/










































































































Text
БИБЛИОТЕКА ПО АВТОМАТ.ИКЕ ·
Выпуск 12
В. А. АЦЮКОВСКИЙ .
ЕМКОСТНЫЕ
ДИФФЕРЕНЦИАЛЬНЫЕ ДАТЧИКИ
ПЕРЕМЕЩЕНИЯ
ГОСУДАРСТВЕННОЕ ЭНЕРГЕТИЧЕСКОЕ ИЗДАТЕЛЬСТВО
МОСКВА
1960
ЛЕНИНГРАд
Редакционная коллегия: И. В. Антик, С. Н. Вешеневский,
в с. Кулебакин, А Д. Смирнов, Б. С. Сотсков, Е. П. Стефани,
·
·
И. И. Шумиловскнй
ЭЭ-5(4) -3
t.-
'
В кн~"«:: рассматриваются принцип работы, основные
rнпы и области применения емко стных дифференциальных
датu""' '' !Iеремещения, приводятся примеры расчета ем
костнь1 .'" датчиков, даются некоторые рекомендации по по
сгпr" шю следящих систем переменного тока с емкостны-
1" и ~а тчиками п е ремещения и их элементов .
Книга рассчитана на инженеров и техников, работаю
щих в области автоматического регулирования и измер е
ния неэлектрических величин электрическими методами.
· Вла ди: нир Акимович
Ацюковский
ЕМI\ОСТНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ ДАТЧИКИ
ПЕРЕМЕЩЕНИЯ
Редактор Д. В. Свечарник
Техн. редактор К. . П. Воронин
Сдано в набор 28/XII 1959 г.
Подписано к печати 16/llI 1960 г.
Т-040 1 2
Бумага 84xlo8•/ "
5,3 печ. JI.
Уч.-изд . JI. 5,7
Тираж 12 ООО экз.
Цена2р.85к.
Заказ 671
Типография Гос;шергоиздата . Москва , Шлюзовая наб" 10.
ПРЕДИСЛОВИЕ
В предлагаемой кн;иге раосмотрены принцип работы,
основные типы и области применения емкостных диффе
ренциальных датЧ"ик6в перемещения, входящих в состав
следящих систем переменного тока высокой Т'ОЧности, рабо
тающих Н'а повышенной ( "-' 400 гц) частоте .
Наряду с теоретической частью .и выводом формул, поз
воляющим производить расчет -собственно ем.к·ос~ных дат
Ч·шюв, )'1силителей к следящим оистемам, а также наиболее
существенных их погрешностей, в каждом разделе приве
дены примеры расчета 'С т-ем, чтобы читатель - и'Нж·енер мог
использ·овать матер.мал ·в .своей 'Непосредственной работе.
В книге пр.иведены ~рекомендации по практическому по
строению и наладке как самих датчиков, так и усилителей
переменного тока с большим ·коэффициентом )'1Силения и
следящих систем переменного тока. При этом отдельные
ре1юмендации могут быть использова:ны не только в следя
щих системах переменного тока с емкостными датчиками,
но и в любых ·следящих ·системах, а ·также в некоторых уз
лах электро- и радиоаппаратуры.
Предлагаемый материал проверен автором эксперимен
тально в теоном контакте с инженером Весбландом Д. М.
и электромехаником Максимовым В . А . , которым автор вы-
ражает глубокую признательность -
·
Автор
ВВЕДЕНИ~
В 1наетоящее •В'Ремя в П1ромышлеН1ности и для равлич:ных
специальных целей шир.оiю применяются ди•станционные
измерения нсевоз.можных величин. Мног.ие из этих величин
n·реобразуются ·в перемещение, и тогда задача ~сводится
к дистанционному измерению величины хода изме р итель
ного органа (чувствительного элемента). Та.к, на.пример,
для замера давления достаточно измерить прогиб анероид
ной коробки, а для определения ускорения достаточно
знать величину перемещения маосы, закрепленной на пру
жине. ~роме того, очень часто нас интересует непосред
с11венно относителыное перемещение отдельных ча•стей ме
ханизма, например угол поворота оси.
Для дистанционного измерения перемещений широкое
распрост1ранение получили следящие ·сист емы, включаю
щие в себя ·соответствующие датчики. Задачей такого дат
чика являе11ся преобразование величины хода чуветвитель
ного элемента (.ра•сстояния, угла поворота) .в электриче
ский сигна .'I, который ·и воспринимается ·следящей систе-
мой [Л. 1-4].
.
Существует большое количест1но типов датчик,сiв .пере
мещения. Наиболее ра.спространены реостатные и индук
тивные да'Гчики, менее ·распространены емкостные, фото
электрическ;ие и некоторые д·ругие специальные датчики,
например лампы ·с механическим управлением и т. д.
Во многих случаях к датчикам перемещения Предъяв
ляются повышенные 'Гребования как в от.ношении точности ,
так и в отношении мадого механичьского момента и пр .
Эти требования в·озникают в приборах, от .которых ;гре
буе11ся высокая 'Гочность работы - в акселерометрах, ги
роскопических, мембранных приборах и других устрой
ствах. В.сем этим требованиям удовлетворить ·с помощью
реостатных, ;индуктивных или фотода'ГЧИК'ов затруднитель -
но, а ем1юстн.ые дат'Чики до посщеднего -времени разрабаты
вались в .совершенно недостаточных масштабах.
Однако дальнейшее повышение требова!Iий в отноше
нии точности, стабильности, малой величины механичес ко
го момента, шИрокой ·регулиравки заста.вляют конструк
торов вновь обратrиться к разработке емкостных да ···ч и. -
ков.
До недавнего времени коне'I1рукторы относились с пре , -
убеждением к емкос11ным датчикам, .полагая, что rx!.:' _,1ы
с емкост11ы:11и датчиками не обеспечивают ни до'Статочной
точности, ни ·стабиJ1ьности ·раб от ы приб оро:в . Считалось
обязательным для получения устойчивого сигнала на выхо
де емкостного датчика питать его напряжением вы сокой
частьты, достигающей сотен кил·огерц. а иногда даже де
сятков. мегагерц [Л. 5, 1стр . 47; Л. 18]. Наличие такой высо
к·ой частоты в свою очер-едь приводил-о к потерЯм в пара
зйт.ных емкостях, с·оед:инительных проводах и т. .n. {Л . 1.
стр. 70]. Для того чтобы повысить амплитуду сигнала, сни
маемого ·с емкостного датчика, и улучшить стабильность
тiака:·за.ний, не1юторые авторы раз.работок применяли в пер
вом каскаде утсил.ителя элект1рометрические лампы, допу
скающие включение -сотен мегом н цепь управляющей сетки
· [Л . 21] и т. д., одна~ю ·все эти меры мало улучшали ста -
бильность систем с емкостными датчиками и в то же вре
мя значительно усложняли конструкцию прибора-в.
Проведенные . в на•стоящее время работы показали, что
причина нестабильности работы ·с-истем с емкостными дат
чшшми лежит ·в неправиль11ом подходе конст:рукторов
к проектированию датчиков, в частности, в не!1равильном
расположении изолирующих элементов конструкции, не
стабильность овойств которых и приводит к ошибкам
в-. работе систем. Эти трудности оказались преодолимыми,
и уже с_озданы приборы -с емкостными датчиками, обоспе
чива'l:Ощие вьюокие точнос·ти и стабильность работы, вьщер
живающие тяжелые ·режимы эксплуатации (см. гл. 6).
В настоящее время установлено, что ем 1<0стные датчи
кr:~ перемещения обладают целым рядом преимуществ по
сравнению с другими датчиками перемещения. К их досто
инствам относят'Ся:
1) потребность ·весьма малых усилий для перемещения
nод:виж:Ной части (ротора) е:м11юстноrо датчика :
2) малое потребление энергии;
3) простота изготовления;
4) иапользова•н:ие дешевых материалов ;
..,
5) отсутствие контаrктов (:в некоторых отдельных слу
<rаях - один токосъем с помощью кольца и щетки);
6) высокая точность и ·стабильность работы систе:v1
с емкостными датчиками;
7) возможность широкой регулировки приборов с неко-
торыми типами емкостных датчиков.
t К недостаткам емкостных датчиков следуе:г отнести вы
сокое внутреннее сопротивле1Ние. достигающее десятков и
даже сотен мегом, высокие требования к сопротивлению
крепежных изолирующих деталей и необходимость рабо
ты на повышенной (по сравнению с 50 гц) частоте. Однако
в большинстве случаев крепления ем к остных датчиков мо
гут быть выполнены и из обычных магериалов, а практика
показывает, что емкосmые датчики дают хорошие резу.пь
таты на ши~роко раопространенной частоте 400 гц.
Ценные качества емкостных датчиков - ма.1ая величи
на механического усилия, необходимого ди1я перемещения
его ротора, возможность регулировки выхода следящей
системы и высокая точность работы - делают емкостные
датчики перемещения незаменимыми в приборах, в кото
рых допускаются погрешности лишь в сотые и даже тыся'I
ные доли процента, а поэтому необходимо емкостные дат-
чики перемещения развивать и осваивать.
Глава первая
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТlЕОРИИ ЕМКОСТНЫХ
. ДАТЧИКОВ
Емкостный датчи·к в общем случае представляет собой
одну или несколько емкостей с изменяющимися параме
трами.
Величина емкости между двумя ~rшраллельными пласти
нами определяется форму.7ой
kвS
гS
вS
с= сг=u.зБ 7ta = 0
•
885tr·
где•-
диэлектрическая проницаемость;
S-площадь пере1{рытия двух пластик, см 2;
d - расстояние между ними, мм;
С - значение емкости, пф ( l 0- .
12
ф);
k - коэффициент пропорциональности.
.
(1)
Для воздуха с достаточной степенью точности s = 1.
Емкость С в цепи перемешюго тока создает соnротив-
ление
106
106
х =--=- -
с wC 21tfC
где f- частота, гц;
хе - сопротивление, Мом.
1,59-105
fC
(2)
Емкостные датчики можно ~разделить на д!Ве основные
группы - датчюш параме11ричеокие (недифференциаль-
ные) и датчики дифференциальные.
В ·схемах с параметричеоким.и датчиками происходит
преобразование входной неэлект1рической ·вели'ЧИНЫ (угла
поворота оси ро'Гора датчика) в электрическую выходную
величину (частоту, ток, напряжение), функционально &а
висящую от входной величины -
13 .схемах ·С дифференци~льными датчиками, включен
ными в следящие ·системы, с ~атчика снимается лишь сиг
нал ·раесогласования, ,которыи станuовится ра1вным нулю
в vстановившемся ·сосrrоянии следящеи системы.
• Примером
парамет:ричес·кого емкостного датчика мо
жет служить переменная емкость, •включенная в контур
лампового генера110р а (рис. 1) [Л. 1 и 6]. Здесь при измене
нии угла поворота оси ·ротора изменяется ем.кость дат~ию1
и меняется частота генератора, являющаяся :вых·однои ве
личиной.
На •рис. 2 приведен другой пример .иопользования пара
метрического датчика . В этом случае ·с изменением значе.-
г
f
Рис. 1. Емкостный дат
чик, включенный в кон
тур генератора.
с
я
и
Рис. 2. Емкостный дат
чик, включенный в uепь
переменного тока .
ния емкости С меняет·ся ток через нее, а сле·довательно, и
напряжение на выходе системы, падающее на ·сопро11ивле
нии нагрузки Rн' 1юторое и является выходной ·вел·ичиной.
Подобные .оистемы являю'{)СЯ разомКJНутыми системами
регулирования. Основньш недостатком этих схем являет
ся ·зависимость значения выходной величины ·от лараме
тров источника питания датчика, усилителя и других эле
ментов •схемы, а также от .внешних условий. В •самом · деле,
С'Гопт измениться напряжению или частоте генератора, пи
тающего датчик (рис. 2), rкак .напряжение, частота и фаза,
являющиеся выходными величинами и •снимаемые с сопро
тивления Rн' также изменятся.
От этих недоетатков свободны схемы с дифференциаль
ными емкостными датчиками, включенными в зам1шутую
систему автома'!1Иче·ского регулирования. В этих схемах
выходной величиной является угол поворота оси от1р,аба
тывающего двигателя или другой оси, связанной с нею че
рез редуктор. Одной из основных характеристик такой си
tтемы является чувствительность, показывающая, при ка
ком мннимальном отклонении чувствительного элемента
система отработки приходит в дейс11вие. Внешние . факто
в
ры - напряжение питания, температура окружающей ере
ды и т. п. - .в'1Jияют Л'ИШЬ на чу~в1сТ1Вительность си 1стемы; на
точность ·с-истемы они могут влrиять лишь в той мере, 'В ка
кой она свнзана с чувствительностью.
Это значит, · что схемы с емкостными дифференциальн ы "
ми датчиками, так же как и любые мостовые нулевые сх е
мы ·С линейными относительно частоты и напряжения со
противлениями в плечах, предъя-вляют
шие требования к стабильности
источника питания .
з начительно мен ь -
В простейшем случае дифферен-
R
R2
1;(
циальный емкостный датчик пред
ставляет собой две последовательно
включенные емкости , построенные
конструктивно таким образом, что Г\.., е·
при увеличении одной из них другая
уменьшается . Эти две емкости мо
.___L-._=r11Cz .
гут быть включены в мостовую схе
му (рис. 3), где два других плеча -
реостатные . Если при этом напря
жение, снимаемое с диаг-онали мос
та, использовать в качестве сигнала
для следящей системы, перемещ~ю
щей щетку потенциометра R в сто
Рис. 3. .Мостовая схема
с емкостным д ифферен
циальным датчиком .
рону уменьшения рассогласования, то всегда в устано ви в
шемся состоянии следящей системы 1Э!Т·О ~напряжение Ли= О.
В этом случае справедливо соотношение
(3)
01'сюда следует, что в ·схемах с дифференr.ш:альными
емкостными д_атчиками с воздушным диэлекгриком пока
зания отрабатывающеrо органа (например, положение
стрелwи указателя) не зависят ни от -состава газа, ни от
наличия в нем .влаги (не выпадающей в виде ·капель), так
как для обеих емкостей, составляющих дифференциальный
датчик, в меняется одинако1Во. Для недифференциал ьных
же схем такое -влияние может набJтюдаться хотя и в не
'больших пределах, так как для воздуха с в~ажностью 0%
В= 1,0006, а для воздуха -с влажностью 100% при t= +20° С
в= 1,0008 [Л. 7]. В этих схемах эта величина составит соот
ветственно погрешность примерно 0,02 %, :н то uремя как
9
-.,т некоторых сисr·ем с. емкостными дифференциальными
датчиками (как показано ниже) удалось добиться более
ВЫСОКОЙ ТОЧНОС'f!И.
Сигнал, снимаемый -с диагонали моста .при небольшом
оп<Лонении от пол·ожения нуля - -небольш ом рассог ласа-
г--1 l/уВстЬительный
~ злвмент Peily/fmop ~
1
Г~tmpEЛJ(Q
1
>
Уси.лuтель двигатель Отf!аtfать1Ва
-ющии элемент
Рис. 4а . Структурная схема следящей системы с
емк остным дифференциа л ьным да тчиком.
вании, очень мал по м·ощности (при ча.сrоте 400 гц .порядка
десятых ·дюлей милливатта). Поэтому для п~ри·ведения в дей
ствие отрабатывающей оси необходим усилmель, подаю
щий сигнал на д'вигатель. В простейшем виде схема пред
ставлена 1На рис. 4,а и 4,6.
]111iDr1~ >ь~
L/-
.
2
/
L--------------~
Рис . 4б . Схема следяuiей сис темы с емк ост ным
диффереющальным датчиком .
Мост, состоящий из двух емкостей диффе.ренциальног.о .
емкос-гного датчи1ка и потенциометра, питаекя напряже - ·
нием переменного тока от отдельной обмотКrи трансформа
· тора, щетка потенциомеТlра заземлена, ·с р·отора датчика
с.нимается сигнал 1ра1есоглаоО1Ван.ия, поступающий на управ
ляющую сетку лампы первого 1кас'Када лампового усилите
ля. Посл·е у.силения ·сигнал поступает ,на управляющую об
мотку д'вухфазноrо ас~инх~ронного дв:игателя, обмотка воз
буждения которог9 пр.исоединена ·к той же сети перемеff·
10
ноrо тока, 01· которой питается и мос'Говая схема
с JJ.Ифференциальным датчиком. Двигатель, ~вращаясь, пе
ремещает щетку потенциометра так, чтобы - воостановить
равновесие мос-1:а, 1гюсле чего отработка прекращается, так
ка.к управляющий сигнал при этом С'Ганов.ится равным ну
лю. Выходной величиной ~здесь является положение щетки
потенциомет:ра, угол п·оворо т а оси ротора двигателя или
угол поворота одной из осей ·редуктора, ·соединяющей дви
гатель со щетк·ой потенциометра.
Емкостные датчики являются датчиками с высоким
внутренним сопротивлением, поэ·гому целесообразно иметь
усилитель с возможно более
высоким входным сопротивле
нием. К сожалению, в настоя
щее время нет никаких дру
гих надежных элементов· с вы-
.
'
соким входным сопротивле
нием,
кроме
электронных
ламп- Поэтому для схем с
емкостными датчиками целе
сообразно применять лампо
вый усилитель переменного
тока. Выходные же каскады,
обслуживающие
двигатель,
могут быть выполнены по ка
R"
Рис . 5. Эквивалентная схема
моста с емкостным дифферен
циальным датчиком.
кой-либо из известных схем на любых элементах, 'Согла
суемых с выбранным двигателем.
Для расчета коэффиuиента уоиления системы · с емкост
ным датчиком необходимо знать крутизну :выходного сиг
нала, -снимаемого с диагонали моста:
'дди)
s=( дiJ '
ли~о
(4)
где Ли - сиrнал, снимаемый с диагонали моста;
о - обобщенное перемещение (угол поворота или
поступательное перемещение ротора датчика).
Кроме того, нужно знать фазу сигнала, снимаемого
с диагонали моста.
· Определим
крутизну и фазу сигнала, снимаемого с диа
гонали моста, включающего -в себя емкостный дифферен
циальный датчик (рис. 3), рассм'отренный выше.
Эквивалiнтная ·схема моста с датчиком представлена
на рис. 5 (примем, что сопротивление потенциометра много
11
мeньllit: сол.рот.и~зления нагрувкн R,J Составим ураiЗнени51
схемы :
е,= -)-i1+ R(i1+i2);
<....tP
е2 = ~i2 +RU1+i2)·
<....2Р
(5)
Из уравнений (5) найдем Ли=R(i1+i2) :
Ли = е1СР-е2С,р R
1+R(С1+С.>р
.
(6)
Положи м:
1е1=-е2=е; С1=с+лс; С2=С-ЛС;
тогда
2едеRp
Ли--_ 1+2RCp .
(7)
За менив р = j w и произведя необходимые выч~:сления,
получ и м:
Ли = ~-=2e=д=C=w=R= sin (wt - qi),
(8)
JI 1+4R2C
2
w•
где
-
1
qi=arctg RCw .
Произведение RCw ~ 1, следовательно, при малых раз
мерах емкостных датчиков и низких частотах (400 zц)
емr{ос'гный датчик дает большой сдвиг фазы. Так, при
f=400 z~. С=50 пф, R"= 1,0 Мо.м qi=83'_).
Крутизнз характеристики находится из выражения :
дд "J
2ewR
дС
S=--=
·-
.
до V1+R~c2w• дЪ ·
Если d = const, то
1,77 ewRs дS
(g)
S=
d
·~
Если S = const, то
S=
( 1О)
При работе с емкостным и датч•иками иногда приходит
ся учитьl'Вать механичеокие силы, в-оз1никающие в ~Них .
12
Есл~и конденсатор заряжен, между его обкладками J:еЙ
ствует механиrческая ·сила, стремящаяся сблизить U-IX . В за
вис.имости от ко'Нiструкции .датчика эта cи.Jia. будет напрэв
лена либо на .сбл·ИЖ•ение пла.стин (пр:и S=.const), либо нг "
затягивание подвижной плас11ины под ·одну из неподюо~ ~
ных (при d=const) .
Энергия заряженного конденса·гора определяется выра-
жени ем
и2с
W=-2 .
а сила при И= const
aw и2ас
F=дд=2дu•
где о - обобщенное перемещение .
Так как И= Итsinшt, то
F= (u;e:tcт + U2 • cos 2шt)\ас
2
деист
до•
Среднее значение силы равно:
2
F _ Vдейст.дС
ер- 2
до·
(11)
(12)
( 13)
( 14)
Обычно 1в емкостных датчиках пульсации с дво.йной ча
стотой •совершенно не оеказываю'Гся вследствие инерции
пластины .ротора, поэтому доС'гаточно 'Ра·ссматривать сред
нее значение силы.
Значение силы и момента для всех емкостных датчиков
дается формулами:
и2 ас
F=2до;
и2 ас
М=2да•
Для датчиков с d = const (датчики с переменной
F=И"Е дs=443-1о-sи2ь.
2dдд
'
d•
М=и2€дS= 443.lo-sИ"Ьр
2dд'У.
'
d•
j
S):
(15)
Для датчиков с S = const (датчики с переменным d):
F=443. 10-1И"S
'
d;/.
J
(16)
13
i.., '
:1 ;де S - площадь перекрытия пластин, см
2
;
1\ " d - расстояние между ними, мм;
"\. И - напряжение на пластинах·, в;
F - сила, возникающая между ними, Г;
\ /1.1 _момент, действующий нз подвижную пласти
ну, Г. с.м;
Ь - ширина пластин, c.JJ -t;
р - средний радиус пластины, см (для пов:эротного
датчика) .
Пр им ер. Рассчитать силу, действующую между двумя пласти-
нами конденсатора, если:
напряжение между пластина-ми И= 100 в;
п.•ющадь пластин S =2 см;
расстояние между пластинами · d= 1 мм .
Расчет ведется по формуле (16) :
F=4,43 · ю--1. 1002 · 2=9 · 10-з Г=9 мГ.
Пр им ер. Рассчитать момент, возникающий в датч ;.ке с пере-
менной площадью пластин S(d=const), если:
напряжение на одной пласти н е и 1 = •10.0 в;
Ширина пластины Ь= 1 см;
средний радиус датчика р =2 см.
Расстояние между пластинами статора и ротора d= 1 мм.
Расчет ведется по формуле (15) .:
,
М=4,43 • 10--в . 1002 •1.2=9 · IQ--4 Г · см=О,9 мГ ·см.
Помимо схем емкостных датчиков с одной подвижной
частью - ротором, где отработка ведется на каком-либо
другом элементе (потенциометре, сельсине), сущепвуют
схемы с емкостными датчиками, с отработ~ой на статор
этого же датчика (•рис. 6,а и 6,6). В таких схемах могут
быть использованы любые дифференциальные датчики. Та-
14
ll!J8cmBumeльнь1u
а.лемент
r...---. - -ol
~
: !(ротору
_FJ'\__y _J ·
tJamvuкa
двигатель r~5п'Ре.лна
___
..;.,
1
r
>
-,
1t
-
1 мностныи Усилитель
1
1Bamvu .,
__j
L..---------------
/f статор!/ оат11шrа
Рис. ба. Структурная схема следящей системы
с отработкой на статор емкостного датчика.
Рис . 6б. Схема следящей системы с отработкой
·
на статор емкостного датчика.
кое пос11роение выгодно там, где не нужна дн.станционная
передача. При этом точность работы системы повышается,
инструментальная погрешность .изготовления ~самого дат
чика (за исключением несовпадения осей ротора относи
тельно статора) в таком слу
чае не играет роли. В такой
системе выходная ось следует
за входной осью линейно.
Существуют также устрой
ства, в которых отработка ве -
дется непосредственно на ро
тор емкостного датчика. На
пример, при сравнении двух
механических усилий на пру
Ротор
c::::J c:::J Статор
Рис. 7. Применение емкостного
датчика в качестве нуль-инди
катора.
жинящую опору ротора емкостного датчика действует раз
ность этих усилмй (·рис. 7), а 1сигнал 1раосогласования ис
пользуется для уравнивания эт.их усилий.
Выбор 1шпа датчика и ·способа 011работки производится
конструктором исходя из 11юнкретных требО1ван:ий, предъяв
ляемых к проектируемому прибору:
Глава вторая
ДВУХЛУЧЕВЫЕ ЕМКОСТНЫЕ ДАТЧИКИ
1. Датчики с переменным d
Емкостные дифференциальные датчики с переменным d
устроены в ос-новном одинаково: между двумя параллель
ными пла-сrгина·ми, расположенными одна против другой,
на которые подается э. д. с., помещается третья подвижная
пласт.ина-ротор, ·перемещающаяся поступательно. С этой
пластины и осуществляется съем сигнала на усилите,1ь
(рис. 8). Та.кой да.тч1щ целесообразно использовать в си-
15
стемах с небольшим 1постуmательным .перемещением. - Эк·ви
валентная схема -включения датчика изображена i;,a 1рис. 9.
Обозначим через d 1 расстояние между нижнеи пластн
ной статора и пластиной ротора. а через d 2 -
расстояние
Тохос'hем
cz:z===!l=c===i !-я пластина статора
Л.пастина ротора
cz;;:::z:z:z:;z:Q::;p2Zi:::z:z:z:zi~-eпластина статора
Шт он
Рис. 8. Емкостный датчик с переменным d.
между пластиной ротора и верхней пластиной статора ,
·при этом ''d1 +d2 =dJ=const; S1 =S2 ; е1 +е2 =е0•
Составим уравнение равновесия моста :
1
S2
ei И1 IXc1
ыС1 с; E"d; !!.!_ .
е;=тт; = lxC2 =-1 -=c-; -=-s;-= с/2 '
roC2
еdi
е1d1•
(l 7)
е;-=-ст;-·
(18)
Так·им образом, в схеме ·С потенuиометрической отра
боткой, изображенной на ·рис. 10, от1работка будет линей
ной при условии равенст1ва площади перекрытия пластин.
Рассмотрим механические силы, действующие на ротор
датчика с переменным d. Определим механ.ические силы
при И1 =И2 =И. Тогда
U~C1 W_ U~C2 F_дW1•р_дW2•
W1=--2 -;
2-
2
i-aa · 2-~·
Рис. 9. Эквивалентная схе
ма включения датчика с пе•
tременным d .
Jб
F=-4 43.l0-7u2Es1.
1
'
2'
d1
F =+4 43.10-7 u2es2.
2
,
d2,
2
F=F1 +F2 =
=4,43-10- 7U 2s(
5
~-
5
\)· (19)
d2
d1
При Si=S~ и di=diF=O.
Таким образом, механичеrское усилие, действующее нз
ротор датчика с переменным d в среднем положении при
равновесии системы, равно нул ю .
Положим d1 >d2, но И,= U2. Тогда F>O . Знак«+» озна
чает ст·ремление :силы увеличить коардинату. Следователь
но, механическая сила направлена в сторону от положен_ия
равновесия, и пол ожение ротора, СТ'Р'ОГО говоря , неустойч и
во. Абоолют~ная величина силы мала, одн аа<о в не1Которых
системах эту ·силу все же приходится учитывать (например,
в системах, где ·por.op датч ика под!вешен на упругой нити) .
:i111·
~
/
/
>
L----·-------- -
_/
/
/
/
Рис . 10. Схема следящей системы с датчиком с пе
ременным d и полным использ о ванием отрабатываю
щего [1 0 тен ц иометра .
Определим усилие, действующее на ротор датчика с пе
ременным d при И1 # И2 , но в положении 'Равновесия:
В положении равновесия
U1
di
. и;=ё i;·
.
Следовательно, и в этом случае F =О.
Определим значение крутизны 1выходного сигнала на
различных участках работы датчика с переменным d прн
условии равновесия системы.
Преобразовав уравнение (6) и пренебрегая членом
R(C1+C2) по · сравнению с единицей, получим:
дU
дiГ::::::: 0,885-10-
12
rшRsS(.!.!_-~)] = 0,885 (J)RsS deod 10-
12
•
1
L
di d2
\2
(20)
2 в . А. l'ЩIOl)OBCJ>Иi\ .
17
или
(21)
При линейной отработке крутизна сигнала не постоянна
(увеличивается к краям диапазона) .
П р и м ер . Рассчитать крутизну сигнала и определить необхо ди
мый коэффицие:нт усиления усилителя для ·микрометра с емкост.ны м
дифференциаль ным датчиком с переменным d.
Параметры датчика:
Датчик круглый с наружным диаметром пластин
Сумма зазоров • •
•••
Начальный зазор • . •
.
.
.
.
•
Конечный зазор . . . •
.
.
.
.
.
Ходротора.. •• • • •• •• •
Допустимая нечувствительность • •
(0,005о/о от диапазона) .
Напряжение питания датчика • • .
Частота питания системы . . . . • •
Сопротивление утечки сетки первого каскада .
Мощность отрабатывающего потенциометра • • • • •
Напряжение трогания отрабатывающего двигателя .
Схема системы изображена на рис. 10.
Dн =.30 мм
d0=2,5мм
d10= U,2мм
d2o= 0,3мт
f).d = 2,0 мм
бсl==О,! MIC
е0=100в
f= 400 гц
Rc=1,0Мом
Р0 =5,О вт
итр -= 1,0 в.
Расчет системы ведется на минимальную крутизну сигнала :
d
d1 =d2 = f=l,25 мм;
1
дU = 0,885· l0- 12wReSe0 -d
d '6d=
12
0,885 · 10 - 122Jt400· 106 · I 7t· J,52.100.10- 14
1,252
=О,! мв.
Коэффициент усиления усилителя (по напряжению)
итр
k= дu;
1
k= O,l ·lO-i
-1 0 ООО.
(22)
Усилители, пригодные для данного слу~1ая, с выходом на дви·
гатели ДИД-0,5 и ДГ-0,5 изображены на рис. 59 и 60.
Мощность, потребляемая цепью сопротивлений моста:
d0
2,5
Р=Р0 М =5 т=6,25 вт.
18
Общее соrtроtивление цеrtй
и• 104
R=p=625
=1600 ом*.
.
Принимаем Rn = 2 ООО ом. Найдем до бавочные сJпротивления :
..
d,.
0,2
R,o = Rnм=20JOт = 200 т.1;
d2o
0,3
R2o = Rnдd =20002=зоо ом.
2. Датчики с переменной S
Бмюостные дифференциаль1ные датчикм с переменной
площадью и постоянным зазором разработаны в несколь
ких вариантах.
Наиболее простым является да'Г'fик с пл·оскими пласти
нами .статора и р:0то'Ра, где ·сигнал снимае'f1ся с ротора
(рис. 11) .
.
Его модификацией являю11ся два плунжерных датчика~
изображенных •i:Ia рис. 12 1И 13-
Статар датчика, изображенного на рис. 12, состои·г · из
двух колец, запрессонанных в пластмассу. Ротор - метал -
Рис. 11. Включение датчика с пе
ременной S в схему.
лический цилиндр, закрепленный
на изоляционной втулке, укреп
ленной на штоке, который пере
мещается вдоль оси. Шток испол
Р ас. 12. Плунжер
ный емкостный
дифференциаль-
ный датчик.
няется полым, сигнал с ротора передается проводником,
проходящим внутри штока, и затем безмоментным волос- .
ком на вход усилителя. Этот датчик пригоден как для ди
станционной передачи с отработкой на потенциометр, так
и для отработки на статор.
·
ле * ~аким образом, допущения, сделанные при составлении эквива
нтнои схемы рис. 5, справедливы.
2*
.
19
Статор датчика, изображенного на рис. 13 [J1. 8], со
стоит из д!ВУХ нитых лент, •впрессованных в плаrстмаесовый
цили•нд~р. Цилиндр 1стат·ора уКJреплен .на подшипниках и
может пово.рач-ивать·ся .вокруг оси. Ротор rпредставляет со
бой металлический цилиндр с винтовой нарезкой. Ша<г резь
бы •СТа'!'ора и ротора одинаков. Отработка производ:ит·ся на
статор датчика. При этом ·ротор перемещает1ся поступа
телыю ~вдоль оси, а -статор паворачи~вает1ся ~вокруг этой оси.
В данной схеме отсутствует 'Ряд по-грешност1ей, прису
щих системам с другими датчиками перемещения, напри
Рис. 13. Винтовой
емкостный диффе
ренциальный дат-
чик.
мер шаговая погрешность и некоторые
другие. В ·связи с тем, что отрабатываю
щая ось делает поворот на значитель
ный угол, ету систему можно иопол ьзо
вать и для дистанuионной передачи дан
ных, использовав во второй ступени
обыкновенную дистанционную передачу
на сельсинах, получив в общем высокую
точность.
При поступательном перемещении
ротора возникает сигнал рассогласова '
ния, для его ликвидации отрабатываю
щий двигатель поворачивает статор
в cтopofiy уменьшения рассогласования.
Таким образом, на датчике •преобразует
ся поступательное движение ротора во
вращательное движение статора, 'ПРИ -
. чем
зависимость между ними линейная.
Подобная •схема не является дистанционной. Тем не менее,
она может найти широкое применение для ми.крометров
высокой точности и других точных приборов. При неболь
шом шаге ·нарезки малое перемещение ~ротора вызывает
значИ'Гельный угол поворота статора. При диаметре ротора
10 .мм, длине его 15-20 .мм и част.оте питания 400 гц точ
ность такой с·истемы может достигать десятых долей ми
крона.
На рис. 14 'Изображен другой вид емкостного дифферен,
циального датчика с переменной S . Здесь ротор датчик~
заземлен, а съем сигнала ·осуществляется •С неподвижн ои
пла·ст.ины, расположенной симметрично относительно пи-
тающих пластин.
·
Экнивалент~ная 1схема включения датчика с неподвиж
ны:м токосъемом изображена на рис. 1'5.
Здесь С1 и С2 - емкости соответственно между первой
20
1
1·
и · 11гороИ статорнЬI/vШ пJ1астинами и •ротор·ом; с/ и С2 -
емкости соответственно между первой и .61,орой статорны-
u
~
с'
ми пла•стинами и заземЛ'еннои пластинои рото•ра; 0 - е :..1 -
кость между пластиной токосъема и завемленной п.nасти
ной ротора (С~ =ioonst).
р ас·смотрим влиян и е этих емкостей на выходной. сиг -
е' с'
нал. Емкости 1 и
2 шунтмруют низкоомные цепи от;ра-
батывающего потенциометра. Так как их абоолютное зна
чение очень мало, они практическ,и .не искажают работу
низкоомного (десятки килоом) потенциометра- Ем.кость С~
rюстояrнна, мала, ее влияние окажет·ся в небольшом умень -
Р
стн т
3111~1
Рис . 14: Включение емкостного
дифференциального дат•щка с не
подвижным TOKOCЪftM O M .
Св
P.ic. 15 . Эквива
лентная схема с
неподвижным то -
косъемом.
шении выходного сигнала и измене н ии сдвига фа'Зы . Емко
сти С 1 и С2 являют,ся основными ·рабочими ем·костями, оп
ределяющими ·ра'6оту оист,емы, так же 1<ак и в случае
съема си~нала с ротора.
По ·сравнению ,с датчиком, изображенным
этот датчик с неподвижным токосъемом имеет
ществ:
на рис. 11,
ряд преиму-
1. Ротор датчика заземлен, что, как правило, сделать
ко.нстр)"ктивно проще, чем тщательно изолировать его.
2. Съем .сигнала осущест•вляется с ~неподвижной пласти
ны, .следовательно, не надо устраивать ~скользящих .или во
лос:~ю•вых КD'Нтактов.
3. Датчик ·с ·н€подвижным токосъемом легче экраниро
вать от наводок.
4. При перемещении пластины ротора в направлении,
перпендикулярном ходу, крутизна ·выходного сигнала не
. :v~ен яегся .
21
5. Уменьшаются 1'ре6ования к изоляции промежутkа
между питающими пластинами,u так как о~ всегда экрани
. рован
от то1rосъе.ма заземленнои пла1стинои.
Э'I'От датчик может найти применение в качестве нуле
вого датчика ·в таких приборах, как акселерометры ie отра
боткой рассогласавания, а также в д:истанцион'Ных переда
чах с ·ограниченным углом перемещения. В этом случае
целесообразJНо выполнить его ·по :рис . 16.
11
11
JL
(-'
-- -1 Jo\..t- -
-
'
/
1r
11
11
Вив по 11
Рис. 16. Да1"1Ir1к с неподвижным ток (, съем о м д "1и
дистанционно~й передачи.
Составим уравнение моста, включаюшего датчик с пере
меннойSприd1= d
2
:
и:ли
где
S 0 =S1 +s2 =const;
е0 =е1 +e2 =consC
(23)
(24)
Из (24) следует, что также, как и в случае датчика с пере·
менным d, в схеме с датчиком с переменной S и потенцио·
метрической обработкой зависимость между углами пово·
рота оси ротора и щетки потенциометра линейная. Разни·
ца заключается лишь в том, что если 1в схеме с пере.мен·
ным d при движении ротора датчика к пластине а щетка
22
потенциометра отрабатывалась так }~е к пластине а, то
в схеме с переменной S при поворо1'е poтCiJ'pa к пластине а
щетка потенциометра отрабатывается к пластине 6 и на
оборот (рис. 17) .
Рис. 17 . Схема следящей системы с датчиком
с переменной S и отрароткой на потенциометр .
Ра.ссмот.рим механические с.илы, действующие на ротор
датчика с переменной S :
ufc ,
И~С2 . _дW1. _ дW2.
W1===-2-; W2- -2-, F1 - -ад'
F-дд,
F 1=0,443· 1О-в U~ е :~о; F 2=0,443- IO-в U~ е ~.
1
d,дl'i
дS
Но aa=b=const; а d 1 =d2 = d.
+
о8Ье
2
2
F=Fl F2=0,443-l
-
т(И,- и2).
(25)
Таким образом, F=O только при U1=U2, т. е . в середи
не датчика. Во всех остальных случаях, если положение
рассогласования отрабатывается, F=FO. Если же система
построена так, что отрабатывается сам ротор датчика об
ратно в нулевое положение 1и U1 = U2 =const всегда, то до
полнительное усилие, испытываемое •ротором со .стороны
статорных пластин, •равно нулю в любой точке при устано
вившемся положении ротора. Этот вывод правилен лишь
до тех пор, пока ротор датчика находится под обеими
пластинами статора. Если же ротор выведен за пределы
одной из пластин статора, он испытыnаетсилу F= О,~43 ь~ U2
,
втягивающую его под вторую пластину. Следовательно,
диапазон отклонения ротора датчика должен быть ограни
чен. диапазон отклонения ротора дощкеf! б1>пь ограничен
23
также еrде и потому, что в противном ·случае рот ор выйдет
за пределы статора, и сигнал, снимаемый с ротора, после
некоторого максимума .начнет уменьшать.ся, хотя рассогла
соваiНие будет ;ра1сти. После тото · как ·р1о•тор1ная пластина
совсем выйдет за пределы статора, 'Сигнал, снимаемый
с токосъема, будет равен нулю.
. Определим
з;начение крутизны выходного сигнала на
различных участках датчика с переменной S при условии
раюювесия системы . Преобрановав уравнение (6) и прене
брегая 'Членом 1R(C1+C2) по ·сра·внению с единИiцей, полу
чим:
Считая dS1=-dS2
,
при рассоглзсш ши п снст е:vr ы со сто
роны датчика получим:
дU ( 77. (0-12 "!_RE ео
дS"' ::::: '
d'
или
:~ ;..::::; 1,77. J0-
12
х
-
для постуrттельных датчиков и
для поворотных датчиков,
·где Ь- ширина пластины статора;
Р - средний радиус статора;
ох - перемещение ротора, ел~.
При рассогдасовании системы со стороны указателя
дU ~О 885-10 - 12 wReSo
де,
'
d'
где
(26)
(27)
(28)
Та.ким образом, крутизна сигнала, снимаемого с датчи
ка, постоянна в любой точке диапазона.
Нужно отметить, что выведенные формулы пригодны
для датчиков с перемещюй S любой конструкции .
•24
,
t1 р и мер. Рассчитать емкостныИ ло:ворот11ый датчик с переменно~!
::> с неподвиж1ным токосъемсм и опредеn~ть . коэффициент усиле
ния усилителя системы при следующих параметрах:
Средний радиус статорных пластин . .
•.
.
•.
.
Ширина пластины статора • • .
.
•.
••.
·
•.
Зазор между пластинами и токосъемом .•. • ••
Максимальный угол поворота р от о ра ( о т нейтраль-
р=Зсм
Ь=1см
d=1м.и
ного положения до упора) .
. амакс = 10°
Частота питания .
••.
.
.
••.
.
•••.•
f= 400 гц
Напряжениепитания.............
U=100в
Сопротивление утечки сетки первого каскада .
Rc=1,0Мом
Напряжение трогания двигателя .
Uтр= 1,0.в
Допустима я нечувствительность
оа= 1" ==4,8Х
х10- 5 рад
Расчет ведется по фор;v1уле (27).
Сигнал при допуст имой нечувс тв ительности :
1,77 -10- 12. 2·r.·400- lО'Ч. 100·3.1 -4,8- IQ-6
лине•1 =
1
=6,4· 10-6 в·
Необходимый коэффициент усиления
1
k = б,4-I0-6 =J,6 - lOs .
В данном
вгл.5.
Пр им ер.
и определить
микрометра со
случае может б'ьпь применен усилитель, описанный
Рассчитать винтовой емкостный датчик t переменной S
необходимый коэффициент усиления усилителя для
следующими параметрами :
Диам етр ротора датч и ка
Величина зазора .
Длина ротора • •
Ход ротора •••
Частота питания ..
Напряжение питания •
.
.
•
Dp= 10 .мм
d= 0,2 мм
l=15мм
Хо= 10 ММ
f=400щ
е0=100 в
Сопротивление утечки сетки первого ка-
Rc=1,0Мом
•
•Uтр=I,fJв
скада ·
....•..•••..
Напряжение тр о гания двнгате.11я • • .
До пустимая нечувствительность • • •
О1·раб отка производится на статор датчика.
!\"=0,1мк
Так как ход ротора всего 10 мм, можно делать систему б.ез допол -
нительного гру;боrо отсчета. Принимаем шаг резьбы датчика л= 10 мм.
Статор имеет двухзаход.ную резьбу .
·
Принимаем:
ширина металлической полосы Ьм = 3 мм;
ширина промежутка
Л-2Ьм
Ь119 =
--
2
- =:=2 ММ·
25
Ротор имееt ОJ~Нофазную резьбу. 11ринимаем Ширину зуба ьр'
.=
5 В~~~ренний диаметр ротора принимаем равным Dвн = 6 мм.
Длина внутренней полости статора
L>l+Хо=25ММ.L= 30мм.
Чертеж датчика изображен на рис. 13.
схема вклю•1ения датчика в систему изображена на рис . 18 .
Длина винтовой линии (эквивалентная ширина пластины)
l
15
Ь=·тnD=1Qт.10=47 .lllM= 4,7С/11.
>
)
/
'--------------/
1
1
~
d/
/
Рис . 18. Схема след я ;цей системы с датчиком
с переменной S и отработкой на статор дат
чика.
Пороговый сигнал при д о пустимой нечу вств и тельностr1
0 885· IQ-IZ
дине•~= ' d
wRee0 bM =
о sss.10 - 12
·2'1t·400·l06 -l -100.4 1.10-5
'
О,2
'
=5,2. 10-
5
в.
Необходимый коэффициент
итр
k= --
д'1неч
усиления уснлителя
5,2.10-5
19 ООО.
При расчете мы пренебрегли членом У 1 + 4R 2C2 w2 , равным при
мерlfО единице. Проверим допустимость этого.
Ширина перекрытия одной ленты с.татора и ротора
26
5-2
-2-=1,5 мм .
Площадь перекрытия одной ленты статора и ротора
sп=ьпс =1,5·47= .70ММ2=0,7см2•
Емкость одной ленты стат<?ра и ротора
С = 0,885S=0,885·0,7 .=з I
d
0,2
'
пф;
Vl + 4R2C•cu
2
= J/l +4·10'2
· 3,12· 10-н.2,5· 106 =
='Jfl,00024 = 1.00012 .
Следовательно, nренебрежение допуст имо.
В данном приборе усилители, изображе н ные на рнс. 59 и 60,
также пригодны для использования.
3. Исправление нелинейностей n следящих системах
с емкостными датчиками
в некоторых случаях от следящей системы, включаю
щей в себя емкос'ГНый датчик перемещения, требуется вос
произведение на выходе некоторой функции, отличной от
.линейной. Обычно такая задача возникает тогда, коr.1а н::~
выходе системы требуется линейное ПЕ:>ремеще1111с от нс -
Рис. 19. А!!еро
идный датчик
давления.
-
---
Рис. 20. Схема преобразо-
11а 1111я п о ступательиого дви
жения.
которой величины х, в то время как сам ротор датчика, .
приводимый в движение другой величиной у = f(х), переме
щается нелинейно от х. Такая задача возникает, например,
в анероидных да.тчи-ках давления (рис. 19). Прогиб анеро
идных коробок ае яв-ляется точно · линейной функцией от
да:вления, в то .в:ремя как отрабатывающая ось должна пе
ремещаться точно линейно в соответствии с давлением.
Другим примером является преобразование поступатель
ного движения с помощью кривошипно-шатунного меха
низма во вращательное (рис. 20). Кривошипно-!патунный
механизм имеет переменное передаточное отношение в те
чение хода. Поэтому одн'ому и тому же приращению по
ступательного д'ВЮJШЮIЯ ·соот1ветствуют пр:и различных yr-
27
rvr<opa датч·и·ка различные приращения пере -
лах поворота pv" 1
·
ошенl'Я вь всех подобных ·случаях угол по-
даточного отн
,.
uф
u
.
.
выходной оси является неко'Го·рои ункциеи от пе -
ворот а я входноиu оси _ угла поворота ротора датчика .
ремещени '
·
u
р о'Гр им более подробно случаи, к·огда ро'Гор ем1<О-
а~м
u
.
стного датчика перемещается нелинеино от некоторого .?а -
аметра, а выходная ось должна перемещаться линеино
~rnосительно того же параметра.
Из уравнений ( 18) и (24) следует, чю на п ряжение, сни
маемое ·С одного плеча отрабатывающего потенциомет•ра,
!lропорционально пере:-.Iещению ротора емкостн ого датчИ'ка .
о.}
Рис . 21. Нелинейные ха рактер и ст н ки сиетемы .
Следовательно, если требуется получить линейное перел~е
щение отрабатывающей оси от некоторого параме-гра, до
статочно знать закон перемещения ротора еыкостного дат
чика от это го параметра и добиваться воспроизв.едения
этой функции напряжением, снимае·:м:ым с одного плеча п о
тенциомегрической схемы при линейном перемещении по
тенциометра . Например, ротор датчика перемещается по
закону 1V=f(x), изображенному ·на рис. 21 , а. Для того чrо
бы отработка была - линейной, нужно, чтобы выходное на -
0пряжение иэменялось юо закону U, =f(a) ('рис. 21,6), rде
f(a) отличается от f(x) то;1ько коэффициентом пропорцио-
нальности.
.
Существует довольно много способов во с произведения
необходимых нелинейностей на потенциометрах. Среди них
надо отметить такие, как намоrгка функционального поте:Н: -.
циометра (рис. 22,а), шунтирование отдельных участков
· потенц.иоме-гра добавочными постоянными сопротивлениЯми
(рис. 22,б), различные варианты подключения постоянных
сопротивлений к лwнейному потенциометру (рис. 22,в) и
некоторые другие . Способы получения различных 1НеЛ1иней-
,2s
ностей на потенциометрах списаны в литературе [Л. l , 9
и 10], однако пока еще нет простого и удобного способа
Построения заданной нели:нейнос11и простыми средствами-
с помощью линейного потенциометра и .небольшого количе
ства добавочных сопро'I'ивлений.
О)
IJ)
IJ)
г)
Рис . 22. Воспроизведение нелинейных функций на
потенциометрах.
Помимо потенциометров, в отрабатывающих узлах м0-
гут быть применены и другие элементы, например сель,си
ны. На ·рис. 23 пред:ста·влена схема дистанционной переда
чи, ·в которой применен емкостный датчик с переменной S
с неподвижным Т(ЖОсъемом, а в качестве отрабатывающе
го элемента - сельсин. Схема работает в ограниченном
~~~g\® >Р~
L--------~-----J
Рис. 23. Емкостная следящая система с отработ
кой на сельсин.
диапазоне, угол поворота ротора датчика колеблется
в пределах ±45~.
При .использовании датчика, изображенного на рис. 16,
получим следующее выражение для ·зависимости угла от
работки сельсина () от угла заводки ротора датчика а. :
COS (6 + 60°)_7t- 2а
cos (6 - 60°)
1r+2а'
29
или иначе
·
2а
О =arctg "r -
·
'lt, 3
(29)
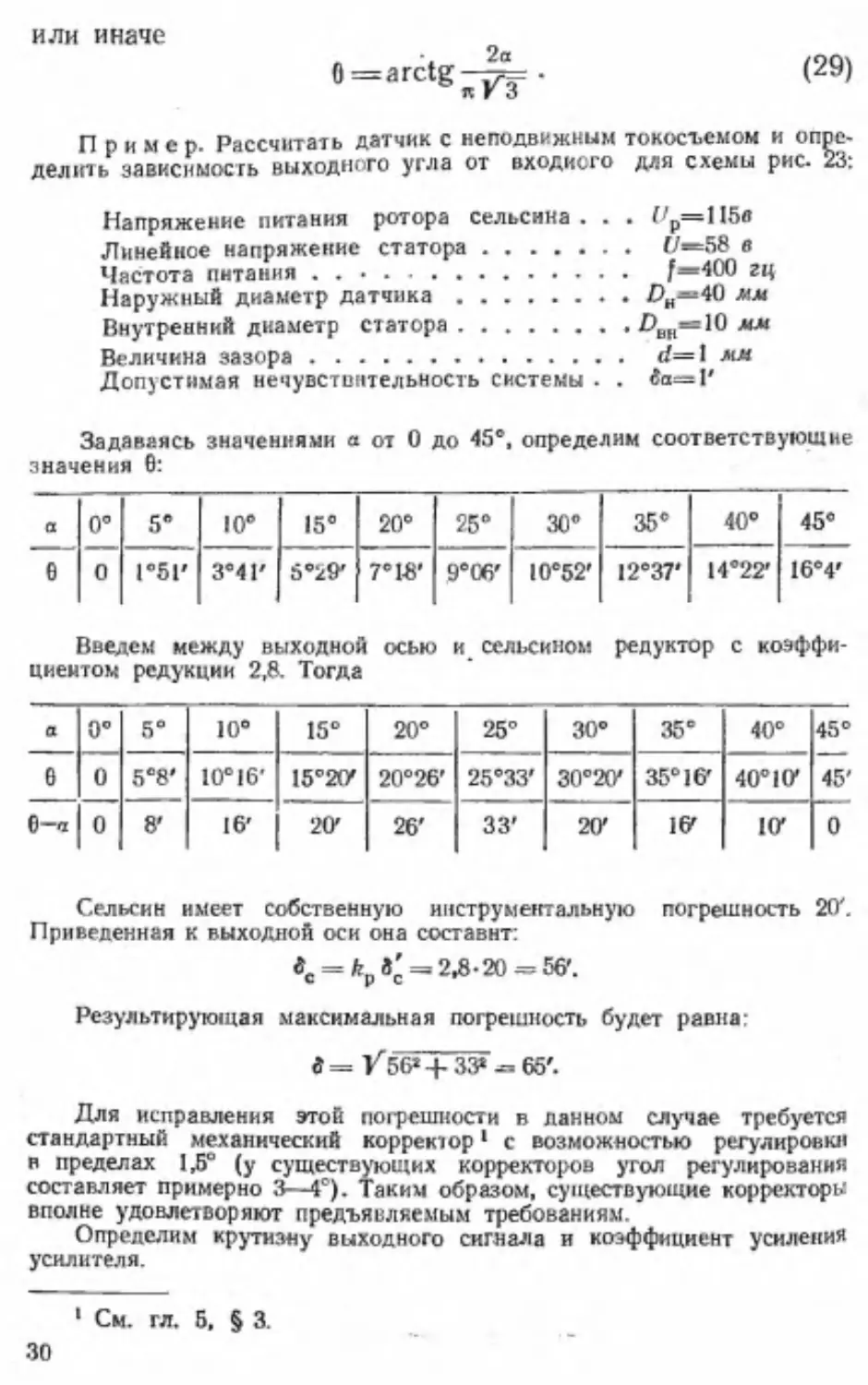
П р и м е р. Рассчитать датчик с неподв и жным токосъемом и опре
делить зависимость выходн ого угда от входн ого для схемы рис. 23:
Напряжение питания ротора сельсина .
Линейное напряжение статора
Частотапитания..... • •
Наружный диаметр датчика •
Внутренний диаметр статора .
Величиназазора..... •
.
Допустимая нечувс т в и тельность системы . .
Uр=115в
И=58 в
f=400 гц
• Dн=40 мм
• Dвн=IО мм
. d=l Mlit
Ca=l
1
Задаваясь значениями а от О до 45°, определим соответствующи е
з начения 0:
а10° 5°
10° J 15° 20° 25°
30°
35°
40°
1
45°
-e-lo 1°51 1 3°41
1
s0 29' 1°~.в1 _9°00
1
10°521 12°31
1
14°22
1
16°4
1
Введем между выходной осью и сельсином редуктор с коэ-ффи
циентом редукции 2,8. Тогда
а
оо 50
10°
15°
20°
25°
30°
350
40° 45°
---
--
---------
------
-
--
--- -
е о 5°8' 10°16' 15°20' 20°26' 25°33
1
30°20' 35°16' 40°10' 45 '
e-alo
-- --- ------ ------
---
--- -
8'
16'
1
201
26'
33'
201
Н>'
10' о
Сельсин имеет собственную инструментальную погрешность 20' .
Приведенная к выходной оси она составит :
t=kв
1
= 2s.20 = 56'
с
рс
•
•
Результирующая максимальная погрешность будет равна :
8=
-v562 +332 = 651
•
Для исправления этой погрешности в данном случае требуется
стандартный механический корректор 1 с возможностью регудировк.и
11 пределах 1,5° (у существующих корректоров угол регулирования
составляет примерно 3--4°). Таким образом, существующие корректоры
вполне удовлетворяют предъявляемым требованиям .
Определим крутизну выходного сигнала и коэффициент усиления
усилителя.
1См.гл.5,§3.
30
11ри noвopote ротора ·на угол ба. nлощадь пластины измениtсSJ на
D2-D2
"S- н
вн ,.
u-
В
ua.
(30)
Из формулы {26) следует:
21t
ila = 360· 60
=2,92 - J0- 4 рад = О,037о/0
от диапазона поворота оси;
0,885·21'400-106 • 1·58 (42-1 2) 2,92.10-•.10-•z
дИнеч =
1
=7·I0-
6
В.
Коэффицие1п ус ИJ1ения усилителя составит:
1
k=7
·Itl- 5 =15 ООО.
Таким образом, здесь могут быть прим~нены усилители, описан
ные в гл. 5, схемы которых изображены на рис . 59 и 60 .
4. Влияние линии связи на точность дистанционной
передачи
Если емкостный датчик применен в дистанционной пе
редаче, то датчик и указатель -соединены между .ообой ли
нией связи , дли.на кvторой достигает •иногда нескольких
деся-гкав метров и более. При оrладке м тарировке прибора
в заводских условиях обычно невозможно предуомотреть
длину линии СJвязи, -с которой бу:цет экоплуатироваться
прибор на практике. Поэт-ому тариро'Вка mрибора обычно
про·и1з1Водит1ся с кор~откой линией связи, а по~~решность,
в•озникающая ·от уrвеличения дли~ны линии, как пра.вило, не
учитывается. Однако из1Вестны случаiИ, 1Когда у~величение
длины ли~нии авязи •на 1-2 .м уже выводило !Прибор за пре
делы дапу~скав, и :по одной этой !Причине приборы браrюва
лись. Таким образом, необходимо .всегда знать степень
влияния длины ли1нии на 1показа~ния 1Прибора, а также
знать .меры, .которые необходи;мо принять для уменьш енщ1
этого влия•ния если это необrоди1мо.
Во избежа~ие наводок провода, соединяющие отраба
тывающий потенциометр, •расп-ол·оженныИ в указателе, и
31
еМ!КОСТ'НЫЙ да'ГЧИК, рас.по.i:ЮЖ8ННЫЙ •В блоке дат'Ч1йка, ДОJ!.Ж
НЫ быть экранированными, а эк.ра·н •заземлен. При}том ем
кости проводов могут достигать больших значении. В таб
лице 1пр.иве~ены значения удельных емкостей ('величина
емкости 1 м пр о вода) для различных марок экранирован
ных проводов .
Марка провода 1Суд• 1
nф/м
lgi
Мар1< а провода
Суд• /
пф/м
tg~
БПВЛ Э-0,35
lбJ 0,08-0, l
БПТЭ-0, 35
130
0,00
БПВЛЭ-0,5
200
БПТЭ-0,5
150 Дляf=
БПВЛЭ-0,75
225
Дляf=
БПТЭ-0, '15 165 = 500 кгц
БПВЛЭ-1,0
245 = 500 кгц
БПТЭ-1,0
l8U
Рассмотрим ·в л ияние паразитных емкостей ·соедин и
тельных проводов на точность показаний прибор а с двух
Jiучевым ем.костным датчиком . Емкости пронодов оказыва
ются включенными параллельно плечам отрабатывающего
потен ци ометра (рис. 4).
Составим выражение для относительной э. д. с., сни
маемой с одного плеча потенциометра, при шунтировании
обоих плеч потенциометра одинаковыми паразитными
емкостями С:
··
r
ll
А относительная погрешность
ной величине
r [(R-r)Ср+l]
2г(R- r)Ср+R
показаний окажется рав-
Ояределим, в каких точках диапазона погрешность
равна нулю:
r(R2
-3Rr+2r2 )Cp=O.
32
Уравнение имеет 'I·ри корни : ·
r1=О;r2= 0,5R;r3= R.
В этих точках ~погрешность полностью отсутствует.
В свнзи •С тем, что ~раньше сиrете~ма была на·строена на
определенную фа'зу оиnнала, и после у1величения длины
линии система будет :реаги.рова'Гь только 1на .сигнал, и:мею
щИй ту же фазу. Поэтому и погрешность ~в показаниях бу
дет да·вать только та ча.сть дополнительного сигнала, кото
рая имеет первоначальную фазу.
Положим р = jffi и найдем · аК'Гивную •и реакт.ивную части
дополни:тельно:rю с:Игнала:
д( )- r(R
2
- 3Rr+2r2)Cjш
ш- R[2r(R- r)Cj(J)+ R} •
Нас интересует только часть си.гнала Re [д (ш)]:
о=Relд(ш)]= 2r
2
(R- r)(R2- 3Rr+2rZ)С•ш2•
R[R2 + 4r2(R - r)2 C2ro2}
r
Положив т=у, получим:
0= _21_
2
_
(_1 -_т_)_( _I -_з_y_+~2~1_2)_R_
2
_c_2w_
2
l + 412(l - 1J2 R2с2ы2
(31)
По этой формуле может быть определена относитель
ная погрешность показаний прибора в любой точке диапа
зона (у) при емкости соединяющего провода С, сопротивле
ы
нии потенциометра R и частоте питающего напряжения f 2'/t •
Если же к концам потенциометра подключены добавоч
ные балластные сопротивления, то погрешность должна
вычисляться по другой формуле:
Rп
гдеР=R.;
~ 212 (р - 1) (р2зр1+212)R2c(J)2
о - ~7-с--,--~,---~~-'-сс-~-с::---=--
-
р[р•+ 412 (р -1)•R'C•(J)•J
'
Rп - полное со.пр')тивление цепи потенциометра, вклю-
чая и балластные сопротивления.
·
.
Определим расположение максимума ошибки и ее · вели
чину в формуле (31), для чего приравняем нулю первую
Производную от о..
3 В. А. Ацюковский.
33
Пренебрегая членом 4у 2 (1 - у)2 R2C
2
w
2
по сравнению
с единицей, получим:
или
откуда
о'~ [2у2 (1 -У) (1 _:_ Зу+2у2) R
2
С2ш
2
]=
= 2R2С2ш2(5У
4
-
10.f
3
+6у2
-
У)=О,
5у4 -10у
3
+6у 2 -у=О,
у1 =О; Уз ~o.s+ JI0,05~ О,724;
r2=l; у4 o,s - iro,os.::::::0,216.
Первые два корня значения максимума не дают, тре
тий и четвертый корни указывают расположение максиму
мов ошибки, которая равна:
0
_- + - 0,0175 (RC(J))2
макс- - l+0,16(RC(J))2'
(32)
где знак "плюс" справедлив для четвертого корня (ниж
няя половина потенциометра), а знак "минус" - для треть
его корня (верхняя половина потенциометра).
Пр им ер. Рассчитать максимальную погрешность показаний при
увеличении длины соединительной Л•ини.и iНа 40 м. Марка провода
Б'ПВЛЭ -0,:35. Частота питания 400 гц. Сопротивление потенциометра
5 ком. Балластных сопротивлений нет.
1110 таблице определяем емкость провода :
С=lпрСуд = 40·160=6400 пф.
Максимальная погрешность с ос тавит:
0,0175(5·103 ·6,4· l0- 9
-2 500)2
11
макс= l + 0,16 (5-103 • 6,4· l0-9
·2 500)2
=
1,12-I0- 4 ~0.0lo/o от диапаз о на.
Бели в результате ~расчета оказывает.ся, чт.о эта погреш
ность недопу.ст.имо велика, можно рекомендовать сле:дую
щиrе пут.и снижения погрешности:
.
1) уменьшение велrичины сопротивления цепи отрабаты
вающего потенциометра;
2) !3ыбор соединительных iiроводов с малой удельной
емкостью (напрiИмер, :~юаwс:иальных кабелей);
3) ~rтр·едва1рителыный учет ча:сти длины лини~и •rгри тари
ровке прибора.
34
Пами·мо шкаJi оной погрешности, вJiияние дли.ны соеди
нительной линии оказывается еще и в том, что •схема пе
рестает быть чисто нулевой сх·емой, так как но всех точках
диапазона {кроме v=·o, 0,5; l,O) имеется еще мнимая (ква
дратичная) составляющая сигнала Im [Л(w)J (составляю
щая ·сигнала , сдвинутая .на 90° относительно полезного сиг
нала), которая не компеноИJруется ·сЛ'едящей системой. Эта
часть сигнала меняется при прохождении диапазона и ее
можно про·смотреть на .осциллографе в •у;становивше:Jуiся со
.стоянии следящей сис11емы. Эта оос'Гавляющая вредна, так
как забивает тракт усилителя и делает пока·зания вав.иси
мыми от •внешних у;сл овий (параметры питания, темпера
ту:ра и пр.).
Глава третья
ТРЕХЛУЧЕВЫЕ ЕМК О СТНЫЕ ДАТЧИКИ
1. Описание и расчет
Наряду с двухлучевыми да'Гчика~ми к емкост.ным диф
ференциальным датчикам должен быть ·отнесен м трехлуче
вой датчик (1см. [Л. l l - 14]).
Статор трехлучевого да'Гчика состоит из ·трех пластин,
к кот.орым подводятея напряшения ·от статора сельсина,
ротор 'К'оторого пита·ется от юет:и (рис. 24). Ротюр трехлуче
вого да'ГЧ!и.ка имеет ·специальную фор.му.
Сигнал с ~ротора подается в усилитель. Отрабатываю
щий двигатель в•ращает ротор сельсина в сторону погаше
ния раооогласован.ия. При этом ем·костный датчик может
быть выполнен как без элек11рической редукции (когда од
ному ·обороту ротора датчика будет 1соотве'ГсТiювать один
обор.от рот<ора отрабатывающего ·сельсина), та;к и с элек
трической ·ред~укцией (1когда о,п;ному обороту оси рот·ора
емкост.ного датчика будет соответст.вовать п оборотов ро
тора отрабатывающего сель,сина, где п - чиоло редую.r:ии).
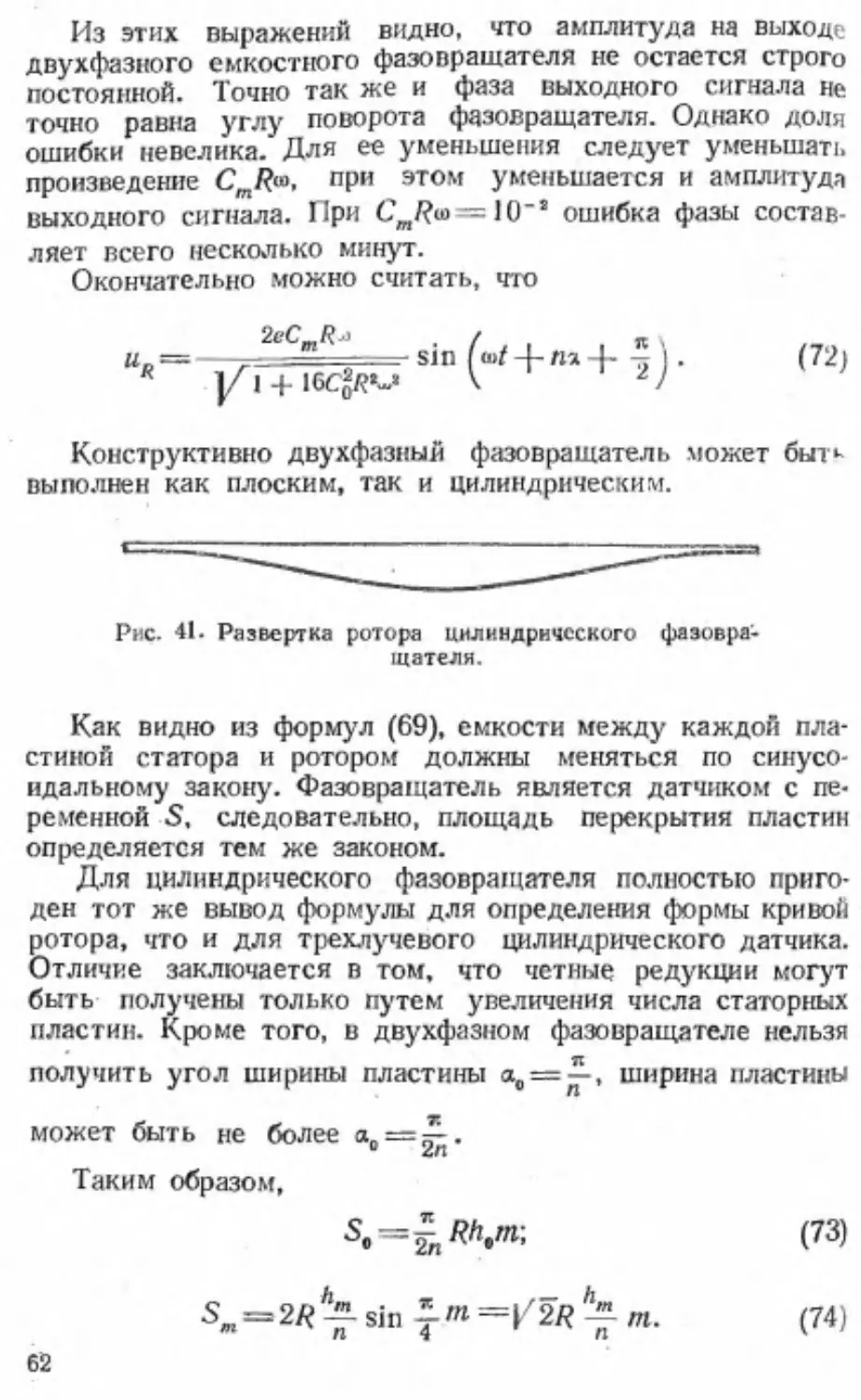
К:онст:руктивно трехлучевой дат:ч·ик может быть сделан
цилиндрическим или плоским. В цилиндрическом да·тчике,
изображенном на ри·с. 25, с'Гат:ор п:редста1вляетообой полый
цилиндр из изолирующего ма-гериала, на внут·реннюю по
верхность которого на'Несены 1меrгаллические пластины, со
единенные. !Между собой через две на третью и образующие,
та;ки.м образом, 11РИ группы. Роторам является металличе
сrоий цилиндр, вставленный в статор. По ·образующей рото-
3*
35
ф-·
а синусоида число периодов которой рав -
р а .вы резерован · •
,
.
еской редукции. Число пла·сrин статора
но числу элект.рич
равно либо Зп, либо 3/2 п.
В плоском датчике (рис. 26) плас'Гины статора ра.спо-
в одноиu плоскости. Р.отор выполнен .в виде фигур
ложены
ной пла·стины и ра.сполатает.ся над статором параллельно
ему. Число пластин и соединение их -в шлоском дат:чике то
же ч1ю 1и в цили.ндри~ческом.
'по принципу работы емкост~ый датчик долже~ быть
отнесен •К .д~атчика•м •С 1переменнrои S. По своему деист•вию
трехлучевой датчик а.налvгичен оельсину, ·И все включения,
t.;'
·~~~ >p,d
L----------------~
Рис. 24. Трехлучевая емкостная следящая система.
пригодные для селЬ1си1на, справещлиJВы и для трехлучевого
сМtкост.ног.о датчика.
Для правильной ·работы системы ,с емкостным трехлуче
вым датчиком необходимо, чтобы емкости между каждой
группой статорных пла·стин и ротором были соответственно
равны:
с1·=со+стsinф - для 1 группы;
)
C,=C,+cmsin(t+i-•)-для 11 группы; 1
С8= С0+Стsin (7+ -{-тс)-для Ш группы;
tJ;=na,
где С0 - постоянная составляющая емкости;
Ст - переменная составляющая емкости;
п - число электрической редукции;
}
1
'
(33)
а -угол поворота ротора емкостного датчика отно
сительно его статора.
Ротор сельсина питается переменным напряжением;
с сопротивления Rн снимается управляющий сигнал, посту
пающий затем в усилитель.
36
Рис. 25 . Цилиндриче
ский емкостный трехлу
чевой датчик.
Рис. 26. П.1юский емко
стный трехлучевоit дат
чик.
Напряжения, трансформируемые на статор сельсина, ·
соответственно равны :
e1 =evkcosfJ;
1
е,="e,k cos ( 6+i- •); 1
е=еkcos(б+ _i_
-rn\•1
з
р
3)'
е=е sinwt,
J
р
т
•
где ш - частота питающего напряжения;
k - коэффициент трансформации;
(34)
б - угол поворота ротора сельсина относительно его
статора.
ЭквивалентН'ая схема емкостной дистанционной пере
дачи изображена на рис. 27.
Уравнения схемы имеют вид:
~i1+R (i1+i2+i3)=e1; 1
1
t..1P
н
_ cl i2+R (i1+i2+iз)=e2; 1
2Р
н
_Cl iз+Rн(i1+i2+iз)=es,
~р
.
}
где р- знак оператора.
Решая систему уравнений (35), получим: .. .·
.
.
,
(е1С1 + в2С2 + езСз) RнР
ИR= (C1+C2 +C&)R.8 p _+!
(35)
(36}
Сущесmующие типы сельсинов не имеют вывода сред
ней точки, поэ-гому ее нообхqдимо искусственно создать .
Так ·как е 1 +е2 +"е3 =0, 'ГО nrpи С1=С2=Сз=С UR=O.
След.с~вательно, имеется ва~можность созда.ния искус
С1'Венной средней rочки из IQдJИJнакавых ем1костей. Ореднюю
Рис. 27. Эквивалентная схема емкостной
трехлучевой дистанционной передачи.
Рис. 28. Схема включения трехлучевого
емкостного датчика со средней точкой .
точку можно создать и из одина,кэвых сопротивлений.
Тогда схема nри-обретает вид, !приведенный на рис. 28.
Находим и;:
U = (е1С1 + е,С2+е3С3)RнР
ePkRнP
R
(C1+C2+Ca)Rн+I 3С0RнР+1 Х
X{cosO(C0 +cms(nl)l)+cos(6+ ~ ?t") Х
Х [Co+Cmsin (Ф+f ?t")] +co.s(o+ ; ~)Х
Х [co+C112 sin (t+ : 1t]}· •
38
Заменяя р = Jш, полуЧиrv! окончательно :
1,5 epkCmR.н(J)
и=
sin(шt+rp)sin(na-6), (37)
R
V9С~ R.~ ())2 + l
l
где rp=arctg ЗСрRн(J) •
Из формулы (37) следует, что ем.костный датчик с за ·
висимостями (33) ~подобен сель,си.ну, а нся ,схема - схеме
сельсин-трансфор;ма'Гора. Пр.и этом по.'Iучаеrг,ся, что в уста
новившемся режи:ме напряжение на ,сопр,отивлении Rн -
-
UR =0; ·следовательно, показания системы не завиrеят от
из·менения нап1ряжения и •rа.стоты (при условии отсутст'Вия
наводок в схеме) .
Из формулы следует, что при равенстве между собой
сопротивлений з'Везды угол ·повор~ата оси !р'отора сельсина
на выходе дистанционной передачи пропорционален уг.пу
поворота оои р'О'юра датчика на входе дистанционной пе
редачи и больше него ·в п раз, где п - число элект~риче
шюй ред;укции датчика .
Р аосм~отрим- проявления механических сил 1В трехлуче
вом датчике.
Для емкостного трехлучевоГо датчика выражение для
механической ,силы nриобретает следующий вид :
3
F=aa~=:а~ uJ ci.
l=I
Определим механическую силу:
р= И~дС1 + U~дС2 + U~дС3 _
2да
2дz
2да
+U
2
n2Cm [cos
2
6cosa+cos
2
(о+~ Тt)соs(па+-~ Тt)+
+cos
2
(o+f Тt) соs(па +f Тt)j= О.
(38)
Механическая сила, возникающая от напряжения на
емкости, при любом положении !ротора трехлучевого дат·
чика относительно его статора, равна нулю.
·
·
Трехлучевой ·да1\чик является датчик·ом ,с переменной S
Н постоянным lf. Емкости между группами плаегин и ро·
39
торам ·пропорцианальны их 1площа.дЯ"м перектрытия (если
пренебречь краевыми эффектами):
C1==S1;
C2=S11;
Сз=Sа•
Определим характер кривой ротора для цилиндриче
ского датчика:
".
S = Jf(a)da ,
",
поэтому
dS
f(а.)=da ·
Для 1 группы пластин
dS
f1 (а)= da
1
= nRh cos па;
для II группы rшастин
f2 (a) = d:U.
2
= nR1icos(na+
2
/ 8 7r.);
для 111 группы пластин
dS
fs (а)= da•=nRh cos(na +
4
/8т;,).
(39)
Следователыю, для .о,,беспечен.ия •завиаимостей (33)
образующая ротора должна иметь синуооидальный харак
а
тер, статорные плаег.ины должны
быть расположены равномерно
по окружно;сти и ~и·меть равную
ширину.
Определим на1ивыгоднейшую
:площадь статорных :пластин.
fX+tx.o
О бозна'Чим через ао угол, за·
Рис . 29. Определение ши- нимаемый •пластиной статора.
·рины пласт_ины статора .
Для получения наибольшего
сигнала необходимо, чтобы Ст ·
был-о :возможно 1больше, а С0 - .возможно меньше. Опреде-
JШМ ширину одной пластины (рис. 29):
·
"+".
S=R J (hn+hmsinna)da=S0 +smsin(пa+Фo).
"
40
где п- число электрической редукции;
R - радиус ротора датчика.
«+tto
tt+tto
S=R S h0da+R J hmsin nada;,
S·Rh"
hm.(
na0\ • na0
=
0а0+2Rns1n па-2)Stn2 .
Очевидно, что
S
hm•na0
=2R-stn- · ·
т
п
2'
S
.
nao
1
т имеет максимум при stn Т =
, или
(40)
(41)
(42)
Элею1р1иче:ская редукция может быть получена двумя
способами :
1) путем увеличения количества плас11и.н •ста11ора и со·
ОТ'ветс'Гв-е:нно числа перию~ов синусоиды ~ротора;
2) путем увеличения только числа периодо.в синусоиды
ро'Гара.
,
Во втюром случае могут быть получены только числа,
не кратные 'Грем, так tКак иначе ротор ·становится ·симме
тричным ·статору, и онИ~мае:м-ый •Сигнал ·равен нулю. Обыч
но :вторым .способом поднимают редукцию в 2 раза, уста
на•влrивая ·Соотношение пластин статора и периодов сину
соиды ротора равным 3/ 2• Даштейшее увеличение редукции
за счет только числа периодов си.нуеаиды ротора при
водит к заметному уменьшению амплитуды выходног:о сиг
нала.
При получении редукции по первому способу нельзя
разместить необходимое число пластин с шириной а0 =
1t
2/'/С S Y3Rhm В
=п· поэтому ао= 3n'а т
h
о втором
h
случае это сделать можно, поэтому Sm = 2R : .
·
Нужно отметить, чго h0 > hm, так как S0 +Sm si~ Ф>О.
Разность Лh=h0 -hm определяется из конструкtивных
соображений, причем с увеJ1ичением дh растет С0 , и по
JJезп~й сигнал уменьшается, хотя и очень незначительно.
·11
Пр им ер. Определим геометриqеские ра змеры ротора е.м~шс ·r.
.ного трехлучевоrо датчика и коэффициент усиления системы .
Наружньfй диаметр статора
Высота статора • .
•·
Угол поворота ротора . • • •
•
Dн= 50 MJ.t
• Нет =18.lltM
ат=30о
Зазор между статором и ротором .
Сопротивление утеч1ш сетки первого ка с- •
ка да ..•. ... ... ... ..
..
Линейное напряжение статора отрабаты
в а ющего сельсина • .
.
••...•
.
Допустимая неqувствительность с и стемы
d = 0,4 JlfJlt
е11 =-16 8
{Ja = 20''
Для того чтобы система не выпала из синхронизма, нужно чтобы
при полном · угле поворота ротора датчика электрический угол не пре
вышал НЮ0• Иэ этого условия определяем редукцию:
п= 180. 1
а'
n=
1
: =6.
(43)
Принимаем : ротор содержит шесть пери одов синусоиды, статор -
девять пластин, соединенных в три группы по три пластины .
43
Опр-еделим геометрические размеры ротора.
Примем то.11щииу стенки статора Ьст =3 мм.
Диаметр ротора равеи:
DP = Dст -2Ьст -2а = 50-2·3-2·0,4 = 44,2 .лtМ.
(44)
Высота ротора
ПОJЮЖИМ:
Нр<Нст- Ь;
нр ~ 15 Jlt.i\t.
НР=h0+hm= 14мм; дh= h0- h111= 1 Ml>t.
Найдем:
h0=7.5мм;hm=6,5мм.
Уг о л, занимаемый пластиной стат о ра:
7t
7t
«о=n =5 рад=3\Jo.
Определим S 0 и Sm:
(45}
Так как в каждой группе· статора по три · пласт ины, емкости ('0
и Ст соответственно равны:
с =О 85тs0 = 3.О,38·0;885
о,8d
О,4
2,5 пф;
с =о 885 тsт = 0,885 -3·0,48=32 пф.
т'
d
1,13·0,4
'
Пороговый сигн ал (Upk == 16 в)
l,5·16-l06 ·3,2-l0-1
"-2:-t400
дт;R =
sin 6-20'' =
У 9·lU12
·3,22 -l0-24 . 4n2 ·400• + 1
о 192
V8
'
5,56· 10-4 = 1,07·\О- 4 в.
5, ·10-4+1
Коэффициент усиления усилител я
Итр
k= дUR =1,07-lU-4 l,07·1U-4 9,4 .\03 = 9400.
Таким образом, эдесь, как и в предыдущих схемах, могут быть
применены усилители, схемы которых изображены на рис . 59 и 60.
Определим форму ,кривой для :роторной пласт:ины пло
ского датчика. Требуе11ся найти за-в1исимость p = f(a) в по
лярных координатах, где р - текущий :радиус, а-текущий
угол 1:ivpинoif, огибающей пластину ротора.
Пластина ~статора представляет •собой
в сектор, vграниченный двумя радиусами
l(ТJL!l...-?7"'77771 и двумя концентри<чеС'кими окружностя
с ми (рис. 30) . Пла·стина ротора ограни
ч·ена определяемой ~кривой.
Рис. 30. Определе·
ние формы ротора
плоского датчика.
Найдем площадь dS перекрытия nла
·стин статора пла,стиной ротора на угол
da (четырехугольник ABCD):
1
1
dS= Тp2da- Т R2da,
(46)
а полная · площадь перекрытия одной пластины равна:
«+ао
S = 5{(p2
-R
2
)da,
(47)
о:
где а0 -угол, занимаемый пластиной статора.
Положим:
2
2L2
2па
р=Р1-гР2cos 2•
(48)
43
тогда
S
12•па0
m=Tp2SШ 2··
(50)
S
.
па0 l
т имеет ма1<симум при sш
2=
, ИJ!И
.
Обозначим число статорных пластин в группе через nz .
Так же как и для цилиндрическог:> датчика в случае
получения редукции за счет статорных пластин,
2 'lt
ао=з·п·
тогда
S
п(2+12
R2'
.
1
о=3i1Р1 2 Р2-
,т,
}
S
12•п-т
1
m=Tp2s1n3.
}
(52)
В случае увеличения редукции за счет числа периодов
'lt
ротора и а0 =п=
'lt
2
12
')
So=2п (Р1 +-у Р2 -!(т~
1.2
5т=Тр 2 т.
Таким образом, окончательная форr~ула,
форму кривой ротора, имеет вид:
1/2+2 2No'
р=fР1Р2cos2.
(53)
(54)
определяющая
(55)
··
* Вы вод .фоf.мулы (55J в основном аmлогичен приведен·ному
в[Л.11]и[Л.14.
44
Пр и м е р . Рассчитать n jюСкий емкостноtl трех л учевой датчик
со следующими параметрами:
Наружный диаметр . .
Внутренний диаметр . . . . .
Зазор между статором и ротором .
Линейное напряжение сельс и на . .
Частота питающего напряжен и я .
Допуст имая нечувствительность
Чис л о редукций
•.•
.
.
Положим:
.
Dн= 60 мм
.
..
D8н= l0 MAt
d = 0,5мм
ил=58в
f=400щ
l>a= 30
п,=2
n2= 3
Рмин = Р1 = 13 .мм; v1-i + Р~ = Рмакс=28-мм.
Опредедим:
Р2= VР~акс- Р~=У 282- 132
= 24,8 MAt.
l-й сдучай: п = 2.
Построим функцию профиля ротора .
р= У132 +24,8
2
cos2a = У169 + 615 cos2a.
а
о
±10°
+20°
± 30°
±40°
±50°
--
р
28
27,7
26,6
25, l
23,0
20,6
а
± 70°
+80° ±90° ± 100 °
±110°
+120·
р
15,5
13,7
13
13,7
15,5
17,9
±60°
17,9
± 130°
20,6
а.
+140°
± 150°
±160°
± 170°
±180°
---
р
23,0
25, 1
26,6
Чертеж датчика приведен на рис. 31.
П о формуле (53):
27,7
S0=
2~2(132+ ~ 24,82 - 10
2
) =538 Аtм2 = 5,38 см2;
l
sm= 2 24,8
2
• l =308мм2=3,08см2;
0,885·5,38
С0=
0,5
=9,5 пф;
0,885·3,08
ст= 0,5
5,45 пф.
1,5-58 - 1ов.5,45.10- 1 2.2.400.1,39· lО- 4
ДТ/ --
.
.
=
-· R - Jf 9·1012·9,52•I0-24
·42 ·4002+ 1
i,67· l0- 4
::-г:=====-= 166- J0-4 в.
V5,l ·J0-1 +1
'
28
Рис . 31. Плоский датчик с ре
дукцией, равной двум.
Рис. 32. Плоский датчик с ре
ду1щией, равной трем.
Коэффици е нт усиления усилитедя
1
k= 1,66-IO -~-6.1оз.
2-й случай п = 3.
а
р
16
Построим функцию пр о фил я ротора
р =У132 + 24,82 cos23/2 а=Jf169 + 6i5 cos2 3/ 2 а:
а
о
+10°
±20°
р
28
27,2
25, 1
а
±60°
±70°
±80°
р
13
15,2
18,3
± 120° ±130° ± 140° ±150°
28
27,2
25, 1
21,8
Чертеж датчика приведен на рис. 32.
По формуле (52) (т =. n):
±3{)0
±40°
21,8
18,3
±9'00 ±100°
21,8
25, 1
±160° ±170°
18,3
15,2
±50°
15,2
± 110°
27,2
1 ±180°
1
13
S0 = ~ (132++24,8
2
-
102) =875 м.м2 = 8, 75 см2;
'1t
'1t
sm =-т 24,8 2 siп ·3=835 мм2 = 8,35см2;
0,885-8,75
Со = -~=15,5 пф;
0,885-8,35
ст= o,s
=14,9 пф.
1,5·58·10" · 14,9 ·I0- 12
• 27t· 40U· l ,39· I0-4
ЛUR =
=4,5·10 ··4 в;
y9. ю12-15,52.10- 24.47t2.4uo2 + 1
1
k = 4,55· IO-~ 2,2 · 1ов.
Усилите л и, пригодные для схем с рассчитанными выше датчи
ками, описаны в гл. 5.
В ряде случаев :необходимо использовать ем.костные
датчиКJи с большой ·редукцией, достигающей нескюльхих
десятков. Такая ,задача возникает, например, тогда, коiда
мы располагаем небольшим пере1мещением чувствительно
го элемеН"Га, и ·ротор емкос11ноnо датчика ~поворачивается
на небольшой у;гол; ·В то •время как стрелка ука.зателя долж
на повернуться на значительный угол.
•
При большой реду.юJ,ии емкостного датчика становится
затрудн.и•гельным кзrо'Гови1ъ рат-ор с •с1инусоидальной фор
мой ·зубьев. Кроме того, здесь уже ·сильно С.Ка"Зывают.ся
краевые эффекты, искажающие поле.
В этом случае целесообразно выполнить конструкцию
следующим образом.
В статор •запрессовываются узкие плас11ИНЫ, ч:исло I<О
'Горых определено числом •редукции, так же .как и .в трех
л.учевых .датчиках •С небольшим ЧИIСЛОМ редукции. Каждая
пласт.и-на имеет ласточкин хвост, коrорый способствует
удержанию пласт.ины ·В пла·стмаосе. Ста'Гор изгатавли-ва·ет
ся сл едующи м образом. Сначал а ·вытачивает.ся заготювка
в виде 11юльца, лучше всего ,из латуни. Чертеж заготов.ки
изображен на рис. 33,а. Изоляционные промежутки на cra-
rope след~ует делаrгь .не менее 0,5 мм. После заnрессавыва ~
ния кольца в пластмассу ·статор растачивае11ся изнутри и
снаружи. Чер теж ·статора йзображен на рис.33,6. Снаружи
протачиваю'!\ся 'r.ри К;руговые к а навки, .в которых ра•спола
гается провод, ·сое\!I,иняющий :пластины статора между с•о
бой через две на 11ретью, образуя три гру~ппы пластин.
Ротор пр ед.ставляе'Г ·собой 1<1руглый дюралюминиевый
цилиндр с выфрезерова.н.ными на нем ·пазами (q:эис. 33,в) .
Пазы ·ротtора имеют прямоугольную форму .и ра.сполагают
ся ~равномерно по окружности . При отнощении числа ро
торных .зубьев к числу сrат.орных пластин, •равному 1/з , ши
рину паза следует делать равной при1мерно 2Ь03 + Ьм.
где Ьпз - ширина из-оляц'Ии между пластинами статора,
Ьм - шир'Ина металлической пластины отатора, а 1при от
Н9щt;нии 2/ 3 шиrрина паза будет ;равна 0,5 Ьпз +0,5 Ьм.
17
18
а)
б}
Рис. 33. Цилиндрический датчик с большой ре
дукцией.
Таким ·спос с.бо :м можно получить ·редукцию п;римеiрно
ОТ 20 ДО 100. Для получения :коэффициента редукции боль"
ще 100 нужно применять специальную т~нолоnию.
-
2. Исправление нелинейностей в следящей системе
с трехлучевым датчиком
Исправление !1 елинейностей в системе с трехлучевым
датчикюм путем из .менения электричесюих параметр ов . си
стемы воз.можно при ·работе •системы .в пределах 1:80° эл.
Регулир.овка системы под заданную нелинейность m1р·9из
води11ся путем изменения соотношений сопротивлений
звезды.
Как из·в·е1с11но , •ПЮле, ,пульси·рующее .в пр~ос11ран:стве,
можно разложить на два вращающихся поля -прямой
посл·едо.вательности и обратной по
·следовате льности. Можно с:читать,
что эти поля ·создаются каждое
с'Воей оистемой трехфазного на1Пря
жения. Векторная диаграмма од
ной .из этих систем построена на
рис. 34.
Здесь АВ, ВС и СА - •векторы
напряжений, наводимых в статоре
сельсина •СО стороны ротора; AD,
BD и СD-падение напряжений на
трех еМ"костях датчика; АО, ВО и
СО-падение напряжений на сопро
11
r:
Рис . 34. Векторная ди а
грамма трехлучев о й сис
темы.
тивлениях IЗ'Везды; OD -напряжения на сопротивлении
Rн схемы.
При повороте ~ротора емкостного датчика точка D пе
ремещаегся по окружносТ!И, центр которой ·совмещен
с центром треугольника АВС. При этом элекrрический
. угол
поворота ротора е.мкост:ного датчика равен длине
дуги этю·й окружв:ости .
Точка О звезды совмещена с центром 'I'реугольника
АВС !В том случае, когда все три ·сопротивления звезды
в точности ~равны между собой. При этом угол, проход.и
мый вектором OD, равен углу поворота ротора ·сель.си.на.
Если же соЦ!рот.ивления "Звезды не равны между еобой, точ
ка О смещаеТ'ся относительно центра треугольни~ка на не
R:отарую ·величину а (рис. 35), тогда угол поворота сельси
Rа будет равен у~глу САВ. · ·
4 В. А. Ацюковс11иf1.
49
В этом ·сл•учае на.пряжение на сопротивлении иs;о6ра
эится вектором АВ. При .вращении 1ротора датчика точка·
В перемещается по окружн9еги, при вращении же ротора
сельсина ,в~ращае11ся нся векторная диаriрамма 0оистемы;
при этом действите.Льный сигнал на оопр~отивлении Rн бу
дет равен проекции вектора АВ .на .некоторую неподвиж
ную ось, изображающую положение ротора сельсина .
Установившееся положение ~оистемы на'СТУПIИТ ·ютда, .когда
проекция этого вектора на ось положения ·сельсина станет
равной нулю. Таким образом, при перемещении точки В
с
Рис. 35. Смещение
звезды.
8
Рис. 36. Векторная диаграмма
скомпенсированной системы.
по окружности при понорот{j> ротора емкостного датчика
на угол СОВ отрабатывающий двигатель разворачивает
ротор сельоина на угол САВ.
Определим зависимость между электрическими углами
пово.рота ротора датчика и ро11ора сельсина:
g!)
L СОВ= ф-угол поворота ротора датчика;
L САВ=6-угол поворота ротора сельсина.
Из треугольнйка АОВ находим:
АО
08
siпLАВО siпLОАВ'
L_OAB=180°-6;
L АВО= 180°-(180°-6)-ф=6- ~;
АО
ОВ
ОВ
siп (6-ф) siп (180° - 6)
sin 6
Окончательно
fJ- ~= at·csin .~ sin6,
(56 )
Таким образом, погрешнос•rь приобре~ает аркоинусои
далы-rую зависимость . Такая заВ1исимость поз·воляет
ком1пенс'ИрО1Вать д аволь·но разнообразные нели1Нейности при
усло~вии, что ок.ончательная регулирО1вка прои~.но:д:ится ме
ханическим ~Iщррекrо1ром, выбирающим околю 2% погреш
вости :И при у.слови.и, что porrop датчика поворачивае11ся
.:на всем диапазоне на угол, ра;вный 180° эл.
Ооставим методику кор•ректиро1вания пюгрепп-ю·ст.и от
велинейности lf!оворота оси ротора датчика .
Раосмо'l1рим векторную <д.иаr~ра1мму рис. 36.
Здесь АО, ВО и СО - напряжения .на 0сопрютивлении
звезды, точка М - нача льная точка угла поворота !ро.то:ра
.
датчика, точка N - конечная точка угла поворота р·отора
датчика, точка К - положение оредней точки з·ве31ды, при
которой и1мелась бы та•кая же поnрешность, как ·от нелиней
ности входных з1Венье~в . За1дача за•ключает1ся .в том, чтобы
оmредел:ить поло·жение еl'ОЙ тоrч.юи К, т. е. узнать ·длину и
положение веtкт:ора ОК и компенсировать его, омещая точ
ку О' 1в :проти1вополоЖ'ную ·стор·ану.
Опред·елим имеющуюся лог.реш1юсть системы. Для это
го уста1Ноним угол поворота ротора датчика ра1вны:м
180° tЭЛ . После этого -определим функцию О -'ф=f('ljJ) и
:юегроим эту зависимость. Эта за1ви0сИJмость приближенно
я;вляется !Прео6разова.нной еа•виоимо0стью •от (56), ее выра
жением служ:ит формула
sin ф
О - lji = arctg ---'---а- - 1)1.
соsФ - ,--
(57)
Для удобства считаем, что ротор датчика поворачи
вается равномерно, а нелинейности обусловлены смеще
нием средней точки.
Определим положение максимума погрешности:
(6-ф)~=(arcsin f-sinfJ)'=0.
Так как ...!!:._ < 1, решение единственное:
r
cosО=О; О= ; .
э
б
900
то значит, что максимум оши ки сдвинут на угол
от .На'f!lравления ;вектора ОК и лежит 1В точке L .
-4"
.
51
Н айдем положение ·векторов АО , ВО и СО {)Тliооитель.
но ;начала отсчета .
Закор:атим одно и-з сопроrивлений , тогда центр звезды
переместится в ве:ршину .треугольника (напр~имер, .в точ
ку В) , :и указатель отрабо11ает это положение , встав под
углом 90° •К направлению ВО - в точку Р. Отсюда опреде
ляются на·пра1вления всех векторов : АО, ВО и СО.
Неюбходимо отметить , что нас , как правило, интересует
испра~влен:ие хара~кт~ери1стики не угл'а rювюроrга ротора дат
чика , а :входной в1ел;ичины, ·С .которой угол поворота датчи
ка связан функционаюшо. Это обстоятелЬ:ство •сути дел а
Рис. 37. График ошибки следящ ей трехлучевой системы.
не меняет, можно непосредственно ·компенсировать нели
нейности шюд1-юй величины.
Таким .образом, методик.а )!'Странения полрешности за
ключается в следующе:м:
1. Путем подбора передатю.чного отношения .на 'Входе
датчика установить угол поворота ротора емкостного дат
чика ра;вным 180° эл. при .п1о~л.ном ив.менении ~входной вели
чины перемещения. Например, при эл·ектричеакой редук
ции, ра1вной шест:И', у.го~л :по1ворота р-ото·ра еМ'IЮСТ'Jюго дат
чика нащо установить равным 30°.
2. Снять погрешность и построить график kвх - kук =
= f (k0 x) (рис. 37), где kвх - перемещение входной вели
чины, а kук - перемещение стрелки указателя .
3. Определить. положение максимума погрешности н а
этом график·е (·юч.ка L) .
4. Отлшшить от этой 11ачки в обе .стороны 1по 90° эл . и
от пересечения вертикаль:ной ли.нии, пр.оведенной через
эти засечки , •с ·графиком ошибки в точ0ке iR' провеет.и гори
зонтальную линию. Ошибкой я:вляет~ся расстонние LR от
'ГОЧКИ L до этой линии.
52
5. Закоротить о~но из сопроти·влений ' звезды и 0П1реде
л.ить положение указателя . Подгоняя kвх в эту же точку,
добить·ся та11юго положения, чтобы при .из:мен-ении этого
сопр·оти'Вл•ения •с'Грелка ука·зателя оставал ·ась неподвиж
ной. Отме11ить это положение ;на графике (то ч ка А ).
Выведем ·сопротивление А ~и закороти1м поочередно со
противления В 1и С. При этом •В одном случае система пой
дет впра•во, в другом - вл·ево . От точки А отметим через
1:20° .вправо и •влево точки В и С.
6. На ра1сстоянии 90° от каждой точки ·слева поста·вить
от.метку положительного максимума, а ·оправа - от.рица
тельного .
7. Определить, между каыим~и макоиму:ма1ми, пrрО'ГИ!ВО
полюжными по знаку .ма1юимуму ошибки, находиvся ма
ксимум ошибки .
8. УстаноВ1Ить ~систему в точку L и ~выправить ошибку
L-R , уменьшая ·соответствующие .оопротивления, выбирая
каждым из них долю .ошибки, 'Обратно п1рапо:рциональ~ную
рас.стоянию положения его маwси.мума до пол'Ожения ма-
, к,оимума ошибки .
9. Возвратить 0систе1М'у 'В нулевое положение и смести'ГЬ
стрелку указателя, установив е1е на нуль.
Несмотря на кажущуюся сложность этой мегод1и.ки,
посл·е ~не:~юторой тренир.ав1ш электрическая («векторная»)
регулировка ·одного ,ко;м1плекта занимает не более ча.са
у одного челО1века ·С .квалификацией техника. Практика по
казала, что так;им способом .можно р·егулировать нелиней
ности, достигающие 40-50% от ,диапазона .
Таким ·обра1зом, .система ·с трехлучевым емкостным дат
чиком обладает ·весьма широl{jи:ми ре1гули·ровочны.ми воз
мож1юстями.
Определим крутизну сигнала системы с трехлучевым
емкостным датчиком, :в которой ттр·оизнеде:на !Векторная ре
гулировка. В 1нексrюрых •случаях закон ·изменения .крутиз
ны ·сигнала играет важную роль, например, тогда, когда
в систему требуется iВвес11и .некоторый дополнительный
еигнал от постороннего иС'Гочника для принудительного из-
менения показаний указателя.
"
Чисто аналитический вывод формулы для вых01:1.ного
сигнала при различных сопротивлениях эвезды громоздок
и не дает четкого представления о ~происходящих процес
сах. Гора•здо проще произ:веости •вывод этой формулы не
посредс11венно из векторной диаграммы ри·с. 35.
Кру1ш'Зна сиг.вала при •малых от1клонениях о·т положе-
53
11ш1 равнов еоия прямо пропо1рционаJrьна самой .веJшtrине
вектора АВ, так как п:р·и малых от.клонен.иях проекция это
го вектора на ось положения ротора сельоина пропорцио
нальна длине этого вектора. Поэтому достаточно рассмо
треть из.менелия вектора АВ п1ри изменении положения ро
тора датчИ.ка (лри затар1може.н~ном р!о'Горе сельоина) или
изменении положения ротора -оельсина (при неподвижном
роторе датчика), чт.обы опР'еделить ·к;рутизну сигнала .
Из треугольника АВО находим:
AB=VA02 + OB2
-
2AOOBcosL_AOB=
= }/a2 +R2
-
2aRcos tjJ=
=RVI +( ~ / -2; costjJ,
или
Выражение для сигнала в зависимости от угла пово
рота ротора датчика в установившемся режиме системы
получим, умножив полученное выражение на величину ра
диуса окружности , равную:
R
1, 5epkCmR "w
.
=
·
s1n(шt+.Ф)
V1+9C6R;, (J)2
•
•
'
(58)
в результате чего получим:
Ия.=
sш(tot+cp) 1+ -
-
· 2 - costj;.
l,5epkCmRнw •
v.(а-)2 а
V1 +9C6R~ w2
R
R
(59)
Для того чтобы получить выражение сигнала через
угол поворота ротора сельсина, рассмотрим треугольник
АОВ. По теореме синусов напишем:
АВ
R
sinф- sin(180° - fJ)
а
sin [180° ~ (180° - 0)-ф]
'
или
54
отсюда
и далее
sin(O - tjJ)=; sinO
АВ sinф
sin[8- (6- ф)]
Jr=SinlJ=
sin 8
-
_
sin8cos(8- ф)-cos8sin(8- ф)
sin 6
откуда после несложных преобразований и принимая во
внимание (56), получим:
-4J=V1- ( ~)2sin
2
О- ; cosО.
У множив выражение на величину радиуса, найдем окон
чательно выражение для выходного сигнала как функцию
угла поворота ротора отрабатывающего сельсина :
Из выражений для выходного напряжения схемы сле
дует, что крутизна сигнала оди накова на всем диапазоне
тольк·о в том ~случае, если а=О, т. е . , когда в-се •оопротивле
ния з·везды •равны -между ·собой. Но ·всех остальных слу
чаях крутизна переменная по диапазону •И меняется моно
'Гон.но от начала к ·ко1ю.r:у, ·воз1ра~стая 1или убывая ~в сзаази-си
мости от начала от-счета.
НеобхО1димо отметить следующую особенность: крутиз
на сигнала воэра1стает на том уча1стке, где одному и тому
же приращению поворо•rа ротора датчика .соответствует
меньшее приращение угла поворота po'I'opa сельсина, и на
оборот, что обычно и требуется в подобных системах.
3. Влияние линии связи на точность дистанционной передачи
В дистанционной ~передаче с трехлучевым емкостным
датчиком во избежание паразитных наводок необходимо
СТа'11ор сель.с:та соединять со ·статором да11чика экраниро
ванным.и проводами. При этом емкости этих пр.овод!ОВ при
соединяI011ся параллель'l-Ю сопротивлениям з:везды.
Е~слн 'В'Се -три оопротивдения звезды в точiюсти оди:на-
55
ковы, т-о ·средняя точка не смест:ится от присое~ш-rения ука
Занных емкостей, так ка.к эти три емкости в свою очередь
однаковы между собой. Если ж,е в оистеме была mроизве
дена векторная регулироока; то ·сопротивления 31везды ока
жутся •разными, 1и подключение ·трех О\/1.инаковых емк01стей
вызовет смещение средней точки звезды по потенциалу
ближе к центру т.р·еугольника АВС (рис . 36). Таким обра
зом, в системе вовни:mrет .искажение показания за .счет из
менения смещения средней точки, и, следовательно, однаж
ды произ1ве1денная тар·ировка ·С 'Iюраткой линией нару ·
шится, если ·в системе будет 'Применена длинная линия.
Расс"Мотр.им подробнее этот случай.
На ~рис. 28 шюбражена .охема .системы .с различными
сопротивления.ми 'З'везды. Определ1им э. д. •с. ~между точ:ка
ми а и 6 этой схемы (э. д. ·С. мешду центром треугольник а
АВС 1и ТQЧКОЙ О векторной диаграммы р.ис. 34) .
Соста.вим уравнения схемы:
е1=И1+i1r1;
е2= ul + i2r2;
е3=И1+i3r3;
i1+i2+i3-0,
гдеИ1-
искомое напряжение.
Решив эту систему, найдем:
Известно, что
Положим:
И _ e1r2r3 +e2r1r3 +e3r1r2
1-
r1r2 + r1rз + r2rз
el= epkcosе;
e 2 =ePkcos(fi+ 1201 );
е3 = еPk cos(lj+240')).
(61)
(34)
(62)
где т-некоторый коэффициент отношения сопротивления
Г2ИГ3КГ1•
Получим:
иk
1-т epk
1= еР cos61+2т ;.::::;--
3(1- т)cos6.
56
Если в систему вк.лючена длинная линия свsэ:з11, то парал
лельно каждому сопротивлению звезды присоединяются соот
ветственно три одинаковые емкости С (собственные емкости
проводов). Тогда в уравнения (61) вместо r 1 нужно подставить
Г1
Г2
выражение r
1
Cp+1
вместо r2 -
выражение r
2
Cp+1,
г
вместо Г8 - выражение rзСРз+ 1 и вместо U 1 -
выраже -
ние и;.
Система уравнений примет вид:
(63)
Отсюда
и' _ В1Г2Гз + В2Г1rз + e3r 1Г2
1 - Зr1r2r.Cp+r1r2 + r2r3 +r,r3 •
Подставив уравнения (34) и (62), получим:
и,
О
1-т
1= ePkcos 1+2т+3RCp·
(64)
Смещение средней точки звезды будет равно:
,
(l-m)ЗRCp
ЛИ=U1 -U1=- epkcosO(l+2m)(l+2т+ЗRСр)"
Так как т весьма близко к единице, можно с доста
точным приближением написать:
ePkcos0(1- т)RCp
ЛИ=- 3(1 +RCp)
•
Заменив р на jш, выделим вещественную часть сигнала,
которая и будет отрабатываться следящей системой:
(65)
57
Пренебрегая членом R.2С2ш 2 rю . сравнению с единицей,
находим выражение для максимального дополнительного
смещения центра звезды:
е kR2C2w2 (1 - т)
ли=рз
см
Определим величину т.
Так как величина И 1 относится к JURI (модулю сигнала ,
U
а
снимаемого с датчика), как /U~/ = -,-(см. ГJI . 3, §2), можно
написать, что
...::_=sin (О -
•'•)
= sinд
r
i MaI{C
ма кс'
где д = 6 - ~ - ошибка нелинейности,
торной регулировкой.
Отсюда
Из формулы (37) следует:
lu
l,5epkCmRнw
1-
~
R - v1+ 9C8R~ w2 .......
Таким образом,
и1
/UR/ - 1,БерkСтRноо
отсюда
выправленная
l - m=4,5C. R шsinB
ти
макс •
(66)
ве к-
Найдем отношение дополнительного смещения к jU RI :
дU
epkR2C~w2 (1 - т)
!U R/ = З· 1,5epkCmRнw
Отсюда окончательно ошибка от включения длинной ли·
нии в систему составит [см. (56)]:
о
·
(Rzc22·~
доп.макс= arcstn
ш stn {)макJ ·
(67)
58
П р им е р. Определить максимальную ,ошибку в днстанuионноli
_передаче с трехлу•zевым емкостны м дат •~иком. Векторной регулиров ·
кой выбрана ошибка в 30°.
Дли·налинии... • • • • •
.
.
.
.
.
°/пр= 40 At
Проводмарки............БПВJIЭ-0,75мм2
Рабочая частота . •
.
.
.
.
.
.
.
.
.
f= 400 и~
Сопротивление фазы звезды . . •
.
.
R= 2 ICOM
С=!прсуд= 40-225= 9ОООпф.
~доп.мак с= arcsin [22
- 1 0•.92 .10- 18
-2,52 . 106 sln 30°] = arcsin 10-s = 3,6'.
В случае, если ошибка от включения дл~инной линии не
допустимо велика, следует у ме.ньшать сопротивления звез
ды (пропорционально) или выбирать провода с малой
удельной емкостью , напtример, коаксиа л ьные.
Глава четвертая
EMl\.OC T HЬIE Ф АЗОВРАЩАТЕЛИ
Одним из видов ем0костных датчи.коо перемещения яв
ляются емкоrстные фазов:ращателИ.
Как известно, фазовраща11елем ·называет·ся устройство,
на выходе котО1рого имеется элеКТ1р.ическюе напряжение пе
ременного тока ·С постоянной амплитудой, фаза К'Отор.ого
пропорциональна или равна 'УГЛУ поворота оси его ротора.
Емкостные фазовращатели исполняются двух- и Тlрехфаз
ными.
1. Двухфазные фазовращатели
Схема включения емКОСТ1ного двухфаз.ного фа"Зовраща
теtr я изображена 1На рис. 38,а и 6.
Для .правильной ·работы фазовращателя необходимо на
пластины его статора подавать напряжения:
на I пластину
\
е1 = Esin wt;
на П пластину
на Ш пластину
(68)
e 3 =Esin(wt+тc);
Jia IV пластину
e4 =Esin (шt+ Зп)·
.2
}
59
Рис . 38. Схема включения емкостного двух
фазного фазовращателя.
При этом емкости между каждой пластиной и ротором
должны соответственно составлять:
С1 =С0 +ст sin па;
}'
C2 =C0 +Cmsin (па+-i}
С3 = С0 +Ст sin(пa +те); j
С4 =С0 +cmsin(па+-}- те)· }
где С0 - постоянная сост:;~вляющая емкости;
Ст- переменная составляющая емкости;
а - угол поворота ротора фазовращателя;
п - число электрической редукции.
(69)
Эквивалентная схема включения фазовращателя изобра
жена 1-щ рис. 39, а векторная · диаграмма - на рис. 40.
Здесь ОА=е1 ; ОВ=е2; 0С=е8; 0D=e4 ; AR, BR.
CR и DR- падения напряжения _ на емкостях , OR- падеQ
ние напрjJЖеf!IН! на сопротивлении Rн:
60
с
А.
.D
Рис . 39. Эквивалентная
схема включения фазо
вращателя .
Рис. 40. Векторная диаграм
ма схемы с двухфазным
фазовращателем.
Составим уравнения схемы рис. 39:
е1=(с ~ + t)i 1R+i2R+iзR+i4R; )\
1·р
е2=(с2~р +1)i2R+i1R+iзR+i4R; 1
е3 =(сз~р +1)i3 R+i1 R+i2 R+i4 R; ',i
е4=(с"~Р + 1)i4 R+ i1R+i2 R+i3 R; J
ИR = i1R+i2R+ i8R+i4R;
Определим ИR:
е1 (1-C2C4 R
2
p 2) (С1-С3) RP е2 (1-С1СзR2р2) (С2-С4) RP. \
.Ия.==1+(С1+ С2+ С3+ С4} RP+1+(С,+С2+сз+ C")Rp' 1
.
2eCmR p
!
хV<'-"iR'P'>+iи::.:.:ln:~~·p'+<--<d,R·p' х
1
J
Х sln ((J)f +пф)];
1
1
.
(70)
(71)
[I -(С~- 4 с~ +4 c~cos 2а) R2p2]
пф= arctg .
1
1
tg (па+]-}
[1-(С2-- с2 --с2 cos 2a)R.2p 2)
о4т4т
.61
Из этих выражений видно, что амплитуда на выход е
двухфазного емкостного фазовращателя не остается строго
постоянной. Точно так же и фаза выходного сигнала не
точно равна углу поворота фцзовращателя. Од!iаКо доJrя
ошибки невелика . Для ее уменьшения следует уменьшат ь
произведение CmRw, при этом уменьшается и амплитуд:~
выходного сигнала. При CmRw = 10-
2
ошибка фазы соста в
ляет всего несколько минут .
Окончательно можно считать , что
Конструктивно двухфазный фазовращатель ~южет быт•
выполнен как плоским, так и цилиндрически м.
---------
·--~----
Р ис. 41 . Развертка ротора цилиндрического фазовра~
щателя .
Как видно из формул (69), емкости между каждой пла
стиной статора и ротором должны меняться по синусо
идальному закону. Фазовращатель является датчиком с пе·
ременной .S, с.цедовательно, площцдь перекрытия пластин
определяется тем же законом.
Для цилиндрического фазовращателя полностью приго
ден тот же вывод формулы для определения формы кривой
ротора, что и для трехлучевого цилиндрического датчика .
Отличие заключается в том, что четные редукции могут
быть · получены только путем увеличения числа статорных
пластин. Кроме того, в двухфазном фазовращателе нельзя
1t
получить угол шир и ны пластины а.0 = n, ширина пластины
"
бо
1t
может оыть не
лее а.0 =
2
ri.
Таким образом,
(73)
(74)
62
Г! р и м е р. Рассчитать щlшшдрический . двухфазны!f фазовраща·
те ль:
Диаметр ротора максимальный . . . . . •
Высота ротора • .
.
•..
.
•.
•..
.
Минимальная то J1щина основания ротора
Величиназазора•••• . • • •
.
••..
Напряжениепитания......... •
Частота питания . . • •
.
.
••••.•
.
Сопротивление нагрузки фазовращателя
Число электрической редукции • • • . •
h0+hm= 15;h0-hm= 1мм.
h0= 8мм;hm=7мм.
Развертка ротора изображена на рис. 41.
Найдем площади S и Sm:
7t
DP ==;= 50 мм
Нр= 15 мм
Лh=lмм
d=0,4 мм
е=36в
f= 400 гц
Rн= 1 Мо.м
п=1
So = 25·82=314 мм2 = 3,14 с.м2;
sm = Jff.25.7 = 250 мм2 = 2,5 см2•
Емкости С0 н С111:
0,885·3,14
Со= 0,4
=7 пф;
0,885-2,5
ст= 0,4
=5,5 пф.
Выходное напряжение фазовращатеJШ (72)
2-36·5 5°I0-
12
·10
6
·2n400
О98
и-
.
.
R- YI + 16·7~·1024 ·l0 12 •47t400 2 V 1 +4,9-IO-a
0,98 в.
Форма п.ластины ротора плоского фазовращатеJJя (рис. 42)
определяется так же, как и в случае трехлучевого п.ло
ского датчика. Отличия здесь те же, что и у цилиндрич~:
\'1
ского фазовращателя; угол, за
нима~мый пласти.ной CTqTopa, не
7t
может быть больше, чем ·2п ,
и тогда
'/t(2+'l2
2\
•
.-=Е:::::=- So = 4п Р1
2Р2 -R) тn, (75)
Рис. 42. Плоский емкостный
фазовращ~телъ.
-(2 2
Sm~-4-P2 •
Формула, по которой
считывается зависимость
=f(a.), та же, что и (55):
i/22па
Р= JI Р1+Р2cos
2
2··
(76)
под
р=
63
r~· =
с~ ~(4:7:
~
~
Емкостный
двухфазный
плоский фазовращатель может
быть выполнен и с неподвиж
ным токосъемом. Токосъем
выполняется в виде кольца ,
рцсположенного нцд роторо м
(рис . 43). Ротор при это м за-
Рис. 43. Плоск и й фазовраща
тель с неподвижн ы м ток о- земляется.
съемом .
При это м S m подсчитывает
ся по той же формуле (76),
а за расстояние d принимается расстояние между статоро м
и токосъемом.
Пр им ер. Рассчитать емкост н ый дв ухфа з ный пло ский фаз о вра ·
щате ль со следующими параметрами:
Максимальный диаметр статора .
Минима ·льный диаметр стат о ра .
Величина зазора • • .
Редукция ... . . .
Напряжен и е питания .
Частота питания . •
.
.
Сопротивление нагрузк и
Определим р1 и Р2=
Положим Рмакс = 28 мм, чтобы
·
Dст.макс = 60 ММ
Dст.мин = 20 ММ
d= 0,4МА!
n=l
е=36в
f=400щ
Rн= 1,ОМом
избежать краевого эффекта ;
sмин = 13 мм:
Pt= Рмин = 13мм;
Р2=УР~акс-Pf= У282- 13
2
= 24,8 мм.
Построим функцию профиля ротора :
р2 =у132 + 24,82 cos
2
~= { 169+615cos2
а
2·
а
о
+10°
± 20°
+30°
±40°
± 50°
р
28
27,8
27,6
27,2
26,6
25,9
а
±60°
±70°
±80°
+90°
± 100° ±110°
р
25
24, 1
23
21,8
20,5
19,2
а
- +120° ±130° ±140° ± 150°
±160° ±170°
±180°
--
р
17,9
16,6
l&,5
14,5
13,7
13,2
13
Ем костный фазовращатель и зображен на рис. 42.
64
ОnределиIУ! напрnжен~iе на пы ходе фазовращатели.
S 0 = ~ (132++ 24, 82 -102 )=300 ..it,1t~ = 3 cJ.1 2;
S - v22482-
· )20
-
22 ·1·
m-
4•
-
~ МЛ'!-
,
с",
0,885 · 3
С0=
- - o:-r=G,7 пф;
0,885-2,2
·ст= 0,4
- 4,85 пф;
2·36 ·4 ,85·I0-12. J06•21t400
UR= -.f
,
0,87 в.
,.. 1+16-6,72 ·10 -24 • \0 12 ·41t2·400"
2. Трехфазные фазовращатели
Трехлучевой датчик может быть использован в качестве
трехфазного фазовращателя. Схема включения его фазовра
щатеJiем изображена на рис. 44, а и 6.
б)
Рис. 44. Схемы вклю•rения трехфазного фазовраща
теля.
На пластины статора необходимо подавать напряжения
относительно средней точки:
на первую пластину
е1= Еsiп(•1/;
ш1 вторую пл а стину
.
(
')\
е2=Е sin \шt+i 7t;;
(77)
ш1 третыо пласт ину
e1 = Esin (шt+ ~.-с).
}
.5
в . А. Al\ IOl((•BCIOIЙ.
65
Эквивалентная схема та же, что и д.Ля вк.r1101iения трех.
лучевого датчика, и изображена на рис. 27. Вывод урав
нения тот же, что и для трехлучевого датчика. Отлиqие
заключается в том, что вместо 6 фигурирует wt, а вместо
ePk siп wt фигурирует е. Тогда окончательный вид формулы
напряжения на выходе ф;~зовращателя сост;шнт :
где
l,5eCmRw
.
ttR= У
sltl (wt +ер - па),
9CgR2w•+ 1
1
ер = arctg ЗСо/(w .
Глава пятая
НЕКОТОРЫЕ РЕКОМЕНДАЦИИ
1. Рекомендации по конструированию емкостных
датчиков и их включению
(78)
При проектировании емкост:ного устройства пезави:С.имо
от его :ко1нстру1щии возникает вопрос креш1ения о<rдельных
его частей . Все детал·и датчика (кроме ротора 'В конс'I'рук
ции с неподвижным токосъемом) должны быть тщательно
к:sssssssssэ р Ст
Рис. 45. Разрез емкостного
датчика.
Рис . 46 . Эквивалентная схема
датчика .
изолированы друг ·от друга. Сам емкос'l'ный датчик обла
. дает
;высоким внутренним сопрО'Гивлением, достигающим
десятков и СJоте:н меrом.
РаосмоТlрим случай, когда :сопротивление изоляции, с по
. мощью
которой wрепятся пластины статора, недостаточно
высоко (рис. 45) .
При недостаточ·но высоком значении лонерхиостного со
противления .изоляци;и ·по ее 'Поверх·ности протекает ток от
одной пластины статора к другой, создавая на этом уча
стке ~падение на1пряжения. В.следствие нера:вномерности
66
своikтв нзоJ1яuни падение напряжения ~даль изоляцион
ного участка норав номерно. Отде "•1ьные участiки 1воляции
в свою очередь имеют определенную емкость .с п ластиной
р отора: емкос ть каждого элемент а находится под потен
циалом данного эл емента изол яци о н ного участка (рис. 46).
Пл ощадь пласти н как бы увел ич и вается, причем неодина
ково. Эк·вивалснтная схе.ма датчика вместе с ·сопротивле
н•ием утечки сетки нерного каска.да изображена .на 'РИС. 47.
Здесь R9 и С9 -эквивале н тные сопротивления и
емкость участка изоляции . Так как сопро11ивление изоля
ции велин.о , то при 1юмпенсации основноr~о сиnнала следя
щей системой сигнал от изоляционного участка остается
Рис. 47. Эквивалентная
схема датчика .
Unap
U116
Рис. 48. Вектор
ная диаграмма
схемы с пара
зитным сигна-
лом .
некомпенс,ированным. Фаза Э'rого .сиnнала •смещена на не-
1<0торый угол по 011ношению к ооновному 1сиг.налу (ри:с. 48).
Указанный сигнал ·может быть равложен на ·составляю
щую, .совпадающую по фазе с осно-вным сигналом, и со
ставляющую, смещенную на угол 90° от основного сиnнала
(квадrратичная). Пер·вая из 1них также компенсируется
следящей си·стемой, а так ~как ·свойства изоляц'Ии ~меняются
со временем и от внешних условий (температура, влаж
ность, давление), меняется :и доля этой ·составляющей сиг
нала . Наличие этого сигнала приводит к медленному слол
заН'ию стрелки указателя. Особенно это заметно пр:и по
вышенной температуре и влажности .
Вторая из этих составляющих не 1юмпенсир:уется и
просматривается на осциллографе .в установившемся со
стоянии следящей системы. Она забивает усилител ь :всл·ед
С'Гвие нелинейной характеристики уоилителя, уменьшает
коэффициент усиления и переnревает двигат·ель, а поэтому
является крайне 'Нежелательной.
Для устранения этих явлений необходимо по ·возмож
ности •О1i1юсить ~изоляцию от ротора, зак.рывать ее металли
ческими завемлен·ными деталям и ·ил-и металлическими де-
5*
67
талями статора (р~ис. 49), 'ПО воз1мож1ности избегать ее, нс
упо11реблять ,00всем там, где может сI-1меть место емкостное
влияние на токосъемную пластину, упагреб лять негиrро-
окопичные изолирующи е
~вещества с ·высОJ<!им ~по
верхностным сопро11и•вле
нием .
У датчиков с зазем
ленным ротором та<ких
\Высоких требований 1{
Рис. 49. Э1,ранировка изоляц и и ме - собственно иволяционно
т алли•~ески м и пластинами статора .
му промежутку не .предъ -
3111{·~ ~
а):fQр
.. ...
:iliift· ~
d) :rор
:=t111f:~~1~~i ~ ®
ompafJom. 86.
являеrся, та1к ка1к сам ро
тор экранирует токосъе м
от этого промежут.ка .
Во ·всех случаях жела
тельно ·помнить, чт о наи
лучшим ИЗОЛЯГ>Ором явля
ется 'Воздушный проме
жуток.
Таrким образом, требо
вание к конструкции дат
чика можно сфор.мулиро
вать так: не должно быть
пря.мой •видимости с пла
-стины, с ·которой снима
ется сигнал, на изолиру
ющие .детали.
Иногда даже при пра
:вильном 'ВЬDполнении дат
чика на осциллограф е
вrсе же пrросматри1вается
J{IВа\д.~ратиrчный
сигнал.
(j)
При этОJм система :ведет
Рис. 50. Схемы включения двухлу 11е- •себя ста'6ильнrо. Причина
воrо Датчика.
этого заключается в сле
Двухлуч евые датчики
а,.6иливрис.50.
дующем.
обычно включаются по схемам
Обмотка Т1рансфоrрматора, ·питаюшая датчик, rимеет
распределенную емкость •с железным сердечником, с пер
вичной обмоnюй и другими деталями . При эrом оказы
вается, что оба конца этой обмот.ки имеЮ'Г различную
ем~кость rНа з·емлю. В схеме ·рис . 50,а эти еМ'кости шунтн -
68
руют обмо11ки транQформатора, в схемах рис . 50,б и fJ - -
сопроти'Вления. Во всех .случаях 1в результате rюо;д:ина,ково
сти этих .емкостей mр.оисходит некоторый •С1д1виг фаз в. д. -с . ,
питающих .обе .nоJювины емкос11ного датчика. (р•ис., 5i1). В ре
зультате ·пр1и .полном ура'Вн·овеши1вании сис:гемы 'ПО 01оно1в
~ному 1оигналу, ура~вновеши1вания по 1воему ~с:иnналу :не про
исходит. Остается :постrщш.ная д:оля •ктвадрат.ичного сиг.нала,
ко11ора:я 1нежела'Гельна :по изложенным выше прич'Инам.
Необходимо отметить, ч·ю налич:ие паразитного квад
ратично110 1си1nнала делает -си~ст~е:о.1у чу;в,сТ1в1ительной к язме -
Рис. 51. Векторная диаграм
ма возникновения паразит-'
ного сигнала.
Р ис . 52. Компенсация паразитного сиг
нала триммерами.
нению питающего на1пряженuя,
и особенно частоты. Это .про
·исходит потому, что вслед
ствие нел'lшейных овойств уси
лителя к·вадратичный -сигнал доходит до д1вигате.тrя
Б измененном виде, при этом 1на обмотке управления он уже
не летит точ:но ~под углам 90°,
а раскладывается JIO ди
аграмме, из1ображен1ной на !рис. 48, 1с~озда1вая •оигнал, лежа
щий в фазе с ос.нов.ным. Этот сигнал .компенсируе'r0ся сле
дящей ·оистемой. При из,менении ча·стоты меняе11ся квадра
тичный сиг.нал и соответственно меняется доля сигнала,
юомпеноируемого ·следящей ·системой. Поэтому одним
из признаков отсутствия квадратичного ~сигнала в схеме
явлнется неза1висимость показаний си.стемы от частоты пи
тающего !Напряжения.
Для компенсации квадра'r-ичного сигнала нужно вьшо.п
нить обмотку питающего трансформатора .симметричной,
с>гремиться •к уменьшению собс11вен.ной емкости тран1сфор
матора и шодводящих ·проводов, ·КJроме того, допустимо по
ставить подстроечные конденсаторы (триммеры) по 25-
30 пф в плечи трансформатора, как показано на рис 52,
для искусственного самметри·рования э. д. с.
В ·схемах с емкостными фазовращатеJ1 ям.и •рис. 38,б и
44,6 средняя точка образована сопр.отивлениями. Неоди -
наковость этих оо.проти1Вл€ний приводит к нели!Нейным из
менениям фазы ·С изменением положения ротора - Ошибку
фазы моLiию сосчитать по формуле (56) .
Обычно от фазовращателя требуется пропорциональ
ность между изменением фазы и изменением угла поворо
та ротора . В этом случае соп~роти·вления средней точкИ
должны быть .равны друг другу •с точностью до пятого зна
ка . )Келательно также, чтобы ·оопр о11ивления •не менял и
сноего значения с температурой. Поэтому в схемах, где
сре дняя точ ка ·выполнена на сопр ·отивлениях, реко·мендует
ся делать их проволочными константановыми с ,не очень
большим значен.и·ем (1-2 ком ) . Сопротивления :в схем е
с трехлучевым датчиком также сл едует ~выполнять из кон
стантана при·мерно той же величи:ны.
Бели емкос11ный ,датчик 0ско1нстр~уи1рова:н пр.а·вильн~а и и э -
менение качес1'ва изоляции с температу~рой не влияет н а
его работу, то вл ияние температуры •сказывается .'!ишь по
стольку, :поскол ыку 1меняю'лоя · геометрические раз·меры дат
чика, напри·мер зазор и пр. В этом случае устра.нени<е тем
пературных вл ияний - ч и сто конс'Тiрукторская задача. Не
обходшмо та•к подобрать .~юэффициенты ли~Нейного расши
рения, чтобы размеры ·сам ого ,да тчика либо не меняли.сь,
л ибо менял ись так, чтобы эт и из:менения взаимно ·к·омпен
си:ровал:и-сь механич-ески или электрически. На;пример, если
датчик с переменной S выполнен 1<:ругл ым , 'Го изм•енени е
температуры не :Влияет на точность передачи, так как все
размеры датчи.ка с изм«:~нением температуры ·меняются
пропорционально и ~оимметрично, а измелшние за:зора н е
создает д'ОПОЛНИТ'еЛЬIН'ОЙ ошИбки и т. д.
При определении габаритных размеров •емкостных дат
чиков следует •руково\/Jiствоваться в о·сновном .консгруктив
l!ЫМИ соображениями. Как правило, ·с увеличением габа
ритов датчика растет крутизна выходного сигнала и облег
чаются условия работы усилителей. Однако это в свою
очередь утяжеляет конструкцию, .не •созда;вая обычн о
слишком больших преимуществ.
При проектировании следует .стремиться увеличить
в первую очередь тот раЗ!Мер, за счет которого растет кру
тивна сигналц. Так, для датчиков с пер-еме.нной S при от
работке ротора датчика !К нулевому ~положению для пов ы
шения крутизны ·сигнала нужно максимально увеличить
ширину пластины и совсем не нужно ·стремиться увеличи
IВа'Гъ их длину. Но если, помимо крутизны, нас -еще :иапе
ресуеrг и максимальный сигнал, который мы можем снять
70
с датчика (.например, при необходимости в широких пр~
делах обеспечить пр·опорциональное регул1иро:вание), тогда
нужно увеличива т ь и длину пласти н.
Для датчиков с пер еменным d геоме11рической вел ичи
ной, обес п ечивающей крутизну сигнала, являет.ся лл·ощадь
пластины .
ОбыЧJно геомет рически е размеры датчиков измеряются
неск о льк и ми санти.метрами .
Минимальный заз·о.р в датч и ке может быть определен
из усдовий пробоя воздуха и зависит от ~напряжения, при -
1юдящегося на одно ш1·еч·о датчика . Значения напряЖения
пробоя .воздушного ·промежутка в 1 мм следует брать не
более 700 в действующеr~о на.nряжен:ия. 3.ная 1Напряжение
пробоя, можно .всегда вЬ1числить минимально допуст1ИJмый
зазор. Во всех случаях •Из конструкт.и·вных ·соображений
не следует делать зазор меньше, чем 0,2-0,3 мм.
2. Рекомендации по оостроению многокаскадных усил ителей
низкой частоты к следящим системам переменного тока
Для ел-едящих систем переменного тока с емкостными
датчиками желательно применять усил.итель с оwосиrгель
Н{) вьюокоомным (порядка 1 Мом) входом. В .с:~вязи с тем,
что пока нет полу1про1во~днико1вых приборов с высокоом1ным
входом, прююдится по .крайней .мере пер·вые каскады та
ких у.си л итедей выполнять на лампах.
Для обес.печения высокой точности работы следящих
систем необходи мо добиваться стабильности работы уси
лителя, содержащего четыре-пять, а иногда и больше ка
скадов. При эrом вопрос постоянс тва коэффициента уси
ления яmляет~ся 1вто.ростепенным, так как при 1из· монении ко
эффициента уJСил·ения •в следящей системе ме:няет,ся лишь
перехюдной пр оцесс 1и 1в небольших пределах-чу~ост1вите11Iь
ность, а положение отрабатывающей оси у~казателя не ме
няегся, так ~как при любом коэффициенте усиления сиrnал,
посту~пающий на ~вход У'силителя с датчика в уста~новившем
ся режиме, ра·вен нулю. Гораздо опаснее дрейф усилителя
переменно·го тока, что выражается s медленн ом сползании
отрабатывающей оси с течением времени. Так же как и
в случаях, ·выз:ванных употреблением ·плохой изоляции
в емкоСТJНых датчиках, это сползание может достигать
больших зна'Ч-ений. Особенно резко такое споmание на
б"1юда.ется rnpи температурах, более •высоких, чем +20° С,
и П1ри повышенной 1влажнюс'Гlи окружающеl'о воздуха.
71
Одной ·из Причин такого дрейфа является то , что н а
управдяющих сетках и анодах первых каскадов появляет
ся и постепенно возра·стает потенциад рабочей чаС'тоты ди
бо от це1пей на.кала (для следящих -систем, работающих на
частюте 400 гц), дибо от це п ей, питающих датчик, из - з.а на
д ичия токов, протекающих по изодирующим и крепежным
дета дям (пластмасса, тек1стол:ит, хлоР'вини.л и т. л . ) вслед
ствие недостаточ•но выоокого 'Значения их ~поверхностного
соПJротивления.
Несмотря на то, что спраiв-очные данные о поверхност
ном сопрот.и1вл ении ~материалов у1казьг.вают !fla достаточно
высокие значения этих величин, на •самом деле величины
поверхн·остного сопротивдения .gначитедыно ните указан
ных значений :вследствие залряв.ненности поверхности ,
гигроскопичности материад.ов и друг.их факторов.
Для усидителей :с мадым коэффициентом усиления то
ки, протекающие по поверх:ности изоля11оро;в, и потен циалы ,
вовникающие от них, 1не имеют никшюго значен и я . Д.'!я
у~силителей же •с бодьши:м коэффициентом уС'ил•ения эти
потенциады .им~еюrг очень ·бодьшое значение и пренебрегать
ими уже .нелия. Амплитуды токов утечки rнестабильны во
Вiремени, зависят от многих факторов, растут с повыше
нием температуры и не поддаются компенсации и учету ,
поэтому ус1ыrитедь необходимо проектировать так, чтобы
повер~ностные токи отв.одшшсь на з·емлю, не достигая
опасных точек .
Для получения хорошей стабильности усилителя необ
ходимо, помимо соблюдения о·бщеиз:вестных правил, при
нять ряд простых, но эффективных мер, перечисденных
ниже:
1. В ·качестве ламп рекомендуется ~применять бесцо
колЬiные лампы («пальчики» или «др.обю>) .
2. Ламповые панели должны быть керамическими и
предохраненными от загрязнения.
3. Цепи накала необходимо неС'ТИ голым или в эмале
в-ой из·оляции проводом, ни в ко•ем ·случае не перевивая
проводов 1Накала между собой. Если провода накала пере
плести между собой, между ними сквозь шюляцию начи
нают течь токи утечки, а с изш1 яции на другие цепи соз
даются нестабильные наводки.
4. В .связи с тем, что с це1Пи накала на катод через
емкости накал - кат.од наводится переменная Э· д. с., необ
ходимо ее компеrнсировать. Для эт·ого нужно ~накальные
цепи заземлить через низкоомный потенциометр по схеме
2
рис. 53а, либо в крайнем ·случае заземлить ·среднюю точку
накалыюй обмотки.
Желательно, чтобы потенциаме11р был проводОЧ[-IЫМ,
например, мар~и ППЗ-11. Нельзя применять для этой це
ли малостабильные переменные СQпрот.ивления, ,например
марки СПО ..
Подключи~в осцилJ1~0граф к одному из промежуточных
каскадов, нужно у.стан О1вить .потенциоме'Гр в положение,
пр~и К'О'Т()ром па-ра·зиrnый -сигнал, П'Р'ох.одящий ,в усилитель
а)
Рис. 53а . Включение потенцио
~е т ра в цепь накала.
при от.сутствии ·сигнала на
входе, стал бы 'Минимальным.
б)
При этом вх·од усили теля Рис. 536. Эквивалентная с хем а
должен быть разомкнут. Пере- цепи накала лампы с в клю-
мещая движок ПQтенциометра
ченным потенциометром .
в это mоложение, мы тем
самым балан~сируем м<>стовую схему, включающую в себя
ем:коСТJИ на•кал-катод (рис. 53б), и уменьшаем пгразит
ный сигнал, наводящийся 1на катод со стороны ·накала . Ос
новную 1р·оль .при этом .играет балансиров-ка 1Пер·вого и вто
рого каскадов.
5. Точки крепления проводов накала не долж•ны н и где
ка·саться пластин, на которых закреплены анодные и сеточ
ные цепи усилителя. Т.о ж•е относйтся ко всем цепнм пере
менrного Т'ОIКа и iwo в:сем цепям большой протяженности, на
1к·оторые может ПJЮисходить наводка со стороны цепей пе
ременного тока. В случае, если цепи перемен:ноrо тока не
обходимо дать опорную точку, рекомендуется выполнить
ее по рис. 54 так, чтобы Uiаразитный ·сиr.нал, протекающий
по поверхности JlrЗOляropa, отводиЛ'СЯ 'На землю.
Точка К'репления представляет -с·обой либо .заземленную
металлическую •стойку, на которой ·закреплена »зол.и.рую-
79
щая пластина с к1репежным лепестком, либо ·стеклянную
«слезку», 1впая•нrную в -заземленную ·металлическую шайбу.
Наибол ее пра·вильно собирать _усилитель на металлических
заземденных пластинах, .в п'Р'ессовывая в tНИХ для каждого
отдедьного контакта из·ол яционную втул.ку .
·
6. Всюду, где м·ож.но, iмонтаж 'Необходимо 1вест~и по sоз
духу, избегая применения изоляци и. Ни в к•аем сдучае не
надевать на цепи переменного тока, прох·одящие вбд·из~и
пер-вых каскад о в, хлорtви ниловые ·трубки, в крайн~м оrучае
применив не хлор~в:инил-овые, а кембрикавые rrрубки . Хоро
шей и золяцией является стеюшрус. В случае пр и менения
хдорвиншювых трубО1к .всдедствие плохих изоляционных
а)
б)
Рис. 54. Изолир о ванная оп о рная точка .
свойств хлорвинила возможно протекание токов утечки че
рез слой хлорвинила, а отсюда - нестабильная емкостная
на:водка на ·ос н овные цепи.
7. Бсл:и уоил:итель пред!ста1вдяет собой отдельный блок,
необходим-о пр-овод сигнала проводить через отде льный
разъем, ·В про"гивно1м случае ·возможно появление в сиг
нальной цепи парази1ног о си1:1нада через пластмассу разъ
ема ·от· цепей 1переменног.о тока. Есди удовдетворить это
требование .невозможно, нужно в общем разъеме отде дить
зажим, ~несущий -силнал, от ~зажима переменного тока (или
имеющих переменную ооста:вляющую) -зажимами, не имею
шими переменной составляющей, шш заземденными :зажи
мами. Доподнитедыюг·о экрана в разъеме устанавдивать
не нужно.
8. При монтаже усилителей, работающих -в шир·оком
интервале температур, жедательно .избегать пр·именения
мал остабильных сопротивдений, например типа УЛМ-0,12,
вследе'Г'Вие их нестабш1ьности и большого уровня шумов.
Монтаж желательно выполнять ;на термостабилизи•рован
ных сопротивлениях, например типа МЛТ-0,5.
9. Все 1в.ходные цепи усил·итеЛя должнь~ быть 1гщате.1ь
н·о экранированы. Так, необходим-о экранировать сО1про
тИ·вление утеЧJки сетки первого каокада, 'все соедините.ль-
74
ные концы делать возмоЖJно короче . В ·качесТ'ве эыраниро
ва~нног{) провода жел ательно применять про·в о~а мар rш
БПТЭ. Ни ·в коем ~случае не .следует надввать экранирую
щий чулок прямо на хл орвиниловую из·оляцию провод а
без бумажнQЙ или шелковой оплетки . Сами лампы долж
ны быть закрыты мета лJ1ически ми эюранами, а лампы т:ипа
«дробь» - помещены в металлические т.рубки.
10. Управляющую ·сетку пер·вого кас'Када (1в случае
примен ения лампы типа «д:робь») опереть ~на .к·репление no
рис . 54.
Рис. 55 . Схема во збуждения усилите ля.
Помимо перечисленного, для улучшения rработы усили
теля можно рекомендоват ь сл едующие м-еры:
1. Для уменьшения содержания паразитных высших
гармон и к, забивающих тракт усилителя и снижающих его
коэффициент у.силе.нrия, .рекомендуется между анодами пер
вого и ·второго каскад ав включить малую емкость (лоряд
ка 60- 300 пф). Включение емкости сС>здает отрицатель
ную обратную связь по высокой частоте, "Сильно очи ща ет
сигнал :и поднимает коэфф иц1иент усиления всего усили
теля по рабочей частоте, ранее уменьшенный •паразитными
сигналами вследствие :нелинейности характеристики _уои
лителя .
2. Усилитель , состоящий и.з нескольких ,каскадов, л·еr
ко !Возбуждается по а1Н{)дным цепям . Колебания, возникаю
щие при этом, обычно в применяемых -схемах имеют часто
ту .порядка нескольких герц. При этом •следящая система
вообще перестает работать .
Р ассмот;рлм механизм ·возникновения кол·еба:ний
(рис. 55).
Есл·и полезный сигнал, проходя через усилитель, ;nстре-
15
чает .на ·своем пути только дифференцирующие ц·епи вида
рис. 56,а 1с характеристикой, пока·занной на рис. 56,6, то
силнал, возни.кающий нсдедствие генерации, проходит iКак
tlepeз усилитель, так и обратно по анодным цепям, -встре
чая, таким образом, к;роме дифференцирующих целей,
еще и и~нтегрИ'рующие цепи ·вида, изображенного на
рис. 57,а, с характеристикой рис. 57,6 .
~~
Uвх
li'1 ~ Uвых
~
i
"
1 1~--::;:;=---~-::-
-
w
а)
d)
Рис. 56 . Дифференцирующее звено и ero характеристика .
Последовательное ·включение нескольких з·веньев не ме
няет вида характеристики, но .изменяет ее коэффициен т
усиления . Результирующие характеристики пока-заны
пунктиром на тех ж·е рисун-ках . Хат1ктеристики как бы
п·
.2
~'~c,fи,;
а)
d)
Р ис. 57. Интегрирующее звено и ero характери
стика .
раздвигаются. Для одиночного дифференцирующего зве
на коэффициент ус:иления равен:
k=Т1ы
дllф v1 + тf.ы• '
(79)
где Т1 =R1C1•
Для интегрирующего звена
где T2 =R2C2•
Коэффициент
последоJЭательно,
7б
(80)
усиления двух этих звеньев, включенных
ращщ произведению их коэффициентов
уси.11ения _ (рис . 58). При этом максимум - усиления соответ
ствуе_т частотt!
(81)
и равен :
1
k=-- .
1+т.
Т2
(82)
Оснонным у~лов.ием отсуrствия колебаний в генераторе
является следующее условие: коэффициент усю1ения . по
замкнутой цепи должен быть меньше единицы . Это значит,
что ослабление сигнада диффер·енцирующими и интегри
рующими цепями должн.о быть
больше k',
гдеk'-
коэффициент Uвых/U1:с
усш1ения усидителя от ·второго до
посдеднего ·каС"када,
охваченных
обратной С'Вязью по анодным це-
пям . Если •считать, что -В'Се ка·ска~ды /<
ш
одинаковы, у;сл·овие .от1сутст.вия ко
лебаний можно рассчитывать для
д
Рис . 58. Характеристика
одного каскада. J!Я выподнения ус- последова т ель но вклю-
Л'СJ!ВИЯ kз < 1 ну1ж1но уменьшать про- ченных интегрирующего
изведение R1C1 межкаокадн·оЙ 'СВЯ- и дифференцирующего
зи (сопротивление ут·ечки -сетки и
звеньев .
пер·еходную емкость) и увеличивать произведение R2C2 ддя
цепей анодного питания. В -первнм случае выгодно идти по
пути уменьшения С 1 , а не R1, так как пр·и этом уменьшает
ся отбор энергии от предыдущего каскада. Во •втором слу
чае выгодно идти по пут.и уведичения С2, тю< ка~К при уве
личении R2 уменьшает~ся ано~ное на•пряжение на первых
каскадах. Однако это ·возможно 11оль.к.о за ечет уведичения
габаритов . При это.м rнаибодыuие емкости нужно ставить
бдиже к выходному каскаду , так как колебан.ия могут
охватить лишь часть каокадов и, в чжчно-сти, возникнуть
между двумя тюсдедними ка·ска:дами.
При заданном :~юэффициенте усиления ~всего усилиrгеля
выгодно получать маr<~симальное усиление от первого кас
када, .который не охвачен анодной связью.
.
В .качест1ве некоторой дополнительной меры можно ре ·
комендовать ставить отдедьную анодную развязку на по
следний выходной (·наиболее 1:моiцный) каокад.
Пр им ер. Рассчитать переходные цепи и цепи питания для
усилителя на пентодах с коэффициентом усиления каждого каскала
ky = 40. - Рабочая
частота f = 400_;щ.
77
Из формулы kyk < 1 получаем:
отсюда
kv
--·т-<1,
1+-2
т1
~2>39.
]
(83)
Положим допустимое ослабJ1еиие сигнала рабочей частоты рав
ным 7,Бо/о, т. е.
1 -kдиф = 7,5о/о,
.тогда kдиф = 0,925 .
Отсюда
k
0,925
wт]=vl- k2- vl-о.925=
2
•
5·
Определим С 1 . Положим R1 = 1,0 Л1ом:
т
2,5 2,5-1012
С]= R: = wR1 - 2;.;400-106 = lООО пф.
Определим Т2 :
39n 39-2,5 39·2,5
Т2= -
1-=--
w-=
2n_
400 = 39· 10-з сек.
Положим С2 = l мкф, тоrдэ.
Т 2 39.10-з
R2 = с; =--1 - =39.10-з Мом=39 ком.
Так как каскады одинаковы, подученные данные при
годны для всех .каскадов.
Реадьно в усилитеде имеются и некоторые дополнитель
ные ослабления, например дедение паразитного сигнала
между ан.одной на1груз1юй и лам1пой, так что расчет произ
веден •С некоторЫ1м за•пасом .
Как можно видеть из перечня, доподнитедьные требова
ния к проектиро·ванию и монтажу не являются трудновы
полнимыми. Практика показывает, что смонтированный
подобным образом усилитель может работать при темпе
ратурах от -60° С до +60° С -совершенно ~стабильно (бо
лее ~высокие температуры не опр-обо.вались) в течение мно
гих часов, ·не •внося никаких искажений ·в работу системы.
Система, в ·которой •был примене.:ц та.кой у.силИ"rел о
78
(включая и ·Jl!ругие элементы), показала· высокую .стабиль
ность; отклонения не превышали тысячных доJJей про-
цента.
.
На р·ис. 59 приведена схема усилитеЛя, rабеспечива,юще
rо К()эффициент уо1J1ения до 500 ООО (пр.и отсутствии па~ра
зитного ква.д:ратичного -сиг:нала на входе усилителя).
Усилитель ~состоит -из четырех ;ка1окадов усиле:ния по ;на
пряжению (лампы 6Ж.2Б и 6ЖJБ) и выходного :каС'Када,
с обранного на лампе 6ЖЗП ,в триодном режиме, ·!3Ключе~н
ной по схеме кат.01дног-о ·повтари'Ге<пя, нш1рузкой которого
является обмотка управления отрабатывающело двига
теля.
Аноды ·всех ламп питаются от последовательной цепоч
ки сопротивлен'ИЙ, между ,которыми .включены развязываю
щие емкости. Овязь между .каскадами осуществлена доста
точно малыми емкостями, что позволяет 1Не ста1вить слиш
К:ом бо.льших емкостей •в и.нтег.рирующие цеп<JЧК'И анодного
питания. Выходной 1ка01<ад, Кiр'ОМе этого, имеет самостоя
тельную развяз·ку, отделяющую его ·ОТ остальной схемы.
Для уменьшения •rшрази11ных высших гармоник между ано
дами первог.о и .второг.о каскадов включена малая (50-
300 пф) емкость, по·средстlВом которо·й осуществляется
.отрицатель·ная -обратная ~связь ·ПО ~высокой частот1е.
Каждый каскад имеет самостояте.тrь:ное смещение.
Экранные сетки пеР'вых двух каскадов !Не имеют от
дельных сопр.ативлен.ий, так ка1к в :противном случае напря
жение на .ни х будет слишком мало, и при з.начениях анод
ной нагрузки в десят.ки кижюм коэффициент усиления кас
кадов будет недостаточным.
Для подгонки фазы сигнала .в цепи анода третьего I<ас
ка:да установлена фазос~д!вигающая е~м1кюсть Св; кроме того,
сама обмотка управления ·отрабатывающего двигателя
шунтирована также фазосдвигающей емкостью С15·
В цепи накала устано1влен по'rенц.иометр, которым мож
но регулировать паразитный еиг:нал, К·отарый наводится на
катоды лам1П со сторо~ны накала. Все ·ОД1ноименные выводы
накала ламп соединены между ообой. От силового т•ранс
форматора, помимо усилителя, питается обмотка возбуж
дения двигателя ДИД-0,5, ·потребляющего 36 в. В случае
питания системы от сети с напряжением 36 в сеть переклю
чаетrся на ·соответствующие IКОнцы трансформатора.
Описанный усилитель пр.и правильном монтаже может
обеспечить коэффициент усиления до 500 ООО, кото:рый при
необходимости .может быть уменьшен до .!JЮбого значения
19
ьжгь
fiЖ2б
бЖZБ
ВЖZб
бЖЗП
·11н~----.--,____ .....--+-г1----.__,__..._,_._______
~2
P v. c . 59 . Схема усилитедя с ламп ов ым выходом.
лутем ивменения ла.раметр-ов )"СИJJ'ИТеЛЯ. Сюециальной регу
лировки усиления 'В схеме •не предусмот~р ено.
Данный усилитель удовле11вО1рительно рабОТает, если
нагрузкой выходного каскада является обмспжа_ управле
ния двигателя, - оеО1противлен-ие 1юторой не менее 500 о.м
(у двигателя ДИД -0,5 оопротивле~ние обм-о:r.к.и управления
при последовательном включении обе:их ее ·пол-о.вин соста'В
ляет 520 ом); ·в противном олучае необходимо ставить на
6ЖZ5
6Ж15
п-в
Tpl
+Е
R,5-:-R ,e
д,"'.0.Q
Рис. 60. Схема усилителя с полупроводниковым выходом.
08
!"\ . .1/5!J
f/ПО<ц.
Пр1
выходе усилителя выходной 1'рансформагор, согласующий
выходную лампу с наррузкой, либо более мощную, чем
бЖЗП, лампу, либо выходной каскад строить на полупро
водниковых триодах. Так, двигатель ДГ-0,5 в описанной
схеме работает плохо, так как -сопротивление его обмотки
возбуждения составляет всего около 40 ом.
Для последнего случая более пригоден усилитель, изо
браженный на рис. 60. Здесь выходной каскад ~ыполнен на
полупроводНИ'КОВЫХ триодах, включенных по двухтактной
схеме. Связь между оконечным каскадом и предоконечным
осуществлена через малогабаритный понижающий транс
форматор, -собранный на желез.е Ш- 5. Питание выход:ного
каскада осуществляется либо от постор-оннего истачника,
либо от отдельного выпрямителя, не предусмоrгренногu
в данной схеме.
данный усилитель удовлетворительно работает как
с двигателем ДГ-0,5, так и .с дви гател ями ДИД-0,5, ДИД-1
и некагорыми другими двигателями до температуры
+60° с, .развивая коэффициент усиления до I?O ООО.
Ниж-е приведены данные элемента.в схемы .
Усилитель, собранный по схеме рис. 59:
R1, R5, R,0- 1Мом;
R3, R", R1 -39 ком;
R2; Rв - 3,3 ком;
R8 - 4,7 ком;
R9 -24 KOJ.t,
R11 - 150 ом;
R,2 -10 ом;
R1з-2 ком;
R14-470 ом;
R,s-R,8 -220 ком.
Все сопротивления марки МЛТ; R14 - марки ППЗ-11 .
С1• Св• С9-25мкфХ4 в;
С2• С1. Сн• С12 -1,0 мкф (МБМ);
С3,Св-1-3,3 пф;
с4-50-330пф;
с10-о,5 мкф.
д1-Д4-Д7Ж.
Силовой трансформатор собран на железе Ш-12, пакет 10 мм.
Обмотки:
I - 216 в (ПЭВ-0,22) + 475 в (ПЭВ-0,3)
11 - 30 в (ПЭВ-U,5);
III-2Xl 100 в (ПЭВ-0,1)
Межкаскадный трансформатор собран на железе Ш-5, пакет 5-
8 мм.
•
Обмотки:
1 - 6 ООО в (ПЭВ-0,05);
II - 200 + 200 в (ПЭВ-0,2).
Усилитель, собранный по схеме рис. 60:
R •• Rs• Rs. R14 -1,0Мом;
R2,R6- 10ком;
Rio• R16 - 3,3 ком;
Rз•R8- 20ком;
R,, R., R11• R16 - 39 ком:
R,2, R,1 - 47 ком;
R,3 - ~О ком;
R 1s-2 ком;
R21 -2 ком;
R22- R2s -220 ·ком;
R20 -47\J ом.
1 При отладке усилителей не следует стреми т ься в точности при
держиваться ука з анных параметров; оставляя схему в неизменном
виде, следует величины подобрать так, чтобы обеспечивались необхо
димый коэффициент усиления и сдвиг фазы.
82
Все сопрq'fив л е ния марки МЛТ, R20 - мар·ки ППЗ-11.
, ~1•Cs. С1• С11-25мкфХ4в;
-
С2, С,., С10. С17 - 1,0 мкф (МБМ);
Сз• CI/! Cs• С9, C13 -l-3,3 Тф;
С4 ;_::>О - 330 пф;
сJ4 - 5,0 >(300;
С15 - О,5;
Д1 - Д.-д7Ж.
Силовой трансф о рматор с о бран на железе Ш- 12, па кет 15 мм.
Обмотки:
1 144 в (ПЭВ-0,25) + 316 в (ПЭВ-0,35 - 0,4);
11 26 в (ПЭВ-0,6- 0,7);
Ш 2Х800 в (ПЭВ-0,12).
В ·качестве выход,1-юго ·каскада для двигателя ДИД -0,5
могут быть использова•ны 'I1риоды 6С7Б или бGбБ (либо
бЖlБ 1ил·и 6Ж2Б в триод
ном режиме), включен
ные ло схеме усилителя
на п ряжения с анодной
нагрузкой ·ОКGЛО 20 ком.
Напряжение с анодной
нагрузки через конд:е:н
сатор 0,5-1,0 мкф посту
пает 11 упра'Вляющую об
мотку дВ'игателя, обе ;по
ловины которой В'ключе
ны 1п оследо!Вательно. Вто
рой 'КОНец ОбМО1'КИ уп
равл е ния заземляется.
Та·кой каскад обеспе
чивает до 15- 20 в пере
Рис. 61. Выходной каскад
.дробь".
rJJJ
оДИД-0,5
на лампе
менного напряжения ~На обмотке управления двигателя
ДИД-О,r5. Схема каокада приведена на рис . 61.
3. Реноме ндации по построению и отладке следящих
сист ем переменн ого тока
От дистанционной сл едящей системы, в которой ·I1риме
нен емкостный дифференциальный датчик, как правило,
требуется вьюокая точность -показаний. Между тем, ~в си
стеме имеется ряд узлов, обладающих инструментальными
погрешностями - ·сам емкостный датчик, отрабатьгвающий
элемент - ·сель·син или ПО'Генциометр, редуктор, устрой
сmо привода poropa датчика. Кроме того, часто требуется
ввести небол ьшие дополнит-ельные отклонения показаний
в определенных точках шкалы. Всем этим требо,ваниям
6~
83
и·с"'"'Ма •в ·которой нриrменен ме
уд:овJ1е1'ВОрЯ·ет ·сJiедящая. а 1 ,,_ .,
,
ханический корР'ектор (лекало)·
0
Существует ·:много схем и конструкции меха1Ничесюих
корrрек11оров. Одна из них изображена rHa рис_' 62. Входная
ось корректора под.ключена .к редуктору, ·соединенному со
стрелкой указателя, :выходная ось соединена с ротором от
рабатывающего эл·емента. На входной оси расшолагается
водил·о •с роликом, к ыоторому прикреплена •ви.mка. В ·в-илку
входит· палец выходной оси. При nroвopme .входной оси ро
лик -обкатывается по ленте, закрепленной на винтах, рас-
Паl-1
Ролии
Поi!стровvн11111
11
!инт
L.
Рис. 62. Схема механического корректора (лекала).
положенных по окружноот.и. При повороте э•тих ,в.интов -из
гибает-ся лента лекала, ролик, обкатывая ленту, поднимает
ся или опу~скается по ·ней, при этом ролик поднимает или
опускает :в-одило. Вил1ка, ·закрепленная -на водиле, 1rювора
tfИвается на некоторый уго~ и через палец выходной оси
поворачивает ее .на дополнительный угол. Таким образом,
дополнительный угол поворота .выходной оси пропорци
онален перемещению подстроечного винта в данной точке.
Настраивая винты корректора, можно ·с хорошей точностью
выбрать инструментальные погрешности всех эле.ментов
системы.
Регулировочная ·способность подобного лекала 2-3°,
что обычно достаточно.
Не последнее место в работе следящей системы зани
мает ее механическая часть. К этой част•и системы отно
сятся механизм датчика и механизм указателя (iтграбаты
вающего узла).
84
Перед · те_м как приступать -к отл_аживанию системы,
нужно устранить ,все зат ирания в подвижных элем:ен.:rах
механизм!()lв. Редуктор указателя проверЯе'Гся в ~ообран:ном
виде на напряжение т~рогания . Напряжение т.р·огш-rия всего
указателя 1не должно быть более чем в 1,5-2 'Раза больше
напряжения трогания двигателя (для индукционных дви
гателей) .
В механизме датчика следует -обратить особое внима.н.ие
на качест:во обработки подпятников и ш11ифтов.
Нал•ичи-е затираний ·в датчике очень Gаме11но пр-оявляет
ся 'В собранной оистеме. Зат.И1ра1ния в датчике приводят
к повышенном:у ги-стерезису . При э11ом систему нутно про
бовать ,в режиме -малых отклонений ют положения равно
весия . Затира!Ния в указателе оП'ределяЮ'ГСЯ путем -отвода
указателя от положения равновесия системы на малое ~рас
согласование. Затирания в дат,чике определяюТ1Ся после
определения зат'И!раний в указателе путем изменения вход
ной •в~еличины 'На -малую величину ·в обе стороны на мини
мальной скорости .
О наличии затираний в системе можно ·судить по харак
теру ее ра1боты на малых скоростях.
Каrк правило, трение пок{)я больше "Грения двитения.
Поэтому 'Пiри малой скорости изменения угла поворота ро
тора датчика и •неподвиЖ'ном у;казателе раrс.согласование
медлен.но наrраст·ает. Наконец, ,сигнал rрассогласова!Ния ока
зывается достаточным для пrреодол'ения 'Грения покоя, и
ст.релка указателя одвигает:ся с места, ,выбирая расоогласо
вание. По достижении rн-екоторого м·инималь'НОlГО рассогла
совш-rия указатель остана-вливаеrг·ся, а затем снова -сдвига
ется с места.
Та1ким образом, если при непод;вижно;;\1 роторе датчика
система ·н-е подвержена а1втокол-еба.ния~м, а при медленном
изменении угла поворота ротора да'Iчика ,отработка пр,о
исходит рывками, как •при наличии автоколебаний, можно
сделать вывод о наличии механичеон::их затираний в реду~к
торе указателя.
АналоrиЧf;!О, за.тирания в \датчике проявляют себя по
добным же образом. Так, •В !датчике да1Вления пр-и медлен
ном измененш.и 1давле1Ния и при наличии зат.ира:н.ий ротор
датчика будет пово•рачивать,ся не плавно, а рынкам1и, о чем
можно ·судить по сигналу рассогласования, rсн.има-емого
с ротора датчика при заторможенном w.рабатывающем
двигателе указателя .
85
Люф'IЪI ·в сн·стемс таюке значительно ·влияют на кач е -
ство се ~работы.
..
Люфт ·в датчи к е при•водит таюке к вариащш пока з ании
11 ри малых откщщен.иях е1ктемы ·от положения равновесия .
Люфт .в ~редукторе от дви гателя к С'Гр~~.тше ука з ателя также
нр-иводит =к появлению гистерез'Иса, отделить его m люфта
в датчике можно, <JТ·ВОдя указа теJJь О'Г nоложения равнове
сия сист~мы. Люфт в ·ред~кторе от двигателя к 011рабаты
вающему элементу (селысину, лотенщюметrру) приводи т
к появлению гистерезиса или ·вариации обратного знака.
Для облегчения .работы редуктора указат·еля лр~1 про -
•
Рис.~63. Безлюфтовое ·:зубqатое зацепление.
ектировапии системы следует руководствоваться следую
щими соображениями:
1. Ред~уктор может быть 1ра3'ветвленным, !НО он должен
иметь пла•в~-юе лонижение чИсла оборотов ·от д!ВИгателя ко
всем к•онечным точкам ответвлений .
Не ·следует допуска'IЪ в редукторе ~наличия повышаю
щих п€редач. Повышение числа оборотов пр·иводит к по
явлению дополнительных .затираний ·в цеПIИ повышающего
редуктора ·на .перехоедных •процессах, к;роме того, ~наличие
повышающего редукюра приводит к более быстрому изно
су зубьев той шестерни, от ·КО'1'арой il-1а 1шнаст1ся п·овышение.
2. Редуктор должен исполняться по ;возмож·ност.и без
люфтовым (например, на •разр!"зных шестернях с п~ружJJ
нами - рис. 63) . При этом -Гре6ова.ния 11< отсугствию люф
тов тем жестче, чем дальше от двигателя расположена дан
ная пара шестерен. Первые д.ве ~пары шесте~рен желатель
но делать обыЧ"ными для об л егчения ~работы двигателя.
3. Иногда для уменьше~ния люфтов •в подв11жных частях
механизмов употребляются пружины. Пружины в меха.низ
:\iс необходимо уста!на·влива:ть так, чтобьr щ1 \Всем диапазо -
1'1 -\
fre работы устройства натяжение пружин 1-i·e менялось .
Примером fтра-вильного выполнения таких пружин явля!Qт
ся безл юф•rовая шестерня и пружина на декал е. Жеvта
тельно и з бегать креп ления пруЖ'ИН одним коп·цом за по
движную деталь с бол ьш и м п еремещен и ем, д.руr~им 1шн
цом - за неподвиж·ную.
При устан овке ;нескольк·их пружин :нужно следить за
т ем, чтобы их усил ия не ком1пенси.рова л1и друг друга,
а складыва~Jшсь.
Радиальный люфт в цапфах приводит также к утлавой
погрешности. Для его устранения желателЬ"но в наибоJiее
ответственных местах употребл ят ь ш а.ри.ковые подшип
НИIКИ.
Однако удовлеrnорительной работы одной лишь меха
ни<Iеокой части 1не:достаточно. Электричеокая часть также
должна ~работать нормально .
Так, ус-илител ь дол жен не тол ько развивать пеобход.и ·.
мый коэффициент ус~иления, но и не самавозбуждаться
в устююви·вшемся сост'Оянии ·системы. О нал1Ичии самовоз
буждения усил ителя ·мотно судить, помимо осциллографа,
пепосредст·~енно п о дрожанию вала двигателя, а также
по отдел ьным хаотическим смещениям его ротора.
Усилитель должен ·иметь .необходимый сдвиг фаз.
Коэффициент усиления .системьt с индукщюнным д1ви.га ·
телем равен:
(84)
1где k - расчетный коэффициент усиления;
'
р
ер - сдвиг фаз напряжений возбуждения и управле
ния .
При ер= 90') коэффициент усилен~я максимальный.
Необходимый адвиг фаз можно получить шунтировкой
емкости ламп усилителя и другими с~пособа:vl'и. Кантро.'1Ь
за сдвигом . фаз можно осуществлять либо по фигурам
Лиссажу, либо фазомет:ром. При построении фигур Лис
сажу на осциллографе !Нужно помнить, чrо вер11и1кальный
и горизонталЬ'ный входы осциллографа ·имеют общую зем
лю, ·В rro ~время как часто нельзя галь"Ваниче.ски соединять
между собой цепи возбуждения и управления двигателя .
Поэтому их нужно разде л ять .конденсаторами.
Иногда приходится стабилизировать переходный про-
lцесс системы. Тогда требуется вводить производную от
рассогласования, для чего в системах .переменного тока
87
nрименяiот либо двойные !- образные Звенья, либо та:хоге
нераторы переменного тока.
в следящих 1оистемах переменною тока для отабилиза
ции переходного процесса целесообразно применять тахо
гене~раторы переменного тока, характеристики кот01рых за
висят от частоты гораздо меньше, чем характе1ристикн
Т-образных з•веньев, а гла·вное, он.и .не ·Влияют на статиче
ский коэффициент уеиления.
Промышленностью 'Выпускаются двигатели типа - ДГ
с вмонтированным в них тахогенератором. В качест.ве та
хогенератора можно также тюпользовать индукционный
· двигатель, посаженный на ось приводящего двигателя ли-
бо сцепленiНыЙ с ним общей па~разiИ'тной шестерней.
Глава шестая
ПРИМЕРЫ ПОСТРОЕНИЯ ПРИБОРОВ
С ДИФФЕРЕНЦИАЛЬНЫМИ ЕМКОСТНЫМИ
ДАТЧИКАМИ
В качестве примеров посnроения оистем с емкостным и
дифференциальными датчи~ками рассrvютрим несколько
сх·ем приборов, 'В которых эти датчиКJи применены.
Акселерометр (Л. 15, Л. 16]
Акселерометром называется прибор, служащий для из
мер·ения ускорений. В некоторых елучаях требуется и~зме
рять ускорения с бо1Льшой точностью.
Сущес:гвует много различных .пр.инцwпов, позволяющих
из·мерять ускорения . Большинство этих способов имеют су
ществеН1ный ~недостаток, заключающийся -в том, чт.о чу:в
ст.вительный элемент, используемый в Нiих (неуравновешен
ная маоса, неу;равновешенныИ ·гир.асrюп и т. д. ), iВ реаль
·.ных конструкциях за:к;реплен на ж·ест:к,их опорах. Эти опо
ры создают за.М'етиое rрение в узле чувствительного эле
мента, не поз·воляющее сильно увеличивать диапазон изме
рения и ооздающее границу чу~вствительности.
В описываемом ниже приборе э тот недостаток пол
ностью устранен. В данном акселерометре неуравновешен
ная масса закреплена на ·растя:нутой гибкой нит.и, подобной
тем, которые употребляются .для ·подвеса рамок гальвано
метров и зеркалец осциллолрафа, выполненной либо из
фосфористой бронзы, либо из к1варца, п"Окрытого тонкой
пленкой золота. Такая нить, обладая значительным -макси -
88
малЬIНым углам закручива.ния (120-160°}, обладае'I· исче
зающе малым собственным трением, Ч'ГО поз,вол·яе:т в одн1ом
диапазоне .иметь высокую чуrн:твителыность и 'ВЬюокую точ-
ность, досrигающу~ 0,001 %.
.
.
В данной конс11ру~кции (:рис. 64) ,на вертикальной . п.о:
движной рамке 1 натянута ни ть 2, на .которой закреплена
дегкая л.опаточка 3. Лопаточка заземлена .и является роrго
ром емкостного дифференциа лЬ<ного датчика с неподвиж-
Рис. 64. Акселерометр с гибкой: nитью.
ным токосъемом 4. При ,возникновениrи ускор·сния .мост,
включаюuiий в себя емкостный датчик, разбалансируется.
Сигнал с моста подает·ся в усили'Гель, а затем на отраба
тывающий двигатель . Двигатель б через rредуктО!р 10 вра
щает .ра,мку 1, которая rзакручивцет нить ;и .воз-вращает ло
паточку 4 в положение .равновесия моста. Та~к как момент,
создаваемый нитью, пропорционален углу закручивания,
то угол поворота рамки пропорционален ускорению, и по
казания прибора могут быть считаны любым .известным
споообом с помощью, например, стрелки со шкалой. кодо
вого диска и т. п.
811
· Диапазон измерения .в данной 1юнструкции определяет
ся 1в основном допустимым временем переходного процес
с.а ~системы .
В связи с •тем, что трение лопаточки :в л.и11и и о воздух
очень мало, затухание · -колебаний возникающих при изме
нении ее положения (частота воз'Никающих .колебаний со
став4яет несколько герц), пр·оисходит очень медленно
(минуты). Поэтому у Jюпаточки устанавливается магнит
ная онстема из ттостоянных магнитов от тахометра 5, соз
дающая демrпфирование •и ус'ПокаИiвающая колебания. При
зазоре в системе магнитов 1,5-2 .м.м затуха1Ние 'КОЛ·е-баний
происходит за 1-2 сек.
Пр.и конструир·овании акселер.ом.етра возникает вопрос
о температурной компенсации.
При повышении температуры удель'НыЙ момент н.ит·и ли
нейно умень~шаег.ся примерно на 0,02%/град. Та.к как о б
щий диапазон изменения температуры ·составляет обычно
110°С (от -50°С д:о +6О0 С), точность из:мерения соста
вит всего ± 1,1 %. Поэтому необходима температур"Ная
компенсация.
Удельный момент нити равен [Л . 17]:
п,1_2(1ЬзG+lЬ8
lb5ha)
/УJуд- з h r 12·rF+35o·тE •
где О-модуль сдвига, G::::::0,65E;
Ь, h, 1- ширина, толщина и длина одной растяжки;
F - натяжение нити;
а _-угол закручивания.
(85)
Для растяжки с размерами: Ь = 0,3 мм= 3· 10-4 м; h = 0,1 мм =
= l·IU-
4
м; 1= 30 м.м=3·1О- 2 ми модулем Юнга Е=9·10 6 кГ/м2,
G = О,65Е =::: б· 109 кГ/м 2 и удельной допустимой нагрузкой f =
= 40 кГ/мм2 сила натяжения определится из выражения:
где
90,
F=fЬh=40·0,3·0,l = 1,2 кг.~
Принимаем F0 =0,6 кГ; ЛF0 =±0,3 кГ, тогда
муд=А+в+с.
А=~ мз _о_ 2.3 .10-
4
.10- 1 2.5.109 -105
3
l
3.3
.
10 _2
=4 Г·с.м/рад;
2Ь2
2.32 .10-в.500.1оз
B = 12· -1-F=
12·3 ·10-2
=О,3Г·см/рад;
С 2b5hE . 2 ·10- 20.10-4.9.1os.1os
=
ЗбU/З а=
350.3з.1u-1 =4,Б-10-s а;
М0 =А +В== 4•3 Г ·см/рад;
в
лм (t) = ±т ± 0.15 г-см/рад;
ЛМ (а)= С= 4,5.10 '"' 5а.
Ошибка , возникающая от ЛМ (а) (нелинейность), при амакс=2 рад
составляет 9· 10 - 5 Г·см/рад, а ее
относительная погрешность
ЛМ(амакс) 9· I0- 5
Мо
·т,з= 0,002.о/о, что допустимо дюке при диапазоне из-
5
ЛМ (t) + 0,15
мерения 10 . Отношение же -М =-
4 3 =±0 , 035=±3,5о/о.
.
о
•
Таким образом, подбирая материал р·амки или применяя биметалд
и регулируя натяжение нити, можно за счет члена дW (t) сделать си
стему не · зависимой от температуры.
Определим раз~еры и вес лопаточки ротора.
Рассмотрим сдучай, когда прибор используется в качестве
акселерометра. В этом случае закручивание нити в установившемся
состоянии системы ( по завершении отработки) пропорционально
ускорению. Положим: амакс = 30°; амакс = lg.
Язычок лопаточки имеет вес Р с центром тяжести, удаленным
от нити на расстояние L. При максимальном ускорении Ig нить сог
ласно условию должна закручиваться на 30°. При этом противодей
ствующий момент будет равен:
При l=3 см
амакс 224Г
М=Мо"fliТ= • ·СМ•
.
м 2,24
P=-l-=3=0,75 Г.
.
Положим площадь язычка лопаточки S = 3 см-2, у дельный вес
т = 8,9 z/см 8 (латунь). Тогда толщина лопаточки
0,75
д=8
,
9.3
=0,028 см= 0,28 мм. C':r
В приборе установлен емкостный датчик с переменной S с непо,:
движным токосъемом (лопаточка заземлена через нить), описанным
в примере гл. 2, § 2.
При чувствительности акселерометра ~ни = 10-Sg лопаточка от
клонится на угол
амин 30
амин= амакс -а--=-1-10- 5 =.3· I0-
4
град = 1,08".
макс
С.nедовательно, и расчет коэффициента усилени я, приведенный
в том же примере, пригоде_н для данного случая .
91
При использовании прибора в качестве уровня на лопа·
точку будет действовать составляюшая силы тяжести,
направленная перпендикулярно к нит~ _и равная :
. Q=Psinф ,
где ф - угол наклона прибора;
Р - вес лопаточки.
Уравнение моментов примет вид :
1И= М0а= Р sintj>l.
(86)
Так как при малых углах sin tj> ~ tj> ('.jl исчисляетсн в ра
дианах), то
(87)
011куда ол€дует, чrо для повышения чувств.ите.пьност и при
бора, помимо коэффициента у.силения, нужно по.вышать
момент лап а'Гочки, что обычно делается за счет ее веса .
Для съема показа1ний прибора целесообраз.но приме.нить
емкост:ный трехлучевой датчик с большой редукцией, на
пример равной 60 (с·м. тл. 3, § 1), сигнал •с которого пода
екя ·в отд'ельный усили:г.ель, а оттуда - ~на ·отрабатываю
щий двигатель указателя-индикатора. Од~и.н оборот .стре"1 -
ки указателя равен 60" = 1'; цена деления равна 1"; один
обарОIГ сельсина указат€Ля равен 6° -повоrрmа ротора дат
чика.
Положим , ; = 1 (при малых углах), тогда коэффици
ент •редукц'И.И между с-грелкой и сель-оином равен 360 ('Ре
дукт:ор безлюфтоБый). l\lоэффиц~иент реду:ю.1:ии между дви - _
гателем указателя и ·ст:рел:кой можно прИ1нять равным
20-30 .
tl}
Приl=3смиS=3см2притехжеданныхнити
Р=4
'
3
=143Г·
3
,
'
о=8
1
,';.
3
3 =0,53 мм.
При заданной чувствительности I" коэффициент уои
лен.ия преж.ний .
Нить •в описа'Нном приборе и<репится одни1м :ко.нцом
к биметаллу, эквивал-еmшая длина щ>тор·о'l~о может ме-
нятыся при на.ст.ройке 'fем.перат)l'рной компенсаци и , дру
гим концом - непосредственно к рамке .
Регулировка прибора осущес11вляется · 1Наст1ройкой про
тивовеса, у1<'р·епленного на л•оп ат.ке.
0.сНrовным недоста тком данноrю прибора является труд
ность получения высоких динамических хара.ктеристик
в связи 1с ·тем, ч'Го с·истема ·в общем при •MaJi ыx значениях
передаточно го ог.ношения ред:уктора ( п ри .высок и х с.коро
стях отработки) скл онна к автоколебаниям. Поэтому наи
лучшее примен ение этот ~прибор может найт.и там, где не
требуется 1высmюй ·Сiюр-оети огработки, !Например в каче
стве уровня. Анал·огич ным прибором в лабораторных усл о
виях быJ!О устойчиво измерено уок:орение 10- s g . Тачн'Оlс:ть
установки платформы с помощью такого прибора может
дос:11игать единиц угловых ·секунд и даже десятых долей.
Микром етр
Для цел-ого ряда проиrзводст'В нужна высокая точность
измер.ений дли.ны, досгигающая единиц и даже десятых до
лей 'Микрона. К та.ким измерениям можно отнвс:ти кон
тр-аль размеров .деталей подшипников, сня11ие характери- .
стик а.нероидных ко1ро.бок и многи е другие. Микрометр ,
предназначенный для снятия характеристик анероидных ко
робок, получил наз•ва1ние категоr:метра. В по~аrвляющеNI
большинст1ве случаев необходJимо, помимо получения вы
сокой точности измерения, автоматиЗ"ировать -сам процесс
измерения. Этим требованиям удовлетворяет автоматиче
ский 1м икрометр повьiшенной ча1стоты, кинематичес к ая схе
ма которого ~изображена на рис. 65.
В данной •конс:трукп:ии применен емкостный дифферен
циа лЬ'Ный .винтовой датчик. При пер·емещении щуп а 1 пере
мещается ротор датчика 2. Через безмомен11ный ·волосок ·3
снl1мается сигна:т расс-огласования, поступ ающи й ·в уоили
тель; а оrгтуда - в двигатель 4. Двигатель через 'Редуктор 5
вращает статор б до положения ·согласования . Одновремен
но с этим вращаются стрелки 7, с помощью которых про ··
исходит О'Гсчет показаний. Стрелки 7 перемещаются по
шкале 8 с ценой делен:Ия 0,1 мк.
Ротор датчика ~закреплен !На тонкой оси, ~~онец которой
выхо~ит за пределы датчика и заканчивается щупом 1.
Опоры porrapa, закрепленные неподвижно относительно все
го прибора, поз-воляют ротору с"Вободно перемещ~ться
1щоль -оси. На щу:пе ук·реплен vалец 9, скользящии па
93
7
Рис. 65 . Микрометр с емкостным винтовым датчиком.
стойке 10. На щуп.е закреплен также ~волосок 11, второй
июнец к,оторого за.креrу1ен на пальце. Волосок 'Несколько
растянут ·вдо~ь оси и заr<;ручен так, что палец 9 'ВIСе время
прижат к стоике 10, Ч'ГО предохраняет ро1'ор от проворота,
не мешая его овобод1Нам у переиещению вдоль оси, так ., как
натяг волоска вдоль оси подбирается •несколько большим,
чем усилие трения , возникающее между пальцем и стой
.кой. Если палец и .стойка выполнены соответст-венно .из ла
туни и стали, а аюверхности их оrnолирО1Ва1Ны, это усилие
соста•вляет .всего 'доли nра·М1ма, а общее усилие вдоль оси
вместе -с ·весом ротора составляет лишь 2-3 Г.
Сам ротор жестко посажен на •из·оляционную втул·ку,
которая ·В свою очередь :за креплена жестко на оси. Нер}QНЯЯ
часть оси ротора выполнена полой, .с1шозь нее пропущен
проводник, которым выводится .сигнал с pmopa на 'ИЗОЛЯ·
ционный элемент (<«слезку» ), ·закрепленный .на · ·вepxнel'vJ
К'Онце оси. Со «·слезки» ·сигнал передается на неподви:ж:ную
стойку посред.с1шом •безмом~енrно:го JВОлоока, откуда пе
редае'Гся .на вход уси~ителя. Верх1rяя часть датчика экра·
нирована .к,олпаком.
Обойма ·статора датчика закреплена в подшипн·иках ка
чен.ия прецизи·онного или 'Высшего класса, причем посадка
подшипников и обоймы .статора датчика такова, что пол·
ностью .исключает ка•к осевой, та1к и радиальшый люфты.
Сам статор .в,ну-гри обоймы закреплен жест1ко.
Редуктор между стрел.кой и статором датчика выпол
няется безлюфтовым. О-стальная часть редуктора иМ'еет
нормальный люфт. Особое внимание обращено на отсут·
сrвие люфтов в цапфах редуктора, ибо он.и могут пр ивести
к значительным погреlli'НОС'Гям. Две последние оси редукто
ра крепятся в шар·иковых подшипниках с внутренним диа
метром 1 мм (в крайнем случае 2 мм). При параметрах
винтового датчика, пр.иведен'НЫХ в гл . 3, § 2, и цене делени.,я
· о,1 мк на шкал·е '!'очного vтсче'Га имеется 100 делении,
цифры наносятся через 10 делений (через 1 мк). Грубую
· шкалу целесообразно выпол.н.ить Л'Ибо 'В •виде десятичного
механического счетчика, оосrоящего .·из трех барабанов
с ценой деления соответственно Ю мк, 100 мк, 1 мм, либо
также со стрелками. Передаточное отношение редуктора
от стрелки точного отс-чета до статора датчика - 1 ООО, от
д.вигателя до стрелки - 100 -1 .50.
В 1реальн:Ь1х условиях микрометр крепится на каком ·
либо штативе. К: этому штатм·ву должны быть предъявлены
В-МС9К!Ие т.ребо!3а11щя 'В от11юще1щн щесткос'IUi н остаточных
95
деформаций. Кроме тото, при :работе с подобнЫ·м прибором
необходимо либо учитывать темп~рат'урные ·ра1сширения
штатива, щуmа, основания и т. IП. (что•• вообще :говоря, не-
11рудно сделать путем п:ред'Вар.ительнои тарировки прибо
ра ~На ра~зных темnературах), либо поддерж·ивать ПО1С110ян
'НОЙ температуру в помещении, где устано;влен этот ми
крометр.
Прибор · для измере ния давления газа (барометр)
В ,некотарых случаях ~возникает :необходимость Т'очного
измерения давления газов, в чаеr.ности .воздуха, в преде
лах -от единиц атмосфер д'о е\д1ИН•ИЦ миллимет1ров ртутного
столба. Разработанные и применяющиеся -в настоящее 'Вре
мя ~ртутные ба~ром~етры 1неуд1обны 'В обращении, вредны
для здоровья и лригодны только для лабораторных условий .
Рrутные барометры обес1печи.вают ·ючность 0,1 мм рт. с1·.
При:меняемые мехаНJические ба:рометры .и барограф ы имеют
точнdсть 'Вlсего лишь около 1 мм р1» ст., 1rю зачасrую :нещо
с'Гаточно.
Ниже описана схема анероидного ( безртутного ) прибо
ра, •который может быть исполь3ован в каче'ст-ве дистанци
uнного барометра с гочностью измерения 0,2-0,3 мм рт. с1·,
если он 'И·СПОЛьзует~ся IB неблагОIП'Р'ИЯТНЫХ у1СЛОВ'ИЯХ, и ·С точ
ностью около 0,1 мм р1·. ст. 1в .диапа1зоне давления 760-
4 мм р1·. с1·., л.ибо 0,03-0,05 мм рт. ст. s диапазоне 20-
2 мм р1·. ст. при нормальных температурных уславиях.
В этом тrриборе чувствительным элементом я'Вляется широ
ко ра•спр•ос11ра.ненная а~нероидная ~коробка.
Анероид'ная коробка предста1JЗляет собой две круглые
гофрирова1нные мембраны ,с ·бортами, св<11ренными .между
собой. Изну11ри к·оробки пол1ностью tвыкачан .ваздух, и внеш
нее давление прогибает ·мембраны .внутрь, обычно на ·ве
личину, ПР'опорциональную этому давлению. Измеряя про
гиб мембран анероидной ыоробки, можно судить о внешне;v1
давлении газа (воздуха), дейст.вующего на коробку.
Если анероидная ·коробка нагружена на 'Механический
редуктор, •как э'fо сделано 1в ·барографах ·и авиационных вы
сотомерах, мембранам необхо.димо развивать некоторое до
полнительное усилие •для търеодvл-ения сил трения m р·е
дукторе, ·в ·связи ·С чем ·вооникают большие .погрешности
- 1 3 ·виде гwстерез.иса прибора, вызванноrо гистерезисом .самой
· а~нер ои:.п :ной
коробк!и и трением в редуктО1ре. Са·мим мем
брасr~:ным коробrшм свойственно так назы13аемое «·ост_аточ-
96
н·ое последействие», заключающееся в гам, что гистерез-ис
ная ошибка в начале диапазона с течением времени сни
жается.
Для уменьшения относительной погрешности гистерези
са и остаточного последейст•вия необходимо увеличить тол
щиrну материала мембран, тем самым уменьшив удельное
напряжение в материале. Однако ощноrвре:менно с этим
уменьшается ход короб:ffiи, что недопустимо для механиче
ских прибор-ов.
В описываемом ниже а.нероидном приборе анерю.идный
блок ПрИВОДИТ В движение Л'ИШЬ ротор еМКОСТНОГО диффе
ренциаЛЫНОГО датчи.ка. При этом ус•илие т.рения <:остав
ляет доли грамма. Поэтому погрешность этого прибора зна
чительно меньше, чем у механических приборов.
В При•борах •С емкОСТНЫМИ датчиками не нужно иметь
боJiьшой X0'1J. анеР'оидной коробrш. На весь щиашш01н из·ме
ряемого давления •в оп1исывае~·ам приборе ход ко~робки со
ставляет :всего около 2-3 мм пр·и изменении да1вления от
800 до 4 мл~ р1·. ст. ·вмеего 4-5 мм •В механических прибо
р ах, что гюзволяет значительно •снизить гистерезис мембран
и остаточное последействие, -которые ·составляют примерно
по 0,2 мм р1·. ст.
В некоторых случаях необход!имо по величине давле
ния судить о кююй-либо другой величине, связанной функ
ционально с давлением. Та.к, •в н·екоторых ~счетно-решаю
щих пр·иборах оrгработка должна происходить пропорllJИО
IНально не ца•нлению, а его ло'Гарифму. В этом случае
целе.оообразно rпри-менить 1'рехлучевой емкостный датчик
(пл•аский ил·и цилиндрический), облащаоощий достаточ
но широкой регулировкой. Описываемый прибор может
быть легко отрегулирован ПР'опорционально да.влению.
Блок датчика анераидного прибора •с трехлучеl\ОЙ:
емкостной передачей изображен на рис. 66. .
Прибор •состоит из блока датчика и указателя.
В передней части блока датчика размещен собственно
емкостный датчик, анероидная коробка, кривошипно-ша
тунный механизм, посредством которого анераидная ко
робка приводит в движение ротор емкостного датчика.
В задней част.и блока датчика 'Размещен усилитель ('кроме
·выпрями·реля и выходного 1каrскада).
В указателе размещаются узел отсчета логарифма
да·вления, !Включающего в себя атрабатывающий двигатель,
ро,т·ор отрабатывающего rсельсина, ·стрелки :и счетчик отсче
'Га логарифма ца,вления, меха:ническ:ий коррекюр и соеди-
7 В. А. Ацю1ювски1!.
97
i:!яiощие их редукторы, ·а также узел с;-мещения на.чала от
счета , включаЮщего ;в себя статор отрабатывающего сель
сина, счетчик смещения начала отсчета, кремальеру, по
средством которой смещается нача ло О'Гсчета л·ог.~риф:1а
давлен и я, и соединяющие их редукторы . В заднеи ча ... 11:и
указателя размещены выпрямитель, обслуживающий уои
лите,тть и выходной каскад усилител я.
Ста'тор ·сельсина закреплен ·в 'О'бойме, ·в •которую .вмо1нти-
!J7
8
б 704
1
\~~
~-
~~·~Xz!~Zt1~~
~i:==.:;:--Г!!·~~-~- ~,.fif'i:
i1
Рис. 66. Емкостный дистанционный
барометр (датчик).
ро'Ван механический корректор. Обойма закреплена в ше
стерне, вращающейся от кремальеры через :редуктор . Жест
кая связь корректора ·СО -статором сельсина обеспечивает
постоянство регулировки прибора при смещении нуля от
счета.
При конс11руировании указателя особое внимание уде
лено отсутствию люфтов в узлах крепления статора сель
сина, корректоре и редукторах. Обойма 1стат1ора сельс:ина
помещена •В коническом подшипнике качения и прижи
мается пружинной шайбой, так что люфтов (ни радиаль
ных, ни осевых) в этом узле нет: кроме того, ·конструкция
предусматривает отсутствие люфтов в последних ступенях
редукто•ров статора и ротора сельсн'на .
·
98
Передiняя часть блака датчика юоединена с измеряе
мым давлением через штуцер. При измененш.-J давления пе
ремещается жесткий центр анероидrной коробки 1, который
через тягу 2 кривошипно - шатунного механ.ИJзма и вилку 3
поворачивает ,ось 4 ротора датчика 5. Рот ор изолирован
от оои .и помещен н_а ее нижнем ·конце. Сигнал с ро11о'Ра
снимается посредством волоска 6, укрепленного на верх
нем к·онце оси и также изолированного от оси , передается
в усили'fель через стеклянные «слезки» 7, iВпаянные
в основание датчика 8 •и поз-во~яющие передать ·сигнал из
переднего отделения, ~Не нарушая его гермет·изации, в уси-
ли1'ель 9.
·
Тяга с корi()iбкой и вишюй С'оединены полированными
штифтами. Ось ротора крепится в шариковых подшипни
ках 10 с внутре1ННИМ диа1мегром 1 J;tM. Вол осок, передаю
щий ·сигнал, одновременно выбирает люфты из · •в:с·ех по-
движных соединений.
·
·
Для динамической ·сбаланснрова~нности пр'Ибора на оси
ротора ·со стороны, противоположной вил;ке, укреtГiлены
под углом 120° друг к другу и к оси вилки ~ва вин
та 11 с оnере1мещающимися ·гайками, ·служащими mротиво
весами.
При на-стройке пр1ибора необходимо на гюлнам диапа
зоне изменения давления устанавливать угол поворота ро
тора датчика, соответствующий 180° эл . При редукции дат
чика, равнDй шести, этот угол составит 30° эл. Для этого
на •вилк;е предусмотрены отвер.с11ия, переставляя по кото
рым штифт, соединяющий тягу с вилкой, можно регулиро
вать дли.ну ВИЛI{!И. Для т·очной регулировки угла служит
подстроечный винт 12, укрепленный в оси ротора и отги
бающий биметаллическую планку, на которой и укреплена
вил~ка. Ша.г отrверстий в .вилке равен 1,5-·2 мм. На такую
же величину можно отгибать биметалл подстроечным вин
том. Начальный угол между вилкой и тягой устанавли
вается ·во избежание перегиба характеристики кривошипа
прмерно равным 90°. Для установки · этого угла в тяге так
же предусматривается ряд отвер~с11ий.
При наладке прибора возникает вопрос стабиль ности
. его
показаний пр.и 1из·менениях температуры окружаю
: щей среды. Наиболее просто этот вопрос решается
_путем термо·статирования датчика. В передней частш дат
чика уста:навли.вается биметаллическое реле, включающее
и выключающее обогрев в зависимости от температуры
внут!р.и передней части бЛ'ока датчика" Обогрев выполняет-
7"'
99
ся в виде .ц1итшд:ра из миканитов:о_й ленты, 1во.круг которой
обмотан кюнстантано.вый п~ронод. Обычно мощности 70-
100 в1· достаточно для поддержания постоянной темпера
Гу ры в1ну11р.и датчика.
1:\торым способом температурной стабилизаIJ,1ии показа
ний :ттрибора является при:менение биметаллов первого 13
и второго 14 родов.
При изменени;и -температуры происходит, •во-первых ,
изменение размеров всех дета лей на 'вел ичину , проп•ор
ци0~наillьную температуре; во -.вrорых, меняется жес11кDсть
коробки.
Анероидная КО'Р'О'бка ·с пов ы шением температуры стан о
нится более мягкой, и п сн~юму наружны м давлением про
rибаетс;я •Внутрь на некоторую веЛ~и чину, К:О'Го1рая, как пра
вил.о, бо\Т!ьше всех остальных деформаций прибора . Поэто
му первая оши бка напра·влена .в ·с11оро1ну увеличения да в
ления . Эта ошибка компенсируется бимета ллом первого
рода, у.кр:еп111е1Нноnо !На :жест:ком центре мембра:ны и соеди
ненного с тягой. Одща:кю, помимо постоянного смещения
показаний в начале д;иапазона, происходwг •В овязи с .шз·ме
нившейся жесткостью коробки изменение пО1каЗаний п о
всему диапазону на вел ичину, пропорциональную давле
нию. Для компенсации этой ~второй ошибки вилка крепит
ся на б.имета1Тiле второго рода, закрепл·енного на оси рото
ра датчика, поэтому с •изменением температуры меняется
плечо к:ри:вошиrrно - шатунног-о механизма и кQмпенс ирует
ся ошибка, ·пропо1рциональная давлению. Для подстройки
этой ошибки в ·оси ротора проснерлен ряд отвереr.ий. В.и.нт ,
служащий для подстройки длины плеча кривошип.но - ша
тунного ~меха1Низма, может быть поставлен 1в любое из от
верстий -ос.и, а так ~как ав упирае'ГСЯ .в биметалл, будет ме
няться тем самым дл1ина биметалла при · постоннстве дли
ны в.илк.и. Переста,вляя •винт в эт.и х отверстиях, можно до
биться удовлет:вориrгельной температурной компенсаци и
по давле~нию.
Компенсации указателя производить не нужно. Одна
ко его показания будут стабильны лишь в том случае,
если ·В указателе нет напряженных элементов .
Блок датчика ~располага·ет•ся ·на амортизирующей
платформе ic резиновым.и амортизаторами. Для гашения
колебаний на собствен.ной ча·стоте дополнительно преду
смог.реиы текстол.и'Говые кольца, укрепленные на блок~::
датчика· и перемещающиеся в металЛ1ических цилиндрах .
Кольца ·т.рутся о <:тен·ки ц.илин~:р-ов 'И демпфируют колеба-
100
t-~ия . В результате этого платформа с датчиком праю,иче
ски не имеет ~собственных колебаний.
У'Казатель с датчиком соед'И'нены rэrюра•нированной
э.пеж:грической линией авязи. В указ.атель в зщдней стенке
нь-юнтиро1ва1н пре!дохранrитель на 1 а для ~предохранения
прибора от .1юз,можных ошиб о1к на стендОIВЫХ исюыта1ниях .
Пита!Ние в у.ка1затель по!дается через отдельный разъем.
Всесторонние и•сп ы тан:ия опис ш-шых систем показали
их уд.о-влетв·о рительную р а-боту.
ЗАКЛЮЧЕНИЕ
Да~нная книга представляет собой попытку обобщить
и меющийся на сегодняшний день · материал по ем-костным
дифференциальным датчикам · перемещения, работающим
на повышенной частот·е .
До последнего вреМ'ени а~в'ГОiрЫ раЗ'работок -относились
к емrюстным датчикам с .некоторым предубеждением. По
казательrно, что -если систем, в к·отарых •применены индук
ТИ'Вные и реостатные датчики, на~ачитываютея тыrся'Ч.и, то
устройо11в, :В которых .применены емкостные датчи~ки, --
единицы . Те1М не 1ме1Н·ее, некоторые точные .приборы удалось
осуществить толыко посл е при~е1нения в !НИХ емкостных
датчиков.
Несмотря на то, что описанн ы е .1выше датчики не обяза·
тельно являются многообх-одными, а мощность, отдаrвае
ыая датчиками, мал а, в связ-и с чем приход'Ит:ся упо
треблять усилители со значит·елыным rюэфф~щиентом уси
ления, практика показала, Ч'Го правнльно выполненные по
добные системы обладают достаточной помех.озащищен
ностью и высокой эксплуатационной надежностью, не
меньшей, чем 1м~ногие другие ·системы .
Те о1рия 1и конструкция -емкостных датчиков еще :недо
ста11очно развиты, нерешенных •вопросО'в :в них осталось
немало, IНО можио ·СЧИ'тать }"становл енным, что емкост.ные
датчики .заслуживают широкого внедр-ения 'В оомери
тедьную технику и автомат1ику и дальнейшего раз-вития и
со·верше:н~ст~вования .
ЛИТЕРАТУРА
1. Тур и чин А. М. , Электрич е ск и е измерения неэлектрических
величин, Госэнергоиздат, 1954.
2. Шля н д и н В. М. , Элементы автоматики и телемеханики ,
Оборонгиз, 1959.
_
3. С от с к о в Б. С . , Основы расчета и проектирования элементов
автоматических и телемеханических устройств, Госэнергоиздат, 1956.
4. В о р о но в А. А . , Элементы теории автоматического регул и
рования, Оборонг из, 1!!54.
5. Михлин Б. 3., Радиоэлектронные
приборы для производст
венного контро дя, Госэнергоиздат, 1956.
6.RоЬsоnR. С.,СооdiеrА.,РеnnR.О.,Fullytransistorized
frequency modulated indicator for field tests , Engineering, 1959, 207,
No 5380.
.
1.БогородиикийН.П.,ПасынковВ.В.,ТареевБ.Н.,
Электротехнические материалы, Госэнергоизда т, 1955.
8. А б р а м о в Б. М., Авторское свидетельство No 117622.
9. К о б р ин с к и й Н . Е., Математические машины непрерывного
действия, Гос т ехиздат, 1954.
1О. Основы автоматического · регулирования, под ред. В. В. Соло
довникова, т. П. ч. 2, Машгиз, 1959.
11. С в е чар ни к Д. В., Бесконтактные синхронно-следящие си
стемы, .Автоматика и телемеханика•, 1938, No 6.
• 2. С в е ч а р ни к Д. В., Секци9ни-рованные схемы автоматики и
телемеханики, .Электр ичество•, 1935, No 21.
13. С в е чар ни к Д. В., Авторские свидетельства No 46293-1934 г;
48691-1935 г., ll6184-l957 г.
14. С в е чар ни к Д. В., Дистанционные передачи, Госэнергоиз-
дат, 1959.
-
-
15. А ц ю к о в с кий В. А., Авторские свидетельства No 113053 и
114083, 1958.
-
16. Sтi-th В.О., StеvеnsJ.W., Quick-acting chemica balance,
Journal of Scientific Instrument, 1959, 36, No 5.
17. Ар у тю но в В. О., Расчет и конструирование электроизме
рительных приборов, Госэнергщ1здат, 1956.
18. К ар по в Р. Г. Измерение давлений вида Р0 + Р (t), .Изме-
рительная техника•, 1959, No 6.
.
19. О r е е n В. S., Capacitance in automatic control, British Com-
munications and Electronics, 1955, No 11.
20. Filden Servograph (каталог . фирмы).
21. Емкостный датчик контроля размеров, в сборнике .Датчики
систем автоматического контроля и регулирования•, Машгиз, 1959.
Предисловие
Введение•••••
СОДЕРЖАНИЕ
r·л а в а пер в а я. Некоторые сведения из 1еории емкост
ных датчиков ..•.
.....
Гл а в а вт о рая. Двухлучевые емкостные датчики . , •
1. Датчики с переменным d • ••...•
2. Датчики с переменной S • ..•..•
3. Исправление нелинейностей в следящих системах с ем·
костнымидатчиками............. ••
4. Влияние линии связи на точность дистанционной пе11еда
чи
Гл а в а т р е т ь я. Трехлучевые емкостные датчики
1. Описание и расчет .......•.•..•
2. Исправление нелинейностей в следящей
_системе
с
трехлучевым датчиком . . .
•....
3. Вли яние линии связи на точность дистанционной пере-
дачи•••...••••••••••••••
Гл а в а чет в е рт а я. Емкостные фазовращатели
1. Двухфазные фазовращатели
•••••
2. Трехфазные фазовращатели
.
.
.
.
.
Гл а в а пят а я. Некоторые рекомендации
1. Рекомендаuии по конструированию емкостных датчиков
иихвключению•......••
.
.
.
•..••
2. Рекомендации по построению многокаскадных усилите
лей низкой частоты к следящим системам переменного
тока .......... . • •.
..•
.
.
3. Рекомендации по построению и отладке следящих . си
стемпеременноготока••••••••••• . . •
.
.
Гл а в а шест а я. Примеры построения приборов с диффе
ренциальными емкостными Датчиками .
Заключение
Литература
.......................
3
4
1
15
15
19
21
31
35
35
49
55
59
59
65
66
66
71
83
88
101
102
"БИБЛИОТЕКА ПО АВТОМАТИl{Е"
вышли · из пе1tати
Выпуск .1 . Шу.миловский Н. Н. и Мельтцер Л. В., Применение ядер
ных излучений для автоматическQГО контроля технологических
процессов, Ш58, г., ц. 2 р. 50 к.
Вып у с к 2. Богданов Д. И. и Евдоки.мов Г. К., ФеррорезQна.ноные
стабилиз·а1'оры, 1958 г. , ц. 2 руб.
Вып у .с:к 3. Вершинин Н. И и др., Автоматиqеск{)е регулирование,
195.9г.,ц.3р.50к.
В ы [[у с к 4. Декабрун И. Е., Электромаnнитные поляризован·ные реле
и .преоброазователи, 1959, г., ц. 2 . р .
.
В ы п у с к 5. Булгаков А . А . , Прог.раммное упрамение металлQрежу
щими станками, 19б9 г., ц. ·З р.
Выл у с к 6. Катыс Г. П., Оптические датчики температуры, 1959 г.
Ц.2р.
Вы iП у с к 7. Крассов И. М., Гидра:влические усилители, 1959 г., ц. 2 р.
В ы iП у с к 8. Юферов Ф. /VI ., Электрические двигатели автоматически х
устройств, 1959 г., ц. 1 р. 30 к.
Вы•Пуск9. Дружинин Г. М., Реле времени, 1959 г.,ц.·2 р. 30к.
В ы пуск 10. Круг Г. К. и Круг Е. К., Электричеокие корректирую
щие элементы .в .схемах ав томатического контроля и регули1рооа
ния,1959г.,ц.2р.4'5к.
Вып у с к 11. Рожанский Л. Л. , Статические электромагнитные пре
образователи чi!•стоты, Ш59 г., ц·. 2 р. 85 к .
Готовятся н печати
1. Архангельский В . И. Бесконтактные а:емы управления электропри
вода1ми реверсивных прокат.ных ста.нов, ц. 2 р. 50 к.
2. Васильев Р. Р. и Шастова Г. А . , Пере~дача телемехЗ!Нической инфор
мации, ц. 3 р.
3. Волосников В. П., И спользование выч1клительных машин для а.вто
матизации электропривода.в, ц_ 2 р . 50 к.
4. Воробьева Т. М., Э.Лектромагнит.ные муфты, ц. 2 р.
5. Догановский С. .А. и Иванов В. А., Блок регулируем.ого запазды
ва•ния, ц. 2 р.
б. Ильин В. А., Системы телемеханики для рассредоточе1Нных объектов,
ц.3р.
7. Лихш~ев В. А . , Мноюка!Нальное .быстро~действующее . регистрирующее
устройсmо . РУМБ, ц. 1 р. 5!0 к.
8. Малов В. С., Телемеха1ника, ц. 2 р . 50 к.
9. Митин И. Г. , Пvдаводовый пир·ометр для i\~артеновск.их печей,
Ц.1р.25к.
10. Уланов Г. М. , Регулирование по возмуще~нию (компенсация воз
мущений и инвариант.ность), ц. 2 р. 50 к.
11. Бондаренко П. А . , «Применение !Вычислительных машин для авто
матизации домеНJных печей», ц. 2 р . 50 к .
Стра
ница
23
52 ·1
Строка
Формула (25)
(3 раза)
Рис. 37
ОПЕЧАТКИ
НапечатанQ
Должно быть
0 ,443 -10"8
4 , 43.10-•
Горизонтальная линия должна быть проведена между
вертикалями из точек L и R'
В. А Аt1юковский, Емкостные диффе ренr\иа ль ные датчики перемещения .