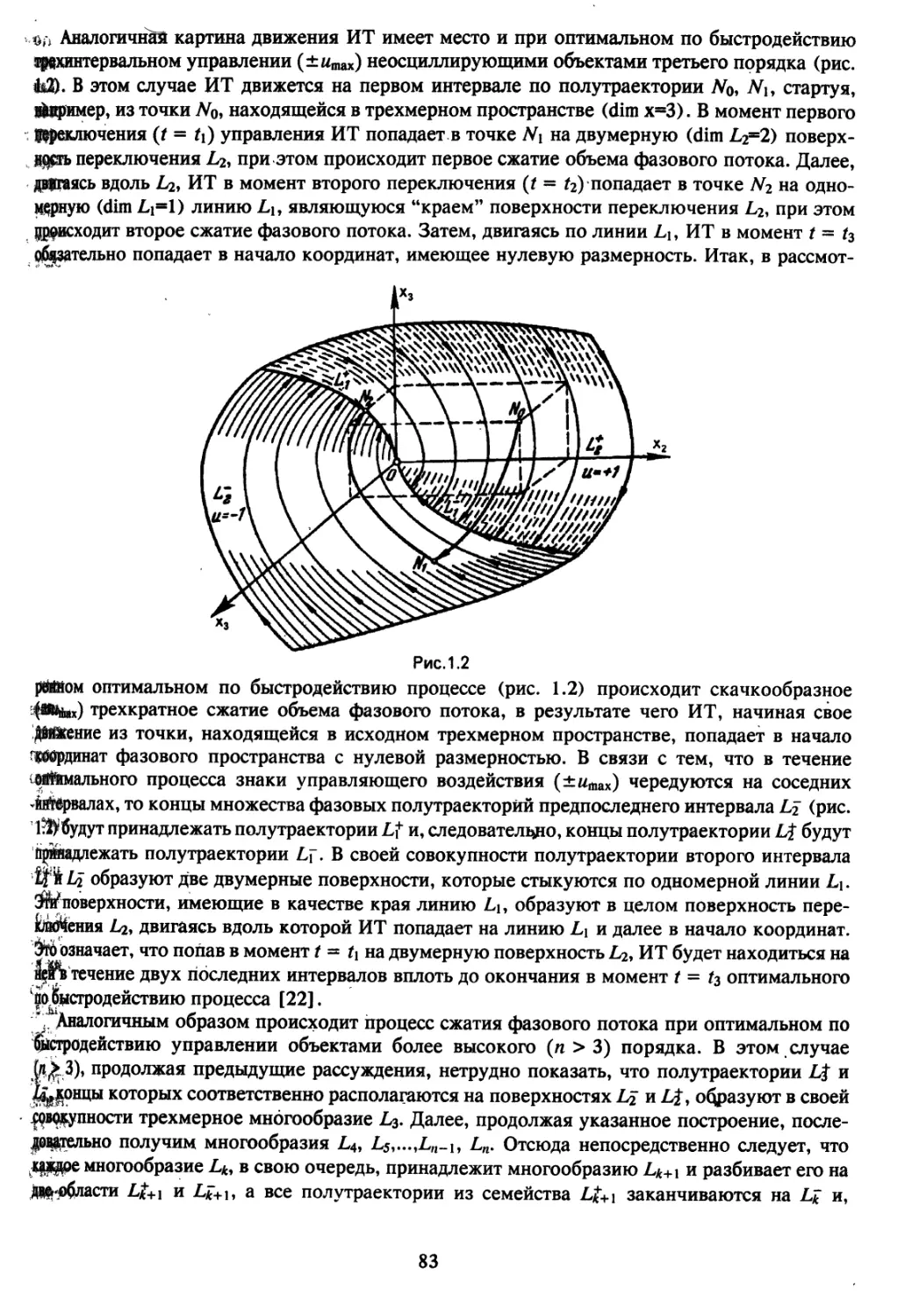
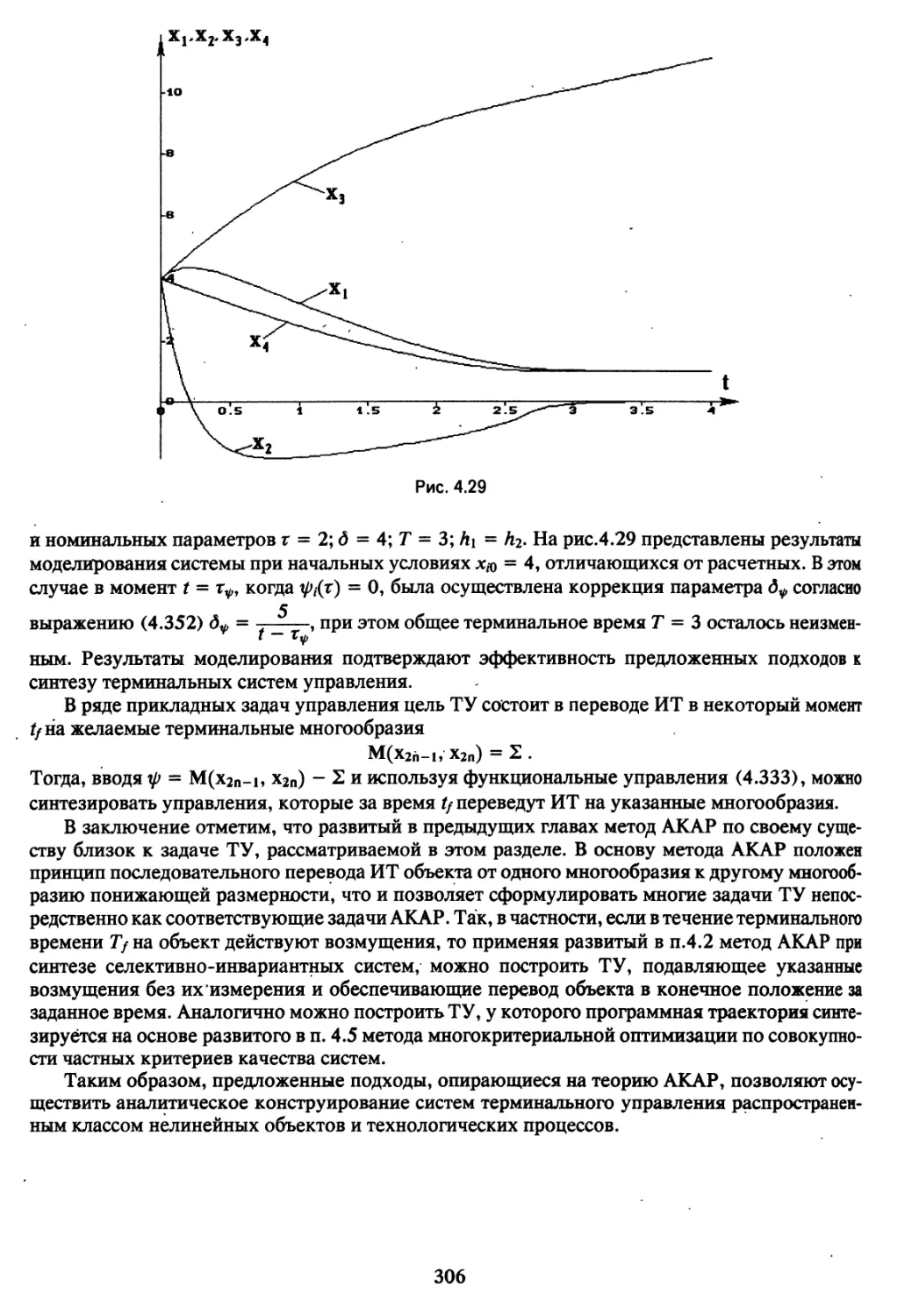
/























































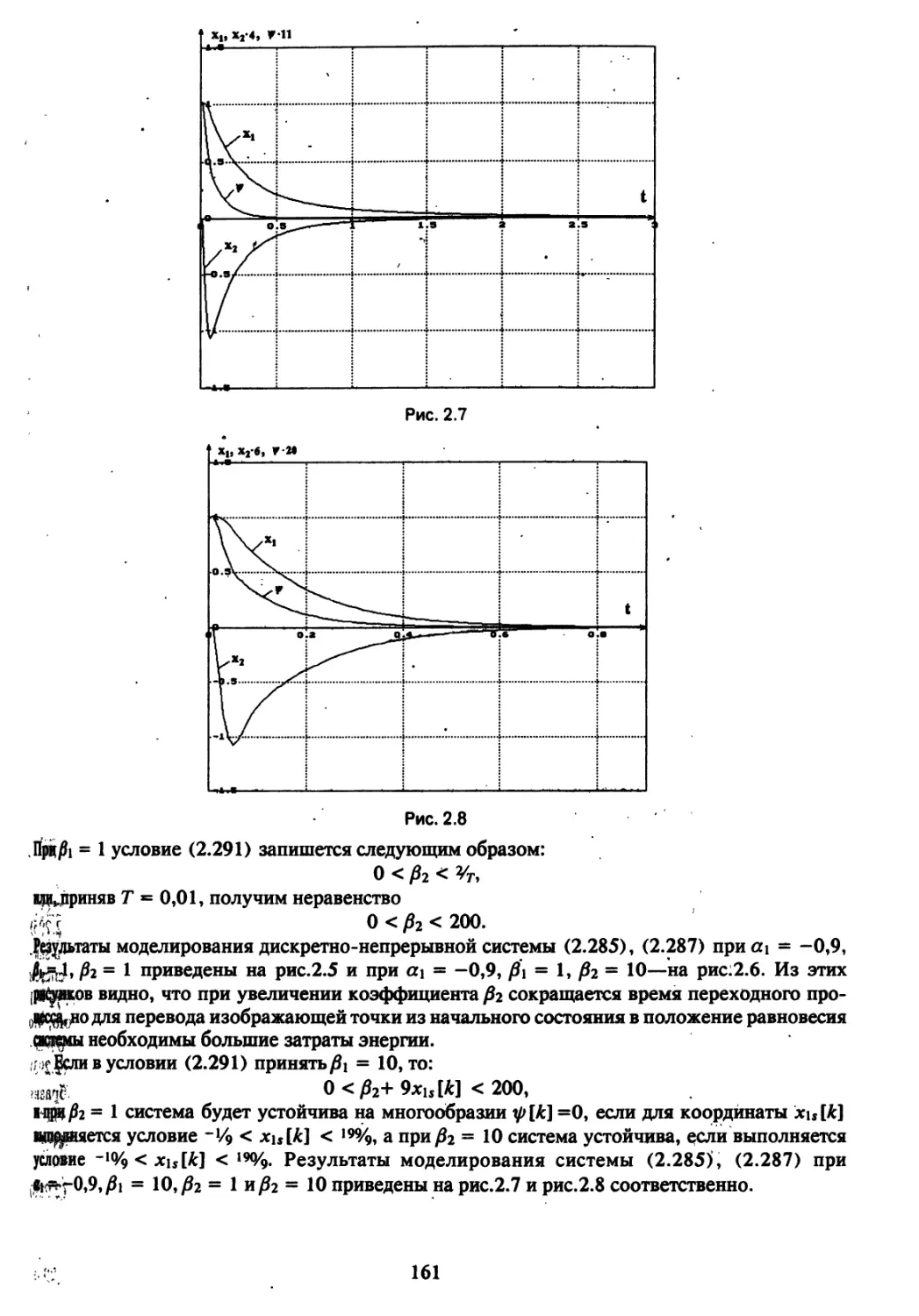
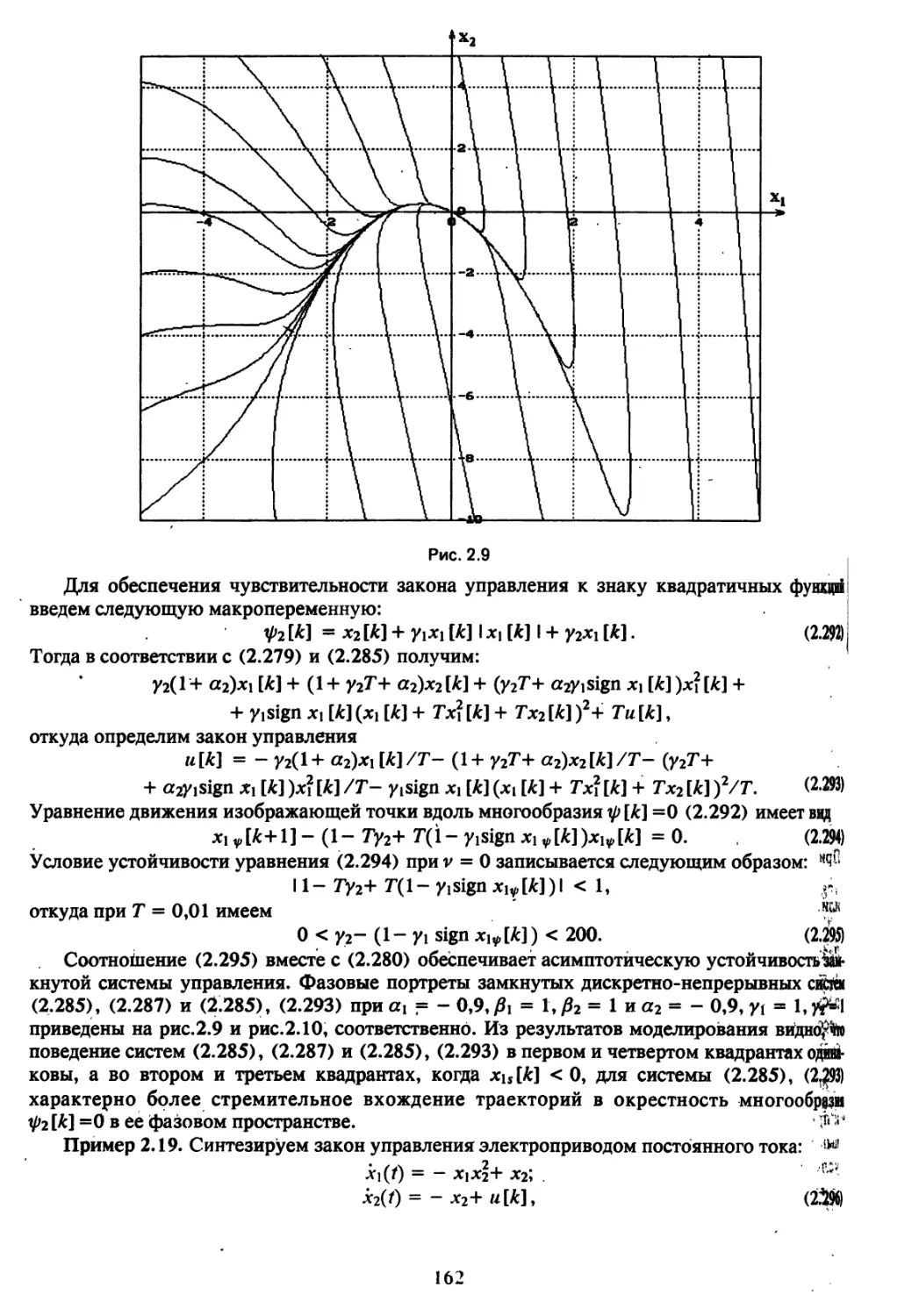










































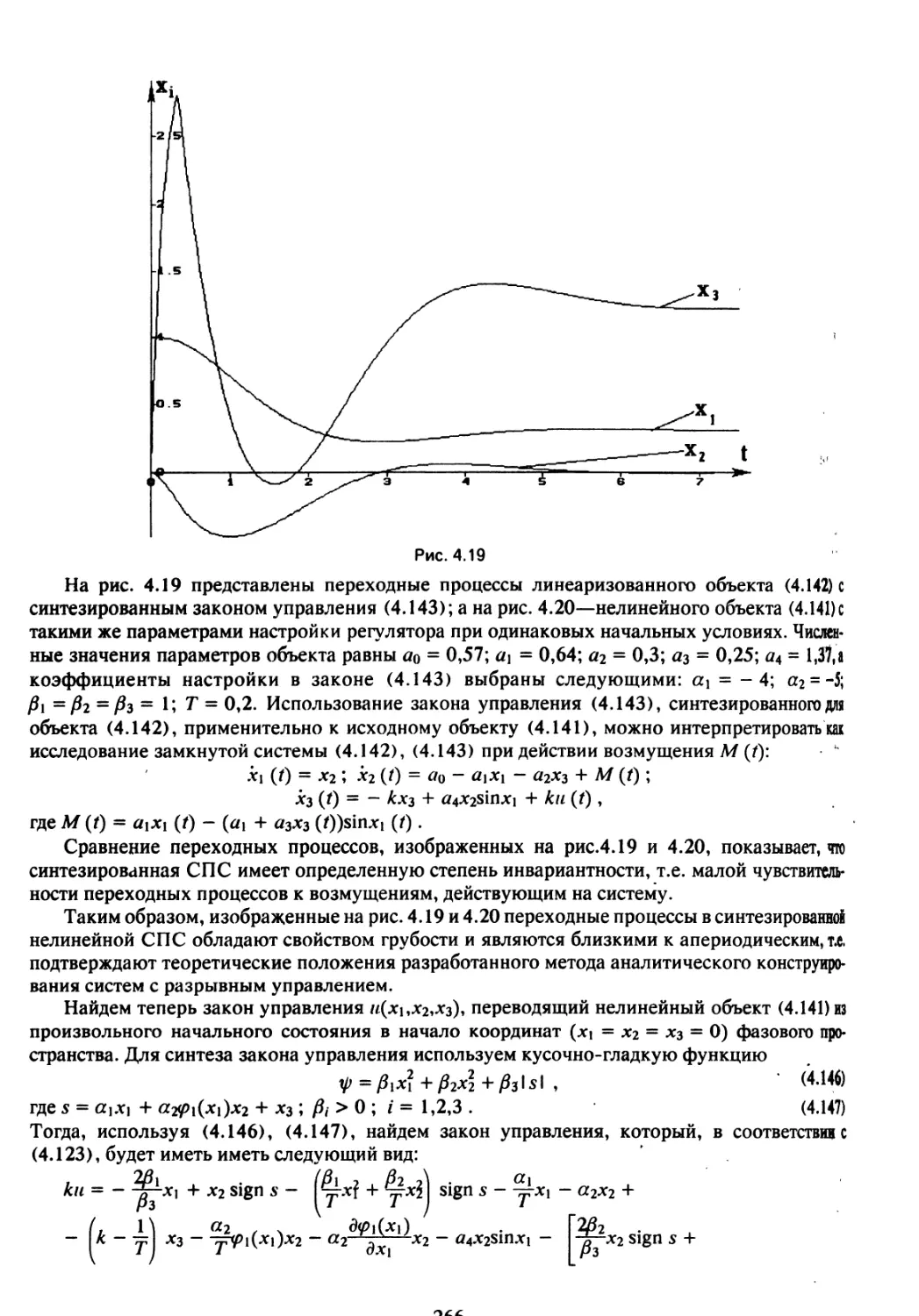























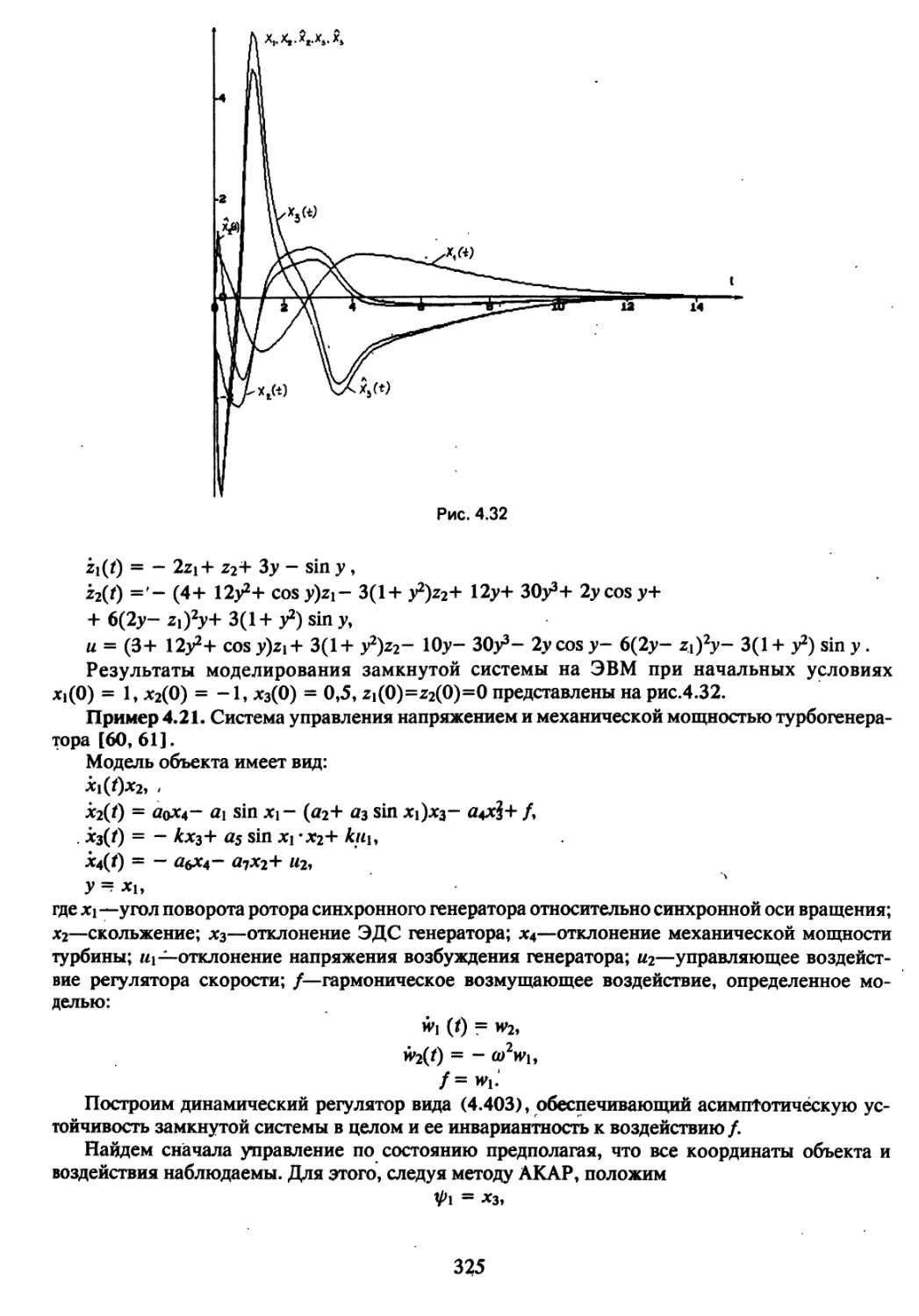











Text
ББК 32.81
К 60
УДК 681.51
Колесников А. А. Синергетическая теория управления.
Таганрог: ТРТУ, М.: Энергоатомиздат, 1994. 344 с.
ISBN 5—230—24678—2
Предложена новая синергетическая концепция в теории
управления, опирающаяся на фундаментальное свойство само-
организации природных диссипативных систем. Инварианты,
самоорганизация, нелинейность, оптимизация и синтез явля-
ются базовыми понятиями развиваемой в книге синергетиче-
ской теории управления, определяющими ее сущность, новиз-
ну и содержание. Разработан принципиально новый подход
к синтезу многосвязных систем управления нелинейными мно-
гомерными объектами, основанный на идее введения притяги-
вающих инвариантных многообразий — аттракторов, на ко-
торых наилучшим образом согласуются естественные свойства
(энергетические, механические, тепловые т. д.) объекта и тре-
бования задачи управления. В развитом синергетическом под-
ходе синтезируются законы управления, учитывающие внут-
ренние кооперативные взаимодействия конкретных физиче-
ских (химических, биологических) явлений и процессов. Этот
подход позволил осуществить прорыв в решении проблемы
аналитического конструирования систем управления сложны-
ми нелинейными динамическими объектами различной
природы.
Книга предназначена для широкого круга читателей раз-
ных специальностей — от профессора до инженера, аспиранта
и студента, интересующихся проблемами управления и само-
организации динамических систем.
Печатается по решению редакционно-издательского совета
Таганрогского государственного радиотехнического университета
Рецензенты:
В. Б. Яковлев/д-р техн, наук; профессор, завед^йщий ка-
федрой автоматики и процессов управление Санкт-Петербург-
ского государственного электротехнического университета,
заслуженный деятель науки - и техники JPO, действительный
член Международной академий, технологической кибернетики;
В. Г. Герасимов, д-р^техн. наук, профессор/ президент
академии электротехнических наук. ч
,7 1402010000
К 6КО (Д=03~) — 94~объявлеиия
ISBN № 5—230—24678—2
ББК 32.81
к »
(^'Таганрогский государственный радиотехнический университет, 1994.
(g)Колесников А. А., 1994.
К ЧИТАТЕЛЮ
В современных физических и технических науках стали рассматриваться столь сложные
системы, что они по своим свойствам и поведению напоминают природные системы. Отсюда
возникает насущная потребность выявления и использования механизмов, действующих в
природных системах и определяющих основы их функционирования, прогноза развития
ноосферы (по В.И. Вернадскому) с гармоничным вхождением искусственных систем в
естественную картину мира. Такое объединяющее направление современной науки о раз-
витии сложных процессов разнообразной физической, химической и биологической при-
роды изучается синергетикой—наукой о самоорганизации в нелинейных диссипативных
системах.
Синергетика—это интегральная наука, которая исследует процессы самоорганизации и
охватывает все отрасли знаний о косной и живой природе, технике и экономике. Именно
синергетика позволяет нам теперь говорить о зарождении общего метаязыка естественника,
инженера и гуманитария, т.е. перейти к целостному пониманию природы, техники и общества
на основе единой синергетической концепции. Эта концепция дает возможность создать новое
отношение к процессу интегрального познания и самой науки, убрав разъединяющие барьеры
между отдельными отраслями науки и техники, уйти от узкого профессионализма. Разумеется,
что переход на целостную, синергетическую концепцию требует проведения новых научных
и прикладных исследований, отражающих кооперативные, синергетические явления в соответ-
ствующих предметных области^ знаний.
К такого рода исследованиям и относится предлагаемая читателю книга, в которой
впервые в теории управления развит принципиально новый синергетический подход к
синтезу систем управления нелинейными динамическими объектами различной физиче-
ской (химической, биологической) природы. Этот подход основывается на концепции
введения инвариантных притягивающих многообразий—синергий, на которых естествен-
ные свойства объекта наилучшим образом согласуются с требованиями соответствующей
задачи управления.
Автор книги—Колесников Анатолий Аркадьевич, заведующий кафедрой систем автомати-
ческого управления Таганрогского государственного радиотехнического университета, доктор
технических наук, профессор, Заслуженный деятель науки и техники РФ, член Академии
электротехнических наук РФ и международной Академии энергоинформационных наук. Про-
фессор А.А. Колесников является выдающимся специалистом в области прикладной теории
управления. Наиболее значительный вклад им внесен в решение фундаментальной проблемы
синтеза и разработки методов автоматизированного проектирования оптимальных и многокри-
териальных систем управления нелинейными объектами, а также в развитие принципиально
нового синергетического подхода к аналитическому конструированию нелинейных агрегиро-
ванных систем высокой размерности, что впервые позволило осуществить крупный прорыв в
решении сложных задач управления широким классом динамических объектов различной
природы. Им опубликовано 11 монографий и учебных пособий, более 180 научных статей в
области синтеза нелинейных систем управления, он сформировал известную научную школу
по оптимальным и синергетическим системам, в которой подготовлено более 20 докторов и
кандидатов наук.
Прочтите новую книгу проф. А.А. Колесникова “Синергетическая теория управления”,
она во многом оригинальна, нетрадиционна и вызывает повышенный интерес. Внимательного
читателя ожадает интеллектуальное удовольствие от целостности и естественности нового
взгляда на теорию систем и процессов управления. Монография предназначена для широкого
3
круга читателей—от ученого до инженера и старшекурсника, интересующихся теорией само-
организации и управления динамическими объектами самой разной природы. Эта монография
выходит в серии книг видных российских ученых Таганрогского государственного радиотех-
нического университета.
Профессор В.Г. Захаревич, ректор ТРТУ
4
Хорошо все то, что в согласии с природой.
Сенека
ПРЕДИСЛОВИЕ
Теория управления получила в свое время значительный импульс в развитии, когда
учеными и инженерами было осознано, что базовые принципы управления не зависят от
конкретной природы объекта. Основные законы механики, электротехники, теплотехники,
гидравлики, газовой динамики и химии, которыми описывается поведение подавляющего
большинства современных подвижных и технологических объектов, могут быть представлены
аналогичными и даже совпадающими закономерностями в виде системы дифференциальных и
алгебраических уравнений. Более того, многие из этих законов могут переходить друг в друга
в результате инвариантных математических преобразований. Для подтверждения этого важ-
ного положения достаточно лишь напомнить, например, о постулате Максвелла, согласно
которому уравнения движения сложной электромеханической системы составляются на основе
глубокой аналогии между механическими движениями и процессами, протекающими в элект-
рических цепях. Нетрудно указать подобную аналогию и в системах другой природы, что во
многих случаях связано с единством законов сохранения.
Именно свойство инвариантности математических преобразований при составлении урав-
нений движения по существу и косвенно лежит в основе универсального подхода теории
управления к различным по своей физической (химической, биологической и т.п.) природе
задачам управления.
Однако дальнейшая формализация этого подхода привела в настоящее время к непомерной
математизации современной теории автоматического управления (СТАУ). С одной стороны,
это позволяет опереться на фундаментальную математическую базу и привлечь к решению
задач СТАУ мощные аналитические и численные методы с применением современных и
перспективных ЭВМ. С другой же стороны, чрезмерная формализация, например линейной,
ТАУ фактически превратила ее в одну из областей алгебры—теории матриц или, по меньшей
мере, в область теории дифференциальных уравнений. Более того, даже базовые, присущие
только ТАУ, понятия нередко формулируются в терминах соответствующей математической
теории. Примерами являются понятия управляемости, наблюдаемости и др.
Обратимся теперь к фундаментальному понятию “оптимальная система”. Само по себе
введение термина “оптимальность”—это лишь попытка отразить оценочное, субъективноё
свойство через некоторое количественное соотношение, т.е. попытка объективизировать, вы-
разить количественно то качество, которое желательно придать синтезируемой системе. На
наш взгляд, введение в СТАУ методов оптимального управления, как базовых и составляющих
ее математическую основу, является лишь первым шагом к новому пониманию прикладных
задач автоматического управления. Представляется достаточно очевидным, что следующим
шагом должно быть введение в самую сущность прикладной ТАУ фундаментальных естествен-
ных закономерностей, отражающих физическое (химическое, биологическое и т.п.) начало
управляемого объекта, f И
Это требование в полной мере
согласуется с известным положением о том, что природа объекта определяет физическое и
математическое содержание основной проблемы прикладной теории автоматического управ-
ления—синтеза, т.е. аналитического конструирования оптимальных регуляторов (АКОР).
Поставленная таким образом проблема СТАУ является принципиально новой и порождает
крупные самостоятельные проблемы и задачи. При этом возникает труднейшая задача пере-
хода от естественных принципов, учитывающих своеобразие объекта, к количественным,
5
формализованным соотношениям. Для этого представляется перспективным использовать
принципы (законы) сохранения, справедливые, как известно, для всех форм существования
материи и являющихся инвариантами в тех предметных областях, к которым относится
данный, конкретный объект управления.
Развитие основной проблемы СТАУ—синтеза оптимальных нелинейных систем—показа
ло, что теория управления по многим признакам оказалась в плену редукционистских методов
когда путем “склеивания” локальных описаний системы пытаются построить ее глобально!
поведение. Хотя эти методы оказываются иногда успешными, например в линейном случае
однако перспективный путь развития прикладной нелинейной теории управления, по-видимо
му, лежит в русле холистических, глобальных подходов, отражаемых путем применение
всеобъемлющих принципов сохранения в процедурах синтеза оптимальных систем. В этох
смысле можно утверждать, что эпоха подлинного, естественно-физического (химического
биологического и т.д.) оптимального управления еще только наступает. Это означает, что i
основу “подлинно оптимального” управления целесообразно положить не только математиче
ское содержание, получившее значительное развитие, но и физическое начало задач управле
ния,' которое в настоящее время выдвигается на первый план. Остановимся на этом положении
Математика, как известно, занимается общими формальными закономерностями, в то времз
как физика в первую очередь интересуется качественными свойствами и особенностей кон
кретных явлений. В то же время и в физике имеются такие обобщающие фундаментальньк
понятия, как законы сохранения, присущие всем физическим процессам и выраженные i
основополагающем вариационном принципе. Этот принцип формально отражается в матема
тической теории оптимального управления через критерии качества. Другими словами, i
основу “подлинной оптимизации” нелинейных систем целесообразно положить не толькс
математические конструкции стандартной теории оптимального управления, а в большей мер<
естественно-математические соотношения, отражающие, во-первых, фундаментальные физи-
ческие закономерности в форме соответствующего вариационного принципа и, во-вторых
технологические требования задачи управления в виде соответствующего критерия качества
Такой подход возвращает ТАУ к естественным источникам ее возникновения, но на новом
естественно-математическом витке ее развития. Именно введение в нелинейную теорию уп-
равления элементов физической (химической, биологической) естественности позволит по-
новому подойти к построению процедур синтеза систем управления нелинейными объектами
Наиболее общим физическим свойством всех объектов различной природы, как известно,
является свойство сохранения—энергии, количества движения и др., в биологии—это гоме-
остазис. В этой связи в основу нового направления нелинейной теории АКОР целесообразно
положить преднамеренное введение в пространство состояний синтезируемых нелинейных
систем некоторых постоянных функциональных соотношений между координатами системы,
т. е. таких инвариантных интегральных многообразий, на которых естественные свойства
объекта наилучшим образом согласуются с соответствующими требованиями технологической
задачи управления, которая отражает цель функционирования данного объекта. Разумеется,
что при этом должны гарантироваться общесистемные свойства—асимптотическая устойчи-
вость движения в области или в целом, грубость, минимально возможное время переходных
процессов и др.
Введение инвариантных многообразий в процедуру синтеза наделяет замкнутую систему
общими глобальными свойствами и позволяет выявить родство разнородных явлений, проис-
ходящих в объектах управления различной природы. Представление этих явлений на матема-
тическом языке—совокупности частных (первых) интегралов дифференциальных уравнений
синтезируемой оптимальной системы—отражает единство принципа сохранения в многообра-
зии управляемых процессов. Этот новый естественно-математический подхо^ к решению
нелинейной проблемы оптимизации систем—основной проблемы СТАУ—глубоко связан с
идеями синергетики и теории нелинейных диссипативных систем.
Между идеями синергетики и развиваемой в этой книге нелинейной теорией управления,
основанной на идее введения желаемых инвариантных мнгообразий в процедуру синтеза.
систем, существует глубокая концептуальная связь. Поэтому кратко остановимся на основных
положениях синергетики, важных с точки зрения проблем управления. В настоящее время
формируется новая интегральная наука—синергетика, изучающая коллективные вопросы
самоорганизации и охватывающая практически все современные отрасли знаний о косной и
живой природе, технические и экономические науки. Эта обобщенная наука основана на
нелинейной динамике и термодинамике необратимых процессов. Буквально на глазах, в тече-
ние короткого времени синергетика—теория неравновесных процессов превращается во все-
общую теорию развития, имеющую весьма широкие мировоззренческие последствия. Смысл
и содержание этой новой интегральной науки состоит в том, что в открытых системах, обме-
нивающихся с внешней средой энергией, веществом и информацией, возникают процессы
самоорганизации, т.е. процессы рождения из физического (биологического, экономического,
социального) хаоса некоторых устойчивых упорядоченных структур с новыми свойствами
систем. Это общее определение справедливо для систем любой природы. Подчеркнем два
фундаментальных свойства высокоэффективных синергетических систем любой природы—
это, во-первых, обязательный обмен с внешней средой энергией, веществом и информацией и,
во-вторых, непременное взГаимосодействие, т.е. когерентность поведения между компонента-
ми системы. Об этих кардинальных свойствах синергетических систем всегда следует помнить
как руководителю коллектива, так и специалисту в конкретной научной или технической
области. К синергетике как к науке, изучающей поведение нелинейных систем вдали от
положения равновесия при изменении некоторых управляющих параметров, наиболее близка
по своей идеологии прикладная теория управления. В этой связи представляется весьма
перспективным для развития современной теории управления осуществить попытку переноса
описанных выше свойств синергетических систем на конструируемые системы управления
нелинейными техническими объектами. Необходимо отметить, что именно синтез такого рода
систем является фундаментальной проблемой современной науки об автоматическом управ-
лении, которая отличается от синергетики тем, что не отыскивает возможные диссипативные
структуры, а формирует, “навязывает” нужные нам структуры для решения различных задач
управления соответствующими динамическими объектами. Разумеется, что при этом возника-
ет непростая проблема перехода от естественных синергетических принципов к количествен-
ным соотношениям. Такой подход позволяет создать новую теорию синтеза систем управления
нелинейными динамическими объектами, имеющую глубокое естественно-научное обоснова-
ние как приложение принципов сохранения в проблемах управления.
В целом ряде работ отечественных и зарубежных ученых в последнее время было показано,
что для естественных динамических систем свойственно наличие некоторых поверхностей
притяжения—инвариантных многообразий в их пространстве состояний. Такие установивши-
еся режимы получили название аттракторов, т.к. они “притягивают” соседние режимы. Ат-
трактор—это притягивающее множество в пространстве состояний, т.е. асимптотически устой-
чивое множество. Аттракторы, отличные от состояний равновесия и периодических колебаний,
получили название “странных аттракторов”. Внутри таких аттракторов траектории блуждают
нерегулярным образом и являются весьма чувствительными к изменению начальных условий.
Из последних работ по исследованию аттракторов нелинейных динамических систем следует,
что для многих природных систем характерен режим движения по некоторым многообразиям
в их пространстве состояний. Так, в природных системах переменные, характеризующие их
состояние, стремятся к таким значениям, которые соответствуют некоторым соотношениям
(уравнейиям баланса), т.е. инвариантным многообразиям в их пространстве состояний. Суще-
ствуют также аналогичные связи, накладываемые непосредственно не на переменные состоя-
ния, а на скорость их изменения. В природных системах наличие инвариантных многообразий
обусловлено необходимостью выполнения законов сохранения, например закона сохранения
массы, а в технических системах существование задаваемых инвариантных многообразий
должно обеспечиваться самой процедурой синтеза законов управления. Природные системы,
в отличие от технических систем управления, обладают целым рядом весьма необычных, с
точки зрения современной теории управления, свойств, например, для природных систем не
существует известного “проклятия размерности”, которое в настоящее время приводит к
существенным, а в случаенелинейных технических систем и к принципиальным затруднениям
в отношении обеспечения их асимптотической устойчивости и желаемого качества. Оказыва-
ется также, что в природных системах качество их функционирования может даже повышаться
при расширении разнообразия входящих в них подсистем (например, разброса их параметров)
и, более того, указанное разнообразие, как правило, играет стабилизирующую роль. В то же
время известно, что в сложных технических системах управления подобное свойство обычно
ведет к ухудшению их качества. В связи с отмеченными замечательными свойствами природ-
ных систем представляется весьма полезным и перспективным для развития современной
теории управления осуществить попытку переноса этих свойств на конструируемые системы
управления техническими и, в первую очередь, нелинейными объектами.
Выше уже отмечалось, что для многих природных систем основная цель функционирова-
ния состоит в стабилизации соотношений между их переменными состояния. Математиче-
ским следствием этого факта является вырожденность их уравнений динамики и наличие
интегральных инвариантов, т.е. некоторых инвариантных многообразий в их пространстве
состояний. Именно это свойство положено в основу развиваемого'в этой книге синергетиче-
ского подхода и разрабатываемых на его основе теории и методов синтеза нелинейных систем
управления. Применение инвариантных многообразий для решения задач управления различ-
ными динамическими объектами основывается на глубокой аналогии между процессами в
естественных системах и в технических управляемых системах. Указанная аналогия следует из
фундаментальных принципов сохранения в физике—закона сохранения энергии, закона со-
хранения количества движения (импульса), закона сохранения момента количества движения,
закона сохранения массы и т.д. Инвариантные многообразия, которые присущи синтезируе-
мым системам, представляют собой некоторые функции, которые во время движения не
изменяются в силу указанных законов сохранения. В механике,'например, величины, которые
подчиняются соответствующим законам сохранения, называют интегралами движения, явля-
ющимися некоторыми постоянными величинами. Любое механическое движение с необходи-
мостью содержит в себе те или иные инвариантные величины. Изучение механического дви-
жения возможно именно в той мере, в какой удается найти эти величины и сформулировать на
их основе некоторые количественные законы движения. Развитие науки показывает фунда-
ментальное значение принципов сохранения, действующих не только в области механического
движения. Основополагающей идеей, присущей предмету и методу науки, является идея
сохранения, или, иначе, принцип инвариантности. Этот принцип содержится в структуре любой
теории, описывающей то или иное природное явление. Выявление инвариантных свойств
исследуемых систем позволяет сформулировать специфические закономерности функциони-
рования разнообразных систем.
Необходимо подчеркнуть, что в отличие от классического подхода механики, когда инва-
риантные многообразия отыскиваются, в развиваемых в данной работе теории и методах
синтеза они задаются как желаемые и имеют непосредственный физический смысл, связанный
с природой исходного нелинейного объекта и требованиями технологической задачи, для
решения которой и синтезируется система управления объектом.
Итак, в книге разрабатывается новый синергетический подход к синтезу систем управления
нелинейными многомерными динамическими объектами различной природы, основанный на
естественном гомеостазисе—сохранении внутренних желаемых свойств динамических систем.
Предлагаемое в данной книге введение инвариантов (синергий) в прикладную теорию управ-
ления, как ее базовых элементов, позволяет придать этой теории естественно-математическое
единство и концептуально-методологическую целостность. Язык инвариантов здесь играет
роль базового языка науки, определяющего системную сторону теории управления и устанав-
ливающего непосредственную связь этой теории с фундаментальными принципами современ-
ного естествознания—принципами отбора действительных движений из множества возможных
на основе инвариантных соотношений, отражающих законы сохранения в соответствующей
предметной области.
Теперь еще раз вернемся к понятию “естественность”, которое ассоциируется в первую
очередь с природным началом. Управление—это всегда то или иное воздействие на соответст-
вующий объект. В этой связи возникает проблема создания прикладной теории управления, в
возможно большей мере учитывающей естественные свойства объекта, при этом сами управ-
ления желательно сделать минимально возможными для достижения поставленной цели уп-
равления. Отсюда следует, что синергетическая теория—это, в первую очечредь, теория
несилового управления,- не противоречащего естественному движению объекта. В мировозз-
ренческом плане развиваемая в данной книге синергетическая теория управления представляет
собой попытку выявить и установить гармонию естества—“-гонии” (от греческого слова
“рождение”) и искусства создания, конструирования (“-ургии” от греческого “деятельность”),
т.е. с позиций единства природы и труда. Ясно, что здесь очень важно соблюсти пропорцию и
согласованность указанных двух компонентов—природного и искусственно сотворенного—в
самой структуре новой теории. Тогда излагаемую в книге науку можно назвать “киберго-
нией”—от слова кибернетика—управление, отражающего искусственно сотворенный (“-ур-
гийный”) компонент, и слова “-гония”—порожденное™ естеством, подчеркивающего непос-
редственный учет природного начала управляемого объекта. Однако такое название, по-види-
мому, непривычно с лингвистической точки зрения, хотя оно в полной мере определяет
сущность излагаемого в данной книге нового синергетического подхода в прикладной теории
управления.
Предлагаемая вниманию читателей книга, посвященная феномену, достижениям и перс-
пективам синергетического подхода в теории управления, по своему содержанию во многом
нетрадиционна с точки зрения классической теории управления. Это обстоятельство связано
хотя бы с тем, что в ней впервые в научной литературе последовательно излагается новый
синергетический подход, базирующийся на языке инвариантов (синергий), который непривы-
чен для стандартных методов теории автоматического управления. Введенный в книге язык
инвариантов, как основной элемент теории управления, позволяет установить непосредствен-
ную связь с законами сохранения, т.е. фундаментальными естественными свойствами управ-
ляемых динамических объектов различной физической (химической, биологической) приро-
ды. Инварианты^ самоорганизация, нелинейность, оптимизация, синтез—это базовые
основополагающие понятия концептуального лексикона развиваемой синергетической теории
управления, определяющие ее сущность, новизну и содержание.
Наша цель будет полностью достигнута, если книга послужит распространению среди
специалистов, инженеров и студентов новых естественно-математических идей в теории авто-
матического управления. Это обстоятельство становится тем более важным в связи с чрезвы-
чайной актуальностью современной проблемы целостного видения и понимания окружающего
мира (природы, техники, человека и общества) как единого эволюционного процесса. Учиты-
вая же существующую непомерно узкую специализацию многих современных, в- первую
очередь технических, наук, необходимо поставить весьма актуальный вопросе единой научной
основе для формирования такого целостного взгляда на мир. Оказалось так, что в последние
годы в силу самой лдгики развития науки в ней начались и в настоящее время значительно
ускорились интеграционные процессы, связанные с изучением кооперативных явлений в сис-
темах существенно разной природы. В этой связи синергетика—наука о кооперативных про-
цессах—стала претендовать на роль базовой и целостной парадигмы современного естество-
знания. Принципиальное отличие синергетического подхода от классических методов науки,
на которых основано существующее естественно-научное и, следовательно, инженерное обра-
зование, состоит в выявлении фундаментальной роли свойства самоорганизации в нелинейных
динамических системах. Синергетика, по-видимому, становится тем эволюционным естество-
знанием, которое позволяет теперь уже говорить о возникновении своего рода метаязыка
целостного понимания различных природных и технических явлений на основе единой науч-
ной концепции. Эта концепция позволяет построить новое отношение к процессу интеграль-
ного познания различных наук. Именно такая цель преследуется в данной книге применитель-
но к теории управления. В какой мере попытка автора в достижении указанной новой и
чрезвычайно трудной цели оказалась успешной—об этом судить читателю книги.
Развитый в книге новый синергетический подход позволил осуществить своего рода про-
рыв в области синтеза и проектирования многомерных и взаимосвязанных систем управления
широким классом сложных нелинейных динамических объектов различной физической при-
роды. Этот подход нашел конкретное применение в основном для решения проблемы управ-
ления нелинейными техническими объектами (роботами, подвижными аппаратами, техноло-
гическими агрегатами и т.д.). которая охватывает, как известно, обширную область конструк-
тивной деятельности человека. Однако также очевидно, что синергетический подход весьма
полезен и для других не менее важных применений, например, в задачах управления в
экологии, биотехнологии и др. В книге приведены многочисленные конкретные примеры
применения развитого синергетического подхода в задачах синтеза систем управления различ-
ными нелинейными техническими объектами. При изложении материала книги автор стремил-
ся следовать заповедям великих ученых: И.Ньютону о том, что “при изучении наук примеры
не менее поучительны, чем правила”, и Д.Максвеллу о том, что “научная правда должна
представляться в различных формах и должна считаться равно научной, будет ли она представ-
лена в ясной форме и живых красках физической иллюстрации или в простоте и бледности
символического выражения”. В книге явное предпочтение автор отдавал геометрическим и
физическим соображениям, полагая, что именно такой подход в наибольшей мере соответст-
вует потребностям прикладной теории управления.
Написание и подготовка предлагаемой книги были бы невозможны без помощи многих
людей. Выражаю свою признательность профессору А.В. Непомнящему, всячески побуждав-
шему меня к написанию книги, основанной на естественном подходе к процессам управления.
Я благодарен своим коллегам и ученикам, принявшим участие в разработке синергетического
подхода: Н.В. Балалаеву (п. 4.8), В.Е. Беляеву (п.п. 2.7, 3.6), О.Т. Вавилову (п.п. 3.8, 4.7),
Г.Е. Веселову (п. 2.8), Алекс. А. Колесникову (п. 3.4), В.Х. Пшихопову (п. 4.6), Ю.Г. Сотни-
кову (п. 4.2), вместе с которыми написаны соответствующие разделы книги. Огромную работу
по компьютерному набору книги выполнили А.М. Гарбуз и Е.В. Солодовник, которых я также
искренне благодарю.
Разумеется, что издание книги в нынешнее трудное для науки время невозможно без
финансовой поддержки. Эту поддержку оказал ректорат Таганрогского государственного ра-
диотехнического университета, которому выражаю свою признательность. Пользуясь случаем,
хочу поблагодарить Конкурсный центр России по фундаментальным исследованиям в области
автоматики и телемеханики, вычислительной техники, информатики, кибернетики, метроло-
гии и связи при Санкт-Петербургском государственном электротехническом университете за
предоставление грантов в 1992-94 гг., в рамках которых был получен ряд важных результатов,,
изложенных в данной работе.
Книга предназначена для научных работников, аспирантов, инженеров и студентов-стар-
шекурсников, специализирующихся в области теории систем управления динамическими объ-
ектами различной физической (химической, биологической) природы.
Буду признателен всем читателям, которые выскажут свои соображения по содержанию
этой книги.
Таганрог, август 1994 г. Автор
10
ГЛАВА!
СИНЕРГЕТИЧЕСКИЙ ПОДХОД
В ТЕОРИИ УПРАВЛЕНИЯ
Мир кажется кучей* мусора, рассыпанного нау-
дачу, цо за игрой стихийных сил и случайносХсй
скры₽ае?ся прекраснейшая гармония.
Г‘раклит
Вместо устойчивости и гармонии мы видим по-
всюду, куда ни обращаем свои взор, эволюцион-
ные процессы, приводящие ко все большему раз-
нообразию и все возрастающей сложности.
Л. Пригожин
1.1. СИНЕРГЕТИКА И ПРОБЛЕМА УПРАВЛЕНИЯ
О редукционистском и целостном подходах в теории управления. Современная научная
картина мира опирается в основном на классический редукционистский подход, согласно
которому окружающие нас природные явления состоят из мира вещей и мира законов. Такое
представление означает, что свойства целого объясняются свойствами частного, т.е. характе-
ристики целого полностью определяются некоторой суммой характеристик егаэлементарных
составляющих. Редукционистская парадигма (исследовательская программа) естествознания,
берущая свое начало еще от Платона, нашла яркое и успешное воплощение в научном методе
Галилея, который был затем обоснован и принципиально развит Ньютоном. Современное
общество обязано этой парадигме крупными успехами в области науки, технологии и промыш-
ленности. Фундаментальными, основополагающими понятиями редукционистской картины
мира являются материя и движение, согласно ей природа—это машина, состоящая, как и любой
механизм, из отдельных частей со своими индивидуальными свойствами и описываемая раз и
навсегда установленными законами математического естествознания.
Однако до Галилея и Ньютона доминировала в основном аристотелева система мира,
согласно которой в природных процессах целое важнее ее составляющих. Это так называемый
холистический, т.е. целостный, глобальный подход к пониманию картины мира*. По Аристоте-
лю, наш мир представляет собой иерархическую систему, в которой одни формы подчинены
другим формам, т.е. находятся в динамической взаимосвязи друг с другом. Холистический,
целостный подход ориентированна системный характер того или иного явления, для него целое
(представляет собой нечто большее, чем простая сумма составляющих. Этот подход уделяет
важное внимание связям и взаимодействию между частями целого как некоторой системы.
1 Редукционистский подход отличается антропоцентризмом; здесь человек во всех проявле-
ниях суть повелитель природы, которую он приспосабливает для удовлетворения своих “не-
уклонно растущих потребностей”. В отличие от этого холистическая картина мира полагает,
»нто человек и природа равны, что они находятся во взаимодействии и составляют нечто целое
11
и единое в своем существовании и развитии. В настоящее время появились многие проблемы,
которые, по-видимому, не могут быть решены редукционистскими методами. С одной стороны,
эти методы позволили создать к настоящему времени гигантскую технократическую цивили-
зацию, а с другой—они не дают ответа на острые вопросы и проблемы, связанные, например,
с возможностью возникновения экологической или ядерной катастрофы и вообще с разруши-
тельными тенденциями в современном мире. В частности, существующие подходы редукцио-
нистского толка не объясняют основополагающих причин быстрого разрушения даже самых
лучших технических объектов и сооружений по сравнению с природными системами, которые
не только восстанавливаются, но и усиленно развиваются, если, конечно, человек их оконча-
тельно не погубил и некоторое время не вмешивается в их функционирование. С редукциони-
стских позиций трудно также понять истинные причины существенного снижения устойчиво-
сти и, следовательно, надежности искусственных сооружений и комплексов с ростом их раз-
меров и сложности структуры, между тем для природных систем, наоборот, характерно явление
повышения устойчивости и стабильности по мере того, как они становятся крупнее и функци-
онально сложнее. Более того, природные системы в пределах их жизненного цикла обладают
удивительными свойствами самосохранения и самоусовершенствования [225]. По-видимому,
конструктивная мысль человека, приведшая к целому ряду выдающихся, эпохальных научно-
технических достижений, все же не учитывает нечто фундаментальное и обобщающее, прису-
щее природным системам.
В этой связи перед современной наукой, в том числе и теорией управления, стоит трудная;
проблема выявления и изучения механизмов построения природных (экологических, биоло-
гических) систем, которые гарантируют высокую выживаемость и надежность функциониро-^
вания этих систем в условиях изменения внутренней и внешней среды обитания. Эти и другие
подобного рода обстоятельства возродили интерес к изучению и развитию глобальных подхо-
дов, что свидетельствует о возвращении к аристотелеву взгляду на картину и развитие мира,
разумеется, на новом витке его познания. Холистические, целостные представления опираются
на такие базовые понятия, как “симметрия", "структура", "связность” [222], которые здесь
более важны, чем понятие “закон”, занимающее, как известно, доминирующее положение при
редукционистском подходе. Для холистического взгляда на мир характерен системный подход,.
в котором главенствуют процессы синтеза по сравнению с традиционной аналитикой класси-:
ческого естествознания. Разумеется, что холистический подход [220] вовсе не антагонистичен’
редукционистскому, а стремится сохранить его положительные стороны, придав им большую^
органичность и системность. Необходимо подчеркнуть, что в классическом естествознании, до'
многом опирающемся на редукционистский подход, элементы холистического взгляда на‘
природу явлений были всегда неизбежно включены в структуру самой науки в форме ее
фундаментальных принципов (например, вариационные принципы физики, очевидно, отио--
сятся к холистическому подходу).
Итак, современные холистические взгляды на естественно-научную картину мира, вклю-
чающую физические, биологические и другие процессы, опираются на фундаментальных
принцип всеобщей связи природных явлений и на принцип развития. При этом выделяете»
физическое (биологическое) ядро природных систем как совокупность низших, редукциони-1
стских форм материи со своими законами движения. Высшие, холистические представления
опираются на низшие формы, отводя первостепенную роль структурным характеристикам и
свойствам связности природных процессов. Очевидно, что известная противоположность обо!
их подходов в науке—редукционистского и холистического—относительна и взаимообратима|
т.к. эти подходы по своему содержанию и смыслу преследуют одну и ту же цель—выявит^
интеграционные, синтезирующие положения в науке, и тем самым добиться ее единства я
целостности.
Тема о редукционистском и холистическом подходах в науке, которой мы здесь кратков
несколько поверхностно коснулись, несомненно достойна более глубокого и развернутого
изложения. Однако для нас важно здесь попытаться выявить- основные редукционистские
особенности и холистические тенденции в теории управления, которые, возможно, могут бытг
12
положены в основу ее дальнейшего развития. Поэтому сначала остановимся на понятии
“управление”. Дело в том, что издревле анализ природных систем носил пассивный, наблюда-
тельный характер, т.е. он не предполагал целенаправленных воздействий на динамику изуча-
емых систем. Ньютоновский и особенно современный взгляды на науку в большей мере
связаны с управленческим подходом, при этом координаты состояния системы из первоначаль-
но независимых в результате действия управления могут превращаться в частично или полно-
стью зависимые с целью обеспечения движения системы по желаемой траектории. В дальней-
шем нас в основном будут интересовать управляемые динамические системы и их свойства, т.к.
именно управление отражает конструктивное начало и активную роль человека в создании
рациональной техносферы и вообще в мировом эволюционном процессе [208].
Перейдем теперь к выявлению редукционистских и холистических тенденций в теории
управления. Распространенное в современной теории управления внутреннее описание про-
цессов в форме уравнений пространства состояний, очевидно, ближе к редукционистскому
подходу. Это объясняется тем, что используемые координаты состояния фактически равны по
значимости и между ними не устанавливается некоторая связь или иерархическая подчинен-
ность, здесь координаты не сгруппированы в функциональные блоки или подсистемы, что
позволило бы осуществить естественную декомпозицию системы на основе, например, ее
физической структуры. В этом смысле внешнее описание системы в виде связи “вход—выход”
в большей мере ближе к холистическому подходу, т.к. оно не содержит информации о локаль-
ных процессах и основано только на отображении, связывающем выходы с входами системы.
Однако внутреннее описание содержит существенно больше ийформации о способе действия
системы, т.к. такое описание порождает ее внешнее описание. Известно, что при построении
модели системы возникает так называемая задача реализации, согласно которой необходимо
выяснить полноту соответствия внутреннего и внешнего описаний системы. Использование же
критериального подхода в теории управления очевидно ближе к холистическому взгляду, т.к.
непосредственно связано с вариационными принципами йауки. Функционал (или критерий
качества) отражает глобальные свойства системы, которые накладывают ограничения на ее
произвольные локальные движения. Эти движения непременно должны удовлетворять экстре-
муму некоторого функционала. Отсюда следует, что оценка свойств систем управления по
конкретным параметрам переходных процессов относится к редукционистскому подходу, т.к.
находится на самой нижней ступени иерархической лестницы: функционал (критерий качест-
ва) -*• уравнения состояния, доставляющие экстремум функционалу на траекториях движе-
ния, -♦ переходные процессы, являющиеся решениями этих уравнений для частных граничных
условий системы.
Продолжим изучение холистических тенденций в теории управления и попытаемся вы-
явить их сущность на основе некоторых общих физических закономерностей. К одному из
важных холистических понятий относится понятие “связности”, т.к. является одной из базо-'
вых качественных характеристик системы. Понятие “система” подразумевает связь совокуп-
ности некоторых элементов, образующих структуру системы, и поэтому с разрушением струк-
турной связности исчезает и сама система [222]. В системах управления, описываемых диф-
ференциальными уравнениям, связность отражает характер динамического взаимодействия
между компонентами, иерархически входящими в соответствующую систему. Отличительной
особенностью систем управления, как известно, является их динамическое описание, т.е.
представление физического (химического, биологического) объекта в движении. Происхо-
дящие в этих системах процессы отражают реакции взаимодействия некоторых локальных
подсистем (элементов), входящих в общую систему управления. Несмотря на кажущуюся
тривиальность последнего утверждения, оно здесь подчеркивается, т.к. относится к принципи-
альной, кардинальной черте теории управления, заметно отличающей ее от доминирующего
во многих современных науках статистического подхода, когда соответствующие явления
описываются как набор возможных ситуаций, как собрание сущностей. Динамический же
подход определяет, какая сущность следует за другой сущностью и как они взаимодействуют
13
между собой. Согласно этому подходу первопричиной всего сущего в этом мире является
динамика, т.е. взаимодействие между сущностями реального мира, а наблюдаемые нами физи-
ческие явления и процессы представляют собой некоторые формы этого взаимодействия.
Иначе, за явленным порядком вещей, т.е. реакцией, скрывается некоторый невидимый смысл,
а это уже холистический взгляд на природные процессы [220, 221, 223].
Итак, динамическое описание окружающего нас реального мира придает особую значи-
мость внутреннему взаимодействию компонентов в системах управления, которому совре-
менная теория, как это и не покажется странным, все же не отводит решающей роли, во многом
увлекшись чисто математической стороной задачи об управлении. Между тем любое природное
явление познаваемо только во взаимосвязи с другими явлениями посредством соответствую-
щих законов, в результате чего эти связанные явления и могут быть описаны как некоторое
целостное представление о природном процессе. Указанный холистический взгляд все в боль-
шей мере становится всеобщим в науке. Все природные системы, в том числе и живые организ-
мы—от отдельной особи и популяции до биосистем и экологических комплексов, организова-
ны в определенные функциональные образования, которые обмениваются между собой веще-
ством, энергией и, очевидно, информацией. По-видиМому, информация как раз и служит
источником управления поведением и состоянием как отдельных компонентов, так и природ-
ных систем в целом. Следует, однако, отметить, что вплоть до последнего времени наука
уделяла основное внимание изучению естественно-энергетической организации природных
систем, оставляя несколько в стороне такую важную их особенность, как управление с целью
самосохранения этих систем, причем в максимально возможной степени. В настоящее время
возникла настоятельная необходимость выявления механизмов управления, действующих в
природных системах и лежащих в основе их функционирования и развития. Представляется ।
достаточно очевидным, что указанные механизмы должны базироваться на динамике управ-!
ляемого взаимодействия вещества, энергии и информации в природных системах [225].
Остановимся теперь на таком важном холистическом понятии, как симметрия в природных
системах [208, 225-228]. Симметрия отностися к одному из фундаментальных понятий в
современной теории физических взаимодействий. Она присутствует повсюду, где существуют
связи между частями в составе какого-либо объекта или системы. Скрытые формы симметрии
были обнаружены учеными в результате физического и математического анализа сил, которые
ответственны за формирование материи. Этот анализ показывает, что силы можно рассматри-:
вать как способ поддержания определенного рода симметрий в природе. На основе теории!
взаимосвязей между симметрией, силовыми полямии частицами современные физики пришли!
к весьма неординарному выводу о том, что мы живем в многомерном (точнее одиннадцатимер- <
ном) мире. В соответствии с этой теорией, окружающий нас обычный трехмерный мир допол-’
няется пространственно-временными измерениями, которые как раз и проявляются как неко-*
торые силы или взаимодействия [236]. Общий принцип симметрии пронизывает структуру и|
функционирование любых естественных систем—от элементарных частиц и клеток до галак-1
тик и живых организмов. В симметрии проявляется общность структуры и свойств систем, в то:
же время симметрия—это некоторые запреты на возможное число вариантов природных?
процессов. Указанные запреты реализуются через законы сохранения в соответствующих!
природных явлениях. В физике идея симметрии, например, лежит в основе классификации^
элементарных частиц, в химии она проявляется в виде периодического закона, в биологии^
симметрия проявляется в законе сохранения наследственности, в математике —в теории групп!
и т.д. В общем случае симметрия представляет собой некоторую упорядоченность частей^
образующих нечто целое. В свою очередь, упорядоченность дает возможность сжать инфорЧ
мацию о структуре природного объекта путем выделения лишь части его блоков и знания*
правил их построения. Однако свойству симметрии в природных системах всегда сопутствует'
асимметрия, т.е. нарушение. В симметрии проявляется некоторая общность свойств природных
процессов, а в асимметрии—их различие й разнообразие. Все явления окружающего нас мира
пронизывает единство симметрии и асимметрии, отражая свойства сохранения и изменения,
являясь причиной порядка и беспорядка, единства закономерного и случайного [208]. •
14
Важно подчеркнуть, что фундаментальное свойство симметрии и асимметрии в природных
системах—это не только некоторая общенаучная концепция, имеющая определенное фило-
софское содержание, но она позволяет также выявить некоторое конструктивное начало,
лежащее в основе рассматриваемого природного процесса. Так, с особой силой сказывается
значимость понятий симметрии и структуры при исследовании нелинейных диссипативных
систем, для которых характерны весьма интенсивные динамические взаимодействия. В таких
системах могут возникнуть так называемые процессы самодвижения, точнее самоорганизации,
невозможные в линейных системах. Для этих систем, описываемых нелинейными дифферен-
циальными уравнениями, как известно, отсутствуют какие-либо общие методы поиска их
решений. Именно здесь свойство симметрии дает возможность выделить некоторые частные,
так называемые инвариантные решения, которые, как оказалось, часто содержат ценную и
богатую информацию об общих свойствах природной системы. Исследование явлений самоор-
ганизации позволяет указать новые пути понимания принципов построения природных систем.
Учитывая, что перенос этих принципов на конструктивную деятельность человека дает воз-
можность выявить новые подходы в проблеме естественного управления различными физиче-
скими (химическими, биологическими) объектами, перейдем к более подробному изучению
явления самоорганизации в природных системах. Для. этого целесообразно изучить пути и
тенденции развития идеи самоорганизации в классической и современной науке.
Обратимость и необратимость процессов в динамических и термодинамических систе-
мах. Перейдем к краткому обзору причин и тенденций возникновения современных понятий
о самоорганизации движущейся материи, уделяя основное внимание тем положениям, которые
в той или иной мере связаны с проблемой управления.' В этом обзоре мы будем следовать
содержанию замечательной книги лауреата Нобелевской премии Ильи Пригожина и Изабеллы
Стенгере “Порядок из хаоса. Новый диалог человека с природой” [235]. Для рассмотрения
столь крупной идеи следует сначала вернуться к ньютоновскому синтезу знаний о природе.
Обратимость процессов в классической механике.
Известно, что ньютоновское понимание науки—это представление о ней как о способе воздей-
ствия на окружающий мир, позволяющего как предсказать, так и изменить ход протекающих
природных процессов. Ньютоновская наука—классическая механика—это активная наука, сред-
ство для построения устройств и механизмов, которая способна как обуздать, так и использовать
силы и материальные ресурсы природы на “благо человека”. Современная наука, в том числе и
теория управления, во многом базируется на указанном ньютоновском взгляде, она представляет
собой союз теории и практики в стремлении как понять, так и структурировать, изменить окружа-
ющий мир. В основе современной науки лежит экспериментальный диалог с природой, который
предполагает активное вмешательство, а не пассивное наблюдение. Эта наука ставит перед учены-
ми задачу научиться управлять физической сущностью, принудить ее действовать в соответствии
со “сценарием”, вытекающим из выдвинутой учеными теоретической схемы [235]. В соответствии
с этим подходом рассматриваемое явление предварительно изолируется, а затем препарируется и
расчленяется на составные мелкие части, чтобы’ быть согласованным с некоторой идеальной
ситуацией, вытекающей, в свою очередь, из принятых априорных принципов. Очевидно, что такое
представление о природе может оказаться весьма упрощенным, а порой и искаженным. Однако эти
обстоятельства вовсе не мешают экспериментальному методу отвергать подавляющее большинст-
во теоретических схем и гипотез, выдвигаемых учеными. Как говорил Эйнштейн, природа обычно
отвечает “нет” на задаваемые ей вопросы и только в исключительно редких случаях дает утеши-
тельный ответ “может быть”. Отсюда следует, что экспериментальный диалог, несмотря на его
в известной мере насильственный характер по отношению к природе, дает гарантию того, что
природа в своем общении с человеком выступает как независимая от него сущность, она
никогда не лжет и не берет своих ответов назад [235]. Однако чрезмерное увлечение экспери-
ментальным методом может привести к весьма упрощенному пониманию природы и убежде-
15
нию, что язык природы единственен и это язык исключительно математический. Так, согласно
классической механике, все разнообразие природы укладывается в универсальные истины,
отражаемые математическими законами движения. Основной вывод классической механики
гласит, что в этом мире “все задано” и, следовательно, все возможно. При этом высокая
общность законов классической динамики уравновешивалась неограниченным произволом в
выборе начальных условий системы. Именно допущение о полной независимости начальных
условий является одним из постулатов классической динамики. Это означает, что если неко-
торое существо способно управлять динамической системой, то оно также может вычислить
требуемое начальное положение системы так, чтобы система самостоятельно, “спонтанно”
могла перейти в желаемый момент времени в любое заранее заданное состояние. В классиче-
ской механике основное внимание сосредоточено на изучение одного вида природных изме-
нений, а именно на процессе механического движения, т.е. качественное разнообразие при-
родных явлений сводится к относительному перемещению материальных тел. При этом время
играет роль геометрического параметра. Итак,’ классическая наука, отождествляемая во мно-
гом с классической механикой, была наукой активного действия и предсказания, основанных
на законах Ньютона. Принципиальной отличительной особенностью классической динамики
является обратимость динамических траекторий, что постулируется в соответствующих за-
конах явным или косвенным образом. Суть указанной обратимости состоит в том, что обраще-
ние времени t -*• — t приводит к обращению скорости V -* — V, а система движется вспять, т.е.
эволюционирует назад во времени, заново проходя через все предыдущие состояния, в кото-
рых она уже ранее побывала. Все изменения в такой динамической системе в результате
обращения.времени могут быть полностью скомпенсированы вторым преобразованием—об-
ращением скорости, что позволяет системе с абсолютной точностью вернуться в исходное
состояние [235]. Описанное свойство обратимости—это основная симметрия классической
динамики. Обратимость траекторий наряду с полной независимостью начальных условий ог
законов движения являются теми принципиальными допущениями и идеализациями, которые
были положены в основу классической динамики. Хотя эти ограничения подвергаются суще-
ственному пересмотру в современной науке, однако они никоим образом не умаляют силу и
мощь методов, развитых основоположниками классической науки. В идеальном мире этой
науки динамическая система полностью и без какого-либо остатка передает все сообщаемое ей
движение. Результатом этого является сохранение полной энергии в изолированной системе
или при ее свободном движении, т.е. в любой момент времени изменение кинетической энергии
полностью компенсирует изменение потенциальной энергии системы. В XIX в. эта базовая
концепция ньютоновской механики была обобщена и формализована Гамильтоном и другими
учеными путем введения гамильтониана Н, представляющего собой полную энергию консер-
вативной системы, что целиком описывает ее динамику. Указанный гамильтонов формализм
явился великим достижением науки, триумфом в математизации описания природных процес-
сов, он до сих пор имеет первостепенное значение как база для разработки новых подходов, j
Примером такого рода подхода может служить принцип максимума Л.С. Понтрягина в теории]
оптимального управления, в основу которого как раз и положен гамильтониан. Именно в
гамильтониане Я, заключены все возможные свойства классической механической системы.
Так, если производная функции Я по координатам системы равна нулю, то соответствующие
производные—импульсы являются интегралами движения, т.е. инвариантами системы. Если
число указанных инвариантов совпадает с числом степеней свободы, то такие системы, назы-
ваемые “интегрируемыми”, можно формально представить в виде совокупности подсистем^
(“свободных частиц”), каждая из которых осуществляет независимое от других подсистем^'
вечное и неизменное движение. Иначе говоря, в “интегрируемых системах” путем подходяще-:
го инвариантного преобразования можно “исключить” взаимодействие между ее подсистема-
ми. Это означает, что в таких системах “все задано”, т.к. в любой момент все инварианта
движения известны и ничего качественно нового произойти принципиально не может. Подве-
дем теперь некоторые итоги в отношении выявленных свойств систем классической динамики.
16
Изложенное выше показывает, что “интегрируемые системы” состоят из совокупности
невзаимодействующих элементов. Эти элементы при движении переносят свое собственное
начальное состояние, но в то же время сосуществуют с другими элементами в рамках установ-
ленного порядка. При этом, хотя каждый из элементов самоопределен, он до мельчайших
подробностей отражает состояние изотропной системы. Каждая точка в любой момент времени
знает все о своем состоянии, которое может быть использовано для предсказания любого
другого состояния интегрируемой системы. Фактически в течение всего XIX в. (и даже многие
годы в XX в.) целые поколения ученых занимались проблемой преобразования динамических
систем к интегрируемому виду, т.к. считалось само собой разумеющимся, что любые динами-
ческие системы сводимы к интегрируемым, т.е. к “свободным частицам”. Именно это положе-
ние лежит в основе гамильтонова формализма классической динамики [235]. Однако в конце
XIX в. Брунс и Пуанкаре получили сенсационные результаты, основанные, в частности, на
задаче небесной механики о движении трех тел. Оказалось, что эта задача в общем случае
неразрешима, а система не сводима к совокупности интегрируемых подсистем. Другими сло-
вами динамические системы в общем случае не изоморфны и только простые (гамильтоновы)
системы допускают их представление в виде некоторой совокупности невзаимодействующих
“свободных частиц”. Существовавшая в течение многих десятилетий базовая посылка о внут-
ренней однородности любых динамических систем в общем случае оказалось неверной. В
действительности многие (если не подавляющее большинство) природные системы представ-
ляют собой сложную совокупность непрерывно взаимодействующих и эволюционирующих
подсистем, которые не сводимы к универсальной схеме гамильтоновых “свободных частиц”
[235].
Описанный исторический урок в развитии классической механики важен и поучителен для
современной теории управления. Дело в том, что вплоть до последнего времени продолжается
поиск прямых или косвенных путей преобразования уравнений динамических систем в соот-
ветствующих конкретных областях к системе полностью или частично интегрируемых уравне-
ний, невзаимодействующих друг с другом. Сама по себе классическая идея такого преобразо-
вания весьма привлекательна и необычайно красива. И поэтому вполне естественно попытаться
в соответствующей области науки выявить предельные возможности построения указанных
преобразований исходной динамической системы к совокупности интегрируемых подсистем.
Такой подход позволяет установить общие, в частности энергетические, соотношения для
рассматриваемой предметной области науки. В этой связи снова и снова продолжает ставиться
фундаментальный вопрос классической механики о возможности преобразования всех или
части уравнений динамики соответствующей предметной области через инвариантные соотно-
шения (первые интегралы) к совокупности новых точно или приближенно интегрируемых
подсистем. И в зависимости от ответа на этот кардинальный вопрос классической динамики ч
можно даже говорить о полноте научного содержания ( в классическом смысле этого слова)
той или иной отрасли знаний. И поныне в различных конкретных областях науки продолжа-
ются поиски прямых или косвенных ответов на указанный труднейший вопрос динамики. В
частности, получили развитие разные методы разделения движений и методы декомпозиции
динамических систем, которые находятся в русле описанного подхода классической науки.
В науке существует в целом отрицательный бтвет на вопрос о возможности инвариантных
преобразований уравнений динамических систем общего класса к совокупности точно интег-
рируемых, независимых подсистем. Однако взгляд на эту проблему с точки зрения идеологии
управления позволяет существенным образом изменить как ее содержание, так и принципи-
ально расширить область применения классической идеи инвариантных преобразований на
более широкий класс нелинейных динамических систем. Сущность идеи, базирующейся на
свойстве управления и позволяющей кардинально расширить возможности метода инвариан-
тных преобразований, состоит не в поиске, а в преднамеренном вводе желаемых инвариантов
в структуру исходных уравнений динамической системы. При этом вновь образованная систе-
ма, состоящая из прежних уравнений динамики и добавленных к ним инвариантных соотно-
шений, будет представлять собой совокупность т подсистем (т = п). Эти подсистемы наделены
17
индивидуальными свойствами и взаимодействуют друге другом через вводимые инвариантные
соотношения. Иначе говоря, как и в подходе классической механики, вновь образованная
система распадается на т интегрируемых подсистем, а коренным ее отличием является обяза-
тельное взаимодействие между подсистемами. Причем, как вводимые интегральные соотноше-
ния (уравнения связи), так и указанные взаимодействия, имеют информационный характер.
Если говорить в более широком смысле, то кратко описанный здесь новый подход к инвариан-
тным преобразованиям опирается в большей мере на концепцию синтеза, а не на традиционную
аналитику классической механики. Именно такой подход к формированию желаемых “интег-
рируемых систем” развивается в данной книге применительно к динамическим объектам
различной природы.
Обратимость и необратимость термодинамических процессов.
Важнейшим понятием классической науки является понятие энергии. В процессе движения
механической системы изменяются ее координаты и импульсы, однако полная энергия системы
остается неизменной, а происходит лишь динамическое перераспределение между потенциаль-
ной и кинетической энергией. На постулате о количественном сохранении “чего-то” при его
качественных изменениях основывается идея превращения, проявляющаяся в механических,
тепловых, химических процессах и в биологических объектах. Иначе говоря, среди огромного
разнообразия возникающих в природе процессов был обнаружен некоторый унифицирован-
ный элемент - сохранение энергии при различных ее преобразованиях. В науке общепринято
положение о всеобщем характере закона сохранения энергии (первого закона термодинами-
ки), который пронизывает все природные процессы. Это привело к его дальнейшему обобще-
нию в форме постулата о фундаментальной инвариантности, которая охватывает все
явления в природе. Однако в [235] отмечается, что процесс превращения энергии, очевидно,
не может быть целью функционирования системы. То или иное превращение энергии может
быть интерпретировано как уничтожение Лишь одного различия с одновременным формиро-
ванием нового различия, т.е. за эквивалентными преобразованиями энергии скрыт, по-види-
мому, более высокий уровень природных процессов. Одним из таких уровней является фун-
даментальное свойство необратимости, находящееся за рамками эквивалентностей (в том
числе сохранения энергии) и охватывающее тепловые и химические превращения, а также
биологические объекты [235]. В науке давно возникла и существует проблема описания не
только идеальных явлений, основанных на законе сохранения энергии, но и учета возникаю-
щих в системе потерь. Эта проблема, как известно, связана со вторым началом термодинамики
и непосредственно сводится к свойству необратимости. Второе начало основано на двух базо-
вых положениях физики: превращении энергии и теплопроводности, что позволило сформу-
лировать универсальную тенденцию к деградации энергии в механической или других ее
формах. Следует подчеркнуть, что для механических превращений энергии характерна иден-
тичность процессов сохранения и обратимости. Однако в реальных системах, кроме обратимых
процессов, происходят также необратимые изменения внутри этих систем, что связано с
производством энтропии—показателем необратимости процессов. Это означает определение
состояния системы в зависимости от ее внутренней упорядоченности. Такое явление принци-
пиально отличается от процессов сохранения и обратимости, изучаемых классической меха-
никой.
Для того, чтобы полнее понять необратимые процессы, происходящие в реальных термо
динамических системах, рассмотрим подробнее явление приращения энтропии. С этой целью, i
следуя [144, 232, 235], будем рассматривать приращение энтропии dS за короткий интервал!
времени dt. В случае идеальной и реальной термодинамической системы ситуации в отношении ।
dS принципиально различны. Для идеальной (изолированной) системы приращение dS можно
полностью выразить через теплообмен между системой и окружающей ее внешней средой.1
Идеальную систему можно поставить в такие условия, при которых она будет отдавать тепло
18
вместо того, чтобы поглощать его. При этом соответствующее приращение энтропии deS лишь
изменит свой знак. Составляющая deS полного приращения энтропии dS может иметь как
положительный, так и отрицательный знак, а это означает, что она обратима. В идеальной
системе приращение deS отражает процесс обмена энергией с внешней миром. Это соответст-
вует закону сохранения энергии, согласно которому энергия никогда не производится, а лишь
переносится с одного места на другое в результате соответствующего преобразования. Отсюда
и следует, что составляющая deS отражает процесс обмена энергией. Как показал еще Клау-
зиус, величину потока энтропии deS можно количественно выразить через тепло, поглощаемое
(или отдаваемое) системой. Итак, обратимые процессы возможны только в идеальных термо-
динамических системах.
В реальных же системах возникает совершенно иная ситуация, а именно: в них, помимо
обратимого теплообмена, протекают также и необратимые процессы из-за тепловых потерь,
трения и т.д. Другими словами, в реальных термодинамических системах происходит процесс
производства энтропии внутри самих систем. При этом увеличение энтропии в виде состав-
ляющей diS не может изменить знак при обращении теплообмена системы с внешней средой.
Поток энтропии diS протекает только в одном направлении, как и все необратимые процессы,
т.е. составляющая diS > 0 может быть только положительной или обращаться в нуль при
отсутствии в системе необратимых процессов. Таким образом, в реальных термодинамических
системах, в отличие от идеальных, протекают как обратимые процессы, отражающие свойство
обмена энергией с внешней средой, так и необратимые процессы, свидетельствующие о про-
изводстве энтропии внутри этих систем.
Обобщим изложенное и, следуя [144, 232, 235], представим полное приращение энтропии
dS в термодинамической системе в форме разложения
dS = deS + diS ,
т.е. суммы двух составляющих, имеющих разный физический смысл. Первая составляющая
deS отражает обмен энергией системы с внешним миром и в принципе обратима, а вторая
составляющая diS > 0 всегда положительна и характеризует необратимые процессы, протека-
ющие внутри системы. В изолированной системе, которая не обменивается ничем с внешней
средой, составляющая deS = 0 и, следовательно, остается лишь составляющая diS, описываю-
щая производство энтропии. В этом случае энтропия системы может оставаться постоянной
либо возрастать и тогда diS > 0, что свидетельствует не столько о необратимых изменениях, а
в большей мере о том, что возрастающая энтропия соответствует самопроизвольной эволюции
системы.
Изменения, происходящие с термодинамическими системами, не эквивалентны между
собой, а именно: самопроизвольное изменение составляющей приращения энтропии diS,
направленное к равновесию, существенно отличается от изменения составляющей deS, кото-
рая управляется путем варьирования граничных условий, например температуры окружающей
среды. Для изолированной термодинамической системы равновесие представляет собой неко-
торое притягивающее множество (аттрактор) неравновесных состояний. Это означает, что
такое состояние заметно отличается от всех иных изменений, в частности от изменений,
происходящих в результате управляемого варьирования граничных условий системы. Еще
Планк [237] подчеркивал существенное различие между двумя фундаментальными типами
изменений, распространенных в природе. Он отмечал, что природа отдает очевидное “пред-
почтение” выделенным, определенным состояниям. Внутри природных систем протекают
необратимые процессы, возникающие в результате производства энтропии (diS > 0) Именно
из-за необратимого увеличения энтропии система устремляется к некоторому “притягиваю-
щему” состоянию, которое природа предпочитает перед другими, и поэтому из такого состоя-
ния система по “доброй воле” выйти не может. “В природе,—писал Планк,—невозможны те
процессы, при которых природа дает меньшее предпочтение конечному состоянию, чем на-
чальному. Предельный случай представляет обратимые процессы; в них природа испытывает
предпочтение как к начальному, так и к конечному состоянию, и поэтому переход из одного
19
состояния в другое может происходить в обоих направлениях” [237]. Подчеркнем еще раз, что
именно свойство обратимости является наиболее характерным для динамических систем,
рассматриваемых в классической механике. В этих системах все изменения сводятся к движе-
нию вдоль заданной раз и навсегда траектории, не забывая начальную точку ввиду того, что
именно начальные условия однозначно определяют всю траекторию для любого момента
времени. В отличие от этого, в изолированных термодинамических системах все неравновес-
ные ситуации порождают эволюцию системы к равновесному положению одного и того же
типа, а в момент достижения равновесия система полностью забывает исходные начальные
условия. В физической интерпретации описанное свойство термодинамических систем озна-
чает, что удельная теплоемкость (“сжимаемость”) системы, достигшей равновесия, никак не
зависит от того, как она была построена [235].
Итак, природные системы по их описанию можно разделить на две принципиально разные
категории: во-первых, на динамические системы, описываемые обратимыми уравнениями
движения классической механики, и, во-вторых, на сложные термодинамические системы,
обладающие внутренней способностью эволюционировать в направлении увеличения энтро-
пии [235]. Такая существенная разница в описании двух категорий систем сразу же ставит
важный вопрос о взаимосвязи между ними, т.е. о возможности совмещения классической
динамики и термодинамики. Этот вопрос требовал решения сложной проблемы перехода от
микроскопического уровня к макроскопическому, которая явилась весьма плодотворной для
науки и получила удовлетворительное разрешение только в последнее время [235]. Оказалось,
что необратимые процессы—это не какие-то досадные помехи, отражающие, в частности,
трение или тепловые потери и т.д. В действительности, необратимые явления играют важней-
шую конструктивную роль в окружающем нас косном и живом мире.
Второе начало термодинамики, из которого следует необратимость процессов, представля-
ет собой некоторый принцип отбора начальных условий, который совместим, но не выводим
из классической механики. По существу, второе начало ограничивает именно те возможные
начальные условия, которые доступны для динамической системы. Причем это только те
начальные условия, при которых система устремляется к положению своего равновесия в
будущем. Суть указанного отбора, реализуемого вторым началом, состоит в энтропийном
барьере, отделяющим разрешенные условия от неразрешенных. Этот барьер, аналогично
барьеру предельной скорости распространения света, никогда не может быть технически
преодолен. Дело в том, что для реализации начального распределения^ запрещенного вторым
началом, необходимо чтобы указанное распределение обладало бесконечно большим инфор-
мационным содержанием, а это принципиально невозможно в природе. Между тем, согласно
постулатам классической механики, начальные условия могут быть произвольными. Это как
раз и означает, что второе начало отбирает только реализуемые начальные условия, которые
перестают быть независимыми от’динамики системы. Особенно сильно проявляется запрет
второго начала для макроскопических состояний, где возникает свойство необратимости. В
микроскопической же области запрещаются некоторые классы начальных условий, а различие
между запрещённым и разрешенным поддерживается во времени законами классической
динамики.
Изложенная выше новая и глубокая трактовка Пригожиным [144,232,235] второго начала
термодинамики, как принципа отбора допустимых начальных условий природных систем, этим
еще не исчерпывается. Согласно Пригожину, энтропия, лежащая в основе второго начала,—
это не просто постепенное и неизбежное образование равновесного состояния—хаоса, как до
сих пор трактовалось в классической термодинамике. Оказывается, что при возникновении так
называемых неравновесных условий энтропия может становиться источником не деградации,
а порядка в системе. Эта неожиданная интерпретация Пригожиным [144, 232, 235] второго
начала кардинально отличается от классических представлений термодинамики. Указанное
толкование энтропии означает, что она утрачивает характер жесткой альтернативы, возника-
ющей перед термодинамическими системами в процессе их эволюции: в то время как одни
системы вырождаются и деградируют в сторону равновесного состояния, другие неуклонно
развиваются и, следовательно, могут достигнуть высокого уровня упорядоченности. Такой
объединяющий подход позволяет сосуществовать явлениям классической динамики с процес-
сами в термодинамических и биологических системах, вместо того чтобы находиться в отно-
шении противоположности, а это принципиально отличается от традиционных представлений.
Перейдем к краткому изложению современного понимания, указанных особенностей природ-
ных систем. -
Неравновесность и порядок в системах
Согласно Пригожину [1.44, 232, 235], термодинамику можно разделить на три большие
области: первая—это равновесная область, в которой производство энтропии, потоки и силы
равны нулю; вторая—это слабо неравновесная, или линейная, область, где термодинамиче-
ские силы еще слабы, а потоки линейно зависят от сйл; и, наконец, третья—это сильно
неравновесная, или нелинейная, область, в которой потоки являются сложными функциями
сил. Линейная неравновесная термодинамика, так же как и равновесная, описывают управля-
емое, предсказуемое поведение системы. При этом, каким бы ни было начальное состояние,
система обязательно перейдет в то положение, которое определяется заданными граничными
условиями. Это как раз и означает предсказуемость реакции системы на изменение ее гранич-
ных условий. В области же сильного неравновесия, описываемой, уравнениями нелинейной
термодинамики, система может по-прежнему эволюционировать к некоторому стационарному
состоянию, однако это состояние уже не определяется выбранным термодинамическим потен-
циалом. И здесь возникает важный вопрос об устойчивости этого состояния, которое становит-
ся заметно зависимым от вида конечных флюктуаций и возмущений, действующих на систему.
Оказывается, что в этих случаях существует определенный порог, за которым флюктуации
(из-за действия положительной обратной связи) могут приводить к новому режиму, отличному
от “нормального” устойчивого’ состояния, присущего для равновесных или слабо неравновес-
ных областей [235]. В результате в системе устанавливается некая глобальная структуру,
причем возмущения или флюктуации не могут сразу преодолеть существовавшее до этого
начальное состояние. Флюктуации должны сначала установиться в определенной конечной
области и лишь затем, возможно, распространиться и заполнять все пространство системы. В
зависимости от начальных размеров эта область либо затухает, либо распространяется на все
пространство существования системы. Иначе говоря, в сильно неравновесных режимах суще-
ствуют критические значения области флюктуации, т.е. некоторое ядро, которое принципи-
ально разделяет свойства и поведение нелинейной системы. Критические размеры этого ядра
возрастают.с повышением эффективности механизмов взаимодействия (диффузии), которые
связывают между собой все области системы. При этом, чем быстрее передаются сигналы по *
каналам связи внутри системы, тем будет больше затухающих, т.е. безрезультативных, флюк-
туаций и, следовательно, тем больше область устойчивости системы. Требование увеличения
критических размеров ядра флюктуаций соответствует увеличению способности внешней
среды, окружающей это ядро, к погашению флюктуаций. В зависимости от эффективности
каналов связи между флюктуирующей областью и окружающей ее внешней средой в составе
системы, флюктуации затухают или, наоборот, усиливаются.
Итак, критические размеры области флюктуаций определяются конкуренцией между ме-
> ханизмами, усиливающие флюктуации, и интегративной, объединяющей силой системы. От
исхода, этой конкуренции зависит порог и размеры области устойчивости системы. Отсюда
. следует, что для преодоления перманентного-хаосй в системе необходимо увеличивать стаби-
лизирующее влияние связей между "отдельными подсистемами-в-соетаве общей ийстемы,йли,
говоря термодинамическим языком, повышать влияние диффузионных процессов. Поэтому в
сложных природных системах, где отдельные виды растений, животных и индивиды вступают
. в разнообразные взаимодействия между собой, связь между различными частями еистемы
должна быть достаточно эффективной [235]. Природные системы, состоящие из большого
21
числа взаимодействующих компонентов, могут сопротивляться .внешним воздействиям и, <
следовательно, вести себя в соответствии с “собственной волей”. Для таких систем каждое
отдельное действие приобретает коллективный эффект, что может привести к неожиданному
глобальному изменению в их поведении. Это указывает на нелинейный характер причинности
взаимодействий в системе. Разумеется, что при управляемом воздействии на такие системы
следует стремиться обратить на пользу нелинейные связи, обеспечивающие устойчивость
предыдущего режима работы.
Рассмотрим более’подробно свойства обратимости и необратимости процессов с точки
зрения внешнего управления системой. Ранее уже неоднократно отмечалось, что обратимые
преобразования лежат в основе классической механики и именно они определяют возможности*
управления соответствующей системой, т.е. внешнего целевого воздействия на нее. Классиче-
ским динамическим объектом в силу его консервативности всегда можно управлять путем
изменения начальных условий. Что же касается термодинамических объектов, то ими также
можно управлять путем внешнего изменения граничных условий, но только в области обрати-
мых преобразований. Это связано с тем, что любая система, находящаяся в термодинамическом
равновесии, при постепенном изменении таких ее макропеременных, как температура, объем
или давление, проходит ряд равновесных состояний и при обращении указанных воздействий
возвращается в исходное состояние. Управление объектом через изменение его граничных
условий и обратимый характер указанных изменений представляют собой обязательно взаи-
мосвязанные процессы. Отсюда следует, что с точки зрения управляемости термодинамиче-
ским объектом необратимость—явление негативное, т.к. она проявляется в форме неуправля-
емых изменений в объекте, что указывает на его уход из под внешнего контроля. Иначе говоря,
необратимые процессы в природных системах можно представить себе как свойство самопро-
извольной внутренней, активности природы.
Итак, “отрицательное” с точки зрения управляемости свойство необратимости, связанное
с диссипацией, показывает, что термодинамические объекты управляемы не до конца, а только
в области обратимых преобразований. Такие объекты могут “выходить из.повиновения” и
самопроизвольно изменить свое состояние, что принципиально отличает их от консервативных
объектов классической механики.
Исследования природных систем показывают, что дифференциальные уравнения, описы-
вающие их поведение в сильно неравновесных областях, нередко содержат некоторые пара-
метры, допускающие сдвиг в слабо неравновесную область, т.е. для этих систем не существует
абсолютно жесткой схемы их эволюции. Это означает, что можно рассмотреть вопрос о
параметрическом управлении системой, имея в виду увеличение порога критических размеров
области флюктуаций, а также вопрос о структурной устойчивости, т.е. о реакции системы на
введение в ее структуру новых единиц, влияющих на процессы взаимодействия между компо-
нентами общей природной системы. Примером параметрического самоуправления в природ-
ных системах может служить логистическая эволюция популяций, согласно которой эколо-
гическая ниша последовательно заполняется теми видами популяций, у которых параметр
“несущая способность” [235] становится больше, чем у других видов. Происходит последова-
тельное вытеснение предшествующих видов, имеющих более низкую “несущую способность”.
Именно возможность “управлять” указанными параметрами и позволяет соответствующим
видам выжить в условиях экологической эволюции.
Перейдем к основным выводам по проблеме обратимости и необратимости процессов в
динамических и .термодинамических системах. В природе существуют изолированные (замк-
нутые) системы с обратимым поведением, полностью описываемые законами классической и
квантовой механики. Однако, по-видимому, большинство существующих и наблюдаемых в
природе систем (термодинамических, химических, биологических) открыты, они обладают
свойствами однонаправленности во времени на макроскопическом уровне. Причем оказыва-
ется, что для таких систем нарушение временной симметрии присутствует и на микроскопиче-
ском уровне. Это означает, что для той или иной системы необратимость, как правило,
существует на всех уровнях описания, или же она отсутствует везде. Разумеется, что эффект
22
проявления необратимости различен для соответствующих уровней: он усиливается по мере
перехода от микроскопического к макроскопическому уровням описания. Важнейший вывод,.
сделанный Пригожиным [144, 232, 235], состоит в том, что источником порядка на всех
уровнях описания природных систем является неравновесность, т.е. порождение порядка из
хаоса. Необратимость как раз и есть тот механизм, который создает неравновесность и,
следовательно, порядок на всех уровнях. Однако необратимость—это не универсальное свой-
ство, обратимые и необратимые процессы сосуществуют в природных системах. Это означает,
что не следует ожидать общего вывода свойства необратимости из уравнений классической
механики.
Таким образом, в природе сосуществуют два мира—это, во-первых, обратимый мир клас-
сической и квантовой механики, в котором невозможна эволюция, а заложенная в динамиче-
ских структурах информация остается неизменной; и, во-вторых, необратимый мир термоди-
намических и биологических процессов, в котором возможно образование упорядоченных
структур с новыми свойствами, возникающими в результате эволюции природных систем. В
необратимых природных системах каждая область (равновесная, слабо неравновесная, сильно
неравновесная) пространства состояний, ввиду неизбежной собственной неравномерности,
имеет свой темп времени. При этом существует непосредственная взаимосвязь между энергией,
пространством и временем. Понимание связи между порядком и хаосом, между простым и
сложным определяется, согласно Пригожину [144, 235], именно отношением к понятию
времени. Современную ситуацию в науке с отношением к времени Пригожин охарактеризовал
в своей Нобелевской лекции: “Уровень развития теории, достигнутый уже сейчас, позволяет
нам выделить различные уровни времени: время, выражаемое понятием классической или
квантовой механики; время, связанное с необратимостью процесса через функцию Ляпунова;
и время, характеризующее “историю” системы через бифуркацию” [243]. Современная тео-
рия управления, по-видимому, находится на первых двух уровнях понимания времени.
Изложенные соображения о проблеме обратимости и необратимости процессов в природ-
ных системах носили достаточно общий характер и отражали взгляд с высоты “птичьего
полета”. Сама по себе затронутая проблема чрезвычайно сложна- и важна для современной
науки, т.к. затрагивает ее фундаментальные основы. Изучению этой проблемы посвящены
работы многих ученых [83,84,99,109,144,214,231,232,235]. В завершение весьма краткого
рассмотрения данной проблемы выделим ее базовые положения и выводы, существенные, на
наш взгляд, для развития современной теории управления. Первым из таких выводов является
наличие свойства управляемости систем с обратимым поведением, а именно: систем класси-
ческой и квантовой механики, а также термодинамических систем, находящихся в равновесной
или слабо неравновесной областях. Ко второму важному выводу следует отнести возникнове-
ние свойства коллективного противодействия флюктуациям со стороны компонентов систе-
мы, находящейся в сильно неравновесной области; и чем дальше ушла система в эту область, _
тем больше может быть эффект указанного противодействиям флюктуациям. Третьим выво-
дом, вытекающим из предыдущего, является рекомендация усилить механизм взаимодействия
между подсистемами в составе общей системы, что приводит к необходимости повышения
быстродействия сигналов связи между компонентами систем.
Итак, любые процессы в физических, химических и биологических системах можно раз-
делить на два существенно разных класса. К первому классу относятся процессы в изолиро-
ванных (в термодинамическом смысле) системах. Они ведут к равновесному состоянию,
которому соответствует физический хаос. Эти процессы управляемы путем внешних воздей-
ствий. Ко второму классу следует отнести процессы в открытых системах, в ходе которых могут
возникнуть упорядоченные структуры, что характерно для явления самоорганизации. При
этом целесообразно ввести количественную оценку степени упорядоченности—самооргани-
збванности различных состояний систем, необходимую для выбора путей наиболее эффектив-
ной структурной самоорганизации. Упорядоченные структуры в открытых системах возникают
в результате изменения управляемых параметров, поэтому если таких параметров несколько,
то, очевидно, можно выявить различные пути самоорганизации. Отсюда вытекает важная
23
задача оптимального управления процессом самоорганизации систем. Перейдем к более под-
робному рассмотрению свойства самоорганизации в проблемах управления.
Синергетика и управление. Недавно возникла и сейчас интенсивно формируется новая
наука о коллективном, когерентном поведении нелинейных динамических систем различной
природы—синергетика. Это слово является производным от древнегреческого “синергос”—
вместе действующий, а сам термин “синергетика” в прошлом веке в науку впервые ввел
Шарринггон для описания кооперативных действий мышечных систем при управлении ими со
стороны мозга. В последующие годы термин широко использовался в физиологии [217, 218,
229, 230] для обозначения совместного поведения. В последнее время теорию совместного
действия, по предложению известного физика Г. Хакена, стали называть “синергетикой”,
основой которой являются общие закономерности процессов самоорганизации в нелинейных
динамических системах самой различной природы. Сущность этой интегральной науки Г.Ха-
кен определяет следующим образом [231]: “... в ней исследуется совместное действие многих
подсистем (преимущественно одинаковых или несколько различных видов), в результате
которого на макроскопическом уровне возникает структура и соответствующее функциониро-
вание. С другой стороны, для нахождения общих принципов, управляющих самоорганизую-
щимися системами, необходимо кооперирование многих различных дисциплин”. Из этого
определения следует, что синергетика изучает свойства самоорганизующихся систем любой
природы—физической, химической, биологической, причем это такие свойства, которыми не
наделена ни одна из под систем, входящих в общую систему. По Хакену, самоорганизация—это
такой процесс в нелинейных динамических системах, который приводит к возникновению
внутренних пространственных и пространственно-временных структур.
Основные понятия синергетики
В основе самоорганизующихся процессов лежит синергетический принцип подчинения,
согласно которому исходная сложная система может быть представлена в виде некоторой
сложной иерархической системы, состоящей из совокупности динамических подсистем. Эти
подсистемы подчинены друг другу и находятся между собой в определенной динамической
взаимосвязи. В математическом плане принцип подчинения базируется на методе адиабати-
ческого приближения или, говоря языком нелинейной механики, на идее разделения исходной
системы на медленные и быстрые подсистемы. При этом осуществляется процедура адиабати-
ческого исключения переменных с характерными временными масштабами. Помимо принципа
подчинения, для синергетики важное .значение имеет также понятие параметра порядка.
Выявим сущность этих основополагающих понятий синергетики на конкретном примере не-
линейной системы второго порядка [83]:
Xi (?) = Л1Х1- xi*2 ;
х2 (0 = - А2Х2+ xi ,
где Л1 ^0, Л2 > 0. .
Такими дифференциальными уравнениями описывается ряд процессов в физике, химии,
экологии и т.д. Следуя [83], предположим, что коэффициент Ai очень мал и Л2> > IAj I. Тогда
если переменные xi и х2 малы, т.е. можно пренебречь квадратичной формой xix2, то переменная
*1 будет изменяться очень медленно. Из второго уравнения видно, что прирост х2 определяется
членом xi, а так как переменная xi изменяется очень медленно, можно ожидать, что и х2 будет
изменяться также достаточно медленно. Поскольку Л2>0 и много больше Ль то производной
х2(Г) можно пренебречь по сравнению с величиной Л2х2. Изложенный приближенный анализ
математических свойств исходной системы дифференциальных уравнений по существу озна-
чает, что эта система может быть представлена медленной подсистемой, описываемой первым
уравнением, и быстрой подсистемой, описываемой вторым уравнением. Изменение поведения
24
быстрой (гг) и медленной (Т1) подсистем определяется переходными процессами, длительность
которых можно оценить следующим неравенством:
Г2~Л.2 1<<Г1-гЛГ1.
Это неравенство и описанные выше соображения позволяют положить xztf^O, т.е. записать
исходные уравнения в виде
xi(/) = Л1Х1- Х1Х2; 0~—Л2хг+ х?.
о
Отсюда находим выражение jq—j-, подставив которое в первое уравнение, получим
• ГЛ 1 х*
Xi(t) ~ Mxi- -Ц.
В результате осуществлено алгебраическое исключение переменной хг- Теперь уже поведение
исходной системы определяется в основном эволюцией медленной подсистемы, которая как
бы “управляет” быстрой подсистемой. При этом переменная х? подчинена переменной -п
системы. Поэтому медленная переменная к которой подстраивается быстрая переменная
хг, и называется параметром порядка [83]. В многомерных системах параметру порядка х\
может быть подчинено весьма большое число других переменных. Это и позволяет принципи-
ально упростить сложную задачу, а именно: исследовать лишь одно уравнение относительно
xi, а затем выразить все остальные переменные через Xi на основе принципа подчийения. В
общем случае в сложной многомерной системе таких параметров порядка может быть несколь-
ко, но'Ъто часто небольшое число, существенно меньшее размерности исходной системы. К
этим коллективным переменным—параметрам порядка подстраиваются остальные перемен-
ные, которые можно исключить при описании макроскопического поведения системы. Именно
небольшое число уравнений для выявленных параметров порядка и позволяет исследовать
макроскопические свойства исходной нелинейной динамической системы. В этом случае для.
многомерных систем удается найти автомодельные (самоподобные) решения, характерные
только для далеких от положения равновесия состояний. Отличительной особенностью систем
с описанными свойствами является “забывание” начальных условий и формирование нерав-
новесных структур. Именно неравновесность и может служить причиной упорядоченности, т.е.
самоорганизации нелинейной динамической системы.
Итак, основополагающими понятиями синергетики являются принцип подчинения и пара-
метры порядка. Оказывается, что между потерей устойчивости системы в линейном прибли-
жении, возникновением параметров порядка и реализацией принципа подчинения существует
важная внутренняя взаимосвязь. В результате изменения параметров управления нелинейная
система может потерять устойчивость в линейном приближении. Для рассмотренной здесь
системы второго порядка таким параметром управления является коэффициент^, i, в результате
изменения которого Re(Ai) может стать очень малой величиной или изменить знак и тем самым
послужить причиной неустойчивости системы в линейном приближении. В таких случаях и
применим принцип подчинения. Отсюда следует, что в тех точках, в которых происходят
структурные изменения, поведение системы определяется только параметрами порядка [83].
Связь между принципом подчинения, параметрами порядка и потерей устойчивости в линей-
ном приближении позволяет выявить общие аналогии в свойстве самоорганизации при макро-
скопическом поведении различных по своей природе нелинейных динамических систем. Сле-
дует отметить, что адиабатический подход, изложенный на примере нелинейной системы
второго порядка, не является принципиально новым и уже достаточно давно используется в
нелинейной механике, химии и др. с целью упрощения исследования исходно сложных систем.
Такого рода подходы основаны на свойстве редукции и в математическом отношении связаны
с методами малого параметра при производных в теории нелинейных дифференциальных
уравнений. Эти подходы и являются обоснованием принципа подчинения—базового принципа
^синергетики [83]. На этом принципе построена теория самоорганизации нелинейных динами-
ческих систем.
25
Саморганизсщия и диссипативные структуры в динамических системах
Самоорганизация в системе может -возникнуть из-за изменения некоторых ее параметров,
называемых управляющими, в результате изменения числа компонент системы, а также из-за
перехода системы в новое состояние. Примерами процессов самоорганизации являются:
• в физике—образование сложных структур в гидродинамических системах,
когерентные колебания в лазерах, упорядоченные состояния в плазме, эффект
мультистабильности в физике твердого тела;
• в технике—макроскопические изменения внешних параметров, например явление
флаттера в авиации, резкие деформации оболочек;
• в электро- и радиотехнике—когерентные электромагнитные колебаниям различ-
ных осцилляторах, появление комбинационных частот в генераторах;
• в химии—образование макроскопических колебательных структур типа реакции
Белоусова-Жаботинского;
• в биологии—процесс образования высокоупорядоченных, кооперативных структур
морфогенеза, т.е. дифференциации клеток путем обмена информацией между
ними для последующего образования жизненно важных структур; затем динамика
популяций и эволюция как образование макроскопических структур и т.д.
Приведенные примеры из весьма различных областей знаний показывают, что все они
обладают некоторыми общими свойствами, а именно: системы состоят из огромного чйсла!
элементов и подсистем и, что особенно важно, в этих системах без какого бы то ни было
внешнего воздействия возникают упорядоченные, диссипативные структуры (от латинского
dissipato—рассеивать), т.е. летучие формирования, возникающие при рассеивании свободной
энергии системы [144, 243].
Понятие “диссипативные структуры” было введено в науку И. Пригожиным, характерна
зуя которое он отмечал, что “...как удаленность от равновесия, так и нелинейность могут’
служить причиной упорядоченности в системе. Между упорядоченностью, устойчивостью и-
диссипацией возникает в высшей степени нетривиальная связв. Чтобы выделить эту связь, мы
будем называть упорядоченные конфигурации, появляющиеся вне области устойчивости тер-
модинамической ветви, диссипативными структурами... Такие структуры могут существовать
вдали от равновесия лишь за счет достаточно большого потока энергии и вещества... Диссипа-
тивные структуры являют собой поразительный пример, демонстрирующий способность не-;
равновесности служить источником упорядоченности” [214, 232]. Парадоксальность возник-
новения упорядоченности в нелинейных открытых системах подчеркивается еще и тем обще-
известным фактом, что в обычных равновесных системах именно свойство диссипации вовсе.;
уничтожает всякий порядок и там всегда возникает термодинамическое равновесие, т.е. дру-
гими словами хаос. Оказывается, что в открытых нелинейных системах диссипация приводит!
к появлению некоторых структур соответствующего размера и формы, т.е. возникает процесс*
самоорганизации. Другими словами, взаимодействие системы с внешним миром в сильно
неравновесной области может привести к образованию новых по своим свойствам динамиче-'
ских состояний, названных И. Пригожиным диссипативными структурами, чтобы подчерк-!
нуть весьма неожиданную и тесную взаимосвязь между структурой и диссипацией, т.е. поте-
рями в системе. Такие структуры могут привести к принципиально новым явлениям в поведе-,
нии системы, а именно к высокой степени упорядоченности поведения огромного количества?
частиц и вообще компонентов, входящих в состав общей системы. Открытие И. Пригожиным
диссипативных структур означает обнаружение нового динамического состояния материи,'
ранее неизвестного в классической науке [144, 235, 243].
Для теории управления понятие “диссипативные упорядоченные структуры”, которые возни-
кают в нелинейных системах в сильно неравновесных областях, само по себе важно с разных точек
зрения на проблему управления. Дело в том, что беспорядок (в пределе—хаос) достижим многими
26
способами. Порядок же, наоборот, может быть обеспечен лишь весьма небольшим числом
способов и чем он выше, тем меньше это число, что в пределе означает оптимальное управление.
Понятие “структура” также связано с понятием управления, т.к. означает некий объект, обладаю-
щий устойчивостью и способностью сопротивляться внешним и внутренним воздействиям, оста-
ваясь подобным самим себе и не изменяясь в целом [235, 243]. Однако, как отмечалось ранее,
образование чрезвычайно жестких упорядоченных структур в сильно неравновесной области
может стать негативным фактором с точки зрения управляемости и удовлетворения требования о
достаточном разнообразии в поведении системы управления.
В синергетических системах могут возникнуть как упорядоченные, так и хаотические
колебания. Для того, чтобы в системе в -динамике существовали упорядоченные структуры
вдали от положения равновесия, через эти системы должен непрерывно протекать непрерыв-
ный поток энергии, вещества и информации. Именно самоорганизация и является общим
свойством перечисленных выше весьма разнообразных систем, которые состоят из элементов
и подсистем различной природы,—атомов, молекул, клеток, животных и т.д. Самоорганиза-
ция, как это не кажется странным на первый взгляд, позволяет изучить динамические свойства
различных по своей природе систем с единых математических позиций и единых понятий. Итак,
во всех перечисленных выше разнообразных системах могут возникать процессы самооргани-
зации, приводящие к образованию вдали от положения равновесия упорядоченных макроско-
пических структур с принципиально новыми свойствами. Эти структуры, на которых могут
возникать .когерентные или хаотические колебания, получили названия аттракторов.
Аттрактор—это притягивающее множество в фазовом пространстве системы, т.е. некото-
рая совокупность точек, к которой притягиваются все близкие траектории движения. И хотя,
как известно, решения нелинейных дифференциальных уравнений в зависимости от начальных
условий могут вести себя принципиально по-разному, однако, попав в область притяжения
аттрактора, они непременно устремятся к нему. Другими словами, эти решения могут подчи-
няться некоторым строгим законам поведения, что в известной мере можно трактовать как
“аналог” принципа суперпозиции в нелинейных системах. Аттракторы в фазовом пространстве
нелинейных систем могут быть различных типов; к основным из них относятся точка (в
частности, устойчивый фокус), предельный цикл (периодически изменяющееся семейство
состояний), тор и, наконец, странный аттрактор. Обычный аттрактор (точка, предельный цикл
или тор) определяет установившийся режим движения системы, к нему устремляются все
переходные режимы, попавшие в область его притяжения. Этот важный класс аттракторов
отличается тем, что они всегда лежат на многообразиях или образуют некоторые многообразия
в фазовом пространстве динамической системы. Многообразия, обладающие свойством при-
тягивать к себе все траектории., начинающиеся в определенной его окрестности, называются
притягивающими. -’Ёе же из них, которые остаются неизменными при движении системы,
очевидно, следует назвать инвариантными многообразиями [83].
Теперь о так называемых “странных аттракторах”. Оказывается, что в ряде случаев ат-
|ракторы могут и не быть многообразиями, однако траектории движения системы, попав в
область действия такого аттрактора, остается в ней сколь угодно долго. Примером такого
аттрактора может служить тор, расположенный в трехмерном фазовом пространстве системы
(см. п. 1.8), Если движение по такому тору становится неустойчивым, т.е. траектории движения
по тору многократно пересекают сами себя в точках бифуркации (раздвоения), то тогда
возникает хаотическое движение. При этом характер поведения траекторий весьма чувствите-
лен к изменениям начальных условий. Это означает, что с течением времени даже малые
изменения и флюктуации могут значительно усиливаться в системе, что неизбежно приведет
к хаотической динамике. В этом случае, когда бифуркации становятся множественными,
поведение траекторий с течением времени становится столь сложным и таким запутанным, что
’Сложность, по существу, становится беспорядком, хаосом. Именно это свойство, присущее
странным аттракторам, и принято называть детерминированным хаосом, или хаотической
Динамикой [83, 99, ПО, 144, 169, 214, 232]. Описанное парадоксальное свойство, возможное
нелинейных детерминированных системах, показывает, что между “упорядоченностью” и
27
“разупорядоченностью”, между простым и сложным не такая уж и огромная пропасть, как это
до сих пор трактовала классическая наука.
Ранее мы уже касались темы о динамическом и стохастическом (вероятностном) описании
явлений в природных системах. Вернемся к этому вопросу, но рассмотрим его с другой точки
зрения, связанной с обнаружением в природных системах странных аттракторов. Вплоть до
последнего времени в большинстве наук все явления окружающего нас косного и живого мира
было принято разделять на детерминированные и случайные процессы. Такой барьер между
поведением детерминированных систем и хаотическими движениями издавна существовал в
классической механике и физике, затем этот кажущийся неопровержимым факт перекочевал
в современные науки—кибернетику, информатику, радиотехнику и т.д. И уж само собой
разумеется, что в подавляющем большинстве учебников всячески подчеркивается этот прин-
ципиальный раздел между детерминированными и хаотическими явлениями. У казанное резкое
разделение явлений окружающего нас мира представлялось очевидным и само собой разуме-
ющимся. При этом выдвигалось кажущееся бесспорным обоснование, что вероятностный,
стохастический характер многих процессов в различных системах объясняется огромным
числом элементов системы и ее степеней свободы. Именно эти положения лежали в понимании
сложных явлений. Действительно, на первый взгляд, представляется очевидным, что много-
мерность и есть суть сложного. В научной литературе даже имеется такой афоризм, как
“проклятие размерности”. Однако оказалось, что не в размерности заключается суть сложного
явления. В действительности, даже поведение одной частицы, движение которой описывается
законами Ньютона, может оказаться непредсказуемым. И уже совсем неожиданно недавно
было показано, что весьма простые детерминированные автономные динамические системы
низкой размерности (л > 3) принципиально могут иметь существенно случайные, стохастиче-
ские движения без какого-либо внешнего воздействия. Современная синергетика доказала, что
подлинная случайность и вероятность окружающего нас мира принципиально определяется
именно наличием хаотических движений в нелинейных детерминированных динамических
системах, а вовсе не размерностью этих систем. Это совершенно поразительное открытие,
коренным образом изменяющее основополагающие представления современного естествозна-
ния, явилось крупнейшей сенсацией недавнего времени и может существенным образом изме-
нить наше научное мировоззрение. Действительно, представляется неординарным и неочевид-
ным установление и признание такого удивительного факта, как возникновение непредска-
зуемых, хаотических движений в “простых” малоразмерных детерминированных системах
различной природы. Это открытие, а также обнаружение фундаментального свойства самоор-
ганизации в нелинейных динамических системах, позволяет объяснить и выявить новые нео-
жиданные явления в окружающем нас мире и создать технические системы и устройства с
необычными, по современным меркам, свойствами.
Изложенное выше позволяет сделать ряд важных выводов. В настоящее время формиру-
ется новая интегральная наука—синергетика, изучающая коллективные процессы самоорга
низации, охватывающие практически все современные отрасли знаний о косной и живо»
природе, технические и экономические науки. Эта обобщенная наука основана на нелинейно!
динамике и* термодинамике необратимых процессов как базовых научных дисциплинах. Уч»
тывая обобщенный характер синергетики как теории самоорганизации систем любой природы
представляется весьма целесообразным осуществить перенос ее основных идей на констру»
рование управляемых динамических систем.
Синергетика и процессы управления
Синергетические процессы обнаружены в различных физических и химических системах, но
наиболее ярко они проявляются в биологии, где образование упорядоченных и эффективно
функционирующих структур непременно происходит на основе кооперации между отдельным»
частями целостного организма. Такого рода кооперативные, внутренне согласованные процесс»
28
обнаруживаются во всем многообразии биосистем, а синергетические процессы давно изуча-
ются биологами. Так, еще в работе Н.А. Бернштейна [229], посвященной проблеме построения
движений животных, сформулирована задача управления движениями как отыскание способов
борьбы с избыточным числом механических степеней свободы. Очевидно, что такие способы могут
быть различными, но наиболее простым и распространенным из них является способ введения
жесткой связи между степенями свободы. В этом случае число степеней свободы редуцируется, а
задача управления движениями существенно упрощается. Указанные формы движений, когда на
механические степени свободы наложены связи, а сами движения каждый раз осуществляются
идентично, получили в биологии название синергий [219]. Итак, в биологии уже давно изучаются
синергетические процессы, во многом определяющие фундаментальные свойства биосистем. В
последнее время в ряде работ биофизиков [217] обобщены и поставлены задачи управления,
имеющие, на наш взгляд, принципиальное значение для развития теории управления не только
биосистемами, но и системами любой природы. Кстати, о понятии “система”, которое стало
повсюду применяться. Имеются разные определения этого понятия [222], базирующиеся в основ-
ном на свойстве взаимодействия между компонентами, входящими в общую систему. Однако
выдающийся физиолог П.К. Анохин считал это недостаточным и дал следующее замечательное
определение системы: “Системой можно назвать только такой комплекс избирательно вовлечен-
ных компонентов, у которых взаимодействие и взаимоотношение приобретают характер взаимо-
содействия компонентов на получение фиксированного полезного результата” [230]. При этом
свойство взаимодействия компонентов реализуется путем освобождения их от тех избыточных
степеней свободы, которые в данный момент не нужны для достижения конкретного результата.
Те же степени свободы, которые способствуют достижению поставленной цели, непременно
сохраняются механизмом взаимодействия компонентов системы. Весьма важно, что сам результат
является тем решающим фактором; который активно влияет на отбор степеней свободы, нужных
для достижения поставленной цели, т.е. именно желаемый результат создает упорядоченную
форму взаимодействия между'компонентами биосистемы. Другими словами, выделенное
П.К. Анохиным фундаментальное свойство взаимосрдействия представляет собой ярко выражен-
ный и повсеместно проявляющийся в биосистемах синергетический процесс.
Буквально на глазах, в течение короткого времени синергетика—теория неравновесных
процессов превращается во всеобщую теорию развития, имеющую весьма широкие мировоз-
зренческие последствия. Если говорить кратко, то смысл и содержание этой новой интеграль-
ной науки состоит в том, что в открытых системах, обменивающихся с внешней средой
энергией, веществом и информацией, возникают процессы самоорганизации, т.е. процессы
рождения из физического (химического, биологического и т.д.) хаоса некоторых устойчивых
упорядоченных структур с существенно новыми свойствами систем. Это общее определение
справедливо для систем любой природы. Подчеркнем два фундаментальных свойства высоко-
эффективных синергетических систем любой природы—это, во-первых, обязательный обмен
с внешней средой энергией, веществом и информацией и, во-вторых, непременное взаимодей-
ствие, т.е. когерентность поведения между компонентами системы. Об этих кардинальных
свойствах синергетических систем всегда следует помнить как руководителю коллектива, так
и специалисту в конкретной научной или технической области.
Ранее были перечислены многие явления различной природы, в которых возникают про-
цессы самоорганизации. Это означает, что между синергетикой и другими физическими,
техническими, химическими, биологическими, экономическими науками имеется внутренняя
взаимосвязь. В то же время синергетика в каждую из наук вносит свои особенности и подходы,
которые были не присущи или даже чужды традиционным направлениям этих наук.
Синергетика—это синтетическая наука, опирающаяся на общую и глубокую концепцию само-
организации в динамических системах различной природы. Ее следует понимать не только как
некоторую совокупность физических идей и математических методов, но и как новый концептуаль-
ный взгляд на. науку. Синергетический подход в науке во многом напоминает системный подход, а
сама синергетика имеет важные точки соприкосновения с общей теорией систем [238,239,243]. Для
синергетики, как и для теории систем, важны не поверхностные аналогии между явлениями различ-
29
ной природы, а достаточно строгое соответствие между всеми элементами сравниваемых
систем. Такое требование означает поиск математически изоморфных законов различной физи-
ческой (химической, биологической) природы. Общая теория систем изучает системы самого раз-
личного характера—концептуальные, материальные, слабо и сильно структурированные, и т.д., в то
время как для синергетики основным предметом исследования является самостоятельная междис-
циплинарная область самоорганизующихся систем [243]. В синергетическом подходе, в отличие от
общесистемного, изучаются конкретные принципы и механизмы самоструктурирования естествен-
ных и технических систем. Иначе говоря, в отличие от общей теории систем, синергетика сосредото-
чивает свое внимание на кооперативных, когерентных и самосогласованных процессах, возникаю-
щих в сложных нелинейных системах. Необходимо также подчеркнуть, что как для общей теории
систем [238,239] и кибернетики [45], так и для синергетики [243] объединяющим понятием является
понятие системы. Однако, в синергетическом подходе, помимо формирования общей системной
концепции—самоорганизации, обязательно учитывается конкретное физическое (химическое,
биологическое) содержание рассматриваемых явлений и процессов [83, 144,243].
В основе классического понимания науки всегда лежала некоторая совокупность экспери-
ментальных результатов и выдвинутых учеными принципов или гипотез. Современная же
наука, в отличие от классической, все в большей мере становится концептуальной. В этом
отношении синергетика—это не новая наука в классическом понимании слова, а по существу
новая концепция, базирующаяся на теории самоорганизации систем. Синергетический подход
стремится, в первую очередь, выявить макроскопические свойства того или иного процесса,
например целых образований, популяций и т.д. Указанный подход не выделяет поведение
отдельной особи или частицы, как это делается в классической механике, для него наиболее
важным является количество отдельных компонентов, входящих в общую систему. В синерге-
тическом подходе предполагается, что само это количество—параметр порядка управляет
поведением каждого компонента (особи, частицы и т.д.) системы [83,144,243]. Итак, в основе
синергетики лежит фундаментальное явление самоорганизации в сложных нелинейных дина-
мических системах. Однако синергетика еще не построила всеобщую и единую теорию само-
организации, справедливую для всех видов природных и технических систем, поэтому н
зависимости от конкретных свойств предметной области той или иной науки синергетический
подход приобретает свои отличительные особенности и содержание. В этой связи в настоящее
время мы можем говорить пока о синергетическом подходе как о некоторой направляющей
концепции в соответствующей науке.
К синергетике как к науке, изучающей поведение нелинейных динамических систем вдали
от положения равновесия при изменении некоторых управляющих параметров, по-видимому,
наиболее близка по своей идеологии нелинейная теория автоматического управления. Разуме-
ется, что в подходах этих наук существуют и свои заметные различия. Так, в [83] утверждается,
что “и кибернетика, и синергетика придают первостепенное значение понятию управления, но
при этом преследуют совершенно различные цели. Кибернетика занимается разработкой
алгоритмов и методов, позволяющих управлять системой для того, чтобы та функционировала
заранее заданным образом. В синергетике мы изменяем управляющие параметры более или
менее непредсказуемым образом и изучаем самоорганизацию системы, т.е. различные состо-
яния, в которые она переходит под воздействием “рычагов управления”. Приведенное выска-
зывание Г. Хакена в отношении аналогий и отличий в подходах синергетики и кибернетики
[45] указывает на охват этими интегральными науками общих закономерностей, включающих
частные законы других наук, однако не следует, на наш взгляд, противостоять цели синерге-
тики и кибернетики в отношении задач управления. Ведь, в конечном итоге, суть любой науки,
в том числе и синергетики, состоит, во-первых, в познании человеком окружающего его мира
и самого себя, и, во-вторых, в конструктивном использовании полученных знаний для форми-
рования гармоничной окружающей среды и затем, по В.И. Вернадскому, ноосферы [209] в
составе мирового эволюционного процесса.
Итак, по Хакену, в синергетических процессах, где отсутствуют целеполагающие причины,
происходит стихийное изменение управляющих параметров, что дает возможность изучить
30
свойство самоорганизации на диссипативных структурах фактически неуправляемой нелиней-
ной системы. Другими словами, здесь важнейшими свойствами являются самодвижение и
самоорганизация, а истинное понимание процессов заключается в изучении причин самоор-
ганизации. В синергетическом же подходе, развиваемом в данной книге, предполагается осу-
ществить переход от непредсказуемого поведения системы по алгоритму диссипативной струк-
туры к управляемому движению вдоль желаемых инвариантных многообразий, к которым
будут подстраиваться все другие переменные динамической системы. Здесь цель уже выступает
как определяющая сущность процесса, а его истинное понимание состоит в самоуправлении и
самоорганизации в соответствии с поставленной целью.
Таким образом, в нелинейных динамических системах необходимо различать причинный и
целевой способы их самоорганизации? Общим объединяющим началом, позволяющим раскрыть
закономерности обоих способов самоорганизации процессов, является синергетический подход.
Концептуальные положения синергетической теории управления
Современная теория управления весьма успешно освоила методы довольно грубого внешнего
воздействия на различные технические объекты, однако, на наш взгляд, наступило время пересмот-
ра силовых подходов в задачах управления и перехода на идеи самоорганизации синергетики.
Отсюда вытекает насущная потребность поиска путей целевого воздействия на процессы самоор-
ганизации в нелинейных динамических системах. Другими словами, возникла необходимость
создания способов формирования и возбуждения внутренних сил взаимодействия, которые могли
бы породить в фазовом пространстве систем устойчивые диссипативные* структуры, адекватные
физической (химической, бйЪлогической) сущности соответствующей системы. В философском
плане такого рода подход к задачам управления согласуется с древнекитайским принципом Дао,
который призывает действовать в этом мире в соответствии с природой (208,214] .По этому поводу
китайский философ Люй Бу-Вэй писал: “Предположим, силач У Хо со всей силой тянет быка за
хвост до такой степени, что хвост оторвался, а сила у силача иссякла. Между тем бык не сдвинулся
ни на шаг с места. Это происходит оттого, что человек идет наперекор естественности. Теперь
допустим, мальчик ростом пять чи ведет быка за уздечку и бык подчиняется ему вр всем. Это
происходит оттого, что человек в данном случае следует естественности.”
Последние результаты общей теории развития, и в частности, синергетики, позволяют
надеяться, что теория управления, как и другие науки, способна пойти путем естественности с
целью перехода на новые концептуальные основы. В этой связи представляется весьма перс-
пективным для развития современной теории автоматического управления осуществить по-
пытку переноса базовых свойств синергетических систем на конструируемые системы управ-
ления нелинейными динамическими объектами. Для такого переноса выделим отличительные
свойства синергетики, принципиально важные для формирования основ синергетической тео-
рии управления.
Процессы самоорганизации в системах различной природы имеют следующие отличитель-
ные признаки [83, 144, 243]: во-первых, движение системы должно протекать в нелинейной
области ее пространства; во-вторых, открытость (разомкнутость) системы, что равносильно
обмену энергией или веществом .(и, возможно, информацией) с внешней средой; в-третьих,
кооперативность, когерентность протекающих в системе процессов', в-четвертых, наличие
неравновесной термодинамической ситуации, согласно которой приток энергии к. системе
должен быть достаточным не только для погашения роста энтропии, но и для ее уменьшения,
что усиливает порядок в системе. Выделенные четыре основных признака самоорганизации со
всей очевидностью показывают, что синергетика имеет дело с неклассическими процессами и
явлениями физики, в том числе и теории управления.
Для применения методов синергетики в теории управления необходимо удовлетворить
указанным четырем признакам самоорганизации. Из них первостепенным в концептуальном
плане является второй признак, т.е. открытость системы, без выполнения которого обеспечить
31
другие признаки принципиально невозможно. В этой связи возникает важный вопрос о том, к
какому виду следует относить системы автоматического управления: к изолированным или
открытым системам (в термодинамическом смысле). Ответ на этот вопрос таков. В исходно:
постановке стандартной задачи управления система описывается дифференциальными урав
нениями объекта, в состав которых входят некоторые внешние силы, состоящие из искомы
управлений //((), задающих q(t) и (возможно) возмущающих M(t) воздействий. Объект по
действием этих сил может совершить соответствующее движение. Однако такая формулировк
задачи управления еще недостаточна для возникновения явления самоорганизации. С целы
перехода от описанной схемы “объект—внешние силы” к уравнениям самоорганизации необ
ходимо эти силы соответствующим образом исключить. Для этого, очевидно, следует расти
рить исходные уравнения системы “объект—внешние силы” таким образом, чтобы включен
ные в уравнения системы внешние силы оказались для нее внутренними [243]. Тогда для новой
расширенной системы ее уравнения могут стать уравнениями самоорганизации, т.е. в резуль
тате указанного расширения можно перейти от организации системы к ее самоорганизации.
Именно такого рода расширение, по существу, и происходит при соответствующей форму
лировке проблемы синтеза систем управления^которая состоите определении законов управ
ления и(х\,...,хп) в функции координат состояния системы. Эти законы, являющиеся уравне
ниями регулятора, должны обеспечить желаемые динамические свойства замкнутой систем!
“объект—закон управления (регулятор) ”. Тогда по отношению к новой, расширенной систем!
(“объект—регулятор”) целесообразно и применить соотношения, характеризующие процесс!
самоорганизации в сортветствии с выделенными выше признаками. Другими словами, исход
ная система, состоящая из некоторого динамического объекта л действующих на него внешни
сил (управляющих, задающих и возмущающих воздействий), в результате замыкания прямы
ми и обратными связями преобразуется в новую, расширенную систему. При этом первона
чальные воздействия, бывшие внешними силами по отношению к исходному объекту, стано
вятся внутренними силами расширенной системы. Такая система действительно становита
открытой (в термодинамическом смысле) и через нее будут протекать энергия или веществ
и информация от соответствующего источника. Носителями же энергии или вещества и инфор
мации как раз и будут синтезируемые управления.
Итак, для применения синергетического подхода, основанного на кооперативных процес
сах самоорганизации, в проблемах управления необходимо перейти от исходной задачи управ
ления, включающей в себя уравнения объекта и внешние силы (в виде управляющих, задаю
щих и возмущающих воздействий), к расширенной постановке задачи таким образом, чтобь
указанные силы стали внутренними взаимодействиями общей (замкнутой) системы.
Для этого, в частности, следует представить внешние задающие q(f) и возмущающе!
воздействия М(0 как частные решения некоторых дополнительных дифференциальных урав
нений и тем самым осуществить их “погружение” в общую структуру системы. Затем сам)
проблему управления необходимо уже формулировать как задачу поиска законов взаимодей-
ствия между компонентами расширенной системы, обеспечивающие возникновение в не»
процессов самоорганизации. Конкретно эта проблема сводится к синтезу соответствующт
законов замкнутого управления u(xi,...,xn,zi,...,zr) в функции координат состояния расширен-
ной системы. Тогда путем подведения энергии или вещества в такой расширенной системе
можно создать неравновесную ситуацию, необходимую для возникновения управляемых про-
цессов самоорганизации. Именно указанное расширение исходной системы и формирование
уравнений самоорганизации позволяет установить связь между методами синергетики и про-
блемой синтеза нелинейных систем управления. Отсюда следует, что синергетическая теория
управления—это, прежде всего, теория синтеза систем замкнутого управления на основе
формирования самосогласованных, кооперативных процессов в системах различной природа.
Сформулируем, теперь базовые положения синергетической теории управления.
Во-первых, в синергетических системах в процессе самоорганизации и образования дисси-
пативных структур (аттракторов) происходит уменьшение числа степеней свободы путем
32
выделения лишь нескольких координат, к которым подстраиваются остальные. Именно эти
Выделенные переменные и определяют основные особенности динамики системы, и поэтому
они получили название параметров порядка [83]. Указанные параметры порядка позволяют
выявить глубокие закономерности в поведении нелинейных динамических систем на основе
построения иерархии базовых упрощенных (агрегированных) моделей, учитывающих взаимо-
действие лишь нескольких переменных. Иначе говоря, в нелинейных диссипативных системах
в результате самоорганизации происходит динамическая декомпозиция фазового пространст-
ва, приводящая к выделению параметров порядка—макропеременных, к которым подстраи-
ваются остальные координаты систем. Очевидно, что образование параметров порядка сопро-
вождается процессом сжатия объемов (площадей) в фазовом пространстве систем.
Во-вторых, следствием процесса самоорганизации является образование аттракторов—инва-
риантных многообразий, к которым притягиваются траектории системы. Такое поведение системы
позволяет поставить вопрос о направлении процессов, об их целях. Указанные аттракторы имеют
размерность, всегда меньшую размерности исходной системы, что означает “забывание” началь-
ных условий, откуда начинаются траектории движения к аттрактору. Следствием этого является
образование инвариантных решений нелинейных дифференциальных уравнений систем, представ-
ляющих собой асимптотику большого класса других решений.
В-третьих, каждый аттрактор имеет свою область притяжения в фазовом пространстве и
поэтому можно выделить границу, разделяющую эти области. Тогда достаточно малое изме-
нение начальных условий, находящихся вблизи указанной границы, может привести к качест-
венно различному поведению всей нелинейной системы. Это будет означать, что, прилагая к
системе достаточно малые воздействия, согласованные с ее внутренними свойствами, можно
обеспечить качественно новое поведение нелинейной системы вдали от ее положения равно-
весия. При этом часто оказывается, что амплитуда и продолжительность таких воздействий
менее важны, чем их соответствие внутренним динамическим свойствам системы, определяе-
мых типом и структурой аттракторов. Такое необычное свойство, объясняемое эффектом
самоорганизации в диссипативных системах, открывает новые возможности в решении задач
управления нелинейными динамическими объектами разной природы.
Выделенные здесь основополагающие принципы и свойства синергетических систем имеют
первостепенное значение для развиваемой в этой книге синергетической теории управления.
Разумеется, что при этом возникает весьма непростая проблема перехода от естественных сине-
ргетических принципов к количественным соотношениям, например, при решении известной своей
сложностью современной фундаментальной проблемы синтеза нелинейных динамических систем.
Непосредственное применение изложенных выше общенаучных фундаментальных концепций
синергетики в задачах управления нелинейными динамическими объектами является весьма не-
простой проблемой, связанной со следующими важными обстоятельствами. Во-первых, методы
синергетики отражают явно целостный, холистический подход в науке, который пока не занимает
доминирующего положения в теории автоматического управления и'в определенной мере'даже
противоречит сложившимся в ней традиционным направлениям. Во-вторых, введение методов
: синергетики неизбежно приводит к необходимости перехода на новый базовый язык науки—язык
. инвариантов, который хотя и лежит в основе классического естествознания, однако во многом
непривычен для современной теории управления. В-третьих, и это, возможно, самое важное,
развиваемый в книге синергетический подход в нелинейной теории управления должен, по-види-
мому, обязательно пройти трудный путь преодоления^ психологического барьера”, состоящего,
согласно сложившейся в науке добротной консервативной традиции, из следующих известных
этапов: “этого не может быть”—“в этом что-то есть”—и, наконец, “это само собой разумеет-
ся”. По этому поводу М. Планк говорил, что: “...научная идея редко внедряется путем посте-
пенного убеждения и обращения своих оппонентов... В действительности дело обстоит так, что
оппоненты постепенно вымирают, а растущее поколение сразу осваивается с новой идеей”.
. Эти, возможно, слишком пессимистические слова великого физика, основоположника кван-
товой механики, объясняют известный в истории научного познания парадокс, согласно кото-
• рому чем очевиднее фундаментальное положение, тем труднее к нему не только прийти, но и
33
особенно внедрить в существующие концепции соответствующей науки [243]. По-видимому,
такого рода примером может служить базовый язык инвариантов, введение которого в теорию
управления представляется совершенно очевидным и естественным. Именно эффективность и
время преодоления указанного “психологического барьера” во многом определяют, как всегда
в науке, успех среди ученых и специалистов той или иной новой теории, в том числе и
синергетического подхода в нелинейной теории управления.
Изложенные здесь обстоятельства приводят к целесообразности рассмотрения основной
проблемы современной теории управления, а также изучения достоинств и недостатков суще-
ствующих подходов к ее решению. И только выявив принципиальные трудности в дальнейшем
развитии этой проблемы, можно перейти к формированию синергетических основ нелинейной
теории автоматического управления. Имеются основания надеяться, что синергетический
подход позволит создать теорию синтеза систем управления нелинейными объектами различ-
ной природы, имеющую естественно-научное обоснование как применение фундаментальных
принципов сохранения в проблемах управления.
1.2. ОСНОВНАЯ ПРОБЛЕМА ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Введение. Среда жизнедеятельности и существования современного человека—это мир
весьма разнообразных систем—живых, технических, природных (экологических) и социаль-
ных, непрерывно взаимодействующих друг с другом. Окружающая нас техносфера стала
несравненно сложнее и гораздо подвижнее, чем когда-либо ранее.
Такие сложные и динамичные комплексы, как авиационно-космические, энергосистемы,
гибкие автоматизированные производства, биотехнические и транспортные системы и многие
другие, а также отдельные современные агрегаты и установки имеют огромные мощности
протекания происходящих в них процессов и создают для человека острые проблемы, требу-
ющие от него быстрых и целесообразных управляющих воздействий. Ответом на эту ситуацию
с целью проектирования и эксплуатации такого рода сложных систем явилось рождение
множества новых научно-технических направлений, которые нередко обособляются, разраба-
тывают свои частные методы и технические средства, но, по существу, занимаются весьма
узкой областью знаний. Однако в современной науке и технике имеется и противоположная
тенденция формирования общих единых представлений и принципов. К таким объединяющим
наукам как раз и относится теория управления— кибернетика [45], которая в настоящее время
испытывает бурный рост и все расширяющееся применение. Ни одна действительно настоящая
наука, возможно за исключением физики, не знала такого развития и не вовлекала в свою
сферу так много людей и технических средств. Наука об управлении является неотъемлемой и
одной из основных частей научной революции нашего времени [84]. С помощью этой науки
могут быть решены многие конкретные сложные проблемы, стоящие перед современной
техникой, экономикой и социальным прогрессом общества. Наука об управлении возникла
вовсе не на стыке разных наук, а в результате осмысления и обобщения многих из них и их
объединения. Благодаря такому синтезу эта наука дала в руки человека методы и средства для
отыскания и реализации эффективных стратегий управления в весьма широких областях—от
технических комплексов до сложных биосистем, экономических и производственных систем.
Другими словами, наука об управлении является наукой нового, синтетического типа, она
базируется на единых принципах управления живыми, техническими, экономическими, эко-
логическими и, во-многом, социальными системами [45].
В общем случае управлять—это значит достигать каких-либо целей, а любой процесс
целенаправленной деятельности—это всегда управление. Принципиальное отличие биологи-
ческих процессов от процессов, протекающих в неживой природе, состоит в том, что биологи-
ческие—это, по меньшей мере, управляемые процессы. Для живых систем одна из главных
целей управления сводится к их самосохранению—гомеостазису, поэтому подобные системы
сконструированы таким образом, чтобы это свойство сохранить и максимально поддерживать
34
при действии на них различных возмущений со стороны окружающей внешней среды или
других систем [106, 225].
Математическая модель объекта, обратная связь, информация, закон (алгоритм) управле-
ния, критерий оптимальности и адаптация—вот базовые понятия современной науки об авто-
матическом управлении, а автоматические регуляторы, микропроцессоры и микроЭВМ—это
ключевые слова техники автоматического управления. Эти важнейшие понятия в совокупно-
сти объединяются обобщающим определением “система автоматического управления”. При
решении большинства современных трудных технических, экономических и т.п. проблем
руководящей идеей является системный подход, позволяющий спроектировать наилучшую по
многим показателям качества систему.. Именно достижения в решении проблемы проектиро-
! вания высокоэффективных систем управления во многом определяют перспективы создания
нового класса технологических и подвижных объектов, автоматически функционирующих в
Интенсивных режимах работы и предназначенных для решения различных технико-экономи-
‘ ческих, энергетических, транспортных, биотехнических, космических и другим проблем, сто-
ящих перед человеком в настоящее время и в ближайшем будущем. Перспективы создания
такого рода новых экономичных и экологически безопасных объектов определяются также и
тем важным обстоятельством, что достигнутый в настоящее время уровень развития средств
автоматики и вычислительной техники позволяет реализовать весьма сложные, оптимальные
алгоритмы управления.
Задача о регуляторе. Современный этап развития индустриального общества характери-
зуется повсеместным внедрением во все отрасли промышленности и техники средств автома-
' тизации, начиная от простых локальных устройств и до сложных управляющих комплексов.
Это связано с тем, что промышленность все в большей мере насыщается различными мощными
‘ агрегатами с повышенными технологическими показателями, и эти агрегаты представляют
собой сложные динамические объекты, которыми необходимо наилучшим образом управлять.
При этом конечной целью является создание в ближайшем будущем автоматизированных и
робототизированных производств. Одной из центральных проблем, возникающих при созда-
нии такого рода производств, является проектирование и реализация на современной техни-
ческой базе эффективных систем автоматического управления, обеспечивающих высокое
качество функционирования управляемых объектов и технологических процессов. На первом
этапе проектирования указанных систем основной задачей является синтез таких управляю-
щих устройств—автоматических регуляторов, которые могли бы гарантировать асимптотиче-
скую устойчивость замкнутых систем и удовлетворить определенной совокупности инженер-
ных требований (в целом ряде случаев—противоречивых) к качественным свойствам систем в
Переходных процессах и установившихся режимах движения, а также к их технико-экономи-
ческим показателям.
Поставленная выше задача—так называемая задача о синтезе регулятора, является карди-
нальной в теории и практике автоматического управления, она берет начало еще с работ И.А.
Вышнеградского и прошла к настоящему времени впечатляющий путь своего развития. Сде-
лаем весьма краткий обзор развития задачи о синтезе регулятора, которая имеет период
выдающихся достижений и относительного затишья и достойна самостоятельного исследова-
ния. Поэтому ограничимся лишь относительно беглым взглядом на этапы развития этой
проблемы, попытавшись достаточно схематично выделить главные ее вехи, уделяя основное
внимание прикладным методам решения и оптимальным системам, т.к. “главная задача специ-
алиста по автоматике состоит, как указывал А.М. Летов [152], в управлении переходным
процессом. Он должен найти и метод и средства гашения этого процесса в некотором смысле
наилучшим образом”. В решении этой основной проблемы автоматического управления при-
няли участие многие выдающиеся инженеры и математики разных стран.
Первые практически важные результаты решения задачи о регуляторе были получены в
40-50-х годах, когда в работах В.В. Солодовникова, Б.Н. Петрова, Т. Честната, А.А. Фельдба-
ума и ряда других ученых она была сформулирована как задача о выборе типа и параметров
корректирующих устройств. В основу расчета корректирующих устройств были положены, в
35
первую очередь, частотные методы, а также корневые методы и интегральные оценки. Такая
постановка и формализация задачи о регуляторе явилась существенным шагом вперед в
проблеме проектирования линейных систем автоматического регулирования, следящих систем
и до сих пор успешно используется для синтеза регуляторов различных одномерных объектов.
Практическая ценность и распространение этого способа при проектировании регуляторов
объясняется его физической ясностью, связанной с использованием первичных показателей
качества систем (времени и характера затухания переходных процессов, перерегулирования,
точности в установившемся режиме и др.), а также его предельной простотой. Этот способ во
многом соответствовал инженерным представлениям о сущности и цели регулирования. Одна-
ко указанный способ синтеза регуляторов ориентировался в основном на линейные одномер-
ные объекты, инженерную интуицию и “ручные” методы расчета. Эти обстоятельства могут
привести к пропуску и потере наилучшего решения в отношении структуры регулятора и к
значительным затратам времени при проведении многовариантных расчетов корректирующе-
го устройства. Эти трудности особенно возрастают и становятся доминирующими при синтезе
регулятора многомерных и многосвязных систем.
Аналитическое конструирование оптимальных регуляторов. Развитие теории управле-
ния и ее применение для широкого класса динамических объектов разнообразной физической
природы требовало дальнейшего поиска и разработки таких формализованных методов реше-
ния задачи о регуляторе, которые позволяли бы математическим путем синтезировать законы
оптимального управления, обеспечивающие желаемые качественные свойства проектируемых*
систем. В этой связи в 60-х it. в работах А.М. Летова [2,12], Р. Калмана [ 16,157,199], Н.Н. Kpa-j
совского [1, 129], В.И. Зубова [13], А.А. Красовского [14, 15], М.М. Атанса и П. Фалба [18] 1>
многих других ученых существенное развитие получила теория аналитического конструиро-j
вания оптимальных регуляторов (АКОР). Метод АКОР, согласно определению А.М. Летова!
[12], представляет собой процедуру синтеза закона управления в функции координат состояв
ния объекта чисто аналитическим путем, т.е. строго на основе математического анализа, исходя
из единых требований к качеству переходного процесса в форме минимума некоторого выбран]
ного оптимизирующего функционала (критерия качества). Таким образом, задача АКОР—эта
задача синтеза закона управления, обеспечивающего минимум критерия качества на траекто^
риях движения объекта из произвольного начального (в некоторой допустимой области про4
странства состояний) в заданное конечное состояние. Очевидно, что закон управления, пол]
ученный в результате применения метода АКОР, будет представлять собой некоторую сово-f
купность обратных связей по соответствующим координатам объекта, т.е. уравнение
оптимального регулятора. Подводя итоги начального этапа формирования теории АКОР <
рассматривая перспективы ее развития, А.М. Летов сделал в докладе [152] на конгрессе ИФАК?
следующие выводы:
• проблема синтеза оптимальных регуляторов является основной для современной
теории автоматического управления;
• ее строгая постановка базируется на концепции Ляпунова возмущенного
движения, служит вполне естественным продолжением и дальнейшим развитием
этой концепции в качестве ее количественного аспекта;
• физическое и математическое содержание проблемы определяется как природой
объекта управления, так и видом критерия оптимальности;
• во многих случаях детерминированных и стохастических систем, представляющих
самостоятельный практический интерес, эффективное решение проблемы синтеза
может быть достигнуто как применением методов вариационного исчисления,
так и метода Беллмана-Ляпунова;
• в этих случаях разрешение простейшей задачи об оптимизации линейных систем
по квадратичному функционалу играет основную роль;
36
• ми располагаем теперь эффективными критериями, позволяющими сказать,
является ли проблема синтеза разрешимой или нет;
• наблюдаемые в литературе настойчивые поиски новых методов решения—методов
функционального анализа и приближенных методов—а также новых случаев
разрешимости проблемы, свидетельствуют о том, что начинает вырисовываться
четкий контур стройной теории, основанной на едином методе;
• тематика исследований по проблеме синтеза имеет хорошую перспективу развития
на ближайшие роды.
Со времени формулировки этих крупных и основополагающих выводов теория АКОР в
работах многих отечественных и зарубежных ученых была распространена на многомерные
линейные нестационарные системы и к настоящему времени превратилась в развитую матема-
тическую теорию синтеза систем как в детерминированной, так и стохастической постановках
{19, 30—33, 155, 156, 168]. Эта теория достигла сейчас высокой степени теоретической
завершенности применительно, в первую очередь, к линейным объектам и квадратичным
оптимизирующим функционалам—критериям качества. Методы АКОР предельно формали-
зованы (см. п. 1.3), их отличает аналитичность и логическая завершенность, они позволяют
(для линейных объектов) определить структуру закона управления, гарантирующего, по мень-
шей мере, асимптотическую устойчивость замкнутой системы. Необходимо отметить, что
методы АКОР уже вошли в учебные курсы для подготовки специалистов в области автомати-
ческого управления. В известных учебных пособиях В.А. Олейникова [92], В.А. Иванова и
Н.В. Фалдина [10], X. Квакернака и Р. Сивана [168] и др. показана неоспоримая значимость
этих методов в деятельности современного инженера по автоматическому управлению различ-
ными подвижными и технологическими объектами.
Однако методы АКОР при практическом применении наталкиваются на целый ряд суще-
ственных затруднений вычислительного и принципиального характера. Так, с повышением
порядка объекта быстро нарастают численные и тем более аналитические трудности, связан-
ные, как известно [12, 14], с необходимостью решения нелинейных уравнений в частных
производных относительно производящей функции, к которым сводится процедура определе-
ния законов управления. Для линейных стационарных объектов и квадратичных функциона-
лов указанные уравнения приводят к нелинейным алгебраическим уравнениям типа Риккати,
определяющим коэффициенты линейного закона управления. Следует отметить, что в насто-
ящее время имеются стандартные программы решения алгебраических уравнений Риккати на
ЭВМ. Несмотря на указанные здесь трудности применения методов АКОР, связанные, напри-
мер, с численным решением уравнений Риккати, особенно высокого порядка, основной недо-
статок этих методов с прикладной, инженерной точки зрения состоит в другом. Дело в том, что
используемые в методах АКОР критерии качества представляют собой постулируемые (как
правило, квадратичные) оптимизирующие функционалы с заранее выбранной структурой и
заданными весовыми коэффициентами. Квадратичные критерии, в отличие от критериев быс-
тродействия и минимума энергозатрат, являются в известном смысле косвенными, т.е. не
связанными однозначно, напрямую с инженерными требованиями к качеству замкнутых сис-
тем. Другими словами, то обстоятельство, что в теории АКОР непосредственно не рассматри-
ваются общепринятые в инженерной практике прямые показатели качества синтезируемых
систем, ставит под сомнение “оптимальность” получаемых при этом решений. Это и послужило
поводом для критики методов АКОР, основанных на постулировании квадратичных критериев
качества и чрезмерной формализации процедур синтеза, что в определенной мере даже подо-
рвало интерес инженеров, занимающихся проектированием разного рода систем управления.
В связи с изложенными трудностями практического применения методов АКОР было выдви-
нуто несколько точек зрения. Так, В.В. Солодовников отмечал, что нерешенная задача проек-
тирования регуляторов по заданным первичным показателям качества “была заменена другой,
причем первая соответствовала самой сущности проблемы регулирования, а вторая была с ней
лишь косвенно связана” [26]. Основоположник же теории АКОР А.М. Летов, с одной стороны,
37
указывал, что “АКОР, будучи чисто математической операцией, решает те же самые задачи,
которые пытается разрешить инженер интуитивно, при обычном конструировании, используя
при этом строгие понятия оптимальности”, а с другой стороны, отмечал, что основная задача
АКОР сводится к выбору оптимизирующего функционала, т.е. он выступает как постулат.
Поэтому, “... когда мы научимся решать проблему выбора, конструирование систем управле-
ния будет выполняться на строго научной основе [12], в противном случае неизбежно возни-
кает вопрос: не представляет ли постулирование попытку скрыть за словом “оптимальность”
практическую бесполезность предлагаемых решений?” В этой связи А.М. Летов предлагал, как
одно из возможных направлений в преодолении указанных выше трудностей применения
методов АКОР, ввести вместо одного постулируемого критерия совокупность вторичных
критериев, каждый из которых отражал бы некоторое частное требование к качеству системы.
Эти вторичные критерии представляются в виде изопериметрических ограничений. При таком
подходе исходный функционал уже не является неизменным и основная задача состоит не
столько в том, чтобы достигнуть минимума функционала, сколько в том, чтобы завершить
процедуру синтеза управления, удовлетворяющего совокупности технических требований к
проектируемой системе. Однако поставленная таким образом проблема выбора технического
рационального критерия качества системы до настоящего времени не получила в прикладном
плане удовлетворительного решения.
Имея в виду изложенные выше трудности в формировании структуры и весовых коэффи-
циентов критериев качества в методах АКОР, основоположник современной теории оптими-
зации нелинейных динамических систем по неклассическим критериям обобщенной работы
академик А.А. Красовский считает [14], что эти методы вообще следует рассматривать не как
полностью формализованные, а как методы поиска оптимальной структуры и параметров
закона управления. И только в весьма редких случаях удается с первого раза выбрать целесо-
образную форму и структуру критерия качества, который бы удовлетворял желаемой совокуп-
ности инженерных требований к системе. Иначе говоря, процедуры АКОР должны быть в
большинстве случаев итерационными при подборе весовых коэффициентов критериев. Это и
подчеркивает отмеченное выше сомнение инженеров в отношении “оптимальности” систем,
получаемых на основе строго постулируемых квадратичных критериев качества.
Изложенные различные точки зрения на методы АКОР показывают, что помимо отмечен-
ных достоинств этих методов, они непосредственно не опираются на прямые показатели
качества синтезируемых систем, а это, в свою очередь, приводит к существенным затруднениям
при их практическом применении. Проблема целесообразного выбора весовых коэффициентов
постулируемых квадратичных критериев качества даже для линейных систем остается до сих
пор в должной мере нерешенной.
Необходимо отметить, что указанные точки зрения на синтез регуляторов отражают
положение, сложившееся к настоящему времени в теории автоматического управления. С
одной стороны, существует традиционный подход к синтезу регуляторов, опирающийся на
длительный практический опыт применения классической теории автоматического регулиро-
вания, когда качество регулятора оценивалось по характеру переходного процесса, который
должен быть быстрозатухающим и с малым перерегулированием. С другой стороны, в насто-
ящее время получил существенное развитие новый, оптимизационный подход к синтезу регу-
ляторов, основанный на современной теории оптимального управления. Этот подход вовсе не
противоречит классическому, основанному на желаемых свойствах переходного процесса, а
развивает и уточняет его, т.к. базируется на использовании оптимизирующих функционалов,
отражающих, как известно, существенно более широкие, глобальные свойства систем по
сравнению с оценками их свойств по характеру переходных процессов. Это связано с тем, что,
выбрав оптимизирующий функционал, можно минимизировать его и получить дифференци-
альные уравнения Эйлера—Лагранжа, являющиеся желаемыми уравнениями движения замк-
нутой системы. И только решив эти уравнения, можно говорить о характере переходных
процессов. Это означает, что при оценке динамики синтезируемых систем очевидна следующая .
иерархическая подчиненность: доминирующее положение занимает оптимизирующий функ- 1
38
ционал, отражающий всеобъемлющий вариационный принцип науки, за ним следуют диффе-
ренциальные уравнения замкнутой системы, полученные из условий минимума функционала,
и, наконец, переходные процессы, являющиеся решением этих дифференциальных уравнений.
Итак, оценка свойств синтезируемых систем по характеру переходных процессов находит-
ся на самой нижней ступени, а оптимизирующий функционал—на самой верхней ступени
указанной выше иерархической подчиненности в динамике замкнутых систем. Это обстоятель-
ство указывает не на антогонистичность оценок свойств систем на основе классических и
современных подходов, как это может показаться на первый взгляд, а, наоборот, на их тесную
связь и последовательное развитие. Отсюда со всей очевидностью следует, что ни одному из
рассматриваемых подходов к оценке свойств синтезируемых систем не следует отдавать одно-
значного предпочтения. Эти подходы находятся в тесной взаимосвязи, они должны дополнять
друг друга при практическом синтезе регуляторов, в противном случае могут возникнуть
непреодолимые противоречия. Примером такого противоречия является требование одновре-
менно высокого качества стабилизации в условиях действия случайных возмущений и быстрого
затухания переходных процессов [126]. При этом часто даже не оговаривается, о каком
переходном процессе идет речь, для каких начальных условий и т.д. Один из распространенных
первичных показателей—время регулирования по некоторой координате в многомерных сис-
темах также точно не определено, а имеет интуитивный характер. Для некоторых воздействий
и начальных условий, например для ступенчатых и гармонических, понятию времени регули-
рования можно дать точное определение [155]. Аналогичные соображения можно высказать
и по поводу других распространенных первичных показателей качества. С другой стороны, и
современный подход к синтезу систем с помощью оптимизирующих функционалов, как это
показано ранее, не приводит к полностью физически ясным и наглядным оценкам свойств
систем. В то же время в практике проектирования регуляторов накоплен огромный опыт и
установились традиции, приемы и рекомендации, которые целесообразно использовать и на
современном этапе развития задачи о синтезе регулятора. Это и приводит к целесообразности
установления алгоритмических или аналитических связей между классическим и современным
подходами к оценке динамических свойств замкнутых систем.
В последнее время появился ряд работ, в которых авторы предприняли попытки разрешить
вопрос о целесообразном формировании структуры и выборе коэффициентов квадратичных
критериев качества. Так, некоторые авторы [27, 28, 173] пытаются установить связи между
весовыми коэффициентами критерия качества и корнями (а чаще—коэффициентами) харак-
теристического уравнения замкнутой линейной системы, т.е. установить, по существу, неко-
торые связи между методами АКОР и модального управления. Выявление такого рода связей
несомненно полезно, в особенности это касается задач с несколькими управлениями. Это
связано с тем, что число параметров законов оптимального управления обычно намного
больше числа весовых коэффициентов квадратичных критериев качества. Так, для линейного
объекта д-го порядка с т управлениями число параметров векторного закона управления будет
равно тип, которое нужно найти в результате применения процедуры модального управления.
Между тем, для квадратичного критерия качества с диагональной матрицей весовых коэффи-
циентов требуется не более п таких коэффициентов. Однако в тех случаях, когда методами
модального управления можно достаточно просто найти коэффициенты закона управления,
исходя из желаемого распределения корней характеристического уравнения замкнутой систе-
мы, возникает сомнение в целесообразности привлечения каких-либо квадратичных критериев
качества.
В работах Ю.П. Петрова [17,126] изложены методы проектирования регуляторов, доставля-
ющих минимум среднеквадратичным критериям для линейных систем в условиях действия на них
случайных возмущений. Синтезируемые регуляторы, кроме того, обеспечивают выполнение до-
полнительных требований к системе, например стабильность при отклонениях параметров линей-
ных объектов от расчетных значений, при этом разработана приближенная процедура расчета
множителя Лагранжа—весового коэффициента среднеквадратичного критерия, выявлены пре-
дельные свойства синтезируемых линейных систем и др. В работах А.Г. Александрова [155, 156],
39
по существу, впервые достаточно,успешно реализована попытка преодоления ранее отмечен-
ных трудностей в применении методов АКОР для линейных многомерных систем, при этом
синтезируемые регуляторы обеспечивают удовлетворение требований к точности, полосе пропу-
скания, грубости, показателям колебательности и др. Разумеется, что установленные связи между
первичными показателями качества синтезируемых систем, отыскиваемой формой и весовыми
коэффициентами квадратичных, функционалов являются алгоритмическими, а это потребовало
разработки объемного матекщуцческого обеспечения для реализации на ЭВМ процедур синтеза
регуляторов многомерных с,истег*|.
Подведем теперь некоторые, итоги изложенного выше краткого обзора работ по проблеме
синтеза оптимальных регулятороа-тт-основной проблеме современной теории автоматического
управления, которая была поставлена А.М. Летовым еще в докладе (152] и прошла с тех пор
крупные этапы в своем развитии. К настоящему времени в автоматическом управлении сфор-
мировалась фундаментальная теория АКОР— аналитического конструирования оптимальных
регуляторов в детерминированной и стохастической постановках, которая совместно с теорией
наблюдаемости и управляемости составила основу современной математической теории син-
теза регуляторов для линейных многомерных и многосвязных систем. В линейной теории
синтеза оптимальных систем, которая в математическом плане имеет фактически завершенный
характер, существуют свои нерешенные задачи в основном прикладного характера, связанные,
в первую очередь, с наличием постулируемых величин (формы и весовых коэффициентов
оптимизирующего квадратичного функционала, коэффициентов наблюдающего устройства и
др.). В рамках математической теории синтеза непосредственно не рассматриваются прямые
инженерные показатели качества систем, что, вообще говоря, ставит под сомнение “оптималь;
ность” получаемых законов управления и служит поводом для критики методов АКОР. В
настоящее время во многих работах предпринимаются попытки для преодоления указанных
недостатков этой теории синтеза, основанные на широком использовании ЭВМ, однако име-
ется ряд принципиальных трудностей в применении данной теории к прикладным задачам
управления.
1.3. ПРОБЛЕМА АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ
НЕЛИНЕЙНЫХ ОПТИМАЛЬНЫХ РЕГУЛЯТОРОВ
Введение. В настоящее время общепринято, что действительный уровень развития той или
иной науки определяется во многом видом используемых на данном этапе соответствующих
математических моделей, описывающих предметную область этой науки. Так, классическая
теория автоматического управления сначала оперировала в основном только линейными ста-
ционарными моделями в виде “вход-выходных соотношений” (передаточных функций), а
затем моделями, представленными в пространстве состояний, с учетом иногда лишь некоторых
нелинейностей. Справедливость принципа суперпозиции (наложения) для линейных систем
позволила разработать настолько общие и эффективные методы решения линейных задач
управления, что невольно наталкивает студентов и некоторых исследователей на мысль: это
основной принцип математического естествознания, а всякого рода нелинейности являются
досадной неприятностью, которую следует тем или иным “способом” избежать. Такой взгляд
ведет к повальной “линеаризации”, которая доминирует во многих монографиях и учебниках
в необоснованных попытках упростить решение сложных, исходно нелинейных задач управ-
ления. Однако это глубокое заблуждение—“... истинные законы не могут быть линейными”—
указывал А. Эйнштейн.
Более того, как это показано в разд. 1.1, последние достижения нелинейной динамики и
синергетики позволили совершенно по-новому взглянуть на динамическую парадигму современ-
ного естествознания и получить ряд исключительно парадоксальных результатов (“странные
аттракторы”, “порядок в хаосе” и др.), которые никак не следуют из линейной теории. В этой связи
возникает насущная потребность рассмотреть задачу об управлении как исходно нелинейную
40
проблему. Кроме того, доминирование линейного подхода, помимо очевидной научной ущер-
бности, имеет существенные недостатки и в прикладном плане при разработке систем управления
современными технологическими и подвижными объектами, т.к. многие из них функционируют в
весьма интенсивных, а нередко и предельных, режимах работы, для которых характерны “боль-
шие” отклонения координат. Естественно, что для таких режимов адекватными могут быть, как
правило, только нелинейные модели движения объектов. Проблема синтеза систем управления
нелинейными объектами в отличие от линейных систем несравненно более сложная и в настоящее
время практически сделаны только первые шаги для ее решения, т.е. разработки методов проекти-
рования нелинейных регуляторов. А ведь в большинстве случаев современные реальные системы
управления должны рассматриваться как нелинейные, т.е. описываться нелинейными дифферен-
циальными уравнениями. Нелинейность систем во многом определяется ограниченностью энергии
и мощности процессов, протекающих в объектах различной физической природы, наличием
механических, электрических и тепловых ограничений, насыщения и т.д. Учет этих ограничений
в настоящее время становится обязательным в связи с требованиями интенсификации технологи-
ческих процессов, когда рабочие режимы промышленных агрегатов и различных подвижных
объектов становятся близкими к предельно допустимым. Кроме того, из теории управления
известно, что именно в классе нелинейных моделей движения объектов можно добиться на прак-
тике существенного повышения эффективности управления. На основе нелинейных моделей
можно получить принципиально новые свойства процессов управления, т.е. реализовать подлинно
оптимальное управление. Однако несправедливость принципа суперпозиции для нелинейных
дифференциальных уравнений чрезвычайно затрудняет анализ и особенно синтез нелинейных
систем управления. И здесь необходимо подчеркнуть, что несмотря на широкие возможности,
которые предоставляют современные ЭВМ для численного исследования и моделирования нели-
нейных систем, приходится констатировать, что наличие мощных ЭВМ привело лишь к опреде-
ленному прогрессу в области параметрического синтеза, т.е. расчету параметров нелинейных
систем при заранее выбранной^ структуре. Однако к принципиальному, качественному скачку в
области структурно-параметрического синтеза систем управления нелинейными объектами высо-
кого порядка применение современных ЭВМ пока не привело.
Необходимо подчеркнуть, что в линейно-квадратичных задачах АКОР структура закона
управления линейным объектом заранее предопределена и процедура синтеза сводится к
вычислению его' параметров. Для нелинейных же объектов структура законов оптимального
управления вообще неизвестна и поэтому здесь целесообразен поиск этих законов через
соответствующий функционал, т.е. в нелинейных задачах управления теория АКОР выступает,
в первую очередь, как направляющая структурно-параметрическая концепция в разработке
методов синтеза нелинейных систем. Изложенные выше обстоятельства указывают на важ-
ность и существенную необходимость разработки новых подходов к проблеме синтеза систем
управлений нелинейными объектами, опирающихся, пр-видимому, не только на строгий ма-
тематический формализм, но и на более широкие концепции современной науки о динамиче-
ских системах различной природы.
Порту лат устойчивости и нелинейная проблема АКОР. Применение метода АКОР Лето-
ва-Калмана [12, 14} для нелинейных объектов сводит задачу синтеза к поиску решения
уравнения Веллмана—нелинейного дифференциального уравнения в частных производных
относительно производящей функции, кбторая определяет закон оптимального управления. В
работах А.М. Летова [12, 152] установлена тесная'связь между функциями Ляпунова, разре-
шающими задачу асимптотической устойчивости движения, и указанным уравнением Веллма-
на. Эта связь состоит в том, что уравнению Веллмана удовлетворяет некоторое множество
производящих функций. Оказывается, что действительное решение задачи оптимального син-
теза могут дать лишь те из них, которые являются функциями Ляпунова для замкнутой
системы. Соответственно, полученные на основе таких функций регуляторы будут оптималь-
ными и, кроме того, они обеспечивают асимптотическую устойчивость движения системы.
Следовательно, с помощью метода Ляпунова можно отбирать требуемые решения среди всех
возможных, которые определяются уравнением Веллмана. Указанное единство и тесная связь
41
методов АКОР и Ляпунова представляет собой математически обоснованную фундаменталь-
ную концепцию решения сложной проблемы, синтеза оптимальных систем управления нели-
нейными объектами. В этой связи представляется важным подробнее рассмотреть существую-
щие подходы к решению проблемы АКОР для нелинейных систем.
Естественно сначала обратиться к свойству асимптотической устойчивости синтезируемых
систем. Среди множества требований к динамическим показателям первостепенным и фундамен-
тальным является свойство асимптотической устойчивости Движения замкнутой системы. Кроме
того, как отмечено выше, задача устойчивости непосредственно связана с решениемтакнх важней-
ших проблем теории автоматического управления, как проблемы качества систем и синтеза законов
управления [1, 2]. В выдвинутом Н.Г. Четаевым “постулате устойчивости” .указывается, что
“устойчивость—явление принципиально общее—как-то должна, по-видимому, проявляться в
основных законах природы. Если знание конструируется по требованию малых отклонений от
природы, то научное мышление отсюда должно (или может) опираться на некоторую функцию
Ляпунова. Разумеется, эта функция будет всегда существовать из постулата устойчивости” [3,4].
Поставив вопрос: Какой вид должен иметь закон, постулирующий независимо дт отдельно дейст-
вующих сил известного рода устойчивость?—он отвечал: “Согласно теореме Ляпунова об устой-
чивости интересующий нас закон должен оговаривать существование некоторой функции со
свойствами функций Ляпунова” [4]. Сформулированный Н.Г. Четаевым постулат устойчивости
основан на замеченной им тесной связи проблемы устойчивости с принципами механики и физики.
В его работах показано, что известные классические законы физики, основанные на единых
вариационных принципах, а также выявленные путем построения соответствующих математиче-
ских моделей рассматриваемых явлений на основе опытных данных, обладают-определенного рода
устойчивостью. Из этого постулата вытекает, что при построении математического описания
реальных процессов необходимо опираться на отбор устойчивых движений материальных объек-
тов.
Приложение постулата устойчивости Н.Г. Четаева к рассматриваемой здесь проблеме
синтеза динамических систем означает, что в основу процедур синтеза должно быть положено
построение асимптотически устойчивых движений, описываемых некоторой совокупностью
дифференциальных уравнений. Свойство устойчивости таких движений можно выявить с
помощью функций Ляпунова [5], удовлетворяющих определенным условиям. Эта общая
концепция в динамике систем получила в последнее время существенное развитие в работах
по синтезу асимптотически устойчивых нелинейных систем управления (1, 7, 8] и др. В этих
работах в качестве единой методологической базы используется аппарат функций Ляпунова
И(хь...,хя), являющихся непрерывными однозначными функциями и удовлетворяющих опре-
деленным условиям [5]. Задача синтеза замкнутой системы формулируется в следующем виде:
среди множества возможных законов управления и(х\,...,Хп}, являющихся функциями фазовых
координат Х1,...,хи, требуется выделить некоторое подмножество или один закон управления
объектом
x^t) = Л(х|,...,х,„/л,...,ит), nt < п, (1.1)
обеспечивающий асимптотическую устойчивость его возмущенного движения в определенной
области фазового пространства или асимптотическую устойчивость в целом. Указанные зако-
ны называют ртабилизирующими ust(x\,...,xn), или законами стабилизации систем [1,7, 8].
Сформулированная проблема синтеза имеет важное значение для теории и практики автома-
тического управления, однако она весьма сложна и требует разработки эффективных методов
решения. В настоящее время в литературе известны конструктивные результаты по решению
этой проблемы в основном для линейных и некоторых частных классов нелинейных объектов
[1,7,8].
Постулат Н.Г. Четаева существенно опирается на интуитивно ясное и привычное понятие
асимптотической устойчивости. Как известно, это понятие может означать устойчивость рав-!
новесия, устойчивое периодическое движение или движение, асимптотически приближающе-;
еся к одному из указанных состояний. Согласно постулату устойчивости, только такие движе--
42
ния и являются физически реализуемыми. Однако открытие “странных” (хаотических) ат-
тракторов требует существенной корректировки постулата устойчивости. Оказывается, что в
природе могут реализовываться и необычные движения на хаотическом аттракторе. На этом
аттракторе отдельные траектории локально неустойчивы и поэтому не могут быть физически
реализованы по отдельности, однако эти траектории реализуемы как определенная совокуп-
ность движений, имеющих некоторые общие общества [85]. Напомним, что под локальной
неустойчивостью здесь понимается экспоненциальное разбегание очень близких вначале фа-
зовых траекторий. После того как эти траектории разойдутся на некоторое расстояние, они
могут снова сблизиться, затем снова разойтись и т.д. Причина такого необычного поведения
фазовых траекторий на “странном аттракторе” состоит в сочетании локальной неустойчивости
этих траекторий со свойствами общего сжатия фазового потока (см. п. 1.8). Указанная особен-
ность и приводит к образованию хаотических движений на некотором ограниченном притяги-
вающем множестве.
Для устойчивых же состояний равновесия и устойчивых периодических движений харак-
терно общее сжатие фазового потока и локальная устойчивость траекторий. Именно для такого
распространенного, но, как оказалось, частного варианта поведения природных систем и был
Выдвинут постулат устойчивости Н.Г. Четаева, когда о возможном существовании “странных
аттракторов” в фазовом пространстве ничего не было известно. В этой связи постулат устой-
чивости справедлив, в первую очередь, для определенной группы природных процессов,
которым всегда присущи порядок и ассимптотическая устойчивость.
Итак, физически реализуемыми могут быть не только асимптотически устойчивые траек-
тории, но и локально неустойчивые движения в форме некоторой совокупности траекторий,
расположенных на хаотическом аттракторе. В этом и состоит современное уточнение постулата
устойчивости. Что же касается синтезируемых технических систем, для которых существова-
ние “странных аттракторов” во многих случаях обычно неприемлемо (кроме специальных
случаев построения нового класса стохастических генераторов [85]), то постулат устойчивости
остается базовой концепцией построения таких систем. Отсюда, однако, в теории синтеза
нелинейных динамических систем возникает новая проблема предотвращения возможности
возникновения так называемых “странных аттракторов”, т.е. своего рода “черных дыр” в
фазовом пространстве этих систем; Указанная проблема была вовсе неизвестна в классической
теории автоматического управления.
Теория синтеза асимптотически устойчивых нелинейных систем продолжает развиваться
в разных направлениях. Основой ее являются фундаментальные положения прямого метода
Ляпунова. При этом большинство методов синтеза асимптотически устойчивых систем бази-
руется преимущественно на теореме Ляпунова об асимптотической устойчивости и теореме
Барбашина-Красовского об асимптотической устойчивости в целом [5, 11]. К настоящему
времени в этой теории на основе теорем об устойчивости сформировался подход к получению
достаточных условий стабилизируемости, который состоит в следующем [7]. Вводится опре-
деленно положительная функция Ляпунова И(хь...,х„) > 0 и находится ее полная производная
по времени в силу уравнений возмущенного движения объекта (1.1):
dV dV (12)
Задача состоит в выборе такого управления для которого выполняется условие
ПО 2 - Ж(х1,...,х„,о, (1.3)
ще Ж(хь...,хи,0—заданная определенно положительная функция. С учетом (1.3) выражение
(1.2) примет вид
” dV dV (1.4)
= 5 y^Z(X|.....х„,/гьW(xi,...,x„,0+ 0.
Законы управления н4/(Х1,...,х„), обеспечивающие выполнение условия (1.4), являются зако-
нами стабилизации. Однако поиск стабилизирующих управлений путем разрешения неравен-
ства (1.4) в вычислительном отношении крайне труден, не говоря уже о получении аналити-
43
ческих решений. Этим, по существу, и объясняется отсутствие в литературе конструктивных
результатов по синтезу стабилизирующих законов управления ust(x\.х;() для достаточно
общих классов нелинейных объектов. Сложность этой задачи возрастает с повышением раз-
мерности объектов. Для ряда классов систем удается несколько конкретизировать условия
стабилизируемости [7, 8]. Изложенный подход к синтезу стабилизирующих законов управ-
ления основан на применении функций Ляпунова, удовлетворяющих условиям типа (1.4).
Анализ опубликованных работ показывает, что выбор таких функций пока еще наталкивается
на значительные трудности не только при аналитическом, но и алгоритмическом синтезе
законов управления нелинейными объектами [1, 7, 8]. В заключение краткого изложения
основных существующих результатов по синтезу стабилизирующих законов управления от-
метим, что на основе условия (1.3) можно получить следующую интегральную оценку:
f BVi.......x„)dt< И(хь...,х„),
о
связанную с качеством переходных процессов в синтезируемых системах.
Существующие результаты в нелинейной теории АКОР. Перейдем теперь к краткому
анализу работ в области синтеза оптимальных систем, т.е. к рассмотрению проблемы АКОР
для нелинейных объектов. Устойчивость далеко не исчерпывает совокупности требований,
обычно предъявляемых к динамическим свойствам синтезируемой системы. Во многих случаях
необходимо также обеспечить требования к качеству управления, которое в теории оптималь-
ных систем оценивается интегральными критериями качества. Задача аналитического конст-
руирования оптимальных регуляторов [12] или оптимальной стабилизации систем [1] форму-
лируется в следующем виде: среди возможных стабилизирующих законов управления, гаран-
тирующих асимптотическую устойчивость нелинейного объекта (1.1), найти такой закон
управления //Op/(xi,...,x„), который обеспечивает минимум выбранного'критерия качества
* (1.5)
J = J Hr(x1,...,x„,tti,..u„l) dt,
о
где РИ(Х],...,х„)—некоторая неотрицательная функция на траекториях движения исходного
объекта (1.1). В настоящее время решению этой задачй посвящена обширная литература
[7—22] и др. В нелинейной теории АКОР имеется следующая теорема оптимальной стабили-
зации [1, 8]: закон управления разрешает задачу стабилизации объекта (1.1) и
обеспечивает минимум критерия качества
00 00
min J IF(xi,...,xH,H|1^m) dt = f W{x\,...,xn,u\ dt =
о о
= Уо(Х1....х„), (1.6)
если выполняются условия:
а) функция Ио(Х|,...,Хи) является определенно положительной, допускающей бесконечно
малый высший предел;
б) функция Ж(Х1,...,х„,/о opt,—,"т opt) является определенно положительной;
в) справедливо равенство
S(Xi,...,XnJlj optd) ~ S fi(,Xlt-“iXn,Uj Opt)~i~ B^(Xj,...,Xn,Zfy opt) + '= 0 ;
г) для произвольных управлений u^x\,...,xn) 4jOpt{x\,...,xn), j— l,2,...,m справедливо
неравенство
5(xi
у
dxt
dV
dt
(1.8)
Функции K0(xi,...,xZ|), удовлетворяющие условиям (1.6) — (1.8) теоремы оптимальной стаби-
лизации, называются оптимальными функциями Ляпунова [12,152]. Таким образом, сущест-
вует глубокая связь между задачами устойчивости и оптимальности систем управления. Так,
из (1.7) следует, что
44
Vo(O = - Hz(xi,...,xnjz/Opf), i- l,2,...,m. (1.9)
Уравнение (1.9) устанавливает отмеченную связь между методами функций Ляпунова и
оптимального управления. Использование оптимальных функций Ляпунова Fo(xi,...,xn) позво-
ляет из всего множества возможных управлений выделить те, которые обеспечивают как
асимптотическую устойчивость движения, так и оптимальность системы по соответствующему
t критерию качества. Следовательно, устанавливается связь между качественным свойством
систем—устойчивостью и количественной оценкой переходных процессов.
В зависимости от вида используемых подынтегральных функций W(x\,...,xn,Uj) критерия
(1.6) можно получить различные динамические свойства систем. В отношении устойчивости
это связано со следующим. Для определенно положительных функций W > 0 оптимальные
управления обеспечивают синтезируемой системе асимптотическую устойчивость движения.
Втех же случаях, когда объект (1.1) является собственно устойчивым (при и} = 0), а функция
W > 0 определенно положительной, синтезируемая система обладает свойством асимптотиче-
ской устойчивости движения в целом [12, 14]. Для неустойчивых объектов применение
определенно положительных функций W > 0 приводит к асимптотической устойчивости дви-
жения в некоторой области фазового пространства. При использовании же функций W, не
принадлежащих к классу определенно положительных, необходимо удовлетворять дополни-
тельным условиям, которые могут быть получены на основе функций Ляпунова, определяю-
щим асимптотическую устойчивость движения на некоторых многообразиях или во всем
фазовом пространстве.
Возможности поиска решений уравнения (1.9), в силу исходных уравнений объекта (1.1),
определяют успех в проблеме синтеза оптимальной системы. В этой связи следует отметить,
что, формально говоря, все трудности синтеза нелинейных оптимальных систем сводятся к
рациональному выбору в (1.6) подынтегральных функций W(xi,...,xn,ut,...,Um), отражающих
инженерные требования к качеству систем, а также к поиску решений уравнения (1.9). Однако,
io-первых, выбор функций Ж, которые были бы непосредственно связаны с желаемыми
свойствами движения синтезируемых систем, представляет собой самостоятельную и нерешен-
ную до сих пор задачу, и, во-вторых, к сожалению, поиск решения уравнения (1.9) наталки-
вается в случае нелинейных объектов на непреодолимые трудности. Поэтому недостаточно
(^основанный выбор функции W хотя и может привести к устойчивому движению системы,
Однако построенные на ее основе стабилизирующие управления могут оказаться малопригод-
ными в отношении выполнения инженерных требований к системе.
Конкретизируем процедуру АКОР для нелинейных объектов (1.1) с линейно входящими
управлениями:
™ (1.10)
, *i(0 = f,{xi,...,xn)+ 2 Gi^xi,...,xn)uj, г = l,2,...,n, m < n.
7=1
Сначала рассмотрим метод AKOP Летова-Калмана [12, 16]. При этом обычно критерий
качества имеет вид
Т 1 7 / V A -u V 2 2\ <1-П)
J = 5 J ( 2 PikXiXk+ 2 dt-
х 0 '«•,*=! /=1 '
Тогда оптимальное управление, доставляющее минимум критерию (1.11) на траекториях
движения объекта (1.10), будет следующим [14]:
1 v / ч дУ0
“ 2 2 ^чЛ*1’•••’*«) »
Ш] |=1 «*1
Уо(*ъ—,хп)—решение уравнения
(1.12)
z=i dXi П 2m]
/ П dVn 1 i «
2 Gy ~ = — т’ 2 PikXiXk .
(i = l O*Z j 4*=1
(1.13)
прикладном плане теперь задача синтеза закона управления (1.12) сводится к поиску
вынужденного решения Ио(*ь...,*«) уравнения (1.13), являющегося нелинейным дифферен-
45
циальным уравнением в частных производных. Методы аналитического и даже численного
решения этого уравнения, к сожалению, отсутствуют. Это связано с существованием множе-
ства возможных вынужденных решений, среди которых могут быть устойчивые и неустойчи-
вые [14]. Таким образом, непосредственное применение метода аналитического конструиро-
вания Летова-Калмана [12,14] для синтеза оптимальных управлений нелинейными объектами,
наталкивается на практически пока непреодолимые трудности выявления структуры и пара- ,
метров законов управления. Положение здесь аналогично положению с решением уравнения
(1.9), записанным для более общего класса критериев качества (1.6). Между тем, хотя как
математическая процедура (1.6)—(1.9), так и уравнения (1.13), известны в литературе уже
давно [1, 12, 14], однако до сих пор фактически отсутствуют не только какие-либо прибли-
женные аналитические, но и численные метода их решения. Открытие и разработка таких
методов несомненно привели бы к значительному прогрессу в решении нелинейной проблемы
АКОР. Для линейных же объектов, например, вида
xtf) = “ S OikXk+ bin, i = 1,2,...,л,
4=1
оптимальное по квадратичному критерию
* (п \
/ = J 2 0iiXt + « л
О у-1 }
управление при выборе Уо = 2 S А^х/х* согласно (1.13) имеет вид [12,14]:
4=11=1
« '• (1.14)
и = - 2 5 biAikxk.
4=11=1
В выражении (1.14) коэффициенты А,* находятся из системы алгебраических уравнений'
типа Риккати [12, 14]:
п п п (1.15)
X (AipUpk^ Акрвл\ + 2 ЬрАл£ ЬрАрк = Pik*
p=i ' / p=i р=1 г
Для определения закона управления (1.14) необходимо численными методами решить систему:
нелинейных уравнений (1.15). Таким образом, в методе Летова-Калмана оптимальные по
квадратичным критериям законы управления линейными объектами являются линейным^
комбинациями фазовых координат, а их коэффициенты определяются путем численною рс-’
шения нелинейных алгебраических уравнений. Аналогичные результаты получены при опта*
мизации линейных систем по среднеквадратичным критериям качества [17], когда учитыва-
ются статистические характеристики возмущений.
Перейдем, далее, к весьма краткому рассмотрению широко известного в современном
теории оптимального управления метода АКОР академика А.А. Красовского по критерию'
обобщенной работы [14, 15]. В этом методе минимизируемый квадратичный критерий каче-t
ства, в частности, имеет вид
(1.16)
1 00 п т т т ду 7
J = i f 2 PikXiXk+ J Ё ) dt'
, * О ,4=1 /=1 /=1 \ 1=1 ОЛ> /
т.е. является полу определенным и отличается от критерия (1.11) в методе Летова-Кал манг
добавочном членом
00 «I « Л К 9
L?, (”!?.<)л
Оптимальный закон управления, обеспечивающий минимум критерия (1.16), определяется
выражением
„ ___Ly BW>
где функция У0(Х1,...,х,() является вынужденным решением уравнения
(1.17)
46
1 4 а (1Л8>
dt ,5 dXifi~ 2£=fikXiXk'
К характерной особенности уравнения (1.18) относится то, что его левую часть можно рас-
сматривать как производную Vo(t) при uj = 0, т.е. Vo является функцией Ляпунова, а (1.18) —
уравнением Ляпунова для неуправляемого объекта. Отсюда возникают возможные затрудне-
ния с непосредственным применением метода А.А. Красовского для нелинейных объектов,
которые при отсутствии управлений (щ = 0) должны быть устойчивыми или заранее стабили-
зированы с помощью отдельной системы. В этой связи в [14,172] изложен способ применения
этого метода для неустойчивых и нейтральных объектов, основанный на преобразовании
исходных дифференциальных уравнений объекта и функционала (1.15) к специальным неста-
вдонарным формам. Достоинство метода АКОР по критерию обобщенной работы (1.15)
состоит в том, что уравнение (1.18), в отличие от (1.13), представляет собой уже линейное
дифференциальное уравнение в частных производных. Это принципиальное отличие позволя-
ет для уравнения (1.18) с различными граничными условиями разработать ряд приближенных
методов его решения на основе использования степенных рядов, путем многократного приме-
дсния некоторого оператора или опираясь на метод характеристик. Развитое к настоящему
времени алгоритмическое и математическое обеспечение метода АКОР А.А.Красовского по-
зволяет подойти к приближенному решению на ЭВМ основной задачи синтеза оптимального
управления—поиску структуры закона управления нелинейным объектом через функционал
обобщенной работы с последующей итерационной коррекцией его параметров. Наиболее
эффективен этот метод при использовании прогнозирующей модели процесса,управления [14,
15, 172]. Метод оптимизации нелинейных динамических систем по критерию обобщенной
работы академика А.А. Красовского имеет, помимо указанных преимуществ вычислительного
характера, также и такое важное достоинство прикладного характера, как возможность совме-
щенного синтеза законов управления, т.е. формализованного определения управлений в про-
цессе движения объекта. Этот метод в настоящее время является фактически единственным в
СТАУ, позволяющим практически осуществить обобщенный совмещенный синтез, когда реа-
лизуется не только текущее формирование закона управления, но и может также происходить
Текущая идентификация математической модели объекта. Разумеется, что совмещенный син-
тез предъявляет дополнительные требования к программному обеспечению и вычислительной
производительности синтезируемой системы управления. Указанный метод нашел широкое
применение в задачах управления различными объектами и технологическими процессами, в
первую очередь в разнообразных задачах управления летательными аппаратами [14,172].
м ? В литературе имеется и ряд других частных результатов по нелинейной теории АКОР [7,
13,18, 19], однако в общем же проблема прикладного синтеза нелинейных оптимальных
регуляторов еще далека от своего разрешения, что является главной трудностью на пути
создания принципиально нового класса систем управления различными современными техно-
логическими и движущимися объектами.
1.4. ЕСТЕСТВЕННО-МАТЕМАТИЧЕСКИЙ ПОДХОД
< К ОСНОВНОЙ ПРОБЛЕМЕ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
У '
' Основная проблема и подлинная оптимизация. Дфке беглый очерк этапов развития
линейной и-нелинейной теории АКОР, изложенный в разделах 1.2 й 1.3, показал, что прогноз
вотношении будущего основной проблемы теории автоматического управления, сделанный
I AM. Летовым в обзорном докладе [152] на втором конгрессе ИФАК, полностью подтвердил-
dfc За прошедшие с тех пор 30 лет теория оптимального управления в форме методов АКОР
Достигла выдающихся результатов, особенно в той ее части, которая в [152] названа “матема-
тическим содержанием” (см. п. 1.2). В этой теории за прошедшее время появились новые
Тенденции и особенности, связанные с существом современных инженерных требований к
47
проектируемым системам управления. В известном уникальном справочнике по ТАУ [172],
подготовленным группой отечественных ученых под руководством А.А. Красовского, содер-
жание понятия “современная теория автоматического управления” (СТАУ) напрямую опре-
деляется требованиями оптимального использования всех ресурсов систем управления (энер-
гетических, информационных, вычислительных и др.) для достижения главной цели на каждом
этапе движения объекта при соблюдении наложенных на систему ограничений. На основе этого
положения оптимизация системы “в большом”, осуществляемая в реальном времени в процес-
се управления, отнесена в [172] к центральной проблеме СТАУ. Эта фундаментальная про-
блема приводит к необходимости рассмотрения и решения ряда самостоятельных крупньй
проблем и задач. Итак, использование математических моделей объектов не только на стадии
априорного проектирования систем, но и в процессе их функционирования, является согласно
[172] одной из характерных черт СТАУ. Там же отмечается, что “центральной частью СТАУ
является собственно теория оптимального или субоптимального управления в “большом”, т.к.’
согласно приведенному выше назначению СТАУ она должна на каждом этапе функциони-
рования системы указывать алгоритм оптимального (субоптимального) достижения важной'
обобщенной конечной цели”. К такого рода задачам относится, например, вывод на новый'
режим работы различных подвижных объектов новой техники—летательных аппаратов, кос-|
мических станций и т.п., а также современных технологических машин и агрегатов с обеспе-1
чением минимальных затрат. Таким образом, только оптимизация управления движением!
объектов в процессе функционирования системы в текущей обстановке определяется в [172] i
как “подлинная оптимизация” и в этой связи “теорию именнр такой оптимизации должна;
содержать СТАУ”. I
В целом, с указанным глобальным подходом, как идеалом в теории оптимизации, вообще!
трудно не согласиться. Действительно, вполне очевидно, что в общем плане развития приклад-'
ной теории управления тенденция по созданию методов совмещенного синтеза систем опти-
мального управления будет нарастать и становиться все более главенствующей, особенно по|
мере роста возможностей и снижения стоимости средств вычислительной, в частности микро-Г
процессорной, техники. OgpQvr> опч^икает целый ряд вопросов, связанных, например, с|
“важностью” того или иного объекта и затратами, необходимыми для реализации такой гло-
бальной текущей оптимизации его системы управления, с самим смыслом оптимизации, т.е. 4
> ^ртхт^пирд пптимя ПТ.ППСГИ, И Т.Д, ОчвВИДНО. ЧТО ДЛЯ У НИ КЭЛЬ-!
ных, сверхмощных и высокодинамических объектов, предназначенных, например, для реше-j
ния особо важных технологических задач в быстроменяющейся, экстремальной обстановке,:
выполнения боевых и других задач подобного рода, указанная в [172] “подлинная оптимиза-j
ция” необходима и целесообразна. Однако такой подход может оказаться пока неприемлемым^
по экономическим и техническим причинам для многих промышленных и других объектов!
“средней важности”, обладающих вполне приемлемой степенью детерминированности и пред-
сказуемости своего поведения, для которых с целью реализации “подлинной” или близкой!
ней оптимизации требуется лишь частичная коррекция математических моделей и алгоритмов
управления только в некоторые моменты времени. Для таких объектов указанную коррекцию
моделей и алгоритмов вообще технически целесообразно проводить в “нерабочее” время.
Примерами могут служить такие распространенные электромеханические объекты как про-
мышленные роботы, электроприводы станков и других аналогичных по режимам работы
установок, турбоагрегаты и т.д. Необходимость априорной и, возможно, текущей оптимизации
систем управления указанными объектами диктуется тем обстоятельством, что, например,
промышленный ^др^р^^ривол потребляет около 60% всдй драче электро-
энергии. Априорный структурный синтез оптимального по энергозатратам управленияэтими^
объектами с последующей коррекцией параметров настройки мог бы дать значительный тех-
нико-экономический эффект. Аналогичная ситуация сложилась и в области синтеза систем;
управления другими объектами и технологическими процессами.
Указанный эффект оптимизации может принципиально возрасти, если удастся переломил
существующую в проектно-конструкторской практике консервативную традицию раздельного
48
проектирования объекта и регулятора. При этом конструктор подсознательно нередко стре-
мится создать малодинамичный, вялый объект с чрезмерными, на всякий случай, запасами по
механической, тепловой и т.п. прочности, что в конечном итоге делает его слабоуправляемым
и неэкономичным. Применение же оптимизационной идеологии не только при синтезе “опти-
мального” регулятора для заранее заданного, неизменного объекта, но и в процессе проекти-
рования оптимальной системы “объект—регулятор” как целостной и неразделяемой конструк-
ции, позволит создать высокоэкономичные, экологичные и динамичные агрегаты, установки
и технологические процессы нового поколения. Такой подход позволяет в известной мере
приблизиться к “подлинной оптимизации”, которую следует начать осуществлять еще на
стадии проектирования соответствующего динамического объекта, когда его энергетические,
механические и другие внутренние, только ему присущие, свойства должны быть естественным
образом согласованы (технический гомеостазис) с требованиями технологической задачи
управления, часто имеющей по отношению к объекту внешний характер. Очевидно, что этот
подход вовсе не исчерпывается “математическим содержанием” задачи оптимизации, как это
принято в подавляющем большинстве работ по теории АКОР, а выходит за его рамки и
приводит к необходимости включения в процедуру синтеза системы также и “физического
содержания” проблемы управления конкретным нелинейным объектом. Само собой разуме-
ется, что такая априорная оптимизация единой системы “объект—регулятор” совместно с
последующей функциональной оптимизацией, осуществляемой в реальном времени в текущей
обстановке, позволяет в большей мере приблизиться к подлинной, глобальной оптимизации
систем.
Изложенные соображения касались понятия “подлинная оптимизация” [172], которое в
современной литературе, как правило, связывается с математическим содержанием основной
проблемы СТАУ. Остановимся подробнее на этой части указанной проблемы.
О математическом и физическом содержании основной проблемы. Подводя определен-
ный итог развития методов решения основной проблемы СТАУ—синтеза оптимальных регу-
ляторов, поставленной А.М. Летовым в докладе [152], можно с полным основанием утверж-
дать, что математическое содержание этой проблемы в трудах крупных математиков получило
существенное развитие. Особенно значительные, обобщающие результаты были достигнуты в
решении линейно-квадратичной задачи как в детерминированной, так и стохастических поста-
новках. Линейная теория АКОР приняла математически завершенный характер, чего никак
нельзя сказать о нелинейной проблеме АКОР. Но дело здесь все же, по-видимому, в другом.
Еще в обзоре работ по АКОР [152] А.М. Летов писал: “Трудность составления обзора возросла
еще и потому, что в исследовании оптимальных процессов управления принимают участие
выдающиеся математики многих стран. В своем стремлении схематизировать рассуждения,
сделать их возможно более общими и подчинить всеобъемлющим законам математического
формализма они добились выдающихся успехов. Методы принципа максимума и динамическо-
го программирования служат этому яркой иллюстрацией. Поэтому всякая попытка подверг-
нуть ревизии теорию оптимального управления неизбежно затронет установленные математи-
ческие каноны, на что автор не может решиться”. С момента произнесения этого великолеп-
ного пассажа в адрес математического содержания СТАУ теория оптимального управления
развивалась в основном в математическом русле принципа максимума Понтрягина—для ис-
следования качественных свойств оптимальных управлений и определения программных оп-
тимальных движений и принципа оптимальности Веллмана—в попытках построить методы
синтеза замкнутого оптимального управления. Особенно крупные результаты были получены
в решении первого класса задач оптимального управления, т.е. определения оптимальных
программных траекторий. Что же касается второго класса задач,
управлений нелинейными объектами, как раз и определяющих основну?бт^|у8блему СТАУ, то
Более того, ситуация в этой области приняла в настоящее
время угрожающий и, по всем признакам Это обстоятельство и заставило
авторов справочника [172] ^а^он^тъ^становленные математические каноны"” в связи с
вполне справедливо пишут, что “...в раз-
49
витии СТАУ с точки зрения практики далеко не все обстоит благополучно. Классическую ТАР
в основном создавали инженеры для инженеров. СТАУ создают в основном математики для
инженеров и во все большей мере математики для математиков. Последнее с точки зрения
практики вызывает определенное беспокойство... Главное негативное влияние на практическое
внедрение методов СТАУ оказывает масса оторванных от практических потребностей и воз-
можностей работ и даже направлений, интересных в математическом отношении, но бесплод-
ных в отношении современных приложений. Нельзя отрицать право на существование мате-
матической СТАУ как раздела математики, развивающегося по собственным законам и нахо-
дящего применение по мере возникновения соответствующих потребностей. Однако такая
математическая СТАУ должна быть достаточно четко выделена по отношению к прикладной
СТАУ”.
Приведенные здесь яркие высказывания А.М. Летова [152] и авторов современного спра-
вочника [172] о математическом содержании основной проблемы СТАУ контрастируют друг
с другом, внешне противоположны, хотя таковыми, по существу, и не являются, но свидетель-
ствуют об острой ситуации, сложившейся в нелинейной теории АКОР. Дело в том, что А.М.
Летов указывает на незыблемость математических канонов теории оптимального управления,
установленных в 50—60 гг. этого столетия выдающимися математиками—Л.С. Понтрягиным,
Р. Веллманом и др., и действительно составляющих математические основы этой теории.
Резкое и негативное высказывание авторов справочника [172] в большей мере связано с
последующим потоком математических работ, хлынувшим в СТАУ, которая, судя по много-
численным публикациям в различных журналах, стала для многих неудавшихся математиков
полигоном для упражнений, не имеющих отношения к прикладной теории управления. И суть
вопроса здесь, на наш взгляд, вовсе не в проблеме подхода к математическим основам СТАУ,
как и в любой другой науке, с позиций “чистых” или “прикладных” математиков, когда
пытаются соблюсти некоторое равновесие между “террором дедукции” и “разгулом правдопо-
добия”, о чем ведется давний спор в научной литературе [150]. Все дело в принципиальном
игнопированиии “чистыми”, и “прикляпными,,у^тематикяы<* такого фундаментального поня-
тия, как Физическая^химическая. биологическая и т.п.)
ность ущнимлСКгого нелинейного объекта^ЛУпиня начальном этапе развития классической
TAV,"'a й НОСЛеднее время в математической теории оптимального управления, такое абстра-
гирование от физического содержания несомненно было полезным с точки зрения разработки
основ теории (в первую очередь, линейной), то на данном этапе развития СТАУ это превра-
тилось в свою противоположность. В разделе 1.2 отмечалось, что базовые принципы класси-
ческой ТАУ не зависят от конкретной природы объекта и именно такой подход дал в свое время
сильный импульс для развития теории управления. Сложившаяся же в настоящее время
кризисная ситуация в СТАУ снова требует возврата и учета основополагающих естественных
свойств объекта, но уже на новом качественном уровне развития теории управления.
Таким образом, можно говорить о витке спирали в процессе развития теории управления,
когда ранее исключенное свойство объекта—его физическая сущность—потребовалось снова
включить в саму ткань прикладной СТАУ, которая несет большой ущерб от недостаточного
взаимодействия математики с физикой (химией, биологией). Этот факт в полной мере согла-
суется с изложенным в п.1.1 синергетическим подходом в современной науке о свойствах
нелинейных динамических систем различной природы. Указанные обстоятельства требуют
развития новых направлений в СТАУ, учитывающих, помимо математического, также и
“физическое содержание”. А.М.Летов в выводах доклада [152] о перспективах развития
теории АКОР (см. п. 1.2) поставил понятие “физическое” впереди “математического содержа-
ния”, хотя четкого определения понятия “физическое Содержание” в [152] не дано. Требова-
ние А.М. Летова о “физическом содержании” теории АКОР не получило должного развития
и в известном смысле было игнорировано, за исключением, может быть, обычной физической
интерпретации задачи управления конкретным объектом, имеющей вторичный, косвенный, а
не сущностный, обобщающий характер. Другими словами, в СТАУ “математическое содержа-
ние” во многом подавляет физическое начало, которое фактически отсутствует в самой фор-
50
мулировке основной задачи управления и, чт^г особенно важно, в подходах к ее решению. И
только в последнее время в работе академика А.А. Красовского [171] была поставлена про-
блема создания “физической теории управления”. Разумеется, что дать достаточно строгое
определение понятия “физическая теория управления” представляется пока трудным делом,
т.к. она еще находится на начальном этапе своего становления. В этой связи А.А. Красовский
дает следующее первоначальное определение: “под физической теорией будем понимать такую
теорию управления, которая базируется на фундаменте физических законов, учете ресурсов
и приоритетах реального мира”. Затем в [171] отмечается, что “отличие физической теории
управления от абстрактно-математической начинается с математических моделей и критериев
систем и процессов управления. В физической теории модели и критерии создаются в физиче-
ских (физически значимых, с физическими размерностями) величинах и терминах. Эти модели
должны учитывать законы сохранения, другие законы природы и технологии. В абстрактно-
математических моделях учет многих ограничений, факторов и закономерностей, как правило,
отсутствует. Физическая теория строится так, чтобы заложенные в математических моделях и
критериях реальные факторы и ограничения фигурировали и в конечных результатах, опре-
деляя границы возможного и невозможного в управлении.” Ясно, что “физическую теорию”
следует понимать в обобщенном смысле, т.е. она может включать химические, биологические
и другие закономерности.
Академик А.А. Красовский затем указывает, что в “физической теории управления” намети-
лись такие направления: информационная теория управления; теория микроуправления; теория
макроуправления физическими процессами, в том числе квантовыми и релятивистскими; теория
систем управления с максимальным использованием физических моделей, критериев и перемен-
ных. В настоящее время указанные направления получили определенное развитие, хотя практи-
чески важных результатов, по-видимому, еще не достигнуто. Что же касается поставленной
АА. Красовским фундаментальной проблемы “открытия или формулировки законов процессов
управления, а не теорем, как в абстрактно-математической общей теории управления” [171], то
указанная проблема еще находится в зачаточном положении, а эффективные подходы к ее решению
I литературе фактически отсутствуют. Для этого необходимо развить новые базисные положения
и методы физической (естественной) теории управления.
Изложенное положение с физическим (химическим, биологическим и т.п.) и математиче-
ским содержанием прикладной СТАУ ставит сложный вопрос об органичном их включении в
; постановку и решение нелинейной проблемы АКОР. Ясно, что физическое и математическое
содержания этой проблемы должны быть парно дополнительными друг другу. Главная труд-
ность при этом состоит в отражении при постановке задачи управления именно физического
начала, которое обычно носит конкретный, частный, уникальный характер, в то время как
• математическое содержание—это чистая формализация. В этом смысле физическое (химиче-
ское, биологическое) начало во многом связано именно с нелинейными свойствами объекта, т.
к. нелинейность—это индивидуальная, уникальная черта, а линейность—это типизация, по-
гружение частного явления в общее описание и, следовательно, в большей мере связана с
формальной, математизированной стороной явления. В этом плане теория управления линей-
ными объектами ближе к общему математическому подходу, т.к. структура решения линейных
дифференциальных уравнений, являющихся математическими моделями таких объектов, не
зависит от начальных условий, в то время как для нелинейных дифференциальных уравнений
отличительным, принципиальным свойством является зависимость как формы, так и самого
существования решений, от начальных условий. Дело усугубляется еще и тем, что основная
задача управления всегда сводится к граничной задаче, а вовсе не к задаче Коши в теории
дифференциальных уравнений, для решения которой к настоящему времени разработаны
эффективные численные методы.
Возможно, что поэтому наука остановилась перед нелинейными свойствами реальных
объектов как у крепости и неуверенно топчется возле нее. Несмотря на длительную математи-
ческую осаду и мощные лобовые компьютерные атаки, эта крепость остается непобежденной.
В этой связи в [172] отмечается, что “главной трудностью решения основной современной
51
проблемы автоматического управления—оптимального управления “в большом" весьма слож-
ными процессами—остается вычислительная производительность. Преодоление этой трудно-
сти возможно только на пути сочетания развитой аналитической прикладной СТАУ, как
фундамента алгоритмического обеспечения, с численными методами, как формой реализации
алгоритмов”, быстрый прогресс ЭВМ открывает определенные возможности в отношении
вычислительной производительности. Однако необходимо подчеркнуть, что лобовой вычис-
лительный подход к решению основной проблемы СТАУ не может быть самым перспективным
направлением в развитии теории управления, несмотря на кажущуюся мощь современной
вычислительной техники. Чтобы убедиться в этом, достаточно еще раз упомянуть о знаменитой
задаче поиска решения основного функционального уравнения вида (1.13), которое опреде-
ляет законы оптимального управления в нелинейной теории АКОР. Хотя это уравнение
известно более 30 лет, с тех пор в поисках его численных решений фактически никакого
продвижения вперед нет. Тем более эти трудности усугубляются при попытке реализация
оптимизации систем “в большом” в реальном времени, т.е. в процессе управления. По-види-
мому, дело не в “победе” над “крепостью” нелинейности реальных объектов, а в переходе на
новое понимание основной проблемы СТАУ как целостной, естественно научной проблемы
современной науки о нелинейной динамике процессов различной природы. Путь этот, на наш
взгляд, представляет собой синергетический подход в теории автоматического управления.
Естественно-математический подход к решению основной проблемы. Подведем некото-
рые итоги рассмотрения основной проблемы СТАУ. Теория автоматического управления
получила в свое время значительный импульс в развитии, когда учеными и инженерами было
осознано, что базовые принципы управления не зависят от конкретной природы объекта.
Основные законы механики, электротехники, теплотехники, гидравлики, газовой динамики я
химии, которыми описывается поведение подавляющего большинства современных подвиж-
ных и технологических объектов, могут быть записаны аналогичными и даже совпадающими
закономерностями в виде системы дифференциальных и алгебраических уравнений. Более
того, многие из этих законов могут переходить друг в друга в результате инвариантных
математических преобразований. Для подтверждения этого важного положения достаточно,
лишь напомнить, например, о постулате Максвелла, согласно которому уравнения движения1
электромеханической системы составляются в форме уравнений Лагранжа второго рода из
аналитической механики. При этом функция Лагранжа L=LM+L9 представляет собой сумму
функции LM, составленной для механической части системы, и функции £э, составленной для
электрической части системы, что и образует в целом сложную электромеханическую систему.
В основе постулата Максвелла лежит глубокая аналогия между механическими движениями и
процессами, протекающими в электрических цепях [136]. Нетрудно указать подобную анало-
гию и в системах другой природы, что во многих случаях связано с единством законов
сохранения.
Именно свойство инвариантности математических преобразований при составлении урав-
нений движения, как по существу, так и косвенно, лежит в основе универсального подхода
теории управления к различным по своей физической (химической, биологической и т.п.)
природе задачам управления. Однако дальнейшая формализация этого подхода привела в
настоящее вреМя к непомерной математизации СТАУ. С одной стороны, это позволяет опе-
реться на фундаментальную математическую базу и привлечь к решению задач СТАУ мощные
аналитические и численные методы с применением современных и перспективных ЭВМ. С
другой же стороны, чрезмерная формализация, например линейной ТАУ, фактически превра-
тила ее в одну из областей алгебры—теории матриц или, по меньшей мере, в область теории
дифференциальных уравнений. Более того, даже базовые, только присущие ТАУ, понятия
нередко формулируются в терминах соответствующей математической теории..Примерами
являются понятия управляемости, наблюдаемости и др.
Вернемся снова к понятию “оптимальная система”. Само по себе введение термина “опти-
мальность”—это лишь попытка отразить оценочное, субъективное свойство через некоторое
52
количественное соотношение, т.е. попытка объективизировать, выразить количественно то
качество, которое желательно придать синтезируемой системе. На наш взгляд, введение в
СТАУ методов оптимального управления, как базовых и составляющих ее математическую
основу, является лишь первым шагом к новому пониманию задач автоматического управления.
Следующим шагом должно быть введение в самую сущность ТАУ фундаментальных естест-
венных закономерностей, отражающий физическое (химическое, биологическое и т.п.) начало
управляемого объекта. Необходимо синтезировать “...оптимальное управление с максималь-
ным использованием естественных, собственных движений объекта. Именно такие управ-
ления получаются на основе СТАУ” [172]. Это требование в полной мере согласуется с
выводами, сделанными А.М. Летовым еще в докладе [152] о том, что природа объекта опреде-
ляет физическое и математическое содержание основной проблемы теории автоматического
управления. В работе [171] академик А.А. Красовский в общем виде сформулировал совре-
мепую фундаментальную проблему физической (аналогично химической, биологической и
т.п.) теории управления как проблему поиска общих объективных законов процессов управ-
ления.
Поставленная таким образом проблема СТАУ является принципиально новой и порождает
крупные самостоятельные проблемы и задачи. При этом возникает труднейшая задача пере-
хода от естественных принципов, учитывающих своеобразие объекта, к количественным,
формализованным соотношениям. Для этого представляется перспективным использовать
принципы (законы) сохранения, справедливые, как известно, для всех форм существования
материи и являющихся инвариантами в тех предметных областях, к которым относится
даетый, конкретный объект управления. Изложенный в п.п. 1.2 и 1.3 краткий очерк развития
основной проблемы СТАУ показал, что теория управления по многим признакам оказалась в
плену редукционистских методов и их доминирования, когда путем “склеивания” локальных
Описаний системы пытаются построить ее глобальное поведение. Хотя эти методы оказываются
иногда весьма успешными, например в линейном случае, однако перспективный путь развития
нелинейной теории управления лежит в русле взаимосвязи и взаимообратимости редукциони-
стских и холистических, глобальных подходов, отражаемых путем применения всеобъемлю-
щих принципов сохранения в процедурах синтеза оптимальных систем.
В этом смысле можно утверждать, что эпоха подлинного, естественно-физического (хими-
ческого, биологического и т.д.) оптимального управления еще только наступает. Это означает,
что в основу “подлинно оптимального” управления целесообразно положить не только мате-
матическое содержание, получившее значительное развитие, но и физическое начало задач
управления, которое в настоящее время выдвигается на первый план. Остановимся еще раз на
этом положении. Математика, как известно, занимается общими формальными закономерно-
стями, в то время как физика в первую очередь интересуется качественными свойствами и
особенностями конкретных явлений. В то же время и в физике имеются такие обобщающие
фундаментальные понятия, как законы сохранения, присущие всем физическим процессам и
выраженные в основополагающем вариационном принципе. Этот принцип формально отража-
ется в математической теории оптимального управления через критерии качества. Другими
словами, в основу “подлинной оптимизации” нелинейных систем целесообразно положить не
только математические конструкции стандартной теории оптимального управления, а в боль-
шей мере естественно-математические соотношения, отражающие, во-первых, фундаменталь-
ные физические закономерности в форме соответствующего вариационного принципа, и,
во-вторых, технологические требования задачи управления в виде соответствующего критерия
качества. Такой подход возвращает ТАУ к естественным источникам ее возникновения, но на
новом, естественно-математическом витке ее развития. Именно введение в нелинейную тео-
рию управления элементов физической (химической, биологической) естественности позво-
лит по-новому подойти к построению процедур синтеза систем управления нелинейными
объектами.
При создании новой теории, в частности нелинейной теории автоматического управления,
целесообразно, следуя великим научным принципам Галилея и Ньютона [213], в определен-
53
ной мере абстрагироваться от второстепенных свойств рассматриваемых явлений в объектах
управления и попытаться за внешним разнообразием увидеть основные, базовые физические
факторы, определяющие сущность рассматриваемого явления. Разумеется, что такой способ
идеализации в известной степени уводит от точного соответствия реальности, однако, как это
ни парадоксально, именно такой подход позволяет приблизиться к реальности в гораздо
большей мере, чем скрупулезный учет очевидных, но второстепенных факторов. Об этом
свидетельствует вся история современного естествознания—от Галилея и до науки наших дней.
В этой связи возникает вопрос, почему достаточно простые законы классической механики и
физики отменно работают в окружающем нас весьма сложном мире и тем самым дают возмож-
ность вполне достоверно описать разнообразные физические явления. Ответ на этот вопрос
дает современная нелинейная наука—синергетика [83, 85, 144, 169, 214]: все дело в том, что
в сложных динамических природных системах, имеющих много степеней свободы, происходит.
сомоорганизация. Ее суть состоит в том, что в физических процессах выделяются несколько
главных степеней свободы, называемых “параметрами порядка”, к которым через некоторое,
время “подстраиваются” все остальные степени свободы сложной природной системы. Обычно,
число этих параметров небольшое, что и позволяет описать и исследовать сложную нелиней-
ную динамическую систему. Однако выделение указанных факторов—“параметров порядка”,
определяющих сущность соответствующего физического явления, вовсе не относится к про-
стым задачам. Что же касается теории управления, то к таким основополагающим фактам,
обобщенно охватывающим рассматриваемые физические процессы (объекты), очевидно, от-
носятся принципы (законы) сохранения. Эти законы отражаются на языке инвариантов—си-
нергий в рассматриваемой здесь синергетической теории управления.
Итак, наиболее общим физическим свойством всех объектов различной природы является:
свойство сохранения—энергии, количества движения и др., в биологии—это гомеостазис. В
этой связи в основу нового направления в нелинейной теории АКОР целесообразно положить
преднамеренное введение в пространство состояний синтезируемых нелинейных систем неко-
торых постоянных функциональных соотношений между координатами системы, т. е. таких!
инвариантных интегральных многообразий, на которых естественные физические (химиче-
ские, биологические и т.п.) свойства объекта наилучшим образом согласуются с соответству-
ющими требованиями технологической задачи управления, которая отражает цель функцио-
нирования данного’объекта. Разумеется, что при этом должны гарантироваться общесистемные'
свойства—асимптотическая устойчивость движения в области или в целом, грубость, мини-'
мально возможное время переходных процессов и др. Введение инвариантных многообразий
в процедуру синтеза наделяет замкнутую систему общими глобальными свойствами и позво-
ляет выявить родство разнородных физических (химических, биологических и т.п.) явлений,
происходящих в объектах управления различной природы. Представление этих явлений на
математическом языке—совокупности частных (первых) интегралов дифференциальных
уравнений синтезируемой системы—отражает единство принципа сохранения в многообразии
управляемых процессов. Этот новый естественно-математический подход к решению нелиней-
ной проблемы АКОР—основной проблемы СТАУ—глубоко связан с идеями синергетики и
теории нелинейных диссипативных систем.
Изложенное выше указывает на то важное обстоятельство, что путь развития ТАУ в
концептуальном плане во многом был аналогичен развитию классической механики. Как
известно [211], механика и в целом физика развивалась в русле двух основных взаимосвязан-
ных путей—во-первых, по пути, указанному Ньютоном и базирующемуся на векторных
понятиях силы и импульса, и, во-вторых, по пути проложенному Лагранжем и Гамильтоном,
опирающемуся на вариационный принцип, а также на скалярные понятия кинетической энер-
гии и силовой функции. Вариационный принцип стал “сквозным” обобщающим принципом^
современной физики и формулируется аналогично для всех теорий—от классической до
квантовой механики. Это указывает на преемственность и взаимосвязь ее теорий, вытекающих
из универсального вариационного принципа. Однако многие ученые считают неудовлетвори-.
тельным и даже кризисным современное состояние механики и физики. В этой связи они
54
предлагают [102, 211] для дальнейшего развития механики и физики использовать третий
путь, впервые указанный А. Пуанкаре и А.М. Ляпуновым и опирающийся, на такие понятия и
теории, как инварианты, асимптотическая устойчивость, качественная теория дифференциаль-
ных уравнений и общая теория структуры фазового пространства.
Вершиной современной ТАУ является теория оптимального управления в форме методов
АКОР в детерминированной и стохастической постановках, которая опирается на универсаль-
ный вариационный принцип экстремального действия. И в ТАУ возникла в настоящее время
описанная выше кризисная ситуация, для выхода из которой следует, на' наш взгляд, перейти
на синергетический путь ее развития, базирующийся на фундаментальных понятияхсовремен-
ной науки о нелинейных динамических системах—теории инвариантов (синергий), асимпто-
тической устойчивости движения, теории аттракторов и общей теории структуры фазового
пространства систем. Разумеется, что переход к новому этапу развития ТАУ будет сопровож-
даться переосмыслением основных понятий и взгляда на ее предшествующие этапы. В насто-
ящее время в ТАУ рождается новая общая синергетическая концепция, с которой старые
классические концепции находятся в глубокой внутренней связи, наполняясь новым естест-
венным (физическим, химическим, биологическим) содержанием. Это обстоятельство указы-
вает на преемственность этапов развития и определенное единство теории управления как
^временной науки.
. Опираясь на высказанные здесь и ранее общие соображения относительно подлинной
Оптимизации, математического и физического содержания нелинейной проблемы АКОР и на
идею естественно-математического подхода к ее решению, перейдем теперь к формированию
базовых элементов синергетической теории управления, а именно: построению оптимизиру-
ющего функционала, формулйровке новой задачи АКОР, выводу основного функционального
Уравнения и естественно-геометрической интерпретации развиваемой в этой книге новой
теории синергетического синтеза нелинейных систем управления. •
1.5. ПЕРЕМЕННЫЙ ОПТИМИЗИРУЮЩИЙ ФУНКЦИОНАЛ
В ЗАДАЧАХ СИНЕРГЕТИЧЕСКОГО СИНТЕЗА НЕЛИНЕЙНЫХ СИСТЕМ
О формах критериев качества и режимах работы нелинейных систем. Предпринимая в
этой книге попытку дальнейшего развития теории АКОР применительно к нелинейным объ-
ектам, подчеркнем еще раз то существенное обстоятельство, что при синтезе оптимальных
систем одной из важных и самостоятельных задач является формированием соответствующих
критериев качества, удовлетворяющих совокупности инженерных требований, предъявляе-
йых к замкнутым системам. Выбор того или иного критерия, отражающего динамические
свойства системы, является трудной и самостоятельной задачей, которая вообще имеет неод-
нозначные решения. Критерий качества в теории АКОР формально выступает как постулат
[12], от которого зависит сложность решения задачи синтеза и вид получаемых законов
управления. На начальном этапе развития теории оптимального управления считалось, что
набор формы критерия оптимальности находится вне ее рамок и должен быть осуществлен
проектировщиком, конструирующим систему управления соответствующим конкретным объ-
ектом или технологическим процессом. В дальнейшем в процессе развития теории синтеза
оптимальных систем преобладающее применение получили критерии быстродействия и энер-
гозатрат [18-24] и квадратичные критерии вида (1.11) и (1.16), которые были положены в
основу теории АКОР [1, 6, 12, 14, 18]. В автоматическом управлении [21] инженерные
требования к качеству переходных процессов часто формулируются путем задания предельных
значений определенных величин—первичных показателей качества: допустимого времени
регулирования, допустимого перерегулирования, колебательности и т.д., которые нередко
носят противоречивый характер и далеко не всегда поддаются формализации. Оказывается,
что одним и тем же предельным характеристиками переходных процессов можно удовлетво-
рять не только с помощью различных комбинаций коэффициентов квадратичного критерия,
55
но и путем некоторого изменения самой его формы. Этим и определяется косвенность оценки
свойств переходных процессов с помощью такого рода критериев качества. Изложенное ука-
зывает на то, что применяемые в методах АКОР постулируемые квадратичные критерии не
позволяют в полной мере отразить проблему синтеза нелинейных систем,.т.к. эти критерии
могут оказаться менее удачными с прикладной точки зрения по сравнению, например, с
критериями быстродействия и «минимума энергозатрат, которые для режимов больших откло-
нений в полной мере отражают желаемые показатели качества систем. Другими словами,
квадратичные критерии часто могут оказаться неадекватными напряженным режимам работы
современных высококачественных систем.
С учетом значительных трудностей, возникающих на пути однозначного выбора оптими-
зирующего функционала, в литературе по теории АКОР [1,14] сформировалось даже мнение
о целесообразности решения обратной задачи вместо основной. При этом считается, что задачу
оптимизации следует вообще отнести на второй план, отдав предпочтение поиску законов
управления, по меньшей мере гарантирующих основные свойства синтезируемых систем—
асимптотическую устойчивость движения, возможно меньшее время и заданный характер
затухания переходных процессов, их грубость и т.д. Н.Н. Красовский отмечал [ 1 ], что в задаче
об оптимальной стабилизации предъявляется больше требований к управлению wePf(xi,...,x„),
чем к стабилизирующему управлению uit(xi,...,xn) в задаче об асимптотической устойчивости
систем. Однако поиск оптимального управления uopt(x\,...,хп) проще в том смысле, что задача
об оптимальной стабилизации обычно имеет единственное решение, а выбор стабилизирующих
управлений ust(xi ,...,хп) вообще содержит значительный элемент произвола. Тогда оказывается
целесообразным следующий путь решения задачи синтеза асимптотически устойчивых систем.
С целью уменьшения произвола в выборе стабилизирующих законов управления ust(xi,...,xn)
в обычные условия этой задачи вводится требование минимума некоторого функционала,
которое здесь выступает в виде дополнительного условия. Тогда исходная задача о стабилиза-
ции трансформируется в некоторую вторичную задачу оптимизации, в которой функционал
играет вспомогательную роль. В этих условиях выбор вида подынтегральной функции
W(x\,...,xn,u\,...,um) должен быть связан не со строгими условиями оптимальности, а опреде-
ляться простотой решения задачи синтеза закона управления. Указанный подход относится к
проблеме синтеза допустимых законов управления, гарантирующих заданные первичные по-
казатели систем, с использованием оптимизационных идеологий теории управления.
Итак, необходимо отметить научную важность и прикладную целесообразность постано-
вок двух оптимизационных задач: во-первых, когда ставится чисто оптимальная задача, а
критерий качества выступает как строгий постулат, т.е. некоторый индекс совершенства сис-
темы [12], которому обязательно нужно удовлетворить в процессе синтеза соответствующего:
закона управления, и, во-вторых, когда тот или иной функционал выступает в роли вспомога-
тельного средства [1, 14], позволяющего завершить сложную процедуру синтеза системы^
особенно это касается задач управления нелинейными объектами. Все это говорит о том, что в
настоящее время необходимо искать новые способы формирования структуры функционала в
общей проблеме АКОР для нелинейных объектов. Одним из таких перспективных способов;
является, во-первых, варьирование подынтегральной формы оптимизирующего функционала*,
в зависимости от области фазового пространства, где в данный момент времени находится
изображающая точка системы, т.е. конструирование переменных в фазовом пространства»
критериев качества, и, во-вторых, выбор и последующая коррекция весовых коэффициентов,'
в частности, при квадратичных составляющих подынтегральной формы исходного функцией
нала. Указанный подход задачи формирования функционала при решении нелинейной про-
блемы АКОР конкретно означает разделение ее на задачу структурного синтеза закона управ*
ления, гарантирующего такие общие фундаментальные свойства систем, как асимптотическая:
устойчивость в области или в целом, грубость, предельное быстродействие в режимах большие
отклонений и др., и задачу поиска параметров этого закона, обеспечивающих заданные требо-
вания к переходным процессам, в частности в режимах малых отклонений от заданного;
56?
состояния системы. Целесообразность указанного способа формирования оптимизирующего
функционала, помимо необходимости учета нелинейных свойств объекта, определяется также
тем важным обстоятельством, что при построении эффективных систем управления современ-
ными многорежимными объектами возникает сложная задача удовлетворения такой совокуп-
ности инженерных требований [170], которые бывают настолько разнообразными и противо-
* речивыми, что их невозможно отразить с помощью одного, неизменного для всех режимов
работы системы, критерия качества.
О многокритериальной оптимизации нелинейных систем управления. Поставленная
здесь задача нелинейной теории АКОР по формированию переменного функционала относится
также к проблематике многокритериальной оптимизации динамических систем. Рассмотрим
кратко основные результаты в этой перспективной области автоматического управления. Итак,
при синтезе нелинейных систем, к которым предъявляются повышенные и одинаково важные
различные требования, может возникнуть необходимость использования некоторой совокуп-
ности критериев качества. Одним из способов построения оптимального управления в этом
случае является введение векторных критериев, состоящих из ряда вторичных критериев,
которым одновременно должно удовлетворять движение объекта. Другими словами, возникает
задача одновременной, параллельной оптимизации системы по совокупности частных крите-
риев, каждый из которых отражает некоторое определенное требование к качеству движения.
Но т.к. в общем случае достигнуть экстремума одновременно по нескольким критериям
невозможно, то решение задачи векторной оптимизации требует определенного компромисса
путем формирования некоторого нового функционала. Ввиду того, что конструирование тако-
гообобщенного (комбинированного, глобального) функционала является неформальной про-
цедУрой, то вид его полностью зависит от выбранной схемы компромиссов, что сводит вектор-
нуюзадачу к скалярной. Методы векторной оптимизации получили к настоящему времени
существенное развитие применительно к статическим задачам, однако эти методы не разрабо-
таны для задач управления динамическими объектами. Сложность и трудность решения задач
векторной оптимизации динамических систем связаны, в первую очередь, с решением сово-*
купности нелинейных граничных задач. Наиболее важные результаты по теории векторной
оптимизации линейных динамических систем получены в работах М.Е. Салуквадзе [34, 35],
А:И. Воронина [36—40] и др. В этих работах показано, что постановка и последующее
решение конкретных задач векторной оптимизации динамических систем существенным об-
разом зависит от выбранной схемы компромиссов, т.е. принципа оптимальности. Из теории
многокритериальной оптимизации следует [41], что применительно к динамическим системам
большинство схем компромиссов сводится в основном к двум полярным принципам оптималь-
ность—интегральному принципу в виде суммы взвешенных вторичных критериев
т .2, . т (1-19)
; г А = min^ Ык
: *=1
и принципу равномерности, т.е. минимакса
Jx = minmaxJ*. (1.20)
Остальные схемы компромиссов представляют собой модификации или комбинации этих или
подобных им принципов оптимальности. Представляется естественным и целесообразным
связать выбор той илииной схемы компромиссов с соответствующим режимом работы системы.
Тода, для облегченных, например стационарных, режимов следует выбрать принцип интег-
ральной оптимальности (1.19), а для напряженных режимов, когда характеристики систем
ищут достигнуть предельно допустимых величин, более подходящим, по-видимому, является
принцип равномерности (1.20) или сходные с ним принципы оптимальности. В промежуточных
режимах, которые характерны для многих систем, а также при широком диапазоне изменения
внешних воздействий и граничных условий целесообразен выбор в известной мере универсаль-
ной схемы компромиссов, обеспечивающей соответствующую “степень” оптимальности син-
тезируемой системы. Постановка и решение задачи оптимизации с универсальной схемой
компромиссов является весьма сложной и трудной проблемой [36—40]. Эта проблема пока не
57
получила должного разрешения в важных задачах синтеза законов управления в функции
фазовых координат, т.е. построения оптимальных и субоптимальных регуляторов, тем более
применительно к нелинейным объектам. Таким образом, выбираемая схема компромиссов
должна быть в определенной мере адекватной соответствующему режиму работы системы в
данный момент времени.
На практике для многих систем можно ограничиться рассмотрением двух основных режи-
мов—малых и больших отклонений от заданного движения, которым соответствует разбиение
фазового пространства системы на внутреннюю и внешнюю области. В режиме малых откло
нений поведение объекта может быть описано линеаризованными дифференциальными урав-
нениями, а наиболее распространенным требованиям к качеству движения для этого режима
можно удовлетворить путем оптимизации системы по стандартным квадратичным критериям
качества или с использованием методов модального управления. При напряженных режимах,
когда изображающая точка находится в области больших отклонений, достаточно удаленной
от начала координат, адекватная модель движения объекта, как правило, должна быть нели-
нейной. Как уже отмечалось, в этих режимах подходящими являются минимаксные критерии
качества, которые позволяют ограничить допустимое отклонение от заданного движения в
течение всего времени переходного процесса, что выдвигается на практике для многих систем
управления [42]. Однако минимаксный критерий [43, 44] не является аналитическим и
поэтому для оптимизации систем в режиме больших отклонений следует использовать другие
функционалы, которые аппроксимируют его в смысле близости получаемых при этом пере-;
ходных процессов. Из критериев, используемых в теории оптимального управления, к мини-
максному наиболее близок критерий быстродействия. В монографии [234] разработан новый
подход к синтезу многокритериальных систем управления нелйнейными динамическими объ-
ектами, основанный на оптимизации системы в режиме больших отклонений по критериям,
быстродействия и минимума энергозатрат, а в режиме малых отклонений—по квадратичным
критериям качества. .
Иерархический подход к синтезу оптимальных систем. Ранее уже отмечалось, что в
режимах больших отклонений математическая модель объекта является нелинейной, а эта
существенно затрудняет синтез законов оптимального по быстродействию управления [23,
24]. В этой связи необходимо сформировать оптимизирующий функционал, который бы во
внешней области фазового пространства эффективно подавлял возникшие большие отклоне-
ния за возможно малое время переходного процесса. Весьма желательно использовать тот же
функционал и для режима малых отклонений, чтобы путем удержания соответствующего числа
его первых членов обеспечить оптимизацию системы во внутренней области фазового про--
странства. Тогда, разработав процедуры синтеза оптимальных по этому обобщенному крите-г
рию законов управления нелинейными объектами, можно решить поставленную выше опти-
мизационную задачу с использованием схемы компромиссов, приближающейся в той или иной
мере к универсальной. Итак, возникает важная задача формирования некоторого .обобщенного
оптимизирующего функционала, позволяющего построить единый подход к процедурам син-
теза законов управления для режимов как малых, так и больших отклонений. Этот функцио-.
нал, в зависимости от его структуры (числа удерживаемых членов в подынтегральном выра-
жении) , должен обеспечивать приближение к описанной выше универсальной схеме компро-
миссов и, кроме того, гарантировать асимптотическую устойчивость синтезируемой
нелинейной системы в наибольшей области фазового пространства. Использование такого род!
критериев приводит к последовательной оптимизации нелинейных систем. Сущность ее состо-
ит в поэтапном конструировании законов управления, когда синтез каждого следующего
уровня иерархической системы управления осуществляется с учетом уже синтезированной по
своему критерию подсистемы предыдущего этапа. С этой целью и следует на каждом из
последующих этапов синтеза использовать подсистему управления и математическую модель
объекта предыдущего этапа. В зависимости от назначения и условий функционироваши
объекта тот или иной режим движения может иметь преобладающий характер и, естественно^
58
подсистеме управления этим режимом и следует отдать определенное предпочтение, однако
нередко эти режимы одинаково важны.
Применение описанного иерархического подхода к задаче синтеза по последовательно приме-
няемым критериям оптимальности в зависимости от режима работы системы приводит к следующей
методике. На первом этапе производится конструирование контуров управления, исходя из усло-
вий оптимизации по первому (наиболее общему) критерию и удовлетворения общим очевидным
требованиям в отношении асимптотической устойчивости, быстродействия и т. д., которые присущи
всем последующим подсистемам управления различными режимами движения. Далее, на втором
этапе, осуществляется оптимизация по второму критерию для нового подобъекта, размерность
которого ниже размерности объекта первого этапа синтеза. При этом изменяются характеристики
некоторых контуров управления, остальнь^еже контуры, синтезированные на предыдущем этапе,
Фгаются неизменными. В зависимости от числа изменяемых на втором этапе характеристик
контуров управления может изменяться степень оптимальности системы по второму критерию.
Затем проводится оптимизация подсистемы, синтезированной на втором этапе, по третьему кри-
терию с учетом нового подобъекта более низкой размерности и т. д. Указанная процедура и
Позволяет осуществить оптимизацию системы по совокупности последовательно применяемых
Критериев качества. Другими словами, производится оптимизация системы по переменным в
фазовом пространстве функционалам.
л ^ Разработке теории оптимизации по последовательно применяемым критериям посвя-
щена работа [46], в которой рассматривается задача поиска разомкнутого управления
0(f) линейными объектами, когда все частные критерии могут быть ранжированы по важ-
ности. Что же касается задачи синтеза, то в работе [47] построены законы управления
линейными объектами второго и третьего порядков при переменном критерии оптималь-
ности, который в области малых отклонений является квадратичным, а при больших
отклонениях—критерием быстродействия. Аналогичные переменные критерии качества
Использовались для синтеза законов управления нелинейными объектами в цикле работ
[48—54], а в работе [59] разработана методика построения субоптимальных по перемен-
йому критерию качества следящих систем.
./“Таким образом, литература по синтезу оптимальных по переменным критериям качества
Сйстем далеко не так обширна, как литература по аналитическому конструированию с исполь-
зованием неизменного, например квадратичного, критерия качества. Это обстоятельство объ-
ясмется сложностью и новизной проблемы последовательной оптимизации, тем более приме-
нительно к задачам управления нелинейными объектами.
Для подтверждения существенной прикладной и теоретической важности проблемы после-
довательной оптимизации замкнутых нелинейных систем рассмотрим постановку трех задач
управления из весьма разных областей техники. В качестве первой рассмотрим одну из задач
управления движением летательного аппарата (ЛА). Для управления боковым движением
Щейгра масс ЛА нередко используют линейные модели, при этом обычно предполагается, что
йяпалъные отклонения от заданной линии пути являются достаточно малыми [ 14]. Однако для
выполненйя этих условий необходимо сначала вывести ЛА в окрестность заданной траектории
Ш по боковому отклонению, так и по направлению движения, т.е. ликвидировать большие
начальные отклонения от заданной линии пути. При этом адекватная модель движения уже
будет нелинейной. На выход ЛА на эту линию при больших начальных отклонениях требуется
значительное время и количество топлива. Поэтому целесообразна оптимизация процесса
Вйхода на заданную линию пути. В целом, вместе с задачей управления боковым движением
это приводит к целесообразности постановки задачи оптимизации системы управления ЛА по
Ш^алениому критерию качества.
- «. В качестве второго примера рассмотрим задачу построения системы управления напряжением
возбуждения синхронных генераторов электроэнергетических систем. Изменение напряжения и
тока возбуждения генератора ведет к соответствующему изменению его мощности, оказывая
существенное влияние на протекание переходного процесса в системе. Управление напряжением
возбуждения должно производиться так, чтобы предотвратить выпадение генератора из синхро-
59
низма и обеспечить требуемое демпфирование колебаний. Система управления напряжением
при больших возмущениях должна обеспечивать интенсивное демпфирование колебаний и макси-
мально возможную область д инамической устойчивости энергосистемы, желательно также в этом
режиме иметь повышенное быстродействие системы. В то же время для режима малых колебаний
предъявляются иные требования в отношении демпферных свойств энергосистем [60—63]. В
работе [60] указывается, что одинаковые настройки системы управления возбуждением как для
малых, так и больших отклонений, являются противоречивыми в отношении качественных свойств
и вообще могут приводить даже к нарушению асимптотической устойчивости энергосистемы. Это
объясняется тем,- что в режиме больших отклонений существенно проявляется нелинейность
характеристик генератора, а это придает системе управления иные свойства, чем при малых
отклонениях [60,61,125]. Можно совместить противоречивые требования к качественным свой-
ствам системы управления при больших и малых отклонениях путем синтеза такой ее структуры,
которая позволяет удовлетворить как требованию расширения области асимптотической устойчи-
вости энергосистемы, так и заданному демпфированию колебаний [125]. Таким образом, рассмот-
ренная исходя из физических'представлений задача управления напряжением возбуждения синх-
ронного генератора приводит к необходимости оптимизации системы управления по переменным
в фазовом пространстве критериям качества.
И, наконец, рассмотрим задачу синтеза систем управления сложными электромеханиче-:
скими объектами, к которым относятся, например, роботы и манипуляторы. В работе [64]
обоснована и показана практическая целесообразность следующей процедуры синтеза систем;
управления манипуляционными роботами: после выбора программы движения на первом этале
синтезируется управление для отслеживания номинальных траекторий в том режиме, когда
начальное состояние отличается от своего номинального значения, но принадлежит ограни-
ченной области начальных состояний. Это режим малых отклонений и для него могут исполь-
зоваться линеаризованные модели и квадратичные критерии качества. Затем, на втором этапе,
синтезируется управление для режима больших отклонений от желаемого состояния. Введение
этого управления диктуется необходимостью ослабления влияния взаимных динамических
связей между подсистемами робота, которые выражаются в виде сил и моментов. Для режима
больших отклонений целесообразно ввести обратные связи по силам, что и позволяет мини-
мизировать дестабилизирующее влияние взаимных связей подсистем на устойчивость всей
системы, т.е. расширить область ее асимптотической устойчивости. При этом синтез управле-
ния для режима больших отклонений осуществляется на основе полной, т.е. нелинейной
модели робота. Следовательно, при синтезе системы управления манипуляционным роботом
также целесообразно использовать переменный в фазовом пространстве оптимизирующий
функционал, который был бы близок к квадратичному критерию для режима малых отклоне-
ний, а в режиме больших отклонений от номинальной траектории обеспечивал наибольшую
область асимптотической устойчивости движения.
Итак, приведенные выше самостоятельные задачи управления из различных областей
техники—от летательного аппарата до манипуляционного робота—указывают на тесную связь
между режимами работы объектов и формой оптимизирующего функционала, структуру
которого целесообразно выбирать переменной в фазовом пространстве синтезируемых нели-
нейных систем.* Это перспективный подход к решению трудной проблемы синтеза эффектив-
ных систем управления Нелинейными динамическими объектами и технологическими процес-
сами. Л
Сопровождающий функционал в задаче синергетического синтеза нелинейных агреги-
рованных регуляторов. Рассмотрим сначала предлагаемый метод выбора обобщенных опти-
мизирующих функционалов. Так так такие функционалы выступают в роли вспомогательного
средства для образования конкретных критериев качества в режимах малых и больших отклонении
от заданного состояния объекта, то будем называть эти функционалы сопровождающими, которые
позволяют достаточно успешно завершить сложную процедуру синтеза систем управления нели-
нейными объектами. Указанная проблема поиска унифицированного оптимизирующего функци-
онала, из которого могут быть образованы частные критерии качества, в общем случае, по-вида-
60
мому, является неразрешимой или сопряжена с чрезвычайными математическими трудностя-
ми Однако эта проблема, сформулированная основоположником теории АКОР А.М. Летовым
[12], продолжает существовать и даже отдельные случаи ее решения имеют важное прикладное
значение для синтеза многокритериальных систем управления. С другой стороны, известно, что в
естественных '(неуправляемых) системах существует высокая степень “единства” функционалов,
^естественных системах вариационные принципы, охватывающие огромное разнообразие при-
родных процессов, отражаются небольшим числом сходных между собой функционалов, которые
минимальны только для реальных процессов. Между процессами в естественных и управляемых
(Технических) системах имеется как глубокая аналогия, вытекающая из фундаментальных прин-
; чипов сохранения, так и существенное отличие, связанное с непрерывной циркуляцией информа-
цмгв управляемых системах, что препятствует, по-видимому, достижению в них высокого единства
функционалов [172]. В этой связи можно надеяться, что развитие современной прикладной теории
управления приведет к определенной унификации оптимизирующих функционалов, в первую
вчередь, по структуре с последующей итерационной коррекцией их весовых коэффициентов
(триметров компромисса), что и должно поставить на научную основу проектирование нелиней-
ных систем управления.
Перейдем к изложению метода конструирования оптимизирующих функционалов, имею-
цек сопровождающий характер в отношении динамических свойств синтезируемых систем.
Как показано ранее, желательно, чтобы такой функционал имел переменную в пространстве
состояний структуру для того, чтобы полнее отразить требования к показателям систем в
регамах малых и больших отклонений, т.е. в известной мере был бы близок к универсальной
иеме компромисса. В данной работе предлагается использование сопровождающего функци-
онала вида
* (1 21)
Л = / Fty$) dt,
< .. • о
—непрерывно дифференцируемая по своим аргументам определенно положитель-
Шфункция; —агрегированная макропеременная, представляющая собой некото-
рую произвольную дифференцируемую или кусочно-непрерывную функцию фазовых коор-
ЛйИтх1,...,х„, ^(0,...,0) = 0.
< Выберем подынтегральную функцию /?(^,ф) в (1.21) в виде следующей квадратичной
фермы:
= mV2(V’)+ cV2(0»
функционал (1.21) принимает вид
' * г > т ->-> п (1.22)
А = J |mV2(V’)+ cV(0 dt.
и о L J
^подынтегральном выражении функции должны удовлетворять следующим условиям:
fa) однозначности, непрерывности и дифференцируемости при всех значениях
Тб)₽(0) = 0;
s ..в) tptytyp > 0 при любых * 0.
Иначе говоря, функции y?(VO при выполнении условий а), б) и в) будут того же знака, что
в нуль они обращаются только на многообразии ^=0. Определим полную производную
£=1 OXfc
ияадставим вместо x^t) правые части исходной системы дифференциальных уравнений объ-
•Ю»
а. дХО = А^ь...,хД z = 1,2,...,л-1;
к ««(О = Л(х1,..пх„)+ й, (1.23)
ИИ^а получим
61
^-1 .....................<L24>
и i *=i (Щ oxn
На основе известного в вариационном исчислении [65] свойства инвариантности к замене
переменных функционал (1.22) с учетом выражения (1.24) может быть записан в следующей
форме:
* г (п Alb Alb \ (1.25)
/z = / Г"Лр2(^)+ te~u 1 dt-
0 L ycM ал* ОЛп у J Й
Очевидно, что обобщенный функционал (1.25) характеризует некоторые свойства как исход-
ного объекта (1.23), так и его системы управления. Это означает, что в рассматриваемом методе
оптимизирующий функционал не строго постулируется заранее, как это предполагается в
стандартных задачах АКОР [12], а конструируется путем выбора соответствующих функций
^>(V>) и с привлечением уравнений объекта (1.23). Такой подход позволяет в изве-
стной мере учесть свойства исходного объекта, т.к. внешнее “навязывание” постулируемом
критерия и игнорирование свойств объекта на этапе выбора критерия качества может привести
к противоестественному или даже неприемлемому для нелинейного объекта протеканию пе-
реходных процессов. Следующее отличие развиваемого здесь подхода состоит в формировании
функционала (1.22), (1.25) относительно обобщенных макропеременных ф, являющихся
некоторыми агрегатами координат состояния. В этой связи задачу синтеза регуляторов на
основе сопровождающегофункционала (1.22), (1.25) с использованием агрегированных мак-
ропеременных будем называть (по аналогии с аббревиатурой АКОР) задачей АКАР—анали-
тическим конструированием агрегированных регуляторов. Агрегированные макропеременные
ф могут выбираться из разных соображений, связанных с желаемыми переходными и устано-
вившимися режимами движения объекта [56, 69—72].
Рассмотрим теперь синергетическую интерпретацию сопровождающего функционала
(1.22) и макропеременных ^>(xi,...,x„), используемых в методе АКАР. Как отмечалось ранее
(см. п. 1.1), базовыми понятиями синергетики [83,99] являются параметры порядка и управ-
ляющие параметры систем. В этой связи в терминах синергетики [83] макроперемйшые
^(Х1,...,хп)—это задаваемые параметры порядка, оптимизируя которые можно добиться
желаемого поведения нелинейной системы. Эти параметры отражают коллективные свойства
систем и являются носителями синергетической информации [99] о процессах в нелинейной
системе вдали от ее положения равновесия. Они определяют протекание процессов самоорга-
низации в синтезируемых системах. Что же касается управляющих параметров, то в качестве
таковых, в частности при ^>(VO=VS можно выбрать отношения весовых коэффициентов функ-
ционала (1.22), т.е. величину ^=‘у=у- Тогда можно дать следующую синергетическую трак-
товку сопровождающему функционалу (1.22) в развиваемом здесь методе АКАР. Согласно
Хакену [99], мерой макроскопического действия самоорганизующихся систем может служить
квадрат параметра порядка. Эту меру можно также назвать работой, производимой системой.
Под эффективностью систем в синергетике [99] понимается скорость изменения указанной
меры при изменении управляющего параметра, который нередко связан с входной мощностью.
Отсюда следует, что в рассматриваемом синергетическом подходе аналогом меры макроско-
пического действия синтезируемой системы является функция ф\х\,...,хп), а эффективность
системы определяется величиной W =
d ф2
dk ’
Изменяя параметр Л и, следовательно, вреш
движения ИТ к многообразию ф(х.....,хи) = 0, можно добиться желаемой эффективности
синтезируемой системы. В целом это означает, что сопровождающий функционал (1.22);
используемый в методе АКАР, в синергетическом смысле представляет собой некоторую
общую меру макроскопического действия или, точнее, суммарную работу, производимую
синтезируемой системой управления. При этом весовые коэффициенты т и с в подынтегралм
62
1.6. ОСНОВНЫЕ ФУНКЦИОНАЛЬНЫЕ УРАВНЕНИЯ В ЗАДАЧЕ
СИНЕРГЕТИЧЕСКОГО СИНТЕЗА АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
» , « . т
до вь ражении функционала определяют управляющий параметр л = — и, следовательно,
с
Непосредственно связаны с эффективностью системы.
^Предложенная синергетическая интерпретация, помимо изложенных ранее физических
Соображений, подтверждает целесообразность применения сопровождающих функционалов
мда (1.22) для оптимизации нелинейных динамических систем.
(О'
^Скалярное управление. Выбрав сопровождающий функционал в виде (1.22), (1.25),
ве^ейдем к определению условий его минимизации и затем приступим к решению различных
кяйссов задач АКАР. Для э^гого найдем основное функциональное уравнение. Используя
Начала единственную функцию ip, поставим первую, простейшую задачу АКАР: требуется
ййти закон управления u(ip) = u(xi,...,x„), который обеспечивает перевод изображающей
йНки (ИТ) системы из произвольного начального состояния хб(хю,...,Хпо) (в некоторой допу-
Сймой области) сначала в окрестность многообразия
: ip(Xl,...,Xn) = о (1.26)
^пространстве координат xi ,...,х„, а затем дальнейшее движение ИТ вдоль этого многообразия
рпачало координат (хи=...=хп*= 0) пространства состояний. При этом на траекториях движе-
т к многообразию (1.26) достигается минимум сопровождающего функционала (1.22),
(125). Используя согласно [65] уравнение Эйлера-Лагранжа
подставляя функцию F(ip,ty) из (1.22), находим, что уравнение экстремалей, доставляющих
ивдимум функционалу (1.25), имеет вид
mV2(V0 = c2ip\f).
Это соотношение включает в себя подсемейства устойчивых и неустойчивых экстремалей,
^чевидно, что подсемейство устойчивых экстремалей, необходимое нам по условиям задачи
синтеза, можно записать в виде следующего дифференциального уравнения:
h Tip(t)+ <p(ip) = 0, (1.27)
= —. Условие асимптотической устойчивости в целом уравнения (1.27) относительно
Многообразия ip=Q имеет простейший вид Г > 0. Это очевидное соотношение можно получить,
используя функцию Ляпунова V = 0,5ip2 > 0. Тогда производная
; r(0 = -^W<o.
дзятая в силу уравнения (1.27), будет всегда определенно-отрицательной для класса функций
с определенными выше свойствами, что означает асимптотическую устойчивость в целом
[5] уравнения (1.27) относительно многообразия у>=0 (1.26). Причем указанная устойчивость
№ зависит от вида нелинейных функций ft в правых частях исходных дифференциальных
уравнений объекта (1.23).
4 Из уравнения (1.27) с учетом выражения (1.24) в силу исходных уравнений объекта (1.23)
получаем следующее основное функциональное уравнение в методе АКАР:
Т&- и+ т£ ^-ft+ = 0,
олп £=1 ОХ/с
Bktfk—функции в правых частях уравнений (1.23), * 0. Запишем (1.28) в виде выражения
(1.28)
63
*?, dxkfk+ T
(1-29)
dfip
и =------f—
dxn
которое определяет множество допустимых законов управления ы(х1,...,хя), обеспечивающих
перевод ИТ из произвольного начального состояния в окрестность многообразия ^=0. Законы
управления и (1.29) удерживают ИТ в этой окрестности при ее дальнейшем движении вдоль
ip(x\,...,x„)=0 (1.26). Это движение будет уже описываться системой дифференциальных урав-
нений размерности п -1: •
—/}(х1^,...,хя—iy>), 1,2,...,/i—1. (1.30)
Для получения уравнений (1.30) следует из конечного уравнения ^(хь...,хя)=0 (1.26) найти
координату х„ = Дх1,...,хя-1) и подставить ее в первые (н-1) уравнений (1.23). Притягиваю-
щие многообразия ^(х|,...,хя)=0 могут быть интерпретированы как задаваемые целевые мио
жества, к которым неизбежно должна притягиваться ИТ из произвольного начального состо-
яния, а затем в соответствии с уравнениями (1.30) двигаться вдоль них. Например, для объектов
второго порядка многообразие ip=Q (1.26) представляет собой уравнение желаемой фазовой
траектории ip(x\ ,хг) = 0, с которой ИТ должна сначала сблизиться, а затем двигаться вдоль нее
к началу координат фазовой плоскости. ;
В аналитической механике [81] многообразия ip=0 называют инвариантными. Напомним
определение понятия инвариантного (интегрального) многообразия динамической системы.
Гладкая поверхность в пространстве координат xi,...,xH называется инвариантным (интег-
ральным ) многообразием системы (1.30), если произвольная траектория, имеющая хотя &
одну общую точку с этой поверхностью, целиком ей принадлежит [167]. Очевидно, что особый
интерес представляет построение инвариантных многообразий последовательно понижающей^
ся размерности (л-1, п-2, и т.д.), которые обладают свойством притяжения траектория,
начинающихся вне этих многообразий.
Отметим теперь, что функциональное уравнение (1.28) может быть записано в виде
dip dip Д dip 1/м d-31)
/1“ 1 у
т.е. представлено как равенство между полной производной (1.24) и некоторой произвольной
функцией <p(ip), обращающейся в нуль на заданных инвариантных многообразиях ^>(0) = 0.
Наличие в правой части уравнения (1.31) функции <p(ip) вообще позволяет учесть дополни-
тельные требования к динамическим свойствам синтезируемых систем в отношении быстро-
действия, ограничения координат и т.д: Именно уравнение (1.31) и является тем условием,
которому необходимо удовлетворить для того, чтобы соотношение (1.26) было заданный
инвариантным многообразием синтезируемой системы.
Подчеркнем, что наличие или отсутствие в пространстве состояний некоторых инвариан-
тных многообразий ip=0 является весьма важным для поведения именно нелинейных систем,
для которых, как известно, не сохраняет свою силу классический принцип суперпозиции. В
этой связи свойства нелинейных систем кардинальным образом отличаются от линейных
многовариантностью своего поведения. Наличие же в пространстве состояний притягивающих
многообразий (аттракторов), к которым устремляются решения нелинейных дифференциаль-
ных уравнений систем, позволяет определенным образом упорядочить их поведение и подчи-
нить движение некоторым достаточно строгим законам. В соответствии с этими законами Ш
системы, попав в область действия притягивающего многообразия, затем неизбежно попадая
на него и дальнейшее поведение системы будет определяться уже свойствами этих многообра-
зий. Разумеется, что в общем случае в исходном пространстве состояний нелинейных объект»
могут быть такие инвариантные многообразия (“черные дыры”), свойства которых не соответ-
ствуют или даже противоречат требуемым динамическим свойствам синтезируемых систем.
Существенное отличие от задач механики [81] рассматриваемого метода применена
инвариантных многообразий ip=0 (1.26) для задач управления состоит в том, что эти много-
образия не отыскиваются, а заранее задаются. Здесь изучается проблема построения такю
64
нелинейных систем управления различной физической (химической, биологической и т.п.)
природы, в которых протекают переходные процессы, удовлетворяющие поставленным зара-
нее требованиям в виде конечных уравнений (1.26). В итоге, задача синтеза сводится к
построению дифференциальных уравнений замкнутой системы (1.23), (1.29) по заданным
частным интегралам (1.26)—инвариантным многообразиям, описывающим заданную про-
грамму движения. В определении законов управления (1.29), обеспечивающих желаемое
движение замкнутой системы (1.23), (1.29), и состоит основная задача АКАР, т.е. аналитиче-
ского конструирования нелинейных регуляторов по заданным инвариантным многообразиям.
. Функция ^(xi,...,x„), определяющая многообразие (1.26), выше была названа агрегирован-
ной макропеременной. Под агрегированием обычно понимается [67, 73] получение из исход-
ноймодели задачи так называемой агрегированной модели, которая содержит в себе меньшее
количество переменных, чем исходная. Агрегированная модель должна быть проще исходной
модели, являться ее следствием, при этом эквивалентом агрегирования является факторизация
систем [73—75]. В. работах [67, 76, 77] предложены некоторые способы приближенного
агрегирования линейных систем.
^Функции y>(xi,...,хл) и, следовательно, притягивающие многообразия V>=0 могут строиться
различными способами. Для целого класса распространенных объектов, в частности имеющих
треугольную функциональную матрицу, т.е. описываемых дифференциальными уравнениями
~ 1,2,...,n- 1,
л Л(0 = А(хь~л«)+ и,
функции у конструируются в результате регулярной процедуры, исходя из требований ко
времени и характеру (апериодическому) затухания переходных процессов и асимптотической
устойчивости движения в целой синтезируемой системы (см. третью главу).
В общем же случае при выборе притягивающих многообразий у>(х1,...,хя)=0 полезно
придерживаться следующего положения: оказывается, что целесообразно построенные и тех-
нически рациональные нелинейные системы (“объект—регулятор”) имеют в пространстве
состояний некоторое внутреннее “желаемое” состояние ^ж(х1,...,х„)=0, на котором обеспечи-
вается асимптотически устойчивое динамическое равновесие системы и сохраняются основные
характерные свойства объекта (технический гомеостазис). Перевод объекта на это состояние
осуществляется в результате действия синтезируемых управлений м(х1,...,хя), которые, как
правило, минимальны, что согласуется с известным в механике принципом наименьшего
принуждения Гаусса [8]. Задача конструктора системы управления состоит в поиске желаемо-
го для объекта притягивающего многообразия ^ж=0 в пространстве состояний. Наличие этого
многообразия непосредственно связано с внутренними свойствами нелинейного объекта и
свойствами решаемой системой (“объект—регулятор”) технологической задачи, характери-
стики которой обычно являются внешними (требуемыми) по отношению к объекту. Очевидно,
что вид закона управления (регулятора) существенным образом зависит от близости или
различия динамических свойств объекта и требуемых свойств системы. При использовании
желаемых притягивающих многообразий регулятор наилучшим образом согласует свойства
велииейного объекта и требования технологической задачи, обеспечивая высокие динамиче-
ские показатели синтезированной системы и гарантируя асимптотическую устойчивость дви-
жения.
г « Перейдем теперь к выявлению некоторых общих оценок таких фундаментальных свойств
нелинейных систем, синтезируемых методом АКАР, как их асимптотическая устойчивость и
время затухания переходных процессов. На замкнутую систему (1.23), (1.29) постоянно
действуют некоторые, возможно и малые, возмущения, что приводит к уходу ИТ с желаемого
многообразия 1р=0 (1.26). В этой связи возникает первая задача об устойчивости в АКАР,
которая конкретно сводится к асимптотической устойчивости уравнения (1.27) относительно
решения у»(Г) = 0. Выше было показано, что решение первой задачи зависит от выполнения
простейшего условия Т > 0. При этом инвариантное многообразие ^>=0 будет притягивающим
65
для всей-области пространства состояний, в которой справедливы уравнения (1.23) объекта. К
нему притягивается ИТ системы из любого начального состояния в указанной области. Ф
В большинстве задач управления конечная цель может быть сведена к попаданию ИТ
системы в начало координат (хи=О,...,х„*=О) пространства состояний, поэтому процесс ди£
жения можно условно разбить на два этапа—этап устойчивого движения ИТ к многообразию
^>=0 (1.26) и этап устойчивого движения ИТ вдоль этого многообразия к началу координат^
пространства состояний. Следовательно, возникает вторая задача об устойчивости в АКАР^-
исследование асимптотической устойчивости движения ИТ вдоль ^=0 к началу координат:
Приведенные дифференциальные уравнения второго этапа движения имеют вид (1.30). Поря-
док этих уравнений равен п-1, что упрощает получение условий их асимптотической устой-
чивости. Итак, решение задачи асимптотической устойчивости синтезируемых нелинейный
систем сводится, по существу, к выявлению'условий устойчивости решений дифференциал^
ных уравнений (1.30), описывающих движение ИТ вдоль многообразия (1.26) к начал|
координат пространства состояний системы. Ф
Перейдем теперь к выявлению некоторых приближенных оценок времени затухания пере-
ходных процессов в синтезируемых системах. В большинстве случаев оценка этого времени?
нелинейных системах представляет самостоятельную задачу, которая обычно решается путем'
моделирования на ЭВМ. В методе АКАР процесс изменения функции tp(t) в общем случай
определяется решением дифференциального уравнения (1.27) и зависит от вида функцщ
Выберем сначала линейную функцию <p(ip) = ip, тогда функционал (1.22) принимает
квадратичную форму г
• Г 22 2’2/ \"l j (1.32)*,
/в = / m2y>2+ C2V>2(0 dt,
0 *- . J
а соответствующее ему функциональное уравнение (1.27) имеет вид ,
7^(0+ V' = 0- (1.33).
Из его решения
= ^о(*1о»-.Х||о)е ~'Т (1И|
следует, что время затухания функции ^(0 от ее начального значения^оДОконечного^*можетj
быть найдено по формуле
= Tin
Приняв = (0,01 -5- O,O2)t^o, получаем ' z
^«(4-s-5) Г. (1-35^
Оценка (1.35) приближенно определяет время попадания ИТ в окрестность многообразия^
У>о(хю,-,х><о)
Время движения вдоль ^=0 к началу координат пространства состояний xi*= хгк—---—хпк=^
определяется решением уравнений (1.30). /
Выберем теперь ограниченную функцию = th^, тогда функционал (1.22) принимает
форму ?
J = J [/n2th2V>+ cV2(0] Л»
< о *- J-
а функциональное уравнение (1.27) вид * <
Т^(Г)+ thV» = 0. (1.37)
Решение уравнения (1.37) будет следующим:
shV>(0 = shV'oe ~t/T. (1.38f
Из него получаем время затухания функции ip(t) от ее начального значения до конечного
грк по формуле
f _ т. sh^xio,...^) (1.39)
^-imshqk(xxk.....Хпку ;
Приняв в (1.39) ipk — fV'o, £ = 0,01 -5- 0,02, находим
66
(1 40)
j sh^o
Оценка (1 40) приближенно определяет время попадания ИТ в окрестность ^=0 для уравнения
(137)
.Сравним полученные оценки (1 35) и (1 40) Из оценки (1 35) следует, что время Ц
Остается неизменным для произвольных начальных условий ^о, а согласно (1 40) оно зависит
at "начальных условий и в каждом конкретном случае определяет время сближения ИТ с
ффягивающим многообразием Указанные отличия оценок (1 35) и (1 40) определяются
тем, что дифференциальное уравнение (1 33) является линейным относительно агрегирован-
ие^ макропеременной у, а уравнение (1 37)—нелинейным
’т Оценим теперь общее время затухания переходных процессов по координатам xi, ,хп
замкнутой системы За время7 ty, (1 35) или (1 39) ИТ сближается с притягивающим много-
образием =0 и попадает в его определенную окрестность Затем в соответствии с уравнениями
(130) ИТ движется вдоль этого многообразия к началу координат хи=хг*= =x«*= 0 про-
странства состояний и, следовательно, общее время затухания переходных процессов может
бцть приближенно оценено суммой времени Ц и времени t (1 30), определяемого решением
уравнений (1 30), т е
. £ ty,+ t(i зо) (1 41)
Верхняя оценка (141) позволяет указать максимально возможное время затухания переход-
ных процессов в нелинейной системе
, ’ Теперь сравним качественный характер процессов попадания ИТ в окрестность ^=0, описы-
Мавк соответственно уравнениями (1 33) и (1 37) В обоих случаях переходные процессы имеют
апвДОдический характер, однако для уравнения (1 37) после истечения времени Гу, (1 40) ИТ будет
ваходиться в более близкой окрестности многообразия V*=0, что определяется нелинейной огра-
аиеиной функцией th^ в этом уравнении Указанное утверждение следует из того, что в пределе
функция thV' может быть представлена релейной функцией sign^, тогда уравнение (1 37) переходит
В предельную форму
у 7V(t)+ sign^ = 0 (1 42)
Очевидно, что предельное функциональное уравнение (1 42) также асимптотически устойчиво
вдююм, т к функция Ляпунова V = 0,5^2 имеет в силу этого уравнения первую производную
F(t) = -у sign V', являющуюся определенно-отрицательной функцией для всего простран-
ства состояний, кроме многообразия 0, на котором возможен скользящий режим движения
[88]. В этом случае, в отличие от уравнений (1 33) и (1 37) с непрерывными функциями
$$), ИТ сближается с мнргообразием ,х„)=0 не за теоретически бесконечное время,
как это следует из решений (1 34) и (1 38), а за определенное конечное время
<-«. = у 'V’ol,
зависящее от начальных условий Лю) К другой особенности предельного уравнения
(IM2) относится то, что траектория движения ИТ в момент Гу, не сближается асимптотически
с^М), а “втыкается” в него, т е ИТ теоретически точно попадает на притягивающее многооб-
разие. Разумеется, что и здесь в реальных условиях из-за действия неучтенных малых нели-
нейностей, запаздываний в объекте и т п в окрестности многообразия ^=0 возникает некото-
рый “пограничный слой” [88], в котором и будет двигаться ИТ к началу координат простран-
ен состояний системы.
- Итак, для предельного уравнения (1 42) с разрывной функцией <p(ip) = sign^ ИТ из про-
извольного начального состояния V>o(*i о, . ,Хло) за конечное время (1.43) теоретически точно
попадает на притягивающее многообразие V'Cxi, ,х,1)=0 в отличие от уравнений (1 33) и
(1.37), для которых ИТ приближенно через время Ц, (1 35) или Гу, (1 40) попадает в окрестность
Указанного многообразия Само собой очевидно, что для этих двух случаев при строго теоре-
(1 43)
67
тическом рассмотрении ИТ может попасть на многообразие ^(Х1,...,хя)=0 лишь в начале
координат пространства состояний хм=Х2*=—=Хп*= 0 в течение бесконечного времени. В
реальных же условиях при рассмотрении прикладных задач ИТ уже через время ty> (1.35) или
ty, (1.40) будет находиться в близкой окрестности многообразия V»(xi,...,xn)=0 и в дальнейшей
будет осуществлять вдоль него движение, приближенно описываемое уравнениями (1.30).
Свойства и устойчивость этих уравнений будут определять характер процесса движения f
началу координат пространства состояний. • ~
Изложенное подтверждает ранее высказанное положение о том, что характер движения i
многообразию ^(х1,...,хи)=0 для уравнения (1.37) действительно занимает некоторое проме-
жуточное положение между свойствами движений для линейного (1.33) и предельного (1.42);
функциональных уравнений. В режимах больших отклонений от хр—0 указанный характер
движения будет близок к характеру движения, определяемому уравнением (1.42), а в режиме
малых отклонений—уравнением (1.33), т.е. уравнение (1.37) обладает определенными уни-
версальными свойствами. В дальнейшем в основном будут использоваться непрерывные фун-
кции = th^ иу>(^>) = и соответствующие функциональные уравнения (1.33) или (1.37)
для синтеза законов управления (1.29) при аналитическом конструировании нелинейный
систем.
Векторное управление. Аналогично изложенному выше скалярному случаю, можно по-
лучить функциональные уравнения при векторном управлении объектом, который описывав
ется системой нелинейных дифференциальных уравнений я
Xi(t) = Л(*ь—,*«)+ bsits, i = 1,2,...,л, s = 1,2,...,р, р < п, (1.44)
где xi(t)—координаты состояния; /—непрерывные дифференцируемые по своим аргумента»
функции; Л(0,...,0) = 0; us—составляющие вектора управления u(ui,...,zzp). На координаты
управления us могут быть наложены ограничения
, 1х,1 < Х/max ИЛИ ^(xi,...,xf) = 0, I Us I < Us max- (1.45)
Требуется синтезировать такой вектор управления u(zzi,...,zzw), который обеспечивает перевод
изображающей точки (ИТ) объекта (1.44) из произвольного исходного состояния (в некоторой
допустимой области) сначала на некоторое многообразие V>(xi,...,xn)=0, а затем в заданное
состояние, в частности, начало координат (хю = ... = хио = 0) пространства состояний. При
этом на траекториях движения замкнутой системы должен достигаться минимум некоторое
оптимизирующего функционала или должны удовлетворяться требуемые первичные показа-
тели качества, выполняться ограничения (1.45), а также гарантироваться асимптотическаз
устойчивость движения в некоторой области или в целом.
Будем считать, что движение ИТ должно удовлетворять следующей системе функциональ-
ных уравнений:
<ps(Vs) = 0, $=1,2,...,р. (1.4^
Функции (pstys) в (1.46) выбираются таким образом, чтобы, во-первых, обеспечить асим-
птотическую устойчивость системе (1.46) в целом, т.е. <pstys)’<ps< 0, а во-вторых, достигнуть
желаемых показателей качества движения ИТ к притягивающим многообразиям
- ®— 7,2,...,р, (1.47)
где V’s—некоторые агрегированные макропеременные.
Очевидно, что ИТ не может в одно и то же время находиться на разных многообразия^
поэтому она сначала сближается с пересечением многообразий (1.47), а затем движется вдоль
него к заданному состоянию (например, хн=Х2*=...=х„^= 0). Это означает, что задача синтеза
векторного управления u(zii,...,zip) сводится к обеспечению условий проекции движения исход-
ного объекта (1.44) на подпространство многообразий, описываемое системой уравнений
(1.46). Синтезируемые управления М1(х1,...,хи),...,цр(х1,...,хл) должны сначала обеспечить пе-
ревод ИТ в окрестность пересечения многообразий (1.47), а затем движение вдоль этой
пересечения, описываемое дифференциальными уравнениями
=/Лх1,-”,Х/), j = l,2',...,zz-p. (1.48)
68
(1.49)
w' Итак, сначала используется параллельная совокупность многообразий (1 46), (1 47), в
дезультате чего ИТ попадает на пересечение у»,=0 (1 47), а затем движение ИТ будет описы-
ваться уравнениями (1.48). Для синтеза управлений ws(xi, ,хи) запишем функциональные
уравнения (1.46) в силу исходных уравнений объекта (1 44)
*=1 ОХк к=\ ОХк
гае # 0 Обобщенные функциональные уравнения (1 49) позволяют, в зависимости от
®х*
конкретных форм макропеременных tys(x\,. ,Хп) и функций получить различные регу-
лятрры Для этого в результате совместного решения алгебраических уравнений <4 49) нахо-
дятся управления м,(хь . ,хи), которые обеспечивают перевод ИТ в окрестность пересечения
р многообразий (1.47), а затем движение ИТ вдоль указанного пересечения в соответствии с
дифференциальными уравнениями (1 48) Если р = л, то соотношения (1 47) представляют
Собой точку, совпадающую с началом координат пространства состояний, что и обеспечивает
асимптотическую устойчивость движения замкнутой управлениями н$(хь ,х„) системы. На
Практике более распространен случай, когда р < п, при этом возникает задача построения
устойчивого движения вдоль пересечения многообразий (1 47), которое будет описываться
системой дифференциальных уравнений (1 48) (л-р)-го порядка
Предложенный здесь подход к синтезу систем имеет весьма общий характер и может быть
‘конкретизирован путем соответствующего выбора макропеременных V\(xi, ,х„) и функций
Покажем, что этот подход может быть изложен в терминах теории оптимального
управления Для этого предположим, что синтезируемые системы должны быть оптимальными
последующему функционалу
Г
2 Wsp>s(^>s)+ 2 Cj^s(^) dt, Ts = —7-
s=l s=l
it*.
ms
(1.50)
* 0
Тогда, используя стандартные в вариационном исчислении [65] условия минимума функцио-
нала (1.50), можно показать, что уравнения (1 46) являются уравнениями устойчивого подсе-
мейства экстремалей Очевидно, что обобщенный функционал (1 50), записанный в силу
уравнений объекта (1 44) в виде
* 00 Р Р / Я
' ‘ А — S 2 ОТ«(Р«((М+ 2 cs|S (fk+bsusy
р
р. дфк
г
dt,
(1.51)
|s=l s-1 1^-1 $Хк /j
отражает как свойства исходного объекта, так и его системы управления Путем соответству-
рппрго выбора функций и >хп) на основе функционала (1 51) можно построить
различные свертки распространенных инженерных критериев качества (квадратичного, быст-
родействия, энергозатрат) для оптимизации режимов малых и больших отклонений Синтези-
руемых систем Используя макропеременные вида
V* = Хк+ A th F(xi, ,хи),
можно обеспечить ограничения (1 45), наложенные на координаты и управления системы.
г A7. ИНВАРИАНТНЫЕ МНОГООБРАЗИЯ В ЗАДАЧЕ СИНЕРГЕТИЧЕСКОГО
, СИНТЕЗА НЕЛИНЕЙНЫХ АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
f !
' ! Инвариантные С&йгношения в механике и метод АКАР. В предыдущем разделе исклю-
чшельно на основе условий минимизации сопровождающих функционалов (1.22), (1 25) и
"(1J0X, (1.51) были получены соответствующие функциональные уравнения, которые позво-
ляют вайти множества законов управления (1.29) или (1.49). Эти законы неизбежно переводят
изображающую точку (ИТ) синтезируемой системы в окрестность некоторого многообразия
00 (1.26) или на пересечение многообразий ips=0 (1.47) в фазовом пространстве
69
Оказывается (и это было несколько неожиданным для автора), что полу ченныерезультап
имеют глубокую связь с теорией инвариантных соотношений в аналитической механике [HJ,
поэтому возникает насущная необходимость изложить здесь элементы теории АКАР нес
позиций минимизации некоторого выбранного оптимизирующегофункционала, а с испояае»
ванием свойств инвариантных многообразий. Тем самым попытаемся проложить путь дя
перехода от формально-математического рассмотрения теории АКАР, как это выполнеяг!
разделах 1.5 и 1.6 в соответствии со стандартной теорией АКОР, к исследованию и включена
в состав метода АКАР естественно-геометрического содержания задач управления и, следе»
тельно, к изучению связи этих задач с фундаментальными принципами (законами) сохранеяи
классического естествознания и базовыми понятиями современной синергетики—науки!
самоорганизации в нелинейных динамических системах. Для этого сначала рассмотрим ска-
лярный случай и предположим, что управление u(xi,...,x„) уже выбрано и тогда дифференци-
альные уравнения замкнутой системы с объектом (1.24) примут вид
Х/(?) = i — 1,2,...,и, (152)
гдеЯ* =A(xi,...,xn), к= 1,2,...,/г-1; Rn =/я(хь...,хи)+ u(xi,...,x„). В аналитической механии
[81] конечное соотношение между переменными £i,...,xn, т.е. ^(х1,...,хл)=0 называют инвари-
антным по отношению к исходным дифференциальным уравнениям (1.52), если все их реше-
ния удовлетворяют равенству гр=О при любом значешш переменной 1. Многообразие рМ'
отражает некоторое свойство, характерное только для тех решений системы (1.52), начальна
условия которых подчиняются соотношению V>=0. Инвариантное многообразие ^=0 называю!
также частным интегралом. Оно описывает в фазовом пространстве некоторую гиперповер-
хность размерности п— 1, образованную интегральными кривыми системы (1.52).
Инвариантным соотношением является также всякий первый интеграл const, в котором
произвольной постоянной задано некоторое частное значение, поэтому инвариантное соотно-
шение гр=О называется также частным интегралом. Всякое инвариантное соотношеи
V>=0, согласно самому определению, образует в пространстве координат системы (1.52) от-
дельную гиперповерхность, в то же время первый интеграл const определяет множена
таких гиперповерхностей, заполняющих пространство в том смысле, что одна и только одяви
этих гиперповерхностей проходит через каждую точку. Это связано с тем, что постояннм!
правой части гр—const для всякого отдельного решения системы (1.52) должна иметь подход»
щее значение, а именно: если хю,...,хяо являются соответствующими начальными значенияв
координат xi,...,x,(, то эта постоянная должна быть положена равной гр(хю,...,Хио). Другие
словами, гиперповерхности гр—const таковы, что на каждой из них лежит целиком однозначм
определенная траектория движения, проходящая, через какую-нибудь ее точку. В литератур»
иногда интегралом системы (1.52) называют также и саму функцию V>(xi,...,хп), однако такув
функцию точнее назвать инвариантом в том смысле, что в фазовом пространстве фунхвдв
^(хь...,хп) сохраняет постоянное значение вдоль всякой траектории движения [81]. Физиче-
скими примерами цервых интегралов механической системы, описываемой уравнениями Лг-
ранжа второго рода, являются обобщенный интеграл энергии и циклические интегралы. I
частности, для скалярных консервативных систем обобщенный интеграл представляет собй
обычный интеграл, отражающий закон сохранения общей механической энергии систем^. В
случае же, когда некоторая обобщенная координата не входит явно в выражение для ф\ нкци»
Лагранжа, но эта функция содержит явно соответствующую производную по времени от
указанной координаты, тогда обобщенный интеграл будет отражать закон сохранения количе-
ства движения механической системы [136]. '
Укажем теперь математические условия, характеризующие уравнение гр=О как январи»
твое многообразие [81]: для того, чтобы это многообразие было инвариантным, необходим
и достаточно, чтобы функция гр(х! ,...,х«) оставалась равной нулю при изменении t для всемл»
уравнений (1.52), начальные условия которых обращают эту функцию в нуль. Это утвержде
ние эквивалентно тому, чтобы для всех указанных решений полная производная от^> по t
70
«< ,= 1 dx‘
взкгая в силу уравнений (1 52)
= S ^Xl'" /«XI. -X,), ° 53)
< Ctt l’=j OX[
должна быть тождественно равна нулю Можно вообще доказать [81], что для этого необхо-
дию и достаточно, чтобы функция ip(xi, ,хп) от п независимых переменных х\, ,хп удовлет-
воряла линейному дифференциальному уравнению в частных производных следующего вида
$(0 = W» (1 54)
1Д€$(0 определяется выражением (1 53), а ш есть некоторая гладкая функция от хь ,хп в
рассматриваемой области Подставив ^(f) из (1.53) в (1 54), получаем
-А dy>(xi,...,xn) п, ч ч * (155)
1 с 2 а— “ ^(^1, •iXnWtXl,
. Л. *=‘ *'
Уравнение (1 55) называется характеристическим и является тем условием, которому необхо-
димая достаточно удовлетворить, чтобы соотношение (1 26) было инвариантным многообра-
зием системы (1.52). Полученное характеристическое уравнение (1 55) можно обобщить
путем введения более широких классов функций в его правой части [68,174] Уравнение (1 55)
получено приравниванием полной производной по t заданного частного интеграла чр=О линей-
до^функции аир В общем случае указанную производную можно приравнять некоторой
(Произвольной функции Ф(^,хь ,хп), обращающейся в нуль на заданном интегральном мно-
^ро^разии, те
Л = $ эу(х, ,х„) = ф(^хь (156)
UI О Xi
1ДеФ(0,Х1, ,хи) = 0. Уравнение (1 56) является обобщенным необходимым и достаточным
условием осуществимости движения системы (1 52) с заданным многообразием V'-O в ее
фазрвом пространстве.
/^Очевидно, что полученные уравнения (1 55) и (1 56) аналогичны уравнениям (1 28) и
Д$1)»найденным в 1.6. Однако, функциональные уравнения (1 28) и (1 31) являются более
.общими, т.к. в них входит варьируемая функция и(х\, ,хи), которую можно выбрать по нашему
усмотрению, в частности, из условий минимизации сопровождающего функционала (1 22) и
4Ц5).Вэтом принципиальное отличие уравнений (1 28) и (1.31) отуравнений (1.55) и (1 56)
Дсшф в том, что уравнения (1 55) и (1 56) позволяют только отыскать соответствующие
инвариантные многообразия для уравнений динамики (1.52), в которых управление никак не
выделено, в то время как уравнения (1.28) и (1 31) позволяют найти управление по заданному
многообразию ^>=0. Другими словами, в случае (1 28) и (1 31) инвариантные многообразия
веотыскиваются, а заранее задаются в зависимости от требуемых свойств синтезируемой
Системы.
! ! Изложенная здесь процедура поиска инвариантного многообразия с помощью уравнений
ХК^) или (1 56) допускает очевидное обобщение на несколько функций Теперь предяоло-
адм» что объект имеет т каналов управления
? “ =/К*1,...,*«)+«Х*1,-..,*л), /=1,2». ,n, /=1,2,. ,т < п (157)
«управления щ уже выбраны из каких-либо соображений, т.е. система (1 57) принимает вид
' < х<(/) = Л/(Х1, .,хп), (1.58)
= «*, к = 1,2, ,m; Rm+i = fm+i, ,Rn = fn Предположим, что желаемые свойства
ДЙЙкения системы управления (1 57), т е программа ее движения, заданы некоторой совокуп-
МОЙЪю многообразий
? ,хп) = 0, s = 1,2, ,т < п. (1 59)
Система (1.59) из т конечных соотношений между координатами хь ,хп называется
инвариантной относительно системы обыкновенных дифференциальных уравнений (1 58),
71
если она будет удовлетворяться при произвольном значении t всяким решением х{(/) уравнений
(1 58) при начальных условиях, принадлежащих многообразиям (1 59) Считаем, что уравне-
ния (1 59) совместны и независимы, для чего необходимо и достаточно [81], чтобы рздг
якобиевой матрицы от tps по х, был равен т, т е
rang D - rang эу>1 dxi topi дХ2 dxi top2 dX2 dtym dxi topm dX2 = m
4ь topi дХщ top2 dxni topm d%m
В этих условиях уравнения (1.59) определяют в фазовом пространстве координат хь а
некоторое (п-т)-мерное многообразие пересечений, образованное интегральными кривым
(фазовыми траекториями) системы (1 58), из которых только одна проходит через даннуй
точку указанного многообразия В окрестности этого многообразия функции ips непрерывны
вместе с производными
tops tops tops
dxi ’ дх2 ’ 'дхп ’ ’ ’ ’
Считая уравнения (1 59) независимыми, можно аналогично ранее изложенному сформули^
вать следующие условия инвариантности системы (1 59) для того, чтобы соотношения (1 59)
были системой инвариантных многообразий относительно уравнений (1 58), необходимей
достаточно, чтобы функции V\(*i, ,хп) удовлетворяли системе дифференциальных уравнений
в частных производных [81]
dips _ v tops(xi, ,хп) D( _ i о О W
dt 2 дХ' -^/(^1, ,Хп) 2 ^s!?Psi •S 1.2» < It
Система уравнений (1 60) получена путем подстановки в выражения для полных производи
от ips(xi, ,х„) по t значений xi(t) из правых частей-уравнений (1 58) Знание т независим»
инвариантных многообразий (1 59) равносильно знанию т независимых между собой интег-
ралов системы дифференциальных уравнений (1 58), а это позволяет понизить порядок эЙ1
системы до п-т Способ такого понижения порядка состоит в том, что из соотношений < 1 ^9)
находятся выражения для т неизвестных, например для хьхг, ,хш, в функциях от остальаш
переменных хт+\, ,хп Подставляя координаты xi,. ,хт в остальные п—т уравнения (1 5$,
получаем приведенную систему дифференциальных уравнений (п—/п)-го порядка * I
~ Rm+p(Xm+lf ,Хп)> ft ~ 1,2, ,П ТП, (1
где функции R*m+n находятся из исходных функций Rfcxi, ,xm) (1.58) в результате указанной
подстановки и зависят только от переменных хт+1, ,хп. Интегрирование приведенной систем»
(1 61) дает уже не общий интеграл исходной системы (1 58), а только некоторый класс решений
Xm+tW, и именно тех решений, которые удовлетворяют инвариантным многообразиям (159);
[81] Это важное в прикладном плане свойство решений приведенной системы (1.61) яо
отношению к решениям исходной системы (1 58), т.к. в методе АКАР многообразия (1 59) ж
отыскиваются, а задаются, “навязываются” синтезируемой системе Другими словами, указа®
ное свойство определяет достаточные условия существования желаемых многообразий (1 59)
в фазовом пространстве замкнутых систем
Заметим также, что в приведенной системе (1 61) не осталось никакого следа от т коод-1
динат xi,. ,хт, т е при определении xm+tt (/<=1,2, ,п) можно не знать (игнорировать) осталь-
ные координаты хь ,хт, входившие в исходную постановку задачи управления Имен»)
поэтому в аналитической механике [81] такой прием получил название метода игнорирование
координат Эта особенность приведенной системы (1 61) будет использована при дальнейшей
разработке метода АКАР для разных классов нелинейных динамических объектов
72
^.Уравнения (1.61) получены приравниванием полных производных по t заданных частных
интегралов (1.59) линейным функциям o)s^Ps- В общем случае указанные производные можно
также приравнять некоторым произвольным функциям обращающимися
*1$ль на заданных интегральных многообразиях (1.59). Тогда обобщенные необходимые
, уяювя осуществимости движений системы (1.58) с заданными свойствами (1.59) можно
заикать в следующем виде:
(tys _ ” tyf(Xl,...,X„) у\-фА/, V (1-62)
гдеФ,—произвольные функции, обращающиеся в нуль на инвариантных многообразиях
(1.59), т.е. 4>s(0,xi,...,x„) = 0. Уравнения (1.62), доставляющие необходимые и достаточные
условия того, чтобы заданные соотношения (1.59) были инвариантными многообразиями
Системы (1.58), получены на основе известных классических результатов динамики механи-
чесйах (неуправляемых) систем. Метод инвариантных соотношений используется в механике
каг математический прием понижения порядка исходных систем канонических уравнений,
чтобы найти наибольшее число приведений, допускаемых частным видом таких систем по
сравнению с системами общего вида, а также для выявления некоторого класса частных
решеиий, имеющих прямое истолкование механической природы движения [81].
В1задаче же АКАР требуется найти управление и/ объектом (1.57), чтобы полученная при
OToff замкнутая система (1.58) с функциями /?,(xi,...,xn) в правых частях уравнений имела
заданяые интегральные многообразия (1.59). Это означает, что управления и} переводят ИТ
системы из произвольной области фазового пространства координат xi,...,xn на многообразия
(1.59), точнее на пересечение этих многообразий. В дальнейшем должно быть организовано
движение вдоль указанного пересечения к началу координат фазового пространства. Получен-
ные уравнения (1.62) не позволяют в явном виде найти управления ц. Однако, если вернуться
^исходной системе дифференциальных уравнений объекта (1.57) с несколькими управления-
ми, го на основе (1.62) можно получить т уравнений, из которых и найти указанные управ-
лении. Эта задача АКАР с векторным управлением кратко рассматривалась ранее в п. 1.6, далее
омбудет подробно исследована в третьей главе на основе введения сопровождающих функ-
ционалов.
Остановимся теперь кратко на вопросе об устойчивости синтезируемых систем. Если в
натальный момент времени ИТ системы находится на заданном пересечении интегральных
многообразий (1.59), то она должна, вообще говоря, и далее двигаться вдоль указанного
пересечения. Однако в реальных условиях на. систему действуют различные возмущения,
которые “сталкивают” ИТ с желаемого многообразия. Это и приводит к уже упоминавшейся
в 16 первой задаче об устойчивости программного движения, т.е. к задаче об устойчивости
интегральных многообразий (1.59) при начальных отклонениях функций от нуля, т.е.
• ‘ ^so(Xio,-‘,Xno) * 0, 5 = l,2,...,m < и. (1.63)
Решение этой задачи устойчивости сводится к следующей процедуре. Программное движение,
задаваемое, в частности, соотношениями (1.59), примем за невозмущенное движение. Тогда
любые возможные движения системы (1.62), начавшиеся с состояния (1.63) со скоростями
$,(/) = Ф„ отличными от программных, будут представлять собой возмущенные движения
системы [68], т.е. уравнения (1.62) могут быть приняты за уравнения возмущенного движения.
Очевидно, что для получения условий асимптотической устойчивости программного движения
«едет функции в (1.62) выбирать так, чтобы нулевые решения
ф*О,...дрт = 0 дифференциальных уравнений (1.62) были асимптотически устойчивыми.
[Такие условия можно получить на основе соответствующих функций Ляпунова. Выявление
условий устойчивости упрощается, если функции Ф1 выбираются зависимыми лишь от
переменных При этом условия устойчивости будут зависеть лишь от функций
Указанная устойчивость уравнений (1.62) относительно тривиальных решений
означает, что инвариантные многообразия (1.59) будут представлять собой притягивающие
73
гиперповерхности, к которым притягивается ИТ замкнутой системы из произвольной области
фазового пространства координат.
Во многих задачах управления конечная цель управления состоит в попадании ИТ вначале
координат x\k = 0,...,х>ц = 0. Следовательно, возникает вторая задача об асимптотически
устойчивости движения вдоль пересечения многообразий (1.59) к началу координат фазового^
пространства. Очевидно, что определение условий устойчивости на этом этапе движения
непосредственно связано с устойчивостью решений приведенных дифференциальных уравне-
ний (1.61), описывающих движение ИТ вдоль пересечения многообразий (1.59). Порядок
уравнений (1.61), в отличие от исходной системы (1.58), равен п—т, что упрощает получение
искомых условий асимптотической устойчивости этих уравнений, а следовательно, и замкну-
той нелинейной системы.
Подведем некоторые итоги. Выше изложены математические особенности применения
инвариантных многообразий для отражения требуемых свойств движения нелинейных систем,
приведены необходимые и достаточные условия того, чтобы задаваемые соотношения (1.5?)
были инвариантными многообразиями замкнутой системы. Эти многообразия и представляют
собой некоторую заданную программу движения. Полученные необходимые и достаточные
условия позволяют доказать, что выбранные соотношения (1.59) являются инвариантным!
многообразиями. Затем могут быть синтезированы управления н?, которые гарантируют суще-
ствование таких многообразий для замкнутой системы. Эту задачу АКАР можно, как показано
в 1.6, эффективно решить с привлечением некоторых сопровождающих функционалов, отра-
жающих соответствующие инженерные требования к переходным процессам. Изложенное
здесь указывает на очевидное родство результатов, основанных на непосредственном приме-
нении теории инвариантных многообразий в механике и теории АКАР с привлечением сопро-
вождающих* функционалов. Однако имеются и существенные отличия—в задачах АКАР ука-
занные многообразия не отыскиваются, а заранее задаются, исходя из требований к качествен-
ным свойствам синтезируемых систем.
Связи в механике и метод АКАР. Выявленное выше определенное родство между методом
АКАР и теорией инвариантных соотношений в аналитической механике [81] указываете
естественный характер базовых понятий, положенных в основу теории АКАР. Этим понятиям
можно дать более конкретную механическую интерпретацию.
Механическая система состоит из совокупности материальных точек, движение каждой из
которых в отдельности зависит от движения и положения остальных точек, т.е. между точкам
системы всегда существуют некоторые силы взаимодействия. Указанные взаимодействия точа
могут быть обусловлены силами, влияющими на ускорение; связями, стесняющими положена
и скорости точек, а также внешними силами от воздействия других объектов, не входящих i
рассматриваемую систему [165]. Если материальные точки, составляющие систему, не могу
занять в пространстве произвольного положения и иметь любую скорость, то это означает, что
на систему наложены ограничения, называемые в механике связями. Эти связи, вводящи
ограничения на изменения координат и скоростей точек, аналитически записываются в виде
некоторых уравнений (ip=0) или неравенств [136]. Конкретно уравнения связей отражают,)
частности, способ соединения отдельных элементов, образующих в своей совокупности меха-
ническую систему. Так, например, для манипуляционного робота уравнения связей описываю!
способ соединения между собой его звеньев, что и определяет структуру манипулятора. 1
результате такого наложения связей число степеней свободы робота будет меньшим по ср»
нению с общим числом степеней свободы его базовых элементов. Аналогично можно дал
конкретную интерпретацию связей для любого механического объекта.
В аналитической механике [136, 151, 165] известен принцип освобождения от связей; I
физическом плане этот принцип утверждает, что ограничения, вводимые связями на систему,
представляют собой дополнительные силы, называемые реакциями связей, действие которш
эквивалентно действию связей. Другими словами, реакция связи есть сила, которая, будучи
приложенной к материальной точке вместо связи, сохраняет неизменным закон движени
74
. точки. При действии других (активных) сил на систему реакция связи должна быть такой,
чтобы левая часть уравнения связи (^=0) была инвариантом (первым или частным интегра-
лом) динамических уравнений механической системы, так как вдоль действительной траекто-
рии движения указанная связь должна всегда тождественно удовлетворяться. Отсюда непос-
редственно следует идентичность менаду понятиями “связь” и “инвариантные соотношения” в
аналитической механике и инвариантными многообразиями в методе АКАР. В механике связь
в виде уравнения
V»(xi..хп, хь...,хм,0 = 0,
содержащего координаты, их производные и время /, называют дифференциальной, или кине-
матической, удерживающей связью. Если уравнение у>=0 явно содержит время t, то такая
связь называется еще реономной, или нестационарной. Связь, накладывающая ограничения
дашь на координаты точек системы, т.е. когда уравнение ^(xb...,x„,f) = 0 не содержит скоро-
стей, в механике называется голономной, или геометрической. Если уравнение дифференци-
альной (кинематической) связи, содержащей производные от координат xi(t),...,xn(f), нельзя
путал интегрирования привести к виду ip(xi,...,xn,t) = 0, в котором отсутствуют производные,
То эта связь называется неголономной, или неинтегрируемой. Голономная связь называется
склерономной, или стационарной, в том случае, если ее уравнение не содержит явно времени
4 т-^. имеет вид = 0. В дальнейшем в методе АКАР, кроме задач терминального
управления, будут использоваться в основном стационарные инвариантные многообразия, что
В терминах аналитической механики означает введение голономных склерономных связей,
накладываемых на дифференциальные уравнения (1.52), описывающие поведение замкнутой
системы “объект—регулятор”.
• Аналогичную интерпретацию можно дать и соотношениям (1.59), если предположить, что
механическая система состоит из п материальных точек [ 151 ]. В общем случае эти точки могут
перемещаться в пространстве координат без всяких ограничений и тогда для определения их
мгновенного положения потребуется задать Зп координат (по три координаты на каждую
Кгёу). Это означает, что механическая система обладает Зп степенями свободы. Однако в
зависимости от назначения этой системы на перемещение ее точек могут накладываться
различные конструктивные и технологические ограничения, например точки должны нахо-
дится на некоторой заданной поверхности. В этом случае указанные s ограничения будут
представлять собой дополнительные условия—связи, которым должно удовлетворять положе-
ние материальных точек. Теперь уже для однозначного определения их положения достаточно
зшь не Зп, а меньшее число (г) координат. Остальные s = Зп- г координат могут быть
шпислены из уравнений связи ips=0. При этом вовсе не обязательно в качестве независимых
брать исходные (декартовы) координаты. Для этого можно использовать любые г переменных
задание которых однозначно определяет положение материальных точек. Такого рода
переменные получили в механике название обобщенных координат. Важно то, что во всех
случаях число независимых обобщенных координат г остается одним и тем же. Это число
называется числом степеней свободы механической системы.
" Понятие связи является базовым в аналитической механике. Связи оказывают на матери-
альные точки механической системы пассивные воздействия, т.к. реакции связей—это пассив-
ные силы. Они влияют как на положение равновесия в статике, запрещая точкам смещаться в
одних направлениях и не. препятствуя смещению в других, так и на характер движения в
давамике, заставляя его характеристики удовлетворять уравнениям связи в каждый момент
времени. Основная задача статики, как известно [136,165], состоит в формулировке условий,
обеспечивающих равновесие системы материальных.точек, а также в определении всех воз-
можных положений равновесия. Эти условия следуют из уравнений виртуальных перемеще-
на, которые* составляются на основе связей, наложенных на механическую систему. При этом
существенным является понятие множества виртуальных перемещений точек, соответствую-
щих наложенным связям. Положение равновесия системы означает отсутствие ускорений и
скоростей всех ее материальных точек в каждый момент времени. Принцип виртуальных
75
перемещений относится к весьма общим методам решения задач статики, он позволяет наибо-
лее просто и экономно сформулировать условия равновесия систем материальных точек на
основе геометрических свойств связей и учета активных сил без введения неизвестных реакция
связей. Связи, точнее реакции связей, также непосредственно входят и в уравнения динамики
механических систем. Так, основополагающий принцип динамики—принцип Даламбера гла*
сит: если к каждой точке системы в некотором ее положении приложить имеющиеся активные
силы, реакцию связей и силу инерции, то это положение будет положением равновесия,
системы. Итак, понятие связи непосредственно входит в основополагающие принципы анали-
тической механики: принцип виртуальных перемещений в статике и принцип Даламбера в
динамике. Это указывает на тот важный факт, что понятие связи и учение о связях игракц
фундаментальную роль в аналитической механике.
Изложенные здесь соображения выявили идентичность и родство между связями в меха-
нике и инвариантными многообразиями s = 1,2,...,m) в методе АКАР. Однако между
этими понятиями имеются и определенные различия. Дело в том, что в отличие от обычных
двусторонних связей (геометрических и кинематических), инвариантные многообразия
реализуются с помощью так называемых сервомоторных сил [81], которые совершают не
равную нулю работу при любых виртуальных перемещениях, совместимых со связями меха:
нической системы. Осуществляемые указанным образом связи в отличие от обычных связей
механики названы в [81] динамическими. Сервомоторные силы, реализующие динамические
связи, в задаче о движении механической системы представляют собой некоторые прямо
приложенные силы. Тогда эту систему можно рассматривать как подчиненную только обычным
связям (геометрическим и кинематическим, в том числе и неголономным) и движущуюся под
действием всех активных и сервомоторных сил. Природа динамических связей в методе АКАР
определяется задаваемыми многообразиями tps=O s = 1,2,...,/и), где 5—число независимы?
соотношений между координатами х, системы. Очевидно, что если на механическую систему
действуют только сервомоторные силы, то для полного определения ее движения достаточно
к (/г—5)-лагранжевым уравнениям присоединить s уравнений V's—0 динамических связей.
Реализация динамических связей в методе АКАР производится с помощью соответствующих
законов управления. Итак, вводимые в методе АКАР инвариантные многообразия ij>s=0 ана-
логичны обычным связям в механике, но в отличие от них имеют динамическую реализации
и могут изменяться в зависимости от желаемых динамических свойств Синтезируемой система
управления.
В терминах синергетики обычные и динамические связи могут быть интерпретированы как
способы введения соответственно “жестких” и “гибких” синергий. Существенное отличие эти
синергий друг от друга состоит в том, что “гибкие синергии” образуют своеобразный “времен-
ный творческий коллектив” [219], который формируется законом управления для решения
требуемой целевой задачи. И после решения указанной задачи этот “коллектив” может быта
распущен и сформирован новый для реализации другой программы движения. Указанное
динамическое осуществление инвариантных многообразий Vs=O является важной и привлека-
тельной особенностью метода АКАР с точки зрения основной задачи ТАУ—синтеза эффек-
тивных систем. В распоряжении конструктора системы управления обычно имеется математи-
ческая модель объекта, однако модель—это не воплощенная в реальность жесткая, например
механическая, конструкция, а некоторое адекватное информационное отражение объекта, и
которое можно нежестко “ввести” различные внутренние динамические связи. Эти связи
реализуются не с помощью неизменных, например механических, звеньев (твердых тел,
соединенных шарнирами, и т.д.), а в виде информационных сигналов управления. Тем самым,
условно говоря, “конструируется” фактически новый механико-информационный объект в
виде замкнутой системы “исходный объект—регулятор”. Новый объект обладает по сравнёнию
с исходным* расширенными показателями и характеристиками. Синтезируя должным образом
соответствующие регуляторы, т.е. вводя динамические связи, можно придать замкнутой сис-
теме (новому объекту) желаемые свойства с точки зрения решаемой ею технологической
76
задачи управления. Следовательно, в механической интерпретации метод АКАР может быть
представлен как своеобразный способ конструирования новых объектов с заданными динами-
Чккими свойствами их движения.
— С учетом того обстоятельства, что механические системы входят в состав большинства
распространенных в технике и промышленности подвижных и технологических объектов,
выявленное здесь родство между инвариантными многообразиями 1р$=0 в методе АКАР и
такими базовыми понятиями механики, как “инвариантные соотношения” и “связи” [81,136,
151, 165], представляет собой весьма важную конкретную интерпретацию, отражающую
механическую аналогию в теории АКАР. В последующих главах книги будут рассмотрены
Мйбгие задачи синтеза управлений механическими системами применительно к подвижным
объектам, летательным и космическим аппаратам, промышленным роботам и т.п.
ь Динамическая парадигма механики сыграла и продолжает играть выдающуюся роль в
развитии естествознания, на ее основе были построены классическая оптика, электромеханика
ФЮюгие другие науки, т.е. в зависимости от конкретной природы управляемого объекта в
методе АКАР можно также выявить оптическую, электромеханическую и т.п. аналогии. В этом
смысле установленная здесь определенная аналогия между базовыми понятиями метода АКАР
к методов аналитической механики дает основание подчеркнуть обобщающий характер и
перспективность развиваемого в теории АКАР подхода к синтезу нелинейных систем управле-
Разумеется, что указанная аналогия затрагивает лишь небольшую часть всего того воз-
можного богатства других физических, химических и биологических иллюстраций, которое,
Очевидно, содержится в конкретных применениях метода АКАР к задачам управления дина-
ДОШЖими объектами различной природы.
Инвариантные многообразия в естествознании и технике. В п.1.1 было показано, что
йййфйанты присущи процессам и явлениям любой природы,—физической, химической, био-
лсйической. Остановимся здесь в основном на выявлении инвариантных многообразий в более
-уЭКйх областях науки—в теории нелинейных колебаний и теории управления, сравнивая их
особенности со свойствами природных (экологических) систем.
Многие задачи теории нелинейных колебаний сводятся к изучению нелинейных диффе-
рййциальных уравнений, содержащих малый параметр [80]. Исследование таких уравнений
значительно упрощается, если с помощью специальных замен эти уравнения могут быть
усреднены. Оказывается, что во многих случаях усредненные уравнения обладают инвариан-
тами многообразиями тороидального типа, .которые имеют определенные свойства и могут
находиться в достаточно малой окрестности интегральных многообразий исходных точных
уравнений. Применение метода интегральных многообразий позволяет значительно упростить
Шественное исследование решений системы, если они лежат на многообразии мецыпей
размерности, чем исходное фазовое пространство. Метод интегральных многообразий дает
Ыже возможность строго обосновать так называемый одночастотный метод в нелинейной
механике и значительно расширить область его применения. Основная идея в методе интег-
рйльяых многообразий состоит в сведении процесса высокой размерности к последовательно-
сти некоторых процессов болеенизкой размерности.
- В настоящее время методы теории интегральных многообразий получили в нелинейной
Механике широкое развитие и обобщение в задачах исследования разнообразных динамиче-:
ских систем, описываемых нелинейными дифференциальными уравнениями, содержащими
МЗяый параметр. Так, в работах [79,161] были получены новые результаты по устойчивости
ибйфуркации инвариантных многообразий специального вида при исследовании стациоиар-
ныждвижений механических (неуправляемых) систем с первыми интегралами, что позволило
существенно продвинуться в изучении качественных свойств движений твердого тела. В работе
[167] метод интегральных многообразий используется для исследования задачи о разделении
быстрых и медленных движений гироскопических систем, Описываемых сингулярно возму-
щенными дифференциальными уравнениями, и задачи о выделении медленной составляющей
движения. Применительно к задачам динамики твердого тела в [78, 166] на основе теории
77
инвариантных соотношении предпринята попытка решения сложной задачи выявления усло-
вий управляемости и наблюдаемости нелинейных систем.
В целом ряде работ [82, 83, 85, 109, 110] в последнее время было показано, что для
естественных (природных) динамических систем характерно наличие некоторых поверхностей
притяжения—инвариантных многообразий в фазовом пространстве. Такие установившиеся
режимы получили название аттракторов, т.к. они “притягивают” соседние режимы. Аттрактор
т.е. притягиватель,—это притягивающее множество в фазовом пространстве, т.е. асимптоти-
чески устойчивое множество. Аттракторы, отличные от состояний равновесия и строго перио-
дических колебаний, получили название странных аттракторов. Внутри таких аттракторов
траектории блуждают нерегулярным образом и являются весьма чувствительными к измене-
нию начальных условий.
Из последних работ по исследованию аттракторов нелинейных моделей систем следует, что
для многих природных систем характерен режим движения по некоторым многообразиям в их
пространстве состояний. Так, в природных системах, например водохранилищах [107], neper
менные, характеризующие их состояние, стремятся к таким значениям, которые соответствуют
некоторым соотношениям (уравнениям баланса), т.е. инвариантным многообразиям в их
пространстве состояний. Существуют также аналогичные связи, накладываемые непосредст-
венно не на переменные состояния, а на скорость их изменения. В этом плане природные
системы во многом существенно отличаются от обычных систем управления, для которых
значение каждой переменной определяется задающим воздействием, т.е. в их фазовом про?
странстве имеется “установочная точка”. По своим задачам функционирования с природными
системами, по-видимому, сходен один из особых типов систем управления—системам коордат
пирующего управления, для которых характерно регулирование соотношений в течение пере-
ходного процесса. В природных системах наличие инвариантных многообразий обусловлено
необходимостью выполнения законов сохранения, например закона сохранения массы, а в
технических системах существование задаваемых инвариантных многообразий должно обес-
печиваться самой процедурой синтеза законов управления соответствующими динамическими
объектами.
Природные системы, в отличие от технических, обладают целым рядом свойств, весьма
необычных с точки зрения современной теории управления, например для природных систем
не существует известного “прокдятия размерности”, которое в настоящее время приводит ?
существенным, а в случае нелинейных технических систем—к принципиальным затруднения*
в отношении проблем обеспечения их асимптотической устойчивости и желаемого качества,*
также синтеза и практической реализации регулятора. Оказывается также, что в природных
системах качество функционирования может даже повышаться при расширении разнообразия
входящих в них подсистем, (например, разброса их параметров) и, более того, указанно^
разнообразие, как правило, играет стабилизирующую роль [107]. В то же время известно,«что
в сложных технических системах управления подобное свойство обычно ведет к ухудшению
их качества. В связи с отмеченными замечательными свойствами природных систем представ^
ляется весьма полезным и перспективным для развития современной теории управления
осуществить попытку переноса этих свойств на конструируемые системы управления техниче-
скими, в первую очередь нелинейными, объектами. Ранее уже отмечалось, что для многих
природных систем основная цель функционирования состоит в стабилизаций соотношений
между их переменными состояния. Математическим следствием этого факта является вырож-
денность их уравнений динамики и наличие интегральных инвариантов, т.е. некоторых инва-
риантных многообразий в пространстве состояний. Именно это свойство целесообразно поло-
жить в основу развиваемых в данной книге методов синергетического синтеза нелинейных
систем управления.
Рассмотрим теперь некоторые конкретные примеры явного или косвенного использования
инвариантных многообразий в задачах управления техническими объектами. Первым приме-
ром может служить синтез систем управления, оптимальных по быстродействию [22, 24], в
которых задача синтеза, как известно, сводится к определению гиперповерхности переключе-
78
шд(Х|,...,Хп) = 0, которая разделяет фазовое пространство на подпространство с положитель-
мйм(м(/) = +нщах) и подпространство с отрицательным (и(0 = -«ш) максимальным управ-
шхпцим воздействием, т.е. на/4 = 0 происходит переключение знака управлений. Многообра-
зие д(х1,...,х,г) = 0 и является инвариантным для замкнутой оптимальной по быстродействию
системы. При оптимальном по быстродействию процессе изображающая точка сначала дви-
Хегся по многообразию размерности п, затем /1-1 и т.д., вплоть до многообразия единичной
размерности, т.е. одномерной линии в фазовом пространстве, двигаясь вдоль которой на
последнем интервале управления она попадает в начало координат, т.е. на многообразие
размерности нуль. Таким образом, при оптимальном по быстродействию управлении проис-
ходит последовательное понижение размерности фазового пространства движений изобража-
ющей точки системы. Именно эта особенность оптимальных по быстродействию процессов
[24] натолкнула автора на идею синтеза систем управления с использованием притягивающих
многообразий понижающейся размерности, которая положена в основу развиваемых в этой
книге методов АКАР.
J Другим примером применения инвариантных многообразий служит синтез систем с пере-
менной структурой [86-88], отличающихся тем, что в их фазовом пространстве вводится
некоторая гиперплоскость переключений, движение вдоль которой происходит в скользящем
режиме. Эта гиперплоскость и является инвариантным многообразием в фазовом пространстве.
8 последние годы стали появляться работы [56, 89, 90, 107, 164], в которых инвариантные
многообразия положены в основу решения задачи синтеза систем управления. Применение
^теории инвариантных многообразий непосредственно к техническим объектам связано, в
частности, с задачами координирующего управления. К такого рода объектам, например,
относятся станки с программным управлением, манипуляционные и транспортные роботы,
>Лхнологические линии прокатки металлов и материалов, бумагоделательные машины и сис-
темы транспортировки ленточного материала, крановые механизмы, летательные аппараты в
тобщем строю, энергоблоки, работающие на общую нагрузку, и т.д. [128, 212]. Для этих
объектов важнейшим функциональным назначением является заданное согласование между
к» переменными состояния в процессе движения [100, 101]. Свойства этого согласованного
движения определяются совокупностью желаемых многообразий, вдоль пересечения которых
^ движется изображающая точка системы. Для природных же систем многообразия в их
пространстве состояний часто отражают соответствующие законы сохранения, присущие этим
системам.
Итак, применение инвариантных многообразий для решения задач управления различны-
ми объектами основывается на глубокой аналогии между процессами в природных системах и
втехнических управляемых системах. Указанная аналогия следует из фундаментальных прин-
ципов сохранения в физике—закона сохранения энергии, закона сохранения количества дви-
'Хения (импульса), закона сохранения момента количества движения, закона сохранения
• кассы и т.д. Инвариантные многообразия, присущие синтезируемым системам, представляют
*собой некоторые функции, которые во время движения не изменяются в силу указанных
законов сохранения. В механике, как это выше показано, величины, которые подчиняются
Соответствующим законам сохранения, называют интегралами движения, являющимися неко-
JЮрыми постоянными величинами. Любое механическое движение с необходимостью содержит
В себе те или иные инвариантные величины. Изучение механического движения возможно
^именно в той мере, в какой удается найти эти величины и сформулировать на их основе
некоторые количественные законы движения. Развитие физики, химии и биологии показывает
фундаментальное значение принципов сохранения, действующих не только в области механи-
ческого движения. Основополагающей идеей, присущей предмету и .методу науки, является
цдёя сохранения или, иначе, принцип инвариантности. В той мере, в какой эта идея принимает
конкретные и разнообразные формы, в той же мере совершается открытие подлинных законов
природы [91].
79
В процессе развития науки, в первую очередь физики, выявилось исключительное значе-
ние принципа инвариантности законов науки, который относится к особому типу принципа
сохранения. Каждый закон выражает собой некоторое постоянство природных процессов ил
этой связи принцип инвариантности законов отражает специальные условия этого постоянен
по отношению к определенному классу движений. В связи с тем, что природные явления
изменчивы и многообразны, законы, лежащие в их основе, выражают определенную устойчи-
вость изменений. При исследовании любого природного процесса поиск законов этого движе-
ния невозможен без выявления некоторых динамических постоянных, свойственных рассмат-
риваемому движущемуся объекту. Здесь уместно привести следующие слова В. Гейзенберга
“Восприняв от античности идею о математическом истолковании порядка в природе, совре-
менное естествознание осуществляет ее, однако, другим... способом... Наука нового времен
показала, что в окружающем нас реальном мире неизменными являются не геометрические
формы, а динамические законы...” Каждый закон действует в определенной, фиксирований
системе. Для того, чтобы найти законы движения, действующие одинаковым образом в раз-
личных системах, необходимо указать принцип, придающий законам природы общий характер
[91]. Именно таким принципом и является принцип сохранения (инвариантности), который,
содержится в структуре любой теории, описывающей то или иное природное явление. Выв»-!
ление инвариантных свойств исследуемых систем позволяет сформулировать специфические
закономерности функционирования разнообразных систем. Таким образом, применение ин-
вариантных многообразий (tps— 0) для решения задач синтеза систем управления имеет глубо-
кое естественно-научное обоснование как применение одного из принципов сохранения. В
развиваемом здесь методе синтеза эта идея дополняется идеей придания движению синтезиру-
емых систем некоторых общих желаемых свойств.
Необходимо подчеркнуть, что в отличие от классического подхода механики [79—$1,
167], когда инвариантные многообразия (первые или частные интегралы) отыскиваются i
развиваемых здесь теории и методе синтеза, они задаются как желаемые и часто имею
непосредственный физический смысл, связанный с природой исходного динамического объек-
та и требованиями (например, оптимальности) технологической задачи, для решения которой
и синтезируется система управления объектом. Итак, в книге развивается новый синергетиче-
ский подход к синтезу систем управления нелинейными многомерными динамическими объ-
ектами различной природы, основанный на естественном гомеостазисе—сохранении внутрен-
них желаемых свойств динамических систем. Предлагаемое в данной книге введение инвари-
антов—синергий в прикладную теорию управления как ее базовых элементов позволяя
придать этой теории естественно-математическое единство и концептуально-методологиче-
скую целостность. Язык инвариантов здесь играет роль базового языка науки, определяющее
системную сторону теории управления и устанавливающего непосредственную связь это!
теории с фундаментальными принципами современного естествознания—принципами отбор!
действительных движений из множества возможных на основе инвариантных соотношений,
связанных с законами сохранения в соответствующей предметной области науки. Как извести,!
управление—это всегда то или иное действие на .соответствующий объект. В этой свяэк
возникает проблема создания прикладной теории управления, в возможно большей мек
учитывающей естественные свойства объекта, при этом сами управления желательно сделф
минимально возможными для достижения поставленной цели управления. Отсюда следует, чй
синергетическая теория управления—это теория по-возможности несилового управления,^
противоречащего естественному движению динамического объекта.
1.8. ПРИНЦИП ДИНАМИЧЕСКОГО СЖАТИЯ-РАСШИРЕНИЯ
ФАЗОВОГО ПОТОКА В АВТОМАТИЧЕСКОМ УПРАВЛЕНИИ
Введение. Выше в п. 1.6 на основе стандартных математических процедур вариационная
исчисления были получены функциональные уравнения (1.28) и ХТ.49) соответственно да'
80
скалярного (m = 1) и векторного т > 1 управлений. Законы управления, следующие из этих
уравнений, обеспечивают обязательный перевод ИТ системы из произвольного начального
состояния в окрестность заданного многообразия ^=0 (1.26) или пересечения многообразий
(1.47). Размерность подпространства многообразий (1.26) или (1.47), куда попадет ИТ
^результате действия указанных законов управления, равна (л-1)—для скалярного или
(***#i)—для векторного управлений соответственно. В п. 1.7 была установлена тесная связь
ййдгообразий (1.26) и (1.47) с инвариантными соотношениями в механике, технике и вообще
Мистествознании.
Возникает важный вопрос о направлении и свойствах дальнейшего движения ИТ вдоль
указанных многообразий под действием синтезируемых управлений. Другими словами, необ-
квдимо разработать общий принцип такого деформирования фазового пространства динами-
ческой системы под действием внутренних управлений, при котором ИТ могла бы пройти
“вглубь” подпространства многообразий (1.26) или (1.47) с последующим попаданием в
Шало координат или на заданное финишное многообразие согласно основной задаче управ-
ления.
В предыдущих разделах этой главы неоднократно формулировалась основная задача син-
теза системы управления, которая в общем виде обычно ставится как определение такого
закона управления в функции координат состояния, который переводит изображающую точку
.(ИТ) объекта л-го порядка из произвольного начального состояния х,о (i = 1,...л) в заданное
конечное состояние, например в начало координат фазового пространства.
Подчеркнем тот очевидный факт, на который почему-то редко обращают внимание, что в
Шальный момент t - О ИТ находится в пространстве размерности п, в конечный же момент,
М. после завершения процесса управления, ИТ попадает в точку хк(0,...,0) с нулевой размер-
ностью. Это означает, что под действием управления ИТ постепенно переходит из исходного
Пространства размерности п в подпространство размерности п— 1, затем я—2, п—3 и т.д. вплоть
до одномерного многообразия (dim ^=1), двигаясь вдоль которого на финишном участке ИТ
я попадает в начало координат фазового пространства. Другими словами, под действием
непрерывного управления происходит постепенное сжатие объема фазового потока, в котором
движется ИТ объекта.
Фазовый поток в диссипативных системах. Строгое определение понятия фазового пото-
ка приведено в [215, 216]. Пусть для динамической системы М—фазовое пространство детер-
минированного процесса, тогда точка этого пространства представляет определенное состоя-
ние процесса. Если в момент t = 0 процесс был в состоянии х, то в другой момент состояние
процесса будет уже £х (где g—однопараметрическая группа преобразований за время t), т.е.
для каждого t определено отображение £: М-*М фазового пространства процесса в себя.
Именно однопараметрическая группа преобразований множества М и называется фазовым
потоком с фазовым пространством М. В физическом плане можно, например, представить себе
фазовое пространство заполненным жидкостью, тогда частица х через время t переходит в
точку g'x, а орбиты фазового потока являются фазовыми траекториями. Под действием фазо-
вого потока ИТ движется так, что вектор скорости системы в каждый момент времени равен
вектору фазовой скорости в той точке фазового пространства, где находится ИТ системы.
Поэтому фазовым потоком векторного дифференциального уравнения
х(0 = F(x)
МЗывается однопараметрическая группа диффеоморфизмов (гладких преобразований), для
которой F является векторным полем фазовой скорости. Для того, чтобы найти фазовый поток
дифференциального уравнения, достаточно решить это уравнение [215, 216]. Напомнив эти
фундаментальные понятия современной теории дифференциальных уравнений, вернемся к
явлению сжатия объема фазового потока в системах управления.
Предположим теперь, что синтезирован закон разрывного, например кусочно-непрерыв-
йбго, управления объектом. В этом случае очевидно, что указанное сжатие фазового потока
81
будет происходить скачком в определенные моменты времени. В качестве примера, подтаем,
ждающего это положение, рассмотрим задачу синтеза законов оптимального по быстродейст
вию управления. Дело в том, что теория оптимального по критерию быстродействия управле*
ния в концептуальном плане является вершиной в современной теории автоматического ynt
равления по сравнению с любыми другими критериями качества. С одной стороны^
оптимальное по быстродействию управление непосредственно отражает динамическую пара{
дигму естествознания, основанную на пространственно-временном подходе, а с другой сторон
ны, известно, что к задаче быстродействия может быть сведена задача оптимизации систему
по любому другому критерию, отличному от критерия быстродействия. Указанная процедура
сведения осуществляется путем расширения фазового пространства исходной системы на одну’
дополнительную координату, равйую соответствующему критерию качества. Предположим^'
что объект является неосциллирующим и описывается дифференциальными уравнениями
Х1(0 = Х2, *2(0 = W, 1«1 «шах- (1.64)
Известно [22], что закон оптимального по быстродействию управления объектом (1.64) имеет,
следующий вид:
н(Х1 ,Х2) = - z/maxsign/z(xi ,Х2) = - MmaxSign I Х| + х21 Хг I I. (1
I **тах \ __
Закон (1.65) обеспечивает двухинтервальное управление (±zzmax) по переводу ИТ из произ*‘
вольного начального состояния (хю, х2о) в начало координат (0,0) фазовой плоскости (рис,
1.1). При этом на первом интервале ИТ движется по полутраектории, имеющей размерност»;
dim х =2, однако в момент переключения (t = А) знака управления происходит сжатие площади
фазового потока. Далее ИТ будет двигаться теоретически по линии переключения,х2)=^
имеющей размерность, равную уже dimц =1. Покажем, что это действительно так. Уравнение
линии переключения согласно (1.65) имеет вид ‘
/4(хьх2) = Х1^-^^-Х21х21 = 0. (1.66)
*чпах
Тогда с учетом первого уравнения объекта (1.1) из (1.66) получим
Xi(t) I Х1(01 + 2zZmxXi .= 0 (1-6TF
или
x2(r)+ zzmaxsignx2 = 0. (1.68)
Дифференциальные уравнения (1.67) или (1.68), описывающие движение ИТ вдоль линии
переключения (1.66) относительно хД/) или x2(f) соответственно, имеют уже размерность
dim =1, хотя исходный объект имел dim х =2. Итак, на линии переключения (1.66) произошло
сжатие фазового потока, а. ИТ, двигаясь вдоль этой линии, в момент t = /2 прибывает в начало;
координат (dim 0 = 0) фазовой плоскости замкнутой системы (1.64), (1.65). Подчеркнем, что
сжатие площади фазового потока происходит скачком в момент переключения управления
попадания ИТ на линию переключения.
82
Аналогичная картина движения ИТ имеет место и при оптимальном по быстродействию
трехинтервальном управлении (±wmax) неосциллирующими объектами третьего порядка (рис.
й2). В этом случае ИТ движется на первом интервале по полутраектории No, Ni, стартуя,
Стример, из точки No, находящейся в трехмерном пространстве (dim х=3). В момент первого
. невключения (t = Л) управления ИТ попадает в точке М на двумерную (dim £г=2) поверх-
ность переключения £г, при этом происходит первое сжатие объема фазового потока. Далее,
двигаясь вдоль La, ИТ в момент второго переключения (t = t2) попадает в точке N2 на одно-
мерную (dim £i=l) линию L\, являющуюся “краем” поверхности переключения L2, при этом
происходит второе сжатие фазового потока. Затем, двигаясь по линии £i, ИТ в момент t = h
обязательно попадает в начало координат, имеющее нулевую размерность. Итак, в рассмот-
рвййом оптимальном по быстродействию процессе (рис. 1.2) происходит скачкообразное
трехкратное сжатие объема фазового потока, в результате чего ИТ, начиная свое
|ЗйЖение из точки, находящейся в исходном трехмерном пространстве, попадает в начало
'координат фазового пространства с нулевой размерностью. В связи с тем, что в течение
ойимального процесса знаки управляющего воздействия (±Мщах) чередуются на соседних
4ййрвалах, то концы множества фазовых полутраекторйй предпоследнего интервала L2 (рис.
Сбудут принадлежать полутраектории Lt и, следовательно, концы полутраектории £| будут
принадлежать полутраектории L\. В своей совокупности полутраектории второго интервала
образуют две двумерные поверхности, которые стыкуются по одномерной линии L\.
поверхности, имеющие в качестве края линию L\, образуют в целом поверхность пере-
Ькйения La, двигаясь вдоль которой ИТ попадает на линию £i и далее в начало координат.
Это означает, что попав в момент t = t\ на двумерную поверхность La, ИТ будет находиться на
течение двух последних интервалов вплоть до окончания в момент t = ?з оптимального
'^быстродействию процесса [22].
^. Аналогичным образом происходит процесс сжатия фазового потока при оптимальном по
быстродействию управлении объектами более высокого (п > 3) порядка. В этом .случае
(д£ 3), продолжая предыдущие рассуждения, нетрудно показать, что полутраектории L% и
Хз^онцы которых соответственно располагаются на поверхностях La и Li, образуют в своей
совокупности трехмерное многообразие £3. Далее, продолжая указанное построение, после-
довательно получим многообразия £4, Ls,...,Ln-\, Ln. Отсюда непосредственно следует, что
каждое многообразие £*, в свою очередь, принадлежит многообразию £*+i и разбивает его на
дввгобласти Lt+i и £*+i, а все полутраектории из семейства Lt+\ заканчиваются на £* и,
83
следовательно, все полутраектории Lk+i заканчиваются на многообразии L^. Очевидно, что
для неосциллирующих объектов задача синтеза в конечном итоге сводится к поиску непрони-
цаемого многообразия Ln-1, разбивающего фазовое пространство L„ на две области, в одной®
которых u(f) = +итях, а в другой u(f) = -итах. При этом многообразие Ln_\ включает в сей
многообразия Ln-i, Ln-z,...,La и, наконец, одномерную линию L\, двигаясь по которой ИТ
попадает на многообразие Lq, состоящее из единственной точки (начала координат) и имеющее
нулевую размерность. Итак, начав движение в исходном фазовом пространстве Ln, ИТ в
результате первого переключения знака управления сначала попадает на многообразие Ln-\
(dim £п-1=?г-1), например L«-i, двигаясь по которому она попадет на многообразие £4-2» затей
на Ln-з, LJ_4 и т.д. В конечном итоге ИТ попадает на двумерную поверхность La и после
последнего переключения знака управления t = tn_\ она по одномерной линии L\ приходит в
начало координат фазового пространства [22].
Подчеркнем, что при оптимальном по быстродействию процессе ИТ последовательно
переходит от одного многообразия Л-ой размерности (dim L*e£) к следующему многообразию
(Л-1)-ой размерности (dim L*-i=£-l), при этом сжатие объема фазового потока происходит
в точках переключения знака управляющего воздействия. Разумеется, что описанная выше
картина движения ИТ в фазовом пространстве является в определенной мере математической
идеализацией, т.к. в реальных условиях переключение управления с одного знака (+мШах) на
другой (-//щах) происходит не мгновенно, а за определенное время, кроме того, могут сущест-
вовать неучтенные малые запаздывания и т.д. В результате при реальном оптимальном по
быстродействию управлении ИТ будет двигаться не абсолютно точно по соответствующей
гиперповерхности переключения Ln, а в некоторой ее окрестности, т.е. в некотором “погра-
ничном слое”, находящемся в сжимающемсяфазовом потоке. Однако описанная выше картина
движения ИТ при идеальном оптимальном по быстродействию процессе позволяет четко и
наглядно выявить такое фундаментальное свойство, как эффект сжатия объема фазового
потока при переходе ИТ с одного многообразия на другое подмногообразие пониженной
размерности вплоть до попадания в начало координат фазового пространства замкнутой'
системы. В этом эффекте как раз и состоит, помимо прочих достоинств, одна из замечательных;
концептуальных особенностей оптимальных по быстродействию систем. Очевидно, что выяв-
ленный эффект сжатия объема фазового потока имеет весьма важное общетеоретическое
значение для проблемы синтеза систем управления.
Рассмотренный процесс сжатия фазового потока в оптимальных по быстродействию сис-
темах, когда ИТ попадает и затем движется по многообразиям последовательно понижающейся
размерности L„-i, L„-2,...,L\, Lq, может быть интерпретирован как процесс попадания и движе-
ния ИТ вдоль желаемого оптимального многообразия, обладающего свойством минимальности
времени движения. В этом случае желаемое многообразие не задается каким-либо
произвольным образом, а находится в результате строгой процедуры синтеза гиперповерхно-
сти переключения. Аналогичное положение имеет место и при оптимизации систем не во
быстродействию, а по другим критериям качества. Это означает, что в оптимальных система?
применение метода АКАР связано с выявлением оптимальных многообразий, входящих в
соответствующие законы управления. При этом.определяющее значение для поиска многооб-
разий имеет заданный критерий оптимальности синтезируемой системы. Далее в третьей главе
(п.3.8) будет установлена тесная связь между методом АКАР и современной теорией оптималь-
ного управления.
Описанные выше и представленные на рис. 1.1 и 1.2 процессы сжатия фазового потока
происходили в оптимальных по быстродействию системах, являющихся исходно нелинейными.
Но оказывается, что сходные явления наблюдаются и в линейных системах, свойства которых,
как известно, существенно зависят от корней характеристического уравнения. В этой связи
рассмотрим линейную систему в трехмерном фазовом пространстве и воспользуемся замеча-
тельными графическими иллюстрациями из работы [215, С. 159]. В этом случае характеря-
84
стическое уравнение представляет собой вещественное кубическое уравнение, которое может
иметь три вещественных корня или один вещественный и два комплексных. Решение линейного
дифференциального уравнения третьего порядка, как известно, имеет следующий вид:
х(0 = + С2Л^2+ С3^3, < 1 -69)
> где^—какой-нибудь собственный вектор с собственными значениями Л* (к = 1,2,3). Выберем
собственные значения А* вещественными, тогда с учетом того, что (Re Л < 0) при /-*<»
стремится к нулю тем быстрее, чем меньше ReA, получим согласно выражению
х(Г) = Re(Ci?‘'M С2^2+ С3№) .
соответствующие фазовые траектории.'На рис. 1.3—1.7 изображены фазовые потоки, которые
имеют следующие отличия: на рис.. 1.3 изображено фазовое пространство в случае
•1) <Л2 < Лз < 0, при этом фазовый поток сжимается по трем направлениям, т.е. по общиму
направлению к нулевой точке; на рис. 1.4 представлен случай Ai < Л2 < Л3 < 0, при этом
фазовый поток сжимается по двум направлениям £i, £2 и растягивается по третьему £3; на рис.
1Л показан случай ReAi,2 < Л3 < 0, при этом фазовый поток сжимается по направлению £3, а в
пдоекости (£ь£2) наблюдается вращение с более быстрым сжатием; на рис. 1.6 изображен
случайЛ3 < ReAi,2 < 0, при этом фазовый поток сжимается по направлению £3, а в плоскости
наблюдается вращение с более медленным сжатием; и, наконец, на рис. 1.7 показан
случай ReA 1>2 < 0 < Л3, при этом фазовый поток растягивается по направлению |3, а в плоскости
(|14г) наблюдается вращение со сжатием фазового потока [215]. .
Изображенные на рис. 1.3—1.7 процессы движения ИТ в трехмерном фазовом простран-
ств» весьма наглядно показывают характер поведения фазовых траекторий в линейных устой-
чивых (рис. 1.3, 1.5, 1.6) и неустойчивых (рис. 1.4, 1.7) динамических системах третьего
первдка. В нелинейных же системах третьего порядка их фазовое пространство может быть как
аналогичным рис. 1.3—1.7, так и иметь принципиально иное поведение фазовых траекторий.
Вояеетого, в фазовом пространстве нелинейных динамических систем третьего порядка воз-
появление некоторых множеств (“странных аттракторов”) с парадоксальными свойст-
вам^ которые принципиально невозможны в линейных системах [83, 85, 109, 110, 144].
Наличие фундаментального свойства сжатия фазовых площадей и объемов у рассмотрен-
ныайыше динамических систем указывает на принадлежность к классу диссипативных систем
[Ш]. Это свойство противоположно свойству сохранения площадей и объемов в фазовом
пространстве у консервативных (гамильтоновых) систем, которое, как известно, следует из
свойства сохранения энергии у такого рода систем. В консервативных системах исходный
элемент фазового потока переносится вдоль траектории без деформации либо экспоненциаль-
но удлиняется со временем (как & при А > 0) в одном направлении и одновременно сжимается
(ыке~я,приЛ > 0) в перпендикулярном ему направлении. Но так как е*' • е~и = 1, то площадь
или объем во втором случае также сохраняются [110]. В динамическом отношении в первом
случае траектории движения устойчивы, а во втором—неустойчивы.
Для консервативных систем характерна инвариантность их свойств относительно обраще-
ния времени, что свидетельствует о сохранении их энергии. В диссипативных же системах
обращение времени приводит к кардинальному изменению их свойств, в частности, к эффекту
сжатия их фазового потока, что указывает на рассеивание их энергии. Диссипативные системы
могут обладать весьма многообразными режимами, в особенности когда их динамика включает
всебя как Зффект затухания, так и механизмы, поддерживающие их движение, при этом их
объем в фазовом пространстве всегда не сохраняется, а динамика необратима. Другими слова-
ми, диссипативным системам обязательно присуще свойство сжатия площадей или объемов в
> фазовом потоке. Однако это вовсе не означает, что в диссипативных системах невозможно
расхождение, т.е. неустойчивость траекторий движения. В действительности в этих системах
могут возникать режимы, когда сокращение площадей или объемов достигается не только за
счет сокращения всех длин, а в результате существенного сокращения одних длин при менее
быстром сокращении других. Иначе говоря, при общем сокращении площадей или объемов в
85
Рис. 1.7
86
фазовом пространстве диссипативных систем по некоторым направлениям их траектории могут
разбегаться и движение по этому направлению будет неустойчивым. Свойство разбегания
траекторий объясняется необратимостью процессов, при этом сжимающийся и растягиваю-
эдйся слои фазового потока будут соответствовать двум реализациям динамики, каждая из
^даюрых отражает эффект нарушения временной симметрии и парное появление несимметрич-
ннх режимов. В этом случае сжимающийся слой отвечает состоянию системы в будущем, а
растягивающийся—в прошлом, т.е. налицо две реализации с противоположной ориентацией
вовремени [235]. Ранее (см. п.1.1) уже отмечалось, что второе начало термодинамики, как
принцип отбора, допускает только те начальные условия, в которых система эволюционирует
к будущему равновесному состоянию. Эти качественные особенности диссипативных систем
обязательно следует учитывать при разработке методов синтеза замкнутых нелинейных сис-
тем.
ч Аттракторы в нелинейных диссипативных системах. Нелинейные диссипативные дина-
мические системы обладают свойством притяжения траекторий, проходящих через определен-
ную область фазового пространства, к некоторому многообразию, называемому аттрактором,
доопределению [ 110], аттрактором А называется некоторое компактное множество в фазовом
пространстве, имеющее следующие основные свойства: во-первых, аттрактор А инвариантен
отпосительно действия фазового потока, т.е. ФА = А; во-вторых, аттрактор имеет нулевой
объем в n-мерном фазовом пространстве системы; в-третьих, аттрактор находится в некоторой
области ненулевого объема, которая является областью притяжения данного аттрактора, т.е. в
фазовом пространстве существует некоторое множество таких точек, что выходящие из них
траектории (при (-»«) всегда устремляются к аттрактору. На рис. 1.8, взятом из [110, С. 128],
схематически изображен аттрактор А и его область притяжения В. Траектории, выходящие из
точек а, р, у и д, переносятся фазовым потоком Ф к аттрактору. В математическом плане
аттрактор представляет собой асимптотический предел решений дифференциальных уравне-
Нйй нелинейной диссипативной системы, причем начальные условия этих решений должны
“Обя&тельно лежать в области притяжения.
к Для того, чтобы нагляднее показать особенности, возникающие при сжатии фазового
Котака, рассмотрим, следуя [110], фазовый портрет нелинейной диссипативной системы вто-
рйОпорядка с аттрактором в виде предельного цикла. Для этого предположим, что множество
начальных условий на фазовой плоскости, откуда стартует ИТ, занимает некоторую область
Г (рис. 1.9). В результате диссипации фазовый поток приводит к сокращению площади Г по
'1ю₽е движения ИТ до некоторого линейного отрезка на аттракторе С—предельном цикле,
Рис. 1.8
87
умеющем размерность dim С=1. Это означает, что происходит потеря информации относите»
но взаимного расположения исходных начальных условий в области Г фазовой плоском
После достижения ИТ аттрактора С информация об исходных начальных условиях полносШ
утрачивается, что является следствием эффекта сжатия площади фазового потока к иалМ
аттрактора системы. Учитывая, что никаких особенностей у рассматриваемой системы, кр»
наличия аттрактора, не предполагалось, то этот факт означает справедливость указаний
свойства для любого другого типа аттрактора, а именно: свойства потери информаций
начальных условиях старта ИТ системы. Аналогичные свойства будут присущи и нелинейж
системам третьего порядка, имеющим аттрактор в виде некоторого двумерного тора в трехм^
ном фазовом пространстве (рис. 1.10). Изображенные на рис. 1.8—1.10 аттракторы лежвд
некоторых многообразиях и сами образуют многообразия в фазовом пространстве систем!
частности, предельный цикл является простым многообразием, что предполагает налвд
касательной в каждой его точке. Изложенные свойства аттракторов позволяют сделать о&щ
важный вывод: размерность (га) аттрактора всегда меньше размерности (п) фазового проста
ства исходной динамической системы, т.е. т < п. В соответствии с [ПО] приведем, некогда
количественные соотношения, являющиеся следствием описанного выше свойства ёокращда
объемов (площадей) в фазовом пространстве нелинейных диссипативных систем. Для это
определим относительную скорость изменения гиперобъема V в фазовом пространстве я
действием фазового потока, найдя следующую производную Ли:
Рис. 1.10
88
(1.70)
_L^ = y^<0,
V dt ft dxt ’ .
гдех—z-я координата фазового пространства вектора замкнутой системы.
Оказывается, что для диссипативных систем величина (1.70) всегда отрицательна и может
служить некоторой мерой сжатия фазового потока. Из (1.70) непосредственно следует, что в
" дх-
случае отрицательности производной 2 'Н~2 < 0 ПРИ (“*°° после попадания ИТ на аттрактор
,= 1 ° Xt
любое множество начальных условий объемом (площадью) V отображается в множество
нулевого объема [110]. Это становится очевидным, если представить выражение (1.70) в виде
»>о.
Vdt
Отсюда непосредственно следует, что при /-* <» объем У-»0, т.е. объем (площадь) самого
«трактора всегда равен нулю. Это важный и нетривиальный вывод, следующий из свойства
сжатия фазового потока в диссипативных системах. Напомним также, что для консервативных
(гамильтоновых) систем объем фазового потока остается неизменным, т.е.
-ж. у = о •
frr, ftdXi~^
чт& является следствием закона сохранения энергии в этих системах.
^Таким образом, к важнейшим свойствам диссипативных нелинейных систем относятся,
вечгервых, “потеря” ими памяти о начальных условиях, откуда начинает свое движение ИТ
системы, и, во-вторых, обязательное снижение размерности аттрактора по сравнению с раз-
мврйостью фазового пространства исходной системы.
последнее время исследование динамики нелинейных диссипативных систем привело к
открытию так называемых “странных аттракторов” с весьма своеобразными свойствами. Дело
'Том, что в обычных динамических системах вследствие детерминистского подхода к их
изучению фазовые траектории принципиально не должны пересекаться в фазовом простран-
ств. В противном случае одно начальное условие могло бы породить разные фазовые траек-
т^рии, т.е. система после точки пересечения траекторий могла вести себя совершенно по-раз-
нвиу. а ее поведение оказалось бы совершенно непредсказуемым. Именно эта базовая уста-
новка лежит в основе известной детерминистской доктрины, согласно которой в
детерминированных динамических системах невозможно хаотическое поведение. Однако в
действительности оказалось, что в фазовом пространстве нелинейных детерминированных
систем, имеющих размерность три и выше, при определенных видах нелинейностей и сочета-
нии параметров принципиально могут существовать аттракторы, обладающие весьма необыч-
нымй свойствами, а именно: близкие траектории, попавшие на такой аттрактор, начинают
быстро расходиться. В результате на аттракторе возникает хаотический режим движения,
(ЯИйтательным свойством которого является чрезвычайная чувствительность к заданию на-
чйлЫшх условий, находящихся на аттракторе. Внешне же фазовые траектории, имеющие
йРййьные условия вне аттрактора, стремятся к аттрактору и “оседают” на нем. Но самой
удивительной особенностью этих аттракторов является их нецелая размерность (например,
< 3), которая получила название фрактальной размерности. Аттракторы, обладающие
указанными весьма необычными свойствами притягивающего хаоса, получили в литературе
[83/85, 99, 109, ПО, 169] название “странных аттракторов”. На рис. 1.11 приведен пример
‘’Странного аттрактора” для достаточно простой по структуре нелинейной динамической сис-
третьего порядка
x(t) = - у- z; у(0 = х+ 2(f) = bx— cz+ xz, (1.71)
имеющей лишь одну нелинейность xz. В окрестности начала координат фазового пространства
оюгййа,(1.71) имеет следующие особенности [169]: фазовые траектории отталкиваются от
нулевой точки вдоль некоторой двумерной поверхности, а сама нулевая точка схожа с неустой-
чйвйм фокусом, и далее траектории притягиваются вдоль некоторой линии. Из рис. 1.11
89
следует, что конфигурация фазового пространства динамической системы со “странным аттрак-
тором” обладает парадоксальными свойствами: с одной стороны, она приводит к неустойчивости
движения, что служит основным источником хаотического движения; а с другой стороны, одновре-
менно не исключается возврат неустойчивых траекторий в окрестность начала координат фазового
пространства, что, вообще говоря, ведет к формированию устойчивого аттрактора. Такого род
“странные аттракторы” подробно изучаются в обширной современной научной литературе [83,
109, 110, 144, 169 и др.]. Открытие этих аттракторов в динамике нелинейных систем явил<х>
крупнейшей научной сенсацией нашего времени, способной привести к кардинальному изменению
существующего взгляда на динамическую парадигму современного естествознания. Действитод
но, представляется неординарной и удивительной возможность возникновения хаотических ревд
мов движения в детерминированной нелинейной системе третьего и более высокого порядков fa
какого-либо внешнего воздействия на эту систему. л
Очевидно, что наличие такого рода “странного аттрактора” в синтезируемой системе
является весьма нежелательным случаем, т.к. тогда система, построенная, например, в сода?
ветствии с положениями классической линейной теории управления, в режимах больших
отклонений может оказаться вовсе неработоспособной из-за влияния нелинейностей и дрейфе
или “старения” ее параметров, приводящих к эффекту “странного аттрактора”. В этом случае
система приобретает свойства своего рода “черной дыры” в ее фазовом пространстве. Это будя
означать, что при попадании ИТ системы в область притяжения “черной дыры” она неизбежво
устремится к указанной “дыре” и будет находиться там сколь угодно долго. И так как “чер|ш
дыра” не совпадает с желаемым технологическим режимом работы объекта, то такая ситуаци
приведет к разрушению объекта, взрывам и т.п. По-видимому, участившиеся в последнее врод
катастрофы в сложных современных технических системах являются результатом не толю
ошибок эксплуатационного персонала, но и, может быть, следствием той ущербной линеЗД
идеологии классической теории управления, которая была положена конструкторами эщ
систем в основу их проектирования. Учет нелинейных явлений в динамических объекэд
становится обязательным при создании эффективных сложных систем. Совершенно ясцр, ли
при проектировании таких систем необходимо синтезировать законы управления объектам
таким образом, чтобы “странные аттракторы” не могли возникнуть при любых сочетай^
параметров объекта и системы управления. В настоящее время в литературе, к сожалею»
практически отсутствуют пригодные критерии выявления “странных аттракторов” в фазова
пространстве динамических систем, тем более для определения свойств и параметров указа»
ных аттракторов. Очевидно, что достаточно надежной гарантией отсутствия “странных^»
тракторов” в фазовом пространстве синтезируемой системы является ее свойство асимптод
ческой устойчивости по Ляпунову в определенной области или в целом. Для обеспечения этот
важного свойства необходимо осуществить структурное деформирование фазового прострй •
90
ства замкнутой системы путем конструирования соответствующих законов управления. Это
означает, что синтезируемые законы управления должны содержать такие нелинейные функ-
ции координат, которые позволили бы осуществить желаемую деформацию фазового про-
странства системы.
| Итак, изложенные выше важные и новые положения из динамики нелинейных систем
показывают, что при управлении различными объектами происходит процесс сжатия фазового
потока вплоть до попадания ИТ на конечное, желаемое многообразие—аттрактор соответст-
вующей размерности. В качестве таких финишных многообразий в обычных задачах управле-
ния нередко выступают точка, например, начало координат фазового пространства, имеющая
нулевую размерность (dim 0 = 0), или предельный цикл с dim С = 1. В общем же случае в
зависимости от технологической задачи управления указанные финишные многообразия могут
иметь разнообразные формы. Так, например, в известной задаче управления космическим
аппаратом осуществляется его перевод на желаемое многообразие—круговую или эллиптиче-
скую орбиту в центральном поле сил с заданной скоростью вращения аппарата относительно
центра. Для других подвижных или технологических объектов эти конечные многообразия
имеют другую форму. Разумеется, что желаемые конечные многообразия не должны противо-
речить естественной, природной сущности и динамическим свойствам исходного объекта.
Рассмотренные выше положения касались процесса сжатия фазового потока в динамиче-
ских системах. Аналогично можно пойти и в обратном направлении, т.е. путем расширения
фазового пространства. Эта процедура необходима при синтезе систем управления, инвариан-
тных относительно неизмеряемых возмущений заданного класса. В этом случае к исходной
системе дифференциальных уравнений объекта добавляется некоторая дополнительная подси-
стема z уравнений д-го порядка, решением которой и является возмущение как функция
времени. Между введенной подсистемой и исходными уравнениями должна быть установлена
некоторая связь в виде соответствующего уравнения. Таким образом, производится расшире-
ние фазового пространства исходного объекта на/4 координат, т.е. новая, расширенная система
будет иметь общую размерность dim(x + z) = п+ц. Осуществив далее процесс сжатия фазового
потока в этой расширенной динамической системе до желаемого финишного многообразия,
можно тем самым синтезировать соответствующий закон управления. В результате этого будет
построен так называемый динамический регулятор, обеспечивающий селективную инвариан-
тность замкнутой системы к определенному классу возмущающих воздействий.
Итак, процесс управления—это по существу всегда процесс сжатия (или сначала расшире-
ния с последующим сжатием) фазового потока, в котором движется ИТ замкнутой системы.
Синтез же законов, управления, реализующих указанный процесс сжатия фазового потока,
должен включать в себя регулярную процедуру перевода ИТ с одного заранее вводимого
многообразия Л-й размерности на следующее многообразие (Л-1)-й размерности вплоть до
финишного, желаемого многообразия.
Основные положения синергетического подхода в теории управления. В общем плане
можно утверждать, что синтезируемая система управления должна обладать достаточным
числом степеней свободы для реализации поставленной технологической задачи управления.
ЭтО означает, что в тех случаях, когда исходный объект обладает ограниченным числом
степеней свободы п, то для реализации поставленной цели управления, заключающейся,
например, в отслеживании или подавлении некоторой функции, представляемой решением
дифференциального уравнения размерности dim z = г, необходимо предварительно осущест-
вить операцию расширения фазового пространства исходного объекта, по меньшей мере до
размерности dim (х + z) = п+r. Отсюда следует важный вывод о том, что для синтеза эффек-
тивных систем управления следует предварительно произвести тем или иным способом добав-
ление стольких степеней свободы, которые были бы достаточными для реализации цели
управления. Это положение корреспондируется с известным в кибернетике законом Эшби
[218] о необходимом разнообразии. Здесь только понятие “разнообразие” конкретизируется
в понятии “степени свободы” системы, т.к. именно степени свободы служат источником воз-
91
можного разнообразия [217]. Изложенные выше соображения позволяют сделать следующие
общие важные выводы о задачах управления при синтезе систем:
•во-первых, управление объектом произвольной природы представляет собой
организованный И целенаправленный процесс редукции избыточных степеней
свободы исходной системы, т.е. все избыточные по отношению к заданной цели
(финишному многообразию) степени свободы редуцируются и в конечном итоге
остаются только те степени свободы, которые определяют цель управления;
• во-вторых, применительно к развиваемому в этой книге синергетическому подходу
процедура редукции степеней свободы означает формирование между коорди-
натами системы некоторых связей—инвариантных многообразий (синергий),
которые и реализуют указанную редукцию степеней свободы системы. При этом
инвариантные многообразия ('‘редукторы степеней свободы”) вводятся в синте-
зируемую систему с помощью соответствующего закона управления;
• в-третьих, редуцируемые степени свободы замкнутой системы представляют собой
элементы управления как некоторые системные категории [217], а инвариантные
многообразия (синергии) ограничивают разнообразие системы и формируют
связи, т.е. некоторые акции управления.
Таким образом, управление—это преодоление избыточных степеней свободы системы,
сами понятия “инвариантное многообразие” (синергия) и “избыточность” степеней свобод
являются базовыми элементами синергетической теории управления. Именно избыточность
инварианты приводят к организованному поведению замкнутой системы. Подчеркнем важно
свойство этой постановки проблемы управления—сначала следует создать избыточные степе
ни свободы, которые определяют дополнительные возможности в свойствах будущей система
а затем преодолеть (редуцировать) эти степени свободы в процессе управления.
В синергетике указанный процесс отражает свойство самоорганизации нелинейных дисси
пативных систем [83, 85, 109, ПО, 144, 169, 214]. Именно описанные здесь новые понята:
положены в основу развиваемого в данной книге синергетического подхода к синтезу систе
управления нелинейными объектами различной природы.
Перейдем теперь к определенной конкретизации и применению изложенного выше прин
ципа динамического сжатия—расширения фазового потока. Итак, управление—это редукци
степеней свободы исходной сформированной (расширенной) системы дифференциальны:
уравнений. Отсюда следует, что исходная расширенная система в потенции обладает опреде
ленными априорными возможностями, которые больше и структурно выше в смысле перепек
тив возникновения новых свойств по сравнению со свойствами той или иной результирующй
(замкнутой) системы, получаемой в итоге соответствующих процедур синтеза. Дело в том, чп
результирующая система—это исходная система с наложенными связями, отражаемыми!
структуре синтезируемого закона управления. Уменьшение числа степеней свободы происхо
дит за счет сил взаимодействия наложенных связей в направлении от начального положена
ИТ к промежуточным состояниям на некоторых многообразиях понижающейся размерносп
(^1=0,...,^т=0) И далее к конечному многообразию. В результате такого взаимодействия!
синтезированной системе генерируется энергия, необходимая для движения ИТ от исходной
до конечного, желаемого многообразий. При этом в процессе движения ИТ от одного инвари-
антного многообразия к другому меньшей размерности расходуется соответствующее количе-
ство энергии, которое постепенно снижается и к моменту попадания ИТ на конечное многооб-
разие становится минимальным или нулевым в зависимости от вида конечного многообразм
системы. Движение вдоль каждого многообразия ^=0 реализуется за счет внутренних управу
лений системы, т.е. в процессе самодвижения к соответствующему аттрактору—инвариантно-
му многообразию в фазовом пространстве. Свойства и направление этого процесса зависят®
столько от внешнего принудительного управления, а в большей мере от внутренней динамил:
нелинейного объекта. Эта автономность движения будет проявляться тем больше, чем ближ!
находится объект к сильно неравновесной области (см. п. 1.1) своего состояния. С точки зрени!
92
ощдметики движение синтезируемых систем на финишных многообразиях может быть интер-
преэдрвано как движение на желаемых диссипативных структурах, представляющих собой
некоторые динамические состояния систем и отражающие их взаимодействие с окружающей
средой [235].
। ^ процессе описанного перехода ИТ от одного многообразия к другому происходит своего
рода;.иигнорирование” части переменных системы. Число этих переменных равно числу мно-
гообразий ^*=0, последовательно (или параллельно) вводимых в процессе синтеза замкнутой
сийймы управления. Эти особенности как раз и отражают процесс сжатия фазового потока в
системах, синтезируемых на основе синергетического подхода. В математическом плане ука-
занный процесс сжатия реализуется путем последовательного вложения друг в друга s первых
вггёгралов дифференциальных уравнений замкнутой системы. Так, при скалярном управле-
m;(m = 1) осуществляется следующий последовательный переход от многообразия к много-
образию:
« Vi(xi...х„)=0 -* ^2(^ь*1»-»хя-1)=0 -* ...-* ...xn-s)=O, s < л-1.
©^Случае же векторного управления (т > 1) сначала осуществляется параллельное введе-
ниесовокупности т первых интегралов, т.е. '
» V»i(xi,...,х„) = О ,..., ^т(хЬ...,Хи) = 0.
Затем на пересечении этих многообразий осуществляется аналогично скалярному управлению
последовательное вложение г первых интегралов друг в друга, т.е.
^^Лн+1(Х|,...,Хп-т) = 0 -* ^т+2(^'п+ьХ|,...,Хп-т-|) = 0 ~* ...
• .^Ь(^т+1^т+2,-,^п-т-г,Х1,...,Хп-т-г) = О, Г < П~т~1.
’Другими словами, при последовательном (т = 1) введении 5 первых интегралов образуется
один общий первый интеграл ^S=Q, а при параллельно-последовательном (т > 1) введении
образуется т первых интегралов будущей замкнутой динамической системы. Для реализации
изложенного процесса сжатия фазового потока необходимо соответствующим образом синте-
зировать законы управления. Именно эти управления вводят в замкнутую систему соответст-
вуюйрло энергию, в результате чего происходит изменение состояния системы, которое про-
' dt----4 * ® I в ее Фазовом пространстве и, как следст-
вие, изменяется скорость движения ИТ системы. Синтезируемые управления служат причиной
, динамического взаимодействия соответствующих компонентов (тел, полей и др.) системы, что
и приводит к деформации ее фазового пространства. Указанные управления представляют
собой некоторые физические процессы, которые взаимодействуют с объектом и определяют
егоивнешние степени свободы”. Однако объекты обладают (т < п) и “внутренними степенями
свободы”, т.е. их динамика может во многом определяться внутренними взаимодействиями.
Иначе говоря, в любой системе управления можно выделить внешние, и внутренние связи,
налагаемые на координаты ее состояния. Внешние связи определяются видом и числом (т)
независимых каналов управления. Это позволяет сразу же осуществить динамическую деком-
позицию системы до многообразия (п—т)-й размерности, которое является гиперповерхно-
сть^, пересечений введенных (т) инвариантных многообразий. Внутренние же связи опреде-
структурой исходной системы дифференциальных уравнений (и-/п)-й размерности,
которая отражает физические (химические, биологические, экономические и т.д.) закономер-
ности, определяющие назначение объекта и замкнутой (“объект—регулятор”) системы. Даль-
нейшая декомпозиция образованных ранее (п—т) уравнений—это установление соответству-
юще внутренних связей (синергий), т.е. навязывание желаемых соотношений (^$=0) между
(координатами синтезируемой системы. Для описания движения декомпозированной системы
на вводимых многообразиях ip^x^,... ,хи)=0 могут использоваться различные комбинации пе-
ременных состояния, удобные для отражения естественных свойств объекта я синтеза систем
управления.
Предложенный общий подход с синтезу законов управления, основанный на идее сжатия
фазового потока путем введения совокупности задаваемых первых интегралов, в определенной
93
мере подобен методу Н.Г. Четаева [4] в теории устойчивости. Согласно этому методу функци!
Ляпунова формируются в виде связки заранее найденных первых интегралов возмущения!
движения. Известно, что это один из редких и весьма эффективных способов построений
функций Ляпунова в теории асимптотической устойчивости. Отсюда, между прочим, следует,!
что в излагаемом подходе существенно упрощается проблема устойчивости, которая в коне?!
ном итоге сводится к исследованию устойчивости движения вдоль финишного многообразш!
описываемого дифференциальными уравнениями (и-т-$)-й размерности. Указанная аналм
гия связывает принцип сжатия фазового потока с методом первых интегралов в теории усто»!
чивости движения. |
Необходимо особо подчеркнуть, что в отличие от обычного метода синергетики [83, Ш
ПО] (см. п.1.1) и стандартного метода малого параметра нелинейной механики [79,167],в
которых параметры порядка находятся путем приближенной разнотемповой декомпозиций
исходной системы (разбиения на медленные и быстрые подсистемы), предложенный здаУ
принцип сжатия фазового потока позволяет однозначно сформировать желаемые инвариант!
ные многообразия ips= 0, т.е. управляемые параметры порядка, в результате ассимптотичесщ
точной динамической декомпозиции. Такая декомпозиция осуществляется путем сжатия фа-1
зового потока под действием синтезируемых внешних и внутренних управлений. Именно
описанный выше эффект сжатия фазового потока и следующая из него точная динамим
ская декомпозиция являются теми базисными положениями, на которых построен синергети-
ческий подход к синтезу многомерных и многосвязных систем управления нелинейным
объектами различной природы.
Таким образом, в основе развиваемого в этой книге синергетического подхода лежат да
фундаментальных принципа естествознания—это, во-первых, принцип инвариантности (со-
хранения) и, во-вторых, принцип сжатия-расширения фазового потока динамических систем.
Принцип инвариантности, как известно, является базовым для всех наук, однако его исполь-
зование в развиваемом синергетическом подходе имеет кардинальное отличие: если в естест-
венно-научном подходе инварианты (синергии) отыскиваются “апостериори”, то в предлага-
емом здесь подходе инварианты задаются “априори” с целью наделения синтезируемой дина-
мической системы желаемыми синергетическими свойствами.
О свойстве эквивалентности в системах управления. Описанное выше свойство сжатм
фазового потока в динамических системах в большей мере опиралось на математические
(геометрические) представления по сравнению с его физическим содержанием. Попытаема
теперь, используя известные общенаучные концепции, выявить физические первопричины
указанного свойства, которое относится к одному из базовых элементов развиваемой в этой
книге синергетической теории управления.
В современной науке известны многие взаимосвязи между природными явлениями, коп»
рые называют эквивалентностями, или принципом компенсации [223, 224]. Суть этого
принципа состоит в том, что изменение какой-либо физической величины непременно приво-
дит к возникновению некоторой другой физической величины. Кроме того, наличие произвёл-
ной от процесса изменения одного явления обязательно приводит к новому, более высокому
этапу возникновения следующего физического явления. Другими словами, природе присуще
фундаментальное свойство “компенсации” одного физического параметра путем появлеяш
другого параметра со своими признаками. Принцип компенсации (эквивалентности) относите
к всеобщим физическим принципам, которые определяют развитие различных природных
процессов. В математическом плане принцип компенсации отражается в виде различных
дифференциальных уравнений, описывающих соответствующие физические явления и взаи-
мосвязи между ними. Итак, в природе всегда существует многомерная связь различных физи-
ческих (химических, биологических) явлений, которая непрерывно проявляется в возникно-
вении одних величин за счет изменения других. Движение материи и термодинамически
процессы порождают новые формы, которые, в свою очередь, могут рождать другие формы!
т.д. По существу, можно представить так, что через принцип компенсации природа сохраняет
94
' еаму себя, какие бы процессы в ней не происходили. Это общенаучная концепция, основанная
на динамическом подходе к природным явлениям. В работе [223] описанные выше явления
компенсации предложено назвать общим законом сохранения.
। Наиболее очевидным проявлением принципа компенсации (эквивалентности) является
третий закон Ньютона, т.е. равенство действия и противодействия. Другим примером принципа
эквивалентности служит равенство инерционной и гравитационной масс, что позволило Нью-
гЖ^создать классическую механику. Следующим важным примером является эквивалент-
дюйь между гравитационным полем и “полем ускорения”, что дало основание Эйнштейну
кпасфоить релятивистскую физику. Можно привести и другие примеры справедливости прин-
эквивалентности в различных физических процессах. Следует, однако, отметить, что
наличие равенства между некоторыми физическими характеристиками является только про-
СТйнним проявлением принципа эквивалентности на некотором определенном уровне. Более
сдакиые взаимосвязи возникают при переходе через указанный уровень, когда принцип
эквивалентности продолжает сохранять свою силу, но приобретает уже более широкое свой-
тйвфеоответствия, т.е. некоторой динамической пропорциональности, а не просто как опре-
деденное равенство.
f Итак, природные системы обладают общим фундаментальным свойством, а именно: изме-
,неиие любой физической сущности обязательно порождает новую физическую сущность,
например в механике изменение скорости приводит к возникновению ускорения, в электро-
нике изменение напряженности электрического поля порождает электромагнитное поле и
т,д. Другими словами, в природных системах образуется цепь эволюции, приводящая к мно-
гообразию физических явлений.
.^казанные законы эквивалентности (компенсации) применяются во многих науках в
шрм виде или косвенно для анализа процессов в звеньях всей цепи эволюции соответствую-
щейприродной системы, когда в каждом звене (подсистеме) выполняется равенство действия
Противодействия с обязательным подчинением соответствующему закону сохранения [223].
Данное равенство отражает свойство эквивалентности указанных характеристик, в то время
как^каждая из них имеет свою физическую природу. И эти свойства, похоже, как раз и
необходимы природе для сохранения самой своей сущности. С особой силой проявляется
фундаментальное значение принципа эквивалентности в явлении самоорганизации нелиней-
ныхдиссипативных систем, которое состоит в образовании коллективных связей—синергий.
Именно свойства эквивалентности и самоорганизации используются в развиваемой здесь
синергетической теории управления, которая базируется на концепции управляемого динами-
ческвго взаимодействия вещества, энергии и информации в системах управления объектами
различной природы.
,.. Докажем теперь конкретно справедливость свойства эквивалентности (сохранения) в
задачах управления нелинейными объектами. Оказывается, что с этим свойством связано
описанное ранее явление сжатия фазового потока в динамических системах. В качестве при-
мерзрассмотрим задачу управления объектом, движение которого описывается следующими
нелинейными дифференциальными уравнениями:
*1(0 = /1(*1,*2) + «13*з + «14*4,
*2(0 =/2<*1,*2)+ «23*з+ «24*4, (1.72)
*з(0 = /з(*1,-,*4)+ ИЗ,
*4(0 = /»(*!,...,*4) + Н4.
Из (1.72) следует, что управления из ии4 непосредственно действуют на производные *з(0 и
х<(0соответственно и, следовательно, на функции -*з(0 и x4(f), которые, в свою очередь, могут
1 быть выбраны в качестве внутренних управлений, определяющих характер изменения коор-
динат Xi и Х2- Управления из и и4 количественно не исчезают, а превращаются во внутренние
управления хз(0 и *4(/), в конечном итоге формирующие поведение координат лд и Х2 объекта.
Внутренние управления, в свою очередь, действуют на подсистему пониженной размерности
95
(п-т = 2), определяемую первым и вторым уравнениями (1.72). Для этой подсистемы мою
поставить свою, внутреннюю задачу управления. »i
Выявленные здесь структурные особенности динамических систем позволяют сформи-
ровать следующее своеобразное свойство эквивалентности (сохранения) управлении: i
любом процессе управления движением, т.е. при переводе объекта из начального состояли!
конечное, управления /9, действующие на соответствующие производные координат
исчезают (не разрушаются), а превращаются во внутренние (промежуточные) управляй
(Vj = х() подобъектами последовательно понижающейся размерности. Выделенное обад
свойство эквивалентности включает в себя два важных взаимосвязанных свойства управляй
динамическими объектами: во-первых, свойство сохранения, т.е. управления, подаваемые!
соответствующие входы исходного объекта, в дальнейшем не исчезают и не разрушаются
во-вторых, свойство превращения, когда управления, проходя соответствующие динамиче-
ские звенья объекта, превращаются в некоторые внутренние управления V, подобъегми
понижающейся размерности, что свидетельствует о процессе сжатия фазового потока айве*
зируемой системы. При этом размерность вектора V} внутренних управлений всегда совпадай
с размерностью вектора и, исходных (внешних) управлений, т.е. dim щ = dim Vj. Указам^
свойство эквивалентности (сохранения) управлений базируется на идее взаимопревращени
управлений и координат, в результате чего происходит сжатие фазового потока в процессеет
протекания через данное динамическое звено замкнутой системы. |
В заключение следует упомянуть о том, что в теории управления понятиям “координатн1
и “управление” обычно придается заметно разный смысл. Считается, что управление предст»
ляет собой что-то главное, доминирующее, а координаты—нечто второстепенное, т.е.-чи
управление—суть причина, а изменение координат—ее следствие. Формально это дейсти
тельно так, но, как показано выше, между управлениями и координатами существует вбещ
внутренняя динамическая иерархия и дуальная взаимосвязь, позволяющая исходным, внен
ним управлениям преобразовываться в соответствующие координаты—внутренние (промезга
точные) управления замкнутой системы. Это обстоятельство целесообразно учитывать и
синергетическом синтезе нелинейных систем, тем более, что реальные достаточно сложив
технические объекты обычно состоят из последовательно-параллельного соединения локал!
ных подобъектов, у каждого из которых трудно провести резкую грань между управлении
и координатами. В частности, внутренние управления локальными подобъектами являйм
координатами состояния общего объекта. j
Изложенные в данном разделе соображения показывают, что в теории управления нега
нейными динамическими объектами целесообразно выделить два важных свойства, а имени
сжатия-расширения фазового потока и принцип эквивалентности (сохранения) управлеш
Эти свойства положены в основу синергетического метода синтеза нелинейных систем упра
ления.
Итак, в первой главе книги развиты концептуальные и математические основы сииерген
ческой теории управления и вытекающего из нее метода синергетического синтеза нелинейнн
динамических систем. Перейдем к развернутому применению этого метода для решен!
сложной проблемы аналитического конструирования систем управления нелинейными теки
ческими объектами и технологическими процессами.
96
ftr
ГЛАВАП
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
АГРЕГИРОВАННЫХ НЕЛИНЕЙНЫХ
РЕГУЛЯТОРОВ НА ОСНОВЕ ЗАДАННОГО
ИНВАРИАНТНОГО МНОГООБРАЗИЯ
На свете есть вещи, поважнее самых прекрас-
ных открытий,—это знание метода, которым они
были сделаны
Г Лейбниц
Предел хитроумия—умение управлять не при-
меняя силы
Люк де Кланъе де Вовенарг
11. ПРОСТЕЙШАЯ ЗАДАЧА АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ
АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
Двиервой главе были изложены основы синергетического подхода к аналитическому кон-
®ф59ф©ванию агрегированных регуляторов (АКАР) Перейдем теперь к егожонкретизации и
р^дртрим первую простейшую задачу АКАР, которая состоит в синтезе такого закона
удаления и(х\ , , х„), который сначала переводит объект
xj (0 = fj{xi , , хп), / = 1,2, ,п-1 ,
Хп (0 = /л(Х1, , хп) + и (2 1)
дзданзвольного начального состояния (хю, , Хпо) в окрестность задаваемого многообразия
хп) = ”0, а затем обеспечивает дальнейшее его движение вдоль ip = 0 к началу коорди-
^ниространства состояний (хи = = хц = = х^ = 0) Эта задача относится к простейшей
задаче АКАР потому, что, во-первых, используется только одно притягивающее многообразие,
и^ва^торых, находится скалярное управление объектом вида (2 1) Решение указанной задачи
синтеза, как показано в общем виде в первой главе, состоит из двух этапов—этапа обеспечения
аар^гготически устойчивого движения изображающей точки к притягивающему многообра-
ТО®-0 и этапа такого же движения вдоль этого многообразия к началу координат с
задайым качеством переходных процессов Законы управления, решающие указанную задачу
первого этапа, определяются, как показано в первой главе, обобщенным функциональным
уравнением, которое позволяет в аналитическом виде найти структуру этих законов Решение
I зада* синтеза на втором этапе, очевидно, сводится к поиску таких параметров найденных
зайие®, которые обеспечивают асимптотически устойчивое движение изображающей точки
цоЙ многообразия ip = 0 к началу координат пространства состояний, при этом должны
удавйетворяться требования к качеству переходных процессов
97
Для выявления особенностей предлагаемого метода АКАР и его конкретизации перездз
к элементарному изложению этого метода путем решения простых задач синтеза, формуляру
их в терминах современной теории оптимального управления В дальнейшем на основе ад
задач выявим некоторые общие характерные свойства метода
Пример 2.1. Предположим, что объект описывается следующим дифференциалу»
уравнением
х (?) 4- ах = и,
а критерий качества системы может быть построен на основе сопровождающего функциоф
/1 = f [mfy2 + с2у2 (?) ] dt,
о '
где V’(x)—некоторая функция переменной х
Тогда производная этой функции по времени может быть записана в виде
® ~ to* ® (2 Л
Определим производную макропеременной V* (?) на решениях объекта (2 2), для чего подй»
вим в выражение (2 4) производную х (?) = и - ах из уравнения объекта (2 2), т е f
V» (0 = $
Подставим теперь V» (?) (2 5) в функционал (2 3)
J\ = т2хр2(х) + с2(а2х2 - 2ахи) + с2 и2 dt
Для простоты положим
1р = X ,
тогда критерий качества (2 6) принимает следующий вид
J
о
(т2 + а2с2)х2 — 2ас2хи + с2 и2
(ЭД
(ЭД
(ЭД
dt
В общем случае не играет роли каким способом был получен критерий (2 8), и поэтому дала
его можно рассматривать совершенно независимо, как некоторый оптимизирующий функций
нал синтезируемой системы Для поиска управления м(х), доставляющего минимум критери
/1 (2 8) на траекториях движения объекта (2 2), применим один из стандартных метода
оптимизации [17], например метод Эйлера—Лагранжа Используя подынтегральное выраже-
ние (2 8) и уравнение связи (2 2), образуем функцию
Li = (т2 + а2с2)х2 - 2ас2хи 4- с2 и2 4- Л(х + ах - и), (ЭД
гдеЛ(?)—функция Лагранжа
Далее запишем систему уравнений Эйлера—Лагранжа [17,65]
^--4 = 2(т2 4-а2с2) х - 2ас2м 4-Ла - А (?) = 0 , (2?
Эх dt I Эх I 4 7 7 s*
дЦ d (dL\ э 2 о 2 , п (211)
"7— “л = 2с и — 2ас х — Л = 0 , «
ди dt \du I *
которые совместно с уравнением объекта (2 2) и позволяют решить поставленную оптимиза
ционную задачу Подставим и = х + ах из (2 2) в уравнения (2 10) и (2 11), тогда получив
2(т2 4- а2с2)х - 2ас\х 4- ах) 4- Ла - А (?) - 0 *
и с
2с2(х 4- ах) - 2ас2х - Л = 0 g
Из этих уравнений окончательно получаем уравнение экстремали
с2х (?) — т2х = 0 (2 Ц
Находим решение дифференциального уравнения (2 12) г
х (?) = Cie_'”'/c 4-C2e"“/c (213
98
Синтезируемая система должна быть устойчивой, поэтому из выражения (2 13) исключаем
оставляющую C2emt/c Тогда получаем устойчивую экстремаль
хэ (0 = Сге'^ (2 14)
Используя (2 14) и уравнение (2 2), находим управление
и = - ^-^с1е’я“4 (215)
Исключая из (2 14) и (2 15) составляющую cie~m/e, находим закон управления
, \ (т \ (2 16)
' ’’ = ~ Ге ~ а\х ’
обеспечивающий оптимальное по критерию J\ (2 8) движение объекта (2 2) Уравнение замк-
нутой системы будет следующим
• /л (т
v и х (t) + ах = - — - а х ,
те,
i х (t) + х = О
(2 17)
В соответствии с уравнением (2 17) можно записать следующую оценку для переходных
процессов в замкнутой системе
1 Закон управления и (2 16) и уравнение замкнутой системы (2 17) были получены на основе
критерия качества (2 8) Покажем, что эти выражения получаются и при использовании
квадратичного критерия
;,= / Ы-ЛУ-Л’Тл, <219)
о L -I
образованного путем подстановки и из (2 2) во второй член критерия (2 8) Для этого согласно
методу Эйлера—Лагранжа, образуем функцию
, р Lq = (т2 - а2с2}х2 + с2и2 + Л(х + ах - и)
и запишем систему уравнений
.t - рг) =2(m2 -aV) х+Л“ -2 (/) =0
ш at \аи I
которые совместно с уравнениями объекта (2 2) решают задачу оптимизации системы по
критерию (2 19) Подставив и из (2 2) во второе уравнение системы (2 20), найдем функцию
Лэтрдяжа
Л = 2с\х + ах} <2 21)
Подставив далее функцию Л (2 21) в первое уравнение системы (2 20), получим дифференци-
альное уравнение
г, <?х (/) — т2х = 0 ,
совпадающее с уравнением (2 21) Отсюда следует, что закон оптимального по критерию
(2.19) управления объектом (2 2) будет совпадать с выражением (2 16) Это означает, что
разливые на первый взгляд критерии качества J\ (2 8) и /2 (2 19) являются эквивалентными
в-смькле свойств переходных процессов в замкнутой системе управления объектом (2 2)
। ( ^.теперь снова вернемся к функционалу (2 3), в котором составляющая (/) определяется
всидуисходных уравнений объекта Поставим задачу найти закон управления и(х) только на
и* этого функционала и уравнения объекта (2 2) Используем для решения указанной
задач* функциональное уравнение (1 27), которое при ip=xp принимает вид
Ту (г) + у = 0 <2 22)
99
Воспользовавшись свойством инвариантности уравнения Эйлера—Лагранжа, а также выборои!
функции V* = х, запишем уравнение (2.22) с учетом уравнения объекта (2.2) в следующем виде!
Ти — аТх + х = 0 ,
откуда находим закон управления
/1
и = — н? - а
х,
который, как и ожидалось, точно совпадает с законом (2.16), полученным в результат
применения уравнениям Эйлера—Лагранжа к функционалам (2.8) или (2.19). Очевидно, что
построение законов управления на основе уравнения (2.22) проще стандартных процедур
оптимизации. Это связано с тем, что ранее, в первой главе, было получено обобщенна
функциональное уравнение (1.27), которое затем конкретизируется путем подстановки в вето
выбранной функции гр с учетом уравнений объекта. Такой подход позволяет в конечном итоп
получить в аналитической форме закон управления, доставляющий минимум интегральному
функционалу (2.3) на траекториях движения объекта.
Кроме того, определенная свобода выбора функций гр позволяет наделить синтезируема
системы дополнительными свойствами, особенно это касается нелинейных систем высокая
порядка. Так, применительно к объекту (2.2) можно улучшить динамические свойства систем!
по сравнению с системой, оптимальной по критериям (2.8) или (2.19). Выберем, напримёц
функцию гр в виде
V» = th x. (2.231
Подставив (2.23) в уравнение (2.22), получаем в силу уравнения объекта (2.2) закон упри-
ления ,
и = — sh 2х + ах ,
который, согласно (2.6) и (2.23), является оптимальным по следующему критерию:
/з = / [m2th 2х + с2(а2х2 — 2ахи) sch 4х + zz2sch 4х dt.
о t J
Уравнение замкнутой системы с законом управления (2.24) имеет вид
Т'х (f) + 0,5sch 2х = 0 ,
(2.34
(2.2Я
(2.26)
где Т = — .
m
Проинтегрировав дифференциальное уравнение (2.26), находим время перевода объекта (2.2)
управлением (2.24) из некоторого начального состояния xq в конечное х*:
th х0
(2.27)
tp = Tin
th Хк
Сравним время (2.27) со временем регулирования (2.18) в линейной системе (2.17). ПринЦ
как и обычно, Хк = О,О5хо, получаем, согласно (2.27), при хо < 1,0 время регулирования^
нелинейной системе (2.26), примерно совпадющее с оценкой (2.18); при хо = 5 оно уменью
ется более, чем вдвое, а при хо = 10 оно становится меньше tp (2.18) более, чем в четыре раза
В дальнейшем с увеличением хо указанный эффект нарастает. Итак, введение нелинейно
функции преобразования (2.23) позволяет синтезировать закон управления (2.24), обеспеч!
вающий по сравнению с линейным законом (2.16) существенное повышение быстродейси»
синтезируемой системы. Интересно отметить, что функция (2.23) является ограниченно!
нечетной, монотонно изменяющейся функцией в диапазоне от -1 до +1 (уже при х = я
функция V» = ±1). Эта особенность преобразования (2.23) может быть использована да
придания замкнутой системе некоторых дополнительных свойств, в частности позволяет обь
яснить ее повышенное быстродействие. Критерий Уз (2.25), на первый взгляд, предоставлю
мало информации о свойствах системы, оптимальной по этому критерию, поэтому рассмотри
режимы малых и больших отклонений. Для малых отклонений х функции, входящие в крйй
100
рий /з (2.25), можно представить в виде th 2х»х2 и sch 4х«=1. Тогда критерий /з принимает
/3 inf «= J fan2 - a2t?)x2 + u2 dt,
0 L -I
совпадающую с формой квадратичного критерия J) (2.19). Для больших же отклонений
функции th2x== ± 1 и sch4x»0, а критерий /3 (2.25) вырождается в критерий
/aw ~ т f dt,
1 ; . /о
вдевшчный критерию быстродействия. Другими словами, критерий качества /3 (2.25), сфор-
мированный на основе обобщенного функционала / (1.24) и нелинейной функции преобразо-
ййй (2.23), позволяет осуществить последовательную оптимизацию системы, близкую к
оптиотаации по квадратичному критерию J\ (2.19) в режиме малых отклонений и сходную с
кр(П|0рШ№м быстродействия в режиме больших отклонений системы от заданного состояния.
Таощрбразом, на простейшем примере объекта первого порядка (2.2} показана эффектив-
иостьлроцедуры синтеза на основе обобщенного критерия (2.3) и функции преобразования
При этом оказалось, что, во-первы^, можно осуществить аналитические процедуры
оиш регулятора и, во-вторых, сформировать различные критерии качества и придать
аигеяруемой системе желаемые динамические свойства.
Перейдем далее к синтезу систем управления объектами второго порядка.
,^имер 2.2. Сначала рассмотрим синтез закона управления линейным объектом
X] (0 = хг; Х2 (t) = aixi + агхг + и . (2.28)
ЕНдвмв рассмотрение функцию преобразования в виде следующей линейной агрегированной
мацхшбременной:
tPfxi , х2) = р\Х\ + Хг. (2.29)
Подставим в обобщенный функционал J\ (2.3) функцию (2 -29) и ее первую производную
3 V^(t) = Д1Х1 (t) + х2 (0 = ЩХ1 + (01 + аг)хг + и ,
полученную с учетом уравнений объекта (2.28), тогда критерий качества принимает вид
+ -^2 ) х% + 2(я]Х1 + а2Х2)и + и2 dt +
(2.30)
о [V / '
+ 2 f [xiXi (/) +’х2Х2 (1) j dt.
Второй интеграл в выражении'(2^0) может быть вычислен в силу уравнений (2.28) объекта
у-: 2 f Fxiii (t) + Х2Х2 (01 dt = (х2 + x^) | * = — х2о - xlo = const,
"о L J
та^поусловиям устойчивости системы, xi(оо) = Х2(«°) = 0. Тогда критерий качества, получен-
Шйжюнове обобщенного функционала Ji (2.3), агрегированной макропеременной # (2.29)
еуравдений объекта (.2328), принимает следующую форму:
. ч >.Ь’' — ' -
1
dt,
(2.31)
о
Дияитеза закона управления н(хг, х2), обеспечивающего оптимальное по критерию (2.31)
рфаметне объектом (2:28), используем метод динамического программирования. Для этого
состав» функциональные у равнения БелМана [92]:
.f’п . Р( vj, xz j zZ n dF d/2 3S n
1 -" “> x»fe=0; «?+мэ^ = 0’
(2.32)
101
где F—подынтегральная функция критерия (2.31); /ь /з—правые части дифференциальш
уравнений (2.28) объекта. Подставив в (2.32) соответствующие выражения из (2.28) и (231
получаем
i
as
dS dS
+ (aiXi + агХ2 + «) "т— = 0 ; 2(«iXi + 02X2) + 2« + -z— = 0 .
0X2 0X2
Найдем и из второго уравнения системы (2.33):
as
(23
и =
и подставим его в первое уравнение; тогда получим
2
fix} + (&тг)х1 - 1аха2Т1'ххХ2 + Т2х2|у- - £ = 0 .
0X1 4 I 0X2 I
Это нелинейное дифференциальное уравнение в частных производных, для решения котефб
функцию 5 можно выбрать в виде определенно положительной квадратичной формы коорд
нат [92]
•г
2 2
S = АцХ1 + А12Х1Х2 + А22Х2 9
и, следовательно,
.
= 2АцХ1 + А|2х2;
dS
= 2А12Х1 + А22Х2 •
dS
Подставив -г— (2.36) в (2.35) и приравняв нулю коэффициенты при соответствующих стещи
ОХ/
х\ и Х2, получаем следующую систему уравнений:
fi - 0,25^12 = 0;
/3?Т2 + 1 + Т2М,2-А12) =0;
2Ац — А12А22 ~ 2й]й2 = 0 ,
(231
откуда находим
А12 = -jT ; А22 = ftl + у ; Ап = Й1Л2 + (/?! + у ) .
dS
Подставляя в (2.34) выражение (2.36) и величины А12 , А22 из (2.37), определяем^
управления: ‘ ' !
1
М = - (Я, + «у X, - ^2 + Pl + Tpj Х2 ,
Подставляя второе уравнение (2.28) в (2.31), можно показать, что закон
минимум не только критерию Jj (2.31), но также и критерию
£
Дт2
1 + ~~2 ~ а2 ~
dt,
° Lv 7 7 ' J
т.е. критерии /1 (2.31) и J2 (2.39) эквивалентны в смысле качества переходных проц<
замкнутой системе.
Применим теперь для поиска закона управления функциональное уравнение
7V (?) + = О,
из которого с учетом ip (2.29) и уравнений объекта (2.28) получаем управление
и = — [ а\ + Xi — | <22 + + уч Х2 ,
102
ЮШВДовпадающее с ранее полученным законом (2 38) Закон (2 40) найден в аналитической
форме в результате простейшей процедуры удовлетворения функциональному уравнению с
узейм уравнений (2 28) исходного объекта
р'йсследуем свойства объекта синтезированной системы Подставив закон управления и
(2.40) в (2 28), получим уравнения замкнутой системы
Г Г Й (0 = Х2 ,
_ (о . С (241)
^•*2 \ t) гр Xl Ipi ' р I «^2 ч
условия устойчивости которой имеют простой вид Pi > О, Т > 0 Запишем уравнения (2 41)
относительно координаты xi
+ + + =0 (242)
Из (142) следует, что замкнутая система имеет декремент затухания
. 1 + ЬТ , f. , о _ ,
£ = Ъ$1Т - 1 ’ = 1 ПРИ^1Г = 1
Это означает, что переходные процессы в системе имеют апериодический характер и при
| > 1 описываются решениями
*i = pif - 1 [(Х20 + “ (*10 + Тх2о)е~Р1* ] ,
Х2 ® = 1 -PiT [(Х20 + ^Х1°)е”^ ~ <Х1° + Tx^e~fiit ] ’ <2 43>
п 1 „
• в которых для определенности положим pi < у Запишем теперь уравнения замкнутой систе-
мы (2.41) в следующей симметричной форме [65]
dx{ __________Tdx2 = , (2 44)
*2 (/?1Х1 + Х2) +£1ГХ2
В [65] отмечается, что для системы дифференциальных уравнений, представленной в
симметричной форме, облегчается нахождение первых или частных интегралов Учитывая
фушщию (2 29), запишем соотношение (2 44) в виде
dxi __________Tdx2 (2 45)
У"" Х2 ty(xi , х2) + Р\Тх2
Полежим в (2 45) = Р1х\ + х2 = 0, тогда, интегрируя уравнение (2 45), находим выражение
/V = - х2» которое точно совпадает с соотношением tp = 0 Это означает, что многообразие
tp = fiixi + х2 = 0 (2 46)
вдается частным интегралом (первым) системы дифференциальных уравнений (2 41) Ука-
занной результат можно получить и на основе решения (2 43), вычислив следующее соотно-
шевде
Pixi + х2 = (jSixio + x2o)e~t/T (2 47>
Предположим, что начальные условия хю и хго таковы, что удовлетворяется условие
М + *20 = 0, тогда, согласно (2 47), tp = 0 Итак, если изображающая точка системы в
начальный момент находится на многообразии tp = 0 (2 46), то это многообразие будет пред-
йййвтъ собой некоторый частный интеграл системы дифференциальных уравнений (2 41),
оживающих движение замкнутой системы управления Таким образом, показано, что син-
тезированная замкнутая система (2 41) обладает следующим характерным свойством с изме-
нением времени t координаты xi (?) и х2 (()» определяющее состояние системы, меняются,
одндко остается неизменным соотношение tp(2 46) Такое многообразие, как известно, назы-
вается инвариантным по отношению к системе дифференциальных уравнений (2 41), если
решения (2 43) этой системы, удовлетворяющие софтношению (2 46) в начальный момент
времени, будут ему удовлетворять также и при любом другом значении переменной t Заметим,
103
что, подставив из уравнения ip — 0(2.46) координату хг = - fiixi в первое уравнение обвей
(2.28), можно найти дифференциальное уравнение
*1? (О = - » (Ш-
которое определяет движение изображающей точки вдоль многообразия ip = 0 к началу коор-
динат. м
Многообразие^ = 0 (2.46), очевидно, определяет некоторое свойство, принадлежащее»
решениям (2.43), начальные условия которых подчиняются тому же многообразию. Рассмот-’
рим подробнее характер движения изображающей точки синтезированной системы на фазою
плоскости, показанной на рис. 2.1,а. Фазовые траектории представляют собой некопфй
семейство параболических кривых, параметрическими уравнениями которых являются pest-
ния (2.43). Так как корни характеристического уравнения отрицательны (pi =
Р2 = < -^), то в общем случае траектории стягиваются, в конечном итоге, к началу
координат. Среди множества траекторий имеются особые траектории, описываемые многой
.разием ip = 0, которое в данном случае задано уравнением прямой (2.46). Так кд
lim — = ^ = - /31 прихго + fax^o * 0, то прямая (2.46) является касательной к любой фазошя
t+сл Xi X) !
траектории [86], кроме прямой (рис. 2.1,а)
Xi + Тх2 — 0 ,
расположенной ниже (fa < у) прямой (2.46). Это соотношение следует из уравнения (2.44),
если его записать в форме
dx\ _ _ Tdx2
Х2 ~ fa(x\ + Тлгз) + Х2
и аналогично предыдущему при условии Xi + Тхг = 0 проинтегрировать. Другими словам,
1 г.-
прямая (2.46) имеет меньший угол наклона (fa < , поэтому именно к ней притягиваем
любая траектория замкнутой системы.
104
j. rJo многих случаях рекомендуется [93] выбирать корни характеристического уравнения
муипательными и кратными, тогда решения дифференциальных уравнений (2.41) имеют вид
= 1):
xi (0 = [хю + (хго + ]е ;
х2 (t) = [х20 - 01(Х2О + PiXio)t ] . (2.49)
£ак известно [93], в таких системах время регулирования ^р== будет наименьшим, а
переходная функция монотонной, и кроме того она не будет иметь перерегулирования. Фазо-
вцйпортрет системы (2.41), определяемый решениями (2.49), представлен на рис.2.1 ,б. В этом
Рис. 2.1,6
цдучае = 1) среди множества фазовых траекторий существует только одна прямая, опи-
шмемая уравнение^ (2.46), угловой коэффициент которой равен - fli. Аналогично предыду-
щему случаю эта прямая - 0 является касательной для всех других фазовых траекторий
даемы.
V» Закон управления и (2.38) был получен на основе линейной функции гр (2.29). Используем
шерь нелинейную функцию преобразования
ip = fiix\ - Р2Х1 + х2 . (2.50)
Поставив гр (2.50) в функционал Ji (2.3), с учетом уравнений объекта (2.28) находим
йруктуру сопровождающего критерия качества
Л = / + а? х? + (X + + ^ + 6pip2xi + 6^2й2Х?) xi +
‘+ (^?i/?2 + 9ftlxi + /Ях?) xf + 2(aiX] + а2х2 + ЗД2х?х2)н + и2] dt.
Подставив второе уравнение (2.28) в этот критерий, получим
гЛ = / х? + + а\ - с& + 60цб2х? + #?xix2j лЗ +
ч,+ (Т$$2 + W + М} 4 + и2 ] dt.
5л ✓ 1
/Критерии /3 и J4, по которым оптимизируется синтезируемая система, содержат, помимо
квадратичных форм координат, как в обычных методах АКОР, также составляющие, пропор-
циойальные четвертой и шестой степеням. Известно [66], что использование таких и анало-
’пгшых им критериев с высокими степенями координат позволяют улучшить важные показа-
тели качества синтезируемых систем управления в отношении их быстродействия, перерегу-
105
лирования, демпфирования колебаний и др. Особенно проявляются достоинства применеия
такого рода критериев качества в режимах больших отклонений изображающей точки систем!
от заданного состояния. Критерии /3, J4 по сравнению с квадратичными критериями более
полно отражают важное требование минимизации больших отклонений в течение переходного
процесса, т.к. оптимальный по критериям J3, /4 регулятор будет более чувствителен к большим,
отклонениям координат [66]. Кроме того, присутствие в критериях /3, /4 квадратичных членов
х?, xi позволяет наделить синтезируемый регулятор необходимой чувствительностью
малым отклонениям координат. Итак, оптимальный по критериям /3, J4 регулятор эффектом
реагирует как на малые, так и на большие отклонения координат. d
Более того, такого рода критерии могут также использоваться для аппроксимации друпи
критериев, имеющих важное практическое значение, но для которых отсутствуют эффектив-
ные аналитические или численные методы решения оптимизационных задач. Однако для
рассматриваемых неквадратичных функционалов в обычных методах АКОР существенно воз-
растают вычислительные трудности определения формы и параметров законов управления.В;
развиваемом методе АКАР, как это будет далее показано, указанные законы определяются в
результате достаточно простых аналитических процедур с учетом условий асимптотически,
устойчивости движения вдоль соответствующего многообразия. •
Используя уравнение
Tty (?) + ^ = 0 ,
с учетом (2.50) определим оптимальный по критериям /3, J4 нелинейный закон управления
и = — Xi — (jSi + аг + у) хг — х? — 302X1X2 ,
который переводит изображающую точку в окрестность многообразия
V» = 01X1 + 02x1 + Х2 = 0 . (2.51)
Найдя из (2.51) координату
Х2 = - 01X1 - 02Х31
и подставив ее в первое уравнение системы (2.28), получим дифференциальное уравнение
xiy (О = - - ^2X1^,, (2-ЭД
которое описывает движение изображающей точки вдоль многообразия = 0 к началу коор-
динат фазовой плоскости. Очевидно, что при 01 > 0 и 02 > 0 это движение асимптотичеоя
устойчиво в целом [5]. Иначе, закон управления, полученный на основе функции (250),
гарантирует асимптотическую устойчивость движения в целом синтезированной нелинейна
системы. Однако этот закон обеспечивает также повышенное быстродействие синтезировании
нелинейной системы по сравнению с линейной (2.41). Это свойство следует из решецц
дифференциального уравнения (2.52), характеризующего динамику замкнутой системна
заключительном этапе движения. Аналогично могут быть синтезированы и другие форм
оптимальных регуляторов с использованием различных нелинейных агрегированных макро-
переменных на основе развиваемого здесь метода инвариантных многообразий.
2.2. ПРИМЕРЫ АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ АГРЕГИРОВАННЫХ
РЕГУЛЯТОРОВ ДЛЯ НЕЛИНЕЙНЫХ ОБЪЕКТОВ ВТОРОГО ПОРЯДКА г
► 1
Рассмотрим теперь особенности предлагаемого метода АКАР при решении задач синтея
систем управления объектами второго порядка с различными нелинейностями.
Пример 2.3. Предположим, что объект описывается дифференциальными уравнения*»
Х1 (?) = 0X1 + Х2 ; Х2 (?) = и . (2-Я1
Особенностью объекта (2.53) при а > 0 является его существенная неустойчивость, т.к. пр?
хг (?) 0 координата xi (?) ~> », что накладывает дополнительные требования к синтезируе-
мым законам управления u(xi , хг), которые должны обеспечивать стабилизацию (xi -»Д
106
(2.54)
(2.55)
(2.57)
(2.58)
T\dx2
системы при произвольных начальных условиях. Применим метод АКАР для синтеза
жих законов управления. Для этого выберем функцию сначала в виде
V'l = х2 + ах1 + Ьхз .
Подставляя (2.54) в уравнение
T1V4 (Г) + = 0 ,
подучаем следующее общее выражение:
«i(xi , х2) = - (ЗЛх? + a) (axi + Х2) - jr ^(V'i) , Л > 0 ,
которое в зависимости от выбранной функций у>(^1) позволяет получить различные законы
управления. Эти законы обеспечивают асимптотически устойчивое движение изображающей
точки в окрестность многообразия ^1=0 (2.54), т.к. функция <p(tpi) выбирается такой, чтобы
0. Дифференциальное уравнение, описывающее движение вдоль ipi = 0, имеет вид
х^ (0 = “ а) х^ . (2.56)
/ Для оценки устойчивости уравнения (2.56) используем функцию Ляпунова v = 0,5х?^,
тогда ее производная по времени, взятая в силу уравнения (2.56), будет равна
g v(t) = - axi^ - (b - a)xi^ < 0 .
Отсюда следует, что неравенства а > 0, а, Т\ >0 являются условиями асимптотической
устойчивости в целом синтезированной замкнутой системы (2.53), (2.55):
xt (t) = axi + x2; x2 (t) = - (3bxi + a) (axi + x2) - jr <p(V>i) •
Определим первые интегралы системы (2.57), для чего представим ее в следующей симметрич-
ной форме [130]:
dxi з_ ________________Tjdx2______________д ;
«х? 4- X2 1 ТДЗдхг 4- a) (axi 4- хг) + ^(V’i)
Положив в (2.58) функцию = 0 и, следовательно, <p(Q) = 0, после интегрирования
находим первый интеграл axi + Z>x? = - хг, который совпадает с выражением ipi = 0 (2.54).
Фатами словами, мы Убедились в том, что заданное инвариантное многообразие ^1=0 (2.54)
действительно является претендентом на желаемое притягивающее многообразие синтезиро-
ванной нелинейной системы. Для того чтобы окончательно выяснить этот вопрос, целесооб-
разно найти угловой коэффициент направления, в котором траектория изображающей точки
системы может стремиться к устойчивому положению равновесия [185. С.77]. Для этого с
целью упрощения преобразований выберем линейную функцию <p(ij>\) = и запишем урав-
нения замкнутой Системы (2.57) в следующем виде:
Х1 (0 = «11*1 + П12Х2 + F,(X1 , х2);
& Х2 (0 = «21X1 + Й22Х2 + /2(^1 I х1) , (2.59)
> хг) = ахЪ ^2(*1 , *2) = ~ I ЗаЬх* + аа + х? - Здх?Х2—ряды, начинающиеся со
Ясеней xi и х2 не ниже второй; йц =0; а\г = Г, «21 = - хгг = - |« + 4-|. При этом
/1 ( 111 •
должно соблюдаться условие
(АГ А =
«и «1? =^-#0.
«21 <*22 Т1
' Согласно методу АКАР, для системы (2.59) всегда существует полутраектория xi = xi (t),
xi (f), стремящаяся при t -» » к состоянию устойчивого равновесия (0,0). Тогда соотно-
dx2 л
нение оудет иметь предел при t -* » в тдм и только в том случае, когда имеет ппедел
-“ш
107
Х2 (<) r<o,
выражение —hx, причем в случае существования этих пределов они равны друг другу [185.
С.77], т.е. к
,. dX2 .. Х2 .
Inn -j— = hm — = к. i
f-»oe d.X\ Jfj -J
Угловой коэффициент к должен удовлетворять следующему квадратному уравнению: \
+ (Ли Л22)к — О.2\ = 0 . (2.Л))
Очевидно, что дискриминант уравнения <2.60) совпадает с дискриминантом характеристиче-
ского уравнения линеаризованной замкнутой системы. Корни уравнения (2.60) связаны^
корнями Л1 и Л 2 характеристического уравнения соотношениями
Л1Я12 = Л1 — ац , к2Л12 ~ кг — ац •
В рассматриваемом случае к\ = Л1 = - а; кг - кг = - т.е. корни Ль кг действительны!
отрицательны, т.к. а > О, Т\ > 0 по условиям устойчивости замкнутой системы. Это означает,
что все траектории системы (2.57) стремятся к состоянию равновесия—устойчивому узлу в
направлениях, определяемых асимптотами хг — к\Х\ихг = кгх\. Очевидно, что действительйЙ
асимптотой, к которой неизбежно будет стремиться фазовая траектория, будет та, у которой
меньше коэффициент наклона I Лт,п I • В данном случае это определяется выбираемыми значе-
ниями параметров а и Т\.
Изложенное исследование уравнения (2.59) по определению коэффициента направления, в
которому стремится траектория синтезированной системы в процессе движения изображающей
точки к устойчивому положению равновесия, позволяет сделать следующие важные выводи
во-первых, задаваемое инвариантное многообразие = 0 (2.54) по своей форме определяет
структуру притягивающего многообразия, к которому стремится любая траектория замкнутой
систем. Однако окончательное параметрически точно определенное притягивающее многообразие
находится в результате выбора соответствующих параметров (а , Ti), определяющих коэффици-
ент направления Л (2.60) при линейном разложении правых частей дифференциальных уравнений
(2.59) замкнутой системы. Иначе, задаваемое инвариантное многообразие V’i = 0 (2.54) обяза-
тельно определяет в пространстве состояний некоторый конус, своего рода фазовые “миноранту"
и “мажоранту”, между которыми всегда будет находиться любая фазовая полутраектория движе-
ния изображающей точки к устойчивому узлу—положению равновесия системы; во-вторых, дм
однозначного определения инвариантного многообразия^] = 0 (2.54) в качестве притягивающего
следует выбирать его параметры (в данном случае а) такими, чтобы они обеспечивали минималь-
ный коэффициент I &min I (2.60) направления, в котором траектория стремится к состоянию равно-
весия системы. В рассматриваемом здесь случае это означает, что параметр а в ipi (2.54) должея
быть выбран таким, чтобы аТ\ < 1; в-третьих, по-видимому, наиболее подходящим и однознач-
ным является такой выбор параметров (а1\ = 1) задаваемого инвариантного многообразда
ipi = 0 (2.54), когда обеспечиваются кратные корни Л1 = кг = ... = Лп характеристического урав-
нения линеаризованной замкнутой системы, тогда коэффициент наклона к (2.60) будет имев
единственное значение, однозначно определяющее параметры притягивающего многообразм
^1=0 замкнутой системы. В этой связи следует снова отметить, что именно такое распределен»
корней нередко рекомендуется [93] при синтезе линейных систем управления.
Таким образом, чтобы сформировать инвариантное многообразие ^1=0 (2.54) как при-
тягивающее, необходимо наложить на его параметры такие условия, при которых обеспечива-
ется минимальный коэффициент направления I £min I, в котором траектория движения изобра-
жающей точки стремится к устойчивому узлу—положению равновесия синтезируемой систе-
мы. Именно эти условия (I £min I) устанавливают связь между параметрами (а) притягивающего
многообразия (2.54) и параметром Т\ функционального уравнения. &
Покажем, что при нарушении указанных условий замкнутая система действительно может
иметь притягивающее многообразие Si = 0, структурно совпадающее с заданным инвариаит-
108
ным многообразием Vh = 0 (2.54), но отличающееся от него значением параметра. Предполо-
жим, что уравнение
Si = Х2 + 61X1 + /3xi = О
«шлется претендентом на притягивающее многообразие синтезируемой системы. Найдем
условия, которые необходимо наложить на параметры 61, /?, чтобы 5 = 0 действительно стало
притягивающим многообразием. Пусть b\ = d] + а, р # а, тогда из Si =0 имеем выражение
xj + axi = - j8xi - dix?, подставив которое в (2.58) при ^(V*i) = V'n получим соотношение
dxi _ T\dx2 _ , (2.61)
—fix\ — <5]Xi Ti(36xi + a) (fix\ + dix?) — (а — fl)x\
При а = fl из (2.61) следует, что V>i = хг + 6х? + ах\ = 0 является первым интегралом замк-
нутой системы, т.е. подтверждается полученный ранее результат. В случае же а * fl и di = 0
из (2.61) имеем уравнение
j9Ti(6xi + axi) + (fl - a)xi = - flT\X2 ,
которое при условии fl1\ = 1 будет совпадать с Si =0. Итак, для того чтобы многообразие
Siхг + 61 х? + /?Х1 = 0 стало еще одним, помимо V'i = 0, первым интегралом замкнутой
системы, необходимо выполнить следующие условия: Z>i = a; dj = 0; fl = При этих услови-
««системе возможно наличие второго частного интеграла, который может быть притягива-
юарщ многообразием.
выполненные выше исследования показывают, что в синтезированной системе (2.57)
возможны следующие два притягивающих многообразия:
з 1
Vi = х2 + bxi + axi - 0 при b > а, а < •=- ;
□ 1 1
S] = хг + Ьх\ + х\ =0 при b = а , а > -=г .
11 i \
При Г] > 0 многообразия^! = 0 или Si = 0 будут притягивающими, т.е. множества траекторий
движения изображающей точки синтезированной системы (2.57) имеются особые траектории,
описываемые уравнениями ipi = 0 или Si = 0, к которым устремляются все другие траектории
системы. В зависимости от вида функции ^’(V’i) процесс сближения траекторий с многообрази-
ями y»i = 0 или S] = 0 осуществляется по-разному, а затем изображающая точка будет дви-
гаться вдоль многообразий V’i = 0 или Si = 0 до попадания в начало координат пространства
состояний.
1 При^ = ^i = хг + axi + ах? закон управления (2.55) принимает вид
г,,; {. ~ ~ ~~ Хт. ~~ xt - (3axi + a)(xi + Х2) •
Йа'рис. 2.2,а для этого закона и параметров « = 1, а=1, Л = 1 изображены траектории
'движения замкнутой системы. Как видно из рис. 2.2,а фазовые траектории “наматываются” на
многообразие ^1=0 (2.54), стягиваясь к нему в начале координат. При этом система является
ОДкптотически устойчивой с апериодическим характером затухания переходных процессов.
Пр! b = а уравнения замкнутой системы (2.53), (2.55) становятся линейными относительно
расходной координаты и могут быть представлены следующим операторным уравнением:
Ю3?’ ГТ u. 1и. Л ( \ A d (2.62)
(ЛР+ 1) -Р+ 1|Х1(р) =0, р =
Выбором соответствующих параметров Т\ и а в уравнении (2.62) можно обеспечить желаемое
время затухания переходных процессов в синтезированной системе. На рис. 2.2,6 представлены
'фактории движения на плоскости xj, xi (/), при выборе Ti = 1, а = 1. В этом случае, как
известно, среди множества фазовых траекторий существует единственная прямая
Х| (() = 0, которая является касательной ко всем другим фазовым траекториям системы.
109
Как следует из рис.2.2,б, который аналогичен рис. 2.1,6, фазовые траектории действителен)
расположены симметрично относительно указанной прямой на фазовой плоскости. Выбра
b > а, можно повысить быстродействие замкнутой системы.
Теперь сравним характер траекторий движения в замкнутой системе (2.57) для разных
функций <p(ipi). На рис 2.2в изображены траектории движения соответственно: 1—для у? -
2—для ip = th ipi, 3—для ф = signer, из начальных условий хю = 0,75; хзо = 0 и хю = (д
хао = 0. Из рис. 2.2,в видно, что в случаях <р = tpi и ф = th^i траектории асимптотичесн ‘
сближаются с многообразием = О (2.54) в начале координат, а для разрывной функщи
<р = signal изображающая точка попадает на многообразие = 0 за конечное время и дще
в скользящем режиме движется по = О к началу координат. -
Предположим теперь, что на координату хг наложено ограничение I хг I < А. Тогда, вида
функцию
^2 = хг + A th (jSxi + axf) , (2^8)
110
получаем выражение для закона управления
А(в + Зах?) fxi + *2^) 1 z. ч гг . Л (2.64)
U2------h2zz> V Т2 > О,
ch (pxi + axi )
который переводит изображающую точку в окрестность многообразия ^2 = 0 (2.63) и обеспе-
чивает в зависимости от выбранной функции у>(^2) и параметров fl и а соответствующее
качество переходных процессов. Уравнение движения вдоль многообразия ^2 = 0 имеет вид
xi^2 (?) = xu/,2 - A th (flxly>2 + ахц,2) . (2.65)
Из уравнения движения (2.65) следует, что условия/? > 0,а > 1 обеспечивают его асимптоти-
ческую устойчивость только в определенной области. Это означает, что введение ограничения
1^| < А и, следовательно, функции 1р2 (2.63) сужает область асимптотической устойчивости
замкнутой системы (2.53), (2.64). На рис. 2.2,г,д,е соответственно для функций у? = ^2,
p«th V»2 и <р = sign 1р2 и параметров а = 1,. Т = 1, А = 1 изображены графики переходных
процессов в замкнутой системе, которые подтверждают наличие области асимптотической
устойчивости с апериодическими переходными процессами в синтезированной системе.
; В режиме малых отклонений, когда iptinf — х2 + Aflxi, законы управления и2 (2.64) и и\
(255) (А = 1) будут оптимальными по квадратичному критерию
Jinf = f Гm2fl2A2x2 + ( т2 + fl2A2C2) х2 + С2 и
о L
Выбор весовых коэффициентов в критерии (2.66) зависит от желаемых показателей качества
переходных процессов. Итак, синтезированные методом АКАР законы управления их (2.55) и
«2 (2.64) гарантируют асимптотическую устойчивость соответственно в целом или в области
1х2Т и обеспечивают требуемые свойства замкнутой системе.
пример 2.4. Синтезируем закон управления объектом
XI (?) = X2 + Х2 , Х2 (?) = U ,
имеющим экстремальную нелинейность. Введя функцию
tp = х2 + flxi + axj I xi I ,
и подставив ее в функциональное уравнение
•? ТХЦ (?) + tp = 0 ,
в силу уравнений объекта (2.67) найдем следующий закон управления (у? = гр):
u = - ^ xi - у xi IX! I - у х2 - (2alxi I + /?) (х2 + х2) .
Заия (2.69) переводит изображающую точку в окрестность многообразия = 0 (2.68),
движение вдоль которого описывается дифференциальным уравнением
Х|^> (?) —“ flx\y •
V 1 dt.
(2.66)
(2.67) •
(2.68)
(2.69) .
(2.70)
111
е
Рис. 2.2
При /3 > 0 уравнение (2.70) и, следовательно, синтезируемая система обладают свойстве»
асимптотической устойчивости движения. На рис. 2.3 приведены траектории движения заюс-
лГ
нутОй системы при /3 = 1; Т = 1, а = 2. Заметное отличие рис. 2.3 от аналогичных фазовнх
портретов систем второго порядка состоит в поведении траекторий в третьем квадран».
Обычно законы управления представляют собой некоторое многообразие, проходящее черв
второй и четвертый квадранты фазовой плоскости. В рассматриваемом примере многообразие
V» = 0 (2.68) выбрано таким, чтобы подчеркнуть указанное отличие. Из рис. 2.3 следует, что
112
фаОые траектории притягиваются к выбранному многообразию ip = 0, при этом обеспечива-
юШапериодические переходные процессы.
>Йример 225. Синтезируем закон управления электроприводом постоянного тока:
1 it (t) = ai*2 _ Й2Х1Х?; хг (0 = - аз*2 + и; а* >0, £-1,2,3, (2.71)
(де*#—скорость, отклонение и вращение; хг—ток; и—напряжение обмотки возбуждения.
Объект (2.71) в пространстве состояний имеет особую линию
,< Л 5 = 2a&ciX2 - а\ = 0 ,
на «второй не выполняются условия общности положения [23].* В соответствии с методом
АКАР введем агрегированную переменную
-ГД’* 1р\= х2+рх\ (2.72)
яд№м получим закон управления
/3 /д г 1 ч 2 (2.73)
ui = - xi - (pai + yr - аз ) х2 + pa2xix2 .
(2.73) переводит изображающую точку в окрестность многообразия ^1=0 (2.72),
движение вдоль которого описывается дифференциальным уравнением
; хц,1 (t) = - faixi - aifi2xiyi . (2.74)
Уравнение (2.74) по своему виду совпадает с уравнением (2.56), и, следовательно, при (5 > 0
обеспечивается асимптотическая устойчивость движения в целом синтезированной системы.
Досмотрим уравнения движения замкнутой системы (2.71), (2.73) на особой линии
Уа0. Подставив S = 2a2Xi%2 — <?i = 0 в закон управления и\ (2.73) и уравнения объекта
(1УЬ, получим соотношение
7*1X2 (0 + Tifixi (t) + Х2 + ftxi = 0 ,
которое представляет собой функциональное уравнение
" 7*1^, (/) + ipi = 0 ,
1Де^1 определяется выражением (1.7^2). Это означает, что линия 5 = 0 является одной из
траекторий движения изображающей точки замкнутой системы.
На рис. 2.4,а представлены траектории замкнутой системы (а* = 1,/3 = 1,Т = 1). Как видно
изрйС. 2.4,а, на плоскости х'/, х? имеется притягивающее многообразие ipi = 0 и особая линия
S = 0, что подтверждает теоретические результаты синтеза методом АКАР. Замкнутая система
асимптотически устойчива и имеет апериодический характер переходных процессов.
Рис. 2.4,а
ИЗ
При ограничении на ток, т е на координату I х2 I Д следует ввести в рассмотрение
функцию .ь
= *2 + A thjSxi (2 75)
Тогда, согласно методу АКАР, получим закон управления
4s / 2\ /1 \ A а (276),
ch jSxi \ / \ 2 ) Т2 &
Закон (2 76) переводит изображающую точку в окрестность многообразия ^>2 = О (2 75),
движение вдоль которого описывается уравнением .
*1^2 (0 = ~ «1А th fixup - a2A2xiV2th2fbciy2 ТШ
При /3 > 0 гарантируется асимптотическая устойчивость нулевого решения уравнения (2 77).
Это означает асимптотическую устойчивость движения замкнутой системы (2 71), (2 76)1
целом по координате xi и в области I х21 < А по координате х2 На рис 2 4,6 изображена
траектории движения замкнутой системы (а* = 1,/? = 1, А = 1) Как видно из рис 2 4,6, на
плоскости xi, х2 имеется притягивающее многообразие ^2 = 0 (2 75), а также особая линй
Рис 2 4,6
S = 0, к которой устремляется часть траекторий движения Синтезированная система асимп-
тотически устойчива и имеет апериодический характер переходных процессов *
Рассмотрев на примерах нелинейных объектов методику применения инвариантных (ив-
тегральных) многообразий ip = 0 для синтеза нелинейных регуляторов, подведем некоторые
первоначальные итоги
Во-первых, как и в любом другом методе, здесь также возникает важный вопрос об
устойчивости синтезируемой системы, решение которого разбивается на два этапа Если i
начальный момент времени изображающая точка находится в окрестности соответствующего
многообразия^ = 0, например вида (2 46), (2 51), то она должна в дальнейшем двигаться вдоль
ip = 0 к началу координат (*i = . = хп = 0) Устойчивость этого движения определяете!
устойчивостью тривиальных (xi = 0) решений уравнений (2 48) или (2 52) и зависит от выбора
коэффициентов/?, и вида функций ip (2 29) или (2 50) Однако любые, даже малые возмущений,
в реальных условиях непрерывно действующие на системы, будут выталкивать изображающую
точку с многообразия ip — 0 и тогда будет возникать возмущенное движение, которое, разуме-
ется, также должно быть устойчивым Таким образом, при синтезе законов управления i
определении структуры обобщенного интегрального функционала должны быть также удов-
114
легворены условия устойчивости задаваемого инвариантного многообразия tp = 0. Это много-
образие, как известно, представляет собой заданную программу движения, под которой здесь
Понимаются выражения xi (t),..., хп ((), удовлетворяющие равенству tp = 0 для любых значе-
вий 1. Условия асимптотической устойчивости в целом синтезируемых систем относительно
многообразия tp = 0 имеют простой вид: V > 0; Т > 0. Это означает, что областью
притяжения программного движения tp = 0 является вся область пространства состояний, для
которой справедлива исходная математическая модель объекта. Иначе, многообразие tp = 0
Ищется притягивающим для всех траекторий замкнутой системы. Так как в рассматриваемом
методе синтеза всегда гарантируется асимптотическая устойчивость систем относительно мно-
юобразия tp = 0, то в конечном итоге асимптотическая устойчивость замкнутых систем по
переменным xi ,..., хп будет определяться лишь условиями устойчивости тривиальных решений
дифференциальных уравнений вида (2.48), (2.52) и др., описывающих движение изображаю-
щей точки вдоль многообразия tp = 0 к началу координат (%i = ... = хп = 0) фазового про-
страйства.
*чгКроме задач устойчивости, при использовании рассматриваемого метода возникает вопрос
об-условиях существования в пространстве состояний синтезируемых систем инвариантных
(дотягивающих) многообразий tp = 0. В этой связи напомним постановку задачи синтеза:
найти такое управление и(х\ ,..., хп), чтобы Задаваемое многообразие tp = 0 являлось интег-
ральным для дифференциальных уравнений замкнутой системы, а программное движение
ф » 0было устойчивым относительно агрегированной переменной tp(x\.,..., хи). Для того чтобы
многообразие tp = 0 было инвариантным (интегральным), необходимо и достаточно, чтобы
макропеременная tp(xi ,..., хп) от п переменных xi,..., хп удовлетворяла соответствующему
функциональному уравнению, например, вида (2.22). Это уравнение после подстановки в него
выражений для) полной производной ip (() может быть записано в виде соотношения, которому
необходимо и достаточно удовлетворить для того, чтобы равенство tp = 0 было инвариантным
многообразием замкнутой системы.
Во-вторых, процедура синтеза законов управления состоит из двух этапов: сначала гаран-
тируется сближение изображающей точки с притягивающим многообразием tp = 0, а затем
движение вдоль этого многообразия к началу координат фазового пространства
Цг... = хп = 0), при этом необходимо обеспечить желаемый, например, апериодический,
хйрйгор затухания переходных процессов. Синтез закона управления осуществляется путем
подстановки в функциональное уравнение уравнений исходного объекта. Такое управление и
переводит изображающую точку в окрестность многообразия tp(xt ,..., хп) = 0, движение вдоль
которого описывается системой из (л -1) дифференциальных уравнений, которые получаются
путем подстановки в первые (л— 1) уравнений объекта координаты
( (() /*п(Х1у> Хп-\'Ц) , ,..., fin) ,
определяемой из равенства tp = 0. На приведенных выше примерах показана двухэтапная
процедура аналитического конструирования регуляторов.
В-третьих, в предлагаемом методе синтеза конкретные критерии качества не постулиру-
к^заранее, а строятся на основе обобщенного интегрального функционала путем выбора
соответствующих функций tp(x\ ,..., х^) с учетом уравнений (2.1) исходного объекта.
t Наложенные выше некоторые первоначальные выводы свидетельствуют об определенных
возможностях предлагаемого метода аналитического конструирования нелинейных регулято-
ров(ДКАР), основанного на применении инвариантных многообразий, задаваемых в фазовом
пространстве синтезируемых систем управления.
’J<w
115
2.3. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АГРЕГИРОВАННЫХ
РЕГУЛЯТОРОВ ДЛЯ ОБЪЕКТОВ ВЫСОКОГО ПОРЯДКА
ПО ЗАДАННОМУ ИНВАРИАНТНОМУ МНОГООБРАЗИЮ
В разд. 2.1 и 2.2 на основе примеров решения задачи АКАР для объектов первого и вторби
порядков было показано достаточно эффективное применение метода конструирования инва-
риантного многообразия в фазовом пространстве систем. Конкретные примеры синтеза пбд
твердили ранее высказанные положения о двухэтапности процедур решения задач устойчив
сти синтезируемых систем, о необходимых и достаточных условиях существования в простри-
стве состояний инвариантного многообразия, о двухэтапности процедур синтеза структура
выбора параметров закона управления и, наконец, о форме оптимизирующих функционалу
которые имеют сопровождающий характер и не постулируются заранее, а конструируются
учетом свойств объекта управления. Все эти выводы имеют общий характер и справедливы $
всего рассматриваемого класса нелинейных систем. В этом разделе изложенные идеи приме-
няются для решения задачи АКАР для объектов третьего и высокого порядков. Рассмотрю
сначала метод АКАР с использованием линейных макропеременных. Задача синтеза состоит)
построении закона управления и(х\,..., хп), обеспечивающего перевод объекта (2.1) из про©
вольного начального состояния в окрестность гиперплоскости
" о л (2.78)
= 2 РкХк = 0 .
Л=1
При этом на траекториях движения объекта должен обеспечиваться минимум функционал#
J = / [mV + CV (О I dt, I
о L J
который с учетом (2.78) принимает вид f
® ~ Н - п , (2 79)
J = / рп ( Ё РкХк) + С ( Ё РкХк) 1 dt.
О L *®1 к=\ -1
В этом случае уравнение экстремали
(Г) + У» = 0 ,
доставляющей минимум функционалу (2.79), имеет форму ?
п п (2801
Т Ё РкХк (0 + Ё РкХк = 0 .
к=\ к=\ -»
Используя уравнения объекта (2.1), найдем оптимальный по критерию (2.79) закон управле-
ния:
п' 1 л (2.81)
« = ~ Ё №к(*\ ,..., Х„) “ у Ё fikXk -
*=1 1 Л=1
Закон (2.81) обеспечивает перевод изображающей.точки в окрестность гиперплоскости- (2.78).
Дифференциальное уравнение экстремали (2.80) является желаемым уравнением движещй
синтезируемой системы. Тогда, оптимизируя систему по критерию (2.79), следует должный
образом выбрать параметры (flк. ,Т) закона управления (2.81) и, следовательно, коэффициента
уравнения (2.56), исходя из условий устойчивости движения изображающей точки как$
гиперплоскости (2.78), так и вдоль нее к началу координат, а также требований-к качеству
переходных процессов.
Ранее в первой главе отмечалась сложность решения этой задачи выбора на основе методй
АКОР^тем более для нелинейных объектов. В методе же АКАР эту задачу в целом ряде важнш
случаев удается разрешить применительно и к нелинейным объектам определенного класса.
Рассмотрим, например, выбор параметров закона управления при синтезе систем управления
нелинейными объектами, уравнения которых могут быть представлены в канонической форме
’ У1 (0 = У2 , У2 (0 = Уз.Ун-1 (0 = Уп,
Ун (0 = Fn(yi Ун) + Ъи , (2.82)
116
дел = fX*i ’•••’ *«)» 1 * i,2,...,n. <,
Переход от описания объекта в виде уравнений (2.1) к канонической форме (2.82) может
^осуществлен одним из методов приведения, например следующим способом [65] Выби-
рая одна из переменных^ (г), относительно которой желательно записать уравнения (2 82)
Qgpno это выходная координата объекта xi (/)* Предполагается, что функции f^x\,., х„)
входной системы дифференциальных уравнений объекта (2.1) имеют непрерывные частные
взводные по своим аргументам до (zi-’l)-ro порядка включительно. Сделаем замену пере-
^ых yj = X] и затем последовательным дифференцированием по времени найдем производ-
ил dxi .. ч,
~ dt ~ ’ *») ’
(2 83)
uiifyi _ <Рх1 _ д У1 </х/ = д ад. _ .
им Л2 dt1 £ dXi dt £ dx/'“'2’
«Ф’д эх/'-ъ...........
^jf-'y, A HF„-2 _
^определитель
Мн Д(/», ^2,7^3 Fn-\) # 0
(чд, D^Xi , X3 ,..., Xn)
систему (2 83) можно разрешить относительно xi, х3 ,..., хп, выразив их через переменные
dn~lyi
fe 'JT ~ У2’ ’ п~\ = у"’^огда’ п°Дставив найденные переменные yi,...,y« в уравнение
Уя, можно получить систему вида (2.82). В [65] доказывается, что если взять решение
подставить его в систему (2 59) и определить из этой системы хг (0 ,., хп (f),то система
^кций xi (/), , хп (t) будет решением исходной системы уравнений (2.1).
-^Изложенную общую методику представления уравнений (2 1) в форме (2.82) можно
к^вкретизировать для определенных классов объектов (2.1). В этом отношении удобным для
указанных преобразований является следующий класс нелинейных объектов с треугольной
й*
хп (0 = Л(*1, ., хп) + и.
этом случае можно записать систему соотношений:
Л = xi = Fi(xi) ,
(2.84)
(2.85)
Л = ^-1/1(Х1,Х2)+...+ ^^/*(Х1,. ,Хк) = /л(Х1,.. ,х*), Л=2,.. ,л
0*1 **-1
Ы^огично обозначим
У«+> = . ^2) +•••+ Мх, ......х„) + «] .
Ф&идно, что при i = 2 , , и справедливо выражение
dl~2
^Х*1 »•••• *») я ^-г/|(*1 ♦ *2) •
дГп
замену переменных (2.85)—(2.87), можно показать, что при -г—= b уравнения
(Ш) принимают вид
(2.86)
(2.87)
У/ (О У/+1, I ~ 1,2,...,л,
(2.88)
117
i да
dF( Л ,
> а > 0 обладают свойством полной управляемо-
где у,|+1 = , х2) + . + ,. , х„-1) + bfn(x\ , , хи) + Ьи
0X1
Если из выражений (2 85), (2 86) выразить координаты х2, , хп через переменяй?'
У1, ,у„ и затем подставить их в^+ь то тогда система уравнений (2 84) будет соответствен^
канонической форме (2 82) Наиболее просто это выполнить для уравнений (2 84), имеюп^1
функции вида
f^x\ » •» Xy+i) ~ $(xi » **’ xi) + , j ~ 1,2, ,n 1 (2 89|'‘
Дифференциальные уравнения (2 84) с правыми частями вида (2 89) описывают достаток
распространенный в разных областях техники класс нелинейных объектов В работе [9$р
показано, что объекты вида (2 84) при
сти Кроме того, из теории АКАР следует, что эти объекты могут быть стабилизирован»
соответствующим выбором такого управления zz(xj , , хп), чтобы нулевое решение системы
(2 84) было асимптотически устойчивым Указанные здесь свойства управляемости и стабили-
зируемое™ объектов (2 84) очевидно следуют из возможности приведения уравнений (2.84)
к форме (2 88) с учетом указанного выше свойства монотонности функций F£x\ , , х,) по Хь
В дальнейшем отмеченные свойства объектов (2 84), (2 89) будут использованы для решети
задачи АКАР с учетом дополнительных требований к первичным показателям качества nejx;
ходных процессов Запись уравнений объекта в форме (2 82) позволяет существенно ynpociW
процедуры синтеза и исследования устойчивости нелинейных систем Так, закон управления
объектом (2 82), доставляющий минимум сопровождающему функционалу
ч 2 ... .2
(2«W
согласно (2 81) имеет вид
Ъи = - 5 (fik + ^Г’)Ул+1 - у\ - Fn(yi , , ylt)
(2«П
Подставив zz (2 91) в (2 82), представим уравнение замкнутой системы, т е уравнение ^кст^е2
мали (2 80), в форме [93]
(0 + (0 + а/|-2й>оу£,-2) (/) + + а>бУэ (?) = 0 (292)
Связь между коэффициентами /3*, /пь С| критерия (2 90) и параметрами ah ш0 уравнения
экстремали (2 92) выражается формулой
пЧ+к (- Пи-'' . _ . ОЙ
а,+*й>о
i”-''
7-, z=l,2, ,/z-l,
А» л=о
/ Л \
где wq I л у. | , Т
\Рп'j
Параметры а„ zw0 могут быть выбраны, например, по известному методу стандартных коэффи
циентов [93], исходя из желаемого времени регулирования, допустимого перерегулировано
и т д Так, при выборе этих параметров из условия минимальной длительности переходных
процессов без перерегулирования, т.е для кратных корней характеристического уравнено
экстремали имеем
(2J6
Pi (n - 1)» » . , o , 1
a ~ ~7T~i—i------~, 1 = 1,2, ,П - 1 , tt)0 =
_ !) » (n - z) ’ T
Аналогично выражениям (2 93) и (2 94) можно получить другие соотношения на основ,
например, методов модального управления [29, 94] В рассматриваемом случае приведем
уравнений объекта (2.1) к каноническому виду (2 82) существенно упрощается также п(йй
условия асимптотической устойчивости синтезируемых систем с законом управления (2$)
Это связано с тем, что в этом случае уравнения движения изображающей точки вдоль много-
образия
4l8
п
V = 2 РкУк = О
*=1
ИЙЙОТВИД
". . .1 И-1
У1у> (О = №,у> , » Уп-2,у> (О = Уп-1,у » Уп-1,у> (О = ~ ~О~ 5
Рп *-!
Для уравнений (2 95), как известно [5], можно записать условия устойчивости
А* > 0, к = 1,2, ,п - 1 ,
(2 95)
(2 96)
fin-1 д _
нд »•
fin-1
fin
fin-3
fin
1
fin-3
fin
А„-1 =^А„-2
В^Ийенства (2 96) являются условиями асимптотической устойчивости в целом синтезируе-
мы^. нелинейных систем управления объектами (2 1), приводимыми к канонической форме
После выбора параметров^ промежуточного закона управления (2 91) в соответствии
^отношениями (2 93), (2.94) и (2.96) можно путем обратного преобразования снова вер-
нул^ от у, к исходным физически измеримым координатам х( системы, удобным для техни-
че&ойреализации регулятора
^Рассмотрев возможности решения задачи АКАР для определенного класса нелинейных
ошя^ов вида (2 82), снова вернемся к исходной задаче АКАР и попытаемся выявить некото-
рйЖиие свойства синтезируемых систем для объектов более общего класса (2.1) Первым и
(Щотельным из’такого рода свойств является асимптотическая устойчивость движения син-
тезируемых нелинейных систем Перейдем к определению условий устойчивости нелинейных
систем управления объектами (2 1), оптимальных относительно линейных агрегированных
мафрпеременных Рассматриваемые системы оптимальны по критерию (2.79), подынтеграль-
иофЩражение которого представляет собой неотрицательные функции координат х\хп и
и? производных В этом случае, как известно, необходимо исследовать устойчивость синтези-
систем Исследуем устойчивость рассматриваемого класса нелинейных систем путем
построения функции Ляпунова на основе метода градиента [5] Введем согласно этому методу
фадиент функции и в виде
ЕЙН’
dv A
j„ ~ 2 bqxt» i ~ 1»2,. ,n.
UXJ 1=1
1ициенты Ьц в этом выражении следует выбирать таким образом, чтобы выполнялись
потенциальности поля
= /у=12
(jj£) dxjdx( dxtdXj' '}
Производная v (f) в силу уравнений объекта (2.1) Ь\ = ... = bn-i = 0, bn= 1 при управлении
(281) определяется выражением
(2 97)
,п.
n / n >
v (0 = 2 2 M xi (0
7=1 V-l )
«-1
п-1
fifink
(2.98)
1 п
о 'г V* jS Ьпкхк
Рп1
ВШйсимости от выбора коэффициентов bjk в (2 98) можно получить различные формы
функций и и и (f). Полагая, например, Ь„к = ImiCifitfi^ (к = 1,2,.. ,п), с учетом выражения
J fikXk получаем
1=1
119
*(0 =
л-1
2
/=i
л-1
х (bjk - 2mic$flk)xk
Л=1
fj - 2m2ip2.
Имея v (f) (2.99), можно найти функцию v с помощью криволинейного интеграла:
v = / ’° °) dx + j > dx +...+ f £(*? »-> Хп) dx .
О ЭХ1 о дх2 ‘ 0 дх„
Выражение (2.99) может быть представлено в виде двух составляющих
v (Г) = Vi (Г) + i>2 (Г),
где
(2.99)
•ж
(2.100)
(2.101)
#
П (?) = - 2mfy2,
«-» Н 1 (2.102)
*2 (?) = X Е (bjk - 2тхсфРк)хк //xi ,..., х„) .
у=1 И=1 I а
Первая составляющая й\ (?) (2.101) может быть использована для оценки устойчивости дви-
жения изображающей точки к многообразию у = О. Для этого, положив в (2.101) коэффи$
енты bjk = 2miCi0j0k, согласно (2.100) находим в
Vi = micrf>2. (2.1$
Функция Ляпунова vt (2.103) и ее полная производная Vi (?) (2.98) в этом случае не зависят
от нелинейных функций /{xi х„) объекта (2.1) и являются знакоопределенными по пере
менной Согласно [5], в этом случае синтезируемые системы асимптотически устойчивый
целом относительно многообразия гр = 0 (2.78), что совпадает с полученными ранее резуль-
татами. Для определения условий устойчивости движения изображающей точки вдоль много-
образия гр = 0 (2.78) используем вторую составляющую i>2 (?) (2.102). Подставив в v2 (?)jb
1 ”-1
уравнения = 0 координату хп (?) = - -я- У /?*х*, получаем условие устойчивости движейм
Рч *=1 гж
вдоль многообразия гр = 0:
я-i p-i 1 . (2.10Й
S X (bjk - 2тхсф^к)хк fj(xi ,..., xn-i ,0i ,...,0п) < 0 . (
j=l |л=1 J
Условие (2.104) зависит от (л-1) координат xi,..., xn-i и (л-1) нелинейных функй
//xi ,..., хи-1) и является условием асимптотической устойчивости в целом синтезируемы!
систем. Движение изображающей точки вдоль многообразия = 0 определяется уравнениям»
(0 — f\(X\y> ,•••» Xfi—, 0\ ,..., 0п) ।
............................................................................... (2.105)
Хц—1у> (?) = fn—l(xig> ,»••, Хц— , 01 ,..., 0п)
Система уравнений (2.105) получается в результате подстановки приведенного выше выражё
ния для переменной xn(f) в первые ,(л-1) уравнений объекта (2.1) (при Ь\ =...= dn-i =0
bn = 1). На многообразии гр = 0 при управлении (2.81) последнее уравнение системы (2.1)
вырождается в производную координаты f:
1 «-1 , &
Хп (() = 7Г 2 0кХк (0
Р«
и поэтому из рассмотрения исключается. Использование уравнений (2.105) пониженной
порядка позволяет несколько упростить процедуры поиска условий устойчивости синтезиру
емых нелинейных систем. Условие устойчивости (2.104), полученное градиентным методом
представляет определенные возможности для получения достаточных условий асимптотик
ской устойчивости конкретных систем. Из него, в частности, следуют условия устойчивости
при которых функция Ляпунова выбирается в виде квадратичных форм: f9,
1 я-1 _ п-1
= 2 ®jXj > 0, (?) ~ 2} fyxjt <0
Z S«=l S=1
120
ityi b„ - ImiCifi] = ap, bjk = 2micPPk; j = l,2,...,n-l; j * k. В общем случае коэффициенты в
(2.104) при выполнении условий (2.97) могут выбираться в виде некоторых функций от
координат xi хп-\ системы. Таким образом, метод градиента позволяет выявить некоторые
общие закономерности, связанные с выявлением условий асимптотической устойчивости дви-
жения в целом рассматриваемого здесь класса оптимальных по критерию (2.79) нелинейных
сийем.
^Свойство асимптотической устойчивости в целом синтезируемых систем относительно
нвогообразия tp = 0 в ряде случаев делает оправданным использование оценок их устойчиво-
сжпо уравнениям первого приближения:
1 • . «-> (2.106)
xh!> (0 = 2 аисХку, i = 1,2,...,л—1 ,
*=i
Уравнения (2.106) получаются из уравнений (2.105) путем удержания линейных членов
рмложений функций fj(xi ,..., хп). Это связано с тем, что изображающая точка системы неиз-
бежно попадает в окрестность многообразия tp = 0, движение вдоль которого описывается
уравнениями (л-1) -го порядка (2.105). Известно [5], что при оценке устойчивости системы
^уравнениям первого приближения желательно определить область притяжения ее положе-
ния равновесия. В нашем случае многообразие tp = 0 имеет областью притяжения все фазовое
пространство относительно фазовых координат х\ ,..., хп системы.
^Перейдем, далее, к рассмотрению примеров, иллюстрирующих возможности изложенного
вшпе метода синтеза агрегированных систем. В процессе синтеза будет проводиться сравнение
процедур определения законов управления, синтезированных на основе существующих мето-
дов аналитического конструирования и предложенного здесь метода, по простоте выполняе-
мое операций, достижению заданных динамических свойств замкнутых систем и т.п. Следует,
однако, заранее подчеркнуть одно важное отличие излагаемого здесь метода синтеза, а именно
фактическую возможность определения законов управления нелинейными объектами в ре-
зультате достаточно простых аналитических процедур. Между тем, обзор существующей ли-
Й]итуры по методам аналитического конструирования систем показывает, что в настоящее
время известны примеры практического синтеза систем в подавляющем большинстве случаев
ТЬЯько лишь для линейных объектов невысоких порядков, за весьма редким исключением [14,
ВЯ отсутствуют какие-либо примеры прикладного синтеза систем управления нелинейными
объектами.
'Пример 2.6. В работе [12, с.239] рассмотрена задача оптимизации системы управления
объектом
-»• X\(f) = X2, Хг(/) = Хз, Хз (/) = «((). (2.107)
Уравнениями (2.107) приближенно описывается ряд объектов, в частности, процесс аэродина-
ийеского торможения при баллистическом входе в атмосферу искусственного'спутника.
Ставится задача синтеза автопилота, оптимального по критерию
г 7 z 2 2 2 2х , (2.108)
,й /1 = J («1X1 + «2X2 + «3X3 + II ) dt .
о
Уравнение автопилота имеет вид
и - - Р\Х\ - р2Х2 - РзХз . (2.109)
работе [12, с.241] приведены различные коэффициенты р, закона (2.109), рассчитанные
Численным методом для различных значений весовых коэффициентов «*, и построены соот-
ветствующие им переходные процессы. Синтезируем закон управления при выборе критерия
качества в соответствии с разработанным здесь методом, вида (2.79):
« г/з \2 /3 \21 (2.110)
/2= / s 0iXi\ + 2 0i*i dt,
Mt. о H=i ) (i=i у
т.е. при mi = с\ = 1. Коэффициенты закона (2.109) связаны с весовыми коэффициентами
критерия (2.110) следующими выражениями:
121
n -0l П - + ^2 • л - 4- I
р3 .Рз-^+1.
(2.111)
Коэффициенты/?, могут быть выражены с помощью формул (2.93) через параметры желаемого
дифференциального уравнения (2.92) замкнутой системы (табл.2.1):
Таблица Zi
Тип стандартных коэффициентов Pi Р2 Рз to а, %
Кратные корни 1,00 3,00 3,00 6,00 0
Минимум времени 0,66 2,05 2,39 4,20 5 1
Критическое затухание 1,00 2,50 2,50 4,50 7
Арифметическая прогрессия 2,25 5,10 6,35 6,90 15 *
Геометрическая прогрессия' L00 6,70 6,20 2,00 21
В табл.2.1 приведены рассчитанные по формуле (2.69) коэффициенты закона управления
(2.105) и соответствующие им время регулирования и перерегулирование а для различию
типов стандартных коэффициентов [93]. В зависимости от требований, предъявляемых к
характеру переходных процессов, из табл. 2.1 может быть выбрано соответствующее сочетание
коэффициентов закона управления.
Установим связь между критериями J\ (2.108) и /г (2.110); Вычислив интеграл (2.101),с
учетом уравнений объекта (2.107) и условий устойчивости xi(«>) = хг(«>) = хз(°°) = 0, пол-
учим
Л = I [#х? + (tf + fll) xl + + ft2) xl Ч- ftV ] Л . <2Л1а
Положив в (2.112) коэффициенты р,- равными
_ _ /?1 + Р\Рг + Рз . _ Рг + Р\Рз + Рз (2.113)
' Рз' 2 р2з ’ 3 Рз ’ \
получим, что оптимизация системы по критерию Ji (2.110) эквивалентна оптимизации по
критерию J\. Следует, однако, подчеркнуть, что расчет коэффициентов р( закона управления
(2.109) при оптимизации по критерию Л (2.108) требует численного решения нелинейного
уравнения типа Риккати [12], а при оптимизации по критерию /2 (2.110) используются
простые аналитические соотношения (2.111). Еще более возрастают преимущества синтеза
законов управления по развитому здесь методу с повышением размерности объектов. Таким
образом, соответственно выбирая весовые коэффициенты критериев качества, можно добиться
практической эквивалентности функционалов, используемых в теории АКОР и в предложен-
ном методе АКАР, основанном на применении агрегированных переменных. <
Пример 2.7. Рассмотрим далее пример синтеза оптимальной системы управления нелиней-
ным объектом, уравнения возмущенного движения которого имеют вид
X} (f) = Х2 , Х2 (t) = sinxi + Хз , Х3 (0 = и . (2.114)
Уравнениями (2.114) описывается движение математического маятника в верхнем неустойчи-
вом положении, при этом xi—угол отклонения маятника от вертикали; х2—скорость отклоне-
ния; хз—момент, приложенный к маятнику [1]. Заметим, что уравнениями математического
маятника описываются многие электромеханические объекты, в частности разного рода фазо-
вые системы, синхронные генераторы и двигатели с асинхронным запуском и др. Такие объекта
имеют цилиндрическое фазовое пространство [96]. Ставится задача стабилизации маятника
моментом, приложенным к нему на оси подвеса. Указанный момент развивается исполнитель-
ным механизмом, который представлен интегрирующим звеном. Требуется найти управление.
/4(xi , хг, хз) на входе исполнительного механизма, которое стабилизирует маятник в верхнем
положении равновесия, т.е. обеспечивает асимптотическую устойчивость системы. Выберем
следующий критерий оптимальной стабилизации:
122
(2 115)
(2 116)
хз - sinxi
(2 117)
/1 = / рП1(/?1Х1 + faX2 + РзХз)2 + С20?1Х1 + faX2 + faxf)2 j dt
Применяя изложенный выше метод синтеза, находим закон управления (2 81)
fami fa (fa , famA . fa , Wk
= ~7^х'-д '" Ift + ftq*2“( ft *”
доставляющий минимум критерию качества (2 115). Исследуем устойчивость движения син-
тезированной системы, уравнения движения которой с учетом уравнений объекта (2 114) и
' зайбна управления (2 116) принимают следующий вид*
:-fXl (/) = Х2 , Х2 (/) = sinxi + Хз ,
' ,• /л (fa .famA (fa mA
•''”w = 'ft^x‘_ (ft ft^r (ft
Подставив первые два уравнения системы (2 117) в третье, получим
хР>(() +
+ xi - — sinxi = О
faci Ci
(^ййнение (2 118) относится к уравнениям вида
«Ш хР> (Г) + ^Р(Х1 , xi)xi2) (0 + ДХ1 , X]) = 0 ,
“ -х fa , mi
ВД8р(Х1, xi) = + —,
J ' « . х (fa , fami , fanti mi .
^Xl ’+ faci C0SX|) Y| faci Xi Cl SmX1
Доопределения условий устойчивости систем (2 117) или (2 118) сначала используем стан-
•дарвные способы, опубликованные в литературе, а затем найдем эти условия, исходя из
особенностей, присущих нелинейным агрегированным системам
В[5С 113-121] установлены условия асимптотической устойчивости в целом нелинейных
шем вида (2118), которые имеют следующий вид*
Xl df(x х )
1Дх1,Х1)- Дх1,0)]Х1> xj —х' dxi при xi* 0, а = const,
»o)*i> о при
l'( •
КФ(Х1, xi) = J 1ДХ1 , xi) - Дх1,0)] dxi > 0 при xi # 0 ;
0
и fa
+ у1] х12) (0 + (ф- + - COSX1] Х1 (Г) +
\РЗ Cl j v \рз рзС\ }
______0
Cl
(2 118)
(2 119)
(2 120)
(2 121)
(2 122)
(2 123)
(2 124)
я 1
4e / Дх1,0) dxi Ф(Х1 , xi) - xi/2(xi , 0) > 0 при xi , xi # 0,
Г о
л
(2 125)
(2 126)
д-j Q ПрИ Xj # 0;
dX\
№ Xj *1
3thn[ af f(xi , 0) dxi + J /(xi , xj) dxi ] = «о при Ixj I-* <» и
фиксированном xi Условия (2 122)—(2 127) получены на основе функций Ляпунова
4 Х* *1
у = aj ДхьО) dxi+ f ДхьХ1) dxi+ 0,5(xi + axi)2+ af fy>(xi,xi) dxi- a]xi dx\
И* о о о
X1 df
v(t) = axt р(хьО) - Лхьх1) ] + xif dxi + [a - <p(xi , xi)]x?+
X1 dtp
+ axi f -&xi dxi
о aXl
Исследование условий асимптотической устойчивости синтезированной системы (2 117) или
(1Н8) на основе соотношений (2 122)—(2 127) является громоздким и здесь не приводится
(2 127)
(2 128)
123
В результате выполненного в работе [69] исследования при помощи выражений (2 122)-
(2 127) были получены следующие соотношения между параметрами
f1 >i, А>о, /= 1,2,3, >0 (ад
Эти соотношения являются условиями асимптотической устойчивости в целом синтезирован
ной системы (2 117), т е закон управления (2 116) является законом оптимальной стабилодл
ции <<
Выше было показано, что достаточным условием асимптотической устойчивости в цедо>
рассматриваемого класса систем является выполнение неравенства (2 104), которое по суще-
ству определяет асимптотическую устойчивость движения вдоль многообразия ^=2 £***4*
*=i j
Для системы (2 117) условие (2 104) принимает следующий вид ч!
|| (2ш1С1^1Д2 - *2i)x? + [£12 - 2miCi£i£2 - (bn - 2т\сф$^ ] xi +
+ Г^н~ 2miCi£?\ — (b22~ — (b2\ — 2miCiflift2\^ 1 х\Х2 +
(21$
Так как выбор коэффициентов произволен, то путем разложения функции sinxi в ряд Тейлор
можно показать, что условие (2 130) удовлетворяется при выполнении соотношений
Ф- > 1 , £, > 0, i = 1,2,3 ,
£з
которые совпадают с условиями (2 129), полученными на основе выражений (2 122) — (2 127)
Следует подчеркнуть, что первый способ определения условий устойчивости на основе исход
ных уравнений системы (2 94) потребовал трудоемкого и кропотливого исследования неде
венств (2 122) — (2 127), второй же способ, основанный на исследовании устойчивости двюод
ния вдоль многообразия V'i = 0, привел к искомому результату достаточно просто после ток
как были выявлены соотношения между параметрами, удовлетворяющими общему условию
(2 104), и было получено условие (2 130) Указанные преимущества исследования устойчиво-!
сти движения вдоль многообразия ^1=0 связаны в основном с тем, что на этом многообразй
снижается на единицу порядок исследуемой системы Условия же устойчивости (2 122>—
(2 127) целесообразно использовать при исследовании нелинейных систем четвертого пород-
ка, у которых дифференциальное уравнение движения вдоль ^1=0 мбжет быть приведена i
виду (2 119)
В литературе [5,11] имеются результаты, позволяющие исследовать устойчивость движе
ния и для некоторых классов нелинейных систем более высоких порядков Однако такое
исследование может натолкнуться на существенные трудности В этой связи на практике мода
оказаться рациональным подход, основанный на исследовании устойчивости движения вдоль
многообразия = 0 при помощи уравнений первого приближения (2 106) Выше указывалось
на применимость такого способа в ряде случаев, т к синтезируемые нелинейные системы
обладают свойством асимптотической устойчивости в целом относительно многообразй
^1=0 Так, для системы (2 117) линеаризованные уравнения движения вдоль ^1=0 прий-
мают вид
,л_ • -Г1 £1 (2131)
X1V (0 Х2ц> , Х2у> ( 1 ) Xty Х2ф ,
Из уравнений (2 131) непосредственно следуют условия устойчивости
> 1 , £ >0, i = 1,2,3 , ,
совпадающие с уже известными условиями (2 129) асимптотической устойчивости в целбы
синтезированной нелинейной системы
124
.-Ранее подчеркивалось, что если дифференциальные уравнения объекта удается преобра-
зишь к виду (2,82), то при этом упрощаются как процедуры исследования устойчивости
жгезируемой системы, так и придания ей соответствующих качественных свойств на основе,
щпример, метода стандартных коэффициентов. После определения закона управления для
скгемы вида (2.82) можно перейти к физически измеримым координатам объекта. Использу-
ежэтот подход для рассматриваемого здесь примера синтеза системы управления объектом
(24)14). Используя выражения (2.85), (2.86), запишем дифференциальные уравнения объекта
ввиде
У1(0 = У2, У2 (0 = Уз, Уз (0 = У2СО8У1 + и . (2.132)
Переменные х, и у, систем (2.114) и (2.132) связаны между собой соотношениями:
У1 ;= хГ, У2 = х(Г) = Х2, уз = sinxi 4? х3. . (2.133)
Синтезируем для объекта (2,132) .оптимальный по критерию
°° г , 3 э „ з _, п 134)
J2= J [mi( Zw) +cl( 2]dt ?
0 L /=i (=i J
закон управления
aim.2 1 , . («2 , m2 \ (2.135)
•L S’ 4 7 3
Из условий устойчивости движения вдоль многообразия 1р2— X ^кУк — 0 сразу же следуют
, Л=1
условия асимптотической устойчивости в целом системы (2.132) с законом управления 112
(2135), которые имеют вид
л п- «, > 0, 1 = 1,2,3. (2.136)
Запишем закон управления иг (2.135) с помощью соотношений (2.133) в исходных координа-
ций?
а\т,2 (а\ «2^2 ) (а2. тг) . /аг тг) (2.137)
1 а3С2 ^а3 а3С2 у (аз с2 j (а3 С2)
Полученный закон ^правления (2.137) отличается от закона Hi (2.116) наличием дополни-
тельйдго чле'йа xicosxi. Указанное отличие связано с различием используемых критериев
качества J, (2.115) и /г (2.134). Подставив Н2 (2.137) в исходные уравнения (2.114), получим
уравнение замкнутой системы относительно выходной координаты xf
w + + w + fe. + (() + _о. (2.138)
I «з С2 j v 7 (а3 а3с2) азС2
Величие от уравнения (2.118) при управлении и\ (2.216) уравнение (2.138) является линей-
ййЬщфференциальным уравнением замкнутой системы. Это позволяет упростить процедуры
определения условий асимптотической устойчивости и выбора весовых коэффициентов а„
вгйсг, исходя из требований к динамическим свойствам системы. Так, на основе условий
- А?! I 3
устойчивости движения вдоль 1р2 = 2 акУк - 0, описываемого линейным дифференциальным
A=l • .
уравнением, были просто получены условия (2.136) асимптотической устойчивости в целом
замкнутой нелинейной системы. Требования же к ее качеству могут быть также достаточно
просто удовлетворены путем выбора коэффициентов а,- на основе выражения (2.93) с исполь-
зованием методов стандартных коэффициентов или модального управления [29]. Однако
определенной “платой” за отмеченные преимущества оптимизации по критерию (2.134) явля-
ется указанное выше некоторое усложнение закона управления иг (2.137) по сравнению с
Законом щ (2.116) для случая оптимизации системы по критерию /1 (2.115). В целом, оба
йпйиа управления и\ (2.116) и иг (2.137) обеспечивают первое, основное свойство синтези-
pyeitfoii нелинейной системы—асимптотическую устойчивость в целом. Таким образом, при-
ведеинем уравнений объекта (2.114) к виду (2.82) можно добиться упрощения процедуры
ййКЗа нелинейных систем управления.
125
Рассмотренные выше примеры синтеза различных систем показывают новые возможйоа
разработанного метода АКАР, который позволяет гибко подойти к процедурам определи!
структуры и параметров нелинейных законов управления. При этом выбор параметров^»
занных законов осуществляется путем назначения соответствующих весовых коэффициент
оптимизирующих функционалов, исходя, например, из условий оптимизации линеаризав»
ной системы по некоторому квадратичному критерию качества или с использованием мац*
стандартных коэффициентов и модального управления, а различные формы законов упрй»
ния находятся в результате аналитических процедур с учетом условий асимптотической
чивости движения. ;а...
2.4. ПРИМЕРЫ АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ
АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ ВЫСОКОГО ПОРЯДКА
НА ОСНОВЕ НЕЛИНЕЙНОЙ МАКРОПЕРЕМЕННОЙ
В предыдущем п.2.3 рассмотрен метод АКАР для нелинейных объектов третьего и высвйм
порядков, когда в качестве агрегированной переменной выбиралась простейшая форма обоб-
« . с?
щенной функции р = 2 Р&ь в виде некоторой линейной комбинации фазовых коордим
состояния. Разумеется, что в общем случае агрегированная переменная ip может представляв
собой некоторую совокупность нелинейных функций от всех или только части координатора
позволяет часто существенно расширить области применения рассматриваемого метода Ли-
тического конструирования и весьма эффективно решить задачу синтеза нелинейных сшйец
наделяя их желаемыми динамическими свойствами.
Ранее уже отмечалось, что многообразие ip(x\,..., х„) = 0 может интерпретироваться^
целевое множество, куда неизбежно попадает изображающая точка из произвольной обжв
пространства состояний в результате действия синтезируемых законов управления. Тощ
задача синтеза может быть сформулирована следующим образом: для системы дифференци-
альных уравнений (2.1), описывающих движение управляемого объекта, пострб^ть замываю-
щее управление
И = p(Xj ,..., хв) = 0 , (ЭД
являющееся уравнением регулятора, чтобы полученная в результате синтеза замкнутая сей-
ма имела заданное в пространстве состояний многообразие ° i
P(*i...*п) = 0. (ЭД
Многообразие (2.140) представляет собой некоторую программу движения системных
можс । отражать некоторый желаемый режим движения. Движение изображающей точкиЖ
исходш по программе (2.140), если заданное многообразие ip = 0 является инварианта
(интегральным) для дифференциальных уравнений (2.1). Уравнение 1р = 0 в фазовом про-
странстве координат xi,..., хп образует многообразие размерности п-1. Управляя
и{х\,..., хп) (2.139) обеспечивает движение по заданной программер = 0 и на этих движения
критерии качества вида
/ = / (mV + с2р2) dt
o' '
достигают наименьшего значения. При этом уравнения экстремалей
Гр (0 + ip = 0
будут являться необходимыми условиями осуществимости заданной программы движда
р = 0 синтезируемой системы. Эти уравнения определяют всю совокупность дифференту
ных уравнений замкнутой системы, имеющих заданное многообразие ip = 0. Такая постанова
задачи и определяет уравнение ip — 0 как некоторое целевое множество в пространстве соде-
яний. Выбор той или иной формы агрегированной макропеременной, по существу, уставая»
вает требования к динамическим и установившимся режимам синтезируемых систем. В част-
126
яоета, предположйм, что в пространстве состояний замкнутой системы желательно соблюдение
которого соотношения между координатами, например, вида
Хп + F(xi ,..., хи-1) = 0 .
Товд, обозначив
и =
(2.145)
= Хп + F(Xi ,..., Хд—i),
! найдем, в соответствии с изложенным ранее методом, управление u(xiх„), которое и
обеспечит указанное желаемое соотношение между координатами системы. Эти соотношения
жнут отражать требования к заданному стационарному режиму движения, ограничения на
Юррданаты, представленные в виде некоторых функций, и многие другие условия.
Рассмотрим примеры аналитического конструирования систем с использованием нелиней-
юй-агрегированной макропеременной для объектов третьего порядка.
рДример 2.8. Вернемся снова к задаче синтеза стабилизирующего управления объектом
(2.114) теперь уже на основе нелинейной агрегированной макропеременной, например, вида
= fiixi + Р2Х2 + 0зхз + asinxi. (2.141)
Используя функцию (2.141), запишем закон управления
tel а \ . ^1 Дг . « \ 1 \ (2.142)
5зТ Xl + |/*з + 0зТ) SUlX1 (Дз + 03? + 0з COSX|Х2 (ft + Т J Хз *
Интересно отметить, что закон (2.142) совпадает по структуре с законом управления (2.137),
полученным путем приведения объекта (2.114) к каноническому виду (2.132). Положим
a•fit, тогда уравнения, описывающие движение вдоль многообразия = 0, будут иметь вид
. ‘ГА- • ЛА — £1 (2.143)
xiy(f) Xty , Xtyff) 0^X1^ 03
Условия устойчивости системы (2.143), а следовательно, и условия асимптотической устойчи-
вой в целом синтезированной нелинейной системы весьма просты:
,Тс &>0, (=1,2,3. (2.144)
Неравенства (2.144) всегда могут быть выполнены. Таким образом, использование нелинейной
агрегированной макропеременной позволило эффективно решить поставленную задачу син-
теза стабилизирующего закона управления.
ЦЦример 2.9. Рассмотрим задачу синтеза регулятора одноосного силового гиростабилиза-
тора (гирорамы). Такие устройства применяются в авиации и ракетной технике и являются
сангиной частью двух- и трехосных гироскопических стабилизаторов [97, 98]. Уравнения
движения гиростабилизаторов имеют вид [98]
~ х2 ,
Г 7*2 (0 = Р22 Х2 + Р23 Х3 COSX1 + Я2 *2 SinXiCOSXj
Хз (0 = Р32 Х2 COSXi + Рзз Хз + R-3 Х1Х3 SinXiCOSX] + Ьзи ,
1ДСЛ1 (0 = 0 (0; х2 (0 = 02 (0; хз (0 = а (0; а, /3—эйлеровы углы.
'^Йз этих уравнений получим уравнения первого приближения
• L Х1(0 = х2; Х2 (0 = Р12Х1 + Р23Х3 ; Хз (t) = 032X2 + РззХз + Ьзи, (2.146)
описывающие движение гиростабилизатора в режиме малых отклонений. Синтезированный в
работе [98] регулятор обеспечивает оптимизацию по квадратичному критерию качества и
устойчивость движения гиростабилизатора в некоторой области малых отклонений, для кото-
рой можно использовать линейную математическую модель (2.146). Однако при больших
отклонениях, возникающих в результате действия значительных возмущений, линейный ре-
тулятор не только не будет оптимальным, но он также может не обеспечить асимптотическую
Устойчивость движения в желаемой области притяжения. В настоящее время в связи с ростом
требований к динамическим свойствам силовых гиростабилизаторов в разных режимах их
работы возникает необходимость дальнейшего усовершенствования методов синтеза опти-
мальных регуляторов этих систем [97,98].
этой связи синтезируем регулятор zz(xi, х2, хз) с использованием исходной нелинейной
модели (2.145), при этом должна гарантироваться асимптотическая устойчивость движения
127
гиростабилизатора в достаточно большой области фазового пространства. Введем в рассый^
рение усеченную нелинейную агрегированную переменную Ж
V» = 0ixicosxi + 0зхз, (214$
отличающуюся тем, что в ней отсутствует координата хг. Синтезируем закон управляй#
объектом (2 145):
b-ьи = - xi c&sxi - Р32Х2 ~ (cosxi - xisinxi)x2 - (рзз + у) *з -
- Яз xj хз sinxicosxi. (214®
Закон (2 148) обеспечивает асимптотическое притяжение изображающей точки из произвол
ной области пространства состояний к многообразию *
= 0ixicosxi + 0зхз = 0, (2.149)
представляющему собой некоторую кривую на фазовой плоскости xi, хз Подставив из (2119)
координату
01
Хз = - ^ X1COSX1
во второе уравнение системы (2.145), получим дифференциальные уравнения
хц, (0 = х-ц,;
• /л 01Р23 2 Яд0? 2*2 ®
Xty (0 = P22X2V - Xxv COS2X1V + -jg- xfy Sinxiy COSX1/ , w
где P22 < 0 , Ргз < 0. Уравнения (2.150) описывают движение вдоль многообразия у» Ml
(2.149). Выберем параметр Ф- из условий асимптотической устойчивости системы (2150).
Рз
Согласно [5], для обеспечения асимптотической устойчивости системы (2 150) необходимо
удовлетворить следующим условиям*
01Р23 Дз01 . 2 п
-------XiSlflXiCOSXi COS Х1 > О
РЗ
2
«(*i) =
и
О
<21е
ф
к (2152)
Ф
2 Я^01 2 . j
д— XjCOS xi —xisinxicosxi ах\ * »
03 J
при I xi I -* оо С учетом того, что, согласно [97], коэффициент ргз < 0» условие (2 Ш)
выполняется при *
а <0 . 81дяз1 ь = 012 (21^)
Р* 0 ’ 1031 31(1 + 8*)Я2 ’ к 0’1,2’' ’
После интегрирования условие (2.152) принимает вид
^41031 + 8l)Cl (cos2xi “ !) + 320^ (cos4xi - 1) х? +
01 (, . RtBx \ . ‘
ЩГГ [1Ргз1 2 Ij831 j x,sin2x,+
+ leifer р₽23' - ffi)(cos2x' -1} - ^iXiSin4xi - (cos4xi - " *
и выполняется при 0з < 0, Это условие является частным случаем условй
(2.153) и удовлетворяется Всегда, если в (2.153) положить к = 1,2,...,. Следовательно, усл<^
(2.153) является достаточным условием асимптотической устойчивости системы (2 150Ц1{
поэтому И замкнутой системы (2 145), (2.148). При этом допустимая область изменена
координаты *1 определяется неравенством
I xi доп I < ~т "1" 2Аэг, к = 1,2,....
Выбрав соответствующее число к, можно определить требуемый параметр (2.153), а также
>рз1 4
выделить область притяжения системы (2 150). х
128
(2 154)
цпгВернемся вновь к условию (2 151) В него в качестве сомножителя входит функция
Дф) = cos2xi и поэтому для выполнения неравенства (2 151) необходимо потребовать, чтобы
( F(xt) = cos2xi > О
Эи»неравенство нарушается в точках, где
*Л’ Х1=у + 2Ъг, к = 0,1,2,
^ч{для первой точки (к = 0) допустимая область изменения координаты xi определяется
неравенством
IXi font <%.
^остановиться на данной точке, то при этом будет обеспечена весьма значительная область
притяжения системы (2 150), вполне достаточная для большинства практических случаев
Межмо, однако, показать, что для синтезированной системы обеспечивается асимптотическая
устойчивость в целом относительно переменных хг и хз, в том числе и в точках (2 154)
Выиолненный в работе [56] теоретический анализ синтезированной системы (2 145), (2 148)
^кипении ее асимптотической устойчивости, времени и характера затухания переходных
процессов подтверждается результатами моделирования на ЭВМ Исследование задачи анали-
шфского конструирования нелинейного регулятора гиростабилизатора показало, что приме-
нение разработанного метода АКАР с использованием нелинейной агрегированной макропе-
ремвнной позволяет не только обеспечить достаточно близкие к желаемым переходные про-
цессы в режиме малых отклонений, но и гарантировать асимптотическую устойчивость
движения в целом по координатам хг, хз и в весьма большой области—по координате xj Это
^возможность существенно улучшить динамические свойства гиростабилизаторов в усло-
виях действия значительных возмущений
жПрим^р 2.10. Рассмотрим задачу аналитического конструирования системы управления
движение^ центра масс подвижного объекта, поведение которого описывается системой диф-
ф^ейциальных уравнений [15 С 162]
mAA(0 = ai<5+ М3, Td(O + d = q/z, (2 155)
цеЛА—координата центра масс, д—отклонение управляющего органа, /п, bi, сь Т—посто-
ЯНЙые коэффициенты Запишем уравнения (2 155) в форме
J (0 = Х2 , Х2 (0 = ЛХз + Ьх$ ,
х3 (t) = ~ <охз + си , (2 156)
адех] = Д А, хг = АЛ (/), хз = д, а = —, b = —, со = 4;, с = Требуется найти закон управле-
AW fit 1 1
ния и(х1,Х2,хз), обеспечивающий перевод объекта (2 156) из произвольной точки пространства
состояний в точку равновесия х*(0,0,0), при этом должны обеспечиваться определенные тре-
бования к динамическим свойствам системы, выражаемые в форме минимизации некоторого
квадратичного критерия качества В работе [15] решается поставленная здесь задача синтеза
(Помощью алгоритма с прогнозирующей моделью, при этом критерием качества является
следующий полуопределенныи функционал
! W t+x 3 ле t+r
Jx = 0,5 f % fid (S) J
> > t i=x k t
А—заданные коэффициенты, t, t + т—скользящий интервал оптимизации. Свойство
«^определенности функционала (2 157) связано с заранее неизвестным членом и^, который
определяется в результате процедуры синтеза управления uopt в соответствии с методом опти-
мизации систем с использованием функционалов обобщенной работы [14, 15]
*1 Полученный в [15] методом прогнозирующей модели закон управления uopt(x\, хг, хз)
представляет собой весьма громоздкое выражение В случае допущения, что г « Т, т.е предпо-
Шеяия малой инерционности исполнительного органа, можно положить ехр( - ^) = 0 и
(2 157)
129
пренебречь членами, в которые входят Т2, Т3 при их суммировании с т. Тогда с уШя
указанного упрощающего предположения оптимальный закон управления будет иметь ви£
Uopt — — Л2с|[ Q,5Pii*Txi+ Тт ^-^-+ 302j хг+ Т2* ^j0it2+ /foj ( а+ j хз) ] X
х (а + Ы) + О,5037х3 } . . (2.158).
В работе [173] поставленная выше задача синтеза закона оптимального управления ряа*
ется не путем поиска весовых коэффициентов 0/ критерия обобщенной работы в резулый
итерационной процедуры [14], а путем формирования желаемой экстремали. Тогда ,йй»
управления и весовые коэффициенты критерия находятся из условий воспроизведения задан-
ной экстремали. При этом считается, что исходные уравнения объекта должны быть приводимы
к канонической форме. (2.82). В рассматриваемом случае эти уравнения имеют следукйй
вид: Ж'-
У1 (0 = У2, Уг (0 = Уз , Уз (0 « «о, (2.М
где yi = xi, уг = Х2 = Х1 (Г)» Уз = *2 (О = ахз + 5х3, «о = (а + З5х3)(- шх3 + + си).
Тогда оптимальный по критерию ш
(2Й
0Л=1 к о
при условии
“ /3 \2
к J 2 dt = const
0 \w- ',Т
закон управления имеет следующую форму [173]:
Ио = — Л2(А13У1 + АгзУг + А33у3) . (2.НЙ)
Коэффициенты закона (2.161) определяются через параметры желаемого уравнения эй*
тремали замкнутой системы
йэ (0 + узуь (0 + У2У1Э (0 + (0 = 0- (2*W
Коэффициенты А,* и параметры у/ уравнения (2.162) связаны между собой следующие
соотношениями: «г-
VAi3 = yi, Л2Аг3 = Уг , &2А33 = у3 , (2.1$)
тогда весовые коэффициенты q^ критерия (2.160) могут быть определены в соответствие
выражениями
q\ = Л2А23 ; qt = к2А%з - 2Ап; <?3 = £2А33 — 24^ ,
гдеАп = Л2А1зА33. После перехода к исходным координатам объекта (2.156) закон управлеим
с учетом (2.161) принимает вид
1 г z , 2ч 1 (о (2.165)
«2 =----т ViXi + Y2X2 + Уз( а + bxl) х3 + - х3. I
с (и + Зохз) L J с
Полученный в [173] закон управления (2.165) обеспечивает в замкнутой системе (2.156)
(2.165) переходные процессы, определяемые желаемым уравнением экстремали (2.162) отно-
сительно выходной координаты xi = уг, при этом обеспечивается оптимизация системы »
критерию обобщенной работы (2.160), весовые коэффициенты qt которого определяются чер«
параметры у/уравнения (2.162) с помощью соотношений (2.163), (2.164).
Замкнутой системе (2.156), (2.165) соответствует функция Ляпунова
V = Ацх? + 2А12Х1Х2 + 2А13( а + bx^) xix3 + A22XI + <
+ 2Аг3( а + 6x3) *2*з + А33( а + 5x3) 2 хЗ , (2.Ш)
с помощью которой может быть показана асимптотическая устойчивость движения синтезиро-
ванной системы управления.
Иначе говоря, в работе [173] по существу решена задача модального управления объект
(2.156) с заданным дифференциальным уравнением (2.162) замкнутой системы, коэффишда-
130
од, которого могут быть определены через спектр Ль Лг, Лз с помощью известных формул
Виета. Оптимизация же системы по критерию (2.160) носит вспомогательный характер и может
Йгь осуществлена в указанном здесь смысле в случае приведения дифференциальных урав-
няй объекта к канонической форме. Другими словами, в [173] осуществлена процедура
регуляризации выбора весовых коэффициентов критерия обобщенной работы путем постули-
рования, а не поиска уравнения желаемой экстремали движения замкнутой системы. В самой
'^процедуре метода аналитического конструирования системы управления по критерию
обобщенной работы, как известно [14, 15], поиск весовых коэффициентов является итераци-
Шйм,т.к . после первого выбора этих коэффициентов, как правило, возникает необходимость
1п0следующей корректировке значений весовых коэффициентов указанного критерия. Изве-
сЙЙв, что сам критерий обобщенной работы по отношению к желаемым динамическим свойст-
вам синтезируемых систем носит косвенный характер, т.е. этот критерий является сопровож-
$йицим и представляет собой некоторое инструментальное средство, помогающее формали-
‘ШйТь процедуру синтеза закона управления.
К88Рйссмотрим решение поставленной задачи синтеза закона управления объектом (2.156)
методом АКАР. Это тем более целесообразно потому, что метод АКАР, помимо непосредст-
в&Ьюго использования притягивающих инвариантных многообразий, базируется также на
идее применения сопровождающих оптимизирующих функционалов [56], если, разумеется,
^Ьр&улировать задачу синтеза регулятора в терминах теории оптимального управления. При-
И№м сначала метод АКАР для объекта (2.156), представленного дифференциальными урав-
(йдеями в канонической форме (2.159).
П Выберем следующую линейную макропеременную:
(Ш. ^1 = Р\У\ + Р2У2 + Уз •
^ида, подставляя (2.167) в функциональное уравнение
T\tyi (0 + = 0 »
g^py уравнений объекта (2.158) получаем закон управления
it z/°*' = ~т\ ~ + ) Уз _ (Р2 + yj-) Уз •
($&р<ходя к исходным координатам, имеем
<qTdr<
При выполнении условий
У1=77’ ?2=Р1+^, Уз=р2 + ^-
управления uq4, (2.169) точно совпадает с «о (2.161), а закон из (2.170), соответственно,
с йг (2.165). Рассмотрим свойства синтезированной системы с позиций метода АКАР. Закон
(умрдаления и^, (2.169) переводит изображающую точку объекта из произвольного начального
нйжюяния в окрестность многообразия
V’i = Р1У1 + Р2У2 + Уз = 0 , (2.172)
(|0доние вдоль которого описывается следующей системой дифференциальных уравнений:
У1у1 (г) = У2ч>1 , У2у1 (0 = -р1У1^1 -Р2У2Ч>1 • (2.173)
Условия асимптотической устойчивости в целом уравнений (2.173) имеют весьма простой вид:
Я > 0,^2 > 0. Тогда с учетом (2.171) условия асимптотической устойчивости в целом синте-
(Цроранной замкнутой системы (2.156), (2.170) будут иметь форму следующих простых
неравенств:
(2.167)
(2.168)
(2.169)
и3 = -
L ~р\_
с(а+ ЗЬхз) Тх
(2.170)
(2.171)
Pi = У1Л > 0; рг = Т1(у2 - пТО > 0; Т, = > 0 . (2Л74)
ЩйЫнение условий (2.174) проще по сравнению с использованием функции Ляпунова
ШЙ)- Закон управления (2.169) является оптимальным по критерию качества
1
131
/з = J + cfV'i (01 dt,
о L J
который с учетом выражения (2.167) и уравнений объекта (2.159) принимает вид
(2Л75)
(2.Й4)
пг
При выполнении условий (2.171) критерий (2.176) эквивалентен критерию (2.160) в отноше-
нии качества переходных процессов в синтезированной замкнутой системе. у.
Таким образом, показано, что на основе метода АКАР можно в результате пропев
аналитических процедур синтезировать законы управления и^, (2.169) и из (2.170), обеспечь-
вающие оптимальность замкнутой системы по критерию (2.175), эквивалентному критефи
обобщенной работы. м
Перейдем далее к рассмотрению возможностей синтеза других законов управления оде-
том (2.156) с использованием метода АКАР. Структура этих законов зависит от форм
выбираемого инвариантного многообразия и вида функционального уравнения. В этой сия
введем в рассмотрение следующую макропеременную:
V>2 = *з + <p(xi , х2) (2,Ш
и функциональное уравнение
T2V2 (0 + Л^2) = о , (2$1
где > 0. -ж
Синтезируем на основе выражений (2.177), (2.178) и исходных уравнений объекта (2’154)
различные законы управления w4(xi , х2 , хз), оптимальные по критерию
/4=/ fmiAvb) + с$2 (01 dt. (2’!<
0 >- J
В соответствии с методом АКАР синтезируемые законы управления u4(xi , х2 , %з) обеспе-
чивают перевод изображающей точки объекта в окрестность многообразия ^2 = 0 (2.177),
движение вдоль которого описывается согласно (2.156) следующей системой дифференциаль-
ных уравнений:
Xlv-2 (Г) = X2v,2 i Х2ч>2 (t) = ~ Яр(Х1у2 , Х2ч>2) ~ , Х2у,2) •
Соответствующим синтезом промежуточного управления <p(xi , х2) можно обеспечитьтре-
буемые динамические свойства при движении вдоль многообразия ^>2 = 0 (2.177). Подставив ф1
(2.178), в силу уравнений объекта (2.156) найдем выражение
д<р д<р . . 2Ч 1 ™, ч , (2.181)
CU4 Х2 -j (О 4* Ьхз^Хз гр F{tp2) + (ОХ3 •,
охватывающее определенную совокупность допустимых законов управления. Выберем снача-
ла простую линейную функцию v <
<p(xi , x2) = 0iXi + 02x2 . (2481)
Тогда, подставив выражение (2.182) в (2.181), с учетом <2Л1Ъ получим следующий зжи
управления при Ftyi) = ’•
С1Ц = — Х\ - (01 + ^г) х2 - (02« + /М*з + у— о>) хз ,
а уравнения (2.180) будут иметь вид
Х1у>2 (0 ” Х2ц>2 » '
хг?! (0 = - £10*1^2 - - 6(0ixiv,2 + £2X2^2)3 • (2^’
Условия асимптотической устойчивости в целом для уравнений (2.184) и, следователь»,
для замкнутой системы (2.156), (2.183) принимает форму простых неравенств: * ,
> 0 ; 02 > 0 ; Т2 > 0 . (2,185)
Закон управления н4 (2.183) при выполнении неравенств (2.185) обеспечивает асимптотичесп
устойчивое движение изображающей точки вдоль многообразия ^2 = 0 (2.177), он прй
законов из (2.170), и2 (2.165) и тем более закона uopt (2.158). Это объясняется тем, чтозд»
132
пользовались не канонические уравнения (2 159), когда синтез законов иг (2 165) и из
Д170) основывался на “компенсационном” принципе, а исходные уравнения объекта (2 156),
(К^гда синтез закона и4 (2 183) основывался на выборе соответствующего промежуточного
правления <р(хх , хг) (2 182) для обеспечения желаемых свойств движения вдоль многообра-
зий = 0 (2 177), определяемого дифференциальными уравнениями (2 184) Параметры /31,
Д(Л Тг закона и4 (2.183) должны удовлетворять условиям (2 185) и могут быть, в частности,
йфеделены исходя из желаемых динамических свойств замкнутой системы в режиме малых
жлонений от заданного состояния
si’.- Для повышения быстродействия при движении изображающей точки вдоль многообразия
= 0 (2 177) можно ввести нелинейную функцию
g <p(Xi , Х2) = filXi + 02X2 + 03X3 (2 186)
“Г^да с учетом (2 186) закон (2 181) при F(^2) = Уг принимает вид
si си4 = — 0\Хг — (/32 + 20з$) (а + Ьх}) хз — ^2 + <охз 187)
выбирая другие функции <р(х\ , х2) и F(^2), можно аналогично (2 183), (2 187) получить
(2 188)
соответствующие законы управления
а и/ Предположим далее, что расход рабочего тела на управление ограничен, т е на скорость
вменения центра масс наложено некоторое ограничение I х21 < Тогда для его учета можно
кпЬльзовать следующую макропеременную
= 0гХ2 + Л th (хз+jSiXi)
Поставляя ^з (2 188) в функциональное уравнение
тэд, тзУз (0 + ^з = 0,
В;®ду уравнений объекта (2 156) получаем закон управления
си4 = (охз - 0\Хг - ch2 (хз + 0\Xi ) (0гахз + 0гЪхз + jr ^з)
закон обеспечивает ограничение I х21 < Л и переводит изображающую точку из произ-
миьного начального состояния объекта по координатам xi и хз в окрестность многообразия
0 (2 188), движение вдоль которого описывается системой дифференциальных уравнений
(0 = х2?з ,
3
(0 = - 0iXiV2- a Arttfj Х2ч>з~ b {0\хх^+ Arth^- x2v,3)
(2 189)
(2 190)
Условия устойчивости уравнений (2 190) сводятся к неравенствам 0\ > 0, 02 > 0, которые
Определяют для синтезированной системы (2 156), (2 189) асимптотическую устойчивость
двйкения по координате х2 в области I х21 < 4£2, а по координатам xsubl, хз—в целом
^Изложенные выше разные подходы к задаче синтеза системы управления движением
цевгра масс подвижного объекта (2 156) и их сравнение между собой показывают преимуще-
ств метода АКАР, позволяющего в результате простых аналитических процедур получить как
известные решения указанной задачи синтеза, так и найти новую совокупность законов
управления, обеспечивающих дополнительные требования к динамическим свойствам замк-
йутой системы
51!^
2.5. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ И ОБРАТНЫЕ ЗАДАЧИ
ДИНАМИКИ НЕЛИНЕЙНЫХ УПРАВЛЯЕМЫХ СИСТЕМ
В последнее время во многих работах [103,104 и др ] развивается так называемая концеп-
дообратных задач (КОЗ) динамики, основанная на задании желаемых траекторий движения
филируемых систем При. этом было показано [104], что структурные свойства законов
удаления, синтезированных для линейных объектов, оказываются идентичными структур-
U 1
133
ным свойствам законов, полученных стандартными методами аналитического конструирова-
ния оптимальных регуляторов (АКОР) Практически это означает, что оба метода в линейном
случае могут привести к одному и тому же результату В работе [116] на основе КОЗ
рассматриваются задачи построения алгоритмов управления движением нелинейных объекта
второго порядка При этом процедура синтеза осуществляется в два этапа сначала определя-
ется ускорение, при котором реализуется назначенная траектория, а затем находится управ-
ление, с помощью которого создается требуемое ускорение при движении в начало коорди^,
В литературе пока отсутствуют примеры применения КОЗ для синтеза систем управлеим
нелинейными объектами более высокого порядка В настоящее время в должной мере еще не
разработаны методические основы применения КОЗ для нелинейных объектов
Необходимо подчеркнуть, что успех метода КОЗ в задачах синтеза полностью зависит от
решения проблемы приводимости исходной системы дифференциальных уравнений объекте
форме Коши к форме “вход-выход” или к некоторой канонической форме [183, 233] По
существу, как решение задачи синтеза законов управления, так и ответ на вопрос об управля-
емости нелинейного объекта и выявления других его важных свойств определяется возможно^
стью приведения исходных уравнений к форме “вход-выход” При этом между координатам!
xi , , хп исходной системы дифференциальных уравнений объекта и координатами yi, , уя>
форме “вход-выход” должно быть взаимно однозначное соответствие Это свойство определя-
ется невырожденностью матрицы управляемости объекта Для случаев, когда указанные здесь
условия приводимости систем выполняются, сама процедура синтеза законов управлеим
сводится к элементарному “компенсационному” принципу, когда синтезируемый закон состо-
ит из двух составляющих первая составляющая полностью компенсирует (вычитает) нели-
нейности, а вторая, в частности линейная составляющая закона управления, обеспечивает
желаемое качество переходных процессов в замкнутой системе Следует, однако, указать, что
требование полной приводимости исходной системы дифференциальных уравнений объектах
форме “вход-выход” по всем координатам с целью последующего применения компенсациои-
ного принципа для синтеза законов управления во многих прикладных задачах являетсх
чрезмерным и ведет к существенному усложнению синтезируемого закона и возникновению
проблемы взаимной однозначности исходной и приведенной систем [183] Это было показав
на примерах решения задач синтеза для объектов (2 114) и (2 156) Метод АКАР, в отличие от
КОЗ, позволяет гибко подойти к процедуре синтеза закона управления, осуществляя липа
частичную приводимость по некоторой группе координат исходной системы дифференциаль-
ных уравнений ;
Покажем, что на основе развитого выше метода АКАР можно получить аналогичные КОЗ
результаты [105], но для нелинейных объектов вида (2 84), имеющих треугольную форму
функциональной матрицы, т.е описываемых следующей системой нелинейных дифференци
альных уравнений
*1 (0 = Л(Х1 , хг), хг (0 = /г(х1 , х2 , х3) ,.. , х„ (() = /«(xi , , хп) + и , (2 Ц1)
где fi—непрерывные дифференцируемые функции, ограничены по модулю;
ДО , , 0) = 0, и—скалярное управление Требуется синтезировать управление u(xi , , х,),
гарантирующее асимптотическую устойчивость системы (2 191) и обеспечивающее желаемый
характер и время затухания переходных процессов Построим систему функций
У/ Ffa , х2, , хя) , i 1,2, ,л , (2 192)
удовлетворяющую следующим требованиям
а) система (2 192) должна быть функционально независимой, т е
aF(xi, , хя)
5(Х1 , , хя)
(2 193)
*0,
где F = (Л , , F„);
б) вектор У(у) , , уп) должен являться решением системы дифференциальных уравнении
У(0 = АУ, (2194)
134
0 10.0
0 0 1.0
0 0 0.1
«1 аг a3 . an
$1б8адно, что система (2.194) является асимптотически устойчивой, т е ори t -» « yt (/) -* о
(Ццду условия взаимооднозначности (2 193) преобразования F имеем при /-»оо
, хп) -* 0, что и означает асимптотическую устойчивость системы (2 191) Получим
аккму уравнений относительно Л, учитывая, что в левой части выражения (2 194) стоит
ползая производная У (/) Имеем
Ф =
Ф/* = AFm,
‘ал ал
dxi дхп
• • • • •
dFn dFn
dxi ’ dxn
Тода основное функциональное соотношение для нахождения F, определится как
A~l<Pf = F,
цеЛ — матрица, обратная к Л, имеет структуру
Г У) У2 Ул-1 Ул'
10 0 0
о
1
о о
(2 195)
0 0 10
В (ввернутой форме выражение (2 195) можно записать в виде
м-1
2
/=1
к
2
/=1
п-1
2
/=1
dF,
II
dFkf'
dxj
dFn-i ,
dxt 1
(2 196)
fv dFi
z y'a7
V=u oxi
Потребуем, чтобы F\ = Fi(xi) Разрешим систему (2 196) относительно Ft,.., Fn Математи-
структура системы (2 196) позволяет рекуррентно определить эти функции из второго
уравнения находим Ft, из третьего—F3 и тд Подставляя найденные выражения для Fj
(i=2, ,п) в первое уравнение системы (2 196), получим искомый закон управления
dFn _ „ "v ($ uFi\. dFn. (2 197)
YndxnU F'Xi [2 Kfix^ Yndxnfn
^^3 выражения (2 197) показывает, что рассматриваемый класс систем управления вида
должен быть ограничен еще одним дополнительным условием # 0 Из структуры
t’or.4' °Хп
окгемы (2 196) видно, что это неравенство эквивалентно требованию
135
dFn__ d f dFn-i \ _ dFn-i dfn-i _ _ df\ dfn-2 dfn-\ (2.19Ц
дхп~ дхп I dxn-i1 I dxn-idxn-i dx2'"dxn-i dxn
Изложенная выше процедура, по существу, сводится к представлению исходного нелий
ного объекта (2.191) в канонической форме (2.194) относительно новых переменных j
(2.192). Затем можно осуществить процедуры АКАР относительно у,- и, используя преобра»
вание (2.192), построить закон управления и(х\,..., хп) относительно исходных фазовых од
динат xt системы. К аналогичным результатам приводит и процедура, изложенная в ir.23i
охватываемая формулами (2.82)—(2.96). Здесь эта процедура представлена в более обща
виде. Разумеется, что при этом справедливы все изложенные в п.2.3 выводы. В частности, пр
yi = Fi = xi канонические уравнения (2.194) можно записать в форме jTr
(0 + fln-ixi” (t) + ... + aoxi = 0 , -дат
коэффициенты а, которой можно найти по методу стандартных коэффициентов или исходен
условий минимизации квадратичного критерия качества (2.90) в методе АКАР по формула)
(2.93), (2.94), а также с использованием метода АКОР относительно переменных у, [ 12]. Итак,
показано, что структуры законов управления нелинейными объектами вида (2.191), Полуни-
ных методом АКАР и на основе КОЗ, идентичны. Это позволяет расширить и углуби»
математическую сущность и физическую интерпретацию указанных методов синтеза нелини-
ных систем управления.
Пример 2.11. Пусть уравнения возмущенного движения нелинейного объекта имеют ц
(2.114). Зададим матрицу системы (2.194) как
ГО 1 О'
А= 0 0 1
-6-11 -6
Тогда
[Я _i _1
6 1 6
А-1 = 10 0
0 1 0
а система (2.196) примет вид
с — Л д/ч / (^£1 t _l _ X (, dF3 f , dF3
1 6 d*i 1 [dxi 1 dX2^2J 6 ^dxi 1 дх2^2 дхз
p d-Fi f • p f u- d^2 f
F2=d^f>’ F3-~d^f' + ~Sr2h
(2.199)
Из соотношений (2.199), задаваясь Fi= y\ = xi, имеем
F2 = Уг = хг ; F3 = уз = sinxi + хз .
Подставляя эти функции в первое уравнение системы, получим
и = - 6xi ~ (П + cosxi)x2 - 6(sinxi + хз) . (2.200)
Разумеется, что структура закона управления (2.200) совпадает со структурой закона (2.137),
полученного выше в п.2.3. Эти законы доставляют минимум критерию (2.134), по которому
является оптимальной синтезированная система.
2.6. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ, ОПТИМАЛЬНЫХ
ОТНОСИТЕЛЬНО МАКРОПЕРЕМЕННОЙ И УПРАВЛЕНИЯ
В предыдущих разделах этой книги рассматривались методы решения задач аналитическо-
го конструирования нелинейных систем, когда в подынтегральное выражение оптимизирую-
щего функционала входили обобщенная функция и ее производная ((). Это позволило^
136
осиове соответствующих функциональных уравнений развить достаточно эффективные про-
цедуры аналитического синтеза законов управления. Рассмотрим теперь другой способ исполь-
зования одного частного вида оптимизирующих функционалов.
•Й Предположим, что объект управления может быть представлен следующим обобщенным
щинейным дифференциальным уравнением:
tfl. (t) + XVO ~ <fl?P)u» (2.201)
,..., xn)—некоторая функция координат xi ,..., x,t; и (t)—управляющее воздействие.
33 Требуется определить закон управления и -.u(ip), обеспечивающий оптимальное в смысле
йийимума функционала
* 1 (2.202)
vs / = J [Fty) + «1 dt
0
ЙЫйкение объекта (2.201). Подставив и из (2.201) в (2.202) и используя процедуру метода
ЦАР, найдем закон управления
№.. « = - + Лй - . <2-203>
(2<203) получен для устойчивого подсемейства экстремалей движения. В зависимости
о^дида функций M>(xi ,..., х„), a(V0 и F(VO из выражения (2.203) можно найти различные
частные формы законов управления. Рассмотрим сначала некоторые классы объектов, описы-
ваемых обобщенным дифференциальным уравнением
к (Г) + fap = и, • (2.204)
Шлрио(у>) = 1 и flip) = fap. Уравнению (2.204) соответствует, например, следующее нели-
нейное дифференциальное уравнение, записанное относительно исходных координат:
.... а п п
2 (0 + Ё (t)x№~v> (t) + 2 (f)xtf> (() + ...+
l«l (,<7=1 /,в=1
к J ар^"’) (() + к 2 Л/«х^Н1) (0 х<9-,) (/) + ...= и.
ff!3i 1=1 • М=1
Вр оптимизации системы (2.205) по критерию
__ Г
» п .
J т22 щх{ _
0 /=1
я .
? ° (0 + т22 aiqx(i ° (0 х(<? ° (0 + и2
dt
(2.205)
(2.206)
Жон управления принимает вид
5H1 • и = - (Vm2+Az- к\ 2 а^-,)(0+2 а/«х(/-1)(0 + ••• • (2-207)
Оптимальный по критерию (2.206) закон (2.207) позволяет получить ряд частных форм
з^рнов управления. Так, для линейного объекта
S afP (1)+к% (() = и °’2°8)
оптимальный по критерию
-ж.1
г.,е
*<•••. О
закон управления будет иметь вид
2
т2 2 (()] + и2
V=i )
dt
(2.209)
(2.210)
.ад w = - ( VOT2 + к2 - к) 2 ° (0 •
/-1
Интересно отметить, что к классу (2.208) приводятся распространенные на практике матема-
тические модели объектов, состоящих из последовательно включенных п инерционных звень-
ев# этом случае для определения коэффициентов а, следует положить, например,
-^“>1= тогда остальные коэффициенты а* могут быть достаточно просто выражены через
137
другие постоянные времени Г* объекта.. Используя оптимальный по критерию (2.209) завов
управления (2.210), можно перейти к физически измеримым координатам и построить теяю
чески реализуемый регулятор. Ж
' Рассмотрим, далее, некоторые классы объектов, описываемых обобщенным дифференци-
альным уравнением
V» (Г) = и, (2.2Ц)
т.е. при ~ ; a(V0 - !• Уравнению (2.211), в частности, соответствует нелинейное Д1ф
ференциальное уравнение
2 (Г) + 2 (0 х(9-1) (Г) + aiqx^~l) (?) х(<?) (Г) + ... = и .
/=1 /,</=1
Для объекта (2.212) оптимальный по критерию (2.206) закон управления принимает вид
и = - т 2 а1Х(1~Х) (0 + 2 (0 х(в-1) (0 + ... . <2'^
i= 1 м= 1
(2.2112)
Из закона управления (2.213) можно получить различные формы частных законов. Так; »
случае линейного объекта
(2.21®
п
U
находим оптимальный по критерию
2
, ..2
закон управления
т2|2 аре' 1
V=1 /
dt
и = - т ° (0
(2.216)
о
Можно показать, что уравнением (2.214) описывается распространенный класс нейтральных
объектов, структурная схема которых состоит из (п -1) инерционных и одного интегрирующею
звеньев. Известно, что такими структурными схемами может быть представлена неизменяем^
часть промышленных систем автоматического регулирования, состоящая из исполнительного
механизма, описываемого интегрирующим звеном, и собственно объекта, описываемого мате*
матической моделью из (/i-1) инерционных звеньев. Уравнением (2.214) описывается такде
неизменяемая часть следящих систем, состоящая из (п-1) инерционных и интегрирующею
звеньев. Это означает, что на основе закона управления (2.216) можно построить оптимальные
по критерию (2.215) различные системы автоматического регулирования, следящие систему
и т,д-
Рассмотрим далее класс нелинейных объектов, описываемых нелинейным дифференциала
ным уравнением
п-2
anxw (0 + 2 (0 = и ,
/==0
которое также представляет собой частный случай уравнения (2.211). Оптимальный по крите-
рию
ш
закон управления принимает вид
Г л-2 .1
и = - т апх^п (?) + dx® •
/«=о с
Используя приведенные выше выражения, можно синтезировать оптимальное управленяе
и для других классов нелинейных объектов.
Отметим некоторые общие закономерности, присущие, нелинейным системам, оптимал^1
ным по критериям вида (2.202). Синтезированное оптимальное управление (2.203) обеспечи-
138
!^ает асимптотическую устойчивость в целом этих систем относительно многообразия ip = 0.
^шжение изображающей точки к многообразию ip - 0 описывается уравнением экстремали
3 V» (?) + VF(v,)c/(V>) + f(^)o(ip) = 0 . . (2.217)
В зависимости от выбора подынтегральной функции F(ip), можно обеспечить различные свой-
Йва уравнения (2.217) и, следовательно, динамические характеристики синтезируемых сис-
тем. Законы управления (2.203), полученные с использованием простейших аналитйческих
Процедур, несмотря на кажущийся частный характер, охватывают многие известные типовые
законы, достаточно распространенные в теории и практике построения различных систем. В
(Штности, оказывается, что к системам, оптимальным по критериям вида (2.202), относятся:
дегемы подчиненного регулирования электроприводов [111, 112]; следящие системы, опти-
мальные по критерию обобщенной работы [ИЗ]; оптимальные по квадратичным критериям
.системы управления объектами с внутригрупповой симметрией [114], примерами которых
жгут служить сложные энергосистемы и др. Указанный перечень разных классов систем
Давления, охватываемых более общим классом систем (2.201), оптимальных по критериям
ища (2.202), позволяет сделать вывод о практической полезности полученных выше законов
давления. {
" Перейдем к рассмотрению некоторых примеров, иллюстрирующих метод аналитического
конструирования систем, оптимальных относительно агрегированных макропеременных и
Правления.
0) Пример 2.12. Синтезируем оптимальную следящую систему, неизменяемая часть которой
Щтоит из (л - 1) инерционных звеньев и интегратора, т.е. описывается системой дифферен-
ЭДйльных уравнений
Х1 (Г) = кпх2 - ai2X2 ;
j * %i (0 ~ Qii+iXj+i "h йцХ/, i — 2,3,...,/i 1 , (2.218)
хп (/) = а,шхп + kilt;
мл — 1
1Д® di i+1 —~ тр •
Г и-i+l 1 n-i+i
Сначала синтезируем следящую систему, оптимальную по критерию вида (2.215). Выбе-
^агрегированную макропеременную
л-i
^1 = П (ТкР + 1)п(/>) •
*=1
Щ^ца критерий оптимальности (2.215) с учетом (2.219) принимает вид
00 , •»
.. . f I . . «.V ZA.
(2.219)
(2.220)
(2.222)
^Соответствии с (2.216) находим оптимальный по критерию (2.220) закон управления
кщ = - mx \TiT2...Tnx^ (/) +...+ (Ti +...+ T„)xi(0 +xil > (2'221)
который на основе уравнений объекта (2.218) может быть записан в форме
> ц1 = -^/х,+
siif; * «=2
= Л]Л2—кп , Xj (/)—выходные координаты инерционных звеньев. Реализация закона
(2.222) проще реализации закона управления (2.221), т.к. в выражение (2.221) входятфизи-
измеримые промежуточные координаты объекта. Закон управления (2.222) обеспечи-
мет перевод изображающей точки системы из произвольного начального состояния в окрест-
ить многообразия ipi = 0 (2.219), движение вдоль которого описывается дифференциальным
радением
«-1 .
п (Ткр + 1 ).Х| (р) = 0 , где р = -Г.,
/Ь=1 ат
(2.223)
139
корни характеристического уравнения которого действительны, отрицательны и р&ва
а* = - Это означает, что синтезированная система с законом управления (2.222) обладая
1 к
свойством асимптотической устойчивости в целом. i
В рассматриваемом случае можно также указать оценки качества и времени регулировки.
Движение замкнутой системы будет описываться уравнением экстремали 1
V»! (О + mi^i = 0. (2.224)
Из уравнения (2.224) можно получить решение
V4 (0 =
Тогда, как обычно, предполагая, что ^и“(О»О1 - О,О2)^Чо, находим, что время движений
многообразию уч = О будет приближенно равно №
. ~ (2»
tP\ ~ (4 • 5)^ . zife
Время же движения вдоль = 0 определяется решением дифференциального уравнСям
(2.223), т.е.
(2.227)
-V1V-1 (0 = 5 Ctfi ,/Гк
*=1 ш.
Приближенную оценку времени затухания переходных процессов в синтезируемой CHCjew
можно представить как сумму времени tp\ (2.226) и времени, определяемом решением ^j(t)
(2.227). Из выражений (2.225) и (2.227) следует, что в системе протекают апериодичен»
переходные процессы. Таким образом, на основе очевидных соображений установлены таив
важные динамические характеристики синтезированной следящей системы п-го порядка, ив
устойчивость, время регулирования и характер переходных процессов.
Синтезируем теперь следящую систему (2.218) с использованием оптимизирующего
функционала
J 2 - I (f»2^2 + dV’i) dt.
o' '
Выберем в этом критерии агрегированную переменную
^2 = 2 fikXk •
*=1
(2.228)
Тогда критерий Jt принимает вид
J? — J //?2
О
II
+ <‘2| 2 РкХк
*=’ )
(2.2И)
2
dt.
Оптимальный по критерию (2.229) закон управления
рпкпТ _ т 'v & Г л. (
-л U2 — Xi Т V a Uij+\Xj+\ + I Ojj
(2.230)
1
Xn '5Q;
обеспечивает попадание изображающей точки из произвольного начального состояния в ок-
рестность многообразия ^2 = 0 (2.228). Выбором в (2.230) соответствующих коэффициент
pi можно добиться требуемых характеристик движения вдоль указанного многообразия^
частности, если положить
= кп~ь+2 ... кп7h-j+i , № 2,3 ,..., и ,
то закон управления (2.230) примет форму
/
п
иг —---------------5---
к2кз...кп-'к*Т\Т
\ (2.231)
/
'hi
<2.23?
Закон (2.232) точно совпадает с законом управления (2.222) при
Т = — = kl
m2 m\knT\ ‘
/
(2.233)
140
иСинм образом, при выполнении условий (2.231) и (2.233) оптимизация следящей системы
гХ&218) по критериям Ji (2.220) и /г (2.229) приводит к совпадающим законам управления.
Это означает, что в этом случае критерии качества Ji (2.220) и /г (2.229) эквивалентны в
отношении свойств оптимизируемой системы.
(2.234)
-,, В работе А. А. Красовского [113] приведен пример синтеза следящей системы (2.218),
оптимальной по критерию обобщенной работы
J3 = M f x2dt
о
{^.ограничивающем условии
— М
Q
f и2 dt
о
• + дМ
dt = const,
(2.235)
где Af—математическое ожидание; д—весовой коэффициент; у,-—коэффициенты обратных
Сйзей. Оптимальный по критерию J3 (2.234). закон управления имеет вид
/
и3 = ~ ки xi +
n t >
2 ^п—i+2 ••• 7+1 »
(2.236)
. дк2к3 ...кп
ки~ k^Tl^.T2-,' (2-237)
Овгимизация системы по критерию обобщенной работы J3 (2.234) означает, что при случай-
(Ййгначальных условиях осуществляется минимизация интегральных оценок вторых моментов
щррдинат [113]. Такая система оптимальна в отношении точности в установившемся режиме
-1|фювиях действия на объект стационарных шумов. Кроме того, как показано в [ИЗ],
синтезированная система устойчива при сколь угодно большом коэффициенте усиления ки
(1237) и малочувствительна к изменениям начальных условий и параметров объекта.
, Если в выражениях (2.222) и (2.232) положить соответственно
_ (2.238)
т* “ ^гтат2 т2
12^3 ... 1 п-1
_ <2.239)
gklkl-.k^k3,'
^аконы управления г/1 (2.222) и иг (2.232) точно совпадут. Это означает, что при выполнении
условий (2.238), (2.239) различные, на первый взгляд, критерии качества J\ (2.220), /2 (2.229)
аи^(2.234), (2.235) в действительности являются эквивалентными в смысле динамических
свойств синтезированной системы. Выполнение условий (2.238) и (2.239) не представляет
^двести, т.к. сводится к соответствующему выбору весовых коэффициентов mi, m2, сг и д в
Плавных критериях качества. Отметим также, что оптимизация системы по критерию /3
(2.234) является частным случаем оптимизации по критерию (2.229), т.к. требует выполне-
тйй'условия (2.231). В общем случае соответствующим выбором весовых коэффициентов
1фй1ерия (2.229) можно добиться различных свойств системы.
Изложенный пример синтеза оптимальной по разным критериям качества следящей сис-
ями еще раз свидетельствует о том, что квадратичные функционалы относятся к косвенным
цйггериям, соответствующим выбором весовых коэффициентов и структуры которых можно
до&ться точной или приближенной их эквивалентности в отношении динамических свойств
ойтезируемых систем.
и. Пример 2.13. Рассмотрим задачу оптимизации отдельных контуров систем подчиненного
радирования электроприводов [115]. Сначала покажем, что выбор параметров настроек
регуляторов отдельных контуров систем по стандартным показателям подчиненного регули-
рования (технический оптимум) представляет собой частную задачу оптимизации по квадра-
141
тичным критериям вида (2.215). В общем случае структурная схема отдельного контурасйй
подчиненного регулирования обычно включает в себя интегрирующий регулятор и об^я
контура, передаточные функции которых соответственно имеют вид [111,112]
^,<p) = -^, hwp) = .
П (Tv + О
/ж* 44
Запишем уравнение движения разомкнутого контура в операторной форме, отнеся интегрвд*
ющее звено к объекту регулирования -
(ТЛ
иэд ” МА
т.е. рф&р) = и^р) или V*i (/) = щ (Г). Оптимизирующий функционал контура выберем в
/1 = J (m/M + ) dt.
С учетом выражений V'/Cp) - W^p) находим оптимальный по критерию (2.241) закон уп|»ь
ления
М Л/ИЭД •
Тогда передаточная функция регулятора в замкнутом контуре будет определяться следую©»
выражением: ®
(24Й)
mi
Wpeii~ ktpwM' а
С учетом (2.242) получим передаточную функцию замкнутого оптимизированного по кр№
рию (2.241) контура •'В
$
т.е. в результате оптимизации контура осуществлена “компенсация” оператора исхода®
объекта. На практике объекты регулирования обычно содержат как большие, так и мада
постоянные времени [111, 112],т.е.
ИЗД = И^0,ч(р)—----*-----
П (ЬР + 1)
5=1
где ИШр)—часть передаточной функции объекта со звеньями, “компенсируемыми” дёйстй-
г •
ем оптимального регулятора, a WHK(p) - 1/fj (Т»Р + 1)—часть передаточной функции объ&я
4-1 ЙЙ*
в виде эквивалентных инерционных звеньев, действие которых нецелесообразно или приеду
пиально невозможно “компенсировать” действием регулятора. Величины т, и У т, обыШ
4“‘ 5
малы по сравнению с постоянными времени, входящими в Wm (р), и по сравнению с постав-
ной времени То/ замкнутого оптимизированного контура. Тогда передаточная функция реуг
лятора принимает вид
” А<р»«р)
Л- г
Обычно при Tqi = — 2 2 2 Ts без большой погрешности [111,112] можно принять
т> 1
Г г
П (*«р + О * р S ь+1 = <tp + 1,
142
тдео= итогда
5=1
1
(2 244)
-W)i
да, передаточная функция замкнутого оптимизированного контура с учетом “некомпенсцру-
емых”, малых постоянных времени приведена к стандартному звену второго порядка В
Зйисимости от выбора коэффициентов mi и А/, входящих в критерий оптимальности (2 241),
можно получить различные свойства оптимизирующего контура В системах подчиненного
Л/
р^улирования нередко выбирают Тщ = — = 2о и тогда передаточная функция регулятора
Й43) принимает вид
Жз ~ TOlp(ap + 1) + 1 ’
(2 245)
^/(Р) 2орЛч(р)
Формула (2 245) широко используется в теории и практике систем подчиненного регулирова-
Й£я [111,112]
ЗУ Таким образом, в системах подчиненного регулирования каждый отдельный контур опти-
мизируется по квадратичным критериям вида (2 241), т е задача выбора параметров настро-
ек регуляторов контуров подчиненного регулирования сведена к более общей задаче оптими-
заЦии по квадратичным критериям качества [115]
'* Перейдем к синтезу систем подчиненного регулирования, когда оптимизация контуров в
рЙйме малых отклонений производится по квадратичному критерию качества (2 241) Для
иллюстрации развиваемых здесь принципов рассмотрим синтез системы регулирования часто-
тывращения (скорости) Контур регулирования тока обычно оптимизируют [111,112] путем
введения ПИ-регуляторов тока
1
(2 246)
Ж" ^регт{Р) ,
’йфйметры которого в соответствии с (2 245) будут равны
к к
ггу гг> гр лгр KrnnKm
1 т “ 1 э , 1 нт — 7?7~
Ъйляются параметрами настройки на “технический оптимум” [111,112] единичного контура
регулирования При синтезе систем подчиненного регулирования частоты вращения обратную
сИЗь по э д с двигателя обычно не учитывают, а тиристорный преобразователь считают звеном
t Малыми “некомпенсируемыми” постоянными времени. Тогда передаточная функция замк-
B^fijro контура тока будет иметь вид
“ кт[2Т„р(Тнр-к 1) + 1]
йёемотрим синтез однократно интегрируемых систем регулирования частоты вращения
Обычно при построении этих систем в результате формального применения выражения (2 245)
получают П-регулятор скорости [111,112]
Ъ’ w _ Тмк„с„Ф
- К. - 4т^Яа
При этом замкнутая система регулирования скорости описывается передаточной функцией
w (Dx____________________________________I_________ <2 247)
у1[4ЗД2Тяр+ 1)+ 1] ’
^.етШриближенно представляется в виде стандартного оператора (2.247) второго порядка
Цыртжение (2 245) справедливо для интегрирующих регуляторов, устанавливаемых на входах
обетов, состоящих из инерционных звеньев. Однако при синтезе регулятора частоты враще-
н»г£2246) на основе (2.245) обратная связь по э.д с. не учитывается, что приводит к переда-
точной функции объекта контура
л
143
(2.348)
R3
ктсеФТмр(2Т^р + 1) ’
содержащей интегрирующее звено Это ведет к тому, что регулятор частоты вращения, пож-
ученный в результате формального применения выражения (2 245), уже не будет оптимальным
по критерию (2 241) В этой связи применительно к объекту (2 248) возникает необходимой
получения оптимального по критерию (2 241) закона регулирования
, х2) = Ди(е - V2X2), (2 249)
, , - „
где е (f) = хи - У1Х1 (t), yi = 1, у2 = ~фу—коэффициенты обратных связей соответственно
по скорости и току, -------коэффициент усиления регулятора скорости Коэфф?
циент ки можно выбрать в соответствии с выражением (2 248), тогда получаем
о _ 4т2Тр _ . §,5кт
" Л2 ’ 71 1 ’ 72 ки
Передаточная функция замкнутой системы регулирования скорости будет иметь вид
7 2Т2Т,,р2 + (Т2 + V^T^p + 1 т2
При Т2 = * /г = О, /3 = 1 передаточные функции (2 247) и (2 250) совпадают Из (2 249)
1
следует, что при оптимальной системе регулятор частоты вращения имеет передаточную
функцию вида С
V
J4
(2 250)
U7 (п\ — М, —
с(р) — рки T2Ra
с введением дополнительной обратной связи (у2х2) по току электродвигателя
Рассмотрим свойства оптимальной по критерию (2 241) системы регулирования частом
вращения Одним из важных ее свойств является устойчивость при сколь угодно большом
коэффициенте усиления (ftku -» «>) регулятора При этом оказывается, что в отличие от общ
ных систем подчиненного регулирования частоты вращения, с увеличением коэффициент
усиления (iku растет коэффициент демпфирования и при ftku -♦ <» система вырождаетср
систему, свойства которой определяются в основном свойствами контура тока (Ур»6) Разуме-
ется, что в реальных системах при неограниченном увеличении коэффициента усиления мо$я
возрастать роль неучтенных при синтезе малых параметров и растет порядок уравнений,
однако разработанный здесь подход указывает путь улучшения свойств систем подчиненного
регулирования Так, при выборе коэффициента усиления fiku регулятора таким, чтобы дина-
мические характеристики (время регулирования, перерегулирование и др ) оптимальной!»
критерию (2 241) и обычной систем совпадали, оказывается, что статизм оптимальной системе
по нагрузке будет в 1,5 раза меньше В пределе статизм оптимальной системы может бал
уменьшен вдвое по сравнению с обычной системой регулирования частоты вращения <
Следует отметить, что эта система оказывается также оптимальной и по критерию обоб-
щенной работы (2 234) с ограничивающим условием (2 235), в котором весовой коэффицшш
q следует положить равным
q R^2
Выбор коэффициентов mi, Л2 критерия (2 241) определяет выбор весового коэффициент! $
при оптимизации системы по критерию (2 234) Таким образом, оптимальная по критерию
(2 241) система регулирования частоты вращения является также оптимальной и по критерию
(2 234) минимума математического ожидания интеграла квадратичной формы координат а'
144
2.7. АНАЛИТИЧЕСКИЕ МЕТОДЫ АНАЛИЗА
УПРАВЛЯЕМОСТИ И ОПРЕДЕЛЕНИЯ ОСОБЫХ МНОГООБРАЗИЙ
НЕЛИНЕЙНЫХ СИСТЕМ НА ЭВМ
Введение и постановка задачи
(2.251)
(2.252)
В современной теории автоматического управления основными и в должной мере еще
нерешенными являются такие фундаментальные проблемы, как анализ свойств управляемости
11 наблюдаемости нелинейных динамических объектов, а также качественных свойств управ-
лений, обеспечивающих оптимальность систем по соответствующим критериям качества. К
настоящему времени в литературе имеются различные методы, позволяющие для частных
^даосов нелинейных объектов, как правило малой размерности, в определенной мере решить
указанные задачи качественного анализа оптимальных систем управления
Распространенная постановка современной задачи оптимального управления формулиру-
ется в следующем виде Предположим, что движение объекта описывается векторной системой
лнршнейных дифференциальных уравнений
= * (!) = А(х) + В(х)и ,
де Л(х)—функциональная матрица-столбец размерности п с элементами /i(xi , ,х„},...,
/4*1» »•*«), xi ’ > хп—координаты вектора состояний, и—вектор управлений размерности
лцдинейно входящий в систему уравнений (2 251), В(х)— функциональная матрица на п строк
ит&столбцов с элементами , , хй) Требуется на множестве кусочно-непрерывных допу-
сгимых управлений и (()€ /<тах найти такие ilopt ((), которые на траекториях движения объекта
(2,251) минимизируют некоторый критерий качества
,зн J = f F(x,u)dt,
to
гдемоменты to и считаются фиксированными Поставленная задача относится к классу задач
оптимального разомкнутого управления, когда управление и (() является функцией времени,
а начальное х (to) = Хо и конечноех (4) = Хк значения вектора состояния х (Г) заранее заданы.
Пой действием управления и (t) объект (2 251) будет двигаться по оптимальной траектории
)$(/), которая должна удовлетворять заданным граничным условиям xopl ((о) = х0 и
«^(4) =
* В этой связи необходимо проверить, существует ли для заданных х0, Хк такое допустимое
управление и (f), при котором соответствующая траектория х (t) движения объекта (2 251),
начинаясь из начальной точки х (to) = хо, попадала в желаемую конечную точку х ((*) = Хк,
при этом необходимо найти множество тех х0 и хк, для которых оптимальное по критерию
(2.252) управление uopt (t) всегда существует Эта задача и является известной задачей управ-
ляемости динамических объектов
^^Управляемость относится к одному из фундаментальных свойств любой динамической
сждемы Исследованию управляемости систем уделяется значительное внимание в литературе
[157—160,163,199—207], наиболее разработана теория управляемости линейных объектов,
базирующаяся на ранговых критериях при отсутствии ограничений на управление и коорди-
наты При наличии же указанных ограничений исследование свойств управляемости сущест-
во затрудняется [201], поэтому в литературе даже в случае линейных объектов имеются
|ишь отдельные результаты
'Что же касается исходно нелинейных объектов, то в этом случае проблема управляемости
принимает нетривиальный характер, требующий применения математических методов, обыч-
но редко используемых в теории управления Анализ литературы показывает, что можно
выделить следующие основные подходы к исследованию управляемости нелинейных систем:
145
•дифференциально-геометрические и теоретико-групповые подходы, основанный-
на применении групп и алгебр Ли и методов дифференциальной геометрии
[201,204,205];
•подход, связанный с выявлением инвариантных многообразий в пространствен
состояний нелинейных объектов [78]; • с-
•подход, в котором используется приведение дифференциальных уравнений
объекта к канонической форме Коши—Бруновского [158—160, 202, 203, 206]
или к блочно-канонической форме Фробениуса [94, 95, 183, 184]. ж
Рассмотрение результатов, полученных на основе указанных подходов, показало,“Ъ
матрицы управляемости для нелинейных объектов вида (2.251) оказываются полностью Тож-
дественными матрице общности положения [23] принципа максимума. Итак, полученные!
настоящее время различными методами результаты по управляемости нелинейных объекта
вида (2.251) являются частными случаями, непосредственно вытекающими из условий общю-
сти положения (УОП) принципа максимума. Однако известно, что УОП представляет собой
важнейшую конструкцию, связанную, в первую очередь, с проблемой поиска необходима
условий оптимальности системы по соответствующему критерию качества (2.252), УОП|
принципе максимума предназначались в основном для исследования качественных, общи
свойств оптимальных управлений uopt (/). Условия же управляемости вытекают из УОП ках
своего рода побочный и весьма полезный результат. В задачах оптимального по различным
критериям управления УОП позволяют выявить в пространстве состояний нелинейных обка-
тов некоторые особые многообразия, на которых не выполняются обычные условия принцип
максимума, а требуются особые (вырожденные) управления [23]. Таким образом, УОП
позволяют, помимо исследования общих качественных свойств оптимальных управлей,
выявить также и свойство управляемости нелинейных объектов. '**'
Изложенные обстоятельства указывают на принципиальную важность УОП для нелиней-
ных задач управления. В этой связи УОП, развитые в работах В.А.Олейникова [23] примени-
тельно к задачам оптимального по быстродействию управления различными классами нели-
нейных динамических объектов, приобретают несомненную прикладную значимость кауи
качественного анализа оптимальных управлений, так и для исследования свойств управляем-
сти нелинейных объектов. Эта значимость определяется, во-первых, известным в принципе
максимума положением, согласно которому к задаче оптимального по быстродействию управ-
ления может быть сведена задача оптимизации по любому критерию качества при налили
ограничений на управление, а именно: путем расширения исходной системы (2.251) на одну
координату х,|+1 (/) = J (2.252), т.е. добавлением к (2.251) дифференциального уравнения
и затем реализацией обычной процедуры УОП уже для системы п +1 -го порядка, и, во-вторых,
тем, что УОП позволяют определить управляемость нелинейного объекта (2.251) при учете
естественных ограничений на управления, а это, как отмечалось выше, относится к одной®
трудных проблем теории управляемости. Отмеченные здесь достоинства УОП, развитый
работах В.А.Олейникова [23], выделяют их среди других известных подходов в задачах
управляемости, а также исследования качественных свойств оптимальных управлений
нейными объектами.
Изложенные выше, важные современные проблемы анализа и, как следствие, сийй
систем автоматического управления нелинейными объектами часто требуют громоздких ана-
литических преобразований для получения конечных результатов в общем виде и не мейее
громоздких преобразований при получении выражений для конкретных операторов или нели-
нейных функций. Это приводит к тому, что исследование или синтез управляющих устройся
превращается в неразрешимую технически задачу уже для систем 4—5-го порядка, хон
теоретический алгоритм известен и проверен на-системах малого порядка.
В этих случаях значительную помощь могут оказать системы аналитических вычисляй
(САВ), созданные с использованием языков логического программирования. В качестве при-
он
146
деде ниже будет показано применение такой системы REDUCE версии 3.3, написанной на
дз^е LISP, для решения задачи анализа качественных свойств нелинейных объектов.
Будем предполагать знакомство пользователя с основными правилами, синтаксисом, опе-
раторами, декларациями, флагами и т д хотя бы в объеме приложения в книге [210]. Для
полноты изложения ниже будут поясняться основные синтаксические правила для встречаю-
дро операторов и выражений
л ।
Задача вычисления матрицы условий общности положения для нелинейных систем
В случае линейных динамических систем условие общности положения (УОП) приводит к
дадице управляемости, полученной Р Калманом [23 С 41] Вычисление ранга матрицы
управляемости для анализа системы, числовые значения всех параметров которой известны,
не представляет большой проблемы для практически любой размерности. Однако если часть
элементов матрицы управляемости задана в виде символьных выражений, представляющих
комбинации неизвестных параметров системы, то аналитический вывод условий управляемо-
сти “вручную” становится весьма громоздкой задачей, как правило, уже при размерности
системы и числе неизвестных параметров выше 2-х
^ля нелинейных систем В А Олейников предложил [23 С 64] вычислять функциональ-
ную матрицу в качестве УОП Ход его рассуждений заключается в следующем.
•‘б'Дяя нелинейного объекта (2 251) при заданном ограничении I и I < пшах оптимальное по
быстродействию управление с использованием принципа максимума можно найти, записав
гамильтониан в виде суммы скалярных произведений
Н = (^ , А(х)) + (V», В(х) и) (2.253)
ащже вспомогательную систему дифференциальных уравнений для вектора
ГК •, /Э4(х) , йВ(х) \г, <2.254)
% ' * = -v
Зд^ь символом^(0 обозначен сопряженный вектор, что не следует путать с макропеременной
в методе АКАР
В уравнении (2 254) выражение ЭА(х)/дх представляет собой производную векторной
функции по векторному аргументу
dfi a/i
dxi дхп
8А(х) _
дХ
dfn dfn
дх] дхп
Ц
<4
я
•V*
«произведение (ЭВ(х)/дх)и понимается как матрица
„4. 4. ЭД” „ 1 + Эх, Н| + + Эх, Эх„“,+
X / X
и Эх
w dfnl . , . dfnm (dfnl
1 a U\ + + a Um . . U\ + 13xi 3xi 1 13x„
dfnm
дхп
(2.255)
(2.256)
Для оптимального управления вектор (2 254) должен быть нетривиальным, а гамильтониан
1Щ.253) максимальным Если максимум И по и достигается в вершинах многогранника
ограничений на и, то оптимальное управление однозначно определяется через векторы х и ip.
В случае, когда этот максимум достигается на гранях или ребрах многогранника, то и нельзя
однозначно определить через х и ip
147
Для линейных систем факт однозначности определения и из условий принципа максиму»
устанавливается УОП [23]. По аналогии с линейным случаем можно провести следуЩй
рассуждения.
Пусть максимум функции Н достигается на грани или на ребре многогранника, топйрш
и для линейной системы дифференциальных уравнений, получим ж
(V», В(х) со) = 0, (2М
где (о—вектор, параллельный некоторой грани или ребру многогранника. Дифференциру!
скалярное произведение (2.257) по времени и учитывая, что du>/dt = 0, получаем
rf(y>, В(х) ш) . ч х , z , ЭВ(х) . . л (2.2»
V -ft х » (¥> » Д(х) а>) + (хю ) = 0. v
Заменив в (2.258) ip и х на правые части исходной и вспомогательной систем дифференциаль-
ных уравнений, получим на траекториях системы
’Hi) эв(х) \т, „ "I „
*|£1(Л(х)+В(х)||))-
(2.ЭД
S3
Преобразуем выражение (2.259) по известному для скалярных произведений правилу
где и и определятся матрицами (2.255) и (2.256).
дХ оХ
(л(х) + в(х)и) * Рй? + ^Га
Обозначив в (2.260)
. ЭВ(х) . ч , ч . (дА(х) , дВ(х) \ .
В2(х , и) = -±-*- (Л(х) + В(х) u) - l-^-2 + и I В(х) ,
тогда получаем
= 0.
GP-
(24»
(2.261)
(2.262)
Hi-
(V><
(ip , В2(х ,и) а)) = 0 .
Дифференцируя последовательно скалярное произведение (2.261), находим
5Хх » u) = (Л(х) + В(х) и) - + u В/_1(х , и).
j = 2,3..я; В,(х) = В(х).
Матрица Dn = [ВДх): В2(х , и):...: Ви(х , и)], где В/х , и) определяется по (2.262), полуУ
ла название УОП для нелинейных систем. Точнее, условием общности положения является
rankDn = п для любого момента времени. Если rankZ>K < л, то возникает особый случай. ।
Исследование этих случаев позволяет определить особые траектории системы и в некого-
рых случая?: найти особые управления, которые могут оказаться решениями задачи оптималь-
ного управления. В этой последовательности действий одним из наиболее трудоемких!
рутинных является вычисление матрицы Dn и условий полноты ее ранга.
Так как в общем случае матрица Dn имеет л строк и л • т столбцов, то по одному из способе»
определения неполноты ранга матрицы Dn требуется вычислить все определители квадратных
матриц размерности п х л, составленных из всех возможных сочетаний столбцов матрицы
Dn. Все эти вычисления весьма трудоемки для ручных выкладок уже при размерности систем
выше 2-й и числе управлений выше 2-х.
Покажем процесс составления и запуска программы на языке Reduce для решения данщм
задачи. t
Программу на языке Reduce начнем с конкретизации размерности задачи, так как язык ве
позволяет декларировать и оперировать с матрицами неопределенной размерности. ,
Первые выражения программы запишем в виде операторов присвоения числовых значевй
размерности системы N и размерности вектора управлений М:
N:=3$
М:« 2 $
NM := N*M $
148
)
Последнее выражение вычисляет значение вспомогательной переменной NM для удобства
записи последующих операторов программы. Знак $ в конце оператора запрещает вывод на
кун и в протокол результата выполнения соответствующего оператора при исполнении
программы, в противном случае вместо $ используется; (точка с запятой).
ж Далее декларируем все матрицы, фигурирующие в формулировке задачи, задавая векторы
сак матрицы с одним столбцом:
MATRIX X(N,1), A(N,1), B(N,M), U(M,1);
MATRIX D(N, NM);
-MATRIX B2(N,M), B3(N,M);
Количество матриц в последней строке должно соответствовать порядку системы, т.е. при N=4
надо добавить B4(N,M) и т.д.
-нДалее заполним исходные матрицы требуемыми выражениями:
^:=МАТ ((XI), (Х2), (ХЗ) ) $
-$L-MAT ( (Fl), (F2), (F3) ) $ В :=МАТ ((Fll, F12),(F21, F22), (F31, F32) ) $
иР.-МАТ ( (Ul), (U2) ) $
Сщаксис этих выражений простой: слева от оператора присваивания указывается одно из
зарезервированных (в MATRIX) для матриц имен, а справа помещается ключевое слово МАТ
пдаем в круглых скобках строки матриц, разделяемые запятыми; при этом каждая строка
за^чается в круглые скобки и элементы строк также разделяются запятыми.
. Количество указываемых элементов в этих выражениях должно строго соответствовать
обделенной в MATRIX размерности. Если необходимо решать менее общую задачу, напри-
мер« с F12=F21=O, то матрицу В надо записать как B:=MAT((Fll,0),(0,F22),(F31,F32))$,
аддотря на то, что при резервировании матриц (по декларации MATRIX) их элементы
автоматически заполняются нулями. Однако это последнее обстоятельство можно использо-
в^, когда заполняемая матрица имеет больше нулей в качестве элементов, чем определяемых
элементов. Например, если F11=F22=F31=F32=O, тогда проще заполнить матрицу В двумя
операторами присваивания: B(l,2):«=F12$ B(2,1):=F21$.
.-уДолезно объявить переменные XI, Х2, ХЗ в качестве сомножителей в выводимых выраже-
ниях:
FACTOR XI, Х2, ХЗ;
Объявим далее функции Fi и Fij в качестве операторов
OPERATOR Fl, F2, F3;
OPERATOR Fl 1, Fl 2, F21, F22, F31, F32;
шикем их аргументы в явном виде:
Fl :=F1(X1, Х2, ХЗ) $
f2:=F2(Xl,X2, ХЗ) $
F3:=F3(X1,X2, ХЗ) $
;;F11:-F11(X1,X2,X3) $
F12~F12(X1, Х2, ХЗ) $
F21:=F21(X1,X2,X3) $
< F22:=F22(X1,X2,X3) $
F31 :=F31(X1,X2, ХЗ) $
W:» F32(X1,X2, ХЗ) $
Есди решение (например, матрица D) при такой общей постановке задачи окажется слишком
иииым, необозримым (а стало быть и практически бесполезным) или это приведет к нехватке
одедвтивной памяти, то лучше вместо последних операторов записать операторы присваивания
. конкретных выражений для функций, например Fl:eXl+X2*X3**2$, или вообще отказаться от
1 использования операторов Fi, Fij, а заполнять исходные матрицы конкретными выражениями
(ок примеры ниже).
Тетерь можно приступить к поэтапному вычислению матрицы УОП.
Зарезервируем вспомогательный вектор DX и присвоим ему результат вычисления вектор-
нойвыражения А(х) 4- В(х) и из (2.262):
149
MATRIX DX(N,1);
DX:=A + B*U$
Декларируем также вспомогательную квадратную матрицу DA и поместим туда выражеме
MATRIX DA(N,N);
FORL:=1:M DO
FOR I := 1:N DO FOR J := 1:N DO
DA (I,J) :=DA(I,J) +DF(B(I,L),X(J,1)) * U(L,1);
FORI:=1:NDO
FORJ:=1:N DO
DA(I,J) :» DA(I,J) + DF(A(I,1) ,X (J, 1));
В этой части программы появляется необходимость использования оператора дифферен-
цирования DF с двумя аргументами, первый из которых есть дифференцируемый оператор а
второй переменная, по которой необходимо выполнить дифференцирование. В оператореФР
возможно и большее число аргументов, например после переменной через запятую мой
указать порядок производной по данной переменной (если этот порядок, как в нашем слуш
равен 1, то его обычно опускают), затем можно указать еще ряд переменных со свойМя
порядками и т.д. Если дифференцируемому оператору в программе не присвоено конкретной
значения, то Reduce поместит в результат сам оператор дифференцирования (см. ниже обсу&
дение решения).
Оператор цикла FOR...DO..., встречающийся во многих широко известных алгоритм^
ских языках, ясен из текста и не требует подробных пояснений, кроме, может быть, одной.
Запись 1:N является сокращенной записью при изменении переменной счетчика циклов#!
до N с шагом 1. Полная форма записи I:=1:N будет I:=l STEP 1 UNTIL N.
Применение вложенных циклов в последнем отрезке программы обусловлено тем, лго
оператор дифференцирования DF применяется только к скалярным аргументам. ‘ >
Продолжим решение нашей задачи путем вычисления промежуточного выражеш
(dB,_i(x , и)/дх) • (А(х) + В(х) и), представляющего собой произведение векторной производ-
ной ЭВ,-1(х , и)/Эх на вектор DX : ы
FORL:=1:MDO 4
FORI:-UNDO
B2(I,L) := FOR J := 1:N SUM DF(B(I,L),X(J,I)) * DX(J,1);
В последней строке в операторе присваивания справа применяется очень удобный в Remice
оператор суммирования SUM с изменением посредством FOR индекса суммирования J от
N с шагом!.
Наконец, можно вычислить в программе матрицу В^х , «) для j = 2: 1
B2:=B2-DA*B$ ’
Матрицу ВЗ получим теперь, повторив просто предыдущие 4 строки программы и замам
в них матрицу В на В2:
FORL:=1:MDO ’’ |
FOR I := 1 :N DO I
B3(I,L) :=FOR J := 1:N SUM DF(B2(I,L),X(J,1)) * DX(J,1); r
ВЗ := B3 - DA ♦ B2 f
Если в задаче будет определена, например, размерность системы N=4, то в программе над
повторить еще раз эти 4 строки, заменив В2 на ВЗ и ВЗ на В4 и т.д. + к
Поскольку мы рассматриваем пример с N=3, то следующим этапом в программе должно
быть составление матрицы УОП D из матриц В, В2 и ВЗ : :
FORI:=1:N DO
FOR L := 1:M DO
D(I,L) :=B (I,L);
150
tfii№D(I,L+M) :=B2(I,L);
D(I,L+2*M) :=B3(I,L);
Скобки в виде < > позволяют записывать так называемый групповой оператор и тем самым
изюлнять в FOR...DO... более одного оператора языка Reduce.
' При увеличении размерности системы в групповой оператор надо добавить соответствую-
щее число строк. Например, при N=4 надо добавить строку D(I,L+3*M):=B4(I,L); и т.д.
/Если, как правило, пользователя интересует содержание матрицы D, то следующий опера-
тор программы должен быть запросом на вывод этой матрицы (хотя этот запрос может быть и
злюбой из последующих строк). Запрос на языке Reduce записывается просто в виде имени
идентификатора с точкой с запятой:
»i'D;
Завершим составление программы вычислением всех определителей размера N*N, которые
можно составить из столбцов матрицы D и которые необходимы для решения дальнейшей
задачи о возможном ранге матрицы D.
"S?=0$
FOR II := 1 : NM - N + 1 DO
FOR 12 ~ Il + 1 : NM - N + 2.DO
FORI3 :=I2+1 : NM - N + 3 DO
<
FORI~1 :NDO
<
DA(I,1) :=D(I,I1);
DA(I,2) :=D(I,I2);
DA(I,3) :=D(I,I3);
>;
S:=S+1;
WRITE “Определитель ”,S," из колонок “,11,12,13,” равен";
WRITE DET(DA);>;
END;
Прк N=3 последний фрагмент необходимо дополнять. Например, при N=4 добавим еще один
вложенный цикл FOR I4:eI3+l:NM-N+4 DO, затем введем во внутренний групповой оператор
проку DA(I,4):=D(I,I4), а в первый из операторов вывода WRITE также добавим в список
. идентификатор 14 для вывода текущего значения счетчика дополненного цикла FOR и т.д.
Подобные программы обычно заканчиваются оператором END, который и помещен в
последней строке фрагмента.
Для получения результатов посредством описанной программы надо с помощью любого
текстового редактора поместить все приведенные выше операторы в текстовый файл с именем,
например problem 1, и записать его в директорию, где находятся все файлы системы Reduce и, в том
числе, файл reduce33.exe. Затем следует загрузить Reduce, запустив программу reduce33.exe из
командной строки DQS, указав ключ -log для того, чтобы Reduce формировал на диске файл
протокола сеанса, и добавить в качестве параметра имя файла протокола с соблюдением всех
правил записи имен файлов в DOS. Командная строка, например, может иметь вид:
“ REDUCE33.EXE -LOG PROTOCOL
Reduce будет готов к работе при появлении на экране символов 1:, где цифра означает номер
ппо* сеанса, а двоеточие — готовность системы к вводу очередной команды пользователя.
Набрав в текущей строке команду ввода входного файла в виде
I: IN PROBLEM 1 $
и нажав клавишу Enter, получим вывод результатов на экран и в протокол сеанса. При
появлении запроса системы в виде 2: можно ввести команду окончания сеанса
2: BYE;
побрататься к изучению результатов, открыв файл протокола в среде DOS.
151
В качестве примера приведем входной файл и выписку из протокола результатов решея
задачи при пв2 и т=1 (два уравнения и одно управление). i £.
Входной файл:
N :-2 $ М 1 $ NM :-N*M $
MATRIX X(N,1), A(N,1), B(N,M), U(M,1);
MATRIX D(N, NM), B2(N,M);
X := MAT ((X1), (X2) ) $
A:=MAT ( (Fl), (F2) ) $
B:-MAT ((FU),(F21)) $
U :=MAT ( (UD) $
FACTOR XI, X2; OPERATOR Fl, F2, Fl 1, F21;
Fl Fl (XI, X2) $ F2F2(X1, X2) $
Fl 1Fl 1 (XI, X2) $ F21 := F21 (XI, X2) $
MATRIX DX(N,1), DA(N,N);
DX:-A + B*U$
FORL:=1:MDO
FOR I := 1:N DO
FORJ:»1:N DO
DA(IJ) DA (I,J) + DF(B(I,L),X(J,D) ♦ U(L,1);
FORI:-1:N DO
FORJ:=1:N DO
DA (I,J) :-DA(I,J) +DF(A(I,1),X(J,1));
FORL:-1:M DO
FOR I := 1:N DO
B2(I,L) :=FORJ :» 1:N SUM DF(B(I,L),X(J,1)) ♦ DX(J,1);
B2 B2 - DA * В $
FOR I:» UNDO
FORL:-1:MDO
< D(I,L) := В (I,L); D(I,L+ M) := B2(I,L) >;
D; S:=0 $
FOR II := 1 : NM-N+1 DO
FOR 12 := 11+1 : NM-N+2 DO
< FOR I := 1 : N DO
<DA(I,1) :-D(I,Il); DA(I,2) :»D(I,I2) >;
S:-S+l;
WRITE 'Определитель ”,S," из колонок “,11,12,” равен";
WRITE DET (DA) >; END;
Результаты решения из протокола:
1: IN PROBLEM 1 $
MAT(1,1) :-Fll(Xl,X2)
MAT(1,2) :-DF(Fll(Xl,X2),Xl)*Fl(Xl,^2) +DF(F11(X1,X2),X2)*
F2(X1,X2) - DF(F1(X1,X2),X1)*F11(X1,X2) -
DF(F1 (X1,X2),X2)*F21 (XI,X2)
MAT(2,1) :=F21(X1,X2)
MAT(2,2) ?“DF(F21(X1,X2),X1)*F1(X1,X2) +DF(F21(X1,X2),X2)*
F2(X1,X2) -DF(F2(X1,X2),X1)*F11(X1,X2) -
. DF(F2(X1,X2),X2)*F21(X1,X2)
Определитель 1 из колонок 12 равен
- (DF(F11(X1,X2),X1)*F1(X1,X2)*F21(X1,X2) +
DF(F11 (XI ,X2) ,X2)*F21 (XI ,X2)*F2(X1 ,X2) -
DF(F1 (XI,X2) ,X1) *F11 (XI ,X2) *F21 (XI,X2) -
DF(F1(X1,X2),X2)*F21(X1,X2)**2 -
152
DF(F21 (X1,X2),X1)*F11 (X1,X2)*F1 (XI,X2) -
DF(F21 (XI ,X2) ,X2) *F11 (XI ,X2) *F2 (XI ,X2) +
DF(F2(X1,X2),X1)*F11 (X1,X2)**2 +
DF (F2 (X1 ,X2) ,X2) »F 11 (X1 ,X2) *F21 (X1 ,X2))
2: BYE;
Эти результаты легко могут быть переписаны в привычной “естественной” форме с заменой
машинной записи DF(F,X) на Заметим, что при постоянном общении с системой Reduce
более привычной и более “естественной” может представлятся именно машинная запись
операции дифференцирования DF (F,X).
' Если запустить на выполнение программу, описанную выше с N=3 и М=2, то одна только
матрица D потребует около 130 Кбайт памяти (около 40 страниц печатного текста стандартного
формата). Вывод всех определителей потребует много больше памяти. Таким образом, реше-
ине подобных задач в общем виде не имеет, повидимому, большого практического смысла,
однако наличие универсальной и легко адаптируемой программы позволит с успехом решать
Практически все частные задачи. Ряд таких примеров рассмотрен в следующем разделе.
Примеры вычисления УОП
Пример 2.14.Возьмем для первого примера задачу вычисления УОП для последовательно-
го соединения 3-х нелинейных звеньев 1-го порядка, сформулированную В.А.Олейниковым в
(23. С.67].
Уравнения системы имеют следующий вид
xi =/i(xi) «]-/ii(xi);
хг = /21 (xi , х2) - /22(^2); (2.263)
Хз = /32(Х2 , Хз) - /зз(хз) •
Адаптированный к задаче (2.263) входной файл для Reduce будет иметь вид:
N :=3 $ М := 1 $ NM :=N*M $
MATRIX X(N,1), A(N,1), B(N,M), U(M,1);
MATRIX D(N, NM), B2(N,M), B3(N,M);
OPERATOR Fll, F21, F22, F32, F33, Fl;
X :=MAT ( (XI), (X2), (X3) ) $
A:=MAT ( (-Fll(Xl)), (F21(X1,X2)-F22(X2)),
(F32(X2,X3)-F33(X3)) ) $
B:=MAT ( (Fl(XD), (0), (0)) $
U := MAT ( (U1)) $ FACTOR XI, X2, X3;
MATRIX DX(N,1), DA(N,N); DX := A + B*U $
FORL:=1:M DO
FORI:-1:N DO
FORJ:=1:N DO
DA(I,J) :=DA(I,J) +DF(B(I,L),X(J,1)) ♦ U(L,1);
FORI:=1:N DO
FORJ:=1:N DO
DA(I,J) .-DA (I, J) +DF(A(I,1),X(J,D);
FORL:=1:M DO
FORI:«1:N DO
B2(I,L) :=FORJ:=1:N SUM DF(B(I,L),X(J,1)) * DX(J,1);
B2 := B2 - DA * В $
FORL:=1:M DO
FORI:=1:N DO
B3(I,L) :=FOR J := 1:N SUM DF(B2(I,L),X(J,1)) ♦ DX(J,1);
B3 :=B3 - DA * B2 $
FORI:=1:NDO
FORL:=1:MDO
153
<D(I,L) :=B(I,L); D(I,L+M):= B2(I,L);
D(I,L+2*M) :=B3(I,L) >;
D; S:=0 $
FOR II := 1 : NM-N+1 DO
FOR 12 := 11+1 : NM-N+2 DO
FOR 13 := 12 + 1 : NM - N + 3 DO
<FORI:=1 :NDO<DA(I,1) :»D(I,I1);
DA(I,2) := D (1,12); DA (1,3) :=D(I,I3) >;
S:=S+1;
WRITE “Определитель ”,S," из колонок “,11,12,13,” равен";
WRITE DET(DA) >; END;
Машинный результат вычисления матрицы УОП D:
D(l,l) :-Fl<Xl)
D(l,2) :“DF(F11(X1),X1)*F1(X1) - DF(F1(X1),X1)*F11(X1)
D(l,3) :=- (DF(F11(X1),X1,2)*F11(X1)*F1(X1)
- DF(Fl 1 (X1) ,X1,2) *F1 (XI) **2 *U 1
- DF(F11 (X1),X1)**2 *F1 (XI)
+ DF(F11 (X1),X1)*DF(F1 (X1),X1)*F11 (XI)
H- DF(F11 (X1),X1)*DF(F1 (X1),X1)*F1 (X1)*U1
- DF(F1 (X1),X1,2)*F11 (Xl)**2
+ DF(F1 (X1),X1,2)*F11 (X1)*F1 (X1)*U1
- DF(F1(X1),X1)**2 *F11(X1)*U1)
D(2,l) :=0
D(2,2) := - DF(F21 (X1,X2),X1)*F1 (XI)
D(2,3) :=- (DF(F11(X1),X1)*DF(F21(X1,X2),X1)*F1(X1)
- 2*DF(F1(X1),X1)*DF(F21(X1,X2),X1)*F11(X1)
+ DF(F1(X1),X1)*DF(F21(X1,X2),X1)*F1(X1)*U1
+ DF(F21 (X1,X2),X1,X2)*F1 (X1)*F21 (XI,X2)
- DF(F21 (X1,X2),X1,X2)*F1 (X1)*F22(X2)
- DF(F21 (X1,X2),X1,2)*F11 (X1)*F1 (XI)
+ DF (F21 (X1 ,X2) ,X 1,2) *F1 (X1) **2 *U 1
- DF(F21 (X1 ,X2) ,X 1) *DF(F21 (X1 ,X2) ,X2) *F1 (X1)
+ DF (F21 (X1 ,X2) ,X 1) *DF (F22 (X2) ,X2) *F1 (X1))
D(3,l) :=0
D(3,2) :=0
D (3,3) := DF(F21 (X1 ,X2) ,X 1) *DF(F32(X2,X3) ,X2)*F1 (XI)
Определитель 1 из колонок 123 равен
- DF(F21 (X1 ,Х2) ,Х 1) **2 *DF(F32 (Х2,ХЗ) ,Х2) *F1 (X1) **3
Эти результаты полностью совпадают с результатами, приведенными в [23. С.68].
Пример 2.15. Рассмотрим пример системы также из [23. С. 120]
Xi (?) = bl и ; Х2 (0 = Л21<*1 ~ й22Х\Х2 — г (2.261)
В [23] для объекта (2.264) с целью упрощения матрица УОП и ее определитель вычислен
для частного случая b - а - а = 1. Машинные вычисления легко можно провести и для общего
случая, присвоив лишь после этого коэффициентам какие-либо числовые значения.
Откорректированный для данной задачи входной файл имеет следующий вид:
N := 2 $ М := 1 $ NM := N*M $
MATRIX X(N,1), A(N,1), B(N,M), U(M,1);
MATRIX D (N, NM), B2 (N,M);
X :=MAT ( (XI), (X2) ) $
A := MAT ( (0), (A21*X1 - A22*X1**2*X2 - R) ) $
В .-MAT ( (Bl), (0) ) $
154
U:-MAT ( (Ul)) $ FACTOR XI, X2;
Г MATRIX DX(N,1), DA(N,N); DX := A + B*U $
FORL:-1:MDO
FOR I1:N DO
FORJ:-1:N DO
~DA(U) :-DA(I,J) + DF(B(I,L),X(J,D) • U(L,1);
FORI : 1:N DO
FORJ:«1:N DO
U DA(I,J) :-DA(I,J) +DF(A(I,1),X(J,1));
FORL:-1:M DO
FORI:-1:N DO
B2(I,L) :-FOR J 1:N SUM DF(B(I,L),X(J,1)) • DX(J,1);
B2:-B2-DA»B$
FORI:-1:N DO
FORL:-1:M DO
<D(I,L) :-B(I,L); D(I,L+M) :-B2(I,L) >;
ТУ Ч-шО <
FOR II :-l: NM-N+1 DO
FOR 1211+1 : NM-N+2 DO
<FORI:-1 :NDO<DA(I,1) :-D(I,I1);
DA(I,2).-D(I,I2>>;
S^S+1;
WRITE “Определитель ”,8,” из колонок “,11,12,” равен";
... WRITE DET(DA> >; END;
Шюлнив этот входной файл в среде Reduce, получим матрицу УОП в виде
О=Р‘ 0 '
О 2X1X2^22^1 “ Й21д1
Йе определитель det D = Ixxxian^ - aaift?. Если до выхода из Reduce (до подачи команды
bye;) мы введем и исполним последовательность из двух комавд
пС,,В1 :=А21 :«=А22 :« 1 $
их О;
£ряогда получим на экране и в протоколе матрицу
kt D _ Г1 О
Ж [О 2X1X2 - 1
мторая и приведена в [ 17] на стр. 120.
Пример 2.16; Рассмотрим задачу, поставленную в [23. С.70], анализа УОП для 2-х
последовательно включенных нелинейных звеньев 1-го порядка с двумя управлениями:
*1 = /1(*0 «1 + Ж*») «2 - /11(^1);
xi = /2i(xi , х2) - /згОг)- (2.265)
Входной файл для этой задачи:
wC;N:-2$M:~2$NM :-N*M$
“’“MATRIX X(N,1), A(N,1), B(N,M), U(M,1);
^MATRIX D(N,NM), B2(N,M);
^OPERATOR Fl 1,F21,F22,F1,F2;
,Й'Х:-МАТ ( (XI), (X2) ) $
ж2А:>=МАТ ((-Fll(Xl)), (F21(X1,X2) - F22(X2))) $
Rs~MAT ( ((Fl(XI)), (F2(X1))), ((0), (0)) ) $
^^MAT ( (Ul), (U2) ) $
^'FACTOR XI, X2;
«^MATRIX DX(N,1), DA(N,N);
WtDX:=A + B*U$
ya
155
FORL:=1:MDO
FORI:»1:NDO
FORJ:-1:NDO
DA(I,J) :« DA(I,J) + DF(B(I,L),X(J,1)) * U(L,1);
FORI:-1:NDO
FORJ:=1:NDO
DA (I,J) :=DA(I,J) + DF(A(I,1),X(J,1));
FORL:-1:MDO
FORI:=1:NDO ;
B2(I,L) := FORJ := 1:N SUM DF(B(I,L),X(J,D) * DX(J,1);
B2:=B2-DA*B$
FOR I1:N DO
. FORL:«1:MDO
< D(I,L) В (I,L); D(I,L+ M) :» B2(I,L) >;
D; S:=0 $
FORI1 := 1: NM‘N+1 DO
FOR 12 := 11+1 : NM-N+2 DO
<FORI^-UNDO
< DA(I,1) :* D(I,I1); DA(I,2) :» D(I,I2) >;
S:=S+1;
WRITE “Определитель ”,S," из колонок “,I1,12,” равен";
WRITE DET (DA) >; END;
В результате выполнения этого файла Reduce выводит матрицу УОП и 6 ее определителей»
виде
Г/, Л 1 °*
D= ° ° -4» '
I 0Х] I I 0X1 I
> s (d/п (dfi у, (д/г\ .
где'/13 = /,(а1Г’/'Дл1г] +/2“2(д^)"/1Иг(д^)’
_/2И1^7|-
Определитель 1 из колонок 1, 2: deti2=0.
Определитель 2 из колонок 1, 3: det>3 = — .
Определитель 3 из колонок 1, 4: det 14 = - (Vj/axj/i/? •
Определитель 4 из колонок 2, 3: det23 = - (д^/э.п)А/2 •
Определитель 5 из колонок 2, 4: det24 = - (9^Xl) А •
Определитель 6 из колонок 3, 4:
de'34 = W(^/,l/2 + + Й/Л“2)
Приравнивая нулю ненулевые определители матрицы УОП (2.267), легко получим услоив
невыполнения УОП для объекта (2.265) в виде я?
Л=0;/2 = 0; > = 0.
0X1
Этот результат полностью .совпадает с выводами в [23. С.70]. При числе управлешй
больше одного анализ матрицы УОП посредством вычисления всех определителей, как зп
делается в приведенных выше примерах, наталкивается с ростом пит очень скорой
проблемы, связанные с быстрым ростом числа этих определителей, равного числу сочетаия
из п'т элементов по п. Приведем для иллюстрации табл.2.2 числа определителей для ni
т < 5:
.______________________Таблица 2.2
" п >50 т
1 2 3 4 5
фи | 1
2 1 6
..... 3 1 20 84
'С;' 4 1 70 495 1820
5 1 252 3003 15504 53130
Т1
зЕДля некоторых частных видов систем, когда большое число определителей оказывается
рйяым нулю, удается получить конечные результаты анализа для п = 3 и даже 4, но все же
большое число систем оказывается трудным для анализа.
$‘В этом случае можно неполноту ранга матрицы УОП установить, умножив матрицу УОП
м ее же транспонированную и вычислив определитель этого произведения. Приравнивание
Вулю этого определителя будет представлять единственное условие неполноты ранга матрицы
УОП. Приведем пример такого вычисления.
^Пример 2.17. Возьмем систему из примера 2.16 и модифицируем входной файл, удалив 8
последних строк, связанных с вычислением всех определителей, и добавим следующие опера-
Й^для вычисления определителя матрицы D*D’ (D’—транспонированная матрица D):
•rjF М1 THEN DA := D ♦ TP (D) ELSE DA := D;
DET (DA); END;
Шь TP(D) означает операцию транспонирования матрицы D.
Исполнение модифицированной программы даст результат, который легко можно приве-
сгиквиду
".И
, ’ 2 Л А2 (2-268)
det(D-D ')= (/ii(/n-2/itti-2/2M2)+(/iH1+/2«2)2+C/?+/2)2)= 0.
Полученное условие (2.268) будет всегда выполняться, если выполняются условия (2.267). В
этом смысле они эквивалентны.
^Изложенные выше аналитические процедуры вычисления на ЭВМ условий общности
положения существенным образом расширияют арсенал средств для автоматизированного
^следования свойств управляемости нелинейных объектов, выявления особых многообразий
11 пространстве состояний, поиска особых управлений и т.д. Это позволяет значительно про-
даануться в проблеме качественного анализа, необходимого для последующего синтеза систем
управления нелинейными объектами.
2.8 АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ НЕЛИНЕЙНЫХ
ДИСКРЕТНО-НЕПРЕРЫВНЫХ СИСТЕМ УПРАВЛЕНИЯ.
' Постановка задачи. В предыдущих разделах этой главы рассматривалось применение
мётеда аналитического конструирования агрегированных регуляторов (АКАР) для объектов,
описываемых непрерывными нелинейными дифференциальными уравнениями. Однако мно-
ие динамические объекты имеют дискретно-непрерывное описание, более адекватное их
реальному поведению. К ним, в частности относятся экологические, биотехнические объекты
.од. Кроме того, повсеместное применение микро-ЭВМ, микропроцессоров и различных
цифровых вычислительных устройств для получения и обработки информации, а также для
дискретного управления подвижными и технологическими объектами превращает системы
{правления ими в дискретно-непрерывные. Следует отметить, что к настоящему времени в
научно-технической литературе имеются методы анализа и синтеза линейных дискретно-не-
ррерывных систем управления. Что же касается нелинейных дискретно-непрерывных систем,
то в отечественной и зарубежной литературе существуют результаты в основном по анализу
устойчивости и практически отсутствуют регулярные методы их синтеза, особенно это касается
157
нелинейных объектов. В этой связи представляется целесообразным распространить общ1
метод АКАР на задачи синтеза дискретно-непрерывных нелинейных систем управления. **
Сформулируем задачу аналитического конструирования нелинейных дискретно-недо
рывных систем управления. Пусть задана система уравнений, описывающая движение надо
рывного нелинейного объекта:
*1(0 =
........................................................................ (2.2«jj
х«(0 = fn(xu...,х„)+ du [Л].
Необходимо определить дискретный закон управления и [Л] = u(xi,...,xn) обеспечивающй
перевод изображающей точки системы из произвольного начального состояния Х(хю,...^й)г
начало координат (xi - ... = хп = 0) пространства состояний. При этом обеспечивается мМ№
мум функционала
< “ (2270)
J = f F^dt, •*
0 V
где ОДчф)—непрерывно дифференцируемая по своим аргументам определенно-положитедШ^
функция; ^(х1,...,хп)—агрегированная макропеременная, представляющая собой некоторую^
извольную дифференцируемую или кусочно-непрерывную функцию фазовых координат.
Аналитическое конструирование дискретных агрегированных регуляторов. Примени^
системе (2.269) процедуру разностной аппроксимации [240], тогда получим следующие до
костные уравнения:
А'Х1[Л] =/1(х1[Л],...,хп[А:]);
.............................................................................. (2ДП)
Дх„ [Л] = /„(X! [Л] ,...,х„ [Л])+ Ьи И,
описывающие исходную дискретно-непрерывную систему. Раскрывая разностные произдо
ные
Лл,Ш = *Л*+11Г X| W , (2'^'
и подставляя (2.272) в (2.271), получим разностную модель объекта: <7Й
xi[^+l] =/l(xi И,...,Хи W);
• «и
хи[*+1] = Д(х1И],...,х„И)+5,М[Л], (2.Ц
тде [Л] ) = Xi+ T//(xiH]v..,xw[^]), b{ = Ь7\ Т—шаг дискретизации по времен.
Функционал (2.270) для системы (2.273) запишется в виде:
00 (2 274).
Z’SWWW)-
*-0
Выберем подынтегральную функцию F(xp\k\ ,Длр [£]) в виде следующей квадратичной форме
Fty [Л], [*]) = mV [Л] + с2(Д^ [Л1 )2,
тогда функционал (2.274) примет вид
J = 5 (mV2 [^] + И )2) •
(2.2$
<2.^б)
Ж
В соответствии с [241] запишем уравнение Эйлера—Лагранжа \ *
ат%хя*],ая*])- ед^+1]Ж*+1]) = о, (2.Ш
тде />(y>U+'l] ,А^[£+1])—производная от F(ip [£+1] ,Ау> [Л+1]) по хр. Подставляя в (2.277)
функцию F(V> [Л] ,Ду> [Л]) из (2.275), находим уравнение экстремалей, доставляющих миний^
функционалу (2.276): ®
V» [Л+2] - (2+ ЛТ2)^ R+1] + [Л] = 0, (2.Ж
2
где Л = —г, которые определяют подсемейства устойчивых и неустойчивых экстрем&М
с
158
Изуравнения (2.278) можно выделить подсемейство устойчивых экстремалей, описываемых
следующим разностным уравнением: .
У>[А+1] + алр[к] = 0 (2.279)
1деа = 1+ УгХТ2- (АТ2+ У* А2/12) и. Условие асимптотической устойчивости в целом уравне-
ш (2.279) имеет следующий простейший вид [240]:
а < 1. (2.280)
Из уравнения (2.279) при учете разностной модели объекта (2.273) можно определить
множество допустимых законов управления и(х\ [А] ,...,хй[А]), обеспечивающих перевод изо-
бражающей точки из произвольных начальных условий в окрестность многообразия у [А] =0,
к удержание ее в этой окрестности при дальнейшем движении вдоль ij>(xi [А],... ,хй[А])=О к
положению равновесия (х1ДА7,]=...=хйл[АТ]=0). Движение вдоль многообразия ^[А]=0
будет описываться системой разностных уравнений размерности п— 1:
х^ [А+ 1] =Zh(xlv,[A],...,x„-iv,[A]), i = 1,2,...,«-1. (2.281)
Для получения уравнений (2.281) необходимо из уравнения ij>(x\ [А] ,...,хй [А] )=0 выразить
координату х„[А] = y>(xi[A],...,xn-i[A]) и подставить ее в первые л-1 уравнений системы
(1273).
Замкнутая дискретная система (2.281) устойчива, если, согласно критерию Калмана—Бер-
тмана [242], /У в (2.281) является ограниченной по норме для всех х[А]. Условие ограничен-
ности ft можно записать в следующем виде:
Г п с. -1
У — I hij(x) I L < 1 для любого х,
/=1 ci
(2.282)
max
или
(2.283)
max
i
11 с-
2 — I hij(x) Q < 1 для любого х,
i=i С1
, ur rm д/Г(х[А]) ..
дей;/—элементы матрицы Н [х [к] ] = - ~ci,... ,сй—положительные константы. Условия
ограниченности по норме (2.282), (2.283) вместе с условием (2.280) обеспечивают асимп-
тотическую устойчивость движения синтезируемых методом АКАР дискретно-непрерывных
систем управления.
Примеры аналитического конструирования нелинейных дискретных регуляторов. Пе-
рейдем к рассмотрению примеров аналитического конструирования нелинейных дискретно-
непрерывных систем управления.
г Пример 2.18. Определим закон управления объектом, описываемым следующей нелиней-
ной системой дифференциальных уравнений:
(Ш Х](0 = х2+ х2;
5НЯЭ. X2(t) = u[k}.
Задишем уравнения (2.284) в разностной форме
f [А+1] = X! [А] + 7х?[А] + Тх2[А] ;
х2 [А+1] = х2 [А] + Ти [А]. (2.285)
В соответствии с методом инвариантных многообразий введем агрегированную перемен-
(2.284)
[А] = хг [Л] + /U [Л] + fax\ [Л],
ЙШ основе (2.279) получим
х2[А+1] + Ргх\ [А+1] + Р\х2 [А+1] + aix2[A] + a$2x\ [Л] + аф\х2 [А] = 0.
Подставляя в полученное выражение уравнения объекта (2.285) , имеем:
' ^г(«1+ l)xi [Л] + (1+ «]+ тРгуХг[к] + (аф\ + 7)82)Xi[A] +
НК + A(*i [Л] + Тх2[к] + Тх2[А])2+ Ти[к] = О,
откуда находим закон управления и [Л]
(2.286)
159
=- (оц + [*]/Т- (1+ а,+ 7)82)х2[*]/Т- (афх + р2Т)х2Лк\/Т-
- 0i(xi Ю + Тх1\к\ + Тх2 [Л] )2/Т. (2.Ж
В процессе движения изображающей точки вдоль многообразия ip [Л] =0 (2.286) уравнение
замкнутой системы можно получить, выразив из (2.286) координату х2 [Л] и подставив ей
первое уравнение системы (2.285):
xi*[^+l]- (!>- 7^2+ T(1-^1)xiv[X:])xiv[^] = 0. (2.288)
Условие устойшвюетжразноЕЯйово нелинейного уравнения первого порядка
х[*+1]-Л*,х[Л])х[Л] =0, (2.Ж
согласно критерию Венгжина—Видаля [242] имеет вид
v< 1- 1Д*,х[*])1. (2.290)
Уравнение (2.288) относится к классу (2.289), поэтому, применив условие (2.290) при г =0
к уравнению (2.288), получим
11-7£2+7’(1-Д1)х1Л*]1 < 1,
ИЛИ
. О < рг- (1 - ft)*.,#] < Ут. (2 291)
160
ЙрЙ/h = 1 условие (2.291) запишется следующим образом:
О <02 < fy,
цОриняв Т = 0,01, получим неравенство
0 < < 200.
Результаты моделирования дискретно-непрерывной системы (2.285), (2.287) прись = -0,9,
рг = 1 приведены на рис.2.5 и при сь = —0,9, Д1 = 1, /?2 == Ю—на рис.2.6. Из этих
(Ящиков видно, что при увеличении коэффициента 02 сокращается время переходного про-
;жс^,до для перевода изображающей точки из начального состояния в положение равновесия
«Йемы необходимы большие затраты энергии.
' с^ли в условии (2.291) принять0\ = 10, то:
0 < 9x1$ [^] < 200,
|Д1Й^2 = 1 система будет устойчива на многообразии у>[Л] =0, если для координаты хи [Л]
од^уйяется условие < %1$[Л] < 19%, а при0г = 10 система устойчива, если выполняется
условие -*% < xi$[£] < 19%. Результаты моделирования системы (2.285), (2.287) при
(fe^rOA/fi = 10,/Ь = 1 и^г = 10 приведены на рис.2.7 и рис.2.8 соответственно.
161
Рис. 2.9
Для обеспечения чувствительности закона управления к знаку квадратичных функци
введем следующую макропеременную:
V»2 [Л] = *2 [Л] + Yixi (Л] I xi [Л] I + y2xi [Л]. (2.292)
Тогда в соответствии с (2.279) и (2.285) получим:
Уг(Г+ а2)х! И + (1+ У2Т+ а2)х2[к] + (у27+ assign х} [Л])х2[Л] +
+ yisign xi [Л] (xi [Л] + 7х2 [Л] + Тх2 [Л] )2+ Ти [Л],
откуда определим закон управления
м[Л] = - у2(1 + a2)xi[*]/7- (1+ у2Т+ а2)х2[к]/Т— (у2Т+
+ assign X! [Л] )х? [Л] /Т- yisign xi [£] (xi [Л] + 7х? [Л] + Тх2 [Л] )2/7. (2-Ж
Уравнение движения изображающей точки вдоль многообразия гр [£] =0 (2.292) имеет вед
xi ДЛ+1] - (1- Ту2+ 7(1- yisign xi *[Л])х1Д£] = 0. (2.294)
Условие устойчивости уравнения (2.294) при v = 0 записывается следующим образом:
11 - 7у2+ 7(1 - yisign xiy, [Л]) I < 1, ,Г1
откуда при 7 — 0,01 имеем •?»
0 < у2- (1- yi sign х^Ш ) < 200. (2.295)
Соотношение (2.295) вместе с (2.280) обеспечивает асимптотическую устойчивость^-
кнутой системы управления. Фазовые портреты замкнутых дискретно-непрерывных систем
(2.285), (2.287) и (2.285), (2.293) при at = - 0,9,0! = 1,02 = 1 и а2 = - 0,9, yt = 1,^1
приведены на рис.2.9 и рис.2.10, соответственно. Из результатов моделирования видного
поведение систем (2.285), (2.287) и (2.285), (2.293) в первом и четвертом квадрантах одИЙ-
ковы, а во втором и третьем квадрантах, когда xis[A:] < 0, для системы (2.285), <2.293)
характерно более стремительное вхождение траекторий в окрестность многообразм
гр2 [Л] =0 в ее фазовом пространстве. 7* з ‘
Пример 2.19. Синтезируем закон управления электроприводом постоянного тока: !W
xi(r) = - Х|Х2+ х2; .
x2(f) = - х2+ и [Л], (2.196)
162
х2
(2.297)
(2.298)
Рис. 2.10
дел—отклонение скорости, хг—ток, и—напряжение обмотки возбуждения. Запишем систе-
му (2.296) в разностной форме:
’ xi [*+1 ] = xi Ш - Тх! [Л] х% [Л] + Тх2 [£];
х2[к+1] = (1 - Т)х2[Л] + Ти[Л].
Въедем агрегированную переменную
г' 1р[к] =х2Ш + 0Х1Ш.
Подставляя (2.298) в (2.279), получим выражение
... х2[Л+11 + 0X1 [Л+1 ] + ахг[Л] + а0х\ [Л] = 0,
или с учетом уравнений (2.297) имеем
' J (1 - Т+ 0Т+ a)x2 [£] + (1 + a)0xi [Л] - 0Тхх [А] х2 [Л] + Ти [Л] = 0.
Жатого уравнения найдем следующий закон управления:
ь «И = - (1+ a)0xi [к]/Т- (а+ 0Т+ Т- l)x2[k]/T+ 0Xi [Л]х2И.
( ^ Коэффициент 0 определим, исходя из условия устойчивости замкнутой системы (2.297),
(2*299) на многообразии ip [А] =0. Уравнение движения вдоль многообразия ip [Л] =0 получим,
йфйзив из (2.298) хг[^] и подставив его в первое уравнение системы (2.297):
т xiv [*+1 ] - (1 - 0Т- Трх^ [Л] )xlv, [Л] = 0. (2.300)
Тйда, используя (2.290), получим условие устойчивости уравнения (2.300) в виде неравенства
\l-0T-T02x2^[k}\ < 1,
(2.299)
4 О<0+02хЪ,\к} <УТ.
,т /Эти соотношения вместе с (2.280) определяют условия асимптотической устойчивости
.синтезируемой системы управления. Приняв, например, максимально возможное значение
ха^динаты Ixiyl < 5, получим:
4 • ' 0 < j8+ 2502 < VT,
О < 0 < 0,16+ о.Уг- 0,4.
163
*2
Рис. 2.11
•I
При Т = 0,01 с. условие устойчивости принимает вид: 0 < $ < 8,55. На рис.2.11 изобразим
траектории замкнутой системы при а = - 0,9, fl = 1. Из рисунка видно, что на плоскости^,
хг существует притягивающее многообразие у [Л] =0. Замкнутая дискретно-непрерывнаясйс-
тема (2.297), (2.299) асимптотически устойчива и имеет апериодический характер переходив
процессов. $ 1
Пример 2.20. Рассмотрим задачу синтеза закона управления объектом, движение которого
описывается следующими нелинейными дифференциальными уравнениями:
xi(f) = axj— 6x1X2+ и, u i
хг(() = - схг+ тх\хг- (2.^1)
Эти уравнения называются моделью Вольтерры—Лотки [244] и описывают динамику числен-
ности популяций в экологической системе “хищник—жертва”. Такого рода моделями могут (дев
представлены две биологические популяции, борющиеся за свое выживание; процессы вырапй-
ния сельскохозяйственных культур; экономические процессы типа “ресурс—потребитель” и тд
[244—246]. В биологической интерпретации переменные и параметры уравнений (2.301) имеют
следующее содержание: xi(()—плотность популяции жертв, х2(0—плотность популяции хищйи-
ков в определенный момент времени; u(t)—управление, действующее на популяцию жертв;
т—положительные числа, характеризующие межвидовые взаимодействия.
Уравнения (2.301) описывают экологическую эволюцию при взаимодействии двух
ляций, каждая из которых стремится повысить свою выживаемость в окружающей среде. Есл
предположить, что в среде отсутствуют хищники и имеются ресурсы для обитания, то тргда
эволюцию соответствующей популяции можно представить в виде логистического уравнена
х$(0 = rs(ks- Xj)x$, (2.302)
где ks—несущая способность окружающей среды. В соответствии с уравнением (2.302)
любом начальном состоянии х& популяция со временем выходит на стационарное состой»
Xsycm = ks, зависящее от несущей способности окружающей среды. В процессе эволюцм
природных систем значения экологических параметров rs и ks изменяются, а каждое экологи-
ческое равновесие х5уст = ks, носит лишь временный характер. В результате такого изменШй
164
параметров экологическая ниша последовательно заполняется теми видами популяций, у
юторых величина ks становится больше, чем у других видов. Происходит последовательное
штеснение предшествующих видов, имеющих более низкую несущую способность. При вза-
имодействии между популяциями в форме “хищник—жертва” экологическая эволюция будет
описываться уравнениями вида (2.301) и носит наиболее сложный характер.
Отсюда следует весьма важный вывод: при управлении экологическими системами, опи-
оиаемыми уравнениями типа “хищник—жертва”, целесообразно выбирать такие инвариант-
ные многообразия ^s(xi,...,xn)=0 в методе АКАР, движение вдоль которых описывается соот-
кгствующими логическими уравнениями вида (2.302). Выбор таких инвариантных многооб-
разий ^s=0 обеспечивает естественный характер эволюции каждой популяции и
соответствует принципу самоподобного, самосогласованного поведения, характерного для
биологических процессов самоорганизации [83, 144, 235].
Другой отличительной особенностью экологических уравнений вида (2.301), помимо
естественного характера выбора инвариантных притягивающих многообразий, является оче-
вадная необходимость перехода от непрерывного к дискретному описанию. Дело в том, что
состояние тех или иных популяций сравнивается обычно через заданные интервалы времени
(еинтервалами, например; месяц, полгода, год и т.д.). Кроме того, само количество xs каждой
ишуляции всегда дискретно по своему существу. В этой связи необходимо перейти от непре-
рывной модели (2.301) к дискретной в виде следующих разностных уравнений:
*1 [А+ И = (1+ аТ)хх [Л] - ЬТхх [А]х2[А] + Ти[к],
хг [А+1] = (1 - сТ)х2 [А] + тТхх [Л] х2 [Л]. (2.303)
Выберем следующую макропеременную:
[*] = - Л)+ 02(х2 [Л] - В). (2.304)
Тогда, подставляя (2.304) в (2.279), получим выражение
•я. faxi [А+1] + /?2х2[А+1] - faA- faB+ afi\X\ [Л] - /ЗцахгЩ - = 0,
дажуда при учете уравнений (2.303) находим закон управления
,,г _ 1+аТ+а jg2(l- сТ+ a) fam- fab
и [А] у, xi [А] у, х2 [А] Х\ [А] х2 [А] +
1+« /?2(1+«) » (2.305)
+ т а+ в.
Этот закон управления переводит изображающую точку в окрестность многообразия
=0 (2.304), движение вдоль которого описывается следующим логистическим уравнени-
ем:
(2.306)
х2ДА+1] = ^1-сТ+ тТ^А+^)--^^х2ДА])х2ДА].
Условие устойчивости решений уравнения (2.306) имеет вид
1- сТ+ тт(л+ хър[А] < 1.
у , fa ) fa
Эго условие совместно с (2.280) обеспечивает асимптотическую устойчивость замкнутой
системы (2.203), (2.305). В установившемся режиме значения переменных равны
_ с _ т(А+ ДгВ)- fac
’’ Ххуст- т, Х2уст~ р2т
Hi рис. 2.12 для параметров а = 4, b = 2,5; с = 2; т = 1; А = 1; В = 1; fa = 1; fa = 5;
а=-0,5; Т = 0,01 приведены результаты моделирования синтезированной системы. Из этого
рисунка видно, что управление (2.305) асимптотически устойчиво поддерживает заданный
установившийся режим xi уст = 2; х2 уст = 0,8 при значительном диапазоне изменения дачаль-
пк условий замкнутой системы.
Разумеется, что рассмотренная простая задача управления экологической системой “хищ-
кик.—жертва” не охватывает огромного разнообразия явлений, происходящих в таких систе-
мюси возникающих при этом специфических задач управления [246]. Проблема управления
жнюгическими системами—это самостоятельная и чрезвычайно важная современная пробле-
165
Рис. 2.12
ма не только с точки зрения теории управления, но и в глобальном смысле. РешениеЗгой
проблемы требует развития новых подходов в теории управления с обязательным учел»
естественных свойств экологических систем. На примере задачи управления системой “ййц-
ник—жертва” (2.301) здесь показан эффективный способ учета естественных особенное^,
основанный на введении логических уравнений вида (2.302) в качестве желаемых инвариант-
ных многообразий, к которым устремляются все траектории движения. Выбор такого ив
притягивающих инвариантных многообразий и следует, на наш взгляд, положить в основу
синергетической теории управления экологическими системами.
166
ГЛАВА]
П
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
АГРЕГИРОВАННЫХ НЕЛИНЕЙНЫХ
РЕГУЛЯТОРОВ ПО ЗАДАННОЙ
СОВОКУПНОСТИ ИНВАРИАНТНЫХ
МНОГООБРАЗИЙ
Знание некоторых принципов нередко возме-
щает незнание некоторых фактов.
Гельвеций
При изучении наук примеры не менее поучи-
тельны, чем правила.
И. Ньютон
х , Во второй главе на основе синергетического подхода был разработан метод аналитического
ддецтеза нелинейных систем, базирующийся на введении агрегированной' макропеременной,
угорая представляет собой некоторую обобщенную функцию (в простейшем случае—линей-
ную) исходных фазовых координат. Затем относительно этой функции осуществлялись про-
Н^ры оптимизации с использованием квадратичных и неквадратичных оптимизирующих
функционалов. Законы управления находились на основе функционального уравнения в ре-
зультате простых аналитических процедур. Указанный подход можно интерпретировать как
достроение такого управления, которое сначала переводит изображенную точку из произволь-
ного начального состояния на некоторое, заранее выбранное, единственное многообразие
^=0, являющееся притягивающим, а затем обеспечивает устойчивое с соответствующим
шеством движение вдоль этого многообразия к началу координат фазового пространства.
Йяаче говоря, осуществлялась двухэтапная процедура движения изображающей точки сначала
^выбранному многообразию, а затем к началу координат фазового пространства. Эта задача
выла названа простейшей задачей аналитического конструирования агрегированных регуля-
пфов—АКАР.
•7‘ Указанный подход можно обобщить путем введения “последовательной” или “параллель-
Ябй”совокупности притягивающих многообразий0(5= 1,2,..,7<п) в фазовом простран-
стве синтезируемых систем. Эти многообразия представляют собой некоторые целевые мно-
хества, которые связаны с программой движения. Выбор этой программы достаточно произ-
ДОден и может производиться, исходя из самых различных требований к конкретной системе.
Программа и, следовательно , цель движения могут быть записаны в виде одного, как это
доказано во второй главе, или нескольких уравнений, связывающих фазовые координаты
в&екта управления. Общее число этих уравнений в принципе ничем не ограничено, оно только
Должно быть лишь меньше (или равно) размерности фазового пространства объекта. Задава-
ема программа отражает желание проектировщика в отношении динамических свойств син-
«аируемой системы при достижении поставленной цели управления. Свобода выбора програм-
167
мы движения в развиваемом здесь методе АКАР выгодно его отличает от известных чрезмерно
формализованных методов, например, основанных на строгом постулировании тех или иных
функционалов. Указанное обстоятельство предоставляет широкие возможности проектирвв-
щику системы управления, который может изменить или дополнить первоначальную програм-
му, т.к. обычно поставленной задаче управления соответствует более чем одна программа,
важно только, чтобы эта программа обеспечивала достижение поставленной цели движения.
Иначе, развиваемые в этой книге методы АКАР обладают немалой эвристической силой,
позволяющей проектировщику в зависимости от возможностей физической реализации, удоб-
ства анализа и синтеза систем осуществить выбор той или иной программы движения. Указав
ная возможность варьирования программ движения путем выбора соответствующих агрегиро-
ванных макропеременных позволяет проектировщику разнообразить и расширить свои воз-
можности на этапе синтеза системы управления, т.е. выбора ее структуры, параметров и
законов управления, удовлетворяющих заданным требованиям к качеству переходных и уста-
новившихся режимов движения. В этой и последующих главах получили дальнейшее развитие
методы АКАР, на основе которых находятся соответствующие законы управления, позволяю-
щие таким образом изменить дифференциальные уравнения исходного объекта, чтобы пол-
ученные в результате этого уравнения замкнутой системы были, во-первых, совместные
выбранной программой движения и, во-вторых, не противоречили законам природы, которым
подчиняются все движения рассматриваемого нелинейного объекта.
3.1. АНАЛИТИЧЕСКИЙ СИНТЕЗ АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
НА ОСНОВЕ КОНСТРУИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОЙ СОВОКУПНОСТИ
ИНВАРИАНТНЫХ МНОГООБРАЗИЙ
В предыдущих разделах книги было показано, что в фазовом пространстве динамических
систем могут существовать многообразия, к которым притягиваются фазовые траектории. В
общем случае можно построить несколько таких многообразий, которые, очевидно, включай
в себя некоторые поверхности притяжения. Тогда возникает идея конструирования такой
совокупности поверхностей притяжения, чтобы изображающая точка, начав двигаться из
произвольного начального состояния, последовательно перемещалась от одной поверхности
притяжения к другой, пока не попадет на последнюю поверхность, совпадающую или ведущую
к началу координат фазового пространства [69]. Такой подход позволит обобщить развитый
во второй главе метод аналитического синтеза нелинейных систем управления, оптимальных
относительно агрегированных макропеременных, который основан на двухэтапной процедур
синтеза, когда изображающая точка сначала сближается с некоторым притягивающим много-
п ‘
образием, например вида V7 = 2 РкХк = 0, а затем за счет должного выбора коэффициент#
организуется устойчивое движение вдоль ip = 0 к началу координат (xi = хг = ... = хп = $
фазового пространства. Представляется естественным расширить и обобщить указанный под;
ход путем введения нескольких притягивающих многообразий ipi = 0,..., 1рт= 0 (т<п-1) по-
нижающейся размерности. В этом случае изображающая точка сначала сближается с многооб-
разием ipi= 0, затем с ip2= 0 и т.д. После сближения с последним многообразием ipm=Q
организуется процесс устойчивого движения к началу координат.
Ранее отмечалось, что размерность первого многообразия тр\ = О равна п—1 и, следователе
но, уравнения движения (2.105) вдоль ^1=0 будет также иметь размерность п-1. Размерность
второго притягивающего многообразия ip2= 0 будет на единицу меньше, т.е. равна п-2.
Аналогично в общем случае при использовании т притягивающих многообразий размерное#
каждого г-го многообразия будет на единицу меньше предыдущего, т.е. изображающая точи
сначала сближается с многообразием размерности л—1, затем л—2 и т.д., вплоть до многооб-
разия размерности л-т. На последнем этапе движение к началу координат будет описыватьос
168
системой дифференциальных уравнений (л—т)-го порядка. Если положить m=n—1, то это
движение будет описываться в общем случае нелинейным дифференциальным уравнением
в^вого порядка, а при т=п—линейным уравнением.
Следовательно, при m=n— 1 (или т=п) не представляет особой трудности решение задачи
обеспечения устойчивости систем и требуемых свойств переходных процессов на последнем т-м
этапе движения. В зависимости от выбранного числа т притягивающих многообразий можно
получить различные свойства синтезируемых нелинейных систем [119].
Перейдем к математическому описанию изложенной процедуры синтеза нелинейных сис-
темна основе введения последовательности притягивающих многообразий. Предположим, что
возмущенное движение объекта описывается следующей системой нелинейных дифференци-
щвых уравнений:
XI (/) = /{ *1 ♦•••» хп), i = 1,2,...,р;
~/( xi »•••> Xj) Ч" Oj+iXj+if j — р+ 1,р4"2,...,л— 1, (3.1)
Хп (0 = fn( Xi ,..., ) + U,
,xj—координаты состояния объекта; и—управляющее воздействие;/^ xi,..., хп)—непре-
рывные функции, /<(0,..., О) = О;// xi,..., х/)—непрерывные функции, дифференцируемые
посвоим переменным, / (0,...,0)= 0; ’ =
Несмотря на некоторую специфичность рассматриваемой системы дифференциальных урав-
вений (3.1) этой математической моделью могут быть представлены практически важные
цшссы различных объектов. Так, частным случаем уравнений (3.1) является система диффе-
ренциальных уравнений (р=0)
*1 (0 = /i(*i) + а2хг',
х2 (0 = Л(хг) + пз^з;
(3.2)
Xn—i (0 =А-1(хп-1) + ЛпХпл
(Г) = /л(х„) + II ,
которой описывается широко распространенный в разных областях техники класс объектов,
састоящий из последовательно включенных нелинейных динамических звеньев. К таким
В&ектам относятся цепочки химических реакторов, различные нагревательные аппараты,
транспортные и обогатительные машины [23]. Уравнениями вида (3.2) может быть представ-
лена неизменяемая часть многих промышленных систем регулирования (например, систем
управления агрегатами для измельчения, сушки и обжига строительных материалов, некото-
рыми видами ядерных реакторов и др. технологических объектов) и следящих систем, элект-
ряческие, гидравлические и пневматические приводы мощных машин и др. При р=0 объекты
(3.1) будут относиться к классу объектов (2.84) с функциями/в правой части вида (2.89). Как
показано в п. 2.3, такие объекты управляемы и стабилизируемы, для них достаточно просто
нфкет быть найден закон управления, обеспечивающий оптимизацию по критерию (2.90) и
желаемые первичные показатели качества переходных процессов. На рис. 3.1 изображена
аруктурная схема для объектов вида (3.1) при р-0. К таким схемам путем структурных
преобразований могут быть приведены схемы достаточно распространенных классов нелиней-
ных объектов, рассматриваемых в теории систем автоматического управления.
Перейдем к описанию метода АКАР для нелинейных объектов (3.1) с использованием
совокупности последовательно вводимых инвариантных (притягивающих) многообразий.
Введем в рассмотрение первую агрегированную макропеременную
п . (3.3)
ЛГ ^1= 2 0ikXk + <pi(Xi ,..., Xn-i).
Д 1 •
'5 Задача состоит в синтезе управления ui( xi,..., хп), переводящего объект (3.1) из произ-
вадьного начального состояния (в некоторой области) в окрестность многообразия ^1 = 0 (3.3).
169
Рис. 3.1
Используем для решения этой задачи развитую во второй главе процедуру аналитического
конструирования систем, оптимальных относительно ipi по критериям вида 5
(ЗМ)
В соответствии с методом АКАР управление, оптимальное по критерию (3.4), будет иметь дад
1 р ( Эй>1 \ 1 / d<Oi \ 1 (35)
Ul=~0Tn г,/+ I fi~ + dd (//+ a'+,X/+1) “ " fn ’ Я •
тде Ti= . Управление ui (3.5) переводит изображающую точку на многообразие V’iH,
движение вдоль которого описывается уравнениями:
X/ (/) «/}( Xi «•••« Хп ), i — 1,2,...,р
Ху (Z) Х1 Ху ) + 42у+1^/+1 . j рЛ" 1.....П 2,
(?) = /и-1( »•••» Хп-1 ) ~о S ftlk хк ~~ *З^Р1( *1 хп-1 ) ‘
* Fin £=1 Pin
Обозначив/81 ntt2 = a^pi( xixn-i ), назовем иг—промежуточным (фиктивным) управлени-
ем, которое переводит изображающую точку на второе многообразие: i
n-i <З^Э)
^2= S р2к Хк + (рг{ *1 ..... Хй-2 ) = 0. да
л=1 д
Размерность ^2= 0 (3.7) на единицу меньше размерности многообразия ^i= 0. У правде^
U2(xi..... хп-1)объектом (3.6), синтезируемое на основе агрегированной переменной wh
ВВД ’ W
(34)
т
а
ЛИ
"2 = S77<Эв + л + +
“ 5 Ди хк + д—т ^2 + /п-1 .
Pin gi P2.B-U2 ..
Управление иг (3.8) обеспечивает перевод изображающей точки в окрестность многообрйй
(3.7) / движение вдоль которого описывается системой дифференциальных уравнений
xi (0 — >•••> хп ) , — 1>2,...,р ,
Ху (Z) ~ Х\ ,..., Xj) + Uj+iXj+i , j — pH" l,p+2,...,я_3,
Xn-l (0 = /n-2( Xi ,..., Xn-2 ) - РгкХк- xi Xn-2 ) • у
P2,n-\ *=i P2,n-1
Обозначив &2,n-\U3 = an-i<P2(x\,..., хп-г), можно, в свою очередь, найти управлепе
«з( xi,..., хл~2), обеспечивающее перевод изображающей точки в окрестность многообраЯй
И-2 а
Дзл хк + <Рз( xi,..., хп-з) = 0.
Л=1 -т.-
170
^мюгиинп, в общем случае можно осуществить последовательный перевод изображающей
W& в окрестности многообразий ^4= 0, ^5- 0 и т.д., вплоть до некоторого многообразия
0*0. При этом последовательность промежуточных управлений определяется выражениями:
'Л‘ w/( Х\ ,..., Хи—1+\ ) — j j ,•••, Xfi—i+i ) , Z l,2,...,m,
U-l = --- 2 (fill + fi + fn-l+\ + O 1 2 (fy + ( fj +
P/,h+/+1 /ssi &Xi Pl,n-l+\j=p+\ uXj
. . 1 <3-9>
; + “'*|X'+|) " J, A--‘Xt + v'-
Движение изображающей точки вдоль соответствующих многообразий
л-/+1 (3.10)
У>1 = 2 Рис Xk + (РК *1 xn-i) = О
Л=1
ожывается системами дифференциальных уравнений
Ч (0 = Л( xi ♦•••» хп), i = 1,2,...,р;
*/(0=Л(х1 xi) + aJ+ixj+i ♦ /= P+l,P+2,...,n-Z+l ; (3.11)
. • /Л , z \ ^П~1+\ V1 О &П—1+1 _ z \
Л1'Хд-/ (Z) — fn-&X\ ,..., Xn-i) ~ pik Xk о Vlx. X1 ,•••, Xn-l ) ,
Pl,n-l+\ k^\ Pl,n-l+l.
/=Ц,...,т, m<n-l .
Вдюгветствии с изложенной процедурой управление ui( xi ,..., xn) (3.5) переводит изобража-
емо точку сначала в окрестность многообразия ipi = 0, затем промежуточные управления
Хп-1+i) (3.9) последовательно переводят ее в окрестность многообразий 0, (3.10)
^...,т), движения вдоль которых описываются системами дифференциальных уравнений
мда (3.11). Управления и/( xt ,..., xn-i+i ) синтезировались на каждом 1-м этапе, исходя из
условий оптимизации по критериям вида (3.4), т.е.
* Г 7 7 7-7 1 (3.12)
Ji= f [rnfyi + cfyfa) I dt,
t 0 L J
i»!M,2..
Оптимальные по критериям (3.12) законы управления м/ (3.9) обеспечивают перевод
возражающей точки с Z-ro на (г+1)-е многообразие, движение вдоль которых описываются
уравнениями вида (3.11).
. йз выражений для ,ipm (3.10) видно, что размерность z-го многообразия 0 на
адшцу меньше размерности (/- 1)-го многообразия. Указанное последовательное понижение
размерности фазового пространства при движении изображающей точки вдоль соответствую-
ццмногообразий ^,= 0 аналогично протеканию оптимальных по быстродействию процессов
120,21], для которых характерной особенностью является последовательное понижение раз-
меряости гиперповерхностей переключения. Аналогичными свойствами обладают переходные
цицессы в системах с переменной структурой с форсированными скользящими режимами
[08]. Следовательно, введение некоторой последовательности притягивающих многообра-
0 позволяет ускорить время протекания переходных процессов.
Процедура синтеза в соответствии с предложенным здесь методом состоит в формировании
шока управления »i(xi,..., хп) (3.5). При этом основной задачей является определение
Фдашда <Pi( xi,..., хп-1) и ее (п-1) производных Функция <pi( xi,..., xn-i) может быть
uXj
(Вайдена в результате последовательного определения вспомогательных функций
»•••♦ хп~2),..., <рт( ,..., хп-т), входящих в соответствующие промежуточные управле-
нияи/(xi,..., xn-i+i) (3.9). Конкретно эта задача решается в обратной последовательности:
сначала выбирается функция срт( xi,..., хп-т), исходя из условий асимптотической устойчи-
вости и требований к качеству движения на заключительном m-м этапе; затем находится
171
функция У>т-1(Х1 Хп-т+1 ), после ЭТОГО функция y>;n-2( Xl Хп-т+2 ) и т.д. вплоть^
функции y>i( xi ,..., хя-г), которая позволяет непосредственно завершить процедуру симй
закона управления u^xi ,..., x„-/+i ) (3.9). Для реализации указанной последовательной,
определения функции ^>,( ,..., х„-,) и вычисления промежуточных управлений щ движений
вдоль соответствующих многообразий ^/= 0 выше приведены все необходимые соотношеии
(3.5)—(3.11). На их основе можно найти соответствующие конкретные выражения для
и <pi, и, в конечном итоге, синтезировать стабилизирующие законы управления. На заверив
ющем этапе синтеза находится управление нт на основе агрегированной переменю!
л-ш+1
Ут ~ 2 РткХк + Х1 ,..., Хп-т ). ВыбрЭВ ДОЛЖНЫМ обрЭЗОМ фуНКЦИЮ <рт( Х| ,..., X,i-W ) И КО
*=1 . &
эффициенты Д, можно закончить решение задачи синтеза нелинейной системы.
Изложенный подход к синтезу нелинейных систем, основанный на введении в фазовст
пространстве совокупности притягивающих многообразий, в полной мере соответствуете
следовательной оптимизации систем, т.к. изображающая точка сначала попадет из внешне!
области на 1-е многообразие, затем на 2-е и т.д., вплоть до т-го. При этом движение вдов
каждого /-го многообразия является оптимальным по соответствующему критерию качесга
вида (ЗЛ2). Таким образом, осуществляется последовательная оптимизация движения в про
цессе попадания изображающей точки на конечное многообразие в фазовом пространстве.
В заключение отметим, что в выражениях (3.5) — (3.11) можно использовать упрощен®»
формы (m-l)-ro многообразия, назначая произвольные значения коэффициент
fiik (/=l,2,...,m-l). Так, при выборе в (3.10) коэффициентов /3,у, равными
Pik = 0 (/= 1,2,...,/n-1), получаем простейшие виды агрегированных переменных -л
Xpl = ( Х| ,..., Х„-/) - Xn-l+i + щ+1 , (Ш
/ = 1,2..т-1. W
Выражения (3.13) могут быть использованы для определения управлений /е2,—
завершающем т-м этапе синтеза находится управление нт с использованием агрегировании
переменной о
н-m+i (ЗЛМ)
tym = 2 ftmk Хк “I” >•••> Хп-т ) • *
*=1
Выбрав в (3.14) должным образом функцию ^»m( xi ,..., хп-т ) и коэффициенты моЙо
обеспечить условия асимптотической устойчивости движения вдоль последнего притягиваю-
щего многообразия ^ш= 0 и, следовательно, гарантировать асимптотическую устойчивЬсп
синтезируемой системы.
В общем же случае в выражениях для промежуточных притягивающих многообразий
V>/= 0 (/= l,2,...,w-1) можно удерживать любое число коэффициентов Tafbi
избыточный выбор коэффициентов позволяет в ряде случаев удовлетворить дополнительным
требованиям к динамическим свойствам синтезируемых систем, например, условиям оптими-
зации в режиме малых отклонений и т.д.
Для систем, синтезируемых на основе изложенного здесь метода введения последователь-
ности притягивающих многообразий, можно выявить ряд общих закономерностей в отношении
их динамических свойств и показателей качества. ‘
Рассмотрим сначала возможности придания синтезируемым системам такого важнейшею
свойства, как асимптотическая устойчивость движения. В соответствии с изложенным метод#
характерной особенностью всего класса рассматриваемых нелинейных систем является»
асимптотическая устойчивость в целом по m-переменным (xn,...,xn-w) вне зависимости от надои
тех правых частей/у исходной системы дифференциальных уравнений (3.1) объекта, в которых
присутствуют управления и/. Это означает, что для синтезируемых нелинейных систем всегда
гарантируется свойство асимптотической устойчивости в целом по части (т) переменных?
к»'
172
(3.15)
Удрвия асимптотической устойчивости в целом по остальным (п—т) переменным можно
загасать из полученного ранее условия (2.104):
J J 2 [ 2 (bjk - Imxcipjfik) Хк] fj( xi,..., xn-m ) < 0.
Удовлетворяя условию (3.15), можно обеспечить асимптотическую устойчивость в целом по
пня координатам и, следовательно, всей синтезированной системы. В зависимости от выбран-
йМ® числа m притягивающих многообразий и числа р в уравнениях (3.1) можно получить
секретные условия асимптотической устойчивости движения. Так, при т=п—2 и р=0 урав-
нения движения if>n-2= 0 согласно (3.11) будут иметь вид
«1 (0 =/1(*1) +
% (<) = Л(Х1,Х2) - о ~(fin-2,\ Xi + fin-2 Х2) ~ ^п-2(хЬХ2) •
Р п-2,3 Рп—2,3
Подставив х2 из первого уравнения во второе, эту систему уравнений можно представить в виде
следующего нелинейного уравнения:
fin-2,3 Xi (f) + (афп-2,2 — fin-2,3 Xi (?) + а2<13^п-2(Х1,Х1) —
~ fin-2,3 Й2/2(Х1,Х1) + a2Cl3fin-2,lXi — a$n-2,2fl(Xi) = 0 . (3.16)
Условия асимптотической устойчивости уравнения (3.16) в целом [5. С.84] имеют вид
Л)
W1 * 0;
d2d^n-2,\
fin-2,3
^-^п-2(Х1,0) - а2/2(Х1,0) - ^2^/10) Xi +
Рп-2,3 Рл~2,3
(3.17)
^^^n-2(xi,xi) - -/г(Х1,0) Х1 +
«1
^^^«-2(Х1,0) ~ в2/2(Х1,0) ~ dx^ +
aifin-2,2 _ fin-2,3 аМ axi 1 1 X?
^2djfin-2,\ х?-» 00
п-2,3
(3.18)
(3.19)
о
® * н
(3.14)
в
' Путем соответствующего выбора коэффициентов fin-2,i и функций y>n-2(xi,x2)
мохйо обеспечить выполнение условий (3.17)—(3.19), что гарантирует асимптотическую
устойчивость движения в целом синтезируемых систем n-го порядка при выборе числа притя-
зающих многообразий ipm= 0, равном т=п—2. Разумеется, что произвольные функции
F«-i(x] ,х2) и коэффициенты fin-2,i дают возможность удовлетворить, кроме асимптотической
устойчивости, также и другим требованиям к динамическим свойствам синтезируемых систем.
JS случае /и=и-1 и р=0 согласно (3.11) получаем уравнение движения вдоль ^«-1= 0:
.„г • ,, ч офп-\,\ «2 „ ( ч (3.20)
xi (0 = /i(xi) - -j-— xi - g— <pn-i(xi) .
Рп-1,2 Рп-\,2
Условия асимптотической устойчивости в целом уравнения можно записать в виде
;гч. г tf \ й2 z xi о&п-хл 2 л (3.21)
[ /101) - а—XI - • Я- -- - XI < 0.
Рп—1,2 Рп-1,2
Неравенству (3.21) можно удовлетворить, например, при .
- ^1(X1)-fca/1(Xl); >0.
Усдорня (3.21), (3.22) гарантируют асимптотическую устойчивость движения в целом синте-
яруемых нелинейных систем при числе притягивающих многообразий, равном m=n—1 и
(3.22)
.., Рассмотрим вырожденный случай, кохда т-п и р-0. Этот случай возникает, если в (3.20)
фбшльно принять fin-1,2^2 = aupn-faij в качестве управления и выбрать <рп = хь Тогда
лвШльное по критерию (3.12) управление будет иметь вид
’.Г/Г .
173
(афп-хл _И . (Ш
lln ~ I Л . , T X1. • над.
у Pn-1,2 *П) 7’
Управление un (3.23) обеспечивает на последнем этапе движение изображающей точен
началу координат в соответствии с уравнением . ?
• /.> 1 „ т — _£д. л (3s$4)'
Xi (г) - - 77г Xi , 1 п - ~ > О.
1 п гпп q*
Из уравнения (3.24) следует, что при т=п и р=0 всегда гарантируется асимптотически
устойчивость движения в целом синтезируемых систем. Вырожденность рассматриваем®»
о
случая (т=п, р=0) состоит в том, что при выполнении условий (3.22) и Тп = решена
ЯзРи-1,1
задач синтеза для числа притягивающих многообразий равномт=/г—1 и т=п, фактичесы
совпадают.
Предположим теперь, что р = 2, а первое уравнение системы (3.1) имеет вид xi (/) эд
Тогда при т=п-3 и р=2 можно записать следующие условия асимптотической устойчивою
в целом [5]:
а) /г(х1,0) *1 >. О при х? * 0;
б) [ fa(xi,X2) - Л(хьО)] х2 > 0 при х2 * 0; (3.25)
•Ч '
в) J /2(xi,O)rf xi -* оо при | xi | -* оо . "
о ‘ >
Аналогично выражениям (3.25) можно получить условия.асимптотической устойчивою
и для других видов первых р уравнений объекта (3.1) и разном числе притягивающих мйй$
образий. Отметим, что в целом ряде случаев для определения условий асимптотически
устойчивости можно использовать уравнения первого приближения, получаемые путем лине-
аризации уравнений (3.11) движения вдоль конечного т-го многообразия (Z=m). Это допу-
стимо в связи с тем, что указанное многообразие, описываемое системой уравнений (n-mj*re
порядка, является притягивающим для всего фазового пространства. Тогда, как известно. [5.
С.50], если корни характеристического уравнения системы первого приближения имеют .от-
рицательные вещественные части, то нулевые решения исходной системы будут асимптотиче-
ски устойчивыми.
Изложенное выше позволяет сделать важный вывод о том, что для класса нелинейных
объектов вида (ЗЛ) при р=0 и числе притягивающих многообразий т=п-2, п-3 и т.д. можно
в соответствии с полученными выше условиями во многих случаях обеспечить, а при р«0,
zn=n-l и т=п—всегда гарантировать асимптотическую устойчивость движения в цеЬом
синтезируемых нелинейных систем, т.е. решить Известную своей сложностью задачу стабили-
зации [1] управляемых движений для достаточно распространенных нелинейных объектов,
В методе АКАР, основанном на процедуре агрегирования—декомпозиции, для анализа
асимптотической устойчивости синтезируемых нелинейных систем высокой размерности^
существу используется последовательная совокупность функций Ляпунова. При этом сначала
вводятся функции Ляпунова для функциональных уравнений относительно макропеременных
xp^xi,...,xn), а затем на конечном многообразии ipm=Q исследуется устойчивость движем
только по отношению к части (п—т)-коордийат Х1,...,хц-т,которые описывают поведение^
на заключительном этапе движения. Указанная совокупность функций Ляпунова представляй
собой своего рода метод векторных функций Ляпунова (ВФЛ) в синергетической теорм
синтеза нелинейных систем. Используемый в этой теории метод заметно отличается от см-
етного метода ВФЛ в теории устойчивости [26] тем, что здесь осуществляется не приближенна
(итерационная), а асимптотически точная динамическая декомпозиция исходной систейй.
Кроме того, использование ВФЛ в методе АКАР.не требует поиска соответствующих систол
теорем сравнения для оценки асимптотической устойчивости движения системы. Эта важяН
отличительная особенность связана с тем, что в методеАКАР рассматриваются задачи усгей-
чивости управляемых динамических систем, а в известном методе ВФЛ [26] исследуется!
174
оаадном устойчивость заданных систем обыкновенных дифференциальных уравнений или
садимых к ним параметрически синтезированных систем управления. Именно возможность
структурного синтеза управлений, переводящих ИТ от одного многообразия к другому поци-
1бЖ)й размерности, позволяет в методе АКАР осуществить строгую процедуру аналитиче-
ажо построения ВФЛ для текущего (на многообразиях) анализа асимптотической устойчи-
вом синтезируемых нелинейных систем.
; В развиваемом методе синтеза, помимо решения проблемы стабилизации, также сущест-
вен® продвинуться и в оценке таких важных показателей,как время регулирования и характер
переходных процессов в замкнутых системах. Рассмотрим сначала возможности получения
адиок времени затухания переходных процессов. Время регулирования в рассматриваемых
системах определяется суммой времен приближения изображающей точки к т многообразиям
п,времени движения вдоль конечного многообразия V’m— О к началу координат фазового
щюстранства. При оптимизации каждого парциального движения по критериям вида (3.12)
иадое движение удовлетворяет уравнению экстермали
Tiipi(t) + V'/ = о,
" С/ й-
1Ж Г/ = —, и тогда оценка для суммарного времени регулирования будет иметь вид
mi
«‘z1 (3.26)
- (4...5) Ti + t^m ,
. z=i
где ^т—время движения вдоль грт = 0 к началу координат.
В случаях, когда т=п-1 и выполняются условия (3.17) или т=п, время движения на
последнем этапе равно ^,,„«(4 - 5)Тт и оценка времени регулирования может быть записана
вйеде
<
(3.27)
т
Г2р^(4...5) Ti,
/=1
в
l#Tm = Tn-i = --д’ при т=л-1; Тт = Тп при т=п. Оценка (3.27) позволяет выбрать
надоенные Г/ в зависимости от заданного времени затухания переходных процессов.
•Перейдем к выявлению характера переходных процессов в рассматриваемых системах.
Предположим сначала, что число притягивающих многообразий выбрано равным т=п-1.
Тада, если выполнены условия (3.22) и осуществляется оптимизация по критериям вида
(112), то замкнутая управлением щ (3.5) система будет описываться линейным дифференци-
п
п (Ткр + 1)х,(р) = о,
к=\
(3.28)
что характеристическое уравнение замкнутой системы имеет
1
ур-, что позволяет записать точные решения
_ d_
р~ df
^выражения (3.28) видно,
отрицательные действительные корни Л* = -
относительно xi (f) и ее (л-1) производных. В справедливости уравнения (3.28) можно непос-
редственно убедиться путем преобразования системы уравнений (3.1) к виду (2.82) с учетом
ойтгезированного управления ui (3.5). К уравнению (3.28) приводит также и вырожденный
играй, когда т=п. Таким образом, при синтезе нелинейных систем с ш=п-\ (или пг=п) в
1 соответствии с изложенным методом замкнутая нелинейная система имеет апериодические
переходные процессы по выходной координате xi(f) при произвольных начальных условиях,
мремя затухания переходных процессов может быть определено по обычным методам линей-
ной теории автоматического регулирования.
175
Таким образом, предложенный метод аналитического конструирования систем управлени
нелинейными объектами вида (3.1), основанный на введёнии в фазовом пространстве после-
довательности притягивающих многообразий, позволяет гарантировать асимптотическую ус-
тойчивость в целом невозмущенного движения синтезируемых систем, т.е. решить задачу
стабилизации нелинейных систем, а также в целом ряде практически важных случаев обесж-.
чить требуемое время затухания переходных процессов. -
Предложенный метод синтеза по своему существу базируется на декомпозиции исхоДшм
задачи и-го порядка на т подзадач последовательно понижающейся размерности и на подзадач
(л-т)-го порядка. При этом декомпозиция общего движения в исходном фазовом простравспе
на парциальные движения основывается не на структурных свойствах рассматриваемых объеив
(связанных, например, с разнотемповостью движений из-за больших отличий постоянных время
[76]), а на последовательном во времени переводе изображающей точки с одного многообрШ
на следующее меньшей размерности. Другими словами, происходит поинтервальное разделена
движений, когда в результате сближения изображающей точки со следующим многообразие»
меньшей размерности, парциальные движения как-бы “выстраиваются” в очередь друг за другом
Указанные отличия предложенного здесь метода и позволяют осуществить не приближенную,!
точную декомпозицию основного движения системы.
3.2. ПРИМЕРЫ ПРАКТИЧЕСКОГО СИНТЕЗА НЕЛИНЕЙНЫХ СИСТЕМ
УПРАВЛЕНИЯ ПО ЗАДАННОЙ ПОСЛЕДОВАТЕЛЬНОСТИ
ИНВАРИАНТНЫХ МНОГООБРАЗИЙ
Перейдем к рассмотрению примеров, иллюстрирующих разработанный в п.3.1 метод ана-
литического конструирования агрегированных регуляторов с введением последовательности
притягивающих многообразий в фазовом пространстве синтезируемых систем.
Пример 3.[.Рассмотрим сначала синтез стабилизирующего закона управления нелиней-
ным объектом, описываемым дифференциальными уравнениями (2.114). Согласно п.3.1 здеа
можно положить т=2 и р=0. Тогда в соответствии с изложенным выше методом выберем
первое притягивающее многообразие вида !'*
+ 0nXi + ^12 хг + 01з Хз + ^i(xi,хг) = о. (3.29),
Управление и\ (3.2), оптимальное по критерию (3.12), примет вид
013 Ui = -011X1 - (011 + + ^-) Х2 - (012 + Хз - (012 +
, . 013 z ч (3.30)
+ дх2> SinX1 01Т1 •
Управление щ (3.30) переводит изображающую точку на многообразие = 0 (3.29), движе-
ние вдоль которого описывается следующей системой дифференциальных уравнений:
Xltpl (/) X2yl ,
/113 *2<Л (0 = jSnSinXi^i — 011 Xitpi — 012 Хъ/>1 — <P1(X1V1, Х2^1) . /
Обозначив 01з иг = хг^О и используя второе притягивающее многообразие ,
^2= /?21Х1 + 022X2 + <Р1(Х1} = 0 , (3.31)
найдем управление
P22U2 = ^ - X, + fe, + Х2 + '
^2 P13J 0*1 Р13 Ъу
+ /fosinxi + ^Рг(*1) •
Управление и* (3.32), в свою очередь, сближает изображающую точку с многообразием
^2— 0 (3.31), движение вдоль которого описывается дифференциальным уравнением первого
порядка
022 Х1у>2 (0 — — 021 Х1^>2 — <Р2(Х1Ч>2) . (3.33)
176
Вобрав в уравнении (3.33) коэффициенты > О и функцию ^>2(xi^2)xiy>2^ О, можно
обеспечить асимптотическую устойчивость движения в целом синтезируемой системы. Поло-
жи, в частности, ^2(xiV2) = 0, находим управление иг (3.32) и затем стабилизирующий закон
управления
4h «1 = - д ф-у- xi - f + jTf- + cosxJ хг - + 4- + 4-] хз -
рцТхТг \Р22Тг Р22Т1 T21\ ) \Р22 1\ 1г)
_ (&. . J_ . О sinY (3.34)
^22 Т1 + Т2) *'
Подставив управление «1 (3.34) в систему исходных уравнений объекта (2.114), найдем
уравнение замкнутой системы
|^Т1Т2х13)(0 + Л + Тг + Tir2j Х1(0 + + Г1 + Т2) ^(Г) + xi = 0 . (3'35)
ИМ3.35) следует, что корнями характеристического уравнения являются At = - ,
£« - 4-, Лз = - -Д-, а решение дифференциального уравнения (3.35) имеет вид
* i 1 *2
3
Таким образом, управление ui (3.34) гарантирует асимптотическую устойчивость в целом
йЙОзмущенного движения нелинейного объекта (2.114). Кроме того, управление (3.34) обес-
печивает заданное время регулирования (за счет выбора величин 1\ иТ2 ), а также
апериодический характер переходных процессов. Заметим, что структуры управления (3.34)
вправления (2.114), полученного путем приведения объекта (2.114) к канонической форме
(^2), при выборе в уравнении (3.33) функции <р2(х\^,г) = 0 совпадают. Однако, в общем
слуш, управление ut (3.34), полученное построением притягивающих многообразий ^1= 0 и
0, предоставляет более широкие возможности в отношении удовлетворения требуемых
динамических свойств синтезируемой системы. Так, например, выбор функций вида
pj(xi) = bxii+l позволяет уменьшить время регулирования и т.д.
Пример 3.2. Рассмотрим синтез стабилизирующего закона в задаче о гашении вращения
, вокруг одной из осей твердого тела. Уравнения движения твердого тела с учетом инерционно-
сти исполнительного механизма имеют следующий вид [189]:
' (Г) = (а2 - аз) хгхз + Ъх^; х4 (() = mi ; (3.36)
• агхг (0 = (аз - ах) х(х3; айз (0 = (ai - a2) xix2,
Xf , х2, хз—координаты вектора скорости; х4—координата положения исполнительного меха-
низма; сц, а2, аз—моменты инерции тела относительно центральных осей; b > 0.
/ Математическая модель объекта (3.36) имеет четвертый порядок и включает в себя такие
Явственные нелинейности, как произведения координат. Этой моделью может описываться,
Пример, космический летательный аппарат (КЛА), который обычно имеет несколько (три)
йбилизирующих управлений. Однако попытаемся стабилизировать объект (3.36) с помощью
только лишь одного управления ut(xi, х2, х3). Из теории механических систем известно, что
стилизация твердого тела с помощью одного управляющего воздействия (и[) является весьма
вджной и до сих пор в должной мере нерешенной задачей. Решим эту задачу стабилизации
нелинейного объекта с помощью развитого в п.3.1 метода АКАР.
{^Система дифференциальных уравнений (3.36) относится к виду (3.1), при этом р=2 и
допустимо выбрать число притягивающих многообразий т=2. Введем первое притягивающее
Многообразие
, 4 л , V. л (3.37)
V*1 = 2 РкХк + <р\(х\ ,Х2,Хз) = 0.
£=1
177
Тогда оптимальный по критерию
/1 = / ( miV»i + eV?) dt
о
закон управления будет иметь вид
^4UX = -JT 2 0кХк ~
/Ма2 -аз)
ах
_ 02( Дз ~ Д1 )
а2
дхз
*1*3 -
+ дх'х
0з( ах — а2) + дуч
аз дхз
(Р2О . <НР\ 1
----+ Т~ х4 ~
ах дхх I
Х1Х2,
где 7,=-^-. :у
т1 , ж
Этот закон обеспечивает асимптотическое притяжение изображающей точки из произвольной
начального положения к многообразию = 0 (3.37). Подставив из уравнения ^1=0 перем»
ную
3
04X4 = 2 0кХк ~ ^1(Х] , Х2 , Хз)
*=1
в первое уравнение объекта (3.36), получим систему дифференциальных уравнений:
лл а2 ~ а3 b V а Ь - .
ах Х2*’1Хз*’1 р4ах ^*х**'1 04Й1*’1’
/л _ fl3 “ «1 .
Х2^1 \t) 9
. ai-a2 (339)
X3V-1 (0 =---—---ХХуХХ2,рХ , *
которая описывает движение вдоль многообразия у>х — 0. Введем теперь второе притягивающее
многообразие
V»2 = «1X1 + «2X2X3 = 0. (ЗЙ®)'
Тогда, обозначив в (3.39) и2 = Хг' хз),находим оптимальный по критерию
J2 = J ( + dV'i) dt
о
3L
•5К
закон управления
z 1 Ъ0Х . axb Л Q • г «1(^2 ~ аз) «21
«1^2 у о п о _ X/ 0к хк [ п + <т> ] Х2Х3
2 2 Р4«1 Р4«1 Л»2 Л1 22
О»2 2 ^2 2
+ ~(«з - ai)xjX3 + —(«1 - «2)Х1Х2,
г
(3.41)
с-
где Т2 =
1Т12
Закон (3.41) обеспечивает асимптотическое приближение изображающей точки ко второму
многообразию V>2= 0 (3.40), уравнения движения вдоль которого можно найти, если.поло-
вить переменную аххх = - «2X2X3 во второе и третье уравнения системы (3.39). Тогда получи
«1«2Х2^2 (0 = - «2<«3 - ai)X2^2X3^2 i
0103*3^2 (0 = ~ «2(«1 “ «2)Х^2Х^2 . » :
Исследуем устойчивость системы (3.42), описывающей движение изображающей точки вда»
if>2= 0 к началу координат фазового пространства. Для этого введем функцию Ляпунова
Vv2 = 0,5X2^2 + 0,5x^2 - . (3i43)
Тогда, в силу системы уравнений (3.42), производная функции Ляпунова v^2 (f) будет рама
. .. _ а2(аз- ах ах- а2\ 2 г 0-44)
178
Для обеспечения условия гу2(0 < О в выражении (3.44) необходимо положить
«2 рз ~ ! Д1 ~ q (3.45)
А аЦ а2 аз ] '
К - «2
Неравенство (3.45) за счет должного выбора знака отношения — всегда можно удовлетворить.
Функция Vy,2 (3.43) представляет собой квадратичную форму координат, а производная Vy2 (3.44)
может, вообще говоря, принимать нулевое значение на многообразиях х2 = 0 или хз — 0. В
соответствии с [5] это означает, что будет, по крайней мере, обеспечиваться устойчивость системы
J0.42) по Ляпунову относительно координат х2 и хз- Напомним, что системой (3.42) описывается
даижение изображающей, точки вдоль многообразия ip2= 0 (3.40). Исследуем также уравнения
(3.42) с использованием теоремы Барбашина—Красовского [5], которая формулируется следую-
щем образом: если существует бесконечно большая определенно положительная функция Ляпу-
нова Vf2, такая, что vv2 (Г) 0, причем v (г) = 0 на множестве, не содержащем целых траекторий
.(кроме x2ll)2 = хз^2 = 0), тогда нулевое решение системы устойчиво в целом. В нашем случае
функция Vy2 (3.43) является бесконечно большой определенно-положительной функцией. Доста-
точным условием отсутствия целых траекторий на множестве Vy2 = 0 является [5]
F>(*2 хз> + 7^ F*X1 *з) * 0 •
Ш F\, F2—правые части уравнений (3.42). Подставив в это неравенство соответствующие
Функции, получим
«2 (аз — а\ <zi - «гА аз - а\ 2 4 , аг (аз~ а\ , ai ~ Д21 Д1 ~ <*2 4 2 п
> V — ---------+-------у- ------Х2Х3 + ? “ '----Z “ Х2Х3 U .
al\ а2 аз j а2 а? а2 аз j аз
Эю выражение выполняется при аз > а\> аг-Таким образом, при определенных соотношения
между моментами инерции выполняются условия теоремы Барбашина-Красовского об асим-
доотической устойчивости в целом системы (3.42) и, следовательно, синтезированной исход-
io^ системы (3.42) с законом управления
- л. + ** - Л - 1)
4Г 1 Ц=1 ' I U1 2 j у <*3
i . А IS32LS1 _ Л х,Хз _ (Ы А + _ &Й. «.(<32-03 +
r а2 j ai ЬТ2 у ci\b а\
x,^_to[«.(«2-«3)+^ xixj-^a,aXa3-«.)X2xj-
1 / I Л\ 12 I Ct\0Cl2
/Mi02(ai ~ ai) a 04 Д1«2(Дз ~ ai) ? 04 a^itai - ai) 1
v сцЬаз 2 3 aiba2 3 4 а^Ьаз 2 4
7ft 04 aia2 lai - a2 2a3 - 2аЛ , (3.46)
a\b l аз a2 I ***2Хз' .
' ' D n
Зщгон управления (3.46), полученный путем подстановки функции <р\(х\, х2, хз) = —^^и2
(3.41) в (3.38), гарантирует асимптотическую устойчивость движения в целом исходной
системы (3.36) по координатам xi и Х4 и, по меньшей мере, устойчивость по Ляпунову по
|О£рдинатам х2 и хз. Отметим, что закон (3.46) был получен в результате выполнения доста-
точно простых аналитических процедур. Результат был достигнут путем введения двух притя-
гивающих многообразий в фазовом пространстве нелинейной системы.
( ,_Пример 3.3. Синтезируем систему управления контура стабилизации продольного углово-
ГОДвижения самолета с учетом нелинейности характеристики сервопривода. Из опыта проек-
тирования систем стабилизации углового движения самолета известно, что существенное
вдадние на качество процессов управления оказывают нелинейные характеристики исполни-
тельного механизма типа ограничения хода штока и скорости хода штока [117,118]. Это
влияние пспбенно усиливается при значительных начальных отклонениях и внешних возму-
179
щающих воздействиях. Оснеяниь причиной вносимых сервоприводом искажений являем
ограниченность мощности. ^пользование известных щпйиженнж методов анализа нсда-
нейных свстевсне ш>зводяетуказас№€Я№0Йгулучшенждинамикисистемы [118]. В этойсмя
возникает задача учета указяшанг нелидежюстей на этапе синтеза с обеспечением желаемое
качества переходаьгк процессе®. Урввненижпродольюгоугловогодвижешысамолета с учен»
нелинейности характеристики сервопривода имеют следующий вид [117]:
•«г (*) = + «o®z + йк; Хт(Т)? = afaxi’, (347)
лэ (Г) = a&Rxz) + язалз? + ода*; ж» = 0*3X3 + 0*4X4,
рдел = Д&($; хг = Ай; х$ = Аю^ х* - Ае^ Здесьобстначёно: Ад—отклонение угла поверия
руля высоты, прянедениве к выходной координате сервопривода; Ашг—отклонешю упшнй
скорости тангажа; Да—отклтетив?угла этакими—управление. Вцд нелинейной характерно»
ки Дх2) сервопривода по ходу штокаиэображен на рис. 3.2. Применим для решения поставлен-
ной задачи стабилизация продольного углового движения самолета метод АКАР с двум
прнпзжиаощими многообразиями. Введем первое многообразие
$1 = л» + Я(*з» хъ *4) = ®- (К
Тогда оптимальное покритерию (З.В2> упражнение будет иметь согласно (3.5) вид
Ьи\ = - (аи +^-+«21-^). Х1- «£2X2- w (*2>- + а44х7) Х*~
~ + ** ~ х3’ х*) ’
Ci
где ТУ = —. Промежуточное уприиеяие иг = ^г(х2, х^лц) найдем на основе уравнений дай^
XfyA (0 = “ <^f*2r
(f) = + яздхз^1 + a&Xtyi’, (3.J0)
(0 = <*40*3yi + •
Для этого виедем второе мятюбрдеие
^2 = х2 + ^2зха = 0 (ЗХ)
и, согласно (3 Л) находим управление
Яа»2 =-^xj + ^Ззз^-Ь^^хз+/823^X4-Ь^ азг^хг) . (3-SQ
Управление u2 (3.52) переводит изображающую тоздеу в окрестность многообразия ^2=0
(3.51), уравнения движения вдоль которого в силу (3.50) имеют вид
хз?2 (0 = <2зх/( ~ 023 хэу>г) + азэхде + <134X4^2 ? (3.53)
*4?2 (О = «43*3^2+ ^44*4^2 •
Условия асимптотической устойчивости в целом нулевого решения уравнений (3.53), согласно
(5. С.72], имекЛ вид следующих неравенств:
6 аз2<ц/^ ^х^ + 033044 - аэ4в44 > 0; + 033+044 < 0;
? * (3.54)
1 044 J /(“023 Xi)dx + 0,5(033044 “ 034043)*3 * * при | Хз | -» 00 .
Нелинейность Д - 0гз хз) имеет характер насыщения и может быть представлена, например,
функцией
/(-023 хз) - - к thX02зХэ. (3.55)
Дм нелинейности вида (3.55) условия устойчивости (3.54) будут зависеть только от соотно-
шения параметров ац и их знаков, а также от знака коэффициентов 0гз. Реальные параметры
их знаки обычно таковы, что условия (3.54) всегда могут быть выполнены. Так, например,
ди полета самолета на высоте Я= 18 км при числе Маха Л/= 1,7 параметры ац таковы [14]:
вп = ~ 8,0; ай = ~ 40,0; 021 я 40,0; 032 “ “ 10,0; 033 = - 0,32;
034 = — 18,0; 043 = — 1,0; ац ш — 0,34; b = 7,0.
ДлД этих параметров условия (3.54) сводятся к простейшему виду
023 < 0. (3.56)
Условие (3.56) может быть всегда выполнено. Подставив (/ = 2,3,4) и
Йфи,хз, х4) = U2 (3.52) в (3.49), находим закон управления
V &*1 = “ + -^ + у- + 023 «32^-^) XI - (ai2 + Х2 -
023 032^ . 1 . 1 \ 1023 <*33 , 1 , 1 \ . 023 034043 , _____
__^Гз+л+^Лх2)_[^Г(вм+гГ+^ + ^—+ <ЗЛ7>
«21T1T2J ’ 021 \ 4 1 4 2/
Снпезированный закон управления (3.57) последовательно переводит изображающую точку из
прдадаольного начального состояния в окрестность первого многообразия y>i= О (3.48), затем в
(дрзстность второго многообразия ^2= 0 (3.51) и, наконец, обеспечивает асимптотически устой-
оде движение вдоль ^2= 0 к началу координат фазового пространства. Замкнутая система
афивзации продольного и углового движения самолета (3.47) с законом управления (3.57) была
армирована на ЭВМ. Для приведенных выше параметров самолета и коэффициентов
1,023=-1 закона управления (3.57) уравнения замкнутой системы имеют вид
S xi (Г) = - 10 xt - 10 xi - 2,5x2 - 4,92 Дхг) + 1,892 х3 - 8,7 х4;
• га ап . 2
' Х2 (0 = 40X1;
X ХЗ (0 = - Ю Дх2) - 0,32 хз - 18 Х4;
х4 (0 = Хз - 0,34 х4.
В^К уравнениях функция Дх3) = 5th0,2 хг. На рис. 3.3,а приведены графики переходных
децвссов для начальных условий: хю = хго = хзо = 0; хю = 3 , а на рис. 3.3,6—при
да» = хзо = 0-й Х40 = 5. Результаты моделирования показывают, что синтезированная
асимптотически устойчива, в которой путем выбора коэффициентов Ту, Тг, 0гз можно
Вселяемых переходных процессов.
образом, закон управления (3.57) позволяет решить поставленную задачу стабили-
эдн продольного углового движения самолета. Заметим, что синтез был осуществлен при
ведаши числа притягивающих многообразий т = 2 < п-1, при этом сами макроперемениые
||(3.48)и^2 (3.51) имели упрощенные формы. Функцию^ можно выбрать, например, в щще
181
^2=х2+^2(хз^С4-)г Где^г(ог?^х4)—нвргашюиающам^функцияпри субоптимальном по быстродая*
ст^ю -упряшшвжшадзяяи^нв^вдигийзмвогогобртвии ^Н)^ Отметим также, что в работе [117]
рассматривгемажзадаяаланалнтияеекюгокюнбтруирввадияжонтуралродольного движениям
молетарвыишааннаютвие^втшн’оготамметодаАКОРлрикусочно-линейнойаппроксимацн
негшн«йшхт*<Д^). Жнашем*случа^сштгезврованный закон управления bui(xi,...,X4) (3.57)
имеетболеео^1ий^харжтер? п0лучен®зналитическойформеи включает в себя естественный
асимитоти1юску1еустойчнвю€лъд1Яйиез^^ажюб!лаЕтималыхотклоненийпозволяетобеспечйть
путем-* выбора? параметрон» 7^ , показателе качества перехода»
прещеесова
1 3.3. АНАЛИТИЧЕСКИЙ СИНТЕЗ АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
а НА ОСНОВЕ КОНСТРУИРОВАНИЯ ПАРАЛЛЕЛЬНОЙ СОВОКУПНОСТИ
ИНВАРИАНТНЫХ МНОГООБРАЗИЙ
г> Во многих задачах управления многосвязными технологическими и подвижными объектами
возникает необходимость использования нескольких каналов управления, что расширяет возмож-
вости в обеспечении требуемых динамических свойств синтезируемых систем [12]. В этой связи
рассмотрим задачу АКАР с векторным управлением. Предположим, что возмущенное движение
объекта описывается следующей системой нелинейных дифференциальных уравнений:
xi (0 = fi (Х1,...,ХИ) + Ms,
г Z=l,2,...,n;s=l,2,...,>y;ij £ п (3.58)
Xi(f)—фазовые координаты объекта; us— составляющие вектора управления
№ В уравнения (3 58) входят управления «1,...,/^, число rj которых обычно меньше числа п
переменных состояний объекта. Ставится задача синтеза вектора управления кото-
рый обеспечивает перевод объекта (3.58) из произвольного исходного состояния
xo(xio, ,Хпо) в некоторой допустимой области в начало координат х(0,... ,0) фазового простран-
цдо Потребуем, чтобы при этом обеспечивался минимум оптимизирующего функционала
00 /7 г > -> ->•-> (3.59)
’ / = J Fp&’s+cs^sCO 1 л» '
, . о |f=i L JJ
Г^кже должна гарантироваться асимптотическая устойчивость движения в некоторой области
фазового пространства или в целом. Уравнения экстремалей, доставляющих минимум функ-
ционалу (3 59), имеют вид
* WZ) 4-^ = 0, (3.60)
ще Ts= —, s= 1,2, ,г] Движение изображающей точки должно удовлетворять системе урав-
Psi
нений (3 60) Так как нулевое решение этой системы устойчиво, то движение после окончания
переходных процессов в системе (3.60) должно одновременно удовлетворять соотношениям
<7 xi,...,x„) = 0,s = 1,2,...,|;. (3.61)
Но изображающая точка не может в одно и то же время находиться на разных многообразиях,
поэтому она сначала сближается с пересечением многообразий (3.61), а затем должна двигаться
вдоль него к началу координат фазового пространства. Это означает, что задача синтеза векторного
управления сводится здесь к обеспечению условий проекции движения исходного объекта (3.58)
наводпространство многообразий (V>i= 0,...,^“ 0), описываемое системой уравнений (3.60).
< Синтезируемые управления tt\,..., должны. сначала обеспечить перевод изображающей точки
^окрестность пересечения многообразий (3.61), а затем движение вдоль этого пересечения к началу
координат Таким образом, в рассматриваемом здесь методе АКАР сначала используется параллель-
пи совокупность многообразий (3.61), а затем, вообще говоря, осуществляется последовательный
перйод изображающей точки от одного притягивающего многообразия к другому в соответствии с
вложенной в п 3.1 процедурой синтеза скалярного управления [127].
Жерейдем к изложению методики синтеза управлений us(xi,...,xn). Синтезируемые управ-
девия Ug должны удовлетворять условиям оптимальности, записанным в виде системы диффе-
ренциальных уравнений (3.60) относительно агрегированных макропеременных Эти фун-
цквдолжны быть независимыми друг от друга. Первым этапом процедуры синтеза управлений
^является запись системы дифференциальных уравнений (3.60) в развернутом виде, т.е. с
учетом исходных уравнений (3.58). Осуществив эту процедуру, получаем систему уравнений
Т, 1 ^Ъ,и, + Т, i fl + у, = 0, s = 1,2,...,7. <3'62)
&Xj /=1
183
Полученные обобщенные функциональные уравнения (3.62) позволяют, в зависимости от конк-
ретных форм агрегированных йеременных xi,...,xn), синтезировать различные регуляторы.
Для этого путем совместного решения систем алгебраических уравнений (3.62) находятся законы
управления ^-каналами управления. Управления us осуществляют перевод изображающей точп
сначала в окрестность пересечения ij многообразий (3.61), а затем ее движение вдоль указанного
пересечения. Если т] = и, то соотношения (3.61) представляют собой точку, совпадающее
началом координат фазового пространства (xi—... =хп= 0). Это означает, что при т] = п упра^да»
ния обеспечивают невозмущенному движению асимптотическую устойчивость в целом.
Рассмотрим подробнее наиболее распространенный случай, когда ij < п. В этом случае
возникает необходимость исследования устойчивости движения вдоль пересечения многооб-
разий (3.61), которое описывается системой дифференциальных уравнений (л - поряд-
ка. В зависимости от форм агрегированных макропеременных ips и видов правых чаэдб
дифференциальных уравнений (3.58) объекта можно получить разные виды законов управле-
ния. Сначала выберем простейшие формы в виде линейных функций
« (3.63)
V’s = S bskXk, s = 1,2,...,7, ‘
*=1
т.е. многообразия V\= 0 будут представлять собой некоторые гиперплоскости. Из первого
уравнения ^1=0 находится координата
1 «-1
Хп ~ 2} @1кХк
Pin
и подставляется в уравнение тр2= 0, т.е.
А=1 Pin
Затем из уравнения (3.65) находится координата
1 п-2
Хп-\~ 7> 75 75 д 2 ( @2к@1п~ @2п@\к) хк-
Р2,n-l Pin ~ P2nPl,n-\
На следующем шаге найденные координаты хп (3.64) и xn~i (3.66) подставляются в уравнедае
V>j= 0, из которого находится координата хп-2- Аналогичный процесс продолжается вплоть^)
получения координаты х„_7. Полученные таким способом координаты xn-i,...,xn-n подставля-
ются в те уравнения исходного объекта (3.58), у которых в Правой части отсутствуют управ-
ления. Число таких уравнений равно п - т/. В результате выполнения указанной процедуры
получается система дифференциальных уравнений
Ху(() —//(xi,...,xy, yJ$i,..., j ~~ 1,2,...,zi—
описывающая движение изображающей точки вдоль пересечения многообразий (3.61). Ен-
мерность системы уравнений (3.67) равна п - ij, что, разумеется, упрощает обеспечение
условий их асимптотической устойчивости, и, следовательно, синтезируемой системы. Выбором
соответствующих коэффициентов fit в (3.67) можно наделить движение на последнем этапе
требуемыми динамическими свойствами.
Перейдем к выявлению общих закономерностей, присущих рассматриваемому классу
нелинейных систем, на основе исследования некоторых конкретных видов уравнений (ЗЛ8)
объекта. Рассмотрим сначала задачу синтеза векторного управления нелинейными объектами
второго порядка:
*1(0 - fl (Xi,X2j + Ml , Х2(0 = f2(xi,X2j + М2 . (3.6$
В этом случае и = 2 и = 2. Выберем оптимизирующий функционал . >
Г _ г („2...2 , „2.1,2 , 2-,2 , 2 • 2\ .* (3.69)
J - J (PiV’i + + ср!>\ + с2^21 dt,
o' '
где.^1 = fiuxi + Р12Х2 ^2- @21X1 + @22X2. Удовлетворив уравнениям
T’iV'iCO + ^1= 0 и Т2^2(0 + ^2= 0,
)<Л
(Ж
(3.66)
184
сучетом уравнений (3.68) объекта получаем законы управления
’ЮН
И1 = -/1-
tt2 = - fl~
1 (@22@11 _ @21 @12
ВI Т\ т2
@21 @11(J____И
в \Т2 7\)х'
\х @22@11(_L__L\
J 1 В |Т1 Т2\ 2’
_ 1 (@11 @12 _ @21 @п\
В \ r2 Ti г2
(3.70)
~ @11 @22 - @21@12-
Управления (3.70) доставляют минимум функционалу (3.69) на траекториях движения
йекта (3.58). Подставив управления (3.70) в исходные уравнения (3.58) объекта, можно
показать, что условие асимптотической устойчивости движения в целом замкнутой системы
адрет следующий весьма простой вид:
@11 @21
?12 @22
^условие очевидно, т.к. в противном случае задача синтеза вырождается в ранее рассмот-
рйиую задачу скалярного управления. Подставив управления (3.70) в исходные уравнения
(338), получим уравнения замкнутой системы:
!h x\(t) —-д-^г^г[(@22@11 Т2 — @2\ @i2T\) xi Л-@22@i2 ^Т2 — Т^х2] ;
Х2(0 = - B^jr[@21@12( Л - T2)Xi +(@ll@l2Ti -@21@12T2)X2] . (3>71)
Интересно, что если уравнения (3.71) преобразовать и выразить через координаты xi(?) или
xi(X),т0 получим соответственно
Т1Т2х\(?) + (Т, + T2^xi(t) + xi — 0
ЛТгХгСО + (Ti + Тг\х2(0 + *2 = 0,
т.фешения xi (?) и х2 (?) будут идентичны: 7
j иг х/(?) = , i = 1,2.
Еста же положить Ti = Т2 = Т, то управления (3.70) принимают вид
- / 1 - /_1
.j-. Hi J\ ^2 ~ /2 у*2»
^уравнения замкнутой системы распадаются на два независимых
ц *1 (?) = - у *i и х2 (?) = - J *2-
Тода решения xi (?) и х2 (?) будут иметь одинаковый вид
*1 (0 = *юе-'/Г ,*2 (?) = X2oe~t/T .
|№агмчныевыводыможноеделатьидлясистемприп>2иТ1 = Т2 = ... = Тп = Т. Это означает,
МИри Ti = Т2 — ... = Тп = Т, п = у синтезируемые системы становятся автономными [12].
Рассмотрим далее задачу синтеза системы управления нелинейным объектом третьего порядка
*1 (?) =/1(*1»*2 ,*з);
*2 (0 = /г(*1»*2 ,*з) + иг; (3.72)
*3 (0 = /з(*1 , *2 ,*3 ) + «3-
Вдинюм случае ij = 2 < п . Выбрав критерием качества функционал вида <3.59), где
< 3 3 (3.73)
^1= £А***и^2= 2 @2кХк.
'^5 к=Х *=1
айёзируем в соответствии с рассматриваемым методом законы управления:
т«»=-/г - ^(^п^23 - ^21 Д1з )/1 + 5 (3.74)
= — /з + -р Г ( @11 @22 ~ @21 @12 ) Л + Vh- Си Vbl, (3.75)
i
185
где Л = Тг = ^, Я = jS]2^23 _ ^22^13 »
а агрегированные макропеременные У\(х\, хг, xi) и ^(xi, хг, хз) определяются выражениям
(3.73). Подставив управления иг (3.74) и из (3.75) в (3.72), получаем систему дифферент
альных уравнений
xi (?) = /1(хь х2, х3);
Хз (?) = /?11 /?22 - /?21 /?12 ) /1 + V’z] •
Уравнения (3.76) описывают синтезированную замкнутую систему. При этом законы
ления (3.74) и (3.75) переводят изображающую точку из произвольного начального полЩ-
ния в фазовом пространстве системы на многообразие пересечения
V’n = (^21J813 — ^23^11 ) Х1 + 0822^13 — ^23)512 ) Х2 = 0, (3i7$
являющееся пересечением двух многообразий У\'= 0 и ^2= 0 (3.73). Подставив из (ЗЛ7)
координату -У
v _ ^11^23-^13^21
«*2 D D Q О
Р22Р13 " Р23Р12
а из уравнения ^1=0 координату
_ @\1 /?12 _/^21/?12 “/?12/?11
Хз — — д— Х1 — д— Х2 — д—Э---75—Э— Х1
Р13 Р13 Р22Р13 - Р23Р\2
в первое уравнение системы (3.72), получим дифференциальное уравнение
Xly,]—2 (?) =/1(Х1у,12,/?11 »^12 *^21^12).
которое описывает движение изображающей точки синтезируемой системы вдоль многообра-
зия пересечения^] 2= 0 (3.77).
Покажем, что движение на последнем этапе действительно описывается уравнением (3>W j
Для этого в уравнениях замкнутой системы (3.76) положим ^1= 0, Уг— 0 и подставим в
соотношение
хг (?) = — xi (?) — хз (?) »
выражения для х> (?) и хг (?) из первого и третьего уравнений системы (3.76). В резульздр
получим второе уравнение системы (3.76). Аналогично, если в соотношение
Хз(0 Ди Ди
подставить xi (?) и хг (?) из первого и второго уравнений системы (3.76), то получим трепе;
уравнение этой системы. Следовательно, при У\ = 0 и Уг— 0 второе и третье уравнения систдар
(3.76) вырождаются соответственно в соотношения (3.79) и (3.80), а это свидетельству^
том, что движенце вдоль многообразия пересечения ^1-2= 0 (3.77) описывается дифференци-
альным уравнением (3.78). Удовлетворив в (3.78), например, условию
/i(xivi2,^n ,Д12 ,^21^22) Х1 < О
путем должного выбора коэффициентов/?! i, /?п, Д21и/? 12, можно обеспечить асимптотическую
устойчивость нулевого решения уравнения (3.78) и, следовательно, синтезированной неливд$
ной системы (3.76). Эти же коэффициенты можно использовать для наделения системы тре-
буемыми динамическими свойствами в режиме малых отклонений и т.д. Таким образом,®
примере нелинейной системы третьего порядка общего вида (3.72) показана простота процедур
аналитического синтеза при наличии двух ( т[ = 2 ) управляющих воздействий иг и из, которые
гарантируют асимптотическую устойчивость движения синтезируемой системы и позволяют
наделить ее требуемыми динамическими свойствами.
Обобщим полученные результаты на случай нелинейных объектов, описываемых системей
дифференциальных уравнений n-го порядка с двумя каналами управления ( 7 = 2 ):
(3.78)!
186
‘ Xl (0 = /1 ( Xl ,..., Хп Хд (0 = fg ( Х1 ,..., Хп ) + bglig,...', (3.81)
... Хя (О = fn ( Xi ,..., Хп ) + bnUn .
будем использовать линейную форму макропеременных
« (3.82)
V’s — 2 ftsk Хк, S — 1,2.
Л *=1
Тогда в соответствии с функциональными уравнениями (3.62), находим:
'.|.6 В bglig = -2 ~ )fk ^Г2^2 ’
В bn un= - 2 (filkfilq ~ filkpiq^fk + ~ V*2 J
В = flxqflln p2qfl\n •
Управления iiq (3.83) и un (3.84) переводят изображающую точку на пересечение многообра-
зии
лжи
"-1 (3.85)
^1-2 = 2 (filnftlk ~ filnftlk) Хк =
. к=1
Подставив из (3.85) координату
Хд — ~п 2 (fi\n^2k ~ frlnfllk ) хк ,
D к=\
k*q
аиз уравнений ip\ = 0 или гр2~ 0 координату
' Л’«=-7Г_2 <fi\n&2k ~ &2пР\к ) 1 Хк
Plnk=l L D J
k*q
вправые части уравнений (3.81), за исключением функций fq иполучим систему дифферен-
циальных уравнений
Хр (0 = /р( Х\ ,..., Хп-1 , fill^ln - &2\ @2п );
р = 1,...,л— \,р q, (3.86)
которая описывает движение изображающей точки вдоль пересечения многообразий ^1-2= О
1$5). Уравнения (3.86) имеют размерность л-2, т.к. в них не входят координаты х9 и хп. В
целом ряде случаев соответствующим выбором коэффициентов ^и,^21 можно обеспечить
асимптотическую устойчивость и желаемые динамические свойства синтезируемой системы.
^Рассмотрим теперь АКАР с тремя (tj = 3) каналами управления нелинейными объектами:
(0 = /|( Х| ,..., Х„ ),..., Хд (0 = fg( Xl ,..., Хп ) + bgllq,...;
kt'Xi (0 = Л( ..... Хп ) + b-Jlz,..., Хп (0 = /«( Х1 ,..., Хп ) + bnlln •
Используя макропеременные вида (3.82) (s= 1,2,3), в соответствии с (3.62) получаем:
"г Я, -I
kibgiig = — 2 Вфи — A?fhi + (@2п Аг — ^ы^г) fi —
i=i L рзп J
~ Т^^1+ 7^^2~ РзпТз ^Зп ^2 ~ Р1п&2) № ’’
(3.87)
fan .
(3.88)
п
k\b-jiz = -2
(3.89)
РЗп * 3
к\Ьц11„ = — 2 £ (@3д ^2 — p3rAi)^2i + QhrBl — РзчВ2 ) @ц + ( к\ —
-@ЗдР2цА2+ @3<1Р\пВ2+ ^Зг^2И1)1Л+ ^1 +
J РЗ/М 1 РЗп * 2
187
+ 2 (/Ь? fanA2~ faqfanB2~ fank\ “ far fan fa + fafanBi) ^3 »
РЗпТз
где k\=A\B2—A2B\t Ai=faq-^^^faq; A2 = fai ~ ^fa^far 'fa = fabi~ ’ fa ~ fa2 ~
Законы управления (3.88) — (3.90) переводят изображающую точку из произвольного началь-
ного состояния на притягивающее многообразие, определяемое пересечением двух гиперпло-
скостей:
л-1 о (391)
^1-2 = 2 ( fak~ ft-^fak) хк + В\Хд + В2ХГ = 0;
*==1 Р1п
k*qj
н-1 л о о fl О
^1-3 = 2 ( fak ~ fifak )хк~ -[Г*- AiXg - А2Х2 = 0 .
£-1 pin Pin Pin
k*q,r НИ
Из уравнений (3.91), (3.92) и ^i= 0 (3.82) найдем координаты м
= [(^-^и)Л + (Д.,+^м)В2]«
Л*«.г
Xr = jj- 2) [( + ( fak ~^nfak)Bl ] хк]
k^q.r
хп = ~Г71- S Г( P2k ~ ( farA\ -faqAr) - k\fak +
K>ipin k=\ L Pin
k*qj
+ ( ДП03* ~ fak) ( far Bl - fag B2 ) 1 Xk
Pin J 'JI
и подставим их в правые части системы уравнений (3.87), кроме тех, где имеются управлеям
Uq, иг и ип . Тогда получим систему дифференциальных уравнений
Хр (() = Ур(Х1,...,Хн-1 ] fa\ ^21 v^2n t fa\ ,'“ifan ) 5 (3.93)
р = 1..П-1 ; p*q\ р^г,
которая описывает движение изображающей точки вдоль пересечения многообразий (3.9)),
(3.92). Размерность этой системы уравнений равна п-3. Выбором коэффициентов fa в цело»
ряде случаев можно обеспечить асимптотическую устойчивость и желаемые динамически
свойства синтезируемой системы. Ограничимся синтезом векторного управления с трав
(tj = 3) каналами и не будем приводить урванения для 7> 3. Это связано с тем, что указавши
выражения весьма громоздки и, кроме того, случаи г] = 2 и у = 3 охватывают достаток
распространенный класс прикладных задач управления.
Рассмотрев случай 7 = 3, обобщим методику АКАР с несколькими каналами управления
Сначала из системы функциональных уравнений (3.62) определяются соответствующие уя
равления us (5=1,...,7), затем находится система дифференциальных уравнений вида (3.93)
описывающая движения вдоль пересечения многообразий (3.82). Поиск этих уравнений щ
ществляется путем последовательного определения координат xn,x2,xq и т.д., вплоть до коор
динаты из уравнений v>$= 0 (s = 1,...,7) и подстановки их в правые части тех (и - 7)—исходи
уравнений (3.58), у которых отсутствуют управления us. Выбором произвольных коэффици
ентов fa] в полученных уравнениях можно обеспечить требуемые динамические свойств
синтезируемых нелинейных систем. Разумеется, что в общем случае может оказаться целесо-
образным, в отличие от выражений (3.82), ввод нелинейных макропеременных, которые года!
образуют в фазовом пространстве некоторые гиперповерхности.
Выявим теперь некоторые общие свойства синтезируемых систем. Очевидно, что с увели-
чением числа управлений 7 и приближением их к п возрастает эффективность синтезируемых
законов управления. Это свойство важно с точки зрения решения, например, известной про-
188
(иемы многосвязности [33,120] в теории синтеза многомерных систем. Наличие в объектах
Перекрестных связей между различными каналами управления и выходными координатами
обычно вызывают значительные затруднения в отношении настройки регуляторов [33], вы-
полнения процедур синтеза и т.д. Поэтому нередко ставится задача минимизации влияния или
дюке компенсации взаимосвязей, берущая свое начало с работ И.Н.Вознесенского, который
сформулировал и решил задачу об автономности регулирования (при т] = п) в линейных
«истемах. В последующих работах многих ученых были предложены методы минимизации
укияния взаимосвязей для т)<п, при этом объект в большинстве случаев предполагался линей-
ным. В этой связи важное значение имеет разработка методов минимизации влияния взаимо-
амзей для распространенных классов нелинейных объектов. Применение развитого в этой
главе метода АКАР позволяет уменьшить влияние взаимосвязей координат, причем с прибли-
жением числа управлений к порядку объекта п указанный эффект существенно усиливается.
Впределе, когда т]=п, гарантируется асимптотическая устойчивость движения в целом синте-
йгруемой системы, при этом ее уравнения могут быть записаны относительно любой из
координат в следующем операторном виде:
п (Г, + 1) х,(р) = О, Тк =
Ще.^—одна из координат. Решение этого уравнения имеет вид
ЦЫ п
**(*) = S к >
" к=1
if. переходные процессы носят апериодический характер, приближенную оценку времени
затухания которых можно записать в виде
п
tp < (3...4) 2 тк.
При выборе одинаковых постоянных времени Т\ = Тг= ... = Тп = Т замкнутая система будет
Описываться уравнением
Тхк (f) + хк — 0 , к — 1,2,...,л ,
являться автономной.
Если 1] < п, то движение вдоль пересечения многообразий 0 описывается системой
дифференциальных уравнений размерности п — 7, а время затухания переходных процессов
при Ts будет удовлетворять оценке tp < (3...4) Т + /^1-^, где —время движения вдоль
ft.p = 0 к началу координат фазового пространства.
Г'Г,
3.4. АНАЛИТИЧЕСКИЙ СИНТЕЗ АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
НА ОСНОВЕ КОНСТРУИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНО-ПАРАЛЛЕЛЬНОЙ
«« СОВОКУПНОСТИ ИНВАРИАНТНЫХ МНОГООБРАЗИЙ
Рассмотрим теперь возможности обобщения методов аналитического конструирования
нелинейных систем, основанных на “последовательном” и “параллельном” введении совокуп-
жги притягивающих многообразий в фазовом пространстве синтезируемых систем.
В п.3.1 разработан метод синтеза, опирающийся на конструирование в фазовом простран-
стве некоторой последовательности притягивающих многообразий понижающейся размерно-
сги. При этом осуществляется последовательная, поочередная оптимизация системы по соот-
Кф’вующим критериям качества вида (3.12). Эффективность этого метода возрастает, когда
математическая модель нелинейного объекта может быть представлена системой дифференци-
альных уравнений вида (3.1) при р=0 или р=1. В этом случае возникает возможность гаран-
тировать такие важнейшие свойства нелинейной системы, как асимптотическая устойчивость
щелом, апериодический характер переходных процессов, заданное время регулирования и др.
189
В методе, разработанном в п.3.3, используется s управлений м$, которые действуйте
объект (3.58) одновременно. При этом для синтеза используются оптимизирующие фунед№
налы вида (3.59), включающие в себя s агрегированных макропеременных ^$. Функцию#),i
общем случае содержат п координат xi ,..., х,;. Следовательно, такой метод синтеза можж
интерпретировать как способ “параллельного”, одновременного введения некоторой совокув-
ности притягивающих многообразий V\= 0. В п.3.3 показаны особенности и свойства нелдай
ных систем, синтезируемых на основе этого способа с использованием нескольких управлений
Поставим теперь задачу объединения указанных методов последовательного и параллель
ного введения совокупности притягивающих многообразий в некоторый обобщенный меяед
сохраняющий преимущества обоих методов. Предположим, что движение объекта описываем
следующей системой дифференциальных уравнений: .ап..
Xi (0 - fi( Xl ,..., хп), I = 1,2,...,р; saw
xi (0 = /X *1 ’•••, xj) + aj+\x}+\ , j = р+1,..,//; (3|94j
Xs (0 = fs( Xl ,..., Xj ) + bsus , S = // + l,...,rt,
где xi,..., x„ —координаты состояния объекта; fi—непрерывные дифференцируемые фум-
ции.
В уравнения (3.94) входят п - // управления, этими уравнениями охватывается обширный
класс объектов управления различной природы. Перейдем к краткому описанию процедур
синтеза законов управления us( xi ,..., хп). Сначала синтезируются оптимальные по критерию
(3.59) управления iii,U2,—,us по методике, изложенной в п.3.3. При этом следует выбирать одну
из агрегированных макропеременных ips в виде
/I
= 2 fisk Хк + y>s( Xl ,..., X/, ) .
4=1
Тогда управления ns( xi х„) будут обеспечивать перевод изображающей точки из произ-
вольного начального состояния в фазовом пространстве в окрестность многообразия пересе-
чения
/<
= S ^skXk + ^Sj«^Ps( Xi ,..., Хц ) = О,
4=1 ‘ .3
движение вдоль которого описывается системой уравнений
Xj(t) fi( X] х„), i l,2,...,p,
• r*\ er \ «/<+• v t (3.95)
Xj (0 = Л( *1 ’•••’ Xj ) “ A- 2 bs4X4 - ---^>s( Xl ,..., X/t ) .
’i“+1 4=1 Ьд+l -;4:
Размерность системы (3.95) равна //. Обозначив первое промежуточное управление f
Ц««1 ~ ~~ь I »•••» xti),
S/«+l I
синтезируем закон управления /^i( xi ,..., хя ), который переводит изображающую точку в
окрестность первого притягивающего подмногообразия
V/.1 = X «14X4+ P/d( Х1 ,..., Xft-1 ) = 0.
£=1
Размерность подмногообразия ^1 на единицу меньше размерности многообразия пересечеим
Vi..^- Далее, обозначив второе промежуточное управление
«/<2 = Xl ,..., Х/.-1 ) ,
<х 1 41 -1
можно, в свою очередь, синтезировать закон управления xi,..., xfl_\), обеспечивающий
перевод изображающей точки на следующее подмногообразие: ’
ft—2
- 2 «24X4 + <ph2{ Х1 ,..., Х/,-2 ) = 0.
4=1 .
190
» В дальнейшем указанный процесс продолжается аналогично процедурам, описанным в
а.3.1. При этом осуществляется последовательное введение притягивающих подмногообразий
обижающейся размерности. На последнем этапе движение осуществляется вдоль следующего
притягивающего подмногообразия:
. /<_р
tyfip = &ркХк + Xi »•••» Хр-р ) = 0"
> A=1
Подставив из уравнений = 0 ,...,^/<p= 0 координаты ,..., в первые р-уравнений
объекта (3.94), получим систему дифференциальных уравнений
(0 = Д xi ,..., хр), i = 1,2,.
описывающих движение вдоль последнего подмногообразия V><-p+i = 0 к началу координат
фазового пространства. Выбором соответствующих функций <ps, <pfl\ <p/tp и коэффициентов
,..., аРк можно обеспечить асимптотическую устойчивость и требуемые динамические
свойства синтезируемой системы.
Итак, изложенный обобщенный метод аналитического конструирования базируется на
двух основных процедурах: во-первых, синтезе управлений us( х\,..., хп), обеспечивающих
перевод изображающей точки на многообразие пересечений О и, во-вторых, синтезе
промежуточных управлений z^( xi ,..., ) ,..., zzx<-p+i( xi ,..., -fy-p+i ), последовательно перево-
дящих изображающую точку с многообразия пересечения 0 на первое притягивающее
подмножество 0, затем на второе ^<2= О и т.д., вплоть до последнего подмногообразия
fyp= 0. В результате выполнения указанных процедур сначала осуществляется параллельное
введение 5 многообразий, а затем—последовательное введение совокупности изр—р притяги-
вающих подмногообразий в фазовом пространстве систем.
Для объектов (3.94) прир = 0,т.е. описываемых системой нелинейных дифференциальных
уравнений
xj (f) ~ fj( xi,..., Xj) + aj+iXj+i , / = 1,2,(3.96)
r xs (Г) = /s( xi ,..., xn) + bsiis, s = p+
имеющей треугольную функциональную матрицу вплоть до р-й координаты, можно путем
введения параллельно-последовательной совокупности притягивающих многообразий ана-
Йтически синтезировать управления us( *i ,..., хп), гарантирующие асимптотическую устой-
злость в целом, апериодический характер переходных процессов и ряд других свойств замк-
нутой системы. В этом случае сначала параллельно вводится s многообразий (3.61) и в
соответствии с изложенным в п.3.3 методом АКАР находятся управления us. При этом одну из
макропеременных следует выбирать в виде
= S PskXk + <Ps( xft).
k=l
Тогда управления us( xi,..., xn) обеспечат перевод изображающей точки из произвольного
j. >*
Цельного состояния в окрестность пересечения многообразий ^1-р=2 askXk+bp+\<ps(x\,....,
4)=0, движение вдоль которого описывается системой уравнений
-i . ч fy+i & flP+iaft+i (3.97)
х/ (0 = /X xj) - £ askxk------<ps •
<*/4+1 <*/4+1
Размерность системы (3.97) равна p. Для синтеза промежуточных условных управлений <ps
подобъектом (3.97) теперь можно ввести последовательную совокупность притягивающих
подмногообразий понижающейся размерности и использовать метод АКАР, изложенный в
nail. Для этого следует сначала ввести 1-е притягивающее многообразие в р-фазовом под-
пространстве:
'«8 . V < ч л (3.98)
i ^/<1= L YikXk + $Р/*1( Х1 х,,-1) = 0
U л=1
191
и, в соответствии с выражениями (3.5)—(3.11), синтезировать промежуточные управляй
<ps( х\ ,..., Хк), переводящие изображающую точку в окрестность подмногообразия
(3.98), движение вдоль которого описывается системой дифференциальных уравнений’^
размерности /л -1, затем найти следующее промежуточное управление и т.д. При этом осущёй»
ляется последовательное введение притягивающих подмногообразий понижающейся размерно-
сти. Выбором соответствующих управлений для нелинейных подобъектов (3.98) и, следова-
тельно, объектов (3.96) можно всегда гарантировать асимптотическую устойчивость движе^|
целом, апериодический характер переходных процессов и ряд других важных свойств адге-
зируемых нелинейных систем. Для конкретности приведем основные соотношения для объекта
вида (3.96) с двумя управлениями:
xi (0 = Л( *1 xi) + aj+rxj+i » j = 1>2,...,// = п-2;
(0 = Л-1( *1 хп ) + bziin-x ; (3.99)
хп (0 = Л( xi......хп ) + Ьщп .
Введем параллельно два многообразия:
V»i = 2 Рим + 1 (xi ,..., х,,-2) = 0;
Л=1 'Т5Р
" о л сз.м»)
V>2 = 2 @2кХк = 0,
к=1 Э!
тогда получим управления:
ВЬ\11п— — 2 (frlnPlk Р\пр2к + Qxki + &к+\Хк+1 ] ~
д / ... , Pin . . (3.10t)
- Bfn-i - ipi;
Bbilln-l = 2 (^2,11-1 Plk ~ fil.n-l Plk + X1 Xk ) + ak+\Xk+\ ] -
„ . . p2,n-l . Pl,n-l . (3.102)
- BfnA-------------‘
где В = Pi,n-i Pin ~ P\nP2,n-\, которые переводят изображающую точку на пересечение много-
образий (3.100): ‘
«-> (3.103)
V>l-2= 2 (PlnPlk-р2пР\к)Хк~ p2n<P\(Xi ,..., Хп-2) = 0.
. л-i .е:
Найдя из уравнения (3.103) координату
1 п~2 В->
Хп-1 ~ ~р 2 ^Plnp2k Р2пР\к)Хк г>
° Л=1 D
и подставив ее в (3.99), получим систему уравнений <’
Xj (0 .= Д *1 >•••• xi) + aixi+' ’ j - 1,2,...,л-3;
(Л- f < an-* ”v2 (Л R л R \ р2Пап-1 (3.10^
^n-2 (0~ g (fl\nP2k (>2nP\k)X g <p\ »
которая описывает движение изображающей точки вдоль ^1-2 = 0 (3.103). Введем теперь
последовательно подмногообразия
п-2
- 2 Y\kXk+ <р2(хх....Хп-з)=^,-,^(,,п-3= Yn-3.lXi+ Yn-3,2X2+<pn-l(Xi)=0 (ЗЛ0$
k=l
и, в соответствии с методами АКАР, изложенными в п. 3.1, найдем управление
<pi( xi,..., хп-2) подобъект*ом (3.104), затем управление^ xt,..., хп-з) следующим подобьем
том и т.д., вплоть до управления ^H-i(xi), обеспечивающего желаемые свойства движения
изображающей точки на последнем интервале к началу координат фазового пространства.
Подставив из (3.105) в (3.101) и (3.102), найдем управления u„-i( xi ,..., xn)i
ия( xi ,..., хп), гарантирующие асимптотическую устойчивость движения в целом, заданное
192
время и характер (апериодический) затухания переходных процессов в синтезируемой системе
^правления исходным объектом (3.99). Аналогичным образом можно найти соответствующие
управления объектами (3.96) при трех и большем числе управлений. Таким образом, изложен-
ный здесь обобщенный метод АКАР с несколькими управлениями базируется на двух основных
I ароцедурах: во-первых, синтезе управлений us( xj ,..., хп), обеспечивающих перевод изобра-
жающей точки в окрестность пересечения многообразий (3.61), и, во-вторых, синтез проме-
жуточных управлений ^>i( xi,..., хп-г ) ,.., <p;t-i(xi), последовательно переводящих изображаю-
щую точку в окрестность первого подмногообразия <pfti = 0, затем второго <pta = 0 и т.д. вплоть
Йо ее попадания в начало координат фазового пространства.
"•V
3.5. ПРИМЕРЫ СИНТЕЗА АГРЕГИРОВАННЫХ СИСТЕМ
УПРАВЛЕНИЯ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ С НЕСКОЛЬКИМИ
* РЕГУЛИРУЮЩИМИ ОРГАНАМИ
р Перейдем к решению ряда прикладных задач управления, иллюстрирующих развитый в
п.п.3.3 и 3.4 метод аналитического конструирования нелинейных систем с несколькими управ-
лениями.
' Пример 3.4. Синтезируем систему стабилизации горизонтального движения подводного
аппарата (ПА), динамически и геометрически симметричного относительно продольной оси
'{121]. В работе [122, с.181] приведены уравнения движения ПА в горизонтальной плоскости
*1 (0 = <211-*! + «12*? + «13X2 + Я14X3 + «15*2*3 + «16*1*2 + «17*1*2*3;
X Х2 (0 = 0-22*2 + «23*3 + «24*1*2 + «25*1*3 + «26*?*2 + «27*2 +
+ «28*2*3 + «29*2*3 + $1^1 + ^2^2*, (3.106)
*3 (0 = «32*2 + «33*3 + «34*1*2 + «35*1*3 + «36*?*2 +
+ «37*?*3 + «38*5*3 + £з^1 + ?4^2 ,
где %1—скорость поступательного движения; х2—угол между вектором скорости и направле-
нием движения ПА; хз—составляющая вектора скорости по курсу ПА; иц—гидродинамические
коэффициенты.
Математическая модель ПА (3.106) получена в [122] в результате разложения до членов
^третьего порядка исходных уравнений движения аппарата в горизонтальной плоскости. Управ-
ления V] и v2 в (3.106) непосредственно связаны с гидродинамическими коэффициентами,
изменение которых оказывает Существенное влияние на динамику ПА [121, 122]. Физически
изменение гидродинамических характеристик ПА реализуется путем изменения его геометри-
ческих форм.
в В работе [122] отмечается, что ПА с малой площадью оперения могут иметь моментные
Йдродинамические характеристики, вообще неустойчивые при малых углах отклонения х2.
Эю связано с тем, что указанные характеристики [wv = /о(*г)] имеют “ложку” с положитель-
ным коэффициентом наклона в окрестности начала координат [122, с. 180]. Как показано в
[122], соответствующим выбором коэффициентов можно добиться того, чтобы характери-
стическое уравнение линейного приближения системы (3.106):
. *1 (0 = «n*i;
> *2 (0 = «22*2 + «23*3;
‘ Хз (0 = «32*2 + «33*3
имело один достаточно большой по модулю отрицательный корень Л1 = «п < 0 и два комплек-
сно-сопряженных корня
Лг.з = 0,5(4222 + «33)±^0.25(й122 ~ «Зз)Х + «23«32
с малыми положительными действительными частями. В этом случае возникает известная задача
стабилизации систем, близких к критическим [99,122]. Применительно к ПА задача стабилизации
сводится к синтезу таких управлений п и v2, которые формируют гидродинамические характери-
193.
стики (например, вида ту = mylxi + ту2х2 + v2), гарантирующие асимптотическую ycrofew
вость горизонтального движения ПА. В работе [122] для решения указанной задачи стабилизацш
ПА используется метод, основанный на переходе от полной системы дифференциальных уравнеай
к некоторой новой системе, содержащей только близкие к критическим переменные. Затем пуде
выбора квадратичной функции Ляпунова и подбора управлений Vi и v2 в виде суммы члор
третьего порядка от новых переменных с произвольными коэффициентами решается задала
стабилизации ПА. При этом указывается приближенная оценка внутренней границы облаяв
устойчивости. Для приближенной оценки внешней границы области устойчивости необходимо
выполнить дополнительное исследование. Отметим сложность и громоздкость производимых go
этому методу различных преобразований, необходимых для разделения полной системы на блнз-
кую к критической и присоединенную подсистемы уравнений.
Покажем, что применение разработанного в п.3.3 и 3.4 метода АКАР позволяет весне
эффективно решить поставленную задачу стабилизации движения ПА, обеспечив устойчивость»
только в режиме малых отклонений, но и асимптотическую устойчивость во всей области фазового
пространства, в которой справедлива математическая модель объекта, представляемая системой
дифференциальных уравнений (3.106). При этом можно указать оценки времени затухания
переходных процессов и другие динамические характеристики системы стабилизации. k
Перейдем к практическому синтезу управлений vi(xiiX2,x3) и у2(х1,Х2,хз), гарантирующий
первую очередь, асимптотическую устойчивость движения ПА (3.106) в горизонтальной пло-
скости. Обозначив
. . . . It
fil = Ь1V1 + 52^2 и «2 = 53vl + 54V2
на основе выражений (3.74) и (3.75) получаем оптимальные по критерию (3.59)
управления:
kv\ — — ^«11 + (/?23 £4+/^22 £2)“ jg-^«11 + (/^13 £4+/З12 £2) *1 -
_ ^12
ВТ\ ^23 + ^22 ~ + ^’2 + %4а22 ~ £г«32 *2 —
“ £j^(/^23 £4 + @22 £2) ~ ^(/*13 £4 + @\2 £2) + £4«23 “ £г«33 *3 “
“ Jfl £4(^11 @23 - @2\ @\з} + ^г(@11 @12 - @21 @22)] х
X (Й12Х1 + «13*2 + «14*3 + «15*2*3 + «16*1*2 + «17*1*2*з) +
+ (^3«34 “ £4«24)*1*2 + (£г«35 ~ £4«25)*1*3 + (^2«36 ~ ?4«2б)*?*2 +
+ (£2«38 _ £4«2в)*2*3 + £г«37*1*3 _ £4«27*2 ~ £4«29*2*3 I
В^(й1,+ С®12^1 + Лз^з)~ ^з’(йн+ (/?22£1 + £2з£з) Xi -
(3.1($
г
kv2=
~ + ~ ^^22^1 + ^2з£з) + £1«32 - £з«22 Х2 -
~ + ~ £^(/?22/?11 + /?2з£з) + £1«33 ~ £з«33 *3 “
— £1(^11 @22 ~ @21 @V1) + £з(/?11 @23 ~ @21 /Ьз)] х
X {O13X1 + «13X2 + «14*3 + «15*2*3 + «16*1*2 + «17*1*2*з) +
+ (£з«24 ~ £1«34)*1*2 + (£з«25 ~ £1 ^Зз)Х[ Х3 - (£з«26 “ £1«3б)*?*2 +
+ (£з«28 ~ £1 «3в)*2*3 + £з«27*2 + £з«29*2*3 ~ £1«37*?*3 ,
законы
(3.108)
194
Ю d J
1деЛ = b\Ci - с\Ьг; В = /812/823 _ /822/813, ^1 = 2 fik Хк, ^2 = £ fiik Хк.
Ъ=1 к=1
Сйггезированные управления и\ (3.107) и 112 (3.108) обеспечивают асимптотическое сближе-
яиНзображающей точки с многообразием пересечения ^1-2= 0 (3.77). При этом область
щЙгяжения к многообразию ^1-2= 0 определяется всей областью фазового пространства, для
которой справедливы уравнения объекта (3.106). Время сближения изображающей точки с
\ • Ci Сэ
многообразием ^1-2= 0 определяется значениями постоянных времени Т\ = —, Т2 = — в
законах управления iii (3.107) и 112 (3.108). После сближения с многообразием ^1-2 = 0 (3.77)
йображающая точка должна двигаться вдоль него к началу координат в соответствии с
ранением
Х1у12(0 = «11Х1у12+Р1-*102+Р2Х1^12 ♦ (3.109)
(Й>1 = «|2 + ^(/813^21 - fill /?2з)2 + ~у(^22^11 “ /?21 fill? +
+ ^(/^з/?21 — fill /823)6822^11 ~ fill fill) '>
pi = ^13 ^2| 1 ^23 [ai6(j8i3 /821 — finfiii) + anifinfiu ~ fiufiii)) •
/и &
Уровня асимптотической устойчивости движения, описываемого уравнением (3.109), сводят-
ся! выполнению следующих неравенств:
’* «и < 0 , рг < 0 .
Й условия в общем случае обеспечивают асимптотическую устойчивость как “в малом”,
мз-за наличия в (3.109) линейного члена «11X1^12, так и “в большом”, благодаря присутствию
нелинейного члена ргх^п- Указанные условия усиливаются с уменьшением коэффициента
/>1-> 0. Условие «п <0, согласно [122], всегда выполняется. Тогда, положив
fin fin ~ fin fin л
/813/821 ~fillfil3
, B2«i2 + «13(^13^21 — fix 1 fii3? + antfiiifiii ~ fin fin)2 +
+ «156813/821 —/8ц/823)6822/811 — fin fin) “ 0 , (3.110)
можно обеспечить условие асимптотической устойчивости в целом движения вдоль многооб-
разия пересечения ^1-2= 0 (3.77), а следовательно, и горизонтального движения ПА. Условия
(3,110) всегда могут быть выполнены как путем соответствующего выбора коэффициентов а;,
ft так и изменением параметров «,у объекта (3.106) [122]. Выбрав в законах управления щ
(Й07) и ii2 равные постоянные времени 1\ = Тг= Т, можно указать верхнюю оценку времени
затухания переходных процессов в синтезированной системе стабилизации:
'<.<(4- 5) (7 + J-).,
Итак, на основе разработанного метода можно достаточно эффективно решить задачу
стабилизации горизонтального движения подводного аппарата.
Пример 3.5. Покажем простоту, наглядность и эффективность разработанного в п.3.3
Мйода аналитического конструирования на примере решения задачи управления вращением
бфйшка, динамика которого описывается следующей системой дифференциальных уравне-
ний [123]:
X] (г) = - 2х2 + «1;
Х2 (() = 2X1 + «2 ;
Хз (Г) = - Х2й>(Хз,Х4) + Х4 ; (3.111)
Х4 (/) = Х1<«(Хз,Х4) - Хз ,
еде ш(хз,х4) = (1 - хз - х2?2 и координаты хцхг представляют компоненты спин-вектора, а
юординаты хз,х4—компоненты некоторого вспомогательного вектора единичной длины, воз-
195
никающее при переходе к инерциальной системе координат из системы, жестко связанной»
спутником; управлениями щ и иг являются моменты, создаваемые двумя реактивными двий*
телями [124]. Необходимо синтезировать законы управления и\{ xi х4) и м2( х\ ,...,^1
обеспечивающие стабилизацию вращения спутника вокруг неподвижной оси, кш,
(xj =...= х4 = 0). Заметим, что по определению область изменения координат х3 и х4 УДОВД^
воряет неравенству х3 + х4 < 1, поэтому изменение координат х3 и х4 следует рассматривать*
этой области. зг
В работе [124] предложена методика приближенного решения поставленной задачи,
ванная на введении новых алгебраических операций на множестве траекторий движем»
управляемой нелинейной системы. При этом синтез управлений производится на основе
изоморфизма, когда для исходной системы (3.111) пытаются найти изоморфную ей линевдр
систему. Тогда, как указывается в [124], если изоморфизм не обладает какими-то патолога^
ми, то можно надеяться, что пересчитанный по изоморфизму на исходную систему регуляор
имеет аналогичные свойства. Конкретно работоспособность регулятора определяется в [1^
на основе результатов моделирования на ЭВМ замкнутой системы. зи
.a
Первый вариант синтеза
Покажем, что применяя разработанный в п.3.3 метод АКАР, можно путем весьма проспв|
аналитических процедур синтезировать регулятор, который не только гарантирует асимптоти-
ческую устойчивость движения исходной системы (3.111) в заданной области (х^ + xl< 1),нс
и обеспечивает желаемые характер переходных процессов и время регулирования. Для этргс
введем следующие агрегированные макропеременные: '1
V'i = + fti2 хг + 0хз Хз/О) 1; (3.1 и)
V’z = *1 + 022 Хг + 024 Х4Ш 1 •
Применяя изложенную в п.3.3 методику, найдем оптимальные по критерию
J = / (mfyi + тгЦг + mfyl + mfafydt
о
законы управления
в«, = - + [Ьф1_^ + 2В+м\Х1_
\ 12 ) \ 11 /
— {024022 + Хзр) 1 - {013 022 ~ О) *Х4 + {0\з022 Х3 —
- 024012 Х4) {Х2Х3 ~ Х1Х4)й>-2 ; (З.ЦЗ;
Виг= — {2В + 024~ +.Х1 — (/?1з+ хг+ {024+ xjp) 1 +
+( 013 - Х4<0-1 + {0X3 Хз- 024 Х4) {Х\Х4 - Х2Х3) О)~2 , (3.114)
1 2
где В = /?22 - 0x2 , Ti = , Тг = = (1 - х3 - x4)U2. Управлениям! (3.113) и u2 (3.114F
обеспечивают перевод изображающей точки замкнутой системы на пересечение многообразий
= Х\ + 012 Хг + 013 хз(1) 1 = 0 И 1рг = Х1 + 022 х2 + 024 Х4О) 1 = 0 . (3.11$$
Находя из совместного решения уравнений (3.115) координаты xi и х2 и подставляя ях
соответственно в первое и второе уравнения системы (3.111), получаем дифференциальные
уравнения
/А Аз □./ 1^^24ч . (3.116)
^Зу>12 (0 = - “g" х3^12 + ( 1 + “g-) Хзухг »
/Л _ / 1 . 013022' , 024012 _
^4^12 {•) ( 1 4" g ) Х3у,12 4" Х4у,\г ,
196
которые описывают движение изображающей точки вдоль многообразия пересечения
|>Р2= 0. Система уравнений (3.116) является линейной, а условия ее устойчивости имеют вид
/322 > о ; 024 >0; £12<о, /Зв > 0 . (3.117)
Таким образом, законы управления (3.113) и (3.114) при выполнении простейших неравенств
0Ц17) гарантируют синтезированной системе асимптотическую устойчивость в целом по
^ординатам хь х2 и асимптотическую устойчивость в области xl + xl< 1 по координатам хз
ИХ4.
, Выбор параметров/Ji jи может производиться из условий оптимизации системы в режиме
малых отклонений по некоторому квадратичному критерию качества или исходя из задания
прямых показателей качества, например, времени и характера затухания переходных процес-
сов'системы (3.116), описывающей движение изображающей точки вдоль многообразия пере-
сегения -2в 0 к началу координат фазового пространства. Тогда, как известно, для линейной
системы второго порядка можно ввести такие обобщенные параметры, характеризующие ее
давмические свойства, как постоянная времени О и декремент затухания £. Эти параметры
омйаны с коэффициентами /?j/ и /?2/ следующими соотношениями:
„2,_________________в\_______________(3118)
(В + /?24) {В + /?1з/?22) ~ ^12^13^24 ’
Л2 = 0,25^3-/312^24)2 <3119)
(В + /824) (В + fil3^22) — ^12^13^24
Выбирая соответствующие $ (3.94) и 0 (3.95), можно обеспечить желаемый характер пере-
кедных процессов по координатам хз и х4 в режиме малых отклонений. Кроме того, при этом
возникает возможность оценки времени затухания переходных процессов в синтезированной
системе. Так, положив в (3.113) и (3.114) параметры Ti= Т2= Т, можно указать приближен-
ную верхнюю оценку времени затухания:
tp < (44- 5) (Т + 0). (3.120)
Соотношения (3.118)—(3.120) позволяют должным образом выбрать параметры fa законов
управления.
Н1ЭВМ было выполнено моделирование синтезированной системы стабилизации вращения
спутника с законами управления (3.113) и (3.114). При этом были выбраны следующие
параметры: /322 = 1» ^24= 1, /?i2=-l, @13- Ю, В = 2, Tj= Т2= 0,5. Тогда согласно (3.118)—
(ЗД2О) получаем: 0 = 0,29; £ = 0,81; tp< 3,2. На рис. 3.4,а приведены графики изменения
ординат xi(?),...,x4(f), а на рис. 3.4,6—управлений и2 и макропеременных ip2(f) для
печальных условий хю = х20 = 1,0; хзо = 0,6; Х40 - 0,5. Из рис. 3.4 видно, что синтезируемая
опнейная система стабилизации спутника является асимптотически устойчивой, переходные
процессы близки к апериодическим, а время регулирования (tp< 3,2) удовлетворяет оценке
(П20), т.е. результаты моделирования в полной мере согласуются с теоретическими положе-
нию! разработанного в п.3.3 метода АКАР с несколькими управлениями.
Второй вариант синтеза
< Полученные на основе макропеременных и tp2 (3.112) законы и\ (3.113), и2 (3.114)
управления вращением спутника обеспечивают при выполнении условий (3.117) асимптоти-
«Лую устойчивость движения и апериодический характер переходных процессов. Однако эти
законы при х?+ х? ~ 1 и, следовательно, 0 имеют особенность, приводящую к их резкому
возрастанию. Для того, чтобы избежать указанную особенность и упростить реализацию
законов управления, введем в рассмотрение макропеременные следующего вида
Ш1 Цз = У1*1 + У2Х2+ У3Х3+ х4+ у4хз+ У5Х4 ;
= Р1Х1 + р2Х2+ />3X3+ Х4+ Р4Х3+ Р5Х4 •
Тяда, подставляя эти макропеременные в функциональные уравнения
197
хьхг,хз,х<
Тз^з(0+^з = 0; 7W0+ № = О; Т3 > О; Т4 > О,
найдем в силу исходных уравнений объекта (3.111) законы управления
М1<р34 = 2X1- — (1+ ЗУ5Х4) (х\(о- Хз) - ^з+ ^4 ;
[21 1’1
Уз 3( у4 р4) *3j Хз) 4" 1рЗ rp^ V^4 •
Полученные законы управления 1114,34, 1124,34 в отличие от законов и\ (3.113), иг (3.114) ужеве
имеют описанной ранее особенности и обеспечивают перевод ИТ в окрестность пересечений
1ПО
многообразий у»з=0 и ^4=0. Движение ИТ вдоль пересечения ^34=0 описывается нелинейными
дифференциальными уравнениями
X3y34(0 — — (fi 1^3v>34 + ^2X3^34) ^4^3^ »
* Х4у,34(/) («1X4^34+ О! 2X4^34! ^0“* Х3^^34 •
Этй уравнения асимптотически устойчивы относительно положения хз^34 = x4v,34 = 0 в области
х|+ х4 < 1, что можно показать на основе функции Ляпунова
*2 2
^^34 “ 0,5xj^34"^" 0,5x4^34 •
Дадная производная по времени
J.K: ^>34(0 =’“ (А*3?34+ /?2Хз^34)<° — («1X4^34+ «2X^34^ <« < О
определенно отрицательна при выполнении неравенств
?; fix > 0, ^2 > 0, ai >0, а2> 0,
m и доказывает асимптотическую устойчивость движения ИТ вдоль пересечения многообра-
зй^34=О к началу координат. Следовательно, замкнутая управлениями «1^34 и И2у-34 система
будет также асимптотически устойчивой. Между коэффициентами в приведенных выше выра-
донцях установлены следующие соотношения:
_ __ 1 . _ __ YS . о _Рз . о __Р4 ,
? 1 У1 ’ 2 Ух ’ р2 ’ р2 ’
при этом У1 = pi; ys = р5; узр2 = р3у2; Z1P2 = Р4У2; У2 * ръ
В приведенные выше выражения для макропеременных ^»3 и V>4 входят кубические члены
xfи xl с соответствующими коэффициентами, что позволяет повысить быстродействие движе-
шИТ вдоль пересечения многообразий ^»34=0. Очевидно, что эти члены можно исключить
^=У5=Р4=Р5=0) без потери асимптотической устойчивости синтезированной системы управ-
леаия вращением спутника.
'‘ выявим отличия между двумя вариантами синтеза замкнутых систем. Указанные отличия
в первую очередь определяются уравнениями движения ИТ вдоль пересечения выбранных
многообразий. В первом варианте это были линейные дифференциальные уравнения (3.116),
а во втором—нелинейные. Если в первом варианте условия устойчивости движения вдоль
пресечения многообразий элементарны, то во втором для исследования асимптотической
устойчивости потребовалось уже применение функций Ляпунова. Разумеется, что во втором
йрйанте возникают более широкие возможности в отношении обеспечения желаемых дина-
мйвских свойств синтезируемых систем. В общем же случае уравнения движения ИТ вдоль
ибрйеечения многообразий целесообразно выбирать, исходя из условий согласованности с
«Жтвенными (механическими, энергетическими и т.д.) свойствами движения спутника. Это
сдельный вопрос, подлежащий самостоятельному рассмотрению.
««Таким образом, на основе метода АКАР можно аналитически синтезировать различные
Сййемы управления спутником.
Пример 3.6. Покажем теперь эффективность метода .АКАР на примере синтеза системы
^канального управления космическим летательным аппаратом (КЛА), угловое движение
второго относительно центра масс описывается динамическими уравнениями Эйлера
Act>i (?) = (В — С^ш^з + Мх ;
Вш2 (/) = (С — А)й>1(У3 + М2 ;
Сй>3 (/) = (А — B}d)i(o2 + М3 ,
допрлнив их кинеметическими уравнениями Пуассона
Л1 (/) = (05X2 — (1)Жз;
(0 <У]Л3 — Wjli;
Л3 (t) = (o-^i — а)[Х2;
It + Л2 + Лз = 1 ,
определяющими ориентацию КЛА.
амне
199
Уравнения Эйлера и Пуассона в совокупности описывают систему одноосной стабюпйацю
равновесия КЛА посредством двигателей. При М\ = Мг= Мз= 0, т.е. когда двигатели вйЬ»
чены, эти уравнения имеют частное решение
tt>i = (Оз = (Оз = 0; Л] = Аз = 0; Лз = 1,
соответствующее положению равновесия КЛА, при котором направление одной из глздвд
центральных осей инерции совпадает с направлением неподвижной вертикальной оси.
Сформулируем задачу стабилизации положения равновесия КЛА с помощью управлеи!
А/ь М2, М3. Для этого, вводя новые переменные xi = ct>2, хг = Аь’хз = Аз, х4 = о>ь
*б = А2-1, ui = MSA; и4 = мУв; и$ = мУс и исключая хв посредством первого интегрй
А?+ А$+ Aj= 1, составим на основе уравнений Эйлера и Пуассона следующие дифференте»
ные уравнения возмущенного движения [190]: Ж
• С А (С~Л\ и. •
(0 = —g—х»*5 + «1;
хг (0 = ~ *1*з + X5V1 — xj — xj ;
Хз (0 = *1*2 - *4^ 1 - *? - *5 ;
• (В - с\
*4 (0 = --Л- *1*5 +
•iot.
(ЗЛЭД
*5 (0 = J *1*4 + U5.
Система уравнении (3.121) описывает угловое движение КЛА относительно центра ма$1
окрестности положения равновесия (х* = 0, к = 1,...,5), в котором аппарат имеет заданную
одноосную ориентацию в инерциальном пространстве. Здесь обозначено:
А, В, С—главные центральные моменты инерции КЛА; т ‘
ль Х4» xs—проекция вектора угловой скорости КЛА на его главные центральные осийвё|и
ции(1ь6, 6);
хг, хз—переменные, характеризующие отклонение КЛА от неподвижной вертикально
оси;
„ »8 S
ii\, и4, и$—управляющие моменты, реализуемые с помощью специальных двигателей..,,
Требуется: синтезировать методом АКАР законы управления и^ xi,..., х$), г = ЦН
обеспечивающие перевод КЛА (3.121) из произвольного исходного состояния (в определений
допустимой области) в начало координат (х, = 0, i = 1,...,5) пространства состояний.
Для решения поставленной задачи синтеза рассмотрим сначала структуру нелинейны:
дифференциальных уравнений КЛА (3.121). Эти уравнения имеют размерность пространства
состояний объекта п=5 и размерность вектора управления т=3 , при этом управленад
иг ( г = 1,4,5) входят в уравнения (3.121) линейно. Метод АКАР дает возможность в данном
случае сразу структурно декомпозировать исходную задачу размерности п = 5 до рассмотре-
ния задачи управления системой второго порядка:_______
*2^(^) х\уХз$ xsy^ 1 в х%ф в хз^ , (3*122)
Xty (0 = X1^2V> + ХцУ 1 - Х^~ Х^> . Ш
Уравнения (3.122) описывают движения изображающей точки КЛА вдоль многообрази
^1,4.5=0, являющегося пересечением многообразий ^1= 0, V>2= 0, ^5= 0, на которые попадает
изображающая точка в результате действия управлений щ, и4п и$ - В подсистеме (3.122) в
качестве промежуточных (внутренних) управлений следует выбрать переменные xiv, х^а
xsy, так как именно первые производные xi(/), x4(f), х$ (?) этих переменных находятся в левых
частях тех строк исходной системы дифференциальных уравнений (3.121), в которых справа
присутствуют соответствующие искомые управления и\, и4 и и$ . Согласно методу АКАР это
означает, что управления ui, и4 и us в системе (3.121) непосредственно влияют на характер
изменения производных xi (Г), х4 (Г) и х$ (Г) и, следовательно, самих переменных xi, х< и
Х5, которые, в свою очередь, могут быть выбраны в качестве промежуточных управленш
200
дажением изображающей точки вдоль пересечения многообразий ^1,4,5= 0 . описываемого
дифференциальными уравнениями (3.122). Другими словами, под действием управлений щ,
Йй «5 изображающая точка системы сначала попадает в окрестность пересечения многообра-
Яй^1,4,5= 0»а затем уже под влиянием промежуточных управлений xiv„ x4ip и она движется
Ноль ^1,4,5= 0 в соответствии с дифференциальными уравнениями (3.122), вплоть до ее
фасадания в начало координат пространства .состояний. Итак, исходная задача управления
движением в пространстве размерности п = 5 может быть точно декомпозируема в задачу
управления внутренним движением в подпространстве уже размерности п—т = 2. Разумеется,
,ротакой двухэтапный подход позволяет принципиально упростить исходную весьма сложную
задачу управления нелинейным объектом пятого порядка (3.121) и, по существу, трансфор-
мировать ее в задачу синтеза промежуточных управлений х^ , х4ч>, xsv подобъектом (3.122)
йброго порядка. Аналитические связи между исходными и\ , и4, и$ и промежуточными
, X5V; управлениями устанавливаются в результате применения изложенного ранее
метода АКАР с несколькими управлениями.
* Перейдем, к конкретному рассмотрению описанной выше процедуры синтеза законов
управления. Для удобства обозначим промежуточные управления
S, . Xiy> = Vi , Xty = V4(X2,X3) , Xs,/, = V5(X2,X3) (3.123)
iзапишем уравнения (3.122) в виде _____________
' x-ty (0 = - vix3^, +• v5V 1 - x^ - x3v, ; (3.124)
*’ Хзч> (0 = V1X2V - V4V 1 - xjv ~ X^ •
давится внутренняя задача управления: синтезировать такие промежуточные управления
ft, v4 и vs (3.123), которые переводят изображающую точку при движении вдоль пересечения
Многообразий ^1,4,5= 0 из произвольного исходного состояния в начало координат подпрост-
ранства состояний хър = хзу> = 0. В зависимости от выбора промежуточных управлений vi, v4 и
^можно обеспечить разные свойства движения вдоль V’i,4,5= 0- Именно уравнения (3.124) и
будут определять свойства исходной системы (3.121), замкнутой внешними управлениями и\,
(ц, И5, на пересечении многообразий ipi,4,s= 0. Согласно методу АКАР внешние управления
& щ и и$ неизбежно переводят изображающую точку на ^1.4,5= 0» движение вдоль которого
описывается уже уравнениями (3.124).
.f Перейдем к решению задачи синтеза управлений vi, v4 и V5. Из уравнений (3.124) видно,
wo эти управления имеют избыточность, так как для управления системой второго порядка
имеется три промежуточных управления. Эта избыточность может быть использована для
наделения синтезируемой системы дополнительными динамическими свойствами. Рассмотрим
^сколько вариантов решения задачи синтеза промежуточных управлений.
Первый вариант синтеза
А'
.X: Из структуры системы уравнений (3.124) видно, что управление vi входит в обе строки правых
детей этой системы. Согласно постановке исходной основной задачи синтеза переменная
fa = vi должна в конечном итоге принять нулевое значение. Для выполнения этого простейшего
дебования можно выбрать, например, макропеременную = xi и на основе уравнения
; (t) + (0 = °
((первого уравнения системы (3.121) можно получить управление щ в виде
(А — С\ 1 (3.125)
zzi I I Xj *
Тогда первое уравнение исходной системы (3.121) с учетом (3.125) будет иметь вид
* Т1Х1 (0 + Х1 = 0 , (3.126)
а его решение
Х1 (/) = V1 = Cie~t/T1. (3.127)
201
Это означает, что уравнения (3.124) могут быть теперь представлены в следующей формЖ
TiVi (?) + У] = 0 , W
хъ/, (?) =- У1Л> + 1 - xi,, - xip ; (3.128)
ХЗу, (?) = VlXty ~ v4V 1 — - Х&р . ш-
Выбрав затем в уравнениях (3.128) промежуточные управления v4, v5, например, вида48
«2X2^ + азхзу (3.1Й)
V4 ~ Vi -V - г'2- 811
и
02Хгу> + 0зхзу> (3.130)
Vs = V i -V _ ;2- ’ ®
получим систему уравнении
T'iVi (?) + Vi — 0 ; f
хър (?) =- v\X3V + агхгч, + азхзч, ; (3.131)
Хзч> (?) = V1X2V- + 02 Х2^> + 03 ХЗу, , ?'
которую с учетом (3.127) можно записать в виде
хър (0 = т С1в-Гг1хз^ + + азхзу; (3.132)
Хзц, (0 = “ ^в^Хц, + 02Х2ч> + 0зХЗч> • г!
Соответствующим выбором коэффициентов аг, аз, 0г п 0з всегда можно обеспечить как
асимптотическую устойчивость движения систем (3.131) или (3.132), так и желаемые свойства
их переходных процессов. Положим, в частности, в уравнениях (3.131) коэффициента
«з = 02 = 0, тогда получим
T’iVi (?) + vi = 0 ;
Х2ч> (?) = - VlXty + «2*2»> 5 (3.133)
ХЗЧ> (О = v1^2y> + 03 •
Систему (3.133) можно представить в форме „ 1
T’iVi (?) + vi = 0 ;
хзу> (t) — (аг + 0з ~ 'хз^ (?) + + v? + аг0з j хзу, = 0 . (3.134)
Или с учетом решения (3.127), получаем:
хзч> (?) + уг — аг ~ /hj хз^ (?) + — х-^ + с?е ^Г1хзу, = 0 .
Аналогично можно записать систему (3.133) относительно переменной хг^:
хгч> (?) + — аг — хгу> (0 + ^«^з — хг^ + с?е ^Г1Х2у> = 0 . (3.136)
Условиями асимптотической устойчивости нулевых решений уравнений (3.135) и (3.136)
являются
«2 < о , 03 < 0 . (3.137)
Таким образом, свойства асимптотической устойчивости и, в известной мере, характер пере-
ходных процессов в синтезируемой нелинейной системе (3.121), по существу, определяются
динамическими свойствами простого линейного нестационарного уравнения второго порядка
(3.135). Выбором Т\, аг и 0з можно получить желаемые свойства переходных процессора
системе (3.135). Положив, в частности,
п _ о _ 1. <т> _ <р (3.138)
«2 - рз-----у, J1 - i ,
получим
0,5Т2хзу (0 + 1,5Tx3v (?) + хз + 0,5тЧе'^х3^ = 0 . (3.139)
Время затухания переходных процессов в системе (3.139) в основном определяется неизмен-
ной частью.
202
Таким образом, при выборе управления ui (3.125) и промежуточных управлений г4 (3.129) и
(3.130) в исходной нелинейной системе (3.121) при выполнении простейших условий (3.137)
Цэдут протекать асимптотически устойчивые затухающие переходные процессы относительно
юординат xi ((), х2 (0 и хз (f). Аналогичные процессы будут протекать также и относительно
координат х4 (0 и х$ (f), что следует непосредственно из процедуры применения АКАР. Кроме
®го, это можно показать и косвенно, определяя координаты х4 и xs из системы (3.121):
*1X2 ~ хз (0 (3.140)
Х1Хз + Х2 (0
Х5 ~ Vf- xf= X3Z ' *
0з (3.140) видно, что координаты х4 (/) и х$ (() действительно будут затухать. Итак, показано,
,уго при выборе «1 (3.125) и v4 (3.129), v$ (3.130) синтезируемая замкнутая система будет
.обладать свойством асимптотической устойчивости по Ляпунову ее положения равновесия.
Цри этом по координатам хь х4 и х$ гарантируется асимптотическая устойчивость в целом, а
декоординатам хг, хз—в области
.1 х! + хз2<1, (3.141)
эддеделяемой физическими характеристиками КЛА.
Для определения, помимо и\ (3.125), также законов управления и4 и следует, согласно
методу АКАР, использовать функциональные уравнения, например, вида
T4ip4 (0 + = 0 ; (3.142)
f' T^s (Г) + V>5 = 0 .
Положив в (3.142) ___________ ______________________
ip4 = у(х4У1 - хз - хз - агхг) + х5У1 - хг - хз - /?з хз;
“ ips = p(x4V 1 - xi ~ хз - а2хг) + X5V \ - х2~ xi - /?з х3, (3.143)
дзатем совместно решая функциональные уравнения (3.142) с учетом tp4 и гр5 (3.143), получа-
ете силе уравнений объекта (3.121) следующие законы управления:
(С__Jg\ I _____
—т— Х1Х5- 7. =7(«2Х|Х5+х3х4- х2х4х5- а2х5^1 - х2- хз -
А I VI - xi- xi
1 1 . (3.144)
* (у-р)т/4 + (у - р)Г5*’5) ’
'' / g_ д\ I ~ ___
А «5 = —Q— Х1Х4 + —(^3X1X2 + Х2Х5 - ХзХ4Х5 - J03X4V1 - Х2 - Хз +
\ / *1 — х2 — Хз
р у ч (3.145)
. + (у-р)т/4 (у-р)т5^
Законы управления 1ц (3.125), и4 (3.144) и и$ (3.145) обеспечивают перевод изображающей
Ички замкнутой системы из произвольного начального положения в области (3.141) на
пресечение многообразий tp4= 0 и ips= 0 (3.143), а затем асимптотически устойчивое движе-
те вдоль этого пересечения, в соответствии с дифференциальными уравнениями (3.133),
«моть до попадания в начало координат пространства состояний системы. Конкретно указан-
ии пересечение можно представить в двух формах:
' ; 1р4$ = (у - р) (x4V 1 - хг - хз - а2х2) = 0 (3.146)
$
1р45 = (у-р) (x5V 1 - Х2 - хз - £3X3) = о (3.147)
подставив (3.146) и (3.147) при v4 = х4', v$ = xs в (3.128), получим уравнения (3.133),
которые ранее были выбраны в качестве желаемых уравнений движения изображающей точки
^ояь пересечения многообразий.
ч Итак, методом АКАР решена задача аналитического конструирования замкнутой 3-ка-
Мяьнойсистемы управления КЛА (3.121), (3.125), (3.144), (3.145), обеспечивающая асимп-
твкически устойчивое движение аппарата относительно его положения равновесия. Время и
203
характер затухания переходных процессов в синтезированной системе определяется формой
функциональных уравнений (3.142) и свойствами дифференциальных уравнений (3.133),
описывающих движение изображающей точки системы вдоль пересечения многообразней
частности, в рассматриваемом случае можно дать верхнюю оценку времени регулировании
нелинейной системе, положив, например, Т\ - Т3= Т4— Т и учитывая (3.138), имеем: ох ,
tp < (8...10)Т. •
Из структуры функциональных уравнений (3.142) и вида дифференциального уравнения (3.1$)
следует, что в синтезированной системе будут протекать апериодические переходные процессы.
Второй вариант синтеза
Выбор и\ (3.125) и г4 (3.129), v5 (3.130) привел к линейным дифференциальным уравй-
ниям (3.133), описывающим движение вдоль пересечения многообразий ^1=0^
V»4= 0 ; ^5= 0 (3.143). В результате применения метода АКАР были получены законы управ-
ления м4 (3.144) и и5 (3.145), обеспечивающие движение изображающей точки сначалй
указанным многообразиям, а затем движение вдоль этих многообразий вплоть до попадание!
начало координат пространства состояний синтезированной нелинейной системы. Получение
законы управления /ц (3.144), и$ (3.145) являются достаточно сложными, что, разумеется,!
первую очередь связано с нелинейностью исходной системы дифференциальных уравнейй
КЛА (3.121). Предпримем попытку упрощения законов управления 114 , 115 при условии обес
печения асимптотической устойчивости движения синтезируемой системы и ее желаемй
динамических свойств. Выберем в уравнениях (3.128) функции
v4 = рх3ч> и v5 = - yx2v,, (3.148)
тогда система (3.128) принимает вид '
Т\vi (0 + vi = 0 ; _
*2ч> (0 = - V1X3V, - уХ2уУ1 - ХЪр - Xty ; (З.ЙФ
Хзу (0 = ViX2v, - рХЗцУ 1 - хЗу, - х^ .
Для исследования устойчивости нулевых решений системы (3.149) используем следующую
функцию Ляпунова:
V = 0,5v? + 0,5xiv + 0,5хзу . <3.150)
Производная функции (3.150) по времени, в силу уравнений (3.149), будет равна
V (Г) = - y-v? - (yxlp + px^)Vl - - x^ < 0 .
При условиях
Г, > 0, у > 0 , р > О (3.152)
неравенство (3.151) всегда выполняется в области (3.141). Согласно [5], это означает, чцо
система (3.149) в области (3.141) при выполнении условий (3.152) обладает свойством асим-
птотической устойчивости по Ляпунову ее положения равновесия.
Для выполнения соотношений (3.148) введем следующие макропеременные:
V»4 = р2 Х2 + Рз Хз + р4 Х4 + Х5
И
Vs = а2х2 + а3 хз + а4х4 + х5. (3.15$
Пересечение многообразий tp4= 0 и ips= 0 можно представить в двух формах:
^45 = (р2 - «2)х2у, + (рз - «з)хзу, + (р4 - a4)x4v, = 0 (3.154)
И ' '-X!
^45 = (^2«4 ~ а2р4)х2^ + (Рза4 - а3р4)хзч, - (р4~ a4)x5v, = о . (3.155)
Из (3.154) находим
Рз ~аз о . л (3.156)
x4v, = v4 = \ _ Хзу, = рхзч> при а2 = р2 > 0 ,
204
аиз (3.155) получаем
(3.157)
(3.158)
х5ч, = Vs = g^4 при аз04 = р3а4
р4~ а.4
4йи, с учетом условия «2 = ръ имеем
х5ч> = V5 = - а2Х2ч, = - yx2ll>.
’Из выражений (3.156) и (3.157) находим
« r = ^;>0; P = f^;>0
'при
«2 = Pi > 0 ; азр4 = faa4.
(3.160)
(3.161)
(3.159)
Полученные выражения (3.156) и (3.157) совпадают с ранее выбранными соотношениями
'(1148), т.е. при выполнении условий (3.158), (3.159) и Т\ > 0 система (3.149), а следователь-
йо, и синтезируемая исходная нелинейная система (3.121) будут обладать свойством асимпто-
тической устойчивости движения. Используя, как и ранее, уравнения (3.142), с учетом (3.153)
Случаем следующие законы управления: __________
$4 ~ a4}ll4 = - 0?3 - «з)Х1Х2 + (рз - «з)х4^1 ~ Х$ - Х$ +
+ (@4 ~ «4) Х1Х5 “ I
(р4 - а4>5 =а2(р4 - at)xiX3 - а2(р4 - а4}х5^ 1 - х$ - xi +
zn ч (В - Л\ а4 , В4 ,
4* (/З4 «4) I С I Т^5 '
Полученные законы управления и4 (3.160) и и$ (3.161) проще соответствующих законов
OS0.144) и (3.145). Однако основное их отличие заключается в отсутствии особенности, возни-
кающей при Х2 + хз ~ 1, когда законы (3.144) и (3.145) могут значительно возрасти. Опреде-
ленной “платой” за отсутствие указанной особенности в законах управления (3.159) и (3.160)
Является необходимость исследования свойств системы уже нелинейных дифференциальных
уравнений (3.149), описывающих движение изображающей точки вдоль пересечения много-
образий.
Разумеется, что промежуточные управления v4 и V5 могут быть выбраны не только в
нелинейной форме (3.129) и (3.130), как в первом варианте синтеза, или в линейной форме
$.148), как во втором варианте, но и с привлечением, например, методов оптимального
управления.
® Покажем теперь, что поставленная задача управления КЛА может быть сформулирована
Як задача оптимальной стабилизации. Синтезированные законы управления и\ (3.125), и4
(3.144), и5 (3.145) или 114 (3.160), (3.161), помимо асимптотической устойчивости замкну-
той системы, обеспечивают также согласно методу АКАР, минимизацию функционала
£ J = f [ m^ +m^-bm^+p^(t)+p^(t)+p^(t) ] dt,
'о
где^1 = xi, а тр4 и ips определяются выражениями (3.143) или (3.153). Подставив и ips в
подынтегральное выражение функционала, получим, с учетом уравнений объекта (3.121),
следующую его форму:
I J = J Г/?1 (X? , Х4 , Х5) + Я1(Х2 , Хз) + 7?з(//1 , «4 , /45) +
о L
Ф(Х],...,Х5,Ц1,/Й»«5) ] dt ,
оде Ri = ajxi + 04X4 + ajxj—квадратичная форма, отражающая кинетическую энергию КЛА;
,! R2 = Ь$х% + Z>ixi—квадратичная форма, характеризующая отклонение главной оси инер-
ции КЛА от неподвижной вертикальной оси;
> R3 = + kfyfi + k$ul—квадратичная форма, характеризующая мощность стабилизиру-
ющих двигателей;
205
Ф(х1,...,Х5,«ь/Ц,«5)—функция координат состояния xi,...,x5 и управлений ui,u4,us, включа-
ющая в себя формы не ниже третьего порядка.
Весовые коэффициенты a*, bs, кг в квадратичных формах Rz, R3 зависят как от парамет-
ров А,В,С, объекта (3.121), так и от настроечных параметров az, аз, /?з, у, р, макропеременщд
^4,^5 (3.143) или (3.153). Это позволяет выбрать требуемые весовые коэффициенты квадра-,
тичного критерия качества, используемого для оптимизации системы стабилизации. Составля-
ющие R\, Rz и 7?з определяют в основном свойства системы стабилизации КЛА в режиме маш
отклонений, а функция Ф, получаемая в процессе решения задачи методом АКАР, в большей
мере оказывает влияние в режиме больших отклонений в результате действия на систему
возможных значительных возмущений.
Итак, поставленная и решенная методом АКАР задача одноосной стабилизации положецш
равновесия КЛА посредством двигателей может быть сформулирована также в терминах
теории оптимального управления. Аналогично можно осуществить аналитическое конструи-,
рование и многих других систем управления движением твердого тела [189—191],в частности,
систем 3-осной ориентации положения равновесия тела посредством маховиков и др. При этом
внутреннее движение изображающей точки системы вдоль пересечения многообразий имеет
непосредственный физический смысл, связанный с желаемыми кинематическими соотношени-
ями при ориентации тела в пространстве. В заключение отметим, что синтезированные законн
стабилизации КЛА будут обладать свойством грубости (робастности) по отношению к откло-
нениям параметров объекта и действующим на него возмущениям, т.к. эти законы обеспечи-
вают замкнутой нелинейной системе асимптотическую устойчивость движения.
Таким образом, изложенные подходы к аналитическому конструированию методом АКАР
системы трехканального управления КЛА, описываемого сложной системой нелинейных диф-
ференциальных уравнений (3.121) пятого порядка, показали значительную эвристическую
силу, наглядность и прикладную эффективность развитого в этой главе метода синтеза систем
управления нелинейными динамическими объектами, базирующегося на идее введения сово-
купности притягивающих многообразий в пространстве состояний синтезируемых систем.
Пример 3.7. Рассмотрим теперь задачу синтеза двухканального регулятора для систем
управления технологическим объектом (рис. 3.5), который состоит из трех конических резер-
вуаров со свободным истечением жидкости из общего трубопровода, соединяющего выходи
резервуаров. В резервуары жидкости поступают по двум каналам питания, при этом одна
жидкость подается в первый и второй, а другая—в первый и третий резервуары. Управлеиие
уровнями жидкостей во втором и третьем резервуарах производится изменением потока
жидкостей по первому и\ и второму tiz питающим трубопроводам. Расход жидкостной смеси на
выходе определяется уровнем жидкости во втором резервуаре. w
Система дифференциальных уравнений объекта имеет следующий вид [ 192]:
. ,За r ,z \ л- \ л- vi . 3 (3.162)
Хг = jrxj *• ^Х1 “ ~ ^Хг ~ Хз^ ~ ^Хг^ + 2лхЗ ’
хз(') = й/(х2-хз) +W'2’
где Of(xt - Xj) = V2glx, - xyl sign(x, - xy); xi, xz, X3—соответственно уровни жидкостей в пер-
вом, втором и третьем резервуарах; yi = a^2gxz—расход жидкости на выходе объекта.
Сформулируем задачу синтеза двухканального регулятора: требуется методом АКАР оп-
ределить законы управления и.\, uz, обеспечивающие заданные уровни жидкостей во втором 1
третьем резервуарах и, следовательно, заданный расход жидкости на выходе, т.е.
v?r (3.163)
Xz = Xzr - -Т—2 ; Хз = Хзг = У2г .
2ga
В установившемся режиме согласно (3.162) выполняются следующие соотношения:
206
Ui u2
У1
Рис. 3.5
f{X\r - X2r) = 0,5^) ; af(X2r) = lllr + U2r = У1Г ;
«Л^2г “ Хзг) = - 0,5U2r • (3.164)
^заданному хгг (3.163) из (3.164) можно найти х\г—уровень жидкости в первом резервуаре
^установившемся режиме работы объекта.
Отличительной особенностью объекта (3.162) с точки зрения теории АКАР является
щясутствие управлений tii и иг во всех строках правых частей дифференциальных уравнений,
^гласно методу АКАР управления tn и иг всегда можно синтезировать так, чтобы обязательно
обеспечить требуемые соотношения (3.163). Что же касается координаты х\ (/), то ее поведение
определяться свойствами первого дифференциального уравнения системы (3.162) после
установки в него синтезированных управлений in и иг, т.е. характер изменения xi (f) является
бедствием выбора функций ui(xi, хг, х3) и иг(х\, хг , х3), а не определяется в результате
регулярной процедуры синтеза, как это осуществляется в обычных задачах АКАР.
Перейдем к изложению процедуры синтеза двухканального агрегированного регулятора
дйнелинейного технологического объекта (3.162). Согласно методу АКАР введем, например,
следующие линейные макропеременные:
V V’l = «2<Х2 - Хгг) + а3(х3 - Хзг);
А, Уг = p2(x2 - хгг) + jS3(x3 - х3г). (3.165)
(Йтезируемые управления и\ и иг должны переводить изображающую точку объекта из
произвольного начального состояния на пересечение V'iz — 0 многообразий = 0, ^2 = О
,0Д65). Указанное пересечение можно записать в виде следующих двух уравнений:
д ’ В(хг - хгг) = 0; В(х3 - х3г) = 0 , (3.166)
, ед В = афз - РгРз, В # 0. Полученные соотношения (3.166) совпадают с выражениями
$163), т.е. выбранные макропеременные У\ и^2 (3.165) обеспечивают заданные требования
1^стеме управления объектом (3.162) в установившемся режиме работы. Для синтеза управ-
лений и\(х\ , хг , х3) и иг{х\ , хг , х3) подставим макропеременные V’i и Уг (3.165) в функцио-
нальные уравнения
TiV>i (Г) + = 0 ; Т2у2 (Г) + Уг = 0 ; Тх > 0 , Тг > 0 ,
(3.167)
207
тогда в силу уравнений объекта (3.162) получим
(3.168)
и\ =
hi =
(З.ф)
(3.171)
(3.1)1)
2л^зХ2 . , Зжг3*2 .
37\В ^,+ ЗТ2В ^2’
«2 = - 2аДх2 - хз) +
Подставив конкретные макропеременные и^г (3.165) в выражения (3.168) и <3.169), после
преобразований получим следующие законы двухканального взаимосвязанного управления:
- 2а |Дх, - х2) - Дх2 - х3) - Дх2)] - х !
гтглггД^з CL 1 b ч.
X (Х2 <^2r) 3J5 I Т1 7*21 *^3г) »
_ ~ , 2лх3 (а-2^3 а$2\, ч
iii х3) 2)В I Т2 Ti I х3г)
Тлх^а^г ( 1 1 V ч
ЗВ ^Т2 Ti I Хзг''
Управления и\ (3.168) и и2 (3.169) или и\ (3.170) и и2 (3.171) обеспечивают асимптотиче-
ски устойчивое движение изображающей точки сначала к пересечению многообразд!
V>i2 = 0 (3.166), а затем вдоль ip\2 = 0, когда ^1=^2 = 0, т.е. х2 = х2г, хз = хзг. Поведеди
координаты xi (?) при движении вдоль ^12 = 0 будет определяться первым дифференциальны»
уравнением системы (3.162), которое после подстановки щ и н2 принимает вид
XI (?) = - [ЛХ1 - Х2г) - 0,5ЛХ2г) 1 (Х1 - Х1г) .
ЛХ1 L J
Исследуем устойчивость уравнения (3.172) относительно установившегося значения коорди-
наты xi = Х1Г. Для этого введем определенно положительную функцию Ляпунова [192] ,
К0\= 0,5(х, - х„)2 . (3.1$
Тогда полная производная функции v(?) (3.173) по времени в силу уравнений (3.172) будет
(3.172)
иметь вид
г(?) = (Х1 - Х1г)Х1 (?) = - 6а^~2 Xlr^ [ЛХ1 “ *2г) “ °»5ЛХ2г)] •
По физическим требованиям функционирования объекта условие xi > 0 всегда соблюдаете,
Рассмотрим теперь условия обеспечения знакоотрицательности функции v(?) (3.174), чп
определяется знаком произведения выражений (xj - х2г) и [ /(х] - х^) - 0,5Дхгг)] в правей
части уравнения (3.174). Тогда с учетом первого соотношения (3.164) имеем следующие дц
возможных варианта [192]:
V2g(%] - Х2г) - 0,5V2glx2J > 0 при xi > xir, т.е. при (xi - xir) > 0 (3.175)
и
V2g(xi - хгг) - 0,5 V 2g 1хгг1 < 0 при xi < xir, т.е. при (xt - xjr) < 0 . (3.176)
В обоих вариантах (3.175) и (3.176) обеспечиваются условия знакоотрицательности функции
U (?) < 0 (3.174), что согласно [5] означает асимптотическую устойчивость в целом уравнений
(3.172) относительно положения равновесия xi = xir. Следовательно, синтезированные заго-
ны управления «i(xi, х2 , х3) (3.170) и u2(xi , х2, х3) (3.171) обеспечивают асимптотическую
устойчивость движения в целом замкнутой системы относительно заданного состояния (3.163),
определяемого требованиями технологического процесса.
Рассмотрим далее некоторые свойства замкнутой системы (3.162), (3.170), (3.171). Из
выражений для законов управления н\ (3.170) и н2 (3.171) следует, что взаимное влияние
между каналами управления определяется функцией/(хг - х3) и последними членами ’
1
Ti
Ълх&зРз (
ЗВ I
1 \ , ч 2лх3д^2 ( Г 1 \.
I (^3 *^3г) И 3Z? I 7^2 Т\ ] •
208
Если положить в (3.177) постоянные времени Т\ = Т2 = Т, то тогда управления щ и и2
принимают вид
щ = - 2а[ /(xi - х2) - /(х2 ~ х3) - Дх2)] ~ (х2 - хъ-)
2лх1 (3.178)
и2 = - 2af(x2 - xi) —yjr (х2 - x2r) •
Ойшчие управлений щ и и2 (3.178) от и\ (3.170) и и2 (3.171) состоит в том, что в них исчезли
дополнительные каналы взаимного влияния (3.177), полученные в результате применения
ийюда АКАР, и, кроме того, в (3.178) теперь отсутствуют параметры а2, а3, ft2 и/?3, соответ-
саующим выбором которых можно придать дополнительные свойства взаимосвязанной сис*
теме управления объектом (3.162). Подставив (3.178) в (3.162), получим для координат
Х1(0 и х3 (/) следующие уравнения:
•ib • 1 ( ч • /А 1 / ч (3.179)
х2 (0 = - у (Х2 - Х2г) И Х3 (0 = - у (х3 - Х3г) .
Решения уравнений (3.179) имеют вид
х2 (0 = (Х20 - Х2г) е~ь и х3 (Г) - (хзо - х3г) е~*т . (3.180)
Дифференциальные уравнения (3.179) являются автономными, однако их решения (3.180)
«насованы друг с другом по времени переходных процессов. Итак, при выполнении равенства
Гдг Т2 = Т управления щ (3.170) и и2 (3.171) обеспечивают, помимо асимптотической устой-
чивости движения в целом замкнутой системы, также автономность координат х2 (f) и х3 (?) и,
согласно (3.180), (3.172), апериодический характер затухания переходных процессов. Инте-
ресно, что при этом для нелинейной замкнутой системы (3.162), (3.170), (3.171) можно
дерзать время регулирования /Р~ЗТ для произвольного начального состояния.
Отметим, что в работе [192] на основе функций Ляпунова получены законы управления щ и
«2, которые точно совпадают с щ и и2 (3.178) для рассмотренного частного случая, когда выпол-
няется условие Т\ = Т2 - Т. Разумеется, что синтезированные методом АКАР управления щ
(У70) и и2 (3.171) в большей мере учитывают взаимное влияние каналов управления, что может
«даться важным, в частности, при действии неучтенных возмущений на объект. Кроме того, в
необходимости путем соответствующего выбора нелинейных макропеременных V'i и тр2
можно придать замкнутой системе дополнительные желаемые свойства переходных процессов.
и
Ь 3;6. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ НЕЛИНЕЙНЫХ
АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ НА ЭВМ
х.мг
Развитые во второй и третьей главах методы аналитического конструирования нелинейных
актированных регуляторов (АКАР), основанные на введении в пространстве состояний
синтезируемых систем некоторой совокупное i и притягивающих многообразий понижающейся
размерности, позволяют тюлучить законы управления в аналитической форме. Однако с
ростом размерности указанная процедура синтеза закона управления становится рутинной и
делительной, особенно в случае задания уравнений объекта в общем виде. В этой связи
целесообразно распространить описанную в п.2.7 систему аналитических вычислений Reduce
ва задачи синтеза законов управления.
Рассмотрим динамическую систему
xt (Г) = fi(xi ,..., Xi) + a/+ixz+i , i = l,2,...,-n-l ;
xn (0 = 7n(Xl xn) + ui, (3.181)
|ДО/ь-Л—заданные непрерывные дифференцируемые функции координат состояния; а,—
числовые коэффициенты; щ—неизвестное управление, которое требуется отыскать как фун-
хцию координат состояния: и\ =/(xi ,..., хя).
209
Метод АКАР, как показано во второй и третьей главах, позволяет придать замкнута
системе некоторое желаемое поведение с обеспечением асимптотической устойчивости дищ-'
ния в целом.
Поставленная задача решается в указанном методе путем последовательного перевод
изображающей точки (ИТ) из некоторого произвольного начального состояния (хю
сначала в окрестность первого многообразия ^>i(xi хп) = 0, затем второго ^(xb—.Xn-iJH
третьего ^з(*1 xn-i) = 0 и т.д. вплоть до V’reC*! *n-m+i) = 0 , где т = /г-1 , движеше
вдоль которого приводит ИТ в начало координат пространства состояний. Функции назван-
ные агрегированными переменными, можно задавать в виде ПОг
tys Хп—$+1 + ws+i(xi ,..., х«—, s 1,2,...,/г 1 ,
используя промежуточные управления us (s = 2,3 ,..., m), которые и приводят ИТ в окцес*
ность очередного многообразия. При движении от многообразия = 0 к многообршо
ipk+] =0 минимизируется вспомогательный функционал 1) <?
°? • л 9 , (3.183)
Л = / >ip)dt = $ (mV»+ с2Й) dt. , i
0 0
Условиям минимума функционала Js (3.183) удовлетворяют следующие уравнения экстрема-
лей:
s = 2,...,/г-1 ;
(3.181
7> + v> = o,t = X. о*
Подставляя в уравнение (3.184) функции (3.182) и уравнения объекта (3.181), моХ»
получить следующие выражения для последовательных управлений:
- - jr - и2 - fn;
1 /V’s •
«s = ----- lls+
s
1 (X1 . f
Un a2 |ТИ + •
Получить управление ui как явную функцию переменных состояния xi ,..., хп можно подсй-
ляя ип в ип-\, в ип~2 и т.д. Решение этой последней задачи даже для конкретных нелинеййй
функций и числовых значениях коэффициентов требует значительной рутинной работы, йй
торую, тем не менее, надо проделать, чтобы получить закон функционирования управляющего
устройства. Если же в целях некоторых исследований требуется получить более общие выра-
жения для управления, например, для общего вида нелинейных функций, то задача становится
уже для системы 4-го порядка практически неразрешимой для ручных выкладок.
Приведем два варианта решения этой задачи на языке Reduce, выбор каждой из которых
будет зависеть от того, в какой форме нужны промежуточные результаты.
Пример 3.8. Пусть число уравнений системы п = 4. Для вычисления управления будем
использовать формулы (3.185), которые можно представить в виде следующих соотношений:
V'l "v dll2 • ,
Ti 2 dxi Xi fn
— 1 dtts+\
Us~ an_s+2\Ts+ * dxi
- _L (xl u. t -
“2 I •* n у
Начнем составление входного файла с операторов типа DEPEND A,B,C,D;, который вводят
в систему информацию о том, что А зависит от В, С и D:
DEPEND Fl, Xl; DEPEND F2, Xl, X2;
DEPEND F3, Xl, X2, X3; DEPEND F4, Xl, X2, ХЗ, X4;
Определим затем переменные для хранения правых частей системы:
у/
(3.18$!
210
MDXl :=F1+A2*X2$
H‘DX2:=F2 + A3*X3 $
ФХЗ :=F3 + A4*X4 $
Щ(ем выражения для последовательных управлений:
:= 1/А2*(Х1/Т4 + Fl) $
;&U3 := 1/АЗ*((Х2 + U4)/T3 + U4T + F2) $
«U2 := 1/A4*((X3 + U3)/T2 + U3T + F3) $
U1:=-(X4 + U2)/T1 - U2T - F4 $
мзмшшем явные определения для производных от сложных функций:
U4T := DF(U4,X1)*DX1 $
U3T := DF(U3,X1)*DX1 + DF(U3,X2)*DX2 $
ШЦ2Т := DF(U2,X1)*DX1 + DF(U2,X2)*DX2 + DF(U2,X3)*DX3 $
Добавив запрос U1; на вывод выражения для интересующего нас управления, программу
можно было бы на этом и закончить. Однако выражение для 114 в такой общей постановке будет
занимать около 150 строк текста. В целях экономии места присвоим коэффициентам числовые
зшйения и после этого выведем выражение для Затем присвоим конкретные значения для
«линейных функций и выведем на печать уже совсем короткое выражение для 114.
хД2:=АЗ :=А4 :=-1 $
’ Т1 :=Т2:=ТЗ := Т4:=1 $
WRITE “ 1) ul = ”,Ul;
Fl :=Х1**2 $ F2 :=Х1*Х2 $
F3:=X1*X3 $ F4 :=Х1*Х4 $
WRITE “ 2) u 1 = ”, U1; END;
В протоколе выполнения входного файла найдем результаты в следующем виде:
1) ul = DF(F1,X1,3)*F1**3 - 3*DF(F1,X1,3)*F1**2*X2 +
3*DF(F 1 ,Х 1,3) *F 1 *Х2**2 - DF(Fl ,Х 1,3) *X2**3 + 4*DF(Fl ,X 1,2) *
DF(F1,X1)*F1**2 - 8*DF(F1,X1,2)*DF(F1,X1)*F1*X2 +
4*DF (F1 ,X 1,2) *DF (F1 ,X 1) *X2**2 + 4*DF(F1,X1,2)*F1**2-
3*DF(F1,X1,2)*F1*F2 - 8*DF(F1,X1,2)*F1*X2 + 3*DF(F1,X1,2)*
F1*X3 + 3*DF(F1 ,X 1,2)*F2*X2 + 4*DF(F1 ,X1,2) *X2**2 -
шй; 3*DF(F1,X1,2)*X2*X3 + DF(F1,X1)**3*F1 - DF(F1,X1)**3*X2+
3%(4*DF(F1,X1)**2*F1 - DF(F1,X1)**2*F2 - 4*DF(F1,X1)**2*X2+
DF(F1,X1)**2*X3 - 2*DF(F1,X1)*DF(F2,X1)*F1 +2*DF(F1,X1)*
DF(F2,X1)*X2 - DF(F1,X1)*DF(F2,X2)*F2 + DF(F1,X1)*
DF(F2,X2)*X3 + 6*DF(F1,X1)*F1 - 4*DF(F1,X1)*F2 + DF(F1,X1)*
F3 - 6*DF(F1,X1)*X2 + 4*DF(F1,X1)*X3 - DF(F1,X1)*X4 -
2*DF(F2,X1 ,X2) *F1 *F2 + 2*DF (F2,X 1 ,X2) *F1 *X3 + 2*DF (F2,X 1 ,X2) *
F2*X2 - 2*DF(F2,X1,X2)*X2*X3 - DF(F2,X1,2)*F1**2 +
2*DF(F2,X1,2)*F1*X2 - DF(F2,X1,2)*X2**2 - DF(F2,X1)*
DF(F2,X2)*F1 + DF(F2,X1)*DF(F2,X2)*X2 - 4*DF(F2,X1)*F1 +
DF(F2,X1)*F2 + 4*DF(F2,X1)*X2 - DF(F2,X1)*X3 - DF(F2,X2,2)*
F2**2 + 2*DF(F2,X2,2)*F2*X3 - DF(F2,X2,2)*X3**2 -
ад ©F(F2,X2)**2*F2 + DF(F2,X2)**2*X3 - 4*DF(F2,X2)*F2 +
DF(F2,X2)*F3 +4*DF(F2,X2)*X3 - DF(F2iX2)*X4 + DF(F3,X1)*F1 -
i/:nDF(F3,Xl)*X2 + DF(F3,X2)*F2 - DF(F3,X2)*X3 + DF(F3,X3)*F3 -
DF(F3,X3)*X4 + 4*F1 - 6*F2 + 4*F3 - F4 + XI - 4*X2 + 6*X3 -
Й|4*Х4 (3.187)
2) ul - 24*X1**5 + 24*X1**4 - 60*Xl**3*X2 + 12*X1**3 -
48*X1**2*X2 + 20*Xl**2*X3 + 4*X1**2 + 30*Xl*X2**2 -
WT8*X1*X2 + 16*X1*X3 - 5*X1*X4 + XI + 12*X2**2 - 10*X2*X3 -
,?и Й»Х2 + 6*X3 - 4*X4
•ЯКЗГ
211
Обратим внимание, что выражение (3.187) содержит производные нелинейных функцию
координатам, от которых они зависят. Можно получить это выражение и с производный ж
времени, если составить программу по формулам (3.185).
Пример 3.9. Входной файл для той же системы можно начать с указания зависите
координат от времени, для обозначения которого мы используем идентификатор ТО (шв
идентификатор Т, к сожалению, зарезервирован в Reduce для обозначения логической ив-
станты “истина ”):
DEPEND XI, ТО; DEPEND Х2, ТО;
DEPEND ХЗ, ТО; DEPEND Х4, ТО;
DEPEND Fl, XI; DEPEND F2, XI, Х2;
DEPEND F3, XI, Х2, ХЗ; DEPEND F4, XI, Х2, ХЗ, Х4;
В следующих операторах предписывается правило дифференцирования координат, заданное
уравнениями системы:
LET DF(X1, ТО) = Fl + А2*Х2;
LET DF(X2, ТО) = F2 + АЗ*ХЗ;
LET DF(X3, ТО) - F3 + А4*Х4;
LET DF(X4, ТО) = F4 + Ul;
Теперь можно записать выражения для последовательных управлений с операцией дифферен-
цирования по времени, которая будет выполнена в этом случае вполне корректно:
U4 := 1/А2*(Х1/Т4 + F1) $
U3 := 1/АЗ*((Х2 + U4)/T3 + DF(U4,T0) + F2) $
U2 := 1/А4*((ХЗ + U3)/T2 + DF(U3,T0) + F3) $
Ul := -(X4 + U2)/T1 - DF(U2,T0) - F4 $
Остальные операторы программы оставим без изменения:
А2:=АЗ:=А4:=-1 $
TI := Т2 := ТЗ := Т4 := 1 $
WRITE “ 1) ul = Ul;
Fl :=X1**2; F2:=X1*X2$
F3:=X1*X3;F4;=X1*X4$
WRITE “ 2) ul = ”, Ul; END;
Выполнение этого варианта входного файла дает выражение для щ, зависящее от производит
нелинейных функций по времени, и конечное выражение, полностью совпадающее с выраже-
нием, полученным в предыдущем варианте:
1)Ш =
DF(F1,TO,3) +4*DF(F1,TO,2) +6*DF(F1,TO) - DF(F2,T0,2) -
4*DF(F2,T0) + DF(F3,T0) + 4*F1 - 6*F2 + 4*F3 - F4 + XI -
4*X2 + 6*X3 - 4*X4
2) Ul =
24*X1**5 + 24*X1**4 - 6O*X1**3 *X2 + 12*X1**3 -
48*X1**2 *X2 + 2O*X1**2 *X3 + 4*X1**2 + 3O*X1*X2**2 -
18*X1*X2 + 16*X1*X3 - 5*X1*X4 + XI + 12*X2**2 - 10*X2*X3 -
4*X2 + 6*X3 - 4*X4
Очевидно, что не представляет труда модифицировать программы примеров 3.8 и 339 ди
решения задач более высокой размерности. (I
В более общем случае агрегированные переменные ф(х) можно задавать в расширений
форме: d
л~*+1 ОДО’
= 2 bijXj + «S+1(X1 ,..., Xn-i) , i = l,2,...,m < n—1 . - $
7=1 „ &
Введение коэффициентов by в (3.188) позволяет иметь больше свободы в выборе жедаемш
свойств синтезируемой системы. Заметим также, что число функций может быть меньщ|,ча
п— 1, если исходные уравнения динамической системы позволяют задать некоторое прошу-
212
«иное управление (с индексом, меньшим п), гарантируя при этом устойчивость и желаемое
ичество соответствующей подсистемы. Оставляя здесь в стороне этот интересный вопрос о
ияборе коэффициентов и числа промежуточных управлений, рассмотрим задачу программи-
рваиия вычисления управлений при т = n—1.
При расширенном задании функций (3.188) и прежнем выражении для оптимизирующих
функционалов Js (3.183), управления потребуется вычислять по последовательности несколь-
й более сложных формул:
? м« ~ Ст" + />) ~ Ьт'х' ’ т ~ л-1 ’’
Г «2 h
h , » Г fihm~s+l \ 1 n-s+1 (3.189)
и* = s п |тГ 2 ^sjXj+ iis+i\/bStn-s+\ + fn~$+i ~ J} bs-xjXj, s = 2,...,m;
“H-s+2 I-* s y=i j /=1
П1 И1 = - + 2 bljXj + il2 I/bln —fn •
Д|я программирования формул (3.189) более рациональным становится привлечение масси-
ивдля хранения идентификаторов и использование операторов составления идентификаторов
ridd. В языке Reduce можно записывать, например, b:=mkid (а, 1), в результате чего переменной
Присваивается идентификатор al. Привлечение этих средств позволяет создавать входные
долы, требующие уже значительно меньше изменений при редактировании в связи с измене-
нием размерности или условий задачи:
rM:=N- 1 $
ARRAY FI (N), Al (N), XI (N), UI (N);
v ARRAY BIJ(M,N), PSI(N), TI(N);
?IFORI:=1:NDO
^FKI) :=MKID(F,I);
AI(I) := MKID(A,I);
XI(I) :=MKID(X,I);
>;
FORI:= 1:N DO
- DEPEND XI(I),TO;
^14(1) :=MKID(TT,I);
P FORI:=1:N DO
FORJ:=1:I DO
^DEPEND FI (I),XI (J);
FORI:=1:M DO
BK:=MKID(B,I);
FORJ:=1:(N-I+1) DO
J!BU(I,J) :=MKID(BK,J);
% При N4 добавлять строки с оператором LET;
При N удалять строки с оператором LET;
«°£ETDF(XI(1),TO) =FI(1) + AI(2)*XI(2);
<ETDF(XI(2),T0) =FI(2) + AI(3)*XI(3);
^ET DF(XI(3),TO) = FI(3) + AI(4)*XI(4);
:u^0-----------------------------------
-UI(N) :=BIJ(M,2)/AI(2)*(XI(1)/TI(N)+FI(1))-BIJ(M,1)*XI(1) $
MF N2 THEN
FOR I := M STEP -1 UNTIL 2 DO
213
<
PSI (I) FOR J := 1: (N-I+l) SUM BIJ (I,J) *XI (J);
PSI (I) :=PSI(I) +UI(I+1);
UI(I) := FOR J := 1:(M-I+1) SUM BIJ(I,J)*DF(XI(J),TO);
UI(I) :=UI(I) + DF(UI(I+1),TO) +PSI(I)/TI(I);
UI(I) :=UI(I)/ BIJ(I,N-I+1) +FKN-I+1);
Ul (I) := Ul (I) *BU (I-1 ,N-I+2) /AI (N-I+2);
UI(I) :=UI(I) - FOR J:=1:(N-I+1) SUM BU(I-1,J)*XI(J);
>;•
PSI(l) :=FOR J := 1:N SUM BIJ(1,J)*XI(J) $
PSI(l) :«PSI(1)+UI(2) $
UI(1) :=FOR J := 1:M SUM BIJ(1,J)*DF(XI(J),TO) $
UI(1) :=UI(1)+DF(UI(2),T0)+PSI(1)/TI(1) $
Ul(1) := - UI(1)/BIJ(1,N) - FI(N) $
END$
Обратим внимание, что в приведенной программе переменной п (число уравнений систем^
не присваивается числового значения и отсутствует вывод результатов. Это позволит боле₽
удобно вводить и исполнять эту программу в диалоговом режиме, как это показано в пример
3.10 и 3.11, редактируя лишь строки с оператором LET, как это указано в комментариях. '&• ।
Пример 3.10. Для иллюстрации вычислим управление для системы из примера 3.8:
Х1 (0 = XI - Х2 ;
Xi (t) = Х1Х2 ~ Хз ;
хз (/) = Х]Хз - Х4 ;
Хд (/) = Х1Х4 ~ U1 .
Пусть приведенная выше программа записана в файл с именем PROBLEM6, тогда задача может
быть решена в среде Reduce в режиме интерпретации следующих предложений:
1:N:=4$
2: IN PROBLEM6 $
3: WRITE “1) U1 = ”,UI(1);
4: Bll:=B12:=B13:=B21:=B22:=B31:=0 $
5: B14:=B23:=B32:= 1 $
6: A2:=A3:=A4:= -1 $
7: TT1:=TT2:=TT3:=TT4:= 1 $
8: Fl :=X1**2$
9:F2:=X1*X2$
10: F3 :=X1*X3 $
11: F4 :=X1*X4 $
12: WRITE “2) Ul = ”,UI(1);
13: BYE;
В протокол сеанса будут помещены рельтаты, аналогичные приведенным в примере 3.8.
Пример 3,11. Рассмотрим систему, описанную в п.3.2:
xi (/) = х2;
Х2 (0 = sinxi + хз ;
х3 (0 = и .
Для решения задачи вычисления управления и при 1р2 = ^21X1 + хг + из и промежуточном
управлении из = 0 выполним предварительно следующие изменения во входном файле PROB-
LEMS (см. пример 3.10): 1) удалим третий из операторов LET, 2) заменим строку с оператора
присвоения Ul (N) :=... на строку UI (3) :=0 $. После этих изменений программу запишем в файд,
например, PROBLEM7. Тогда сеанс решения поставленной задачи может иметь вид а>
l:N.-3$
2: IN PROBLEM7 $
214
3: Bl 1:=В12:= 0 $
4: В22:= 1 $
5: А2:=АЗ:= 1 $
< 6: Fl :=F2:=O$
7: F2 := SIN(Xl) $
м 8: ON DIV;
9: WRITE “u = ”,UI(1);
< 10: BYE;
Результат решения из протокола сеанса:
> u = - (COS(X1)*X2 + SIN(X1)*B21 +SIN(X1)/TT1 +
, SIN(X1)/TT2 +B21/(TT1*TT2)*X1 +B21/TT1*X2 + B21/TT2*X2 +
B21*X3 + Х2/ (ТТ1*ТТ2) + ХЗ/ТТ1 + ХЗ/ТТ2)
полностью совпадает с результатом из (3.34).
Отметим в заключение, что с помощью описанных выше программ можно получать реше-
ния гораздо более сложных задач, чем задачи из рассмотренных примеров, которые поддава-
ясь решению и с помощью ручных выкладок.
Разумеется, что изложенная процедура аналитического конструирования на ЭВМ агреги-
рованных регуляторов со скалярным управлением может быть в соответствии с развитым далее
в Четвертой главе методом АКАР без ограничения общности распространена и на системы с
ккторным, разрывным, селективно-инвариантным, астатическим, терминальным и многокри-
териальным управлениями разными нелинейными объектами и технологическими процессами.
' Таким образом, развитые в данном разделе аналитические методы синтеза на ЭВМ нели-
ийных динамических систем высокой размерности позволяют на основе АКАР разработать
эффективные программные средства для проектирования современных систем автоматическо-
тоуправления.
ЛА
3.7. СТРУКТУРНОЕ КОНСТРУИРОВАНИЕ И СИММЕТРИЯ
v НЕЛИНЕЙНЫХ АГРЕГИРОВАННЫХ ПД-РЕГУЛЯТОРОВ
(^В процессе создания новой научной теории, в том числе и в проблеме АКАР, весьма
полезным в прикладном отношении может оказаться выявление некоторых общих свойств,
отражающих сущность той идеи, на которой базируется развиваемая теория, в частности,
теория агрегированных систем управления нелинейными динамическими объектами. В основе
Извиваемого в этой книге нового синергетического подхода к аналитическому конструирова-
нию агрегированных регуляторов лежит идея введения в пространстве состояний синтезируе-
mbdj систем некоторых инвариантных многообразий—аттракторов, на которых наилучшим
обрдзом согласуются естественные свойства (энергетические, механические и др.) объекта и
гре^ования исходной технологической задачи, обеспечивая при этом желаемые динамические
Свойства замкнутых систем и гарантируя их асимптотическую устойчивость движения. Приме-
нение указанной идеи для разработки методов АКАР показало, что эти методы построены на
единообразной последовательной процедуре применения типовых операций, независящих от
конкретного вида нелинейных функций в правых частях дифференциальных уравнений объ-
ектрв. Назовем совокупность указанных операций структурным синтезом агрегированных
регуляторов.
Рассмотрим в общем виде структурный синтез агрегированных регуляторов методом АКАР
сначала для нелинейных объектов второго порядка
’ ’ , *1 (0 = /1 G*i) + агХ2 ;
Л ' Х2 (0 = /2(Х1 , х2) + и, (3.190)
где/i,/г—дифференцируемые по своим аргументам функции,/1(0) = 0, /2(0) = 0.
Соййсно методу АКАР введем макропеременную
V'i = хг + ^i(xi) , (3.191)
215
тогда, подставляя^! (3.191) в функциональное уравнение
(0 + = 0 ,
в силу уравнений объекта (3.190) найдем следующий закон управления:
и = - <Р1 (0 - 7^1 “ 7^ х2 “ Л(*1 , Х2) .
Управление и (3.192) переводит изображающую точку системы в окрестность многообразия
= 0 (3.191), движение вдоль которого описывается дифференциальным уравнением
xw (Г) = /i(xiv-i) ~ . (3.193)
Для устойчивости нулевого решения уравнения (3.193) достаточно положить
<Wi(xi) = /i(xi) + axi . (3.194)
Тогда уравнение замкнутой систем (3.190) (3.192) с учетом (3.194) относительно выходной
координаты xj будет иметь вид
.Ой
^-х, (0+ (Г, +l)i,(/) + x1=0,
которое при а > 0 , Т\ > 0 будет асимптотически устойчивым в целом. Полученное выражение
для и (3.192) показывает, что синтезированный регулятор имеет ПД-алгоритм управлейй
относительно функции <р\ (3.194). Для построения регулятора необходимо сформирован
функцию (р\ (3.194) путем введения координаты %i и функции/i(xi), а затем координатами
функции ,/2(х1 , х2). реализации регулятора требуются дифференциатор и сумматор
Регулятор может быть технически реализован аппаратурно на стандартных устройствах серии
но выпускаемых средств автоматизации или программно построен на микропроцессорами
микро ЭВМ.
Рассмотрим теперь структурный синтез регуляторов для нелинейных объектов третьего
порядка следующего вида:
xi (Г) = /i(xi) + а2х2; '
х2 (0 = /2(xi , х2) + азхз; (3.195)
ХЗ (0 = Л(Х1 , х2 , х3) + и,
где /1 ,/2,/з—дифференцируемые по своим переменным функции, /1(0) = 0; /2(О)=0;
/з(0) = 0. Введем первую макропеременную
V’i = хз '+ <Pi(xi , х2), (3.196)
подставляя которую в функциональное уравнение
(0 + = о, ’
получим, в силу уравнений объекта (3.195), следующий закон управления: 31
_ . 1 1 . (3.19$
И ф\ (/) р\ Хз /з . jfjji
Закон (3.197) по своей структуре идентичен синтезированному выше ПД-регулятору (3.19$’
Этот закон управления переводит изображающую точку системы в окрестность первого мж£
гообразия = 0 (3.196), движение вдоль которого будет описываться следующими диффе-
ренциальными уравнениями:
Xlyl (0 = /1(^1у»1) "1” tf2X2v,l ,
Xtyl (0 = , Xtyl) - a3pl(xlv>l » X2V’2) • (3.1$j
Вводя далее вторую макропеременную д‘
V>2 = Х2 + 0>2(Х1) (3.1$|
и подставляя ее в функциональное уравнение ’
Т2ф2 (?) + ip2 — 0 ,
в силу уравнений (3.198) находим промежуточное управление
яз#>! (0 = фг (t) + jr <р2 + уг х2 + /2 . (3.200)
216
Рис.3.6
Удивление (3.200) по структуре идентично законам управления (3.197) и (3.192) и, в свою
очередь, переводит изображающую точку в окрестность многообразия V>2 = 0 (3.199), движе-
иввдоль которого будет описываться уравнением
X1V,2 (0 = fi(xif2 - • (3.201)
Выбор функции вида
#’ «2(P2(xi) =/i(xi) + axt (3.202)
оголяет обеспечить асимптотическую устойчивость в целом нулевого решения как уравне-
W (3.201), так и синтезированной замкнутой системы, уравнение которой относительно
Ординаты xi будет иметь следующий вид:
X ^х13)(«)+(т,Гг+^+^)х|(0+ (л+л+^ш+х^о. <3203)
^следует из уравнения (3.203), при 7\ > 0, Тг > 0, а > 0 синтезированная система, во-пер-
ИХ, асимптотически устойчива, а, во-вторых, имеет апериодический характер затухания
переходных процессов. Вид функции^2 (3.202) совпадаете (3.194). Из выражений (3.197) и
|УОО) вытекает, что построенные управления и (3.197) и <pi (3.200) представляют собой
ю^аедовательно включенные ПД-регуляторы, на входы которых вводятся также сигналы,
йогаетствующие координатам xi, х2 и функциям /i(xi) и/2(Х1 , хг)-
ДАМа рис.3.6 изображена структурная схема замкнутой системы, управляющее устройство
дайрой представляет собой последовательное включение двух ПД-регуляторов, на входы
юйрых подаются соответствующие переменные. Из рис.3.6 можно заметить, что агрегиро-
ййные регуляторы состоят из последовательно включенных регулирующих элементарных
рфк, реализующих операцию дифференцирования и масштабирования входных сигналов.
Эй свойство агрегированных регуляторов позволяет выделить указанные ячейки стандартной
^структуры в качестве типовой элементарной ячейки (ТЭЯ)-, изображенной на рис.3.7. На
осй&ве ТЭЯ можно осуществить структурный синтез агрегированного регулятора для объекта
/нр порядка
i,yi‘ Xj (t) = //Х] ,..., X/) + aj+iXj+1 , j = 1,2,...,/г - 1 ;
x„ (?) = fn(xx ,..., x„) + u , (3.204)
217
fk(xp...,xk)
Рис.3.7
где fj, fn—функции, непрерывно дифференцируемые по своим переменным, /ХО)=0,/П(0)М
Уравнения (3.204) имеют треугольную функциональную матрицу и, как уже равнее
отмечалось, описывают распространенный класс динамических объектов различной природы.
К ним относятся, в частности, объекты, состоящие из последовательно включенных подобш-
тов первого порядка. Такие объекты весьма распространены в различных отраслях промыш-
ленности и техники.
На рис.3.8 изображена структурная схема замкнутой системы /i-го порядка со структурно
синтезированным агрегированным ПД-регулятором. Этот регулятор состоит из послед»
тельно включенных (/г — 1)-й регулирующей ТЭЯ, на вход каждой из которых, помимо выход-
ного сигнала предыдущей А-й ТЭЯ, подаются также сигналы, соответствующие коордвдай
хл+1 и функции Д+1(Х1 ,..., хл+1). Указанная особенность позволяет для объектов (3.204) про-
извольного порядка единообразным структурным способом построить агрегированный рОДу;
лятор, который обеспечивает асимптотическую устойчивость в целом замкнутой системе яр
выполнении очевидных простейших условий (7\ > 0, А = 1,2,...,/г— 1, а > 0), а также тара?»
ровать заданное время и апериодический характер затухания переходных процессов по выход-
ной координате (?) системы. < :
Предложенный здесь способ структурного построения агрегированных ПД-регуляторо!
базируется на своеобразном свойстве симметрии, проявляющемуся в том, что для каждой
отдельного подмногообразия ip к = 0 (3.191), (3.196), (3.199) и т.д., а следовательно, жду
соответствующего подобъекта (3.190), (3.198) и т.д., структура алгоритмов управлений
(3.192), (3.197) и т.д. остается неизменной, при этом динамические операции интегрировав
и дифференцирования соответственно в подобъекте и алгоритме управления им обратном
отношению друг к другу. Кроме того, как следствие указанной здесь особенности метода АШ
общая конструкция синтезируемого агрегированного ПД-регулятора (рис.3.8) представке
собой симметризованную структуру, состоящую из последовательно включенных идентивдьв
ТЭЯ (рис.3.7), в своей совокупности однозначно определяющих общую структуру регуля^
согласно соответствующей структуре и функциям в цепях обратных связей исходной модщ ’
нелинейного динамического объекта.
Выявленные здесь свойства симметрии между структурами объекта и синтезируеиИ
агрегированного регулятора подтверждают фундаментальную значимость и общность
женного в первой главе положения о том, что симметрия—это некоторое обобщенное естодт?
венное свойство, присущее законам природы, в том числе, разумеется, и агрегированным
системам управления техническими динамическими объектами.
в силу уравнений объекта (3.207), можно получить следующие законы управления:
из = - kif 1 (Г) - hpi (Г) - д3х3 - 64X4 - /3; (UN)
U4 = ~ Р\ф\ (0 ~ Р<Р\ (t) -1]3X3 ~ П4Х4 - А, (ЗД)
где
кх = ~Ь\ ~ ’ к= 1Й ^~ТГ ~ ’ -
а _ 1 (аз@* «463 \ _ а^4 /1 1 \
дз-^[~тГ--тГ ; д4~ Ь т?"^;
p-b^-Tt-------тГ)'
м _ «з^з z j___к . „ _ х (азр2. а^\. : I
73 bt ( Т2 7? ’ />Ц Т2 71 J ф
Ь\ = 03^4 - P3PI4 . Г
Отметим, что часто целесообразно выбрать 71 = Т2 = 7, чтобы обеспечить симметрию управ-
лений из (3.210) и 114 (3.211) и многообразий Mi = 0 (3.208),Мг = 0 (3.209) относительно^
друга. Тогда 64 = уз = 0 и выражения (3.212), а следовательно, и законы управления (3^10)
и U4 (3.211) упростятся.
Законы управления 113 (3.210) и U4 (3.211) переводят изображающую точку системы!
окрестность пересечения Mi 2 = 0 многообразий Mi = 0 (3.208), М2 = 0 (3.209) движение вдоль
которого будет описываться дифференциальными уравнениями
*tyl2 (0 = /1(Л1^12) + «2*2^12 ; .
*2^12 (0 = fz(xiyi2 , Xtyu) + atpi, (3ltl3)
гдеа = -^-(у2а4-У1^4) +-^-(У1а3-у^з) • - , w
Для синтеза промежуточного управления Mi(*i > *2) введем макропёременную ога
Мз = х2 + M2(xi), (ЗД15)
используя которую, а также функциональное уравнение
7зМз (0 + Мз ~ 0,
в силу дифференциальных уравнений (3.213) получаем ’^!В
л — л АА 1 л 1 / (З.ЭД
«Mi — ~ Мг(О ~ - jr№-/2- / ши
Под действием промежуточного управления Mi (3.216) изображающая точка переВоДйТЙЙ
окрестность многообразия Мз = О (3.216), движение вдоль которого описывается диффОрЙ-
циальным уравнением
Хууз (0 = /1(^1^>з) ~~ . (3.217)
Выбрав в (3.217) функцию <р2(х\), например, вида
aip2(xi) = /i(xi) + axi, (3.218)
получим все соотношения (3.210), (3.211), (3.214) и (3.218), необходимые для структурой''
синтеза агрегированного регулятора, который при 71 > 0, Т2 > О, 73 > 0, а > 0 обеспечийй?
замкнутой системе асимптотическую устойчивость движения и апериодический характер
текания переходных процессов по выходной координате объекта.
Полученные соотношения (3.210), (3.211), (3,216) и (3.218) аналогичны выражениям
соответственно (3.197), (3.200) и (3.202) для нелинейного объекта третьего порядка (3.195) с
одним управлением. Соотношения (3.210), (3.211), (3.216) и (3.218) позволяют построить
структуру двухканального агрегированного ПД-регулятора, изображенную на рис.3.9.
следует из рис.3.9, синтезированный ПД-регулятор совершенно аналогичен предыдущему по
составу элементарных ячеек. Он состоит из последовательно включенных ТЭЯ и, кроме того
в отличие от предыдущих, двух параллельно включенных ТЭЯ, отражающих факт двухканаль-
ности управления согласно дифференциальным уравнениям исходного объекта (3.207). .о ы
220
Рис.3.9
Очевидно, что в случае трех управлений в структуре агрегированного ПД-регулятора
^явится три параллельных ячейки ТЭЯ. Аналогично можно построить m-канальные агреги-
рованные регуляторы, которые будут состоять из п—т последовательно и т параллельно
включенных элементарных ячеек.
Итак, в задачах векторного m-мерного управления нелинейными объектами, имеющими
треугольную форму матрицы их (п-т)-уравнений, синтезируемые структурным методом
агрегированные ПД-регуляторы будут состоять из совокупности последовательно и параллель-
лшлюченных ТЭЯ, т.е. отмеченный ранее эффект симметрии структур при многоканальном
давлении усиливается. Выявленные особенности позволяют структурным методом синтези-
ровать агрегированные регуляторы, обеспечивающие асимптотическую устойчивость движе-
Лйи желаемые переходные процессы замкнутых нелинейных систем.
jfK Разумеется, что изложенная процедура структурного синтеза нелинейных агрегированных
ПД-регуляторов может быть распространена без ограничения общности и на задачи синтеза
методом АКАР систем управления со специальными двойствами, в частности, и на рассмотрен-
ие в четвертой главе процедуры аналитического конструирования систем с селективно-инва-
•рвдитным, астатическим, разрывным, многокритериальным и терминальным управлениями.
При этом следует лишь дополнительно учесть особенности, возникающие при выборе формы
еоетветствующих макропеременных и функциональных уравнений, определяющих структуру
^тированного регулятора.
При конструировании синтезированных методом АКАР структурно-симметричных агре-
$рованных ПД-регуляторов (рис.3.6—3.9) возникает известная в технике проблема реализа-
221
цйи операций дифференцирования (Д) сигналов, особенно в условиях действия возможных»
чительных помех. В настоящее время в литературе предложены различные способы реализади
аналоговых дифференциаторов [186], которые имеют различную эффективность в зависимая
от отношения уровня полезного сигнала к уровню помех. При широких пределах изменим
характеристик полезного сигнала и помехи указанные дифференциаторы могут оказаться недоста-
точно эффективными. В этой связи для решения задачи дифференцирования сигналов в условия
помех может возникнуть необходимость адаптивной фильтрации, т.е. адаптации параметров филь-
тра, входящего в состав дифференциатора, к изменениям характеристик сигнала и помех. В работах
[ 187,188], в частности, предложены способы построения гибридных адаптивных дифференциато-
ров и фильтров, которые позволяют вполне приемлемо решить задачу получения высококачест-
венных производных сигналов в условиях помех. Указанные дифференциаторы состоят из анало-
говой части и микропроцессора, подстраивающего параметры фильтра, который обрабатывает
входной сигнал устройства. Это позволяет, как указывается в [188], построить помехоустойчивые
адаптивные дифференциаторы, обеспечивающие приемлемую для практических целей точно
получения производных первого, второго и более высоких порядков для сигналов, наблюдаемы!
на фоне помех и характерных для различных технологических и движущихся объектов.
Другими словами, в настоящее время в связи с широким внедрением микропроцессор® i
микро ЭВМ возникает возможность построения эффективных агрегированных ПД-регулЙто-1
ров, конструируемых в соответствии с изложенным здесь структурным методом синтеза систем.
Следует отметить, что предложенная процедура структурного синтеза, хотя и базируете!
на очевидных “компенсационных” соображениях, однако развитый на ее основе метод струк-
турного конструирования агрегированных регуляторов обладает немалой эвристической силой
и позволяет для нелинейных объектов произвольного порядка с треугольной функциональной
матрицей единообразным способом построить одно- и многоканальные ПД-регуляторы, реа-
лизуемые на серийных средствах вычислительной техники и систем управления. । j
Разумеется, что достоинства и преимущества способов построения агрегированных рёту-
ляторов, основанных на использовании аналитических законов управления, синтезируемый
соответствии с развитым в третьей главе методами АКАР, или на применении изложением
здесь структурного метода зависит от адекватности модели (3.205) свойствам реального объ-
екта, уровню помех и т.д. Согласно методу АКАР влияние этих факторов носит, вообще говоря,
второстепенный характер, т.к. синтезируемые системы управления обладают таким фундамен-
тальным свойством, как асимптотическая устойчивость движения. ,
3.8. МЕТОД АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ
АГРЕГИРОВАННЫХ ОПТИМАЛЬНЫХ РЕГУЛЯТОРОВ
В предыдущих разделах второй и третьей глав общий метод аналитического конструиро-
вания агрегированных регуляторов (АКАР) развивался как метод динамического синтеза
законов управления, так как используемый в нем оптимизирующий функционал не посту®-
ровался, а играл вспомогательную роль (являлся сопровождающим), при этом основными
задачами были обеспечение асимптотической устойчивости движения и заданного качеСйа
переходных процессов в системе. В данном разделе получены новые важные результаты,
которые позволяют отнести общий метод АКАР также к методам теории синтеза оптимальней
управления и соответственно назвать его методом аналитического конструирования агрегиро-
ванных оптимальных регуляторов (АКАОР). н
Постановка задачи. Пусть возмущенное движение объекта описывается векторным диф-
ференциальным уравнением
x(f) = f(/,x,u), (3.219)
где х = 1хьх2,...,хи1т—вектор координат состояния, dim х = n; f = l/i(Z,x,u),.,/„(/,x,u)fT,
uEFCA'”—вектор управлений, dim u = tn, f(/,0,0) = 0, при следующих граничных условиях
222
R1 x(to) = Хо, x(tf) = Xf. (3.220)
а. Основная задача синтеза формируется следующим образом: на множестве возможных
давлений и траекторий (3.219), (3.220) определить оптимальные управление и траекторию,
ишимизирующие функционал
Я-
У
J = f /о(Ах,и) dt.
к
(3.221)
Здесь предполагается, что левый конец траектории закреплен (х©—заданный вектор), а правый
ЙЬдвижен. Ограничения на вектор состояния отсутствуют. В такой постановке задача опти-
Ильного управления является задачей Лагранжа.
7; Обоснование метода АКАОР. Переформулируем задачу Лагранжа в задачу Майера. Для
®го введем новую скалярную переменную при помощи уравнения
i ' (3.222)
хп+1(() = J /o(f,x,u) dt.
*0
Тогда задача оптимального управления принимает вид
£ |'xn+i(l‘/)-»min, ’ (3.223)
х(0 = f(/,x,u),
xn+i(r) = /0(/,х,и),
it- juGFC/?"',
x(f) = Хо, x(tf) = xf,
Xn+i(^o) ~ 0, xn+i(iy) = J.
Йкдем агрегированную макропеременную <p(t,x). Запишем уравнение для некоторого много-
о$азия
? ’ Xn+i(t) = о. (3.224)
йловия движения изображающей точки системы (3.223) по многообразию (3.224) примет вид
'j. ^(/) = ^|^ + < >-/о(г,х,и) = 0, <3 225)
$< ,f(f,x,u) > = J^-/i(/,x,u)+ ...+ у^-/а(Лх,и) —скалярное произведение векторов.
иХ ОХ] С/Хн
Из (3.225) следует, что условие движения по многообразию (3.224) определяет функцию
Кротова [131, 132]:
it! P(/,x,u) = + < & Л'.х.и) > - /о(Ах,и), (3.226)
v I О А
вторая обращается в нуль на этом многообразии:
Я(/,х,и) = 0. ' (3.227)
^пользуемся теоремой о достаточных условиях оптимальности [131,132], согласно которой,
шЯ есть допустимый процесс {x(Z),u(f)| и функция <p(t,x), непрерывная и имеющая такие
непрерывные частные производные при всех 1, х, что
‘!ti /?(6xOpt,UoPt) = max/?(Ax,u), D re [r0,//],
х.иеи
(3.228)
^процесс |xopt(/),uopt(0} оптимален, т.е.
J = J /о(Лх,и) dt -* min.
*0
Представим максимум по совокупности переменных как последовательность максимумов по
сдельным переменным:
X max/?(Z,x,u) = max Гmax/?(f,x,u)l = maxP(/,x),
v x;uGF
i$P(/,x) = maxA(/,x,u). Условие (3.229) с Счетом (3.226) и (3.227) можно представить в виде
tier
(3.229)
ибУ
maxP(7,x) = ^£^1 + maxj < ,f(/,x,u) >- /0(Г,х,и)] = 0.
хеу» °* uev OA
223
Разумеется, что, аналогично соотношениям (3.228), (3.229), можно записать условия оШ
мальности в терминах минимизации функций, т.е.
'О
minP(/,x) = + min[ < ,f(f,x,u) >+ /о(/о,х,и)] = 0. *
xev> uev
Из (3.23Q) следует, что при движении по многообразию (3.224) максимум фунЩа
Р(Г,х) по х равен нулю. Это означает, что частная производная по х от Р(/,х) на многообрййм
V» обращается в нуль, т.е. с Ф
^0 I -о
дх Г6* и
или
в
Р(/,Х) = С(0|хеу-. <3Ц
В работах Кротова [131, 132] результат (3.231) вводится как априорное требование ^
каких-либо особых предположений относительно сущности функции Р(/,х). В нашем слудае
он получен как результат движения системы по многообразию ^=0 (3.224).
Перепишем уравнение (3.230) с учетом (3.231) в виде
+ max[ < & ,f(/,x,u) >- /0(Лх,ц)] |xGV, = С(Г)
или аналогично
+ min[ < ,f(f,x,u) >+ /о(Г,х,и)] I xGv, = C(t) . тй
Введем функцию
,х) = max[ < & ,f(r,x,u) > - /о(Лх,и)] (3‘|?
или аналогично ..
/ф,? ,х) = min[ < ,f(Z,x,u) > + /о(*,х,и)]. <
ОА UGF
Тогда уравнение (3.232) примет вид --
-ч I +С(Л 0.2»
Q-f ~ Я(Г,^Х ,Х) | xG*,+ С(<). ф£
Уравнение (3.234) является уравнением Гамильтона—Якоби—Веллмана [131, 132], мй
C(t) = 0 получим из него уравнение Веллмана [135]: *
др(Лх) _ н( Эу I (3.235)
dt “ “ "О’дх’Х)|хе*‘ 3.
Уравнения (3.234) и (3.235) являются уравнениями в частных производных первого порядка
с граничным условием
у>(/о,х(*о)) = 0.
Положим
. С(() =
тогда структуру макропеременной у>(7,х) можно задать следующей:
р(Лх) = Л(0+ В(х).
С учетом (3.237) и (3.238) уравнение (3.234) можно представить в виде
>х)|Хбу, = 0,
т.е.
max < ,f(f,x,u) > = /о(Г,х,ц) | х6^,
или аналогично
min < ,f((,x,u) > = - 7o(f,x,u) | xGV,.
(3'^
(З.Й)
(3.23«)
df
(3.239)
224
Уравнение (3.239) также является уравнением Веллмана для нестационарного объекта (3.219)
и функционала (3.221) , которое совпадает с уравнением Веллмана, полученным в [9] для
Шщонарного объекта при /о = !• Функция В(х) является функцией Веллмана.
р Если в (3.238) положить А( 7) = 0, то тогда агрегированная макропеременная будет равна
$х) = В(х), т.е. является функцией Веллмана. В этом случае уравнение для многообразия
($224) примет вид
V = В(х)- хп+1 = О. (3.240)
Выражение (3.240) является уравнением границы множества достижимости в расширенном
пространстве состояний с координатами xi,...,xe+i. Так, если рассматривать задачу быстродей-
С1ия, т.е. /q(/,x,u) = 1, то уравнение (3.240) примет вид
V* = ^(х)~ ? = о,
1 уравнение движения по многообразию ^=0 при оптимальном управлении запишется в виде
V = max < ,f(?,x,u) > I хеу- 1 = 0
UGV 1
Й аналогично
$(0 = min < Л*>х’и) > I xgv-+ 1 = 0.
UGH ох I
Ймучено уравнение Веллмана для задачи быстродействия, что совпадает с результатами работ
&135].
к; Теперь метод АКАОР можно сформулировать следующим образом. Пусть задача опти-
«лъного управления определена в форме Майера (3.223). Требуется решить задачу синтеза
ойимального управления, т.е. uopt = u(?,x). Метод АКАОР содержит два подхода к решению
наставленной задачи. Рассмотрим эти подходы.
. Первый подход к решению задачи оптимального синтеза основан на определении агреги-
реванной макропеременной у>(?,х) (или В(х)) как решение какого-либо одного из уравнений
($234), (3.235) или (3.239). Так как функции #>(?,х) или В(х) теперь определены, то тем самым
определена и функция Я(?,х,и), максимизируя (минимизируя) которую по управлению и€У,
р^цем Uopi(/,x):
Uopt(r,x) = arg max7?(?,x,u), D tE [W/] (3.241)
• uev
кии аналогично
M Uopt(^x) = arg minA(?,x,u), D/eiW/h
-ЯС. U6F
Необходимо отметить, что если область определения управления и замкнута и возможные
рпямальные значения uopt лежат на границе допустимой области V, то тогда следует во всех
кдвеприведенных выражениях вместо символов max, min записать sup, inf [12]. Итак, первый
мдход в методе АКАОР приводит к решению оптимальной задачи в форме закона управления
0i241) в функции координат состояния системы.
Рассмотрим примеры применения первого подхода АКАОР.
• ? -Пример 3.12. Синтезируем оптимальное управление и(х\ ,х?) в следующей линейной задаче
!®:
& xi(?) = хз; хз(0 = <*i*i+ 02X2+ и; (3.242)
J = / (<71X1+ <12x1+ и2) dt -* min.
ОТ О
Ияоответствии с методом АКАОР переформулируем задачу Лагранжа (3.242) в задачу Майера
феи введения новой переменной хз = /, тогда получим
*1(0 = Х2, Хг(0 = а1Х1 + <*2*2+ щ
и.' хз(0 = <71 *1 + <72*2+ «2, хз-» min; (3.243)
У xi(0) = хю; х2(0) = хго; х3(0) = 0.
225
Введем функцию В(х1,хг) и в расширенном пространстве состояний запишем уравнением^
гообразия фs
^(хь*2»хз) = #(Х1,Х2)+ Хз = 0. (З.Ж
Движение изображающей точки исходной системы (3.242) по многообразию ^=0 (3.244) в
силу уравнений (3.243) будет описываться следующим уравнением:
. ,Л дВ , дВ , ч 2, 2,2 л (3.245)
$(0 = 0^-х2+ («1X1+ а2х2+ и)+ qiXi+ q2x2+ и = 0.
Уравнение (3.245) образует функцию Кротова шВ
ft ft 2 2 2
- R(xi,x2,u) = х2+ (ai*i+ а2х2+ и)+ qixi + q2x2+ и ,
которая имеет единственный минимум по управлению и:
Я(*ь*2,н) = Ц + 2и = 0,
откуда находим оптимальное управление
им=- - ,3'ж'
Подставляя uopt (3.246) в (3.245), получаем
дВ ав 1рв'| 2 2 2 п <3-2$
^Хг+7«;(О|Х|+вд)_ +«л+»2^ = о.
Решение нелинейного дифференциального уравнения в частных производных (3.247) относи-
тельно функции В(х\ ,Х2) в данном случае можно представить в виде определенно-положите»
ной квадратичной формы < э
•F(xi,X2) ~ Ацх?+ Л12Х1Х2+ А22х2. 'u!
Коэффициенты Ац,А12,А22 этого выражения можно определить через параметры «ь а2, qii
дВ
q2 исходной задачи (3.242) путем подстановки -г— в (3,247) и приравнивания нулю коэффи-
С7Л/
циентов при соответствующих степенях xi и х2. Закон управления (3.246) имеет вид 81
Uopt(xi,x2) = - 0,5(Ai2Xi+ 2А22Х2). (3.2W
Выражения (3.245)—(3.248) точно совпадают с соответствующими соотношениями в [92,
С. 164], полученными на основе метода динамического программирования Веллмана. .г/
Аналогично можно решить методом АКАОР и другие задачи оптимального управления.
Однако прежде чем продолжить рассмотрение конкретных применений метода АКАОР, обра-
тим внимание на следующие его особенности. В обычном методе АКАР, когда оптимизируем^
функционал не постулировался, а являлся сопровождающим [56], изображающая точи>
двигаясь в пространстве состояний размерности л, сначала должна была сблизиться с многооб*
разием V’i(-’civ-,x„)=0, а затем уже двигаться вдоль него вплоть до попадания в задавай
состояние системы. Функциональное уравнение, из которого находился закон управления!
обычном методе АКАР, имело вид '
riV>i(O+ Ftyx) = 0, F(0) = О, > 0. (3.249)
После попаданий на многообразие V,i(xi,...,x,l)=0 изображающая точка согласно (3.249) будя
двигаться в соответствии с вырожденным уравнением $i(f)=0 в силу исходных уравнении
системы.
В случае же оптимального управления, когда минимизируемый функционал является
постулатом, изображающая точка исходно и сразу находится на многообразии:
^(x],...,x„,xn+i)=0 размерности л+1, а затем может двигаться вдоль него в соответствий^
вырожденным уравнением V>i(/)=0. Размерность многообразия ^(Х1,...,хн,хп+1)=О в методе
АКАОР на единицу больше по сравнению с размерностью многообразия ^(х1,...,х„)=0 в общая
методе АКАР. Другими словами, необходимость рассмотрения движения изображающей точки
только согласно вырожденному функциональному уравнению
226
d^Xl,...,Xn+i,t) &V . _(t},fa(xi x Ui u}+W=Q (3-250)
^методе AKAOP непосредственно следует из чисто формальной процедуры применения обще-
ГО метода АКАР для задач оптимального управления, когда исходная система размерности п
расширяется на единицу с добавлением координаты x„+J = Л Дело в том, что координата
Хи в расширенном пространстве соетояний входит только и последнее (я+1)-е уравнение и
не входит в первые п уравнений исходной системна В этой связи даже.формально невозможно
подставить координату xn+1 =' В{х\ хл) в первые п уравнений, что требуется согласно? общему
детоду АКАР. Этот факт также приводит квырожденному (^=0) функциональному уравнению
(3.250), из которого в соответствии с требованием В(хь...,хи) = min/ и находится закон опти-
дального управления.
,г. Пример 3.13. Найти управление w(%i) в нелинейной задаче Лагранжа, которая описывается
^рфференциальным уравнением и критерием качества:
V *1(0 = х2+ и, х,(0) = хю;
” I т
у / = J и2 dt -* min.
I о
Рассмотрим случай, когда время Т не задано. Согласно методу АКАОР эту задачу Лагранжа
^реформулируем в задачу Майера, введя новую переменную
4 ‘ х2(Г) = J и2 dt, Х2(0) = О, Х2(Т) = J.
о
имеем:
[*1(0 = х?+ и, х2(/) = и2; <3.251)
х2(Т) -> min;
|х1(0) = хю;
F |х2(0) = 0, х2(Т) = J.
1Ьедем макропеременную B(xi) и в расширенном пространстве состояний с координатами xi,
Xi запишем уравнение многообразия (3.224):
2- ^(Х1,Х2) = В(Х1)- х2 = 0.
Уравнение движения по многообразию (3.245) с учетом правых частей уравнений (3.250)
мет иметь вид
V z 2 . 2 л (3.252)
V(t) = (xi+ и)—- и = О.
Уравнение (3.252) определяет функцию Кротова
,1# • nt \ ( 2. >дВ(х\) 2 (3.253)
R(x\,u) - (xi+ и) qx^ ~ и •
Функция (3.253) вогнута по и и имеет единственный максимум по и:
’ - 2и = О,
1куда
ч 1 aB(xi) (3.254)
MopK^i) 2 dxi '
Доставляя выражение иор^х\) (3.254) в (3.252), получим уравнение
V х?^}+1 №f=e, В(Х1)=0. °-255*
ЭХ1 4 I dxi I
Решение уравнения (3.255), удовлетворяющее граничным условиям, будет иметь вид
°' ЯГг \= - 3 г3 \ (З-256)
2з>(Х1^ , f Xi. XiQt •
ЙЙдем закон оптимального управления, подставляя (3.256) в выражение (3.254):
ifii ИоХхО = -2х?. (3.257)
227
Уравнение границы множества достижимости согласно (3.251) в расширенном пространстве
состояний имеет вид
3 / з з \ , Л (3.25»'
Xjol + %2 = 0.
Уравнение (3.258)определяет область функционирования замкнутой оптимальной системы.
Рассмотренные примеры указывают на главную трудность при нахождении оптимального
управления методом АКАОР, которая, как и в методах Кротова и Веллмана, связана с поиски
решения нелинейного дифференциального уравнения в частных производных первого поряд-
ка. В настоящее время предложен ряд приемов, которые в ряде случаев позволяют находив
решения такого рода уравнений [146], хотя в целом эта проблема остается весьма трудной!
требует развития новых методов.
Второй подход к синтезу оптимального управления следует из обоснования метода АКАОР. ।
Действительно, построим многообразие (3.224>, используя один из методов нахождения мно-
жества достижимости [147]. Далее, аналогично первому подходу, находим функцию /?(/,х,и),
максимизируя которую по управлению uGV, определяем оптимальный закон управлеим
иор1(Дх) из выражения (3.24*1 >, полученного на основе достаточных условий оптимальное™.
Необходимо подчеркнуть, что обоснование указанных условий непосредственно связано с
определением границ множества достижимости в системах управления. Согласно [147], мно-
жество достижимости представляет собой совокупность точек ((*,%*), в которую может попаси
изображающая точка системы из начального положения по какой-либо траектории
движения. В общем методе АКАР множестводостижимости, очевидно, определяется выраже-
нием т.к. изображающая точка, стартуя из некоторого начального положения (V’o),»
некоторое время неизбежно достигнет многообразия ^>=0 в пространстве состояний синтези-
руемой системы.
Связь метода* АКАОР с методами теории оптимального управления. Отметим тепер
некоторые особенности метода. АКАОР. по-сравнению с известными в теории оптимальней
управления методами Кротова и Бел л мана, на основе которых строятся различные численны
процедуры поиска оптимальных управлений. Основная трудность применения метода динами
ческого программирования Веллмана, как известно [25], состоит в том, что задача оптималь
ного управления здесь сводится к необходимости решения нелинейного дифференциальна
уравнения в частных производных. Достоинства же метода Веллмана состоят в том, что
во-первых, решение оптимальной задачи ищется в форме синтеза закона управления в функ
ции координат состояния системы, и, во-вторых, этот метод обладает значительной эвристи
ческой силой, т.к. гарантирует абсолютный минимум решения задачи оптимального управле
ния [25,135].
Метод Кротова включает в себя, как частный случай, достаточные условия динамически
программирования и позволяет, помимо этого, найти особые управления в нелинейных зада
чах, например, в случае скользящих режимов движения, для которых метод Беллмана мало
эффективен. Развитие подхода Кротова привело в настоящее время к общему принцип
расширения в задачах управления [57, 58, 137—139], что позволило подойти к решению
многих нелинейных задач оптимального (в основном, разомкнутого) управления.
В методе Кротова [131,132] основной проблемой является задание функции ^>(/,х), что во
многом определяет процедуру решения конкретной задачи. Выбор этой функции произволен
и часто не имеет достаточно ясной геометрической и физической интерпретации. В методе же
АКАОР указанная функция определяет некоторое желаемое многообразие (первый интеграл),
вдоль которого движется изображающая точка системы. Здесь функция <р(Г,х) получает доста-
точно четкую интерпретацию в пространстве состояний синтезируемой системы, а само введе-'
ние этой функции непосредственно связано с сущностью метода АКАОР. В этом смысле метод
АКАОР явился обобщением методаКротеваи', следовательно, метода динамического програм-
мирования, уравнения которых следуют из теории АКАОР как конкретные частные случая
выбора соответствующей функции ^>((,х). Необходимо также отметить, что несмотря на почта
(3.259)
очевидный характер принципа динамического программирования Веллмана, его доказатель-
но и, как следствие, вывод [9, 25, 135] соответствующего функционального уравнения
Представляет сложную и несколько туманную процедуру. В методе же АКАОР эта процедура
проста и имеет ясную геометрическую и физическую интерпретацию, что свидетельствует об
общности и целостности метода АКАР.
й Итак, установленная здесь весьма нетривиальная обобщающая связь между методом
ХКАОР и методами Кротова и Веллмана показывает фундаментальную обоснованность теории
ЙСАР, которая в указанном ранее смысле охватывает известные подходы и методы современ-
ней теории синтеза оптимальных систем управления.
!0 Нетрудно, следуя [12], также установить связь метода АКАОР с функцией Ляпунова и
Принципом максимума Понтрягина.
5 Для выявления связи с функцией Ляпунова следует предположить, что решение (3.235)
ййдено, т.е. определена некоторая функция Тогда полная производная этой функции
по времени на траекториях движения замкнутой системы согласно (3.235) будет определяться
выражением
? <W>X) f (4 ч
эн dt = ~ ^>(r’x’uop‘)-
Ш уравнения (3.259) следует, что в рассматриваемом случае искомая функция <p(t,x) будет
представлять собой оптимальную в смысле критерия (3.221) функцию Ляпунова [12] для
замкнутой системы.
Связь метода АКАОР с принципом максимума Л.С. Понтрягина можно установить, опи-
раясь, например, на работы [145], в которых выявлена тесная связь между методом динами-
ческого программирования Веллмана и принципом максимума. Учитывая то, что, как показано
метод динамического программирования является частным случаем выбора функции
p(f,x) в методе АКАОР, то тем самым можно установить связь между методом АКАОР и
принципом максимума. Действительно, если обозначить
ж ^0 = , i = 1,2,...,/г, rjQ = - 1,
^уравнение (3.235) с учетом (3.233) можно переписать в виде
max[ < >;,f(r,x,u) > + rjofoX = тахЯоСМ,х,и). (3.260)
v uev uer
Полученное здесь соотношение (3.260) и есть принцип максимума Л.С.Понтрягина [6,9].
Разумеется, что этот формальный прием вовсе не является доказательством принципа макси-
мума и, кроме того, уравнение Веллмана справедливо, строго говоря, только для гладких
функций $о(Лх), между тем как принцип максимума охватывает более широкие классы функ-
ций. Однако весьма важно установить внутреннюю связь этих методов и, следовательно, тем
самым показать идейную связь метода АКАОР и принципа максимума. Это свойство метода
ЖЙАОР представляется тем более важным, что, как отмечено в [25,145], принцип максимума
ЙЙлся существенным обобщением уравнений Эйлера—Гамильтона, а уравнения Веллмана—
уравнений Гамильтона—Якоби, что выводит метод АКАОР на непосредственную связь с
нйЬдами классического вариационного исчисления.
Таким образом, полученные здесь теоретические и прикладные результаты показывают,
чометод АКАОР органически связан с методами оптимальности в форме достаточных условий
Кротова, динамического программирования Веллмана, а также методами оптимального управ-
левдя, основанными на построении множества достижимости. Кроме того, установлена также
t метода АКАОР с принципом максимума и методами классического вариационного ис-
чкления. Полученные результаты показывают, что метод АКАР, помимо значительной эври-
сгической силы, связанной с решением конкретных задач нелинейного синтеза, имеет фунда-
ментальные основы физико-математического характера. Эти свойства метода АКАР указыва-
ют на его существенную значимость для прикладной теории синтеза нелинейных систем
управления.
229
Инвариантный подход в теории синтеза оптимальных систем автоматического управе-
ния. Установленная выше глубокая связь между методом АКАОР и методом динамичес^до
программирования Р.Беллмана и достаточными условиями оптимальности В.Ф.Кротов^до-
зволяет, как следствие, выявить аналогичную связь между АКАОР и известными метода
аналитического конструирования оптимальных регуляторов (АКОР) Летова—КалманаДЙ,
16] по квадратичным критериям качества и А.А.Красовского [14,15] по критерию обобщено!
работы. В основе указанной связи, объединяющей АКАОР с методами АКОР, лежиг^
нетривиальный факт, что оптимальные процессы в замкнутой системе протекают на некого^ I
инвариантном интегральном многообразии в расширенном пространстве состояний.
оптимальное инвариантное многообразие является первым интегралом исходной и некот^мй
дополнительной системы дифференциальных уравнений, описывающих оптимальный процед
в (п+1)-м пространстве состояний. Следствием указанного важного положения является^
частности, свойство сильной инвариантности у систем, синтезированных методом АКАОР дд
одним из перечисленных методов теории оптимального управления. f g
Ранее был уже указан подход к решению проблемы оптимального управления в
синтеза, который базируется на идеологии метода АКАР. Продолжим более подробно рассми-
рение этого подхода. Для того, чтобы методом АКАОР получить необходимые и достаточен ।
условия решения проблемы синтеза оптимальных систем, рассмотрим общую задачу оптима^
ного управления, которая характеризуется критерием качества: t
J = J /о(Лх,и) dt -*• min
о ‘ ле*,,
и векторным дифференциальным уравнением возмущенного движения объекта
x(f) = f(/,x,u); (3.2В
х(О) = Хо, иеУСА'", (3.2^
где х = |х1,х2,...,х„}т, f(/,x,u) = |/i(r,x,u),.../„(Z,x,u)|T;/o(^x»u)—заданные функции.
Требуется найти закон управления и = и(/,х), обеспечивающий перевод объекта (3.2®
из произвольного начального состояния (3.263) в заданное, например, начало координат
пространства состояний, при этом на траекториях движения должен минимизироваться крите-
рий качества (3.262).
Переформулируем исходную задачу Больца (3.261)—(3.263) в задачу Майера, введя
новую скалярную переменную x„+i при помощи уравнения
х„+1(0 = / /o(f,x,u) dt. (3*^
В этом случае задача оптимального управления (3.261)—(3.264) примет вид
хя+1(Т) -» min; (З.Ш
“ Уй
х(0 = f((,x,u); (З.Ж
x«+i(/) = /о(Лх,и); (3.2^
uGPCRw; (3.2$).
х(0) = х0, (З.Ж
Найти закон управления и = и(7,х).
Аналогично изложенному ранее в этом разделе, введем некоторую макропеременн^
^>(f,x) и запишем уравнение интегрального многообразия
у>орХЛх,хя+1) = $Ро(^х)- хя+1 = О. (3.2Ж*
Требуется определить условия, которым должно удовлетворять оптимальное интегралы^3
многообразие (3.270), обеспечивающее решение задачи оптимального управления.
, Для решения этой задачи запишем уравнение Гамильтона—Якоби—Веллмана (3.232):^
+ “ей [ < to > “ = (3‘27|
7$
230
J(M) > = 2 -W’X’U)
?} OX CrXi
—скалярное произведение, которое является следствием
Вйжения системы (3.266), (3.267) по оптимальному интегральному многообразию (3.270).
Ийожив в (3.271) С(() = 0, получим уравнение Веллмана
1 Цг + max Г < ,f(r,x,u) > - /b(/,x,u)l = 0. (3.272)
Уравнению (3.272) эквивалентна система следующих уравнений:
,f(/.x,u) > + ^Zof/.x.u) = 0;
Ul ил vXfl+1
< дгрр^ df_ > + = о / = 1 2 пг
дх 'dllj дхп+1 dllj ’ ’
' ^ор/=0 ДЛЯ D (6 [0,Т].
Наедем в рассмотрение следующие дифференциальные операторы:
= /= 1,2,...,т;
1 ди/
а п д д
Х° = SL + W.x,u)^ + .
(3.274)
(3.275)
(3.276)
(3.277)
Затем введем новые операторы, вычислив следующие коммутаторы:
/= 1,2,. ..,т.
(3.278)
‘ г Операторы У), Хо» Ху определяют однопараметрические группы преобразований. Исполь-
зуявведенные операторы (3.277), (3.278), систему уравнений (3.273), (3.274) можно записать
«к:
. Ао^=0; : (3.279)
Х\^Ор1=0", (3.280)
YjipOpt=0, j — 1,2,...,/га; (3.281)
‘^=0 для D ZG [0,T]. (3.282)
Hi(3.279)—(3.281) следует, что интегральное многообразие (3.270) является общим инвари-
авюм однопараметрических групп преобразований, которые определяются операторами У,,
ЦХц, т.е. ipopt является интегральным инвариантным многообразием относительно этих групп
^образований.
Введем понятие первого интеграла управляемой системы.
Определение. Первым интегралом управляемой системы в расширенном пространстве
состояний •7,xi,X2,...,xn+ij йазывается такая функция w((,x,xn+i), которая на любом решении
j40,Xn+i(O} системы (3.266), (3.267) сохраняет постоянное значение. Поверхности уровня
первого интеграла w(7,x,x„+1) = С расслаивают рассматриваемую область на инвариантные
пшерповерхности. Действительно, если решение {x(()»*n+i(0} начинается в точке
|^xo,xn+i(fo)|, то какому бы допустимому управлению и(() это решение нё соответствовало,
фбудет принадлежать гиперповерхности w(^x,xn+i) = иХ^о,Хо,хп+1(())» определяемой только
©вальной точкой {4>,Xo,xn+i(/b)}- Из этих рассуждений и из системы (3.279), (3.280) следует,
* многообразие ^ор/(^х,х,1+1)=0 есть один из слоев расширенного пространства состояний,
тд функция ^оРХ^х,хп+1)=0 есть первый интеграл системы (3.266), (3.267) и дополнительной
зйемы
—*L = ^aXAx’u) ;=12 m- i = 1 2
Эх„+1 /о«Х(,х,и) ’ 1 1 х’2
ди, ’ '°“/ ди, ‘
Теорема. Для того, чтобы оптимальная задача (3.265)—(3.269) имела решение, необхо-
дим и достаточно, чтобы система уравнений (3.266), (3.267), (3.283) имела первый интеграл
(3.283)
п,
231
в расширенном пространстве состояний |f,xi,X2,...,xn+i|, который удовлетворяет системе ура
нений (3.279) — (3.281) и условию (3.282).
Необходимость. Пусть оптимальная задача (3.265) — (3.269) имеет решен!
{яоргОХиорН***)}и пусть существует функция rpop^t,x,xn+\), которая сохраняет постоянней
чение, равное нулю на движении xopt(0, соответствующем оптимальному управлёвв
Uopt(^x), т.е. tyOpt(t,x,xn+\) = 0—первый интеграл в обычном смысле обыкновенных диффереа|
циальных уравнений
х(0 = f(r,xOpt(0,uOpt(^x)),
x»+i(0 = fo(t, xOptG),uOpt(r,x))
и дополнительной системы-уравнений
^Г~ = ’ ' - > = 1А-•п' ‘ =const-
Тогда уравнение (3.279) есть обычное условие того, что функция ^(/,x,xn+i) не меняла
на движениях системы (3.266), (3.267), т.е. = о, а уравнения (3.280) есть условие тощ
что функция ^Ор/(Лх,х,1+1) не меняется также на движениях дополнительной системы (3.283),
т.е. = 0. Уравнения (3.281) показывают, что в ^>орг управления и\,...,и,п не входа
иХн+1 г
Необходимость доказана.
Достаточность. Пусть функция ipOpt(^x,xn+y есть решение системы (3.279)—(3.281)1
удовлетворяет условию (3.282). Следовательно, ipOpt(Kx,xn+\) есть первый интеграл систем
уравнений (3.266), (3.267) и дополнительной системы уравнений (3.283). Тогда, подставм
^орг(^х,хл+1) в систему уравнений (3.280) и разрешив их относительно ui,...,uj, получимжй
векторного оптимального управления uOpt(?,x). Достаточность доказана.
Таким образом, система уравнений (3.279)—(3.281) и равенство (3.282) являются уело-?
виями, которыми должно удовлетворять оптимальное инвариантное многообразие (3.210),
являющееся первым интегралом системы уравнений (3.266), (3.267), (3.283) в задаче отт
мального управления (3.265) — (3.269). Следовательно, можно утверждать, что задача синяя
оптимального управления имеет решение, если найден первый интеграл системы уравйй
(3.266), (3.267), (3.283). Для этого необходимо решить систему уравнений (3.279)—(3.^51)
при условии (3.282). Для решения системы (3.269)—(3.281), если она не является полнота
надо пополнить. Процедура пополнения, описанная в [140], проводится на уровне дифферея-
цирования и сравнения на линейную зависимость. В результате пополнения подсчитывай^
операторы
X2J = [Ху,Хо], Ху = [Х2/,Хо] ....
и к системе (3.279)—(3.281) добавляются новые уравнения 7
Х2ftp opt ~ Q'XyipOpt = 0,... .
Количество операторов У;,Хъ,Ху,Х2},... не превосходит количества переменных N = п+л*41.
После завершения процедуры пополнения могут возникнуть следующие ситуации:
1. Число уравнений пополненной системы равно числу переменных N. В этом случае
пополненная система имеет единственное решение—тривиальный первый интеграл тр = сШ
Из этого следует, что оптимальная задача (3.265)—(3.269) не разрешима как задача оптшед-
ного синтеза. t
2. Число уравнений пополненной системьгна единицу меньше числа переменных N. В это*
случае пополненная система имеет единственный нетривиальный интеграл ipOpt(tJ^xn+i) =0i
оптимальная задача (3.265)—(3.269) имеет единственное решение.
3. Число уравнений пополненной системы М меньше числа переменных N. В этом случае
пополненная система имеет N—M нетривиальных частных интегралов и оптимальная задача
имеет N-М решений.
232
f Следствие. Оптимальная система, являющаяся решением задачи (3.265)—(3.269), сильно
йвариантна.
Ф Действительно, в этом случае согласно теореме существует,' по крайней мере, один первый
дтеграл, т.е. существует функция y>opt(ttx.,xn+i), удовлетворяющая системе уравнений
$.279)—(3.281) для DZG [О,Г], которые, в свою очередь, полностью совпадают с условиями
Сильной инвариантности в работе [141].
Т Пример 3.14. В [12] рассмотрена задача оптимизации системы управления объектом
xi(f) = хг, хг(0 = ~ Х2+ и. (3.284)
В качестве оптимизирующего функционала рассмотрен квадратичный критерий
’ г * / 2 2 2\ J (3.285)
/X J ~ f (xi + Х2+ и ) dt.
o' '
Там же найдена производящая функция
i v = 2л?+ 2х,х2+ х22 ' <3.286)
(и
а оптимальное управление
и = - xi- х2. (3.287)
Шрепишем оптимальную задачу (3.284), (3.285) в форме Майера, введя дополнительную
беременную
(3.288)
[еем:
(3.289)
xi(0 = х2;
хг(0 = - хг+ м;
хз(0 = х?+ xl+ и2-,
х3(0) = 0.
‘'Воспользовавшись знанием производящей функции (3.286), запишем уравнение оптимально-
Шногообразия (3.270)
V
V’opr = ^(Х1,Х2) + Хз - О
(3.290)
В
ipopt = 2xi+ 2х1Хг+ х2+ хз = 0.
В нашем случае условия теоремы (3.279) — (3.282) примут вид
J Х^, = хЛ* + х2)^И + (х?+ xi+ иЛ = 0;
h dxi ' дх2 \ / Эхз
+ 2"^ =0;
0X2 иХ$
= °’ = °-
oil
1^>ямой подстановкой (3.290) в (3.291) с учетом (3.287) убеждаемся, что (3.290) удовлетво-
ряет системе уравнений (3.291). Из этого следует, что (3.290) является первым интегралом
системы (3.289) и дополнительной системы
<Zxt _ dx2 I (3.292)
dx3 U’ dx3 2u ’
при и = - Xl - X2.
Таким образом, оптимальное многообразие (3.290) удовлетворяет условиям теоремы.
; Найдем первый нетривиальный интеграл ^(хьхг,хз) = 0. Так как и = - xi - хг, то система
(3.291) принимает вид
Ч (-*>- 2хг)^+ ( 2*?+ 2^+ =0; <3'293)
oXi 0X2 OXj
233
X^, = ^-(2z,+ 2x2)^ = 0.
иЛ2
Система уравнений (3.293) является полной. Инвариантный базис второго уравнения таю
ВИД .fc,
Ii = xi, h = *з+ 2х1%г+ х%.
Запишем первое уравнение системы (3.293) через инвариантный базис (3.294) второго урав-
нения:
XoV’op, = Хо(/,)^ + Х0(/2)^ = 0. (Ж
Из (3.295) следует уравнение:
dtyopt _ л т dtyopt _ л (3.294)
4/1 а/2 °* !£1
Решение уравнения (3.296) дает следующий им вариант:
/ = 72+2/?. <3.291)
Подставив в (3.297) выражение для I\,h (3.294), получим выражение левой части уравнена
оптимального инвариантного многообразия (3.290). Итак, делаем вывод, что оптима^и
задача (3.284), (3.285) имеет решение в форме синтеза закона управления и = -
существует первый интеграл в виде уравнения оптимального инвариантного многообразм
(3.290) в пространстве состояний оптимальной системы.
В заключение следует подчеркнуть, что рассмотренный инвариантный подход в тео^и
оптимальных процессов позволяет в определенной мере по-новому вглянуть на сложив
проблему синтеза оптимального управления, которую теперь можно рассматривать как посер-
ение некоторой эффективной процедуры нахождения первых интегралов системы уравнеш
(3.266), (3.267), (3.283). Следует однако отметить, что поиск указанных первых интеграл»
до сих пор остается весьма непростой задачей теории^ифференциальных уравнений.
Таким образом, применение идеологии метода АКАР позволило получить необходим!#!
достаточные условия решения задачи оптимального управления в форме синтеза, а та№
по-новому подойти к физической (первый интеграл—принцип сохранения) и геометрией
(оптимальное инвариантное многообразие) интерпретации процесса синтеза законов опп-
мального управления. Метод АКАР имеет внутреннее единство и тесную связь с известным
методами теории оптимального управления, что указывает на его существенную значимо
для прикладной теории синтеза систем управления динамическими объектами.
234
ГЛАВА IV
АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
НЕЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ СО
СПЕЦИАЛЬНЫМИ ДИНАМИЧЕСКИМИ
СВОЙСТВАМИ
“Открыл и усовершенствовал”
—девиз Французской академии наук.
На благо людей с различным складом ума науч-
ная правда должна представляться в различных
формах и должна считаться равно научной, будет
ли она представлена в ясной форме и живых кра-
сках физической иллюстрации или в простоте и
бледности символического выражения.
Д. Максвелл
. Во второй и третьей главах на основе синергетического подхода был разработан метод
иадитического конструирования агрегированных регуляторов (АКАР) для решения класси-
едих задач синтеза систем управления нелинейными объектами, при этом гарантировалась
ж^штотическая устойчивость движения замкнутых систем, обеспечивался заданный характер
।время переходных процессов, т.е. синтезируемые системы наделялись стандартными в при-
цадной теории управления показателями качества. Само по себе это является значительным
достижением в решении известной своей сложностью проблемы синтеза нелинейных систем.
Вп.3.8 было установлена фундаментальная связь метода АКАР с методами теории оптималь-
ного управления. Однако возможности метода АКАР являются существенно более широкими
позволяют наделить синтезируемые нелинейные системы дополнительными динамическими
свойствами: инвариантностью к определенным классам возмущений, действующих на объект;
наличием скользящих режимов движения; многокритериальностью; терминальностью управ-
ления и др.
4.1. АНАЛИТИЧЕСКОЕ КОСТРУИРОВАНИЕ АГРЕГИРОВАННЫХ
НЕЛИНЕЙНЫХ РЕГУЛЯТОРОВ ПРИ ОГРАНИЧЕНИЯХ
НА КООРДИНАТЫ И УПРАВЛЕНИЯ
рДля многих современных систем управления различными объектами в энергетике, метал-
эдлии, химии и других отраслях промышленности выдвигается основное требование—интен-
лёфйкация технологических процессов. Это приводит к необходимости постановки и решения
рядя новых задач управления, в частности, требует обязательного рассмотрения нелинейных
Тематических моделей движения управляемых объектов. Другой особенностью таких задач,
235
связанной с напряженностью режимов работы оборудования, является учет ограничении,
накладываемых на допустимые диапазоны изменения фазовых координат. Эти ограничен®!
определяются заданным технологическим регламентом протекания тех или иных процессов,
когда тепловые нагрузки, механические напряжения, скорости протекания веществ и т.п
приближаются к предельно допустимым значениям. Учет ограничений в процессе синтеза
систем управления позволяет выполнить требования, характеризующие качество продукции»
повысить надежность работы технологических установок.
Необходимо отметить, что решение задачи синтеза оптимальных законов управления с
учетом ограничений, как правило, усложняется. Так, в работе [15] указывается, что решение
задачи аналитического конструирования с учетом ограничений, основанное на использовании
квадратичных функционалов Летова—Калмана, приводит к неаддитивным управлениям в том
смысле, что в синтезируемых законах трудно выделить часть, обеспечивающую собственно
оптимальное управление, и часть, отвечающую за выполнение заданных ограничений. В
методе же аналитического конструирования по критерию обобщенной работы [14, 15] вслед-
ствие линейности функционального уравнения обеспечивается аддитивность управлений, что
и позволяет синтезировать так называемые автоматы ограничений. В работе [15] приведены
примеры синтеза таких автоматов применительно в основном к линейным объектам. Следует
также отметить, что в работе [10] изложен метод синтеза оптимального по быстродействию
управления линейными объектами с учетом ограничений фазовых координат.
Рассмотрим аналитическое конструирование систем управления нелинейными объектам»
при наличии ограничений на фазовые координаты и управление с использованием соответст
вующих агрегированных макропеременных. Отличительной чертой излагаемого подхода яв
ляется простота и аналитичность выполняемых процедур синтеза законов управления [180].
Ограничения на координаты в форме равенств. Перейдем сначала к изложению метод
синтеза с учетом ограничений на фазовые координаты. Развитый в предыдущих главах подхо,
к аналитическому конструированию базируется на использовании некоторых многообразий
V\( xi ,..., xtl) = 0 , 5 = 1,2,...,т < п , (4.1
к которым асимптотически притягивается изображающая точка в фазовом пространстве сис
темы. Агрегированные макропеременные tps и притягивающие многообразия (4.1) служилид
сих пор в качестве некоторых выражений, с помощью которых достигалось решение таки
фундаментальных задач управления нелинейными объектами, как асимптотическая устойчи
вость движения, обеспечение желательного (апериодического) характера переходных процес
сов, заданное время регулирования и др. Однако в общем случае задаваемые притягивающи
многообразия (4.1) можно трактовать как некоторые соотношения, которые желательно вь
держать между координатами xi ,..., х„ объекта в установившемся режиме движения. Тако»
рода задания (4.1) используются в целом ряде прикладных задач автоматического управд
ния—в электроприводе бумагоделательных машин, где требуется поддерживать заданнъ
соотношения между скоростями секций; в задачах управления пространственным движение
тел по заданной траектории; в задаче оптимального управления движением судна с переме»
ными условиями плавания (во льдах), сводящейся к поддержанию постоянной мощное
судовой электроэнергетической установки; в задачах программного управления станкаь
[ 128] и т.п. Такого рада системы называют системами функционального регулирования [108
К формам задания вида (4.1) приводятся также и ограничения, накладываемые на координат
объекта. Ограничения можно представить в виде области R( х, ,..., хп) фазового пространств
определяемой некоторой системой равенств или неравенств:
<Pj{ xi ,..., xq ) = 0 , j = 1,2,...,р < п ; q< = n. (4.'
Для выполнения соотношений (4.2) необходимо, чтобы число р не было больше числа
управляющих воздействий в уравнениях объекта, т.е. р < 5. Соотношения (4.2) определяют
уравнения связей между фазовыми координатами. Будем полагать, что число этих уравнений
совпадает с числом управлений т = s. Покажем методику синтеза законов управления с учетом
236
ограничений (4.2). Для этого следует сформировать агрегированные макропеременные следу-
ющим образом:
р п (4.3)
Vs = Ё х9 ) + 2 а$РХр .
А=1 р=р+1
Тогда в результате действия управлений us, синтезированных в соответствии с ранее изложен-
ным методом, изображающая точка попадает на пересечение притягивающих многообразий
^s= 0 (4.3) и затем будет устойчиво двигаться вдоль него. Это приведет к выполнению ограни-
чений (4.2). Предположим, что ограничения (4.2) имеют следующий простейший вид:
х7 < а,.
Тогда, вводя переменные
У/ (0 = XJ (*) “ ai ’ / = Ь2,...,р ,
записываем соответствующие макропеременные
Р п
Vs= fisk Ук( *1 xq) + 2 азрхр .
к=\ р=р+\
Очевидно, что после' попадания изображающей точки на пересечение многообразий tps= О
переменные уу (?) -» 0, что приведет к выполнению ограничений (4.3). Изложенная процедура
учета ограничений весьма проста и основана на использовании разработанного ранее метода
аналитического конструирования.
Предположим теперь, что ограничения задаются в виде некоторой системы неравенств
y>7(xi,...,x9) < 0, j = 1,2,...,р < п; q < п . (4.4)
Неравенства (4.4) можно представить эквивалентными им равенствами [108]:
= |^(хь...,х9)| - ^(xi,...,xj = 0 . (4.5)
Образуя, далее, агрегированные макропеременные в виде
р 11 (4.6)
1р5(Х1,...,Хп) = 2 fiskFk(xi,...,xq) + X aSpXp ,
А=1 />=р+1
можно осуществить аналитический синтез законов управления с учетом ограничений, заданных
веравенствами (4.4) — (4.6). При этом синтезируемые законы будут иметь переменную структуру.
Пример 4.1. Рассмотрим пример аналитического конструирования нелинейной системы
при наличии ограничений в форме равенств на фазовые координаты. Синтезируемые законы
управления, обеспечивающие перевод материальной точки в центральном поле сил на круго-
вую орбиту [129]. Дифференциальные уравнения плоского движения материальной точки в
поле тяготения неподвижной притягивающей массы имеют вид [129,130]
*1 (0 = х2;
(4.7)
Х2 (?) = -^ + Х1хЗ + —Mi ;
xf т
хз (О = х4 ;
• _ 2х2х4 1
Х4^ xi + Ьх^2'
Здесь обозначено: xi (?), хз (?)—полярные координаты точки относительно неподвижной при-
тягивающей массы; х2 (?), х4 (?)—скорость вдоль радиуса-вектора и угловая скорость вращения
точки относительно центра соответственно; а—постоянная; т—масса материальной точки;
iii, «2—управления, представляющие собой проекции реактивной силы на направление ради-
уса-вектора и на перпендикулярное ему направление. Необходимо синтезировать законы
управления /zi(xi,...,xn) и z/2(xi,...,x,(), обеспечивающие перевод материальной точки (4.7) из
произвольного начального состояния на круговую орбиту радиуса г с постоянной угловой
скоростью вращения со.
Запишем указанные ограничения в виде равенств •
‘ х2 + dxi = dr , д > 0 , (4.8)
х4 = ш .
(4.9)
237
Выполнение равенства (4.8) обеспечивает стремление ((-» оо) координаты xi-» г, т.к. это равен-
ство с учетом первого уравнения объекта (4.7) можно записать в виде [130]
xi (f) + dxi = dr, (4.10)
откуда следует, что
xi (7) = (хю - г) e~6t + г -* г при Л-* оо .
Выполнение же равенства (4.9) означает достижение заданной угловой скорости вращения.
Выбираем следующие агрегированные макропеременные:
V'l = A.V1 + ^2}’2 ; ^2 = «1У1 + «25’2 , (4.11)
где yi = хг + dxi - dr; у2 = х4 — со.
Используя изложенный ранее метод аналитического конструирования, найдем оптималь
ные по критерию
J = / [wfv’f + m2ip2 + (О + <$2 (t) ] dt
о
законы управления
И} _ 1 ^1<Х2 «1^ / , А А ч А _l а ( 1 И ( \ 2 .
d 'р Т (^2+ ^Х1 dr) ОХ2+ 2 п гр гр (Х4 СО) Л4Х4 ч (4.13)
Ж / 1 1 2 у Х\ П у1 1 1 2J
112 «1^2/1 1k ,А А\ .о 1 C/?J«2 ч .. ...
— = —в[т\~ тТ (Х2 + <5xi" Х| + 2х2Х4~ B\Ti--------------тГр*4- ’ (4.14)
'С} С2
где Т} = — Т2 = —.
nt} т2
Законы (4.13) и (4.14) обеспечивают перевод изображающей точки системы из произволь-
ного начального положения на пересечение многообразий = 0 и тр2 = 0 (4.11), которое
можно представить в двух формах:
V>12 = Ву\ = В(х2 + dxi - 6г) = О
(4.15)
или
V>i2 = Ву2 = В(х4 - со) = 0, (4.16)
/9 „
где В * 0 , т.е. О- * —. Выражения (4.15) и (4.16) совпадают с заданными соотношениями
Р2 «2
(4.8) и (4.9) соответственно. Таким образом, законы управления (4.13) и (4.14) решают
поставленную задачу перевода материальной точки из произвольного начального положения
на заданные многообразия (4.8) и (4.9), которые представляют собой некоторые ограничения,
записанные в виде равенств. Отметим также, что с другой точки зрения, законы (4.13) и (4.14)
обеспечивают оптимальное по критерию (4.12) движение объекта (4.7). Конкретно этот
процесс представляет собой перевод материальной точки из произвольного начального состо-
яния на круговую орбиту и дальнейшее устойчивое движение на ней. Время попадания на
круговую орбиту зависит от выбора постоянных времени Т\, Т2 и, следовательно, от выбора
весовых коэффициентов т\, пг2, сь и с2 критерия качества (4.12). При выполнении условия
Т} = Т2 = Т (4.17)
законы (4-.13) и (4.14) упрощаются и принимают вид
и2 = -т
ф-(х4 - со) - 2X2X4
(4.19)
Эти законы управления при условии (4.17) являются частным случаем законов (4.13) и (4.14),
они не зависят от коэффициентов , /32, czi и а2. В работе [130] на основе построения
специального уравнения, включающего в себя правые части уравнений (4.7), матрицу Якоби
отображения задаваемых многообразий и некоторую устойчивую матрицу, синтезированы
законы и и2, совпадающие с законами (4.18) и (4.19) при выполнении условия (4.17) несли
238
воложить в них Л] = Л2 = - у, где Л] , Л2—элементы устойчивой матрицы. В нашем же методе
^процедуры синтеза весьма наглядны, просты и имеют аналитический характер. Кроме того, при
ijtom получаются более общие законы управления (4.13) и (4.14), которые обеспечивают не
только выполнение ограничений (4.8) и (4.9), но и позволяют путем выбора коэффициентов
|ц, , «1 и «2 придать дополнительные свойства синтезируемой системе.
Ограничения на координаты и управления в форме неравенств. Перейдем теперь к
|йссмотрению задачи АКАР с учетом ограничений в виде неравенств на управление и коорди-
наты, т.е. I гг (/) I < итак и I xzl < х(тах- Учет таких ограничений представляет собой весьма
сложную и далеко еще нерешенную задачу как в теории АКОР, так и вообще в любых других
методах синтеза систем управления. Это связано с тем, что указанные ограничения на управ-
ления и координаты приводят к существенной нелинейности синтезируемого закона управле-
ния, тем более задача усложняется для нелинейных объектов.
Рассмотрим сначала задачу АКАР с учетом ограничения на управление. Вообще можно
предложить несколько способов учета этого ограничения. Одним из очевидных способов учета
ираничения I и (t) I < итяк является введение в канал управления статического звена, имею-
щего характеристику типа “насыщение”, т.е. обладающего свойствами релейного элемента в
[сжиме больших отклонений. Однако отличительной особенностью такого способа является
кобходимость установки на выходе этого звена некоторого дополнительного динамического
жена, например, интегратора. Тогда за новое условное (неограниченное) управление следует
выбрать управление щ на входе введенного интегратора. Следовательно, размерность неизме-
Рис. 4.1
i немой части синтезируемой системы увеличивается на единицу по сравнению с размерностью
доходного объекта. На рис. 4.1 изображена структурная схема, отражающая предложенный
способ учета ограничения на управление. Зависимость между действительным управлением
ни выходом введенного интегратора может быть выражена различными функциями с насыще-
шем, например, вида
и = arctg by или и = A thby. (4.20)
Тогда уравнения таким образом сформированной неизменяемой части можно записать, в
частности, в форме
ху(0 = + aj+ixj+i , j = 1,2,...,/i-l ;
xn(0 =/n(xi,...,x„) + и ; (4.21)
у (О = Xn+i (0 = ui,
цехь...,х„—координаты состояния исходного объекта; и—исходное управление; у = x,l+i —
выходная координата дополнительного динамического звена;//]—условное управление.
С учетом (4.20) уравнения (4.21) приводятся к форме
х/(0 =/у(х1,...,х/) + aj+iXj+i , у = 1,2,...,//—1 ;
Хп (0 = А(Х],...,Х„) + A arctg bxn+i ; (4.22)
Хл+1 (0 = Hi
Применительно к расширенному объекту (4.22) можно использовать развитую в третьей
иве процедуру АКАР на основе введения последовательной совокупности притягивающих
«ногообразий понижающейся размерности. Для этого выбираем первую агрегированную мак-
[опеременную, например, в виде
ipi=A arctg x„+i + w2(xi,...,x„) (4.23)
239
и синтезируем управление //i(xi,...,x„), исходя из условия оптимизаций по критерию
“ 7 7 7-7 (4.24)
/1 = f [mfyi + cfyi (0 ] dt.
о
Минимум критерия (4.24) достигается на экстремалях, являющихся решением уравнения
+^1=0. (4.25)
Подставив^! (4.23) в (4.25), находим функциональное уравнение
Abxn+\(t) ап2(Х1,...,х„) • z.x . Я . , , 1 , , Л (4.26)
---->2 2 + —Н------------ хк (0 + тг arctg b хп+1 + ^rw2(xi,...,x„) = 0 .
l + 6x,2t+i л-i дхк Г1
С учетом уравнений расширенного объекта (4.22) и (4.26) находим управление
т = ~ 1 У ^х ^Ххь-’х/) + й/+1х/+11 + 1Л(Х1 ,-,хп) + A arctg Z>x,i+i] +
A t , 1 , Л1 (4.27
+ уг- arctg bxn+\ + yr/Z2(xi,...,xn) |.
Управление tt\ (4.27) переводит изображающую точку в окрестность многообразия ipi = 0 (4.23),
движение вдоль которого описывается следующей системой дифференциальных уравнений:
х/ (0 = fj{xi,...,x/) + cij+iXj+i , j = l,2,...,n—1 ;
Xn (0 = /«(xi..xtl) - u2 •
К этой системе, имеющей размерность п, можно применить изложенный ранее метод синтеза
путем введения второй, третьей и т.д. вплоть до т = п— 1 макропеременной понижающейся
размерности
V>2 = Хп + и*(Х\,...,Хп-\) ;
V>3 = Хп-\ + zz4(xi,...,xn-r), ...;
== Xr + Um+ l(-’Cl) •
Используя уравнения вида (4.25), определяем промежуточные управления zz2 , мз»-,н«+ь
а затем и управление и\ (4.27). В соответствии с рис. 4.1 управление и = arctg b x„+i, действу-
ющее на исходный объект, будет ограничено I u{t) I < А, т.е. будет решена поставленная задача
АКАР с учетом ограничения на управление.
Пример 4.2. Для иллюстрации предложенного способа учета ограничений на управление
рассмотрим и исследуем задачу АКАР для следующего простого объекта:
xi (0 = хг ; хг (t) = и = A arctg b хз ; хз (7) = и\ . (4.28)
Введем сначала первую макропеременную вида (4.23)
ipi = A arctg b хз + иг{х\, х2). (4.29)
Тогда, в соответствии с (4.27), для объекта (4.28), находим управление
1+52хз ди2 . (диг 1 \ . 1 , ч
axi Х2 + А I дх2 + Л arctg^*3 + 71/z2(xi, х2)
(4.30)
Ul Ab
Управление (4.30) переводит изображающую точку в окрестность многообразия ip = 0 (4.29),
движение вдоль которого описывается дифференциальными уравнениями
Х1у,1 (Г) = x2v,l , Х2Щ (t) = - U2(Xi^,X24,l) • (4.31)
Промежуточное управление и2 найдем из уравнения
Тг^2 (0 + ^2 = 0
путем введения второй макропеременной
1рг = «1X1 + х2.
Используя 1рг (4.33), с учетом (4.31), находим управление
_ «1 1 Л (4.32)
^2 T'l + 7^2 ’
которое переводит изображающую точку на многообразие ^2 = 0 (4.33). Движение вдоль
1рг = 0 описывается уравнением
xiч>г (t) = ~ «1X1^2 - (4.33)
240
Условие устойчивости решения уравнения (4.33) весьма простое: > 0. Подставив и?. (4.32)
в (4.30), находим закон управления
1+д2хз Г «1
Щ=-~АЬ
«1 «2 1 А ( 1 1 \ , /л
гт гт иц , — + — + TfTTfr х2 + А «1 + — + ^- arctg b Хз . (4.34)
1 \1 2 Л h * М2 I Ъ 1 2 J
Выбрав в (4.34) величины Т\ = Т2 = — = Т, получаем
]
_ 1 +Z>2%3 (xi 3X2 , ЗЛ , \
/<1 — дь 3 + т "* j1 arctg Ьхз . (4.35)
V 1 /
На ЭВМ для разных начальных условий и параметра Т выполнено моделирование системы
(4.28) с управлением щ (4.35). В рассматриваемом случае можно определить приближенную
оценку времени затухания переходных процессов в замкнутой системе:
tp < (3...4) (Ti + Т2 + «ЮТ. (4.36)
На рис. 4.2 изображены графики переходных процессов для параметров А = 0,6366, b = 20,
Т= 0,5 и хю = 1, *20 — хзо = 0. В этом случае на переменную и = A arctgZ>X3 наложено ограни-
JT
чение I и (7) I < А = 1. Из рис. 4.2 видно, что переходные процессы по основным координа-
Хг
там xi (t), хг (У) объекта (4.28) имеют апериодический характер, выполняется ограничение
КОшах = - 0,86) на управление l/d < 1, время регулирования tp~ 4 < 5, т.е. выполняется
оценка (4.36).
На рис. 4.3 представлены переходные процессы при тех же начальных условиях, но при
выборе Т = 1. В этом случае переходные процессы по xi (7) и хг (У) также являются апериоди-
ческими, время регулирования tp < 10 удовлетворяет оценке (4.36), а ограничение на //. суще-
ственно ослабляется (/гтах (0 — ~ 0,23).
Аналогично были исследованы переходные процессы в системе (4.28) для режима больших
отклонений хю = 5, Х20 = хзо = 0 для разных Т и I и\ < 1. На рис. 4.4 изображены переходные
процессы при Т = 1,2, которые имеют апериодический характер по координатам xi (/) и
Х1((), время их затухания (tp ~ 9) удовлетворяет оценке (4.36), а управление (umsui(f)= -0,8),
241
Xp x2,u
Рис. 4.4
не превосходит заданного ограничения I и I < 1. На рис. 4.5 представлены переходные процес-
сы при тех же начальных условиях (xi о = 5,х20 = хзо = 0),ноприТ = 1,5-Как видно из рис.45,
характер переходных процессов остается прежним, время их затухания 1) удовлетворяет
оценке (4.36), а ограничение на управление стало менее жестким (z/max (() = - 0,51). Еще более
ослабляется ограничение на управление (пШах (0 = - 0,28) при Т = 2, переходные процесса
для которого изображены на рис. 4.6. При этом их характеристики остаются прежними.
242
Таким образом, параметр Т в законе управления (4.35) оказывает существенное влияние
ПК на время затухания переходных процессов в системе, так и на условия достижения огра-
гения на управление Ini < 1. При увеличении Т происходит сглаживание процессов по
йбрдинатам хг(0 и управлению и\, однако при этом увеличивается время регулирования,
примерное же уменьшение параметра Т, хотя и не нарушает ограничения I u I < 1, но может
фйести к существенному по условиям функционирования объекта сужению допустимой
jfacra фазового пространства, из которой еще можно достигнуть начала координат. По-ви-
]рмому, целесообразно сначала назначить указанную область, исходя из технологических
243
условий, а затем для наиболее удаленных точек этой области найти допустимое /min, когда еще
остается приемлемым характер возникающих при этом переходных процессов.
Перейдем далее к рассмотрению способа учета ограничений на управления и промежуточные
координаты путем введения в цепи обратных связей динамических звеньев специальных обратных
связей, имеющих резко возрастающие характеристики и зону нечувствительности в окресгноси <
начала координат. Такого рода обратные связи давно используются в электроприводе в виде
Рис. 4.7
“отсечек” по скорости и току. На рис. 4.7 представлена структурная схема указанного способа
введения обратных связей для учета ограничения на управление lu I <//тах- Рассмотрим связь
между переменными у (f) и и (/), записав уравнение
ii(t) = к\у - ki(p(u).
Выбрав функцию <р(и) = ^4itg b\it, из уравнения (4.37) получим
(4.37)
(4.38)
В соответствии с уравнением (4.38) можно построить структурную схему (рис. 4.8), из которой
следует, что управление и действительно будет ограничено некоторой величиной //тах =
т.е. при имеем I и. I < 1. Итак, введение в цепь обратной связи интегратора звена с
характеристикой вида /Mg b\it ограничивает его выход, т.е. управление и, действующее на
объект. Запишем дифференциальные уравнения неизменяемой части, имеющей изображен-
ную на рис.4.7 структурную схему
хДО = + aj+ixj+i , j = 1,2,...,п—1 ;
Хп (0 = А(Х1,...,ХИ) + и ; (4.39)
й (Г) = к}у - kiAitgbiii;
У (0 = k2iii ,
где xi,...,xn—координаты состояния исходного объекта; и—исходное управление; у—выходная
координата второго дополнительного звена; щ—условное управление. Обозначив
и = xn+i , у = хп+2, представим (4.39) в следующем виде:
= fj{xi,...,xi) + aj+lXj+i , j = 1,2,...,//-! ;
хп (0 = fn(xi,...,xn) + х„+1 ; (4.40)
244
Xn+i (() = ktXn+2 ~ kiAitgb\xn+i;
*л+2 (0 = k2ui .
Для полученного расширенного объекта (4.40) можно использовать метод АКАР, который
разработан выше в третьей главе на основе введения последовательной совокупности притяги-
вающих многообразий. Для этого введем сначала первую макропеременную
|1=хн+2+м2(Х1,...,Хп-1), затем вторую ^2 = *n+i + n3(xi,...,xH), третью ip3 = хп + u4(xi,...,xn-i)
ит.д., вплоть до V'm = х2 + Mm+i(xi). Как было показано ранее, при этом можно обеспечить
асимптотическую устойчивость в целом по координатам xi, хг.хп, оценить время затухания
переходных процессов и придать им желаемый (апериодический) характер. Ранее в третьей
главе были приведены все необходимые выражения для синтеза управления ni(xi,...,xn+2),
основанные на последовательном использовании уравнений
Т$к (0 + V1* * 0 ♦ к = 1,2,...,ш < п-1 . (4.41)
Пример 4.3. Для примера синтезируем управление объектом вида (4.40), описываемом
следующими дифференциальными уравнениями:
xi (0 = Х2;
хг (0 = и = хз;
*з.(0 = ~ Attg £1*з + *4;
*4-(0 = НО “ “1 •
Введем первую макропеременную
= х4 + М2(*1 , *2 < *з)
и на основе уравнения вида (4.41) при kel, т.е.
(Г) + ^1=0,
паходим с учетом уравнений объекта (4.42) условное управление
ди2 ди2 dii-2, . , . х 1 1 , х
ZZj дХ2 дх$ ^4“ у^ -^2» Хз) •
Управление ui (4.44) переводит изображающую точку в окрестность многообразия = 0
(4.43), уравнения движения вдоль которого имеют вид
Xlyl (0 = Х2^1 , X2VI (0 = Xty] , Хз¥,1 (0 = - AltgZ>iX3 - и2.
Вводим теперь вторую макропеременную
У'г = *з + @\Х\ + р2Х2
(4.42)
(4.43)
(4.44)
(4.45)
(4.46)
ина основе уравнения
Т2Ф2 (0 + V>2 = О ,
с учетом уравнений (4.45), находим управление
»2 = уГ- X) + | Х2 + (@2 + Хз — Altg5]X3 .
(4.47)
Это управление переводит изображающую точку в окрестность многообразия ^2 = 0 (4.46)
уравнения движения вдоль которого имеют вид
*1у2 (0 = Х2ч>2 , Х2ч>2 (0 = “ /31X1^2 “ у32Х2у2 (4.48)
1 2
При, /32 = у дифференциальные уравнения (4.48) устойчивы и имеют кратные корни
I 1 \
Pi,2= “V’l характеристического уравнения. Подставив 112 (4.47) в (4.44) при Т\ - = Т,
получаем закон управления
_ xi 4х2 бхз (4 Z>iAi \ (4 biAi \ (4.49)
П1 л 2 I ГГ* 2 I Х4 I Т* 2.1 Ajtg01X3.
ГТ3 Т2 \Т COS2A1X3; \т cos2Z>ix3J
Синтезированный закон управления и.\ (4.49) объектом (4.42) обеспечивает ограничение
, , л
1и1 - мшах = 2^ и апериодический характер переходных процессов по основным координатам
245
x\ (f) и хг (0 объекта. На ЭВМ для разных значений параметра Т было выполнено моделиро-
вание переходных процессов в замкнутой системе. На рис. 4.9 изображены переходные про-
л
цессы при Т=0,5; bi = Ai = 0,05 и начальных условиях: хю = 1, хго = *зо = Х40 = 0. Время,
регулирования составляет /р~4,5, а максимальное значение координаты x3ltlax = и составля-
ет 10,51 < «max = 1. На рис. 4.10 для Т = 1 и тех же условий представлены соответствующие
переходные процессы; при этом хз,пах — 10,131 < I. Сравнение рис. 4.2 и 4.3 с рис. 4.9 и 4.10
для тех параметров, начальных условий и одного и того же объекта показывает, что переходные
процессы при управлениях и\ (4.35) и и\ (4.49) практически идентичны, во втором случае
? 2546
!ремя регулирования несколько больше, что объясняется наличием дополнительного динами-
«хого звена. Однако во втором случае смягчаются условия ограничения на управление
1*1 £ Umax, действующее непосредственно на исходный объект.
На рис. 4.11 изображены переходные процессы в системе (4.42) с управлением ui (4.49)
qs* Т = 1, I и I < 1 и начальных условиях хю = 5, хго = *зо = *40 = 0, а на рис. 4.12 при
f = 1,5 и тех же начальных условиях. Сравнение, например, рис.4.5 с рис.4.12 соответственно
247
при управлении (4.35) в системе (4.28) и управлении (4.49) в системе (4.42) для однихитех
же начальных условий исходного объекта так же показывает идентичность переходных про-
цессов. Однако во втором случае их время затухания несколько затянуто, но при этом смягча-
ются условия ограничения на управление u(t). Определенным недостатком второго способа
(рис.4.7) учета ограничения Izzl < zzmax по сравнению с первым способом (рис.4.1) являем
необходимость введения дополнительного динамического звена в неизменяемой части систе-
мы.
Следует, однако, подчеркнуть, что второй способ (рис.4.7) непосредственно применим дм
ограничения не только управления, но и некоторых промежуточных координат объекта. Так,
если считать, что на рис.4.7 представлена заданная неизменяемая часть системы, щ (?) являем
действительным управлением и необходимо ограничить некоторую координату, например,
1хп+11 < Xn+i.max, то в цепь обратной связи по этой координате следует ввести нелинейность
типа AitgbiXn+i, что и обеспечит требуемое ограничение по рассматриваемой промежуточной
координате. Разумеется, что при этрм никакого расширения исходного объекта не потребуется.
Итак, предложенные здесь способы позволяют синтезировать регуляторы для нелинейных
объектов при ограничениях на фазовые координаты и управления, обеспечивая при этом
желаемы^ показатели качества замкнутой системы.
4.2. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ АГРЕГИРОВАННЫХ
СЕЛЕКТИВНО-ИНВАРИАНТНЫХ СИСТЕМ УПРАВЛЕНИЯ
НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ
При проектировании высокоточных систем управления нелинейными объектами возникает
необходимость учитывать отрицательное влияние на динамику системы внешних возмущаю-
щих воздействий. Достаточно обширный класс реальных возмущающих воздействий может
быть представлен сигналами, которые на отдельных временных интервалах могут быть описаны
моделью в виде решений линейного дифференциального уравнения. Рассмотрим метод синтеза
нелинейных систем управления, инвариантных к внешним возмущающим воздействиям ука-
занного класса, для объектов, описываемых уравнениями [182]
Х/(0 = Z(xi,...,x,) + ai+iXi+i , z = 1,2,...,л-1 ;
Xn (0 = /„(xi,...,x„) + boll + blip (Г) , (4.50)
где xi,...,x„—координаты состояния; u —управление; <p (/)—возмущающие воздействия, при-
веденные ко входу канала управления. Сформулируем задачу синтеза, состоящую в опреде-
лении структуры параметров закона управления такого, чтобы:
а) синтезируемая система была асимптотически устойчива в целом;
б) отклонение от заданного движения (ошибка), обусловленное возмущающим воздейст-
вием, было нулевым в установившемся режиме;
в) переходные процессы замкнутой системы обладали заданными качественными свойст-
вами в отношении времени и характера их затухания;
г) управляющее устройство (УУ) было физически осуществимо (координаты состояния
объекта Доступны прямому измерению). Предполагаем, что приведенное возмущение <р (f)
представляет собой функцию, являющуюся решением некоторого линейного дифференциаль-
ного уравнения. В соответствии с развитым в третьей главе методом сформулируем первое
притягивающее многообразие в виде
<pi = £1(хь-,x„-i) + Г(р)х„ . (451)
Здесь и далее ^i(xi,...txn-i)—скалярная функция координат системы; F(p) является к(р)—изо-
бражением [154] функции <р (г), порядок которого равен v. Согласно методу агрегированная
переменная (4.51) должна удовлетворять дифференциальному уравнению вида
ТД- (0 + ipj = 0 , j = 1,2,...,m < п-1 . (4.52)
248
Уравнения (4.52) являются уравнениями экстремалей движения. Тогда, подставив^! (4.51) в
уравнение
(Г) + V’l = о,
в силу уравнений исходного объекта (4.50) будем иметь
и-i (4.53)
Т12 -T^L/1(xi,...,x,)+TiF(p)A(xi,...,xn)+T|F(p)Z>ow+Ti/;’(p)Z>1^(/)4-V'i = 0 .
/=1 <'*»
В выражении (4.53) слагаемое TiF(p)bi<p (() = 0 в силу свойств к(р)—изображения В.С.Куле-
бакина [154]. Решая (4.53) относительно управления, получим
и-i nt 1 (4.54)
boF(p)u = - 2 - F(p)fn(xi,...,xn) - .
Замкнутая управлением (4.54) система имеет вид
X/ (() fi(X\,...,ХЛ—/) “1“ @i+\Xn+i , Z = l,2,...,/t 1 ,
и-i nt * 1 , (4.55)
F(p)xn (7) = - 2 - yrV’i + F(p)<p (0 , -
асимптотически устойчива в целом относительно многообразия ^1=0 (4.51) и инвариантна к
возмущению <р ((), т.к. слагаемое F(p)<p (() s 0 в силу свойств к(р)—изображения [154]. По-
рядок синтезированной системы (4.55) равен /г+v, т.е. введение к(р)—изображениям агреги-
рованную макропеременную (4.51) привело к расширению фазового пространства системы.
Физически указанное расширение объясняется тем, что синтезированный регулятор (4.54)
является динамическим звеном, пространство состояний которого и повышает порядок всей
системы.
В силу асимптотической устойчивости системы относительно многообразия 7/7=0 изобра-
жающая точка неизбежно попадает в окрестность этого многообразия, тогда систему (4.55)
можно дополнить конечным уравнением ^i(xi,.;.,jcn) = 0 (4.51), из которого можно выразить
координату х„, что понижает порядок замкнутой системы на единицу и тогда движение замк-
нутой системы вдоль многообразия ip\ = 0 будет описываться следующими дифференциальны-
ми уравнениями:
Xj(f) = A(xi,...,xz) + a/+ix(+i , I = 1,2,...,/г-2 ;
F(p)xn-i (Г) = /’(p)/n-i(xi,...,x„-i) - • (4.56)
Продолжая процедуру синтеза, следует для системы (4.56) с условным управлением
Ji(xi,...,x„-i) ввести следующую макропеременную:
фг = ^2(xi,...,x„-i) + F(p)x„-i . (4.57)
Тогда, используя уравнение
Т2ф2 (0 + V7 = 0 , (4.58)
можно найти ^i(xi,...,x„-i) обеспечивающее асимптотически устойчивое попадание изобража-
ющей точки в окрестность многообразия ^2 = 0 (4.57) в пространстве размерности п + v. - 1.
Подставляя в (4.58) макропеременную т/12 (4.57), в силу уравнений (4.56) получаем условное
управление •
,Х/) + F(p)/„-2(Xi,...,Xn_2) +
(4.59)
Подставляя (4.59) в (4.56) и рассматривая движение этой системы вдоль многообразия
ft = О (4.57), можно снова понизить размерность фазового пространства замкнутой системы:
Xi(f) =Z(xi,...,x/+i) + а1+1Х/+1 , i = 1,2,...,п—3 ;
। F{p)xn-2 (0 = F(p) fn-2(xl,...,xn-2) ~ ап-2 £2(Xi,...,Xn-2) . (4.60)
Используя (4.60) и уравнение
Тзфз (0 + Фз = 0 ,
можно найти |2(xi,...,xn_2) и затем продолжить, аналогично вышеизложенному, процедуру
синтеза условных управлений £з,..., которые позволяют осуществить последовательный
249
перевод изображающей точки в окрестность многообразий ^2 = 0, ^з = 0 и т.д., вплоть до
= 0. На последнем этапе имеем уравнение
F{p)xx (t) = F(p)/i(xi) - а£п_х(хх), (4.61)
описывающее движение в фазовом пространстве размерностью v+1. Очевидно, что соответст-
вующим выбором функции ^,i-i(xi) в (4.61), например, вида
= -М/ШСсО - А(Р)Х!] ,
U2
можно обеспечить асимптотическую устойчивость и требуемое качество в системе (4.61).При
этом операторный полином А(р), имеющий порядок г, выбирается из условия
A(p) = D(p)-pF(p), (4.63)
где D(p) желаемый характеристический полином порядка v + 1 системы (4.61), замкнуто!
управлением i (xi) (4.62). Таким образом, в результате указанных процедур синтеза можю
найти закон управления (4.54), обеспечивающий по меньшей мере, замкнутой системе управ-
ления нелинейным объектом (4.50) асимптотическую устойчивость в целом и инвариантно
к возмущающему воздействию (р (f) заданной структуры. В закон управления (4.54) входа
функция |i(xi,...,Xh-i), для определения которой следует подставить в (4.62) полином Л(р)
(4.63) и получить в результате выражение для функции £n-i(xi) (4.62). Зная |,!-i(xi), можно
определить макропеременную ip„_i(xi , хг) и функцию|„-2(xi , хг) по формулам, аналогичным
(4.57) и (4.59), т.е.
1pn-i = 4- F(p)xn-i (4.64)
^,l-,(xi,...,x„-J) = —Г 2 +^(p)/n-f-i(^b-,xn-z-i) +
un-i L i=i ОЛ/
1 , ( .i (4.65)
Формулы (4.64) и (4.65) позволяют, последовательно получая функции |,l_((xi,...,xn_1) и
(z=1,2,...,/i-z), определить функцию i(xj ,...,xi) в законе управления (4.54). С учетом формул
(4.64), (4.65) для функции ^„-^xi) вида (4.62) закон управления (4.54) нелинейными объек-
тами (4.50) можно записать в следующем обобщенном виде:
F(p)U = - ^f(p)
(т m—j+1 , ш+1 \ 1
2 2 MfAijFfi + 2 ciFXi\ - -г-А{р}
у=0 i=l 1=2 ) °0
/п-l in—J пг+\ \
S + 2 ci$xi
^’=0 z=l /=1 ?
(4.66)
В выражении (4.66) обозначено:
п
LifAijFf= AijF £
j=i
dLJ~l
dXj
(4.67)
(i \ m+i i
_L| p«+i-H n — •
T И n, ’
1 ) l=i+\ al
/1) • w+1 1
= I cr~J П ±;
V/ /=/+1 ai
(4.68)
m+1 -j
,m+l-f гт
ш 11 a
l=i+\ al
, /П ~k „ .
где m=n -1; у C,n—сумма кортежей с числом компонент, равным к из m элементов, напри-
мер = 1 , Сз = тДр- + тЛр- + уЛг-; Ст = ^-Т2...Тт при к > т, П ( ) = 1- В выражении
7 1/2 / 1/ 3 /2/3 / 1 т
25П
। (4.66) порядок полинома F(p) равен порядку полинома Л(р), т.е. при условии измерения всех
координат объекта закон управления и (4.66) физически реализуем.
Итак, синтезированный закон управления и (4.66) удовлетворяет условиям а)—г), т.е.
асимптотической устойчивости в целом замкнутой системы, ее селективной инвариантности к
структурно-заданным возмущающим воздействиям и физической реализуемости устройства
управления.
Рассмотрим возможности получения оценок качества синтезируемых селективно-инвари-
антных систем. Движения изображающей точки в окрестность каждого z-го многообразия
у( = 0 (z = l,2,...,/z — 1 описываются уравнениями (4.52). Тогда уравнение замкнутой системы
относительно выходной координаты xi (/) имеет вид
ад Ц (TiP + 1)х,(р) = 0 , р = £ . (4.69)
, Все параметры уравнения (4.69) являются произвольно задаваемыми величинами. Отсюда
«следует, что, используя стандартные методы линейной теории автоматического управления,
например, метод модального управления, можно всегда обеспечить желаемые качественные
характеристики переходных процессов в замкнутой системе. Из уравнения (4.69) видно, что
его порядок не является произвольным, а равен сумме порядков исходных уравнений объекта
(4.50) и порядка v изображения возмущения <р (/), т.е. выполнение требования б) в отношении
(инвариантности приводит к повышению порядка синтезируемой системы. Время регулирова-
' ния в замкнутой системе определяется постоянными времени 7) и коэффициентами полинома
D(p). Выбором этих коэффициентов также можно обеспечить апериодический характер пере-
ходных процессов в замкнутой системе.
Пример 4.4. Рассмотрим задачу синтеза селективно-инвариантной системы управления
ранее рассматривающимся нелинейным объектом
xi (/) = Х2 ; хг (/) — sinxi + хз; хз (/) =: и + Bsin2/ (4.70)
при действии на него синусоидального возмущения с неизвестной, но ограниченной амплиту-
дой В. А(р)-изображение этого возмущения имеет вид
ад = р2+4 .
Характеристический полином D(p) уравнения, описывающего движение изображающей точки
вдоль (/; — 1)-го притягивающего многообразия, выберем в следующем виде:
ад = (р+1)3. <4-71>
Тогда, в соответствии с (4.63), имеем полином
Л(р) = Зр2 - р + 1 ,
а закон управления (4.66) при т=2 принимает вид
Z»o(p2+4)zz = — (р2 + 4) [Люг/1 + Лгог/г + Л30//3 + +Aixtfi ) +
+ (Л12л/1+ C2FX2+ C3FX3)] — (Зр2— р + 1 )(Л10$/1 + Л 20^2 + FfAn^fi +
i + Ci£xi + С^Х2 + Сз^хз). (4.72)
Вейлу уравнений объекта (4.70) и выражений (4.67), (4.68) закон управления (4.72) запи-
шется в виде
(р2+4)и = — (р2 + 4) (ЛголвТпх] + L^ifSinxj + С2/Х2 + Сз^хз) —
| ~ (Зр2 — р + 1 )(Лго^тх] + С||Х] + С^Х2 + Сз$хз)>
(коэффициенты которого определим из соотношений (4.68), положив Tj = Т2 = 1, т.е. получим
Л20/7 = 2 , A21F = 1 , C2F = 1 , Cjf — 2 , Лго£ = 1 , А21£ = 1 , = 2 , = 1 .
Ч Тогда закон управления окончательно примет вид
. (p2+4)z/= -(р2+4) (2sinxi+x2cosxi+x2+2x3)—(Зр2—р+1) (sinxi+Х1+2Х2+Х3). (4.73)
Исследуем устойчивость системы (4.70), (4.73):
*1(0 = х2;
%г(/) = sinxi + хз ;
251
Рис. 4.13
(р2+4)хз(/)=-(р2+4) (2sinxi+x2cosxi+x2+2x3)-(3p2-p+l) (sinxi 4-Х1+2х2+хз)+
+(р2+4)Bsin2(. (4.74)
Слагаемое (p2+4)Bsin2/= О в силу известных свойств Л(р)-изображения [154]. Запишем
дифференциальное уравнение замкнутой системы (4.74) относительно выходной коордшигы
xi ((). На основе первых двух уравнений системы (4.74) имеем:
хг = xi (?); хз = xi (?) •- sinxi , хз (?) = xf/z/) (?) — xi (?) cosxi . (4.75)
Тогда подставив выражения (4.75) в последнее уравнение системы (4.74), получаем уравненяе
в операторной форме
(/ + 5р4 + Юр3 + Юр2 + 5р + l)xi(p) = 0 , (4-76)
описывающее движение замкнутой системы относительно координатах! (?). Дифференциаль-
ному уравнению (4.76) соответствует характеристическое уравнение
Л5 + 5Л4 + ЮЛ3 + ЮЛ2 + 5Л + 1 = (Л + I)5 = 0 . (4-77)
Уравнение (4.77) имеет кратные и равные корни рк = - 1 ,k = 1,2,...,5. Этот результат непос-
редственно следует также из уравнения (4.69), т.к. полином D(p) выбран в виде (4.71), а
Т1 = ?2 = 1- Следовательно, синтезированная нелинейная система (4.74) асимптотически ус-
тойчива, селективно инвариантна к возмущению <р (?) = Bsin2f и имеет апериодический харак-
тер затухания переходных процессов. На рис. 4.13 приведены графики переходных процессов,
подтверждающие теоретические результаты разработанного метода синтеза селективно-инва-
риантных нелинейных систем.
4.3. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
АСТАТИЧЕСКИХ НЕЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
Продолжим рассмотрение важной задачи синтеза систем управления, инвариантных к
определенным классам возмущающих воздействий. При создании систем управления различ-
ными промышленными объектами на практике часто используются так называемые астатиче-
ские законы управления [33, 142, 143], включающие в себя интегральные составляющие, что
улучшает точностные свойства систем в установившемся режиме движения. Указанные законы
реализуются в виде ПИД-регуляторов, широко распространенных в промышленных системах
регулирования, электроприводах, автопилотах, авторулевых и др. Наличие интегральной (И)
составляющей позволяет подавить скачкообразные возмущения на выходе замкнутых систем и,
252
шедовательно, повысить их статическую точность. Необходимо также отметить, что в настоя-
щее время многие микропроцессорные системы управления промышленными объектами нередко
продолжают конструироваться с использованием ПИД-алгоритмов управления, хотя современные
микропроцессорные средства позволяют реализовать весьма сложные алгоритмы управления.
Такое положение объясняется, по-видимому, обширным опытом успешного применения ПИД-ре-
[уляторов для обеспечения основных первичных показателей Качества различных промышленных
систем регулирования. Однако необходимо подчеркнуть, что ПИД-алгоритмы управления в по-
цавляющем большинстве случаев используются для линейных математических моделей объектов.
4 это значит, что в режимах больших отклонений, характерных для современных объектов, когда
модель объекта должна быть, как правило, нелинейной, во-первых, возникает важный вопрос об
кимптотической устойчивости замкнутой системы, и, во-вторых, синтез законов управления
объектами, описываемыми нелинейными моделями, позволяет получить принципиально новые
ичественные свойства замкнутых систем.
Итак, возникает задача синтеза астатических законов управления нелинейными объекта-
ми, гарантирующих асимптотическую устойчивость и другие качественные свойства (напри-
Рис.4.14
мер, грубость) замкнутых систем в режиме больших отклонений и обеспечивающих заданные
аервичные показатели качества в режиме малых отклонений в результате перехода в стандар-
иые ПИД-алгоритмы управления. Решение поставленной задачи синтеза астатических зако-
нов управления рассмотрим на достаточно общем примере системы с нелинейной неизменяе-
мой частью третьего порядка и имеющей структуру, изображенную на рис.4.14.
Уравнения движения имеют вид
ii (?) = /101) + х2 + М (?) , х2 (?) = /2О1 > *2) + хз ;
хз(?) = - азхз + и, (4.78)
да М (?) = Мо = const—возмущающее воздействие. Первые два уравнения системы (4.78)
описывают непосредственно объект, а третье уравнение описывает исполнительный механизм
। виде интегрирующего (аз = 0) или инерционного звеньев. Для решения задачи синтеза
расширим пространство состояний системы следующим образом:
z (?) = xi , xi (f) - /i(xi) 4- х2 + М (?) ;
х2 (?) = f2(x\ , х2) + хз ; хз (?) = - а3хз + и . (4.79)
Используя изложенный ранее метод АКАР, синтезируем астатический закон управления
wz = F (xi , х2, хз , J xidt) , (4.80)
йрантирующий асимптотическую устойчивость в целом замкнутой системы (4.78), (4.80) и
обеспечивающий желаемые (апериодические) переходные процессы по выходной координате
Х1 (?), при этом в режиме малых отклонений закон и? (4.80) содержит ПИД-алгоритм управ-
мяия относительно xi (?), т.е.
«х inf = ~ kpXi - kpTgXi (t) f xidt - fix3 . (4.81)
- 1 u
253
Параметры kp , Tg и Tu закона (4.81) выбираются исходя из заданных первичных показателей
качества к замкнутой системе в режиме малых отклонений. Из постановки задачи синтеза
следует, что обобщенный закон управления их (4.80), по мере приближения изображающей
точки к началу координат пространства состояний, постепенно переходит в закон (4.81), что
соответствует процессу последовательной оптимизации синтезируемой системы. ; -
Перейдем к синтезу закона их (4.80) на основе метода АКАР с введением последовательной
совокупности инвариантных многообразий в пространстве состояний системы (4.79). Согласно
методу АКАР введем первую агрегированную переменную
= x3+pi(z, xi, х2) (4.82)
и, подставив ее в функциональное уравнение
(0 + = 0 , Т1 = > 0 ,
в силу уравнений системы (4.79) найдем закон управления
dpi dpi r, ч , dpi r, . 1 1 / 4 (4.83)
dzXx~ dx? ^(^i)+x2]- 1Л(Х1,Х2)4-хз]- угхз+азхз- jry>i(z,xi,x2),
доставляющий минимум сопровождающему функционалу
Ji = f [mipi + cipi (0 ]dt.
о
Закон их (4.83) переводит изображающую точку в окрестность многообразия р\ = 0 (4.82),
движение вдоль которого описывается системой уравнений
z (t) = xi , X] (t) = /i(xi) + х2 + М (0, х2 (0 = /2(xi , х2) - ^i(z,xi,x2). (4.84)
Приняв #>i(z,xi,x2) за промежуточное управление и используя вторую агрегированную пере-
менную
Рг = х2 + $P2(z,xi), (4.85)
на основе функционального уравнения
Т2р2 (t) + р2 = о ,т2 = > о
и в силу уравнений (4.84), найдем
pi(z,xi,x2) = xi+ + х2] + /2(xi,x2) + -jr х2 + £ р2 .
Промежуточное управление (4.86) доставляет минимум сопровождающему функционалу
/г = / . [т2р2 + с2р2 (0 ]dt
о
и переводит изображающую точку в окрестность многообразия р2 = 0 (4.85), движение вдоль
которого описывается системой уравнений
Z (0 = Xi , Х1 (0 = /1(Х1) - p2(z,xi) + M(t). (4.87)
Выберем в (4.87) промежуточное управление
p2<z,xi) = Xoz + У1Х1 + /1(Х1) (4.88)
и запишем (4.87) в виде уравнения относительно выходной координаты xi (0:
xi (0 + у 1X1 (0 + yoxi + Af (0 = 0 , (4.89)
где М (0 = 0 при М (0 = Mq.
Выбором коэффициентов уо и yi можно обеспечить устойчивость и желаемый характер пере-
ходных процессов в (4.89). Условия уо > 0, У1 > 0 обеспечивают не только устойчивое»
управления (4.89), но совместно с условиями Т\ > 0 и Т2 > О являются условиями асимптоти-
ческой устойчивости в целом синтезируемой нелинейной системы (4.78), (4.80). Итак, изо-
бражающая точка под воздействием р2 (4.88) движется вдоль р2 = 0 и попадает в начало
координат пространства состояний системы. Подставив р2 (4.88) в (4.86), а затем pi (4.86) в
(4.83), с учетом выражения
z= / xidt (4.90)
254
можно найти астатический закон управления (4.83) объектом (4.78) для конкретных функций
/i(*i) и В режиме малых отклонений нелинейные функции /ДхО и /2(xi,x2) можно
линеаризовать, т.е. /i(xi)m/ »Л|Хь fi^xx^inf^bxx + t/2x2, и записать уравнения (4.78) в виде
xi (Г) = Ц|Л-| + х2 + М (0 , х2 (0 = Z>ixi + а2х2 + хз;
хз (() = “ "з*з + (4.91)
Закон управления (4.83) обеспечивает асимптотическую устойчивость в целом синтезиро-
ванной нелинейной системы (4.78), (4.83), переходя в режиме малых отклонений в закон
kxihj, включающий в себя стандартные составляющие (xi,xi, J x\df) ПИД-законов управле-
ния [142, 143] относительно Х| (() и составляющую хз, которая определяет обратную связь по
положению исполнительного механизма. Параметры кр, Tg, Ти ПИД-закона управления будут
зависеть от параметров ах, аг объекта (4.91) и у0, у,, Т(, Т2. Эти параметры выбираются по
широко известным в литературе [70,96] методам, исходя из заданных первичных показателей
качества линеаризованной системы (4.91). Выбрав кр, Tg и Ти, можно найти параметры уо, Уь
Г, и Т2 закона управления и^. Для этого между двумя параметрами у0 и yi или Т\ и Т2
необходимо установить заданную зависимость, например, положив
Т] = Т2 = Т или yi = 2^4у2 ,
ще^—выбранный декремент затухания системы (4.89).
Выбрав соответствующую зависимость в (4.92) и зная кр, Tg и Ти, можно вычислить
параметры у0, yi, Т или yt, Тх и Т2 закона управления (4.83). Разумеется, что при этом должны
соблюдаться условия
(4.92)
Уо > 0 ; у, > 0 ; Т{ > 0 ; Т2 > 0 (4.93)
асимптотической устойчивости в целом синтезированной нелинейной системы (4.78), (4.83).
Найденные параметры у0, уь Т\ иТ2 при выполнении условий (4.93) обеспечивают первичные
показатели качества в режиме малых отклонений, а закон управления и? (4.83) будет также
[гарантировать свойство асимптотической устойчивости в целом замкнутой системы, что спо-
[ собствует грубости переходных процессов.
। Параметры уо, yi, Т\ иТ2 закона управления и? (4.83) можно также выбрать другим способом,
[основанном не на использовании линеаризованных уравнений (4.91) и задании параметров кр,
I Г, и Ти ПИД-закона управления по первичным показателям качества для режима малых отклоне-
ний, а исходя из требований к характеру и времени затухания переходных процессов по выходной
координате хД?) в синтезируемой нелинейной системе (4.78), (4.83). Для этого, подставив закон
управления (4.83) в исходные нелинейные уравнения объекта (4.78), после преобразований при
М (?) = Мо получим уравнение замкнутой системы относительно хД():
^(0+ ~(yiTxT2+ Т|Т2)43)(0+ ^(У1Т,+ ухТ2+ у01\Т2+ 1)х^)(0 +
, /у. \ .
+ + Тх + Т2 х, (0 + Х1 = 0 .
V0 /
Представим (4.94) в виде операторного уравнения
[.'/ + ^Р + 1) (Т,р + 1)(Лр + 1)х, (р) = 0 , р = ^ .
Из (4.95) следует, что, во-первых, условия (4.93) действительно являются условиями асимп-
тотической устойчивости в целом замкнутой нелинейной системы, и, во-вторых, характер
переходных процессов зависит от декремента затухания £ = — уравнения (4.89), описыва-
zvyo
Тощего движение вдоль многообразия ty2 = 0 (4.85) к началу координат пространства состоя-
ний. При выборе | > 1 согласно (4.85) переходные процессы по выходной координате хх (() в
замкнутой нелинейной системе (4.78), (4.83) будут иметь апериодический характер. Так, при
[= 1 и выборе уо = '/©2 получим ух = У©, тогда уравнение (4.95) принимает вид
(0/? + 1)2(Т1Р + 1)(Т2р + 1 )xi (р) = 0 .
(4.94)
(4.95)
(4.96)
255
Параметры kp , Tg и Tu закона (4.81) выбираются исходя из заданных первичных показатели
качества к замкнутой системе в режиме малых отклонений. Из постановки задачи синтеза
следует, что обобщенный закон управления и? (4.80), по мере приближения изображающей
точки к началу координат пространства состояний, постепенно переходит в закон (4.81), что
соответствует процессу последовательной оптимизации синтезируемой системы.
Перейдем к синтезу закона us (4.80) на основе метода АКАР с введением последовательно?
совокупности инвариантных многообразий в пространстве состояний системы (4.79). Согласно
методу АКАР введем первую агрегированную переменную
V'i ~ хз+pilz, хь х2) (4.82)
и, подставив ее в функциональное уравнение
(?) + - о , t’i = > о,
в силу уравнений системы (4.79) найдем закон управления
_ dpi dpi r,. . , dpi f . ,1 1 , 4 (4.83)
ZZj; Xi L? 1(X1)4"X2J *7^(Х1,Х2)"1"Хз] у^Хз"Ь(I3X3 rj> lyZ^Xi^xf) ,
доставляющий минимум сопровождающему функционалу
Ji = f [mipi + (?) ]dt.
0
Закон us (4.83) переводит изображающую точку в окрестность многообразия pi = 0 (4.82),
движение вдоль которого описывается системой уравнений
Z (?) = Xi , Х1 (?) = /1(Х1) + х2 + М (?), х2 (?) = /2(Х1 , х2) - pi(z,xi,x2). (4.84)
Приняв pi(z,xi,X2) за промежуточное управление и используя вторую агрегированную пере-
менную
р2 - Х2 + p2(z,Xi} , (4.85)
на основе функционального уравнения
Т2Р2 (?) + V*2 = 0 , Т2 = ~~~ > 0
ПТ2
и в силу уравнений (4.84), найдем
^i(z,xi,x2) = xi + ^LA(xi) + х2] + /г(Х1,х2) + х2 + у- р2 •
OZ ОХ\ 12 *2
Промежуточное управление (4.86) доставляет минимум сопровождающему функционалу
Ji = f . [mjipl + cipl (?) ]dt
о
и переводит’ изображающую точку в окрестность многообразия ^2 = 0 (4.85), движение вдоль
которого описывается системой уравнений
Z (?) = Xi , Х1 (?) = fl(xi) - p2<z,Xi) + М (?). (4.87)
Выберем в (4.87) промежуточное управление
pi(z,xi) = yoz + у ixi + /i(xi) (4.88)
и запишем (4.87) в виде уравнения относительно выходной координаты xi (t):
*i (?) + У1X1 (?) + Уо*1 + М (?) = 0 , (4.89)
где М (?) = 0 при М (?) = Mq.
Выбором коэффициентов уо и yi можно обеспечить устойчивость и желаемый характер пере-
ходных процессов в (4.89). Условия уо > 0, yi > 0 обеспечивают не только устойчивость
управления (4.89), но совместно с условиями 7\ > 0 и Т2 > 0 являются условиями асимптоти-
ческой устойчивости в целом синтезируемой нелинейной системы (4.78), (4.80). Итак, изо-
бражающая точка под воздействием <р2 (4.88) движется вдоль р2 = 0 и попадает в начало
координат пространства состояний системы. Подстарив р2 (4.88) в (4.86), а затем <р\ (4.86) >
(4.83), с учетом выражения
J xidt (4.90)
254
можно найти астатический закон управления (4.83) объектом (4.78) для конкретных функций
/,(.п) и /2(-Vi,%2)- В режиме малых отклонений нелинейные функции /i(xi) и/2(х1,х2) можно
линеаризовать, T.e./i(xi)(,(/- ==Л|Х1,/2(Х1,х2),„/“/>Х| + а2х2, и записать уравнения (4.78) в виде
X, (/) = Ц|Х| + х2 + М (/), х2 (Г) = £лХ! + а2х2 + хз;
| *з(0 = “ "з*з + Hint- (4.91)
Закон управления (4.83) обеспечивает асимптотическую устойчивость в целом синтезиро-
ванной нелинейной системы (4.78), (4.83), переходя в режиме малых отклонений в закон
включающий в себя стандартные составляющие (xj,xi, f x\df) ПИД-законов управле-
ния [142, 143] относительно Х| (/) и составляющую х3, которая определяет обратную связь по
положению исполнительного механизма. Параметры кр, Tg, Т„ ПИД-закона управления будут
зависеть от параметров а2 объекта (4.91) и у0, у(, Т\, Т2. Эти параметры выбираются по
широко известным в литературе [70,96] методам, исходя из заданных первичных показателей
цчсства линеаризованной системы (4.91). Выбрав кр, Tg и Т„, можно найти параметры у0, уь
J, и Т2 закона управления и^. Для этого между двумя параметрами уо и у\ или Т\ и Т2
^необходимо установить заданную зависимость, например, положив
Т\ = Т2 = Т или у[ = 2£Vy2 , (4.92)
!де|—выбранный декремент затухания системы (4.89).
Выбрав соответствующую зависимость в (4.92) и зная кр, Tg и Ти, можно вычислить
параметры у0, yi, Т или у(, Т\ иТ2 закона управления (4.83). Разумеется, что при этом должны
соблюдаться условия
Уо > 0 ; yi > 0 ; 7\ > 0 ; Т2 > 0 (4.93)
асимптотической устойчивости в целом синтезированной нелинейной системы (4.78), (4.83).
Найденные параметры уо, yi, Т\ иТ2 при выполнении условий (4.93) обеспечивают первичные
показатели качества в режиме малых отклонений, а закон управления и% (4.83) будет также
^гарантировать свойство асимптотической устойчивости в целом замкнутой системы, что спо-
’собствует грубости переходных процессов.
। Параметры уо, Уь Л и Т2 закона управления (4.83) можно также выбрать другим способом,
(основанном не на использовании линеаризованных уравнений (4.91) и задании параметров кр,
.и Ти ПИД-закона управления по первичным показателям качества для режима малых отклоне-
ний, а исходя из требований к характеру и времени затухания переходных процессов по выходной
координате хДг) в синтезируемой нелинейной системе (4.78), (4.83). Для этого, подставив закон
управления //х (4.83) в исходные нелинейные уравнения объекта (4.78), после преобразований при
' lf(f) = Mq получим уравнение замкнутой системы относительно хД():
^4)(0+ ^-(717’17’2+ Т1Т2)х?)(/)+ -7(У1Т,+ у\Т2+ у01\Т2+ 1)х12)(/) +
Уо Уо Уо
, /у, ~п (4.94)
; + — +Ti + T2 Xi(() + xi=0.
V0 /
Представим (4.94) в виде операторного уравнения
/ 1 2 , У1 , ,т , . 1Ч , . л _ d (4.95)
\—р + —Р + 1 (Tip + 1)(Т2р + 1 )х, (р) = 0 , P = -rt.
I/O/О/ ч l
Из (4.95) следует, что, во-первых, условия (4.93) действительно являются условиями асимп-
отической устойчивости в целом замкнутой нелинейной системы, и, во-вторых, характер
У1
переходных процессов зависит от декремента затухания £ = уравнения (4.89), описыва-
й zvy°
"щего движение вдоль многообразия ip2 = 0 (4.85) к началу координат пространства состоя-
ий. При выборе | > 1 согласно (4.85) переходные процессы по выходной координате х\ (?) в
мкнутой нелинейной системе (4.78), (4.83) будут иметь апериодический характер. Так, при
= 1 и выборе /о = *4»2 получим у\ = %, тогда уравнение (4.95) принимает вид
(0р + l)2(TlP + 1)(Т2р + 1 )х, (р) = 0 .
(4.96)
255
(4.97)
(4.98)
В литературе нередко рекомендуется выбирать коэффициенты характеристического уравнения
замкнутой нелинейной системы такими, чтобы это уравнение имело кратные корни. Тогда
переходные процессы будут апериодическими и монотонными с минимальным временем зату-
хания при отработке скачка по выходной координате xi (Г) замкнутой системы. Для получения
кратных корней уравнения (4.96) положим
1 2
© = Т\ = Т2 = Т, т.е. /о = , У1 = у;,
12 1
тогда уравнение (4.96) примет вид
(Тр+ 1)4х, (р) = 0 .
Запишем решения уравнения (4.98):
xi (г) = £
/=1
Х2 (0 = Х1 (Г) - /1(.Г1) = - у 2 + 2 (/- 1)с,/'“2е-Г2 - Д (х,);
1 ;=1 ;=2
*3 (0 = yi .2 + (2сз + 6с41)е~Ут - /2(Х1 , х2).
Эти решения позволяют рассчитать переходные процессы при различных начальных условиях
замкнутой нелинейной системы. Время затухания переходных процессов при отработке скачка
по координате xi (Г) имеет следующую оценку:
tp < 8Т . (4.99)
Таким образом, при выборе параметров уо, уь 7|, Т2 (4.97) замкнутая нелинейная система
(4.78), (4.83) имеет апериодические переходные процессы по выходной координате xi ((),
время затухания которых определяется оценкой (4.99), т.е. возникает возможность удовлет-
ворения таких практически важных показателей качества синтезируемых нелинейных систем,
как их асимптотическая устойчивость в целом, характер (апериодический) и время затухания
переходных процессов.
Изложенный метод АКАР позволяет без ограничения общности решать задачу синтеза
астатических законов управления не только для объектов вида (4.78), но и нелинейных
объектов n-го порядка с треугольной функциональной матрицей, т.е.
*1 (0 = + х2 + ;
л'/(0 =/Xxi,...,xy) + ху+1 ,/ = 2,...,/?—! ;
X,; (Г) =/„(Х1,...,Х,|) + и .
Этими уравнениями описываются объекты, распространенные в промышленности и различных
областях техники, в частности, при fj(x/), /„(хц) указанные объекты будут состоять из последо-
вательно включенных нелинейных звеньев первого порядка и т.д. Для синтеза астатического
управления следует аналогично (4.79) записать расширенную систему:
i| (() = z2,..., zr (7) = xi , xi (/) = /i(xi) + x2 + M (f);
X2 (0 = f2(x\, x2) + x3,..., x„-i (0 = 1(ЛГ1 + x„ ; (4.100)
x,i (t)= - anxn + и .
Аналогично предыдущему, используя метод АКАР, можно найти закон управления
//.£ = F(x[,...,xn, $x\dt,..., J ... fx\df) , (4.101)
обеспечивающий астатизм г-го порядка по координате xi (?) и гарантирующий асимптотиче-
скую устойчивость в целом синтезируемой системы. Для синтеза закона управления следует
использовать последовательность агрегированных переменных:
V’i = хп + ^i(zi ,..., zr, xi,...,x,i-i);
^2 = х„-1Л2(2| ,..., zr, Х|,...,х„-2),...; (4.102)
V'h-I = Х2 + <Pn-\(Z\ Zr , -Vl)
и рассмотреть систему уравнений
Z\ (7) = Z] ,..., zc(Z) = X| , X] (Г) = /1(Х1) - <Pn-\{z} ,..., zr, X]) + М (t) , (4.103)
256
которая описывает движение изображающей точки вдоль многообразия V^-i =0 (4.102).
Выбрав в (4.103), в частности, функцию
Vn-i = 2 УкГк + «X, + /1(Х1) ,
к=\
можно представить (4.103) в виде уравнения r-го порядка относительно X] ((), т.е.
х^+1) (0 + /]Х^Г) (/) + у2х^г-1) (/) + ...+ ах\ (0 + y2xi + Л/(г) (7) = 0 . (4.104)
Выбрав в уравнении (4.104) коэффициенты у* и а для обеспечения устойчивости и желаемых
свойств переходных процессов при движении вдоль многообразия 1рп-\ = 0, найдем на основе
изложенного выше метода закон управления iiv (4.101), приводящий к астатизму r-го порядка
по выходной координате xi (/) и гарантирующий асимптотическую устойчивость в целом
замкнутой нелинейной системы.
Подставив синтезированный закон управления и% (4.101) в исходные уравнения (4.100),
можно найти в операторной форме уравнение замкнутой нелинейной системы, относительно
выходной координаты xi (():
(Pr+1 + У\РГ + ••• + Yr-\Р2 + ар + Yr)(T}p + V)...(Tnp + 1 )xi (р) = 0 .
Положив в (4.104), (4.105) параметры
(4.105)
г‘„ . « = ^2‘ т, = гг = ... = т„ = т,
(4.106)
(4.107)
представим уравнение (4.104) в виде
(Тр + 1)хГ1 (р) = 0.
Тогда уравнение (4.105) можно записать в следующей операторной форме:
(Тр + l)"+r+1xf1 (р) = 0.
Из (4.107) следует, что выбор параметров у„ a, Ti,...,Tn закона управления по выражениям
(4.106) приводит к кратным корням характеристического уравнения замкнутой системы, что
обеспечивает апериодические переходные процессы, а простейшее неравенство Т > 0 является
условием асимптотической устойчивости в целом синтезируемой астатической нелинейной
системы.
Разумеется, что аналогично можно синтезировать и законы управления нелинейными
объектами, имеющими несколько каналов управления. В этом случае необходимо применить
разработанный в третьей главе метод АКАР с использованием сначала параллельной, а затем
последовательной совокупности инвариантных многообразий, когда изображающая точка
свачала сближается с пересечением многообразий в пространстве состояний, а затем движется
вдоль этого пересечения к началу координат пространства состояний замкнутой системы.
Рассмотрим теперь метод аналитического конструирования астатического управления
(4.80) объектом (4.78) при учете возможного ограничения на положение исполнительного
механизма, т.е. на координату
I х31 <А. (4.108)
Для этого можно ввести макропеременную
= х3 + A th^i(z,xi,x2). (4.109)
В режиме больших отклонений изображающей точки от заданного движения, когда
Ibpi» ± 1, функция^! (4.109) будет следующей:
^suP = х3 ± А ,
года сопровождающий функционал с учетом уравнений объекта (4.78) при <73 = 0 принимает
ад
tksup (4 11 О)
jsup~! [m2^±A)2 + c}u2]dt.
257
Функционал (4.110) сходен с критерием энергозатрат, что усиливает эффект отражения
инженерных требований при синтезе астатического управления. Аналогично изложенному, в
силу уравнений системы (4.79) и с учетом ipi (4.109), найдем закон управления (аз = 0):
А Г^>| , d<f>\ 1 11 (4.111)
"' = “ drVTp*' ЙЛ1' ~ ₽|_ г?”
Функцию <p\(z,x\,xi), входящую в (4.111), целесообразно выбирать в соответствии с (4.86),
(4.88), тогда управление (4.111) будет гарантировать асимптотическую устойчивость дви-
жения в целом по координатам Х], хг, а по хз в области (4.108), и, кроме того, обеспечиватьв
режиме больших отклонений минимизацию функционала (4.110), сходного с критерием энер-
гозатрат. Итак, введение макропеременной ip\ вида (4.109) позволяет осуществить учет огра-
ничения (4.108) путем синтеза соответствующего закона управления. Следует отметить, что
учет (4.108) позволяет ограничить не только координату хз, но, как следует из (4.111), и
управление Izzl < 2А/т\ в в режиме больших отклонений (th99]=®± 1, 1хз1=А, ch2^i -» ») от
заданного состояния системы.
Разумеется, что без без ограничения общности, изложенный здесь метод синтеза астатиче-
ского управления с учетом ограничения на положение исполнительного механизма
(1х„1 < А) может быть распространен и на нелинейные объекты n-го порядка вида (4.100). В
этом случае управление zzz (4.101) будет обеспечивать асимптотическую устойчивость по
координате хп в области I х„ I < А, а по остальным п— 1 -координатам устойчивость движения в
целом, что способствует грубости переходных процессов.
Пример 4.5. Для иллюстрации предложенного метода АКАР с астатическим управлением
рассмотрим синтез агрегированного регулятора для нелинейного объекта
xi (7) = — xi 4- хг 4- М;
Х2 (0 = - х2 + xl + Хз ;
x3(t) = u, (4.112)
где М—возмущающее воздействие.
В системе уравнений (4.112) первые два описывают непосредственно объект, состоящий
из двух инерционных звеньев, одно из которых охвачено нелинейной обратной связью (хЗ), а
третье является уравнением исполнительного механизма системы управления.
Сначала исследуем систему с законом управления вида (4.83). Из уравнений (4.112)
следует, что/Дх]) = — Х1,/г(х1 , хг) = — хг - х%, подставив которые в (4.88) и (4.86), получаем
при Т = 1 (4.97) следующие выражения:
(pl = Z — Х1 , ^>2 — X] + Х2 — Хг + z . (4.113)
Подставив (4.113) в (4.83), находим закон управления
//2(х1 , хг, хз) = - xi - Х2 - 2хз - хг - Зхг + Зх2х3 - J X[dt, (4.114)
который в режиме малых отклонений переходит в закон (4.81) со следующими параметрами
настройки ПИД-регулятора:
кр = 2 , Tg = 0,5 , Ти = 2 , /3 = 2 . (4.115)
На рис. 4.15 изображены графики переходных процессов при хю = 2, Х2о = хзо = 0,
М = 0, а на рис. 4.16—при хю = 2, хго = хзо = 0, М = 1. Из рис. 4.15 следует, что переходные
процессы имеют апериодический характер, при этом выполняется оценка (4.99) времени их
затухания, замкнутая система (4.112), (4.114) обладает свойством астатизма (г = 1) к скачко-
образному возмущающему воздействию (M=const) и асимптотической устойчивостью движе-
ния. Характер изменения координат х2 (7) и хз (7) для рис. 4.15 М = 0 и рис. 4.16 М = \
существенно различен из-за действия возмущения.
Исследуем свойства замкнутой системы при ограничении на координату I хз I < А. Для
этого, подставив <р\ и <р2 (4.113) в (4.111), получим закон управления
258
- A th(xi + хг - xl + z) - хз , (4.116)
де z определяется выражением (4.90).
Закон (4.116) в режиме малых отклонений переходит (Л = 1) в ПИД-алгоритм управления
!4.81) с прежними параметрами настройки (4.115) регулятора.
На рис. 4.17 изображены графики переходных процессов в замкнутой системе (4.112),
(4.116) при Л = 1 и хю = 5, хго = хзо — 0, М = 0, а на рис. 4.18—при хю = 5, хго = хзо = 0,
И = 0,5. Из рис. 4.17 и рис. 4.18 следует, что в замкнутой системе при больших отклонениях
ыполняется ограничение на координату I хз I < Л = 1 и управление I и I <2. Необходимо
метить важную особенность, связанную с влиянием ограничения I хз I < Л на астатические
яойства системы. Оказывается, что в этом случае система может подавлять только допустимые
юзмущения М < М^,,, определяемые из статических уравнений (х, = 0) замкнутой системы
54.112), (4.116). При М > Мвоп система имеет новую точку равновесия, отличную от начала
юординат фазового пространства. Так, для системы (4.112), (4.116) при М = 1 эта точка имеет
гоординаты хи = 0,32; Х2к - - 0,68; хз* = - 1, а при М = 5 координаты—хи = 4,32;
259
Рис. 4.17
xzk = — 0?68; хзк = — 1. Для замкнутой системы при А = 1 допустимое возмущение равно
М^п = 0,68. При уменьшении или увеличении А соответствующим образом будет изменяться!!
Мдоц. Разумеется, что такими же свойствами будут обладать и отличные от (4.112) объекты при
отсутствии в их структуре интегрирующих звеньев. Обнаруженное здесь свойство ограничения
астатических свойств систем при учете ограничения I хп I < А на положение исполнительного
механизма необходимо учитывать при проектировании реальных систем управления объектами
технологическими процессами. Приведенные исследования подтверждают теоретические положе-
ния предложенного метода аналитического конструирования астатических систем управления, я.
Итак, на основе изложенного выше метода АКАР можно синтезировать астатические
системы управления нелинейными объектами, что позволяет повысить точностные характери-
стики систем при отслеживании задающих и подавлении возмущающих воздействий, а также
обеспечить первичные показатели качества переходных процессов и асимптотическую устой-
чивость движения замкнутых систем.
260
4.4. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ НЕЛИНЕЙНЫХ СИСТЕМ
РАЗРЫВНОГО УПРАВЛЕНИЯ ПО ЗАДАННОЙ СОВОКУПНОСТИ
ИНВАРИАНТНЫХ МНОГООБРАЗИЙ
В настоящее время существенное развитие получила теория систем с разрывным управле-
нием, в которых за счет организации скользящего режима движения изображающей точки
вдоль некоторой поверхности разрыва (s = 0) можно получить достаточно высокие динамиче-
ские свойства и обеспечить малую чувствительность к изменению параметров объекта и
ограниченных затухающих возмущений, действующих на систему. В фундаментальных рабо-
тах академика С.В.Емельянова [86] и профессора В.И.Уткина [88] заложены основы теории
разрывных систем, а также показана их существенная практическая ценность, связанная со
свойствами инвариантности, конечности управляющих воздействий и понижения размерности
по мере приближения изображающей точки к началу координат фазового пространства. В
последние годы теория разрывных систем получает расширяющееся практическое применение
при управлении различными объектами [149]. Так, в работе [153] эта теория получила
развитие в приложении к задачам синтеза электромеханических систем. Следует, однако,
отметить, что указанная теория наиболее развита в основном применительно к линейным
объектам, хотя, в целом, синтезируемые системы с разрывным управлением всегда являются
существенно нелинейными.
Задача синтеза систем с разрывным управлением считается решенной [86], если, во-пер-
вых, решена задача перевода изображающей точки из произвольного начального положения
(в определенной области фазового пространства) на некоторую поверхность (s = 0) разрыва
управления и, во-вторых, решена задача обеспечения условий существования скользящего
режима [148] в любой точке поверхности разрыва и устойчивого движения изображающей
точки к началу координат фазового пространства. Именно эти две задачи во многом опреде-
1ляют сущность проблемы синтеза систем с разрывным управлением. В этой связи синтез
рассматриваемого класса систем сводится, как правило, к организации двух этапов движения:
первого этапа движения к некоторой поверхности (s = 0) и второго этапа движения вдоль
! указанной поверхности к началу координат фазового пространства. При этом как требования
ккачеству движений, так и уравнения, описывающие эти движения на указанных двух этапах,
могут быть существенно различными. В литературе по теории разрывных систем выделенные
выше две основные задачи синтеза во многом решаются раздельно и преимущественно для
линейных объектов. В этой связи возникает необходимость разработки таких методов анали-
тического конструирования, которые позволили бы регулярным образом на основе, например,
реории инвариантных многообразий находить структуру и параметры регулятора для систем
разрывного управления нелинейными объектами [55, 181].
Применим для решения поставленной задачи разработанный в предыдущих главах метод
АКАР. Приложение этого метода для синтеза разрывных систем связано с рядом особенностей.
Дело в том, что между инвариантными многообразиями = 0 в непрерывных и разрывных
системах должна существовать принципиальная разница [88]. При выполнении условий тео-
рем о существовании и единственности решений, о чем всегда выше предполагалось, инвари-
антное многообразие, вообще говоря, не может быть достигнуто изображающей точкой за
конечное время из произвольного начального положения, находящегося вне этого многообра-
зия в фазовом пространстве исходного объекта. Это следует из того, что в противном случае,
через одну и ту же точку проходили бы две траектории [88]. Итак, в непрерывных системах
^изображающая точка может только асимптотически сблизиться с инвариантным многообрази-
ем ips = 0, т.е. попасть в некоторую окрестность этого многообразия, о чем неоднократно
^упоминалось ранее. В системах с разрывным управлением изображающая точка должна по-
пасть на саму поверхность разрыва и затем устойчиво двигаться к началу координат фазового
пространства. Эти требования приводят к необходимости введения новых форм агрегирован-
261
(4.117)
ных макропеременных ips в методе АКАР. В качестве таких макропеременных ips могут быть
использованы, в частности, следующие кусочно-гладкие функции:
/1-1
Ipi = 2 Pk\xkl + /?„lsl
А=1
или
n-\
^2=2 PkXk + Д; । S I ,
A=1
(4.118)
(4.119)
где s = xn + <p(xi
Синтез СПС на основе заданного инвариантного многообразия. Рассмотрим сначала
применение функций (4.117) — (4.119) для синтеза разрывного управления объектами
W =/Xxi’•••>*«), j = 1,2,...,л-1 ;
Хп (/) = /и(хь...,х„) + и (4.120)
с использованием одного притягивающего многообразия ip = 0. Тогда, в соответствии с урав-
нением
Tip (!) + ip = 0 ,
получаем законы управления объектом (4.120):
—для макропеременных вида (4.117):
/1-1
(4.121)
/1—1
и= - Т 2 fikfk signx*+ flk I xk I signs— 2 ^fk~ T s- fn ;
—для макропеременных вида (4.118):
1 г- И-I
(4.122)
k=l
k=l
и-1
2'
It = - 2Т 2 fikXkfk+ Е РкХк signs - 2
(4.123)
k=\
k=\
к=\ дхк‘
"-1 д<р , 1
<Ы1 дхкК Т
Управления (4.122) и (4.123) переводят изображающую точку соответственно в окрестность
многообразия ip\ = 0 (4.117) или ip2 = Q (4.118). Отсюда следует, что синтезируемые СПС
обладают свойством асимптотической устойчивости в целом относительно состояния
Xi = хг = ... = х„-1 = 0; s = 0. Это означает, что фазовая траектория, вдоль которой движется
изображающая точка в силу уравнений (4.120) при управлениях (4.122) или (4.123), должна
неизбежно встретиться с многообразием переключения s = 0. Другими словами, изображаю-
щая точка обязательно попадает на поверхность разрыва s = 0, т.е. решается первая из упомя-
нутых ранее основных задач синтеза СПС. Формы законов управления (4.122) и (4.123)
таковы, что замкнутые системы будут иметь переменную структуру. Изменение структуры
системы происходит на поверхности s = 0 и частично на плоскостях хк = 0 (Л = 1,2,...,л-1).
Эти законы гарантируют замкнутым нелинейным системам с переменной структурой асимп-
тотическую устойчивость движения во всем фазовом пространстве, кроме многообразия
s = 0. Движение вдоль s = 0 описывается отличными от (4.120) дифференциальными уравне-
ниями, имеющими размерность п— 1. Эти уравнения можно получить, если из соотношения
s = 0 (4.119) найти координату хп и подставить ее в первые (/;- 1)-уравнений объекта (4.120),
т.е.
ху(Г) =//[Х1,...,х„-1 ,^p(X],...,X;i-i)] , j= 1,2,...,/!-1 . (4.124)
В зависимости от требований, предъявляемых к синтезируемым системам, можно обеспечить
разные условия движения изображающей точки вдоль s = О в соответствии с уравнениями
(4.124). Согласно второй основной задаче синтеза СПС необходимо обеспечить условия
возникновения скользящего режима движения на s = 0 и асимптотической устойчивости этого
движения. Условия возникновения скользящего режима имеют следующий вид [86, 87]:
lim s(t) < 0 и lim s(Z) > 0 (4.125)
5“*+0 У->-0
Эти условия можно записать и в форме
s-s(/)<0. (4.126)
262
Используя выражения (4.125) или (4.126), можно записать условия возникновения скользя-
щего режима на многообразии s = 0. Для этого находится производная s (Г) из уравнения для
экстремали (4.121), составленного с учетом выражений (4.117) или (4.118) в силу системы
(4.120) на 5 = 0, т.е. в силу уравнений (4.124). Подставив (4.117) и (4.118) в (4.121), в силу
уравнений (4.124), соответственно получаем:
1 "Д1 х, . . 1 (4.127)
s(0 = - 2 Pkfk , ^(xi,....,.,x„-i)] signxt signs - signs ;
2"-> 1 (4.128)
s(/) = - д-S PkXkfk [x1,...,x„-i,^(xi,...,x„-i)]signs- -resigns.
P,lk=\ ' ”n
Применяя к выражениям (4.127) и (4.128) условия (4.125) или (4.126), получаем, что для
синтезируемых по изложенному здесь методу нелинейных СПС условия возникновения сколь-
зящего режима движения вдоль s = 0 имеют следующий вид:
—для макропеременных вида (4.117):
л—i л-1 (4.129)
Т 2 Pkfk [xj,.:.,xn-i , ^(xi,.-,x„-i)]signx* + £ jSJxJ > 0 ;
А=1 . Л=1
-для макропеременных вида (4.118):
«-» "-1 , (4.130)
2Т 2 PkXkfk\x\,—,xn_\, <p(xi,...,x„-i)] + 2 ркХк 0 .
к=\ к=\
В синтезированных СПС невозможен случай “прошивания” изображающей точкой многооб-
разия s = 0, т.к. в этих системах условие “прошиваемости” [87] lim s • lim s > 0 всегда нарушается.
0 5-*+0
Таким образом, в нелинейных СПС с законами управления (4.122) или (4.123) в соответ-
ствии с условиями (4.129) или (4.130) на поверхности разрыва s = 0 возникает скользящий
режим движения.
Получив общие выражения для законов управления (4.122), (4.123) и условий возникновения
скользящих режимов (4.129), (4.130) на s = 0 в СПС для нелинейных объектов вида (4.120),
перейдем к конкретизации указанных выражений для ряда частных случаев таких систем.
Рассмотрим синтез разрывного управления для достаточно распространенного класса не-
линейных объектов, описываемых дифференциальными уравнениями
и (4.131)
K(O = .S aijXj(t) , /=1,2,...,п-1 ;
/=|
Хп (0 =/(Х1,...,Х„) + и ,
тде Xjt (Z)—фазовые координаты; и—управление.
Поставим задачу синтеза: найти управление в функции координат обеспечива-
ющее сначала сближение изображающей точки объекта (4.131) с некоторым заданным много-
образием ip = 0 в фазовом пространстве, а затем движение вдоль него (точнее движение вдоль
некоторого подмногообразия s = 0, входящего в = 0) в скользящем режиме к началу коор-
динат (xi = хг = • • . = х,! = 0). Выберем ip в виде кусочно-гладкой знакопостоянной функции
"-1 (4.132)
= 2 Д1х,1 + jgjsl , pt,pn>Q.
/=1
Подставив ip (4.132) в (4.121), получим, с учетом уравнений объекта (4.131), следующее
функциональное уравнение:
и-i /« \ (4.133)
Т 2 Pt S аихД signx, + fins (7) signs + ip = 0 .
z=l V=1 /
Из этого уравнения, в зависимости от выбранной функции s, можно найти соответствующее
управление. Выберем s в виде линейной функции
Д , (4.134)
s = z акХк , ак = const, ап = 1 .
к=1
263
Тогда, подставив s (4.134) в (4.133), находим управление
п
/=1
7i-i
S aij
/=1
•
тг-signx,signs + а,-
\Рп
1 (В, . . \
+ y y-signxysigns + ау
1 V " !
Xj ~f(x\
(4.135)
.,х„).
Синтезированное управление и (4.135) имеет разрывной характер, при этом изменение струк-
туры происходит на гиперплоскости s = 0 (4.134) и частично на плоскостях ху = О
(j = 1,2,...,/?—1). Закон управления (4.135) определяет структуру нелинейного регулятора.
Управление (4.135) переводит изображающую точку на многообразие ip = 0 (4.132),
откуда следует, что синтезированная система обладает свойством асимптотической устойчиво-
сти в целом относительно состояния xi = хг = ... = x,z-i = 0, s = 0, т.е. изображающая точка
попадает на гиперплоскость s = О (4.134). Найдем условия возникновения на s = 0 скользя-
щего режима движения. Для этого найдем выражение для s (/) из уравнения (4.133) с учетом
(4.132), т.е.
S (0 = - J- S */[ Р){ач+ aP^j) signxy+ X р-,(ац- а/вщ) signx,] signs .
P'ij=i 1 /=1
Отсюда очевидно, что для выполнения условий возникновения скользящего режима (4.125)
необходимо потребовать удовлетворения следующих неравенств:
1 п~1 (4.136)
Pi(aJJ + т “ "/'А) - 2 Pi (аи ~ aiau>); } = 1,2,...,/?-1.
1 /=1
/*'
Условия (4.136) являются необходимыми и достаточными условиями существования скользя-
щего режима на s = 0 (4.134) в синтезированной системе с разрывным управлением (4.135).
Выполнение условий (4.136) всегда можно обеспечить за счет выбора соответствующих пара-
метров Т, pj и ау.
Движение вдоль s = 0 (4.134) описывается уравнениями (4.124), которые для рассматри-
ваемого случая принимают следующий вид:
"-1 а, . (4.137)
Xis (0 Zj (&ij Qin)Xjs , i 1,2,...,/? 1.
/=1 ип
Путем выбора соответствующих коэффициентов ау можно обеспечить как устойчивость, таки,
желаемые динамические свойства системы (4.137), описывающей движение изображающей
точки вдоль гиперплоскости s = 0 (4.134).
Необходимо отметить, что предложенный метод позволяет указать оценки времени зату-
хания переходных процессов в замкнутой системе. Эти оценки основаны на том положении,
что изображающая точка сближается с многообразием ip = 0, а затем движется в скользящем
режиме вдоль подмногообразия s = 0, описываемым уравнениями (4.137). Отсюда следует, что
оценка времени затухания будет иметь вид
tp < + Л = 0 = (34- 4)Т + ts, (4.138)
где первая составляющая определяет с уравнением. (4.121) время сближения с ip = 0 и,
следовательно, с s = 0, а вторая (s=0—время движения вдоль s = 0 к началу координат, опре-
деляемое временем затухания переходных процессов в системе (4.137). Полученная оценка
(4.138) позволяет указать время регулирования в нелинейной системе.
Рассмотрим еще один частный случай уравнений объекта (4.120), когда они могут быть
путем соответствующего преобразования представлены в следующей канонической форме:
у? (0 = у2, уг (/) = уз..5’»-1 (0 = Ун;
Уп (0 = Л((У1,...,у„) + Ьи , (4.139)
гдеуу = , / = 1,2,...,/?.
Синтезируем управление //(yi,...,y,() на основе макропеременной
/1-1
ч> = S Pih’ii + Azisi,
(=i
264
/1—1
где s = y„ + акУк
k=\
«уравнения экстремали (4.121). На основе изложенной выше процедуры получаем закон
управления
1 "-1 "-1 1 "_| 1 (4.140)
Ьи = - д- 2 ДУ,+ 1 signv, - signs - fa\уIsl -Fn(y\ - у,,).
Рп /=1 Л=] Р«у ,=1 7
Условия возникновения скользящего режима движения изображающей точки вдоль s = 0
найдем, используя производную
1 »i-i 1 ।
s (0 = “ Е fab'i+t + уУ/) signx, signs - ys .
Применяя условия (4.125), получаем неравенства
У = 1,2,...,л—1 ; j80 = 0 ,
*Рп-\ Рп-\
удовлетворение которых обеспечивает возникновение скользящего режима движения.
При технической реализации закона управления (4.140) можно путем обратного преобра-
зования перейти от канонических переменных у, (?) к исходным измеряемым координатам
х((?) и построить физически реализуемый регулятор нелинейной системы.
Пример 4.6. В качестве примера, иллюстрирующего изложенный метод, рассмотрим синтез
стабилизирующего регулятора напряжения возбуждения синхронного генератора, работающе-
го на шины бесконечной мощности энергетической системы. Движение ротора генератора
описывается следующей системой уравнений [125]:
xi (?) = х2 ; х2 (?) = «о - «isinxi - (а2 4- <Z3sinxi)x3;
х3 (?) = — кхз + a4x2sinxi 4- ки ,
1де X] (?)—угол поворота ротора генератора относительно синхронной оси вращения; х2 (?)—
скольжение; хз (?)—отклонение ЭДС генератора от установившегося значения; и (?)—откло-
нение напряжения возбуждения; к—положительные постоянные; ао—воздействие, пропор-
циональное механической мощности турбины. Для режима стабилизации линеаризуем первые
два уравнения системы (4.141):
xi (?) = х2 ; х2 (?) = а0 - Й1Х1 - а2х3;
хз (?) = — кхз + a4x2sinxi + ки (?).
Тоща искомый закон управления согласно (4.135) имеет вид
ки (?) = — xi
(4.141)
(4.142)
Г1 А . . fai . • /1
signxi signs- ai^- signx2 signs+ lytZi - a2«i
(4.143)
(4.144)
- х2 signxi signs+ у signx2 signs+ (cq 4- уа2) - a4sinxi -
Г, /?2 • • 11
- хз к - а2-^ signx2 signs - а2а2 + у .
Условия возникновения скользящего режима (4.136) в этом случае принимают вид
> jS2lai«2 - «11 ; fai + а2а2^ > fa .
Уравнения движения изображающей точки вдоль s = a^xi + а2х2 4- хз = 0, согласно (4.137)
будут следующими:
Xis (?) = Xis; Xis (0 = «о + («1«2 - «1)^15 4- a2a2x2s.
Условия устойчивости этих уравнений имеют вид
- а2а2 > 0 ; - aia2 > 0 . (4.145)
Итак, удовлетворяя условиям (4.144) и (4.145), можно путем выбора соответствующих at,
обеспечить устойчивый скользящий режим движения изображающей точки вдоль s = 0 с
хелаемыми показателями качества.
265
На рис. 4.19 представлены переходные процессы линеаризованного объекта (4.142) с
синтезированным законом управления (4.143); а на рис. 4.20—нелинейного объекта (4.141)с
такими же параметрами настройки регулятора при одинаковых начальных условиях. Числен-
ные значения параметров объекта равны «о = 0,57; а\ = 0,64; аг = 0,3; аз = 0,25; а4 = 1,37,а
коэффициенты настройки в законе (4.143) выбраны следующими: ctj = - 4; сг2 = ~5;
pi = Рг= Рз - 1; Т = 0,2. Использование закона управления (4.143), синтезированного дм
объекта (4.142), применительно к исходному объекту (4.141), можно интерпретировать как
исследование замкнутой системы (4.142), (4.143) при действии возмущения М (7):
xi (Z) = хг ; хг (0 = а0 - atxi - а2х3 + М (Г);
х3 (0 = — Лх3 + a4x2sinxi + ки (Г),
где М (/) = aixi (t) - (at + а3х3 (0)sinxi (/).
Сравнение переходных процессов, изображенных на рис.4.19 и 4.20, показывает, что
синтезированная СПС имеет определенную степень инвариантности, т.е. малой чувствитель-
ности переходных процессов к возмущениям, действующим на систему.
Таким образом, изображенные на рис. 4.19 и 4.20 переходные процессы в синтезирований!
нелинейной СПС обладают свойством грубости и являются близкими к апериодическим, т.е.
подтверждают теоретические положения разработанного метода аналитического конструиро-
вания систем с разрывным управлением.
Найдем теперь закон управления //(хьх2,хз), переводящий нелинейный объект (4.141) из
произвольного начального состояния в начало координат (xi = х2 = хз = 0) фазового про-
странства. Для синтеза закона управления используем кусочно-гладкую функцию
1р = j^iXi + @2*2 + Рз I SI , (4.146)
где 5 = ajX] + аг$р1(Х1)х2 + хз ; pt > 0 ; i = 1,2,3 . (4.147)
Тогда, используя (4.146), (4.147), найдем закон управления, который, в соответствии с
(4.123), будет иметь иметь следующий вид:
ки = - ^-xi + х2 sign s - + фх^ sign s - ~xi - a2x2 +
(, П «2 z ч fy>l(xi)
- А - у I Хз - утР1(*1)х2 ~ «2 Х2 - a4X2Sinxi -
£р2
^-х2 Sign $ +
Г
Рис. 4.20
+ «2У>1(Х1) ] [ «о - aisinx] - ( аг + tfasinxi ) хз ] . (4.148)
Управление (4.148) обеспечивает попадание изображающей точки на многообразие 5 = 0 из
произвольного начального состояния системы. На многообразии 5 = 0 движение описывается
следующими уравнениями:
* xi (() = хг; хг (() = ао~ «isinxi + (аг+ a3sinxi) [axi+ «^(-Vi)^] . (4.149)
Выберем коэффициенты at , аг и функцию 99(xi) в (4.149) из условий получения наибольшей
области асимптотической устойчивости движения на 5 = 0. Вид условий устойчивости сущест-
венным образом зависит от соотношения коэффициентов аг и аз. Рассмотрим сначала случай,
когда аг > аз. Тогда, согласно [5. С.70] условия асимптотической устойчивости в целом
уравнений (4.149) и, следовательно, исходной системы (4.141) будут иметь следующий вид:
«1 <0 , а2 < 0 ; l«i I > 3jr~^~2"Z йз) ; ^Pi(xi) = 1 . (4.150)
Для случая аг < аз можно обеспечить условия асимптотической устойчивости движения на
5 = 0 в области
Эти условия имеют вид следующих соотношений:
_ Л „ Л . , , «I
(4.151)
(4.152)
.xj - w , <л2 v , .«). ; ^i(xi) = а2 + a3sinx( .
На многообразии 5 = 0 можно организовать движение в скользящем режиме. Условия возник-
новения этого режима, согласно выражению (4.130), имеют вид
16X11
Р2«2 «О
2 2я(й2 + Л3) ’
Условия (4.152), совместно с условиями устойчивости (4.150) и (4.151), позволяют соответ-
ствующим.образом выбрать параметры ai иа2, определяющие характер движения изобража-
ющей точки вдоль многообразия 5 = 0. Организация движения в скользящем режиме позволяет
уменьшить зависимость характера переходных процессов от изменения параметров объекта и
действующих возмущений.
267
Синтез СПС на основе последовательной совокупности инвариантных многообразий.
Ранее рассмотрен метод синтеза нелинейных СПС путем задания в фазовом пространстве
систем некоторого инвариантного многообразия ip = 0, состоящего из некоторых кусочно-
гладких функций, например функций типа “сумма модулей”. Для решения задачи синтеза
использовалась процедура, основанная на применении одного многообразия в соответствиис
методом АКАР, разработанным во второй главе. Этот метод дополнялся условиями возникно-
вения скользящего режима изображающей точки вдоль некоторой поверхности разрыва уп-
равления 5 = 0, входящей в состав выбираемого инвариантного многообразия, к которому
притягивается изображающая точка из произвольного начального состояния системы.
Возникает идея применения для синтеза нелинейных СПС последовательной или парал-
лельной совокупности инвариантных многообразий в фазовом пространстве систем, основан-
ная на развитом в третьей главе методе АКАР. При этом, в зависимости от способа формиро-
вания макропеременных ipk(xi,...,x,i-i , 5а) и функций л’а, можно построить различные проце-
дуры синтеза СПС. Перейдем к рассмотрению методов аналитического конструирования СПС
на основе применения совокупности инвариантных многообразий.
Рассмотрим метод, основанный на введении многообразия
„ (4.153)
V>1 = 2 /MxJ + I A'l I = 0
k=\
и последовательной совокупности подмногообразий
5j = хн + z42(xi,...,.v(I-i) = 0 ; (4.154)
52 = Х„-| + //2(Х| ,...,Х/;-2) = о ; Sm = Х2 + И»1+1(Х1) •
На основе уравнения
(О + ip\ = 0 , (4.155)
в силу исходных уравнений объекта
х, (О = Л<Х1,.-,Х/) + cij+\Xj, j = 1,2,...,л-1 ;
Хп (О = /H(xi,...,x„) + iii , (4.156)
где/у—непрерывно-дифференцируемые функции, с учетом ip\ (4.153) и 5| (4.154) находите
управление
vl a f • • "v 1 , • f (4Л57!
III = - 2 fikfk Sign Xk Sigil 5-2, T—fk ~ T^lpl Sign 5, - fn .
A=l A=1 aXk
Это управление переводит изображающую точку из произвольного начального состояния на
многообразие V-’i = 0 (4.153). В связи с тем, что система асимптотически устойчива относительно
ipi = 0, то это означает, что изображающая точка неизбежно попадает на подмногообразие
51 = 0 (4.154). Движение вдоль 5] = 0 можно организовать, используя подмногообразия
52 = 0,...,5„| = 0 (4.154) и синтезируя промежуточные управления иг,—, П/п+1 на основе уравнений
TjSj (/) + 5, = 0 , / = 2,...,щ ; 7, > 0. (4.158)
При этом управление пг находится из уравнения
7/5'2 (() + 5’2 = О,
в силу уравнений
Xj (0 = fj(x\,—,Xj) + а/+1Х;+| , / = 1,2,...,//—2 :
х,(-1 (0 =/„-1(Х1,...,х;|-1) - ПиПгСх],...,.^-!),
описывающих движение вдоль подмногообразия 5] = 0. Управление пг находится аналогично
из уравнения
T3S3 (/) + 5з = О,
в силу уравнений
Х;(Г) =/Хх|,...,ху) 4- а/+1Х/+1 , /= 1,2,...,л-3 ;
Хп-2 (0 = fn-2(x\,---,Xn-2) - ««-1//з(Х1,--,Х,(-2) ,
описывающих движение вдоль подмногообразия 5г = 0. Остальные управления п4,..., ит^
находятся подобным же образом на основе соответствующих функциональных уравнений
(4.158) и уравнений движения на предыдущих подмногообразиях $3 = 0,...,sm = 0. Очевидно,
что основное управление щ (4.157) имеет переменную структуру, а вспомогательные (проме-
жуточные) управления/г2 «»«+1 будут представлять собой некоторые непрерывные функции
координат системы. Процедура синтеза закона управления и.\ (4.157) завершается после
выбора промежуточных управлений ит+ i(xi) последнего этапа движения, описываемого диф-
ференциальным уравнением
*1 (0 = fi(xi) ~ a2iim+i(xi).
Затем zzm+i(xi) подставляется в предыдущее управление zzni(xi , х2), которое, в свою очередь,
подставляется в Z4,„(xi , х3, х3) и т.д., вплоть до управления zz2(xi,...,xrt-i), непосредственно
входящего в закон управления zzi(xi,...,x„) (4.157).
Конкретизируем изложенную общую процедуру синтеза для нелинейного объекта третьего
порядка:
xi (0 =/i(xi) + а2х2 ;
Х2 (0 = Л(Х1 , х2) + а3х3; (4.159)
хз (0 = /зО1 , х2 , Хз) + 1Ц .
Выберем макропеременную = 0 в виде
ipi =/3]lxjl + j32lx2l + Isl , (4.160)
ще s, = х3 + zz2(xi , х2). (4.161)
Подставляя (4.160), (4.161) в функциональное уравнение (4.155), получаем в силу уравнений
объекта (4.159), закон управления (4.157):
«1= - (fi + <Z2X2)(^isignxisignsi+ |^) - (/2+ a3x3)(^2signx2signs+ |^) -
- /з ~ тг I xi I - I х21 - у- (х3 + zz2).
11 11 11
(4.162)
В выражение (4.162) входит промежуточное управление zz2(xi , х2), которое найдем на основе
дифференциального уравнения
T2s2 (0 + s2 = 0 , Т2 > 0 , (4.163)
в силу системы дифференциальных уравнений
xi (0 =/i(xi) + а2х2 ; (4.164)
хг (0 = /г(х1 , х2) - а3и2 ,
описывающих движение изображающей точки вдоль подмногообразия Si = 0 (4.161). Подста-
вив S2 = хг + zz3(xi) в уравнение (4.163), в силу уравнений (4.164), получаем
«з«2 = Л + (6 + а2Хг)|^ + ^гх2 + ^ru3(xi).
(4.165)
Управление (4.165) переводит изображающую точку в окрестность подмногообразия $2 = 0,
движение вдоль которого описывается следующим дифференциальным уравнением:
Х1 (0 =/1(Х1) - й2«з(Х1) • (4.166)
Выбрав (4.166) промежуточное управление zz3(xj), например, вида
й2«з(*1) = «xi + /i(xi), (4.167)
ваходим уравнение движения изображающей точки вдоль $2 = 0:
xi (0 = - axt .
Условие асимптотической устойчивости в целом этого уравнения и, следовательно, движения
вдоль $1=0 имеет весьма простой вид
а>0. (4.168)
Используя и3 (4.167), получаем на основе (4.165) следующие производные функции ii2‘.
ди2 1 а/2 1 d-Ма- I И I 1 1 f I J | 1 p/if 1 а .
dxi a3dxi а2а3 dxi T2j а3 дх} ^2Z1 J й2«з ^xj a2a3T2 ’
azz2 _ 1 / dfi + df2\ + a + 1
дхг a3 3xi 3x21 a3 a3T2'
(4.169)
(4.170)
269
Теперь, подставив выражения (4.167), (4.169), (4.170) в (4.162), можно окончательно шт
закон управления ui(xi, х2, *з) (4.162), переводящий изображающую точку на подмногооб-
разие 5] = 0 (4.161), т.е.
а 1 _l 1 f □. 1 / u. 1 <f л (4.171)
Si = ----X2 + *3 + ----------------rr~ f1 —/2 -------(/1 + Л2Х2) (a + -7—) = 0,
a2a3T2 a3T2 a2a3T2l a3 a2a3v L L,x Эхг
движение вдоль которого описывается уравнениями (4.164), т.е.
xi (0 =/i(xi) + а2х2 ,
• лл _ а 7 1 f 1 ч г u. d/i ч (4.172)
Х2^ а2Т2Хх Т2Хг а2Т-/' + Д + Эх? •
Найдем условия возникновения скользящего режима движения вдоль S| = 0 (4.171). Для этого
используем функциональное уравнение (4.155), откуда, в силу уравнений (4.171), находим
$, (0 = - (/] + а2х2) signxi signsi +
«1 , 1 z
a2T2Xi + Т2Х2 + а2Т2х +
+ ^(/i + а2х2) (а + signx2 signsi - yjVisignsi .
Применяя к выражению (4.173) условия (4.125), получаем неравенство
+ а2Х2) signxt - fl2
а\ _1_ 1/1
a2T2Xi Т2Х2 а2Т2\а2
a/i
dxi
signx2+
+ ф- I xi I + I х21 > 0 .
2 1 2 1
(4.174)
Неравенства (4.168) и (4.174) определяют условия возникновения устойчивого скользящего
режима движения изображающей точки вдоль поверхности разрыва $i =0 (4.171) под дейст-
вием управления щ (4.162). Выбором параметров /?ь fl2, а, Т\ и Т2 эти условия во многах
случаях можно удовлетворить. Оценка времени движения изображающей точки в окрестность
начала координат фазового пространства имеет вид
Тр<(3^4) (Ti + T2 + ^) .
При этом замкнутая система будет иметь апериодический характер затухания переходных
процессов.
Таким образом, синтезированное разрывное управление (4.162) обеспечивает для нели-
нейного объекта (4.159) устойчивый скользящий режим движения с заданным временем и
характером затухания переходных процессов в нелинейной СПС. Закон управления (4.162)
синтезирован на основе разработанного метода АКАР с использованием заданной последова-
тельной совокупности подмногообразий Si = 0 ,..., sm = 0 понижающейся размерности.
Аналогично можно синтезировать разрывные управления и для других нелинейных объек-
тов, описываемых системой нелинейных дифференциальных уравнений (4.156), имеющей
треугольную функциональную матрицу. Такими математическими моделями, как это было
показано ранее на примерах многих механических и электромеханических объектов, может
быть представлен достаточно широкий класс распространенных в различных отраслях техники
и промышленности подвижных и технологических объектов.
Синтез нелинейных СПС и обратные задачи динамики. Во второй главе показано, .что на
основе развиваемых в этой книге методов АКАР можно синтезировать нелинейные системы с
использованием концепции обратных задач динамики. Применим метод АКАР для решения
обратных задач динамики в нелинейных СПС для объектов вида (4.156). Метод предполагает
аналитический синтез законов разрывного управления, обеспечивающего устойчивое сколь-
жение вдоль выбранного нелинейного или линейного многообразия в пространстве состояния
системы. Для объекта (4.156) рассмотрим задачу синтеза разрывного управления, обеспечи-
вающего асимптотическую устойчивость системы.
Для решения поставленной задачи необходимо выбрать многообразие в пространстве
состояний системы (4.156), характер движения по которому является заранее заданным, и
организовать скользящее движение вдоль этого многообразия. Предположим, что заданное
движение в скользящем режиме описывается линейным дифференциальным уравнением п-1 -
порядка
х\П 2) + ••• + k\Xi — 0 ,
(4.175)
где xi (f)—выходная координата; к,—такие коэффициенты, что уравнение (4.175) имеет же-
лаемое распределение корней Ai ,..., Л(П-1), а поверхность переключения в пространстве состо-
яния системы (4.156), в общем случае, определяется следующим выражением:
5 = y>(x],...,x„-i) + хп = 0 , (4.176)
1де^(Х1,...,х;1-1)—нелинейная (линейная) непрерывная функция, дифференцируемая по своим
переменным, ^>(0,...,0) = 0.
Поведение объекта (4.156) в скользящем режиме (при выполнении условия s = 0) описы-
вается системой дифференциальных уравнений п-1 порядка
Xi (0 = ffcxi...Xi) + ai+iXi, i = 1,2,...,л-2 ; •
X(„-i) (0 = /,(-i(xi,...,xn-i) - an-\<p{xi,...,xn-\). (4.177)
Последовательно дифференцируя (л—1) раз выходную координату xi (/), в силу системы
(4.177), и подставляя полученные производные в выражение (4.175), можно определить вид
искомой функции y>(xi,...,x„-i):
у(//-1) . [(п-1) .(/-1) v (4 17R)
<Р{ХХ...хн_.) = П «Г* 2 + П Л"('+1))(х.,..,х,) ] , (4Л78)
4 1=1 ' 1=1 ' 1=1 '
ще
«1 - xi ; s2 = xi (/) ;...; sn = х(”-1) (/);
° (4.179)
П а, = 1 ; fli-\(x\,...,xn_\) =/n-i(xi,...,x„-i) .
/=1
Выражение (4.178) представляет собой нелинейную (линейную) функцию координат объекта
(4.156) и коэффициентов Подставив (4.178) в (4.176), найдем уравнение поверхности
переключения (4.176). Движение вдоль этой поверхности s = 0 в скользящем режиме носит
заранее заданный характер, определяемый уравнением (4.175), которое, с использованием
выражений (4.179), можно представить в виде
(-i'l V» , л (4.180)
5 = П ai S kisi = 0 •
/=1 J /=1
Найдем разрывное управление n(xi,...,x„); обеспечивающее устойчивое скольжение вдоль
s= 0. Если для синтеза закона управления /z(xi,...,x„) в качестве ip выбрать кусочно-гладкую
функцию
(«з1) л (4.181)
= 2 А Ь/1 + Рп 151 ,
1=1
юискомый закон управления можно получить из уравнения (4.121) с учетом (4.180), (4.181)
в силу системы (4
п
Ё 5,-
.156):
. ((-О
-д— signsi signs + И а,
\ Р'1 ( 1=1
1 (в- (
+ ~ I тр-signs;-signs + | П аТ1
1 \Р" /=1
/ /i-i
+ П ат
/
(4.182)
/?о = 0 , ко = 0 , signx„ = 0 .
Синтезированный закон управления (4.182) имеет разрывной характер. Изменение структуры
происходит на поверхности s = 0 и частично на sz = 0 (/ = 1,(л-1)). Закон управления (4.182)
гарантирует асимптотическую устойчивость замкнутой системы в “целом” относительно
Si= 0,51 = 0. При построении СПС необходимо обеспечить выполнение условий возникнове-
271
ния скользящего режима движения вдоль s = О, которые имеют вид (4.125). Выражение дм
s(f) находится из уравнения экстремали (4.155) с учетом (4.180), (4.181), в силу системы
(4.156), при условии s = 0:
(4.183)
(4.184)
n-J j j
2 Si (fii-i signs,-1+ Ypi signs,— pn-iki signs,,-1)) signs .
»=i 1
Из (4.183) следует, что условия (4.125) представляют собой неравенства вида
)S,y >jS,-i +рп_{ 1Л,1 , i= 1,2,...,/г—1 .
Выполнение неравенств (4.184) всегда можно обеспечить за счет выбора коэффициентов Ди
параметра Т\. Движение изображающей точки вдоль s = 0 в устойчивом скользящем режиме
определяется свойствами желаемого дифференциального уравнения (4.175), которые могут
быть обеспечены на основе методов стандартных коэффициентов или модального управления.
Пример 4.7. Рассмотрим пример синтеза СПС, иллюстрирующий изложенные ранее мето-
ды. В качестве объекта выберем математический маятник, описываемый уравнениями
*1 (0 = Х2; х2 (0 = sinxi + хз; хз (0 = и • (4.185)
Найдем управление u(xi ; х2, х3), которое обеспечивает асимптотическую устойчивость замк-
нутой системы, желаемое движение которой в скользящем режиме описывается следующим
уравнением:
Xi (7) + £2*i (0 + kiX\ (/) = ().
Запишем уравнение поверхности переключения
s = ^p(xi , х2) + хз = 0 . (4.187)
Движение маятника (4.185) в скользящем режиме вдоль s* = 0 (4.187) описывается уравнени-
ями
(4.186)
*1 (0 = Х2 (/) ; Х2 (0 - sinxi - <р(х\ , хг) • (4.188)
Подставив выражения производных от выходной координаты xi (f), взятых в силу системы
(4.188),
5’1 = xi ; S2 = xi (f); 5з = *1 (0 = sinxi - <р(х\ , хг)
в уравнение (4.186), определим искомое выражение для <р(х\ , х2):
#>(xi , хг) = к\Х\ + к,2Х2 + sinxi . (4.190/
Используя выражения (4.189) и (4.190), записываем, согласно (4.182), закон у правления
1 о к В[
и - - у (Л1 + signxi signs )xi-(£i+-^ + ^ signxi signs -
Л, 1 /?г
- signx2 signs+ cosxi) x2- ( x3+ sinxi) (k2+ y+ signx2 signs ).
Выражение для s (f) в соответствии с (4.183) имеет вид
— 'у-signxi - р2к{ signx21xi + (Pi signxi-/?2*2signx2+ у signx2)x2 signs.
(4.189)
(4.191)
(4.192)
iw = ‘S
Тогда условия возникновения скользящего режима движения вдоль s = 0 (4.187) будут выра-
жаться следующими неравенствами:
уТ > /?21 &1 I , /?г _ > Pi •
При выполнении неравенств (4.192) синтезированный закон управления (4.191) гарантирует
не только стабилизацию маятника (4.185) в верхнем положении, но и обеспечивает заданный
уравнением (4.186) характер движения в скользящем режиме.
На рис.4.21 представлены переходные процессы замкнутой системы с законом управления
(4.191) при различных начальных условиях (кривые 1: хю=1, х2о=1, х30 = 1; кривые 2:
хю= -1, хго=1, *зо=1; кривые 3: хю=1, х2о= -1, хзо=1). Коэффициенты желаемого диффе-
ренциального уравнения (4.186) заданы значениями: ki = 2, Л2 = 3, а параметры настройи
272
• регулятора с учетом условий (4.192) выбраны следующими: /?i = /32 = /З3 = 1; Т = 0,2. Изо-
браженные на рис. 4.21 переходные процессы имеют апериодический характер затухания, а
амкнутая система обладает свойством асимптотической устойчивости движения.
К достоинствам предложенного метода синтеза СПС относится то, что за счет определения
ребующейся гиперповерхности переключения s = 0 обеспечивается желаемый процесс дви-
:ения нелинейного объекта (4.156) в скользящем режиме, определяемый задаваемым диффе-
енциальным уравнением (4.175), что по существу снимает необходимость решения задачи
стойчивости скользящего движения. Метод также позволяет значительно упростить выпол-
[ение необходимых и достаточных условий возникновения скользящего режима, которые в
ассматриваемом случае имеют вид неравенств (4.184), не зависящих от нелинейных функций
i,fn объекта (4.156). Указанные преимущества разработанного метода позволяют синтезиро-
ать нелинейные СПС с заданными свойствами переходных процессов.
Покажем теперь, что изложенные выше методы синтеза нелинейных СПС, основанные на
ведении последовательной совокупности многообразий и на концепции обратных задач,
риводят к идентичным результатам. Для этого сравним результаты синтеза разрывного
травления указанными методами применительно к нелинейному объекту (4.185). Ранее было
юлучено управление (4.191) с привлечением концепции обратных задач. Теперь синтезируем
травление на основе введения последовательной совокупности многообразий. Объект (4.185)
лносится к виду (4.189), поэтому воспользуемся соотношениями (4.162) — (4.172). Для этого,
юпользуя уравнения (4.185), находим из (4.167)
/<з(х1)=ах1,
1затемиз (4.165) получаем
u2(xi , х2) = ^rx\ + (a + yr) х2 + sinxi .
Подставив (4.193) в (4.162), находим следующий закон управления:
" ~ . . a
Signxi signsi +
(4.193)
Ml =
xi -
о . . а В2 . . 1 / 1 \ '
- pi signxi signsi + 7fr-1- cosxi + ^r signx2 signs] + a + -=-
'2 1 \ ' Ц 1 2/
X2 ~
- (хз + sinxi) LS2 signx2 signsi + a + + -k
(4.194)
(4.195)
Аналогично, подставив u2 (4.193) в (4.164), получаем уравнения.
*1 (0 = х2 , х2 (Г) = - yrxi - (а + уг) х2
или дифференциальное уравнение
xi (Г) + ( а + -jr) xi (Г) + yrxi = 0 ,
описывающее движение изображающей точки вдоль поверхности (4.171):
ОС z 1 X
si = —xi + ( а + уг) х2 + х3 + sinxi = 0
кхользящем режиме. Структуры законов управления (4.194) и (4.191), а также дифферен-
циальных уравнений (4.195) и (4.186) идентичны. Если положить в (4.186) и (4.191) парамет-
ры:
(4.196)
i a 1
k\ — уг , k2 — a + yr, T — T\ , /?з — 1 ,
to законы управления (4.191) и (4.193), а также уравнения (4.168) и (4.195) полностью
^впадут. Итак, при выполнении соотношений (4.196) законы управления объектом (4.185),
синтезированные изложенными двумя методами АКАР, совпадут, а выбором соответствующих
.параметров (4.196) можно обеспечить желаемые свойства нелинейной СПС. Аналогично
мно показать, что и для других нелинейных объектов вида (4.156) оба метода приводят к
273
274
вдентичным результатам. Однако эти методы имеют свою специфику применения, связанную
с поиском или заданием дифференциальных уравнений движения в скользящем режиме,
выполнением условий устойчивости движения и др., что расширяет возможности проектиров-
щика нелинейных СПС. Следует отметить, что первый метод может быть применен не только
доя объектов (4.156), но и для нелинейных объектов, имеющих неполную треугольную фун-
кциональную матрицу, когда имеется возможность записать условия устойчивости движения
вдоль нелинейной гиперповерхности переключения управления.
Таким образом, оба метода тесно связаны и взаимно дополняют друг друга при решении
практических задач синтеза нелинейных систем.
Синтез нелинейных СПС с форсированным скользящим режимом. Высокая скорость
протекания переходного процесса в СПС обеспечивается за счет понижения размерности
(|йзового пространства путем введения скользящего режима с желаемыми динамическими
свойствами. Ускорить протекание процесса скольжения возможно путем организации нового
скольжения вдоль поверхности еще более низкой размерности, т.е. путем организации форси-
рованного скользящего режима (ФСР) [87]. Если после организации в системе скольжения
первого порядка удалось добиться требуемых динамических свойств, то нет необходимости
вводить в систему скольжение более высокого порядка, если же не удалось, то следует органи-
зовать скольжение второго и т.д. вплоть до (л — 1) порядка включительно.
Введение в систему ФСР не только ускоряет протекание переходного процесса, но и
’наделяет систему свойствами инвариантности к изменению в широком диапазоне параметров
^объекта к внешним возмущениям, позволяет решать задачу устойчивости на конечном этапе
цвижения.
Рассмотрим применение метода АКАР для синтеза нелинейных'систем с ФСР.
Предположим, что возмущенное движение объекта управления описывается системой
нелинейных дифференциальных уравнений и-го порядка
*1(0 = 2 (О» г = 1,2,...,и—1 ;
, /=|
Хц(Х) = + bkUk (f), к = l,2,...,n—1 , (4.197)
едеху (О—координаты вектора состояния; tik (О—управляющие воздействия; A(xi,...,xzl)—не-
линейные непрерывные функции, дифференцируемые по своим переменным, /(0,...,0) = 0;
Д—коэффициент усиления; к—порядок скольжения.
| Такой математической моделью описывается довольно распространенный класс объектов.
Процедура синтеза разрывного управления состоит из двух этапов [88]. На первом этапе за
счет выбора уравнения поверхности скольжения обеспечивается желаемое в каком-либо смыс-
ле движение в скользящем режиме. На втором этапе осуществляется непосредственно синтез
икона управления, обеспечивающего скользящий режим уже вдоль выбранной поверхности
кольжения. При этом размерность исходной системы понижается на единицу. Если еще раз
применить эту процедуру, то в исходной системе возникает скольжение второго порядка, или
ФСР. Иначе, на поверхности скольжения первого порядка организуется новое скольжение,
юнижающее размерность исходной системы еще на единицу. Процедуру можно повторять
{«-1) раз, пока порядок исходной системы не станет равным единице, или пока в системе не
юзникнет скольжение вдоль одномерной линии.
, Рассмотрим подробнее процедуру синтеза. Согласно первому этапу синтеза выберем урав-
кние поверхности переключения для скольжения первого порядка к= 1 в виде
к ' (4.198)
Sk = 2 akjXj + Uk+i (0 = 0; Ukn = 1 » un-k+i (0 = 0 ,
/=i
Деа*у—могут быть любыми выражениями, за счет выбора которых движению системы (4.197)
^скользящем режиме придаются требуемые динамические свойства, в частности, а*у- = const.
Функция Uk+i (0—это неизвестное на данном этапе управляющее воздействие, обеспечиваю-
щее скользящий режим следующего порядка и носящее вспомогательный характер. Поведение
275
системы (4.197) в скользящем режиме будет описываться уже линейным дифференциальным
уравнением (л-1) порядка:
0+1)
Xi (0 = 2 aijXj (t);
/=i
(«-О ________ (4.199)
Х(«-1) (Г) = 2 («п-i./ ~ <**/) Xj (0 - an-i,nun+} (?) , i = 1,(и-2) •
/=1
Введя обозначения
(п-1)
/(А:+1) = 2 (^п-1,/ ^kj) Xj (?) , Ьк+\ = Оп—}<п ,
j=1
можно представить систему (4.199) в виде
0+1)
х, (t) = 2 W (t), .
/=1
Xn-i (0 = fk+i(xi,...,xn—i) + Ьц+111п+\ (f). (4.200)
Затем, согласно процедуре второго этапа, необходимо синтезировать оптимальное в каком-ли-
бо смысле управление ик (/)» носящее разрывной характер и обеспечивающее скользящий
режим вдоль уже выбранной поверхности переключения Sk — 0 (4.198).
Выберем сопровождающий функционал, по которому производится оптимизация системы,
в виде
“ 2 ? 2-2 (4.201)
Jk= f [тМ + cl^k(t)} dt,
о
где — агрегированная макропеременная, зависящая от координат пространстаа
состояний; т-к, Ск—весовые коэффициенты. Устойчивое подсемейство экстремалей, доставля-
ющее минимум функционалу (4.201), определяется уравнением
т _п Т _ (4.202)
ТкУк + V'A - 0 » Тк - — •
Если хрк выбрать в виде кусочно-гладкой функции
(«-1) (4.203)
tyk S flkj । Xj I + fikn' Sk I ,
/=1
где под fikj могут пониматься любые выражения, в частности = const, то искомый закон
управления Uk(f) можно определить из уравнения экстремали (4.202) с учетом (4.198), (4.203)
в силу уравнений (4.197):
п
“к (0 = - 2
1=1
(п-1)
х,- 2 «Д
/=1
'Bki .
£— signxy signs* + akj
Рпк
1 (Pki . . , '
+ jran I signx, signs* + aki
-/*(xi,
— fyk+1) yT^t+l (0 + Щ.+ 1 (0 1»
rflesignx„ = 0 , /z*+i = zz*+i (t) = 0, если A = /г—1. В уравнение (4.204) входит неизвестное пока
вспомогательное управление w*+i (f) и его производная //*+1 (f).
Синтезированный закон управления (4.204) имеет разрывной характер. Изменение его струк-
туры происходит на поверхности s* = 0 и частично на плоскостях х7 = 0 он переводит изобража-
ющую точку из произвольного состояния в некоторой области на поверхность s* = 0, а также
гарантирует асимптотическую устойчивость замкнутой системы во всем фазовом пространстве, за
исключением s* = 0.
При синтезе СПС необходимо обеспечить выполнение условий (4.125) возникновения сколь-
зящего режима движения вдоль многообразия s* = 0. Выражение для s* (f) находится из уравнения
экстремали (4.202) с учетом (4.203), (4.198) в силу уравнений (4.197) на поверхности s* = 0:
276
1 г(«-2) 1 Л о 1 (4.205)
sk (0 = ~ д— 2 xi 2 Pkjan signxy + -Tfratfiki signxz - Pk,(n-V)ii(k+\) signx„-i signs* ,
Pkn /=1 L j=i *k J
ще Uk+1—часть вспомогательного неизвестного управления, которая обеспечивает скользящий
режим более высокого порядка. Очевидно, что для выполнения условий (4.125) возникновения
жользящего режима необходимо потребовать выполнения следующих неравенств:
1 (»-•) _ ______ (4.206)
А» (ап + т-') s 2 А/1 «А1 + Ал-11 м*+1(х,)I , Z = 1,(п-1).
\ 1к/ ;=1
Выполнение неравенств (4.206) всегда можно обеспечить за счет выбора соответствующих
коэффициентов Ал Г* при условии, что iik+i (0 пока неизвестно.
Для того, чтобы определить вспомогательное управление Uk+i (/) необходимо проделать
описанную процедуру синтеза еще раз, теперь уже для уравнения (4.200), понизив тем самым
порядок исходной системы или повысив порядок скольжения еще на единицу. Процедуру
синтеза в общем случае можно повторять (и-1) раз до тех пор, пока порядок скольжения не
станет равным к = п -1. В этом случае движение исходной системы в скользящем режиме будет
описываться линейным дифференциальным уравнением первого порядка и не зависеть от
изменений параметров объекта.
Таким образом, изображающая точка, попав на поверхность скольжения первого порядка,
последовательно “переходит” с одной поверхности скольжения на другую, но более высокого
порядка, и так до тех пор, пока поверхность скольжения при к = п— 1 не выродится в одномер-
ную линию, скользя вдоль которой изображающая точка приходит в начало координат фазо-
вого пространства.
На конечном этапе движения вид вспомогательного управления itk+i (/) конкретизируется
в зависимости от желаемого характера переходного процесса. Производя (л — 1) раз подстанов-
ку каждого последующего вспомогательного управления в предыдущее, начиная с iik+i (xj,
получим искомые выражения (4.204) — (4.206), необходимые для синтеза замкнутой СПС.
После выбора параметров fy, ациТк производится конкретизация управлений iik+1 и тем самым
заканчивается процедура синтеза системы.
Рассмотрим теперь процедуру синтеза СПС с ФСР для нелинейных объектов (4.156), как
и ранее, синтезируем управление нелинейным объектом (4.159). Выберем сначала первую
макропеременную
V’i =^ц1х11 + Хг1 +^1з15|1 »
ще s’i = ацХ1 + «12X2 + хг + иг{х\ , хг).
Поставив выражения (4.207) и (4.208) в уравнение
T’iV'i (0 + V>i = 0 ,
в силу уравнений объекта (4.159), определим управление
/о = ~fi signxi signal + аи j - /2 signx2 signsi + а^ - /з -
- signxi signsi +)Si3«ii) - x2 ^|a2 signxi signsi +
fi\2 . . $13#12 \ (fill . . fil^
+ -=- signx2 signs! + Л2«11+ —r— ) - x3 75—a3 signx2 signsi + аза 12+
7 1 J1 / IP13 71
Аз zz I \ /1 . \ dfZ2
- ^i‘2 - (/, + a2x2) - (/2 + a3x3) .
Управление iii (4.210) переводит изображающую точку на многообразие^! — 0 (4.207), т.е.
ва поверхность si = 0 (4.208). Движение вдоль $i = 0 описывается уравнениями:
xi (0 = /i(xi) + а2х2 ;
хг (О = /z(xi , х2) - a3anxi - a3ai2X2 - а3и2(х\ , х2).
(4.207)
(4.208)
(4.209)
(4.210)
(4.211)
277
Тогда, выбрав вторую майропеременную
V*2 = /Ь1 I *1 I + @221 $21 , (4.212)
где S2 = «21X1 + х2 + «з(*1) » (4.213)
и подставив в уравнение
Т2^2 (0 + ^2 = 0 (4.214)
выражения (4.212) и (4.213), получаем, в силу уравнений (4.211), вспомогательное управле-
ние
/?21 . #21 \ 1
112 = [аз@22Т2 SlgnX1 SlgnX2 ” а" + а&пТг] ~ Х2 (а*2 " аз@22Т^ +
+^Ь?з(х,)++а2Х2) (fesignxi signs2+ “2,+ 14,2151
Управление «2 (4.215) переводит изображающую точку на многообразие V>2 = О (4.212), м.
на кривую «2 = 0 (4.213), движение вдоль которой описывается уравнениями
xi (0 = /1 (Х1) - «2«21Х1 - «2«з(Х1) • (4.216)
Выбрав в (4.213), в частности
z х 1 , , ч (4.217)
"з(х,) = —/i(xi),
находим, что для асимптотической устойчивости в целом уравнения (4.216) необходимо
положить
«21«2 > 0 . (4.218)
Условие (4.218) обеспечивает также (при 1\ > О, Т2 > 0) и асимптотическую устойчивость
движения в целом вдоль поверхности si = 0 и, следовательно, всей синтезированной система
с законами управления (4.210). Для окончательного определения закона (4.210) необходимо
подставить функцию нз(х1) (4.217) в выражение (4.215), а его, в свою очередь, подставите»
(4.210). Уравнение поверхности переключения S] = 0 также можно определить, подставив щ
(4.215) в (4.208), а уравнение линии переключения st =0—путем подстановки (4.217)»
(4.213). На линии «2 = 0 (4.213) и поверхности si = 0 (4.208) должен возникать скользящий
(4.2W)
(4.220)
режим движения. Из уравнения (4.209), с учетом (4.207) и (4.208), находим
$1 (0 = “ (/1 + «2X2) Signal Signal ” (/2 “ «3«11Х1 - <?3«12Х2 -
- tf3u2) signxj signsi - I xi I signsi - IX21 signsi + s'i .
Применив к выражению (4.219) условия (4.125), получим неравенство
Д^зТ^Х2^ signxi+ «п«зХ1 «3^2) signx2- '
-|^(«12«2-^) 1Х21 >0,
Р13 Л 1
которое гарантирует условия возникновения скользящего режима движения вдоль поверхно-
сти переключения si = 0 (4.208). Аналогично из уравнения (4.214) с учетом (4.212) и (4.213),
в силу уравнения (4.216), находим
• @21,, х . . @21 , . . 1 (4.221)
S2 (0 = - ^(/1 “ «2«21Х1 - <22^3) Signxi SlgflS2 “ 1 Х1 1 Slgn«2 “ ^у$2 •
Применив к соотношению (4.221) условия (4.125), с учетом (4.217), получим неравенство
п < 1 (4.222)
и < (221^2 — ‘7Г ,
определяющее условие возникновения скользящего режима движения вдоль линии переклю-
чения
S2 ~ «21X1 + Х2 + 4"/1(Х1) = 0 .
278
Итак, неравенства (4.220) и (4.222), которые могут быть выполнены за счет соответству-
ющего выбора параметров Ьц и «*,, обеспечивают скользящие режимы движения вдоль = 0
и $2 = 0. Полученные выражения для закона управления (4.210), (4.215), (4.217) и условия
возникновения скользящих режимов (4.220), (4.222) определяют все выражения, необходи-
мые для синтеза замкнутых СПС с ФСР для нелинейных объектов третьего порядка вида
(4.159). Аналогично можно построить процедуру синтеза СПС и для других нелинейных
объектов класса (4.156),имеющих, как ранее отмечалось, важное применение в различных
областях техники и современной промышленности.
Пример 4.8. В качестве примера рассмотрим применение предложенного метода синтеза
нелинейных СПС с ФСР к задаче управления электромеханическими процессами синхронного
генератора энергосистемы, описываемого дифференциальными уравнениями (4.141). Для синтеза
СПС используем линеаризованные уравнения (4.142). Требуется определить закон управления,
переводящий объект из некоторого исходного состояния в начало координат фазового простран-
ства. Критерием качества выбираем оптимизирующий функционал вида (4.201) с функциями^
н^2 вида (4.203) и уравнениями поверхностей скольжения s, = 0 и S2 = 0 вида (4.198) соответст-
венно для организации скользящих режимов первого и второго порядков, т.е.
Wi = fill ' +/^12l-Y2l +/?1з1$1 । И (/>2 =/?21 । Xi I +/?22 । $2 । , (4.223)
ще 5] = «цХ1 + «12^2 + хз + /4г(х1 , хг) = 0 ; 5г = «21X1 + хг = 0 . (4.224)
Тогда, применяя, с учетом выражений (4.223) и (4.224), изложенную выше процедуру синтеза,
находим закон управления объектом (4.142):
( 1 . /?12 . ^11 \
kui = ~ xi signxj sign.si - д «I signx2 signs) 4- — a^ai -
|P13' 1 P13 11 j
(/?11 . . P22 . . CZi? 1
Signxi Slgnsi + Slgnx2 Slgnsi + + «п I -
-X3(k+ -±- -«12«2- ^a2signx2sign5i) -tfola signx2 signsi + «12
1 I P13 IP13
1 f . dm dill (4.225)
- a4x2sinxi - уг-/<2(х1 , xi) - j^-xi - - «1X1 - а2хз) •
Для определения неизвестной функции iii{x\ , xi) следует использовать уравнения движения
вдоль поверхности Si = 0 (4.224). Найдя из уравнения si = 0 переменную
хз = - ацХ1 - «12Х2 - пг(*1 , х2)
«подставив ее в первые два уравнения системы (4.142), получаем дифференциальные уравне-
ния
Х1 (0 = х2 ;
1 х2 (7) = а0 + («ц«2 - а\)х\ + «12^2X2 + «2«2(xi , xi), (4.226)
.доторые и определяют движение вдоль $i = 0. Проделав аналогичную процедуру синтеза для
системы (4.226), определим вспомогательное управление
, V 1 ( Рп . . . «21 , ) «о
I «2(Х1 , Х2) = - — l^yrsignxi Slgn52 + 7Г- + «И«2 ~ «1 X, - - -
\ f)^2i • • , 1 , «12 . ) (4.227)
~ д-Signxi Slgn52 + + --- + «21 «2 Хг .
! \Р22 12 Cli }
(Подставив iii (4.227) и его производные в выражение (4.224), получим закон управ-
Jb CfX\ dX2
уния iii(xi , xi, хз). Управление т (4.227) переводит изображающую точку на линию пере-
‘шючения si = 0 (4.224), управление движения вдоль которой можно представить в виде
j „ X] (Г) + «21Х, = 0. (4.228)
^Условие устойчивости уравнения (4.228) имеет вид следующего простейшего неравенства:
«21 > 0 . (4.229)
279
Неравенство (4.229) при Т\ > 0 и Т2 > 0 является также и условием асимптотической устой-
чивости синтезированной нелинейной СПС. Очевидно, что движение вдоль s2 = 0, в соответ-
ствии с уравнением (4.228), не зависит от параметров объекта (4.142), а определяется только
значением коэффициента «2|, входящего в уравнение линии переключения s2 = 0 (4.224).
Условия возникновения скользящего режима движения вдоль si = 0 записывается следующим
образом:
/?21
/?22
+ «21
а вдоль 52 - 0 в виде
(4.230)
(4.231)
(4.232)
и
Синтезированный закон управления щ (4.225), с учетом выполнения неравенств (4.229)—
(4.232), обеспечивает устойчивый ФСР, переводя объект (4.142) из произвольного исходного
состояния в начало координат фазового пространства.
На рис. 4.22 представлен переходной процесс по выходной координате xi синтезированной
СПС с законом управления и\ (4.208), который стабилизирует нелинейный объект (4.141),
при этом численные значения параметров объекта (4.141) остались прежними, а коэффициен-
ты настройки в законе (4.225) и начальные условия выбраны следующими:
*ю = *20 = *30 — 1; «н = — 4; aj2 = — 5; «21 = — 0,5; Т\ = 0,25; Т2 = 1. Замкнутая система
описывается дифференциальными уравнениями:
* i (г) = х2;
* 2 (0 = «о - «1*1 ~ «2*3 + М (Г);
* з (0 = ~ £*з + «4*2Sinxi + ku\{x\ , хг , *з), (4.233)
где М (Г) = aiXi (/) — cusinxi (Г) — <73X3 (/) sinxi (7). (4.234)
Функцию (4.234) можно интерпретировать как затухающее возмущение, действующее на
замкнутую систему (4.233). Это следует из того, что закон управления /o(xj , х2, хз) (4.225)
был синтезирован для линеаризованного объекта (4.142), а переходной процесс на рис. 4.22
представлен для исходного нелинейного объекта (4.141) стем же законом управления (4.225).
Замкнутая СПС обладает асимптотической устойчивостью и свойством грубости переходных
процессов.
Таким образом, предложенный метод, основанный на введении в фазовом пространстве
последовательности кусочно-гладких многообразий^ = 0 (4.203), включающих в себя повер-
хности скольжения 54 = 0 (4.198), позволяет осуществить аналитическое конструирование
нелинейных СПС с форсированным скользящим режимом движения, обеспечивающим высо-
кие динамические свойства синтезируемых систем.
280
В заключение рассмотрения задач синтеза систем разрывного управления нелинейными
объектами со скользящими режимами движения отметим некоторые отличительные особенно-
сти предложенных методов АКАР: во-первых, в наших методах законы управления включают
в себя как квазирелейные составляющие (с изменяющимся выходом релейного элемента), так
и непрерывные составляющие, что делает управление “мягким”, сглаженным, без возникно-
вения резких колебательных переходных процессов; во-вторых, не требуется дополнительных
исследований по выявлению условий попадания изображающей точки на инвариантное мно-
гообразие и, следовательно, поверхности скольжения; и в-третьих, для распространенного
класса нелинейных объектов с треугольной функциональной матрицей удается обеспечить
условия асимптотически устойчивого движения в целом.
Указанные достоинства предложенных методов синтеза СПС позволяют решить новые
задачи управления различными нелинейными объектами и технологическими процессами.
4.5. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
МНОГОКРИТЕРИАЛЬНЫХ НЕЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
При построении эффективных современных систем управления различными объектами
возникает сложная проблема удовлетворения совокупности инженерных требований, предъ-
являемых к качеству движения объекта в переходном процессе и установившемся режиме.
Указанные требования бывают настолько разнообразны, а нередко и противоречивы, что это
существенно затрудняет их отражение с помощью одного критерия качества, неизменного для
всех режимов работы системы. В этой связи при синтезе систем может потребоваться исполь-
зование некоторой совокупности критериев качества, т.е. возникает необходимость использо-
вания векторных критериев, состоящих из ряда вторичных критериев, каждый из которых
отражает некоторое определенное требование к качеству движения. Но, т.к. в общем случае
достигнуть экстремума одновременно по нескольким критериям невозможно, то решение
проблемы векторной оптимизации требует определенного компромисса путем формирования
некоторого нового функционала. Ввиду того, что построение такого обобщенного функциона-
ла является неформальной процедурой, то вид его полностью зависит от выбранной схемы
компромиссов. Методы векторной оптимизации динамических систем, связанные с синтезом
законов управления, тем более нелинейных объектов, в настоящее время в должной мере не
разработаны. В работах [34—41] предложены методы векторной оптимизации линейных
динамических систем при фиксированных граничных условиях объектов. В задачах синтеза же
требуется найти закон управления в функции координат состояния, обеспечивающий требуе-
мое качество системы при произвольных начальных условиях. Это обстоятельство принципи-
ально усложняет проблему синтеза многокритериальных систем. До настоящего времени в
литературе практически отсутствовали прикладные методы синтеза таких систем управления,
тем более для нелинейных объектов [234].
Перейдем к изложению предлагаемого подхода к синтезу многокритериальных систем на
основе идеи последовательной оптимизации в пространстве состояний с использованием обоб-
щенного сопровождающего функционала, конструируемого в зависимости от выбранной схе-
мы компромисса. Очевидно, что выбираемая схема компромисса должна быть адекватной
соответствующему режиму системы в данный'момент времени. На практике для многих систем
можно ограничиться рассмотрением двух основных режимов работы—малых и больших от-
клонений от заданного состояния. В режиме малых отклонений поведение объекта может быть
описано линеаризованными дифференциальными уравнениями, а распространенными требо-
ваниями к качеству движения можно нередко удовлетворить путем оптимизации систем по
стандартным квадратичным критериям или с использованием методов модального управления.
В режиме же больших отклонений адекватная модель движения объекта, как правило, должна
быть нелинейной. В этом режиме работы наиболее подходящими являются критерии быстро-
действия и минимума энергозатрат, при этом существенное влияние оказывают ограничения
281
на координаты и управления. Разумеется, что в режиме больших отклонений должна гаранти-
роваться асимптотическая устойчивость движения.
Оптимизирующий функционал в многокритериальных задачах АКАР. Для решения
задачи синтеза многокритериальных систем управления используем предложенный ранее
метод АКАР на основе непостулируемого сопровождающего функционала. Требуется найти
закон управления и(х\ ,..., х„) объектом
Xi (0 = fi(x\ ,..., хп), i = 1,2,...,п-1;
х„ (0 = fn(xi ,..., хп) + и, (4.235)
где xi (t)—координаты состояния; и—управление, обеспечивающее последовательный перевод
изображающей точки (ИТ) системы из произвольной начальной точки (в некоторой допусти-
мой области) сначала в окрестность некоторого многообразия в пространстве координат
V>(.vi ,•••, хп) = 0 , (4.236)
а затем движение ИТ вдоль ip = Q (4.236) в начало координат пространства состояний
(xj = хг = .. • = х„ = 0). Будем считать, что на траекториях указанного движения управление
и доставляет минимум следующему сопровождающему функционалу:
А = f [m2<p2(ip) + c2<p2(ip) (t)]dt, <4‘237)
о
где ip(x\,..., хп)—некоторая конструируемая агрегированная макропеременная координат. С
учетом выражения
« dip . , ч (4.238)
41 w =(,)’
в силу уравнений объекта (4.218), функционал (4.220) можно записать в виде
г ?Г2,ч 2, Z dip, dip .21 , (4.239)
J-L= f ["J V(V’) + ( 2 -^fk + ~^u) \dt,
me fk—функции в правых частях уравнений (4.218). Из формы сопровождающего функционала
(4.237), (4.239) следует, что он не постулируется заранее, как это предполагается в стандартных
задачах аналитического конструирования оптимальных регуляторов (АКОР) [ 12], а формируется
путем выбора соответствующих функций ip с использованием уравнений объекта (4.235). Такой
подход позволяет построить сопровождающий функционал (4.237), (4.239), удовлетворяющий
выбранной схеме компромисса при многокритериальном синтезе систем. Используя, согласно
[65], уравнения Эйлера—Лагранжа, имеем следующее уравнение экстремалей:
Tip (t) + <p(ip) = 0 , Т = > 0 , (4-240)
<p(ip)np > 0, решение которого ip (t) доставляет минимум функционалу (4.237). Из (4.240),
с учетом выражения (4.238), в силу уравнений объекта (4.235), получаем основное функцио-
нальное уравнение
Т-^-и + Т^ 1х№Хх......Хп^ = 0 * <4 241>
Из (4.241) можно получить законы управления, которые неизбежно переводят ИТ в окрест-
ность многообразия ip = 0, т.к. дифференциальное уравнение (4.240) обладает свойством
асимптотической устойчивости в целом относительно ip = 0. В зависимости от выбранной
функции ip(xi ,..., хп) и уравнений объекта (4.235) можно построить различные законы управ-
ления, удовлетворяющие конкретным критериям качества.
Покажем, что на основе сопровождающего функционала (4.237), (4.239), путем соответ-
ствующего выбора функций <p(ip) и ip(xi ,..., хп) можно получить распространенные инженер-
ные критерии качества. В дальнейшем будем в основном использовать функции <p(ip) вида
<p(ip) ~ У ИЛИ ~ которым будут соответствовать функционалы (4.237) вида
1 [mV + eV (01Л (4 242)
о
282
или
/2 = J [m2th V + CV2 (01^ • <4.243)
о
Перейдем к применению оптимизирующих сопровождающих функционалов (4.242) и
(4.243) для построения частных критериев качества, отражающих распространенные инженер-
ные требования к динамическим свойствам синтезируемых систем в разных режимах работы.
Необходимо подчеркнуть, что сама по себе задача синтеза управления, оптимального по
соответствующим критериям качества, нередко имеет смысл и в наибольшей мере проявляет
свои особенности в условиях, когда необходимо учитывать ограничения на координаты состо-
яния и управление. Так, задачи оптимизации систем по таким распространенным критериям,
как быстродействие и минимум затрат топлива, могут быть поставлены и решены только при
учете ограничений на управление (I и I Umax) и, возможно, координаты состояния. В этой
связи возникает вопрос о соответствии сопровождающих функционалов (4.242) и (4.243)
указанному положению об ограничениях и, следовательно, о естественном отражении ими
частных критериев качества синтезируемых систем в разных режимах движения.
Учет ограничений можно производить путем формирования соответствующих макропере -
менны tp(x\ ,..., хп) в оптимизирующих функционалах (4.242), (4.243) и конструирования на
их основе конкретных критериев качества. Очевидно, что к таким макропеременным относятся
ограниченные функции. Выберем сначала агрегированную макропеременную tp(xi ,..., хп) как
ограниченную функцию, например, вида
tp = A th Fi(xi ,..., хп) • (4.244)
Тогда в режиме малых отклонений, когда th F\~Fi и V’w/ e A F\(x\ ,..., хп) функционал (4.242)
будет иметь обычную форму, а в режиме больших отклонений от многообразия tp = 0, когда
th Fi ~ ± 1 и tpsup = ±Л, производная tpsup (t) ~ 0 и функционал становится сходным с критерием
быстродействия:
(4.245)
J'Ssup ~ т f 1 dt.
iQsup
Другим способом конструирования конкретного критерия качества на основе функционала
(4.242) является использование макропеременных tp, ограниченных по части переменных,
например, вида
tp = A th Fi(xi ,..., Xn-i) + Хц . (4.246)
Тогда при больших отклонениях от многообразия tp = 0, когда tpsup = ±А + х;|, функционал
(4.242) принимает форму
(4.247)
Stsup ~ f [гп (±А + хп) + с2хп (()] dt.
tOsup
Если в уравнениях объекта (4.235) функция fn = 0, то тогда критерий (4.247) принимает вид
' (4.248)
Jimp ~ J [т (±А + х„) + с2и ] dt
tQsup
и будет отражать требование минимума затрачиваемой на управление энергии с учетом огра-
ничения на координату
1х„1 <А, (4.249)
которое нередко выдвигается при построении различных систем управления.
Сделаем одно замечание, касающееся интервала времени tosup—tkilip, на котором могут
рассматриваться критерии (4.245), (4.248) и аналогичные им формы критериев качества,
образующихся из сопровождающих функционалов (4.248) и (4.243). Дело в том| что пред-
ставление сопровождающих функционалов в виде (4.245), (4.248) и др. отражает определен-
ную сходность этих функционалов с распространенными критериями качества на некотором
интервале времени to sup—sup режима больших отклонений от многообразия tp = 0, когда
функция th tp(x\ ,..., x„)sup « ±1. Заранее указать моменты возникновения tosup и окончания
283
tksup режима больших отклонений в общем случае не представляется возможным, т.к. здесь
рассматривается задача синтеза законов управления при произвольных (в некоторой допусти-
мой области) координатах начального состояния объекта. Это означает, что для одного и того
же объекта будут различные моменты tosup и tksup в зависимости от конкретных начальных
условий. По мере затухания переходных процессов после момента 4 sup наступает режим малых
отклонений, когда соотношение th ip ~ ±1 уже не только не выполняется, но, более того,
функция th ip(x\ ,..., х„) -* 0, при этом критерии качества Л,имеют другую форму. Очевидно,
что в зависимости от конкретных условий функционирования соответствующего объекта будут
различными частота возникновения и длительность tosup—tksup режимов больших отклонений.
Разумеется, .что такие режимы могут и вовсе отсутствовать. Итак, выражения вида (4.245),
(4.248) и им аналогичные не являются постулируемыми критериями в общепринятом в теории
оптимального управления смысле, а отражают лишь текущую (на интервале tbsup—
сходность сопровождающих функционалов (4.242), (4.243) с известными критериями качест-
ва синтезируемых систем.
Продолжим рассмотрение способов конструирования конкретных критериев качества с
учетом ограничений, т.е. в режимах больших отклонений, теперь уже на основе использования
сопровождающего функционала (4.243). В режиме больших отклонений от многообразия
ip = 0 функция th ipSUp = ±1, т.е. функционал (4.243) формально принимает вид
tksy> 1 i-i (4.250)
J Zsup [т2 + с21р2ир (/)] •
ttosup
Если же использовать агрегированную функцию ip вида (4.246) и также предположить, что в
уравнениях объекта (4.235) функция /„ = 0, то на основе (4.250) можно формально сконстру-
ировать новый функционал
7 7 7 (4.251)
Jisup ~ S (т + си) dt.
t to sup
Функционал J^sup (4.251) включает в себя критерий быстродействия и энергетический крите-
рий, т.е. содержит линейную свертку двух очевидных в инженерном плане и распространенных
критериев качества. В зависимости от выбора значений весовых коэффициентов тис будет
увеличиваться или снижаться влияние соответствующего критерия качества на динамические
свойства замкнутой системы, т.е. переходные процессы в режиме больших отклонений будут
ближе к оптимальным по быстродействию или по минимуму энергии на управление, или же
иметь некоторый промежуточный характер по своим свойствам между указанными критериями
качества.
Очевидно, что функционал (4.251) можно представить в форме
[1 + T2U2(t)] dt, Т = -^,
tto sup
т.е. в виде линейной свертки с весовым коэффициентом Т, который назовем параметром
компромисса. Выбор Т определяет влияние соответствующего критерия и может производить-
ся, например, итерационным путем по результатам моделирования замкнутой системы или
изменяться, исходя из конкретных условий функционирования объекта. Такой подход вполне
согласуется с современным взглядом на проблему многокритериальной оптимизации [173] в
прикладной теории управления.
Остановимся на особенностях формы полученного функционала (4.251) и влиянии интер-
вала to sup—tk sup на решение задачи оптимального управления. Если сначала предположить, что
интервал tosup—tksup задан и равен tsup, то тогда член m2tSUp будет известной постоянной
величиной, а минимизация функционала (4.251) станет эквивалентной минимизации расхода
энергии
tkSPP 2 2 2 2 2 tf7 2 (4.252)
Jtsup ~f (rn + C2u) dt = mtsup + c2 f u2 dt.
tftsup 0
284
Если же интервал tosup—tksup не фиксирован, то тогда существует такое конечное tsup, для
которого функционал (4.251) локально минимален. Длительность интервала tsup оказывает
противоположное влияние на частные критерии качества, входящие в функционал (4.251).
Так, с увеличением интервала tsup критерий затрат энергии (4.252) обычно уменьшается и
[формально при tsup = «о достигает абсолютного минимума. Но при этом и (f) = 0 и система не
может попасть в требуемое конечное состояние, т.е. такое решение задачи является неприем-
лемым. Критерий же быстродействия определяет возможный минимум времени перевода
объекта из начального состояния в заданное, т.е. требует минимизации интервала tsup, на
котором возможен режим больших отклонений.
j Итак, изменение интервала (о sup—hsup существенным образом влияет на минимум функ-
ционала (4.251), оказывая противоположное действие на входящие в него критерии быстро-
действия и минимума энергозатрат. Это означает, что указанные критерии в известной мере
'Противоречивы, т.к. чем быстрее должен быть осуществлен перевод объекта из одного состоя-
‘ ния в другое, тем обычно больше затраты энергии на этот процесс движения.
Сформулируем теперь ответ на поставленный ранее вопрос о соответствии сопровождаю-
'щих функционалов (4.242) и (4.243) динамическим свойствам систем с учетом ограничений
на координаты (4.249) и управление и об отражении этих свойств с помощью конкретных
критериев качества. Ранее на основе сопровождающего функционала (4.242) и функций
(4.244) и (4.246) получены критерии (4.245) и (4.248), сходные с критериями быстродействия
[н энергозатрат, а на основе функционала (4.243) и функции (4.246) построена линейная
свертка указанных критериев вида (4.251), что позволяет в известной мере приблизиться к
универсальной схеме компромисса. При этом в режиме малых отклонений система .оптимизи-
руется по некоторому квадратичному критерию, а в режиме больших отклонений имеет
переходные процессы, сходные с оптимальными по критериям быстродействия и минимума
энергозатрат. Аналогично, на основе сопровождающих функционалов (4.242), (4.243) и соот-
ветствующих макропеременных 1р можно сконструировать и некоторые другие конкретные
формы критериев качества. Итак, введение сопровождающих функционалов вида (4.242) и
j (4.243) носит достаточно естественный характер в отношении отражения динамических
j свойств синтезируемых систем и в полной мере согласуется с распространенными инженерны-
ми требованиями к качеству систем в разных режимах движения.
Следует подчеркнуть, что задача выявления свойств идентичности и, возможно, эквива-
лентности критериев качества, которой мы кратко коснулись выше, является важной в прак-
тическом отношении, т.к. свойства различных критериев расширяют возможности конструи-
рования современных регуляторов. Из теории оптимального управления известно, что в целом
раде случаев различные критерии, по существу, эквивалентны в отношении свойств оптими-
зируемых процессов, хотя структура и вид сравниваемых критериев могут значительно отли-
читься друг от друга. Это позволяет при практическом синтезе находить форму и параметры
закона управления по наиболее удобному критерию как в отношении вычислительных проце-
‘цур, так и простоты технической реализации регулятора. Кроме того, эквивалентность крите-
риев, по существу, означает возможность проведения одновременной, “параллельной” опти-
мизации систем по некоторой совокупности критериев качества.
Решение многокритериальных нелинейных задач АКАР. Перейдем к рассмотрению
задач аналитического конструирования многокритериальных нелинейных систем управления
распространенными классами подвижных и промышленных объектов.
Пример 4.9. Рассмотрим синтез закона управления простейшим объектом
J X (0 = и (0 (4.253)
Чили
Xi (t) = Х2 ,Х2 (Г) = и (t).
(задачам, описываемым уравнением (4.253), в первом приближении относятся задачи управ-
зения движением материальной точки относительно центра масс, в частности, процессы ори-
ентации космических летательных аппаратов (КЛА) [14]. Процесс ориентации осуществляет-
285
ся путем перевода аппарата из некоторого углового положения в конечное, причем эти
перевод может происходить в пределах значительных углов положения КЛА. Перевод в новое
положение должен осуществляться как с минимизацией энергии или рабочего тела, затрачм-
ваемых на управление, так и по возможности за наименьшее время. Будем предполагать, «но
на скорость хг (?) наложено ограничение 1хг1 — А (4.249), что вытекает непосредственною ,
физической сущности процесса управления ориентацией КЛА, т.к. расход рабочего тада
пропорционален максимальной угловой скорости движения. Выберем функцию ^(xi, *х) в
виде
V>(xi , xi) = Х2 + A th^ixi . (4.254)
Тогда функционал (4.243) с учетом (4.252) и (4.254) и уравнения объекта (4.253) принимает
вид
J = f Гm2th 2(А th faxi + х2) + с2 ( ^**2 + и
О L ^ch PiXl
Задача синтеза состоит в определении закона управления a(xi , xi), обеспечивающего
перевод объекта (4.253) из произвольного начального состояния в начало координат
(xi = хг = 0) пространства состояний, при этом на траекториях движения должен обеспечи-
ваться минимум функционала (4.255) и выполняться ограничение (4.249) на скорость движе-
ния. Для выявления качественных свойств синтезируемой системы рассмотрим вид функцио-
нала (4.254) в двух основных режимах: малых и больших отклонений от начала координат
пространства состояний. В режиме больших отклонений функция ipsup = ±А 4- хг, а ее произ-
водная tysup (/) = х (t) = и (t). Тогда, подставляя ipsup и tysup (f) в (4.243), находим, что оптими-
зирующий функционал (4.255) в режиме больших отклонений имеет форму (4.251). В режиме
малых отклонений функционал (4.255) принимает следующий вид:
о
m2(Aftixi + Х2)2 + c2(4/3iX2 + м)2^ dt.
С учетом уравнений (4.253) этот функционал принимает форму квадратичного критерия
Jmf = f [m2A2fi2x2 + (т2 + с2А2$)х22 + с2и21 dt. (4,2Л)
о*- -1
Подставляя в (4.241) функцию V>(xi , xi) (4.254), с учетом уравнений (4.253), находим закон
управления
L. ч № (4.257)
и = - -th (A thpjxi + xi) - —f-—х2.
ch р\Х{
В зависимости от выбора параметра Т закон управления (4.257) будет обеспечивать в режиме
больших отклонений переходные процессы, сходные с оптимальными по быстродействию или
по энергетическому критерию. В режиме малых отклонений закон (4.257) приводит к опти-
мальным по квадратичному критерию качества (4.256) переходным процессам.
Закон управления (4.257), оптимальный по последовательной совокупности отдельных
критериев качества, неизбежно переводит ИТ в окрестность многообразия ip(x\, xi) » 0
(4.254), а затем обеспечивает движение вдоль этого многообразия в соответствии с дифферен-
циальным уравнением
xi (0 = - A thflixi,
условие асимптотической устойчивости которого в целом имеют вид неравенства fix >0.Азт
означает, что закон управления (4.257) обеспечивает асимптотическую устойчивость синте-
зированной системы по координате xi в целом, а по координате хг— в области 1хг1 £Л,
которая была введена на этапе синтеза, исходя из инженерных требований к системе. На рис.
4.23 приведены результаты моделирования синтезированной системы (4.253), (4.257) при
хю = 10, Х20 = 0 и параметрах А = 1,/h = 5, Т - 1; при этом в функционале (4.251) m = с, та
в режиме больших отклонений критерии критерии быстродействия и затрат энергии равноправ-
ны. Отсюда вытекает, что переходные процессы будут иметь промежуточный характер, сход-
286
Xj.XpU
яый с оптимальным по расходу энергии и быстродействию. Как показывает рис 4.23, управле-
ние и (4.257) сначала имеет участок (1 = 0...4) отрицательных значений (иШах = -0.8), затем
участок (/=4...8) нулевых значений и=0 и участок (7>8) положительных значений
(Кшах=0,4). При этом характер переходного процесса по xi (?) апериодический, а координата
х2 (у) на участке и (?) = 0 достигает заданного ограничения х-юоп = 1, а затем монотонно зату-
хает. Из выражения (4.257) следует, что в режиме больших отклонений (I хг I - Л) управление
а всегда ограничено и никогда не может достигнуть предельно допустимого значения
„ + л д2 (4.258)
U-sup — т + р\ А
Соотношения (4.249) и (4.258) позволяют обеспечить ограничения, накладываемые на управ-
ление и координаты объекта.
Перейдем к рассмотрению задачи многокритериального управления объектами, имеющи-
ми нелинейную неизменяемую часть.
Пример 4.10. Предположим, что объект описывается уравнениями следующего вида (рис. 4.24):
xi (0 + ,xi) = 5хз, хз (7) = и (4.259)
пли
xi (У) = хг ;хг (0 = Ьхз - /(xi , хг) ;хз (0 = и (4.260)
Уравнениями (4.259), (4.260) могут быть представлены многие нелинейные подвижные и
промышленные объекты. Предположим сначала, что сам объект, описываемый первым урав-
вением системы (4.259) или первыми двумя уравнениями системы (4.260), является асимпто-
тически устойчивым, при этом координата хз (/) представляет собой некоторое промежуточное
управляющее воздействие на этот объект. Будем считать, как и ранее, что на положение
Исполнительного механизма хз (/) наложено ограничение
1х31< А. (4.261)
йштезируем многокритериальную систему управления, полагая, что физически измеримыми
координатами являются xi (f), хг (7) = xi (t) и хз (/). Введем агрегированную переменную
= A th (flixi + Р2Х1) + хз , (4.262)
287
Рис. 4.24
которая позволяет удовлетворить условию (4.261). Тогда, используя (4.262) и уравнения
(4.259), на основе функционального уравнения (4.241) находим закон управления
и =- | th[ A thtf ,х1+ ftx2)+ х3] - х2)+^бхз (4.263)
1 chx()8ixi+ ргхг)
Управление (4.263) неизбежно переводит изображающую точку в окрестность притягивающе-
го многообразия = 0 (4.262), движение вдоль которого описывается следующим диффереи-
циальным уравнением:
(0 + Л*1 » *0 + ЬА th + faxi) ~ 0 • (4.264)
Устойчивость синтезированной замкнутой системы (4.259), (4.263) определяется условиями
устойчивости уравнения (4.264). Запишем согласно [5. С.84] условия асимптотической устой?
чивости в целом для уравнения (4.264) и, следовательно, замкнутой системы:
Дх1,0)%1 + Mxith ^1x1 > 0 при xi * 0 ; (4.265)
]/(xi, xi)- Дхь 0)]xi+ ЬА [th(/?ixi+ th0iXi]xi-> 0 при xi # 0; (4.266)
f l/(xi , 0) + ЬА th jSixi] dx\ -* 00 при Ixi I -* 00 . (4 267)
0 >
Исследуем полученные условия устойчивости (4.265) — (4.267). Условие (4.265) при/?| >0
упрощается и принимает вид
Дх1,0)xi > 0 при xi # 0 . (4.268)
Используя известное соотношение
th (plXi + 02xi) = х + »
запишем условие (4.266) в следующей форме:
2
[ ЛАГ1 , Х1) — /(Х1‘ , 0) ] Х1 + j^ttiftixith fcxi *lth > 0 при # 0.
Это неравенство, а следовательно, и условие (4.266) при/?2 > 0 также упрощается и принимав?
ВИД )
[/(xi , xi) - ДХ1,0) ]xi > 0приxi * 0 . (4.269)
Рассмотрим условие устойчивости (4.267), которое, проинтегрировав, можно представить!
виде
J /(xi , 0) dxi + -д-ln sh ^1X1 -» 00 при I xi I -♦ оо ,
о Р>
а при /?1 > 0 можно записать в упрощенном виде
(4.275)!
J Дх1,0) dx\ -* 00 при I xj I -* оо .
о
Итак, при
fit > 0 , j32 > 0 (4.271)
288
условия асимптотической устойчивости (4.265) — (4.267) упрощаются и сводятся к условиям
(4.268) — (4.270). Из сравнения (4.265) — (4.267) с условиями (4.268) — (4.270) следует, что
закон управления и (4.263) при выполнении соотношений (4.271) усиливает условия асимп-
тотической устойчивости (4.265) — (4.267) замкнутой системы. Это означает, что для всех
устойчивых нелинейных объектов, описываемых первым уравнением системы (4.259), при
выполнении условий (4.271) синтезированный закон управления и (4.263) всегда гарантирует
для замкнутой системы асимптотическую устойчивость в целом по координатам xi и Х2, а по
хз—в области (4.271). Упрощенные условия асимптотической устойчивости (4.268) —(4.270)
совпадают с общими условиями [5. С.84] для самого объекта, описываемого первым уравне-
нием системы (4.259). Это значит, что при выполнении условий (4.271) исследование асимп-
тотической устойчивости .замкнутой системы сводится лишь к выполнению условий
(4.268) — (4.270). Тогда для разных конкретных видов нелинейности/(xi , xi) в (4.259) можно
записать условия асимптотической устойчивости, например [5]:
/(xi , X]) = <p(xi)xi (0 + F(xi) : (4.272)
a) F(xi)xi > 0 при xi * О';
б) <p(xi) > 0 при xi 0 ;
*1
в) J F(xi) dxi -» оо при Ixi I -» » .
о
Аналогично и для других/(xt , xi) можно записать условия асимптотической устойчивости
синтезированной системы.
Изложенное позволяет сделать следующий важный вывод: для устойчивых нелинейных объ-
ектов, описываемых первыми (и — 1) уравнениями системы (4.235), метод АКАР позволяет
синтезировать закон управления //(xi ,..., х„), обеспечивающий оптимизацию в определенной мере
сходную с оптимизацией переходных процессов в режиме больших отклонений по критериям
быстродействия и минимума энергозатрат на управление (4.251), а также гарантирует асимптоти-
ческую устойчивость в целом по координатам xj ,..., x„-i, а по х„—в области (4.249). В режиме
малых отклонений этот закон управления позволяет оптимизировать переходные процессы по
квадратичным критериям или по первичным показателям качества синтезируемых систем.
Развиваемый метод синтеза применим и для неустойчивых нелинейных объектов, для
которых необходимо уже использовать не упрощенные, а исходные условия асимптотической
устойчивости (4.248) — (4.250) синтезированной системы.
Примеры синтеза многокритериальных систем управления. Пример 4.11. Рассмотрим
синтез систем управления нелинейным объектом (2.114)
X] (?) = хг , хг (0 = sinxi + хз; хз (() = и . (4.273)
Уравнениями (4.273) описывается, в частности, движение маятника в верхнем неустойчивом
положении, при этом: xi—угол отклонения маятника от вертикали; хг—скорость отклонения;
хз—момент, приложенный к маятнику [ 1 ]. Ставится задача стабилизации маятника моментом,
приложенным к нему на оси подвеса. Указанный момент развивается исполнительным меха-
! низмом, который представлен интегрирующим звеном. Требуется синтезировать закон управ-
. ления «(xi , хг , хз), который оптимизирует переходные процессы по быстродействию и затра-
там энергии и стабилизирует маятник в верхнем положении равновесия, т.е. обеспечивает
асимптотическую устойчивость системы. Введем функцию
гр = хз + A th (fiixi + /З2Х2) (4.274)
Тогда, в соответствии с уравнением (4.241) и с учетом уравнений объекта (4.273), находим
закон управления
и = - у th [A th + fax2) + х3] - ~-2 + ^sinx. + ^2Хз . (4.275)
1 ch (fiixi + /З2Х2)
Управление и (4.275) переводит изображающую точку в окрестность многообразия гр = О
(4.274), движение вдоль которого описывается уравнениями
xi (0 = х2, хг (0 = sinxi - A th 6З1Х1 + /32х2) (4.276)
289
или
xi (Г) + A th (^1X1 + /32xi) - sinxi = 0 . (4.277)
Условия устойчивости уравнений (4.276) или (4.277) определяют условия асимптотической
устойчивости синтезированной системы (4.273), (4.275). В соответствии с (4.265)—(4.267)
условия асимптотической устойчивости уравнения (4.277) в целом имеют вид
AxAhfiiXi - xisinxi > 0 при xi * 0; (4.278)
A [th (jSiXi + /82х>) - th/81X1]xi > 0 при xi 0 (4.279)
или
А(1 - th^ixi) . . _ . . . . (4.280)
’ (4.281)
f (A th /81X1 - sinxi) dx\ -* <» при I xi I -* 0 .
о
Неравенства (4.278) —(4.281) выполняются при
/81 > 0 , /82 > 0 , А > 1 . (4.282)
При выполнении условий (4.282) гарантируется асимптотическая устойчивость синтезирован-
ной системы по координатам xi и х2 в целом, а по координате х2—в области I хз Г < А. Итак,
закон управления (4.275) обеспечивает асимптотическую устойчивость замкнутой системы.
Выбором параметров Т, /8Ь /82 и Л можно получить желаемые переходные процессы в режиме
малых и больших отклонений от верхнего положения равновесия маятника. Для выбора этих
параметров рассмотрим сначала режим малых отклонений, тогда линеаризованный объект
(4.273) будет описываться уравнениями
xi (Г) = х2 , х2 (() = xi + хз , хз (/) = и , (4.283)
а закон управления и (4.275) принимает вид
и = — А + /32j xi — А + /8ij х2 + + A/82j хз .
В работе [117] найден закон управления
и = - 4,61xi - 4,61х2 - 3,19хз (4.285)
линеаризованным объектом (4.283) при оптимизации замкнутой системы в режиме малых
отклонений и по квадратичному критерию
* , , , -у (4.286)
Jinf — f (xi + х2 + хз + и ) dt.
. о
Выберем параметры: Т = 1; А = 1,5; fit = 1,6; /82 = 1,47, обеспечивающие в режиме малых
отклонений совпадение законов управления (4.284) и (4.285). В режиме больших отклонений
эти параметры приводят к оптимизации по критерию
. (4.287)
J sup $ (1 4“ U ) dt.
tto sup
Итак, закон управления и (4.275) обеспечивает переходные процессы, сходные с оптималь-
ными по критериям (4.287) быстродействия и затрат энергии в режиме больших отклоненийи
по квадратичному критерию (4.286) в режиме малых отклонений от верхнего положения
равновесия.
На рис.4.25 приведены графики переходных процессов в синтезированной системе с зако-
ном управления и (4.275) и начальными условиями хю = х2о = хзо = 0. Из рис.4.25 видно,
что координата хз ограничена I хз < А. Переходные процессы имеют апериодический харак-
тер и обеспечивается асимптотическая устойчивость системы для больших отклонений
(хю = лг) от верхнего положения равновесия, что соответствует желаемым требованиям к
замкнутой системе.
Пример 4.12. Для некоторых объектов выбором параметров функции у(х\ ,..., х„) можно
сразу образовать оптимизирующие функционалы, являющиеся критериями быстродействия и
расхода энергии в режимах больших отклонений и квадратичными критериями для режимов
290
малых отклонений. В качестве примера рассмотрим синтез многокритериальных систем управ-
ления, неизменяемая часть которых состоит из (п - 1) инерционных и одного интегрирующего
звеньев, т.е. описываемых уравнениями
TiXi (?) = kix2 ;
TiXi (?) + Xj = kjXj+\ , i 1 ,
Tnkn (f) + xn — knit.
Выберем агрегированную переменную
$ = E 0iXt, 0n = 1 ,
i=l
тогда производная ф (?) после подстановки Xi (?) из (4.288) принимает вид
л. (f\ —"у* (0^1 _ @l+l 1 Y. + 0n^n
Y \i) xJ т ПР I т гр II .
\ 1 i * Ж) 1 п
Положив
fhkj _ 0 м
Ti Ты ’
получим
1 п
Из соотношения (4.291) следует выражение
Л = Г~Г‘ т" ’ z = 1’2,...,«-1,0п = 1 ,
• .Ки-1 / п
(4.288)
(4.289)
(4.290)
(4.291)
(4.292)
(4.293)
устанавливающее связь между коэффициентами Д и параметрами исходного объекта (4.288).
Подставив^ (4.289),$ (?) (4.290) в оптимизирующий функционал (4.243), получаем критерий
ичества
- / , ,« c20ik2n (4.294)
/ = / (m2th2S 0iXi + ^^u2\dt,
о ' /=1 г; >
который в режиме больших отклонений принимает форму, сходную с критерием быстродей-
ствия и затрат энергии на управление
291
hsup
•w~! (m
t()sup * П
(4.295)
Подставив гр (4.289) в уравнение (4.241), получаем оптимальный по критерию (4.294) закон
управления
т п г
7 = ^-
который в режиме больших отклонений имеет ограничение
Тп
- k„fl„T •
а в режиме малых отклонений с учетом (4.293) принимает вид
Г» / 1 ” \
Uinf ~ к\к2 к Т Т\ ••• ki—lTjXjj .
(4.296) *
(4.297)
Закон управления uinf (4.297) точно совпадает с законом, полученным в работе А.А.Кра-
совского [113] при синтезе следящей системы (4.288), (4.297), оптимальной по критерию
обобщенной работы
J inf ~ М
при дополнительном условии
(4.299)
= const,
где весовой коэффициент к связан с параметром Т следующим соотношением:
TiTi...T?t 2T„ (4.300)
к\к2 ... кп-2Т ’
а коэффициенты а, определяются через fit выражением
М-Л-г л (4.301)
ТхТ22...Т2п-2Т„
* с
Приведенное соотношение (4.300) устанавливает связь между параметром Т = — в критерии
(4.294) и весовым коэффициентом к в критерии обобщенной работы (4.298), (4.299), а
выражение (4.301) —между коэффициентами обратных связей 0, и а, при оптимизации систе-
мы.
Таким образом, синтезированный закон управления и (4.296) обеспечивает для объекта
(4.288) переходные процессы, сходные с оптимальным по быстродействию и расходу энергии
(4.295) в режимах больших отклонений, и оптимальные по квадратичному критерию обобщен-
ной работы (4.298), (4.299) в режимах малых отклонений от желаемого состояния. Уравнени-
ями вида (4.288) описывается достаточно распространенный класс промышленных объектои,
электроприводов, транспортных установок, следящих систем и др. На рис.4.26 приведены
результаты моделирования системы управления (4.288) объектом третьего порядка при
Ti = 1; Т2 = 0,5; Тз =' 1; jSi = 1; (h = 2, описываемого уравнениями
*1 (0 = х2;
х2 (0 = — 0,5х2 + 0,5хз; (4.302)
хз (Г) = и .
Закон управления (4.296) объектом (4.302) принимает вид
и = - | th 01 + 2х2 + хз). (4,303)
На рис.4.26,а изображены переходные процессы в замкнутой системе (4.302), (4.303) при
хю = 10; х2о = хзо = 0; Т = 0,5, когда критерий (4.295) принимает вид
292
(4.304)
tkaar -> *
JSUP ~ J (1 + 0,25 m) dt,
^Охир
а на рис.4.26,б при хю = 10; хго = хзо = 10; Т — 1, когда критерий (4.295) имеет вид
{ W . • (4.305)
J Jsup~f (1 + u2)dt.
‘ ^Qsup
,jb рис.4.26 следует, что при управлении и (4.303) переходные процессы в замкнутой системе
(4.302), (4.303) имеют апериодический характер, при этом для рис.4.26,а, когда параметр
компромисса Т = 0,5, время затухания меньше по сравнению с рис.4.26,б, когда Т = 1, что
293
соответствует виду критериев (4.304) и (4.305) в режиме больших отклонений от заданного
состояния объекта.
Развитый здесь подход к синтезу многокритериальных нелинейных систем управления
опирается на применение обобщенного функционала, который в определенной мере идентичен
частному критерию качества в соответствующей нечетко определенной области пространства
состояний. Это означает, что указанный функционал может только постепенно, асимптотиче-
ски приближаться к конкретному критерию качества, обеспечивая не строго оптимальные, а
сходные с ним переходные процессы в замкнутой системе.
4.6. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ
НЕЛИНЕЙНЫХ СИСТЕМ ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ
В настоящий период развития теории и практики автоматического управления к одной из
важных задач относится управление конечным, терминальным состоянием объектов, т.е. зада-
ча приведения их из начального положения в некоторое желаемое конечное состояние в
пространстве координат в заданный момент времни (//). Терминальное управление (ТУ) имело
до сих пор основной областью своего применения задачи управления летательными аппаратами
[12, 14, 175-177]. Однако в настоящее время в связи с ростом сложности задач управления
промышленным производством, его роботизацией и т.д. возникает существенная потребность
ТУ промышленными движущимися объектами. Разумеется, что в этом случае желательно
разработать законы ТУ, достаточно просто реализуемые на современных средствах аналоговой
и микропроцессорной техники.
В отечественной и зарубежной литературе наибольшее количество работ посвящено в
основном программному, разомкнутому ТУ и (t) линейными объектами и лишь в некоторых
из них [176] рассматриваются нелинейные модели движения. Однако из-за действия различ-
ных возмущений на объект и неточности введения начальных условий изображающая точка
(ИТ) объекта отклоняется от программной траектории. В этой связи возникает проблема
синтеза законов управления ц(х\ ,..., xm,t) в функции координат отклонения и времени, обес-
печивающих достаточно точное движение объекта вдоль программной траектории. Традици-
онный подход к синтезу систем ТУ сводится к последовательному решению двух классических
задач автоматического управления—выбора и расчета программной траектории движения как
некоторой функции времени и задачи синтеза системы стабилизации, обеспечивающей движе-
ние ИТ вдоль программной траектории. При этом расчет программных траекторий произво-
дится по заданной совокупности начальных и конечных условий движения объекта, а синтез
систем стабилизации обычно осуществляется на основе линеаризованных уравнений движе-
ния. Однако все же число работ, в которых синтезируются замкнутые системы ТУ, в литературе
существенно меньше числа работ, посвященных программному ТУ. Только в некоторых
работах синтезированы алгоритмы замкнутого ТУ, как правило линейными объектами. И
кроме того, при традиционном подходе к синтезу ТУ возникает известная проблема особенно-
сти управления в конечной точке [176], заключающаяся в неопределенности (неограниченном
росте) управления по мере приближения ИТ к конечному положению. В [176] предложены
способы устранения указанной особенности, однако и здесь возникает своя проблема выбора
“жесткости” управления, связанная с точностью следования ИТ вдоль программной траекто-
рии. Трудности указанных проблем синтеза ТУ особенно возрастают для нелинейных объек-
тов, т.к. в этом важном случае к ним присоединяется сложная проблема обеспечения устойчи-
вости нелинейных терминальных систем. Итак, важной и нерешенной проблемой современной
теории и практики автоматического управления является синтез систем ТУ нелинейными
объектами. Следует отметить, что в настоящее время, помимо изложенного классического
подхода к ТУ, применительно к задачам управления летательными аппаратами, функциони-
рующие в быстроменяющихся условиях, неопределенности моментов начала включения сис-
темы ТУ и др., развивается квазитерминальный беспрограммный подход, не предусматриваю-
294
щий использование жестких программных траекторий. Этот подход опирается на процедуру
прогнозирования в процессе полета конечных условий движения и возможной ошибки ТУ в
конечный момент'времени [177]. Подход основывается на оптимизации нетерминального
функционала обобщенной работы [14] с помощью метода прогнозирующей модели [15]. При
этом требуется обеспечить устойчивость замкнутой системы и заданные показатели качества
по прогнозируемой ошибке: время переходного процесса tnn < tf, перерегулирование, ошибку
в установившемся режиме и др. По существу это не классическое ТУ, а некоторое ее прибли-
жение. Необходимо указать, что использование этих процедур требует сложного технического
и программного обеспечения, а применение указанного подхода целесообразно в основном для
дорогостоящих летательных аппаратов [177] и других аналогичных объектов.
Перейдем к рассмотрению предлагаемого метода синтеза систем ТУ нелинейными объек-
тами, основанного на идее введения в пространстве состояний замкнутых систем нестационар-
ных инвариантных многообразий, что позволяет осуществить аналитическое конструирование
программно-замкнутых законов терминального управления.
Постановка задачи ТУ. Пусть модель объекта управления представляется системой диф-
ференциальных уравнений вида
Х2п-1 (0 = Fi(X2n-l) + Х2п ;
*2п (0 = F2(x2n) + в (х2п-1)и ; (4.306)
X = Ф(х2п-1) , П = Тлг, (4.307)
где х2п-1» Х2П—векторы внутренних (обобщенных) координат и скоростей объекта, в общем
случае измеряемые dim x2n-i = dim x2n = (mxl); Fi(x2n-i), F2(x2n)—аналитически определяе-
мые, дифференцируемые требуемое число раз нелинейные вектор-функции своих аргументов,
dimF2 = (mXl);B (x2n-i)—в общем случае неособенная матрица нелинейных коэффициентов,
dimB = (mXm), detB # 0; u—вектор управляющих воздействий, dim u = (mx 1); x—вектор
|иешних (рабочих) координат dim х = (Лх 1); Ф(х2п-1)—необходимое число раз дифференци-
руемая нелинейная вектор-функция, корректно задающая преобразование (4.307)
Ф:Ят-Я*, dim Ф = (Ах1).
Система (4.306) описывает достаточно широкий класс управляемых машинных агрегатов,
атакже некоторые классы летательных аппаратов, манипуляционные роботы, станки и системы
приводов.
Перейдем к постановке общей задачи ТУ. Задача ТУ заключается в нахождении закона
управления u = u(x2n-i, x2n, t), обеспечивающего перевод объекта (4.306) из начального со-
стояния
х° = (хо, хо ,..., хГ‘У
(заданное
х" = Сч, i»,..;. 4'-”)’ <4.308)
«время Тк, где г—число начальных условий; /—число конечных условий; т—символ транс-
понирования.
Требуется синтезировать траекторию программного движения х* ((), удовлетворяющую
граничным условиям:
(х* (/о), х* (Го),-,х* (Го)(0) = х°, i = Т7=Т;
(х* W, х (Тк)....x*(T*)w)T = xk, (4-309)
С достаточной степенью завершенности решение задачи синтеза программной терминаль-
ной траектории х* (t) приводится в работе [176]. Траектория, задающая требуемое движение
объекта (4.306) и удовлетворяющая условиям (4.309), представляется полиномами вида
г+/-1~ (4 310)
xj(() = SGf, Р = Г7Т; v < zn , d
Z=1
295
где Cj—постоянные коэффициенты полинома, определяемые из решения алгебраической сис-
темы (4.309) или по рекуррентным соотношениям вида [176]
С, = ^, ; = 0,7=Т;
/-1 АИ
S Л"’;
1'=0 / к
С, = S i - v - 1) + rfjn'lrfffr I ] x(r> +
v=0 " к
+ S \) + №№r\]xfp, i = 7+Wl, ~ (4,3U)
v=0 к
j|r] (г+Z-v-l)! ,[r] , (r+ I -v - 1)! ~
где dl = 1)!(г_г)!т/г Л' = (-1) r\(7Zr _ Tk = tf ~ ^-заданное время пе-
рехода.
Следует отметить, что задание траектории х* (/) помимо (4.310) возможно и в классе
тригонометрических функций.
Дальнейшая процедура синтеза ТУ по [176] предполагает получение закона управления
и (f) из уравнений объекта, с последующей заменой произвольного начального состояния на
текущее фазовое, а заданного времени перехода Тк—оставшимся временем движения tf-t*
Замкнутое таким образом управление имеет особенность в терминальной точке,, устраняемую
процедурами [176], приводящими к усложнению синтеза и, что особенно важно, в случае
нелинейных объектов не решает известной проблемы асимптотической устойчивости системы.
Предлагаемый подход к стабилизации движения объекта (4.306) относительно параметри-
чески задаваемой траектории х* (/) базируется на методе АКАР и использует результаты,
полученные в предыдущих главах.
Представим полиномиальную форму записи программных траекторий в матричном виде
х* = С L ,
(4.312)
где С—матрица постоянных коэффициентов, зависящих от Тк, Хк, хо, dim С = (yxr+l), v < т,
L—нелинейная вектор-функция параметра t, dim L=(r+/x 1), L = (1 ... f)r, rj = 0 , r+l-1.
Можно показать, что производная /г-порядка от терминальной траектории может быть
представлена матричным уравнением, линейным относительно вектора L, т.е. справедливы
соотношения
х* = CDiL, х* = CD2L , х® = CDflL, (4.313)
где Di , D2,..., —матрицы постоянных коэффициентов, dim Df, =(r+lxr+l)
Следует отметить также, что матрица С представлена в форме Фергюсона [178]:
С = х С,
где х—матрица граничных условий, dim х = vXr+l, а ее структура имеет вид х = (х0 I io I ...
I х£-,) I xk I хк I ... I х£-,)). С—матрица рекуррентно определяемых постоянных коэффици-
ентов, зависящих от Тк, dim С — (г+Гхг+1).
Таким образом, общая задача ТУ сводится к задаче стабилизации движения объекта (4.306)
вдоль заданной выражением (4.312) программной траектории: необходимо синтезировать
вектор управления и(х2п-\ , х2п , t), который обеспечивал бы для Vx0 U V х0 U - V Vr-1) 6 J
С х? выполнение условия
х(х° , и(х2п-1 , х2п , Г)) eV С xd, We Ro , tf} , (4314)
где xz, x*—ограниченные области фазового пространства xd рабочих координат объекта
(4.306) вблизи заданной траектории.
296
Решение задачи АКАР при программно-замкнутом ТУ. В соответствии с методом АКАР
зададим уравнения притягивающих многообразий в следующем виде:
x = CL, х — C^L, (4.315)
где dim х = (vx 1), v < т. Оставшиеся (/и-v) многообразий назначаются произвольным обра-
зом или исходя из оптимизации какого-либо критерия. Соответственно справедливы равенства
F(x) = F(CL), Г(х) = r(CZ>iL) , (4.316)
где F, F*—дифференцируемые достаточное число раз функции своих аргументов, F: Rv -*• Rv,
F: Rv -> Rv.
Формирование агрегированных макропеременных возможно как в соответствии с выраже-
ниями (4.315), так и с выражениями (4.316).
Пусть уравнение притягивающих многообразий задано выражениями (4.315). Тогда урав-
нения траекторных 1рТ и скоростных VV макропеременных имеют вид
V>T = x-CL = O; (4.317)
^c = x-CPiL = 0, (4.318)
где dim = (vx 1), dim ipc = (vx 1).
По существу, уравнения (4.317) и (4.318) являются уравнениями дополнительных связей,
наложенных на движение объекта (4.306).
Агрегированные макропеременные ip, являющиеся линиями пересечения макроперемен-
ных ipT и 1рс в фазовом пространстве внешних координат, могут быть представлены их линейной
комбинацией
ip = ipr + Aipc = x — CL + Ax — ACDiL = 0 (4.319)
и, следовательно, .
ip = х - CZ>iL + Ах - ACD^L = 0 ,
где А—диагональная невырожденная матрица постоянных задаваемых коэффициентов,
dim А = (vXv).
Зададим уравнение движения объекта (4.306) относительно многообразий (4.315) диффе-
ренциальным уравнением вида
Q ip + Q (ip) = 0 , (4.320)
где Q—диагональная невырожденная матрица постоянных задаваемых коэффициентов,
dim Q = (vXv)—дифференцируемая требуемое 'число раз функция от макропеременных ip,
Q:Rk^Rk.
Примем Q(ip) = ip. Решая совместно уравнения (4.319), (4.320) и (4.306) относительно
вектора и, получим закон программно-замкнутого управления
. и = к П О А ( Гф + /ф J4- (Q + А) /ф J(/?i Хх2п) + Ф + й А /ф Fi — uT "1, (4.321)
где к = - (Й А 7фВУ~\ uT = FL. . (4.322)
Здесь к* = (й А V D2 + (й + A)Cz>i + С; J<p—якобиева матрица многообразия (4.307),
/ф = dim /ф = (mxm); Гф = dim Гф = (mxm); Jf\— якобиева матрица вектора
F\. Очевидно, что должно выполняться требование
det(QAJ^) * 0 , (4.323)
что эквивалентно условиям
detQ * 0 , det А # 0, det В # 0, det Уф 0. (4.324)
Неравенства (4.324) выполняются по условию их задания. Не нарушая последнего неравенства
(4.324), можно определить условия метрического тензора G многообразия (4.307):
det G = det /^ф * 0 . (4.325)
Последнее выражение является условием корректности преобразования координат, т.е. в
точках пространства, где нарушается условие (4.325), выражение (4.307) является некоррек-
тным [179].
297
При линейном соответствии обобщенных и рабочих координат х = х2п_ь структура peiy-
лятора (4.321) упрощается и принимает вид
и = - ( QAB) 1 Q QAJ F\ 4- Q 4- А }(₽! + x2fl) + x2n-i 4- QA F2 - uT ] . (4J26)
Управления, определяемые выражениями (4.321) и (4.326), представимы в виде
и = к {u3(x2n-i, x2n) - uT(x°, хк, Г, 7*)},
где U3(X2n-i, X2n) = А (/ф/л4- Гф)4-(Й4- Л)/ф(Р14- Х2о)4-Ф4-Й Л/фР2 |
в случае управления (4.321) и
из(*2п-1» *гл) =|(ЙЛ/£14-О4-Л)(Р14-х2п)4-х2п_14-ЯЛ F2 |—
в случае управления (4.326).
Следует отметить, что при движении объекта (4.306) по траекториям (4.312), т.е. при
точном измерении вектора начальных условий х° и отсутствии внешних возмущений, управ-
ление и3 = 0. Также справедливо тождество uT(Z/) = 0.
Рассмотрим качественные оценки поведения замкнутой системы относительно выходных
координат. Подставив управление (4.321) в уравнения объекта (4.306), получим
QA х 4- (Л 4- Q)x 4- х = QA х* 4- (Л 4- Q)x* 4- х*,
или, записав относительно вектора ошибок Е, получим
QAE 4- (Л 4- Q)E 4- Е = 0 . ' <4.327)
Запишем выражение (4.327) в пространстве состояний:
хде 0—нулевая матрица, dim 0 = (vx v); I—единичная матрица, dim I = (vxv).
Следовательно, решение относительно вектора ошибок по координате Е и скорости £,
записывается в виде:
(4.328)
где Eq, Eq—вектор начальных отклонений от многообразий по координате и по скорости.
Очевидно, что управление (4.321) при надлежащем задании коэффициентов матриц Q i
Л обеспечивает асимптотическую устойчивость движения в целом замкнутой системы относи-
тельно многообразий (4.315), что непосредственно связано с грубостью ее переходных про-
цессов [8], т.е. малой чувствительностью к изменениям параметров объекта. Полученная
оценка в силу статичности преобразования (4.307) распространяется и на управление(4.326).
При более сложной, но известной структуре внешних возмущений и использовании при
синтезе управлений их к (р) -изображений [182] сохраняется справедливость приведенных
выводов об асимптотической устойчивости движения объекта (4.306) относительно многооб-
разий (4.315).
Продемонстрируем на примере полученные результаты.
Пример 4.13. Манипуляционный робот UMS—2 типа BI 1П_Ш описывается следующей
системой дифференциальных уравнений:
Х1 (Г) = х2 , х2 (0 = /21 + £1«1 , Хз (t) = х4 , х4 (t) = fn 4- Ьги.2 ;
Xs (0 = Х6 , х6 (0 = /23 4- Ь3и3 , (4329)
fl,9x2 ~ (58,0x5 + 26,1-)хэЛб^
_ _ 29,0x1 4- 26,1x5 4-7,8
гдеГз- -65,5x4 4-0,5
—28,5x6 — 0,01х2(1 4- Х5)
298
/ 15 9 \ Л Л
'х\ ( “ xjsinxjA Ф(*2л-1) = У = X5COSX1 , В = Z Хз \ / \ / 29,Ох? + 26,1X5 + 7,8 0 1,3 0 . 0 0 0,6
Примем
(0,1
0
О
хо =
/0\
О .
fXiQ
У20
/зо
\ i
(—3\
+5
А = Q =
В соответствии с формулами (4.311) и уравнениями (4.312) имеем
/
хо О
х* = Уо О
ZQ О
\
3 / Ч
J.2 (Хк Х°)
3 , Ч
^2 О'* - №)
3 ( Л
-2 \
уЗ (Л'* ~ Хо)
-2 ,
(Ук ~ Уо)
Pi =
/О
1
О
10
ООО' ООО 2 0 0 0 3 0 , d2
j3 (Zk Z3°)
/
/О 0 0 0\
_ О О О О
" 2 0 0 0
0 6 0 0
t
X /
Тогда, в соответствии с выражением (4.322), получим
ит =
-3,12-2,16? -3,6?2 +4,0?3'
4,22-14,04?-23,4?2+26,0?3
<-7,28+12,96?+21,6?2-24,0?3>
По известному х = Ф(х2п-1) определим /ф и Гф:
'—X5COSX1
—xjsinxj
О
\
О —sinxp
О cosxi ;
1 О
. /
' - X6C0SX1 + X2*5SinXi
- x^inxi - X5X2COSX1
о
\
— X2COSXi'
- X2SinXi
о
/
о
о
О
Подставив полученные матрицы Уф и Гф, а также заданные матрицы Q, А и В в выражение
(4.321), получим уравнение регулятора
[0,01 ( - 2х2х6 - /1X5) + 0,2х5Хб] ' IQOcosxi b\xs IQOsinxi Z>1X5 0 (4.330)
U = - ~ [0,2x4 + 0,01/2] + х3 02 + 0 0 100 62
[0,01(xix5 - /3) - 0,2X6 - х5] IQOsinxi I 63 lOOcosxi Ьз 0 )
Результаты моделирования замкнутой системы (4.329), (4.330) в пространстве обобщен-
ных координат представлены на рис. 4.27 полностью подтверждают изложенные выше теоре-
гические основы разработанного метода синтеза программно-замкнутого терминального уп-
равления.
299
XpXj.Xj.X^Xj.Xf
Решение задачи АКАР при замкнутом ТУ. Важнейшей особенностью рассмотренной
классической задачи ТУ является наличие в законе программно-замкнутого управления
и(х, х, Т, f) (4.321) программной составляющей u(x°, xk, Т, t), непосредственно связанной с
выбранной траекторией х* (?) и определяющей момент tf=T окончания процесса перевода ИТ
в конечное положение. Как было показано, при должном выборе замкнутой по координатам
составляющей из(Х2П-ь х2п), именно программная составляющая u(x°, xk, Т, f) позволяет точ-
но выдержать требуемое время перевода tf = 7, если даже ИТ начинает двигаться не из
заданных х°, а из произвольных начальных условий (в определенной допустимой области).
Указанная отличительная особенность синтезированных законов ТУ является принципиально
важной в самой проблеме ТУ и представляет собой своеобразную обратную связь по заданному
терминальному времени.
Перейдем теперь к рассмотрению возможностей построения законов ТУ в чисто замкнутом
виде, т.е. без составляющей ufx°, xk, 7, /), жестко привязывающей движение ИТ к программ-
ной траектории. Итак, ставится задача синтезировать закон ТУ и(х2п-ь х2п , 7), обеспечиваю-
щий перевод ИТ объекта (4.306) из начального состояния в конечное положение за время
tn = tf< Т. Такая постановка неклассической задачи ТУ уже упоминалась во введении и
встречается при управлении многими техническими объектами—летательными аппаратами,
манипуляционными роботами и др. Так, при сборочных операциях на конвейере необходимо
перевести схват манипулятора из различных начальных состояний в некоторые точки около
тех элементов, с которыми производится соединение различных деталей. При этом допускает-
ся, что конечное положение схвата может достигаться с некоторой допустимой погрешностью,
а время перевода удовлетворяло условию („ = //< 7, где 7—наибольшее допустимое время
перемещения манипулятора. Аналогичная задача ТУ возникает при необходимости согласова-
ния работы манипулятора с другими механизмами при выполнении различных технологиче-
ских операций, чтобы эти механизмы не “ожидали” робот, т.к. это снижает производительность
машинного агрегата и т.д.
В общем случае синтез законов ТУ в замкнутой форме u(x2n-i, х2п, 7) позволяет осущест-
вить оперативное изменение траектории движения ИТ при возникновении необходимости
текущего изменения условий полета [177] или соответствующего технологического процесса.
В этих случаях построение ТУ не связано с формированием жесткой программной траектории
300
движения. Очевидно, что для решения поставленной здесь неклассической задачи ТУ, когда
законы ТУ были бы замкнуты только по координатам, необходимо сформировать эти законы
так, чтобы синтезированная замкнутая система ТУ, как соответствующая система дифферен-
циальных уравнений, обладала следующими свойствами: во-первых, математически конечным
временем затухания переходных процессов (tnn = //), во-вторых, это время зависело от началь-
ных условий системы, и, в-третьих, обеспечивалась асимптотическая устойчивость системы
относительно конечного положения.
Из теории дифференциальных уравнений известно, что перечисленными здесь свойствами
могут обладать только нелинейные дифференциальные уравнения. Кроме того, такие уравне-
ния должны содержать нелинейные функции с такой тонкой особенностью, как недифферен-
цируемость в нулевой точке. Это требование связано с конечностью времени затухания
переходных процессов системы и означает нелинеаризуемость указанных функций. Изложен-
ное показывает всю сложность поставленной задачи конструирования чисто замкнутых зако-
нов ТУ. Рассмотрим предлагаемый подход к решению задачи. Предположим, что движение ИТ
задается функциональным уравнением (4.320) и справедливы следующие равенства:
' ? + = 0, (4.331)
где zty) — Ки—вектор-функция; Н = diag Л/, i = 1, v.
Тогда свойство зависимости решений нелинейных дифференциальных уравнений (4.331)
от их начальных условий V'oz можно, очевидно, обеспечить выбором коэффициентов Л, в
функции от V’oz, т.е.
Н = т-12о(^о), (4.332)
ще т,-—задаваемое время попадания ИТ на z-e многообразие ^/ж = 0. Тогда решения (г) будут
содержать выражения т, - t. Вектор-функцию z(ip) следует выбирать таким образом, чтобы,
во-первых, обеспечить асимптотическую устойчивость системы (4.331), а, во-вторых, эти
функции должны обладать указанным свойством недифференцируемости в терминальный
момент времени. Выберем функции zXV’z) в виде ^/(V'z) = тогда уравнения (4.331)
принимают форму
V + Я(?) = 0, (4.333)
где? = |^+1 ^+1...^+1 |\р = 1Д..
В уравнениях (4.333) коэффициенты hi равны
(4.334)
а их решения будут следующими:
/г. _ А (4.335)
V'/CO = ¥'oz 1-^—1
Как следует из (4.335), время затухания переходного процесса в системе (4.333) точно
равно Г/, т.к. при t = Т( функция V’zO'z) = 0, т.е. в этот момент ИТ точно попадает на пересечение
многообразий tpi = 0. Заметим, что при р -» « уравнения (4.333) преобразуются в
? + Я(?) = 0 , (4.336)
где#= sgnxpi... sgnipv |Т,Л,-= ^и^(0 = V’oz^—
В уравнениях (4.333) функции действительно не являются дифференцируе-
мыми в точке ^/(т,) = 0, т.к. не существует предел
lim = lim .
V’z-O
Итак, введенные в рассмотрение функциональные уравнения (4.333) удовлетворяют из-
ложенным требованиям и имеют конечное время затухания переходных процессов. Эти урав-
нения являются обобщенными, т.к. при р = 0 они линейны, а при р -* оо преобразуются в
301
предельные релейные функциональные уравнения (4.336). Как и ранее, на основе метода
АКАР можно, используя функциональные уравнения (4.333), синтезировать такой вектор
управления и(х2п-ь х2п, т(), который переводит ИТ объекта (4.306) из некоторого начального
состояния ^»(х°) на пересечение многообразий = 0 за заданное время ( = т(. Действитель-
но, ИТ не может в одно и то же время находиться на разных многообразиях, поэтому она
сначала будет сближаться именно с пересечением многообразий = 0, а затем двигаться
вдоль него к заданному конечному положению. Это означает, что синтезируемое управление
и(Х2п-ь х2п, т) должно сначала обеспечить перевод ИТ за время Ту i = г, на пересечение
многообразий = 0» а затем в течение времени А т,- движение вдоль этого пересечения,
описываемого вырожденными дифференциальными уравнениями (и-т)-го порядка,
х =F(x), (4.337)
где dim х= (п — mx 1),
вплоть до попадания ИТ в требуемое терминальное состояние. Общее время движения ИТ к
пересечению многообразий *М70 = ‘О и вдоль него к конечному положению должно совпадать
с заданным терминальным временем Т, т.е.
Т = т + Д т . (4.338)
Очевидно, что в случае m = п, т.е. когда размерность вектора управления (т) совпадает с
размерностью пространства состояний (/г) объекта (4.306), время Дт, = 0. В этом случае
соотношения V'/C7») = 0 представляют собой точку, совпадающую с конечным положением
объекта. На практике обычно m < п и тогда возникает задача ТУ на участке времени Д т, при
движении ИТ вдоль пересечения многообразий V’K7/) = 0, которое будет описываться системой
дифференциальных уравнений (4.337) (п — т)-го порядка.
Таким образом, в рассматриваемом методе синтеза замкнутого ТУ возникает две задачи:
во-первых, задача синтеза вектора управления ио(х2п-ь Хгп , 7о) размерности т, обеспечива-
ющего попадание ИТ за t = т, на V'/C7») = 0, и, во-вторых, задача синтеза подзаконов управле-
ния u(x, х, Д г), непосредственно связанных С и(Х2П-ь хгп , г) и обеспечивающих движение ИТ
в соответствии с уравнениями (4.337) вдоль ^/(7/) = 0 в течение t = Д г, вплоть до попадание
ИТ в терминальное положение объекта. Общее время движения ИТ определяется выражением
(4.338).
Первая задача решается на основе функциональных уравнений (4.333), записанных в силу
исходных уравнений объекта (4.306):
+ F2(x2„) + Я^)
дХ2п
(4.339)
Обобщенные уравнения (4.339) позволяют, в зависимости от конкретных макропеременных
Va(xi ,..., хп), получить различные терминальные агрегированные регуляторы. Для этого, как
и ранее, в результате совместного решения алгебраических уравнений (4.339) находятся
управления и(Х2п-ь хгп , т), которые обеспечивают перевод изображающей точки за время г,
на пересечение многообразий = 0,-что и решает указанную первую задачу синтеза.
Вторая задача синтеза состоит'в обеспечении движения изображающей точки в течение
Д Г/ вдоль пересечения многообразий ^(т() = 0 в соответствии с уравнениями (4.337). В
отличии от первой задачи, здесь трудно заранее указать общую процедуру синтеза законов
и(х,...,х , Д т), т.к. это полностью определяется конкретным видом дифференциальных урав-
нений (4.337). Применительно к классу объектов (4.306) эта задача решается аналитически
методом АКАР.‘Итак, показана возможность решения задачи синтеза замкнутого ТУ. Рассмот-
рим особенности, которые возникают при изложенном общем подходе к синтезу замкнутых
ТУ. Дело втом, что как отмечалось-ранее, при синтезе программно-замкнутого ТУ, развитого
в первой части этого раздела, именно программная часть закона uT(x°, xk , Т , t) обеспечила
302
математически точное терминальное время tf=T перевода ИТ в желаемое конечное положе-
ние. В этой связи в развиваемом методе синтеза замкнутого ТУ возникает необходимость
ввести некоторые элементы, контролирующие терминальное время т(. Это можно сделать
двумя способами.
Первый способ состоит в вычислении параметра Л, (4.334) в заранее заданные контрольные
моменты времени, например, при = А/T,-; b, < 1. Для этого в контрольный момент времени
t = tk определяется текущее значение макропеременной хпк) и по формуле (4.334)
вычисляется параметр А,*. Если hn * hi ном, где А, —номинальное значение А^ определяемое
по (4.334) для расчетных начальных условий объекта ipoi(x°) и заданного терминального
времени г,, то вычисляется новое значение параметра
. _ + 1 , / ч (4.340)
Л/Л — Vki^Xik ,..., Хпк) ,
ГДе Tik Tj tk-
Неравенство А,* А, НОЛ может возникать из-за несовпадения реальных и расчетных на-
чальных условий объекта в момент t0, а также вследствие действия неучтенных возмущений на
интервале времени (о.../*- Вводя новое значение параметра А,* (4.340), можно обеспечить более
точное совпадение реального и заданного терминального времени г,. При необходимости
можно ввести несколько контрольных точек tp = tkf> определения параметра Ад. Для реализа-
ции изложенного способа контроля параметра А,* и, следовательно, терминального времени т,-
необходимо измерить текущее время движения, вычислить текущее значение макроперемен-
ной tyki(x\k хпк) и по формуле (4.340) определить параметр А,* в некоторые контрольные
моменты времени tk, а затем ввести его в закон и^х\ ,..., хп , hin) управления.
Второй способ контроля терминального времени т, состоит в следующем интересном
свойстве развитого подхода к синтезу замкнутого ТУ. Дело в том, что для любого номинального
параметра hiHOM, рассчитываемого по формуле (4.334) при заданном т( и предполагаемых
начальных условий объекта (4.306), ИТ неизбежно попадет в некоторый момент времени
на пересечение многообразий ,) = 0. Это свойство непосредственно следует из решения
(4.335), только момент времени t*, попадания ИТ на ip, = 0 может не совпадать с заданным т;
из-за отличия реальных начальных условий объекта от номинальных и действия неконтроли-
руемых возмущений. Тогда можно предложить следующий способ контроля терминального
времени т(. На основе изложенного метода АКАР синтезируется закон замкнутого управления
«(xi ,..., хп, И, ном) с постоянными параметрами. Этот закон обеспечивает неизбежное попада-
ние ИТ на пересечение многообразий ipi(tv,) = 0 в некоторый момент времени tyкоторый
может не совпадать с заданным' моментом г,. Ранее было указано, что т, всегда меньше общего
терминального времени Т системы. Тогда в системе следует контролировать текущее время и
в момент t- tyi, когда ~ вычисляется Ат,-—время/движения вдоль пересечения
многообразий ipifty i) = 0 согласно формуле (4.338):
Ат,= Т- tyt. (4.341)
Параметр А т, (4.341) затем вводится в закон управления ,..., хп , А т;), который и осуще-
ствляет движение ИТ вдоль () = 0 в течение времени а г,. При этом общее терминальное
время Т будет определяться выражением (4.338), а ИТ попадет в желаемое конечное положе-
ние. Таким образом, при втором способе контролируется не параметр А/, а время tv, прибытия
ИТ на пересечение многообразий, т.е. здесь время А т;- не задается, а вычисляется по (4.341) и
затем вводится в. закон управления. Для реализации изложенного способа контроля времени
и, следовательно, общего терминального времени Т (4.338) необходимо измерять макро-
переменную ipi(xi ,..., хп), контролировать текущее время и в момент = 0 вычислить
параметр А т, (4.341), а затем ввести его в закон управления и(х, х , А т).
Изложенное показывает, что второй способ, по-видимому, более прост в реализации и,
кроме того, у него имеются преимущества качественного характера, т.к. результирующая
303
коррекция закона ТУ происходит только на момент неизбежного попадания ИТ на пересечение
многообразий $,(?v,,) = 0- Другими словами, в отличие от первого способа здесь фактически
закон ТУ движением ИТ, вплоть до $/(?^ /) = 0» не корректируется и только в момент t = в
него вносится коррекция по параметру Д т„ чтобы выдержать заданное общее время ТУ.
Разумеется, что преимущества или недостатки первого или второго способа коррекции Т при
замкнутом ТУ могут быть выявлены лишь при конкретных реализациях ТУ соответствующими
классами объектов.
Отличие программно-замкнутого ТУ, описанного в первой части этого раздела от изло-
женных здесь способов состоит в том, что в первом случае для реализации ТУ требуется
генератор времени для формирования программной составляющей Ut(x0, xk , Т , ?), а во втором
случае такого генератора не требуется, однако необходимы устройства для коррекции пара-
метров законов замкнутого управления.
Выделить очевидные преимущества или недостатки программно-замкнутого или только
замкнутого ТУ можно применительно лишь к конкретной ситуации функционирования объ-
екта и в зависимости от требований, предъявляемых к системе управления. Так, например, в
ситуации, когда программная траектория изменяется редко, следует использовать программ-
но-замкнутое ТУ, а в случаях, когда необходимо часто изменять условия ТУ, рекомендуется
применять замкнутое ТУ с коррекцией параметров закона управления.
Пример 4.14. Рассмотрим задачу ТУ перевода космического аппарата (КА) в центральном
поле сил на круговую орбиту [129]. Дифференциальные уравнения плоского движения КА в
поле земного тяготения имеют вид
Л 2 1
XI (?) = Х2 , Х2 (0 = ^2 + Л/ ’
. . 2х2х4 . 1 (4.342)
Хз (О = Х4 , х4 (?) = —— + и2 ,
где xi ; хг—полярные координаты КА относительно Земли; хз—скорость вдоль радиуса-век-
тора; х4—угловая скорость вращения КА относительно центра; М—масса КА; А\, В > 0—па-
раметры; и\, иг—управления.
Из структуры управления (4.342) следует, что координата хз может принимать произволь-
ные значения, не влияя на другие координаты. Ставится задача синтезировать законы управ-
ления
u\(xi ,..., х4 , «]) и H2(xi ,..., х4 , аг), (4.343)
обеспечивающие перевод КА (4.342) из некоторого начального состояния хо(хю ,..., x/i0) за
время tf < Г на круговую орбиту радиуса R с постоянной угловой скоростью вращения т.е.
перевести КА в конечное положение:
xi(tf) = R ; х4(?/) = (Уо ; x2(tf) = 0 ; х3(?/) = var. (4.344)
Для синтеза законов управления используем функциональные уравнения (4.333) при г = 1,
т.е.
$1 (?) 4- h\ipA = 0 ; $2 (?) + Лг$23 = 0 , (4.345)
где
ЛЗ . 26 1 3 . У/х __ ,
1 = $10; Л2 = $20; т = Ti = t2 •
Выберем следующие макропеременные, удовлетворяющие условиям (4.344):
$1 = £1(Х2 + (5xi - dR) + jS2(x4 - (Уо)
и
$2 = «](х2 + dxi - <5Я) + «2(х4 - (Уо) • (4.346)
Подставив $i и $2 (4.346) в выражения (4.345), в силу исходных уравнений КА (4.342),
получим следующие законы управления:
1 А 2 д а2^1 .16 , ^2^2 16 (4.347)
"1 = - ^2 " Х|Х4 - <5х2 - —$1 + с $2 ;
304
Рис. 4.28
1 _ ^1Л1 fiih2 Уз (4.348)
-&U2 =2х2х4 + —— V'txi -^-—1р2Х1 ,
JD С С
где с = fi\a2 — аф2; с # 0 .
Управления и\ (4.347) и и2 (4.348) за время t = г переводят ИТ на пересечения многооб-
разий = 0; V»2 = 0 (4.346), которые можно представить в двух формах:
^12 = с (х2 + dxi - 6R) = О
и
^>12 = с (х4 - й>о) = 0 • (4.349)
Соотношения (4.349), с учетом первого уравнения системы (4.342), соответствуют следующим
уравнениям:
xi (f) — — dxi + 6Л , х4 = (Oq (4.350)
или
Х2 (0 = “ <5х2 , Х3 = (У0 ,
которые описывают движение ИТ вдоль пересечения многообразий ipi2 = 0 в конечное поло-
жение (4.344). Время А т этого движения определяется решением первого уравнения (4.350),
т.е.
xi (0 = (хю - R)e~il + R ; х2 (t) = х^*' (4.351)
а 5
и тогда Д -т ~ .
С учетом (4.351) общее терминальное время перевода КА (4.342) в конечное положение
(4.344) будет равно
Т = г+Дг = г + |. М-352)
О
Итак, решена задача АКАР для КА при замкнутом ТУ. На рис.4.28 представлены резуль-
таты моделирования системы (4.342), (4.347), (4.348) с использованием второго способа
коррекции параметров законов управления, т.е. в данном случае путем изменения параметра
i в момент прибытия ИТ на пересечение многообразий = 0 (4.346). При этом на рис.4.28
взображены графики переходных процессов для граничных условий:
хю = 3 ; i = 1,2,...,4 ; xi(ty) = R; x4(tf) = суо ; хз(Г/) = var,
305
х1.х2.х3.х4
и номинальных параметров т = 2; д = 4; Т = 3; h\ = hi. На рис.4.29 представлены результаты
моделирования системы при начальных условиях хда - 4, отличающихся от расчетных. В этом
случае в момент t = т^,, когда = 0, была осуществлена коррекция параметра ду согласво
выражению (4.352) , при этом общее терминальное время Т = 3 осталось неизмен-
t Ту
ным. Результаты моделирования подтверждают эффективность предложенных подходов к
синтезу терминальных систем управления.
В ряде прикладных задач управления цель ТУ состоит в переводе ИТ в некоторый момент
tf на желаемые терминальные многообразия
M(x2h-i, х2п) = 2 .
Тогда, вводя у = М(Х2П-ь х2п) - 2 и используя функциональные управления (4.333), можно
синтезировать управления, которые за время tf переведут ИТ на указанные многообразия.
В заключение отметим, что развитый в предыдущих главах метод АКАР по своему суще-
ству близок к задаче ТУ, рассматриваемой в этом разделе. В основу метода АКАР положен
принцип последовательного перевода ИТ объекта от одного многообразия к другому многооб-
разию понижающей размерности, что и позволяет сформулировать многие задачи ТУ непос-
редственно как соответствующие задачи АКАР. Так, в частности, если в течение терминального
времени Tf на объект действуют возмущения, то применяя развитый в п.4.2 метод АКАР при
синтезе селективно-инвариантных систем, можно построить ТУ, подавляющее указанные
возмущения без их измерения и обеспечивающие перевод объекта в конечное положение за
заданное время. Аналогично можно построить ТУ, у которого программная траектория синте-
зируется на основе развитого в п. 4.5 метода многокритериальной оптимизации по совокупно-
сти частных критериев качества систем.
Таким образом, предложенные подходы, опирающиеся на теорию АКАР, позволяют осу-
ществить аналитическое конструирование систем терминального управления распространен-
ным классом нелинейных объектов и технологических процессов.
306
АЛ. ИЕРАРХИЧЕСКАЯ ОПТИМИЗАЦИЯ НЕЛИНЕЙНЫХ
АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
В данном разделе в определенной мере структурно обобщается метод аналитического
конструирования (АКАР), Который нашел эффективное применение в третьей главе и пред-
ыдущих разделах четвертой главы для решения различных задач синтеза систем управления
нелинейными динамическими объектами. Метод АКАР основан на идее введения в фазовом
пространстве координат последовательной совокупности инвариантных притягивающих
(асимптотически устойчивых) многообразий. Он позволяет обеспечить желаемые динамиче-
ские свойства системы (асимптотическую устойчивость, заданное время и характер затухания
переходных процессов и т.д.), а также оптимизировать совокупность некоторых функциона-
лов. Асимптотическая устойчивость инвариантных многообразий ips = 0 следует из того, что в
методе используются уравнения устойчивых экстремалей сопровождающих функционалов,
составленных относительно макропеременных Законы управления, полученные методом
АКАР, Обеспечивают последовательный перевод изображающей точки (ИТ) с одного много-
образия = 0 на следующие меньшей размерности и т.д. При этом гарантируется асимптоти
ческая устойчивость в целом относительно многообразий V’s = 0. Разработанный во второй и
третьей главах метод АКАР базируется на том, что функциональные уравнения, из которых
следует совокупность искомых законов управления, также следуют из уравнений устойчивых
экстремалей. Задача выделения уравнений устойчивых экстремалей некоторого функционала
вообще является достаточно трудной. Кроме того, структура уравнений устойчивых экстрема-
лей может быть ограничена видом сопровождающего функционала. Это важный момент в
задаче АКАР, так как структура уравнений устойчивых экстремалей определяет динамические
свойства синтезируемой системы. В этом разделе развивается подход, изложенный в п.2.6, и
показывается, что функциональные уравнения, используемые для определения законов уп-
равления синтезируемой системы, могут быть получены также, исходя из необходимых усло-
вий осуществимости движения по заданным интегральным многообразиям [68]. При этом в
правые части этих уравнений введены некоторые фиктивные управленения. Это позволило
определить двухуровневые иерархические структуры на каждом интервале движения ИТ к
интегральным многообразиям, что расширило возможности метода АКАР.
Предположим, что возмущенное движение объекта описывается системой нелинейных
дифференциальных уравнений:
Xi (0 = //(Х1 ,..., Xi) + а,+1Х,+ 1 , г= 1,2,...,п - 1 ;
хп (0 = /«(xi ,..., х„) + щ, (4.353)
где х(—координаты состояния объекта; ui—управление; /j(xi ,..., xz)—непрерывные функции,
дифференцируемые по своим переменным, ДО ,..., 0) = 0.
Ранее уже отмечалось, что такими уравнениями могут быть представлены практически
важные классы объектов различной физической природы.
Поставим задачу синтеза управления: требуется определить на классе кусочно-непрерыв-
ных функций закон управления
ui = Mi(xi ,..., х„), (4.354)
обеспечивающий последовательный перевод изображающей точки системы из произвольного
начального состояния ,xo(xi0 ,..., х,;0) в окрестность первого многообразия Vh(xi ,..., хп) = 0 в
пространстве координат xi ,..., х„_2, затем второго ^2(xi ,..., xn-i) = 0, третьего ^з(х1,...,
х,г-з) = 0 и т.д. вплоть до многообразия
V\(xi ,..., Xn-s+i) = 0 , 5 < п - 1 , (4.355)
движение вдоль которого приводит ИТ в начало координат фазового пространства (xi =х2=...
=х„=0). Будем считать, что на указанных интервалах движения от многообразия = 0 к
многообразию ^Ч+i = 0 управление обеспечивает в системе требуемые динамические свойства
и оптимизирует некоторую совокупность функционалов. Обсудим особенности поставленной
задачи синтеза. Запишем известное в динамике условие осуществимости движения по интег-
ральному многообразию в виде
и-А+!
Фк (0 = 2 (0 = Фк(фк) ,
1= 1 ах‘
(4.356)
где Фк(1рк)—непрерывная функция, дифференцируемая по своему аргументу, ФДО) = 0. Пере-
пишем двойное равенство (4.356) и введем аргументом в функцию ФД^*) некотороефйктивное
управление vk. Получим следующую систему уравнений:
d^t “к + Fi = Фк^к ’ Vk> ’
vXn—k+\ >=i иХ}
(4.357)
(0 = ФДУЧ , vk), . (4.358)
где Фк(Ук, v^—непрерывная по своим аргументам функция, ФДО,0) = 0; F,—правые части
уравнений (4.353); itk—управление, обеспечивающее движение ИТ вдоль многообразия
фк = 0; Vk—некоторое фиктивное управление.
Рассмотрим систему уравнений (4.357), (4.358). Уравнение (4.357) является необходимым
условием осуществимости движения объекта (4.353) по программе, определяемой интеграль-
ным многообразием = 0, при управлении удовлетворяющему (4.357), и при начальных
условиях, удовлетворяющих многообразию о *(«-*+1>о) — 0. Однако в действительно-
сти установление начальной точки на многообразии в реальных системах может быть осуще-
ствлено лишь с некоторой точностью, а также учитывая, что на систему действуют постоянные
аддитивные и параметрические возмущения, то в результате в системе будут возникать возму-
щенные движения, описываемые уравнением (4.358). Так как в правую часть уравнения
(4.358) входит фиктивное управление v*, тоото уравнение описывает некоторый управляемый
объект, для которого можно сформулировать самостоятельную задачу синтеза управления.
Таким образом, система уравнений (4.357), (4.358) определяет двухуровневую иерархиче
скую структуру, которая вводится на каждом интервале движения ИТ к многообразиям
ф5 = 0 понижающейся размерности. При этом нижним уровнем этой иерархической системы
может служить некоторая система управления относительным движением, которое описыва-
ется дифференциальным уравнением (4.358), а верхним уровнем—некоторая глобальная
система, которая описывается функциональным уравнением (4.357).
Остановимся подробнее на задачах, которые решаются на каждом уровне иерархической
системы (4.357), (4.358). Задачи нижнего уровня связаны с обеспечением задач верхнего
уровня и сводятся в основном к заданию требуемых динамических свойств системы в переход-
ных режимах.
Основной задачей нижнего уровня является обеспечение асимптотической устойчивости ин-
тегрального многообразия фк = 0. Однако на этом уровне можно формулировать и решать неко-
торые оптимизационные задачи. Действительно, например, запишем уравнение (4.358) в виде
Фк (0 = <Рк(.Фк) + bkVk, (4.359)
где фк.{Фк)—выберем таким, чтобы при v* = 0 система (4.359) была асимптотически устойчива
относительно фк — 0, т.е. фк(Фк)Фк > 0- Тогда, введя некоторый функционал $к(фк , поставим
задачу: найти такое фиктивное управление v*, чтобы оно придавало функционалу 8к(фк, vk)
экстремальное значение. Так как такая задача может решаться на каждом интервале движения ИТ,
то, построив функционалы в требуемой последовательности, можно решать задачу последователь-
ной оптимизации замкнутых нелинейных систем.
На верхнем уровне иерархической системы решается задача нахождения управления,
которое обеспечивает устойчивое продольное движение ИТ вдоль многообразия фк = 0 с
учетом результатов решения задачи нижнего уровня.
Рассмотрим теперь вопрос построения в фазовом пространстве некоторых притягивающих
многообразий (4.355) понижающейся размерности, структура которых влияет на динамические
свойства системы. Очевидно, что не только структура , но и взаимное расположение этих много-
образий в фазовом пространстве влияет на динамические свойства синтезируемых систем. Дейст-
308
вительно, если многообразие^* — 0 размерности/г—Л+1 и многообразия ^*+1 = Оразмерности
п-к расположены в фазовом пространстве произвольным образом, то ИТ в начале попадает в
окрестность многообразия ^>* = 0 и далее, выйдя из него, движется в окрестность многообразия
^+i = 0. В этом случае в системе, вообще говоря, могут возникнуть напряженные переходные
режимы. Чтобы смягчить протекание переходных режимов целесообразно использовать , как
это показано в третьей главе, принцип вложенных многообразий:.. лрк+1С ipk. • В этом случае ИТ,
попав в окрестность многообразия ^* = 0 и не выходя из него, движется в окрестность многообра-
зия трк+\ = 0 и т.д.
Математическую процедуру АКАР для нелинейных объектов на основе притягивающих
многообразий: проведем аналогично процедуре, изложенной в третьей главе. Задача состоит в
последовательном введении некоторых двухуровневых иерархических структур, которые по-
зволяют найти управление us, обеспечивающее последовательный перевод ЙТ в окрестность
многообразий ips = 0 (4.355), при этом обеспечиваются заданные динамические свойства, а
также оптимизация некоторой совокупности функционалов. Учитывая сказанное й систему
уравнений (4.357), (4.358), процедуру АКАР запишем в следующем виде:
tops
дХц-s+l
= Ф,»,, n);
*=1
ips (0 = ®s(lps , Vj) ;
S(ipk , v*) -> min(max) ; (4.360)
I Vs I < VSmax , $ = 1,2,...,W .
Решение задачи (4.360) на каждом интервале движения ИТ состоит из двух этапов. На первом
этапе решается задача нижнего уровня, в результате которой определяется управление
vk = v*(V>*). Затем, записав систему нижнего уровня в замкнутом виде, получим функцию
Ф*(^* , v*(^)), которая является правой частью функционального уравнения верхнего уровня
структуры (4.360). Разрешив его относительно ик, получим управление, которое обеспечивает
сближение ИТ с многообразием грк = 0'размерности п-к+1. На следующем интервале движе-
ния ИТ, решая задачу синтеза, получим управление и*+ь которое обеспечивает сближение ИТ
с многообразием ipk+1 = 0 размерности п—к. Последовательное решение задачи АКАР (4.360)
определяет совокупность законов управления, которые обеспечивают асимптотическую ус-
тойчивость движения в целом относительно многообразий ips = 0, требуемые динамические
свойства системы, а также оптимизацию некоторой последовательности функционалов
Sstys, Vj). В простейшем случае, когда vk = 0, нижний уровень иерархической структуры
можно определить как подходящее дифференциальное уравнение, обеспечивающее заданное
динамическое качество системы на к-м интервале движения ИТ.
Д ля конкретности опишем подробнее процедуру АКАР с тремя притягивающими многообра-
зиями (т = 3). При этом необходимо последовательно минимизировать два интегральных функ-
ционала (/1 и Ji). Для этого введем в рассмотрение первую агрегированную макропеременную
in = хп + u2(xi ,..., xn-i) . (4.361)
В соответствии с (4.360) относительно многообразия ^1=0 введем двухуровневую иерархи-
(4.362)
(4.363)
(4.364)
ческую структуру в виде
«1 + 2 ^(fi + ai+ixi+i) = gi(V'i) + biVi ;
(0 = gifV’i) + bivi ;
J\ = / (ai^i + £?v?) dt.
Нижний уровень (4.363), (4.364) организован как система оптимального управления, в кото-
рой в качестве критерия качества выбран, в частности, функционал (4.364), значение которого
характеризует взвешенную по константам а, и интегральную квадратичную ошибку, кото-
рою система будет иметь в течение времени переходного процесса. Нахождение управления
309
Vi—известная задача синтеза оптимального управления с квадратичным критерием качества.
Допустим, что, используя известные методы решения этой задачи [12], найдено управление
Vj = vi(^>i). Подставив его в уравнение (4.362) и разрешив его относительно получим
«1 = gi(V’i) + Vi “ 2 ^(fi + ai+ixi+1) - fn. (4>365)
1=1 OXj
Управление (4.365) переводит ИТ в окрестность многообразия = 0, движение вдоль кото-
рого описывается уравнением:
X/ (/) — fj(x\ ,..., х/) 4" |Х/+1 , i 1,2,...,л-2 ,
хп-1 (0 = /и-1(Л1 ,..., x„-i) - a„zz2(xi *n-i).
Введем теперь вторую макропеременную
V»2 = Хп-\ + «з(Х1 ,..., Х„-2)
и организуем следующую двухуровневую структуру в виде
Л-i - апи2 + 2 j/fyi + <*i+iXi+i) = C2V2 + b2v2
1=1 ОХ)
$2 (0 = с2^2 + b2v2;
(4.366)
(4.367)
(4.368)
(4.369)
(4.370)
Данная иерархическая структура аналогична структуре (4.362), (4.363), (4.364). Пусть най-
дено фиктивное управление г2 = г2(^2), тогда подставив его в (4.368) и разрешив функцио-
нальное уравнение относительно управления «2, получим
anii2 - fn-i ~ + Oi+iXi+i) - C2V2 ~ 6гг2(^2) . (4.371)
Промежуточное управление и2 переводит ИТ подобъекта (4.366) в окрестность многообразия
V>2 = 0 (4.367).
Движение ИТ вдоль многообразия ^2 = 0 описывается уравнениями
xi (0 = fi(xi ,..., х{) + ai+iXi+i , i - l;2,...,/i—3 ;
Xn-2 (0 = fn-2(x\ Xn-2) ~ an-iu3(x\ ,..., x„-2) • (4.372)
Для придания желаемых свойств движению вдоль последнего многообразия ip3 = 0 введем
расширенную третью макропеременную
п-2
V»3 = S fakXk + «4*1 Хп-з)
*=1
(4.373)
и организуем следующую иерархическую структуру:
д-з & (4.374)
~ Рз(п-2)^п-\Из(.Х1 ,..., Х„-2) + fan-2)fn-2 4- J} (fa + д~) (fi + «/+ lxi+1) ~ С31рз 4- 63V3 ,
к=1 ОХк
Цз (0 = с31рз 4- b3v3 , (4.375)
где с3 , Ьз < 0.
Для завершения процедуры синтеза закона управления подобъектом (4.372) необходимо
найти из из функционального уравнения (4.374), (4.375) путем выбора в ^з (4.373) соответ-
ствующих коэффициентов fa и функции «4, а затем последовательно определить составляю-
ди4 ди2 ,. .
щие -ч— и -х—, входящие соответственно в промежуточное управление и2(4.371) и искомое
дХ[ dXj
управление щ (4.365). Аналогично, в общем случае можно осуществить последовательный
перевод ИТ в окрестность многообразий ip4 = 0, ips = 0 и т.д., вплоть до некоторого многооб-
разия 1рт - 0. Соответственно при этом вводится т двухуровневых иерархических структур,
каждая из которых решает определенную на т-м интервале задачу управления. Связь между
структурами осуществляется посредством промежуточных (условных) управлений и2,
из,...,ит. Конкретно, в общем случае, задача синтеза управления и\ (4.365) решается в
обратном порядке. Сначала находится промежуточное управление из т-й иерархической
310
структуры, затем находится управление um-i и т.д., вплоть до и2, которое, согласно (4.365),
позволяет завершить процедуру синтеза закона управления.
Разумеется, что для подсистем нижнего уровня, особенно при векторном управлении,
помимо квадратичных критериев относительно макропеременных ips, например вида J\
(4.364), могут быть приняты и другие технически целесообразные критерии качества. В
частности, к таким критериям относятся критерии быстродействия и минимума энергозатрат,
которые оценивают свойства подсистемы нижнего уровня в отношении времени переходного
процесса, затрат топлива или энергии и т.д. Применяя, например, критерий быстродействия
для оценки качества подсистемы нижнего уровня и используя известные результаты теории
оптимальных систем [20, 22], можно сразу записать следующие функциональные уравнения:
•для систем с двумя управлениями
$1(0=^2, ^2 (0 = - “V'max SigHU^l , V»2) , (4.376)
где/2(^1 , = V>1 + „°’5 ^21 ^2 I ;
<’ Ч> max
•для систем с тремя управлениями
(0 = v>2 , $2 (0 = v>3 , V>3 (0 = - w^max sign//О , #2 , V>3), _____ (4.377)
где, ip2 , ^з) = + ‘41^з I (2^2 + V*31 V^3 •) + (V>2 + 0,5^з । V>31 )V | ^2 + 0,5^з I V>3 • I » и т.д. В
этом случае изображающая точка системы сначала за минимальное время, определяемое
величиной /^шах в уравнениях (4.376), (4.377), попадает на подмногообразие переключений
fi = 0 для подсистемы нижнего уровня, а затем будет двигаться вдоль выбранной совокупности
притягивающих подмногообразий для подсистем верхнего уровня и т.д.
В рассматриваемом в этом разделе подходе к двухуровневой оптимизации основная проблема
синтеза сводится к формированию функционалов подсистемы нижнего уровня, физической и
технической интерпретации этих функционалов, выбору ограничений I vs I < vs max, 1iiy I < max и
т.д. Дело в том, что макропеременные V>s(xi ,..., х„) по своему существу определяют совокупность
задаваемых независимых первых интегралов х„) = 0, которые обязательно будут прису-
‘Щи дифференциальным уравнениям замкнутой нелинейной системы. Как это уже отмечалось в
предыдущих главах, основная проблема метода АКАР сводится к заданию таких первых интегралов
fa = 0, т.е. притягивающих многообразий, на которых наилучшим образом согласуются естест-
венные механические, энергетические и т.п.свойства объекта и требования технологической задачи
управления. В частности, для механических систем указанные первые интегралы могут определить
величину и скорость рассеиваемой полной механической энергии объекта [90] при управлении его
движением. Теория инвариантов получила определенное применение [90,133,134,162,193—198]
для построения первых интегралов в задачах оптимального управления, что может упростить
проблему поиска управляющих воздействий [198]. Так, в работах [90,133,134] первые интегралы
уравнений неуправляемого движения (//=0) используются для построения частных законов управ-
ления и оценки значений оптимизирующего функционала. Однако в большинстве случаев это
разомкнутые управления и (/) в функции времени. Что же касается проблемы синтеза законов
замкнутого управления и(х\ ,..., хп) в функции фазовых координат, то фундаментальная идея
применения инвариантных многообразий для решения указанной проблемы получила свое суще-
ственное развитие впервые, по-видимому, в работах автора этой книги. Важно подчеркнуть, что
при этом нередко удается достаточно успешно разрешить известную в теории АКОР задачу выбора
весовых коэффициентов обобщенных квадратичных функционалов. В методе АКАР параметры
функционала т.к и q определяют постоянные времени Тк = — функциональных уравнений, т.е.
имеют ясную физическую интерпретацию. В случае же использования неквадратичных функци-
оналов и здесь возникает указанная ранее проблема выбора ограничений на I z/v I < ич, тах, связан-
ных с первыми интегралами замкнутой системы управления.
311
Пример 4.15. Рассмотрим пример синтеза нелинейной системы, иллюстрирующий обоб-
щение метода АКАР. Применим этот метод для системы управления нелинейным объектом,:
xi (t) = Х2 , хг (0 = sinxi + хз , х3 (/) = ui. (4.378)
Введем сначала первую макропеременную i,
Vi = х3 + tt2(xi , х2) . (4.379)
Согласно (4.360) введем двухуровневую иерархическую структуру, в котором на нижнем
уровне будем решать задачу оптимального демпфирования переходных процессов в объекте
(4.378), тогда получим
Ul + fx?*2 + l^(sillX1 + = + 6,V1 ’
(4.380)
(0 = Citpi + biVi, ci < 0 . (4.381)
Так как при vi = 0 положение равновесия ^1=0 (4.379) асимптотически устойчиво, то суще-
ствует положительно определенная квадратичная форма VfV’i), удовлетворяющая уравнению
(V V , ciV>i) = -
и притом единственная.
Будем считать, что функция V определяет расстояние интегральной кривой системы
(4.381) до инвариантного многообразия ^1=0 (4.379). Построим управление vi, оптимальное
к демпфированию функции V, т.е. управление vi необходимо выбрать так, чтобы функция V
убывала наибольшим образом вдоль траектории системы (4.381).
Пусть vi удовлетворяет условию I vi I < 1, тогда функция
W = - V»? + (V V , vidi)
принимает наименьшее возможное значение при
. . (2bi , \ (4.382)
vi = - sign(di , V V) = - sign I — ipi .
\ /
Задача нижнего уровня иерархической структуры решена. Переходя к решению задачи верх-
него уровня, из функционального уравнения (4.380) с учетом (4.382), найдем управление «1
в виде
«1 = Я1Х3 + а\Иг — b\ sign
— (*з + иг)
ди2 диг, . , ч
- - di2(smX| +
(4.383)
Управление (4.383) переводит ИТ из произвольного начального состояния в окрестность
многообразия ^1=0 (4.379), движение вдоль которого описывается уравнениями
xi (() = хг , х2 (0 = sinxi - z/2(xi » х2) . (4.384)
Используя вторую макропеременную
трг = fizixi + х2 + u3(xi), (4.385)
введем двухуровневую структуру в виде
' диз , (4.386)
Рг\х2 + smxi - и2 + ^х2 = - ^2 ;
^2 (0 = - V>2 • ’ (4.387)
Нижний уровень структуры (4.387) обеспечивает асимптотическое движение ИТ к многооб-
разию хрг - 0 (4.385). Из (4.386) найдем промежуточное управление подобъектом (4.384):
а х о • диз (4.388)
м2 = рг\Х\ + хг + рг\Хг + smxi 4- -г—х2 .
ил 1
Это управление, согласно (4.387), обеспечивает сближение ИТ с многообразием ^>2 = 0
(4.385), движение вдоль которого описывается уравнением
Xi (0 = - /?21Х1 - И3(Х1) .
Выбрав в этом уравнении коэффициент /?21 > 0, а функцию zz3(xi) так, чтобы выполнялось
неравенство zz3(xi)xj > 0, можно обеспечить асимптотическую устойчивость движения в целом
312
синтезируемой нелинейной системы. В простейшем случае можно положить u3(*i) = 0, тогда,
найдя и2 из (4.388) и подставив его в (4.383), получим закон управления
zzi = (а\ — Ри)хз + (xi/?2i + ai — ^21)х2 + ai^2ixi + (ai — /?2i)sinxi —
(4.389)
- X2COSX1 - bl sign (хз + (^21 + 1)х2 + /?21Х1 + sinxi) .
Подставив управление (4.389) в исходные уравнения объекта (4.378), получим уравнение
замкнутой системы относительно координаты х,:
Х^3) (/) - (Л1 - /?21 )х^2) (0 - (Я1/?21 + «1 - /?21)Х1 (0 - <21^21X1 +
+ bl sign ( х$2) (0 + (021 - 1)Х1 (0 + 021X1) = 0 .
I
(4.390)
Выбрав в (4.390) соответствующие «1,^21» bi, можно обеспечить желаемое время переходного
процесса замкнутой нелинейной системы.
Таким образом, предложенное обобщение метода АКАР, основанное на конструировании
двухуровневых иерархических структур относительно вводимых притягивающих многообра-
зий, позволяет расширить круг решаемых методом АКАР задач синтеза систем многокритери-
ального управления нелинейными динамическими объектами.
4.8. ОБОБЩЕНИЕ МЕТОДА АНАЛИТИЧЕСКОГО КОНСТРУИРОВАНИЯ
НЕЛИНЕЙНЫХ АГРЕГИРОВАННЫХ РЕГУЛЯТОРОВ
Основные этапы обобщённого метода АКАР. Рассмотренные ранее различные модифи-
кации метода аналитического конструирования агрегированных регуляторов (АКАР) показали
его существенную новизну и эффективность в решении трудной проблемы синтеза систем
управления нелинейными динамическими объектами. Перейдем теперь к обобщению этого
метода. В соответствии с изложенным в п. 1.8 принципом сжатия—расширения фазового потока
к базовым положениям метода АКАР относятся:
•во-первых, формирование расширенной системы дифференциальных уравнений,
отражающих процессы отработки задающих воздействий, подавления возмущений,
оптимизации, наблюдения координат и т.д.;
•во-вторых, формирование таких “внешних” управлений, которые обеспечивают
редукцию избыточных степеней свободы расширенной системы по отношению
к финишному многообразию, движение изображающей точки (ИТ) вдоль которого
описывается дифференциальными уравнениями “внутренней” динамики системы;
•в-третьих, формирование между “внутренними” координатами системы таких
связей—инвариантных многообразий, которые обеспечивают достижение постав-
ленной цели управления.
Изложенные базовые положения метода АКАР приводят к следующим его этапам:
1. Записываются исходные дифференциальные уравнения объекта
Xk(t) = A(xi,...,xn)+ Mk(t), к = 1,2,...,т— 1;т < п,
x*+i(0 = A+i(xi,...,x„)+ uk+i+ Mk+X(t),
•................................................................... (4.391)
Хи(0 = /и(Х1,...,Хп)+ «п+ Mn(t),
где xi,...,x„—координаты состояния объекта, uk+i,...,iin—управления, Mi(f),...,Mn(f)—возму-
щающие воздействия.
2. К системе (4.391) добавляется//-уравнений, связанных с проблемой предсказания и
подавления указанных возмущений:
- «/(И'ь-м^.хь...^), /= 1,...//. (4.392)
313
При построении уравнений (4.392) возникают две важные задачи: во-первых, задача описания
реальных возмущений Л/Д(),...,Л/„(() как частных решений некоторых дифференциальных
уравнений, и, во-вторых, задача формирования связей между уравнениями исходного объекта
(4.391) и уравнениями возмущений. Рассмотрим отдельно эти две важные задачи.
Для описания реальных возмущений выберем в соответствии с работой [249] волновое
представление в виде полудетерминированных выражений
М(0 = IFrA/i(0,M2(0,...,A/„(0;cb...,crl, (4.393)
где i = 1,2,...,л—известные функции, Cj,j = 1,...,г—неопределенные параметры, кото-
рые могут в неизвестные моменты времени скачком изменять свои кусочно-постоянные зна-
чения. Набор известных функций Mfcf) в уравнении (4.393) должен отражать все волновые
формы возмущений, действующих на объект. Многие реальные возмущения можно предста-
вить как линейное волновое описание
г (4 394)
AfKO = 2 cikMik(t), i = l,2,...,n.
4=1
Это означает, что возмущение состоит из взвешенных линейных комбинаций ступенек и
непрерывных функций времени. Волновое представление возмущений дает, по сравнению с
традиционным статистическим описанием, информацию о возмущениях иного рода [249,250].
Дело в том, что статистическое описание несет обычно информацию о среднем значении
изменения возмущения и его величине на длительном интервале времени, а на коротких
отрезках времени оно достоверной информации о характере изменения возмущений, как
правило, не дает. Волновое же описание предоставляет возможность определить именно ха-
рактер изменения путем соответствующего выбора базовых функций Mik(f)—по меньшей
мере на коротких интервалах времени. При этом величина изменения Л//(г) остается неизвест-
ной, т.к. зависит от неизвестных коэффициентов Cjk, имеющих кусочно-постоянных характер
своего поведения. Для многих прикладных задач управления именно информация о возмуще-
ниях на коротких интервалах времени нередко представляет наибольший интерес. Тогда
статистическое описание может оказаться неэффективным, а более приемлемым будет именно
волновое представление возмущений. В этих важных случаях достаточно просто подобрать
конкретные формы базовых функций Mik(f) для аппроксимации действующих на объект реаль-
ных возмущений [249, 250]. После выбора базовых функций необходимо перейти к форми-
рованию модели состояния для возмущений волновой структуры в виде некоторой системы
дифференциальных уравнений. Описание непрерывных функций в виде решений некоторых
дифференциальных уравнений впервые начали использовать К.Шеннон [247] в теории диф-
ференциальных анализаторов и В.С.Кулебакин [248] в теории управления. Обобщенное
представление возмущений дано в работе С.Джонсона [249] в форме системы дифференци-
альных уравнений
= g/w(M'i,...,H’/<,a],...,a(I<), (4.395)
где Wj{t) = а оу(() являются случайными дельта-функциями, отражающими скачкообраз-
ный характер изменения коэффициентов су.
Для линейного волнового описания (4.394) уравнения (4.395) могут быть представлены в
каноническом виде
wi(0 = w2+ = w3+ о2(0 , й>г-1(0 = mv+ ,
й*»»(0 = - aiwi - a2w2- • • • - arwr+ u2(t).
В работе [247] приведены и другие способы представления волновых возмущений в виде их
моделей состояния.
На основе моделей состояния (4.395) можно перейти к формированию уравнений связи
(4.392), что составляет содержание упомянутой выше второй важной задачи. Перейдем к ее
краткому рассмотрению. От уравнений модели возмущений (4.395) к уравнениям связи
(4.392) можно перейти различными способами. Выбор соответствующей структуры уравнений
связи (4.392) влияет на структуру синтезируемого динамического регулятора, приспосаблива-
ющегося к возмущениям. Очевидно, что в уравнения связи (4.392) целесообразно вводить те
314
координаты исходного объекта xi,...,x„, производные которых xi(0,...,xe(/), согласно уравне-
ниям (4.391), содержат в правых частях соответствующие возмущения В рамках
метода АКАР координаты xi,...,xn можно интерпретировать как некоторые “внутренние” уп-
равления, при достижении которыми заданных (например, нулевых) значений уравнения
связи (4.392) переходят в модель возмущений (4.395). Это и будет означать “поглощение”
регулятором действующих возмущений. Разумеется, что выбор такого рода “внутренних”
управлений, реализующих противодействие возмущениям, может быть осуществлен различ-
ными методами, в частности, на основе теории оптимального управления.
После выбора уравнений связи (4.392) в результате получаем расширенную систему
дифференциальных уравнений
x£t) =Л(х1,...,хи)+ i = fi+(4.396)
*/+i(0 =Am(*i.•••♦*»)+ W/+1+ «z+ь
Xn(f) =/n(Xl,...,Xn)+ Wn+ lln.
Уравнения (4.396) позволяют поставить задачу синтеза законов управления in+i,...,un, подав-
ляющих возмущения Mi(/),...,A/n(/) и обеспечивающих заданные динамические свойства зам-
кнутой системы.
3. Для решения поставленной на втором этапе расширенной задачи синтеза используется
цдеология метода АКАР. Из этого метода следует, что под действием “внешних” управлений
м/+1,...,мп ИТ расширенной системы (4.396) попадает в окрестность пересечения многообразий
=0,...,^т=0, движение вдоль которого описывается следующими уравнениями “внутренней”
динамики:
i = (4.397)
Xtytt) =Z(^-,Xm-l^V/+i,...,V„), I = l,...,m-l,
где v/+i,...,v„—“внутренние” управления.
4. Рассматривая декомпозированную систему (4.397) размерности n+fi-m, синтезируем
“внутренние” управления v/+b...,v„, обеспечивающие желаемые динамические свойства при
движении ИТ вдоль пересечения многообразий ^i=0,...,^m=0. Синтез управлений v/+i,...,vn
представляет собой самостоятельную внутреннюю задачу управления. Зная управления
v,+i vn можно ввести теперь желаемые макропеременные, например, линейного вида
% = Ул(*|+1- V1)+ ...+ Ysm(.xn- Vn), s = l,...,m (4.398)
5. На основе функциональных уравнений
Tstys(t)+ <Pstys) = 0, s= l,...,m,
желаемых макропеременных ips (4.398) и в силу уравнений расширенной системы (4.396) в
соответствии с методом АКАР находятся “внешние” управления:
, , ч D\
ut+i = ~ fi+i(xi,...,xn)~ wi+i-;
.................................................... (4.399)
D '
Un= ~ fn(Xi,...,Xn)~ Wn- -j* ,
ще:
У11 У12 ... Yim Ф1 У12 ... Yim
У21 У22 ••• У2т Ф2 У22 ••• Y2m
D = • . • • * 0, Di = • • * 0 при Ф, = 0,
Ут\ У m2 • • • У mm Фщ У m2 • • • У mm
315
У11 У12 ... У1.Щ-1 Ф1
У21 У22 ••• Уг.т-1 ф2
Dn = • • • * 0 при Ф, 0,
У ml Уm2 ••• Y in,Hl-1 Фш
Ф5 = 7slVl(0+ УйЬ(О+ •••+ rsmVn(t)~ ^(ФД
Полученные здесь соотношения позволяют найти законы управления (4.399), которые пере-
водят ИТ в окрестность пересечения инвариантных многообразий ^1=0,...,^т=0. Движение
ИТ вдоль этого пересечения определяется уравнениями “внутренней” динамики (4.397).
Законы управления (4.399) вместе с уравнениями связи (4.392) образуют уравнения агреги-
рованного регулятора, который обеспечивает селективную инвариантность замкнутой системы
к возмущениям асимптотическую устойчивость ее движения и желаемые свой-
ства переходных процессов.
Отметим, что системы, синтезируемые методом АКАР, обладают свойством адаптив-
ности, т.е. малой чувствительности к разбросам параметров и различным погрешностям в
объекте. Дело в том, что для таких систем, вообще говоря, не возникает необходимости
строго поддерживать внутренние параметры, важно лишь, чтобы система попадала на
заданное инвариантное многообразие—аттрактор ips(xi,...rKn)=:0, на котором обязательно
поддерживается желаемое соотношение между координатами объекта. Другими словами,
несмотря на разного рода внутренние шумы и параметрические пертурбации, синергетиче-
ская система все равно решает поставленную перед ней задачу—неизбежно устремляется
к желаемому аттрактору и достигает его через некоторое время. Согласно принципам
синергетики [83, 99], именно в этом проявляется свойство самоорганизации, а указанный
аттрактор служит “параметром порядка”, которому подчиняются все другие переменные
самоорганизующейся системы. Сама же система всегда асимптотически устойчива в целом
относительно этого аттрактора. Из теории устойчивости известно [8, 11], что свойство
асимптотической устойчивости, тем более в целом, является грубым свойством динамиче-
ских систем. Отсюда следует, что синергетические системы, синтезируемые методом АКАР,
обладают робастной устойчивостью к параметрическим возмущениям. Это означает, что
обобщенный метод АКАР, основные положения которого были изложены выше, в целом
позволяет синтезировать системы управления нелинейными объектами, обладающие малой
чувствительностью к параметрическим возмущениям и селективной инвариантностью к
заданному классу (множеству) внешних воздействий. В этом отношении выявленные здесь
особенности синтезируемых синергетических систем управления приближают их к свойст-
вам самоорганизующихся природных систем.
Перейдем к рассмотрению примеров, иллюстрирующих базовые положения обобщенного
метода АКАР. В предыдущих разделах книги были приведены многочисленные примеры
синтеза систем управления нелинейными объектами. Представляется целесообразным вер-
нуться к наиболее характерным из этих примеров, чтобы отразить описанные выше основные
этапы применения обобщенного метода АКАР.
Пример 4.16. Рассмотрим сначала важную задачу стабилизации положения равновесия
КЛА, возмущенное движение которого описывается сложной системой нелинейных дифферен-
циальных уравнений (3.121). Внешние управления щ, и4 и и$ переводят ИТ в окрестность
пересечения многообразий =0, ^4=0 и ^5=0, движение вдоль которого описывается уравне-
ниями внутренней динамики (3.124). Выберем макропеременные вида
V’s = vl)+ v4)+ YSs(x5- V5), 5 = 1,4,5.
316
Положив в ^внутренние управления V| = О, V4 = £1Хзи — а 1X2 и подставив их в (4.399), найдем
следующие законы управления КЛА:
_ (А- С \ Di .
Щ I & IХ4Х5+ ♦
/С- В \ х Г>4 . (4.400)
П4 I Х1Х5+ ,
_ (В- А \
Hi ~ I £ I Х1Х4 + ч
где D = /11 /14 /15 ; А = Ф1 ф2 Фз /14 /15 /24 /25 /34 /35
/21 /31 /24 /25
/34 /35
/п Ф1 /15 /11 /14 Ф1
£>4 = /21 /31 ф2 Фз /25 ; /35 Ds = У21 /24 Ф2 ; /31 /34 Фз
Ф1 = £1/14Х1Х2+ «1/15X1X3+ (£1/14X4— «1/15Х5)УТ~- xj~ Х3 \
Ф2 = £1/44Х1Х2 + «1/45X1X3+ (£1/44X4“ «1/45Х5)УТ— Xj~ Х3 J
Ф3 = £1/54X1X2+ «1/55X1X3+ (£1/54X4- «1/55X5)V1- Х2- Хз .
Уравнения движения ИТ вдоль пересечения многообразий y>i =0, VU=O и ^5=0 имеют вид
Х2у«(0 ~ ~ «1Х2уУ1~ Х2^~ Хзу, ,
Хз^>(/) .= £1Хз^У1 Х2^> х2^ .
Покажем, что эти уравнения дают ясную геометрическую интерпретацию движения КЛА. Для
этого умножим первое уравнение на х^, второе на хз^, и сложим почленно, тогда получим
Х2^Х2^>(() + Х^/Хз^»(() — («1X2^+ £1X3^,) У1 — Х2у Хз^, •
Положим г2 = Х2У+ х^, и «1 = £1 = «, где г—расстояние от начала координат до ИТ, движу-
щейся вдоль пересечения многообразий. Отсюда имеем уравнение
„ е d г2 2 л---------------------------------2-
0,5 -г- =-«г У1-г
/ a t
или
г(0 = — а г У1 — г2 .
Проинтегрировав последнее уравнение, получим
м =______2г„(1+ )е-'___
{ 2(1+)+1) ’
При « > 0 радиус г(() монотонно убывает, стремясь к нулю при (-»<», т.е. движение ИТ вдоль
пересечения многообразий является асимптотически устойчивым. Это означает, что синтези-
рованная нелинейная система управления КЛА (3.121), (4.400) при а > 0, Т\ > 0, Т4 > 0,
Г5 > 0 будет также обладать свойством асимптотической устойчивости движения. Если поло-
жить Т\ = Т4 = Т$ = Т, то можно указать верхнюю оценку времени переходного процесса
/ 2
ГР<(4...5)1Т+^
для произвольных начальных условий системы. Синтезированные управления (4.400), в отли-
чие от ранее полученных (3.125), (3.144), (3.145) и (3.160), (3.161), взаимосвязаны между
собой и переводят ИТ в окрестность пересечения трех многообразий. В то же время управление
ui (3.125) в предыдущих двух вариантах синтеза было автономным и отдельно поддерживало
заданный инвариант V'i = xi = 0 в замкнутой системе. Такой раздельный способ введения
317
инвариантных многообразий целесообразен, например, в задачах устойчивости динамических
систем по отношению к части переменных [189] и т.д.
Итак, рассмотренный пример синтеза многосвязной системы управления сложным нели-
нейным объектом (3.121) свидетельствует об эффективности и весьма широких возможностям
обобщенного метода АКАР, основанного на синергетическом подходе в теории управления.
В изложенном выше примере отсутствовали возмущения. Рассмотрим теперь пример
синтеза регулятора, который предсказывает и поглощает структурно заданные воздействия на
объект.
Пример 4.17. В п. 4.2 на основе А(р)-изображения синтезирован селективно-инвариантный
регулятор, стабилизирующий маятник в верхнем неустойчивом положении при действии на
него гармонического возмущения В sin a>ot с неизвестной, но ограниченной амплитудой. Пред-
ставим теперь систему (4.70) в расширенном виде
й>1(() = w2 ; й>2(() = - 4^ + v(xj,x2),
xi(() = х2; х2(() = sin xi+ хз ;хз(0 = и+ и>|.
При v(xi,x2) = 0 первые Два уравнения этой системы являются моделью возмущения. Для
синтеза динамического регулятора, противодействующего возмущению, введем последова-
тельно следующие инвариантные многообразия:
V'l = *3+ <pl(Xi,X2,Wi,W2) = 0 И 1р2 = Х2+ <P2(Xi,W[,W2) = 0,
где = sin xi + £>2(f)+ jrtp2, <Р2 = Poxi + p\W} + p2w2.
Тогда на основе функциональных уравнений
= 0 и Т2^2+ tp2 — 0
и выборе, в частности, функции связи v(xi ,х2) = xi получим следующий закон управления:
7\Т2и = — \р}Т}Т2+ Р2(Т}+ Ti)+ ро]Х}— \р2Т\Т2+ро(Т\+ Т2)+
+ T|T2 cos Xi+ 1]х2— (Р0Т1Т2+ Т1+ T2)(sin xi+ хз)— |/>i(l—4T’i7’2)—
— 4/>2(7’i + Т2)]и’]— [р2(1— 47,]72)+ pi(Ti+ Т2)]щ2.
Этот закон совместно с первыми двумя уравнениями расширенной системы образует динами-
ческий регулятор, поглощающий гармоническое воздействие. Синтезированный регулятор по
своей структуре отличается от ранее полученного (4.73), однако уравнения замкнутой систе-
мы, записанные относительно выходной координаты хь в обоих случаях совпадают, что
свидетельствует об эквивалентности динамических свойств двух вариантов синтезированных
регуляторов. Различие в структурах этих регуляторов определяется принятыми уравнениями
связи, т.е. в данном случае зависит от выбора функции связи v(xi,x2), которая может быть
интерпретирована как некоторое “внутреннее” управление, действующее на модель возмуще-
ния. Разумеется, что это управление само по себе может быть синтезировано на основе,
например, методов теории оптимального управления.
Итак, в зависимости от выбранных уравнений связи в обобщенном методе АКАР можно
построить различные динамические регуляторы, противодействующие возмущениям.
Аналитическое конструирование нелинейных систем с наблюдателями состояния. Про-
должим дальнейшее обобщение метода АКАР и перейдем к рассмотрению наиболее общей и,
вместе с тем, наиболее сложной проблемы синтеза нелинейных систем при неполной инфор-
мации о векторе состояния объекта и действующих на него возмущений. Несмотря на очевид-
ную важность решения этой проблемы с точки зрения практики, она остается, как правило, вне
поля зрения исследователей. Конструктивные методы синтеза в этом направлении, пригодные
для широкого использования, на данный момент, по существу, отсутствуют как в отечествен-
ной, так и зарубежной научной литературе.
В настоящем разделе в рамках метода АКАР предпринята попытка решения указанной
проблемы для некоторого класса нелинейных систем.
318
Постановка задачи и метод решения
I
Задана математическая модель объекта управления в виде:
х =,а(х)+B(x)-u+#(x)-w, (4.401)
У = с(х)
где х—n-вектор состояния, и—m-вектор управления, w—р-вектор воздействия, у—v-вектор
наблюдаемых переменных. Векторы а(х), с(х) и матрицы В(х) и 7/(х) предполагаются непре-
рывными и дифференцируемыми.
Воздействие w принадлежит классу детерминированных воздействйй заданной формы и
определяется однородным дифференциальным уравнением
w = G w, w(0)G W, (4.402)
где G— заданная матрица, a WC R ^—компактное множество.
Задача заключается в синтезе динамического регулятора
z = Л(у,г), (4.403)
u = u(y,z),
где z—вектор состояния, обеспечивающего асимптотическую устойчивость системы (4.401),
(4.403) в целом с заданным временем переходных процессов в ней и инвариантность выхода
системы у к воздействию w заданной формы, определенному уравнением (4.402).
Для решения задачи используется метод инвариантных многообразий. Процедура предла-
гаемого метода синтеза включает два этапа. На первом этапе в предположении полной наблю-
даемости векторов х и w Определяется управление по состоянию u(x,w), обеспечивающее
асимптотическую устойчивость системы (4.401) в области или в целом. На втором этапе для
вектора w и ненаблюдаемых компонент вектора х строится асимптотический наблюдатель.
Динамический регулятор (4.403) получается путем замены в полученном на первом этапе
выражении для и ненаблюдаемых переменных их асимптотическими оценками, формируемы-
ми наблюдателем.
Методы синтеза управления по состоянию для объектов вида (4.401) достаточно хорошо
изучены и подробно изложены в предыдущих разделах книги, поэтому приступим сразу ко
второму этапу—синтезу асимптотического наблюдателя.
Наблюдатель
Приведем уравнение объекта (4.401) и воздействия (4.402). к виду, удобному для постро-
ения наблюдателя. С этой целью представим вектор состояния объекта х в виде
x=|q';v"|" <4-4М’
где вектор q размерности v > 1 составлен из трех компонент вектора х, для которых отобра-
жение
у: q +* С (q,v*),
определенное уравнением выхода в (4.401) является взаимно однозначным для всех v*G7?rt-’',
где v*—вектор, состоящий из оставшихся компонент вектора х.
Образуем вектор
viv^w’r
и предположим, что уравнение
у = C(q,v’) (4.405)
разрешимо в явном виде относительно q. Тогда уравнения (4.401), (4.402) с учетом введенных
обозначений можно записать в следующей эквивалентной форме:
У « ai(y,v)+ Bi(y,v)u , (4.406)
v = a2(y,v)+ B2(y,v)u .
319
Здесь у—полностью наблюдаемый, а у—полностью ненаблюдаемый вектор размерности
1=п-у+р.
Выбор вектора g в (4-404) мо^ет оказаться неоднозначным. Тогда из имеющихся альтер-
натив следует gpfypprp ту, при которой правые части уравнении (4.406) имеют наиболее
простую структуру цо переменной у. Если уравнение (4.405) не разрешимо в явном4 виде
относительно вектора g рл» переход от ц к у согласно (4,405) усложняет структуру уравнений
(4.406), то в последних следует использовать вместо у вектор q. Это не повлияет на конечный
результат, но упростит вычисления-
Далее, введем в рассмотрение /-вектор определяемый формулой
V'CO ₽ Р(У,*)“ ?(/) , (4.407)
где функции <р и ? удовлетворяют следующим условиям:
•^(у,у) и <p(f) непрерывны и дифференцируемы по своим аргументам;
•решение уравнения
^>(y,v) = $ (4.408)
относительно у существует и является единственным для всех yG R'.
Рассматривая вектор V» пак функцию времени, потребуем, чтобы он удовлетворял одно-
родному дифференциальному уравнению
$ s Ду)^ » (4.409)
где /х/—матрица Ду) такова, ЧТО тривиальное решение ^=0 данного уравнения асимптотиче-
ски устойчиво в целом- В цростецщем случае Ду)—числовая устойчивая матрица.
С учетрм (4-407) и (44$P WW? (4.409) принимает вид:
|| ai(y>v)+ аз(у,¥)+ -Bi(y,v)+ & B2(y,v)j и- $ = Ду) (4,410)
Предположим, что для заданных ^|(У,У), a?(y,v), fii(y>v) и ^г(ул) найдутся такие векторы
а(у), Ду) и матрица Г(у), не зависящие от У, что оказываются выполненными равенства:
|| )Bi(y,v)+ & B2(y,v) « Г(у)Д(у,у)Ду), (4 411}
^.В1(у,¥)+аз(ул)- ДуМу,у)= F(y)ai(y,v)a(y). (4,412)
Тогда уравнение (4-410) с учетом первого уравнения системы (4.406) примет вид:
Г(у)у- ?+ а(у)+ Ду)ц+ Ду)? = о
ИЛИ
4 = ДУ)4“ ДУ> / ДУ)4У- «(У)- Ду)и , (4‘413)
о
где
у ч J - (4.414)
2 = J Г(У) dy- <р .
О
При этом, согласно (4-4₽7), (4-414), вектор
у (4 415)
~ #(У,У)~ / ДУ) 4Х+ г •
о
Поскольку решение ^^ураддемия (4-409) асимптотически устойчиво в целом, то асим-
птотическая оценка у ненаблюдаемого, вектора v может быть найдена из уравнения
z о. у? 4 J (4.416>
- J F(y) Jy-z,
Q
которое, согласно условию (4 4$&, имеет единственное решение относительно v для всех
уе^.
Уравнения (4.413) и (4.416) представляют собой уравнение асимптотического наблюдате-
ля для ненаблюдаемого вектора v системы (4.406). При этом из (4.409) следует, что компо-
ненты вектора V’, определяемого (4.415) представляют собой инвариантные многообразия в
пространстве состояний системы (4.406), (4.413).
Задача синтеза наблюдателя сводится, таким образом, к нахождению функций p(y,v),
Г(у), а(у) и /3(у), удовлетворяющих уравнениям (4.411), (4.412). Рассмотрим частный случай
системы (4.406), когда
Bi(y,v) = 0 , (4.417)
F2(y,v) = F2(y),
а векторы ai(y,v) и a2(y,v) являются линейными функциями v:
ai(y,v) = а10(у)+ Д1(у)у , (4.418)
a2(y,v) = а20(у)+ Л2(у)у ,
Тогда из уравнения (4.411) следует, что функция <p(y,v) должна быть линейной относительно
v. При этом равенство (4.412) может быть удовлетворено, если =0. Таким образом,
функция <p(y,v) в рассматриваемом случае должна иметь вид:
^>(y,v) = Fv , (4.419)
где F—числовая и, согласно требованию (4.408), неособая матрица.
Подстановка (4.417), (4.418), (4.419) в (4.411) и (4.412) приводит к следующей системе
уравнений для Г(у), а(у) и
Л2(у)-^'Г(у)Л,(У) = /г1ЦУ)^.
а(у) = Fa20(y)~ Г(у) аю(у), (4.420)
, 0(у) = FB2(y).
Положим А(у)=£—числовой матрице. Транспонируя обе части первого уравнения системы
(4.420), получим
-4"'(У) (^T(y)) " = . <4-421)
Отсюда видно, что собственные значения матрицы L, определяющие динамику наблюдателя,
могут быть назначены произвольно, если
ы (4 422)
rang Ai"(y) : Л?(у)ЛГ(у) : ... ; (л?(у)) ЛГ(у) . I, V yG R’.
При этом в качестве F может быть выбрана любая неособая матрица. Положим F=I—единич-
ной матрице. Тогда (4.421) запишется в виде
Л?(у)- ЛГ(у)Г"(У) = Lm • (4.423)
Матрица Г(у) может быть найдена отсюда известными методами модального управления [29].
После ее определения из (4.420) с учетом равенства F-I, находим
а(у) = а20(у)- Г(у)аю(у)
/Чу) = В2(у).
Таким образом, при выполнении условий (4.417), (4.418) и (4.422) уравнение наблюдателя
для системы (4.406) имеет вид
z = El- ь] Г(у)с?у- а20(у)+ Г(у)а10(у)~ В2(у)и ,
о
(4.42,4)
* у
v = / Г(у)<7у- z ,
о
аде матрица Г(у) однозначно определяется уравнением (4.423) для заданной устойчивой
матрицы L.
. Для иллюстрации предлагаемого метода рассмотрим ряд конкретных примеров.
Примеры синтеза нелинейных систем с наблюдателями состояния. Пример 4.18. Пусть
математическая модель объекта имеет вид:
з .
Х1 = Х[ + Х2 ,
321
Рис. 4.30
Хг = X1X2+ U ,
У = Х1 •
Необходимо построить динамический регулятор вида (4.403), обеспечивающий асимптотиче-
скую устойчивость замкнутой системы в целом.
Следуя общему плану, изложенному выше, построим сначала управление по состоянию в
предположении, что координата хг наблюдаема. Для этого воспользуемся методом синтеза
нелинейных систем на основе последовательной совокупности инвариантных многообразий.
Вводя инвариантное многообразие .
У» = Х1+ 2X1+ Х2 ,
из функционального уравнения
= 0
с учетом уравнений объекта находим
и = —Х1~ Эх?— 6Х1~ (1+ Х1+ 6х?)х2.
Полученное управление обеспечивает асимптотическую устойчивость рассматриваемой сис-
темы в целом.
Перейдем к синтезу наблюдателя. В данном случае у = хь v = хг- Объект удовлетворяет
условиям (4.417), (4.418), при этом аю=)Л «20=0, -41 = 1, Аг=У, Вг=1, 7=1. Условие (4.422),
очевидно, выполняется и, следовательно, задача синтеза наблюдателя имеет решение. Поло-
жим -1. Тогда уравнение (4.423) для рассматриваемого объекта принимает вид:
У- Г = - 1 ,
откуда Г»у+1. Полагая в найденном выше выражении для управления по состоянию xi=y,
Х2“* и используя (4.424), получаем искомые уравнения динамического регулятора:
z = - (3+ у+ 6y2)z+ 4у+ 23у2+ Г0,5у3+ 4у4+ бу5,
и = - Зу- 2у2- $Зу3- Зу4- б/+ (2+ у+ 6y2)z.
Результаты моделирования замкнутой системы на ЭВМ при начальных условиях
xi (0)=-1, Хг(О)«1, z(O) =0, представлены на рис.4.30.
322
Пример 4.19. Математическая модель объекта имеет вид:
Xi(t) = Х[+ Хг ,
х2(0 = xl+ и ,
У = хх .
Построим для него динамический регулятор вида (4.403), обеспечивающий асимптотическую
устойчивость замкнутой системы в целом.
Как и в примере 1, вводя многообразие
= 2X1+ Х2,
из функционального уравнения
ф+ ip = 0
с учетом уравнений объекта находим управление по состоянию
U = - 4X1“ ЗХ2~ xi,
обеспечивающее асимптотическую устойчивость замкнутой системы в целом.
Построим наблюдатель. В. данном случае у = xi, v = х2, Ф(у,г) = у+ v, a2(y,v) = v$,
Z?i(y,v) = 0, B2(y,v) = 1. Объект не удовлетворяет условию (4.418), поэтому для построения
наблюдателя используем уравнения (4.411), (4.412), которые в рассматриваемом случае
имеют вид:
$=№).
(?+ v)+ v2- ЦуУр = Г(у)(у+ v)+ а(у).
Из первого уравнения следует, что функция <p(y,v) должна быть линейной относительно у.
Положим
p(y,v) = pi(y)v. .
Тогда второе уравнение примет вид:
v (у+ v)+ y?iv2- Uy^pxv = Г(у)(у+ v)+ а(у).
Приравнивая коэффициенты при одинаковых степенях v слева и справа данного равенства,
приходим к системе уравнений
> - =«•
у- ЦуУрх = Г(у),
Г(у)у+ а(у) = 0.
Из первого уравнения находим <pi(y) = е~у. Полагая Цу)- -1, из второго и третьего уравнений
получаем
Г(у) = е’’(1-У).
“(у) = - г“'(1- у)у
и из первого уравнения исходной системы
Ду) = е~у.
При этом
j Г(у) dy = е~уу.
о л
Полагая в найденном уравнении по состоянию х\ = у, х2 = v и используя (4.413), (4.416),
получаем искомые уравнения динамического регулятора:
z(t) = - 4z+ е~у(9- у)у+ ev(y- evz)2 ,
и - - 7у+ ЗеУг- (у- Л)2 .
Результаты моделирования замкнутой системы на ЭВМ при начальных условиях
Х1(.О) = 1, х2(0) = 2, z(0) = 0 представлены на рис.4.31.
323
Пдымар4к21^Ст^1ва1ашда’>шпмат»№ва№(мх) ман731Ш£а в вархнем неустойчивом положе-
нии. Модель объекта ямеегвиде
х<(/) = Хг,
Х2(/) = ЯП Х{+ х3,
=»,
У-xt.
^кле^гшж^вню^утцнштнвмгтшсоЕптшаода^тън» объектом, которое в иевжояыю
модиф|ншод1т1ит»|фи|ПМ1 пъмгтгпмл*
и —' —xj— Зяс^—(&I” Е25й?Ч~сов'Ху)х2— 6x4X2— 3^1 ~Ь x?)(sifl.xi+ Х3)
жобвтемп—ет ппштотонтиуте устойчивость замкнутой системы в целом.
Пост1ямш на6люда1ель<. Б^щн|а»№Слу*шеу — xi, v = [х2 х3]г. Объект удовлетворяет усло-
вии»1 (4Ж77), (Ф^8^,1цигатом
0^=0» ^ = £10], В| = О,
нам рмци находим Г = [2 1]г. При этом
Ндоягакиу11рвж11ея1!»11в<та^ —у, хг — vb х3 = у2 и используя (4.424), получаем
1«наммеура8кения^дшнаиическэтогрвЕуяяторЕГ
X„X,.Xt.X5,X,
x3W
Рис. 4.32
ii(f) = - 2zj + Z2+ 3y - sin у,
Ъ(0 (4+ 12^+ cosy)zi- 3(1+ yz)z2+ 12y+ 30^+ 2ycosy+
+ 6(2y- zi)2y+ 3(1 + y2) sin y,
и = (3+ 12y*+ cos y)zi+ 3(1+ y2)z2~ Юу- ЗОу3- 2y cos y- 6(2y- zi)2y- 3(1+ y2) sin у.
Результаты моделирования замкнутой системы на ЭВМ при начальных условиях
xi(0) = 1, х2(0) = -1, х3(0) = 0,5, zi(0)=z2(0)=0 представлены на рис.4.32.
Пример 4.21. Система управления напряжением и механической мощностью турбогенера-
тора [60, 61].
Модель объекта имеет вид:
*1(0*2, <
*1(0 = <?о*4~ «1 sin xi~ («2+ «з sin Х1)х3- а^+ f,
*з(0 = ~ £хз+ «5 sin *i -*2+ kii\,
*4(0 = “ «6*4_ <*7*2+ «2,
У=?*ь
где xi—угол поворота ротора синхронного генератора относительно синхронной оси вращения;
хг—скольжение; хз—отклонение ЭДС генератора; Х4—отклонение механической мощности
турбины; mi—отклонение напряжения возбуждения генератора; иг—управляющее воздейст-
вие регулятора скорости; /—гармоническое возмущающее воздействие, определенное мо-
делью:
H’l (Г) = Н>2,
W2(0 = “ ЛЬ
/= Wi.'
Построим динамический регулятор вида (4.403), обеспечивающий асимптотическую ус-
тойчивость замкнутой системы в целом и ее инвариантность к воздействию /.
Найдем сначала управление по состоянию предполагая, что все координаты объекта и
воздействия наблюдаемы. Для этого, следуя методу АКАР, положим
V4 = хз,
325
1р2 - *4“ ~ («1 sin Х1+ Х1+ 2X2- W1).
Тогда при -» О я О первые два уравнения объекта преобразуются в асимптотически
устойчивую систему
*1(0 = Х2,
X2(t) = ~ Х\~ 2X2,
так, что xi -» О и х2 -* 0, а из уравнений для ух и ^2 будем иметь: х3 -*• 0, х4 -> - — wx. Задавая
«о
характер стремления к нулю функций ух и ^2 дифференциальными уравнениями
У\ (0+ кух = о,
(Ы0+ ^2 = 0
и учитывая уравнение объекта и воздействия, получаем искомые управления по состоянию:
«5 .
11\ =--Sin Xi • Х2,
(4.425)
1 , 3«i . 1
«2 = - — Xl + — Sin Xl - — (3- Oo«7- Л1 COS X1)X2
ao «о «о
+ - («2+ a, an x,)x3+ — x,- (3- a6)xt- - ж,- -
Перейдем к иестроеюпо наблюдателя. В данном случае требуемый порядок его I = 5
довольно высокий. В целях упрощения синтеза оценки координат хз и х4 построим отдельно,
используя особенности модели объекта.
Полагая
Уз - хз+ а$ cos xi - zi,
из уравнения
$з(0+ ^3 = 0
с учетом уравнений объекта находим:
zi(t) = — kzx + kas cos xi+ kux,
x3 = zj — as cos xi.
(4.426)
Аналогично, полагая
У4 = х4+ a7xi- z2,
из уравнения
получаем
М0+ Мч = о
Z2(0 <*6Z2+ а6а1хх + и2,
х4 = z2- а7хх.
(4.427)
Построим наблюдатель для оставшихся ненаблюдаемых координат х2, wi, С этой целью
сформируем вектор
V’ =
х2- х2
W1- WX
W2~ W2
изменение которого во времени определим дифференциальным уравнением
W = ьу-
Запишем это уравнение с учетом уравнений объекта в развернутом виде, заменяя координаты
хз и х4 их оценками, что, очевидно, допустимо:
аох4— в] sm xi~^(<z2+ «з si*1 xi)x3- a4x3+ wi~ x2 =
= /ii(xi- x2)+ Zi^wi- iri)+ /1з(и>2- w2),
*7- *1= /21(X1- X2>+ /22(^1- W1) + Z23O2- W2),
(4.428)
326
- ttAvi- W2 = 61(*1~ X2)+ 62(^1“ W1)+ /зз(и>2- w2).
Здесь Ijj—элементы матрицы L. Ненаблюдаемые координаты должны отсутствовать в уравне-
ниях наблюдателя, поэтому положим /12 = 1, Лз = 0, /22 = 0, /23 = 1, /32 = - a)2, I33, = 0. Для
определения оставшихся трех элементов /] i, Z12 и Лз матрицы L необходимо задать ее собствен-
ные значения. Положим последние, например, все равными -1. Тогда из уравнения
det (si- L) = ?+ 3s2+ 3s+ 1,
находим ZH = -3, l2\ = a)2- 3, /31 = За)2- 1. Таким образом,
-3
1 О
£ =
О 1
- а)2 О
Полагая теперь в (4.428) Зх| — х2 = 23, (a)2— 3)xi + b»i = z4 и (За)2— l)xi + w2 = z5, приходим к
уравнениям наблюдателя для координат х2, wi и w2.
23(f) = - 3z3+ z4+ (а)2+ 6)xj - ао*4+ «1 sin xi + (a2+ аз sin X|)x3+ n4x£,
z4(Z) = - (a)2- 3)z3+ Z5+ 8x1,
. 25(f) = — (3a>2— l)z3— <z)2z4+ (ft>4+ 6o»2— 3)xi,
(4.429)
X2 = 3X1 - 23,
Wi = - (a)2— 3)xi + z4,
и>2 = z5- (3ft)2- l)xi.
И, наконец, полагая в (4.425) x2 = x2, хз = x3, x4 — x4, wj = wi, w2 = w2, с последующим
исключением из (4.425), (4.426), (4.427), (4.429) промежуточных переменных х2, х3, х4, wi,
w2 получаем требуемые уравнения динамического регулятора:
21(f) = — kzi+ as sin xi -z3+ ka$ cos X|- ЗП5 sin xi - xi,
2 1 3 1
22(t) = — («2+ аз sin xi)zi- 3z2+ — (3- aoa2- a\ cos xi)z3- — z4- — z5+
no no ao ao
. t Л2 . 20 , 6 2 . 3«1 \ 3ft| .
4-----(zi — as cos xi r + 6ft?-----1----ft>2+----cos xi xi 4-----sin xi —
n0 v no n0 «0 -J no
2a$ . • \
—— (пг+ аз sin xi) cos xi, _
z3(Z) = (n2+ П3 sin xi)zi- aoz2- 3z3+ z4+ n4(zi~ as cos xi)2+
+ (to2+ 6+ non7)xi+ ni sin xi- as(a2+ аз sin xi) cos xi, (4.430)
z4(Z) = - (ft)2- 3)гз+ Z5+ 8x1,
25(f) = — (3ft)2— 1)Z3~ co2z4+ (to4+ 60)2- 3)xj,
u2 = — (a2+ аз sin xi)z|- (3- a^)22+ — (3— a^a-)- ni cos Xi)z3~
3 1 2n4 . Mita 20 6 2^
- — 24- — z5+ — (z(- as cos xi)2+ (6n7- — - n6n7+ — ft)2+
По По По Ho - Ho
. 3hi . 3hi . 2nj .
+ cos xi)xi+ sin xi—— (a2+ аз sin xj cos xj.
Результаты моделирования замкнутой системы для по = 1, а\ = 2, а2 = 1, аз = 2,
а4 = 0,01, as = 1, к = 1, пв = 1, а2 = 1, а)2 = 10 и начальных условий хДО) = — 1, хг(0) = 1,
х3(0) = 0,2, х4(0) = -0,2, w'i(O) = О, ^(О) = 10, Z!(0)=...=Z5(0)=0 представлены на рис.4.33 и
4.34. Эти рисунки показывают, что синтезированный динамический регулятор (4.430) подав-
ляет возмущение и обеспечивает асимптотическую устойчивость движения.
327
Рис. 4.33
Рис. 4.34
Дадям теперь техияческуте и теоретическую оценку полученных результатов синтеза
дммммсоюго регуляторе 44.4ЭД. Дело в том, что сама ио себе постановка и успешное
ре—еящ—сянтем миног—шипiw гмгтенптхдагласснкнмото управления возбуждением
и механической мощностью турбогенераторов является чрезвычайно важной для современной
328
электроэнергетики, т.к. позволяет решить одну из ее центральных проблем—обеспечить мак-
симально возможную область динамической устойчивости энергосистем [60—63, 251]. В
настоящее время в литературе практически отсутствуют примеры синтеза такого рода взаимо-
связанных систем управления турбогенераторами, тем более с использованием их нелинейных
моделей движения [252]. Отсюда следует, что изложенный пример синтеза имеет важное
самостоятельное значение для решения проблемы согласованного управления турбогенерато-
рами энергосистем.
Для определения теоретической значимости приведенного примера синтеза необходимо
лишь напомнить постановку задачи: исходный объект описывается нелинейными дифферен-
циальными уравнениями четвертого порядка, имеется два канала управления, из четырех
координат состояния только одна измеряется и, наконец, на объект действует неизмеряемое
возмущение. Требовалось аналитически синтезировать динамический регулятор, который
подавляет возмущение и гарантирует асимптотическую устойчивость движения замкнутой
системы. Такая постановка весьма сложной нелинейной задачи управления редка в современ-
ной литературе,а ее успешное решение, наряду с многими другими рассмотренными в книге
задачами, свидетельствует об уникальных возможностях разработанного метода АКАР и его
существенном значении для прикладной теории управления.
О синергетической концепции синтеза нелинейных динамических систем. В заключение
книги еще раз, как и в п. 1.1, кратко остановимся на вопросе о месте синергетического подхода
в теории управления. Ранее уже многократно подчеркивалось, что в основу этого подхода
положены инвариантные многообразия, определяющие сущность и содержание синергетиче-
ской теории управления, развитию которой посвящена эта книга. Введенный в книге язык
инвариантов кардинально отличается от традиционного языка классической теории автомати-
ческого регулирования (вход—выходные соотношения, передаточные функции, частотные
характеристики) и в определенной мере корреспондируется с языком современной теории
управления. В синергетическом подходе базовыми понятиями служат инварианты, самоорга-
низация, нелинейность, оптимизация и синтез, составляющие основу его концептуального
лексикона. Прямые или косвенные признаки этого подхода нетрудно обнаружить как в клас-
сической теории нелинейных динамических систем, так и в современной теории управления.
С классически интегрируемыми динамическими системами (см. п.1.7) его связывают понятия
первого (частного) интеграла и инвариантного соотношения. Что же касается современной
теории управления, то элементы синергетического подхода присутствуют, например, в теории
оптимальных по быстродействию систем (поверхности переключения—синтезируемые инва-
риантные многообразия), в системах со скользящими режимами (поверхности скольжения—
задаваемые инвариантные многообразия), в теории бинарных систем и др. В синергетическом
подходе движение в некоторой окрестности инвариантных многообразий реализуется в основ-
ном за счет организации “внутренних” управлений, т.е. в процессе самодвижения к соответст-
вующему аттрактору. Свойства этого движения и время попадания ИТ на аттрактор определя-
ются мерой соответствия структуры выбранного инвариантного многообразия естественной
динамике исходного объекта. Иначе говоря, в синергетическом подходе управление должно
быть согласовано с естественными свойствами объекта и синтезируемой системы.
В связи с изложенным возникает необходимость выявления “меры естественности” в
динамических системах. Понятие “естественное движение”, например, тела в классической
механике подразумевает его движение в соответствии с объективными законами механики, т.е.
без заранее поставленной цели. Известно, что уравнения классической (гамильтоновой) ме-
ханики обратимы (см. п.1.1) и поэтому в них нет места диссипативным структурам вдали от
положения равновесия. Открытие же синергетического явления самоорганизации на диссипа-
тивных структурах существенно изменило понятие “естественного движения”, придав ему
смысл естественного самодвижения, самоуправления. Такое самоуправление приобретает
свою цель—попадание на желаемую структуру—аттрактор. Именно эти аттракторы и отража-
ют внутренний смысл и содержание данной системы. Это своего рода внутренний план дейст-
вий, план движения с целью “выпадения” на аттрактор, т.е. самодостраивания структуры
329
нелинейной системы [83, 99, 144, 208, 214]. Самодостраивание, самодвижение, о чем не
подозревала классическая механика,—это замечательное свойство природных диссипативных
систем. Согласно этому свойству даже в результате случайного попадания ИТ в область
притяжения аттрактора движение само собой организуется, т.е. произойдет самодостраивание
системы. Другими словами, в результате действия механизма самодвижения в системе возни-
кает направленность на возникающее целое, она выбирает свой путь эволюции. Открытое
синергетикой свойство самоорганизации, самодвижения позволяет наметить новый путь в
ответе на вопрос о направленном естественном движении. В этом, на наш взгляд, и состоит
существенное отличие современного синергетического понимания естественного самоуправ-
ляемого движения от упрощенного понятия естественного (неуправляемого) движения клас-
сической механики.
Разумеется, что в проблеме построения систем автоматического управления организация
целенаправленного движения непосредственно связана с проявлением воли человека, форми-
рующего цель движения системы. Однако выделенные выше свойства синергетических систем
позволяют по-новому взглянуть на понятие естественности в синтезируемых системах управ-
ления. Именно поэтому в синергетическом подходе, которому посвящена книга, и предпринята
успешная, на наш взгляд, попытка отразить эти свойства природных систем в конструируемых
системах управления. Необходимо подчеркнуть, что подавляющее большинство существую-
щих систем автоматического управления структурно построено по широко известной класси-
ческой схеме: на входе системы имеется некоторое задающее воздействие (эталонный сигнал),
необходимо синтезировать регулятор, который стремится свести к нулю отклонение (ошибку),
т.е. разность между входным задающим воздействием и выходными координатами системы.
Эта схема положена в основу различных промышленных систем автоматического регулирова-
ния, систем числового программного управления, автопилотов, авторулевых, следящих систем
и т.д. В отличие от указанной схемы слежения, синергетические системы управления, синте-
зируемые методом АКАР, конструируются по общему принципу внутренней генерации, когда
расширенная замкнутая система, во-первых, поглощает внешние задающие и возмущающие
воздействия, а, во-вторых, система, и это ее главное отличие, неизбежно выходит на желаемое
инавриантное многообразие в ее пространстве состояний. Другими словами, синергетическая
система генерирует некоторый геометрический аттрактор, к которому устремляются все тра-
ектории движения. Такое построение синергетических систем позволяет наделить их принци-
пиально новыми свойствами, описанными в предыдущих разделах книги. Классическая же
схема построения систем автоматического управления является частным случаем обобщенного
метода АКАР. В формальном отношении этот метод можно изложить, с одной стороны, в
терминах классической теории инвариантов с использованием теории асимптотической устой-
чивости А.М. Ляпунова, а, с другой стороны, в терминах современной теории оптимального
управления. В книге был принят совмещенный вариант изложения, который диктовался стрем-
лением автора, во-первых,.отразить глубинную связь развиваемого подхода с фундаменталь-
ными понятиями нелинейной механики, а, во-вторых, установить терминологическую и содер-
жательную связь с основными понятиями современной теории управления.
Итак, синергетический подход и вытекающий из него метод АКАР по своему содержанию
представляют, на наш взгляд, новое самостоятельное направление в теории управления, которое
углубляет и расширяет понимание процессов управления в результате учета основных естествен-
ных свойств объекта. Развитый в книге синергетический подход направлен на решение фундамен-
тальной проблемы поиска общих объективных законов процессов управления [171].
В заключение следует отметить, что синергетический подход в теории управления—это не
столько новая теория в классическом ее понимании, а в большей мере новая концепция,
опирающаяся на фундаментальное свойство самоорганизации нелинейных диссипативных
систем вдали от их положения равновесия. В синергетическом подходе синтезируются соот-
ветствующие законы управления, учитывающие внутренние кооперативные взаимодействия
конкретных физических явлений и процессов.
330
СПИСОК ЛИТЕРАТУРЫ
1. Красовский Н.Н. Проблемы стабилизации управляемых движений. Дополнение к книге
Малкина И.Г. Теория управляемых движений. М.: Наука, 1966. С.475-571.
2. Летов А.М. Некоторые нерешенные задачи теории автоматического управления. Диф-
ференциальные уравнения, 1970.№ 4. С. 592—615.
3. Четаев Н.Г. Устойчивость движения. Работы по аналитической механике. М.: Изд-во
АН СССР, 1962.
4. Четаев Н.Г. Устойчивость и классические законы. Сб. научных трудов Казанского
авиац. ин-та. 1936. № 6. С. 3—5.
5. Барбашин Е.А. Функции Ляпунова. М.: Наука, 1970.
6. Понтрягин Л.С., Болтянский В.Г, Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая
теория оптимальных процессов. М.: Наука, 1969.
7. Кунцевич В.М., Лычак М.М. Синтез систем автоматического управления с помощью
функций Ляпунова. М.: Наука, 1977.
8. Фурасов В.Д. Устойчивость движения, оценки и стабилизация. М.: Наука, 1974.
9. Болтянский В.Г. Математические методы оптимального управления. М.: Наука, 1966.
10. Иванов В.А., Фалдин Н.В. Теория оптимальных систем автоматического управления.
М.:Наука 1981. ‘
11. Красовский Н.Н. Некоторые задачи теории устойчивости движения. М.: Физматгиз, 1959.
12. Летов А.М. Динамика полета и управление. М.: Наука, 1969.
13. Зубов В.И. Теория оптимального управления. Л.: Судостроение, 1966.
14. Красовский А.А. Системы автоматического управления полетом и их аналитическое
конструирование. М.: Наука, 1973.
15. Красовский А.А., Буков В.Н., Шендрик В.С. Универсальные алгоритмы оптимального
управления непрерывными процессами. М.: Наука, 1977.
16. Kalman R. Contributions to the theory of optimal control Bui. Soc. Mex. Mat 1960, P. 102-119.
17. Петров Ю.П. Вариационные методы теории оптимального управления. М.: Энергия, 1977.
18. Атанс М.М., Фалб П. Оптимальное управление. М.: Машиностроение, 1968.
19. Ли Э.Б., Маркус Л. Основы теоии оптимального управления. М.: Наука, 1972.
20. Фельдбаум А. А. Основы теории оптимальных автоматических систем. М.: Наука, 1966.
21. Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. М.:
Наука, 1977.
22. Павлов А А Синтез релейных систем, оптимальных по быстродействию. М.: Наука, 1966.
23. Олейников В.А. Оптимальное управление технологическими процессами в нефтяной и
газовой промышленности. Л.: Недра, 1982.
24. Клюев А.С., Колесников А.А. Оптимизация автоматических систем управления по
быстродействию. М.: Энергоиздат, 1982.
25. Габасов Р., Кириллова Ф.М. Основы динамического программирования. Минск: Изд-во
БГУ, 1975.
26. Метод векторных функций Ляпунова в теории устойчивости./Под ред. А. А. Воронова
и В.М. Матросова. М.: Наука, 1987.
331
27. Кухаренко Н.В. Выбор коэффициентов квадратичных функционалов при аналитическом
контруировании регуляторов.//Известия вузов. Электромеханика. 1978. № 4. С.410-417.
28. Жиляков В.И. К определению весовых коэффициентов функционалов качества.//Из-
вестия вузов. Электромеханика. 1984. № 5. С.32-35.
29. Кузовков Н.Г. Модальное управление и наблюдающие устройства. М.: Машинострое-
ние, 1976.
30. Лернер Д.М., Лу коме кий Ю,А., Михайлов В.А. и др. Управление морскими подвижными
объектами. Л.: Судостроение, 1979.
31. Дмитриевский А. А., Лысенко Л.Н.. Прикладные задачи теории оптимального управле-
ния движением беспилотных летательных аппаратов. М.: Машиностроение, 1978.
32. Сахаров В.В. Расчет оптимальных регуляторов судовых автоматических систем. Л.: Су-
достроение, 1983.
33. Рей У. Методы управления технологическими процессами. М.: Мир, 1983.
34. Салуквадзе М.Е. Об оптимизации векторных функционалов, ч. 1, 2//Автоматика и
телемеханика. 1971. № 8. С. 162-168; № 9 С. 42-46.
35. Салуквадзе М.Е. Задачи векторной оптимизации в теории управления. Тбилиси: Мец-
ниерба, 1975.
36. Воронин А.Н. Принципы рациональной организации в многокритериальных задачах
управления//Известия вузов. Электромеханика. 1979. № 10. С. 918—924.
37. Воронин А.Н. О схемах компромиссов в задачах многокритериальной оптимизации
//Известия вузов. Электромеханика. 1978. № 4. С. 403-410.
38. Воронин А.Н. Нелинейная критериальная функция в многокритериальных задачах
управления//Известия вузов. Электромеханика. 1978. № 6. С. 580-583.
39. Воронин А.Н. Многокритериальная оптимизация динамических систем управления
//Кибернетика. 1980. № 4. С. 56-68.
40. Воронин А.Н. О формализации выбора схемы компромиссов в задачах многокритери-
альной оптимизации//Известия АН СССР. Техническая кибернетика. 1984. № 2. С. 173-176.
41. Емельянов С.В., Борисов В.И., Малевич А.А., Черкашин А.М.. Модели и методы
векторной оптимизации//Итоги науки и техники. Техническая кибернетика. Т. 5. Изд-во
ВИНИТИ АН СССР, 1973. С.386-448.
42. Бесекерский В.А. Проблемы развития систем автоматического управления//Известия
вузов. Приборостроение. 1982. № И. С. 20-27.
43. Первозванский А.А. Критерий равномерного приближения в задачах оптимального
управления.—В кн.: Оптимальные системы. Статистические методы. М.: Наука, 1967. С. 20-27.
44. Джонсон К.Д. Минимаксная теория управления Чебышева//Оптимальные и адаптив-
ные системы. М.: Наука, 1972. С. 140-159,
45. Винер Н. Кибернетика или управление и связь в животном и машине М.: Советское
радио, 1968.
46. Подиновский В.В., Гаврилов В.М. Оптимизация по последовательно применяемым
критериям. М.: Советское радио, 1975.
47. Кузнецов Н.А. Построение .алгоритмов управления при переменном критерии опти-
мальности//Автоматика и телемеханика. 1966. № 5. С. 5-15.
48. Колесников А. А. О построении систем автоматического управления, оптимальных по сово-
купности критериев качества//Известия вузов. Электромеханика. 1975. № 10. С.1104-1110.
49. Колесников А.А. Синтез автоматических регуляторов, оптимальных по переменному
критерию качества//Известия вузов. Приборостроение. 1976. № 4. С. 30-35.
332
74. Елкин В.И. Об условиях агрегирования управляемых динамических систем//Журнал
вычислительной математики и математической физики. 1978. Т. 18. № 4. С.32-36.
75. Черноплеков А.Н. Алгебраические аспекты факторизации динамических систем //Ки-
бернетика и вычислительная техника. Киев: Наукова думка. 1981. Вып. 5. С.63 -66.
76. Первозванский А. А., Гайцгори В.Г. Декомпозиция, агрегирование и приближенная
оптимизациия.М.: Наука, 1979.
77. Цурков В.И. Декомпозиция в задачах большой размерности.М.: Наука, 1981.
78. Ковалев А.М. Нелинейные задачи управления и наблюдения в теории динамических
систем. Киев: Наукова думка, 1980.
79. ИртеговВ.Д. Инвариантные многообразия стационарных движений и их устойчивость.
Новосибирск: Наука, 1985.
80. Митропольский Ю.А., Лыкова О.Б. Интегральные многообразия в нелинейной меха-
нике. М.: Наука, 1973.
81. Леви-Чивита Т., Амальди У. Курс теоретической механика. М.: Изд-во иностр, лит.,
1951. Т. 2.4. 2.
82. Томсон Дж. М. Т. Неустойчивости и катастрофы в науке и технике. М.: Мир, 1985.
83. Хакен Г. Синергетика. Иерархия неустойчивостей в самоорганизующихся системах и
устройствах. М.: Мир, 1985.
84. НеймаркЮ.И., Коган Н.Я., Савельев В.П. Динамические модели в теории управлении.
М.: Наука, 1985.
85. Неймарк Ю.И., Ланда П.С. Стохастические и хаотические колебания. М.: Наука, 1987.
86. Емельянов С.В., Уткин В.И., Таран В.А. и др. Теория систем с переменной структурой.
М.: Наука, 1970.
87. Барбашин Е.И. Введение в теорию устойчивости. М.: Наука, 1967.
88. Уткин В.И. Скользящие режимы в задачах оптимизации и управления. М.: Наука, 1981.
89. Иванова Е.И., Фурасов В.Д. О построении притягивающих многообразий и стабилиза-
ции нелинейных систем //Дифференциальные уравнения. 1982. № 3. С.409 -418.
90. Бербюк В.Е. Использование первых интегралов в задачах синтеза оптимальных систем
управления //П рикладная математика и механика. 1986. Т. 50. Вып. 1. С. 17 -23.
91. Овчинников Н.Ф. Принципы сохранения. М.: Наука, 1966.
92. Олейников В.А. Зотов Н.С., Пришвин А.С. Основы оптимального и экстремального
управления. М.: Высшая школа, 1969.
93. Красовский А.А., Поспелов Г.С. Основы автоматики и технической кибернетики. М.—
Л.: Госэнергоиздат, 1962..
94. Подчукаев В.А. Быстрые алгоритмы анализа и синтеза САР. Саратов: Изд-во Саратов-
ского ун-та, 1986.
95. Коробов В.И. Управляемость, устойчивость некоторых нелинейных систем //Диффе-
ренциальные уравнения. 1973. № 4.
96. Барбашин Е.И., Табуева В.А. Динамические системы с цилиндрическим фазовым
пространством. М.: Наука, 1969.
97. Репников А.В., Сачков Т.П., Черноморский А.И. Гироскопические системы. М.: Маши-
ностроение, 1983.
98. Александров А.Г. Аналитическое конструирование оптимального регулятора гирорамы
//Автоматика и телемеханика. 1967. № П.С. 39-49.
99. Хакен Г. Информация и самоорганизация. М.:Мир, 1991.
100. Игнатьев Б.М. Голономные автоматические системы. М.: Изд-во АН СССР, 1963.
334
101. Игнатьев Б.М., Ильевский В.З., Клауз Л.П. Моделирование системы машин. Л.:
Машиностроение, 1986.
102. Lochak С. Irreversibility in Phisics. Rbeflections on the Evolution of Ideal in Mecha-
nics.//Found of Phisics. 1981. Vol. II. № 7-8. P.593-621.
103. КрутькоП.Д. Обратные задачи динамики управляемых систем. Линейные модели. М.:
Наука, 1987.
104. Крутько П.Д., Попов Е. П. Аналитическое конструирование оптимальных регулято-
ров и обратные задачи динамики управляемых систем //Известия АН СССР. Техническая
кибернетика. 1982. № 3. С.182—193.
105. Колесников А.А, Чирченков А.Г., Бессарабов М.В. Аналитическое конструирование
агрегированных регуляторов и обратные задачи динамики управляемых систем //Синтез
алгоритмов сложных систем. Таганрог. ТРТИ. 1986. Вып. 6. С.3—6.
106. Новосельцев В.Н. Теория управления и биосистемы. М.: Наука, 1978.
107. Бойчук Л.М. Синтез координирующих систем автоматического управления. М.: Энер-
гоатомиздат, 1991.
108. Бойчук Л.М. Метод структурного синтеза нелинейных систем автоматического управ-
ления. М.: Энергия, 1971.
109. Николае Дж. Динамика иерархических систем. Эволюционное представление. М.:
Мир, 1989. ‘
110. Берже П., Помо И., Видаль Р. Порядок в хаосе. М.: Мир, 1991.
111. Лебедев Е.Д., Неймарк Б.Е., Пистрак М.Я. и др. Управление вентильными электро-
приводами постоянного тока. М.: Энергия, 1970.
112. Рудаков В.В., Мартикайнен Р.П. Синтез электроприводов с последовательной кор-
рекцией. М.: Энергия, 1975.
113. Красовский А.А. Статистическия теория переходных процессов в системах управле-
ния. М.: Наука, 1968.
114. Янушевский Р.Т. Теория линейных оптимальных многосвязных систем управления.
М.: Наука, 1973.
115. Башарин А.В., Колесников А.А. Синтез систем подчиненного регулирования электро-
приводов, оптимальных по переменным критериям качества //Известия вузов. Электромеха-
ника. 1984. № 2. С.57-65.
116. Крутько П.Д. Обратные задачи динамики управляемых систем. Нелинейные модели.
М.: Наука, 1988.
117. Махлин А.Р., Уколов И.С. К вопросу аналитического конструирования систем управ-
ления нелинейных динамических систем //Известия АН СССР. Техническая кибернетика.
1985. №2. С. 125-129.
118. Уколов И.С., Бек В.В., Махлин А.Р. Интегральнее системы активного управления. М.:
Наука, 1986.
119. Колесников А.А. Аналитическое конструирование нелинейных агрегированных регу-
ляторов по заданной совокупности инвариантных многообразий //Известия вузов. Электро-
механика, I. Скалярное управление. 1987. № 3. С. 100-109.
120. Мееров М.В. Системы многосвязного регулирования. М.: Наука, 1965.
121. Пантов Е.Н., Махин Н.Н., Шереметов Б.В. Основы теории движения подводных
ппаратов. Л.: Судостроение, 1973.
122. Веретенников В.Г. Устойчивость и колебания нелинейных систем. М.: Наука, 1984.
123. Hermes Н. Onastabilifcinq Feedback Attitude Control. J. Optimizat. Theory an Appl. 1980.
Vol. 31. №3. P.343-384.
335
124. Панасюк АИ. Введение алгебраических операций на множестве траекторий управляю-
щей нелинейной системорй //Прикладная математика и механика. 1984. Т. 48. Вып. 4. С. 601-614.
125. Колесников А А. Аналитическое конструирование нелинейных агрегированных регу-
ляторов возбуждения синхронных генераторов энергосистем //Известия вузов. Энергетика.
1987. № 2. С.7-9.
126. Абдуллаев Н.Д., Петров Ю.П. Теория и методы проектирования оптимальных peiy-
ляторов. М.: Энергоатомиздат, 1985.
127. Колесников А. А. Аналитическое конструирование нелинейных агрегированных регу-
ляторов по заданной совокупности инвариантных многообразий //Известия вузов. Электро-
механика, II. Векторное управление. 1987. № 5. С.58-66.
128. Галиуллин А.С., Мухаметзянов И.А., Мухарлямов Р.Р., Фурасов В.Д. Построение
систем программного движения. М.: Наука, 1971.
129. Красовский Н.Н. Теория управления движением. М.: Наука, 1968.
130. Кирсанов АН. О синтезе управлений нелинейными системами при наличии ограниче-
ний в виде равенства на координаты //Известия АН СССР. Техническая кибернетика. 1984.
№ 1. С. 183-187.
131. Кротов В.Ф., Букреев В.З., Гурман В. И. Новые методы вариационного исчисления в
динамике полета. М.: Машиностроение, 1969.
132. Кротов В.Ф., Гурман В.И. Методы и задачи оптимального управления. М.: Наука, 1973.
133. Бербюк В.Е. Метод первых интегралов для оценки минимума функционала в задачах
оптимального управления //Известия РАН. Техническая кибернетика. 1993. № 1. С.39-43.
134. Бербюк В.Е. Динамика и оптимизация робототехнических систем. Киев: Наукова
думка, 1989.
135. Беллман Р. Динамическое программирование. М.: ИЛ, 1960.
136. Бутенин Н.В., Фуфаев Н.А. Введение в аналитическую механику. М.: Наука, 1991.
137. Методы решения задач теории управления на основе принципа расширения /Под ред.
В.И. Гумана и Г.Н. Константинова. Новосибирск: Наука, 1990.
138. Новые методы улучшения управляемых процессов /Под ред. А.И.Москаленко. Но-
восибирск: Наука, 1987.
139. Методы улучшения в вычислительном эксперименте /Под ред. А.И.Москаленко.
Новосибирск: Наука, 1988.
140. Яковенко Г.Н. Необходимые условия оптимальности //Вопросы прикладной матема-
тики. Иркутск: Изд-во СЭИ СО АН СССР, 1975.
141. Яковенко Г.И. Критерий инвариантности управляемых систем //Методы оптимиза-
ции и исследования операций. Иркутск.: Изд-во СЭИ СО АН СССР, 1976.
142. Ротач В.Я. Теория автоматического управления теплоэнергетическими процессами.
М.: Энергоатомиздат, 1985.
143. Клюев А.С. и др. Наладка средств автоматизации и автоматических систем регулиро-
вания. М.: Энергоатомиздат, 1989.
144. Пригожин И. От существующего к возникающему. М.: Наука, 1985.
145. Розонэр Л.И. Принцип максимума Л. С. Понтрягина в теории оптимальных систем
//Автоматика и телемеханика. 1959. № 10. С.13’20-1334; № 11. С. 1441—1458; № 12. С.
1561-1578.
146. Субботин А.И. Минимальные неравенства и уравнения Гамильтона-Якоби. М.: Наука,
1991.
147. ЧерноуськоФЛ. Оценивание фазового состояния динамических систем. М.: Наука, 1988.
336
148. Филиппов А.Ф. Дифференциальные уравнения с разрывной правой частью. М.: Наука, 1985.
149. Уткин В.И. Системы с переменной структурой: состояние проблемы, перспективы
//Автоматика и телемеханика. 1983. № 9. С.5-25.
150. Блехман И.И., Мышкис А.Д., Пановко Я.Г. Механика и прикладная математика:
логика и особенности приложений математики. М.:Наука, 1990.
151. Сивухин Д.В. Общий курс физики. Т. 1. Механика. М.: Наука, 1989.
152. Летов А.М. Теория оптимального управления //Оптимальные системы статические
методы. Труды II конгресса ИФАК. М.: Наука, 1965. С.7-38.
153. Борцов Ю.А., Юнгер И.Б. Автоматические системы с разрывными управлениями.
М.:Энергоатомиздат, 1986.
154. Кулебакин В.С. Об основных задачах и методах повышения качества автоматически
регулируемых систем // Труды II Всесоюзн. совещан. по теории автоматического регулиро-
вания. М.: Наука, 1955. Т.П. С.184-207.
155. Александров А.Г. Синтез регуляторов многомерных систем. М.: Машиностроение, 1986.
156. Александров А.Г. Оптимальные и адаптивные системы. М.: Высшая школа, 1989.
157. Калман Р.Е. Об общей теории систем управления //Труды I Междунар. конгр. ИФАК.
М.: Изд-во АН СССР, 1961. Т. 2. С.521-546.
158. Жевнин А.А., Крищенко А.П. Управляемость нелинейных систем и синтез алгоритмов
управления //ДАН СССР. Т. 258. № 4.С.693-702.
159. Жевнин А. А., Крищенко А.П., Глушко Ю.В. Управляемость наблюдаемость нелиней-
ных систем //Аналитические методы синтеза регуляторов. Саратов: СПИ, 1981. С. 3-11.
160г Семенов В.Н. Об управляемости нелинейных динамических систем // Кибернетика и
вычислительная техника. Киев, Наукова-думка, 1971. Вып. 8. С.38-40.
161. Иртегов В.Д. О смене устойчивости при бифуркациях //Проблемы аналитической
механики, устойчивости и управления движением. Новосибирск: Наука, 1991. С.73-79.
162. Баранов Н.Г. Оптимизация процессов и систем управления в судовой автоматике. Л.:
Судостроение, 1976.
163. Воронов А.А. Устойчивость, управляемость, наблюдаемость. М.: Наука, 1979.
164. Мирошник И.В. Согласованное управление многоканальными системами. Л.: Энер-
гоатомиздат, 1990.
165. Голубев Н.Ф. Основы теоретической механики. М.: Изд-во МГУ, 1992.
166. Губин С.В., Ковалев А.М. Ориентированные многообразия управляемых механиче-
ских систем. Проблемы аналитической механики, устойчивости и управления движением.
Новосибирск: Наука, 1992. С.151-156.
167. Стрыгин В.В., Соболев В.А. Разделение движений методом интегральных многообра-
зий. М.: Наука, 1988.
168. Квакернаак X., Сиван Р. Линейные оптимальные системы управления. М.: Мир, 1977.
169. Николае Г, Пригожин И. Познание сложного. М.: Мир, 1990.
170. Петров Б.Н., Александров А.Д., Андреев В.П. и др. Многорежимные и нестационар-
ные системы автоматического управления. М.: Машиностроение, 1978.
171. Красовский А.А. Проблемы физической теории управления //Автоматика и телеме-
ханика. 1990. № 11. С.3-28.
172. Красовский А.А. и др. Справочник по теории автоматического управления. М.: Наука, 1987.
173. Жиляков В.Й., Дрюгин В.Г. К задаче синтеза регуляторов нелинейных объектов по
заданной экстремали критерия обобщенной работы / /Известия вузов. Электромеханика. 1991.
№11. С.45-50.
337
174. Еругин Н.П. Построение всего множества систем дифференциальных уравнений, имею-
щих заданную интегральную кривую //Прикладная математика и механика. 1952. Выл. 6.
175. Петров Б.Н., Портнов-Соколов Ю.П., Андриенко А.Я., Иванов В.П. Бортовые тер-
минальные системы управления. М.: Машиностроение, 1983.
176. Батенко А.П. Системы терминального управления. М.: Радио и связь, 1984.
177. Бек В.В., Вишняков Ю.С., Махлин А.Р. Интегральные системы терминального управ-
ления. М.: Наука, 1989.
178. Фокс А., Пратт М. Вычислительная геометрия. Применение в проектировании и на
производстве. М.: Мир, 1982.
179. Беличенко В.В. Матрично-геометрические методы в механике с приложениями к
задачам робототехники. М.: Наука, 1988.
180. Колесников А.А. Аналитическое конструирование нелинейных агрегированных регу-
ляторов по заданной совокупности инвариантных многоообразий //Известия вузов. Электро-
механика, III. Учет ограничений. 1989. № 12. С.55-64.
181. Колесников А. А. Аналитическое конструирование нелинейных агрегированных регу-
ляторов по заданной совокупности инвариантных многоообразий //Известия вузов. Электро-
механика, IV. Разрывное управление. 1990. № 1. С.41-51.
182. Колесников А.А., Сотников Ю.Г. Аналитическое конструирование нелинейных агре-
гированных регуляторов по заданной совокупности инвариантных многоообразий //Известия
вузов. Электромеханика, V. Селективно-инвариантное управление. 1990. № 2. С.50-56.
183. Подчукаев В.А. Быстрые алгоритмы совмещенного синтеза систем управления //Из-
вестия вузов. Приборостроение. 1991. № 8. С.28-43.
184. Подчукаев В.А. Устойчивость, качество и коррекция систем автоматического управ-
ления. Саратов: Изд-во СПИ, 1989.
185. Баутин Н.Н., Леонтович Е.А. Методы и приемы качественного, исследования дина-
мических систем на плоскости. М.: Наука, 1990.
186. Иванов Б.Р., Циделко В.Д. Принципы построения высокоточных аналоговых диффе-
ренциаторов //Измерения, контроль, автоматизация. 1984. № 2. С.38-49.
187. Загарий Г.И., Шубладзе А.М. Методы адаптивного управления для промышленного
применения. Ч. 2. Дифференцирование и фильтрация сигналов //Автоматика. 1981. № 3. С.50-60.
188. Загарий Г.И., Шубладзе А.М. Синтез систем управления на основе критерия макси-
мальной степени устойчивости. М.: Энергоатомиздат, 1988.
189. Воротников В.И. Устойчивость динамических систем по отношению к части перемен-
ных. М.: Наука, 1991.
190. Воротников В.И. Об оптимальной стабилизации нелинейных управляемых систем
//Автоматика и телемеханика. 1991. № 3. С.22-34.
191. Раушенбах Б.В., Токарев Е.Н. Управление ориентацией космических аппаратов. М.:
Наука, 1974.
192. Keller Н. Verenfacht Ljapunov—Synthese fur nichtliheare Systeme //Automatisierun-
gstechnik. 1990. № 3. S.lll-113.
193. Разумихин Б.С. Принцип аналитической механики и проблема оптимального управ-
ления. I Принцип Гамильтона для задач оптимального управления // Автоматика и телемеха-
ника. 1976. № 2. С.31-43.
194. Иванилов Ю.П. Применимость методов аналитической механики в оптимальном
управлении // Известия АН СССР. Техн, кибернетика. 1983. № 2. С.61-71.
195. Иванилов Ю.П. Главная функция Гамильтона и условия оптимальности // АиТ. 1988.
№5. С.51-61.
338
196. Вин Н. Интегралы движения для оптимальных траекторий полета в атмосфере //
Ракетная техника и космонавтика. 1973. Т. 11. № 5. С. 157-162.
197. Djukic Djordje S. Noethers theorem for optimum control systems// Int. I.Contr. 1973. V.18.
№ 3. P.667-672.
198. Гараев К. Г. Теория инвариантных вариационных задач в проблеме оптимизации
динамических систем с управлением //Автоматика и телемеханика. 1992. № 9, С.49-56.
199. Колман Р., Фалб П., Арбиб М. Очерки по математической теории систем. М.: Мир, 1971.
200. Красовский Н.Н. Теория управления движением. М.: Наука, 1968.
201' . Емельянов С. В., Коровин С.К, Никитин С.В. Управляемость нелинейных систем.
Двумерные системы. Итоги науки и техники. Серия Техническая кибернетика. М.: ВИНИТИ,
1985. Т. 21. С.3-72.
202. Ж.евнин А. А., Крищенко А.П., Глушко Ю.В. Управляемость и наблюдаемость нели-
нейных систем и синтез терминального управления //ДАН СССР. 1982. Т. 266. № 4.
203. Крищенко А.П. Исследование управляемости и множества достижимости нелинейных
систем //Автоматика и телеханика. 1984. № 6. С.30—36. ’ •
204. Яковенко Г.Н. Управление на группах Ли: первые интегралы, особые управления
//Кибернетика и вычислительная техника. Киев: Наукова думка, 1984. Вый. 62.
205. Яковенко Г.Н. Необходимое условие управляемости //Вопросы прикладной матема-
тики. Иркутск. 1975. С. 108-119. 1
206. Коробов В.И. Сведения задачи управляемости к граничной задаче / / Дифференциаль-
ные уравнения. 1976. Т. 12. № 7. С. 1310-1312. . • .. ?
207. Федоров А.Ю. Исследование управляемости нелинейных автономных динамических
систем //Автоматика и телемеханика. 1986. № 7. С. 55—60.
208. Компьютеры и нелинейные явления. М.: Наука, 1988.
209. Моисеев Н.Н. Алгоритмы развития. М.: Наука, 1987.
210. Теоретическая механика. Вывод и анализ уравнений движения на ЭВМ. М.: Высшая
школа, 1990.
211. Разумовский О.С. Проблема взаимосвязи ньютоновской аксиоматики с экстремальными
принципами //Ньютон и философские проблемы физики XX века. М.: Наука, 1991. С. 35-51.
212. Дроздов Н.В., Мирошник И.В., Скорубский И.В. Системы автоматического управле-
ния с микро ЭВМ. Л.: Машиностроение, 1989.
213. Клайн М. Математика. Поиск истины. М.: Мир, 1988.
214. Ахромеева Т.С., Курдюмов С.П., Малинецкий Г.Г., Самарский А.А. Нестационарные
структуры и диффузионный хаос. М.: Наука, 1992.
215. Арнольд В.И. Обыкновенные дифференциальные уравнения. М.: Наука, 1984.
216. Арнольд В.И. Математические методы классической механики. М.: Наука, 1989.
217. Смолянинов В.В. От инвариантов геометрий к инвариантам управления //Интеллек-
туальные процессы и их моделирование. М.: Наука, 1987. С.66-110.
218. Эшби У.Р. Введение в кибернетику. М.: Изд-во ин. лит-ры, 1959.
219. Беркинблит М.Б., Гельфанд И.М., Фельдман А.Г. Двигательные задачи и работа
параллельных программ //Интеллектуальные процессы и их моделирование. Организация
движения. М.: Наука, 1991. С.37-54.
220. Криппнер С. Холистская парадигма. Урания, 1992. № 1.
221. Мицкевич Н.В. Третий закон Ньютона и самосогласованность взаимодействий в фи-
зике //Ньютон и философские проблемы XX века. М.: Наука, 1991.
222. Касти Дж. Большие системы. Связность, сложность и катастрофы. М.: Мир, 1982.
339
223. Белостоцкий Ю.Г. Энергия: что это такое? С.Пб: СПб ДНТП, 1992.
224. Белостоцкий Ю.Г. Смирнов А.П. Пространство—время и принцип компенсации
//Материалы II Международной конференции. Проблемы пространства и времени в современ-
ном естествознании. СПб., 1992.
225. Гомеостатика живых, технических социальных и экономических систем. Новоси-
бирск: Наука, 1990.
226. Вейль Г. Симметрия. М.: Наука, 1968.
227. Вигнер Е. Этюды о симметрии. М.: Мир, 1971.
228. Система.Симметрия.Гармония/Отв.ред. В.С.Тюхтин,Ю.А.Урмани^евМ.-.Мысль, 1988.
229. Бернштейн Н.А. О построении движений. М.: Медгиз.1947.
230. Анохин П.К. Очерки по физиологии функциональных систем. М.: Медицина, 1975.
231. Хакен Г. Синергетика. М.: Мир, 1980.
232. НиколисГ., Пригожин И. Самоорганизация в неравновесных системах. М.: Мир, 1979.
233. Isidori A. Nonlinear Control Systems. Springei^Verlag, 1989.
234. Колесников А.А., ГельфгатА.Г. Проектирование многокритериальных систем управ-
ления промышленными объектами М.: Энергоатомиздат, 1993.
235. Пригожин И., Стенгере И. Порядок из хаоса. М.: Прогресс, 1986.
236. Девис П. Суперсила. М.: Мир, 1989.
237. Планк М. Избранные труды. М.: Наука, 1975.
238. Колман Р., ФалбП., Арбиб М. Очерки по метематической теории систем. М.: Мир, 1971.
239. Месарович М., МакоД., Такахаре И. Теория иерархических многоуровневых систем.
М.: Мир, 1973.
240. Самарский А.А. Теория разностных схем. М.: Наука, 1977.
241. Крутько П.Д. Вариационные методы синтеза систем с цифровыми регуляторами.
М.: Советское радио, 1967.
242. Видаль П. Нелинейные импульсные системы. М.: Энергия, 1974.
243. Климонтович Н.Ю. Без формул о синергетике. Минск: Вышэйшая школа, 1985.
244. Вольтерра В. Математическая теория борьбы за существование. М.: Наука, 1976.
245. Свирежев Ю.М. Нелинейные волны, диссипативные структуры и катастрофы в эколо-
гии. М.: Наука, 1987.
246. Заславский Б.Г., Полуэктов Р.А. Управление экологическими системами. М.: Наука, 1988.
247. Шеннон К. Математическая теория дифференциального анализатора //Работы по
теории информации и кибернетике. М.: ИИЛ. 1983. С.209-728.
248. Кулебакин В.С. О поведении непрерывно возмущаемых автоматизированных линей-
ных систем. //Доклады АН СССР. 1949. Т.68. Ne 5. С.73-79.
249. Джонсон С. Теория регуляторов, приспосабливающихся к возмущениям. //Под ред.
К.Т. Леодцеса. Фильтрация и стохастическое управление в динамических системах. М.: Мир. 1980.
250. Салычев О.С. Скалярное оценивание многомерных динамических систем. М.: Маши-
ностроение. 1987.
251. Баринов В.А., Совалов С.А. Режимы энергосистем: методы анализа и управления.
М.: Энергоатомиздат. 1990.
252. Колесников А. А. Аналитическое конструирование взаимосвязанных регуляторов воз-
буждения генераторов и частоты вращения турбогенераторов энергосистем. //Известия вузов.
Энергетика. 1989. № 12. С. 12—17.
340
ОГЛАВЛЕНИЕ
К читателю........•....................................................... 3
Предисловие................................................................. 5
Глава I. Синергетический подход в теории управления......................... 11
1.1. Синергетика и проблема управления................................. 11
О редукционистском и целостном подходах в теории управления...... 11
Обратимые и необратимые процессы в динамических
и термодинамических системах.................................. 15
Синергетика и управление........................................ 24
1.2. Основная проблема теории автоматического управления............. 34
Введение...................................................... 34
Задача о регуляторе........................................... 35
Аналитическое конструирование оптимальных регуляторов........... 36
1.3. Проблема аналитического конструирования нелинейных оптимальных
регуляторов............................................................. 40
Введение........................................................ 40
Постулат устойчивости и нелинейная проблема АКОР................ 41
Существующие результаты в нелинейной теории АКОР................ 44
1.4. Естественно-математический подход к основной проблеме теории
автоматического управления.............................................. 47
Основная проблема и подлинная оптимизация....................... 47
О математическом и физическом содержании основной проблемы....... 49
Естественно-математический подход к решению основной проблемы.... 52
1.5. Переменный оптимизирующий функционал в задачах синергетического
синтеза нелинейных систем............................................... 55
О формах критериев качества и режимах работы нелинейных систем.. 55
О многокритериальной оптимизации нелинейных систем управления... 57
И ерархический подход к синтезу оптимальных систем............. 58
Сопровождающий функционал в задаче синергетического синтеза
нелинейных агрегированных регуляторов.......................... 60
1.6. Основные функциональные уравнения в задаче синергетического синтеза
агрегированных регуляторов.............................................. 63
Скалярное управление............................................ 63
Векторное управление............................................ 68
1.7. Инвариантные многообразия в задаче синергетического синтеза нелинейных
агрегированных регуляторов.............................................. 69
Инвариантные соотношения в механике и метод АКАР................ 69
Связи в механике и метод АКАР................................... 74
Инвариантные многообразия в естествознании и технике............ 77
1.8. Принцип динамического сжатия-расширения фазового потока
в автоматическом управлении............................................. 80
Введение........................................................ 80
Фазовый поток в диссипативных системах.......................... 81
Аттракторы в нелинейных диссипативных системах.................. 87
Основные положения синергетического подхода в теории управления.. 91
О свойстве эквивалентности в системах управления.............. 94
341
Глава II. Аналитическое конструирование агрегированных нелинейных регуляторов
на основе заданного инвариантного многообразия............................. 97
2.1. Простейшая задача аналитического конструирования агрегированных
регуляторов.......................................................... 97
2.2. Примеры аналитического конструирования агрегированных регуляторов для
нелинейных объектов второго порядка....................................106
2.3. Аналитическое конструирование агрегированных регуляторов для объектов
высокого порядка по заданному инвариантному многообразию...............116
2.4. Примеры аналитического конструирования агрегированных регуляторов
высокого порядка на основе нелинейной макропеременной..................126
2.5. Аналитическое конструирование агрегированных регуляторов и обратные
задачи динамики нелинейных управляемых систем..........................133
2.6. Аналитическое конструирование агрегированных регуляторов, оптимальных
относительно макропеременной и управления...............•..............136
2.7. Аналитические методы анализа управляемости и определения особых
многообразий нелинейных систем на ЭВМ..................................145
Введение и постановка задачи................................... 145
Задача вычисления матрицы условий общности положения для
нелинейных систем...............................................147
2.8. Аналитическое конструирование нелинейных дискретно-непрерывных
систем управления......................................................157
Постановка задачи...............................................157
Аналитическое конструирование дискретных агрегированных
регуляторов.....................................................158
Примеры аналитического конструирования нелинейных дискретных
регуляторов.....................................................159
Глава III. Аналитическое конструирование агрегированных нелинейных регуляторов
по заданной совокупности инвариантных многообразий.....................167
3.1. Аналитический синтез агрегированных регуляторов на основе
конструирования последовательной совокупности инвариантных
многообразий.......................................................... 168
3.2. Примеры практического синтеза нелинейных систем управления по заданной
последовательности инвариантных многообразий............................176
3.3. Аналитический синтез агрегированных регуляторов на основе
конструирования параллельной совокупности инвариантных многообразий 183
3.4. Аналитический синтез агрегированных регуляторов на основе
конструирования последовательно-параллельной совокупности
инвариантных многообразий............................................ 189
3.5. Примеры синтеза агрегированных систем управления нелинейными
объектами с несколькими регулирующими органами..........................193
3.6. Аналитическое конструирование нелинейных агрегированных
регуляторов на ЭВМ......................................................209
3.7. Структурное конструирование и симметрия нелинейных агрегированных
ПД-регуляторов..........................................................215
3.8. Метод аналитического конструирования агрегированных оптимальных
регуляторов.............................................................222
Постановка задачи............................................. 222
Обоснование метода АКАОР........................................223
342
Связь метода АКАОР с методами теории оптимального управления....228
Инвариантный подход в теории синтеза оптимальных систем
автоматического управления......................................230
Глава IV. Аналитическое конструирование нелинейных систем управления со
специальными динамическими свойствами......................................235
4.1. Аналитическое конструирование агрегированных нелинейных регуляторов
при ограничениях на координаты и управления............................235
Ограничения на координаты в форме равенств......................236
Ограничения на координаты и управления в форме неравенств.......239
4.2. Аналитическое конструирование агрегированных селективно-инвариантных
систем управления нелинейными объектами.............................. 248
4.3. Аналитическое конструирование астатических нелинейных систем
управления..............................................................252
4.4. Аналитическое конструирование нелинейных систем разрывного управления
по заданной совокупности инвариантных многообразий.....................261
Синтез СПС на основе заданного инвариантного многообразия..... 262.
Синтез СПС на основе последовательной совокупности инвариантных
многообразий....................................................268
Синтез нелинейных СПС и обратные задачи динамики................270
Синтез нелинейных СПС с форсированным скользящим режимом........275
4.5. Аналитическое конструирование многокритериальных нелинейных систем
управления-.......................................................... 281
Оптимизирующий функционал в многокритериальных задачах АКАР.....282
Решение многокритериальных нелинейных задач АКАР................285
Примеры синтеза многокритериальных систем управления............289
4.6. Аналитическое конструирование нелинейных систем терминального
управления..............................................................294
Постановка задачи ТУ............................................295
Решение задачи АКАР при программно-замкнутом ТУ.................297
Решение задачи АКАР при замкнутом ТУ............................300
4.7. Иерархическая оптимизация нелинейных агрегированных регуляторов...307
4.8. Обобщение метода аналитического конструирования нелинейных
агрегированных регуляторов..............................................313
Основные этапы обобщенного метода АКАР..........................313
Аналитическое конструирование нелинейных систем с наблюдателями
состояния.......................................................318
Примеры синтеза нелинейных систем с наблюдателями состояния.....321
О синергетической концепции синтеза нелинейных динамических систем . 329
Список литературы..........................................................331
343