



























































































































































































Author: Ковалёв Ф.Н. Рындык А.Г.
Tags: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика радиотехника системы управления
ISBN: 5-93272-344-0
Year: 2006




Ф.Н. КОВАЛЕВ
А.Г. РЫНДЫК
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
И РАДИОАВТОМАТИКИ
УЧЕБНОЕ ПОСОБИЕ
ДЛЯ ВУЗОВ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Ф.Н. КОВАЛЁВ, А.Г. РЫНДЫК
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
И РАДИОАВТОМАТИКИ
Рекомендовано учебно-методическим объединением
вузов Российской Федерации по образованию в области радиотехники,
электроники, биомедицинской техники и автоматизации в качестве
учебного пособия для студентов высших учебных заведений,
обучающихся по направлению подготовки 210300 (654200) "Радиотехника"
Нижний Новгород 2006
УДК 681.51 + 621.396.6-52
ББК 32.965
К 56
Рецензенты:
доктор технических наук, профессор В.Т. Ермолаев
доктор технических наук, профессор И.Я. Орлов
Ковалёв Ф.Н., Рындык А.Г.
Основы теории управления и радиоавтоматики: учеб, пособие дли
студентов ВУЗов/ Ф.Н. Ковалёв, А.Г. Рындык; НГТУ. Нижний Новгород, 2006.
210 с.
ISBN 5-93272-344-0
Рассматриваются основные принципы действия, способы математического описания.
вопросы устойчивости, методы анализа и оценки качества работы систем автоматического
управления и радиоавтоматики. Основное внимание уделено линейным непрерывным и им-
пульсным системам, методам математического описания систем и объектов в пространстве со-
стояний, теории оптимальной дискретной фильтрации и анализу влияния случайных воздейст-
вий, Теоретический материал сопровождается примерами.
Предназначено для студентов высших учебных заведений, обучающихся по направле-
нию подготовки 210300 “Радиотехника”, может быть полезно студентам, обучающимся по на-
правлению подготовки 230200 “Информационные системы” при изучении курса “Основы тео-
рии управления”, а также студентам других технических специальностей, изучающих дисцип-
лины, касающиеся систем автоматического управления.
Рис. 96. Библиогр.: 12 назв.
УДК 681.51 + 621.396.6-52
ББК 32.965
ISBN 5-93272-344-0
© Нижегородский государственный
технический университет, 2006
© Ковалёв Ф.11., Рындык A.I 2006
ОГЛАВЛЕНИЕ
Введение
Глава 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
ТЕОРИИ УПРАВЛЕНИЯ.............................................. 9
1.1. Функциональная схема системы автоматического управления. 9
1.2. Математическое описание объектов управления......... 10
1.3. Цель и задачи управления............................ 17
1.4. Критерии качества и оптимальное управление.......... 19
1.5. Управляемость, достижимость, наблюдаемость.......... 20
Глава 2. ТЕОРИЯ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ..................
2.1. Методы анализа линейных непрерывных систем
автоматического управления.................................
2.1.1. Классический метод..................................
2.1.2. Метод преобразования Лапласа (операционный метод)..
2.1.3. Переходная и импульсная переходная функции..........
2.1.4. Частотный метод (метод преобразования Фурье)........
2.2. Типовые динамические звенья и их характеристики
2.3. Условия устойчивости.....................................
2.4. Критерии устойчивости....................................
2.4.1. Алгебраические критерии устойчивости...............
2.4.2. Частотные критерии устойчивости...................
2.4.3. Запасы устойчивости................................
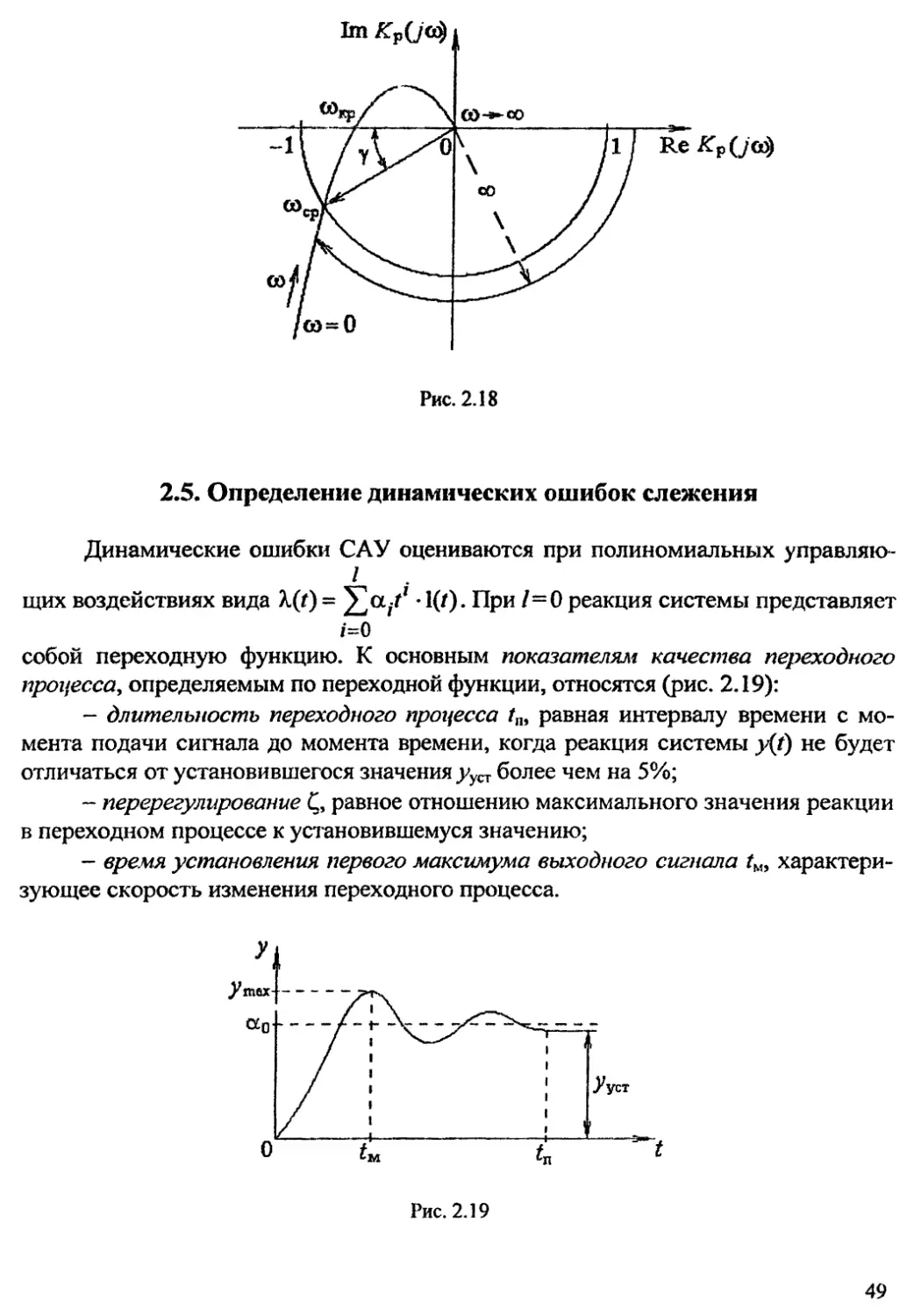
2.5. Определение динамических ошибок слежения.................
2.6. Определение флюктуационных ошибок слежения...............
2.7. Расчёт и анализ характеристик линейной непрерывной системы
с заданной передаточной функцией.............................
25
25
26
32
34
36
43
44
44
45
48
49
52
54
Глава 3. АНАЛИЗ НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ В ПРОСТРАНСТВЕ СОСТОЯНИЙ...................... 60
3.1. Векторные дифференциальные уравнения систем
автоматического управления........................... 60
3.2. Матрица перехода................................ 70
Глава 4. ТЕОРИЯ ЛИНЕЙНЫХ ИМПУЛЬСНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ................................ 75
4.1. Методы анализа линейных импульсных систем автоматического
управления........................................... 79
4.1.1. Z- преобразование.......................... 79
3
4.1.2. Передаточная функция разомкнутой импульсной системы... 83
4.1.3. Разностное уравнение импульсной системы и алгоритм
дискретной фильтрации.................................... 84
4.1.4. Решетчатая весовая функция........................ 86
4.1.5. Частотная характеристика........................ 89
4.2. Дискретная передаточная функция для соединения нескольких
звеньев ................................................... 89
4.3. Условия устойчивости ................................... 90
4.4. Критерии устойчивости................................... 91
4.4.1. Алгебраические критерии устойчивости.............. 92
4.4.2. Частотные критерии устойчивости....................92
4.5. Определение динамических ошибок слежения................ 95
4.6. Определение флюктуационных ошибок слежения.............. 97
4.7. Расчёт и анализ характеристик линейной импульсной системы
с заданной передаточной функцией............................. 99
4.8. Соотношение между линейными непрерывными
и линейными импульсными системами.............................101
Глава 5. АНАЛИЗ ДИСКРЕТНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ В ПРОСТРАНСТВЕ СОСТОЯНИЙ. ДИСКРЕТНЫЙ
ФИЛЬТР КАЛМАНА............................................
5.1. Векторные разностные уравнения дискретных
систем автоматического управления....................
5.2. Дискретная матрица перехода.....................
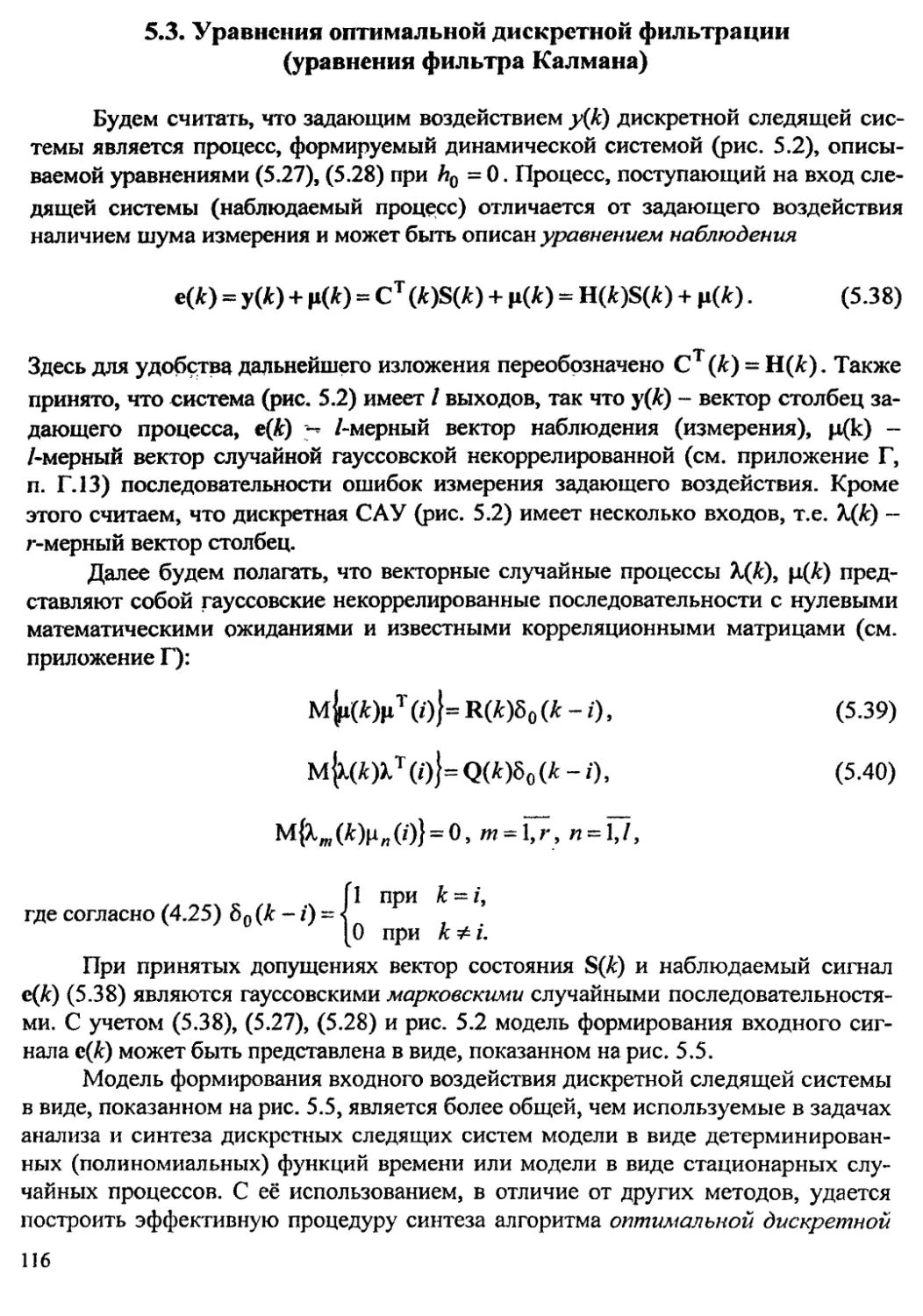
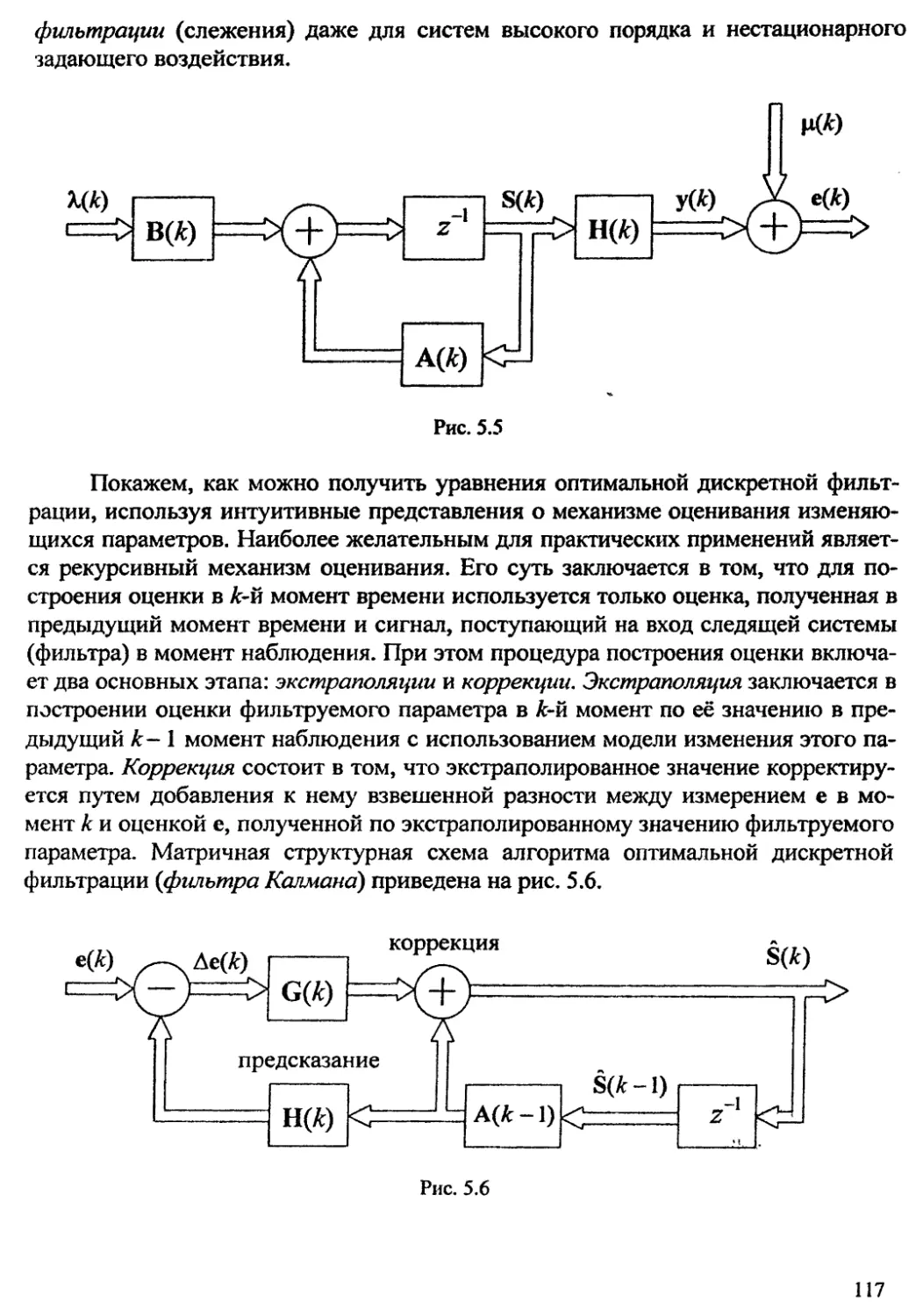
5.3. Уравнения оптимальной дискретной фильтрации
(уравнения фильтра Калмана).........................
5.4. Пример синтеза оптимальной дискретной системы...
105
105
112
116
123
Глава 6. ПОСТРОЕНИЕ РАДИОТЕХНИЧЕСКИХ СЛЕДЯЩИХ
СИСТЕМ. ДИСКРИМИНАТОРЫ СЛЕДЯЩИХ СИСТЕМ...................... 128
6.1. Фазовый дискриминатор............................. 128
6.2. Частотный дискриминатор............................131
6.3. Временной дискриминатор........................... 134
6.4. Система фазовой автоподстройки частоты............ 136
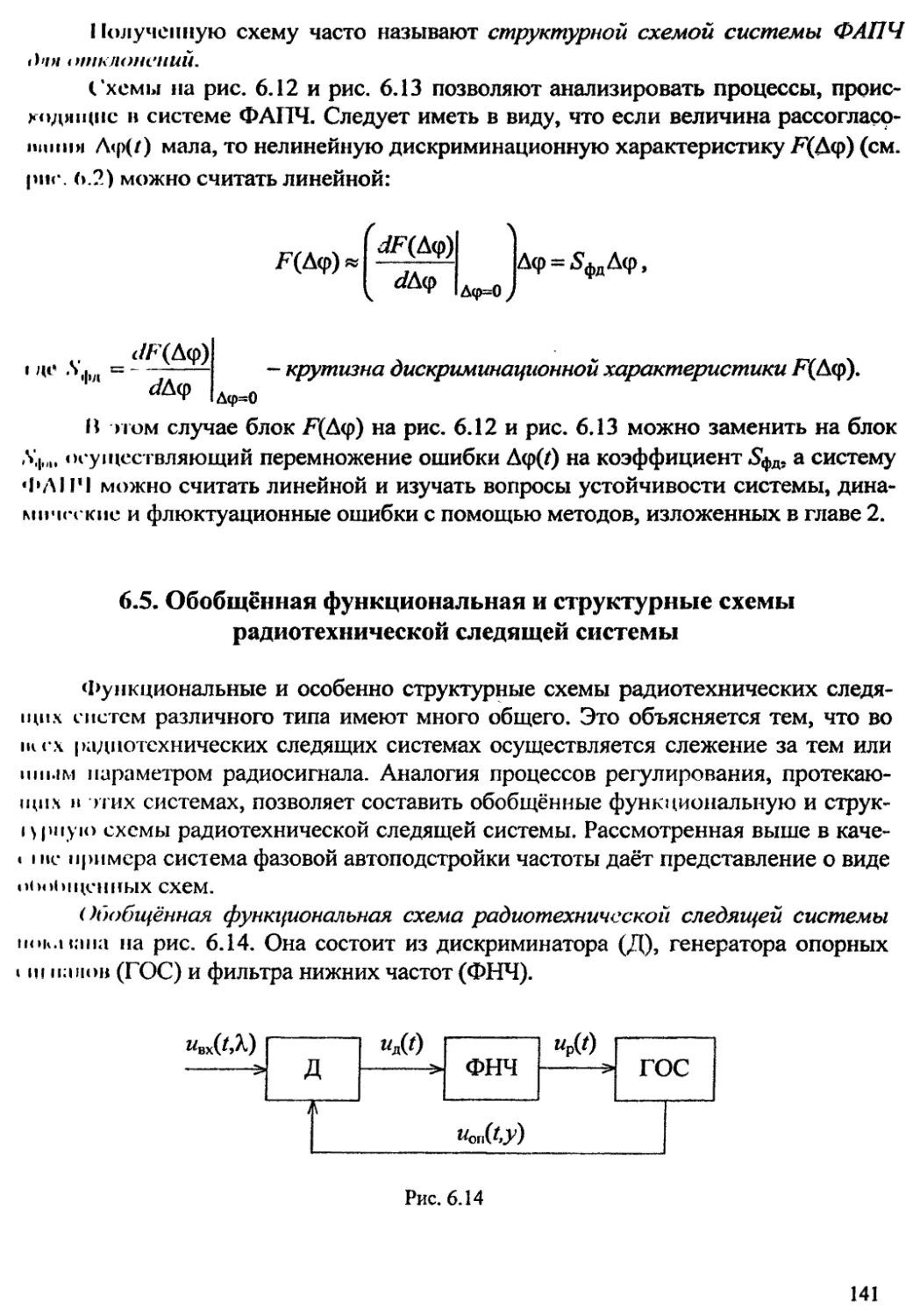
6.5. Обобщённая функциональная и структурные схемы
радиотехнической следящей системы...................... 141
6.6. Особенности импульсных систем радиоавтоматики......146
Глава 7. ЦИФРОВЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ.................................................148
7.1. Цифровые системы автоматического управления с аналоговыми
дискриминатором и объектом управления...............150
7.2. Цифровые системы автоматического управления
с цифровым дискриминатором............................ 155
4
Приложения
Приложение А. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ МАТРИЦ................
А. 1. Определения и обозначения...........................
А.2. Сложение и умножение матриц.........................
А.З. Определитель и обратная матрица.......................
А.4. Блочная матрица.......................................
А. 5. Ранг матрицы........................................
А.6. Дифференцирование и интегрирование, матричная экспонента ....
А. 7. Квадратичные формы...................................
159
159
159
160
162
163
164
164
166
Приложение Б. ПРЕОБРАЗОВАНИЕ ЛАПЛАСА НАИБОЛЕЕ
ЧАСТО ВСТРЕЧАЮЩИХСЯ ФУНКЦИЙ ....................167
Приложение В. ПОНЯТИЕ КОМПЛЕКСНОГО ЧИСЛА И
КОМПЛЕКСНОЙ ФУНКЦИИ ДЕЙСТВИТЕЛЬНОГО АРГУМЕНТА .
168
Приложение Г. КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ
СЛУЧАЙНЫХ ПРОЦЕССОВ ............................................ 171
Г. 1. Определение случайной величины, закон её распределения
и числовые характеристики............................... 172
Г.2. Понятие многомерной случайной величины................. 175
Г.З. Понятие случайного процесса............................ 178
Г.4. Распределение случайных процессов....................... 179
Г.5. Моментные функции случайных процессов .................. 180
Г.6. Стационарные случайные процессы..........................182
Г.7. Эргодические процессы................................. 184
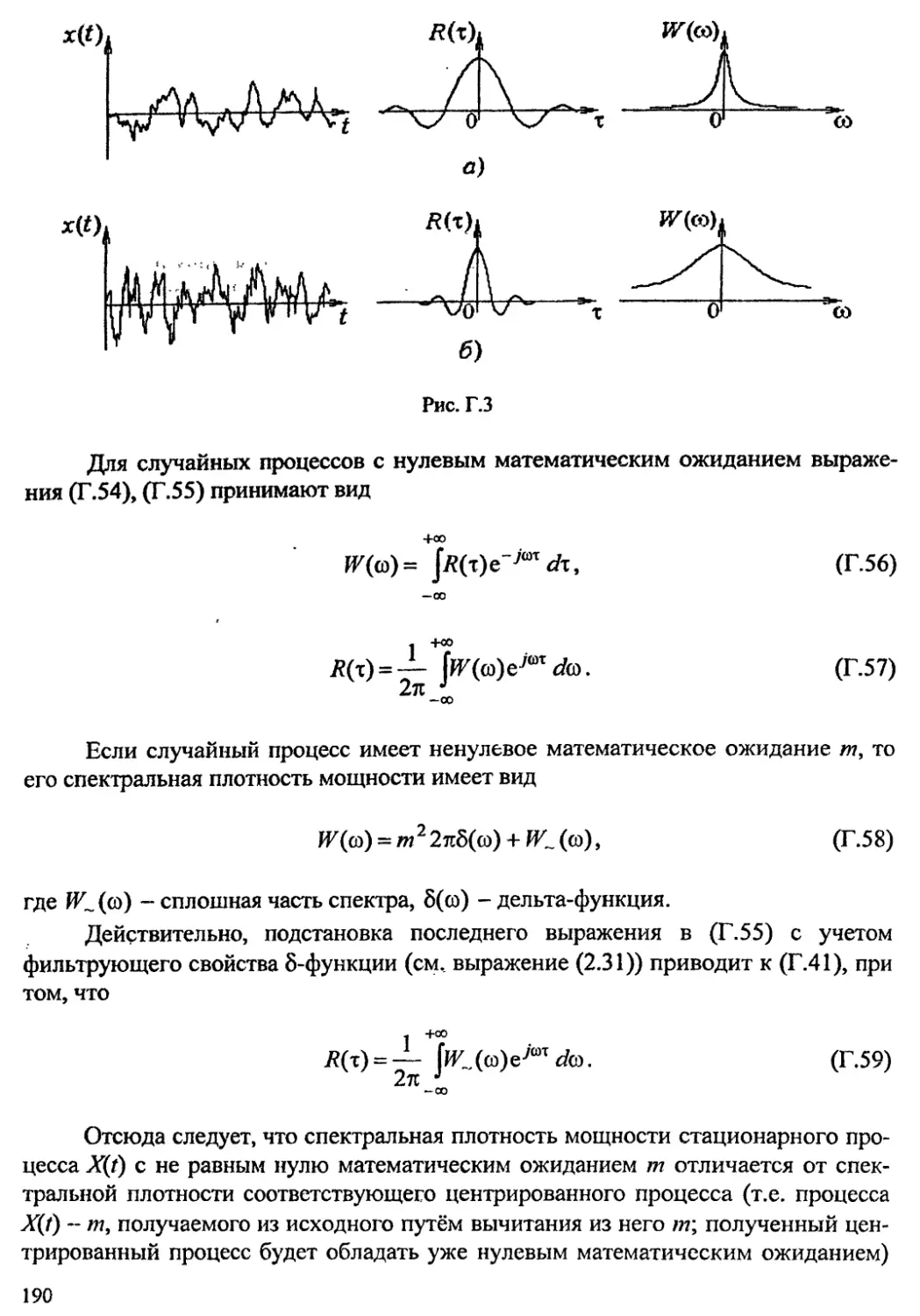
Г.8. Спектральная плотность мощности случайного процесса..... 186
Г.9. Соотношение между спектральной плотностью
и ковариационной функцией случайного процесса............ 189
Г. 10. Белый шум.............................................191
Г. 11. Спектральная плотность мощности случайного процесса
на выходе линейной системы............................ 193
Г. 12. Дискретные случайные процессы....................... 194
Г. 13. Нормальный (гауссовский) случайный процесс........... 196
Г. 14. Понятие марковского случайного процесса ............ 198
Приложение Д. Z-ПРЕОБРАЗОВАНИЕ НАИБОЛЕЕ ЧАСТО
ВСТРЕЧАЮЩИХСЯ ФУНКЦИЙ........................
200
Список литературы.......................................... 202
Список основных обозначений и сокращений.....................203
Предметный указатель...................................... 206
ВВЕДЕНИЕ
Предлагаемая вниманию читателя книга посвящена изучению систем ав-
томатического управления (САУ). САУ применяются для управления объектами
различного назначения и устройства: механическими, гидравлическими, электри-
ческими, радиотехническими и др. Кроме того, возможно автоматическое управ-
ление предприятиями, коллективами людей, отраслями производства, экономи-
кой. Общие принципы организации и построения, а также режимы работы и ха-
рактеристики систем автоматического управления рассматриваются в теории ав-
томатического управления, являющейся ветвью кибернетики - науки об общих
законах управления и обработки информации. Применительно к радиотехниче-
ским системам теория автоматического управления получила собственное назва-
ние —радиоавтоматика. Часто используемыми системами радиоавтоматики (ра-
диоавтоматическими системами) являются:
- система частотной автоподстройки (применяется в радиоприемных
устройствах для поддержания постоянной промежуточной частоты сигнала и для
стабилизации частоты генерируемых колебаний);
система фазовой автоподстройки частоты (предназначена для слеже-
ния за фазой сигнала);
- система автоматического сопровождения по дальности (предназначена
для пространственно-временной селекции по дальности объекта с одновременным
измерением расстояния и строится на основе системы слежения за временным по-
ложением импульсного сигнала);
— система автоматического регулирования усиления (предназначена для
стабилизации уровня сигнала на выходе усилителей при большом динамическом
диапазоне изменения входного сигнала);
— система автоматического слежения за направлением прихода радиосиг-
нала (предназначена для пространственной селекции по направлению целей в ра-
диолокационных комплексах и строится на основе направленных свойств антенн).
Различные по назначению и устройству САУ в теории автоматического
управления изучаются на основе математических моделей. То, что разным САУ
соответствуют математические модели одного и того же класса, позволяет ис
пользовать разработанный математический аппарат и методы анализа для иссле-
дования процессов в различных системах
не только в технических, но, напри-
мер, и в социальных или в биологических.
Бурное развитие ЭВМ и вычислительных алгоритмов привело к тому, что
сегодня можно эффективно исследовать динамические процессы и в целом пове
дение достаточно сложных САУ и самоорганизующихся систем и организмов.
Более качественному и наглядному анализу с применением ЭВМ способствуют и
специально разработанные в теории автоматического управления методы, напри-
мер, метод анализа САУ в пространстве состояний.
Кроме этого, большие вычислительные и логические возможности совре-
менных ЭВМ повысили актуальность изучения дискретных и цифровых САУ и в
целом теории автоматического управления. Реализованные в соответствии с этой
теорией такие системы, как адаптивные роботы-манипуляторы, производственные
линии с заложенной в них гибкой программой, устройства слежения, искусствен-
ные органы и т.д., сегодня активно используются в современном производстве,
военной технике, медицине и других областях.
Книга состоит из семи глав и пяти приложений.
В первой из них изложены основные понятия и определения теории автома-
тического управления.
Вторая и третья главы посвящены изучению непрерывных систем автома-
тического управления. Во второй главе рассматриваются структурные схемы сис-
тем, методы анализа и математического описания, условия и критерии устойчиво-
сти, влияние случайных воздействий на качество работы САУ.
Третья глава содержит методику анализа непрерывных систем в простран-
стве состояний. Актуальность этого материала позволила разместить его в от-
дельной главе. Анализу систем в пространстве состояний посвящена и пятая глава
данного пособия, но в ней речь идёт об импульсных системах. В книге должное
внимание уделено различным способам введения переменных состояния (они
рассмотрены в главах 1, 3 и 5) и нахождения их значений в зависимости от за-
дающего воздействия.
Четвёртая и пятая главы посвящены изучению импульсных систем, по своей
структуре они во многом схожи со второй и третьей главами. Так, в четвёртой
главе изложены методы анализа и математического описания импульсных систем,
затронуты некоторые вопросы из теории дискретных фильтров. Рассмотрены ус-
ловия устойчивости системы, оценка влияния на систему случайных воздействий,
соотношение между линейными непрерывными и линейными импульсными САУ.
В пятую главу помимо параграфа, содержащего основы анализа систем в
пространстве состояний, включён материал, относящийся к синтезу оптимальных
дискретных систем. Рассмотрена структурная схема фильтра Калмана, изложена
методика исследования оптимальной системы.
В отдельную шестую главу выделена тема, посвященная следящим радио-
техническим системам и их дискриминаторам. В ней рассмотрены основные типы
используемых дискриминаторов и их математическое описание. В качестве при-
меров САУ приведено описание радиотехнических следящих систем: системы
фазовой автоподстройки частоты и обобщенной радиотехнической следящей сис-
темы, приведены особенности импульсных систем радиоавтоматики.
В заключительной седьмой главе рассмотрены особенности математическо-
го описания и анализа цифровых систем управления, в которых в качестве управ-
ляющего устройства используется цифровая вычислительная машина.
Большое внимание при написании книги авторы уделили удобству её ис-
пользования. Так, все главы дополнены наглядными примерами. Книга содержит
предметный указатель, облегчающий работу и дающий возможность её использо-
вания в качестве справочника основных терминов. Термины, вынесенные в пред-
метныи указатель, по ходу текста выделены курсивом. Достаточное количество
справочного материала содержится в приложениях.
Предполагается, что читатель, приступивший к изучению книги, знаком с
основными понятиями ряда предшествующих курсов, таких как “Высшая матема-
тика”, “Основы теории цепей” или “Основы электротехники”. Наиболее востре-
бованы базовые элементы следующих разделов “Высшей математики”: диффе-
ренциальных уравнений, теории вероятностей и аппарата теории матриц. Большая
часть необходимых сведений из курса “Высшая математика” приводится в при-
ложениях. Для облегчения понимания таких важных вопросов, как анализ систем
в пространстве состояний и влияние на систему случайных возмущений в прило-
жении А и приложении Г значительное внимание соответственно уделено основ-
ным понятиям из теории матриц и теории случайных процессов. Приложения Б й
Д содержат таблицы преобразований Лапласа и /-преобразования. В приложении
В приведен ряд важных понятий, касающихся комплексных чисел.
Авторы книги - преподаватели Нижегородского государственного техниче-
ского университета: А.Г. Рындык более чем 10 лет преподавал курс “Радиоавто-
матика” для студентов специальности “Радиотехника”, Ф.Н. Ковалёв с 2002 года
преподаёт курсы “Основы теории управления” и “Радиоавтоматика”. Книга напи-
сана по материалам прочитанных авторами лекций.
Появление книги связано с желанием авторов изложить для студентов в
простой и доступной форме основные понятия и положения теории автоматиче-
ского управления и далее с их использованием пояснить основные моменты и
особенности построения и функционирования систем радиоавтоматики. Всё это
обусловило практическую направленность материала книги при одновременной
строгости математических формулировок.
Предлагаемая книга является учебным пособием по курсу “Радиоавтомати-
ка” и предназначена
“Радиотехника”. Книга может быть полезна студентам, обучающимся по направ-
лению подготовки “Информационные системы
теории управления”, а также студентам других технических специальностей, изу-
чающих дисциплины, касающиеся систем автоматического управления.
,ля студентов, обучающихся по направлению подготовки
при изучении курса “Основы
»
ГЛАВА 1
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
ТЕОРИИ УПРАВЛЕНИЯ
Управление состоит в том, чтобы, оказывая на какой-либо объект воздейст-
вие, изменять протекающие в нем процессы для достижения определенной цели.
Управление является автоматическим, если оно осуществляется без вмешатель-
ства человека с помощью специальных устройств.
1.1. Функциональная схема системы автоматического управления
Систему автоматического управления условно можно представить состоя-
щей из двух частей (рис. 1.1): из объекта управления (ОУ) и управляющего уст-
ройства (УУ). Под объектом управления применительно к инженерным задачам
подразумевается любое техническое устройство, процессом y(t)
на выходе кото
рого надлежит управлять.
ЯО
Рис. 1.1
Управляющее устройство обобщает все входящие в контур системы управ-
ления элементы, используемые с целью организации процесса управления. На
вход системы управления подается задающее воздействие определяющее
желательный характер управляемого процесса у(/). Управляющее устройство на
основании информации о процессах Л(/) и у(0, а в ряде случаев и на основании
данных о возмущении fit), “рассчитывает” управление ?/(/), с помощью которого
воздействует на объект управления с целью поставить процесс y(t) в соответствие
сигналу !(/) в рамках некоторого формального описания этого соответствия. Как
правило, возмущение fit) учитывает влияние па систему таких случайных факто-
ров как изменяющиеся параметры окружающей среды (температура, давление,
влажное;ь и т.п.), колебаний напряжений источников питания и т.д.; поэтому
возмущение/^/1) принято описывать случайным процессом.
Задачей рассматриваемой на рис. 1.1 системы управления часто является
установление простого равенства между задающим воздействием Х(/) и управляе-
мым процессом y(t). В этом случае работу системы управления можно предста-
вить следующим образом. При отклонении y(f) от воздействия X(f) возникает рас
согласование (ошибка) х(0 = Л(/) - y(f), которое вырабатывается в У У. После чего
УУ формирует управляющий процесс и(0, который поступает на ОУ и изменяет
управляющую величину ХО так, что модуль исходного рассогласования х(0
уменьшается. В такой системе использована отрицательная обратная связь, и реа-
лизован так называемый принцип управления по рассогласованию.
В системах радиоавтоматики задающим воздействием является, как прави-
ло, параметр радиосигнала: фаза, частота, временное положение или направление
прихода. Это приводит к некоторому отличию указанных систем радиоавтомати-
ки от системы, изображенной на рис. 1.1. Оно состоит в том, что на вход УУ по-
дается не само задающее воздействие X(f), а радиосигнал мс0Л), одним из пара-
метров которого является процесс X(f). На второй вход УУ поступает вырабаты-
ваемый ОУ опорный сигнал Wonfay), параметром которого является управляемая
величина ХО- В устройстве управления происходит измерение рассогласования
сигналов по отслеживаемому параметру, т.е. вырабатывание напряжения «д(0, за-
висящего от ошибки х(0- Такое устройство называется дискриминатором. После
чего напряжение нд(/) с выхода дискриминатора преобразуется в управляющее
воздействие «(/), приложенное к ОУ и изменяющее управляемую величину y(t)
таким образом, чтобы свести к нулю рассогласование x(t). Устройство некоторых
дискриминаторов, а также функциональная и структурная схемы радиотехниче-
ской следящей системы (системы радиоавтоматики) рассмотрены в главе 6.
Рис. 1.1 отражает общие принципы построения САУ. На практике могут
встречаться системы с многоконтурной структурой, системы, содержащие в каче-
стве подсистем также САУ, системы с несколькими возмущениями и т.д. При
этом в большинстве случаев САУ можно привести к виду, изображенному на
рис. 1.1.
К системам управления многие специалисты также относят системы без об-
ратной связи. Однако они встречаются не часто, поэтому подавляющее большин-
ство систем, рассматриваемых в теории автоматического управления и радиоав-
томатике, строятся обычно по схеме, приведенной на рис. 1.1с использованием
управления по рассогласованию. Именно такие системы рассматриваются в посо-
бии.
1.2. Математическое описание объектов управления
Для решения большинства задач анализа и синтеза систем управления необ-
ходимо иметь математическую модель ОУ. Построение математической модели
заключается в установлении ряда соотношений, позволяющих при каждых вхо;
ных воздействиях и начальных состояниях найти сигнал на выходе объекта
управления. Обычно модель получают как математическую формулировку физи-
10
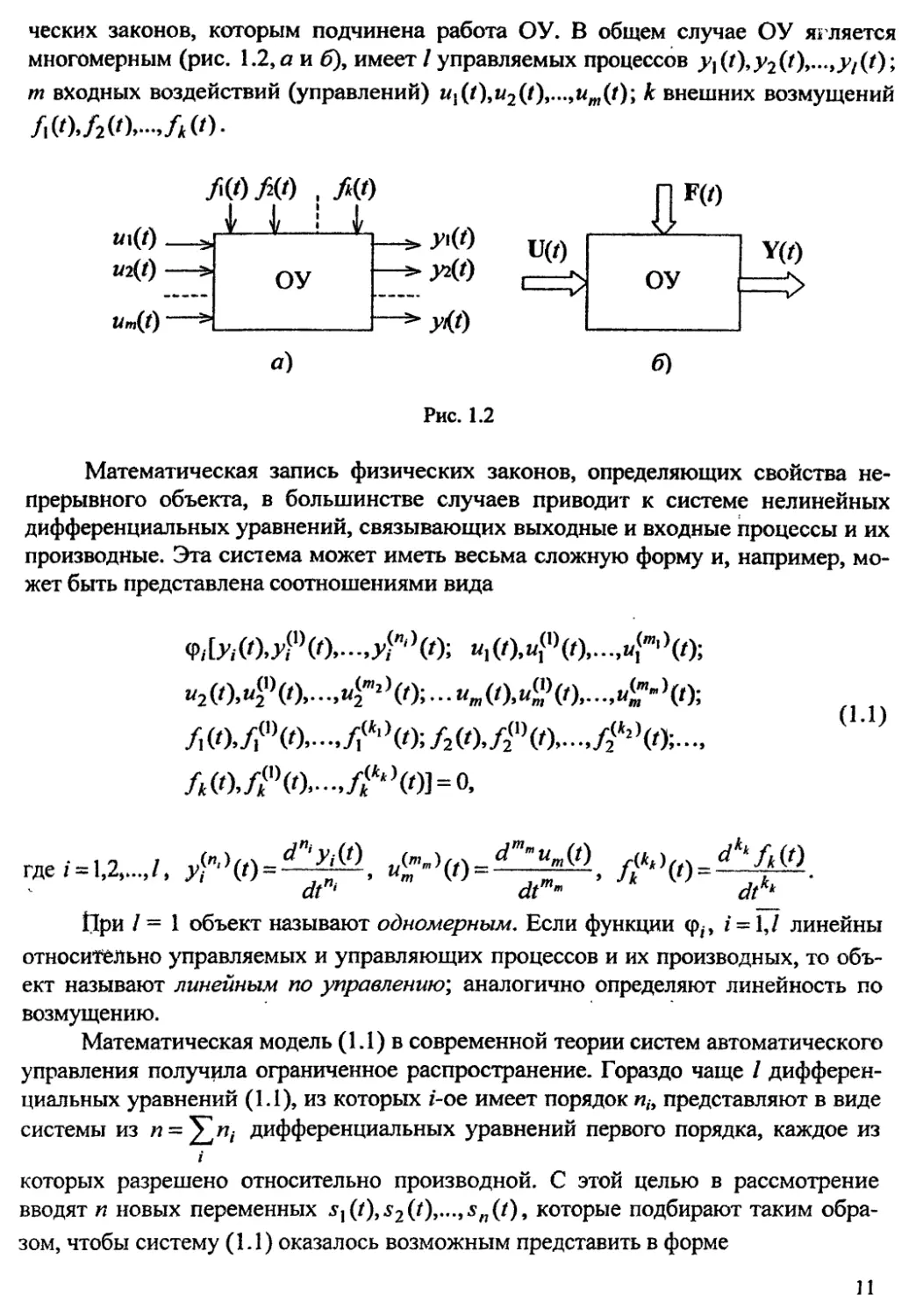
ческих законов, которым подчинена работа ОУ. В общем случае ОУ является
многомерным (рис. 1.2, а и б), имеет I управляемых процессов (0»Уг(0,—
т входных воздействий (управлений) И|(0»«2(0»—>нда(0; внешних возмущений
/1(0,/2(0,...,Л(0.
/(О АО , АО
И ! I
«1(0 ——*——П—> л(0
«2(0 —> оу —> АО
Um(t)----И__________________ДО
а}
Рис. 1.2
Математическая запись физических законов, определяющих свойства не-
прерывного объекта, в большинстве случаев приводит к системе нелинейных
дифференциальных уравнений, связывающих выходные и входные процессы и их
производные. Эта система может иметь весьма сложную форму и, например, мо-
жет быть представлена соотношениями вида
<рДуХО,й”(О,-• ^(t);
«2 (0, «2 ’ (0.- • . «г”г ’ W; • «„ (0. • -Л"’ ’ ОТ;
/1 ОТ. //"ОТ- • ..# ’ ОТ; /> Xty„.
ft (0, Л(,) (0. Л(Л* ’ ОТ]=о,
При 7=1 объект называют одномерным. Если функции ф,, i = 1,1 линейны
относительно управляемых и управляющих процессов и их производных, то объ-
ект называют линейным по управлению", аналогично определяют линейность по
возмущению.
Математическая модель (1.1) в современной теории систем автоматического
управления получила ограниченное распространение. Гораздо чаще Z дифферен-
циальных уравнений (1.1), из которых 7-ое имеет порядок nit представляют в виде
системы из « = У?Н/ дифференциальных уравнений первого порядка, каждое из
которых разрешено относительно производной. С этой целью в рассмотрение
вводят п новых переменных которые подбирают таким обра-
зом, чтобы систему (1.1) оказалось возможным представить в форме
11
•jy(0 = 4/yh(0»-s2(0, - ^„(0; Л<О>А(О»-»Л(О]» / = U (1.2)
где принято обозначение Sj(t) = ds:(t)ldt.
Эту систему называют нормальной формой Коши. Выходные процессы ОУ
выражаются через введенные переменные - переменные состояния s (/), j = 1,п -
яг
соотношениями вида
z(0=0(Gi(0^2(0>-,^(0; «|(/),«2(0эЛ (О, Л (О»..., Л (OX * = М, (1-3)
где стоящие в правой части функции в, являются в общем случае нелинейными.
Система уравнений (1.2) должна быть эквивалентна исходной системе (1.1) в том
смысле, что по решению (1.2) можно однозначно установить решение (1.1). Сово-
купность уравнений (1-2), (1.3) часто называют уравнениями состояния. При этом
часто (1.3) называют уравнением выхода.
Переход от системы уравнений в форме (1.1) к уравнениям состояния не яв-
ляется однозначным, т.е. может быть осуществлен разными путями. Одной и той
же системе уравнений (1.1) может соответствовать несколько систем в форме
Коши в зависимости от способа определения переменных состояния. Универсаль-
ных рекомендаций для перехода, обеспечивающих преобразование самых произ-
вольных уравнений (1.1) в форму (1.2), (1.3) в настоящее время нет. Однако для
некоторых частных случаев такие подходы существуют. Рассмотрим один из них.
Достаточно просто уравнения состояния находятся, когда уравнения (1.1)
являются линейными, с постоянными коэффициентами - стационарными. Поло-
жим, что ОУ одномерный с одним управлением u(t) и одним возмущением fit).
Общее описание такого объекта сводится к линейному дифференциальному урав-
нению и-го порядка с постоянными коэффициентами
л п п
(О М(,) (О + X (()>
i -0 /=0
ai = const, bj = const, ci = const, i - 0, n,
(1-4)
в составе которого an* 0 с тем, чтобы уравнение не теряло свойств уравнения п-го
порядка, а часть остальных коэффициентов могла равняться нулю.
Возможный способ перехода от уравнения (1.4) к системе уравнений в фор-
ме (1.2), (1.3) основан на введении переменных состояния по правилу
s = a ny(t) ~ b
(1.5)
и далее
s2 (t) = j1 (t) + an_xy(t) - bn_xu(j\
s3 (0 = s2 (0 + ап-2У(0 ~ bn-2u(t),
sn (0 = Vi (0 + a\У(0 ~ M(0,
0 = sn + aoy(f) - bou(t),
(1.6)
где для упрощения записей принято^/) = 0. Не трудно убедиться в эквивалентно
сти (1.5), (1.6) исходному уравнению (1.4). Для этого достаточно п раз продиффе-
ренцировать уравнение (1.5) с учётом замены при каждом j-ом дифференцирова-
нии (у = ],и) переменной Sj(t) на s+1(f) согласно j-ому уравнению системы
(1.6).
Для удобства уравнения (1.5), (1.6) перепишем в следующем виде:
Я0 = “ (Л1 (0 + bnu(t)\
(/) = s2 (0 - an_xy(t) + bn_xu{t),
s2 (f) = S3 (0 “ an_2y(t) + bn~2u(t),
* »
(0 = sn(t) - axy(t) + bxu(t\
sn = ~«оЯО + bQu(t),
(1.7)
где Я0 B (1-8) выражается через (1.7), так что после подстановки у(1) в (1.8) и
группировки слагаемых в уравнениях получим:
(')+v('A (1.9)
*1 (0 = 1 (- (0 + ans2 (0) + “(a„b„_x - an_{bn )u(t\
Qn &п
(1.10)
i„ I (I) = — (- «1 Si (') + o„s„(')) + —- (a„i, - atb„)«(/),
Sn^~~ S] (0 + —- {anbQ - aob„ >(/).
13
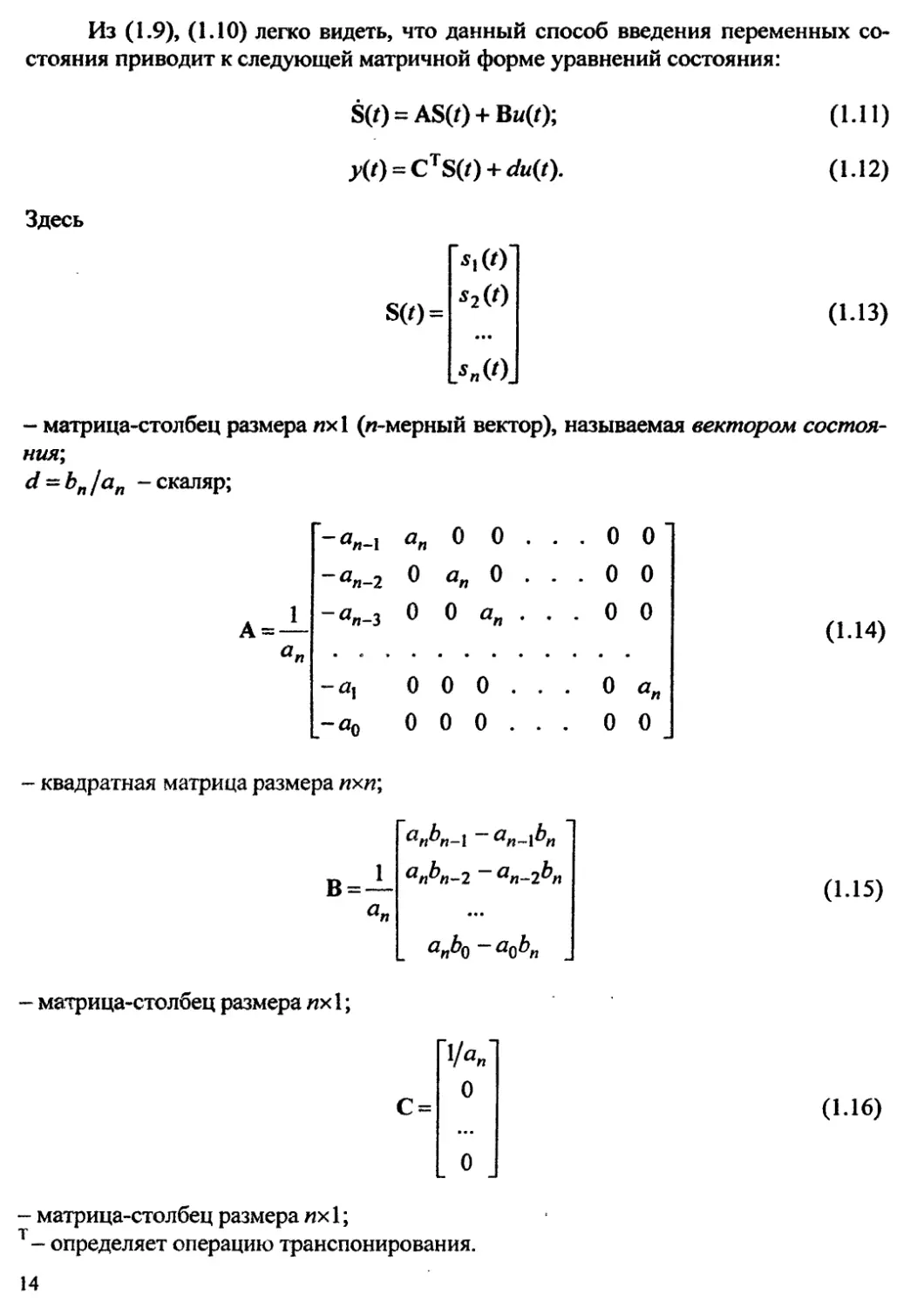
Из (1.9), (1.10) легко видеть, что данный способ введения переменных со-
стояния приводит к следующей матричной форме уравнений состояния:
Здесь
S(0 = AS(0 + Bw(Z);
*
J(O = CTS(0 + du(t).
S(0 =
(O’
s2(0
(1.11)
(1.12)
(1.13)
_5n(0_
— матрица-столбец размера их 1 («-мерный вектор), называемая вектором состоя-
ния;
d — bn/an - скаляр;
(1.14)
- квадратная матрица размера ихи;
мп-2ип
(1-15)
матрица-столбец размера их 1;
о
(1-16)
- матрица-столбец размера их 1;
т— определяет операцию транспонирования.
14
Данное определение матриц А, В и С приводит к эквивалентности матрич-
ного дифференциального уравнения (1.11) системе (1.10). Уравнение (1.12) (и со-
ответственно (1.9)) является уравнением выхода. Рассмотрим пример.
— ! — шиш » III I II ...мчи» г u.n. ........... .. p. .. . T.—-J—|-гтг.г |
Пример 1.1. Используя изложенный способ введения переменных состоя-
ния, перейдём от уравнения, описывающего объект управления -
+ 30 + 200Я0 = 200w(0,
dr dt
(1.17)
к матричной форме (1.11), (1.12).
Сопоставление (1.17) и (1.4) показывает, что в данном случае:
о„=а2=1» °w-i ~ai =30, ао-2ОО,
bn = Z>2 = ®= 0, £>о = 200.
В соответствие с (1.14) 4- (1.16) получим:
200
(1.18)
При подстановке (1.18) в (1.11), (1.12) найдём уравнения состояния:
Si (t) _ - 30
s2 (О - 200
XO=[1
0w(0,
или
$1(0= -зо$](о + $2(О.
s2 (0 = -200$! (0 + 200w(0,
M0=$i (0 •
M I
ЯЫ4
1Мчмф«мищ«т*ш«гй*1в*т'«ма|1Ш»
«мчм
Изложенный подход к описанию систем с помощью уравнений состояния
можно успешно применить и к многомерным, нестационарным объектам. В ре-
зультате усложняются соответствующие уравнения, однако внешняя структура их
не усложняется.
15
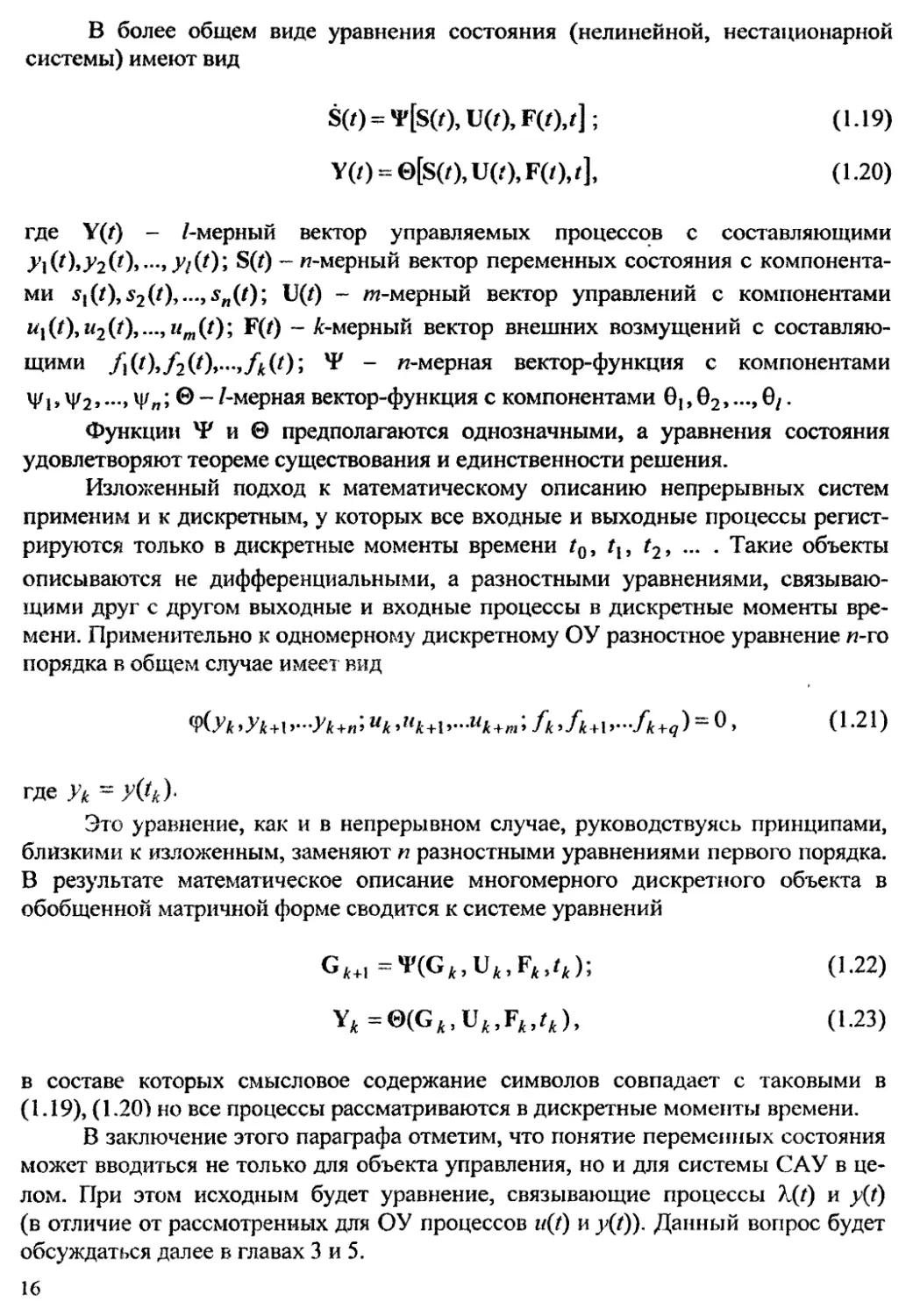
В более общем виде уравнения состояния (нелинейной, нестационарной
системы) имеют вид
ЭД=4-[s(r), U(O, ЭД,<];
(1.19)
Y(/) = ©[S(z),U(.-),F(/),z],
(1.20)
где ¥(/) - Z-мерный вектор управляемых процессов с составляющими
(0,^(0»у lit)', S(Z) — «-мерный вектор переменных состояния с компонента-
ми $1(7),s2(t),...,sn(t); U(7) - /тг-мерный вектор управлений с компонентами
W|(Z),w2 (/),...,/<„,(/); F(z) — A-мерный вектор внешних возмущений с составляю-
щими fi(t),f2(t)t...,fk(t)’, 4х - w-мерная вектор-функция с компонентами
у!, V2»—»Ул J ® ~ Z-мерная вектор-функция с компонентами 0|, 02,0/ .
Функции Т и ® предполагаются однозначными, а уравнения состояния
удовлетворяют теореме существования и единственности решения.
Изложенный подход к математическому описанию непрерывных систем
применим и к дискретным, у которых все входные и выходные процессы регист-
рируются только в дискретные моменты времени z0, Zj, Z2, ... . Такие объекты
описываются не дифференциальными, а разностными уравнениями, связываю-
щими друг с другом выходные и входные процессы в дискретные моменты вре-
мени. Применительно к одномерному дискретному ОУ разностное уравнение «-го
порядка в общем случае имеет вид
»Та+1 У'Ук+п> uk'Uk+\*"”Uk+m* fk >fk+\>'‘'fk+q) >
(1.21)
где ук ~ y(tk)-
Это уравнение, как и в непрерывном случае, руководствуясь принципами,
близкими к изложенным, заменяют « разностными уравнениями первого порядка.
В результате математическое описание многомерного дискретного объекта в
обобщенной матричной форме сводится к системе уравнений
^(GbU*,^);
(1-22)
Yt=0(GA,Ut,FA,zA),
(1-23)
в составе которых смысловое содержание символов совпадает с таковыми в
(1.19), (1.20) но все процессы рассматриваются в дискретные моменты времени.
В заключение этого параграфа отметим, что понятие переменных состояния
может вводиться не только для объекта управления, но и для системы САУ в це-
лом. При этом исходным будет уравнение, связывающие процессы \(t) и y{f)
(в отличие от рассмотренных для ОУ процессов м(7) и ,v(/)). Данный вопрос будет
обсуждаться далее в главах 3 и 5.
16
1.3. Цель и задачи управления
Введем в рассмотрение //-мерную систему координат, по осям которой бу
дем откладывать величины , s2,...»stl (рис. 1.3).
Рис. 1.3
Графически подобную систему можно отобразить лишь при п ~ 1,2,3. В ос-
тальных случаях она не поддается геометрической интерпретации и вводится как
удобный для последующего изложения абстрактный прием. Пространство, харак-
теризуемое этой системой координат, принято называть пространством состоя-
ний или фазовым пространством. В некоторых работах под фазовым простран-
ством понимают тот частный случай пространства состояний, когда величины
5](/),s2(t),...,sn(f) имеют смысл соответственно выходного процесса объекта,
скорости изменения выходного процесса, ускорения и т.д. (применительно к од-
номерному случаю).
Пусть в некоторый момент времени (обычно ~ 0), используемый как на-
чало отсчета времени, переменные состояния 5|, s2, , sn имеют значения (г0),
52(/о), sn(tG) или, иными словами, вектор состояния равен S(/o). Начало этого
вектора находится в точке О пространства состояния, а конец в точке которую
принято называть изображающей тонкой. Пусть далее к объекту приложены
конкретные воздействия U(f) и F(z). Подставим их в уравнение (1.19). Если те-
перь это уравнение решить при начальных условиях S(f0), то решение
S(Z,U(/),F(/),S(r0)), t >tQ, будет зависеть от всех воздействий и начальных усло-
вий. Этому решению при каждом t в пространстве состояний будет соответство-
вать определенная точка. Если эти точки соединить кривой, получим траекторию,
называемую траекторией движения объекта в пространстве состояний.
17
Траектория движения объекта может изменяться под действием управляю-
щего воздействия. Предположим, что момент /о соответствует началу управления
объектом, т.е., начиная с этого момента на объект подаётся управление U(z). Из-за
конструктивных, прочностных, энергетических и других особенностей объекта на
его вход не могут подаваться произвольные управления. Реальные управления
должны быть подчинены некоторым ограничениям, например:
Ut (t) < С/ ,
(1.24)
где ct = const, i = 1, m.
Совокупность ограничений формирует область возможных значений управ-
ляющих воздействий, которую принято также называть областью допустимых
управлений. Обозначим эту область символом Q(U). Реально подаваемые на вход
ОУ управления должны принадлежать области допустимых управлений:
U(r) е Q(U).
(1.25)
В этом случае управления называются допустимыми. Аналогично перемен-
ные состояния 5] (/), s2 (/), —> sn (О в общем случае должны удовлетворять опреде-
ленным ограничениям, т.е. вектор S(z) в пространстве состояний не должен выхо-
дить за пределы некоторой области Q, называемой областью допустимых со-
стояний (рис. 1.3):
S(0 е GCS).
(1.26)
Пусть б области Q можно выделить некоторую подобласть состояний Qi
(Qt czQ), которые для нас по каким-то причинам являются желательными. Цель
управления заключается в том, чтобы перевести объект из начального состояния
S(/o), в котором он находился в момент to, в конечное состояние S(7’K), принадле-
жащее подобласти Qi области допустимых состояний, т.е. S(7’k)g<2i. Момент
ремени t
Тк, соответствующий моменту попадания объекта в конечное состоя-
ние, может быть неизвестным.
Для достижения цели управления на вход объекта необходимо подать соот-
ветствующее управление. Задача управления состоит в том, чтобы в области до-
пустимых управлений (1.25) подобрать такое управление, при котором будет дос-
тигнута цель. Иными словами, требуется отыскать такое допустимое управление
U(/)€Q(U), определенное на временном отрезке [Zo, 7К] (где Тк заранее может
быть неизвестно), при котором уравнения ОУ (см. (1.19)) при заданном начальном
состоянии и известном векторе F(f) имеют решение S(Z), удовлетворяющее огра-
ничению (1.26) при всех t е [z0, Тк ] и конечному условию 8(7^ ) е Q{.
18
1.4. Критерии качества и оптимальное управление
В общем случае задача управления имеет бесконечное число решений, т.е.
существует бесконечное число допустимых управлений, переводящих объект из
начального состояния в конечное в соответствии со всеми введенными ограниче-
ниями. В этом смысле все управления, реализующие цель управления, являются
равноценными. Однако к системе управления могут предъявляться ряд требова-
ний, не участвующих в формулировке задачи управления, но характеризующих
успешность продвижения по пути к цели управления. Чтобы судить о степени со-
ответствия системы предъявляемым к ней требованиям, вводят в рассмотрение
числовые показатели, отражающие качественную сторону процесса движения к
цели управления и формирующие понятия качества управления.
Формально качество управления можно описать двумя путями. Либо в
форме совокупности показателей качества (время регулирования, установившиеся
ошибки при типовых воздействиях, значение перерегулирования (см. п. 2.5) и
т.п.), либо в форме некоторого обобщенного показателя, определяемого всеми про-
цессами, участвующими в процессе регулирования U(/)> F(z), S(0> А(/) (задающее
воздействие также может быть многомерным). Качество существенно зависит от
конкретного вида управления U(/). При каждом управлении, при котором дости-
гается цель управления, качество будет принимать определенное значение. Оче-
видно, что из числа реализующих цель управлений следует выбирать такие, при
которых качество будет обеспечено в соответствии с заданными требованиями.
При первом подходе качество управления оценивается совокупностью по-
казателей, представляющих по существу параметры реакции системы на некото-
рые типовые детерминированные и случайные входные воздействия. Выбор ра-
ционального управления в этом случае обеспечивается выбором параметров и
структуры, входящих в цепь управления корректирующих цепей (фильтров).
При втором подходе качество управления описывается некоторым обоб-
щенным показателем качества, представляющим собой меру эффективности
достижения цели управления средствами конкретного управления U(r). Обобщен-
ный показатель - это числовая характеристика, в общем случае зависящая от U(z),
S(/), F(/), А(7). Так что конкретному управлению U(Z) и процессам F(/), А(7) соот-
ветствует определенное значение показателя качества.
Обобщенный показатель в каждой задаче назначается самостоятельно. Вы-
бор показателя - часто сложная задача, и общих рекомендаций по его назначению
не существует. Качество может содержать различный физический смысл и отра-
жать в зависимости от технического назначения объекта различные свойства сис-
темы управления. Такими свойствами, например, могут быть точность поддержа-
ния заданного режима работы объекта управления, время достижения цели
управления, надёжность безотказной работы, значение максимальной ошибки в
определенном режиме функционирования, энергетические затраты на управление
и т.д. Наиболее часто обобщенный показатель качества представляет собой функ-
ционал, и его можно описать в форме интегрального соотношения
19
J= fA(U(r),S(z),F(/),AW,O<*
(1.27)
где функция Д определяет конкретный физический смысл показателя качества.
Введение показателя (1.27) позволяет сформулировать задачу оптимального
управления.
Задача оптимального управления заключается в следующем: в области до-
пустимых управлений Q(U) следует найти такое допустимое управление U(Z), на
котором показатель качества (1.27) при заданных F(/), Л(/) достигает экстремаль-
ного значения
J = extremum, U(Z) е Q(U),
(1.28)
а объект управления переводится из начального состояния S(/o) в конечное
S(7'K ) е Qi, оставаясь в области допустимых состояний (1.26) при всех t g [Zo , Тк ].
Условие (1.28) в этом случае называют критерием оптимальности, а само
управление, удовлетворяющее условиям задачи, называют оптимальным управ-
лением. Решение уравнения, описывающего ОУ, соответствующее оптимальному
управлению и удовлетворяющее цели управления, называют оптимальной тра-
екторией движения ОУ; систему управления, которая с позиций критерия (1.28)
оказывается наилучшей среди всех других систем, также называют оптимальной.
1.5. Управляемость, достижимость, наблюдаемость
В предыдущем параграфе при постановке задачи оптимального управления
полагалось, что имеется бесконечное число допустимых управлений, переводя-
щих объект из заданного начального состояния в нужное конечное. Однако суще-
ствование такой ситуации не является очевидным фактом.
Пусть имеется объект, описываемый в пространстве состояний уравнениями
(1.19), (1.20). Предположим, что на управление U(t) никаких ограничений не на-
ложено. Если можно подобрать такое управление U(f), с помощью которого ОУ из
любого начального состояния S(Z0), соответствующего любому начальному мо-
менту времени t0, можно за конечное время Гк-Г0 перевести в конечное состояние
покоя S(7”K) ~ 0 или в иное желаемое состояние, то объект называют вполне (пол-
ностью) управляемым по Калману (ученый, который ввел это понятие), а указан-
ное свойство объекта называют управляемостью.
Выявление условий, при которых объект является полностью управляемым,
является весьма сложной задачей. Наибольшие успехи в этой области достигнуты
для линейных стационарных объектов. Если объект описывается уравнениями
А
г С
- S(0 = AS(r) + BU(r); (1.29)
20
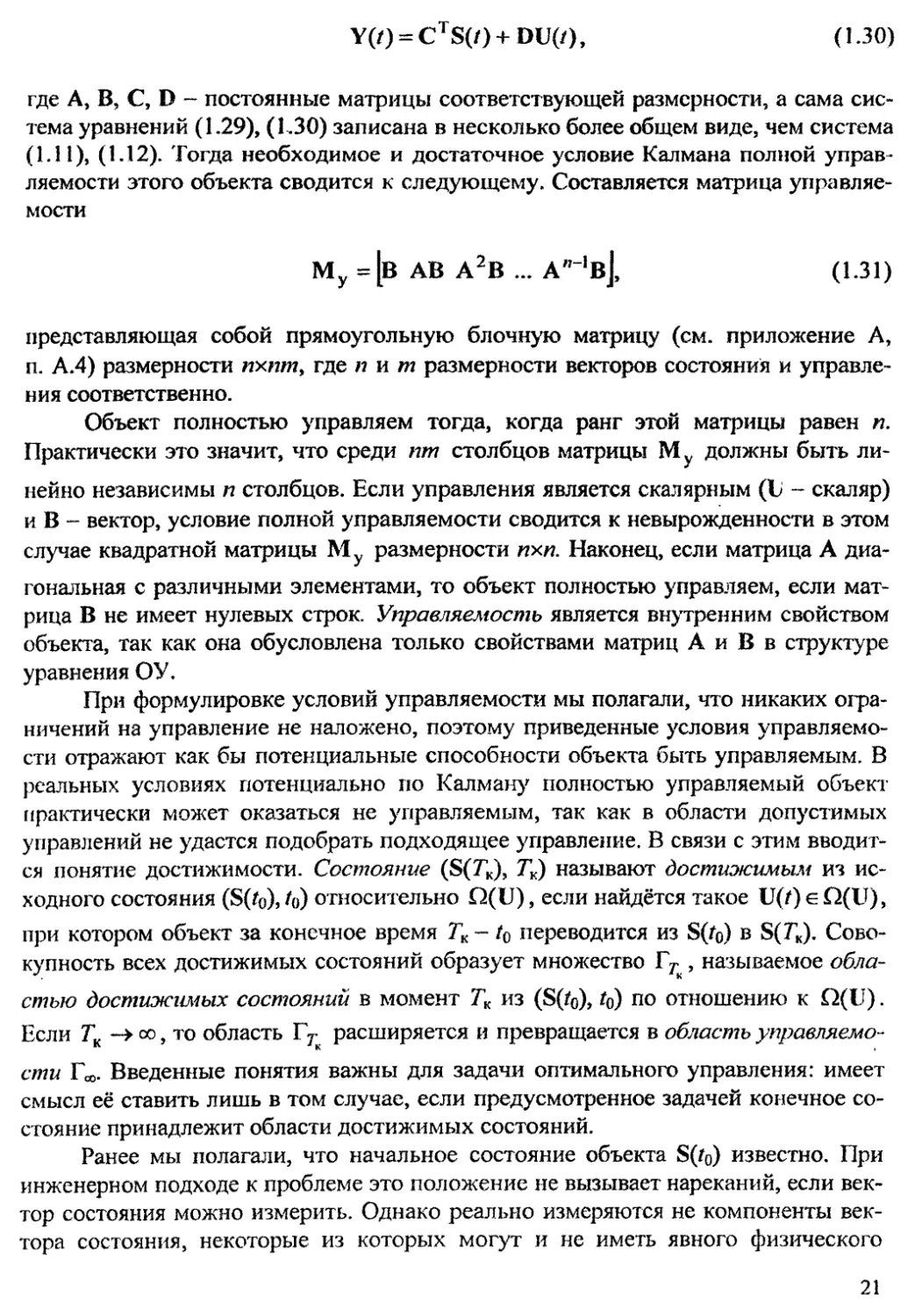
Y(Z) = CTS(/)+DU(/),
(1.30)
где А, В, C, D - постоянные матрицы соответствующей размерности, а сама сис-
тема уравнений (1.29), (130) записана в несколько более общем виде, чем система
(1.11), (1.12). Тогда необходимое и достаточное условие Калмана полной управ-
ляемости этого объекта сводится к следующему. Составляется матрица управляе-
мости
Му =[в АВ А2В ... Ап-,в],
(131)
представляющая собой прямоугольную блочную матрицу (см. приложение А,
п. А.4) размерности ихши, где п и т размерности векторов состояния и управле-
ния соответственно.
Объект полностью управляем тогда, когда ранг этой матрицы равен п.
Практически это значит, что среди пт столбцов матрицы Mv должны быть ли-
нейно независимы п столбцов. Если управления является скалярным (L - скаляр)
вектор, условие полной управляемости сводится к невырожденности в этом
случае квадратной матрицы Му размерности их/?. Наконец, если матрица А диа-
гональная с различными элементами, то объект полностью управляем, если мат-
рица В не имеет нулевых строк. Управляемость является внутренним свойством
объекта, так как она обусловлена только свойствами матриц А и В в структуре
уравнения ОУ.
При формулировке условий управляемости мы полагали, что никаких огра-
ничении на управление не наложено, поэтому приведенные условия управляемо-
сти отражают как бы потенциальные способности объекта быть управляемым. В
реальных условиях потенциально по Калману полностью управляемый объект
практически может оказаться не управляемым, так как в области допустимых
управлений не удастся подобрать подходящее управление. В связи с этим вводит-
ся понятие достижимости. Состояние (8(7^), Гк) называют достижимым из ис-
ходного состояния (S(/o), to) относительно Q(U), если найдётся такое U(/) с D(U),
при котором объект за конечное время
к - to переводится из S(/o) в S(7K). Сово-
купность всех достижимых состояний образует множество Гг , называемое обла-
стью достижимых состояний в момент Тк из (S(fo), to) по отношению к Q(U).
Если Тк -> оо, то область Г? расширяется и превращается в область управляемо-
сти Га,. Введенные понятия важны для задачи оптимального управления: имеет
смысл её ставить лишь в том случае, если предусмотренное задачей конечное со-
стояние принадлежит области достижимых состояний.
Ранее мы полагали, что начальное состояние объекта S(/o) известно. При
инженерном подходе к проблеме это положение не вызывает нареканий, если век-
тор состояния можно измерить. Однако реально измеряются не компоненты век-
тора состояния, некоторые из которых могут и не иметь явного физического
21
смысла, а выходные и входные координаты объекта, т.е. векторы U(f), Y(?). В этих
условиях возникает необходимость по наблюдениям за выходом объекта Y(r) и
его входом 11(0 на некотором конечном временном отрезке [r0, Тк] восстанавли-
вать начальное состояние объекта S(/o)- Возможность подобного восстановления
называют наблюдаемостью. Говорят, что некоторое состояние (S(/o), to) наблю-
даемо, если при заданном U(/) существует такой конечный промежуток времени
Гк -10, что знания входа объекта L’(f) и выхода Y(z) на этом промежутке доста-
точно для определения S(/o). Если каждое состояние S(?o) в любой момент ?0 явля-
ется наблюдаемым, то объект по Калману называют полностью наблюдаемым.
Проблема наблюдаемости, как и проблема управляемости, наиболее просто реша-
ется для линейных стационарных объектов. С этой целью на основании уравне-
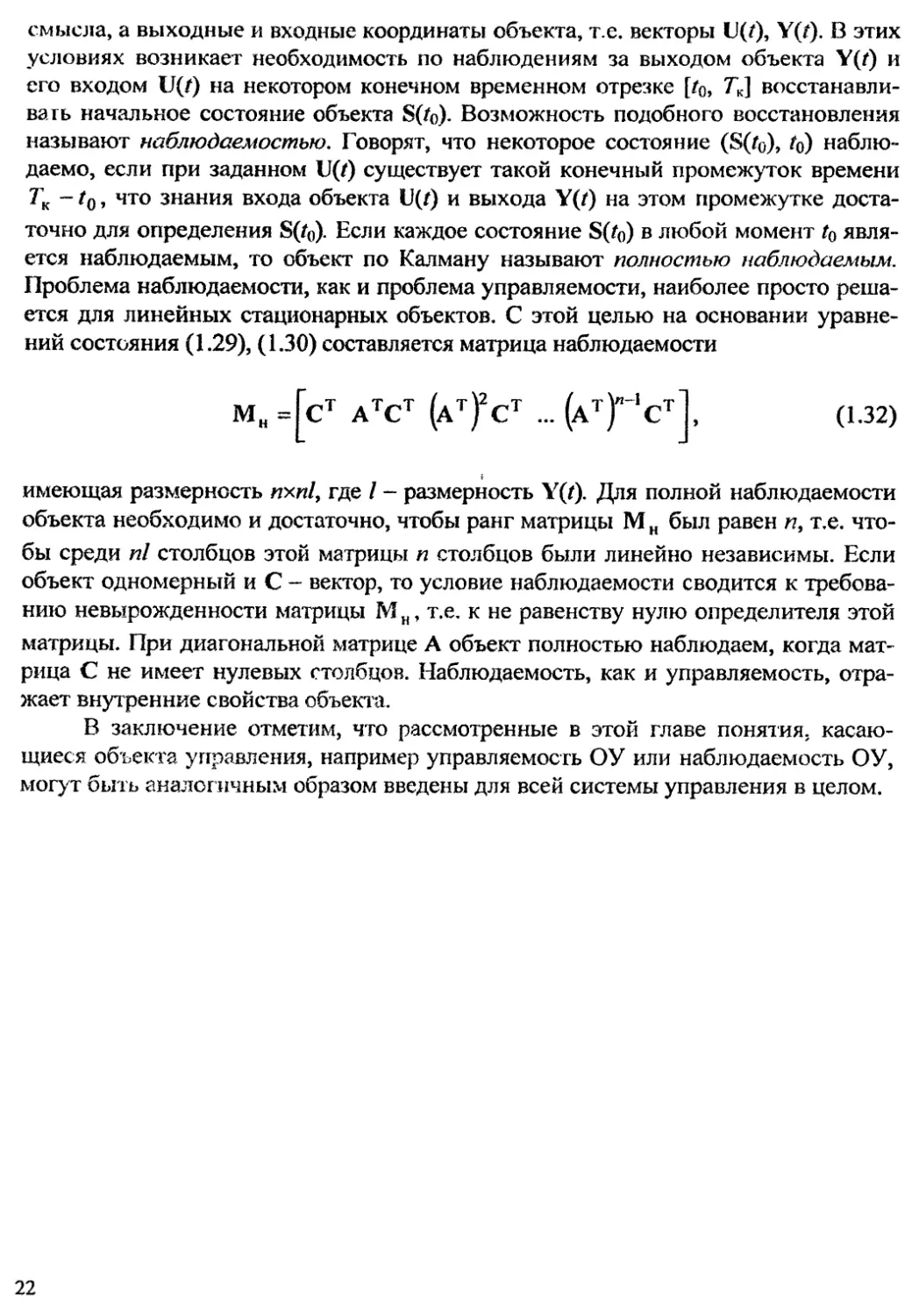
ний состояния (1.29), (1.30) составляется матрица наблюдаемости
(1.32)
имеющая размерность лхи/, где I - размерность ¥(г). Для полной наблюдаемости
объекта необходимо и достаточно, чтобы ранг матрицы М н был равен и, т.е. что-
бы среди п1 столбцов этой матрицы п столбцов были линейно независимы. Если
объект одномерный и С - вектор, то условие наблюдаемости сводится к требова-
нию невырожденности матрицы Мн, т.е. к не равенству нулю определителя этой
матрицы. При диагональной матрице А объект полностью наблюдаем, когда мат-
рица С не имеет нулевых столбцов. Наблюдаемость, как и управляемость, отра-
жает внутренние свойства объекта.
В заключение отметим, что рассмотренные в этой главе понятия, касаю-
щиеся объекта управления, например управляемость ОУ или наблюдаемость ОУ,
могут быть аналогичным образом введены для всей системы управления в целом.
ГЛАВА 2
ТЕОРИЯ ЛИНЕЙНЫХ НЕПРЕРЫВНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Рассмотренная ранее схема САУ (рис. 1.1) охватывает широкий класс объ-
ектов управления и управляющих устройств. Ограничимся случаем линейных
стационарных ОУ и УУ, и будем полагать, что устройство управления состоит из
устройства сравнения, в котором осуществляется сравнение задающего воздейст-
вия X(f) и управляемой величины ХО, и фильтра, в котором осуществляется сгла-
живание ошибок измерения. В этом случае схема САУ может быть представлена
в виде рис. 2.1.
Рис. 2.1
Как видно из рис. 2.1, в схеме реализуется принцип управления по рассогла-
сованию'. при отклонении y{t) от требуемой величины, определяемой воздействи-
ем л(/), возникает рассогласование x{f) - %{t) - y{t), которое после сглаживания и
преобразования в фильтре Ф воздействует на объект управления так, чтобы
уменьшить первоначальное рассогласование. Такая система является системой с
отрицательной обратной связью. Ее достоинством является то, что в контур
управления входит не только сам ОУ, но и УУ.
Задающее воздействие \{t) может быть постоянной величиной (в этом слу-
чае САУ называют системой стабилизации), детерминированной функцией вре-
мени {система программного управления) и случайной функцией {следящая сис-
тема).
Относительно систем радиоавтоматики следует заметить, что следящие сис-
темы являются наиболее распространенным типом систем радиоавтоматики. Ме-
тоды их анализа применимы к системам стабилизации и программного управле-
ния. Для выделения рассогласования — ошибки слежения x{t) в радиотехнических
следящих системах и САУ обычно используются устройства, называемые дис-
криминаторами. Дискриминатор - это устройство, сигнал на выходе которого за-
висит от величины и знака рассогласования между задающим воздействием Х(7) и
23
управляемой величиной y(t). Если система многомерная (рис. 1.2), то дискрими-
натор должен быть по каждому из параметров, за которыми осуществляется сле-
жение.
Если фильтр Ф и ОУ являются линейными, то они могут быть объединены в
один фильтр (Фг). В этом случае получаем линейную стационарную САУ, схема
которой принимает вид, приведённый на рис. 2.2. Здесь воздействие А,(/) должно
учитывать и действие возмущений^) на систему.
Рис. 2.2
Отличительной особенностью линейных систем является то, что они подчи-
няются принципу суперпозиции. Если обозначить через Г оператор системы, ха-
рактеризующий реакцию системы на входной сигнал v(z), то в математической
форме этот принцип выражается следующим равенством:
r{v, (/) + V, (?) + ...} = Г{v! (/)} + r{v2 (Г)} +... ,
т.е. в линейной системе сумма эффектов от отдельных воздействий совпадает с
эффектом от суммы воздействий.
Рассмотрим методы анализа системы (рис. 2.2), полагая, что воздействие
Х(/) учитывает не только задающее воздействие, определяющее требуемые значе-
ния управляемой величины, но и мешающее, являющее результатом возмущений,
действующих на систему.
В общем случае линейная стационарная динамическая система с постоян-
ными сосредоточенными параметрами описывается обыкновенным линейным
дифференциальным уравнением
а,У'"(О + + - + «оИО = + - + W), (2-1)
где , устанавливающим зависимость реакции >0) системы от
задающего воздействия X(t). Порядок уравнения п (порядок системы), значения
постоянных коэффициентов at, bj m < n) полностью определяют-
ся параметрами системы.
Стоит отметить, что динамическими принято называть системы, характери-
зуемые тем, что их выходной сигнал определяется не только величиной
ходного
сигнала в рассматриваемый момент времени, но и “предысторией” этого сигнала
(т.е; такая система обладает “памятью”)’. Принято описывать такие системы диф-
24
фсренциальным уравнением типа (2.1). То что система стационарная, в (2.1) от-
ражено постоянными значениями коэффициентов bj.
Рассмотрим методы анализа систем, описываемых уравнением (2.1).
2.1. Методы анализа линейных непрерывных систем
автоматического управления
Задачей математического исследования любой динамической системы или
устройства, в том числе и системы автоматического управления, является опреде-
ление реакций этой системы на заданные входные воздействия. В ряде случаев
достаточно ограничиться более простой задачей нахождения некоторых характе-
ристик системы, определяющих её общие свойства. В этом разделе рассмотрим
самые распространённые методы математического анализа систем. Все эти мето-
ды так или иначе связаны с уравнением (2.1).
2.1.1. Классический метод
Классический метод основан на решении дифференциального уравнения
(2.1). Известно, что это решение в общем случае состоит из двух составляющих
ЯО=ус (0+л (0,
1 де Гц(/) - вынужденная составляющая (обусловленная внешним воздействием),
ус(0 _ собственное решение однородного дифференциального уравнения
У00 (0 + «и-1 У° (0 + - + «оЯО = 0 -
Известно, что при некратных корнях характеристического уравнения собст--
венное решение
(2.4)
где Pi - корни характеристического уравнения; с ~ постоянные интегрирования.
Действительно, подстановка y(t) = Cept в (2.3) даёт (при CV0):
Разделив обе части полученного уравнения на epl (ept
*0)
получим урав-
нение
25
апрп+ап-\рп
(2.6)
о
которое называется характеристическим.
Из (2.5), (2.6) следует, что подстановка функции y(t) - СсР‘ в (2.3) обраща-
ет это уравнение в тождество, т.е. y(f) ~ СеР‘ действительно является решением
уравнения (2.3), если р, является корнем характеристического уравнения (2.6).
Действительному корню характеристического уравнения в выражении (2.4) соот-
ветствует слагаемое в виде экспоненциально убывающей функции, если корень д
отрицательный. Паре комплексно-сопряженных корней уравнения (2.6) соответ-
ствует слагаемое
>’с/(0 = 4eY/ sin(p,T + 4/,),
(2.7)
где у{ ± /Р( - корни характеристического уравнения; Д, - постоянные интег-
рирования, определяемые через С,-. При этом yci(t) стремится к нулю при неогра-
ниченном увеличении времени если вещественные части yz корней отрицатель-
ны, в противном случае амплитуда колебаний yci(t) непрерывно возрастает.
Вынужденная составляющая yK(t) может быть найдена как любая функция,
обращающая в тождество уравнение (2.1) при заданном входном воздействии.
Определение управляемой величины y(t) позволяет ответить на все вопросы,
связанные с анализом системы (рис. 2.2).
2.L2. Метод преобразования Лапласа (операционный метод)
Метод преобразования Лапласа основан на использовании для решения
дифференциального уравнения (2.1) преобразования Лапласа
U(р) - - ]u(t)e~ptdt,
О
(2.8)
где р — комплексная переменная.
Часто преобразование Лапласа в виде (2.8) называют односторонним, так
как оно используется для функций u(t), заданных при 0 < t < +00 (исходя из этого
взяты пределы интегрирования в преобразовании). Такое преобразование Лапласа
получило особенно широкое распространение при анализе переходных процессов,
связанных с действием на систему внешней силы, когда начало отсчёта времени
совмещают с началом воздействия. В дальнейшем, если не оговорено специально,
предполагается, что сигналы и возмущения заданы при 0 < t < +00.
Идея, лежащая в основе операционного метода, заключается в следующем.
Каждой функции u(t) из некоторого класса функций, для которых преобразование
26
(2.8) существует, и называемых оригиналами, ставится в соответствие функция
U(p) из другого класса, называемая изображением. Используя (2.8) и свойства
преобразования Лапласа, определяют правила, позволяющие по оригиналу нахо-
дить изображение и, обратно, по изображению определить оригинал. Устанавли-
вается, какие изображения будут соответствовать сумме двух оригиналов, произ-
ведению двух оригиналов, интегралу от оригинала и т.д. Законы соответствия вы-
бираются таким образом, чтобы сложным операциям над оригиналами соответст-
вовали простые над изображениями. Так, например, операции дифференцирова-
ния оригинала соответствует операция умножения исходного изображения на
комплексную переменную р, операции интегрирования - деление на комплекс-
ную переменную р. Кроме того, строятся таблицы, позволяющие для наиболее
распространенных оригиналов или изображений быстро находить соответствую-
щие им изображения или оригиналы. В приложении Б приведены преобразования
Лапласа часто встречающихся функций.
Полностью решение дифференциального уравнения с помощью операцион-
ного исчисления производится следующим образом.
1. От исходного уравнения в области оригиналов переходят к соответст-
вующему ему уравнению в области изображений.
2. Решают полученное уравнение и находят изображение решения.
3. По изображению решения находят решение - оригинал.
Основные свойства преобразования Лапласа
1. Свойство (теорема) линейности. Пусть u(t) и v(0 ~ оригиналы, a U(p) и
Г(р) - их изображения. Тогда
£{aw(Z) + pv(/)j= аЩр) +рГ(/?),
где а - const, Р = const.
2. Теорема подобия. Если u(t) - оригинал, a U(p) его изображение, то
Z{w(ar)}= — (Л --
a Vay
(2.9)
(2-10)
3. Теорема запаздывания. Если u(f) - оригинал, a U(p) его изображение, то
£{«(/- -г)}=е'пи(р),
(2 11)
I де а — const.
4. Теорема дифференцирования. Если производная «-ого порядка w'"V) су-
шествует в каждой точке интервала [0, оо) и является оригиналом, то
z{w(n)(o}= pnU(p)-pn~'u(G)-...-u(”~x\G). (2.12)
Здесь и(0), п(|,(0),..., г/"” ’(О) обозначают предельные значения справа в точке /=0
функции u(t) и её производных (начальные условия).
При нулевых начальных условиях теорема дифференцирования принимает
наиболее простой вид
4w(()}= p"u(p).
(2-13)
5. Теорема интегрирования оригинала. Если «(/) - оригинал, а (7(р) — его
изображение, то
(2.14)
6. Теорема о свёртке. Если н(/) и v(/) — оригиналы, заданные при 0 < t < +оо,
a U(p) и F(p) - их изображения, то
L{u(t) * v(z)} - L! jw(Z - t)v(t)Jt > - U(p)V(p),
to J
(2.15)
где * - операция свёртки функций u(f) и v(Z), определяемая как интеграл
г
«(0 * = [«(/ - т)у(т)с/т .
о
F
7. Теорема о предельном значении оригинала. Если u(t) - оригинал, a U(p) -
его изображение, то
»(0 /->00
lim w(Z)= lim pU(p).
(2.16)
8. Теорема обращения (обратное преобразование Лапласа). Если u(t) - ори-
гинал, a U(p) - его изображение, то
«ОТ = Г1 {U(p}} =
1
27TJ
а+у’оо
|(7(р)е^'ф.
(2.17)
Здесь а ~~ постоянная величина, определяемая условиями существования изобрач
жения от функции u(t).
Вычисление (2.17) производится с помощью теоремы о вычетах
28
1 «+J00 п
w(0 = Т~. ]и(р)еР' dp = £ Res(7(p)ep'
2л/ . 77
J a—j<x> <-i
(2.18)
где pi - полюсы подинтегральной функции в (2.17), i = 1,и, п - число полюсов.
Вычет в простом полюсе вычитается по следующей формуле:
Rest7(/?)e,’/
= lim (р - Pi )U(p)ept ,
(2.19)
а в полюсе кратности к
ResU(p)ept
-/ли»».* ~L~M---1‘-y u i .. _i_
lim
(2.20)
МЙМ
V4>
Пример 2.1. По известному изображению
U (р) -
Р
(Р + а)2
где а - const, найти соответствующий ему оригинал u(t).
Для нахождения оригинала u(f) используем (2.18). Полюсам подынтеграль-
ной функции U{p}cp!
----е
(/> + «)
соответствуют нули её знаменателя. При*
равняв знаменатель к нулю
получим единственный корень рх ~ -а второй кратности. То есть подынтеграль-
ная функция имеет единственный полюс рх =-ос кратности к =2. Для нахожде-
ния u(f) дальше будем использовать (2.20):
Res U(p) е р1
lim ~-r-r\(p-p})2U(p)ept
lim
lim ер/
at (1 — ос/).
В итоге получим искомый оригинал
u(t)-e a,(l-af).
Этот же результат можно получить, если сначала найти оригинал изображе-
ния U(p) =-----—- (см. приложение Б, шестую строку таблицы при п~ 1), а за-
(Р + а)"
тем использовать теорему дифференцирования (2.12).
W*y«W*H*
Г~1Л~1Г1-ГГТП Tffr-I л~ ^ЛпГ| h~ii U- глдгуттт
Рассмотрим решение уравнения (2.1) с использованием преобразования Ла-
пласа. Для этого, используя свойство линейности (2.9) и теорему дифференциро-
вания (2.13), найдем преобразования Лапласа правой и левой части уравнения
(2.1). В результате преобразования получим:
a„p"Y(p)+a^,pn-,Y(p)+..ла1>У(.Р) = Ь„ртЛ(Р)+Ьт_1Р^'Л(р)+...+Ь0Л(Р), (2.21)
где У(р), А(р) - изображения (по Лапласу) реакции ХО и задающего воздействия
Х(0 соответственно.
Уравнение (2.21) является алгебраическим и его можно разрешить относи-
тельно изображения К(р) выходного процесса:
т
Y(p) = Л(р)^°--------= Кр)К(р).
F У
(2.22)
Отношение
(2.23)
изображения по Лапласу выходного сигнала к преобразованию Лапласа входного
сигнала, вычисленное при нулевых начальных условиях, называют передаточной
функцией системы.
Используя передаточную функцию К(р\ легко найти по изображению вход-
ного процесса изображение (по Лапласу) выходного процесса, а затем, применяя
теорему обращения (2.17), вычислить сам выходной процесс. Передаточная функ-
ция играет важную роль в анализе линейных САУ. Используя её, можно, не вы-
30
числяя сам выходной процесс, ответить на многие важные вопросы. В частности,
определить условия устойчивости и оценить качество функционирования САУ.
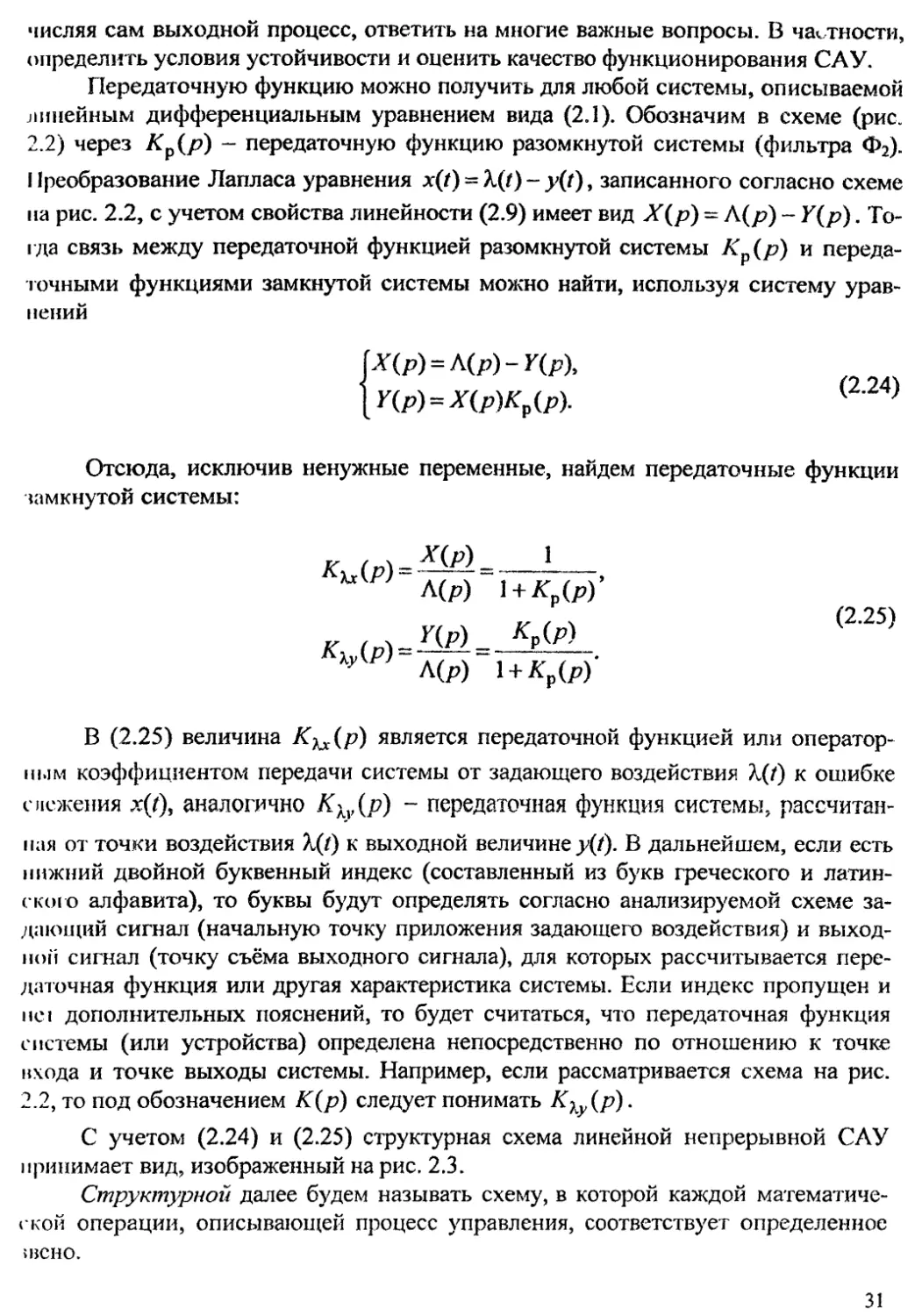
Передаточную функцию можно получить для любой системы, описываемой
линейным дифференциальным уравнением вида (2.1). Обозначим в схеме (рис.
2.2) через К Ар) - передаточную функцию разомкнутой системы (фильтра Ф2).
Преобразование Лапласа уравнения x(t) = Х(Г) - y(t), записанного согласно схеме
на рис. 2.2, с учетом свойства линейности (2.9) имеет вид Х(р) = А(р) - Y(p). То-
гда связь между передаточной функцией разомкнутой системы КАр) и переда-
точными функциями замкнутой системы можно найти, используя систему урав-
нений
Х(р) = А(р) - У(р),
Y(p) = X(p)K^p).
(2.24)
Отсюда, исключив ненужные переменные, найдем передаточные функции
замкнутой системы:
*(р)
А(р)
М/4
(Р) ~
Г(/?)^ Кр(р)
А(р) 1 + *р(р)*
(2.25)
В (2.25) величина К^(р) является передаточной функцией или оператор-
ным коэффициентом передачи системы от задающего воздействия ?<(/) к ошибке
с исжения x(t), аналогично К'м,(р) - передаточная функция системы, рассчитан-
ная от точки воздействия X(Z) к выходной величине y(i). В дальнейшем, если есть
нижний двойной буквенный индекс (составленный из букв греческого и латин-
ского алфавита), то буквы будут определять согласно анализируемой схеме за-
дающий сигнал (начальную точку приложения задающего воздействия) и выход-
ной сигнал (точку съёма выходного сигнала), для которых рассчитывается пере-
даточная функция или другая характеристика системы. Если индекс пропущен и
нс1 дополнительных пояснений, то будет считаться, что передаточная функция
системы (или устройства) определена непосредственно по отношению к точке
входа и точке выходы системы. Например, если рассматривается схема на рис.
2.2, то под обозначением К(р) следует понимать Ар).
С учетом (2.24) и (2.25) структурная схема линейной непрерывной САУ
принимает вид, изображенный на рис. 2.3.
Структурной далее будем называть схему, в которой каждой математиче-
ской операции, описывающей процесс управления, соответствует определенное
«вено.
31
Рис. 2.3
2.1.3. Переходная и импульсная переходная функции
Рассмотрим случай, когда на САУ (рис. 2.3) действует единичный сигнал
(единичный перепад)
где
МО=1(0,
f<0,
/>0.
(2.26)
Переходной процесс у(г) в системе, вызванный входным сигналом в виде
единичного сигнала, называют переходной функцией системы. Преобразование
Лапласа переходной функции согласно (2.22)
Н(р) = Y(p) = Л(р)Хх/р) = Z{1(O \КУу (р) = ^-кКу(р),
(2.27)
1 00
где — = | l(r) е ~pt at - преобразование Лапласа единичной функции.
Р о
Переходная функция может быть вычислена по формуле обращения
(2.18):
h(t) . . _L Т ф = f Res
I Р ) 2тг/' J. Р м Р
(2-28)
где вычет в простом полюсе подынтегральной функции вычисляется по формуле
(2.19)
ReS^If2e'”l._. = |im (р - А,
р u р
/чу
а в полюсе кратности к - по (2.20)
32
о К.ъ.у{р) pt 1 1; dk * K-^y(p) t
Res—------eF k =——— lim —гт(р~Р.) —- ez .
p P~a (k-\)\p^p, dpk'x p
Рассмотрим случай, когда на систему действует сигнал вида Ъ-функции
МО = 5(0 =
который удовлетворяет следующим условиям:
+оо
—00
+00
|х(т)5(т - О di = х(0.
—СО
(2.29)
(2.30)
(231)
Выражение (2.31) называют фильтрующим свойством Ь-функции. Очевидна связь
между единичным сигналом и 5-функцией:
= d}
dt
(2.32)
Так как преобразование Лапласа для 5-функции с использованием свойства
(2.31) будет равно
+оо
о
то для выходного сигнала
i'(p) = ^(rii{8W}=^(₽).
(2.33)
Переходный процесс, возникающий в системе при действии 5-импульса на
входе (сигнала в виде 5-функции) называют импульсной характеристикой или
импульсной переходной функцией. В некоторых книгах она также называется ве-
совой функцией системы. Из выражения (2.33) следует, что импульсная характе-
ристика связана с передаточной функцией К^р) преобразованием Лапласа:
п
g(0 = L' {К^р)} =
i=l
и наоборот
+оо
= £{«(')} = jg(l)C/”dt.
о
(2-34)
(2.35)
33
Несложно установить связь между переходной функцией h(f) и импульсной
характеристикой g(t). Она аналогична связи (2.32), и согласно выражениям (2.28),
(2.34) и (2.35) и теореме дифференцирования (2.13), имеет вид
(2.36)
Импульсная переходная функция удовлетворяет следующим условиям:
g(f) = 0 при t < О,
+со
J|g(O|^ < °0 .
о
(2.37)
Первое из этих условий называют условием физической реализуемости; оно
показывает, что в реальной системе переходный процесс не может возникнуть
раньше подачи входного воздействия. Второе условие является условием устой-
чивости системы (импульсная характеристика должна удовлетворять условию аб-
солютной интегрируемости).
Из определения передаточной функции системы (2.23) следует, что преоб-
разование Лапласа для выходного сигнала при нулевых начальных условиях
Y(p) = KKv(р)Л(р). На основании теоремы свертки (2.15) сигнал на выходе
**
ХО = - x)g(x)£/T. (2.38)
о
В теории цепей (2.38) часто называют интегралом Дюамеля. Используя ин-
теграл Дюамеля, можно вычислить отклик любой линейной стационарной систе-
мы, если известно входное воздействие и импульсная характеристика системы.
Очевидно, что эта формула может быть записана также в виде
t
y(t) = jXCOgO1 - t)dT.
о
2.1.4. Частотный метод (метод преобразования Фурье)
Прямое преобразование Фурье для сигнала u(t) определяется по формуле
+00
6'(» = F{u(t)} = р(0 е ~jat dt.
—оо
(2.39)
Ему соответствует обратное преобразование Фурье'.
34
(2-40)
< +О>
u(l) = F~' {{/(»} = — fc/Oo)e>“' da.
2л J
Функция U(Jo) в (2.39) и (2.40) называется спектральной плотностью
(спектром) сигнала u{t).
Представляя U(jd)) в показательной форме (см. приложение В), имеем
(2.41)
Модуль |£7(/со)[ называют амплитудным спектром сигнала.
Аргумент ф(со) = arg (У (/со) называют фазовым спектром сигнала.
Преобразование Лапласа (2.8) является обобщением преобразования Фурье
(2.39) на случай комплексных частот р = а + /со, где о - вещественная часть ком-
плексной частоты. Поэтому схожи и свойства обоих преобразований. Например,
теорема о свертке для преобразования Фурье имеет вид аналогичный (2.15):
I +00 I
F{;/(/) ♦ г(Г)} = г] Jw(/ - т)г(т)А !> = U(/co)F(/со).
(2.42)
В (2.42) предполагается, что u(t) и v(/) заданы при - со < t < +оо.
Поскольку процесс на выходе линейной системы определяется из (2.38), то
согласно (2.42) преобразование Фурье (спектр) выходного процесса можно найти
как произведение спектра входного процесса на частотную характеристику сис-
темы K(joy). Для системы на рис. 2.3 получим
Y(Jg>) = A(j&)KKv (/со), (2.43)
где частотная характеристика Ку., (/со) определяется как преобразование Фу-
рье от импульсной характеристики
4-00
(2.44)
или, имея в виду (2.37),
+00
\g(t)eiMdt.
о
I h (2.35), (2.44) очевидно, что для произвольной линейной системы
kw=к( р)
p=j(& •
(2.45)
35
Пусть входной сигнал представляет собой комплексную синусоиду
Х(0 = леу(ю/+ф) = пе-/фе-,<й/ ~Авхе^а1 ( Авх — а е,<р - комплексная амплитуда), то
выходной сигнал в установившемся режиме согласно (2.38):
4*^0 4*00
y(t) = J Ах еу<0(/"т) g{x)dx = Ах е7<0/ je~yWT g(T)<A = Лвх eJ(i>t K(ja). (2.46)
о о
Представляя ХО через комплексную амплитуду y(f) = Авык е7<0/ получим
(2.47)
DA
То есть частотная характеристика K(jto) есть отношение комплексной ампли-
туды выходного гармонического сигнала к комплексной амплитуде входного гар-
монического сигнала в установившемся режиме. Значение K(Ja) показывает как
изменяется при прохождении через систему комплексная амплитуда
гармонического сигнала с частотой со.
Модуль частотной характеристики |АГ(/о)| принято называть амплитудно-
частотной характеристикой, а аргумент частотной характеристики arg К (/со) -
фазо-частотной характеристикой системы.
В теории управления широко используется также амплитудно-фазовая ха-
рактеристика. Амплитудно-фазовой характеристикой (годографом частотной
характеристики) называют геометрическое место точек конца вектора K(fo) на
плоскости с координатами ReA.’(/co), Im/C(/co) при изменении частоты от 0 до оо.
Расчёт и анализ спектральных характеристик систем и сигналов основан на
использовании методов, изучаемых в теории функций комплексной переменной.
Некоторые базовые понятия этой теории, помогающие осуществить расчет и по-
строение спектральных характеристик, приведены в приложении В.
Учитывая (2.45) и выражения (2.25), легко записать соотношения, связы-
вающие частотные характеристики разомкнутых и замкнутых САУ.
2.2. Типовые динамические звенья и их характеристики
Рассмотрим введенные характеристики на примерах часто встречающихся
звеньев - составных частей САУ.
*» М •> —. л. — Т ГТГ Г1,-‘1ПГ11Г-г -- - ла -Л ** А I » I I.W-. «V. —L-.—fir- --r- J- -П-—-."I-.-.-- mw .Т.ТГ л -.ГМ -..гл - -Д| |Г Milt II
»
* I
Пример 2.2. Инерционное (апериодическое) звено описывается дифферен-
циальным уравнением
36
(2.48)
const.
dt
Такое звено может быть выполнено в виде 7?С-цепи (рис. 2.4).
Рис. 2.4
Мвмх(/) — y(f)
V
Выходным сигналом служит напряжение на конденсаторе. Поскольку ток в
.. ^duBfM(t) ~dy(t)
цепи =
' dt dt
то, используя второй закон Кирхгофа, получим
дифференциальное уравнение (2.48). В этом уравнении Гф будет представлять со-
бой постоянную времени цепи гф = RC. RC-цепь часто используется как простей-
ший фильтр нижних частот.
Подвергнув правую и левую части (2.48) преобразованию Лапласа, вычис-
лив отношения изображения Y(p) процесса к изображению Л.(р) процесса Х(/),
найдем передаточную функцию инерционного звена
К(р) = -----.
1 + Р*ф
(2.49)
Из (2.49) согласно (2.45) найдём выражение для частотной характеристики
А(» =
1 1->^ф_______________
1 + ЛТф (1 + уютф)(1 - усохф) 1 + Ю2Тф
и далее выражения для амплитудно-частотной и фазо-част отной характеристик:
|ХО)| = K(Jajf + [Im tf(»]2 = ,
+ <А2
(2.50)
<р(со) = arg К(усй) = arctg
ImA'(jco)
Re K(jo)
- -arctg соТф.
Зависимости (2.50) показаны на рис. 2.5. На рис. 2.6 показан годограф час-
тотной характеристики.
37
bn K( j<$ i
Рис. 2.6
Из графиков следует, что инерционное звено является фильтром нижних
частот и вносит фазовый сдвиг от 0 (на частотах близких к 0) до - тг2 (на высоких
частотах).
Переходная функция звена находится по (2.49), и в соответствии с (2.28)
имеет вид
h(')
ф КО-
Импульсная характеристика может быть найдена из (2.34), или с учётом
связи (2.36):
g(t) = — е ф 1(0.
ТФ
------
Пример 2.3. Другим, часто встречающимся звеном, является идеальное ин-
тегрирующее звено. Оно описывается дифференциальным уравнением
ЯО = »
о
(2-51)
где ки - const.
Продифференцировав правую и левую части (2.51) и подвергнув получен-
ное дифференциальное уравнение преобразованию Лапласа, после определения
отношения изображения выходного процесса к изображению входного, получим
выражение передаточной функции идеального интегрирующего звена
38
(2.52)
К(р)=--.
р
Отсюда найдём частотную характеристику
JCO ®
и далее амплитудно-частотную и фазо-частотную характеристики:
К(»|=
(2-53)
<р((о) = arg AT(jco) = arctg(-oo) =
Зависимости (2.53) показаны на рис. 2.7. На рис. 2.8 показан годограф час-
тотной характеристики.
Рис. 2.8
Рис. 2.7
Переходная функция звена может быть найдена непосредственно из (2.51)
при А,(г)= 1(/);
h(t) = к„ J1 .
О
39
Импульсная характеристика может быть найдена или согласно (2.36), или из
(2.51) при Х(0 = 8(/) с учетом свойства (2.30):
g(0 = ки /§(0<* = к» КО •
0
(2-54)
* ОШ'
Инерционное и идеальное интегрирующее звенья являются примерами ти-
повых динамических звеньев. Обычно к типовым относятся динамические звенья
первого и второго порядков (описываются дифференциальными уравнениями со-
ответствующих порядков). Сложные (многоконтурные системы) могут состоять
из большого числа соединенных между собой динамических звеньев. Обычно
предполагается, что такие звенья развязаны между собой, т.е. подключение по-
следующего не влияет на характеристики предыдущего звена. Примером таких
звеньев являются динамические звенья, выполненные на основе операционных
усилителей.
Операционный усилитель характеризуется высоким входным (в идеальном
случае бесконечно большим, на практике 10б -s-1012 Ом), низким выходным (в иде-
альном случае равном нулю, на практике десятки ом) сопротивлениями и очень
большим коэффициентом усиления Ко (в идеальном случае бесконечно большим,
на практике KQ» I05 10б). Как правило, операционный усилитель снабжен двумя
входами (рис. 2.9): инвертирующим (—) и неинвертирующим (+).
Если мВХ| и wBX2 - напряжения входного сигнала на неипвертирующем и ин-
вертирующем входах соответственно, то выходное напряжение:
^вых ^OV^bxI
^вх2 ) •
(2.55)
Во входную цепь операционного усилителя включается сопротивление Z(p),
и, кроме того, усилитель охватывается отрицательной обратной связью через со-
противление Zo(p), как показано на рис. 2.10.
Состояние полученного таким образом звена (цепи) описывается изображе-
ниями входного и выходного напряжения С/вх(р) и С/Вых(р) соответственно.
Выведем формулу для передаточной функции звена ЛГ(р) -£7С11Х(р)/£/вх(р).
Пусть узел а имеет напряжение с некоторым заранее известным напряжением
40
иа(р). Так как Ц(р) = 12(р)
(считаем, что входное сопротивление идеального
операционного усилителя бесконечно велико и инвертирующий вход не потреб
ляет тока), то получим:
Увх(р)~Ца(Р) _Ug(p) ^ВЫХ (р)
Zip) Z,(p)
или с учетом (2.55):
^вх (р) ^ВЫХ (р)/^О _ ^вых (pXV^o + О
> • п h—! * , BW* ~~ 1 *'^~~~,*~—‘^^~^~^П"т-П*П| — —Г-1_- »fll II! и- I
Z(p) zo(p)
Рис. 2.10
Разделив обе части последнего выражения на изображение Ц,х(р),
1 + К(,р)/К„ _ 2C(jp)(l/A70 + 1)
Z(P) zo (р)
найдём передаточную функцию:
Др)=
- z0 (р)______L
Z, (р)/к9 + Z(p)(l/K0 +1 j
Отсюда получим, что в идеальном случае (Ко —> оо) передаточная функция
звена выражается только через Z(p) и Z0(p):
К{р) = -
Zoip)
Z(p)
(2.56)
В частности, идеальное интегрирующее звено реализуется при
Zo (р) -1/рС (в цепь обратной связи включен конденсатор) и Z(p) = R. Ему соот-
ветствует частотная характеристика K(jo)~ku/jo, где kK =-l/RC.
Укажем далее на некоторые правила нахождения передаточных функций
многозвенных соединений.
41
При последовательном включении динамических звеньев (рис. 2.11) их пере-
даточные функции перемножаются.
Рис. 2.11
Действительно, так как Кх{р) = ^~-, ^2(р) = 7-~~>- ’
Л(р) *i(P) Yn_x(j.
то, перемножив передаточные функции, получим
К<Р) = Т7~7
Л(р)
(2.57)
При параллельном включении динамических звеньев (рис. 2.12) их переда-
точные функции складываются.
НО
y<i)
у®
Рис. 2.12
Действительно, так как ¥х (р) = Кх (р)Л(/>), У2 (р) - К2 (/’)Л(р),
^(р) = ^и(р)Л(р),то
Лр) = Kt(p) + К1(р) +...+ К„(р)|Л(р).
Отсюда передаточная функция параллельно соединённых звеньев:
К (р) = (р) +к2(р)+...+к„ (р) -
(2.58)
Правила (2.57), (2.58) и выражения для передаточных функций замкнутой
системы (2.25) позволяют просто находить передаточные функции сложных и
многоконтурных систем.
42
2.3. Условия устойчивости
Решение ХО уравнения (2.1), описывающего в общем случае линейную не-
прерывную САУ, в общем случае состоит из собственного решения однородного
линейного дифференциального уравнения и вынужденного решения неоднород-
ного уравнения (2.2).
СА У устойчива, если собственное решение стремится к нулю. Это означа-
ет, что если устойчивая система выведена из состояния равновесия каким-либо
возмущением, то она возвращается в состояние равновесия после снятия входного
воздействия.
Известно, что при некратных корнях характеристического уравнения собст-
венное решение определяется выражением (2.4)
Л
где р, - корни характеристического уравнения; С, - постоянные интегрирования.
Как указывалось в п. 2.1.1, действительному корню характеристического
уравнения в последнем выражении соответствует слагаемое в виде экспоненци-
ально убывающей функции, если корень р, отрицательный. В противном случае -
если корень /л положительный - слагаемое неограниченно возрастает при t -> оо.
Паре комплексно-сопряженных корней уравнения (2.6) соответствует сла-
гаемое (2.7)
Л/(0=4eY// sin(P? + уД
где у, ± /Д - корни характеристического уравнения; - постоянные интегри-
V
рования, определяемые через С,.
При этом уС1- (X) стремится к нулю при неограниченном увеличении времени
X, если вещественные части у,- корней отрицательны, в противном случае ампли-
туда колебаний yCI (X) непрерывно возрастает.
Таким образом, для устойчивости СА У необходимо и достаточно, чтобы
действительные части всех корней характеристического уравнения имели отри-
цательные знаки, т.е. корни характеристического уравнения устойчивой системы
на плоскости комплексного переменного должны быть расположены слева от
мнимой оси.
Отметим, что характеристическое уравнение (2.6) может быть непосредст-
венно найдено по известной передаточной функции системы (2.23), путем
приравнивания к нулю её знаменателя.
43
2.4. Критерии устойчивости
Для того чтобы выяснить, является ли система устойчивой, нет необходи-
мости находить точные значения корней характеристического уравнения. Доста-
точно знать, в какой половине плоскости комплексных величин они находятся.
Для ответа на этот вопрос разработаны правила, называемые критериями устой-
чивости. Существуют алгебраические и частотные критерии. Однако, прежде чем
воспользоваться тем или иным критерием, следует проверить выполнение необ-
ходимого (но не достаточного) условия устойчивости, в соответствии с которым
все коэффициенты характеристического уравнения должны быть больше нуля.
Для доказательства этого утверждения необходимо представить уравнение (2.6) в
виде
ап(р - Р\ )(р ~ Р2 ) ••• (Р “ Рп) = 0-
(2-59)
Если система устойчива, т.е. реальные части всех корней р, отрицательны,
то, раскрыв скобки в (2.59), получим уравнение с положительными коэффициен-
тами. Требование не достаточности приведенного условия говорит о том, что и
неустойчивая система может тоже обладать положительными коэффициентами
характеристического уравнения, однако если не все рассматриваемые коэффици-
енты положительны, то система наверняка неустойчива и никаких дополнитель-
ных исследований устойчивости не требуется.
2.4.1. Алгебраические критерии устойчивости
Рассмотрим критерий устойчивости Гурвица. Он относится к числу алгеб-
раических критериев, т.е. критериев, сформулированных в виде некоторых алгеб-
раических формул.
Для оценки устойчивости САУ по критерию Гурвица необходимо из коэф-
фициентов характеристического уравнения (2.6) составить матрицу 1 урвица
^и-3» ап~5’ " О
^и-2» ^и-4»”’ О
^и—1’ ^и-3»’” О
(2.60)
Порядок составления матрицы Гурвица следующий. В левом верхнем углу
матрицы записывается коэффициент а„_\, по главной диагонали располагаются
коэффициенты характеристического уравнения с младшими индексами, над эле-
44-
ментами главной диагонали записываются коэффициенты с убывающими индек-
сами, под элементами — с возрастающими индексами.
Для оценки устойчивости САУ необходимо
ычислить определители
Гур-
вица, которые получают из матрицы (2.60) путем отчеркивания равного числа
строк и столбцов
левом верхнем углу матрицы. Например, первый определитель
второй
&п-1 >^п-3
|#л, 2
третий
&п-\»^л—З’^л—5
^л-24
^л-Н^л-З
И Т.Д.
САУ устойчива, если при ап > О
Aj > 0, А2 > 0, A J > 0,... Аи > 0.
(2.61)
Если один из определителей равен нулю, то система находится на границе
ус гойчивости.
Критерий Гурвица удобен для проверки устойчивости системы с заданными
параметрами (т.е. коэффициентами дифференциального уравнения). Однако, им
неудобно пользоваться при экспериментах, так как часто бывают известны не ко-
эффициенты уравнения, а передаточная функция разомкнутой цепи (системы)
К/р). Также возрастает сложность его использования с увеличением порядка
уравнения. Кроме этого, критерий Гурвица не даёт чётких указаний, как неустой-
чивую систему сделать устойчивой. Поэтому наряду с алгебраическими крите-
риями широкое распространение получили частотные критерии устойчивости.
2.4.2. Частотные критерии устойчивости
О
А
Частотные критерии устойчивости базируются на принципе аргумента. Рас-
смотрим этот принцип, для чего запишем выражение для характеристического
вектора, которое получается из характеристического уравнения (2.6), представ-
ленного в виде (2.59), путем заменыр на j(o:
</®) = ап (jo - )(jco - р2)... (jo - р„).
(2.62)
45
На рис. 2.13 изображены два сомножителя характеристического вектора
(/со - а) и (Л0 ~ Pi)-
Im A(Jo ) А
Рис. 2.13
Используя график (рис. 2.13), определим изменение аргумента вектора Л(/со)
при изменении частоты со от - оо до + оо
00^(0<+00
(2.63)
оо <;<£><;-юо
Если корень характеристического уравнения р, расположен на комплексной
плоскости слева от мнимой оси, то вектор j® — pt поворачивается на угол л при
изменении со от -оо до +оо (при этом точка у® перемещается по мнимой оси снизу
вверх). Если корень находится справа, то вектор у® - pt поворачивается на угол - л.
Допустим, что т корней характеристического уравнения расположены справа от
мнимой оси, а остальные п - т корней - слева. Тогда изменение аргумента харак-
теристического вектора
Л(у®) = (п - 2т)п.
(2.64)
—00<(0<+00
Эго выражение и определяет принцип аргумента.
Если полином A(jco) имеет действительные коэффициенты, то можно рас-
сматривать изменение частоты от 0 до + оо. Изменение аргументов комплексных
сомножителей (До - а) при этом уменьшится вдвое. Учитывая, что в устойчивой
системе т - 0, получим
arg A(Ja) = n- .
О<(0<+00 ~
(2.65)
46
Из выражения (2.65) следует критерий устойчивости Михайлова. САУ ус-
тойчива, если годограф характеристического вектора, начинаясь на положи-
тельной части действительной оси, обходит последовательно в положитель-
ном направлении п квадрантов, где «-порядок характеристического уравне-
ния системы.
Годографом характеристического вектора Л (/со) называется геометрическое
место точек конца этого вектора на комплексной плоскости при изменении часто-
ты от 0 до + оо (см. приложение В). На рис. 2.14 и рис. 2.15 приведены примеры
годографов устойчивых (рис. 2.14) и неустойчивых (рис. 2.15) САУ.
ImAOw)!
Рис. 2.14
Re А (/со)
Рис. 2.15
На практике более широкое применение по сравнению с критерием Михай-
лова находит критерий Найквиста, который позволяет судить об устойчивости
системы по частотным характеристикам разомкнутой системы. Рассмотрим слу-
чай, когда разомкнутая САУ устойчива и не содержит интегрирующих звеньев.
Для доказательства критерия Найквиста введем вектор
лр (/“)+#р (/«)
ВД = 1 + /с (»=1
t gp(>)
Лр О)
AM
А (М ’
(2.66)
лР (М
где 2?p(/cd) и Лр(/’со) - полиномы степени т и п соответственно (т <«). При этом
очевидно, что Л(/со) также является полиномом степени п.
Числитель (2.66) является характеристическим вектором замкнутой, а зна-
менатель - характеристическим вектором разомкнутой системы. Если разомкну-
тая и замкнутая системы устойчивы, то изменение аргументов Лр(/£о) и ,4(/(о) ОДИ-
каково и равно «л/2, и, следовательно, изменение аргумента вектора (2.66)
arg Ч7(/со) = А arg J(/co)-A arg Лр(./(о) = 0.
0<0)<+°о 0<to<+oo 0<ю<+<»
(2.67)
Таким образом, замкнутая система будет устойчива, если устойчива ра-
зомкнутая система и годограф 4J(/co) не охватывает начало координат (только в
этом случае изменение arg vP(/co) будет равно нулю при изменении частоты от 0 до
+ оо) (рис. 2.16).
йпЛГрС/со)!
Рис. 2.17
Так как годограф Kp(j(d) отличается от годографа 1Р(/о) только сдвигом вле-
во на 1 (рис. 2.17), то приходим к следующей формулировки критерия устойчиво-
сти {критерия Найквиста). САУ, устойчивая в разомкнутом состоянии, будет
устойчива и в замкнутом состоянии, если годограф частотной характеристи-
ки разомкнутой системы не охватывает точку с координатами (-1,/0).
Если САУ содержит v интегрирующих звеньев, то начальное значение фазо-
частотной характеристики (ФЧХ) равно —vjc/2, а амплитудно-частотной (АЧХ) -
бесконечности. В таких системах для удобства оценки устойчивости годограф до-
полняют дугой бесконечно большого радиуса (рис. 2.18). Формулировка критерия
устойчивости при этом не изменяется.
2.4,3. Запасы у сто й ч ивост и
Запасы устойчивости характеризуют способность системы сохранять ус-
тойчивость при отклонениях ее параметров от расчетных.
Запасы устойчивости определяются на двух частотах: частоте среза соср и
критической частоте сокр. На частоте среза АЧХ разомкнутой системы равна еди-
нице (I Ар(/соср) I = 1), на критической частоте ФЧХ разомкнутой системы прини-
мает значение, равное - тс (arg /Ср(/соКр) ~ -я) (рис. 2.18).
Различают запасы устойчивости по фазе и усилению. Запас устойчивости
по фазе у (рис. 2.18) показывает, на какое значение ФЧХ разомкнутой системы на
частоте среза отличается от -я. Запасом устойчивости по усилению называют от-
ент усиления, чтобы система оказалась на границе устойчивости.
Для нормальной работы САУ необходимо, чтобы запас устойчивости по фа-
зе превосходил 30°, а по амплитуде был не менее двух.
48
bn KP(J<$ i
Рис. 2.18
2.5. Определение динамических ошибок слежения
Динамические ошибки САУ оцениваются при полиномиальных управляю-
щих воздействиях вида 1(г) = • 1(f)- При /=0 реакция системы представляет
/=0
собой переходную функцию. К основным показателям качества переходного
процесса, определяемым по переходной функции, относятся (рис. 2.19):
- длительность переходного процесса равная интервалу времени с мо-
мента подачи сигнала до момента времени, когда реакция системы ХО не будет
отличаться от установившегося значения ууст более чем на 5%;
- перерегулирование С, равное отношению максимального значения реакции
в переходном процессе к установившемуся значению;
— время установления первого максимума выходного сигнала tM характери-
зующее скорость изменения переходного процесса.
Рис. 2.19
49
Установившееся значение реакции системы может быть вычислено по тео-
реме о предельном значении оригинала (2.16):
Уус1 = Hm y(t) — Нт рГ(р)= Пт рКр)КХу{р),
*>со jp—уО р—>0
(2.68)
limx(r)= lim рХ(р)= lim рК(р)Ки(р).
(2.69)
Если ошибка слежения в установившемся режиме изменяется во времени,
то найти её с помощью полученных выражений нельзя. Это можно сделать, на-
пример, используя метод импульсных переходных функций (см. (2.38)):
/
х(/) = JX(? - т)^ (т) dr.
о
(2.70)
Входящая в (2.70) импульсная переходная функция от входного воздействия
X к ошибке слежения х (импульсная характеристика) g}x(t) связана с со-
отношением аналогичным (2.35):
Ч'СО
о
(2.71)
Представив k(t - т) в (2.70) разложением в степенной ряд:
k(t - т) = k(t) - тГ(?) +... + (-1/ --Х(/)(?)
(2.72)
где (?) ~ , получим
(2.73)
Для моментов времени t > tn, когда переходный процесс в системе практи-
чески закончится (при t > ?п gyjf) * 0 и верхний предел в (2.73) можно заменить
па ?=оо), получим:
№ (0.
(2.74)
о
о
0
50
Величины с,, называемые коэффициентами ошибок, определяются равенст-
вом
4оо
о
(2.75)
Коэффициенты ошибок можно определить по передаточной функции Kyjp).
Продифференцировав (2.71) i раз по переменной р, положив затем р — 0 и сравнив
полученное выражение с (2.75), нетрудно убедиться в том, что
d‘K^p)
dp’
р=о
то есть
(2.76)
Порядок астатизма САУ равен номеру первого отличного от нуля коэф-
фициента с, (f=0,1,.../). Если с0 * 0, то система обладает астатизмом нулевого по-
рядка, т.е. является статической.
Характерная особенность астатических систем состоит в том, что при пода-
че на систему с астатизмом v-ro порядка воздействия, выраженного полиномом
степени v, ошибка в установившемся режиме постоянна и отлична от нуля. Если
степень полинома, описывающего воздействие, меньше v, то установившееся зна-
чение ошибки слежения равно нулю. Эти свойства вытекают из формулы (2.74),
если принять во внимание, что для степенного полинома v-ro порядка v-ая произ-
водная есть постоянная величина, а производные более высокого порядка равны
нулю.
Порядок астатизма системы (рис. 2.3) равен числу интеграторов, включен-
ных в контур управления. Чтобы убедиться в этом, представим передаточную
функцию разомкнутой системы, содержащей v интеграторов, в виде
pv Аг(р)
где В/р), Аг(р) - полиномы степеней т и г соответственно (г = п - v); —— пере-
PV
даточная функция v последовательно соединенных интеграторов, k„ - const. Пере-
да точная функция Kyjp) в рассматриваемом случае равна:
51
I I r- WEt
PVAr(P~) + k„Bf(p)
(2.78)
Определяя по передаточной функции (2.78) коэффициенты c, no формуле (2.76),
найдем, что cq~ с\ = ... = cv-i~ 0, cv^ 0 и, следовательно, система обладает астатиз-
мом v-ro порядка.
2.6. Определение флюктуационных ошибок слежения
Полный анализ САУ невозможен без исследования влияния на систему слу
чайных возмущений. Это исследование базируется на теории случайных процес-
сов. Ввиду важности этого раздела в приложении Г приведены основные сведения
из теории случайных процессов. Здесь же, воспользовавшись материалом прило-
жения, приведём ряд важных результатов и понятий.
Будем рассматривать воздействие на систему аддитивного шума (случайно
го процесса), т.е. будем считать, что входное воздействие состоит из суммы по-
лезного сигнала и случайной компоненты. Поскольку линейная система подчиня-
ется принципу суперпозиции, то можно отдельно рассматривать прохождение че-
рез неё сигнальной компоненты входного воздействия (она описывается детерми-
нированной функцией) и случайной (флюктуационной) компоненты. Сумма от-
кликов системы на каждую из составляющих входного воздействия даст резуль-
тирующую реакцию системы.
В стационарном режиме спектральная плотность мощности Wfa)) флюктуа-
ционной составляющей реакции y(t) системы на флюктуационную составляющую
£,(/) входного воздействия определяется соотношением (см. приложение Г, п. Г. 11)
W, («) = (Ju)
2 (О)).
(2.79)
где И^(<в) - спектральная плотность мощности флюктуационной составляющей
£,(/) входного воздействия; А^(/со) - комплексная частотная характеристика сис-
темы, рассчитанная от точки воздействия £,(/) к выходной величине Если
флюктуационное воздействие приложено ко входу системы (рис. 2.3), т.е. £(/) -
есть флюктуационная составляющая входного воздействия X(z), то A^(/co)=7<iy(/co).
Во многих случаях, например, при оценке точности слежения, достаточно
найти дисперсию флюктуационной составляющей выходного процесса. Выраже-
ние для дисперсии получается суммированием мощности всех спектральных со-
ставляющих процесса у{1):
2л
1 +°° 2
— f|^(7®)| ^(со>7со.
(2.80)
52
Если флюктуационную составляющую £,(/) можно считать белым шумом со
спектральной плотностью И^(0), то с учетом того, что Kfy(jo)
2
является чётной
функцией частоты
(2.81)
где No = 21^(0);
пропускания непрерывной системы, f= ю/2л.
эквивалентная шумовая полоса
Из выражения (2.81) следует, что по;
э понимается полоса пропускания
системы с прямоугольной амплитудно-частотной характеристикой, имеющей
одинаковый с исходной системой коэффициент передачи на нулевой частоте и
одинаковую дисперсию выходного процесса при действии на входах этих систем
белого шума. Это иллюстрируется рис. 2.20, на котором сплошной и штриховой
кривыми показаны зависимости от частоты со квадрата модуля комплексного ко-
эффициента передачи исходной и эквивалентной системы соответственно.
для исходной системы
для эквивалентной системы
СО
2 л л?:
Рис. 2.20
Если Кн, (усо) Ну (со) описывается дробно-рациональной функцией
то для
вычисления интеграл (2.80) удобно представить в виде
=м;«>)2”-2+(»2^4 + -+*„->;
где
53
Результат вычисления (2.82) при п < 3 имеет вид
д2^о +o0fei -a0aib2/a3
^>1 "НИИ W > И HMM M fell • AM
2a0(a0o3 -axa2)
(2.83)
Аналогичным образом с использованием табличного интеграла (2.82) может
вычисляться и эквивалентная шумовая полоса AF3.
2.7. Расчёт и анализ характеристик линейной непрерывной системы
с заданной передаточной функцией
Проанализируем характеристики системы (рис. 2.3) для случая, когда в ка-
честве фильтра используется динамическое звено с передаточной функцией
Кр (Р) =
*у (1 + РЧф )
(2.84)
где Тф - постоянная времени фильтра, ку = const - коэффициент усиления. В этом
случае согласно (2.25) передаточные функции замкнутой системы по ошибке
слежения и управляемой величине будут соответственно равны:
Р + Ау(1 + рТф)
М1 + ^ТФ)
р2 +£у(1 + ртф)
(2.85)
(2.86)
С учетом обозначений <вс — Jk^, С,-------где сос и £ - соответственно '
собственная частота и коэффициент затухания контура регулирования, выра-
жения (2.85), (2.86) преобразуются:
(2.87)
с
(2.88)
54
На рис. 2.21 приведены амплитудно-частотные характеристики
рассчитанные для трех значений коэффициента затухания: £ = 0,2 (сплошная ли-
ния), С, = 0,7 (пунктирная линия) и £ = 2 (штрих-пунктирная линия). Из приведен-
ных графиков следует, что замкнутая система имеет частотную характеристику.
типичную для фильтров нижних частот. Это означает, что медленные, в пределах
полосы частот о < 1,4(ос, изменения будут отслеживаться системой. Малым
(^ < 0,7) значениям коэффициента затухания контура регулирования соответству-
ет наличие значительного подъема частотной характеристики в области собствен-
ной частоты сос контура и более узкая по сравнению с большими значениями С,
полоса пропускания по уровню ниже 0 дБ.
со.
к
Рис. 2.21
Условия устойчивости. Условия устойчивости системы можно определить,
используя алгебраические или частотные критерии устойчивости. В соответствии
с алгебраическим критерием устойчивости Гурвица (п. 2.4.1) необходимым и дос-
таточным условием устойчивости системы с передаточной функцией (2.88) явля-
ется условие положительности коэффициентов характеристического уравнения
р2 + 2£соср + о* = 0,
т.е. 2^о)с > 0, шс > 0, откуда с учетом равенств ос =
(2.89)
= (ТФ )/2 слеДУет
что необходимым и достаточным условием устойчивости является к? > 0. Анало-
гичный результат даёт и применение частотного критерия Найквиста, согласно
которому годограф частотной характеристики ЯГр(/а>) разомкнутой системы не
должен охватывать на комплексной плоскости точку с координатами (-1, /0). Час-
тотная характеристика ^(/со) для рассматриваемой системы (см. (2.84)) имеет вид
55
kv к "t.
(Л>)=--у-У—
СО со
На рис. 2.22 построен её годограф для значений ку- 1 с*1, тф =2 с.
О
Ьп Гр(/<в) 5
-10
-10 -5 о
Re Kv(ja>)
Рис. 2.22
Динамические характеристики слежения. Изображение по Лапласу
управляемой величины y(t) для задающих воздействий А.1(/) = а0 -1(0 и
Х2(0 = cq/ • КО будет соответственно иметь вид
Yi(p) = *i(p)KXy(p)=
(2.90)
Г2(р) = Л2(р)^(р) =
р2 р2 + 2&ср + ©с
(2.91)
Используя (2.18) для перехода во временную область, получим:
Ji(0
а о® с
Р1Р2тф
Pi -Р2
exp(pt г)
Pi-Pi
ехр(р20
, (2.92)
56
PiP2f
I ИНТ -* --!__ ~ . '
Тф
+ PiP2 +
P\
ТФ
P\ ~P2
expCpj/)
exp(p2O
(2.93)
2 2
PlPl^
гдеp\,pi~ корни характеристического уравнения (2.89).
На рис. 2.23 приведены зависимости pi(/) и yi(t), а также зависимости оши-
бок слежения xi(/) = lj(r) - y\(f) и х2(/) = Х2(0 - У2(0> рассчитанные при a0 "1 и
ct| = 1 для различных значений коэффициента затухания С, контура регулирования:
£=0,2 (сплошные кривые), С,=0,7 (пунктирные кривые), £ = 2 (штриховые кривые).
Анализ кривых, приведенных на рис. 2.23, показывает, что характер пере-
ходного процесса в системе зависит от коэффициента затухания С,. При С, - 0,2 пе-
реходной процесс колебательный, при С, - 2 -- апериодический, при С = 0,7 - кри-
тический. Установившееся значение ошибки слежения в обоих случаях равно ну-
лю. Для квадратичного воздействия Х3(/) = а2< 1(0 установившееся значение
ошибки слежения можно найти, используя свойство преобразования Лапласа -
теорему о предельном значении оригинала (2.16), согласно которой
vrT = lim р
а2
(2.94)
Таким образом, рассмотренная система обладает астатизмом второго поряд-
ка (контур интегрирования содержит два идеальных Интегратора) и обеспечивает
равенство нулю ошибок слежения при полиномиальных воздействиях Х(Г) нулево-
го и первого порядков. Определение порядка астатизма следует и непосредствен-
но из анализа Хр(р) (2.84): наличие сомножителя указывает на то, что в конту-
Р
ре находятся два последовательно соединенных идеальных интегратора с переда-
точной функцией (2.52).
Флюктуационные ошибки слежения. Полагая, что флюктуации входного
сигнала представляют собой белый шум со спектральной плотностью мощности
И‘\ = const и, используя выражение (2.88) частотной характеристики замкнутой
57
системы, с учетом равенств со
получим выражение (2.81) для
дисперсии флюктуационной составляющей выходного процесса
о
-*»1(7®)2 + 2усо4ос + со2
Тф
ус/со = ^соск+~1.(2.95)
*1(0
Рис. 2.23
Эквивалентная шумовая полоса пропускания системы составит
+00
2л Кку (0)
(2.96)
2
58
На рис. 2.24 приведена зависимость AF3 = function(Q при сос = 1
с
Гц 1
1 2 3
Рис. 2.24
Минимальное значение эквивалентной полосы пропускания при фиксиро-
ванной собственной частоте сос контура достигается для значения коэффициента
затухания £ = 0,5.
59
ГЛАВА 3
АНАЛИЗ НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ В ПРОСТРАНСТВЕ СОСТОЯНИЙ
Анализ систем в пространстве состояний находит широкое применение при
исследовании и проектировании современных и перспективных САУ. Методы
анализа, базирующиеся на понятии пространства состояний, являются новыми
относительно рассмотренных в п. 2.1 методов и могут рассматриваться обособ-
ленно.
Понятие пространства состояний было введено в п. 1.2 для описания объек-
та управления. В данной главе мы более подробно рассмотрим это понятие при-
менительно уже ко всей САУ (рис. 2.2), описываемой линейным дифференциаль-
ным уравнением (2.1), и обобщим результаты для случая нестационарных систем,
когда коэффициенты дифференциального уравнения (2.1) зависят от времени.
3.1. Векторные дифференциальные уравнения систем
автоматического управления
с. математической точки зрения анализ систем в пространстве состоянии
означает использование методов матричного исчисления и векторного анализа.
Поэтому актуальность этого анализа быстро возрастает в связи с развитием ЭВМ.
Рассмотрим методику составления матричных дифференциальных уравне-
ний для САУ с одним входом и одним выходом.
Например, пусть система описывается дифференциальным уравнением (2.1)
3-го порядка (и=3):
(?) + «2>'<2) W + о./'ЧО + «оЯ') = *з*(3)Ю + b2fS2\t) + + V(0, (3.1)
где bj - постоянные (для удобства взято а,.=аз = I); , //'-1 (/) = .
di dtl
Введем обозначение:
у(0 = (0 + М40»
и составим систему дифференциальных уравнений:
pi (0 = (0 +
s2(t) s3(t) + h2X(t\
Лз(О = (0 “ (0 - а2 5з (0 +
(3-2)
(3.3)
(3.4)
(3.5)
60
Покажем, что составленная нами система (3.3)-г-(3.5) с учетом (3.2) сводит-
ся к исходному дифференциальному уравнению (3.1). При этом убедимся, что ко-
эффициенты - не произвольные, а будут определены через коэффициенты
уравнения (3.1) а, и Ьг Для этого попробуем выразить (3.5) через sx(t).
Согласно (3.3) и (3.4):
s2 (0 = ’1 (О - *А(С >
МО = Ъ (О ~ М-ОТ
(3.6)
(3.7)
Подставляя в (3.7) s2(z) из (3.6) получим:
53 (0 = (О - А|Х(О - й2Х(0. (3.8)
Соответственно производная s^t) —
s3 (/) = si (z) - - hj^f).
Подстановка в (3.5) 53(/)из (3.9), s2(f) из (3.6) и s3(Z) из (3.8) даёт
K-j (0 - hxk(f) - /j2X(z) = -зд (/) - a}s2 (t) - a2s3 (t) + /?31(Z) =
= -зд (Г) - axsx (t) + axh{k(t) - a2sx (?) + a2hx\(t) + a2h2X(t) + h3X(t),
или, после группировки слагаемых,
$ (Z) + a2sx (Z) + (z) + ед (z) =
= fyX(Z) + (a2hx + A2)X(Z) + (axhx + a2h2 + /?3)X(z).
(3.10)
Замена sj(Z) на y(t) согласно (3.2) .$•] (z) - y{t) - h0)^t) приводит к дифферен-
циальному уравнению
y(t) - A0X(Z) + a2y(t) - a2h0K(f) + axy(t) - + aQy(t) - =
= /?|X(Z) + («2^1 + + (a\hi + a2h2 + ^)X(Z).
ИЛИ
)7(/) + a2y(t) + axy(t) + aQy(f) = Л0Х(Г) + (hx + a2h0)H(t) +
+ (a2hx +h2+ axhQyk(t) + (axhx + a2h2 + h3 + «0Л^)Х(/).
Уравнение (3.11) полностью эквивалентно (3.1) при
61
Таким образом, мы доказали, что дифференциальное уравнение третьего
порядка (3.1) описывается системой дифференциальных уравнений первого по-
рядка (3.3) -г (3.5), если коэффициенты Л,:
h(j -b3,
-Ь2 ~«2^0»
й2 — bx -a2hx -axhOi
h3=b0- a2h2 -axhx- aoho.
Обобщим рассмотренный пример на линейное неоднородное дифференци-
альное уравнение л-ого порядка (2.1), в котором возьмём предельный случай
т = п, и для удобства, как и ранее в (3.1), положим ап -1:
/"'(О + + - + W(t) = +... + bok(t). (3.13)
Аналогично (3.2) введем обозначение
ХО=si (О + ЛЛ(').
(3.14)
и составим систему дифференциальных уравнений первого порядка (см. (3.3) ->
(3.5)):
(О = з2 (0 +
«2 (О s«3 (0 + ^2 МО,
\ ‘ ’
Л’л (?) = -a^Si (?) - axs2 (?) -... - an_xsn (?) + Л,Д(?) =
л-1
“ “X aiSi+\ (0 +^лМ0-
г-0
(3.15)
Как и в рассмотренном примере покажем, что (3.14) и (3.15) сводится к
(3.13) при определенных коэффициентах h,.
Согласно (3.14)
62
•S| (О = у(1) - Aol(f).
(3.16)
Далее выразим все st{f) через Si(t)- Согласно (3.15)
*2 (О = МО ~ 1(0»
(О s *2 (0 ~ М40 s
=(*i (0 - МОТ)0’~ МОТ=
== 5'1 (0 - Л11(0 - h21(0,
(3.17)
SM~ (0 - ллЧ1(0 =
=^Г,(о-Ел,1("",_/)(о.
1=1
В каждое последующее уравнение (3.17) для s£t) подставлено значение si_l(kty из
предыдущего, выраженное в свою очередь через $1(0-
Взятие производной от последнего уравнения (3.17) даёт
П-1
sn (t) = (0 - Е Л/1("'° (0 • (3.18)
/=1
С другой стороны s„(t) определено в последнем уравнении системы (3.15).
Приравнивая эти выражения, получим
s,w от - X h^"~nот=-X от+W')
м /=0
Из последнего уравнения (3.17) найдём
*/+1 от=от - Ё от •
9=1
(3.20)
Подстановка (3.20) в (3.19) позволяет получить уравнение относительно
5i(/):
от - Е м0”0«=-Ё* а<4°от+X ai Ё w+W).
/2=1 /=0 /=0 9=1
ИЛИ
63
л-1 л-1 л-1 i
4й)(О+Е^4о(о=ЕА«-х’(й“о(о+Еа/ Ем0^(*)+(')• (з.21)
/~0 /=1 /~0
Полученное уравнение (3.21) зависит только от S|(z) и его производных. По-
этому подстановка в (3.21) $](г) из (3.16) приводит к (3.13) и к определению коэф
фициентов h, через ait bt:
G(0 -йоадУ”’ + 2л Gw - йокор =
/==0
л-1 л-1 /
=хал‘"'')(')+Ёа/ Ё +wo,
/=0 q~l
ИЛИ
Л—1 Л—1 Л“1 I
/”ю+ 2>, у0> (О-Х^0 (о+2>, +
i=Q t=l i=0 q=l
л-1
+ /?nX(0 + hQtfn\t) + ^аДХ(0(/).
/=о
В итоге получим
л-1 л—1
/">(0+Хя /"(О=+ ЕЛА‘"'°(О+
/—О /—1
+Xai ЁАХ’’’ w+Е«л(0 (о+W)-
/"0 f=0
(3.22)
Приравнивая коэффициенты при одинаковых производных Х(0(У) в (3.22) и
исходном уравнении (3.13) для заданного порядка п несложно получить выраже-
ния для коэффициентов h(. Например, как видно из (3.22), h0 = bn при любом п:
К =60 “с»-2Л«-2
(3.23)-
Для п = 3 коэффициенты h,определены ранее в (3.12).
64
Систему уравнений (3.15) можно записать в виде векторного дифференци-
ального уравнения (называемого ещё матричным дифференциальным уравнени-
ем):
S(0 = AS(r) + В ад.
Выражение (3.14) определяет уравнение выхода системы:
y(O = CTS(O + /?0X(O.
(3-24)
(3.25)
Здесь
1 0 ... О
О 1 ... О
(3.26)
~а\ -а2 . . .
—матрица системы размером ихи;
(3.27)
_М
— матрица управления размером их 1;
О
(3.28)
—матрица наблюдения размером их 1;
определяет
операцию транспонирования.
И, наконец, вектор S(/) называют вектором состояния системы
S(0 =
(О
52(0
(3.29)
/л (0.
65
Сами st(t) называют переменными состояния. В пространстве состояний,
осями которого являются переменные состояния, каждому моменту времени со-
ответствует вектор S(/). Величина и положение этого вектора с течением времени
изменяются, в результате чего вектор S(?) описывает кривую, называемую
траекторией движения системы в пространстве состояний.
Более пристальное рассмотрение введенных матриц (3.26) -ь (3.28) показы-
вает, что элементы матрицы системы А определяются структурной схемой систе-
мы и значениями её параметров. Матрица управления В характеризует влияние на
переменные состояния входного сигнала, а матрица наблюдения С отражает связь
выходного сигнала системы с вектором состояния.
В реальных системах часть коэффициентов Ьь например Ьп, в правой части
(3.13) равны нулю, т.е. степень полинома числителя передаточной функции (2.23)
меньше степени полинома ее знаменателя. Поэтому /?о и ряд коэффициентов А,
оказываются равными нулю. При этом матрица управления
Го 1
h
где т - порядок правой части (3.13) (порядок числителя (2.23)).
В общем случае САУ имеет г входов и I выходов. Матрица системы А не
изменяется гю сравнению с матрицей систем с одним входом. Матрица управле-
ния В становится прямоугольной размером ихг и матрица наблюдения С - прямо-
угольной, размером пх.1.
На рис. 3.1 изображена так называемая структурная схема САУ в перемен-
ных состояниях, построенная по системе уравнений (3.14), (3.15). Она составлена
из интеграторов; введенные переменные состояния - это сигналы на выходах ин-
теграторов.
На рис. 3.2 изображена структурная схема САУ в векторной форме, соот-
ветствующая матричному дифференциальному уравнению (3.24) и уравнению
выхода (3.25) при т <п, т.е. bn~ho~O; двойные линии на рисунке характеризу-
ют векторные связи.
Как уже отмечалось в п. 1.2 переход от исходного дифференциального урав-
нения (3.13) к системе уравнений (3.24) и (3.25) не является однозначным. Для
одного и того же дифференциального уравнения можно составить несколько
систем дифференциальных уравнений первого порядка в зависимости от способа
введения переменных состояния. Например,
п. 1.2 для описания объекта управ-
ления матрицы системы А, наблюдения С и управления В определены иначе, не-
жели в этом разделе. Здесь же приведём ещё один способ определения перемен-
ных состояния.
66
Рис. 3.1
Часто удаётся представить передаточную функцию системы автоматическо-
го управления (2.23) в виде
К(р) = + +... + -^S-, (3.30)
Кр) Р~ Р\ Р - Р2 Р-Рп
где р. _ полюса системы (передаточной функции К(р)); Д, - вычеты, определяемые
как
А,=(Р-Л)ОД|Р=Й-
Такое представление (3.30) функции К{р) в виде суммы простых дробей
возможно, если передаточная функция имеет только простые полюса, и т < п (см.
(2.23)).
67
Выражению (3.30) соответствует схема, представленная на рис. 3.3.
Ai
ад
ад
ма
Рис. 3.3
Если сигналы на выходах интеграторов wt(f) снова принять за переменные
состояния, то систему с передаточной функцией (3.30) можно описать следующей
системой дифференциальных уравнений:
™2 (0 = Р2 vv2 (0 + А2^-(0;
АЛО = pn-wn(t) + АЯХ(/).
В этом случае выходной сигнал
Я0 = w, (0 + w2 (г) +... + (/).
(3.31)
(3.32)
Системе уравнений (3.31) соответствует матричное дифференциальное
уравнение
W(0 = AwW(0 + BwW).
(3.33)
Выходной сигнал системы (рис. 3.3) описывается матричным уравнением
вида
y(0=cJw(0-
(3.34) :
68
Здесь
(z)
W(f) =
w2(0
(3.35)
WM
- вектор состояния системы размером их 1;
Р1
о
Р2
(3.36)
- матрица системы размером ихи;
(3.37)
О
О
О
W
о
о
п
- матрица управления размером их 1;
(3.38)
— матрица наблюдения размером ях1.
Из сравнения (3.24), (3.25) и (3.33), (3.34) видно, что при математическом
описании одного и того же динамического процесса (3.13) различному выбору
переменных состояния соответствуют различные матрицы системы, управления,
наблюдения и различные матричные дифференциальные уравнения, каждое из
которых полностью определяет выходной сигнал системы.
Ранее векторные дифференциальные уравнения были определены для ста-
ционарных САУ. В нестационарных системах матрицы в уравнениях (3.24) и
(3.25) будут переменными и матричные дифференциальные уравнения примут вид
S(O=A(t )S(r)+В(О ад,
(3.39)
y(t) = С(/)т S(z) + W).
(3.40)
69
3.2. Матрица перехода
Найдём решение векторного дифференциального уравнения (3.39), которое,
как известно, состоит из решения однородного уравнения и составляющей, обу-
словленной действием входного сигнала Х(/). Однородное уравнение получим из
уравнения (3.39), положив 1(f)=0. В результате имеем
S(0 = A(z)S(O.
(3.41)
Решение однородного уравнения (3.41) ищем в виде
SQ) = Ф(/)S(f0 ),
(3.42)
где Ф(Г) - фундаментальная матрица', S(to) - вектор, описывающий состояние
системы в начальный момент времени t0.
Из (3.42) следует, что при t —10 фундаментальная матрица
Ф('о) = 1,
(3.43)
где I - единичная матрица.
Подставив (3.42) в (3.41) найдем уравнение для фундаментальной матрицы:
Ф(0 = А(/)Ф(О.
(3 -44)
Преобразовав (3.44) к виду:
</Ф(/)Ф"‘(О = A(f)dt,
и проинтегрировав полученное уравнение, найдём
Ф(г) = ехр
t
jA(f>*
(3.45)
При определении вынужденной составляющей решения (3.39) положим
S(r) = Ф(0 V(0,
(3.46)
где V(r)
неизвестный вектор размером их 1.
Подстановка (3.46) в исходное уравнение (3.39) даёт
d>(?)V(0 + Ф(0 V(O = А(0Ф(0У(0+В(О НО .
70
С учётом (3.44) из последнего уравнения получим
<P(OV(O=B(OMO.
ИЛИ
V(z) = Ф1 (г )B(/)X(Z).
Отсюда после интегрирования определим неизвестный вектор
V(/) = |ф’’(т)В(т)Х(т)Л.
1о
(3.47)
Общее решение (3.39) равно сумме (3.42) и (3.46), так что с учётом (3.47)
оно имеет вид
S(z) = Ф(/ )S (/0) + Ф(0 /ф (т)В(т)Х(т)А.
4)
(3.48)
Функцию
ф(т,т) = ф(/)ф-‘(т)
(3.49)
называют матрицей перехода СА У.
Основные свойства матрицы перехода:
1. В начальный момент времени I = матрица перехода равна фундамен-
тальной матрице
ф(/,/0)=ф(/)ф-'((())=ф(/),
(3.50)
так как Ф(/о) = I (см. (3.43)).
2. При г= t матрица перехода равна единичной матрице, поскольку
Ф(/,Г) = Ф(0Ф~‘(/) = 1.
(3.51)
В общем случае вычислить матрицу перехода сложно. Обычно для её опре-
деления используются численные методы.
Для стационарных САУ нахождение матрицы перехода упрощается. Реше-
ние уравнения (3.41) принимает вид
S(/) = 0(/)S(/o>eA'S(/o),
где Ф(/) - -матричная экспонента (см. приложение А, п. А.6).
71
Матрица перехода в соответствии с (3.49)
Ф(Лт) = Ф(/)Ф_,(т) = еА/е~Ат = еА('“г) = Ф(г-т).
(3.52)
Фундаментальную матрицу для стационарной системы определим, приме-
нив преобразование Лапласа к уравнению (3.44). В результате согласно (2.12)
получим
рф(р) = АФ(р) + Ф(0).
Отсюда, полагая Ф(0) ~ I (см. (3.43)), найдём фундаментальную матрицу
®OT = Z”'{[pI-Ar'},
(3-53)
где [pl — А] - характеристическая матрица, определитель которой позволяет оп-
ределить характеристическое уравнение системы.
В заключение отметим, что матрица перехода зависит от выбора перемен-
ных состояния.
Пример 3.1. Найдем матрицу перехода для САУ, передаточная функция
(2.23) которой имеет вид
ЛГ(р) =
200
(р +10)(р + 20)
(3.54)
Этой передаточной функции соответствует дифференциальное уравнение:
d2y(t)
dt2
+ 30 + 200X0 = 2001(0.
dt
(3.55)
В качестве переменных состояния выбираем выходной сигнал и его первую
производную. Тогда передаточной функции системы (3.54) соответствует вектор-
ное дифференциальное уравнение
t
и уравнение выхода
(3.56)
72
Таким образом, матрицы системы, управления и наблюдения принимают
вид
200 -30 ’
О
200 *
(3-57)
О
Характеристическая матрица
200 р+30
Матрица, обратная характеристической матрице, имеет вид
[р! - А]-’
(р + 10)(р + 20) -200
Фундаментальная матрица определяется выражением (3.53)
Ф(') =
2е~10' - е~20'
-20е"10/ + 2Ое~20'
-е“,0/+ 2е~20/
Матрица перехода в соответствии с (3.52)
Ф(/ - т) =
2е-Ю(/-г) _ е-20(/-т)
- 20e~1O(z-T) + 20е~:
O^-W'-O _ о,1е“20(/~т)
_е~ю(/-1) j
Вектор переменных состояния при действии на систему управляющего воз-
действия X(f) -l(z) и нулевом начальном состоянии в соответствии с (3.48)
S(T)
2Ое~10' - 2Ое"20'
Отсюда в соответствии с выбором переменных состояния (3.56) видно, что
выходной сигнал системы
Я0 == 1 - 2е"10' + е~20'.
(3.58)
Если в рассматриваемом примере переменными состояния выбрать вектор
W(/) (3.35) с составляющими wj(r) и (3.31), определяемые через полюса сис-
73
темы, то матрицы системы, управления и наблюдения в соответствии с (3.36) -
(3.38) получаются следующими:
20
(3.59)
При этом матрица перехода
Г -10(/-г)
V
о
О 1
*4
Вектор переменных состояния при Х(/) = 1(?) и нулевом начальном состоя-
нии
W(/) =
Так как в этом случае выходной сигнал согласно (3.32) равен сумме пере-
менных состояния:
Х0 = vvj (/) + w2 (t),
(3.60)
то легко видеть, что определенный таким образом сигнал y(t) (3.60) совпадает с
ранее полученным результатом (3.58). Что и следовало ожидать, поскольку, как
отмечалось ранее, одному и тому же динамическому процессу (3.13) (в этом при-
мере он задан через передаточную функцию (3.54) или уравнение (3.55)) в зави-
симости от выбора переменных состояния соответствуют различные матрицы
системы, управления, наблюдения (см. (3.57) и (3.59)) и, следовательно, различ-
ные векторные дифференциальные уравнения. Однако при одном и том же управ-
ляющем воздействии Х(/) на выходе всей системы получаем один и тот же выход-
ной процесс, т.е. одно и тоже решение Х0 (3.13), в независимости от различного
описания системы и соответствующего ему уравнение выхода.
V J.
74
ГЛАВА 4
ТЕОРИЯ ЛИНЕЙНЫХ ИМПУЛЬСНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Системы автоматического управления, в которых обрабатываемая инфор-
мация подвергается дискретизации по времени, называются импульсными. Им по
священы эта и следующая главы. Однако, прежде чем преступать к непосредст-
венному изложению материала, следует несколько слов сказать о цифровых и
дискретных системах и их отличии от импульсных и непрерывных систем.
Цифровые системы ещё больше отличаются от непрерывных систем, чем
импульсные. Цифровые системы автоматического управления содержат в своём
контуре цифровое устройство обработки информации - цифровую вычислитель-
ную машину (ЦВМ) или специализированный цифровой вычислитель. В таких
системах информация квантуется не только во времени (как в импульсных систе-
мах), но и по уровню. Это объясняется заменой непрерывного сигнала цифровым
кодом определенной длины, происходящей в аналого-цифровом преобразователе
(АЦП), а также эффектами округления в цифро-аналоговом преобразователе
(ЦАП) и в самой ЦВМ. Более подробно цифровые САУ будут рассматриваться
далее в главе 7.
И импульсные и цифровые системы принадлежат более широкому классу
дискретных систем автоматического управления. Понятие дискретной системы
допускает возможность квантования сигналов во времени и по уровню.
Если в цифровой системе АЦП, ЦАП и ЦВМ имеют достаточное число раз-
рядов, то при исследовании такую систему можно линеаризовать, а погрешности
от квантования по уровню учесть добавлением в сигнал шумов квантования с оп-
ределенными статистическими характеристиками. Методы исследования линеа-
ризованных цифровых и линейных импульсных систем имеют много общего. В
обоих случаях используются рассмотренные далее понятия идеального импульс-
ного элемента, решетчатой функции и импульсного фильтра.
Обратимся к непосредственному изучению импульсных САУ. Простейшим
примером импульсной системы является система, показанная на рис. 4.1.
Рис. 4.1
75
В схеме (рис. 4.1) непрерывный сигнал рассогласования x(t) преобразуется с
помощью ключа Кл в импульсный xa(t) и затем обрабатывается непрерывным
фильтром Ф с передаточной функцией К(р).
Будем считать, что замыкание ключа происходит периодически с интерва-
лом времени Г, а формируемые на выходе ключа импульсы имеют неизменную
форму и длительность ти (рис. 4.2).
Рис. 4.2
Амплитудно-импульсную модуляцию процесса x(fy которая имеет при этом
место, называют амплитудно-импульсной модуляцией первого рода (АИМ-1). При
АИМ-1 на выходной процесс непрерывного фильтра ХО влияют только значения
рассогласования x(t) в моменты кТ замыкания ключа. При этом работа модулятора
(ключа) моделируется схемой (рис. 4.3), состоящей из последовательно соединен-
ных идеального импульсного элемента (ИИЭ) и формирующего фильтра (ФФ) с
передаточной функцией К^(р).
Рис. 4.3
ИИЭ преобразует входной сигнал в последовательность 5-импульсов с ве-
сом, определяемым значением входного сигнала в момент взятия соответствую-
щего отсчета
х*(0= Ух(кТ}§(! - кТ).
Л=0
(4-1)
Последовательность (4.1) схематически показана на рис. 4.4.
Используя (4.1), получим, что импульсная характеристика формирующего
фильтра £фф(1) согласно (2.38) определяет форму импульсов на выходе всего мо-
дулятора (ключа):
76
xa(t) = ЕА'(*Л#фф(* “ кТ) ‘
А=о
(4.2)
х (/) А
Рис. 4.4
Для получения процесса на выходе ключа, модулированного по закону ам-
плитудно-импульсной модуляции первого рода (рис. 4.2), формирующий фильтр
должен иметь импульсную характеристику следующего вида:
£фф(О = 1(О-1(*-ти)
(4.3)
Согласно (2.35) импульсная характеристика g^(t) связана с передаточной
функцией Кфф(р) соотношением
+00
о
Отсюда, используя (4.3) получим следующее:
(р)=
(4.4)
При малой длительности формируемых импульсов ти « Т (рис. 4.2) для
анализа импульсной системы во многих случаях используют приближенное ра-
венство е рх" к 1 - рти. Откуда получают Лфф(р) « ти.
Формирующий фильтр, наравне с непрерывной частью системы, определяет
её динамические характеристики. Поэтому обычно его объединяют с непрерыв-
ным фильтром в один фильтр (рис. 4.5) с передаточной функцией Кпт(р), назы-
ваемый приведённой непрерывной частью (ПНЧ).
77
Г пнч
р5* ^фф(р)
> К(р)
Рис. 4.5
Таким образом получают структурную схему линейной импульсной систе-
мы, изображенную на рис. 4.6.
Рис. 4.6
Приведённая непрерывная часть имеет передаточную функцию
В дальнейшем будем рассматривать приведённую непрерывную часть как
один фильтр с передаточной функцией Л?Пнч(р), без конкретизации К^(р) и К(р).
При анализе динамики системы (рис. 4.6) обычно интересуются значениями
выходной величины y(f) в дискретные моменты времени t = kT, поскольку именно
эти значения влияют через цепь обратной связи на дискретные значения рассогла-
сования х\кТ). Рассмотрение вместо непрерывных функций Л,(г), x(t), y(t) соответ-
ствующих им дискретных функций х(Л7), у(кТ) позволяет анализировать
систему (рис. 4.6) как некоторый импульсный фильтр и существенно упрощает
анализ. Импульсным фильтром называется динамическое звено (или система),
входная и выходная величины которого рассматриваются в дискретные момен-
ты времени.
Введённое понятие дискретной функции применяется для любой функции
u(kl\ значения которой определены в дискретные моменты времени t = кТ, где
к = 0,1,2,... , и совпадающей в эти моменты времени с исходной непрерывной
функцией и(/). Функцию и(кТ) ещё называют решетчатой функцией. Преобразо-
вания таких функций рассматриваются при анализе импульсных систем.
Вид дискретной функции и(кТ) и её связь с непрерывной функцией u(t) про-
являются на рис. 4.7. Также отметим, что решетчатая функция не обязательно
должна формироваться из некоторой исходной непрерывной. Любая числовая по-
следовательность некоторой величины, определенная в дискретные равноотстоя-
щие моменты времени, может быть представлена в виде решетчатой функции.
78
u(kT)h
Рис. 4.7
Если рассмотреть разомкнутую импульсную систему, состоящую из иде-
ального импульсного элемента и приведенной непрерывной части с передаточной
функцией Кит(р) (рис. 4.6), то несложно установить связь между дискретными
функциями х(кТ) и у(кТ). Согласно (4.2), выходной процесс ХО такой системы в
моменты пТ можно записать в виде
у(пТ) = Z x(kT)g„m (пТ - кТ)
(4.5)
где gniri(0 ~ импульсная характеристика приведенной непрерывной части.
4.1. Методы анализа линейных импульсных систем
автоматического управления
В этом разделе рассматриваются наиболее распространённые методы мате-
матического анализа импульсных систем. Несмотря на то, что они во многом по-
хожи на методы, используемые для описания линейных непрерывных систем
(п. 2.1), у них имеются некоторые особенности.
4.1. L Z-преобразование
Математическим аппаратом, используемым для анализа импульсных систем
(импульсных фильтров), является аппарат Z-преобразования. Оно играет ту же
роль, что и преобразование Лапласа в теории непрерывных систем. Запишем пре-
образование Лапласа процесса на выходе идеального импульсного элемента ИИЭ
в схеме (рис. 4.6)
+00 +00 оо оо
L{x\t)} = \x'(fr~p,dt = j £>(AT)5(/ - kTyrp,dt = £х(ЛТ’)е'^Г. (4.6)
0 0 к~0 к= О
79
Введя замену z - ерТ, получим выражение Z-преобразования функции х(&7):
Z{x(kT)}~ ^x(kT)z~k
~0
Для произвольной функции flkT), определенной при к > 0, /-преобразование
существует и имеет вид
Z{f(kT)]^ Z{F(p)} = F(z) = ^/(АГ)
*=0
если ряд в правой части
ыражения (4.7) сходится.
(4.7)
В левой части (4.7) приведено несколько формально допустимых способов
обозначения Z-преобразования. При записи Z{F(p)} предполагают, что фактиче-
ски Z-преобразование взято от решетчатой функции/АТ), однозначно связанной с
fit) и изображением этой функции F(p).
<4*
***«*
Пример 4.1. Найдём /-преобразование для решетчатой функции
f(kT)~e~akr, определенной при А>0. Ей соответствует временная функция
f (t) = e~at • 1(/). Согласно (4.7) будем иметь
F(z)=2Le z =лде z>
A~0
(4.8)
Полюс функции F(z) расположен в точке zn = е ; т.е. функция (ряд) сходится
Г. ^ ***»>
1 frIF
В рассмотренном примере ряд представляет собой сумму геометрической
О 1 -- 1
прогрессии: 1 + q + q + q + ... . Первый член равен 1, знаменатель q-e z
Такая ситуация встречается нередко. Сумма бесконечного числа членов геомет-
1
рической прогрессии рассчитывается по формуле lim Sk =----, при условии то-
го что, ряд (прогрессия) сходится. Это происходит в случае Ы < 1.
Для нахождения дискретных значений функции (решетчатой функции) по
её /-преобразованию используют формулу обращения. Она представляет собой
следующий контурный интеграл:
80
f(kT) = Z"' {F(z)} = F(z)zaz.
(4.9)
Данная формула называется обратным Z-преобразованием. Интеграл в (4.9) бе-
рётся по окружности с центром в начале координат, охватывающей все полюсы
F(z). Обход контура интегрирования производится в положительном направле-
T«v« ПрОТИ В М2.СОВОИ стрелки. Для вычисления (4.9). так же. как и в случае об-
ратного преобразования Лапласа (2.18), используют теорему о вычетах:
f(kT)~ -^^F(z)zk~'dz = ^ResF^z*’1
(4.10)
полюсы функции F(z), v = l,/, I
- число полюсов. Вычеты в простых по-
люсах и полюсах большей кратности соответственно вычисляются аналогично
(2.19), (2.20):
- вычет в простом полюсе вычисляется по формуле
ResF(z)z*~’
а в полюсе кратности г:
(4.12)
Отдельный случай представляет собой нахождение полюсов при к = 0, по-
скольку второй сомножитель подынтегральной функции F(z)z *"1 в (4.9) при к—0
равен z~ ’, г.е. подынтегральная функция F(z)zA “1 при к—0 может иметь нулевой
полюс (если он простой, то нужно использовать (4.11)). Если функция F(z) имеет
нулевой полюс кратности г, то для функции F(z)zk~' при к — 0 полюс будет иметь
кратность г + 1. В этом случае значение интегрального вычета в точке z — 0 будет
! тч*Чыч и
ResF(z)z*-5
Л = 0,
Л>0.
Л»**<*'*к» и rr
(4.13)
Пример 4.2. Исследуем временную функцию /(/) = е •!(/) из примера
4.1. Однако теперь поставим обратную задачу: по изображению F(z) =
8]
(см. (4.8)) найдем соответствующий ему оригинал. Будем использовать (4.10).
Приравнивая знаменатель F(z) к нулю, обнаружим, что изображение содержит
единственный простой полюс в точке z\— zn = е~аТ. Вычисляя вычет согласно
(4.11), найдем решетчатую функцию и соответствующий ей оригинал:
7(4Г) = SF^z^'dz = ResFfz)?-'
27Г/ j
и /(0 = е а1 • 1(/). Полученный результат полностью совпал с предыдущим при-
мером 4.1.
vmww*"*
На практике пользуются таблицами /-преобразований, если изображение
является табличным. В приложении Д приведены /-преобразования наиболее час-
то встречающихся функций. Применяют также различные методы, облегчающие
нахождение решетчатых функций по изображениям. Например, пытаются разло-
жить исходное изображение F(z) на сумму простых дробей или слагаемых, изо-
бражения которых являются табличными.
Основные свойства Z-преобразования.
1. Свойство {теорема) линейности. Если Fj{z) = Z[ft{kT)}, то
{w 1 N
Ycifi(kTn = XciFi(z^
/=1 J /=1
(4.14)
где с,- = const.
2. Теорема запаздывания. Если F{z) = Z\f{kT)}, то
Z{f{k~m)T} = z~niF{z).
(4.15)
Из (4.15) следует, что задержка сигнала, например, на один такт Т приводит
к умножению его изображения на изображения на z 1: Z{f{k —1)7"} = z r{z). По-
этому на схемах дискретных (импульсных) фильтров блок задержки на один такт
Т изображается прямоугольником с символом z .
3. Теорема о конечном значении оригинала. Если F{z) — Z\f{kT)}, то
lim f {kT) - lim-------F(z).
k~>oo z—>1 z
(4.16)
82
4. Теорема о свёртке {изображение свертки двух решетчатых функции).
Если Ei(z) = Z{/j(in) и F2(z) = Z{f2(kT)}, то
4Е/5(''ПЛ((* - v)F)[ = F)(z)F2(z). (4.17)
1 v=0 J
4. 1.2. Передаточная функция разомкнутой импульсной системы
Найдем передаточную функцию разомкнутой импульсной системы. Под-
вергнув правую и левую части соотношения (4.5) Z-преобразованию и используя
правило нахождения Z-преобразования свертки дискретных функций (4.17), полу-
чим
Y(z)=X{z)KP{z),
где K(z), X{z) - Z-преобразования дискретных функций y(kT), x{kT);
X„(z)= YgmdkT)z-k =Z{g„m(t)} = Z{Knm(p)}
k-0
(4.18)
(4.19)
- передаточная функция разомкнутой импульсной системы, представляющая со-
бой Z-преобразование импульсной характеристики её приведённой непрерывной
части.
Согласно (4.18) передаточная функция линейной импульсной системы {дис-
кретная передаточная функция) представляет собой отношение Z-преобразова-
ния выходного сигнала к Z-преобразованию входного сигнала при нулевых началь-
ных условиях (значения у{кТ) и х{кТ) равны 0 при к < 0). В теории линейных им-
пульсных систем дискретная передаточная функция X{z) играет ту же роль, что и
передаточная функция К{р) в непрерывных системах.
Применяя Z-преобразование к уравнению x(f) = Х(/) - y{t) (или к уравне-
нию х{кТ) - Х{кТ) - у{кТ)), записанное согласно схеме на рис. 4.6, и учитывая
свойство линейности (4.14), получим X{z)~K{z)- Y{z). Тогда с использованием
(4.18), (4.19) структурную схему системы (рис. 4.6), как импульсного фильтра,
можно преобразовать к виду, изображенному на рис. 4.8.
4
Рис. 4.8
83
Система (рис. 4.8) описывается уравнениями
Х(г) = Л(г) - У(г),
Y(z) = X(z)Kr(z),
из которых нетрудно получить передаточные функции замкнутой системы
(Z) =
Л£) = __1_____
A(z) l + tfp(z)’
И» ^PU)
A(z) 1 + /Cp(z)'
(4.20)
4.1,3. Разностное уравнение импульсной системы
и алгоритм дискретной фильтрации
Другим способом описания линейных импульсных систем является описа-
ние с помощью разностного уравнения, связывающего значения входного и вы-
ходного процессов в дискретные моменты времени. Если в качестве выходного
рассматривать процесс _ИЛГ)> то разностное уравнение замкнутой системы в об-
щем случае можно записать в виде
у(кТ)+а,у((к - 1)Г) +... + а„у((к - п)Т) = Ьок(кТ) +... + Ь„,к((к - т)Т). (4.21)
Подвергну
5
правую и левую части выражения (4.21) Z-преобразованию при
нулевых начальных условиях (используется теорема запаздывания (4.15)) и вы-
числив отношение K(z)/A(z), найдем
rK(z)^ bQ+blZ-'+... + bmZ-m
A(z) l + alZ~l+a2z~2+... + апг~п
(4.22)
Соотношения (4.21), (4.22) устанавливают связь передаточной функции и
разностного уравнения САУ.
На практике уравнение дискретного фильтра (системы) (4.21) часто перепи-
сывают в следующей форме:
у(кТ) = Ь^(кТ) + Ь{к({к -1)7*)+... + bm\({k - m)T) -
~ ~ 1)Г) -... - апу((к - п)Т).
(4.23)
84
Данная формула (4.23) называется алгоритмом дискретной фильтрации, в отли-
чие от (4.21) - разностного уравнения. На рис. 4.9 изображена структурная схема
такого фильтра.
Рис. 4.9
Здесь, как и ранее в (4.15), блок задержки на Т обозначен прямоугольником с сим-
волом z .
Рекуррентное соотношение (4.23) позволяет вычислять каждое последую-
щее значение выходного процесса по его предыдущим
значениям и значениям
входного воздействия. Эта формула используется при решении разностных урав-
нений на ЭВМ. Если входное воздействие 'k(kT'), определенное при к > 0, подаёт-
ся на вход системы (фильтра) рис. 4.9, то выходная реакция при нулевых началь-
ных условиях (значения у(к'Г) также равны 0 при к < 0) рассчитывается по (4.23):
у(0) = Ао?.(О),
у(Г) = ЬеЦТУ+ 6Д(0) - а,у(0),
у(2Г) = А„Ц2Г) + b,X(T) + fe2X(0) - а,у(Т) - а2у(0),
Импульсный фильтр, изображенный на рис. 4.9, называется рекурсивным
фильтром: в нём для формирования текущего Л-ого выходного отсчёта использу-
ются предыдущие значения не только входного, но и выходного сигнала (предпо-
лагается, что коэффициенты а, не равны нулю). Верхняя часть структурной схемы
(рис. 4.9) отвечает трансверсальной (нерекурсивной) части алгоритма фильтра-
ции. Рекурсивной части алгоритма соответствует нижняя часть структурной схе-
мы.
85
Частным случаем рассматриваемого дискретного фильтра является транс-
версальный или нерекурсивный фильтр. В трансверсальном фильтре при вычисле-
ниях не используются предыдущие отсчёты выходного сигнала, в схеме отсутст-
вуют обратные связи. Структурная схема такого фильтра изображена на рис. 4.10.
Рис. 4.10
Трансверсальному фильтру соответствует уравнение фильтрации:
у[кТ) = Ь0К(кГ) + Ь,^(к - 1)Т) +... + Ь„,к((к - т)Т).
(4.24)
В импульсных САУ могут использоваться различные дискретные фильтры.
Помимо этого фильтры сами по себе могут представлять импульсную САУ. В по-
следнем случае исключением являются нерекурсивные фильтры, так как в них
отсутствует необходимая обратная связь.
4.1.4, Решетчатая весовая функция
Пусть входное воздействие есть единичная импульсная решетчатая функ-
ция
\{кТ)^кТ)
(4-25)
Единичная импульсная решетчатая функция Ь^кТ) играет при исследовании
импульсных систем такую же роль, как 5-функция при исследовании непрерыв-
ных систем.
Реакция g\/kT) на воздействие (4.25) называется решетчатой весовой
функцией системы (она является аналогом импульсной характеристики непре-
рывных систем). Так как У(г) — Afz^K^z), то её Z-преобразование можно найти из
соотношения
£&,(«> = KKy(z).
(4-26)
86
Здесь Z{S0(A7')}- ^bQ(kT)z~k = 1•z° = 1.
Очень просто находится решетчатая весовая функция для трансверсального
фильтра (рис. 4.10). Подставляя единичный импульс (4.25) в качестве входного
сигнала в (4.24) получим:
т
уШ') = gb, (4Т)=ХМо ((к - от)=bt,
i=0
поскольку 50((А - i)T) равен нулю для всех к, кроме к~ i, когда этот отсчёт равен
единице. То есть в данном случае коэффициенты Ь, являются отсчётами решетча-
той весовой функции. Это наглядно поясняется прохождением одиночного им-
пульса по схеме, изображенной на рис. 4.10. Поэтому трансверсальный фильтр
обладает решетчатой весовой функцией конечной длительности. Это обусловило
ещё одно название таких фильтров - фильтры с конечной импульсной характери-
стикой (КИХ-филътры). В отличие от них рекурсивные фильтры (рис. 4.9) из-за
обратных связей обладают решетчатой весовой функцией (импульсной характе-
ристикой) бесконечной длительности (БИХ-фильтрьг). Кроме этого из наличия
обратных связей рекурсивные фильтры могут быть неустойчивыми.
Пусть теперь на входе произвольной системы действует процесс Х(Л7) (как
и ранее к > 0). Тогда, согласно (4.26):
У(и) = Z\k(kT)}K^y{z) = Z{X(kT)}z\gXy(kT)\.
Используя теорему свертки (4.17), получим формулу для вычисления выходной
реакции:
У<кТ) = EgXy(v7-)X((A- - v)7). (4.27)
v=0
’ A'* W * •RNWb*
Пример 4.3. Найдем решетчатую весовую функцию, передаточную функ-
цию, структурную схему и разностное уравнение импульсного интегратора. Так
как идеальное интегрирующее звено (пример 2.3) имеет импульсную характери-
стику (2.54) (примем кп = 1), то решетчатая весовая функция импульсного инте-
гратора
при
при
g(kT) =
(4.28)
Ей соответствует согласно (4.26) передаточная функция
87
(4.29)
К(г) = Z{g(kT)} = fl • z-‘ = -1
k-Q * %
Отсюда согласно (4.21) и (4.22) найдём разностное уравнение
y(kT) - у((к - 1)Т) = 1.(кТ),
и уравнение дискретной фильтрации
у(кТ) = ^кТ) + у((к - 1)Т).
(4.30)
Структурная схема импульсного интегратора получена из (4.30) и изобра-
жена на рис. 4.11.
ЦкТ)
у(кТ}
Рис. 4.11
Эти же результаты можно получить, если учесть, что импульсный интегра-
тор представляет собой последовательное соединение идеального импульсного
элемента и непрерывного интегратора с передаточной функцией (2.52) (считаем
кп =1). Выходная реакция y(t) такого соединения на воздействие Л(Г) согласно
(4.1) имеет вид
f 00
/(/) = j £ ЦкТ )8(t - kT)dt.
Qk=O
Отсюда получим алгоритм работы импульсного интегратора:
у(кТ) =Y4iT).
О
Если входное воздействие представляет собой единичную импульсную ре-
шетчатую функцию Х(кТ) - 50 (кТ), то согласно последнему выражению получим
(4.28) и все предыдущие результаты, т.е. (4.29) и (4.30).
WUU*******^J^<»W»l^t
88
4.1.5. Частотная характеристика
Рассмотрим воздействие в виде комплексной синусоиды (см. п. 2.1.4):
“k(kT) = a ewp{j((i)kT + ф)} = Лвх ехр{у(о&Г),
где Лвх =сгехр{/ф} - комплексная амплитуда. Подстановка этого воздействия в
(4.27) даёт:
У(кТ) = (W - v)71 = А„
v=0
е*" Ъв>.у<УТ^>'тТ
= A^tT К .
В этом выражении
^(e>r)= f gXy(vT)e-^T
v=О
(431)
определяет отношение комплексных амплитуд синусоид на частоте со и имеет
смысл комплексной частотной характеристики. Чтобы найти К7 (е^“7), доста-
*
точно в передаточной функции K^z) заменить z на е/й . Как следует из (4.31),
К7 (ej<aT) является периодической функцией с периодом а)п = 2п/Т.
.2. Дискретная передаточная функция
для соединения нескольких звеньев
Пример 4.3, а также формулы (4.5), (4.7) и (4.19) показывают, что дискрет-
ная передаточная функция K(z) может определяться по импульсной характеристи-
ке непрерывного фильтра, в том случае, если импульсный фильтр реализован как
последовательное соединение идеального импульсного элемента и непрерывного
фильтра. Отсюда следует, что если непрерывная часть (непрерывный фильтр) со-
стоит из последовательно включенных звеньев с общей передаточной функцией
(2.57), т.е.
К(Р) = х, (р)к2 (.P)-K„(P) = t[ к, (Р)
/"1
(4.32)
и общим идеальным импульсным элементом на входе, то дискретная передаточ-
ная функция такого соединения в общем случае
89
ад * fl к, (z)
и дискретная передаточная функция K(z) должна сразу определяться по результи-
рующей импульсной характеристике последовательного соединения звеньев g(t)
(т.е. по оригиналу изображения К(р) в (4.32)). Если же имеется ряд последова-
тельно включенных звеньев, каждое из которых имеет на входе свой импульсный
элемент (последовательно включенные импульсные фильтры), результирующая
дискретная передаточная функция может находиться перемножением дискретных
передаточных функций каждого импульсного фильтра:
п п
/=4 z—I
Непрерывная часть импульсного фильтра может содержать временное за-
паздывание тТ. Если это запаздывание пропорционально периоду дискретизации
{тп - целое число), то дискретная передаточная функция, согласно (2.11) и (4.15)
имеет вид
ад=ф, (p)e-'”"z }=zfe, (z - mr)}=z-% (z).
(4.33)
Если непрерывная часть состоит из параллельно включенных звеньев и её
передаточная функция равна (2.58), т.е.
Х(р) = Кх(р) + К2{р) +... + Кп(р) = j^Ki(p),
/=1
то дискретная передаточная функция может быть определена суммированием
дискретных передаточных функций, определенных для каждого звена в отдельно-
сти:
ад=£од=£г{од}.
/~1 I
4.3. Условия устойчивости
Импульсная система устойчива, если переходный процесс в ней затухает с
течением времени. Если g\y(kT) - решетчатая весовая функция системы, являю-
щаяся реакцией на воздействие в виде единичной импульсной решетчатой функ-
ции (4.25), то условие затухания переходного процесса (условие устойчивости)
можно записать в виде
90
Z И < С,
(434)
где С — произвольная постоянная.
Если условие (434) выполнено, то для устойчивой системы передаточная
функция KXy(z)~ должна существовать (ряд сходится) при |z| > 1.
v=0
Отсюда следует, что передаточная функция устойчивой импульсной системы
должна быть конечной всюду вне круга радиусом Izl < 1. Если передаточная
функция имеет полюсы, то у устойчивой системы все они должны находиться
внутри этого круга. Отсюда вытекает следующее условие устойчивости.
Для устойчивости линейной импульсной системы необходимо и достаточ-
но, чтобы все полюсы её передаточной функции лежали внутри круга единичного
радиуса на плоскости комплексной переменной z. При (z) = B(z)/J(z) полю-
сам передаточной функции соответствуют нули знаменателя A(z). Таким образом,
для определения условий устойчивости достаточно найти условия, при которых
нули (корни) характеристического уравнения A(z) - 0 замкнутой системы
удовлетворяют условию z, < 1, i
4.4. Критерии устойчивости
Критерии устойчивости импульсных систем позволяют определить, удовле-
творяются ли условия Zj < 1, i - 1, п без расчета корней z,.
Введём в рассмотрение комплексную величину v, связанную с комплексной
величиной z билинейными преобразованиями’.
z-1
v =---.
Z + 1
(435)
Если в характеристическом уравнении A(z) = 0 комплексную переменную z
заменить на
, то области внутри круга единичного радиуса на плоскости
комплексной переменной z будет соответствовать левая полуплоскость на плоско-
сти комплексной переменной v. При этом задача определения условий, при кото-
рых корни уравнения A(z) - 0 лежат внутри круга единичного радиуса, сводится
к задаче определения условии, при которых корни уравнения
- О лежат в
91
левой полуплоскости. Решение последней задачи определяется критериями ус-
тойчивости линейных непрерывных систем.
4.4.1. Алгебраические критерии устойчивости
Для анализа устойчивости импульсной системы, т.е. для определения усло-
вий, при которых корни уравнения А
**
О лежат в левой полуплоскости,
может применяться критерий Гурвица.
Допустим, если A(z)-l + atz~l
-п
т.е. характеристическое урав-
нение имеет вид zn
0, то после подстановки в него z =
и
записи характеристического уравнения относительно переменной v использова-
ние алгебраического критерия Гурвица (см. п. 2.4.1) приводит к следующим усло-
виям устойчивости:
-прии-1: l + «i>0, l-aj>0;
-прия=2: 1 + at + а2 >0, 1~а1+а2>0, 1 —о,2>®’
-прип = 3: 1 + aj + а2 + а3 >0, 1 -а} + а2 -а2 >0,
1-aj~а2 >0, 3(1 + а2)-а} ~а2 >0,
3(1 — ) + «j — а2 > 0.
4.4.2. Частотные критерии устойчивости
Переход к частотным критериям может быть осуществлен, если комплекс-
этом случае
ную переменную v заменить на , где Q имеет смысл частоты. В
применительно к частотной характеристике разомкнутой системы
р
может быть использован критерий Найквиста для непрерывных
i-jn;
систем (см.
п. 2.4.2). Обычно вместо О используют нормированную величину
, на-
зываемую также псевдочастотой. Легко установить связь псевдочастоты Q с час-
тотой со. Из равенства аргументов выражений Кр
1-jQJ
, с учётом
О, следует
92
(4.36)
При выполнении условия cor <2, когда tg-----, псевдочастота
2 2
Это облегчает исследование импульсных систем. Кроме того, при изменении час-
тоты со в пределах - п/Т < со < к/Т псевдочастота пробегает все значения от -- со
до + со. Поэтому при переходе к псевдочастоте периодичность частотной характе-
ристики Лр(еусоГ) пропадает, а интервал -п/Т <о<п/Т растягивается до беско-
нечности,
С использованием псевдочастоты частотную характеристику импульсной
системы можно записать в виде
*р*ОП) = К
f l + jQT/2}
^1- jQT/2/
Обычно она является дробно-рациональной функцией. Введение Кр (jQ) позво-
ляет применить частотный критерий Найквиста для непрерывных систем.
Частотный критерий Найквиста может быть сформулирован и примени-
тельно к частотной характеристике Лгр(е-/О^) импульсной системы. В этом слу-
чае он формулируется следующим образом. Для устойчивости замкнутой им-
пульсной системы, устойчивой в разомкнутом состоянии, необходимо и доста-
точно, чтобы амплитудно-фазовая характеристика (годограф) частотной ха-
рактеристики разомкнутой системы при изменении частоты со от О
до соп/2 (со = 2л/7’) не охватывал точку (- 1,/0).
I .PI IW I**•«*.
Пример 4.4. Рассмотрим линейную импульсную систему (рис. 4.6) с пере-
, „ z ч кие~рТ . ~пт
даточной функцией Кпнч (р) =------, где ки = const; е 1 - передаточная функ-
ция звена задержки на один период дискретизации (2.11); Т - период дискретиза
ции.
Вначале определим условия устойчивости по значению полюса передаточ-
ной функции замкнутой системы. Передаточная функция разомкнутой системы,
состоящей из последовательного соединенных идеального импульсного элемента
и фильтра с передаточной функцией /vnH4(p), согласно (4.19) и (4.33) будет равна
93
Передаточная функция замкнутой системы согласно (4.20) равна:
^(2) =
*'р & _ ки
1+/Tp(z) г-1 + £и
(4.38)
Приравняв знаменатель (4.38) к нулю, получим характеристическое уравнение
системы:
(439)
Его единственный корень zx = 1 - кн. Следовательно, условием устойчивости сис-
темы (см. п. 4.3) является |z| | = |1 - кК | < 1. Откуда следует: 0 < к„ <2.
Теперь рассмотрим способ, основанный на применении критериев устойчи-
вости непрерывных систем. В передаточной функции (4.38) заменим переменную
1 + V
z на v согласно (4.35): z = ——. После замены получим
Kly W=
(4.40)
И
Передаточной функции (4.40) соответствует характеристическое уравнение
(4.41)
Если его корни лежат в левой полуплоскости комплексной переменной у, то кор-
ни уравнения (4.39) лежат в круге единичного радиуса на плоскости комплексной
переменной z. Согласно алгебраическому критерию Гурвица для непрерывных
систем, корни характеристического уравнения (4.41) лежат в левой полуплоско-
сти, если выполнены условия
и >0, 2-ки >0. Отсюда следует условие устой
чивости исходной системы в следующем виде: 0<кн <2.
И в заключение примера рассмотрим условия устойчивости, исходя из кри-
терия Найквиста. Частотную характеристику разомкнутой системы получим пу-
тем замены z на е/и.
/С „ (» = —— —---------------"--------
р е7“7 ~1 coscoT-1 + jsincoT
кК . ^HsinoT ки
♦*** _. l . fl_„ J __ _ _ _ _-J
2 2(1-cos со Г) 2
kH (cos со Г -1) - jkи sin cd T
l МНР i и IF**»**» J.HP-М-ММНШШм
2(1-cos co Г)
(4.42)
94
На (рис. 4.12) приведены годографы функции Кр (/со) при Ли > 0 (рис. 4.12, а)
и кн < 0 (рис. 4.12, б). Частота со при построении годографов изменялась от 0 до
соГ1/2, соп = 2п/Т (см. п. 4.4.2).
1ш£Р0'а}д
со
Рис. 4.12
Из рис. 4.12, а следует, что при к„ > 0 система устойчива, если точка
расположена правее точки (-1,/0), т.е. кК < 2, что соответствует ранее полученно-
му условию устойчивости. При кК < 0 годограф частотной характеристики охваты-
вает точку (-1 ,j0) и система неустойчива.
«мI.W*
4.5. Определение динамических ошибок слежения
Динамические ошибки импульсных САУ оцениваются при полиномиаль-
ных воздействиях X(t) - (а0 + а/ +... + а/Г ) •!(/). Ошибки могут быть рассчитаны
с помощью Z-преобразования (в этом случае сначала вычисляется изображение
ошибки слежения X(z) ~ KtyKyJz), а затем находится сама ошибка х(кТ)) или во
временной области с использованием формулы дискретной свертки (4.27). В по-
следнем случае для ошибки слежения х(кТ) получим следующее выражение (см.
- V)T] = cJJkT) + с^'\кТ) +... + ^’ЧкГ), (4.43)
v~0 * •
95
sdy(f\
где )S '(kT) =--r~h-*r»^-преобразование g^JJcT) есть K^x(z)\
dt
C.i=(-l)'i:(vD'^(vn = ^z(Kb(e'’r))|/,M).
v=o dp
(4.44)
Значения коэффициентов cf, называемых коэффициентами ошибок, опреде-
ляют порядок астатизма системы.
Порядок астатизма импульсной САУ равен номеру первого отличного от
нуля коэффициента с( (z = 0,1,...,/). Если с0 *0, то система обладает астатизмом
нулевого порядка, т.е. является статической.
Характерная особенность импульсных астатических систем, как и непре-
рывных, состоит в том, что при подаче на систему с астатизмом v-ro порядка воз-
действия, выраженного полиномом степени v, ошибка в установившемся режиме
постоянна и отлична от нуля. Если степень полинома, описывающего воздейст-
вие, меньше v, то установившееся значение ошибки слежения равно нулю. Эти
свойства вытекают из формулы (4.43), если принять во внимание, что для степен-
ного полинома v-ro порядка v-ая производная есть постоянная величина, а произ-
водные более высокого порядка равны нулю.
Как и для непрерывных систем, порядок астатизма импульсной системы ра-
вен числу интеграторов, включенных в контур управления. Доказательство этого
утверждения, как и в случае непрерывных систем, можно получить путем расчета
коэффициентов ошибок по формуле (4.44) с учетом того, что передаточная функ-
ция разомкнутой импульсной системы, содержащей v интеграторов, имеет вид
(4.45)
где Z/p(z), Ar(z) ~ полиномы степеней т и г соответственно (г = п - v);
передаточная функция v последовательно соединенных интеграторов (см. пример
4.3). Передаточная функция K^x{z) в рассматриваемом случае будет равна:
(4.46)
Произведя в (4.46) замену z на е
и рассчитав с использованием выраже-
ния (4.44) коэффициенты найдем, что cG—с\ ~... ~cv.i = 0, cvФ0 и, следовательно,
система обладает астатизмом v-ro порядка.
96
Если установившееся значение ошибки слежения равно постоянной вели-
чине, то его можно рассчитать, используя теорему о конечном значении оригина-
ла (4.16):
lim х(кТ)= lim-—^A(z)= lim-—^A(z)A'Xx(z).
к—>оо z-+\ Z z—>1 Z
(4.47)
4.6. Определение флюктуационных ошибок слежения
Определим ковариационную функцию1 (см. приложение Г, п. Г. 12) и дис-
персию реакции y(t) системы на флюктуационное воздействие ^(/). Ковариацион-
ная функция дискретного случайного процесса на выводе линейной импульсной
системы может быть записана следующим образом (см. п. Г. 12, (Г.66)):
К., (кт, (к + т)Г) = М{у(кТ)у((к + тут)} =
9*
Ik k+m |
Z gb (v7X«* - v)T) Z gfy (ПУ&к + m - tyr) =
v=0 i=0 J
к k+m
= ZSb<vr>£gb(,T>M+ m - Or)} =
v=0 /=0
к k+m
= ZZgfyVWbft* - v)7'-(* + '"- 07)
v=0 /“0
Здесь Kk ((/. - v)7\{k + m-i)T) - ковариационная функция мешающего воздейст-
вия ^(z); g^y{kT) - решетчатая весовая функция системы от точки действия £(f) к
выходной величине у(0; М{-} - обозначает операцию вычисления математическо-
го ожидания.
В установившемся режиме (к -> оо ) при стационарном входном воздействии
(см. приложение Г, п. Г.6) (п}Т, п2Т)~ К ((л, - п2 )Т) = ((«2 ~ ”1 )Т) получим:
ос оо
Ку (mT) = Y gb, (vT)X Sb W ft"1 + v - 0Г) =
v-0 /=0
(4.48)
= Z Sb (vr)Z Sb VW I. (ft - <m + v»r)-
v-0 /-0
г - " - Г- - - - I. ‘
1 В этом параграфе, как и в приложение Г, ковариационная функция обозначена
К{п\ Т,П2Т).
97
Будем считать, что входной процесс представляет собой дискретный белый
шум (см. приложение Г, п. Г. 12, (Г.69)) с корреляционной функцией
ЩуТ) = ^60(vn.
Белый шум имеет нулевое математическое ожидание (см. приложение Г,
п. Г.10) Mfe(v7j} = пи = 0, т.е. RtfyT) - К£уТ). Поскольку математическое ожи-
дание выходного процесса в этом случае:
= М =М j £ gb (<Л - v)rX(v Г) U f gb ((к - v)r)M fe(vZ)} = 0,
I v~0 J v=0
то из (4.48) получим выражение для корреляционной функции выходного процес-
са:
Ry (тТ) = (vT)g^ ((v + m)T).
, v=0
(4.49)
Отсюда приходим к выражению для дисперсии выходного процесса (см. прило-
жение Г, п. Г.5) при воздействии дискретного белого шума:
cj = s/o)=affg^(vn.
V—О
(4.50)
Дисперсию флюктуационной составляющей процесса на выходе линейной
импульсной системы можно рассчитать и другим способом, используя комплекс-
ную частотную характеристику
) системы. Используя равенство Парсе-
валя
п/Т
E4.(v7)=
v~0
f \K^JaT)2da,
(4.51)
где Kfy(z) = Z{g&(W)}, получим
Kb, (е* da.
(4.52)
Наличие множителя Т в (4.51), равного здесь периоду дискретизации, отли-
чает формулу (4.51) от равенства Парсеваля для непрерывных сигналов (см. при-
ложение Г, (Г.48)). Причина этого связана с тем, что размерность частотной ха-
рактеристики (4.31) дискетной системы отличается от размерности спектральной
плотности непрерывного сигнала (частотной характеристики непрерывной систе-
мы (2.44)) как раз на размерность времени.
98
2 co Т9
Введя в (4.52) новую переменную (псевдочастоту) Q = — tg— (см. (4.36)),
с учетом равенств
= e/tli7/2 = cos(<o772) + jsin(co772) = 1 + Jtg(v)T/2) = 1 + JQT/2
с - е-ушГ/2 “ cos(to7/2) - Jsin(<o7/2) 1 - jtg(co7V2) ” 1 - jQ772 ’
<7co —
1 + (ПТ/2)2
d£l
I Д I W la
1 + jQ7V2|2 ’
получим:
dQ.
|1 + jQT/2|2
= 7c^AF3*,
где AF3* ~ эквивалентная шумовая полоса пропускания импульсной системы
m2 Vi
а произведение Тсг^ - имеет смысл спектральной плотности мощности белого
шума. При Kfy~ 1, из (4.52), (4.53) следует AF3* ~ \/Т и о2 = а?.
Так как подинтегральное выражение в формуле (4.53) является дробно-
рациональной функцией, то для расчётов эквивалентной шумовой полосы можно
использовать выражения, полученные для решения аналогичной задачи при ана-
лизе непрерывных САУ (см. (2.82), (2.83)).
4.7. Расчёт и анализ характеристик линейной импульсной системы
с заданной передаточной функцией
Рассмотрим линейную импульсную систему (рис. 4.6) с передаточной
функцией приведенной непрерывной части
^ПНЧ (Р)
А е~рТ
(1 + РТф)*
где ky = const, с рТ
- передаточная функция звена задержки на один период дис-
кретизации Т, Тф - постоянная времени.
99
Передаточную функцию разомкнутой системы, состоящей из последова-
тельно соединенных идеального импульсного элемента и фильтра с передаточной
функцией Кпнч (р), согласно (4.19) и таблиц Z-преобразования (см. приложение Д)
получим в виде
(4.54)
Передаточная функция замкнутой системы по ошибке слежения (см. (4.20)):
*ф(*-<0
(4.55)
где d = е~Г/Тф.
Приравняв знаменатель (4.55) нулю, получим характеристическое уравне-
ние системы:
(4.56)
Его единственный корень z( -d - ку /г$ . Следовательно, условием устойчивости
системы является |zj
d~ky Дф < 1. При d «1 (когда Тф » Т ) отсюда следует:
0 < кч <2 (постоянная ку имеет размерность времени).
Рассчитаем переходную характеристику системы для ошибки слежения
x(t). Для задающего воздействия ?..(0~ 1(0 Z-преобразование ошибки слежения
имеет вид
X(z) = A(z) Ккх (р) =
(4.57)
Изображению (4.57) согласно (4.10), (4.11) соответствует функция времени:
2 2
х(/Т) = % ResT(z)?'1 _ = £ lim (z - zv )X (z)z1"1,
V=1 Z-Zv V~l Z->Zv
(4.58)
где Z|, z2 - полюсы функции X(z) (функция X(z) имеет простые полюса и не
имеет нулевого полюса). Согласно (4.57) полюсы равны: Zj =1, z2 = d — ку .
Подстановка этих значений в (4.58) дает:
к ' г
x(JT) = lim(z - l)%(z)zM + lim (z, - d + --Щг)? 1. s ... (4Д9)
т—/т. ’ T - "
к
100
С учетом выражения (4.57) для X(z) получим:
x(zT)
Тф(1-<0
+Тф(1“£/)
(4.60)
Из (4.60) видно, что при d
- ку /Тф| < 1 второе слагаемое с ростом i (с уве-
личением времени) стремится к нулю, а первое определяет установившееся зна-
чение ошибки слежения. Установившееся значение ошибки слежения для воздей-
ствия в виде единичного перепада можно получить, если воспользоваться свойст-
вом (4.16):
lim x(iT) = lim -—- X(z) = lim -—-
/->00 z->l z Z
тф(1-<0
** м» I Hi P ^*x^****^г*—ч >|1И.Ч ... “IP
(2-1Д&У +^(z-d)J Лу+тф(1-оГ)
. (4.61)
Полученное выражение ошибки слежения показывает, что система является
статической. Её свойства приближаются к свойствам астатической системы пер-
вого порядка при d —> 1. В этом случае передаточная функция разомкнутой сис-
темы приближается к передаточной функции идеального интегратора.
4.8. Соотношение между линейными непрерывными
и линейными импульсными системами
Рассмотрим как связаны преобразования Фурье (спектры) процессов на вхо-
де и выходе идеального импульсного элемента (рис. 4.13).
Рис. 4.13
Для непрерывного входного процесса x(t) пара преобразований Фурье
(2.39), (2.40) имеет вид
+00
Х(/П)=
—ОС
1 4 00
Л-(/) = -I. f a'(jQ) е yQ' dQ.
2л J
(4.62)
101
Здесь и далее в этом параграфе Q - круговая частота, переменная интегрирования
в (4.62).
Для дискретизованного процесса х*(/) на выходе идеального импульсного
элемента (см. (4.1)) преобразование Фурье имеет вц;
+°О +сО 4-со 4-со
ЛГ*(» = Jx*(/)e~y<B' dt- j ^х^кТ^-кТ)^ dt~ ^x(kT)e~jfS>kT. (4.63)
—OQ —00 ~00
Здесь, как и в (4.62) рассмотрим сигнал, определенный при — оо < t < +со.
Правую часть выражения (4.63) можно рассматривать, как разложение в ряд
Фурье периодической (с периодом 2п/Т ) функции Х*(/а>). Тогда для вычисления
коэффициентов х(кТ) этого ряда справедлива следующая формула:
т +п/Т
х(кТ) = — [%* (j®)eJ(okTd&.
-Tt/Т
(4.64)
Формулы (4.63), (4.64) являются парой преобразований Фурье для дискре-
тизованного процесса на выходе идеального импульсного элемента.
Вычислим значения х(кТ), используя формулы (4.62). Заменив во втором
выражении непрерывный аргумент t на дискретный кТ, получим:
* +со
х(кТ) = - - (Х( j'Q) е jQkr dQ..
2л J
(4.65)
Разобьём в (4.65) область интегрирования на участки (2m — 1)
m — ...-2, ~ 1,0,1,2.... Тогда:
х(кТ) =
2л
(2m—1)—
(4.66)
После замены в (4.66) переменной интегрирования Q на со = Q---m окон-
чательно получим:
(4.67)
102
Из сравнения (4.67) с (4.64) следует соотношение между спектрами процес-
сов на входе и выходе идеального импульсного элемента:
(4.68)
Из (4.68) видно, что спектр дискретизированного процесса образуется в ре-
2л
зультате наложения смещенных по частоте на величину т— спектров непре-
рывного процесса. В результате могут наблюдаться два характерных случая: в
первом случае спектр непрерывного процесса не выходит за пределы полосы час-
(эта ситуация условно показана на рис. 4.14); во втором случае
тот
спектр непрерывного процесса выходит за пределы полосы частот
(рис. 4.15).
Рис. 4.14
Из рисунков видно, что если в первом случае спектр входного сигнала мож
но полностью восстановить путем выделения полосы частот
из спек-
103
тра сигнала на выходе идеального импульсного элемента, то во втором случае
этого сделать нельзя.
Таким образом, если в системе (рис. 4.16) полоса пропускания ограничена
полосой частот
и спектр входного процесса не выходит за пределы
этой полосы, то спектр процесса y(t)
Г(» = 1 X(ja)Kp (ja).
(4.69)
кр(р)
Рис. 4.16
То есть последовательное соединение идеального импульсного элемента (ИИЭ) и
фильтра (рис. 4.16) можно заменить на непрерывный фильтр с частотной характе-
ристикой —Кр (усо), а импульсную систему анализировать как непрерывную.
104
ГЛАВА 5
АНАЛИЗ ДИСКРЕТНЫХ1 СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ В ПРОСТРАНСТВЕ СОСТОЯНИЙ.
ДИСКРЕТНЫЙ ФИЛЬТР КАЛМАНА
Современная теория дискретных САУ, так же как и непрерывных (глава 3),
базируется на описании процессов в пространстве состояний. В данной главе рас-
смотрены методы математического описания систем автоматического управления
в пространстве состояний. Приведены краткие сведения из теории оптимальных
дискретных систем. В качестве примера рассмотрен синтез оптимальной дискрет-
ной системы (фильтра Калмана) второго порядка, приведено описание её модели
и изложена методика исследования характеристик системы.
5.1. Векторные разностные уравнения дискретных
систем автоматического управления
Рассмотрим системы, дискретные передаточные функции которых описы-
ваются уравнением
где K(z) и A(z) - Z-преобразования процессов у(кТ) на входе и "ЦкТ) на выходе
системы соответственно.
Передаточной функции (5.1) согласно (4.21), (4.22) соответствует разност-
ное уравнение
у((к + п)Т) + ап_ху((к + п -1)?) +... + aQy(kT) =
= bmX((k + m)T) + bm_^k + m - l)7j +... + Ь^(кТ\
где m < n.
Далее примем для упрощения период дискретизации Т равным единице
(7 = 1).
—_-.. <-c-LT и —Т - |--П —~И~—-И—TT^rwV hl. If ~ 'I -—Т~—Г—— ‘f
1 В этой главе под дискретными системами (фильтрами) понимаются либо импульсные
системы (фильтры), либо цифровые с большой разрядностью используемых цифровых кодов,
когда эффекты округления либо отсутствуют, либо ими можно пренебречь (см. главу 7). Округ-
ление возникает из-за конечности числа разрядов при выполнении арифметических операций
(конечность числа разрядов также приводит к округлению коэффициентов разностного уравне-
ния) и при амплитудном квантовании (в АЦП).
4
105
Покажем, что процесс у(кТ) может быть сформирован линейной дискретной
системой, показанной на рис. 5.1.
Х(Л)
Рис. 5.1
Из рис. 5.1 видно, что изображенная система описывается следующей сис-
темой уравнений:
bW=»,(*)+W).
Г, (к + 1) = 52(Й) + Й|Х(А),
у г(к + 1)=ss(fc) + л2ад,
(5-3)
{к +1) = sn (к) + hn_^(k),
sn(k +1) = -ад(к) - (к) -... - an^sn(к) + hnk(k).
Выразим si(k),s2(k), ...,sn(k) черезу(к) и к(к) из первых п уравнений сис-
темы (5.3):
51 (к) ~ у(к) ~ Л0Х(£),
$2 (к) - 5] (к + 1) - АД(А:) - у{к +1) - hq'Mk +1) - hxk{k),
s3(k) = 52(£ + О “ Ь2Цк) = у(к + 2) - hok(k + 2) - hxk(k +1) - h2k(k),
(5.4)
sn (k) = ^-i (k +1) - /zw_i k(k) ~y(k + n-V)-hok(k + n -1) -
- h{k(k + n - 2) -... — hn_{k(k).
106
Подставив полученные равенства в последнее уравнение системы (5.3), будем
иметь:
М* + 0 = -а0 [>(*) - МОТ] - «1 [X* +1) - W +1) - Л, Х(*)] -
-а2[у(к + 2)- W + 2) - Wk +1) - МОТ]-... - [И* + Л - О ~ (5 5)
- Wk + и -1) - Wk + п - 2) -... - V,к(к)] + h„k(k).
Выражение для sn(k + 1) можно получить иначе, положив в последнем урав-
нении (5.4) значение аргумента sn(k) равным к+1:
sn (к + I) = у(к + п) - Л0Л(£ + и) - hYX(k + п -1) -... - h„_{k(k +1). (5.6)
Приравняв правые части уравнений (5.5) и (5.6) и перегруппировав члены
полученного равенства, получим:
у(к + и) + an_Yy(k + п -1) +... + а2у(к + 2) + aYy(k +1) + aQy(k) =
= <20Л0Х(Л) + а} [А0Л(Л +1) + fyX(&)] + а2 [А0Х(Л + 2) + hY к(к +1) + Л21(£)] +... +
+ а„_1 [АоХ(А: + и -1) + h^k + п - 2) +... + ЛИ_{Х(^)]+Л„1(А) + h^k + п) +
+ h^k + п — 1) +... + h^k +1),
или
у(к + п) + an_Yy(k + п -1) +... + а2у(к + 2) + aYy(k +1) + aGy{k) =
= + п) + [Л, + /?0 ]л(Л + п -1) + [h2 + an_YhY + ап_2 h0 ]Л(А + п - 2) + (5.7)
+ ... + [Л„ +an_Yhn_Y + ... + a2h2 +aYh} +а0Л0]Х(А:).
Из сравнения правых частей уравнений (5.2) и (5.7) следует, что они экви-
валентны при выполнении следующих условий:
ho
hY — bn_Y — ял_| Лф,
^2 ~^п—2 ~^n-2^Q’> (^*^)
Ь® ®n—\hn—\ ^п—2^п—2 ^0^0*
Равенства (5.8) определяют условия, при выполнении которых процесс у(к)
на выходе системы с передаточной функцией К^/р) (5.1) может быть сформиро-
ван системой, изображенной на рис. 5.1. Легко видеть, что эта схема во многом
похожа на структурную схему непрерывной системы в переменных состояния
(рис. 3.1).
107
Перепишем уравнения (5.3) в матричной форме
где
S(£ + 1) = AS(*) + BXU),
у(к) = CTS(*) + //0X(£),
S(*) =
s2(A)
(5.9)
(5.Ю)
(5.Н)
- вектор переменных состояния (или просто вектор состояния) размером их 1,
'0 1 0 ... 0
(5.12)
а0 ~а\ ~а2 ♦ • • ~ап-\
матрица системы размером ихи,
Л
й2
В =
(5.13)
- матрица управления размером их 1,
1
0
(5.14)
- матрица наблюдения размером nxl, Ст - транспонированная матрица наблю-
дения, п - порядок системы.
Выражение (5.9) называют векторным (или матричным) разностным урав-
нением системы, а выражение (5.10) -уравнением выхода.
108
На рис. 5.2 изображена структурная схема дискретной САУ в векторной
форме, соответствующая уравнениям (5.9) и (5.10) и т<п, т.е. Ьп=И^ =0; двой-
ные линии на рисунке характеризуют векторные связи. •
Щ)
Я*)
Рис. 5.2
Приведенная схема отличается от структурной схемы непрерывной САУ в
векторной форме (рис. 3.2) тем, что вместо векторного интегратора здесь введен
вектор запаздывания.
Аналогично непрерывным системам составляющие вектора переменных со-
стояния sl(к) можно рассматривать как оси координат многомерного пространства
состояния системы. С течением времени вектор состояния S(£) изменяет своё зна-
чение и положение. Его конец описывает в пространстве состояния некоторую
кривую, называемую траекторией движения системы. Вид этой траектории за-
исит от начального состояния и входного сигнала.
Матрица системы А определяет устойчивость и другие показатели качества
работы системы, матрица управления В характеризует влияние на переменные
состояния входного сигнала, а матрица наблюдения С определяет связь выходно-
го сигнала системы с вектором переменных состояния.
Аналогично непрерывным системам, выбор переменных состояния в дис-
кретных системах является неоднозначной операцией, т.е. векторное разностное
уравнение зависит от выбранных переменных состояния. При этом все возмож-
ные векторные уравнения эквивалентны, так как описывают один и тот же дина-
мический процесс связи выходного сигнала системы с .входным сигналом. Рас-
смотрим это на конкретном примере.
Пример 5.1. Найдём векторное разностное уравнение для системы, дис-
кретная передаточная функция которой имеет следующий вид:
(5.15)
Данной передаточной функции соответствует разностное уравнение
109’
у(к + 2)- 0,75j(* +1) + 0,125Я^)= Х(Л +1)- Х(Л).
# f •> i -
4 ▼
На основании выражений (5.3), (5.9) и (5.10) получим, что
(5.16)
Уравнения системы в пространстве состоянии получаются следующими:
sx(k +1)=52(^)+ ^(*1
s2 (к +1) = -0,125^, (к) + 0,75s 2 (к) - 0,25Х(А),
(5.17)
а уравнение выхода имеет вид
Я*)= *>(*)•
(5.18)
Уравнения (5.17) и (5.18) согласно (5.9) и (5.10) можно переписать в мат-
ричной форме:
S(k +1) = AS(£) + В Х(Л),
(5.19)
y(*) = CTS(£),
(5.20)
где, как и ранее (см. (5.11)), вектор переменных состояния
На рис. 5.3 изображена структурная схема рассматриваемой Системы, по-
строенная по уравнениям (5.17) и (5.18), из которой видно, что переменные со-
стояния - это сигналы на выходах звеньев запаздывания.
Теперь представим передаточную функцию системы (5.15) в виде суммы
простых дробей (аналогично (3.30)):
(5.21)
Передаточной функции (5.21) соответствует структурная схема, представ-
ленная на рис. 5.4.
НО
Х(Л)
Рис. 5.3
Рис. 5.4
Выберем в качестве переменных состояния сигналы на выходах звеньев за-
паздывания. Тогда можно записать следующую систему уравнений:
W] (к + 1) = 0,25wj (к) + ЗЩ);
w2 {к +1) = 0,5 w2 (к) - 2Х(Л).
&
В этом случае уравнение выхода имеет вид
а
я*) = Wj (к) + w2 (к).
Перепишем (5.22) и (5.23) в матричной форме:
W(* + l) = AwW(*)4-B„W);
(5.22)
(5.23)
(5-24)
Jt < *
Hi
хо=Ci W(z),
(5.25)
где W(£) =
WjC/r)
вектор переменных состояния,
0,25
0
0
0,5
3
-2
гп
(5.26)
Из уравнений (5.17) и (5.18) (или (5.19) и (5.20)), (5.22) и (5.23) (или (5.24) и
(5.25)) следует, что различным переменным состояния соответствуют различные
матрицы системы, управления и наблюдения (см. (5.16) и (5.26)), но связь выход-
ного сигнала с входным остаётся неизменной:
XC=cTS(A) = ciww.
Ранее рассмотрение дискретных САУ в пространстве состояний ограничи-
валось стационарными системами. В нестационарных системах матрицы системы,
управления и наблюдения являются переменными, и векторные разностные урав-
нения приобретают следующий вид:
S(A +1) = A(k)S(k) + В(£) Цк),
(5.27)
Я*) = Ст (k)S(k) + /?0 {к) Х(к).
(5.28)
В общем случае дискретная САУ имеет г входов и I выходов. При этом вид
векторных разностных уравнений остаётся таким же, как и в (5.27) и (5.28), в ко-
торых матрица системы А имеет тот же вид, что и в системах с одним входом и
одним выходом. Изменяются лишь матрицы управления и наблюдения: матрица
управления В становится прямоугольной, размером ихг, матрица наблюдения С -
прямоугольной, размером их/.
5.2. Дискретная матрица перехода
Рассмотрим однородное нестационарное уравнение, которое получается из
разностного векторного уравнения (5.27) при Х(/с) = 0:
S(k +1) = A(k)S(k).
(5.29)
Обозначим через S(0) начальное состояние системы. Тогда из выражения
(5.29) последовательно получаем:
112
ЭД = A(O)S(O);
S(2) = A(1)S(1) = A(1)A(O)S(O);
(5.30)
S(A) = П A(i)S(0)
Введём дискретную матрицу перехода с помощью следующего соотношения:
S(k) = Ф(Л, m)S(m). (5.31)
Дискретная матрица перехода Ф(Л, т) обладает следующими свойствами:
Ф(Л, k) = I, Ф(Л, т) = [ф(т, А)]"1, (5.32)
где I - единичная матрица.
Соотношения (5.30) через введённую дискретную матрицу перехода запи-
сывают в виде
S(A) = Ф(£,0)8(0).
Тогда матрица перехода:
Л-1
Ф(£,0) = П А(0 • (5.33)
Отсюда следует, что для стационарных систем
Ф(А,0) = Ф(&) = А*.
Полное решение векторного разностного уравнения (5.27) можно найти пу-
тём последовательных вычислений:
S(l) = A(0)S(0) + В(0)Х0);
S(2) = A(1)S(1) + B(l) 1(1) = A(l) A(0)S(0) + А(1)В(0) Х(0) + В(1) Х(1);
S(i) = П A(/)S(0) +£
B(i)X(0,
П А(Л
или учитывая введённую дискретную матрицу перехода,
113
S(i)=Ф(адо)+£ Ф(А - i - 1)В(оад.
<=0
(5.34)
Поскольку система может иметь несколько входов, то k(i) может быть вектором.
Для стационарных систем дискретная матрица перехода может быть найде-
на с помощью Z-преобразования, которое следует применить к уравнению (5.9).
В результате получим
zS(z) = AS(z) + V(z) + zS(0),
где V(z) = BA(z), S(0) — начальное состояние системы.
Согласно последнему выражению, получим
S(z) = [zl - A]’1 V(z) + [zl - A]-’ zS(0) . (5.35)
* 1/ «ч
Обратное Z-преобразование от уравнения (5.35) с учётом теоремы о свёртке
(4.17), позволяет определить
S(£) = £ф(£ -1 - m)V(m) + Ф(£)8(0)
т~0
или
S(A +1) = £ Ф(£ - m)V(m) + Ф(к + l)S(O)
где
Ф(Л) = 2"1 |[zI-A]"’z}.
(5.36)
(5-37)
Матрицу [zl — А] называют характеристической, определитель этой мат-
рицы является характеристическим уравнением системы.
Пример 5.2. Найдём дискретную матрицу перехода для системы, рассмот-
ренной в примере 5.1.
Система описывается разностными уравнениями (5.17). Тогда её характери-
стическая матрица имеет вид
-1
z - 0,75
Матрица, обратная характеристической (см. приложение А),
_________1 Г z - 0,75 1 "
(z - 0,5)(z - 0,25) [- 0,125 z
114
Отсюда согласно (5.37), используя обратное Z-преобразование (4.9), (4.10), най-
дём дискретную матрицу перехода
Ф(Л) =
’2(0,25)* - (0,5)*
0,5(0,25)* -0,5(0,5)*
- 4(0,25)* + 4(0,5)*
- (0,25)* + 2(0,5)*
Аналогично находится матрица перехода для случая, когда в качестве пере-
менных состояния выступают wj(/) и w2(0 (см. (5.22) -*• (5.26)):
’(0,25)*
0
0
(0,5)*
Из (5.34) для конкретного управляющего воздействия Z(f) и начальных ус-
ловий S(0) можно получить выражения для введённых переменных состояния
S(A). В случае использования схемы на рис. 5.4 (см. (5.24) -г- (5.26)) переменные
состояния соответственно находятся как
W(*) = ф w (к) W(O) + Е ф „ (к -1 - 1)В „ (0Ш).
<=0
По найденному вектору S(A) (или W(£)) и уравнению выхода (5.18) или
(5.20) ((5.23) или (5.25)) несложно найти выражения для выходного процесса Х^)-
Так при действии на систему управляющего воздействия X(z) = !(/)
(т.е. Л.(£) = 1(£)) и нулевом начальном состоянии для обоих случаев получим
ЯА) = -(0,25)‘-' +2(0,5)*-'.
Полученный результат будет полностью совпадать со значением у(к), полученным
при непосредственном использовании Kky(z) (5.15) и обратного Z-преобра ювания
(4.10):
у(к) = Z-'{Y(z)} = Z-' (z)A(z)},
или с учётом A(z) = Z{!(&)} =-(см. приложение Д) и (5.21)
z — 1
iiMih И*'
115
5.3. Уравнения оптимальной дискретной фильтрации
(уравнения фильтра Калмана)
Будем считать, что задающим воздействием у(к) дискретной следящей сис-
темы является процесс, формируемый динамической системой (рис. 5.2), описы-
ваемой уравнениями (5.27), (5.28) при Ло = 0. Процесс, поступающий на вход сле-
дящей системы (наблюдаемый процесс) отличается от задающего воздействия
наличием шума измерения и может быть описан уравнением наблюдения
е(к) = у (к) + р(А) = Ст (k)S(k) + р(А) = H(A)S(A) + р(А). (5.38)
Здесь для удобства дальнейшего изложения переобозначено СТ(Л) = Н(Л). Также
принято, что система (рис. 5.2) имеет I выходов, так что у(А) - вектор столбец за-
дающего процесса, е(А) /-мерный вектор наблюдения (измерения), р(к) -
/-мерный вектор случайной гауссовской некоррелированной (см. приложение Г,
п. Г. 13) последовательности ошибок измерения задающего воздействия. Кроме
этого считаем, что дискретная САУ (рис. 5.2) имеет несколько входов, т.е. 1(A) -
г-мерный вектор столбец.
Далее будем полагать, что векторные случайные процессы 1(A), ц(А) пред-
ставляют собой гауссовские некоррелированные последовательности с нулевыми
математическими ожиданиями и известными корреляционными матрицами (см.
приложение Г):
m|i(A:)|it(/)}= R(A)50 (Л - /),
(5.39)
м{1(А)1т(/)}= Q(A)S0(A - /), (5.40)
М{1„г(А)р„(/)} = 0, w = l,r, л = 1,/,
где согласно (4.25) 80 (к - /)
I при к - z,
0 при к Ф i.
При принятых допущениях вектор состояния S(A) и наблюдаемый сигнал
е(А) (5.38) являются гауссовскими марковскими случайными последовательностя-
ми. С учетом (5.38), (5.27), (5.28) и рис. 5.2 модель формирования входного сиг-
нала е(А) может быть представлена в виде, показанном на рис. 5.5.
Модель формирования входного воздействия дискретной следящей системы
в виде, показанном на рис. 5.5, является более общей, чем используемые в задачах
анализа и синтеза дискретных следящих систем модели в виде детерминирован-
ных (полиномиальных) функций времени или модели в виде стационарных слу-
чайных процессов. С её использованием, в отличие от других методов, удается
построить эффективную процедуру синтеза алгоритма оптимальной дискретной
116
фильтрации (слежения) даже для систем высокого порядка и нестационарного
задающего воздействия.
К*)
Рис. 5.5
Покажем, как можно получить уравнения оптимальной дискретной фильт-
рации, используя интуитивные представления о механизме оценивания изменяю-
щихся параметров. Наиболее желательным для практических применений являет-
ся рекурсивный механизм оценивания. Его суть заключается в том, что для по-
строения оценки в А-й момент времени используется только оценка, полученная в
предыдущий момент времени и сигнал, поступающий на вход следящей системы
(фильтра) в момент наблюдения. При этом процедура построения оценки включа-
ет два основных этапа: экстраполяции и коррекции. Экстраполяция заключается в
построении оценки фильтруемого параметра в k-й момент по ее значению в пре-
дыдущий к— 1 момент наблюдения с использованием модели изменения этого па-
раметра. Коррекция состоит в том, что экстраполированное значение корректиру-
ется путем добавления к нему взвешенной разности между измерением е в мо-
мент к и оценкой е, полученной по экстраполированному значению фильтруемого
параметра. Матричная структурная схема алгоритма оптимальной дискретной
фильтрации {фильтра Колмана) приведена на рис. 5.6.
117
На рис. 5.6 и далее в тексте знак Л обозначает оценку соответствующего век-
тора.
Для реализации алгоритма оценивания по схеме (рис. 5.6) должен быть вы-
полнен ряд условий. К ним относятся: задание модели задающего воздействия в
виде системы уравнений (5.9), (5.10) или (5.27), (5.28). При этом обеспечивается
возможность пошаговой экстраполяции оцениваемых параметров. Другим важ-
нейшим условием является условие наблюдаемости системы (рис. 5.5). Динами-
ческая система является наблюдаемой, если за конечное время по наблюдениям
е(£) при известных сигналах 1(£) и р(Л) может быть вычислено точное значение
вектора состояния S(&), т.е. имеется связь между переменными состояния
мна-
мической системы и линейной комбинацией различных измерений входного
сигнала.
Покажем, как, используя приведенные выше интуитивные представления о
работе фильтра Калмана, можно получить уравнения оптимальной фильтрации.
Предположим, что известна оценка вектора состояния S(Zr-l) в момент
к — 1 и матрица перехода (матрица системы) А (Л -1). В этом случае, согласно
(5.27), можно вычислить математическое ожидание оценки S(fc) вектора состоя-
ния S(k) в соответствии с уравнением
m{s(A)}= S3K(к) = м{а(£ - l)S(Ar -1) + В(к - 1)к(Л -1)}= А(к - 1)S(£ -1). (5.41)
При этом предполагается, что М{Х(£)} = 0.
Выражение (5.41) определяет процедуру экстраполяции (предсказания)
оценки на один шаг вперед. При вычислении 8ЭК(Л) не использовалось последнее
измерение е(А), проведенное в момент к. Оптимальную оценку с учетом е(к) мож-
но получить, если использовать измерение е(к) и организовать формирование кор-
ректирующего сигнала
Ae(£) = e(£)-H(A)S3K(£).
(5.42)
Корректирующий сигнал (5.42) характеризует отличия наблюдаемого сиг-
нала е(к), измеренного в момент к, и его оценки H(£)S3K(A), полученной на осно-
ве прошлых измерений (до момента к -1 включительно). Эти отличия определя-
ются влиянием шума измерения р(£) и ошибкой оценки вектора состояния Sэк (к).
Следовательно, необходима коррекция оценки S3K(/c) корректирующим сигналом
Ае(А). Для того, чтобы коррекция была оптимальной, необходимо соответствую-
щим образом выбрать матрицу весовых коэффициентов G(k). Рассмотрим реше-
ние этой задачи в случае, если критерием оптимальности является условие
trace М (S(^) - S(£))(s(A) - эд)1 = min,
(5.43)
118
где S(k) - оптимальная оценка, trace{.} - обозначен след матрицы (см. прило-
жение А, п. А.1). Выполнение критерия (5.43) означает, что обеспечивается ми-
нимум суммарной дисперсии ошибок оценивания компонент вектора S(A) (мини-
мум среднеквадратичных ошибок оценивания).
Улучшенную (за счет последнего наблюдения) оценку можно записать в ви-
де
S(£) = S3K(£) + G(£)Ae(£),
где G(k) — весовая матрица корректирующего сигнала (рис. 5.6).
С учетом (5.42) уравнение (5.44) примет вид
S(k) = 8эк(к) + G(A)(e(£) - H(*)S3K(*)).
(5.44)
(5.45)
В уравнении (5.45) оценка S3K(£) получена по результатам измерения до
момента к - 1 включительно, а оценка S(A) характеризует улучшенную, с учетом
последнего наблюдения, оценку. Подставив в (5.45) для экстраполированной
оценки S3K(£) её выражение согласно (5.41) получим каноническую форму урав-
нения дискретного фильтра Калмана'.
S(k) = А(Л - 1)S(£ -1) + G(£)(e(£) - H(fc)A(£ - 1)S(A -1)). (5.46)
Этому уравнению соответствует схема, показанная на рис. 5.6.
Для обеспечения оптимальности схемы коэффициент усиления G(k) должен
быть выбран так, чтобы выполнялось условие (5.43), заключающееся в минимиза-
ции суммы диагональных элементов ковариационной матрицы ошибок фильтра-
ции:
trace MnS(£)-S(k)lS(k)-S(k)) (= traceМШ)ет(^)|= traceР(АЛ), (5.47)
где е(к) - ошибка фильтрации:
е(А) = S(k) - S(k);
P(ktk) = М^(Л)ет(Л)}
(5.48)
(5.49)
ковариационная матрица ошибок фильтрации.
Получим основные уравнения, определяющие оптимальное значение мат-
ричного коэффициент усиления G(k). Для этого перепишем с помощью (5.27) и
(5.46) выражение ошибки в виде
119
е(£) = S(Jl) - S(A) = A(k - 1)S(£ -1) + B(£ -I)X(£ -1) -
- A(k - 1)S(* -1) - G(k)[e(k) - H(k)A(k - 1)S(£ -1)).
(5.50)
Заменив в (5.50) e(k) его выражением согласно (5.38) и перегруппировав
слагаемые, с учетом выражения ошибки (5.48) с(Л -1) = S(£ -1) - S(k -1), полу-
чим:
е(к) = [I - С(Л)Н(Л)1Л(Л - 1)е(А -1) + В(к - 1)Х(Л -1)] - G(£>(£), (5.51)
где I - единичная матрица (приложение А).
Подставив в (5.51) выражение ковариационной матрицы ошибок фильтра-
ции Р(Л, к), после матричных преобразований будем иметь:
Р(к,к) = Р(к,к -1) - Р(к,к - 1)HT(£)GT(£) -
- G(£)H(£)P(£, к -1) + G(£)R(£)G т (к),
(5.52)
где
Р(М -1) = А(к - 1)Р(Л -1, к - 1)АТ(Л -1) + - 1)Q(* - 1)ВТ(Л -1); (5.53)
Щк} = H(fc)P(fc, к - 1)НТ(к) + R(£);
(5-54)
R(jl) и Q(A) - матрицы корреляционных моментов компонент векторов шумов на-
блюдения и шумов возбуждения соответственно (см. (5.39) и (5.40)).
Следует заметить, что Р(к, к -1) ~ Рт(£, к -1). Это непосредственно следу-
ет из определений матриц Р(к,к) (5.49) и Q(£) (5.40) (Р(к,к) и Q(£) - симмет-
ричные, т.е. Р(к,к} ~ Рт {к, к) и Q(£) = QT(к)) и приложения А.2.
Соответствующим выбором коэффициента G(k) можно добиться минимума
ковариационной матрицы Р(к,к) и, следовательно, обеспечить оптимальность дис-
кретного фильтра. Коэффициент G(k) входит во второе, третье и четвертое сла-
гаемые уравнения (5.52). Первое слагаемое не зависит от G(k). Запишем уравне-
ние (5.52) в виде, удобном для дальнейшего исследования по определению мини-
мума ковариационной матрицы Р(к,к). Для этого введем дополнительные матри-
цы:
N(£)N т (к) = R(£);
М(А) = Р(к,к - 1)Ht(£)[n~1 (Л)]Г.
(5.55)
(5.56)
Уравнение (5.52) с учётом соотношений (5.55), (5.56) запишем в развёрну-
том виде:
120
Р(к,к) = P(£,к -1) - G(£)N(A)MT(£) - M(A)NT(£)GT(£) +
+ G(£)N(£)NT(*)GT(£),
P(£, к) = P(A, к -1) + [G(£)N(£) - M(*)][G(A)N(£) M(£)]T - M(jt)MT(£). (5.57)
В соответствии с (5.55) матрицы N(A) и NT(A) являются невырожденными, а
матрица R(£) должна быть симметричной и неотрицательно определенной.
След матрицы Р(&,Л) (trace Р(Л,Л)) согласно уравнению (5.57) принимает ми-
нимальное значение при выполнении условия
¥(£) = [G(£)N(£) - M(fc)][G(£)N(jl) - М(£)]т = 0,
так как элементы, стоящие на главной диагонали матрицы Т(Л), всегда положи-
тельны. Отсюда получаем условие оптимальности коэффициента усиления дис-
кретного фильтра Калмана в виде
G(£) = M(£)N “’(*)•
(5.58)
Условие (5.58) с учетом соотношений (5.55), (5.56) можно представить сле-
дующим образом:
G(/r) = Р(Л, к - l)H T(fc)R ' (к)
(5.59)
а с учётом (5.54)
G(k) = Р(£,£ - 1)Н т (£)[н(£)Р(Л, £ - 1)НТ(£) + R(£)] ’. (5.60)
Условие (5.60) определяет оптимальный коэффициент дискретного фильтра
Калмана, обеспечивающий минимум дисперсии ошибки фильтрации Р(А,£) в со-
ответствии с критерием оптимальности (5.43). При выполнении критерия опти-
мальности (5.43) ковариационную матрицу погрешности фильтрации Р(Л,А) мож-
но согласно (5.57) записать в виде
Р(Л, к) = Р(£, к - 1) - М(£)МТ (к) ,
(5-61)
а с учетом (5.55), (5.56)
Р(£, к) = Р(Л, к -1) -
- Р(А,к - 1)НТ(Ш1(£)Р(Л,Л - 1)НТ(£) + R(£) *H(A:)PT(A:,к -1).
(5.62)
Учцтьщая (5.60), уравнение (5.62) можно записать в более компактном виде:
121
• •* ♦
Р(£, к) = Р(£, к -1) - G(fc)H(£)PT(£, к -1).
(5.63)
Общая структура дискретного фильтра Каймана приведена на рис. 5.7. Об-
щий алгоритм включает вычисление коэффициента усиления дискретного фильт-
ра и ковариационной матрицы ошибок фильтрации.
Задержка на |
один шаг
Р(£- \,к~ 1)
V(k.k)
Уравнение (5.53)
’ Р(к,к -1) = А(к - 1)Р(Л - 1,к - 1)АТ(Л -1) +
. + В(Л - 1)Q(£ “ 1)ВТ(* “ 1)
Уравнение (5.63)
Р(М) = Р(М-1)-
-G(£)H(£)PT(*,A-1)
Уравнение (5.54)
R(Jt) = Н(*)Р(М - 1)НТ(£) + R(A)
R(i)
Уравнение (5.59)
G(k) = Р(£, к - 1)НТ(£)R~’ (к)
G(£)
АЙ»
4
е(Л)
Де(Л)
G(£)
коррекция
S(k)
4fr
предсказание
S(k -1)
= Н(А)
Рис. 5.7
Важно отметить, что для вычисления оптимального значения матричного
коэффициента усиления G(k) на каждом шаге не требуются входные данные, а
необходимы лишь априорные сведения о модели формирования задающего воз-
122
действия (матрицы А, Н (т.е. С) и В) и статистических характеристиках шума на-
блюдения и шума возбуждения (корреляционные матрицы R, Q). Поэтому значе-
ния G(k) могут быть рассчитаны заранее.
5.4. Пример синтеза оптимальной дискретной системы
Рассмотрим пример синтеза оптимальной дискретной системы второго по-
рядка. Модель задающего воздействия примем в виде
v(k +1) = av(k) + Х(Х),
г (к +1) = r(k) + v(k).
(5-64)
Здесь г может иметь смысл расстояния до движущегося объекта, a v - скорости
его движения. Модель (5.64) учитывает, как регулярное изменение скорости дви-
жения, определяемое коэффициентом а, так и случайную составляющую, стати-
стические характеристики которой задаются параметрами шума возбуждения X.
Таким образом принятая модель является более общей, чем модели детерминиро-
ванного (полиномиального) воздействия или воздействия в виде стационарного
случайного процесса.
Введя обозначения
запишем систему уравнений (5.64) в матричном виде (5.9):
S(k +1) = AS(£) + В Х(Л).
Дополнив (5.65) уравнением наблюдения (5.38):
е(к) = H(£)S(X) + ц(Х),
(5.65)
(5.66)
где П(Л) = [О 1J; ц(£) - шум наблюдения, получим динамическую модель форми-
рования входного процесса е(к).
Конкретизируем выражения (5.52), (5.53), (5.54) и (5.59), определяющие ал-
горитм работы оптимальной дискретной системы (рис. 5.7).
Обозначим:
Р(Х, к)
Р\ 1(к)
Р1\(к)
Pi2 (к)
Р22 (к) ] ’
(5.67)
С учётом (5.67), приведённых выше выражений матриц А, В, Н и равенств
Q~q и R = r для матриц Р(£Д-1) (5.53), R1^) (5.54) и G(£) (5.59) получим:
Р(А,к -1) = АР(Л -1,к - 1)АТ + BQBT =
oTpn(^-i)
(5.68)
Pi2(fc-1)
а2рп (£-!) + #
apn(^-l) + a/?2i(^-l)
<*Pi i (к -1) + арп (к -1)
9
Ри(к~1) +р12(к-1) +р21(к-\) +р22(к-Г)_
= [ Л, (к - 1) + й2 (к -1) + р21 (к -1) + р22 (к -1) + г]-',
G(i) =
>
P(£,£-1)HTR “’(£) =
а2рц(£-1) + $
.«А 1 (к -1) + qp2i -1)
А, {к - 1) + Рп (к - 1) + р21 (к - 1) + Р22 (к ~ 1) J
Рп(* -1) + рп(к -1) + р2х(к -1) + р22(к -1)
Р\\(к -1) + рп(к -1) + р2\(к -1) + р22(к -1) + г
(5.70)
Использование полученных выражений в формуле (5.63) позволяет выра-
зить значения элементов корреляционной матрицы Р(£,А) (5.67) для момента вре-
мени к через их значения в предыдущий момент времени и таким образом полу-
чить рекурсивный расчёта матриц G(A), Р(А,А), Р(к,к - 1). После подстановки вы-
ражений (5.68) и (5.70) в (5.63), будем иметь:
Pi 1 (*) = «2Р11 (к -1) + q - Gj (k)[apii {к -1) + ар12 (к -1)];
Р12 (к) = ccLpi 1 (к -1) + р12 (к -1)] -
“ Gx (*)[р5, (к -1) + р12(Л -1) + р21 (к -1) + р22(к ~ 1)]; (5.71)
Р21 = [1 -G2(*)Hpi 1(^“1) + ^21 (к -1)];
Р22 (к) = [1 - G2 (A:)]/?, i (к -1) + р12 (к -1) + р2, (к -1) + р22 (к -1)].
X
124
Очевидно, что нет необходимости отдельно вычислятьр\г(к) иP2i(^)> так как
по определению матрицы Р(к,к) (5.49)эти коэффициенты равны: р12{к) = р2\(к).
Это равенство непосредственно следует из (5.71) при подстановке в него значений
коэффициентов Gi(k) и G2(k) из (5.70) и рп (0) = Р21 (0) •
С учётом (5.70) выражение алгоритма фильтра Калмана (5.46) примет вид
ОТ v(k -1)"
1 ]/(* -1)_
G, (к)
вг (к)
(е(к) - г(к -1) - Цк -1)), (5.72)
или (при скалярной форме записи):
v(k) = av(£ -1) + G, (к)(е(к) - г(к -1) - v(k -1))=av(k -1) + G, (Л)Ae(Ar),
г(к) = v(k - 1) + г(к -1) + G2(k)[e(k) - г(к -1) - v(k -1))= (5.73)
= v(k -1) + г(к -1) + G2 (к)Ье(к),
где Ле(£) = е(к) — г (к -1) - v(k -1).
Уравнение (5.73) определяет рекурсивный алгоритм оптимального слеже-
ния за параметрами г и v движущегося объекта. При его реализации обеспечива-
ется выполнение критерия оптимальности, а именно, обеспечивается минимум
среднеквадратических значений ошибок слежения. Алгоритму (5.73) соответству-
ет структурная схема следящей системы, показанная на рис. 5.8.
На рис. 5.9 представлен алгоритм расчёта оптимальных значений коэффи-
циентов Gj(A) и G2(k).
При оптимальных значениях коэффициентов усиления G\(k\ G2(k), рассчи-
тываемых согласно (5.70), система (рис. 5.8) обеспечивает минимум дисперсий
125
ошибок слежения за параметрами г и v. Однако это возможно только в тех случа-
ях, когда G\(k) и G2(k) на каждом шаге можно рассчитать точно. Во многих случа-
ях этого сделать нельзя (неизвестны начальные условия (7](0) и G2(0), не точно
известны параметры модели задающего воздействия), поэтому часто (71 (к) и G2(A)
выбирают постоянными исходя из условий устойчивости системы (рис. 5.8) и
требований к её динамическим характеристикам. В этом случае роль синтеза сво-
дится к определению структуры оптимальной системы с учетом предполагаемой
модели формирования задающего воздействия.
Р(Л-1Л-1)
>1 j (к -1)
Р12(^“0
Задержка на
один шаг
Р(£, к)
Р\ 1 (*)
Р22<*)_
Уравнение (5.71)
Pi! (Л) = a2pi j (к -1) + д - Gi (^[apj, (к -1) + apj2 (к - 1)J
Р12 (к) = а[р! j (к -1) + р12 (к -1)] -
- G] (*)[Pi 1 (* -1) + Р12 (* “ О + />21 (* - О + Р22 & ~ 1)}
р21 (к) = [1 -G2 (£)]a[Pi 1 (к -1) + р21 (к -1)},
Р22 (к) = [1 - G2(A)Jpj j (к -1) + pi2 (к -1) + р21 (к -1) + р22 (к -1)}
G(£) =
G2(k)
Уравнение (5.70)
(к} =^1Рп(к-1) + Р12(к~1)]_______.
Рп(Л-1) + р12(* -1) + р21(* -1) + р22(к -1) + г ’
(к) = А i (* “ D + Р12 (* - 0 + Р21 (* ~ D + Р22 (к -1)
Р\\(к -1) + рп(к -1) + р2Х(к -1) + р22(к -1) + г'
G(A) =
<?](*)
G2 (kl
Рис. 5.9
126
Проанализируем характеристики дискретной следящей системы (рис. 5.8)
при условии, что (£)-(/! = const и G2(k) = G2 = const. Согласно (5.73) и рис.
5.8 передаточные функции разомкнутой системы К Az) и замкнутой системы
Г
^еДе(г) определяются следующими выражениями:
^еДе (^) ^еЛг (^)
________- 1Х^ - а)______
z2 +7(Gt +G2 -а-1)+а(1-62)
(5-74)
(5.75)
Из (5.74) видно, что в общем случае система обладает астатизмом первого
порядка (содержит один идеальный интегратор). При сс = 1 порядок астатизма
возрастает до двух. Случай a = 1 соответствует линейному закону изменения де-
терминированной составляющей задающего воздействия г и отсутствию динами-
ческой ошибки слежения за величиной г в установившемся режиме.
Условия устойчивости можно получить, воспользовавшись, например, ал-
гебраическим критерием устойчивости (см. п. 4.4.1). Эти условия при a = 1 имеют
следующий вид:
127
ГЛАВА 6
ПОСТРОЕНИЕ РАДИОТЕХНИЧЕСКИХ СЛЕДЯЩИХ СИСТЕМ.
ДИСКРИМИНАТОРЫ СЛЕДЯЩИХ СИСТЕМ
Методы анализа систем автоматического управления, рассмотренные в пре-
дыдущих главах, широко используются при построении и анализе радиотехниче-
ских следящих систем. Радиотехнические следящие системы являются наиболее
распространенным типом систем радиоавтоматики. Как уже отмечалось в п. 1.1, в
таких системах осуществляется слежение за параметром радиосигнала: фазой,
частотой, временным положением или направлением прихода. Для выделения
ошибки слежения (рассогласования) x(t) в радиотехнических следящих системах
используются устройства, называемые дискриминаторами. Дискриминатор - важ-
ный элемент радиотехнической следящей системы. Он должен из поступающих
на его входы сигналов выделить напряжение, зависящее от величины и знака рас-
согласования сигналов по отслеживаемому параметру.
В начале данной главы рассмотрены некоторые из широко используемых
дискриминаторов. Далее в качестве примера приведено устройство системы фазо-
вой автоподстройки частоты. После чего рассматриваются обобщенная функцио
нальная и структурные схемы радиотехнической следящей системы с пояснением
работы отдельных элементов и особенности построения дискретных систем ра-
диоавтоматики.
6.1. Фазовый дискриминатор
Фазовым дискриминатором (ФД) называют устройство, выходное напря-
жение которого определяется разностью фаз гармонических колебаний, посту-
пающих на его входы.
Согласно определению фазовый дискриминатор имеет два входа (рис. 6.1),
на один из которых поступает входное колебание (напряжение) wBX (t), а на дру-
гой - опорное напряжение моп(/). В общем случае входное колебание uBX(f) яв-
ляется смесью сигнала wc(/) и помехи (случайного процесса) un(f), т.е.
^вх (0 ~ (О ** СО •
Рис. 6.1
128
Для начала положим, что на вход ФД поступает только детерминированный
процесс wBX (/) = ис (0, т.е. ип (г) = 0. Пусть при этом входное и опорное колебания
на входах фазового дискриминатора имеют вид
«вх (0 = “с (0 = ис sin(<M + Фс I
(6.1)
^ОП (О ^ОП COs((OgZ + Фол )•
Для получения напряжения, определяемого разностью фаз Дф = ф
достаточно выделить низкочастотную часть произведения колебаний (6.1)
«фд = «Кх (0"оп (0}нч = sin(coor + фс )cos(o0/ + фоп )}нч =
= |al7cC7on{sin(<pc -фоп) + sin(2<o0r + фс +ФОП)}НЧ = |at/cf/onsin(A<p),
(6.2)
где a - постоянный коэффициент (коэффициент детектирования).
Зависимость «фД (6.2) от амплитуд колебаний Uc и С70п нежелательна, так
как приводит к изменению динамических свойств следящей системы. Для устра-
нения этой зависимости в дискриминаторе или перед ним производится норми-
ровка сигналов по амплитуде. Нормировка может осуществляться, например, сис-
темой автоматического регулирования усиления.
Зависимость и
— F(A<p) называется дискриминационной характеристикой.
Согласно (6.2) она имеет вид, показанный на рис. 6.2.
Из рис. 6.2 видно, что дискриминационная характеристика фазового дис-
криминатора является периодической функцией фазового сдвига Дф. Однако на
рабочем участке это функция однозначная, т.е. выходному напряжению дискри-
минатора однозначно соответствует определенная, с учетом знака, величина фа-
зового сдвига.
Нфд(Дф)л
рабочий
участок !
Рис. 6.2
129
С учетом того, что начальные фазы поступающих на ФД колебаний (6.1) в
общем случае зависят от времени <рс — фс(0> фон — фОп(0 (фазы медленно изменяют-
ся во времени, инерционность дискриминатора не учитывается), то
^фд (О
аС/вх^оп sin(AqKO).
При наличии на входе ФД помимо сигнала ещё и помехи, т.е.
мвх(О = г/с(О + мп(0» выходное напряжение ФД можно, согласно (6.2), предста-
вить в виде
^фд(О ®{^ВХ (0^Оп(0}нч «{(«с (О "l"
= а{нс(0«
оп (0}OT + «к (f)uon (0}ет •
(6.3)
Из (6.3) видно, что выходное напряжение ФД Нфд(/) представляет собой
случайный процесс (см. приложение Г). Первое слагаемое (6.3) представляет со-
бой детерминированную часть выходного напряжения МфЛ(0 (она найдена в (6.2)),
а второе слагаемое - случайную компоненту (она является результатом прохож-
дения помехи wn(Z) через ФД).
Полагая, что входная помеха обладает нулевым математическим ожиданием
М{нп(/)} = 0, из (6.3) получим выражение для математического ожидания напря-
жения ИфД (?):
М^фд (0}— м{а{ивх(O^on (0}Hq } M|ot{wc(z)won(0}нч
+ а{г/п0>оп(0}нч} = а{«с(0«оп(0}нч sin(A<p(/)).
(6-4)
То есть математическое ожидание М|г/фд(/)] определяется дискриминационной
характеристикой ФД: M^ul(f)j= F(A<p(z)).
Напряжение iufl(z) можно представить в виде суммы математического
ожидания м{ифд(/)| и центрированной случайной составляющей £(z) (случайный
процесс £(z) обладает нулевым математическим ожиданием):
Ифл(/)=м^,д(ф «о=Цлч>(г))+ ij(z),
(6.5)
где согласно (6.3) Е(/) = а{ил (Г)м0„ .
С учетом последнего выражения (6.5) структурная схема фазового дискри-
минатора может быть представлена в виде, изображенном на рис. 6.3.
В качестве характеристики показанного на рис. 6.3 случайного воздействия
£,(/) обычно используется дисперсия, которая в общем случае зависит от рас
130
стройки Дф. Зависимость дисперсии от? (Дф) носит название флюктуационной ха-
рактеристики дискриминатора.
4(0
Рис. 6.3
Другие типы дискриминаторов имеют структурные схемы, аналогичные
схеме, изображенной на рис. 6.3. На рис. 6.4 показана обобщенная структурная
схема дискриминатора САУ. В соответствии с ней для ФД 1(/) = фс(/)»
y(t) = фоп(/)> = Дф(0> иц(0 - • Отличие дискриминаторов заключается
только в дискриминационной и флюктуационной характеристиках. Они должны
быть рассчитаны для каждого дискриминатора.
Рис. 6.4
На практике для флюктуационной составляющей часто используют модель
белого шума, т.е. считают, что процесс ^(t) имеет равномерный спектр мощности
в неограниченной полосе частот (автокорреляционная функция является
6-функцией). Основанием для этого является часто выполняемое условие: полоса
пропускания САУ обычно значительно уже ширины спектра мешающего воздей-
ствия и поэтому его энергетический спектр можно считать равномерным в
пределах этой полосы (см. приложение Г. 10).
6.2. Частотный дискриминатор
Частотным дискриминатором (ЧД) называют устройство, выходное на-
пряжение которого определяется разностью частот колебаний, поступающих на
«•к» входы. Помимо этого частотным дискриминатором называют устройство, вы-
чодпое напряжение которого определяется разностью частоты входного сигнала и
номинального (эталонного) значения частоты (это значение, как правило, задается
131
настройкой резонансного фильтра - колебательного контура). Частотный дискри-
минатор может быть построен на основе фазового дискриминатора. Функцио-
нальная схема такого устройства показана на рис. 6.5.
1/2(0
1/чд(/)
Рис. 6.5
На рис. 6.5 обозначено: ФВ - фазовращатель, сдвигающий фазу сигнала на
угол л/2; Ф - узкополосный фильтр (резонансный контур), частота настройки ко-
торого соответствует номинальному (точному) значению частоты входного сиг-
нала; ФД — фазовый дискриминатор. Фильтр Ф описывается частотной характери-
стикой /Гф(У<о).
Для объяснения принципа работы ЧД рассмотрим детерминированные про-
цессы, т.е. действие случайных возмущений учитывать не будем.
Входной сигнал ЧД (рис. 6.5) разделяется на два канала. При отклонении
частоты входного сигнала от номинального значения в верхнем канале фазовый
сдвиг напряжения изменяется по отношению к фазе сигнала в нижнем канале в
соответствии с фазо-частотной характеристикой фильтра. В зависимости от вели-
чины фазового сдвига будет изменяться и напряжение на выходе ФД, которое та-
ким образом будет зависеть от величины и знака частотной расстройки входного
сигнала по отношению к резонансной частоте контура (фильтра Ф). Непосредст-
венно из схемы (рис. 6.5) следует, что на ФД подаются напряжения: wj(f) - в
нижнем канале и и2(0 “ в верхнем канале. Напряжения и u2(t) в соответ-
ствии с рис. 6.5 равны:
(0 — ^вх
Фф (Дсо) ,
амплитудно-частотная харак-
ф UА»)
где дсо - отклонение частоты входного напряжения от номинального значения;
Хф (уДсо) =(j(oo + jAco) - обозначает смещенную в область нижних частот
частотную характеристику фильтра Ф;
теристика фильтра Ф, смещенная в область нижних частот; <Рф (Дсо) = arg (/Дсо)
- фазовый сдвиг, вносимый фильтром.
В соответствии с (6.6) и (6.2) напряжение на выходе ФД:
^ЧД
= -1 aU 2Х |кф (/Д<в)| sin ((ср ф (Д<о)) = а(/в2х 1т Кф (у'Дсо),
(6.7)
• t
где Im (jAa) - мнимая часть частотной характеристики фильтра; а - коэффи-
циент детектирования.
Выражение (6.7) определяет дискриминационную характеристику ЧД.
Если в качестве фильтра Ф используется одиночный резонансный контур,
то
£ф (уд®)=
^ФО
1 + удшт фо
1
Здесь Кф0 = const, Тф0 - постоянная времени контура. Тогда в соответст-
вии с (6.7) получим:
о вх фО^ФО
До
(6.8)
Типичный вид дискриминационной характеристики ичл (До) = /'(Дсо) пока-
зан на рис. 6.6.
2/чд(ДС0 )д
Рис. 6.6
В общем случае частота входного напряжения изменяется во времени
Лю - Лсо(г), т.е. напряжение на выходе частотного дискриминатора не постоянно
~ичд(О • Структурная схема частотного дискриминатора имеет вид, анало-
। ичпый схеме, приведенной на рис. 6.4.
Другим, часто используемым частотным дискриминатором, является дис-
криминатор с расстроенными (по частоте) контурами. Такой дискриминатор вы-
|||>||иясгся в виде двухканальной схемы со смещенными по частоте резонансными
х.||мк1еристиками контуров. Коэффициенты передачи каналов зависят от частоты
133
входного сигнала. Это позволяет по разности амплитуд сигналов на выходах ка-
налов судить о величине частотной расстройки входного сигнала относительно
средней частоты, соответствующей равным значениям коэффициентов передачи
каналов. Вид дискриминационной характеристики такого дискриминатора близок
к виду характеристики, приведенной на рис. 6.6.
6.3. Временной дискриминатор
Временным дискриминатором называют устройство, используемое для из-
мерения временного сдвига двух импульсов. Один из них, формируемый в систе-
ме слежения (опорный сигнал), обычно имеет специальную форму, удобную для
измерения, например, в виде двух разнополярных импульсов, следующих друг за
другом (рис. 6.7).
Напряжение, зависящее от величины временного сдвига Дт, можно полу-
чить, выполнив операции, определяемые выражением
h
^вд (Ат) J МВХ (О^оп (0^ •
h
(6.9)
Рис. 6.7 помогает понять принцип работы временного дискриминатора.
Из (6.9) с использованием рис. 6.7 получим аналитическое выражение для
^вд (А”0 •
134
Uoa(t) A
h
опорный сигнал
входной сигнал
t/вх
Hon2(0
Рис. 6.7
Соответствующая (6.10) дискриминационная характеристика г/вд(Дт)=/ч(Дт)
изображена на рис. 6.8. Её рабочий участок определяется длительностью импуль-
сов т„.
Аппаратно временной дискриминатор согласно (6.9) можно реализовать по
схеме на рис. 6.9. На рис. 6.9 учтено, что woni(0 - положительный импульс, а
//„„•(0 - отрицательный импульс (см. рис. 6'7).
Структурная схема временного дискриминатора также приводится к виду,
показанному на рис. 6.4.
135
Рис. 6.9
6.4. Система фазовой автоподстройки частоты
Рассмотренные дискриминаторы применяются в радиотехнических следя-
щих системах. В качестве примера рассмотрим одну из таких систем. Составим
структурную схему системы фазовой автоподстройки частоты (ФАПЧ).
Напомним, что структурной схемой (см. п. 2.1.2) системы автоматического
управления принято называть такую схему, в которой каждой математической
операции, описывающей процесс управления, соответствует определенной звено*
То есть структурная схема является формой представления математического
описания системы и удобна для её анализа.
В системах ФАПЧ осуществляется слежение за фазой сигнала. Такие систе-
мы применяются в радиоприемных устройствах, перестраиваемых по частоте ге-
нераторах высокостабильных колебаний и других устройствах. Функциональная
схема системы ФАПЧ показана на рис. 6.10.
Рис. 6.10
Система работает следующим образом. Входное колебание wBX (f) и колеба-
ние подстраиваемого генератора (ПГ) ur(f) поступают на входы фазового дис-
криминатора (ФД). При рассогласовании указанных колебаний по фазе на выходе
ФД появляется напряжение МфД(/), зависящее от величины и знака этого рассо-
гласования (см. п. 6.1). Пройдя через фильтр нижних частот (ФНЧ), выходное на
пряжение дискриминатора изменяет частоту колебаний подстраиваемого генера-
136
горл. Как известно, изменение фазы колебаний равно интегралу от его мгновен-
ной частоты. Поэтому при изменении частоты колебаний подстраиваемого гене-
р.пора меняется и их фаза. Управление частотой ПГ в системе ведется так, что
первоначальное несовпадение фаз входного колебания um(t\ и колебания под-
< ipaiiBaeMoro генератора wr(/) уменьшается и они поддерживаются близкими
друг другу. Таким образом, в процессе слежения за фазой входного сигнала изме-
няется частота подстраиваемого генератора. Отсюда система получила своё на-
звание - система фазовой автоподстройки частоты, т.е. ФАПЧ.
Согласно терминологии, принятой в главе 1 (см. п. 1.1), можно сказать, что
объектом управления (ОУ) в системе ФАПЧ является подстраиваемый генератор,
частота (т.е. и фаза) колебаний которого меняется в зависимости от управляюще-
к> (регулирующего) напряжения мо(г). Выходным сигналом системы является
Г
колебание ПГ нг(Г), одним из параметров которого является управляемая вели-
чина - полная фаза <рг(/) колебания wr(z). Управляющее устройство (УУ) состоит
111 фазового дискриминатора и фильтра нижних частот.
J 1араметры системы ФАПЧ выбираются так, чтобы фаза и частота колеба-
нии 11Г отслеживали изменения фазы и частоты полезной составляющей входного
сигнала и возможно меньше флюктуировали под действием шумов.
Более подробно остановимся на элементах системы (рис. 6.10) и их матема-
1 пческом описании.
Положим, что на вход фазового дискриминатора помимо входного сигнала
mc(/) поступает ещё и помеха wn(/). То есть входное колебание wBX(/) представ-
ляет собой смесь сигнала и помехи:
^вх (О (О (О ’
Здесь напряжение сигнала
«с(0 = ^с sin(<Pc(0)>
где
Фс(О = ФсО +
О
(6Л1)
в
(6-12)
полная фаза сигнала; <рс0 - начальная фаза; сос (t) - мгновенная частота сигнала.
Напряжение подстраиваемого генератора
ur(t) = Ur cos(<pr(Z)),
где
/
<Рг(О = ФгО +
О
(6.1 зу
(6.14)
137
- полная фаза колебания «г(0; ФгО “ начальная фаза; <ог(/) - мгновенная частота
колебания ur(t).
На выходе фазового дискриминатора формируется напряжение, зависящее
от разности фаз входного колебания и колебания ПГ (см. п. 6.1), равной
Дф(О = (рс(О-<Рг(О-
(6.15)
Полагая амплитуды Uc и Ur постоянными, согласно (6.5) получим выходное
напряжение ФД:
i • В‘ »
«ф, (О = (г)} + «о = F(A<p(O) + «О, (6.16)
Г ) 1
где К(Д<р(/)) = Л/{мфд(0/= — aUcUr вт(Дф(/)) является дискриминационной ха-
рактеристикой ФД (см. (6.4)), т.е. зависимостью математического ожидания вы-
ходного напряжения ФД от Дф, £(f) — флюктуационная составляющая, обуслов-
ленная преобразованием в дискриминаторе входной помехи и п (/).
Отметим, что при рассогласовании Дф(/) = фс(О-фг(О, равном нулю, на-
пряжение сигнала и напряжение подстраиваемого генератора, как видно из (6.11),
(6.13), сдвинуты по фазе на л/2.
Фильтр нижних частот, включаемый на выходе фазового дискриминатора,
является, как правило, линейным устройством и описывается линейным диффе-
ренциальным уравнением. Например, при использовании 7?С-цепи (см. пример
2.1, п. 2.2), оно имеет вид
6?Wp (Z)
~т Up (0 - ^фд (О >
(6.17)
где Тф - RC - постоянная времени цепи. Уравнению (6.17) соответствует переда-
точная функция ФНЧ
^фнч (р)
(6.18)
Постоянная времени ФНЧ (а значит и полоса пропускания ФНЧ) выбирает-
ся так, чтобы на выход фильтра проходили медленные изменения выходного на-
пряжения дискриминатора Нфд(/), вызванные плавными отклонениями фазы сиг-
нала фс(/) от фазы колебаний генератора фг(0- Флюктуационная составляющая
^(t) выходного напряжения ФД должна как можно сильнее подавляться в ФНЧ.
Необходимо отметить, что вид передаточной функции ФНЧ
ределяет свойства системы.
во «многом оп
138
Выходное напряжение ФНЧ uAf) оказывает влияние на частоту колебаний,
Г
итерируемых ПГ. Зависимость частоты от напряжения и At) достигается благо-
дари подключению к колебательному контуру генератора управляющего элемен-
ia, обладающего регулируемым реактивным сопротивлением. В качестве такого
-цемента может использоваться варикап. Варикапом называется конденсатор в
пи де полупроводникового диода, ёмкость которого зависит (в общем случае не-
линейно) от приложенного к нему электрического напряжения. В рассматривае-
мой системе ёмкость варикапа регулируется напряжением и At).
I la рис. 6.11 изображен типичный вид регулировочной характеристики — за-
висимости частоты колебаний подстраиваемого генератора от управляющего на-
пряжения, поступающего с выхода ФНЧ. Величина AwrMaKC на рис. 6.11 показы-
вает максимально возможное изменение частоты генератора под действием
у и ра вл яющего напряжения и At).
Рис. 6.11
11ри малых величинах wp регулировочная характеристика линейна и описы-
вается выражением
<йг — согс + Spi/p, (6.19)
। де Sp - крутизна регулировочной характеристики, - значение собственной
час тоты генератора при отсутствии управляющего напряжения ир.
Частота согс с учётом её нестабильности 5со гс определяется равенством
®гс = ®го + 6согс, (6.20)
। де со, о — номинальное значение частоты подстраиваемого генератора.
Так как в фазовом дискриминаторе напряжения сигнала (6.11) и подстраи-
ваемого генератора (6.13) сравниваются по фазе, необходимо перейти от частоты
•о, подстраиваемого генератора к его фазе фг. Этот переход описывается выраже-
нием (6.14).
Структурная схема системы ФАПЧ, поведение которой описывается
уравнениями (6.15) 4- (6.20) и (6.14), изображена на рис. 6.12.
139
(Ого+ 5сОге(0
Рис. 6.12
Блок \/р отображает в этой схеме операцию интегрирования, соответст-
вующую уравнению (6.14).
Если при исследовании системы ФАПЧ ввести в рассмотрения отклонения
До)с и Дсог частот сигнала и гетеродина от номинального значения <оо = 0)^ (т.е. от-
клонения фаз Дфс и Афг), то выражения (6.12) и (6.14) соответственно примут вид
t t
ФсО) = ФсО + J<oc = ФсО + f(W0 + Д®с(0)<* =
о о
= ФсО + ® о' + f Д®с (№ = ФсО + <М + АФс (О,
О
Фг(О = ФгО + рг(О^=ФгО + J(C00 +АСОГ(Г)^ =
О о
t
= фго + со0Г + |А(0г(0Ж = фг0 + о0/ + Дфг(/).
о
Полагая при этом подстраиваемый генератор стабильным (6согс =0), а на-
чальные фазы равными фс0 = <рг0, то структурная схема на рис. 6.12 упрощается и
принимает вид, изображенный на рис. 6.13.
Рис. 6.13
140
I (слученную схему часто называют структурной схемой системы ФАПЧ
< i ч « <ннклонен ни.
Схемы на рис. 6.12 и рис. 6.13 позволяют анализировать процессы, проис-
ходящие н системе ФАПЧ. Следует иметь в виду, что если величина рассогласо-
iiiii।и>i А<р(/) мала, то нелинейную дискриминационную характеристику ^(Дф) (см-
рис. 6.2) можно считать линейной:
। цс
<//?(Дф)
t/Дф
Дф—О
Г(А<р)
г?Г(Дф)
г/Дф
Аф=О
Дф = 5фд Дф,
- крутизна дискриминационной характеристики Л(Дф).
В этом случае блок /'’(Дф) на рис. 6.12 и рис. 6.13 можно заменить на блок
Л'ф„. осуществляющий перемножение ошибки Дф(/) на коэффициент Л>фД; а систему
ФАПЧ можно считать линейной и изучать вопросы устойчивости системы, дина-
мические и флюктуационные ошибки с помощью методов, изложенных в главе 2.
6.5. Обобщённая функциональная и структурные схемы
радиотехнической следящей системы
Функциональные и особенно структурные схемы радиотехнических следя-
щих систем различного типа имеют много общего. Это объясняется тем, что во
тех радиотехнических следящих системах осуществляется слежение за тем или
иным параметром радиосигнала. Аналогия процессов регулирования, протекаю-
щих в н их системах, позволяет составить обобщённые функциональную и струк-
црпую схемы радиотехнической следящей системы. Рассмотренная выше в каче-
• । нс примера система фазовой автоподстройки частоты даёт представление о виде
обобщенных схем.
Обобщённая функциональная схема радиотехнической следящей системы
нок.кана на рис. 6.14. Она состоит из дискриминатора (Д), генератора опорных
i in панов (ГОС) и фильтра нижних частот (ФНЧ).
KonUj)
Рис. 6.14
141
На один из входов дискриминатора подаётся процесс wBK(Z) = wc(Z,X) + wn(Z),
представляющий собой смесь полезного сигнала мс(/,Л), за параметром Л,(/) кото-
рого ведется слежение, и помехи (случайного процесса) un(t). На второй вход дис-
криминатора поступает опорный сигнал мОп(^), зависящий от оценки y(f) отсле-
живаемого параметра 1(Z), сформированной в процессе слежения. Например, в
системе ФАПЧ опорным сигналом является напряжение подстраиваемого генера-
тора.
В дискриминаторе входной сигнал wBX(z) подвергается нелинейному преоб-
разованию, в результате которого на выходе дискриминатора формируется на-
пряжение «д(0, зависящее от ошибки слежения х — 1 - у. Зависимость F(x) мате-
матического ожидания выходного напряжения от ошибки слежения называется
дискриминационной характеристикой (см. п. 6.1 п. 6.3). Выходное напряжение
дискриминатора нд(/) содержит также флюктуационную составляющую £(t>x), за-
висящую в общем случае от ошибки слежения х:
(/) = М{г/Д (Z)} + % х) = F(x) + £(/, х).
Напряжение ^(Zpc) является результатом нелинейного преобразования в дискри-
минаторе входного процесса ывх(0, содержащего помеху wn(z).
Напряжение wfl(z), снимаемое с выхода дискриминатора (рис. 6.14), прохо-
дит через фильтр ФНЧ и воздействует на генератор опорных сигналов, изменяя
соответствующий параметр (фазу, частоту, временное положение) опорного сиг-
нала.
Обобщённая структурная схема радиотехнической следящей системы,
отображающая процесс автоматического слежения за параметром сигнала, пока-
зана на рис. 6.15. На этой схеме приняты следующий обозначения: A,(Z) - задаю-
щее воздействие, которым является отслеживающий параметр сигнала; y(t) -
управляемая величина (частота подстраиваемого генератора, положение следя-
щих (опорных) импульсов и т.п.), являющаяся оценкой отслеживаемого парамет-
ра; x(z) - ошибка слежения.
^х)
Яд
Рис. 6.15
Часть схемы, охваченная штриховой линией, является математическим эк-
вивалентом дискриминатора и отображает формирование выходного напряжения
дискриминатора, зависящего от ошибки слежения.
142
Входящее в структурную схему звено с передаточной функцией К(р) опи-
ti.iii.ici преобразование выходного напряжения ua(t) дискриминатора (рис. 6.15),
происходящее в фильтре нижних частот и генераторе опорных сигналов. Переда-
1 очная функция К(р) зависит как от передаточной функции ФНЧ ЛГфнчО7), так и от
Hina и параметров управляемого генератора опорных сигналов. Например, в сис-
1смс ФАПЧ (см. п. 6.4) К(р) = 7СфНЧ (p)Sp Ip, где оператор интегрирования 1/р
учи । ынаег переход частоты подстраиваемого генератора к его фазе.
Остановимся подробнее на эквиваленте дискриминатора, входящего в
обобщенную структурную схему радиотехнической следящей системы. Анализ
рассмотренных дискриминаторов (п. 6.1 -5- п. 6.3) показывает, что качественно
форма дискриминационной характеристики F(x) соответствует графику на рис.
(>.16. При малых значениях ошибки слежения характеристика линейна и записы-
вается в виде
F(x) = Sax,
(6.21)
। цс Л'д - dF(x)/dx J Х!=о - крутизна дискриминационной характеристики. Так для
бУ(Лф)
t/Дф
ра пюсп» фаз входных колебаний. Аналогично этому для частотного и временного
JF(Aco)
«/Д<о
фа юного дискриминатора получим /'’(Дф)
Дф = 5фдДф, где Аф
Д<р=О
дне криминаторов соответственно получим: F(Ao)
Дсо=О J
от номинального значения;
= 5вдДт, где Дт - временной
/\<|> отклонение частоты входного напряжения
dAx
пупьсами. Под обозначениями 5фД, и 5ВД можно понимать коэффициенты пере-
/I I'm соответственно фазового, частотного и временного дискриминаторов.
сдвиг между входными им-
143
Форма дискриминационной характеристики F(x) и её крутизна зависят не
только от схемы и параметров дискриминатора, но и от амплитуды сигнала. Эта
зависимость нежелательна, так как приводит к изменению динамических свойств
следящей системы. Поэтому в усилительном тракте, предшествующем дискрими-
натору, или в самом дискриминаторе проводится нормировка сигнала по ампли-
туде. Нормировка может осуществляться системой автоматической регулировки
усиления или ограничителем.
Рабочий участок дискриминационной характеристики (рис. 6.16) имеет, как
правило, ограниченный раствор по оси х. Выход ошибки слежения за пределы
этого участка дискриминационной характеристики приводит к размыканию сле-
дящей системы и срыву сопровождения. В момент включения системы ошибка
слежения может находиться вне раствора характеристики дискриминатора. При
этом следящая система также разомкнута. Для её замыкания необходимо умень-
шить первоначальную ошибку, что достигается в процессе предварительного по-
иска значения отслеживаемого параметра сигнала.
Поскольку в структурной схеме системы, изображенной на рис. 6.15 содер-
жится безинерционное нелинейное звено F(x), то дифференциальное уравнение
системы, связывающее x(t) и !(/) (или у(0 и Л,(ф будет нелинейным. Анализ тако-
го уравнения достаточно сложен. Кроме этого дополнительные трудности связа-
ны с нелинейной в общем случае зависимостью характеристик процесса £,(/, х) от
ошибки слежения х.
Рассмотрим возможность упрощенного описания системы. Для этого обра-
тимся к эквиваленту дискриминатора. Во многих случаях флюктуационное на-
пряжение ^(t,x) имеет равномерную спектральную плотность в полосе, значи-
тельно превышающей полосу пропускания элементов системы, следующих за
дискриминатором. При этом шум £/7д) можно считать белым (см. приложение
Г. 10). Его дисперсия сих) в общем случае зависит от ошибки слежения х. Эта
зависимость называется флюктуационной характеристикой (см. п. 6.1).
Дальнейшее; упрощение эквивалента дискриминатора получается при усло-
вии малости ошибки слежения х. При малых ошибках слежения дискриминаци-
онная характеристика линейна и описывается выражением (6.21). Кроме этого
можно считать, что процесс £(/,х) не зависит от х, т.е. принять £,(/, х) = £,(/),
(х) = al.
Эквивалент дискриминатора и обобщённая структурная схема следящей
системы при этом значительно упрощаются и принимают вид, приведенный на
рис. 6.17.
Принимая = несложно получить систему уравнений, описывающих
систему (рис. 6.17) в области изображений (по Лапласу):
ад = А(р)-17р),
Пр)=х(р)5дх(р).
144
Рис. 6.17
()н1ода легко найти передаточные функции замкнутой системы. Например,
<>|Цинк-ине %(р)/Л(р) определяет передаточную функцию замкнутой системы от
no VK'iic гния X(f) к ошибке слежения x(f) (при = 0 ):
(р)=
*(р) _ 1
Л(р) 1+здад'
Аналогично, предварительно написав систему уравнении, можно наити пе-
рс м.и очную функцию замкнутой системы от воздействия ^(/) к ошибке слежения
»(/) (полагая Л,(/) = 0):
(р) =
К(Р)
1 + S^K(p-)
1:сли допущение о малой величине ошибки слежения х недопустимо, то
< пенящую систему необходимо анализировать как нелинейную и использовать
i ipvh гурную схему, изображенную на рис. 6.15.
Пользуясь обобщёнными структурными схемами, приведенными на рис.
<> I \ 6.17, удается с единых позиций рассмотреть ряд вопросов описания, анализа
и синтеза различных радиотехнических следящих систем. Так, оперируя обоб-
пк пной структурной схемой, можно решить задачу синтеза оптимальной переда-
lo'iiioii функции К(р) при заданных характеристиках воздействия X(Z) и возмуще-
ния £,(/) для произвольной следящей системы, не уточняя, является ли она систе-
мой слежения за временным положением, фазой или иным параметром сигнала.
Аналогично этому с использованием обобщённой структурной схемы радиотех-
нической следящей системы может быть изучен ряд таких важных вопросов, как,
\ч ншчивость, поведение при наличии регулярных и случайных возмущений, ха-
p. и» icp переходных процессов, и могут быть получены результаты, справедливые
пни радиотехнических следящих систем различного назначения. Поскольку изо-
<>р.1жснная на рис. 6.17 схема аналогична структурной схеме САУ, исследованной
и । паве 2, то многие из этих вопросов могут быть рассмотрены на основе ранее
।к>иучспных в главе 2 результатов.
145
На практике могут встречаться системы, структурные схемы которых не
совпадают с изображенными на рис. 6.15 и рис. 6.17 схемами. Они могут отли-
чаться наличием дополнительных возмущений, элементов с нелинейным описа-
нием, многопетлевой (многоконтурной) структурой, более полным учетом инер-
ционных элементов системы. Однако в большинстве случаев структурные схемы
этих систем путем упрощений и преобразований могут быть сведены к обобщён-
ной структурной схеме радиотехнической следящей системы.
6.6. Особенности импульсных систем радиоавтоматики
Системы радиоавтоматики, в которых сигналы преобразуются в последова-
тельность импульсов, называются импульсными. В таких системах
лительность
импульсов обычно намного меньше периода их следования.
Дискретизация сигналов по времени осуществляется с помощью ключевого
устройства, включаемого в контур управления. На рис. 6.18 показан возможный
вид построения импульсной следящей системы. Изображенная на этом рисунке
система отличается от обобщённой радиотехнической следящей системы (рис.
6.14) наличием ключа (КЛ), введенного между дискриминатором (Д) и фильтром
(ФНЧ). Такое размещение ключа связано с тем, что дискриминатор, как правило,
выполняется в виде конструктивно целого элемента. Это обуславливает некоторое
отличие приведенной здесь схемы от схемы линейной импульсной САУ, рассмот
ренной в главе 4 (рис. 4.1). Напомним, что в системе на рис. 4.1 дискретизации
подвергалась ошибка x(Z), а не напряжение дискриминатора ua(f) как на рис. 6.18.
Рис. 6.18
^оп(0
Структурная схема импульсной следящей системы изображена на рис. 6.19.
Она построена для малых значений ошибок слежения х и отличается от обобщен-
ной структурной схемы радиотехнической следящей системы (рис. 6.17), рабо-
тающей в линейном режиме, наличием ключа Кл.
Дальнейшее упрощение структурной схемы основано на использовании мо-
дели ключа в виде последовательного соединения идеального импульсного эле-
мента (ИИЭ) и формирующего фильтра (ФФ). При использовании АИМ-1 в осно-
ве этой модели лежат соотношения, приведенные в п. 4.1.
В случае отсутствия шумов в системе £(/) = 0 структурная схема импульс-
ной следящей системы приобретает вид, показанный на рис. 6.20.
146
Рис. 6.20
Она отличается от рассмотренной в главе 4 импульсной САУ (рис. 4.6)
1ОЛ1.КО наличием блока SM осуществляющего перемножение ошибки слежения х
па крутизну дискриминационной характеристики 5Д. Аналогичны выражением
(1.20) и передаточные функции приведенной на рис. 6.20 замкнутой системы:
^(z)
П*)
Т - период дискретизации, ЛГ (z) = Z {А^пнч (/?)}.
। де A(z), X(z), Y(z) - Z-преобразования соответствующих функций Х(/)| _ ,
'(Ч „ги яо
При анализе работы системы, изображенной на рис. 6.20, пользуются мето-
чами, изложенными в главе 4.
147
ГЛАВА 7
ЦИФРОВЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Переход к цифровым методам управления (с использованием цифровых вы-
числительных машин (ЦВМ) и специализированных цифровых устройств) явля-
ется общей тенденцией при построении систем управления (в том числе и систем
радиоавтоматики).
Цифровыми принято называть системы управления, в которых все или часть
элементов (дискриминаторы, фильтры, объекты управления) построены на базе
ЦВМ или в виде отдельных цифровых устройств, использующих элементы им-
пульсной и цифровой техники: триггеры, логические элементы И, ИЛИ, счётчики,
регистры памяти и др.
Вычислительные устройства, используемые в цифровых системах управле-
ния и предназначенные для обработки сигналов, могут оперировать только с циф
ровыми сигналами. Рис. 7.1 иллюстрирует разницу между аналоговым, дискрет-
ным и цифровым сигналами. Исходный физический сигнал (рис. 7.1, а) «(/) явля
ется непрерывной функцией времени. Такие сигналы, определенные во все мо-
менты времени, называют аналоговыми. Непрерывные САУ, рассмотренные в
главах 2 и 3, обрабатывают аналоговые сигналы. Из аналогового сигнала может
быть получен дискретный сигнал (рис. 7.1,6). Определение дискретного сигнала
совпадает с определением дискретной функции (см. главу 4): дискретный сигнал
- это счетное множество точек } (к - целое число) на оси времени, в каждой из
которых определено отсчётное значение сигнала (отсчёт сигнала) ик . Как прави-
ло, период дискретизации Т = tk+l - tk для каждого сигнала постоянен, так что
tk = кТ, а ик -u(tk)~ и(кТ). Понятие дискретного сигнала (дискретной функции)
лежит в основе анализа импульсных систем (главы 4 и 5).
а)
Рис. 7.1
148
11роцесс преобразования аналогового сигнала в последовательность отсчё-
!<ш пал.!нается дискретизацией, а результат такого преобразования — дискретным
i in паном.
11ри обработке сигнала в вычислительных устройствах его отсчёты пред-
1। .шляются как правило в виде двоичных чисел, имеющих ограниченное число
1>.| «рядов. Вследствие этого отсчёты могут принимать лишь конечное множество
tiij'iciiiiii и, следовательно, при представлении сигнала неизбежно происходит его
округление. Процесс преобразования отсчётов сигнала в числа называется кван-
ннншнием по уровню, а возникающие при этом ошибки округления - ошибками
(пни шумами) квантования.
Таким образом, сигнал дискретный во времени, но не квантовый по уровню,
па и.шается дискретным (импульсным) сигналом. Сигнал, дискретный по времени
и к цан говый по уровню, называют цифровым сигналом. Цифровой сигнал ип(кТ)
представлен на рис. 7.1, в. Для представления изображенного сигнала в виде по-
следовательности двоичных чисел достаточно трёх разрядов. То есть изображен-
ный на рис. 7.1, в сигнал можно представить последовательностью трёхразрядных
двоичных чисел: 011» 010, 011, 100, 101, 100, 010, 001. Из рис. 7.1 видно, что чем
больше используемых разрядов, тем меньше отличие цифрового сигнала от дис-
кретного сигнала.
Сигналы, квантованные по уровню, но непрерывные во времени, на практи-
ке встречаются редко (например, в релейных системах).
В цифровых системах инструментальные ошибки имеют иную природу, чем
в аналоговых системах. Они обусловлены алгоритмом работы, периодом дискре-
। изации во времени, разрядностью используемых цифровых кодов и могут быть
сделаны пренебрежимо малыми.
Цифровые системы из-за присущей им дискретности по амплитуде являют-
ся в принципе нелинейными, что усложняет их анализ. Однако при большой раз-
рядности используемых кодов, когда эффектами округления можно пренебречь,
их можно анализировать как линейные. В этом случае для анализа цифровых сне-
гом могут быть использованы методы анализа линейных импульсных систем (см.
главы 4, 5).
Важными достоинствами цифровых систем управления являются: резкое
упрощение их настройки и регулировки, делающее такие системы весьма техно-
логичными, высокая стабильность их характеристик и параметров, высокая на-
дежность, удобство изменения их параметров в процессе работы, позволяющее
реализовать в них сложные алгоритмы обработки сигналов, гарантированная точ-
I юсть получаемых результатов и ряд других. Перечисленные достоинства делают
цифровые системы. весьма, перспективными, и во многих случаях им отдается
*
предпочтение. Прогресс в развитии элементной базы (интегральных микросхем,
микропроцессоров, мини ЭВМ) также ведёт к развитию цифровых САУ, расши-
рению: областей их применения.
Структурные схемы цифровых систем отличаются в зависимости от того,
какой дискриминатор используется в системе. Различают системы с аналоговым и
цифровым дискриминаторами, с аналоговым и цифровым объектами управления.
149
7.L Цифровые системы автоматического управления с аналоговыми
дискриминатором и объектом управления
Функциональная схема системы с цифровым фильтром (цифровой вычисли-
тельной машиной) в контуре управления приведена на рис. 7.2. На этой схеме
обозначено: Д — дискриминатор; АЦП - аналого-цифровой преобразователь; ЦФ
- цифровой фильтр; ЦАП - цифро-аналоговый преобразователь; ОУ - объект
управления.
Рис. 7.2
В аналого-цифровом преобразователе происходит преобразование сигналов
из непрерывной формы в цифровую. При этом на первом этапе осуществляется
дискретизация сигналов во времени - выборка непрерывных сигналов, соответст-
вующих дискретным моментам времени (обычно выборка производится через
равные промежутки Т - период дискретизации). На втором этапе производится
квантование по уровню. В результате квантования по уровню из всех возможных
дискретных сигналов выбираются только разрешенные уровни, кратные шагу
квантования, равного значению младшего разряда ЦВМ. Если АЦП имеет п раз-
рядов, то число уровней квантования, отличных от нуля, составляет 2” -1.
Структурная схема АЦП приведена на рис. 7.3.
u(t) дэ
Рис. 7.3
п(кТ)
На этой схеме ДЭ — дискретный элемент, коэффициент передачи которого
t^kT,
t * кТ,
(7.1)
150
осуществляет дискретизацию поступающего непрерывного сигнала (в нашем слу-
чае но напряжение u(t), являющееся напряжением на выходе дискриминатора
//(/) "д(0 (см. рис. 7.2)).
Второй блок на рис. 7.3 — блок квантования по амплитуде, осуществляющий
мипнование сигнала по уровню. Он описывается характеристикой, изображенной
и.। рис. 7.4.
Рис. 7.4
На рис. 7.4 обозначено AwBbIX, Aw - соответственно шаг квантования по вы-
ходу и по входу. Отношение
Sn = Адвых /Ам называют крутизной преобразования.
Таким образом, в результате работы АЦП поступающее на его вход непре-
рывное напряжение ua(f) преобразуется в последовательность чисел п(кТ) (рис.
/.3), появляющихся в дискретные моменты времени t-kT.
Цифровым фильтром (рис. 7.2) называют устройство, которое преобразует
поступающую на его вход последовательность чисел п(кТ) в другую последова-
1слыюсть чисел щ(кТ), формируемую на выходе фильтра.
Цифровой фильтр является дискретным устройством. В нём преобразуются
отсчёты сигнала представленные, как правило, в виде двоичных чисел, имеющих
ограниченное число разрядов. Ограниченность разрядной сетки проявляется в ок-
руглении результата выполнения арифметических операций. Кроме этого конеч-
ность числа разрядов также приводит к округлению коэффициентов разностного
уравнения, что в свою очередь прцводит к изменению динамических свойств
фильтра и даже может нарушить устойчивость системы.
Без учета округления чисел из-за ограниченности разрядной сетки (или при
отсутствии округления чисел) цифровой фильтр ЦФ можно анализировать как
линейный импульсный фильтр (глава 4) и описывать передаточной функцией
А'ф(г) или линейным разностным уравнением.
Цифро-аналоговый преобразователь преобразует последовательность чи-
сел, поступающую с выхода цифрового фильтра, в непрерывное напряжение. Его
с груктурную схему можно представить в виде, показанном на рис. 7.5.
151
u*(kT) **
-----> Кфф(р)
Up(t)
Рис. 7.5
Процесс и*(кТ) на выходе идеального импульсного элемента (ИИЭ), со-
гласно (4.1), можно записать в виде
«;(кТ) = £ и, (ктум - кГ). (7.2)
Тогда процесс на выходе ЦАП (см. (4.2)):
wp (О = S «1 (' ' кТ), (7.3)
А=0
где £фф(О - импульсная характеристика формирующего фильтра. В качестве
формирующего фильтра в ЦАП часто используется фильтр с импульсной харак-
теристикой £фф (Г) =!(/) -1(/ - Т). Аналогично (4.4) получим выражение его пе-
редаточной функции
^фф (Р) =
В этом случае каждому отсчету входного сигнала на выходе ЦАП будет соответ-
ствовать прямоугольный импульс длительности Т с соответствующей амплиту-
дой. Само же напряжение wp(Z) будет представлять собой непрерывную функцию
времени, имеющую ступенчатую форму. Причём высота каждой ступени равна
значению п\(кТ) в соответствующий момент времени, а её длительность равна пе-
риоду дискретизации Т.
С учетом рассмотренных моделей АЦП и ЦАП структурная схема цифровой
САУ (рис. 7.2) с аналоговыми дискриминатором и объектом управления показана
на рис. 7.6.
В схеме, изображенной на рис. 7.6, K^(z), К^(р), К$(р) — передаточные
функции соответственно цифрового фильтра ЦФ системы, формирующего фильт-
ра ЦАП и объекта управления.
Структурная схема (рис. 7.6) учитывает нелинейность дискриминатора (ха-
рактеристика F(x)) и нелинейность АЦП (характеристика Q(u)). Рассмотрим пути
её линеаризации. Линеаризация дискриминационной характеристики F(x), как
было отмечено в п. 6.5, возможна при малой величине ошибки слежения х и за-
152
кнючастся в замене нелинейной функции F(x) её производной (крутизной дис-
криминационной характеристики =dF(x)/<&|Jt=0) при нулевом значении
ошибки слежения.
п(кТ)
пх(кТ)
....V.....
Аф(г)
Рис. 7.6
Характеристику квантования (рис. 7.4) можно также аппроксимировать ли-
нейной зависимостью Q(u)^Snii. Ошибки аппроксимации не превосходят шири-
ны шага квантования по выходу и могут быть учтены добавлением к величине
Snit шума квантования е(£7). В этом случае линеаризованная структурная схема
АЦП принимает вид, изображённый на рис. 7.7.
w(Z)
Рис. 7.7
На рис. 7.7 вместо обозначения п(кТ) (рис. 7.3) используется UltkT), чтобы
подчеркнуть, что выходной процесс АЦП рассматривается здесь как дискретная
функция.
Линеаризованная структурная схема цифровой САУ показана на рис. 7.8.
Здесь, как и на рис 7.7 п(кТ) и п\(кТ) (рис. 7.6) соответственно переобозна-
чены через uztkT) и щ(кТ) соответственно.
Определим передаточную функцию системы (рис. 7.8), связывающую Z-
преобразования сигнала Х(0 на входе и сигнала ХО на выходе системы.
Для процесса и2{кТ) можно записать соотношение:
и2 (кГ) = z(kT) + S„ (Х(АТ) - ХЮ)) (7.4)
153
е(кТ)
коу(р)
Рис. 7.8
Подвергнув правую и левую части выражения (7.4) Z-преобразованию, по-
лучим
U2 (z) = e(z) + S„ fc(z) + 5Д (A(z) - r(z))}, (7.5)
где U2(z),e(z),^(z),A.(z),Y(z)- Z-преобразования соответствующих временных
функций.
Z-преобразование процесса на выходе фильтра с передаточной функцией
ЭД:
U. (z) = U2 (г)Кф (z).
(7-6)
Z-преобразование Y(z) процесса на выходе линейной импульсной системы,
состоящей из идеального импульсного элемента, формирующего фильтра с пере-
даточной функцией Кфф(р) и объекта управления с передаточной функцией Коу(р)
согласно (4.18), (4.19) определится выражением:
Г(г) = U, (z)Z (р)Коу (р)}.
(7.7)
Определив из (7.5), (7.6), (7.7) отношение 7(z)/A(z) (при ^(ЛТ) = 0,
tfJkT) - 0), получим выражение для передаточной функции замкнутой системы:
Кку(г) ~
^^Лф(г)г^фф(рХоу(р)}
1 + S^S„K^z)Z {kw (р)К (р
(7.8)
Аналогично можно получить выражение передаточной функции от задаю-
щего воздействия к ошибке слежения на выходе сравнивающего устройства:
154
1 + S ,S„ Кф (z)Z (p)Koy (p
(7.9)
Дальнейший анализ цифровой системы не отличается от анализа линейных
импульсных систем.
Следует заметить, что влияние квантования в системе можно учесть, анали-
шруя воздействие шума квантования е(£7). Его значения ограничены величиной
А«11Ь1Х/2 и, следовательно влияние шума квантования убывает с увеличением
числа разрядов (уровней квантования) АЦП. При достаточно большом числе
уровней квантования шум квантования е(к7) можно приближенно считать дис-
кретным белым шумом и анализировать его влияние на систему, как воздействие
дополнительного шума. При малом числе уровней квантования такой подход не-
справедлив и процессы в системе должны анализироваться с учетом нелинейно-
сти аналого-цифрового преобразования.
7.2. Цифровые системы автоматического управления
с цифровым дискриминатором
Функциональная схема системы с цифровым дискриминатором приведена
па рис. 7.9. На этой схеме обозначено: Д - дискриминатор;
ЦФ - цифровой
фильтр; ОУ — объект управления.
Рис. 7.9
В этой схеме и дискриминатор и объект управления предполагаются дис-
кретными устройствами.
Рассмотрим в качестве примера цифрового дискриминатора цифровой фа-
ювый дискриминатор. Его схема приведена на рис. 7.10, а на рис. 7.11 приведены
временные диаграммы, поясняющие его работу.
На рис. 7.10 обозначено: М2 - сумматор по модулю два, НЕ - схема отрица-
ния (инвертор), & - схема совпадения (операция И), PC - реверсивный счётчик,
ГСИ - генератор счётных импульсов.
155
Рис. 7.10
геи
Рис. 7.11
156
В отсутствие расстройки по фазе напряжения на входе дискриминатора
мвх (О = sin Q0Z’
«г (0 = ^0 coso0/.
(7.Ю)
Временной сдвиг Дт напряжения «Х0 (рис. 7.10) соответствует сдвигу по
2л
Дф = -<ооДт =---Дт, где Гс - период входного сигнала. В зависимости от
временного сдвига меняется количество счетных импульсов на выходах схем сов-
падения. При отсутствии сдвига по фазе (Дт = 0) количество импульсов на выхо-
дах схем совпадения одинаково и, следовательно, сумма импульсов, поступаю-
щих по суммирующему и вычитающему входам реверсивного счётчика (рис. 7.10)
будет равна нулю. При наличии временного (фазового) сдвига количество им-
пульсов на суммирующем и вычитающем входах PC становится разным (рис.
7.11) и в PC будет формироваться число, зависящее от величины Дт. На рис. 7.12
показана зависимость разности числа импульсов на выходах схем совпадения, об-
разующаяся в PC в зависимости от величины Дф (или Дт) (дискриминационная
характеристика).
Рис. 7.12
Дискриминатору соответствует структурная схема, показанная на рис. 7.13.
Па рис. 7.13 начальные фазы входных напряжений «вх(0 и u^t) обозначены соот-
ветственно как фвх и фг.
Рис. 7.13
Пд
* ид(Лф) —
157
В этой схеме период дискретизации равен Т = Тс. Это означает, что измере-
ние происходит один раз в течение периода входного сигнала: в реверсивном
счётчике в каждом периоде повторения входного сигнала подсчитывается раз-
ность импульсов на выходах схем совпадения, затем производится считывание
сформированного в PC числа пя (разности), являющегося результатом работы дис-
криминатора, и сброс счётчика на нуль.
Может быть реализован и другой режим, при котором период дискретиза-
ции выбирается в целое число раз больше периода Тс. Это будет означать, что в
реверсивном счётчике результат измерения формируется путем вычитания им-
пульсов с выходов схем совпадения за несколько периодов повторения. При этом
производится усреднение результата счёта за несколько периодов повторения
сигнала.. Возможна также организация непрерывного подсчёта в PC разности им-
пульсов на выходах схем совпадения в режиме скользящего окна.
Рассмотренный цифровой фазовый дискриминатор используется в цифро-
вой системе ФАПЧ: на рис. 7.9 объект управления ОУ является подстраиваемым
генератором. Если значения фг фазы подстраиваемого генератора меняются дис-
кретно во времени, то дискретный элемент в схеме (рис. 7.13) может быть выне-
сен на вход сравнивающего устройства.
В этом случае линеаризованная структур-
ная схема цифровой системы ФАПЧ принимает вид, изображенный на рис. 7.14.
Рис. 7.14
На рис. 7.14 обозначено: 5Д - крутизна дискриминационной характеристики
дискриминатора; K\(z) - передаточная функция, равная произведению передаточ-
ных функций цифрового фильтра ЦФ и объекта управления ОУ (подстраиваемого
генератора).
Анализ данной системы (рис. 7.14) производится как анализ любой им-
пульсной системы. В частности, передаточная функция от воздействия Х(/) (<рвх(0)
к ошибке слежения x(f) (А<р(/)) имеет вид
1
(и) =
(7.11)
ПРИЛОЖЕНИЯ
Приложение А
КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ МАТРИЦ
А.1. Определения и обозначения
Матрицей А = I размером т х п называют таблицу чисел, состоящую из
я/ *
т строк и п столбцов; индекс i указывает номер строки, а индекс J - номер столб-
ца. Числа (т.е. элементы) матрицы могут быть вещественными или комплексны-
ми. Рассмотрим матрицу с вещественными элементами:
Л12 — а1п
а21
а22 — а2и
&т2 •" &тп
Если т - п = 1, т.е. матрица имеет только один элемент, то она называется
скаляром.
Матрицу размером т х 1 называют матрицей-столбцом или вектором-
столбцом:
Матрицу размером 1хл называют матрицей-строкой или вектором-
строкой:
W = [wj w2...wj.
Если т = п, то матрицу называют квадратной. Квадратную матрицу, у кото-
рой все элементы равны нулю, кроме элементов, стоящих на диагонали (т.е.
а- = 0 при i Ф j) называют диагональной.
В приложениях введены собственные обозначения величин.
159
Диагональную матрицу, в которой al} = 1, z = 1, п называют единичной'.
Матрицу произвольных размеров, все элементы которой равны нулю, назы-
вают нулевой и обозначают просто 0.
Если существует матрица А = [ау ] размером т х п, то матрицу Ат = [л «]
размером п х т называют транспонированной по отношению к матрице А. То
есть операция транспонирования заключается в перестановке элементов таким
образом, что элементы z-oro столбца исходной матрицы становятся элементами
z'-ой строки транспонированной матрицы.
Матрицу считают симметричной, если Ат = А, и кососимметричной, если
Ат = - А. В частности, диагональная матрица симметрична.
Следом квадратной п х п матрицы А называется сумма её диагональных
элементов:
п
trace А — V .
/=1
А.2. Сложение и умножение матриц
Матрицы одинаковых размеров можно складывать. Элементы матрицы
С = А + В являются суммами элементов слагаемых, стоящих на тех же местах:
у
Равенство А = В означает, что а у = by.
J &
Умножение матрицы на число X означает, что все элементы матрицы ум-
ножаются на число X, т.е. ХА — [Х<7;/- J.
Умножение матрицы А размером тх х щ на матрицу В размером т2 х п2
(число И] столбцов А совпадает с числом т2 строк В) позволяет получить матри-
цу С размером т} х п2, элементы которой
160
I-'ели nl * m2, то умножение невозможно.
Для умножения матриц не справедлив коммутативный закон, т.е.
АВ * ВА.
Приведём частные случаи общего правила умножения.
Умножение матрицы на единичную (их размеры одинаковы) сохраняет её
неизменной:
1А = А1 = А.
Произведение матрицы А размером тх п на вектор-столбец U размером
п
их 1 даёт вектор-столбец Vразмером т х 1, элементы которого V,- = 2_.аци»•
Произведение вектора-строки UT размером 1хт на матрицу А размером
т
тхп даёт вектор-строку W размером 1 х п, элементы которого w.
Произведение вектора столбца U размером п х 1 на вектор-строку VT разме-
ром 1 х п даёт квадратную матрицу А размером их п: UVT = А.
Произведение вектора-строки VT размером 1 х п на вектор-столбец U разме-
ром пх 1 даёт скаляр; такое произведение называют скалярным произведением'.
VTU = Vi«i + v2u2 + ... +v„w„.
Если АВ = ВА, то матрицы А и В называют перестановочными.
Операции сложения и умножения матриц, как и скалярных величин,
обладают сочетательным и распределительным свойством, т.е.
(АВ)С = А(ВС), (А + В)С = АС + ВС, А(В + С) = АВ + АС.
Справедливо правило транспонирования произведения:
(АВ)Т =ВТАТ,
распространяемое на любое число сомножителей: при транспонировании произ-
ведения сомножители переставляются в ооратном порядке, после чего каждый из
них транспонируется, например,
(ABC)T =CTBTAT.
Транспонирование суммы матриц даёт:
161
или
(А + В + С)т = Ат+ВТ+СТ.
А.З. Определитель и обратная матрица
Если А — квадратная матрица размером п х п, то её определителем считают
п
величину |A| = detA = Удл-Ау при любом /, где А,.- =(-1)'+у Ми - алгебраиче-
7=1
ское дополнение элемента. Здесь А/у — минор элемента а у, т.е. определитель квад-
ратной матрицы, получаемой из матрицы А вычеркиванием z-ой строки и /-го
столбца.
Отметим несколько важных свойств определителя. Определитель не меня-
ется при транспонировании. Если одна из строк матрицы состоит из нулей, то её
определитель равен нулю. Если в матрице есть две пропорциональные строки, то
её определитель равен нулю. Если одна из строк матрицы есть линейная комби-
нация её других строк, то определитель матрицы равен нулю.
Матрицу А называют невырожденной (несингулярной или неособенной), ес-
ли её определитель не равен нулю det А * 0, в противном случае матрицу А назы-
вают вырожденной (сингулярной или особенной).
Любая невырожденная матрица имеет обратную матрицу А 1, удовлетво-
ряющую тождеству
Обратная матрица вычисляется по формуле
Так, для матрицы второго порядка
имеем
а21а12>
Ап — #22» А]2 --#21» ^21 - “ °12> ^22 “ а11 •
162
Таким образом, обратная матрица
1
Н
al 1а22 -а21д12
При обращении матриц справедливо тождество
(АВС)'1 = С-1В",А"’,
распространяемое на любое число сомножителей, если каждый из них является
невырожденной матрицей.
Действительную квадратную матрицу S, удовлетворяющую условию
S-1 = ST, называют ортогональной. Определитель ортогональной матрицы
Si = ±1.
А.4. Блочная матрица
Любая матрица А может быть произвольным образом разбита на прямо-
угольные блоки, каждый из которых является матрицей, называемой также под-
матрицей относительно исходной матрицы А. Например,
Матрицы могут перемножаться поблочно, причём если
то
C = AB = [Cft] =
т.е. применяется то же правило, что и при поэлементном перемножении (с соблю-
дением ограничений по размерам перемножаемых блоков).
163
А.5. Ранг матрицы
Пусть дана матрица A = |afy], содержащая т строк и п столбцов, причём
числа тип никак не связаны между собой. Столбцы этой матрицы, рассматри-
ваемые как /и-мерные векторы, могут быть линейно зависимыми. Максимальное
число линейно независимых столбцов матрицы А (т.е. число столбцов, входящих
в любую максимальную линейно независимую подсистему системы столбцов),
называется рангом этой матрицы.
Подобным же образом строки матрицы А можно рассматривать как
«-мерные векторы. Доказано, что ранг системы строк матрицы равен рангу систе-
мы её столбцов, т.е. равен рангу этой матрицы.
На практике часто используют ещё одну форму определения ранга матрицы.
Рангом матрицы А называется число, равное наибольшему из порядков отличных
от нуля миноров, или, что то же самое, наибольшему числу строк (столбцов) не-
особенной квадратной подматрицы, которую можно выделить в А. Для ранга мат-
рицы принято обозначение rank А.
А.6. Дифференцирование и интегрирование, матричная экспонента
Если элементы матрицы А зависят от скалярного аргумента /, то
Матричное дифференциальное уравнение
d_
dt
Ф = АФ,
где А = к л I - заданная квадратная матрица, а Ф = [фй. ] - искомая, эквивалентно
системе уравнений относительно столбцов Ф* матрицы Ф:
или
d
Если элементы матрицы А не зависят от времени (А = const), то решение
исходного матричного дифференциального уравнения с начальным условием
164
Ф(0) = I определяет неособенную матрицу еА/, называемую матричной экспо-
нентой. Существует несколько способов её вычисления. Укажем лишь три из них.
Первый способ основан на вычислении по определению. Элементы А?го
столбца матрицы е , обозначаемые удовлетворяют системе уравнений с
начальными условиями <р^ (0) = 1, ф/Л(0) = 0, i*k. Эта система решается
произвольным способом, например, сведением к одному уравнению.
Рассмотрим конкретный пример. Пусть:
,П “ Ф21> Ф11(0)-1> ~3~-Ф22> Ф12(0)~0»
at at
“ = -®2фц> Ф21(°) = 0, = -со2ф12, ф22(0) = 1.
at at
Решение этой системы даёт
"ф11 (0
Ф21(0
<Р12(0
COSCO/
smeof
cosmco/ cos со/
Второй способ основан на использовании преобразования Лапласа. Приме-
няя к исходному матричному дифференциальному уравнению преобразование
Лапласа и учитывая теорему дифференцирования (2.12), получим:
рФ(р) = АФ(р) + Ф(0).
С учётом начального условия Ф(0) = I, найдём решение
еА/ = Г' {[pl - А]"1
Пусть А — та же что и в предыдущем примере. Тогда
[pl - А]4
165
Используя таблицу преобразований Лапласа (приложение Б), имеем
— г = cos со/, Е~ < —-----~> = sinco/,
2 1 I _2 . „2 I
откуда вновь следует результат предыдущего примера.
Ещё один способ основан на вычислении матричной экспоненты с помощью
степенного ряда:
-AV
п!
Такой способ вычисления матрицы eAt для конкретного t и требуемой точ
ности в настоящее время реализуется с помощью ЭВМ.
А.7. Квадратичные формы
Бели А — вещественная симметричная матрица, a U — вектор-столбец, то
f (и) = Ur AU называют квадратичной формой с матрицей преобразования А.
Квадратичная форма Ди) считается положительно определенной или отри-
цательно определенной, если соответственно
причём f (и) - 0 при U = 0.
Квадратичная формами) положительно определена, если все главные мино-
ры матрицы А - положительны, т.е.
°12
166
Приложение Б
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА НАИБОЛЕЕ ЧАСТО
ВСТРЕЧАЮЩИХСЯ ФУНКЦИЙ
Все функции предполагаются равными нулю при t < 0.
167
Приложение В
ПОНЯТИЕ КОМПЛЕКСНОГО ЧИСЛА И КОМПЛЕКСНОЙ
ФУНКЦИИ ДЕЙСТВИТЕЛЬНОГО АРГУМЕНТА
Комплексными числами называют выражения вида а +jb, где а и b - дейст-
вительные числа, j- так называемая мнимая единица (число, квадрат которого
равен - 1, т.е. j — - 1). Число а называется действительной частью комплексного
числа z=a +jb и обозначается символом а — Re z, а число b - его мнимой частью и
обозначается символом b — Imz.
Действительные числа — частный случай комплексного числа.
Два комплексных числа = ц + jfy и z2 = + jb2 равны только тогда, ко-
гда равны их действительные и мнимые части, т.е. zv -z2 лишь при а} ~а2,
=Ь2.
Геометрически каждое комплексное число z = a + Jb изображается точкой
плоскости (х,у) с декартовыми координатами х = а и у= b (рис. В.1). Число z — О
ставиться в соответствие началу координат данной плоскости. Такую плоскость
принято называть комплексной плоскостью, ось абсцисс — действительной, а ось
ординат - мнимой осью комплексной плоскости. При этом устанавливается одно-
значное соответствие между множеством всех комплексных чисел z = a + jb и
множеством свободных векторов, проекции х и у которых на оси абсцисс и орди-
нат соответственно равны а и Ь.
ТА
х
Рис. В. 1
Если полярные координаты точки, изображенной на рис. В.1, обозначить г
и ср, и использовать связь между декартовыми и полярными координатами
(х = г cos ф, у— г sin ср), то комплексное число z = а + jb можно представить в
тригонометрической (или полярной) форме:
z = r(cos(p + jsincp),
где г = VаК bz~ <
z, ср = arctg(Z>/а).
— модуль комплексного числа z, (p = argz — аргумент
168
От тригонометрической формы, используя формулу Эйлера
«
еу<₽ = cos <р + j sin ф,
легко перейти к показательной форме записи комплексного числа:
z = ге7ф =
zleyarg2
Комплексное число z = a — jb называется комплексно сопряженным числу
z = a +jb. Легко видеть, что комплексно сопряженные числа имеют один и тот же
модуль, а значения их аргументов различаются знаком.
Арифметические действия над комплексными числами производятся по
обычным правилам действий над многочленами с учетом условия у — — 1. Суммой
двух комплексных чисел zx = at + jbj и z2=a2 + jb2 будет комплексное число
z = (flj + а2 ) + у(^1 + ) с реальной частью а = + а2 и мнимой b = Ьх + Ь2. Опе-
рация вычитания определяется как операция обратная сложению. Комплексное
число z - а + jb называется разностью zl=ai + jb^ и z2 — а2 + jb2, если
а - - а2, b = b} - . Отмеченное выше соответствие между множеством всех
комплексных чисел и плоскими векторами позволяет отождествить операции
сложения и вычитания комплексных чисел с соответствующими операциями над
векторами (правило треугольника, правило параллелограмма).
Произведение и деление комплексных чисел легче делать, когда они пред-
ставлены в показательной форме:
^(argz,-^), I ЬО те
argz = argzj - argz2,
У (arg z, +arg z2 )
т.е.
z2
Рассмотрим теперь более общий случай. Комплексная величина
z-a + jb
(а, b — действительные числа) называется комплексной функцией действительно-
го аргумента I, если каждому из значений t соответствует определенное значение
z (т.е. определенное значение а и определенное значение Ь). При этом каждая из
величин а, b является действительной функцией аргумента I, т.е. а — a(t), b = b(t).
Понятие комплексной функции действительного аргумента широко исполь-
зуется в теории автоматического управления и радиотехнике. При спектральном
анализе сигналoi
и систем в качестве действительного аргумента выступает час-
тота со. Саму комплексную функцию представляют в форме
z(jo) =4Z(co) + jb(o),
169
или
z(» - |z(> )|e > г<м = ,
где «(co) = Re z( Jco) — вещественная (действительная) часть функции z(Jco),
jo) = Imz(jco) - мнимая часть функции z(Jco), U(со) = |z(Jco)| - а2(о) л-b2 (о)
, z . x z /. ч #(co) , .. .
- модуль функции z(jco), ф(со) = argz(jco) = arctg-----аргумент функции z(jco).
«(co)
Принятое обозначение аргумента Jco (а не просто co) функции z(/co) указыва-
ет на то, что функция z(/co) - комплексная и содержит в общем случае как вещест-
венную, так и мнимую части.
Каждому значению со функции z{jo) на комплексной плоскости соответст-
вует вектор с определенными координатами. Например, при со = coj построим век-
тор с координатами «(со t) - по оси действительных чисел и Z>(co j) - по оси мни-
мых чисел (рис. В.2). При со = со2 (со2 > tOj) получим уже другой вектор. Далее
изменяя со от 0 до + со, получим целое семейство векторов (в общем случае полу-
чим бесконечное число векторов). Таким образом, мы пришли к понятию годо-
графа комплексной функции. Годографом называется геометрическое место то-
чек конца вектора z(/co) на комплексной плоскости с координатами Rez(Jco),
Im z( jo) при изменении частоты со от 0 до + оо. На рис. В.2 годограф показан
пунктирной линией.
Imz(/co ) а
О а(о i) «(со 2) \ Rez(/co)
со —> оо
Рис. В.2
Помимо годографа для изображения комплексной функции могут использо-
ваться и другие способы. Часто строят зависимости t/(co) = |z(Jco)[ и
<p(cn) =s arg z(Jco) от переменной со. Если под z(Jco) подразумевается спектральная
плотность (комплексный спектр) сигнала, то U(o) называют амплитудным спек-
тром, а ср(со) - фазовым спектром.
170
Приложение Г
КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ СЛУЧАЙНЫХ ПРОЦЕССОВ
При анализе систем наиболее часто встречается ситуация, когда детермини-
рованное описание сигналов невозможно. Тогда на смену ему приходит вероятно-
стное или статистическое описание.
Отличительной чертой случайного сигнала является то, что мгновенные
значения его заранее не предсказуемы. Однако изучение такого сигнала с помо-
щью аппарата теории вероятностей позволяет выявить ряд характеристик доста-
точно точно описываемых в вероятностном смысле. Например, даже предвари-
тельный анализ флюктуаций (случайных отклонений) напряжения резистора по-
зволяет судить о том, что чем больше отклонения, тем реже они наблюдаются.
Необходимость вероятностного описания возникает в случае, если физиче-
ская система, порождающая случайный сигнал, представляет собой объединение
очень большого числа мелких подсистем, совершающих некоторые индивидуаль-
ные движения, слабо зависимые друг от друга.
Анализом случайных сигналов и процессов занимается теория случайных
процессов. Она является быстро развивающейся ветвью теории вероятностей. В
основе последней лежит понятие случайного события и соответствующего ему
понятия вероятности.
Под событием понимают любой факт или явление, которое происходит или
может произойти в результате опыта, наблюдения или испытания. Под опытом
(наблюдением или испытанием) понимают осуществление некоторого комплекса
условий, в которых наблюдается случайный процесс или система (явление). Одни
события происходят чаще, другие реже, т.е. каждое событие обладает определен-
ной степенью возможности. Для количественного сравнения между собой собы-
тий по степени их возможности, каждому событию сопоставлено вещественное
число, которое тем больше, чем более возможно событие. Это число обозначается
Р(А) и называется вероятностью события А. Вероятность обладает рядом
свойств, в том числе: 0 < Р(А) < 1, причём нижняя граница соответствует вероят-
ности невозможного события, а верхняя - достоверного события; если Л, и Aj —
несовместные события, то Р(А{ + А ) = P(At) + Р(А:); вероятность появления
хотя бы одного события из полной группы событий (полную группу образуют со-
бытия Ai,A2,...,An,
хотя бы одно из которых обязательно происходит в опыте)
равна 1:
P(^i + А2 +... + Ап ) — 1.
Принято оценивать вероятность события относительной частотой благопри-
ятных исходов. Если произведено N независимых испытаний, причём в М из них
171
наблюдалось событие А, то эмпирическую (выборочную) оценку вероятности
Р(Л) можно рассчитать по формуле
Р» (Л)
М
N '
Отталкиваясь от введенных понятий, рассмотрим последовательно случай-
ную величину и её характеристики и после этого перейдём к понятию случайного
процесса и способам его анализа.
Г.1. Определение случайной величины, закон её распределения
и числовые характеристики
Случайной принято называть величину, которая в результате опыта прини-
мает то или иное возможное значение, априори неизвестное, меняющееся от од-
ного испытания к другому и зависящее от ряда случайных или непредсказуемых
факторов.
Например, случайной величиной является число отказавших элементов в
приборе, состоящем из пяти элементов (возможные значения этой случайной ве-
личины 0, 1,2, 3, 4, 5). Показания вольтметра при измерении напряжения тепло-
вого шума в электрической цепи также является примером наблюдения случайной
величины (если вольтметр нецифровой, то возможные значения случайной вели-
чины (напряжения) образуют непересчитываемое множество).
Математическое описание случайной величины X сводится к перечислению
всего множества возможных значений (х)=|х|, х2 г.., } и определению распре-
деления вероятностей {/?}= {р\,Рт.->—>Рп} на множестве {х}. Это распределение
характеризует частоту появления в опыте (наблюдении) различных значений X из
множества {х}.
Распределением, или законом, случайной величины X называется вполне
определенное соотношение между возможными её значениями xi,x2,—>xn и со-
ответствующими им вероятностями рх, р2,-.., рп- При этом термин “распределе-
м. И
ние” связан с нормировкой суммарной вероятности V pt = 1: “единица” вероят-
ности распределяется между различными значениями X], х2,..., хп.
Указанное свойство нормировки вытекает из определения случайной вели-
чины: в результате опыта случайная величина принимает обязательно только одно
из возможных своих значений.
Принято задавать закон распределения произвольной случайной величины
или в виде функции распределения или в виде плотности распределения.
Функция распределения, как правило, обозначается F(x) и определяется по
формуле
172
F(x) = P{-¥ < x}
(Г.1)
т.е. равна вероятности того, что случайная величина X в результате опыта примет
значение, меньшее х (х является аргументом функции F(x)). Так как F(x) - вероят-
ность, то 0<F(x)<I. Кроме этого, согласно определению случайной величины
lim F(x) = l, lim F(x) = 0 и для Vx2 >xi выполняется F(x2)> F(xj).
Г—>+00 x—>“00
Плотность распределения (или плотность вероятности), как правило,
обозначается fix) и определяется по формуле
(Г.2)
Согласно свойствам F\x) плотность распределения обладает следующими
свойствами: /(х) > О как производная от неубывающей функции F(x) и свойством
нормировки J f (x)dx = F(+oo) - F(-oo) = 1. Интегрирование (Г.2) позволяет нахо-
дить F(x) по заданнойДх):
X
F(x) = $f(x)dx.
-00
(Г.3)
С использованием F(x) и fix) рассчитывается вероятность попадания слу-
чайной величины в заданный конечный интервал [а,Р):
₽
Р{а < X < 0} = /•([!) - F(a) = ]f(x)dx.
(Г.4)
Более полный и наглядный анализ случайной величины производится с ис-
пользованием числовых характеристик. К ним прежде всего относится математи-
ческое ожидание случайной величины и, кроме этого, дисперсия и моменты раз-
личных порядков.
Математическое ожидание случайной величины определяется следующим
образом:
+оо
м{х}= р/(х)А.
(Г.5)
Часто операцию вычисления математического ожидания рассматривается в
более широком смысле. Так, математическое ожидание произвольной функции
ij(A') от случайной величины вычисляется по формуле
173
(Г.6)
+00
Здесь и в тексте учебного пособия символ М{-} обозначает операцию математи-
ческого ожидания над величиной, указанной в фигурных скобках. Сама операция
математического ожидания по существу есть осреднение рассматриваемой вели-
чины с соответствующей плотностью вероятности.
Дисперсия произвольной случайной величины определяется по формуле
( 1 +о°
D(X) = МрГ - М {X })2 }= j(x - М {X })2 f(x)dx.
—00
(Г.7)
Размерность дисперсии - квадрат размерности случайной величины. Поэто-
му говорят, что дисперсия характеризует мощность или интенсивность случайных
флюктуаций (отклонений).
Обобщением понятий математического ожидания случайной величины и
дисперсии являются понятия начального момента q-ro порядка (q - 1,2,...)
(Г.8)
и центрального момента q-ro порядка (q = 1,2,...)
z \ +О0
н, = м{рг-М{Х})’}= J(x - м{А-})’/(х)А.
(Г.9)
Из сравнения (Г.5) и (Г.8), а также (Г.7) и (Г.9) легко видеть, что М{Л}= vb
a Z7(^V) Р2 • “*
После определения основных числовых характеристик заметим, что наибо-
лее часто в практических задачах встречается нормальное распределение случай-
ной величины. Случайная величина распределена нормально, если её плотность
распределения имеет следующий вид:
Здесь и далее математическое ожидание и дисперсия имеют обозначения:
(Г. 10)
174
м{х} = т„ О.Х) = а2.
Стоит заметить, что нормальное распределение часто называют гауссовым
(гауссовским) распределением, а нормальную случайную величину - гауссовской
случайной величиной.
Г.2. Понятие многомерной случайной величины
На практике чаще всего сталкиваются с задачами, в которых результат опы-
та описывается двумя (и более) случайными величинами. В этом случае говорят о
двумерной или «-мерной случайной величине, или о системе случайных величин.
Например, точка попадания пули в мишень определяется не одной случай-
ной величиной, а двумя: абсциссой и ординатой.
Ограничимся рассмотрением системы из двух случайных величин Хи Y.
По аналогии с одномерной случайной величиной наиболее часто использу-
ются два способа задания системы: с помощью многомерной функции распределе-
ния и многомерной плотности распределения.
Функцией распределения системы двух случайных величин (ЛГ, У) называется
вероятность совместного выполнения двух неравенств, X < х и Y < у:
F(x, у) = Р{(Х < ДГ < /)}.
(Г. 11)
Двумерная функция распределения обладает следующими свойствами:
а) неубывающая функция, т.е. F(x2, у) > F(x}, у) при х2 > Xj и
F(x, у2 ) > F(x, yt) при у2 > л;
б) она связана с одномерными функциями F(x) и F(y) следующим образом:
F(x,+oo) = Р{(Х < хХк < +оо)} = Р(Х < х) = F(x)
(Г. 12)
и аналогично F(+oo, у) - F(y);
в) F(-oo, у) - F(x,-oo) = F(-oo,-oo) = 0;
г) F(+co,+oo) = 1.
Многомерная (двумерная) плотность распределения обозначается j(xy) и
определяется как смешанная производная:
У) =
d2F(x, у)
dxdy
(Г. 13)
Она обладает следующими свойствами:
«) /(х,у)>0;
175
б) двумерная плотность распределения связана с одномерными плотностями
-НЮ
распределения fix) и Ду) следующим образом J f (х, y)dy = f(x) и аналогично
J/(*> y}dx = f(y);
в) J J/(x,y)dxdy = 1 - свойство нормировки;
—00 —00
г) двумерная плотность распределения отвечает теореме умножения плот
ностей:
Ж У) = х) или f{x, у) = f(y)f(x/y). (Г. 14)
Здесь f(yjx) и f(x/y) - условные плотности распределения. Отсюда следует, что
X vl Y взаимозависимы друг от друга. В частном случае независимых случайных
величин X и У будем иметь f(x/y) = f(x) и f(yjx)=f(y). Следовательно, вы-
полняется равенство
/(X, V) = f(x)f(y).
(Г. 15)
Равенство (Г. 15) есть признак статистической независимости двух случай-
ных величин.
Выражение (Г. 13) позволяет получить ещё одну формулу связи F(xy) и
fay):
(Г. 16)
С использованием F(xy) и fix у) рассчитывается вероятность попадания
случайной величины в определенную область двумерного пространства
< Х<В_. а., <У <В„:
Р[ах <X<p„fay <Y<&„ }}=F@x,fiy)-F(ax,Py)~F®x,ay) +
+ F(ax,ay)= j jf(x,y)dxdy.
(Г. 17)
К числовым характеристикам многомерной случайной величины относят
моменты различных порядков. Начальный момент порядка (к+s) системы двух
случайных величин определяется выражением
176
(Г. 18)
. +00 +00
vM=Mk*У J = J \xk ys f (x, y)dxdy.
-00 —00
Центральный момент порядка (к+s) системы двух случайных величин оп-
ределяется выражением
где тх и ту — соответственно математические ожидания случайных величин X и Y.
Легко видеть, что числовые характеристики входящих в систему случайных
величин могут быть определены по (Г. 18) и (Г. 19). Так, математическое ожидание
(Г.5) и дисперсия (Г.7) случайной величины X определяются по формулам
тх = М{%} = v]0 и <у2 -D(x) = p2,o- Действительно, если рассматривать матема-
тическое ожидание, то, используя свойство б) для^х^), получим:
Особую роль как характеристика системы играет центральный смешанный
момент второго порядка щд = называемый корреляционным моментом'.
f \ +оо +оо
Rxy =Н1,1 = М^Х - т (у ~ т уЦ= { J (х - тх )(у - ту )/(х, y)dxdy. (Г.20)
Корреляционный момент Rxv помимо рассеивания величин Хи К описывает
•Л
ещё и степень статистической связи между ними. Стоит отметить, что корреляци-
онный момент R - 0 в случае независимых случайных величин X и Y. Действи-
тельно, согласно (Г.20) и (Г. 15) получим:
ту )/ (x)f(y)dxdy = j(x - тx)f (x)dx J(y - my)f(y)dy = 0.
Обратное утверждение в общем случае неверно, т.е. две некоррелированные
(R =0) случайные величины могут быть зависимыми. Исключение из этого
правила — случай двух нормальных случайных величин X и Y (они имеют плот-
ность распределения (Г. 10)), когда понятия .коррелированное™ и зависимости
। ождественны друг другу.
177
Корреляционный момент имеет связь с начальным смешанным момен-
том второго порядка — ковариационным моментом Кху
Rxy К ху тхту,
(Г.21)
где
= М{ЛУ}= J Jxj/(х,y)dxdy.
Г.3. Понятие случайного процесса
Случайный процесс - это процесс изменения случайной величины во време-
ни. Будем его обозначать X(t). Случайным процессом является, например, сигнал
на выходе генератора шума. Если произвести N независимых наблюдений, то
можно получить N независимых реализаций случайного процесса. Обозначим
реализации xi(z), x2(t),..., хЛ{/), где 0 < t < Тн. Здесь Гн- интервал наблюдения.
Другое определение случайного процесса основано на понятии случайной
функции. Случайной функцией называется функция, которая в результате опыта
может принять тот или иной конкретный вид, неизвестно заранее - какой именно.
Конкретный ви,
принимаемый случайной функцией в результате опыта, называ-
ется реализацией. Случайная функция времени называется случайным процессом.
На рис. Г.1 приведены на одном графике несколько из N реализаций слу-
чайного процесса. Каждая реализация xt{t) представляет собой детерминирован-
ную функцию времени. Зафиксируем некоторый момент t=tjи посмотрим, во что
превратится при этом случайный процесс X(f). Очевидно, он превратится в слу-
чайную величину в обычном смысле слова. Принято называть эту случайную ве-
личину сечением случайного процесса, соответствующим данному tj. Если провес-
ти “сечение” семейства реализаций при данном tj (рис. Г. 1), то мы получим N зна-
чений, принятых случайной величиной X(tj) в N опытах: |rz(/ )|= xi(tj), x2(tj), ...,
Xfl(tj). Её плотность вероятности называют одномерной плотностью вероят-
ности процесса в момент времени Ц С помощью ^х,/,) по (Г.5) - (Г.9) определяют
числовые характеристики случайной величины %(/,).
Множество всех мыслимых реализаций случайного процесса (xz(z),z = 1,#},
N —> оо называют его ансамблем реализаций. Ансамбль реализаций несёт в себе
всю необходимую информацию о случайном процессе. Задать (определить) слу-
чайный процесс - это значит задать его ансамбль реализаций {xz(/)}. Кроме этого
задать случайный процесс можно через полный набор случайных сечений [X(t. )),
j = 1,оо на интервале наблюдений [О, Г,,]. Это вторая исчерпывающая форма мате-
матического описания случайного процесса.
178
Рис. Г.1
Оба перечисленных способа задания случайного процесса на практике, как
правило, не реализуемы, так как оперируют либо с бесконечно большим числом
реализаций, либо с бесконечно большим набором сечений. Поэтому для описания
случайного процесса используются другие методы, в частности, основанные на
использовании многомерных плотностей распределения и функциях распределе-
ния.
Г.4. Распределение случайных процессов
Основываясь на понятии системы случайных величин Xt, Х2, ..., Хт опреде-
лим произвольный случайный процесс его многомерной функцией распределения
или соответствующей ей многомерной плотностью вероятности
(Г.24)
при достаточно большом значении порядка п. Любая из этих статистических ха-
рактеристик содержит в себе всю необходимую информацию о рассматриваемом
случайном процессе в пределах заданного интервала наблюдений при п—>оо.
Здесь п — суммарное число сечений X(t Л — Х . случайного процесса j = 1, п.
Используя (Г.24) для рассматриваемого случайного процесса можно запи
сать выражения, аналогичные (Г. 16), (Г. 17):
Л
п >Ч>€2
, tn px]dx2 ' • • dxn, (Г.25)
179
/>{(«, £ <V(Z„ ) < 4„ )) =
Z>i b2 bn
«I «2 an
(Г.26)
Кроме этого, используя (Г. 12), можно определить многомерную функцию
распределения (« - 1) порядка по функцию распределения w-ого порядка:
Таким образом, зная многомерную функцию распределения или многомер-
ную плотность распределения для произвольного случайного процесса, мы можем
рассчитать вероятность сколь угодно сложного события и получить любую стати-
стическую характеристику меньшего порядка от и -1 до 1 включительно.
Если «-мерную функцию распределения можно представить через произве-
дение одномерных функций распределения:
п
*х2*’">хп»?1 »^2»—Ди)- J”J^*1 (хк ’^к )’
к=\
(Г.28)
или соответствующая «-мерную плотность вероятности выражается в виде произ
ведения одномерных плотностей
и
п * > ^2 п ) J J f\ (хк ’
(Г.29)
то по аналогии с (Г. 15) говорят о случайном процессе с независимыми отсчётами
в совокупности, или независимом случайном процессе.
Г.5. Моментные функции случайных процессов
Исследование случайного процесса удобно производить с помощью момен-
тов различного порядка, вычисляемых для различных сечений случайного про-
цесса. Поскольку в общем случае эти моменты зависят от временных аргументов,
они получили название моментных функций. Определение этих функций анало-
гично определению числовых характеристик (начальных, центральных моменте!
и т.д.) для многомерной случайной величины (Г. 18) - (Г.21).
Начальным смешанным моментом, или начальной моментной функцией
случайного процесса порядка (к} + к2 +...+ кп) называется величина
180
.=МИ ^xkl
+00 +00 +00
—00 ”00 —со
(Г.30)
Центральным смешанным моментом, или центральной моментной функци-
ей случайного процесса порядка (£j + k2 +...+ kn) называется величина
Ш1Л....Л<'|Зг.-Л) = М|Х(Г,) - m(tt ))*' ...(Х(Г„)- «(?„))*" )=
(Г.31)
где m(t}) = M{x(/j )},..., m(tn ) = M{vV(/rt )} - математические ожидания сечений.
На практике, как правило, используются моментные функции порядка, не
превышающего второй. К ним относятся:
- математическое ожидание процесса
+00
m(f) = М{%(/)} = Jxf(x,/)с£х,
***оо
(Г.32)
определяемое как среднее значение процесса X(f) в текущий момент времени t
(усреднение проводится по всему ансамблю реализаций);
- дисперсия
z X +00
о2 (0 = МрГ(О - m(t))2 }= J(x - w(/))2 /(х, t)dx
(Г.ЗЗ)
позволяет судить о степени разброса мгновенных значений, принимаемых от-
дельными реализациями в фиксированные моменты времени /, относительно
среднего значения;
- ковариационная (или автоковариационная) функция есть смешанная на-
чальная моментная функция второго порядка, определяемая аналогично (Г.22):
+оо +оо
^(^1 >^2) = ^1,1 (^1 ) = ^{-^(^1 )} = / \х\х2/2^х\ух2’>^\^2^х\^х2> (Г.34)
- корреляционная (или автокорреляционная) функция определяется сме-
шанной моментной функцией вида
181
Ml. <2 ) = Ни ('., <2 ) = м|х(»,) - m(t,))’ (X(t2 ) - т(Г2 ))' }=
= J J(^l -m(»l)Xx2 -"’('2))/2(Ibx2;'l>'2)Al*2-
—CO •j»* 00
(Г.35)
Из определения корреляционной функции (Г.35) следуют её свойства: свойство
чётности R(tx,t2) = R(t2,tx) и ^(/j,r2)|/=/ м = o2(z). Кроме этого, между функ-
1 2
циями /?(/], Г2) и K(tltt2) существует связь, аналогичная (Г.21):
/?(/1, t2 ) = K(t2, ) - m(tx )m(t2 ).
(Г.36)
Из (Г.36) следует, что R(t itt2) = K(t2,tx) для случайных процессов с т(/) = 0 для
vre[o,rj.
Г.6. Стационарные случайные процессы
«
*
Стационарными случайными процессами принято называть случайные про-
цессы, статистические характеристики которых одинаковы для всех сечений.
Случайный процесс X(t) называется стационарным в узком смысле, если все
конечномерные функции распределения вероятностей (Г.23) любого порядка ин-
вариантны относительно сдвига по времени, т.е. при любых п и At справедливо
равенство
Fn(^1»^2’»п’’^2(xj,х2,...,+ At,t2 ~¥At,...,tn + А/). (Г.37)
Это означает, что два процесса X(t) и X(t + А/) имеют одинаковые вероятно-
стные характеристики при любом А/. Стационарные процессы, не удовлетворяю-
щие условию (Г.37), называются нестационарными в узком смысле.
Очевидно, что аналогичное (Г.37) равенство должно выполняться для
плотностей вероятностей (Г.24)
(Г.38)
а также для моментных и корреляционных функций.
Стационарный в узком смысле случайный процесс, в отличие от нестацио-
нарного, ведёт себя однообразно во времени. На рис. Г.2 приведены примеры реа-
лизаций нестационарного (рис. Г.2, а) и стационарного случайных процессов (рис.
Г.2, б).
Стационарные случайные процессы аналогично установившимся детерми-
нированным процессам получаются в установившемся режиме работы системы
при неизменных внешних условиях. Стационарные процессы являются частным
182
случаем более широкого класса нестационарных процессов. Примером нестацио-
нарного процесса может служить любой случайный процесс в переходном режи
ме работы системы (например, случайный процесс на выходе инерционной сис-
темы в начальный период при воздействии на вход системы даже стационарного
случайного процесса).
Рис. Г.2
Согласно определению стационарности (Г.38) можно записать:
f(x', ) = Дх; /j - гj) = fx (х),
(Г.39)
f2 (*i»xz ;'i , h)=fi (-«i - х2 'А -*\>*2 - * ।)=Л (*i > *2;т) >и т-д-
Здесь т = t2 Таким образом, для стационарного в узком смысле случайного
процесса «-мерная плотность вероятности, «-мерные моменты и корреляционные
функции зависят не от п, а от п - 1 моментов времен, так как один из выбранных
моментов времени можно всегда принять за начало отсчёта времени (например,
положить tj = 0).
Из первой формулы (Г.39) видно, что одномерная плотность вероятности
стационарного в узком смысле случайного процесса вообще не зависит от време-
ни. Поэтому одномерная плотность вероятности и одномерные моменты не учи-
тывают временных характеристик стационарного процесса. Процесс, протекаю-
щий в несколько раз быстрее или медленнее, будет иметь одну и ту же одномер-
ную плотность вероятности. То есть описание процесса с помощью одномерной
плотности вероятности является неполным. Математическое ожидание (Г.32) ста-
ционарного в узком смысле случайного процесса согласно (Г.39) не зависит от
времени:
+00
т = М{Х(/)} ~ (x)dx.
~оо
(Г.40)
Ковариационная К(f,, t2 ) и корреляционная R(tx, t2 ) функции зависят лишь
t
ft
от разности аргументов т = t2 - /1:
183
+00 +00
R(x) = M{(X(0 - m\X(t + т) - /»)} = J J (xj - m\x2 - m)f2 (xj, x2; x}dx} dx2 -
—00
(Г.41)
= К(т)-т2.
Дисперсия стационарного в узком смысле случайного процесса
= я(0)
(Г.42)
постоянна и равна значению корреляционной функции при т = 0.
При решении некоторых практических задач многомерные плотности веро-
ятности не рассматривают, а ограничиваются анализом математических ожиданий
и корреляционной функции. В связи с этим введено понятие стационарности в
широком смысле.
Случайный процесс X(t) с конечной дисперсией (дисперсия постоянная) на-
зывается стационарным в широком смысле, если его математическое ожидание
постоянно (не зависит от времени), а ковариационная функция инвариантна отно-
сительно сдвига во времени (зависит только от разности аргументов т -12 - ):
m(t) = const, K(tx ,t2) = K(t2 - tx) = K(t). (Г.43)
Согласно (Г.40) и (Г.41) следует, что случайные процессы, стационарные в
узком смысле, всегда стационарны и в широком смысле. Обратное утверждение в
общем случае неверно. Исключение составляют гауссовские стационарные про-
цессы (их сечения имеют нормальную плотность распределения (Г. 10)). Как будет
показано далее (см. п. Г. 13) их многомерная плотность вероятности (Г.38) опре-
деляется математическим ожиданием и корреляционной функцией. Поэтому для
гауссовских случайных процессов понятия стационарности в узком и широком
смыслах полностью совпадают.
Г.7. Эргодические процессы
В общем случае при математическом определении характеристик случай-
ных процессов, таких как математическое ожидание, дисперсия, корреляционная
функция и т.д., используется операция статистического усреднения, или усредне-
ния по ансамблю реализаций случайного процесса, которая обозначается М{.}.
То есть средние значения вычислялись “поперёк процесса” (рис. Г. 1). Оказывает-
ся, что для многих стационарных случайных процессов указанные характеристи-
ки можно получить путем осреднения соответствующих величин “вдоль процес-
са”, т.е. по одной реализации достаточно большой длительности. Стационарные
184
случайные процессы, для которых это справедливо, называются эргодическими
или говорят, что стационарный процесс обладает свойством эргодичности.
Стационарный случайный процесс называется эргодическим, если при оп-
ределении статистических характеристик усреднение по ансамблю реализаций
эквивалентно усреднению по времени одной теоретически бесконечно длинной
реализации. Свойство эргодичности присуще только стационарным процессам, а
возможность усреднения по времени может быть оправдана тем, что стационар-
ный случайный процесс протекает однородно во времени. Поэтому одна реализа-
ция достаточно большой продолжительности может содержать все сведения о
свойствах случайного процесса.
В соответствии с определением эргодического процесса соотношения
(Г.40), (Г.41) и (Г.42) эквивалентны следующим выражениям, в которых операция
усреднения по времени обозначена чертой:
x(f) = lim — \x(f)dt;
Т —>00 7* •
« jh О
(Г-44)
(Г.45)
1 ----\2
7?(0)~ lim — |lx(/) — x(t)l dt.
T ->oo T J x Z
« 0
(Г.46)
Выражение (Г.46) может быть преобразовано
/?(0)= lim —
Т ->оо Т
И 2 И
На практике временной интервал осреднения ТИ берут конечным, но по воз-
можности большим, так, чтобы получить наиболее точные оценки параметров
(Г.40) 4- (Г.42).
Если x(t) представляет собой электрический сигнал (ток или напряжение),
то x(t) — постоянная составляющая случайного сигнала, о2 = А(0) = x2(t) - (x(Z))2
- средняя мощность флюктуаций сигнала (относительно постоянной составляю-
щей х(/)).
185
Функции К(х) и R(t) характеризуют связь (корреляцию) между значения-
ми X(t), разделёнными промежутком т. Чем медленнее, плавнее изменяется во
времени х(/), тем больше промежуток т, в пределах которого наблюдается стати-
стическая связь между мгновенными значениями случайного процесса.
Стационарный процесс X(f) называется эргодическим в строгом смысле, ес-
ли с вероятностью единица все его вероятностные характеристики (плотности ве
роятности, функции распределения, моментные функции) могут быть получены
по одной реализации процесса, т.е. определяются осреднением по времени. Для
эргодичности в строгом смысле необходима стационарность процесса в узком
смысле.
Часто интересуются не всеми, а только отдельными характеристиками про-
цесса (в частности математическим ожидание процесса, корреляционной функци-
ей и т.д.). Ясно, что процесс может быть эргодическим относительно одной ха
рактеристики (параметра) и неэргодическим относительно для других. В связи с
этим вводится понятие эргодичности относительно отдельных характеристик
процесса. Так, стационарный случайный процесс X(t) обладает эргодическим
свойством относительно математического ожидания, если оно может быть опре-
делено по (Г.44). При этом он может быть стационарным лишь в широком смыс-
ле, а достаточным условием такой эргодичности является стремление к нулю кор-
реляционной функции (Г.41) при неограниченном росте временного сдвига
lim /?(т) = 0. Если случайный процесс обладает ещё эргодическим свойством от-
Т->00
носительно корреляционной функции (справедливо (Г.45)), то он уже должен
быть стационарным в узком смысле. В дальнейшем для упрощения случайный
процесс эргодический в строгом смысле будем называть просто эргодическим
случайным процессом.
Г.8. Спектральная плотность мощности случайного процесса
Как было сказано ранее, под случайным процессом X(f) можно подразуме-
вать множество (ансамбль) реализаций - функций времени. Каждая отдельная
реализация представляет собой детерминированную функцию, и к ней можно
применить прямое преобразование Фурье (2.39), т.е. вычислить её комплексную
спектральную плотность. Например, для &-ой реализации xk(t) получим:
+00
ЗД®) = dt.
(Г.47)
Так как реализации имеют различную форму, то им соответствуют различные
спектры. При изучении случайных процессов интересуются статистически усред-
ненными характеристиками. Вычислим среднее значение спектральной плотности
случайного процесса:
186
i+oo I +oo +oo
jX(t) e-^1 dt S = |м{Аг(/)}е->/ dt = ^m(t)e'jv>t dt.
—00 J —00 — 00
Отсюда следует, что усредненная спектральная плотность случайного про-
цесса представляет собой спектр его детерминированной составляющей (матема-
тического ожидания). Для центрированных случайных процессов (они характери-
зуются нулевым математическим ожиданием М {%(/)} = 0) получим
M{X(jco)} = 0. Таким образом, усреднённое значение спектральной плотности не
несёт никакой информации о флюктуационной, т.е. о случайной, составляющей
случайного процесса. Это говорит о том, что фазы спектральных составляющих в
различных реализациях случайны и независимы.
Можно, однако, ввести понятие спектральной плотности мощности случай-
ного процесса, поскольку мощность не зависит от соотношения фаз спектральных
составляющих. Введенная характеристика (спектральная плотность мощности
случайного процесса) будет описывать распределение по частотам мощности слу-
чайного процесса.
Выделим из ансамбля случайного процесса какую либо реализацию х&).
Ограничив её длительность конечным интервалом Т и применив к ней прямое
преобразование Фурье (Г.47), найдём её спектральную плотность XkT ( усо). Тогда
энергию рассматриваемого отрезка реализации согласно равенству Парсеваля
можно вычислить как
т
|хкт (J № ~
о
2л
(Г. 48)
где по аналогии с детерминированными сигналами характеристику |.А\г(усо)| для
к-й реализации можно рассматривать как спектральную плотность энергии этой
реализации.
Разделив эту энергию на Г, получим среднюю мощность к-й реализации на
отрезке Т:
(Г-49)
При увеличении длительности промежутка времени Т энергия отрезка реа-
лизации Экт неограниченно возрастает, а средняя мощность стремится к некото-
рому пределу. Совершив предельный переход Г —> со, получим:
187
»l(<)
2л
где функция
(»l2
2л
(<o)d(£),
пл / x 1- PCtrC/M
Wk (co) = hm 1-----1
(Г.50)
представляет собой спектральную плотность средней мощности рассматриваемой
Л-й реализации.
В общем случае величина Wk (со) должна быть усреднена по множеству реа-
лизаций.
Если ограничится далее рассмотрением стационарного и эргодического
процесса, то можно считать, что найденная по одной реализации (т.е. путем ус-
реднения по времени) функция Wk (со) характеризует весь процесс в целом. Опус-
кая индекс к, получаем окончательное выражение для средней мощности случай-
ного процесса:
1
X2 (/) =
2л
pF(co)Jco
(Г-51)
где спектральная плотность мощности
2
Hz(co)= lim
У
X т (J®)
(Г. 52)
Если рассматривается случайный процесс с ненулевым математическим
ожиданием, то спектральную плотность (Г. 52) следует представить в виде
IV (<о) = (х(Г))2 2п8(га) + W_ (со),
(Г.53)
где (со) - сплошная часть спектра, соответствующая флюктуационной состав-
ляющей процесса, 5(со) - дельта-функция.
Подстановка (Г.53) в (Г.51) и последующее интегрирование приводит к
сумме двух слагаемых, первое из которых есть мощность постоянной со-
ставляющей, а второе - мощность флюктуационной составляющей, т.е. диспер-
сия:
2 тс
fa. (со)Ло.
188
Для процесса с нулевым математическим ожиданием:
х2(0 = о2
1 +<х>
*—00
Из определения спектральной плотности (Г.52) следует, что №(<д) есть чёт-
ная и неотрицательная функция со. Кроме этого FF(co) - вещественная функция,
она не содержит информации о фазах спектральных составляющих и не позволяет
восстановить отдельные реализации случайного процесса. Размерность функции
W(со), являющейся отношением мощности к полосе частот, есть
[FK (со)] =
Мощность
полоса частот
[мощность х время]=[энергия].
Отметим, что на практике спектральную плотность мощности часто находят
исходя из физических соображений, т.е. анализируя механизм образования слу-
чайного процесса.
Г.9. Соотношение между спектральной плотностью
и ковариационной функцией случайного процесса
Как распределение спектральной плотности мощности, так и вид ковариа-
ционной функции связаны со скоростью изменения случайного процесса во вре-
мени. Так, в качестве примера на рис. Г.З изображены фрагменты реализаций двух
стационарных процессов с нулевым математическим ожиданием (А'(т) =/?(т)),
спектральные плотности мощности процессов и соответствующие им корреляци-
онные функции. На рис. Г.З, а изображен фрагмент реализации и характеристики
первого случайного процесса, а на рис. Г.З, б - второго. Очевидно, что между
FK(co) и К(т) имеется тесная связь.
Теорема Винера-Хинчина утверждает, что спектральная плотность мощно-
сти стационарного в широком смысле процесса FT((o) и ковариационная функция
К(т) связаны между собой преобразованиями Фурье:
+00
FT(co)= ]к(т)е"7“тЛ,
—00
1 +?
/С(т) = — рГ(<о)е7ОП Jco.
(Г.54)
(Г.55)
189
Рис. Г.3
Для случайных процессов с нулевым математическим ожиданием выраже-
ния (Г.54), (Г.55) принимают ви,
4-00
JV(d))= |л(т)е>тЛ,
Л(т) = — рГ(со)с,О)гб/со.
(Г.56)
(Г-57)
Если случайный процесс имеет ненулевое математическое ожидание т, то
его спектральная плотность мощности имеет вид
= т2 2л8(со) + ИС (со),
(Г.58)
где ИС (со) - сплошная часть спектра, 5(со) - дельта-функция.
Действительно, подстановка последнего выражения в (Г.55) с учетом
фильтрующего свойства 8-функции (см. выражение (2.31)) приводит к (Г.41), при
том, что
+00
— f^(co)ey“Tt7co.
2тг J
(Г.59)
Отсюда следует, что спектральная плотность мощности стационарного про-
цесса X(f) с не равным нулю математическим ожиданием т отличается от спек-
тральной плотности соответствующего центрированного процесса (т.е. процесса
X(f) - т, получаемого из исходного путём вычитания из него т\ полученный цен-
трированный процесс будет обладать уже нулевым математическим ожиданием)
190
лишь наличием дискретной линии на нулевой частоте. Имея это в виду, можно
сказать, что формулы (Г.54), (Г.55) и (Г.56), (Г.57) являются равнозначными.1
Полагая в (Г.59) т = 0, получим формулу расчёта дисперсии случайного про-
цесса по спектральной плотности мощности:
а2 = Л(0) =
1
2л
-НЮ
J«C(oj)J(o.
Докажем теорему (Г.54) -е- (Г.55) для стационарного эргодического процес
са. Как известно, ковариационная функция детерминированного сигнала (в теории
сигналов она называется корреляционной функцией) связана преобразованием
Фурье с его спектральной плотностью энергии. Применим это свойство к отрезку
реализации процесса длительности Т:
т
[х(/)x(f + i)dt —
о
2тс
е/<йТЖ>.
Разделим обе части этого выражения на Г и устремим Т к бесконечности:
г 1 +г \хт (»
lim \x(t)x(t + r)dt = — f lim -------------
r->oo J 2л J г-и» T
0 -CO
2
-е'^сЛо.
Поскольку левая часть этого выражения есть ковариационная функция эргодиче-
ского процесса (см. выражение (Г.45)), а в правой части под интегралом содер-
жится выражение (Г.52) для спектральной плотности мощности, то приходим к
выражению (Г.55).
Г. 10. Белый шум
Белым шумом принято называть стационарный случайный процесс, спек-
тральная плотность мощности которого постоянна на всех частотах:
W (со) = W0 = const.
(Г.60)
Согласно теореме Винера-Хинчина, корреляционная функция белого шума пред-
ставляет собой дельта-функцию: ! f
2л
ад=
Ло = Жо5(т),
11'
(Г.61)
191
т.е. равна нулю всюду, кроме точки т = 0. Средняя мощность (дисперсия) белого
шума неограниченно велика.
На рис. Г.4 изображены графики спектральной плотности мощности и кор-
реляционной функции белого шума.
Ж)
Ш(т)
«а»
Рис. Г.4
Поскольку спектральная плотность мощности белого шума постоянна на
всех частотах, в том числе у неё отсутствует особенность в виде дельта-функции
на нулевой частоте, то согласно (Г.58) у случайного процесса, являющегося бе-
лым шумом, математическое ожидание следует считать равным нулю, т = 0.
Термин “белый шум” подчеркивает аналогию с “белым” (естественным)
светом, у которого в пределах видимого диапазона интенсивность всех спек-
тральных линий приблизительно одинакова.
Белый шум является дельта-коррелированным случайным процессом. То
есть в несовпадающие моменты времени значения белого шума некоррелированы
- как бы ни был мал интервал т, сигнал за это время может измениться на любую
величину.
Белый шум является абстрактной математической моделью и физически
существовать не может. Это объясняется прежде всего бесконечностью его дис-
персии (т.е. средней мощности). Однако в тех случаях, когда в пределах ампли-
тудно-частотной характеристики интересующей нас системы спектральную плот-
ность мощности внешнего воздействующего реального шума можно приближен-
но считать постоянной (допустим, когда полоса пропускания исследуемой систе-
мы намного уже ширины спектра входного шума), то для упрощения анализа
можно заменить реальный входной случайный процесс белым шумом.
Если сечения дельта-коррелированного шума распределены нормально
(Г. 10) (см. п. Г. 13), то такой шум называется белым гауссовским (белым нормаль-
ным) шумом. В этом случае некоррелированность мгновенных значений случай-
ного процесса тождественна независимости. Такая модель случайного процесса
также бывает востребованной на практике.
Стоит заметить, что вероятностные и корреляционные (или спектральные)
характеристики случайного процесса - это разные и не связанные между собой
функции. Так, нормальный случайный процесс может иметь разнообразную спек-
тральную плотность мощности, а белый шум - произвольную функцию распреде-
ления. Единственное соприкосновение вероятностных и корреляционных харак-
теристик - это возможность расчёта дисперсии случайного процесса как на осно-
192
ве одномерной плотности вероятности (Г.ЗЗ), так исходя и из корреляционной
функции (Г.35) при =/2-
Г.11. Спектральная плотность мощности случайного процесса
на выходе линейной системы
Рассмотрим воздействие на линейную систему с постоянными параметрами
стационарного случайного процесса. Будем полагать, что система находится в ус-
тановившемся (стационарном) режиме работы, т.е. переходные процессы в на-
чальный период при подаче воздействия окончены.
Спектральную плотность входного процесса обозначим (со), спектраль-
ную плотность мощности выходного процесса - ?ГВЫХ (со), а частотную характери-
стику системы обозначим K(ja).
Задача нахождения И^вых (со) решается с помощью рассуждений в п. Г.8 при
выводе (Г.50). Ограничив длительность реализации x*(f) входного процесса ко-
нечным интервалом Г, найдём её спектральную плотность Xkr(jo). Умножив
XкТ (/со) на Х(/со), получим спектральную плотность этой же реализации на вы-
ходе системы:
**гвыхО) = ХАГ(»Х(/со).
Энергию рассматриваемого отрезка реализации согласно равенству Парсе-
валя можно вычислить, как
~ АТ вых (0<*
О
кТ вых
. +00 . +00
~ Л%АгВых(»|2б/со = 7~ /|^ат(7<о)|2|а:(/(»)|2с7со.
271 271 *
Тогда по аналогии с (Г.52) получим:
ВЫХ
(ш) = Пт
Г—>оо Т
(Г.62)
Корреляционная функция случайного процесса (m = 0) на выходе системы
определяется выражением (Г. 5 7):
1 4-со < +оо
.ых« = — Кых(а)е'«” = ]и'вх(о>)|К(уга)|2 da. (Г.63)
i * Jb* / L
Полагая в (Г.63) т~0, получим формулу расчёта дисперсии выходного слу-
чайного процесса:
193
1 +00 | +00
dux = Ъ (0) - — J^ux (<»)<*> = V J»'.x(<B)|^(j®)|2d<0.
Z7T Z7E *
—00 —00
Особый интерес представляет случай, когда процесс на входе системы явля-
ется белым шумом. В этом случае согласно (Г.60) fTBX (со) = FF0 = const и в соот-
ветствии с (Г.63):
I +00
«хих 0) = — И»12 е>’da
—со
Г.12. Дискретные случайные процессы
Когда дискретизации подвергается случайный процесс, получаемая после-
довательность отсчётов будет зависеть от конкретной реализации дискретизируе-
мого процесса, и, следовательно, должна анализироваться статистическими мето-
дами.
Принято называть случайный процесс %(/), представленный последователь-
ностью своих отсчётов X(tn) в равноотстоящие (эквидистантные) моменты време-
ни t„=t0 + пТ с периодом Т — const, где п — 0, 1,2, дискретным случайным
процессом. Здесь и далее, в отличие от предыдущих параграфов приложения Г,
буквой Т обозначен период дискретизации по времени.
Случайный процесс Х(пТ) также называют решетчатым случайным процес-
сом. Он образован совокупностью своих реализаций - решетчатых функций х,{пГ)
(i = l,N, N - число мыслимых реализаций случайного процесса, образующих его
ансамбль реализаций).
На рис. Г.5 приведены несколько из Лг реализаций дискретного случайного
процесса.
Статистические характеристики дискретного случайного процесса опреде-
ляются по аналогии с непрерывными процессами. Например, согласно (Г.32) *
(Г.35):
- математическое ожидание, или среднее по ансамблю реализаций
т(пТ) = М{Х(лГ)} = \xf(x,nT)dx-,
(Г.64)
- дисперсия
/ ч +оо
а2(лГ) = М((Л(ИГ)-т(лП)2/= $(х - т(пТ)У f(x,nr)dx; (Г.65)
“00
- ковариационная функция
194
+00 +оо
ЛГ(и|Г,«2П = М{Х(и17’)А'(и27’)} = J /х|х2/2(х,.х2;И|Г,л2Г>|А2; (Г.66)
~С0 ****00
— корреляционная функция
Я(»1 Т, пгТ) = М {(.¥(», Г) - т(Я1 Г)Х%(«2 Т) - т(п2 Г))} =
+°? +« (Г.67)
= J Jfa - m{nx Т)\х2 ~ m(n2T))f2 fa, х2;nxt, n2T)dxxdx2.
Рис. Г.5
Понятия стационарности и эргодичности дискретного случайного процесса
вводятся аналогично непрерывным случайным процессам с поправкой на то, что
дискретный случайный процесс представлен -последовательностью своих отсче-
тов. Так, дискретный случайный процесс Х(пТ) с конечной дисперсией будет спга-
ционарным в широком смысле, если при любом п его математическое ожидание
195
постоянно т(пТ) = m = const, а ковариационная функция инвариантна относи-
тельно сдвига во времени (зависит только от разности аргументов vT = п2Т
К(П1 Т,пгГ) = К((п2 - и, )Т) = К((и, - и2 }Т) = К(уТ). (Г.68)
Дискретный случайный процесс называется дискретным белым шумом, ес-
ли его корреляционная функция имеет вид
/?(vT) = o250(vr) = ]CT npHV °’
I 0 при v & 0.
(Г.69)
В отличие от аналогового белого шума, дисперсия дискретного белого шума
не является бесконечной. Следовательно, такой шум является физически реали-
зуемым.
Г. 13. Нормальный (гауссовский) случайный процесс
Вещественный случайный процесс X(f) называется гауссовским, если для
любого конечного множества моментов времени t2, случайные величины
Xi = X(ti),Х2~X(t2), ...,Х„-X(tn) имеют совместную нормальную плотность веро-
ятности
fn= Г wT/1;--------м/2ехр1 -1(х - m)TR-1 (х - ш)
(2я) '2 (det R)1/2 ( 2
(Г. 70)
вектор отсчётов случайного гауссовского процесса в моменты времени
™2
m —
m
п
- вектор математических ожиданий mi - m(ti) = 'M{X(ti')}',
196
- корреляционная матрица; Ry = R(tt ,1/) = М ) - m(tt )\X(tj ) - m(t j ))/ — кор-
реляция /-го и j-го сечений; detR - определитель корреляционной матрицы.
Элементы корреляционной матрицы R расположены симметрично относи-
тельно главной диагонали Rf -Кц, Rj, = <з2 ~a2(tj). То есть корреляционная
матрица является симметричной.
Таким образом, в соответствии с (Г.70) распределение гауссовского
случайного процесса однозначно определяется вектором математических
ожиданий ш и корреляционной матрицей R.
Из (Г.70) следует, что одномерная плотность вероятности гауссовского слу-
чайного процесса определяется (Г. 10).
Особенностью гауссовских случайных процессов является то, что понятия
стационарности в широком и узком смысле совпадают. Для гауссовского стацио-
нарного процесса выполняются следующие равенства:
т( = m(tj) = const,
Ry = R(tittj) = /ф, -/у|)=/?(т/у),
т.е. математическое ожидание не зависит от выбора момента времени и является
постоянным, а корреляционная функция зависит лишь от абсолютного значения
интервала между рассматриваемыми моментами. При этом диагональные элемен-
ты корреляционной матрицы одинаковы и равны дисперсии Ru = о2 = const.
Как отмечалось ранее (см. п. Г. 10) на практике часто востребована модель
гауссовского случайного процесса с некоррелированными сечениями (спектраль-
ная плотность мощности процесса постоянна на всех частотах). Для гауссовского
процесса некоррелированность мгновенных значений тождественна независимо-
сти. Действительно, подстановка Ry - 0 для /V j в (Г. 70) приведёт к тому, что
многомерная плотность вероятности будет выражаться через произведение одно-
мерных плотностей (см. (Г.29)), что является признаком независимости сечений.
Такой случайный процесс называют белым гауссовским (белым нормальным) шу-
мом. Его также можно условно назвать абсолютно случайным процессом.
197
Г.14. Понятие марковского случайного процесса
Рассмотрим произвольный случайный процесс АЭД» заданный своей много-
мерной плотностью вероятности /и(х|,х2,...,хя;/|,/2,...,гя). В соответствии с
(Г. 14) можно записать
Ул \Л'1» х2 *хп fn)~ fl(xl»h )Ул-1 \х2*х3"'’»хп*^2»^3 f-y^nlx\^\ )•
Продолжая по индукции, в результате п последовательных вычислений по-
лучим
fn (*i > х2 , •••» хп; 'i >*2»•••»1 п)=Л (*i>'1 )/i (х2; н /х\>*1 )Л (*з; *з 1х\> хг; h. h)х
х • • • f\ (^л ’ Gi /х\»х2 »•"’ хл-1»»G »•••» Cj-1 )•
(Г.71)
Случайный процесс называется процессом без последствия или марковским
случайным процессом, если его условная плотность вероятности
в каждый текущий момент времени t„ зависит только от предыдущего значения
и не зависит от всех других значений. При этом величина f(xn\tnlxn_pttn_x)
называется плотностью вероятности перехода (из точки хп_х в точку хп). В соот-
ветствии с определением марковского процесса для его «-мерной плотности веро-
ятности (Г.71) в общем случае получаем выражение
п
fп (^"1 ’ х2 ’•••’ Хп‘>?\»^2 »’••» п ) ~ У"1 (^1 J ffal >0 /х1—I, ^/-1 )• (Г.73)
/-2
При фиксированном временном сдвиге между двумя смежными сечениями
случайного процесса ht = tt -= const, при V/, получим однородный марков-
ский процесс, плотность вероятности переходов которого независимо от времени
t равна
(Г.74)
В этом случае из (Г.73) в соответствии с (Г.74) получим «-мерную плот
ность вероятности:
п
)=/1 (*1 )П /х/->) ♦
198
Основным свойством марковских процессов является равенство
+00
f(xt /х;_2 ) = J/(x/ /х,_| )/(х/-1 /х,_2 )dXiL\ •
—-00
(Г.75)
Понятия марковских и гауссовских процессов напрямую не связаны между
собой. Для того чтобы гауссовский случайный процесс с нулевым математиче-
ским ожиданием обладал свойством марковского, необходимо чтобы его автокор-
реляционная функция удовлетворяла следующему равенству:
(Г.76)
Указанному требованию отвечает, например, гауссовский процесс с функ-
цией автокорреляции экспоненциального вида
7?(А/) = ехр(- а| Д/|)>
(Г.77)
где а = const.
Из (Г.77) следует выполнение (Г.76):
R(k&) = R({k - l)&)R(l&).
199
Приложение Д
Z-ПРЕОБРАЗОВАНИЕ НАИБОЛЕЕ ЧАСТО
ВСТРЕЧАЮЩИХСЯ ФУНКЦИЙ
Все функции предполагаются равными нулю при t < 0.
мим
ДО
Я I1 при * = <>»
Ол(кТ) = «
1 0 при к*0
кТ
(tr)2
sin(coAT)
sin (art)
cosftokT )
cos(art)
ea/ sin(art)
eo/ cos(art)
MH
(kTY
(ЛТ)иеа*г
(кТ)п
еаЛТ
еаАГ sin(a)AT)
еаЛГ cos(co*T)
1° ПРИ *<0»
»(*Т)= , ,>п
11 при к > 0
д frt-J При / = 0’
0 1о при
)0 при t < 0,
1 при 12:0
Я*)
Tz
•м
10
11
T2z(z +1)
rt+l
мут/ъ ОС?'
где а = е
л+1
•<«ММММ
zsin((oT)
z2 - 2z cos(a)Г) +1
z2 -zcos(oT)
z2 - 2z cos(a>t) +1
zJsin(a)7’)
z2 - 2zdcos(a)T)+ d2
z2 -z<Zcos(coT)
z2 - 2zd cos(©T) + d2
200
В некоторых изображениях приведённой таблицы использованы обозначе-
ние d = еаТ и полиномы Rn (z), которые могут быть представлены в виде опреде-
лителя
1 1-z 0 ... О
и! (л-1)! (л-2)!
Некоторые частные значения этого полинома:
я0(*)=1>
/?2(z) = z + l,
fl3(z) = z2 +4z + l,
/?4(z) = z3 +llz2 +11Z + 1.
201
Список литературы
1. Баскаков, С.И. Радиотехнические цепи и сигналы: учебник для ВУЗов/
С.И. Баскаков - М.: Высшая школа, 1988. - 448 с.
2. Бесекерский, В.А. Цифровые автоматические системы/ В.А. Бесекерский
- М.: Наука, 1976. - 576 с.
3. Венгеров, А.А., Щаренский, В.А. Прикладные вопросы оптимальной
линейной фильтрации/ А.А. Венгеров, В.А. Щаренский - М.: Энергоиздат, 1982.
-192 с.
4. Гноенский, Л.С., Каменский, Г.А., Эльсгольц Л.Э. Математические
основы теории управляемых систем/ Л.С. Гноенский, Г.А. Каменский, Л.Э. Эльс-
гольц - М.: Наука, 1969. - 512 с.
5. Гоноровский, И.С. Радиотехнические цепи и сигналы: учебник для
ВУЗов/ И.С. Гоноровский - М.: Радио и связь, 1986. - 512 с.
6. Коновалов, Г.Ф. Радиоавтоматика: учебник для вузов/ Г.Ф. Коновалов -
М.: Радиотехника, 2003. - 288 с. '
7. Первачёв, С.В. Радиоавтоматика: учебник для вузов/ С.В. Первачёв - М.:
Радио и связь, 1982. - 296 с.
8. Первозванский, А.А. Курс теории автоматического управления: учебн.
пособие для студентов вузов/А.А. Первозванский - М.: Наука, 1986. - 616 с.
9. Радиоавтоматика: учебн. пособие для студентов вузов; под ред. В.А. Бе-
секерского - М.: Высшая школа, 1985. - 271 с.
10. Сергиенко, А.Б. Цифровая обработка сигналов: учебн. пособие для сту-
дентов вузов/ А.Б. Сергиенко - СПб.: Питер, 2002. - 608 с.
11. Тихонов, В.И. Статистическая радиотехника/ В.И. Тихонов - М.: Радио
и связь, 1982. — 624 с.
12. Чураков, Е.П. Оптимальные и адаптивные системы: учебн. пособие для
студентов вузов/ Е.П. Чураков - М.: Энергоатомиздат, 1987. - 256 с.
202
Список основных обозначений и сокращений
В пособии принята двойная нумерация формул, примеров и рисунков (сна-
чала номер главы, затем номер внутри главы). Некоторые обозначения величин
сохраняются только в пределах глав. Далее указаны наиболее распространённые
обозначения* и сокращения.
А — матрица системы (матрица перехода);
A(j<d) - характеристический вектор (глава 2);
а, - <-ый коэффициент левой части дифференциального
(или разностного) уравнения;
В - матрица управления;
bj — i-ый коэффициент правой части дифференциального
(или разностного) уравнения;
С - матрица наблюдения;
d - f-ый коэффициент ошибки (глава 2, глава 4);
F - вектор внешних возмущений (глава 1);
F(x) - дискриминационная характеристика (глава 6, глава 7);
ХО — внешнее возмущение (глава 1);
F{.} - оператор преобразования Фурье;
g(t) — импульсная характеристика (импульсная переходная функция);
gxx(0 — импульсная переходная функция непрерывной системы от
входного воздействия Х(Г) к ошибке слежения x(Z);
g(kT) — решетчатая весовая функция системы;
gxy(^T) - решетчатая весовая функция системы от воздействия Л к ошибке
слежения х;
h(t) - переходная функция (глава 2);
I - единичная матрица;
J — мнимая единица;
К(р) - передаточная функция системы;
A(z) - дискретная передаточная функция;
КхХр) - передаточная функция замкнутой непрерывной системы по
ошибке слежения (рассогласованию), т.е. от воздействия X(f) к
ошибке слежения х(/);
- дискретная передаточная функции замкнутой импульсной
системы, расчитанная от воздействия X к ошибке слежения х;
А?х/р) - передаточная функция замкнутой непрерывной системы по
управляемой величине, т.е. от воздействия Х(/) к управляемой
величине ХО;
г ’
Приведенные обозначения не совпадают с некоторыми обозначениями, принятыми в
приложениях.
203
Къ/z) ~ дискретная передаточная функции замкнутой импульсной
системы, распиханная от воздействия 1 к управляемой величине у\
Кр(р) - передаточной функция непрерывной системы в разомкнутом
состоянии;
Xp{z) - передаточная функция разомкнутой импульсной системы;
К$Пу1\ ПгТ) ~ ковариационная функция выходного дискретного случайного
процесса у(0 (глава 4);
К^(п\Т, П2Т) - ковариационная функция входного дискретного случайного
процесса £(/) (глава 4);
L{.} - оператор преобразования Лапласа;
М{.} - оператор математического ожидания;
р — комплексная переменная - комплексная частота, аргумент
преобразования Лапласа;
S, - вектор переменных состояния;
Si - i-ъя переменная состояния;
- крутизна дискриминационной характеристики дискриминатора;
Т - период, дискретизации;
t - время; .. /
U - вектор управлений (глава..!);
и — управление (глава 1);
и - напряжение (глава 6, глава 7);
W — вектор состояния системы (глава 3, глава 5);
- спектральная плотность мощности случайного процесса (глава 2);
wj - z-ая переменная состояния системы (глава 3, глава 5);
х — рассогласование или ошибка слежения;
Y-вектор, управляемых процессов;
У - управляемый процесс - процесс на выходе объекта управления,
реакция системы;
Z{.} - оператор (символ) Z-преобразования;
z - комплексная переменная, аргумента-преобразования;
AF3 — эквивалентная шумовая полоса пропускания непрерывной
системы;
' * - эквивалентная шумовая полоса пропускания импульсной
системы;
- разность начальных фаз колебаний (фазовый сдвиг);
- дельта-функция;
- единичная импульсная решетчатая функция;
- ошибка фильтрации;
- шум квантования (глава 7);
Дф
ад
S^kTj
е(*7)
!(/) задающее воздействие;
£(f) — флюктуационное воздействие;
о2 - дисперсия случайного процесса;
Ф(Г) - фундаментальная матрица;
204
Ф(Л, т) - дискретная матрица перехода системы;
Ф(Л т) - матрица перехода непрерывной системы;
<р - начальная фаза (глава 6, глава 7);
© — круговая частота.
АИМ-1 — амплитудно-импульсная модуляция первого рода;
АЦП — аналого-цифровой преобразователь;
ГОС - генератора опорных сигналов;
ГСИ — генератор счётных импульсов;
ИИЭ — идеальный импульсный элемент;
ОУ —объект управления;
ПГ — подстраиваемый генератор;
ПНЧ - приведенная непрерывная часть;
PC — реверсивный счётчик;
САУ - система автоматического управления;
УУ - управляющее устройство;
ФАПЧ г- фазовая автоподстройка частоты;
ФД - фазовый дискриминатор;
ФНЧ - фильтр нижних частот;
ФФ — формирующий фильтр;
ЦАП - цифро-аналоговый преобразователь;
ЦВМ - цифровая вычислительная машина;
ЦФ - цифровой фильтр;
ЧД — частотный дискриминатор.
л
Предметный указатель
Алгоритмом дискретной фильтрации, 85
Амплитудно-импульсная модуляция
первого рода, 76
Ансамбль реализаций, 178
Б
Билинейные преобразования, 91
БИХ-фильтры, 87
В
Варикап, 139
Вектор состояния:
дискретной системы, 108
непрерывной системы, 65
объекта управления, 14
Вектор-столбец, 159
Вектор-строка, 159
Вектор характеристический, 45
Вероятность события, 171
Включение динамических звеньев:
параллельное, 42
последовательное, 42
Возмущение, 9
Время установления первого максимума
выходного сигнала (переходного
процесса), 49
Г
Годограф, 170
частотной характеристики, 36
Дельта-функция, 33
Дискретизация, 149
Дискриминатор, 10,23
временной, 134
фазовый, 128
частотный, 131
Дисперсия случайной величины, 174
Длительность переходного процесса, 49
Е
Единичный перепад, 32
3
Задача:
управления, 18
оптимального управления, 20
Задающее воздействие, 9
Закон случайной величины, 172
Запас устойчивости:
по усилению, 48
по фазе, 48
Запасы устойчивости, 48
Звено:
идеальное интегрирующее, 38
инерционное (апериодическое), 36
типовое динамическое, 40
И
Идеальный импульсный элемент, 76
Изображающая точка, 17
Изображение свертки двух решетчатых
функций, 83
Импульсная переходная функция, 33
Импульсная характеристика, 33
Интеграл Дюамеля, 34
Интегратор импульсный, 87
К
Качество управления, 19
Квадратичная форма (в теории матриц), 166
Квантование по уровню, 149
КИХ-фильтры, 87
Комплексная амплитуда сигнала, 36
Комплексная функция действительного
аргумента, 169
Комплексное число, 168
Коррекция (в фильтре Калмана), 117
Коэффициент затухания контура
регулирования, 54
Коэффициенты ошибок, 51
импульсной системы, 96
Критерии устойчивости, 44
импульсных систем, 91
Критерий:
оптимальности, 118
оптимальности управления, 20
устойчивости Гурвица, 44
устойчивости Михайлова, 47
206
устойчивости Найквиста, 48
устойчивости Найквиста
(для импульсных систем), 93
Крутизна:
аналого-цифрового преобразования, 15
дискриминационной
характеристики, 141,143
регулировочной характеристики, 139
Математическое ожидание случайной
величины, 173
Матрица, 159
блочная, 163
вырожденная, 162
диагональная, 159
дискретной системы, 108
единичная, 160
квадратная, 159
кососимметричная, 160
наблюдения, 65
наблюдения дискретной системы, 108
невырожденная, 162
неособенная, 162
несингулярная, 162
нулевая, 160
обратная, 162
ортогональная, 163
особенная, 162
перехода дискретная, 113
перехода системы, 71
симметричная, 160
сингулярная, 162
системы, 65
транспонированная, 160
управления, 65
управления дискретной системы, 108
фундаментальная, 70
характеристическая, 72
характеристическая дискретной
системы, 114
Матрица-скаляр, 159
Матрица-столбец, 159
Матрица-строка, 159
Матрицы перестановочные, 161
Матричная экспонента, 71, 165
Минор элемента матрицы, 162
Момент:
ковариационный, 178
корреляционный, 177
Н
Наблюдаемость:
системы, 118
объекта управления, 22
Начальный момент:
системы двух случайных величин, 176
случайной величины, 174
Нормальная форма Коши (для системы
дифференциальных уравнений), 12
О
Объект:
линейный по управлению, 11
одномерный, 11
управления, 9
управления полностью наблюдаемый, 22
Область:
допустимых состояний, 18
допустимых управлений, 18
достижимых состояний объекта
управления, 21
управляемости объекта управления, 21
Обобщенный показатель качества
управления, 19
Определитель матрицы, 162
Оптимальная траектория движения
объекта управления, 20
Оптимальное управление, 20
Ошибки квантования, 149
Ошибки слежения, 23
П
Переменные состояния, 12,66
Перерегулирование, 49
Плотность распределения (плотность
вероятности):
случайной величины, 173
многомерная, 175
двумерная, 175
Показатели качества переходного
процесса, 49
Порядок астатизма:
системы, 51
импульсной системы, 96
Z-преобразование, 80
обратное, 81
основные свойства, 82
Преобразование Лапласа, 26
обратное, 28
основные свойства, 27
207
Преобразование Фурье:
обратное, 34
прямое, 34
Преобразователь:
аналого-цифровой, 150
цифро-аналогов&Й/Т51‘
Приведённая непрерывная-Часть, 77
Принцип аргумента для анализа
устойчивости, 46
Принцип суперпозиции, 24
Принцип управления по
рассогласованию, 10,23
Пространство состояний, 17.
Псевдочастота, 92
Радиоавтоматика, 6
Разностное уравнение, 84
Ранг матрицы, 164
Распределение случайной величины, 172
Рассогласование, 10,23
СвСртка функций, 28
Свойство Z-преобразования, 82
теорема запаздывания, 82
теорема линейности, 82
теорема о конечном значении
оригинала, 82
теорема о свертке, 83
Свойство преобразования Лапласа, 27
теорема дифференцирования, 27
теорема запаздывания, 27
теорема интегрирования оригинала, 28
теорема линейности, 27
теорема обращения, 28
теорема о предельном значении
оригинала, 28
теорема подобия, 27
теорема о свертке, 28
Свойство фильтрующее 5-функции, 33
Сечение случайного процесса, 178
Сигнал:
аналоговый, 148
дискретный, 148
единичный, 32
цифровой, 149
Система:
автоматического регулирования
усиления, 6
автоматического слежения за
направлением прихода радиосигнала
автоматического сопровождения
по дальности, 6
автоматического управления, 6
динамическая, 24
дискретная, 75
импульсная, 75
линейная, 24
программного управления, 23
радиоавтоматики импульсная, 146
следящая, 23
с отрицательной обратной связью, 23
стабилизации, 23
стационарная, 25
управления оптимальная, 20
управления цифровая, 148
фазовой автоподстройки частоты, б
цифровая, 75
частотной автоподотройки, б.
Скалярное произведение матриц, 161
След матрицы, 160
Сложение матриц, 160
Случайная величина, 172
Случайная последовательность (процесс)
марковская, 116
Случайный процесс, 178
гауссовский, 196
дискретный, 194
дискретный стационарный в широком
смысле, 195
марковский, 198
независимый, 180
нестационарный в узком смысле, 182
решетчатый, 194
стационарный в узком смысле, 182
стационарный в широком смысле, 184
эргодический, 185
Случайная функция, 178
Собственная частота контура
регулирования, 54
Событие случайное, 171
Состояние объекта управления
достижимое, 21
Спектральная плотность:
сигнала, 35
мощности случайного процесса, 186
Спектр сигнала:
амплитудный, 35
фазовый, 35
208
обобщённая структурная радиотех-
нической следящей системы, 142
обобщённая функциональная радиотех-
нической следящей системы, 141
структурная, 31
структурная дискретной системы
в векторной форме, 109-.
структурная системы автоматического
управления, 136
структурная системы в векторной
форме, 66
структурная системы в переменных
состояниях, 66
структурная системы ФАПЧ, 139
структурная системы ФАПЧ для
отклонений, 141
функциональная системы ФАПЧ, 136
Транспонирование матрицы, 160
Траектория движения:
объекта в пространстве состояний, 17
системы в пространстве
состояний, 66,109
Умножение матриц, 160
Управление, 9
автоматическое, 9
У правления допустимые, 18
Управляемость объекта управления, 20,21
Уравнение:
векторное разностное системы, 108
выхода, 12
выхода системы, 65
выхода дискретной системы, 108
дискретного фильтра Калмана, 119
матричное дифференциальное, 15
наблюдения, 116
состояния, 12
характеристическое, 26
Усилитель операционный, 40
Условие (свойство) нормировки
(для случайной величины), 172,173
У словия устойчивости:
линейной непрерывной системы, 43
линейной импульсной системы, 91
Устройство управляющее, 9
Фазовое пространство, 17
Фильтрация оптимальная дискретная, 11
Фильтр:
импульсный, 78
Калмана, 117
нерекурсивный, 86
рекурсивный, 85
трансверсальный, 86
формирующий, 76
цифровой, 151
Функция:
весовая системы, 33
дискретная, 78
дискретная передаточная, 83
единичная импульсная решетчатая, 86
ковариационная, 181
ковариационная дискретного
случайного процесса, 194
корреляционная, 181
корреляционная дискретного
случайного процесса, 195
начальная моментная случайного
процесса, 180
передаточная линейной импульсной
системы, 83
передаточная системы, 30
переходная, 32
распределения многомерная, 175
распределения случайной величины, 1'
решетчатая, 78
решетчатая весовая системы, 86
центральная моментная случайного
процесса, 181
Характеристика:
амплитудно-фазовая, 36
амплитудно-частотная системы, 36
дискриминационная, 129
регулировочная, 139
фазо-частотная системы, 36
флюктуационная дискриминатора, 131
Ц
Цель управления, 18
Центральный момент, 174
системы двух случайных величин, 177
случайной величины, 174
209
ч
Частотная характеристика комплексная
импульсной системы, 89
Частотная характеристика системы, 35,36
Числовые характеристики случайной
величины, 173
Ш
Шум:
белый, 191
белый гауссовский
(нормальный), 192,197
Э
Эквивалентная шумовая полоса
пропускания:
импульсной системы, 99
непрерывной системы, 53
Экстраполяция (в фильтре Калмана), 117
210