны изменяться плавно. При всех возможных кон-
фигурациях самолетов на всех эксплуатационных режимах полета
при уменьшении перегрузки пу отклонением руля высоты до пу—
=0,5 производная Р2У балансировочной кривой Рв=1{Пу) должна
сохранять знак. При дальнейшем уменьшении перегрузки допуска-
ется уменьшение усилий на штурвале, но не более чем на 30% (при
»у=0) от максимальной величины или предусмотренной руковод-
ством по летной эксплуатации балансировке самолета (рис. 20.14).
12*—776
341
Рис. 20.15. Влияние обледене-
ния носка крыла на баланси-
ровочную кривую P3 = f(6n)
Рис. 20.16. Изменение расхо-
да руля направления (а) и
усилий на педалях (б) при
наличии (сплошная линия)
и отсутствии обледенения
(пунктирная линия) носка
киля
Происходит изменение характеристик боковой устойчивости и
управляемости при обледенении носка крыла и вертикального опе-
рения. Если условно разделить боковую устойчивость на попереч-
ную и путевую устойчивость и управляемость, то на первую влияет
обледенение крыла, а на вторую —• обледенение вертикального опе-
рения. Изменение характеристик поперечной устойчивости самоле-
та вследствие обледенения носка крыла проявляется при полете на
больших углах атаки. Связано это с возникновением срыва потока
на меньших углах атаки, с уменьшением критического угла ата-
ки, максимального коэффициента подъемной силы. Рекомендуемые
запасы по углу атаки до сваливания в этом случае могут умень-
шаться до нуля и самолет будет сваливаться на крыло. Влияние
обледенения носка крыла на характеристики поперечной управляе-
мости качественно повторяет влияние обледенения носка стабили-
затора на изменение усилий на штурвале при отклонении руля вы-
соты. Отличием является лишь то, что при рассмотрении шарнир-
ных моментов элеронов необходимо учитывать, что при обледенении
носка крыла срыв потока будет происходить на верхней поверхно-
сти крыла. Усилия на штурвале от элеронов Рв при обледенении
носка крыла при сравнительно небольших углах отклонения элеро-
нов могут менять знак (рис. 20. 15), происходит так называемый
«захват элеронов», что приводит к резкому ухудшению пилотирова-
ния самолета.
Изменение характеристик путевой устойчивости при обледене-
нии носка киля связано с возникновением срыва на вертикальном
оперении. Боковой фокус самолета смещается при этом вперед и
самолет может стать в путевом отношении неустойчивым. Послед-
нее может быть при полете с отказавшим двигателем и возникно-
вении больших углов скольжения. Усилия на педалях при срыве
342
потока на вертикальном оперении значительно уменьшаются (рис.
20. 16), при этом происходит «забегание» педали. В связи с этим
при пилотировании самолетов в условиях обледенения установле-
ны ограничения по углу скольжения.
Вопросы для повторения
1. Назовите основные параметры безопасности полета.
2. Напишите уравнение боковой балансировки при отказе двигателя.
3. Получите уравнение, связывающее момент отказа (коэффициент момента)'
и потребное значение угла отклонения руля направления.
4. Получите уравнение, связывающее момент отказа двигателя и потребное
значение угла отклонения элеронов.
5. Как влияет обледенение передней кромки крыла на продольную устойчи-
вость самолета: а) с прямым крылом; б) со стреловидным крылом?
6. Как влияет на продольную устойчивость обледенение носка стабилизато-
ра? На каких режимах полета?
7. Объясните, почему изменяется характер зависимости усилия на штурвале
от коэффициента перегрузки при обледенении носка стабилизатора?
8. Как влияет обледенение крыла на боковую устойчивость и управляемость?
Задача
Определите потребное для балансировки разворачивающего момента отка-
завшего двигателя приращение отклонения руля направления, если известны сле-
дующие данные: тяга работающего двигателя составляет Р=58600 Н, тяга от-
казавшего двигателя Р=0, расстояние от оси двигателя до оси самолета
OY Кдв=2,45 м, скорость полета К=270 км/ч, производная коэффициента мо-
мента JYizl'== 0,00573 рад.
Ответ: бн = 0,02 рад.
12**
Глава 21
Динамика самолета в возмущенной атмосфере
§ 21.1. Атмосферные явления и вызванные
ими возмущения
Воздушная среда, в которой летит самолет, находится в непре-
рывном движении. Неравномерное распределение температур, плот-
ностей и давлений в атмосфере приводит к нарушению ее равновес-
ного состояния: происходит перемещение масс относительно поверх-
ности Земли. Собственное движение атмосферных масс воздуха
относительно неподвижной системы координат обычно называют
ветром и его скорость обозначают W.
Воздушные течения делятся на упорядоченные и неупорядочен-
ные движения воздуха в атмосфере. Первые из них являются срав-
нительно регулярными движениями и возникают вследствие нерав-
номерного распределения атмосферного давления на участках боль-
шой протяженности, порядка сотен километров. Вторые являются
нерегулярными беспорядочными движениями более мелкого мас-
штаба протяженностью порядка сотен метров, называемые турбу-
лентностью.
Если скорость движения воздушных масс достигает максималь-
ного значения в течение достаточно длительного времени (напри-
мер, более 2—3 мин), то такие перемещения масс воздуха принято
называть потоками. Если движение воздуха происходит с большим
градиентом нарастания скорости, то такие перемещения воздушных
масс называют порывом ветра. Обычно рассматривается воздейст-
вие на самолет порыва, имеющего конечную протяженность. Такой
порыв характеризуется протяженностью, величиной максимального
отклонения скорости полета по модулю и направлению, а также
отрезком пути полета, в течение которого изменение скорости дости-
гает максимума (градиентное расстояние).
При встречном порыве ветра обтекание самолета более эффек-
тивное, чем при попутном, и имеет место увеличение лобового со-
противления самолета, поскольку при прочих равных условиях в
первом случае скорость обтекания и, следовательно, равнодейству-
ющая полной аэродинамической силы будут больше, чем во втором.
При наличии горизонтального порыва ветра также изменяется угол
атаки: при снижении самолета попутный порыв ветра увеличивает
угол атаки, а встречный уменьшает его, при наборе высоты попут-
ный ветер уменьшает угол атаки, а встречный — увеличивает.
При воздействии на самолет вертикального порыва ветра вслед-
ствие изменения угла атаки происходит изменение перегрузки по
344
времени. Если при этом самолет сохраняет устойчивость по пере-
грузке, то при увеличении угла атаки возникает пикирующий мо-
мент, который стремится восстановить исходный угол атаки.
Угол атаки при попадании самолета в восходящие или нисходя-
щие порывы изменяется следующим образом:
Да tg Да = + UZ^/V7, {21.1)
где №у — скорость вертикальных порывов.
При боковом порыве ветра, когда скорость ветра составляет не-
который угол с направлением движения центра масс самолета, из-
меняются не только скорость набегающего на самолет потока, но и
угол скольжения:
^^tg^=Wz/V. (21.2)
Все эти факторы необходимо учитывать при пилотировании са-
молета, поскольку при наличии ветра может произойти срыв пото-
ка с поверхности самолета. Так попутный порыв ветра может вы-
звать срыв потока на положительных углах атаки, а встречный —
на отрицательных.
При переходе от горизонтального полета к набору высоты
встречный порыв ветра может настолько увеличить угол атаки, что
либо наступит срыв потока, либо перегрузки достигнут величин,
превосходящих их допустимые значения. Таким образом, поле вет-
ра оказывает существенное влияние на аэродинамические силы и
моменты, действующие на самолет, при этом изменяются местные
углы атаки и скольжения органов управления, воздушных винтов,
лопаток компрессоров и т. п.
Обтекание аэродинамических органов управления (элеронов,
рулей высоты и направления) как в подвижной, так и в неподвиж-
ной воздушной среде определяется не только углами их отклонения,
но также и скоростями их вращения относительно «неподвижной»
части планера самолета.
Скорость и направление ветра в каждой точке атмосферы и в
каждый момент времени имеют случайный характер. Если масшта-
бы движения атмосферы очень велики, то среднее значение ско-
рости стремится к постоянной величине. В этом случае течение на-
зывается струйным. Струйные течения носят глобальный характер,
представляют собой горизонтальные потоки, распространяющиеся
на тысячи километров и имеющие на определенной высоте четко
выраженный максимум скорости. Толщина струйного течения со-
ставляет несколько километров, а ширина — сотни километров.
Струйные течения встречаются в верхней части тропосферы и в
стратосфере. Максимальные значения скорости ветра на оси струй-
ного течения в стратосфере изменяются в диапазоне от 30 до
200 м/с, при этом среднее значение скорости составляет 40—50 м/с,
на высоте 25 км и более среднее значение скорости примерно 60—
100 м/с. Е1а малых высотах скорость на оси струйного течения не-
велика вследствие трения о поверхность земли.
На малых высотах (в приземном слое) метеорологические усло-
вия часто изменяются, поэтому для решения практических задач
345
Рис. 21.1. График функ-
ции распределения ве-
роятности превышения
среднею а др атичного
значения скорости вер-
тикальной составляю-
щей ветра для различ-
ных высот полета
0 1 2 J ¥ 5 Б 7 в
СреднепваОрагпачное зна-
чение спор и сттш ветра, м/с
Рис. 21.2. Функции распределе-
ния вероятности среднеквадра-
тичного значения случайного
ветра от условий погоды:
/—грозовые условия; 2—кучевые
облака: 3—ясная погода
используют осредненные характеристики ветра на малых высотах.
Под турбулентностью атмосферы понимают также ее состояние,
когда в отдельных областях атмосферы имеются порывы ветра в
большинстве случаев в направлении, перпендикулярном движению
самолета определенной интенсивности. При полете в такой атмосфе-
ре появляются дополнительные перегрузки и «болтанки» с линей-
ными и угловыми колебаниями.
Скорость движения воздушной массы можно схематически раз-
делить на две составляющие, постоянную IF» и переменную w:
W=W0-\-w.
Именно переменная составляющая w (пульсация скорости), являю-
щаяся случайной функцией координат и времени, характеризует
турбулентность атмосферы. Пульсация, вернее флуктуация, охваты-
вает широкий диапазон волн длиной от доли метра до многих кило-
метров. Простейшим случаем турбулентного движения является
однородное и изотропное течение. Атмосферное турбулентное поле
скоростей можно считать однородным и изотропным. Наличие од-
нородности означает, что статистические свойства поля скоростей
не зависят от выбора координаты точки в этом поле, а наличие изо-
тропии означает, что эти свойства не зависят от выбора направ-
ления. Интенсивность турбулентности о определяется отношением
осредненной во времени амплитуды пульсационной скорости ветра
к средней скорости.
346
Из многочисленных опытных данных можно заключить, что
функция скорости случайного ветра является кусочно-стационарной
случайной функцией. Это означает, что ее вероятностные характе-
ристики не зависят от времени.
Среднеквадратичное значение случайного ветра снг, как это по-
казывают данные практики, зависит от высоты полета и метеоусло-
вий. На рис. 21. 1 приведены кривые функций распределения веро-
ятности F (спг) в зависимости от среднеквадратичного значения слу-
чайного ветра gw для различных высот. Из этого графика видно,
что с увеличением высоты время полета в сравнительно спокойной
атмосфере возрастает. Если при сц.у=0,5 м/с считать атмосферу
практически спокойной, то самолет совершает полет в спокойной
атмосфере на высоте 0—3 км около 70% общего времени, а на вы-
соте 9—15 км —около 95%. Если среднеквадратичный ветер сцг>
>2,5 м/с принять за сильно возмущенную атмосферу, то время по-
лета в таких условиях на высоте 0—3 км составляет ~0,4%, а на
высоте 9—15 км всего 0,05% [32].
Е1а рис. 21.2 приведены кривые, иллюстрирующие зависимость
функций распределения вероятности среднеквадратичного значения
случайного ветра от метеоусловий. Из анализа сравнения этих кри-
вых можно заключить, что вероятность встречи с ветром данной
интенсивности в кучевых и особенно грозовых облаках существенно
больше, чем в ясную погоду.
Если турбулентность носит случайный характер, то одиночные
порывы ветра отождествляются со случайными сильными измене-
ниями вертикальной скорости. Специальный анализ турбулентно-
сти, включающий одиночные порывы ветра, позволяет получить бо-
лее реальную картину явления.
Турбулентность в ясном небе связана главным образом со струп-
ными течениями и является следствием сдвига ветра, т. е. разных
изменений скорости ветра на сравнительно малых расстояниях; при
этом эти изменения в вертикальном направлении на много меньше,
чем в горизонтальном.
Турбулентность при грозе связана с конвективной активностью
в грозовых облаках. В типичных грозовых облаках, состоящих из
развивающихся и распадающихся ячеек, встречаются сильные вос-
ходящие и нисходящие потоки иногда с большими градиентами ско-
рости. Время жизни отдельных ячеек редко доходит до 1 ч, а сама
система активно сохраняется несколько часов. Турбулентность при
грозе характеризуется двумя особенностями—наличием нисходящих
и восходящих потоков с большими скоростями и порывов ветра с
большими градиентами скорости, скрытых в зоне перемещения вет-
ра. Е1аиболее часто турбулентность встречается на малых высотах.
Мезометеорологические процессы обусловлены влиянием мест-
ности (рельефа) на характер воздушных течений и подразделяют-
ся на горные волны, вихревые течения, ураганы и др.
Масштабы мезометеорологических процессов могут изменяться
в широких пределах, от нескольких метров до нескольких сотен
километров.
347
Наиболее простым из мезометеорологических процессов являют- .г
ся горные волны, которые образуются при обтекании горного хреб-
та ветром, направленным под углами, близкими к прямому. Гор-
ные волны возникают на границе двух воздушных слоев, движущих-
ся с различными скоростями и имеющими различные плотности и
температуры. Линии тока, деформируясь волнообразно до некото-
рого уровня, повторяют форму препятствия, выше этого уровня про-
исходит и их обращение. На подветренной стороне наблюдается
обратное явление. Обращение линий тока по вертикали имеет ме- '
сто не только над препятствием, но и на подветренной стороне пре-
пятствия в области распространения подветренных волн. Поэтому
в этой области на одной и той же вертикали на различных уровнях
могут одновременно существовать и восходящие и нисходящие то-
ки. Амплитуда и длина этих волн тем больше, чем больше разность
скоростей движущихся масс и чем меньше разность плотностей и
температур. Длина горных волн — до нескольких десятков км, ам-
плитуда— до 1—2 км, а период —до 200 с. Горные волны харак-
теризуются большим градиентом изменения горизонтальной состав-
ляющей ветра по высоте.
Летные испытания подтверждают ранее сделанные выводы дру-
гих авторов, основанные на теоретических исследованиях и назем-
ных измерениях, о том, что в результате разрушения горных волн
образуются роторные течения, обусловливающие значительное из-
менение нормальной перегрузки, что по своему воздействию на
полет самолета аналогично турбулентности.
§ 21.2. Полет в турбулентной атмосфере
Турбулентные зоны в свободной атмосфере занимают зоны хотя
и небольшой толщины, но большой протяженности, поэтому время
полета в турбулентных зонах может быть значительным. Поэтому
при полете по маршруту необходимо построить маршрут и профиль t
полета так, чтобы сократить до минимума время нахождения в
турбулентных зонах. Относительные распределения полетов в тур-
булентной негрозовой и наиболее опасной грозовой атмосфере [32]
приведены на рис. 21. 3.
При периодическом влиянии атмосферной турбулентности на
самолет движение последнего становится возмущенным. Воздейст-
вие возмущающих сил вызывает колебания самолета и «болтанку».
Попадание в зону интенсивной турбулентности атмосферы может К
явиться причиной выхода самолета на большие углы атаки с после- b
дующим сваливанием либо значительным увеличением перегрузки.
Образующиеся в этих условиях перегрузки приводят к перенапря- g
жению отдельных элементов самолета и ухудшению комфорта пас-
сажиров.
В настоящее время турбулентные явления могут быть описаны
только статистически, поэтому анализ поведения самолета с учетом }
случайных воздействий на него со стороны турбулентной атмосфе-
ры оказывается сложным.
348
Рис. 21.3. Относительное рас-
пределение полета в турбулен-
тной атмосфере в зависимости
от высоты:
а—обычные условия; б—полет в
условиях грозы
Рис. 21.4. Стандартная фор-
ма дискретного порыва
Для оценки воздействия атмосферной турбулентности на само-
лет применяются методы дискретных порывов и непрерывных слу-
чайных порывов.
При учете влияния дискретного порыва на самолет полагают,
что форма дискретного порыва фиксирована, а под его воздействи-
ем самолет перемещается только вертикально — вниз или вверх в
соответствии с направлением порыва.
Стандартная форма дискретного порыва, которая используется
для расчета нагрузки самолетов, приведена на рис. 21.4. Воздей-
ствие на самолет вертикального порыва ветра приводит к измене-
нию нормальной перегрузки пуа, которая определяется по прибли-
женной формуле:
(21.3)
Z р
где p = mgJS — удельная нагрузка на крыло; т — масса самоле-
та; Кпуа — приращение перегрузки; q, V, S — плотность, скорость,
площадь крыла соответственно; Суа— производная Суа по a; k —
коэффициент ослабления порыва из-за градиентного участка поры-
ва и реакции самолета на изменения угла атаки.
Из выражения (21.3) следует, что чем больше скорость полета,
коэффициент k и производная Суа, тем большие перегрузки А/?ус1 бу-
дет испытывать самолет при данной скорости порыва ветра; чем
больше высота полета и удельная нагрузка на крыло р, тем мень-
шие перегрузки Апуа будет испытывать самолет при данной скоро-
сти порыва.
При применении метода непрерывных случайных порывов пола-
гают, что поле скоростей ветра на определенных участках турбу-
лентной атмосферы является однородным и изотропным; поле ско-
ростей ветра не меняется (т. е. является «замороженным»).
Изучение материалов летных испытаний показывает, что вер-
тикальные порывы ветра не только изменяют угол атаки крыла и
349
оперения, но и в значительной мере влияют на срывные характери-
стики профиля. Наложение на плоскопараллельный поток, обте-
кающий крыло и горизонтальное оперение, турбулентности атмо-
сферы ускоряет начало срыва потока и обуславливает преждевре-
менное возникновение тряски и уменьшение критического угла
атаки.
Повышение турбулентности атмосферы, вызывающее «болтанку»
самолета, может иметь место в струйных течениях. Наиболее опас-
ная для самолетов турбулентность возникает в кучевых облаках, -
где скорость вертикальных порывов достигает 6—8 м/с. Мощные
кучевые облака обычно имеют небольшую горизонтальную про-
тяженность, поэтому самолет проходит зону интенсивной турбу-
лентности за 5—20 с. Однако полет в таких облаках не является
безопасным, так как вертикальный порыв может случайно вы-
вести самолет на неустойчивый режим за углом атаки а>адоп-
В кучево-дождевых, особенно в грозовых, облаках скорость вер-
тикальных порывов достигает 30 м/с, а иногда и больше (40—
50 м/с). Вход в грозовые облака категорически запрещен не только
в связи с сильными порывами, но и в связи с опасностью пораже-
ния молнией вследствие высоких напряжений атмосферного элек-
тричества.
Практическую опасность выхода самолета на сваливание пред-
ставляет вертикальная составляющая скорости воздушных масс.
Под воздействием скорости восходящего потока Wy угол атаки са-
молета а увеличивается на Ла (21. 1):
Да=a rctg Wy/V ~ Wy/V,
где V — скорость набегающего потока.
Для выхода самолета на сваливание, очевидно, должно быть ус-
ловие Лас^ЛаДот где приращение угла сваливания Лас=ас-—а.
В этом случае из выражения для Ла можно найти скорость Wyc,
вызывающую сваливание:
W7c=rtgAac. (21.4)
Чем больше угол Лас, тем меньше угол атаки самолета а и, оче-
видно, чем больше скорость полета V, тем больше должна быть
скорость порыва способная вывести самолет на критические
режимы. В то же время с увеличением скорости V, следовательно,
числа М проявляется сжимаемость и угол ас заметно уменьшается.
Следовательно, здесь можно выбрать режим наиболее безопасного
полета в зависимости от числа М и интенсивности турбулентности
атмосферы.
Допускаемую скорость порыва с учетом числа М можно опреде-
лить по формуле
^яоп=У tg Ладой ~ ^даЯОп-=М аДаЛ0„,
ГДе Д®доп ®доп С1ГП.
350
аз w 0,5 0,0 0,7 0,0 0,9 М
Рис. 21.5. Характер изме-
нения скорости допусти-
мых вертикальных по-
рывов по режимам поле-
та тяжелого скоростного
самолета с mg!S=
= 400 кгс/м2
Рис. 21.6. Пример ограничений
максимальных допустимых скоро-
стей вертикальных порывов в за-
висимости от скорости полета на
малых высотах
Допустимый угол атаки определяется соотношением
л ЛСуслоп п
даДоп=—(21-5)
^уа
Существует определенный оптимальный для полета в условиях
«болтанки» диапазон чисел М, где скорость допустимых вертикаль-
ных порывов оказывается наибольшей (рис. 21. 5).
Для полета с большими скоростями на малых высотах ограни-
чения по допустимой скорости вертикальных порывов могут быть
вызваны не ограничениями по углам атаки, а ограничениями по
допускаемой перегрузке. В этом случае в соответствии с выраже-
нием (21.3) получим значение допустимого вертикального по-
рыва:
Wy^^P^onlkClaQV. (21.6)
Примерный вид зон ограничений максимальных скоростей вер-
тикальных порывов в зависимости от скорости полета на малых
высотах приведен на рис. 21. 6.
Для полета в условиях повышенной турбулентности каждый са-
молет имеет свои ограничения. Например, полет самолета Ту-134
в этих условиях рекомендуется производить на высотах свыше
7500 м и при числах М=0,75-4-0,77, на высотах ниже 7500 м полет
производится на скоростях не более 600 км/ч.
При пересечении самолетом зон интенсивной турбулентности по-
следний подвергается энергичным броскам вследствие изменения
угла атаки, а также перемещению вверх и вниз в соответствии с
направлением вертикальных порывов. Если самолет пересекает
турбулентную зону струйного течения под прямым углом, в этом
351
случае «болтанка» будет продолжаться не долго, а если пересекает
под острым углом пли течение струи является параллельным с кур-
сом самолета, то «болтанка» может продолжаться долго. Для ос-
лабления «болтанки» необходимо несколько затормозить самолет
(на малых высотах) или уменьшить высоту полета (на больших
высотах).
При полете самолета в турбулентной атмосфере следует со-
хранять прямолинейное горизонтальное движение на рекомендуе-
мом в данных условиях режиме полета.
Следует отметить, что превышение Хунтах ООЛ66 В€рОЯТНО НЯ МЭ-
лых высотах и больших скоростях полета, а превышение Суа доп —
на больших высотах.
Боковые порывы вызывают значительное накрененпе, а очень
большие боковые порывы на больших высотах могут привести к
переворачиванию самолета на «спину».
Турбулентность атмосферы, изменяя характер обтекания само-
лета и его частей, изменяет истинные углы атаки крыла и горизон-
тального оперения. В настоящее время не существует надежных
средств регистрации углов атаки при полете в турбулентной атмо-
сфере, поэтому действие турбулентности в атмосфере на самолет
учитывается изменением нормальной перегрузки в центре масс са-
молета, а по ней определяется угол атаки и коэффициент Суа.
Между коэффициентом Суа и перегрузкой имеет место соотно-
шение
Cya=^a/QV2S-, nya=Ya/mg- Ya=nyamg.
В прямолинейном горизонтальном полете пуа=1. Если \пуа —
приращение нормальной перегрузки, которое характеризуется от-
клонением от режима установившегося горизонтального полета, то
nya = 1+AHjra и У„= (i+Anya)mg. Следовательно,
Cya=2(\+^va)mg/QV^S. (21.7)
В турбулентной атмосфере изменение перегрузки происходит
циклически. Приращение перегрузки при ее уменьшении (А/гуа<0)
и увеличении (А/7?/г,. > 0) примерно одинакового порядка. Однако от-
рицательное приращение перегрузки действует на пилота более не-
благоприятно. При полете в турбулентной атмосфере для баланси-
ровки самолета, обладающего продольной статической устойчиво-
стью, потребные отклонения руля высоты вниз несколько больше,
чем при полете в спокойной атмосфере. Эти дополнительные откло-
нения с ростом высоты и скорости полета растут п достигают 1—2°
у самолета Ил-62.
По данным летных испытаний, показывающим изменение во вре-
мени нормальной перегрузки пуа, отклонение руля высоты 6Б и ско-
рости для различных высот полета, можно судить о характере тур-
булентной атмосферы и определять максимальные и минимальные
амплитудные значения и частоту циклического изменения нормаль-
ной перегрузки. Допустимые перегрузки ограничиваются пределами
прочности конструкции самолета и условиями комфорта пассажи-
352
ров. Атмосферная турбулентность оказывает влияние на деятель-
ность пилота, особенно если эффекты влияния являются продолжи-
тельными. С точки зрения эргономики пилот является составной
частью системы самолет — среда — пилот. Если самолет и среду
считать заданными (т. е. их функции зафиксированными), то тре-
тья часть (пилот-оператор) может менять свои характеристики.
Так например, в условиях турбулентности меняются характеристи-
ки пилота. Это может привести к тому, что вся эргономическая си-
стема окажется неустойчивой.
Исходя из физиологических ощущений пассажиров при пере-
грузках (табл. 21. 1) в качестве предельного значения для пасса-
жирских самолетов принимают величину Ьпуа = 0,5.
Таблица 21.1
Интенсивность болтан- ки Приращения перегруз- ки Физиологические ощущения пассажиров
Слабая 0,005—0,2 Неприятные ощущения у отдельных пассажиров
Умеренная 0,2—0,5 Неприятные ощущения у значитель- ной части пассажиров. Затрудненность хождения по салону
Сильная 0,5—1,0 Болезненные явления у -большинства пассажиров. Возможность травм при хождении по салону
Очень сильная Больше 1 Болезненные явления у подавляющего' большинства пассажиров. Отделение от кресел и зависание на ремнях
Кроме рассмотренных порывов существуют несимметричные го-
ризонтальные порывы, которые приводят к изменению угла сколь-
жения. Статически устойчивый самолет реагирует на порыв креном
на противоположное полукрыло и разворотом навстречу порыву.
В этом случае начальное возмущение характеризуется углом сколь-
жения. Исследование возмущенного движения выполняется по ме-
тодике, приведенной в гл. 16.
§ 21.3. Полет в условиях спутного следа
Во время полета за самолетом создается аэродинамический
след или спутный поток, мощность которого зависит от размеров
и силы тяжести самолета, скорости и высоты полета, угла атаки
(перегрузки). Спутный след обычно устойчив.
В случае, когда самолет попадает в спутный след впереди летя-
щего самолета, воздействие следа может оказаться настолько силь-
ным, что органы управления самолета не будут в состоянии преодо-
леть это воздействие.
Спутный след образуется:
реактивной струей двигателя;
353
пограничным слоем, сбегающим с поверхности самолета;
концевыми вихрями крыла, связанными с образованием подъем-
ной силы.
Определяющее влияние оказывает спутный след, создаваемый
крылом. Спутный след от крыла представляет, как известно из кур-
са аэродинамики, совокупность двух вихревых «жгутов» одинако-
вой интенсивности, расстояние между которыми составляет пример-
но 80% размаха крыла. Вихревые жгуты, вращаясь, создают скос
потока. Угол скоса потока зависит от коэффициента подъемной си-
лы Су. Следует отметить, что чем больше подъемная сила, с кото-
рой воздушный поток воздействует на крыло, тем больше скос по-
тока за крылом и, следовательно, интенсивнее спутный след само-
лета.
Воздействие спутного следа от крыла впереди летящего самоле-
та может привести к существенному изменению параметров движе-
ния летящего за ним самолета. Особенно опасно кренение на пред-
посадочных режимах полета.
Спутный след, создаваемый фюзеляжем, представляет собой
турбулизированную зону, при попадании в которую самолет испы-
тывает тряску. Возмущение, вносимое в спутный след турбулент-
ным пограничным слоем сравнительно невелико. Воздействуя на
самолет оно вызывает тряску, однако на расстоянии 100—150 м
практически размывается.
Время существования этого следа зависит от размаха крыла,
силы тяжести, перегрузки самолета и метеоусловий. У современных
гражданских самолетов в спокойной атмосфере время существова-
ния следа достигает 2—3 мин.
Спутная струя от турбореактивного двигателя представляет со-
бой высокоскоростной и высокотемпературный поток газа, вытекаю-
щий из сопла, однако скорость и температура газа быстро гасятся
и на расстоянии 60—80 м от ТРД скорость газа, вытекающего из
сопла, составляет 3-—5 м/с. Попадание самолета в струю от ТРД
может вызвать помпаж двигателя.
§ 21.4. Допустимые значения перегрузки
и скоростей вертикальных порывов
От воздействия атмосферной турбулентности самолет испыты-
вает перегрузки по всем осям координат, однако наиболее сильная
перегрузка направлена по оси OY от вертикальных порывов.
Рассмотрим горизонтальный полет самолета при наличии вер-
тикальных перегрузок от вертикальных порывов ветра. Вертикаль-
ные перегрузки связаны двумя ограничениями, обусловленными
прочностью конструкции самолета и его выходом на большие углы
атаки. Что касается перегрузки, связанной с допустимым углом
атаки, то здесь, как мы увидим дальше, изменение происходит в
широких пределах.
354
Рис. 21.7. График изме-
нения коэффициента
подъемной силы при дей-
ствии ступенчатого вер-
тикального порыва ветра
Рис. 21.8. Графики приращения
вертикальной перегрузки, ис-
пытываемой самолетом при
входе в ступенчатый порыв на
разных высотах, в функции
числа М полета
На рис. 21.7 показан график зависимости Cya=f(ct) при нали-
чии воздействия ступенчатого вертикального порыва ветра. При
этом рассматривается наиболее неблагоприятный случай—самолет
в горизонтальном полете заходит в ступенчатый порыв. В связи с
этим угол атаки изменяется на величину Да=И7г//1[/ и создает при-
ращение коэффициента подъемной силы ДС^. Если скорость верти-
кального порыва достаточно большая, то в этом случае коэффи-
циент подъемной силы достигает значения, соответствующего сва-
ливанию, т. е. Суа = Суас, между тем в целях безопасности необхо-
димо, чтобы было сохранено условие Суа №л<Суа с.
В момент захода самолета в порыв ветра перегрузка будет до-
стигать максимального значения, а затем начнет постепенно умень-
шаться вследствие изменения угла атаки и появления у самолета
скорости в вертикальном направлении.
Для стреловидного крыла (угол стреловидности %=50° суже-
ние т)= 7, удлинение X=2,45,—=300 кгс/м2, скорость порыва
S
12 м/с) на рис. 21.8 приведены изменения перегрузки на раз-
ных высотах. При числах Л1<1,0 перегрузки увеличиваются при-
мерно пропорционально скорости, при М>1,0 начинают медленно
уменьшаться.
Для каждой скорости и высоты полета существуют значения
ЬСуа И Д/Zya, При КОТОрЫХ Суа И Пуа СТЭНОВЯТСЯ Суа доп И &Пуа доп-
На рис. 21.9 приведены графики зависимостей Суа=/(М) и
&1уа доп —ф (М).
На рис. 21. 5 приведен график допустимых скоростей вертикаль-
ных ступенчатых порывов 1F на разных высотах в функции от чис-
ла Мполета.
Приведен только один случай горизонтального входа самолета
в ступенчатый порыв. Правда, это наиболее невыгодный случай, но
на практике встречается множество разнообразных случаев. Для
355
Рис. 21.9. Графики зависимостей потребных и располагаемых значе-
нии коэффициента подъемной силы в функции числа М полета (а)
и допустимых приращений вертикальной перегрузки на разных вы-
сотах в зависимости от числа М полета (б)
подробного изучения этого вопроса необходимо изучить специаль-
ную литературу.
Из формулы (21.3) видно, что при прочих равных условиях при
увеличении нагрузки на крыло p = mgfS снижается перегрузка от
вертикальных порывов ветра. Однако уменьшение болтанки с рос-
том нагрузки на крыло не означает, что повышается безопасность
полета. Увеличение массы самолета и .соответственно нагрузки на
крыло приводит к существенному нагружению элементов конструк-
ции при полете в турбулентной атмосфере, хотя болтанка и умень- |
шается.
Существуют активные п пассивные методы снижения нагрузок
от вертикальных порывов ветра. К пассивному методу можно от-
нести изменение аэродинамических и геометрических характеристик
крыла. К активным методам можно отнести автоматические систе-
мы, управляющие непосредственно подъемной силой крыла, напри-
мер закрылок, гаситель подъемной силы и другие виды механиза-
ции, автопилот с сигналом перегрузки, воздействующим на руль
высоты.
§ 21.5. Эксплуатационные ограничения самолета
Ограничения, накладываемые на режимы полета самолета, вво-
дятся из условий обеспечения безопасности полета.
Для существующих самолетов ограничения накладываются на
нормальную перегрузку пуа. На составляющие пха, nza в виду их
малости ограничения обычно не вводятся. В полете наибольшую
перегрузку пуа можно определить по формуле:
QV2
Cya^-S
—-___—
tl,ua
У mg mg
По условиям безопасности полета коэффициент подъемной силы
Сцадоп должен быть, меньше коэффициента Суас (т- ^•1Суа№а<.
356
Максимальная эксплуата-
ционная перегрузка в 1,5 раза
меньше разрушающей.
На сверхзвуковых скоро-
стях в случае снижения эффек-
тивности стабилизатора не уда-
ется достичь угла атаки, при
котором происходит свалива-
ние самолета. При полном от-
клонении ручки управления на
себя достигается лишь CIJU<
<Суис.
Рис. 21.10. Зависимость допустимых и
возможных перегрузок от скорости и
высоты полета
Сравнение зависимостей допустимых и
возможных перегрузок
пуи дОП и n,ja от скорости и высоты полета для магистральных граж-
данских самолетов показано на рис. 21. 10.
Из этого рисунка видно, что на высотах меньших 11000 м и при
числах М меньших 0,8 на данном самолете имеется возможность
создать перегрузку более n3va шах=2,3.
Согласно нормам летной годности гражданских самолетов
СССР для обеспечения надежной и безопасной эксплуатации са-
молетов необходимо, чтобы установленные в эксплуатации мини-
мальные допустимые скорости полета существенно превышали ско-
рости сваливания. Например, для самолета Ту-154 необходимо,
чтобы минимальные скорости на взлете превышали не менее чем
на 20% скорости сваливания, а при заходе на посадку — на 30%.
Например, для полета самолета Ту-154 при массе 70, 80, 90 т
минимальные скорости при взлете и заходе на посадку будут 225,
240, 255 и 292, 312, 332 м/с соответственно. Аналогичные данные
имеются в НЛГС для взлета и посадки.
Вопросы для повторения
1. Перечислите какие виды возмущенных сил обусловлены атмосферными яв-
лениями?
2. Какое обтекание самолета более эффективно, встречным или попутным
ветром?
3. Что такое порыв ветра и какое влияние оказывают порывы ветра на ха-
рактеристики полета самолета?
4. Что понимают под турбулентностью атмосферы и какое влияние оказыва-
ет турбулентность на характеристики полета самолета?
5. Каким образом снижаются нагрузки от вертикальных порывов ветра?
Задачи
1. Определить эффективный индикаторный порыв ветра для самолета Ту-134
из условий ограничения по сваливанию, если известно, что полет осуществляет-
ся на высоте /7=11000 м со скоростью, соответствующей М=0,8; удельная
нагрузка на крыло равна 3500 Н/м2; значение Суа крыла равно 5,45; допустимое
значение коэффициента подъемной силы при М=0,8 равно Суа Доп=0,72: эффек-
Зо7
тивный индикаторный порыв св^?н с действительным индикаторным порывом
соотношением Н^/эф — ~ ’
Ответ: W, г,ф =9,9 м/с.
2. На самолет, совершающий ’горизонтальный полет с углом атаки а=3,7°,
подействовал восходящий порыв ветра. Была ли превышена величина допустимо»
перегрузки пуа ДОП=2,12. если С!/а w =0,68, C“rt = 5,l, «О=0.
Ответ: nvaw = 2,105<пвп доп.
Глава 22
Особенности полета самолета
на больших углах атаки
§ 22.1. Взаимодействие продольного
и бокового движений самолета
В предыдущих главах общее движение разделяли на продоль-
ное и боковое и исследовали их независимо друг от друга. В дей-
ствительности эти движения взаимосвязаны и изолированное их рас-
смотрение в некоторых случаях может привести к неправильным
результатам.
Факторы, обуславливающие взаимосвязь продольного и боко-
вого движений, называются перекрестными связями. К таким фак-
торам относятся аэродинамические, кинематические и инерционные
перекрестные связи.
Перекрестные аэродинамические связи обусловлены зависимо-
стью продольных сил и моментов от кинематических параметров
бокового движения и, в свою очередь, зависимостью боковых сил
и моментов от кинематических параметров продольного движения.
В качестве примера возникновения аэродинамических перекре-
сгных связей можно указать на зависимость поперечной (тл-) и пу-
тевой (/7Zy ) устойчивости от угла атаки и числа М полета. Осо-
бенно сильная аэродинамическая взаимосвязь продольного и боко-
вого движений может наблюдаться на больших углах атаки при
возникновении срывного обтекания.
Кинематические перекрестные аэродинамические связи возни-
кают при вращении самолета.
Например, при вращении самолета относительно оси ОХ с уг-
ловой скоростью id.v углы атаки п скольжения периодически изме-
няются (рис. 22.1). В результате изменения угла атаки и утла
скольжения появляются стабилизирующие продольный и путевой
моменты, которые, препятствуя изменению этих' углов, изменяют
положение оси вращения ОХ. Чем больше степень продольной ус-
тойчивости по перегрузке и флюгерной устойчивости и меньше
угловая скорость вращения, тем действительная ось вращения бли-
же к оси ОХа скоростной системы координат и дальше от оси ОХ
связанной системы.
Возникновение инерционных поперечных связей обусловлено не-
равенством нулю моментов инерции самолетов относительно глав-
ных осей инерции и наличием гироскопических моментов вращаю-
щихся частей двигателя.
359
Рис. 22.1. Схема изменения углов атаки и скольжения при
вращении самолета относительно продольной оси
са самолетов. С перекрестными связями приходится считаться при
полете на больших углах атаки.
Особенности полета на больших углах атаки связаны с тем, что
возникновение срывных режимов на крыле может привести к рез-
кому изменению аэродинамических характеристик самолета, в том
числе его характеристик устойчивости, управляемости и демпфиру-
ющих свойств.
Гироскопический момент появляется при вращении самолета
относительно любой осн, не параллельной оси ротора двигателя,
и определяется соотношением
МгИр=Л>(0,р х <0)> (22.1)
где и сор — момент инерции и угловая скорость вращения ротора
двигателя соответственно; со — угловая скорость вращения само-
лета.
Обычно величина угла установки двигателей д>да невелика, по-
этому векторное соотношение (22. 1) в проекциях на осп связан-
ной системы координат можно записать в виде
•^л гир ~ ~ ^plOpu>2’ гир '
Из этих соотношений следует, что при вращении самолета вок-
руг оси ОУ появляется продольный момент, а при вращении в пло-
скости симметрии самолета - путевой, т. е. на лицо перекрестная
инерционная связь.
Некоторое значение для современных пассажирских самолетов
имеет наличие перекрестных инерционных связей, обусловленных
весовой компоновкой самолета (распределением масс).
Перекрестные инерционные моменты учитываются теми членами
уравнений системы (1.23), которые равны произведению угловых
скоростей вращения самолета относительно осей ОХ, ОУ, OZ на
разность моментов инерции:
мхку=(1у-^,,=(4-/>a; МгипИЛ-4Н“х-
(22. 2)
Инерционные моменты, описываемые равенствами (22.2), всег-
да являются дестабилизирующими. Например, если самолет вра-
щается вокруг оси, проходящей через центр масс самолета и парал-
лельной вектору скорости, то центробежные силы, возникающие при
вращении, приводят к появлению момента, стремящегося увеличить
угол между осью вращения и осью ОХ. У маневренных самолетов
инерционные моменты при возрастании угловой скорости вращения
могут стать больше аэродинамических восстанавливающих момен-
тов, что приведет к общей потере устойчивости самолета.
У пассажирских самолетов перекрестные связи могут заметно
влиять на полет только при выполнении весьма энергичных манев-
ров, не предусмотренных правилами эксплуатации для этого клас-
або
§ 22.2. Особенности аэродинамики самолета
при полете на больших углах атаки
Углы атаки в полете регламентируются правилами летной экс-
плуатации, поэтому выход самолета на большие углы атаки, близ-
кие к критическим, а тем более на закритические углы атаки воз-
можен лишь как непреднамеренный, обусловленный непредвиден-
ными обстоятельствами, такими как полет на скоростях, близких к
минимальным, при взлете, посадке, уходе на второй круг, криволи-
нейном полете с перегрузкой пу>1, попадании самолета в зону по-
вышенной турбулентности атмосферы с интенсивно восходящим по-
рывом воздуха, при отказе в работе указателя скорости, отказе дви-
гателя, системы управления и т. д. В область больших углов атаки
можно попасть в результате ошибки пилотирования, например при
перетягивании ручки управления на себя с выводом самолета на
закритические углы атаки с потерей скорости.
Аэродинамические характеристики крыла и самолета в целом на
больших углах атаки резко отличаются от аэродинамических харак-
теристик на эксплуатационных режимах: снижаются несущие свой-
ства и уменьшается эффективность органов управления. В соответ-
ствии с нормами летной годности имеется комплекс требований к
аэродинамическим характеристикам самолетов в этих областях.
При выходе на большие (околокритические) углы атаки появ-
ляются различные предупреждающие признаки, например аэроди-
намическая тряска конструкции и органов управления, покачива-
ния с одного полукрыла на другое. Причинами этих признаков яв-
ляется зарождающийся срыв потока. При срыве струи воздушного
потока перестают следовать вдоль контура обтекаемого тела, со-
здают большую возмущенную волну за телом и приводят к резкому
изменению распределения давления по сравнению со случаем без-
отрывного обтекания. Срыв потока появляется при сравнительно
небольших углах атаки (10—13°) и сначала имеет местный харак-
тер. Постепенно по мере увеличения углов атаки зона срыва рас-
пространяется вдоль размаха и хорды крыла. Отрыв пограничного
слоя возникает в той части по размаху крыла, где коэффициент
подъемной силы сечения достигает значения Су сечтах. Место воз-
никновения срыва и дальнейшее развитие срывной зоны зависит
от геометрических характеристик крыла: формы крыла в плане,
формы профиля, крутки, удлинения. У прямых и трапециевидных
крыльев с малым сужением срыв появляется в корневых сечениях,
распространяясь к концевой части крыла; у трапециевидных с
13 776 зб!
0,26раб
'х-0, с73оад
ра,
CL
<х=О,244 рад
'*=0,318,оад
Рис. 22.2. Характер развития срыва на
крыле самолета Ил-62 при торможении:
а—механизация выпущена; б—механизация
убрана
<*=0,279рад
большим сужением, у стре-
ловидных и треугольных
крыльев — в концевых сече-
ниях, распространяясь к
корневой части.
Появление развитых об-
ластей срыва на крыле при-
водит к сваливанию само-
лета.
В зависимости от харак-
тера изменения углов танга-
жа и крена различают сва-
ливание на нос (движение
тангажа), сваливание на
крыло, при котором преоб-
ладающим является враще-
ние крыла относительно про-
дольной оси (движение кре-
на) и сваливание по спира-
ли (спиральное движение).
Сваливание на нос является наиболее благоприятным, так как в
этом случае самолет может набрать скорость и выйти из режима
сваливания.
Анализ развития срыва на крыле Ил-62 при торможении с вы-
пущенной и убранной механизацией (рис. 22.2) показывает, что,
как правило, здесь срыв потока начинается в срединной части кры-
ла и развивается влево, вправо и вперед к передней кромке по ме-
ре увеличения угла атаки. Подъемная сила крыла на углах атаки
0,31—0,35 рад начинает уменьшаться. В крейсерской конфигурации
при угле атаки выше 0,174 рад производная Суа несколько умень-
шается. Вследствие даже небольшой асимметрии в развитии отрыва
на стреловидном крыле может возникнуть значительный по вели-
чине момент, приводящий к крену самолета (сваливание на крыло),
одновременно эффект использования элеронов уменьшается. Увели-
чение сопротивления крыла в зоне отрыва пограничного слоя при-
водит к появлению момента рыскания.
Поведение самолета при дальнейшем увеличении угла атаки во
многом зависит от быстроты развития срыва потока по размаху
крыла. Может оказаться, что самолет с прямым крылом будет сва-
ливаться на крыло энергичнее, чем со стреловидным, потому что
срывной режим обтекания быстрее развивается по размаху у пря-
мого крыла. Это явление можно объяснить, анализируя распреде-
ление коэффициента давления по хорде в различных сечениях кры-
ла (рис. 22. 3) и вторичное течение в пограничном слое.
В сечениях прямого крыла (см. рис. 22. 3, а) с развитым отры-
вом разрежение в носовой части уменьшается, а в кормовой — уве-
личивается, что приводит к возникновению в носовой части течения
от зоны отрыва к зоне безотрывного обтекания, а в кормовой —
к возникновению обратного течения. Такой характер вторичного те-
362
Рис. 22.4. Изменение распределе-
ния давления по хорде крыла в
процессе срыва:
1 — приближение к срыву; 2 — при сры-
ве; 3 — нормальный полет
Рис. 22.3. Взаимное влияние .потоков возду-
ха б сечениях с отрывным и безотрывным
обтеканием прямого крыла (я) и стрело-
видного (б):
1t-эпюры распределения давления; 2—эпюра ско-
рости течения по размаху в пределах погранич-
ного слоя
чения ускоряет развитие отрыва вдоль размаха крыла. Отрыв мо-
жет быть достигнут даже в тех сечениях, где коэффициент подъем-
ной силы еще невелик. Кроме того, разрушение пика разрежения и
характерное изменение распределения давления вдоль хорды крыла
(рис. 22.4) приводят к созданию пикирующего момента.
У стреловидного крыла зона срывного режима обтекания дви-
жется навстречу набегающему потоку (рис. 21. 3,6), что замедляет
распространение зоны отрыва пограничного слоя. Развитие зоны от-
рыва у стреловидного крыла вдоль размаха происходит гораздо
медленнее, чем у прямого.
В результате отрыва потока на концах стреловидного крыла,
выдвинутых назад, подъемная сила уменьшается, в то время как в
корневых сечениях она еще продолжает расти. Это приводит к сме-
щению центра давления вперед, а затем к возникновению кабриру-
ющего момента, увеличивающего угол атаки. Смещение центра
давления вперед может привести к потере устойчивости по пере-
грузке самолета со стреловидным крылом.
У самолетов со стреловидным крылом начало срыва возникает
при меньших коэффициентах аэродинамической подъемной силы,
чем у самолетов с прямым крылом (рис. 22. 5). Однако критический
угол атаки у самолетов со стреловидным крылом акр значительно
больше, чем у самолетов с прямым крылом. Величины Сутах и акр
в значительной степени зависят от геометрических характеристик
крыла и числа Re. Так применение профилированных и распростра-
ненных на большую часть размаха крыла передних наплывов у са-
молета Ил-62 позволило увеличить максимальное аэродинамиче-
ское качество, C?jmax и акр, коэффициент подъемной силы, соответ-
ствующий допустимым углам атаки, достижение которых не сопро-
вождается появлением и развитием тряски (рис. 22.6). Следует от-
метить, что использование на самолете Ил-62 геометрически закру-
13*
363
Рис. 22.5. Характер изменения протекания
зависимости Cy=f(a) .при скольжении у
самолетов с нестрел обидным и стреловид-
ным крылом
Рис. 22.6. Влияние положе-
ния наплыва по размаху
крыла и его .профилировки
на характеристики самоле-
та при 'больших углах ата-
ки:
1 — модифицированный нап-
лыв; 2—исходный наплыв; 3—
без наплывов на передней кром-
ке крыла
ценного стреловидного крыла с наплывами позволило также обес-
печить сохранение устойчивости самолета по перегрузке на боль-
ших углах атаки, поскольку такая компоновка крыла привела к то-
му, что срыв потока теперь располагается в средней части крыла,
ближе к центроплану, а концевые сечения обтекаются безотрывным
потоком до максимально возможных углов атаки.
Скольжение в большой мере сказывается на аэродинамических
характеристиках стреловидного крыла чем прямого (см. рис. 22.5).
Если срыв потока зарождается на обеих половинах крыла сим-
метрично, то с увеличением угла атаки возникают симметричные
потери подъемной силы крыла, что приводит к сваливанию само-
лета на нос, при этом ас~«Кр. Очевидно, что при несимметричном
развитии областей срыва на полукрыльях самолета, самолет будет
сначала накреняться, что приведет к сваливанию самолета на кры-
ло, а затем опусканию носа самолета. Такие сваливания, как уже
отмечалось, происходят обычно при углах атаки, меньших аКр> т. е.
Ис<СС1кр.
Самолет должен располагать средствами предупреждения о при-
ближении срыва, распознавания режима срыва и обеспечения выхо-
да из режима сваливания. Возможность предупреждения срыва
можно обеспечить либо аэродинамическими средствами, либо авто-
матическими устройствами.
У самолета со стреловидным крылом и высокорасположенным
горизонтальным оперением и двигателем, расположенные в хвосто-
вой части, имеются две особенности, отличающие эти самолеты от
364
Перед сва,ли.Вани.ем
Рис. 22.7. Влияние вихревой
спутной струи крыла на эф-
фективность горизонталь-
ного оперения реактивного
транспортного самолета с
Т-образиым оперением
Рис. 22.8. Аэродинамический гистерезис
на больших углах атаки:
а—характер зависимости коэффициента подъ-
емной силы от угла атаки при увеличении
(Су пр) и уменьшении (Су обр) утла атаки;
Да
б— -*--прямой ход (увеличение а; --->0);
At
Да
ч------обратный ход (уменьшение а;----<0)
самолетов с обычной схемой. Этими особенностями являются ха-
рактерное изменение момента тангажа и уменьшение эффективно-
сти горизонтального оперения при срыве. Начиная со скорости
1,4 Vc до скорости сваливания пилотажные характеристики само-
лета со стреловидным крылом аналогичны характеристикам само-
летов обычной схемы, за исключением того, что высоко расположен-
ный стабилизатор на этих режимах сохраняет свою эффективность,
т. е. не попадает в аэродинамический след от крыла. В момент сва-
ливания вихревая пелена сходит со стреловидного крыла и попадает
на высоко расположенное горизонтальное оперение (рис. 22.7).
В этом случае эффективность горизонтального оперения уменьша-
ется, появляется кабрирующий момент и самолет продолжает уве-
личивать угол тангажа — теряет устойчивость по перегрузке. В ре-
зультате самолет углубляется в область срыва, сопровождающегося
уменьшением Су, увеличением Сх и ростом вертикальной скорости
снижения.
При выводе самолета из сваливания пилот должен энергичным
отклонением ручки (штурвала) от себя уменьшить угол атаки. Па-
рирование сваливания отклонением элеронов или рулем направле-
ния не только не дает эффекта, но может привести к штопору. По-
этому при выходе на угол атаки а>аДОп, необходимо оставить эле-
роны в нейтральном положении, а рулем направления не допус-
кать скольжения.
С аэродинамическим гистерезисом на больших углах атаки,
близких к акр, связаны некоторые особенности при выходе на ре-
жим сваливания.
В этих условиях при одном и том же угле атаки аэродинамиче-
ские характеристики оказываются различными. Все зависит от то-
365
г», как осуществляется выход па этот угол атаки: со стороны боль-
ших углов атаки (обратный ход) или со стороны меньших (прямой
ход), рис. 22. 8.
Как известно, величина гистерезиса зависит в значительной сте-
пени от компоновки крыла и скорости изменения угла атаки. Сва-
ливание при плавном торможении до К< Клоп горизонтального по-
лета существенно отличается от сваливания при больших скоростях
полета с превышением угла адоп (при маневре, или в результаге-
порыва ветра).
Наиболее резкое сваливание с большими углами крена и тан-
гажа происходит на высотах менее 1000 м при числах М>0,75. Бо-
лее плавное сваливание происходит на высотах более 1 1000 м и при
меньших числах М.
Так, например, на самолете Ту-144 на больших высотах (около
12000 м) при приближении к минимальной скорости с убранным
шасси и закрылками появляются признаки тряски. На скорости
250—275 км/ч появляется тряска всего самолета, которая предше-
ствует сваливанию.
С изменением высоты изменяются угловые скорости их и юг при
сваливании (на больших высотах значения (охтах достигают
11 град/с, a cozmax~3,5-4-4 град/с; на малой высоте угловые скоро-
сти крена и тангажа равны 50 и 9 град/с соответственно).
§ 22.3. Самовращение крыла на больших углах атаки
Способность самолета входить при определенных условиях в ре-
жим устойчивого вращения относительно некоторой оси связано с
особым свойством крыла, называемым самовращением (авторота-
цией).
Самовращение во многом зависит от коэффициентов аэродина-
мической нормальной и продольной сил, от углов атаки и скольже-
ния, от формы крыла в плане.
Предположим, что при угле атаки а самолету сообщена угловая
скорость (o.v (путем отклонения элеронов и руля направления). При
этом вследствие изменения условий обтекания из-за наложения
вращательного движения появится спиральный заворачивающий
момент, а значит и угловая скорость
Если их и соу имеют противоположные знаки (рис. 22.9), то
мгновенная ось вращения, совпадающая с угловой скоростью
<о = ]/'о>2 будет повернута относительно продольной оси по
часовой стрелке на угол Де, определяемый из условия
tg Дг=<»,
с> ух
Очевидно, если и ыу имеют одинаковые знаки, то Де>0 и
М1новенная ось вращения будет развернута против часовой
стрелки (см. рис. 22.9). В зависимости от расположения мгновен-
ной оси вращения относительно осп ОХ„ скоростной системы коор-
динат в начале вращения будет иметь место скольжение на опуска-
ющееся крыло при Де<а; скольжение будет отсутствовать при
366
Рис. 22.9. Схема вращения са-
молета при разных (а) и оди-
наковых (б) знаках угловых
скоростей С0х и
Рис. 22.10. Аэродинамические
характеристики прямого кры-
ла на больших углах атаки
—Де=а. При Де>0 скольжение при любом а>0 возрастает при
вращении. Для прямого крыла при докритических углах атаки вра-
щение относительно оси ОХ вызывает спиральный момент рыска-
ния, по знаку совпадающий с сож. В этом случае положение мгно-
венной осп вращения соответствует рис. 22. 9, б, т. е. при вращении
появляется скольжение на опускающемся крыле. На закритических
углах атаки знаки сох и а>у противоположны, т. е. положение мгно-
венной оси вращения соответствует схеме на рис. 22. 9, а. В этом
случае самолет имеет тенденцию войти в более глубокую спираль.
При несовпадении мгновенной оси вращения с осью ОХа скоро-
стной системы координат в зависимости от степени поперечной и
флюгерной устойчивости появляются стабилизирующие (препятст-
вующие вращению относительно оси ОХ) или дестабилизирующие
(способствующие увеличению скорости вращения) моменты крена
и рыскания.
Зависимость коэффициента нормальной силы прямого крыла
Су от угла атаки в связанной системе координат (рис. 22.10) тако-
ва, что при закритических углах атаки ее величина сначала умень-
шается (зона II), а затем снова возрастает (зона III), но несколь-
ко медленнее, чем при докритических углах атаки (зона /). Такой
характер зависимости Cv=f(a) приводит к тому, что если самолет
по какой-либо причине приобретает угловую скорость ®т, то в зави-
симости от исходного угла атаки и величины на самолет может
действовать либо демпфирующий, либо вращающий момент крена.
Вследствие вращения самолета вокруг продольной осп угол
атаки опускающегося полукрыла увеличивается, а угол атаки под-
нимающегося полукрыла уменьшается пропорционально угловой
скорости вращения. В зависимости от величины и знака момента
крена, обусловленного изменением углов атаки, можно выделить
.367
Рис. 22.11. Схема для определения зон самовращения:
а-~демпфирование; б—самовращение; е—скрытое самовращение
три характерных случая в поведении самолета, каждый из которых
соответствует определенному диапазону углов атаки.
1. Если самолет получит вращение при угле атаки 0<а<акр
(рис. 22.11, а), то коэффициент нормальной силы опускающегося по-
лукрыла больше коэффициента нормальной силы поднимающегося
полукрыла (Сг/0п>Сг/п0д). В этом случае возникает демпфирующий
момент, который препятствует вращению.
2. Если угол атаки таков, что режимная точка находится на
опускающейся части кривой Cy—f(a) (см. рис. 22.11, б), то при
малой величине начальной угловой скорости вращения коэф-
фициент Суоп меньше Су110Л. В этом случае возникает направлен-
ный в сторону вращения момент, под действием которого угловая
скорость увеличивается до тех пор, пока коэффициент нормальной
силы правого и левого полукрыльев не сравниваются. В этом слу-
чае вращение будет установившимся СуОп.уст=Супод.уст, а углы
атаки опускающегося аоп.уст и поднимающегося аПод. уст полукрыль-
ев будут постоянны. Угловая скорость установившегося самовра-
щения обычно определяется экспериментально. Разным исходным
углам атаки будут соответствовать разные угловые скорости уста-
новившегося самовращения. Диапазон углов атаки, при котором
малейшее начальное вращение является причиной возникновения
вращающегося момента, называется зоной самовращения.
3. Если закритические углы атаки соответствуют восходящей
ветви зависимости Cy=f(a), то, на первый взгляд, самовращение
самолета невозможно. Однако это справедливо только для малых
исходных угловых скоростей ax=f(a). С увеличением скорости вра-
щения точка, соответствующая углу атаки поднимающегося полу-
крыла, попадает на нисходящую ветвь и может возникнуть ситуа-
ция, при которой Су0Л=Сутюд (угловая скорость при этом ацд).
Если теперь увеличивать скорость вращения, то при Су Оп<С’г/Под
возникает момент самовращения. Дальнейшее увеличение скорости
вращения приводит к тому, что угол атаки поднимающегося крыла
становится меньше критического и Су ПОд начинает быстро умень-
шаться, в то время как Суот! растет. При некотором новом значе-
нии угловой скорости (£)х2 коэффициенты нормальной силы левого
и правого полукрыльев снова сравниваются (см. рис. 22. И, в).
Таким образом, область режимов самовращения заключена
между двумя значениями угловой скорости оы и (ож2- Диапазон уг-
368
лов атаки, в котором область самовра-
щения ограничена по величине угловой
скорости сверху и снизу, называется зо-
ной скрытого самовращения. Если для
каждого угла атаки определить угловые--
скорости установившегося самовращения,
то можно построить график зависимости
Qr=f(a) (рис. 22. 12), называемый ха-
рактеристикой самовращения. Пункти-
ром показаны режимы неустойчивого са-
мовращения. Обычно из двух возможных
угловых скоростей на практике реализу-
ется большая.
Большое влияние на характеристики
Рис. 22.12. Характеристики
самовращения прямого кры-
ла:
/—скольжение отсутствует; 2-~
внешнее скольжение; 3—виут-«
реннее скольжение
самовращения оказывает скольжение.
Обычно скольжение на опускающееся полукрыло называют внут-
ренним, а на поднимающееся-—внешним. Это терминология объ-
ясняется тем, что в свободном полете самолет обычно разворачива-
ется в сторону опускающегося полукрыла, которое как бы находит-
ся внутри дута траектории, описываемой центром масс самолета.
При скольжении зоны отрыва смещаются в сторону отстающего
полукрыла. По этой причине при скольжении устойчивого в попе-
речном отношении самолета создается дополнительный момент
крена, который при внешнем скольжении увеличивает, а при внут-
реннем уменьшает угловую скорость вращения (см. рис. 22. 12).
Скольжение является мощным средством изменения характеристик
самовращения крыла.
Рассмотрим теперь особенности самовращения стреловидного
крыла, отличающегося от прямого как аэродинамическими харак-
теристиками, так и различным влиянием скольжения на эти харак-
теристики.
У стреловидного крыла кривые зависимости Суа—f(a) и Су—
=f(a) (рис. 22. 13) более плавные, чем у прямого. Максимум на
Рис. 22.13. Аэродинамические
характеристики стреловидно-
го крыла на больших углах
атаки
Рис. 22.14. Характеристики са-
мовращения стреловидного
крыла:
/—скольжение отсутствует; 2—
внешнее скольжение, ₽=0Л рад;
3—внешнее скольжение, р=л/6 рад
36').
Рис. 22.15. Влияние
скольжения иа поло-
жение зон отрыва
стреловидного крыла:
I—а=0,2 рад; II—а~
—0,3 рад, левое враще-
ние; III—cz—0,4 рад, левое
вращение; IV— а=0,5 рад,
правое вращение; V—
0—0,7 рад, левое враще-
ние
кривой Cy=f(u) выражен нечетко, поэтому
при небольшой исходной угловой скорости
разность между коэффициентами нормальной
силы опускающегося и поднимающегося
крыльев мала либо практически даже равна
нулю и зона самовращения сравнительно не-
велика (рис. 22. 14). Самовращение оказы-
вается слабым, а в некотором диапазоне за- -
критических углов атаки вообще отсутствует.
При скольжении зона самовращения су-
щественно изменяется. В небольшом началь-
ном скольжении самолета на разных углах
атаки может изменяться как величина угло-
вой скорости вращения, так и его направле-
ние. Столь сложный характер поведения стре-
ловидного крыла объясняется совместным
влиянием угла атаки и угла скольжения на
положение зон отрыва пограничного слоя.
Отрыв пограничного слоя возникает на от-
стающем полукрыле (рис. 22. 15), что ускоря-
ет вращение в сторону этого полукрыла. Затем
срыв появляется на полукрыле, выдвинутом
вперед, причем развитие зоны опережает ана-
логичный процесс на отстающем полукрыле.
Вращение замедляется, прекращается и, нако-
нец, когда все выдвинутое вперед полукрыло
охвачено срывом, а на части отстающего полу-
крыла еще сохраняется некоторая область без-
отрывного обтекания, начинается вращение в
другую сторону. На рис. 22. 14 вращение в про-
тивоположную сторону отражено частью кри-
вой 2, расположенной ниже оси абсцисс. При дальнейшем увеличе-
нии углов атаки отрыв пограничного слоя захватывает всю поверх-
ность крыла, поэтому вследствие скольжения момент крена направ-
лен в сторону отстающего крыла и восстанавливает первоначальное
направление вращения. При больших углах скольжения (кривая 3
на рис. 22. 14) направление вращения может быть неизменным.
Таким образом, характеристики самовращения стреловидного
крыла существенно отличаются от характеристик самовращения
прямого крыла и в большей степени зависят от сочетания углов
атаки и скольжения. Самовращение стреловидного крыла в отли-
чие от прямого при скольжении может начаться на угле атаки,
значительно меньшем критического (угол атаки может уменьшать-
ся на 20—30% от исходного).
Поведение самолета на больших углах атаки значительно слож-
нее, чем изолированного крыла, что объясняется, во-первых, взаим-
ным влиянием частей самолета; во-вторых, тем, что при свободном
полете эволюции самолета сложнее и богаче, чем поперечное вра-
щение в рабочем участке аэродинамической трубы.
370
5 22.4. Штопор самолета
Способность крыла к самовращению (авторотации) является основной при-
чиной штопора самолета. Штопором называется движение самолета по крутой
спирали, возникающее при полете на закрптических углах атаки, сопровождаю-
щееся вращением вокруг всех трех осей и частичной пли полной потерей управ-
ляемости самолетом. Опасность попадания самолета в штопор заключатся в боль-
шой потере высоты от входа в штопор до выхода из него. Для вывода из штопо-
ра требуются большие и резкие отклонения органов управления.
Долгое время причины входа самолета в штопор оставались неизвестными,
поэтому не были отработаны и методы выведения самолета из штопора. Первая
удачная попытка преднамеренного входа в штопор была предпринята в 1916 г.
русским летчиком К. К. Арцеуловым. Однако ввиду сложности явлений, сопро-
вождающих штопор, полет Арцеулова и попытки других летчиков, не смогли
дать решения основных проблем, связанных с выводом самолета из штопора п
его предупреждения. Лишь в конце 20-х годов профессор В. С. Пышнов дока-
зал. что основной причиной штопора является авторотация крыла. Теоретический
анализ в сочетании с экспериментальными исследованиями штопора летчиками-
испытателями М. М. Громовым, В. А. Степанчонком, В. П. Чкаловым и другими
дали возможность отработать '.методы управления самолетом в штопоре.
Штопор самолета начинается на больших углах атаки с последующим сва-
ливанием самолета. Как уже отмечалось, у самолетов с прямым крылом угол
атаки при сваливании ас мало отличается от критического угла атаки, причем
самолет обычно сваливается на крыло с опусканием «оса. Самолет со стрело-
видным крылом может сваливаться на крыло при углах атаки, существенно
меньше критического, если срывноп режим обтекания несимметричен, что воз-
можно при скольжении. Отклонение элеронов и руля направления могут приве-
сти к резкому крену и скольжению. Вероятность выхода на режим сваливания
для самолетов со стреловидным крылом, особенно для сверхзвуковых самолетов,
больше чем для самолетов старых компоновок. Это связано с увеличением прак-
тически минимальной скорости из-за возросших высот полета и больших удель-
ных нагрузок на крыло. В этих условиях сжимаемость среды оказывает суще-
ственное влияние на аэродинамические характеристики при минимальной скоро-
сти полета, угол атаки </.с заметно уменьшается, поэтому полет выполняется на
углах атаки, близких к углу ас.
Сваливание самолета само по себе не означает неизбежного попадания са-
молета в штопор. Если пилот, энергично отклоняя руль высоты, опустит нос са-
молета и тем самым уменьшит угол атаки, то самолет выйдет на режим сниже-
ния п при запасе высоты его будет нетрудно вернуть к горизонтальному
режиму полета. Самолет входит в штопор только в том случае, если не удалось
избежать выхода на режим самовращения (авторотации). При вращении самоле-
та появляются инерционные моменты. С течением времени может наступить рав-
новесие аэродинамических и инерционных моментов, аэродинамических и мас-
совых сил, что свидетельствует об установившемся режиме штопора. В устано-
вившемся штопоре самолет будет двигаться по вертикальной спирали.
Различают устойчивый и неустойчивый штопор. Для неустойчивого штопора,
наблюдаемого практически только на больших высотах, характерно значительное
изменение углов атаки, крена, тангажа п скольжения, а также угловых скоростей
как по величине, так и по знаку. В устойчивом штопоре направленные вращения
ио <ох ц сои не изменяются, хотя по величине угловые скорости могут быть пе-
ременными.
Когда угловые скорости вращения будут практически постоянны, устойчивый
штопор с течением времени может перейти в установившийся.
При входе самолета в штопор из горизонтального полета весь процесс от
входа самолета в штопор до возвращения к горизонтальному полету можно раз-
бить на ряд этапов, показанных на рис. 22.16. На переходном участке штопор
«бычно устойчив, но неустановившипся. В конце переходного участка ось што-
пора практически вертикальна. Переходной участок сверхзвуковых самолетов
оказывается настолько протяженным, что пилот успевает вывести самолет из што-
пора до начала его вертикального участка.
Вертикальный штопор наблюдается в основном у дозвуковых самолетов, при-
мем в> пределах вертикального участка возможен установившийся штопор.
371
Рис. 22.16. Схема, иллюстрирующая положения
самолета на входе в штопор и в штопоре:
а—сваливание в (нормальном полете с переходом в нор-
мальный штопор; б—сваливание в перевернутом полете
и переходном в перевернутый штопор
Режим штопора делят на нормальный и перевернутый. Нормальный што-
пор протекает при положительных закритических углах атаки самолета, пере-
вернутый — протекает при отрицательных закритических углах атаки.
Величина коэффициента аэродинамической силы стреловидного и прямого
крыльев при отсутствии скольжения CR в штопоре меняется сравнительно мало
(ряс. 22.17), так как на закритических углах атаки уменьшение коэффициента
подъемной силы С11а обычно в значительной степени компенсируется возраста-
нием коэффициента лобового сопротивления Сха.
В штопоре наличие двух колебаний, происходящих с весьма близкими час-
тотами, может привести к биению. Взаимодействие аэродинамических и инерци-
онных моментов и сил при нелинейных зависимостях аэродинамических коэффи-
циентов от углов атаки и скольжения может привести к резким изменениям па-
раметров движения самолетов и вызвать (периодические выходы самолета на
большие критические и малые докритические углы атаки с периодическими само-
произвольными остановками вращения и даже переходом самолета из штопора
одного направления в штопор другого направления, т. е. появление движения
самолета типа падения «листом».
Наиболее простой режим штопора вертикальный установившийся можно,
хотя и довольно приближенно, описать теоретически, что позволяет выполнить
весьма полезный анализ и на его базе выработать рекомендации пилоту о выво-
де самолета из штопора. При анализе вертикального установившегося штопора
полагают, что тяга двигателя равна нулю, плотность воздуха с изменением вы-
соты не меняется, а аэродинамическая сила Ел лежит в плоскости симметрии.
Обозначив угол между вертикалью и осью ОХ через <р, а угловую скорость вра-
щения самолета относительно вертикальной оси через со (рис. 22.18), для проек-
ции угловой скорости на координатные оси получим
<лу = ы sin у; ых~ — <о cos у; = 0. (22.3)
372
Рис. 22.17. Зависимости
Сио=/(а) и С/?л=/(а)
для .самолетов с прямым (!)
и стреловидным (2) крылом
(13=0)
Рис. 22.18. Схема сил,
действующих на самолет
в вертикальном устано-
вившемся штопоре
В вертикальном штопоре траектория движения центра масс близка к верти-
кали, поэтому можно положить <р^а. Условия балансировки аэродинамических
и инерционных моментов с учетом соотношений (22.2) можно записать в виде
Мх = 0» Му = 0, Mz — (Iу — 7х) <tijMy = 0.
Используя для со* и <>>у выражения (22.3), получим
MZH„ = (Iy — Ix) — Sin 2а. (22.4)
В установившемся штопоре аэродинамический момент тангажа должен
быть равен инерционному 'моменту, взятому с обратным знаком.
Уравнения сил удобнее записать -в цилиндрической системе координат (см.
рис. 22.18):
/?А sin а = mg; cos а — muSr, (22.5)
где г — расстояние центра масс самолета до оси штопора; 7?л— аэродинамиче-
ская сила, направленная вдоль нормальной оси самолета, поскольку на закрити-
ческих углах атаки продольная сила мала.
Из первого уравнения системы (22.5) можно определить перегрузку в цент-
ре масс самолета:
Яа 1
п =-----=------.
mg sin а
Чем больше угол а, тем меньше перегрузки. При а=О,6...О,8 рад (крутой
штопор) п=2...1,5; при а=1,8...1 рад (пологий штопор) п=1,5...1,1.
Введя коэффициент аэродинамической силы, из первого же уравнения сис-
темы (22.5) можно найти скорость самолета
у = '\r2mglSQCRk sin а = ]f2mgn/SQCRA.
В первом приближении для закритических углов атаки можно считать, что
^/?А = С„ max. Тогда, принимая во внимание соотношение (3.15), получим
V=VmIn/^ (22.6)
Значит, чем меньше перегрузка при штопоре, тем ближе скорость к мини-
мальной. Почленным делением первого уравнения системы (22.5) на второе мож-.
по определить радиус штопора
/ = ~ctga. ' (22.7)
й)2
Рис. 22.19. Схема для определе-
ния угла атаки в установив-
шемся штопоре
Рис. 22.20. Влияние сколь-
жения на условия вывода
самолета из штопора:
а—скольжения нет; б—впут-
реннее скольжение
Время выполнения одного витка
t — 2л/ы,
тогда потеря высоты за один виток
Н = Vt = — =----------- УШ|П .
со оо
(22.8) .
При <о=0,5 рад/с, п^1 и Vmin=100 м/с потеря высоты за виток будет no-
ir
рядка 1250 м. Величину радиуса штопора можно оценить, положив а=~—:
колучим real0 м. Сопоставляя этот результат с потерей высоты за один виток,
придем к выводу, что в вертикальном штопоре самолет движется по очень вытя-
нутой спирали.
Для определения угла атаки а можно воспользоваться уравнением (22.4),
левая часть которого представляет собой аэродинамический момент тангажа, а
правая — инерционный момент.
Разделив обе части уравнения на qSbx н введя безразмерные величины
ы/ - 4(/у —Zv)
“ = Iv ’ tz = (2£е\ ’ >
получим уравнение (22.4) в виде
mz = Zzco2 sin 2а. (22.9)
Здесь правую часть можно назвать коэффициентом инерционного момента
пн. Зависимости величин коэффициентов моментов от углов атаки приведены
на рис. 22.10 и 22.13.
Для определения коэффициента инерционного момента в зависимости от уг-
ла атаки можно воспользоваться характеристикой авторотации (см. рис. 22.14),
учитывая при этом, что величина <о, входящая в выражение (22.4), определяется
при известных и еъ, из условия
о 2 । 2
График зависимости гп2ЯН=/(а-) показан на рис. 22.19. В общем случае ус-
ловие ,—mt=mZUH выполняется в двух точках, соответствующих углам атаки
«1 и а2 (точки Ки£).В точке К равновесие моментов неустойчиво, так как при
случайном отклонении угла атаки от О; результирующий, .момент будет стимули-
ровать увеличение этого отклонения.
Чтобы вывести самолет из штопора, необходимо прекратить самовращение
самолета, уменьшить угол атаки и перевести самолет в режим пикирования, из
374:
которою после увеличения скорости полета самолет можно перевести в режим
горизонтального полета.
Часто для вывода самолета из штопора необходимо предварительно создать
внутреннее скольжение. В этом случае вследствие скольжения возникает момент
крена, тормозящий вращение, инерционный момент тангажа уменьшается (рис.
22.20) и энергетического отклонения руля высоты будет достаточно для опуска-
ния носа самолета с последующим переходом в пикирование.
Остановить вращение путем отклонения элеронов обычно невозможно, а ино-
гда и опасно. При больших углах атаки элероны охвачены зоной отрыва погра-
ничного слоя, поэтому они 'неэффективны для создания момента крена и влия-
ют на поведение самолета в штопоре в основном благодаря тому, что разное
сопротивление левого и правого полукрыльев при отклонении элеронов создает
момент М„, который может привести к внутреннему или внешнему скольжению.
Наиболее надежно замедляется вращение путем отклонения руля направления
«против штопора» для создания внутреннего скольжения.
Поведение самолета при входе в штопор и выходе из него изучается как в
стадии проектирования .на .моделях, так и в летных испытаниях. Наилучшим бу-
дет самолет, который хуже входит в штопор и легче из него выходит. Известны
самолеты, которые из штопора выходят «сами», если рули установить в нейт-
ральное положение.
Вопросы для повторения
1. Что такое перекрестные связи?
2. Какие причины вызывают выход самолета на большие углы атаки?
3. Какие причины вызывают появление так называемой предупредительной
тряски у самолетов со стреловидным крылом?
4. Чем отличаются характеристики самовращения прямого и стреловидного
крыльев?
5. Почему в зоне скрытого самовращения устойчивым будет самовращение
с большой угловой скоростью?
6. Почему элероны могут оказаться неэффективными для вывода самолета
из штопора?
Задача
Определите проекции перекрестного гироскопического момента двигателя,
воспользовавшись формулой (22.1), в предположении, что угол фдв достаточно
большой.
Ответ: Л!гиР х— /pwpwz sin <р |П,
Л4гир У~ cns ? n >
AlrHPZ = IРЫР (<cf/ ?л»)‘
Глава 23
Принципы контроля режимов летной
эксплуатации самолета
§ 23.1. Принципы регистрации параметров полета
и их расшифровка
На всех современных самолетах устанавливаются системы ре-
гистрации параметров полета. Наибольшее распространение полу-
чили магнитные системы регистрации, в которых сигналы от датчи-
ков параметров движения (высоты, скорости, угловых скоростей,
перегрузок и др.), преобразованные в аналоговые сигналы — на-
пряжения, записываются на магнитной ленте. Эти записи исполь-
зуются для:
контроля соответствия пилотирования и эксплуатации самоле-
та руководящим документам;
контроля работоспособности систем самолета;
анализа причин летных происшествий и предпосылок к ним;
накопления статистических данных полетов для составления ру-
ководящих документов и внесения изменений в них;
оценки пилотирования и поведения самолета в особых ситуа-
циях;
учебных целей при контроле подготовки летного состава.
Систематическое изучение материалов регистрации параметров
полета в обычных и особых ситуациях является одним из важных
направлений дальнейшего повышения безопасности полетов.
На пассажирских самолетах используются магнитные системы
регистрации параметров полета. Самописец позволяет вести непре-
рывную запись двенадцати и более параметров полета и столько
же разовых сигналов, отражающих некоторые управляющие дей-
ствия пилота или состояние отдельных систем самолета. Лентопро-
тяжный механизм системы помещается в удароустойчивом контей-
нере. Записи ведутся таким образом, что сохраняется информация
только 20—70 последних минут полета. Воспроизведение записей
осуществляется с помощью специального декодирующего устрой-
ства ДУМС и выдается в виде фотолент, содержащих записи пара-
метров движения по времени полета. Дальнейшая обработка ин-
формации осуществляется вручную с помощью тарировочных гра-
фиков и шаблонов, либо автоматически с использованием системы,
состоящей из цифровой и аналоговой ЭВМ.
Такая технология расшифровки записей параметров полета при-
водит к заметным погрешностям, особенно по таким параметрам,
как скорость и высота полета. Точность определения значений па-
раметров движения зависит от точности датчиков параметров дви-
376
женпя, погрешности регистрации аналоговых сигналов на магнит-
ной ленте (у современных самописцев эта погрешность не превыша-
ет 2%), погрешностей, допускаемых при декодировании записей на
магнитной ленте с помощью ДУМС, технологии обработки осцил-
лограмм. Разработана специальная технология декодирования и
обработки осциллограмм для получения наименьших систематиче-
ских погрешностей при определении параметров полета.
Самолеты гражданской авиации оборудованы магнитными само-
писцами. Выбор регистрируемых параметров полета и оценка со-
стояния агрегатов самолета, которые регистрируются системой
магнитных самописцев, производятся в зависимости от типа само-
лета, но такие важные параметры как скорость, высота, нормаль-
ная перегрузка и параметры, характеризующие работу двигателя,
регистрируются на всех самолетах. В качестве примера можно при-
вести перечень параметров, регистрируемых с помощью магнитного
самописца, установленного на самолете Ту-134А. На этом самолете
непрерывно записываются следующие 12 параметров: барометри-
ческая высота Яб, скорость V, нормальная пу и поперечная nz пере-
грузки, отклонения руля высоты бЕ, руля направления бн элеронов
бэ, частота вращения роторов левого и правого двигателей, поло-
жения РУД этих двигателей, угловая скорость крена <щ. Регистри-
руются также следующие двенадцать разовых команд: пожар в ле-
вой (в правой) гондоле двигателей, стружка в масле левого (пра-
вого) двигателя, вибрации левого (правого) двигателя велики, вы-
пущены закрылки, основная стойка шасси левая (правая) выпуще-
на, выключение автопилота (АП) по продольному каналу, выключе-
ние АП по боковому каналу, угол атаки велик, скорость велика.
В настоящее время используются более совершенные системы
регистрации режимов полета. Эти устройства позволяют вести од-
новременную непрерывную запись 48 параметров полета и до 32 ра-
зовых команд. Время непрерывной работы достигает 30 ч. Запись
производится с непрерывным стиранием ранее записанных сигналов
так, что на магнитной ленте всегда остается информация о режи-
мах последних 52 мин полета.
Приведенная погрешность регистрации аналоговых сигналов на
магнитной ленте (без учета погрешностей датчиков) не превыша-
ет 1,5%.
Воспроизведение в виде осциллограмм записи магнитной лен гы
производится с помощью декодирующего устройства. При этом сум-
марная погрешность может составить величину порядка 3% (без
учета погрешностей датчиков). Однако так как в этой системе ана-
логовые величины регистрируются на магнитной ленте 8-разрядным
параллельным импульсным двоичным кодом, то расшифровку этих
записей можно вести непосредственно через цифровую вычисли-
тельную машину, при этом суммарная приведенная погрешность
регистрации аналоговых величин снижается до 1,5%.
377
§ 23.2. Обработка результатов записи
бортовых регистраторов
Современные системы регистрации параметров полета позволяют
полностью автоматизировать с помощью ЭЦВМ обработку получен-
ной информации.
Алгоритм обработки и глубина анализа полетной информации
зависят от конкретной цели получения информации о полете. На-
практике применяются следующие основные виды анализа:
экспресс-анализ полетной информации; проводится для выявле-
ния соответствия действий экипажа и работоспособности техники
требованиям руководящих документов;
полный анализ информации, накопленной регистрирующей си-
стемой; выполняется для выявления допущенных экипажем нару-
шений руководящих документов, работоспособности техники, уста-
новления причин допущенных отклонений;
статистический (углубленный) анализ, направленный на выяв-
ление закономерностей пилотирования, выдерживания параметров
движения экипажем; проводится с целью уточнения нормативных
документов;
анализ информации при расследовании летных происшествий и
предпосылок к ним, включающий восстановление по записям пара-
метров полета траектории движения самолета в аварийной ситуа-
ции и оценку действий экипажа в этих условиях.
Требования, предъявляемые к точности определения параметров
движения, зависят от вида проводимого анализа. Если при экспресс-
анализе достаточно установить наличие или отсутствие отклонений
параметров движения от нормированных значений, а при полном
анализе — определить величины основных параметров полета и
действие экипажа, то при расследовании летных происшествий не-
обходима более глубокая и точная обработка всей бортовой и на-
земной информации о полете. В последнем случае при определении
параметров полета по записям на магнитной ленте вносятся все по-
правки, связанные с условиями полета и особенностями данного
самолета.
При обработке данных бортовых регистраторов параметров дви-
жения необходимо внести поправки к перегрузкам и скоростям, за-
писанные регистратором. Чувствительный элемент измерителя пере-
грузки представляет собой груз, подвешенный на пружине, с одной
степенью свободы, обычно это поступательное перемещение вдоль
одной из связанных осей самолета.
Рассмотрим для примера работу датчика нормальной перегруз-
ки (рис. 23. 1). Предположим, что масса груза датчика ускорений
расположена в центре масс самолета, силами трения груза о кор-
пус датчика можно пренебречь. В этом случае на груз в направле-
нии оси Оу действуют силы: сопротивлений 2hy (демпфирования), «
упругой деформации пружины ky (k —• коэффициент жесткости
пружины), составляющая силы тяжести mrcos О cos у; 21г—-коэффи-
циент демпфирования.
378
Рис. 23.1. Схема дат-
чика нормальной пе-
регрузки
Рис. 23.2. Схема датчика уг-
ловой скорости тангажа:
/—демпфер; 2—пружина
Сравнение движения груза может быть записано в виде
mvy + 2// 'у -\-ky=— mrgny. (23.1)
В состоянии равновесия имеет место равенство
ky——mTgny<.. (23/2)
Тарировка прибора производится при задании установившихся
значений перегрузки. Поэтому в соответствии с (23. 1) и (23. 2) име-
ет место следующая зависимость между фактическим значением
перегрузки пу и найденным по расшифровке записи регистрато-
ра Пу с: .
, 2/г • . k к ,
Пус~----пус~\----Чуе —— Пу (23.3)
тг тг mr J >
Отсюда определяется поправка к значению пу с в виде
Ну с-] —ПуС. : '1 (23.4)
Фактор демпфирования h и жесткость пружины k определяются
из условия получения оптимального переходного процесса.
В случае несовпадения размещения датчика перегрузок с цент-
ром масс самолета в перегрузки, записанные на самописце, необхо-
димо вносить поправки на влияние угловых скоростей и" ускорений,
которые имеют вид
°пх= — — [^yzk — г/к) + (о^т/,.+wzzK) <ov — (о>|+хк];
8иг/=---— [(“Л — “Г(°>z2k + %Л) ЫУ — (“г + //к]: (23.5)
= КшлУк — <уск)4-(1'<л + им/к) и)г —(№-?-Ггк],
37*>
где х,:, ук, zK — координаты корпуса датчика перегрузок относитель-
но центра масс самолета.
В качестве датчика скорости и высоты полета используется при-
емник воздушного давления (ПВД). По величине статического дав-
ления определяется высота, а по разности полного и статического
давлений — скоростной напор. Для определения барометрической
высоты и воздушной скорости самолета в величины, полученные на
самописце, необходимо внести поправки, обусловленные:
1) неточностью измерения статического давления из-за влияния
местного поля давлений, индуцированных самолетом;
2) погрешностью измерения полного давления /?Ст. связанной с
влиянием сжимаемости или затенением ПВД, особенно при полете
с большими углами атаки;
3) запаздыванием в передаче фактического давления рп на ана-
логовый преобразователь сигналов.
Поправки на запаздывание определяются по данным летных ис-
пытаний самолетов, выполненных по специальной методике (3S1,
а. иоправки.льа.£акГ1маемос.ть — * расчоглым. путем-
Высоту и воздушную скорость полета находят по формулам
Нр=Нс-$-&На',
V=(Vc + SVа + В1/сж + ВПза„), (23.6)
где Нс и Vc — высота, скорость, записанные регистратором; 6Д.3,
бVa — аэродинамические поправки, обусловленные погрешностью
измерения рст; 6ПСЖ •— поправка на сжимаемость; 6V3an — поправка
та запаздывание; Д— относительная плотность воздуха.
Определим поправки к угловой скорости. Угловые скорости из-
меряются с помощью датчика, представляющего собой гироскоп с
двумя степенями свободы.
В качестве примера рассмотрим датчик угловой скорости тан-
гажа (рис. 23. 2). Ось вращения рамки гироскопа расположена па-
раллельно нормальной оси самолета, а ось вращения ротора гиро-
скопа — параллельно оси ОХ. При вращении самолета относительно
поперечной оси OZ с <oz>O гироскопический момент поворачивает
рамку вправо. Этому движению препятствуют моменты, создавае-
мые упругой силой пружины и демпфером. Предполагается, что мо-
ментом, обусловленным трением в подшипниках рамки гироскопа,
можно пренебречь.
Уравнение движения рамки гироскопа имеет вид
4Ф=W* — ад - ад. (23.7)
где /г •— момент инерции массы гироскопа относительно оси враще-
ния рамки; 7Р — осевой момент инерции ротора; ор— угловая ско-
рость ротора; ф — угол поворота рамки; /гп— коэффициент жестко-
сти пружины; /гд — коэффициент демпфера.
При установившемся состоянии гироскопа ф=ф=0 и рамка ги-
роскопа отклоняется на установившийся угол
380
Тарировка показания гироскопа производится по установившей-
ся угловой скорости cozc. т. е. принимается, что заданной угловой
скорости cozc соответствует определенный угол отклонения рамки.
Подставляя значение ф, определенное зависимостью (23.8),
в уравнение гироскопа (23. 7), получим
(23.9)
/Г * Г * г
Уравнение (23. 9) устанавливает связь между фактической уг-
ловой скоростью coz и ее значением, определенным по записи бор-
тового регистратора coz с. Очевидно, coz можно представить суммой:
“z— “гс + Цг»
где 8(иг = Л;2с+А4с. (23. 10)
Аналогичные поправки следует вносить и к составляющим угло-
вой скорости самолета по осям ОХ и ОУ.
Для более подробного ознакомления с поправками, которые не-
обходимо вносить в параметры, определенные по записи бортовой
регистрирующей системы, следует обратиться к работе [85].
При автоматической обработке информации внесение всех по-
правок к параметрам может быть предусмотрено в алгоритме рас-
шифровки.
§ 23.3. Определение траекторий по результатам
регистрации параметров полета
При расследовании летных происшествий иногда возникает не-
обходимость в восстановлении траектории движения центра масс
самолета и его ориентации относительно земли по записям борто-
вой регистрирующей аппаратуры. Алгоритм решения этой задачи
зависит от информации о параметрах полета, накопленной в маг-
нитном самописце. В лучшем случае должны быть записаны за до-
статочно длительный отрезок времени (лучше за весь полет) такие
параметры движения, как высота и скорость полета, перегрузки
пх, Пу, nz, углы крена у, тангажа й, рыскания ф и курсового угла ЧЛ
Предполагается, что известна и масса самолета.
Траекторию движения центра масс строим в земной системе ко-
ординатных осей. Для этого выбирается некоторое начальное время
полета. Лучше это совместить с участком полета, когда пгхп2х(}
и Такие участки всегда можно обнаружить по магнитной
записи.
Для выбранного момента времени определяем направления нор-
мальной земной системы координат. Начало координат размещаем
на земле, ось OXg направляем в соответствии с курсовым углом в
этот момент времени, OYg направлена вертикально вверх и ось OZg
образует правую систему координатных осей OXgYgZg. Для выбран-
ной точки определяются начальные значения параметров полета.
Уравнения движения центра масс самолета относительно нор-
мальной земной системы координатных осей имеют вид
381
iVxg ‘IVyg ,, dI' „
m —=R- m——=/? — mg; m-----------------= RZ„, (23.11)
at dz yi dt
где Rxg, Ryg, 2?2g •—проекции результирующей силы по осям нор-
мальной земной системы координат.
Если поделить левые и правые части уравнений (23. 11) на мас-
су, то их можно записать так:
rfKrg- dVyg , ,. d\ zg
Составляющие перегрузки по осям нормальной земной системы
координат выражаются через ее проекцию по осям связанной систе-
мы так:
пх —пх cos э cos Ъ-~пу (sin Ф sin у —cos Ф sin & cos у)~
~viiz (sin Ф cos у 4-cos Ф sin & sin y);
nyg= nx sin ft-}- ny cos cos V — nz cos & sin Yi (23- 13)
— nx sin Ф COS & 4- lly (cos Ф sin У 4- sin Ф sin & COS y) 4"
4-nz (cos Ф cos у — sin Ф sin & sin y).
Имея зависимости (23. 13), можно проинтегрировать уравнения
(23. 12) при заданных начальных условиях:
t ' t
+ g f Vyg^=Vyg^Y'-g f }dt,
6 0
V?i=V^(0)4-g \nzgdt, (23.14)
о
где Vxg(0), Vw(0), l4g(0) определяются при ywifaiO, как V.vg(()) =
= V0; Vw(0) = l4«(0)=0.
Повторное интегрирование уравнений (23. 14) позволит опреде-
лить xg, tjg, zg (при xg(0) =2g(0) =0, z/g(O) =Я(0)):
Pg-H(0) + jV;/^/, Zg=\Vzgdt. (23.15)
0 OU
Таким образом, определяются координаты самолета для любо-
го момента времени/Ориентация связанных осей относительно зем-
ной системы координат определяется углами ф(^), ^(0, у(0-
В случае, если в полете измеряются угловые скорости ыЛ-, оц, сог,.
углы рыскания, крена и тангажа определяются путем интегрирова-
ния кинематических дифференциальных уравнений Эйлера (1. 5):
Ф=-----‘с)-----<о siny—^cosy, (23.10)
cos & cos & J
у==и)г — w^tg & cos у4~0)г sin H sin y.
При начальных условиях ф(0) =у(0) =0; •Й'(О) — а(0). Угол ата-
ки для выбранного начального времени полета приближенно мож-
но определить из условий горизонтального полета при известных
характеристиках самолета.
382
При автоматизированной обработке записей магнитного само-
писца в алгоритме расчета на ЭЦВМ может быть предусмотрено
определение траектории полета.
Восстановление траектории полета и ориентации самолета в про-
странстве по записям регистратора параметров полета затрудни-
тельно ввиду отсутствия достаточных для решения этой задачи дан-
ных. Применение более совершенной системы регистрации пара-
метров движения позволяет при необходимости легко восстановить
траекторию полета в любых случаях.
§ 23.4. Использование данных самописцев
для повышения безопасности полета
Информация о полете, накопленная памятью бортовой регист-
рирующей аппаратурой, служит важным источником для дальней-
шего совершенствования методов пилотирования, уточнений руко-
водящих документов, повышения безопасности полетов. С этой це-
лью после каждого полета производится экспресс-анализ полетной
информации. При обнаружении нарушений требований руководя-
щих документов выполняется полный анализ предпосылок к лет-
ному происшествию. После декодирования записи отмечаются ха-
рактерные моменты полета. Значения параметров движения при
этих моментах полета сравниваются с нормативными данными по
оценке пилотирования и действиями членов экипажа. Эти данные,
дополненные записями переговоров членов экипажа и наземными
средствами информации, используются для оценки качества пило-
тирования.
Соответственно кодированные материалы анализа техники пило-
тирования используются для статистической обработки с целью
выявления закономерности выдерживания параметров движения в
характерных точках, выявления особенностей пилотирования, наи-
более часто повторяемых нарушений, оценки пилотирования в осо-
бых и сложных ситуациях.
Данные статистической обработки в дальнейшем находят при-
менение при проведении работ по нормированию показателей безо-
пасности. При этом используются также материалы экспресс-ана-
лизов.
Анализ и обобщение ошибок и нарушений в технике пилотиро-
вания служат важным материалом для принятия мер по их преду-
преждению, планирования обучения и тренажа летного экипажа,
выявления резервов для дальнейшего повышения безопасности по-
лета на данном типе самолета.
Вопросы для повторения
1. Каково назначение бортовых регистрирующих устройств?
2. Какие виды анализа применяются при обработке полетной информации?
3. Чем объясняется необходимость внесения поправок в перегрузки, опре-
деленные по записи бортового регистратора?
4. Как определяется воздушная скорость по данным записи регистратора?
5. Как используется бортовая информация для повышения безопасности по-
летов?
Глава 24
Динамика полета вертолета
§ 24.1. Уравнения движения. Методы их решения
Движение вертолета, как и движение самолета, можно предста-
вить в виде переносного поступательного движения со скоростью
центра масс вертолета и относительного движения вращения во-
круг центра масс. В соответствии с этим в динамике полета верто-
лета рассматриваются траекторные задачи и задачи по исследова-
нию характеристик устойчивости и управляемости.
Решение траекторных задач движения вертолета дает возмож-
ность определить поступательные скорости полета, ускорения на
различных режимах работы двигателя и на различных этапах по-
лета, изменение скорости полета с высотой, потолок вертолета
и т. д.
При исследовании возможных траекторий движения вертолета,,
обусловленного действующими на него силами, вся масса вертоле-
та считается сосредоточенной в его центре масс.
Как и при решении задач динамики самолета, параметры, ха-
рактеризующие летные свойства, устойчивость и управляемость,
определяются с помощью уравнений типа (1.24) в выбранной си-
стеме координат.
При решении траекторных задач движения вертолета выбира-
ется скоростная или траекторная система координат (характеристи-
ка осей дана в гл. 1).
При рассмотрении траекторных задач динамики вертолета аэро-
динамическую силу несущего винта К (рис. 24. 1) спроектируем на
осп ОХА, ОУА и OZA. Проекции силы R на оси ОХА, OYA и OZA
Рис. 24.1. Схема сил, действующих ла
вертолет
, Z и называются пропульсивной,
подъемной и боковой силами
несущего винта. При рассмот-
рении траекторных задач вер-
толет предполагается сбалан-
сированным и проекции Рх, Y
и Z, как п все силы, на рис.
24. 1 приложены в центр масс.
При рассмотрении задач
устойчивости и управляемости
равнодействующую R проекти-
руют на оси связанной систе-
мы координат. Проекция R на
ось OY обозначается буквой Т
384
и называется тягой несущего винта, проекция на ось ОХ называ-
ется продольной силой Н и проекция на ось OZ обозначается бук-
вой S.
При движении вертолета в вертикальной плоскости кроме сил
несущего винта Рх, У и Z на вертолет действуют сила тяжести mg
и сила вредного сопротивления Хвр, обусловленная сопротивлением
элементов вертолета (фюзеляжа, шасси, хвостовой балки и др., за
исключением силы сопротивления несущего винта).
Система уравнений неустановившегося движения вертолета в
вертикальной плоскости по криволинейной траектории имеет вид,
аналогичный системе (2. 26):
Рх — А’вр — mg sin b=mdVldt-, Y — mg cos b=mVMIdt\
Z-7\B=0. (24.1)
В случае установившегося движения по прямолинейной траекто-
рии уравнения (24. 1) примут вид
Рх —Хвр — mg sin 0=0; К —mg-cos 0=0; Z — 7'хв=0. (24.2)
Третье уравнение системы (24. 2) записано для вертолета одно-
винтовой схемы, у которого реактивный момент несущего винта
уравновешивается моментом от тяги хвостового винта. Для верто-
летов с другими способами уравновешивания реактивного крутя-
щего момента, например для вертолетов двухвинтовой и соосной
схем, это уравнение будет иметь другой вид, так как в этих схемах
хвостовой винт отсутствует и реактивный момент вращения урав-
новешивается вследствие вращения винтов в противоположные сто-
роны.
Подобно уравнениям для определения кинематических парамет-
ров движения самолета уравнения (24. 2) также решаются графо-
аналитическими методами, а именно методом тяг или методом
мощностей.
Из первого уравнения системы (24. 2) следует, что потребная тя-
га в режиме установившегося движения
^n=^B₽ + mgsin0. (24.3)
Умножая обе части равенства (24. 3) на скорость V, получим
выражение для потребной мощности
X=PnV=pCBP + mgsin0)n. (24.4)
Соотношение (24. 4) для потребной мощности вертолета анало-
гично выражению потребной мощности самолета, однако в форму-
ле (24. 4) учитывается только мощность, затрачиваемая на преодо-
ление силы вредного сопротивления и на подъем вертолета, и не
учитывается мощность, обусловленная силой сопротивления вра-
щающихся лопастей несущего винта /Ущъ и мощность Л'г, обуслов-
ленная индуктивными скоростями несущего винта. С учетом этих
мощностей получим выражение для потребной мощности верто-
лета:
sin 0) V47Vnp + M, (24.5)
385
В режиме горизонтального полета угол наклона траектории ра-
вен нулю п потребная мощность определяется формулой
^„=^1/+^+^. (24.6)
Графики изменения потребной и располагаемой мощностей вер-
толета дают возможность определить летные характеристики вер-
толета на различных режимах.
Для определения летных характеристик вертолета применим как
метод потребных и располагаемых мощностей или тяг, так и метод-
потребных и располагаемых коэффициентов крутящего момента,
построенных в координатном поле mKp=f(p). Коэффициент ц, ра-
вен отношению составляющей скорости невозмущенного потока,
расположенной в плоскости вращения несущего винта, к окружной
скорости конца лопастей винта и называется характеристикой ре-
жима несущего винта.
Переход к этому методу от метода потребных и располагаемых
мощностей можно осуществить, выразив потребную и располагае-
мую мощности через крутящий момент в соответствии с форму-
лами
^п=<р.п«; (24.7)
(24.8)
где Л1Кр.п и ЛКр. р — потребный и располагаемый крутящие момен-
ты; со — угловая скорость вращения винта.
Крутящие .моменты Л'КР. п и Л/кр, р можно представить в виде
6(°^)2 ; /Ккр.р=дгкр.рзл/?3-^у^-, (24.9)
где mi;p. п — коэффициент потребного крутящего момента; mKD. р —
коэффициент располагаемого крутящего момента; 7?—-радиус не-
сущего винта; о — коэффициент заполнения, равный отношению
суммарной площади лопастей несущего винта в плане к площади,
сметаемой несущим винтом.
После подстановки в формулы (24.9) значений ЛТкр. п и Л1кр. р,
полученных по формулам (24.7), (24.8), выражения для коэффи-
циентов крутящего момента получаются в следующем виде:
niKP^NJ^ ; (24.10)
™kp.p=^pW2-^-• (24.11)
Рассмотренный метод можно использовать для расчета аэроди-
намических характеристик вертолетов не только одновинтовой схе-
мы, но и других схем.
§ 24.2. Потребная и располагаемая мощности
вертолета
Потребная мощность при горизонтальном полете, как указыва-
лось в предыдущем параграфе, складывается из мощностей, затра-
.316
чиваемых на вращение несущего винта и на преодоление вредного
сопротивления. Рассмотрим более подробно каждую из них.
Мощность, затрачиваемая на вращение несущего винта, состоит
из индуктивной мощности, затрачиваемой на создание индуктивной
скорости, а следовательно, тяги винта, и профильной мощности.
Согласно теории идеального винта индуктивная мощность выра-
жается соотношением
N—T-V;, (24.12)
где Т — тяга несущего винта; Vi— индуктивная скорость в плоско-
сти вращения винта.
При определении тяги несущего винта используем известное из
теории идеального винта выражение
Т—mv2=m-2’vi, (24.13)
где m — масса протекающего через винт воздуха; v2 — индуктивная
скорость за винтом, связанная с индуктивной скоростью в плоско-
сти вращения соотношением v2=2vi.
На режиме висения поступательная скорость полета равна нулю
и масса определяется по формуле
ш—qFvi, (24. 14)
где F=xR2-—площадь, ометаемая несущим винтом (R— радиус
винта).
При Поступательном движении вертолета масса m определяется
полной скоростью Ун (рис. 24.2), которая равна векторной сумме
поступательной V и индуктивной Vi скоростей:
m=QFVx, (24. 15)
где V1=pf(V sin a4"4-)2 + (^CQSa)2-
Подставляя в формулу (24. 12) значение индуктивной скорости
из формулы (24. 13) и значение протекающей массы, полученной
по формуле (24.14) или (24. 15), получим формулы для индуктив-
ной мощности:
на режиме висения
7V'=74/^; <24'16>
при поступательном движении
N----T—-—. (24.17)
При расчетах можно принять Тamg.
С учетом неравномерности поля индуктивных скоростей vt в ре-
альном несущем винте мощность Л',- больше, чем это следует из
теории идеального пропеллера, поэтому в формулы (24. 16) и
(24. 17) вводятся поправки:
(24-18’
387
Рис. 24.2. Схема .натекания пото-
ка на несущий винт при поступа-
тельном движении вертолета
кВт
Рис. 24.3. Зависимость
индуктивной МОЩНО-
СТИ от скорости И ВЫ-
СОТЫ полета
где Д- — поправочный коэффициент, зависящий от отношения ра-
диуса нерабочей части винта г0 к его радиусу R и от характера рас-
пределения индуктивной скорости по радиусу винта.
Для вертолетных винтов на режиме висения при r0/R — 0-4-0,25
поправочный коэффициент можно принять равным 1,2—-1,3; с уве-
личением поступательной скорости V коэффициент уменьшается
и при V/Vi ВИс>2 коэффициент 1.
Кроме неравномерности индуктивных скоростей на индуктив-
ную мощность несушего винта влияют концевые потери, вызванные
перетеканием воздуха через концы и корневые части лопастей из
области повышенного давления под винтом в область пониженного
давления над винтом. Это перетекание, интесивность которого зави-
сит от тяги винта, увеличивает индуктивную мощность несущего
винта примерно на 3—4%.
Из формул (24. 16) и (24. 17) следует, что с увеличением высо-
ты полета индуктивная мощность возрастает вследствие уменьше-
ния плотности воздуха (рис. 24. 3) и уменьшается с увеличением
поступательной скорости.
При определении мощности, затрачиваемой на преодоление про-
фильного сопротивления лопастей вертолета на различных режимах
полета, воспользуемся формулой, полученной в теории изолирован-
ного элемента лопасти воздушных винтов:
dN„=dQu=C^bdrQ-^p^r, (24. 19)
где dQ — сила профильного сопротивления элемента лопасти шири-
ной dr и хордой Ь; и — окружная скорость элемента, равная про-
изведению угловой скорости вращения со на радиус выделенного
сечения; Сжпр — коэффициент профильного сопротивления выделен-
ного элемента.
Профильная мощность всех лопастей при предположении, что
лопасти прямоугольны и коэффициент профильного сопротивления
388
лопасти в первом приближении определяется его средним значени-
ем (Сх прж const), будет равна
/?
= k \Cxnpbdr^ = kCxupb^^- =
J 2 1 2 4
о
(24.20)
о
где k — количество лопастей; bR— площадь лопасти в плане.
Для трапециевидной в плане лопасти хорда и среднее значение
коэффициента СЖПр обычно выражаются через их значения для се-
чения, расположенного на расстоянии 0,7 R от оси винта.
Часто профильную мощность выражают через коэффициент за-
полнения. Если выражение (24. 20) умножить и разделить на л/?2,
то получим
^п₽.вис=-4 е oFe W, (24.2i)
О ПЛУ о
kbR kb , ,
где о=- =—^—-коэффициент заполнения.
На режиме поступательного движения при наличии составляю-
щей поступательной скорости Vx (см. рис. 24. 2) профильная мощ-
ность может быть определена по формуле
^пР=-^пр.вис(1+4,65Е1), (24.22)
,-у Г, V cos а
где V х=—=---------— Н — относительная скорость.
V со/?
При малых углах атаки несущего винта Vcosct^V.
Из формулы (24.22) следует, что увеличение поступательной
скорости сравнительно мало сказывается на изменении профиль-
ной мощности. Так, если при максимальной скорости движения вер-
толета значение р~0,25, то профильная мощность увеличивается
на 28% (рис. 24.4).
Влияние высоты на профильную мощность легко проследить по
формулам (24.20) и (24.22), из которых следует, что при прочих
равных условиях без учета сжимаемости мощность Л'пр с высотой
уменьшается.
Мощность, затрачиваемая на преодоление вредного сопротивле-
ния вертолета Хвр при полете со скоростью V, может быть опреде-
лена по формуле
ЛГВР=*ВРИ. (24.23)
Подставляя значение Хвр из экспериментальной аэродинамики
и преобразуя выражение, получим
’ (24-24)
где F= VJaR.
389
Рис. 24.4 Зависимость Nf, '
Л'пр, Л^вр, Nu и Nv от скоро-
сти полета при // — const
N, кВт
Рис. 24.5. Зависимость потребных
и располагаемых мощностей от
скорости при различных высотах
поле’,’а
Здесь С?. вр — суммарный коэффициент вредного сопротивления
указанных выше элементов вертолета, определяемый по формуле
", У С aS,-
Vs-bp"-------, гдеС,.;и S,- —коэффициенты сопротивления и ха-
рактерные площади рассматриваемых элементов (соответственно
для фюзеляжа — площадь миделевого сечения, для хвостовой бал-
ки — омываемая поверхность и т. д.).
Из формулы (24. 24) следует, что вредная мощность пропорцио-
нальна кубу поступательной скорости движения (см. рис. 24.4) и
что Л'вр уменьшается с увеличением высоты.
Графики изменения потребной мощности вертолета и ее состав-
ляющих (индуктивной, профильной мощностей и мощности вредно-
го сопротивления) в зависимости от скорости полета приведены на
фис. 24. 4.
Под располагаемой мощностью несущего винта вертолета пони-
мается мощность, подводимая к валу несущего винта от двигатель-
ной установки и расходуемая на вращение несущего винта. Распо-
лагаемая мощность несущего винта Np меньше эффективной мощ-
ности на валу двигателя Ne:
JVp_7Ve-(ArBC + 7V.rp+^+7Vnp+7Vx.B), (24.25)
где Л'вс, Л^Тр, N0Xn., Nn(,, Nx. в — мощности, затрачиваемые соответст-
венно на всасывание воздуха, на трение в трансмиссиях, на охлаж-
дение двигателя, на различные приводы и на вращение хвостового
винта в вертолетах одновинтовой схемы. Все перечисленные выше
потери мощности можно учесть с помощью коэффициента исполь-
.зования мощности g, тогда формула (24. 25) примет вид
Np=Nez_. (24.26)
39С-
Зяк 776
Коэффициент использования мощности двигателя можно пред-
ставить в виде зависимости от коэффициента потерь
(24.27)
ГПР t 5 1 t -1-5 -1-5 --S
1 Ml Ч«Т ’’Tp I М)ХЛ I -®пр 1 '’Х.в*
Среднее значение коэффициента использования мощности g=
= 0,75-4-0,80 и, соответственно, среднее значение коэффициента по-
терь £ц=0,254-0,20. Средние значения коэффициентов потерь сле-
дующие: gBC=0,02; gTp=0,07; gOXa=0,05; gnp=O,OI; 1P.в=0,08. Ко-
личество входящих в выражение для определения gn коэффициен-
тов и их значения зависят от схем вертолета. В качестве примера
можно привести значения коэффициентов потерь для вертолета
Ми-6, для которого sbc = 0,021, £тр=0,03, £охл=0,02, gnP=0,01;
gx.в зависит от скорости полета: при К=0 в=0,09, при К=
= 270 км/ч gp. п=0,034, при К=320 км/ч gx.в=0,05.
Величина эффективной мощности двигателя Ne зависит от ре-
жима работы двигателя, от высоты и скорости полета. Как и при
определении эффективной мощности двигателей, установленных на
самолетах, мощность Ne двигателей вертолетов определяется по
высотно-скоростным характеристикам двигателей. Общий вид зави-
симости располагаемой мощности /Vp от скорости полета для фик-
сированной высоты показан на рис. 24. 4. На рис. 24. 5 показаны
потребные и располагаемые мощности полета вертолетов с невы-
сотными двигателями на двух высотах (располагаемые мощности с
увеличением высоты уменьшаются).
Полученные выше значения потребной и располагаемой мощно-
стей дают возможность проанализировать основные режимы поле-
та вертолета и определить его летные свойства.
§ 24.3. Характеристики вертолета на режимах
висения и вертикального подъема
На режиме висения вредная мощность вертолета равна нулю к
потребная мощность складывается из индуктивной и профильной.
Учитывая значения /Уг-впс [см. формулу (24.16)] и /Упр.Вис [см. фор-
мулу (24.21)], запишем выражение для потребной мощности на
высоте, отличной от нуля:
^„.висн=М-Висог^ + -^°^еОДМЛ (24.28)
у Л о
где Л'гвисо—-индуктивная мощность на режиме висения у земли,
A = Qh/Qo-
Так как с высотой минимальная потребная мощность увеличи-
вается, а располагаемая уменьшается, то существует предельная:
высота, называемая статическим потолком вертолета, на которой
осуществим режим висения. На высоте статического потолка по-
требная и располагаемая мощности равны.
Влияние близости земли весьма сильно сказывается на вели-
чинах тяги и потребной мощности. Вблизи земли индуктивная ско-
391
Рис. 24.6. Влияние близости
земли 4; тягу и .мощность (не-
сущего feiiHTa (Р и У — тяга и
мощность с учетом влияния
близости земли; Р«> и N<» —
тяга и .мощность без учета вли-
яния близости земли); hJR —
относительное (расстояние не-
сущего винта от земли
Рис. 24.7. Зависимость V 7/, Vy щ ах
и t от высоты полета
рость, создаваемая несущим винтом, уменьшается вследствие тор-
мозящего действия земли. Уменьшение индуктивной скорости
(vi2<vn) приводит к увеличению истинных углов атаки сечений.
Соответственно изменяются величина и направление аэродинами-
ческой силы 7?. В итоге вблизи земли увеличивается тяга при почти
неизменной силе сопротивления вращению (неизменной потребной
мощности). Поэтому если располагаемая мощность постоянна, то
с приближением к земле тяга винта увеличивается. Если же сохра-
нить тягу постоянной, то из-за влияния земли уменьшается потреб-
ная мощность. Количественные результаты влияния земли на харак-
теристики несущего винта приведены на рис. 24. 6. Приведенные
зависимости показывают значительное уменьшение потребной мощ-
ности вблизи земли, что позволяет совершать взлет и висение у зем-
ли при меньших мощностях. Увеличение тяги винта вблизи земли
существенно уменьшает скорость вертикального снижения на ре-
жиме авторотации.
На режиме вертикального установившегося подъема секундная
масса воздуха, протекающего через винт, больше, чем на режиме
висения, так как при подъеме сказывается появление скорости
внешнего потока. Следовательно, в этом случае для создания той
же тяги потребуется меньшая индуктивная скорость, чем на режи-
ме висения.
Скорость вертикального установившегося подъема V,, можно
определить из уравнений движения (24.2). Так как в этом случае
ось ОХА совпадает с вертикалью, то первое уравнение системы
(24.2) по аналогии с выражением (24.4) можно преобразовать к
виду
A^=P\p+zng)^+M-+-M.P . (24.29)
392
или A7p=XBPI/JZ+JV,. + 7Vnp+/7igVp=7Vn.r.r,+mgV!Z, (24.30)
, 7 -Ур А п.г.п
откуда V„=—--------------,
mg
где Ур и Л’п.г. п — располагаемая мощность и потребная мощность
горизонтального полета на рассматриваемой высоте и скорости по-
лета.
Из формулы (24. 30) следует, что статический потолок вертоле-
та может быть определен как высота, на которой Vv—0.
§ 24.4. Подъем вертолета по наклонной траектории
При анализе подъема вертолета по наклонной траектории наи-
больший практический интерес представляют такие характеристи-
ки, как максимальная вертикальная скорость Vpmax, скорость по
траектории, при которой достигается Vv шах> п максимальная вы-
сота, которая может быть достигнута при наклонном подъеме, или
так называемый динамический потолок вертолета Ня.
Вертикальную скорость Vy при установившемся подъеме верто-
лета по наклонной траектории можно определить из преобразован-
ного уравнения движения (24. 5):
A<P-XBPI/ + mgsin9l/+^ + ^p, (24.31)
в котором Vsin6=Ep, а сумма остальных членов правой части
уравнения (24.31) является потребной мощностью в режиме гори-
зонтального полета (24. 6), отсюда
Ур-Уп.г.п = . (24<32)
mg mg
Очевидно, из формулы (24. 32) следует, что вертикальная ско-
рость будет максимальной при максимальном ДУ. Максимальный
избыток мощности будет при скорости полета, соответствующей
минимальной потребной мощности (см. рис. 24. 4). Эта скорость на-
зывается экономической скоростью Еэк по аналогии с экономической
скоростью самолета, при которой Уп имеет минимальное значение.
Отметим, что Vpmax при подъеме по наклонной траектории
больше Ергаах при вертикальном подъеме (см. рис. 24.5), так как
в случае подъема по наклонной траектории потребная мощность
меньше, и, следовательно, больше избыточная мощность.
С ростом высоты минимальная потребная мощность увеличива-
ется. Изменение располагаемой мощности по высотам зависит от
типа двигателя, установленного на вертолете. Так, для вертолета с
поршневым невысотным двигателем располагаемая мощность, из-
быток мощности и вертикальная скорость Vv с увеличением высоты
уменьшаются (рис. 24. 7).
При установке высотного поршневого двигателя располагаемая
мощность растет до границы высотности двигателя, что приводит к
росту избытка мощности и вертикальной скорости (рис. 24.7 —
Пунктирная линия). После границы высотности двигателя раснола-
>4 776 393
гаемая мощность падает и это приводит к уменьшению вертикаль-
ной скорости.
Характер изменения вертикальных скоростей по высотам при
установке турбовинтовых или турбореактивных двигателей также
определяется характером изменения располагаемых мощностей по
высотам.
На динамическом потолке вертолета избыток мощности и верти-
кальная скорость при подъеме по наклонной траектории равны ну_-
лю и вертолет может совершать горизонтальный полет только со
скоростью, равной экономической VBK. С увеличением высоты поле-
та экономическая скорость возрастает; изменение Увк с высотой
можно рассчитать по формуле
V3K=V9k0^. (24.33)
При известных значениях Vy по высотам можно определить вре-
мя подъема вертолета, т. е. построить барограмму подъема мето-
дом, изложенным в гл. 4.
§ 24.5. Максимальная скорость вертолета. Диапазон
скоростей. Ограничение максимальной скорости
Режим максимальной скорости вертолета в горизонтальном по-
лете может быть получен в том случае, если двигатель работает на
полной мощности и, следовательно, подводимая к несущему винту
мощность (располагаемая) имеет максимальное значение. При
установившемся полете на максимальной скорости располагаемая
мощность равна потребной и, следовательно, максимальная ско-
рость может быть определена по точке пересечения кривых потреб-
ных и располагаемых мощностей, построенных для ряда высот
(рис. 24. 8). Изменения максимальной скорости по высоте могут
иметь различный характер в зависимости от типа двигателя, уста-
новленного на вертолете. При установке поршневого двигателя с
нагнетателем максимальная скорость растет до расчетной высоты
двигателя, а затем падает (рис. 24. 9), так как мощность двигателя
после расчетной высоты интенсивно уменьшается. Если нанести на
этот же график скорость набора высоты VBK, то на динамическом
потолке Emax=VSK.
Для того чтобы определить диапазон скоростей вертолета, не-
обходимо выявить изменение максимальной скорости горизонталь-
ного полета с высотой. Так как до высоты статического потолка
вертолет имеет возможность подниматься вертикально, то мини-
мальная скорость его до этой высоты равна нулю. Выше статиче-
ского потолка висение невозможно, и полет может осуществляться
только при наличии горизонтальной скорости, которая должна быть
больше минимальной скорости (см. рис. 24.9). С ростом высоты
Vmin увеличивается вплоть до динамического потолка, где Vmin=
— Кж- Диапазон скоростей по высотам в случае установки
на вертолете турбовинтового двигателя показан пунктиром на
рис. 24. 9.
394
Рис. 24.8. Схема определения
максимальных и минимальных
скоростей горизонтального по-
лета
н,км
Рис. 24.9. Диапазон скоро-
стей по высотам для верто-
лета с ПД (двигатель вы-
сотный) и ТВД (пунктир)
Максимальные скорости, получаемые из условия использования
полной мощности двигателя, в большинстве случаев не могут быть
достигнуты на практике, так как при увеличении скорости появля-
ется целый ряд неблагоприятных явлений (срыв потока на лопа-
сти, деформация конструкции, появление скачков уплотнения), для
устранения которых необходимо ограничивать максимальную ско-
рость.
Максимальная скорость вертолета ограничивается по срыву по-
тока на лопасти, идущей назад, и по концевому числу М на лопа-
сти, идущей вперед.
Рассмотрим ограничение максимальной скорости по срыву по-
тока на идущей назад лопасти.
Лопастью, идущей назад, является лопасть, окружная скорость
которой в рассматриваемый момент времени направлена противо-
положно скорости полета. Лопастью, идущей вперед, является ло-
пасть, окружная скорость которой в данный момент совпадает с
направлением скорости полета. Так, при азимутальном угле
О-Сф-Сл лопасть идет вперед, а при угле л<ф<2л лопасть идет
назад. Лопасть, идущая назад, имеет зону пониженных скоростей
обдувки. Поскольку подъемная сила лопасти зависит от скорости
обдувки, то на лопасти, идущей вперед, она будет больше, чем на
лопасти, идущей назад. При наличии горизонтального шарнира впе-
ред идущая лопасть, развивающая большую подъемную силу, будет
взмахивать вверх, а назад идущая лопасть, развивающая меньшую
подъемную силу, будет опускаться. Это приводит к уменьшению
углов атаки сечений вперед идущей лопасти и к увеличению углов
атаки сечений назад идущей лопасти.
В результате взмаха вниз назад идущей лопасти на концевой
ее части углы атаки могут стать выше критических, что приведет
к срыву потока в этой области.
С увеличением скорости полета скорость взмаха вниз назад
идущей лопасти растет. Это приводит к еще большему росту углов
14*
395
Рис. 24.10. Ограничения макси-
мальной скорости вертолета
атаки и к расширению зоны конце-
вого отрыва, а также зоны обратно-
го обтекания комлевой части лопа-
сти.
При появлении срыва резко воз-
растает сопротивление назад иду-
щей лопасти, а следовательно, и
мощность, потребная для ее враще-.
ния. Кроме того, появляются виб-
рации и ухудшается управляемость
вертолетом.
Из-за перечисленных выше не-
желательных явлений, появляющих-
ся в результате развития срыва на
лопасти, идущей назад, максималь-
ную скорость полета приходится ог-
раничивать (рис. 24.10).
С ростом высоты для сохранения равенства Y=mg необходимо
увеличивать углы атаки сечений лопастей, в результате чего при
одной и той же скорости полета зоны срыва на идущей назад ло-
пасти расширяются. Чтобы не допустить этого, необходимо умень-
шить максимальную скорость полета. Таким образом, с увеличени-
ем высоты максимальная скорость, ограниченная срывом, умень-
шается.
Одним из методов затягивания срыва является разгрузка винта
при помощи крыла сравнительно небольшой площади (например,
у вертолета Ми-6). При увеличении скорости по траектории подь-
емная сила крыла возрастает, что дает возможность уменьшить
подъемную силу несущего винта, а следовательно, и углы сечений
лопасти. Применение такого крыла дает возможность увеличить
максимальную скорость на 25—30%• Эффективным средством за-
тягивания концевого срыва назад идущей лопасти при больших
скоростях является крутка лопасти. Для уменьшения углов атаки
конец лопасти закручивают таким образом, чтобы углы установки
на конце были меньше, чем у корня. Применение крутки дает воз-
можность повысить максимальную скорость на 8—10%•
Рассмотрим ограничения максимальной скорости по концевому
числу Мк. Скорость концевого сечения лопасти, идущей вперед, при
ф=л/2 равна 14=14:+^®, а концевое число Мк= (Vx+Rsi>)/а.
С ростом скорости концевое число Мк может достигнуть крити-
ческого значения, при котором возникают сверхзвуковые зоны об-
текания, скачки уплотнения и волновое сопротивление. Кроме того,
при дальнейшем увеличении скорости полета и числа М возможны
срывы потока за скачком уплотнения, что приводит к падению не-
сущих свойств винта. Ограничение максимальной скорости по чис-
лу М можно записать как
К>гр •^к.кр®
где Мк. кр — критическое число М. концевых сечений. С ростом вы-
соты полета скорость звука уменьшается. Уменьшается также
396
Мк. кр поскольку растут углы атаки вследствие увеличения углов
установки. Таким образом, скорость ограничения по числу М умень-
шается (см. рис. 24. 10).
§ 24.6. Снижение вертолета с работающими
двигателями
Снижение вертолета с работающими двигателями возможно как
по вертикальной, так и по наклонной траектории.
Поскольку на режиме вертикального снижения угол атаки отри-
цателен и равен л/2, а ось ОХА совпадает с вертикалью, то уравне-
ния (24. 1) для случая установившегося снижения примут вид
mg-y-2CBp=0; Л\=0; Z-7x.B=0. (24.34)
В первом приближении при вертикальном снижении можно счи-
тать, что YxR, а Хврл;0. В этом случае потребную мощность, как
и потребную мощность на режиме висения (24.28), можно опреде-
лить по формуле Ли=Л^г+ЛтПр.
Однако следует учесть, что индуктивная скорость с/,- при верти-
кальном снижении уменьшается. Это приводит к уменьшению ин-
дуктивной мощности, и формула (24. 12) примет вид
N^T^-Vy), (24.35)
где Vy — скорость снижения вертолета. Поскольку потребная мощ-
ность на режиме снижения больше располагаемой, то скорость сни-
жения определяется отрицательным избытком мощностей (24.32).
Скорость снижения вертолета при работающих двигателях не дол-
жна превышать 3 м/с. Это ограничение связано с тем, что при боль-
ших скоростях снижения несущий винт может войти в режим вих-
ревого кольца.
Вихревое кольцо образуется в результате перетекания воздуха
из зоны отбрасывания (под винтом) в зону подсасывания (над вин;
том). При вертикальном снижении индуктивные скорости в зоне
отбрасывания тормозятся
некоторой поверхности
результирующая скорость
движения потока равна
нулю. Поверхность затор-
моженного потока с уве-
личением скорости сниже-
ния приближается к пло-
скости вращения винта,
тем самым способствуя
перетеканию воздуха из
зоны отбрасывания в зо-
ну подсасывания. В режи-
ме вихревого кольца мощ-
ность двигателя частич-
но расходуется на увели-
встречным потоком, вследствие чего на
Рис. 24.11. Схема сил, действующих иа вер-
толет при снижении ;
397
Рис. 24.12. Располагаемая и потребная мощности при сни-
жении (а) н характеристика снижения (б)
чение интенсивности вихря и тяга винта падает.
Внешний поток в этом случае набегает не на винт, а на вихрь и
обтекает его как тело. При обтекании вихря на его верхней части
появляются зоны отрыва, что приводит к сильной тряске и ухудше-
нию управляемости. Во избежание этих неприятных явлений ско-
рости вертикального снижения ограничиваются; ограничивается
также использование режимов вертикального снижения.
Основным видом снижения вертолетов при работающем
теле является снижение по наклонной траектории
(|в|<т)
двига-
. Как
и в режиме подъема, на вертолет в режиме снижения действуют
проекции равнодействующей несущего винта У и Рх, сила тяжести
mg и сила вредного сопротивления Хвр (рис. 24. 11). В этом слу-
чае уравнения движения примут вид
-mgsin0-Px-A"Bp=O; K-mgcos0=O; Z-TX_B=O, (24.36)
где Рх, У, Z — проекции равнодействующей силы на оси скоростной
системы координат.
На рис. 24. 11 показано снижение вертолета с отрицательным
углом атаки. Составляющая Р на ось ОХА является тормозящей
силой. При наклоне плоскости вращения винта вперед угол атаки
может быть положительным и тогда проекция тяги Рх станет дви-
жущей силой. Чаще всего при снижении угол атаки близок к нулю
или имеет небольшую отрицательную величину.
Основными параметрами, характеризующими снижение вертоле-
та, являются скорость Кен и угол снижения 0. Качественный и ко-
личественный анализ Ксн и угла 0 можно проводить как по урав-
нениям (24.36), так и по графической зависимости располагаемой
и потребной мощностей (рис. 24. 12, а) на режиме снижения.
Располагаемая мощность на режиме снижения определяется по
формуле (24. 26) и зависит от режима работы двигателя. Потреб-
ная мощность на снижении исходя из первого уравнения (24. 36) с
учетом профильной и индуктивной мощностей (24. 5) определяется
формулой
7Vn=7Vz+2Vnp+ ^ + 1/^ sin 0 (24.37)
ИЛИ sin 0.
398
Из формулы (24. 37) следует, что потребная мощность на сни-
жении при отрицательном угле наклона траектории меньше потреб-
ной мощности горизонтального полета на величину Vmg sin 0. С уве-
личением угла наклона траектории величина потребной мощности
уменьшается. Если на график изменения потребной мощности нане-
сем изменение располагаемой мощности, то по точкам их пересе-
чения (точки 1, 2, 3, 4 на рис. 24. 12, а) можно определить скоро-
сти установившегося снижения при фиксированном угле наклона
траектории, а эти данные дают возможность построить характери-
стику снижения (рис. 24. 12, б). Такие характеристики обычно стро-
ят для различных углов установки лопастей несущего винта.
Как на режиме вертикального снижения, так и на режиме сниже-
ния по наклонной траектории для горизонтальной и вертикальной
составляющих скорости снижения существуют ограничения, имею-
щие целью предотвратить переход несущего винта в режим вихре-
вого кольца.
§ 24.7. Снижение вертолета на режиме самовращения
Работа несущего винта вертолета на режиме самовращения ха-
рактерна тем, что лопасти вращаются благодаря энергии набега-
ющего потока, создавая при этом тягу без подвода мощности от
двигателя. Это свойство несущего винта позволяет вертолетам со-
вершать безопасную посадку при отказе двигателя. Для выявле-
ния условий, при которых возможно самовращение несущего винта,
рассмотрим элемент его лопасти при вертикальном снижении вер-
толета (рис. 24. 13). Скорость обтекания W равна векторной сумме
окружной гео, вертикальной Vy и индуктивной Vi скоростей.
При обтекании элемента лопасти потоком воздуха под углом
атаки аг со скоростью W возникает равнодействующая сила /?, про-
екция которой на оси скоростной системы координат равны подъ-
емной силе Y и силе сопротивления Q. Угол наклона подъемной
силы Y относительно оси винта равен углу притекания струй 0;
угол между равнодействующей /? и подъемной силой Y обозначим
ф. Величины углов риф зависят от угла атаки элемента лопасти,
равного сумме углов установки лопасти <р и притекания р, т. е.
Сг = Р+ф.
Если р>ф, то равнодействующая R имеет такой наклон, как
это показано на рис. 24. 13, и ее проекция R sin (р — ф) на плоскость
вращения вызывает ускорение вращения лопасти (в плоскости вра-
щения лежит окружная скорость гео). Если р<ф, то сила R откло-
нена от оси винта в левую сторону и ее проекция 7?sin'(p—ф) вы-
зывает торможение винта. При равенстве р и ф угловая скорость
вращения лопасти будет постоянна. Таким образом, величины уг-
лов риф определяют режим вращения лопастей винта.
Угол ф, как это следует из рис. 24. 13, равен <p=arctg —=
С
==arctg и зависит от угла атаки элемента лопасти. С увели-
чу
чением угла атаки до анаив угол ф уменьшается; при дальнейшем
399
Рис. 24.13. Обтекание элемента ло-
пасти при самовращении
Рис. 24.14. Диаграмма са-
мовращения
увеличении аг угол -ф увеличивается вследствие интенсивного роста
Сх (рис. 24. 14). Угол р также определяется углом аг в соответствии
с выражением р— аг — ф.
Сопоставим изменение углов ф и р в зависимости от а,- График
изменения угла *р от аг имеет вид прямой, направленной к оси аг
под углом, равным л/4 рад. Угол р=0, когда аг=Ф, т. е. нулевое
значение угла р определяется точкой на оси аг, в которой аг=Ф-
С увеличением угла установки лопасти прямая р = аг—<р сдвига-
ется вправо от начала координат (см. ф='фг)-
Сопоставляя изменение ф=/(аг) и pi(ar), приходим к выводу,
что в некотором диапазоне углов атаки аг, соответствующем точ-
кам а и Ь, и при заданном угле ф=фц угол р больше угла ф и, сле-
довательно, проекция ₽sin(p—-ф) способствует вращению лопа-
сти винта. Отмеченный диапазон режимов называется режимом са-
мовращения, или авторотации несущего винта, а диаграмма, пред-
ставленная на рис. 24. 14, называется диаграммой самовращения.
Из приведенной на рис. 24. 14 диаграммы самовращения следу-
ет также, что если угол установки лопасти растет, то диапазон
самовращения уменьшается и при ф=фшах самовращение возмож-
но лишь при одном единственном значении р (точка с).
Таким образом, при малых значениях угла установки лопасти
винта характеристики самовращения будут наиболее благоприят-
ными, поэтому при переходе от моторного полета на режим само-
вращения необходимо уменьшить углы установки лопастей винта.
Следует учесть, что приведенный выше анализ был дан для вы-
деленного элемента лопасти. Если же рассматривать соотношение
между углами р и ф для сечений, находящихся на различных рас-
стояниях от оси винта, то при определенной скорости снижения
сечения, расположенные ближе к комлевой части и имеющие мень-
шую окружную скорость, будут иметь большие углы р, чем конце-
400
вне сечения. Может случиться так, что для более близких к оси вин-
та сечений 6>'ф, а для концевых р<ф, и тогда об авторотации
винта можно говорить только в том случае, когда суммарный мо-
мент вращения лопасти будет больше момента сопротивления.
Для определения скорости снижения вертолета по вертикали
удобно рассматривать самовращающийся несущий винт как диск,
создающий сопротивление. При установившемся снижении сопро-
тивление винта равно силе тяжести вертолета:
X=CxaF^=mg,
откуда скорость вертикального снижения
(24.38)
где Сха — коэффициент сопротивления винта, который можно при-
нять равным 1,0—1,2.
Для уменьшения Vy при посадке можно применить так назы-
ваемый подрыв вертолета, заключающийся в резком увеличении
угла установки лопастей винта при приближении к земле, что дает
возможность кратковременно увеличить тягу и за счет этого значи-
тельно уменьшить скорость снижения.
При применении этого приема необходимо возможно точно рас-
считать момент и продолжительность подрыва, так как при дли-
тельном подрыве наряду со снижением вертикальной скорости
уменьшается и частота вращения в связи с увеличившимся сопро-
тивлением лопастей, а из-за этого падает тяга и опять увеличивает-
ся скорость снижения.
Вертикальную скорость снижения можно уменьшить также пере-
ходом от вертикального снижения к снижению по наклонной тра-
ектории. При снижении вертолета по наклонной траектории на ре-
жиме самовращения физическая картина обтекания лопасти слож-
нее, чем при вертикальном снижении. Объясняется это изменением
скорости обтекания лопасти в различных ее азимутальных положе-
ниях и наличием взмаха лопастей, чего при вертикальном снижении
нет. Однако качественная сторона рассмотренного ранее самовра-
щения на режиме вертикального снижения остается. Минимальная
вертикальная скорость снижения при полете по наклонной траек-
тории обычно значительно меньше вертикальной скорости при вер-
тикальном снижении. Минимальная вертикальная скорость сниже-
ния возможна при полете вертолета на экономической скорости.
Это объясняется тем, что на этом режиме потребная мощность для
полета с установившейся скоростью У=УЭК имеет минимальное
значение.
Рассмотрим безопасные и опасные высоты полета вертолета. Са-
мовращение несущего винта наступает после достижения опреде-
ленной скорости снижения вертолета (см. рис. 24. 13). Для сниже-
ния вертолета с минимальной вертикальной скоростью необходимо,
чтобы скорость поступательного движения вертолета была равна
401
экономической, поскольку при этой скорости потребная мощность
вертолета минимальная.
Если отказ двигателя происходит на режиме висения вертолета,
то для снижения вертолета в режиме самовращения с минимальной
вертикальной скоростью требуются определенное время и потеря
высоты. В связи с этим возникают такие понятия, как безопасные
и опасные высоты полета вертолета. Безопасная высота определя-
ется той высотой полета, с которой в случае отказа двигателя вер- -
толет в режиме самовращения способен развить до приземления та-
кую скорость снижения, при которой вертикальная скорость сни-
жения будет минимальной.
На исходном режиме висения безопасную высоту можно опре-
делить, используя уравнение движения вертолета на режиме сни-
жения (24. 1). При вертикальном снижении вертолета после отказа
двигателя на режиме висения первое уравнение системы (24. 1) за-
пишем в виде
т ^=тё—х^—у-
at
Преобразуя левую часть уравнения (24. 39)
rfV,, dVу dH i
т-—= т-----
dt dH
Подставляя выражение (24. 40)
величину
к виду
dV2
uv у
dt 2 dH
в уравнение (24.39),
т-
(24.39)
(24.40)
определим
dH=—~
2g
1
dV2
и у
(24.41)
mg
Если принять, что на ускорение вертолета затрачивается при-
мерно 20% силы тяжести, а на уравновешивание силы среднего
сопротивления и тяги несущего винта остальные 80%, то можно
записать
1
2g -0,2
Н
ЭК
\dV2y.
о
(24.42)
При определении безопасной высоты висения запас высоты можно
взять 10 м. Тогда получим
"-=^Д”+10-
Для вертолета Мп-6, у которого экономическая скорость у зем-
ли равна примерно 140 км/ч, безопасная высота примерно равна
38 м.
Из формулы (24. 42) следует, что если при отказе двигателя ис-
ходная поступательная скорость больше нуля, то безопасная высо-
та уменьшается (рис. 24. 15, кривая АБ) и при исходной скорости
402
полета V=VSk опасные высоты должны ис-
чезать, //без должна равняться 10 м. Из
формулы (24.42) также следует, что при
различной экономической скорости кривая
АБ будет проходить на различных высотах.
Однако следует иметь в виду, что при
отказе двигателя на небольших высотах не-
сущий винт если и не перейдет на режим
авторотации, то его частота вращения
уменьшится настолько незначительно, что
при этом будет обеспечиваться безопасная
Рис. 24.15. К определе-
нию опасных зон .полета
вертолета
посадка вертолета. В связи с этим сущест-
вует ограничение опасной высоты снизу
(линия СБ на рис. 24.15, опасные высоты
режима висения вертолета заштрихованы).
Наличие опасных высот для каждого вер-
толета необходимо учитывать при полетах вблизи земли. Висение
вертолета в опасных зонах без крайней необходимости выполнять
нецелесообразно.
§ 24.8. Дальность и продолжительность полета
вертолета
Часовой расход топлива для вертолета может быть выражен
через удельный расход топлива двигателем се и мощность двигате-
ля Ne-.
7ч CeNе.
При установившемся полете
NP=N„=We,
где g — коэффициент потерь мощности.
Тогда
Километровый расход топлива для вертолета
(24'44)
По известным q4, qK и V определяется на соответствующих уча-
стках продолжительность полета в часах и его дальность в кило-
метрах:
t=m,lq4, L=m.elqK.
Как следует из выражения (24. 43), часовой расход топлива за-
висит от се, и g. Если в первом приближении считать се и g по-
стоянными, то часовой расход топлива будет пропорционален по-
требной мощности и характер его изменения в зависимости от ско-
рости будет такой же, как и А7П; при этих условиях минимальное
403
значение часового расхода топлива q4 соответствует Кэт;' ^см.
рис. 24. 5).
Километровый расход при этих же условиях имеет минималь-
ное значение на скорости, при которой (A^n/V)min- Графически этот
режим определяется точкой касания прямой, проведенной из на-
чала координат, с кривой потребной мощности, т. е. для достиже-
ния наибольшей дальности полета скорость должна быть выше
экономической (см. рис. 24.8).
Если на вертолете установлен невысотный двигатель, то с уве-
личением высоты удельный расход топлива се и минимальная
потребная мощность Mimin увеличиваются. В результате этого с
ростом высоты увеличивается минимальный часовой расход топ-
лива.
Увеличение километрового расхода топлива с ростом высоты
менее интенсивно, чем часового расхода, так как при увеличении
высоты соотношение (Мт/УКип несколько уменьшается (см. рис.
24.8). Таким образом, для вертолетов с невысотным поршневым
двигателем дальность и продолжительность полета будут макси-
мальными у земли.
При установке на вертолете двигателя с нагнетателем
(Мт/Ё)т1п и се уменьшаются до расчетной высоты и километровый
расход на расчетной высоте несколько меньше, чем у земли.
В случае установки турбовинтового двигателя дальность и про-
должительность полета с увеличением высоты возрастают.
§ 24.9. Взлет и посадка вертолета
В зависимости от запаса мощности двигателя и характера вы-
полнения работ на вертолете возможны следующие виды взлетов:
вертикальный взлет, взлет по-вертолетному, взлет по-самолет-
ному.
Вертикальный взлет применяется в случаях взлета вертолета с
площадок малых размеров, при выполнении спасательных, строи-
тельно-монтажных работ и при транспортировке грузов на внешней
подвеске. Вертикальная скорость подъема определяется формулой
(24.30). Вертикальный взлет не является основным видом взлета,
поскольку для его выполнения требуется большой запас мощности
AN=NV — что возможно при уменьшенной грузоподъемности
вертолета. Кроме того, вертикальный взлет приходится выполнять
большей частью в опасной зоне полета.
Взлет по-вертолетному осуществляется по восходящей траекто-
рии с поступательной скоростью и состоит из следующих этапов:
отрыва от земли; вертикального набора высоты до 1,5—3 м и раз-
гона с увеличением высоты и поступательной скорости до эконо-
мической, при которой будет наибольшая скороподъемность верто-
лета; набора высоты по наклонной траектории. Взлет считается
законченным, когда вертолет наберет высоту 25 м. Взлет по-верто-
летному применяется при запасе мощности, обеспечивающем висе-
ние на высоте 1,5—3 м. При переходе в режим набора высоты
возможно «проседание» вертолета, а иногда и удар колесами о зем-
404
лю, 4V0 обусловлено наклоном оси конуса несущего винта вперед
для создания проекции тяги несущего винта на направление дви-
жения. (Зоэтому одновременно с наклоном оси конуса обеспечива-
ют увеличение подъемной силы У путем увеличения шага винта.
Схема сй,л, типичная для режима набора, показана на рис. 24. 1.
Движениё вертолета на этом участке неустановившееся и проек-
ция равнодействующей R на направление оси ОХа, т. е. сила Рх,
будет больше XBp+mg sin 0.
Поскольку при этой схеме взлета набор высоты происходит прак-
тически при отсутствии влияния земли на тягу и потребную мощ-
ность, то она оказывается неприемлема при большой загрузке вер-
толета, при высокой температуре окружающей среды, при взлете с
высокогорного аэродрома (ввиду отсутствия достаточного избытка
мощности AN='XP — Nn)
Взлет по-самолетному. Это вид взлета выполняется с площадок,
обеспечивающих безопасный разбег длиной 50—100 м, и использу-
ется при большой загрузке вертолета, при больших температурах
внешней среды, при взлете вертолета с высокогорных аэродромов.
Взлет осуществляется по следующим этапам: разбег по земле, от-
рыв и переход к набору высоты по наклонной траектории. В процес-
се разбега по земле ввиду уменьшения потребной мощности обра-
зуется максимальный запас мощности. Взлет считается закончен-
ным прш наборе высоты 25 м и скорости по траектории, близкой к
V=V№.
При взлете по неровной поверхности взлетной площадки могут
возникать вибрации вертолета, поэтому взлет может выполняться с
отрывом и дальнейшим разгоном и выдерживанием вертолета
вблизи земли. Такой взлет называется по-вертолетному с исполь-
зованием воздушной подушки, поскольку разгон вертолета осуще-
ствляется на высоте, где близость земли значительно влияет на тя-
гу несущего винта и потребную мощность полета.
Расчет взлетных характеристик вертолета принципиально не от-
личается от расчета взлетных характеристик самолета. Так, при
расчете длины разгона при взлете по-вертолетному с использовани-
ем воздушной подушки можно воспользоваться уравнениями неуста-
новившегося движения вертолета (24. 1). При угле наклона траек-
тории 0=0 время и длину разгона до скорости V=1/3I- можно оп-
ределить из первого уравнения системы (24. 1):
mV +М + М_Р). (24.45)
Преобразуем левую часть уравнения
tz dV 1 гои лт
mV-----=тп-------- (24.46)
dt 2 dt
и обозначим 7Vp — (JVBPl/-j--^< 4* А^пР)=ДА^. (24.47)
Тогда, подставляя выражения (24.46) и (24.47) в уравнение
405
(24.45), получим соотношение для определения
высоты:
времени tfaoopa
,, m dV2 , m С dV2
dt=-------; t =— \ -----.
2 AW 2 J AW
o
Преобразовывая левую часть уравнения (24. 45)
т/ dV т/ dV dL т/2 dV 1
dt dt dL dL 3
(24.48)
к виду
т----
dt dL dL 3 dL
и подставляя соотношения (24. 49) и (24. 47) в уравнение
получим выражение для определения длины разгона:
и „
ЭК
С бД/З.
J AW ’
о
Вычисление интегралов (24.48) и (24.50) можно производить гра-
фически. ДлЯгатого необходимо построить графическую зависи-
мость
,, т dV:i , т
dL —— ; L = —
3 AW 3
(24.49)
(24. 45),
(24.50)
AW yiv / дДГ
(24.51)
и интегралы будут определяться площадями, ограниченными этими
кривыми и осями координат.
Длина участка установившегося набора высоты на режиме наи-
большей скороподъемности может быть определена по формуле
4a6=VHa6-^, (24.52)
t/наб
где Мг=Н — /г; h, Н — высоты в точке начала и окончания набора.
В зависимости от запаса мощности, полетной массы, характера
подходов на посадочную площадку вертолета возможны следующие
виды посадок:
посадка по-вертолетному при работающих двигателях с зависа-
нием в зоне влияния воздушной подушки на тягу несущего винта
и потребную мощность вертолета;
посадка по-вертолетному при работающих двигателях с зависа-
нием вне зоны влияния воздушной подушки;
посадка по-самолетному с работающими двигателями;
посадка с неработающим двигателем на режиме самовращения
несущего винта.
Посадка по-вертолетному в зоне воздушной подушки является
основным видом посадки при работающем двигателе вертолета лю-
бой схемы и выполняется при наличии запаса мощности двигателя,
обеспечивающего зависание вертолета перед приземлением на вы-
соте 2—3 м по следующим этапам: снижение с уменьшением ско-
рости по траектории и вертикальной скорости снижения; зависание
на высоте 2—3 м для просмотра места приземления и его уточне-
ния перед посадкой; вертикальное снижение; приземление.
406
np\i снижении движение вертолета в целом описывается систе-
мой уравнений (24. 1). Отличие в записи уравнений при снижении
заключатся в том, что проекция Рх равнодействующей R на ось
ОХа благодаря изменению циклического шага лопастей является
отрицательной величиной, обусловливающей торможение вертоле-
та. Кроме Voro, поскольку в этом случае угол наклона траектории
отрицательйый, то проекция силы тяжести на ось ОХа изменяет
знак. На высоте 15—20 м начинается выравнивание вертолета, ко-
торое выполняется одновременно с торможением скорости. В кон-
це выравнивания, на высоте 5—7 м, вертолет переходит на режим
висения, для чего увеличиваются общий шаг несущего винта и мощ-
ность двигателя в таком темпе, чтобы вертолет завис на высоте 2—
3 м. При зависании тяга несущего винта Т путем изменения цикли-
ческого шага лопастей отклоняется вперед так, чтобы выполнялось
равенство Y — mg=0. После зависания с боковым ветром рекомен-
дуется развернуть вертолет против ветра и произвести вертикальное
приземление. Вертикальное снижение осуществляется при умень-
шении общего шага несущего винта и мощности двигателя.
Посадка по-вертолетному с работающими двигателями и зави-
санием вне зоны влияния воздушной подушки применяется в тех
случаях, когда посадочная площадка ограничена со всех сторон
препятствиями. При такой схеме посадки зависание вертолета вы-
полняется на высоте 5—10 м над препятствиями, поэтому эта схе-
ма используется только в том случае, если имеется запас мощно-
сти для зависания на указанной высоте.
Вертикальное снижение с высоты зависания выполняется со
скоростью Vv=2 м/с, чтобы избежать попадания несущего винта
в режим вихревого кольца. Эта посадка применяется только в
случае крайней необходимости, так как при отказе двигателя на
высоте 10 м не гарантируется безопасность посадки (вертолет на-
ходится на опасных высотах).
Посадка вертолета по-самолетному с работающими двигателями
осуществляется в случае, когда невозможно произвести зависание
из-за недостатка располагаемой мощности двигателя. Этот вид по-
садки является основным для тяжелых вертолетов. Преимущества-
ми посадки по-самолетному является то, что для нее требуется
меньшая мощность, она возможна как с нормальной, так и с мак-
симальной полетной массой. Однако следует заметить, что поса-
дочная дистанция в этом случае большая, что требует определен-
ной длины посадочной площадки. Посадка по-самолетному включа-
ет такие этапы, как снижение с высоты 25—30 м, выравнивание с
высоты 7-—40 м до Я=1,0 м, выдерживание, на котором поступа-
тельная скорость уменьшается до 17=304-40 км/ч, приземление и
пробег.
Посадка вертолета с неработающими двигателями на режиме
самовращения несущего винта может осуществляться различными
способами: по-самолетному без изменения общего шага несущего
винта; посадка по наклонной траектории с использованием увели-
чения общего шага винта; посадка при вертикальном снижении на
407
режиме самовращения с «подрывом», т. е. с увеличением Общего
шага несущего винта, начиная примерно с высоты 20—25
Основным способом посадки в рассматриваемом случае является
посадка по наклонной траектории с использованием увеличения
общего шага винта. Однако если посадка производится на неболь-
шую площадку, используется посадка с подрывом. Снижение вер-
толета на режиме авторотации несущего винта рассмотрено
в § 24. 7.
§ 24.10. Балансировка, устойчивость
и управляемость вертолета
При рассмотрении равновесия, устойчивости и управляемости
вертолета используется связанная система координат. Начало свя-
занной системы координат совпадает с центром тяжести вертолета,
ось ОХ направлена вперед параллельно плоскости вращения втулки
несущего винта, или так называемой конструктивной плоскости не-
сущего винта; ось OY — вверх и лежит в плоскости симметрии вер-
толета; положительное направление оси OZ— правое. Иногда на-
правление оси OZ выбирается в зависимости от направления вра-
щения винта. Для отечественных одновинтовых вертолетов, направ-
ление вращения которых (если смотреть со стороны положитель-
ного направления оси ОУ) по часовой стрелке, за положительное
направление оси OZ принимается влево от центра масс.
Положение центра тяжести определяет центровку вертолета.
Под центровкой вертолета понимают расстояние от центра тяжести
до оси вращения несущего винта (рис. 24. 16) хт и до плоскости,
проходящей через оси горизонтальных шарниров ут. Центровка
считается передней, если центр тяжести расположен впереди оси
вращения несущего винта, и задней, если он расположен сзади оси
вращения. Центровка обычно отсчитывается в линейных величинах.
Задачей балансировки вертолета является определение откло-
нения органов управления в установившемся режиме полета, при
которых обеспечивается, как и для самолетов, равенство
2^=°, 2<=°- (24.53)
Одновременно с этим должны удовлетворяться условия равнове-
сия сил
(24.54)
и 2Z=°- (24.55)
Уравнение балансировки (24.55) могут рассматриваться неза-
висимо от уравнений (24.53) и (24.54).
Рассматривая продольную балансировку, рассмотрим сначала
балансировку по силам, потом по моменту. Конечной целью про-
дольной балансировки является определение положения равнодей-
ствующей аэродинамической силы несущего винта, при котором
выполняются условия EAfz=O, SX=0 и 2У=0, и балансировочного
408
значения угла отклонения ры-
чага управления циклическим
шагом, при котором обеспечи-
вается выполнение условий ба-
лансировки.
Рис. 24.17. К продольной балансировке
вертолета
Рис. 24.16. Схема определения
центровки вертолета
Угол отклонения равнодействующей! б
вившемся горизонтальном полете можно
(24. 2), которые при 0=0 будут иметь вид
/\-ХвР=0;
Y — mg—0.
(рис. 24. 17) при устано-
получить из уравнений
(24.56)
Подставляя в уравнение (24.56) Рх=—У? sin 6 и T=/?cos6,
получим
—7? sin 8=Лвр; Rcosb=mg,
откуда следует
-Увр
8=arctg----
mg
(24.57)
Для определения угла отклонения равнодействующей ббал, при
котором обеспечивается выполнение условия S7Wz=0 (рис. 24.17),
необходимо учитывать все продольные моменты, действующие на
вертолет. При определении момента тангажа по отношению к свя-
занной оси OZ от равнодействующей аэродинамических сил заме-
ним его моментами от ее проекций — тяги Т и продольной силы Н.
Для простоты продольные моменты от других элементов вертолета
рассматривать не будем. Тогда при передней центровке получим
или
откуда
-^cosB6ajlxf4-7? sin йба„у.г==О,
86ajI=arctg f—V
\ jI/' t /
(24.58)
(24. 59)
Из формулы (24. 59) следует, что балансировочный угол отклонения
равнодействующей зависит от центровки вертолета.
409.
Рис. 24.18. Балансировочные кри-
вые по отклонению ручки продоль-
ного управления
Рис. 24.19. Изменение положе-
ния конуса вращения при уве-
личении скорости полета
Полученные значения 6 [формула (24.57)] и ббал [формула
(24. 59)] определяют угол тангажа вертолета
& = 8 + 8бал. (24.60)
Кроме угла тангажа -О балансировочные кривые вертолетов ха-
рактеризуются зависимостью потребного угла отклонения рычага
управления циклическим шагом 6В от скорости полета. Поскольку
балансировочный угол ббал образуется в результате отклонения ры-
чага управления, регулирующего отклонение кольца автомата пере-
коса, и вследствие отклонения конуса лопастей набегающим пото-
ком, то можно соотношение между упомянутыми параметрами
представить зависимостью
86ал=8гв8в_]_8^у (24.61)
Зная производные 868^Ч=^8бал/^8В, 8^*=д8бал/д1/х и скорость Vx, мож-
но определить потребный угол отклонения ручки управления
8В = 8бал~8^ . (24. 62)
®бал
Пример балансировочных кривых по углу отклонения ручки уп-
равления при различных центровках показан на рис. 24. 18.
Рассмотрим устойчивость вертолетов. Так же, как у самолетов,
у вертолетов различают статическую и динамическую устойчивость.
Статическая устойчивость характеризует поведение вертолета под
воздействием аэродинамических и других сил и моментов в перво-
начальный момент времени после прекращения действия возмуще-
ния. Динамическая устойчивость характеризует поведение вертоле-
та с течением времени после действия возмущения.
Статическая устойчивость вертолета, как и самолета, рассмат-
ривается по углу атаки и по скорости.
Рассмотрим устойчивость вертолета по скорости. Допустим, что
до какой-либо причине скорость полета вертолета увеличилась.
Увеличение скорости полета вертолета сопровождается более ин-
тенсивным маховым движением лопастей несущего винта, в резуль-
410
тате чего конус лопастей отклоня-
ется назад, следовательно, отклоня-
ется (назад и вектор тяги винта Tj
(рис. 24.1,9). Отклонение вектора тя-
ги назад \ приводит к образованию
кабрируюйщго момента, который
увеличивает угол атаки и, следова-
тельно, уменьшает скорость верто-
лета. Таким образом, несущий винт
статически устойчив по скорости.
Рассмотрим статическую устой-
чивость вертолета с работающим
двигателем по углу атаки. Пусть
Рис. 24.20. Изменение положе-
ния конуса вращения при уве-
личении его угла атаки
внезапно увеличится угол атаки
несущего винта (рис. 24.20). Это приведет к уменьшению осевой
составляющей скорости V sin а и к увеличению скорости V cos а.
Увеличение скорости V cos а приведет к росту результирующей ско-
рости, которая определяет подъемную силу лопасти. Уменьшение
скорости V sin а приведет к увеличению углов атаки лопасти. При
увеличении угла атаки изменяются подъемные силы, создаваемые
вперед и назад идущими лопастями. Эти изменения пропорциональ-
ны изменению скорости движения лопасти. Действительно, подъем-
ная сила лопасти пропорциональна углу атаки и квадрату скорости
движения-лопасти относительно скорости W, которая при малых а
приближенно равна составляющей в плоскости вращения винта
(1Г«П\). Изменение угла атаки лопасти равно \Wy/Wx, где
Д Wy — приращение нормальной к плоскости вращения составляю-
щей скорости лопасти (&Wy— V sin Аа). Очевидно, приращение
подъемной силы лопасти ДУЛ ~Аа1Гж2 или kWvWx. Так как
величина AWV постоянна, a Wx на вперед идущей лопасти больше,
чем на назад идущей, то и приращение АУЛ на ней будет больше,
что вызовет маховое движение лопастей, приводящее к наклону не-
сущего винта назад. Наклон несущего винта назад приведет к по-
явлению кабрирующего момента, стремящегося еще более увели-
чить угол атаки. Таким образом, несущий винт статически неустой-
чив по углам атаки и ТИгн.в >0.
Очевидно, M'i вертолета будет складываться из следующих ве-
личин:
С увеличением угла атаки фюзеляжа прирост его подъемной
силы обычно приложен к носовой части фюзеляжа и приводит к
ухудшению устойчивости по углу атаки, т. е. 7ИгФ^>0.
Для улучшения статической устойчивости вертолета устанавли-
вают стабилизатор, производная М'а которого меньше нуля. Од-
нако вертолет по углу атаки остается статически неустойчивым.
На режиме авторотации несущий винт статически устойчив по
углу атаки, так как в этом случае увеличение угла атаки винта со-
411
Рис. 24.21. Схема возникновения демпфирования при уве-
личении угла таигажа (а) и мгновенном повороте втулки
несущего винта (б)
провождается уменьшением скорости V cos а. При этом уменьшают-
ся взмахи лопасти и завал конуса назад, т. е. конус наклоняется
вперед, что приводит к возникновению восстанавливающего мо-
мента.
Рассмотрим устойчивость вертолета на режиме висения по тан-
гажу и крену. Устойчивость равновесного положения вертолета на
режиме висения определяется в первую очередь силами и момен-
тами, создаваемыми несущим винтом. Пусть вследствие возмуще-
ния вертолет получил мгновенное возмущение по тангажу Дй =
= Да (рис. 24. 21, а). Поскольку в исходном равновесном положе-
нии линия действия тяги проходила через центр масс вертолета,
то и в новом положении она будет проходить этот центр. Вследст-
вие изменения угла тангажа несущий винт и другие элементы на
режиме висения не создают моментов и равновесие моментов тан-
гажа не нарушается, т. е. дМ2/да=М°г =0, что означает стати-
ческую нейтральность вертолета по углу атаки. Однако в этом слу-
чае нарушается равновесие сил тяги и силы тяжести и под дейст-
вием составляющей mgAQ возникает поступательное движение на-
зад. Поступательная скорость изменит скорость обтекания вперед и
назад идущих лопастей, что приведет к изменению махового дви-
жения и отклонению конуса лопастей вперед. Линия действия тяги
теперь проходит за центром масс, создавая пикирующий момент,
т. е. момент, стремящийся вернуть вертолет в исходное положение,
что обусловливает возникновение восстанавливающего момен-
та Тхив.
Аналогичная картина поведения вертолета будет при возмуще-
нии на висении по крену: при образовании крена Ду под действием
силы mgAy вертолет начинает скользить в сторону крена. Отклоне-
ние конуса несущего винта при наличии поступательной скорости
способствует возникновению восстанавливающего момента. Однако
следует иметь в виду, что по мере возвращения вертолета по крену
к исходному режиму и стремлению tngAy к нулю плечо тяги несу-
щего винта (в этом случае плечо будет обозначаться через zH. в)
не будет равно нулю. По инерции вертолет будет двигаться в про-
412
тивоположную сторону от исходного равновесного состояния и под
действием момента TzIITi будет направляться в противоположную
сторону. Такие колебания могут в дальнейшем повториться.
Следует иметь в виду, что как при движении по тангажу, так
и по крену на вертолет действует не только момент от тяги несу-
щего винта, обусловленный завалом .конуса, но и демпфирующий
момент и момент от хвостового винта. На характер колебательно-
го процесса будет оказывать влияние момент инерции относитель-
но рассматриваемой осн.
Возникновение демпфирующих моментов при возмущении но
тангажу и по крену можно объяснить следующим образом. При
мгновенном отклонении вертолета от положения равновесия вслед-
ствие инерции лопастей и наличия горизонтальных шарниров про-
исходит отставание поворота конуса несущего винта (рнс. 24. 21,6)
от вала винта. Тяга винта остается перпендикулярной плоскости
вращения лопастей и создает по отношению к центру тяжести, ко-
торый в приведенном примере смещается вперед, восстанавливаю-
щий момент. Очевидно, что если отклонение осн вала продолжает-
ся, то отклонение оси конуса продолжает отставать от оси вала.
Этот момент тяги называется демпфирующим. Вторая составляю-
щая демпфирующего момента определяется разносом горизонталь-
ных шарниров. При отклонении вала винта между центробежными
силами лопастей (рис. 24. 21, б) при отставании конуса лопастей
от осн вала образуется плечо у, наличие которого обусловливает
появление момента F^y. Таким образом, суммарный демпфирующий
момент
А1гдеМп=^1 + ^-
Аналогично возникает демпфирующий момент при вращении от-
носительно продольной оси ОХ с угловой скоростью 0)к.
Рассмотрим продольное возмущенное движение на режиме ви-
сения. Приближенные линеаризованные уравнения возмущенного
движения при исходном равновесном состоянии на режиме висе-
ния в связанной с вертолетом системе координат могут быть запи-
саны в виде
т-^-= —mg№,
dt (24.63)
Izd^ldt=MvzbV-{-M^~.
Уравнением нормальных сил в этом случае можно пренебречь.
Характеристический определитель системы (24. 63) имеет вид
^Р^Р3------~Р2+р~, (24.64)
* Z * Z
где р — корни характеристического уравнения.
Приравнивая Д(р) нулю и анализируя корни характеристиче-
ского уравнения, приходим к заключению, что возмущенное движе-
ние складывается из колебательного и апериодического движений.
413
На основании критерия Раусса — Гурвица убеждаемся, что
движение неустойчивое.
Период колебаний может быть определен в первом приближе-
нии по следующей формуле:
(24.65)
So Vgr MVZ
где Qo — круговая частота колебаний.
При наличии поступательной скорости возмущенное движение,
обусловленное изменением угла тангажа, приближенно может быть
описано системой линеаризованных уравнений, записанной в скоро-
стной и связанной системе координат:
dAV IZ dA6 ™ .
m-----= — №'Д&; mV------=Г “Да;
dt dt
... (24.66)
/zd2^ldt2=M^a + M^V + .
При составлении уравнений принято, что главная ось инерции
совпадает с осью ОХа скоростной системы координат и что Iz в
процессе возмущенного движения остается постоянным. Характери-
стический определитель системы (24. 66) имеет вид
Др
У'С'.
mF
Та 2 , gT" Mvz
mV I* lJP ‘ mV Iz
(24.67)
где Ta— производная по углу атаки от тяги несущего винта.
Как и в случае висения, продольное возмущенное движение
складывается из апериодического и колебательного движений. По-
следнее неустойчиво. Приближенно круговую частоту колебаний
можно найти из выражения (24. 67) по следующей приближенной
формуле:
и соответственно период колебаний
Г ма
-\/ -M^-mV^-
-Т-. (24.68)
Считая К=0, из соотношения (24.68) можно определить пери-
од колебаний на режиме висения (24. 65).
Уменьшению степени колебательной неустойчивости способству-
ют увеличение демпфирования и уменьшение степени устойчивости
по скорости. Поскольку период колебаний вертолета достаточно
велик (15—20 с), то колебательная неустойчивость, если градиент
414
нарастания амплитуды невелик, не вызывает значительных затруд-
нений в управлении.
Управление вертолетом осуществляется, как это было рассмот-
рено выше, при помощи автомата перекоса, циклически изменяю-
щего углы установки лопастей несущего винта. При отклонении ав-
томата перекоса конус лопастей несущего винта вместе с вектором
тяги, направленным примерно по оси конуса, отклоняется в необ-
ходимом направлении. Вслед за отклонением вектора тяги относи-
тельно оси вращения несущего винта на угол йо возникает момент,
изменяющий положение всего вертолета в пространстве. Это, в свою
очередь, приведет к изменению направления вектора тяги вместе с
вертолетом.
Под управляемостью вертолета, как и самолета, следует пони-
мать способность вертолета изменять свое положение в простран-
стве под действием отклонения органов управления. К характери-
стикам управляемости относится эффективность управления^ кото-
рая оценивается приростом управляющего момента на один градус
отклонения кольца автомата перекоса, чувствительность к управ-
лению, которая оценивается приростом угловой скорости вращения
относительно соответствующей оси на один градус отклонения коль-
ца автомата перекоса, и усилия на органах управления.
В отличие от самолета, у которого управляющие моменты возни-
кают непосредственно вслед за отклонением штурвала управления,
у вертолета имеется некоторое запаздывание в реакциях на движе-
ние рычагов управления. Это обстоятельство связано с шарнирной
подвеской лопастей, разносом горизонтальных шарниров и появле-
нием демпфирующих моментов, физическая сущность появления
которых рассмотрена при анализе устойчивости на режиме висения.
Демпфирующий момент возникает при вращении вертолета и
уменьшает чувствительность управления вертолетом. В процессе
роста скорости вращения вертолета увеличивается демпфирующий
момент и на определенной угловой скорости этот момент становит-
ся равным управляющему моменту. После этого вертолет будет
вращаться с постоянной угловой скоростью. Отсюда следует, что
чем больше момент демпфирования, тем меньше та максимальная
угловая скорость установившегося вращения, которая получается
при отклонении ручки управления.
Вопросы для повторения
1. Какие методы используются при определении летных характеристик вер-
толета?
2. Как влияет близость земли на индуктивную мощность?
3. Почему динамический потолок вертолета больше статического?
4. Чем вызывается ограничение вертикальной скорости снижения вертолета
с работающим двигателем?
5. На какие углы установки (малые или большие) выгоднее устанавливать
лопасти несущего винта при снижении на режиме самовращения? Почему?
6. Какими показателями характеризуется режим максимальной дальности
полета вертолета?
415
7. Напишите уравнение продольной балансировки вертолета.
8. Устойчив ли вертолет по углу атаки несущего винта?
9. Устойчив ли вертолет по скорости?
10. Устойчив ли вертолет при висении?
11. Вследствие чего возникают демпфирующие моменты?
12. Чем обусловлено запаздывание вертолета в реакции на движение рыча-
гов управления?
Задача
Определить, чему равна проекция Z тяги несущего винта на ось OZ верто-
лета Ми-6 при следующих условиях: в горизонтальном полете мощность на валу
несущего винта Л'=4500' кВт, а частота вращения винта п=116 об/мин; плечо
от центра масс вертолета до оси хвостового винта £хв = 23 /м.
Ответ: 16000 Н.
СПИСОК ЛИТЕРАТУРЫ
1. Абгарян К. А., Рапопорт И. М. Динамика ракет. — М.: Машиностроение,
1969. —378 с.
2. Атмосферная турбулентность, вызывающая болтанку самолетов./Под. ред.
Н. 3. Ппнуса. — М.: Гпдрометеопздат, 1962. — 319 с.
3. Аэромеханика самолета./Под ред. А. Ф. Бочкарева.—М.: Машиностроение,
1977. —415 с.
4. Барабашин Е. А. Введение в теорию устойчивости. — М.: Наука, 1967.—
214 с.
5. Баранов А. А., Сорокин Э. И., Тотиашвили Л. Г. Аэродинамика и динами-
ка полета транспортных летательных аппаратов. Кн. II. — Рига: Изд. РИИГА,
1970,— 624 с.
6. Белоцерковский С. М., Скрипач Б. К. Аэродинамические производные ле-
тательного аппарата и крыла при дозвуковых скоростях. — М.: Наука, 1975.—
424 с.
7. Бехтир П. Т., Бехтир В. П. Практическая аэродинамика самолета Ил-18.—
М.: Транспорт, 1972. — 200 с.
8. Богославский Л. Е. Практическая аэродинамика самолета Як-40. — Мд
Транспорт, 1975. — 152 с.
9. Бодиков К. Е., Игнатосян С. А., Аксенов Д. Т. Теория и техника полета
вертолетов. — М.: Воениздат, 1961. — 334 с.
10. Боднер В. А. Теория автоматического управления полетом. — М.: Наука,
1964, —619 с.
И. Брага В. Г., Лысенко Н. М. и др. Практическая аэродинамика самолетов
с турбореактивными двигателями. — М.: Воениздат, 1968. — 408 с.
'12 . Брайсон А., Хо-Ю-Ши. Прикладная теория оптимального управления.—
М.: Мир, 1972. — 544 с.
13. Бревер Н. К. Параметры, влияющие на боковую и продольную силы ави-
ационного пневматика.—Авиастроение. 1975, № 14. — 19 с.
14. Бухгольц Н. Н. Основной курс теоретической механики, ч. I, II. — М.:
Наука, 1969,— 167 с.
15. Бюшгенс Г. С., Студнев Р. В. Динамика пространственного движения са-
молета.— М.: Машиностроение, 1967.— 221 с.
16. Васильев Г. С., Лысенко Н. М., Микиртунов Э. Б. Аэродинамические осо-
бенности реактивных самолетов-истребителей. — М.: Воениздат, 1966. — 262 с.
17. Ведров В. С., Тайц М. А. Летные испытания самолетов. — М.: Оборон-
гиз, 1951. — 477 с.
18. Ветчинкин В. П. Динамика самолета. — М.: Госмашметеоиздат, 1933.—
400 с.
19. Вильдгрубе Л. С. Вертолеты. Расчет интегральных аэродинамических ха-
рактеристик и летно-технических данных. — М.: Машиностроение, 1977.— 151 с.
20. Галлай М. Л. Особенности пилотирования реактивных самолетов. — М.:
Изд-во ДОСААФ, 1962. — 194 с.
21. Гессоу М., Майерс Г. Аэродинамика вертолета. — М.: Оборонгиз, 1954.—
256 с.
22. Гильберг Л. А. Покорение неба. — М.: Изд-во ДОСААФ, 1977. — 224 с.
23. Горшенин Д. С., Мартынов А. К. Методы и задачи практической аэро-
динамики. — М.: Машиностроение, 1977. — 230 с.
24. Горбатенко С. А., Макашов Э. М., Полушкин Ю. Ф., Шефтель Л. В. Ме-
ханика полета. — М.: Машиностроение. 1969. — 340 с.
25. Горбатенко С. А., Макашов Э. М., Полушкин Ю. Ф. и др. Расчет и ана-
лиз движения летательных аппаратов.—М.: Машиностроение, 1971. — 343 с.
26. Горощенко Б. Т. Динамика полета самолета. — М.: Оборонгиз, 1954.—
336 с.
27. Гродзовский Г. Л., Иванов Ю. И., Токарев В. В. Механика космического
полета. Проблемы оптимизации. — М.,: Наука, 1975. — 704 с.
28. Дэвис Д. Пилотирование больших реактивных самолетов.—М.: Машино-
строение, 1975. — 336 с.
29. Денисов В. Г., Лопатин Р. И. Летчик и самолет. — М.: Оборонгиз, 1962.—
202 с.
417
30. Денисон В. Г., Онищенко В. Ф., Скрипец А. В. Авиационная инженерная
психология. — М.: Машиностроение, 1976. — 216 с.
31. Динамика полета./Под ред. А. М. Мхитаряна. — М.: Машиностроение,
1971, —364 с.
32. Доброленский Ю. П. Динамика полета в неспокойной атмосфере. — М.:
Машиностроение, 1969. — 252 с.
33. Дьяченко А. А., Микиртумов Э. Б., Сушко В. В., Филиппов В. В. Практи-
ческая аэродинамика самолетов с турбовинтовыми двигателями.—М.: Воениз-
дат, 1970. — 318 с.
34. Егер С. М. Проектирование пассажирских реактивных самолетов. — М.:
Машиностроение, 1964. —452 с.
35. Жуковский Н. Е. Избранные сочинения, т. 1, 2. — М.—Л.: ГИТТЛ,
1948, — 392 с., 422 с.
36. Есаулов С. Ю., Бахов О. И., Дмитрис И. С. Вертолет как объект управ-
ления.— М.: Маиностроение, 1977.—-190 с.
37. Котик М. Г. Критические режимы сверхзвукового самолета. — М.: Маши-
ностроение, 1967. — 227 с.
38. Котик М. Г., Павлов А. В. и др. Летные испытания самолетов. — М.:
Машиностроение, 1968. — 424 с.
39. Котик М. Г. Динамика штопора самолета. — М.: Машиностроение,
1976,—328 с.
40. Кочин Н. Е., Кибель И. А., Розе Н. В. Тероетическая гидромеханика,
ч. 1, II. — М.: Гостехиздат, 1948, 1949. — 536 с., 612 с.
41. Краснов Н. Ф. Аэродинамика. — М.: Высшая школа, 1971. — 632 с.
42. Краснов Н. Ф. Аэродинамика тел вращения. — М.: Машиностроение,
1964. — 572 с.
43. Лазнюк П. С. Новые вопросы аэродинамики и динамики полета лета-
тельных аппаратов. Курс лекций.— Киев: КИНГА. 1976.— 57 с.
44. Лебедев А. А., Стражева И. В., Сахарова Г. И. Аэромеханика самолета. —
М.: Оборонгиз, 1955.— 420 с.
45. Лебедев А. А., Чернобровкин Л. С. Динамика полета. — М.: Машиностро-
ение, 1973. — 616 с.
46. Лебедев А. А., Карабанов В. А. Динамика систем управления беспилот-
ными летательными аппаратами.— М.: Машиностроение, 1965.—528 с.
47. Летов А. М. Динамика полета и управления. — М.: Наука, 1969. — 359 с.
48. Лигум Т. И. Аэродинамика и динамика полета турбореактивных самоле-
тов.— М.: Транспорт, 1972.—352 с.
49. Лигум Т. И., Скрипниченко С. Ю., Чульский Л. А. и др. Аэродинамика
самолета Ту-154. - -М.: Транспорт, 1977. — 304 с.
50. Лысенко Н. М. Динамика полета. Устойчивость и управляемость лета-
тельных аппаратов. Изд. ВВИА им. проф. Н. Е. Жуковского, 1967.— 639 с.
51. Ляпунов А. М. Общая задача об устойчивости движения. — М.: Изд-во
АН СССР, 1948. —320 с.
52. Малкин И. Г. Теория устойчивости движения.—М.: Наука, 1966.— 514 с.
53. Мартынов А. К. Прикладная аэродинамика. — Машиностроение, 1972.—
448 с.
54. Мартынов А. К., Баскин В. Э., Вильгрубе Л. С. и др. Теория несущего
винта.—М.: Машиностроение, 1973.— 364 с.
55. Мельников А. П. Аэродинамика больших скоростей. — М.: Воениздат,
1961. —424 с.
56. Механика в СССР за 50 лет./Под ред. Л. И. Седова, т. II. — М.: Наука,
1970,— 880 с.
57. Миеле Анджело. Механика полета. Теория траектории полета, т. 1. — М.:
Наука, 1965.
58. Мизес Р. Теория полета. — М.: ИЛ, 1949. — 688 с.
59. Мнкеладзе В. Г., Титов В. М. Основные геометрические и аэродинамиче-
ские характеристики самолетов и ракет. —-М.: Машиностроение, 1978.— 124 с.
60. Миль М. Л., Некрасов А. А., Браверман А. С., Гродко Л. Н., Лейканд М. А.
Вертолеты. Расчет и проектирование, кн. 1. — М.: Машиностроение, 1966. — 455 с.
61. Мусаелян Ш. А. Волновые препятствия в атмосфере. — Л.: Гидрометео-
издат, 1962. — 144 с.
418
62. Мхитарян А. М. Аэродинамика. — М.: Машиностроение, 1976. — 442 с.
63. Мхитарян А. М., Ененков В. Г., Мельников Б. Н. и др. Снижение шума
самолетов с реактивными двигатслями./Под ред. А. М. Мхитаряна. — М.: Маши-
ностроение, 1975. — 264 с.
64. Мхитарян А. М. Некоторые вопросы теории пограничного слоя атмосфе-
ры.— Ереван: Айастан, 1970. — 322 с.
65. Нормы летной годности гражданских самолетов СССР. Междуведомст-
венная комиссия по нормам летной годности гражданских самолетов и вертоле-
тов СССР. 2-е изд., 1974 — 344 с.
66. Остославский И. В. Аэродинамика самолета. — М.: Оборонгиз, 1957.—
560 с.
67. Остославский И. В., Стражева И. В. Динамика полета. Траектории лета-
тельных аппаратов. М.: Оборонгиз, 1963. — 430 с.
68. Остославский И. В., Стражева И. В. Динамика полета, устойчивость и
управляемость летательных аппаратов.-—М.: Машиностроение, 1965.— 463 с.
69. Павленко В. Ф. Самолеты вертикального взлета и посадки. — М.: Воен-
издат, 1966. — 344 с.
70. Пашковский И. М. Особенности устойчивости и управляемости скорост-
ного самолета. — М.: Воениздат, 1961. — 342 с.
71. Пашковский И. М. Устойчивость и управляемость сверхзвукового само-
лета.—-М.: Авиация и космонавтика 1962, № 11. —328 с.
72. Пейн П. Р. Динамика и аэродинамика вертолета.—М.: Оборонгиз,
1963, —491 с.
73. Практическая аэродинамика маневренных самолетов./Под ред. Н. М. Лы-
сенко.— М.: Воениздат, 1977. — 440 с.
74. Практическая аэродинамика самолетов с турбовинтовыми двигателями./
Под ред. Э. Б. Микиртумяна. — М.: Воениздат, 1970. — 320 с.
75. Пышнов В. С. Динамические свойства самолета. — М.: Оборонгиз, 1951.—
173 с.
76. Пышнов В. С. Аэродинамика самолета. — М.: Оборонгиз, 1943. — 438 с.
77. Пышнов В. С. Штопор самолета. Труды Военной воздушной ордена Ле-
нина Академии РККА им. проф. Н. Е. Жуковского, Сборник № 1, 1929. — 62 —
124 с.
78. Рабинович Б. И. Вариационные режимы полета крылатых летательных
аппаратов. — М.: Машиностроение, 1966.— 182 с.
79. Рабкин И. Г. Безопасность полетов. — М.: Воениздат, 1962.— 135 с.
80. Седов Л. И. Методы подобия и размерности в механике. — М.: Наука,
1965. — 428 с.
81. Седов Л. И. Механика сплошной среды, т. I, II. — М.: Наука, 1973.—
536 с., 584 с.
82. Седов Л. И. Плоские задачи гидродинамики и аэродинамики. — М.: На-
ука, 1966. — 446 с.
83. Склянский Ф. И. Динамика полета и управляемость тяжелых реактивных
самолетов. — М.: Машиностроение, 1976. — 208 с.
84. Склянский Ф. И. Управление сверхзвукового самолета. — М.: Машино-
строение, 1964. — 388 с.
85. Снешко Ю. И. Исследования в полете устойчивости и управляемости са-
молета.— М.: Машиностроение, 1971. — 322 с.
86. Тарасов Е. В. Оптимальные режимы полета летательных аппаратов. — М.:
Оборонгиз, 1963. — 246 с.
87. Теория и практика проектирования пассажирских самолетов./Под ред.
Г. В. Новожилова. — М.: Наука, 1976. — 440 с.
88. Трунов О. К. Обледенение самолетов и средства борьбы с ним. — М.: Ма-
шиностроение, 1965. — 247 с.
89. Эткин Б. Динамика полета. Устойчивость и управляемость. — М.: Маши-
ностроение, 1964. — 494 с.
90. Юрьев Б. И. Аэродинамический расчет вертолетов. — М.: Оборонгиз,
1956. — 559 с.
ОГЛАВЛЕНИЕ
Стр.
Предисловие.............................................. . г _ s 3
Глава 1. Уравнения движения самолета ................................... 4
§ 1.1. Механическая модель самолета. Уравнения движения самолета
в векторной форме.............................................. 4
§ 1.2. Системы координат. Параметры полета и кинематические
соотношения....................................................... 5
§ 1.3. Уравнения движения самолета в связанной системе координат 10
§ 1.4. Разделение движения самолета на продольное и боковое 15
Вопросы для повторения............................... . 17
Глава 2. Уравнения движения для расчета траекторий полета самолета 18
§ 2.1. Уравнения движения самолета в проекциях на оси траектор-
ной системы координат ........ 18
§ 2.2. Силы, действующие на самолет ...................20
§ 2.3. Уравнения движения центра масс самолета в свободном по- .
лете..............................................................24
§ 2.4. Уравнения движения центра масс самолета при контакте само-
лета со взлетно-посадочной полосой................................27
§ 2.5. Уравнения движения центра масс в частных случаях полета
§ 2.6. Приближенные методы решения уравнений движения . . 28
Вопросы для повторения. Задача.............................. 30
Глава 3. Горизонтальный полет ... ...................34
§ 3.1. Потребная скорость горизонтального полета..................35
§ 3.2. Потребная тяга двигателей для горизонтального полета . . -35
§ 3.3. Потребная мощность для горизонтального полета ... 37
§ 3.4. Характерные скорости горизонтального полета .... 42
§ 3.5. Влияние условий эксплуатации на характерные скорости гори- 44
зонтального полета ......................................... 47
§ 3.6. Первые и вторые режимы горизонтального полета ... 51
§ 3.7. Разгои и торможение самолета в прямолинейном горизонталь-
ном полете........................................................53
§ 3.8. Эксплуатационные ограничения скорости полета .... 56
Вопросы для повторения. Задачи.............................. 59
Глава 4. Набор высоты ............................................61
§ 4.1. Уравнения движения. Потребная скорость, тяга и мощность
для установившегося полета по наклонной траектории . . 61
§ 4.2. Вертикальная скорость при наборе высоты . 64
§ 4.3. Максимальная вертикальная и наивыгоднейшая скорости на-
бора высоты ....... .................... 66
§ 4.4. Барограмма подъема. Теоретический и практический потолок 69
§ 4.5. Набор высоты с разгоном ...................................73
420
Стр.
§ 4.6. Влияние эксплуатационных факторов на скороподъемность са-
молета . ................. ......................... 74
Вопросы для повторения. Задачи............. .... ; 76
Глава 5. Снижение самолета . ...... 77
§ 5.1. Характеристики снижения.....................................77
§ 5.2. Планирование самолета.......................................82
§ 5.3. Влияние эксплуатационных и конструктивных факторов на ха-
рактеристики снижения и планирования . . . . 86
Вопросы для повторения. Задача .... . . 87
Глава 6. Дальность и продолжительность полета ..............89
§ 6.1. Основные определения и понятия............................ 89
§ 6.2. Дальность и продолжительность полета самолета с ТРД . 91
§ 6.3. Дальность и продолжительность полета самолета с винтовыми
двигателями.......................................................97
§ 6.4. Влияние конструктивных и эксплуатационных факторов на
дальность и продолжительность полета . . . 101
Вопросы для повторения. Задачи .... . 103
Глава 7. Криволинейный полет самолета ......................... . . 104
§ 7.1. Условия возникновения криволинейного движения и его осо-
бенности ...................................................... Ю4
§ 7.2. Криволинейный полет самолета в горизонтальной плоскости.
Правильный вираж . ...............................104
§ 7.3. Предельный вираж...................... ................108
§ 7.4. Криволинейный полет самолета в вертикальной плоскости ; ИО
Вопросы для повторения. Задачи ....... 114
Глава 8. Взлет и посадка самолета......................................115
§ 8.1. Взлет самолета. Основные этапы ............................115
§ 8.2. Расчет взлетной дистанции................. . 118
§ 8.3. Параметры, характеризующие взлет...........................120
§ 8.4. Посадка самолета. Расчет посадочной дистанции . .. . 121
§ 8.5. Характеристики посадки.....................................124
§ 8.6. Влияние эксплуатационных условий на взлетно-посадочные ха-
рактеристики .... 125
§ 8.7. Влияние конструктивных факторов на взлетно-посадочные ха-
рактеристики .....................................................126
§ 8.8. Пути улучшения взлетно-посадочных характеристик . . . 128
Вопросы для повторения. Задачи ....... 132
Глава 9. Продольная статическая устойчивость . . 133
§ 9.1. Основные понятия....................................133
§ 9.2. Аэродинамический момент тангажа.....................134
§ 9.3. Аэродинамический момент тангажа фюзеляжа . . . 136
§ 9.4. Аэродинамический момент тангажа горизонтального оперения 138
§ 9.5. Аэродинамический момент тангажа планера . , . . 141
§ 9.6. Момент тангажа от тяги.................................. 141
§ 9.7. Полный момент тангажа самолета............................144
§ 9.8. Продольная статическая устойчивость по перегрузке при фик-
сированном руле высоты......................................... 145
§ 9.9. Продольная статическая устойчивость по скорости при фик-
сированном руле высоты . . . ... 147
Вопросы для повторения. Задача . . .... 149
Глава 10. Продольная статическая управляемость.........................150
§ 10.1. Управляющие силы и моменты................................150
§ 10.2. Усилие на штурвале, потребное для продольной балансировки
самолета ........................................................152
§ 10.3. Определение балансировочного угла стабилизатора . . . 155
§ 10.4. Балансировочные кривые . ..............156
421
Стр.
§ 10.5. Предельные центровки самолета............................163
§ 10.6. Характеристики продольной статической управляемости . 164
Вопросы для повторения. Задача...........................169
Глава 11. Боковая статическая устойчивость .................170
§ 11.1. Общие понятия.......................................... 170
§ 11.2. Влияние скольжения на распределение аэродинамической наг- (
грузки по самолету........................................
§ 11.3. Боковые силы и моменты ................................. 17»
§ 11.4. Боковая статическая устойчивость . . ... 181
Вопросы для повторения. Задача........................... 187
Глава 12. Статическая боковая управляемость самолета...................188
§ 12.1. Боковые управляющие силы и моменты.......................188
§ 12.2. Прямолинейный установившийся полет со скольжением
§ 12.3. Шарнирные моменты и усилия в тягах (рычагах) органов бо
кового управления .........................................
§ 12.4. Балансировочные кривые по усилиям в тягах бокового управ
ления .....................................................
§ 12.5. Характеристики боковой статической управляемости . . 202
Вопросы для повторения. Задача .......................... 204
Глава 13. Дополнительные моменты при неустановившемся движении. Ба-
лансировка самолета в криволинейном полете............................206
§ 13.1. Нестационарные аэродинамические силы и моменты . . 206
§ 13.2. Продольные нестационарные силы и моменты . . . 208
§ 13.3. Боковые нестационарные силы и моменты...................213
§ 13.4. Балансировка сил и моментов в криволинейном установив-
шемся полете . ...................................219
Вопросы для повторения. Задача . ...... 221
Глава 14. Общая постановка задачи об устойчивости и управляемости са-
молета .... ..........................222
§ 14.1. Основные понятия и определения ....... 222
§ 14.2. Система дифференциальных уравнений движения самолета в
вариациях ... ..............................227
§ 14.3. Продольное и боковое возмущенное движение . . . . 231
§ 14.4. Общая постановка задачи исследования устойчивости полета
и управляемости. Методы решения............................... 234
§ 14.5. Операторный метод решения дифференциальных уравнений
возмущенного движения...........................................241
Вопросы для повторения. Задача............................ 246
Глава 15. Продольное возмущенное движение.............................247
§ 15.1. Исследование продольного возмущенного движения . . 247
§ 15.2. Короткопериодическая форма движения .... 254
§ 15.3. Длпннопериодическая форма движения......................257
§ 15.4. Нормирование характеристик продольной устойчивости са-
молета .........................................................258
§ 15.5. Продольная динамическая управляемость...................259
Вопросы для повторения. Задача .......................... 265
Глава 16. Боковое возмущенное движение самолета.......................266
§ 16.1. Уравнения бокового возмущенного движения ... 266
§ 16.2. Анализ решения уравнений бокового возмущенного движения 267
§ 16.3. Приближенные методы исследования форм бокового движе-
ния ............................................................270
§ 16.4. Характеристики боковой устойчивости . ... 275
§ 16.5. Динамические характеристики боковой управляемости . . 276-
Вопросы для повторения. Задача.......................... 281.
422
Глава 17. Устойчивость и управляемость самолета на взлете и посадке
17.1. Общие особенности устойчивости и управляемости на взлете
_ и посадке .... р
Уравнения движения самолета по ВПП . . . . .
Путевая устойчивость самолета при движении по ВПП . .
УРРавляемость самолета при движении по ВПП
Боковая балансировка в условиях захода
ковым ветром
Продольная устойчивость
ВПП.....................
17.7. Особенности устойчивости J„r.______v
ВПП, покрытой атмосферными осадками
Вопросы для повторения
§
§
§
§
§
§
§
17.2.
17.3.
17.4.
17.5.
17.6.
и управляемость
и управляемости
на посадку с
при движении
б о-
по
при движении
по
Глава 18. Устойчивость и управляемость самолета при наличии автома-
тических устройств
Стр.
282
282
283
288
290
292
293
291
300
301
§ 18.1. Распределение функций управления между пилотом и авто-
матическими устройствами .......
§ 18.2. Системы улучшения характеристик управляемости самолета
§ 18.3. Системы улучшения характеристик устойчивости
§ 18.4. Автоматическая посадка самолета ...
Вопросы для повторения. Задача.........................
301
303
307
311
312
Глава 19. Влияние упругих деформаций конструкции на характеристики
устойчивости и управляемости самолета .......
§ 19.1. Упругие деформации. Способы оценки их влияния на динами-
ку самолета....................................................
§ 19.2. Дивергенция крыла и оперения, реверс органов управления
§ 19.3. Влияние упругих деформаций на характеристики устойчиво-
сти и управляемости самолета...................................
Вопросы для повторения. Задача ..........................
Глава 20. Устойчивость и управляемость самолетов в особых ситуациях
§ 20.1. Основные определения параметров безопасности полета
§ 20.2. Боковая устойчивость и управляемость самолета при отказе
двигателя ......................................................
§ 20.3. Поведение самолета при отказах в системе управления
§ 20.4. Особенности продольной устойчивости и управляемости само-
лета при обледенении ...........................................
Вопросы для повторения. Задача.........................
Глава 21. Динамика самолета в возмущенной атмосфере..................
§ 21.1. Атмосферные явления и вызванные ими возмущения
§ 21.2. Полет в турбулентной атмосфере . .................
§ 21.3. Полет в условиях спутного следа.........................
§ 21.4. Допустимые значения перегрузки и скоростей вертикальных
порывов..............................................• . .
§ 21.5. Эксплуатационные ограничения самолета...................
Вопросы для повторения. Задачи.........................
Глава 22. Особенности полета самолета на больших углах атаки .
313
§ 22.1. Взаимодействие продольного и бокового движений самолета
§ 22.2. Особенности аэродинамики самолета при полете на больших
углах атаки ...................................................
§ 22.3. Самовращение крыла на больших углах атаки
§ 22.4. Штопор самолета ... ........................
Вопросы для повторения. Задача .....-
Глава 23. Принципы контроля режимов летной эксплуатации самолета
§ 23.1. Принципы регистрации параметров полета и их расшифровка
§ 23.2. Обработка результатов записи бортовых регистраторов
§ 23.3. Определение траекторий по результатам регистрации пара-
метров полета ................................. ...............
313
315
319
323
324
324
326
336
337
343
344
344
348
353
354
353
357
359
359
361
366
371
375
376
376
378
381
423
Стр.
§ 23.4. Использование данных самописцев для повышения безопасно-
сти полета ... 383
Вопросы для повторения ....................................383
Глава 24. Динамика полета вертолета...................................384
§ 24.1. Уравнения движения. Методы их решения ..... 384
§ 24.2. Потребная и располагаемая мощности вертолета . . . 386
§ 24.3. Характеристики вертолета на режимах висения и вертикаль-
ного подъема.................................................... 391
§ 24.4. Подъем вертолета по наклонной траектории .... 393
§ 24.5. Максимальная скорость вертолета. Диапазон скоростей. Ог-
раничение максимальной скорости..................................394
§ 24.6. Снижение вертолета с работающими двигателями . . • 397
§ 24.7. Снижение вертолета на режиме самовращения .... 399
§ 24.8. Дальность и продолжительность полета вертолета . . . 403
§ 24.9. Взлет и посадка вертолета........................404
§ 24.10. Балансировка, устойчивость и управляемость вертолета . 408
Вопросы для повторения. Задача...........................415
Список литературы................................................. 417