

























































































































































































































Author: Шелофаст В.В. Чугунова Т.Б.
Tags: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка общее машиностроение машиноведение проектирование машин
ISBN: 5-901346-04-1
Year: 2004




ШЕЛОФАСТ В. В., ЧУГУНОВА Т. Б.
ОСНОВЫ ПРОЕКТИРОВАНИЯ МАШИН
Примеры решения задач
Москва Издательство АПМ 2004
f
УДК 621.81.(075.8)
ББК 34.42
A Ш44
Шелофаст В. В.
Чугунова Т. Б.
Ш 44 Основы проектирования машин. Примеры решения задач. — М.: Изд-во АПМ. — 240 с.
ISBN 5-901346-04-1
Настоящее издание можно рекомендовать преподавателям, аспирантам и студентам технических университетов и колледжей при изучении ряда курсов, таких как «Сопротивление материалов», «Основы проектирования машин», «Техническая механика» и т. д. Книга может быть полезна инженерам — конструкторам для выполнения практических расчетов машин, механизмов и конструкций.
В книге на конкретных примерах рассматриваются методы решения задач, возникающих при проектировании механического оборудования.
Теоретической базой для настоящего издания является учебник В. В. Шелофаста «Основы проектирования машин», на формулы, табличный и текстовый материал которого даны прямые ссылки. В этом смысле книгу можно рассматривать как практическое приложение теоретического курса.
Результаты неавтоматизированного расчета по предлагаемым методикам дополнены аналогичными вычислениями с помощью известной CAD/CAE системе АРМ WinMachine, которая эффективно используется более чем в трехстах технических университетах и колледжах и на нескольких сотнях предприятий России, а также ближнего и дальнего зарубежья. Многочисленные пользователи АРМ WinMachine найдут в книге много полезных сведений, ориентированных на практическое применение системы для решения учебных и производственных задач.
УДК 621.81. (075.8) ББК 34.42
© Шелофаст В.В., Чугунова Т.Б, © Издательство АПМ, 2004
ISBN 5-901346-04-1
ОГЛАВЛЕНИЕ
Предисловие........................................................ 5
Глава 1. СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
1.1. РАСТЯЖЕНИЕ — СЖАТИЕ .......................................... 7
1.1.1. Статически определимая система ......................... 7
1.1.2. Статически неопределимая система ............... 11
1.2. СДВИГ И КРУЧЕНИЕ ............................................ 16
1.2.1. Статически определимая система ........................ 16
1.2.2. Статически неопределимая система ...................... 20
1.3. ИЗГИБ ....................................................... 25
1.3.1. Расчет моделей балочных конструкций ................... 25
1.3.2. Расчет плоских рамных конструкций ..................... 38
1.3.3. Расчет пространственных рамных конструкций ............ 53
1.4. РАСЧЕТ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИЯ ................. 60
1.5. УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ ................................ 67
Глава 2. СОЕДИНЕНИЯ ЭЛЕМЕНТОВ МАШИН
2.1. РЕЗЬБОВЫЕ СОЕДИНЕНИЯ ........................................ 71
2.1.1. Расчет кронштейна, нагруженного отрывающей силой ...... 71
2.1.1. Расчет группы винтов при действии отрывающих нагрузок . 83
2.1.3. Расчет группы винтов, нагруженных сдвигающей силой ... 89
2.2. СОЕДИНЕНИЯ ДЕТАЛЕЙ ВРАЩЕНИЯ ................................. 97
2.2.1. Расчет соединения с натягом ........................... 97
2.2.2. Расчет конического соединения ........................ 103
2.2.3. Расчет соединения призматической шпонкой.............. 106
2.2.4. Расчет соединения сегментной шпонкой.................. 109
2.2.5. Расчет прямобочного шлицевого соединения ............. 111
2.2.6. Расчет эвольвентного шлицевого соединения ............ 115
2.2.7. Расчет треугольного шлицевого соединения ............. 116
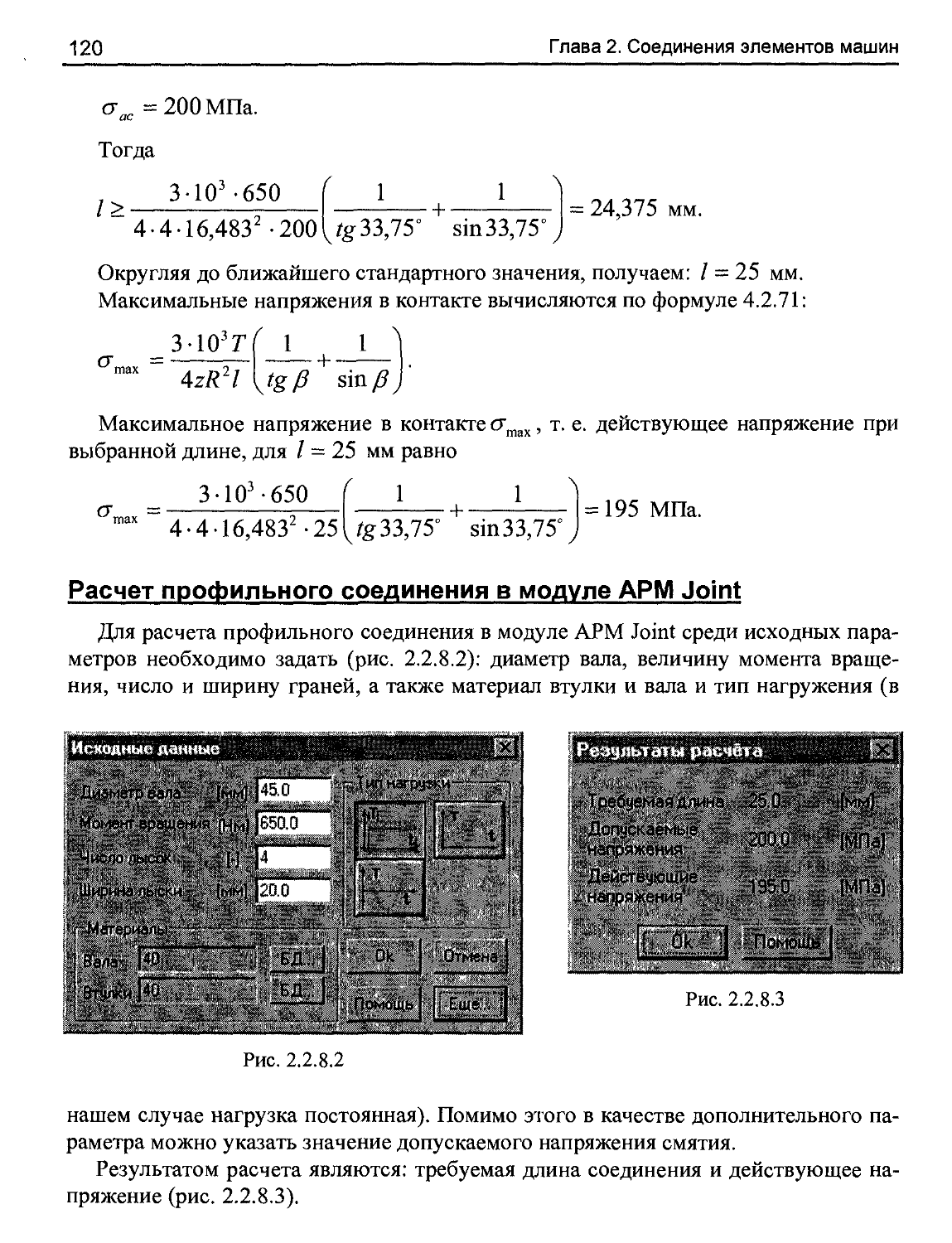
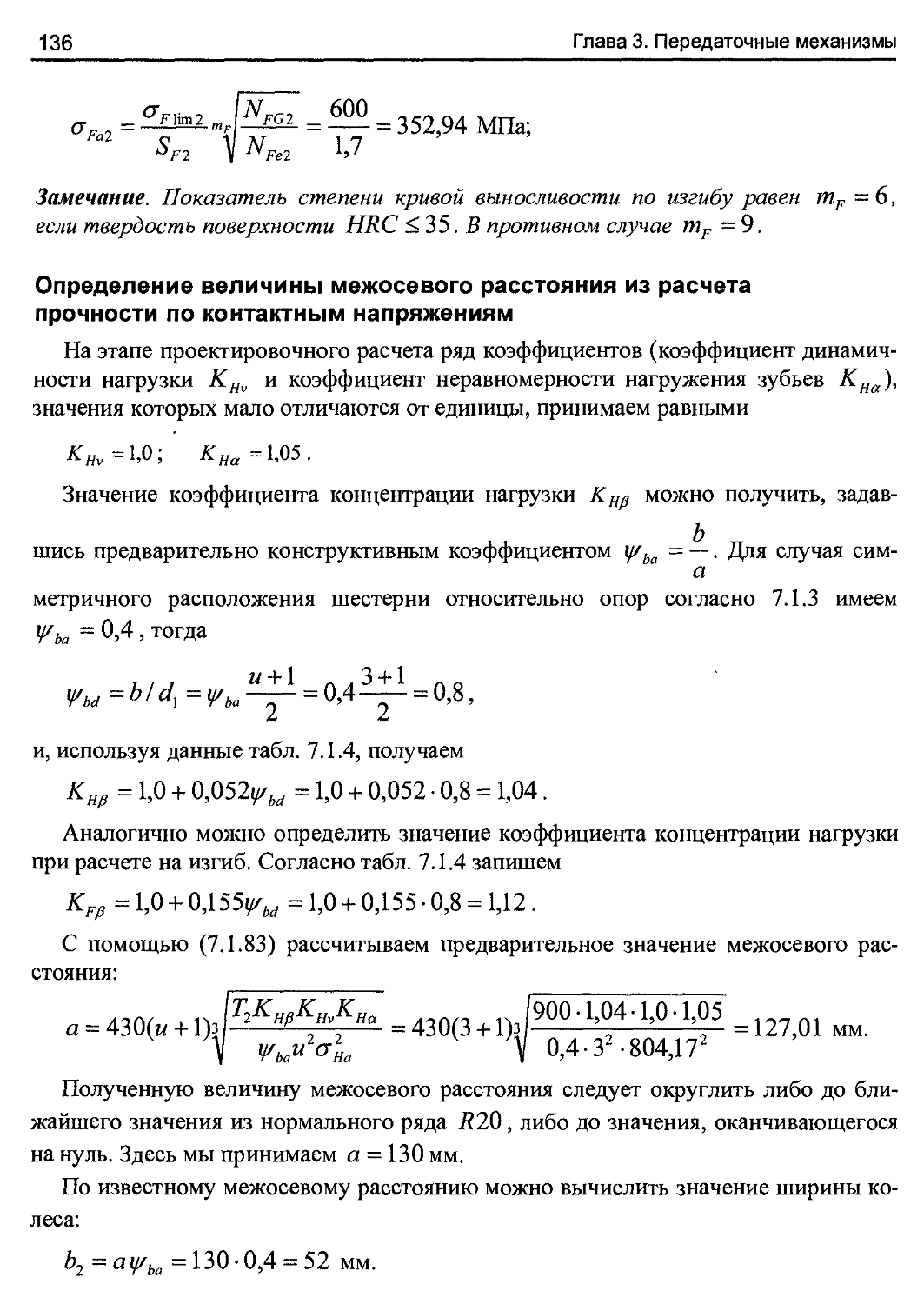
2.2.8. Расчет призматического профильного соединения ........ 118
2.3. СВАРНЫЕ СОЕДИНЕНИЯ.......................................... 121
2.3.1. Расчет нахлесточного сварного соединения ............. 121
2.3.2. Расчет таврового сварного соединения ................. 126
Глава 3- ПЕРЕДАТОЧНЫЕ МЕХАНИЗМЫ
3.1. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЗУБЧАТОЙ ЦИЛИНДРИЧЕСКОЙ КОСОЗУБОЙ ПЕРЕДАЧИ ВНЕШНЕГО ЗАЦЕПЛЕНИЯ ....................... 133
3.2. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЗУБЧАТОЙ КОНИЧЕСКОЙ ОРТОГОНАЛЬНОЙ ПЕРЕДАЧИ С ПРЯМЫМИ ЗУБЬЯМИ...................... 145
2
Оглавление
3.3. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЗУБЧАТОЙ КОНИЧЕСКОЙ ОРТОГОНАЛЬНОЙ ПЕРЕДАЧИ С КРУГОВЫМИ ЗУБЬЯМИ ............. 156
3.4. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ ......... 168
3.5. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ КЛИНОРЕМЕННОЙ ПЕРЕДАЧИ ..... 177
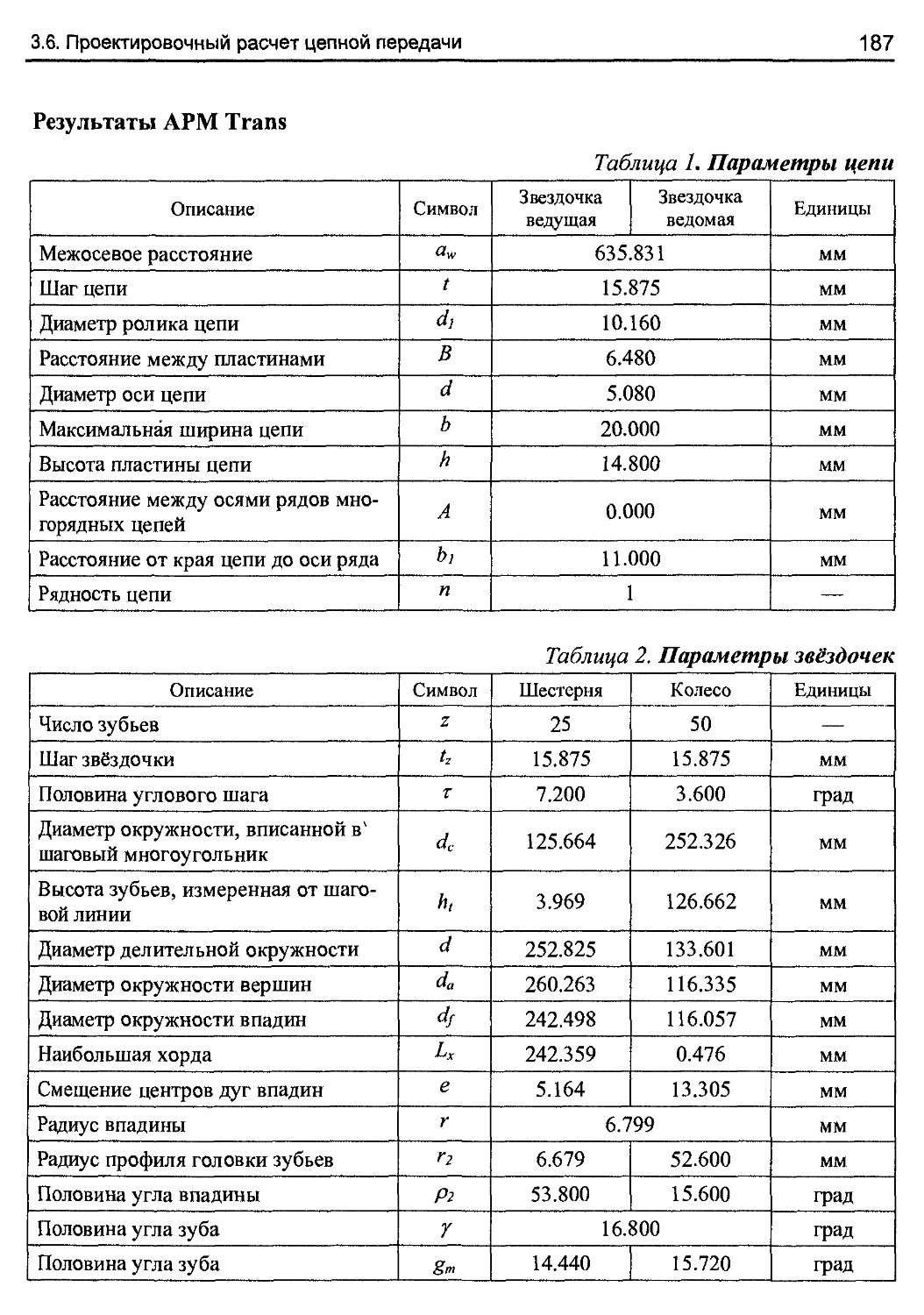
3.6. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЦЕПНОЙ ПЕРЕДАЧИ ............ 183
Глава 4. ТИПОВЫЕ ЭЛЕМЕНТЫ МАШИН
4.1. РАСЧЕТ ВАЛА НА УСТАЛОСТНУЮ ПРОЧНОСТЬ .............. 189
4.2. РАСЧЕТ РАДИАЛЬНОГО ПОДШИПНИКА СКОЛЬЖЕНИЯ, РАБОТАЮЩЕГО В РЕЖИМЕ ЖИДКОСТНОГО ТРЕНИЯ ................ 199
4.3. РАСЧЕТ ПОДШИПНИКОВ КАЧЕНИЯ ........................ 207
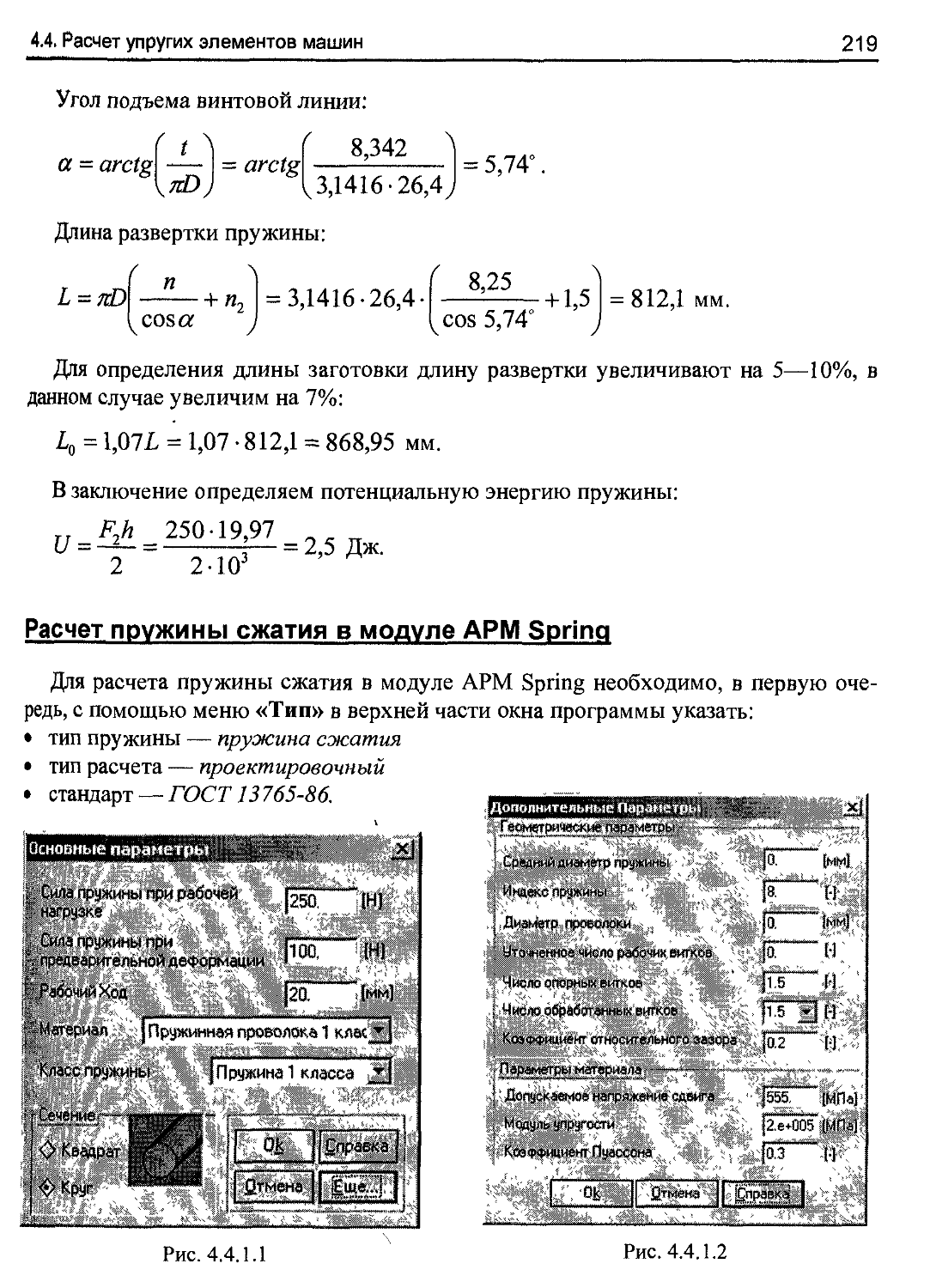
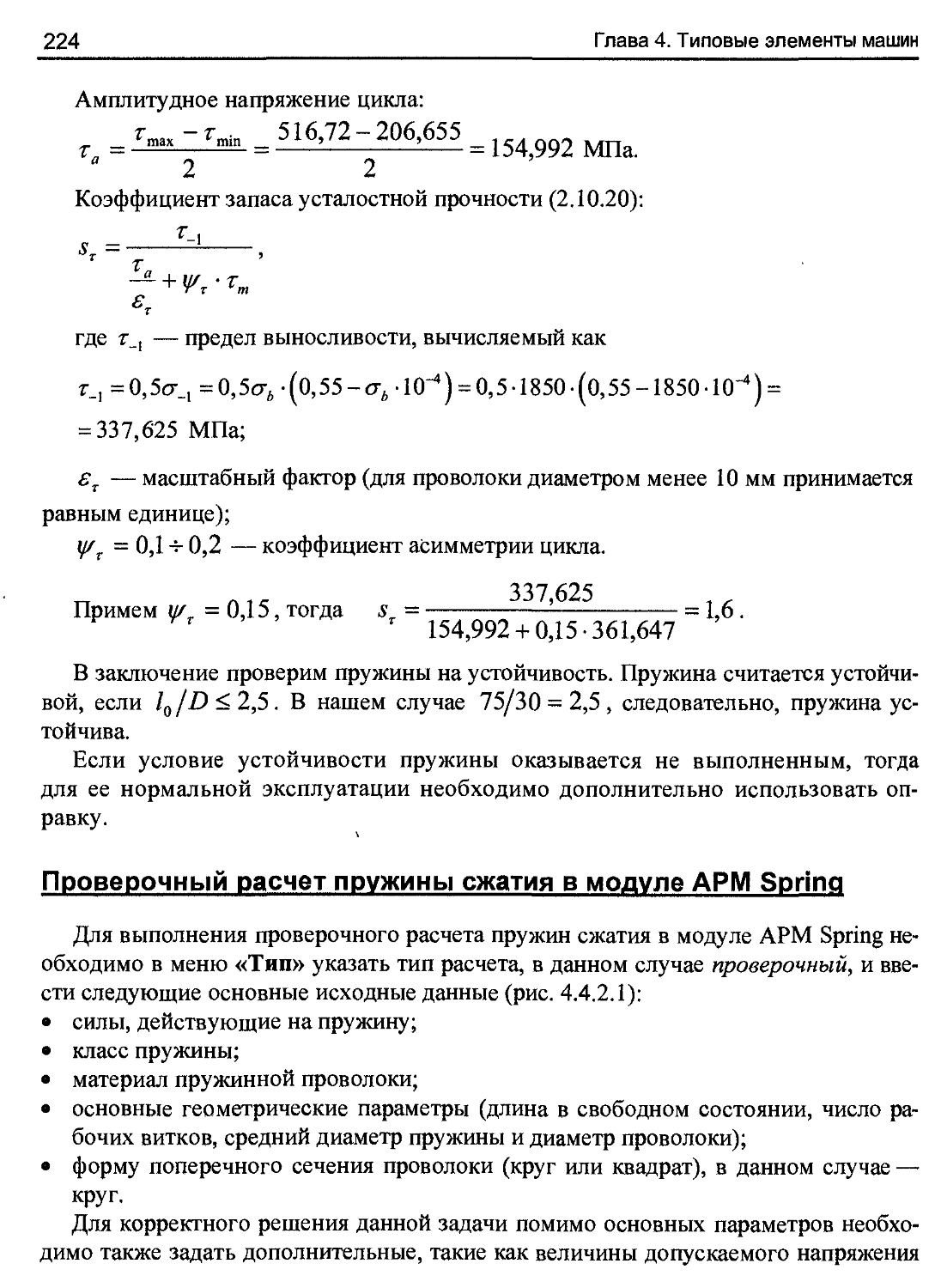
4.4. РАСЧЕТ УПРУГИХ ЭЛЕМЕНТОВ МАШИН..................... 214
4.4.1. Проектировочный расчет пружины сжатия круглого поперечного сечения ........................ 214
4.4.2. Проверочный расчет пружины сжатия круглого поперечного сечения ........................ 221
4.4.3. Проектировочный расчет пружины сжатия квадратного поперечного сечения ..................... 226
4.4.4. Проектировочный расчет пружины растяжения круглого поперечного сечения ........................ 230
4.4.5. Проектировочный расчет пружины кручения круглого поперечного сечения ........................ 233
ПРЕДИСЛОВИЕ
Важным вопросом при проектировании машин, механизмов и других механических систем и конструкций является определение их основных геометрических размеров в зависимости от условий эксплуатации, выбранных материалов и ряда других факторов. От того, как проведена эта работа, в конечном итоге зависит то, насколько совершенным окажется конечный продукт, созданный большим коллек
тивом конструкторов и технологов.
Ответить на эти вопросы можно только после выполнения комплекса необходимых вычислений, основанных на методиках инженерного анализа, практике проек
тирования и современных компьютерных технологиях.
Основные критерии работоспособности и методы расчета большинства типовых
деталей, изложенные в форме лекций, подробно рассмотрены в фундаментальном учебнике В. В. Шелофаста «Основы проектирования машин», выпущенном изда
тельством АПМ в 2000-м году.
Знания, полученные в теоретических курсах, можно эффективно дополнить се
рией практических примеров. Такие примеры и собраны в этой книге, которая представляет собой логическое продолжение учебника «Основы проектирования
машин» в том смысле, что ее можно рассматривать как практическое приложение теоретического курса. Более того, все имеющиеся в данной книге прямые ссылки на формулы, таблицы и справочный материал относятся именно к учебнику.
Настоящее издание можно рекомендовать преподавателям, аспирантам и студентам технических университетов и колледжей при изучении ряда курсов, таких как «Сопротивление материалов», «Основы проектирования машин», «Техническая механика» и т. д. Теоретический курс вместе с задачником можно успешно использовать как для аудиторной работы, так и для самостоятельного изучения вышеуказанных предметов.
Книга может быть полезна также и инженерам-конструкторам для проведения практических расчетов машин, механизмов и конструкций.
Кроме этого, изложенный в книге материал служит иллюстрацией того, как выполняются многочисленные расчетные процедуры в известной российской CAD/CAE/CAM/PDM системе АРМ WinMachine, разработанной в НТЦ «Автоматизированное Проектирование Машин» (НТЦ АПМ). Это обстоятельство позволяет рекомендовать настоящее издание в качестве приложения к системе АРМ Win-Machine ее многочисленным пользователям в России и за рубежом.
Пользователям АРМ WinMachine, особенно в учебных заведениях, весьма полезно проводить параллельные расчеты, выполненные как в системе АРМ WinMachine, так и без использования специализированных программных продуктов на основе известных методик, в том числе и рассмотренных в этой книге. Такой подход к проблеме конструирования позволит осознано выполнять и процедуру подготовки исходных данных, и анализ полученных с помощью АРМ WinMachine ре
зультатов.
Предисловие I .... ' ....—
кто пока не имеет доступа к АРМ WinMachine, задачник тоже сможет оказаться полезным: для практического изучения вопросов проектирования, ддя выполнения домашних заданий, а также курсовых и дипломных проектов.
Понятно, что методы, которые используются для вычислений в системы f АРМ WinMachine, в некоторых случаях не идеально точно совпадают с результатами аналитических вычислений ввиду того, что численные решения универсальны и приближенны. Однако, как легко убедиться с помощью параллельных вычислений, эти решения имеют вполне достаточную для инженерной практики точность-
Важно отметить также, что книга примеров, которую Вы держите Bjpypx, ориентирована в первую очередь на студентов и аспирантов технических ву^овг в то время как система АРМ WinMachine главным образом предназначена дляжонст-рукторских организаций и предприятий и, следовательно, имеет значительна большие возможности по отношению к тем, которые здесь описаны. Так, при иллюстративных ссылках на АРМ WinMachine авторы ограничивались только тем набором параметров, которые вошли в перечень определяемых в рассматриваемом примере величин.
Все рисунки в книге сделаны в среде плоского графического редактора АРМ Graph, который является составной частью АРМ WinMachine.
Большая помощь авторам при подготовке настоящего издания была, оказана техническим директором НТЦ АПМ Шелофастом Вадимом Владимировичем^ а также всеми разработчиками системы АРМ WinMachine.
Авторы благодарят Карнопелеву Елену Васильевну за высокопрофессиональную работу по верстке книги и подготовке ее к печати.
Огромную работу по улучшению содержания книги выполнила редактор Старкова Елена Геннадьевна. Авторы очень признательны ей за этот ценный и не дсегда заметный труд. *
Глава 1
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
1.1. РАСТЯЖЕНИЕ — СЖАТИЕ
1.1.1. Статически определимая система
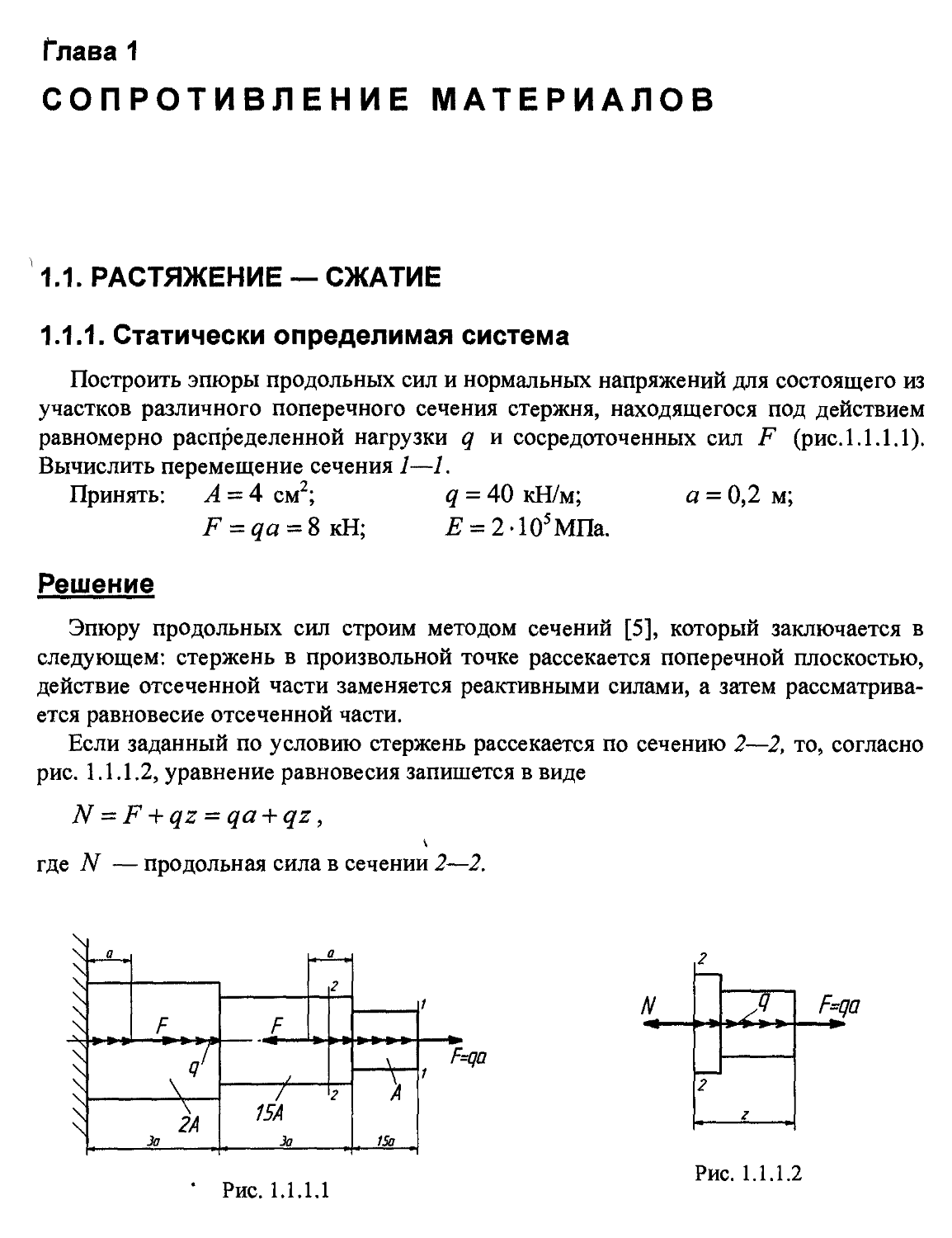
Построить эпюры продольных сил и нормальных напряжений для состоящего из участков различного поперечного сечения стержня, находящегося под действием равномерно распределенной нагрузки q и сосредоточенных сил F (рис. 1.1.1.1). Вычислить перемещение сечения 1—1.
Принять: А = 4 см2; q = 40 кН/м; а = 0,2 м;
F = #a = 8KH; £ = 2-Ю5МПа.
Решение
Эпюру продольных сил строим методом сечений [5], который заключается в следующем: стержень в произвольной точке рассекается поперечной плоскостью, действие отсеченной части заменяется реактивными силами, а затем рассматривается равновесие отсеченной части.
Если заданный по условию стержень рассекается по сечению 2—2, то, согласно рис. 1.1.1.2, уравнение равновесия запишется в виде
N = F + qz = qa + qz,
где N — продольная сила в сечении 2—2.
Рис. 1.1.1.2
Рис. 1.1.1.1
8
Г лава 1. Сопротивление материалов
Рассмотрев условия равновесия отсеченной части для каждого из указанных выше сечений стержня, получим эпюру продольных сил (рис. 1.1.1.3).
Считаем, что при центральном растяжении (сжатии) нормальные напряжения равномерно распределены по площади поперечного свечения и вычисляются как а = —-, 4
где — продольная сила в рассматриваемом i -ом сечении; А/ — площадь текущего поперечного сечения. Таким образом, эпюру нормальных напряжений можно получить делением величины продольной нагрузки на площадь соответствующего поперечного сечения (рис. 1.1.1.3).
Полное перемещение произвольного сечения равно алгебраической сумме перемещений от каждого из силовых факторов в отдельности. Его можно вычислить по формуле, которая следует из _________________ е cN.dz закона Гука (2.2.3), о = J——,
Рис. 1.1.1.3
где интегрирование ведется по участкам от точки заделки до нужного сечения. Тогда для сечения 1—1 имеем
1,5r (qa + qz)dz °r(2,5qa + qz)dz 2,5qa 2a
J ~EA + J 1,5K4 + 1,5K4 4
2af(2,5qa + qz)dz ( a^5,5qa + qz)dz
+ j _ + j __ _
aa2 40-0 22-IO6
= 14,46-^— = 14,46 - ——• — u- = 0,289мм.
EA 2 105-4 102
1.1. Растяжение — Сжатие
9
Решение задачи в модуле АРМ Structure3D
Для выполнения необходимых вычислений в программном модуле АРМ Struc-ture3D стержень разбивается на необходимое количество участков (в данном случае — на 5 участков) с помощью узлов. Узлы помещаются на концах стержня, в местах изменения поперечного сечения и в точках приложения сосредоточенных нагрузок. Номера узлов показаны на диаграмме осевой силы, а номера стержней, для большего удобства при сопоставлении результатов теоретического расчета и расчета в АРМ Structure3D, отмечены на самом стержне (рис. 1.1.1.3).
Следует отметить, что возможности АРМ Structure3D позволяют помимо табличных результатов получать также цветовые карты результатов для внутренних нагрузок, напряжений и перемещений с варьируемым числом изоуровней (здесь эти карты не- приведены). Перемещение сечения 1—1 в рассматриваемом случае можно определить либо из цветовой карты результатов, либо как максимальное перемещение всего стержня в целом (сечение 1—1 расположено на конце стержня, и его перемещение будет наибольшим).
Замечание. При автоматизированном расчете с помощью АРМ Structure3D полученный результат относится к локальной системе координат стержня [4], которая жестко привязана к его началу и организована следующим образом: ось X всегда располагается вдоль стержня, ось Y направлена вертикально вверх, а ось Z дополняет систему координат до правой тройки.
Ясно, что в локальной системе координат стержня все параметры рассматриваемой задачи, кроме осевых (направленных вдоль оси X), равны нулю.
Результаты расчета в АРМ Structure3D
Количество стержней: ' 5
Список стержней:
N стержня Узлы Длина [см]
0 0,1 20.00
1 1,2 40.00
2 2,3 40.00
3 3,4 20.00
4 4,5 30.00
Диаграмма: Осевая сила
ШШППШШшшп
О
10
Глава 1. Сопротивление материалов
Нагрузки на концах стержней
Индекс стержня 0
Узел конца Сила[Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 51920.00 0.00 0.00 0.00 0.00 0.00
1 44160.00 0.00 0.00 0.00 0.00 0.00
Индекс стержня 1
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
1 35840.00 0.00 0.00 0.00 0.00 0.00
2 20320.00 0.00 0.00 0.00 0.00 0.00
Индекс стержня 2
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
2 20000.00 0.00 0.00 0.00 0.00 0.00
3 20000.00 0.00 0.00 0.00 0.00 0.00
Индекс стержня 3
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
3 27920.00 0.00 0.00 0.00 0.00 0.00
4 20160.00 0.00 0.00 0.00 0.00 0.00
Индекс стержня 4
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
4 19880.00 0.00 0.00 0.00 0.00 0.00
5 8240.00 0.00 0.00 0.00 0.00 0.00
1.1. Растяжение — Сжатие
11
Напряжение в стержне (макс.) [МПа]
N Узлы Экв. напряжение
0 0,1 64.8
1 1,2 44.8
2 2,3 33.3
3 3,4 46.5
4 4,5 49.7
Максимальное перемещение 0.29 мм.
1.1.2. Статически неопределимая система
Для стержня, жестко закрепленного с обеих сторон и нагруженного системой центральных сил (рис. 1.1.2.1), построить эпюры продольных усилий и нормальных напряжений, а также вычислить перемещение сечения 1—1.
Принять: F = 20 кН; А = 1,5 см2; а = 0,2 м; Е=2-105 Н/мм2.
Решение
Рассматриваемая задача является один раз статически неопределимой, поскольку из единственного уравнения равновесия найти две неизвестные реактивные силы невозможно.
Статически неопределимые задачи решаются дополнением статического уравнения равновесия необходимым количеством уравнений перемещений, отражающих особенности наложенных на деформируемую систему геометрических связей.
В данной задаче действие опор описываем реактивными силами RB и Rc (рис. 1.1.2.2). Тогда уравнение равновесия имеет вид
RB-Rc+F + F-3F = Qz=> RB=RC+F.
В и D U
Рис. 1.1.2.1
Уравнение равновесия в данном случае необходимо дополнить одним уравнением перемещений. Для записи уравнения перемещений можно использовать одно из двух
Рис. 1.1.2.2
12
Глава 1. Сопротивление материалов
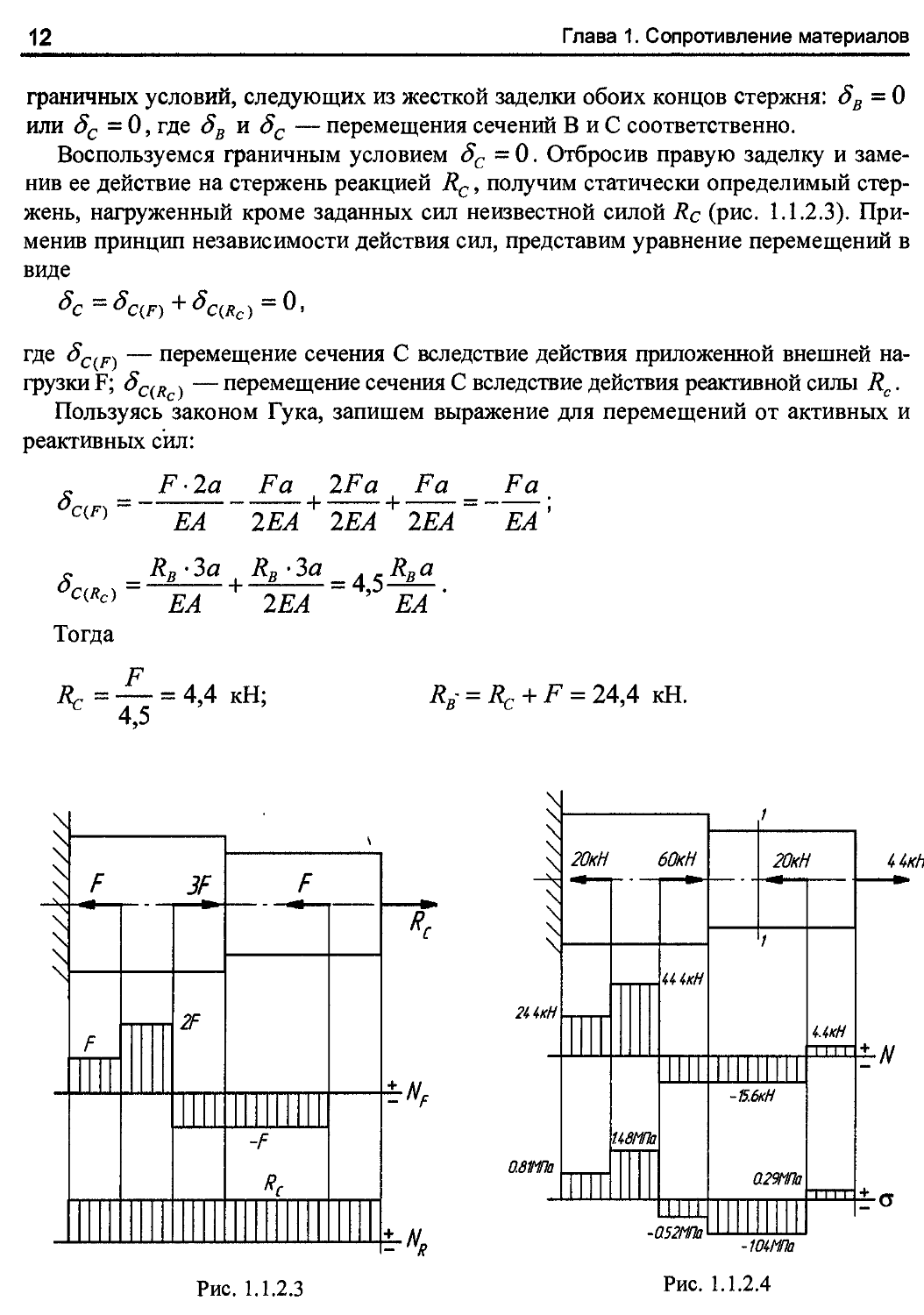
граничных условий, следующих из жесткой заделки обоих концов стержня: 5В = О или дс = 0, где дв и <5С — перемещения сечений В и С соответственно.
Воспользуемся граничным условием 6С = 0. Отбросив правую заделку и заменив ее действие на стержень реакцией Rc, получим статически определимый стержень, нагруженный кроме заданных сил неизвестной силой Rc (рис. 1.1.2.3). Применив принцип независимости действия сил, представим уравнение перемещений в виде
~ ^C(F) + <^С(Яс) = 0 ’
где <5C(F) — перемещение сечения С вследствие действия приложенной внешней нагрузки F; £С(Л } — перемещение сечения С вследствие действия реактивной силы Rc.
Пользуясь законом Гука, запишем выражение для перемещений от активных и реактивных сил:
с F • 2а Fa 2Fa Fa Fa
Or( FX ~------------1------1----“-----7 i
C(F} EA 2EA 2EA 2EA EA
» R„ • 3a R„ -3a . -RBa
Я = £_________। £_____= 45 —-—
С(Лс) EA 2EA ’ EA '
Тогда
= — = 4,4 кН; = Rc + F = 24,4 кН.
4,5
Рис. 1.1.2.3
-lulrlna
Рис. 1.1.2.4
1.1 Растяжение — Сжатие
13
Эпюры продольных сил N и нормальных напряжений <т строим по известным значениям активных и реактивных силовых факторов. Это легко сделать с помощью метода сечений. Построенные эпюры приведены на рис. 1.1.2.4.
Перемещение сечения 1—1 найдем так же, как в задаче 1.1.1:
_ af24,4-1036fe af44,4-103^ af-15,6-1036fe 7-15,6-Ю3
1-1 “0' 2ЕА +0' 2ЕА +0' 2ЕА J ЕА
11-103а __1Л_2
=--------= 7,3-10 мм.
ЕА
Решение задачи в модуле АРМ Beam
Расчет стержней в модуле АРМ Beam несколько отличается от их расчета в АРМ Structure3D (см. задачу 1.1.1). Дело в том, что, в отличие от АРМ Structure3D, в котором силовой фактор можно задать только в узловой точке, в АРМ Beam допускается приложение силы в любой точке участка стержня. Применительно к рас-
Рис. 1.1.2 5
сматриваемой задаче это означает, что для ее решения необходимо создать всего два стержня, отличающихся между собой формой поперечного сечения.
Окно результатов расчета показано на рис. 1.1.2.5. Некоторые из кнопок (графики результатов) могут быть недоступны. Это определяется выбором типа расчета (статический расчет, изгибные колебания в вертикальной плоскости, изгибные ко
14
Глава 1. Сопротивление материалов
лебания в горизонтальной плоскости, крутильные колебания) в меню «Расчет: типы расчета».
Ниже приведено решение рассматриваемой задачи, выполненное в модуле АРМ Beam. На рис. 1.1.2.5 и 1.1.2.6 представлены эпюры осевых сил и напряжений. Пе-
Рис. 1.1.2.6
Рис. 1.1.2.7
1.1. Растяжение — Сжатие
15
ремещение сечения 1—1 можно найти как по графику перемещений (рис. 1.1.2.7), так и при помощи таблицы 1.1.2.1 с уточненными значениями перемещений; фрагмент этой таблицы, содержащей искомое сечение (сечению 1—1 соответствует точ-
Рис. 1.1.2.8
ка на оси абсцисс с расстоянием 800 мм от левого конца балки), располагается после графика.
Таблица 1.1.2 1
Перемещение в осевом направлении
Индекс точки Расстояние мм Перемещение мм
66 780.00000 0.08416
67 792.00000 0.07793
66 780.00000 0.08416
1.2. СДВИГ И КРУЧЕНИЕ
1.2.1. Статически определимая система
Для стержня, состоящего из участков различного поперечного сечения и нагруженного группой моментов вращения (рис. 1.2.1.1), построить эпюры: крутящих
Рис. 1.2.1.1
моментов, максимальных касательных напряжений и углов поворота поперечных сечений.
Принять: М, =10 кН-м;
*
// = 0,3;
а = 0,5 м; Е' = 2-105МПа;
= 0,77-105 МПа.
Решение
Для того чтобы ответить на поставленные вопросы, необходимо воспользоваться методом сечений. В рассматриваемом случае крутящий момент, возникающий в произвольном поперечном сечении стержня, численно равен алгебраической сумме крутящих моментов, приложенных к отсеченной части.
Крутящий (вращающий) момент будем считать положительным, если для наблюдателя, смотрящего из конца вектора нормали на плоскость поперечного сечения, момент представляется направленным против хода часовой стрелки.
Таким образом, используя метод сечений и правило знаков, строим эпюру крутящих моментов (рис. 1.2.1.2).
Прежде чем переходить к построению эпюры максимальных касательных напряжений, необходимо в каждом из заданных поперечных сечений рассчитать полярный момент сопротивления кручению. Для удобства дальнейших вычислений разобьем стержень на участки I—IV, характеризующиеся постоянным значением крутящего момента и неизменной формой поперечного сечения, и вычислим полярный момент сопротивления каждого участка:
1.2. Сдвиг и кручение
17
fK' = — = 0,2d3;
Р 16
Wpv = s 034J3 16
Эпюру максимальных касательных напряжений (рис. 1.2.1.2) строим по рассчитанным величинам момента кручения и соответствующим им значениям полярного момента сопротивления (2.4.24), =Mt/Wp,
Угол закручивания участка стержня, имеющего постоянное поперечное сечение, при условии, что момент кручения во всех сечениях данного участка одинаков, оп-ределяетсапо формуле 2.4.25:
2. Основы проектирования машин
Глава 1 СопротИйЛёМйё5материа>ю
.............> .4
'1.8
Вычислим полярные моменты инерции для каждого из участкад стержня*
% и i
32
s 0,1<У4;
V
*
II ТIII
_ тг(1,8с/) 32~
s 1,02<У
IV л
- я(1’м)4 ~ О Id'
т ' " и ” *
5 J z !
*
<
I
Эпюру углов поворота сечений (р Строим, начиная од закрепленного,» конца. Е пределах каждого из участков стержня эпюра углов линейна, найти углы поворота только для граничных сеченцй участков:
угол поворота сечения А:
(рА ~ 0, т. к. это сечение закреплено;
угол поворота сечения В:
поэтому достаточнс
—2
G 0,W
2QM‘a = -0,745"; Gd4
угол поворота сечения С:
М“1п М,а ЗМр
<Рс = <Р в + 777^ + Л1' \ '/ч
РМ,ла =-0,d31°;
угол поворота сечения D:
<PD=(PC+-^ Tlk~-
-ЗМ.а
у?..t1 1 *"
G 1,02<У4
= -0,745° Gd4
угол поворота сечения E:
(PE — <pD +
™ Mdi ЗМ. За = —20---т- +
р Gd4 G 0,2d4
50М.а
_L—
Gd4
1
Решение задачи в модуле АРМ Beam —,1 t. j 'у —i.-ч j й. ( n.fn.j (1 (j । j г .
На рис. 1.2.1.3 И L2.1.4 показаны эпюры моментов кручения, и углов поворота поперечных сечений, полученные при решении данной задачи в модуле АРМ Beam.
Эта программа позволяет также получить эпюру эквивалентных напряжений, которая здесь не представлена. Зная величины эквивалентных напряжений, можно, используя энергетическую теорию прочности, легко перейти к максимальном каса-
<Рв =
J
к
г
г
/
A
f
5
о
Г вавп! q<g
rrWiHHM»XfctttoftTT^™Krthk^aitt^ 1ЦцТ^>
»we«W эквивалентных напряжений на ч • о . -
нодэаш|и jow нн,1Ш<’ глжиш оятэого Я жннОш окна а - ог^сдф гюаояонн а н он
: Ki Klf.I *>i t
•; Графики
R)T*i
j 4
kfHi jp'^g¥iUpY
^«мМш»Ы9«ш^шие44в4№*им»>ЫМ. :: r ?
мМмйшмСМЛ, /Y.- ’:/
УйМйй^Й ;>»ентЖНЖ&Ж
18!Ш^.?Ж^йН5М11ТН:
Щй# -Ш* ’ и Н
•>
“»!
.4
«Мм* I
Zp
ih'
ОМОН nomv M ШП
л...
tfl
ШШЙЦ
09000.0! I)
* '*‘-Xv V v^tsCyss’X-.1 ' •*,F4‘ SJ^
БмяИге^э! RBtffi!
L4i • kAw^J.I J
•s
ШДЗД|ПШЖ WWW
'! , ’ * » * '< 4 »х. хЬ ’ 1 J :й0 ;? Х< \£-1 :?: -:\ » ?;} | ,>., f;.J .7 b<? > r£;.t :-:й?У ~‘ И 7. f \.:: < -, .YJ . •, >:;.; Д ", t . ? t х-’ ;'О:4 j ;:, J » >
<,.." ... РЗ ••„.••••; flog; ; "... кг--'-'•• ”. ' гл ' ” U 2..I ;:?;.2ЖЖ'-
<М> М> 111 q J - -.-- — ._.LLLl| гуг-^р—ррАуф^р.-^ !. . •••• алл^ г аа.*- _~ ?^~ 2г УН ? . .~.-.~. )4
Q* * q) ::Д^5^ИЖ1 И^^М^;М1В1ЙЙИ|^Ш:. Д Я дД в >, кпкaquBH /ынапэ rirjcoi^kni^y-^^oHEM ?в(тг:жо^ zhh*R г(С|я jaqoiiH’ .нннорэз ^auooqonon вгоц
£Q
*й**|и:
Oi
?*
K.::V-'
W
: iiiMMHiijKii'iib
;lz #
+" *
rnmoq’l I
К
.%
<
, 'j.', , x г.м ||0№ *mwr*
•*wr*mWH*
fps
«ЙUS|J< 1 ЛЧрЯИ» 1»
- .АЛ»: -о:> !:<-: А’-Жх-Т-1 А '< \
I»
•? >Wl-«i Vh*i*4 «► vj । w
!f ” “
')' ,|;r"i":'.r/W7rTT-7;7?W"
- ..
... ;^<.g^;gg:gg:;gg¥f.^. ;: . . ' ... : 0 РвССГОЛЖН?. ММ
r -
t
I
1
*
w
/
Л
‘ ж X
d\ ?V8;..i
*
*
%
*
T
J
)
*
r
И
i
V
J
i
£
\
J.
1
f Ю i
f •:
A tf
1
V
Рис. 1.2.1.4
20
Глава 1 Сопротивление материалов
АРМ Beam позволяет представлять результаты расчета не только в виде эпюр, но и в числовой форме — в виде таблиц. В качестве иллюстрации здесь приведен фрагмент таблицы углов поворота поперечных сечений.
Индекс точки Расстояние, мм Угол кручения, град
34 990.00000 -0.75473
35 1020.00000 -0.74671
51 1500.00000 -0.63442
67 1980.00000 -0.78771
68 2010.00000 -0.82068
100 2970.00000 -1.87576
1.2.2. Статически неопределимая система
Для заданного статически неопределимого стержня (рис. 1.2.2.1) построить эпюры: крутящих моментов, максимальных касательных напряжений и углов поворота поперечных сечений.
Принять: Mt =10 кН-м; ___ о = 1м; Е = 2 • ц = 0,3; G = = 0,77 -10’ МПа/
Z Я ' 2(1 + //)
Рис. 1.2.2.1
. 1.2. Сдвиг и кручение
21
МММ
Решение
Отбросив заделки и заменив их действие на стержень реактивными моментами MtA и MtB, получим эквивалентную систему, которая должна находиться в равновесии (рис. 1.2.2.2).
Рис. 1.2.2.2
Статическое уравнение-равновесия для этой системы имеет вид:
А?,, + М, й — ЗМ. + М, = 0,
рли
М1А + MtB = 2М,.
В единственное уравнение равновесия входят два неизвестных фактора, следовательно, задача один раз статически неопределима. Необходимо составить одно дополнительное уравнение перемещения. Для этого в исходной системе отбросим правую заделку, заменим ее реактивным моментом Ms и определим этот момент из условия <рв = 0, выражающего тот факт, что опора представляет собой жесткую заделку (рис. 1.2.2.3). Представим уравнение перемещения в виде
где '
<рв — угол повдрота сечения В;
<рвм — угол поворота сечения В от внешних силовых факторов;
<рвм — угол поворота сечения В от реактивного момента.
3Mt
Рис. 1.2.2.3
Глава 1 Сопротмвленлематериалда
ffwywj wmuю1 д'илпдцщмлд'и шия м ш w п чу
мжитидию JUi.HLJiiwuHuwDma^
wwsmwww»
Далее, по аналогии с задачей 12 1, разобьем стержень на участки I
4КЧи|ЛД11ДДЯР,Ч₽ЧЯЯ£?'ЯЧеЖ»ТГГ«Я^^^^!ТГ«Ч5‘
reoMWMW^KW’W№WwraW'XraompHwe,MOMOHTbnMmpun« и шодярны^ моменты
<шпр0|ги аденw) каждом участку ю ? < ?
UH I I J 1/ > I?
И JH J OL (Н ШО Лйияьи Ш1ру* О i f u vA N ХЧ
>3 t f r i H(0 UH Jj I
i л > нон
ЗОкНп
l n H M
(J IO HI
7НХХИ И) Я
H M I я
r*j z| I I
i j)
()j
к
joj ;
44 I (J
VN \Л! ИГЛ 4
ЮкНп
I HUH (ЬО у UkHm
ГГ7-? I IZZ.
TZZ
Z pflh {
1IJ4’
? л ч,qi о ш i
1 j>
? P| i
RHH * JN1P i H Ь q /
01 Hi q )ЧП)НЬ(р Л)НН
^ЧН^-Д>Н t,
*и oi lunozib q > t/i'ioMG
Я OUJHOH hiqida
КМНШШШ1МВ&1МШЖ
Z4 7xHfl
-4 7kHH
5“^//
OP n JJNIliH I ?
qn M oqwp
<y z < h
L i i q чы i
t v .
И
T
b
f
76$ m
в
у г
Шигп i<rn Моочи
, 392 NHq
1 (ь 1Л о oopqn । )
й.^‘
7
О
H u *
I > О
X )
{ IVGiV (
1%'
_ <P
г
1
рис ]. 2 2 4
Гог да подурим
ЪМ\а
✓у^ -ww *Е _
твм ~ ОТ//’ Gr л
Mta M.a
* -r
r 15M.a
Gd^ ’
6
<л _- -^tB® _ ^\1В^ __ M^ci __ |
^BM}i GJp GJ" GJ™ < < r? y^Gd* ’
til >2,'.Сдю1Г|<*|'Ждачениея ;
J
MtR = —— Mt = o,47<;
,B 3:;rf‘ ’
M,A
МЛ-
му
>.’
2M. - Mtl
'1 <
А !>
•k^
1,53M,.
Зная реакции в опорах и воспользовавшись методом сечений, легко построить эпюры моментов кручения, наибольших касательных напряжений и углов поворота. Результаты построения эпюр моментов М,, максимальных касательных напряжений гтах и углов закручивания (р приведены на рис. ji .2.2.4. ’ Ж;)
1
Решение задачи в модуле АРМ Beam
i I
Данная задача решается аналогично задаче 1.2.1.
На рис. 1.2.2.5 и 1.2.2.6 представлены эпюры моментов кручения и углов поворота поперечных сечений, постро/ед^ще с помощью модуля АРМ Beam. ^Возможно-' . ' : ' 'г! ।
*&£.•
......
iW
fi‘
Й£
AWtVW *'
$ i ? ?
i
1
w
Л»
чг
Т5
4?
V;
f-
.i.)
j.
.11
Л / >V;
МыНкМЖМч1|Ь
и* i£Z
-. X-..' * ,Х:*.л ’
«WWMtWMMW»
»' >’ * хлл^л
'/'.'-.у,-,-, ^ . TyJ*g<O-X. v.w.v» s rrd yf
?/ . f •
•J
W
*
<
>
а
J
*
ч
V
j
X
Т
4
/
л
?
4
I i
f :
уч‘‘.''"^"Г..'''">'."у
> J ,»
АГ^
л
.: 1 t
1 .
•• з i, г» b 5 ' • • 7 Г г n t Ч И : .< «
Рис. 1.2.2.6
24
Глава 1 Сопротивление материалов
: Карта напряжении
Ед^ницьг.. Палитра.., Масштаб...
Увеличение
й |е4йФЙ******«0м» rt'iVi'i i н******ММ1й'| i i'i А 1**Н *mi ii1 ini иТййТЙ > in iTn iTi н 11 >>t»mi h¥i a 111 i 11 f l*****+++MW<i Гн wn n li Hi П i i i»M< м > i'i.1111 и <*>*♦> «h П й 1111 Mw< *<***»*>*>> i f f 11 in HI
ШШМММММААШШАШйМЙММШШАШМММААМХм1........-----------UмШММАШМЙж-и-жжж l-l^l L .............................................
1U1- 4
....yfaf
♦шннН**
Х
<1^
сти этой программы позволяют получить также карту распределения напряжении по сечению для любого сечения стержня. На рис. 1.2.2.7 показано распределение напряжений для одного из сечений участка II,
1.3. ИЗГИБ
1.3.1. Расчет моделей балочных конструкций
Задача 1. Для заданной балки (рис. 1.3.1.1) построить эпюры поперечных сил и изгибающих моментов.
М=80кН-м
q=30kH/m
Решение
Как обычно, эпюры строятся методом сечений: балка в произвольной точке рассекается поперечной плоскостью, действие отсеченной части заменяется реакциями
М п= ЗГ/кН/м
Рис. 1.3.1.2
М=80кН-м
о=30кН/м
Рис. 1.3.1.3
в полученном поперечном сечении, а затем рассматривается равновесие этого' участка балки.
Для первого участка, на котором действует распределенная нагрузка (рис. 1.3.1.2), имеем:
Qy=qz = 30z;
Мх =-------= —15z2 (эпюра изгибающего
момента строится на сжатой части балки).
Для второго участка (рис. 1.3.1.3):
Q — 2q — 60 кН;
Мх =M-^-2(l + z)=20-60z.
Рис. 1.3.1.4
26
Гпава 1 .Сопротивлен^^^рв^иалдв
Положение нулевой точки эпюры моментов: . „ _
йммлуатэноя лкп--и5ап.£& <шп.эпим тенэеЧ .rX.v
Мх = 20 - 60z = 0 => 7 = 1/3 = 0,33 м.
!' ИМ'.. ''I'.! Н !> ';ЦЬ' !< ;•!! ЫЩ.ННС S !!(.)(! ЧI ( 1 . ‘ . i. ! .ЛКр U>»r-.uO ЧОИЬШ ,КГ .. ’
В окончательном виде эпюры поперечных сил и изгиба^да^х моме^тр^^^и^-дены на рис. 1.3.1.4.
На рис. 1.3.1.5 и 1.3.1.^. гфсдставленм. эцюры поперечных сил и изгибающих моментов для рассматриваемой балки, построенное с помощыр модуля АРМ Beam.
Рис. 1.3.1.6
WWW
Задача 2. Для балки, показанной на рис 13 17, построить эпюры попе речных» сил
и изгибающих моментов ,
I У
М=ЮОкНм
а^ОкН/м
Рис 13 17
М, =20кН\м w
Решение
Разобьем балку на несколько участков и составим, уравнения равновесия для каждого из них, начиная со’свободного1 конца балки (рис I 3 1 8). Прй этом отсчет
координаты z будем всякий раз вести от начала очередного участка
Участок I
f /
Qy = -Fx = -50 кН;
М ™ —М + R % — —20 + 50z 1 J*
<. If
Mi
28
Гпава 1 Сопротивление материалов
Нулевая точка эпюры моментов:
Мх = -20 + 50z = 0 => z = 2/5 = 0,4 м.
Участок II
Qy - -Ft +qz = -50 + 40z;
Mx = -M, + ^(1 + z)= 30 + 50z - 20?.
Участок III
Qy = -Ft - F2+ <y(l + z) = -40 + 40z ,
Mx=-Mt + (2 + z) - * Z> + z = 60 + 40z - 20z2.
Участок IV*
Qy = ~Fi ~F2 + <7(2 + z) = 40z;
Mx = -Mx + Ft (3 + z) - + F2 (1 + z) - M2 = -20 - 20z2.
45?
...... ***********< ГГгЯУг>~м^дДйГ^1
* 1,
2<4_________
JVuWv “ЛЧ 4*ч*еч*ч*ч*
э^г ' ’ цшчннЛй.........
Пй||речнь1й силы в вертикальной пжшти
j_.j-._- .- . . . . . . . .'у . . ... . Л . л-.-.?.•. . г1 .уу? *
Sk
* »
Рис 13 19
1.3. Изгиб
29
Рис. 1.3 1.10
На рис. 1.3.1.9 и 1.3.1.10 представлены результаты расчета этой задачи в программном модуле АРМ Beam.
Задача 3. Построить эпюры поперечных сил и изгибающих моментов для балки,
изображенной на рис. 1.3.1.11.
Решение
Прежде всего необходимо с помощью уравнения равновесия моментов, записанного для опоры А, определить реакцию в опоре В:
3aRB - qa— + qa • 3,5a -2q-3a- 1,5a = 0 =>
RB = 2qa.
Гпава 1 Сопротивление MaWi&fitiahde
**“”»~* ..^ Угтраям Lin -----~*™-
Если теперь записать уравнение равновесия сил | >»®ВШ«ЛЮЖМое на' правление, то получим к • i м & рш «, ц v
'чг
г
Теперь можно переходить к построению эпюр^
Поскольку эпк)ра поперечных сил имеет :
бающих моментов — симметричный, То ^ржй^р^с^рбйуь ^пюры только половины балки (рис. 1.3.1.13). z ( ! ; i ' 1 J , 1 J
1(осос]^1у^е5грр4ный вид, а энкзра изги-сйО постобйть эпюоы только Ьля одной
товины балки (рис. 1.3.1.13). z ( । | , ' ] । J i । !j
Для участка, расположенного справа сзт рп'о^ь! |В ij н^гд 1 нагрузкой q, получаем:,/ ' ( , , , । 1 । ' 1 । i
-•г I I । L ! ъ Е । Е*
нои нагрузкой q, получаем:
уженного
i
р^делен-
1
-r
r
Q = qz = 20л ;
£
2
= И0л2.
1,
Oqn
Л
iOS
г
/ i 5 ’ ! f
V
qz20kH/m
11 Ill
2Q
ПЛ
А
a-lrf
ЯП
1f,' r ^rr 7
jf
I
У W,. Л! 8
Г'П’тГ ’"Ш'ТОТ С'7"У
zq
WWTWinnr
60kH
J
>
i
.... ('I??!
J
t * ?
£
c
? 01 9!/ "M’/bH J
q r * Ш’нн oq
г ЛА
't
Vй
5 1
f RfZqo
«t?r
_L
Г -20kH
? w
-IOkHm
ЮЩ nu
«Г, К, V*
’il
At
< J№ у
46
f
^q они
X
11
4 JH
i4
Л
?/on * (wm; о
>qn
<тнвш ^4
** wr>;<
GO JH
? V
Жл X]U
Mty H ' м н n ИЛИИ )
(h
Рис 1 3 1 12 , ь? V- ' г ' "г » г Gx
a t u\ <
6** Д tJ*
>цц му ид <-^*ц дьджм ,у. W*W* iM^t-n. «дАзд *-А ть w> -у? |а> >-jww ____________ WA »г* чу*<<______
glK t»*K>
Л'*-» *rtu
t’<U f
If
>л'я-уЧа&тка!сЛ6ва от'опоры ВРнайруйсййиого'рйСПрёДбЖйййдйчгигрузксЙ!
^1
Г,
Qy =qa + 2qa - 2qz = 60- 2qz,
I f I И ЭР I I 0 !Ч JjK 'jfKi N
Mx = -qa
= -10-60z + 10z2.
7 F Vх f V 'У Ч' У У
/ъи |^|Н№№ 4 # tawtwd Л J /ЛУ *5КС?ЯМ-« % ДО1» "JWr^S'.Afc’Jrti jfWtVTV P WWb ."Ziws r‘
На рис. 1.3.1.13 и 1 3.1 14 приведено решение этой задачи, ле АРМ Beam
»s w» 'Илйг лзячмег*
выполненное в моду-
к
МЭОН'М;
?ds
^iKjfcvAV-Vw-L м'|>" >" ।
X X
ж Ян-*.,? Ш:
,.Vt A.VA'Jlj
>
t
<H О
'
.t
1A.>±^L
(ПфЛИ]ВШ
^’ТЖУ
'' - PWCtftW^MH ,^i-
_ ..**.“Л.“цЛАЦА“*‘ * -,..-: A'J,'','','‘l|‘’'‘ -l/S~ ~ ~ " ~<~V»jS&?''j
Рис. 1,3.1.14
*
>'i"7'"i 'T^rrT-.T’t^dr?
&: " .: :0iS •' ‘1 1 J& ‘'i'*' ' 4:‘
ДР**....ГИДУЛ^,!.' !tl''"5*i'''!.l)"***-V ! !,! ! ! I I h»4<l|!|! *41‘9
:¥;•
ЖЙВш
Ijjitfh.n.l
1 r . # .• Ж • л:, ;зл
Жш п |Фй ^frjraari н »**
Графики
гл» . ол h iJ!!‘
;.. Я '-•да *ifr-i <vjrr.' f. 4»• / *•aJi-, ,>«#. t- .-., #v ‘J’
Рис. 1.3.1.13
'S-S^
&L1
f\i KH’W>e<,eciWf#vi^w^.4«W<i'*4W*'**4*l<444№^w^ed'*<4"4i^r4*4C&.M *Z| лХ^ИШ-ИЛ <<.": ’>< ivJljtfiyl
t ! i ?
i .'A;
J •Чг^<4»м t-.
’^Т*ТТ*ГТ*7 4Й 4$
— х.^ххххх- ... ... . .^^.
32
Главе 1.Сопротивление материалов
Задача 4. Построить эпюры поперечных сил и изгибающих моментов для балки, изображенной на рис. 1.3.1.15.
Рис. 1.3.1.15
Решение
Несмотря на то, что на балку наложено четыре связи, задача является статически определимой, так как наличие шарнира С позволяет записать не только три уравнения равновесия для балки в целом, но и еще одно дополнительное уравнение - условие равенства нулю суммы моментов всех сил, приложенных слева или справа от шарнира, относительно точки С .
Воспользуемся этим обстоятельством для определения реакции опоры В:
£Мс=0: qa--RBa = 0 => RB= — •
Рис. 1.3.1.16
1.3. Изгиб
33
Теперь можно приступить к построению требуемых эпюр (рис. 1.3.1.16). Чтобы не определять реакции в заделке, начнем строить эпюры с правого конца.
Для участка I:
„ <1а ™ 1С w qz1 2
Q = qz = 30z -15 ; M = — z-~— = 15z-I5z .
4 2 x 2 2
Точка экстремума эпюры моментов:
—^- = 15-30z = 0 => z = —a = 0,5 м,
dz 2
Mt = 15 • 0,5 -15 • 0,52 = 3,75 kH-m.
Л z=0,5 л/ e
Для участка II:
Qy = qa-^- = \5 кН;
qaz
Для участка III:
Q = qa- — + 2qa = 75 кН; 2
1/ , X ( ^Cl , n n « U -7C
Mx = —^-(2a + z) - qa\ — + z — 2qaz = —----2pqaz — -15 - 75z.
Ниже приведены результаты решения этой задачи в модуле АРМ Structure3D. При нумерации стержней сначала указывается номер левого узла стержня, затем — номер правого узла, так что участку балки с номером I соответствует стержень №1, участку II — стержень №2, а участку III — стержень №0.
Результаты расчета в АРМ Structure3D:
Количество стержней:
Список стержней:
N Узлы Длина [см]
0 0,2 100.00
1 3,1 100.00
2 2,3 100.00
3. Основы проектирования машин
34
Глава 1 .Сопротивление материалов
Нагрузки на концах стержней
Индекс стержня О
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 0.00 -75000.00 0.00 0.00 0.00 -89625.00
2 0.00 -75000.00 0.00 0.00 0.00 -16875.00
Индекс стержня 1
Узел конца Сила [Н] Момент [Н*м]
Fx (о.севая) Fy Fz Мх (кручения) Му Mz
3 0.00 -14700.00 0.00 0.00 0.00 73.50
1 0.00 14400.00 0.00 0.00 0.00 219.00
Индекс стержня 2
Узел конца Сила[Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
2 0.00 -15000.00 0.00 0.00 0.00 -14925.00
3 0.00 -15000.00 0.00 0.00 0.00 -375.00
Диаграмма: Сила вдоль оси Z [Н]
Диаграмма: Момент изгиба в пл-ти XV [Н]
Реакции в опоре
N Узел Сила [Н] Момент [Н*м]
X У Z X У Z
1 0 0.0000 0.0000 75000.0000 90000.0000 0.0000 0.0000
2 1 0.0000 0.0000 15000.0000 0.0000 0.0000 0.0000
1.3. Изгиб
35
Задача 5. Построить эпюру изгибающих моментов для статически неопределимой балки, если q = 30 кН/м, а= 1 м (рис. 1.3.1.17).
Рис. 1.3.1.17
Решение
Для решения этой задачи воспользуемся методом сил. В качестве основной системы выберем ту же балку, но с размещенным в точке В виртуальным шарниром (рис. 1.3.1.18). Тогда в качестве эквивалентной будет выступать основная система, к которой помимо внешней нагрузки приложены два одинаковых неизвестных силовых фактора (два неизвестных момента). Величина должна удовлетворять следующему условию: угол поворота точки В равен нулю, т. к. на самом деле шарнир в этой точке отсутствует.
Составим каноническое уравнение метода сил (2.6.37): '
^11^1 + “ О’
где — поворот точки В в направлении неизвестного силового фактора под действием единичного момента, приложенного вместо ;
— поворот точки В в направлении неизвестного момента под действием внешней нагрузки.
Из канонического уравнения определим Хх:
1 ’ Рис. 1.3.1.19
эквивалентная система
3*
36
Глава 1.Сопротивление материалов
Для того чтобы определить коэ
ициенты канонического уравнения, восполь-
зуемся интегралом Мора, а именно:
1 1
Здесь М[Х[ — изгибающий момент от единичной нагрузки, приложенной вместо неизвестного фактора X; (эпюра Fua рис. 1.3.1.19); МF — изгибающий момент от внешней нагрузки (эпюра 1 на рис. 1.3.1.19).
Разобьем всю балку на три равных участка длиной а и свяжем с началом каждого участка локальную систему координат, в которой будут выполняться все дальнейшие расчеты. Подставляя аналитические выражения и вычисляя интегралы, получим:
1 2a
^f=~— \qa2-^-dz +
EJy * 2a
15<?a2
24E7
A*
При расчете более сложных моделей балочных и рамных конструкций метод Мора является слишком трудоемким, так как требует составления аналитического выражения подынтегральных функций. Для упрощения вычислений используют метод Верещагина [5], суть которого заключается в следующем.
Пусть на участке длиной I нужно взять интеграл от произведения двух функций /j(z)- /2(z), т. е. G ~ j/j(z)- /2(z)jz, при условии, что по крайней мере одна из этих функций — линейная, например, /2(z) = bz + a , где а и b — некоторые константы. Тогда интеграл можно заменить следующим выражением:
О 0 0
где Q, — площадь, ограниченная кривой £(z), т. е. площадь эпюры /^(z), а /2(zcl)— значение линейной функции /2(z) в точке zcl, которая является координатой центра тяжести первой эпюры.
Если линейными являются обе функции, то операция перемножения обладает свойством коммутативности, т. е. не имеет значения, умножается ли площадь первой эпюры на ординату второй или площадь второй эпюры на ординату первой.
1.3. Изгиб
Определим теперь методом Верещагина коэффициенты канонического уравне
ния. Коэффициент найдем перемножением эпюры F на эпюру 1 , а коэффици ент <5^ —умножением эпюры 1 саму на себя:
Как видно, оба рассмотренных метода — Мора и Верещагина — дают одинако-
вые результаты.
Решая каноническое уравнение, получаем —
да.
15
Тогда эквивалентную систему приобретает вид (рис. 1.3.1.20). Рассматривая части балки, расположенные справа и слева от шарнира, как самостоятельные независимые системы, с помощью уравнений статики найдем реакции в опорах. После этого строим эпюру изгибающих моментов.
Мм 11/T6QQ =20.6 кНн
5/8qa =18,75 кН-н
Рис. 1.3.1.20
38
Гпава 1 Сопротивление материалов
Решение этой задачи, выполненное с помощью модуля АРМ Beam, представлено на рис. 1 3.1.21
Рис 13 1 21
1.3.2. Расчет плоских рамных конструкций
Задача 1. Для плоской рамы, изображенной на рис 1 3.2.1, построить эпюры внутренних силовых факторов
Решение
Начнем с того, что определим реакции в опорах Составим уравнение моментов относительно точки В.
q-2a-a-2q-a- —a-qa2 +RA-2a = Q
=> Ra = qa = 20 кН
Спроецировав все силы на горизонтальное направление, получим: Rg = 0 (рис. 1.3.2 2)
Для того чтобы построить эпюры внутренних силовых факторов, воспользуемся методом сечений
1.3. Изгиб
4
1
Вначале рассечем раму на некотором расстоянии z от точки В и рассмотри равновесие нижней части (рис. 1.3.2.3):
N, =qa = 20 кН;
Qt = qz = 20 z;
M, = ^- = 10z2.
1 2
Л л/
V
Рис. 1.3.2.3
Рис.
1.3.2.4
Рис. 1.3.2.5
40
Глава 1.Сопротивление материалов
Затем рассечем раму на горизонтальном участке слева от приложенного внеш-
него момента и рассмотрим равновесие левой части (рис. 1.3.2.4):
Nn = 2qa = 40 кН;
Qn = -qa = -20 кН;
Мn = 2qa2 - qaz = 40 - 20z .
Следующий рассматриваемый участок — горизонтальная часть рамы справа от приложенного внешнего момента (рис. 1.3.2.5, начало отсчета координаты z— от точки приложения момента):
Nш - 2qa = 40 кН;
RA=qa
Рис. 1.3.2.6
Qin = ~qa = —20 кН;
Мш = 2qa2 — qaz = 40 - 20z.
Теперь рассмотрим правый вертикальный участок рамы (рис. 1.3.2.6):
N,v = -qa = -20 кН; Л *
Qiv = ~2qz = -40z ;
М, = qz2 = 20z2.
Теперь можно построить эпюры внутренних растягивающих и сжимающих сил N, поперечных сил Q и моментов изгибаМ (рис. 1.3.2.7—1.3.2.9).
2йкН
iOkH
Рис. 1.3.2.7
-2йкН
Ниже приведены результаты расчета этой рамы, выполненные в модуле АРМ Structure3D. На рис. 1.3.2.10 продемонстрирован общий вид рамы с номерами узлов
' 1.3. Изгиб
41
(эпюры внутренних силовых факторов не показаны). Приведено также табличное представление результатов: информация по стержням, сосредоточенные и распре-
Рис. 1.3.2.10
деленные нагрузки на раму, значения внутренних силовых факторов в узлах (на концах стержней) и реакции в опорах.
Результаты расчета в АРМ Structure3D:
Количество стержней 4
Список стержней
N Узлы Длина [см]
0 0,1 200.00
1 2,3 100.00
2 1,4 100.00
3 4,2 100.00
Нагрузки на узлы
N Тип Номер узла Проекции Модуль
нах на у на z
0 момент, Нхм 4 -20000.00 0.00 0.00 20000.00
42
Глава 1 .Сопротивление материало(
Нагрузки на стержни
Индекс стержня О
Индекс начальной точки О
Направление системы координат стержня х = (-0.000, 0.000, 1.000) (вдоль оси стержня) у = (-1.000, 0.000, 0.000) z = ( 0.000, -1.000,-0.000)
Распределенные нагрузки
N Левая граница, мм Правая граница, мм Удельное значение на левой границе Удельное значение на правой границе
0z 0.00 2000.00 20.00 [Н/мм] 20.00 [Н/мм]
Индекс стержня 1
Индекс начальной точки 2
Направление системы координат стержня х = (0.000, -0.000, -1.000) (вдоль оси стержня) у = ( 1.000, 0.000, 0.000) z = (0.000,-1.000, 0.000)
Распределенные нагрузки
N Левая граница, Мм Правая граница, мм Удельное значение на левой границе Удельное значение на правой границе
Oz 0.00 1000.00 —40.00 [Н/мм] -40.00 [Н/мм]
Нагрузки на концах стержней
Индекс стержня О
— - Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 20000.00 -0.00 0.00 -0.00 0.00 -0.00
1 20000.00 -0.00 -40000.00 -0.00 40000.00 0.00
Индекс стержня 1
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
2 -20000.00 0.00 -40000.00 0.00 -20000.00 0.00
3 -20000.00 0.00 0.00 0.00 -0.00 -0.00
1.3. Изгиб
43
Индекс стержня 2
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
1 40000.00 20000.00 -0.00 -0.00 0.00 40000.00
. 4 40000.00 20000.00 -0.00 -0.00 0.00 20000.00
Индекс стержня 3
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
4 40000.00 20000.00 -0.00 -0.00 0.00 40000.00
2 40000.00 20000.00 -0.00 -0.00 0.00 20000.00
Реакции в опоре
N Узел Сила [Н] Момент [Н*м]
X У Z X У Z
1 0 0.0000 0.0000 —20000.0000 -0.0000 □00.0000 0.0000
2 3 -0.0000 -0.0000 20000.0000 -0.0000 0.0000 -0.0000
Задача 2. Для плоской статически неопределимой рамы (рис. 1.3.2.11)построить эпюру изгибающих моментов, если q - 20 кН/м, а = 1 м.
Рис. 1.3.2.11
44
Гпава ^Сопротивление материалов
Решение
В качестве основной выберем систему, изображенную на рис. 1.3.2.12. Как видно из этого рисунка, опора А получила возможность горизонтального перемещения. Для того чтобы основная система была эквивалентной исходной, нужно найти величину неизвестного силового фактора Х{. Его значение должно быть таким, чтобы перемещение по направлению Х{ равнялось нулю. Каноническое уравнение метода сил будет иметь следующий вид:
5] ] X. + 6]г = 0, откуда Х}
Нагрузим основную систему сначала только заданной внешней нагрузкой, а потом только единичной силой, приложенной вместо неизвестной реактивной силы Хг (рис. 1.3.2.13). Построим эпюры изгибающих моментов от единичного фактора (рис. 1.3.2.14) и от внешней нагрузки (рис.1 ,3.2.15).
Рис. 1.3.2.13
Рис. 1.3.2.14
2qa2
qa2
2qa2
Рис. 1.3.2.15
1.3. Изгиб
45
Коэффициенты канонического уравнения находим методом перемножения эпюр. Умножая единичной эпюры саму на себя, получим коэффициент ,
23 а
Перемножив эпюру внешней нагрузки и единичную эпюру, найдем
82 да4
12 EJX '
. 41
} = —qa, а эквивалентная система принимает вид, показанный на рис. 46
Затем определим реакции в шарнирах (рис. 1.3.2.17) и построим эпюру изгибающих моментов (рис. 1.3.2.18).
Эпюра моментов строится аналогично предыдущей задаче: рама разбивается на ряд участков (рис. 1.3.2.3— рис. 1.3.2.6), затем для каждого участка с помощью уравнения равновесия записывается аналитическое выражение функции изгибающих моментов.
Для участка I (начало отсчета координаты —как на рис. 1.3.2.3):
М, = -^—L- + 17.83z, = -10z? + 17.83z,.
Определяем положение точки экстремума: ^- = -20z; +17,83
17,83 ояо -----= U,89 м, 20
7 м, =о
46
Глава 1 .Сопротивление материалов
Рис. 1.3.2.17
13.25 кНи
Рис. 1.3.2.18
2у =0,89 м
20 • 0,892
17,83-0,89 = 7,94 кН-м.
М
Для участка II (начало отсчета координаты zu —как на рис. 1.3.2.4): МИ =20-2 -17,83 -2-11,09д;; = 4,34 -1 l,09z;;.
Для участка III (начало отсчета координаты zIU —как на рис. 1.3.2.5): М1П =20-2 + 20-17,83 -2-11,09(1 + zin) = 13,25 -1 l,09zM.
Для участка IV (начало отсчета координаты zIV —как на рис. 1.3.2.6):
40z2
MIV = -^-х- -17,83z,„ = 20z2 -17,83z,„.
iv 2 7 IV IV 7 IV
Положение точки экстремума:
= 40z-17,83 => zlv м п = = 0,446 м
dzlv lv 40
М,„ ПЛЛЛ = 20 • 0,4462 -17,83-0,446 = 3,97 кН-м.
IV 2уг =0,446 л/ ’ 5 ’
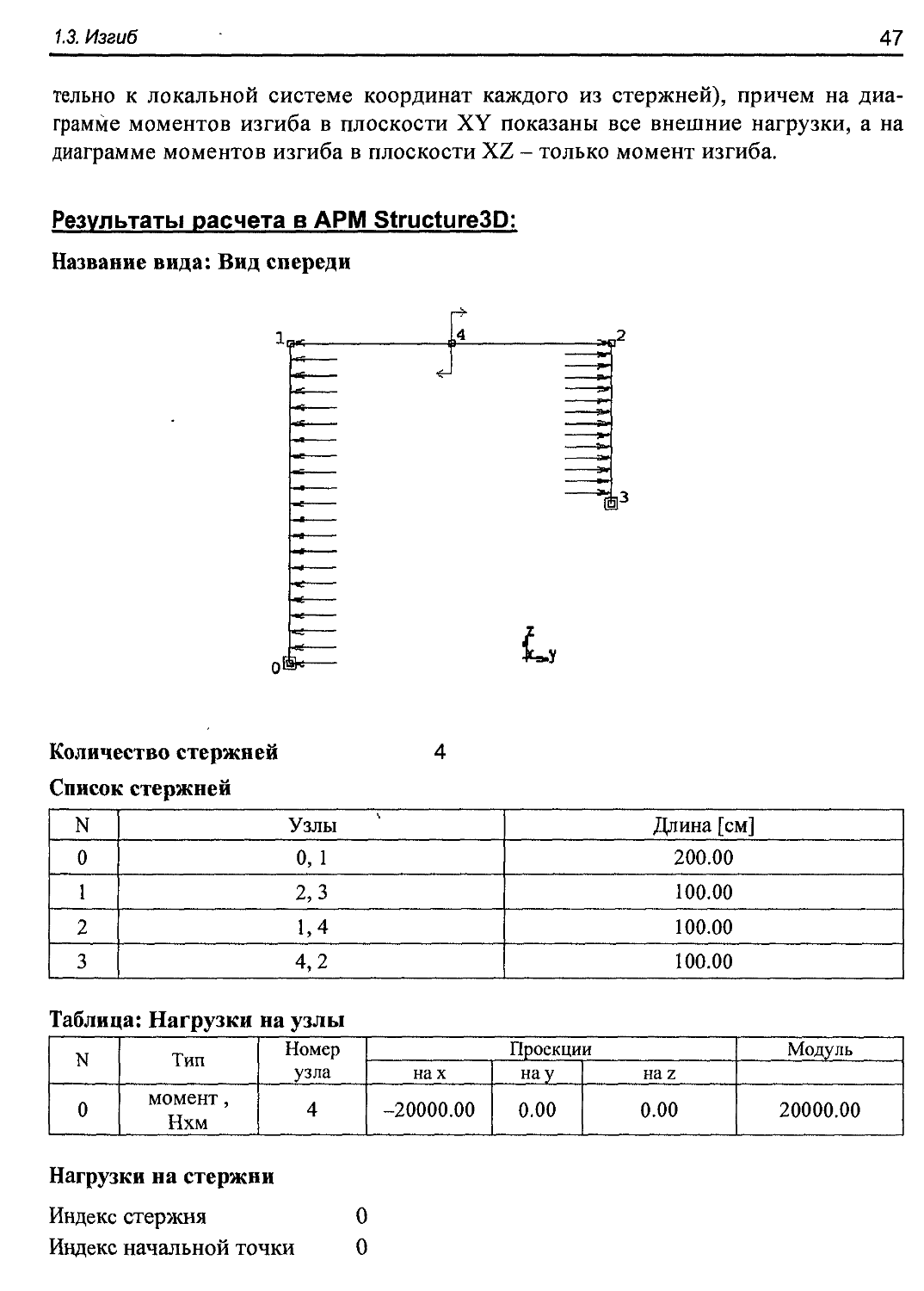
Ниже приведены результаты расчета данной задачи в модуле АРМ Struc-ture3D. Результаты содержат: вид спереди (ось х направлена на нас), информацию по стержням и приложенным к раме нагрузкам, значения внутренних силовых факторов в узлах конструкции и реакции в опорах. Также показаны диаграммы моментов изгиба в координатных плоскостях XZ и XY (примени
1.3. Изгиб
47
тельно к локальной системе координат каждого из стержней), причем на диаграмме моментов изгиба в плоскости XY показаны все внешние нагрузки, а на диаграмме моментов изгиба в плоскости XZ - только момент изгиба.
Результаты расчета в АРМ Structure3D:
Название вида: Вид спереди
Количество стержней
Список стержней
N Узлы Длина [см]
0 0, 1 200.00
1 2,3 100.00
2 1,4 100.00
3 4,2 100.00
Таблица: Нагрузки на узлы
N Тип Номер узла Проекции Модуль
на х на у на z
0 момент, Нхм 4 -20000.00 0.00 0.00 20000.00
Нагрузки на стержни
Индекс стержня
Индекс начальной точки
О
О
48
Глава 1. Сопротивление материалов
т
Направление системы координат стержня х == (-0.000, 0.000, 1.000) (вдоль оси стержня)
у-(-1.000, 0.000, 0.000) z = ( 0.000,-1.000, 0.000)
Распределенные нагрузки
N Левая граница, мм Правая граница, мм Удельное значение на левой границе Удельное значение на правой границе
0 z 0.00 2000.00 20.00 [Н/мм] 20.00 [Н/мм]
Индекс стержня 1
Индекс начальной точки 2
Направление системы координат стержня х = (0.000, -0.000, -1.000) (вдоль оси стержня) у = ( 1.000,0.000, 0.000) z-( 0.000,-1.000, 0.000)
Распределенные нагрузки
N Левая граница, мм Правая граница, мм Удельное значение на левой границе Удельное значение на правой границе
0 z 0.00 1000.00 -40.00 [Н/мм] -40.00 [Н/мм]
Нагрузки на концах стержней
Индекс стержня 0
Узел конца Сила[Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 11083.22 -0.00 17833.56 0.00 0.00 -0.00
1 11083.22 -0.00 -22166.44 0.00 4332.89 0.00
Индекс стержня 1
Узел конца Сила[Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
2 -11083.22 0.00 -22166.44 0.00 -2166.44 0.00
3 -11083.22 0.00 17833.56 0.00 -0.00 -0.00
Индекс стержня 2
Узел конца Сила [Н] Момент [Н*м^
Fx (осевая) Fy Fz Мх (кручения) Му Mz
1 22166.44 11083.22 -0.00 -0.00 -0.00 4332.89
4 22166.44 11083.22 -0.00 -0.00 -0.00 -6750.33
13. Изгиб
49
Индекс стержня 3
Узел конца Сила[Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
4 22166.44 11083.22 -0.00 -0.00 -0.00 13249.67
2 22166.44 11083.22 -0.00 -0.00 0.00 2166.44
Диаграмма: Момент изгиба в пл-ти XY [Нхм]
Диаграмма: Момент изгиба в пл-ти XZ [Нхм]
4. Основы проектирования машин
50
Глава 1 .Сопротивление материале
Реакции в опоре
N Узел Сила[Н] Момент [Н*м]
X У Z X У Z
1 0 0.0000 17833.5553 -11083.2223 0.0000 -0.0000 -0.0000
2 3 -0.0000 -17833.5553 11083.2223 -0.0000 0.0000 -0.0000
Задача 3. Построить эпюры внутренних силовых факторов для изображенной в рис. 1.3.2.19 криволинейной рамы, если М = 20 кН-м, R = 1 м.
Решение
Сначала определим реакции в шарнирах (рис. 1.3.2.20):
м
— = 10 кН;
— = —10 кН.
Рассматриваемая рама имеет два участка нагружения: справа и слева от прил женного момента. Проведем произвольное сечение, положение которого определ ется углом (р (рис.1.3.2.21). Эпюры N и Q буду описываться одной и той же фун цией на обоих участках нагружения, а эпюра изгибающих моментов п] (р > 90° будет отличаться от эпюры при (р < 90° на постоянную величину М:
^ =—cos^; 2 = -—sin<p;
2л 2л
Рис. 1.3.2.19
Рис. 1.3.2.20
I 1.3. Изгиб
51
при <р = 0° ,<р = 180°;
Определим положение сечений, в которых N и Q равны нулю, а также сечений, где N и Q экстремальны:
N = 0 при ср = 90°; Q = 0
dN
— = 0, прир = 0°, р = 180°; dcp
-О- = 0, при 69 = 90°. d(p
Для эпюры моментов: на первом участке (слева)
М = 0 при ^9 = 0°;
dM М . п
---- -------Sin (р - 0, при 6/9 = 0.
dtp 2
На втором участке (справа):
М = Опри <р = 180°;
M/2R
dM М . п
----=------sin (р = 0, при (р = 180 .
d<p 2
Теперь по полученным зависимостям строятся эпюры внутренних силовых факторов (рис. 1.3.2.22—1.3.2.24).
Ниже приведены табличные результаты решения этой задачи в модуле АРМ Struc-ture3D.
Для того чтобы рассчитать в этой программе криволинейную раму, ее нужно разбить на ряд сегментов (в данном случае — на 50 частей). Нумерация узлов идет в на-
Рис. 1.3.2.21
ЮкН
ЮкН
Рис. 1.3.2.22
Рис. 1.3.2.23
4*
52
Глава 1. Сопротивление материалов
правлении справа налево (правый узел-— 0, левый узел— 49). В таблицах представлены значения внутренних силовых факторов для характерных точек: крайние узлы (№ 0, 49), узел в верхней точке (№ 25) и узлы, расположенные под углом 45° и 135° (№ 37—38, 12—13). В таблице «Нагрузки на узлы» показано место приложения внешнего момента.
Результаты расчета в АРМ Structure3D:
Кол и ч ество стержн ей 50
Таблица: Нагрузки на узлы
N - Тип Номер узла Проекции Модуль
на х нау на z
0 момент, Нхм 25 -20000.00 0.00 0.00 20000.00
Нагрузки на концах стержней
Индекс стержня 0
Узел конца Сила[Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 -9995.07 -314.11 -0.00 0.00 -0.00 0.10
1 -9995.07 -314.11 -0.00 0.00 -0.00 19.24
Индекс стержня 12
Узел конца Сила[Н] Момент [Н*м
Fx (осевая) Fy v Fz Мх (кручения) Му Mz
12 -7071.07 -7071.07 -0.00 0.00 -0.00 2712.53
13 -7071.07 -7071.07 -0.00 0.00 -0.00 3143.42
Индекс стержня 24
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
24 -314.11 -9995.07 -0.00 -0.00 0.00 9375.23
25 -314.11 -9995.07 -0.00 -0.00 0.00 9984.30
Индекс стержня 25
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
25 314.11 9995.07 0.00 -0.00 0.00 9996.86
26 314.11 9995.07 0.00 -0.00 0.00 9387.79
1.3. Изгиб
53
Индекс стержня 37
Узел конца Сила[Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
37 7071.07 7071.07 0.00 0.00 -0.00 3152.31
38 7071.07 7071.07 0.00 0.00 -0.00 2721.42
Индекс стержня 49
.. _ . L ... Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
49 9995.07 314.11 0.00 0.00 -0.00 19.63
50 9995.07 314.11 0.00 0.00 -0.00 0.49
1,3,3. Расчет пространственных рамных конструкций
Задача 1. Для пространственной рамы, изображенной на рис. 1.3.3.1, построить эпюры крутящих и изгибающих моментов.
ЮкН
Рис. 1.3.3.1
Решение
Эпюры для пространственной рамы строятся аналогично эпюрам для плоско рамы: рассекаем раму поперечными плоскостями в различных местах (начиная с свободного конца) и рассматриваем равновесие отсеченной части. Таким образол для данной задачи эпюры будут иметь вид, изображенный на рис.1.3.3.2.
Ниже приведены результаты расчета в модуле АРМ Structure3D: диаграммы м( мента изгиба (цифрами обозначены номера узлов) и момента кручения, информ:
54
Глава 1 .Сопротивление материалов
ция по стержням и приложенным нагрузкам, а также значения внутренних силовых факторов в узлах конструкции и реакции в опоре.
Результаты расчета в АРМ Structure3D:
Количество стержней 4
Список стержней
N Узлы Длина [см]
0 0,1 100.00
1 1,2 100.00
2 2,3 100.00
3 3,4 100.00
Таблица: Нагрузки на узлы
N Тип Номер узла Проекции Модуль
на х на у на z
0 момент, Нхм 1 0.00 -10000.00 0.00 10000.00
1 сила, Н 4 0.00 0.00 -10000.00 10000.00
Нагрузки на концах стержней
Индекс стержня О
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 0.00 -10000.00 -0.00 -10050.00 -0.00 10050.00
1 0.00 -10000.00 -0.00 -10050.00 -0.00 19750.00
1.3. Изгиб
55
Индекс стержня 1
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
1 0.00 -10000.00 0.00 -10000.00 -0.00 -9999.75
2 0.00 -10000.00 — , - , 0.00 — -10000.00 -0.00 -251.25
Индекс стержня 2
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
2 10000.00 0.00 0.00 -0.00 0.00 10000.00
3 10000.00 0.00 0.00 -0.00 0.00 10000.00
Индекс стержня 3
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
3 0.00 -10000.00 0.00 0.00 -0.00 -9950.00
4 0.00 -10000.00 0.00 0.00 -0.00 -250.00
Диаграмма: Момент изгиба
V
Диаграмма: Момент кручения
Реакции в опоре
N Узел Сила [Н] Момент [Н*м]
X Z X У __ Z
[ 1 0 -0.0000 -0.0000 10000.0000 10050.0000 10000.0000 0.0000
56
Глава ^Сопротивление материалов
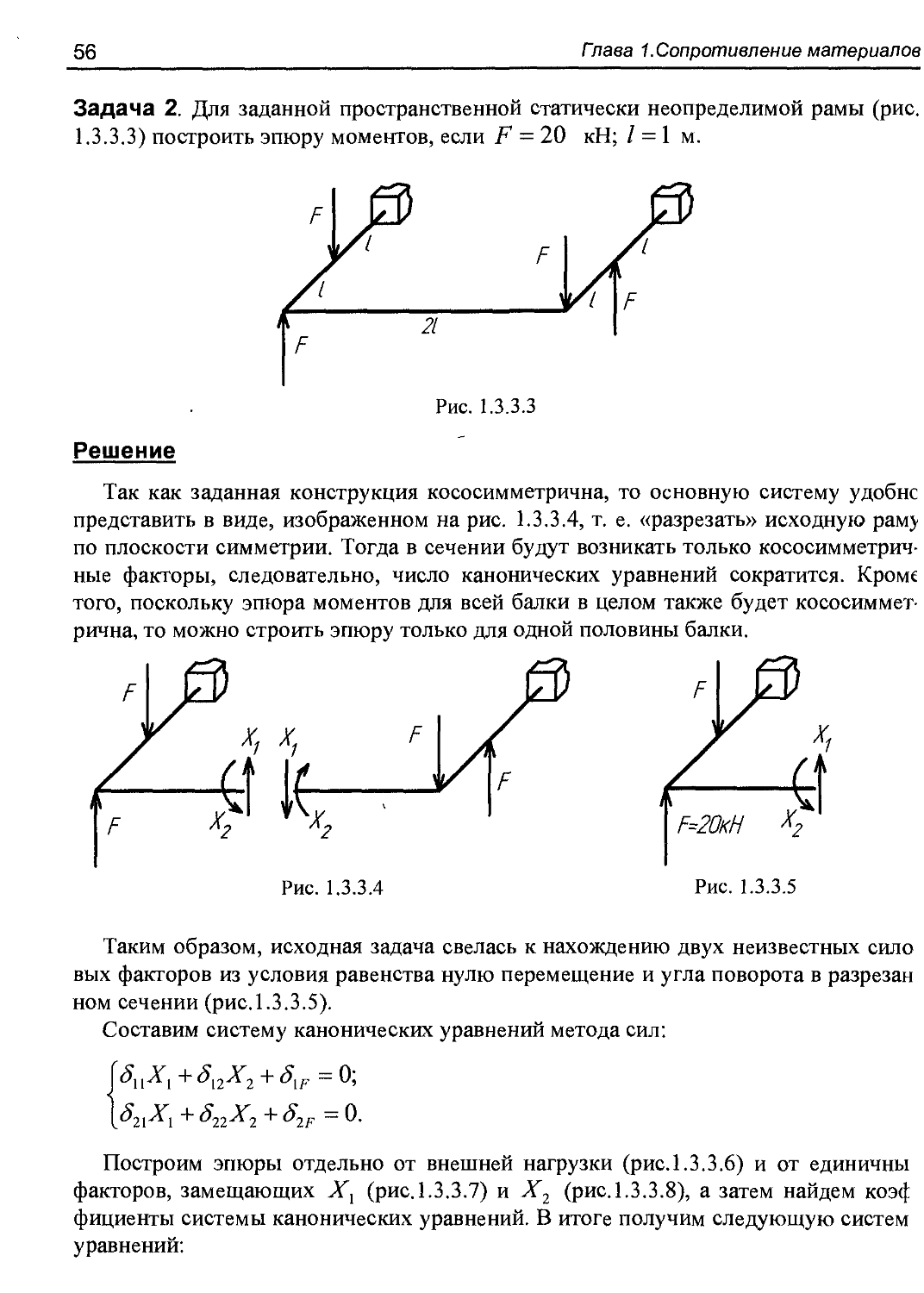
Задача 2. Для заданной пространственной статически неопределимой рамы (рис. 1.3.3.3) построить эпюру моментов, если F = 20 кН; 1 — 1 м.
Рис. 1.3.3.3
Решение
Так как заданная конструкция кососимметрична, то основную систему удобнс представить в виде, изображенном на рис. 1.3.3.4, т. е. «разрезать» исходную раму по плоскости симметрии. Тогда в сечении будут возникать только кососимметричные факторы, следовательно, число канонических уравнений сократится. Кроме того, поскольку эпюра моментов для всей балки в целом также будет кососимметрична, то можно строить эпюру только для одной половины балки.
Рис. 1.3.3.4
Рис. 1.3.3.5
Таким образом, исходная задача свелась к нахождению двух неизвестных сило вых факторов из условия равенства нулю перемещение и угла поворота в разрезан ном сечении (рис.1.3.3.5).
Составим систему канонических уравнений метода сил:
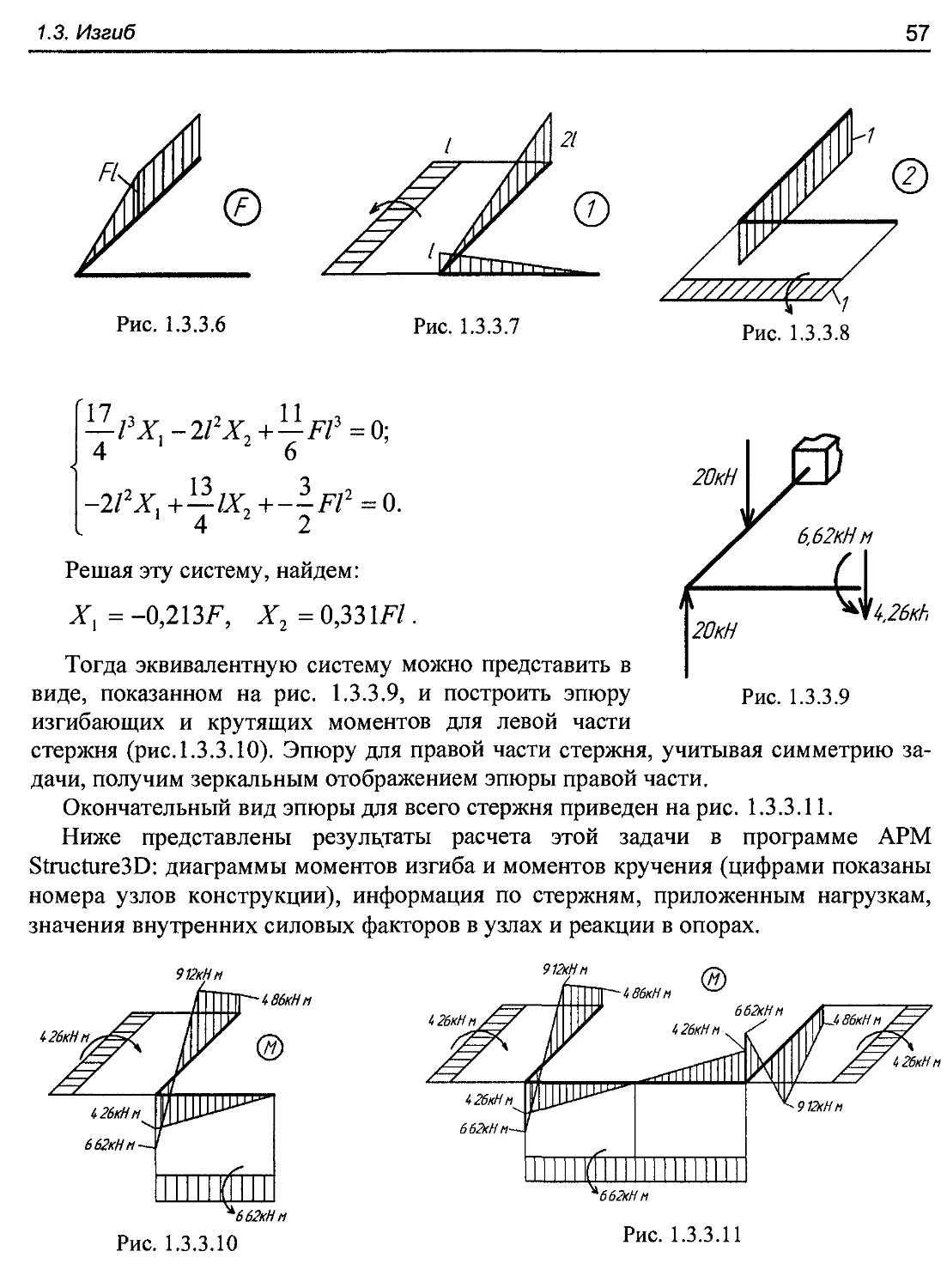
Построим эпюры отдельно от внешней нагрузки (рис.1.3.3.6) и от единичны факторов, замещающих Х{ (рис.1.3.3.7) и Х2 (рис.1.3.3.8), а затем найдем коэф фициенты системы канонических уравнений. В итоге получим следующую систем уравнений:
1.3. Изгиб
57
Рис. 1.3.3.6
Рис. 1.3.3.7 Рис. 133.8
17 , , 11 ,
—13Х,-212Х,+ —Я3=0;
4 2 6
-2l2X.+—lX7+--Fl2=0.
1 4 2 2
Решая эту систему, найдем:
^=-0,213^, Х2=0,331Я.
Тогда эквивалентную систему можно представить в
виде, показанном на рис. 1.3.3.9, и построить эпюру Рис. 1.3.3.9
изгибающих и крутящих моментов для левой части
стержня (рис. 1.3.3.10). Эпюру для правой части стержня, учитывая симметрию задачи, получим зеркальным отображением эпюры правой части.
Окончательный вид эпюры для всего стержня приведен на рис. 1.3.3.11.
Ниже представлены результаты расчета этой задачи в программе АРМ Structure3D: диаграммы моментов изгиба и моментов кручения (цифрами показаны номера узлов конструкции), информация по стержням, приложенным нагрузкам, значения внутренних силовых факторов в узлах и реакции в опорах.
Рис. 1.3.3.11
58
Гпава 1 .Сопротивление материалов
Результаты расчета в АРМ Structure3D:
Количество стержней
Список стержней
г
N Узлы Длина [ст]
0 0,2 200.00
1 0,4 100.00
2 4, 1 100.00
3 2,5 100.00
4 ... ...... 5,3 100.00
Таблица: Нагрузки на узлы
N Тип Номер узла Проекции Модуль
на х на у на z
0 сила, Н 0 0.00 0.00 20000.00 20000.00
1 сила, Н 2 0.00 0.00 -20000.00 20000.00
2 сила, Н 4 0.00 0.00 -20000.00 20000.00
3 сила, Н 5 0.00 0.00 20000.00 20000.00
Нагрузки на концах стержней
Индекс стержня О
Узел конца Сила [Н] Момент [Н*м *
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 0.00 -4266.22 ' 0.00 6609.21 0.00 -4223.56
2 0.00 -4266.22 0.00 6609.21 0.00 4052.91
Индекс стержня 1
Узел конца Сила [Н] * Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
0 0.00 -15733.78 0.00 -4266.22 0.00 -6530.54
4 0.00 -15733.78 0.00 -4266.22 0.00 8731.23
Индекс стержня 2
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
4 0.00 4266.22 0.00 -4266.22 0.00 9103.24
1 0.00 4266.22 0.00 -4266.22 0.00 4965.01
1.3. Изгиб
59
Индекс стержня 3
Узел конца СилаЩ] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
2 X 0.00 15733.78 0.00 -4266.22 0.00 6530.54
5 0.00 15733.78 0.00 -4266.22 0.00 -8731.23
Индекс стержня 4
Узел конца Сила [Н] Момент [Н*м]
Fx (осевая) Fy Fz Мх (кручения) Му Mz
5 0.00 -4266.22 0.00 -4266.22 0.00 -9103.24
3 • 0.00 -4266.22 0.00 -4266.22 0.00 -4965.01
Диаграмма: Момент изгиба в пл-ти XY Диаграмма: Момент кручения
Реакции в опоре
N Узел Сила [Н] Момент [Н*м]
X У Z X ... У _ Z
1 1 0.0000 0.0000 4266.2206 4266.2206 4858.3525 0.0000
2 3 0.0000 0.0000 -4266.2206 4266.2206 -4858.3525 0.0000
1.4. РАСЧЕТ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК СЕЧЕНИЯ
Задача 1. Для заданного сечения, изображенного на рис. 1.4.1, определить моменты инерции относительно центральных осей.
Решение
Сначала необходимо найти положение центра тяжести заданной фигуры. Для этого выберем две произвольные декартовые оси, и , и определим статические моменты инерции сечения относительно этих осей. Оси следует выбирать таким образом, чтобы относительно них можно было определить статические моменты и моменты инерции наиболее простым способом.
Для удобства проведения расчетов разобьем данное сечение на прямоугольники, геометрические характеристики которых легко находятся (рис. 1.4.2), и вычислим площадь каждого прямоугольника, а затем и площадь всей фигуры в целом:
А\ = 34•6 = 204 мм2;
Л, =Л =50-5 = 250 мм2;
5
A = ^Aj =1394 мм2.
/=1
А7 = 40 • 6 = 240 мм2; Аг
Л4 = 90 5 = 450 мм2;
Статические моменты прямоугольных фигур относительно выбранных осей
= 17-204 + 37-240 + 65-250 +42,5-450 + 65-250 = 63973мм3;
1.4. Расчет геометрических характеристик сечения
61
5
= = УаЛ + УС2^2 + Усз^з + Ус4^4 + УС5^5 =
/=1
= 3-204 + 20-240 + 2,5-250 + 50-450 + 97,5-250 = 52912мм3.
По формуле 2.3.3 определим положение центра тяжести (рис. 1.4.3):
63973
1394
= 45,89 мм;
52912
1394
= 37,96 мм.
Рис. 1.4.2
f-1391204/
1-889-V 96!
(-2889 -34,96!
4589
юпяя/ \
тП-3546/
Х1
Рис. 1.4.3
X
Далее нужно вычислить моменты инерции каждого из прямоугольников относительно осей, проходящих через центр тяжести сечения. Это можно сделать, используя теорему о параллельном переносе осей (2.3.12):
•Л, - Лс> + у а 4 >
где JxCt и 7 С/ — моменты инерции каждого из прямоугольников относительно собственных центральных осей (2.3.8), а ха и У а — координаты положения центров масс прямоугольников в координатной плоскости х, у.
Имеем:
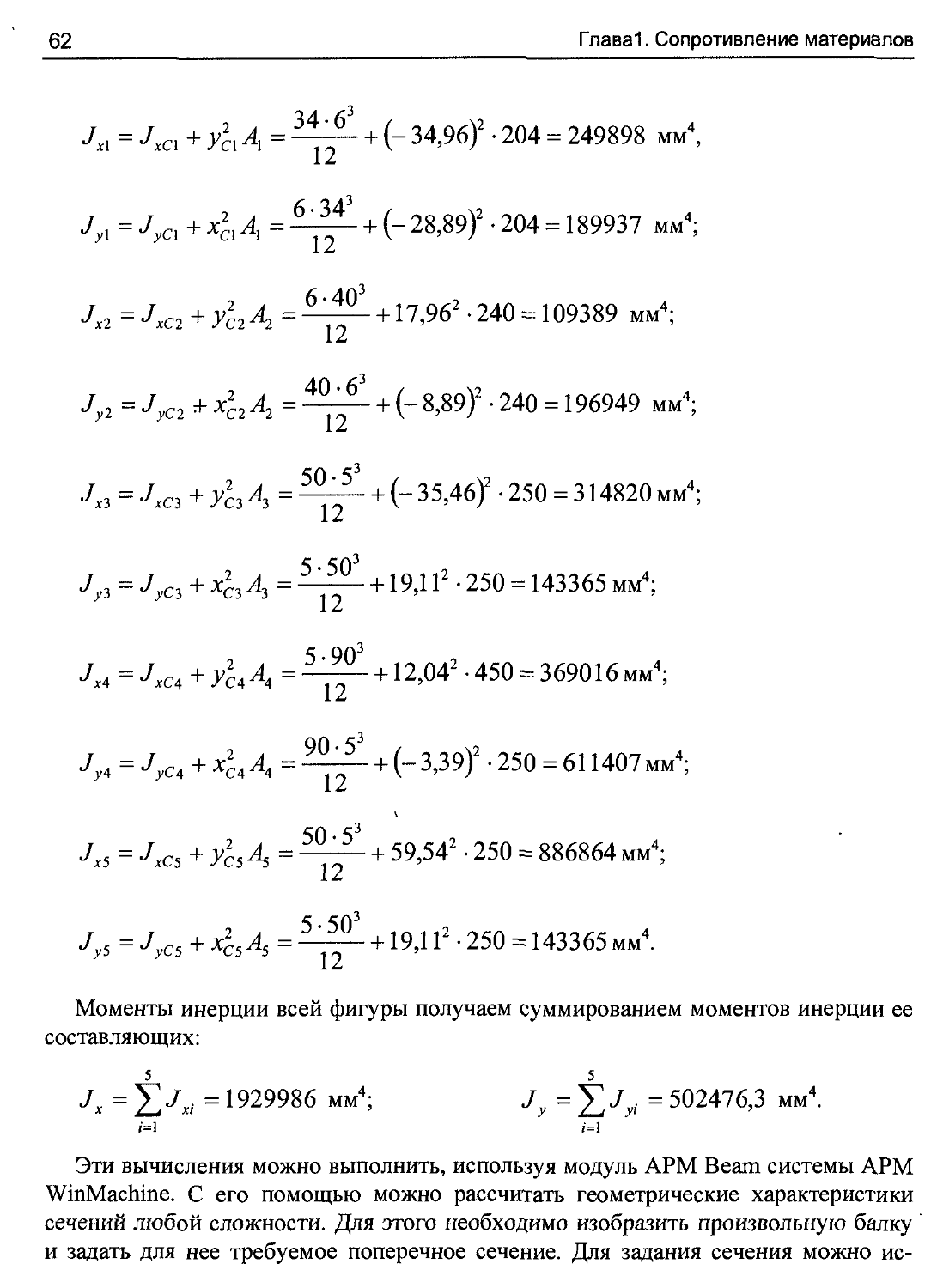
62
Глава1. Сопротивление материалов
. 34*6 / чэ
Л. = Лс> + Ус14 = + (- 34,9б)2 • 204 = 249898 мм4,
JV1 = JvCi + х2 А. = + (- 28,89)2 • 204 = 189937 мм4;
yi yci ci 1 2 7
. 6•40 ,
л2 = Лс2 + УС2^= -гг- +17,962 • 240 = 109389 мм4;
1.
Jv2 = JvC2 * х2с2 4 = + (- 8,89)2 • 240 = 196949 мм4;
у £ ус £ С £ £ "
50 • 53
Лз = Лез + Усз 4 = уу- + (- 35,4б)2 • 250 = 314820 мм4; 1.
5.503
Л3 = JyC2 + 4з 4 =---+19Д1 •250 = 143365 мм4;
У Э ус эСз^12 7 "
, 5.903 ,
л4 = Лс4 + Ус. 4 = уу +1W • 450 = 369016 мм4; X
„ 90-53 / чо
Jy. = JyC. + *С4 4 = -г-+(-3’39) •250 =611407 мм4;
о 50-5 ,
Л5 = Лс5 + Угс5 4 = уу" + 59,542 • 250 = 886864 мм4; X £*
= JvC5 + х2С5А, = +19,112 • 250 = 143365 мм4
уэ Усэ СЭ 3 |2
Моменты инерции всей фигуры получаем суммированием моментов инерции ее составляющих:
Л = УЛ -1929986 мм4; Л ***
J=yJ. = 502476,3 мм4.
У £^i У1 7
Эти вычисления можно выполнить, используя модуль АРМ Beam системы АРМ WinMachine. С его помощью можно рассчитать геометрические характеристики сечений любой сложности. Для этого необходимо изобразить произвольную балку и задать для нее требуемое поперечное сечение. Для задания сечения можно ис
1 4 Расчет геометрических характеристик сечения
6
пользовать встроенный редактор сечений После запуска программы на расчет он автоматически рассчитает все характеристики заданного сечения Результат!
такого расчета в приложении к данной задаче представлены на рис 14 14
Рис 14 4
Задача 2. Для сечения, составленного из двух стандартных элементов — двутавра №12 (ГОСТ 8239-89) и швеллера №12П (ГОСТ 8240-89)— рассчитать моменты инерции относительно центральных осей (рис 14 5)
Рис 14 5
64 '
Глава!. Сопротивление материалов
Решение
Прежде всего по соответствующим ГОСТ определим геометрические размеры и характеристики заданных элементов сечения.
Для двутавра №12 (по ГОСТ 8239-89) имеем: h' = 120 мм — высота балки;
Ь' = 64 мм — ширина полки;
5'= 4,8 мм —толщина стенки;
/'= 7,3 мм — средняя толщина полки;
/?’=7,5мм г'= Змм Д'=14,7см2 //=350 см4 Jy'= 27,9 см4 5/=33,7см3
радиус внутреннего закругления;
радиус закругления полки;
площадь сечения;
момент инерции относительно оси х';
момент инерции относительно оси у'; статический момент полу сечения.
Для швеллера №12П (по ГОСТ 8240-89):
/?"= 120 мм — высота балки;
Ь"= 52 мм — ширина полки;
5"=4,8мм —толщина стенки;
/"= 7,8 мм — средняя толщина полки;
R"= 7,5 мм — радиус внутреннего закругления;
Рис. 1.4.6
Рис. 1.4.7
1.4. Расчет геометрических характеристик сечения
65
г"= 4,5 мм — радиус закругления полки;
Л"=13,3см2 —площадь сечения;
Jx"= 304 см4 — момент инерции относительно оси х'';
J "= 31,2 см4 — момент инерции относительно оси у" ;
8Х"= 29,6см3 — статический момент полусечения;
z0"= 1,54 см — расстояние от оси у"-у" до наружной грани стенки.
Зная геометрические характеристики элементов сечения, нетрудно рассчитать параметры самого сечения. Для начала определим координату ус центра масс сечения. Очевидно, что положение одной из центральных осей — вертикальной оси у (рис. 1.4.8) — известно, так как эта ось является осью симметрии фигуры.
Введем вспомогательную ось х1. Тогда
•14,7-102 = 95256 мм3
статический момент
инерции двутавра относительно вспомогательной оси ;
S ."= zn"-A" = 1,54-10-14,7-102 = 20482 мм3— статический момент инер-Л 1 К/
ции швеллера относительно вспомогательной оси .
Для координаты ус центра масс сечения имеем
Я. 95256 + 20482
A’+A" " A’+A" ~ (14,7 + 13,3)-102
= 41,34 мм.
5. Основы проектирования машин
66
Глава1 Сопротивление материалов
Тогда в принятых на рис. 1.4.8 обозначениях получаем:
(h' У (120
у'= -t + 5" -ус= ----+ 4,8 -41,34 = 23,47 мм,
<2 J { 2 )
y" = z0”-yc =15,4-41,34 = -25,94 мм.
Теперь с помощью теоремы об изменении момента инерции при параллельном переносе осей определяем моменты инерции швеллера и двутавра относительно центральных осей сечения (рис. 1.4.8):
Jx '= J/+(y)2/l'= 350•104 + (23,47 J2 • 14,7 • 102 = 4,309 • 106 мм4,
J/'= Л’'+(У')2^=31,2-104 +(-25,94)2-13,3-102 =1,207-106 мм4,
Jx = JJ+J "=4,309-IO6 +1,207-106 =5,516-IO6 мм4, /1 /1 /1 7 7
JY = <//+./,"= 27,9-IO4 +304-104 =3,319-106 мм4
На рис. 1.4 9 представлены результаты расчета заданного сечения, полученные, аналогично предыдущей задаче, с помощью программного модуля АРМ Beam. Создание сечения в АРМ Beam происходит следующим образом* вначале средствами графического редактора АРМ Graph изображается профиль сечения (при этом стан-
Рис. 1 4 9
дартные составляющие сечения импортируются из встроенной в редактор АРМ Graph базы данных стандартных элементов), а затем файл с изображенным сечением сохраняется с расширением dxf. Сохраненный таким образом файл в дальнейшем можно импортировать во встроенный в программу АРМ Beam редактор сечений.
1.5. РАСЧЕТ УСТОЙЧИВОСТИ СЖАТЫХ СТЕРЖНЕЙ
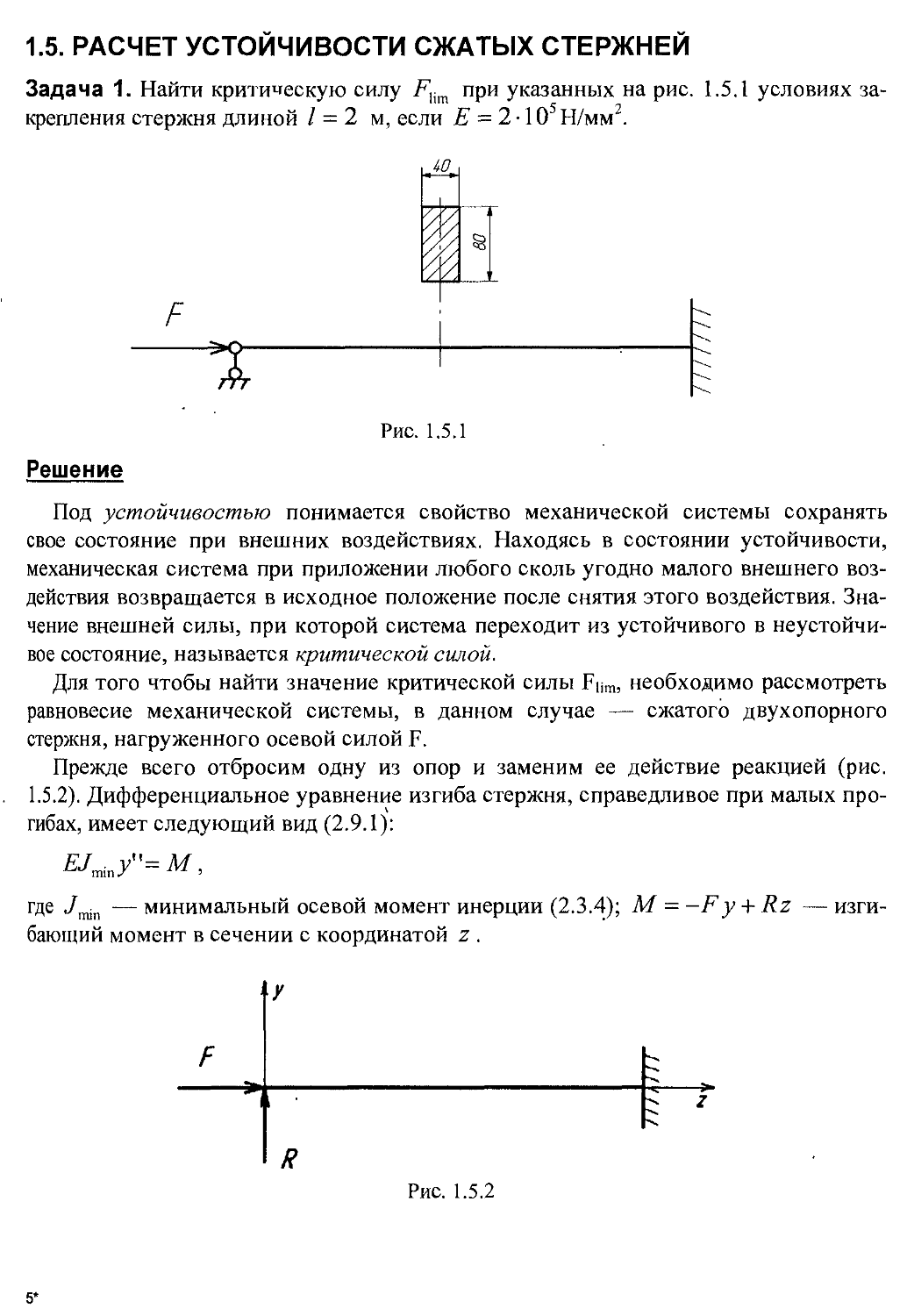
Задача 1. Найти критическую силу Flim при указанных на рис. 1.5.1 условиях закрепления стержня длиной / = 2 м, если Е = 2 • 105 Н/мм2.
Рис. 1.5.1 №
Решение
Под устойчивостью понимается свойство механической системы сохранять свое состояние при внешних воздействиях. Находясь в состоянии устойчивости, механическая система при приложении любого сколь угодно малого внешнего воздействия возвращается в исходное положение после снятия этого воздействия. Значение внешней силы, при которой система переходит из устойчивого в неустойчивое состояние, называется критической силой.
Для того чтобы найти значение критической силы Fiim, необходимо рассмотреть равновесие механической системы, в данном случае — сжатого двухопорного стержня, нагруженного осевой силой F.
Прежде всего отбросим одну из опор и заменим ее действие реакцией (рис. 1.5.2). Дифференциальное уравнение изгиба стержня, справедливое при малых прогибах, имеет следующий вид (2.9.1):
EJminy"=M,
где Jmin — минимальный осевой момент инерции (2.3.4); М = -Fу 4- Rz — изгибающий момент в сечении с координатой z .
5*
68
Глава 1. Сопротивление материалов
Уравнение изгиба стержня можно представить в форме
Общее решение этого уравнения, как известно, следует искать в виде
Постоянные интегрирования С] и С2 можно найти, используя граничные условия:
Из первого граничного условия находим Ci=0. Второе граничное условие эквивалентно однородной системе линейных алгебраических уравнений с двумя неизвестными, С2 и R,
Эта система будет иметь ненулевое решение при нулевом определителе:
sin а I —
, 1 а cos а I —
Раскрывая определитель, получим трансцендетное уравнение tgal = al, имеющее бесконечное множество решений. Решая это уравнение графически, найдем его первый корень:
al = 4,49.
Тогда
Для заданного сечения
min
80-403
12
= 426666,7 мм4;
, _ 4,492 - 2-105-426666,7 lim “
4 • 10б
1,5. Устойчивость сжатых стержней
69
Возможности программы АРМ Structure3D позволяют рассчитать систему на устойчивость и в качестве результата получить коэффициент запаса устойчивости при заданном загружении.
Необходимо заметить, что создание стержневой модели в АРМ Structure3D имеет одну особенность. Для получения верного результата стержень следует разбить как минимум на два участка, т. е. создать хотя бы один дополнительный узел. Это связано с необходимостью обеспечения достаточного числа степеней свободы в месте максимального прогиба балки (при расчете подобных конструкций методом конечных элементов необходимо наличие узлов, которые могли бы свободно перемещаться, [4]).
Рис. 1.5.3
Окно с результатами расчета стержня, нагруженного силой F = 1 кН, показано на рис. 1.5.3. Для того чтобы получить значение критической силы, нужно умножить величину нагрузки на коэффициент запаса устойчивости:
lim
Задача 2. Рассчитать на устойчивость стержень, изображенный на рис. 1.5.4, если F = 200 кН; 7 = 3 м; Е = 2 • 105 МПа; b = 101 мм; аа = 160 МПа.
Решение
Для того чтобы решить эту задачу, воспользуемся энергетическим методом определения критической силы (2.9.14), согласно которому
/
о
Здесь U — потенциальная энергия изгиба стержня, a J — величина вертикального перемещения точки приложения силы F.
Для определения функции прогиба стержня у — f(z) представим эту функцию
в виде полинома, старшая степень которого равна числу граничных условий. Граничные условия для данной задачи запишутся следующим образом:
70
Глава 1. Сопротивление материалов
Следовательно, функция прогиба будет иметь вид
Используя граничные условия, найдем коэффициенты полинома:
^ 0 ^'2 1 -3 *
В окончательном виде для функции прогиба и ее производных имеем:
Как видно, во всех выражениях присутствует
неизвестная константа С3. В рассматриваемом случае она не играет никакой роли, так как в дальнейшем, при вычислении критической силы, просто сократится. Получим:
- __ гт______________о
lim mtn //2
= EJmm
Л i J 7
0
__2-10".0,10Г „
= 3,15---------:— = 607 jcH.
32-12
Коэффициент запаса устойчивости:
п = = ^2Z = 2,02.
F 300
На рис. 1.5.5 показано окно результатов расчета данного стержня на устойчивость в программе АРМ Structure3D. Расчетная модель строится с учетом рекомендаций, указанных в предыдущей задаче.
Рис. 1.5.5
Глава 2
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ МАШИН
2.1. РЕЗЬБОВЫЕ СОЕДИНЕНИЯ
2.1.1. Расчет кронштейна, нагруженного отрывающей силой
Подобрать винты группового резьбового соединения кронштейна, изображенного на рис. 2.1.1.1, где а = 50 мм. Соединение нагружено сосредоточенной силой F ~ 10000 Н, приложенной под углом а = 30°.
Рис. 2.1.1.1
Винты установлены в отверстие с зазором и изготовлены из стали со следующими характеристиками: предел прочности аь =600 МПа; предел текучести (Уг = 400 МПа. Коэффициент трения в резьбе и на торце f = 0,15 .
Общее количество винтов крепления 2 = 9.
72
Глава 2. Соединения элементов машин-
Расчет
Расчет при постоянном внешнем нагружении
Как следует из схемы нагружения, на групповое резьбовое соединение действует отрывающая нагрузка.
Стык, в котором нет зазора между сопряженными поверхностями при приложении внешней нагрузки, называется нераскрытым. Критерием расчета резьбового соединения, нагруженного внешней отрывающей силой, считается условие нераскрытые стыка.
Центр тяжести стыка. Для того рассчитать необходимые размеры элементов крепления, прежде всего необходимо все силовые факторы, действующие на кронштейн, перенести в центр тяжести плоскости контакта (рис. 2.1.1.2).
Найдем координаты центра тяжести стыка — точки С.
Поскольку центр тяжести лежит на оси симметрии на некотором расстоянии от
оси у , то ус = 0, а хс можно вычислить по формуле 2.3.3, хс =
где
статический момент площади фигуры относительно оси у' площадь этой фигуры. Тогда
— а == 85 мм.
10
к соединению
Следовательно, центр тяжести плоскости стыка находится в точке
Действующие на кронштейн силовые факторы. Приложенную внешнюю сосредоточенную силу F представим в виде совокупности проекций на вертикальную (обозначаемую индексом у) и горизонтальную (индекс h) оси:
2.1. Резьбовые соединения
73
Fv - F sin a - 10000 • sin 30 = 5000 H;
Fh~ F cos a = 10000 • cos 30° = 8660 H.
При недостаточном усилии затяжки вертикальная составляющая Fv может вызвать появление зазора между образующими стык поверхностями. Таким образом, силу затяжки, а, следовательно, и геометрические размеры элементов крепления, необходимо выбирать исходя из этого условия.
Составляющая Fh, в свою очередь, может служить причиной относительного сдвига находящихся в контакте поверхностей. Для проверки наличия сдвига необходимо записать условие, при котором такой сдвиг невозможен, т. е. условие не-сдвигаемости.
Поскольку все внешние силовые факторы перенесены в центр тяжести стыка, то система внешнего нагружения может быть сведена к действию центральной результирующей силы и центрального результирующего момента. В рассматриваемом случае центральной результирующей силой является сила F, а результирующий момент М вычисляется как (рис. 2.1.1.1)
м = 4 a Fh + Fv (хс - За / 2) = 4 • а • 8660 + 5000 • (1,7а - 1,5а) = 1782000 Н мм.
Условие нераскрытая стыка. Кронштейн, который крепится группой винтов, находится в равновесии под воздействием системы сил, а его положение можно описать уравнением равновесия. Уравнение равновесия затянутого соединения при выполнении условия нераскрытая стыка имеет вид (4.1.48):
tfmin = <?0 - 4Fv -qu 0,
где q{} — давление от силы затяжки F§, a qFv и — давления, вызванные соответственно отрывающей силой Fv й моментом М. Представим это условие в виде (4.1.55):
_ F,Q-z) _ ^0 - z) > 0
A A Wy '
где
А — 10 а2 — площадь стыка;
W — —— и I — осевой момент сопротивления и момент инерции площади у х у max
фигуры, находящейся в контакте, относительно оси у ;
Хтах — расстояние от центральной оси до наиболее удаленной точки поверхности касания;
%— коэффициент основной нагрузки, значения которого для контакта металлических поверхностей лежат в диапазоне ^ = 0,24-0,3, так что можно принять Z = 0,25.
74
Глава 2. Соединения элементов машин
Моменты инерции:
+ а2(За + а/2)2 = 39,33а4;
I = 1у, - А-х2с = 39,33а4 -10а2(1,7а)2 = 10,43а4. ’
Осевой момент сопротивления:
1У 10,43а4 ... 3
Wv = = —-------= 4,54а .
? *max 2,3а
Из условия нераскрытая стыка определяем необходимое усилие затяжки:
Л-0-Z) ~ _ 5000 • 0,75 1782000-0,75 10а2
°~ z + z W„ 9 + 9 -4,54а3
Принимая во внимание несовершенство принятой расчетной модели и приближенный характер ряда иных переменных, найденное усилие затяжки следует увеличить в Кп раз, где Кп = 1,1 — коэффициента запаса нераскрытая:
Fo - K„F^ = 1,1 * 6959 - 7655 Н.
Условие неразрушения находящихся в контакте поверхностей. Исходя из принятого значения усилия затяжки, определяем максимальную величину давления #тах :
7655-9 5000-(1-0.25) 35640-й-(1-0.25)
Ятт = + Ям = •. п.г" -;----------- +-----. , . з----- = 4,96 МПа.
10-й 10-й 4,54-й
Величина #тах не должна превышать значение допускаемого давления на поверхности сопряженных деталей qa, которое может вызвать разрушение находящихся в контакте поверхностей при их сжатии: #max < qa.
Если величина допускаемого давления не оговорена в условии, то контактная прочность при этом не контролируется.
Сила, действующая на наиболее нагруженный винт. Сила, действующая на произвольно размещенный j -й винт вследствие приложенной к нему внешней нагрузки и усилия затяжки, согласно 4.1.57 равна
Fj = l,3F0 + FFv + FM , где
сила затяжки;
л/
нагрузка на винт от нормальной составляющей внешнего усилия;
нагрузка на винт от момента, зависящая от расположения данного винта.
2.1. Резьбовые соединения
75
Возникающая при действии момента М сила растяжения для наиболее нагруженного винта имеет вид (4.1.59):
" ~ max
Л/ max т 2
/ J I I
Здесь m — это количество групп, на которые можно разбить все винты в стыке в зависимости от их удаленности от оси у, z, — количество винтов в i-ой группе, х( — координата этой группы. В рассматриваемом случае имеется четыре группы винтов (рис. 2.1.1.3), так что
Тогда для нагрузки на наиболее нагруженный винт Fmax получаем:
. . 5000-0,25 35640«-°>25-5а
’ = 1,3 • 7655 +------— +-----------—— = 11768 Н.
ШаХ 7
9,56а2
Определение геометрических размеров винта из условия прочности. Зная приходящуюся на винт максимальную силу, можно определить его размеры из условия прочности на растяжение (4.1.12),
где <та— допускаемое напряжение растяжения винта; dx —- внутренний диаметр резьбы.
Здесь возможны два случая: контролируемое и неконтролируемое усилие затяжки.
В случае, когда усилие затяжки контролируется, коэффициент запаса прочности можно принять равным п = 1,5. Тогда из 4.1.17 и 4.1.12 имеем
- 192 - 266,66 МПа;
1,5
76
Глава 2. Соединения элементов машин
, 4-11768
dx > /—— = /----------------= 7,55 мм.
\ яаа V 3J416-266,66
Размеры винта выбираем из стандартного ряда диаметров: d = 10 мм; р ~ 1,5 мм;
dx = d -1,0825/7 = 8,376 мм;
d2 = d - 0,6495/7 = 9,026 мм.
При неконтролируемом усилии затяжки полагаем п — 2,5 , тогда
400
= —- - 160 МПа;
2,5 .
4*11768
3,1416 • 160
= 9,67 мм.
Выбираем:
d ” 12 мм; р = 1,75 мм;
dx~d~~ 1,0825/7 = 10,106 мм;
d2 —<7 — 0,6495/7 = 10,8 мм.
Расчет момента завинчивания для контролируемой затяжки. Контроль затяжки производится с помощью динамометрического ключа. На практике необходимо знать, какое усилие затяжки соответствует измеряемому ключом моменту завинчивания.
Момент завинчивания Т определяется как сумма моментов в резьбе Тх и на торце Т2 (4.1.2):
Момент трения в резьбе вычисляется по формуле 4.1.4, 7] = Fo
tgty + Р')
5
которую можно упрощенно переписать в виде
2 тс
2.1. Резьбовые соединения
где р
шаг резьбы; р'~ arctg
cos(o,5 • 60°)
= arctg
0,15
cos 30°
= 0,172 рад—при-
веденный угол трения (для метрической резьбы с углом профиля 60°).
Момент на торце равен (4.1.7)
где D — наружный диаметр опорной поверхности гайки; d — диаметр резьбы.
Если принять d2 равным диаметру резьбы, б72=б7 = 10мм, а размер под ключ S = \,1d — D (для стандартной резьбы), так что (D/<i) = l,7, то для момента завинчивания получаем
+ 0,69F0#
= 7655-10- 0,16- —+ 0,5-0,172 +0,69-7655-10-0,15 = 16343 Н-мм.
I 10 > J
Проверка условия несдвигаемости. Необходимо проверить соединение на отсутствие касательного сдвига затянутых поверхностей. Для того чтобы не было сдвига поверхностей друг относительно друга, сила трения в контакте должна быть больше внешнего усилия сдвига (4.1.61):
где Ks — 1,5 — коэффициент запаса по сдвигу.
Подставляем в обе части этого неравенства числовые значения:
[Foz - Fv(l - xAf = [7655 • 9 - 5000 • (1 - 0,25)]- 0,15 = 9772 Н;
FhK, =8660-1,5 = 12990 Н. Ft ьЗ
Так как 9772 Н < 12990 Н, то условие несдвигаемости в данном случае не выполняется. Для предотвращения возможного сдвига следует поставить упор в направлении действия сдвигающей нагрузки.
78
Глава 2. Соединения элементов машин
Расчет кронштейна под действием
постоянного внешнего нагружения в модуле АРМ Joint
Для расчета соединения в модуле АРМ Joint необходимо задать форму стыка, координаты расположения болтов, постоянные параметры (предел текучести, предел прочности, коэффициент запаса по сдвигу, коэффициент основной нагрузки и др.) и действующие на соединение внешние силы.
Задание внешней нагрузки имеет некоторые особенности. Дело в том, что резьбовое соединение в общем случае может находиться под действием как отрывающих, так и сдвигающих усилий. Если сдвигающие силы окажутся незначительными по сравнению с отрывающими, программа АРМ Joint выполнит расчет по критерию нераскрытая стыка. Если же превалирующими окажутся сдвигающие силы, то диаметр винтов будет выбран из условия отсутствия сдвига.
Таким образом, для того чтобы расчет был проведен именно по отрывающим нагрузкам, необходимо исключить возможное влияние горизонтальной составляющей силы Fh, т. е. среди внешних нагрузок указать только вертикальную силу Fv и момент, создаваемый силой Fh. В модуле АРМ Joint момент задается в виде пары сил, в данном случае М F - Fh • 4cz = 36640 * а .
Система нагружения рассматриваемого соединения, принимаемая для расчета в предлагаемой программе, показана на рис. 2.1.1.4, где FM • b = 36640 * а.
Для резьбовых соединений с зазором результатами расчета являются:
• площадь поверхности стыка;
• положение центра масс стыка;
• осевые моменты инерции относительно осей (X и Y);
• угол поворота главных центральных осей;
• сила затяжки;
• максимальная нагрузка, действующая на тело винта;
• максимальное давление в стыке;
• диаметр винта (болта) — наружный диаметр резьбы.
Помимо этого можно получить значения давления в стыке в виде карты давлений.
2.1. Резьбовые соединения
79
На рис. 2.1.1.5 представлены результаты расчета данного соединения при неконтролируемом усилии затяжки. Результаты расчета при контролируемой силе затяжки можно получить, изменив значение коэффициента запаса по пределу теку-
Рис. 2.1.1.5
Рис. 2.1.1.6
80
Глава 2. Соединения элементов машин
чести деталей крепления в соответствующей строке ввода окна «Постоянные параметры». На рис. 2.1.1.6 представлена карта давлений в стыке, на которой также показаны силы, действующие на элементы крепления.
Расчет на прочность при переменном характере внешнего нагружения
Предположим, что внешнее нагружение носит пульсационный характер, причем сила меняется от Fmin = 0 Н до Fmax = 10000 Н (в качестве Fmax здесь принято значение заданной по условию сосредоточенной силы F).
Расчет на прочность сводится к нахождению коэффициента запаса усталостной прочности s, для чего следует определить уровень напряжений при наибольшей и наименьшей нагрузке, а также амплитудное и среднее напряжения цикла.
Так как помимо переменной внешней нагрузки на винты действует также постоянная по величине сила затяжки , то цикл нагружения элементов крепления будет асимметричным, причем наименьшее напряжение цикла <rmin определяется силой затяжки (затяжку считаем неконтролируемой), а наибольшее сгтах — нагрузкой Fmax, действующей на наиболее нагруженный винт (эта величина была рассчитана ранее):
1,3 - 4 - 7654,9
3,1416-10,122
= 123,717 МПа;
4-11768
3,1416-10,122
= 146,302 МПа.
Тогда для среднего <Jm и амплитудного (7ат напряжений цикла имеем:
СГтах+СГтт 146,302 + 123,717 1агЛ, 1/rr
ст _ —щах---mm _-----,--------г---_ 135 01 мПа;
т 2 2
_ ^тах “ O’min _ 146,302 - 123,717 _ - -
0- —-----------—------------------— ] Mila.
am 2 2
Коэффициент запаса усталостной прочности при асимметричном цикле в общем случае определяется по следующей формуле (2.10.20):
где
= 0,02 + 2 • 104 • (гь = 0,02 + 2 • 10~4 * 600 = 0,14 — коэффициент асимметрии цикла (2.10.21), учитывающий влияние средних напряжений на величину усталостной прочности;
сг_и = 0,75бТ„! — предел выносливости при растяжении (приближенная зависимость, полученная с помощью статистической обработки экспериментальных
2.1. Резьбовые соединения
81
данных большого числа испытаний); для сталей предел выносливости рассчитывается по формуле (2.10.9),
ст.! = (0,55 - 0,0001o-A)o-ft = (0,55 - 0,0001 • 600)- 600 = 294 МПа,
следовательно,
ст = 0,75сг_1 = 0,75 • 294 = 220,5 МПа;
Kda - 0,65 — масштабный фактор, зависящий от диаметра резьбы (табл. 4.1.1);
Ка = 1 + q(aa -1)
эффективный коэффициент концентрации (2.10,11), зави
сящий от от чувствительности материала к концентрации напряжений q (для среднеуглеродистых и низколегированных сталей q = 0,5, табл. 2.10.1) и теоретического коэффициента концентрации напряжений который определяется либо аналитическими, либо численными методами.
С точки зрения усталостной прочности наиболее опасными являются сечение
тела винта в резьбовой части ([6], рис. 4.1.12) и сечение в месте перехода тела вин
та в головку (([6], рис. 4.1,13).
Для вычисления теоретического коэффициента концентрации для резьбового
участка можно воспользоваться формулой 4.1.42:
-1 + 1,1
Здесь риг — шаг резьбы и радиус закругления впадины резьбы соответственно. Так как для стандартной метрической резьбы имеет место соотношение: г = 0,144/?, то
Ка = 1 + q(aa -1) = 1 + 0,5(3,9 -1) = 2,45 .
Для участка перехода тела винта в головку теоретический коэффициент концентрации равен (4.1.43):
где dc — диаметр стержня винта, a rh — радиус перехода от стержня к головке. Обычно резьбовые соединения, работающие в условиях переменного внешнего на-
6. Основы проектирования машин
82
Глава 2. Соединения элементов машин
гружения, изготавливают так, чтобы выполнялось соотношение — = 0,05 4- 0,10.
Тогда, принимая — = 0,075, получаем
0,075
Ка = 1 + q(aca -1) = 1 + 0,5(3,0 -1) = 2,0.
Окончательный расчет выполняется для наиболее опасного сечения, коэффициент концентрации которого больше. В данном случае это первое сечение с
В результате определяем коэффициент запаса усталостной прочности:
—-11,292 + 0,14-135,01 0,65
220,5
= 3,587.
Расчет соединения при переменной внешней нагрузке в модуле АРМ Joint
Расчет соединения при переменном нагружении носит проверочный характер.
Если в АРМ Joint в меню «Тип расчета» выбрать «Проверочный», то в окне с параметрами внешних нагрузок автоматически появляются строки с указанием максимального и минимального значения силы. По умолчанию максимальная ве-
Рис. 2.1.1.7
2.1. Резьбовые соединения
личина нагрузки принимается равной ее номинальному значению, а минимальная — нулю, но при необходимости эти значения можно изменить.
Результаты проверочного расчета заданного соединения приведены на рис.
2.1.1.7.
2.1.2. Расчет группы винтов при действии отрывающих нагрузок
Рассчитать установленное с зазором соединение, предназначенное для крепле
ния полу фланца. Полу фланец нагружен постоянной силой F ~ 9 кН (рис. 2.1.2.1), приложенной под углом а = 30° (рис. 2.1.2.1).
Рис.2.1.2.1
Параметры соединения: D} = 300 мм;
D = 350 мм; D2 = 400 мм; h — 40 мм.
Класс прочности соединения — 4.6.
Коэффициент трения скольжения при сдвиге затянутого резьбового соединения принять равным коэффициенту трения в резьбе, f = 0,15 .
Расчет
Центр тяжести стыка. Расчет начинаем с определения координат хс,ус центра тяжести поверхности контакта (рис. 2.1.2.2).
Так как стык симметричен относительно оси
Рис. 2.1.2.2
6*
84
Глава 2. Соединения элементов машин
х, то, обозначив его площадь через А =
, согласно 2.3.3 имеем
; Ус = °
Дня нахождения статического момента 5 . выделяем на поверхности площадки контакта находящийся на расстоянии р элементарный участок кольца площадью dA = pdpd(p (рис. 2.1.2.3) и вычисляем 5 . по формуле
12
Тогда искомая координата центра тяжести равна
(D3-D3)-4-2 2 4ОО3-ЗОО3 11ПП
хг =------------у- -------------- — 112,2 мм.
с 12 • л- • (D,D2) Зя: 4002 - 3002
Приложенную к соединению внешнюю силу F представим в виде совокупности проекций на вертикальную (индекс v) и горизонтальную (индекс h) оси, а затем по правилам механики перенесем эти проекции в центр тяжести стыка. Поскольку все внешние силовые факторы перенесены в центр тяжести стыка, то система внешнего нагружения может быть сведена к действию силы F(F, Fh ) и момента изгиба (опрокидывающего момента) М:
Fv = F • sin а = 9000 • sin 30° = 4500 Н;
Рис. 2.1.2.3
Fh = F-cosa = 9000• cos30° = 7794 Н;
h
V
( 300
= 7794-40 + 4500- —
-112,2 =481860 Н мм.
Условие нераскрытая стыка. Запишем условие нераскрытая стыка (4.1.48): tfmin = % “ <1fv “ <1М 0 , ИЛИ
W.
где
q0 — давление от силы затяжки ;
qFv и Ум — давления, вызванные соответственно отрывающей силой и моментом;
2.1. Резьбовые соединения
85
осевой момент сопротивления и момент инерции площади
W = ^~ И
•^тах
фигуры, находящейся в контакте, относительно оси у ;
Хтах — расстояние от центральной оси до наиболее удаленной точки поверхности касания, в данном случае xmax = хс = 112,2 мм;
/ — коэффициент основной нагрузки, значения которого для контакта металлических поверхностей лежат в диапазоне / = 0,2 -г 0,3, так что можно принять
z = 5 — количество винтов.
Определим осевой момент сопротивления W фигуры, совпадающей с плоскостью контакта. Первым этапом здесь является процедура нахождения осевого момента инерции. С целью определения момента инерции, как и в случае расчета статического момента, выделяем элементарную площадку (рис. 2.1.2.3) площадью dA ~ pdpd(p. Тогда, исходя из определения (2.3.4), для момента инерции относительно оси у' запишем:
128
А Д/2 0
3,1416-(4004 -3004)
- — V — 7 = 429,5 • 106 мм4;
128
Момент инерции относительно оси у, проходящей через центр тяжести стыка, вычисляем по известным правилам параллельного переноса осей*.
т _ г А 2 49Q s 1П6 3,1416-(4002-3002) , v
J — J . — Л • хс = 429, э • LU —---------------• II12,2) =
= 83,46-106 мм4.
Осевой момент сопротивления:
83’±6'1О-. = 74 39.1 о4
112,2
мм .
W = —^~ У *тах
Из условия нераскрытая стыка определяем силу затяжки:
о
z zW
4500-0,75 , 48 1 8 60-0,75-3,1416-(4002 - 3 002)
= 3346 Н.
5-74,39-104-
86
Глава 2. Соединения элементов машин
Окончательную величину силы затяжки F() находим с учетом коэффициента запаса на нераскрытое Кп = 1,1:
Fo - Кп • Fo' = 1,1 • 3346 - 3681 Н.
Сила, действующая наиболее нагруженный винт. Найдем силу, действующую на наиболее нагруженный элемент крепления. Для этого сначала разобьем все винты на группы, в зависимости от их удаленности от оси у (в каждую группу будут входить винты с одинаковыми координатами х). В данной задаче есть три таких группы (рис. 2.1.2.4). Вычислим координаты этих групп xt, i - 1,2,3:
• cos 60° -х
•cos30 —х
350
— -cos60° -112,2 - -24,7 мм, zx = 2;
350
-----cos30° -112,2 - 39,35 мм, z2 -2;
350
-----112,2-62,8 мм, z3 -1.
Сила, действующая на каждый из винтов, складывается из трех составляющих: силы затяжки Fo, силы от внешней отрывающей нагрузки FFv и силы от момента FM . Сила затяжки уже известна, найдем силу от вертикальной нагрузки:
4500-0,25
---------— ZZj Н.
Для того чтобы рассчитать силу от момента, действующую на наиболее нагруженный винт, предположим, что эта сила линейно зависит от местоположения винта, т. е. от расстояния до оси у, откуда следует, что
^1
При этом предположении уравнение равновесия для всего стыка, находящегося под действием одного только опрокидывающего момента, имеет вид
^МЗ *3 Z3 ^M2^2 Z2 •''I ~ % >
ИЛИ
Рис. 2.1.2.4
М3
Очевидно, что самым нагруженным будет винт третьей группы (в третьей группе находится всего один винт), т. к., во-первых, эта группа наиболее удалена от
2.1. Резьбовые соединения
87
центра тяжести стыка, а во-вторых, сила, действующая на винты этой группы, про-
тивоположна силе затяжки.
Тогда
Z
482021-62,8-0,25
(62,8)2 • 1 + (39,4)2 • 2 + (-24,7)2 • 2
= 915,79 Н.
В итоге получаем силу, действующую на максимально нагруженный винт (4.1.57):
Fm = 1,3FO + Fr, +F„m„= 1,3.3681 + 225 + 915,79 = 5926,2 Н,
где усилие затяжки увеличено на коэффициент, учитывающий наличие напряжений сдвига от момента трения в резьбе.
Определение геометрических размеров винта из условия прочности. Зная приходящуюся на винт максимальную силу, можно определить его размеры из условия прочности на растяжение (4.1.12):
где аа— допускаемое напряжение растяжения винта; — внутренний диаметр резьбы.
Для заданного класса прочности предел прочности материала винта <зь = 400 МПа, а предел текучести сг, = 0,6аь ~ 240 МПа. Примем усилие затяжки неконтролируемым, тогда коэффициент запаса статической прочности можно положить равным п = 3. Величину допускаемого напряжения винта при растяжении вычисляем по формуле 4.1.17, сга = аг /п = 80 МПа, а внутренний диаметр резьбы — из условия прочности (4.1.12):
4F
У лоа
5926,2-4 Q7 ---------= 9,7 мм.
3,1416-80
Следовательно, заданным условиям удовлетворяет винт Ml2, размеры которого:
<7 = 12 мм; р - 1,75 мм; dx = d -1,0825/? = 10,106 мм;
d2 = </-0,6495/2 = 10,8 мм.
Расчет момента завинчивания. Момент завинчивания (4.1.8):
5
88
Глава 2 Соединения элементов машин
где arctg
= arctg~^~ = 0J72 рад cos30
приведенный коэффи-
циент трения
Т = 3681-12.( 0,16- — + 0,5-0,172
12
+ 0,69-3681-12-0,15 = 9390 Нмм
Проверка условия несдвигаемости. Проверим условие несдвигаемости (4 161) ко* - Fv (1 - %)]f > FhKs,
где Кs =1,5 — коэффициент запаса по сдвигу,
[Foz - Fv(1 - %)]f = [3681 • 5 - 4500(1 - 0,25)] • 0,15 = 2246 Н,
FhKs =11691 Н
Видно, что условие несдвигаемости не выполняется, следовательно, в направлении действия горизонтальной силы нужно поставить упор, который воспримет нагрузку от сдвига
Расчет соединения в модуле АРМ Joint
Расчет проводится аналогично предыдущей задаче соединение нагружается только внешней вертикальной силой и моментом, создаваемым горизонтальной силой Необходимые значения различных коэффициентов задаются в полях вво-
гГеометрия
Результаты
ж
4+
- 387761
«имм*нмн
Л***И^^
Н, X координата центра масс стыка Й4 । Y кЬордйнатащенгра мас^СгЛ [ЙЭД
• [
fl» i'l I
отЙосиг оси [ммЛ4]
: йгЙ! наклона рал^ных Лей [Град]
о а*
3680J
М аксима льная болт (Н)
[МПа/•'
1дДметЩи^ [мН1 ^М(иен^ви^чйв«Ыия Мсмент трения врезьб%Шм]
,й
''''‘I1.... 4М"-'TlJrrf 1Г*" ......................... Y...^-гг7Ji?|-riTj-|Tifj-^^i^r/TT illTiWribrtVYТ iWiWiYiHtf-1?' 1Т|ТПШ. iTiW
Л^лмтс/ vX+X- ж+л*,*л+ Х'М'.’Х-ч-;?
J
457151
<
i
Рис 2 12 5
2.1. Резьбовые соединения
89
^iYTriftWirirrrnYbVii',ri‘ii'ii'nfe'iiii'Tfeii'>‘ili11nr*ijfirtriV •"Trii'rii'in№ra^Ti'in'i'inirtrnirt'iifffrA"^"-'-miTj^'-'^'-t iriiiiftiifi%itnfrrr-v[ -- * 'iiWiifTtL^r'-LJT‘-,T7-Y-7-t .......................................................................................................................................................•UU^^U^U^HUmW^iAiAiJJJ^JJJ^^VWA^^mtUAiAWW.iJlJAiAWmw^il^iJWiHWW
•"? Карга давлений
да
ГгxZ> Z
Qwip^: Hieii)T<^^s8gM46HKe
J ^cXv ЛФФ»К^>>
, . 5 :
ItHIHtUlll
444Ш
HWfthM***4Tn ci j c i >ii»iiaiii 11 lit !!~Ht tc i tl>
Рис. 2.1.2.6
да диалогового окна «Постоянные параметры». Результаты вычислений и карта давлений с нагрузками на каждый из винтов приводятся на рис. 2.1.2.5, 2.1.2.6.
2.1.3. Расчет группы винтов, нагруженных сдвигающей силой
Рассчитать группу винтов крепления пластин, нагруженных сдвигающей силой (рис. 2.1.3.1). Соединение нагружено постоянной внешней силой F = 8000 Н, действующей под углом а = 30°. Расстояние между винтами а — 50 мм. Класс прочности винтов — 4.6.
Коэффициент трения в резьбе и на поверхности соединяемых деталей f — 0,15 .
90
Глава 2. Соединения элементов машин
Задачу решить в двух вариантах:
а) винты установлены в отверстие с зазором;
б) винты установлены без зазора.
Расчет
Решение задачи следует начинать с определения наиболее нагруженного винта соединения и действующей на него нагрузки, а затем переходить к нахождению отвечающего заданным условиям диаметра винта, который будет зависеть от вари
анта установки.
Центр тяжести стыка. Поскольку приложенная внешняя нагрузка действует в плоскости стыка, то критерием расчета соединения является отсутствие относительного сдвига соединенных поверхностей, т. е. критерий несдвигаемости.
Так как винты в соединении расположены несимметрично относительно оси у, необходимо определить положение центра сдвига С, который при действии момента вращения совпадет с центром тяжести геометрической фигуры, образованной из совокупности поперечных сечений крепежных деталей. Координаты центра тяжести равны:
ус = 0 (соединение симметрично относительно оси х);
«
2.1. Резьбовые соединения
91
где z — число винтов в соединении, х. — координаты размещения крепежных деталей относительно оси у' (рис. 2.1.3.2), АЛ — площадь поперечного сечения тела винта.
4 • а + 4 • 2а + 2 * О —
Рис. 2.1.3.2
Для рассматриваемого соединения из десяти винтов имеем:
= 1,2а — 60
мм.
Сила, действующая на наиболее нагруженный винт. Далее перенесем внешнюю нагрузку в центр сдвига, заменив тем самым заданную расчетную схему нагружения эквивалентной (рис. 2.1.3.2). Эквивалентная схема помимо сдвигающей силы F = 8000 Н имеет момент вращения относительно центра, равный
Т = F sin а (5,5а - хс) = 8000 • sin30° • (275 - 60) = 8,6 • 105 Н-мм.
Так как расчет прочности группового винтового соединения сводится к расчету изолированного винта, нагруженного наибольшей сдвигающей силой Fsm^ , то необходимо определить наиболее нагруженный винт. Как видно из рис. 2.1.3.3, на котором изображена схема нагружения самых удаленных от центра сдвига винтов соединения, наиболее нагруженными являются винты, расположенные в точках А и В, так как полная нагрузка на винт зависит не только от его удаленности от центра сдвига С, но еще и от угла между компонентами сил, составляющими полное сдвигающее усилие.
92
Глава 2. Соединения элементов машин
Силу, действующую на произвольно размещенный j -й винт, можно предста-
вить в виде векторной суммы двух составляющих: реактивной силы Ff ~ —, вы-
Z
званной действием центральной внешней нагрузки, и реактивной силы от внешнего момента
/ = 1
где т - количество групп, на которые можно разбить все винты соединения, в каждую из которых входят равноудаленные от центра С винты;
pt - расстояние от центра сдвига до z-й группы;
z - количество винтов в z-й группе.
Рис. 2.1.3.3
Поскольку в данной задаче пять групп винтов, т = 5, причем в каждую группу входят по два винта, т. е. zt = 2 (рис. 2.1.3.4), то имеем
zx = 2, рх = д/(1,2а)2 + (1,5а)2 =96,0 мм;
z2 = 2, рг — д/(0,2а)2 + (1,5а)2 = 75,7 мм;
= 7(0,2а)2 + (0,5а)2
= 26,9 мм;
А
2.1, Резьбовые соединения
93
z4 = 2, р4 = д/(О,8«У +(1,5<я)2 = 85
мм;
z5 = 2, р5- д/(0,8а)2 + (0,5а)2
— 47,17 мм;
^zp2 = 50250,17 мм2.
г=1
Тогда величины сил, вызванных действием внешнего момента, для расположенных в точках Л и В винтов равны
8,6 Ю5-85
50250,17
= 1457,72
8,6 -105-96,047
50250,17
= 1643,78 Н.
Суммарная сдвигающая сила определяется по теореме косинусов:
Fs = J Fp + Fp + 2FfFt cos (p
где <p - угол между векторами Ff и Ft .
Окончательно для сдвигающих нагрузок получаем: — винтЛ (рис. 2.1.3.5):
/> I
= 61,93°; (рА =1,93°;
FsA = д/8002 +1457,722 + 2 • 800 • 1457,72 • cos 1,93° = 2257,43 Н.
— винт .8 (рис. 2.1.3.6):
Рв = arctg
= 51,34°; (рв = а + (90-/?в)= 68,66°;
FsB = д/8002 +1643,782 +2-800-1643,78 • cos 68,66° = 2066,3 Н.
Сравнивая результаты суммирования составляющих сдвигающих сил в точках Л и В, видим, что наиболее нагруженным является винт, расположенный в точке Л.
94
Глава 2. Соединения элементов машин
Рис. 2.1.3.5
Рис. 2.1.3.6
Расчет соединения на прочность по критерию несдвигаемости. Расчет прочности соединения ведем для наиболее нагруженного винта, расположенного в точке А. Определим размеры винта для двух вариантов его установки: с зазором и без. а) винт установлен в отверстие с зазором
При установке винта в отверстие с зазором сила затяжки должна быть такой, чтобы выполнялось условие взаимной неподвижности соединяемых деталей при приложении максимальной сдвигающей нагрузки (4.1.18):
$ ’
где Ks = 1,3 - коэффициент запаса по сдвигу.
Поскольку в рассматриваемом случае Fs = FA = 2257,43 Н, то
KsFsA 1,3-2257,3 f 0J5
= 19563,27 Н.
Для заданного класса прочности предел прочности материала винта равен суь — 400 МПа, а предел текучести сг = 0,6<ть = 240 МПа. Примем усилие затяжки неконтролируемым, тогда коэффициент запаса статической прочности можно положить равным п = 3.
Условие прочности тела винта при растяжении (4.1.16):
1 ? 47?о < яск п
откуда
2.1. Резьбовые соединения
95
1,3-4-19563,27-3
3,1416-240
= 20,119 мм.
Следовательно, для обеспечения прочности данного резьбового соединения необходимы винты М24 (выбираем из первого ряда нормальных размеров).
Для этого варианта установки винтов следует определить также момент завин-
чивания:
+ O,69Fodf,
где приведенный момент трения
р'= arctg
cos30°
= 0,172 рад.
Тогда
Т = 19563,27-24-| 0,16- —+ 0,5-0,172 1 + 0,69-19563,27-24-0,15 =
112 )
= 98248 Н-мм.
б) винт установлен в отверстие без зазора
При установке винта без зазора основной причиной разрушения соединения является срез тела винта вследствие больших напряжений в поперечном сечении среза. Срез по опасному сечению произойдет тогда, когда напряжение в этом сечении сравняется с пределом текучести при сдвиге. Таким образом, условие прочности на срез (4.1.21) имеет следующий вйд:
WsA
Т = --~ < Т
s ndl~
где ras = 0,4сгг — допускаемое напряжение сдвига, d0 - диаметр тела винта. Из условия прочности найдем диаметр винта:
4-2257,3 an к I—— =I-----------------= 5,472 мм.
Was Д/3,1416-0,4-240
Необходимо также из условия отсутствия смятия определить минимальную толщину пластины. Величина напряжения смятия (4.1.23):
где аас ~ 0,9сгг — допускаемое нормальное напряжение на поверхности смятия.
96
Глава 2. Соединения элементов машин
Минимальная толщина пластины из условия недопустимости пластических деформаций в контакте стержня винта с отверстием:
z FA 2257,37
Lin >---------=---------------= 1,91 мм.
min do-O,9ar 5,472-0,9-240
Расчет соединения в модуле АРМ Joint
Для выполнения расчета группы винтов в АРМ Joint необходимо задать форму стыка, координаты расположения элементов крепления, силы и координаты точек
Результаты
йййШМммммшшш
х Рис. 2.1.3.7
ч'г Ы
СЙ£ ЦЙМГрШНЫ#
{I Макси
Мой
* X
мж
а
их приложения, а также запрашиваемые программой постоянные параметры.
На рис. 2.1.3.7 приведены результаты расчета заданного соединения при установке болтов в отверстие с зазором, на рис. 2.1.3.8 — при установке в отверстие без зазора.
Рис. 2.1.3.8
2.2. СОЕДИНЕНИЯ ДЕТАЛЕЙ ВРАЩЕНИЯ
2.2.1. Расчет соединения с натягом
Подобрать посадку, обеспечивающую соединение червячного колеса с валом (рис. 2.2.1.1).
Нагрузки, действующие на соединение от зацепления: передаваемый момент вращения Т = 960 Н-м; радиальная сила Fr = 2936 Н; осевая сила Fa = 1852 Н; опрокидывающий момент М = 222 Н-м.
Рис. 2.2.1.1
Диаметр соединения d = 50 мм; условный наружный диаметр ступицы d2 = 65 мм; длина посадочной поверхности / = 100 мм. Шероховатость вала и отверстия Ra{ = Ra2 = 1,6 мкм, сборка осуществляется под прессом.
Вал выполнен из стали 45 (предел прочности <Тг1 = 355 МПа; модуль упругости Е{ =2,1-105 МПа; коэффициент Пуассона = 0,3 ), центр колеса отлит из чугуна ВЧ 80 (сгг2 = 480 МПа; Е2 =1,1-105 МПа; ц2 = 0,25).
Расчет
В данной задаче рассматривается случай общего нагружения соединения вращения, когда среди приложенных внешних нагрузок имеются следующие силовые факторы:
• момент вращения;
• осевая сила;
• радиальная сила;
• момент изгиба (опрокидывающий момент).
7. Основы проектирования машин
98
Глава 2. Соединения элементов машин
Натяг в таких соединениях достигается посредством разности посадочных размеров вала и сопряженного с ним отверстия.
Так как момент вращения и осевая сила могут вызвать сдвиг поверхности одной детали относительно другой, а действие момента изгиба и радиальной силы может привести к появлению зазора между деталями, то соединение с натягом следует рассчитывать по двум критериям: критерию несдвигаемости соединения и критерию нераскрытия стыка.
Вначале определяется минимально необходимое давление в стыке, при котором выполняются оба условия, несдвигаемости и нераскрытия. Далее по наибольшему из найденных давлений определяется минимально требуемый натяг, после чего подбирается посадка, которая может обеспечить этот натяг.
Определение минимально требуемого натяга
Исходя из условия несдвигаемости, минимально допустимое давление в контакте рассчитывается по формуле 4.2.5:
mm
Z7 У
F Л. с Л м
ndlf
Здесь f = 0,1 — коэффициент трения в контакте сопрягаемых деталей; Ks = 1,5 -г 2 — коэффициент запаса сцепления (в данной задаче примем Ks = 1,8); Fs — наибольшее усилие сдвига, величина которого определяется как результат векторного сложения внешней осевой Fa и окружной Ft (от момента вращения) сил:
18522 +
2-960-10
50
= 38445 Н.
Подставляя в выражение для определения давления числовые значения входящих в него величин, получаем:
min
38445-1,8
3,1416-50-100-0,1
= 44,05 МПа.
Условие нераскрытия соединения с натягом при одновременном приложении радиальной силы и изгибающего момента записывается следующим образом (4.2.22):
Pmin “ APf ~ АРм 0 >
ИЛИ
12М п dl2
2.2. Соединения деталей вращения
99
где
наибольшее значение давления, создаваемого радиальной силой;
12М
7tdl2
наибольшее значение давления, создаваемого моментом изгиба;
Кс — коэффициент запаса по нераскрытою, Кс = 1,8 .
Минимально необходимое давление для отсутствия зазоров в стыке, найденное из условия нераскрытая, равно
2F t 12М
7tdl 7tdl2
2*2936 12-222
3,1416-50-100 + 3,1416-50-100
Видно, что минимальное давление р”тin, найденное из условия нераскрытая, много меньше давления , рассчитанного по критерию несдвигаемости. Следовательно, дальнейший расчет будем вести по давлению p'min = pmin = 44,05 МПа.
Теперь необходимо вычислить расчетный натяг 9 который обеспечит наличие в соединении давления pmin. Расчетный натяг можно найти, решая частный случай задачи Ляме контакта двух толстостенных цилиндров (4.2.6), когда внутренний диаметр одного из цилиндров (в нашем случае— вала) равен нулю. Если обозначить вал как деталь 1, а колесо— как деталь 2, то решение задачи Ляме будет иметь вид:
некоторые по-
где#! и Ег—модули упругости сопряженных деталей, С}и С2 стоянные величины, определяемые по формулам 2.8.20:
Так как внутренний диаметр вала d{ = 0, то Q-1-//-1-0,3-0,7;
(б52 +502)
с2 = -----и+°?25 = 4Д5;
2 (б52 -502)
44,05 • 50 •
0,7 2,1-105
4,15
1,1-105
= 0,09 мм = 90 мкм.
т
100
Глава 2. Соединения элементов машин
Для того чтобы получить величину требуемого минимального натяга J, т1П, необходимо к значению расчетного натяга прибавить величину поправки и на шероховатость (4.2.7):
£,min =^mm + и = Зс + 5,5(Ra1 + Ra2) = 90,0 + 5,5 • (1,6 + 1,б) = 108 мкм.
Определение максимально допустимого натяга
Помимо минимально необходимого натяга для данного типа соединений большое значение имеет также величина максимально допустимого натяга. Под максимально допустимым понимается натяг, при котором эквивалентные напряжения в самых нагруженных точках соединения будут равняться пределу текучести материала детали. Таким образом, необходимо проверить соединение на отсутствие пластических деформаций.
Наибольшие эквивалентные напряжения возникают в точках внутренних поверхностей вала и втулки (т. е. в данном случае червячного колеса).
Максимально допустимое давление в контакте для вала (4.2.11):
d2 -d2 ст. 355
Pi max = ~----=-----= 177,5 МПа.
Г1тах и 2d2 2 2
Максимально допустимое давление в контакте для втулки:
J2 ~ d2 652 - 502
P2max = ----2— = 480--------г— = 98 МПа.
Z'2 max г 2 ^2 2.652
Максимально допустимый натяг определяем как наименьшее из полученных давлений: pmax s р2тах =98 МПа.
1Пс*А л. Z, ulaA
Максимальный расчетный цатяг:
= 0,2 мм = 200 мкм.
Максимально допустимый натяг:
а = ^стах + и = <^стах + 5,5(7?«, + Ra2) = 200 + 5,5• (1,6 + 1,б) = 218 мкм.
Для требуемых параметров, Jimin = 108 мкм и Jimax =218 мкм, подходит посадка H6/z8, которая обеспечивает минимальный натяг 7Vmin =120 мкм и максимальный натяг =175 мкм. 1Пс1А
Силы запрессовки
В заключение рассчитаем минимальную и максимальную силы запрессовки. Усилие пресса Fa0, необходимое для осуществления сборки, определяется по формуле 4.2.24:
2.2. Соединения деталей вращения
101
Лю > ndIpj,
где p0 — давление, создаваемое в контакте требуемым натягом, f — коэффициент трения при запрессовке, в данном случае равный по величине коэффициенту |Трения сопрягаемых деталей, f ~ 0,1.
Силу запрессовки можно вычислить из следующих соображений (не прибегая к пересчету давления в контакте по формуле Ляме):
— минимально допустимое давление в контакте pmin создает расчетный минимальный натяг Jcmin;
— минимальный натяг (за вычетом поправки на шероховатость), гарантируемый выбранной посадкой, обеспечивается некоторым неизвестным давлением /^Otnin ’
FK F •
учитывая, что pmin = —S a pOmin = —377, получаем формулу для вычисления naif 7tdlj
минимального усилия затяжки:
Р — р к ^min ~ ^,5' )
1 Omin * sе
с min
Подставляя числовые значения, имеем
Fomn = 38445' • 120~5>5(1>6 + 1>6) = 78373 н
Om,n 90,415
Аналогично находим максимальную силу затяжки:
Omin
= 38445 1,8 •175 5>5' О»6 j~ = 120468 Н.
90,415 '
Расчет соединения с натягом в модуле АРМ Joint
Для расчета цилиндрического соединения в модуле АРМ Joint в окне «Исходные данные» следует задать следующие параметры (рис. 2.2.1.2):
• геометрические параметры: диаметры вала, отверстия и втулки, а также длину соединения;
• силовые факторы, нагружающие соединение: момент вращения, опрокидывающий момент, осевую и радиальную силы;
• коэффициент трения в контакте вала со втулкой;
• материалы деталей;
• параметры шероховатости сопрягаемых поверхностей.
102
Глава 2. Соединения элементов машин
Необходимо также указать диапазон выбора посадок, выбрав его из списка «Система посадки»: все возможные, система отверстия или система вала; в данном случае выбираем систему отверстия.
В процессе расчета программа вычисляет минимально требуемый и максимально допустимый натяги, после чего производится подбор всех возможных посадок
Исходные данные
<xi:»w!
WiiiMiMiMMMMIM*
МЙШ<4*ММ*Й*ШЙ«МЫМЙй‘ММ«Ы*ММШййММШ*М1М^
Рис. 2.2.1.2
|мм] J65.0
* * ‘‘ч 5? .-. S' V4WAWA -J
ШкШМкнМшМшйшМШг1
11^1пн»»нн>1мминН<Ш<1ГГПП||^
м»йн*«****00*ммммй«м*шЬм^
Wi wiwhww*wnw>wwiww<^ jg
Система отверстия
ЖШМММ»МДМАМДЦЩаиМ
Лшптбмйн шин*»*»*
kUVbbUtfwXkbrt
Соединение с натягО)
ИнйчиУй!
120.0000
^мймем
******
ЙЙММЙМ*
125.000G
i и ........ m»»i I Hi
iiiliainliilili» 11 in in inn iiih Hiiii'ii
i rt rn lUtWntHtV
'^мЖв^ще^
i нм wi» »0i и jii й i>(i)iwW
м*м*1*^^ i1! liiTii'iiMi
> *
L>i>H>Hannniiiiiliiiiir>iJilir>i»<iM**
Рис. 2.2.1.3
2.2. Соединения деталей вращения
103
из указанного диапазона с расчетом минимальной и максимальной сил запрессовки для каждой из них. Для заданного соединения программой было подобрано 5 посадок в системе отверстия. Результаты расчета представлены на рис. 2.2.1.3 и в табл.
2.2.1.1.
Таблица 2.2.1.1.
Результаты расчета
Обозначение посадки Минимальный натяг, [мкм] Максимальный натяг, [мкм] Минимальная сила запрессовки, [Н] Максимальная сила запрессовки, [Н]
H5/z8 125.0000 175.0000 82199.3106 120467.1460
H6/z8 120.0000 175.0000 78372.5270 120467.1460
H6/z9 120.0000 198.0000 78372.5270 138070.3503
H7/z8 111.0000 175.0000 71484.3166 120467.1460
H7/z9 111.0000 198.0000 71484.3166 138070.3503
2.2.2. Расчет конического соединения
Рассчитать коническое соединение, передающее момент вращения Т = 700 Н м (рис. 2.2.2.1), если длина соединения I - 60 мм; диаметр вала d = 50 мм; диаметр ступицы D = 65 мм; угол наклона образующей конуса к оси вала <7 = 2°; коэффициент трения вал-втулка f = 0,1; параметры шероховатости сопрягаемых деталей Rax = Ra2 = 2,5 мкм; материал деталей — сталь 40.
Рис. 2.2.2.1
1
104
Глава 2. Соединения элементов машин
Расчет
В конических соединениях, в отличие от цилиндрических, натяг и контактные напряжения создаются затяжкой. Поэтому расчет конического соединения сводится к определению минимально необходимого усилия затяжки из условия несдвигае-мости поверхностей при передаче соединением заданного момента.
Для характеристики таких соединений вводится параметр конусности:
2
где d2 и — соответственно максимальный и минимальный диаметры конического участка.
Для дальнейших расчетов необходимо знать величину среднего диаметра конуса dm , которую можно вычислить следующим образом:
В принятых на рисунке 2.2.2.1 обозначениях dm ~ d -tga • / = 50 — /g 2° ♦ 60 = 47,905 мм.
Минимальная сила затяжки, при которой приложение момента вращения Т не приведет к относительному сдвигу контактирующих поверхностей, определяется из условия несдвигаемости по формуле 4.2.32:
,27-10^,fea+/)
1 я min
fd.
где Ks = 1,2 4-1,4 — коэффициент запаса сцепления.
Приняв Ks = 1,2 , для минимальной силы затяжки получаем
2-700-103 • 1,2 -(/g2°
0,1 • 47,905
= 47316 Я = 47,316 кН.
Необходимо также найти максимальную силу затяжки из условия прочности конического соединения. Условие прочности записывается следующим образом (4.2.33):
птах
где аг2 — предел текучести материала ступицы (так как вал обычно выполняется из более прочного материала). Поскольку для данной задачи сгг2 = 320 МПа, то максимальная сила затяжки равна
2.2. Соединения деталей вращения
105
Fa^=-&r^dml(tg
= -•320-3,1416-47,905-60-^g 2°
2
“89,051 кН.
Расчет конического соединения в модуле АРМ Joint
Перечень всех параметров, необходимых для расчета конического соединения в модуле АРМ Joint, показан на рисунке 2.2.2.2 в окне «Исходные данные». Среди них:
• геометрические параметры соединения;
• приложенные нагрузки;
• материал деталей;
• значение коэффициента трения;
• параметры шероховатости сопрягаемых поверхностей.
Исходные данные
/4 \ I
%
..Ц/#,
МММЙМ*МмММйМММШй£^^
Рис. 2.2.2.2
******
> У
Iliiliiiiini iWu'iin TiiinTi'iiVl'ii нН и
700,0
0.0
В программе АРМ Joint под углом конуса понимается угол между образующими конического участка вала. Если соединение нагружено, помимо крутящего момента, радиальной силой и моментом изгиба, то оно рассчитывается аналогично соединению с натягом цилиндрических деталей, с проверкой условия нераскрытия стыка.
Окно с результатами решения данной задачи приведено на рис. 2.2.2.3. Помимо минимального и максимального усилий затяжки АРМ Joint рассчитывает также ве
106
Глава 2. Соединения элементов машин
личины коэффициентов запаса по текучести деталей соединения, а также значения осевого и диаметрального натягов. Указанные параметры рассчитываются по той же схеме, что и для соединения с натягом цилиндрических деталей; величина осевого натяга получается простым делением значения диаметрального натяга на тангенс угла конуса.
Рис. 2.2.2.3
2.2.3. Расчет соединения призматической шпонкой
Рассчитать подвижное соединение прямозубой шестерни коробки передач с валом для постоянной во времени нагрузки и следующих исходных данных: передаваемый момент Т = 280 Нм; диаметр вала d = 40 мм; частота вращения вала « = 1050 мин'1. Соединение выполнено призматической шпонкой, материал шпонки — сталь 45. Вал и шестёрня изготовлены из стали 40.
Расчет
Расчет соединения призматической шпонкой сводится к определению длины шпонки I из условия прочности. Предварительно по ГОСТ 23360-78 в зависимости от диаметра вала подбираются основные параметры шпоночного соединения (рис. 2.2.3.1), такие как высота h и ширина b шпонки, глубина шпоночного паза вала tx и втулки t2. Крутящий момент передается с вала на ступицу боковыми гранями шпонки, при этом на них возникают напряжения смятия <тс ; в продольном же сечении шпонки действуют напряжения среза г. Поэтому условие прочности для призматического шпоночного соединения записывается следующим образом (4.2.48):
2-103Г 2-103Г
" di(h-"аас; Тс~ ьш -г°с’
2.2. Соединения деталей вращения
107
где <тас — допускаемое напряжение смятия, тас — допускаемое напряжение среза.
У стандартных шпонок размеры b и h подобраны так, что нагрузку на соединение ограничивают не напряжения среза, а напряжения смятия. Поэтому длину шпонки следует рассчитывать из условия прочности по напряжениям смятия, а расчет по напряжениям среза является проверочным.
Рис. 2.2.3.1
Величина допускаемого напряжения смятия зависит от типа нагрузки. При постоянной нагрузке стос = 0,8 <тг. Если соединение подвижно в осевом направлении, то допускаемые напряжения смятия следует уменьшить вдвое:
<уас = 0,5 • 0,8 <зг = 0,4 сг..
Величину допускаемых напряжений среза берут в два раза меньше, чем <уас, т. е. т =0,5(7 . ас ^ ас
Наименее прочным материалом в соединении является сталь 40, для которой <7Г = 320 МПа, поэтому допускаемые напряжения будем определять по ее характеристикам:
ст = 0,4ст_ = 0,4-320 = 128 МПа;
I-•> f
т = 0,5 ст = 0,5 128 = 64 МПа.
Для заданного диаметра вала б/ = 40мм по ГОСТ 23360-78 определяем параметры шпоночного соединения:
b = 12 мм; h = 10 мм; - 3,3 мм; t2 = 5 мм.
Из условия прочности по напряжениям смятия (4.2.49) определяем необходимую длину шпонки:
108
Глава 2. Соединения элементов машин
2-103Г 2-103 - 28 0
dcrac(h-/,)~ 40-128-(8-3,3)
= 36,45 мм.
Округлим эту величину в большую сторону до ближайшего целого значения и примем / = 37 мм.
Тогда действующие в соединении напряжения:
2-103Г _ 2-Ю3 -280 dl(h-ty~ 40-37-(8-3,3)
= 126,1 МПа;
2-10T 2-103-280
т =-------=------------= 31,5 МПа.
с bld 12-37-40
Видно, что условие прочности по напряжениям среза выполняется, т. к. г, < Л„. = 64 МПа. k--1 l-'f
Окончательно длину шпонки выбираем из нормального ряда длин: / = 40 мм.
Расчет призматического шпоночного соединения в модуле АРМ Joint
Для расчета призматического шпоночного соединения в модуле АРМ Joint в полях ввода диалогового окна «Исходные данные» необходимо задать следующие параметры (рис. 2.2.3.2): • диаметр вала;
• момент кручения, передаваемый соединением;
• материалы деталей соединения;
• тип нагрузки (постоянная, пульсационная, знакопеременная);
• тип конструкции (подвижное^ или неподвижное в осевом направлении соединение; по условию соединение подвижное, т. е. нужно нажать правую кнопку).
Исходные данные
HIIHIIIIIIIIHIII
Шиш
ймййммм
Рис. 2.2.3.2
ЫЙММШР
2.2. Соединения деталей вращения
109
Среди дополнительных параметров можно указать значения допускаемых напряжений на смятие и на срез. Если эта значения не заданы, то программа установит величины допускаемых напряжений по умолчанию в зависимости от типа нагрузки и конструкции.
Рис. 2.2.3.3
Результаты расчета данного шпоночного соединения в модуле АРМ Joint представлены на рис. 2.2.3.3.
2.2.4. Расчет соединения сегментной шпонкой
Рассчитать соединение сегментной шпонкой, предназначенное для передачи постоянного крутящего момента Т = 450 Н'М. Соединение неподвижно в осевом направлении. Диаметр вала D = 38 ,мм. Материал шпонки — сталь 45, материал вала и втулки — сталь 40.
Расчет
В отличие от расчета соединения призматической шпонкой расчет соединения, выполненного сегментной шпонкой, является проверочным, так как основные размеры сегментных шпонок (ширина, высота, длина, диаметр заготовки) стандартизованы. Вначале по ГОСТ 24071-80 по заданному диаметру вала выбирается соответствующая шпонка. После этого из условия прочности по напряжениям смятая и напряжения сдвига определяется, может ли эта шпонка передать требуемое значение момента.
Для данной задачи находим, что диаметру вала D = 38 мм по ГОСТ 24071-80 соответствуют следующие размеры шпонки (рис. 2.2.4.1):
6 = 10 мм, h = 13 мм, tx = 10 мм, /2 = 3,3 мм, d — 32 мм, I = 31,4 мм.
110
Глава 2. Соединения элементов машин
Определим допускаемые напряжения. Наименее прочный материал в соединении — сталь 40: сгг = 320 МПа. Тогда допускаемое напряжение смятия <уас = 0,8-сгг =0,8-320 = 256 МПа, а допускаемое напряжение среза— вдвое меньше: таг = 0,5 • <т = 0,5 • 256 = 128 МПа. l-'f
Рис. 2.2.4.1
Условие прочности для сегментных шпонок имеет вид 4.2.48:
ас 9
bld
Подставим заданные по условию числовые значения и определим величины действующих напряжений:
2-103Г 2-103-450 л „
сг = - =--------------- = 25154 МПа;
2-103Т 2-Ю3-450
=-------=-----------= 75,4 МПа.
с bld 10-31,4-38
Таким образом, выбранная нами шпонка является годной, так как условия прочности выполняются:
' < ст, = 256 МПа; V И*'
т =128 МПа.
2.2. Соединения деталей вращения
111
Расчет соединения сегментной шпонкой в модуле АРМ Joint
Расчет соединения сегментной шпонкой в модуле АРМ Joint осуществляется так же, как расчет соединения, выполненного призматической шпонкой. В случае если предлагаемые ГОСТ шпонки не подходят для заданного значения момента круче-
I
Рис. 2.2.4.2
ния или диаметр вала слишком большой (ГОСТ 24071-80 устанавливает сегментные шпонки для валов диаметром до 38 мм), программа выдаст сообщение об ошибке.
Результаты расчета данной задачи в модуле АРМ Joint показаны на рис. 2.2.4.2.
2.2.5. Расчет прямобочного' шлицевого соединения
Рассчитать неподвижное в осевом направлении прямобочное шлицевое соединение в условиях постоянного нагружения при следующих исходных данных: передаваемый момент Т = 900 Н м; диаметр вала D = 45 мм. Термообработка деталей — закалка ТВЧ.
Расчет
Расчет прямобочного шлицевого соединения проводится следующим образом. Вначале по ГОСТ 1139-80 в зависимости от заданного диаметра вала подбираются подходящие шлицы среди трех серий: легкой, средней и тяжелой, и определяются основные параметры выбранных шлицев, такие как число зубьев, внешний диаметр, внутренний диаметр и т. д. Далее из условия прочности соединения для каждого шлица рассчитывается длина. После этого по совокупности всех параметров
112
Глава 2. Соединения элементов машин
принимается окончательное решение о выборе той или иной серии шлицевого соединения.
В нашем случае задан диаметр вала, D = 45 мм. По ГОСТ 1139-80 выберем из каждой серии по одному подходящему шлицу (табл. 2.2.5.1).
Таблица 2.2.5.1.
№ серия число зубьев номинальный диаметр, мм внешний диаметр, мм ширина шлица, мм
1 тяжелая 10 36 45 5
2 средняя 8 36 42 7
3 легкая 8 36 40 7
Как видно из таблицы, заданному диаметру вала соответствует лишь внешний диаметр шлица тяжелой серии, внешние диаметры шлицев других серий придется выбирать меньше 45 мм (если только нет возможности взять вал большего диаметра).
Требуемую длину для каждого из выбранных шлицев определяем из условия прочности шлицевого соединения (4.2.67):
/
dmzlhy/
откуда
2-103Г
V » > I |
где
<ус — нормальное напряжение в контакте;
сгос — зависящее от вида термообработки деталей и типа нагрузки допускаемое напряжение в контакте, которое при заданных условиях можно положить равным <Уас — 120 МПа;
у/ = 0,7 4- 0,8 — коэффициент концентрации, учитывающий неравномерность распределения давлений по длине шлица, для данной задачи принимаемый равным = 0,7;
dm — средний диаметр соединения;
h — высота шлица, участвующая в контакте.
Геометрические размеры шлица dm и h вычисляются в зависимости от типа
шлицевого
соединения.
Если шлицы прямобочные, то
ТУ — d
h =---------If, где D и d — соответственно внешний и номинальный диаметры
шлица, f— размер фаски шлица.
2.2. Соединения деталей вращения
113
Для выбранных нами шлицев имеем:
/;=/2=/з=ол
мм;
45 + 36
= 40,5 мм;
ml
мм;
мм;
Д - d} 45-36
~ ——l _ 2yj - —--2 • 0,4 = 3,7 мм;
7 ~ ^2 ъ г 42 ~ 36 л
—1 - 2f2 — — --------2 • 0,4 = 2,2 мм;
D3~d3 40-36
21 _ 2/3 =---------2 • 0,4 = 1,2 мм;
2 2
Теперь можно определить длину каждого из трех шлицев:
2 • 103•900
= 14,3 мм;
' 40,5-10-120-3,7-0,7
2103-900
, >-----------------= 31,3 мм;
39 • 8 • 120 • 2,2 0,7
2*103-900 -------------- 58,7 мм.
Расчет прямобочного шлицевого соединения в модуле АРМ Joint
Для решения данной задачи в программе АРМ Joint в полях ввода диалогового окна «Исходные данные» необходимо указать следующие параметры (рис. 2.2.5.1):
• диаметр вала— геометрический параметр, используемый при поиске в базе данных подходящих шлицев;
• параметры нагрузки: величину момента кручения и тип нагрузки;
8 Основы проектирования машин
114
Глава 2. Соединения элементов машин
• тип конструкции соединения (подвижное или неподвижное в осевом направлении; в данной задаче рассматривается неподвижное в осевом направлении соединение, т. е. нужно нажать левую кнопку);
• параметры материала: вид термообработки вала и втулки, в данном случае это закалка ТВЧ;
• тип шлица: прямобочный, эвольвентный, треугольный; по условию шлиц пря-мобочный, следовательно, выбираем верхнюю левую кнопку.
Рис. 2.2.5.1
Результаты расчёта шлицевых соединений представляют собой набор выбранных из базы данных параметров шлицев (из каждой серии выбирается подходящий шлиц) с рассчитанными длинами, необходимыми для передачи заданной нагрузки. Для данной задачи результаты расчета представлены в таблице 2.2.5.2.
Таблица 2.2.5.1.
Результаты расчета
Длина соединения, мм 14.4000 31.3000 58.8000
Подтип шлица тяжелая средняя легкая
Внутренний диаметр шлица, мм 36.0000 36.0000 36.0000
Число зубьев 10 8 8
Внешний диаметр шлица, мм 45.0000 42.0000 40.0000
Ширина шлица, мм 5.0000 7.0000 7.0000
Диаметр центрирования, мм 31.3000 33.5000 34.5000
Минимальная ширина опорной поверхности, мм 0.0000 1.0200 3.4600
Ширина фаски, мм 0.4000 0.4000 0.4000
Радиус скругления, мм 0.3000 0.3000 0.3000
2.2. Соединения деталей вращения
115
2.2.6. Расчет эвольвентного шлицевого соединения
Рассчитать неподвижное в осевом направлении эвольвентное шлицевое соединение в условиях постоянного нагружения для тех же параметров, что и прямобоч-ное: передаваемый момент Т = 900 Им; диаметр вала D = 45 мм. Термообработка деталей — закалка ТВЧ.
Расчет
Эвольвентное шлицевое соединение рассчитывается аналогично прямобочному. По ГОСТ 6033-80 выбираются подходящие шлицы, а затем вычисляется их рабочая длина.
ГОСТ 6033-80 для эвольвентных шлицевых соединений устанавливает угол профиля зуба а = 30° и ряд модулей в пределах m = 0,5 4-10 мм. Для номинального диаметра D = 45 мм можно подобрать одиннадцать соединений со следующими значениями модуля: m = 0,6; 0,8; 1; 1,25; 1,5; 2; 2,5; 3; 3,5; 4; 5.
Рассчитаем рабочую длину для четырех из них:
тх - 0,6, т2 = 1,25 , т3 = 2,5, т. = 5 .
Длина шлица вычисляется так же, как и для прямобочных шлицев,
2-103Г
dmZ°aehV
с той лишь разницей, что здесь
dm = mz, h = т .
Определим по ГОСТ 6033-80 числа зубьев для каждого из выбранных шлицев и вычислим их длину, учитывая, что <Уас = 120 МПа, у/ = 0,7. Результаты расчета представлены в таблице 2.2.6.1.
Таблица 2,2.6.1.
Результаты расчета
ш, мм D, мм Z с!т, мм 1, мм
0,6 45 74 44,4 10,9
1,25 45 34 42,5 11,9
2,5 45 16 40 13,4
5 45 7 39 17,5
116
Глава 2. Соединения элементов машин
Расчет эвольвентного шлицевого соединения в модуле АРМ Joint
Эвольвентное шлицевое соединение рассчитывается так же, как и прямобочное, только в окне «Исходные данные» следует указать другой тип шлица.
В таблице 2.2.3.2 приведены результаты расчета заданного соединения в АРМ Joint. Программой были рассчитаны длины 11-ти шлицевых соединений со всеми возможными для данного номинального диаметра значениями модулей.
Таблица 2.2,6.2
Результаты расчета
Длина соединения, • [мм] Подтип шлица, Номинальный диаметр шлица, [мм] Число зубьев Модуль, [мм]
10.9000 1-й ряд диаметров 45.0000 74 0.6000
11.1000 1 -й ряд диаметров 45.0000 55 0.8000
11.1000 1-й ряд диаметров 45.0000 44 1.0000
11.9000 1-й ряд диаметров 45.0000 34 1.2500
12.2000 1-й ряд диаметров 45.0000 28 1.5000
12.2000 1-й ряд диаметров 45.0000 21 2.0000
13.4000 1-й ряд диаметров 45.0000 16 2.5000
14.1000 1-й ряд диаметров 45.0000 13 3.0000
12.2000 1-й ряд диаметров 45.0000 12 3.5000
13.4000 1-й ряд диаметров 45.0000 10 4.0000
17.5000 1-й ряд диаметров" 45.0000 7 5.0000
2.2.7. Расчет треугольного шлицевого соединения
Рассчитать неподвижное в осевом направлении треугольное шлицевое соединение в условиях постоянного нагружения при тех же исходных данных, что и прямобочное: передаваемый момент Т = 900 Н • м; диаметр вала D ~ 45 мм ; вид термообработки деталей — закалка ТВЧ.
Расчет
Целью расчета треугольного шлицевого соединения, как и других видов шлицевых соединений, является определение длины шлица.
Треугольное шлицевое соединение и его основные параметры показаны на рис. 2.2.7.1. Подбор подходящих шлицев осуществляется по номинальному диаметру
2 2 Соединения деталей вращения
117
Db, который является наружным диаметром вала. Помимо этого выделяют следующие параметры треугольных шлицевых соединений:
Dx — наружный диаметр по вершинам;
D2 — внутренний диаметр по вершинам;
р
диаметр начальной окружности;
внутренний диаметр втулки;
диаметр впадин отверстия (втулки); диаметр впадин вала;
угол зуба и впадины отверстия; число зубьев.
Рис. 2.2.7Л
Для расчета требуемой длины соединения необходимо знать участвующую в контакте высоту шлица h и средний диаметр соединения dm. Эти параметры в принятых на рисунке 2.2.7Л обозначениях вычисляются следующим образом:
Формула для расчета требуемой длины имеет тот же вид, что и для расчета других типов шлицевых соединений (см. п. 2.2.5):
2-103Т
” dmzaachy/'
Для данной задачи выбираем шлиц со следующими параметрами [1, т. 2, стр. 851]:
118
Глава 2. Соединения элементов машин
Db - 45 м; Д - 45,480 мм; D2 = 42,408 мм; d = 43,944 мм;
d а= 42,81 мм; Da = 45,05 мм; db= 42,76 мм; /3 = 82,5°; z = 48.
Вычисляем высоту шлица и средний диаметр соединения:
Db-d 45-42,81 nQ
h = —----- ------------ 1,095 мм;
А +“а 45 + 42,81 п
т ™ —°----~-------------= 43,905 мм.
2-IO3-900
Из условия прочности определяем требуемую длину, принимая <Уас =120 МПа и у/ = 0,7:
2-103Г
~ (Lzoji у/ 43,905 • 48 120 1,095 0,7 Г f f С* V *
Расчет треугольного шлицевого соединения в модуле АРМ Joint
Треугольное шлицевое соединение рассчитывается в программе АРМ Joint аналогично другим типам шлицев. Среди результатов расчета (табл. 2.2.7.1) выводятся основные параметры подобранного шлица и требуемая длина соединения.
Таблица 2.2.7.1,
Длина соединения, [мм] 9.3000
Номинальный диаметр, [мм] 45.0000
Число зубьев [—] 48
Диаметр начальной окружности, [мм] 43.9440
Диаметр впадин отверстия, [мм] 45.0500
Внут. диаметр отверстия, [мм] 42.8100
Наружный диаметр вала, [мм] 45.0000
Диаметр впадин вала, [мм] 42.7600
Угол зуба, [град] 82.5000
2.2.8. Расчет призматического профильного соединения
Рассчитать профильное соединение для заданных параметров (рис. 2.2.8.1): передаваемый крутящий момент Т = 650 Нм; число граней z = 4; радиус описанной окружности (диаметр втулки) Д = 40 мм; ширина грани Ь ~ 20 мм; допускаемое напряжение смятия <зас = 200 МПа.
2.2. Соединения деталей вращения
119
Расчет
Расчет профильного соединения сводится к определению необходимой длины соединения I из условия отсутствия пластических деформаций на поверхности сопряженных деталей.
Рис. 2.2.8.1
Условие отсутствия пластических деформаций записывается как
max — ас ’
Из этого условия находим минимально необходимую длину соединения /:
ас
Здесь z, 135 Р = —;
tg Р sin р )
- средний радиус соединения;
s = Ь/2 — ширина рабочей площадки. Применительно к данной задаче
„ 135
135
— = 33,75°;
О
sin 33,75
= 16,483 мм;
120
Глава 2. Соединения элементов машин
<т - 200 МПа.
Тогда
З-Ю3 -650 Г 1
4- 4-16,4832 -200^^33,75°
sin33,75°
= 24,375 мм.
Округляя до ближайшего стандартного значения, получаем: I = 25 мм.
Максимальные напряжения в контакте вычисляются по формуле 4.2.71:
max
Максимальное напряжение в контакте <ттах, т. е. действующее напряжение при выбранной длине, для I = 25 мм равно
max
З-Ю3-650
sin33,75°
= 195 МПа.
О
Расчет профильного соединения в модуле АРМ Joint
Для расчета профильного соединения в модуле АРМ Joint среди исходных параметров необходимо задать (рис. 2.2.8.2): диаметр вала, величину момента вращения, число и ширину граней, а также материал втулки и вала и тип нагружения (в
Рис. 2.2.8.2
нашем случае нагрузка постоянная). Помимо этого в качестве дополнительного параметра можно указать значение допускаемого напряжения смятия.
Результатом расчета являются: требуемая длина соединения и действующее напряжение (рис. 2.2.8.3).
2.3. СВАРНЫЕ СОЕДИНЕНИЯ
2.3.1. Расчет нахлесточного сварного соединения
Рассчитать нахлесточное сварное соединение, изображенное на рис. 2.3.1.1, если а = 50 мм. Соединение нагружено силой F = 20 кН, действующей под углом а = 30°. Предел текучести материала деталей <УГ = 400 МПа.
Расчет
Опасное сечение нахлесточного соединения представляет собой тонкую полоску толщиной 0,7к (к — величина катета сварного шва), имеющую конфигурацию сварного шва. Полная длина шва, как видно из рис. 2.3.1.1, равна 9а .
Поскольку пластина нагружена нецентральной силой, решение задачи необходимо начинать с. переноса всех силовых факторов в центр тяжести опасного сечения сварного шва С (рис. 2.3.1.2). Определим положение центра тяжести (2.3.3):
Ус ~ 0 > хс ~
Sy. 0,7к • 2а • а • 2 + 0,7к -а -а + 0,7к • а • а
9а • 0,7к
2 “ (л -
Перенесем все силовые факторы в центр тяжести и перейдем к эквивалентному нагружению, которое по своему силовому воздействию равноценно исходному. В этом случае внешняя нагрузка будет складываться из заданной по условию центральной силы F и момента вращения Т, вызывающего сдвиг относительно центра тяжести фигуры, составленной из сварных швов. Момент вращения, согласно рис. 2.3.1.3, равен
Рис. 2.3.1.1
122
Глава 2. Соединения элементов машин
Т = Fsinor • (8а--а) = 3,67 • 106Н-мм.
Каждый из имеющихся силовых факторов приводит к возникновению касательных напряжений, которые в силу линейной зависимости нагрузки от перемещения можно рассматривать независимо друг от друга. Касательные напряжения, вызванные силой F, в каждой точке опасного сечения можно считать постоянными по величине и противоположными внешней силе. Величину напряжений сдвига от внешней нагрузки можно рассчитать по формуле
F F 2-Ю4 44,44
WWI _________ , ***** ....
F А 9а -0,7к 9а-0,7к 0,7к
Касательные напряжения от момента вращения распределены по длине шва неравномерно, причем в каждой точке шва вектор напряжения прямо пропорциона-
Z2 Z7ZZZ77:
Хс
zzzzzzzzztzzzza
/2ZZZZZZZ2 zzzzzzzzzzzzzzzzzza
Рис. 2.3.1.3
Рис. 2.3.1.2
лен плечу р (расстоянию до центра тяжести) и направлен перпендикулярно ему (рис. 2.3.1.3). Такая модель позволяет определить наибольшие касательные напряжения методом полярного момента, а именно
Т
М max
W ’ р
где JVp
полярный момент сопротивления, Jx и J — моменты инер-✓
ции сечения относительно соответствующих осей.
2.3. Сварные соединения
123
Вычислим геометрические характеристики сечения, пренебрегая членами всех высших порядков малости относительно 0,1 к, начиная с (0,7&) :
141
J = — • 0,7 ка3 = 1468750 • 0,7 к.
х 12
+ 2я-0,7Аа2
42 п з
= — 0,7ка 6
= 3 0,7ка3 =375000 -0,7к.
-0,7 к 9а
2
Таким образом, получаем
Тртах 3,67-106-100,34 1 99,73
। * Шил __ ' _ '
~ Jx + J ~ 0,7к-(1468750,+ 375000)" 0,7к
Наиболее нагруженной будет точка А (рис. 2.3.1.3), т. к. в этой точке угол между векторами напряжений наименьший. Следовательно, суммарное значение касательного напряжения в этой точке имеет максимальное значение (5.2.12):
Ь = = 7(гмтах)2 + О/Э2 - 2^wmax TF COSd ,
где 0 = 90 + а + (5, /3 = arctg
(рис. 2.3.1.4).
Подставляя числовые значения, получаем
( 44,44 У < 0,7к ;
199,73-44,44 (0,7&)2
•sin(a + /?) =
243,25 0,7k
124
Глава 2. Соединения элементов машин
Согласно 5.2.5, условие прочности сварного соединения запишется как
где та'= О,6(У/Л — допускаемое значение напряже-
/ ния для шва при сдвиге, <3atr =------допускаемое
п
напряжение для шва при растяжении. Если коэффициент запаса принять равным п —1,5, то, согласно табл. 5.2.1, для та' получаем fl
сг 400
т'= 0,бег' = 0,6^ = 0,6—— = 160 МПа. и ' uif ' у л г*
п 1,5
Рис. 2.3.1.4
3/2а
Из условия прочности получим значение катета сварного шва:
243,25
0,7*160
= 2,17 мм.
^sA “ а »
Пересчитаем значения моментов инерции с учетом полученной величины катета сварного шва:
— относительно горизонтальной оси:
J = 1468750-0,7^ = 2,21859-Ю6 мм4;
— относительно вертикальной оси:
J = 375000 • 0,7 k = 566448,75 мм4.
Расчет нахлесточного сварного соединения в модуле АРМ Joint
Для расчета соединения в модуле АРМ Joint необходимо задать вид сварного шва, его геометрическую форму и внешнюю нагрузку. Результаты расчета показаны на рис. 2.3.1.5. Среди результатов можно получить: геометрические характеристики шва (площадь, координаты центра масс, моменты инерции), максимальное эквивалентное напряжение в шве и величину катета сварного шва. Помимо этого можно также вывести карту напряжений, из которой легко определяется напряжение в любой точке шва (рис. 2.3.1.6).
' 2.3. Сварные соединения
125
«
Результаты
II
'f
tf; ‘
<
>
ГРРИ
>
^^йе<швецмнГ <
v.. ... чч >ч
& си’ж>сит/йенгЬа>^&,рйй
r^^>j»rt rt^^ifntwmii^^i'ii'iin MiAi
i 1 V<QE '' :Н| *
> - гл „
< й / Х> \ J
" I ^?z
:
х<м^>>т^«мк^ А ,, v С-^.< а , ^Ни/напряж^ш ЙЙ).'; ......................' 4 ’"Ц чХ*>Хб*^4*л*|*|*л ч*Ч>»МАЧ*Мм*,> jvKi^/i^ojk
Рис. 2.3.1.5
Рис. 2.3.1.6
126
Глава 2. Соединения элементов машин
2.3.2. Расчет таврового сварного соединения
Рассчитать тавровый сварной шов между трубой и полуфланцем (рис. 2.3.2.1, 2.1.2.1). Полуфланец нагружен постоянной силой F = 9 кН, действующей под углом а = 30°.
Параметры соединения: Dx =300 мм; h = 40 мм; а = 10 мм. Толщина трубы 5 = 5 мм.
Материал свариваемых деталей — сталь 3: сгг = 240 МПа; п = 2 .
Рассмотреть два варианта выполнения соединения:
а) угловым швом (рис. 2.3.2.2);
б) стыковым швом (рис. 2.3.2.6).
Расчет
Соединение, предназначенное для крепления полуфланца, уже было проанали
зировано в задаче 2.1.2, но при условии, что крепление осуществляется с помощью группового резьбового соединения (рис. 2.1.2.1).
Здесь рассматривается вариант таврового сварного соединения (рис. 2.3.2.1).
Расчет соединения, выполненного угловым швом
Под расчетом сварного шва понимается определение его катета к из условия прочности по касательным напряжениям: касательное напряжение Ts в наиболее нагруженной точке опасного сечения сварного шва не должно превышать допускаемое напряжение та',
Опасное сечение сварного шва представляет собой тонкое полукольцо диаметром Dx и толщиной 0,7к (рис. 2.3.2.2).
Рис. 2.3.2.1
Рис. 2.3.2.2
2.3. Сварные соединения
127
Сначала найдем положение центра масс этого сечения С (рис. 2.3.2.3):
ус = 0 — в силу симметрии;
А ‘
Для нахождения статического момента S , выделяем на поверхности шва элементарный участок кольца площадью dA = 0,5Д • 0,7kdcp (рис. 2.3.2.4) и вычисляем S , по формуле 2.3.1:
f Д2 • 0,Ik cos (р dtp D? 0,1к
JxaA = 2 J
А О
Рис. 2.3.2.4
Рис. 2.3.2.3
Тогда для координаты хс имеем
S F)
~ —- “ . ~ 95.49 мм»
с А 7С
Видно, что координата не зависит от величины катета сварного шва.
Далее разложим внешнюю нагрузку на составляющие и приведем их к центру масс опасного сечения:
Fv - F sin а ~ 9000 -sin 30° = 4500 Н;
Fh = Fcosa - 9000’Cos30° = 7794 Н;
128
Глава 2. Соединения элементов машин
Му = Fh-(h- «) + Fv-
= 7794-30 + 4500-
Гзоо ------95,49
= 4,79-105 Н-мм.
Определим величины касательных напряжений, вызываемых в опасном сечении каждым силовым фактором в отдельности
F 4500 9,549 тт
т ~-----------—------------------—------ НММ’
Fv я-Д п_, 3,1416-300 п_, 0,7к ’
---— •\JjK ----------— • и, / к
2 2
. Fh 7794 16,54 „ М х
TFh = —=— ----= - , : >- -----= —----Н-мм; т,, = —— .
Fh nD, 3,1416-300 Q7k м J
--0,7к — 0.7 к ’ Jy 2----------------------------------------------------------2
Здесь х — расстояние от центра масс до текущей точки опасного сечения сварного шва; Jy — Jy, — А • — момент инерции относительно центральной оси у .
Момент инерции полукольца относительно вспомогательной оси у’ (рис. 2.3.2.4) равен
Тогда
т т л 2 3,1416-3003-0,7£ 3,1416-300-0,7к лп2
Ju = J. -А-хс- —---------------------------------95,49 =
у у с 16 2
= 0,7к-1,0045-106 мм3. '
Далее необходимо определить положение наиболее нагруженной точки. Очевидно (рис.
2.3.2.5), что самой напряженной точкой сечения будет либо точка Л , либо точка В . Вычис-
Рис. 2.3.2.5
2.3. Сварные соединения
129
лим суммарные касательные напряжения в каждой из этих точек и все дальнейшие расчеты будем проводить по точке с наибольшим их значением.
Вычислим суммарные касательные напряжения в каждой из этих точек и все дальнейшие расчеты будем проводить по точке с наибольшим их значением.
Найдем координаты х интересующих нас точек:
Д 300 АС ЛА СЛ С1
х, = —- - хг —------95,49 = 54,51 мм,
л л С- л х '
хв = хс = 95,49 мм.
Окончательно получаем:
4,79-105
0,1 к-1,0045-106
54,51 =-----МПа;
0,1к
=..ill.95 49 =
0,1 к-1,0045-106 ’
45,55 0,1к
МПа.
Суммарные напряжения:
-777+77+77 = -^-7(26 + 9,549)2 +16,54' = МПа;
0,1 к 0,1 к
тв = J(tmb - г.)2 + т2 = —— 7(45,55 - 9,549)2 +16,542 = 39, 19 МПа.
SS V х. /ИД ГУ' гП q 3 " / 7 0
Таким образом, самой напряженной точкой сварного шва будет точка В .
Согласно 5.2.5, условие прочности сварного соединения в точке В запишется как
где та'- допускаемое значение напряжения для шва при сдвиге. Так как величина допускаемого напряжения при расчете сварных соединений ниже, чем при расчете монолитных деталей, необходимо помимо всего прочего внести поправочный коэффициент, зависящий от типа сварки (табл. 5.2.1). Для углового шва
гг 240
гв'= 0,6<г = 0,6^ = 0,6— = 72 МПа.
п 2
Из условия прочности получим значение катета сварного шва:
39,619
72 • 0,7
= 0,786 мм.
9. Основы проектирования машин
130
Глава 2. Соединения элементов машин
Как правило, сварные швы имеют значения катета не ниже 1 мм. Следовательно, в данном случае принимаем к = 1 мм.
Расчет соединения, выполненного стыковым швом
Соединение, изображенное на рис. 2.3.2.6, называется тавровым сварным соеди-
нением стыковым швом. Расчет прочности соединений, выполненных встык, явля-
ется проверочным, так как сводится к определению коэффициента запаса прочно-
сти при заданной толщине 8 (в данном случае равной толщине трубы).
Рис. 2.3.2.6
^Омв
Рис. 2.3.2.7
При расчете стыкового шва, так же, как и углового, сначала определяется положение центра тяжести геометрической фигуры, образованной сварным швом. Поскольку конфигурация сварного шва в опасном сечении такая же, как и углового шва, то координаты центра тяжести у этих швов одинаковые. По этой же причине здесь можно использовать полученные для углового шва выражения моменты инерции, если вместо толщины 0,7к взять 8, а именно
ЗД416-ЗОО3
16
3,1416-300-5
2
•95,492 = 5,022-106
4 ММ .
Эквивалентные напряжения для точек А и В, согласно энергетической теории, можно записать следующим образом (рис.2.3.2.7):
где
Fh
2•7794
3,1416-300-5
= 3,308 МПа;
2.3. Сварные соединения
131
2-4500
3,1416-300-5
= 1,91 МПа;1
479122-54,51
5,022-106
479122-95,49
5,022-106
= 5,201 МПа;
= 9,11 МПа.
Подставляя числовые значения, получаем величины эквивалентных напряжений:
<геА = +Зтп = л/(5,201 + 1,91)2 +3-3,3082 =9,132 МПа;
°еВ = 7(<тмя +^fv)2 -Зг2а = 7(9,11 +1,91)2 -3-3,3082 =9,413 МПа,
Как и в предыдущем случае, самая нагруженная точка сварного шва — точка В. Определим величину коэффициента запаса по пределу текучести:
240
9,413
= 25,497.
Расчет углового сварного соединения в модуле АРМ Joint
Для расчета сварного соединения в модуле АРМ Joint необходимо задать тип сварного шва, его геометрическую форму и действующие на него внешние силы, а также указать предел текучести материала и коэффициент запаса текучести (окно «Постоянные параметры»).
Результатами расчета являются: геометрические характеристики шва (площадь шва, координаты центра масс и др.), максимальное напряжение в сварном шве и минимальная величина катета сварного шва (рис. 2.3.2.8). Помимо этого можно по
9*
Рис. 2.3.2.8
132
Глава 2. Соединения элементов машин
лучить карту распределения напряжений по длине шва (на рис. 2.3.2.9 представлен лишь фрагмент окна).
Расчет стыкового сварного соединения в модуле АРМ Joint аналогичен расчету соединения угловым швом. Результаты такого расчета показаны на рис. 2.3.2.10.
Рис. 2.3.2.9
Рис. 2.3.2.10
Глава 3
ПЕРЕДАТОЧНЫЕ МЕХАНИЗМЫ
3.1. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЗУБЧАТОЙ ЦИЛИНДРИЧЕСКОЙ КОСОЗУБОЙ ПЕРЕДАЧИ ВНЕШНЕГО ЗАЦЕПЛЕНИЯ
Рассчитать зубчатую цилиндрическую косозубую передачу одноступенчатого редуктора с моментом на выходе Т2 = 900 Н-м.
Частоты вращения входного и выходного валов передачи равны п{ - 210 об/мин и п2 = 70 об/мин соответственно, т. е. передаточное число и = 3 .
Передача нереверсивная, с симметричным расположением шестерни относительно опор. Время безотказной работы t = 10 000 часов в тяжелом режиме нагружения.
Зубчатые колеса изготовлены из стали 40Х, закаленной по поверхности до твердости HRC 45-г 50, термообработка типа «улучшение» с последующей закалкой ТВЧ по контуру до заявленной твердости.
В качестве параметров исходного контура инструмента принять:
h*a = 1 — коэффициент высоты головки зуба;
= 1 — коэффициент высоты ножки зуба;
с =0,25 —коэффициент радиального зазора;
а ~ 20° — угол профиля рейки.
Замечание. Здесь и далее в п.п. 3.1— 3\3 при обозначении переменных индекс 1 относится к ведущему колесу (шестерне), а индекс 2 — к ведомому.
Расчет
Проектировочный расчет передачи выполняется с целью определения ее геометрических размеров из условия прочности по контактным напряжениям и напряжениям изгиба, и начинается с определения допускаемых напряжений по контакту и по изгибу.
Определение допускаемых напряжений
Числа циклов нагружения шестерни и колеса (7.1.104):
= 6QnytKn{ = 60-210 104 4 = 1,2640’,
N2 = 60п2(К„2 = 60-70-104 1 = 0,42 108, М № F I №
134
Глава 3. Передаточные механизмы
где Kni и Кп2 — числа зацеплений зуба шестерни и колеса за время одного оборота.
Приведенные числа циклов нагружения по контактным напряжениям и напряжениям изгиба, NM и NHe2, зависят от значений коэффициентов приведения КНе и К Fe переменного режима работы к постоянному. Для тяжелого режима коэффициенты приведения по контактным напряжениям и по напряжениям изгиба равны КИе = 0,5 и KFe = 0,2 соответственно (табл. 7.1.7). Эти значения коэффициентов получены при условии, что показатель степени кривой выносливости при расчете прочности по контакту равен тн = 6 , а по изгибу — mF = 9.
Приведенное число циклов нагружения по контактным напряжениям:
Приведенное число циклов нагружения по напряжениям изгиба:
Крл = KFeN2= 0,2'0,42 ' Ю* = 0,84 • 10? .
Пределы выносливости зубьев по контактным напряжениям для шестерни и колеса (табл. 7.1.9) и коэффициенты запаса выносливости для этих напряжений:
сгЯНт1 = 17-/#?Clmin + 200 = 17-45 + 200 = 965 МПа; = 1,2 ;
<т7/Пт2 =17,Жтт + 200 = 17• 45 + 200 - 965 МПа; SH2 =1,2.
Замечание. Значение коэффициента запаса контактной прочности Sн зависит от однородности материала зуба. Рекомендуется пользоваться следующими значениями: SH = 1,1, если материал зуба имеет однородную структуру, и SHX = 1,2 — если неоднородную. В рассматриваемом случае применяется закалка по контуру зуба, т. е. материал становится неоднородным (см. табл. 7.1.10), следовательно, следует брать SHi =1,2.
Пределы выносливости зубьев по напряжениям изгиба шестерни и колеса (табл. 7.1.10):
&f Пт 1 "600 МПа; ~ 1,7;
&Flimi “ 600 МПа; SF2 - 1,7 .
Базовое число циклов нагружения для расчета прочности по контактным напряжениям (п. 7.1.6):
NHm = 340HRC^ + 8 • 10б = 340 • 453’15 + 8 • 106 = 6,28 • 107;
NHG2 = 340ЯЯС3;!3 + 8 • 106 = 3 40 • 453’15 + 8 • 106 = 6,28 • 107;
^FGl = 4-106 ; NFG2 =4-106.
. 3.1. Проектировочный расчет зубчатой цилиндрической косозубой передачи
135
Допускаемые напряжения по контакту (7.1.117):
гт . У 965 6 28-107
1 = ——=---------------!> —----у- = 804,17 МПа;
$я1 \^Не1 1,2уб,3-107
965 6,28-107
----в —’------
1,2 V 2,1-107
= 963,35 МПа.
В качестве допускаемого контактного напряжения для расчета контактной прочности прямозубой передачи принимается минимальное из этих значений, а именно:
аНа = ” 804,17 МПа.
Если передача косозубая либо с круговым зубом, тогда, согласно ГОСТ 21354-87, допускаемое напряжение определяется по формуле
аНа = 0,45(сгЯд1 + <тНа2) = 0,45(804,7 + 963,35) = 795,62 МПа.
Для того чтобы окончательно определиться со значением допускаемого напряжения, нужно учесть, что оно должно удовлетворять следующим условиям:
^яшт - ана - !»25сгятт — ДО» передач с косым зубом;
ан min ° На 1Д 5сгя min — ДЛЯ передач с круговым зубом.
В рассматриваемом случае эти условия принимают вид
804,17 < (УИа <1005,21 — для передач с косым зубом;
804,17 < (УИа < 924,80 — для передач с круговым зубом.
Поскольку полученное расчетным путем значение допускаемого напряжения этим условиям не удовлетворяет, то в качестве стНа принимаем его значение на нижней границе, т. е.
сг„ = 804,17 МПа. net 7
Допускаемые напряжения прочности на изгиб (7.1.117) вычисляются для случая, при котором базовое число циклов нагружения шестерни и колеса NFG меньше
действующего числа циклов нагружения NFe, так что тг—— = 1:
V ^Fe
<rF, — ~~F1~1 "F = 352,94 МПа;
SFl \NFei
136
Глава 3. Передаточные механизмы
^£1 = ^2 = 352,94 МПа; N 17 /NFe2
тр
_ __ &F lim 2
UFa2 " о
Замечание. Показатель степени кривой выносливости по изгибу равен mF =6, если твердость поверхности HRC <35. В противном случае mF = 9.
Определение величины межосевого расстояния из расчета прочности по контактным напряжениям
На этапе проектировочного расчета ряд коэффициентов (коэффициент динамичности нагрузки KHv и коэффициент неравномерности нагружения зубьев КНа)9 значения которых мало отличаются от единицы, принимаем равными
=15о; к на =1’05.
Значение коэффициента концентрации нагрузки Кн^ можно получить, задав-
шись предварительно конструктивным коэффициентом у/Ьа = —. Для случая сим-а
метричного расположения шестерни относительно опор согласно 7.1.3 имеем
Wba ~ О’4 > тогда
Wbd = Ы^=у/Ьа
и, используя данные табл. 7.1.4, получаем
К„„ = 1,0 + 0,052<//„„ = 1,0 + 0,052 0,8 = 1,04.
Аналогично можно определить значение коэффициента концентрации нагрузки при расчете на изгиб. Согласно табл. 7.1.4 запишем
KFp -1,0 + 0,155^м =1,0 + 0,155-0,8 = 1,12.
С помощью (7.1.83) рассчитываем предварительное значение межосевого расстояния:
ддл/ , П. l^2^H^Hv^Ha ЛаП/Т , 1Y. f^OO -1,04 1,0 • 1,05 .
а = 43U(w + 1)з/--—-------= 430(3 + 1)з--------------— = 127,01 мм.
1 Vbrf^Ha V 0,4-32-804,172
Полученную величину межосевого расстояния следует округлить либо до ближайшего значения из нормального ряда R2Q, либо до значения, оканчивающегося на нуль. Здесь мы принимаем а = 130 мм.
По известному межосевому расстоянию можно вычислить значение ширины ко
леса:
62 =130-0,4 = 52 мм.
3.1. Проектировочный расчет зубчатой цилиндрической косозубой передачи
137
Для того чтобы скомпенсировать возможные ошибки осевого положения шестерни относительно колеса, в качестве значения ширины шестерни Ь{ принимается величина, превышающая на несколько миллиметров ширину колеса Ь2:
- 1^2 ' " ' ' - к/ 1VL1VL*
Предварительное значение диаметра колеса (7.1.18):
, 2аи 2*130-3
а2 -------—-----------= мм
Определение значения модуля из расчета прочности по напряжениям изгиба
Ориентировочное значение модуля тпо можно найти с помощью (7.1.94), используя усредненные значения входящих в эту формулу коэффициентов.
Коэффициент динамичности нагрузки примем равным KFv -1, тогда коэффициент нагрузки;
KF=KFpKFv = 1,124*1 = 1,124.
Учет остальных коэффициентов можно осуществить, если ввести поправку Кт, равную Кт =3,5 для косозубых и шевронных передач и Кт - 5 для цилиндрических передач с прямым зубом. Тогда
т г-^Т.К.К, 2-10’.900-3,54,12
" 52-195-352,94
ММ.
В качестве значения модуля принимается величина из нормального ряда (табл. 7.1.2), удовлетворяющая условию тп >тпо. В данном случае полагаем тп = 2 мм.
Далее находим минимальное значение числа зубьев. Прежде всего рассчитываем угол наклона зуба, исходя из условия обеспечения осевого перекрытия не менее 10%, т. е. когда коэффициент осевого перекрытия равен 8р = 1,1. Тогда из (7.1.52) получаем:
A™, = arcsin 3,5
7°42'.
Суммарное число зубьев шестерни и колеса находится по следующей формуле (табл. 7.1.3):
2acos/?min 2-130-cos(7°42')
z =-------слв ------------ь----i = 128,8.
2
138
пьр № Глава 3. Передаточные механизмы
Значение zs округляем до целого в сторону уменьшения, а именно zs =128, и рассчитываем число зубьев шестерни и колеса соответственно:
5 128 „„
— =-------= 32 •
, 1 , 1 5
-Z, =128-32 = 96.
О 1
По принятым значениям чисел зубьев следует уточнить передаточное число
и “
96
32
и требуемое значение угла наклона зуба:
z т
s п
Р - arccos
= arccos
2*130
= 1(Г6’.
Диаметры колес (7.1.18):
2а _ 2-130
1 — т 1 — 65 Мм;
2а-и 2-130-3 Т= Z i = 1У5 мм.
Передачу проектируем без смещения, полагая xt = 0 и х2 = 0 .
Расчет коэффициентов динамичности нагрузки
Далее переходим к определению коэффициентов динамичности нагрузки, значения которых зависят от скорости и степени точности изготовления передачи (6.3).
Линейная окружная скорость:
лскп, 3,14-65-210 ,
v =----L-Ц- = —-----з--= 0,71 м/с.
60-Ю3 60-Ю3
По скорости можно выбрать рекомендуемое значение степени точности изготовления Np (7.1.60):
Np = int(l ОД - 0,12v) = int(l ОД - 0,12 • 0,71) = 10.
Поскольку на практике детали изготавливаются со степенью точности не ниже 8-й, то задаем граничное значение Np - 8.
139
3.1. Проектировочный расчет зубчатой цилиндрической косозубой передачи Й... I ........... .............. ..............
Г
Коэффициенты динамичности нагрузки при расчете контактных напряжений KHvn напряжений изгиба KFv рассчитываются по формулам (7.1.62) и (7.1.64) соответственно с учетом (7.1.63) и (7.1.65):
F — 1 4-—14---------~,
2-103^
1 bd,
F -11______Fv l
Fv 2-1037^f/
Здесь
= 0,004 -56-0,71- = 1,054;
V и V 3
0)Fv = 6FgOFv J- = 0,006 • 56 • 0,71 • J— = 1,581.
V и V 3
Значения коэффициентов 5н, 3FgOHgOF следует взять из таблиц 7.1.6 а, Ь. Тогда
„ 1 1,054-52-65
KHv = 1 +----z---------= 1,006 ;
2 -103 - 300 • 1,04
1,581-52-65 1ЛП0
----~---------— LUUo .
2-103 -300 -1,12
Проверка выполнения условия прочности по контактным ‘напряжениям
Условие прочности по контактным напряжениям имеет вид сгн < аНа, где аИ — действующее напряжение в контакте зубьев, а сгНс1 — допускаемое. Проверка выполнения этого условия сводится к определению величины напряжений в (контакте зубьев (7.1.81) и сравнению полученных значений с допускаемыми напряжениями:
= 797МПа,
Л430(3 + 1)? 900-1,05-1,04 1,006
k 130 J 0,4-32
<т„ < ст„ = 804,17 МПа. * Ж J tzf
Следовательно, условие прочности по напряжениям контакта для проектируемой передачи можно считать выполненным.
140
Глава 3. Передаточные механизмы
Проверка выполнения условия прочности по напряжениям изгиба
Вначале определяем приведенное число зубьев (7.1.101) шестерни и колеса: 32
—1 = 33,53;
cos3 10°6')
П 3 о
cos р
96
у — _____2
И2 ” 3 Q
cos р
Пользуясь формулой (7.1.91) для расчета коэффициента формы зуба
= 100,57.
cos
112х2 -154х + 71
для шестерни и
колеса соответственно получаем:
0,93 71
33,53 + 33,5
0,93 71
100,57 + 100,572
Используя полученные величины коэффициентов формы зуба, переходим к расчету напряжений изгиба (7.1.102) и проверке изгибной прочности зубьев:
aubm
где коэффициент учета осевого перекрытия Y0 определяется по формуле 7.1.103, а именно: = 1 - /7/140 = 1 -10,1/140 = 0,928. Тогда для шестерни и колеса соответственно имеем:
103 • 900 • (3 +1) • 1,12 • 1,008 • 1,0 • 3,74 • 0,928 130-3•52•2
= 347,78 <352,94 МПа;
103 • 900 • (3 +1) • 1,12 • 1,008 • 1,0 • 3,59 • 0,928 130-3•52•2
= 333,83 <352,94 МПа.
Как видно из сравнительных соотношений, условие прочности по напряжениям изгиба для проектируемой передачи можно считать выполненным.
V
2
V
3
3.1. Проектировочный расчет зубчатой цилиндрической косозубой передачи
141
Геометрические размеры зубчатой передачи в случае нарезания зубчатых колес без смещения (таблица 7.1.3)
Диаметры делительной и начальной окружностей шестерни d{ и колеса d2:
d. = = 2-32 = 65,00 мм;
1 cos/? cos(10°6')
d2 = = 2-96 = 195 00мм.
2 cos/? cos(10°6')
Диаметры вершин зубьев шестерни daX и колеса da2 ‘
°Ci -d\+ = 65 + 2 • 1 • 2 = 69 мм;
da2 = d2 + ^h*mn —195 + 2 • 1 • 2 = 199 мм. W Х £ W f f
Диаметры впадин зубьев шестерни d и колеса df2:
Jp =<7] -2{Kf +c*)mn = 65-2(1+ 0,25)-2 = 60мм;
df2 = d2-2(h'f+c')mn=195-2-(l + 0,25)-2 = 190MM.
Силы в зацеплении
Нагрузка в контакте зубчатых колес представляет собой нормальную силу, составляющие которой называются окружной Ft, радиальной Fr и осевой Fa проекциями.
Величины этих проекций можно определить по формулам (7.1.56), (7.1.57):
F = 240^^.10^.900 ^^0
' d, 195
А*
/-Iga _ 9230-«20°
l — — — 11}
cos/? cos 10,1°
Fa = F tg/3 = 923 ° • tg\ °Д0 =! 647 H.
Расчет цилиндрической косозубой передачи в модуле АРМ Trans
Расчет передачи в программе АРМ Trans следует проводить следующим образом:
1. Выбрать тип передачи - косозубая внешнего зацепления.
2. Указать тип расчета - проектировочный.
3. Установить стандарт - ГОСТ (меню «База данных»/«Установить стандарт»).
142
Глава 3. Передаточные механизмы
4. Проверить установку параметров исходного коцтура (по умолчанию в меню «База данных»/«Исходный контур» установлен ГОСТ 13755-81 — исходный контур зубчатых цилиндрических колес эвольвентного зацепления).
5. Задать основные исходные данные в полях ввода диалогового окна «Основные данные», рис. 3.1.1.
6. Нажав в нижней части диалогового окна «Основные данные» кнопку «Ещё», ввести в соответствующие поля ввода открывшегося диалогового окна «Дополнительные данные» (рис. 3.1.2) необходимые значения. В данном случае необходимо
Дополнительные данные
Рис. 3.1.1.
включить флажок «Стандартное межосевое расстояние», для того чтобы зна-
Рис. 3.1.2
чение межосевого расстояния выбиралось из стандартного ряда, и задать точное значение твердости поверхности зубьев, использованное при расчете — в противном случае для вида термообработки «Закалка» программой будет принято по умолчанию HRC = 50.
7. Произвести расчет передачи (пункт «Расчет» главного меню).
8. Открыть диалоговое окно «Результаты» и отметить флажка-
Рис. 3.1.3
ми интересующие результаты расчета, рис. 3.1.3.
3.1. Проектировочный расчет зубчатой цилиндрической косозубой передачи
143
Результаты расчета цилиндрической косозубой передачи в АРМ Trans
Заданные параметры:
Передача:
Зацепления:
Тип расчета:
Косозубая Внешнего
Проектировочный
Основные данные
Рабочий режим передачи
Термообработка колес
Шестерня
Колесо
Расположение шестерни на валу
Нереверсивная передача
Момент вращения на ведомом валу, Нм
Частота вращения ведомого вала, об./мин.
Передаточное число
Ресурс, час
Число зацеплений
Тяжелый
Закалка
Закалка Симметричное
900.00
70.00
3.00
10000.00
Шестерня 1
Колесо 1
Результаты АРМ Trans
Таблица 1. Основная геометрия
Описание Символ Шестерня Колесо Единицы
Межосевое расстояние &W 130.001 мм
Модуль m 2.000 мм
Угол наклона зубьев р 10.066 град
Делительный диаметр d 65.000 195.001 мм
Основной диаметр db 60.968 182.905 мм
Начальный диаметр d\v 65.000 195.001 мм
Диаметр вершин зубьев da 69.000 199.001 мм
Диаметр впадин df 60.200 190.201 мм
Коэффициент смещения X 0.000 0.000 1
Высота зубьев h 4.400 4.400 мм
144
Глава 3. Передаточные механизмы
Описание Символ Шестерня Колесо Единицы
Ширина зубчатого венца ь 58.000 54.000 мм
Число зубьев Z 32 96
Таблица 2, Свойства материалов
Описание Символ Шестерня Колесо Единицы
Допускаемые напряжения изгиба CTFa 352.941 352.941 МПа
Допускаемые контактные напряжения ^На 804.167 МПа
Твёрдость рабочих поверхностей 45.0 45.0 HRC
Действующие напряжения изгиба <^Fr 333.636 321.501 МПа
Действующие контактные напряжения Онг 784.292 МПа
Таблица 3. Силы
Описание Символ Шестерня Колесо Единицы
Тангенциальная сила Ft 9230.706 н
Радиальная сила Fr 3465.561 н
Осевая сила Fa 1638.505 н
Расстояние от торца колеса до точки приложения силы В 29.000 мм
Плечо силы < R 32.500 мм
3.2. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЗУБЧАТОЙ КОНИЧЕСКОЙ ОРТОГОНАЛЬНОЙ ПЕРЕДАЧИ С ПРЯМЫМИ ЗУБЬЯМИ
Рассчитать зубчатую коническую прямозубую передачу одноступенчатого редуктора с моментом на выходе Т2 = 900 Н-м.
Частоты вращения входного и выходного валов передачи равны = 210 об/мин и п2 = 70 об/мин соответственно (передаточное число и = 3).
Передача нереверсивная. Шестерня передачи расположена консольно относительно опор. Время безотказной работы t = 10 000 часов в тяжелом режиме нагружения.
Зубчатые колеса изготовлены из стали 40Х, закаленной по поверхности до твердости HRC 45 4- 50, термообработка типа «улучшение» с последующей закалкой ТВЧ по контуру до заявленной твердости.
В качестве параметров исходного контура инструмента принять:
h* = 1 — коэффициент высоты головки зуба;
h*r = 1 — коэффициент высоты ножки зуба;
с = 0,2 — коэффициент радиального зазора;
а = 20° — угол профиля рейки.
Расчет
Определение допускаемых напряжений
Расчет допускаемых напряжений по контакту и по изгибу не зависит от типа зубчатой передачи. Поскольку исходные данные для расчета рассматриваемой конической передачи совпадают с аналогичными данными цилиндрической передачи (п. 3.1), то в качестве допускаемых напряжений можно принять значения, полученные в п. 3.1. Следовательно, имеем:
1. допускаемое напряжение устало'стной прочности по контакту:
аНа =804 МПа;
2. допускаемые напряжения усталостной прочности по напряжениям изгиба:
для шестерни: crFnl = 352,94 МПа;
для колеса: cFa2 = 352,94 МПа.
Расчет геометрии передачи из условия прочности по контактным напряжениям
На этапе проектировочного расчета, как и в п. 3.1, значение коэффициента динамичности нагрузки полагается равным KHv = 1,0.
Коэ
ициент концентрации нагрузки Кн/3 зависит от величины конструктивно-
го коэ4
ициента
Vbd=b/d^ где b
ширина зубчатого венца. В свою оче-
10. Основы проектирования машин
146
Глава 3. Передаточные механизмы
редь, для определения i//ba необходимо задать коэффициент ширины зубчатого венца КЬе = Ы Re, значения которого лежат в диапазоне КЬе = 0,25-5-0,3. Выбираем КЬе = 0,275. Тогда для конструктивного коэффициента у/Ьа с учетом (7.2.7) имеем
у/м=Ы(1х =
6л/1 +W2
2R. С
= 0,275
= 0,435.
Используя данные табл. 7.1.4, для заданного по условию консольного размещения шестерни относительно опор получаем
Кнр = 1,0 + 0,766^w = 1,0 + 0,766 • 0,435 = 1,333.
Аналогично можно определить значение коэффициента концентрации нагрузки при расчете на изгиб KF„. Согласно табл. 7.1.5 запишем
KFp = 1,0 + 1,2^м = 1,0 +1,2 • 0,435 = 1,522.
Внешней диаметр колеса de2 рассчитывается по формуле 7.2.29, полученной из условия прочности по допускаемым контактным напряжениям (7.2.28):
de2 = 970з
М1-о>5^)ЧХ>
= 970
_________900-3-1,333-1________
0,85 (1 - 0,5 • 0,275)2 0,275 • 8042
= 308,02 мм.
где
&н =0,85; б7е] = de2/u = 308,02/3 = 102,67 мм.
Следовательно, внешнее конусное расстояние конического зацепления Re, согласно (7.2.7), равно
102,672 308,022
—-------+--------= 162,34 мм.
Для обеспечения выполнения геометрических и технологических условий изготовления конических передач количество зубьев шестерни вычисляется по следующей формуле, которая носит рекомендательный характер [3, стр. 101]:
(6,25-41gw)
Для рассматриваемых исходных данных получаем
z, = J[22 - 9 Ig3]' + (6,25 - 41g3)^T^ = 19,6. v 645
Й.2, Проектировочный расчет зубчатой конической передачи с прямыми зубьями 1 —............................. -.................—....-..............
147
Поскольку количество зубьев шестерни может быть только целым числом, следовало бы принять z{ = 20. Но, как покажут дальнейшие расчеты, для такого числа зубьев не будет выполняться условие прочности по контактным напряжениям, поэтому число зубьев нужно увеличить: = 21.
Расчетное значение внешнего окружного модуля, согласно 7.2.6, равно d.
Следовательно, для передачи с прямым зубом имеем
102,67
21
= 4,89
мм.
Полученную величину модуля те округляем, принимая ее равной ближайшему значению из нормального ряда (табл. 7.1.2), т. е. в данном случае те = 5. Число зубьев колеса равно z2 = z{ и = 21 • 3 = 63. Зная те = 5, z, и z2, можно получить уточненные значения диаметров шестерни и колеса:
d, = m.z, = 5 • 21 = 105 мм. t- 1
(Ze2 = mezz = 5 • 63 = 315 MM.
Тогда уточненное значение внешнего конусного расстояния конического зацепления равно (7.2.7):
= 166,02 мм,
а значение рабочей ширины колеса:
b = ReKbe = 166,02 • 0,275 = 45,66 мм.
Полученное значение b округляем до целого, т. е. полагаем b = 46 мм.
Теперь необходимо уточнить значение коэффициента ширины зубчатого венца:
= 0,277, 166,02
46
а также пересчитать коэффициенты у/Ьа, Кнр и KFp:
_ д/1 + w2 _ п 71 + 32 _
Vbd ~&ье ~ 0,277 —0,438;
Кнр = 1,0 + 0,766^ bd = 1,0 + 0,766 • 0,438 = 1,336;
KFp = 1,0 + 1,2^м = 1,0 +1,2 • 0,438 = 1,526.
ю*
148
Глава 3. Передаточные механизмы
Среднее конусное расстояние (7.2.8):
R = R- Q,5b = 166,02 - 0,5 • 46 = 143,02 мм. С
Средний окружной модуль (7.2.9):
т = m.R / R. = 5 • 143,02/166,02 = 4,307 мм. С с
Средние делительные диаметры шестерни и колеса (табл. 7.2.1):
б/[ = = 4,307 -21 = 90,45 мм;
d, = mz, = 4,307 • 63 = 271,36 мм.
Угол делительного конуса шестерни (табл. 7.2.1):
= arctg(\/u) = arctg(\/S) = 18,44°.
Угол делительного конуса колеса (табл. 7.2.1):
£2 =90°-18,44° = 71,56°.
Коэффициент смещения инструмента равносмещенной передачи (из 7.2.12 при
х„ = 2(1 -1 / и2 )7cos!^yZ| = 2(1-1/3!)7Г72Т = 0,39;
= -хв| - -0,39. и 1
Расчет коэффициентов динамичности нагрузки
Далее переходим к определению коэффициентов динамичности нагрузки, значения которых зависят от скорости и степени точности изготовления передачи.
Вначале по формуле 6.3 вычисляем линейную окружную скорость у:
МММ
7ldlnl
60-Ю3
3,1416-90,45-210
60-Ю3
= 0,995 м/с.
Исходя из полученного значения скорости, можно выбрать рекомендуемую степень точности изготовленияNp (7.1.60):
Np = int(l 0,1 - 0,2v) = int(l 0,1 - 0,2 • 0,91) = 9.
Поскольку на практике детали изготавливаются со степенью точности не ниже 8-й, то задаем граничное значение Np = 8.
Коэффициенты динамичности нагрузки при расчете контактных напряжений и напряжений изгиба, KHv и KFv, рассчитываются по формулам (7.1.62) и (7.1.64) соответственно с учетом (7.1.63) и (7.1.65) и таблиц 7.1.6 а, Ь:
3.2. Проектировочный расчет зубчатой конической передачи с прямыми зубьями
149
где
a>Fvb •
2Atfl\KFp
! , <°нуЬ 4
2 103 ’
£• 1^1 ^2 Л Л1 Л f 1 ГХ СХСХЕ 90,45 Ч~ 27 1536
(°HV = 5hSohv\\—^----= 0,014- 61 • 0,995 • ---—------= 6,596,
V 2и V 2-3
/с^+й^ , Д1 по, /82,08 + 254,88
a>Fv ~ ^fSofv\\—г--= 0,016 • 61 • 0,91 • J-—--= 7,538.
V 2и V 2•3
Тогда
, , 6,596-46-90,45 _ 1П0/|.
Hv 2-103-300-1,336 ’
^=1+^38-46-90,45 = 2-103-300-1,526
Проверка условия прочности по контактным напряжениям
Проверка сводится к определению величины действующего напряжения в контакте зубьев с н и сравнению его с полученным значением допускаемого напряжения аНа.
Действующее напряжение (7.2.27):
900-3-1,336-1,034
0,85-3153-0,277
= 784 МПа.
Очевидно, что при таком значении действующего напряжения условие прочности по контакту (7.2.28) оказывается выполненным,
<т„ < сг„ = 804 МПа. Г1 Г10
Проверка условия прочности по напряжениям изгиба
Пользуясь формулой (7.1.91) для расчета коэффициент формы зуба YF,
112х2 ~154х + 71
J
2
V
V
где zv — приведенное число зубьев (7.2.32),
150
Глава 3. Передаточные механизмы
=-----------= 22,136, zv2 = =-----—-----= 199,223,
cosJ. cos 18,44° cos cos 71,56°
для шестерни и колеса соответственно получаем:
„ 2,8-0,39 + 0,93 112-0,392-154-0,39 + 71
22,136
22,1362
112(-0,39)2 -154(-0,39) + 71
199,223
199,2232
= 3,616.
Используя полученные величины коэффициентов формы зуба, переходим к расчету напряжений изгиба (7.2.33) и проверке изгибной прочности зубьев:
&Fd2bm
J
T2KF„KFvYF{ 2-IO3-900-1,526-1,034-3,477 1O. w<rT
-----l~= Mila;
&Fd2bm 0,85-271,36-46-4,307
FflKFvYF2 2-103-900-1,526-1,034-3,616 1Q/1 wrT
—------------------------------------= 194 МПа;
0,85-271,36-46-4,307
F2 &Fd2bm
Поскольку
crF1 <crFal =352,94 МПа, aF2 <crFa2 =352,94 МПа,
то условие прочности на изгиб можно считать выполненным.
Результаты геометрического расчета рассматриваемой передачи сведены в таблицу 3.2.1.
Геометрический расчет передачи
Таблица 3.2.1
Условные обозначения, расчетные формулы и величины основных
геометрических параметров ортогональной зубчатой конической передачи с прямыми зубьями
Параметр Обозначение, расчетная формула и величина
Число зубьев плоского колеса zs = д/z2 +z2 = V2I2 + 632 = 66,41
Внешний окружной модуль, мм т. = 5 С
3.2. Проектировочный расчет зубчатой конической передачи с прямыми зубьями
151
Параметр Обозначение, расчетная формула и величина
Внешнее конусное расстояние, мм R. = 0,5w.z. = 0,5 • 5 • 66 = 166,02 С ' с «э s
Ширина зубчатого венца, мм b = 46
Коэффициент ширины Кы = b[Re = 46/166,02 = 0,277
Среднее конусное расстояние, мм R = Re - 0,5Z> = 166,02 - 0,5 • 46 = 143,02
Средний окружной модуль, мм т = meR/Re = 5 • 143,02 /166,02 = 4,307
Средний делительный диаметр, мм Шестерня dx = mzx =4,307-21 = 90,45
Колесо d2 = mz, = 4,307 • 63 = 271,36
Передаточное число w = z2/zj — 63/ 21 = 3
Угол делительного конуса Шестерня 3X — arctg(\./u) = arc/g(l/3) = 18,44°
Колесо 3, =90°-8. =90° -18,44° =71,56° MX *
Коэффицинт смещения Шестерня Xi =0,39 — по формуле (7.2.12)
Колесо x2 = -0,39
Внешняя высота головки зуба, мм Шестерня hae\ = + xei )me = (1 + 0,39)- 5 = 6,95
Колесо hae2 = (h'a + Xe2M = (1 ~ 0,39) - 5 = 3,05
Внешняя высота ножки зуба, мм Шестерня v hfeX = (Л* + c* - xel )me = (1 + 0,2 - 0,39) • 5 = 4,05
Колесо hfe2 = + ca - xe2 }me = (1 + 0,2 + 0,39) • 5 = 7,95
Внешняя высота зуба, мм Шестерня h., =6,95 + 4,05 = 11
Колесо he2 = + hfe2 = 3,05 + 7,95 = 11
Внешняя окружная толщина зубьев, мм Шестерня sel = (0,5я- + 2 • 0,39/g20° )• 5 = 9,273
Колесо se2 = (0,5л- - 2 • 0,39 • Zg20° )• 5 = 6,434
Угол ножки зубьев Шестерня 0fX - arctg[hfeX[R.e} - arctg(4di5—1,397°
Колесо 0/2 = arctg{hfe2!= arctg (7,95/166,02^ = 2,742°
I
152
Глава 3. Передаточные механизмы
Силы в зацеплении
Нагрузка в контакте зубчатых колес представляет собой нормальную силу, составляющие которой называются окружной Ft, радиальной Fr и осевой Fa проекциями. Величины этих проекций можно определить по формулам (7.2.15): окружная сила
2
2-103-900 „„„
----------= 6633 Н;
271,36
радиальная сила на шестерне
= Fttga • cos <5] = 6633-^20° cos 18,44“ = 2290 H;
осевая сила на шестерне
Ffll = Ft tga • sin 8V = 6633 -/g20° sin 18,44° =763,5H.
радиальная и осевая силы на колесе
3.2. Проектировочный расчет зубчатой конической передачи с прямыми зубьями
153
Расчет конической передачи с прямым зубом в модуле
АРМ Trans
Порядок расчета конической прямозубой передачи в программе АРМ Trans принципиально не отличается от расчета цилиндрической косозубой передачи (см. главу 3.1). Диалоговое окно «Основные данные» имеет вид, аналогичный изображенному на рис. 3.1.1, с той лишь разницей, что при расчете конических передач
отсутствует такой параметр, как число зацеплений.
Вид диалогового окна «Дополнительные параметры»' показан на рис. 3.2.1. Для корректного проведения расчета необходимо указать значения твердости поверхностей зубьев шестерни и колеса.
После нажатия кнопки «Продолжить» программа выдаст запросы о том, действительно ли коэффициент смещения шестерни %] и коэффициент изменения толщины зуба хг должны иметь нулевые значения. В рассматриваемом случае на первый вопрос следует ответить «Нет» (в данной задаче х, Ф 0), а на второй «Да», так как коэффициент изменения толщины зуба при проведении расчета не учитывался, т. е. было принято хт = 0 . >
Необходимо также указать параметры исходного контура. Это можно сделать в диалоговом окне (меню «База дан-ных»/«Исходный контур»), выбрав один из следующих ГОСТ:
• ГОСТ 13754-81— исходный контур конических зубчатых колес с прямыми зубьями;
• ГОСТ 16202-81 — исходный контур конических зубчатых колес с круговыми зубьями.
В данном случае процедуру вычислений следует выполнить в соответствии с ГОСТ 13754-81.
На рис. 3.2.2 показано окно результатов расчета рассматриваемой кониче-
Рис. 3.2.1
Рис. 3.2.2
154
Глава 3. Передаточные механизмы
ской передачи. Флажками отмечены те параметры, результаты расчета которых в данном случае необходимо просмотреть. Эти результаты приведены ниже.
Заданные параметры
Передача: Коническая прямозубая
Тип расчета: Проектировочный
Основные данные
Стандарт ГОСТ
Исходный контур ГОСТ 13754-81
Рабочий режим передачи Тяжелый
Термообработка колес
Шестерня Закалка
Колесо Закалка
Тип опоры вала шестерни Не выбран
Нереверсивная передача
Момент вращения на ведомом валу, Нм 900.00
Частота вращения ведомого вала, об./мин. 70.00
Передаточное число 3.00
Ресурс, час 10000.00
Результаты АРМ Trans
Таблица 1, Основная геометрия
Описание Символ Шестерня Колесо Единицы
Число зубьев Z 21 63 —
Средний угол наклона линии зубьев ₽ 0.000 град
Внешний делительный диаметр de 105.000 315.000 ММ
Средний делительный диаметр d 90.454 271.361 мм
Коэффициент смещения X 0.390 -0.390 '
У гол делительного конуса 5 18.435 71.565 град
Средний окружной модуль m 4.307 мм
Внешний окружной модуль me 5.000 мм
Внешнее конусное расстояние Re 166.020 мм
Среднее конусное расстояние R 143.020 мм
Ширина зубчатого венца b 46.000 мм
3.2. Проектировочный расчет зубчатой конической передачи с прямыми зубьями
155
Таблица 2, Свойства материалов
Описание Символ Шестерня Колесо Единицы
Допускаемые напряжения изгиба 352.941 352.941 МПа
Допускаемые контактные напряжения Она 804.167 МПа
Твёрдость рабочих поверхностей 45.000 45.000 HRC
Действующие напряжения изгиба Орг 187.348 194.874 МПа
Действующие контактные напряжения стНг 786.392 МПа
Таблица 3, Силы
Описание Символ Шестерня Колесо Единицы
Тангенциальная сила Ft 6633.241
Расстояние от торца колеса до точки приложения силы L 23.000 мм
Плечо приложения равнодействующей силы R 45.227 мм
Осевая сила Fa 763.532 0.000 Н
Радиальная сила Fr 2290.595 0.000
Таблица 4. Геометрические параметры
Описание х Символ Шестерня Колесо Единицы
Внешний диаметр вершин ^ае 118.187 316.929 мм
Внешняя высота головки зубьев hae 6.950 3.050 мм
Внешняя высота ножки зубьев hfe 4.050 7.950 мм
Внешняя высота зубьев he 11.000 11.000 мм
Внешняя толщина зубьев se 9.444 6.264 мм
Угол головки зубьев 0a 2.742 1.397 град
Угол ножки зубьев 0f 1.397 2.742 град
Угол конуса вершин 8a 21.177 72.962 град
Угол конуса впадин 8f 17.038 68.823 град
Расстояние от вершины конуса до плоскости вершин зубьев В 155.302 49.607 мм
3.3. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЗУБЧАТОЙ КОНИЧЕСКОЙ ОРТОГОНАЛЬНОЙ ПЕРЕДАЧИ С КРУГОВЫМИ ЗУБЬЯМИ
Рассчитать зубчатую коническую передачу с круговыми зубьями для одноступенчатого редуктора с моментом на выходе Г2 - 900 Нм.
Частоты вращения входного и выходного валов передачи равны пх =210 об/мин и и2 = 70 об/мин соответственно ( передаточное число и — 3 ).
Конические колеса соответствуют осевой форме 1. Угол наклона зуба в среднем сечении /Зп = 35°.
Передача нереверсивная. Шестерня передачи относительно опор расположена консольно. Время безотказной работы /-10 ООО часов в тяжелом режиме нагружения.
Зубчатые колеса изготовлены из стали 40Х, закаленной по поверхности до твердости HRC 45 4-50, термообработка типа «улучшение» с последующей закалкой ТВЧ по контуру до заявленной твердости.
В качестве параметров исходного контура инструмента принять:
/г* - 1 — коэффициент высоты головки зуба;
йу- = 1 — коэффициент высоты ножки зуба;
с = 0,25 — коэффициент радиального зазора;
а - 20° -— угол профиля рейки.
Расчет
Определение допускаемых напряжений
Расчет допускаемых напряжений по контакту и по изгибу не зависит от типа зубчатой передачи. Поскольку исходные данные для расчета рассматриваемой конической передачи с круговыми зубьями совпадают с аналогичными данными цилиндрической передачи (п. 3.1) и конической передачи с прямыми зубьями (п. 3.2), то в качестве допускаемых напряжений будем принимать значения, полученные в п.п. 3.1—3.2. Тогда
1. допускаемое напряжение усталостной прочности по контакту:
= 804 МПа;
Г1в '
2. допускаемые напряжения усталостной прочности по напряжениям изгиба:
для шестерни: aFa{ = 352,94 МПа;
для колеса: = 352,94 МПа.
Расчет геометрии передачи из условия прочности по контактным напряжениям.
На этапе проектировочного расчета значение коэффициента динамичности нагрузки принимаем равным KHv = 1,0.
3.3. Проектировочный расчет зубчатой конической передачи с круговыми зубьями
157
Для определения коэффициента концентрации нагрузки Кнр необходимо предварительно вычислить величину конструктивного коэффициента , зависящую от коэффициента ширины зубчатого венца КЬе = Ь/ Re, Поскольку значения КЪе лежат в диапазоне КЬе = 0,25 = 0,3, выбираем КЬе = 0,275. Конструктивный коэффициент у/Ьа с учетом (7.2.7) равен
_ , / , _ b^ll + u2 _ д/1 + w2 _ n л/1 + 32 _
^bd -bl dx - —— - КЬе - - 0,275 - - 0,435.
Z/v, Z Z
Используя данные табл. 7.1.4, для заданного в условии консольного размещения шестерни относительно опор получаем
Кид = U0 + 0,766^ = 1,0 + 0,766 • 0,435 - 1,333.
Аналогично можно определить значение коэффициента концентрации нагрузки при расчете на изгиб KF$. Согласно табл. 7.1.5 запишем
KFp = 1,0 + 1,2^м = 1,0 +1,2 • 0,435 = 1,522.
Внешний диаметр колеса de2 рассчитывается по формуле 7.2.31, полученной из условия прочности по допускаемым контактным напряжениям, аналогичного (7.2.28), с той лишь разницей, что повышенная по отношению к прямозубым передачам прочность учитывается введением иного по величине поправочного коэффициента &и. При заданной в условии твердости зубьев в качестве расчетного принимаем следующее значение :
= 0,81 + 0,15w = 1,26 .
Тогда ____________________________ \
, 07П | T2uKHpKHv | 900-3-1,333-1
и— 970 з-------------?-------= 970 з I--------------2----------=
Vh (1 - 0’ 5Kbe) V1,26(1 - 0,5 • 0,275) 0,275 • 8042
= 270,15 мм;
gL = / и = 270,15 / 3 = 90,05 мм.
Внешнее конусное расстояние конического зацепления и рабочая ширина колес:
=142,38 мм;
b = RK. = 142,38 • 0,275 = 39,15 мм.
Для обеспечения выполнения геометрических и технологических условий изготовления конических передач количество зубьев шестерни следует вычислять по формуле [3, стр. 101]:
158
Глава 3. Передаточные механизмы
sin2
(б,25 - 41g w)
d2
645
После подстановки исходных данных получаем
(6,25-41g 3)
90,052
645
= 14,282.
Поскольку количество зубьев может быть только целым числом, принимаем Z] = 15; z2 = 15 • 3 = 45 .
Расчетное значение внешнего окружного модуля:
90,05
15
= 6,003
Полученное значение округляем до ближайшего из нормального ряда (табл.
7.1.2) , т. е. полагаем mte = 6.
После этого уточним диаметры шестерни и колеса:
б7е1 = mtezx = 6 • 15 = 90 мм;
<7е2 = mtez2 = 6 • 45 = 270 мм.
Уточненное значение внешнего конусного расстояния:
Ширина обода колеса:
b = RK. = 142,30 • 0,275 = 39,1 мм. и и
Если округлить значение ширины колеса до ближайшего целого числа, b = 40 мм, то, как показывают дальнейшие расчеты, не выполняется условие прочности по контактным напряжениям. Поэтому ширину колеса следует сразу несколько увеличить: b = 42 мм.
Уточняем значения коэффициента относительной ширины и коэффициента ширины зубчатого венца:
b 42
= 0,467;
90
be
42
142,30
= 0,295.
3.3. Проектировочный расчет зубчатой конической передачи с круговыми зубьями
159
Пересчитываем коэффициенты Кн„ и KF„:
Кнр = 1,0 + 0,766^м = 1,0 + 0,766 • 0,467 = 1,357;
KFp = 1,0 + 1,2^м = 1,0 +1,2 • 0,467 = 1,56.
Среднее конусное расстояние (табл. 7.2.2):
R = Re - 0,5& = 142,30 - 0,5 • 42 = 121,30 мм.
Число зубьев плоского колеса:
= ^lzi + zl = л/152 +452 = 47,43.
Средний нормальный модуль:
42 '
47,43>
cos 35° = 4,19 мм.
Средний делительный диаметр шестерни:
4=-^-созД
4,19-15
cos35°
= 76,72 мм;
Средний делительный диаметр колеса:
mnZ2
cos/7„
4,19-45
cos35°
- 230,16 мм.
Угол делительного конуса шестерни:
<5>! = arctg(l/u) = arctg(l/3) = 18,44°.
Угол делительного конуса колеса:
62 =90° -18,44° =71,56°.
Коэффициент смещения инструмента равносмещенной передачи (7.2.12): хп1 = 2(1 -1 / и2 \/cos3= 2(1 -1 / 32 )\/cos3 35° /15 = 0,34;
е1 “ -0,34 .
Расчет коэффициентов динамичности нагрузки
Коэффициенты динамичности нагрузки зависят от скорости и степени точности изготовления передачи.
Линейная окружная скорость v (6.3):
160
Глава 3. Передаточные механизмы
ж/.и, 3,1416-76,72-210 ЛОЛ/1 ,
v =---1—1— = _2--------------= 0,844 м/с.
60-Ю3 60-Ю3
Степень точности изготовления передачи Np (7.1.60):
Np = int(10,l - 0,12v) = int(10,l - 0,12 • 0,844) = 9.
Но, поскольку на практике детали не изготавливаются со степенью точности ниже 8-й, то для дальнейших расчетов принимаем Np = 8.
Коэффициенты динамичности нагрузки при расчете контактных напряжений KHv и напряжений изгиба KFv рассчитываются по формулам (7.1.62) и (7.1.64) соответственно с учетом (7.1.63) и (7.1.65) и таблиц 7.1.6 а,Ь:
Hv
Hv
2-Ю3^/
2-10^^
где
«Hv
----1- = 0,004 -61 -0,844 • 2w
76,72 + 230,16 _
- /X 5
«fv = ^fSofv\\~----= W ’ 61 • 0,844 •
v 2w
76,72 + 230,16 --------------= 2,208.
Окончательно для KHv и KFv получаем:
„ , 1,472-42-76,72 . ЛЛ.
К,., = 1 + ——--------— = 1,006;
2-103 - 3 00-1,3 5 7
v _ 1 2,208- 42 • 76,72
Ап — Ц-------;---------— l.UUo .
Fv 2-Ю3-300-1,56
Проверка условия прочности по контактным напряжениям
Определяем величину действующего в контакте зубьев напряжения (7.2.30):
ЗЮ4 lr2uKfl/>Kf/, _ ЗЮ4 /900-3-1,357-1,006 __
а" ~ (1 -0,5Kbe) \ &d3e2Kbe ~ (1-0,5 -0,295) V 1,26-2703-0,295
= 790 МПа.
Поскольку действующее напряжение меньше допускаемого, сгн < сгНа = 804 МПа, условие контактной прочности (7.2.28) выполнено.
3.3. Проектировочный расчет зубчатой конической передачи с круговыми зубьями
161
Проверка условия прочности по напряжениям изгиба
Проверку начинаем с определения приведенного числа зубьев шестерни zvx и колеса zvx (7.2.34):
zv\
z\
COS^] COS3
_________15 cos 18,44° - cos3 35°
______Z2_______
cos<52 COS3 Pn
42 cos 71,56°-cos3 35°
259.
Коэффициенты формы зуба шестерни YFX и колеса YF2 (7.1.91):
2,8х + 0,93 112х2 -154х + 71
2,8-0,34 + 0,93 112 • 0,342 -154-0,34 + 71^
2,8 (-0,34) + 0,93 112-(-0,34)2 -154 -(-0,34) + 7Р
259 259
= 3,61.
Числовой коэффициент изменения нагрузочной способности по изгибу &р для заданной в условии твердости зубьев равен (7.2.35)
&F = 0,65 + 0,1 lw = 0,98 .
Пользуясь полученными величинами коэффициентов формы зуба и изменения нагрузочной способности, рассчитываем действующее напряжение изгиба (7.2.35) и проверяем выполнение условия изгибной прочности зубьев:
2 • 10! T2KFfKnYp
<тр =---------------;
&Fd2bm
г z
2A^T2KFpKFvYp] &Fd2bmte
2-Ю3-900-1,56-1,006-3,5
0,98-230,16-42-6
= 174,31 МПа;
2
2QQQT2KFpKFvYF2 7*^* — - _ _ _ ”
Q -
SFd2bmte
2000-900-1,56-1,008-3,61
0,98-230,16-42-6
= 179,58 МПа;
Видно, что
<TF1 <<TFal =352,94 МПа;
сгР2 < сгРп2 = 352,94МПа. Г Z Г <72 '
Следовательно, условие прочности на изгиб также выполняется.
11. Основы проектирования машин
162
Глава 3. Передаточные механизмы
Результаты геометрического расчета заданной передачи приведены в таблице
Геометрический расчет передачи
Таблица 3.3.1
Условные обозначения, расчетные формулы и величины
основных геометрических параметров
ортогональной конической зубчатой передачи
с круговыми зубьями, изготовленными по форме 1
Параметр
Обозначения и расчетные формулы
Число зубьев плоского колеса
zs = Jzf + z2 = 7152 + 452 = 47,43
Среднее конусное расстояние, мм
R = R- 0,5b = 142,30 - 0,5 • 42 = 121,30
Внешнее конусное расстояние, мм
Ширина зубчатого венца, мм
Коэффициент ширины
R =142,30
b = 42
Kbe=b!Re= 42/142,30 = 0,295
Средний нормальный модуль зубьев, мм
тп = 4,19
Передаточное число
u = zjz, =45/15 = 3
Угол делительного конуса
Шестерня
Колесо'
=18,44°
32 =71,56°
Коэффициент смещения
Шестерня
хп1 = 0,34
Колесо
Хп2 = ~°>34
Внешний окружной модуль, мм
т. = 6 £ &
Шестерня
Высота ножки зуба в среднем сечении, мм
Колесо
hfi=\h*a+c -хпХ]тп =
= (1 + 0,25-0,34)-4,19 = 3,813
Л/2 = (Ло* + с* - х„2 )т„ =
= (1 + 0,25+ 0,34)-4,19 = 6,661
Нормальная толщина зуба в среднем сечении, мм
Шестерня
5„, = (0,5л+ 2xnltga„)mn = (0,5я- - 2 • 0,34 • tg35°) • 4,19 = 4,618
3.3. Проектировочный расчет зубчатой конической передачи с круговыми зубьями
163
Параметр
1 I ........ J 1 1 ..... .....
Нормальная
толщина зуба Колесо
в среднем сечении, мм
Обозначения и расчетные формулы
зп2 = лтп ~sn\ = ^ • 4,19 - 4,618 = 5,544
Шестерня
ол = arctg(hfi/R) = arctg(3,813/121,30) = 1,8°
Угол ножки зубьев
Колесо 0f2 = arctg(6,661/121,30) — 3,14
Шестерня = 3,14°
Угол головки зубьев
Колесо 0а2 = = 1,8°
Увеличение высоты головки зуба при переходе от среднего сечения на внешний торец, мм Увеличение высоты ножки зуба при переходе от среднего сечения на внешний торец, мм
Высота головки зуба в среднем сечении
Шестерня
ЛЛае, = Q,5b-tg0ai = 0,5 • 42 -tg 3,14° =1,153
Колесо khae2 = 0,5b tg0a2 = 0,5 • 42 • tg 3,14° = 0,66
Шестерня
Колесо
Шестерня
ДЛ ,е1 = 0,5Z> • tg0fx = 0,5 • 42 • tg 1,8° = 0,66
= 0,5-42-#3,14° =1,153
ha\ = te + = (to + 0,34)- 4,19 = 5,614
Внешняя высота головки зуба, мм
Колесо
---——
Шестерня
ha2 = fe + = (h0 - 0,34). 4,19 = 2,765
haei =hai+Mael =5,614 + 1,153 = 6,767
Колесо hae2 — ha2 + ^hae2 — 2,765 + 0,66 — 3,425
Внешняя высота ножки зуба, мм
Шестерня
^#1
= hfK + = 3,813 + 0,66 = 4,473
Колесо
hjel
= й,2 +Дй,2 =6,661 + 1,153 = 7,815 j 2 7е £
Внешняя высота зуба, мм
Шестерня heK = haei + — 6,767 + 4,473 — 11,24
Колесо he2 - hae2 +hfe2 = 3,425 + 7,814 = 11,24
Шестерня dai =S{ + 0ai =18,44° +3,14° =21,58°
Угол конуса вершин
Колесо
5 , = + 0п, = 71,56° +1,8° = 73,36°
С4 w ** £4
11*
164
Глава 3. Передаточные механизмы
Параметр Обозначения и расчетные формулы
Угол конуса впадин Шестерня 8fx'=8{ -0Л =18,44° -1,8° =16,64°
Колесо 8„ =8, -0f2 =71,56° -3,14° =68,42° у Z Z J z
Средний делительный диаметр, мм Шестерня d = = Ш'.1.5 = 76,72 cos/7„ cos 35°
Колесо m 419* 45 d = ZVl = = 230,16 cos Д, cos 35°
в Внешний делительный диаметр, мм Шестерня d, = w,P^i = 6-15 = 90
Колесо d 2 = = 6 • 45 = 270 C Z f cT Z
Внешний диаметр вершин, мм Шестерня dae\ = del + 2hael cos 8r = = 90 + 2 • 6,767 • cos 18,44° = 102,84
Колесо 8aei = de2 + 2hae2 cos 82 = = 270+ 2-3,425-cos 71,56° =272,17
Коэффициент осевого перекрытия = 6 sin Д, = 42-sin35° p nmn 3,1416-4,19 ’
Силы в зацеплении
Нормальная нагрузка в контакте зубьев колес может быть представлена в виде проекций на три взаимно перпендикулярных направления. Как и в случае цилиндрических передач, компоненты общего усилия в зацеплении представляются как окружная F{, радиальная Fr п осевая Fa составляющие.
Величину окружной составляющей силы в зацеплении конических колес можно рассчитать как
2.900.10-=Ж1Н d2 230,16
Значения других составляющих общего усилия в контакте принципиально отличаются от аналогичных значений для прямозубых колес, поскольку зависят от направлений вращения колес и линии наклона зуба.
3.3, Проектировочный расчет зубчатой конической передачи с круговыми зубьями
165
Если направление линии зуба правое, а шестерня вращается по часовой стрелке (либо направление левое, а шестерня вращается против часовой стрелки), тогда
cos/9„
(tga sin <5j + sin pn cos <5j) =
(tg20° • sin 18,44° + sin35° • cos 18,44°) =
cos35°v ’
= 6294 H;
.Z§-22.-(/g2O° cos 18,44° - sin35° sin 18,44°) =
cos35°v }
cos/7„ = 1565 H.
Если направление зуба правое, а шестерня вращается против часовой стрелки (направление левое, а шестерня вращается по часовой стрелке), то
'n ~ —ug<zsin<£ - sir cos/?„
7821
—------(zg20° -sin 18,44°
cos35°V
' t COS#,
7821
-------(&20° cos 18,44° + sin 35° sin 18,44°) =
cos35°v ’
Расчет конической передачи с прямым зубом в модуле АРМ Trans
Расчет конической передачи с круговым зубом в модуле АРМ Trans проводится так же, как и расчет передачи с прямым зубом. Необходимо лишь в менк «База данных»/«Исходный контур» задать нужный ГОСТ для исходного контура (в данном случае это ГОСТ 16202-81) и указать осевую форму зуба (при менительно к данной задаче— форма 1) в диалоговом окне «Дополнительны* параметры».
Ниже приведены результаты расчета заданной конической передачи, получен ные с помощью программы АРМ Trans.
Заданные параметры
Передача:
Тип расчета:
Коническая с круговым зубом
Проектировочный
166
Глава 3. Передаточные механизмы
Основные данные
Стандарт ГОСТ
Исходный контур ГОСТ 16202-81
Рабочий режим передачи Тяжелый
Термообработка колес
Шестерня Закалка
Колесо Закалка
Тип опоры вала шестерни Не выбран
Нереверсивная передача
Момент вращения на ведомом валу, Нм 900.00
Частота вращения ведомого вала, об./мин. 70,00
Передаточное число 3.00
Ресурс, час 10000.00
Результаты АРМ Trans
Таблица 1. Основная геометрия
Описание Символ Шестерня Колесо Единицы
Число зубьев Z 15 45 —
Средний угол наклона линии зубьев 35.000 град
Внешний делительный диаметр de 90.000 270.000 мм
Средний делительный диаметр d 76.718 230.155 мм
Коэффициент смещения v Xn 0.340 -0.340
Угол делительного конуса 8 18.435 71.565 град
Средний окружной модуль mn 4.190 мм
Внешний окружной модуль me 6.000 .... мм
Внешнее конусное расстояние Re 142.302 мм
Среднее конусное расстояние R 121.302 мм
Ширина зубчатого венца b 42.000 мм
Таблица 2. Свойства материалов
Описание Символ Шестерня Колесо Единицы
Допускаемые напряжения изгиба Сфа 352.941 352.941 МПа
Допускаемые контактные напряжения &На 804.167 МПа
Твёрдость рабочих поверхностей 45.000 45.000 HRC
3.3. Проектировочный расчет зубчатой конической передачи с круговыми зубьями
167
Описание Символ Шестерня Колесо Единицы
Действующие напряжения изгиба 177.194 182.544 МПа
Действующие контактные напряжения ОНг 797.054 МПа
Таблица 3. Силы
Описание Символ Шестерня Колесо Единицы
Тангенциальная сила Ft 7820.806 Н
Расстояние от торца колеса до точки приложения силы L 21.000 мм
Плечо приложения равнодействующей силы R 38.359 мм
Осевая сила Fa 6291.709 -4095.546 Н
Радиальная сила Fr 1563.034 5025.453 Н
Таблица 4. Геометрические параметры
Описание Символ Шестерня Колесо Единицы
Внешний диаметр вершин dae 102.840 272.166 мм
Внешняя высота головки зубьев Йае 6.767 3.425 мм
Внешняя высота ножки зубьев hfe 4.473 7.815 мм
Внешняя высота зубьев he 11.240 11.240 мм
Внешняя толщина зубьев Sn 8.049 5.113 мм
У гол головки зубьев 0a 3.143 1.800 град
Угол ножки зубьев Of 1.800 3.143 град
Угол конуса вершин 8a 21.578 73.365 град
Угол конуса впадин 8f 16.635 68.422 град
Расстояние от вершины конуса до плоскости вершин зубьев в 132.860 41.751 мм
3.4. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ
Рассчитать червячную передачу с архимедовым червяком, предназначенную для передачи крутящего момента с моментом на выходе Т2 =1000 Н-м. Частота вращения на выходе п2 = 30 об/мин, передаточное число и = 32.
Время безотказной работы передачи — t — 30 000 часов. Режим работы — тяжелый. Температура окружающей среды /0 = 20°.
Материал червячного колеса: бронза Бр ОЮФ1 (предел прочности <УЬ = 245 МПа, предел текучести сгг =160 МПа).
Материал червяка: сталь закаленная и шлифованная ТВЧ до твердости 45 4- 50 HRC.
В качестве параметров исходного контура инструмента принять:
h *а = 1 — коэффициент высоты головки зуба;
* —
с = 0,2 —- коэффициент радиального зазора;
а = 20° — угол профиля рейки.
Расчет
Определение допускаемых напряжений
Частота вращения входного вала
П] = п2 и = 30 • 32 = 960 об/мин.
Ориентировочное значение скорости скольжения можно определить по рекомендованной формуле:
v =4,5-10'4 пЛ[7\ = 0,00045 • 960 • V1000 = 4,32 м/с.
Общее число циклов нагружения червячного колеса (7.1.104):
N = 60/и, = 60 • 30000 • 30 = 5,4 • 107.
Значения коэффициентов приведения по контакту КНе и по изгибу KFe берем из таблицы 7.3.7, учитывая тяжелый режим работы передачи:
0,416;
^е = 0,2.
Эквивалентное число циклов нагружения по контактным напряжениям:
NHe2 =МгКНе =5,4-107- 0,416 = 2,246-107.
Эквивалентное число циклов нагружения по напряжениям изгиба:
NFe2 = N2KFe = 5,4 • 107 • 0,2 = 1,08 • 107.
3.4. Проектировочный расчет червячной передачи
169
Допускаемое контактное напряжение колеса сгНа для колес из бронзы с содержанием олова при твердости поверхности витков червяка HRC > 45 проводится по формуле 7.3.42:
107 107
сг„ = 0,9сг. § —— = 0,9 • 245 •«---------- = 199,29 МПа.
V^2 у2,246-107
После этого проверяется условие попадания полученных напряжений в рекомендованный диапазон 0,55сг6 < < 0,95сг6, который определяет область при-
менимости формулы 7.3.42. Очевидно, что в данном случае неравенство оказывается выполненным:
134,75 <199,29 <232,75.
Если рассчитанное значение допускаемого напряжения выходит за одну из границ указанной области, то в качестве допускаемого напряжения следует принимать граничное значение этой области.
Допускаемое напряжение изгиба колеса crFa (7.3.44):
(0,44сгг + 0,14ab) Г10®~ (0,44160 + 0,14245) I 106
—............. 91---- —----------------.9-------— =
a SF \NFe 1,75 \ 1,08-107
= 45,93 МПа.
Определение величины межосевого расстояния из расчета прочности по контактным напряжениям
Предварительный расчет межосевого расстояния а из условия прочности по контактным напряжениям с учетом того, что передача нарезана без смещения, можно выполнить по формуле 7.3.38:
5300
Согласно существующим рекомендациям, для коэффициента диаметра червяка справедливо соотношение как q = 0,25z2, а произведение коэффициентов концентрации и динамичности нагрузки допустимо положить равным КнрК№> = 1 • ТогДа
Т 1000
а = 610з -4- =610-3 -^^ =178,8мм.
V < V 99,292
170
Глава 3. Передаточные механизмы
Полученную величину межосевого расстояния округляем в большую сторону до ближайшего значения из нормального ряда чисел R20, выбирая а = 180 мм.
Далее с помощью таблицы 7.3.2 определяем число заходов червяка, которое для данной передачи, имеющей передаточное число и - 32 > 30, равно zx = 1.
Количество зубьев колеса при выбранной заходности червяка:
z2 = zx и = 1 ’ 32 = 32 .
Определение значения модуля
Ориентировочное значение модуля т можно определить, если, как и ранее, принять # = 0,25z2, а межосевое расстояние а рассчитать по формуле 7.3.9, справедливой для передач без смещения исходного контура. Тогда имеем:
2а 2а \Да 1,6 • 180
Окончательно в качестве значения модуля выбирается ближайшая к рассчитанной величина из нормального ряда (табл. 7.1.2), т. е. т = 8 .
Некоторые геометрические размеры червячной передачи
После определения основных геометрических параметров (а , т и z2) необходимо уточнить коэффициент диаметра червяка q. Предварительно вычисляем его по формуле 7.3.9,
2а - z2m 2*180-32-8 — = = 13, т------------8
а затем в качестве коэффициента диаметра принимаем ближайшее значение из стандартного ряда 7.3.2, q ~ 12,5.
Округленным значениям а, т и q будет соответствовать передача со смещением (7.3.13)
a-0,5m(z2+q) 180-0,5-8(32 + 12,5) т 8
= 0,25.
Замечание Л Диапазон допустимых значений коэффициента смещения х ограничен, — 1 < х < 1. Если при расчете это условие не выполняется, то следует варьировать параметры а, т и q до получения нужного значения х, принадлежащего указанному диапазону.
Замечание 2, При наличии смещения делительный диаметр не совпадает с начальным. В дальнейшем для обозначения величин, связанных с начальным диаметром, используется индекс W.
3.4. Проектировочный расчет червячной передачи
171
Угол подъема винтовой линии на начальном диаметре
= arctg
= arctg
= 0,077 рад,
или yw = 0,077 — = 4,4°.
71
Делительный диаметр червяка (7.3.2):
<7] = mq = 8 • 12,5 = 100 мм.
Делительный диаметр червячного колеса (7.3.1): d2 = mz2 = 8 • 32 = 256 мм.
Начальный диаметр червяка (7.3.7):
<i = m(q + 2х) = 8(12,5 + 2 • 0,25) = 104 мм.
Проверка условия прочности по контактным напряжениям
Находим действующее напряжение в контакте витка червяка и зуба колеса (7.3.37):
5300(? + 2х)
Z2
5300(12,5 + 2-0,25) —
32 + 12,5 + 2-0,25 ।
<180-(12,5 + 2-0,25) ;
1000-1,1-1=190,44 МПа.
Сравнивая действующее напряжение с допускаемым, ан < сНа = 199,29 МПа, убеждаемся в том, что условие прочности по контактным напряжениям выполненно.
Проверка условия прочности по напряжениям изгиба
Приведенное число зубьев (7.1.101):
cos3 yw
32 cos3 (0,077)
= 32.
Окружная проекция силы на колесе Ff2 (см. далее расчет сил в зацеплении):
271 • 103
<7,
2-1000-103
256
= 7813Н.
172
Глава 3. Передаточные механизмы
Значения коэффициентов концентрации и динамичности нагрузки выбираем в соответствии с рекомендациями: KFp — 1,1 и KFv = 1.
Коэффициент формы зуба для рассчитанного ранее значения приведенного числа зубьев z2v = 32 берем из таблицы 7.3.5: YF -1,71.
Тогда действующее напряжение изгиба (7.3.41):
tl^Fp^Fv^F COS/ 1,3m2 (q + 2x)
7813 -1,1 -1,0 -1,71005(0,077)
1,3-82 (12,5+ 2-0,25)
= 13 МПа.
Отсюда ясно,
crF < ° Fa = 45,93 МПа.
Следовательно, условие прочности на изгиб также выполняется.
Тепловой расчет червячного редуктора
Поскольку червячная передача, в отличие от цилиндрических и конических передач, работает с большим тепловыделением, то для предотвращения чрезмерного нагрева масла необходимо проводить тепловой расчет червячного редуктора. Такой расчет носит проверочный характер и заключается в определении температуры масла внутри корпуса редуктора в режиме установившегося теплообмена на основе уравнения теплового баланса.
Окружная скорость (7.3.17):
60-Ю3
тг • 100 • 960 60-Ю3
= 5,027 м/с.
Скорость скольжения (7.3.16);
V 5>027 СПЯ1 ,
V, =------=------------= 5,041 м/с.
cos/w cos(0,077)
Приведенный коэффициент трения между червяком и колесом (табл. 7.3.4):
Коэффициент полезного действия передачи (7.3.26):
= tgyw = Zg(0,077) = 0 776
£(Г„+р') /£(0,077 + 0,02) ’
Мощность редуктора на выходе:
9550
1О3-ЗО
9550
= 3,14 кВт.
3.4. Проектировочный расчет червячной передачи
173
Требуемая мощность на входе в редуктор:
Р 3 14
Р - — = —— = 4,3 кВт.
7 0,79
Примерную площадь поверхности теплоизлучения А можно получить суммированием площадей корпуса редуктора, используя рекомендованную для этого зависимость
Л = 12а1’7 = 12 • (0,18)1,7 = 0,65 м2.
Температура масла в редукторе в отсутствие вентилятора (7.3.51), при значении коэффициента теплоотдачи Kt =12, равна:
t = 10 +1 10 0 ~ О’79)4’3 + 20 = 135 77’ с.
К.А ° 12,0-0,65
Видно, что если в редукторе не ставить вентилятор, то фактическая температура масла превышает максимально допустимую температуру, t > ta— 95° С. Следовательно, при данных условиях необходимо использовать вентилятор. Пользуясь данными таблицы 7.3.8, для указанной в условии частоты вращения на входе (Hj =960 об/мин) получаем значение коэффициента теплоотдачи Kt =21. Тогда температура масла в редукторе при наличии вентилятора равна
(= + 10^79)43 + 20 =
К.А 0 21-0,65
Итак, если в корпусе рассматриваемого редуктора установить вентилятор, то фактическая температура масла будет меньше допустимой.
Определение других геометрических размеров передачи
Диаметр вершин червяка (7.3.5):
с/а) = dx + 2/га/и = 100+ 2-1-8 = 116 мм.
Диаметр вершин червячного колеса (7.3.6):
<7а2 = d2 + 2(й* + х)т = 256 + 2(1 + 0,25)- 8 = 276 мм.
Наибольший диаметр червячного колеса:
б/дМ2 = da2 + 6т/(z{ +2)= 276 + 6 • 8/(1 + 2)= 292 мм.
Длина нарезанной части червяка предварительно определяется с помощью таблицы 7.3.3, азатем округляется до ближайшего целого значения:
b = (11 + 0,lz2)m = (11 + ОД • 32) - 8 = 113,6 мм; b = 120 мм.
174
Глава 3. Передаточные механизмы
Для расчета ширины венца червячного колеса пользуемся формулой Ь2 = 28 da\ / 2, где 8 — угол обхвата, равный для силовых передач 8 « 0,75 рад. Тогда Z>, = 0,75oL = 0,75 • 116 = 87 мм.
Округляем полученное значение: Ь2 = 90 мм.
Силы в зацеплении
Окружная проекция силы на колесе Fl2 и осевая на червяке Fal (7.3.20):
= 7813Н.
Окружная проекция силы на червяке Fa и осевая на колесе Fa (7.3.20):
2-1037; 2-103-95507> _ 2-Ю3-9550-4,3
" 100-960
= 805 Н.
Радиальная составляющая усилия в зацеплении (7.3.24):
; = = Z8-13-^20 = 2852 Н
cos/w cos4,41°
Расчет червячной передачи в модуле АРМ Trans
Расчет червячной передачи в модуле АРМ Trans начинается с задания основных параметров, которые вводятся с помощью соответствующего диалогового окна
(рис. 3.4.1). При необходимости можно также задать дополнительные данные (кнопка «Ещё»), среди которых:
• модуль т;
• коэффициент диаметра q;
• межосевое расстояние а;
• коэффициент ширины венца;
• число заходов червяка z .
Для расчета заданной передачи достаточно указать лишь основные параметры. В списке дополнительных параметров можно включить флажок «Взять из базы данных», определив тем самым выбор геометрических параметров передачи из базы рекомендованных значений.
Рис. 3.4.1
3.4. Проектировочный расчет червячной передачи
175
Заданные параметры
Передача:
Тип расчета:
Червячная
Проектировочный ж Л
Основные данные
Рабочий режим передачи Тяжелый
Материал венца колеса БрОЮФ!
Нереверсивная передача
Момент вращения на ведомом валу, Нм 1000.00
Частота вращения ведомого вала, об./мин. 30.00
Передаточное число 32.00
Ресурс, час 30000.00
Результаты АРМ Trans
Таблица 1. Общие параметры
Описание Символ Червяк Колесо Единицы
Межосевое расстояние 180.000 мм
Модуль т 8.0 мм
Коэффициент диаметра Я 12.5 1
Коэффициент смещения X 0.25 —
Мощность на червяке 4.047 кВт
КПД передачи 0 0.776
Число зубьев (заходов) Z 1 32
Таблица 2. Силы
Описание Символ Червяк Колесо Единицы
Осевая сила Fa 7812.500 805.142 Н
Радиальная сила Fr 2854.749 2854.749
Тангенциальная сила F, 805.142 7812.500 н
Плечо приложения силы R 52.000 128.000 мм
Таблица 3. Геометрические параметры
Описание Символ Червяка Колеса Единицы
Делительный угол подъема У 4.574 град
Начальный угол подъема Уп 4.399 град
176
Глава 3. Передаточные механизмы
Описание Символ Червяка Колеса Единицы
Делительный диаметр d 100.000 256.000 мм
Начальный диаметр dwi 104.000 мм
Высота витка червяка hs 17.600 мм
Высота головки витка червяка 8.000 мм
Диаметр вершин da 116.000 276.00 мм
Наибольший диаметр червячного колеса daM2 292.000 мм
Радиус кривизны переходной кривой червяка Pfl 2.400 мм
Длина нарезанной части червяка b) 120.000 мм
Ширина венца червячного колеса ^2 90,000 мм
Радиус выемки поверхности вершин зубьев червячного колеса r 42.000 мм
Диаметр впадин df 80.800 240.800 мм
3.5. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ КЛИНОРЕМЕННОЙ ПЕРЕДАЧИ
Определить основные геометрические размеры клиноременной передачи, предназначенной для передачи мощности = 7,5 кВт.
Частота вращения ведущего шкива = 950 об/мин, передаточное число и = 3, величина межосевого расстояния а0 = 800 мм.
При работе передачи имеют место умеренные колебания нагрузки, пусковая нагрузка не превышает 150% от номинальной.
Расчет
Проектировочный расчет выполняется для выбранного поперечного сечения ремня. Из таблицы 8.1.1 выбираем сечение В, для которого:
Ьо = 14 мм — ширина ремня на нейтральном слое;
/0 = 2240 мм — длина эталонного ремня сечения В;
А = 138 мм2 — площадь поперечного сечения ремня;
h = 10,5 мм — высота поперечного сечения ремня;
р, = 0,18 кг/м — масса единицы длины ремня (погонная плотность).
По таблице 8.1.3 определяем коэффициент динамичности нагрузки Cd . Для заданного характера нагрузки можно принять
= 1,1 .
Момент вращения ведущего шкива (6.6):
7! = 9550— = 9550— = 75,395 Н-м.
1 Н] 950
Для уменьшения геометрических размеров передачи в качестве диаметра малого шкива предварительно выбираем из таблицы 8.1.1 его минимальное значение, t/lmin = 125 мм, а затем в соответствии с нормальным рядом R20 округляем это зна
чение до d{ = 140 мм.
Рекомендованное значение коэффициента скольжения равно £ = 0,015. Тогда диаметр ведущего шкива d2 (8.1.10):
d2 =u-dx{\-Q = 3-140(1-0,015) = 413,7 мм.
Полученное значение округляем до ближайшего из нормального ряда R20, d2 =400 мм. Воспользовавшись формулой 8.4.10 еще раз, определяем уточненное значение передаточного числа (8.1.10):
^2 40-0
400 140(1-0,015)
= 2,90.
12. Основы проектирования машин
178
Глава 3. Передаточные механизмы
Расчетная длина ремня по заданному межосевому расстоянию (8.1.38):
/ = 2о, + £(dl W,)+. 2• 800 + ^(400 +140) + =
" 2' ’ 4а, 2 ' ’ 4800
= 2469 мм.
Окончательное значение длины ремня получаем, обратившись к нормальному ряду R20: I ~ 2500 мм. Далее уточняем величину межосевого расстояния (8.1.39):
2 • 2500 -3,1416(400 +140) + J[2 • 2500-3,1416(400 +140)]2 - 8(400-140)2 -
= 815,52 мм.
Для того чтобы принять окончательное решение по выбору величины межосевого расстояния, необходимо проверить выполнение следующего условия:
^min “ “ ^тах ’
где граничные значения атп и атзх согласно существующим рекомендациям (8.1.41) равны
amin = 0,55(tZ, + d2)+h = 0,55(140 + 400)+10,5 = 307,5 мм;
«max =1J 5 (t/i +d2)= 1,75(140 + 400) = 945 мм.
Поскольку полученная величина межосевого расстояния удовлетворяет предельным условиям, окончательно имеем
а - 815,52 мм.
Считая межосевое расстояние известным, рассчитываем номинальный угол обхвата малого шкива (8.1.36):
а, =180° -57° .fa-^) = 180° -57° -^—^ = 161,828’.
а 815,52
Расчет нагрузочной способности ременной передачи
Скорость перемещения ремня (6.3):
3,1416 140-950
60•103
= 6,964 м/с.
60-Ю3
3.4. Проектировочный расчет клиноременной передачи
179
Поправочный коэффициент Ки, который учитывает разные по величине напряжения изгиба на большом и малом шкивах, рассчитываем с помощью 8.1.58:
= 1,135.
Приведенный диаметр шкива (8.1.57): de = dxKu =140 -1,135 = 158,9 мм.
Число пробегов ремня в секунду:
103v 103-6,964 vn =-----=-----------= 2,786.
° I 2500
Полезное натяжение эталонного ремня (8.1.59):
1,57
-10'3v
0,09 u
V0
j 41,57
.6п5--10-36,9642-6------------= 2,63 МПа.
de 158,9
Поправочный коэффициент на угол обхвата ремня на малом шкиве: Са = 1 - 0,003(180 - а,) = 1 - 0,003(180-161,828) = 0,945.
Поправочный коэффициент учета фактической длины ремня по отношению к эталонной (8.1.62):
( 2500
-1 =1,024.
Допускаемая мощность, передаваемая одним ремнем для заданных условий эксплуатации в предположении равномерной нагруженности ремней (8.1.62):
Л = al0AvCa = 2,63 • 138 • 6,964 • 1,024 -?97 - = 2,277 кВт.
,а '° a103Cd 103-1,1
Необходимое количество ремней передачи (8.1.64):
Р 7 5
2 = — = —^- = 3,368.
Л, 2,277 •
Поскольку количество ремней может быть только целым числом, полагаем 2 = 4.
12*
180
Глава 3. Передаточные механизмы
На практике ремни испытывают неодинаковую нагрузку. Это учитывается ко-
эффициентом неравномерности нагрузки по потокам:
Сг = 1,025 - 0,025z = 1,025 - 0,025 • 4 = 0,925.
Мощность, передаваемая одним ремнем с учетом неравномерности нагрузки по ремням (8.1.62):
C,CZ - ~ ао _ . ЛП. 0,976-0,925 _
Р.„ = сг.0Л • v • С —-— = 2,63 • 138 • 6,964 • 0,945-;----= 2,06 кВт.
,а 10 “103G 103-1.1
Уточняем количество ремней z = — ^ta
= 3,75 . Окончательно принимаем
Расчет силовых параметров передачи
Полезное окружное усилие, передаваемое ременной передачей (8.1.45):
F, = 2-103^- = 2-103^^ = 1077Н.
' d{ 140
Вспомогательный коэффициент (8.1.59):
? = 5.
Натяжение ведущей ветви ремня (8.1.20):
S. = F -%- = 1077—=4346 Н.
'7-1 5-1
Натяжение ведомой ветви ремня (8.1.20):
5, = F. —1- = 1077— = 269 Н.
'7-1 5-1
Напряжение ремня, возникающее при действии центробежной нагрузки (8.1.26):
(У = ^v2 = —6,9642 = 0,063 МПа.
с А 138
Дополнительное натяжение от центробежной нагрузки:
5 =а А = 0,063 -138 = 8,73 Н. L*- С, *
Вычисления показывают, что центробежной нагрузкой, вследствие ее малости относительно сил натяжения, можно пренебречь.
3.4. Проектировочный расчет клиноременной передачи
181
Сила предварительного натяжения (8.1.1):
S', + S2 1346 + 269
= 808Н.
Напряжение в ремне от предварительного натяжения:
А.
Az
808 . .
=-------= 1,46 МПа.
138-4
Сила, действующая на вал со стороны шкива:
S = Jsi2 + S2-2SlS,cosa, =./13462 + 2692 - 2 • 1346 • 269 • cos (161,828°) = 1364 Н. у 1 “ 1 ** 1 \/ \ /
Расчет клиноременной передачи в модуле АРМ Trans
Рис. 3.5.1
Для расчета клиноременной передачи в модуле АРМ Trans необходимо задать следующие исходные данные (диалоговое окно «Основные параметры ременной передачи», рис. 3.5.1): • мощность на ведущем валу;
• число оборотов ведущего вала;
• передаточное число;
• коэффициент динамичности нагрузки.
Для корректного решения поставленной задачи в диалоговом окне «Дополнительные данные», открывающемся нажатием кнопки «Ещё», следует обязательно указать величину межосевого расстояния, а0 = 800 мм.
Из остального списка дополнительных параметров можно задать максимальное число ремней и угол наклона передачи. По умолчанию максимально допустимое число ремней — 12, расположение передачи — горизонтальное.
В качестве результатов программа выводит таблицу с различными вариантами размеров поперечных сечений ремней и диаметров ведущего шкива. Количество расчетных вариантов можно сократить, вводя ограничения на число ремней.
Для заданных исходных данных программой был рассчитан 31 вариант клиноременной передачи, из которых в данном случае нужно выбрать тот, результаты автоматизированного расчета которого (с помощью АРМ Trans) совпадают с результатами проведенного выше неавтоматизированного расчета.
182
Глава 3. Передаточные механизмы
Заданные параметры
Передача: Клиноременная
Тип расчета: ' Проектировочный
Основные данные
Тип натяжного устройства Не выбран
Мощность передачи, кВт 7.500
Частота вращения ведущего вала, об./мин. 950. 000
Передаточное число 3.000
Коэффициент динамичности нагрузки 1.100
Максимально допустимое количество ремней
Дополнительные данные
Межосевое расстояние, мм 800.000
Результаты АРМ Trans
Таблица 1. Результаты расчёта ременных передач
Описание Символ Параметры Единицы
Обозначение 5 В "
Число ремней Z 4
Диаметр ведущего шкива d, 140.000 мм
Диаметр ведомого шкива d2 400.000 мм
Длина ремня 2500.000 мм
Межосевое расстояние а 815.524 мм
Передаточное число и 2.901 1,
Сила предварительного натяжения F 807.801 н
Сила, действующая на вал Q 1363.566 н
3.6. ПРОЕКТИРОВОЧНЫЙ РАСЧЕТ ЦЕПНОЙ ПЕРЕДАЧИ
Определить основные геометрические размеры элементов втулочно-роликовой цепной передачи с передаваемой мощностью Р2 = 1,5 кВт.
Частоты вращения ведущей и ведомой звездочек равны пх = 200 об/мин и п2 =100 об/мин соответственно.Величина межосевого расстояния близка к оптимальной, а = (30 т 50)р, где р — шаг цепи. Расположение цепи - горизонтальное. Натяжение цепи регулируется периодически. Смазка цепи - периодическая.
Коэффициент полезного действия передачи т] — 0,94 (табл. 8.2.1).
Расчет
Расчет износостойкости передачи
Передаточное число:
и, 200 _
и = — =----= 2.
п2 100
Число зубьев ведущей звездочки (8.2.12):
z, = 29-2w = 29 - 2 • 2 = 25.
Число зубьев ведомой звездочки:
z2 — z^ w = 25 * 2 — 50.
Момент на валу ведущей звездочки:
Т. = 9550— = 9550-S- = 9550---------= 76,2 Н-м.
1 щ 0,94 • 200
Момент на валу ведомой звездочки:
Т2 = 9550— = 9550— = 143,25 Н-м.
2 п2 100
Коэффициент приведения к эталонному режиму нагружения ке рассчитывается по формуле 8.2.26,
ке = кх к2 к3 к4 к5,
где
к} — коэффициент учета динамичности приложения нагрузки; нагрузку считаем близкой к постоянной, без резких ударов и толчков, поэтому к{ = 1;
к2 — коэффициент учета длины цепи по отношению к эталону; значение этого коэффициента выбирается в зависимости от величины межосевого расстояния и для заданных условий равно к2 = 1.
184
Глава 3. Передаточные механизмы
— коэффициент, учитывающий положение цепи по отношению к горизонтали; поскольку по условию расположение цепи горизонтальное, то къ = 1;
кА — коэффициент учета характера регулировки натяжения цепи, равный в случае периодической регулировки (неавтоматической) к4 = 1,25 ;
к5 — коэффициент, учитывающий характер смазки цепи; поскольку в данной задаче смазка периодическая, то к5 = 1,5.
После подстановки значений этих коэффициентов получаем ке = 1,875.
Допускаемое давление в контакте qa зависит от шага цепи р и частоты вращения ведущей звездочки пх. В качестве допускаемого контактного давления для заданной в условии частоты вращения пх = 200 об/мин выбираем среднее арифметическое значений, приведенных в соответствующем столбце таблицы 8.2.6, т. е. Ча = 29.
Шаг цепи предварительно определяем с помощью формулы 8.2.25 для расчета давления в контакте, с учетом соотношений 8.2.20 и 8.2.21 и стандартного геометрического соотношения А = 0,28р2:
76,2-103-1,875 --------------= 16,29 мм.
25-29
Т&
V г*а
Окончательное значение шага согласовываем с таблицей нормальных размеров цепей 8.2.2, приняв р = 15,875 мм. Это соответствует цепи ПР 15,875-2300-1 с погонной массой m = 0,8 кг/м [1, т. 2, стр. 649].
Уточняем фактическое значение скорости движения цепи (8.2.21):
z,pn, 25 -15,875 -200 ,
V ---1--------------------- 13 м/с.
60-103 60-Ю3
Проверяем значение расчетного давления: ойз%е 9fi3 76,2-103-1,875
q = 2,8 - -*- = 2,8 ----------— = 31,3 МПа.
д.р3 25-15,8753
Так как действующее давление оказывается близким к допускаемому, величина которого равна qa = 30, то такой вариант выбора цепи можно считать удовлетворительным.
Определение геометрических размеров передачи
Предварительную величину межосевого расстояния выбираем оптимальной, т. е. равной
а0 = 40р = 40 • 15,875 = 635 мм.
3.6. Проектировочный расчет цепной передачи
185
Далее определяем необходимое число шагов цепи (8.2.17):
V 2л- ) а0
2-635
15,875
25 + 50
* *| । I
2
<50-25?
15,875
635
= 117,89.
Полученное значение округляем до ближайшего целого числа, W = 118. Затем уточняем величину межосевого расстояния (8.2.18):
Расчетная длина цепи
L = WQp = 118 • 15,875 = 1873,25 мм.
Диаметры делительных окружностей ведущей и ведомой звездочек (табл. 8.2.4):
15,875
180>
25 >
= 126,66 мм;
sin
15,875
180>
50 >
= 252,82 мм.
Натяжение ведомой ветви цепной передачи можно принять равным F2 = 0.
Натяжение ведущей ветви цепной передачи (8.2.20):
27]-10
2-76,2-103
126,66
= 1203,22 Н.
Передаваемое окружное усилие Ft = F, - F2 = F} = 1203,22 H.
Проверка статической прочности на разрыв
Предельная нагрузка, вызывающая разрыв цепи [1, т. 2, стр. 649]:
/max
= 23000 Н.
Поскольку выполняется неравенство Л^Лгаах=23000Н,
то условие статической прочности на разрыв выполнено.
186
Глава 3. Передаточные механизмы
Расчет цепной передачи в модуле АРМ Trans
Для расчета цепной передачи в модуле АРМ Trans необходимо задать основные параметры передачи. Диалоговое окно «Данные Цепной Передачи» показано на рис. 3.6.1.
Замечание. Следует отметить, что в программе АРМ Trans, в отличие от приведенной методики, расчет по износостойкости проводится с учетом ресурса.
Если при задании исходных данных указать небольшой ресурс работы передачи (в данном случае ресурс составляет 30 часов), то результаты автоматизированного расчета в АРМ Trans полностью совпадут с результатами, полученными с использованием изложенной выше методики. В противном случае АРМ Trans выдаст большие геометрические размеры передачи.
С помощью АРМ Trans могут быть получены следующие характеристики цепной передачи:
• параметры цепи;
• параметры звездочек;
• нагрузка на вал;
• чертеж звездочек.
Рис. 3.6.1
Результаты расчета передачй при заданных условиях приводятся ниже.
Заданные параметры
Передача:
Тип расчета:
Цепная
Проектировочный
Основные данные
Тип цепи Роликовая повышенной точности
Вид рабочей нагрузки Плавная нагрузка
Тип смазки цепи Периодическая смазка
Момент вращения на ведомом валу, Нм 76.20
Частота вращения ведомого вала, об/мин. 200.00
Передаточное число 2.00
Ресурс, час 30.00
3.6. Проектировочный расчет цепной передачи
187
Результаты АРМ Trans
Таблица 1. Параметры цепи
Описание Символ Звездочка Звездочка ведущая ведомая Единицы
Межосевое расстояние 635.831 мм
Шаг цепи t 15.875 мм
Диаметр ролика цепи di 10.160 мм
Расстояние между пластинами В 6.480 мм
Диаметр оси цепи d 5.080 мм
Максимальная ширина цепи b 20.000 мм
Высота пластины цепи h 14.800 мм
Расстояние между осями рядов многорядных цепей A 0.000 мм
Расстояние от края цепи до оси ряда bi 11.000 мм
Рядность цепи n 1 - "
Таблица 2. Параметры звёздочек
Описание Символ Шестерня Колесо Единицы
Число зубьев Z 25 50 ———
Шаг звёздочки 15.875 15.875 мм
Половина углового шага Т 7.200 3.600 град
Диаметр окружности, вписанной в" шаговый многоугольник de 125.664 252.326 мм
Высота зубьев, измеренная от шаговой линии h, 3.969 126.662 мм
Диаметр делительной окружности d 252.825 133.601 мм
Диаметр окружности вершин 260.263 116.335 мм
Диаметр окружности впадин df 242.498 116.057 мм
Наибольшая хорда ^х 242.359 0.476 мм
Смещение центров дуг впадин е 5.164 13.305 мм
Радиус впадины г 6.799 мм
Радиус профиля головки зубьев Г2 6.679 52.600 мм
Половина угла впадины Р2 53.800 15.600 град
Половина угла зуба Y 16.800 град
Половина угла зуба gm 14.440 15.720 град
188
Глава 3. Передаточные механизмы
Описание Символ Шестерня Колесо Единицы
(для многорядных цепей) I»
Длина прямого участка профиля hr 0.956 1.064 мм
Толщина зуба ^2 12.598 мм
Толщина вершин зубьев Ь3 6.457 мм
Опорная длина впадины зуба С 6.559 мм
Радиус закругления R2 4.800 мм
Ширина многорядной звёздочки В 12.574 мм
Диаметр окружности заплечика Dc 12.574 1.579 мм
Радиус скругления вершины R3 1.579 мм
Таблица 3. Сила, действующая на вал
Описание Символ Шестерня Колесо Единицы
Модуль силы F 1203.199 Н
Угол между вектором силы и линией центров af 5.684 град
Глава 4
ТИПОВЫЕ ЭЛЕМЕНТЫ МАШИН
4.1. РАСЧЕТ ВАЛА НА УСТАЛОСТНУЮ ПРОЧНОСТЬ
Выполнить расчет вала (рис. 4.1.1) на сопротивление усталости, приняв:
Т( = Тг = 2000 Н-м; Fa = 13,3 кН; Fl2 = 40 кН;
F, = 4,9 кН; F 2 = 14,7 кН; Ма. = Ма, = 280 Н-м;
г 1 • ** и 1 С< м
F, = 1,87 кН; F 2 - 5,6 кН; F - 3,73 кН.
Через F обозначена равнодействующая осевых сил, нагружающая правую опору.
Рис. 4.1.1
На рис. 4.1.2 показана канавка А.
Вал изготовлен из стали 55 со следующими характеристиками:
предел прочности:
предел текучести:
предел выносливости при изгибе:
предел выносливости при кручении:
Вид механической обработки поверхности:
<jb =700 МПа;
а{ = 420 МПа;
(Т., =336 МПа;
т . =175 МПа.
—1
тонкое шлифование.
Рис. 4.1.2
190
Глава 4 Типовые элементы машин
Расчет
В силу конструктивных особенностей валов напряжения, возникающие в каждой точке вала, меняются как по величине, так и по знаку. Это обстоятельство является главной причиной усталостного разрушения валов, поэтому расчет их усталостной прочности (выносливости) является основным.
В данном примере расчет сводится к определению коэффициента запаса длительной усталостной прочности $, минимально допустимое значение которого рекомендуется выбирать из диапазона sa -1,5 -j- 2,5 . В конечном итоге величина коэффициента задается субъективно, в зависимости от ответственности конструкции, последствий разрушения вала, точности определения нагрузок и напряжений, уровня технологии изготовления и контроля. Для рассматриваемой задачи примем
Расчет на выносливость базируется на статическом расчете напряженно-деформированного состояния.
Расчетный запас прочности определяется для наиболее опасного сечения, поэтому, прежде всего, нужно найти те сечения вала, которые подлежат проверке. В нашем случае такими сечениями будут (рис. 4.1.3):
• сечение 1—1, в котором имеется концентратор напряжений в виде галтели;
• сечение 2—2, ослабленное шпоночным пазом в месте приложения внешних сил F(l, F,1, Fal и моментов МаХ, Тх;
• сечение 3—3 с канавкой А;
• сечение 4—4, имеющее шпоночный
^2»Fr2 > f«2 и моментов Ма2, Т2,
паз в месте приложения внешних сил
Рис. 4.1.3
Для каждого из этих сечений необходимо провести расчет усталостной прочности при совместном действии напряжений кручения и изгиба (2.10.27):
а '
где
-----коэффициент запаса сопротивления усталости по изги-
m
4,1. Расчет вала на усталостную прочность
191
коэффициент запаса сопротивления усталости по напря
жениям сдвига;
&ат и тат — амплитуды переменных напряжений;
ат и тт — средние напряжения цикла;
и \рт — коэффициенты асимметрии цикла, учитывающие влияние средних напряжений на величину усталостной прочности; величины этих коэффициентов, согласно ГОСТ 25.504-82, рекомендуется выбирать следующим образом:
=0,02 + 2-10'4бгА =0,02 + 2 -10“4 -700 = 0,16;
= 0,5^ст = 0,08;
KaD и KrD — коэффициенты концентрации напряжений в опасном сечении при изгибе и кручении соответственно (10.1.5):
кЛ=1К/кЛ)+1/кЛ-1К;
Для получения числовых значений и KtD необходимо рассчитать ряд параметров:
Ка и Кт — эффективные коэффициенты концентрации напряжений, учитывающие влияние местных напряжений на величину запаса по усталостной прочности (табл. 10.1.1 — 10.1.2);
Kda и KdT — масштабные факторы, характеризующие повышение вероятности появления усталостных трещин < при возрастании линейных размеров детали, вычисляющиеся по формулам:
где d — выраженный в миллиметрах диаметр вала,
=0,19-1,25-10-4 сгА =0,19-1,25-КГ4-700 = 0,103,
v = l,5v = 0,155 ; ► и
KFa и KFr — коэффициенты влияния качества (шероховатости) поверхности, для тонкого шлифования равные KFff = KFr = 1;
Kv — коэффициент, учитывающий наличие поверхностного упрочнения, равный для заданного вала Kv = 1, поскольку последний изготовлен без поверхностного упрочнения.
192
Глава 4. Типовые элементы машин
В этом случае расчетные формулы для вычисления коэффициентов концентрации напряжений в опасном сечении значительно упрощаются:
а / Кda ’ ^rD ” ^r I dr '
Учитывая характер работы вала, можно, если противное не оговорено особо, закон изменения вызванных изгибом нормальных напряжений считать симметричным, а сжатием и растяжением по отношению к изгибу пренебречь. При таких допущениях
^=0, vam = M!W,
где М = JM2X + Му — результирующий изгибающий момент; W — осевой мо-мент сопротивления.
Касательные напряжения, в свою очередь, всегда положительны и могут изменяться пульсационно от нуля до номинального значения, поэтому
= т = 0,5г = T/2Wn, т ат ’ / р ’
W — полярный момент сечения.
Определение геометрических характеристик опасных сечений
Сечение 1—1:
7Т тг » SO3
Ж =—— = ———= 12272 мм3; W, = 2Ж = 24544 мм3.
1 32 32 р
Сечения 2—2 и 3—3:
jr тг • 603
W2 = W.=-----=-------= 21206 мм3; ИС = W.= 2W, = 42412 мм3.
2 3 7 Zp 5р Z
Сечение 4—4\
^= — =-^^- = 26961 мм3; W.=2W.= 53922 мм3.
4 32 32 р 4
Построение эпюр изгибающих и крутящих моментов для заданного вала (рис. 4.1.4)
Силовые факторы в опасном сечении 1—Г.
изгибающий момент
в горизонтальной плоскости: М j = 2290 • 0,03 = 68,7 Нм;
в вертикальной плоскости: МЛ = 7300 • 0,03 = 219 Н-м;
результирующий изгибающий момент: Мх = JMx1 + М2 - 229,52 Нм.
4.1. Расчет вала на усталостную прочность
193
1586,55 Н-н
2000 Н-н
Рис. 4.1.4
Силовые факторы в опасном сечении 2—2:
изгибающий момент
в горизонтальной плоскости: М 2 = 183,32 Н-м,
в вертикальной плоскости (слева отсечения): Мх2 = 583,83 Н-м;
результирующий изгибающий момент: М2 = jMx2 + М2~ = 611,93 Н-м.
Силовые факторы в опасном сечении 3—3:
изгибающий момент
в горизонтальной плоскости: Му3 = 2290 • 0,13 +13300 • 0,05 = 962,7 Н-м,
в вертикальной плоскости: Мх3 = 7300 • 0,13 - 4900 • 0,05 - 280 = 424 Н-м;
результирующий момент: М3 = JMx3 + Му3 =1051,94 Н-м.
13. Основы проектирования машин
194
Глава 4. Типовые элементы машин
Силовые факторы в опасном сечении 4—4'.
изгибающий момент
в горизонтальной плоскости: М 4 = 1586,55 Н м,
в вертикальной плоскости (справа от сечения): Мх4 = 79,64 Н-м;
результирующий момент: М4 = ЛМх4 + М?4 =1776,67 Н-м.
Момент кручения во всех сечениях одинаковый: Т — 2000 Н-м. Исключение составляет сечение 1—1, в котором Т = 0.
Определение коэффициента запаса прочности по сечениям
Сечение 1—1.
Так как момент кручения в этом сечении равен нулю, то .
Амплитудное напряжение изгиба:
. М,_ 103 - 229,52
ami W, 12272
МПа.
Эффективный коэффициент концентрации в сечении 1—1 (табл. 10.1.1): =1,55.
Масштабный фактор:
= 0,838.
Коэффициент концентрации напряжений при изгибе: ^=^/^=1,55/0,838 = 1,85.
Следовательно, коэффициент запаса прочности в сечении 1—1 равен
s = s^
336
18,703-1,85
= 9,711.
Сечение 2—2.
Амплитуды напряжений и среднее напряжение цикла:
. М2 Ю3-611,93
am2 W2 21206
МПа;
Т 2-103-103
Г 2 = Тат1 = ~~ МПа.
ят2 2WO, 2-42412 Г
Коэффициенты концентрации напряжений и масштабные факторы:
*
4.1. Расчет вала на усталостную прочность
195
dcr2
60
60
= 0,762;
KaD2 = Ка2/Kda2 = 2/0,826 = 2,421, KlD2 = Кт2/Kdr2 = 1,7/0,762 = 2,231.
Коэффициенты запаса по нормальным и касательным напряжениям:
336 . 175 ,
s„2 =-------------= 4,809, s 2 =-------7-----------г = 3,212 .
02 28,856-2,421 23,578-(2,231 + 0,08)
Тогда коэффициент запаса прочности в сечении 2—2:
~ S~ 'S
2 (72
s2 = 2,671.
Сечение 3—3.
Амплитуды напряжений и среднее напряжение цикла:
М3 103-1051,94 .....
ст , = —1 =----------— = 49,606 МПа;
em3 W, 21206
Т 2000-10
г а — 7 «а =---=---------= 23,578 МПа.
'"3 й,й3 2^хз 2-42412
Коэффициенты концентрации напряжений и масштабные факторы: ^<та = 1,95, К , =1,6;
К,., = =0.826. К„ -К.,..,- 0,762 ;
Км = /K„„, = 1,95/0,826 = 2,361, К„„
Коэффициент запаса прочности в сечении 3—3:
336 s =-------—-------= 2,869,
а3 49,606-2,361
dr3 = 1,6/0,762 = 2,1;
175
— 3,405,
5
3 <тЗ
= 2,194.
Сечение 4—4.
Амплитуды напряжений и среднее напряжение цикла:
М4 103-1176,67 ..... АДП
сг „. = —=• ----------= 43,643 МПа
W. 26961
13*
196
Глава 4. Типовые элементы машин
Т 2000-10 1ОС/1С
. = г . =----=----------= 18,545
m4 ат4 2Ж 4 2-53922
рч
МПа.
Коэффициенты концентрации напряжений и масштабные факторы:
= 0,82,
= KajKM = 2/0,82 = 2,421, Км = KTjKdr4 = 1,7/0,756 = 2,231;
Коэффициент запаса прочности в сечении 4—4:
336
43,643-2,421
= 3,18,
_________175________ 18,545-(2,231 + 0,08)
= 4,083,
*4 = Sa4 Sr41^S14+Sr4 = 2>509 '
Анализируя полученные результаты, можно сделать вывод о том, что данный вал имеет недостаточную усталостную прочность в сечении 3—3, для которого значение коэффициента запаса меньше допускаемого, зъ <за= 2,2.
Расчет вала по усталостной прочности в модуле АРМ Shaft
Для расчета вала в модуле АРМ Shaft необходимо изобразить вал, описать
условия его закрепления, задать точки приложения и величины действующих на вал внешних нагрузок, указать все имеющиеся концентраторы напряжений и ввести параметры материала (или выбрать один из стандартных материалов в базе данных).
Окно результатов, выводимых после выполнения расчета, показано на рис. 4.1.5. На рис. 4.1.6—4.1.8 приведены некото-
Рис. 4,1.5
L' I ’V ‘оиа
(/,'!> ‘SHd) июолоогп HOH4ifBxHO£Hdoj я вдшеи xhswow
9TV -оиа
(9-Vt? ’OHd) ИЮ0М001Ш цончггвдилкя я вдилси хнэиои
:awwedjodu HowaBJBirtfodii я еквя ojOHHBf axahoed ndu эганнэьЛиои ‘dome ей and ^4
Z6L
Ч1ЭОHhodU 0|Лн1001ГВ10Л BH BLTB0 lahOBJ (.’t?
198
Глава 4. Типовые элементы машин
коэффициент запаса по усталостной прочности (рис. 4.1.8)
Рис. 4.1.8
Fr = 50 кН;
п = 800 об/мин;
d = 200 м;
Ъ = 200 мм.
4.2. РАСЧЕТ РАДИАЛЬНОГО ПОДШИПНИКА СКОЛЬЖЕНИЯ, РАБОТАЮЩЕГО В РЕЖИМЕ ЖИДКОСТНОГО ТРЕНИЯ
Рассчитать половинный (с углом охвата а = 180°) подшипник скольжения для следующих исходных данных:
подшипник нагружен радиальной силой
частота вращения вала диаметр шейки вала длина вкладыша подшипника чистота обработки поверхности
цапфы вала:
поверхности вкладыша:
температура масла в гидравлической системе
создаваемое насосом давление подачи масла в подшипник ре = 0,2 • 105 Па.
/?я2 = -г- 3,2) мкм,
/о=4О°;
Расчет
Так как R7 = 4R , то 7? . = 6,4 мкм, R7? = 12,8 мкм.
Окружная скорость вращения вала:
rrdn 3,1416-200-800 000 ,
V =------ =----------:-----= 8,38 м/с.
60-103 60-103
Угловая скорость вращения вала:
лп 3,1416-800 _ _0 (
со = — =-----------= 83,78 с
30 30
28
Относительный зазор у/ = — вычисляем по рекомендованной зависимости:
= 0,8 • 10’3 Vv = 0,8 • 10~3 • ^/8,38 = 1,36 • 10'3.
Все последующие вычисления необходимо проводить, основываясь на известной температуре масла в подшипнике, так как эта температура определяет вязкость масла и, следовательно, нагрузочную способность подшипника.
На первом этапе вычислений температура масла в подшипнике считается неопределенной. Приходится задавать ее начальное приближение с последующим уточнением фактической температуры масляного слоя. Иначе говоря, задача расчета подшипника скольжения является итерационной. >
При первой итерации температуру масла принимаем равной t' ~ 50° С. Выбираем сорт масла— Т22, который при вышеуказанной температуре характеризуется следующими параметрами [2]:
• динамическая вязкость /u = Axemt ~ 0,083е“°’0297‘50 = 0,019 Па-с;
• плотность масла /? = 876 кг/м3;
• теплоемкость масла с —1980 Дж/(кгтрад).
200
Глава 4. Типовые элементы машин
Коэффициент нагруженности подшипника (10.3.28):
Ф
Г
Fur 50-103-(1,36-1 (Г3 У ,
---Li--- — —.. ... \ . /- “14/
Ucobd 0,017-83,77-0,2-0,2 ’
Используя таблицы 4.2.1 и 4.2.2, по полученному значению Фг и заданному углу охвата а = 180° находим величину относительного эксцентриситета s = 0,65.
Таблица 4.2.1.
Значения коэффициентов нагруженности подшипника Фг для угла охвата а = 180°
Е 6/<7
0,5 0,6 0,7 0,8 0,9 1.0 1.1 1.2 1.3 1.5
0,300 0,133 0,182 0,234 0,282 0,339 0,391 0,440 0,487 0,529 0,610
0,400 0,209 0,283 0,361 0,439 0,515 0,589 0,658 0,723 0,784 0,891
0,500 0,317 0,427 0,538 0,647 0,754 0,853 0,947 1,033 1,111 1,248
0,600 0,493 0,655 0,816 0,972 1,118 1,253 1,377 1,489 1,530 1,763
0,650 0,622 0,819 1,014 1,199 1,371 1,528 1,669 1,796 1,912 2,099
0,700 0,819 1,070 1,312 1,538 1,745 1,929 2,097 2,247 2,375 2,600
0,750 1,098 1,418 1,720 1,965 2,248 2,469 2,664 2,838 2,990 3,242
0,800 1,572 2,001 2,399 2,754 3,067 3,372 3,580 3,787 3,968 4,266
0,850 2,428 3,036 3,580 4,053 4,459 4,808 5,106 5,364 5,586 5,947
0,900 4,261 5,412 6,029 6,721 7,294 7,772 8,186 8,533 8,831 9,304
0,925 6,615 7,956 9,072 9,992 10,753 11,380 11,910 12,350 12,730 13,340
0,950 10,706 12,640 14,140 15,370 16,370 17,180 17,860 18,430 18,910 19,680
0,975 25,620 29,170 31,880 33,990 35,660 37,000 38,120 39,040 32,810 41,070
0,990 75,860 83,210 88,900 92,890 96,350 98,950 101,15 102,90 104,42 106,84
Таблица 4.2.2.
Значения коэффициентов нагруженности подшипника Фг для угла охвата а = 120°
Е b/d
0,5 0,6 0,7 0,8 0,9 1,0 1.1 1,2 1,3 1,5
0,300 0,103 0,135 0,166 0,195 0,221 0,245 0,276 0,286 0,303 0,332
0,400 0,188 0,245 0,299 0,349 0,395 0,436 0,473 0,506 0,535 0,583
0,500 0,261 0,364 0,441 0,512 0,576 0,633 0,683 0,722 0,766 0,831
4.2. Расчет подшипников скольжения
201
8 b/d
0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,5
0,600 0,463 0,592 0,709 0,815 0,909 0,992 1,064 1,126 1,181 1,271
0,650 0,620 0,788 0,935 1,068 1,184 1,285 1,372 1,448 1,513 1,622
0,700 0,826 0,979 1,221 1,385 1,525 1,644 1,749 1,838 1,914 2,041
0,750 1,144 1,420 1,656 1,862 2,043 2,185 2,311 2,499 2,519 2,663
0,800 1,676 2,052 2,365 2,632 2,856 3,042 3,206 3,335 3,450 3,667
0,850 2,674 3,209 3,654 4,013 4,312 4,540 4,766 4,941 5,089 5,328
0,900 4,717 5,556 6,213 6,749 7,181 7,508 7,800 8,075 8,283 8,618
0,925 6,880 ’ 7,994 8,849 9,537 10,085 10,532 10,901 11,208 11,471 11,890
0,950 12,570 13,550 14,800 15,780 16,560 17,220 17,700 18,130 18,490 19,060
0,975 29,330 32,220 34,300 35,860 37,190 38,080 38,900 39,580 40,150 41,060
0,990 90,500 95,520 99,030 101,73 103,79 105,47 106,84 107,98 108,93 110,48
Абсолютный радиальный зазор:
1,36-1(Г3-200
2
= 0,136 мм.
Минимальная толщина масляного слоя в подшипнике (10.3.35): &min = <?(1 - £) = 0,13 б(1 - 0,65) = 0,048 мм.
Условие, при котором отсутствует непосредственный контакт движущихся поверхностей, имеет вид /zmjn > Amin^, где /zmjna — минимальный зазор, при котором в подшипнике сохраняется режим жидкостного трения. Эта величина вычисляется по формуле 10.3.36:
^mina ” ^z2 + ” 6,4 12,8 + 0 — 0,019 MM.
Замечание. При вычислении hmina значение прогиба оси вала на ширине подшипника 6S принималось равным нулю, т. к. в данном случае геометрия вала неизвестна. Величину прогиба можно определить, если выполнить автоматизированный расчет вала.
Из полученных результатов видно, что в нашем случае подшипник работает в
режиме жидкостного трения.
Переходим к определению коэффициента трения в подшипнике (10.3.34):
3,1416 /200
—------+ 0,55 -----
1,47 1200
• 1,36 • 10’3 =3,657 Ю~3.
202
Глава 4. Типовые элементы машин
Мощность, выделяющаяся в подшипнике за счет трения (10.3.38): р = Ffv = 50 • 103 • 3,657 • 10’3 • 8,38 = 1,532 кВт.
Момент трения
Р 1532
Tf = 9550— = 9550—----= 18,286 Н-м.
f п 800
Коэффициент сопротивления вращению (10.3.32):
2^7} 2 • 1,36-Ю"3-18,286
ц со b d2 ~ 0,019 • 83,78 • 0,2 • 0,22 ~ ’
Коэффициент окружного расхода масла в подшипнике: q0 = 0,25 - 0,25s = 0,25 - 0,25 • 0,65 = 0,088.
Коэффициент торцевого расхода масла в зоне нагружения выбирается из таблиц 4.2.3. и 4.2.4 и в рассматриваемом случае равен q} = 0,141.
Таблица 4.2.3.
Значения коэффициентов торцевого расхода подшипника q} для угла охвата а = 180°
8 b/d
0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,5
0,300 0,109 0,105 0,100 0,095 . .... 0,090 0,085 0,081 0,076 0,072 0,065
0,400 0,135 0,129 0,122 0,115 0,107 0,102 0,096 0,091 0,086 0,076
0,500 0,166 0,156 0,147 0,138 0,129 0,121 0,113 0,106 0,100 0,088
0,600 0,194 0,182 0,169 0,158 0,146 0,136 0,127 0,118 0,111 0,098
0,650 0,206 0,192 0,178 0,165 0,153 0,141 0,131 0,122 0,114 0,101
0,700 0,217 0,200 0,185 0,170 0,157 0,145 0,139 0,124 0,117 0,101
0,750 0,222 0,203 0,186 0,172 0,156 0,143 0,132 0,122 0,114 0,099
0,800 0,224 0,203 0,185 0,168 0,153 0,138 0,128 0,119 0,110 0,096
0,850 0,218 0,198 0,176 0,158 0,143 0,130 0,119 0,110 0,102 0,088
0,900 0,208 0,184 0,163 0,146 0,131 0,119 0,109 0,100 0,092 0,080
0,925 0,194 0,170 0,150 0,133 0,119 0,108 0,098 0,090 0,084 0,072
0,950 0,178 0,153 0,134 0,118 0,106 0,096 0,087 0,080 0,074 0,064
0,975 0,145 0,123 0,107 0,099 0,084 0,075 0,068 0,063 0,058 0,050
4.2. Расчет подшипников скольжения
203
Таблица 4.2.4.
Значения коэффициентов торцевого расхода подшипника для угла охвата qx сг-120°
Е b/d
0,5 0,6 0,7 0,8 0,9 1,0 1.1 1.2 1.3 1.5
0,300 0,072 0,067 0,062 0,057 0,053 0,048 0,045 0,042 0,039 0,034
0,400 0,087 0,080 0,074 0,068 0,062 0,058 0,053 0,050 0,046 0,040
0,500 0,098 0,089 0,082 0,075 0,069 0,063 0,058 0,054 0,050 0,044
0,600 0,106 0,096 0,087 0,079 0,072 0,066 0,061 0,056 0,052 0,046
0,650 0,111 0,100 0,090 0,082 0,074 0,068 0,062 0,058 0,053 0,046
0,700 0,115 0,103 0,093 0,084 0,076 0,069 0,063 0,058 0,054 0,047
0,750 0,117 0,104 0,093 0,084 0,075 0,069 0,063 0,058 0,054 0,047
0,800 0,117 0,103 0,092 0,082 0,074 0,067 0,061 0,056 0,052 0,044
0,850 0,113 0,098 0,086 0,077 0,069 0,063 0,057 0,052 0,048 0,042
0,900 0,105 0,090 0,079 0,070 0,062 0,057 0,052 0,047 0,043 0,038
0,925 0,098 0,084 0,073 0,064 0,057 0,052 0,047 0,043 0,040 0,034
0,950 0,087 0,074 0,064 0,056 0,050 0,045 0,041 0,038 0,035 0,030
0,975 0,064 0,054 0,046 0,041 0,036 0,032 0,030 0,027 0,025 0,022
Коэффициент торцевого расхода в ненагруженной зоне определяется по следующей формуле:
где
ре — давление масла, создаваемое насосом при входе в подшипник;
Fr _ 50-Ю3
db ~ 200 • 200 ПО’6
= 1,25 -106 Па
среднее давление масла в подшип-
нике;
/3 — коэффициент, определяемый по таблице 4.2.5.
204
Глава 4. Типовые элементы машин
Таблица 4.2.4.
Значение коэффициента (3
S значение /3
а = 180° а = 120°
0,300 0,194 0,246
0,400 0,227 0,285
0,500 0,273 0,329
0,600 0,323 0,380
0,650 0,352 0,408
0,700 0,384 0,437
0,750 0,417 0,468
0,800 0,454 0,501 •
0,850 0,469 0,536
0,900 0,535 0,573
0,950 0,562 0,612
0,975 0,609 0,632
В нашем случае q2 — 0, т. к. подвод масла осуществляется в ненагруженной половине подшипника.
Приращение температуры в смазочном слое:
М =
qcop 3,951-83,776-0,019
с pys2 q} 1980-876-(1,36-10 3 У-0,141
= 13,73° С.
Температура масла при входе в смазочный слой:
* = Л + = 40 + 13,73^^ = 48,52° С.
?! 0,141
Средняя температура масла в зазоре:
/;=/*+ 0,5 Дг = 48,52 + 0,5 -13,73 = 55,39° С.
Напомним, что рассматриваемая итерация проводилась в предположении, что температура масла равна /' = 50°. Так как полученная в результате вычислений средняя температура масла, ^=55,39° С, отличается от принятой изначально f = 50° С, то необходимо провести вторую итерацию: в качестве исходной температуры масла выбрать tn = t'm, затем уточнить значение вязкости для этой темпера
4.2. Расчет подшипников скольжения
205
туры и выполнить весь расчет заново. Расчет следует повторять до тех пор, пока принятая в качестве исходной и полученная расчетным путем температуры не станут достаточно близкими по значению.
Результаты расчета для всех итераций (в данном случае было проведено две итерации) представлены в таблице 4.2.6.
Таблица 4.2.6.
Результаты расчета
Определяемый параметр Результаты вычислений при различных значениях //
Итерация 1 Итерация 2
Вязкость смазки при средней температуре в смазочном слое /Л , Пас 0,019 0,016
Коэффициент нагруженности подшипника ф. 1,47 1,725
Относительный эксцентриситет S 0,65 0,65
Коэффициент торцевого расхода смазки qx 0,141 0,141
Окружной расход смазки qQ 0,088 0,088
Коэффициент сопротивления вращению 3,951 4,091
Приращение температуры в смазочном слое А/, °C 13,73 12,118
Температура смазки на входе в смазочный слой t , С 48,52 47,52
Средняя температура смазки в зазоре t °C 55,39 53,58
Итерация 1 выполнена при температуре 50°C, а итерация 2—55°C. Последующие уточнения не имеют смысла, так как получить более высокую точность вычислений не представляется возможным из-за ограниченной точности, связанной с выборкой из таблиц.
Окончательно получаем tm =53,58° С.
Максимальная температура масла в зазоре:
/ х = ^ + А/ = 47,52 + 12,12 = 65,7° С. IlldA л z у
Расход масла, который обеспечивает работоспособность подшипника:
Q = 0,5i//bd2ql = 0,5 • 1,36 • 10’3 • 83,77 • 200 • 2002 • 10’9 • 0,141 = 6,43 • 10’5 м3/с.
206
Глава 4. Типовые элементы машин
Расчет подшипника скольжения в модуле АРМ Plain
Для расчета подшипника скольжения в программе АРМ Plain прежде всего необходимо указать тип подшипника (радиальный подшипник жидкостного трения, полужидкостного трения или упорный подшипник), в данном случае мы имеем дело с радиальным подшипником жидкостного трения. После этого нужно задать следующие данные:
• геометрия подшипника (меню «Данные/Геометрия...»);
• условия работы подшипника (меню «Данные/Условия работы...»);
• параметры масла (меню «Данные/Условия работы...»).
Результаты расчета
ния за
">о*>»м*>**>**»^
4ЙНШМ*МИН«|
liliiiHllliTiTi
йнйнмШмшМм
iTiTit I... H i > ШНИ iininui i >н й WWaWflt ittli ] иТТмЬ ililii i nil l'i
Рис. 4.2.1
Следует отметить, что параметры масла можно задать двумя способами: либо указанием марки масла, либо заданием вязкости масла при двух фиксированных температурах. Зависимость масла от температуры можно также задать графически с помощью встроенного специализированного редактора.
На рис. 4.2.1 показано окно результатов расчета заданного подшипника в модуле АРМ Plain.
svj; " -I
Гисто
1МЫЙ*ММ«**
Подъята
5
о
>
4.3. РАСЧЕТ ПОДШИПНИКОВ КАЧЕНИЯ
Подобрать подшипники качения для опор выходного вала червячного редуктора
Частота вращения вала:
диаметр в месте посадки подшипников:
диаметр червячного колеса:
температура подшипников:
требуемый ресурс работы
при вероятности безотказной работы 90%:
режим нагружения:
Силы в зацеплении:
окружная
радиальная '
осевая
Радиальная сила на валу от муфты
п = 25 об/мин;
db ~ 45 мм;
d2 = 240 мм;
/<100° С;
Lb- 20000 часов; постоянный.
Fw( = 8000 Н;
Fwr 2936 Н; ^а=1852Н.
К =1600 н. к
Расчет
На начальном этапе необходимо определить силы, нагружающие каждый из подшипников.
Реакции опор можно представить в виде проекций на две взаимно перпендикулярные плоскости, как это показано на рис. 4.3.2. Одну из этих плоскостей назовем вертикальной (все относящиеся к ней величины будем снабжать индексом «V»), а другую— горизонтальной (индекс «h»). Точки приложения и направление реактивных сил, возникающих от усилий в зацеплении, показаны на рис. 4.3.2.
208
Глава 4. Типовые элементы машин
Точку приложения внешних сил можно перенести в точку О, лежащую на оси вращения вала. По правилам механики при таком переносе необходимо добавить
момент вращения
и момент изгиба М = F)n
^2
2
l =120 мм
Рис. 4.3.2
Запишем условие равновесия моментов в горизонтальной и вертикальной плоскостях.
В горизонтальной плоскости окружная сила относительно опор приложена симметрично, следовательно, реакции в опорах равны между собой и составляют половину величины окружной силы,
= ^wt /2 = 4000 Ц.
В вертикальной плоскости:
= -384 Н;
2936-(120-60)-1852* 120 ~
120
УМ, =0: -R, -1 + F / * *2 -* IV * w
= 0 => 7?)v =
2936-60 + 1852-120
120
= 3320 Н.
Суммарные реакции опор от сил в зацеплении:
Я. = + Я2 = д/33202 + 40002 = 5198 Н;
Я2 = y/^2v + Ru = л/з842 +40002 =4018 Н.
4.3. Расчет подшипников качения
209
Реакции от силы FK (рис. 4.3.3):
7^=0: ^-/-Tv-(/ + /2) = O =4» R2k = 1-60-0-1?6 =2347 Н;
2—2 » гк к \ г/ zk л ал ’
V 1 / А А 7 7 А А 1600*56
/ Л/? — 0Rx * I — F • /? — 0 .R. —---------= 747 Н.
2—2 2 \к к 2 1к J20
/ -120 ш
12 =56 нн
Рис. 4.3.3
Реакции опор для расчета подшипников (принимается, что реакции опор от действия силы FK совпадают по направлению с суммарными реакциями опор от сил в зацеплении):
Frl - fl, + Яи - 5198 + 747 = 5945 Н;
К2 =Я2+Я2 =4018 + 2347 = 6365 Н. г
Первоначально выбираем шариковый радиально-упорный однорядный подшипник 46109 особо легкой нормальной серии с углом контакта а = 26°. Схема установки подшипников— «в распор», или схема X. Выбор подшипника с большим углом контакта обусловлен тем,х что осевая сила в зацеплении червячного колеса составляет значительную часть от радиальной нагрузки.
По справочным таблицам [7] определяем динамическую грузоподъемность выбранного подшипника: Сг = 22500 Н.
Для радиально-упорного подшипника характерно наличие осевой нагрузки от приложения радиальных нагрузок, величины которых можно рассчитать как
Я = eF. = 0,68 - 5945 = 4043 Н, W | f |
So2 = eFr, = 0,68 • 6365 = 4328 Н,
где е = 0,68 — зависящий от типа подшипника и угла контакта параметр осевой нагрузки (табл. 10.4.9).
Учитывая схему установки подшипников и направление осевой силы, вычисляем осевые реакции в опорах:
^й2 ~ ~ 4328 Н;
14. Основы проектирования машин
210
Глава 4. Типовые элементы машин
F. = Fwn + Sa2 =1852 + 4328 = 6180 Н.
Воспользовавшись формулой 10.4.51, для каждого из подшипников определим эквивалентную динамическую нагрузку Рг:
т
Здесь
Ks — зависящий от характера нагрузки коэффициент безопасности (табл. 10.4.7), для спокойной нагрузки равный Ks = 1;
Кг — температурный коэффициент (табл. 10.4.8), который для рассматриваемого случая можно принять равным Кг = 1, т. к. температура работы подшипников ниже 100° С-;
V — коэффициент вращения, имеющий значение V ~ 1, поскольку относительно нагрузки вращается внутреннее кольцо подшипника;
X и Y — коэффициенты приведения радиальной и осевой сил.
Рассчитаем коэффициенты радиальной и осевой сил для каждой из опор. Опора 1:
Fax 6180 1АЛ — =-------= 1,04 > е
FrX 5945
Х1 — 0,41, Y1 =0,87 (табл. 10.4.9).
Опора 2:
= 0,68 = е => Х2 = 1, К = 0.
F2 6365 2,2
Тогда
РгХ = 0,41-5945+ 0,87-6180 = 7814Н;
Рг2 =1-6365 = 6365 Н.
Как видно, более нагруженным является левый подшипник (опора 7). Для него необходимо определить скорректированный по уровню надежности и условиям применения расчетный ресурс (10.4.44):
106
60и ’
где
ах — коэффициент надежности, для вероятности безотказной работы 90% равный = 1;
4.3, Расчет подшипников качения
"^^щранмимм
аг — коэффициент, зависящий от специальных свойств подшипника, в данном случае полагаем а2 = 1;
а3 — коэффициент, зависящий от условий работы подшипника, здесь принимаем а3 = 1.
Подставляя числовые значения, получаем:
(22500
h
7814 j 60-25
106 -----= 15910 часов.
Делаем вывод о том, что подшипник 46109 не пригоден к применению в данных условиях работы, так как его расчетный ресурс меньше требуемого: Lh <£/=20000 часов.
Проверим, не подойдет ли подшипник 46209 легкой серии того же типа и с тем же углом ОС = 26°. Для этого подшипника параметр осевой нагрузки е и коэффициенты X и Y остаются неизменными, а динамическая грузоподъемность возрастает: Сг = 38700 Н.
Тогда расчетный ресурс
(38700? 106
... ... г Ч1Л
7814 J 60-25
= 80988 часов,
Т. е. условие Lh > Lh' выполняется. Следовательно, подшипник 46209 для заявленных целей пригоден.
Теперь необходимо проверить выбранный подшипник на статическую прочность. Условие статической прочности 10.4.32 для радиально-упорного подшипника записывается в виде .
Рп ^Сп ,
* Or 0г ’
где PQr = X0Fr + YaFa — эквивалентная статическая радиальная нагрузка
(10.4.38); СОг — статическая грузоподъемность.
Пользуясь данными таблиц 10.4.1, 10.4.2 и [7], для подшипника 46209 получаем:
Хо = 0,5; Уо = 0,37; СОг =23100 Н.
Тогда
PQr = 0,5 • 5945 + 0,37 • 6180 = 5259 Н.
Так как эквивалентная нагрузка не может быть меньше радиальной, то принимаем PQr = Fr = 5945 Н.
Следовательно, условие статической прочности выполнено: 7’0г < CQr.
Таким образом, для данной задачи окончательно выбираем подшипник 46209.
212
Глава 4. Типовые элементы машин
Расчет подшипников качения в модуле АРМ Bear
Программа АРМ Bear обладает большими возможностями для расчета неидеалъ-ных подшипников качения (т. е. подшипников, имеющих погрешности в изготовлении тел качения), но применительно к данной задаче эти возможности рассматриваться не будут.
Принцип расчета подшипников качения без учета погрешностей изготовления в АРМ Bear аналогичен рассмотренному выше: сначала выбирается подшипник (из встроенной базы данных или любой другой с произвольными геометрическими параметрами), указываются точность его изготовления и условия работы. Затем по полученному в результате расчета значению долговечности делается вывод о пригодности этого подшипника для работы в заданных условиях.
Для корректного решения данной задачи необходимо выполнить следующую последовательность операций:
• В меню «Данные/Тип подшипника» выбрать позицию «Радиально-упорный подшипник».
• В меню «Данные/Геометрия» выбрать подшипник 46109 из встроенной базы данных.
• В меню «Данные/Точность» задать величины биений внутреннего и внешнего кольца, выбрав значения из базы данных для нулевого класса точности изготовления.
• В меню «Данные/Условия работы» указать схему установки подшипника, величины действующих на опоры сил и тип нагрузки (для рассматриваемого примера нагрузка постоянная).
Дополнительные параметры
TiHMiH
Н HMidtifiiTiiiiii'i?
Рис. 4.3.4
22500
5- > > Л
После выполнения расчета значение долговечности для выбранного подшипника, подсчитанное стандартными методами (по теории идеального контакта), можно посмотреть в диалоговом окне «Дополнительные параметры» (меню «Результаты», кнопка «Ещё...»). Вид этого диалогового окна с результатами расчета подшипника 46109 показан на рис. 4.3.4. Как видно из рисунка, для за
4.3. Расчет подшипников качения
213
данных условий нагружения подшипник 46109 является непригодным к применению.
Рис. 4.3.5
Аналогичным образом рассчитывается подшипник 46209.
Из результатов, приведенных на рис. 4.3.5 можно заключить, что этот подшипник годен, т. к. его расчетный ресурс превышает требуемый.
4.4. РАСЧЕТ УПРУГИХ ЭЛЕМЕНТОВ МАШИН
4.4.1. Проектировочный расчет пружины сжатия круглого поперечного сечения
Выполнить проектировочный расчет пружины сжатия круглого поперечного сече
ния при следующих исходных данных:
действующее на пружину усилие предварительного сжатия = 100 Н;
рабочее осевое усилие F2 = 250 Н;
осадка пружины при рабочей нагрузке д = 20 мм;
относительный инерционный зазор А - 0,2.
Пружина первого класса, число циклов нагружения не более N - 106.
Расчет
Целью проектировочного расчета является оценка статической прочности, в результате которой определяются основные геометрические характеристики пружины, пригодной для заданных условий эксплуатации.
Определение диаметра проволоки пружины из условия прочности
На начальном этапе расчета по выбранному значению допускаемого напряжения сдвига та находим предварительное значение диаметра проволоки, основываясь на условии прочности (10.2.2):
где С — D/d — индекс пружины (отношение среднего диаметра пружины D к диаметру проволоки б/), значение которого выбираем из таблицы 10.2.3 и в 4С + 2
данном случае принимаем С = 8; к~----------1,172 — вспомогательный коэф-
467 — 3
фициент.
Величина допускаемого напряжения сдвига та зависит от класса пружины, материала, из которого она изготовлена, и условий ее работы.
По ГОСТ 13764-86 пружины подразделяются на три класса. К пружинам первого класса относятся пружины сжатия-растяжения, работающие в условиях переменного режима нагружения без соударения витков, с числом циклов нагружения не менее 107. Пружины второго класса — это пружины сжатия-растяжения, испытывающие циклическую или статическую нагрузку и имеющие выносливость не менее 105 циклов. К пружинам третьего класса относят пружины сжатия, рабо
4.4. Расчет упругих элементов машин
215
тающие при циклических нагрузках с возможным соударением витков не менее 2000 циклов.
Замечание. Величина та выбирается исходя из следующих рекомендаций:
• для пружин первого класса та = (0,25 ч- Q,3)crb;
• для пружин второго класса та = (0,45 ч- О,5)сг6;
• для пружин третьего класса та = 0,6ст6.
Таким образом, расчет пружины начинается с задания механических характеристик материала. Поскольку предел прочности материала проволоки сгь зависит от диаметра проволоки и от класса пружины, то процедура его выбора неоднозначна. В таблице 4.4.1.1 с некоторыми сокращениями приведены значения предела прочности по ГОСТ 9389-75 при растяжении стальной углеродистой пружинной проволоки различного диаметра для различных классов пружин.
Таблица 4.4.1.1
d, мм Классы
III II I
0,32—0,60 1700—2200 2200—2650 2650—3050
0,63—0,80 1700—2150 2150—2600 2600—3000
0,85—1,0 1650—2100 2050—2500 2500—2850
1,1; 1,2 1550—200 1950—2400 2400—2700
1,3; 1,4 1500—1900 1900—2300 2300—2600
1,5; 1,6 1450—1850 1850—2200 2200—2500
1,6; 1,8; 2,0 1400—1800' 1800—2100 2000—2300
2,2; 2,3 1400—1750 1700—2000 1900—2200
2,5; 2,8 1300—1650 1650—1950 1750—2000
3,0 1300—1650 1650—1950 1750—1950
3,2 1200—1550 1550—1800 1700—1950
3,4; 3,5; 3,6 1200—1650 1550—1800 1650—1900
4,0 1150—1500 1500—1750 1600—1850
4,5 1150—1450 1400—1650 1500—1750
5,0 1100—1400 1400—1650 1500—1750
5,6; 6,0 1050—1350 1350—1600 1450—1700
6,3; 7,0; 8,0 1000—1250 1250—1450
216
Глава 4. Типовые элементы машин
Предварительно в качестве предела прочности примем среднее арифметическое граничных значений диапазона таблицы 4.4.1.1, соответствующего пружинам первого класса:
, 3050 + 1450
= 2250 МПа.
Учитывая класс пружины, определяем допускаемое напряжение сдвига: т'а = (0,25 + 0,3)сг6 = 0,3 • 2250 = 675 МПа.
Теперь по формуле 10.2.3, полученной из условия прочности 10.2.2, вычисляем предварительное значение диаметра проволоки:
„ |8ЖС /8 1,172-250-8 „
d = -----i— =------------------- 2 97 мм.
V тгта V 3,1416-675
V *
Как видно из таблицы 4.4.1.1, для проволоки диаметром 3 мм значение ст6 следует несколько уменьшить. Примем ст" = 1850 МПа. Снова определяем допускаемое напряжение г* =0,3-1850 = 555 МПа и пересчитываем диаметр проволоки:
„ 18кЕ,С /8-1,172-250-8 „ о d” = ----2— = —--------------= 3,28 мм.
V пта V 3,1416-555
В W
Обратившись к таблице 4.4.1.1 еще раз, убеждаемся, что выбранное значение
предела прочности удовлетворяет полученному диаметру. В противном случае ве-
личину <зь необходимо уточнить и повторить расчет. Эти действия нужно повторять до получения приемлемого результата.
Округлим полученное значение диаметра до десятых долей в большую сторону, т. е. окончательно принимаем, что для изготовления нужной пружины подходит стальная углеродистая пружинная проволока диаметром d = 3,3 мм, предел прочности которой равен сгь =1850 МПа.
Тогда средний D и внешний Da диаметры пружины равны:
D = Cd = 8 • 3,3 = 26,4 мм;
D.= £> + </ = 26,4+ 3,3 = 29,7 мм.
Сила, действующая на пружину при полном сжатии
Под полным сжатием понимается такой случай деформирования, при котором осевой зазор между витками исчезает, а витки пружины опираются друг на друга. Сила F3, действующая на пружину при полном сжатии, вычисляется как
где А = 0,2 — предварительно заданный относительный инерционный зазор.
4.4, Расчет упругих элементов машин
217
Замечание. Величина инерционного зазора для пружины сжатия выбирается следующим образом:
• А = (0,05 -г 0,25) — для пружин первого и второго класса;
• А = (ОД 0 -г 0,40) — для пружин третьего класса.
В нашем случае, т. к. рассматриваемая пружина принадлежит к первому классу, можно положить А = 0,2, тогда для силы F3 имеем
F} = -^- = -^- = 312,5 Н.
3 1-Д 1-0,2
Наибольшие напряжения сдвига (10.2.1):
.8RD 8-312,5-29,7
т = k—Ц- = 1,172--------------j- = 685,381 МПа.
3 ж/3 3,1416-3,33
Расчет критической скорости пружины сжатия
Критической скоростью VK называется предельно допустимое значение скорости перемещения пружины, при которой отсутствуют динамические нагрузки от соударения витков. Рабочая скорость перемещения пружины не должна превышать предельно допустимое значение. Если скорость перемещения задана изначально, то ее необходимо сравнить с полученным расчетным путем предельным значением VK и в случае превышения последнего изменить параметры так, чтобы при пересчете добиться получения необходимых скоростных характеристик.
Для расчета критической скорости пружины сжатия необходимо знать такие характеристики материала, как модуль упругости Е, коэффициент Пуассона р, мо-
дуль сдвига G и плотность р. Так как проволока изготовлена из пружинной ста-
ли, то Е - 2 • 105 МПа; р = 0,3; G =
= 76920 МПа; р = 7850 кг/м3.
Тогда критическая скорость
Jl-^ 685,381 -fl
У = _Д-----Ц. = ........I. 312’5Л = з 944 м/с.
pGp • 10’3 72-76920-7850 • 10’3
Геометрические характеристики пружины сжатия
Найдем необходимое число рабочих витков, обеспечивающих заданное по условию значение осадки пружины 8 = 20 мм (10.2.5):
Gd'S 76920-3,34-20 о
П =---77-----\ =------т~7--------\ = 8,263 .
8Z>3(F2-^) 8-26,43-(250-100)
218
Глава 4. Типовые элементы машин
Округлим полученный результат до ближайшего значения, кратного одной четверти витка: п — 8,25 .
Полное число витков с учетом опорных (п2 = 1,5 — число опорных витков):
И] = п + п2 = 8,25 +1,5 = 9,75.
Осадка пружины от полной рабочей нагрузки (10.2.4):
• - р 8/)3"
F2 2 Gd4
= 250-
--------^4- = 33,28 мм. 76920 • 3,34
Осадка пружины при предварительной деформации (10.2.4):
*4 = 100-
Gd
-----------г- = 13,31 мм. 76920 • 3,34
Проверим величину рабочего хода пружины (напомним, что по условию S = 20 мм):
3 = 3F2 - = 33,28 -13,31 = 19,97 мм.
Осадка пружины при полном сжатии:
8Р3ц
Gd4
= 312,5 •
8 • 26,43 • 8,25 76920 • 3,34
= 41,6
мм.
Длина пружины при максимальной деформации:
13 = (п, +1 -n3)d = (9,75 + 1-1,5)-3,3 = 30,53 мм,
где п3 = 1,5 — число срезанных витков.
Длина пружины в свободном состоянии: /0 = /3 + dF3 = 32,18 + 41,6 = 72,13 мм.
Длина пружины при предварительной деформации: А =4-^1 = 72,13-13,31 = 58,82 мм.
Длина пружины при рабочей нагрузке:
12 = /0 - 3F2 = 72,13 - 33,28 = 38,85 мм.
Шаг пружины в нагруженном состоянии: t2 = d + 8/п = 3,3 + 20/8,25 = 5,72 мм.
Шаг пружины в свободном состоянии (шаг навивки): t = d + dF3/n = 3,3 + 41,6/8,25 =8,342 мм.
4.4. Расчет упругих элементов машин
219
Угол подъема винтовой линии:
а = arctg
8,342
3,1416 • 26,4;
= 5,74°.
Длина развертки пружины:
= 3,1416-26,4-
8,25
cos 5,74°
= 812,1 мм.
Для определения длины заготовки длину развертки увеличивают на 5—10%, в данном случае увеличим на 7%: *
10 = 1,071 = 1,07-812,1 = 868,95 мм.
В заключение определяем потенциальную энергию пружины:
FJi 250-19,97 м —
2 ” 2-Ю3
Дж.
Расчет пружины сжатия в модуле АРМ Spring
Для расчета пружины сжатия в модуле АРМ Spring необходимо, в первую оче редь, с помощью меню «Тип» в верхней части окна программы указать:
• тип пружины — пружина сжатия • тип расчета — проектировочный • стандарт — ГОСТ 13 765-86.
Рис. 4.4.1.1
Рис. 4.4.1.2
220
Глава 4. Типовые элементы машин
Кроме этого, в полях ввода диалогового окна «Основные параметры» (рис. 4.4.1.1) следует задать:
• условия работы пружины (нагрузки, рабочий ход);
• класс пружины;
• материал пружинной проволоки;
• форму поперечного сечения пружинной проволоки (в данном случае — круглое).
Этих данных уже достаточно для выполнения расчета. При необходимости в соответствующих полях ввода окна «Дополнительные Параметры» (это окно открывается нажатием кнопки «Ещё» в правой нижней части диалогового окна «Основные параметры») можно ввести ряд дополнительных параметров, таких как геометрические параметры пружины, допускаемые напряжения и характеристики материала проволоки (модуль упругости, коэффициент Пуассона).
Пружина сжатия.
264
AW AW
| Фактический индекс пружины. [♦] 1 Средний диаметр пружины [мм] ; Внешний диаметр пружины [мм]
Диаметр проволоки, [мм] _
Число рабочих битков а {•] t Рабочий ход h. [мм] j Длина пружины в свободном состоянии, [мм] j Длина пружины при предвар нагрузке, [мм] I Длина пружины при рабочей нагрузкеЛмм] ! Длина развертки пружины [мм] j Длина заготовки пружины [мм] 5 Шаг в свобод состоянии. (мм) j Шаг в нагруженном состоянии, [мм| I Перемещение прирабочей нагрузкеЛмм] j Перемещение при предварительной нагрузке, [мм] । Угол подъема винтовой линии, [град] I П отенциальная э нергия. [Дж ] j Допустимое напряжение сдвига, [МПа]
Критическая скорость, [м/с]
394
8J
AV.W.W,
33 Га 25 И 9.97
58 81
WAWAWAWH
3985
8121
86895
834
572 3328
1331 574
Рис. 4.4.1.3
Применительно к данной задаче следует указать индекс пружины, число опорных и обработанных витков, коэффициент относительного зазора и параметры материала (рис. 4.4.1.2).
Окно результатов расчета пружины сжатия показано на рис. 4.4.1.3.
4.4. Расчет упругих элементов машин
221
4.4.2. Проверочный расчет пружины сжатия круглого поперечного сечения
Выполнить проверочный расчет пружины сжатия при заданных размерах и услови
ях нагружения:
средний диаметр пружины
диаметр проволоки
число рабочих витков
число опорных витков
число срезанных витков
длина пружины'в свободном состоянии
D - 30 мм;
d = 3,5 мм;
п = 8,5;
п2 = 1,5;
п3 = 1,5;
/0 = 75 мм;
действующее на пружину усилие предварительного сжатия = 100;
рабочее осевое усилие
Выносливость пружины не более
Характеристики материала пружинной проволоки:
предел прочности
модуль упругости
коэффициент Пуассона
модуль сдвига плотность
F2 = 250 Н.
N = 10 циклов.
(jb =1850 МПа;
Е = 2 -105 МПа;
А = 03;
G = 76920 МПа; р = 7850 кг/м3.
Расчет
При проверочном расчете по заданным внешним геометрическим размерам нужно определить коэффициент запаса статической прочности, а в случае действия переменной нагрузки — и коэффициент усталостной прочности.
Начинать следует с нахождения основных параметров пружины: индекс, осадка, длина, шаг и т. д.
Индекс пружины С = D/d - 30/3,5 = 8,571.
Осадка пружины зависит от действующих на нее сил. Если пружина эксплуатируется в режиме переменного нагружения, то в качестве сил, действующих на нее в процессе работы, можно рассматривать максимальную и минимальную силы, т. е. в данном случае
Тогда наибольшая осадка пружины, возникающая при действии максимальной силы, равна (10.2.4):
max
, 8Г)3п 8-303-8,5
----__ “250----------
max Gd4 76920-3,54
= 39,76 мм.
222
Глава 4. Типовые элементы машин
Наименьшая осадка пружины (при минимальной силе):
_ „ 8£>3и 1ПП 8-ЗО3-8,5
------------------т = 100------------т = 15,91 мм. mm f\ mm Gd^ 76920 -3,54
Рабочий ход пружины:
s = SF2 - SFl = 39,76 -15,91 = 23,85 мм.
Полное число витков с учетом опорных:
щ = п + п2 = 8,5 +1,5 = 10.
Длина пружины в полностью сжатом состоянии: 4
/3 = (и, + 1- п3)- d = (10+ 1-1,5)-3,5 = 33,25 мм.
Осадка пружины при полном сжатии:
= L -1, = 75 - 33,25 = 41,75 мм.
J
Шаг пружины в нагруженном состоянии:
t? = d 4— = 3,5 4—— = 6,31
2 л 8,5
мм.
Шаг пружины в свободном состоянии:
t = d + — = 3,5 + = 8,41
п 8,5
мм.
Угол подъема винтовой линии:
а ~ arctg
' 8,41
k 3,1416 - 30
Длина развертки пружины:
+ п2 = 3,1416-30-
+ 1,5 =945,66 мм.
Г
Длина заготовки:
£0 = 1,071 = 1,07 • 945,66 = 1012 мм.
Потенциальная энергия пружины:
F2h 250-23,85-10
= 2,982 Дж.
223
И.4. Расчет упругих элементов машин I»*——— ............
Для того чтобы перейти к определению критической скорости vK, нужно вычислить вспомогательный коэффициент к, а также рассчитать силу F3 и напряжение сдвига т3 при полном сжатии:
к =
= Ц6;
SF3Gd*
41 75-76920-3 5
, , ’ = 262,49 Н;
8F3D 11r 8-262,49-30
—ц_ = л 6------->----- - 542,45 МПа.
Тогда критическая скорость равна
250 >
2
542,45- 1-I. 262,49)
v — I ' ‘ ; /.. .... ? 0,743 м/с.
j2Gp • 10’3 V2 • 76920 • 7850 -10
Далее находим коэффициенты запаса.
Допускаемое напряжение сдвига:
та = 0,3 -1850 = 555 МПа (пружина первого класса).
Фактическое напряжение сдвига:
ZF2Dk 8-250-30-1,16
т - —------------------— - 516,72 МПа.
Коэффициент запаса статической'прочности:
s = = =1,074.
т 516,72
Максимальное напряжение цикла:
8W^ax 8-1,16-30-250 ,™кдп ттах =----— =--------------— = 5 j б,72 МПа.
Минимальное напряжение цикла:
8WFmin 8-1,16-30-100
rmin =---= "Г-------------Г" = 206,655 МПа.
Среднее напряжение цикла:
Тт = + = 516,72 + 206,655 = 361)647 МПа
224
Глава 4. Типовые элементы машин
Амплитудное напряжение цикла:
Tmax-Tmin 516,72-206,655 1С, _ _max---mm _----’------!---= 154 992 МПа
" 2 2
Коэффициент запаса усталостной прочности (2.10.20):
£г
где — предел выносливости, вычисляемый как
т_, = 0,5сг_, = 0,5сгЛ -(0,55-аь • Ю"4) = 0,5• 1850• (о,55 -1850• КГ4) =
= 337,625 МПа;
£т — масштабный фактор (для проволоки диаметром менее 10 мм принимается равным единице);
цг т = 0,1 -5- 0,2 — коэффициент асимметрии цикла.
Примем у/т = 0,15, тогда
337,625
St ~ 154,992+ 0,15-361,647
В заключение проверим пружины на устойчивость. Пружина считается устойчивой, если /0/£)<2,5. В нашем случае 75/30 = 2,5, следовательно, пружина устойчива.
Если условие устойчивости пружины оказывается не выполненным, тогда для ее нормальной эксплуатации необходимо дополнительно использовать оправку.
Проверочный расчет пружины сжатия в модуле АРМ Spring
Для выполнения проверочного расчета пружин сжатия в модуле АРМ Spring необходимо в меню «Тип» указать тип расчета, в данном случае проверочный, и ввести следующие основные исходные данные (рис. 4.4,2.1):
• силы, действующие на пружину;
• класс пружины;
• материал пружинной проволоки;
• основные геометрические параметры (длина в свободном состоянии, число рабочих витков, средний диаметр пружины и диаметр проволоки);
• форму поперечного сечения проволоки (круг или квадрат), в данном случае — круг.
Для корректного решения данной задачи помимо основных параметров необходимо также задать дополнительные, такие как величины допускаемого напряжения
4 4 Расчет упругих элементов машин
225
и предела выносливости, модуль упругости, коэффициент Пуассона и число обработанных и опорных витков (рис 4 4 2 1),
йадыйнаи
йммшмммм*
250
Пружина 1 класса
rivrittfh'riiiiHii'Liirr
Рис 4 4 2 1
Рис 4 4 2 2
Пружина сжатия.
&
Фактический индекс пружины Ц Средний диаметр пружины [мм] Внешний диаметр пружины, (мм] Диаметр проволоки (мм] Число рабочий витков г» []
857
30
335
35
4 РабочийходЬ [мм]
S Длина пружины в свободном состоянии, [мм] Длина пружины при предвар нагрузке (мм] Длина пружины при рабочей нагрузке [мм] Длина развертки пружины [мм] Длина заготовки пружины, [мм] Шаг в свобод состоянии [мм]
; Шаг е нагруженном состоянии [мм]
Яу Перемещение при рабочей нагрузке,,/мм]
а Перемещение при предварительной нагрузке [мм] Угол подъема винтовой линии [град] Потенциальная энергия (Дж]
2 Допустимое напряжение сдвига, [МПа]
Ж Коэффициент запаса на выносливость [ ] Коэффициент запаса статической прочности []
J Устойчивость пружины
2386
75
5309
3524
945.66
101186
841
631
3976
1591
51
298
555
161
107
Пружина устойчива
Рис 4 4 2 3
На рис. 4,4.2.3 представлены результаты проверочного расчета заданной пружины в программе АРМ Spring
15 Основы проектирования машин
226
Глава 4. Типовые элементы машин
4.4.3. Проектировочный расчет пружины сжатия квадратного поперечного сечения
Выполнить проектировочный расчет пружины сжатия квадратного поперечного сечения при таких же исходных данных, которые были приняты в п. 4.4.1:
действующее на пружину усилие предварительного сжатия F} =100 Н;
рабочее осевое усилие F2 = 250 Н;
осадка пружины при рабочей нагрузке 3 = 20 мм;
относительный инерционный зазор Л = 0,2.
Пружина первого класса, число циклов нагружения не более N = 106.
Расчет
Методика и порядок проектировочного расчета пружин квадратного и круглого сечений аналогичны (см. п. 4.4.1).
Поскольку при одинаковых условиях нагружения размеры квадратного и круглого сечения не будут сильно различаться, то значение предела прочности выберем таким же, какое использовалось при расчете пружины круглого поперечного сечения:
аь =1850 МПа.
Тогда, учитывая класс пружины, определяем допускаемое напряжение сдвига:
та =0,3-1850 = 555 МПа.
Значение индекса пружины задаем в соответствии с рекомендациями:
тогда вспомогательный коэффициент:
4С + 2
4С-3
= 1,172.
Из условия прочности (10.2.6) находим сторону квадрата сечения проволоки (10.2.7):
2,4£КС 2,4-1,172-250-8
а = ।------— = J----------------
V та V 555
= 3,184 мм.
Округляем это значение до десятых долей в большую сторону:
а = 3,2 мм.
Для рассчитанного геометрического параметра— стороны квадрата сечения проволоки а — справедливы такие же рассуждения, которые были проведены в п. 4.4.1 в отношении диаметра проволоки d. Сравнивая полученное значение а с данными таблицы 4.4.1.1, видим, что величины предела прочности аь и допускав-
4.4. Расчет упругих элементов машин
227
мого напряжения та были выбраны верно. В противном случае расчет нужно повторить необходимое число раз.
Рассчитываем остальные параметры.
Средний диаметр пружины:
D = Са = 8 • 3,2 - 25,6 мм.
Внешний диаметр пружины:
Da = D + а = 25,6 + 3,2 = 28,8 мм.
Сила, действующая на пружину при полном сжатии:
• 250
Наибольшее напряжение сдвига (10.2.6):
т = к 2^D- = 1,172 • = 686,961 МПа.
а 3,2
Параметры материала примем такими же, как при расчете пружины с круглым поперечным сечением: модуль упругости Е = 2-105 МПа; коэффициент Пуассона // = 0,3; плотность проволоки /э = 7850 кг/м3; модуль сдвига
G ~ -Л—_ - 76920 МПа. 2(1 + f)
Тогда критическая скорость (по аналогии с пружиной круглого поперечного сечения):
F 1 ( 750 1
т3 1--2- 685,381- 1-—
I F3 I I 312,5 J
г~^-----Г = 7———-—=-------- = 3,954 м/с.
72G/?-10~3 л/2 -76920- 7850 -10“3
Определяем число рабочих витков (10.2.9),
Ga8 _ 76920-3,24-20
5,57D3 (F2 - F{) “ 5,57 • 25,63 • (250 -100)
11,509,
и округляем полученное значение до ближайшего значения, кратного половине витка, т. е. принимаем п = 11,5 .
Задав число опорных витков п2 = 1,5 и число срезанных витков п3 = 1,5, для полного числа витков получим
пх = п + п2 = 11,5 +1,5 = 13.
15*
228
Глава 4. Типовые элементы машин
Осадка пружины от полной рабочей нагрузки:
= р5,57Д3и 5,57-25,63-11,5
F2 2 Ga4 ' 76920-3,24
= 33,31 мм.
Осадка пружины при предварительной нагрузке:
, 5,57D3n
1 Ga4
inn 5,57 • 25,63 • 11,5
1UU--------------л—
76920 • 3,24
= 13,32 мм.
Рабочий ход пружины несколько отличается от заданного по условию (8 = 20 мм) из-за сделанных при предыдущих вычисления округлений:
<5 = 8F1~8FX = 33,31 -13,32 = 19,99 мм.
Осадка пружины при полном сжатии:
5,577_)3н 5,57 • 25,63 • 11,5
” = Л;-“г?- = 312’5- 76920“37<
= 41,64 мм.
Длина пружины при максимальной деформации: Z3 = (^ +1 - и3)а = (13 +1 -1,5)-3,2 = 40 мм.
Длина пружины в свободном состоянии: /0 = /3 + 3Fi =40 + 41,64 = 81,64 мм.
Длина пружины при предварительной деформации:
А = /0 “ 5 к = 8 Ь64 -13,32 = 68,32 мм.
Длина пружины при рабочей нагрузке:
Z2 =/0 -3F2 =81,64-33,31 = 48,33 мм.
Шаг пружины в нагруженном состоянии: t = а + 8/п = 3,2 + 20/11,5 = 4,94 мм.
Шаг пружины в свободном состоянии: t = а + 3Fi/n = 3,2 + 41,64/11,5 = 6,82 мм.
Угол наклона рабочих витков:
а = arctg
= arctg
6,82
3,1416-25,6>
4 4 Расчет упругих элементов машин
229
Длина развертки пружины:
cos а
= 3,1416-25,6-
vcos 4,85
+ 1,5 =1049 мм.
п
Длина заготовки:
Zo = 1,071 = 1,07 • 1049 = 1122 мм.
Потенциальная энергия пружины:
250-19,99
2-Ю3
= 2,5 Дж.
Расчет пружины сжатия квадратного поперечного сечения в модуле АРМ Spring
Пружина сжатия квадратного сечения рассчитывается так же, как и пружина сжатия круглого поперечного сечения. Исходные данные для расчета аналогичны данным задачи 4.4.1 (рис. 4.4.1.1, 4.4.1.2), за исключением формы поперечного се-
г
4 85
$
Пружина сжатия.
555
395
*****
Tiiri:>»»Hi
СИМ
Рис. 4.4.3.1
? Фактический итекс пружинььЦ I Средний диаметр пружины (мм} Внешний диаметр пружины, [мм]
। Сторона кеадрета [мм] । Число рабочих витков п [] Рабочий ход Ь, [мм] Длина пружины в свободном состоянии, [мм] Длина пружины при предвар нагрузке, (мм) Длина пружины при рабочей нагрузке [мм] Длина развертки пружину (мм) Длина заготовки пружины Дмм] Шаг в свобод состоянии [мм]
J Шаг в нагруженном состоянии, [мм] Перемещение при рабочей нагрузке, [мм] Перемещение при предварительной нагрузке [мм] 13 32 Угол подъема винтовой линии, [грод] Потенциальная энергия, [Дж] Допустимое напряжение сдвига [МПа] Критическая скорость [м/с]
8 256 288
32 115
1999 8164 6831
4833 104884
112228 682
4 94 3331
чения— вместо «круг» следует указать «квадрат». На рис. 4.4.3.1 представлены результаты расчета пружины сжатия квадратного поперечного сечения в модуле АРМ Spring.
230
Глава 4. Типовые элементы машин
4.4.4. Проектировочный расчет пружины растяжения круглого поперечного сечения
Выполнить проектировочный расчет пружины растяжения круглого поперечного
сечения при следующих исходных данных:
максимально допустимый внешний диаметр пружины действующее на пружину рабочее усилие усилие предварительного растяжения
удлинение пружины при рабочей нагрузке
относительный инерционный зазор
Пружина первого класса, требуемая выносливость пружины:
Da = 35 мм;
F2 = 500 Н;
Fx = 120 Н;
6 = 75 мм;
Л = 0,08. до 106 циклов.
Расчет
Расчет пружины растяжения принципиально не отличается от расчета пружины сжатия. Так как изначально задан максимальный диаметр пружины Da =35 мм, то расчет следует проводить исходя из этого условия.
Как правило, значение диаметра проволоки пружины находится в диапазоне от 2 до 8 мм. Предварительно примем, что d = 5 мм. Тогда средний диаметр пружины D = Da — d = 35 — 5 = 30 мм. По таблице 4.4.1.1 определяем предел прочности материала проволоки, аь = 1600 МПа. По числу циклов выносливости устанавливаем, что пружина относится к первому классу, следовательно, допускаемое напряжение сдвига
та =0,3-1600 = 480 МПа.
Из условия прочности (10.2.2) по формуле (10.2.3), приближенно полагая к = 1,2 , находим уточненное значение диаметра проволоки:
, [8ккЬ [8 -112 - 500^30 л
d = з----= з---------------= 4,571 мм.
у лта у 3,1416 • 480
Округлим диаметр до десятых долей в большую сторону: d = 4,6 мм.
Тогда индекс пружины равен С = D/d 30/4,6 = 6,522.
Внешний диаметр пружины: Da = D + d = 30 + 4,6 = 34,6 мм.
4.4, Расчет упругих элементов машин
231
Видно, что полученное значение диаметра не превышает предельно допустимой величины Da — 35 мм, оговоренной условием задачи.
Максимально допустимое усилие растяжения:
500 1-0,08
- 543,48 Н.
Для дальнейших вычислений нам потребуются числовые значения механических характеристик пружинной проволоки: модуль упругости Е = 2 • 105 МПа; ко-
Е
эффициент Пуассона р = 0,3 ; модуль сдвига G = —>--г = 76920 Н; плотность
2(1 + //)
проволоки р 7850 кг/м3.
Вычисляем число рабочих витков (10.2.5):
Gd48 76920 • 4,64 • 75
и —------------ —---------------- — a I 4 / у .
2>D3(F2-F^ 8-ЗО3 (500-120)
Округлим полученное значение числа рабочих витков:
п = 31,5 .
Удлинение пружины от полной рабочей нагрузки:
с W3n СЛЛ 8-303-31,5 попо
8Р, - F-----г = 500-----------т = 98,78 мм.
72 2 Gd4 76920,4,64
Удлинение пружины при предварительном нагружении:
5 = f^ = 120A30Mi,5
F1 1 Gd4 76920-4,64
= 23,71 мм.
Рабочее удлинение пружины:
8 = SF1 - SFX = 98,78 - 23,71 = 75,07 мм.
Удлинение пружины при наибольшей нагрузке:
„ SD3n 8-303-31,5
8Р. = F.----т- = 543,48----------т = 107,36 мм.
Р3 3 Gd4 76920-4,64
Длина пружины в свободном состоянии:
/0 = (и + 1)с7 = (31,5 +1)- 4,6 = 149,5 мм.
232
Глава 4. Типовые элементы машин
Длина пружины при рабочей нагрузке:
l2 = l0 + 8F2 = 149,5 + 98,78 = 248,28 мм.
Длина пружины при предварительной нагрузке:
Z] = /0 + = 149,5 + 23,71 = 173,21 мм.
Максимальная длина пружины:
l3 = l0 + 8F3 = 149,5 +107,36 = 256,86 мм.
Шаг пружины в свободном состоянии равен диаметру проволоки, т. к. пружины растяжения навиваются без зазора между витками:
t = d = 4,6 мм.
Шаг пружины в растянутом состоянии:
8 75,07 ,по
L = t ч— = 4,6 ч------= 6,98 мм.
2 п 31,5
Угол наклона рабочих витков:
а = arctg
----- arctg
3.1416-30
Длина развертки пружины (длина зацепов lh = 20 мм):
+ lh =3,1416-30-
( 31,1
^cos 2,8°
ч- 20 = 2992 мм.
Длина заготовки:
£0 = 1,071 = 1,07 • 2992 = 3202 мм.
Потенциальная энергия пружины:
250-75,07
2-Ю3
= 18,767 Дж.
Расчет пружины растяжения в модуле АРМ Spring
Для расчета в модуле АРМ Spring пружины растяжения, так же как для расчета любого другого типа пружины, следует задать основные начальные данные (окно «Основные параметры», идентичное такому же окну для пружин растяжения, рис.
4 4 Расчет упругих элементов машин
233
4 4.1.1) и, при необходимости, дополнительные параметры. Окно ввода дополнительных параметров показано на рис. 4.4.4.1. В полях ввода этого окна еле-
Рис. 4.4.4.1
Пружина растяжения.
ii'> rr л iitftffipp • h |П w w
I Фактический индекс пружины I ] Средний диаметр пружины {мм] Внешний диаметр пружинь! {мм] Диаметр проволоки [мм] Число рабочих витков п [ ] Рабочий ход h {мм]
Длина пружины в свободном состоянии (мм] Длина пружины при предвар нагрузке [мм] Длина пружины при рабочей нагрузке {мм] Длина развертки пружинь! (мм] Длина заготовки пружины {мм] Шаг в свобод. состоянии, (мм] Шаг е нагруженном состоянии [мм] Перемещение при рабочей нагрузке [мм] Перемещение при предварительной нагрузке (мм) Угол подъема винтовой линии, {грел] Потенциальная энергия (Дж| Допустимое напряжение сдвига {МПа]
iii.fWi i''iilH i I»ii iii'ii1 i i > i > I Vi T ''( i
-*>*>>*
652
30
34 6
46
31 5
75 07
1495
17321
24827 2992 35
3201 81
46
698
98 77
23 71
279 1877
480
Рис. 4.4.4.2
К
дует указать средний диаметр пружины,
длину зацепов, коэффициент относитель-
ного зазора и параметры материала.
Окно результатов расчета представлено на рис. 4.4.4.1.
4.4.5. Проектировочный расчет пружин кручения круглого поперечного сечения
Выполнить проектировочный расчет пружины кручения круглого поперечного се-
чения для следующих исходных данных:
момент предварительного закручивания
рабочий момент вращения
рабочий угол закручивания
длина проволоки прицепов
Пружина первого класса, выполнена из стали 60С2А.
7\ =12 Н-м;
Т2 =32 Н-м;
О = 55°;
lh = 50 мм.
Расчет
Проектировочный расчет пружины кручения начнем с определения требуемого диаметра проволоки. В начале расчета зададим индекс пружины, С = 7. Условие статической прочности для пружины круглого поперечного сечения записывается в виде (10.2.10)
234
Глава 4. Типовые элементы машин
где
32£Г2
-о ™ О"а , ла
4С-1
4С-4
вспомогательный коэффициент;
сга — допускаемое напряжение изгиба, вычисляемое по формуле аа = 1,25та .
Для заданного класса пружины и марки стали 60С2А максимальное касательное напряжение при кручении равно та - 560 МПа. Тогда
о- = 1,25г - 1,25 • 560 - 700 МПа.
VC VT
Из условия прочности определяем требуемый диаметр проволоки (10.2.10):
32кТ2 32-1,125-32-103
1 I S
V л(Уа у 3,1416-700
= 8,061 мм.
Округлим полученное значение до десятых долей в большую сторону: d ~ 8,1 мм.
Средний диаметр пружины:
£) = С<7 = 7-8,1 = 56,7 мм.
Определяем число рабочих витков (10.2.13):
OEd'n 55 -2 105-8Д4-3,1416
п =--7-----Г------=-----7------------Г--------= 11,387,
64(72 -7])• 180/7 64 <32000-12000) 180-56,7
и округляем его до целого в ближайшую сторону, п = 11. Далее рассчитаем угловые перемещения пружины. Угол поворота пружины при рабочей нагрузке:
MT2Dn 64 • 32-103-56,7-12 ОГЛ1„ = -Т'ТГ" =-----Г77^777------= 85’01 •
Угол поворота пружины при предварительной нагрузке:
MTxDn 64 12-Ю3-56,7-12 000
Pi = "• \4 =----77777777----= 31’88 •
Рабочий угол поворота пружины будет несколько отличаться от заданного по условию из-за округлений при определении числа витков:
0 = (р2-у =85,01° -31,88° =53,13°.
4.4. Расчет упругих элементов машин
235
Из условия устойчивости определяем предельно допустимый угол закручивания:
^>тах = 120-V«= 120-VH =218,539°.
Шаг пружины в ненагруженном состоянии вычисляется как t ~ d 4- А/, где А/ = (ОД 4- 0,5) мм — зазор между витками. Пусть А/ — 0,3 мм, тогда
t = d 4- А/ — 8,1 4- 0,3 = 8,4 мм.
Длина пружины в свободном состоянии:
/0 = (п 4- 1)б/ 4- пЫ ~ (114-1)- 8,14-11 • 0,3 = 100,5 мм.
Длина развертки пружины:
Z - 3,2Z)w 4-= 3,2 • 56,7 • 114-50 - 2046 мм.
Угол подъема винтовой линии:
а = arctg
Увеличение числа витков при закручивании:
2л
53,13-3,1416
2'3,1416480
-0,153.
Диаметр пружины после закручивания:
n D 56’7 ст.
и, —-------- —------------— — 55 923 мм.
1 + Ли/и 1 + 0,153/11
Потенциальная энергия, накопленная пружиной:
32-53,13-3,1416 180-2
—14,84 Дж.
Расчет пружины кручения в модуле АРМ Spring
Для расчета пружины кручения в программе АРМ Spring необходимо указать основные данные:
• момент пружины при рабочей нагрузке;
• момент пружины при предварительной деформации;
• угол закручивания;
• класс пружины;
• материал пружинной проволоки.
236
Глава 4. Типовые элементы машин
Можно также задать дополнительные параметры:
• средний диаметр пружины;
• индекс пружины;
• диаметр про волоки;
• длину прицепов;
• допускаемые напряжения;
• модуль упругости.
г.я
Результаты расчета: Пружина круч
11
IHMHHIltihllKI
>w< НК rirrriihinMHMiiiW
* -- j
587
648
81
11 U84
100.5
84
27
Средний диаметр пружины, [мм] Внешний диаметр пружиныДмм] Диаметр проволоки, [мм] Индекс пружины, [•] Число рабочих витков п, [•] Потенциальная энергия, [Дж] Длина пру^ны,Й Шаг, [мм] Угол подъема винтовой линии, [град]
Угол закручиванияпри предвар нагрузке, [град] 3188 Угол закручивания при рабочей нагрузке, [град] 85 01 Рабочий угол закручивания, [град] Длина развертки пружины, [мм] Длина заготовки пружины, [мм] Диаметр после закручивания, [мм] Допустимое напряжение, [МП а) Предельный угол закручивания, [град]
5313
2045 84
2189 05
5595
700
218.54
Рис. 4.4.5.1
£
Результаты расчета данной пружины в модуле АРМ Spring показаны на рис.
237
СПИСОК ЛИТЕРАТУРЫ
1. Анурьев В. И. Справочник конструктора-машиностроителя. В 3-х т., М.: Машиностроение, 1999.
2. Воскресенский В. А„ Дьяков В. И. Расчет и проектирование опор скольжения (жидкостная смазка): Справочник. М.: Машиностроение, 1980.
3. Зубчатые передачи: Справочник / Под общей редакцией проф. Е. Г. Гинзбурга. Л: Машиностроение, Ленинградское отделение, 1980.
4. Замрий А. А. Проектирование и расчет методом конечных элементов трехмерных конструкций в среде АРМ Structure3D. М.: Изд-во АПМ. 2004.
5. Феодосьев В. И. Сопротивление материалов: Учебник для вузов. М.: Изд-во МГТУ им. Н.Э. Баумана, 1999.
6. Шелофаст В. В, Основы проектирования машин. М.: Изд-во АПМ. 2000.
7. Черменский О. Н. Федоров Я Я Подшипники качения: Справочник-каталог. М.: Машиностроение, 2003.
238
Система автоматизированного расчета и проектирования механического оборудования и конструкций в области машиностроения и строительства
АРМ WinMachine
Научно-технический центр “Автоматизированное проектирование машин” (НТЦ АПМ), работающий на рынке информационных технологий более 12-ти лет, предлагает предприятиям, проектным и исследовательским организациям, а также техническим университетам CAD\CAE\PDM Систему автоматизированного проектирования АРМ WinMachine. Система предназначена для выполнения всего многообразия расчетов машин, механизмов и конструкций и полноценного инженерного анализа создаваемого оборудования с целью выбора его оптимальных параметров, а также оформления и хранения конструкторской документации. Это новейшее программное обеспечение, созданное в России, недорогое по цене, которое в полном объеме учитывает требования ГОСТов, СНиПов и частично национальных стандартов зарубежных государств.
Имеющиеся в АРМ WinMachine возможности инструментального обеспечения решения инженерных задач позволяют выполнить расчет:
• энергетических и кинематических параметров;
• прочности, жесткости и устойчивости;
• выносливости при переменных режимах нагружения;
• вероятности, надежности и износостойкости;
• динамических характеристик.
АРМ WinMachine — это наукоемкий программный продукт, созданный на базе современных инженерных методик проектирования, численных методов механики, математики и моделирования, гармонично сочетающий опыт поколений конструкторов, инженеров -механиков и других специалистов с возможностями компьютерной техники и технологии.
В настоящее время в состав АРМ WinMachine входит параметрический чертежнографический редактор, информационная и графическая база данных, электронный учебник, модули инженерных расчетов, инструменты для расчета напряженно-деформированного состояния (НДС) методом конечных элементов, средства анализа динамического состояния механических конструкций и их устойчивости. Все это в конечном итоге позволяет выполнить весь комплекс необходимых вычислений и в полном объеме подготовить конструкторскую документацию, в случае необходимости используя возможности экспорта и импорта графической и расчетной информации.
Созданное с использованием предлагаемого нами программного обеспечения оборудование будет соответствовать наилучщим мировым аналогам, оптимальным по цене, весу, энергопотреблению и т. п., и, как результат, станет конкурентоспособным на мировом рынке.
Система АРМ WinMachine построена по модульному принципу, причем каждый из модулей может работать как в составе Системы, так и самостоятельно:
• АРМ Graph — плоский чертежно-графический редактор для оформления конструкторской документации, имеющий удобные функции параметрического задания геометрических объектов.
• АРМ Studio — модуль создания трехмерных поверхностных и твердотельных моделей со встроенным генератором разбивки на конечные элементы.
239
АРМ Mechanical Data — модуль хранения стандартных деталей и узлов, справочных данных по общему машиностроению.
АРМ Material Data — модуль хранения и редактирования параметров материалов.
АРМ Construction Data — модуль хранения графической информации по стандартным деталям и элементам строительных конструкций.
АРМ Technology Data — модуль хранения стандартных информационных данных для проектирования технологических процессов
АРМ DOCs — модуль хранения, просмотра, поиска и редактирования технической документации.
АРМ Book — электронный учебник “Основы проектирования машин”, в котором изложены основные методы расчета, реализованные в Системе АРМ WinMachine.
АРМ Structure3D — модуль расчета и проектирования произвольных конструкций, состоящих из пластинчатых, стержневых, а также объемных элементов и их произвольных комбинаций методом конечных элементов. С его помощью можно рассчитать напряженно-деформированное состояние конструкции в статическом режиме, выполнить расчеты на устойчивость и определение собственных частот, а также проанализировать поведение конструкции при произвольном динамическом нагружении.
АРМ Joint — модуль расчета и проектирования соединений деталей машин и элементов конструкций, который позволяет выполнить комплексный расчет всех типов резьбовых, сварных, заклепочных соединений и соединений деталей вращения.
АРМ Trans — модуль проектирования передач вращения, предназначенный для расчета всех типов зубчатых передач, а также червячных, ременных и цепных передач, и генерации чертежей элементов этих передач в автоматическом режиме.
АРМ Bear — модуль расчета неидеальных подшипников качения, позволяющий провести комплексный анализ опор качения всех известных типов.
АРМ Plain -— модуль расчета и анализа радиальных и упорных подшипников скольжения, работающих в условиях жидкостного и полужидкостного трения.
АРМ Shaft — модуль расчета, анализа и проектирования валов и осей.
АРМ Drive -— модуль расчета и прЬектирования привода произвольной структуры, а также планетарных и волновых передач. С его помощью выполняется комплексный расчет кинематических характеристик и проектирование как привода в целом, так и отдельных его элементов (подшипников качения, передач зацеплением и валов), с автоматической генерацией чертежей, как отдельных деталей, так и в сборе, включая корпус.
АРМ Spring — модуль расчета и проектирования пружин и других упругих элементов машин, при помощи которого можно рассчитать и вычертить пружины сжатия, растяжения и кручения, плоские пружины, а также тарельчатые пружины и торс ионы.
АРМ Cam, АРМ Slider — модули расчета и проектирования кулачковых механизмов с автоматической генерацией чертежей и рычажных механизмов произвольной структуры. АРМ Screw -— модуль для расчета неидеальных передач поступательного движения. Он способен рассчитать винтовые передачи скольжения, шарико-винтовые и планетарные винтовые передачи.
АРМ Beam, АРМ Truss — модули расчета и проектирования балочных элементов конструкций и плоских ферм методом конечных элементов.
АРМ Technology — модуль проектирования технологических процессов.
Тел/факс: (095) 513-1393; тел. 514-84-19. E-mail: com@apm.ru; www.apm.ru;
Адрес: 141070, Московская область, г. Королев - Центр, а/я 58.
I
Владимир Васильевич Шелофаст Татьяна Борисовна Чугунова
ОСНОВЫ ПРОЕКТИРОВАНИЯ МАШИН Примеры решения задач
Редактор Е. Г. Стайнова Компьютерная верстка Е. В. Карнопелевой
Подписано в печать 23.09.04, Формат 70X1007(6. Бумага офсетная.
Печать офсетная. Гарнитура Таймс. Усл. печ. л. 19,5.
Тираж 1000. Заказ 8273.
Издательство «Автоматизированное проектирование машин» (АПМ) 141070, Московская обл., г. Королёв-Центр, а/я 58.
Тел. (095) 513-13-93, (095) 514-84-19
Отпечатано с оригинал-макета в ГУП «Брянское областное полиграфическое объединение» 241019, г. Брянск, пр-т Ст. Димитрова, 40