/











































































































Author: Усынин Ю.С.
Tags: характеристика машин по способу привода электротехника электропривод системы управления
ISBN: 5-696-01910-2
Year: 2001
Similar




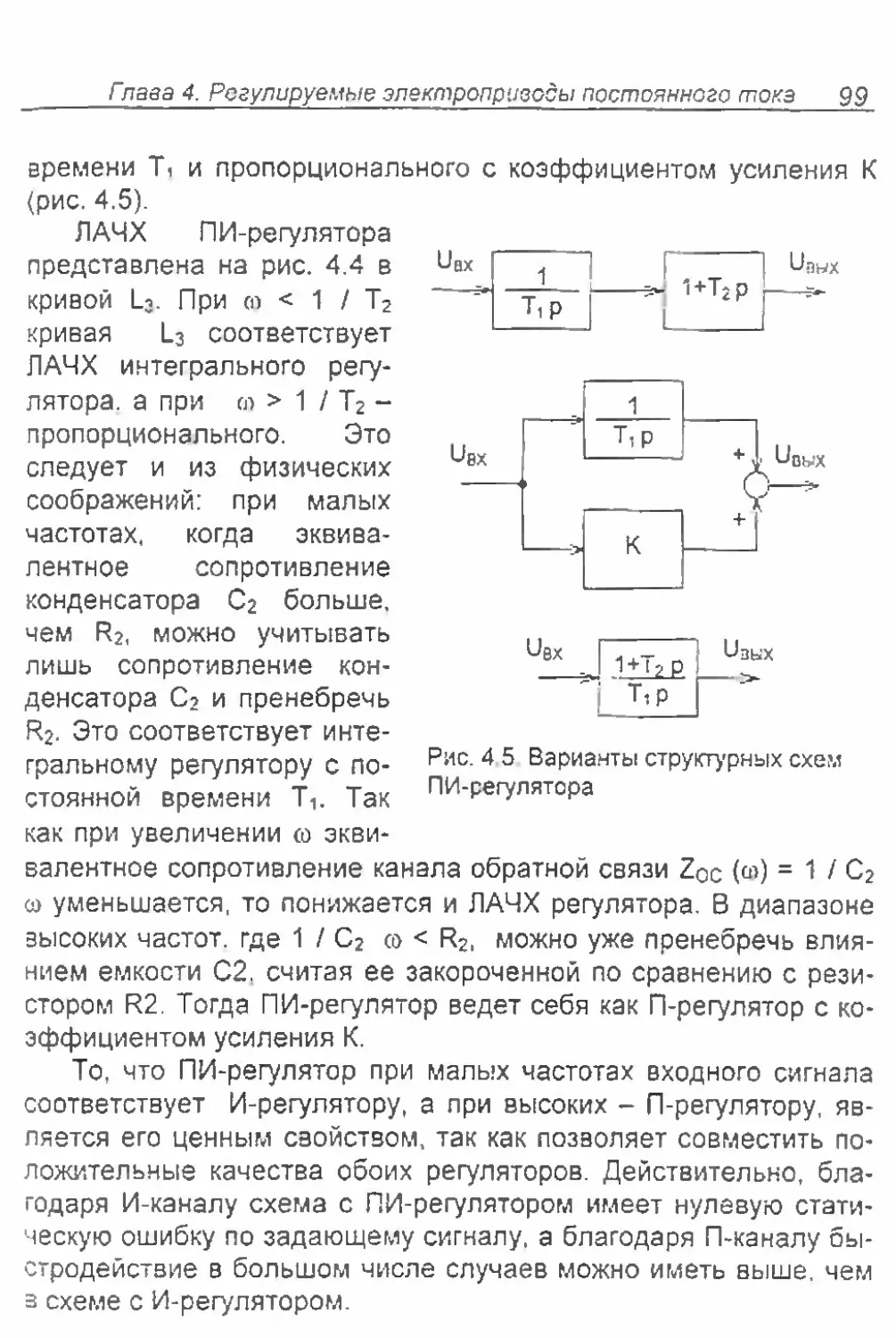
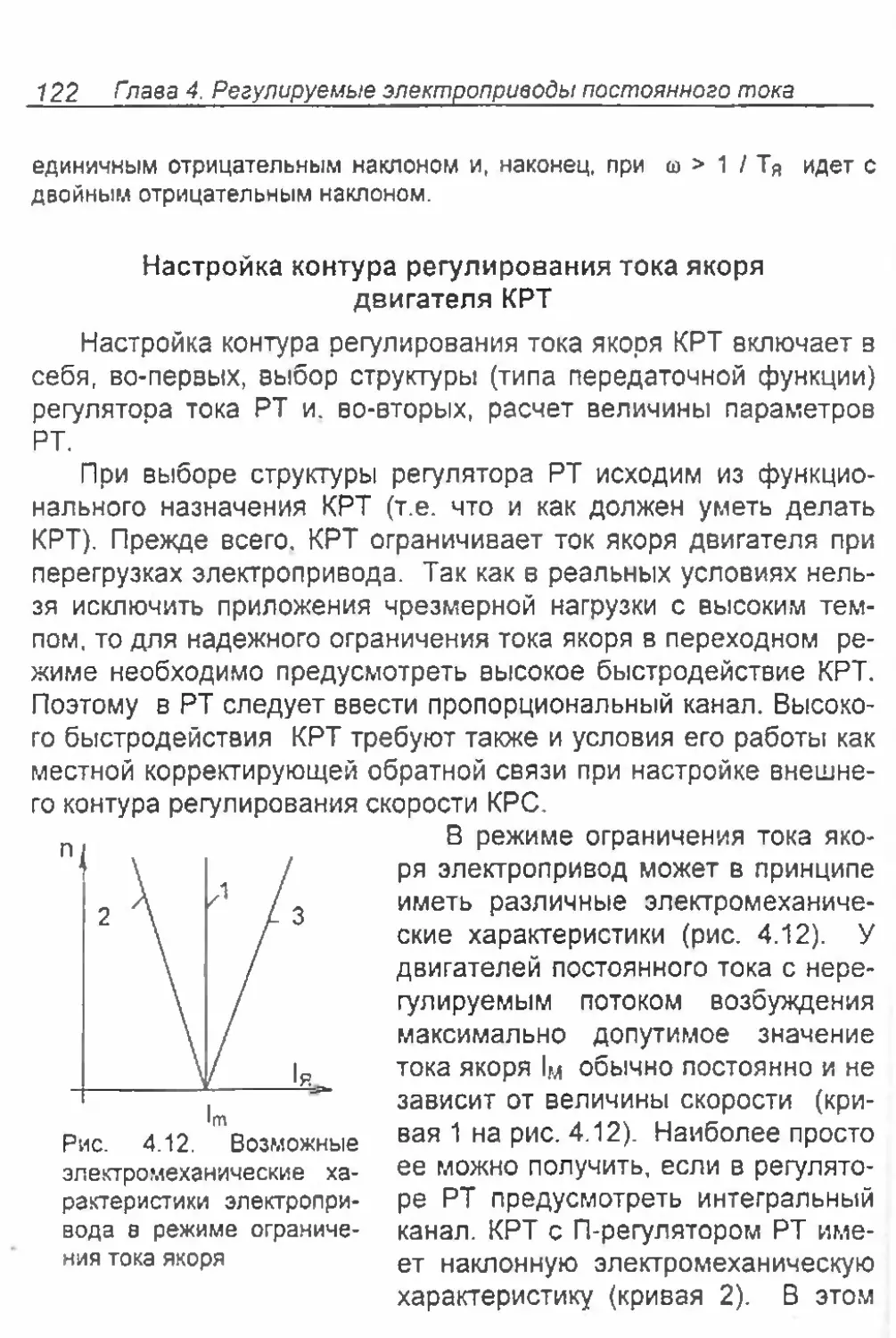
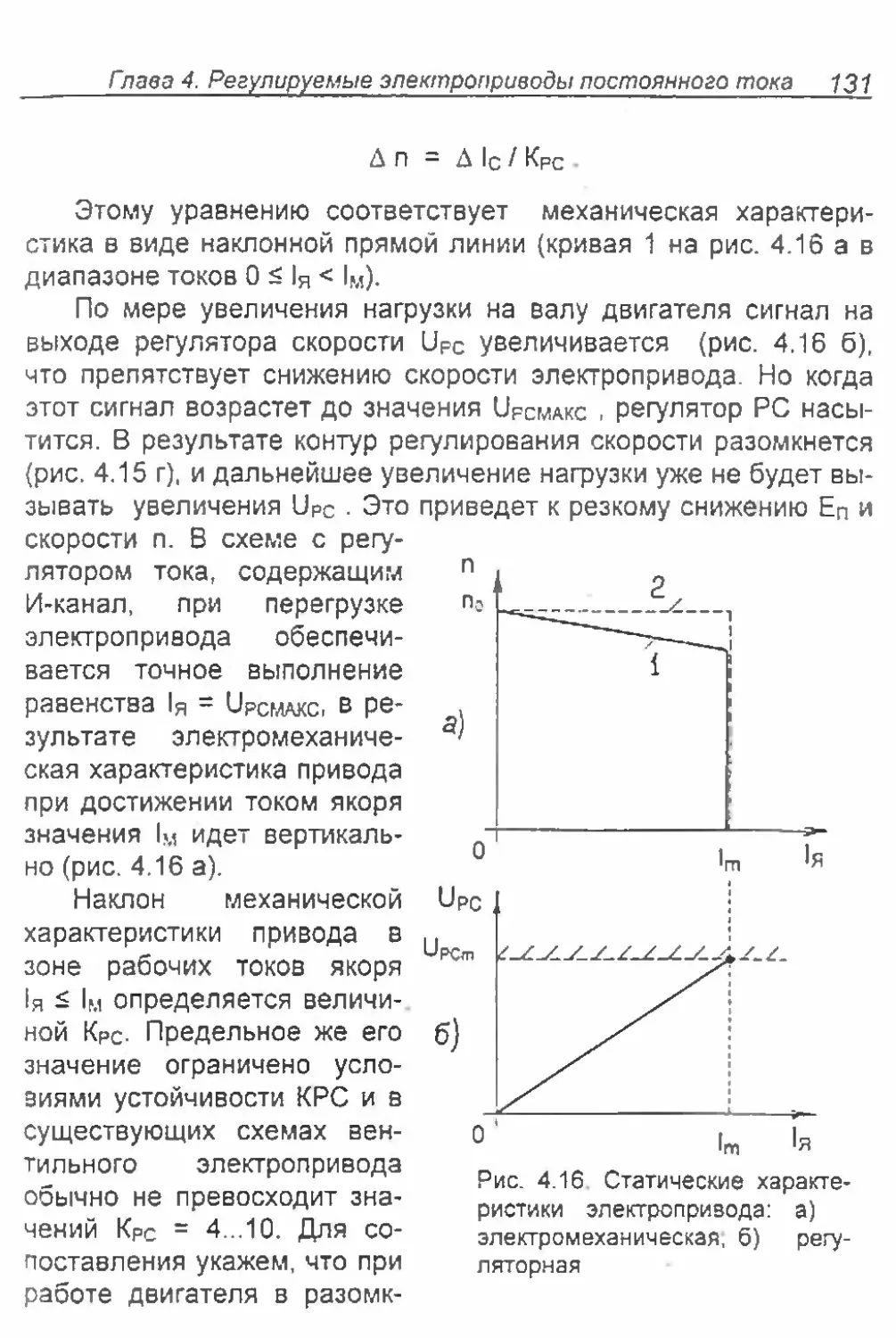
Text
Министерство образования Российской Федерации
Южно-Уральский государственный университетКафедра электропривода и автоматизации
промышленных установок62-83(07)У836Ю.С. УсынинСИСТЕМЫ УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОВУчебное пособиеЧелябинск
Издательство ЮУрГУ
2001
УДК 62-83.01 (075)Усынин Ю.С. Системы управления электроприводов:
Учеб. пособие. - Челябинск: Изд-во ЮУрГУ, 2001. - 358 с.Приведены примеры промышленных систем управления электропри¬
водов. Описаны функциональные схемы, принцип работы, способы фор¬
мирования процессов регулирования и особенности наладки.Дня студентов старших курсов специальности 180^ - «Электропривод
и автоматика промышленных установок и технологических комплексов».Ил. 133, список лит. - 73 назв.Одобрено учебно-методической комиссией энергетического факуль¬
тетаРецензенты: доктор технических наук, профессор А.Г. Возмилов;доктор технических наук, профессор В.Л. Кодкин.Издание учебного пособия состоялось благодаря финансовой под¬
держке энергетических служб предприятий Южного Урала. Особо автор
благодарит С.И. Шкаликова и Б.М. СамохзалоБа (ОАО «Челябинский тру¬
бопрокатный завод»), В.М. Плешкова, А.И. Сабурова и В.Г. Козлова ( ОАО
« Комбинат «Магнезит», г. Сатка), А.П. Горбуноза и В.Я. Рыбалко (ОАО
«Южуралэлектромонтаж»), С.А. Чупина ( НТЦ «Приводная техника»,
г. Челябинск)ISBN 5-696 -01910-2© Усынин Ю.С.,2001.£> Издательство ЮУрГУ, 2001.
Введение3ВВЕДЕНИЕВ курсе «Системы управления электроприводов» (СУЭП)
изучаются примеры промышленных систем электроприводов,
рассматриваются методы их расчета и наладки. Он является од¬
ним из курсов, завершающих образование студентов специаль¬
ности 1804 «Электропривод и автоматика промышленных уста¬
новок и технологических комплексов», и строится с учетом полу¬
ченных студентами знаний по электрическим машинам и аппа¬
ратам, промышленной электронике, элементам автоматизиро¬
ванного электропривода и теории электропривода. Методиче¬
ской основой курса СУЭП является теория автоматического
управления.СУЭП является одним из наиболее динамично развивающих¬
ся учебных курсов. Его потребности предопределили появление
в разное время в учебных планах специальности 1804 таких
предметов, как «Теория автоматического управления», «Элемен¬
ты автоматизированного электропривода», «Микропроцессорные
средства и системы управления электроприводов».Большое разнообразие СУЭП требует их классификации.
Наиболее важными классификационными признаками следует
считать функциональный, структурный и конструкционный (рис.
В.1).В основе тех функций, которые выполняются СУЭП, лежат
требования технологического процесса. Электропривод обеспе¬
чивает движение механического исполнительного органа. Функ¬
циональный признак является наиболее важным, так как с выяс¬
нения требований технологического процесса начинается со¬
ставление технических условий на проектируемый электропри¬
вод. Классификация электроприводов по типу регулируемой ко¬
ординаты механической системы является наиболее естествен¬
ной. Здесь обычно выделяют системы регулирования усилия
(момента), скорости или положения рабочего механизма. При
этом встречаются системы как прямого регулирования, так и кос¬
венного. Например, системы регулирования усилия редко вы¬
полняются с датчиками усилий. Значительно чаще встречаются
4ВведениеПРИЗНАКИ КЛАССИФИКАЦИИ СУЭППо обобщенным требованиям технологии
(функциональный признак)Системы регулирования усилия (момента,
тока якоря)Системы регулирования скорости->| Системы регулирования положенияПо типу структуры
(точностной признак) >Разомкнутые СУЭПЗамкнутые СУЭП > Адаптивные СУЭППо типу электродвигателя ^
j'конструкционный признак) >СУЭП постоянного токаСУ асинхронными ЭП-J СУ синхронными ЭПРис. В.1. Классификация систем управления электроприводов
Введение5системы косвенного регулирования, например, с обратной свя¬
зью по току якоря двигателя постоянного тока. Регулирование то¬
ка применяется как в случае непосредственного контроля усилия
на рабочем органе (например, поддержание натяжения наматы¬
ваемой полосы на моталках станов холодной прокатки), так и при
формировании процессов пуска и торможения электропривода с
заданным темпом. Системы регулирования скорости также могут
выполняться как прямыми, так и косвенными, например, с обрат¬
ной связью по напряжению на якоре. Системы регулирования
положения получили также название следящих электроприводов.Уровень требований к электроприводу со стороны различных
технологических агрегатов может весьма значительно отличать¬
ся, и это отразится на возможной структуре СУЭП. В зависимо¬
сти от требуемой точности регулирования применяют разомкну¬
тые (без обратных связей) или замкнутые (с обратными связями)
СУЭП.Если электропривод, работая на естественной механической
характеристике двигателя, обеспечивает требуемую точность ре¬
гулирования, целесообразнее применить разомкнутую систему
регулирования. В случаях, требующих более высокой точности
регулирования, применяют замкнутые системы. Сегодня более
95% всех электроприводов выполнено по разомкнутому принци¬
пу. Однако обострившиеся проблемы энерго- и ресурсосбереже¬
ния требуют более широкого применения регулируемых электро¬
приводов и, следовательно, замкнутых систем. Так, по мнению
американских экспертов, доля регулируемых электроприводов
может быть доведена до 30...40%, но относительно высокие це¬
ны на электронные компоненты препятствуют массовому приме¬
нению регулируемого электропривода.Особую группу замкнутых СУЭП образуют адаптивные сис¬
темы - такие, которые при изменении внешних воздействий или
параметров электропривода так изменяют свои структуру и (или)
параметры корректирующих связей, чтобы выбранный показа¬
тель качества регулирования (например, производительность,
точность и т.д.) стал наибольшим. Например, в электроприводе
6Введениеподачи колонны бурильного станка нужно добиться максималь¬
ной скорости проходки скважины. Если изменять усилие подачи,
начиная с нуля, то сначала скорость проходки растет, достигает
максимума, а затем снижается из-за возрастающих потерь в оча¬
ге разрушения породы. Другими словами, зависимость показате¬
ля качества (производительности станка) от величины усилия
носит экстремальный характер. Существо же синтеза экстре¬
мальной системы регулирования заключается не столько в учете
существования этого максимума, сколько в необходимости учета
его смещения в зависимости от типа встречающейся горной по¬
роды, что обычно предусмотреть заранее нет возможности. Дру¬
гим примером адаптивной системы может служить электропри¬
вод такого часто встречающегося механизма, как моталка стана
холодной прокатки полосы. При намотке полосы на барабан мо¬
талки диаметр рулона может изменяться в весьма значительном
(до 2,5...3 и более раз) диапазоне. Поэтому электропривод, на¬
строенный при работе на начальный (малый) диаметр рулона,
при больших диаметрах из-за изменения момента инерции элек¬
тропривода и соотношения между угловой и окружной скоростя¬
ми рулона должен быть перестроен.Наконец, конструкционный признак электропривода важен
потому, что различные по принципу своей работы типы электро¬
двигателей требуют и различной аппаратуры. Здесь принято вы¬
делять электроприводы постоянного тока (с двигателями незави¬
симого или последовательного возбуждения), асинхронные и
синхронные.В основу настоящего пособия положен курс лекций, читаемых
автором на протяжении многих лет на кафедре электропривода
Южно-Уральского государственного университета (ранее - Челя¬
бинского политехнического института). Структура этого курса бы¬
ла в свое время заложена Ю.А. Борцовым. На методику изложе¬
ния курса весьма благоприятно повлияла совместная многолет¬
няя работа автора с Г.В. Суворовым.Все годы своей преподавательской работы в вузе автор по¬
лучал значительную поддержку от коллектива кафедры автома¬
Введение7тизированного электропривода Московского энергетического ин¬
ститута. В особом долгу автор перед Н.Ф. Ильинским и В.М. Те¬
реховым за их постоянное внимание и доброжелательность в ра¬
боте.Автор благодарит студентов Е.Е. Боголюбова и
Е.А. Шинкаренко, которые вложили много труда при подготовке
рукописи, а также Е.В. Ананина за помощь в издании книги.
в Глава 1. Электроприводы с релейно-контакторными системами управления Глава 1. ЭЛЕКТРОПРИВОДЫ
С РЕЛЕЙНО-КОНТАКТОРНЫМИ СИСТЕМАМИ
УПРАВЛЕНИЯВо всех отраслях хозяйства широкое распространение полу¬
чили электроприводы постоянного и переменного тока с питани¬
ем двигателей непосредственно от сети. Управление такими
электроприводами осуществляется релейно-контакторной аппа¬
ратурой. Релейно-контакторные системы управления (РКСУ)
осуществляют автоматические пуск, торможение, реверсирова¬
ние и останов двигателей. Более 90% всех установленных элек¬
троприводов управляются сегодня по схемам РКСУ. Электро¬
промышленность поставляет релейно-контакторные схемы в ви¬
де законченных изделий - станций управления, предназначен¬
ных, для оснащения электроприводов постоянного тока (с двига¬
телями независимого и последовательного возбуждения), асин¬
хронных (короткозамкнутых и с фазным ротором) и роторных це¬
пей синхронных двигателей. На этих станциях управления соб¬
раны типовые схемы, с помощью которых осуществляется
управление движением электропривода, а также необходимые
защиты.1.1. Условные обозначения, применяемые
в электрических схемахВ электротехнических схемах электротехнические устройства
и их элементы обозначаются в соответствии с правилами, приня¬
тыми в Государственном стандарте по Единой системе конструк¬
торской документации (ЕСКД). Буквенные коды электрических
элементов приведены в табл. 1.1. В соответствии с ГОСТ 2.710-
81 первая (она может быть единственной) латинская буква кода
отражает укрупненные функциональные признаки элемента схе¬
мы. Более детально признаки элемента могут быть отражены
двухбуквенным кодом. Примеры соответствующих обозначений
приведены в той же таблице. Далее, в схеме могут быть уста¬
новлены несколько однотипных элементов, например, контакто¬
ров. Тогда им присваиваются порядковые номера: КМ1, КМ2 и
Глава 1. Электроприводы с релейно-контакторными £системами управленият.д. В некоторых случаях электротехническое устройство или ап¬
парат может состоять из нескольких элементов, включенных в
разных участках электрической цепи. Например, реле или кон¬
тактор может иметь несколько главных (силовых) и блокировоч¬
ных (вспомогательных) контактов, которые необходимо одно¬
значно представить на схеме. В этом случае элементу электро¬
технического устройства (контакту контактора) присваивается
свой порядковый номер. Так, буквенное обозначение КМ 1-2 сле¬
дует читать так: второй контакт контактора номер один.До введения ГОСТ 2.710-81 существовали буквенно¬
цифровые функциональные обозначения элементов схемы. Они
обозначались прописными буквами русского алфавита (они тоже
приведены в табл. 1.1), были более наглядны, легче восприни¬
мались и запоминались. Поскольку эти качества принципиально
важны в учебном процессе, то авторы учебников зедущих вузов
при изучении принципов построения схем управления электро¬
приводов отдают предпочтение «старым» обозначениям [2, 6].
Полные же схемы выполняются с позиционными обозначениями
согласно ГОСТ 2.710-81. Так как читать такие схемы очень труд¬
но, то они снабжаются надписями, поясняющими функциональ¬
ное назначение аппаратов или участков электрических цепей.ГОСТ не запрещает применение буквенно-функциональных
обозначений (на русском языке) элементов в дополнение к ос¬
новному (латинскому) коду, если это способствует лучшему по¬
ниманию схемы. Тогда функциональные обозначения выступают
в качестве поясняющих надписей.
10 Гпава 1. Электроприводы с релейно-контакторными системами управления Табл. 1.1Буквенные коды электрических элементов (по [25])Обозначение элемвм та
в однобуквенном код ех 5
^ оо X
с О« 3О 1&S х
X >.
a) a
г d
га8° |
8226 и
ш >■
о а11
Я ^сю
(0 •X О11
~ о
¥ х о
■F га sВид элемента (устройства)1234АAD, AJ
АР
АА.
AR.AQУПУ. ОУРТ, PC,
РПУстройство (общее обозначение), усилитель, ре¬
гуляторУсилители: полупроводниковый, операционный
Панель (плата) монтажная
Регуляторы: тока, скорости, положенияВBE, ВС
BQ, BRСП. сд
ДП. тгПреобразователи (датчики) неэлектрических ве¬
личин в электрические (кроме генераторов и ис¬
точников питания)и наоборот
Резольвер (сельсин, поворотный трансформатор)
- приемник и датчикДатчики: положения, скорости (тахогенератор)СКонденсаторыDDA, DDЭлементы логические, интегральные схемы
Аналоговые и цифровые микросхемы, логические
элементыЕEH. ELэн. лЭлементы различные, для которых не установле¬
но специальное буквенное обозначение.Элемент нагревательный, лампа осветительнаяFFA, FP,
FV. FUРМ. РТ,
PH. ПрЭлементы и устройства защитные
Максимально-токовое реле, реле тепловое, реле
напряжения защитное (например, реле минималь¬
ного напряжения), предохранитель плавкийGгГенераторы, источники питанияННА, HLЗв, ЛСУстройства индикаторные и сигнальные
Приборы звуковой и световой сигнализации
Глава 1. Электроприводы с релейно-контакторными11системами управленияПродолжение табл. 1.1.' 1234кКА, KV,
KR. КТ.
KFРТ, PH,
PC, РВРОП
(РНТ),
РБ. РУ,
РФ. РПРеле, контакторы, пускатели
Реле тока, напряжения, скорости, времени, в це¬
пях защитыРеле обрыва поля (нулевого тока), блокировочное,
ускорения, форсировочное, промежуточноеКМл, В, н.
У, Т. д,
пКонтактор магнитныйКонтакторы: линейный, вперед, назад, ускорения,
торможения, динамического торможения, проти-
вовключенияLИндуктивности,реакторыМдАД, СД,
ДПТ,
МДП,
ШД.
ЛДДвигателиДзигатели: асинхронные, синхронные, постоянного
тока, машины двойного питания, шаговые, линей¬
ныеРРА,
PV,
PW,
PC, PFА, V, W,
СИ, HzПриборы и устройства измерительные и испыта¬
тельные, указывающие, регистрирующие, диффе¬
ренцирующиеАмперметр, вольтметр, ваттметр, счетчик импуль¬
сов, частотомерQQF,QM,QSВА. В
РУстройства механические сильноточные, комму¬
тирующие, выключатели, разъединители в сило¬
вых цепяхВыключатели: автоматический, силовой
РазъединительRRP, RS
RK,
RT,
RUП, ШРезисторыПотенциометр, шунт измерительный
Терморезистор, термистор, варистор
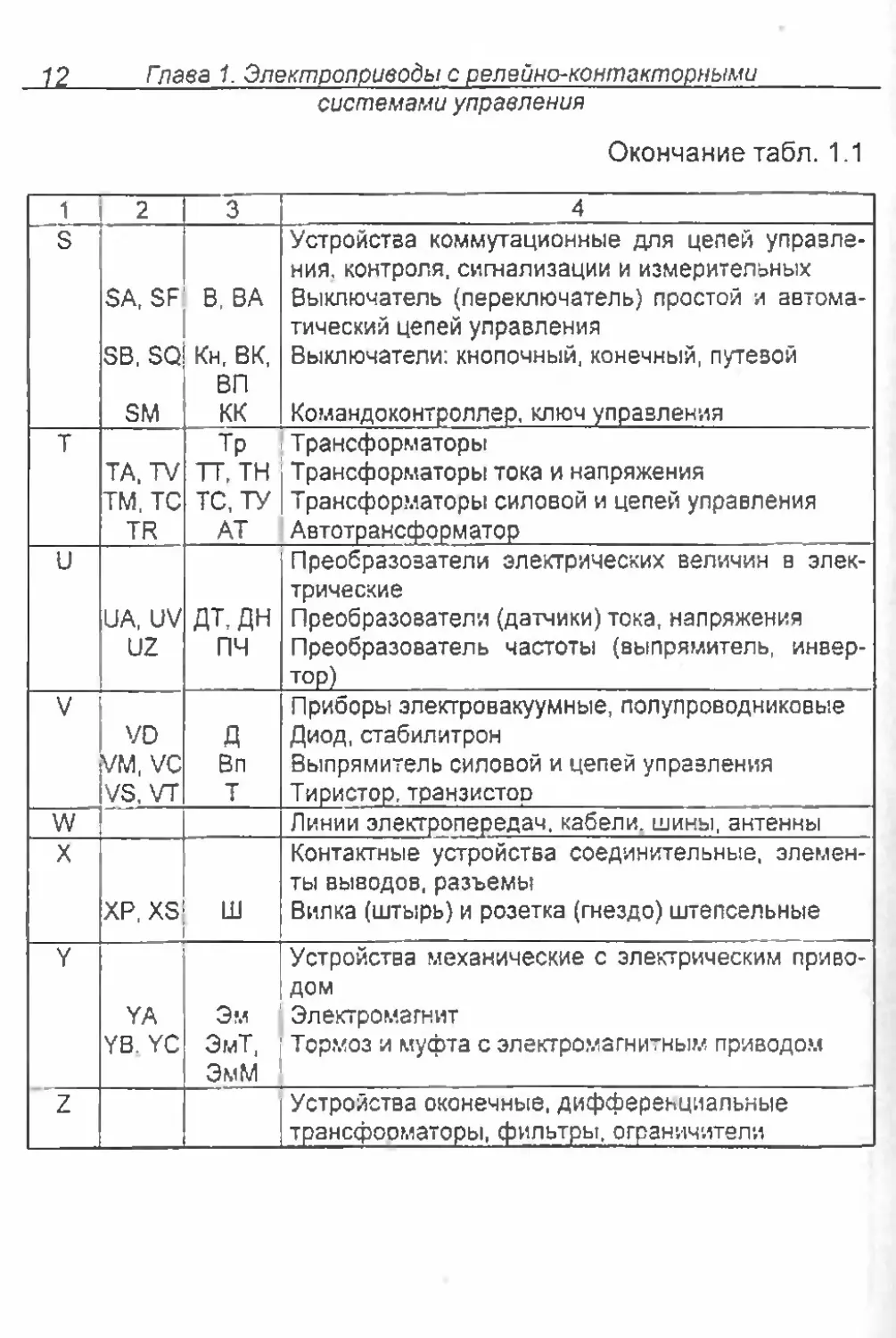
12 Глава 1. Электроприводы с релейно-контакторнымисистемами управленияОкончание табл. 1.11234SSA, SF
SB, SQ
SMВ, ВАКн, ВК,
ВП
ККУстройства коммутационные для цепей управле¬
ния, контроля, сигнализации и измерительных
Выключатель (переключатель) простой и автома¬
тический цепей управления
Выключатели: кнопочный, конечный, путевойКомандоконтроллер. ключ управлениятТА, TV
ТМ, ТС
TRТр
ТТ. тн
ТС. ТУ
АТТрансформаторыТрансформаторы тока и напряжения
Трансформаторы силовой и цепей управления
АвтотрансформаториUA, UV
UZДТ. ДН
пчПреобразователи электрических величин в элек¬
трическиеПреобразователи (датчики) тока, напряжения
Преобразователь частоты (выпрямитель, инвер-
ТСГ.1VVD
VM, VC
VS. VTдВпТПриборы электровакуумные, полупроводниковые
Диод, стабилитронВыпрямитель силовой и цепей управления
Тиристор, транзисторWЛинии электропередач, кабели, шины, антенныXХР. XSшКонтактные устройства соединительные, элемен¬
ты выводов, разъемыВилка (штырь) и розетка (гнездо) штепсельныеYYA
YB. YCЭмЭмТ,ЭмМУстройства механические с электрическим приво¬
домЭлектромагнитТормоз и муфта с электромагнитным приводомZУстройства оконечные, дифференциальные
трансформаторы, фильтры, ограничители
Гпава 1. Электроприводы с релейно-контакторными 13системами управления1.2. Способы пуска и торможения электроприводовсРКСУВ электроприводах с двигателями постоянного тока средней
и большой мощности и с асинхронными двигателями с фазным
ротором при пуске и торможении требуется ограничить пусковой
ток, исходя из перегрузочной способности. Эта задача решается
зведением в цепь якоря двигателя постоянного тока (или фазно¬
го ротора асинхронного двигателя) пускового резистора. Управ¬
ление электроприводом заключается, во-первых, в подключении
обмоток двигателя к питающей сети при пуске и отключении при
остановке и, во-вторых, к постепенному переключению релейно-
контакторНой аппаратурой ступеней пускового резистора по ме¬
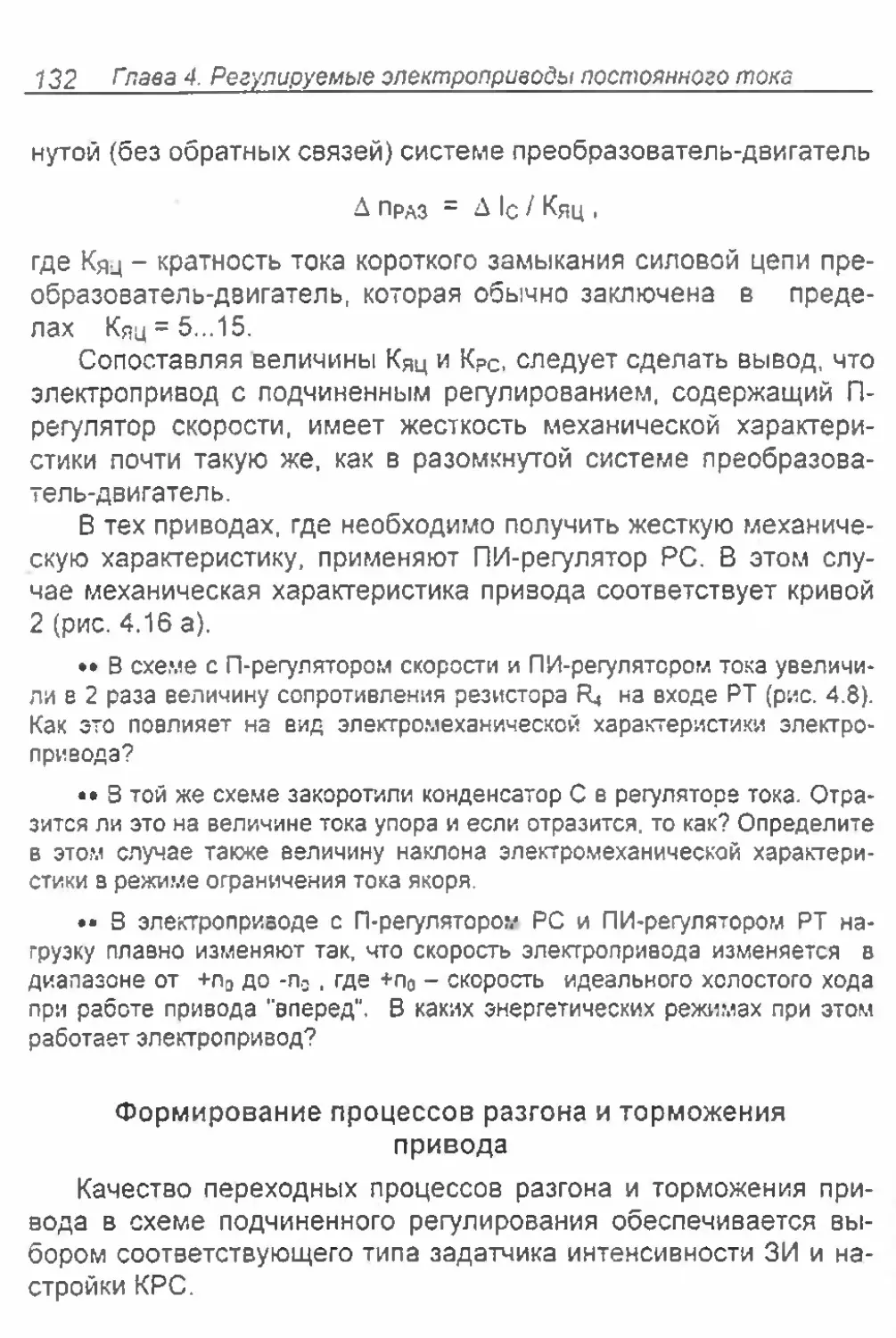
ре разгона двигателя.При пуске стремятся к получению правильной пусковой диа¬
граммы, когда все броски тока h между собой равны, а все токи
переключения \2 тоже одинаковы. Рассмотрение пусковой диа¬
граммы электропривода (рис. 1.1) показывает, что последова¬
тельное выключение ступеней пускового резистора в цепи якоря
возможно несколькими способами:поЕстественнаяб)Рис. 1.1. Схемы силовых цепей (а) и пусковая диаграм¬
ма электропривода (б) при двух ступенях ускорения
14Гпаза 1. Электроприводы с о елейно-контакторнымисистемами управления- в функции скорости, когда переход с одной искусственной
характеристики электропривода на другую возможен при дости¬
жении электроприводом скорости n1t а затем - п2;- в функции тока, когда переключение наступает после сни¬
жения тока до тока переключения 12;- в функции времени, когда в процессе пуска электроприво¬
ду заранее программируется фиксированное время работы на
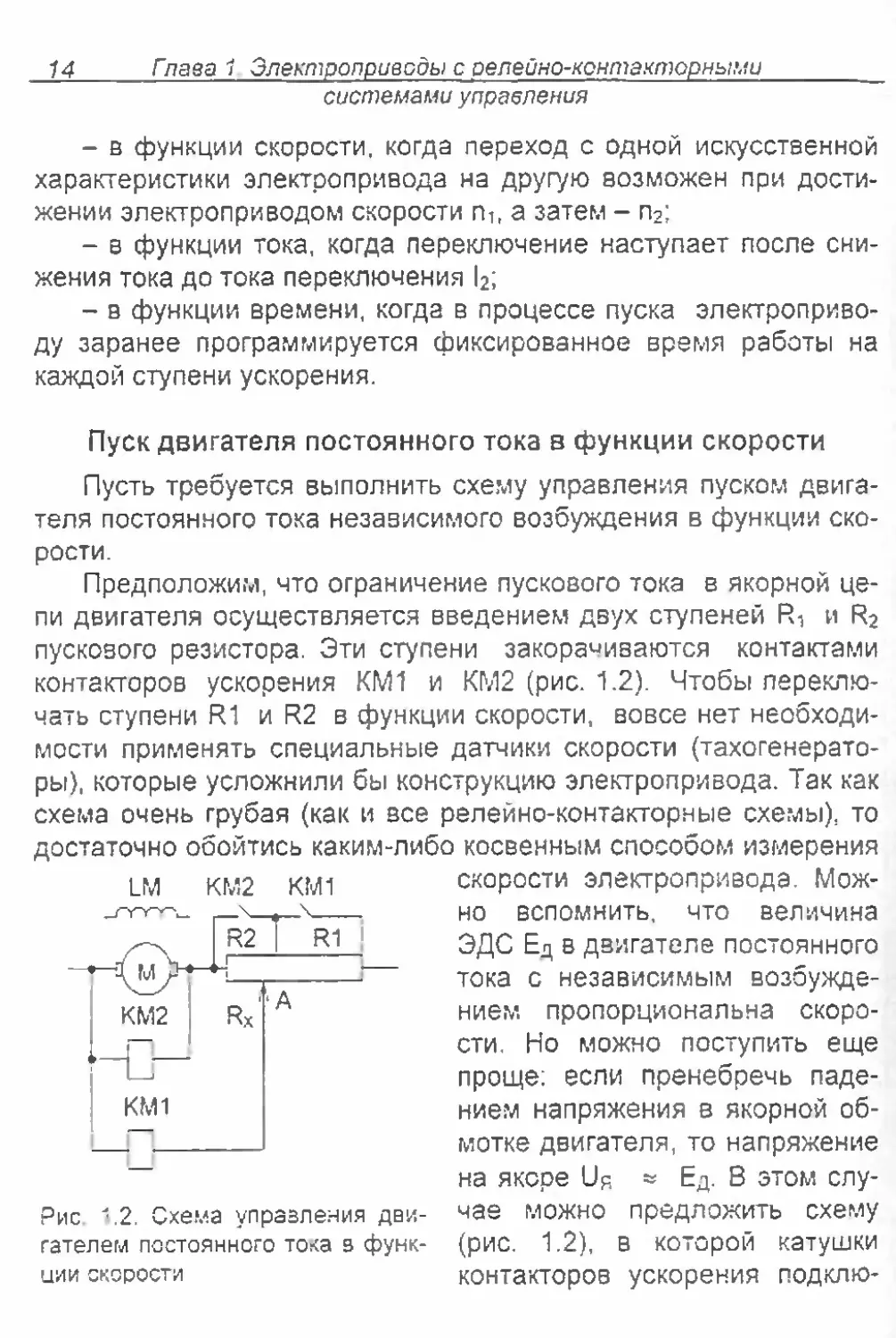
каждой ступени ускорения.Пуск двигателя постоянного тока в функции скоростиПусть требуется выполнить схему управления пуском двига¬
теля постоянного тока независимого возбуждения в функции ско¬
рости.Предположим, что ограничение пускового тока в якорной це¬
пи двигателя осуществляется введением двух ступеней и R2
пускозого резистора. Эти ступени закорачиваются контактами
контакторов ускорения КМ1 и КМ2 (рис. 1.2). Чтобы переклю¬
чать ступени R1 и R2 в функции скорости, вовсе нет необходи¬
мости применять специальные датчики скорости (тахогенерато-
ры), которые усложнили бы конструкцию электропривода. Так как
схема очень грубая (как и все релейно-контакторные схемы), то
достаточно обойтись каким-либо косвенным способом измеренияскорости электропривода. Мож¬
но вспомнить, что величина
ЭДС Ед в дзигателе постоянного
тока с независимым возбужде¬
нием пропорциональна скоро¬
сти. Но можно поступить еще
проще; если пренебречь паде¬
нием напряжения в якорной об¬
мотке двигателя, то напряжение
на якоре Ur « Ед. В этом слу-
Рис. 1.2. Схема управления дви- чае можно предложить схему
гателем постоянного тока з функ- (рис. 1.2), в которой катушки
ции скорости контакторов ускорения подклю-LM КМ2 КМ1\ м
КМ2ни—КМ1R2 R1R*
Гпава 1. Электроприводы с релейно-контакторными15системами управлениячены к якорной обмотке двигателя и которая работает следую¬
щим образом. При подаче напряжения в якорную цепь двигателя
скорость вращения двигателя М невелика, следозательно, малы
Ед и ия, поэтому контакторы КМ1 и КМ2 не втягиваются. По мере
разгона двигателя напряжение на его обмотке якоря увеличива¬
ется, что вызывает срабатывание сначала контактора КМ1, а за¬
тем и КМ2. Правда, рассмотренный вариант схемы неудобен тем,
что контакторы ускорения имеют разные напряжения срабатыва¬
ния. Но он легко устраняется, когда точка подключения правого
контакта катушки КМ1 выбирается на части Rx пускового рези¬
стора. В этом случае для напряжения втягивания контактора
КМ2 можно записать соотношениеU2 вт = Ед + 1я Ra ,а для напряжения втягивания контактора КМ1 - другое выраже¬
ние:Ui зт = Ед + 1я (Rp + Rx )•При одинаковых напряжениях втягивания контакторы ускоре¬
ния срабатывают при разных значениях Ед, а .следовательно, и
скорости вращения двигателя. Наладка схемы осуществляется
подбором величины Rx.Правильная пусковая диаграмма в рассматриваемой схеме
может гарантироваться не всегда. Она нарушается при колеба¬
ниях напряжения питающей сети, при нагреве катушек контакто¬
ров и, следовательно, изменении их активного сопротивления.
При чрезмерных колебаниях момента статической нагрузки (ко¬
гда ток статической нагрузки становится больше тока переключе¬
ния 12) возможно «застревание» двигателя на промежуточной
смягченной характеристике, что вызывает перегрев пусковых ре¬
зисторов, повышенные потери в электроприводе, а главное - на¬
рушение технологического процесса, так как электропривод не
обеспечивает работу технологического агрегата с заданной ско¬
ростью.
76 Глава 1. Электроприводы с релейно-контакторнымисистемами управленияНазванные недостатки характерны для разомкнутых систем
электропривода, которые не способны ослабить влияние дейст¬
вующих на электропривод возмущений, и являются своеобразной
платой за «простоту» принимаемых технических решений.Динамическое торможение двигателя постоянного
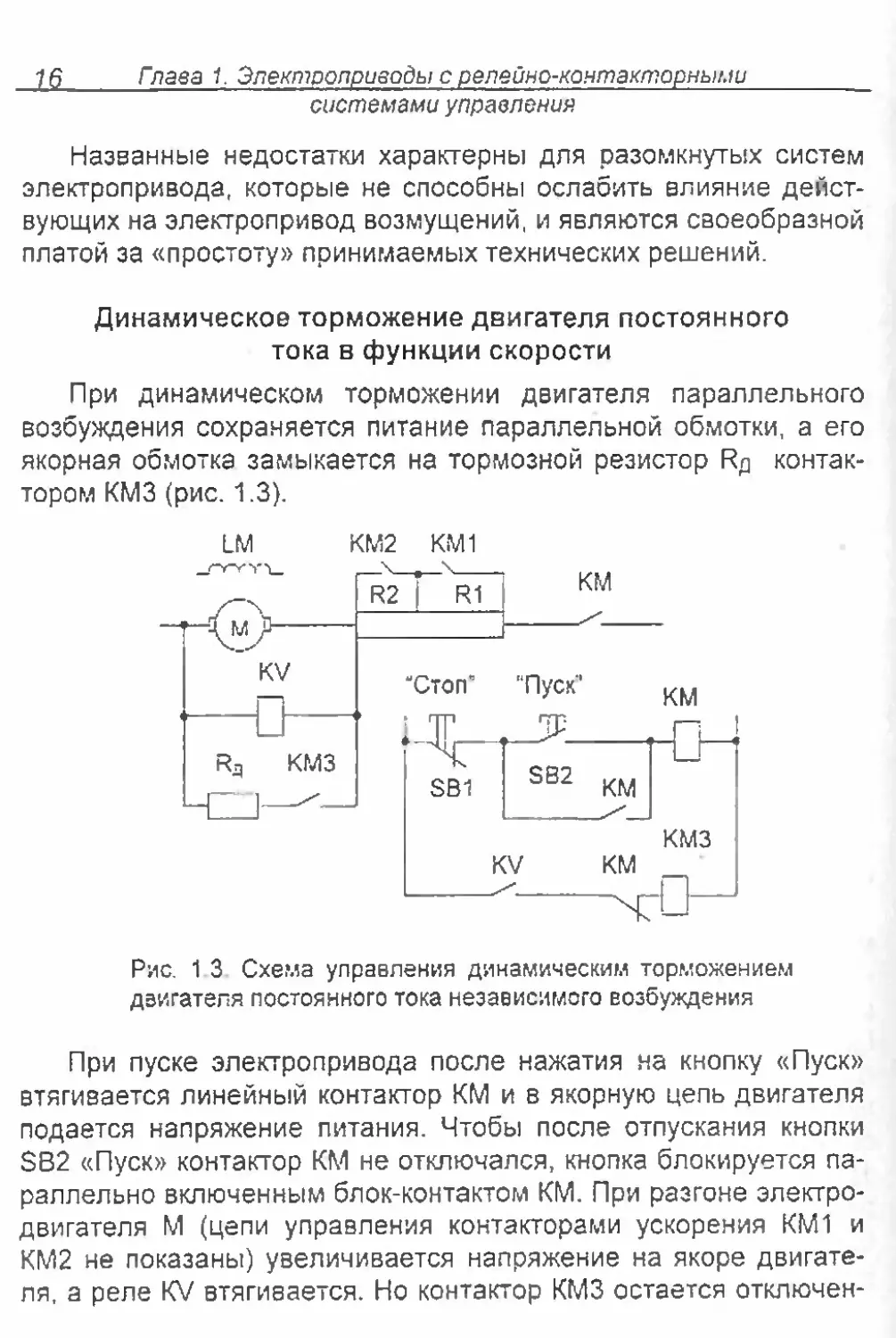
тока в функции скоростиПри динамическом торможении двигателя параллельного
возбуждения сохраняется питание параллельной обмотки, а его
якорная обмотка замыкается на тормозной резистор Нц контак¬
тором КМЗ (рис. 1.3).КМ2 КМ1R2R1КМ‘'Стоп”Jt"Пуск"ТРSB1SB2КМКМ-снКМЗKVкм-чтО-Рис. 1.3. Схема управления динамическим торможением
двигателя постоянного тока независимого возбужденияПри пуске электропривода после нажатия на кнопку «Пуск»
втягивается линейный контактор КМ и в якорную цепь двигателя
подается напряжение питания. Чтобы после отпускания кнопки
SB2 «Пуск» контактор КМ не отключался, кнопка блокируется па¬
раллельно включенным блок-контактом КМ. При разгоне электро¬
двигателя М (цепи управления контакторами ускорения KM1 и
КМ2 не показаны) увеличивается напряжение на якоре двигате¬
ля, а реле KV втягивается. Но контактор КМЗ остается отключен-
Глава 1. Электроприводы с релейно-контакторными17системами управленияным, так как цепь его катушки остается разорванной из-за ра¬
зомкнувшегося блок-контакта КМ.После отключения электропривода нажатием на кнопку SB1
«Стоп» контактор КМ отпадает, якорная цепь отключается от се¬
ти, а цепь катушки контактора КМЗ собирается, этот контактор
втягивается, подключая якорную обмотку к тормозному резистору
Яд. Динамическое торможение продолжается до тех пор, пока ос¬
тается втянутым реле динамического торможения KV.Схема настраивается на напряжение отпадания реле KV, ко¬
торое обычно выбирается в пределах (0,1...0,15) Uceth- Коэффи¬
циент возврата этого реле устанавливается минимальным и ре¬
гулируется толщиной латунной прокладки между ярмом и якорем
во втянутом состоянии реле.•• На современных станциях управления часто применяют «направ¬
ленную защиту от противозключения», когда невозможно перевести дви¬
гатель з режим противовключения. но можно прервать динамическое тор¬
можение и пустить двигатель в прежнем направлении. Составьте схему
управления электроприводом для этого случая.Торможение противовключением двигателя
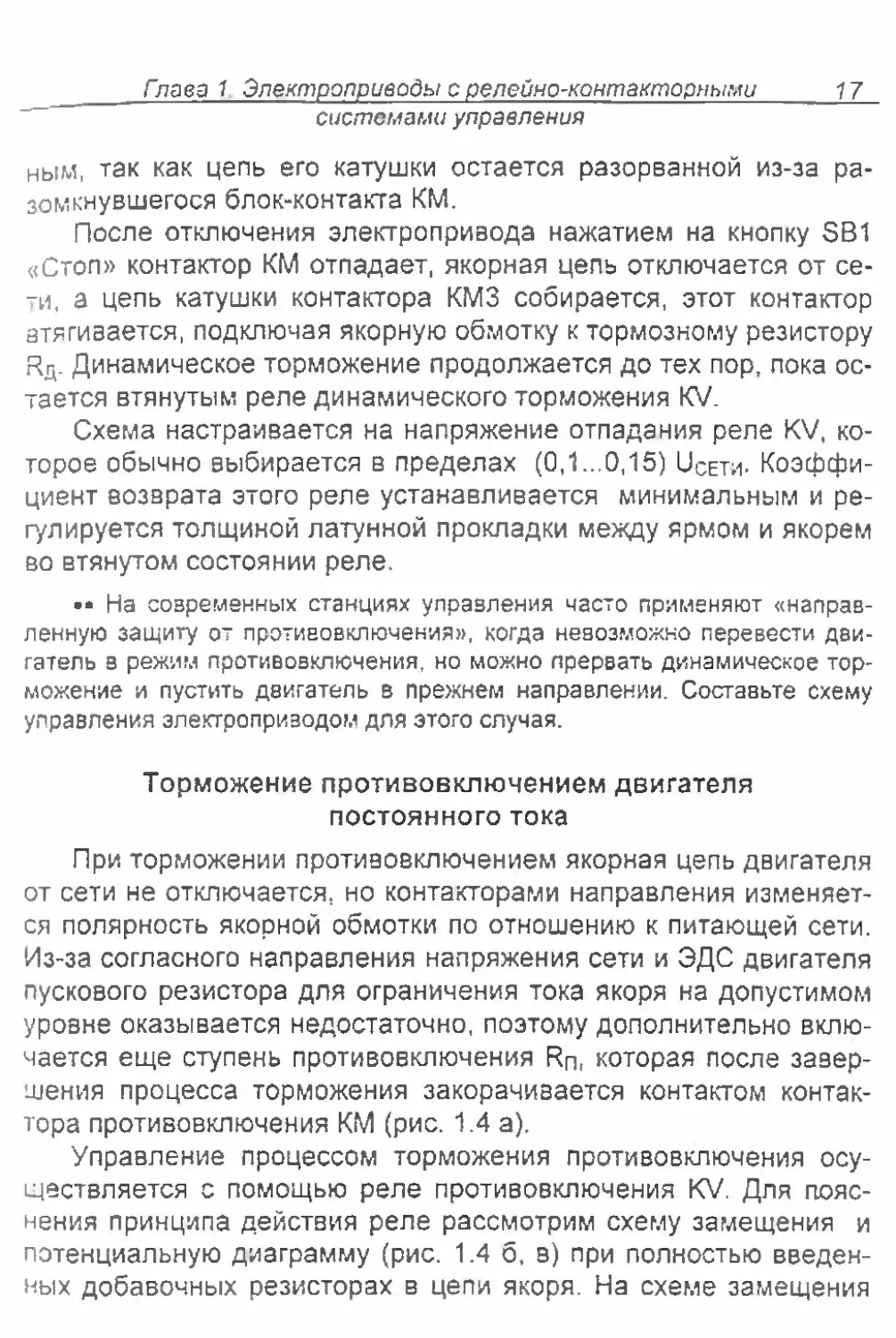
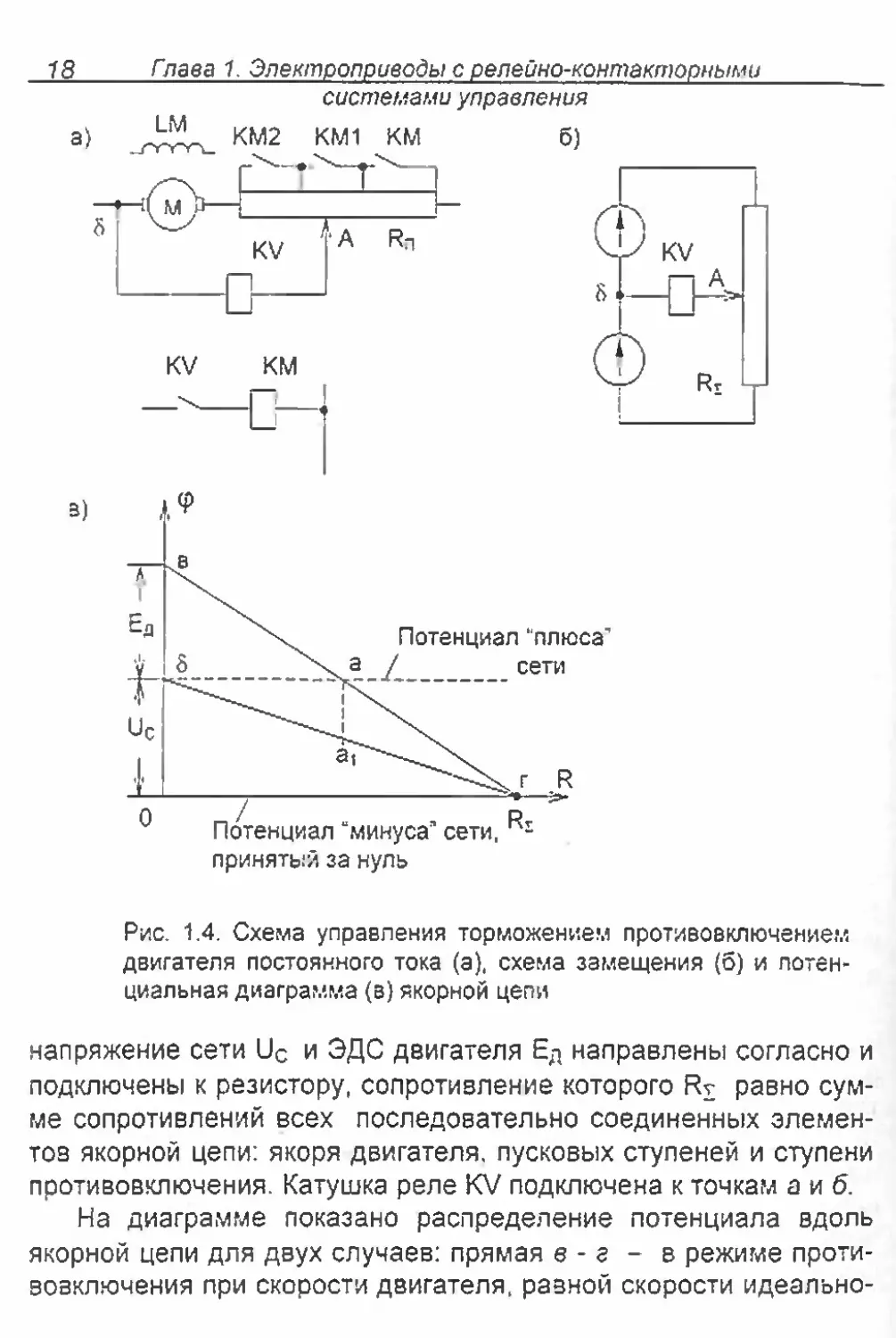
постоянного токаПри торможении противовключением якорная цепь двигателя
от сети не отключается, но контакторами направления изменяет¬
ся полярность якорной обмотки по отношению к питающей сети.
Из-за согласного направления напряжения сети и ЭДС двигателя
пускового резистора для ограничения тока якоря на допустимом
уровне оказывается недостаточно, поэтому дополнительно вклю¬
чается еще ступень противовключения Rn, которая после завер¬
шения процесса торможения закорачивается контактом контак¬
тора противовкпючения КМ (рис. 1.4 а).Управление процессом торможения противовключения осу¬
ществляется с помощью реле противовключения KV. Для пояс¬
нения принципа действия реле рассмотрим схему замещения и
потенциальную диаграмму (рис. 1.4 б, в) при полностью введен¬
ных добавочных резисторах в цепи якоря. На схеме замещения
18 Глава 1. Электроприводы с релейно-контакторнымисистемами управленияб)KV КМ-чнKVо *JПотенциал “минуса" сети, Rl
принятый за нульПотенциал "плюса'
/_ сетиРис. 1.4. Схема управления торможением противовключением
двигателя постоянного тока (а), схема замещения (б) и потен¬
циальная диаграмма (в) якорной цепинапряжение сети 1)с и ЭДС двигателя Ед направлены согласно и
подключены к резистору, сопротивление которого Rv равно сум¬
ме сопротивлений всех последовательно соединенных элемен¬
тов якорной цепи: якоря двигателя, пусковых ступеней и ступени
противовключения. Катушка реле KV подключена к точкам а и б.На диаграмме показано распределение потенциала вдоль
якорной цепи для двух случаев: прямая в - г - в режиме проти-
зозключения при скорости двигателя, разной скорости идеально-
Глава 1. Электроприводы с релейно-контакторными 19' системами управленияго холостого хода, когда ЭДС двигателя равна напряжению сети;
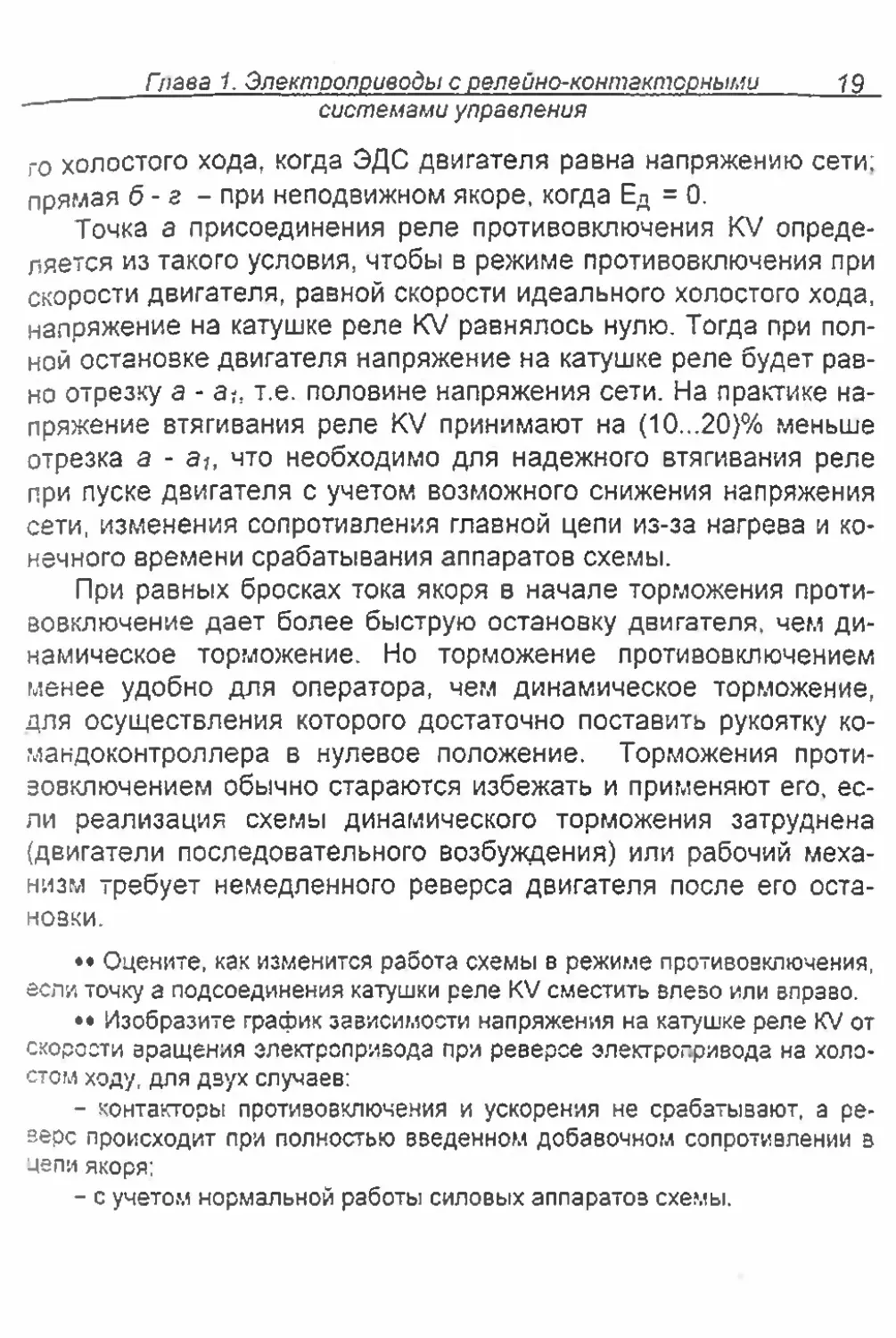
прямая 6 - г - при неподвижном якоре, когда Ед = 0.Точка а присоединения реле противовключения KV опреде¬
ляется из такого условия, чтобы в режиме противовключения при
скорости двигателя, равной скорости идеального холостого хода,
напряжение на катушке реле KV равнялось нулю. Тогда при пол¬
ной остановке двигателя напряжение на катушке реле будет рав¬
но отрезку а - at, т.е. половине напряжения сети. На практике на¬
пряжение втягивания реле KV принимают на (10...20)% меньше
отрезка а - а1г что необходимо для надежного втягивания реле
при пуске двигателя с учетом возможного снижения напряжения
сети, изменения сопротивления главной цепи из-за нагрева и ко¬
нечного времени срабатывания аппаратов схемы.При равных бросках тока якоря в начале торможения проти-
вовключение дает более быструю остановку двигателя, чем ди¬
намическое торможение. Но торможение противовключением
менее удобно для оператора, чем динамическое торможение,
для осуществления которого достаточно поставить рукоятку ко-
мандоконтроллера в нулевое положение. Торможения проти-
вовключением обычно стараются избежать и применяют его, ес¬
ли реализация схемы динамического торможения затруднена
(двигатели последовательного возбуждения) или рабочий меха¬
низм требует немедленного реверса двигателя после его оста¬
новки.•« Оцените, как изменится работа схемы в режиме противовключения,
если точку а подсоединения катушки реле KV сместить влево или вправо.•• Изобразите график зависимости напряжения на катушке реле KV от
скорости вращения электропривода при реверсе электропривода на холо¬
стом ходу, для двух случаев:- контакторы протизовключения и ускорения не срабатывают, а ре¬
верс происходит при полностью введенном добавочном сопротивлении з
цепи якоря:- с учетом нормальной работы силовых аппаратов схемы.
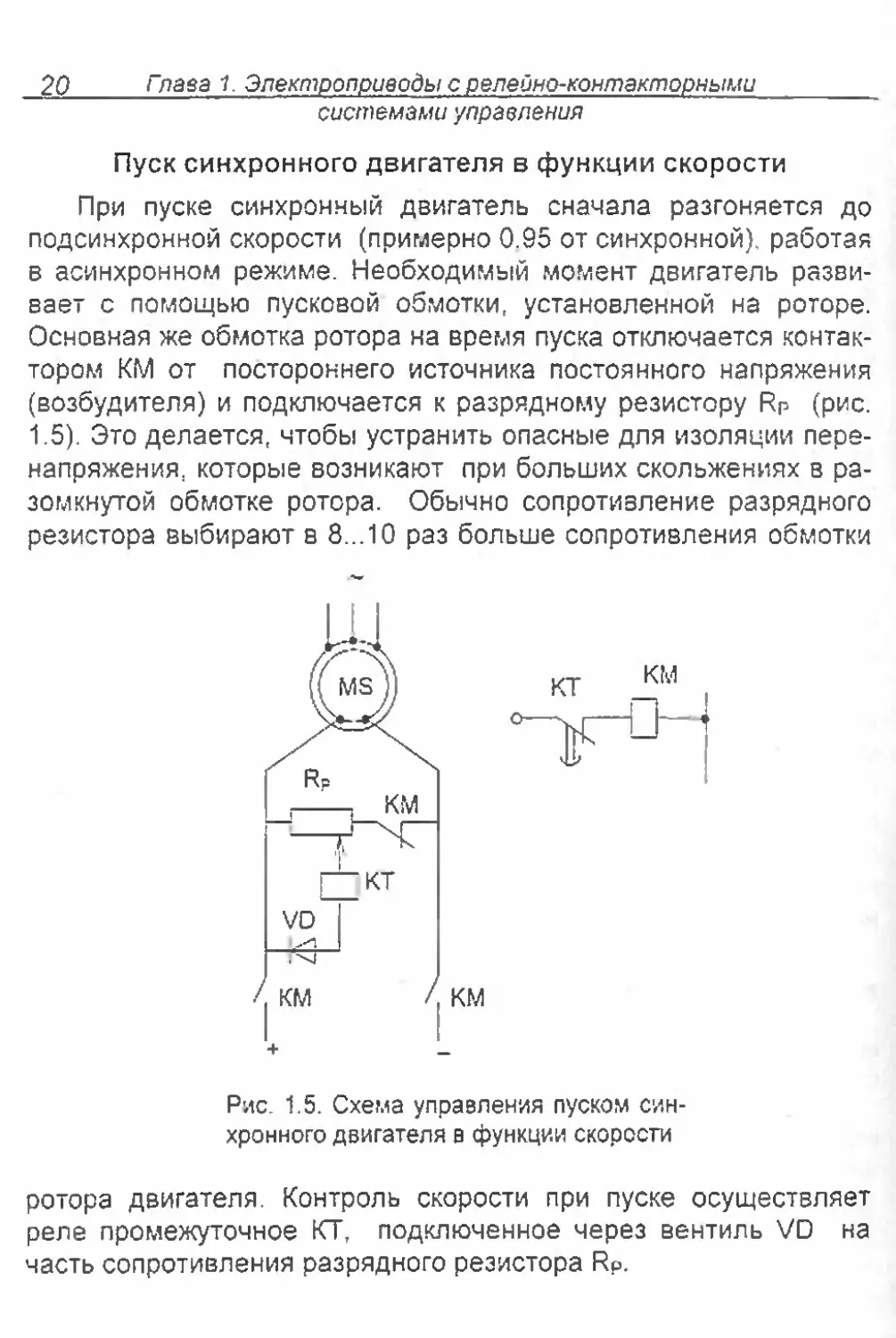
20 Гпава 1. Электроприводы с релейно-контакторнымисистемами управленияПуск синхронного двигателя в функции скоростиПри пуске синхронный двигатель сначала разгоняется до
подсинхронной скорости (примерно 0.95 от синхронной), работая
в асинхронном режиме. Необходимый момент двигатель разви¬
вает с помощью пусковой обмотки, установленной на роторе.
Основная же обмотка ротора на время пуска отключается контак¬
тором КМ от постороннего источника постоянного напряжения
(возбудителя) и подключается к разрядному резистору RP (рис.
1.5). Это делается, чтобы устранить опасные для изоляции пере¬
напряжения, которые возникают при больших скольжениях в ра¬
зомкнутой обмотке ротора. Обычно сопротивление разрядного
резистора выбирают в 8...10 раз больше сопротивления обмоткиVD4<rJ
/ КМ / км+Рис. 1.5. Схема управления пуском син¬
хронного двигателя в функции скоростиротора двигателя. Контроль скорости при пуске осуществляет
реле промежуточное КТ, подключенное через вентиль VD на
часть сопротивления разрядного резистора Rp.
Гпава 1. Электроприводы с релейно-контакторными21системами управленияВ первый момент пуска, когда скольжение двигателя и паде¬
ние напряжения на Rp велики, реле КТ втягивается, запрещая
срабатывание КМ. По мере разгона двигателя напряжение на ка¬
тушке КТ понижается. Реле настраивается так, чтобы оно отпа¬
дало при подсинхронной скорости. При этом включается контак¬
тор КМ, который подает полное напряжение возбуждения на об¬
мотку ротора.Так как на подсинхронной скорости частота напряжения в ро¬
торе составляет 2...3 Гц, есть опасность вибрационной работы
реле КТ. Чтобы ее исключить, реле КТ выбирают с выдержкой
времени установкой короткозамкнутой гильзы на ярмо его магни-
топровода. В этом случае магнитный поток реле спадает пропор¬
ционально среднему (а не мгновенному) значению тока в катуш¬
ке, обеспечивая четкую работу схемы.•• Почему с целью полного устранения перенапряжений на обмотке
ротора синхронного двигателя при его пуске нельзя установить R? = О?•• Номинальное напряжение на обмотке синхронного двигателя со¬
ставляет 50 В. При пуске амплитудное значение напряжения на кольцах
ротора составило 150 В. Величина сопротивления разрядного резистора
по сравнению с активным сопротивлением обмотки возбуждения двигате¬
ля R* =9,0 Roefl. Определите величину постоянной времени обмотки
возбуждения ротора. Какую роль играет индуктивность обмотки возбужде¬
ния синхронного двигателя в ослаблении (или усилении?) перенапряжений
при пуске?Разгон двигателя постоянного тока до скорости выше
основной в функции тока якоряВ релейно-контакторных электроприводах постоянного тока с
двухзонным регулированием скорости разгон (и регулирование
скорости) двигателя до основной скорости осуществляется изме¬
нением напряжения на якоре переключением ступеней пускового
реостата контакторами ускорения КМ1, КМ2 и КМЗ, а выше ос¬
новной-изменением тока возбуждения введением регулируемого
резистора (шунтового реостата R4) в цепь обмотки возбуждения
(рис. 1.6).
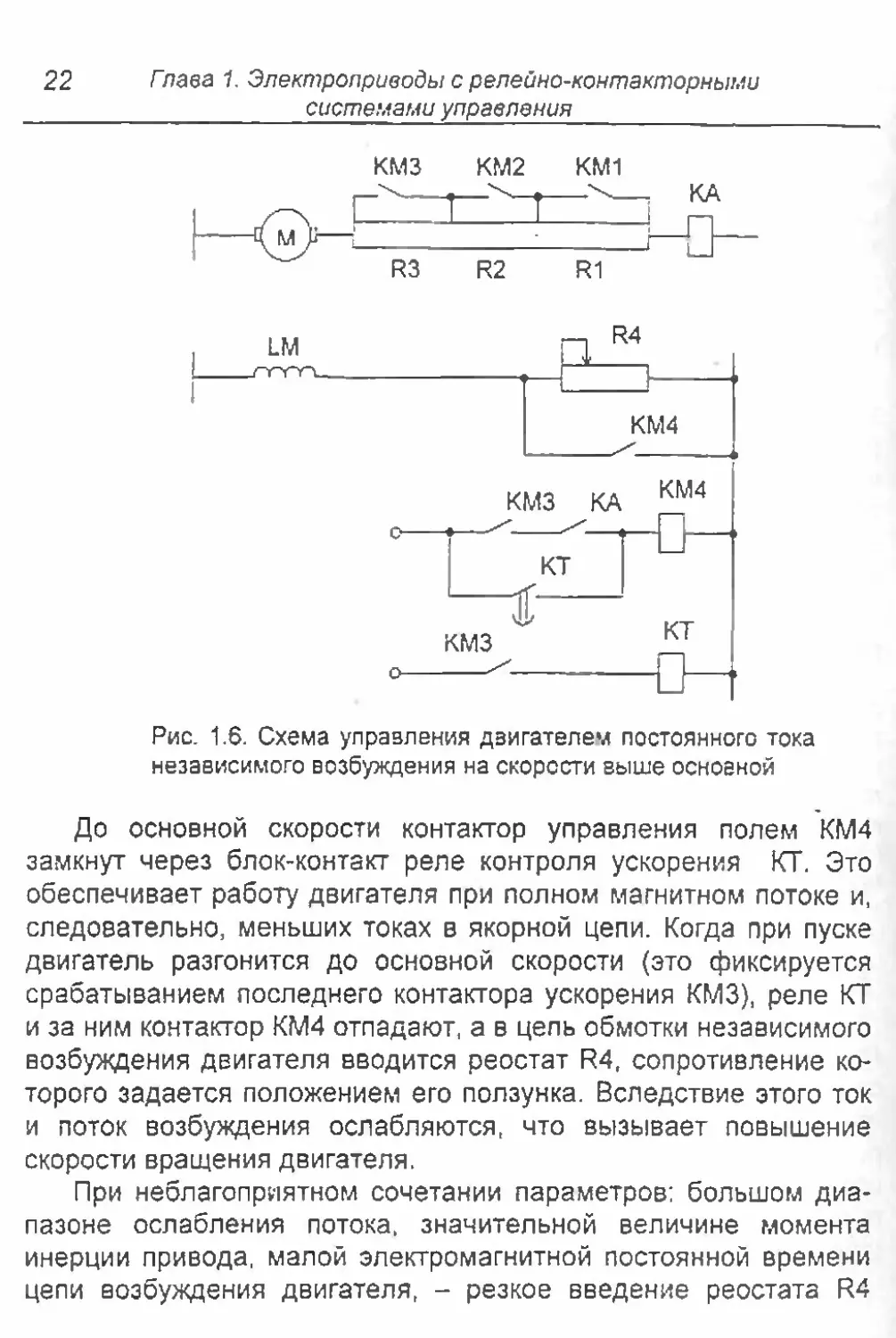
22 Гпава 1. Электроприводы с релейно-контакторными системами управления КМЗ КМ2 КМ1Рис. 1.6. Схема управления двигателем постоянного тока
независимого возбуждения на скорости выше основнойДо основной скорости контактор управления полем КМ4
замкнут через блок-контакт реле контроля ускорения КТ. Это
обеспечивает работу двигателя при полном магнитном потоке и,
следовательно, меньших токах в якорной цепи. Когда при пуске
двигатель разгонится до основной скорости (это фиксируется
срабатыванием последнего контактора ускорения КМЗ), реле КТ
и за ним контактор КМ4 отпадают, а в цепь обмотки независимого
возбу>едения двигателя вводится реостат R4, сопротивление ко¬
торого задается положением его ползунка. Вследствие этого ток
и поток возбуждения ослабляются, что вызывает повышение
скорости вращения двигателя.При неблагоприятном сочетании параметров: большом диа¬
пазоне ослабления потока, значительной величине момента
инерции привода, малой электромагнитной постоянной времени
цепи возбуждения двигателя, - резкое введение реостата R4
Глава 1. Электроприводы с релейно-контакторными 23 системами управления может вызвать бросок тока якоря больше допустимой величины.
Требуется, чтобы схема управления ограничила в этом случае
ток якоря при разгоне электропривода.Если при введении реостата R4 ток якоря двигателя достиг¬
нет величины тока втягивания реле управления полем КА, то по¬
следнее своим нормально открытым контактом включает контак¬
тор КМ4, закорачивающий реостат R4. Это вызовет увеличение
потока возбуждения, снижение тока якоря и уменьшение ускоре¬
ния двигателя. После снижения тока якоря до тока отпадания ре¬
ле КА отключается контактор КМ4, благодаря чему происходит
повторное ослабление потока возбуждения, и ускорение двига¬
теля увеличится.Во зремя разгона двигателя выше основной скорости вклю¬
чение и отключение реле КА и контактора КМ4 могут повторяться
несколько раз (вибрационный режим работы этих аппаратов).
При этом ток якоря колеблется в коридоре, ограниченном устав¬
ками втягивания и отпадания реле КА. Чтобы снизить ширину то¬
кового коридора, реле КА выполняют с максимально возможным
коэффициентом возврата (0,80...0,85).При динамическом торможении двигателя с высокой скорости
нельзя сразу включать контактор КМ4 по условиям коммутации
двигателя и из-за опасности увеличения его ЭДС до недопусти¬
мой величины. Тогда торможение осуществляется в две ступени:
скачала с ослабленным потоком, для чего реле КТ выполняется
с выдержкой времени, а затем после отпадания реле КТ - с пол¬
ным потоком двигателя.*о В установившихся режимах двигатель с полным потоком возбужде¬
ния (контактор КМ4 втянут) поддерживает основную скорость, а с ослаб¬
ленным (когда КМ4 отпадает) - повышенную. Почему же при работе рас¬
сматриваемой схемы происходит разгон двигателя как на отрезках време¬
ни. когда контактор КМ£ отпадает, так и на отрезках времени, когда КМ4
втягивается?*= Оцените предельную величину возможного броска тока якоря при
ослаблении потока, если при работе двигателя на основной характеристи¬
ке в номинальной точке статическое падение скорости по сравнению с ре-
24Гпава 1. Электроприводы с релейно-контакторнымисистемами управленияжимом идеального холостого хода составляет 5%, а диапазон ослабления
потока - 50%.Пуск двигателя постоянного тока в функции времениВ зтом случае управление осуществляется с помощью реле
времени, число которых равно числу ступеней пускового реоста¬
та, а выдержка времени каждого реле равна времени разгона
двигателя на каждой из пусковых ступеней. В электромагнитных
реле выдержка времени создается или установкой короткозамк¬
нутой гильзы на ярмо магнитопровода, или (если это допустимо
по условиям работы электрической схемы) замыканием накорот¬
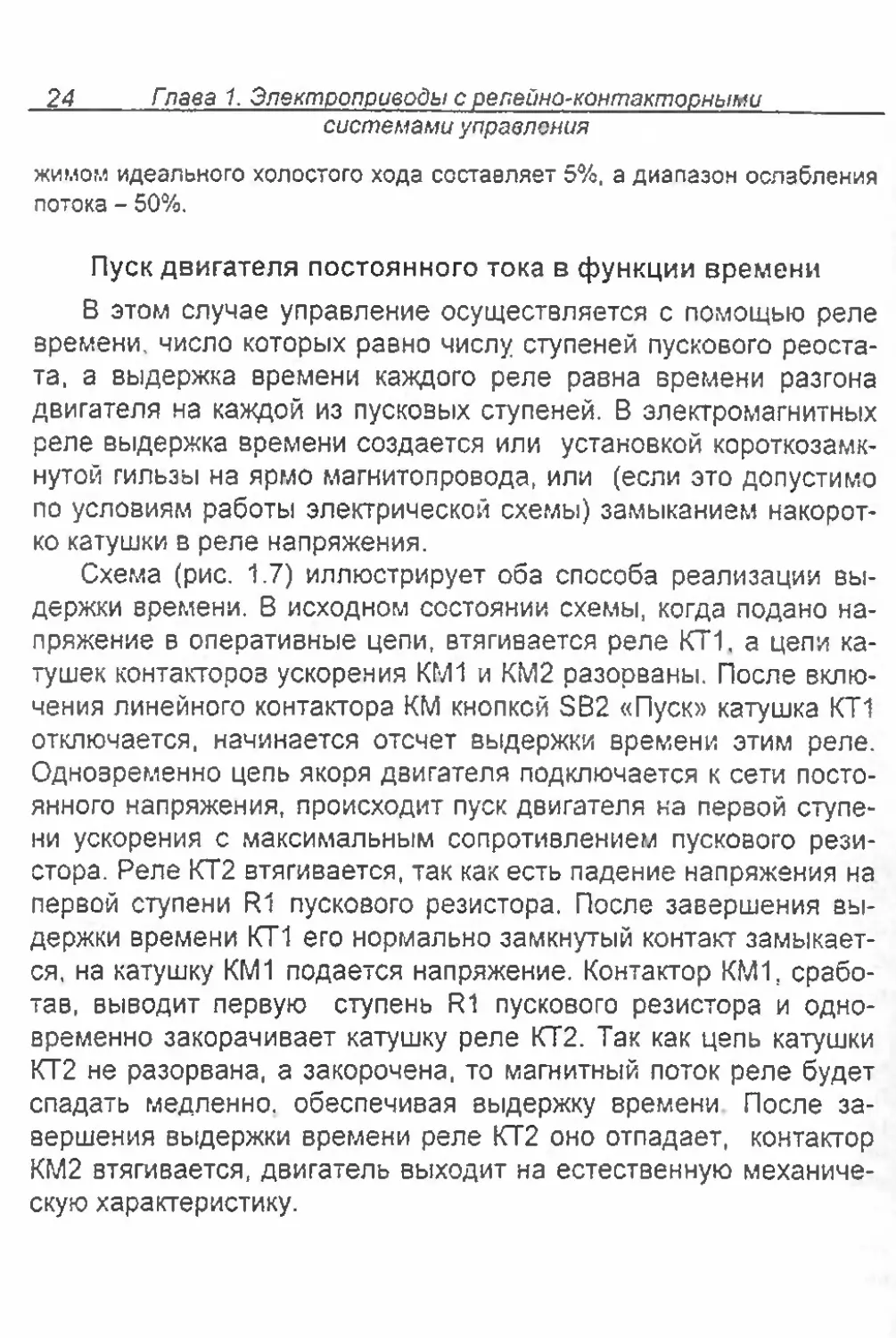
ко катушки в реле напряжения.Схема (рис. 1.7) иллюстрирует оба способа реализации вы¬
держки времени. В исходном состоянии схемы, когда подано на¬
пряжение в оперативные цепи, втягивается реле КТ 1, а цепи ка¬
тушек контактороз ускорения КМ1 и КМ2 разорваны. После вклю¬
чения линейного контактора КМ кнопкой SB2 «Пуск» катушка КТ1
отключается, начинается отсчет выдержки времени этим реле.
Однозременно цепь якоря дзигателя подключается к сети посто¬
янного напряжения, происходит пуск двигателя на первой ступе¬
ни ускорения с максимальным сопротивлением пускового рези¬
стора. Реле КТ2 втягивается, так как есть падение напряжения на
первой ступени R1 пускового резистора. После завершения вы¬
держки времени КТ 1 его нормально замкнутый контакт замыкает¬
ся. на катушку КМ1 подается напряжение. Контактор КМ1, срабо¬
тав, выводит первую ступень R1 пускового резистора и одно¬
временно закорачивает катушку реле КТ2. Так как цепь катушки
КТ2 не разорвана, а закорочена, то магнитный поток реле будет
спадать медленно, обеспечивая выдержку времени. После за¬
вершения выдержки времени реле КТ2 оно отпадает, контактор
КМ2 втягивается, дзигатель выходит на естественную механиче¬
скую характеристику.
Глава 1. Электроприводы с ролейно-контакторными 25системами управленияLM КМ2 КМ1КТ2ЧУ"Стоп" “Пуск"Рис. 1.7. Схема управления двигателем постоянно¬
го тока в функции времени3 электроприводах постоянного тока и асинхронных с фаз¬
ным ротором пуск двигателя чаще всего осуществляется в функ¬
ции времени. Эта схема позволяет унифицировать оборудование
(разными двигателями можно управлять от одних реле), удобна в
наладке (можно полностью опробовать работу схемы управле¬
ния, не подключая силовые цепи), стабильное время пуска об¬
легчает работу оператора и упрощает схемы автоматизации при
совместной работе нескольких электроприводов.Правда, независимость программы пуска от текущего состоя¬
ния электропривода может вызвать чрезмерные выбросы тока
якоря, например, при перегрузках. Поэтому схемы с управлением
26 Гпава 1. Электроприводы с релейно-контакторнымисистемами управленияпуском двигателя в функции времени обязательно дополняются
максимальной токовой защитой.1.3. Защиты в электроприводеЗащитой называют аппарат или узел схемы, который отклю¬
чает электропривод после возникновения в нем каких-либо ава¬
рийных режимов. Опишем работу некоторых из наиболее часто
применяемых в системах электропривода защит.Максимально-токовая защита главных цепей в схемах
управления двигателями постоянного и переменного тока служит
для отключения от сети главной цепи при появлении в ней токов
короткого замыкания или ненормально больших токов, а также
при длительных перегрузках.Основными причинами появления токов короткого замыкания
и опасно больших токов могут быть повреждение изоляции дви¬
гателя или подводящих проводов, выход из строя аппаратов на
станции управления или пусковых резисторов, механическая пе¬
регрузка двигателя ненормально большим статическим момен¬
том.Для осуществления максимально-токовой защиты применя¬
ют:- автоматические воздушные выключатели (автоматы) с
электромагнитными или комбинированными (тепловыми и элек¬
тромагнитными) расцепителями;- предохранители;- электромагнитные токовые реле (с воздействием на ли¬
нейный контактор);- тепловые реле.Автоматы устанавливаются для защиты от коротких замыка¬
ний на ответвлении к одному или к группе двигателей.Предохранители применяют главным образом для защиты от
токов короткого замыкания в схемах управления мелкими двига¬
телями. В электроприводах средней и большой мощности при¬
менять предохранители избегают, что сзязано как с неудобства-
Гпав а 1. Электроприводы с релейно-контакторными2Lсистемами управлениями обслуживания из-за необходимости менять плавкие вставки,
так и опасностью применения некалиброванных плавких вставок.
В статорных цепях асинхронных двигателей применение предо¬
хранителей влечет за собой опасность работы двигателя на двух
фазах при перегорании одного из предохранителей. Использова¬
ние предохранителей оправдано для неответственных потреби¬
телей (бытовая техника) или в тех случаях, когда по своим вре¬
менным характеристикам автомат не может обезопасить защи¬
щаемый аппарат (например, быстродействующие предохраните¬
ли з цепях вентилей тиристорных агрегатов).Максимальные токовые реле обычно выполняются с воздей¬
ствием на реле напряжения, при отключении которого отключа¬
ется и линейный контактор. Они отключают токи перегрузки, а их
уставка срабатывания выбирается на 10% больше допустимого
тока перегрузки. В электроприводах повторно-кратковременного
режима эти реле выполняются с самозозвратом, что позволяет
оператору после срабатывания этой зашиты вновь пускать дзи-
гатель без вызова электрика. Воздействие максимального токо¬
вого реле непосредственно на линейный контактор с целью от¬
ключения токов короткого замыкания встречается реже и приме¬
няется в относительно простых схемах (нереверсивные магнит¬
ные пускатели асинхронных двигателей малой мощности).Нулевая защита (защита минимального напряжения) от¬
ключает главную цепь при исчезновении (или снижении ниже до¬
пустимого уровня) напряжения так, что она после восстановле¬
ния напряжения самопроизвольно включиться не может. Для
большинства технологических механизмов самозапуск электро¬
привода недопустим, поэтому они имеют такую защиту. Сказан¬
ное особенно актуально для подъемно-транспортных механиз¬
мов (подъемных кранов), где отсутствие или неисправное со¬
стояние такой защиты опасно для обслуживающего персонала.
28Глава 1. Электроприводы с репейно-контакторнымисистемами управления1 /1-SM0 в1 1s.mo !*! !—i! •■ 1SPil2 !i !а)FVКМ1КМ2б)?SQ1о -оКМ1Т SQ2 КМ2
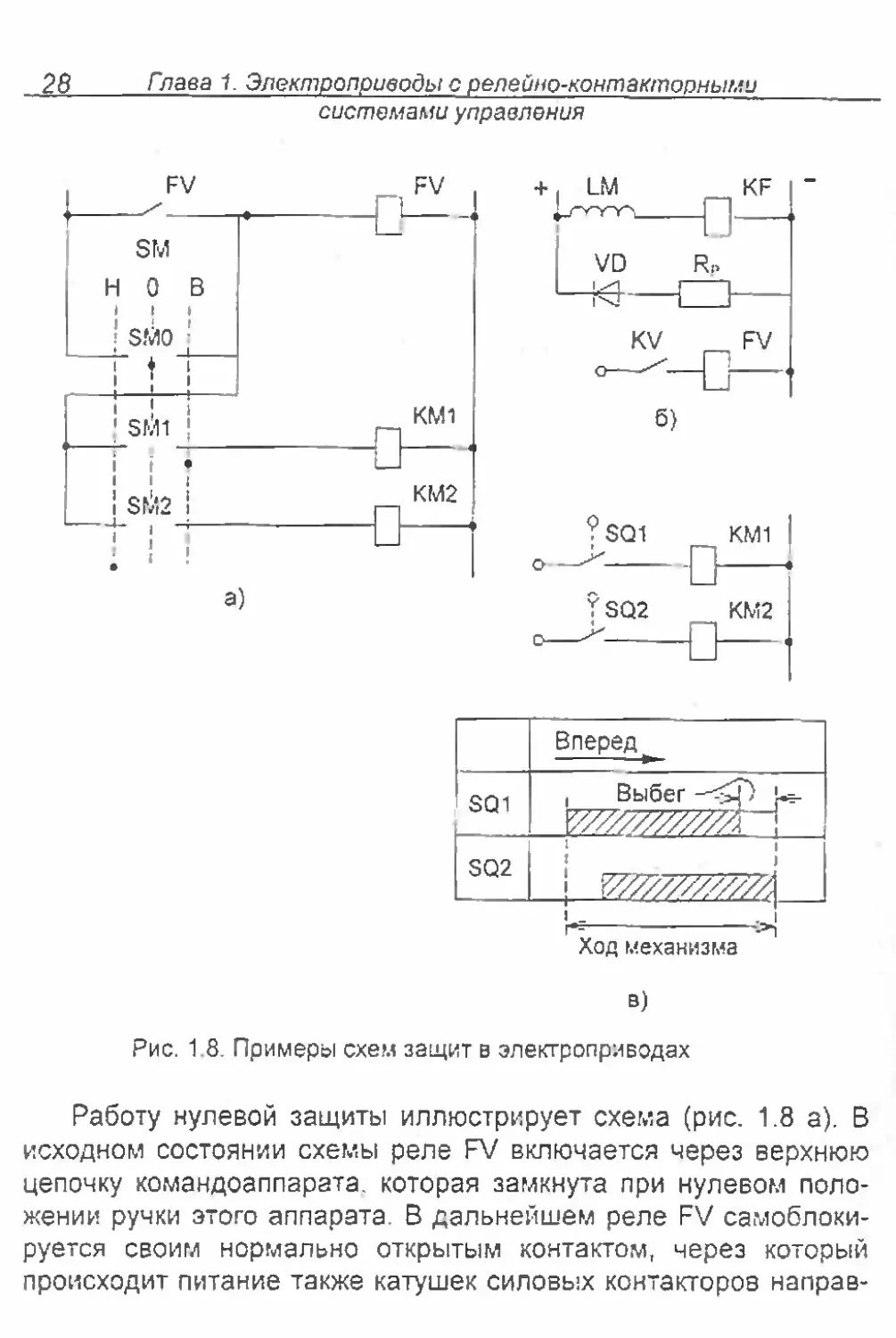
> □_Вперед^SQ1Выбег —{«£-У///////////Л !SQ2ШШТЩ АХод механизмав)Рис. 1.8. Примеры схем защит в электроприводахРаботу нулевой защиты иллюстрирует схема (рис. 1.8 а). В
исходном состоянии схемы реле FV включается через верхнюю
цепочку командоаппарата, которая замкнута при нулевом поло¬
жении ручки этого аппарата. В дальнейшем реле FV самоблоки-
руется своим нормально открытым контактом, через который
происходит питание также катушек силовых контакторов направ-
Глава 1. Электроприводы с релейно-контакторными 29системами управленияления КМ1 и КМ2. Если при вращении привода вперед или на¬
зад. когда ручка командоаппарата SM стоит в положении В или
Н, произойдет исчезновение напряжения, то реле FV отпадет, а
запитать цепи катушек КМ1 и КМ2 после восстановления напря¬
жения не удастся до тех пор, пока ручку командоаппарата не по¬
ставят в нулевое положение (т.е. включат реле FV).Минимально-токовая защита (защита от потери возбуж¬
дения) двигателей постоянного тока (рис. 1.8 б) осуществляется
реле нулевого тока KF, катушка которого включается в цепь об¬
мотки LM возбуждения двигателя, а контакт этого реле включает¬
ся в цепь катушки реле напряжения FV нулевой защиты электро¬
привода. При обрыве цепи возбуждения двигателя реле KF от¬
ключает реле напряжения FV, а оно - контакторы силовой цепи
двигателя.Для защиты крупных электродвигателей от чрезмерного по¬
вышения скорости применяют также центробежные реле
скорости, которые дополняют действие нулевой токовой защи¬
ты.Защита обмотки возбуждения двигателя от перена¬
пряжений, возникающих при ее отключении, обеспечивается
разрядным резистором R? (рис. 1.8 б). Диод VD обеспечивает
протекание по резистору только разрядного тока, что уменьшает
потребление тока из сети. Сопротивление разрядного резистора
зыбирают с учетом допустимых перенапряжений, определяемых
классом изоляции, и достигающих нескольких сотен вольт.Конечная защита реверсивных механизмов выполняется с
помощью конечных (путевых) выключателей (рис. 1.8 в). Здесь
приведен вариант схемы с двумя конечными выключателями
SQ1 и SQ2 для ограничения хода механизма (например, тележки
мостового крана) в направлении вперед и назад. С учетом выбе¬
га электропривода при торможении флажок конечного выключа¬
теля устанавливается на определенном расстоянии от конечного
положения механизма.
30Гпава 2. Способы формирования процессов пускав регулируемых электроприводахГлава 2. СПОСОБЫ ФОРМИРОВАНИЯ ПРОЦЕССОВ
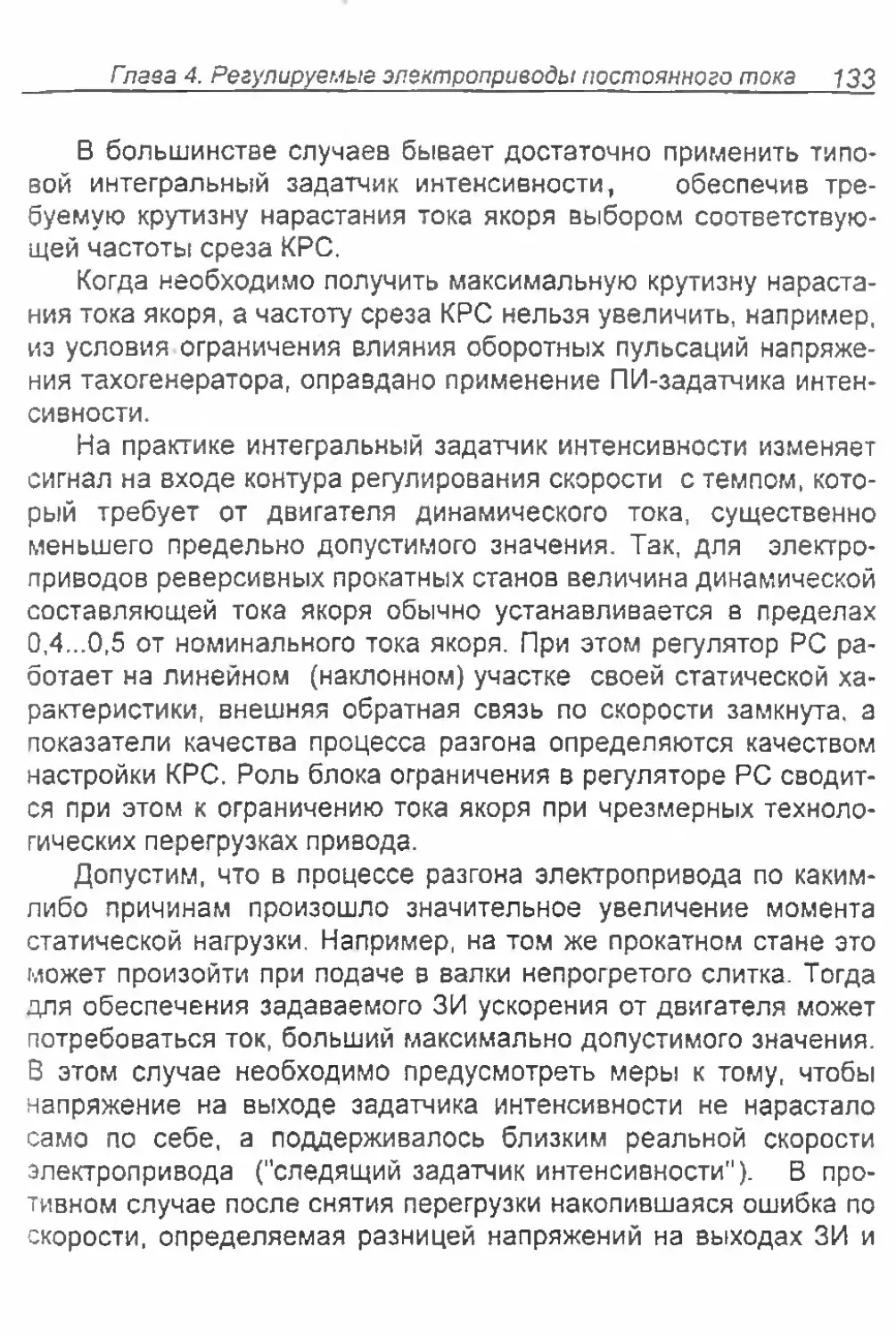
ПУСКА В РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДАХ2.1. Оптимальные кривые переходных процессов
разгона и торможения электроприводаПроектируя систему электропривода, инженер всегда заинте¬
ресован в наибольшей производительности электрифицируемого
механизма. Но возможности электропривода и, в первую оче¬
редь, двигателя ограничены. Так, в двигателе постоянного тока
независимого возбуждения приходится учитывать следующие ог¬
раничения:- ограничение по максимально допустимому из условий
коммутации току якоря•я ^ !м . (2.1)- ограничение по максимально допустимой скоростип < пм , (2.2)- ограничение по максимально допустимому напряжению на
якореия < UM, (2.3)- ограничение по нагреву, которое можно оценить величи¬
ной, пропорциональной потерям в цепи якоря,Q = 1 1Я 2 dt < Q„ , (2.4)Огде t|_| - время цикла.Могут быть и другие ограничения, связанные, например, со
свойствами элементов системы управления (максимально допус¬
тимые ток, напряжение), механической части электропривода
(прочность деталей) или вопросами экономики (стоимость уста¬
новки).
Гпава 2. Способы формирования процессов пускав регулируемых электроприводах31Ограниченность ресурсов, которая, в частности, проявляется
в существовании неравенств (2.1)...(2.4), ставит задачу наиболее
эффективного и экономного их использования. Отсюда и возни¬
кает проблема оптимального (наилучшего в каком-то смысле),
управления электроприводом.Посмотрим, какими должны быть оптимальные переходные
процессы в системе электропривода, когда необходимо обеспе¬
чить наибольшую возможную производительность механизма, не
нарушив при этом условий (2.1)...(2.4). Остановимся на следую¬
щих трех случаях.1-й случай. Необходимо выполнить только ограничение(2.1). Случай этот характерен для электроприводов механизмов,
имеющих невысокую продолжительность включения (ПВ), но
требующих интенсивной отработки сравнительно небольших пе¬
ремещений, при которых двигатель не успевает разогнаться до
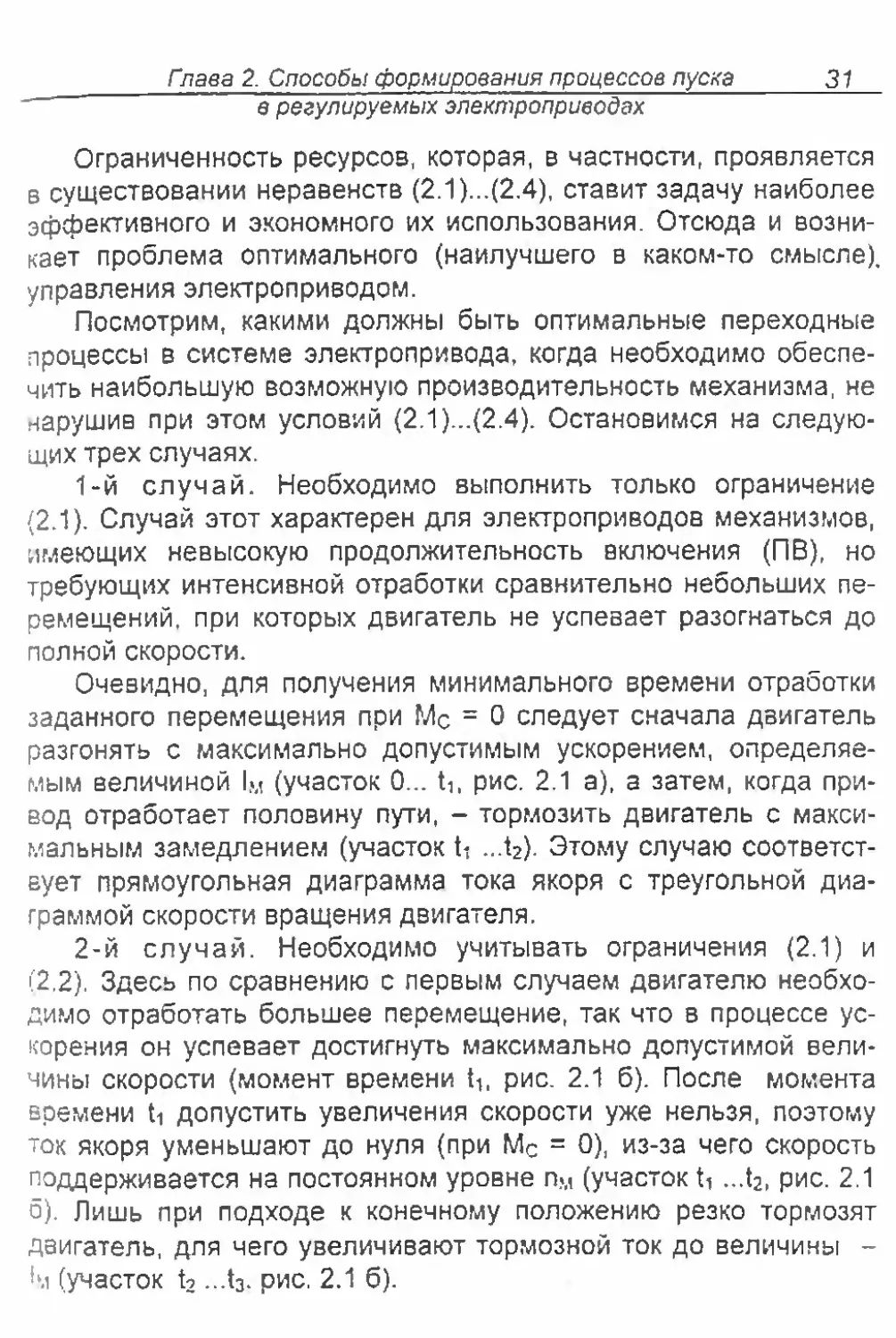
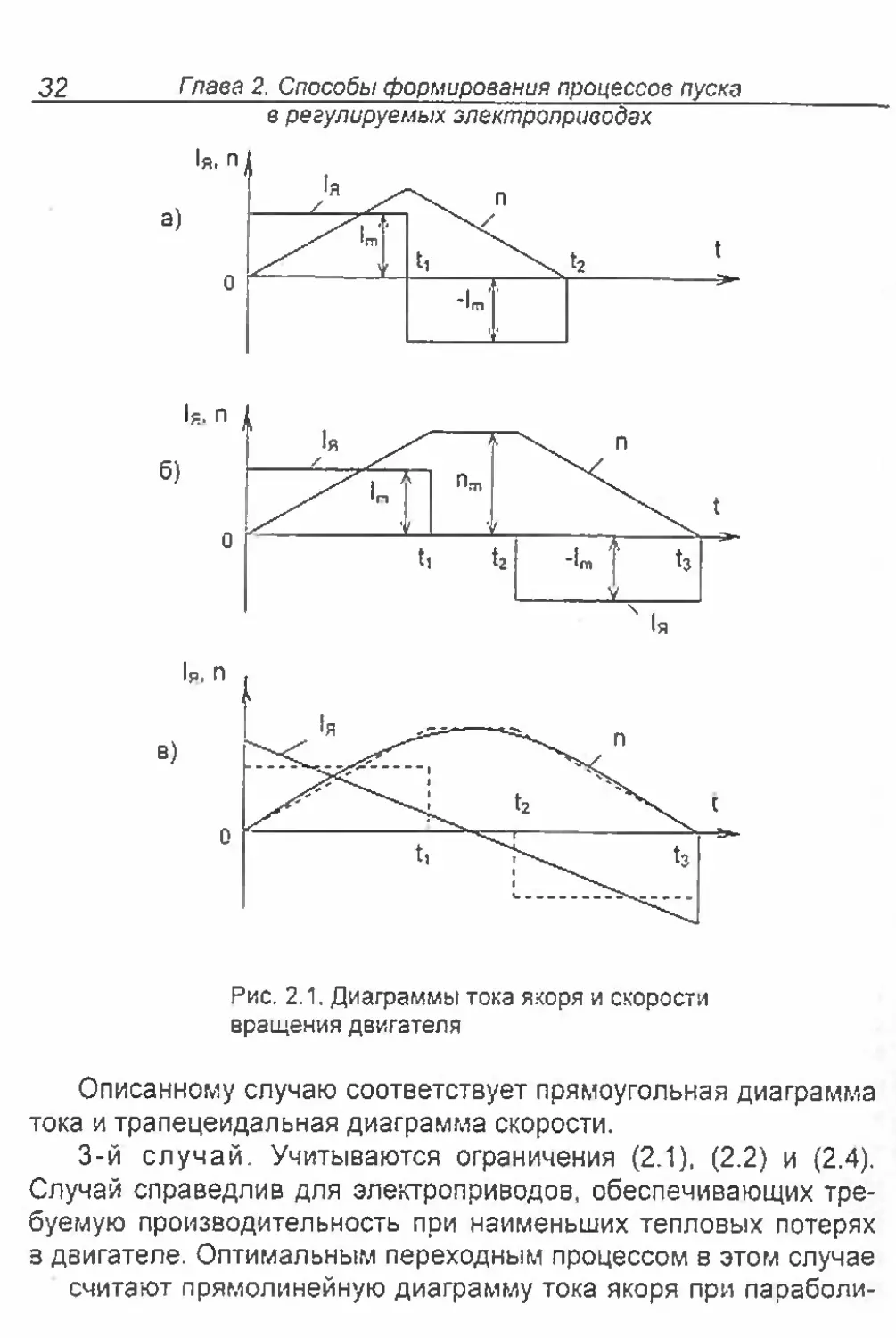
полной скорости.Очевидно, для получения минимального времени отработки
заданного перемещения при Мс = 0 следует сначала двигатель
разгонять с максимально допустимым ускорением, определяе¬
мым величиной 1М (участок 0... ti, рис. 2.1 а), а затем, когда при¬
вод отработает половину пути, - тормозить двигатель с макси¬
мальным замедлением (участок ti ...t2). Этому случаю соответст¬
вует прямоугольная диаграмма тока якоря с треугольной диа¬
граммой скорости вращения двигателя.2-й случай. Необходимо учитывать ограничения (2.1) и(2.2). Здесь по сравнению с первым случаем двигателю необхо¬
димо отработать большее перемещение, так что в процессе ус¬
корения он успевает достигнуть максимально допустимой вели¬
чины скорости (момент времени ti, рис. 2.1 б). После момента
времени ti допустить увеличения скорости уже нельзя, поэтому
ток якоря уменьшают до нуля (при Мс = 0), из-за чего скорость
поддерживается на постоянном уровне пм (участок ti ...t2, рис. 2.1б). Лишь при подходе к конечному положению резко тормозят
двигатель, для чего увеличивают тормозной ток до величины -
•м (участок t2 ...t3. рис. 2.1 б).
32Гпава 2. Способы формирования процессов пускав регулируемых электроприводах!я. nj1д // /па),‘тti*2 ^0-L'Рис. 2.1. Диаграммы тока якоря и скорости
вращения двигателяОписанному случаю соответствует прямоугольная диаграмма
тока и трапецеидальная диаграмма скорости.3-й случай. Учитываются ограничения (2.1), (2.2) и (2.4).
Случай справедлив для электроприводов, обеспечивающих тре¬
буемую производительность при наименьших тепловых потерях
з двигателе. Оптимальным переходным процессом в этом случае
считают прямолинейную диаграмму тока якоря при параболи¬
Гпава 2. Способы формирования процессов пуска 33 в регулируемых электроприводах ческом законе изменения скорости вращения двигателя (рис. 2.1
в). Однако на практике часто отказываются от параболической
диаграммы скорости. Действительно, параболу скорости на рис.
2.1 в можно легко, не уменьшая времени цикла, а следователь¬
но. и производительности, заменить трапецией. Но последней
соответствует уже прямоугольная диаграмма тока якоря. Поэто¬
му важно знать цену отказа от линейной диаграммы тока в поль¬
зу прямоугольной. Как показывают расчеты, потери в двигателе
увеличиваются не более, чем на 12%. Однако при наличии пауз в
работе механизма, невозможности и нежелательности (из-за
ударов в зазорах механических передач) предельно крутых
фронтов нарастания тока якоря переход на параболическую диа¬
грамму скорости практически не дает никакого дополнительного
выигрыша в нагреве двигателя по сравнению с трапецеидальной
диаграммой [51].С учетом сказанного замкнутые системы управления элек¬
троприводов, работающих в пуско-тормозных режимах, строят
так, чтобы обеспечить во всех случаях прямоугольную диаграмму
тока якоря при трапецеидальной диаграмме скорости.2.2 Связь частотной характеристики электропривода
с кривой тока якоря при разгонеПроцессы, приведенные на рис. 2.1, характеризуют желае¬
мые свойства системы электропривода во временной области.
Выбор же структуры и величины параметров системы управле¬
ния электропривода наиболее просто осуществлять, пользуясь
частотными характеристиками. Поэтому требуется установить
связь оптимальной кривой переходного процесса с видом же¬
лаемой частотной характеристики системы электропривода.Идеальной прямоугольной токовой диаграмме соответствует
переходная функция безынерционного звена. В этом случае ло¬
гарифмическая амплитудная частотная характеристика (ЛАЧХ)
системы электропривода ЭП (с входом по сигналу задания U3 и
зыходом по току якоря 1я) должна быть горизонтальна во всем
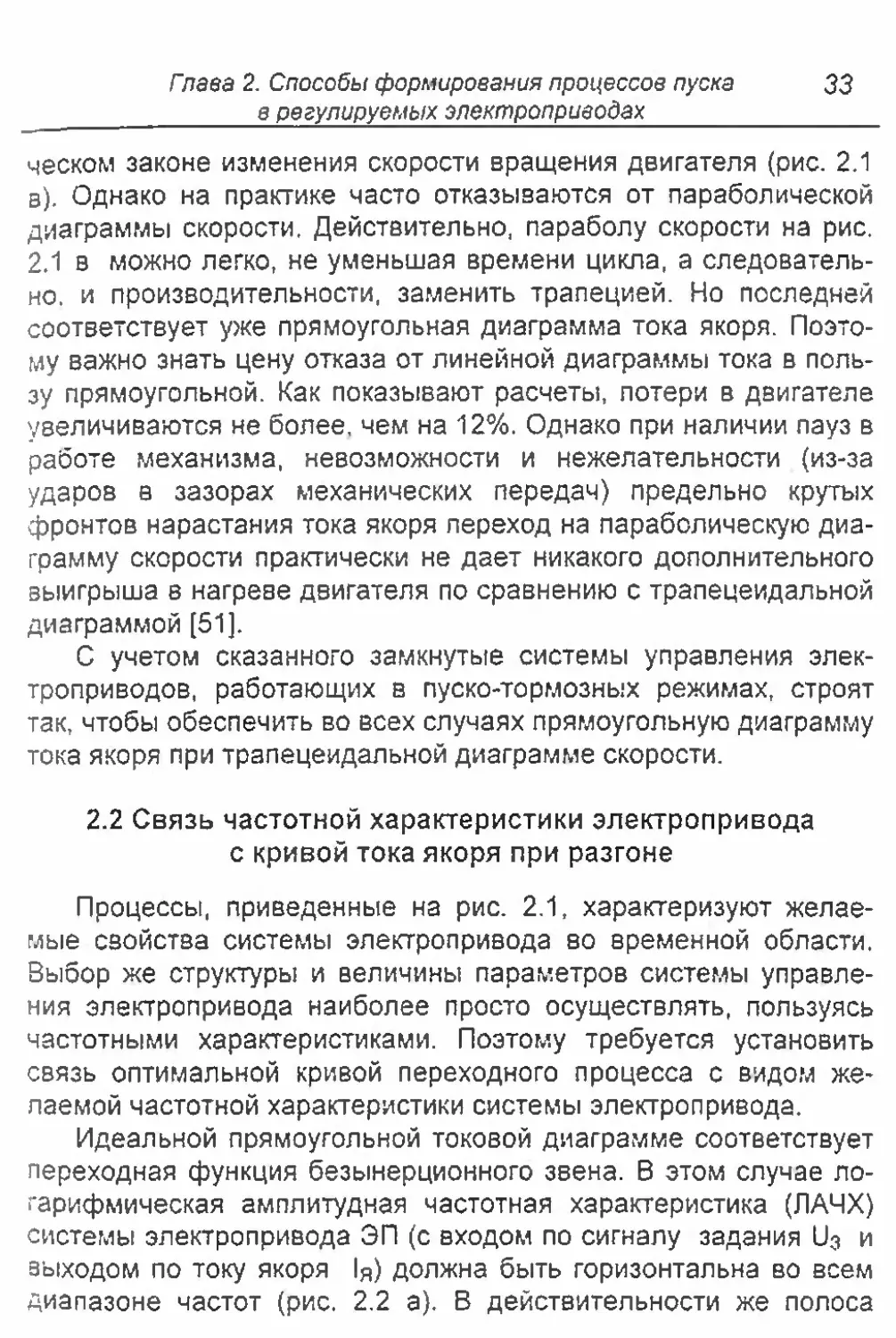
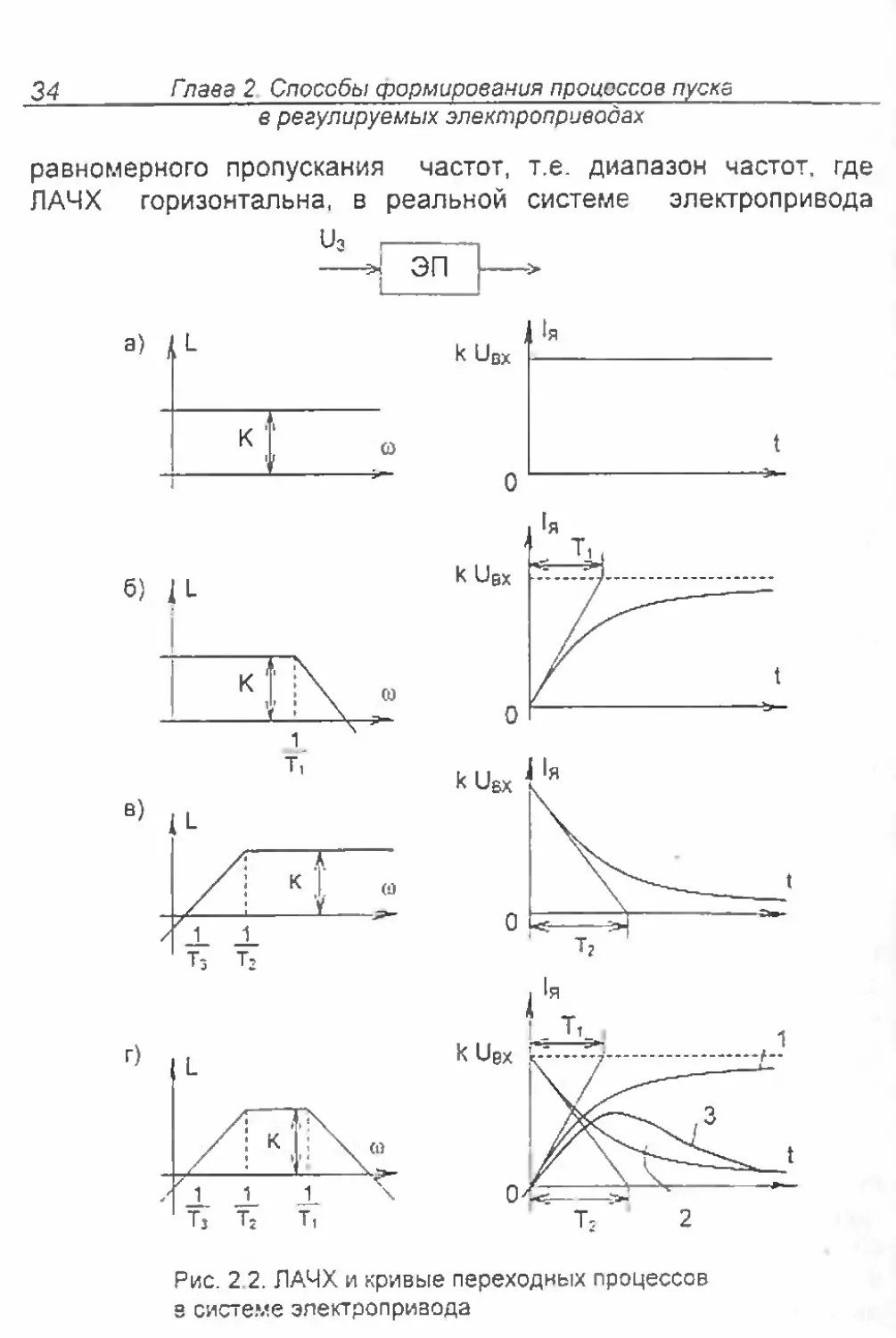
диапазоне частот (рис. 2.2 а). В действительности же полоса
34Гпава 2 Способы формирования процессов пускав регулируемых электроприводахравномерного пропускания частот, т.е. диапазон частот, где
ЛАЧХ горизонтальна, в реальной системе электроприводаи3ЭПa) LКсоб) [I1т7В)«ГТз Т2Рис. 2.2. ЛАЧХ и кривые переходных процессов
в системе электропривода
Гпава 2. Способы формирования процессов пуска 35в регулируемых электроприводахобычно ограничена. В такой системе кривая переходного процес¬
са тока якоря при разгоне двигателя отличается от прямо¬
угольной. На рис. 2.2 изображено несколько простейших случаев,
иллюстрирующих взаимную связь между кривой тока якоря при
разгоне двигателя и ЛАЧХ системы электропривода.На рис. 2.2 б ЛАЧХ системы электропривода аппроксимиру¬
ется частотной характеристикой инерционного звена с переда¬
точной функциейW(p)=K/(1 +Ti р).ЛАЧХ системы в области высоких частот (при со > 1/Т<) пони¬
жается. Ток якоря при разгоне двигателя в такой системе элек¬
тропривода изменяется по экспоненциальному закону, достигая
своего установившегося значения за время, равное tM = (3...4) Ti.
Чтобы увеличить крутизну переднего фронта кривой тока якоря
при разгоне двигателя, нужно уменьшить постоянную времени Ть
увеличив тем самым полосу равномерного пропускания частот на
кризой L.На рис. 2.2 в ЛАЧХ и кривые процессов соответствуют реаль¬
ному дифференцирующему звену с передаточной функциейW(p) = Т3р / (1 + Т2 р) = К Т2 р / (1 + Т2 р).ЛАЧХ этой системы электропривода в области низких частот
(при го < 1/Т2) понижается. Выходная величина, увеличившись
мгновенно до значения KUbx , спадает по экспоненте до нуля с
постоянной времени Т2. Чтобы уменьшить темп спадания выход¬
ной величины 1я, увеличивают постоянную времени Т2, т.е. рас¬
ширяют полосу равномерного пропускания частот на кривой L.
Для сохранения прежнего значения максимума тока якоря сохра¬
няют неизменной величину коэффициента К, т.е. пропорцио¬
нально величине Т2 увеличивают и Т3.Наконец, в более общем и сложном случае (см. кривые на
рис. 2.2 г) передаточная функция электропривода аппроксимиру¬
ется выражением
36 Гпава 2. Способы формирования процессов пуска в регулируемых электроприводахW(p) = Тз Р / (1 +Ti Р)(1 +Т2р).Приближенные показатели переходного процесса можно оп¬
ределить, учитывая общеизвестные зависимости между кривой
переходного процесса в системе регулирования и формой ее
частотной характеристики. В зоне высоких частот, определяющих
характер начального участка кривой переходного процесса, ре¬
альную систему электропривода аппроксимируют инерционным
звеном с постоянной времени Ti, а в зоне средних и низких час¬
тот - реальным дифференцирующим звеном с постоянной вре¬
мени Т2. Тогда на рис. 2.2 г кривую 3 переходного процесса из¬
менения тока якоря в системе электропривода можно аппрокси¬
мировать двумя экспонентами: с постоянной времени Ti в начале
процесса (кривая 1) и с постоянной времени Т2 в конце его (кри¬
вая 2). Изменением Ti и Т2 можно изменять характер переходно¬
го процесса: уменьшая Т1( увеличивать крутизну переднего
фронта кривой тока якоря, а увеличивая Т2, уменьшать темп спа¬
дания тока якоря после достижения его максимума.Подведем итог сказанному. Для получения идеальной прямо¬
угольной токовой диаграммы требуется система автоматического
регулирования тока якоря с горизонтальной ЛАЧХ во всем диапа¬
зоне частот. Так как это условие в реальных системах не удается
выполнить, то при синтезе системы управления добиваются мак¬
симально возможной полосы равномерного пропускания частот.Качество настройки системы электропривода, реализующей
прямоугольную токовую диаграмму, будем оценивать по сле¬
дующим критериям:а) высоте горизонтального участка ЛАЧХ системы электро¬
привода с выходом по току якоря. В устойчивой системе регули¬
рования максимум тока якоря при скачкообразном изменении
сигнала задания не превосходит максимума амплитудной час¬
тотной характеристики, т.е.1м « к иВх;
Гпава 2. Способы формирования процессов пуска 37в регулируемых электроприводахб) правой границе (01 полосы равномерного пропускания час¬
тот системы регулирования тока якоря. Нарастание тока якоря в
начале переходного процесса разгона привода происходит тем
круче, чем больше соь Приближенно можно считатьtM * (3...4) / ш1;в) левой границе сог полосы равномерного пропускания час¬
тот системы регулирования тока якоря. Чтобы обеспечить посто¬
янство поддержания тока якоря после достижения им своего
максимального значения, следует иметь шг наименьшего воз¬
можного значения. Приближенно время спадания тока якоря до
нуля после достижения максимумаtnn ~ (3--.4) / 0)2 .2.3. Формирование переходного процесса пуска
двигателя в разомкнутой системе
преобразователь-двигательПрежде чем рассматривать условия формирования пуско¬
тормозных режимов в современных замкнутых системах элек¬
тропривода. оценим показатели процессов, возможные в разомк¬
нутой (без обратных связей) системе преобразователь - двига¬
тель. Сегодня такой вариант пуска электропривода встречается
уже крайне редко. Но его рассмотреть полезно, так как это по¬
зволит, во-первых, изучить свойства того прототипа электропри¬
вода, с которым можно сопоставлять эффективность принимае¬
мых в дальнейшем различных решений, направленных на улуч¬
шение качества пуско-тормозных процессов и, во-вторых, сфор¬
мулировать требования к желаемым параметрам силовых эпе-
ментов эпектропривода (двигателя, механической передачи,
преобразователя) с позиций оптимизации пуско-тормозных ре¬
жимов.
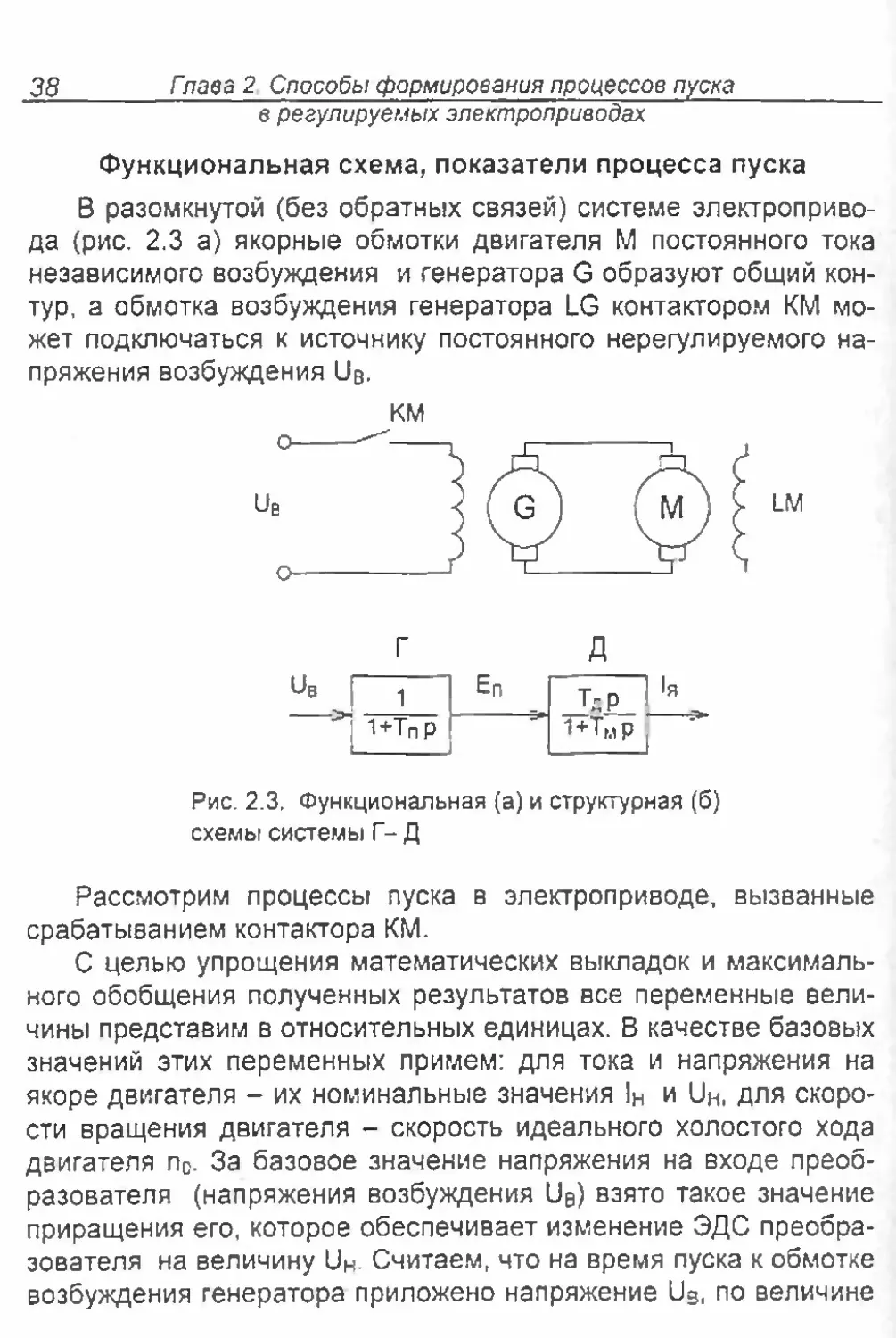
38Гпава 2. Способы формирования процессов пускав регулируемых электроприводахФункциональная схема, показатели процесса пускаВ разомкнутой (без обратных связей) системе электроприво¬
да (рис. 2.3 а) якорные обмотки двигателя М постоянного тока
независимого возбуждения и генератора G образуют общий кон¬
тур, а обмотка возбуждения генератора LG контактором КМ мо¬
жет подключаться к источнику постоянного нерегулируемого на¬
пряжения возбуждения Ub.КМ1ЕпТдР1+ТпРТ+ТмРРис. 2.3. Функциональная (а) и структурная (б)
схемы системы Г- ДРассмотрим процессы пуска в электроприводе, вызванные
срабатыванием контактора КМ.С целью упрощения математических выкладок и максималь¬
ного обобщения полученных результатов все переменные вели¬
чины представим в относительных единицах. В качестве базовых
значений этих переменных примем: для тока и напряжения на
якоре двигателя - их номинальные значения 1н и 1)н, для скоро¬
сти вращения двигателя - скорость идеального холостого хода
двигателя п0. За базовое значение напряжения на входе преоб¬
разователя (напряжения возбуждения UB) взято такое значение
приращения его, которое обеспечивает изменение ЭДС преобра¬
зователя на величину Uh- Считаем, что на время пуска к обмотке
возбуждения генератора приложено напряжение U5l по величине
Гпава 2. Способы формирования процессов пускав регулируемых электроприводах39соответствующее установившемуся значению ЭДС преобразова¬
теля Uh-Передаточные функции звеньев, записанные в системе от¬
носительных единиц, представлены на структурной схеме (рис.2.3 б). Управляемый преобразователь (генератор G) представлен
инерционным звеном с постоянной времени Тп. Такое прибли¬
жение упрощает рассуждения, но не нарушает их общности. В
двигателе индуктивность якорной цепи La принимается равной
нулю, а учитывается только электромеханическая инерция якоря
постоянными времени: механической Тд = J п0 / Мн и электроме¬
ханической Тм = Тд / КЯц. Момент статической нагрузки считается
равным нулю. Здесь J - момент инерции электропривода: п0 -
скорость идеального холостого хода двигателя: Мн - его номи¬
нальный момент; КЯц - кратность тока короткого замыкания си¬
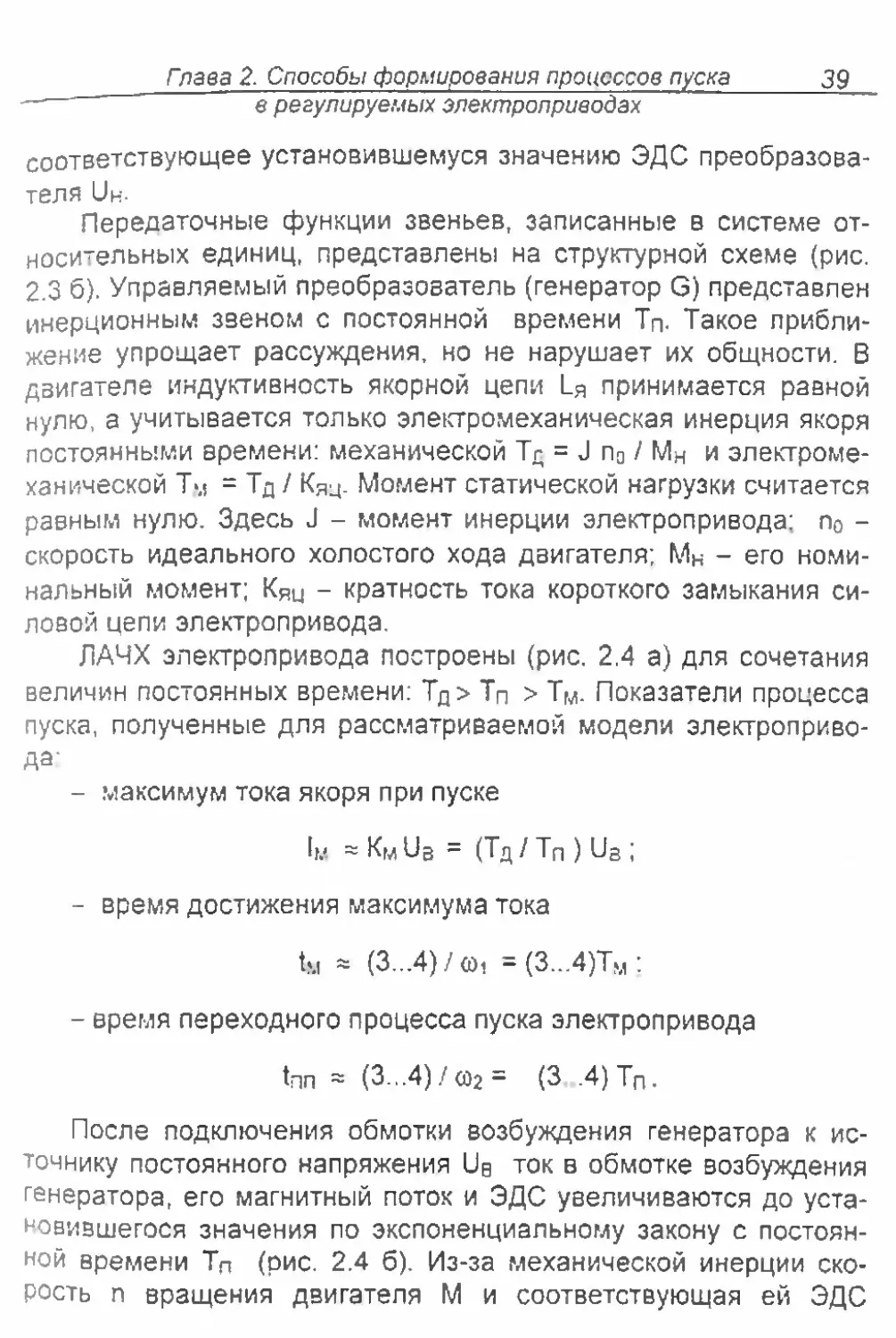
ловой цепи электропривода.ЛАЧХ электропривода построены (рис. 2.4 а) для сочетания
величин постоянных времени: Тд> Тп > Тм. Показатели процесса
пуска, полученные для рассматриваемой модели электроприво¬
да:- максимум тока якоря при пуске1м ~ Км U3 = (Тд / Тп ) Us ;- время достижения максимума токаt>(1 * (3...4) / coi = (3...4)Тм ;- время переходного процесса пуска электроприводаthn * (3...4)/<d2= (3...4) Тп.После подключения обмотки возбуждения генератора к ис¬
точнику постоянного напряжения Ue ток в обмотке возбуждения
генератора, его магнитный поток и ЭДС увеличиваются до уста¬
новившегося значения по экспоненциальному закону с постоян¬
ной времени Тп (рис. 2.4 б). Из-за механической инерции ско¬
рость п вращения двигателя М и соответствующая ей ЭДС
40I лава 2. Способы формирования процессов пускав регулируемых электроприводахРис. 2.4. ЛАЧХ (а) и кривые переходных процессов
пуска (б) в разомкнутой системе генератор - двигательдвигателя Ед отстают от ЭДС генератора Еп. Увеличивающаяся
разница Еп - Ед вызывает рост тока якоря 1я и увеличение темпа
нарастания скорости, поэтому кривая скорости на начальном от¬
резке процесса имеет вогнутый характер. В результате отстава¬
ние скорости от нарастающей Еп замедляется, а через время
(3...4) Тм темпы нарастания Еп и Ед практически одинаковы. Ток
якоря достигает максимума, который затем постепенно снижает¬
ся из-за постепенного снижения темпа нарастания Еп. Общее
время процесса определяется временем нарастания ЭДС гене-
Глава 2. Способы формирования процессов пуска 41_в регулируемых электроприводахраюра до установившегося значения. Для экспоненты это время
составляет (3...4) Тп.Анализ показателей пуско-тормозных процессов
в разомкнутой системе преобразователь-двигательВыясним связь сформулированных нами показателей качест¬
ва процесса' пуска (1М> Ьл, tnn) с параметрами силовых элементов
схемы. Это явится основой правильного конструирования двига¬
теля, механической передачи и преобразователя с позиций оп¬
тимизации пуско-тормозных режимов.Начнем обсуждение со времени переходного процесса пуска
электропривода tnn- В электроприводах с трапецеидальной диа¬
граммой скорости (рис. 2.1) максимальная скорость движения ис¬
полнительного органа чаще всего бывает задана. В этом случае
минимизировать время перемещения рабочего органа можно,
только выбирая электропривод с меньшей величиной механиче¬
ской постоянной времени Тд, что следует из смысла определения
этой постоянной как времени разномерного разгона электропри¬
вода до полной скорости под действием номинального динами¬
ческого момента. Так как на начальном этапе синтеза известны
лишь энергосиловые характеристики рабочего механизма, то па¬
раметры электропривода удобнее приводить к валу рабочего ме¬
ханизма. Постоянная времениТд = J£ пн / Мн = ( Jpm + Ля i2) Прм / Мрм ,где - суммарный момент инерции привода, равный сумме мо¬
ментов инерции рабочей машины JPM и момента инерции якоря
двигателя, приведенного к валу рабочей машины ^ i2 ; пРМ и
Мру - скорость и момент на валу рабочей машины, соответст¬
вующие номинальным скорости Пн и моменту Мн двигателя.Здесь возможны два случая соотношения величин приве¬
денных моментов инерции электродвигателя и рабочего меха¬
низма.
42Глава 2. Способы формирования процессов пускав регулируемых электроприводахВ первом случае Jpm < J* i2- Указанное соотношение пара¬
метров характерно, например, для электроприводов реверсив¬
ных станов горячей прокатки, вспомогательных механизмов этих
станов, для приводов подачи металлорежущих станков. Тогда
можно принять Jr ~ Jя i2. а выражение для постоянной времениТд » Jfl i2 Прм / Мрм = Ja пн / Мн .Здесь Пн = Прм / i и Мн = Мрм i - номинальные скорость и
момент двигателя.Видно, что в рассматриваемом случае снижение Тд возможно
только за счет выбора или конструирования двигателя с умень¬
шенными величинами Jh и Пн и увеличенным Мн. Уменьшение
J* достигается выполнением двигателя с удлиненным якорем.
Но чрезмерное увеличение длины якоря вызывает ухудшение
условий коммутации в двигателе, тогда приходится выполнять
двухъякорные машины или применять двухдвигательный элек¬
тропривод. В следящих электроприводах мощностью от долей до
единиц кВт часто применяют специальные «малоинерционные»
конструкции двигателей (с гладким, полым или дисковым якорем)
Для достижения малых величин Тд конструируют двигатели
с малой номинальной скоростью вращения вала и большим но¬
минальным моментом. Так, электродвигатели для главных элек¬
троприводов реверсивных станов горячей прокатки при номи¬
нальной мощности Рн = 6000...10000 кВт имеют Тд = 0,4...0,5 с.
При этом пн = 4...6 рад/с, а Мн = 100...150 тм. Сами двигатели
оказываются весьма металлоемкими с массой до 200 т и выше.Во втором случае JPm > Ля i2 и тогда Jz » Jpm- В результатеТд « Jpm Прм / Мрм = Jpm Пн / Мн i2.Как и в первом случае, можно снизить Тд выбором или кон¬
струированием двигателя с уменьшенной пн и увеличенным Мн-
Но наиболее эффективно снижать величину Тд, воздействуя на
передаточное число механической передачи.
Глава 2. Способы формирования процессов пуска 43— в регулируемых электроприводах.. Электроприводы некоторых механизмов (например, летучих нож¬
ниц) отрабатывают заданное перемещение по треугольной диаграмме
скорости, когда не требуют, чтобы двигатель успевал разогнаться до пол¬
ной скорости. По каким параметрам следует выбирать электропривод, ес¬
ли необходимо минимизировать время отработки перемещения?В практике проектирования позиционных электроприводов известна
формула для передаточного числа редуктора в оптимальном по быстро¬
действию электроприводе i = (JPM / J?.)‘ ,2Х где JPM и ия - моменты инер¬
ции рабочей машины и якоря двигателя. Сформулируйте разницу в усло¬
виях постановки обеих задач. Почему получаются «разные» результаты?Выражение для максимума тока якоря при пуске 1м указывает,
достигается ли заданный темп разгона электропривода в рас¬
сматриваемой схеме. Оно же показывает, параметры каких
звеньев электропривода влияют на величину 1М. В зависимости
от величины постоянной времени преобразователя Тп по-
разному приходится решать задачу формирования процесса пус¬
ка в разомкнутой системе преобразователь - двигатель. При
очень малых значениях Тп, характерных для вентильных преоб¬
разователей, бросок тока якоря при прямом пуске может дохо¬
дить до тока короткого замыкания в якорной цепи электроприво¬
да, поэтому в вентильных электроприводах прямой пуск не при¬
меняют.Другая картина наблюдается в системе генератор - двига¬
тель, где постоянная времени обмотки возбуждения генератора
(особенно большой мощности) может быть равной нескольким
секундам. Например, при Тд = 0,4 с, Тп = 2 с, UB = 1 максимум то¬
ка якоря при пуске не превысит 0,2 от номинального значения,
что свидетельствует о крайне вялом темпе разгона электропри¬
вода. Общее же время переходного процесса пуска электропри¬
вода составит tnn * (3-4) Тп = 6...8 с. Сам двигатель в состоя¬
нии разогнаться до той же скорости более чем в 10 раз быстрее.Для ускорения процессов пуска в системе генератор - дзига-
тель применяют форсировку возбуждения, т.е. на время пуска
увеличивают напряжение на обмотке возбуждения генератора в
несколько раз. Улучшение качества протекания процесса дости-
44Гпава 2. Способы формирования процессов пускав регулируемых электроприводахгается, во-первых, увеличением темпа нарастания ЭДС генера¬
тора и, во-вторых, работой генератора на начальном почти
линейном участке экспоненты, гарантирующем более равномер-Рис. 2.5. Функциональная схема цепей возбуждения
генератора (а) и переходные процессы изменения Ег
в реальной разомкнутой системе Г-Дный разгон электропривода. На рис. 2.5 приведены кривые про¬
цессов нарастания ЭДС генератора постоянного тока при подаче
на вход обмотки возбуждения постоянного напряжения Uq. В ис¬
ходном случае (кривая 1) величина этого напряжения соответст¬
вует заданному (например, номинальному) установившемуся
Глава 2. Способы формирования процессов пуска 45 в регулируемых электроприводах значению ЭДС генератора. Во втором случае (кривая 2) величина
Ug выбрана в два раза большего значения. Если в первом слу¬
чае время нарастания ЭДС генератора до величины Ен состав¬
ляет (3...4) Тг, то во втором - оно заметно меньше даже при уме¬
ренном значении коэффициента форсировки.Время *м нарастания тока якоря до максимума в рассматри¬
ваемой схеме определяется величиной Тм. Если это время необ¬
ходимо уменьшить, то следует выбирать двигатель с меньшей
Тм- Снижение же Тм достигается уменьшением Тд или активно¬
го сопротивления якорной цепи РЯц. Некоторые из мероприятий,
направленных на уменьшение Тм (снижение Нщ, увеличение
номинального потока), оборачиваются, однако, увеличением
электромагнитной постоянной времени якорной цепи. Конструк¬
торы электрических машин пытаются различными мерами (от¬
крытые пазы на якоре, компенсационная обмотка) снизить индук¬
тивность якорной цепи. Но многие тихоходные двигатели при
приложении момента статической нагрузки имеют ярко выражен¬
ный колебательный характер процессов [14].Чтобы сформировать процесс торможения электропривода в
разомкнутой системе Г - Д, к обмотке возбуждения генератора
постоянно подключают резистор R2 (рис. 2.5 а), так чтобы посто¬
янная времени Тт разрядного контура, образованного обмоткой
LG и резистором R2, соответствовала времени торможения. Од¬
нако удовлетворительного качества процесса торможения обыч¬
но добиться не удается: на начальном участке наблюдается
большой выброс тока якоря, а конец процесса затягивается. Это
происходит потому, что ЭДС генератора уменьшается до нуля
по экспоненциальному закону: круто в начале процесса и очень
постепенно - в конце.Физическая картина процессов в реверсивных электроприво¬
дах постоянного тока была великолепно изложена Д.П. Морозо¬
вым [36], вошла в учебники по теории электропривода [2, 20], но
постепенно была утрачена.
46 Гпава 2. Способы формирования процессов пуска в регулируемых электроприводах2.4. Формирование прямоугольной токовой
диаграммы с помощью отрицательной обратной
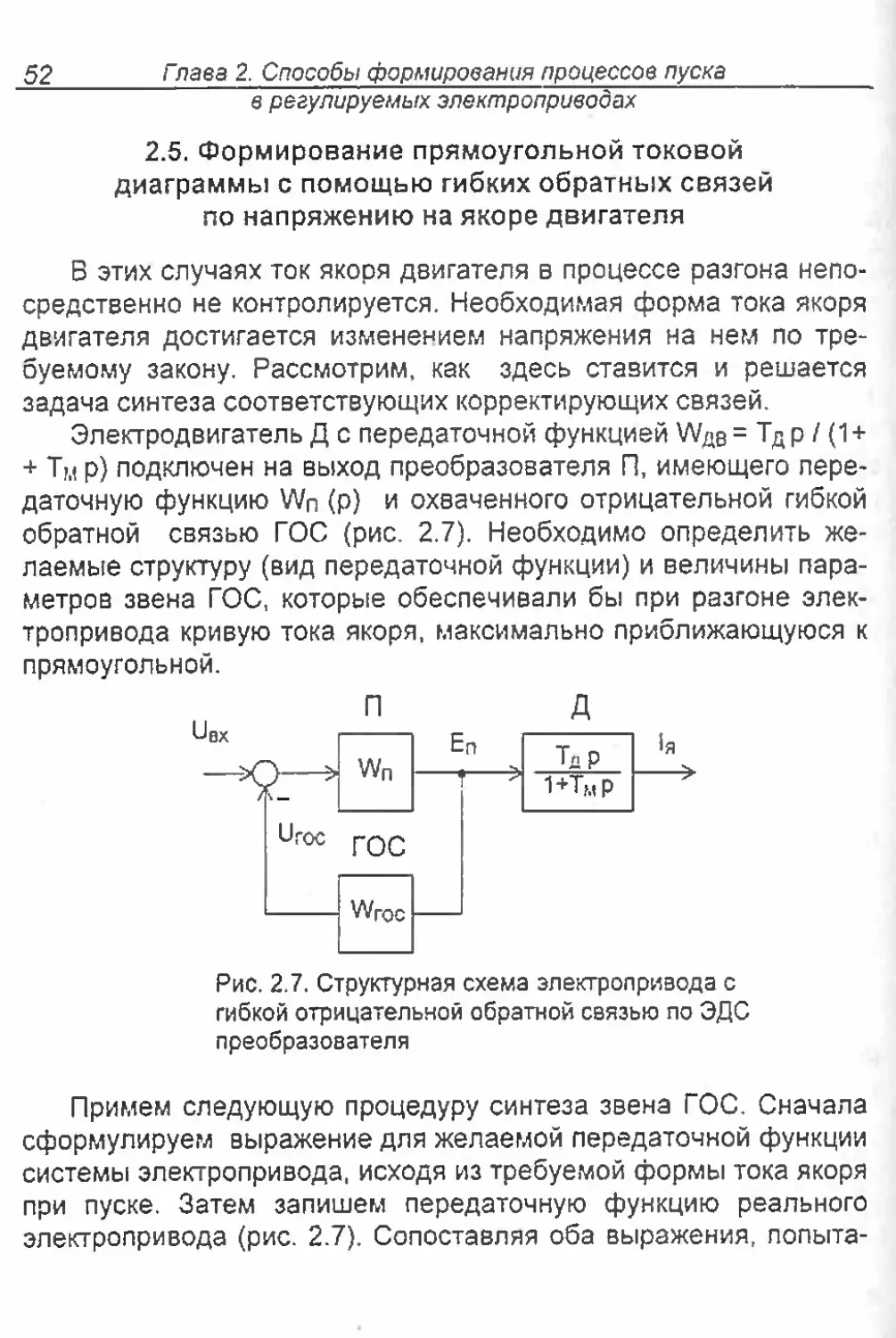
связи по току якоряРассмотрим электропривод (рис. 2.6 а), выполненный по
схеме управляемый преобразователь - двигатель. На той же
структурной схеме представим передаточные функции звеньев,
записанные в системе относительных единиц. Базовые значения
переменных выберем такими же, как в предыдущем примере.
Управляемый преобразователь П представим инерционным зве¬
ном с постоянной времени Тп, а в двигателе Д постоянными вре¬
мени Тд и Тм учтем электромеханическую инерцию якоря, при¬
няв индуктивность якорной цепи Lh = 0. Обратную связь по току
якоря опишем безынерционным звеном с коэффициентом усиле¬
ния Кот.Проанализируем влияние обратной связи по току якоря на
форму кривой тока якоря при разгоне электропривода. Для этого
сначала оценим показатели переходного процесса в разомкнутой
системе электропривода до введения обратной связи по току
якоря, т.е. при Кот = 0. Затем посмотрим, как изменятся те же
показатели процесса при пуске электропривода с отрицательной
обратной связью по току якоря. Такое поэтапное рассмотрение
динамических свойств электропривода позволит выразительнее
показать влияние отрицательной обратной связи по току (или
другого способа коррекции) на показатели переходного процесса
разгона электропривода.На рис. 2.6 б изображены ЛАЧХ системы электропривода с
выходом по току якоря до и после введения отрицательной об¬
ратной связи. Они построены для случая, когда Тд > Тп > Тм.Как видно из кривой Ц, ЛАЧХ разомкнутой системы электро¬
привода с выходом по току якоря идет горизонтально сравни¬
тельно в небольшом диапазоне частот от 1 / Тп до 1 / Тм. При
частотах больше 1 / Тм ЛАЧХ понижается из-за влияния инер¬
ционностей в системе электропривода. При частотах меньше
1 / Тп ЛАЧХ тоже понижается. Это обусловлено снижением
Гпава 2. Способы формирования процессов пуска47в регулируемых электроприводах
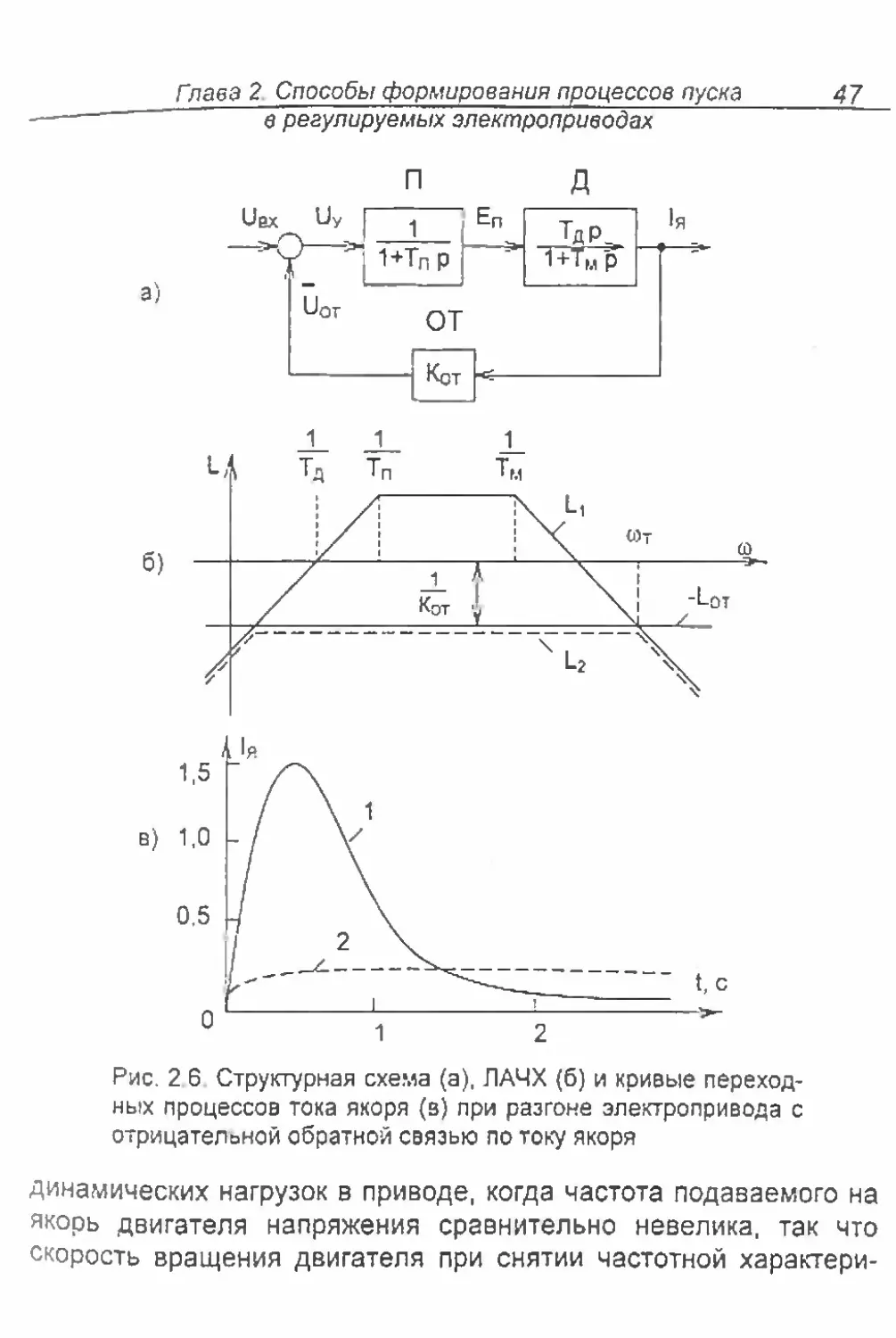
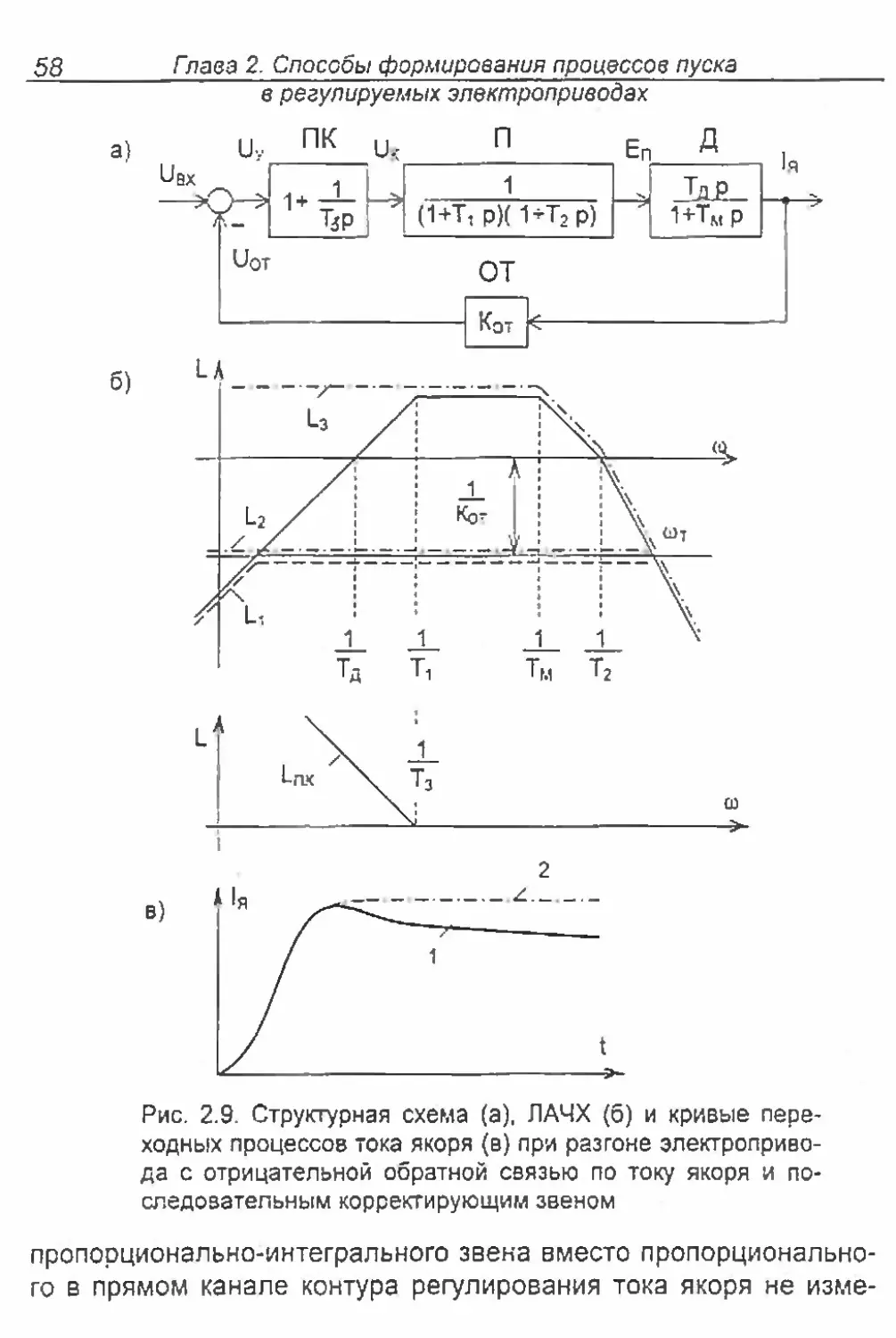
П ДUex Uy—кэ—>-3)1ЬпТдР.1+ТпР1+ТмР1яи,отОТКотL,6}Тд ТпТмL,0)тj_ АКотРис. 2.6. Структурная схема (а), ЛАЧХ (б) и кривые переход¬
ных процессов тока якоря (в) при разгоне электропривода с
отрицательной обратной связью по току якорядинамических нагрузок в приводе, когда частота подаваемого на
якорь двигателя напряжения сравнительно невелика, так что
скорость вращения двигателя при снятии частотной характери-
48 Глава 2. Способы формирования процессов пуска в регулируемых электроприводахстики электропривода успевает следить за колебаниями напря¬
жения на якоре.Кривая переходного процесса тока якоря при разгоне элек¬
тропривода после скачкообразного увеличения Ubx, соответст¬
вующая электроприводу с характеристикой Li, аналогична кривой
в разомкнутой системе Г-Д (кривая 1, рис.2.6 в). Максимум тока
якоря при этом не превышает максимума кривой Ц, равного
(Тд/Тп) Ubx- Начало переходного процесса, определяемое высо¬
кочастотным участком кривой L1t приближается к экспоненте с
постоянной времени Тм.Спадание тока якоря в конце переходного процесса, где су¬
щественно влияние низкочастотного участка кривой Li, происхо¬
дит также по кривой, близкой к экспоненте с постоянной времени
Тп. Из-за того, что в реальных разомкнутых системах электро¬
привода не удается существенно расширить горизонтальный
участок 1 / Тп ... 1 / Тм, кривая переходного процесса тока якоря
далека от прямоугольной формы.При введении отрицательной обратной связи по току якоря
ЛАЧХ замкнутой системы электропривода (кривая L2, рис. 2.6 б)
аппроксимируется нижними участками характеристики Li или пе¬
ревернутой характеристики - Lot обратной связи. Сопоставле¬
ние кривых Li и L2 позволяет сделать некоторые выводы о влия¬
нии обратной связи по току на форму токовой диаграммы.Поскольку частотная характеристика замкнутой системы идет
ниже исходной Li, то и соответствующая кривая тока якоря дви¬
гателя при разгоне в схеме с обратной связью по току (кривая 2,
рис. 2.6 в) имеет меньший максимум. Уменьшение броска тока
якоря в замкнутой системе электропривода происходит потому,
что сигнал обратной связи по току якоря Uqt, действуя в пере¬
ходном процессе разгона навстречу сигналу Ubx, уменьшает ре¬
зультирующий сигнал Uy на входе преобразователя П, а это вы¬
зывает уменьшение скорости нарастания ЗДС преобразователя
по сравнению с исходным случаем. В неколебательной системе
регулирования максимум тока якоря при разгоне электропривода
Гпава 2. Способы формирования процессов пускаа регулируемых электроприводах49после скачкообразного изменения входного сигнала Ызх можно
приближенно оценить с помощью выражения1м = Км Usx = (1 /Kot)Ubx-Здесь Км - ордината максимума амплитудной частотной ха¬
рактеристики системы электропривода с выходом по току якоря.С помощью отрицательной обратной связи по току якоря
удается расширить полосу равномерного пропускания частот в
системе электропривода. То, что эта полоса расширяется впра¬
во, свидетельствует об уменьшении - времени нарастания то¬
ка якоря до 1м при разгоне привода. Абсолютная же крутизна пе¬
реднего фронта кривой тока якоря меньше, чем в исходной сис¬
теме. Это объясняется тоже влиянием отрицательной обратной
связи по току якоря, действующей навстречу Ubx и уменьшаю¬
щей результирующий сигнал на входе преобразователя. Ориен¬
тировочно в замкнутой системе электропривода можно считатьtw ^ (3...4)/шт,где tor - частота среза контура регулирования тока якоря, соот¬
ветствующая правой границе полосы равномерного пропускания
частот замкнутой системы электропривода.В момент времени t = 0 наклон кривых 1 и 2 на рис. 2.6 в оди¬
наков. из-за инерционности звеньев в прямом канале регулиро¬
вания выходная величина (ток якоря 1я) в начальный момент
времени близка к нулю, поэтому действие обратной связи по току
настолько неэффективно, что им можно пренебречь. Это под¬
тверждается и ЛАЧХ системы электропривода: кривые Ц и L2 на
рис. 2.6 б при высоких частотах совпадают.Так как обратная связь по току якоря уменьшает при разгоне
электропривода сигнал Uy, то переходный процесс нарастания
ЭДС преобразователя в замкнутой системе электропривода за¬
тягивается по сравнению с разомкнутой системой. Это вызывает
уменьшение темпа спадания тока после достижения им значения
50Гпава 2. Способы формирования процессов пускав регулируемых электроприводах1м- Сказанное подтверждает и ЛАЧХ замкнутой системы электро¬
привода, в которой граничная частота со2 перемещается влево.Увеличением К0т можно значительно расширить полосу рав¬
номерного пропускания частот в замкнутой системе электропри¬
вода и получить кривую тока якоря, близкую к прямоугольной.
Чтобы при этом сохранить заданное значение максимального
броска тока якоря при разгоне электропривода, приходится уве¬
личивать на время разгона сигнал Usx, уменьшая его до устано¬
вившегося значения в конце разгона. Форсировка (избыточное
значение) сигнала Usx при разгоне электропривода тратится не
только на преодоление инерционностей звеньев в прямом кана¬
ле регулирования, но и, главным образом, на получение требуе¬
мого уровня сигнала Uy на входе преобразователя, ослабленно¬
го действием отрицательной обратной связи.Диаграмма тока якоря тем ближе к прямоугольной, чем выше
коэффициент усиления Кот. Но увеличение К0т вызывает сме¬
щение вправо частоты «т среза контура регулирования тока, где
сказывается влияние неучтенных ранее малых постоянных вре¬
мени. Это нарушает устойчивость контура регулирования тока.
Поэтому максимум величины К0т приходится выбирать с учетом
условий устойчивости контура регулирования тока.Отличительной особенностью описанного способа формиро¬
вания переходного процесса разгона привода является непо¬
средственный контроль тока якоря двигателя, что позволяет
осуществить разгон привода с максимально допустимым ускоре¬
нием. Поэтому формирование процесса разгона с помощью от¬
рицательной обратной связи по току широко применяется, на¬
пример, в типовых схемах быстродействующих позиционных
электроприводов.В тех случаях, когда необходимо обеспечить при разгоне по¬
стоянство ускорения, избегают применять обратную связь по току
для формирования процесса разгона, так как изменение статиче¬
ской нагрузки на валу двигателя вызывает изменение ускорения
привода при разгоне.
Гпава 2. Способы формирования процессов пускав регулируемых электроприводах51" 6 электроприводе с отрицательной обратной связью по току якоря
требуется, чтобы после подачи скачкообразного сигнала Ubx ток якоря,
достигнув максимума, не спадал постепенно до нуля, а поддерживался
строго на постоянном уровне все время разгона. Какого вида последова¬
тельное корректирующее ЗБено следует зключить на входе преобразова¬
теля? Как выбрать желаемые величины параметров этого звена?П р и м е р. В системе электропривода с параметрами звеньев
уд = 1 с; Тм = 0,1 с; Кп = 1; Тп = 0,5 с определить основные пока¬
затели переходного процесса при разгоне электропривода после
изменения скачком входного сигнала на величину U8x = 1 в двух
вариантах схем: без обратной связи по току якоря и при введен¬
ной обратной связи по току с коэффициентом усиления Кот = 4.На основании ЛАЧХ Li (рис. 2.6 б), построенной для разомк¬
нутой системы электропривода, имеем следующие приближен¬
ные показатели процесса разгона электропривода:!м = (Тд/Тп)иВх = (1 /0,5) -1=2;
tM = (3...4) • Тм = (3...4) • 0,1 = ОД..0,4 с ;
tnn = (3...4) • Тп = (3...4) • 0,5 = 1,5...2 с.На основании кривой 12 дня замкнутой по току якоря систе¬
мы электропривода1м ~ Км Ubx = (1 / Кот) Ubx = (1 /4)-1 = 0,25;
tM * (3...4) / сот = (3...4) / 80 =0,04...0,05 с;
tnn * (3...4) / (о2 = (3...4) / 0,25 =12...16 с;На рис. 2.6 в изображены рассчитанные для тех же парамет¬
ров электропривода точные кривые переходных процессов, кото¬
рые дают следующие результаты:- в разомкнутой системе электропривода1м =1.5- lH; tM = 0,3 с; tnn = 2 с;- в замкнутой по току системе электропривода1м = 0,25 • lH; tM = 0,05 с; tnn = 15 с.•• Постройте электромеханическую характеристику электропривода
п = f («л ) в рассматриваемом примере.
52 Гпава 2. Способы формирования процессов пускав регулируемых электропривооах2.5. Формирование прямоугольной токовой
диаграммы с помощью гибких обратных связей
по напряжению на якоре двигателяБ этих случаях ток якоря двигателя в процессе разгона непо¬
средственно не контролируется. Необходимая форма тока якоря
двигателя достигается изменением напряжения на нем по тре¬
буемому закону. Рассмотрим, как здесь стазится и решается
задача синтеза соответствующих корректирующих связей.Электродвигатель Д с передаточной функцией V% = Тд р / (1 +
+ Тм р) подключен на выход преобразователя П, имеющего пере¬
даточную функцию Wn (р) и охваченного отрицательной гибкой
обратной связью ГОС (рис. 2.7). Необходимо определить же¬
лаемые структуру (вид передаточной функции) и величины пара¬
метров звена ГОС, которые обеспечивали бы при разгоне элек¬
тропривода кривую тока якоря, максимально приближающуюся к
прямоугольной.Рис. 2.7. Структурная схема электропривода с
гибкой отрицательной обратной связью по ЭДС
преобразователяПримем следующую процедуру синтеза звена ГОС. Сначала
сформулируем выражение для желаемой передаточной функции
системы электропривода, исходя из требуемой формы тока якоря
при пуске. Затем запишем передаточную функцию реального
электропривода (рис. 2.7). Сопоставляя оба выражения, попыта¬
Глава 2. Способы формирования процессов пускав регулируемых электроприводах53емся получить соотношения для желаемых структуры и парамет¬
ров звена ГОС.Потребуем от электропривода прямоугольной диаграммы то¬
ка якоря при пуске. Тогда его желаемая передаточная функция
\д'эпж должна соответствовать безынерционному звену, а выра¬
жение для тока якоря1я = Worw Ubx = kj Ubx •Передаточная функция реального электропривода соответ¬
ствует последовательно соединенным замкнутому контуру регу¬
лирования напряжения КРН и электродвигателю Д:W3n = Wkph ■ WflQ.Если предположить частоту среза замкнутого КРН достаточно
высокой, то его передаточная функцияWkph = Wn / (1 + Wn Wroc) ~ 1 / Wrcc .Полученное выражение показывает, что динамические свой¬
ства замкнутого быстродействующего КРН хорошо аппроксими¬
руются каналом ГОС, а весь электропривод описывается пере¬
даточной функциейW3n * (1 / Wroc ) ■ W/jb .Приравнивая W3n = W5Пж , получим следующее выражение
для желаемой передаточной функции звена ГОС:Wroc = Wfl3 / W3tok = Wfls / кт.Последнее соотношение указывает, во-первых, на вид же¬
лаемой передаточной функции звена ГОС (она должна быть та¬
кой же, как у звена Д) и, во-вторых, является основанием для
определения желаемых параметров звена ГОС. Поэтому, запи-
саз его в детализированной форме, получим одновременно и
выражения для определения этих параметров:
54 Глава 2. Способы формирования процессов пуска в регулируемых электроприводахТ-l Р / (1 + т2 р) = (Тд р / кт) / (1 + Тм Р )•Здесь Ti и Т2 - желаемые параметры звена ГОС, которые
определяются на основании выражений: Т1 = Тд / кт ; Т2 = Тм.Заметим ещё раз, что приведенные соотношения выполня¬
ются тем точнее, чем выше достигнутое быстродействие контура,
образованного преобразователем и охватившей его ГОС. В тири¬
сторных электроприводах постоянного тока достигнутые величи¬
ны быстродействия КРН оцениваются частотами среза до
о » (250...300) рад / с. Этого достаточно для достижения вполне
удовлетворительных показателей процесса пуска в схеме с гиб¬
кими обратными связями по напряжению на якоре двигателя.Рассмотрим физику процесса пуска в рассматриваемой схе¬
ме. Для упрощения модели процесса и выделения влияния
главного фактора - звена ГОС - примем быстродействие КРН
бесконечно высоким (т.е. положим озн = со), а в двигателе учтем
только механическую инерцию и пренебрежем электромагнитной.
Тогда передаточная функция замкнутого КРН будет описываться
пропорционально-интегральным звеномW«ph = 1 / Wrcc = П + Т2)/Т,Р = 1/Т1Р + К.В этом выражении первое слагаемое обусловлено операцией
дифференцирования сигнала по напряжению преобразователя, а
второе - появляется тогда, когда эта операция выполняется с
инерционностью, измеряемой постоянной времени Т2.Рассмотрим сначала более простой случай, когда Т2 = 0 и,
следовательно, К = 0. В этом случае звено ГОС выделяет сигнал
идеальной (без внесения запаздывания) производной по ЭДС
преобразователя. При подаче скачком на вход преобразователя
сигнала UBx напряжение на выходе П возрастает, как в любом
интегрирующем звене, по линейному закону (кривая 1)я, рис. 2.8
а). Скорость же вращения двигателя нарастает строго по линей¬
ному закону не сразу, а спустя время переходного процесса, рав¬
ное примерно (3...4) -Тм (кривая п, рис. 2.8 а). Это время требу¬
Глава 2. Способы формирования процессов пуска 55 в регулируемых электроприводах ется для того, чтобы в якорной цепи двигателя установиласьразница ЭДСРис. 2.8. Предельные кривые переходных процессов в электропри¬
воде с гибкими обратными связями по ЭДС преобразователя:
а) преобразователь охвачен идеальным дифференцирующим звеном
5) преобразователь охвачен реальным дифференцирующим звеномЗдесь 1Дин - динамический ток, необходимый для разгона
двигателя с заданным ускорением.Чтобы получить идеальную прямоугольную диаграмму тока
якоря, необходимо в первоначальный момент времени t = 0 на¬
пряжение на выходе преобразователя изменить скачком на ве¬
личину, соответствующую падению напряжения в якорной цепи
1дин ■ Rfl, а затем - увеличивать по линейному закону с заданным
ускорением (см. рис. 2.8 б). Реализация указанных процессов
возможна, если в начале переходного процесса на входе преоб¬
разователя создать форсировку напряжения Uy. Эту форсировку
можно получить, введя в канал ГОС инерционность, оценивае¬
мую величиной постоянной времени Т2. При этом избыток сигна¬
ла получается не благодаря увеличению UBx, а благодаря тому,
что из-за инерционности в канале обратной связи вычитающее
Действие её в начале процесса ослабляется. Тогда ГОС по на-а)б)ДЕ - Еп - Ед - 1дин * Rfl •
56Гпава 2. Способы формирования процессов пускав регулируемых электроприводахпряжению преобразователя имеет передаточную функцию ре¬
ального дифференцирующего звена.При подаче на вход такого преобразователя скачка L/зх, на¬
пряжение на его выходе будет изменяться, как у пропорциональ¬
но-интегрального звена: сначала возрастет скачком на величину
К • Ubx. а потом будет увеличиваться с темпом, определяемым
величиной постоянной времени Ti. Ток якоря двигателя в соот¬
ветствии с приложенным напряжением сначала увеличивается
скачком, а затем постепенно подтягивается до значения, опреде¬
ляемого темпом нарастания напряжения на якоре. Когда Т2 < Тм,
начальный скачок тока якоря меньше его значения на устано¬
вившемся участке разгона, а когда Тг > Тм - больше. Когда
Тг = Тм, величина начального скачка ЗДС преобразователя в
точности соответствует падению напряжения в якорной цепи
электропривода на установившемся участке разгона, поэтому ток
якоря имеет идеальную прямоугольную форму.•• Пользуясь аппроксимированными ЛАЧХ электропривода, поясните
характер влияния параметров ГОС на показатели процесса пуска. Покажи¬
те, как влияют величины постоянных времени Т, и Т2 на показатели про¬
цесса пуска. Проверьте правильность рекомендаций по выбору желаемых
величин Т, иТг.•• В электроприводе существенно влияние электромагнитной посто¬
янной времени якорной цепи ТЯц. Как в этом случае Вы будете выбирать
структуру и параметры ГОС по напряжению на якоре двигателя? Назовите
причины, препятствующие достижению таких же высоких показателей про¬
цесса пуска, как и в исходном варианте.2.6. Применение последовательных корректирующихустройств для улучшения формы кривой тока якоря
при разгоне электроприводаКак самостоятельное средство -формирования переходных
процессов последовательные корректирующие устройства не
применяются, так как не в состоянии учесть нестабильность па¬
раметров последовательно включенных элементов схемы, в
первую очередь, преобразователя. В сочетании же с обратными
Глава 2. Способы формирования процессов пускав регулируемых электроприводах57связями такие устройства поззоляют улучшать качество пере¬
ходных процессов.Эффективность применения последовательных корректи¬
рующих устройств рассмотрим на примере электропривода с от¬
рицательной обратной связью по току якоря (рис. 2.9 а).3 исходном случае, когда последовательное корректирующее
звено ПК не зведено, можно принять его передаточную функциюWnK (р) = 1Замкнутая система электропривода имеет частотную
характеристику Li (рис. 2.9 б), а переходный процесс тока якоря
при разгоне электропривода после скачкообразного увеличения
сигнала U3x соответствует кривой 1 на рис. 2.9 в.Введем последовательное корректирующее устройство с пе¬
редаточной функциейWnK(p)=1 + 1/Т3 р = (1+Тзр)/Т3р,т.е. в звене ПК параллельно безынерционному звену включим
интегрирующее. ЛАЧХ этого звена изображается кривой 1_Пк
(рис. 2.9 б) и соответствует пропорционально-интегральному
(ПИ-) регулятору.Выберем, ориентируясь пока лишь на упрощение выкладок,
величину Т3 равной наибольшей из постоянных времени инер¬
ционных звеньев прямого канала системы регулирования. В на¬
шем случае Т3 = Тп-ЛАЧХ прямого канала системы регулирования, в который
включены последовательно ПК, П и Д, изображается кривой L3
(рис. 2.9 б). Если теперь эти звенья охватить отрицательной об¬
ратной связью по току якоря с прежним коэффициентом усиле¬
ния Кот, то аппроксимированная ЛАЧХ замкнутой системы элек¬
тропривода изобразится кривой L.2.Сопоставляя кривые Ц и L2, оценим влияние последователь¬
но включенного ПИ-регулятора на вид ЛАЧХ замкнутой системы
электропривода и на характер переходного процесса разгона
электропривода. Можно сделать вывод, что включение
58 Глава 2. Способы формирования процессов пускав регулируемых электроприводахРис. 2.9. Структурная схема (а), ЛАЧХ (б) и кривые пере¬
ходных процессов тока якоря (в) при разгоне электроприво¬
да с отрицательной обратной связью по току якоря и по¬
следовательным корректирующим звеномпропорционально-интегрального звена вместо пропорционально¬
го в прямом канале контура регулирования тока якоря не изме¬
Гпава 2. Способы формирования процессов пуска 59в регулируемых электроприводахняет ни максимума ЛАЧХ системы электропривода, ни правой
границы полосы равномерного пропускания частот. При разгоне
электропривода после скачкообразного увеличения сигнала за¬
дания Ubx кривая тока якоря будет иметь в обоих случаях почти
одинаковый максимум и одинаковую крутизну переднего фронта.
Кривые переходного процесса тока якоря (рис. 2.9 в), рассчитан¬
ные для тех же параметров, что и ЛАЧХ Li и L.2, подтверждают
этот вывод.Причина сохранения неизменным переднего фронта кривой
тока якоря при разгоне электропривода состоит в том, что в обо¬
их случаях характер начального участка процесса определяется
свойствами пропорционального канала как более быстродейст¬
вующего, влияние же интегрального канала не успевает про¬
явиться. Из кривой LnK также видно, что действие пропорцио¬
нального канала проявляется в диапазоне средних и высоких
частот, а интегрального - только низких. Более того, в большин¬
стве существующих схем не удается из условий устойчивости
контура регулирования выбирать величину Т3 так, чтобы в рай¬
оне частоты среза контура сот действие интегрального канала в
звене ПК преобладало над пропорциональным каналом.Кривые L, и 1_2 существенно отличаются друг от друга в рай¬
оне низких частот: при уменьшении со кривая Li понижается, а
L2 - идет горизонтально. Будут отличаться и кривые тока якоря: в
первом случае ток якоря, достигнув 1М, будет постепенно спадать
до нуля (кривая 1, рис. 2.9 в), во втором (кривая 2) - поддержи¬
ваться на неизменном уровне.Поддержание постоянства тока якоря двигателя при разгоне
объясняется введением интегрирующего канала в звене ПК. Из¬
вестно, что выходной сигнал такого звена неограниченно возрас¬
тает, когда сигнал на входе его остается отличным от нуля.Если теперь на вход контура регулирования тока якоря по¬
дать скачком сигнал USx, то установившегося режима, при кото¬
ром напряжение на выходе ПК постоянно (а следовательно, по¬
стоянны ЭДС Еп и скорость п), получить не удастся.
60Гпаза 2. Способы формирования процессов пускев регулируемых электроприводахЕсли такой режим предположить, то необходимо, с одной
стороны, потребовать равенства нулю результирующего сигнала
Uy на входе интегрирующего канала в звене ПК и, значит,
Ubx = Uot- С другой стороны, условие постоянства скорости вра¬
щения двигателя П означает равенство нулю тока якоря, а в этом
случаеUot = Кот * 1я = 0 ,
что противоречит принятым условиям.2.7. Формирование прямоугольной токовой
диаграмллы с помощью интегрального задатчика
интенсивности в схеме с отрицательной обратной
связью по скоростиВ этой схеме ток якоря непосредственно не контролируется.
Требуемое качество процессов обеспечивается изменением по
заданной программе напряжения на выходе специального узла -
задатчика интенсивности. Чаще всего напряжение на выходе за¬
датчиков нарастает при разгоне электропривода по линейному
закону. Задачей системы регулирования скорости вращения дви¬
гателя является воспроизведение этого закона с наибольшей
достижимой точностью, гарантирующей получение прямоуголь¬
ной диаграммы тока якоря.На рис. 2.10 а приведена структурная схема рассматривае¬
мого электропривода. Напряжение и3и с выхода задатчика ин¬
тенсивности ЗИ. который при разгоне представлен интегрирую¬
щим звеном с постоянной времени Тзи, поступает на вход систе¬
мы регулирования скорости. Управляемый преобразователь П,
который питает двигатель постоянного тока Д, представлен уп¬
рощенно инерционным звеном с постоянной времени Тп . Так как
частотные характеристики электропривода необходимо иметь с
выходом по току якоря, то на структурной схеме двигатель Д
представлен последовательным соединением инерционного зве¬
на с постоянной времени Тм и дифференцирующего с посто¬
Гпава 2. Способы формирования процессов пуска 61_в регулируемых электроприводаха) ЗИ П Д1 1Рис. 2.10. Структурная схема (а) и ЛАЧХ (б) системы
электропривода с обратной связью по скорости
и интегральным задатчиком интенсивностиянной Тд. Обратная связь по скорости ОС принята безынерцион¬
ной с коэффициентом усиления Кос-На рис. 2.10 б изображены ЛАЧХ электропривода. ЛАЧХ Ц
замкнутого контура регулирования скорости получается аппрок¬
симацией нижних участков кривых L2 и -Loo, где 12 - ЛАЧХ
звеньев, включенных в прямой канал контура регулирования ско¬
рости, -Lee - обратная ЛАЧХ канала ОС. Результирующая ЛАЧХ
электропривода с выходом по току якоря 1_з получена смещением
кривой U на величину Тд / Тзи.
62 Гпава 2. Способы формирования процессов пуска в регулируемых электроприводах В рассматриваемой схеме удается сравнительно просто по¬
лучить заданный динамический ток якоря двигателя на участке
установившегося режима разгона1м » (Тд /Тзи Кос ) • U3X.Крутизна нарастания тока якоря в начале разгона определя¬
ется быстродействием контура регулирования скорости. Прибли¬
женно время нарастания тока якоря до максимального значенияtM * (3...4)/©с,где сос - частота среза контура регулирования скорости.Чтобы применять обратную связь по скорости вращения дви¬
гателя, приходится устанавливать тахогенератор на валу двига¬
теля. Это усложняет конструкцию электропривода. В данной схе¬
ме не удается устранить ползучую скорость вращения двигателя
из-за недостаточной чувствительности существующих тахогене-
раторов. Поэтому в случаях, не требующих высокой точности
поддержания скорости вращения двигателя, получили распро¬
странение также схемы с задатчиками интенсивности и отрица¬
тельной обратной связью по напряжению на якоре двигателя.2.8. Формирование прямоугольной токовой
диаграммы с помощью задатчика интенсивности
в схеме с отрицательной обратной связью
по напряжению на якореРассмотрим сначала схему с интегральным задатчиком ин¬
тенсивности. Структурная схема электропривода изображена на
рис. 2.11 а. Напряжение изи выхода задатчика интенсивности
ЗИ поступает на вход преобразователя П, охваченного отрица¬
тельной обратной связью по напряжению на якоре ОН с коэффи¬
циентом усиления Кон . Двигатель Д, как и в предыдущих случа¬
ях, представлен реальным дифференцирующим звеном.Для оценки динамических возможностей рассматриваемого
способа формирования переходного процесса обратимся к час-
Глава 2. Способы формирования процессов пуска63в регулируемых электроприводаха)б)в)11! ,\ ' N /^2Тд\ ' 4Тзи КонLi \. \ L3 « *\v/\\\\\\Рис. 2.11. Структурная
схема (а), ЛАЧХ (б) и кри¬
вые переходных процессов
тока якоря (в) системы
электропривода с обрат¬
ной связью по напряжению
и задатчиком интенсивно¬
сти.
64Гпава 2. Способы формирования процессов пусказ регулируемых электроприводахтотным характеристикам электропривода (рис. 2.11 б). Здесь ре¬
зультирующая частотная характеристика Ц системы электропри¬
вода получается суммированием частотных характеристик
звеньев ЗИ, КРН (получается охватом преобразователя П звеном
ОН) и Д; L-| = Ци + Lkph + L-д. С помощью интегрального задатчи¬
ка интенсивности удается обеспечить постоянство поддержания
тока якоря на установившемся участке разгона привода. Динами¬
ческий ток якоря двигателя при разгоне!м * (Тд / Тзи Кон ) • Ubx .Из кривой Li видно, что правая граница полосы равномерного
пропускания частот никогда не превосходит значения <01 = 1 / Тм,
т.е. даже при самой идеальной настройке схемы управления
время нарастания тока якоря до полного значения (кривая 1, рис.2.11 в) составитUi > (3...4) • Тм .Причина состоит в том, что схема с обратной связью по на¬
пряжению на якоре двигателя стремится поддержать величину
напряжения Up в строгом соответствии с напряжением на выходе
задатчика изи- В идеальном случае, соответствующем безынер¬
ционному контуру регулирования напряжения, получим точное
воспроизведение кривой Up желаемого напряжения изи, изме¬
няющегося по линейному закону. ЭДС двигателя (и его скорость
вращения п) в силу электромеханической инерции привода будет
отставать во времени от кривой Up. Время установления процес¬
са составляет, как известно, (3...4) • Тм.Чтобы иметь идеально прямоугольную токовую диаграмму,
необходимо напряжение Up в начальный момент переходного
процесса изменить скачком на величину 1д • Rp. В этом случае
учитывается влияние электромеханической инерции привода,
проявляющееся в неизбежном рассогласовании Up и Ед на ве¬
личину падения напряжения в якорной цепи.
Гпава 2. Способы формирования процессов пускав регулируемых электроприводах65Для получения начального скачка напряжения 11я можно ин¬
тегральный задатчик интенсивности заменить на интегро-
пропорциональный с передаточной функциейW3H (р) = (1 + Ti р) / Тзи р = 1 / Т3и р + Кзи .Здесь величину коэффициента усиления Кзи пропорциональ¬
ного канала в ЗИ следует принимать в соответствии с требуемым
скачком напряжения 11я в начальный момент переходного про¬
цесса. Для этого необходимо выбрать Ti = Тм, чему соответ¬
ствует К3и - Т] I Тзи = Тм / Тзи.Частотная характеристика 1_5 = 1зи + l-д с интегро-
пропорциональным задатчиком интенсивности, начиная с часто¬
ты (01 = 1/ Тм, идет не наклонно, как было в схеме с интеграль¬
ным задатчиком интенсивности, а горизонтально за счет влияния
пропорционального канала. В итоге на частотной характеристике
всего электропривода l_2 полоса равномерного пропускания час¬
тот увеличивается вправо до частоты среза контура регулирова¬
ния напряжения. На кривой переходного процесса тока якоря в
этом случае наблюдается увеличение крутизны переднего фрон¬
та при сохранении неизменной величины динамического тока на
участке установившегося режима разгона (кривая 2, рис. 2.11 в).Увеличить полосу равномерного пропускания частот на ЛАЧХ
электропривода с интегральным ЗИ можно также, введя в канал
ОН фильтр с постоянной времени То = Тм-В этом случае, как следует из характеристик 1_з, Ц и L3, уве¬
личивается полоса равномерного пропускания частот на ЛАЧХ
L5 электропривода: ЛАЧХ преобразователя П, охваченного инер¬
ционной обратной связью, начиная с частоты со = 1 / Тм , подни¬
мается вверх с единичным наклоном, нейтрализуя тем самым
неблагоприятное влияние электромеханической инерции приво¬
да на правочастотную часть ЛАЧХ электропривода (кривые Ц и
Ц, рис. 2.11 б).Механизм благоприятного влияния инерционности в канале
обратной связи на характер кривой тока якоря в начале процесса
объясняется тем. что за счет влияния этой инерционности сигнал
66 Гпава 2. Способы формирования процессов пуска s регулируемых электроприводахобратной связи по напряжению отстает во времени по сравнению
со случаем безынерционной обратной связи. Поэтому во время
переходного процесса разгона привода напряжение на якоре
двигателя ия имеет перерегулирование по отношению к сигналу
1)зи, которое и учитывает падение напряжения в якорной цепи
двигателя, равное 1д • Rя- Переходный процесс тока якоря пред¬
ставлен в этом случае кривой 3 (рис. 2.11 в).Заметим, что благоприятное влияние фильтра в канале об¬
ратной связи на форму кривой тока якоря проявляется лишь в
том случае, если сон > 1 / Тм, где сон - частота среза контура ре¬
гулирования напряжения.
Гпава 3. Способы поддержания скорости электропривода 67Глава 3. СПОСОБЫ ПОДДЕРЖАНИЯ СКОРОСТИ
ЭЛЕКТРОПРИВОДА
3.1. Исходные положенияКачество поддержания заданной скорости вращения элек¬
тропривода определяется степенью подавления действующих на
электропривод возмущений и, в первую очередь, момента стати¬
ческой нагрузки. Здесь можно пользоваться прямыми оценками
(по кривым переходных процессов, вызванных приложением мо¬
мента Мс) или косвенными (обычно - по виду амплитудной час¬
тотной характеристики электропривода по каналу «момент стати¬
ческой нагрузки Мс - скорость п).Если в момент времени tt к валу двигателя приложить скач¬
ком постоянный момент статической нагрузки Мс (рис. 3.1 б), то
сначала скорость снижается, достигая через время tM наиболь¬
шего своего отклонения Дпд (явление динамического падения
скорости), а затем постепенно за время переходного процесса tnn
восстанавливается до своего установившегося значения, которое
от заданного значения отличается на величину статической
ошибки Дпс. В частном случае Дпс = 0. Динамическое падение
скорости Дпд наступает не мгновенно, а спустя время tw из-за
наличия маховых масс на валу двигателя. Время восстановления
скорости tnn определяется быстродействием системы регулиро¬
вания скорости. Качество процессов поддержания скорости в
электроприводе тем выше, чем меньше Дпд, t« и tnn-Синтез системы регулирования скорости электропривода
удобнее вести, пользуясь косвенными оценками. Аппроксимиро¬
ванная ЛАЧХ электропривода по каналу «Мс - п» (рис. 3.1 в)
имеет максимум Км в диапазоне частот ыг... coi. В районе высо¬
ких частот при оз > о)1 амплитуда понижается из-за влияния махо-
аых масс электропривода. В районе низких частот при ю < о>2 ам¬
плитуда также уменьшается до значения К0 благодаря работе
системы регулирования скорости.
68 Глава 3. Способы поддержания скорости электроприводаMrЭП1Рис. 3.1. Структурная схема (а), кривые процессов (б) и ЛАЧХ элек¬
тропривода (в) при приложении момента статической нагрузкиСвязь между прямыми и косвенными оценками качества под¬
держания скорости устанавливается с помощью следующих при¬
ближенных соотношений:АПд « Км ДМс! Апс ~ Ко ДМс;t>,i * (3...4)/coi; tnn ~ (3...4)/о)2.(3.1)Режиму идеально точного поддержания скорости соответст¬
вовало бы АПд = 0, а ЛАЧХ канала «Мс - п» в такой системе
электропривода располагалась бы во всем диапазоне частот
бесконечно низко. В реальном электроприводе нельзя добиться
нулевой ошибки, но ее следует минимизировать.
Гпава 3. Способы поддержания скорости электропривода 69При сравнительном анализе та из систем электропривода, у
которой ЛАЧХ расположена ниже, более точно поддерживает
скорость. В процессе синтеза системы поддержания скорости
следует вводить такие корректирующие связи и так выбирать их
параметры, чтобы исходную ЛАЧХ электропривода опустить как
можно ниже.В качестве исходного (эталонного) варианта примем разомк¬
нутую систему электропривода, рассмотрим в ней физику про¬
цессов и вид частотных характеристик. Затем, вводя корректи¬
рующие связи, будем изменять характер процессов в электро¬
приводе и вид частотных характеристик. Выводы об эффектив¬
ности тех или иных способов поддержания скорости будем де¬
лать, пользуясь соотношениями (3,1).3.2. Показатели разомкнутой системы
«преобразователь - двигатель»Рассмотрим процессы, вызванные скачкообразным приложе¬
нием момента статической нагрузки в разомкнутой (т.е. без
внешних обратных связей) системе электропривода (рис. 3.2).
Здесь и далее переменные представлены в относительных еди¬
ницах. Их базовые значения выбраны так же, как в предыдущей
главе: для ЭДС преобразователя Еп, двигателя Ед, тока якоря 1я
и момента двигателя М приняты номинальные величины напря¬
жения, тока якоря и электромагнитного момента двигателя.Рис. 3.2. Структурная схема разомкнутой
системы «преобразозатель - двигатель»На схеме двигатель представлен звеньями Д и ЯЦ, охвачен¬
ными отрицательной обратной связью по Ед . Звено Д учитывает
70 Глава 3. Способы поддержания скорости электроприводамеханическую инерцию вращающихся масс электропривода и
описывается передаточной функцией \Л/д (р) = 1 / Тд р. звено ЯЦ,
учитывая электромагнитную инерцию силовой цепи двигателя и
преобразователя, описывается передаточной функцией
У/яц (р) = КЯц / (1 + Тяц р). Здесь Тд - механическая постоянная
времени привода; Тяц - электромагнитная постоянная времени
силовой цепи; КЯц - кратность тока короткого замыкания силовой
цепи.Расчеты, выполненные для большого числа двигателей, по¬
казали, что обычно величина Тд лежит в следующих пределах:
0,2...0,7 с - для двигателей постоянного тока общепромышлен¬
ных серий П, 2П, 4П; 0.2..Д5 с - для крупных реверсивных про¬
катных двигателей; 07...2.0 с - для крупных нереверсивных про¬
катных дзигателей. В двигателях одной серии величина Тд воз¬
растает с увеличением номинальной мощности и скорости вра¬
щения. Асинхронные двигатели имеют Тд= 0,05..Д4 с.Параметры Кяц и Тяц для электроприводов средней и боль¬
шой мощности обычно имеют следующие значения: КЯц = 10...30;
Тяц = 0,02...0,07 с в системе Г-Д и КЯц = 6...15; ТЯц = 0,03...0,10 с
в системах вентильный преобразователь - двигатель.На рис. 3.3 изображены структурные схемы, ЛАЧХ электро¬
привода по каналу «статическая нагрузка Ic - скорость вращения
двигателя п» и кривые переходных процессов после приложения
статической нагрузки. Они позволяют раскрыть механизм влия¬
ния каждого из звеньев на характер процессов в электроприводе.Отдельно взятое звено Д учитывает механическую инерцию
привода, когда якорная цепь двигателя отключена от преобразо¬
вателя. Привод ведет себя как обыкновенный маховик и описы¬
вается интегратором с постоянной времени Тд . При приложении
скачком постоянного момента статической нагрузки скорость
вращения двигателя п линейно уменьшается до полной останов¬
ки двигателя (кривая п-i, рис. 3.3 а). Если момент статической на¬
грузки равен номинальному, а начальное значение скорости -
скорости идеального холостого хода, то время торможения со¬
ставит Тд.
Гпава 3. Способы поддержания скорости электропривода 71Если якорную цепь двигателя подключить на выход нерегу¬
лируемого преобразователя, то динамические свойства двигате¬
ля можно оценить, пользуясь структурной схемой, на которой
звено Д охвачено звеном ЯЦ (рис. 3.3 б). Приложение статиче¬
ского момента вызывает снижение скорости вращения двигателя
п и его ЭДС Ед, вследствие чего растет разность Еп - Ед, приво¬
дя к увеличению тока якоря до значения, соответствующего ве¬
личине приложенной статической нагрузки. Процесс снижения
скорости вращения двигателя идет или монотонно (кривая п2
при m > 4) или с перерегулированием (кривая п3 при m < 4).
Здесь m = Тм / Тяц - отношение электромеханической к электро¬
магнитной постоянной времени. Наличие перерегулирования -
динамического падения скорости Дпд - следует объяснить отста¬
ванием во времени !я вслед за разницей Еп - Ед вследствие
влияния индуктивности якорной цепи. Длительность процесса
может быть оценена частотой среза соэ разомкнутого контура
саморегулирования ЗДС двигателя. Предельные значения соэ,
характерные для электроприводов большой мощности, лежат в
пределах соэ = 20...30 рад/с.Сказанное подтверждает также ЛАЧХ электропривода 1_2, ко¬
торая в соответствии со структурной схемой (рис. 3.3 б) построе¬
на по нижним участкам характеристик 1_д и 1>Яц, соответствующих
звену Д в прямом канале и звену ЯЦ в канале обратной связи
контура саморегулирования ЭДС двигателя. Эта характеристика
при малых частотах идет горизонтально на высоте 1 / КЯц, а в
районе частоты среза соэ имеет максимум, который тем выше,
чем больше величина ТЯц. Наличие этого максимума свидетель¬
ствует о динамическом падении скорости вращения двигателя
при приложении момента статической нагрузки.Выясним, как основные параметры конструкции двигателя
влияют на показатели процесса, вызванного приложением мо¬
мента статической нагрузки. Прежде всего, увеличение КЯц при¬
водит к снижению ошибки поддержания скорости в установив¬
шихся режимах, но это требует конструирования двигателей с
уменьшенным активным сопротивлением якорной обмотки, что
72 Глава 3. Способы поддержания скорости электроприводаРис. 3.3. Структурные схемы, ЛАЧХ, кривые переходных
процессов в разомкнутой системе электропривода-Тд-Нприводит к повышенному расходу меди. Аналогичные результаты
дает завышение установленной мощности двигателя, на что шли
ранее некоторые электротехнические фирмы. Сегодня оба эти
пути считаются неэффективными, так как задачу снижения ста¬
тической ошибки проще решить, применяя замкнутые системы
регулирования скорости.Динамическое падение скорости Дпд, как это следует из кри¬
вой L_2> можно ослабить двумя способами: увеличивая механиче¬
скую постоянную времени привода Тд или уменьшая электромаг¬
нитную постоянную времени ТЯц. Способы изменения постоянной
Тд рассматривались нами в п. 2.3. Требования к величине этой
постоянной в режимах поддержания скорости и пуско-тормозных
Гпава 3. Способы поддержания скорости электропривода 73процессах оказываются противоречивыми. Снижение же величи¬
ны Тяц полезно во всех случаях и достигается при конструирова¬
нии электрической машины применением открытых пазов на яко¬
ре, введением компенсационной обмотки, применением высоко¬
скоростных двигателей.3.3. Применение отрицательной обратной связи
по скорости вращения двигателяРассмотрим электропривод, выполненный по схеме управ¬
ляемый преобразователь - двигатель с отрицательной обратной
связью по скорости (рис. 3.4). На схеме изображено два контура
регулирования:Рис. 3.4. Структурная схема электропривода с отрица¬
тельной обратной связью по скоростиа) контур 1 саморегулирования ЭДС двигателя, образован¬
ный звеньями Д, ЯЦ и местной обратной связью по ЭДС двигате¬
ля. Работа этого контура, учитывающего статические и динами¬
ческие свойства электропривода в разомкнутой системе регули-
оования, рассмотрена нами ранее;б) внешний контур 2 регулирования скорости, полученный
охватом преобразователя и двигателя звеном ОС - внешней об¬
ратной связью по скорости.
74 Глава 3. Способы поддержания скорости электроприводаПосле введения этой обратной связи процессы в электропри¬
воде протекают иначе, чем в разомкнутой системе. Приложение
Мс вызывает увеличение 1я и восстановление скорости п не
только за счет снижения Ед (работа контура 1 саморегулирова¬
ния ЭДС двигателя), но и за счет увеличения Еп (работа внешне¬
го контура регулирования скорости 2). Действительно, снижение
скорости вращения двигателя п вследствие приложения момента
статической нагрузки Мс приводит к уменьшению сигнала U0c, а
это вызывает увеличение разницы U3 - Ucc, подъем Еп и вос¬
становление скорости п.Здесь и далее анализ влияния любой корректирующейся свя¬
зи на качество процессов поддержания скорости будем выпол¬
нять по одному алгоритму: сначала выделяем исследуемую кор¬
ректирующую связь на структурной схеме, затем фиксируем вни¬
мание на изменениях в ЛАЧХ электропривода, вызванных этой
корректирующей связью и, наконец, используя общеизвестные
соотношения между формой частотной характеристики и харак¬
тером процесса, даем оценку показателей процесса.На структурной схеме (рис. 3.5 а) введение внешней обрат¬
ной езязи по скорости удобно показать звеньями ОС и П (показа¬
ны жирно), включенными параллельно единичной обратной связи
по ЭДС двигателя перед звеном ЯЦ. Это приводит к увеличению
коэффициента усиления отрицательной обратной связи по ско¬
рости, охватывающей звено Д и, следовательно, к снижению
ошибки по скорости (по крайней мере, в полосе пропускания час¬
тот канала ОС - П).ЛАЧХ электропривода с отрицательной обратной связью по
скорости описывается кривой L . Влияние канала внешней об¬
ратной связи по скорости по сравнению с разомкнутой системой
регулирования (описывается кривой 1_г) показано заштрихован¬
ной полосой. Видно, что ослабление возмущения Мс происходит
только в полосе частот со < ос, где сос - частота сопряжения ка¬
налов обратных связей по ЭДС двигателя и внешней по скоро¬
сти.
Гпава 3. Способы поддержания скорости электропривода 75Рис. 3.5. Структурная схема (а) и ЛАЧХ (б) электропривода
с отрицательной обратной связью по скорости
76 Гпава 3. Способы поддержания скорости электроприводаСтатическую погрешность можно определить из соотношения
(при Кос » 1):Дпс » Ale / Кос Кяц •В переходном процессе, если влияние хотя бы одной из
инерционностей - преобразователя П или якорной цепи ЯЦ -
существенно (т.е. выполняется хотя бы одно из неравенств
1/Тп < сое или 1/Тяц < шс ), то наблюдается динамическое
падение скорости вращения двигателя дпд >Дпс- Это
объясняется запаздыванием действия сигнала обратной связи по
скорости, когда увеличение 1я из-за подъема Еп не успевает за
приложенным Мс-Величину Дпд можно приближенно оценить по величине мак¬
симума характеристики Ц. При этом в одноконтурной системе
регулирования скорости снижение Дпд за счет увеличения Кос
происходит, когда обеспечивается ас> соэ- Тогда можно прибли¬
женно считатьДПд ~ Лпестсоэ/сос ,где Дпест - динамическое падение скорости в системе преобра¬
зователь - двигатель без внешних обратных связей.При (Dc < соэ, действие внешней обратной связи по скорости
ОС, входящей в контур регулирования 2, может настолько запаз¬
дывать, что влиянием этой связи на величину Дпд можно пренеб¬
речь. Тогда величина Дпд будет такой же, как у двигателя, под¬
ключенного к преобразователю П в схеме без обратных связей. И
на кризой Ц максимум будет таким же, как на характеристике ра¬
зомкнутой системы электропривода (кривая 1_2 на рис. 3.3).В реальных условиях частоту среза шс часто снижают до зна¬
чений, даже меньших, чем этого позволяют условия устойчиво¬
сти контура, из-за неблагоприятного влияния оборотных пульса¬
ций напряжения тахогенераторов. Суть этого явления поясняется
кинематической схемой (рис. 3.6) часто применяемого случая со¬
единения валов двигателя (или рабочего механизма) и
Гпава 3. Способы поддержания скорости электропривода 77Рис. 3.6. Кинематическая схема
соединения валов дзигателя
и тахогенераторатахогенератора через одно¬
пальцевую муфту. Допустим,
что движение от двигателя к
тахогенератору передается с
помощью пальца А, располо¬
женного на расстоянии R от
оси вращения двигателя О, -
О,. Полумуфта тахогенерато¬
ра, принимающего движение,
условно показана вилкой,
входящей в зацепление с
пальцем А и установленнойна оси тахогенератора 02 - 02 . Обе оси идеально точно при
монтаже совместить не удается, поэтому остается несоосность
(радиальная и (или) осевая). Наличие радиальной несоосности
величины е приводит к тому, что в соответствии с рисунком рас¬
стояние от пальца А до оси вращения тахогенератора изменяет¬
ся от R + е до R - е. При постоянной величине окружной скорости
движения пальца А вал тахогенератора вращается неравномер¬
но из-за переменного радиуса вращения вилки. В результате по¬
является погрешность, имеющая частоту вращения («оборотная
погрешность») и амплитуду s / R. Как показывает анализ возмож¬
ных допусков при сборке деталей и практика монтажа, величины
кесоосностей невелики: доли миллиметра при радиальной и
единицы градусов при угловой несоосности. Однако поданные на
зход высокоточной, а следовательно, с высоким коэффициентом
усиления системы регулирования эти сигналы приводят к боль¬
шим вынужденным колебаниям тока якоря при постоянных вели¬
чинах момента статической нагрузки и скорости вращения при-
зода.Например, предположим, что в простейшей одноконтурной
системе регулирования скорости с пропорциональным регулято¬
ром скорости коэффициент усиления разомкнутой системы равен
100. Тогда при полной скорости вращения электропривода, при¬
нимаемой за 100%, сигнал ошибки регулирования по скорости
78 Гпаза 3. Способы поддержания скорости электропривода(разность между сигналами задающим и с выхода датчика отри¬
цательной обратной связи по скорости), подаваемый на вход ре¬
гулятора скорости, составляет 1%. И этой величины достаточно,
чтобы изменить напряжение и скорость на 100%. Если при этом
оборотные пульсации датчика скорости составят около 3%, то
существенно превысят полезный сигнал на входе и вызовут
пульсации ЭДС преобразователя и тока якоря очень большой
амплитуды.Так как оборотные пульсации скорости, особенно при глубо¬
ком ее регулировании, имеют низкую частоту, то ослабить их
влияние применением фильтров не удается. Поэтому в высоко¬
точных электроприводах датчики скорости часто устанавливают
на одном валу с якорем двигателя. Возможно также для переда¬
чи вращения на вал датчика применение специальных муфт или
опор, имеющих высокую податливость в радиальном и осевом
направлениях и очень жестких при передаче крутящего момента.
Здесь следует указать на муфты, в которых соединительный
элемент между полумуфтами выполнен в виде четырехлепестко¬
вой пластины из упругого материала. При этом первая пара про¬
тивоположных лепестков отгибается в одну сторону и крепится к
первой полумуфте, а вторая пара - отгибается в другую сторону
и крепится ко второй полумуфте. Муфта имеет высокую податли-
зость упругого элемента при радиальной и угловой несоосностях
и высокую жесткость при передаче крутящего момента. Кроме то¬
го, она отличается очень высокой точностью в передаче движе¬
ния при наличии радиальных или угловых несоосностей соеди¬
няемых валов.Схема с отрицательной обратной связью по скорости приме¬
няется в электроприводах с высокой точностью регулирования
скорости. К этому же способу обращаются, если необходимо
обеспечить глубокий или сверхглубокий (десятки тысяч) диапа¬
зон регулирования скорости. Последний случай представляет
собой сложную техническую проблему, в которой наиболее
трудно бывают решить две задачи: измерение скорости и сниже¬
ние динамического падения ее, которое при очень малых устав¬
Глава 3. Способы поддержания скорости электропривода 79ках скорости вызывает периодические остановки электропривода
(«скачковый» режим работы).Первую задачу решают, изменяя принцип измерения скоро¬
сти и отказываясь от датчиков с непосредственным измерением
скорости (тахогенераторов), которые при сверхмалых скоростях
неработоспособны. Вместо этого при измерении скорости чаще
зсего пользуются соотношением: AS / At, где AS - изменение по¬
казания датчика положения рабочего органа за время измерения
(квантования) At. Здесь переходят к цифровым электроприводам,
поскольку основные операции, связанные с обработкой инфор¬
мации в этом случае (квантование по времени, деление пути на
время, запоминание результата измерения за время квантова¬
ния) удобнее выполнять в цифровой форме.Решение второй задачи достигается применением специаль¬
ных покрытий трущихся поверхностей, имеющих малые значения
момента сухого трения («противоскачковые» покрытия), услож¬
нением опорных узлов вала (например, трехколенные подшипни¬
ки), изменением кинематической схемы механической передачи
(дифференциальный электропривод). Полезно бывает в этих
случаях и увеличение момента инерции рабочего механизма.3.4. Применение отрицательной обратной связи
по напряжению на якоре двигателяИдея рассматриваемого способа регулирования заключается
в том, чтобы, охватив преобразователь жесткой отрицательной
обратной связью, ослабить влияние на точность поддержания
скорости тех возмущений, которые вызывают снижение напря¬
жения Up на якоре двигателя. К таким возмущениям можно отне¬
сти, например, изменение статической нагрузки на валу двигате¬
ля, которое вызывает увеличение падения напряжения в силозой
цепи преобразователя и снижение ия. В схемах вентильных
электроприводов колебания напряжения сети тоже влияют на
величину 1!я и вызывают погрешность в поддержании скорости.
80 Гпаво 3. Способы поддержания скорости электроприводаРассмотрим структурную схему электропривода с отрица¬
тельной обратной связью по напряжению (рис. 3.7). На схеме
изображено три контура регулирования:ЯПдип1+Тяп Р
КяпРис. 3.7. Структурная схема электропривода с отрицательной
обратной связью по напряжению- контур 1 саморегулирования ЭДС в двигателе, образован¬
ный звеньями ЯД, Д и отрицательной обратной связью по ЭДС
двигателя. Передаточными функциями этих звеньевWfl(p) = 1/Tap и \Л/Яд (р) = Кя / (1 + Тя р)учитываются механическая инерция привода и электромагнитная
инерция якорной цепи двигателя (без учета параметров силовой
цепи преобразователя). Здесь Тд - механическая постоянная
времени привода, Кя и Тя - кратность тока короткого замыкания
и электромагнитная постоянная времени якорной цепи двигате¬
ля. В электродвигателях средней и большой мощности ориенти¬
ровочно Кя = 15...30 и Тя = 0,02...0.1 с;- контур регулирования 2, образованный звеньями ЯД и ЯП
и учитывающий параметры силовой цепи отдельно двигателя и
преобразователя. Передаточная функция ззена ЯП
Глава 3. Способы поддержания скорости электропривода 81Мяп (р) - (1 + Тяп Р ) / Кяп ,где КЯп и ТЯп - кратность тока короткого замыкания и электро¬
магнитная постоянная времени силовой цепи преобразователя. В
электроприводах средней и большой мощности, выполненных по
системе Г- Д. обычно КЯп = 20...40, ТЯл = 0,01...0,02 с, а по сис¬
теме вентильный преобразователь - двигатель - Кяп = 10...20,
Тяп = 0,02...0,05 с. Меньшие величины Кяп во втором случае
обусловлены более мягкой внешней характеристикой вентиль¬
ных преобразователей из-за перекрытия вентилей в процессе
коммутации;- контур регулирования напряжения на якоре двигателя 3,
образованный звеньями П и ОН.С точки зрения функционирования контура 3 изменение па¬
дения напряжения AUn в силовой цепи преобразователя при
протекании тока якоря (выходная величина звена ЯП) действует
как возмущение, вызывая изменение напряжения ия на якоре
двигателя. Если этот контур выполнить с высоким быстродейст¬
вием и большим коэффициентом усиления, то можно ослабить
влияние возмущения AUn. В реальных случаях частота среза
контура 3 доходит до to * 250...300 рад / с. Это приводит практи¬
чески к полному подавлению влияния возмущения AUn . В пере¬
ходных процессах, вызванных приложением момента статиче¬
ской нагрузки, наблюдается ия ^ const. Показатели переходных
процессов в электроприводе с контуром регулирования напряже¬
ния вентильного преобразователя получаются, как у двигателя,
работающего на естественной механической характеристике.Некоторые, особенно тихоходные двигатели имеют малую
величину показателя m =Тм / Тя. В этом спучае процессы, вы¬
званные приложением статической нагрузки, носят колебатель¬
ный характер с большим перерегулированием по току якоря. Для
устранения этого перерегупирования целесообразно применять
дополнительную отрицательную гибкую обратную связь по току
якоря двигателя [59].
82 Гпава 3. Способы поддержания скорости электропривода3.5. Применение положительной обратной связи
по току якоря двигателя (IR-компенсация)В разомкнутом (без обратных связей) электроприводе, вы¬
полненном по схеме управляемый преобразователь - двигатель,
статическая ошибка по скорости вращения двигателя после при¬
ложения Мс определяется величиной падения напряжения 1я Rau
в силовой цепи преобразователь - двигатель. Эту ошибку можно
уменьшить, если на величину падения напряжения 1я Rяц увели¬
чивать ЭДС преобразователя ЕП- Для этого нужно ввести поло¬
жительную обратную связь по току якоря.На схеме (рис. 3.8) имеется два контура регулирования. Кон¬
тур 1 образован звеньями ЯЦ и Д. Как мы уже отмечали, этот
контур учитывает передаточные свойства разомкнутой системы
преобразователь - двигатель. Контур 2 образован звеньями ЯЦ.
ОТ и П. Он учитывает эффект, вносимый положительной обрат¬
ной связью ОТ.Рис.3.8. Структурная схема электропривода с
положительной обратной сзязью по току якоряОценим влияние положительной обратной связи по току яко¬
ря на ошибку по скорости, обусловленную приложением статиче¬
ской нагрузки lc. Для этого сначала структурную схему электро¬
привода изобразим, как на рис. 3.9 а, после чего рассмотрим вид
передаточной функции и частотной характеристики электропри-
Глава 3. Способы поддержания скорости электропривода 83вода по каналу «1с - п» при различных значениях коэффициента
усиления Кот канала ОТ.б)Рис. 3.9. Структурная схема (а) и ЛАЧХ (б) электропривода
с положительной обратной связью по току якоряОхват звена ЯЦ местной положительной обратной связью эк¬
вивалентен (в статических режимах) увеличению его коэффици¬
ента усиления. А это приводит к уменьшению коэффициента пе¬
редачи электропривода по каналу «1с - п», т.е. увеличивает же¬
сткость механической характеристики электропривода.Если выбрать Кт = Кяц Кот Кп = 1, то коэффициент усиления
звена ЯЦ можно сделать бесконечно большим, а механическую
характеристику электропривода - абсолютно жесткой. Но каковы
будут при этом динамические показатели электропривода?Тд(Оэ
84 Гпава 3. Способы поддержания скорости электроприводаОценку динамических показателей электропривода выполним
для простейшего случая, когда звенья ОТ и П приняты безынер¬
ционными, а в ЯЦ учтена электромагнитная инерция якорной це¬
пи постоянной времени Тяц. Тогда передаточная функция конту¬
ра регулирования 2 (звена ЯЦ, охваченного ОТ и П)W2 (р) = \Л/ЯЦ (р) / [1 - УУяц(р) Wqt(p) Wn (р) ] == Кяц / (1 - Кт + Тяц р).При Кт < 1 звено ЯЦ, охваченное ОТ и П, ведет себя как
инерционное, у которого и коэффициент усиления и постоянная
времени увеличены в 1 / (1 - Кт) раз.Для оценки влияния звена ОТ на характер процессов в элек¬
троприводе после приложения Мс построим частотные характе¬
ристики электропривода по каналу «1с - п» (см. рис. 3.9 б). Здесь
кривая 1_д учитывает механическую инерцию привода. Характе¬
ристика —1_2, которая соответствует контуру регулирования 2,
изображена для нескольких значений Кт < 1. Видно, что высоко¬
частотные участки кривых -L2 и -1_Яц совпадают. Низкочастот¬
ные (идущие горизонтально) участки кривой -1_2 располагаются
тем ниже, чем больше Кт. В пределе, когда Кт = 1, кривая -L2
вырождается в наклонную прямую, соответствующую интегри¬
рующему звену с постоянной времени Т2 = Тяц/ Кяц, включенному
в канал обратной связи звена 2.Частотные характеристики электропривода по каналу «1с - п»
аппроксимируются нижними участками характеристик 1_д или
—1_2. Сопоставим эти характеристики с исходной характеристикой,
соответствующей разомкнутой системе преобразователь - дзи-
гатель и аппроксимируемой нижними участками кривых 1_д и
-1_яц. Изменение Кот вызывает изменение лишь низкочастотного
участка характеристики электропривода, высокочастотный уча¬
сток сохраняется без изменений. Другим словами, начало пере¬
ходного процесса изменения скорости вращения двигателя после
приложения Мс идет по одной и той же кривой как з разомкнутой
системе преобразователь - двигатель, так и в замкнутой систе¬
Гпава 3. Способы поддержания скорости электропривода 85ме с положительной обратной связью по току якоря. Это объяс¬
няется тем, что канал воздействия по току якоря выполнен с не¬
высоким (менее единицы) коэффициентом усиления. Поэтому
процессы коррекции Еп в функции тока якоря 1я (работа контура
регулирования 2) протекают медленнее, чем процессы измене¬
ния тока якоря, обусловленные изменением Ед вследствие паде¬
ния скорости вращения двигателя (работа контура регулирова¬
ния 1). В итоге величина динамического падения скорости вра¬
щения двигателя остается практически такой же, как и в разомк¬
нутой системе преобразователь - двигатель. Статическое же па¬
дение скорости будет тем меньше, чем ближе контурный коэф¬
фициент Кт разомкнутого контура регулирования тока приближа¬
ется к единице.•• Известно, что система регулирования с положительной обратной
сзязью относится к неминимально-фазовым системам. Для этих систем
применение в общем случае аппарата аппроксимированных амплитудных
частотных характеристик без учета фазовых является некорректным и мо¬
жет привести к ошибочным результатам. Каким образом в схеме с положи¬
тельной обратной связью по току якоря преодолевается указанная труд¬
ность анализа?А каковы будут динамические показатели электропривода в
предельном случае настройки контура регулирования тока, когда
Кт = 1? В этом случае интегрирующее звено Д в прямом канале
регулирования скорости охватывается другим интегрирующим
звеном 2. Наличие же двух интегрирующих звеньев в однокон¬
турной системе регулирования, не содержащей форсирующих
звеньев, свидетельствует о структурной неустойчивости этой
системы. Чтобы избежать неустойчивости, выбирают Кт < 1.В настоящее время рассматриваемый способ самостоятель¬
ного значения не имеет, но он удачно дополняет возможности
схем с отрицательной обратной связью по напряжению на якоре
в схемах, когда хотят избежать применения датчиков скорости.
Ранее он применялся достаточно широко даже в электроприво¬
дах таких ответственных механизмов, какими являются непре¬
рывные станы холодной прокатки. Параметры токовой свя¬
36 Глава 3. Способы поддержания скорости электроприводази обычно выбирают так, чтобы с ее помощью устранялось не
все статическое падение скорости вращения двигателя, а на
50...70%.3.6. Регулирование по возмущениюИдея рассматриваемого способа регулирования заключается
в том, чтобы, непосредственно измерив величину действующего
на электропривод возмущения (в нашем случае - Мс), изменить
уставку на входе контура регулирования скорости так, чтобы ско¬
рость вращения двигателя не изменялась при приложении Мс.
На схеме (рис. 3.10) измерение возмущения и подача компенси¬
рующего сигнала Uk на вход системы электропривода произво¬
дится специальным компенсирующим устройством КУ.Рис. 3.10. Структурная схема электропривода с регулированием
по моменту статической нагрузкиПоставим сначала задачу достижения абсолютной инвари¬
антности скорости вращения двигателя от приложенного возму¬
щения Мс как в установившихся, так и в переходных режимах.
Физически это означает создание противодействия, равного и
противоположного по знаку внешнему возмущению Мс- Для вы¬
полнения указанного условия необходимо, чтобы передаточные
функции каналов передачи возмущения и компенсирующего ка¬
налов были равны, т.е.
Глава 3. Способы поддержания скорости электропривода Q71 =Wkv (p)Wn (p)WfiU(p).Здесь Wxy (р) - передаточная функция компенсирующего
устройства КУ; Wn (р)-\Л/Яц (р) - передаточная функция последо¬
вательно включенных П и ЯЦ, т.е. части системы электропривода
между местом приложения компенсирующего сигнала UK и воз¬
мущения Мс- Из приведенного уравнения желаемая передаточ¬
ная функция звена КУWKy(p)=1/Wn (Р) Wpu(p).Если учесть, что звенья П и ЯЦ содержат инерционности, то
для выполнения условия абсолютной инвариантности необходи¬
мо, чтобы звено КУ, кроме пропорционального канала, содержа¬
ло также идеальные дифференциаторы в общем случае того же
порядка, что и звенья П и ЯЦ. Это физически невозможно. По¬
этому, если измеряется только возмущение Мс, то в переходных
режимах, вызванных приложением Мс, динамическая ошибка не¬
избежна.Потребуем выполнения условий компенсации возмущения
только в установившихся режимах, что достигается при
К:<у Кп Кяц = 1. Для этого случая, во-первых, оценим величину ди¬
намической ошибки по скорости при приложении Мс и, во-вторых,
выясним, как и до каких пределов можно улучшить динамические
показатели электропривода, не усложняя существенно схему.Преобразуем структурную схему электропривода, приведя
воздействие Uk к тому же сумматору, что и возмущение Мс (рис.3.11 а). Звеном А учитывается совместное влияние на изменение
скорости п и возмущения Мс и компенсирующего сигнала UK. Так
как в звене А оба канала суммируются с противоположными зна¬
ками, образуя неминимально-фазовое соединение звеньев, то
найдем точное аналитическое выражение для передаточной
функции этого звена. Чтобы не усложнять выкладки, учтем инер¬
цию только в звене ЯЦ постоянной времени ТЯц, а звенья П и КУ
примем безынерционными. Тогда передаточная функция звена А
88 Гпава 3. Способы поддержания скорости электроприводаWA = 1 - Wk-у (р) Wn (р) (р) == 1 - Кку Кп Кяц / (1 + Тяц р) == 1 - 1 / (1 + + Тяц р) = ТЯц р / (1 + ТЯц р).В соответствии с полученным выражением построена ЛАЧХ
La звена А, которая показывает, как происходит подавление при¬
ложенного возмущения Мс на разных частотах: так, воздействия
в диапазоне частот о > сок = 1 / Тяц полностью проникают на вход
системы электропривода, не будучи ослаблены действием ком¬
пенсирующей связи. Наоборот, при и < шк происходит ослабле¬
ние приложенного возмущения. Другими словами, действие ком-Рис. 3.11. Структурная схема (а) и ЛАЧХ (б) электропривода
с регулированием по моменту статической нагрузки
Гпава 3. Способы поддержания скорости электропривода 89пенсирующего канала эффективно лишь в полосе частот юк, ко¬
гда частотные характеристики каналов передачи возмущения и
компенсирующего канала совпадают.Сказанное позволяет сформулировать идею наиболее про¬
стого способа улучшения динамических показателей электропри¬
вода с регулированием по возмущению: необходимо с помощью
дополнительных корректирующих связей максимально расши¬
рить полосу равномерного пропускания частот канала передачи
компенсирующего сигнала (звеньев П и ЯЦ). Самым естествен¬
ным в этом случае решением является охват звеньев П и ЯЦ ме¬
стной обратной связью по току якоря. Здесь достижимая полоса
равномерного пропускания частот, определяемая частотой среза
контура регулирования тока якоря, доходит в существующих вен¬
тильных электроприводах до ©т ~ 100...150 рад /с. Следователь¬
но, в этом же диапазоне частот будет эффективно работать и ка¬
нал передачи компенсирующего сигнала U«. Динамическое паде¬
ние скорости вращения двигателя, связанное с неполной ком¬
пенсацией Мс из-за инерционности звеньев канала передачи Uk,
можно приближенно оценить выражением:Лпд ~ (1/ Тдок) ДМс.Заметим, что приведенное соотношение справедливо при
о).< > соэ. В тех редких случаях, когда указанное неравенство не
выполняется, динамическое падение скорости в электроприводе
с регулированием по возмущению остается таким же, как и в ис¬
ходной системе.Динамические показатели регулирования по возмущению
оказываются более высокими, чем во всех рассмотренных пре¬
дыдущих случаях даже при весьма простой схеме компенсирую¬
щего устройства КУ (пропорциональный регулятор). Однако дан¬
ный способ не нашел широкого применения в системах регули¬
рования скорости вращения двигателя. Во-первых, рассмотрен¬
ная схема реагирует лишь на один вид возмущения - изменение
момента статической нагрузки. Другие возмущения, например,
колебания напряжения питающей сети, этой схемой не учитыва¬
90 Глава 3. Способы поддержания скорости электроприводаются. Во-вторых, реализация рассматриваемого способа требует
специальных датчиков момента, номенклатура которых оказа¬
лась бы непомерно широкой из-за большого количества типо¬
размеров применяемых электродвигателей.Между тем, в тех случаях, когда возмущение, действующее
на электропривод, может быть измерено стандартными датчика¬
ми, данный способ оказывается весьма эффективным. Наибо¬
лее показательный пример - электроприводы моталок станов
холодной прокатки. Почти на всех существующих электро¬
приводах моталок поддержание заданного натяжения наматы¬
ваемой полосы осуществляется косвенным способом - в функ¬
ции тока якоря двигателя. Изменение же скорости выходящей из
клети полосы для сис+емы регулирования натяжения на моталке
является весьма сильным возмущением, которое может не толь¬
ко изменить натяжение сверх допустимых значений, но даже вы¬
звать нагон петли. Чтобы сохранить поддерживаемое натяжение
в заданных пределах, на вход системы регулирования натяжения
на моталке подают сигналы с выхода тахогенератора электро¬
привода клети (пропорционально скорости полосы) и из схемы
узла задания скорости стана (пропорционально произзодным
скорости).
Гпава 4. Регулируемые электроприводы постоянного тока 97Глава 4. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ
ПОСТОЯННОГО ТОКА4.1. Основные сведения об элементах серии УБСРСовершенствование средств преобразовательной техники в
течение последних десятилетий способствовало дальнейшему
прогрессу в развитии регулируемого электропривода. Электриче¬
ские двигатели принципиальных изменений не претерпели, хотя
применение новых конструкционных материалов и, в первую
очередь, повышение класса изоляции позволили существенно
интенсифицировать процессы в них и улучшить динамические
показатели электрических машин. Регулируемые же источники
питания двигателей изменились весьма значительно. В тридца¬
тые годы получило широкое распространение контакторное
управление в цепи якоря двигателя и в цепи обмотки возбужде¬
ния генератора. В сороковые годы использование электрома-
шинных усилителей позволило внедрить замкнутые системы ре¬
гулирования, которые характеризуются лучшим качеством про¬
цессов. Еще более высокие регулировочные показатели обеспе¬
чили управляемые ртутные выпрямители. Наконец, шестидеся¬
тые годы явились началом широкого внедрения тиристорной
техники.Какие же регулировочные показатели были улучшены про¬
грессом преобразовательной техники? Прежде всего, резко
уменьшилась мощность сигналов управления на входе преобра¬
зователя. На рис. 4.1 а показано ориентировочно, как по годам
изменялась мощность управления преобразователем. Если в
тридцатые годы она соответствовала мощности цепи возбужде¬
ния генератора и для крупных машин достигала десятков кило¬
ватт, то в настоящее время мощность на входе систем импульс¬
но-фазового управления СИФУ тиристорных преобразователей
не превышает долей ватта и практически не зависит от его вы¬
ходной мощности. Малая мощность входных цепей позволяет
92 Гпава 4. Регулируемые электроприводы постоянного токаРу .Вт1 -1СГ-•15ю-'ШШ. эму'Ш22I i i
1940 1950 1S50 1970Г. Г.а)б)Рис. 4.1. Характеристики изменения по годам основных регули¬
ровочных свойств управляемых преобразователей: а) мощ¬
ность управления преобразователем; б) постоянная временишироко внедрять элементы полупроводниковой техники и уни¬
фицировать элементную базу схем управления электроприводов.Развитие преобразовательной техники шло также в направ¬
лении уменьшения инерционности преобразователей, питающих
двигатель. На рис. 4.1 б показано, как по годам уменьшалась ве¬
личина эквивалентной постоянной времени преобразователей.
Так, величины постоянной времени цепи обмотки возбуждения
крупных генераторов составляют несколько секунд. В настоящее
зремя динамические возможности электропривода ограничива¬
ются инерционностью двигателя, а не преобразователя. Приме¬
нение малоинерционных преобразователей, с одной стороны,
расширяет регулировочные возможности схемы управления, а с
другой, - позволяет снизить относительный уровень требований
Гпава 4. Регулируемые электроприводы постоянного тока 93к настройке ее, так как заданные показатели качества регулиро¬
вания могут быть достигнуты в более простых схемах и с мень¬
шими затратами сил на их наладку. Сказанное позволяет стан¬
дартизировать целые схемы управления и унифицировать мето¬
ды их расчета и наладки.Стандартные элементы схем управления электроприводами
получили название УБСР - унифицированная блочная система
аналоговых регуляторов [49,58]. Они были разработаны в инсти¬
туте ВНИИЭлектропривод под руководством О.В.Слежановского.
Серия элементов УБСР включает в себя усилители постоянного
тока, датчики обратных связей, задающие устройства, функцио¬
нальные преобразователи, источники питания и блоки связи. На
усилителях постоянного тока совместно с блоками связи выпол¬
няются регуляторы различных типоз, с помощью функциональ¬
ных блоков осуществляются операции умножения, деления и
введения различных нелинейностей. Датчики обратных связей
производят измерение регулируемых координат, а также потен¬
циально разделяют измеряемые и выходные величины.Элементы серии УБСР выполнены на стандартных транзи¬
сторных модулях. Из них могут компоноваться блоки управления,
размещаемые в шкафах. В настоящее УБРС выполняются с
применением интегральных микросхем [49, 57].Прежде чем перейти к анализу схем электроприводов на
элементах УБСР, рассмотрим, какие регуляторы встречаются в
схемах электроприводов и по каким структурам выполняются ти¬
повые схемы управления.4.2. Основные типы регуляторов, реализуемых
на операционных усилителях серии УБСРРегуляторами принято называть [49, 57] корректирующие
устройства, выполненные обычно на операционных усилителях и
включенные в прямой канал замкнутой системы регулирования
(рис. 4.2). Здесь W0(p) - передаточная функция объекта регули¬
рования; Wp(p) - передаточная функция регулятора; Woc(p) - пе¬
редаточная функция датчика обратной связи.
94 Гпава 4. Регулируемые электроприводы постоянного токаРис. 4.2. Структурная схема одноконтурной
системы регулирования с последователь¬
ным корректирующим устройствомНа рис. 4.3 приведена в общем виде схема включения опера¬
ционного усилителя для реализации передаточных функций раз¬
личных регуляторов и для суммирования сигналов. Если коэф¬
фициент усиления операционного усиления принять бесконечно
высоким, то можно записать соотношение, связывающее вход¬
ные Ui, U2 и выходное 1)Вых напряжения усилителя:иэых = U, • Zoc / Z-i + U2 - Zoc IZ2.Здесь Zi(p), Z2(p), Zoc(p) - операторные сопротивления на
входах и в цепи обратной связи усилителя.Этим соотношением и пользуются на практике, хотя коэффи¬
циент усиления и входное сопротивление операционных усили¬
телей не бесконечны. Отсюда же следует, что передаточная‘ Z2(P) Zcc(P)UfibixРис. 4.3. Принципиальная схема регулятора. вы-
полненного на операционном усилителе
Гпава 4. Регулируемые электроприводы постоянного тока 95функция регулятора по каждому из входов равна отношению
операторного сопротивления в цепи обратной связи к оператор¬
ному сопротивлению на входе. Так как входная цепь усилителя
потребляет ток, то точность реализации передаточных функций
регуляторов (без учета погрешностей резисторов и конденсато¬
ров) существенно зависит от величин токов в их входных цепях и
цепи обратной связи. По этой причине приходится ограничивать
наибольшие сопротивления в цепях регуляторов. Так, опыт на¬
ладки промышленных электроприводов показывает, что для уси¬
лителей серии УБСР-АИ, выполненных на аналоговых микросхе¬
мах, максимальная величина операторных сопротивлений не
превышает 500...2000 кОм [49, 57], усилители предшествующих
серий УПТ-3 или ЯФХ-00 [57, 58] допускали не более 150...200
кОм. Нижний предел величины операторных сопротивлений оп¬
ределяется обычно максимальным входным током усилителя или
допустимой нагрузкой элементов. Например, для усилителей се¬
рии УБСР-АИ он составляет 0,5...2,0 кОм, а для УПТ-3 - не ме¬
нее 2,4 кОм.Если в цепях входа и обратной связи усилителя включать
различные элементы, изменяя характер Zi(p), то можно получить
различного типа регуляторы.Рассмотрит регуляторы, наиболее часто применяющиеся в
схемах управления электроприводов на элементах УБСР. Прин¬
ципиальная схема каждого из регуляторов, их ЛАЧХ и переход¬
ные функции представлены на рис. 4.4.Пропорциональный (П-) регулятор (рис. 4.4 а). Во вход¬
ной цепи и в канале обратной связи усилителя включены рези¬
сторы Ri и R2, т.е. Zi(p) = Ri , Zoc(p) = R2 • Передаточная функция
П-регулятораW(p) = Zoc(p) / Zi(p) = R2 / Ri = Ки соответствует безынерционному звену. Величину коэффициен¬
та усиления регулятора К можно изменить с помощью сопротив¬
лений R-- и R2.
96 Гпава 4. Регулируемые электроприводы постоянного токаа)R2R1ОУ=пб)С2R1ОУIа)R1
-С2 R2ЧН=>ОУт,к UbxО1 1Д)R1°—С }НООУиРис. 4.4. Принципиальные схемы,
ЛАЧХ и переходные функции регуля¬
торов:а) пропорционального;б) интегрального;в) пропорционально-интегрального;
г, д) пропорционально-интегрально-
дифференциального
Гпава 4. Регулируемые электроприводы постоянного тока 97Интегральный (И-) регулятор (рис. 4.4 б) получается,
если во входную цепь регулятора включить резистор R1, а в цепь
обратной связи - конденсатор С2. В этом случае Zi(p) = R1( а
Zcc(p) = 1 / С2 р. Передаточная функция регулятораW(p) = Zoc(p) / Zi(p) = 1 / Rr C2 p = 1 /Ti p .ЛАЧХ L.2 (w) И-регулятора и его переходная функция U2 (t)
изображены на рис. 4.4 б.Ценным свойством замкнутой системы с интегральным регу¬
лятором является точное воспроизведение в установившемся
режиме выходной величиной заданного значения сигнала. Ра¬
венство нулю статической ошибки Dx = Х5х - Хвых в схеме на
рис. 4.2 следует объяснить невозможностью существо-вания ус¬
тановившегося режима на выходе интегрального звена, когда ре¬
зультирующий сигнал на входе этого звена не равен нулю.Включение интегрального ззена в контур регулирования вы¬
зывает дополнительный отрицательный фазовый сдвиг, равный
SO град., во всем диапазоне частот фазовой частотной характе¬
ристики разомкнутой системы регулирования. Это в схеме с
инерционным объектом регулирования вызывает снижение запа¬
са устойчивости и, как следствие, - необходимость понижения
быстродействия системы. Поэтому по сравнению со схемой с П-
регулятором схема с И-регулятором обеспечивает высокую ста¬
тическую точность регулирования, но имеет пониженное быстро¬
действие.Выбрать параметры И-регулятора можно, построив, напри¬
мер, ЛАЧХ настраиваемого контура регулирования и обеспечив
при этом заданные показатели качества. Частотные характери¬
стики необходимо строить не во всех случаях. Часто объект ре¬
гулирования можно аппроксимировать последовательным со¬
единением п апериодических звеньев с постоянными времени Tj,
где 1< j < п. В этом случае динамические свойства объекта ре¬
гулирования можно описать передаточной функцией видаWQ (р) = 1 / П (1 + Tj р)(4.1)
98 Гпава 4. Регулируемые электроприводы постоянного токагде П (1 + Tj р) - произведение п сомножителей, соответствую¬
щих апериодическим звеньям объекта регулирования. Желаемую
величину постоянной времени И-регулятора можно определить,
пользуясь выражением, которое в технической литературе (на¬
пример, в [5]) получило название технического оптимума:Ти = (2...4) ZTj, (4.2)где ITj - сумма постоянных времени всех инерционных звеньев,
входящих в объект регулирования.Смысл приведенной рекомендации, которой часто пользуют¬
ся для быстрой оценки ожидаемой величины постоянной време¬
ни ТИ, заключается в следующем. Включение последовательно с
объектом регулирования интегрального регулятора вызывает,
как уже отмечалось, появление во всем диапазоне частот допол¬
нительного отрицательного сдвига по фазе на 90 град. Зто при¬
водит к тому, что частоту среза настраиваемого контура прихо¬
дится выбирать левее зоны частот, где сказываются инерцион¬
ности объекта регулирования.При выбранных параметрах регулятора частота среза на¬
страиваемого контураСОС = 1 / Ти .Пропорционально - интегральный (ПИ-) регулятор
соответствует случаю, когда Z\ (р) = Ri и Zee (р) = R2 + 1 / С2 р
(рис. 4.4 в). Передаточная функция ПИ-регулятораW(p) = Zqc(P) / Z,(p) = (1 + R2 • C2 p) / R1 • C2 p == (1+T2P)/TlP = 1 /Ti p + К ,где Ti = Ri'C2 , T2 = R2 • C2, К = T2 / Ti = R2 / R1.В зависимости от выбранного способа настройки замкнутой
системы регулирования ПИ-регулятор бывает удобно предста¬
вить или последовательным соединением интегрирующего и
форсирующего звеньев с постоянными времени Т, и Т2 или па¬
раллельным включением интегрирующего звена с постоянной
Гпааа 4. Регулируемые электроприводы постоянного токэ 99времени Ti и пропорционального с коэффициентом усиления К
(рис. 4.5).ЛАЧХ ПИ-регулятора
представлена на рис. 4.4 в
кривой L3. При со < 1 / Т2
кривая 1_з соответствует
ЛАЧХ интегрального регу¬
лятора. а при еп > 1 / Т2 -
пропорционального. Это
следует и из физических
соображений: при малых
частотах, когда эквива¬
лентное сопротивление
конденсатора С2 больше,
чем R2i можно учитывать
лишь сопротивление кон¬
денсатора С2 и пренебречь
R2. Это соответствует инте¬
гральному регулятору с по¬
стоянной времени Ti. Так
как при увеличении со экви¬
валентное сопротивление канала обратной связи Zee (to) = 1 / С2
со уменьшается, то понижается и ЛАЧХ регулятора. В диапазоне
высоких частот, где 1 / С2 со < R2l можно уже пренебречь влия¬
нием емкости С2; считая ее закороченной по сравнению с рези¬
стором R2. Тогда ПИ-регулятор ведет себя как П-регулятор с ко¬
эффициентом усиления К.То, что ПИ-регулятор при малых частотах входного сигнала
соответствует И-регулятору, а при высоких - П-регулятору. яв¬
ляется его ценным свойством, так как позволяет совместить по¬
ложительные качества обоих регуляторов. Действительно, бла¬
годаря И-каналу схема с ПИ-регулятором имеет нулевую стати¬
ческую ошибку по задающему сигналу, а благодаря П-каналу бы¬
стродействие в большом числе случаев можно иметь выше, чем
з схеме с И-репулятором.Рис. 4.5. Варианты структурных схем
ПИ-регулятора
100 Гпава 4. Регулируемые электроприводы постоянного токаПереходная функция ПИ-регулятора соответствует кривой U3
(рис. 4.4 в). После подачи скачка входного напряжения выходное
напряжение регулятора сначала увеличивается скачком на вели¬
чину ди = К Ubx благодаря влиянию П-канала. а затем - нарас¬
тает по линейному закону с темпом, определяемым величиной
Ti. Наличие начального скачка напряжения на зыходе ПИ-
регулятора можно предугадать, исходя из чисто физических со¬
ображений. Зная из осноз электротехники, что в электрической
цепи в момент включения напряжения конденсатор можно заме¬
нить закороткой, имеем для момента времени t = 0 схему П-
регулятора, в переходной функции которого наблюдается скачок
начального напряжения.Выбор параметров ПИ-регулятора, когда заданы ЛАЧХ объ¬
екта регулирования, производят так, чтобы частота сопряжения
регулятора шг = 1 / Т2 лежала левее частоты среза сое настраи¬
ваемого контура. В этом случае ослабляется неблагоприятное
влияние И-канала в регуляторе на устойчивость контура ре¬
гулирования, так как динамические свойства регулятора в районе
средних частот аппроксимируются П-каналом. Обычно выбирают
юг < <*>с I (2...4).В тех случаях, когда динамические свойства объекта регули¬
рования описываются передаточной функцией вида (4.1), ПИ-
регулятор представляют последовательным соединением интег¬
рирующего и форсирующего ззеньев. Рассматривая теперь фор¬
сирующее звено как дополнительное средство последова¬
тельной коррекции с опережающей фазой, выбирают величину
постоянной времени Т2 так, чтобы нейтрализовать неблагоприят¬
ное влияние на устойчи-вость настраиваемой системы инерци¬
онного звена с наибольшей постоянной времени. Учитывая также
стремление к простоте выкладок, обычно принимают в расчетахТ2 = Ттах, (4.3)где Тmax - наибольшая постоянная времени инерционных ззеньев
настраиваемого контура регулирования.
Гпава 4. Регулируемые электроприводы постоянного тока 1Q1Постоянную времени Т, в ПИ-регуляторе можно определить
по аналогии с выражением (4.2):Ti = (2...4) I Тц . (4.4)Здесь I Тц - сумма всех постоянных времени инерционных
звеньев настраиваемого контура, кроме одной самой большой
Ттах. Постоянную времени Т.тах при выборе Ti не учитывают по¬
тому, что неблагоприятное влияние на устойчивость контура
инерционного звена с этой постоянной времени было подавлено
(в литературе часто встречается ошибочный термин "скомпенси¬
ровано") введением форсирующего звена с постоянной временит2.Применение ПИ-регулятора наиболее эффективно в тех слу¬
чаях, когда объект регулирования содержит инерционное звено,
постоянная времени которого заметно (в 2 и более раз) преобла¬
дает над остальными. В этом случае удается увеличить быстро¬
действие настраиваемого контура по сравнению со схемой с И-
регулятором.Включение ПИ-регулятора не дает эффекта, если все посто¬
янные времени Т/ объекта регулирования близки между собой.
Более того, применение ПИ-регулятора в этом случае может ока¬
заться даже нежелательным, так как трудно бывает обеспечить
стабильность частоты среза контура при отклонении параметров
объекта регулирования от ожидаемых значений.Пропорционально - интегрально - дифференциаль¬
ный регулятор (ПИД- регулятор) изображен на рис. 4.4 г.
Исходя из физических соображений, представим, как должна вы¬
глядеть ЛАЧХ ПИД-регулятора. При низких частотах входного
сигнала, когда 1 / (со-СО > Ri и 1 / (<оС2) > R2. можно приближен¬
но считать, что конденсатор С1 отброшен, а резистор R2 закоро¬
чен. Тогда ПИД-регулятор можно заменить на И-регулятор с по¬
стоянной времени Т-, = (R1 + R3) • С2 , или, так как выбирают
R- > R3 , то Т-, ~ Rr С2 . При увеличении частоты со величина
емкостных сопротивлений уменьшается. В точке с частотой
'о2 = 1/ Т2 = 1 / (R2 C2) выравниваются сопротивления емкости
102 Гпава 4. Регулируемые электроприводы постоянного токаконденсатора С2 и резистора R2. При со > го2 конденсатор С2
можно заменить закороткой и учитывать лишь активное сопро¬
тивление R2. Тогда ПИД-регулятор можно рассматривать как П-
регулятор с коэффициентом усиления К, = R2 / (Ri + R3) *
« R2 / R1 (так как Ri > R3). Дальнейшее увеличение со приводит к
тому, что сопротивление конденсатора Ci уменьшается до зна¬
чения R] и даже ниже. В диапазоне частот со = 1/Т3 = 1 / (R--Ci) <
<10 < о4 = 1 / т4 = (Ri + R3) / (Ri R3 • СО * 1 / (R3 • Cl). где со¬
противление конденсатора Ci стало менее Ri, но остается боль¬
ше, чем R3l можно условно отбросить резистор R1 и закоротить
R3. Зто соответствует дифференциальному регулятору. Нако¬
нец, при высоких частотах, когда со > 1/ Т4, сопротивление кон¬
денсатора С1 становится менее R3. Тогда вместо конденсатора
С1 ставится закоротка и получается схема П-регулятора с коэф¬
фициентом усиления К2 = R21 R3-Ограничение диапазона частот со3... со4 дифференциального
канала включением R3 во входную цепь регулятора производится
с целью предотвращения влияния высокочастотных помех на ра¬
боту операционного усилителя. Обычно принимаютRi = (4...10) R3.Кривую U можно аппроксимировать передаточной функцией
видаW(P)* (1 +т2р)(1 +т3р) / Т1Р(1 +Т4р).Переходная функция ПИД-регулятора соответствует кривой
U4 (рис. 4.4 г, д). В начале переходного процесса можно прибли¬
женно считать, что выходное напряжение ПИД-регулятора изме¬
няется (соответствует правому участку кривой L4), как выходной
сигнал реального дифференцирующего звена с передаточной
функциейW(p)= К2Т4р/ (1 +Т4р).
Гпаеа 4. Регулируемые электроприводы постоянного тока ЮЗВ этом случае наблюдается начальный скачок выходного на¬
пряжения на величину AU = К2 U3X, после чего выходной сигнал
начинает спадать с темпом, определяемым величиной постоян¬
ной времени Т4. Установившийся участок переходного процесса
(сопоставьте левые части кривых L3 и L4) изменения напряжения
на выходе ПИД-регулятора выглядит так же, как в схеме с ПИ-
регулятором, имеющим передаточную функциюW(p) = (1 +Т2р)/ TiP,т.е. выходной сигнал ПИД-регулятора стремится асимптотически
к прямой, пересекающей вертикальную ось в точке, лежащей на
высоте Ki UBx.Как можно полезно использовать при настройке замкнутого
контура регулирования свойства каждого из каналов в ПИД-
регуляторе? Очевидно, наличие И-канала позволяет получить в
системе регулирования высокую статическую точность. П- и Д-
каналы при правильном выборе параметров позволяют увели¬
чить запас устойчивости в системе регулирования и поднять ее
быстродействие.Если динамические свойства объекта регулирования описы¬
ваются частотными характеристиками, то форму кривой Ц и,
следовательно, параметры ПИД-регулятора обычно подбирают
так, чтобы оз2 ^ юс / (2...4) и соз ~ сое, где шс - частота среза на¬
страиваемого контура регулирования.Когда динамические свойства объекта регулирования харак¬
теризуются передаточной функцией вида (4.1), параметры ПИД-
регулятора принято выбирать из следующих условий.Т2 = Tmaxi , Тз = Ттзх2 •Здесь Trr.axi - наибольшая постоянная времени инерционных
звеньев, входящих в настраиваемый контур регулирования;
Т—ах2 - вторая по величине постоянная времени тех же звеньев.Выполнив эти условия, удается ослабить неблагоприятное
влияние на устойчивость системы регулирования сразу двух
инерционностей.
104 Гпава 4. Регулируемые электроприводы постоянного токаПостоянную времени Ti интегрального канала в ПИД-
регуляторе можно определить, используя соотношение, анало¬
гичное случаям И- и ПИ-регулятороз:Т, = (2...4) 2Тц. (4.5)Здесь I T|i - сумма всех постояннных времени инерционных
ззеньев настраиваемого контура регулирования, кроме двух са¬
мых крупных: Ттах1 и Ттах2 .Применение ПИД-регулятора наиболее эффективно в тех
случаях, когда объект регулирования содержит два инерционных
звена, постоянные времени которых значительно преобладают
над остальными.На рис. 4.4 д изображен другой вариант принципиальной
схемы ПИД-регулятора. ЛАЧХ этого регулятора также соответст¬
вует кривой Ц. Подъем характеристики в диапазоне частот
©з... 0)4 происходит благодаря фильтру, выполненному на рези¬
сторе R3 и конденсаторе СЗ, который ослабляет в этом диапазо¬
не частот амплитуду сигнала, поступающего в канал обратной
связи регулятора.4.3. Структурные схемы электроприводов
на элементах УБСРПрименение операционных усилителей дает возможность
выполнять электропривод с самыми различными схемами управ¬
ления. Но на практике схемы на элементах УБСР содержат отно¬
сительно небольшое число модификаций, так как в массовом
производстве экономически целесообразнее иметь ограниченное
число вариантов универсальных схем управления.Наибольшее распространение как в отечественной, так и в
зарубежной практике получили два варианта типовых структур¬
ных схем управления электроприводов:а) схема с последовательным включением регуляторов (ее
принято также называть схемой подчиненного регулирования);б) схема с параллельным включением регуляторов.
Гпава 4. Регулируемые электроприводы постоянного тока 1Q5Схема подчиненного регулированияПоставим задачу синтеза системы подчиненного регулирова¬
ния на примере, когда:- объект регулирования (рис.4.6 а) представляет собой по¬
следовательное соединение звеньев с передаточными функция¬
ми W) (р), W2 (р), W3 (р). Через Xt и Х2 обозначены промежуточ¬
ные координаты, через Хз = ХВых - выходная регулируемая ко¬
ордината;- по условиям технологического процесса необходимо обес¬
печить поддержание выходной координаты ХВых равной задан¬
ному значению входного сигнала Хзх с минимальной статиче¬
ской и динамической ошибкой (т.е. необходимо минимизировать
ошибку регулирования ДХ = ХВх - ХВых);- из условий прочности (электрической, механической или
др.) элементов следует обеспечить ограничение некоторых про¬
межуточных координат задан-ным максимальным значением, т.е.
необходимо иметь как в переходных, так и в установившихся ре¬
жимах I X-j | < X 1м и | Х2! - Хгм • Здесь Хш и Х2м — допустимые
максимальные значения промежуточных координат Xi и Х2.Если прозести аналогию с электроприводом постоянного тока
и в качестве выходной координаты Х3 рассмотреть угловое по¬
ложение а вала двигателя, то промежуточным координатам Xi и
Х2 объекта регулирования можно поставить в соответствие ток
якоря 1я и скорость вращения п вала двигателя. При работе элек¬
тропривода необходимо обеспечить ограничение максимальных
значений тока якоря из условий его коммутации коллектором
двигателя и скорости вращения двигателя из условия механиче¬
ской прочности вращающихся частей.Поставленную задачу синтеза системы регулирования пони¬
маем как задачу выбора ее структуры (т.е. перечня обратных
связей и типа регуляторов) и параметров регуляторов.
106 Глава 4. Регулируемые электроприводы постоянного тока•_Рис. 4.6. Структурная схема подчиненного регулирования
Гпава 4. Регулируемые электроприводы постоянного тока 1Q7Как можно выполнить схему управления с учетом сформулиро-
занных требований? В качестве одного из возможных путей ре¬
шения задачи выберем следующий:- выделив координату Xi в качестве промежуточной регули¬
руемой величины, выполним замкнутый контур регулирования 1.
Настройку этого замкнутого контура с обратной связью по Xi бу¬
дем осуществлять регулятором с передаточной функцией
Wpi (р), на вход которого подадим сигналы задающий Хчздц и об¬
ратной связи по Xi (рис. 4.6 б). Заметим, что с точки зрения
функционирования любой замкнутой системы, внутренний кон¬
тур 1 стремится поддержать Xj = Х^ад;- когда контур регулирования 1 настроен, выполним настрой¬
ку (иногда говорят оптимизацию) контура регулирования 2 с об¬
ратной отрицательной связью по Х2 (рис. 4.6 в). При этом в каче¬
стве объекта регулирования величины Х2 примем последова¬
тельно включенные настроенный замкнутый контур регулирова¬
ния величины Х1 и звено с передаточной функцией W2(p). На¬
стройка контура регулирования 2 производится воздействием
только на регулятор W?2(p), параметры регулятора WPi(p) оста¬
ются на данном этапе уже неизменными. Обратим внимание на
то, что выходная величина регулятора WP2(p) может рассматри¬
ваться как задающий сигнал для замкнутого контура регулирова¬
ния 1;- аналогично двум предыдущим контурам регулирования 1 и2 выполним настройку контура регулирования 3, т.е., охватив от¬
рицательной обратной связью по Х3 последовательно соединен¬
ные настроенный замкнутый контур регулирования 2 и звено
объекта регулирования с передаточной функцией W(p) и отнеся
их к неизменяемой части контура 3, настроим этот контур с по¬
мощью только регулятора Wp3(p);- ограничим координату Xi допустимым значением Хш, Для
чего создадим ограничение максимального значения задающей
величины Х'.здд, введя на уровне Х-ш зону насыщения в статиче¬
ской характеристике регулятора W?2(p) (рис.4.6 в). Если контур
регулирования 1 настроен в соответствии с общепринятыми кри¬
108 Глава 4. Регулируемые электроприводы постоянного токатериями качества (например, по максимуму быстродействия и
минимуму колебательности), то достигается поддержание
Xi = Х13ЛД , тем самым гарантируется выполнение усло¬
вия X-i < X-im •Качественная настройка контура регулирования 1, в частно¬
сти, его высокое быстродействие, позволяет надежно подавить
влияние возмущений, действующих в системе электропривода,
на точность поддержания Xi. Кроме того, высокое быстродейст¬
вие контура регулирования 1 намного облегчит условия настрой¬
ки и обеспечит качество работы последующих контуров регули¬
рования величин Х2 и Хз;- ограничим величину Х2 введением зоны насыщения в ста¬
тической характеристике регулятора WP3(p) на уровне Х2М
(рис.4.6 г).При работе электропривода в режиме малых отклонений от
положения равновесия все регуляторы находятся в ненасыщен¬
ном состоянии. Система регулирования работает как многокон¬
турная система поддержания выходной величины Х3. Внутренние
контуры выступают при этом как дополнительные, подчиненные
основному внешнему контуру (отсюда и название схемы регули¬
рования).В переходных режимах, вызванных, например, резким изме¬
нением входного сигнала Хвх = Хз зад, регуляторы WP2(p) и
Wp3(p) могут насыщаться за счет большого рассогласования сиг¬
налов на их входе. Это вызывает замену обычного режима под¬
держания выходной координаты, равной заданному входному
сигналу Хвх = Х3 зад, на режим поддержания соответствующей
промежуточной координаты на допустимом уровне. За счет на¬
сыщения статических характеристик регуляторов происходит
разделение режимов поддержания различных регулируемых ве¬
личин. .Ценным преимуществом схемы подчиненного регулирования
является ее универсальность. Она способна удовлетворить раз¬
нообразному сочетанию требований со стороны технологическо¬
го процесса. Как показывает опыт наладки таких схем, они по
Гпава 4. Регулируемые электроприводы постоянного тока 1Q9сравнению с другими известными схемами наименее чувстви¬
тельны к изменению параметров силового оборудования в элек¬
троприводе.Схема подчиненного регулирования отличается относитель¬
ной простотой расчета и наладки. Это получается за счет того,
что процесс наладки сложной многоконтурной системы регулиро¬
вания удается представить в виде нескольких последовательных
этапов, на каждом из которых приходится настраивать систему
регулирования лишь с одной обратной связью.Однако не следует переоценивать возможности подчиненно¬
го регулирования и забывать того обстоятельства, что в этой
системе одновременно могут работать контуры с противоречи¬
выми условиями настройки. Это вызывает некоторое снижение
качества процессов, например, при приложении возмущений. Да¬
лее, при наличии в системе регулирования последовательно
включенных двух и более существенно нелинейных звеньев, ка¬
ковыми являются регуляторы с зоной ограничения в их статиче¬
ской характеристике, возможны практически неустранимые авто¬
колебания низкой частоты и большой амплитуды, если систему-
подвергнуть "большому” воздействию. "Большое" - это такое
воздействие, которое способно вывести хотя бы один из регуля¬
торов на насыщенный участок его статической характеристики.
При этом в "малом", когда все регуляторы работают на линейных
участках своих статических характеристик, система регулирова¬
ния остается устойчивой и даже с большим запасом. В силу ска¬
занного системы подчиненного регулирования выполняются с
числом контуров не более двух, реже - трех.В настоящее время схема подчиненного регулирования полу¬
чила наибольшее распространение, как в отечественных, так и
зарубежных электроприводах*Схема с параллельным включением регуляторовУправление тем же объектом, что и в предыдущем случае,
можно осуществить по другой схеме, включив регуляторы между
собой параллельно и построив для каждой из регулируемых ко¬
110 Гпава 4. Регулируемые электроприводы постоянного токаординат свою одноконтурную систему регулирования (рис. 4.7).
На вход каждого из регуляторов с передаточными функциями
Wpi(p), Wpa(p) и WP3(p)( подаются встречно сигналы задания
Хюлд, Ха зад, Х3 зад и сигналы обратных связей по соответствую¬
щим регулируемым величинам X*,, Хг и Хз. Обычно Хчздд = Xim и
Хг зад = Хгм- К входному звену объекта регулирования с переда¬
точной функцией Wi(p) подключен всегда выход только одного
из регуляторов, что осуществляется с помощью специального ло¬
гического устройства ЛУ. При этом, когда каждая из промежуточ¬
ных координат Xi и Х2 остается меньше своего допустимого зна¬
чения, к входу объекта регулирования подключен выход регуля¬
тора WP3(p). Если какая-либо из величин Xi или Хг достигает
своего максимально допустимого значения, вход объекта регули¬
рования переключается на соответствующий регулятор, чем
обеспечивается ограничение нужной промежуточной координаты.Описываемая схема позволяет настраивать каждый из конту¬
ров регулирования независимо от другого. За счет этого можно
получить высокое качество процессов регулирования в каждом
контуре.Наибольшую известность схема с параллельным включением
регуляторов получила в электроприводах экскаваторов разра¬
ботки фирмы Westinghause [67]. Имеются и другие применения
названного принципа регулирования [18].4.4. Одноканальная схема вентильного
электропривода с подчиненным регулированиемПринципиальная схема электроприводаПринципиальная схема одноканальной системы регулирова¬
ния для электропривода с реверсивным вентильным преобразо¬
вателем дана на рис. 4.8. Силовые цепи преобразователя UZ по¬
казаны в однолинейном изображении. Выпрямительные группы
включены по встречно-параллельной схеме. В настоящее время
подавляющее большинство реверсивных тиристорных
Гпава 4. Регулируемые электроприводы постоянного тока 111Рис. 4.7. Структурная схема с параллельным включением регуляторов
112 Гпава 4. Регулируемые электроприводы постоянного токаРис. 4.8. Функциональная схема электропривода по¬
стоянного тока с подчиненным регулированиемпреобразователей для электроприводов постоянного тока вы¬
полняется с раздельным управлением вентильными группами,
при котором отпирающие импульсы подаются на управляющие
входы только той из групп, которая пропускает ток якоря. Тири¬
сторы другой группы при этом полностью заперты. Хотя раз¬
дельное управление требует более совершенной работы систе¬
Гпава 4. Регулируемые электроприводы постоянного тока 113мы импульснофазового управления каждой группой в преобразо-
зателе из-за трудностей согласования их характеристик вблизи
зоны переключения групп и высокого быстродействия датчиков
тока вентильных групп, но при этом снижаются затраты на сило-
зое оборудование (меньше установленная мощность трансфор¬
матора. нет уравнительных дросселей) и выше энергетические
показатели- преобразователя (нет уравнительных токов, можно
полностью открыть работающую группу).Трансформатор ТМ выполняет несколько функций. Прежде
зсего, он необходим для согласования величин номинальных на¬
пряжений преобразователя и двигателя. В этом случае макси¬
мальное напряжение на якоре двигателя может быть достигнуто
при минимальном угле управления вентилей тиристорного пре¬
образователя и, следовательно, при максимальном коэффици¬
енте мощности электропривода. Далее, благодаря индуктивности
рассеяния в фазных цепях трансформатора ограничивается ско¬
рость нарастания тока через вентили, которая в аварийных ре¬
жимах (например, при коротких замыканиях в преобразователе)
может превысить допустимую величину и, кроме как параметри¬
ческим путем, ограничена быть не может. Величина индуктивно¬
сти рассеяния, как известно, характеризуется напряжением ко¬
роткого замыкания трансформатора. Наконец, в электроприводах
средней и большой мощности питание преобразователя осуще¬
ствляется чаще от сети 6 или 10 кВ. Наличие трансформатора
потенциально разделяет высоковольтные цепи питания и якор¬
ные цепи двигателя, повышая уровень безопасности схемы.Дроссель L предназначен для сглаживания пульсаций тока
якоря двигателя и улучшения тем самым условий его коммута¬
ции. Снижение пульсаций тока якоря благоприятно также сказы¬
вается на уровне вибраций и шума в машине и ее нагреве.Система управления электропривода выполнена по подчи¬
ненному принципу и содержит два контура регулирования: внут¬
ренний контур регулирования тока якоря КРТ и внешний контур
регулирования скорости двигателя КРС.
114 Гпава 4. Регулируемые электроприводы постоянного токаВнутренний контур регулирования выполнен с отрицательной
обратной связью по току якоря двигателя. Измерение тока произ¬
водится с помощью шунта RS и датчика тока ДТ UA. Настройку
контура регулирования тока якоря осуществляют АА - регулято¬
ром тока РТ. При этом один регулятор воздействует сразу на на¬
пряжение обеих групп вентильного преобразователя, из-за чего
схема и названа одноканальнсй. В большинстве промышленных
схем РТ выполняется пропорционально-интегральным. Наличие
интегрального канала позволяет получить вертикальный наклон
механической характеристики при работе привода на упор.Пропорциональный канал дает возможность увеличить быст¬
родействие контура регулирования тока. А это, во-первых, облег¬
чает условия настройки последующего контура регулирования
скорости и, во-вторых, при резких перегрузках привода исключа¬
ет в переходных режимах выбросы тока якоря сверх допустимых
значений.Наружный контур регулирования скорости настраивается с
помощью AR - регулятора скорости PC. Скорость вращения дви¬
гателя измеряется тахогенератором BR и датчиком скорости ДС
UV, подключенным через потенциометр RP к якорю тахогенера-
тора. Если привод не требует высокой точности поддержания ус¬
тановившейся скорости вращения, то регулятор PC выполняется
пропорциональным. Если необходимо поддерживать установив¬
шуюся скорость с высокой точностью, - ставится ПИ-регулятор
PC.Статическая характеристика PC выполняется с зоной насы¬
щения. Для это-го в цепь обратной связи регулятора PC включа¬
ют блок ограничения БО А1. Наличие зоны насыщения в регуля¬
торе PC позволяет ограничить максимально допустимое значе¬
ние тока якоря. Уставку блока ограничения БО выполняют регу¬
лируемой, что удобно и безопасно при настройке электроприво¬
да.Задатчик интенсивности ЗИ AJ служит для плавного измене¬
ния уставки на зходе PC при разгоне и замедлении привода.
Глава 4. Регулируемые электроприводы постоянного тока 115Уровень установившейся скорости вращения двигателя соответ¬
ствует величине сигнала UBx-•• Поясните, зачем в силовой цепи вентильного преобразователя ну¬
жен трансформатор ТМ?•• Сказывается ли характер момента статической нагрузки ка залу
дзигателя (активный или реактивный) на преимуществах раздельного
управления группами в вентильном преобразователе по сравнению с со¬
вместным? Поясните свои рассуждения, например, нагрузочными диа¬
граммами электропривода.«• Электроприводы, подключенные к питающей сети 380 В и имею¬
щие двигатель постоянного тока с номинальным напряжением 440 В, вы¬
полняются часто по бестранформаторной схеме. Как в этом случае огра¬
ничивается скорость нарастания тока через вентили в аварийных режи¬
мах?Выбор базовых величин переменныхАнализ замкнутой системы регулирования удобнее произво¬
дить, пользуясь относительными единицами. Поэтому, прежде
чем составлять структурную схему электропривода, произведем
выбор базовых значений для регулируемых координат привода.
Поймем за базовые значения тока якоря 1я и напряжения на яко¬
ре двигателя Up (а также ЭДС преобразователя Еп и двигателя
Ед) их номинальные значения, т.е. 1Яб = !н; ияв = ЕПб = Едб = UH.
За базовое значение скорости вращения двигателя возьмем ско¬
рость идеального холостого хода двигателя пб = пс.Выполнив линеаризацию статической характеристики вен¬
тильного преобразователя, примем за базовое значение напря¬
жения на входе преобразователя (оно же является и выходным
напряжением регулятора РТ) такое приращение его иРТБ, которое
соответствует изменению напряжения на выходе преобразова¬
теля на величину UH в соответствии с его линеаризованной ха¬
рактеристикой.Базовые значения напряжений на выходах датчика тока идт и
регулятора скорости Upc желательно выбрать так, чтобы, во-
первых, упростить в последующем структурную схему электро¬
привода и выражения для передаточных функций ее звеньев и,
116 Гпава 4. Регулируемые электроприводы постоянного токаво-вторых, получить передаточную функцию регулятора РТ оди¬
наковой относительно обоих входов. Поэтому выберем сначала
базозое значение для напряжения на выходе датчика тока 11дт5,
приняв его равным показанию на выходе датчика тока, когда в
якорной цепи двигателя протекает ток, равный 1н- Тогда коэффи¬
циент усиления канала обратной связи по току якоря в системе
относительных единиц равен единице. Базовое значение напря¬
жения на выходе PC выберем с учетом соотношения величин
входных сопротивлений R4 и R5: Urcb = идтв • R4 / Rs- В этом
случае динамические свойства РТ в системе относительных еди¬
ниц одинаковы по обоим входам.Рассуждая так же, выберем базовые значения напряжений на
выходе датчика скорости ДС и задатчика интенсивности ЗИ.
Примем за иДС5 показание на выходе ДС, когда скорость враще¬
ния двигателя равно п0, а 113иб = иДСв • R1 / R2 • Когда на началь¬
ном этапе расчета схемы управления величины R1, R2, R4 и R5
еще не определены, достаточно бывает задать их отношение.
Так, расчетные выкладки упрощаются, если предварительно
принять R1 = R2 и R4 = Rs- Тогда Upc& = идтв и 1)зиб = ^дсб-Структурная схема электропривода
и параметры звеньевСтруктурная схема электропривода изображена на рис. 4.9.
Звеном Д с передаточной функциейЩ(р) = 1 / ТД ручитывается механическая инерция привода. Здесь Тд - посто¬
янная времени разгона привода, равная времени разгона приво¬
да до скорости По под действием номинального динамического
момента.Звено ЯЦ с передаточной функциейWau(p) = Кяц / (1 + ТЯц р)
Гпава 4. Регулируемые электроприводы постоянного тока 117Рис. 4.9. Структурная схема электропривода постоянного тока
с подчиненным регулированиемучитывает электрические свойства силовой цепи преобразова-
тель-двигатель. Здесь КЯц и ТЯц - кратность тока короткого замы¬
кания и электромагнитная постоянная времени якорной цепи
двигателя, включая силовую цепь преобразователя.Регулировочные свойства преобразователя учитываются
звеном ТП с передаточной функциейWn(p) = е^ / (1 +ТпР) ,где Тп - постоянная времени фильтра на входе СИФУ преобра¬
зователя; т - время чистого запаздывания.Введением звена чистого запаздывания весьма приближенно
учитывается влияние на динамические свойства управляемого
выпрямителя невозможности запирания до конца рабочего полу-
периода проводящего вентиля. В работах [2, 8] содержатся и
другие уточненные способы описания динамических свойств
управляемого выпрямителя, но аппроксимация его звеном чисто¬
го запаздывания является наиболее простым и распространен¬
ным.Регулятор тока РТ в системе относительных единиц имеет
передаточную функцию
118 Глаза 4. Регулируемые электроприводы постоянного токаWpt(p) = Upt / идт = (1 + Т2 Р) / Т, р, (4.6)где Т1 = Upts R5 ’ С6 / иДтБ; Т2 = Rg • С3.Пропорциональный регулятор скорости PC имеет коэффици¬
ент усиленияКрс = UacbR3/UFcb-R2 (4.7)Каналы обратных связей по току якоря ДТ и по скорости вра¬
щения двигателя ДС при выбранных базовых величинах имеют
единичные коэффициенты усиления.Преобразования структурной схемыВыполним некоторые преобразования структурной схемы
(рис. 4.9). Заменим звено чистого запаздывания с постоянной
времени запаздывания т инерционным звеном с такой же по¬
стоянной времени, т.е. положиме'р' = 1 / (1 + т р).Смысл этой замены состоит в стремлении избавиться от не¬
минимально-фазовых звеньев в системе регулирования. Оценим
правомерность такой замены. На рис. 4.10 приведены частотные
характеристики обоих звеньев. В диапазоне низких частот, когда
со < 1 / х, ЛАЧХ обоих звеньез практически совпадают. Фазовые
характеристики их - арктангенсоида у инерционного звена и по¬
казательная функция у звена чистого запаздывания - также
весьма близки. В точке с частотой ш = 1 / т ЛАЧХ отличаются на
1,5 децилог, а ЛФЧХ - на 12° . В зоне высоких частот при
со > 1 / т наблюдаются существенные расхождения в обеих харак¬
теристиках. Следовательно, замена звена чистого запаздывания
инерционным допустима лишь в диапазоне частот ш < 1 / т . Так
как в существующих схемах управления электроприводов часто¬
та среза настраиваемых контуров не превышает десятков радиан
в секунду, а эквивалентное время чистого запаздывания в вен-
Гпава 4. Регулируемые электроприводы постоянного тока 119Рис. 4.10. ЛЧХ звена чистого запаздывания
(1) и инерционного звена (2) с постоянной
Бремени Iтильных преобразователях составляет всегда менее 0,01 с, то
описанная замена возможна.Структурная схема электропривода (рис. 4.9) содержит пере¬
крестную связь, обусловленную влиянием ЭДС двигателя, и в та¬
ком виде для расчета неудобна. Чтобы получить структурную
схему электропривода, аналогичную изображенной на рис. 4.6,
можно, например, при настройке системы по сигналу задания
изИ! положив возмущение !с = 0, выполнить приведение сигнала
обратной связи по скорости во внутреннем контуре саморегули¬
рования ЭДС двигателя к сигналу по току якоря. Тогда получим
структурную схему электропривода, которая не содержит пере¬
крестных связей и вполне пригодна для расчетов параметров ре¬
гуляторов РТ и PC.В практике расчетов электроприводов с подчиненным регу¬
лированием часто поступают проще, отбрасывая в схеме (рис.
4.9) обратную связь по ЭДС двигателя. В этом случае получается
120 Глава 4. Регулируемые электроприводы постоянного токавесьма простым путем приближенная структурная схема элек¬
тропривода, также не содержащая перекрестных связей.Оценим, насколько правомерно с целью упрощения расчетов
пренебрежение обратной связью по ЭДС в двигателе. Для этого
рассмотрим частотные характеристики двигателя постоянного
тока (рис. 4.11) с учетом и без учета обратной связи по его ЭДС.
Кривые Ц и (рг соответствуют последовательно включенным
звеньям ЯЦ и Д. После охвата этих звеньев единичной обратной
связью по ЭДС имеем уточненные частотные характеристики
двигателя L2 и ф2. Сопоставим между собой кривые Ц и L2) Ф1
и (р2- В диапазоне частот со > шэ, где соэ - частота среза контура
саморегулирования ЭДС в двигателе, аппроксимированные ха¬
рактеристики совпадают полностью. Точные характеристики не-Рис. 4-11. ЛЧХ двигателя постоянного то:<а с учетом
и без учета обратной связи по ЭДС двигателя
Гпава 4. Регулируемые электроприводы постоянного тока 121сколько отличаются, но это отличие уменьшается по мере увели¬
чения частоты со.Близкое совпадение кривых L1 и L2i 91 и ф2 в рассматривае¬
мом диапазоне частот объясняется тем, что в силу электромеха¬
нической (а затем и электромагнитной) инерции привода ско¬
рость вращения двигателя не успевает реагировать на колеба¬
ния входного напряжения на якоре двигателя. Это приводит к
слабому влиянию ЭДС двигателя на характер процессов в диа¬
пазоне высоких частот.Так как кривая лежит ниже, чем ф2, то пользование при
расчетах кривой ф1 вместо ф2 приводит к результатам, имею¬
щим дополнительный запас устойчивости в системе регулирова¬
ния. Расчетные же выкладки при этом упрощаются.При ш < соэ и аппроксимированные и точные характеристики
отличаются существенно, но и здесь это отличие завышает за¬
пас устойчивости в системе.Итак, с целью упрощения расчетов допустимо пренебреже¬
ние местной обратной связью по ЭДС двигателя, если частота
среза настраиваемого контура регулирования тока якоря лежит
выше о)э- Как показывает опыт наладки, в тиристорных электро¬
приводах постоянного тока общепромышленных механизмов
частота среза КРТ обычно находится в пределах оэт = (80...150)
рад/с, в то время как соэ = (20...40) рад/с. В этих условиях отбра¬
сывание на структурной схеме (рис. 4.12 б) местной обратной
связи по Ед вполне правомерно.Неучет обратной связи по ЭДС в двигателе является част¬
ным случаем весьма распространенного при предварительном
анализе многоконтурных систем регулирования приема, при ко¬
тором пренебрегается влиянием инерционного контура регули¬
рования на работу и условия настройки связанного с ним более
быстродействующего контура.•• Поясните физический смысл формы ЛАЧХ по каналу "напряжение
на якоре - скорость двигателя": сначала в диапазоне частот
«> < (Оэ = 1 / Тм она идет горизонтально, затем при ыэ < со < 1 / Тя идет с
122 Гпава 4. Регулируемые электроприводы постоянного токаединичным отрицательным наклоном и, наконец, при to > 1 / Тя идет с
двойным отрицательным наклоном.Настройка контура регулирования тока якоря
двигателя КРТНастройка контура регулирования тока якоря КРТ включает в
себя, во-первых, выбор структуры (типа передаточной функции)
регулятора тока РТ и, во-вторых, расчет величины параметров
РТ.При выборе структуры регулятора РТ исходим из функцио¬
нального назначения КРТ (т.е. что и как должен уметь делать
КРТ). Прежде всего, КРТ ограничивает ток якоря двигателя при
перегрузках электропривода. Так как в реальных условиях нель¬
зя исключить приложения чрезмерной нагрузки с высоким тем¬
пом, то для надежного ограничения тока якоря в переходном ре¬
жиме необходимо предусмотреть высокое быстродействие КРТ.
Поэтому в РТ следует ввести пропорциональный канал. Высоко¬
го быстродействия КРТ требуют также и условия его работы как
местной корректирующей обратной связи при настройке внешне¬
го контура регулирования скорости КРС.В режиме ограничения тока яко¬
ря электропривод может в принципе
иметь различные электромеханиче¬
ские характеристики (рис. 4.12). У
двигателей постоянного тока с нере¬
гулируемым потоком возбуждения
максимально допутимое значение
тока якоря 1м обычно постоянно и не
зависит от величины скорости (кри¬
вая 1 на рис. 4.12). Наиболее просто
ее можно получить, если в регулято¬
ре РТ предусмотреть интегральный
канал. КРТ с П-регулятором РТ име¬
ет наклонную электромеханическую
характеристику (кривая 2). В этомРис. 4.12. Возможные
электромеханические ха¬
рактеристики электропри¬
вода в режиме ограниче¬
ния тока якоря
Глава 4. Регулируемые электроприводы постоянного тока 123случае при высоких и средних скоростях движения электродвига¬
тель не может быть использован полностью по габаритной мощ¬
ности, что может снизить производительность механизма при пе¬
ременной нагрузке. Но электроприводы с такой характеристикой
ещё встречаются, например, электроприводы экскаваторов по
системе Г-Д с более инерционной, чем с тиристорными преобра¬
зователями, системой регулирования. Наклонный характер
электромеханической характеристики позволяет в этом случае
оператору почувствовать по снижению скорости наступление пе¬
регрузки и вмешаться в процесс управления движением рабочего
механизма. Наконец, кривую 3 допускать нельзя, так как в этом
случае ток якоря выходит за допустимый предел 1м-С учетом сказанного в тиристорных электроприводах посто¬
янного тока наиболее часто применяется ПИ-регулятор тока яко¬
ря.Для выбора параметров РТ воспользуемся структурной схе¬
мой (рис. 4.13). Она получена при неучете работы внешнего кон¬
тура регулирования скорости и при отбрасывании обратной связи
по ЭДС двигателя, что соответствует режиму работы затормо¬
женного двигателя на упор.Параметры регулятора РТ Т, и Т2 можно весьма эффектив¬
но определить, воспользовавшись, например, частотными харак¬
теристиками КРТ.Приближенное их определение можно также осуществить,
воспользовавшись правилом технического оптимума. С этой це¬
лью выполним следующие действия:- так как в тиристорных электроприводах постоянного тока
обычно Тяц > Тп > т. то выберем постоянную времени форси¬
рующего каналаТг = Тмакс = Тяц :- введем расчетную постоянную времени контура регулиро¬
вания тока
124 Глава 4. Регулируемые электроприводы постоянного токаРТ п ЯЦРис. 4.13. Структурная схема и ЛАЧХ КРТТрт = Ti / Кяц ;- выберем величину расчетной постоянной времени
Трт = 2 Тц = (2...4) (Тп + т).Параметры R4 . Rs , R6 и С6 принципиальной схемы регулято¬
ра тока можно выбрать, воспользовавшись выражением (4.6) и
задавая в качестве исходных Ti и Т2 .Для последующих расчетов потребуется аппроксимация вы¬
ражения для передаточной функции замкнутого настроенного
КРТ произведением передаточных функций апериодических
звеньев. С этой целью построим аппроксимированные ЛАЧХ КРТ
(рис. 4.13). Здесь кривая Lo = LPT + Ln + \-щ соответствует после¬
довательно включенным РТ, П и ЯЦ, а кривая Црт является
Гпава 4. Регулируемые электроприводы постоянного тока 125ЛАЧХ замкнутого КРТ. Последнюю кривую можно аппроксимиро¬
вать передаточной функциейWkpt (р) * 1 / (1 + Трт р)(1 + Тп р)(1 + I р).Заметим также, что между частотой среза разомкнутого КРТ
и величиной его расчетной постоянной времени выполняется
следующее соотношение:сот = (2...4) / ТрТ .•• Дать физическое толкование характеру кривых Ь, и 1_крТ на рис.
4.13.•• На рис. 4.13 влияние постоянной времени ТЯц «никак не учтено»,
хотя она самая большая. В этом случае есть две версии учета электро¬
магнитной инерции якорной цепи при построении L0: первая - эта инерция
подавлена так, что вообще не ощущается её существования (или, как это
сказано, например, в [58], постоянная времени ТЯц полностью «скомпенси¬
рована»); вторая - электромагнитная инерция проявляется, но как? Дайте
истинную картину влияния инерционности, оцениваемой величиной ТЯц, на
вид кривой Ц.Настройка контура регулирования скорости КРСВ реальных электроприводах применяются П- и ПИ- регуля¬
торы скорости PC. Если КРС с П-регулятором PC отвечает тре¬
буемой точности поддержания скорости электропривода, то его
применяют как более простой. В тех случаях, когда требуемая
точность оказывается выше, применяют более сложный ПИ-
регулятор PC. Рассмотрим оба этих случая.Случай 1. Выбор параметров в КРС с П-регулятором.На расчетной структурной схеме (рис. 4.14) КРТ представлен
упрощенной передаточной функцией. Структура и параметры
звеньев, входящих в КРТ, при настройке КРС не изменяются.При выборе желаемой величины коэффициента усиления
КРС можно воспользоваться стандартным правилом техническо¬
го оптимума. Тогда:
126 Гпава 4. Регулируемые электроприводы постоянного токаPC КРТ ДРис. 4.14. Структурная схема и ЛАЧХ КРС- чтобы представить передаточную функцию неизменяемой
части системы электропривода стандартным выражением, вве¬
дем расчетную постоянную времени КРСТрс = Тд / КРС;- используя рекомендации технического оптимума, вычислимТрс = (2...4) I Tj = (2...4) (ТРТ + Тп + т).Заметим, что в соответствии с ЛАЧХ разомкнутого КРС (рис.
4.14) выполняется соотношение между частотой среза разомкну¬
того КРС и его расчетной постоянной времени:сое = 1 / Трс.
Гпава 4. Регулируемые электроприводы постоянного тока 127Учитывая выражения для расчетных постоянных времени
КРТ и КРС, обнаруживаем, что в рассматриваемой структуре
подчиненного регулирования при стандартных настройках этих
контуров наблюдается следующее соотношение величин их час¬
тот среза:(Ос = сот / (2...4).Случай 2. Выбор параметров в КРС с ПИ-регулятором.Передаточную функцию ПИ-регулятора скорости можно запи¬
сать:Wrc = (1 + Т4 р) / Тз р = Крс + 1 / Тз р.Идея выбора параметров этого регулятора состоит в том,
чтобы в районе частоты среза <х>с заставить работать П-канал в
регуляторе, а интегральному каналу оставить только район низ¬
ких частот. Количественные рекомендации для этого случая дает
правило симметричного оптимума, которое предлагает отодви¬
нуть вправо частоту сопряжения И- и П-каналов в PC в соответ¬
ствии с выражением©сопр = 1 / Т4 = ©с / (2...4).При выбранных параметрах PC наблюдается равная (в 2...4
раза) протяженность единичного наклона на амплитудной харак¬
теристике разомкнутого КРС как влево (до частоты сосопр). так и
вправо (до частоты сот) от частоты среза сое КРС.Статические характеристики электроприводаПостроим электромеханическую характеристику электропри¬
вода п = f (1я). Для этого воспользуемся его структурной схемой
(рис. 4.9). Для уста.новившегося режима работы в выражениях
для передаточных функций звеньев положим р = 0. Тогда инер¬
ционные звенья можно заменить пропорциональными, а интегри¬
рующим присвоить бесконечно большой коэффициент усиления,
который обозначим через к*.
128 Глава 4. Регулируемые электроприводы постоянного токаПри принятых условиях структурная схема электропривода с
ПИ-регулятором тока и П-регулятором скорости представлена на
рис. 4.15. Здесь интегрирующие звенья Д и РТ заменены про-кПг)■ VoРис. 4.15. Структурные схемы электропривода с подчи¬
ненным регулированием для установившегося режима
работы
Гпава 4. Регулируемые электроприводы постоянного тока 129порциональными с коэффициентом усиления k Звено PC, ста¬
тическая характеристика которого содержит зону ограничения,
заменяется пропорциональным звеном с коэффициентом уси¬
ления крс, когда выходной сигнал PC меньше уровня насыщения,
и коэффициент усиления PC принимается равным нулю, когда
рабочая точка PC соответствует насыщенному участку его стати¬
ческой характеристики. Во втором режиме канал обратной связи
по скорости размыкается, а на вход контура регулирования тока
якоря подается постоянный сигнал задания Upcmakc. соответст¬
вующий уровню насыщения в регуляторе PC.Так как система содержит существенно нелинейное звено PC,
то в полном объеме общепринятые правила преобразования
линейных структурных схем здесь неприменимы. Но, учитывая,
что статическую характеристику PC можно представить кусочно-
линейными отрезками, будем решать задачу в приращениях, од¬
новременно наблюдая положение рабочей точки на статической
характеристике PC.Рассмотрим сначала режим идеального холостого хода при¬
вода, когда Мс = 0 и и3и = 1. В этом случае 1с = 0 и 1я = 0. Так как
в установившемся режиме результирующий сигнал на входе ин¬
тегрирующего звена равен нулю и только нулю, тоUpc = ^дт = 0.Выполнение последнего условия требует1!зи = Ццс = п = 1.Перейдем к рассмотрению постепенного нагружения элек¬
тропривода. Преобразуем исходную структурную схему электро¬
привода (рис. 4.15 а). Сначала сигнал местной обратной связи по
ЭДС двигателя приведем к входу РТ (т.е. сумматор 2 перенесем
к сумматору 3). Тогда в преобразованном канале обратной связи
по ЭДС появится согласующее звено с коэффициентом усиленияКсогл - 1 / Кру Кп.
130 Гпава 4. Регулируемые электроприводы постоянного токаЗатем контур регулирования тока якоря, содержащий звенья
РТ, П и ЯЦ в прямом канале и единичное звено в канале обрат¬
ной связи, заменим одним звеном с коэффициентом усиленияКкрт = Крт Кп Кяц / (1 + Крт Кп Кяи) = 1 •Это означает, что !я = Upc, т.е. в установившихся режимах
работы в схеме с ПИ-регулятором тока ток якоря точно соответ¬
ствует напряжению на выходе PC.Наконец, отбросим местную обратную связь по ЭДС двигате¬
ля, содержащую звено с коэффициентом усиления 1 / Крт рав¬
ным нулю.•• Почему в ходе преобразования структурной схемы мы прежде
замкнули КРТ и лишь затем отбросили местную обратную связь по ЭДС
двигателя? Почему этого нельзя было сделать сразу, обратив внимание
на то, что в случае ПИ-регулятора тока 1 / КРТ = О?Физический смысл возможности неучета влияния местной
обратной связи по ЭДС двигателя в рассматриваемом случае за¬
ключается в абсолютно точной (без статической ошибки) работе
КРТ. Здесь любое изменение ЭДС двигателя Ед вызывает з пе¬
реходном процессе сначала изменение тока якоря и соответст¬
венно напряжения на выходе датчика тока ДТ, приводящего к из¬
менению разницы напряжений (ошибки по току) на входе регуля¬
тора РТ. В результате регулятор РТ изменяет свое напряжение и
заставляет измениться ЭДС преобразователя Еп так, чтобы
уменьшить отклонение тока якоря от исходного значения. А так
как регулятор содержит интегральный канал, то переходный про¬
цесс длится до тех пор, пока не сравняются сигналы Upc и 1)дс. В
этом случае приращения в статике ЭДС двигателя и преобразо¬
вателя оказываются равными, а величина тока якоря неизмен¬
ной.После указанных преобразований получим структурную схе¬
му (рис. 4.15 в), справедливую при положении рабочей точки ре¬
гулятора PC на линейном участке его статической характеристи¬
ки.На основании последней структурной схемы
Глава 4. Регулируемые электроприводы постоянного тока 131Д П — А 1с / Крс •Этому уравнению соответствует механическая характери¬
стика в виде наклонной прямой линии (кривая 1 на рис. 4.16 а в
диапазоне токов 0 < 1я < 1м)-По мере увеличения нагрузки на валу двигателя сигнал на
выходе регулятора скорости UPC увеличивается (рис. 4.16 б),
что препятствует снижению скорости электропривода. Но когда
этот сигнал возрастет до значения Upcmakc , регулятор PC насы¬
тится. В результате контур регулирования скорости разомкнется
(рис. 4.15 г), и дальнейшее увеличение нагрузки уже не будет вы¬
зывать увеличения UPC . Это приведет к резкому снижению Еп и
скорости п. В схеме с регу¬
лятором тока, содержащим
И-канал, при перегрузке
электропривода обеспечи¬
вается точное выполнение
равенства 1я = UPCmakc, в ре¬
зультате электромеханиче¬
ская характеристика привода
при достижении током якоря
значения 1м идет вертикаль¬
но (рис. 4.16 а).Наклон механической
характеристики привода в
зоне рабочих токов якоря
1Я £ 1м определяется величи-.
ной КРс. Предельное же его
значение ограничено усло¬
виями устойчивости КРС и в
существующих схемах вен¬
тильного электропривода
обычно не превосходит зна¬
чений КРС = 4...10. Для со¬
поставления укажем, что при
работе двигателя в разомк¬2•я0 lmРис. 4.16. Статические характе¬
ристики электропривода: а)
электромеханическая; б) регу¬
ляторная
132 Гпава 4. Регулируемые электроприводы постоянного токанутой (без обратных связей) системе преобразователь-двигательД праз = A Ic / Кяц ,где Кяц - кратность тока короткого замыкания силовой цепи пре¬
образователь-двигатель, которая обычно заключена в преде¬
лах КЯц =5...15.Сопоставляя величины КЯц и КРС, следует сделать вывод, что
электропривод с подчиненным регулированием, содержащий П-
регулятор скорости, имеет жесткость механической характери¬
стики почти такую же, как в разомкнутой системе преобразова¬
тель-двигатель.В тех приводах, где необходимо получить жесткую механиче¬
скую характеристику, применяют ПИ-регулятор PC. В этом слу¬
чае механическая характеристика привода соответствует кривой
2 (рис. 4.16 а).•• В схеме с П-регулятором скорости и ПИ-регулятсром тока увеличи¬
ли е 2 раза величину сопротивления резистора R4 на входе РТ (рис. 4.8).
Как это повлияет на вид электромеханической характеристики электро¬
привода?•• S той же схеме закоротили конденсатор С в регуляторе тока. Отра¬
зится ли это на величине тока упора и если отразится, то как? Определите
в этом случае также величину наклона электромеханической характери¬
стики в режиме ограничения тока якоря.•• В электроприводе с П-регулятором PC и ПИ-регулятором РТ на¬
грузку плавно изменяют так, что скорость электропривода изменяется в
диапазоне от +п0 до -пс, где +п0 - скорость идеального холостого хода
при работе привода "вперед". В каких энергетических режимах при этом
работает электропривод?Формирование процессов разгона и торможенияприводаКачество переходных процессов разгона и торможения при¬
вода в схеме подчиненного регулирования обеспечивается вы¬
бором соответствующего типа задатчика интенсивности ЗИ и на¬
стройки КРС.
Гпава 4. Регулируемые электроприводы постоянного тока 733В большинстве случаев бывает достаточно применить типо¬
вой интегральный задатчик интенсивности, обеспечив тре¬
буемую крутизну нарастания тока якоря выбором соответствую¬
щей частоты среза КРС.Когда необходимо получить максимальную крутизну нараста¬
ния тока якоря, а частоту среза КРС нельзя увеличить, например,
из условия ограничения влияния оборотных пульсаций напряже¬
ния тахогенератора, оправдано применение ПИ-задатчика интен¬
сивности.На практике интегральный задатчик интенсивности изменяет
сигнал на входе контура регулирования скорости с темпом, кото¬
рый требует от двигателя динамического тока, существенно
меньшего предельно допустимого значения. Так, для электро¬
приводов реверсивных прокатных станов величина динамической
составляющей тока якоря обычно устанавливается в пределах
0,4...0,5 от номинального тока якоря. При этом регулятор PC ра¬
ботает на линейном (наклонном) участке своей статической ха¬
рактеристики, внешняя обратная связь по скорости замкнута, а
показатели качества процесса разгона определяются качеством
настройки КРС. Роль блока ограничения в регуляторе PC сводит¬
ся при этом к ограничению тока якоря при чрезмерных техноло¬
гических перегрузках привода.Допустим, что в процессе разгона электропривода по каким-
либо причинам произошло значительное увеличение момента
статической нагрузки. Например, на том же прокатном стане это
может произойти при подаче в валки непрогретого слитка. Тогда
для обеспечения задаваемого ЗИ ускорения от двигателя может
потребоваться ток, больший максимально допустимого значения.
В этом случае необходимо предусмотреть меры к тому, чтобы
напряжение на выходе задатчика интенсивности не нарастало
само по себе, а поддерживалось близким реальной скорости
электропривода ("следящий задатчик интенсивности"). В про¬
тивном случае после снятия перегрузки накопившаяся ошибка по
скорости, определяемая разницей напряжений на выходах ЗИ и
134 Гпава 4. Регулируемые электроприводы постоянного токадатчика скорости, будет отрабатываться с темпом, соответст¬
вующим максимально допустимому моменту двигателя.Процессы в электроприводе, вызванные
приложением статической нагрузкиРассмотрим, как взаимодействуют различные контуры з схе¬
ме подчиненного регулирования в переходных процессах, вы¬
званных приложением статической нагрузки.Анализ выполним, пользуясь структурной схемой (рис. 3.9).
Эту схему преобразуем так, как показано на рис. 4.17. Здесь с
целью упрощения указаны только функциональные обозначения
звеньев. С этой же целью будем считать ЛАЧХ разомкнутых на¬
строенных контуров регулирования соответствующими интегри¬
рующим звеньям с постоянной времени Т = 1 / шс , где сос - час¬
тота среза соответствующего контура регулирования. ЛАЧХ
замкнутых контуров регулирования считаем соответствующими
инерционным звеньям с той же постоянной времени Т.Чтобы нагляднее представить динамические свойства замк¬
нутой многоконтурной системы регулирования, оценим сначала
показатели двигателя без внешних обратных связей, а затем
сравним эффект, вносимый каждым из контуров регулирования
системы.Звено Д (рис. 4.17 а) с передаточной функцией
Wfl(p) = 1 / Тдр учитывает механическую инерцию привода, когда
якорная цепь двигателя отключена от питающего преобразова¬
теля. Привод ведет себя как обычный маховик. При приложении
скачком постоянного момента статической нагрузки скорость
вращения двигателя п линейно уменьшается до полной останов¬
ки двигателя. Если начальное значение скорости равно п0, а мо¬
мент нагрузки Мс = Мн. то время полной останозки привода со¬
ставит Тд (кривая п,, рис. 4.17 а).Если якорную цепь двигателя подключить на выход нерегу¬
лируемого преобразователя, то динамические свойства двигате¬
ля можно оценить на основании структурной схемы, где звено Д
охвачено отрицательной обратной связью ЯЦ (рис. 4.17 б). Звено
Гпава 4. Регулируемые электроприводы постоянного тока 135ЯЦ учитывает электрические свойства силовой цепи преобразо-
ватель-двигатель.Приложение момента статической нагрузки Мс вызывает
уменьшение скорости вращения двигателя п, вследствие чего
ЭДС двигателя Ед понижается, разность Еп - Ед растет, приводя
к увеличению тока якоря 1я до значения 1с, соответствующего Мс.Б зависимости от соотношения зеличин электромагнитной
ТЯЦ и электромеханической Тм = Тд / КЯц постоянных времени
процесс снижения скорости вращения двигателя идет или моно¬
тонно (при Тм > 4 ТЯц) или с перерегулированием (кривые пгд и
п2б на рис. 4.17 б). Длительность процесса может быть оценена
частотой среза соэ разомкнутого контура саморегулирования ЭДС
двигателя. Статическое падение скорости можно оценить вели¬
чиной 1 / Кяц.Сказанное вытекает также и из рассмотрения ЛАЧХ электро¬
привода l_2, которая в соответствии со структурной схемой (рис.
4.17 б) построена по нижним участкам характеристик !_д и -1_Яц,
соответствующих звену Д, включенному в прямой канал, и звену
ЯЦ, включенному в канал обратной связи. Здесь низкочастотная
ветвь кривой 1_2 идет горизонтально на высоте 1 / Кяц, а з районе
частоты среза контура соэ, соответствующей точке пересечения
характеристик Цд и -1_Яц наблюдается подъем кривой 1_2, если
увеличивать постоянную ТЯц.Предельные величины КЯц, соэ, Тяц, характерные для элек¬
троприводов большой мощности, лежат в следующем диапазоне:
Кяи = 15...20; мэ = 20...30 рад/с; ТЯц = 0,02...0,07 с в системах
генератор-двигатель и КЯц = 5...10; соэ = 10...15 рад/с;
Тяц = 0,ОЗ...0,5 с в системах вентильный преобразователь-
двигатель.Включение в работу контура регулирования тока якоря КРТ
соответствует на рис. 4.17 з охвату звена ЯЦ местной отрица¬
тельной обратной связью из последовательно включенных
звеньев РТ и П. Это ослабляет влияние обратной связи по ЭДС в
контуре саморегулирования ЭДС двигателя. Поэтому приложе¬
ние МС, приводящее к уменьшению п и Ед, не вызывает такого
136 Глава 4. Регулируемые электроприводы постоянного тока
при In,- lc=Гпава 4. Регулируемые электроприводы постоянного тока 137сРис. 4.17. Структурные схемы. ЛАЧХ и переходные процессы после приложения нагрузки в электроприводе
с различными обратными связями
736 Гпава 4. Регулируемые электроприводы постоянного токаже увеличения 1я, как в двигателе без внешних обратных связей,
потому что действие РТ способствует снижению Еп.В современных вентильных электроприводах контур регули¬
рования тока якоря имеет высокое быстродействие, в результате
обратная связь в контуре саморегулирования ЭДС двигателя
оказывается полностью подавленной, а статические и динамиче¬
ские свойства электропривода при приложении Мс опреде¬
ляются лишь интегрирующим звеном Д. При приложении нагруз¬
ки скорость вращения двигателя п падает до нуля, так как КРТ,
стремясь поддержать постоянство заданного на его входе тока
якоря, успевает понизить ЭДС преобразователя вслед за умень¬
шившейся ЭДС двигателя.Поясним высказанную мысль, пользуясь частотными харак¬
теристиками электропривода (рис. 4.17 в). Примем для простоты
передаточную функцию последовательно включенных РТ и П со¬
ответствующей интегрирующему звену с постоянной времени
ТРТ. Влияние звена ЯЦ, охваченного отрицательной об-ратной
связью по току из последовательно включенных РТ и П, учитыва¬
ется кривой L3f которая получается аппроксимацией верхними
участками кривых -1_яц и + LPT_n . При о)Т > «э кривая L3 во всем
диапазоне частот проходит выше кривой 1_д. Следовательно, от¬
рицательную обратную связь, охватывающую звено Д (звенья
ЯЦ, РТ и П на рис. 4.17 в), можно отбросить. Тогда дина¬
мические свойства электропривода с учетом звена ЯЦ и при вве¬
дении отрицательной обратной связи по току якоря будут совпа¬
дать со свойствами звена Д. По этой же причине совпадают и пе¬
реходные функции электропривода в случаях (рис. 4.17 а, в).Динамические свойства электропривода с введенным конту¬
ром регулирования скорости оценим, пользуясь структурной схе¬
мой (рис. 4.17 г). Здесь наличие контура регулирования скорости
учитывается каналом отрицательной обратной связи по скоро¬
сти, в котором включены последовательно регулятор скорости
PC и замкнутый контур регулирования тока якоря (звенья РТ, П и
ЯЦ). Учитывая ранее обнаруженное влияние контура регулиро¬
вания тока якоря на динамические свойства электропривода (см.
Глава 4. Регулируемые электроприводы постоянного тока 139рис. 4.17 в), замениги звено Д, охваченное ЯЦ. РТ и П, одним
звеном Д. В результате приходим к схеме (рис. 4.17 д).Влияние контура регулирования скорости на динамические
свойства электропривода при приложении Мс иллюстрируется на
частотных характеристиках (рис. 4.17 г, д). ЛАЧХ электропривода
с учетом действия КРТ описывается кривой L4 = L-д. Учет влияния
КРС производится кривой -Ls , которая соответствует последо¬
вательному соединению PC и КРТ с передаточными функциями
Wpc (р) = Кос и Wkpt (р) = 1 / (1 + Трт р), где Трт = 1 / сот.Результирующая ЛАЧХ электропривода L6 в области малых
частот идет горизонтально на высоте 1 / КрС, что соответствует
статическому падению скорости вращения двигателя
4Пс = !с / КРС.Применение ПИ-регулятора скорости вызывает снижение
ЛАЧХ электропривода (кривая L?) лишь в диапазоне малых час¬
тот. Но соблюдение условий устойчивости КРС требует, чтобы в
диапазоне средних частот со » сас работал П-канал PC. В резуль¬
тате максимум кривых L6 и L.7 остаются практически неизменны¬
ми, т.е. наибольшее падение скорости вращения двигателя в
обоих случаях почти одинаково (кривые п5 и п7 на рис. 4.17 г).
Величина постоянной времени И-канала в регуляторе PC оказы¬
вает влияние лишь на темп восстановления динамического па¬
дения скорости.Попытка уменьшить падение скорости путем увеличения
КРС приводит к увеличению частоты среза контура регулирова¬
ния скорости сое- В промышленных электроприводах условиями
устойчивости контура регулирования скорости предельные зна¬
чения его частоты среза ограничиваются величиной сос = 30...40
рад/с. В реальных условиях для ослабления влияния пульсаций
ЭДС тахогенераторов приходится ещё больше снижать быстро¬
действие КРС, доводя сос ДО 20...25 рад /с.В этих условиях в начале переходного процесса, вызванного
приложением Мс, контур регулирования скорости практически не
работает, действие же контура саморегулирования ЭДС двигате¬
ля (см. рис. 4.17 в) подавляется быстродействующим контуром
140 Глава 4. Регулируемые электроприводы постоянного токарегулирования тока. В результате в электроприводе со схемой
подчиненного регулирования может наблюдаться значительное
динамическое падение скорости вращения двигателя, особенно
при малых величинах Тд. Например, в электроприводах ревер¬
сивных станов горячей прокатки, имеющих Тд = 0,4...0,5 с, дина¬
мическое падение скорости вращения двигателя в системе вен¬
тильный преобразователь - двигатель составляет 15...25% от пн.4.5. Электропривод постоянного тока по схеме
"источник тока - двигатель"Функциональная схема электроприводаВ двигателе постоянного тока электромагнитный момент (все
величины представлены в долях от их номинальных значений)М = 1я Ф.Обычно регулируют момент двигателя воздействием на
якорь двигателя при Ф = const, тогда величина момента пропор¬
циональна величине тока якоря 1я. Но можно поступить иначе:
поддерживать 1я = const, а величину момента регулировать про¬
порционально потоку двигателя Ф, воздействуя на обмотку воз¬
буждения. При этом обеспечивается плавность и непрерывность
регулирования во всем диапазоне изменения момента.Математически оба способа формирования момента равно¬
ценны. Техническая же реализация каждого из них приводит к
различным схемным решениям: в первом случае для получения
реверса момента дзигателя требуется двухкомплектный преоб¬
разователь в якорной цепи, во втором же случае достаточно
иметь однокомплектный преобразователь, что значительно уде¬
шевляет схему электропривода и повышает её надежность.
Правда, во втором спучае необходим реверсивный тиристорный
возбудитель, но затраты на него существенно меньше, чем на
якорный преобразователь.Поэтому, когда хотят уменьшить габариты вентильного пре¬
образователя в реверсивном электроприводе постоянного тока,
Гпава 4. Регулируемые электроприводы постоянного тока 141применяют схему регулирования скорости с воздействием на по¬
ток двигателя и питанием якорной цепи от источника тока (рис.
4.18). Якорь двигателя М подключен к нереверсивному тиристор¬
ному преобразователю ТП UZ1. Этот преобразователь работает
в режиме источника тока, для чего выполнен контур регулирова¬
ния тока якоря Кртя, содержащий регулятор тока якоря РТЯ АА1 и
датчик тока, якоря ДТЯ UA1. Величина поддерживаемого тока
якоря пропорциональна сигналу задания тока 11зт на входе РТЯ.Обмотка возбуждения двигателя LM подключена к реверсив¬
ному тиристорному возбудителю ТВ UZ2, управление которым
производится с помощью двухконтурной системы регулирования
скорости, выполненной по подчиненному принципу. Внутренним
контуром регулирования является контур регулирования тока
зозбуждения КРТВ, содержащий регулятор тока возбуждения
РТВ АА2 и датчик тока возбуждения ДТВ UA2. Внешний контур
регулирования скорости КРС, кроме КРТВ, содержит регулятор
скорости PC AR и датчик скорости ДС UR, подключенный на вы¬
ход тахогенератора BR. Регулятор PC выполнен с зоной насы¬
щения, соответствующей максимальному току возбуждения дви¬
гателя.Заданное значение скорости вращения двигателя устанав¬
ливается задатчиком интенсивности ЗИ AJ1.В исходном состоянии схемы, когда иБх = 0, равны нулю и
напряжения на выходах регуляторов PC, РТВ и возбудителя ТВ.
Поэтому равны нулю ток возбуждения и магнитный поток двига¬
теля, а, следовательно, электромагнитный момент двигателя.
Двигатель неподвижен.При разгоне электропривода происходит плавное увеличение
напряжения на выходе задатчика ЗИ, что приводит к появлению
напряжений на выходах PC, РТВ и ТВ. Это вызывает увеличение
потока Ф двигателя и появление момента; в результате чего
двигатель разгоняется.В установившемся режиме скорость вращения п пропорцио¬
нальна величине напряжения на выходе задатчика интенсивно¬
сти, так как в контуре регулирования скорости с ПИ-регулятором
142 Гпава 4. Регулируемые электроприводы постоянного токаРис. 4.18. Функциональная схема электропривода постоянного тока
с питанием цепи якоря от источника тока.PC в установившемся режиме обязательно выполняется
изи = Щс. При этом ток якоря 1я и поток двигателя Ф не зависят
Глава 4. Регулируемые электроприводы постоянного тока 143от величины скорости.При приложении момента статической нагрузки сначала про¬
исходит снижение скорости и соответствующего ей напряжения
на выходе датчика скорости ДС, это вызывает увеличение раз¬
ницы напряжений ЗИ и ДС (ошибки в контуре регулирования ско¬
рости), что приводит к росту напряжений на выходах PC, РТВ и
ТВ и увеличению момента двигателя. Когда переходный процесс
закончится, то величина напряжения на выходе PC и соответст¬
вующего ему магнитного потока двигателя установятся такими,
чтобы уравновесить приложенный внешний момент статической
нагрузки и восстановить скорость. При этом будет выполняться
изи = идс, т.е. скорость нагруженного электропривода установит¬
ся такой же, какой была задана в режиме холостого хода. Это
обусловлено тем, что регулятор PC, содержащий И-канал, может
иметь постоянное напряжение у себя на выходе только при усло¬
вии равенства нулю результирующего сигнала на входе (т.е. при
изи = идс).Статические характеристики электроприводаРассмотрим две серии статических характеристик: при изме¬
нении сигнала на выходе задатчика интенсивности и3и и момен¬
та на валу двигателя.Первую серию характеристик рассмотрим для двух различ¬
ных фиксированных значений момента статической нагрузки:
Мс = 0 (кривые 1 на рис. 4.19 а) и Мс = const (кривые 2).Так как якорная цепь двигателя питается от идеального ис¬
точника тока, то график тока якоря 1я не зависит ни от величины
иЗИ| ни от момента статической нагрузки.Скорость вращения п двигателя строго пропорциональна ве¬
личине напряжения 1!зи: за выполнением этого условия строго
"следит" регулятор PC, в котором благодаря работе интегрально¬
го канала в установившихся режимах строго поддерживается ну¬
левая статическая ошибка регулирования, т.е. иДс = и3и.Величина магнитного потока Ф двигателя от скорости не за¬
висит, а определяется его моментом. В частном случае при М = О
144 Гпава 4. Регулируемые электроприводы постоянного тока1.2/ •яUrЗХиямMm| ия' '2 I.i аUexМа)б)Рис. 4.19. Статические характеристики электропривода постоянного
тока с питанием цепи якоря от источника тока:а) при изменении сигнала Uex (1 - при Мс = 0; 2 - при Мс = const);б) при изменении момента статической нагрузки Мс и U&x = const
Гпава 4. Регулируемые электроприводы постоянного тока 145наблюдается Ф = 0. В общем случае при М = const поток также
постоянный.Напряжение на якоре двигателя Up определяется общеизве¬
стным выражением:Up = Ед + Ip Rp •В режиме идеального холостого хода ЭДС двигателя Ед = 0,
так как Ф = 0. Поэтому Up = Ip Rp при любых значениях сигнала
и3и- Когда М = const, но отлично от нуля, то ЭДС двигателя уве¬
личивается пропорционально величине скорости, в результате по
мере роста изи напряжение на якоре двигателя также растет.Во второй серии характеристик, когда увеличивается момент
статической нагрузки при неизменном сигнале изи, ток якоря и
скорость вращения двигателя поддерживаются постоянными. Но
это выполняется только тогда, когда регулятор PC не насыщен.
При этом ток возбуждения двигателя и его поток изменяются
пропорционально величине напряжения Upc на выходе регуля¬
тора PC. Напряжение на якоре двигателя также увеличивается,
чтобы преодолеть влияние ЭДС двигателя, которая тем больше,
чем больше поток двигателя.Когда по мере увеличения момента статической нагрузки вы¬
ходное напряжение регулятора PC увеличивается до уровня на¬
сыщения, поток двигателя остается постоянным, чем достигается
ограничение момента двигателя допустимым значением Мм.
Скорость вращения двигателя п при этом снижается до нуля (при
реактивном характере момента статической нагрузки), а напря¬
жение на якоре - до величины, равной падению напряжения |я Rp
на активном сопротивлении якорной обмотки двигателя.•• При неизменном сигнале задания и3и = const момент статической
нагрузки на валу двигателя плавно изменяют в диапазоне от +Мм до -Мм.
Как выглядят при этом графики скорости и напряжения на якоре двигателя
от момента?•• В процессе плавного изменения момента статической нагрузки на
валу дзигателя в диапазоне от +Мм до -Мм двигатель работает в разных
146 Гпава 4. Регулируемые электроприводы постоянного токаэнергетических режимах. Назовите их асе по порядку. Как на графиках
(рис. 4.19 б) четко разделить эти режимы?Настройка системы электроприводаВ тиристорных электроприводах постоянного тока можно до¬
биться очень высокого по быстродействию и точного регулирова¬
ния тока якоря. В этом случае стабильность поддержания задан¬
ного значения тока якоря оказывается настолько высокой, что
можно пренебречь влиянием изменения ЭДС двигателя на вели¬
чину тока якоря. Это обусловлено тем, что благодаря быстрой и
точной работе контура регулирования тока якоря любое измене¬
ние ЭДС двигателя вызывает соответствующее изменение ЭДС
преобразователя, так что ток якоря практически сохраняется не¬
изменным.Считая в этом случае тиристорный преобразователь UZ1,
охваченный отрицательной обратной связью по току, идеальным
источником тока, составим структурную схему электропривода
для выбора типа и параметров регуляторов (рис. 4.20). Полу¬
чившаяся двухконтурная система регулирования имеет в точно¬
сти такую же структуру, что и обычная типовая схема подчинен¬
ного регулирования (см. рис. 4.9), в которой отброшена местная
обратная связь по ЭДС двигателя. Отличие же заключается
только в том, что вместо звена ЯЦ, имеющего относительно не¬
большую по величине электромагнитную постоянную якорной
цепи Тяц, включено звено ОВД, учитывающее постоянной време¬
ни Тв электромагнитную инерцию обмотки возбуждения двигате¬
ля. Так как обычно Тв > ТЯц, то достижимое быстродействие
КРТВ несколько ниже, чем у КРТЯ. Б остальном методика расче¬
та параметров регуляторов в обеих схемах одинакова.Из опыта наладки тиристорных электроприводов постоянного
тока быстродействие КРТЯ оценивается обычно частотой среза
(оя = 100...150 рад/с, а быстродействие КРТВ - сов = 40...80 рад/с,
т.е. динамические показатели электропривода по схеме ИТ-Д
оказываются близки схеме Г-Д с тиристорным возбудителем. В
рассматриваемой схеме в отличие от обычных систем электро-
Гпава 4. Регулируемые электроприводы постоянного тока 147'ЗИPC uFC ртвтв и9°ВД ФмWpcJWPT3
идсWtb1+Твр'дтзмс д1Т^РРис. 4.20. Структурная схема электропривода постоянного тока
с питанием цепи якоря от источника токапривода с воздействием на поток двигателя коэффициенты уси¬
ления всех звеньев постоянны и не зависят от величины потока.
Это существенно упрощает настройку электропривода.Формирование процессов в электроприводах
с большим диапазоном изменения моментаСхема электропривода (рис. 4.18) имеет два существенных
недостатка. Во-первых, схема не позволяет использовать полную
габаритную мощность установленного двигателя. Действительно,
ток в якорной цепи, поддерживаемый на постоянном уровне, не
может по условиям нагрева превысить номинального значения.
Магнитный же поток в двигателях постоянного тока из-за насы¬
щения магнитной системы также не увеличивают выше номи¬
нального значения. Поэтому в зоне нагрузок менее предельно
допустимых по условиям коммутации, но выше номинальных
рассматриваемый электропривод не может даже кратковременно
обеспечить требуемых усилий. Во-вторых, при значительном
снижении момента на валу двигателя ток в его якорной цепи ос¬
тается значительным, вызывая неоправданные потери в якорной
цепи и дополнительный нагрев двигателя.Отмеченные недостатки легко преодолеваются, если между
регулятором скорости PC и входными цепями КРТЯ и КРТВ
включаются функциональные преобразователи ФП1 и ФП2 (рис.
4.21). При этом номинальному моменту двигателя соответствуют
148 Рпава 4. Регулируемые электроприводы постоянного токаточки б ид статической ха¬
рактеристики ФП1 и точки ж
и з ФП2. Увеличение напря¬
жения на выходе PC приво¬
дит к увеличению сигнала на
выходе ФП1 и, следова¬
тельно, тока якоря. Напря¬
жение же на выходе ФП2
при этом не повышается, так
как увеличивать ток возбуж¬
дения двигателя сверх но¬
минального значения неэф¬
фективно из-за насыщения
его магнитной системы.
Уровень ограничения на¬
пряжения в регуляторе ско¬
рости PC устанавливается
соответствующим макси¬
мальнодопустимому значе¬
нию тока якоря двигателя
(соответствует точкам а и е на статической характеристике ФП1).Когда напряжение на выходе PC по абсолютной величине
меньше значений, соответствующих точкам б и д (при моментах
двигателя менее номинального значения), происходит снижение
уставок на входах и КРТЯ и КРТВ. При этом статическая харак¬
теристика ФП2 проходит через нуль, обеспечивая реверс момен¬
та двигателя. Реализация статической характеристики ФП1 ока¬
зывается более простой, когда она соответствует ломаной а - б -
в - 0 - г - д -е. Однако в этом случае вблизи нуля электромагнит¬
ного момента статическая характеристика канала "напряжение
PC - электромагнитный момент" имеет нулевой коэффициент
усиления, что ухудшает точностные показатели электропривода.
Поэтому вблизи нуля момента ток якоря до нуля не снижают, а
оставляют на уровне 0,4...0,5 от номинального значения (лома¬
ная а - б - в - г - д - е). Тем самым достигается заметное (пропор¬ФП1Рис. 4.21. Статические характе¬
ристики функциональных пре¬
образователей ОП1 и ФП2
Гпава 4. Регулируемые электроприводы постоянного тока 149циональное квадрату величины тока якоря) снижение потерь в
якорной цепи при незначительном уменьшении коэффициента
усиления по моменту.Электропривод постоянного тока, выполненный по схеме
(рис. 4.18), впервые был удачно применен на экскаваторах [30],
обеспечив при высоком качестве процессов снижение затрат на
зентильные преобразователи. Б тех случаях, когда динамические
требования к электроприводу умеренные, в цепи якоря включают
более дешевые и простые параметрические источники тока: вен¬
тильно-емкостные или индуктивно-емкостные, которые хорошо
изложены в [26].4.6. Электропривод постоянного тока
с двухзонным регулированием скоростиПостановка задачиЕсть ряд производственных механизмов, у которых работа
электропривода на высоких скоростях происходит с уменьшен¬
ными значениями момента статической нагрузки. К таким меха¬
низмам относятся, например, продольно-строгальные станки, у
которых во время обратного хода резца стружка с обрабатывае¬
мой детали не снимается, поэтому обратный ход целесообразно
и возможно производить с повышенной скоростью. Далее, на ре¬
версивных станах горячей прокатки последние пропуски прока¬
тываемого слитка происходят с малыми величинами статическо¬
го момента, длина же слитка в этих пропусках наибольшая. Это
также способствует увеличению скорости привода.В указанных случаях целесообразно регулирование скорости
вращения двигателя как изменением напряжения на якоре, так и
изменением его потока возбуждения. На рис. 4.22 приведены за¬
висимости установившихся значений некоторых регулируемых
величин в электроприводе при изменении уровня напряжения
задания U3x. Чтобы улучшить энергетические показатели приво¬
да, регулирование скорости вращения двигателя в пределах от
нуля до основной производят только изменением напряжения на
150 Гпава 4. Регулируемые электроприводы постоянного токаякоре Ыя при номинальном потоке
возбуждения Ф, а в диапазоне из¬
менения скорости выше основной -
изменением только потока возбуж¬
дения при постоянном, обычно но¬
минальном напряжении на якоре.Конечно, в случае двухзонного
регулирования скорости схема
электропривода получается не¬
сколько сложнее, чем при однозон¬
ном (т.е. при постоянном потоке
возбуждения) регулировании. Здесь
выгода от применения ослабления
поля двигателя на скорости выше
основной получается за счет сни¬
жения установленной мощности
преобразователя (агрегата Г-Д или
вентильного преобразователя), пи¬
тающего якорную цепь двигателя. Габарит, а следовательно, и
стоимость двигателя в обоих вариантах оказываются одинако¬
выми, так как они определяются величиной его номинального
момента.Рис. 4.22. Зависимости не¬
которых регулируемых пе¬
ременных при изменении
сигнала задания з схеме с
двухзонным регулировани¬
ем скоростиФункциональная схема электроприводаСхема электропривода с двухзонным регулированием скоро¬
сти состоит из двух систем регулирования: системы регулирова¬
ния с воздействием на напряжение на якоре двигателя и системы
регулирования с воздействием на поток двигателя (рис. 4.23).
Первая система включает в себя контуры регулирования тока
якоря и скорости, ничем не отличается от описанной ранее схе¬
мы подчиненного регулирования (см. рис. 4.9) и изображена уп¬
рощенно. Вторая система выполнена двухконтурной. Внутренний
Гпава 4. Регулируемые электроприводы постоянного тока 157Б02JbxЗИОН РСРис. 4.23. Функциональная схема с двухзонным регулированием
скорости
152 Глава 4. Регулируемые электроприводы постоянного токаконтур регулирования тока возбуждения включает в себя тири¬
сторный возбудитель ТВ UZ2, нагруженный на обмотку возбуж¬
дения двигателя LM, регулятор тока возбуждения РТВ АА2 и дат¬
чик тока возбуждения ДТВ UA2. Регулятор РТВ выполняется
обычно интегрально-пропорциональным. Если двигатель имеет
большую (единицы секунд) постоянную времени цепи возбужде¬
ния, то применяют пропорциональный РТВ.Внешний контур регулирования напряжения на якоре (ино¬
гда - ЭДС двигателя) включает в себя замкнутый контур регули¬
рования тока возбуждения, а также регулятор напряжения (или
ЭДС) PH AV и датчик напряжения ДН UV. Регулятор PH обычно
интегральный. Максимум выходного напряжения PH ограничен с
помощью блока ограничения БО А2 и соответствует номиналь¬
ному току возбуждения двигателя. Выпрямительный мост, вклю¬
ченный между потенциометром RP и датчиком напряжения ДН,
обеспечивает неизменную полярность напряжения на выходе ДН
при реверсе привода.При скорости вращения ниже основной, пока напряжение на
выходе ДН ниже напряжения задания 11зн, регулятор PH нахо¬
дится в насыщенном состоянии, благодаря чему ток возбуждения
двигателя поддерживается постоянным, равным номинальному.
Регулирование скорости вращения двигателя производится толь¬
ко за счет изменения напряжения на якоре двигателя.Когда напряжение на якоре двигателя увеличится до значе¬
ния, соответствующего изн, регулятор PH уменьшает свой вы¬
ходной сигнал, снижая тем самым и уставку на входе контура ре¬
гулирования тока возбуждения двигателя. Поток в двигателе на¬
чинает ослабляться, приводя к увеличению скорости вращения
двигателя. Так как регулятор PH интегрального типа, то в устано¬
вившихся режимах работы электропривода на скорости выше ос¬
новной всегда соблюдается равенствоидя = U3H,т.е. ослабление потока происходит при постоянном напряжении
на якоре двигателя, соответствующем U3H.
Гпава 4. Регулируемые электроприводы постоянного тока 153Описываемая схема, в которой ослабление потока двигателя
происходит в функции напряжения на якоре, получила название
схемы с зависимым управлением полем двигателя. В схемах с
независимым управлением полем двигателя сигнал на ослабле¬
ние потока двигателя дается обычно в функции величины напря¬
жения на выходе задатчика интенсивности ЗИ.Структурная схема двигателя
при скорости вращения выше основнойСоставим структурную схему двигателя постоянного тока не¬
зависимого возбуждения при скорости выше основной и при
управлении по якорю и по потоку. Переходя к относительным
единицам, примем за базовые значения переменных: тока якоря
1я - номинальный ток lHl магнитного потока Ф - номинальный по¬
ток Фн, момента двигателя М - электромагнитный момент двига¬
теля при номинальных токе якоря и потоке, напряжения на якоре
Uя и ЗДС двигателя Ед - номинальное напряжение на якоре Uh,
скорости вращения двигателя - скорость п0 идеального холосто¬
го хода при номинальных потоке и напряжении на якоре.При составлении структурной схемы приходится считаться с
тем, что уравнения для момента двигателяМ = Ф1Яи для ЭДС двигателяЕд = Ф пявляются нелинейными. Рассматривая процессы "в малом", за¬
пишем линеаризованные выражения для приращений перемен¬
ных:АМ = Фо А1я + lo АФ;АЕд = Фо Дп + п0 ДФ
154 Гпава 4. Регулируемые электроприводы постоянного токаЗдесь Ф, 1я, п - текущие значения потока, тока якоря и скоро¬
сти вращения двигателя в точке линеаризации.Добавив к этим выражениям также уравнения моментов на
валу двигателяМ - Мс = Тд р пи ЭДС в якорной цепиия- Ед = (1 + Тя р) 1я/Кя.составим структурную схему двигателя (рис. 4.24 а). Эта струк¬
турная схема составлена для приращений переменных, но знак А
перед переменными опущен. Двигатель представляется звеном с
переменными параметрами, зависящими от текущих координат
Ф, 1я, п.Преобразуем структурную схему двигателя, приведя воздей¬
ствие Ф к тому же сумматору, что и Еп (рис. 4.24 б). Воздействие
Ф поступает на вход контура регулирования по двум каналам.
Канал 1 учитывает изменение скорости вращения двигателя,
обусловленную только смещением точки холостого хода на ме¬
ханической характеристике двигателя (аналогично регулирова¬
нию скорости в системе Г-Д). Канал 2, по знаку противоположный
каналу 1, учитывает только изменение наклона механической ха¬
рактеристики при изменении потока возбуждения.При скорости выше оснозной (при п0 > 1) действие канала 2
по крайней мере в Кя раз слабее, чем канала 1. Поэтому с целью
упрощения структурной схемы пренебрежем в схеме двухзонного
регулирования влиянием канала 2, когда скорость вращения дви¬
гателя выше основной (рис. 4.24 в).•• Приведите примеры систем электропривода с регулированием по
потоку, в которых в отличие от рассматриваемой схемы двухзонного регу¬
лирования влияние канала 1 подавляется, а влияние канала 2 является
определяющим.
Гпава 4. Регулируемые электроприводы постоянного тока 155Структурная схема электропривода
при работе в зоне ослабленного потока двигателяЛинеаризованная структурная схема электропривода при
скорости вращения двигателя выше основной изображена на
рис. 4.25. Все регулируемые величины представлены в относи¬
тельных единицах. Выбор базовых значений регулируемых коор¬
динат в основных контурах регулирования КРС и КРТЯ произво¬
дился так же. как и в п. 4.4. В канале регулирования потока дви¬
гателя базовые значения напряжений на выходах тиристорного
возбудителя ТВ и регулятора тока возбуждения РТВ выбирались
соответствующими номинальному потоку двигателя в устано¬
вившемся режиме, а на выходах датчиков тока возбуждения ДТВ
и напряжения на якоре ДН - соответствующими номинальным
потоку и напряжению на якоре двигателя.Обозначения звеньев, входящих в КРТЯ и КРС, и их переда¬
точные функции - такие же, как в электроприводе с подчиненным
регулированием и независимым возбуждением двигателя (п. 4.4).Звено СЦ с передаточной функциейWcu (р) = (1 + Тсц р) / Ксцучитывает падение напряжения на участке силовой цепи двига¬
теля и преобразователя до точки съема сигнала на ослабление
потока двигателя. В зависимости от способа ослабления потока
двигателя передаточная функция звена СЦ может быть пред¬
ставлена следующими выражениями:если сигнал на ослабление потока
Wcu (Р) = двигателя подается в функцииЭДС преобразователя:
если сигнал на ослабление потока
Wcu (р) = (1 + Тяп р) / Кяп . подается в функции напряженияна якоре;если сигнал на ослабление потока
Wcu (Р) = 0 + ТЯц р) / КЯц . подается в функции ЭДС двига¬
теля.
156 Глава 4. Регулируемые электроприводы постоянного токаРис. 4.24. Структурные схемы двигателя постоянного тока
Глава 4. Регулируемые электроприводы постоянного тока 157Здесь Тяп и КЯп - электромагнитная постоянная времени и
кратность тока короткого замыкания силовой цепи только преоб¬
разователя; Тяц и КЯц - то же, но всей силовой цепи преобразо¬
ватель-двигатель.Преобразуем структурную схему электропривода (рис. 4.25).
Звенья, относящиеся к цепям возбуждения двигателя (обведены
на рисунке пунктиром), обозначим одним звеном ЗСВ - зависи¬
мой системой возбуждения. На структурной схеме (рис. 4.25)
видно, что наличие ЗСВ вызывает появление дополнительных
каналов лишь в КРТЯ, поэтому в дальнейшем достаточно оце¬
нить влияние ЗСВ только на условия настройки КРТЯ.Сумматор 3 перенесем к сумматору 1, т.е. действие ЗСВ по
ия или Ед представим двумя каналами:один канал учитывает
воздействие Еп на ЗСВ, а другой - учитывает наличие звена СЦ,
которое уточняет картину взаимодействия отдельных звеньев
из-за того, что сигнал по 11я или Ед, в функции которого происхо¬
дит ослабление потока двигателя, не совпадает с Еп из-за паде¬
ния напряжения в силовой цепи.Прежде чем рассматривать условия настройки КРТЯ с ЗСВ,
примем допущения, которые уже встречались ранее при анализе
электроприводов с подчиненным регулированием: пренебрежем
влиянием обратной связи по ЭДС вращения двигателя (ее сиг¬
нал, пропорциональный скорости п. поступает на вход сумматора
2 через звено с коэффициентом усиления Ф0) и внешней обрат¬
ной связи по скорости в контуре регулирования скорости КРС. В
результате приходим к схемам (рис. 4.26),Настройка электропривода с двухзонным
регулированием скорости.Рекомендации по выбору регуляторовСначала выясним, как сказывается наличие дополнительных
каналов регулирования потока двигателя (зависимой системы
возбуждения ЗСВ) на показателях настройки КРТЯ, а затем
РТВ-ТВ158 Глава 4. Регулируемые электроприводы постоянного токаРис. 4.25. Структурная схема электро при вода постоянного тока с двухзонным
регулированием скорости
Глаза 4. Регулируемые электроприводы постоянного тока 159определим, из каких условий следует выбирать структуру и па¬
раметры регулятов PH и РТВ.Рассмотрим возможные варианты выполнения ЗСВ.Вариант 1. Ослабление потока двигателя производится в
функции ЭДС преобразователя.В этом случае структурная схема электропривода преобразу¬
ется к виду (рис. 4.26 а). Наличие ЗСВ на структурной схеме учи¬
тывается введением в прямой канал КРТЯ последовательного
корректирующего звена А с передаточной функциейWA (р) = 1 + W3C5 (P).Если пренебречь влиянием инерционных звеньев с малыми
постоянными времени в контуре регулирования тока возбужде¬
ния двигателя, то в настроенной системе электропривода звено
ЗСВ можно представить последовательным соединением интег-
7 60 Глава 4. Регулируемые электроприводы постоянного токаРис. 4.27. ЛАЧХ (а) и структурная схема (б) звена Арирующего звена с постоянной времени ТА = Три / л0 = 1 / шА и
инерционного с постоянной времени Тв = 1 / «в, где аз - частота
среза контура регулирования тока возбуждения двигателя. Тогда
в диапазоне частот со < сов передаточная функция звена ЗСВW3C3 (р) ~ По / Трн Р (1 + Тв р).Аппроксимированная ЛАЧХ звена А (кривая LA на рис. 4.27 а)
соответствует пропорционально-интегральному звену, которое
получается после параллельного соединения единичного канала
и ЗСВ. Чтобы звено А не оказывало влияния на устойчивость и
качество процессов в КРТЯ, необходимо обеспечить0)А < сот/(2...4),где сат - частота среза КРТЯ. Чтобы само звено А было устойчи¬
во, необходимо соблюдатьсоА < сов / (2...4).Приведенные неравенства являются основанием для выбора
параметров регуляторов РТВ и PH. Так как обычно сов < сот. то
бывает достаточно обеспечить только второе из неравенств. В
итоге условия настройки регуляторов РТВ и PH в схеме с ослаб¬
лением потока в функции Еп можно сформулировать так: необ¬
ходимо сначала выбрать параметры РТВ, обеспечив наибольшее
Гпава 4. Регулируемые электроприводы постоянного тока 161возможное быстродействие КРТВ, а затем - параметры PH, вы¬
брав частоту среза контура регулирования напряжения сон в
(2...4) раза меньше, чем КРТВ.Вариант 2. Ослабление потока двигателя производится в
функции ЭДС двигателя Ед. В этом случае влияние ЗСВ учиты¬
вается на схеме (рис. 4.26 б) введением в прямой канал КРТЯ
двух последовательно включенных звеньев А и Б. Передаточная
функция звена А уже обсуждалась в варианте 1. Так как в данном
случае Won (р) = 1 / V\fou(p), то передаточная функция звена Бw5(p) = 1 / [1 +W3C5 (р)].Последовательно включенные звенья А и Б соответствуют
звену с передаточной функциейW(p) = WA(p)W5(p) = 1.Отсюда получаем важный вывод, что если ЗСВ выполнена по
Ед, то условия устойчивости КРТЯ в зоне ослабления потока
двигателя остаются такими же, как и при скорости ниже основ¬
ной. Это происходит потому, что противоположное влияние
звеньев А и Б на устойчивость КРТЯ взаимно уравновешивается.Следует сделать весьма существенную оговорку. Сокращать
числитель и знаменатель в выражении для передаточной функ¬
ции последовательно соединенных звеньев А и Б и на основании
этого делать вывод о независимости (инвариантности) динами¬
ческих характеристик КРТЯ от степени ослабления потока можно
далеко не всегда. Полученный вывод справедлив только тогда,
когда сами звенья А и Б удовлетворяют условиям устойчивости.
Эти условия выполняются с учетом стандартных величин запа¬
сов устойчивости, если при выборе параметров регуляторов РТВ
и PH соблюдается неравенствоод ^ сов / (2...4).Итак, услозия настройки регуляторов РТВ и PH в случаях ос¬
лабления потока в функции Еп и Ед совпадают и сводятся, во-
162 Глава 4. Регулируемые электроприводы постоянного токапервых, к достижению наибольшей возможной частоты среза
КРТВ юв иг во-вторых, выполнению неравенства (оА £ юв / (2...4).•• Покажите, что в случае ослабления потока двигателя в функции ве¬
личины напряжения на якоре получаются те же количественные рекомен¬
дации по выбору параметров регуляторов РТВ и PH, что и в случаях ос¬
лабления потока в функции Еп или Ед.Если система электропривода работает, главным образом, в
установившихся режимах поддержания заданной скорости вра¬
щения двигателя, а процессы пуска и торможения привода не
играют существенной роли, то настройку ЗСВ проще всего осу¬
ществить, понизив ее быстродействие. В этом случае отработка
возмущений, вызывающих отклонение скорости вращения двига¬
теля (например, приложения статической нагрузки), производит¬
ся в переходном режиме только за счет воздействия на напряже¬
ние на якоря двигателя. Поток же двигателя в переходном режи¬
ме почти не изменяется. При разгоне такого электропривода на¬
блюдается перерегулирование напряжения на якоре, прибли¬
женную величину которого можно оценить с помощью выраженияД1)я ~ Л Uh / соатд ,где л - динамический момент привода при разгоне в долях от
номинального значения.Если электропривод работает в режимах интенсивных пусков
и торможений, то делать инерционную ЗСВ нельзя, чтобы избе¬
жать перерегулирования напряжения на якоре при разгоне. В
этом случае параметры регулятора PH выбирают так, чтобы по¬
лучить наибольшее достижимое быстродействие ЗСВ, не нару¬
шив условий устойчивости КРТЯ.Чтобы дать представление о реально достигнутых показате¬
лях настройки электроприводов с ЗСВ, укажем параметры конту¬
ров регулирования, определенные экспериментально в процессе
наладки электропривода клети 20-валкового стана холодной про¬
катки. Здесь двигатель постоянного тока (Рн = 1450 кВт;
Un = 715B; lH = 2200 А; п = 450/1025 об/мин) питается от инди¬
Гпава 4. Регулируемые электроприводы постоянного тока 163видуального генератора. Возбуждение электрических машин
производится от тиристорных возбудителей. Частоты среза кон¬
туров регулирования составляют: скорости вращения электро¬
привода - сое = 20 рад/с, тока якоря - сот = 60 рад/с, тока возбуж¬
дения двигателя - cos = 60 рад/с, звеньев А и Б, учитывающих
быстродействие ЗСВ, - соА = 20 рад/с.Учет переменных параметров двигателя
при настройке КРН и КРСВеличина соА изменяется при изменении скорости вращения
двигателя п. Поэтому электропривод, устойчивый при скоростях,
близких к номинальной, может оказаться колебательным или да¬
же неустойчивым в зоне максимальных скоростей. Чтобы этого
не случилось, часто последовательно с регулятором PH включа¬
ют блок с регулируемой в функции скорости вращения или тока
возбуждения величиной коэффициента усиления, чтобы сохра¬
нить постоянное значение сйА. В качестве такого блока на рис.
4.28 а применено множительное устройство, на первый вход ко¬
торого подано напряжение регулятора PH, а на второй - напря¬
жение датчика тока возбуждения двигателя.Во внешнем КРС при регулировании скорости вращения дви¬
гателя выше основной наблюдается снижение частоты среза
контура по сравнению с основной настройкой. Причина этого яв-БП >и?н ^ На вход ,.' Х ftPTB Uw< -iНа вход
'ЙРТЯАидтв>dXФП-tРис. 4.28. Способы учета влияния переменных па
раметроз звеньев: а) в ЗСВ; б) в КРС
7 64 Гпава 4. Регулируемые электроприводы постоянного токаления заключается в уменьшении потока двигателя, который
входит в коэффициент пропорциональности между величиной
тока якоря двигателя и моментом. Для сохранения стабильной
настройки КРС на выход регулятора PC включают блок произ¬
ведения, на первый вход которого подают напряжение PC, а
на второй - напряжение датчика скорости электропривода
(рис. 4.28 б).Статические характеристики электроприводаСтатические характеристики электропривода с двухзонным
регулированием на скорости ниже основной ничем не отличают¬
ся от характеристик стандартной системы подчиненного регули¬
рования (п. 4.4). При работе электропривода в зоне скоростей
выше основной необходимо помнить об ослаблении магнитного
потока двигателя и поддержании регулятором PH постоянстванапряжения на якоре двигателя.
Если допустимое значение тока
якоря одно и то же при всех воз¬
можных значениях скорости элек¬
тропривода, то предельная элек¬
тромеханическая характеристика
электропривода n = f(l) имеет пря¬
моугольный вид (кривая 1 на рис.
4.29). Предельная механическая
характеристика электропривода
п = f(M) в зоне скоростей выше ос¬
новной наблюдается снижение до¬
пустимого момента из-за ослабле¬
ния магнитного потока двигателя. В
электроприводах с двигателями
постоянного тока предельной мощ¬
ности допустимое значение тока
якоря в зоне повышенных скоростей снижается еще больше. На¬
пример. двигатели главных электроприводов реверсивных ста¬
нов горячей прокатки при работе на скоростях ниже основной до¬
пускают ток 2.5 1н, при работе же на максимальной скорости, ко¬Рис. 4.29. Статические ха¬
рактеристики электроприво¬
да постоянного тока с дзух-
зонным регулированием ско¬
рости
Гпава 4. Регулируемые электроприводы постоянного тока 165торая выше номинальной в 1,5...1,6 раза, - не более 1.5 1н. В ре¬
зультате максимальный момент при повышенных скоростях не
превышает номинального значения. Но тем не менее работать с
ослабленным потоком выгодно, так как слиток в последних про¬
пусках имеет малое сечение и большую длину.•• Злектропризод с двухзонным регулированием работал в режиме
холостого хода при скорости в 1,5 раза выше номинальной, после чего
производилось плавное увеличение момента статической нагрузки до пре¬
дельно допустимого значения. Изобразите на графике, как при этом изме¬
няются от величины момента скорость вращения двигателя, напряжение
на якоре, ток якоря и ток зозбуздения двигателя.4.7. Электропривод с реверсом поля двигателяЕсть производственные механизмы (например, непрерывные
станы горячей прокатки в металлургической промышленности),
которые работают преимущественно с установившейся рабочей
скоростью вращения дэигателя, обеспечивают ее поддержание
с высокой точностью, но не предъявляют особых требований к
качеству процессов реверса и торможения. В этих случаях с це¬
лью снижения затрат на силовой преобразователь и повышение
его надежности целесообразно в цепи якоря двигателя включать
нереверсивный вентильный преобразователь, а реверс двигате¬
ля осуществлять, изменяя направление тока в обмотке возбуж¬
дения.На рис. 4.30 приведена схема электропривода постоянного
тока с реверсом поля двигателя. Здесь двигатель постоянного
тока М подключен к нереверсивному тиристорному преобразова¬
телю ТП UZ1. Регулирование скорости вращения двигателя про¬
изводится изменением напряжения на якоре в двухконтурной
подчиненной системе регулирования. Внутренним, контуром яв¬
ляется контур регулирования тока якоря КРТЯ, содержащий UZ1,
регулятор тока якоря РТЯ АА1 и датчик тока якоря ДТЯ UA1.
Внешним контуром является контур регулирования скорости
КРС, который кроме КРТЯ содержит также регулятор скорости PC
AR и датчик скорости ДС UV, подключенный через промежуточ
166 Глава 4. Регулируемые электроприводы постоянного тока~[-L,UV(BR)c—\=r SРис. 4.30. Функциональная схема электропривода с реверсом поля
двигателя
Гпава 4. Регулируемые электроприводы постоянного тока 167ный потенциометр к тахогенератору BR. Так как тиристорный
преобразователь нереверсивный, между выходом регулятора
скорости и входом регулятора тока якоря РТЯ включен функцио¬
нальный преобразователь ФП А2. который зыполнен на пропор¬
циональном регуляторе с единичным коэффициентом усиления и
диодах VD1 и VD2. Он реализует зависимость Ucn = I Upc I,
обеспечивая положительное (в проводящем для вентилей ТП
направлении) задание тока контуру КРТЯ при любом знаке ста¬
тической нагрузки на валу двигателя. Для ограничения макси¬
мально допустимого значения тока якоря регулятор скорости со¬
держит блок ограничения БО А1. Величина и направление скоро¬
сти вращения двигателя пропорциональны напряжению на вы¬
ходе задатчика интенсивности ЗИ AJ.Питание обмотки возбуждения двигателя производится от
реверсивного тиристорного возбудителя ТВ UZ2. Качество пере¬
ходных процессов изменения потока возбуждения двигателя оп¬
ределяется настройкой контура регулирования тока возбуждения
КРТВ, который содержит ТВ, обмотку LM, регулятор тока возбуж¬
дения РТВ АА2 и датчик тока возбуждения ДТВ UA2. Величина и
направление тока возбуждения двигателя соответствуют напря¬
жению на выходе релейного элемента РЭ АЗ, подключенного на
зыход регулятора PC. Статические характеристики нелинейных
элементов РЭ, PC и ФП изображены на схеме (рис. 4.30) рядом с
соответствующими звеньями.В установившихся режимах работы рассматриваемая схема
работает так же, как обычная система подчиненного регулирова¬
ния, с той лишь разницей, что при изменении знака напряжения
на выходе PC изменяется знак напряжения на выходе релейного
элемента РЭ при неизменном знаке напряжения иФП на выходе
функционального преобразователя.«• Изобразите, как выглядят в данной схеме статические характери¬
стики: механическая n = f(M), внешняя (ЭДС преобразователя) Еп = f(M),
тока возбуждения 1э = f(M) и тока якоря 1я = f(M), когда момент статической
нагрузки изменяется в пределах от +MfAAKc Д° -Ммакс- Как сказывается на
этих характеристиках наличие релейного элемента РЗ в схеме?
1 68 Глава 4. Регулируемые электроприводы постоянного токаСхема управления (рис. 4.30) имеет один недостаток. В на¬
чале переходного процесса торможения электропривода (осо¬
бенно при малых моментах статической нагрузки и большой
инерционности цепи возбуждения), когда ток возбуждения еще
не сменил знак, наблюдается всплеск двигательного момента,
происходящий из-за разницы в быстродействии КРТЯ и КРТВ.
Сказанное поясняют упрощенные кривые изменения регулируе¬
мых координат в электроприводе в переходном процессе тормо¬
жения (рис: 4.31). Рассматривается самый неблагоприятный слу¬
чай, когда процесс торможения начинается с холостого хода при¬
вода. Быстродействие контуров регулирования тока якоря и ско¬
рости принимается очень высоким, тогда напряжение Upc на вы¬
ходе PC и ток якоря 1я могут изменяться скачком.На отрезке времени 0 ... ti электропривод работает в устано¬
вившемся режиме, развивая скорость По. Так как Мс = 0, то 1я = 0.
В момент времени ti дается импульс на торможение, Upc мгно¬
венно изменяется до -Urcmakc, релейный элемент РЭ переклю¬
чается, изменяя знак сигнала задания на входе КРТВ, а на вход
КРТЯ подается через ФП сигнал на увеличение тока якоря. Так
как КРТЯ практически безынеционный, то ток 1я мгновенно уве¬
личится до заданного значения. Ток же возбуждения 1в мгновенно
измениться не может, и требуется отрезок времени U ... \2, когда
|8 уменьшится до нуля, и t2... t3; когда 1в нарастет до нужного от¬
рицательного значения. В результате разницы в быстродействии
КРТЯ и КРТВ на отрезке времени ti ... t2 двигатель будет разви¬
вать не тормозной, а двигательный момент М, вызывая ненужное
увеличение скорости вращения п.В реальной схеме ряд факторов (конечная величина быстро¬
действия контура регулирования скорости и плавное в связи с
этим изменение Upc, наличие момента статической нагрузки)
способствуют снижению ложных выбросов момента М на отрезке
времени ti... t2l но устранить их не могут.Для полного устранения упомянутых ложных выбросов мо¬
мента ранее между выходом ФП и входом КРТЯ включали логи¬
ческие переключающие устройства. Их назначение состояло в
Гпава 4. Регулируемые электроприводы постоянного тока 169Рис. 4.31. Кривые переходных процессов в электро¬
приводе с реверсом поля двигателя при торможении
170 Глава 4. Регулируемые электроприводы постоянного токатом, чтобы на вход КРТЯ подавать сигнал, равный нулю, если
знаки Upc и 1в не соответствовали друг другу. В этом случае уча¬
сток ti ... t2 ложного значения момента заменялся на бестоковую
паузу. Но можно обойтись и более простыми решениями [5]. Хо¬
рошие результаты дает замена релейного элемента РЭ на про¬
порциональный регулятор с зоной ограничения, благодаря чему
двигатель в зоне .малых нагрузок работает с ослабленным пото¬
ком. Это уменьшает величину изменения тока 1в при реверсе дви¬
гателя, снижает нагрев двигателя при малых нагрузках. Наличие
линейного участка на статической характеристике пропорцио¬
нального усилителя позволяет также простым путем ослабить
влияние оборотных пульсаций напряжения тахогенератора, при¬
водящих в установившемся режиме работы привода к чрезмер¬
ной амплитуде колебаний Upc и ложной работе узла реверса тока
возбуждения двигателя.4.8. Вентильный электроприводс параллельными регуляторамиВ типовой схеме электропривода с подчиненным регулирова¬
нием (п. 4.4) одновременная работа обратных связей по току
якоря и по скорости приводит к большим статическим и динами¬
ческим ошибкам по скорости при приложении момента статиче¬
ской нагрузки. Чтобы система электропривода, работающая в ус¬
ловиях частых перегрузок, обеспечивала достижение наиболь¬
шей возможной производительности, необходимо в зоне допус¬
тимых нагрузок механическую характеристику электропривода
иметь наиболее жесткую, а в зоне перегрузок - абсолютно мяг¬
кую. Для выполнения поставленного требования в системе элек¬
тропривода на первом участке должна работать только обратная
связь по скорости (или по напряжению), а на втором - только по
току якоря. Поэтому с целью уменьшения статического и динами¬
ческого падений скорости, вызванных приложением Мс, нужно
исключить на механической характеристике электропривода уча¬
стки с совместной работой обеих обратных связей - по току и по
напряжению на якоре.
Гпава 4. Регулируемые электроприводы постоянного тока 171Одним из вариантов решения поставленной задачи является
введение двух независимо работающих контуров регулирования
тока и напряжения на якоре, регуляторы которых подключаются
ко входу вентильного преобразователя через бесконтактное ло¬
гическое устройство [67].Функциональная схема электроприводаНа схеме (рис. 4.32) сигнал с выхода задатчика интенсивно¬
сти ЗИ AJ, пропорциональный задаваемому на якоре двигателя
М напряжению, сравниваясь с сигналом на выходе датчика на¬
пряжения ДН UV, поступает на вход регулятора напряжения PH
AV. Независимо от PH работает другой регулятор тока РТ АА. на
входе которого сравниваются сигнал задания максимального то¬
ка -U37 и сигнал с выхода датчика тока якоря ДТ UA. Выходы ре¬
гуляторов PH и РТ подключены к входам логической схемы, соб¬
ранной на диодах VD1 и VD2, источнике напряжения смещения
+UCM и резисторе R5. Выход логической схемы подключен к
управляющему входу нереверсивного тиристорного преобразо¬
вателя UZ.При работе системы электропривода, когда 1я < 1,м, регулятор
тока РТ насыщен до максимального положительного уровня из¬
быточным сигналом -U3T. Уровень напряжения на выходе PH,
задаваемый величиной Ызи, меньше, чем на выходе РТ. Логиче¬
ская схема, изображенная на рис. 4.32, всегда пропускает мень¬
шее из входных напряжений, т.е. в рассматриваемом режиме ди-
сд VD2 закрыт, a VD1 - открыт, и на вход преобразователя по¬
дано напряжение только с выхода PH. Схема работает в режиме
поддержания заданного напряжения на выходе преобразователя
UZ.При увеличении тока якоря 1я до 1м выходное напряжение ре¬
гулятора тока РТ начнет резко снижаться. Когда напряжение на
выходе РТ станет ниже выходного напряжения PH, диод VD2 от¬
кроется, a VD1 - откроется. Схема работает в режиме поддержа¬
ния (ограничения) заданного тока якоря. Если нагрузка на элек-
172 Глева 4. Регулируемые электроприводы постоянного тока+UcmРис. 4.32. Функциональная схема элекгропризода постоян¬
ного тока с параллельным включением регуляторовтропривод уменьшится, вновь работает контур регулирования
напряжения.Чтобы увеличить быстродействие каналов переключения то¬
ка и напряжения, конденсаторы в цепях обратных связей опера¬
ционных усилителей, реализующих регуляторы PH и РТ, включе¬
Гпава 4. Регулируемые электроприводы постоянного тока 173ны не на выходы регуляторов, а на общий выход логической схе¬
мы.Особенности настройки одноконтурной
системы регулирования напряженияКаждый из контуров регулирования в схеме (рис. 4.32) на¬
страивается независимо один от другого. Структура и параметры
регулятора РТ в контуре регулирования тока якоря выбираются,
как в обычной схеме подчиненного регулирования (п. 4.4). На¬
стройку контура регулирования напряжения КРН рассмотрим,
пользуясь структурной схемой (рис. 4.33 а). Все регулируемые
координаты представлены в относительных единицах. Выбор ба¬
зовых величин выполнен так же, как в п. 4.4.а)ЯЦПPHизнидиW-PHпWnЕП"-О1+1япР^япияя идКя1+ТяР•я'с ДТдР5)PH П ДВ1 ДВ2Рис. 4.33. Структурные схемы контура регулирования напряжения
на якоре двигателя: а) исходная; б) преобразованная
174 Гпава 4. Регулируемые электроприборы постоянного токаПреобразуем исходную структурную схему, для чего обрат¬
ную связь по ия приведем к выходной координате п. В преобра¬
зованной схеме (рис. 4.33 б) в прямом канале КРН. кроме регу¬
лятора напряжения PH и преобразователя П, включены звенья
ДВ1 и ДВ2, которые учитывают параметры силовой цепи двига¬
теля и преобразователя. При этом звеном с передаточной функ¬
циейWflBi (р) = Лп(р) / ДЕп (р) = 1 / (1 + Тм£ р + ТмгТяц р^)описываются статические и динамические свойства двигателя с
учетом параметров силовой цепи преобразователя, а звеном
ДВ2 с передаточной функциейЩв2 (Р) = Дп(р) / дия (р) = 1 / (1 + Тм р + Тм Тя р2) -свойства того же двигателя, но без учета параметров силовой
цепи преобразователя. Передаточные функции ДВ1 и ДВ2 были
получены после сворачивания части схемы (рис. 4.33 а), образо¬
ванной звеньями Д, ЯЦД и ЯЦП. На структурной схеме и в выра¬
жениях для передаточных функций обозначены: Кяц, TMs и ТЯц -
кратность тока короткого замыкания, электромеханическая и
электромагнитная постоянные времени электропривода с учетом
полного активного сопротивления силовой цепи "преобразова¬
тель - двигатель"; Кя, Тм и Тя - то же, но с учетом сопротивления
якорной цепи только двигателя; Кяп и Тяп - кратность тока корот¬
кого замыкания и электромагнитная постоянная времени силовой
цепи только преобразователя.Если бы последовательно включенных звеньев ДВ1 и ДВ2 не
было, то сигнал обратной связи по 11я совладал бы с Еп. Наличие
же этих звеньев указывает на то, что условия настройки и дина¬
мические свойстза КРН, когда преобразователь работает на хо¬
лостом ходу (т.е. двигатель отключен от преобразователя, а об¬
ратная связь замыкается по Еп) и когда преобразователь нагру¬
жен (при подключении двигателя обратная связь замыкается по
11я), могут не совпадать.
Глава 4. Регулируемые электроприводы постоянного тока 175Физическую картину несхожести динамических свойств кон¬
туров регулирования Ыя и Еп рассмотрим на физической модели
(рис. 4.34), где последовательному соединению звеньев ДВ1 и
ДВ2 соответствует электрическая схема замещения звена "пре¬
образователь-двигатель". Там же приведены их аппроксимиро¬
ванные частотные характеристики. На схеме Rn, RHn - величины
активных сопротивлений силовых цепей двигателя и преобразо¬
вателя; Ся = Тм / Rfl - динамическая емкость двигателя - емкость
эквивалентного конденсатора, который запасает столько же
электрической энергии, сколько запасается кинетической во
вращающихся частях электропривода; coi. со2 - частоты среза
контура саморегулирования ЭДС в двигателе с учетом и без уче¬
та параметров силовых цепей преобразователя.При неучете влияния индуктивностей силовых цепей двига¬
теля и преобразователя, когда l-я = 1-яп = 0, аппроксимированная
ЛАЧХ Ц двигателя по каналу передачи "ЭДС преобразователя -
напряжение на якоре" в диапазоне частот 0 < о < ©1 = 1 / Тме
совпадает с горизонтальной осью, затем при ои < со < сог = 1 / Тм
имеет единичный отрицательный наклон и, наконец, при ш > m2
снова идет горизонтально с коэффициентом усиления (см. рис.
4.34 б) К = сси / сог = Ря / (Ря + Ряп)-Rsnо—L_J-fЕпR*Сяииа)б)Рис. 4.34. Электрическая схема замещения (а) и апрок-
симирсванная ЛАЧХ (б) двигателя постоянного тока,
подключенного к преобразователю
176 Гпава 4. Регулируемые электроприводы постоянного токаОтмеченные особенности кривой Ц объясняются переменной
величиной сопротивления динамической емкости Ся двигателя
при разных частотах. При малых частотах, когда
Хс = 1 / ися > Rh + Яяп, на схеме замещения конденсатор Ся
можно заменить разрывом цепи, тогда Un ~ Еп. При ooi < со < сог
имеем Ra < Хс < Rя + Rnn, поэтому уменьшение Хс с ростом со
вызывает увеличение падения напряжения на Rnr\ и снижение
ия. Наконец, при высоких частотах Хс < Ra, т.е. имеется возмож¬
ность заменить конденсатор Ся закороткой.В диапазоне частот ссм ... со2, где кривая Ц имеет падающий
характер, звену "преобразователь-двигатель" свойственна от¬
стающая фазовая характеристика, поэтому при настройке КРН
частоту среза этого контура необходимо выбирать вне интервала
0)1 ... 0)2 .В более сложном случае, когда учитываются индуктивности
1_я и 1_Ял, аппроксимированная ЛАЧХ Li в диапазоне частот
coi < со < 0)2 имеет двойной наклон, обусловленный падением на¬
пряжения также и на 1_Ял. Здесь отмечается и больший отрица¬
тельный фазозый сдвиг.В общепромышленных электроприводах частоты о* и со2
обычно не превышают 30...40 рад/с. Полоса же равномерного
пропускания частот в вентильных преобразователях составляет
<оп = 200...300 рад/с и выше. Поэтому при настройке КРН жела¬
тельно его частоту среза сон выбирать в диапазоне ©2 < юн < соп.
При уменьшении сон по сравнению с рекомендованным значени¬
ем начинает сказываться неблагоприятное влияние параметров
силовых цепей двигателя и преобразователя, отмеченное выше.
При чрезмерном увеличении <он проявляются малые инерцион¬
ности в преобразователе.В диапазоне частот <о2 ... соп фазовая частотная характери¬
стика звеньев прямого канала КРН имеет значительный (обычно
более 120°) запас. Это дает возможность применить интеграль¬
ный регулятор напряжения PH, который отличается простотой
схемной реализации и позволяет снизить уровень помех на вхо¬
де СИФУ преобразователя. Кроме того, КРН с интегральным ре¬
Гпава 4. Регулируемые электроприводы постоянного тока 177гулятором менее чувствителен к изменению параметров отдель¬
ных звеньев, чем КРН с П- или ПИ-регулятором. Последнее об¬
стоятельство имеет принципиальное значение из-за ограничен¬
ного диапазона сог ... соп оптимальных значений частоты среза
КРН.Как показал опыт наладки электроприводов с параллельными
регуляторами, КРН с интегральным регулятором PH имеет
высокое быстродействие, оцениваемое частотой среза
юн * 250...300 рад/с. Поэтому действие различных возмущений
(колебания напряжения питающей сети, приложение статической
нагрузки) практически не влияет на величину напряжения на яко¬
ре двигателя. Вместе с тем, высокодинамичные электроприводы
имеют, как правило, малые значения отношения m = Тм / Тя- На¬
пример, в электроприводах реверсивных станов горячей прокатки
оно доходит до m = 0,4...0.5. В результате процессы, вызванные,
например, ударным приложением нагрузки, характеризуются вы¬
сокой степенью колебательности. Для устранения перерегулиро¬
вания тока якоря при набросе статической нагрузки в этом случае
очень эффективной оказывается гибкая обратная связь по току
якоря, включенная параллельно обратной связи по напряжению.
На схеме (рис. 4.32) она реализована последовательно включен¬
ными конденсатором Сз и резистором R3, включенными между
выходными зажимами датчика тока ДТ и входом регулятора PH.
7 78 Гпава 5. Регулируемые электроприводы переменного токаГлава 5. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ
ПЕРЕМЕННОГО ТОКА5.1. Общие положения. Преимущества
электроприводов переменного токаОсновным видом регулируемого электропривода в настоя¬
щее время является электропривод постоянного тока. Вместе с
тем в последние десятилетия расширяется применение регули¬
руемых электроприводов переменного тока, которые имеют ряд
определенных преимуществ.Прежде всего, электроприводы на базе электродвигателей
переменного тока оказываются более выгодными в эксплуата¬
ции. Отсутствие коллектора и требующего постоянного внимания
щеточно-контактного узла позволяют резко снизить объемы и пе¬
риодичность, а следовательно, и стоимость технического обслу¬
живания электроприводов переменного тока. Бесконтактное ис¬
полнение электродвигателей переменного тока позволяет бес¬
препятственно и эффективно применять их в случаях, когда ис¬
пользование электродвигателей постоянного тока весьма стес¬
нено из-за тяжелых условий работы (металлургия, транспортные
средства) или даже невозможно (химически агрессивные произ¬
водства, погружные установки, взрывоопасные среды).Далее, электродвигатели переменного тока имеют меньшую
стоимость, чем электродвигатели постоянного тока. Коллектор
электрических машин постоянного тока содержит много медных
пластин, разделенных прослойками слюды, и требует тщатель¬
ного изготовления. Электрические машины переменного тока
имеют более простую конструкцию и технологию изготовления.
Например, асинхронные короткозамкнутые электродвигатели
часто выполняются с алюминиевой литой обмоткой на роторе,
которая не изолируется от пластин сердечника ротора. Такой
двигатель имеет малый момент инерции ротора, может долго
работать при повышенных температурах и угловых скоростях
вращения.
Гпава 5. Регулируемые электроприводы переменного тока 179При проектировании электродвигателей постоянного тока
приходится учитывать ограничения по допустимым току и напря¬
жению на якоре. В результате невозможно выполнить электриче¬
ские машины постоянного тока выше так называемой предельной
мощности. В электрических машинах переменного тока эти огра¬
ничения отсутствуют, что позволяет иметь агрегаты большой
единичной мощности (цементные и рудоразмольные мельницы,
нагнетатели для газопроводов), на прокатных станах перейти от
дорогих двух- и трехъякорных электрических машин к одноякор¬
ным, на экскаваторах добиться больших ускорений при внезап¬
ном стопорении ковша, в металлообработке получить сверхвысо¬
кую чистоту поверхности при обработке деталей с угловой скоро¬
стью вращения до 50...100 тыс. об/мин.Следует признать, что регулируемые электроприводы пере¬
менного тока пока еще не получили той степени распростране¬
ния, которая соответствовала бы их технико-экономическим воз¬
можностям. Конечно, здесь есть и объективные причины: элек¬
тропривод постоянного тока еще далеко не исчерпал своих воз¬
можностей и продолжает совершенствоваться, переход на новый
тип электропривода связан с изменением и освоением соответ¬
ствующих технологий, оснастки, технической документации.
Нельзя не указать также на недостаточный сегодняшний уровень
подготовки выпускников электротехнических специальностей ву¬
зов в области регулируемого элек¬
тропривода переменного тока.Требования технологического
процесса к электроприводам пере¬
менного тока остаются в принципе
такими же, как и к электроприводам
постоянного тока. Для статических
режимов работы их в большинстве
случаев можно обобщить в виде
привычной для электроприводов по¬
стоянного тока желаемой прямо¬
угольной (или почти прямоугольной)М.МАХРис. 5.1. Желаемая механи¬
ческая характеристика регули¬
руемого электропривода
180 Глава 5. Регулируемые электроприводы переменного токамеханической характеристики, содержащей два участка (рис.5.1):- участка 1 поддержания заданного значения скорости в диа¬
пазоне допустимого изменения рабочих нагрузок и- участка 2 ограничения момента при перегрузках электро¬
привода со стороны рабочего механизма.На каждом из этих участков качество регулирования соответ¬
ствующей координаты (скорости или момента) оценивают по об¬
щепринятым критериям (статической и динамической ошибке,
диапазону регулирования, величине перерегулирования, частоте
среза, запасу устойчивости и т.д.). Другими словами, система
оценок качества процессов регулирования в электроприводах
переменного тока остается такой же, как и в электроприводах по¬
стоянного тока.Как и в электроприводах постоянного тока, наиболее распро¬
страненной структурой управления в электроприводах перемен¬
ного тока остается система подчиненного регулирования (рис.5.2), з которой внутренний контур регулирования момента КРМ
охвачен внешним контуром регулирования скорости. Внешний
контур содержит регулятор скорости PC (с блоком ограничения
БО), датчик обратной связи по скорости ДОС, а звеном Д учиты¬
ваются динамические свойства механических звеньев электро¬
привода (вращающихся масс якоря с присоединенными механи-Рис. 5.2. Обобщенная структурная схе¬
ма электропривода с подчиненным регу¬
лированием координат
Глава 5. Регулируемые электроприводы переменного тока 181ческой передачей и рабочим механизмом).Если в электроприводах постоянного тока вариантов реали¬
зации КРМ относительно немного (по сути, это - или контур регу¬
лирования тока якоря в электроприводах с якорным управлени¬
ем, или контур регулирования тока возбуждения двигателя в
схемах "источник тока - двигатель"), то в электроприводах пере¬
менного тока схемное разнообразие значительно богаче, что
обусловлено и большим числом применяемых типов двигателей
переменного тока (синхронных, асинхронных, двойного питания),
и возможных вариантов косвенного измерения и регулирования
величины электромагнитного момента в электрической машине
переменного тока.5.2. Понятие векторного регулирования
электромагнитного момента в электрической машине
переменного токаЭлектромагнитный момент, развиваемый машиной перемен¬
ного тока, можно представить как результат взаимодействия маг¬
нитных полей, создаваемых токами, протекающими по обмоткам
статора и ротора. На рис. 5.3 а изображен в разрезе синхронный
двигатель с нанесенными на ротор и статор токовыми нагрузками
и соответствующими им потокосцеплениями Ч^р и Ч^с, которые
изображены в виде пространственных векторов. Здесь же нане¬
сена система прямоугольных координат, жестко связанная с ро¬
тором (оси d и q). При этом одна из осей (ось d) направлена
здоль оси катушки ротора, а другая (ось q) - поперек. Когда на
трехфазную обмотку статора подано трехфазное напряжение,
токи проводников обмотки статора создают вращающееся маг¬
нитное поле, которое увлекает за собой ротор.На рис. 5.3 б изображена упрощенная векторная диаграмма,
построенная в предположении, что в двигателе нет потоков рас¬
сеяния и отсутствует падение напряжения в цепи обмоток стато¬
ра. Вектор результирующего потокосцепления двигателя (пото-
косцепления в воздушном зазоре) 21 равен геометрической сум¬
182 Глава 5. Регулируемые электроприводы переменного токаме составляющих Тр и Ус- Составляющая Н^р направлена по оси
d. Направление и величина вектора Ус определяются мгновен¬
ными значениями токов фазных обмоток статора.В большинстве современных высококачественных регули¬
руемых электроприводов переменного тока реализован принцип
"векторного регулирования" электромагнитного момента [49,66].
В основу этого принципа положено известное из теории электри¬
ческих машин выражение для электромагнитного момента:Здесь к = 0,5 m / Lu - коэффициент пропорциональности;
m - число фаз двигателя; LM - индуктивность току намагничива¬
ния.Если сопоставить (5.1) с векторной диаграммой потокосцеп-
лений в электрической машине (рис. 5.3 б), то площадь S,4, огра¬
ниченная векторами-слагаемыми и ^с и вектором-суммой ш
(площадь моментного треугольника в электрической машине),
пропорциональна величине электромагнитного момента, т.е.М = к | у/p х I = к I Жр х У. I = к | х w |- (5.1)а)б)Рис. 5.3. Токовые нагрузки статора и ротора (а) и век¬
торная диаграмма потокосцеплений в электрической
машине (б) на примере синхронного двигателя
Гпава 5. Регулируемые электроприводы переменного тока 183М = 2 к . (5.1а)С учетом сказанного можно так сформулировать первое пра¬
вило векторного регулирования электромагнитного момента:
чтобы косвенным способом регулировать величину электро¬
магнитного момента в электрической машине, достаточно
каким-либо способом изменить площадь моментного тре¬
угольника, т. е. векторного треугольника, соответствующего
выражениюЖ = Шр + Ж ■«• Синхронная машина, поперечный разрез которой изображен на рис.
5.3 а, работает в двигательном режиме. Укажите направление зращения
ротора (по часовой стрелке или против). Чем Вы при этом руководствуе¬
тесь?В регулируемом электроприводе переменного тока наблюда¬
ется избыточность управляющих воздействий, поэтому одно и то
же значение момента и скорости электродвигателя, требуемое по
условиям ведения технологического процесса, может быть реа¬
лизовано при разных электромагнитных состояниях электродви¬
гателя, соответствующих моментным треугольникам различной
формы.Казалось бы, оптимизация режимов электропривода должна
производиться на основе технико-экономического критерия, в ко¬
тором с определенными весовыми коэффициентами должны
входить массогабаритные и стоимостные показатели электро¬
привода, суммарные потери в электродвигателе и преобразова¬
теле частоты, потребление реактивной мощности от питающей
сети.Однако неоднозначность возможных режимов электроприво¬
да, скудность исходной информации заставляют отказываться от
реализации строго оптимальных режимов, а отдавать предпочте¬
ние режимам более простым. Правда, последние по своим тех¬
нико-экономическим показателям часто оказываются несущест¬
венно хуже оптимальных. Например, в синхронных частотнорегу¬
184 Гпава 5. Регулируемые электроприводы переменного токалируемых электроприводах часто указывают на режим [17,49,66],
когда во всем диапазоне нагрузок обеспечивается работа элек¬
тродвигателя, во-первых, с магнитным потоком в зазоре не выше
номинального значения и, во-вторых, - с коэффициентом мощ¬
ности, равным или близким единице.На векторной диаграмме первое условие означает выполне¬
ние неравенстваФ < Фн,где Фн - величина номинального потока электродвигателя. Этим
условием исключается режим насыщения магнитной системы
электродвигателя.Чтобы учесть второе условие, достроим векторную диаграм¬
му (рис. 5.3 б) векторами фазных тока Ic и напряжения на стато¬
ре Uc. Здесь вектор тока Ic параллелен вектору и/с , а вектор Uc
(при неучете падения напряжения на статорной обмотке элек¬
тродвигателя) - ортогонален вектору у/ потокосцепления в за¬
зоре. Коэффициент мощности на зажимах статора электродвига¬
теля равен единице, если угол ф между векторами ic и Uc равен
нулю. Это будет выполняться, если угол между векторами vj/c и vj/
прямой.В зависимости от конкретных условий можно принять и обос¬
новать другие законы возможного управления электромагнитны¬
ми координатами электродвигателя, которым соответствуют
иные требования к форме его векторной диаграммы.Подытоживая сказанное, можно сформулировать второе пра¬
вило векторного регулирования электромагнитного момента:
чтобы при регулировании момента электродвигателя до¬
биться оптимальных режимов работы электропривода, необ¬
ходимо в соответствии с выбранными критериями оптимиза¬
ции соблюдать (с помощью системы регулирования) опреде¬
ленную форму моментного треугольника этого электродви¬
гателя.Графическая интерпретация выражения (5.1) оказывается
весьма удобной при построении регулируемых электроприводов
Глава 5. Регулируемые электроприводы переменного тока 185переменного тока. Естественно, в этом случае система регулиро¬
вания электромагнитного момента получается многомерной. Су¬
ществуют разные пути ее реализации, которые удобнее класси¬
фицировать по способам возможного построения моментного
треугольника в электрической машине.Во-первых, треугольник можно построить по трем сторонам.
Технически это означает реализацию внутренней подсистемы
косвенного регулирования электромагнитного момента как сово¬
купности трех параллельно работающих систем регулирования
величин потокосцеплений уР, ус и у. При этом сигнал задания
желаемой величины момента может поступать с выхода регуля¬
тора скорости PC (рис. 5. 2), а требуемый закон изменения вели¬
чин ур, ус и у - формироваться соответствующими нелиней¬
ными блоками, включенными между регулятором PC и соответ¬
ствующими контурами регулирования величин потокосцеплений.Чтобы в общем случае выполнить контур регулирования ка¬
кой-либо величины, необходимо ее уметь измерять (иметь соот¬
ветствующий датчик) и в функции этой величины воздействовать
на регулятор. Под этим углом зрения рассмотрим условия реали¬
зуемости системы косвенного регулирования момента с выход¬
ными координатами ур, ус и у.В электрической машине существует только результирующий
поток Ф, а составляющие потокосцеплений уР и ус вводятся ис¬
кусственно для понимания механизма образования и регулиро¬
вания магнитного потока в электрической машине. Здесь наблю¬
дается определенная аналогия с методом, например, контурных
токов в цепях постоянного тока, когда контурный ток (или его со¬
ставляющая) в какой-либо ветви электрической схемы может и
не совпадать с истинным током этой ветви.По этой причине первый контур регулирования нельзя вы¬
полнить как контур прямого регулирования величины уР| так как
эта величина физически не существует. Но вместо составляю¬
щей потокосцепления ур можно регулировать величину соответ¬
ствующей ей намагничивающей силы FP, а еще удобнее - вели¬
186 Глава 5. Регулируемые электроприводы переменного токачину тока в обмотке ротора. Аналогично можно поступить и с со¬
ставляющей потокосцепления wc-Третья составляющая - потокосцепление \|/ в зазоре маши¬
ны - поддается прямому измерению, однако существующие
средства измерения магнитного потока в зазоре электрической
машины (например, с помощью датчиков ЭДС Холла или иным
путем), применительно к общепромышленным электроприводам
технически неудобны и несовершенны, что заставляет отказы¬
ваться от систем регулирования момента поддержанием трех
величин составляющих потокосцеплений в электрической маши¬
не. Правда, системы электропривода, реализующие этот способ
формирования электромагнитного момента, существуют, напри¬
мер, общеизвестная система Transvektor [66, 68].Во-вторых, моментный треугольник можно построить по двум
сторонам и углу между ними (т.е. по величинам \j/p и ц/с и углу
между этими векторами). Примером высококачественной реали¬
зации данного способа является синхронный частотнорегули¬
руемый электропривод цементной мельницы, разработанный
фирмой ВВС [72], положительный опыт которого неоднократно
использовался при разработке электроприводов переменного то¬
ка [17,49].Строить все три названные подсистемы по замкнутому прин¬
ципу совсем необязательно, можно, например, с целью упроще¬
ния электропривода систему регулирования угла между вектора¬
ми u/р и wc выполнять как разомкнутую (т.е. без обратных свя¬
зей). Тогда заданный угол между этими векторами устанавлива¬
ется при наладке электропривода и затем при работе не изменя¬
ется и не регулируется. Этому случаю соответствует весьма ши¬
рокий класс частотнотоковых систем формирования электромаг¬
нитного момента [12]. Они оказались весьма эффективными, а в
станочных и специальных следящих электроприводах перемен¬
ного тока получили почти монопольное распространение.Наконец, в-третьих, моментный треугольник можно строить
по величине тока ротора lF и проекциям вектора тока статора на
продольную и поперечную оси электрической машины (оси d и q).
Гпава 5. Регулируемые электроприводы переменного тока 187Этот способ, далеко не самый простой в схемной реализации,
положен в основу частотнорегулируемых синхронных электро¬
приводов большой мощности с высокими требованиями к качест¬
ву динамики и энергетики процессов регулирования.5.3. Синхронный электропривод с частотнотоковым
регулированием моментаКонструирование системы управленияЭлектромагнитный момент в синхронном двигателе создает¬
ся за счет взаимодействия магнитодвижущих сил (МДС), созда¬
ваемых обмоткой ротора FP и обмотками статора Fc. Для регули¬
рования момента необходимо уметь изменять величину этих
МДС и пространственный угол между ними в зазоре электриче¬
ской машины. В схеме частотнотокового регулирования этот угол
обычно постоянный и не регулируется.Примем дпя простоты (что, в общем-то, соответствует мно¬
гим реальным электроприводам) FP = const. Это бывает в элек¬
троприводах с питанием обмотки возбуждения от источника по¬
стоянного нерегулируемого напряжения или от постоянных маг¬
нитов. Пространственно вектор этой МДС поворачивается меха¬
ническим путем при вращении ротора, совпадая с его магнитной
осью.Управлять же вектором FCl регулируя его амплитуду, а также
угловые положение и скорость движения, будем, изменяя токи в
фазных обмотках статора СД с помощью преобразователя час¬
тоты. Для этого каждую из обмоток подключим на выходы преоб¬
разователей UZA, UZB и UZC, работающих в режиме источников
тока (рис. 5.4). В качестве примера источника тока фазы А стато¬
ра (рис. 5.5) может быть взят тиристорный реверсивный преоб¬
разователь постоянного тока ТПА, охваченный отрицательной
обратной связью по току (датчик тока ДТА UAA) и настроенный
на заданные показатели качества регулятором тока РТА ААА.
188 Глава 5. Регулируемые электроприводы переменного тока<соCDОосгDdDОLG5.4. Схема функциональная синхронного электропривода с частотнотоковым управлением.
Гпава 5. Регулируемые электроприводы переменного тока 189Если на входы этих источников тока подать управляющие на¬
пряжения, образующие симметричную трехфазную систему и ре¬
гулируемые по амплитуде и частоте, то получится трехфазный
преобразователь частоты с непосредственной связью (НПЧ).Рассмотрим, как можно выполнить узел формирования этих
управляющих напряжений.В качестве первого предположительного варианта возьмем
самое простое и наглядное решение: применим маломощныйРис. 5.5. Пример реализации источника тока фазы А
статораприборный трехфазный синхронный генератор СГ, статорные
обмотки которого подключены к входным зажимам источников
тока в цепях статорных обмоток двигателя MS. Изменяя угловую
скорость вала приборного СГ, можно регулировать частоту ста¬
торного напряжения (и тока) MS, а изменяя ток возбуждения ро¬
тора СГ - амплитуду фазных напряжений (и токов) MS. Но в этой
схеме не удается сформировать сигнал задания вблизи скорости,
равной нулю, в результате электропривод не может реализовать,
190 Гпава 5. Регулируемые электроприводы переменного токанапример, такой важный в регулируемом электроприводе режим,
как работа электропривода на упор.Тогда заменим синхронный генератор на сельсин 2С BE, вы¬
ходные статорные обмотки которого через демодуляторы ДМА,
ДМВ и ДМС (UA, UB и UC) подключены к входным цепям источ¬
ников статорных токов MS. В этом случае амплитуда задающих
сигналов 1!аз, из*, Uc3 на входе НПЧ регулируется изменением
амплитуды высокочастотного (обычно 0,4...2,5 кГц) напряжения,
подаваемого на обмотку ротора сельсина 2С, а частота - угловой
скоростью вращения его вала. В этой схеме задающие сигналы
поддаются формированию во всем диапазоне желаемых частот
напряжения на статоре.Однако при независимом задании угловой скорости враще¬
ния ротора 2С в регулируемом синхронном электроприводе со¬
храняются недостатки, характерные для традиционного синхрон¬
ного нерегулируемого по скорости (например, работающего от
промышленной сети 50 Гц) электропривода: склонность к коле¬
баниям угловой скорости ротора синхронного двигателя MS при
колебаниях момента статической нагрузки и опасность выпаде¬
ния его из синхронизма при перегрузках. Между тем типовая ме¬
ханическая характеристика регулируемого электропривода пред¬
полагает режим поддержания заданного предельного момента
при перегрузках (см. участок 2 механической характеристики на
рис. 5.1), но отнюдь не выпадение из синхронизма.Причиной выпадения ротора синхронного двигателя из син¬
хронизма в электроприводах с независимым заданием частоты
напряжения его на статорных обмотках является то, что при уве¬
личении момента статической нагрузки растет угол между векто¬
рами у/ и и/р (угол нагрузки в синхронной машине). Площадь же
моментного треугольника может увеличиваться, лишь, когда этот
угол менее 90 градусов, после чего векторы МДС Fc и Fp вра¬
щаются с разными угловыми скоростями, соответствующими ре¬
жиму выпадения двигателя из синхронизма. Между тем боль¬
шинство рабочих механизмов, оборудованных регулируемым
электроприводом, требует другого алгоритма работы электро¬
Гпава 5. Регулируемые электроприводы переменного тока 191привода при перегрузках: электропривод должен развивать по¬
стоянный момент, соответствующий максимально допустимому
значению, но не выпадать из синхронизма. Этому режиму соот¬
ветствует участок 2 типовой механической характеристики регу¬
лируемого электропривода (рис. 5.1).Решить поставленную задачу можно, если заставить не ротор
синхронного- двигателя следить за "убегающим" с частотой пи¬
тающей статорные обмотки сети вектором МДС статора Fg, а
вектор Fc ориентировать относительно Fp. Этого можно добить¬
ся, если механически связать вал сельсина 2С с валом двигателя
MS. В этом случае форму моментного треугольника, заданную,
например, при покое электропривода, удастся сохранить и при
его движении, так как угол поворота векторов Fp_ и £с оказывает¬
ся одинаковый.В результате электромеханические свойства регулируемого
по частоте синхронного электропривода радикально изменяются:
из источника регулируемой скорости (механические характери¬
стики горизонтальны) синхронный электропривод превращается
в источник регулируемого момента (механические характеристи¬
ки вертикальны). Теперь достаточно этот электропривод охва¬
тить внешним контуром регулирования скорости, чтобы получить
стандартную структуру электропривода (рис. 5.2).Функциональная схема электроприводаСтаторные обмотки трехфазного синхронного двигателя MS
(рис. 5.4) подключены к выходным зажимам преобразователя
частоты с непосредственной связью НПЧ. Этот преобразователь
выполнен на трех реверсивных управляемых выпрямителях UZA,
U2B и UZC, работающих в режиме управляемых источников тока.
Контуры регулирования токов фаз статора настраиваются иден¬
тично друг другу, соответствуют функциональной схеме (рис. 5.5)
и на рис. 5.4 для краткости не указаны. Цепь ротора MS подклю¬
чена к источнику постоянного нерегулируемого напряжения.Последовательно включенные модулятор МД U, сельсины 1C
и 2С (ВС и BE) и демодуляторы ДМА, ДМВ и ДМС (UA, UB и UC)
192 Глава 5. Регулируемые электроприводы переменного токаобразуют узел задания фазных токов статора двигателя MS.
Частота коммутирующего (опорного) напряжения, на котором ра¬
ботают модулятор, сельсины и демодуляторы, выбирается зна¬
чительно выше частоты напряжения на статоре MS. Напряжения
на выходах демодуляторов ДМА, ДМВ и ДМС образуют симмет¬
ричную трехфазную систему, так как магнитные оси обмоток ста¬
тора сельсина 2С расположены под углом 120 градусов. Ампли¬
туда этих напряжений пропорциональна величине напряжения на
входе модулятора, а частота - разнице угловых скоростей вра¬
щения роторов сельсинов 1C и 2С. В процессе работы схемы ро¬
тор 1C заторможен, а ротор 2С механически связан с валом СД
так, чтобы электрические скорости вращения роторов 2С и MS
были одинаковы. В этом случае частота напряжения на выходе
каждого из демодуляторов (а, следовательно, и частота напря¬
жения на статоре MS) всегда соответствует скорости вращения
сельсина 2С. Сельсин 1C облегчает настройку схемы управле¬
ния, позволяя устанавливать заранее требуемое значение угла
между векторами намагничивающих сил ротора и статора. В этом
случае говорят, что с помощью 1C производят начальную про¬
странственную ориентацию вектора магнитодвижущей силы (а
следовательно, и потокосцепления) статора относительно рото¬
ра.Все описанные выше элементы схемы образуют внутренний
контур косвенного регулирования электромагнитного момента
MS. Внешним здесь является контур регулирования скорости
вращения вала двигателя, который, кроме контура регулирова¬
ния момента MS содержит также регулятор скорости PC, датчик
скорости ДС с тахогенератором ТГ.Задатчик интенсивности ЗИ позволяет сформировать про¬
цессы разгона и торможения электропривода с заданным тем¬
пом.Работа электропривода в установившихся режимахРассмотрим сначала работу внутреннего контура регулиро¬
вания электромагнитного момента двигателя при неизменной ве¬
Гпава 5. Регулируемые электроприводы переменного тока 193личине сигнала UPCl поданного на вход модулятора МД. Предпо¬
ложим, что вал двигателя преднамеренно заторможен. Тогда ро¬
тор сельсина 2С неподвижен. Если теперь на вход модулятора
МД подать постоянное напряжение (например, с выхода регуля¬
тора PC), то на выходах демодуляторов установятся постоянные
напряжения, а по обмоткам фаз статора двигателя будут проте¬
кать токи, создающие МДС якоря (статора) машины. Амплитуду
этой МДС можно менять, если изменять величину напряжения на
входе МД. Направление этой магнитодвижущей силы (точнее -
пространственное положение максимума, например, положи¬
тельной полуволны МДС статора вдоль окружности воздушного
зазора машины) можно задавать, поворачивая ротор сельсина
1C или 2С. Можно, например, сельсином 1C выбрать такое на¬
чальное пространственное положение МДС якоря относительно
оси катушки ротора двигателя MS, чтобы электромагнитный мо¬
мент М, развиваемый MS при заданных значениях МДС обмоток
ротора и статора, был наибольшим. В этом случае пространст-
аенные оси катушки ротора и МДС якоря образуют угол 90 граду¬
сов. Естественно, если установить начальный пространственный
угол между осями рассматриваемых МДС равный нулю, то элек¬
тромагнитный момент синхронного двигателя тоже будет равен
нулю, хотя по обмоткам статора и будут протекать токи.Если теперь статический момент Мс на валу двигателя
уменьшить так, что Мс < М, то ротор MS придет в движение. При
этом он будет одновременно и на одинаковый угол поворачивать
э зазоре машины и вектор МДС катушки ротора (так как она уста¬
новлена на роторе) и вектор МДС, создаваемой токами в обмот¬
ках статора (так как ротор сельсина 2С механически жестко свя¬
зан с валом MS). В итоге величина угла взаимной ориентации
векторов МДС обмоток ротора и статора двигателя при движении
машины остается такой же, какой ее установили при покое. В ре¬
зультате электромагнитный момент, развиваемый двигателем,
остается неизменным от скорости вращения двигателя (конечно,
при неизменной величине напряжения на входе модулятора МД).
Механическая характеристика электропривода в этом режиме
194 Гпава 5. Регулируемые электроприводы переменного токаполучается абсолютно мягкой. Частота напряжения на статоре
двигателя автоматически устанавливается равной его скорости
вращения. При п = const токи фаз статора - синусоидальные
кривые со сдвигом фаз на 120 градусов. В работающей системе
электропривода изменение величины электромагнитного момен¬
та двигателя производится изменением величины напряжения на
входе модулятора МД с помощью регулятора скорости PC.Итак, функционально рассматриваемая система электропри¬
вода выполнена как двухконтурная схема подчиненного регули¬
рования, в которой внутренним контуром является контур кос¬
венного регулирования электромагнитного момента двигателя
(он содержит три параллельных канала регулирования фазных
токов статора), а внешним контуром - контур регулирования ско¬
рости вращения электропривода с обратной связью по скорости.
Регулирование величины электромагнитного момента синхронно¬
го двигателя достигается в рассматриваемой схеме за счет из¬
менения амплитуды токов фаз статора пропорционально напря¬
жению на выходе PC при фиксированной величине угла ориента¬
ции вектора МДС статора относительно магнитной оси обмотки
ротора.Вывод соотношения для величины
электромагнитного момента двигателяФормирование величины электромагнитного момента двига¬
теля производится в следующей последовательности: сначала в
узле задания фазных токов напряжение на выходе регулятора
скорости Upc, поступающее на вход модулятора МД, преобразу¬
ется в систему трех напряжений иАэ, U53 и 11Сз, которые образу¬
ют симметричную трехфазную систему и соответствуют желае¬
мым величинам фазных токов статора; затем в трех параллельно
работающих контурах регулирования токов фаз статора проис¬
ходит преобразование сигналов 1)Аз, иВз и 1)Сз в мгновенные
значения токов фаз статора 1А, 1з и 1с и, наконец, самой элек¬
трической машиной MS производится преобразование токов 1А, 1В
и 1с в величину электромагнитного момента двигателя.
Гпаза 5. Регулируемые электроприводы переменного тока 195Рассмотрим основные соотношения, которые характеризуют
принцип работы вышеназванных узлов, входящих в контур регу¬
лирования электромагнитного момента двигателя.В узле задания фазных токов частота коммутирующего на¬
пряжения выбирается значительно выше частоты питающей ти¬
ристорные преобразователи сети, а процессы преобразования
сигналов в этом узле протекают на порядок быстрее процессов
регулирования величины электромагнитного момента двигателя.
Принимая поэтому узел задания фазных токов безынерционным,
запишем следующие уравнения его состояния:Uag = куз Upc sin etc iUb3 = куз Upc sin (ас -120°); (5.2)Uc3 = куз Upc sin (ас +120°).Здесь куз - коэффициент передачи последовательно вклю¬
ченных модулятора МД, сельсинов 1C и 2С и одного из демоду¬
ляторов при таком взаимном положении роторов сельсинов, ко¬
гда сигнал на выходе соответствующего демодулятора наиболь¬
ший; Upc - напряжение на выходе регулятора PC; ac - угол пово¬
рота Еала ротора сельсина 2С.За начало отсчета можно взять любое положение ротора 2С.
С целью удобства записи последующих выражений в качестве
начального взято такое положение ротора сельсина 2С, когда
напряжение на выходе демодулятора ДМА проходит через нуль в
положительном направлении.При описании процессов, происходящих в контурах регулиро¬
вания фазных токов, воспользуемся структурной схемой {рис.
5.6). Здесь РТА, ТПА, ОФА и ДТА - регулятор тока, тиристорный
преобразователь, цепь обмотки фазы статора и датчик тока фа¬
зы А статора двигателя, иэд, Upr, 1)дт - напряжения задающее и
на выходах регулятора тока и датчика тока фазы А; 1А - ток в об¬
мотке фазы А статора; ЕА - ЭДС преобразователя ТПА; E0Ai
Еса - ЭДС. обусловленные наличием взаимоиндуктивности меж-
196 Гпава 5. Регулируемые электроприводы переменного токаЕса ЕваРис. 5.6. Структурная схема контура регулирования тока фазы А
статора СДду обмоткой фазы А статора и обмотками В и С статора; ЕРА -
ЭДС, обусловленная наличием взаимоиндуктивности между об¬
моткой фазы А статора и обмоткой ротора.Для контура регулирования фазного тока 1А ЭДС Ева, Еса и
Ера являются внешними возмущениями. Их влияние на точность
поддержания заданного значения тока фазы статора можно ос¬
лабить, если настроить контур регулирования тока на высокое
быстродействие и минимум ошибки регулирования. Как показал
опыт наладки промышленных синхронных электроприводов с ти¬
ристорными преобразователями частоты, достигнутое быстро¬
действие контура регулирования тока фазы статора оценивается
частотой среза 200...300 рад/с. При таких высоких показателях
настройки контуров регулирования фазных токов можно считать,
что влияние оцениваемых возмущений практически подавлено.Физически неучет приложенных возмущений означает, что за
счет энергичной во времени и точной по результату работы ка¬
нала отрицательной обратной связи по току U ЭДС преобразо¬
вателя Еа успевает измениться вслед за приложенными возму¬
щениями Ева, Еса и Ера так, что при этом ток фазы 1А остается
практически неизменным, соответствующим сигналу задания 1)за-
С учетом сказанного будем считать, что, во-первых, рабо¬
та контуров регулирования фазных токов статора протекает
автономно, а во-вторых, эти контуры безынерционны, т. е.
Глава 5. Регулируемые электроприводы переменного тока 197токи фаз статора без искажений во времени и по амплитуде
воспроизводят напряжения на выходах соответствующих демо¬
дуляторов. Тогда для фазных токов можно записать уравне¬
ния:U - ккрт Ua3IIb = ккрт U33; (5.3)lc = ккрт Uc3iгде ккрт - коэффициент усиления замкнутого контура регулирова¬
ния тока фазы.При определении выражения для электромагнитного момен¬
та, развиваемого синхронным двигателем, воспользуемся энер¬
гетическим принципом, учитывая, что в процессе электромехани¬
ческого преобразования энергии изменение электромагнитной
энергии W3M, запасенной в магнитосвязанных катушках, входя¬
щих в электрическую машину, тратится на совершение механи¬
ческой работы:d Wsm = М da ,откудаМ = dW3M / da .Здесь dW3M - приращение электромагнитной энергии, М -
текущее значение электромагнитного момента электрической
машины, da - приращение угла поворота вала электрической
машины.В многообмоточной системе, содержащей п магнитосвя¬
занных обмоток,W3M = 0.5 S L| I,2 + .Б Lu I. ь.Lel ‘где I,, lj - токи в обмотках с номерами in]; Ц , L (J - собствен¬
ные и взаимные индуктивности обмоток с соответствующими ин¬
дексами.
198 Гпава 5. Регулируемые электроприводы переменного токаВ неявнополюсном синхронном двигателе электромагнитная
энергия, запасенная в порознь взятых обмотках фаз статора А, В,
С и ротора, и энергия, обусловленная взаимодействием обмоток
фаз статора, не вызывает вращающего момента, так как не из¬
меняется от величины угла поворота вала ротора. Поэтому при
определении величины электромагнитного момента следует учи¬
тывать лишь составляющую электромагнитной энергии, которая
учитывает взаимодействие обмотки ротора с обмотками фаз А, В
и С статора. ТогдаМ = МА + Mb + Me = d(iA ip Lap ) / deep + (5.4)
+ d(ie ip Lbp ) I dap + d(ic ip Lcp) I dap .Здесь MA, Mb и Mc - составляющие электромагнитного мо¬
мента двигателя, обусловленные взаимодействием фазных то¬
ков А, В и С статора с полем ротора; Lap , Lbp , Lcp - взаимные
индуктивности обмоток А, В и С фаз статора с обмоткой ротора.Взаимные индуктивности обмоток статора с обмоткой ротора
являются периодическими функциями угла поворота вала ротора
СД, достигая своего максимального значения при совпадении
осей обмоток статора с осью обмотки ротора:Lap = Lm sin ap ;Lbp =LMsin(aP -120°); (5.5)Lcp = Lm sin (ap + 120°).За начальное положение угла поворота вала ротора здесь
взято взаимно ортогональное положение оси обмотки ротора с
осью обмотки фазы А статора.С учетом (5.5) выражение (5.4) для электромагнитного мо¬
мента запишется следующим образом:М = d[iA ipLwsinap + IbIpLm sin(ap - 120°) ++ ic ip Lm sin(ap + 120°)] / daP == iP Lm [iA cosap + \q cos(ap - 120°) + ic cos(ap + 120°)].
Глава 5. Регулируемые электроприводы переменного тока 199Учитывая соотношениями (5.2) и (5.3) работу схемы управле¬
ния, запишемМ = ip Lm куз ^крт UPc [sin ас cosap ++ sin (ас - 120°) cos(ap - 120°) ++ sin (ас +120°) cos(aP + 120°)].Обозначим k = куз ккрт и воспользуемся известным тригоно¬
метрическим соотношениемsina cos£ = [sin(a - Р) + sin(a + (3)] / 2 ,тогдаМ = 0,5 iP LM k Upc [sin(ac - aP) + sin(ac + ap) + sin(ac - aP) ++ sin(ac + ap-120°) + sin(ac-ap) + sin(ac + ap +120°)].Сумма второго, четвертого и шестого слагаемых в последнем
выражении равна нулю, поэтомуМ = 1,5 iP Lm k U?c sin(ac - aP). (5.6)Анализ выражения для электромагнитного момента
СД в электроприводе с частотнотоковым
управлениемОбратим внимание на некоторые особенности формирования
электромагнитного момента в рассматриваемой системе регули¬
рования.Сигналом задания для контура регулирования момента явля¬
ется величина UPc. Чтобы выполнялась пропорциональность ме¬
жду величиной Upc и электромагнитным моментом М, развивае¬
мым синхронным двигателем, нужно, чтобы произведение ко¬
эффициентов, стоящих при Upc в выражении (5.6), было посто¬
янным. Этого можно добиться, если обеспечить ас - аР = const. С
этой целью сельсин 2С механически соединяется (непосредст¬
200 Глава 5. Регулируемые электроприводы переменного токавенно или через редуктор) с валом ротора MS, чтобы электриче¬
ские скорости обеих машин были одинаковы.При неизменной величине Upc, а следовательно, и неизмен¬
ных средних значениях токов статора величина момента М мо¬
жет быть различной в зависимости от величины разницы углов
ас _ ар. Так, при ас - ар = 90° момент, развиваемый MS при за¬
данном U?c, наибольший. При ас - аР =0 момент MS М = 0, не¬
смотря на то, что по обмоткам статора могут протекать любые
токи, задаваемые сигналом Upc. Дело в том, что выставляя раз¬
личные значения ас - аР, под разными углами друг к другу удает¬
ся ориентировать пространственные оси магнитного потока рото¬
ра и магнитодвижущей силы обмоток статора. При этом изменя¬
ется также и величина coscp на зажимах статора MS.Изменить во время наладки взаимное положение роторов 2С
и MS относительно друг друга можно, выполнив их соединение
друг с другом, например, через муфту. Но можно избежать регу¬
лировки разницы ас - а? механическим способом, если повора¬
чивать на определенный угол ротор 1C.Как правило, в схемах частотнорегулируемых синхронных
электроприводов предпочитают работать с величиной coso дви¬
гателя равной единице, чтобы не перегружать реактивными то¬
ками цепи статора. При этом, однако, коэффициент мощности
всего электропривода, измеряемый на шинах сети, питающей
силовые цепи преобразователей частоты, в целом оказывается
невысоким. Это связано с неизбежным понижением напряжения
на статорных обмотках двигателя при работе его в районе низких
частот.Момент, который развивает синхронный двигатель при за¬
данных значениях токов в роторе и статоре, как это следует из
(5.6), тем больше, чем больше взаимная индуктивность !_м между
обмотками статора и ротора. В серийных синхронных машинах,
чтобы ослабить влияние реакции яксря (статора), которая
уменьшает перегрузочную способность синхронного двигателя,
выбирают сравнительно большие величины воздушного зазора,
а это снижает величину LM Если же синхронный двигатель пред¬
Глава 5. Регулируемые электроприводы переменного тока 201назначается для электропривода с частотнотоковым (или другим
векторным способом формирования момента), то повышенные
значения 1_м в двигателе оказываются полезными. Поэтому син¬
хронные двигатели для частотнорегулируемых электроприводов
могут конструироваться не с повышенной, а с нормальной с точки
зрения механической надежности машины величиной воздушно¬
го зазора, что приводит к более продуктивному использованию
активных материалов в электрической машине.Оценку выигрыша за счет более рационального использова¬
ния активных материалов в электрической машине можно дать,
ориентируясь на опыт проектирования электрических машин раз¬
ных серий. У асинхронных двигателей общепромышленных
серий мощностью в несколько десятков кВт относительный воз¬
душный зазор, измеряемый отношением его величины к диамет¬
ру ротора, обычно лежит в пределах (2,0...2,5)'3. Но эти двигате¬
ли предназначены для механизмов с длительным и, как правило,
спокойным характером нагрузки. Их конструируют с минималь¬
ной величиной воздушного зазора, чтобы снизить ток намагничи¬
вания. У асинхронных двигателей краново-металлургических се¬
рий, работающих в более тяжелых режимах, зазор выбирают из
условий механической надежности электрической машины, и он
получается примерно в полтора раза больше. У электродвигате¬
лей же постоянного тока (некомпенсированных) и серийных син¬
хронных, предназначенных для работы от промышленной сети,
воздушный зазор увеличен еще больше: в 3...4 раза. На это
идут, чтобы ослабить влияние реакции якоря и сохранить удов¬
летворительные условия коммутации (в двигателях постоянного
тока) или достаточную перегрузочную способность (в синхронных
дзигателях).При этом в серийных синхронных машинах доля, приходя¬
щаяся на воздушный зазор, доходит до 75% от полного магнит¬
ного сопротивления машины. В синхронных двигателях, рассчи¬
танных для работы в частотнорегулируемом электроприводе,
воздушный зазор следует выбирать лишь из условий их механи¬
ческой надежности, тогда экономия только на активных материа-
202 Глава 5. Регулируемые электроприводы переменного токапах может доходить до 25...30%. Другим словами, в замкнутой
системе синхронного электропривода удается получить высокое
качество процессов при меньших затратах на электрическую ма¬
шину.Наконец, обратим наше внимание на последнее обстоятель¬
ство. Выражение (5.6), описывающее передаточные свойства
синхронного двигателя в системе частотнотокового регулирова¬
ния электромагнитного момента, когда входной координатой при¬
нята величина напряжения на выходе регулятора скорости Upc, а
выходной является величина момента М, соответствует безы¬
нерционному звену. Оно было получено при допущении о безы-
нерционности процессов регулирования токов статора двигателя.
При этом было достигнуто весьма существенное упрощение ма¬
тематических выкладок при сохранении ясной физической карти¬
ны происходящих явлений. Если же учитывать электромагнитную
инерцию статорных цепей синхронного двигателя, то решение
уравнений состояния в большой мере усложняется. В некоторых
случаях (например, при анализе аварийных переходных процес¬
сов, вызванных короткими замыканиями в статорных цепях) этот
учет необходим,- Получающиеся при этом уравнения с периоди¬
ческими коэффициентами решаются или путем соответствующих
координатных преобразований (см. например, [17,40,49]), или
специальных преобразований Лапласа [63]. Но вместе с тем сле¬
дует признать, что питание статорных цепей двигателя от регу¬
лируемых источников тока, выполненных на современной полу¬
проводниковой базе, весьма приближает истинную картину про¬
цессов к идеальной. Это обстоятельство некоторые авторы
очень эффективно и давно используют при разработке и иссле¬
довании процессов в регулируемом электроприводе переменного
тока [12,62].«о В учебной лаборатории первый студент в схеме синхронного элек¬
тропривода с частотнотоковым управлением при токе возбуждения !Р = 10
А и угловой скорости вращения вала двигателя п = 10 рад/с получил в ус¬
тановившемся режиме величину момента на валу двигателя М = 10 Нм.
При этом у него оказалось, что действующее значение тока в цепи каждой
Гпава 5. Регулируемые электроприводы переменного тока 203из фаз статора 1с = 10 А, а на зажимах статора дзигателя coscp = 0,7. Вто¬
рой студент при тех же значениях lP,n и 1с добился со5ф = 0:87, но при этом
у него получилось М = 8,7Нм. Когда они подошли за советом к третьему
студенту, тот сказал, что эксперименты ошибочны, их следует провести
занозо и обратил внимание на то, что, с одной стороны, в первом вариан¬
те двигатель развивает (а следовательно, и потребляет) большую актив¬
ную мощность, а с другой - при разных токах статора и ротора имеет
меньший коэффициент мощности, что должно противоречить физике ра¬
боты любой электрической цепи.Определите, кто из студентоз прав и при каких условиях. Обоснуйте
свою точку зрения соответствующими векторными диаграммами и осцил¬
лограммами процессов.Статические характеристики электропривода с ЧТУПри построении механической характеристики синхронного
электропривода воспользуемся структурной схемой контура ре¬
гулирования скорости КРС для установившегося режима работы
(рис. 5.7), которая идентична рассмотренной нами ранее схеме
электропривода постоянного тока.Здесь Крс, Км, Кд - коэффициенты усиления регулятора ско¬
рости, канала регулирования электромагнитного момента и звена
Д, описывающего движение механической части электроприво-Рис. 5.7. Структурная схема синхронного электро¬
привода с частотнотокозым управлениемда. В режиме идеального холостого хода электропривода, когда
Мс = 0, наблюдается 1)зи = 11дс, a Upc = 0. По мере постепен¬
ного нагружения электропривода сигнал на выходе регулятора
204 Глава 5. Регулируемые электроприводы переменного тока2\1Ммах Мв) IМмах МРис. 5.8. Статические характеристики
синхронного электропривода с час¬
тотнотоковым управлением:а) механическая;б) величины напряжения (дейст¬
вующего значения) на статоре от мо¬
мента;в) тока статора от момента.скорости PC увеличизается.
вызывая увеличение момента
М синхронного двигателя и
препятствуя тем самым сни¬
жению скорости. Когда же PC
насытится, то контур регули¬
рования скорости разомкнет¬
ся, и дальнейшее увеличение
нагрузки уже не будет вызы¬
вать увеличения UpCl а сле¬
довательно, и момента двига¬
теля. Это приведет к резкому
снижению скорости п элек¬
тропривода. Если контуры
регулирования фазных токов
статора считать безынерци¬
онными во всем диапазоне
скоростей вращения двигате¬
ля, то механическая характе¬
ристика синхронного электро¬
привода в режиме насыще¬
ния регулятора PC идет вер¬
тикально (участок 2 на рис.
5.8 а).При этом в режиме пере¬
грузки по моменту синхрон¬
ный двигатель никогда не мо¬
жет выпасть из синхронизма,
так как частота напряжения на
статоре двигателя всегда же¬
стко определяется скоростью
вращения ротора двигателя,
с которым механически свя¬
зан ротор сельсина 2С.
Гпавэ 5. Регулируемые электроприводы переменного тока 205Обычно при настройке электропри¬
вода уровень ограничения напряжения
на выходе регулятора PC устанавлива¬
ют соответствующим максимально до¬
пустимому значению момента на валу
электродвигателя.Подробнее анализ статических ре- рис. 5.9. Векторная диа-
жимов электропривода выполним, вое- грамма синхронного дви-
пользовавшись векторной диаграммой гателя, в частотно-
(рис. 5.9). Здесь моментный треугольник ^потокосцеплений образован векторами
потокосцеплений ротора \цр, статора \*/си результирующим (в воздушном зазоре машины) \>/. Угол между
векторами \цр и и/с поддерживается постоянным работой систе¬
мы управления. На рис. 5.8 этот угол равен 90°, хотя возможны и
другие его значения.При работе электропривода на участке поддержания задан¬
ного значения скорости изменение, например, увеличение мо¬
мента статической нагрузки на валу электропривода вызывает
увеличение напряжения Upc и тока статора ic. В результате
площадь моментного треугольника увеличивается за счет удли¬
нения вектора vj/c. Соответствующий векторный треугольник на
рис. 5.9 изображен штриховыми линиями.Видно, что с ростом момента (и площади треугольника пото¬
косцеплений) увеличивается длина вектора и/, т.е. величина
магнитного потока в зазоре и, следовательно, напряжение на
якоре (участок 1 кривой изменения напряжения на статоре на
рис. 5.8 б).В частотнотоковой схеме с идеальным синхронным двигате¬
лем, имеющим линейную (без насыщения) кривую намагничива¬
ния, теоретически можно величину его электромагнитного мо¬
мента увеличивать неограниченно. Здесь нет ограничений мо¬
мента электромагнитного характера, свойственных электродви¬
гателю постоянного тока (по условиям коммутации на коллекто¬
ре) или синхронному двигателю в обычной нерегулируемой по
206 Глава 5. Регулируемые электроприводы переменного токаскорости схеме подключения к сети (момент опрокидывания, за
которым наступает выпадение двигателя из синхронизма). Это -
ценное достоинство частотнотокового способа регулирования
электромагнитного момента. Правда, ограничения по нагреву
обмоток и механической прочности ротора двигателя остаются.
Да и в реальном электроприводе необходимо считаться с воз¬
можным насыщением магнитной системы электродвигателя при
перегрузках, когда резко увеличивается его ток намагничивания.Итак, регулировочные свойства синхронного частотнотоково¬
го электропривода получаются такими же, как в схеме электро¬
привода постоянного тока с подчиненным регулированием. При
этом величина электромагнитного момента пропорциональна то¬
ку статора (а в двигателе постоянного тока независимого возбу¬
ждения - току якоря). В отличие же от электропривода постоян¬
ного тока электропривод переменного тока допускает принципи¬
ально большие перегрузки.•• Вспомните определение коэффициента L»* Поясните его физиче¬
ский смысл.•о Как в лабораторных условиях экспериментально определить вели¬
чину LM? Составьте схему опыта, укажите необходимые измерительные
приборы и источники питания.•• Применительно к синхронному частотнотоковому электроприводу
попытайтесь дать физическое толкование общеизвестной тригонометри¬
ческой формулеsina cosp = [sin(a - 0) + sin(a + p)] / 2 .•• Как будет выглядеть зависимость тока статора от величины элек¬
тромагнитного момента двигателя 1с = f(M) при учете насыщения его маг¬
нитной системы? Если задана кривая намагничивания, то как воспользо¬
ваться ей при построении графика 1с = f(M)?Габаритная мощность силовых элементов
в электроприводе переменного токаСопоставим величины габаритной мощности преобразовате¬
лей, питающих силовые цепи двигателей постоянного и пере¬
менного тока. Считаем, что якорная обмотка двигателя постоян¬
ного тока подключена к реверсивному тиристорному преобразо-
Гпава 5. Регулируемые электроприводы переменного тока 207Рис. 5.10. Схемы силовых цепей: электропривода постоян¬
ного тока (а) и синхронного частотнорегулируемого (б).вателю. а статорная обмотка синхронного двигателя - к трех¬
фазному преобразователю частоты с непосредственной связью
(рис. 5.10). Чтобы обратить внимание лишь на наиболее суще¬
ственные моменты, примем следующие допущения: падения на¬
пряжения в обмотках силовых цепей не учитываются, запасы по
напряжению в силовых преобразователях отсутствуют, а режимы
работы обоих сравниваемых электроприводов одинаковы.Величину механической мощности на валу двигателей в обе¬
их системах электропривода примем равнойРмех = М • п = 1;где М и п - момент на валу и скорость вращения вала двигате¬
ля.Величина электрической мощности двигателя постоянноготокаРзл = Е - I = 1,
где Е и I - ЭДС и ток якоря.
208 Глава 5. Регулируемые электроприводы переменного токаГабаритную мощность тиристорного преобразователя посто¬
янного тока с учетом принятых допущений можно оценить выра¬
жением:Рпр = Ud - ld =1,где Ud и Id - выпрямленные напряжение и ток преобразова¬
теля. При 3T0MUd = E = 1, Id = I.Для трехфазного двигателя переменного тока полная элек¬
трическая мощность статорных цепейРэл = 3 • Ua> • I© = Рдкт / cosp.Здесь 11ф и 1Ф - действующие значения фазных напряжения
и тока двигателя, <р - угол сдвига между U© и 1Ф, РАкг - актив¬
ная мощность статорной цепи двигателя. Если принятьСОЭф = 1, тоРэл = Ракт = 1.Габаритная мощность тиристорного преобразователя часто¬
тыРнпч = 3 • Ud • Id-Если поставить условие, что напряжение и ток статора имеют
синусоидальный характер, тоUd = <2 Uo, и ld = V2 ld.В этом случаеРнпч = 2 Рэл = 2.Итак, если статорные цепи синхронного двигателя получа¬
ют от преобразователя частоты синусоидальное напряжение, то
даже при единичном коэффициенте мощности на зажимах стато¬
ра двигателя потребная габаритная мощность преобразователя
частоты с непосредственной связью должна быть выбрана в два
Гпава 5. Регулируемые электроприводы переменного тока 209раза выше, чем соответствующая мощность тиристорного преоб¬
разователя напряжения в электроприводе постоянного тока. Это
обусловлено тем, что габарит вентильных преобразователей оп¬
ределяется не средними, а амплитудными значениями напряже¬
ния и тока.Чтобы не завышать столь значительно габаритную мощность
преобразователей в электроприводах переменного тока, какая
требуется при строго синусоидальных кривых напряжения и тока,
часто преобразователи выбирают не по амплитудному, а по дей¬
ствующему значениям напряжения и тока фазы. В этом случае
при больших частотах напряжения на статоре, соответствующих
высоким угловым скоростям вращения двигателя, кривая напря¬
жения на статоре имеет не синусоидальную, а трапецеидальную
форму, т.е. принципиально, кроме основной гармоники, содержит
высшие.Наличие высших гармоник приводит к тому, что, во-первых,
вектор потокосцепления статора в зазоре машины вращается
неравномерно, а во-вторых, увеличиваются потери в стали и
особенно - на поверхности ротора.Неравномерность вращения вектора потокосцепления стато¬
ра в зазоре машины приводит к пульсациям вращающего момен¬
та двигателя, но с этим обстоятельством часто примиряются, так
как на высоких скоростях пульсации момента, имеющие также
высокую частоту, легко фильтруются маховыми массами ротора.
При пониженных же скоростях эта трудность отпадает сама со¬
бой, так как в этих режимах напряжения на статоре также пони¬
жены и, следовательно, режим насыщения преобразователя не
наступает.Поверхностные потери в стали ротора наиболее опасны в
крупных машинах и надежнее всего снижаются шихтовкой его
полюсных башмаков. Но в последние годы крупные синхронные
двигатели чаще изготавливают с массивными полюсами, т.е. из
сплошного железа. В этих случае хорошие результаты дает риф¬
ление поверхности ротора. Это - нанесение на поверхности ро¬
тора кольцевых канавок шириной до 3...6 мм и глубиной до 6...8
210 Глава 5. Регулируемые электроприводы переменного токамм с шагом около 1...1.5 см. Рифленая поверхность резко увели¬
чивает активное сопротивление контуров вихревых токов от
высших гармоник, которые, как известно, замыкаются по поверх¬
ности ротора. Кроме того, заметно увеличивается площадь ох¬
лаждаемой поверхности ротора.5.4. Частотнорегулируемые синхронные
электроприводы с регулированием продольной и
поперечной составляющих тока статораВ предыдущей частотнотоковой системе электропривода век¬
тор потокосцепления статора ус ориентируют относительно век¬
тора потокосцепления ротора \j_P в полярной системе координат,
т.е. с помощью системы регулирования обеспечивают требуемые
длину вектора и его угол относительно опорного вектора ц/с.
Построить моментный треугольник потокосцеплений в синхрон¬
ной машине можно и в прямоугольной (декартовой) системе ко¬
ординат. В этом случае вектор и/с задают (ориентируют относи¬
тельно опорного вектора м/р) проекциями его на две ортогональ¬
ные оси d и q машины. Здесь так же, как в (5.1) и (5.1а), возмож¬
ны разные формы записи выражения для электромагнитного мо¬
мента синхронного двигателя. Чаще пользуются следующим со¬
отношением:.М = 2 k = к [WdM'cq - Щ vcd] == 0,5 m [\}/d !q - Yq Id]. (5-16)Здесь и \uq - составляющие вектора полного потокосцеп¬
ления (в зазоре) по осям d и q; v|/Cq и ycd - составляющие по
осям d и q вектора потокосцепления wcl lq и Id - составляющие
тока статора по осям d и q. Знак минус перед вторым слагаемым
в квадратных скобках получается потому, что составляющие уса
и ld встречны вектору уР.Рассмотрим упрощенный вариант функциональной схемы
частотнорегулируемого синхронного электропривода с выделе¬
нием составляющих тока статора по осям d и q. Примем постоян¬
Гпава 5. Регулируемые электроприводы переменного тока 211ной величину тока ротора и, кроме того, считаем, что величина
задания продольной составляющей тока статора ld3 = 0. В этом
случае М = 0,5 m \j/d lq.Статор синхронного двигателя MS подключен на выход пре¬
образователя частоты с непосредственной связью НПЧ, собран¬
ного на трех источниках тока UZA. UZB и UZC. Управление ис¬
точниками тока происходит от специального вычислительного
блока, именуемого преобразователем координат ПК1 UV1. На
вход этого блока подаются напряжения Ud и Uq, которые в функ¬
ции угла поворота ротора двигателя, измеряемого датчиком по¬
ложения ротора ДПР BQ, преобразуются в три сигнала задания
фазных токов статора 1Аз, !вз, 1сз- Другой вычислительный блок -
преобразователь координат ПК2 UV2 - в функции положения ро¬
тора двигателя преобразует измеряемые датчиками тока фазные
токи статора двигателя lA, la, 1с в фиктивные величины ld и lq, ко¬
торые затем обрабатываются регуляторами PTd и PTq (AAj и
AAq) продольной и поперечной составляющих тока статора.Сигналом задания для контура регулирования поперечной
составляющей тока статора iq является напряжение на выходе
регулятора скорости PC AR. В упрощенной схеме продольная со¬
ставляющая тока статора ld поддерживается равной нулю. Тогда
система электропривода по своим регулировочным характери¬
стикам совпадает с частотнотоковой системой регулирования.В общем случае ток возбуждения двигателя регулируется
и появляется благоприятная возможность реализовать все по¬
тенциальные возможности векторного способа формирования
момента в синхронном электроприводе: неограниченность элек¬
тромагнитного момента, совпадение по времени первых гармо¬
ник тока и напряжения, возможность ограничения магнитного по¬
тока машины номинальным значением.
212 Гпава 5. Регулируемые электроприводы переменного токаРис. 5.11. Схема функциональная синхронного частотнорегулируемого элек¬
тропривода с выделением продольной и поперечной составляющих тока статора
Гпава 5. Регулируемые электроприводы переменного тока 2135.5. Синхронный частотнорегулируемый
электропривод по схеме вентильного двигателяВыберем в качестве прототипа регулируемый электропривод
постоянного тока с однокомплектным тиристорным преобразова¬
телем в цепи якоря (рис. 5.12 а). Обмотка якоря двигателя М
подключена на выход вентильного преобразователя UZ1, кото¬
рый питается от источника переменного тока неизменной (про¬
мышленной) частоты. Здесь возможен как двигательный, так и
генераторный режимы работы электромашины М. Тогда преоб¬
разователь UZ1 работает соответственно или в выпрямитель¬
ном, или в инверторном режиме. Обратим внимание на следую¬
щие существенные для рассматриваемого электропривода при¬
знаки, которыми характеризуется смена энергетического режима
его работы. Во-первых, при переводе UZ1 из выпрямительного
режима в инверторный (а двигателя М - соответственно из дви¬
гательного в генераторный) направление тока в якорной цепи не
изменяется. Во-вторых, чтобы при неизменном направлении тока
получить смену направления потока энергии, надо изменить зна¬
ки действующих в якорной цепи ЭДС: сначала (например, изме¬
нением направления тока в обмотке возбуждения двигателя) из¬
менить направление ЭДС якорной обмотки М, а затем преобра¬
зователь UZ1 перевести из выпрямительного режима в инвер¬
торный (для чего его угол управления следует установить более
90 градусов), ограничивая в допустимых пределах величину
якорного тока. При этом происходит естественная (за счет фаз¬
ных напряжений питающей сети) коммутация тиристоров при ра¬
боте UZ1 как в выпрямительном, так и в инверторном режимах.Заменим питающую преобразователь сеть переменного тока
эквивалентной синхронной машиной MS (рис. 5.12 б). Если бы
при этом ротор MS вращался синхронно и синфазно с генерато¬
рами энергосистемы, частью которой является питающая UZ1
сеть, то наш электропривод не "почувствовал" бы этой подмены.
В случае же автономной работы MS, при которой угловая ско¬
рость ее вала может изменяться и, естественно, не совпадать с
частотой сети энергосистемы, преобразователь UZ1 окажется
214 Глава 5. Регулируемые электроприводы переменного токаЕп|>\!я |Ед1ЕдЕпll >l Еп|•я |
tEnб)h/mV-iидпАв)I w I\tIII— —Lyz?_nUZ1г/h/2и5Рис. 5.12. Эволюция силовых цепей,
приводящая к вентильному двигателю:а) электропривод постоянного тока с
однокомплектным вентильным преоб¬
разователем;б) электропривод постоянного тока,
связанный через вентильный пре¬
образователь с синхронной машиной;в) вентильный двигательнеработоспособным. В тиристорных преобразователях обяза¬
тельна синхронизация управляющих импульсов с частотой пи¬
тающей сети. В системах импульсно-фазового управления
Глава 5. Регулируемые электроприводы переменного тока 215(СИФУ) с вертикальным управлением [7], где управляющий им¬
пульс создается в момент совпадения величин напряжений
управления и опорного на выходе генератора пилы, эта синхро¬
низация осуществляется путем привязки кривой пилообразного
напряжения, например, к началу синусоиды питающего тиристор
напряжения. При этом благодаря высокой стабильности частоты
промышленной сети развертку опорного напряжения осуществ¬
ляют не в функции угла поворота ротора эквивалентного генера¬
тора энергосистемы, а в функции времени, что упрощает схему.
Если же MS работает автономно, когда угловая скорость его ва¬
ла может изменяться, то синхронизацию импульсов на выходе
СИФУ с фазными ЭДС обмоток статора двигателя следует осу¬
ществлять в функции угла поворота ротора MS, а не времени, как
при питании UZ1 от промышленной сети. Для этого в схеме
(рис. 5.12 б) устанавливают датчик положения ротора двигателя
BQ. Примером простейшего датчика положения ротора может
быть, например, круговой потенциометр, у которого движок жест¬
ко связан с валом двигателя, а корпус потенциометра зафикси¬
рован так, что точке а соответствует, например, начало синусои¬
ды напряжения фазы А. Напряжение на выходе потенциометра
в пределах одного оборота вала пропорционально углу ар пово¬
рота вала, а в точке б происходит сброс выходного сигнала, по¬
сле чего процесс повторяется.Наконец, на последнем этапе заменим электрическую маши¬
ну М, работающую преимущественно в генераторном режиме на
бесконтактное устройство - вентильный преобразователь UZ2.
Получившаяся схема (рис. 5.12 в), содержащая два последова¬
тельно включенных преобразователя UZ1 и UZ2, может обеспе¬
чить работу двигателя MS как в двигательном, так и в тормозном
(генераторном) режимах. Действительно, когда двигатель MS ра¬
ботает в двигательном режиме, то преобразователь UZ2 перево¬
дится в выпрямительный режим, а преобразователь UZ1 - в ин¬
верторный, что осуществляется изменением углов управления
вентилей этих преобразователей. Величина тока статора двига¬
теля регулируется соотношением величин напряжений обоих
216 Глава 5. Регулируемые электроприводы переменного токапреобразователей. Когда двигатель MS необходимо перевести в
тормозной режим, то преобразователь UZ1 переводится в вы¬
прямительный режим, a UZ2 - в инверторный.Отметим следующие особенности рассмотренной схемы. Во-
первых, оба преобразователя работают в режиме естественной
коммутации тиристоров, что существенно упрощает схему сило¬
вых цепей и повышает надежность работы. Во-вторых, число
вентильных групп преобразователя не более чем в реверсивном
электроприводе постоянного тока, а сами вентильные группы вы¬
полняются так же, как и стандартные преобразователи постоян¬
ного тока.Функциональная схема электроприводаСинхронный двигатель MS подключен на выход двухззенного
преобразователя частоты, содержащего инвертор UZ1, питаю¬
щийся от сети переменного тока промышленной частоты через
управляемый выпрямитель UZ2 (рис. 5.13). Выпрямитель UZ2
работает в режиме регулируемого источника тока, для чего он
охвачен отрицательной обратной связью по току. Контур регули¬
рования тока выпрямителя настраивается с помощью регулятора
тока РТ АА, на входе которого сравниваются напряжения с выхо¬
да функционального преобразователя ФП и датчика тока ДТ UA.Автономный инвертор UZ1 работает в режиме коммутатора.
Коммутатор (переключатель) - это автономный инвертор, кото¬
рый может регулировать частоту выходного переменного напря¬
жения. но не регулирует его амплитуду. В режим коммутатора
преобразователь UZ1 переводят умышленно, так как хотят иметь
максимально возможный коэффициент мощности в статорной
цепи MS. С этой целью в режиме инвертора управляющее на¬
пряжение иУАи фиксируют на постоянном уровне, соответствую¬
щем работе инвертора с минимально допустимым углом инвер¬
тирования, а в режиме выпрямителя - на другом уровне, соот¬
ветствующем нулевому углу выпрямления.
Гпава 5. Регулируемые электроприводы переменного тока 217ис. 5.13. Схема функциональная синхронного электропривода по схеме вентильного двигателя
218 Гпава 5. Регулируемые электроприводы переменного токаДатчик положения ротора двигателя ДПР BQ формирует
шесть (по числу тиристоров в UZ1) пилообразных напряжений,
которые сравниваются с управляющим напряжением Uyah-Электропривод выполнен по подчиненному принципу, внеш¬
ним контуром регулирования является контур регулирования
скорости. Настройка этого контура осуществляется регулятором
скорости PC AR, на входе которого сравниваются встречно вклю¬
ченные выходные напряжения задатчика интенсивности ЗИ AJ и
датчика скорости ДС UV. Канал отрицательной обратной сбязи
по скорости образован последовательно включенными тахогене-
ратором ТГ BR. потенциометром RP и датчиком скорости ДС.Схема управления построена с учетом того, что в двухзвен¬
ном преобразователе при смене знака момента, развиваемого
двигателем, ток в силовой цепи преобразователей UZ не может
изменить своего направления из-за односторонней проводимости
тиристоров. Поэтому выбор знака момента производят, воздей¬
ствуя на величину и знак напряжения преобразователей UZ. При
этом величину момента (но не знак) задают пропорциональной
абсолютному значению напряжения на выходе регулятора PC. С
этой целью между выходом PC и входом регулятора тока РТ
включают функциональный преобразователь (блок выделения
модуля сигнала), который выполнен на пропорциональном регу¬
ляторе ФП А1, имеющем единичный коэффициент усиления, и
диодах VD1 и VD2. Вид статической характеристики этого блока
изображен на рис. 5.13 под регулятором ФП. Отрицательное
напряжение с выхода PC поступает на вход РТ через регулятор
ФП, инвертируется в нем и далее следует через открытый диод
VD1, верхний же диод VD2 при этом закрыт. Так формируется
левая ветвь статической характеристики звена ФП. Правая ветвь
характеристики при положительных напряжениях на выходе PC
формируется непосредственно диодом VD2 при закрытом VD1.Знак момента, развиваемого двигателем, задают в соответ¬
ствии со знаком напряжения на выходе PC, воздействуя на
управляющий вход преобразователя UZ1. Для этого между вы¬
ходными зажимами регулятора PC и управляющим входом пре¬
Гпава 5. Регулируемые электроприводы переменного тока 219образователя UZ1 включают релейный элемент РЭ А2. Макси¬
мальное положительное напряжение на выходе РЭ соответству¬
ет работе преобразователя UZ1 в инверторном режиме с мини¬
мальным допустимым углом инвертирования тиристоров. Отри¬
цательный же сигнал на выходе РЭ переводит UZ1 в выпрями¬
тельный режим с углом управления тиристоров а = 0°.Работа схемы происходит следующим образом. При разгоне
электропривода на вход задатчика интенсивности ЗИ подается
напряжение UBx и происходит плавное нарастание напряжения
на выходе ЗИ. Напряжение на выходе PC увеличивается в поло¬
жительном направлении. Это положительное напряжение посту¬
пает на вход двух каналов. По первому входу (через функцио¬
нальный преобразователь ФП и регулятор тока РТ) происходит
задание требуемой положительной величины тока в силовой це¬
пи преобразователя частоты. По второму входу (через релейный
элемент РЭ) преобразователь UZ1 переводится в инверторный
режим. Двигатель MS, работая в двигательном режиме, разгоня¬
ется.При торможении электропривода, когда при снижении напря¬
жения на выходе ЗИ изменяется знак напряжения на выходе PC,
знак задания на ток преобразователя UZ2 и направление тока в
силовой цепи преобразователей UZ не изменяется из-за наличия
функционального преобразователя ФП. Но знак напряжения иУЛи
на входе преобразователя UZ1 изменяется на противоположный,
из-за чего UZ1 переходит в выпрямительный режим, а двигатель
MS - в тормозной. Преобразователи UZ1 и UZ2 , работая оба в
выпрямительном режиме, могли бы создать в их силовой цепи
недопустимо большой ток. Но этого не происходит, так как контур
регулирования тока преобразователя UZ2, поддерживая задан¬
ную регулятором PC величину тока, переводит этот преобразо¬
ватель в инверторный режим. В результате механическая энер¬
гия, запасенная во вращающемся электроприводе, отдается в
сеть.Отметим одну принципиальную особенность, характерную
Дпя рассматриваемой схемы вентильного двигателя с преобра¬
220 Гпава 5. Регулируемые электроприводы переменного токазователем UZ1, выполненным на тиристорах. В качестве одного
из достоинств данной схемы мы называли естественную комму¬
тацию вентилей. При этом коммутация вентилей в преобразова¬
теле UZ2 производится напряжением питающей сети, а в UZ1 -
за счет ЭДС вращения двигателя. Однако при пуске двигателя и
на ползучих скоростях (в реальных схемах - это при частотах на¬
пряжения на статоре до 5... 10% от номинальной) фазные ЭДС
синхронного двигателя равны нулю или очень малы, так что ес¬
тественную коммутацию в преобразователе UZ1, работающем
инвертором, они выполнить не могут. Схема оказывается нера¬
ботоспособной. Чтобы не прибегать к узлам искусственной ком¬
мутации и не удорожать систему электропривода, коммутацию
тока тиристоров инвертора UZ1 при пуске и в районе низких ско¬
ростей электропривода осуществляют управляемым выпрямите¬
лем UZ2. Для этого в функции положения ротора в моменты вре¬
мени, соответствующие моментам коммутации тока соседних ти¬
ристоров в UZ1, на управляющий вход преобразователя UZ2 по¬
даются короткие мощные отрицательные импульсы напряжения
иимп. которые вызывают запирание его тиристоров, а следова¬
тельно, и тока во всей силовой цепи преобразователя частоты,
включая UZ1.После исчезновения тока запирающие свойства тиристоров
UZ1, проводивших ток, восстанавливаются. После окончания
бестоковой паузы преобразователь UZ2 переводится в нормаль¬
ный выпрямительный режим работы источника тока, а в UZ1 от¬
пирающие импульсы подаются уже на управляющие входы сле¬
дующих тиристоров. В результате двигатель в районе низких
скоростей работает не в режиме самокоммутации, а как шаговый
двигатель.Невыгодной особенностью шагового режима двигателя явля¬
ется дополнительный нагрев поверхности ротора из-за повышен¬
ного содержания высших гармоник в кривых фазных токов. Это
обусловлено, во-первых, близостью к прямоугольнику, а не сину¬
соиде основной волны тока фазы статора синхронного двигате¬
ля, подключенного к источнику тока через коммутатор а во-
Гпава 5. Регулируемые электроприводы переменного тока 221зторых, - дополнительным прерыванием каждой полуволны тока
бестоковой паузой, необходимой для коммутации тиристоров
второй тройки моста. По этой причине приходится несколько
снижать величину длительно допустимого тока в вентильном
электроприводе при пониженных скоростях.Статические характеристики электроприводаВыясним сначала, как выглядит механическая характеристи¬
ка электропривода n = f(M). Рассматриваемый электропривод
выполнен по схеме подчиненного регулирования, поэтому фор¬
мирование его режимов на участке рабочих нагрузок, где дос¬
тигается n = const, и на участке ограничения момента, где
М = const, аналогично рассмотренным ранее системам подоб¬
ной структуры (электропривод постоянного тока, синхронный час¬
тотнотоковый).Для построения же других характеристик: ld = f(M) и
Ud = f(M) - тока и напряжения управляемого выпрямителя UZ1
(которые соответствуют току и напряжению на статоре синхрон¬
ного двигателя) при изменении момента MS, - полезно восполь¬
зоваться векторными диаграммами синхронного двигателя.
Рассмотрим два варианта формирования электромагнитного
момента:- ток возбуждения ротора постоянный,- ток возбуждения регулируется пропорционально току ста¬
тора.В первом случае векторный треугольник потокосцеплений в
синхронном двигателе формируется таким образом, что контро¬
лируются следующие его параметры: длина вектора уР, которая
остается постоянной при изменении момента , а также угол Z у,
Ч'с между векторами потокосцеплений в зазоре у и статора Не¬
постоянство названного угла при изменении нагрузки обуслов¬
лено постоянством установленного угла инвертирования в пре¬
образователе UZ1, из-за чего примерно постоянным остается
угол между векторами фазных ЭДС и тока двигателя. В резуль¬
тате при изменении нагрузки на валу двигателя вершина мо-
222 Глава 5. Регулируемые электроприборы переменного токаментного треугольника, противолежащая вектору i|/P, перемеща¬
ется по дуге окружности, опирающейся на этот вектор (рис. 5.14а). Это приводит к тому, что предельная величина момента, раз¬
виваемого двигателем, оказывается ограниченной, а сам двига¬
тель при перегрузках может выпасть из синхронизма.Во втором случае при изменении величины электромагнитно¬
го момента отношение длин векторов ц/р и \ус остается постоян¬
ным, а угол между векторами ур и \ус (в том случае, когда угол
инвертирования в преобразователе UZ1 задается от датчика по¬
ложения ротора ДПР) или векторами vy и ус (когда поддержива¬
ется постоянство угла управления р в вентильном преобразова¬
теле UZ1) поддерживается неизменным. Поэтому при изменении
момента на валу дзигателя треугольники векторов потокосцеп¬
лений оказываются подобными (рис. 5.14 б). В результате пло¬
щадь моментного треугольника может при увеличении нагрузки
неограниченно увеличиваться, т.е. теоретически вентильный
двигатель может создать неограниченно большой электромаг¬
нитный момент. Конечно, те причины, на которые указывалось в
частотнотоковом синхронном электроприводе (ограничение поРис. 5.14. Векторные диаграммы синхронного двигателя при из¬
менении момента на залу, когда: а) потокосцепление ротора
уР = const; б) потокосцепления ротора уР и статора ц/с пропорцио¬
нальны друг другуа)б)
Гпава 5. Регулируемые электроприводы переменного тока 223механической прочности ротора и а)
нагреву его обмотки), остаются. На¬
блюдается также и насыщение маг¬
нитной системы двигателя при пере¬
грузках по моменту, которое может
вызвать чрезмерное увеличение то¬
ка намагничивания в обмотке стато¬
ра. Необходимо также не забывать,
что при чрезмерно больших токах б)
инвертирования, когда в вентильном
преобразователе растет угол комму¬
тации тиристоров, всегда есть опас¬
ность прорыва инвертора.Технически формирование мо-
ментного треугольника по второму
закону можно осуществить двумя
способами: или подключением об- в)
мотки возбуждения к регулируемому
возбудителю, выходной ток которого
регулируют пропорционально току
нагрузки преобразователя UZ2, или
обмотку возбуждения двигателя
включают в цепь постоянного тока
двухзвенного преобразователя. В
этом случае (рис. 5.13) обмотка L Рис. 5.15. Статические харак-
выполняет и роль сглаживающего теристики вентильного двига-
дросселя и в то же время ее ток про- теля: а) механическая; б)
порционален току статора двигателя. тока; в) напряжения наМеханическая характеристика статоРе двигателя
синхронного электропривода в схемевентильного двигателя (рис. 5.15 а) имеет характерные для сис¬
тем подчиненного регулирования два участка: на участке 1 дос¬
тигается поддержание заданной скорости электропривода, а на
участке 2 - ограничение максимального момента, развиваемого
двигателем, за счет работы блока ограничения БО АЗ в регуля¬21Ммдх М
224 Глава 5. Регулируемые электроприводы переменного токаторе скорости PC. Статическая характеристика ld = f(M) имеет
вид параболы, вытянутой вдоль оси М (рис. 5.15 б), так как пло¬
щади подобных моментных треугольников пропорциональны
квадратам длин их сторон, т.е. токам статора, ротора и намагни¬
чивающему.Статическая характеристика Ud = f(M) содержит два участка
(рис. 5.15 в). На участке 1, где поддерживается постоянство ско¬
рости электропривода, величина ЭДС двигателя пропорциональ¬
на потокосцеплению в зазоре двигателя у, т.е. изменяется по па¬
раболе. На участке 2, где у = const, а скорость снижается, про¬
порционально скорости снижается и статорная ЭДС двигателя.
Напомним, что статические характеристики (рис. 5.15) построены
при неучете падения напряжения в силовых цепях статора двига¬
теля.5.6. Особенности формирования электромагнитного
момента в асинхронных электроприводахВ асинхронных электроприводах с управлением только по
цепи статора (обычно - с асинхронными короткозамкнутыми дви¬
гателями) число независимых управляющих переменнных со¬
кращается до двух (амплитуда и частота напряжения на статоре),
так как роторные цепи электрической машины недоступны для
воздействий. По этой причине оказывается ограничен и диапазон
возможных конфигураций моментного треугольника асинхронно¬
го двигателя, который определяется параметрами роторной це¬
пи. Так как эта цепь носит активно-индуктивный характер, то угол
между векторами тока намагничивания и тока ротора всегда бо¬
лее 90 градусов, а асинхронный двигатель всегда имеет отстаю¬
щий коэффициент мощности. Однако в замкнутых системах регу¬
лирования всегда обеспечивается работа асинхронного двигате¬
ля на верхнем участке механической характеристики, где сколь¬
жение ротора мало и, следовательно, полное сопротивление ро¬
торной цепи носит активный характер, а доля индуктивного со¬
противления мала. В этом случае на упрощенных векторных диа¬
граммах токов асинхронного двигателя ток ротора можно считать
Гпава 5. Регулируемые электроприводы переменного тока 225чисто активным, а угол между векторами токов намагничивания и
ротора можно считать прямым. В реальных двигателях в точке
номинального режима отклонение этого угла от прямого не пре¬
вышает 10...15°.Хотя схемное разнообразие асинхронных частотнорегули¬
руемых электроприводов весьма велико, однако в конечном ито¬
ге преобладают два варианта формирования моментного тре¬
угольника: в первом случае в асинхронном электродвигателе при
регулировании момента в процессе поддержания заданного зна¬
чения скорости поддерживается постоянство магнитного потока,
а во втором - стремятся вести регулирование в электроприводе
с минимальными или почти минимальными потерями. Известно,
что минимум потерь в асинхронном электроприводе достигается
при поддержании постоянства абсолютного скольжения [13], что
и используется с целью поддержания минимума потерь.Для первого случая механические характеристики и вектор¬
ные диаграммы представлены на рис. 5.16 а. Регулирование мо¬
мента ведут так, чтобы поддержать в двигателе постоянство маг¬
нитного потока в зазоре. Обычно эту задачу решают косвенным
способом. Так, широко известный закон частотного регулирова¬
ния скорости в асинхронном электроприводе Uc / fc = const сле¬
дует отнести к рассматриваемому способу. В некоторых случаях
величину магнитного потока измеряют непосредственно или вы¬
числяют через электрические переменные двигателя (ток, на¬
пряжение, скорость), как это делает часто, например, фирма
Siemens [33,66,68].Предположим, что с точки зрения требований технологиче¬
ского процесса асинхронному эпектроприводу необходимо обес¬
печить прямоугольную механическую характеристику, проходя¬
щую через точки а, б и в. При нагружении электропривода режим
поддержания заданного значения скорости (например, требуется
перейти из точки а в точку 6 на механической характеристике
замкнутого электропривода) достигается изменением как часто¬
ты, так и напряжения на статоре (рис. 5.16 а). Механические ха¬
рактеристики асинхронного двигателя при фиксированных значе-
226 Гпава 5. Регулируемые электроприводы переменного токаРис. 5.16. Векторные диаграммы и механические характери¬
стики асинхронного электропривода:а) при поддержании постоянства магнитного потока;б) при поддержании постоянства абсолютного скольженияниях частоты и напряжения на статоре, соответствующих точкам
а, б и в, изображены там же.Моментный треугольник асинхронного двигателя обычно
строят как геометрическую сумму векторов токов статора 1ь при¬
веденного тока ротора 1г и тока намагничивания !0. Б этом слу¬
чае, точке а на механической характеристике электропривода со¬
ответствует векторная диаграмма 0 - 2 - 3, а точкам б и в - диа¬
грамма 0-1-2. Режим поддержания постоянства магнитного
потока Ф = const энергетически менее выгоден, особенно при ма¬
лых моментах статической нагрузки. Но он обеспечивает более
высокие динамические показатели в электроприводах при резко
переменных моментах.
Гпава 5. Регулируемые электроприводы переменного тока 227•• На векторной диаграмме (рис. 5.16 а) изображен вектор напряжения
на статоре Uc. Если считать, что он соответствует работе двигателя в точ¬
ке а механической характеристики, то как его следует изобразить при ра¬
боте электропривода б точках бив? Для определенности можно предпо¬
ложить, что электромагнитный момент двигателя в точке б в два раза
больше, чем в точке а, а скорость электропривода в точке в в три раза ни¬
же, чем в точке а.Для второго случая механические характеристики электро¬
привода и векторные диаграммы при изменении момента стати¬
ческой нагрузки изображены на рис. 5.16 б. Здесь при нагруже¬
нии электропривода и работе его в режиме поддержания задан¬
ного значения скорости в установившихся режимах изменяется
только величина напряжения на статоре (рис. 5.16 б). Энергети¬
чески это - наиболее выгодный режим, так как в зоне малых мо¬
ментов двигатель работает с малыми значениями магнитного по¬
тока, а следовательно, и тока намагничивания.Векторные диаграммы токов асинхронного двигателя в режи¬
ме поддержания неизменного абсолютного скольжения ротора
образуют подобные моментные треугольники (рис. 5.16 б), так
как при постоянстве скольжения параметры роторной цепи оста¬
ются неизменными. Если при работе двигателя в точке а механи¬
ческой характеристики моментный треугольник описывается ло¬
маной 0-3—4, то при работе в точке 6 - ломаной 0-1-2. При этом
площадь первого треугольника во столько раз меньше, чем вто¬
рого, во сколько раз меньше электромагнитный момент, разви¬
ваемый двигателем.При нагружении электропривода режим поддержания задан¬
ного значения скорости (например, требуется перейти из точки а
в точку б на механической характеристике замкнутого электро-
гривода) достигается изменением только напряжения на статоре
при постоянной частоте (рис. 5.16 б). В режиме же ограничения
момента (участок б - в характеристики) частота и напряжение
уменьшаются пропорционально друг другу.
228 Глава 5. Регулируемые электроприводы переменного тока5.7. Асинхронный электропривод с частотнотоковым
управлениемПринятый способ формирования момента АДПри построении схем с частотнотоковым управлением асин¬
хронными электроприводами моментный треугольник формиру¬
ют, задавая, во-первых, величины полного тока статора (или его
активной составляющей в схемах с двухзвенным преобразовате¬
лем частоты) и, во-вторых, величину абсолютного скольжения.Величина тока статора АД и абсолютное скольжение одно¬
значно определяют моментный треугольник и, следовательно;
величину электромагнитного момента.Действительно, при заданной величине скольжения s:- во-первых, наблюдается вполне определенное соотноше¬
ние величин активной и индуктивной составляющих полного со¬
противления цепи ротора и, следовательно, ф2 - угла сдвига по
фазе между первыми гармониками ЭДС ротора Е2 и током рото¬
ра 12 и;- во-вторых, в АД устанавливается вполне определенная ве¬
личина отношения величин токов ротора 12 и намагничивания 10.
Это следует из пропорциональности между величиной тока ро¬
тора 12 и ЭДС Е2, а последняя , в свою очередь, при заданном
скольжении пропорциональна току намагничивания 10.В результате системе косвенного регулирования момента АД
по зеличине тока статора h и абсолютному скольжению соответ¬
ствует система формирования (построения) моментного тре¬
угольника по одной стороне (току статора U), противолежащему
углу (углу между векторами 10 и 12) и заданному отношению длин
сторон 10 и 12. При этом два последние условия не являются не¬
зависимыми друг от друга, а определяются величиной абсолют¬
ного скольжения.Принципиальная схема электроприводаСтаторные цепи асинхронного короткозамкнутого двигателя
М (рис. 5.17) подключены к преобразователю частоты с непо-
гскГпава 5. Регулируемые электроприводы переменного тока 229Рис. 5.17. Схема функциональная асинхронного электропривода с частотнотоковым управлением
230 Глава 5. Регулируемые электроприводы переменного токасредственной связью НПЧ, который выполнен на трех регули¬
руемых источниках тока UZA, UZB и UZC. Каждый из источников
тока представляет собой реверсивный тиристорный преобразо¬
ватель постоянного тока, охзаченный отрицательной обратной
связью по току фазы и настроенный с помощью регуляторов
фазных токов.Управление НПЧ производится от узла формирования фаз¬
ных токов, который содержит генератор U низкочастотных сину¬
соидальных колебаний ГСК, три модулятора М1, М2, М3 (U1, U2,
U3), сельсин BE, вал ротора которого механически связан с ва¬
лом двигателя МА, и три демодулятора ДМА, ДМВ и ДМС (UA,
UB, UC).Генератор ГСК выдает три синусоидальные низкочастотные
напряжения, образующие симметричную трехфазную систему, и
имеет два управляющих входа: по верхнему напряжением ии за¬
дается величина амплитуды напряжений на его выходе, по ниж¬
нему - напряжением U? - задается их частота. При этом верх¬
ний канал ГСК реагирует на модуль напряжения Uu, при измене¬
нии же знака напряжения Uf изменяется последовательность
чередования фаз выходных напряжений. Б схеме заложено под¬
держание постоянного значения величины абсолютного скольже¬
ния, для чего напряжение Uf снимается с выхода релейного ре¬
гулятора РЭ (А2), подключенного на выход регулятора скорости
PC.Электромагнитный момент двигателя формируют, задавая
амплитуду тока статора и величину скольжения. Сигнал, про¬
порциональный желаемой амплитуде тока статора, снимают с
выхода регулятора скорости PC и подают на верхний вход гене¬
ратора ГСК. Далее сигнал поступает через модуляторы М1, М2,
М3, сельсин BE и демодуляторы ДМА, ДМВ и ДМС на управляю¬
щие входы регулируемых источников тока UZA, UZB, UZC. Же¬
лаемая частота напряжения и тока статора задается дифферен¬
циальным сельсином BE в соответствии с равенством:fc = fp + fs = n + s.
Гпава 5. Регулируемые электроприводы переменного тока 231Здесь fp - составляющая частоты тока статора, задаваемая
вращением ротора сельсина BE. Так как ротор BE механически
связан с валом двигателя, то она всегда равна скорости враще¬
ния п ротора двигателя; fs - составляющая частоты тока стато¬
ра, задаваемая ГСК и непосредственно соответствующая сколь¬
жению s. В такой схеме как бы ни изменялась угловая скорость
двигателя, частота статорного напряжения всегда будет такой,
чтобы поддерживалось заданное генераторм ГСК скольжение s.Величина скольжения в рассматриваемой схеме поддержи¬
вается постоянной, а знак- определяется знаком напряжения на
выходе PC. Возможно также непосредственное подключение
зыходных зажимов PC к нижнему входу ГСК.•• Если обратиться к функциональной схеме синхронного частотно¬
токового электропривода (рис. 5.4), то между этими схемами можно найти
много общего, особенно в работе узла формирования фазных токов, вы¬
полненного на сельсине BE. Чем отличается работа каждого из узлов и как
при этом учитывается принцип работы синхронного и асинхронного двига¬
телей?Внешний контур регулирования скорости выполнен по обще¬
принятой схеме и настраивается регулятором скорости PC (AR),
на верхний вход которого подается сигнал с выхода задатчика
интенсивности ЗИ (AJ), а на нижний - напряжения датчика скоро¬
сти ДС (UV), подключенного через потенциометр RP к тахо-
генератору BR. Регулятор PC содержит блок ограничения БО
(А2), которым задаются предельные значения напряжений Uи и
UF, а следовательно, электромагнитного момента асинхронного
двигателя.При подаче на вход ЗИ напряжения UBx увеличивается на¬
пряжение на выходе ЗИ, затем - напряжение на выходе PC, а это
вызывает появление на трех выходных зажимах ГСК системы
трех симметричных синусоидальных напряжений, амппитуда ко¬
торых соответствует величине напряжения на выходе PC, а час¬
тота - напряжению на выходе релейного элемента РЭ. Когда эти
три выходных напряжения ГСК пройдут через модуляторы М1,
М2 и М3 и будут поданы на три роторных обмотки сельсина BE,
232 Гпава 5. Регулируемые электроприводы переменного токато в этих обмотках будут наведены три высокочастотных одно¬
фазных тока, создающих МДС, которая имеет высокую (частоты
коммутации модуляторов) частоту и поворачивается относитель¬
но ротора с угловой скоростью, равной частоте напряжений на
выходе ГСК. Амплитуда этой МДС соответствует величине на¬
пряжения на выходе PC. В статорных обмотках сельсина BE бу¬
дут трансформироваться три высокочастотных напряжения,
аналогичные напряжениям на выходах модуляторов, а после
прохождения их через демодуляторы ДМА, ДМВ и ДМС получит¬
ся система из трех симметричных синусоидальных напряжений
частоты fc = fP + fs. Эти три напряжения задают три тока в источ¬
никах тока, двигатель МА развивает момент, его ротор придет во
вращение с угловой скоростью п, в точности на столько же изме¬
нится и частота токов статора, так как вал ротора сельсина BE
механически связан с валом МА. В результате скольжение в ро¬
торе сохранится неизменным.Когда напряжение на выходе ЗИ сравняется с иох, его рост
прекратится. Переходный же процесс нарастания скорости
электропривода будет продолжаться, пока не сравняются между
собой напряжения с выхода ЗИ и ДС. Тогда напряжение на
выходе PC упадет или до нуля (это призойдет в случае, если элек¬
тропривод работает в режиме идеального холостого хода) или до
значения, соответствующего моменту статической нагрузки на
валу двигателя.При торможении электропривода работа протекает аналогич¬
но, только знак напряжения на выходе PC изменяется на проти¬
воположный и, следовательно, отрицательной будет величина
скольжения двигателя.Статические характеристики электроприводаРассмотрим, как выглядят механическая п = т'(М), внешняя
Uc = f(M) и токовая 1с = f(M) характеристики электропривода.Механическая характеристика определяется принципом ра¬
боты схемы подчиненного регулирования и содержит два участка
(рис. 5.18а): горизонтальный 1 и вертикальный 2.
Гпава 5. Регулируемые электроприводы переменного тока 233Формирование горизонтального
участка механической характери¬
стики электропривода осуществля¬
ется в контуре регулирования ско¬
рости путем изменения величины
сигнала UPC в функции ошибки (т.е.
разницы напряжений задатчика ЗИ
и датчика скорости ДС) по скоро¬
сти. Этот режим возможен, когда
регулятор скорости работает на ли¬
нейном участке своей статической
характеристики, т.е. напряжение на
его выходе меньше напряжения,
задаваемого блоком ограничения
ВО.Когда напряжение на выходе
регулятора скорости увеличится до
уровня, задаваемого блоком огра¬
ничения БО, то Upc = const, элек¬
тропривод работает в режиме ис¬
точника момента, т.е. механическая
характеристика вертикальна (рис.5.18 а, участок 2 характеристики).Действительно, если, к примеру,
при заторможенном роторе МА на Рис. 5.18. Статические ха-
входы генератора синусоидальных рактеристики асинхронного
колебаний ГСК подать два незави- электропривода с частотното-
симых фиксированных напряжения ковым управлением: а) меха-
ии и UF, то им будут соответство- ническая: б) тока статора; в)
зать три низкочастотных (с часто- напРяжения на статоре
той задаваемого в ротор скольже¬
ния) однофазных напряжения, образующие симметричную
трехфазную систему. После модуляции, прохождения через
сельсин BE и демодуляции они задают в источниках статор¬
ных токов систему симметричных фазных токов МА частотыа) п.2\1Ммах М
234 Гпав а 5. Регулируемые электроприводы переменного токаскольжения и амплитуды, соответствующей уровню напряжения
на выходе регулятора PC. Двигатель работает в режиме упо¬
ра. Если ротор МА придет во вращение с угловой скоростью п,
то в точности на столько же изменится и частота токов статора,
так как вал ротора сельсина механически связан с валом АД. В
результате скольжение в роторе сохранится неизменным.Для построения других статических характеристик обра¬
тимся к векторным диаграммам МА, работающего в схеме час¬
тотнотокового регулирования. При принятых нами условиях
формирования электромагнитного момента МА (по току статора
и величине скольжения) треугольники, образованные вектора¬
ми токов статора, ротора и намагничивания, оказываются по¬
добными при изменении нагрузки (рис. 5.16 б). В этом слу¬
чае величину электромагнитного момента, развиваемого двига¬
телем в схеме с частотнотоковым регулированием, можно оце¬
нить на основании выражения:М = Мн(1/1н)2,где Мн - номинальный электромагнитный момент двигателя, I и
1н - текущее и номинальное значения тока статора. График за¬
висимости lc = f(M) на участке поддержания заданной скорости
вращения будет представлять собой параболу с осью симмет¬
рии, совпадающей с осью момента (рис. 5.18 б).•• Оцените, как будет выглядеть при изменении момента нагрузки за¬
висимость lc = f(M), если учесть нелинейность кривой намагничивания
асинхронного электродвигателя?Кривая напряжения на статоре при изменении момента
Uc = f(M) содержит два участка (рис. 5.18 в): на первом, соответ¬
ствующем режиму поддержания заданной скорости электропри¬
вода в зоне рабочих нагрузок, напряжение на статоре совпадает
по величине с ЭДС двигателя и пропорционально длине вектора
10, т.е. описывается параболой.М = Мн ( U n / UH пн )2,
Гпава 5. Регулируемые электроприводы переменного тока 235где U и Uh - текущее и номинальное значения напряжения на
статоре, п и пн - текущая и синхронная величины угловой ско¬
рости вращения двигателя.На участке 2 характеристики (рис. 5.18 в), соответствующем
режиму ограничения момента, ЭДС двигателя (и равное ей при
принятых условиях величина напряжения на статоре) снижается.
Это снижение происходит только за счет снижения скорости
вращения вала МА при постоянном значении амплитуды магнит¬
ного потока в машине.В случае учета падения напряжения в цепи обмотки статора
к величине ЭДС необходимо (векторно!) прибавить падение на¬
пряжения на активно-индуктивном сопротивлении обмотки стато¬
ра.5.8. Регулируемые асинхронные электроприводы
массовых серийЕще сравнительно недавно можно было очень язственно
противопоставить регулируемый электропривод нерегулируемо¬
му: с одной стороны мы наблюдали относительно сложные, хотя
и немногочисленные (до 3...5% от общего числа) замкнутые сис¬
темы электропривода, обеспечивающие работу электропривода
во всех его четырех квадрантах, с высоким качеством протекаю¬
щих процессов и весьма малой погрешностью регулирования, а с
другой - разомкнутые системы электропривода, в которых ско¬
рость вала рабочего механизма или не регулировалась, или ре¬
гулировалась наиболее грубыми, например, реостатным, спосо¬
бами. Такая поляризация технических решений объяснялась, с
одной стороны, высокой стоимостью регулируемых источников
питания, когда сложные и, следовательно, дорогие электропри¬
воды были экономически целесообразны для механизмов с вы¬
сокими требованиями к качеству процессов (прокатные станы) и
точности движения рабочего органа (станки с числовым про¬
граммным управлением). С другой стороны, относительно невы¬
сокая стоимость электроэнергии, а в ряде случаев - и самого
236 Гпава 5. Регулируемые электроприводы переменного токатехнологического продукта способствовали широкому примене¬
нию простых нерегулируемых электроприводов.Однако в последние десятилетия экономическая обстановка
изменилась: обострившаяся конкуренция производителей на
рынке товаров и услуг способствовала повышению качества то¬
варов, а рост стоимости энергоносителей и сырья потребовал их
экономии. Вместе с тем стремительный прогресс з области си¬
ловой полупроводниковой техники: освоение промышленного
производства биполярных транзисторов с изолированным затво¬
ром (IGBT), рост степени интеграции в микропроцессорной тех¬
нике и переход от микропроцессоров к микроконтроллерам с
встроенным набором специализированных периферийных уст¬
ройств, - способствовали разработке компактных и экономичных
систем регулируемого электропривода.По мнению американских экспертов [31], от 25 до 50% всех
технологических агрегатов нуждается в регулируемом электро¬
приводе. По данным фирмы Motorola рынок регулируемых элек¬
троприводов в Европе вырастет с 1 млрд. долларов США в
1993 г. до 1,5 млрд. в 2000 г., причем 77% продаж относятся к
электроприводам 0,75-75 кВт.Для большинства массовых применений электроприводов
(насосы, вентиляторы, конвейеры и т.д.) при нереверсивном ха¬
рактере работы требуется относительно небольшой диапазон
регулирования скорости (до 1:10, 1:20) с умеренным быстродей¬
ствием, т.е. точностные требования к электроприводу относи¬
тельно снижены. Здесь регулирование электропривода позволя¬
ет сэкономить как электроэнергию (например, отказом от регули¬
рования расхода воды с помощью задвижек), так и сам техноло¬
гический продукт (снижение утечек из-за повышенных давлений в
магистрали при неполностью открытых задвижках) и оборудова¬
ние (снижение гидравлических ударов в магистрали благодаря
плавному пуску электропривода). Так, по данным [31] применение
регулируемых электроприводов насосов питьезой воды в жилых
зданиях позволяет сэкономить до 10...30% воды и до 20...50%
электроэнергии. Учитывая массовый характер этих электропри¬
Глава 5. Регулируемые электроприводы переменного тока 237водов, следует добиваться высокой степени их надежности и ми¬
нимальных затрат на обслуживание в процессе эксплуатации.Преимущественное применение в настоящее и ближайшее
будущее время имеют электроприводы с асинхронными коротко-
замкнутыми двигателями. В связи с резким удешевлением стати¬
ческих преобразователей частоты быстро увеличивается доля
частотно-регулируемых асинхронных электроприводов. При этом
целесообразны наиболее простые, известные из классических
курсов основ электропривода и электрических машин способы
регулирования, получившие в современной технической литера¬
туре название систем скалярного управления.Структурная схема асинхронного электропривода с автоном¬
ным инвертором напряжения приведена на рис. 5.19. Здесь си¬
ловая часть схемы состоит из нерегулируемого выпрямителя В,
силового фильтра, выполненного на реакторе L и конденсаторе
С, и автономного инвертора напряжения АИ, выполненного на
шести IGBT-транзисторах. Инвертор работает в режиме широт¬
но-импульсной модуляции и преобразует нерегулируемое посто¬
янное напряжение на выходе выпрямителя и фильтра в регули¬
руемое по частоте и амплитуде первой гармоники напряжение на
статоре асинхронного двигателя М. Схема нереверсивная и не
предусматривает электрического торможения электропривода,
что для большой группы механизмов (например, насосов, венти¬
ляторов) часто и не требуется.Основой системы управления электроприводом является мо¬
дуль микроконтроллера МК, с помощью которого осуществляется
управление преобразователем частоты и электроприводом в це¬
лом. Реализация желаемой структуры системы управления и на¬
стройка параметров регуляторов производится программным пу¬
тем. Фирмы, выпускающие регулируемые электроприводы для
массовых серий, как правило, предпочитают простые алгоритмы
управления двигателем (например, U / f = const).Электропривод (рис. 5.19) выполнен с отрицательной обрат¬
ной связью по скорости, которая измеряется тахогенератором ТГ.
Настройка контура регулирования скорости осуществляется ПИ-
238 Гпава 5. Регулируемые электроприводы переменного тока
Гпава 5. Регулируемые электроприводы переменного тока 239регулятором скорости PC. Задатчик интенсивности ЗИ позволяет
формировать процессы разгона и торможения электропривода с
заданным ускорением.Управление инвертором АИ осуществляется по двум кана¬
лам: сигнал fy, пропорциональный заданной частоте напряжения
АИ, снимается с выхода пропорционального регулятора 2и, а сиг¬
нал Uy, пропорциональный заданной величине напряжения АИ, -
с выхода пропорционального регулятора Ег. включенного на вы¬
ходе канала, образованного последовательным соединением
функционального преобразователя ФП и 12- Статическая харак¬
теристика ФП (изображена над звеном ФП на рис. 5.19) аппрок¬
симируется тремя линейными отрезками: 0-а, а-б и б-е. Отрезком
о-a создается начальное смещение напряжения на выходе АИ,
необходимое для преодоления падения напряжения на обмотке
статора М при малых частотах напряжения на статоре. На отрез¬
ке а-б напряжение на статоре Uc и частота его fc изменяются
пропорционально. Зтот отрезок соответствует диапазону изме¬
нения частоты и напряжения на статоре, когда магнитный поток в
двигателе косвенным способом поддерживается постоянным и
номинальным. На участке б-а величина напряжения на статоре
двигателя остается неизменной, хотя при этом частота его может
увеличиваться. Здесь осуществляется регулирование скорости
вращения двигателя при постоянстве мощности, что позволяет
снизить габарит преобразователя частоты для тех электропри¬
водов, в которых на больших скоростях наблюдаются малые мо¬
менты статической нагрузки. Чтобы падение напряжения в цепи
обмотки статора двигателя мало сказывалось на величине его
магнитного потока при изменении нагрузки, статическая харак¬
теристика 0-а-б-в функционального преобразователя смещается
вертикально в функции тока статора, для чего предусмотрен узел
IR-компенсации (слабой положительной обратной связи по току
статора), когда сигнал с выхода датчика тока ДТ подается на
вход суммирующего усилителя S2-Ограничение тока статора и электромагнитного момента дви¬
гателя производится ПИ-регулятором тока РТ: когда ток статора
240 Гпава 5. Регулируемые электроприводы переменного токадвигателя меньше тока уставки 1М, то в соответствии со статиче¬
ской характеристикой РТ (изображена рядом со звеном РТ на
рис. 5.19) сигнал на его выходе равен нулю, отрицательная об¬
ратная связь по току не работает. Электроприводом обеспечива¬
ется режим поддержания заданной скорости. Когда ток статора
достигнет уставки !м, происходит резкое увеличение сигнала на
выходе РТ, который преодолевает действие сигнала с выхода
PC, из-за чего наступает снижение сигнала на входе и соответст¬
венно на выходе регулятора Li, а вместе с ним - частоты и вели¬
чины напряжения на статоре двигателя М.Напомним, что вся регуляторная часть системы электропри¬
вода является модулем микроконтроллера МК, а описанные ал¬
горитмы функционирования регуляторов реализованы программ¬
ным путем.Часто фирмы избегают установки внешних датчиков скорости
и (или) других регулируемых технологических координат, если
заданные рабочие режимы электропривода могут быть обеспе¬
чены при измерении только напряжений и токов в силовых цепях
схемы. В этом случае в схеме (рис. 5.19) должны быть отброше¬
ны датчик скорости ТГ и регулятор PC, а сигнал с выхода ЗИ по¬
ступает непосредственно на вход сумматора Еч. В остальном
схема может быть оставлена без изменений. Электропривод
обеспечивает поддержание заданной угловой скорости вращения
двигателя с погрешностью, определяемой величиной наклона его
естественной механической характеристики. За счет работы ре¬
гулятора тока РТ здесь также достигается ограничение тока и
электромагнитного момента двигателя при перегрузках. Для
уменьшения погрешности часто выполняются программы иден¬
тификации подключенного к АИ двигателя.На выходе МК образуется шесть дискретных частоты ШИМ
сигналов управления транзисторами АИ. С этой целью МК со¬
держит ШИМ-контроллер.Чтобы обеспечить согласование выходных сигналов МК с
входными характеристиками IGBT модулей и гальваническую вы¬
соковольтную развязку сигналов, включен модуль выходных уси¬
Гпава 5. Регулируемые электроприводы переменного тока 241лителей ВУ. С целью оптимизации конструкции полупроводнико¬
вых преобразователей и повышения их надежности ведущие
фирмы-изготовители полупроводниковых приборов (например,
Siemens. Mitsubishi) выпускают IPM-модули, в которых ВУ и
IGBT-транзисторы объединены.Управление электроприводом чаще осуществляется от
встроенного, пульта управления, который позволяет не только
подавать команды на пуск и остановку электропривода, но и
производить простейшую настройку электропривода (например,
изменять темп разгона) и отражать на дисплее заданные и теку¬
щие значения регулируемых переменных. Фирмы, выпускающие
преобразователи частоты, создают специальные макросы, ори¬
ентированные на наиболее часто встречающиеся стандартные
режимы. Если имеющийся в программном обеспечении макрос
удовлетворяет условиям применения преобразователя частоты в
конкретном электроприводе, то достаточно только проверить со¬
ответствие параметров привода заводским установкам, ввести
номинальные данные двигателя и осуществить пуск.Предельная механическая характеристика асинхронного
электропривода со скалярным управлением приведена на рис.
5.20. На участке 1-2 этой характеристики ток статора двигателя
равен максимально допус¬
тимому 1м, напряжение на
статоре и частота при этом
изменяются пропорциональ¬
но друг другу, а по величине
остаются меньше своих
предельных значений. На
участке 2-3 предельной ха¬
рактеристики и напряжение
и ток статора достигли своих
предельных значений. Так
как напряжение на статоре
ограничено, то с ростом час¬
тоты происходит уменьше¬Рис. 5.20. Предельная механическая ха¬
рактеристика асинхронного электро¬
привода со скалярным управлением и
двухзонным регулированием скорости
242 Гпава 5. Регулируемые электроприводы переменного токание потока в двигателе, поэтому при движении по характеристике
от точки 2 к точке 3 при соблюдении постоянства тока статора
1С = 1м предельный момент двигателя уменьшается. Наконец,
последний участок 3-4 предельной механической характеристики
соответствует максимально допустимой скорости, что реализует¬
ся в схеме ограничением сигнала задания Ubx-В пределах,. ограниченных осями координат и ломаной
1-2-3-4, электропривод способен обеспечить постоянство за¬
данной скорости, но это постоянство в зависимости от уровня
скорости поддерживается с соблюдением разных законов регу¬
лирования. Через точки 5 и 2 проведена естественная механиче¬
ская характеристика асинхронного двигателя при значениях час¬
тоты и напряжения на статоре, как в точке 2. Если рабочий режим
электропривода определяется точкой, находящейся внутри мно¬
гоугольника 0-1-2-5, то поддержание заданной скорости обеспе¬
чивается при номинальном магнитном потоке путем пропорцио¬
нального изменения частоты и напряжения на статоре. Если ра¬
бочая точка лежит внутри многоугольника 5-2-3-4, то поддержа¬
ние скорости достигается только изменением частоты при неиз¬
менной максимальной величине напряжения на статоре. Магнит¬
ный поток двигателя при этом меньше номинального значения.•« Изобразите, как изменяются от скорости электропривода ток стато¬
ра, напряжение и частота напряжения на статоре при регулировании ско¬
рости от максимального значения до нуля при постоянном моменте стати¬
ческой нагрузки.•• В регуляторе PC уменьшили в 2 раза уровень ограничения макси¬
мального напряжения. Как это повлияет на вид механической характери¬
стики электропривода? Изменится ли величина момента при работе элек¬
тропривода на упор? Поясните свои решения.•• Сопоставьте два способа ограничения максимального момента
электропривода: в схеме (рис. 5.19) и в традиционной системе подчинен¬
ного регулирования.
Гпава 5. Регулируемые электроприводы переменного тока 2435.9. Асинхронные электроприводы с регулированием
напряжения на статореФункциональная схема электроприводаРегулировать угловую скорость вращения асинхронного дви¬
гателя можно, изменяя напряжение на его статоре [62,65]. Прав¬
да, в разомкнутой системе электропривода эффективность тако¬
го регулирования очень мала из-за крайне незначительного диа¬
пазона устойчивых скоростей вращения двигателя. В замкнутой
же системе благодаря введению внешней отрицательной обрат¬
ной связи по скорости удается получить механические характе¬
ристики с устойчивыми скоростями вращения во всем первом
квадранте. В этом случае в цепь статора асинхронного коротко-
замкнутого двигателя включается тиристорный преобразователь
напряжения ТПН UZ, при этом статорная обмотка каждой фазы
двигателя подключается к питающей сети пременного тока через
два встречно-параллельных тиристора (рис. 5.21), изменяя угол
управления которых, можно регулировать напряжение на стато¬
ре.Вход системы импульсно-фазового управления ТПН подклю¬
чается на выход ПИ-регулятора скорости PC AR, с помощью ко¬
торого производится настройка контура регулирования скорости
КРС с достижением требуемых показателей качества. Величина
требуемой скорости вращения двигателя МА пропорциональна
напряжению на выходе потенциометра RP1, которое сравнивает¬
ся на входе PC с напряжением канала отрицательной обратной
связи по скорости, снимаемым с выхода датчика скорости ДС
UV.В схеме возможно и динамическое торможение двигателя,
когда по обмотке статора пропускается выпрямленный ток через
два тиристора соседних фаз при полностью закрытых остальных
тиристорах. В этом случае ТПН содержит специальный блок ло¬
гики, разделяющий режим поддержания скорости, когда работа¬
ют все тиристоры, и режим динамического торможения, когда
включаются только два тиристора.
244 Гпава 5. Регулируемые электроприводы переменного токаРис. 5.21. Функциональная схема асинхронного электропривода
с регулированием напряжения на статореНа рис. 5.22 изображено два семейства механических харак¬
теристик асинхронного электропривода: в разомкнутой системе
при разных фиксированных напряжениях на статоре Ui > U2 > U3
и в замкнутой системе поддержания скорости (штриховая линия).
В разомкнутой системе диапазон регулирования скорости весьма
невелик и при постоянной величине момента статической нагруз¬
ки ограничен устойчивой ветвью естественной механической ха¬
рактеристики.Иначе ведет себя электропривод в замкнутой системе, где
режим поддержания заданной скорости вращения электроприво¬
да осуществляется следующим образом. Предположим, что на¬
чальное состояние электропривода определялось точкой а, на¬
ходящейся на неустойчивом участке механической характеристи¬
ки (рис. 5.22). Если действие какого-либо возмущения (например,
изменения момента статической нагрузки) вызовет изменение
скорости вращения электропривода, то изменится и напряжение
Гпава 5. Регулируемые электроприводы переменного тока 245тахогенератора BR. Это
приведет к изменению на¬
пряжения на выходе датчика
скорости, изменению разни¬
цы между напряжениями на
выходах задающего потен¬
циометра RP1 и датчика UV,
изменению напряжения на
выходе регулятора скорости
PC и напряжения на выходе
преобразователя UZ так, что
электромагнитный момент
двигателя изменится в сто- Рис. 5.22. Механические характеристи-
рону восстановления скоро- ки асинхронного электропривода
сти. Механические харак¬
теристики электропривода идут горизонтально и ограничены сле¬
ва вертикальной осью (когда все тиристоры в преобразователе
полностью закрыты), а справа - естественной механической ха¬
рактеристикой электропривода (когда тиристоры полностью от¬
крыты).Структурная схема асинхронного двигателяСоставим линеаризованную структурную схему асинхронного
электродвигателя с управлением по напряжению на статоре.
Представим все переменные в относительных единицах, приняв
за базовые значения момента двигателя, напряжения на статоре
и частоты - их номинальные значения Мн, Uh, и f Hf а скорости
вращения двигателя - скорость идеального холостого хода
(синхронную) п0. Пренебрежем влиянием электромагнитной
инерции в цепях статора и ротора на характер переходных про¬
цессов.При составлении структурной схемы приходится считаться с
тем, что уравнение электромагнитного момента двигателя
М = f(Uc , fc) является нелинейным. Рассматривая процессы «в
малом», ограничимся выражением для приращений переменных:
246 Гпава 5. Регулируемые электроприводы переменного токаДМ = Ки AUc + Kn Ап.Здесь Ки = дШ 5Uc; Kn = 6М Ion - линеаризованные коэф¬
фициенты передачи воздействия з асинхронном двигателе от
напряжения на статоре Uc и скорости п к величине электромаг¬
нитного момента М. Добавив к выражению для приращения ве¬
личины электромагнитного момента двигателя также уравнение
механического движения приводаМ - Мс = Тд рп,получим линеаризованную структурную схему двигателя на
структурной схеме электропривода (рис. 5.23). Здесь каналы пе¬
редачи воздействий обозначены: КН - канал передачи воздейст¬
вия «приращение напряжения на статоре - момент» и КС - «при¬
ращение скорости - момент». Все переменные представлены в
приращениях, но знак Д опущен. Двигатель представляется зве¬
ном с переменными коэффициентами усиления Ки и Км, завися¬
щими от текущих координат Uc и п.Рис. 5.23. Структурная схема асинхронного электропривода
с регулированием напряжения на статореКоэффициенты передачи каналов КН и КС могут быть найде¬
ны как частные производные по Uc и п в выражениях для элек¬
тромагнитного момента, известных из курсов основ электропри¬
Гпава 5. Регулируемые электроприводы переменного тока 247вода. На наш взгляд, более наглядным будет определение
этих коэффициентов, исходя из физических представлений.При выбранных фиксированных значениях п и f коэффици¬
ент усиления канала КН можно представить:Ки =оМ/аис«АМ/дис.На рис. 5.24 а изображена серия механических характеристик
асинхронного двигателя при постоянной частоте f и различных
фиксированных напряжениях на статоре Ui > U2. При выбранных
неизменных значениях скорости ni и напряжении Lh двигатель
развивает момент М? (точка 1 на рис. 5.24 а). Если при неизмен¬
ной скорости nt изменить напряжение на статоре до U2l то вели-Рис. 5.24. Механические характеристики (а) и зависимость от
скорости передаточного коэффициента Ки (б) в асинхронном
двигателе при различных напряжениях на статоречина момента будет определяться точкой 2. Тогда в зоне малых
отклонений от точки равновесия 1|<и * дм / дис = (М2 - Mi) / (U2 - U,).Величина этого коэффициента зависит от текущего значения
скорости п и напряжения на статоре Uc (рис. 5.24 б). Так, когда
скорость равна синхронной п0, то Ки = 0, т.е. воздействие на
248 Гпава 5. Регулируемые электроприводы переменного токанапряжение на статоре не вызывает изменения электромагнит¬
ного момента. При снижении скорости величина Ки сначала уве¬
личивается, а затем при скорости ниже критической - уменьша¬
ется.Определим максимальное значение Ки. Так как указанный
максимум достигается при критической скорости асинхронного
двигателя, а величина момента пропорциональна квадрату при¬
ложенного к статорной обмотке напряжения, то относительная
величина момента, развиваемого двигателем на этой скорости,
Мк = л (Uc/Uh)2 = X (Uc)2- Здесь А. = М«р / Мн - относительная
величина критического момента асинхронного двигателя на есте¬
ственной механической характеристике.Коэффициент усиления канала КН на скорости двигателя,
равной критической, определится из выражения:Ки — сМк / dUc — 2 к Uc .При номинальном напряжении на статоре, когда Uc = 1, полу¬
чим наибольшее возможное значение коэффициента усиления
канала КН в асинхронном двигателе:Ки макс - 2 X .Коэффициент усиления канала КС, определяемый как ча¬
стная производная от момента по скорости, приближенно заме¬
няется отношением малых приращений момента, вызванных со¬
ответствующими приращениями скорости при фиксированных
(неизменных) значениях напряжения на статоре:Kn = SM / дп я АМ / Дп.Если при фиксированных значениях f и Uc задать скорость
вращения двигателя п-i, то он в соответствии с механической ха¬
рактеристикой будет развивать момент Mi (точка 1 на рис. 5.25
а). Когда происходит изменение скорости двигателя до значения
пг , то момент двигателя изменяется до Мг (точка 2 на рис. 5.25а). Тогда
Гпава 5. Регулируемые электроприводы переменного тока 249KN » ЛМ / Дп = (М2 - Мт) / (п2 - п,).Величина этого коэффициента зависит от текущего зна¬
чения скорости п и напряжения на статоре Uc (рис. 5.25. б).
При скоростях выше критической Kn < 0 , т.е. местная обратная
связь по скорости в асинхронном двигателе является отрица¬
тельной. При скоростях ниже критической, когда KN > 0, асин¬
хронный двигатель становится неустойчивым апериодическим
звеном. Физическая природа этого обстоятельства общеизвест¬
на: при п > пкр, когда цепь ротора можно считать активной
(R2 > Х2), снижение скорости вращения п вызывает увеличение
скольжения s, а следовательно, ЗДС Е2 в цепи ротора и тока
ротора 12, что вызывает увеличение момента М. При п < п«р , ко¬
гда цепь ротора следует считать активно-индуктивной , в которой
из-за возросшего s наблюдается Х2 > R2, снижение п хотя и вы¬
зывает такое же увеличение s и Е2 , но темп роста тока ротора 12
замедляется из-за роста Х2 , а главное, увеличение Х2 вследст¬
вие увеличения скольжения вызывает снижение активной со-Рио. 5.25. Механические характеристики (а) и зависимость от
скорости вращения передаточного коэффициента KN (б) в
асинхронном двигателе при различных напряжениях на статоре
250 Гпава 5. Регулируемые электроприводы переменного токаставляющей тока ротора из-за увеличения фазового сдвига меж¬
ду ЭДС Е2 и током ротора.Чтобы оценить величину коэффициента усиления KNl аппрок¬
симируем механическую характеристику двигателя двумя пря¬
мыми а и б (рис. 5.25. а). Прямая а соответствует работе двига¬
теля на устойчивом участке механической характеристики и про¬
ходит через точки идеального холостого хода и номинального
режима. Здесь, взяв приращения ДМ = Мн, а Дп = п0-пн, получимKn = ДМ / Дп = 1 / sH,где sH - номинальное скольжение двигателя. При работе асин¬
хронного двигателя в зоне п > Пкр звено КС в асинхронном дви¬
гателе полностью аналогично звену ЯЦ в двигателе постоянного
тока, а коэффициент KN - величине КЯц.Прямая б соответствует работе асинхронного двигателя на
неустойчивом участке механической характеристики и проходит
через точки моментного тормоза и критической скорости. На этом
участке характеристикиKn = ДМ / Дп = (А. - Кп) / (1 — sKp). •где Кп - кратность пускового тока двигатепя; sкр - критическое
скольжение.Настройка электроприводаАнализ динамики электропривода выполним, воспользовав¬
шись его линеаризованной структурной схемой (рис. 5.23). При¬
мем ряд допущений. Будем считать, что напряжение на статоре
не изменяется при изменении нагрузки на валу двигателя. В ка¬
честве расчетного значения коэффициента усиления канала КН
примем его максимальное значение Ки макс. когда условия устой¬
чивости контура регулирования скорости наихудшие. Примем
KN = 0, т.е. двигатель при изменении напряжения на статоре рас¬
сматривается как источник регулируемого момента и имеет аб¬
солютно мягкую механическую характеристику. Это допущение
Глава 5. Регулируемые электроприводы переменного тока 251бывает приемлемым потому, что в схемах асинхронных электро¬
приводов с регулированием напряжения на статоре применяются
или двигатели с повышенным скольжением, или в цепь ротора
двигателей с фазным ротором вводятся добавочные резисторы.
Да и в обычных короткозамкнутых асинхронных двигателях вели¬
чины X и Кп разнятся незначительно, так что частота среза конту¬
ра, образованного звеньями Д и КС, получается намного ниже
частоты среза контура регулирования скорости. С учетом сказан¬
ного при выборе структуры и параметров регулятора PC звено
КС можно отбросить.Тиристорный преобразователь напряжения ТПН описывается
инерционным звеном с постоянной времени Тп = 0,01...0,05 с.
Относительно большое по сравнению с вентильными электро¬
приводами постоянного тока значение постоянной времени
фильтра в СИФУ ТПН объясняется желанием свести к минимуму
влияние электромагнитных переходных процессов в двигателе
на величину электромагнитного момента.Предварительную оценку величины желаемых параметров
регулятора можно выполнить, используя правило симметричного
оптимума:- ввести расчетную постоянную времени контура регулиро¬
вания скоростиТрс = Тд / Ки Крс,где КрС = Т2/Т1:- определить желаемую величину этой расчетной постоян¬
нойТрС ~ (2...4) £ Tj = (2...4) Тп ,а по ней - коэффициент усиления П-канала Кос в регуляторе
скорости;- определить постоянную времени Тг, соответствующую час¬
тоте сопряжения П- и И-каналов в регуляторе PC:Т2 = ТРС * (2...4).
252 Гпава 5. Регулируемые электроприводы переменного токаЭнергетические показатели и рациональные области
применения электроприводаПри регулировании скорости вращения асинхронного элек¬
тропривода только изменением напряжения на статоре при не¬
изменной частоте этого напряжения энергетические показатели
электропривода получаются низкими из-за больших потерь в це¬
пи ротора при больших скольжениях. Если рассматривать только
установившиеся режимы работы электропривода, то при регули¬
ровании скорости электропривода необходимо, чтобы мощность
потерь в цепи ротора асинхронного двигателяР = М s < Мн sH .Здесь М, s - электромагнитный момент и скольжение ротора
двигателя, соответствующие заданной скорости вращения; Мн,
sH - номинальные момент и скольжение двигателя.Из приведенного соотношения следует, что в установившем¬
ся режиме работы допустимый момент асинхронного двигателяМдоп ^ Мн sH/s .Записанное неравенство указывает на то, что величину МДОп
следует снижать тем более значительно (при выбранном двига¬
теле), чем больше s, т.е. глубже регулирование скорости.Чтобы обеспечить требуемые величины момента на валу ме¬
ханизма во всем диапазоне скоростей в длительном режиме ра¬
боты, необходимо или увеличивать sH (выбирать двигатели с по¬
вышенным скольжением, вводить добавочные резисторы в цепи
ротора), или увеличивать Мн (т.е. применять двигатели завы¬
шенной мощности). В частности, при Me = const и регулировании
скорости вращения асинхронного двигателя до нуля приходится
завышать мощность двигателя в 3...4 раза даже в случае исполь¬
зования двигателей с повышенным скольжением.Так как при регулировании скорости асинхронного электро¬
привода изменением только напряжения на статоре двигателя
энергетические показатели невысокие, то наиболее целесооб¬
Глава 5 Регулируемые электроприводы переменного тока 253разно к этому способу прибегать тогда, когда снижение скорости
вращения двигателя требуется лишь кратковременно и энергети¬
ка процессов регулирования не играет существенной роли.Полезно включение тиристорных преобразователей напря¬
жения в цепь статора асинхронного двигателя в нерегулирумых
по скорости электроприводах с перемежающейся нагрузкой, при
которой за отрезками времени с большим моментом статической
нагрузки следуют и порой значительные промежутки времени, ко¬
гда нагрузка падает до холостого хода. Примером таких меха¬
низмов являются некоторые прессы в машиностроительной про¬
мышленности. Регулируемые преобразователи напряжения по¬
зволяют снижать напряжение на статоре двигателя при малых
моментах статической нагрузки и тем самым уменьшать потери
холостого хода двигателя, а также повышать коэффициент мощ¬
ности электроустановки.В последние годы тиристорные преобразователи напряжения
стали часто использоваться в электроприводах механизмов с на¬
грузочными характеристиками вентиляторного типа (центробеж¬
ные насосы, вентиляторы) для формирования режимов «мягко¬
го» пуска. В этом случае преобразователь напряжения переводят
в режим источника тока, а процесс пуска ведут при токе статора,
превышающем номинальное значение не более, чем в 2...2,5
раза. Тем самым удается существенно разгрузить при пуске дви¬
гателей (а мощность их составляет сотни киловатт и более) пи¬
тающие сети, но самое главное - в двигателе резко снижаются
вибрационные электромагнитные моменты, обусловленные
взаимодействием апериодической и вынужденной составляющих
тока статора в момент подключения статорной цепи к источнику
питания [44J. Конечно, ограничение пускового тока в асинхронном
дзигателе приводит к снижению его момента. Но в данном слу¬
чае речь идет о механизмах, имеющих малые моменты статиче¬
ской нагрузки при малых скоростях. А таких механизмов немало.
В частности, установленная мощность электроприводов только
центробежных насосов и вентиляторов доходит до 30...40% от
установленной мощности всех электроприводов [31].
254 Гпава 5. Регулируемые электроприводы переменного тока5.10. Электропривод с машиной двойного питанияОбщая оценка электроприводов с машинами
двойного питанияМашина двойного питания (МДП) - это асинхронный электро¬
двигатель с фазным ротором, у которого статорные и роторные
цепи подключены^ источникам питания трехфазным напряжени¬
ем. При этом регулируемыми по частоте могут быть один или оба
источника питания.Благодаря двухпоточности и возможности направить каждый
из энергетических потоков (по цепи статора и по цепи ротора) в
любом направлении этот электропривод получает ряд дополни¬
тельных привлекательных возможностей:- сделав один из каналов передачи энергии нерегулируемым
(подключив обмотку статора или ротора напрямую к сети), можно
существенно снизить установленную мощность регулируемых
преобразователей частоты, если угловую скорость электропри¬
вода регулировать вверх и вниз от синхронной. Здесь наиболь¬
шая выгода достигается, когда рабочий механизм требует нере¬
версивного электропривода с ограниченным диапазоном регули¬
рования скорости;- регулируя величину тока в обмотке электродвигателя, под¬
ключенной к преобразователю, удается в цепи другой обмотки,
подключенной напрямую к питающей сети, иметь любой коэф¬
фициент мощности, включая опережающий. Электропривод с
машиной двойного питания - единственный из вентильных элек¬
троприводов переменного и постоянного тока, который может ра¬
ботать источником реактивной энергии. Правда, здесь нужно учи¬
тывать дополнительные затраты на более мощный регулируе¬
мый преобразователь, которые могут оказаться значительными
из-за относительно больших (по сравнению с трансформатора¬
ми) значений индуктивностей рассеяния фазных цепей двигате¬
ля;- повышенная надежность электропривода. При выходе из
строя преобразователя частоты возможна работа электроприво¬
Гпава 5. Регулируемые электроприводы переменного тока 255да з нерегулируемом по скорости режиме, если это допустимо по
условиям технологического процесса;- высокий КПД электропривода, так как преобразованию
подвергается лишь часть потребляемой им энергии.К сожалению, в настоящее время электроприводы с машина¬
ми двойного питания еще не получили такого распространения,
какого они заслуживают по своим техническим возможностям.Функциональная схема электроприводаРассмотрим электропривод с частотнотоковым регулирова¬
нием электромагнитного момента двигателя (рис. 5.26). Здесь
обмотки ротора асинхронного двигателя МА напрямую (или через
согласующий трансформатор) подключены к питающей сети.
Обмотки же статора подсоединяются к выходным зажимам трех
реверсивных тиристорных преобразователей UZA, UZB и UZC,
работающих в режиме источников тока и образующих трехфаз¬
ный НПЧ - преобразователь частоты с непосредственной свя¬
зью. Режим источника тока, как и в схеме синхронного электро¬
привода с частотнотоковым управлением (см. рис. 5.5), достига¬
ется охватом тиристорного преобразователя каждой фазы отри¬
цательной обратной связью по току фазы.Управление НПЧ производится от узла формирования фаз¬
ных токов статора асинхронного двигателя, который содержит
модулятор М UV2, блоки произведения БП1, БП2 и БПЗ, трех¬
фазный трансформатор TV, подключенный к зажимам той же се¬
ти, что и обмотки ротора двигателя, дифференциальный сельсин
2С BE, вал которого через редуктор с целым передаточным чис¬
лом, равным отношению чисел пар полюсов асинхронного двига¬
теля и сельсина 2С, связан с валом двигателя МА, три демоду¬
лятора ДМА, ДМВ и ДМС (UVA, UVB, UVC), выходные напряже¬
ния которых являются выходными сигналами узла формирова¬
ния фазных токов.
256 Глава 5. Регулируемые электроприводы переменного токаРис. 5. 26. Функциональная схема электропривода с
машиной двойного питания
I лава 5. Регулируемые электроприводы переменного тока 257•• Сопоставьте рассматриваемый узел формирования фазных токов с
аналогичным узлом в схеме синхронного частотнотокового электроприво¬
да (рис. 5.4). Обратите внимание на новые элементы и дополнительные
функции, ими реализуемые.Работа узла формирования фазных токов происходит сле¬
дующим образом. При подаче постоянного напряжения UPC на
вход модулятора М (рис. 5.26) на выходе его появляется пере¬
менное высокочастотное (обычно с частотой 0,4...2,5 кГц) напря¬
жение, амплитуда которого соответствует величине UPC) а фазо¬
вый сдвиг относительно опорного коммутирующего напряжения
зависит от знака UPC. Выходное напряжение модулятора М пода¬
ется на первые входы трех блоков произведения БП1...БПЗ, а на
три вторых входа этих блоков подано трехфазное напряжение с
вторичных обмоток трансформатора TV, обмотки первичной сто¬
роны которого подключены к той же сети, что и роторные цепи
МА. Поэтому на статорные обмотки первого сельсина 1C с выхо¬
дов блоков произведения подаются три высокочастотных (часто¬
ты коммутирующего напряжения) напряжения, амплитудные зна¬
чения которых модулированы (ограничены) выходными напря¬
жениями трансформатора TV. В итоге токами трех статорных об¬
моток 1C создается результирующая высокочастотная магнито¬
движущая сила, ось которой поворачивается в зазоре 1C с час¬
тотой сети, питающей трансформатор TV и ротор МА. Амплитуда
этой МДС (при неизменном напряжении сети Uc) пропорциональ¬
на величине UРС.Система трех однофазных высокочастотных токов, проте¬
кающих по роторным обмоткам 1C и 2С и вызванных ЭДС, наве¬
денными в обмотках ротора 1C, приводит к появлению в сельси¬
не 2С высокочастотной МДС, ось которой поворачивается вдоль
окружности ротора 2С с частотой сети Uc. Вдоль же окружности
расточки статора ось той же самой МДС поворачивается с другой
угловой скоростью, отличающейся на величину угловой скорости
вращения ротора 2С.Если вал МА, а следовательно, и 2С неподвижен, то на вы¬
ходах трех демодуляторов ДМА, ДМВ и ДМС появляется система
258 Гпава 5. Регулируемые электроприводы переменного токатрехфазных симметричных напряжений частоты сети, питающей
ротор МА. В том случае, когда вал МА (и 2С) вращается, частота
напряжений на выходах демодуляторов изменяется на величину,
соответствующую угловой скорости вращения ротора 2С.Все описанные выше узлы входят в подсистему косвенного
регулирования электромагнитного момента МА. В исходном со¬
стоянии электропривода считаем, что активный момент статиче¬
ской нагрузки на его валу отсутствует, a Upc = 0. Когда обмотка
ротора МА окажется подключенной к питающей сети, то проте¬
кающие по ней под действием напряжения сети токи создадут
вращающееся магнитное поле, которое наведет в обмотках ста¬
тора МА фазные ЭДС, однако (в идеальной системе) тока в об¬
мотках статора протекать не будет, так как условие UPC = 0 при¬
водит к нулевым напряжениям на выходе демодуляторов и, сле¬
довательно, к нулевым уставкам на входах источников тока UZA,
UZB, UZC. В результате эти источники тока будут развивать
ЭДС, равнопротивоположные тем ЭДС, которые наводятся в ста¬
торных обмотках МА со стороны ротора, но так, чтобы токи в
фазных обмотках статора МА были равны нулю.При подаче напряжения UPC на вход модулятора М на выхо¬
дах демодуляторов появится (при неподвижном роторе МА)
трехфазная система симметричных напряжений задания, кото¬
рая вызовет в источниках тока и статорных обмотках МА проте¬
кание соответствующих токов. Результирующая волна МДС. соз¬
даваемой токами статора, будет вращаться вдоль окружности
расточки статора с той же угловой частотой, что и МДС от токов
ротора. Пространственный же угол сдвига этих МДС в зазоре МА
будет определяться начальным углом установки заторможенного
ротора 1C. Взаимодействие токов обмоток ротора и статора в МА
создаст вращающий момент МА. Когда же ротор МА придет в
движение, то на такой же угол будет поворачиваться и ротор 2С,
В итоге взаимный пространственный угол сдвига между осями
МДС обмоток ротора и статора, выставленный при покое МА, ос¬
танется в точности таким же и при движении, т.е. электропривод
Гпава 5. Регулируемые электроприводы переменного тока 259будет работать как источник момента, по величине соответст¬
вующего сигналу Upc.Электропривод выполнен по типовой схеме подчиненного ре¬
гулирования с внешним контуром регулирования скорости. Здесь
сигнал иРС задания момента двигателя получают на выходе ре¬
гулятора скорости PC AR, на входе которого алгебраически сум¬
мируются сигнал задания скорости U3 и сигнал отрицательной
обратной связи по скорости, снимаемый с выхода датчика скоро¬
сти ДС UV1. Блок ограничения БО А1, который определяет уро¬
вень насыщения в статической характеристике регулятора PC,
позволяет получить на механической характеристике электро¬
привода участок ограничения момента.Векторные диаграммы и статические характеристики
электроприводаЗа базовый вектор в моментном треугольнике электроприво¬
да с МДП примем вектор результирующего потокосцепления в
зазоре щ: его положение и величина жестко определяются на¬
пряжением питающей сети, к которой напрямую подключена об¬
мотка ротора асинхронного двигателя.Напряжение на выходе регулятора скорости через узел фор¬
мирования фазных токов и замкнутые контуры регулирования
этих токов задает однозначно величины фазных токов и следо-
зательно, длину вектора потокосцепления статора ус.Ориентация вектора ус относительно базового вектора \*/0
задается выбором начального угла поворота ротора 1C, который
при работе электропривода остается неизменным. Действитель¬
но, вектор ц/р вращается относительно ротора с угловой скоро¬
стью, определяемой только частотой питающей сети. А так как
ротор 2С вращается с угловой скоростью вала МА, то частота
напряжений на выходах демодуляторов в точности соответствует
б любой момент времени разности частот питающей сети и угло¬
вой скорости ротора. Т.е. векторы и/с и и/0 повернуты друг отно¬
сительно друга на фиксированный угол. Величина этого угла за¬
дается начальным поворотом вала ротора 1C.
260 Гпава 5. Регулируемые электроприводы переменного токаИтак, моментный треугольник в рассматриваемом электро¬
приводе с МДП формируется длинами сторон цо и ус и углом
между ними.Если при наладке электропривода выставить начальное зна¬
чение угла Z \уо, Ур = 90 0 (рис. 5.27), то во-первых, при любых
нагрузках на зажимах статора МА выполняется costp = 1, что
экономит габарит силовых цепей преобразователя частоты, а во-
вторых, в АД принципиально не наблюдается ограничения по
максимальному электромагнитному моменту: площадь момент-
ного треугольника увеличивается неограниченно за счет удлине¬
ния сторон \|/р и ус, но при этом магнитный поток в зазоре дви¬
гателя остается постоянным.В реальных условиях приходит-
' ^ Направление вектора ся считаться лишь с условиями на¬
грева силовых элементов в цепях
ротора и статора, а также ограни¬
ченной механической прочностью
ротора МА. Кроме того, при очень
больших токах статора и ротора не¬
обходимо учитывать возрастающую
долю падения напряжения на этих
обмотках, что приводит к некоторо¬
му снижению магнитного потока в
зазоре и требует завышения на¬
пряжения на выходе преобразова¬
теля частоты.•• В некоторых электроприводах с МДП вместо НПЧ установлен двух¬
звенный преобразователь частоты с естественной коммутацией вентилей
в автономном инверторе. Можно ли в этом случае получить опережающий
соБф электропривода, и какие дополнительные ограничения следует при
этом учитывать?тока статораРис. 5.27. Векторная диа¬
грамма асинхронного двига¬
теля в режиме двойного пи¬
тания и частотнотокового
регулирования
Гпава 5. Регулируемые электроприводы переменного тока 261Механическая характеристи¬
ка электропривода с МДП
n = f(M) имеет вид типовой ха¬
рактеристики электропривода с
подчиненным регулированием
(рис. 5.28 а). Здесь возможны два
варианта поддержания скорости
электропривода с последующим
ограничением момента: ниже
синхронной (кривая а-б-ж) или
выше синхронной (кривая г-д-е-
б-ж).Зависимость тока статора от
момента lc = f(M) имеет линей¬
ный характер, так как площадь
моментного треугольника при
ц/о = const пропорциональна дли¬
не вектора vyc-Выясним, как выглядит
кривая действующего напря¬
жения на статоре Uc = f(M).При неучете падения напря¬
жения на обмотке статора
Uc = Ес. В свою очередь, вели¬
чина ЭДС, наводимой в обмотке
фазы статора,пДПмахПэПмМДМмАХмРис. 5.28. Статические характе¬
ристики электропривода с ма¬
шиной двойного питания: а)
механическая; б) напряжения
на статоре; в) тока статораЕс - Eco s,где Есо - величина ЭДС, наводимой в разомкнутой обмотке ста¬
тора, когда неподвижный ротор двигателя подключен на полное
напряжение сети;s = (шс - сор) / сое - величина, аналогичная скольжению в
асинхронном двигателе; ©с - частота приложенного к обмотке
ротора напряжения сети; сор - частота (электрическая) враще¬
ния ротора.
262 Гпава 5. Регулируемые электроприводы переменного токаНа участке поддержания постоянства скорости электропри¬
вода, где s = const, действующее значение напряжения на ста¬
торе поддерживается постоянным, а в режиме ограничения мо¬
мента определяется величиной скольжения и изменяется про¬
порционально ему. Когда в режиме поддержания скорости двига¬
тель сначала работает на синхронной скорости, а затем в режи¬
ме перегрузки снижает скорость (траектория е-е-6 на рис. 5.23а), то кривая напряжения на статоре описывается траекторией
в-е-6 на рис. 5.28 б. При уставке скорости ниже синхронной, ко¬
гда скорость изменяется по кривой а-б-е (рис. 5.28 а), дейст¬
вующее значение напряжения изменяется по кривой а-б-е (рис.
5.28 б). Когда же уставка скорости выше синхронной (траектория
г-д-е-б на рис. 5.28 а), то действующее значение напряжения
изменяется по кривой г-д-е-б, т.е. сначала поддерживается по¬
стоянным, потом падает до нуля (в предположении, что падение
напряжения в обмотке статора не учитывается), а затем увели¬
чивается до Есо- Точка э на характеристике соответствует син¬
хронной скорости МА.•в Постройте энергетическую диаграмму электропривода при работе
его в точке 6, а затем - з точке д (рис. 5.28 а).5.11. Частотнорегулируемый асинхронный
электропривод с векторным управлениемПоявление микропроцессорных средств позволило вычис¬
лять переменные состояния электропривода, недоступные для
прямого измерения и реализовать законы управления, более
сложные, но более эффективные. В качестве примера можно
указать на частотнорегулируемый асинхронный электропривод с
векторным регулированием момента и вычислением с использо¬
ванием модели двигателя тех переменных состояния, которые
трудно доступны для прямого измерения.Асинхронный двигатель М (рис. 5.29) получает питание от
преобразователя частоты ПЧ, который содержит неуправляемый
выпрямитель, L-С фильтр, подключенные к автономному инвер¬
Глава 5. Регулируемые электроприводы переменного тока 263БОп3■W ЗАДf "зи-нО-рсPTwUa3 э*-ПКСгаыПЧ Uc3Рис. 5.29. Функциональная схема асинхронного частотнорегу¬
лируемого электропривода с векторным управлениемтору напряжения, выполненному на транзисторах по трехфазной
мостовой схеме.Регулирование электромагнитного момента производится ре¬
гуляторами PTW активной Iw и РТц реактивной 1ц составляющих
тока статора. Измерение этих составляющих осуществляется
косвенным путем с помощью модели асинхронного двигателя
(«Модель АД»), на вход которой поступают мгновенные (текущие)
значения фазных токов 1А, 1в . 1с, напряжений UA, UBl Uc и угло¬
264 Гпава 5. Регулируемые электроприводы переменного токавой скорости п двигателя. На выходе модели представлены ве¬
личины скольжения s, составляющих токов lw и 1ц.Управление движением электропривода производится по
традиционной схеме подчиненного регулирования скорости с за¬
датчиком интенсивности ЗИ, ПИ-регулятором скорости PC с бло¬
ком ограничения БО, двумя параллельно работающими канала¬
ми регулирования токов lw и Iji со своими регуляторами PTw и
РТЦ , преобразователем координат ПК, который вектор желаемо¬
го тока статора, полученный регуляторами тока в двухфазной
системе коородинат, преобразует в трехфазную систему пере¬
менных по числу фаз асинхронного двигателя.Как правило, фирмы-изготовители электрооборудования не
считают обязательным раскрывать алгоритмы функционирова¬
ния отдельных блоков более подробно, чем это представлено на
рис. 5.29.Для более глубокого понимания процессов, происходящих в
системе управления, рассмотрим подробнее один из возможных
вариантов работы модели асинхронного двигателя.Будем исходить из упрощенной модели двигателя, для чего
примем ряд допущений. Прежде всего, считаем, что асинхронный
двигатель работает в режимах малых скольжений, когда цепь ро¬
тора можно принять чисто активной, а вектор приведенного тока
ротора Г2 равнопротивоположен вектору lw. Это вполне допусти¬
мо. так как в номинальном режиме отклонение вектора тока 12 от
ЭДС ротора Е2 не превышает 10...15 градусов. Далее, не будем
учитывать падение напряжения в обмотке статора (примем
It Zi * 0), тогда можно принять ортогональность векторов напря¬
жения на статоре и тока намагничивания (Ui 1 |ц). С учетом ска¬
занного принята векторная диаграмма асинхронного двигателя
(рис. 5.30), которая является основой для описания
электромагнитного состояния двигателя.Уравнения, описываюшие состояние двигателя, с учетом
принятых допущений выглядят следующим образом.Уравнение связи между напряжением на статоре и током
намагничивания:
Гпава 5. Регулируемые электроприводы переменного тока 265U-I » Ei = kifiln.Уравнения токов в асинхронном дви-гателе:12 ~ Iw - (121 - 1ц )0,5.
Закон Ома для цепи ротора:12 ~ к2 1ц s / г2.2Наконец, связь между частотой на- Ркс. 5.30. Упрощеннаяпряжения на статоре fi, угловой скоро- векторная диаграммастью п ротора и скольжением s дается асинхРонного двигателя
уравнением:Здесь ki и к2 - коэффициенты пропорциональности; г2 - ак¬
тивное сопротивление роторной цепи.Процедура определения текущих (мгновенных) значений
скольжения s и токов lw и 1ц с использованием приведенных
уравнений может выглядеть следующим образом. Задавая ^ и
зная Ui, определяем \ц. По !р и зная h, определим Iw. По 1д и lw
найдем s. По найденному s и измеренному п найдем U- Найден¬
ное fi сопоставим с заданным в начале процедуры расчета fi и
повторим процедуру счета до тех пор, пока, ошибка (погрешность
расчета) не уменьшится до допустимой величины. Схема опи¬
санной процедуры расчета изображена на рис. 5.31.Однако рассмотренная процедура вычислений не отражает
полной картины преобразования информации в модели асин¬
хронного двигателя, так как она устанавливает связь только ме¬
жду действующими (или амплитудными) значениями векторов Ui
и h и составляющими токов Iw и 1ц. На схеме же датчиками тока и
напряжения измеряются текущие (мгновенные) значения фазных
токов и напряжений. Необходимо установить связь между мгно¬
венными значениями этих токов и напряжений и векторами и
li Эта связь дается уравнениями преобразования координат иfi = п + s.
266 Гпава 5. Регулируемые электроприводы переменного токаU, liпРис. 5.31. Схема вычисления переменных со¬
стояния в модели асинхронного двигателяпоясняется рис. 5.32, на котором изображены неподвижные сис¬
темы координат, связанные со статором (трехфазная с осями а,
в, с и двухфазная прямоугольная с осями а и {3, причем ось а на¬
правлена по оси а), и подвижная (вращающаяся с частотой на¬
пряжения на статоре) двухфазная прямоугольная с осями х и у,
причем ось х направлена по оси изображающего вектора Ui.
Чтобы не загромождать рисунок, показана связь только изобра¬
жающего вектора тока h с его проекциями на оси во всех трех
указанных системах координат.Последовательность вычислительных процедур может быть
принята следующей. По измеренным мгновенным значениям
фазных напряжений UAl UB, Uc определяются проекции изобра¬
жающего вектора U, на оси сх и р, после чего вычисляются длина
вектроа Ui и угол у поворота этого вектора относительно оси «.
Аналогично определяются длина и угол поворота вектора h, по¬
сле чего ищутся составляющие lw и 1д как проекции вектора li
на оси х и у.Безболезненное упрощение модели АД возможно потому, что
в основном соотношении fc = fp + fs частота напряжения на ста¬
торе fc не подвержена влиянию возмущений (момента статиче¬
ской нагрузки и колебаний напряжения сети) и очень стабильно
связана с величиной сигнала задания частоты инвертора, а час¬
тота скольжения fs составляет лишь единицы процентов. Это по¬
зволяет весьма точно определять в модели АД величину угловой
скорости ротора.
Гпава 5. Регулируемые электроприводы переменного тока 267Когда установка тахогенератора нежелательна, с помощью
модели АД можно вычислять скорость вращения двигателя и за¬
мыкать контур регулирования скорости по ее оценке.Векторное регулирование момента асинхронного двигателя
обеспечивает точное поддержание электромагнитного момента иРис. 5.32. Векторная диаграмма асинхронного
двигателя в различных системах координатустойчивую работу электропривода во всем диапазоне скоро¬
стей, включая режимы работы на упор и ползучие скорости. Зтим
оно выгодно отличается от скалярного регулирования.•о Вспомните определение изображающего вектора тока в трехфазной
электрической машине переменного тока. Чем этот вектор отличается от
результирующего вектора тока?
268 Гпава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питанияГлава 6. ПЕРСПЕКТИВНЫЕ ЭЛЕКТРОПРИВОДЫ
С НЕТРАДИЦИОННЫМИ ТИПАМИ ДВИГАТЕЛЕЙ
И НОВЕЙШИМИ ИСТОЧНИКАМИ ПИТАНИЯСерийные электрические машины переменного тока рассчи¬
таны на применение в электрических цепях с синусоидальными
источниками питания. Автономные инверторы современных ре¬
гулируемых электроприводов переменного тока также, как пра¬
вило, имеют выходное напряжение синусоидальной формы, хотя
для этого необходимо преодолеть определенное усложнение их
схемы, так как силовые вентильные элементы, работая в ключе¬
вом режиме, синусоидальную форму напряжения и тока создать
естественным образом не могут. Да и для самих электрических
машин, работающих от преобразователей частоты, синусоидаль¬
ная форма фазных токов и результирующей МДС в воздушном
зазоре может быть подвергнута сомнению, когда заходит речь о
рациональном использовании активных материалов. Так, напри¬
мер, амплитудное и среднее значения синусоиды очень отлича¬
ются; три синусоидальных фазных тока единичной амплитуды
создают не тройную, а лишь полуторакратную амплитуду резуль¬
тирующего вектора тока статора в электрической машине.По этой причине вполне логичным является создание таких
вентильных электроприводов, в которых электрическая машина
проектируется под вентильный преобразователь, а тогда теряют
свою бесспорность такие привычные утверждения, что три фа¬
зы - это оптимальное число фаз, что синусоида является наи¬
лучшей формой напряжения для электрической машины, питаю¬
щейся от вентильного преобразователя. Итак, системный подход
к разработке вентильного электропривода и, в первую очередь,
учет взаимодействия между электрической машиной и преобра¬
зователем приводит к нетрадиционным конструкциям электриче¬
ской машины и вентильного преобразователя, обеспечивающим
более высокие удельные показатели электропривода (например,
мощность на единицу массы и др.).Ниже приведены два примера наиболее перспективных вен¬
Гпава 6. Перспективные электроприводы с нетрадици- 269онными типами двигателей и новейшими источниками питаниятильных электроприводов с нетрадиционными типами двигате¬
лей.В первом случае рассмотрен ВИП - вентильно-индукторный
электропривод, - в отечественной научно-технической литерату¬
ре хорошо известный благодаря работам М.Г. Чиликина. Б.А.
Ивоботенко [23], Н.Ф. Ильинского, Л.А. Садовского, М.Г. Бычкова
[15,16,42]. В'зарубежной литературе ВИП более известен под на¬
званием SRD-привод (Switched Reluctance Drive [69,70,71]).Во втором случае описан вентильный электропривод с син¬
хронным реактивным двигателем независимого возбуждения,
получивший название FRRM - Field Regulated Reluctance Ma¬
chine [70,73].6.1. Вентильный индукторный электроприводИндукторные двигатели выполняются с неравным числом
зубцов (полюсов) на статоре Zc и роторе Zр. Реверсивные двига¬
тели должны иметь не менее трех фаз. В общем случае для ин¬
дукторных двигателей должно выполняться соотношениеZc = 2 k m, ZP =2 (km ± 1),где к = 1, 2, 3... - целое число; m - число фаз. В трехфазных ин¬
дукторных двигателях чаще встречается соотношение Zc / Zp
равным 6/4, 12/8 и 12/10; в четырехфазных - 8/6.Обмотки статора индукторного двигателя создают не вра¬
щающиеся, как в обычных двигателях переменного тока, а пуль¬
сирующие однополярные потоки фаз, дискретно сдвинутые в
воздушном зазоре. Угловая скорость вращения ротора не равна,
а кратна угловой скорости перемещения фазных потоков в зазо¬
ре. При Zc > Zp эти скорости даже встречны.Принцип работы простейшего индукторного двигателя пояс¬
няется рис. 6.1. Здесь каждая из трех фаз статора образована
двумя последовательно и согласно включенными катушками,
размещенными на диаметрально противоположных зубцах (по¬
люсах). Токи подаются поочередно в обмотки каждой фазы.
270 Гпава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питания23‘2’tl ^2 tj tsа)б)Рис. 6.1. Индукторный двигатель с числом полюсов 6/4 разрезе (а) и
диаграмма токов фаз статора (б)Пусть в исходном состоянии двигателя был подан постоян¬
ный ток в обмотку статора 1 - V , тогда полюса 1-1' ротора со¬
вместятся с полюсами 1 -1* статора, а полюса 2-2' ротора по¬
падут в межполюсное пространство полюсов 2 - 2' и 3 - 3' стато¬
ра. Если теперь ток в обмотке 1-1' статора уменьшить до нуля,
а в обмотку 2-2' подать постоянный ток, то ротор придет во
вращение так, чтобы полюса 2-2' ротора совместились с полю¬
сами 2-2' статора (отрезок времени ti -12). В момент времени t2
производится подача тока в обмотку статора 3 - 3', а обмотка 2 -
2' отключается. Далее в момент времени t3 снова включается об¬
мотка 1 - V, и процесс продолжается аналогично.Полный электрический цикл управления двигателем (пооче¬
редное подключение к источнику питания всех трех обмоток ста¬
тора) приводит к повороту ротора двигателя на одно зубцовое
деление ротора, т.е. в рассматриваемом случае на 90°. При этом
скорости вращения ротора и фазных потоков статора между со¬
бой не равны, а при ZP < Zc - даже противоположны: на рис.
Гпава 6. Перспективные электроприводы с нетрадици- 271очными типами двигателей и новейшими источниками питания6.1а фазные потоки статора перемещаются по часовой стрелке,
а ротор - вращается против.Если из исходного состояния индукторного двигателя (полю¬
са 1 - 1' статора и ротора совпадают, по обмотке 1 - 1' течет ток)
знешним механическим усилием поворачивать ротор, а ток в об¬
мотке сохранить, то двигатель будет оказывать сопротивление
движению вала ротора, т.е. перейдет в тормозной режим. Диа¬
грамма фазных токов двигателя для этого режима оказывается
сдвинутой в направлении вращения ротора.Переход двигателя в тормозной режим можно осуществить,
если в этом режиме с датчика положения ротора снимать после¬
довательность отпирающих импульсов, смещенную вперед (в
сторону вращения вала) на один полюсный шаг статора.Силовые цепи электроприводов с индукторными двигателями
содержат меньшее число силовых вентилей, так как через обмот¬
ки статора пропускаются однополярные импульсы тока.В электроприводах малой и средней мощности (рис. 6.2 а) в
цепи обмоток 1, 2 и 3 статора включены транзисторы VT1...VT3,
которые образуют коммутатор (переключатель) фазных токов
статора. Последовательно с ними включен транзистор VT, кото¬
рый работает в режиме широтно-импульсной модуляции и вы¬
полняет функции регулируемого источника тока. Диоды VD и
VD1...VD3 снимают перенапряжения на силовых переходах тран¬
зисторов при переключениях фазных обмоток двигателя.В двигателях большей мощности каждая из фазных обмоток
статора включена по двухтранзисторной мостовой схеме (рис. 6.2б). В режиме поддержания заданного значения тока фазы в ре¬
жиме широтно-импульсной модуляции работает один из транзи¬
сторов, например, VT1. При этом другой транзистор VT2 полно¬
стью открыт. При переключении тока нагрузки с одной фазной
обмотки на другую происходит запирание обоих транзисторов и
резкое отсекание тока. При этом электромагнитная энергия, за¬
пасенная в обмотке статора, сбрасывается в питающую сеть че¬
рез диоды VD1 и VD2.
272 Гпава 6. Перспективные электроприводы с нетрадици-очными типами двигателей и новейшими источниками питания+ Unб)VT1АVD2VD1VT2Рис. 6.2. Схемы силовых цепей индукторного двигателя:а) схема статорных цепей двигателей малой и средней мощности;б) схема цепи обмотки одной фазы двигателей средней и большой
мощностиСхема управления электроприводом с трехфазным индук¬
торным двигателем (рис. 6.3), помимо силовых элементов, изо¬
браженных на рис. 6.2 а и образующих источник тока с коммута¬
тором фазных токов, содержит регулятор скорости AR с блоком
ограничения А1, датчики положения ротора BQ и скорости BR.
Уровень установившейся скорости вращения электродвигателя
определяется величиной входного напряжения Ugx. Темп разго¬
на электропривода формируется задатчиком интенсивности AJ.
Датчик положения ротора выдает импульсы, которые определя¬
' Глава 6. Перспективные электроприводы с нетрадици- 273онными типами двигателей и новейшими источниками питанияют моменты времени, когда следует переключать токи фазных
обмоток статора.Механическая характеристика электропривода является ти¬
повой для электроприводов с подчиненным регулированием. В
зоне рабочих нагрузок электропривода, когда регулятор скорости
AR работает на линейном участке своей статической характери¬
стики, электропривод поддерживает заданную скорость враще¬
ния. При перегрузках электропривода регулятор скорости насы¬
щается и происходит ограничение тока статорных обмоток и мо¬
мента двигателя.Рис. 6.3. Функциональная схема управления индукторным двигателемК безусловным проверенным практикой достоинствам элек¬
троприводов с индукторными двигателями следует отнести про¬
274 Гпава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питаниястую и технологичную конструкцию магнитопровода и фазных ка¬
тушечных обмоток на статоре, компактный, прочный, не содер¬
жащий обмоток ротор, выдерживающий значительные перегрузки
и скорость вращения, простую, надежную и сравнительно деше¬
вую схему вентильного преобразователя, пониженный расход
меди. Области применения таких электроприводов постоянно
расширяются. Так, промышленные серии индукторных двигате¬
лей, освоенные странами Европы, охватывают диапазон
мощностей от 0,5 до 250 кВт, а их выпуск в США доведен до 1
млн. уже в 1995 г.6.2. Электропривод с синхронным реактивным
двигателем независимого возбужденияВ традиционной синхронной машине (рис. 5.1) магнитная сис¬
тема возбуждается обмоткой, установленной на роторе и по ко¬
торой пропускают постоянный ток. Но в явнополюсной машине
роль обмотки возбуждения может выполнить и обмотка, разме¬
щенная в пазах статора, если, во-первых, ее витки находятся на¬
против межполюсного промежутка ротора и, во-вторых, эта об¬
мотка имеет полный шаг. Так, если по обмоткам 1 - 1' и 2 - 2'
(рис. 6.4) пропустить ток, то он создаст поток по продопьной маг¬
нитной оси машины. Еспи теперь по обмоткам 3 - 3', 4 - 4', 5 - 5'
и 6 - 6', расположенным над полюсами ротора, пропустить ток, то
создается электромагнитный момент.В описываемом реактивном (с явно выраженными полюсами)
двигателе при вращении ротора каждая обмотка (пара диамет¬
рально расположенных проводников) работает попеременно или
как обмотка возбуждения, или как обмотка якоря (создает вра¬
щающий момент). Токи в обмотках возбуждения, расположенных
над межполюсными промежутками ротора, и токи в якорных об¬
мотках, расположенных над попюсами ротора, могут регулиро¬
ваться независимо и переключаться в функции положения рото¬
ра. По этим обмоткам нет необходимости пропускать синусои¬
дальный ток. Более эффективной оказывается прямоугольная
форма тока, как в секциях обмотки двигателя постоянного тока.
Гпава 6. Перспективные электроприводы с нетрадици- 275онными типами двигателей и новейшими источниками питанияфП3 1234tоА)tРис. 6.4. Шестифазный реактив- Рис- 6.5. Кривые тока и напря-
ный двигатель с независимым жения одной фазы статора,
возбуждением.На рис. 6.5 изображены упрощенные диаграммы тока и ЭДС од¬
ной фазы такого двигателя. Двигатель работает как многофаз¬
ный, ток и ЭДС каждой последующей фазы сдвинуты на тг / m
электрических градусов, где m - число фаз двигателя. Так, на
рис. 6.4 m = 6.•• В каком режиме (двигательном или генераторном) работает двига¬
тель, если очередность следования токов возбуждения и якоря в каждой
фазе соответствует осциллограммам, изображенным на рис. 6.5?Кривые магнитной индукции в воздушном зазоре этого двига¬
теля. определенные экспериментально для разных режимов
включения обмоток, очень напоминают аналогичные кривые в
электрических машинах постоянного тока. Когда в шестифазном
двигателе, ротор которого расположен, как на рис. 6.4, пропуска¬
ется постоянный ток только через обмотки 1 - V и 2 - 2', распо¬
ложенные напротив межполюсных промежутков, то картина поляз воздушном зазоре имеет трапецеидальную форму. Если же
пропускать ток только через обмотки 3 - 3\ 4 - 4', 5 - 5' и 6 -6',
расположенные над полюсами, то имеем поле реакции якоря.
Когда в том же положении ротора пропускают ток через все
шесть обмоток статора, то картина магнитного поля в зазоре ис¬
276 Гпава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питаниякажается, уменьшаясь под одним краем и увеличиваясь под дру¬
гим.Как у всех синхронных реактивных двигателей, угловая ха¬
рактеристика описываемого двигателя имеет два периода наоборот (рис. 6.6,
кривая 1). Эта ха¬
рактеристика сни¬
мается при питании
обмоток статора от
источников посто¬
янного тока, вели¬
чина тока которых
при изменении угла
поворота ротора
остается неизмен¬
ной. Так как длина
полюсной дуги ро¬
тора больше меж-
полюсного промежутка, то изменение момента в диапазоне от
+Ммакс ДО - Ммакс происходит на большем отрезке, чем от -
Ммакс До + Ммакс- Нуль момента на более крутых участках угло¬
вой характеристики наступает при нуле МДС возбуждения (из-за
встречных токов в обмотках, расположенных в межполюсных
промежутках), а на более пологих - при нуле МДС обмоток якоря
(из-за встречных токов обмоток, расположенных над полюсами).
Обычно соотношение величин полюсной дуги ротора и межпо-
люсного промежутка подбирают так, чтобы в точке номинального
режима двигателя токи возбуждения и якоря совпадали или были
близки. Это достигается при относительной длине межполюсно-
го промежутка 0,3...0,4 от длины полюсного деления машины.При вращении вала реально работающего шестифазного
двигателя через каждые 30°, соответствующие ширине его фаз¬
ной зоны, происходит переключение знака тока в одной из фаз¬
ных обмоток, переходящей из зоны возбуждения в зону якоря,
поэтому кривая электромагнитного момента в функции угла по¬
ворота вала ротора идет по огибающей семейства угловых ха¬ния при питании от источника тока
Гпава 6. Перспективные электроприводы с нетрадици- 211очными типами двигателей и новейшими источниками питаниярактеристик, смещенных друг относительно друга на величину
фазной зоны статора (кривая 2 на рис. 6.6).Электроприводы с синхронными реактивными двигателями
(FRRM) требуют датчиков положения ротора, но схемы управле¬
ния отличаются крайней простотой реализации. На рис. 6.7 при-Рис. 6.7. Функциональная схема электропривода с реак¬
тивным двигателем независимого возбужденияведен один из возможных вариантов функциональной схемы
электропривода. Здесь статорные обмотки питаются от шести
независимых источников тока, которые могут быть выполнены на
транзисторных или тиристорных преобразователях. Задание на
ток якорных обмоток (напряжения +UPC и -Upc) подается с выхо-
278 Гпава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питаниядов регулятора скорости PC и инвертора И1 через узел форми¬
рования фазных токов УФФТ. Нерегулируемое задание на ток
возбуждения (напряжения +Ue и -Ub) подается с выходов потен¬
циометра RP1 и инвертора И2. Желаемое значение скорости п3
вращения электропривода поддерживается с помощью контура
регулирования скорости, который настраивается на заданные по¬
казатели качества регулятором скорости PC. Допустимое значе¬
ние тока фазных обмоток дзигателя (и электромагнитного мо¬
мента) ограничивается максимальным напряжением на выходеPC, которое устанав-
и ливается блоком ог-U2 3и33 раничения БО, как в
U обычной схеме под¬
чиненного регулиро¬
вания.УФФТ управляет
токами источников
тока в цепях фазных
обмоток в функции
угла поворота вала
ротора ар так, чтобы
были реализованы
диаграммы токов
(рис. 6.5). Наиболее
наглядно идею рабо¬
ты этого узла иллю¬
стрирует вариант
контактного (коллек--иРС : ? : торного) УФФТ (рис.6.8). Здесь на валу
ротора двигателя ус¬
тановлены четыре
контактных кольца
Рис. 6.8. Пример реализации простейшего щеточ-^ ^ к КОторым че-
но-контактного (коллекторного) датчика положа- 1Д ПЛГ1,|ПТ^ния ротора и узла формирования фазных токов Рез Щетки подаютсянапряжения +UFC и -+и6+Upc-U.тж'кз '///////т/шш/////, К4 т/тт/ш/Направление вращения
вала дзигателя360е
Гпава 6. Перспективные электроприводы с нетрадици- 279" онными типами двигателей и новейшими источниками питанияUpc, а также +Us и -Ug. Эти кольца соединены электрически с
четырьмя коллекторными пластинами П1...П4. Длина дуги кол¬
лекторной пластины соответствует или полюсной дуге ротора
(пластины П2 и П4, на них подаются напряжения +UPC и -Upc),
или ширине межполюсного промежутка (пластины П1 и ПЗ, на
них подаются +Ub и -Us). На щеткодержателе вдоль окружности
коллектора через каждые 30° (в шестифазном двигателе) уста*
новлено шесть щеток, с которых снимаются сигналы задания для
всех шести источников тока. При вращении вала двигателя вход¬
ная управляющая клемма источника тока каждой фазной обмотки
статора подключается поочередно к соответствующему напря¬
жению задания: +UPC) +UB, -UPC и -U3 (как на рис. 6.5). Когда не¬
обходимо сменить знак электромагнитного момента двигателя
(при реверсе или торможении), производится смена знака напря¬
жения на выходе регулятора скорости PC (например, изменени¬
ем напряжения на выходе задатчика интенсивности). Это приво¬
дит к смене последовательности чередования знаков напряже¬
ний задания на входах УФФТ, знаков токов в фазных обмотках
статора и к изменению знака момента. По аналогии с двигате¬
лем постоянного тока, здесь возможны два варианта управления:
в первом случае устанавливается очередность: -Upc, +Ub, +Upc и
-Ug (в двигателе постоянного тока этому случаю соответствовал
бы реверс момента изменением знака тока якоря при неизмен¬
ном знаке тока возбуждения), во втором - очередность: +UPCt
—Ug, -Upc и +UB (этому случаю соответствовал бы реверс изме¬
нением знака тока возбуждения при неизменном направлении то¬
ка якоря). На рис. 6.7 приведена схема, реализующая перзый ва¬
риант реверса момента.•• Для цепи какой из фазных обмоток статора (от первой до шестой)
изображены кривые процессоз на рис. 6.5? Начальное положение ротора
можно считать соответствующим рис. 6.4.Конечно, в реальных электроприводах сегодня используются
бесконтактные датчики положения ротора. Но описанный кон¬
тактный датчик наиболее наглядно иллюстрирует идею работы
УФФТ: необходимо в функции угла поворота ротора аР переклю¬
280 Гпава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питаниячать четыре управляющих сигнала (+U3 и -U3 , +UPC и —UpC),
подавая их в заданной последовательности на управляющие
входы источников тока в цепях обмоток статора.Представленная на рис. 6.7 функциональная схема электро¬
привода является, пожалуй, наиболее простой, но не единствен¬
ной. Во-первых, она может быть изменена в зависимости от схе¬
мы силовых цепей источников тока. Так, возможно питание ста¬
торных обмоток от двух типовых мостовых трехфазных транзи¬
сторных автономных инверторов (обмотки 1, 3 и 5 от одного и 2,4 и 6 - от другого), имеющих 180-градусную проводимость венти¬
лей, управляемых от одного датчика положения ротора и реали¬
зующих наиболее простую прямоугольную (а не привычную сину¬
соидальную) форму тока ключей.Во-вторых, система управления может иметь несколько ва¬
риантов. Например, она может быть выполнена как схема двух¬
зонного регулирования (рис. 6.9 а). Здесь контур регулирования
скорости выполнен так же, как на рис. 6.7, но возбуждение кон¬
тролируется контуром регулирования напряжения на статоре
двигателя. При напряжениях на статоре двигателя меньших но¬
минального (U < Uh) регулятор напряжения PH насыщен, а ток
возбуждения двигателя определяется уставкой блока ограниче¬
ния Б02 и максимален. При увеличении скорости выше основной
происходит уменьшение напряжения на выходе PH и ослабление
потока двигателя при постоянной амплитуде напряжения на ста¬
торе. Предельная механическая характеристика электропривода
совпадает в этом случае с аналогичной характеристикой в элек¬
троприводе постоянного тока с двухзонным регулированием.Б электроприводах с большим диапазоном изменения мо¬
мента нагрузки возможно включение синхронного реактивного
двигателя по схеме двигателя с последовательным воз¬
буждением (рис. 6.9 б). В этом случае ток возбуждения изменя¬
ется пропорционально абсолютной величине напряжения Upc,
для чего применен функциональный преобразователь ФП, напря¬
жение на выходе которого пропорционально модулю U?c. Тем
самым достигается два эффекта. В зоне малых моментов нагруз¬
ки достигается снижение потерь в электроприводе за счет
Глава 6. Перспективные электроприводы с нетрадици- 281онными типами двигателей и новейшими источниками питанияснижения тока возбуждения. В зоне же перегрузок ослабленоРис. 6.9. Варианты схем управления электроприво¬
дом: а) с двухзонным регулированием скорости;
б) с последовательным возбуждением
282 Глава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питанияразмагничивающее влияние реакции якоря, а двигатель способенвыдерживать кратковременные
перегрузки по моменту (до 10 и
более), существенно большие,
чем в электроприводах асинх¬
ронных или постоянного тока.Сказанное подтверждают
экспериментальные зависимо¬
сти момента от тока якоря при
работе электропривода на упор
(рис. 6.10). Номинальному току
1н = 5 А в обоих случаях соот¬
ветствует одинаковый момент.
В зоне больших токов в схеме с
постоянным током возбужде¬
ния наблюдается снижение
приращений момента при уве¬
личении тока якоря (кривая 1),Рис. 6.10. Зависимость моментачт0 следует объяснить раз-
от тока якоря при разных законах магничивающим влиянием ре¬
возбуждения: Iq = const (кривая акции якоря. При последова-
1); !в = U (кривая 2) тельном возбуждении (кривая2) в зоне больших токов со¬
храняется линейность характеристики (что косвенно указывает
на насыщение магнитной системы), а предельное значение мо¬
мента ограничено лишь перегревом обмотки двигателя и сило¬
вых элементов источника питания.Рассматриваемый двигатель имеет повышенные удельные
моменты. Так, опытный экземпляр двигателя FRRM, выполнен¬
ный в корпусе асинхронного короткозамкнутого двигателя мощ¬
ностью 4 кВт, имел номинальный момент в длительном режиме
на 40% больше, чем прототип.Дадим физическое объяснение высоким удельным и перегру¬
зочным моментам рассматриваемого электропривода, для чего
рассмотрим картину магнитных полей в явнополюсных двигате¬
лях разного типа.
Гпава 6. Перспективные электроприводы с нетрадици- 283онными типами двигателей и новейшими источниками питанияВ электродвигателе постоянного тока (рис. 6.11 а) на магнит¬
ное поле, создаваемое токами обмотки возбуждения, наклады¬
вается поле реакции якоря Fa, в результате под одним краем по¬
люса индукция в зазоре увеличивается, а под другим - уменыиа-! kxxxxxx>i-j 1 1кой нейтралиРис. 6.11. Поперечный разрез и кар¬
тина магнитных полей в воздушном
зазоре: а) двигателя постоянного
тока; б) двигателя FRRM.
284 Гпава 6. Перспективные электроприводы с нетрадици-онными типами двигателей и новейшими источниками питанияется (соответствует жирно обведенным участкам кривой Fa).
Строгое совпадение физической и геометрической нейтралей в
двигателе постоянного тока приводит (при неучете насыщения
магнитной системы) к равным величинам приращений магнитного
потока под обоими краями полюса. В результате в ненасыщен¬
ной электрической машине постоянного тока увеличение тока
якоря не вызывает увеличения магнитного потока.В синхронном реактивном двигателе независимого возбуж¬
дения картина взаимодействия магнитных полей остается в
принципе такой же, как в двигателе постоянного тока, но с одним
весьма существенным отличием (см. рис. 6.11 б). Так как в этом
двигателе нет ограничений по условиям коммутации, то физиче¬
скую нейтраль сдвигают с геометрической на край полюса. В
этом случае удается направить действие намагничивающей со¬
ставляющей реакции якоря по продольной оси полюса, а размаг¬
ничивающей - по поперечной оси. т.е. в межполюсный промежу¬
ток. В результате в FRRM с ростом нагрузки происходит увели¬
чение магнитного потока. То, что основная доля размагничиваю¬
щего действия реакции якоря в FRRM приходится на межполюс¬
ный промежуток, а намагничивающего - на полюс, позволяет до¬
биться высоких удельных моментов, не применяя компенсацион¬
ную обмотку, т.е. сохраняя простую конструкцию электрической
машины и не увеличивая расход обмоточной меди.•• На основании рис. 6.2 и 6.11 изобразите картину магнитной индук¬
ции в зазоре для двигателей постоянного тока и FRRM. Покажите, как она
выглядит при разных значениях момента двигателя.Бесконтактное исполнение в сочетании с «холодным» не со¬
держащим обмоток ротором, облегчающим тепловой режим ра¬
боты подшипников, резко увеличивают эксплуатационную при¬
влекательность электроприводов с синхронными реактивными
двигателями независимого возбуждения. При такой же токовой
линейной нагрузке статора, как у асинхронного короткозамкнуто¬
го двигателя, рассматриваемый двигатель развивает удельный
момент на 30...40% больший, а благодаря простоте конструкции
ротора и малым затратам меди оказывается на 15...25% дешев¬
ле. Возможность реализации больших перегрузочных моментов и
Гпава 6. Перспективные электроприводы с нетрадици- 285онными типами двигателей и новейшими источниками питаниявысоких угловых скоростей, эффективное использование актив¬
ных материалов при простой системе управления делает элек¬
тропривод с синхронными реактивными двигателями независи¬
мого возбуждения серьезным конкурентом лучшим традицион¬
ным регулируемым электроприводам переменного тока. По мере
развития и совершенствования полупроводниковой элементной
базы сфера применения этого электропривода будет постоянно
расширяться.
286Гпава 7. Следящие электроприводыГлава 7. СЛЕДЯЩИЕ ЭЛЕКТРОПРИВОДЫ7.1. Примеры электроприводов с регулированием
положения выходного вала рабочего механизмаПрежде чем непосредственно заняться изучением особенно¬
стей проектирования и настройки промышленных следящих
электроприводов, полезно рассмотреть несколько примеров ра¬
бочих механизмов, чтобы нагляднее представить характер тех¬
нологических требований к электроприводу. Эти механизмы уп¬
рощенно изображены на рис 7.1.б)в)р%Ьг&LПушка
Гпава 7. Следящие электроприводы287Д)Рис. 7.1. Примеры производственных механизмов, на которых уста¬
новлены электроприводы с регулированием положения рабочего ва¬
ла: а) реверсивный стан горячей прокатки; б) стан холодной про-
хатки полосы; в) орудие; г) дуговая печь; д) летучие ножницы;
е) копировально-фрезерный станок
288Гпава 7. Следящие электроприводыНа реверсивном стане горячей прокатки (рис. 7.1 а) слиток 1,
поступающий из сталеплавильного цеха, прокатывается валками
клети 3 до заготовки нужного размера квадратного или прямо¬
угольного сечения за несколько проходов. Подача заготовки в
клеть и прием ее производятся рабочими рольгангами 2. Перед
каждым проходом зазор между рабочими валками прокатной кле¬
ти изменяется по заданной программе с помощью нажимного
устройства, содержащего электродвигатель 4 и механическую
передачу 5. По условиям технологии требуется обеспечить точ¬
ное положение верхнего валка в начальной и конечной точках
движения, хотя сама траектория перевода рабочего органа из
одного положения в другое на качество технологического про¬
цесса не влияет, так как производится, когда в валках металла
нет.Исходные требования к электроприводу нажимного устройст¬
ва обычно характеризуются гистограммой перемещений, пример
которой приведен там же. На основании этой гистограммы выби¬
рают силовое оборудование (электродвигатель, механическую
передачу) и структуру системы управления.На нажимных винтах станоз холодной прокатки полосы (рис.
7.1 б) электропривод используют не только для начальной уста¬
новки зазора между валками, но и для регулирования толщины
полосы. Поэтому режим работы здесь принципиально иной: во-
первых, требуется непрерывное поддержание заданной толщины
прокатываемой полосы 1 на выходе клети 2, а во-вторых, элек¬
тродвигателю 3 нажимных винтов 4 приходится при перемеще¬
нии валков преодолевать момент статической нагрузки, вызван¬
ный давлением прокатываемого металла на валки.Исходные требования к электроприводу и системе управле¬
ния формулируют обычно, задавая график спектральной
плотности разнотолщинности полосы S = f(co), поступающей в
клеть. С учетом высоких (до 20... 25 м/с) скоростей прокатки при
больших величинах упругостей механической системы нажимно¬
го устройства (так, для изменения толщины полосы на станах хо¬
лодной прокатки на 0,1 мм необходимо повернуть вал электро¬
Гпава 7. Следящие электроприводы289двигателя нажимного устройства на угол, соответствующий 2...3
мм свободного хода валков) задача конструирования высокоточ¬
ного электропривода нажимного устройства оказывается доста¬
точно сложной.В электроприводе зенитного орудия (рис. 7.1 в) наводчик из¬
меняет угол поворота оси прицела он в соответствии с простран¬
ственным положением цели.Исполнительный же электропривод, изменяя угол а2 поворо¬
та орудия, повторяет угловое движение прицела («следит» за
осью прицела). Заданную точность слежения выходного вала за
валом задающим необходимо обеспечивать непрерывно на всем
участке слежения. Задающий сигнал изменяется плавно, при
конструировании электропривода задают предельные значения
ускорения и скорости.В дуговых печах электросталеплавильных цехов (рис. 7.1 г)
плавку металла ведут, используя тепло электрической дуги, го¬
рящей между электродом 2 и шихтой 1 (на стадии расплава) или
расплавленным металлом (на стадии рафинирования). Непре¬
рывное горение дуги обеспечивается регулированием расстоя¬
ния между электродом и металлом с помощью электропривода
перемещения электрода, содержащего электродвигатель 3 и ме¬
ханическую передачу 4. Так как напрямую замерить дуговой
промежуток между электродом и шихтой невозможно, то его под¬
держивают косвенно, ориентируясь на величину падения напря¬
жения на дуговом промежутке, график которого в функции от
длины дуги AU = f(L) приведен там же.На стадии расплава дуга горит неустойчиво: во-первых, ших¬
та еще не прогрета, а во-вторых, из-за ее неплотности случаются
обвалы, что приводит к обрывам дуги или к коротким замыкани¬
ям. Кривая распределения необходимых перемещений электро¬
да р% = f(AL) в этом режиме носит случайный характер и очень
близка к кривой распределения Пуассона.Электропривод летучих ножниц на выходе непрерывного
мелкосортного стана (рис. 7.1 д) должен обеспечить отрезание
переднего конца прокатываемого металла 1, выходящего из вал¬
290Гпава 7. Следящие электроприводыков 2 последней клети стана. Барабаны 3 ножниц вращаются не¬
прерывно с окружной скоростью, разной скорости движения ме¬
талла. Ножи ножниц при этом утоплены в полости барабанов. В
момент реза ножи выходят наружу. Так как пространственные
положения переднего конца металла и ножей между собой не со¬
гласованы, то отрезаемый передний конец может оказаться лю¬
бой длины от заданного значения до длины окружности барабана
ножниц. Чтобы устранить это пространственное несоответствие,
за время ti- t2, пока передний конец металла проходит путь от
клети до ножниц с постоянной скоростью Vn, барабаны ножниц
сначала притормаживаются, а затем разгоняются до прежней
скорости (кривая VH) так, чтобы, во-первых, отрезать передний
конец заданной длины, а во-вторых, произвести этот рез при ок¬
ружной скорости ножей, равной линейной скорости движения ме¬
талла. Площадь, заштрихованная между кривыми Vn и VH, равна
тому относительному расстоянию, которое должны преодолеть
ножи ножниц, чтобы обеспечить точный рез переднего конца.Аналогичная задача решается, например, и в космонавтике
(задача причаливания кораблей), где на нее отводится от не¬
скольких часов до суток. В металлургии эту операцию требуется
выполнить за доли секунды.При обработке деталей на копировально-фрезерных станках
может возникнуть необходимость в изготовлении мелкой серии
идентичных деталей сложной формы. Тогда можно поступить
следующим образом (рис. 7.1 е). Сначала изготавливают копир -
шаблон, форма и размеры которого в точности соответствуют
требуемой детали. Затем на станке по этому копиру 1 передвига¬
ется щуп 2, снабженный датчиком положения, сигнал которого
поступает на первый вход системы регулирования 3. Профиль
готовой детали 4 получается обработкой ее режущим инструмен¬
том (например, фрезой) 5, также снабженным своим датчиком
положения, сигнал которого поступает на второй вход системы
регулирования 3. Эта система воздействует на двигатель 6, осу¬
ществляющий перемещение (подачу) режущего инструмента в
Гпава 7. Следящие электроприводы291функции величины рассогласования между показаниями обоих
датчиков положения.Правда, сегодня выполнять копир в натуре несовременно:
значительно удобнее желаемую траекторию перемещения ис¬
полнительного органа задать в памяти вычислительного устрой¬
ства, откуда считывать ее при работе станка. По этому принципу
работают все современные системы числового программного
управления станками, сколь сложными они бы ни казались.Обобщая рассмотренные примеры, обращаем внимание на
большое разнообразие технологических режимов, которые долж¬
ны обеспечиваться электроприводами этих механизмов.Электроприводы с регулированием положения исполнитель¬
ного вала принято делить на два класса:- позиционные электроприводы, задачей которых является
перемещение рабочего органа механизма из одного фиксиро¬
ванного положения в другое (в случаях а, г, д на рис. 7.1). Харак¬
тер траектории перемещения важен лишь постольку, поскольку
требуется минимальное время перемещения, когда необходима
наибольшая производительность механизма;- собственно следящие электроприводы (например, в случа¬
ях б, в, е на рис. 7.1), когда задающий сигнал является непре¬
рывной функцией с ограниченными значениями ускорения и ско¬
рости задающего вала. Заданную точность слежения необходимо
обеспечить как в установившихся, так и в переходных режимах
на всей траектории движения исполнительного органа.7.2. Ошибки следящих электроприводов
в установившихся нормированных режимахКачество настройки следящих электроприводов часто оцени¬
вают величиной установившейся ошибки регулирования, возни¬
кающей при изменении входного сигнала с постоянной скоро¬
стью, постоянным ускорением или по гармоническому закону.
292Глава 7. Следящие электроприводыДля определения величин названных ошибок воспользуемся
обобщенной структурной схемой следящего электропривода
(рис. 7.2 а). Здесь интегрирующим звеном И учитывается преоб¬
разование скорости п исполнительного вала в угловое переме¬
щение авых- Постоянная интегрирования этого звена Ти = 1 с.
Контур регулирования скорости КРС может быть как замкнутым
по скорости, так и-оставаться разомкнутым без обратных связей.
Он принят безынерционным звеном с единичным коэффициен¬
том усиления. Это допустимо потому, что в рамках поставленнойб)Рис. 7.2. Структурные схемы следящего электропривода:
а) - исходная; б) - с выходом по ошибке регулированиязадачи ошибка регулирования определяется или в установив¬
шихся режимах движения с постоянными скоростью или ускоре¬
нием, или в полосе частот, меньших частоты среза сол контура
регулирования положения КРП, когда внутренний КРС можно ап¬
проксимировать безынерционным звеном. Регулятор положения
РП выполняется или как пропорциональный с коэффициентом
усиления Крп, или как пропорционально-интегральный с переда¬
точной функциейWpn = (1 + Тг р) /Ti р.
Глава 7. Следящие электроприводы293В зависимости от типа регулятора РП передаточная функция
разомкнутого КРП содержит различное число интегрирующих
звеньев. В КРП с П-регулятором положения таких звеньев будет
лишь одно (звено И). Тогда говорят, что следящий электропривод
обладает астатизмом первого порядка по управляющему воздей¬
ствию. В схеме с ПИ-регулятором таких звеньев уже два, т.е.
следящий электропривод обладает астатизмом второго порядка.Структурную схему (рис. 7.2 а) преобразуем так чтобы ошиб¬
ка регулирования Да являлась выходной координатой системы, а
в канале входного воздействия в явном виде присутствовали
скорость Vbx и ускорение авх (см. рис. 7.2 б).Установившуюся ошибку следящего электропривода при
VBx = const (скоростную ошибку Дао) принято оценивать, вводя
понятие добротности по скоростиDc = Vbx / Дас •Ошибка Да следящего электропривода, отнесенная к изме¬
нению скорости входного вала, определится на основании схемы
(рис. 7.2 б):Да = Wean Vbx = Vbx / P (1 + Wpn Wkpc VVh).Для установившегося режима работы, когда Vbx = const, в
схеме с П-регулятором положения, полагая р = 0 в приведенном
зыражении для Да , получим :Дас = Vbx / Крп ,откуда добротность по скорости в следящем электроприводе с
астатизмом первого порядкаDc = Vbx I Дас = Крп.Заметим, что добротность по скорости имеет размерность 1/с
и вызвано это наличием интегратора И с постоянной времениТи = 1 с.
294Гпава 7. Следящие электроприводыа) б)Рис. 7.3. ЛАЧХ разомкнутой системы, поясняющие
добротность по скорости (а) и добротность по ускоре¬
нию (б)На плоскости логарифмических амплитудных частотных ха¬
рактеристик (рис. 7.3 а) величина Dc соответствует частоте среза
соп = КрЛ разомкнутого контура регулирования положения, когда
его низкочастотная асимптота имеет единичный наклон, т.е. со¬
ответствует схеме с П-регулятором положения.Физика существования скоростной ошибки в следящем элек¬
троприводе с астатизмом первого порядка связана с тем, что для
вращения выходного вала механизма с постоянной скоростью
необходимо на якорь двигателя подать напряжение, тем боль¬
шее, чем выше скорость. Чтобы это напряжение получить, необ¬
ходимо на входе П-регулятора положения иметь какой-то сигнал,
отличный от нуля, т.е. допустить существование разницы между
мгновенными значениями положения вала задающего и вала ис¬
полнительного.Если в следящем электроприводе П-регулятор положения
заменить на ПИ-, то Дас = 0, а величина добротности неограни¬
ченно возрастет.Качество слежения в электроприводе с ПИ-регулятором по¬
ложения принято оценивать также добротностью по ускорениюРуск = авх / Аауск-
Глава 7. Следящие электроприводы295В установившемся режиме равноускоренной заводки
(азх = const) ошибка по ускорению на основании структурной
схемы (рис. 7.2 б)Лауск = авх Ti,откудаDycK = авх / Асхуск = 1 / Ti.Добротность по ускорению имеет размерность 1 /с2.Геометрически величина Dyo< соответствует частоте пересе¬
чения с горизонтальной осью низкочастотного (имеющего двой¬
ной наклон) участка асимптоты амплитудной частотной характе¬
ристики разомкнутого следящего электропривода, имеющего ПИ-
регулятор положения (рис. 7.3 б).Когда качество следящего электропривода оценивают проб¬
ным гармоническим сигналом, то обычно выбирают режим «ка¬
чания маятника», при котором задают входной сигналавх = ам sin coKt,где aw - амплитуда входного сигнала при заданной («контроль¬
ной») частоте сок- При этом связывают между собой величину до¬
пустимой амплитуды ошибки Ладоп с формой частотной характе¬
ристики следящего электропривода.Амплитуда ошибки следящего электропривода может быть
определена при фиксированной частоте сок сигнала задания на
основании выражения:Да = 1 /11 + Щ сок) |,где W(j ©к) - значение частотной передаточной функции разомк¬
нутой системы при со = сок.Так как в реальной системе при со < сое, где сос - частота среза
контура регулирования положения, выполняется | W(j сок) | > 1, тоДа =s 1 /1 W(j о*) |.
296Глава 7. Следящие электроприводыРис. 7.4. ЛАЧХ замкнутой системы, поясняющая допус¬
тимую ошибку при гармоническом воздействииНа основании последнего соотношения можно сформулиро¬
вать следующее требование к желаемой частотной характери¬
стике следящего электропривода: чтобы входное гармоническое
воздействие, у которого заданы амплитуда ам и частота сок, вос¬
производилось системой с ошибкой не более Дадоп. необходимо
иметь ЛАЧХ по ошибке замкнутой системы, проходящую ниже
контрольной точки А к с координатами (рис. 7.4) шк и Дадоп / ам .В некоторых случаях для входного гармонического сигнала
задают не ам, а амплитуду скорости VM или ускорения ам при
контрольной частоте со к. Тогда для определения положения кон¬
трольной точки Ак дополнительно пользуются соотношениями:
Vm = ам шк и a*,* = Vm со к = ам сок .7.3. Позиционный тиристорный электропривод
постоянного токаФункциональная схема электроприводаВ позиционном электроприводе (рис. 7.5) якорь двигателя по¬
стоянного тока М подключен на выход реверсивного тиристорно¬
го преобразователя UZ. Схема управления электроприводом вы¬
полнена многоконтурной по подчиненному принципу и содержит
контуры регулирования тока якоря КРТ, скорости вращения дви¬
гателя КРС и положения вала двигателя (или рабочего механиз¬
ма) КРП. КРП является основным контуром регулирования, а КРС
и КРТ - подчиненными.
502Гпава 7. Следящие электроприводы 297Рис. 7.5. Функциональная схема позиционного тиристорного электропривода
298Гпава 7. Следящие электроприводыКРТ образован регулятором тока АА (РТ), тиристорным пре¬
образователем UZ, нагруженным на якорь двигателя М, и кана¬
лом отрицательной обратной связи по току якоря.КРТ предназначен для ограничения тока якоря допустимым
значением. Кроме того, отрицательная обратная связь по току
якоря используется как дополнительное средство коррекции при
настройке КРС и КРП. Требуемое качество статических и дина¬
мических характеристик КРТ обеспечивается выбором соответ¬
ствующей структуры (т.е. типа передаточной функции) и величии-
ны параметров регулятора РТ. В тиристорных электроприводах
обычно применяют ПИ-регулятор РТ.В КРС входят замкнутый КРТ, регулятор скорости AR (PC) и
канал отрицательной обратной связи по скорости вращения дви¬
гателя с тахогенератором BR. КРС ограничивает скорость вра¬
щения двигателя максимально допустимым значением, а отрица¬
тельная обратная связь по скорости используется также как
средство коррекции при настройке КРП. Статические и динами¬
ческие характеристики КРС оптимизируются выбором соответст¬
вующей структуры и величины параметров регулятора PC.
Обычно в позиционных электроприводах применяют П-регулятор
PC, реже, когда нужно уменьшить ошибку, вызванную приложе¬
нием момента статической нагрузки, применяют ПИ-регулятор
PC.КРП является основным в позиционном электроприводе. В
этот контур входят указанные ранее КРТ и КРС, а также регуля¬
тор положения AQ (РП), узел задания и измерения положения
вала рабочего механизма на сельсинах BE (1C) и ВС (2С) и фа¬
зочувствительный выпрямитель UV (ФЧВ), преобразующий пе¬
ременное напряжение на выходе 1C в постоянное соответст¬
вующей полярности. Сельсин 2С установлен на валу рабочего
механизма, который приводится от двигателя М.В исходном состоянии позиционного электропривода поло¬
жение задающего вала совпадает с положением вала исполни¬
тельного механизма, а роторы сельсинов 1C и 2С сдвинуты отно¬
сительно своих статоров на 90°. При этом ЭДС, наводимая в
Гпава 7. Следящие электроприводы299обмотке ротора 1C, равна нулю. Равны нулю и напряжения на
выходах ФЧВ, РП, PC, РТ и UZ. Двигатель М неподвижен. Если
ротор 1C повернуть на некоторый угол, то на выходе 1C появится
напряжение рассогласования, которое вызовет на выходе UZ на¬
пряжение такого знака, что двигатель М начнет вращаться в сто¬
рону устранения возникшего углового рассогласования роторов
1C и 2С.Переходные процессы отработки заданного рассогласования
формируются с помощью контуров регулирования КРП, КРС и
КРТ. Величина допустимого тока якоря при разгоне и торможе¬
нии двигателя М устанавливается уровнем ограничения выход¬
ного напряжения в регуляторе скорости с помощью блока огра¬
ничения А1 (Б02), а максимальное значение скорости - с по¬
мощью блока ограничения А2 (Б01) в регуляторе положения.Настройка электропривода «в малом».Синтез регулятора положенияСостояние позиционного электропривода «в малом» соответ¬
ствует работе всех регуляторов на линейных участках своих ста¬
тических характеристик. Электропривод находится вблизи задан¬
ного положения, когда ошибка регулирования по углу
Да = азх - а.« 0.Выбор структуры и параметров регуляторов РТ и PC произ¬
водится, как в любой системе подчиненного регулирования. По¬
этому ограничимся лишь рассмотрением выбора структуры и
параметров регулятора положения РП.На линеаризованной структурной схеме (рис. 7.6) контур ре¬
гулирования положения содержит в прямом канале звенья: РП
(соответствует регулятору положения РП и звеньям измерения и
преобразования сигнала ошибки по положению вала рабочего
механизма), КРС (соответствует замкнутому и настроенному
КРС) и интегратор И (учитывает преобразование угловой скоро¬
сти выходного вала в угол).Регулируемые координаты электропривода представлены в
относительных единицах. За базовое значение напряжения на
300Гпаеа 1. Следящие электроприводыРП КРС ИРис. 7.6. Структурная схема позиционного электропривода
«в малом»выходе регулятора положения Upn принято его максимальное
значение, соответствующее уровню насыщения на статической
характеристике. Базовое значение скорости п выходного вала
соответствует режиму идеального холостого хода электропри¬
вода при базовом значении напряжения на выходе РП. За базо¬
вое значение угла поворота роторов сельсинов 1C и 2С принят
угловой путь, проходимый ротором 2С за одну секунду, когда
двигатель М вращается со скоростью идеального холостого хода.
И, наконец, базовые напряжения на выходах 1C и ФЧВ соответ¬
ствуют напряжениям на выходах этих элементов, когда реальные
их статические характеристики заменены линейными с такими же
коэффициентами наклона, как в начале координат, а ошибка по
углу равна базовому значению.При выбранных базовых значениях переменных интегратор
И имеет постоянную времени интегрирования Ти = 1с. Замкну¬
тый настроенный КРС представляется инерционным звеном
первого порядка с коэффициентом усиления Ккрс = 1 и постоян¬
ной времени Тс = 1 / «с- Тем самым не учитываются «малые»
постоянные времени звеньев, образующих КРС. Это допустимо
в диапазоне частот со < о>с, где сос - частота среза КРС.В случае пропорционального регулятора положения его пе¬
редаточная функция Wpn = КрП, а желаемую величину коэффи¬
циента усиления регулятора можно определить, воспользовав¬
шись стандартными методиками. Тогда:- введем расчетную постоянную времени для контура регу¬
лирования положения
Глава 7. Следящие электроприводы301Та = Ти/(КрпКкРс) = 1/Крп;- воспользовавшись правилом технического оптимума, опре¬
делимТа = (2...4) ITi = (2...4) Тс.Частота среза КРП связана с постоянной времени интегриро¬
вания этого контура соотношениемсоп = 1 / Та.При общепринятых в практике наладки электроприводов кри¬
териях качества настройки систем подчиненного регулирования
соотношения между величинами частот среза контуров регули¬
рования положения и скоростисоп ~ сое / (2... 4).В тех случаях, когда статическая погрешность в КРП с П-
регулятором положения оказывается больше допустимого зна¬
чения, применяют ПИ-регулятор, а выбор его параметров произ¬
водят, например, используя критерий симметричного оптимума.Процессы отработки больших перемещений
в схеме с линейным регулятором положенияНастройка позиционного электропривода «в большом» (когда
один или оба регулятора РП и PC выходят на насыщение) ос¬
ложняется тем, что из-за наличия двух последовательно вклю¬
ченных существенно нелинейных звеньев РП и PC и несогласо¬
ванности их характеристик с динамическими параметрами
звеньев в электроприводе возможны автоколебания низкой час¬
тоты и большой амплитуды. Это делает электропривод полно¬
стью неработоспособным. При этом «в малом» каждый из конту-
роз регулирования может быть устойчив и даже с большим запа¬
сом.
302Глава 7. Следящие электроприводыПокажем механизм возникновения этих автоколебаний, рас¬
сматривая процесс торможения в конце отработки большого рас¬
согласования в электроприводе с подчиненным регулированием.Задачу максимально упростим, не учитывая временно огра¬
ничение по допустимому току якоря и предполагая статическую
характеристику регулятора PC линейной во всем диапазоне ее
существования. Кроме того, примем сот ~ сое ~ во, т.е. считаем,
что процессы регулирования в КРТ и КРС протекают существен¬
но быстрее, чем в КРП. В этом случае получим структурную схе¬
му идеализированного электропривода (рис. 7.7 а), где КРС
представлен безынерционным звеном с единичным коэффици¬
ентом усиления, а регулятор РП - безынерционным звеном с ко¬
эффициентом усиления Крп на линейном участке и зоной ограни-КРС ИРис. 7.7. Структурная схема (а) и кривые переходных про¬
цессов торможения (б) в идеализированном позиционном
электроприводе
Гпава 7. Следящие электроприводы303чеиия ирпмлкс = Пм. Переходный процесс торможения электро¬
привода протекает здесь,как в системе первого порядка.Если принять Да достаточно большим, при котором двига¬
тель в процессе отработки перемещения выходит на макси¬
мальную скорость пм, то переходный процесс торможения элек¬
тропривода на заключительном этапе, когда регулятор РП вый¬
дет на линейный участок своей статической характеристики, бу¬
дет описываться следующими уравнениями:п = пм • е -t/T° ;1я =ТД dn/dt = - (пм Тд/Та).е-1/та = -1м -е-‘/Т“;Да= - Тв Пм • е _t/Ttt.Здесь пм - относительная величина максимальной скорости
вращения электропривода; Тд - механическая постоянная вре¬
мени электропривода; TQ - постоянная времени интегрирования
КРП; t - время, отсчитываемое от момента подачи импульса на
начало торможения (соответствует выходу РП на линейный уча¬
сток статической характеристики).Чтобы начальный бросок тока якоря при торможении1м = пм Тд / Тане превосходил максимально допустимого (например, из усло¬
вий коммутации тока на коллекторе) значения 1м, необходимо так
настроить КРП, чтобыТа > Пм Тд / 1м-Условия устойчивости существующих тиристорных электро¬
приводов с двигателями постоянного тока общепромышленных
серий позволяют получитьсоп ~ (10...20) рад/с,что соответствует
304Гпава 7. Следящие электроприводыТв = 0,05...0,1 С.Реальные же электроприводы, например, вспомогательных
механизмов прокатных станов имеют Тд = 0,3...0,6 с, летучих
ножниц - Тд = 0,3...1,0 с, станков - Тд = 0,1 ...1,0 с.Если при указанных величинах постоянных времени Та и Тд в
схеме подчиненного регулирования убрать узел ограничения на¬
пряжения регулятора PC (что соответствует рис. 7.6), то на¬
блюдается |м > 1д0п- Например, если принять Тд = 1с,
сол = 1 /Та = 10 рад / с, пм = 1, то 1м = 10, что намного превыша¬
ет допустимое по условиям коммутации значение тока якоря в
общепромышленных двигателях, обычно равное 1доп = 2,0 ...2,5.Если же с целью ограничения 1я < 1доп выполнить, как это и
делается в реальных электроприводах, уровень насыщения в ре¬
гуляторе PC соответствующим 1ДОп, то двигатель, начав процесс
торможения в тот же момент времени, что и на рис. 7.7 б, не ус¬
пеет полностью остановиться, когда дойдет до конечной точки, и
вынужден будет проскочить её. В результате, когда скорость дви¬
гателя упадет до нуля, электропривод уйдет дальше заданной
конечной точки, регулятор положения потребует движения при¬
вода назад, потом снова «опоздает» дать сигнал на начало оче¬
редного торможения и т.д. В результате возникают незатухаю¬
щие (или слабо затухающие) колебания электропривода около
конечной точки.Принципиальную невозможность получить оптимальный пе¬
реходный процесс в системе подчиненного регулирования с ли¬
нейным регулятором РП даже при высоком быстродействии каж¬
дого из настраиваемых контуров можно более наглядно показать
на фазовых траекториях движения позиционного электроприво¬
да. Фазовыми же траекториями воспользуемся и при синтезе
системы, в которой достигаются процессы отработки заданных
перемещений, оптимальные по быстродействию.
Гпава 7. Следящие электроприводы305Формирование оптимальных процессов «в большом»Если минимизируется время перемещения рабочего меха¬
низма из исходного положения в заданное, то с учетом ограниче¬
ний по току якоря 1я < 1дол и скорости вращения двигателя п <
пм оптимальными по быстродействию кривыми переходных про¬
цессов отработки достаточно больших перемещений являются
прямоугольная диаграмма тока якоря и трапецеидальная -скоро¬
сти (рис. 7.8 а). При этом предполагается, что система управле¬
ния электроприводом идеальна, т.е. способна абсолютно точноа)'дол-1допПмРис. 7.8. Оптимальные по быстродействию переходные
процессы (а) и фазовые траектории движения (б) позицион¬
ного электропривода
306Глава 7. Следящие электроприводыво времени воспроизвести законы регулирования |1я| = 1доп на
отрезках времени ti...t2 и t3...t4 и п = пм на отрезке t2...t3; кроме
того, эта система безошибочно предугадывает выбор момента
времени t3, когда подается импульс на начало торможения элек¬
тропривода.Теперь рассмотрим фазовую траекторию движения такой
системы в координатах «скорость п - остаток пути Да» при тех же
выбранных ограничениях (рис. 7.8 б). На начальном этапе пере¬
ходного процесса, когда 1я = 1доп (отрезок времени ti...t2), фазо¬
вая траектория движения системы представляет собой параболу,
начинающуюся в точке ai (отрезок кривой 1 - 2 на рис. 7.8 б). Ко¬
гда скорость системы приблизится к предельному значению пм,
ток якоря мгновенно снизится до нуля, ускорение системы пре¬
кратится и отклонение Ла будет убывать с постоянной скоростью.
Этому процессу соответствует переход с параболического отрез¬
ка 7- 2 фазовой траектории на горизонтальный 2-3. В точке 3,
соответствующей моменту времени t3 , производится переклю¬
чение на торможение, поэтому скорость начинает убывать. Так
как 1я = !доп = const, то фазовая траектория движения идеаль¬
ной системы электропривода на заключительном отрезке пред¬
ставляет собой параболу, проходящую через начало координат.
Её уравнение легко получить, если исключить время t из урав¬
нений, характеризующих изменение п и Да на участке времени
t3...ts (рис. 7.8 б):Да = — Тд п2 / 2 !дсп-Теперь рассмотрим фазовую траекторию движения в системе
подчиненного регулирования. Взяв уравнения движения системы
электропривода (рис. 7.7 а) и исключив в них время t, получим
уравнение прямой, проходящей через начало координат:п = - (1 / Та) Да = - Крп Да.•• Приведите известные Вам из предыдущих курсов примеры про¬
цессов. фазовые траектории которых описызаются отрезками наклонных
Гпава 7. Следящие электроприводы307прямых линий. Покажите, что в этих случаях кривые переходных процес¬
сов во времени протекают по экспоненциальным кривым.Сделаем одно очень важное с точки зрения синтеза опти¬
мальной позиционной системы наблюдение. В настроенной сис¬
теме электропривода предполагается высокое качество процес¬
сов регулирования в КРТ и КРС, поэтому как в статике, так и в
динамике можно считать 1я = UPCl п = иРП. Тогда фазовая траек¬
тория движения системы электропривода в координатах (п, Да)
на заключительном этапе переходного процесса перемещения
привода совпадает со статической характеристикой регулятора
РП.В этом случае при принятых допущениях статическая харак¬
теристика регулятора РП в схеме с оптимальными кривыми про¬
цессов отработки больших перемещений должна описываться
кривой 2-3-0 (рис. 7.8 б), т.е. содержать горизонтальный участок
2-3 и параболический 3-0. В обычной же схеме подчиненного ре¬
гулирования статическая характеристика РП описывается лома¬
ной 2-3-4-0. Однако каждую из названных статических характе¬
ристик РП следует признать непригодной. Действительно, первая
из характеристик не может обеспечить условия устойчивости ре¬
ального КРП «в малом», где при Да « О коэффициент усиления
РП возрастает до бесконечности. Вторая же характеристика, как
мы уже убедились, приводит к автоколебаниям при отработке
больших перемещений.Желаемую статическую характеристику РП, обеспечивающе¬
го процесс, максимально близкий к оптимальному, строят сле¬
дующим образом. Сначала строят статическую характеристику
линейного РП (ломаная 2-3-4-0), а потом - проводят параболу,
касающуюся первой характеристики на наклонном (линейном)
отрезке 4-0. Получившаяся статическая характеристика а-5-
в-г-0 (рис. 7.9) соответствует оптимальной с учетом ограничений
по току якоря 1я ^ 1дсп и скорости п < Пм и условий устойчиво¬
сти КРП.
308Глава 7. Следящие электроприводы•• Почему статическая характеристика РП, составленная из отрезков
прямых 2-3, 7-0 и отрезка параболы 3-7, не может быть рекомендована в
качестве оптимальной характеристики регулятора положения?Рис. 7.9. Статические характеристики регулятора
положенияСвязь параметров схемы с показателями процессовНа рис. 7.10 приведены кривые переходных процессов тока
якоря 1я и скорости п при отработке заданного скачком переме¬
щения в позиционном электроприводе. Весь переходный процесс
можно разбить на несколько участков. Поставим вопрос: на ка¬
кие узлы системы управления необходимо воздействовать, когда
требуется скорректировать характер процесса на каком-либо из
участков.На участке 0... 1 регуляторы РП и PC насыщены избыточным
сигналом авх и происходит интенсивное нарастание тока якоря
до заданного максимального значения. Время нарастания тока
якоря определяется быстродействием КРТ, которое можно из¬
менять, воздействуя на параметры регулятора РТ. На участке1...2 обеспечивается поддержание постоянства тока якоря двига¬
теля, что достигается выбором ПИ-структуры регулятора РТ. За¬
данное значение величины тока обычно устанавливают, изменяя
уровень ограничения напряжения в регуляторе PC. На отрезке
времени 2...3 ток якоря спадает до нуля (если Мс = 0), так как
Гпава 7. Следящие электроприводы309двигатель разогнался до полной скорости. Темп спадания тока
якоря определяется быстродействием КРС, которое изменяется
настройкой PC.Участок 3...4 соответствует постоянной максимальной скоро¬
сти вращения двигателя. Её уровень задается величиной макси¬
мального напряжения на выходе РП.На участке 4...7 происходит снижение напряжения на выходе
РП, что приводит к торможению электропривода. Отрезок време-Рис. 7.10. Осциллограммы переходных про¬
цессов в позиционном электроприводени 4...6 формируется изменением уставки задания на входе PC,
поэтому время нарастания тока на отрезке времени 4...5 опреде¬
ляется быстродействием КРС, степень же стабильности поддер¬
жания тока якоря на отрезке 5...6 в большой мере зависит от
формы нелинейной статической характеристики РП. В частности,
при неточной аппроксимации параболы линейными отрезками
возможны выбросы тока якоря двигателя на отрезке времени5...6.
310Глава 7. Следящие электроприводыНаконец, спадание тока якоря до нуля в конце переходного
процесса (участок 6...7) определяется быстродействием КРП.Так как быстродействие внешних контуров регулирования
ниже, чем внутренних, то продолжительность отрезка времени6...7 больше, чем 2...3 и 4...5, а последних - больше, чем отрезка0...1.7.4. Высокоточный следящий электроприводФункциональная схема электроприводаРассмотрим следящий электропривод (рис. 7.11), в котором
якорь двигателя М подключен на выход реверсивного транзи¬
сторного широтно-импульсного преобразователя UZ. Этот пре¬
образователь выполнен по мостовой схеме, в каждом плече мос¬
та включены параллельно один из транзисторов VT1...VT4 и
диоды VD1...VD4. Диоды предназначены для устранения комму¬
тационных перенапряжений в коллекторных цепях транзисторов.Вал двигателя М соединен с валом рабочего механизма РМ
через механическую передачу, в которой приходится учитывать
упругие податливости ее звеньев. Поэтому она на функциональ¬
ной схеме обозначена как упругое звено УЗ.Схема управления СУ осуществляет подачу на транзисторы
VT1...VT4 отпирающих и запирающих импульсов. Скважность
этих импульсов соответствует величине напряжения на якоре
двигателя. СУ обеспечивает также защиту транзисторного пре¬
образователя от сквозных токов, для чего производится соответ¬
ствующая задержка в подаче отпирающих импульсов на после¬
довательно соединенные ключи. В этом случае отпирающий им¬
пульс на закрытый ключ подается только после того, как закроет¬
ся другой ключ, соединенный с первым последовательно.Управляющее воздействие подается на схему управления СУ
с выхода регулятора положения AQ (РП). На рис. 7.11 изображе¬
на простейшая одноконтурная следящая система, в которой
имеется обратная связь только по положению вала рабочего ме¬
ханизма РМ. Настройка следящей системы производится выбо-
Глава 7. Следящие электроприводы3112ПVD3“Ч гVD4J иL^I! 1^МVD1чVT3 ICN^T2 ^
О ' Г; rvjKJf->V>[иональная схема следящего электропривода
312Глава 7. Следящие электроприводыром соответствующей структуры и параметров РП. На рис. 7.11
приведен ПИ-регулятор, хотя не исключены и другие структуры.Измерение углового рассогласования между валами задаю¬
щим и исполнительным производится с помощью поворотных
потенциометров RP1 и RP2. Сигнал, пропорциональный углу
рассогласования валов, снимается с движков этих потенциомет¬
ров и подается на входные резисторы R1 и R2 регулятора РП.Учет упругих податливостей механических звеньев
в высокоточных электроприводахВ высокоточных электроприводах возникает проблема по¬
давления влияния упругих деформаций звеньев механической
системы на величину ошибки регулирования выходной коорди¬
наты. Это объясняется тем, что, во-первых, допустимые по¬
грешности системы оказываются и порой существенно меньше
упругих деформаций, вызванных податливостью звеньев кинема¬
тической цепи. Так, в металлообрабатывающих станках сум¬
марная упругая податливость звеньев механизмов подачи может
в 5...20 раз превышать величину допуска на обработку детали,
• в тонколистовых станах холодной прокатки при толщине
прокатываемого листа 0,1 мм суммарная упругая деформация
деталей системы «валки - клеть» может составлять 1...2 мм.
Во-вторых, наличие упругостей в кинематической цепи приводит
к появлению в контуре регулирования остроколебательных
звеньев, а это затрудняет условия устойчивости и, следователь¬
но, ухудшает общие показатели качества настройки электропри¬
вода даже в тех случаях, когда стремятся применить специаль¬
ные малоинерционные двигатели, питающиеся от безынерцион¬
ных транзисторных преобразователей. В-третьих, часто с целью
сохранения благоприятных массогабаритных показателей элек¬
тропривода стремятся не утяжелять механическую передачу.Учет упругостей в механических передачах вошел в сущест¬
вующие учебники по электроприводу.Суммарная податливость механической передачи складыва¬
ется из податливостей зубчатых передач, валов, на которых за¬
Гпава 7. Следящие электроприводы313креплены колеса и шестерни, подшипников, соединений вал-
ступица (шпоночных, шлицевых и др.), муфт, опорных соедине¬
ний редуктора с основанием.Податливость шестеренной передачи определяется упругой
деформацией зубьев от изгиба и контактного сжатия. Обычно
ограничивают допустимые значения удельной жесткости на
единицу длины зуба. Для стальных прямых зубьев нормаль¬
ной высоты удельная жесткость в полюсе зацепления
Сз = (13... 18) 10 3 Н / мм2 [7].Податливость валов на кручение может достигать внуши¬
тельных величин. При проектировании максимальные её значе¬
ния ограничивают допустимыми углами закручивания валов, ко¬
торые, например, для стали принимают в пределах (4...18)
мрад /м.Податливость подшипников зависит от величины диаметра
вала и от условий насадки колец подшипников качения на вал и
корпус [43]. Так, у подшипников качения для валов диаметром до
50 мм коэффициент радиальной жесткости лежит в пределах
(200...600) Н /мк в зависимости от предварительного натяга.Податливость соединений вал-ступица носит, в основном,
контактный характер и обычно определяется на основании эмпи¬
рических формул [47]. Так, для шпоночных соединений угол уп¬
ругого закручиванияФШП = 4 к Мк / d2 L h ,где Мк - крутящий момент; d - диаметр соединения; L, h — длина
и высота шпонки; k = (1...3) мкм / МПа- эмпирический коэффи¬
циент.Для шлицевых соединенийФшл = 4 к Мк / d2 L h z ,где d - диаметр соединения, L h - длина и высота шлицев, z -
число зубьев, k = (1...4) мкм / МПа - эмпирический коэффициент,
учитывающий неравномерность распределения и концентрации
нагрузки в соединении.
314Глава 1. Следящие электроприводыДля следящего электропривода важно оценить величину
суммарной податливости упругих звеньев, которую принято ха¬
рактеризовать косвенной величиной - частотой резонанса в од¬
номассовой упругой механической системе, образованной упру¬
гим звеном с коэффициентом жесткости (величиной, обратной
податливости) С и моментом инерции рабочего механизма Jpw
сор = ( С / Jpm )тДля разных производственных механизмов эта
частота распределяется в широких пределах [9, 10]: для меха¬
низмов прокатных станов (ор = 40...150 рад/с, для общепромыш¬
ленных механизмов соР = 2...150 рад/с , для следящих электро¬
приводов сор = 60...200 рад/с.Кроме упругой податливости звеньев механической переда¬
чи. в высокоточных следящих электроприводах необходимо счи¬
таться и с наличием люфтов. Наибольшую долю в общую вели¬
чину люфта механической передачи вносят ее последние звенья
и, особенно, - ее открытая пара, которую устанавливают между
выходным валом редуктора и входным валом рабочего механиз¬
ма для удобства их механического сопряжения. Чтобы устранить
люфт в последней ступени механической передачи, применяют
разрезные подпружиненные шестерни [50]. Однако в этом случае
возрастает влияние момента сил сухого трения из-за возросших
постоянно присутствующих усилий, создаваемых затянутой пру¬
жиной в разрезной шестерне. Кроме того, остается неустранен-
ным влияние люфтов из-за технологических погрешностей пред¬
варительных ступеней редуктора (из-за неизбежного бокового за¬
зора в шестеренных парах, допуска на смещение исходного кон¬
тура, податливости подшипников и отклонения межосевого рас¬
стояния). Например, механические передачи высокоточных сле¬
дящих электроприводов с общим передаточным числом iP =400...600 (при этом передаточное число подпружиненной откры¬
той пары ion = 15...20) имеют величину общего люфта, приведен¬
ную к валу рабочего механизма, до 1,0...1,5 угловых минут.Более радикально подавляют влияние люфтов, когда приво¬
дят венец зубчатого колеса последней ступени механической пе¬
редачи от двух электродвигателей, которым системой регулиро¬
Гпава 7. Следящие электроприводы 315вания задают постоянную разницу моментов, достаточную для
создания предварительного натяга в звеньях не только послед¬
ней, но и промежуточных ступеней механической передачи.Структурная схема неизменяемой части
электропривода с учетом упругостей механическойсистемыС целью упрощения математических выкладок и максималь¬
ного обобщения полученных результатов представим все пере¬
менные в относительных единицах. Напряжение на якоре двига¬
теля 1)я , ЭДС преобразователя Еп и двигателя Ед, ток якоря |я
выразим в долях от их номинальных значений Uh , 1н ; скорость
Пт вращения двигателя - в долях от скорости идеального холо¬
стого хода двигателя По при напряжении на якоре Uh . Базовые
значения моментов на валу двигателя Mi и электромагнитного М
выберем равным величине электромагнитного момента двигате¬
ля при номинальном токе якоря. В этом случае Ед = п , |л = М.
За базовое значение напряжения управления Uy на входе пре¬
образователя П возьмём такое приращение его, которое обеспе¬
чивает изменение Еп на величину UH. Базовые величины скоро¬
сти вращения п2 выходного вала рабочего механизма РМ и мо¬
мента на выходном валу РМ М2 примем в соответствии с выра¬
жениями: п 2Б = п0 / г, М2б = М1Б i. где i — передаточное число
редуктора. В этом случае в относительных единицах М, = М2 и
в случае идеально жесткой механической передачи ni = п2.•• Покажите, что при выбранных значениях базовых величин пере¬
менных автоматически решается известная в теории электропривода за¬
дача приведения скоростей, моментов, моментов инерции и коэффициен¬
тов жесткости механических звеньев или к валу двигателя, или к валу РМ.Запишем в операторной форме уравнения, связывающие из¬
менение входных и выходных координат отдельных звеньев:- преобразователя П -Еп = Кп Uy.
316Гпава 7. Следящие электроприводыКак видно из приведенного уравнения, преобразователь
описан безынерционным звеном с коэффициентом усиления Кп,
что вполне допустимо для транзисторного широтно-импульсного
преобразователя с частотой коммутации в несколько кГц;- электрической цепи ЯЦ якоря двигателя (с учетом парамет¬
ров силовой цепи преобразователя) -1я - Кяц (Еп - Ед).Здесь коэффициент усиления звена ЯЦ соответствует крат¬
ности тока короткого замыкания якорной цепи Кяц = UH / 1н ^яц.
Когда применяются малоинерционные двигатели (с гладким, по¬
лым или дисковым якорем), из-за большой величины немагнит¬
ного зазора их электромагнитная постоянная времени якорной
обмотки очень мала (например, у двигателей с гладким якорем
мощностью 0,4...0,8 кВт она составляет 0,5...1,0 мс) и обычно не
учитывается;- звена Д, учитывающего механическую инерцию вращающе¬
гося якоря двигателя, -М - Mi =Тд р п,Здесь Тд = Ля п0 / Мн - механическая постоянная времени
якоря двигателя, равная времени равномерного разгона двигате¬
ля с моментом инерции якоря до скорости холостого хода п0
под действием постоянного динамического момента, равного Мн;- упругого звена УЗ между двигателем и рабочей машиной,
учитывающего податливость механической передачи, -Мг = (1 / Туз р) Да = (1/ Туз р) (n-j - П2).Представленное уравнение соответствует двухмассовой уп¬
ругой механической системе. В этой системе (рис. 7.12) массы
якоря двигателя Д и рабочего механизма РМ с моментами инер¬
ции Ji = Jjj и J2 = J'pm = Jpm / i2 связаны между собой через упру-
Гпава 7. Следящие электроприводы317гое звено УЗ с коэффициентом жесткости С = dM / da, где a -
угол упругого скручивания вала под действием момента М.Постоянная времени звена Туз = М2е / С2 п2Б = М1Б I Ci гиб и
численно равна времени, в течение которого усилие скручивания
входного вала механической передачи возрастет до значения Мн,
если при защемленном выходном вале РМ входной вал редукто¬
ра (вал Д) вращать с постоянной скоростью, равной П15. Анало¬
гично эту постоянную времени можно определить и для враще¬
ния выходного вала. Ct = dM! / dai - коэффициент жесткости ме¬
ханической передачи, измеренный по входному валу, С2 = dM2
/ da2 - то же по выходному валу. Очевидно, что С2 = С1 i2;- звена РМ, учитывающего механическую инерцию вращаю¬
щихся масс рабочего механизма,М2 - Мс = Трм рп2.Здесь Мс - момент статической нагрузки, приложенный к ва¬
лу РМ;Трм = Jpm п25 / М25 == Jpm п1Б / i2 М,в - механиче¬
ская постоянная времени зве¬
на РМ, численно равная вре¬
мени разгона звена РМ до ско¬
рости п25 = п0 / i под действием
постоянного динамического
момента М2Б = Мчб i;- звена И, учитывающего
связь угла поворота авых вала
РМ и скорости его вращения,авых = (1 / Р) п2.На структурной схеме двигатель, механическая передача и
рабочий механизм, которые при синтезе системы регулирования
принято относить к «неизменяемой части системы» (рис. 7.13),
образуют три контура регулирования:ДМУЗ-A/WVП,п2М-)М2«1«2РММсРис. 7.12. Модель двухмассовой
механической системы с упругой
связью
318 Гпава 7. Следящие электроприводыа) контур 1 саморегулирования ЭДС в двигателе, образован¬
ный звеньями ЯЦ, Д и отрицательной обратной связью по ЭДС
двигателя. Этот контур учитывает статические и динамические
свойства двигателя (без рабочей машины), подключенного к
преобразователю П в схеме без внешних обратных связей;б) контур 2, образованный звеньями УЗ, РМ и единичной об¬
ратной связью по скорости вращения п2 выходного вала. Этот
контур описывает движение одномассовой упругой механической
системы, которая получается., если конец упругого звена УЗ со
стороны двигателя защемить жестко, а другой - подсоединить к
вращающейся массе РМ. При этом в контуре наблюдаются неза¬
тухающие гармонические колебания с частотойсо = VC / jpM .Реально колебания затухают из-за неизбежных потерь энер¬
гии в силовых элементах. Влияние сил вязкого трения и потерь в
материале механической передачи на схеме (рис. 7.13) учтено
звеном ЖТ. Это звено имеет в общем случае нелинейную стати¬
ческую характеристику. На стадии предварительных оценок её
спрямляют, заменяя нелинейное звено ЖТ пропорциональным с
коэффициентом усиления Кжт. Величину же этого коэффициента
усиления достоверно предварительно определить обычно не
удается. Лучшие результаты дают здесь экспериментальные
способы.«о В следящих электроприводах мощностью 0,2... 1,0 кВт и переда¬
точным числом механической передачи i= 100... 700 частота резонанса
обычно лежит в пределах oil = 40... 60 рад/с, а высота резонансного
максимума достигает Ам = 3... 5. Определите величину эквивалентного
Кжт для случая, когда ТРМ = 10 Туз.в) контур 3, образованный звеньями УЗ, Д и единичной об¬
ратной связью по упругому моменту в механической передаче.
Этот контур также описывается одномассовой упругой механиче¬
ской моделью, но в роли вращающейся массы выступает якорь
двигателя Д, а защемляется выходной конец вала УЗ. Канал об-
Гпава 7. Следящие электроприводы319ГОсГОmsCLсоQ.tФg2фВсг55го2фSс:гохо.Q-Осоо5CL
320Глава 7. Следящие электроприводыратной связи по упругому моменту, замыкающий контур 3, в
учебниках по теории электропривода получил название «элек¬
тромеханической связи» [29].Пример настройки одноконтурной системы
регулирования положенияВ случаях, когда двигатели, применяющиеся в следящих
электроприводах, допускают прямое включение на полное на¬
пряжение источника питания, не требуется ограничивать с помо¬
щью схемы управления максимальные значения тока якоря и
скорости вращения двигателя. Это позволяет применить для
следящего электропривода наиболее простую - одноконтурную
систему регулирования с последовательным корректирующим
устройством. Сценку возможностей такой структуры выполним,
воспользовавшись экспериментальными частотными характери¬
стиками конкретного электропривода. При этом обратим внима¬
ние на изучение тех реальных факторов, которые в каждом кон¬
кретном случае необходимо преодолеть, чтобы достигнуть за¬
данных динамических показателей.В качестве примера был взят типовой следящий электропри¬
вод, в котором конструкторами были предусмотрены общепри¬
нятые меры, направленные на достижение наилучших динамиче¬
ских показателей [50]: малоинерционный двигатель с гладким
якорем, безынерционный транзисторный широтно-импульсный
преобразователь в цепи якоря, передаточное число редуктора,
создающее примерное равенство приведенных моментов инер¬
ции двигателя и рабочего механизма. Здесь рабочий механизм
РМ с моментом инерции JPM = 8 кгм2 приводится через редуктор
с передаточным числом i = 343 от электродвигателя постоянного
тока (Рн = 180 Вт, UH = 27 В, 1Н = 15 А, пн = 3000 об/мин,
Jn = 0,46-10-4 кгм2). Широтно-импульсный преобразователь
(ШИП) управляется с помощью регулятора положения, на входе
которого суммируются сигнал задания и встречный сигнал с вы¬
хода датчика положения вала РМ.
Гпаеа 7. Следящие электроприводы321Экспериментальные логарифмические частотные характери¬
стики (ЛЧХ) разомкнутого контура регулирования положения
(КРП) РМ анализировались сначала в диапазоне низких частот,
а потом - в районе средних и высоких.Низкочастотным участком амплитудной ЛЧХ разомкнутого
КРП определяются такие точностные показатели электроприво¬
да, как добротность по скорости и добротность по ускорению,
весьма актуальные в электроприводах станков с числовым про¬
граммным управлением [35], а также в режимах наведения спе¬
циальных следящих электроприводов [22,50].Чтобы повысить точность замкнутой системы регулирования
как по задающему сигналу, так и при воздействии возмущений,
необходимо в низкочастотной зоне амплитудной ЛЧХ разомкну¬
той системы регулирования иметь максимально высокий дина¬
мический коэффициент усиления. Между тем, в реальном элек¬
троприводе амплитудная ЛЧХ разомкнутого КРП имела весьма
низкий динамический коэффициент усиления при малых частотах
(кривая Li на рис. 7.14). Более того, характер её наклона ближе к
нулевому (горизонтальному), а не к единичному, как это бывает
в обычной линейной системе с пропорциональным регулятором
положения из-за существования интегральной связи между по¬
ложением и угловой скоростью выходного вала РМ. Фазовая же
ЛЧХ разомкнутого КРП имеет при низких частотах отстающий
фазовый сдвиг, близкий к 90° (кривая <pi на рис. 7.14), что требу¬
ет объяснения, так как в рамках линейных систем с минималь¬
нофазовыми звеньями существует общеизвестная [52,53] одно¬
значная и отличающаяся от упомянутых кривых зависимость ме¬
жду наклоном амплитудной ЛЧХ системы регулирования и её
фазовой характеристикой: так, нулевому наклону амплитудной
ЛЧХ соответствует фазовая характеристика, близкая к нулю,
единичному её наклону - фазовая характеристика, близкая к 90°
и т.д.
322Гпава 7. Следящие электроприводыРис. 7.14. Структурная схема (а) и амплитудные (L)
и фазовые (<р) ЛЧХ разомкнутого одноконтурного
следящего электропривода (б)Чтобы выявить причины, вызывающие указанный характер
ЛЧХ прямого канала следящего электропривода, и объяснить
механизм их влияния, структурная схема неизменяемой части
системы (вход - напряжение управления Uy на входе ШИП, вы¬
ход - угол поворота вала РМ а) была представлена последова¬
тельным соединением звеньев с промежуточными координатами:
п; - скоростью вала электродвигателя и п2 - скоростью выходно¬
го вала РМ. При этом ЛЧХ прямого канала контура регулирова¬
ния положения определялась для нескольких значений амплиту¬
ды пробного сигнала Uy.
Гпава 7. Следящие электроприводы323Было обнаружено, что ЛЧХ выходного звена, учитывающего
динамические свойства инерционных вращающихся масс РМ,
соединенных с валом электродвигателя через механическую пе¬
редачу (вход - скорость ni, выход - скорость п2), не зависят от
амплитуды входного сигнала Uy и довольно точно описываются
линейным колебательным звеном (рис. 7.15) с частотой резо¬
нанса coi = 60 рад/с и высотой резонансного максимума
АР = Амакс / А0 = 5. Здесь А0 и Амакс - значения амплитудной ха¬
рактеристики звена при нулевой частоте и частоте резонанса.а)ПтУЗ-РМп2Кб)0.10.01АL(" N\\\\\\/ф
ч ^9.град0°-90°-180?1 10 100 со, рад/сРис. 7.15. Структурная схема (а) и амплитуд¬
ные (L) и фазовые (ф) ЛЧХ (б) механической
части следящего электроприводаАмплитудные же характеристики первого звена (вход - Uy,
выход - п, на рис. 7.16) требуют более подробных пояснений.
Во-первых, в районе со = 60 рад/с наблюдается провал в ампли¬
тудной ЛЧХ. Причину его появления следует объяснить влияни¬
ем второй массы на движение первой в двухмассовой упругой
системе, когда в режиме механического резонанса резко увели¬
чиваются нагрузки на валу двигателя, необходимые для поддер¬
жания с возросшей амплитудой периодических движений вто¬
рой массы. А это в силу естественной мягкости механической ха-
324Гпава 7. Следящие электроприводы1 10 100 о. рад /сРис. 7.16. Структурная схема (а) и амплитудные (L) и фазозые
(ср) ЛЧХ (б) канала «напряжение управления Uy - скорость дви¬
гателя п,» в следящем электроприводе при амплитуде входно¬
го сигнала: 1 - Uy = 0,5 В. 2 - Uy = 2,0 Врактеристики двигателя приводит к снижению его скорости по от¬
ношению к сигналу задания и соответствующему напряжению на
якоре. Это обстоятельство общеизвестно и описано в публикаци¬
ях по электроприводам с упругими звеньями [29].Во-вторых, в районе низких частот нарушается однозначная,
характерная для минимально-фазовых систем взаимосвязь ам¬
плитудной и фазовой ЛЧХ, а вид этих характеристик зависит от
амплитуды входного сигнала. Так, при малых сигналах (кривая
Li на рис. 7.16) снижение амплитудной ЛЧХ при уменьшении час¬
тоты пробного синусоидального сигнала наблюдается и в боль¬
шем диапазоне частот и выражено более явственно, чем при
больших (кривая L2).Отмеченные особенности амплитудной ЛЧХ неизменяемой
части системы при малых частотах следует объяснить наличием
сил сухого трения, воздействующих на якорь двигателя. Падаю¬
щий характер амплитудных ЛЧХ при уменьшении частоты проб¬
ного сигнала объясняется снижением допи динамического мо¬
Гпава 7. Следящие электроприводы325мента двигателя в доле общего электромагнитного момента при
постоянстве величины момента, обусловленного силами сухого
трения. По этой же причине при меньших сигналах управления
снижение амплитудной характеристики наблюдается в большем
диапазоне частот.Момент, необходимый для преодоления сил трогания элек¬
тродвигателя, в несколько раз превышает его момент холостого
хода и в электродвигателях постоянного тока мощностью100...400 Вт может доходить до 25...40% от номинального значе¬
ния. Того же порядка бывает и величина момента от дополни¬
тельных сил трения в механических люфтовыбирающих устрой¬
ствах при предварительной закрутке их торсиона на один-два
зуба разрезной шестерни, установленной в последней ступени
редуктора или в открытой паре после него. Момент же от сил
трения в зубчатых зацеплениях и опорах осей промежуточных
ступеней редуктора, не содержащих люфтовыбирающих уст¬
ройств, оказывается существенно (в 10...20 раз) меньше.Ослабить неблагоприятное влияние сил сухого трения на вид
амплитудной характеристики (а следовательно, и на показатели
точности следящего электропривода) можно, охватив это воз¬
мущение, например, местной отрицательной обратной связью по
скорости электродвигателя. При этом подавление возмущения
от сил сухого трения будет тем эффективнее, чем выше быстро¬
действие и точность регулирования в этом контуре. В следящих
электроприводах с малоинерционными двигателями (например,
с гладким якорем ) можно добиться частоты среза в контуре ре¬
гулирования скорости ni до 300...400 рад/с, что делает электро¬
привод малочувствительным к влиянию сил сухого трения. Экс¬
периментальные ЛЧХ замкнутого контура регулирования скоро¬
сти пу (рис. 7.17) подтверждают сказанное: наблюдаемого на
предыдущих характеристиках снижения амплитуды выходного
сигнала в районе низких частот нет. Оказывается также подав¬
ленным влияние второй массы РМ на характер движения первой
(хотя при снятии частотных характеристик вал РМ оставался
присоединенным через механическую передачу к выходному ва-
326Гпава 7. Следящие электроприводы1 10 100 о), рад/сРис. 7.17. Структурная схема (а) и амплитуд¬
ные (L) и фазовые (<р) ЛЧХ (б) контура регули¬
рования скорости двигателя в следящем элек¬
троприводе при присоединенном РМлу двигателя) и нет поэтому наблюдавшегося ранее провала на
амплитудной характеристике в районе частоты резонанса. Это
происходит потому, что частота среза контура регулирования
скорости ni оказалась существенно выше частоты резонанса в
механической системе.Результирующая ЛЧХ разомкнутого контура регулирования
положения РМ с внутренним контуром регулирования скорости
двигателя ni (рис. 7.18) подтверждает возможность восстанов¬
ления единичного наклона изменения её амплитуды в районе
низких частот и, следовательно, повышения статической точно¬
сти регулирования. Однако, предельное значение её частоты
среза остается сравнительно невысоким (не выше со = 10 рад/с),
что объясняется влиянием резонансного максимума, истощаю¬
щего запас устойчивости по модулю в системе регулирования.
Глава 7. Следящие электроприводы327осаха)*9пРПКРСияУЗ-РМIXтРис. 7.18. Структурная схема (а) и амплитудные (L) и фа¬
зовые (ф) ЛЧХ (б) следящего электропривода с местной
отрицательной обратной связью по скорости двигателяОслабить влияние резонансного максимума механической
системы на динамические показатели контура регулирования по¬
ложения РМ можно двумя способами: или соответствующим об¬
разом выбрать параметры силового оборудования в электропри¬
воде, или перейти к многоконтурной системе регулирования.
Оба варианта рассмотрены ниже.
328Гпава 7. Следящие электроприводы7.5. Выбор параметров силового оборудования из
условия достижения
максимальной точности слеженияМетоды оптимизации силового электрооборудования
в следящих электроприводахТрадиционные методики выбора мощности электродвигате¬
лей общепромышленных установок обычно исходят из известных
нагрузочных диаграмм электропривода и ограничиваются лишь
допустимыми условиями использования двигателя по нагреву, по
перегрузочному моменту, по максимальной скорости и др.Для следящих электроприводов задача выглядит сложнее из-
за существенного влияния динамических показателей двигателя
на качество процессов в электроприводе и в большинстве случа¬
ев ее решение неоднозначно. Поэтому процедура выбора сило¬
вого оборудования сопровождается оптимизацией его по каким-
либо критериям, которые позволяют получить наилучшие качест¬
венные показатели электропривода при работе в определенных
режимах.Чаще задачу параметрической оптимизации силового обору¬
дования решали для позиционных электроприводов, принимая за
критерий оптимизации время перемещения рабочего механизма
из одной точки в другую. На наш взгляд, впервые эту задачу в 30-
е годы решил Н.А. Тищенко для электропривода летучих ножниц
прокатных станов. При этом он исходил из минимума «живой си¬
лы» (по терминологии тех лет - запаса кинетической энергии
вращающихся масс электропривода) и пришел к общеизвестному
на сегодняшний день соотношению для оптимального переда¬
точного числа редуктораi - (Jpm I ) °'5,
Гпаб а 7. Следящие электроприводы329где Jpm и Jfl - моменты инерции вращающихся частей рабочего
механизма и якоря двигателя.Позднее это соотношение подтверждалось в работах других
авторов, например, для кузнечно-прессового [19], металлургиче¬
ского [1], машиностроительного [3. 35] электрооборудования.Для следящих электроприводов характерно большее разно¬
образие режимов работы и требований к ним, чем для позицион¬
ных. При этом режим работы электропривода в значительной
мере произволен и тогда требуемые мощность двигателя и пе¬
редаточное число редуктора определяются на основании или
максимальной скорости и ускорения [22, 50]. или статистических
характеристик приложенной нагрузки[22, 45]. Подробный обзор
вариантов и примеры оптимизации силовой части электроприво¬
да по оазным обобщенным показателям выполнил В.Г. Каган
[28].Общим для всех указанных методик является рассмотрение
механической системы как абсолютно жесткой. Между тем, нали¬
чие податливостей в механической передаче затрудняет дости¬
жение высоких точностных показателей в следящем электро¬
приводе.Наиболее глубоко и убедительно задачу выбора силового
оборудования следящих электроприводов с учетом упругостей в
механической передаче решил В.М. Терехов [55,56]. Взяв за кри¬
терий оптимизации точность слежения электропривода, он
сформулировал основные этапы оптимизации, нашел эффектив¬
ные алгоритмы выделения и определения величин параметров
конструкции, в наибольшей степени влияющих на точность.Приведенный краткий обзор указывает на важность умения
правильно выбирать параметры силового оборудования, так что¬
бы добиться максимальной точности слежения, когда этому пре¬
пятствует наличие податливостей в механической передаче.Идея подхода и метод решения задачиОптимально сконструированная неизменяемая часть следя¬
щего электропривода, несомненно, обеспечит лучшие точност¬
330Гпава 7. Следящие электроприводыные характеристики. Выясним, 80-первых, какие её параметры и
в каких случаях следует оптимизировать и, во-вторых, как целе¬
сообразнее при этом сформулировать критерий оптимизации,
ориентируясь на достижение максимальной точности слежения.Для решения поставленной задачи воспользуемся структур¬
ной схемой двухмассовой электромеханической системы и пре¬
образуем её так, чтобы устранить перекрестные связи (рис. 7.19а). Динамические свойства электромеханической системы можно
поставить в зависимость от соотношения трех обобщенных па-Рис. 7.19. Структурная схема двухмассовой электромеханической
системы с упругим звеном в механической передаче: а) исходная;
б) преобразованнаяраметров по числу исходных сепаратных контуров регулирования
1, 2 и 3. Выберем эти параметры.За обобщенный параметр в контуре 1 удобно взять величину
электромеханической постоянной времени двигателя
Глава 7. Следящие электроприводы331Тм = Лд Яя / СЕ2 . Она характеризует динамические свойства
апериодического звена первого порядка, которое получится, если
свернуть контур, образованный ЯЦ, Д и местной обратной связью
по ЭДС двигателя.Контур 2 будем характеризовать частотой резонанса
Ш2 = (С / JPM)1/2 одномассовой механической системы, образо¬
ванной вращающейся массой РМ и упругой механической пере¬
дачей УЗ.Прежде чем выбрать обобщенный параметр для контура 3,
определим передаточную функцию звена, стоящего в канале его
обратной электромеханической связи:Womc = 1 / (Waq Wpm ) = Тэмс Р*Здесь Тэмс = Jpm Ия / (i * Се)2 - постоянная времени звена
электромеханической связи. Ее можно получить, если в выраже¬
нии для электромеханической постоянной времени двигателя Тм
величину момента инерции якоря двигателя Jfl заменить вели¬
чиной приведенного момента инерции рабочего механизма
Jpm / i2. Величину Тзмс и выберем для характеристики динамиче¬
ских свойств контура 3.Итак, в двухмассовой электромеханической системе её ди¬
намические характеристики зависят от нескольких обобщенных
параметров, поэтому не будем пытаться найти один универсаль¬
ный ответ. Вместо этого попытаемся получить рекомендации
для возможных и наиболее характерных сочетаний их величин,
тем более что число варьируемых параметров невелико (всего
три).Воспользуемся аппроксимированными логарифмическими
частотными характеристиками (ЛАЧХ) электромеханической сис¬
темы (ЭМС), построенными в соответствии со схемой (рис. 7.19б). Чтобы учесть все возможные сочетания параметров ЭМС, от¬
несем при построении её ЛАЧХ звенья, описывающие динамиче¬
ские свойства электродвигателя и указанной выше одномассовой
упругой механической системы, образованной звеньями УЗ и РМ,
к «неизменяемой» части структурной схемы ЭМС, а внешнюю
332Гпава 7. Следящие электроприводыобратную связь, учитывающую наличие упругой электромехани¬
ческой связи в ЭМС, - к «изменяемой». Т.е. параметры Тм и сиг
зафиксируем, а величину Т3мс будем варьировать во всем воз¬
можном диапазоне. Здесь возможны две группы характеристик:
первая относится к «легким» двигателям, когда со2 < 1 / Тм . и
вторая - к «тяжелым», когда со2 > 1 / Тм . Этот подход является
естественным при частотных методах анализа, хотя и несколько
отличается от общепринятого [29], где соотношение параметров
звеньев ЭМС рассматривается в функции величины коэффици¬
ента у = (J'PM + Jn ) / Jfl .Характеристики строятся з общеизвестной для замкнутых
систем регулирования последовательности [22,52,53]: сначала
строится ломаная Ц.2 - ЛАЧХ звеньев, включенных последова¬
тельно в прямой канал (на рис. 7.20 а это - инерционного звенаРис. 7.20. Типовые случаи аппроксимированных ЛАЧХ
двухмассовой ЭМС с упругими связями: а) когда со2 < 1 / Тм;
б) когда со? > 1 / Twс постоянной времени Тм. учитывающего динамические свойстза
электродвигателя, и колебательного звена с частотой собствен¬
ных колебаний сог , описывающего динамические свойства конту-ККб)
Глава 7. Следящие электроприводы333ра 2), затем - наклонная прямая -1_з, соответствующая обрат¬
ной (перевернутой) ЛАЧХ упругой электромеханической связи с
постоянной времени Тэмс и, наконец, результирующая характе¬
ристика ЭМС аппроксимируется нижними участками кривых Ц.2
или -1-3 .Оптимизация параметров ЭМС для случая ш2 < 1 / ТмБ первой группе случаев (при сс>2 < 1 / Тм ) при весьма малых
Тэмс , когда ломаные Ц.2 и -1_з не пересекаются (рис. 7.20 а),
влияние упругой электромеханической связи слабое, вся ЭМС
ведёт себя как разомкнутая по каналу внешней обратной связи
система. Этот случай характерен, например, для электроприво¬
дов подъема руки манипулятора, для следящих электроприводов
вертикального наведения. Он же описан в приведенном выше
(см. п. 7.4) примере настройки одноконтурной системы регулиро¬
вания положения. Здесь в районе частоты со2 наблюдается резо¬
нансный максимум, который в существующих электроприводах
доходит до Ам = 3...5 и весьма затрудняет дальнейшую настройку
электропривода, замкнутого по положению рабочего органа. На
стадии синтеза ЭМС воздействовать на величину С или JPM
обычно не удается. Изменение Тм также малоэффективно, так
как ограничение динамических возможностей электропривода
обусловлено в данном случае упругими свойствами системы
«механическая передача - рабочий механизм» и начинает про¬
являться, начиная с частоты сог. Наибольшие резервы заключены
в возможности увеличения постоянной Тэмс, например, измене¬
нием передаточного числа редуктора.С целью снижения резонансного максимума Ам полезно уве¬
личивать Тэмс до значений, когда наблюдается пересечение ло¬
маных Ц.2 и -L3 (рис. 7.20 а) и когда точка этого пересечения
(она же - частота среза со3 контура, замкнутого по каналу внеш¬
ней обратной связи с постоянной времени Тэмс) лежит в диапа¬
зоне сог <«з < 1 I Тм. Тогда ЛАЧХ ЭМС меняет сзой резонансный
характер на монотонный, а это заметно улучшает условия и по¬
334Глава 7. Следящие электроприводыказатели последующей настройки замкнутого контура регулиро¬
вания положения рабочего органа.Итак, в рассматриваемом случае критерием качества удобно
выбрать величину резонансного максимума Ам , минимизируя её.
Параметром оптимизации целесообразно взять величину Тэмс-
Изменять же её можно, варьируя передаточное число редуктораi. Заметим, однако, что уменьшение i вызывает рост среднеквад¬
ратичного момента двигателя, а это может потребовать выбора
электродвигателя с большим номинальным моментом и, следо¬
вательно, с большим моментом инерции якоря.В ряде электроприводов (например, в электроприводе пово¬
рота платформ) величина ТЭмс из-за больших моментов инерции
вращающихся масс оказывается столь велика, что частота среза
ш3 превышает любую из собственных частот звеньев, включен¬
ных в прямой канал ЭМС. Тогда резонанс в районе частоты ©2
не проявляется, но наблюдается резонансный максимум на час¬
тоте среза контура регулирования 3 (рис.7.19).Ослабить это влияние можно, уменьшив величину Тм. При
этом не всякое уменьшение этой величины эффективно: приме¬
нение специальных малоинерционных электродвигателей (с
гладким, дисковым или полым якорем ) обычно достигает цели,
но решения, направленные только на уменьшение Rr или увели¬
чение Се, при рассматриваемом сочетании параметров ЭМС ма¬
лоэффективны или даже бесполезны, так как в равной степени и
в одном направлении изменяют обе постоянные времени: Тм и
Тэмс-Оптимизация параметров ЭМС для случая 1 / Тм < о>2В случае, когда 1 / Тм < сог (рис. 7.20 б), условия настройки
контура регулирования положения оказываются самыми небла¬
гоприятными из-за совместного влияния электромеханической
инерции электродвигателя и колебательной механической сис¬
темы, образованной вращающимися массами РМ и упругостью в
механической передаче. Часто это наблюдается, например, в
Гпава 7. Следящие электроприводы335электроприводах подачи станков с числовым программным
управлением или в следящих электроприводах оптико¬
механических систем. Иногда применением малоинерционных
двигателей удается свести этот случай к предыдущему варианту,
при котором сог < 1 / Тм. Если же применение малоинерционных
двигателей оказывается недостаточным для достижения в элек¬
троприводе требуемых точностных показателей, то высокую точ¬
ность регулирования можно получить в двухканальных системах
[5,12.41]. Существенных результатов можно добиться переходом
на нетрадиционные типы электроприводов точного канала [39]:
электромагнитные, пьезоэлектрические или магнитострикцион-
ные. Они имеют благоприятные массогабаритные показатели,
большие значения удельных усилий, которые по сравнению с
электродвигателями постоянного тока оказываются выше в50...200 раз. Правда, у них наблюдается весьма ограниченный
(от долей до единиц миллиметра) рабочий ход якоря, но принцип
двухканальности позволяет обойти этот недостаток. Тогда в гру¬
бом канале осуществляется перемещение вала электродвигате¬
ля, не ограниченное по величине, а в точном - перемещение ис¬
полнительного органа, ограниченное по ходу, но весьма дина¬
мичное.7.6. Электроприводы с модальным управлением.Наблюдающие устройстваИдею модального управления поясним, пользуясь структур¬
ной схемой (рис. 7. 21). Допустим, что требуется выполнить
замкнутую систему регулирования выходной координаты,
так что ХВх = Хвых- При этом неизменяемая часть системы
представлена последовательным соединением п интегральных
звеньев с промежуточными переменными X1t Х2, .... Xn.i. Для
простоты у всех этих звеньев постоянные времени приняты рав¬
ными 1 с, но это непринципиально. Ясно, что непосредственно
замкнуть контур регулирования по выходной координате Х5ых не
удастся, так как получится структурно неустойчивая система.
336Глава 7. Следящие электроприводыРис. 7.21. Структурная схема системы с модальным
управлениемМы поступим несколько иначе, разбив решение задачи на
ряд этапов. Сначала выполним контур регулирования Xi, для че¬
го охватим регулятор У и первое интегрирующее звено неизме¬
няемой части системы местной отрицательной обратной связью
по Xi с коэффициентом усиления Ki. Получившийся контур регу¬
лирования 1 не имеет ограничений по условием устойчивости,
так как безынерционной обратной связью охватывается звено
первого порядка. По этой причине частоту среза контура 1 можно
сделать сколь угодно высокой. После завершения настройки кон¬
тура 1 выполним отрицательную обратную связь по переменной
Х2, а настройку контура регулирования 2 выполним, изменяя ко¬
эффициент усиления К2 канала отрицательной обратной связи по
Х2. Повторяя последовательно процедуру охвата обратными свя¬
зями все большего числа звеньев, установленных в прямом ка¬
нале регулирования, реализуем в конечном итоге и внешний кон¬
тур регулирования по переменной Хвых- При этом величины ко¬
эффициентов обратных связей могут быть выбраны с использо¬
ванием любых общепринятых методов синтеза. В частности, при
частотном подходе величину частоты среза каждого последую¬
щего контура регулирования следует выбирать в 2...4 раза ниже,
Глава 7. Следящие электроприводы337чем предыдущего, так как в каждом новом контуре добавляется
по одному интегрирующему звену.Так как во внутреннем контуре 1 нет ограничения по быстро¬
действию, то соответствующим выбором коэффициентов усиле¬
ния K-i, К2 Кг,-1 можно получить любые заранее заданные по¬
казатели качества регулирования. Если объект регулирования,
кроме интеграторов в прямом канале регулирования, содержит
также набор местных обратных связей, то простым преобразо¬
ванием структурной схемы эти связи могут быть приведены ко
входу общего усилителя У и затем просуммированы с вводимы¬
ми обратными связями.Переменные Xi, Х2, Xn = Хвых принято называть перемен¬
ными состояния системы. Совокупность же обратных связей по
всем переменным состояния с коэффициентами усиления
К1( К2?... , Кп-1 образует так называемый модальный регулятор.В общем случае переменными состояния системы принято
называть набор наименьшего числа независимых переменных,
однозначно определяющих динамическое состояние системы в
любой момент времени на отрезке [tc, ti], если заданы их началь¬
ные значения в момент времени t = to и известны в любой мо¬
мент времени на отрезке [to, ti] внешние воздействия. В частном
случае, когда уравнения системы представлены в нормальной
форме (Коши) за переменные состояния удобно принять выход¬
ную координату и набор всех ее производных.Применительно к следящему электроприводу, динамика ко¬
торого описывается структурной схемой (рис. 7.13), за перемен¬
ные состояния следует принять, кроме выходной координаты
азых, также скорость выходного вала РМ п2, момент упругого
звена М2, скорость входного вала (вала двигателя) Пь ток якоря
двигателя 1я- Если бы удалось выполнить многоконтурную сис¬
тему регулирования с полным набором всех указанных обратных
связей, то динамические показатели такой системы были бы
зесьма высоки. Однако на пути реализации этой системы стоят
существенные как технические трудности (сложно выполнить не¬
которые из датчиков, например, момента М2 или скорости п2), так
338Гпава 7. Следящие электроприводыи конструктивные и экономические (сама система с полным на¬
бором указанных датчиков будет весьма дорогой и громоздкой).
По этой причине в современных системах электропривода очень
часто отказываются от прямого измерения переменных состоя¬
ния и переходят к вычислению этих переменных с помощью спе¬
циальных узлов, именуемых наблюдателями.Идею наблюдателя поясняет схема (рис. 7.22). Предполо¬
жим, что движение электромеханической системы ЭМС произво¬
дится изменением ЭДС преобразователя Еп, а выходной коор¬
динатой её является угловое положение вала а исполнительного
органа. Промежуточные переменные 1д, ni, М, п2 являются нена¬
блюдаемыми и необходимо их как-то вычислить. Поступим сле¬
дующим образом. Выполним модель ЭМС. Ее можно реализо¬
вать, например, используя стандартные операционные усилите¬
ли и набирая с их помощью регуляторы, имеющие тот же тип пе-Рис. 7.22. Структурная схема, поясняющая
идею применения наблюдателя
Гпава 7. Следящие электроприводы339редаточных функций, что звенья Д, УЗ, РМ, И, входящие в ЭМС.
При этом напряжения на выходах соответствующих регуляторов
оказываются аналогичны истинным 1я, ni, М, п2 и а. Благодаря
существованию аналогии между промежуточными переменными
реальной ЭМС и напряжениями на выходах соответствующих
звеньев на модели этой ЭМС последние принято обозначать те¬
ми же буквами, что и сами переменные, но со знаком «л» над
переменной, что облегчает понимание процессов. Сами же на¬
пряжения на выходах регуляторов принято называть оценками
соответствующих переменных. Например,'пг есть оценка истин¬
ной скорости п2.Сказать, что оценки переменных в точности равны соответст¬
вующим переменным нельзя, так как модель не учитывает дей¬
ствие в реальной схеме возмущений и нестабильности парамет¬
ров. Чтобы названное расхождение уменьшить, измеряемую вы¬
ходную координату ЭМС (в нашем случае это - угловое положе¬
ние выходного вала а) сравнивают с ее оценкой и в функции этой
разности Да корректируют показания модели. С этой целью мо¬
дель ЭМС* охватывают местной^ отрицательной обратной сзязью
ОС. Совокупность модели ЭМС’ и местной обратной связи ОС,
предназначенных для вычисления переменных состояния реаль¬
ной системы, образует наблюдающее устройство (наблюдатель).В простейшем случае звено ОС - это безынерционное звено
с коэффициентом усиления Кос- Естественно, чтобы добиться
большей точности работы модели, коэффициент усиления Кос
стремятся иметь максимально высоким. Но в этом случае встает
проблема устойчивости наблюдателя. Чтобы иметь достаточно
высокую точность наблюдения (воспроизведения) переменных и
не нарушать условий устойчивости наблюдателя, звено ОС вы¬
бирают с передаточной функцией видаWoe (р) = Кос + Ti р + Т22 р + ....где порядок старшей производной выбирают на единицу меньше
порядка уравнения модели ЭМС\ Чтобы слагаемые в выражении
для передаточной функции ОС, пропорциональные первой и по¬
340Гпава 7. Следящие электроприводыследующим идеальным производным по ошибке наблюдения Ла,
были технически реализуемы, их подают на входы регуляторов,
стоящих за первым, вторым и последующими интегрирующими
звеньями. Когда наблюдатель настроен, то с выходов его звень¬
ев можно брать сигналы по оценкам переменных состояния ЭМС
и использовать эти сигналы как местные корректирующие связи
при настройке контура регулирования положения (см. рис. 7.23).
Здесь на вход модального регулятора РМ через звенья с коэф¬
фициентами усиления Кь Кг, Кз, К4 подаются сигналы местных
обратных связей по оценкам переменных состояния. Внешний
контур регулирования настраивается регулятором положения РП.
Внутренняя структура звена ЭМС соответствует схеме (рис.
7.13). Правда, в этом случае, строго говоря, оценки переменных
будут отличаться от своих переменных, так как наблюдатель
корректируется не пропорциональным звеном, а содержит произ¬
водные по ошибке Да. Однако в [8] показано, что система мо-Рис. 7.23. Система модального управления с обрат¬
ными связями по оценкам переменных состояния
Гпава 7. Следящие электроприводы341дального управления, выполненная по такому принципу, имеет
динамические показатели, что и система, выполненная по самим
переменным состояния.На рис. 7.24 приведен пример функциональной схемы на¬
блюдателя, восстанавливающего недостающие переменные со¬
стояния в ЗМС, структурная схема которой рассмотрена нами
ранее (рис. 7.13). Здесь апериодическим регулятором 1 модели¬
руется двигатель постоянного тока, а интегральными регулято¬
рами 2, 3 и 4 - звенья УЗ, РМ и И. Пропорциональные регулято¬
ры 6 и 7 соответствуют местным обратным связям по упругому
моменту и скорости вала РМ. Сигнал ошибки наблюдения Да по¬
дается на входы регуляторов 1, 2, 3 и 4 с выходов регуляторов 5
и 8. Регулятор 8 является инвертором.Модальное управление - очень эффективный способ дости¬
жения высоких динамических показателей в сложных динамиче¬
ских системах. На это преимущество обращают внимание разные
авторы [11,34,54]. Но не следует преувеличивать его возможно¬
сти, когда заходит речь об условиях настройки реальных систем
электропривода. Прежде всего, гипотеза о возможности получе¬
ния в системе регулирования с модальным регулятором любых
наперед заданных динамических показателей молчаливо пред¬
полагает отсутствие ограничений по быстродействию в самом
внутреннем контуре регулирования, где оптимизация произво¬
дится изменением величины коэффициента Кь Но как раз в этом-
то контуре и наблюдается ограничение предельного значения его
частоты среза, что обусловлено необходимостью учета влияния
помех в ходе повышения быстродействия настраиваемого конту¬
ра, а также необходимостью учета дискретного характера работы
вентильных преобразователей в зоне высоких частот переда¬
ваемого сигнала.Далее, необходимо считаться с ограниченной чувствительно¬
стью датчиков положения в реальных следящих электроприво¬
дах, что подробнее рассмотрено ниже.
аоРис. 7.24. Функциональная схема наблюдателя
Гпава 7. Следящие электроприводы3437.7. Выбор структуры и параметров наблюдающих
устройств при ограниченной чувствительности
датчиков положенияИзвестная теория наблюдающих устройств [11, 34] построена
в предположении идеальности характеристик установленных
датчиков переменных состояния объекта регулирования. Однако
ограниченная чувствительность самого датчика и погрешности,
вносимые кинематической передачей, требуют соразмерять ожи¬
дания и реальные возможности наблюдателей как устройств для
измерения и переработки информации о положении вала рабо¬
чего механизма.Высказанное обстоятельство обосновывает постановку зада¬
чи синтеза наблюдающих устройств с учетом конечной чувстви¬
тельности датчиков положения исполнительного вала.Решение задачи продемонстрируем на примере одномерной
линейной системы регулирования с последовательно соединен¬
ными звеньями А и Б (рис. 7. 25). Здесь WA и \Л/Б - передаточные
функции звеньев А и Б, образующих реальную систему и потому
подверженных влиянию помех и имеющих нестационарные ха¬
рактеристики; \Л/А и Wb - передаточные функции введенных в
наблюдатель звеньев модели реальной системы, имеющих не¬
изменные характеристики; W0c - передаточная функция канала
корректирующей связи ОС в наблюдателе, доставляющая ему
как замкнутой системе регулирования любые наперед заданные
свойства (например^требуемые быстродействие и степень коле¬
бательности); ХА и Хд- неизмеряемая промежуточна^координа-
та реальной системы и ее измеряемая оценка; ХБ и Х5 - изме¬
ряемая координата реальной системы и ее оценка; Uy - управ¬
ляющее воздействие.Пусть требуется иметь информацию о координате ХА, кото¬
рую непосредственно (с помощью датчика ХдХизмерить нельзя.
Тогда придется воспользоваться ее оценкой ХА , которая выде¬
ляется как промежуточная координата в наблюдателе.
344Гпава 7. Следящие электроприводыа)Вб)Канал 2в) при и < ц),-р Хб- Хз и Хсс=0Ху./Х'д=Хаг) При ш.-р <0J< ШнБЛ Хв~0д) при со> Шибл Хв~0; Хв~0; Хос~0ЧЖ1%ХаРис. 7.25. Структурная схема наблюдателя, выделяющего сигнал нена¬
блюдаемой координаты ХА : а) исходная; б) преобразованная; а, г. д)
эквивалентные при разных частотах передаваемого сигнала
Гпава 7. Следящие электроприводы345Рассмотрим подробнее механизм формирования оценки ХА.
Учтем следующие условия:- наблюдатель как замкнутая система регулирования, обра¬
зованная звеньями с передаточными функциями \ftA, и Woe,
имеет определенную частоту среза сонбл, поэтому при о) < сонбл
выполняется приближенное равенство1 + • \^Б ' Woe * Й7а • ■ Woe .
а при аз > шнбл - другое приближенное соотношение:1 + ■ Woe *1;- в реальных системах амплитудные ЛЧХ звеньев имеют
обычно убывающий характер, а датчики - конечную чувствитель¬
ность. При наличии ограничений на некоторые промежуточные
координаты (например, на напряжение источника питания или
ток якоря двигателя в следящем электроприводе) величина ХБ
убывает и при частотах, больших некоторого граничного значе¬
ния согр. не может быть достоверно измерена датчиком Хб. Так, в
следящих электроприводах, механическая передача которых со¬
держит люфт, в области высоких частот колебания выходного
вала, вызванные изменением сигнала задания, становятся столь
малыми, что не выходят за пределы этого люфта, поэтому дат¬
чик положения остается неподвижен;- чтобы повысить точность наблюдателя (т.е. минимизиро¬
вать ошибку между координатами реальной системы и соответ¬
ствующими оценками этих координат), частоту среза сонбл в кон¬
туре, образованном звеньями наблюдателя ЛА, W5 и Woe. стре¬
мятся иметь максимально высокой. Поэтому примем сонбл > ^гр-Если бы в реальной системе сигнал ХА был наблюдаем, то
его связь с входным воздействием Uy описывалась бы уравнени¬
емХА = WA • Uy
346Гпава 7. Следящие электроприводыПосмотрим, как выполняется (и всегда л^ выполняется) при¬
веденное равенство между Ха и ее оценкой ХА в рассматривае¬
мой системе с наблюдающим устройством.С учетом двухканальности наблюдателя (см. рис. 7.25 б) его
выходной сигналЛ. А ЛХА = Хд1 + Хд2== Uy • (WA ■ Wb • Woe +^a)/(1 +tf/A'$B'Woc),где XM - составляющая, обусловленная подачей на вход наблю¬
дателя сигнала ХБ , т.е. выходной величины канала 1, который
образован звеньями А, Б и датчиком величины Хб (в следящих
электроприводах - обычно датчиком положения вала рабочего
механизма); Хдг - составляющая . обусловленная работой кана¬
ла 2, который образован непосредственным подключением сиг¬
нала Uy на вход наблюдателя.С учетом высказанных выше условий формирования сигнала
Ха получим для разных частот отличающиеся друг от друга вы¬
ражения гцередаточных функций рассматриваемой системы с вы¬
ходом по ХА.При (о < согр ХА = WA Uy , т.е. происходит полноценная пере¬
дача сигнала Uy обоими каналами 1 и 2.В диапазоне частот согр < со < сонбл выходной сигнал наблю¬
дателя ХА » 1 / (\&а Woe)' Uy. Это выражение справедливо пото¬
му, что наблюдатель передает управляющий сигнал Uy только
каналом 2, а канал 1 из-за недостаточной чувствительности дат¬
чика Хб уже не работает. При этом из-за со < сонбл в наблюдателе
как замкнутой системе регулирования доминирует канал обрат¬
ной связи.Наконец, при со > сонбл имеем ХА * $д Uy. В этом случае сиг¬
нал Uy передается только каналом 2, но так как со > сонбл, то в
наблюдателе доминирует прямой канал, а каналом обратной
связи можно пренебречь.Сопоставляя приведенные выражения для передаточных
функций канала восстановления координаты Хд, видим, что точ¬
Глава 7. Следящие электроприводы347ное восстановление ее происходит лишь при от < соГР, при
о > сонел - приближенное, а при согр < о < сонбл наблюдатель во¬
обще дает ошибочный сигнал.Неработоспособность наблюдателя в диапазоне согр ... сонбл
объясняется тем, что канал 2 в наблюдателе «еще не работает»,
так как подавлен местной обратной связью, а канал 1 - «уже не
работает» в’ силу ограниченной разрешающей способности дат¬
чика Хб. Если требуется выполнить контур регулирования вели¬
чины ХА , а полоса частот согр ©нбл попадает в район предпола¬
гаемой чдстоты среза этого контура, то настроить контур регули¬
рования ХА с помощью наблюдателя не удастся.Как показывают расчеты, в реальных следящих электропри¬
водах величина шгр лежит в пределах 80...250 рад/с и может,
следовательно, сказаться при настройке внутренних, самых бы¬
стродействующих контуров регулирования (например, контура
регулирования ускорения рабочего органа).Итак, чтобы с помощью наблюдателя качественно воспроиз¬
вести ненаблюдаемые координаты, регулируемые внутренними
контурами, необходимо, с одной стороны, ©нбл > юпром; где
сопром - частота среза наиболее быстродействующего контура
регулирования оценки промежуточной координаты, вычисляемой
с помощью наблюдателя; но с другой - надо, чтобы сйнбл < югр.В следящих электроприводах, выполненных по традицион¬
ным схемам, обычно не предъявляют особых требований к дат¬
чикам положения по полосе пропускания частот, так как они
включены во внешний контур регулирования, имеющий самое
низкое быстродействие. Положение меняется в электроприводе с
модальным управлением, когда сигнал с выхода датчика поло¬
жения используется для коррекции показаний наблюдателя. В
этом случае при организации и настройке внутренних контуров
регулирования (например, по ускорению рабочего органа, задан¬
ного его оценкой) необходимо расширить частотный диапазон
выходных сигналов датчика, что ставит более жесткие требова¬
ния к силовому оборудованию и узлам крепления датчиков.
348Список литературыСПИСОК ЛИТЕРАТУРЫ1. Азимов И.К., Дружинин Н.Н. Оптимальные параметры ав¬
томатизированных позиционных электроприводов - // Ав¬
томатизированный электропривод / Под ред. Н.Ф, Ильин¬
ского и М.Г. Юнькова. - М.: Энергия, 1980. - С. 25 - 30.2. Андреев В.П., Сабинин Ю.А. Основы электропривода. -
М.-Л.: Госэнергоиздат, 1956.-448 с.3. Андреенко С.Н. и др. , Проектирование приводов манипуля¬
торов / С.Н. Андреенко, М.С. Ворошилов, Б.А. Петров. - Л.:
Машиностроение, 1975. - 312 с.4. Аракелян А.К., Афанасьев А.А. Вентильные электрические
машины и регулируемый электропривод. В 2 кн. - М.: Энер-
гоатомиздат, 1997. Кн. 1. Вентильные электрические маши¬
ны. - 509 с. Кн. 2. Регулируемый электропривод с вентиль¬
ным двигателем. - 498 с.5. Башарин А.В. и др. Управление электроприводами: Учеб.
пособие для вузов / А.В. Башарин, В.А. Новиков,
Г.Г. Соколовский. - Л.: Энергоиздат, 1982. - 392 с.6. Бесекерский В.А. Динамический синтез систем автоматиче¬
ского регулирования. - М.: Наука, 1970. - 576 с.7. Биргер И.А. и др. Расчет на прочность деталей машин:
Справочник. 3-е изд. / И.А. Биргер, Б.Ф. Шорр, Г.Б. Иосиле-
вич. - М.: Машиностроение, 1979. - 702 с.8. Богданов В.М. Контакторное управление электроприводами
прокатных станов. - М.: Металлургиздат, 1958. - 228 с.9. Борцов Ю.А., Бычков А.И. Обобщенные оценки влияния уп¬
ругих звеньев на динамику электроприводов и настройку
регуляторов унифицированных систем II Электропромыш¬
ленность. Сер. Электропривод. - 1973. - № 7 (24).10. Борцов Ю.А. , Соколовский Г.Г. Автоматизированный элек¬
тропривод с упругими связями . - 2-е изд., перераб. и доп.- СПб.: Энергоатомиздат, 1992. - 288 с.
Список литературы34911. Борцов Ю.А. и др. Электромеханические системы с адап¬
тивным и модальным управлением / Ю.А. Борцов, Н.Д. По-
ляхов, В.В. Путов.-П.: Энергоатомиздат, 1984. -216 с.12. Бродовский В.Н., Иванов Е.С. Приводы с частотнотоковым
управлением; Под ред. В.Н. Бродовского. - М.: Энергия,1974.-168 с.13. Булгаков А.А. Частотное управление асинхронными элек¬
тродвигателями. - М.: Наука, 1966. - 297 с.14. Бычков В.П. Электропривод и автоматизация металлурги¬
ческого производства. - М.: Высш. школа, 1977. - 391 с.15. Бычков М.Г. Элементы теории вентильно-индукторного
привода // Электрическтво. - 1997.- № 8.16. Бычков М.Г., Ильинский Н.Ф., Кисельникова А.В. Расчет ме¬
ханических характеристик вентильно-индукторного элек¬
тропривода // Электропривод и системы управления; Тр.
МЭИ. Вып. № 675, 1997. - С. 16 - 29.17. Вейнгер А.М. Регулируемый синхронный электропривод. -
М.: Энергоатомиздат, 1985. - 224 с.18. Гарнов В.К. и др. Унифицированные системы автоуправле¬
ния электроприводами в металлургии / В.К. Гарнов, В.Б.
Рабинович, Л.М. Вишневецкий. - М.: Металлургия, 1971. -
192 с.19. Гейлер Л.Б. Оптимальное передаточное число и мощность
двигателя. - Электричество. - 1955. - № 12. - С. 59-61.20. Голован А.Т. Основы электропривода. - М.-Л.: Госэнерго-
издат, 1959. - 344 с.21. Горбачев Г.Н., Чаплыгин Е.Е. Промышленная электроника:
Учебник для вузов / Под ред. В.А. Лабунцова. - М.; Энерго¬
атомиздат, 1988. - 320 с.22. Динамика следящих приводов: Учеб. пособие / Б.И. Петров,
В.А. Полковников, Л.В. Рабинович и др. - М.: Машинострое¬
ние, 1982.-496 с.23. Дискретный электропривод с шаговыми двигателями / Под
общ. ред. М.Г. Чиликина. - М.: Энергия. - 624 с.
350Список литературы24. Дружинин Н.Н. Электрооборудование прокатных цехов. -
М.: Металлургиздат, 1956. - 456 с.25. Елисеев В.А. Релейно-контакторные системы управления
электропривода. - М.: Изд-во МЭИ, 1995. - 144 с.26. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электроприво¬
да: Учеб. для вузов. - М.: Энергоатомиздат, 1992. - 544 с.27. Ильинский Н.Ф. Преобразователи частоты в энергосбере¬
гающем электроприводе насосов // Преобразователи час¬
тоты в современном электроприводе: Доклады науч.-практ.
семинара. - М.: МЭИ, 1998. - С. 56 - 66.28. Каган В.Г. Электроприводы с предельным быстродействи¬
ем для систем воспроизведения движений. - М.: Энергия,1975,- 240 с.29. Ключев В.И. Теория электропривода: Учебник для вузов. -
М.: Энергоатомиздат, 1985. - 560 с.30. Ключев В.И., Вуль Ю.Я., Усманов А.М. Разработка и иссле¬
дование тиристорного электропривода поворота экскавато¬
ра // Автоматизированный электропривод промышленных
установок: Сб. трудов Моск. энерг. ин-та. Вып. 223 . - М.:
МЭИ, 1975.-С. 146- 154.31. Козаченко В.Ф. Основные тенденции развития встроенных
систем управления двигателями и требования к микрокон¬
троллерам // CHIP NEWS. - 1999. - № 1 (34). - С. 2 - 9.32 Кожевников К.И. Диаграмма тока двигателей вспомогатель¬
ных механизмов прокатных станов // Электричество. -
1956.- № 6.33. Кудрявцев А.В., Ладыгин А.Н. Современные преобразова¬
тели частоты в электроприводе // Преобразователи частоты
в современном электроприводе: Доклады науч.-практ. се¬
минара. - М.: МЭИ, 1998. - С. 4 - 30.34. Кузовков Н.Т. Модальное управление и наблюдающие уст¬
ройства. - М.: Машиностроение, 1976. - 184 с.
Список литературы35135. Лебедев А.М. и др. Следящие электроприводы станков с
ЧПУ /А.М. Лебедев, Р.Т. Орлова, А.В. Пальцев. - М.: Энер-
гоатомиздат, 1988. - 223 с.36. Морозов Д.П. Теория электропривода и автоматика ревер¬
сивных станов. - М.: Госэнергоиздат, 1949.37. Мэрфи Дж. Тиристорное управление двигателями перемен¬
ного тока: Пер. С англ. - М.; Энергия, 1979. - 256 с.38. Несмеянов А.С., Усынин Ю.С. Проектирование амортизи¬
рующих опор для датчиков положения в высокоточных сле¬
дящих электроприводах // Прочность машин и аппаратов
при переменных нагружениях: Сб. научн. Трудов. - Челя¬
бинск: ЧГТУ, 1991. - С. 133 - 136.39. Никольский А.А. Точные двухканальные следящие электро¬
приводы с пьезокомпенсаторами. - М.: Энергоатомиздат,
1988.- 160 с.40. Онищенко Г.Б., Локтева И.Л. Асинхронные вентильные кас¬
кады и двигатели двойного питания. - М.: Энергия. 1979. -
200 с.41. Осмоловский П.Ф. Итерационные многоканальные системы
автоматического управления. - М.: Советское радио, 1968.- 256 с.42. Особенности расчета индукторных двигателей для вен¬
тильного электропривода / В.А. Кузнецов, Л.А. Садовский,
В.Л. Виноградов, В.В. Лопатин // Электротехника. - 1998-
№ 6.-С. 35-43.43. Перель Л.Я., Филатов А.А. Подшипники качения: Расчет,
проектирование и обслуживание опор: Справочник. - М.:
Машиностроение, 1983. - 543 с.44. Петров Л.П. Управление пуском и торможением асинхрон¬
ных двигателей. - М.: Энергоиздат, 1981.-184 с.45. Ратнер Н.И. Расчет электроприводов в случайных режимах.- Л.: Энергия, 1969. - 126 с.46. Регулирование вентильного электропривода постоянного
тока с реверсом поля двигателя / А.С. Валдырев, А.М.
352Список литературыВейнгер, Б.Н. Дралюк, В.В. Караман // Электричество-
1973. -№ 11.47. Решетов Д.Н., Портман В.Т. Точность металлорежущих
станков. - М.: Машиностроение, 1986. - 336 с.48. Сергеев П.С. и др. Проектирование электрических машин /
П.С. Сергеев, Н.В. Виноградов, Ф.А. Горяйнов - М.: Энер¬
гия, 1969. - 632 с.49. Системы подчиненного регулирования электроприводов
переменного тока с вентильными преобразователями / О.В.
Слежановский, J1.X. Дацковский, И.С. Кузнецов и др. - М.:
Энергоатомиздат, 1983. -256 с.50. Следящие электроприводы. В 2-х кн. / Под ред. Б.К. Чемо-
данова. - М.: Энергия, 1976. - 480 и 384 с.51. Слежановский О.В. Реверсивный электропривод постоянно¬
го тока. - М.: Металлургия, 1967.52. Теория автоматического управления. Ч. 1: Учебник для ву¬
зов/ Л.С. Гольдфарб, А.В. Балтрушевич, Г.К. Круг и др.; Под
ред. А.В. Нетушила. - М.: Высш. школа, 1967. - 427 с.53. Теория автоматического управления. Часть1. Теория ли¬
нейных систем автоматического управления: Учеб. пособие
для вузов / Н.А. Бабиков, А.А. Воронов, А.А. Воронова и
др.; Под ред. А.А. Воронова. - М.: Высш. школа, 1977. - 303
с.54. Терехов В.М. Дискретные и непрерывные системы управ¬
ления в электроприводах: Учеб. пособие. - М.: Моск. энерг.
ин-т, 1989. - 80 с.55. Терехов В.М. Комплексная оптимизация по точностному
принципу следящих электроприводов // Тр. Моск. энерг.
ин-та, вып. 477. - С. 13-19.56. Терехов В.М, О точности силовых следящих электроприво¬
дов постоянного тока // Электротехника. - 1974. - № 1057. Терехов В.М. Элементы автоматизированного электропри¬
вода: Учеб. для вузов. - М.: Энергоатомиздат, 1987. - 224 с.
Список литературы35358. Управление вентильными электроприводами постоянного
тока / Е.Д. Лебедев, В.Е.Неймарк, М.Я. Пистрак, О.В. Сле-
жановский. - М.: Энергия, 1970. - 197 с.59. Усынин Ю.С. Управление замкнутыми электроприводами:
Конспект лекций - Челябинск: ЧПИ, 1975. - 4.1. - 130 с.60. Филатов А.С. Электропривод и автоматизация реверсивных
станов холодной прокатки. - М.: Металлургия, 1973.61. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. -
6-е изд. - М.: Энергоиздат, 1981. - 576 с.62. Чиликин М.Г. и др. Основы автоматизированного электро¬
привода / М.Г. Чиликин, М.М. Соколов, В.М. Терехов,
А.В. Шинянский. - М.: Энергия, 1974. - 568 с.63. Шаталов А.С. Преобразования сигналов и изображающих
их функций обобщенными линейными системами автома¬
тического управления. - М.-Л.: Энергия, 1965. - 344 с.64. Шёнфельд Р., Хабигер Э. Автоматизированные электро¬
приводы: Пер. с нем. / Под ред. Ю.А. Борцова .- Л.: Энерго¬
атомиздат, 1985. - 464 с.65. Шубенко В.А., Браславский И.Я. Тиристорный асинхронный
электропривод с фазовым управлением. М.: Энергия, 1972.- 200 с.66. Blaschke F. Das Prinzip der Feldorientiemng, die Grundlage fur
die Transvektor-Regelung von Drehfeldmaschinen. - Siemens-
Z., 1971, Bd 45, № 10, S. 757 - 760.67. Eisele H., Vance A.M. Parallel control system regulates motor
speed and torque. - «Westinghause Engr.» , 1966, 26, № 4,
119 - 124. Русский перевод: Экспресс-информация. Серия
«Автоматизированный электропривод и электротехноло¬
гия», 1966, вып. 42, реф. 152. Система параллельного
управления для регулирования скорости и вращающего
момента двигателя.68. Flotter W., Ripperger Н. Die Transvektor-Regelung fur den
feldorientierten Betrieb einer Asynchronmaschine. - Siemens-Z.- 1971. - Bd 45. - № 10. - S. 761 - 764.
354Список литературы69 Lawrenson P. A. Brief Status Review of Swiched Reluctance
Drives//EPE Journal.- 1992.-Vol. 2.- № 3.-P. 134-144.70 Lipo T. A. Advanced Motor Technologies: Converter Fed Ma¬
chines // IEEE Trans. - 1997. - P. 204 - 222.71. Miller T.J.E. Switched Reluctance Motors and Their Control.
Oxford: Magna Physics Publishing and Clarendon Press, 1993.- 200 s.72. Stemmier H. Antriebssystem und elektronische Regeleinrich-
tung der getriebelosen Rohrmuhle // Brown Boveri Mitt. -
1970. - Bd 57. - № 3. - S. 121 - 129.
Русский перевод: Частотнорегулируемый синхронный
электропривод цементной шаровой мельницы // Автомати¬
зированный электропривод, электротехнология и электро¬
снабжение промышленных предприятий: Экспресс-
информация. - М.: ВИНИТИ, 1970, № 36. - С. 1 -13.73. Weh Н. On the Development of Inverter Fed Reluctance Ma¬
chines for High Power Densities and High Outp // ETZ Archiv¬
ed. 6.-1984.- P. 135-144.
Оглавление355ОГЛАВЛЕНИЕВВЕДЕНИЕ 3Глава 1. ЭЛЕКТРОПРИВОДЫ С РЕЛЕЙНО-КОНТАКТОРНЫМИ
СИСТЕМАМИ УПРАВЛЕНИЯ 81.1. Условные обозначения, применяемые в электрических
схемах 81.2. Способы пуска и торможения электроприводов с РКСУ 131.3. Защиты в электроприводе 26Глава 2. СПОСОБЫ ФОРМИРОВАНИЯ ПРОЦЕССОВ ПУСКА
В РЕГУЛИРУЕМЫХ ЭЛЕКТРОПРИВОДАХ2.1. Оптимальные кривые переходных процессов разгонаи торможения электропривода 302.2 Связь частотной характеристики электропривода с кривой
тока якоря при разгоне 332.3. Формирование переходного процесса пуска двигателяв разомкнутой системе преобразователь-двигатель 372.4. Формирование прямоугольной токовой диаграммыс помощью отрицательной обратной связи по току якоря... 462.5. Формирование прямоугольной токовой диаграммы
с помощью гибких обратных связей по напряжениюна якоре двигателя 522.6. Применение последовательных корректирующих
устройств для улучшения формы кривой тока якоряпри разгоне электропривода 562.7. Формирование прямоугольной токовой диаграммыс помощью интегрального задатчика интенсивности
в схеме с отрицательной обратной связью по скорости 602.8. Формирование прямоугольной токовой диаграммы
с помощью задатчика интенсивности в схемес отрицательной обратной связью по напряжениюна якоре 62
356ОглавлениеГлава 3. СПОСОБЫ ПОДДЕРЖАНИЯ СКОРОСТИ
ЭЛЕКТРОПРИВОДА3.1. Исходные положения 673.2. Показатели разомкнутой системы «преобразователь -
двигатель» 693.3. Применение отрицательной обратной связи по скорости
вращения двигателя 733.4. Применение отрицательной обратной связипо напряжению на якоре двигателя 793.5. Применение положительной обратной связи по токуякоря двигателя (IR-компенсация) 823.6. Регулирование по возмущению 86Глава 4. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ
ПОСТОЯННОГО ТОКА4.1. Основные сведения об элементах серии УБСР 914.2. Основные типы регуляторов, реализуемыхна операционных усилителях серии УБСР 934.3. Структурные схемы электроприводовна элементах УБСР 1044.4. Одноканальная схема вентильного электроприводас подчиненным регулированием 1104.5. Электропривод постоянного тока по схеме"источник тока - двигатель" 1404.6. Электропривод постоянного токас двухзонным регулированием скорости 1494.7. Электропривод с реверсом поля двигателя 1654.8. Вентильный электроприводс параллельными регуляторами 170Глава 5. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ
ПЕРЕМЕННОГО ТОКА5.1. Общие положения. Преимущества электроприводов
переменного тока 1785.2. Понятие векторного регулирования электромагнитного
момента в электрической машине переменного тока 181
Оглавление3575.3. Синхронный электропривод с частотнотоковым
регулированием момента 1875.4. Частотнорегулируемые синхронные электроприводы
с регулированием продольной и поперечной
составляющих тока статора 2105.5 Синхронный частотнорегулируемый электропривод по схеме вен¬
тильного двигателя 2135.6. Особенности формиррвания моментного треугольникав асинхронных электроприводах 2245.7. Асинхронный электропривод с частотнотоковым
управлением 2285.8. Регулируемые асинхронные электроприводы массовых
серий 2355.9. Асинхронные электроприводы с регулированием
напряжения на статоре 2435.10. Электропривод с машиной двойного питания 2545.11. Частотнорегулируемый асинхронный электроприводс векторным управлением 262Глава 6. ПЕРСПЕКТИВНЫЕ ЭЛЕКТРОПРИВОДЫ
С НЕТРАДИЦИОННЫМИ ТИПАМИ ДВИГАТЕЛЕЙ
И НОВЕЙШИМИ ИСТОЧНИКАМИ ПИТАНИЯ 2686.1. Вентильный индукторный электропривод 2696.2. Электропривод с синхронным реактивным двигателем
независимого возбуждения 274Глава 7. СЛЕДЯЩИЕ ЭЛЕКТРОПРИВОДЫ7.1. Примеры электроприводов с регулированием положения
выходного вала рабочего механизма 2867.2. Ошибки следящих электроприводовв установившихся нормированных режимах 2917.3. Позиционный тиристорный электроприводпостоянного тока 2967.4. Высокоточный следящий электропривод 3107.5. Выбор параметров силового оборудования из условия
достижения максимальной точности слежения 328
358Оглавление7.6. Электроприводы с модальным управлением.Наблюдающие устройства 3357.7. Выбор структуры и параметров наблюдающих устройств
при ограниченной чувствительности датчиков
положения 343СПИСОК ЛИТЕРАТУРЫ 348
359Юрий Семёнович УсынинСИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВУчебное пособиеТехн. редактор А.В. Миних
Издательство Южно-Уральского государственного университетаИД № 00200 от 28.09.99. Подписано в печать 17.12.2001. Формат
60 х 84 1Л6. Печать офсетная. Уел. Печ. Л. 20,93. Уч.-изд.Л.20,94. Тираж 700 зкз. Заказ 613/2002. Цена договорная.Отпечатано с готовых оригинал-макетов
а ГУП «Копейская типография».
Челябинская область, г.Копейск, ул.Ленина, д. 19.
Тел. (8-239) 7-51-06.7-51-40.