/










































































































































Author: Белкин А.М
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника справочник гражданская авиация самолетовождение
ISBN: 5-277-00093-3
Year: 1988




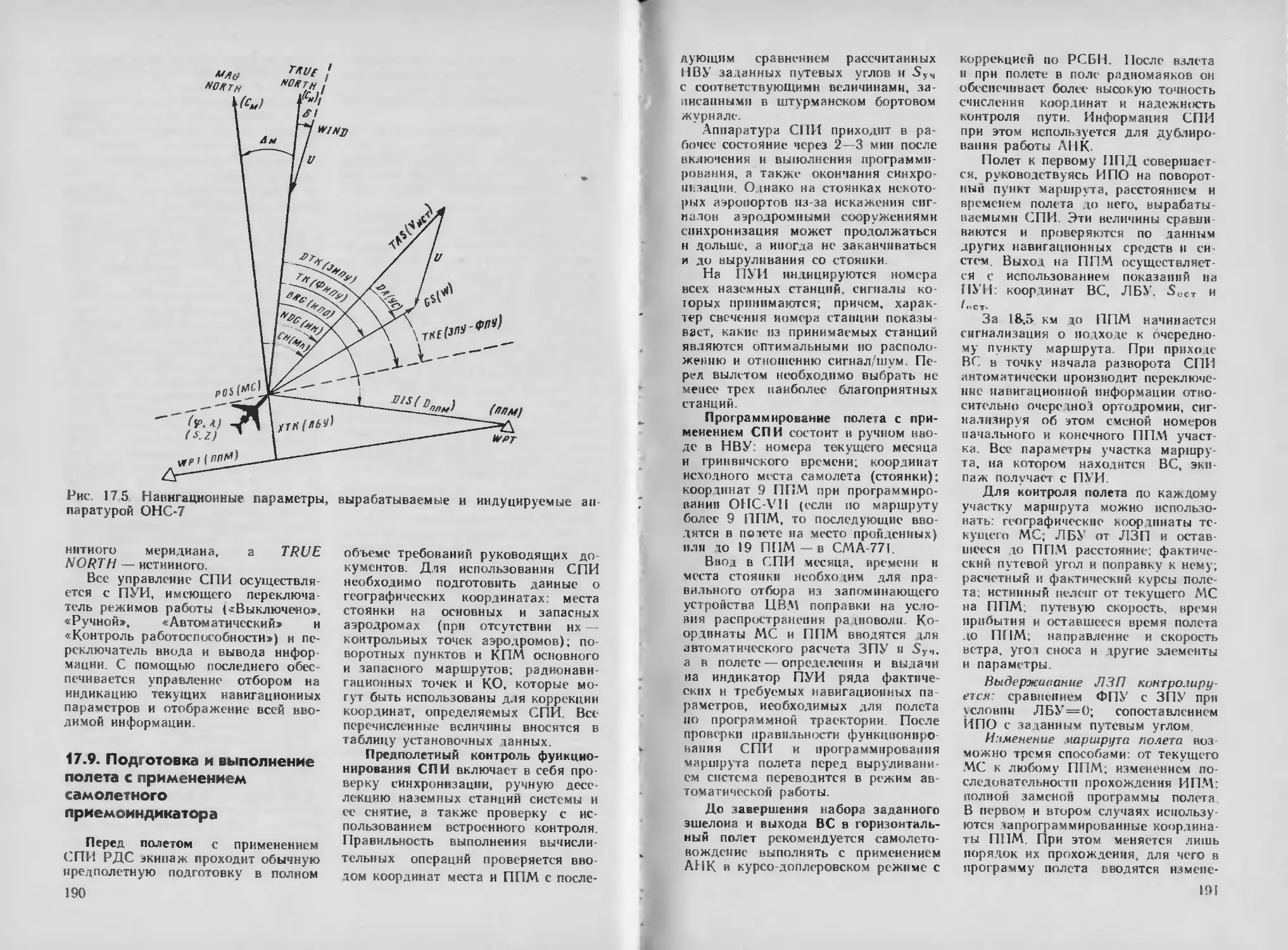
Text
иючник
ВОЗДУШНАЯ
НАВИГАЦИЯ
Москва "Транспорт" 1988
1р.70к.
ВОЗДУШНАЯ НАВИГАЦИЯ
ВОЗДУШНАЯ \
навигация
УДК 629.7.052.(083)
Воздушная навигация: справочник / А. М. Белкин, Н. Ф. Ми-
ронов, Ю. И. Рублев, Ю Н. Саранский М.: Транспорт. 1988.—303 с.
Изложены основные сведения по теории и практике воздушной
навигации, приводятся навигационные характеристики технических
средств самолетовождения, даются рекомендации по повышению
точности и надежности решения навигационных задач и штурман-
скому обеспечению безопасности полетов. Рассматриваются вопросы
подготовки и выполнения полетов на воздушных судах с различным
навигационно-пилотажным оборудованием. Особое внимание уделя-
ется применению авиационных навигационных комплексов
Для летного, диспетчерского и инженерно-технического состава
гражданской авиации.
Ил. 174, табл. 41. библиогр. 58 назв
Справочник написали Л М Белкин — главы 1, 4, 5 (и. 5.1). 16
17, 22 23. 25; Н Ф. Миронов — гл 6. 7. 11, 15. 19 20, 21,
Ю И. Рублев — гл. 13, 14, 18; Ю. Н. Сарайский — гл. 2, 3. 5 (и 5.2).
8, 9, 10, 12, приложение.
Рецензенты канд. воен наук В Н Кузьменко. В В. По
ликов
Заведующий редакцией Л В Васильева
Редактор Э М Федорова
36060400003161
049(01)-88
209 88
ISBN 5-277-00093-3
(С Издательство «Транспорт» 198Я
УСЛОВНЫЕ СОКРАЩЕНИЯ
ААЕ — авиационный астроно-
мический ежегодник
АК — астрокомпас
АЛП — астрономическая линия
положения
АНК — авиационный навигаци-
онный комплекс
АНЗ — аэронавигационный за-
пас топлива
АНС астрономическая нави-
гационная система
АР — авиационные работы
АРК — автоматический радио-
компас
АРП — автоматический радио-
пеленгатор
АСШОП —автоматизированная си-
стема штурманского
обеспечения полетов
АФС — аэрофотосъемка
АФА — аэрофотоаппарат
АХР — авиационно-химические
работы
БВ — барометрический высо
томер
БГМК —блок гиромагнитного
курса
БНК — бортовой навигационный
комплекс
БПРМ — блнжиий приводной ра-
диомаркер
БРЛС —бортовая радиолокаци
ониая станция
БСК — блок согласования курса
БСФК — блок системы формиро-
вания курса
БУ — боковое уклонение
БУР — боковое упреждение
разворота
БЦВМ —бортовая цифровая вы-
числительная машина
ВПР — высота принятия реше
ния
ВРМ — веерный радиомаяк
ВРЛС — вторичная радиолокаци-
онная станция
ВС — воздушное судно
ВТ — воздушная трасса
ВФ — воздушное фотографи-
рование
ВОР — зарубежный угломерный
радиомаяк (VOR)
ГИК — гнроиндукнионный ком-
пас
ГМК гиромагнитный компас
I МС — географическое место
светила
ГОСК — главиоортодромичеекая
система координат
ГПК —гирополукомпас
ГТ — географическая точка
ДИСС —доплеровский измери-
тель скорости и сноса
ДП —дополнительная по-
правка
ДПРМ—дальний приводной ра-
диомаркер
ЗИПУ — заданный истинный пу
тевон угол
ЗМПУ — заданный магнитный
путевой угол
ЗПВТП —заданная пространст-
веиио-времениая траек
торня полета
ЗТ -заданная точка
ИЗК — индикатор-задатчик ко
ординат
ПК — истинный курс
ИКАО—международная органи-
зация гражданской авиа-
ции (ICAO)
ИНС—инерциальная навигаци-
онная система
ИКВ — инерциальная курсовер-
тикаль
ИПМ — исходный пункт марш
РУта
ИПС —истинный пеленг само-
лета
ИГТУ — истинный путевой угол
ИПР — истинный пеленг радио-
станции
ИШР — инженерно-штурманский
расчет
КГС — курсо-глнссадная си-
стема
КМ — коррекционный меха-
низм
КО — контрольный ориентир
КПМ — конечный пункт марш
руга
КС — курсовая система
КТА — контрольная точка i аэро-
КУО дрома — курсовой угол орнен
КУР тира — курсовой угол радио-
станции
КУС — комбинированный указа-
тель скорости
3
КЭ — контрольный этап
ЛБУ — линейное боковое укло-
нение
ЛЗП —линия заданного пути
ЛП — линия положения
ЛРВ—линия равных высот
ЛРПР—линия равных пеленгов
радиостанции
ЛРПС —линия равных пеленгов
самолета
ЛРРПР —линия равных разностей
пеленгов радиостанций
ЛРР —линия равных расстоя-
ний
ЛРРР — линия равных разно-
стей расстояний
ЛУР — линейное упреждение
разворота
ЛФП —линия фактического пути
МБВ — минимальная безопас-
ная высота
МВЛ — местная воздушная ли-
ния
МК — магнитный курс
МНТ—минимальные навига-
ционные требования
МПР магнитный пеленг радио-
станции
МПС - магнитный пеленг само
лета
МПУ — магнитный путевой угол
МС — место самолета
МСРП — магнитная система ре-
гистрации параметров
НАС — навигационная автома-
тизированная система
НВ — навигационный вычис-
литель
НК — навигационный комплекс
ИРЛС— наземная радиолокаци-
онная станция
НТС—навигационный треуголь-
ник скоростей НЭ - навигационный элемент
ОЗМПУ - ортодромнческий иый магнитный угол задан- путевой
ОЗПУ —ортодромнческий иый ИСТИННЫЙ угол задан путевой
ОК — ортодромнческий курс
ОМПУ — ортодромнческий нитный путевой ОП — обратный пеленг маг- угол
ОПВП — особые правила альных полетов । низу-
ОПМ — опорный пункт марш
рута
ОГ1РС — отдельная приводная
радиостанция
ОПУ — ортодромнческий истин
ный путевой угол
ОРК — отсчет радиокомпаса
ОССК—ортодромическая сфери-
ческая система коорди-
нат
ПАНХ—применение авиации в
народном хозяйстве
ПВИ — пульт ввода и индика-
ции
ПВП — пульт взлета и посадки
ПВТП —пространственно-вре-
менная траектория по-
лета
ПК — поправка в курс
ПКП — прибор командио-пнло
тажный
ПМС—пространственное место
самолета
ПМПУ — посадочный магнитный
путевой угол
ПНК —пилотажно-иавпгациои-
ный комплекс
ПНП — плановый навигацион-
ный прибор
ПОСК—прямоугольная ортодро-
мическая система коор-
динат
ПОД — пункт обязательного до-
несения
ПП — прямой пеленг
ППМ — поворотный пункт марш
Рута
ППМС — программное простран-
ственное место самолета
ППП—правила полетов по при
борам
ППР —путевой пеленг радио-
станции
ППС — путевой пеленг самолета
ПРВ —прямая равных высот
ПС — пеленг самолета
ПУП —пульс управления и ин-
дикации
РА — район аэродрома
РВ — радиовысотомер
РДРНС — разностно-дальномерные
радионавигационные си-
стемы
РЛС радиолокационная стан-
ция
4
РЛЭ — руководство по летиой ТВА
эксплуатации воздуш- ного судна
РМ — радиомаяк ТВАЗ
РИС — радионавигационная си-
стема ТВГ
РНТ — радионавигационная ТГП
точка
РО — рабочая область ткс
РСБН — радиотехническая систе- тк
ма блнжией навигации ТНСР
РСП — радиолокационная си-
стема посадки тпм
РТС — радиотехническое сред-
ство УВ
САРПП — система автоматической У Впос
регистрации параметров полета увд
САХ — средняя аэродинамиче- УВИ
ская хорда
СВ — случайная величина УД РИС
СКП — средняя квадратическая
погрешность
ск — система координат УКВ
СКРП — средняя квадратическая УО
радиальная погрешность УРНС
снс — спутниковая иавигаци-
СПС ониая система УС
— система предупреждения УШ
столкновений ФПУ
ссос — система сигнализации
опасной скорости сбли- жения с землей ФТ
сспи — средства сбора полетной чоск
информации
таблицы высот и азиму-
тов Солнца, Луны и пла-
нет
таблицы высот и азиму-
тов звезд
точка входа в глиссаду
точка начала горизон-
тального полета
точная курсовая система
точка коррекции
точка иачала стандарт-
ного разворота
точка предпосадочного
маневра
угол ветра
угол ветра посадочный
управление воздушным
движением
устройство ввода и ин-
дикации
угломерио-дальиомеряая
радионавигационная си-
стема
ультракороткие волны
угол отворота
угломерная радионавн
гационная система
угол сноса
указатель штурмаиа
фактический путевой
угол
фиксированная точка
части оо ртодромичес кая
система координат
РАЗДЕЛ ПЕРВЫЙ
ОСНОВЫ ТЕОРИИ ВОЗДУШНОЙ НАВИГАЦИИ
Глава 1
ЗАДАЧИ ВОЗДУШНОЙ НАВИГАЦИИ И МЕТОДЫ ИХ РЕШЕНИЯ
1.1. Основные навигационные
понятия и определения
Движение воздушного судна (ВС)
в воздухе осуществляется по прост-
ранственно-временной траектории по-
лета (ПВТП). Траектория полета,
представляющая пространственную
линию / (рис. 1.1), описываемая
центром масс ВС при его перемеще-
нии, может быть заданной, требуемой
и фактической. Заданная ПВТП на-
зывается программной траекторией.
Каждому моменту времени соответ-
ствует определенное пространствен-
ное положение ВС — пространствен-
ное место самолета (ПМС) Ci,
Сг, .... С„. Совокупность ПМС со-
ставляет фактическую ПВТП.
Линия пути 2 (см. рис. 1.1) есть
проекция траектории полета ВС иа
поверхность Земли. Оиа также мо-
жет быть за тайной, требуемой и
фактической. Проекция программной
Рнс. 1.1. Элементы движения само-
лета
6
траектории полета иа земную поверх-
ность называется линией ладанного
пути (ЛЗП). Эта линия, заданная
опорными (основными) пунктами
маршрута (ОПМ), через которые
должно пролететь ВС, составляет
маршрут полета. К числу ОПМ отно-
сятся: исходный пункт маршрута
(ИПМ)—точка маршрута, от кото-
рой начинается прокладка ЛЗП из
полетной карте; поворотные пункты
маршрута (ППМ) — пункты марш-
рута, над которыми происходит из-
менение направления ЛЗП; исходный
пункт обратного маршрута
(ИПОМ)—пункт маршрута в райо-
не выполнения задания (фотографи-
рования, различных видов разведки
н т. и.), от которого начинается об
ратный маршрут для возвращения
на аэродром посадки; конечный пункт
маршрута (КПМ)—ОПМ в районе
аэродрома, до которого прокладыва-
ется линия заданного пути па полет-
ной карте ЛЗП.
Обычно в качестве основных пунк-
тов маршрута выбирают легко обна
руживаемые н надежно опознавае-
мые с воздуха наземные ориентиры
(или радионавигационную точку),
под которыми понимают естествен-
ный или искусственный хорошо вы
деляющнйся на общем ландшафте
объект с точно известными коорди-
натами нли положением, который мо-
жет быть использован для определе
пня местонахождения ВС по визу-
альным н ра зиолокацнонным наблю-
дениям.
Линия фактического пути (.1ФП)
представляет собой проекцию на зем-
ную поверхность фактической траек-
тории полета Чтобы найти ЛФП,
необходимо с достаточной точностью
и частотой определять в полете ме-
стонахождение ВС.
Местом сачолета (МС) называет-
ся та точка иа поверхности Земли,
над которой в данный момент нахо-
дится ВС (в которую проецируется
его центр масс). Положение этой точ-
ки определяется нли указанием двух
ее координат (например, географиче-
ских широты и долготы), или относи-
тельно ориентира (например. 10 км
южнее острова А) Дополнительная
информация о высоте полета позво-
ляет определить ПМС.
При задании маршрута, как пра-
вило, указывается н высота пролета
его ОПМ. Если маршрут полета раз-
вернуть в прямую линию и через
эту прямую провести вертикальную
плоскость, то проекция на нее задан-
ной пространственной траектории бу-
дет представлять профиль полета.
В реальном полете из-за неизбеж-
ных погрешностей решения навигаци-
онных задач фактическая траектория
полета не совпадает точно с задан-
ной. В связи с этим вдоль маршрутов
регулярных полетов устанавливают
ся воздушные трассы (ВТ) и мест-
ные воздушные линии (МВД), пред
ставляющие собой ограниченные по
высоте и ширине коридоры в воздуш-
ном пространстве. Ширина воздуш-
ной трассы (МВЛ) и эшелоны (вы-
соты), выделенные для полетов, мо-
гут периодически пересматриваться.
Для оценки движения ВС по тра-
ектории используются геометриче-
ские и механические величины, ха-
рактеризующие его пространственное
положение, скорость и направление
движения в некоторый момент вре-
мени. Их принято называть навига-
ционными элементами полета.
1.2. Задачи воздушной
навигации
Навигация — наука о целенаправ-
ленном перемещении движущегося
объекта, а воздушная навигация —
прикладная наука о методах и сред-
ствах формирования и реализации за-
данной пространствеино-врем°нной
траектории полета (ЗПВТП), обеспе-
чивающих перемещение ВС из одной
точки земной поверхности в другую.
В соответствии с предметом воздуш-
ной навигации ее основной задачей
является обеспечение точного полета
ВС по программной траектории и вы
воде его в заданные точки (ЗТ) в на
значеннос время нли, кратко, обеспе-
чение выполнения ЗПВТП. Следова
тельно, воздушная навигация в прак
тическом плайе есть процесс опреде-
ления пространственного места ВС.
его скорости и направления движе-
ния, а также требуемых параметров
для полета по программной траекто-
рии.
Выполнение основной задачи до
стигается решением следующих част-
ных задач: программирования поле-
та — выработки н задания закона
движения ВС; определения фактнче
ского навигационного режима поле-
та — измерения параметров движения
(координат ВС, путевых скорости и
угла) и оценки степени их неопреде-
ленности (достоверности); коррек-
ции — сравнения результатов нзмере
ний навигационных параметров с за-
данными, оценки отклонений и нс
правления пути; прогнозирования —
определения будущего положения
ВС в заданный момент времени; ма
неврцрования — изменения характе-
ристик движения с целью обеспече-
ния полета по ЗПВТП; оптимизации
решения навигационной задачи; на-
вигационного обеспечения безопасно-
сти полетов
В процессе программирования
производится выбор иаивыгоднейшей
траектории и необходимых данных
для полета по ней. Маршрут и про
филь полета, режим следования по
заданной траектории по времени, ус-
ловия выхода в заданные точки вы-
бираются оптимальными в соответ-
ствии с некоторыми критериями. Ча
стиые критерии могут быть самыми
разными — максимальная продолжи-
тельность полета с данным запасом
топлива, полет по кратчайшему рас-
стоянию между двумя заданными
точками, минимум расхода топлива
и др. Но обобщающим критерием
для гражданской авиации служит
7
максимальная экономическая эффек-
тивность полетов.
Как основная задача в целом, так
и частные задачи воздушной навига-
ции должны выполняться с обяза-
тельным соблюдением мер по без-
опасности полетов. Из трех основных
обобщенных показателей деятельно-
сти гражданской авиации — безопас-
ности, экономичности и регулярно-
сти — прежде всего должна обеспе-
чиваться безопасность полетов.
Для успешного решения задачи
обеспечения полета по программной
траектории, требующего непрерывно
го управления центром масс ВС, эки-
паж постоянно с достаточной точно-
стью должен зиать: где находится
ВС в данный момент времени; куда
необходимо лететь в дальнейшем; ка-
кую при этом держать скорость, что-
бы в ОПМ прибыть точио по месту
и времени. Источниками таких дан-
ных служат разнообразные борто
вые технические средства навигации
и наземные средства обеспечения но
летов. С их помощью экипаж полу-
чает осведомляющую информацию о
многомерном векторе состояния ВС:
текущих координатах, высоте поле-
та. воздушной и путевой скорости,
курсе и путевом угле, крене и тан-
гаже, ускорениях движеиня, текущем
времени и интервалах времени меж-
ду двумя событиями и др Она под
вергается перекодировке н оптималь-
ной обработке, а затем переработке
в управляющую информацию, обес-
печивающую выполнение поставлен-
ных задач в соответствии с програм-
мой полета
С воздушной навигацией связано
самолетовождение — комплекс дей-
ствий экипажа и диспетчеров служ-
бы движения, направленный на обес-
печение наибольшей точности выпол-
нения полетов по установленным
трассам (маршрутам) и осушествле
ние посадки в заданное время. Сле-
довательно, самолетовождение озна-
чает рабочий процесс, т. е. практиче-
ское вождение самолетов и вертоле
тов. Оно включает в себя действия
экипажа по решению навигационных
задач и пилотированию, контроль за
осуществлением полетов по програм-
мной траектоцни и управление воз-
8
душным движением диспетчерами.
Этот комплекс действий н обеспечи-
вает выполнение как основной, так и
частных задач воздушной навигации.
1.3. Земные навигационные
системы координат
Для решения основной навшаци-
онной задачи прежде всего необходи-
мо располагать информацией о коор-
динатах ВС и ОПМ в земной навига-
ционной системе координат (СК),
выбранной для выполнения полета,
Указание положения объектов и то-
чек па земной поверхности в зависи-
мости от принятой формы Земли осу-
ществляется в астрономической, гео
дезической и сферической системах
координат. На практике широко
пользуются термином географические
координаты (широта <рг п долгота
Аг), хотя такой СК нет. Под геогра-
фической системой координат пони
мают ортогональную сетку меридиа-
нов и параллелей на поверхности
земного эллипсоида вращения, пере-
нссеипую иа карту. Поэтому снятые
с карты координаты точек называют-
ся географическими.
При решении многих задач воз
душной навигации Землю принимают
за сферу (шар) и пользуются нор-
мальной сферической СК. Преобразо
ванне географических координат в
нормальные сферические выполняют
следующим образом:
если радиус Земли /?л = 6371,1 км
(сфера, равновеликая по объему сфе-
роиду Красовского, то <F = <fr и
А=\г. если /?л=б372.9 км (сфера
Каврайского), то
<р = <рг — 8'39" sin 2<рг и А = Аг (I I)
В первом случае на сфере будут
иметь место искажения по углу по-
рядка 0,4° и по расстоянию 0,5%. Во
втором случае оии соответственно не
превышают 0,1° и 0,08%. В совре-
менной навигации магистральных
самолетов преобразование координат
осуществляется обязательно по фор-
муле (1.1).
Применение различных датчиков
навигационной информации, работа
которых основана на самых разнооб-
разных физических принципах, а
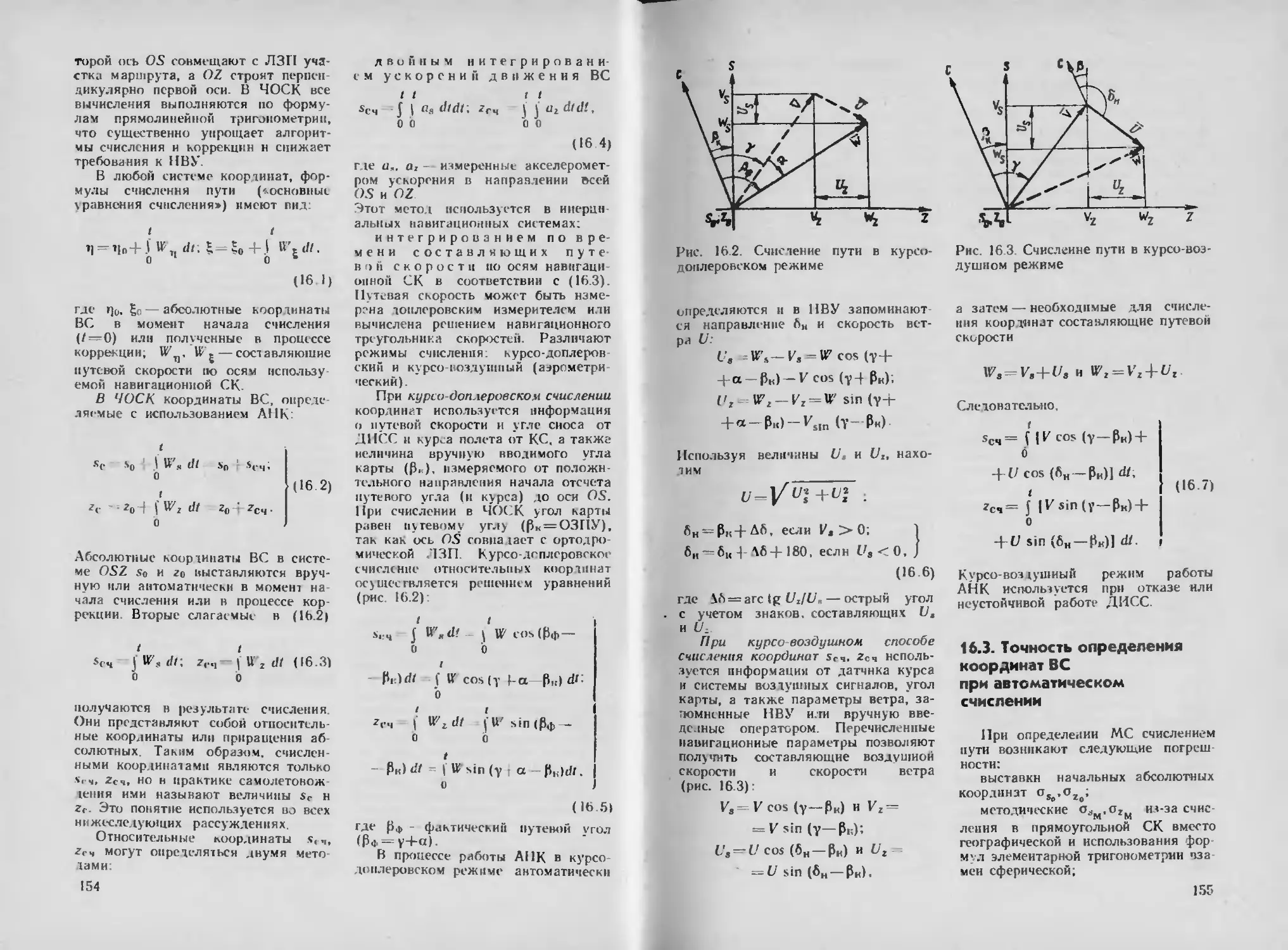
Рис. I 2 Главная (а) и частная (б) ортодромические системы координат
также большое число навигационных
задач, решаемых в процессе подго
тонки к полету и в позете, обуслов
лпвают использование в воздушной
навигации значительного числа зем-
ных систем координат: географиче-
ской, нормальной сферической, орто-
дромнческой сферической, главной и
частной ортодромической, плоской
прямоугольной, полярной и биполяр
нон, экваториальной, горизонтальной
и др
Для решения всех навигационных
задач исходной информацией являют
ся географические координаты, кото
рыс при необходимости преобразу
ются в любые другие.
Ортодромическая сферическая СК
(ОССК) представляет собой косую
сферическую систему, экватор кото-
рой располагается в любом требуе-
мом направлении и называется глав-
ной ортодромией (условным эквато-
ром) Равноудаленные от нее две точ-
ки, в которых сходятся условные ме
ри шаны, принимаются за полюса Ре
этой СК. Координатами точки явля-
ются ортодромнческие широта и дол
гота в градусной мере Z, .¥, в ти
нейиой г, х Шпрота 1 измеряется
от плоскости условного экватора к
полюсам системы от 0 до +90° На-
чало отсчета долготы Л может быть
выбрано произвольно если оно не
предопределяется особенностями
бортового навигационного комплекса
Если известны координаты точки
вертекса фс. Л,- ортодромии, то нор-
мальные сферические координаты q.
А преобразуются в ортодромнческие
siiiZ - sin ф cos qq-—
—cos <p sin фр cos (A — A„):
cos V [sin ф sin фо-д-совф X
> cos фп cos (A—A,,)] sec Z,
где фи. Ao — координаты начала глав-
ной ортодромии. Вычистенные по
формулам (1.2) координаты Z и X
из угловой меры (взятые в минутах)
пересчитываются в линейные (кило-
метры)
z 1.853Z' и х 1,853А" . (1.3)
В практике современной навига-
ции условный экватор ОССК строит-
ся для всего мари оута (проходит
через ППМ и КПМ), или несколь-
ких участков, или каждого участка
(рис. 1.2.о). В первом и втором слу-
чаях полученная СК называется глав-
ной ортодромической (ГОСК), в по
слешем — частной ортодромической
(моею.
<»
В настоящее время наибольшее
распространение получила ЧОСК.
В ней начато СК выбирают в конце
участка маршрута, ось OS совмеща-
ют с ортодромнческон ЛЗП участка
(с условным экватором), a OZ (ус-
ловный меридиан) направляют пер-
пендикулярно оси OS (рис. 1.2,6).
Поскольку при полетах по воздуш-
ным трассам уклонения ВС от ЛЗП
невелики, то в полосе маршрута по-
верхность Земли допустимо прини-
мать за цилиндрическую. Тогда при
развертке цилиндра получается прак-
тически плоская поверхность, а
ЧОСК превращается в прямоуголь-
ную ортодромическую систему коор-
динат (ПОСК). Она может строиться
непосредственно на полетной карте.
Координаты г, s ориентиров измере-
ниями иа карте будут определяться
с методическими погрешностями, при-
сущими этой СК Их значения зави
сят от проекции и масштаба карты.
Они равны нулю на ЛЗП и возраста-
ют по мере удаления пунктов от оси
OS. Хотя в полосе маршрута они
несущественны, по тем не менее в
современной воздушной навигации
координаты пунктов рассчитываются
с требуемой то шостью по формулам
сферической тригонометрии
В прямоугольной ОСК земная по-
верхность считается плоской и зада-
чи воздушной навигации решаются с
использованием формул элементар-
ной тригонометрии. Допустимость
этого определяется теоремой Ле-
жандра, согласно которой при вы-
прямлении сторон малого сфериче-
ского треугольника (стороны сущест-
венно малы по сравнению с /?,)
каждый угол в полученном плоском
треугольнике будет меньше соответст-
вующего утла сферического треутоль
ника на Aa—Q/SRl, где Q — пло-
щадь треугольника. Если рассматри-
вать равносторонний треугольник со
сторонами /, то справедливо соотно-
шение /as285VVa. Тогда для /=
= 450 км н 900 км имеют место иска-
жения углов порядка Аа = 2,5' и 10'
соответственно
Прямоугольная ОСК удобна дли
контроля пути, навигационного уп-
равления полетом и управления воз-
10
душным движением: координаты 2 с
и sc непосредственно указывают ли
нейное боковое уклонение (ЛБУ) от
ЛЗП и оставшееся до очередного
ППМ расстояние. В этой СК упро-
щается н автоматизированное вож-
дение ВС, так как для следования
но линии заданного пути достаточно
вы юржпвать гс=0. zc=O и гс=0
Полярная и биполярная СК ис-
пользуются при эксплуатации радио-
навигационных систем, а экватори-
альная и горизонтальная — астроно-
мических средств.
1.4. Методы задания
траектории полета
В общем виде программная тра-
ектория задается (навигационная за
дача ставится) координатами П.МС
в функции времени
»Ь-= £з= ьз(7);
НЛ И-ЛТ), (1.5)
где г)», £3, НЛ — координаты МС в
любой выбранной криволинейной
СК.
В широко применяемой ЧОСК вы-
ражения (1.5) принимают внд
<i z3(T); s3 s3(F);
«з Н3(Т). (1.6)
В общем случае уравнения (1.5)
н (16) являются сложными функци-
ями выражающими зависимость
между программными координатами
z.,. s.,, Н, п заданными иавигацион-
но-пнлотажными параметрами для
различных отрезков траектории. По-
этому в практике воздушной навига-
ции прибегают к более простым и
нагля ;ным способам задания ПВТП.
Упрощение достигается разделением
программной траектории на горизон-
тальную и вертикальную составляю-
щие, которые оформляются как за-
данные маршрут и профиль полета.
Последние могут быть изображены
графически или описаны аналитиче-
ски Причем в зависимости от соста-
ва навнгацнонно-пплотажиого обору-
дования ВС программная траектория
оформляется по-разному.
В простейшем случае, когда ВС
не имеет авиационного ианигацнонио
го комплекса (АНК), заданная ПВТП
оформляется на полетной карте и в
левой части («предварительный рас-
чет полета») штурманского бортово-
го журнала. На карте прокладывает-
ся маршрут полета с указанием ЗПУ
и длин участков маршрута, а в штур-
манском бортовом журнале в цнфро
вом виде записывается вся заданная
пространственно-временная траекто
рия полета по частным ортодромиям.
Объем вносимой в нес программной
информации зависит от класса ВС.
Для полета на ВС, оборудован-
ных АНК. кроме полетной карты и
штурманского бортового журнала,
составляется таблица установочных
данных. Она используется в процессе
ввода программы в навигационное
вычислительное .стройство (ИВУ)
для автоматического счисления коор-
динат и автоматизированного вожде-
ния ВС по ЛЗП
Линия пути задается ортодро-
мией, представляющей собой дугу
большого круга на сфере и являю-
щепся кратчайшим расстоянием меж-
ду двумя точками на земной поверх-
ности. Она пересекает географические
меридианы под различными углами,
и на карте должна строиться по ко-
ординатам ее промежуточных точек
В некоторых случаях в качестве
линии пути используется локсодро-
мия — кривая на сфере, пересекаю-
щая меридианы под одним и тем же
углом. Она длиннее ортодромии и
имеет боковое уклонение от нее, за
исключением совпадения локсодро
мии с меридианами и экватором
Основное требование в теории и
практике самолетовождения — обес
печение наиболее точного совпадения
фактической траектории полета с
программной. Для этого в любой мо-
мент времени необходимо выполне-
ние условии.
ПР') Чз(7’) (?')-> 0,
^(7')-L(7) -ДНТ)-0;
77(7')-/73 (7’) = Д„(7')-)-0.
(1-7)
где 1](Г), НТ1). 77(1)—текущие ко
ординаты ВС. определяющие вектор
его состояния.
Произвольно выбранная и ориен
тированная система Ог^Н создает
некоторые неудобства из-за взаим-
ного влияния одной погрешности на
другую. Корреляционная связь меж-
ду ними может быть устранена вы-
бором ортогональной ЧОСК, одна из
осей которой совмещена с ЛЗП,
вторая — перпендикулярна ей, а
третья—направлена вдоль местной
вертикали. В этом случае условия
(1.7) принимают вид
Н7)-0.
А, (7) |s(7')-Sa(7’)]-bO;
Ал (7") — [77 (7’) —Н3 (7')]-»-0.
(1.8)
В данном выражении в любой мо
мент времени координата г(Т) ука-
зывает только наличие линейно-боко-
вого уклонения от ЛЗП; \,(Т) ин
формирует о несоблюдении временной
программы полета, a A//(7")—укло-
нение от заданного профиля полета
Такое разделение переменных созда
ет удобство в дифференциации каиа
лов навигации и пилотирования по
направлению, дальности и высоте,
т. е. выдерживание заданного марш-
рута полета по направлению и даль-
ности и профиля полета могут рас
сматриваться как независимые зада
чи самолетовождения
1.5. Методы решения основной
задачи воздушной навигации
Методы решения основной зада
чи воздушной навигации — выполне
ние условий (18) — зависят от со
става и характеристик навигацноино
го оборудования ВС. Но во всех
случаях в основе самолетовождения
лежит определение МС счислением
пути и комплексное применение тех
ническнх средств и способов решения
навигационных задач Счисленные
координаты периодически должны
корректироваться Экипаж обязан
выбирать для решения тех или иных
задач самолетовождения такие сред
ства и способы из имеющихся в его
распоряжении, которые в данных ус
ловиях полета обеспечат наибольшую
точность следования по программной
траектории и безопасность полета.
11
Неавтоматическое счисление пути
и визуальная ориентировка ведутся
при полетах на ВС, не оборудован-
ных АНК. Выполнение условия
г(Г)-»-0 достигается непрерывным
контролем пути по направлению с
использованием курсовых приборов
и радионавигационных систем, а ус-
ловия У,(Т)~*-0— контролем пути по
дальности В случае обнаружения
уклонений ВС от программной тра-
ектории производится исправление
пути.
Автоматизированный полет. На
ВС, оснащенных АНК, при введен-
ной в НВУ программы и включении
системы автоматического управления
(САУ) обеспечивается автоматизиро-
ванный полет по ЛЗП с выдержива-
нием z(T)=0. Выполнение условия
Аа(/)=0 достигается изменением
скорости полета в соответствии с
результатами контроля пути по даль-
ности.
Соблюдение заданного профиля
полета на ВС всех классов осуществ-
ляется с помощью барометрических
высотомеров. При включенной САУ
эшелон полета выдерживается авто-
матически. На современных ВС пред-
усмотрена автоматическая сигнали-
зация, которая оповещает об откло-
нении от заданного эшелона.
Задание и выполнение полета по
ПВТП требует знания текущего вре-
мени и измерении его интервалов.
Для этого используются пружинные
бортовые авиационные часы с секун-
домером (АЧС), имеющие три меха-
Глава 2
АВИАЦИОННАЯ КАРТОГРАФИЯ
2.1. Форма и размеры Земли
Физическая поверхность Земли,
состоящая из поверхности материков
и океанов, имеет сложную форму.
В качестве приближения к реальной
поверхности Земли используется
геоид
Г еоид — фигура Земли, ограни-
ченная уровенной поверхностью, пе-
ресекающей отвесные линии во всех
12
ннзма: текущего времени (работает
непрерывно); времени полета (вклю-
чается в момент взлета); секундомера
для измерения интервалов времени.
Точность показаний часов в штур-
манских комнатах, помещениях служ-
бы УВД, авиационной метеорологи-
ческой станции (АМСГ), связи, бор-
товых, а также личных часов летного
н диспетчерского состава, руководя-
щего полетами, должна быть не ху-
же ±15 с. В процессе предполетной
подготовки члены экипажа обязаны
сверить показания личных часов с
контрольными (которые проверяются
по сигналам точного времени), а на
ВС — завести бортовые часы и уста-
новить точное время. Точность ра-
диосигналов точного времени А/ =
= 0.01 с.
Бортовые АЧС позволяют опреде-
лять время суток с точностью, зави-
сящей от погрешности начальной вы-
ставки времени и суточного хода, не
превышающего ±45 с. Интервалы
времени с помощью обычных секун-
домеров измеряются с о<^0,5 с, а
хронометров с с(«0,1 с.
В радионавигационных системах
используется системное время, позво
ляюшее определять интервалы вре-
мени между двумя событиями с по-
мощью электронного измерителя.
В системном времени достигнуты
очень высокие точности: например,
в импульсных дальномерных РНС
обеспечивается (О,3-4-О,6) мкс =
= (3-4-6)10 7 с, а в спутниковых иа
внгационных системах Ot ~ (5-4-
—22) нс= (5-4-22) 10" с.
точках под прямым углом и совпа-
дающей в открытых морях и океа
нах с их спокойной поверхностью.
В СССР за поверхность геоида при
нята уровенная поверхность, прохо-
дящая через нуль Кронштадтского
футштока. Поверхность геоида имеет
сложную форму и не удобна для
математических вычислений.
Точно определить положение гео-
ида относительно отсчетной поверх-
ности практически невозможно, по-
этому используется вспомогательная
поверхность квазигеоида, совпадаю-
щая в оксанах и открытых морях с
поверхностью геоида и продолженная
под материками в соответствии с
теорией, разработанной М С. Моло-
денским. Поверхность квазигеоида
отступает от поверхности геоида ие
более чем на несколько сантиметров
в равнинной местности и до 2 м в
горной. От поверхности квазигеоида
отсчитываются высоты точек земной
поверхности, показываемые на кар
тах.
Для решения навигационных за-
дач поверхность геоида заменяется
приближающей его поверхностью
эллипсоида вращения (сфероида).
Эллипсоид вращения, центр и эква-
тор которого совпадают с центром
масс и экватором Земли и наилучшим
образом аппроксимируют поверх-
ность геоида в планетарном масшта-
бе, называется общеземным эллип-
соидом.
Эллипсоид, ближе всего подходя-
щий к поверхности геоида иа данной
территории (данного государства или
группы государств), называют рефе-
ренц -эллипсоидом.
Эллипсоид вращения характери-
зуют экваториальным радиусом а
(большой полуосью), полярным ра-
диусом b (малой полуосью) и сжати-
ем а. Используются также первый и
второй меридианные эксцеитриси
теты
е.-Д/и2—ft’/a; e'=yfl2—52/b (2.1)
В СССР при проведении всех гео-
дезических и картографических ра-
бот пользуются референц-эллипсои-
дом. предложенным Н. Ф Красов-
ским Его параметры, а также пара-
метры других референц-эллипсоидов,
используемых за рубежом, приведе-
ны в табл. 2.1.
Уровень эллипсоида Красовского
совмещен с уровнем геоида в пункте
Пулковской астрономической обсер-
ватории. В остальных точках терри-
тории СССР отклонение не превыша-
ет 40 м. По измерениям, выполнен-
ным с помощью ИСЗ в 1980 г, па-
раметры общеземного эллипсоида со-
Таблица 2.1. Параметры
земных референц-эллипсоидов
Автор эллипсои- да Эквато- риальный радиус а. м Полярный радиус b, м Сжатие а
Красов- ский 6 378 245 6356 863 I : 298,3
Вессел ь 6 377 397 6 356 079 I : 299,2
Хайфорд 6 378 388 6 356 912 I : 297,0
Кларк 6 378 249 6 356 515 I :293.5
ставляют a = 6 378I37 м, п =
= I 298.257.
При решении некоторых навига-
ционных и картографических задач в
качестве приближения эллипсоида
принимают сферу. Размеры сферы в
этом случае зависят от закона изоб
ражения поверхности эллипсоида на
сфере. При приближенных расчетах
за радиус шара, объем и площадь
поверхности которого равны объем}
и площади поверхности эллипсоида
Красовского, принимается ₽»=
= 6371,1 км.
Различие референц-эллипсоидов,
принятых в различных странах, мо
жет привести к дополнительным по-
грешностям определения координат
МС с помощью глобальных высоко-
точных РНС. Координаты МС могут
быть рассчитаны иа основании одних
исходных геодезических данных, а
карта, на которую наносится МС —
на основании других. Возникающая
погрешность может превысить по
грешность самой РНС. Для оценки
возможной погрешности целесообраз
но провести серию контрольных рас
четов иа стоянке самолета с извест-
ными координатами.
2.2. Системы координат
на эллипсоиде и сфере
Земной эллипсоид является гео-
метрическим телом, образованным
вращением эллипса вокруг его малой
оси. Точки пересечения оси вращения
с поверхностью эллипсоида иазыва
ются полюсами. Параллелью эллип-
соида называется окружность, обра
13
Рис. 2.1 Геодезические координаты
юнанная сечением эллипсоида пло-
скостью, перпендикулярной оси вра-
щения Сечение эллипсоида плоско-
стью, проходящей через ось враще
ния, образует меридиан, пре тставля
ющий собой эллипс с полуосями а
и Ь. Перпендикуляр к плоскости, ка-
сательной к поверхности эллипсоида
в данной точке, называется нормалью
к поверхности эллипсоида в данной
точке. Нормаль в общем случае не
проходит через центр эллипсоида, но
веема лежит в плоскости меридиана
Плоскость, прохо |ящая через нор-
маль, называется нормальной, а след
от ее сечения называется нормаль
ным сечением (вертикалом). Нор
мильное сечение перпендикулярное к
меридиану, называется сечением пер
вого вертикала.
Геодезические координаты (рис
2.1) используются для определения
положения точки на поверхности зем-
ного эллипсоида.
Геодезической широтой В точки
называется угол, заключенный меж-
ду плоскостью экватора и нормалью
к поверхности эллипсоида в данной
точке Широта измеряется от 0 до
±90’.
Геодезической долготой L называ
ют двугранный угол, заключенный
между плоскостями начального мери
знака и меридиана данной точки
Долгота измеряется от 0 до ±180”
(плюс к востоку), а иногда от 0 до
360’ За начальный меридиан прини-
мается Гринвичский меридиан, про-
ходящий через центр Гринвичской об-
серватории в Лои доне
Астрономические координаты ис-
пользуются тля определения положе-
ния точки на поверхности Земли
(геоида) (рнс. 2 2)
Астрономической широтой ч» точ-
ки на поверхности Земли называется
угол, заключенный меж ту плоско
стью экватора и направлением от-
весной линии в этой точке.
Астрономической долготой ХЛ точ-
ки на поверхности Земли называет
ся двугранный угол, заключенный
Рис 2 2 Астрономические коорлн- Рис. 2.3. Нормальные сферические
наты координаты
14
между плоскости ми Гринвичского
меридиана и астрономического мери-
диана данной точки
Гак как отвесные линии не совпа-
дают с нормалями к элтипсонду, а
астрономические меридианы не сов-
падают с геодезическими, астрономи-
ческие координаты отличаются от
геодезических. Прн приближенном
решении некоторых задач, когда раз-
ность между геодезическими и аст-
рономическими координатами несу-
щественна. их объединяют названи-
ем географические координаты.
Нормальными сферическими ко-
ординатами (рис. 2.3) пользуются
тля решения задач иа поверхности
сферы
Нормальная сферическая широта
<( — угол между плоскостью эквато-
ра н направлением из центра земно-
го шара в точку, являющуюся изоб-
ражением соответствующей точки эл-
липсоида.
Нормальная сферическая долгота
X—двугранный угол между плоско
стямн Гринвичского меридиана и ме-
ридиана данной точки.
Если решать навигационные за-
дачи на поверхности сферы с ради-
усом /?,=(>371,1 км н принять <p = fi,
/.= /., то погрешности вычисления
расстояния не превысят 0.5%, а уг-
лов —• 0.4°. Для более точных расче-
тов применяют сферу Каврайского с
радиусом /?з = 6372.9 км и прини-
мают
Ф — В—8'39" sin 2Я; X L. (2.2)
Прн этом относительная погрешность
определения расстояния не превысит
0.08%, а углов —0,1°. Для дости-
жения еще более высокой точности
необходимо решать задачи на по-
верхности эллипсоида.
2.3. Расчет элементов
ортодромии и локсодромии
Ортодромией называется дуга
большого круга (см. приложение I),
проходящая через две заданные точ-
ки. Ортодромия является линией
кратчайшего расстояния на поверхно-
сти сферы (геодезической линией)
Частными случаями ортодромии яв-
ляются меридианы и экватор В об
тем случае ортодромия пересекает
меридиан иад разными углами
(рис. 2.4).
Уравнение ортодромии
tET- etg р0 sin (X — Хо), (2 3)
где Хо — долгота точки пересечения
ортодромии с экватором; р0— путе-
вой угол ортодромии в точке Пересе
чсиия се с экватором
Расчет путевого угла ортодромии.
Если (аны точки / и 2 иа поверх-
ности сферы с координатами соответ
ствеиио <|4Л1 и <р:Лг. то путевой угол
ортодромии н точке / (угол между
северным направлением меридиана и
направлением ортодромии)
<-ЧеР1-cosipj tgq, cosec (Х2—Х() —
— sin <р, etg (Л2 —Xj). (2.4)
По этой формуле рассчитывают
главное значение угла Pi (острый
угол р(', — 90е Pi <4-90°) Путе-
вой угол ортодромии определяется
исходя из схемы ее расположения
(направления полета) и равен
360° -I р; или 180°4- р;.
Длина ортодромии
cos if, sin (X,— X.)
sin S —----—-----—------- (2 5)
sin P,
cos S sin ip, sin <ps |
-|-cos q, cos ip, cos (X,—X|). (2.6)
Рис. 2.4 Ортодромия
15
Для получения длины ортодромии
в километрах рассчитанное по дан-
ным формулам угловое значение S
должно быть переведено в у|ловыс
минуты и умножено на 1,853.
Расчет промежуточных точек ор-
тодромии. Если задаться долготой
X некоторой точки ортодромии, то
широта Ч' этой точки
tgq-=d2sin (X—Х,) +
-f-d^in (Х2— X), (2.7)
где ?l2 = tg q2 cosec (Х2—Х2),
Л। = tg ч i cosec (X2—Xi).
Задаваясь значениями X в интер-
вале Xt<X<X2, получают соответст-
вующие значения q.
Точками вертекса ортодромии на-
зываются точки, в которых она пе-
ресекает меридианы под углом 90°.
В этих точках ортодромия наиболее
близко подходит к полюсам. Точки
вертекса могут лежать вне участка
ортодромии между двумя рассматри
ваемыми пунктами (на ее продол-
жении).
Координаты точки вертекса:
ctg(Xv — X) sincpitgP,; I
} (2.8)
cos q r = cos q>, sin p,.
При известных координатах точ-
ки вертекса координаты промежуточ-
ных точек могут быть определены
следующим образом:
tg<Г tg<Tv cos(Xv — X) (2.9)
Углом схождеиия меридианов на-
зывают разность между путевыми уг-
лами орто ipoMiin в точках qlt Х| н
Чд. X.:
°СХ ~ Р2~ Рр
2| =
sin 1(4 1 Ч2) 2]
--- , ‘W2-X,) 21- <2.10»
cos|(q,-q2) 2]
Для практических расчетов доста-
точной точностью обладает формула
«Дх (Xi — X2)sin(ql + q2) 2. (211)
Локсодромией называется кри-
вая, пересекающая меридианы под
постоянным утлом. Частными случа-
ями локсодромии являются параллс
ли (включая экватор) н меридианы.
В общем случае локсодромия явля
ется логарифмической спиралью, не-
ограниченно приближающейся к по
люсам Земли (рис. 2.5).
Уравнение локсодромии
tg(45° + q 2) е сщ ₽ (2 12)
где Хо — долгота пересечения локсо-
дромии с экватором;
Р — путевой угол локсодромии
Путевой угол локсодромии
lutg(45c + q2 2) —
—>--------------------- , (2.13)
-lntg(45° + q, 2)
или приближенно
♦g Р — >1) (<Г1 Ti»l X
• cos|(q, | q2) 2|. (2 14)
Длина локсодромии
S = (q>2 — 41) cos Р (2.15)
При путевых углах, близких к 90
или 270°, целесообразнее пользовать
ся формулой
S —)(Х2— X,) sin 0] cos |(q, '-q2) 2|
Для получения длины локсодро-
мии в километрах угловые значении
S должны быть переведены в мину
ты дуги и умножены на 1,853.
Локсодромия длиннее ортодромии,
но удлинение для малых и средних
3
я
w
Suvorov AV 63-64@mail.ru для http://www.russianarm:
расстояний невелико (при
^2000 км удлинение не превышает
15 км)
Боковое уклонение локсодромии
от ортодромии может быть оценено
приближенно
*тм (Я£рт‘8Ч*-р8'п Р)/51 °00- (216>
2.4. Основные понятия теории
искажений
Поверхность эллипсоида и сферы
изобразить па плоскости без иска-
жений невозможно. Характер иска-
жений зависит от вида картографи-
ческой проекции.
Картографической проекцией на-
зывается способ перенесения поверх-
ности земного эллипсоида или зем-
ной сферы на плоскость. Он описы-
вается математическим законом, ста-
вящим в соответствие каждой точке
па земной поверхности изображаю-
щую ее точку на плоскости.
Изображение поверхности Земли
па какой-либо другой поверхности
осуществляется в определенном
масштабе.
Масштабом дайн называют отно-
шение бесконечно малого отрезка
изображения к соответствующему
ему отрезку на местности. Например,
численный масштаб I : 1 000 000 озна-
чает. что I см на карте соответству
ет I 000 000 см (10 км) на местности
В общем случае масштаб является
переменной величиной. Под южной
рамкой карты подписывается глав-
ный масштаб.
Главный (общий) масштаб .М
представляет собой степень общего
уменьшения Земли до размеров гло-
буса. Вследствие искажений, возни-
кающих при развертывании поверх-
ности эллипсоида пли сферы иа пло-
скость, масштаб карты отличается от
главного масштаба в различных точ-
ках и по различным направлениям в
зависимости от картографической
проекции.
Частным масштабом р называет-
ся отношение бесконечно малого от-
резка иа карте в данной точке и по
данному направлению к соответству-
ющему бесконечно малому отрезку
земного шара или эллипсоида. Увели-
чением масштаба называют отноше-
ние частного масштаба в данной точ-
ке и но чанному направлению к глав-
ному масштабу, т. е. С=р/Л1.
Масштабом площадей! Р называют
отношение бесконечно малой площа-
ди. взятой в данной точке поверхно-
сти изображения, к горизонтальной
проекции соответствующей поверхио
стн местности.
Всякий бесконечно малый кру-
жок, взятый на поверхности Земли
(глобуса), изображается на проекции
бесконечно малым эллипсом На-
правления, соответствующие боль-
шой и малой осям этого эллипса, на
зывают главными. На большинстве
проекций главные направления сов-
падают с направлением меридианов
и параллелей. Частные масштабы
по меридиану и параллели обознача-
ют соответственно тип. Главный
масштаб в теории искажений приня-
то считать равным единице (М=1)
Искажение длин по иаправлеиию,
характеризуемому углом а, в дан-
ной точке оценивается
)*а
где — частный масштаб по
данному направлению. Величину 1'а
часто измеряют в процентах (напри-
мер. Va = 0,3 = 30%)
В случае когда главные направле-
ния совпадают с меридианом и па-
раллелью, частный масштаб по за-
данному направлению
ра—"V/п2 cos2 a-f-n2 sin2 а. (2.17)
Под искажением направлений по-
нимают разность между иапразлеии
ем на поверхности Земли (глобусе)
а и его изображением иа проекции
р. При совпадении главных иаправ
ленпй с меридианом и параллелью
tgP (nm)tga. (2 18)
Значение максимального искаже-
ния направлений в данной точке
<к= (« -P)msi может быть рассчи-
тано как
sin<o = (m—п) (т-(-п). (2.19)
17
Максимальное искажение углов,
измеряемых на карте, всегда в 2 ра
за больше максимального искажения
направлений в данной точке Масш-
таб площадей в данной точке
Р = тп. (2.20)
По характеру искажения карто-
графические проекции классифициру-
ются на следующие: равноугольные
(углы передаются без искажении,
т—п); равнопромежуточные (дли-
ны по одному из главных направле-
ний передаются без искажений.
т—\ или л=1); равновеликие (пло
шадь изображаемой фигуры равна
площади этой фигуры на глобусе,
Р=1); произвольные (ни одно из
вышеперечисленных условий не вы-
полняется)
2.5. Характеристика
картографических проекций
Нормальной сеткой в картогра
фии называют такую систему сфери
ческих коордииат (широт и долгот),
координатные линии которой проще
Рис. 2 7. Азимутальная проекция:
и вспомогательная поверхность; б
нормальная сетка
18
всего изображаются в данной проек-
ции. Для большинства проекций нор-
мальной сеткой является геогрзфичс
екая сетка меридианов и параллелей.
По виду' нормальной сетки все ис-
пользуемые п авиации картографиче-
ские проекции подразделяются на
цилиндрические, азиму >альиые, ко-
нические, пол чконические н специ-
альные
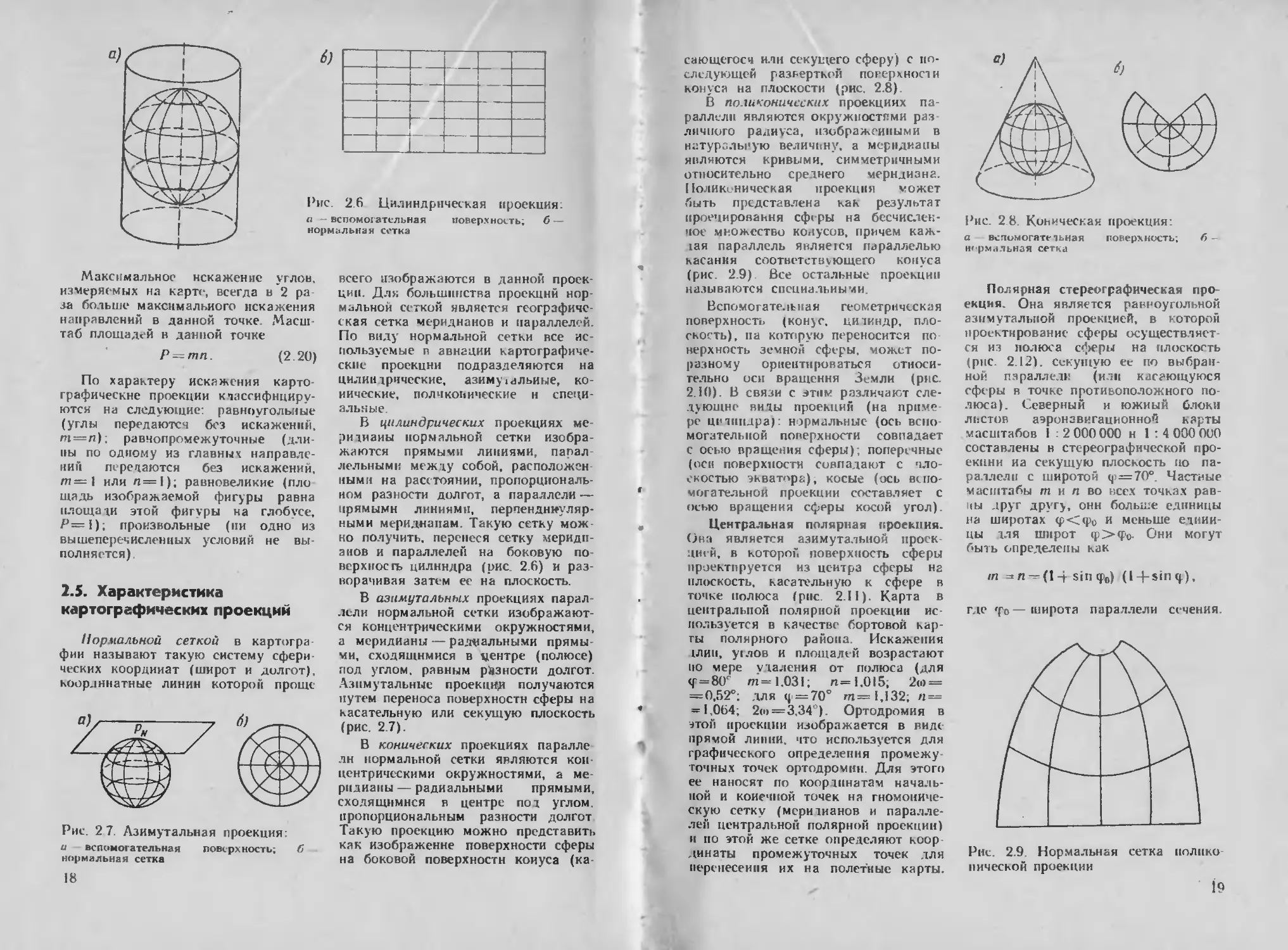
В цилиндрических проекциях ме-
ридианы нормальной сетки изобра-
жаются прямыми линиями, папал
дельными между собой, расположен
ними на расстоянии, пропорциональ-
ном разности долгот, а параллели —
прямыми линиями, перпендикуляр-
ными меридианам Такую сетку мож
но получить, перенеся сетку мериди-
анов и параллелей на боковую по
верхнее гь цилиндра (рис. 2 6) и раз-
ворачивая затем ее на плоскость.
В азимутальных проекциях парал-
лели нормальной сетки изображают-
ся концентрическими окружностями,
а меридианы — радиальными прямы
ми, сходящимися в центре (полюсе)
под углом, равным разности долгот.
Азимутальные проекции получаются
путем переноса поверхности сферы на
касательную или секущую плоскость
(рис. 2.7).
В конических проекциях паралле
лн нормальной сетки являются кон-
центрическими окружностями, а ме
рндианы — радиальными прямыми,
сходящимися в центре пот углом
пропорциональным разности долгот
Такую проекцию можно представить
как изображение поверхности сферы
на боковой поверхности конуса (ка
сающегосч или секущего сферу) с по-
следующей разверткой поверхности
конуса на плоскости (рис. 2.8).
В полифонических проекциих па-
раллели являются окружностями раз-
личного радиуса, изображенными в
натуральную величину, а меридианы
являются кривыми, симметричными
относительно среднего меридиана.
11оликоническая проекция может
быть представлена как результат
проецирования сф< ры на бесчислен-
ное множество конусов, причем каж-
гая параллель являеюя параллелью
касания соответствующего конуса
(рис. 2 9) Все остальные проекции
называются специальными.
Вспомогательная геометрическая
поверхность (конус, цилиндр, пло-
скость), па которую переносится по
верхность земной сферы, может по-
разному ориентироваться относи-
тельно оси вращения Земли (рис.
2.10). В связи с этим различают сле-
дующие виты проекций (на приме-
ре цилиндра): нормальные (ось вспо-
могательной поверхности совпадает
с осью вращения сферы); поперечные
(оси поверхности совпадают с пло-
скостью экватора), косые (ось вспо-
могательной проекции составляет с
осью вращения сферы косой угол).
Центральная полярная проекция.
Она является азимутальной проск
дней, в которой поверхность сферы
проектируется из центра сферы на
плоскость, касательную к сфере в
точке полюса (рис. 2.11). Карта в
центральной полярной проекции ис-
пользуется в качестве бортовой кар-
ты полярного района. Искажения
глин, yi-чов и площадей возрастают
но мере удаления от полюса (для
ф=80 т= 1,031. п= 1,015; 2<» =
=0,52°; для <(=70° т= 1,132; п—
= 1064, 2<1>=3,34°). Ортодромия в
этой проекции изображается в виде
прямой липни, что используется для
графического определения промежу
точных точек ортодромии. Для этого
ее наносят по координатам началь-
ной и конечной точек на гномониче-
скую сетку (меридианов и паралле-
лей центральной полярной проекции)
и по этой же сетке определяют коор
динаты промежуточных точек для
перенесения их на полетные карты.
Рис 2 8 Коническая проекция:
а вечомогатетьная поверхность; 6-
н'рмальная сетка
Полярная стереографическая про
екция. Она является равноугольной
азимутальной проекцией, в которой
проектирование сферы осуществляет-
ся из полюса сферы на плоскость
(рис. 2.12). секущую ее по выбран-
ной параллели (или касающуюся
сферы в точке противоположного по-
люса). Северный и южный блоки
листов аэронавигационной карты
масштабов I ; 2 000 000 н 1 "4 000 000
составлены в стереографической про-
екции иа секущую плоскость по па-
ра тлели с широтой ф=70°. Частные
масштабы m и п во всех точках рав
<ы друг другу, онн больше единицы
на широтах ф<ф0 и меньше е.днии
цы для широт ф>фо. Они могут
быть определены как
т = п — (1 -) sin ф0) (1 + sin <р),
где фо — широта параллели сечения.
Рис. 2.9. Нормальная сетка иолико-
нической проекции
16
Рис. 2.10. Ориентация вспомогательных поверхностей:
а — нормальная; 6 — поперечная; в косая
Расстояние между двумя точками
5 = 2R3-arcsin {SKapT/
/(2Л3 Утг т.2)1,
где Хкарт—длина прямой на карте;
ть Шг — частные масштабы в конеч-
ных точках прямой; R3 — радиус зем-
ной сферы.
Ортодромия на карте изобража-
ется дугой окружности большого ра-
диуса, вогнутостью обращенной к
полюсу. Поправка на кривизну орто-
дромии (угол между прямой на кар-
те и путевым углом ортодромии)
ц = 0,5ДХ(1—sin<pe|J) (2.21)
Локсодромия на карте изобража-
ется логарифмической спиралью.
Равноугольная цилиндрическая
проекция (проекция Меркатора). Ме-
ридианы и параллели здесь изобра-
жаются перпендикулярными друг к
другу прямыми линиями. Расстояния
между параллелями увеличиваются
с увеличением широты таким обра-
зом, чтобы обеспечивалось равенство
частных масштабов тип Локсодро
мия иа карте изображается в виде
прямой линии, а ортодромия изги-
бается в направлении полюса Орто-
дромическая поправка
н = 0.5Л1 sin (<pt-|-<f2)'2. (2.22)
Равноугольная поперечно-цилинд-
рическая проекция Гаусса. В этом
случае на плоскость проектируется
эллипсоид, т. е. проекция учитывает
сжатие Земли. В проекции Гаусса
земной эллипсоид проектируется иа
поверхность эллиптического цилпнд
ра, касательного к эллипсоиду по ме-
ридиану Поверхность Земли разбита
меридианами иа 60 зон, занимающих
6е по долготе каждая. Каждая зона
Рис. 2.11. Центральная полярная про-
екция
Рис. 2.12. Полярная стереографиче-
ская проекция
20
проектируется на свой цилиндр
(рис. 2.13). Средний меридиан изоб-
ражается прямой линией без иска-
жения длины, остальные меридианы
представляют собой сложные кривые
малой кривизны. Экватор изобража-
ется прямой линией, но с искажени-
ем длины В проекции Гаусса состав-
лены крупномасштабные карты от
масштаба I : 500 000 и крупнее На
картах указанного масштаба нанесе-
на сетка геодезических коор шнат, а
более крупного масштаба — километ
ровая штка Гаусса, представляющая
собой взаимно перпендикулярные ли-
нии. Вертикальные линии параллель-
ны среднему меридиану зоны, а го-
ризонтальные — экватору. Оцифров-
ка горизонтальных линий (координа-
та X) указывает расстояние от эква
тора в километрах по среднему ме
ридиану зоны Первые две цифры
оцифровки вертикальных линий (ко
ордината У) означают номер зоны
(номера зон отсчитываются к восто
ку от меридиана Гринвича), а
остальные — расстояние от среднего
меридиана зоны, увеличенное на
500 км. Искажения длин в проекции
Гаусса максимальны на экваторе и
юстнгают 0,137%.
Угол, измеренный от северного
направления вертикальной километ-
ровой линии на карте в проекции
Гаусса, называется дирекциоппым а
Азимут точки
А —а -(-(Л— лГр) sin <р, (2.23)
где Лер — долгота среднего мериди-
ана зоны.
Сферические координаты точки
могут быть определены прибли-
женно
X
<1 ~;
111,2
^=Ьср + (У—500) 111,2cos<p, (2.24)
где координата У берется без номе-
ра зоны.
Ортодромия на картах в проек-
ции Гаусса прокладывается в виде
прямой линии.
Равноугольная коническая проек-
ция. Карты в этой проекции строят
на касательном илн секущем конусе.
Параллели сечения изображаются в
главном масштабе, на них отсутст-
вует искажение длин (m=n=l).
В других точках карты частные мас-
штабы
m = n psincpp 7?3cosq>.
где ([-о — широта параллели с наи-
меньшим масштабом, р — удаление
на проекции точки с широтой ц от
полюса.
Ортодромия на расстоянии до
1000 км прокла гывается в виде пря
мой липин, при больших расстояни-
ях ортодромическая поправка
и 0.5АЛ (sin <рср — sin<p0). (2.25)
Своей вогнутостью ортодромия об
ращена в сторону параллели с паи
меньшим масштабом.
Видоизмененная поликоиическая
проекция (международная проекция)
При построении данной проекции по-
верхность Земли принимается за эл-
липсоид и делится на участки, пред-
ставляющие собой сфероидпческие
трапеции, занимающие по широте 4,
а по долготе 6° (до параллели с
21
4 = 60°) нли 12° (при 60°<ф<76°).
Каждый участок проектируется на
плоскость независимо от других.
Крайние параллели листа карты вы-
черчиваются в главном масштабе в
виде дуг окружностей неодинакового
радиуса и с центрами, лежащими на
продолжении среднего меридиана
участка. В натуральную величину
изображаются в виде прямых линий
также два .меридиана, отстоящие от
среднего на 2° к западу и востоку
(для участков с протяженностью 6°
.ю долготе).
Карта в международной проекции
ячляется произвольной, т. е. имеет
искажения углов, длин и площадей.
Однако они невелики Наибольшие
искажения имеют место на экватори-
альных листах и достигают 5' при
измерении углов и 0.076% при измс
рении длин. Поэтому практически
ларту в международной проекции
можно считать равноугольной и раь-
нопромежуточной. Ортодромия в пре-
делах листа карты прокладывается
в виде прямой линии.
2.6 Авиационные карты
Авиационные карты, применяемые
на ВС гражданской авиации, подраз-
1еляются на полетные и бортовые.
Полетная карта — один из основных
документов, используемых для само-
летовож |ення. Полеты без полетной
карты запрещаются. Бортовые карты
предназначены для самолетовожде-
ния в случаях, когда ВС вынужден-
но выходит из района, охватываемого
полезной картон, а также для ис-
пользования радионавигационных
средств большой дальности действия.
Основным видом карт, используе-
мых в гражданской авиации СССР,
являются карты, выполненные в меж-
дународной (видоизмененной полико-
ническон) проекции. В качестве по-
летных карт для самолетов 1. 2 и
3-го класса используются полимарш-
рутные карты масштаба I : 2 000 000
В качестве бортовых используются
карты такого же масштаба или
масштаба 1.4 000 000 Для самоле-
тов 4-го класса и вертолетов всех
классов в качестве полетной исполь
22
зуется карта масштаба 1 I 000 00'1
(а при выполнении специальных bi.
дов работ и карты более крупного
масштаба), в качестве бортовой —
масштаба I : 2 000 000.
Разграфка и номенклатура карт
в международной проекции. Основой
для нее служит карта масштаба
1:1000 000 Разграфка и номенлла
тура листов карты этого масштаба
осуществляются следующим образом
Поверхность земного шара от эквато-
ра и до широты 88° делят иа пояса,
но 22 пояса в каждом полушарии
Ширина пояса 4°. Каждый пояс обо-
значен заглавной буквой латинского
алфавита, начиная от экватора (А
В С, ..). Поверхность земного шара
также делится на 60 колонок шири
ной 6е каждая, обозначенных араб
скими цифрами от 1 до 60, начиная
от меридиана 180° к востоку. Таким
образом, каждый лист карты получа-
ет цифробсквениое обозначение на
пример К-46 Листы приполярных
областей имеют вид круга с полю
сом в центре и обозначаются бук-
вой Z
Разграфка и номенклатура карты
масштаба I : 500 000 осуществляется
путем деления листа масштаба
I : I 000 000 иа четыре равные части
с обозначением их заглавными бук-
вами русского алфавита (А, Б,
В ...). Лист имеет размер 2° ио
широзе и 3° по юлготе. его номенк-
латура состоит из номенклатуры со-
ответствующего листа карты милли-
онного масштаба и соответствующей
русской буквы, например К-46 В.
Лист карты масштаба 1:20000ч
получают делением карты миллион-
ного масштаба иа 36 частей (6 ря
дов и 6 колонок) с обозначением их
римскими цифрами. например
К-46 XXI.
Лист карты масштаба I : 100 000
получают делением листа масштаба
I 1000 000 на 144 части (размером
20' по широте и 30' по долготе) и
обозначением их арабскими цифрами,
например К 46-115.
Для карт более мелкого масшта-
ба принята другая номенклатура
Для получения листа карты маси/та
ба 1:2000000 общую карту делят
па пояса (обозначают заглавными
буквами русского алфавита, счет ве-
дут от сев< риой широты 76° к югу)
и' колонки (обозначают римскими
цифрами, счет ведется от западной
юлготы 12° иа восток). Лист карты
масштаба 1 2 000 600 имеет размер
12° по широте и 18° по долготе и
включает в себя 9 листов карты мас-
штаба I 1 000 000. Пример номенк-
латуры. A.-11I.
Номенклатура листа полимарш
рутной карты масштаба 1:2000 000
имеет вид Б'-1П Листы полимарш-
рутной карты по сравнению с обыч-
ной картой масштаба 1 : 2 000 000
имеют большие размеры, нарезка их
осуществляется с перекрытием.
Для разграфки карт масштаба
I :4 000 000 поверхность земного ша
ра телят на 6 поясов и 10 колонок
(размеры листа 24° по широте и 36°
по долготе). Номенклатура листа со-
стоит из заглавной буквы русского
алфавита и арабской цифры, напри-
мер А-2 Счет поясов и колонок та-
кой же, как v карты масштаба
1 : 2 000 000.
Искажения на картах. Карты мас-
штаба 1 : 1 000 000 допустимо склеи-
вать в блоки или полосы. При состав-
ления блока из четырех карт неиз-
бежны разрывы между ними, харак-
теризуемыми углом в (рис. 2.14) или
линейными разрывами /. k. Они могут
быть рассчитаны следующим обра
зом
е — 25' созфер.бл.
/ — 3,25 cos (рс р бт*
k -= 4 .87 cos2 <рср бл. (2.26)
где <рСр вл — средняя широта блока
из четырех листов.
В этом выражении линейные раз-
меры I и k измеряются в миллимет-
рах. В средних широтах разрывы со-
ставляют 1—-2 мм, что компенсиру-
ется деформацией бумаги при склей-
ке. Поэтому практически можно скле-
Рис. 2 14 Блоки полетных карт:
а — склейка по парлл.и'лн; б — склейка
по меридиану
ивать блоки и из девяти карт. При
этом неизбежны дополнительные
искажения, возникающие при перехо
де с одного листа карты на другой
В пределах одного блока ортодромию
можно с точностью до 1 мм прокла
дывать в виде прямой линии.
Карта масштаба I : 2 000 000 име-
ет искажения для длин до 1%, а для
углов до 1°. Лишь в углах карты ис-
кажения больше. Склейка листов в
блок нецелесообразна из-за большого
углового разрыва между листами.
Карты этого масштаба склеивают в
полосы. Ортодромия в виде прямой
липни может прокладываться при ее
протяженности ие более 400 км.
При практической работе с кар-
тами необходимо также учитывать
точность ее полиграфического испол-
нения и погрешности графической
работы па карте. Наиболее точно на-
несена на карту сетка меридианов и
параллелей, их смещение характери-
зуется средней квадратической по-
грешностью а(=0,2. 0,3 мм
Остальные пункты нанесены с по-
грешностью о = 0,5. .0,6 мм Сред
няя квадратическая погрешность на
несения на карту точки в полете со-
ставляет около ог = 0,5 мм. Экспери
ментально оцененная СКП измере
пия расстояний на карте составляет
Оя = 0,8 мм, а углов оА=0,8° При-
везенные значения погрешностей не
учитывают искажений, присущих про
екции карты, а также искажений,
возникающих из-за склеивания ли-
стов карты в блоки.
23
Глава 3
МЕТОДЫ РЕАЛИЗАЦИИ ТРАЕКТОРИИ ПОЛЕТА
3.1. Методы определения
координат
Основа реализации за чанной тра-
ектории полета—определение факта
ческпх координат ВС. Различают аб-
солютные и относительные коорди
паты.
Абсолютные координаты опреде
л нют положение ВС относительно
навигационных ориентиров с досто
верно известными земными координа-
тами. Абсолютные координаты полу-
чают с помощью внешних источников
позиционной информации. В качест
bi навигационных ориентиров при
этом могут выступать объекты на
земной поверхности, опознаваемые
визуально или с помощью бортового
радиолокатора, наземные радиомая-
ки, географическое место светила.
Для определения абсолютных коор-
1инат используют параметрический,
обзорно-сравнительный методы, а
также метод пролета ориентира.
Пирометрический метод (метод
координатных преобразований, пози
цпопный метод) основан на функци-
ональной зависимости между некото-
рыми параметрами, измеряемыми в
полете, и координатами МС.
Обзорно-сравнительные методы
основаны на сранненин характери
стик пролетаемой местности с харак-
теристиками, хранящимися в заломи
нающпх устройствах (в памяти
ЬЦВМ, на полетной или радиолока
цнопной карте местности). При ис-
пользовании метода пролета ориенти-
ре коор щнатам МС приписываются
«качения координат некоторой точки,
момент прохождения которой фикси
руется визуально или с помощью ра-
диотехнических средств.
Относительные координаты опре-
деляют положение ВС по отношению
к его положению в некоторый про-
ще дший момент времени Относитель-
ные координаты получают методом
счисления пути.
Счисление пита — это определе-
ние относительных координат МС на
24
основе решения (графического, ана-
литического иди численного) кпиема
тичсскнх уравнений, описывающих
движение центра масс ВС. Счисле-
ние пути является моделирующим
способом определения координат, так
как использует математическую мо-
дель движения ВС (уравнения дви-
жения) в явном или неявном (прн
графической прокладке) виде.
Методы счисления пути использу-
ются при невозможности или иецеле
сообразности непрерывного получе-
ния абсолютных координат с по-
мощью источников позиционной ин-
формации. Счисление пути может
осуществляться непрерывно, но на-
копление погрешностей счисленных
коор шпат требует периодического
их уточнения (коррекции счисленных
координат) с помощью внешних
источников. Таким образом, процесс
самолетовождения представляет со-
бой последовательность периодов
счисления пути, сменяющих друг
друга в моменты коррекции коорди-
нат При этом относительные (счис-
ленные) координаты сохраняют ин-
формацию о МС между моментами
опредедения абсолютных координат.
3.2. Обобщенный метод линий
положения
Общий принцип определения по-
ложения ВС по отношению к навига-
ционным ориентирам реализуется в
виде обобщенного метода поверхно-
стей и линий положения (ЛП).
Н авигационный параметр — гео-
метрическая или физическая величи-
на, значенье которой зависит от ме
стоположення ВС. Примерами нави
гационных параметров являются уг-
лы, расстояния, атмосферное давле-
ние, напряженность магнитного поля
н т. д.
Поверхностью положения (рис
3.1) называется геометрическое место
точек в пространстве, в которых
значение навигационного параметра
постоянно. Точка пересечения трех
поверхностей положения, соответст-
вующих трем измеренным в полете
навигационным параметрам, опреде-
ляет местоположение ВС в простраи
стве.
Линия пересечения земной поверх
ности с поверхностью положения об
разует изолинию соответствующего
навигационного параметра (линию
положения ВС).
Линия положения — геометриче-
ское место точек вероятного место-
положения самолета на земной по-
верхности соответствующих посто-
янному значению навигационного па-
раметра. Точка пересечения двух
ЛП определяет место ВС (МС). ЛИ
классифицируются по типу навига-
ционных параметров.
Линия равных пеленгов самолета
(ЛРПС) характеризуется постоян-
ным значением пеленга самолета ПС
(направления на ВС относительно
меридиана некоторой наземной,
обычно радионавигационной, точки)
На сфере ЛРПС является орто-
дромией, проходящей через РНТ, и
описывается уравнением
ctgnC cos <fp tg<р cosec (л — Xp)—
— sin<f>pctg(X —Хр), (3.1)
где q,, и лр широта и долгота ра-
дионавигационной точки.
Па плоскости ЛРПС является
прямой линией и описывается урав-
нением
tgnC = (z — zp) (s—sp),
где zp Sp — координаты РНТ в част
ноортодромической прямоугольной
системе координат.
Прокладка ЛРПС на карте осу-
ществляется аналогично прокладке
ортодромической ЛЗП
Линия равных пе 1енгов радиостан-
ции (ЛРПР) характеризуется посто-
янным значеншм пеленга ПР из лю
бой ее точки на наземную РНТ.
Уравнения ЛРПР иа сфере и пло
скости имеют вид
etg ПР cos tg <рр cosec (Хр — X) —
— sinq. ctg(Xp —X), (3.2)
tgnP (zp —z) (Sp —s)
ЛРПР на плоскости имеет вид
дуги, проходящей через РНТ На
сфере ЛРПР имеет вид сложной
кривой, построение которой возможно
путем расчета по специальным фор-
мулам координат ее промежуточных
точек. Отрезок ЛРПР в районе ме
стоположения ВС может быть пост-
роен на карте международной проск
нин путем прокладки от РНТ орто-
дромии с пеленгом ПС = НР4-Осх±
±180°.
Рие. 3.1. Поверхности и линии положения
25
Линия равных разностей пеленгов
(ЛРРПР) характеризуется постоян-
ным значением разности пеленгов
\П двух РНТ. Вит ЛРРПР иа сфе-
ре такой же, как у ЛРПР, но роль
полюса при этом играет отна из
РНТ. На плоскости ЛРРПР имеет
вит окружности, проходящей через
обе РНТ и имеющей радиус
R Б (2 sin Mi),
где Б расстояние между РНТ
(бзза)
Линия равных расстояний (ЛРР)
1Ч'зь геометрическое место точек, рав-
ноудаленных от некоторой точки на
земной поверхности (РНТ) ЛРР яв-
ляется сферической окружностью с
радиусом D и описывается следую-
щими уравнениями на сфере н пло-
скости
cos Z>- sin <j p sinq }
4-cosqipcosq cos(k—kp); (3.3)
D V(z-zflp-f-(s-spp.
При небольших значениях D, ха-
рактерных дтя современных дально-
мерных систем, ЛРР можно прокла-
дывать на карте в виде окружности.
Линия равных разностей расстоя-
ний (ЛРРР) характеризуется посто-
янным значением разности расстоя-
ний А/1 ю двух точек па земной по-
верхности РНТ На плоскости ЛРРР
Рис 3.2 Внд линий положения
является гиперболой с фокусами, сов-
падающими с РНТ:
(г2 a2) —(s* Ьг) =1,
где a &L) 2 : Ь= '\/ Бг аг.
На сфере ЛРРР является сфери-
ческой гиперболой. Ввиду сложности
прокладки ЛРРР иа полетных кар-
тах при больших Б используются
специальные карты с нанесенными
гиперболами.
Линия равных высот светила ха-
рактеризуется постоянным значением
высоты й светила и описывается на
сфере уравнением:
sin й = sin q sin 6 j-
4-cos q cos 6 cos (/rJ14- A), (3.4)
где 6, — склонение и гринвичский
часовой угол светила.
Для определения координат ВС
на карте проводится касательная к
линии ранных высот, называемая
прямой равных высот (ПРВ) или
астрономической линией положения
(АЛИ). Линия равных высот свети-
ла является окружностью с центром
в географическом месте светила. Вид
некоторых ЛП на плоскости пока-
зан на рис. 3.2. Если известны урав
нения линий положения, соответству-
ющих двум навигационным парамет-
рам:
Z. (»1. S) 0и/2(т),5) О,
то координаты ВС ц и ; могут быть
найдены путем совместного (анали-
тического или численного) решения
этих уравнений
При графическом определении
местоположения самолета на карте
строят отрезки ЛП в районе его ве-
роятного нахождения.
3.3. Навигационные элементы
положения и движения
Навигационные элементы — ска-
лярные величины, .характеризующие
положение центра масс ВС и его
движение в пространстве.
Пространственное место саиолееи
(ПМС)— точка пространства, в ко-
торой в данный момент находится
центр масс ВС.
26
Место самолета (МС)— точка иа
земной поверхности. в которую
проектируется центр масс ВС
(ПМС).
Совокупность ПМС иа некотором
отрезке времени образует фактиче-
скую траекторию полета, а совокуп-
ность !ЛС. — линию фактического пути
(ЛФП) ПМС характеризуется тре-
мя, а .МС двумя координатами в од
пой из земных систем координат.
Если известна заданная простраист
венно временная траектория полета,
то могут быть определены условные
координаты, характеризующие откло-
нение фактического ПМС от задан-
ного в данный момент времени Ко-
ординаты ПМС являются навигаци-
онными элементами положения.
Навигационные элементы движе-
ния характеризуют векторы скорссти
ВС. Различают скорости движения
ВС относительно воздушной среды и
относительно земной поверхности.
Истинной воздушной скоростью
1'и (или просто V) называется ско-
рость перемещения ВС относительно
воздушной массы. Для пилотирова-
ния используется также приборная
воздушная скорость ЕПр. определяе-
мая скоростным напором воздуха и
включающая погрешности прибора и
приемника воздушного давления. На-
—>
правление вектора Уп относительно
продольной оси ВС характеризуется
углами атаки и скольжения.
Угол атаки образуется между
средней хордой крыла и проекцией
вектора Уи на вертикальную пло-
скость симметрии ВС.
Углом скольжения называется
—♦
угол между вектором Еи и верти-
кальной плоскостью симметрии ВС.
Для самолетов углы атаки и
скольжения невелики и при решении
ряда иавид ационных задач принима-
ют. что вектор истинной воздушной
скорости направлен по продольной
оси самолета
Курсом у называют угол в гори-
зонтальной плоскости между направ-
лением, принятым за начало отсче-
та, и проекцией на эту плоскость
продольной осп ВС. Курсы класси-
фицируют в зависимости от направ
ленпя, принятого за начало отсчета
Рис. 3.3. Вектор полной скорости ВС
н его составляющие
(истинный, магнитный, условный и
другие курсы).
При отсутствии скольжения курс
характеризует направление проекции
вектора истинной скорости на гори
зонтальную плоскость. При наличии
скольжения имеется аэродинамиче-
ский угол сноса аЛ — угол между
проекциями иа горизонтальную пло-
скость продольной оси ВС и некто
ра Е„
Вектор скорости перемещения ВС
относительно земной поверхности
называется вектором полной скоро-
сти iVn. В навигации используются
его вертикальная и горизонтальная
составляющие.
Путевой скоростью UZ называется
скорость перемещения МС по земной
поверхности. Вектор IV' направлен по
касательной к ЛФП и незначительно
отличается от горизонтальной со-
ставляющей гор вектора полной
скорости (рис 3.3).
Путевым углом р называется
угол в горизонтальной плоскости
между направлением, принятым за
начало отсчета, и вектором путевой
скорости. Фактический путевой угол
характеризует направление ЛФП и
классифицируется в зависимости от
направления, принятого за начало
отсчета (аналогично курсам), а за-
данный путевой угол — направление
ЛЗП
Вертикальной скоростью 1ГПВ на-
зывается вертикальная составляющая
вектора полной скорости. Пренебре-
гая вертикальным перемещенном
27
Рис. 3.4. Навигационное и метеоро-
логическое направления ветра
воздушной среды, ее принимают рав-
ной вертикальной составляющей
истинной воздушной скорости VB.
Различают мгновенные и средние
на некотором отрезке времени векто-
ры скоростей.
3.4. Ветер и его характеристики
Ветром называется горизонталь-
ное перемещение воздушной массы
относительно земной поверхности.
Навигационное направление ветра
бн — угол между направлением, при-
нятым за начало отсчета, и вектором
ветра (направление куда он дует).
В зависимости от выбранного на-
правления отсчета (меридиана) раз-
личают истинное бн.к, магнитное
б„ м и условное бн.у навигационные
направления ветра (рис. 3.4).
Метеорологическое направление
ветра б — угол между северным на-
правлением истинного (географиче-
Рис. 3.5. Коэффициенты изменчивости
ветра:
а — пространственный; б — временной
28
ского) меридиана, и направлением
противоположным направлению век-
тора ветра (откуда он дует).
Связь между различными направ-
лениями ветра характеризуется со-
отношениями
6Н-И — 6± 180°; 6н.м 6 — Дм±180°;
6„.у= б+Ла ± 1803, (3.5)
где ,\м - магнитное склонение; Ла —
азимутальная поправка.
Ветер в реальной атмосфере ме-
няется во времени и пространстве.
В слое трения (от земли до 1000 м)
скорость ветра с высотой увеличива-
ется и происходит его поворот впра-
во. Выше слоя трения ои направлен
вдоль изобар и определяется положе-
нием барических систем. В обычных
условиях изменение ветра с высотой
составляет в среднем 10—15 км/ч иа
каждые 1000 м. В струйных течени-
ях, наблюдающихся вблизи тропопа-
узы на высотах 9—12 км, скорость
ветра может составлять 200 —
300 км/ч. Наблюдались случаи
струйных течений со скоростями бо-
лее 700 км/ч.
Различают пространственную и
временную изменчивость ветра. Из-
менение ветра в свободной атмосфе-
ре при перемещении из одной точки
в другую характеризуется разностью
векторов ветра в этих точках
По экспериментальным данным век-
------►
тор XU имеет круговое рассеивание,
а его среднее квадратическое ради-
альное отклонение ° us зав11С1,т От
расстояния S (в километрах) между
данными точками
°us=kusVS- (3.6)
где ku — коэффициент простран-
ственной изменчивости ветра, завися-
щий от высоты и времени года
(рнс. 3.5, а).
Формула (3.6) применима при
1800 км.
Временная изменчивость ветра в
некоторой точке свободной атмосфе-
ры характеризуется средним квадра-
тическим радиальным отклонением
(3.7)
где t — время, за которое оценивает-
ся изменчивость (не более 18 ч);
ky — коэффициент временной из-
менчивости ветра, зависящий от вы-
соты полета и времени года
(рис. 3.5,6).
Решение ряда навигационных за-
дач упрощается при использовании
понятия эквивалентного ветра.
Эквивалентный ветер — скалярная
величина, равная разности путевой и
истинной скоростей ВС;
(/э= 1Г-РИ.
Эквивалентный ветер зависит от
скорости и направления реального
ветра, величины истинной воздушной
скорости и направления линии пути
(рис. 3.6). При неизвестной W экви-
валентный ветер
Рис. 3.6. Эквивалентный ветер
(/2
(/а = U cose. —----sin2e, (3.8>
2V„
где г — угол ветра; е = 6н—₽.
Fro приближенное значение
Ua~U cos е.
По определению эквивалентного
ветра путевая скорость
VT=VH+Ua (3.9)
Поскольку Ua мало зависит от
истинной скорости, для определения
эквивалентного ветра используются
табл. 3.1 и 3.2, составленные для
Таблица 3.1. Скорость эквивалентного ветра для ВС
С Уя = 800-900 км/ч
Угол Скорость ветра, км/ч
ветра, ° 40 60 80 .00 .20 .40 .60 .80 200
F >етер по путный к-}-»
0,360 40 60 80 100 120 140 160 180 200
10,350 39 59 79 98 118 138 157 177 196
20,340 37 56 75 93 112 130 149 167 185
30,330 34 51 68 85 102 119 135 151 168
40,320 30 45 60 74 89 103 117 130 144
50,310 25 37 49 61 72 84 95 105 116
60,300 19 29 37 46 54 62 69 77 83
70,290 13 19 24 29 34 38 42 46 49
80,280 6 8 10 12 13 14 14 14 13
Ветер встречный «—>
90,270 1 2 4 6 8 11 14 18 22
100,260 8 12 17 23 29 35 42 49 54
110,250 14 22 31 39 48 57 67 77 88
120,240 21 31 43 54 66 78 91 103 117
130,230 26 40 54 68 82 96 111 126 142
140,220 31 47 63 79 95 112 128 145 162
150,210 35 52 70 88 106 124 142 160 179
160,200 38 57 76 95 114 133 152 171 191
170,190 39 59 79 99 118 138 158 178 198
180 40 60 80 100 120 140 160 180 200
29
Таблица 3.2. Скорость эквивалентного вегра для ВС с У» = 400...500 км ч
Угол Скорость ветра, км ч
ветра. ° 10 | КО | 80 | 100 120 | НО | IC.0 | 180 | 200
Ветер попутный «+»
0,360 40 60 80 100 120 140 160 180 200
10,350 39 59 79 98 118 137 157 176 196
20,340 37 56 74 93 111 129 147 165 183
30,330 34 51 68 84 100 116 131 147 162
40,320 30 44 58 72 85 98 ill 123 135
50,310 25 36 47 58 68 77 86 95 102
60,300 19 27 35 42 48 54 59 63 67
70,290 12 17 21 24 27 29 30 30 29
80,280 5 7 7 7 5 3 0 — —
Ветер встречный «—»
80,280 — — —- — — — — 4 8
90,270 2 4 7 11 16 22 28 36 44
100,260 9 14 21 28 36 15 55 66 78
110.250 15 24 34 44 55 67 80 93 108
120.240 21 33 45 58 72 86 101 117 133
130,230 27 41 56 71 87 103 120 137 155
140,220 31 48 64 81 99 116 134 153 172
150,210 35 53 71 89 108 127 146 165 184
160,200 38 57 76 95 115 134 154 173 193
170.190 39 59 79 99 119 139 158 178 198
180 40 60 80 100 120 140 160 180 200
различных диапазонов изменения Г„. носьгельно воздушной массы со ско-
Различают мгновенные и средине ростью V и перемещения последней
значения скорости эквивалентного
ветра. Средний за сезон (или год)
эквивалентный ветер по данному
маршруту опре шляется иа основе
метеорологических наблюдений.
Средний эквивалентный ветер С'3
ср
но маршруту, состоящему из п уча-
стков с протяженностями S,-, опреде-
тяется с использованием скоростей
эквивалентного ветра иа каждом
участке С'3(:
1 ж/'
U4 ----------> U3iSi
,р $общ ",
3.5. Навигационный
треугольник скорое гей
Перемещенне ВС относительно
земной поверхности со скоростью W
складывается из перемещения его от-
относительно земной поверхности со
скоростью U.
Навигационный треугольник ско-
ростей (Н1С)— векторный треуголь-
ник, образованный векторами истин-
ной V, путевой IV скоростей и ско-
рости ветра U (рис. 3.7).
Элементами НТС являются его
стороны (V, U, U'), углы, попарно
образуемые векторами (углы ветра и
сноса, курсовсй угол ветра), а так-
же угловые величины, характеризу-
ющие ориентацию НГС относительно
направления, принятого за начало
отсчета (курс у, путевой угол Р и
направление ветра 6И).
Угол ветра е — угол, образуемый
- ►
между векторами U’ и U. Он отсчи-
тывается от вектора U7 по часовой
стрелке от 0 до 360° (иногда от
180 до 4-180°).
30
Курсовой угол ветра ф — угол
между векторами У и U. Отсчиты-
вается ои от вектора V по часовой
стрелке от 0 то 360° (иногда от
— 180 до +180°).
Угол сноса а — угол между векто
—* —>
рамп V' и 1У. Отсчитывается ои от
—>
вектора V вправо (ио часовой стрел-
ке) со знаком плюс и влево — со зна-
ком минус.
Суммарный угол сноса образует
ся между проекцией про дольной осн
ВС иа горизонтальную плоскость и
—>
вектором путегой скорости W
а т а + яа,
где аа — аэродинамический угол
сноса.
При ааг®0 между элементами
НТС имеются следующие основные
соотношения:
Р -у+а;
1У V cos a-T U cos е:
е 6Н—Р;
21 С'cos ф;
Ф -бн— У е-f-a:
U sina— У'sine й'Сы'пф.
(3.10)
Из этих соотношений следует, что
нри попутном ветре (г = 0) IV =
= У-|-17, а при встречном U' = V—U
(е=180с). И в том и в другом слу-
чае угол сноса равен нулю (<»=0).
При боковом ветре (8=90° или е =
= 270°) путевая скорость IV7 близка
к истинной Уи, а угол сноса прини-
мает максимальное значение Umax —
— 60 ту- . измеряемое в градусах.
У и
Для реализации заданной траек-
тории полета экипаж решает НТС,
оиретеляя неизвестные его элементы
с помощью известных по приведен-
ным выше математическим соотноше-
ниям. Необходимые расчеты выпол-
няются автоматически навигацион-
ным вычислителем либо экипажем с
помощью навигационной лииейки
НЛ-10м или расчетчика НРК-2. На-
иболее часто используются четыре ти-
повые задачи по решению НТС.
Рис. 3.7. Навигационный треугольник
скоростей
Определение ожидаемой путевой
скорости и требуемого курса полета.
Эта первая типовая задача решается
во время предполетной подготовки
прн заполнении бортового журнала.
Определение W7, а и у пэ известным
У, р, б и U осуществляется в сле-
дующем порядке. После определе-
ния навигационного направления вет-
ра би по одному из соотношений
(3 5) оценивается угол ветра
е -р.
Затем по НЛ-Юм определяются it и
IV (рис. 3.8). Устанавливаемая иа
лииейке величина е' определяется
следующим образом:
в' =е, если 0° < е< 180° (а > 0);
е* 360 — 8, если 180° < 8 <
< 360° (а < 0).
Тогда курс у=Р—и
Определение фактических значе-
ний путевой скорости IV' и путевого
угла р по известным курсу у, истин-
ной скорости Уи, а также скорости
н направлению ветра. Вторая типо-
вая задача решается методом после-
©
©
t'
U Vu W=?
Рис. 3.8. Алгоритм определения учла
скоса и путевой скорости (1-я типо-
вая задача)
31
Рш 3.9. Алгоритм определения угла
сноса и путевой скорости (2-я типо
ная задача)
ювательного приближения Вначале
за приближенное значение угла вст
ра принимается курсовой угол ветра
tp, что допустимо, поскольку угол
сноса не принимает больших зна-
чений
впр *1’ — 6н — V •
Затем, в соответствии с алгоритмом
(рис 3.9) иа НЛ-10м рассчитывает-
ся приближенное значение угла сно-
са цп|, и уточняется угол ветра е =
= 6н—(у+а11р). После этого с по-
мощью того же алгоритма определя-
ется уточненное значение утла сноса
а н путевая скорость. Путевой угол
Р=у + и.
Определение требуемой истинной
скорости и курса полета у для обес-
печения заданной путевой скорости
IV и путевого угла 0 Для решения
третьей типовой задачи вначале оп
ределяется угол ветра и истинная
скорость е = 6в — р V® IV — U cos е.
При этом величина U cos е опреде-
ляется иа НЛ 10м по алгоритму,
представленному на рис. 3.10, о, а
угол сноса — по алгоритму, приве-
денному на рис. 3 10,6. После этого
рассчитывается курс у=Р—а
Определение скорости и направле-
ния ветра по известным V', W, у и а.
Для решения четвертой типовой за-
дачи определяется эквивалентный ве-
тер t/a=W'— V ив соответствии с
алгоритмом, приведенным на рис.
3.11, находится вспомогательный
угол в', а затем и скорость ветра U.
Направление ветра определяется в
зависимости от знаков (J3 и а: при
17э>0 6н = у+«±к' (знак перед г'
соответствует знаку а); при U3<0
6н = у+а± 180±е' (знак перед е'
противоположен знаку а).
Влияние у, V, б и U на путевую
скорость W и угол сноса определя-
ется углом ветра. При встречном и
попутном ветре небольшое измене
иие курса или направления ветра ие
влияет па IV’ и незначительно влияет
на и. Любое приращение V или I/
при встречном или попутном ветре
вызывает такое же приращение пу-
тевой скорости IV', но ие влечет из-
менения угла сноса а. При боковом
ветре изменение у и 6 почти ие ока-
зывает влияние на угол сноса и
а) @ ------------ б) ® -V----------------'
© - Д— а\__________________________________
ф Vase-? V U Уи
Рис 3.10. Алгоритм определения V cos г (а) и угла сноса (б) (3-я типовая
за чача)
Рис 3.11. Алгоритм определения (а) угла ветра и скорости ветра (б) (4 я ти
новая задача)
32
незначительно влияет на путевую
скорость. Изменение V при боковом
ветре сильно влияет на W, но слабо
на и. От изменения скорости ветра
в этом же случае существенно завк
сит угол сноса (тем сильнее, чем
меньше скорость самолета), но прак-
тически не зависит IV.
При приближенном расчете а и IV'
в уме могут оказаться полезными
следующие соотношения
е... ±ЗО°(18О°±ЗС°) ± 60 (180°±60°)
а ±0 5ат„ ± 0,9атах
W . . V,, ±0.91' VH± 0,5(7
3.6. Методы счисления пути
Методы счисления пути классифи-
цируют по степени автоматизации и
по виду используемой навигационной
информации
Неавтоматизированное счисление
координат, осуществляемое навига-
тором на карте, называют проклад-
кой пути Различают штилевую, пол-
ную и обратную прокладки.
При полной прокладке отрезки от
кладываются в направлении, соответ-
ствующем фактическому истинному
путевому углу, а их протяженноеть
S — U t, т е рассчитываются по
фактической путевой скорости. При
полной прокладке получают линию,
близкую к линии фактического пути
(с точностью до погрешностей про-
кладки).
Штилевая прокладка осуществля-
ется при отсутствии информации о
IV и а на каждом участке маршрута
или когда иет необходимости в по-
строении линии фактического пути, а
требуется только определить МС в
некоторый момент времени. От по
следчего достоверного МС в направ-
лении. соответствующем истинному
курсу ВС. откладывается отрезок
S=V„/.
где t время полета с данным кур
сом.
От полученной таким образом
точки строится отрезок, соответству-
ющий следованию с другим курсом,
н т. д. Последняя полученная точка
смещается в направлении б„„ иа
S = l//r,
где —суммарное время полета
по всем участкам.
Обратная прокладка осушествля
ется после полета над безорнеитир-
ной местностью для уточнения линии
фактического пути. В полете ведется
полная прокладка нети, а после вы-
хода на опознанный ориентир опреде-
ляется невязка счисления (расстояние
между счисленным и фактическим
МС). Последняя распределяется про-
порционально времени полета по
участкам маршрута и таким образом
уточняется линия фактического пути
Автоматизированное счисление ко-
ординат производится бортовыми на-
вигационными вычислителями анало-
гового пли цифрового типа. Счисле
пне может осуществляться в прямо
угольной, главноортодромнческой, ча
стноортодромической или географн
ческой системах координат. Общие
уравнения счисления пути при этом
имеют следующий вид
I
П = По+ f
о
t
о
г те I], обобщенные координаты и
текущий момент времени I; т]с. £о -
координаты в начальный момент вре
менп t = 0; IV , IV'—составляющее
вектора путевой скорости по коордв
натным осям.
При счислении в частиоортодромв
ческой системе OZS величины 1» k и
IV'. формируются по разному в зави
снмости от используемых датчиков
навигационной информации
2 Зак. Ь39
33
Глава 4
НАВИГАЦИОННАЯ ХАРАКТЕРИСТИКА ТЕХНИЧЕСКИХ СРЕДСТВ
САМОЛЕТОВОЖДЕНИЯ
4.1. Классификация технических
средств самолетовождения
Выполнение основной задачи воз-
душной навигации достигается при
менением разнообразной бортовой н
наземной аппаратуры, составляющей
технические средства самолетовожде-
ния (ТСС). Число их, различных по
назначению, принципам построения и
действия, измеряемым первичным на-
вигационным параметрам, особенно-
стям использования и другим показа-
телям, сравнительно велико. Поэтому
для выработки общих методов их
применения, рационального комплек-
тирования н грамотной эксплуатации
требуется классификация названных
ере 1ств.
В воздушной навигации ТСС при-
нято классифицировать по: степени
зависимости работы бортовой аппара
туры от наземных средств; использу-
емому первичному источнику иавша-
ционной информации; назначению;
виду измеряемого навигационного па-
раметра; дальности действия.
По степени зависимости работы
бортовой аппаратуры от наземных
устройств (степени автономности)
все ТСС делятся иа три класса: авто-
номные навигационные средства, на-
вигационные системы и навигацион-
ные комплексы.
Автономные средства определяют
навигационные параметры с по-
мощью бортовой аппаратуры без
взаимодействия с наземными техни
чески ми устройствами. В этот класс
входят три группы ТСС, отличаю-
щихся по используемому первичному
источнику информации: геотехниче-
ских, радиотехнических и астроиоми
ческих средств. Ими можно пользо-
ваться в продолжении всего полета в
любой точке Земли, если имеются не-
обходимые условия для их прнмече
НИИ.
Навигационные системы (неавто-
номные средства) состоят из борто-
вой и наземной (спутниковой) под-
34
систем, совместно позволяющих полу-
чать навигационную информацию на
борт} ВС Они составляют три труп
пы систем: радиотехнические, спут-
никовые и светотехнические системы.
В первую группу входят радиона-
вигационные системы, различающие
по виду измеряемого навигационного
параметра: угломерные, дальномер
ные. разностно-дальномерные, угло-
мерно-дальномерные.
Спутниковые навигационные си
стемы (СНС) состоят из трех подси
стем: бортовой, спутниковой и назем
ной. В зависимости от принципа по
строения они могут использоваться и
для решения задач по управлению
воздушным движением.
Светотехнические системы состоят
из наземных и бортовых источников
света, необходимых для выполнения
посадки в условиях плохой види
мости.
Навигационные комп <ексы состоят
из различных но принципу построе
ния автономности и используемом}
первичному источнику информации
измерительных устройств, в совокуп
иости обеспечивающих решение той
или иной навигационной задачи Как
правило, они обобщают данные от
нескольких независимых технических
средств, перерабатывают их и выда
ют интегральную информацию как
для использования экипажем, так и
автоматизированного вождения ВС
по программной траектории. Совре
менные навигационные комплексы мо
гут быть подразделены иа три
гру ппы:
комбинированные навигационные
измерители составляют группу прибо
ров (систем), обеспечивающих изме
рение одного или нескольких навпга
ционных элементов при комплексном
использовании двух или более пер
винных датчиков. К ним относите;
все разновидности курсовых систем
(ГИК. ГМК. КС, ТКС, БСФК).
В эту же группу входят иавигаци
онные индикаторы, определяющие ко
ординаты ВС счислением в курсо-
воздушном режиме;
авиационные навигационные комп-
гексы. представл» ющис совокупность
функционально взаимосвязанных бор-
товых средств и систем, обеспечиваю-
щих автоматизацию решения навига-
ционных задач с представлением эки-
пажу данных, требующихся для уп-
равления движением центра масс ВС
нлн вводом их в систему автоматиче-
ского управления (САУ);
полиотажно-нивигационные ко ип-
лексы (ПНК), состоящие из АНК с
САУ, обеспечивающие автоматиче-
ское решение задач пилотирования и
навигации Ими оснащаются все со-
временные магистрадьные самолеты и
некоторые тины вертолетов.
Классификация по первичному
источнику информации является тра-
диционной В качестве источника ин-
формации используются: геофитиче-
скне поля Земли; электромагнитные
поля наземных или бортовых радио-
технических устройств; электромаг-
нитное и световое поле небесных
светил; искусственные световые ори-
ентиры на земной поверхности.
Геотехнические средства и систе-
мы основаны на использовании гео-
физических полей Земчи магнитного,
гравитационного, статического и ди-
намического давления и температуры
воздушной среды, естественные и
искусственные объекты на земной по-
верхности (поле ориентиров) и конт-
расты температур различных участ
коч иа ней (по-разному излучающих
тепловую и электромагнитную эиер
гню). К числу геотехнических средств
относятся:
курсовые приборы и системы
(магнитный и гироиндукциониый ком-
пасы, гирополукомпас, курсовая си
стема, курсовертикаль, базовая си
стема формирования курса, базовая
система курса н вертикали);
приборы и системы, основанные
на изменении физических параметров
воздушной среды (барометрический
высотомер, прибор скорости, комби-
нированный прибор скорости, варио-
метр, прибор числа М термометр на-
ружного воздуха, система воздушных
сигналов, информационный комплекс
высотно-скоростных параметров);
2*
инерциальные приборы и системы
(инерциальные курсовертикаль и на-
вшацпонпая система);
автоматизированные вычислители
координат (навигационный индика-
тор и каналы АНК. ведущие счисле
низ в курсовоздушном режиме);
оптические приборы (визиры),
измерители времени (часы)
Некоторые из перечисленных
средств (барометрический высотомер,
гпрополукомнас и др.) используют
только одно из геофизических полей,
а другие (гироиндукцнониый компас,
система воздушных сигналов и ,др ) —
несколько полей. В последнем случае
они являются комбинированными из
мерительными приборами (система-
ми) В соответствии с исподьзуемым
полем геотехнические средства под-
разделяются на группы. Важные их
достоинства — простота устрой-
ства, надежность, автономность и вы-
сокая помехозащищенность. В то же
время геотехническим средствам при-
суши недостатки: ие все они
обеспечивают требуемую точность из-
мерений; МС возможно определять
(при отсутствии видимости земной
поверхности) только счислением пу
ти, вследствие чего его погрешность
возрастает со времени начала счис-
ления
Радиотехнические средства (РТС)
и системы используют свойства элек-
тромагнитных воли: время и прямо-
линейность распространения, способ-
ность преломляться я отражаться, ко-
герентность колебаний К числу РГС
относятся группы угломерных, даль-
номерных. разпостно дальномерных и
угломерно- дальномерных радионави-
гационных систем, а также радиоло-
кационных средств (бортовые радио-
локационные станции, доплеровские
измерители скорости и сноса и радио-
высотомеры). К ним же причисляют-
ся инфракрасные приборы и радиови-
зиры (тепловизнры) — аппаратура
пассивной локации для ведения ори
ептировки, основанная иа использова-
нии контрастов температур земной
поверхности.
Радиотехнические средства в свою
очередь классифицируются по авто-
номности. назначению, виду опреде-
дяемого навигационного параметра
35
(угол, дальность, разность дально-
стей, доплеровские частоты) и изме-
ряемого параметра радиосигнала
(амплитудные, частотные, фазовые и
временные). дальности действия
и ip.
Важное достоинство РТС
состоит в их способности выдавать
информацию практически в любых
метеорологических условиях днем и
ночью, с высокой точностью произво-
дить измерения и непосредственно оп-
ределять абсолютные координаты
ВС и путевую скорость полета. Н е-
достатком РТС являются под-
верженность естественным и органи-
зованным помехам, ограниченность
дальности действия радионавигаци-
онных систем, снижение точности из-
мерений и навигационных определе-
ний по мере удаления ВС от назем-
ной подсистемы и радиолокационного
ориентира.
Астрономические средства основа-
ны на пеленгации светил, являющих-
ся источником светового или радио-
излучения. На этом принципе рабо-
тают авиационные секстанты, астро-
номические компасы, радиосекстаиты
и астроориентаторы. Они обладают
свойствами автономности, абсолютной
помехозащищенности и применимости
в любой точке Земли, но требуют ус-
ловий наблюдаемости небесных све-
тил (за исключением радиосекстан-
тов) и, следовательно, не могут ис-
пользоваться при полетах в облаках
или под ними.
Светотехнические средства (свето-
маяки, посадочные огни, пиротехниче-
ские средства) относятся к вспомога-
тельным и используются главным
образом в районе аэродрома в ноч-
ных условиях.
Классификация по назначению.
Такая классификация наиболее удоб-
на для практического использования
в процессе решения навигационных
задач и комплексировапия средств.
По этому признаку ТСС подразделя-
ются па группы измерителей: курса
(магнитного, гироскопического, аст-
рономического, инерциального и ком-
бинированного принципов действия);
скорости (аэродинамического, допле-
ровского, инерциальною и корреляци-
онно-экстремального принципов дей-
36
ствия); высоты (барометрического,
радиолокационного и инерциального
принципов действия); координат ВС
(радионавигационные системы, борто-
вые радиолокаторы, астроориептато-
ры, навигационные индикаторы, инер-
циальные навигационные системы,
спутниковые навигационные системы,
авиационные навигационные комп-
лексы, тепловизиры, корреляционно-
экстремальные системы).
Кроме того, имеются системы: по-
садки (ратиомаячпого курсо-глиссад-
ного, радиолокационного, инфракрас-
ного и лазерного принципов дейст-
вия); предупреждения столкновений
ВС в воздухе (СПС}; сигнализации
описного сближения с земной поверх-
ностью (ССОС): взаимного опозна-
вания и межсамолетной навигации.
Некоторые средства и системы явля-
ются многофункциональными, напри-
мер, бортовая радиолокационная
станция, инерциальная и спутниковая
навигационные системы и др.
По дальности действия ТСС под-
разделяются на системы ближнего
действия, дальнего действия и гло-
бальные. Такая классификация отно-
сится к радиотехническим, тепловым
и лазерным средствам. К радиотехни-
ческим системам ближней навигации
(РСБН) относятся такие, которые
позволяют поддерживать связь меж-
ду бортовой и наземной подсистема-
ми на расстояниях до 350—450 км.
Таковыми являются угломерпо-даль-
померные РНС (отечественные и за-
рубежные РСБН), радиомаячные и
радиопеленгаторные системы УКВ
диапазона (радиопеленгаторы АРП.
радиомаяки ВОР и ДМЕ) и радио-
компасные системы.
Системы дальнего действия обес-
печивают получение навигационной
информации при у щлениях ВС от на-
земной подсистемы до 2500—3000 км
(разностно-дальномерные системы ти-
пов РСДН-3 и «Лоран», секторные
веерные радиомаяки ВРМ-5 и «Кон-
сол»).
Глобальные системы позволяют
определить МС в любом районе Зем-
ли (РД РНС «Омега», СНС). Строго
говоря, такой системы иет: одна на-
земная пли спутниковая подсистема
не может обеспечивать определение
координат ВС в .побои точке около-
земного пространства. Глобальность
достигается расстановкой такого чис-
ia наземных средств и размещением
ИСЗ, которые в совокупности созда-
ют сплошное радионавигационное
поле.
Навигационные вычислительные
устройства (НВУ) составляют осо-
бую группу ТСС. Они нс предназна-
чены для произвотства непосредст-
венных измерений, но тем не менее
играют важную роль. Многие навига-
ционные средства имеют вычисли-
тельное устройство той или иной
сложности, а АНК, ИНС, СНС бет
него вообще немыслимы.
Привезенная классификация не
является единственно возможной и
полной. Она, как и любая другая ус-
ловна и не очень строга. Однако она
позволяет дать общую характеристн
ку каждой группе средств, наметить
общие методы их применения, ука-
зать их достоинства и недостатки.
4.2. Навигационные
характеристики
Оборудование ВС ТСС различны
мп по принципу действия, устройству,
ниду вы таваемой информации, объ-
ему выполняемых функций и других
требует грамотного выбора и приме-
нения их с учетом навигационных ха-
рактеристик. К ним относятся: на
значение, решаемые задачи, точность
измерения параметров и решения на-
вигационных задач, условия примене-
ния, техническая надежность, степень
автоматизации измерения, оператив-
ность измерения и получения конеч-
ного результата. Кроме того, специ-
фическими характеристиками, прису-
щими РНС, являются дальность
(сйствия, рабочий диапазон радио-
волн, рабочая область, пропускная
способность и помехоустойчивость.
Все большее распространение по-
лучает понятие «минимальные нави-
гационные требования» (МНТ) пли,
в документах ИКАО, «минимальные
навигационные характеристики»
(МНХ). определяющие обобщенные
требования ко всему навигационно-
пилотажному оборудованию ВС по
точности н надежности выполнения
навигационных задач.
Назначение ТСС указывает, для
измерения какого параметра (высо-
ты, скорости, пеленга, дальности и
пр.) или решения какой задачи (по-
садки, предупреждения столкновений
и т. д.) предназначено техническое
средство. Обычно уже название ТСС
раскрывает его назначение (высото-
мер, прибор скорости и т. п.). но в
некоторых случаях по нему невоз-
можно непосредственно определить
пи его функцию, ни измеряемую ве
личину (радиолокатор, радиокомпас
и др ).
Решаемые задачи определяется
прежде всего, назначением ТСС и
измеряемым навигационным парамет-
ром. Однако объем решаемых за tan
обычно значительно больше, чем
число измеряемых величин. Так, на-
пример, УД РНС по измеренным пе-
ленгу и ольности позволяет опреде-
лить МС в различных системах коор-
динат, вести контроль пути по на-
правлению и дальности, выводить
ВС в заданную точку, выполнять ма-
невр для захода на посадку и пр.
Число решаемых задач возрастает
прн совместном использовании шух-
трех средств. Например, АРК авто-
номно находит ограниченное приме-
нение, а в комплексе с курсовым при-
бором его возможности существенно
расширяются.
Точность измерения первичного
навигационного параметра — важней-
шая характеристика, определяющая
эффективность использования ТСС
для решения конкретной навигациои
нон зздачи. Поскольку точность изме-
рительных средств представляет со-
бой понятие, обратное понятию их
погрешностей, а в метрологии иаибо-
дее широкое применение находят крп
терпи погрешностей измерений, то иа
практике количественная оценка точ-
ности обычно отождествляется с
погрешностью.
По i погрешностью измерений А,
понимается отклонение измеренных
величин Хм.лм от их истинных значе-
ний. По своему происхождению они
разделяются на методические, аппа-
ратурные (включая ошибки индика
ции), оператора и помеховые, а по
37
характеру проявления — на система
тпческие и случайные.
Случайным погрешностям свойст-
венно изменение их значений и знака
от измерения к измерению. Поэтому
они учитываются по вероятностным
закономерностям. Наиболее полная
информация о случайных величинах
(СВ) содержится в законах их рас-
пределения Одиако прн решении
практических задач часто достаточ-
но знать математическое ожидание
nix и дисперсию £)х (или среднюю
квадратическую погрешность ох =
— + }DX). Опыт показывает, что на-
вигационные СВ чаще всего по щипл-
ются нормальному закону распреде-
ления. Для него характерны следую-
щие соотношения: частная погреш-
ность измерения Дх не выходит за
пределы тх±ох с вероятностью
0.6827, за пределы гпх±2ох —0,9545
и шх±3ох— 0.9973. В практике са-
молетовождения погрешность Лх =
=3ах принимается за максималь-
ною. т. е. Л»тах~3ах.
Технические средства самолето-
вождения по точности обычно оцени-
ваются средней квадратической по-
грешностью (СКП) измерения. Они
даются в описаниях ТСС н инструк-
циях по их применению. Иногда в
литературе по воздушной навигации
чается погрешность, равная двум
СКП, — на это необходимо обращать
внимание. В практике самолетовож
дения следует помнить, что из-за
плохой регулировки аппаратуры и
особенностей условий распростране-
ния радиоволн фактические погреш
ности нередко бывают значительно
больше указываемых в описаниях.
Точность решения задач. Погреш-
ность измерения навигационного па-
раметра во многом предопределяет
потенциальную точность решения на
виганионной задачи Практически же
точность часто зависит от метода ре-
шения. Например, при одной и той
же погрешности измерения пеленга
и дальности угломерно-дальномерной
РНС точность определения частно-
ортодромнческих координат ВС за-
висит от того, графически или ана
литически решается эта задача. При-
чем, если графически, то необходимо
учесть на карте какой проекции и
38
масштаба, а если аналитически, то с
помощью Hv'1-Юм, аналогового или
цифрового вычислителя. Поэтому
оператор должен ясно представлять,
какую точность может обеспечить
кажзый метол и выбрать тот из них,
который гарантирует требуемую точ-
ность.
Условия применения. Каждое ТСС
требует определенных условий при-
менения. Астрономические средства
можно эксплуатировать только при
видимости небесных светил, магнит
ный датчик курса — при конкретном
значении горизонтальной составляю-
щей магнитного поля Земли, борто-
вой радиолокатор — наличии харак-
терных опознаваемых радиолокацион-
ных ориентиров и т. д.
Надежность ТСС — способность
навигационного устройства безотказ-
но (исправно) работать в заданных
условиях эксплуатации в течение оп-
ределенного времени. Безотказной
работой считается выполнение функ-
ций в зарзиее установленном объ-
еме, в пределах заданных допусков.
Количественно надежность оценпва
ется вероятностью безотказной ра
боты Р.тр((), т е. вероятностью того,
что в течение времени t (в продол-
жение полета) не будет отказа.
Оперативность решения навигаци-
онной зада ай определяется злитель
ностью процесса получения и исполь-
зования навигационной информации,
т. е. суммарным временем перера-
ботки информации на всех этапах: от
формирования сигнала — носителя
информации ю отображения ее в го-
товом виде и применения потреби-
телем.
Дальность действия радионавига-
ционных систем определяет возмож-
ность их применения для решения
навигационных задач. Обычно имеет-
ся в виду максимальная дальность
О„,ЙХ от РНТ до ВС (или наоборот),
при котором возможно получение на-
вигационной информации. Ьиа зави-
сит о г энергетического потенциала
РТС, чувствительности приемного
устройства, диапазона и условий рас-
пространения радиоволн. Кроме Dmxx
надо знать и минимальную дальность
Omin действия. Она определяет об-
ласть около РНТ, в которой в силу
Таблица 4.1. Диапазоны радиоволн радионавигационных систем
Радиочастоты Границы радиочастот Радиоволны Границы радио- волн Радиотехнические средства, рабо1аю- щие в этом диапазоне
Очень низкие (ОНЧ) 3-30 кГц Сверхдлинные (мириаметровые) (СДВ) 10—30 км РД РНС «Ом<га>
Низкие (НЧ) 30—300 кГц Длинные (кило- метровые) (ДВ) 1 — 10 км Радиокомпасы, ра- диомаяки ВР.М-5. РД РНС «Лорап-С»
Средние (СЧ) 0.3—3 МГц Средние (гекто- мстровые) (СВ) 0,1 — 1 км Радиокомпасы
Высокие (ВЧ) 3—30 МГц Короткие (дека- метровые) (КВ) 10—100 м Секторные радио- пеленгаторы
Очень высокие (ОВЧ) 30 -300 МГц Метровые (МВ) 1 — 10 м Системы посадки СП, автоматиче ские радиопелен- гаторы АРП, ра- диомаяки ВОР
Ультра высокие (УВЧ) 0,3—3 ГГц Дециметровые (Д.МВ) 1 —10 дм РСБН, ДВОР, Д ME СД 67, СНС. ОРЛ, ДРЛ
Сверхвысокие (СВЧ) 3—30 ГГц Сантиметровые (СМВ) 1 —10 ем ДИСС БРЛС, МСП, СНС, РВ. ОРЛ, ПРЛ
Примечание. Диапазоны МВ. Д.МВ и СМВ объединяются в одни диапазон
ультракороткие волны (УКВ»
особенностей характеристики направ-
ленности антенн РНС прием радио-
сигналов отсутствует.
Рабочий диапазон радиочастот в
значительной степени определяет об-
ласть применения РНС. вид измеряе-
мого радионавигационного парамет-
ра, точность измерения дальность
действия, помехоустойчивость и пр
Принятое в настоящее время деление
всей частотной области, занимаемой
радиоволнами, на диапазоны, приве-
дено в табл. 4.1.
Пропускная способность радиона-
вигационного средства характеризует
возможность обслуживания одиовре
меиво или в единицу времени опреде-
ленного числа ВС. Если передаваемая
(шформация принимается всеми ВС.
то РНС имеет неограниченную про-
пускную способность (приводные ра-
диостанции, радиомаяки ВОР и
ВР.М-5 и др.). При передаче инфор-
мации только ио запросу с борта ВС
имеем дело с РНС с ограниченной
пропускной способностью (дальноме-
ры запросного тока, радиопеленгато-
ры и др.)
Рабочая область (РО)—часть
пространства, в которой с применени
ем РНС с гарантийной вероятностью
Рг обеспечивается контроль пути с
точностью не ниже требуемой Она
представляет обобщенную характе-
ристику РНС по дальности действия
и точности решения навигационной
задачи. Построение на карте РО поз-
воляет наглядно представить воз-
можности радионавигационных си
стем и облегчает рациональный вы
бор их для контроля пути.
Рабочая область может быть по
строена по требуемым точностям оп
релелеппя МС оГт. контроля пути по
направлению о1т и дальности о«т
39
Она описывается системой уравнс
пий:
по требуемой <7Гт
Пг^Пгг: (4.1)
по требуемой <г2т
^1п1п1 Г)[ Отах^ Пгт'
по требуемой о<т
0щ1п( D, Отах,.; ав °ьт’ (4.3)
г ie D, расстояние между ВС и
i-ой РНТ
Для получения РО на карту не-
обходимо нанести максимальную
Dmax и минимальную Dm in дальности
и кривую ранной точности Дкгт, со
ответствующую или <т,т, или о2 . или
о.,т Причем, внешняя граница РО
ограничивается меньшей из двух ве-
личин— Dmai и Окнт. а внутренняя
боЛЫПеЙ Drain и Ькет
4.3. Влияние условий
распространения радиоволн
на характеристики
радионавигационных средств
Но закономерностям распростра-
нения в земной атмосфере радиовол-
ны принято разделять иа группы:
прямолинейно распространяющиеся;
поверхностные, пространственные и
волноводного типа Эти закоиомер
ности сказываются на дальности дей-
ствия РНС и точности измерения.
Рис 4 1. Дальность действия РНС
УКВ диапазона
Прямолинейно распространяющие-
ся волны Такое распространение
свойственно метровым, дециметровым
и сантиметровым радиоволнам, т. е.
УКВ диапазону. Высокая степень
прямолинейности имеет место в гори
зонтальной плоскости и меньшая — в
вертикальной. Земная поверхность
своей шарообразной формой и рель-
ефом местности служит экраном на
пути прямолинейного распростране-
ния, и поэтому при отсутствии реф-
ракции в вертикальной плоскости
дальность действия УКВ РНС ие
превышает дальности прямой вида
мости Dun, а в условиях рсфрак
ции — дальности радиовидимости
D^e- Причем. Dmai является функ-
цией высоты полета, высоты антен-
ны РНТ и характера пролетаемой
местности Вследствие этого даль
пость действия РНС должна быть
рассчитана для каждого эшелона и
маршрута полета.
В практике самолетовождения
принято определять DmflI для рав
нпниой и горной местностей.
В радионавигации местность счи-
тается равнинной если в пределах
горизонта выполняется условие
(рис 4 I).
HR~hM-±-hR> Ирел,
где йм—высота мачты антенной си-
стемы ha — абсолютная высота рель
ефа в точке установления мачты ан-
тенны; //Рел — рельеф местности иа
удалении d, радногоризокта.
В этом случае
Отах = с/| + ^2 —
k Оа.отн 4“ У'Л.ол отн) -
ГДе 7/а.оти—— Нрел, Нвол отн —
= //пол.авс — Орел, (ВЫСОТЫ беруТСЯ
в метрах, Dmax получается в километ-
рах); k — коэффициент, учитывающий
сферичность Земли и рефракцию ра-
тиоволн. При отсутствии рефракции
£ = 3,57, тогда Dmax<DnB. В услови-
ях стандартной атмосферы £=4,12
(нормальная рефракция) и Dmax^
«gDp,. В воздушной навигации для
получения гарантийной дальности
расчеты часто выполняют при
£ = 3.7.
40
Так как обычно Апол>Иа, то не-
редко считают
Нпол.отн. (4.4)
В некоторых источниках k берут
равным 113, 118 н 130 вместо 3,57;
3,7 и 4,12 соответственно. В этом
случае высоты надо брать в километ
рах.
В радионавигации местность счи-
тается горной, если в пределах гори-
зонта
/7a <Z Нpa I,
где НрГл — высота местности («пре
пятствия») иа удалении d1 от РНТ.
В горной местности
k
^mai <Л“Ь^2 djH — X
ГДе ХЙ—7/ргл— На, //полоти —
= //лол абс — //рел. м. di и 4г — рас-
стояния до препятствия, км.
Высота полета, рельеф местности
и рефракция радиоволн в вертикаль-
ной плоскости определяют макси-
мально возможную дальность связи
в УКВ диапазоне. Фактическая даль-
ность зависит также от энергетиче-
ского потенциала РНС н поглощения
энергии в атмосфере. Она может
быть существенно меньше О11в н £>р».
Радиомаячным УКВ РНС прису-
щи погрешности измерения дальности
и пеленга, обусловленные отражепи
ями радиоволн от неровностей рель-
ефа « местных предметов, оказываю
щихся в поле излучения РНТ. Поле
отраженных сигналов взаимодейству-
ет с основным рабочим полем н вы
зывает погрешности измерения,
вследствие чего последние могут быть
в несколько раз больше паспортных
данных.
Поверхностные волны. Радиоизлу-
чения ДВ и СВ диапазонов способны
распространяться, огибая поверхность
земного шара. По мере перехода в
область более длинных волн даль-
ность нх распространения возрастает,
причем она не зависит от высоты рас-
положения передающей н приемной
антенн. Поэтому поверхностные вол-
ны могут приниматься при больших
и малых высотах полета. Им прису-
ща довольно высокая степень посто-
янства направления распространения,
вследствие чего они используются в
угломерных системах
Радионавигационным СВ и ДВ
системам свойственны погрешности
пеленгации, обусловленные ночным,
береговым и горным эффектами. Для
исключения ночного эффекта исполь-
зуются РНТ. нахо (ящнеся на рассто-
яниях до 100 - 150 км (береговым
эффектом можно не считаться, если
угол пересечения радиоволн с бере-
гом превышает 20° или высота поле-
та нс меньше нескольких длин волн).
Ошибки под действием горного эф-
фекта существенны только при поле-
тах вблизи гор и над горами ниже
1000—1500 м, и если между РНТ и
воздушным судном имеются горы.
Пространственные волны. Радио-
излучения КВ, СВ и ДВ, попадая на
ионосферу, отражаются ею и возвра-
щаются в приземные слои атмосферы.
Затем они могут отразиться земной
поверхностью и повторно — ионосфе-
рой, вследствие чего способны прони-
кать далеко за горизонт. Траектория
распространения имеет форму лома-
ной линии, но характеризуется посто-
янством направления. Электрические
свойства и высота ионосферы изме-
няются в значительных пределах в
зависимости от времени суток и года
и солнечной деятельности. Поэтому
условия распространения отличают-
ся нестабильностью, что сказывается
на работе РНС, в частности, в виде
ночного эффекта (на СВ, примыка-
ющих к КВ) и замираний. Особенно
неблагоприятны условия радионави-
гационных измерений в области, где
напряженности полей пространствен-
ной и поверхностной волн соизмери-
мы друг с другом. Несмотря иа ука-
занные недостатки, средние и длин-
ные волны используются в РНС, так-
как обеспечивают большую дальность
действия независимо от высоты по-
лета.
41
Радиоизлучения волнового типа.
Для излучений СДВ диапазона зем-
ная поверхность и ионосфера обра
зуют своеобразный сферический вол-
новод. В процессе распространения
радиоволн имеет место многократ-
ное отражение от земной поверхно-
сти и ионосферы и интерференция от
раженных колебании. Им свойствен-
но малое затухание, поэтому даль-
ность действия СДВ РНС юстпгает
8—10 тыс км п более
Исследования показали, что в дна
вазоне СДВ наиболее целесообразны
фазовые методы измерений. Вследст-
вие использования многократно отра-
женных радиоволн, влияния подсти-
лающей поверхности, времени суток
и года на фазовый сдвиг РНС сверх-
глинноволнового диапазона свойст-
венны большие погрешности. Однако
они носят систематический характер,
постоянны для данного района поле-
тов, времени суток и гола. Это поз-
воляет заранее рассчитать поправки
к результатам измерения и тем са-
мым обеспечивать высокую точность
определения места ВС.
Глава 5
ВЫЧИСЛИТЕЛЬНЫЕ СРЕДСТВА
5.1. Счетные инструменты
В процессе предполетной подго-
товки и в полете экипажу приходит-
ся выполнять большой объем вычис-
лительных работ. Для этого исполь-
зуются навигационная счетная линей
ка НЛ-Юм, ветрочет, комбинирован-
ный навигационный расчетчик
НРК-2 и электронно вычислительные
машины.
Навигационная линейка. С по-
мощью НЛ-Юм решаются практиче-
ски все задачи по самолетовождению
и выполняется ряд других вычисли-
тельных операций, требующих умно-
жения и деления, возведения в
квадрат и извлечения корня, исполь
зования тригонометрических функ-
ций. Она устроена по принципу обыч-
ной счетной логарифмической линей-
ки и позволяет сложные математиче-
ские действия иад числами по умно-
жению и делению заменить на более
простые — сложение и вычитание от-
резков шкал, выражающих в опреде-
ленном масштабе логарифмы этих
чисел. Например, вычисление выраже-
ний S = и IF = S// выполняется
действиями igS = lg U7+lg/ и
lgW = IgS — lg t соответственно.
Навигационная лииейка (НЛ) со
стоит из корпуса, движка и бегунка
с визирной риской (рис. 5.1). На кор-
пусе и движке нанесены шкалы, ин-
42
дексы, формулы и надписи. Всего
имеется 18 шкал, которые предназна-
чены для:
1а — определения времени разво-
рота иа заданный угол (совместно
со шкалами / и 2);
1,2 — расчета путевой скорости,
пройденного расстояния, времени по-
лета и разворота, а также выполне-
ния операций умножения и деления;
4, 5 — определения тригономет-
рических функций углов, произведе
пий вида a sin а и Mg а, решения
прямоугольных и косоугольных тре-
угольников. расчета радиуса разво-
рота и утла крена;
5, 6 — возведения в квадрат, из-
влечения корпя, а совместно со шка-
лой 4 — радиуса разворота и угла
креиа;
7, 8, 9 перерасчета приборной
высоты в исправленную высоту и
обратно при II12 000 м;
10, 12, 14 15 — перерасчета высо-
ты полета при Н>12 000 м;
11, 12, 13. 14. 15, 16—перерасче-
та приборной скорости в исправлен-
ную скорость и обратно;
14, 15—умножения и деления
Вычисления путевой скорости, вре-
мени полета и пройденного расстоя
ния производятся с использованием
шкал 1 и 2 и расположенных иа
43
а
Произ!екнио
Множимое
Ф
Множитель
Рис. 5.2. Алгоритмы умножения а и деления б
Частное
Делимое
Делитель
последней («время») индексов
Круглый и тре-
угольный индексы служат также для
умножения и деления: первый на
3.6 с, второй — на 60 мин или 1 ч.
Положение шкал линсйкн и индек-
сов при решении задач принято
изображать в виде алгоритмов
(«ключей»). Значения чисел, нанесен-
ных на шкалы, можно увеличивать и
уменьшать в любое число раз, крат-
ное десяти.
Для умножения чисел прямоуголь-
ный индекс с цифрой 10 или 100
шкалы 2 необходимо установить на
множимое, а против множителя от-
считать по шкале 1 произведение
(рис. 5.2).
Число знаков произведения опре-
деляют в уме или по правилам умно-
жения чисел иа логарифмической ли-
нейке.
Для умножения и деления, при-
чем с большей точностью, можно
пользоваться шкалами 14 и 15: при
вычислении произведения против
множимого на шкале 15 устанавли-
вается цифра ;||ооI Ull |юоо| шка-
лы 14 и против множителя (берется
по шкале 14) по шкале 15 считыва-
ется результат.
Для вычисления тригонометриче-
(S0-P)
sin а созр 1(100)
Рис. 5.3. Алгоритмы вычисления тригонометрических функций:
а — синуса и косинуса; б— тангенса и котангенса
44
скнх функций пользуются шкалами 3.
4, 5 (рис. 5.3).
Поскольку задачи по определению
пройденного расстояния S. скорости
IV' и времени полета t есть операции
умножения и деления, то они вы-
полняются на шкалах 1 и 2. Потому
они и называются шкалами расстоя-
ний, скорости и времени (рис. 5.4 и
5.5). При выполнении этих расчетов
пользуются индексами: круглым, ес-
ли t выражается в секундах; тре-
угольным, если t берется в минутах
(путевая скорость выражается в ки-
лометрах в час, а расстояние в кило-
метрах в обоих случаях). Для возве-
дения в квадрат и извлечения корня
пользуются шкалами 5, 6 (рис. 5.6).
Знание алгоритмов облегчает и
убыстряет решение навигационных
задач без запоминания описывающих
их зависимостей. Например, определе-
ние 1Г и УС решением навигационно-
го треугольника скоростей (НТС) по
формуле (3.10) с использованием ал-
горитма производится легко и быст-
ро. хотя при этом выполняется де-
вять операций умножении, деления и
вычисленья тригонометрических функ-
ций.
Навигационный расчетчик комби-
нированный. Он представляет комби-
нацию НЛ и ветрочета и является
счетным инструментом, предназначен-
ным для выполнения расчетов при
подготовке к полету и в полете, по
применению авиации в народном хо-
. у_____.
tga etgp 1(100)
М,км/ч
©
©
W,km/i
f
t,MUH
Ж
t,c
Рис. 5.4. Алгоритмы вычисления пройденного расстояния:
а — время выражается в минутах; б — время выражается в секундах
зяйствс и ряда вычислительных опе-
раций.
С помощью навигационного рас-
четчика производятся:
расчет курса следования, угла сно-
са, путевой скорости и угла ветра
по известному вектору ветра и за-
данным путевому углу и истинной
воздушной скорости;
определение скорости и направле-
ния ветра по измеренным: или углу
сноса и путевой скорости, или двум
углам сноса на двух курсах, или по
двум путевым скоростям иа двух кур-
сах при известной истинной скорости
полета;
определение пройденного расстоя-
ния, путевой скорости и времени по-
лета;
расчет радиуса и времени разво-
рота на заданный угол по известным
воздушной скорости и углу крепа;
пересчет истинной воздушной ско-
рости в приборную и обратно;
вычисление числа М, соответству-
ющего заданной истинной воздушной
скорости, и обратно;
определение поправки на сжимае-
мость воздуха к показанию прибор-
ной скорости аэродинамических при-
боров скорости;
пересчет истинной высоты полета
в приборную и обратно;
определение поправки к показа-
ниям термометров наружного возду-
ха ТНВ и ТУЭ;
S,km №,км,'ч
расчет элементов захода иа по-
садку;
преобразование полярных коорди-
нат ВС в частиоортодромические;
определение МС и навигационных
элементов с помощью угломерных
радионавигационных систем;
выполнение различных вычисли-
тельных операций и т. д.
Навигационный расчетчик имеет
23 шкалы и номограмму. У шкал тот
же принцип построения, что и у
шкал навигационной линейки. Номо-
грамма с соответствующими индекса-
ми образует ветрочет, обеспечиваю-
щий графическое решение навигаци-
онного треугольника скоростей. Центр
номограммы является концом векто-
ра воздушной скорости и началом
вектора ветра. Она построена иа ос-
нове нормированного НТС, все сто-
роны которого выражены в отличие
от ветрочета не в абсолютных едини-
цах, а в относительных (нормирован-
ных) долях (в процентах) от истин-
ной воздушной скорости, модуль ко-
торой принимается за 100%. Поэто-
му с номограммы считываются: пу-
тевая скорость в процентах от V»
(по дугам, оцифрованным в процен-
тах) 1Гг= (W'/Vn) 100; скорость вет-
ра в процентах от VH (по концент-
рическим окружностям) 17г =
= (Ц/Уи)Ю0. Угол сноса определяет-
ся по той же номограмме с помощью
линий сноса, оцифрованных в граду-
d'
хтч Щнм/ч
-----е
t,Hun
Рис. 5.5. Алгоритмы вычисления путевой скорости:
а.— время выражается в минутах; б— время выражается в секундах
45
Рис. 5.6. Возведение в квадрат и из-
влечение корня
сах. Предельное значение Ur равно
30% от VH, И?,.—от 70 до 130% от
1'и и угол сноса — ±17°.
Номограммы и таблицы. В прак-
тике воздушной навигации, особенно
при подготовке к полетам, широкое
применение находят номограммы и
таблицы. Их целесообразно исполь
зовать для решения сложных задач
(например, расчет заправки ВС топ-
ливом, определения дальиосди дей-
ствия УКВ РНС и пр), требующих
большой затраты времени при вычис-
лениях с помощью счетных инстру-
ментов. С помощью номограммы за-
дачи решаются менее точно, чем по
таблице, но последняя дает только
дискретные ответы тогда как иомо
граммам этот недостаток присущ в
меньшей степени
Расчеты в уме. В быстро меняю-
щейся воздушной обстановке экипаж
не всег ia имеет возможность точно
определить интересующий его нави-
гационный параметр с помощью из-
мерений или вычислений с использо-
ванием счетного инструмента, номо-
граммы и таблицы. В этих условиях
можно уметь выполнять расчеты в
уме по прибзиженным формулам
пройденного расстояния, времени и
скорости полета, угла сноса, элемен-
тов захода на посадку и пр
Нанигационная линейка НЛ-Юм,
а тем более комбинированный рас-
четчик НРК-2 позволяют решать
практически все задачи в процессе
подготовки к полету и в полете. Од-
нако им присущи два больших недо-
статка: неоперативность вычислений
но сложным формулам и недостаточ-
ная точность решения некоторых за-
дач. Например, подготовка устано-
вочных данных для полетов с приме-
нением АНК и выполнение астроно-
мических расчетов с использованием
46
11Л-10м и ИРК 2 занимает слишком
много времени Кроме того, для пол
ной реализации потенциальных воз-
можностей АНК углы и расстояния
должны быть вычислены с погреш-
ностью до единиц минут и долей ки
дометра соответственно. Но такую
точность достичь с помощью НЛ-Юм
и НРК-2 невозможно Поэтому в воз-
душной навигации возрастающее
применение находят ЭВМ.
5.2. Применение электронных
вычислительных машин
Электронные микрокалькуляторы
(ЭМК) используются для выполне-
нья навигационных расчетов при под-
готовке к полету и в полете. По вы
числительным возможностям они
разделяются на простые, для научно-
технических (инженерных) расчетов
и программируемые Для решения
задач самолетовождения используют-
ся калькулиторы двух последних ти
пов. Промышленностью выпускается
большое число ЭМК, различающихся
функциональными возможностями,
типом индикаторов, элементами пита-
ния, особенностями вычислительной
логики.
Для индикаторов в ЭМК приме-
няется различная элементная база.
Индикаторы на светоизлучающих
диодах (цвет свечения красный) от-
личаются малой чувствительностью к
ударным нагрузкам, большим сроком
службы, хорошей видимостью при
слабом освещении, но они потребля
ют довольно много электроэнергии
Ваку умно люминесцентные злемен
ты (цвет свечения зеленый) также
хорошо видны в темноте, но чувствп
тельны к ударным нагрузкам и по
сравнению со светоизлучающими дио
дами потребляют больше электро
энер| ин и имеют значительно более
короткий срок службы Индикаторы
на жидких кристаллах отличаются
исключительно низким потреблением
электроэнергии, хорошо видны в ус-
ловиях яркого освещения, по еовер
щенно не видны в темноте.
Питаются ЭМК от смеииых эле-
ментов питания (батареек) или встро
енпых аккумуляторов. Большинство
калькуляторов комплектуется бло-
ком питания от внешней сети, кото-
рый используется также тля заря тки
аккумуляторов. Выпускаются также
ЭМК с солнечными элементами пи-
тания.
Ввод информации в ЭМК (число-
вых данных и команд) осуществляет-
ся с помощью клавиатуры, разме-
щенной иа лицевой панели микро-
калькулятора. Клавиши являются,
как правило, многофункциональными,
каждая может быть использована
для выполнения двух трех операций.
Микрокалькуляторы для научно-тех-
нических расчетов, помимо четырех
арифметических действий, выполня-
ют такие операции, как возведение в
квадрат и извлечение кватратного
корня, нахождение обратной величи-
ны, расчет тригонометрических и об-
ратных тригонометрических функций,
возведение в степень, логарифмирова-
ние и другие операции. В некоторых
Э1МК (например, БЗ-38) предусмот-
рен режим статистических расчетов
для определения среднего арифмети
веского, среднего квадратического от-
клонения и других статистических
оценок Большинство ЭМК имеют
один или несколько регистров па-
мяти.
Микрокалькуляторы воспроизво-
дят исходные данные и результаты
вычислений в экспоненциальной фор-
ме (в виде мантиссы и порядка чис-
ла) или с естественной запятой.
Большинство ЭМК воспроизводят во-
семь разрядов числа. Ввод угловых
величин может осуществляться в
градусах или в радианах, а в неко-
торых ЭМК и в градовой мере (де-
сятичных градусах).
Наиболее часто в ЭМК использу-
ются два варианта вычислительной
логики, алгебраическая запись и «об-
ратная польская запись» При алгеб-
раической записи для выполнения
двухместной операции вводятся после-
довательно первый операнд (число),
знак арифметической операции, вто-
рой операнд и знак «=». Такой по
рядок наиболее близок к естествен-
ной записи математических выраже-
ний. В некоторых ЭМК с такой си-
стемой имеются клавиши одно- или
двухуровневых скобок При «обрат-
ной польской записи» вводятся по-
следовательно первый операнд, знак
разделения операндов «1», второй
операнд и знак арифметической опе-
рации. Такая система позволяет обхо-
диться без использования скобок.
Микрокалькулятор БЗ-34 — типич-
ный представитель программируемых
ЭМК. Он позволяет составлять про-
граммы объемом до 98 шагов, с по-
мощью которых удобно выполнять
однотипные вычисления при различ-
ных исходных данных. Система про-
граммирования этого микрокалькуля-
тора испо 1ьзуется и в ЭМК новых
типов Так, в МК 61 программная
память расширена до 105 шагов,
калькулятор автоматически выполня-
ет 65 операций. Микрокалькулятор
МК 52 обладает встроенным полупо-
сгоянным запоминающим устройст-
вом, которое позволяет хранить про-
грамму объемом 512 шагов при от-
клонении или отказе основного
источника питания. Разрабатываемый
микрокалькулятор МК 72 для записи
и отображения информации может
подключаться к бытовому магнито-
фону и телевизору.
Микрокалькуляторы могут успеш-
но использоваться для выполнения
инженерно штурманского расчета по-
лета, построения рабочих областей
радионавигационных систем, оценки
точности навигационных определений
и др
Малые ЭВМ типов «Искра-1256»,
«Искра-226» применяются для вы-
полнения навигационных расчетов во
время предполетной подготовки (рас-
чет левой части штурманского бор-
тового журнала, выбор оптимального
эшелона полета и т д) и решения
ряда задач оптимизации штурманско-
го обеспечения полетов. Они облада-
ют быстродействием порядка 500 опе-
раций в 1 с. снабжены дисплеем,
цифропечатающим устройством и
внешней памятью.
Универсальные ЭВМ Единой се-
рии (ЕС) используются для решения
иаучио-исследовательскнх навигаци-
онных задач и сложных задач опти-
мизации штурманского обеспечения
полетов. Такие машины различаются
быстродействием (от десятков тысяч
до 2.5 млн операций в 1 с), объемом
47
•оперативной памяти и комплектом
внешних устройств. Они являются
программно-совместимыми и позво-
ляют решать задачи высокой сложно-
сти. ЕС ЭВМ снабжаются накопите-
лями на магнитной ленте и магнит-
ных тисках, электронными дисплея-
ми, алфавитно-цифровыми печатаю-
щими устройствами, перфораторами,
устройствами ввода с перфокарт и
другими внешними устройствами. Для
решения задачи на ЕС ЭВМ состав-
ляются программы иа одном из уни-
версальных языков программирова-
ния Наиболее распространенными и
удобными для навигационных расче-
тов являются языки Фортран-IV и
ПЛ, I.
В состав ПНК современных ВС
входят бортовые цифровые вычисли-
тельные машины. Они являются
специализированными и предназначе-
ны для решения специальных нави-
гационных задач: счисления пути,
преобразования координат, оптимиза-
ции навигационного и пилотажного
режима полета и др.
Глава 6
ИЗМЕРЕНИЕ НАВИГАЦИОННЫХ ЭЛЕМЕНТОВ
6.1. Принципы измерения
навигационных элементов
Навигационные элементы полета
измеряются, как правило, с помощью
технических средств, находящихся иа
борту ВС. Измерения могут выпол-
няться непрерывно и дискретно с ча-
стотой, необходимой экипажу или
обусловленной аэронавигационной
обстановкой.
В основе измерения курса лежит
способность чувствительных элемен-
тов компасов ориентироваться в оп-
ределенном направлении: вдоль маг-
нитного меридиана, в направлении на
небесное светило, иа работающую ра-
диостанцию или сохранять заданное
направление, как это имеет место у
гирополукомпасов. В основе опреде-
ления путевой скорости и угла сноса
лежит принцип измерения относи-
тельного перемещения ВС вдоль зем-
ной поверхности.
Навигационные элементы поло-
жения ВС получают либо непосред-
ственным определением МС, либо
косвенно. При косвенном определе-
нии МС измеряются некоторые пара-
метры (пеленг, дальность, высота не-
бесного светила и т. д.), находящи-
еся в'ф^икциональной зависимости от
взаимного положения ВС и внешне-
го источника навигационной инфор-
мации, например, наземного ориен-
тира, или оадиомаяка, небесного све-
48
тила. Все измерения могут произво-
диться автоматически или непосред-
ственно экипажем.
6.2. Применение курсовых
приборов
Магнитные компасы. Свободно
подвешенная магнитная стрелка всег-
да располагается в плоскости маг-
нитного меридиана См, не совпада-
ющего, в общем случае, с меридиа-
ном истинным Си на величину маг-
нитного склонения (рис. 6.1). Ес-
ли магнитный меридиан повернут по
часовой стрелке относительно истин-
ного (географического), то магнит-
ное склонение положительно (Ам>0).
если против часовой стрелки — отри-
цательно (Дм<0). Линии, соединя-
ющие точки с одинаковым магнит-
ным склонением называются изогона-
ми. Они наносятся на полетные кар-
ты линиями фиолетового цвета.
Если магнитную стрелку устано-
вьть на самолете нлн вертолете, то
она подвергнется воздействию допол-
нительного магнитного поля самого
ВС и расположится в плоскости ком-
пасного меридиана Сн, отличающего-
ся от магнитного на величину девиа-
ции \к. Если компасный меридиан
расположен по часовой стрелке отно-
сительно магнитного, то девиация
считается положительной (Ли>0),
если против часовой стрелки — отри-
цательной (АкСО).
Таким образом, чтобы получить
ма!иитный курс ВС по показанию
компаса, необходимо компасный курс
исправить иа девиацию, взятую со
своим знаком МК=КК+ЛВ, и на-
оборот, чтобы рассчитать курс следо-
вания по магнитному, надо учесть
девиацию с обратным знаком КК=
МК —Лк.
Соответственно преобразуются
магнитный и истинный курсы
ИК==МК+Л„;МК ИК—Дм- (6.1)
Основными недостатками магнит-
ных компасов являются девиация и
динамические погрешности, приводя-
щие к колебательному характеру от-
счета курса ВС в полете.
Девиация магнитных компасов
возникает под влиянием ферромаг-
нитных масс ВС и его постоянного
электрического поля. Она может до-
стигать больших значений. Ферро-
магнитные массы по своим магнит-
ным свойствам делятся на «твердое»
и «мягкое» железо.
«Твердое» железо, долго сохраня-
ющее свою намагниченность, создает
постоянную и полукруговую девиа-
цию. Постоянная не меняет своего
знака и значения при изменении кур-
са ВС. Полукруговая деви-
ация при изменении курса на 360°
имеет два максимума и два нулевых
значения, разнесенных иа 180°. «Мяг-
кое» железо создает четвертную
девиацию, которая имеет по че-
тыре максимума и нулевых значения,
разнесенных на 90°. Обычно полукру-
говая тевиация (5... 7) ° превосхо-
дит четвертную (2 ... 3)°.
Для уменьшения девиации созда-
ются дистанционные компасы, у кото-
рых чувствительный элемент удален
от ферромагнитных масс ВС обычно
в консоль плоскости. Другой путь
уменьшения девиации заключается в
создании •вблизи чувствительного эле-
мента дополнительного магнитного
поля, компенсирующего влияние са-
молетного. Ойо создается двумя па-
рами перпендикулярно расположен-
ных регулируемых постоянных маг-
нитов девиационного прибора. Не-
значительная часть остаточной деви-
ации может устраняться механиче-
ски — лекальным устройством.
Полукруговая девиация устраня-
ется иа всех магнитных компасах
вертолетов и самолетов 4-го класса,
а также у компасов типа КИ на всех
типах ВС. Девиационные работы про-
изводятся в следующем порядке:
ВС устанавливается на магнитный
курс 0°. С помощью девиационного
прибора шлицем «С—Ю» девиация
доводится до нуля (КК=МК). Отсчет
компасного курса у ГИК-1 должен
производиться со шкалы коррекцион-
ного механизма;
ВС разворачивается иа МК=90°.
Шлицем девиационного прибора
«3—В» девиация доводится также
до нуля;
последовательно ВС разворачива-
ется иа МК= 180 и 270°. На этих
Рис. 6.1. Система измерения курсов ВС
49
курсах девиация доводится чо поло-
винного значении;
постоянная девиация (установоч-
ная ошибка)
ДКх.ст = 0-25(Дк +Дк )• <62)
УГ1 1 "1Я0 К27О/
где Лк1М и Лк„,— девиации на
МК 180° и 270° до уменьшения их с
помощью девиационного прибора
(Лк= 180°(2/0) — КК)
Для устранения установочной
ошибки корпус компаса или датчика
разворачивается иа ту же величину.
При этом, если установочная ошибка
получилась положительная, надо так
повернуть компас, чтобы показания
компасного курса увеличилось, и на-
оборот;
остаточная девиация не устраня-
ется, а «списывается». и для компа-
сов типа КП составляется график.
С этой целью ВС последовательно
разворачивается на восемь курсов
через 45°. На каждом из них опреде-
ляется девиация Л„ = МК—КК.
Если все девиационные работы
были произведены правильно, то
кривая графика должна быть сим-
метрична относительно нулевой ли-
нии (Лк=0), т. е. 4 раза пересекать
нулевсю линию. Если вся кривая сме-
шена в сторону, то это означает, что
постоянная девиация устранена не-
правильно. Если кривая имеет толь-
ко два пересечения, то это свипетель-
ствуст о том. что полукруговая де-
виация устранена неполностью.
У гироиидукциониого компаса
ГИК-1 график девиации не составля-
ется, а остаточная девиация устра-
няется с помощью коррекционного
механизма на 24 курсах.
В процессе выполнения девиаци-
онных работ ВС устанавливается иа
заданные магнитные курсы с по-
мощью девиационного пеленгатора
путем пеленгации оси ВС или удален-
ного иа 4—5 км ориентира, магнит-
ный пеленг которого предварительно
измерен.
На самолетах 1—3-го классов
вследствие рационального размеще-
ния индукционного датчика на ВС
девиация не превышает 2°. Это дает
возможность полукруговую девиацию
данным способом не устранять, а
50
применять механический способ. Для
этого вращают не сам самолет, а
только да. чин, установленный иа
проверочном стенде УПК 3. А девиа-
цию на всех магнитных курсах через
15” доводят до нуля с помощью ле-
кального устройства коррекционного
механизма. В результате этого на
индикаторы подается ие компасный,
а магнитный курс. Значение компас
пого курса можно снять только со
шкалы коррекшюнвого механизма.
Г ирополуксмпасы. Способность
гироскопов с тремя степенями свобо-
ды сохранять положение оси ротора
в пространстве неизменным позволи-
ла применить их в качестве курсо-
вых приборов для выдерживании на
правления полета. Применяемые в
гражданской авиации гирополуком-
пасы гПК-52 и курсовые системы в
режиме «ГПК» позволяют при сохра-
нении постоянного ги,юск .пического
курса и отсутствии ветра выполнять
полет строго по ортодромии. Однако
гирополукомпасы не могут сами ори-
ентироваться относительно какого-то
направления, поэтому они требуют
обязательной начальной установки иа
заданный курс.
Находящийся иа ВС гирополуком-
нас участвует в твух движениях: су-
точном вращении земли и перемеще-
нии ВС относительно земной поверх-
ности. Первое движение приводит к
видимому повороту оси ротора (из-
менению отсчета курса на шкале
ГПК) неподвижного ВС относительно
географического меридиана. Это дви
жение носит закономерный характер
и зависит от широты места. Ойо ком-
пенсируется механизмом азимуталь
ной коррекции, создающей прецесси-
онный момент, в результате которого
ось ротора получает вращательное
движение -вокруг вертикальной оси с
угловой скоростью
ш = Йэ sin <р,
где £2з — угловая скорость суточного
вращения земли, равная 15”/ч. Уста
иовка широты <р производится обыч
но вручную по специальной шкале
прибора.
При дискретном вводе широты
возникает погрешность в гироскопи-
ческом курсе.
Курс, снятый со шкалы ГПК, от
.шчается от истинного и магнитного.
Это объясняется тем, что отечет ус-
ловных (гироскопических) курсов ве-
дется относительно начального
(опорного) меридиана установки кур-
са на ГПК. Б полете при перемеще-
нии ВС относительно земной поверх-
ности с изменением долготы МС воз-
никает методическая ошибка услов
иого курса Дук = Д31ь1п<р. На эту ве-
личину условный курс будет отли-
чаться от истинного.
Вследствие неточного изготовле-
ния ротора гироскопа и кордаиного
подвеса возникает инструментальная
погрешность, приводящая к медлен-
ному прецессионному вращению оси
ротора относительно -вертикальной
оси. Эта погрешность называется соб-
ственным уходом гироскопа. В поле-
те она приводит к искривлению линии
фактического пути и 'уклонению от
ортодромии Согласно техническим
условиям допускается уг.>овая ско
рость собственного ухода 2—2,5о/ч
1ЛЯ ГПК-52 и курсовых систем типа
КС н 0,5—0,7ч'ч для курсовых си-
стем типа ТКС.
6.3. Измерение элементов
движения ВС
Измерение скорости. Для измере-
тня скорости полета в авиации наи-
более широкое применение иашел
аэродинамический метод, при котором
определяют давление встречного по
тока воздуха (скоростной иапор),
равного разности полного и статиче-
ского давления атмосферы на высоте
полета. Скоростной иапор определя-
ет аэродинамические характеристики
ВС (подъемную си чу, лобовое сопро-
тивление), поэтому приборные скоро-
сти Vnp используются в основном при
пилотировании.
В навигации используется истин-
ная воздушная скорость Ги. Оиа
функционально связана с при<орной,
однако ее значение зависит та*чже от
давления и температуры воздуха
С подъемом на высоту давление ат-
мосферы понижается, что приводит к
росту истинней скорости полета. На
высоте 12 000 м истинная скорость
превышает приборную вдвое. Чтобы
определить истинную скорость поче-
та, учитываются инструментальная
ДГи. аэродинамическая ДГа и мето-
дическая ДГ'М=/(ТЕри) поправки
^’и К|,р+АГ'и-гА^м ! Vra
Инструментальная поправка вы-
бирается из соответствующего гра-
фика или таблицы. Учет методике -
ской поправки производится с по-
мощью навигационной линейки
НЛ 10м (см. рис. 5.1) одновременно
с расчетом истинной воздушной ско-
рости. Ключ для расчета приведен
на рис. 6.2, а
Комбинированный указатель ско-
рости КУС-7301100 устроен так, что
широкая стрелка показывает прибор-
ную скорость, а узкая — истинную,
соответствующую стандартной атмос
© т'? V ИСТ
Ь (J!) пр (^пр 'A Vj (vnp 4 ИСТ*? ***)*? 'ист
® 'пр (VKiC ^avHhr
Рис. 6.2. Алгоритмы преобразования воздушных скоростей:
и для УС; б - для КУС
51
фере Гнус- Учет методической поправ-
ки от несоответствия фактической
температуры от стандартной произво-
дится на НЛ-Юм (рнс. 6.2,6), но вме-
сто шкалы 12 используется шка-
ла 13
На скоростях полета, близких к
скорости звука а = 20.05 |7'и вместо
приборной скорости для пичотирова-
ния ВС пользуются числом A1=Vu/a,
которое зависит от скоростного напо-
ра и давления иа высоте полета, но
не зависит от температуры атмосферы.
Измерение ускорения ВС. Послед-
ние годы начал развиваться новый
метод определения элементов движе-
ния ВС и пройденного расстояния,
заключающийся в измерении ускоре-
ний ВС с последующим интегрирова-
нием его по времени. Реализуется
данный метод в инерциальных нави-
гационных системах (ИНС). Измере-
ние ускорений ВС производится с по-
мощью специальных устройств, назы-
ваемых акселерометрами. В ннерци
альных системах обычно измеряется
не сам вектор ускорения, а его со-
ставляющие по осям координат, для
чего акселерометры и ориентируются
вдоль этих направлений.
При полете в гравитационном но
ле земли ВС испытывает воздействие
силы тяжести. Действие этой силы иа
акселерометр по своему характеру не
отличается от действия сил инерции.
Это приводит к тому, что при накло-
не измерительной оси акселерометра
относительно горизонтальной плоско-
сти к динамическому ускорению при-
соединяется составляющая ускорения
силы тяжести
«иэм a cos а—gsina (6.3)
Для исключения гравитационной
составляющей широкое применение в
ИНС получил способ точного нивели-
рования — <выставки» плоскости из-
мерения и непрерывной автоматиче-
ской коррекции ее горизонтального
положения в процессе п ьтета.
Инерциальная система подверже-
на ошибкам измерения, источниками
появления которых являются инстру-
ментальные погрешности и ошибки
начальной выставки гнроилатформы
по горизонту и по азимуту. Отличи-
тельной особенностью погрешностей
52
ИНС является колебательный харак-
тер их во времени. Период колебания
равен 64 мин.
6.4. Измерение угла сноса
и путевой скорости
Навигационные элементы (НЭ)
полета путевая скорость и угоч
сноса в зависимости от располагае-
мых средств самолетовождения па
борту ВС измеряются автоматически
непрерывно нли дискретно экипажем.
Непрерывное измерение навигаци-
онных элементов полета. Автоматиче-
ские средства самолетовождения —
инерциальные навигационные системы
и доплеровские измерители позволя-
ют непрерывно в течение всего полета
измерять путевую скорость и угол
сноса. Эти средства являются полно-
стью автономными, так как не требу-
ют дополнительного наземного обору-
дования.
При использовании ИНС путевая
скорость и УС вырабатываются авто
матически и выдаются на индикаторы
обычно но мере необходимости
Измерение путевой скорости и у г
ла сноса доплеровским измерителем
(ДИСС) основано на замере разно-
сти частот радиосигналов, излучен-
ных радиопередатчиком ДИСС и при-
нятых обратно после отражения их
от земной (водной) поверхности.
Условия отражения радиоволн от
земной или водной поверхности ока
зывают влияние на точность измере
ния. Для устранения ошибки путевой
скорости из за морского эффекта в
ДИСС вводится калибровочная по-
правка, соответствующая среднему
состоянию водной поверхности. Более
совершенные ДИСС имеют специаль-
ную схему автоматического учета от-
ражающих свойств поверхности.
При изменении режима полета,
при наборе высоты и снижении, раз
гоне и торможении, а также при из
мепении полетной массы ВС изменя-
ется и угол тангажа. У ДИСС с не
стабилизированными антеннами это
приводит к изменению наклона диаг-
раммы излучения в вертикальной
плоскости и к завышению показаний
UZ. Повышение точности измерения
путевой скорости по этой причине
достигается двумя путями. Наиболее
простой из иих заключается в перево-
де ДИСС в режим «Память», если
продольный крен ВС приводит к воз-
никновению ошибок, превышающих
допустимые. Другое направление реа-
лизуется в тех ДИСС, расчет путевой
скорости у которых выполняется не
самим прибором, а бортовой ЦВМ.
В этом случае возможно аналитиче-
ски рассчитать и учесть поправки.
При продолжительных поперечных
кренах, например при развороте ВС,
ДИСС переходит в режим «Память».
Доплеровские измерители непре-
рывно измеряют УС. Достигается это
либо разворотом антенной системы
ДИСС по направлению вектора IF и
отсчетом УС относительно продоль-
ной оси ВС, либо аналитически, если
антенна закреплена неподвижно, а на
борту ВС имеется ЦВМ.
Дискретное измерение навигацион-
ных элементов полета. При отсутст-
вии иа борту ВС ИНС или ДИСС
путевая скорость, угол сноса и ФПУ
могут определяться в полете экипа-
жем дискретно по мере необходимо-
сти с помощью оптических и радио-
технических средств. В основе всех
способов дискретного измерения НЭ
лежит оценка перемещения ВС отно-
сительно земной поверхности. Наи-
большее распространение получили
измерения, выполняемые иа контроль-
ном этапе (КЭ) и базисным спосо-
бом.
На контрольном этапе для изме-
рения IV' и УС экипажу необходимо
располагать двумя зафиксированны-
ми иа полетной карте точками факти-
ческих МС (рис. 6.3). По измеренно-
му расстоянию 5иэ между ними и
времени пролета рассчитывается пу-
тевая скорость
^=sKJ,(rK-TH),
где Тк, Тк—время пролета начала и
конца КЭ
Точность измерения IV' зависит от
частных погрешностей определения
МС, графической работы на карте и
отсчета времени. Относительная по-
грешность определения путевой ско-
рости характеризуется выражением
находится в пределах 0,03—0,04.
Для измерения угла сноса рассчи-
тывается разность между фактичес-
ким путевым углом и средним курсом
ВС:
УС=ФМПУ— МКср.
Знак УС получается автоматически.
При ФМПУ >МК угол сноса поло-
жительный и наоборот. Чтобы полу-
чить ФМПУ иа полетной карте, соеди-
няют линией точки начала и конца
КЭ и измеряют истинный фактичес-
кий путевой угол. Тогда
ФМПУ=ФПУ— Дм.
Точность измерения УС зависит
от погрешностей определения МС и
Рнс. 6.3. Измерение IF и УС на контрольном этапе
53
выдерживания заяаиного курса, точ-
ности учета магнитного склонения и
графической работы на карте:
*-!-°2к г"Ам + °гр- <е5)
Обычно аус = 2,5-.-3°. На контроль
ном этапе определяют и путевую ско-
рость, и угол сноса одновременно.
Непосредственное же определение
фактических мест ВС может быть
произведено любыми средствами, на-
пример угломерно-дальномериой РНС,
БРЛС или визуально При выборе
средств надо стремиться к получению
наивысшей точности определения мес-
та ВС. В процессе измерения 1Г по-
четное время необходимо фиксиро-
вать с помощью секундомера.
В основе большинства способов
измерения навигационных элементов
полета с помощью оптических и ра
тиолокационных визиров лежит ба-
зисный способ, заключающийся в
оценке относительного перемещения
ВС, зафиксированного курсовыми уг-
лами и дальностями до выбранной
точки (ориентира) на земной поверх-
ности. Особенностью данного способа
является то, что для измерения не
требуется опознавания самих ориен-
тиров. Задача расчета выполняется
графически на ветрочете (навигаци-
онном расчетчике) или аналитически
в полярной системе координат, свя-
занной с ВС.
Измерение U’ производят, как по
казано иа рис. 6 4
Для упрощения определения IV' с
помощью БРЛС применяются частные
случаи базисного способа, выполияе-
Рис. 6.4. Измерение W и УС базис-
ным способом
мые на равных илн половинкой даль-
ностях
В первом случае D|=D2=D путе-
вая скорость
2D КУ02-КУО1
W —---- ЯП --------------•
t 2
Измерение U иа половинной даль-
ности £)2=0,5 О, предусматривает вы
бор визирной точки в начальный мо-
мент измерения на курсовой черте
БРЛС. При этом 0,5£>|/. Расче-
ты легко выполняются на навигацион-
ной линейке НЛ-Юм
Если измерение (Е производится
с помощью РСБН, то можно опреде-
лить путевую скорость без графиче
ских построений Особенно удобен в
этом смысле режим полета по задан-
ному азимуту. Тогда
11/= («, D2)7.
Измерение путевой скорости ба-
зисным способом с помощью оптиче-
ских средств реализуется в визире
ДБ 52, установленном иа некоторых
ВС, выполняющих полеты в поляр-
ных районах.
Ьазиснтй способ измерения угла
сноса также ие требует опознавания
пролетаемой .местности, поэтому для
его реализации могут применяться
любые визирные точки на земной по-
верхности. Способ основан на слеже-
нии за относительным перемещением
визирной точки в ноле зрения радио-
локационного или оптического визира
Относительное перемещение фиксиру
ется в изменении дальности и КУО
(см. рис. 6.4).
Обычно применяются частные слу-
чаи базисного способа на равных и
половинной дальностях
В первом случае начало и оконча-
ние промера фиксируется на одина-
ковых дальностях. Тогда УС°-
= 0,5 (КУО, + КУО2) -90° (270°) соот
ветственно для правого и левого бор-
тов ВС. Если начальный курсовой
угол КУО, = 45° (315е), то УС-
КУО2 135°(225)°)
2
В другом случае вторую даль-
ность выбирают равной половине пер-
вой. Топа УС = 2КУО|—КУО2. Здесь
удобнее вести счет курсовых углов не
от 0 до 360°, а от 0 до ±180°.
54
Рис 6.5 Полет ВС от радиостанции
Точность навигационных элемен-
тов, измеренных базисным способом,
зависит в основном от погрешностей
измерения дальностей и курсовых уг-
лов ориентира. Поэтому очень важно
при этом сохранять постоянный курс
ВС.
Измерение УС по остановленной
антенне БРЛС — также частный слу-
чай базисного способа, когда КУО| =
= КУО2 равен УС и углу разворота
антенны. Наблюдая на экране БРЛС
за характером свечения развертки,
можно плавным поворотом аитеины
совместить максимум диаграммы из-
лучения с направлением вектора пу-
тевой скорости Точность измерения
этим способом аТс -0,5-^0,8°.
При выполнении полета от радио-
станции можно измерять угол сноса
с помощью радиокомпаса совместно
с курсовым прибором (рис. 6.5):
УС = МК + КУР± 180 —МКср, (6.7)
где МК и КУР — мгновенные значе
ния магнитного курса и курсового
угла PC; МКср—средний курс, вы-
держиваемый экипажем в процессе
промера
Точность измерения УС характери-
зуется величиной Оус=34-4°.
6.5. Измерение высоты полета
Для однозначного определения по-
ложения ВС в пространстве, помимо
координат МС, необходимо знать его
высоту.
Высота полета есть расстояние по
вертикали от ВС до выбранного
уровня, принятого за начато отсчета.
В соответствии с этим различают еле
дующие высоты: абсолютную, отсчи-
тываемую от уровня моря, над су-
шей от уровня геоида; истинную, от-
считываемую от уровня земной по-
верхности под ЕС; относительную
(высоту эшелона), отсчитываемую от
условного уровня, например уровня
аэродрома или изобарической поверх-
ности, соответствующей атмосферно
му давлению ро—760 мм рт. ст.*.
В практике самолетовождения ча-
ще применяется относительная высо-
та. измеряемая барометрическими вы-
сотомерами. По ах показаниям опре-
деляется и выдерживается высота
(эшелон) полета. Истинная высота
используется тогда, когда необходи
мо знать точное расстояние между
ВС и земной (нотной) поверхностью,
например при АФС и других авиаци-
онных работах. Истинные высоты из
меряются с помощью радиовысотоме-
ров Абсолютная высота используется,
как правило, в расчетах, когда надо
привязать отсчет высоты и давления
к одному уровню, как это имеет ме
сто при расчете безопасных высот.
Принцип действия барометриче-
ских высотомеров основан иа реше
нии зависимости, связывающей дав-
ление и температуру атмосферы:
dp __ dH
Рн ~ RTн
(6.8)
* Отечественные барометрические
приборы измеряют давление в милли-
метрах ртутного столба
55
^испр
^испр
^пр + AHj.)
(*,р+ДНг)=?
Рс. 6.6. Алгоритм преобразования высот полета
В барометрических высотомерах
измеряется только давление атмосфе-
ры на высоте полета рн, остальные
величины принимаются постоянными
или устанавливаются на высотомере
перед вылетом и в полете экипажем.
Фактические же значения даплеиия на
уровне пролетаемой местности и тем-
пературы иа высоте, и особенно у
земли, изменяются в широких преде-
лах. Это приводит к возникновению
методических погрешностей измере-
ния высоты.
Приближенно можно считать, что
каждый 1 мм рт ст несоответствия
давления у земли р0 установленному
иа высотомере приводит к ошибке в
высоте 10 м. Отклонение же фактиче-
ской средней температуры от стан-
дартной на 2.5° вызывает ошибку
высотомера, равную 1%. Например,
зимой при /0=—20° ошибка может
достичь 8% Учет методических по-
празок производится с помощью
НЛ-Юм.
Однако для упрощения расчета и
сокращения возможных ошибок вы-
числения при определении относи-
тельных высот учитываются не всегда
и не все погрешности. Это объясняет-
ся тем, что в непосредственной бли-
зости друг от друга ВС методические
погрешности у каждого из них будут
иметь одинаковые знак и значения.
Поэтому при расчете приборных зна-
чений высот (эшелонов) полета учи-
тываются только инструментальные
АН» и аэродинами геские А//а по-
правки, так как они присущи каждо-
му конкретно ВС в отдельности:
^пр —
- (АДИ + Ша) = /7ЭШ - .
По рассчитанным данным строится
таблица приборных высот эшелонов.
56
Для пересчета истинных высот по
лета в приборные и обратно, кроме
суммарной поправки АН£ должны
быть учтены рельеф пролетаемой ме-
стности Прел и фактические значения
/о» + и р.
Если экипажу ВС известны давле-
ние и температура на уровне проле-
таемой местности (района авиа-
ционных работ), но на барометриче
ском высотомере установлено давле-
ние ро=76О мм рт. ст., то истинная
высота
/7и = ^ир +AHv4 +
*- t
+ (760 PnpifB.mln) П —7/рел,
где АН(—температурная (методиче-
ская) поправка высотомера, учиты-
ваемая при расчете па НЛ-Юм
(рнс. 6.6).
Приборная высота полета по за-
данной истинной для тех же условий
Дчр = »и I Нреп~Ь
+ (760— Рцрив.т1п) Ч
Следует иметь в виду, что при незна-
нии экипажем фактических значений
То и ро пролетаемой местности в рас-
четах будут содержаться ошибки.
Для непосредственного измерения
истинной высоты полета применяются
радиовысотомеры (РВ). В зависимо-
сти от предназначения и принципа
действия они делятся на импульсные
и частотные. Частотные применяются
для измерения высот до 1500 м, им-
пульсные до 10 000 м и более. Рабо-
та РВ основана на использовании от-
раженного радиосигнала от земной
(водной) поверхности.
6.6. Измерение элементов
положения с помощью РТС
Несмотря иа большое р< зпообра-
зие радионавигационных средств по
принципу действия и назначению, все
радиоизмерения основываются на on
ределеиии направления или дальности
до наземных радиомаяков.
Измерение направлений ст ВС иа
наземный радиомаяк и от РМ на ВС
осуществляется различными радиотех-
ническими устройствами: автоматиче-
ским радиокомпасом совместно с кур-
совым прибором; наземными радио-
пеленгаторами и радиомаяками; на-
земными и бортовыми ратио.токаци
онными станциям ультракоротко-
волновыми РНС типов РСБН и ВОР.
При графическом построении ра-
диопеленгов, полученных с использо-
ванием АРК, НРП и РЛС, на даль-
ностях до 1500 км земную поверх-
ность можно принять за плоскость,
а ортодромию заменить прямой ли-
нией. Ошибка от подобной замены
нс превышает 0,5°.
С помощью радиокомпаса АРК
экипаж измеряет мгновенное значе-
ние курсового угла радиостанции
(КУР). Таким образом, истинный пе-
ленг радиостанции (рис 6.7) опреде-
лится суммой курса и КТР
ИПР МК+Дм-^КУР. (6 9)
Однако вследствие того, что экипаж
своего МС не знает, прокладка линии
радиопеленга иа карте производится
не от ВС, а от радиомаяка. Это тре-
бует учета угла схож тения меридиа
нов Осх- Тогда
ИПС —ИПР ± 180°+&„;
агх —(Хр —Ar)sin<p0, (6.10)
где Ар — географическая долгота
РМ, Ас—географическая долгота
ВС; <р0—широта наименьшего мас-
штаба карты [для стереографической
проекции <fo=90°, для равноугольной
цилиндрической проекции Ч'о=0, для
равноугольной конической (поликони-
ческой) фо=фср листа карты].
На удалениях до 100 км от РМ
схождение меридианов при расчетах
можно не учитывать.
При использовании ГПК для от-
счета ортодромического курса и вы
бора в качестве опорного меридиана
географического меридиана РМ рас
четная формула упрощается
ИПС ИПР ± 180°
Устранение радиодевиации. В ре-
зультате вторичного радиоизлучения
деталями ВС искривляется фооит
принимаемых радиоволн. Это приво
лит к ошибкам измерения курсового
угла радиостанции Отсчет радноком
паса ОРК бт дет отличаться на вели
Рис. 6.7. Определение ИПР и ИПС с помощью радиокомпаса
57
чину раднодевпацни \р. Радиодевиа-
ция может достигать более 20°. Ее
значение зависит от КУР и носит
четвертной характер с нулевыми зна-
чениями на КУР = 0. 90 180 и 270е и
максимумами на КУР = 45. 135, 225
и 315е
Для удобства использования АРК
в полете радиодевиацию компенсиру-
ют механическим способом, а для ос-
таточной — составляется график.
В процессе списывания \р ВС после-
довательно разворачивают на 24 кур
са через 15г и снимают 24 ОРК. По-
лученные значения Лр = КУР— ОРК
вводят в компенсатор радиокомпаса.
Наземные коротковолновые и УКВ
ив 1 оматичсские paduoiu ленгаторы
(АРП) позволяют определять на-
правление на работающею радиостан-
цию ВС. При этом радиопеленги от-
считываются относительно меридиана
места установки НРП. Радиопеленга-
торы среднего и дальнего действия
тают, как правило, истинные, а УКВ
радиопеленгаторы — магнитные пря-
мой (ПП) и обратный (ОП) радио-
пеленги (рис. 6 8).
НРП дальнего действия обычно
объединяют в пеленгаторные базы,
способные выдавать па борт ВС не
только ИПС (ШГЕ). но и географи-
ческие координаты МС (1ПТФ) Дли
их использования необходимо забла-
говременно подготовить карту с про
ложен ной сеткой ортодромических
пеленгов Учитывая то, что дальность
действия их достигает 5600 км. а точ-
ность пеленгования характеризуется
погрешностью аи=0,7°, изолинии на-
до строить по промежуточным точ
кам с шагом не более 300 км или ис-
пользовать опорные точки (см.
рис. 6.8). Расчет должен производить-
ся иа сфере. При этом радиус разре-
шенной области вблизи опорной точки
не должен превышать
R 0,110 J
При дальности 4300 км и а„ =
= 0 7° £=370 км.
Бортовые л наземные РЛС рабо-
тают в диапазоне УКВ, поэтому и\
дальность действия зависит в оснон
иом от высоты полета. Она опреде
тястся выражением ; 4.4) Для высо-
ты полета 10 000 м и й- 20 м пре-
дельная 0 = 387 км.
Расчет ИПС относительно выбран-
ного радиолокационного ориентира
произвозится так же. как при ис-
пользовании АРК, когда 0^100 км:
ИПС МК<Лм ,-КУО±180°. (6.11)
При использовании наземной РЛС
расчет пеленга самолета осуществлю
ется так же. как и при использова-
нии НГП. Точность пеленгации ИРЛС
<7цс=0,5°, а БРЛС апс=3°.
Рис 6.8. Определение МИР и ИПС с помощью ратионеленгатора
Рис. 6.9. Преобразование наклонной дальности в горизонтальную
а—решаемый треугольник; б - алгоритм решения на НЛ-10м
Ультракоротковолновые РНС ти-
пов РСБН и ВОР обеспечивают не-
прерывный прием бортовой аппарату-
рой радиосигналов от наземных РМ
и выдачу иа индикацию информации
о текущем радиопеленге ВС, отсчи-
тываемом у РСБН относительно гео
графического, а у ВОР — магнитного
меридиана РМ. Точность измерения
ра тиопеленгов оп =0,2°-М,0°.
Измерение дальности. Расстояния
от ВС до фиксированных точек на
земной поверхности измеряются ра-
диотехническими средствами косвен-
но. через время прохождения радио
сигнала этого расстояния
D = ct, (6. 12
где с — скорость распространения
волн. Приближенно с=300000 км/с.
Учитывая сложность отсчета нре
мени (расстояние 360 м радиосигнал
проходит за 1 мкс) прн измерении
расстояний чаше используют эффект
отражения радиоволн. Тогда D
= 0.5 ct.
Радиоизмереиия сопровождаются
методическими погрешностями, харак-
тер которых зависит от самих даль-
ностей. При определения больших
дальностей основными причинами
возникиовеиич погрешностей измере-
ния являются: непостоянство скоро
сти распространения радиоволн
вследствие влияния неоднородности
состава атмосферы и времени суток;
трудность распознавания прямых и
отраженных от ионосферных слоев
атмосферы — пространственных ра-
диосигналов. Эти погрешности учиты-
ваются либо автоматически, либо
введением в отсчеты поправок, полу-
ченных из специальных таблиц.
При измерении небольших, менее
100 км. расстояний скорость распро-
странения радиоволн может быть
принята постоянной. Однако в этих
условиях появляются методические
погрешности, вызванные неучетом вы
соты полета. Радиоволны распростра-
няются по кратчайшему расстоянию
Поэтому для получения горизонталь
ной дальности, измеряемой вдоль
земной поверхности и используемой в
па тигацин, необходимо учитывать вы
соту полета (рис. 6.9):
D =VHD*—W» (6.13)
Задача может быть решена на
НЛ-10м через вспомогательный угол
n=arcsin ///HD.
При этом
( 7/tg(90—а).
( HDsin(90—а)
(6.14)
Если же измеренную дальность
принимают за горизонтальную (HD
= £>), то возникает систематическая
погрешность
AD' = H=/2HD. (6.15)
Она проявляется на малых дальио
стях, но практически ие сказывается
на точности измерения при HD>7 Н
Поэтому с этой ошибкой необходимо
считаться, если измерения произво
дятся УКВ РНС.
Если измерения дальностей произ
водятся по экрану БРЛС, то, как
правило, необходима интерполяция
между масштабными метками \г
59
Таблица 6.1. Предельные
дальности определения МС
на БРЛС, км
Н. м Масштаб дальности БРЛС. км
0-125 0-250 200 -375
10 000 76 34 34
5 000 1000 18 7 Более 1 7
что значительно снижает точность
12). В ссютветствии с этим
п зависимости от масштаба изобра-
жения рекомендуется измерения про-
изводить на дальностях, больших
указанных в табл. 6.1.
Неучет сферичности Земли приво-
дит к появлению систематической по
грешности
которая начинает сказываться иа
больших высотах и дальностях. При
использовании БРЛС па высотах
больше 15000 м необходимо учиты-
вать эту погрешность.
Глава 7
ОСНОВЫ ДИНАМИКИ ПОЛЕТА И МАНЕВРИРОВАНИЯ
7.1. Уравнение динамики
полета
При полете по маршруту после
взлета н перед посадкой ВС выпол-
няют различные маневры для заня-
тия необходимого положения относи-
тельно оси воздушной трассы или
аэродрома. Поэтому решение многих
задач воздушной навигации связаны
с маневрированием, а аналитическое
их решение требует знания законов
движения ВС в пространстве. При
расчетах элементов маневрирования
используются только истинные значе-
ния воздушной скорости полета.
Перемещение ВС, как и любого
физического тела, характеризуется
движением его центра масс относи-
тельно выбранной системы коорди-
нат. В прямоугольной системе коор
шнат (рис. 7.1). связанной с землей.
ВС находится в точке Л1 с координа
тамн Хт, Ym, Zm. Перемещение его
при отсутствии ветра будет характе-
ризоваться уравнениями:
— = X = V cos 6 cos у;
dt
dy
---- У — V cos 6 sin y;
dt ’
dV
= V = g(nx— sin 6);
dz
dt
dY
dt
dO g
~ =— ("u cos x —cos 0),
1
(7.1)
Z = Ksin 6,
•_gn9sinX .
Y Pcos0 ’
Рис. 7.1. Пространственные коорди-
наты ВС
где V — истинная воздушная ско-
рость полета ВС;
х, 6. у — крен, тангаж и курс ВС.
отсчитываемый от оси;
пх, Пу — продольная и поперечная
перегрузка ВС.
В установившемся горизонтальном
полете (6 =0, 6=0, 2=0) при расче
ге элементов пространственного ма-
60
иевра ВС пользуются следующими
выражениями:
X = V cos у; 4' = Г sin у; Z — 0;
V = n,v«. у-~tgx. « 0
(7-2)
7.2. Расчет элементов
пространственного
маневра ВС
В процессе полета ВС выполняют
маневрирование в горизонтальной
(продольное и боковое) и вертикаль
нон плоскостях.
Продольное маневрирование. Оно
выполняется при необходимости из-
менения скорости полета как в гори-
зонтальной плоскости (0 = 0), так и
при наборе (0>0) высоты и сниже-
нии (О<0). При условии постоянства
продольной перегрузки пх—const
продолжительность маневра и протя-
женность участка разгона (Ек^Ен)
от начальной 1'н до конечной 1Л< ско-
рости или торможения (4К<ЕВ)
|ЕК-ИН|
‘май — . ... .
е(пх—smO)
Е^ —Е*
$ман — ~ (7 3)
2g (л v — sin 0)
Выразив скорости в километрах в
час, пройденный путь в километрах,
а время в минутах, получим расчет
ные формулы
7ман — 4.7-10 1
|ЕК-ИН| .
пх—sinfi
5ман —
4-10-е
Е*—И*
пх— sin 0
Маневрирование в вертикальной
плоскости. Оно выполняется при не-
обходимости изменения высоты по-
лета. В процессе набора заданного
эшелона после взлета и снижения до
высоты круга происходит полет по
некоторой пространственной траекто-
рии переменной кривизны. Это явля-
ется следствием изменения вертикаль-
ной и истинной воздушной скоростей
полета в широких пределах. Кроме
того, изменяется и вектор ветра.
Для набора высоты рекомендуют
ся три режима: экономический, обес
печивающий наименьшие эксплуатаци-
онные расходы на рейс, максимальной
дальности, соответствующий мини
мальному расходу топлива иа весь
полет, максимальной скороподъемно-
сти, соответствующий наименьшей
продолжительности набора высоты.
Вертикальные и приборные скоро-
сти полета устанавливаются в зави-
симости от полетной массы ВС, тем-
пературы и высоты полета. Они ука-
зываются в РЛЭ но тинам ВС.
Если принять средние значения
воздушной, вертикальной скоростей и
ветра, то про юлжи^ельность мансв
рировании и протяженность участка
набора от начальной /7„ до конечной
Нк высоты рассчитываются по фор-
мулам:
7наС (77к— Н,t) I ц.гр;
5цаб (Ц-р Е 77э.ср) (7-4)
’ в.ср
Например, нрн наборе высоты от 600
до 9600 м с вертикальной скоростью
15 м/с иа Уср = 700 км ч (195 м/с) и
попутном эквивалентном ветре
7/э.ср=72 км/ч (20 м/с) получаем
/Наб=10 мни, Snan=129 км.
Изменение скорости ветра приво-
дит к увеличению при попутлом
ветре и ее уменьшению при встреч-
ном. Характер изменения удаления
рубежа набора заданного эшелона
\3няп в зависимости от эквивалент-
ного ветра ТА показан на рис. 7.2.
Набор высоты 4000 м до 10 000 м при
U3=—100 км/ч приводит к сокраще-
нию SnBe иа 23 км по сравнению с
данными, РЛЭ
Если установлен определенный ру-
беж набора заданного эшелона 5вав.
то в зависимости от скорости экви-
валентного ветра будет изменяться
потребное значение вертикальной ско
рости
Ев.ср =
|Н /7М|
= —Т-------— (ЕсР + 77э.сР). (7-5>
61
Мснкм JB гв 10 ° г3 43 ьз 30 100 &sna<f,KH
Снижение -•------ ----»• Набор
Рис. 7.2. Учет влияния ветра на удаление рубелей набора высоты (эт = Р0 т)
и снижения (т = 60т) Ту-154
Д дя снижения с эшелона рекомен-
дуются три режима полета; экономи
ческии, обеспечивающий наименьшие
эксплхатационные расходы на рейс;
минимального времени снижения;
экстренного (аварийного) снижения,
выполняемого с максимально возмож-
ной вертикальной скоростью.
Время и путь, проходимый ВС в
процессе снижения.
круга, т. е с необходимостью уста
новки аэродромного давления иа вы-
сотомере;
^СН V
|Нн-Нк|
Ув.ср
1 А/.
^сн~ (Рер ср)
(7.6)
Дополнительное время, возникаю-
щее при ограничениях, вводимых
УВД, и при снижении до высоты
Ивер-(760-Раар) 11
V'a
Боковое маневрирование. Оно вы-
полняется при необходимости измене-
ния направления полета для исправ-
ления пути и вывода ВС на новую
линию заданного пути.
Элементами разворота являются
радиус R, время и путь, проходимый
ВС за время разворота на заданный
угол. Если не уштывать переходный
период
на, то
R
ввода
V®
и вывода
из кре-
—------, /ур (R V) УР;
g ‘й 7.
Рис. 7.3. Элементы разворота ВС
62
Syp
Р<ур.
РУР.
(7.7)
Дгч плавного вписывания в ЛЗП
очередного участка маршрута
(рис. 7.3) лелбходимо знать либо ли-
нейное (ЛУР), либо боковое (БУР)
упреждения разворота:
ЛАР ₽tg(0.5yP);
БУР R tg (0,5V p) „in УР (7 8)
Учет в шяния ветра на траекторию
ВС в процессе разворота н вывода
его на ЛЗП осуществляется вводом
поправки ДЛУР в линейное упрежде-
ние разворота
ЛУРВ = ЛУР + ДЛУР;
ДЛУР = 0,01757? -у- УР°.
Знак ДЛУР определяется знаком эк-
вивалентного ветра, соответствующе
го полету на текущем участке марш-
рута. Порядок расчета ДЛУР пока-
зан на номограмме пунктиром
(рис. 7 4)
Расчет элементов разворота иа
обратный курс с точным выводом ВС
иа ЛЗП. смещенную на величину III.
производится при навигационном
обеспечении многих авиационных ра-
бот Если смещение смежных марш-
рутов Ш<2А? то необходимо выпол-
нить специальный маневр с отворо-
том ВС иа заданный Угол (рис 7.5):
при штиле
сс== arccos IJ1/27?; (7.9)
при ветре
a =arccos(lll ± Uc tpajh)i2R,
смещении маршрутов «иа ветер» и
«—» «под ветер» Продолжительность
маневрирования ВС
( раза —
90 /
(7.10
Если самолет Ан-2 необходимо выве-
сти на новую ЛЗП, отстоящую ст
первой на 800 м, при V’ = 200 км/ч
(55,5 м/с), х=15° и безветрии, то
/?=1174 м, а=70°, /раЭв=118с=«
= 1 мин 58 с.
При наличии ветра в расчетное
значение угла створе та вносится по
правка на угол сноса Если смещение
маршрутов производится в сторону,
откуда дует ветер («на ветер»), то
угол а ув1личнвается на величину
VC н, наоборот, при смешении оче-
редного участка маршрута по на-
правлению ветра («под гетер») —
уменьшается иа величину угча сноса.
При этом знак УС не учитывается.
Если в результате контроля пути
было установлено уклонение ВС от
заданного маршрута, то выполняется
специальный маневр для вывода его
иа ЛЗП. Чаше всего производят вы-
ход на ближайший контрольный
ориентир, лежащий на ЛЗП, или вы
полняют 5-образный маневр.
Рис. 7.4 Номограмма учета ветра при расчете ЛУР
63
Путь и время маневрирования
U1-2R
Я‘О
Рис. 7.5. Вилы маневра ВС при раз-
вороте на обратный курс
ш-о
5ма , 27? sin а;
л 7? о
'ман 90P- “ ’
(7-13)
Увеличение длины фактического
пути в результате маневрирования
/ па° \
A5M = K f —2 sin al- (7.14)
и изменения курса па этот угол
(рве. 7.6):
rv . ЛЬУ
БУ - arc g—— :
*U|1
ПК БУ+ДП;
ЛБУ
ДП- arctg—----- • (7.11)
5<>СТ
Наиболее быстрый способ вывода
ВС на лниню заданного пути прн на-
личии бокового уклонения Z
(рис. 7.7) является S-образный ма-
невр, заключающийся в последова-
тельном выполнении двух разворотов
на угол а. Целесообразность его при-
менения определяется условием Z^
^27?. При этом
a = arccos
(7.12)
ППМ вводом поправки в курс
Рис. 7.7. Выполнение S-образного ма-
невра
64
Если самолет Ту-154 уклонился от
ЛЗП на Z=8 км. то Е=950 км’ч
(263,8 м/с), х=15°. В результате
/? = 26,5 км; а=32°, 5Ман=28 км,
(ман=112 С, Д5маи=1,5« КМ.
7.3. Инженерно-штурманский
расчет топлива
Дальность н продолжительность
полета зависят от заправки ВС топ-
ливом и расхода его в полете. Коли-
чество топлива, израсходованное за
1 ч полета, называется часовым рас-
ходом Сч. Расход топлива, отнесен-
ный к пройденному расстоянию, назы-
вается километровым Ск. Они связа-
ны простой зависимостью CK=C4!V.
Расход топлива для данного типа
ВС зависит от полетной массы пгпол,
режима полета (7/, V) и температуры
атмосферы иа высоте полета Гн.
С увеличением высоты полета у ВС
с ТРД расходуется меньше топлива.
Изменение полетной массы ВС за
счет выработки топлива в полете ве-
дет к уменьшению и часового, и ки-
лометрового расхода. Повышение
температуры на высоте полета при
выдерживании постоянного режима
(И и V') по приборам ведет к росту
только Сч, примерно 1% на каждые
4—5°; километровый расход топлива
при этом не меняется.
Для каждой воздушной трассы и
данного типа ВС должен быть выпол-
нен инженерно-штурманский расчет
(ИШР). Его цель — определение не-
обходимого количества топлива иа
полет, взлетной и посадочной масс
ВС. Он рассчитывается для условий
стандартной атмосферы (СА)
Исходные данные ИШР: масса
снаряженного ВС (коммерческая за-
грузка); расход топлива на этапах
полета; длина маршрута общая и по
этапам, выбранный режим полета;
характер маневрирования после взле-
та и перед посадкой; удаление запас-
ного аэродрома.
Для ИШР весь полет разбивается
на этапы (рис. 7.8). Общая заправка
Q-.Hil>.mT = Q'3 + Qh +
+ Сгн,"ЬСсн + Ой
i = I
+ Q3-+ (Qahj + Qh.o)- (7l5)
где Q's, Qs — количество топлива,
расходуемое иа земле до взлета и
после посадки; Qm. Qm—количество
топлива, расходуемое при выполне
нии маневра после взлета н перед
посадкой; QH. Qch — количество топ-
лива, расходуемое при наборе задан-
ного эшелона и снижении; <?гп(—ко-
личество топлива, расходуемое в го
рнзоитальном полете но участкам
маршрута с учетом изменения полет-
ной массы; ^днз-Q" °— аэронавига-
ционный запас топлива и невыраба
тываемый остаток топлива
Порядок расчета
— mc. н Н Q з + Q анз +
+ Q11 о.
mH.CH = mnOC = Qm+Qch'»
п
т!'.ГП =тН.СН~Ь 2
i= 1
твзл — тн.гп + Qh + Qm’
т нач == твэл ~Ь Q3
Озпр.шт - тнач — тснар.
(7.16)
лоне н неизменном режиме работы
двигателей оказывают, эквивалент
ный ветер 1/а, температура атмосфе-
ры Тн и полетная масса ВС. Общая
заправка ВС топливом с учетом этих
факторов
Сзнрг Фзнр.шт-|‘Л9в-1_
+ Д<?г+Д(?га. (7.17)
Дополнительная заправка топли-
вом, компенсирующая влияние
встречного ветра,
kU3 Qaiip (И-|-1/э).
Коэффициент пропорциональности
k, учитывающий соотношение рас
стояний, проходимых ВС на участках
набора высоты и снижения, к общей
длине ВТ от аэродрома вылета до
аэродрома назначения Sa:
Sa. км . . . 100 200 300 500 1000
k............ 0,4 0,5 0,6 0,7 0,85
Sa, км . . . 2000 3000 4000 и более
k . . . 0,94 0,98 1
Изменение заправки топливом
учитывающее фактическую темпера-
туру иа высоте полета,
Д<?т 6?ч га /По.т ("V'T'h Тн са—1)-
Донолннтельная заправка топли-
вом, компенсирующая изменение
расхода топлива из-за несоответствия
фактической массы ВС га„о1 с мае
сой ВС, принятой в ИШР,
AQm=*(0,7-—0,8) РЭцр.
Расчет потребного количества тон
лива иа полет выполняется перед
каждым вылетом. Для упрощения
обычно пользуются табличным или
номографическим способом расчета
где тсвар—масса снаряженного ВС;
Шнач, Шазл, Шпог — начальная, взлет-
ная и посадочная масса ВС; т„ гп,
тя сн — масса ВС в момент начала
горизонтального полета и снижения.
Учет факторов, влияющих на рас-
ход топлива в полете. Наибольшее
влияние иа изменение расхода топли
ва в полете по ВТ на заданном эше
3 Зак. 639
Рис. 7.8. Вертикальный маневр ВС
при полете по ВТ
65
7.4. Штурманское обеспечение
регулярности попетое
Для обеспечения своевременного
согласно расписанию прибытия ВС в
аэропорт назначения в зависимости
от фактического ветра на эшелоне
полета рассчитывается воздушная
скорость, с которой должно еле то
вать ВС.
Потребная путевая скорость на
участке горизонтального полета
•и- ______________
“ТР /раем-(/ ' +
где /раса — полетное время от взлета
до посадки по расписанию; 1м. 1м
продолжительность маневрирования
в районе аэродромов взлета и посад-
ки.
Соответственно потребная воздушная
скорость полета на эшелоне в зави-
симости от фактического ветра
^птр“ ^нтр ^Т/.э.гр, (7.18)
В случае задержки ВС с вылетом
и необходимости прибытия в аэро-
порт назначения в заданное время
рассчитывается требуемое увеличение
скорости полета
(^fpaett ^выл 80)
—Уптр> (7.19)
где МВЫл— задержка с вылетом,
мин.
Минимальное расстояние, требуе-
мое для полета с повышенной скоро-
стью для компенсации опоздания с
вылетом,
Smin = ^птр (Уптр
+ 1) Д(выл)/60. (7.20)
где A Va — допустимое увеличение
скорости полета в соответствии с
66
энергетическими возможностями ВС н
ограничениями, связанными с безо-
пасностью полета.
Если ВС вылетело с опозданием
на 8 мин при Sa =2500 км (fe=0.96)
И /раси = 3 ч, то для прибытия н аэро-
порт назначения согласно расписанию
необходимо увеличить скорость поле-
2500
та на ДЕ 0,96-3 — 8 60 — 870 —
40 км ч.
Если же есть возможность увели-
чить скорость полета на 60 км/ч, то
для этого достаточно пролететь
/870 \ 8
SmIn = 0.96-870 — 4-1 -=1726 км.
\ 60 / ьо
Приведенные формулы дают толь-
ко приближенную оценку возможно
стен соблюдения регулярности поле-
тов. Это связано с тем, что ошибка в
вылете и ошибка в прибытии связаны
не линейной, а корреляционной зави-
симостью. Учитывая то. что ВС, экс-
плуатируемые в гражданской авиа-
ции, имеют небольшие резервы по ско-
рости, для обеспечения регулярности
полета необходимо добиваться стро
того выдерживания времени выле-
тов ВС.
7.5. Траектория движения
при автоматическом
управлении ВС
Для выдерживания направления
полета применяются курсовые прибо-
ры, обеспечивающие моделирование
некоторого направления, принятого
за начало отсчета. Вид линии пугн
определяется характером изменения
опорного направления во времени н
пространстве. При выдерживании
курса по магнитному компасу линией
пути будет локсодромия, по ГПК —
ортодромия.
При реализации курсового и пу-
тевого способов автоматизированно-
го самолетовождения полет выполня-
ется с выдерживанием постоянного
угла ₽ (рис. 7.9), отсчитываемого от
носительно текущего направления на
полюс полярной системы координат
точка Р. Траектория полета при от-
сутствни ветра будет определяться
прямоугольными координатами
D;
Z D sin (tg р In
(7 21)
где Du, D — начальное и текущее
удаление ВС от заданного пункта
(0=0, Z = 0)
Траектория имеет максимальное
ЛБУ Zmax=KjjPDa на удалении
DM=KpOB (см. рис. 7.9), где Кр—
коэффициент, принимающий значе
ния.
Р°...... О 10 20 30
К j .. 0,368 0,37 0,38 0,4
0° .... 40 50 60 70 90
Кр. . О 44 0,48 0,55 0,64 1.0
Тля малых углов 0^10°
^шах = 0,0065Р О„,
Ом 0.37Он. (7.22)
Характер изменения угла 0 опре-
деляется принципом действия курсо-
вого прибора. Если для выдержива-
ния направления полета применяется
радионавигационная система АРК
ОПРС, то угол р при пассивном
способе полета принимается равным
УС нлн погрешности выдерживания
КУР, равного УС, при активном спо-
собе
Применение автоматизированных
навигационных систем позволило при-
менить так называемое «нуль-вожде
ние» ВС, заключающееся в выдержи-
вании в полете нулевого значения
Z = 0 нлн Р—рз = О Характер траек-
тории полета при этом определяется
способами задания ЛЗП и получения
координат текущего МС
.Тля точного следования по задан-
ному маршруту ВС должно выпол-
нять полет с курсом, соответствую-
щим фактическим ветровым услови-
ям Однако изменчивость ветра и по
грешности навигации приводят к ук-
лонениям ВС от ЛЗП. В общем слу-
чае, ВС относительно ЛЗП может
занимать некоторые положения, на-
3*
в.
Рис. 7 9. Траектория полета ВС при
выдержнваиин постоянного угла 0
пример, /, 2, 3, 4 и 5 (рис. 7.10). Для
точного следования по маршруту не
обходимо постоянно знать знак и ве-
личину ЛБУ Z. (Хтнако, как видно из
положений 3, 4 и 5, этого недоста
точно. ВС в этих положениях имеет
одинаковое Z, ио для вывода его на
ЛЗП необходимо принять разные ре-
шения: для положения 3 необходимо
выполнить доворот ВС влево, для
4 — нужно выполнить доворот влево,
но на больший угол, а для положе-
ния 5 доворот не надо выполнять,
так как ВС с этим курсом идет на
сближение с ЛЗП.
Следовательно, для выработки ре-
шения или сигнала при автоматизи-
рованном самолетовождении необхо-
димо, помимо ЛБУ, знать еще ско
рость его изменения, т. е. первую
производную бокового уклонения ВС
по времени 1. Отсюда следует, что
минимально необходимая навигацион-
ная информация для автоматизиро
ванного полета по маршруту — Z и 2.
В зависимости от способа получения
этих величин в полете все АНС ус-
ловно можно разделить на две rpvn
пы
В основе работы АНС первой
группы лежит принцип тифференци
рования координат МС, получаемых
непрерывно от внешних источников.
Измерение координаты Z в течение
некоторого времени позволяет полу-
чить 2 = AZ М.
J » (7)
Рис. 7.10 Характерные положения
ВС относительно ЛЗП
67
Принцип работы АНС второй
группы основан на интегрировании
навигационных элементов движения
ВС. При этом составляющая скоро-
сти t вырабатывается схемой счисле-
ния пути, а координата Z получается
в результате периодического контро-
ля пути
Траектория полета при выработке
управляющих сигналов АНС, относя-
щейся к первой группе, носит колеба-
тельный характер. Амплитуда боко-
вых уклонений зависит от величины
погрешности определения МС, а пе
риод колебаний — от частоты обнов
лення этих данных. Систематические
погрешности появятся при наличии
ошибок в моделировании ЛЗП. Если
11ПМ задаются не географическими
координатами а через ЗПУ и длину
участка пути D, то систематическая
погрешность ЛЗП_будет носить ли-
нейный характер 2=Д0л£>.
При использовании АНС, относя-
щихся ко второй группе, траектория
полета будет представлять собой ло-
маную кривую, удаляющуюся от
ЛЗП на участках выдерживания кур-
са, несоответствующего данным усло-
виям полета н приближающуюся к
ней после выполнения контроля пу-
ти. Причинами появления уклонений
являются погрешности моделирова-
ния ЛЗП и счисления координат те-
кущего МС. Систематическая погреш-
ность будет описываться уравнением
(7.21).
РАЗДЕЛ ВТОРОЙ
МЕТОДЫ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ВОЗДУШНОЙ
НАВИГАЦИИ
Глава 8
ТОЧНОСТНЫЕ ХАРАКТЕРИСТИКИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЙ
8.1. Понятие точности
самолетовождения
Под точностью самолетовождения
понимается степень близости факти
ческой и заданной пространственно-
временных траекторий полета. Про-
цесс самолетовождения носит вероят-
ностный характер. Фактическая тра-
ектория не совпадает с заданной
вследствие случайных погрешностей
навигационных измерений, погрешно-
стей выдерживания требуемого нави
ганнонного режима, инерционных
свойств ВС, воздействия внешней сре-
ды и других причин. Рассматривают
точность самолетовождения по боко-
вой Z, вертикальной Н и продольной
5 координатам. Вместо погрешности
по продольной координате As часто
рассматривают связанную с ией по-
грешность времени М пролета задан
кого рубежа.
Поскольку погрешности самолето-
вождения являются случайными, в
качестве показателей точности само-
летовождения используются статисти-
ческие характеристики этих погрешно-
стей. Наиболее часто используются
следующие показатели точности само-
летовождения.
Среднее значение (математическое
ожидание) погрешности по соответ-
ствующей координате (nit, m,, mu,
'п,) по множеству траекторий полета
пли на некотором участке одной тра
ектории. В процессе полета экипаж
стремится свести к нулю системати-
ческие погрешности навигационных
измерений и строго выдерживать на-
ннгационную программу полета, по-
этому в ряде случаев математические
ожидания погрешностей самолетовож-
дения принимают равными нулю. Од-
нако иногда систематические погреш-
ности (например, боковое уклонение
при полете по ортодромической ЛЗП
с использованием локсодромических
курсовых приборов) возникают из-за
используемого метода самолетовож-
дения.
Средняя квадратическая погреш-
ность самолетовождения по соответст-
вующей координате (а1р о,, Он,
<т<). Она характеризует степень рас-
сеяния случайных погрешностей са-
молетовождения относительно их ма-
тематического ожидания, а при ну-
левом математическом ожидании —
разброс фактической координаты ВС
относительно заданной. Чем меньше
о, тем менее разбросаны реализации
случайной погрешности относительно
их средств значения, тем выше точ-
ность самолетовождения.
Максимальная погрешность
(Датах, Asmax, Airmax, А/max) харак-
теризует максимально возможное от-
клонение фактической траектории от
заданной. Она может быть установ-
лена из физических соображений. Ча-
сто за максимальную погрешность
принимают утроенную среднюю квад-
ратическую Атах=3о. При ЭТОМ ДОПу-
скается пренебрежимо малой вероят-
ность превышения случайной погреш-
ностью данного значения Агаах (тля
нормального закона распределения
эта вероятность составляет 0,003).
Погрешность самолетовождения
по каждой координате может быть
разделена на составляющие, разли-
чающиеся по их происхождению: по-
грешность измерения положения,
обусловленная неточным определени-
69
ем с помощью датчиков навигацион
ной информации положения ВС; по-
грешность выдерживания траектории
(погрешность пилотирования), выз-
ванная несовпадением вследствие
разных причин измеренной координа-
ты с заданной
Поскольку процесс самолетовож-
дения представляет собой последова-
тельность участков счисления пути с
периодической коррекцией координат,
то погрешности определения место
положения ВС складываются из по-
грешностей коррекции координат и
счисления пути Погрешности выдер-
живания траектории зависят от спо-
соба исправления пути и тщательно-
сти выдерживания заданного режи-
ма полета.
Точность самолетовождения зави
снт от технологии работы навигато-
ра, который выбирает момент и сред
ства коррекции координат, режим
счисления. порядок исправления
пути.
8.2. Точность определения
ЛП и места ВС
Измеренному в полете_зиачению
навигационного параметра и соответ-
ствует определенная изолиния (ли-
ния положения). Погрешность изме-
рения и вызывает погрешность опре-
деления положения изоляции Для ее
оценки используется понятие гради-
ента навигационного параметра.
Градиентом g называется вектор,
характеризующий скорость возраста-
Рис. 8.1. Градиент навигационного па-
раметра ,
ния и в направлении нормали к изо-
линии:
-► du —>
где п — единичный вектор нормали
(рис. 8 1)
Модуль градиента играет роль ко
эффипиента пропорциональности меж-
ду приращением навигационного па-
раметра Дц и соответствующим сме-
щением изолинии. Некоторая доста-
точно малая погрешность измерения
навигационного параметра Ди вызо-
вет погрешность определения линии
положения
Ьр \и g.
Переходя к средним квадратическим
погрешностям
<Тр ои g. (8.1)
Модуль градиента зависит от вида
навигационного параметра и выбран-
ной системы координат В прямо-
угольной декартовой системе коорди
нат X, у
В полярной системе координат A, D
I ди \г / 1 ди V
8 = l' I ~dD ) >
В географической системе коортннат
<Г. X
1
cos2 <р
Модули градиентов наиболее часто
используемых в навигации линий по-
ложения привезены в табл 8 1
С помощью данной таблицы и со-
отношения (8.1) можно оценить точ-
ность определения линии положения,
если известна средняя квадратичес-
кая погрешность измерения навига-
ционного параметра. Если строится
70
Таблица 8.1. Градиенты линий положения
Линия положения Навига- ционный параметр Модуль градиента Примечание
Равных пеленгов само- лета (ЛРПС) ПС 1 D —
Равных пеленгов радио- станции (ЛРПР) sin ПР etg D sin (ПР4- i) i — угол между ЛРПР и ортодромией
Равных разностей пелен- гов (ЛРРП) АП sin АП Л — расстояние МС до базы
h
Равных расстояний (ЛРР) D 1 —
Рапных разностей рас- стояний (ЛРРР) \D о> 2 sin — 2 со — угол между направ- лениями на радио- станции
изолиния навигационного параметра,
который непосредственно не измеря-
ется, а рассчитывается с помощью из-
меряемых, то его средняя квадратиче-
ская погрешность оценивается по
средним квадратическим погрешно-
стям измеряемых параметров (прило-
жение 3). Например, при определе-
нии пеленга самолета ПС по курсу у
и керсовому углу радиостанции ф
«пс = t 4 •
Если ЛП и МС определяются гра-
фически на карте, то необходимо > чи-
тывать погрешности прокладки При
работе на карте СКП измерения рас-
стояния о, = 0,8 мм (на местности
СКП может быть найдена с помощью
масштаба карты), а углов пеленгов
<тп=0,8°.
Наличие систематической погреш-
ности измерения навигационного па-
раметра вызывает постоянное смеше-
ние ЛП
При использовании обобщенного
метода линий положения МС может
быть определено по двум ЛП Точка
их пересечения — точка наиболее ве-
роятного положения ВС. Однако
вследствие погрешностей навигацион-
ных измерений полученные ЛП не
проходят через фактическое МС. Точ
ка пересечения ЛП занимает случай-
ное положение относительно фактиче
ского МС. При оценке точности удоб
нее считать, что МС рассеяно относи
тельио точки пересечения ЛП
Достаточно полная оценка точно
сти определения МС дается с помо
шью эллипса ошибок. При этом пред
полагается: грубые ошибки измере
нин (промахи) исключены; системати
ческие погрешности определены и
устранены введением поправок; слу
чайные погрешности измерений подчи
йены нормальному закону.
Если навигационные параметры и(
и и2 измерены соответственно с по
грешностями х и у, то плотность
распределения МС будет описываться
двумерным нормальным законом рас
пределения (см. приложение 3)
f(x, у). Поверхность f(x, у) имеет
куполообразную форму с максиму-
мом, соответствующим наиболее ве
роятному местоположению ВС (в точ
ке пересечения ЛП). Сечение поверх
ности f(x, у) горизонтальными плос
костями дает эллипсы (см.
рнс. П.12). Геометрическое место то
чек равной и постоянной плотности
7»
вероятности системы двух независи-
мых величин представляет собой эл
лппс, который называется эллипсом
ошибок или эллипсом рассеивания
(рис. 8.2).
Полуоси а и Ь любого эллипса
ошибок пропорциональны ох и ov
а сох, b сОу, (8.5)
где с — коэффициент пропорциональ-
ности.
Вероятность того, что фактическое
МС находится в пределах эллипса с
ОСЯМИ СОх и согв.
(8 6)
Эксцентриситет (сжатие) эллипса
ошибок зависит от соотношения ох и
а его ориентация зависит от угла
пересечения ЛП и наличия корреля
нии погрешностей х и у.
Полуоси эллипса (при с=1) мо
гут быть легко найдены после опреде-
ления их суммы и разности:
и ± 8
1
sin ш
+
(ои V 2сгт a,, sin ы
— ±-^-^-------. (8-7)
Яг ! ₽i Яг
где ах, ов — СКП измерения навига-
ционных параметров, gi, g2 — гради
енты; со — угол пересечения ЛП.
Рис. 8 2. Эллипс ошибок
1.2 — линии положения
Угол между линией положения
2—2 и большой осью эллипса (см.
рис. 8.2)
tg2ip =
sin 2<о
= ------------------------- • (8.8)
(о«. Й2^1Ои.)2Ч-СО5 2с0
Угол <р откладывается всегда вну
три острого угла со между ЛП.
Средняя квадратическая радиаль-
ная погрешность (СКРП) рассчиты-
вается как диагональ прямоугольни-
ка, построенного на полуосях эллип-
са ошибок:
Or =—7- ] ар, + °р, • <8-9)
Sin (I) r F-
где о , о_ — СКП определения линий
Pl Р2 г
положения
Это более простая и более распро
страненпая по сравнению с эллипсом
ошибок оценка точности определения
МС.
Формула (89) применима при не-
зависимых погрешностях измерения
навигационных параметров При на
лнчии корреляции погрешностей с ко-
эффициентом корреляции р
1
Ог =------- X
S!n СО
J, а* + <т* + 2рсТр, Opt cos со.
(8.10)
Вероятность попадания МС в круг
радиуса г=сог зависит не только от
с, но и от угла пересечения ЛП со и
соотношения СКП определения ЛП
°р,/пр,- При со=90° и oPi=Cp2 дан-
ная вероятность составляет (при
с=1) Ркр=0,632. При aPl=MP2 она
изменяется в пределах 0,632 .. 0.683.
В то время как эллипс ошибок да-
ет возможность оценить погрешность
определения МС по любому заданно-
му направлению, с помощью СКРП
этого сделать нельзя. В этом случае
часто допускают, что погрешности оп-
ределения МС имеют круговое распре-
деление (оно имеет место лишь при
со=90°, opj=opJ. В этом случае СКП
определения МС по любому направ-
лению
ох = ог/1/2 0,71ог. (8.11)
72
Для УД РНС с СКП измерения
пеленга ап и дальности По
or-J о24-7Го', (8.12)
где D — удаление до радиомаяка;
Оц — СКП пеленга берется в радиа-
нах.
Для УРНС формула (8.9) примет
нн т
1
0, —-----X
S11! о»
I сь 13)
где о11.оПв — СКП измерения перво-
го и второго пеленгов, рад: D|, О2 —
удаления ВС от радиостанций; ш-
\тол пересечения пеленгов.
8.3. Оценка точности счисления
пути
Точность счисления пути определя-
ется рядом факторов, проявляющих-
ся через следующие виды погрешно-
стей:
математической модели счисления,
возникающих за счет нестрогости ре-
шаемых уравнений счисления пути
(неточного учета формы Земли, не-
горизонтальности вектора воздушной
скорости и т. д.);
датчиков навигационной информа-
ции, используемых для счисления и
установки исходных данных;
переноса счисленного МС на по-
летную карту (погрешности проклад-
ки), осуществляемого вручную или
автоматически.
Характерная особенность погреш-
ностей счисления пути — возрастание
нх во времени, что вызвано интегри-
рованием составляющих вектора W.
Неавтоматическое счисление пути.
Навигатор определяет МС проклад-
кой на карте (нлн путем аналитиче-
ского расчета ЛБУ и пройденного
расстояния) по известным путевой
скорости и путевому углу. СКП опре-
1еления продольной s н боковой г
координат:
+ (0,47^ U7)2 5; (8.14)
"z,.4-S| "v + + °а +
• 4 ' Vp Ч1ЫД иэм
4-Ой -r(0,47fe,, 1Г)2Х. (8.15)
рз РПР «
где 5 — расстояние, пройденное от
последней точки коррекции коорди-
нат; И" — путевая скорость ky —
коэффициент пространственной
изменчивости ветра; Ou, '1F —от-
изм
носительная погрешность измерения
путевой скорости; оу , — СКП
расчета и выдерживания курса соот-
ветственно; <т„ — СКП нзмере-
“изм
ния угла сноса; пр — СКП опреде-
ления заданного путевого угта;
— СКП прокладки углов на
ппр
карте (он =0,8°, прн аналнтиче-
р п р
ском расчете координат не учитыва-
ется ).
Если пренебречь влиянием прост-
ранственной изменчивости ветра, то
формулы (8.14) и (8.15) примут вид:
,Tsc4 — oZf4 — kc4zS< (8-16)
где ^сч,- ^счг—соответственно ко-
эффициенты точности счисления пути
по продольной и боковой координа-
там.
Средняя квадратическая радиаль-
ная погрешность счисления пути в
этом случае
°ггч 1 о 1 +os* *счЗ;
СЧ ’ *СЧ 5СЧ
*еч Г^чг + ^чв- (8->7)
Если известен только коэффициент
Леч и необходимо оценить коэффици-
енты точности счисления по боковой
и продольной координатам, то в
предположении кругового распределе-
ния счисленного А1С
Лрч2 ^счв ——
0,71feC4. (8.18)
При автоматизированном счисле-
нии пути в НК точность счисления
зависит от его режима При курсо-
73
ВОЗДУШНОМ счислении пути коэффици
енты точности счисления
(8.19)
^ечг |
поскольку в целом погрешности счис
леиия носят возрастающий характер,
они также могут быть описаны соот-
ношениями типа (8.16).
Инструментальные погрешности
вычислителей аналогового типа имеют
порядок ov- /У=0.!5-10 ’ для
ИНС
НВУБЗнПу /1=0.03 для НАС-1.
ннс
Для аналоговых вычислителей также
характерно наличие погрешностей
счисленных координат за счет перехо-
да к новому участку .13П (в новую
систему ЧО-координат). Соответству-
ющие СКП о, = 0,75 км (НВУ-БЗ) и
j 0,5 ( —) - (8.20)
\ V /
где о.. /V —относительная СКП из-
изм
мерения воздушной скорости; °V!H.
инструментальная погрешность нанн-
гационного вычислителя, приведенная
к скорости; ov — СКП измерения кур
са. рад; — СКП установки путе-
ного утла, раз; о,, —радиальная
уст
СКП установки ветра.
При курсодоплеровском счисле-
нии:
(8.21)
^<ч2 I пу °а °Н
1 ’ г изм рк
ч-
(8.22)
где o,v , о„ — средняя квадра-
нзм “нам
тнческая погрешность измерения пу-
тевой скорости и угла сноса с по-
мощью ДИСС соответственно.
Погрешности счисления пути с по
нощью инерциальных навигационных
систем вызваны неточностью выстав-
ки гироплатформы в плоскости гори-
зонта и в азимуте, инстрсментальны-
ми погрешностями акселерометров,
собственным уходом гироплатформы.
Особенность погрешностей счисления
пути с помощью ИНС—наличие в
них периодических составляющих. Но
74
Таблица 8.2. Погрешности
средств навигации и УВД
Вид РНС Средние квадратиче- ские погрешности измерения
P/J °п
Трассовая РЛС «Скала» I ,о 0,7 —
Аэродромная РЛС ДРЛ-7С Автоматические радиопеленга- торы: 0,7. 2,2 1 ,5
АРП-75 — 1,0 —
АРП-6, АРП-7С — 3,0 —
Бортовые РЛС 0,5.. 5,0 — 2,0
РСБН 2, РСБН-4 0,1 0,125 —
РСБН МВД 0.3 0.6 —
VOR/DME DVOR/DME 0,1 2,5 —
0,1 0,3 —
TACAN Автоматиче- ские радиоком- пасы: 0.1 1.0
АРК-5, АРК-9, АРК-У2 — — 3.0
АРК-Н, АРК-22 — — 2 5
АРК-15 — — 2,0
Примечание. По данным, полу-
ченным в экспериментальных полетах.
РСБН обеспечивает практическую точ-
ность ап«0.Я'. о/) *0.9 км
Таблица 8.3. Погрешности
измерения курса
Курсовой прибор (курсовая система) СКП
Измерения курса, ° Соб- ственмо- I о ухо- да/ °/ч
КИ-13 (с учетом 2,5 —
погрешности счи- тывания) гик-1 0.75
ГПК 52 КС-8. — 1.5
по УШ 0,75 1.0
по НКП-4 и ИКУ-1 А 1 .0 —
ГМК-1 0,75 1 .25
ТКС П но УШ-3 0,75 0.25
(стрелка К) ТКС-П2 0.5 0,25
о =1.5 км (НАС-1). Такне же значе
ния погрешностей и по координате s.
Инструментальными погрешностя-
ми цифровых навигационных вычис-
Таблица 8.4. Погрешности
измерения высоты и воздушной
скорости
Датчик Измеряемый параметр СКП изме- рения*
ВМ 15 Барометри- 22 (ннст-
ческая румеи-
РВ 5 высота, м тальная) 20 (аэро- динамиче- ская)
Истинная
высота, м: 0</7< 10 10< Н< 750 0.4 0,04/7
РВ-25 Истинная высота, м: /7 <2000
14
2000<Н< 12,5 +
<25 000 +0,7577
Воздушная 0,71' +
скорость, +0.05 №
км/ч
* При расчете Н берется в километ-
рах. я I я сотнях километров в час
I а б л и ц а 8.5. Погрешности
измерения путевой скорости
и угла сноса
Навигационное средство is 2 О* «СИ o' °UU>IJ
дисс-з ДИСС 013: 0,0035 0,25
по импульсно- му входу 0,00125 0.13
по аналогово- му входу 0,002 0.17
Бортовая РЛС «Гроза» — 1.5
лнтелей можно пренебречь. Данные
для расчетов по приведенным форм\
лам представлены в табл. 8.3—8.6.
Если оценивается точность счнсле
ния пути по маршруту, имеюшсмс не
сколько участков (ЛЗП имеет изло-
мы). то СКРП
где п — число участков; о —СКРП
ri
счисления пути на i-м участке.
Таблица 8.6. Коэффициенты
точности счисления пути /ггч
Тип ВС Режим счисления Коэффициент точности счисления
Ил-86 Курсо-доп- леровский 0.009
Як 42 То же 0.011
Ил-62 > 0,014
Tv-154 » 0.014
Tv-134 » 0.022
Ан-24 Неавтома- тизирован- ный 0.054
Як-40 » 0.054
Ан-2 и вертолеты » 0,1
75
8.4. Общая точность
самолетовождения
Погрешности опредетения МС с
помощью средств навигации и
УВД — ие единственная причина не-
точного выдерживания заданной тра-
ектории полета. Отклонения от нее
вызываются рядом объективных н
субъективных причин.
Суммарная погрешность выдержи-
вания ЛЗП при полете в автоматизи-
рованном режиме
’выд’
(8.23)
где Пгк — СКП коррекции координат
по боковому уклонению; о. —СКП
ZC4
счисления пути; о — СКП выдер-
гвыд
жнвания ЛЗП системой автоматиче-
ского управления ВС.
Погрешности полета на заданной
высоте
(8-24)
41 о.М ВЫД
где он —СКП измерения высоты;
Оц —СКП выдерживания заданной
высоты.
Точность выхода на заданный ру-
беж по времени (пренебрегая измен-
чивостью ветра)
где <т, — СКП определения оставше-
гося до рубежа расстояния, км;
5 — расстояние до заданного рубежа,
км; ou- W— относительная СКП
изм
измерения путевой скорости; ov —
выд
СКП выдерживания воздушной скоро-
сти, км/ч.
Формулы (8.23, 8.24) справедливы
в предположении, что экипаж в любой
момент времени стремится выполнять
полет точно по заданной траектории.
Однако оно ие всегда справедливо.
Например, после обнаружения укло-
нения ВС экипаж не может осущест-
вить выход на ЛЗП мгновенно, и на
протяжении определенного времени
счисленное и фактическое боковое
уклоиеине не равны нулю. Кроме то-
го, слетует учитывать, что экипаж не
всегда осуществляет исправление пу-
ти. Исследования показали, что если
полученное при контроле пути боко-
вое уклонение невелико по сравне-
нию с возможной погрешностью его
определения (приблизительно менее
одной СКП), то экипаж пренебрегает
этим уклонением и продолжает полет
в прежнем режиме. Это, с одной сто-
роны, позволяет избежать необосно-
ванных изменений курса полета, а с
другой — приводит к снижению об-
шей точности самолетовождения.
К снижению точности самолето
вождения приводят и другие субъек-
тивные факторы. Так, часть пилотов
ошибочно считает, что достаточно на-
ходиться в пределах воздушной трас-
сы и не стремиться к точному выдер-
живанию ЛЗП. Другие пилоты «сре-
зают углы> маршрута. Все это снижа-
ет общую точность самолетовожде-
ния и препятствует повышению эф-
фективности использования воздуш-
ного пространства.
Экспериментальные данные дают
следующие СКП выдерживания пара-
метров режима полета:
Высота, м:
при пилотировании
пилотом .... 10...30
при пилотировании
автопилотом . . . 5...20
Воздушная скорость,
км ч:
при пилотировании
пилотом................ 5... 15
при пилотировании
автопилотом 2...7
Курс, °:
при пилотировании
пилотом . 1,5
при пилотировании
автопилотом . . . 0,25...1,0
Вертикальная скорость,
м/с...................... 0,2
Линейное боковое укло-
нение при пилотировании
САУ, км.................. 0,25
76
По экспериментальным данным
траекторных измерений СКП выдер-
живания ЛЗП зависит от типа ВС,
оснащенности маршрута раднонавнга
циоииыми средствами и составляет
огг = 1,0 ... 3.5 км в районах подхода
до <j^=2.0 ... 6.0 км на воздушных
трассах. На отдельных участках трасс
= 10 км и более.
Глава 9
НАДЕЖНОСТЬ ВОЗДУШНОЙ НАВИГАЦИИ
9.1. Вероятность выдерживания
воздушной трассы
Для опенки качества воздушной
навигации, помимо показателей точ-
ности, используются и вероятностные
показатели. Вероятность нахождения
ВС в пределах воздушной трассы —
один из наиболее часто используе-
мых показателей.
Пусть при контроле пути по на-
правлению установлено, что линейное
боковое уклонение составляет z, а
также известна СКП определения
этой величины ог. Тогда в предполо-
жении нормального закона распреде-
ления погрешности определения г. ве-
роятность того, что МС находится в
пределах трассы шириной ±Ь:
где f(z) — плотность распределения
линейных боковых уклонений от оси
трассы.
Вид плотности распределения ус-
танавливается исходя из эксперимеп
тальных статистических данных о
траекториях движения ВС Наиболее
часто экспериментальные данные ап-
проксимируются нормальным распре-
делением и двусторонним экспоненци-
альным распределением (распределе-
нием Лапласа). В обоих случаях ма-
тематическое ожидание (центр рас-
пределения) боковых уклонений при-
нимается рапным нулю, так как ук
лонения вправо и влево от ЛЗП счи-
таются равновероятными. В этом
случае плотность нормального распре-
деления
I 20
/(z)=—------е
у 2л ог
(9.2>
а плотность распределения Лапласа
где z — фактическое ЛБУ.
Функция Лапласа
2 С
ф(?с)=2dt-
¥ о
Ее можно определить по таблице
(приложение 3).
Если экипаж стремится точно сле-
довать по ЛЗП, то z = 0, а точность
самолетовождения будет характерн
зоваться СКП выдерживания ЛЗП
оt. Тогда в общем виде для вероят
ности выдерживания воздушной трас-
сы
---- I г |
/(г) =(1/2ог)-1е °* (9.3)
Для нормального распределения
при 5 = 0 вероятность выдерживания
воздушной трассы оценивается с по-
мощью таблицы функции Лапласа
(см. приложение 3)
(9.4)
Для двустороннего экспоненпиаль
ного распределения вероятность вы
держивания воздушной трассы
+ />
Г’тр= f Z(z)dz,
-Ь
z
Ртр = 1-е (9.5)
77
При значениях b, не превышаю-
щих двух-трех средних квадратиче-
ских отклонений О;, значения Рт₽.
рассчитанные по формулам (9.4) и
(9.5). близки. Прн больших значени-
ях b необходимо пользоваться зако
пом распределения Лапласа, так как
нормальный закон дает в этом случае
завышенные по сравнению с экспери-
ментальными данными значения Рц,.
9.2. Потребная точность
самолетовождения
Задача самолетовождения по бо-
ковой координате в полете по марш-
руту — выдерживание заданного ко
рн topa (воздушной трассы). Прн за-
данных ширине воздушной трассы
2b и вероятности ее выдерживания
Ртр.т из соотношения (94) может
быть получена потребная СКП само
летовождения
1
о, . (9 6)
д<’" Ф ’(Ртр.т)
где Ф 1 (-) — функция обратная
функции Лапласа.
Величина <т2до1[ называется пока-
зателем потребной точности самолето-
вождения (ППТС).
Вследствие случайного .характера
процесса самолетовождения выходы
ВС за пределы трассы полностью ис-
ключить нельзя, поэтому должна
быть задана вероятность выдержива-
ния воздушной трассы В настоящее
время принято РТрт=0,95. В этом
случае для трассы шириной 10 км
ог 2'55 км> а для трассы шириной
20 км °zpoIJ 5.1 км
В настоящее время в рамках
ИКАО получает развитие концепция
минимальных навигационных требо-
ваний (МИТ), в соответствии с кото-
рой все ВС, выполняющие полеты в
определенном регионе, должны обес-
печивать требуемую точность самоле
товождення. В частности, для района
Северной Атлантики установлены еле
дующие МИГ
СКП самолетовождения а2дог1
= 6.3 морской мили (11,7 км);
78
доля полетного времени, прове
денного ВС вне полосы ±30 морских
миль (55,6 км)—5,3-10 *,
доля полетного времени, когда
линейное боковое уклонение составзя
ет от 50 до 70 морских миль (92,7 ...
129.7 км) — 1.3-10
Данные МНТ установлены исходя
нз действующих норм бокового эше
локирования и допустимого риска
столкновений ВС др\т с другом
вследствие нарушения норм эшелони-
рования. вызванного погрешностями
самолетовождения. Допустимый риск
столкновения устанавливается ИКАО
на основе прогноза статистических
данных о частоте столкновений с уче
том величины риска прн пользовании
другими видами транспорта. Так. для
риска столкновений вследствие потери
бокового эшелонирования на парад
дельных маршрутах в настоящее вре-
мя принято значение 0.18 на 107 ч
налета. В СССР и за рубежом ве
дутся работы по развитию концепции
МНТ и обоснованию значений пока-
зателей для различных регионов.
Поскольку точность самолетовож
дения оценивается относительно
ЛЗП, маршрут полета должен быть
задан с необходимой точностью. Она
устанавливается исходя из того, что-
бы СКП задания маршрута (исход
ных данных) oz =• о2/3. Для
нд дин
трасс шириной 10 и 20 км значе
ния о2„д составляют соответственно
0,85 и 1.7 км.
9.3. Области применения
навигационных средств
и рабочие области
радионавигационных систем
Под областью применения навига-
ционного средства понимают совокуп
ность значений параметров, характе-
ризующих состояние ВС и внешней
среды, при которых возможно исполь
зование данного средства по его наз-
начению. В качестве таких парамет
ров могут выступать координаты ВС.
крен, тангаж, характеристики подсти
лающей поверхности и т. д. Иногда
нс-1 мне область применения понима
!•> г г % 1юм смысле как часть прост
ранства, в которой можно использо-
вать навигационное средство.
Наиболее широкой областью при-
менения обладают геотехнические
средства. Барометрические приборы
могут использоваться над всей тер
риторией земного шара на всех высо-
iax. используемых для полетов
гражданской авиации. Не ограничено
использование инерциальных и гиро-
скопических систем. Магнитные ком-
пасы ограниченно используются в по
тяриых районах (вблизи магнитных
полюсов Земли), где мала горизон-
тальная составляющая напряженно
сти магнитного поля планеты.
Области применения радионавига-
ционных средств существенно зави-
сят от типа средства и диапазона нс
пользуемых радиоволн. Доплеровские
измерители скорости и сноса имеют
ограничения в использовании по кре-
ну и тангажу, а также но характеру
подстилающей поверхности Область
применения бортовых РЛС определя-
ется их дальностью действия, наличи-
ем радиолокационных ориентиров,
креном ВС, наличием ухудшающих
ра гиови гнмость атмосферных образо
наций
Для неавтономных радионаннганн
онных систем область применения оп-
ределяется минимальной и максималь-
ной дальностью действия. Для того
чтобы информация, получаемая с по-
мощью радионавигационных систем,
могла быть использована для решения
навигационных задач, она должна
у довлетворять требованиям по точно
с гн.
Рабочей областью радионавигаци-
онной системы называется область
пространства, в пределах которой по-
грешности определения МС (или ли
ннн положения) с определенной веро-
ятностью не превосходят допустимого
значения.
Размеры и конфигурация рабочей
области зависят от требуемой точно-
сти определения МС нлн ДП. типа
самолета (угломерная, угломерно-
гальномерная н т. д.), взаимного
расположения наземных станций и н.х
точностных характеристик. высоты
полета. На карте наносят границы
рабочей области в горизонтальной
плоскости. Расположение нх может
зависеть от высоты полета ВС.
Рабочая область является Пересе
чением области применения радиона-
вигационной системы н области, в
которой исходя из геометрических
соображении может быть обеспечена
требуемая точность опре телепня МС.
(или ЯП)
Различают рабочие области по ла-
танной точности: линий положения,
МС и опре теления боковой и про
толытой коор шпат.
Построение рабочей области по
заданной точности Л П. Для ее по-
строения необходимо построить гра
ницу области в пределах кодорой
случайная погрешность определения
ЛП Ар с вероятностью Р, не превы-
сит допустимого значения \р1,,п.
Для этого определяют допустимую
среднюю ква трагическую погрешность
определения ЛП
°/’доц 'Яиш ’(/’г). (9-7)
где Ф 1 (Pi) — аргумент функции
Лапласа, соответствующий значению
Рг функции.
Так как в общем случае <Т|.
= <)(?. >1). то у равнение») (£.т)) <Ъ>Л1(11
определяет кривую равной точности,
т. е. геометрическое место точек, н ко
торых СКП определения ЛП состав
л нет л
' ДОИ
Кривая равной точности ограничи-
вает область, в которой точность
определения ЛП не хуже заданной.
Вид кривой равной точности опре-
деляется выбранной системой коорди-
нат и видом зависимости ч (е, ц).
Так, для УРНС кривые равной точно-
сти имеют вид окружности с' центром
в месте расположения радиостанции
и ра гнусом
Р*крт а/’Л()11/аП’
где о,, — СКП измерения пеленга,
рад.
Построение рабочей области по
заданной точности МС. Прн ее по-
строении определяется кривая равной
точности, ограничивающая область,
в которой радиальная погрешность г
определения места самолета с вероят-
ностью Р, не превышает допустимого
значения гл„и. В предположении кру-
гового рассеяния, полученного МС
относительно фактического, допусти-
мое значение средней квадратической
ра диалыюй погрешности
°'доп = гдои 1/ — In (1—Рг). (9 8)
Значение функции —1п( I—Рг) при-
ведены в приложении 3. По извест-
ной зависимости а, от координат
строится кривая равной точности
4(5. •))=<’г •
доп
9.4. Построение рабочих
областей радионавигационных
систем
Рабочие области угломерно-даль-
номерной (УД) РНС. Для построе-
ния рабочем области по заданной точ
ности МС необходимо знать: СКП
измерения пеленга и дальности о„ и
<тп, допустимую радиальную погреш
ность Гд,.!, определения МС и соот-
ветствующую ей вероятность Рг, вы
соту полета Н и высоту антенны ра-
диомаяка Ла, а для горной местности
также высоту и удаление прспятст
Рнс. 9.1 Рабочая область РНС
во заданной точности определе
пня МС
вий в различных секторах по азимуту
от радиомаяка
Построение рабочей области осу-
ществляется в следующем порядке
определяется минимальная [аль
ность действия Dmln^H;
рассчитывается максима дьная
дальность действия по формулам
приведенным в гл. 4;
рассчитывается допустимая сред
ияя квадратическая радиальная по-
грешность
____гдон_____
д"" V—1п“(1—/>г)
(9 9)
Рассчитывается дальность кривой
равной точности
(9.10)
^npi
где <Тц — берется в радианах. Для не
ревода <тл из градусной меры в ради
энную необходимо ее умножить на
0.0175.
строится на карте область приме-
нения УД РНС. Для этого проводятся
окружности радиусом Dmiu И Oman
(для равнинной местности). В горной
местности Dn,ax проводятся соответ
ствующими радиусами по секторам
Область применения (возможного
получения навигационной и [форма
пии) ограничена кривыми Dnii„ и
Оша» (рис. 9.1);
наносится кривая равной точности
в виде окружности с радиусом DKVt
и отмечается рабочая область. Опа
включает в себя все точки, которые
ограничены кривой 0,.1>т и одвовре
менио принадлежат области приме-
нения, лежащей между Dmin и Dnlax
Если МС пре [полагается опре ie
лять графически, то в значениях
и о„, используемых для расчета Оьрт,
могут быть учтены погрешности про-
кладки пеленга и дальности на карте.
Рабочие области УД РНС по тре-
буемой точности контроля пути по
направлению и датиности строятся в
аналогичной последовательности, ио
кривые равной точности в этом слу-
чае не бу дут являться окружностями
Их удаление от радиомаяка будет
80
зависеть от значения путевого пелен
га самолета ППС=Пс—fl:
^кртг =
। Ч1оП-Ч-(°»5|пППС)2
0.0175o®n cos ППС
(9.11)
^крт, =
1 о2 —<т? — (ап cos ППС)2
' доп SP * ______________'
0.0175° п’,, sin ППС
(9 12)
гце %ов- допустимые СКП
контроля пути по направлению и
дальиости;0Гр. о„р — СКП определе-
ния частноортодромических коорди-
нат радиомаяка.
Рабочая область УД РНС по тре-
буемой точности контроля пути по
направлению (°гдоп) приведена на
рис. 9.2.
Рабочая область угломерной РНС.
Для построения рабочей области по
точности определения МС с помощью
двух наземных станций необхотимо
иметь следующие исходные данные:
допустимую радиальную погрешность
Гдвп определения МС и соответствую-
щую ей вероятность Рг, СКП опреде-
ления пеленга ВС с помощью каждой
из станций <тП1 и onj. базу (расстоя
иие между станциями) В Построение
рабочей области может осуществлять-
ся графоаналитическим путем (с ис-
пользованием шаблонов) и расчетным
(с использованием программируемых
ЭВМ).
Построение рабочей области с по-
мощью шаблона:
определяют минимальную и мак-
симальную дальности действия. При-
нимают а Отах — в зависи-
мости от мощности используемых
станций и чувствительности бортовой
приемной аппаратуры;
определяют допустимую СКРП
агДо11 п0 Формуле (9.9);
рассчитывают коэффициент, рав-
ный отношению СКП определения пе-
Рис. 9 2 Рабочая область УД РНС
по заданной точности контроля пути
по направлению
ленга с помощью первой и второй
станций:
я — <,п,/<,п1 • (9.13)
В качестве о П1 принимается меньшая
из СКП, т. е. n$sl;
рассчитывают коэффициент
*^%oi./(finn.-0-0175)- <9 14)
где оП1 берется в градусах;
выбирают шаблон (рис. 9.3), соот
ветствующий значению, наиболее
близкому к рассчитанному. На нем
отыскивают кривую равной точности,
соответствующую рассчитанному зна-
чению k. При отсутствии такой кри-
вой она может быть нанесена на шаб-
лон путем интерполяции между кри-
выми, соответствующими соседним
значениям k;
с помощью нанесенных на шаб-
лон радиальных линий снимают коор-
динаты кривой равной точности в
биполярной системе координат. Для
этого, задаваясь значениями угла 01
с вершиной в точке расположения
первой станции и отсчитываемого от
линии базы, определяют значения уг-
ла для точки пересечения кривой
равной точности и радиальной линии
ёь Значения 0, (выбираемые обычно
через 10°) и соответствующие им 02
сводят в таблицу. В случае когда ра-
диальная линия, соответствующая уг-
лу 0J, пересекает кривую равной точ-
81
ностн дважды, одному значению бу-
дут соответствовать два угла: О и
е;;
по полученной таблице углов О,
и в2 на карту наносят кривую рав-
ной точности, а также кривые Droin
и Dmax. Рабочая область УРНС ле-
жит в пределах кривой равной точно-
сти с учетом ограничений Drain и
Dmax- Вторая половина рабочей об-
ласти получается построением фигу-
ры, симметричной первой относитель-
но линии базы (рис. S 4).
Для построения рабочей области
расчетным путем с помощью ЭВМ
может быть составлена программа
вычислений, позволяющая определять
границы рабочей области в любой
удобной системе координат (геогра-
фической, прямоугольной н т д.).
При равноточной пеленгации от
двух станций (п 1,оп = оп.) рабочая
область УРНС обладает следующими
свойствами:
рабочая область симметрична от-
носительно линии базы н относитель-
но линии, проходящей через середину
базы перпендикулярно к ней;
при значениях А^0,0|75 кривые
равной точности проходят через обе
станции, а при k<0,0175 замыкаются,
не проходя через них;
минимальная погрешность опреде-
ления МС достигается в двух точках
на перпендикуляре к базе, в которых
угол пересечения линий положения
равен 109,5° При этом
orinlI1-0,016O11B.
где оп — в градусах.
При неравноточной пеленгациг
(п>1, оП1¥=оП1) кривые равной точно
сти несимметричны относительно пер-
пендикуляра к базе н смещены в сто-
рону станции с большим значением
Оп- В эту же сторону смещена точка
с минимальной погрешностью опреде-
ления МС.
9.5. Вероятность применения
навигационных средств
Возможность применения навита
ционного средства зависит от нахож-
дения ВС в области применения дан-
ного средства, его технической ис-
правности. вероятности обслужива-
ния (для системы с ограниченной про
Рис. 9.3. Шаблон кривых равной точности УРНС (п=1)
82
пускной способностью), вероятности
обнаружения и опознания источника
информации, а также наличия помех.
При оценке вероятности приме-
нения навигационного средства (НС)
в заданной точке маршрута нахожде-
ние ВС в области его применения яв-
ляется событием неслучайным, так
как заданная точка либо находится
в области применения (в этом случае
вероятность нахождения в области
применения Роп = 1), либо нет (Рви =
= 0). Если оценивается вероятность
применения НС в заданный момент
времени, то вследствие неопределен
ностн МС вероятность нахождения в
области применения лежит в преде-
лах 0<Роп<1 и зависит от соотно-
шения общей протяженности марш
рута и суммарной протяженности
участков, проходящих в пределах об
ласти применения.
Влияние техинческой исправности
навигационного средства на вероят-
ность его применения может быть
учтено с помощью вероятности без-
отказной работы. Под вероятностью
безотказной работы Рь.р навигацион-
ного средства понимается вероятность
того, что в определенном интервале
времени ие произойдет отказа данно-
го средства. При этом предполагает-
ся, что в начале рассматриваемого от
резка времени навигационное средст-
во исправно. Вероятность безотказной
работы зависит от времени t и интен
сивности потока отказов Л. Посколь-
ку = ~—то вероятность безотказной
' ср
работы
Рбр = ехр ( — Х() =
где ТсР — среднее время наработки
на отказ.
Вероятность обнаружения и опоз-
нания источника навигационной ин-
формации Роби зависит от аэронави
гациоинон обстановки, метеорологиче-
ских условий полета, опыта и квали
фнкацин членов экипажа. При ис-
пользовании АРК навигатор обязан
настроить необходимую частоту н
прослушать позывные радиостанции.
Рнс. 94 Рабочая область угломер
ной РНС
При использовании астрономических
средств небесное светило должно
быть опознано. Осуществляя ориенти-
ровку с помощью бортовой РЛС не-
обходимо идентифицировать наблю-
даемые на экране объекты с ориенти
рами на карте. При недостаточном
уровне профессиональной подготовки
членов экипажа эти задачи мог\т
быть и не выполнены (Р.и.нт=1).
Вероятность применения цавигаци
оиного средства снижается и при иа
личин помех. Радиопомехи могут за-
труднить и даже сделать невозмож
ным использование радионавнгацион
ных средств. Так, помехи при работе
АРК могут приводить к резким коле-
баниям стрелки, что сделает невоз-
можным отсчет курсового угла ра-
диостанции. Наличие облачности мо-
жет препятствовать наблюдению све-
тила в течение требуемого времени.
Вероятность нормального Функ
цианирования навигационного средст-
ва при наличии помех характеризует-
ся величиной Р„иц
Для навигационных систем, обла-
дающих ограниченной пропускной
способностью, необходимо учитывать
вероятность обслуживания Рог.сл в
83
данный момент ВС. Например, опера-
тор наземной РЛС или АРП не мо-
жет одновременно обеспечивать коор-
динатной информацией более одного
ВС. Если среднее время обслужива-
ния одного ВС составляет в среднем
foiic.i. а запросы на обслуживание
поступают в среднем через интервал
времени /зап, то вероят< ость обслу-
живания в заданный момент времени
^пбел
--------------. (9.16)
'+Нобел Аип)
Если в рабочей области системы
одновременно находится N ВС и
каждое запрашивает информацию в
среднем через время Г, то
^зап T/N.
При отказе в обслуживании ВС
запрос может быть повторен. Вероят-
ность того, что будет обслужен хотя
бы одни из п сделанных запросов
Ро6елп 1-(1-Робе„)П
Если рассматривать все перечис-
ленные факторы как независимые, то
вероятность применения навигацион-
ного средства может быть прибли-
женно оценена как
^ир- ^оп ^бр ^пом Робел • (9-17)
9.6. Показатели надежности
воздушной навигации
Одни из основных критериев ка-
чества воздушной навигации — ее на-
дежность. Она характеризует степень
успешности решения основных задач
воздушной навигации.
Главная задача навигации — обес-
печение полета по заданной траекто-
рии без отклонений, превышающих
Рис. 9.5. Область допустимых откло-
нений ВС
допустимые. Она непосредственно ре-
шается эргатической, т. е. включаю-
щей в себя человека, системой само-
летовождения во взаимодействии с
системой УВД.
Эргатической системой самолето-
вождения называется подсистема си-
стемы «экипаж-ВС», составляющая
контур управления полетом по задан-
ной траектории и включающая в се-
бя навигационно-пилотажное обору-
дование, средства связи и экипаж.
Качество навигации в значительной
степени зависит от качества функцио-
нирования эргатической системы са-
молетовождения, а также от работы
служб УВД, аэронавигационной ин-
формации. наземного штурманского
обеспечения.
Надежность воздушной навига-
ции — совокупность свойств эргатиче-
ской системы самолетовождения и си-
стем навигационного обеспечения по-
лета, определяющих их способность
функционировать без нарушения тре-
бований, предъявляемых к траектории
полета.
Требования к траекториям полета
ВС выдвигаются основными руково-
дящими документами и службой
УВД. Они представляют собой допус-
ки на отклонения ВС от заданной
пространственно-временной програм-
мы полета (ширина воздушной трас-
сы, нормы эшелонирования, допуски
по времени на прибытие в задан-
ный пункт и т. д.).
Надежность воздушной навигации
характеризуется рядом показателей,
значения которых определяют меру
успешности решения главной задачи
навигации в различных частных слу-
чаях.
При оценке надежности навигации
по заданной пространственно-времен-
ной траектории в качестве показате-
ля используется вероятность нахож-
дения ВС в пределах области допус-
тимых отклонений (рис. 9.5), центром
которой является программное прост-
ранственное место самолета (ППМС).
Если область допустимых отклонений
задана в виде предельно допустимых
отклонений по боковой ±Ь, продоль-
ной ±я и вертикальной ±с коорди-
натам, то показатель надежности воз-
душной навигации в этом случае бу-
дет определяться как вероятность то-
84
го, что отклонения ВС от ППМС по
соответствующим координатам (Az,
As, ЛЯ) не превзойдут по асболют-
ной величине этих значений:
Рнн =P(|Az|<b,
| As|<a, | ДН|<с). (9.18)
Различают надежность воздушной
навигации (как свойство эргатиче-
ской системы самолетовождения) и
показатели надежности воздушной
навигации, численные значения кото-
рых зависят не только от качества
навигации, но и от значений допусти-
мых отклонений. Так, при переходе
от полета по воздушной трассе к по-
лету в районе аэродрома требования
к траектории становятся более жест-
кими, и показатель надежности мо-
жет уменьшиться.
Применяются следующие показа-
тели надежности воздушной навига-
ции:
Локальные показатели надежно-
сти воздушной навигации Рпнл харак-
теризуют вероятность нахождения
ВС в пределах области допустимых
отклонений в заданный момент време-
ни или в заданном сечении маршрута.
Они используются для анализа на-
вигационного обеспечения различных
районов полета и для исследования
динамики изменения надежности на-
вигации в полете.
Интегральные показатели надеж-
ности воздушной навигации Рнни ха-
рактеризуют среднюю на некотором
отрезке времени или участке маршру-
та вероятность нахождения ВС в до-
пустимой области. Они легко опреде-
ляются с помощью показателей типа
РНнл и могут быть интерпретированы
как отношение среднего времени поле-
та в пределах области допустимых от-
клонений к общему времени полета.
Показатели этого типа используются
в концепции минимальных навигаци-
онных требований и характеризуют
качество навигации в целом (за весь
полет).
Экстремальные показатели надеж-
ности Рнп3 определяют вероятность
того, что за определенное время (на
заданном участке маршрута) ВС ин
разу не выйдет за пределы области
допустимых отклонений.
9.7. Оценка показателей
надежности
Надежность воздушной навигации
определяется значительным числом
взаимосвязанных между собой фак-
торов, обусловленных функциониро-
ванием технических средств навига-
ции, деятельностью экипажа на борту
и влиянием внешних условий.
Сложный характер и взаимосвязь
отдельных факторов значительно за-
трудняют практическую оценку пока-
зателей надежности воздушной нави-
гации. Используют статистический и
аналитический методы оценки надеж-
ности воздушной навигации, а также
метод, основанный иа имитационном
моделировании процесса самолето-
вождения.
Статистический метод основан на
учете числа полетов, в которых име-
ли место отклонения, превышающие
допустимые. При этом оценивается
показатель W', который характеризу-
ет долю полетов, протекавших с от-
клонениями:
W7 = (п — т) п, (9.19)
где п — общее число полетов; т —
число полетов с отклонениями.
Показатель W' может быть рас-
считан для всех видов отклонений
или дифференцировано по их видам
(уклонения от маршрута, потери ори-
ентировки, нарушение высоты полета
и т. д.). Статистический метод прост
для использования, с его помощью
можно оценивать качество работы
штурманской службы в авиапред-
приятии, УТА. Одиако он не позво-
ляет прогнозировать надежность на-
вигации и определять пути ее повы-
шения.
Аналитический метод основан иа
расчете показателей надежности воз-
душной навигации исходя из аэрона-
вигационной обстановки, характери-
стик точности и надежности навига-
ционного оборудования и других
данных, которые предполагаются из-
вестными. Этот метод позволяет ана-
лизировать влияние различных причин
на надежность воздушной навигации
и может быть использован для ее
оценки до выполнения полета, что
является важным при введении но-
85
вых трасс, установке более совершен-
ного оборудования и т. д. В то же
время аналитическое (с помощью
формул) выражение показателей на-
1ежности навигации не позволяет в
полной мере учесть влияние на каче-
ство самолетовождения деятельности
экипажа в полете, динамики измене-
ния навигационных погрешностей и
некоторых других факторов.
Наиболее полный учет всех факто-
ров, влияющих на надежность воз-
душной навигации, может быть осу-
ществлен с помощью метода имита-
ционного моделирования процесса са-
молетовождения. Оно заключается в
построении математической модели
процесса самолетовождения (с учетом
погрешностей навигационных измере-
ний, деятельности экипажа и влияния
внешней среды) н многократной реа-
лизации этой модели, «проигрывания»
полета с помощью ЭВМ. На основе
множества полученных в результате
моделирования траекторий почета мо-
гут быть оценены любые показатели
надежности навигации. Изменение ус-
ловий моделирования (исходных дан-
ных) позволяет определить наиболее
рациональные пути повышения надеж-
ности воздушной навигации.
9.8. Аналитическая оценка
надежности воздушной
навигации
Существующие аналитические спо-
собы оценки надежности воздушной
навигации основаны на использова-
нии частных показателей надежности
но боковой продольной Рн„ и
вертикальной Рци координатам.
Принимая, что управление поле-
том по каждой координате осущест-
вляется независимо, можно записать
выражение общего показателя надеж-
ности через частные:
^нн Р(9.20)
Если ограничений на движение ВС по
продольной координате не наклады-
вается (не устанавливается заданное
время и допустимая ширешность по
времени пролета контрольных ориен-
тиров), то =
Я6
При полете на заданной высоте
частный показатель (локального и
интегрального типа) по вертикальной
координате
где с — предельно допустимое откло
пение по высоте. В качестве его часто
используется половина нормы верти-
кального эшелонирования; — сум-
марная СКП измерения и выдержива-
ния заданной высоты полета.
Наиболее сложно оценить частный
показатель по боковой координате
Phz. так как для этого требуется так-
же учесть вероятности безотказной
работы и применения навигационных
средств, возможность ошибок экипа-
жа и комплексное применение нм
средств самолетовождения. Прибли-
женно
Р«2 — Рт Рэт Рн.атН-
+ ^-Рт)Р'згР;.зт, (9.21)
где Рт — вероятность безотказной ра-
боты навигационного оборудования;
Рят, Рэт — вероятности безошибочной
работы экипажа соответственно при
безотказной работе техники н при ее
отказе; Рн.зт.^в.эт — условные пока-
затели надежности навигации (соот-
ветственно при условии исправности
техники и при ее отказе).
Поскольку Рт3>1—Рт, нз формулы
можно видеть, что наибольшее влия-
ние оказывает условный показатель
надежности при безошибочной работе
экипажа и исправной работе навига-
ционного оборудования Ри.ат- Если
в каждый момент времени определе-
ны средства, используемые экипажем
для самолетовождения, то
где oz — суммарная СКП самолето-
вождения по боковой координате;
Pn|i — вероятность применения ис-
пользуемого навигационного средст-
ва; b- предельно допустимое откло-
нение по боковой координате.
При комплексном применении на-
вигационных средств расчет сущест-
венно усложняется.
Показатель надежности воздушной
навигации, соответствующий задаче
выхода в заданное время в заданную
точку с предельно допустимой по-
грешностью:
^нп= I —ехр(—ГдО11/а*),
где а, — средняя квадратическая ра
диальная погрешность самолетовож-
дения и заданный момент времени.
Если время выхода в заданную
точку ие задано, то показатель на-
дежности
Рнн — Ф (Ь,ог), (9.22У
где Ь — предельно допустимая но
грешность выхода.
Глава 10
КОМПЛЕКСНОЕ ПРИМЕНЕНИЕ НАВИГАЦИОННЫХ СРЕДСТВ
10.1. Понятие комплексного
применения навигационных
средств
Основное правило самолетовожде-
ния — комплексное применение нави-
гационных средств. Комплексным при-
менением навигационных средств на-
зывается наиболе» рациональное ис-
пользование всей имеющейся избы-
точной навигационной информации
для обеспечения точного и безопасно-
го самолетовождения в условиях те-
кущей аэронавигационной н метеоро-
логической обстановки.
Все современные ВС имеют датчи-
ки навигационной информации, кото-
рые позволяют получать навигацион-
ную информацию в объеме, превыша-
ющем минимальное ее количество,
необходимое для решения главной
задачи навигации. Это дает возмож-
ность использовать избыточную нави-
гационную информацию для повыше-
ния точности определения навигаци-
онных параметров и исключения
случаев использования недостоверной
(ложной) информации.
Различают три уровня комплексно-
го применения навигационных
средств.
Первый уровень (комплексирова-
ние навигационных средств) характе-
ризуется конструктивным объедине-
нием двух и более датчиков навига-
ционной информации, измеряющих
один и тот же навигационный пара-
метр. Объединенная система датчи-
ков формирует значение навигацион-
ного параметра, обладающее более
высокой точностью нлн устойчивостью
к воздействию внешних факторов »
от сазов элементов системы. Приме-
ре < комплексировання навигацион-
ные средств могут служить гиромаг-
нитные компасы, объединяющие маг-
нитный и гироскопический датчики.
На втором уровне (комплексной
обработки навигационной информа-
ции) информация, поступающая от
нескольких датчиков, обрабатывается
навигационным вычислителем по спе-
циальным алгоритмам для получения
точных и надежных оценок навигаци-
онных элементов движения н коорди-
нат ВС. Качество комплексной обра-
ботки информации зависит от реали-
зуемых навигационным вычислителем
математических методов обработки
(алгоритмов). Примером комплексной
обработки информации является ал
горит.м автоматизированной коррек
цин счисленных координат по данным
РСБН, реализованный на самолете
Ту-154, алгоритмы контроля курсовой
информации на самолете Ил-86 и др.
Третий уровень комплексного при-
менения навигационных средств реа-
лизуется экипажем ВС (навигато-
ром). Прн любой степени совершенст-
ва навигационного оборудования
окончательное решение при определе-
нии положения и характеристик дви-
жения ВС принимает экипаж. Он
осуществляет выбор режимов само-
летовождения, определяет последова-
тельность и способы использования
различных навигационных средств
оценивает достоверность и точность
получаемой навигационной информа
87
ции в зависимости от аэронавигаци-
онной обстановки на основе опыта
своей работы.
Комплексное применение навига-
ционных средств позволяет решить
две основные задачи: исключить ис-
пользование недостоверной навигаци-
онной информации и повысить точ-
ность определения навигационных
элементов.
Недостоверность навигационной
информации может иметь место при
постепенных (неконтролируемых) от-
казах навигационных средств или при
неправильном их применении экипа-
жем. Если при явном отказе навига-
ционного средства (срабатывании
сигнализации отказа или прекраще-
нии поступления информации) эки-
паж имеет возможность своевременно
перейти на использование дублирую-
щего средства, то прн постепенном
(неявном) отказе недостоверность по-
ступающей информации может быть
выявлена только с помощью других
навигационных средств. Например,
отказ курсового гироскопа, повлек-
ший недопустимо большой его уход в
азимуте, может быть выявлен путем
сравнения гироскопического и магнит-
ного курсов. Ошибки, допущенные
навигатором прн работе с системами,
также могут быть выявлены при кон-
троле по другим средствам
Повышение точности определения
навигационных параметров с помо-
щью нескольких датчиков однород-
ной информации достигается приме-
нением таких математических мето-
дов обработки измерений, при кото-
рых независимые погрешности от-
дельных датчиков взаимно компенси-
руются.
10.2. Способы комплексной
обработки навигационной
информации
Математические методы обработ-
ки навигационной информации осно-
вываются на использовании резуль-
татов теории вероятностей, математи-
ческой статистики и теории статисти-
ческого оценивания. Алгоритмы обра-
ботки информации, основанные на
одних и тех же математических мето-
88
дах, могут быть реализованы с по-
мощью различных технических
средств — аналоговых вычислителей,
бортовых цифровых вычислительных
машин, а некоторые выполнены не-
посредственно человеком (навигато-
ром). Цифровые ЭВМ в состоянии
реализовать практически любые алго
ритмы обработки, если они не тре-
буют чрезмерно большого объема
памяти и быстродействия. Навигаци-
онные вычислители аналогового типа
обладают существенно более низкой
точностью н быстродействием, в них
затруднена реализация логических
операций и организация памяти. Не-
посредственно человеку (навигатору)
под силу осуществить в приемлемое
время только простейшие вычисли-
тельные операции, ио зато он сравни-
тельно легко проверяет логические
условия.
Сущность комплексной обработки
информации в упрощенном виде.
Пусть имеется п датчиков навигаци-
онной информации (однотипных или
работающих на различных принци-
пах), измеряющих один и тот же
навигационный параметр у. Каждый
датчик обладает своей погрешностью
измерения Ai/i, вследствие чего изме-
ренные значения у<, (=1, п отлича-
ются от фактических:
У,= у-^-Лу,, (=1, л.
Задача комплексной обработки ин-
формации — получение такой оценки
у измеряемого параметра, которое
было бы наиболее близко в некото-
ром смысле к фактическому значению
параметра у. Совокупность операций,
которые необходимо проделать над
известными значениями у, для полу-
чения у, называется алгоритмом оце-
нивания:
>/ = ф(У1. Уг....Уп)-
Для того чтобы однозначно опре-
делить алгоритм <f, необходимо за-
дать класс допустимых алгоритмов,
сделать допущение о характере по
грешностей (закон распределения,
значения СКП) и выбрать меру бли-
зости оценки у к фактическому значе-
нию у (критерий оценивания). Обыч-
но предполагают, что Al/.- являются
случайными с математическим ожи-
данием, равным нулю, поскольку при
известных систематических погрешно-
стях они могут быть устранены или
учтены. Также иногда допускают, что
\у, имеют нормальный закон распре-
ie-дения.
Вследствие случайного характера
Vi оценка у также является случай-
ной. Поэтому в качестве критерия
точности оценивания принимают ма-
тематическое ожидание какой-либо
функции от погрешности оценивания
\у=у—у.
Наиболее часто выбирают в каче-
стве критериев оценивания математи-
ческое ожи такие квадрата или моду-
ля \у. Инопа в качестве критерия
используется вероятность того, что
погрешность А1/ не превзойдет некото
рого допустимого значения.
Резервирование — простейший спо-
соб комплексной обработки информа-
ции. При этом оценкой у служит из-
мерение у>, полученное с помощью
основного датчика навигационной ин-
формации (более точного). При его
отказе используется резервный дат
чик. При таком способе точность у
нс выше точности основного датчика,
но повышается надежность системы.
Резервирование датчиков эффективно
при достаточной глубине их контро-
ля, когда любой отказ сразу автома
тически обнаруживается.
Для выявления неявных отказов
используется сравнение значений па-
раметров, измеренных различными
датчиками. Прн этом двух датчиков
для выявления отказавшего средства
недостаточно, поскольку при расхож-
дении измеренных ими значений пагн-
гационного параметра остается неиз
вести ым, какой из них отказал. Прн
использовании такого способа приме
няют как минимум три датчика. На-
|ежность выявления отказа зависит
от выбранного значения допуска на
расхождение измерений.
Распространенный способ комплек-
сного использования информации —
коррекция навигационных систем.
Она используется в тех случаях, ког-
да основной датчик навигационной
информации обладает свойством на-
капливания погрешностей (системы
счисления пути, гироскопические кур-
совые приборы), а дублируюшнй дат-
чик аналогичной навигационной ин-
формации не может использоваться
непрерывно. В этом случае показа-
ния основного датчика периодически
устанавливаются по показаниям ре-
зервного (средства коррекции).
Осреднение измерений — один из
эффективных способов комплексной
обработки информации. При этом
оценка
I
У -----(</1Н-{/г+ ••+Ул) (Ю.1)
я
Если все датчики обладают о зна-
ковой точностью. то точность оценки
у в )п раз выше точности каждого
из них. Полученная таким образом
оценка у является оптимальной по
критерию СКП при нормальном рас-
пределении Af/i. Однако в случае не-
явного отказа одного из средств (ког-
да измеренное им значение параметра
далеко от фактического) точность
оценки v значительно ухудшается,
причем тем больше, чем меньше число
1атчиков. В связи с этим перед ос-
реднением применяют доп ус ко-
вы й контроль. В случае трех
однотипных датчиков вначале опреде-
ляют расхождение измерений
‘^12 I Уз Уг I’ -^23 —
-1 У г — Уз I • А13 = I Уз Уз I
н путем сравнения их с заранее уста-
новленным допустимым значением }
определяют отказавшее средство. Ес-
ли все А12, А23, А|3 меньше А. то у
получают осреднением всех трех
В противном случае измерение отка-
завшего датчика отбрасывается и
осредняются только два измерения.
На такой мажоритарной логике осно-
ван алгоритм контроля курсовой ин-
формации в навигационном комплексе
самолета Ил-86.
Если датчики обладают разной
точностью, характеризуемой средними
квадратическими погрешностями из-
мерений о,, то осреднение осущест-
вляется с учетом этих погрешностей:
л / П I
У ’Vvi / У —• 2)
•м / «м О,
1 / । '
Алгоритм оптимальной динамиче-
ской фильтрации навигационных из-
89
черений Р Калма на позволяет полу-
чать оптимальные по критерию мини
мума СКП оценки сразу нескольких
величии, характеризующих состояние
ВС (например, координат, скоростей
п т. д.). Он имеет рекуррентный ха-
рактер и позволяет учитывать не
только значения измерений в текущий
момент времени, но и изменение из-
меряемых величин и состояния ВС в
последовательные моменты времени
Одновременно с оценками формиру-
ется корреляционная матрица ошибок
оценивания. Данный алгоритм назы-
ваемый также фильтром Калмана,
требует большого объема вычислений
на каждом шаге оценивания н поэто-
му может быть реализован только иа
основе использования высокопроизво-
дительных бортовых ЭВМ.
Недостатком многих алгоритмов
комплексной обработки информации
является их чувствительность к виду
закона распределения погрешностей
навигационных измерений. Методы
оценивания, дающие оптимальные
оценки при условии нормального за-
кона распределения погрешностей, мо
гут быть далеки от оптимальных
при нарушении этого условия
Устойчивые (робастные) методы
оценивания позволяют получать па-
дежные результаты при достаточно
широком енапазоие изменения харак-
тера погрешностей измерений К клас-
су устойчивых (робастных) относятся
многие мето 1Ы, основанные на мажо-
ритарном преобразовании иавигацнон
ных измерений При нх псподьзова-
пии множество у< располагают в ви-
де вариационного ряда, т е. в поряд-
ке возрастания их значений так, что
первый член вариационного ряда ян
ляется минимальным, а последний —
максимальным из измерений у, Алго-
ритм оценивания обычно является
некоторо"! функцией от значений чле-
нов вариационного ряда с определен
пыми номерами. Например, у может
приниматься ранной центральному
члену вариационного ряда, полусум-
ме минимального и максимального
значений р,- и т д.
Алгоритм выбора .медианы — про-
стейший из этого класса. Медианой
называется центральный член вариа
циониого ряда (при нечетном числе
90
его членов) и.ш полусумма двух цен-
тральных членов (при четном числе
членов). Например, если У1<У2<Уз.
то медианой является у? \нализ по-
казывает, что точность оценки у.
принимаемой равной медиане, не
сколько хуже, чем оценка по средне
му арифметическому (10.1) при при-
близительно равной точности датчи-
ков Однако, когда погрешности од-
ного из датчиков значительно превос-
ходят погрешности других (например,
при невыявленном отказе), выбор
медианы более предпочтителен. Так,
при трех датчиках отказ одного из
них совершенно не влияет на значе-
ние медианы, в то время как значе-
ние среднего арифметического може'
существенно измениться Мажорптар
ные методы, уступая по точности
мето (ам оптимальной фильтрации
(прн нормальной работе всех датчи-
ков), позволяют получить простые и
достаточно надежные оценки.
10.3. Основы комплексного
применения навигационных
средств экипажем
Основы комплексного применения
навигационных средств закладывают-
ся во время подготовки к полету.
Ошибки, допущенные на этом этане,
трудно или невозможно исправить
во время полета, они могут привести
к тяжелым последствиям Особенно
тщательно необходимо проконтроли
ровать правильность исходных дан
пых, требуемых для выпол! ения но
лета) путевых углов, расстояний пре-
вышений рельефа, установочных дан-
ных для ННК. частот радионавигаци-
онных средств), чтобы и в самой
сложной обстановке полета не возник
ло сомнений в их достоверности
Во время предварительной подго-
товки к полету на основе анализа
расположения наземных навигацион-
ных средств и их рабочих областей,
наличия визуальных и радиолокаци-
онных ориентиров необходимо опре-
делить для каж юго участка полета,
какое из навигационных средств бу-
дет использоваться в качестве основ-
ного, а какие бу дут использоваться
для контроля В качестве основного
на данном участке выбирается сред-
ство, обеспечивающее наибольшую
точность, рассчитываются оптималь
ные точки коррекции координат
При подготовке к визуальным
полетам с помощью карты выявляют-
ся характерные признаки ориентиров,
их взаимное расположение, оценива-
ется возможность наблюдения в за-
висимости от высоты полета и метео
рологической видимости.
Важнейшее условие комплексного
применения навигационных средств
непрерывное счисление пути Незави
снмо от наличия на борту автомати-
зированных систем счисления пути
навигатор обязан постоянно знать
риближенное значение пройденного
расстояния, оценивая его по путевой
скорости на НЯ 10м или в уме. Мес-
то самолета, полученное хотя бы i ру-
бим счислением пути, служит цент
ром области возможного положения
ВС н необходимо как для облегчения
визуальной ориентировки, так и для
правильного выбора используемых
навигационных средств. Передняя и
задняя границы области возможного
положения рассчитываются по вре
мени полета от последнего достовер-
ного ориентира соответственно по
максимально и минимально возмож
иым в данной аэронавигационной об-
становке путевым скоростям, а боко-
вые границы — с учетом максимально
возможной погрешности выдержива-
ния фактического путевого угла.
Контроль выдерживания курса —
важнейшее условие для исключения
потерь ориентировок и уклонений от
маршрута полета. Он должен осуще-
ствляться для проверки соответствия
его заданному путевому углу и пока-
заний основного и резервного датчи-
ков курса.
Проверка соответствия курса за-
данному путевому углу осуществля-
ется каждый раз после разворота ВС
на очередной участок маршрута. При
этом важно убедиться, что угол сно-
са учтен с правильным знаком.
Счисление показаний основного и
резервного датчиков курса позволяет
своевременно выявлять отказ курсо
вого прибора. Расхождение показа-
ний основного курсового прибора
(курсовой системы, 1ИК-1) н аварий-
ного датчика курса типа КН 13 бо
лее чем на 10°, а также датчиков как
ГПК-52 и ГИК-1 на 5°, должно на
сторожить навигатора.
При обнаружении отказа необхо
днмо определить направление своего
полета всеми доступными способами
(по АРК. по радиолокационным или
визуальным ориентирам, по направле-
нию на Солнце) Достаточно частый
контроль курса позволит исключить
одну из самых серьезных причин по
терь ориентировки. При контроле
курсовых приборов необходимо обра
щать внимание на положение крс
мальер установки магнитного скло-
нения на КМ и УШ.
Большое число уклонении от мар
шрута и потерь ориентировок пропс
ходит вследствие неверной настройки
радионавигационных средств. Необхо-
димое условие для настройки АРК —
точное знание частоты настраивав
мой радиостанции и прослушивание
ее позывных. Нельзя ограничиваться
тем, что после установки частоты
стрелка АРК установилась в ожидае-
мом направлении.
Необходимо быть внимательным
при вводе различных данных в нави
рационный вычислитель (бокового ук-
лонения и пройденного расстояния,
координат радиомаяков, заданного
путевого угла или угла карты), об-
ращая внимание на правильный ввод
знака величины
Экипаж ВС, осуществляя самоле-
товождение, должен не только оцени-
вать текущую аэронавигационную об-
становку, но н уметь прогнозировать
ее, предвидеть ее изменение в пред
стоящий период времени.
Прогноз времени пролета визу аль
них или радионавигационных ориен-
тиров позволяет заранее подготовить-
ся к их использованию для ориенти-
ровки, сокращает время на их обна-
ружение и опозиаваиие. При этом
следует иметь в виду, что из-за по-
грешностей определения путевой ско-
рости пролет ориентира может про-
изойти раньше расчетного времени.
Поэтому целесообразно хотя бы гру-
бо оценить временное <окио» (по ми-
нимально и максимально возможной
в данной обстановке путевой скоро-
91
сти), в пределах которого должен
произойти пролет ориентира.
Несмотря на то, что отказы нави-
гационных средств относительно ред-
ки, экипаж должен быть постоянно
готов к ним, внимательно относясь ко
всем отклонениям в работе оборудо-
вания и стараясь исключить возмож-
ность использования навигационного
средства с неявным отказом.
Важное значение для обеспечения
надежности и точности самолетовож-
дения имеют своевременный контроль
пути и коррекция счисленных коорди-
нат, правильный выбор основных и
дублирующих средств коррекции, обо-
снованное принятие решения об ис-
правлении пути.
Коррекцию счисленных координат
целесообразно выполнять в точках,
рассчитанных перед полетом, а если
они не были рассчитаны, то в точках,
где обеспечивается наивысшая точ-
ность коррекции. В качестве основно-
го средства контроля пути необходи-
мо использовать наиболее точное.
Стедует помнить, что точность опре-
деления МС с помощью ряда средств
зависит от положения ВС относитель-
но наземных радиомаяков или ори-
ентиров. Это нужно учитывать при
выборе основного средства контроля
пути
Комплексное применение иавига
ционных средств при контроле пути
заключается, в обязательном сопо-
ставлении полученного МС со счис-
ленным; в использовании дублирую-
щих средств для контроля достовер-
ности полученной информации.
Особенностью принятия решения
навигатором прн контроле пути яв-
ляется неопределенность, обусловлен-
ная, с одной стороны, избыточностью
навигационной информации (имеется
информация о МС одновременно от
двух и более средств), а с другой —
ее неточностью (вследствие навигаци-
онных погрешностей координаты МС,
полученные с помощью различных
средств, ие совпадают друг с дру-
гом) При отсутствии специальных
вычислительных средств и в условиях
дефицита времени в полете навигатор
практически не может использовать
большинство методов комплексной
обработки информации и нонменяет
92
свои специфические способы, хотя и
не являющиеся оптимальными, но да-
ющие достаточно надежные результа
ты.
Когда навигатор может использо-
вать для контроля только одно (ос-
новное) средство, в качестве дублиру-
ющего выступают средства счисления
пути, а при их отсутствии — инфор
мация о расчетном МС. Например,
при контроле пути по направлению
(координате г) навигатор, как прави
до, считает информацию от основного
средства достоверной, если получен-
ная с его помощью координата Z\ до
статочно близка к счисленной гсч.
Анализ показывает, что информацию
от основного средства коррекции це
лесообразно считать достоверной, ес
ли расхождение zx и гСч не превыша-
ет ~3огсч- В противном случае (если
нет возможности использовать для
контроля еще одно средство) более
достоверной следует считать инфор-
мацию от средства счисления пути и
осуществлять полет без исправления
курса до тех пор, пока ие появится
возможность использовать дополни-
тельную информацию.
В случае когда, помимо средств
счисления, имеется возможность ис-
пользовать два средства контроля
пути по направлению (основное и
дублирующее), целесообразно исполь-
зовать в качестве фактического ЛБУ
значение z (полученное с помощью
основного, более точного) при усло-
вии, что их расхождение не превыша-
ет 3o2i, a z, н г2 принадлежат обла-
сти возможного положения ВС
В противном случае следует считать,
что с помощью одного из средств по
лучеиа недостоверная информация.
В этом случае в качестве достаточно
надежной оценки ЛБУ можно ис-
пользовать медиану.
Если для определения МС имеется
возможность использовать более двух
линий положения (минимальное их
число), то точность и надежность оп-
ределения координат может быть по-
вышена. Так, если в случае трех ЛП
все они имеют приблизительно одина-
ковую точность и нет оснований
предполагать неявный отказ одного
нз них, то в качестве фактического
МС целесообразно считать точку, ле-
жащую иа пересечении биссектрис
треугольника погрешностей, образо-
ванного тремя ЛП. Если ЛП иерав
неточны илн одна из них может ока-
заться недостоверна, то в качестве
МС рекомендуется использовать ту
вершину треугольника погрешностей,
при которой имеется большее значе
ние угла. Это значительно уменьшит
вероятность использования недосто-
верной информации.
При визуальных полетах комплек-
сное применение средств самолето-
вождения достигается неукоснитель-
ным соблюдением правил визуальной
ориентировки, контролем визуально
полученного МС со счисленным, обя
зательным использованием радиона
вигационных средств.
При полете в пределах рабочих
областей наземных РЛС и радиопе-
ленгаторов экипаж обязан запраши-
вать МС для контроля пути, получен-
ные координаты должны сопостав-
ляться с данными бортовых средств
для исключения возможной ошибки
диспетчера.
Для повышения точности счисле-
ния пути (особенно при отсутствии
на борту автоматизированных средств
счисления) необходимо регулярно
оценивать основные навигационные
элементы полета, путевую скорость,
угол сноса, направление и скорость
ветра.
Для исключения навигационных
ошибок вследствие влияния человече
ского фактора контроль деятельности
навигатора (штурмана или второго
пилота) должен обязательно осуще-
ствлять командир ВС. Особое внима-
ние необходимо уделять комплексно-
му применению навигационных
средств прн снижении с заданного
эшелона для исключения случаев пре-
ждевременного снижения (особенно
в горной местности).
10.4. Эргономические
характеристики навигатора
Качество самолетовождения зави
сит ие только от используемых техни-
ческих средств, но и в значительной
мере от навигационной деятельности
экипажа на борту. В связи с этим на
всех стадиях подготовки и выполне-
ния полетов необходимо учитывать
возможности и характеристики дея-
тельности человека как оператора на-
вигационных систем.
Вопросы оптимального распреде-
ления функций между человеком и
машиной (навигационным оборудова
пнем), рациональной организации ра-
бочего места навигатора рассматри-
ваются и решаются на всех стадиях
проектирования ВС. При эксплуата-
ции воздушного транспорта, непо
средственио при выполнении полета
и пои подготовке к нему каждый
член экипажа должен хорошо знать
и учитывать психофизиологические
особенности деятельности навигатора
Главный анализатор человека, по
средством которого он получает ос-
новной поток поступающей информа-
ции, — зрение. В поле зрения челове
ка различают центральною зону (при
мерио 4°), где наиболее четко разлн
чаются детали, зону ясного видения
(30... 35°), где при неподвижном гла-
зе можно опознать объекты, не раз
личая детали, и зону периферического
зрения (75 ...90°), где предметы обна-
руживаются, но не опознаются. Глав-
ные индикаторы должны располагать-
ся в зоне ясного видения навигатора.
Разрешающая способность зрения
(минимальное расстояние между дву
мя раздельно воспринимаемыми объ-
ектами) при нормальной освещенно-
сти составляет Г.
Рремя полной его адаптации (при
способления) от света к темноте
составляет 40 ... 60 мин. Это необхо-
димо учитывать при визуальной ори
ентировке ночью и по возможности не
включать свет в кабине Время адап-
тации навигатора от темноты к свету
составляет 5 ... 10 мин. При освеще-
нии кабины красным светом снижа-
ется производительность труда one
ратора (до 76%)
Шум оказывает отрицательное
влияние на навигационную деятель-
ность. Сильный шум снижает иа
5 ... 12% производительность труда,
остроту зрения и зрительную реак
цию в темное время, нарушает вос-
приятие визуальной информации. При
передаче информации с помощью че-
ловеческой речи уровень шума дол
жен быть ниже звука речи не менее
93
чем на 10 дБ, что влечет за собой не
обхотнмость пользования СПУ. Влия
нне шума неоходимо учитывать при
передаче речевой информации. Неже-
лательно, чтобы фраза превышала
9 слов, ие считая индексов и позыв-
ных. Наиболее значащие слова необ-
ходимо располагать в первой трети
фразы. В разрешающих командах
разрешение следует давать в конце,
после содержания действия, а в за-
прещающих — наоборот. Точнее
опознаются слова с ударением на
последнем слоге. Распознаваемость
слов повышается, если они начина-
ются с гласной.
Прн оценке точности навигацпон
пых определений необходимо, кроме
погрешностей измерений, учитывать
и погрешности считывания информа-
ции с ин шкаторов. При использова
нин стрелочных индикаторов возмож-
на систематическая погрешность из-
за параллакса зависящая от поло-
жения глаза оператора. Случайная
погрешность считывания характери-
зуется средней квадратической по-
грешностью, составляющей примерно
0,3 от цены деления.
Временные характеристики дея-
тельности навигатора имеют важное
значение Время считывания инфор
мании с индикатора составляет 0,6 ...
1,5 с, фиксация загорания или пога-
сания индикатора 0,28 с. Поиск, нос
приятие и декодирование информа-
ции в целом занимают 5 10 с, при-
нятие решения 15... 35 с, а его вы-
полнение 5. 10 с. При ухудшении
условий деятельности (в сложной си-
туации) время увеличивается на 20%,
а в экстремальной ситуации - на
50% и более
Временные характеристики дея-
тельности навигатора определяют и
его временную загруженность в по-
лете. которой называется отношение
суммарного времени его занятости ко
всему рассматриваемому интервале
времени. Для нормальных условий
деятельности временная загружен
ность не должна превышать 0,4 ...0,6.
Она зависит от условий деятельности
(протяженности участков маршрута,
состава навигационного оборудова-
ния), технологии навигационной рабо-
ты (навигационною плана полета) к
характеристик навигатора (его психо-
физиологических свойств, опыта и
квалификации).
При возникновении дефицита вре-
мени в полете, а также ситуаций,
требующих ответственных решений
v членов экипажа возникает состоя
пие повышенной эмоциональной на
пряженности. Увеличение эмоцнональ
ной напряженности ведет к измене-
нию как средней длительности опера-
ций, так и вероятности ее успешного
выполнения. Длительность вы пол не
ния операции при возрастании напря
женности сначала несколько уменьши
ется (за счет мобилизации, повыше
ния собранности навигатора), а затем
наступает срыв (резкое увеличение
длительности). Вероятность безоши
бочного выполнении операций внача-
ле несколько увеличивается, а затем
(при напряженности выше некоторого
критического значения) падает. Прн
сре дней напряженности вероятность
правильных действий составляет
0.95 ... 0,85, а при высокой 0,6.
Точность и безошибочность рабо-
ты навигатора зависят и от степени
его усталости, вызванной продолжи
телыюстью полета, и от времени су
ток При непрерывной работе, требую
щей постоянного внимания, пронзво
дительность труда уже через 45 мин
снижается то 25% от наивысшей.
Наивысшая производительность труда
V человека с b до 9 ч утра, низшая —
около 3 ч ночи.
Учет психофизиологических харак
теристик человека и условии его дея
дельности в полете позволит повысить
эффективность планирования навига
циоииой работы экипажа.
Глава 11
ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ШТУРМАНСКОГО ОБЕСПЕЧЕНИЯ
ПОЛЕТА И ОПТИМИЗАЦИЯ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ
11.1. Эффективность
штурманского обеспечения
полетов
Штурманское обеспечение полетов
ВС гражданской авиации включает
в себя комплекс мероприятий, прово
тимых командованием, пилотами,
штурманами, работниками ipyi их
служб и направленных на тосгнженнс
высокой точности, на еежности и безо
пасности самолетовождения.
Под эффективностью штурманско-
го обеспечения полетов понимается
результативность деятельности долж-
ностных лиц штурманской службы по
обеспечению безопасности, регулярно
стн и экономичности полетов в нави-
гационном отношении.
Под эффективностью воздушной
навигации в полете подразумевается
результативность действий экипажа
по выбору способов и применению
ере 1Ств самолетовождения при ренк
нии задач, связанных с выполнением
заданной программы полета.
Для количественной оценки эф-
фективности используется показатель
надежности воздушной навигации —
вероятность выполнения экипажем
ВС заданной программы полета в
установленных пределах.
Основные пути повышения эффек-
тивности штурманского обеспечения
полетов:
совершенствован!!! бортовых и на-
земных средств самолетовож leiiHR,
автоматизация процесса самолето
вождения;
систематизация действий экнпа
жа. определяемых технологией рабо-
ты экипажа по самолетовождению;
комплексация применения борто-
вого и ваземного навигационного
оборудования в процессе самолето
вождения;
оптимизация решения навнгаипон
иых задач, обеспечивающая наилуч-
шие условия их выполнения;
повышение эффективности предва-
рительной и пре июлетпой подготовки
экипажей,
совершенствование системы пред-
полетного контроля экипажей и раз-
боров полета.
Большая потеря полетного време
ии v членов зкнпажа ВС, решающих
задачи самолетовождения, происхо-
дит из-за нерациональной работы с
навигационным оборудованием в но
лете. Кроме того, распре шленне на-
грузки на каждого члена экипажа
бывает неравномерной. Существуют
хва метода борьбы с дефицитом по-
летного времени: автоматизация про
цесса самолетовождения и система-
тизация действий членов экипажа В<
прн решении задач самолетовож де-
ния.
Автоматизация самолетовождения
Прн полете на В<2, не оборудованном
\НК. наибольшая доля полетного
времени приходится, на контроль за
выдерживанием заданного режима
полета, прокладку линии фактическо-
го пути, ведение ориентировки и из
меренне навигационных элементов.
Автоматизация счисления пути значн
тельно упростила технологию работы
экипажа по самолетовождению и из-
менила ее характер. В этих условиях
наибольшее внимание и время потре-
бовал контроль за точностью вы icp-
жнвания гироскопическою курса и
ЛЗП с использованием различных
средств самолетовождения. Возрос
шне скорости полета снова сократили
появившимся резерв времени за счет
автоматизации счисления пути
Дальнейшее совершенствование
навигационных систем позволило до-
полнительно программировать ЛЗП,
автоматизировать процесс контроля
пути и «вписыванияж в схему захода
па посадку и ее выполнение Упрос-
тился процесс индикации На экипаж
легли задачи выявления фактнческо
го состояния ПИК по сигналам авто-
кон гроля, грамотного принятия реше-
ния о переходе на использование ре-
зервных каналов (режимов работы)
95
ПНК, определение постепенных отка-
зов отдельных приборов, не выявлен-
ных автоконтролем
В целях унификации навигацнон
кого оборудования разработаны ба-
зовые навигационные комплексы
(БНК), имеющие однотипные индика-
торы н пульты управления н индика
цин (ПУК). с которыми имеет дело
экипаж ВС в полете (тля всех основ-
ных типов). Базовые навигационные
комплексы самолетов ИЛ-86 и ЯК 42
обеспечивают автоматический полет
по заданному пли выбранному в по-
лете маршруту от взлета до посадки.
Систематизация действий экипажа.
Для сокращения нерационально рас-
ходуемого времени в полете рекомен
дуется:
детально разработать технологию
по применению средств навигации
для решения задач самолетовожде-
ния на всех этапах полета. Для рав-
номерной загрузки членов экипажа в
процессе самолетовождения следует
использовать сетевой график Это
особенно важно при полетах в сокра-
щенном составе экипажа (без штур-
мана ВС на борту),
довести до автоматизма действия
экипажа при стандартных ситуациях
полета по воздушным трассам и МВЛ
па специализированных н комплекс-
ных тренажерах;
отработать методики прямого и
косвенного выявления отказов нави-
гационных средств в полете и персхо-
ia на другой канал {режим) навига-
ционной системы;
отработать методики безошибочно-
го оперативного программирования
полета применительно для разных
ПНК.
Решение этих вопросов, помимо
рационального использования полет-
ного времени, позволит систематизи-
ровать работу экипажа в полете, что
исключит промахи и ошибки в ра-
боте.
Комплексное применение навига-
ционных средств. Успешность вожде-
ния ВС по воздушным трассам и
МВД во многом зависит от полноты
навигационной информации, получае-
мой от внешних источников непрерыв
но и в течение всего полета.
В условиях резко изменяющейся
навигационной обстановки непрерыв-
ности получения навигационной ин-
формации можно достичь только
комплексным применением средств
самолетовождения, работающих на
различных принципах действия и спо-
собных решать ту же задачу, но в
других условиях Это позволяет по-
высить точность измеряемого пара-
метра, не применяя для этого высо-
коточной, а следовательно, и дорого-
стоящей аппаратуры.
Оптимизация решения навигаци-
онных задач. Наиболее простым и
действенным путем повышения каче-
ства штурманского обеспечения поле-
та, не требующем дополнительных
средств, является оптимизация нави-
гационных процессов, охватывающих
широкий круг вопросов (выбор нан-
выгоднейшего маршрута и режима
полета, создание наилучшнх условий
для контроля пути и измерения на-
вигационных элементов, размещение
наземных РНС).
При оптимизации навигационных
процессов и принятии решения по
применению средств самолетовожде-
ния показателями (критериями) опти-
мальности обычно служат:
наименьший расход топлива на
преодоление заданного расстояния
между двумя точками на земной по-
верхности;
наивысшее значение показателя
надежности самолетовождения;
создание наилучшнх условий ня
решений той или иной задачи. На-
пример, получение наибольшей шири-
ны полосы просматриваемой местно-
сти при выполнении визуальных на-
блюдений или поисковых работ;
минимальное значение погрешно-
сти самолетовождения или измерения
навигационного элемента.
11.2. Методы оптимизации
способов действия
•
Самолетовождение представляет
собой сложный процесс, состоящий
нз целого ряда связанных и не свя
заппых между собой целенаправлен-
ных тейстний экипажа и диспетчеров
УВД, носящих иногда цикличный ха-
06
Рис 11.1 Сетевой график
рактер, с применением равноточных
и разноточных средств. Развитие дей-
ствия происходит по этапам: от одно-
го поворотного пункта маршрута к
тр\гому. Оптимизация всего процесса
самолетовождения с просчетом боль
ного числа вариантов возможна толь-
ко с применением ЭВМ. Однако, рас-
членив весь процесс на отдельные
операции, можно сравнительно легко
найти оптимальные решения по част-
ным навигационным задачам
При оптимизации сложных про
цессов применяются методы линей-
ного н динамического программирова-
ния, теории игр и сетевого планиро-
ван ня.
Линейное программирование по-
зволяет отыскивать максимум или
минимум линейной функции — целе-
вой функции при наличии ограниче-
ний, заданных в виде линейных урав-
нений или неравенств. Сущность ре-
шения заключается в нахождении ус-
ловий, которые обращают целевую
функцию в минимум или максимум.
Решение, удовлетворяющее условиям
поставленной задачи, называется он
тнмальным планом. Если задача ка-
сается неоднородных, разноточных
навигационных средств, то примени
ются методы нелинейного программи
ровання.
Динамическое программирование
применяется в случае, когда весь
процесс полета можно разбить па от-
ельные этапы, протекающие во вре-
мени. На каждом этапе может быть
использован ряд средств и способов
самолетовождения, имеющих ограни-
чения в области применения. Осуще-
ствляя на каждом этапе распределе
ние и перераспределение средств до-
4 Зак 639
биваются оптимального управления,
при котором критерий оптимальности
достигает экстремального значения.
В результате динамического програм-
мирования можно определить опти-
мальное управление на каждом участ
ке маршрута и тем самым оптималь
ное управление всего полета в целом.
Сетевое планирование служит для
составления и выполнения наиболее
целесообразного плана проведения
подготовки к полету и его выполне
иия в кратчайший срок и с минималь-
ными затратами. Все мероприятия
представляются наглядно в виде се
левого графика, состоящего нз взан
мосвязанных элементов. Работа обоз-
начается на сетевом графике стрелкой
с индексом В скобках указывается
продолжительность ее выполнения
События обозначаются на сетевом
графике кружочками с обозначением
буквой вида события. Они располага
ются в начале и конце работы, г. е.
по концам стрелок (рис. 11.1).
Основные требования при состав-
лении сетевого графика:
ни одно событие не может проч
зойти до тех пор, пока не будут за-
кончены все входящие в него работы.
ни одна работа, выходящая из
данного события, не может начаться
до тех пор, пока не произойдет дан
ное событие;
ни одна последующая работа не
может начаться раньше, чем буду!
закончены все предшествующие ей
работы.
С помощью сетевого графика мож-
но на этапе планирования обнару-
жить «узкие» места проводимой опе-
рации и внести необходимые коррек-
тивы в ее организацию.
97
11.3. Оптимизация выбора
высоты полета
Качество выполнения полетного
задания в большой степени зависит
от условий и навигационных элемен
тов полета Неудачно выбранные вы-
соты и скорость полета могут гначн-
тельно усложнить выполнение задачи
или сделать полет экономически не-
выгодным. Наилучшего результата
можно добиться, оптимизируя пара-
метры определяющие \словия вы
полнення полета и в первую очередь
высоту полета.
В зависимости от полетного зада
пня прн выборе наивыгоднейшей вы-
соты необходимо исходить:
нз достижения наименьшего сум-
марного расхода топлива на прсодо
ление расстояния от аэродрома вы
лета до аэро грома посадки (прн по-
лете по воздушным трассам на креп
серских высотах),
обеспечения наибольшей полосы
просматриваемой местности (при по-
летах по ПВП и особым ПВП).
Большое значение для ведения ви-
зуальной ориентировки имеет да /ь
ность видимости земной поверхности
и ориентиров на ней Особенно это
важно нрн полетах по ПВП и особым
ПВП, koi та визуальная ориентировка
является основным способом контро-
ля пути С увеличением высоты поле
та расширяется зона пролетаемой ме
стностн просматриваемая экипажем
с борта ВС. Однако дальнейшее уве-
личение высоты ограничивается проз-
рачностью атмосферы Наивыгодней
шая высота полета для визуальных
наблюдений и ведения ориентировки
при полетах по ПВП и ОПВП
Н1(„ = ^40 £2-6 35 (111)
г те Ln метеорологическая види
мость, км.
Наивыгоднейшие высоты полета
для визуальной ориентировки следую-
щие.
км 1 2 4 6 8 10
Нн „, м.. 50 280 1130 2370 3850 5480
Выполнение поисковых работ тре-
бует обнаружения в полете точечных
98
(малора«мерных) ориентиров и объек
тов на земной или водной поверхно-
сти При этом наивыгоднейшая высо
та полета в метрах
/7и,в 100/ м "р £м exp X
V i
х [0.24------— 1.56 , (11 2)
\ 100 I
где £м — метеорологическая вили
мость, км, 1 — скорость полета ВС
км/ч
Вследствие необходимости расноз
иаиання точечных ориентиров в ней
учтены продолжительноегь наблюде
ния, определяемое скоростью полета
Вследствие этого высота, полученная
по формуле (11.2), меньше, чем по
(11 1)
Если поиск выполняется с приме
нением РНС, работающих в диапазо
не УКВ, то минимальная высота по
лета в метрах, нрн которой можно
получить еще радиосигналы от назем
ной радиостанции,
I Р г
Winfn= ’О3 sec—---------1J =
\ оз
^ 0,078D2, (11 3)
где D — дальность действия РНС, км
— радиус Земли, км
При работе бортового радиокомна
са АРК-У2 с наземной радиостанцией
типа Р 885У минимальной высотой
полета с учетом рефракции является
//-260-?-300 м
11.4. Оптимизация контроля
и исправления пути
Контроль пути ВС в полете — обя
зательный элемент процесса самоле
товождения. В результате контроля
пути экипаж сравнивает фактическое
МС с расчетным, полученным о ре
зультате автоматизированного ечнеле
ния пути или графической работы на
полетной карте, т. е выполняет кор
рекцню МС. Это дает возможность
периодически ликвидировать накаплн
вающиеся погрешности самолетовож
депия.
Один из возможных путей новы
шения точности самолетовождения —
Рис 11.2. Распределение точек с минимальными погрешностями определения
МС но данным УД РНС
совершенствование методики неволь
зования навигационных средств, на-
ходящихся на борте ВС. Для этого
процесс коррекции МС оптимизирует
ся с целью юстнження минимального
или допустимого значения погреши»
сти определения МС. В зависимости
от применяемых средств определения
МС мето 1ика оптимизации режима
контроля пути — коррекции МС —
меняется.
Полуавтоматический контроль пу-
ти имеет место, когда счисленные
автоматической навигационной снсте
мой координаты места ВС сравнива-
ются с координатами МС, полученны-
ми от внешних источников позицион-
ной информации в результате измере-
ния полярных координат МС и их
дальнейшего преобразования в систе-
му координат, используемую для
счисления пути Наибольшее приме-
нение в гражданской авиации для
коррекции пути получили угломерно-
дальномерные радионавигационные
системы типов РСБН 2. ВОР ДМЕ,
бортовые и наземные РЛС. Эти стан-
ции в пределах рабочих областей вы-
тают текущие значения пеленга и
тальности ВС от радиомаяка.
Точность полученного МС нахо-
дится в зависимости от расстояния
I*
между ВС и РМ характеризуется бо-
ковой СКП:
°.’к = sin «)2-| (Оц Л cos а)2,
(Н4)
где Од, On — СКП измерения дально-
сти и пеленга; Д — расстояние меж
ду ВС и РМ; а—угол, измеренный в
точке МС, между осью ВТ и направ-
лением на радиомаяк
Из распределения СКП МС о1)(,
полученных с помощью УД РНС.
вдоль воздушной трассы при разлпч
пых боковых смещениях РМ Z„
(рнс. 11.2) видно, что существуют
точки, гдео2|< имеет наименьшее зна-
чение, и удаление их d от траверза
РМ >ависит от бокового смешения
РМ
Точка с наивысшей точностью оп
ре деления МС располагается на осп
воздушной трассы и смещена относи
телыю траверза радиомаяка на рас-
стояние
V 2р (<Тд Оц Zp)
при 0 Zp Од о„;
О
при Zp > Од о„.
(Н.5)
99
Наибольшее удаление dMM—ZpM име-
ет место при смещении РМ на ZpM =
=Од '2ап. Удаления точек с минималь-
ными погрешностями измерения МС
для РСБН-2 с точностными характе-
ристиками <тп=0,85° и Од=0,95 км
следующие:
Zp. км ............10 20 30 40
dM, км ........... 23 30 32 31
OzK(nin. км 0-5 0,7 0,8 0,88
Zp. км ... 50 60 63.9
dM, км........... 26 15 0
п-кп11„. «м . . .0,93 0.95 0,95
Для принятых точностных харак-
теристик максимальное значение
dN.M — Zp.M = 32 км.
Выполнять коррекцию МС в точ-
ках, где о?в имеет минимальное зна-
чение, с позиции общей точности са
молетовождеиия не всегда целесооб-
разно. Это объясняется тем. что в
процессе полета ВС может находить-
ся как в пределах рабочих областей
РНС, так и вне их. Полет за предела-
ми рабочих областей выполняется с
постоянным курсом, расчетное значе-
ние которого было получено после
последней коррекции МС и исправле-
ния пути. На этом участке происхо-
дит накопление суммарной боковой
погрешности самолетовождения Ozs
по закону, близкому к линейному
(выражения 8.17 и 8.23). Наибольше-
го значения о2£ достигает в конце
автономного участка, т. е. к моменту
входа в рабочую область очередного
радиомаяка. Момент последней кор-
рекции А4С на выходе из рабочей об-
ласти предыдущего РМ находят, ми
кнмизируя погрешность о21 именно
в этой точке.
Путь, проходимый ВС от точки
траверза первого РМ до точки тра-
верза второго РМ, складывается из
трех участков (рис. 11.3):
удаления последней точки коррек-
ции Г/С] на выходе из рабочей обла
стн первого РМ dt;
автономного участка полета S, на
холящегося за пределами рабочих об-
ластей (между точками ТК\ и ТК?).
Он может содержать несколько изло-
мов воздушной трассы;
удаления точки коррекции TKi на
входе в рабочую область очередного
РМ d2.
Оптимальное удаление точки пос-
ледней коррекции МС на выходе из
рабочей области угломерно-да гьно-
исрной РНС находят по точке экс
тремума функции по переменной d,.
%<*1)г + А'?Чг
~*-4d.)2+o’ (11.6)
пи-1 •
где On, — СКП измерения пеленга
РНС; Кечг — коэффициент точности
счисления, <т2— СКП пилотирова-
ния; — суммарное расстояние меж-
ду РМ, равное Sj.=d|+S+d2, d|—
удаление точки коррекции МС на вы-
ходе из рабочей области РНС.
Коэффициент, учитывающий СКП
измерения радиопеленгов первого и
второго РМ рассматриваемой пары.
-4 (ап,+апг),/ап,. (|17>
Рис. 11.3. Определение оптимальных точек коррекции МС на границе рабочей
области УД РНС
100
Располагая точностными характе-
ристиками РНС и бортового навига-
ционного оборудования, можно рас-
считать удаление оптимальной точки
последней коррекции МС, отсчиты-
ваемое вдоль оси ВТ от точки тра-
верза РМ:
d.iu'f
------------------------.$’» s.s
(°п. ЛечУ .4* -
(И8)
где Б — коэффициент, значения кото-
рого приведены в табл. 11.1.
Удаление точки коррекции Г Ki на
входе в рабочую область очередного
РМ
d2 =—dOI1T BdOI1T. (11.9)
° 112
Значения dnln и d? будут менять-
ся в зависимости от фактического
расстояния между смежными радио-
маяками угломерно-дальномерных
РНС. Значения коэффициентов А, Б
н В применительно для самолетов
Ту-154 (/(сч=0.014) приведены в
табл. 11.1.
Находясь в пределах рабочей об
ласти (РО), экипаж ВС может вы
поднять коррекцию МС в любой мо
мент времени, в любой точке марш-
рута. Сочетание работы механизма
счисления пути бортовой навигацион
пой системы со средствами независи-
мого определения МС еще больше
расширяет эти возможности, что по-
зволяет реже уточнять свое местопо-
ложение. Оптимизацию режима кор-
рекции МС на участке от d> до dam
целесообразно произвести по крите
рпю минимально допустимого числа
коррекции МС. Это достигается со-
блюдением равенства суммарной и
допустимой СКП самолетовождения
а,.. — о,
'доп
Расстояния между точками кор
рскции МС в пределах рабочей обла-
сти УД РМ
(11.10)
Таблица 11.1. Исходные данные
для расчета оптимальных
удалений ТК
Применяемые пары РНС Коэффициенты
.4 Б В s2inax
РСБН — РСБН 2 0,39 1 386 км
ВОР/ДМЕ — ВОР/ДМЕ 2 0,15 1 216
БРЛС — БРЛС 2 0,075 1 197
РСБН — ВОР/ДМЕ 1 .34 0.46 0,34 293
ВОР/ДМЕ — РСБН 3,94 0.16 2,94
РСБН — БРЛС 1,22 0,47 0,22 278
БРЛС —РСБН 5,47 0,1 4,47
ВОР/ДМЕ — БРЛС 1,66 0.13 0,66 206
БРЛС — ВОР/ДМЕ 2,52 0.09 1,52
где о/д(1П — допустимая погрешность,
являющаяся показателем потребной
точности самолетовож дення и завися-
щая от ширины воздушной трассы и
гарантийной вероятности; d - удале-
ние предыдущей ТК от траверза РМ
Номограмма определения \S для
Ту-154 приведена на рис 11.4
Если перед экипажем поставлена
задача вывода ВС в точку, находя-
щуюся в море на удалении DH от бе
рега, на котором установлен УД РМ.
то оптимальное удаление последней
точки коррекции МС
d<niT
(ПН)
Все выводы, касающиеся примене-
ния УД РНС, в полной мере распро-
страняются и на радиолокационные
ориентиры при использовании борто-
вой РЛС
Контроль пути при визуальной
ориентировке имеет место при поле-
тах по ПВП и ОПВП на малых и
средних высотах. Опре деление поло-
жения ВС визуально производится
путем опознавания пролетаемой мест-
ности с помощью полетной карты и
101
Рис. 11.4. Номограмма определения
\S для самолета Ту-154
1 — режим курсо-доплеровского счисления,
коррекция МС по РСБН (Zp — О); 2 — ре
жим курсо доплеровского счисления кор-
рекция МС по РСБН (Zp=200 км); Л ре
жим курсо доплеровского счисления, кор-
рекция МС по БРЛС (Zp= О км). 4 режим
курсо доплеровского счисления, коррекции
МС по БРЛС (Zp - 200 км); 5 режим
Kvpco-воздушилго счисления. коррекция
МС по РСБН (Zp-o); в режим курсо
воздушного счисления коррекция МС по
РСБН (Zp - 200 км)
определения МС по относительному
расположению земных ориентиров.
Эффективность визуальной ори
ентировки оценивается по тому, как
экипаж сумел использовать элементы
земной поверхности для опре юления
своего местоположения. Большое
влияние на успешность ведения визу-
альной ориентировки оказывает час-
тота контроля пути Непрерывное сли-
чение карты с местностью позволяет
в любой момент времени получить
свое местоположение. Однако это
очень утомляет экипаж и исключает
возможность комплексного примене-
ния средств и способов самолетовож
тения, что опасно и поэтому нсприем
лемо. Редкое обращение к полетной
карте в полете приводит к тому, что
значительно расширяется зона воз-
можного положения ВС., и для опо-
знавания местности требуется значи
тельное время. Чем больше был ин-
тервал времени после последнего кон
102
троля пути, тем меньшая вероятность,
что местность будет опознанной и воз-
растает возможность потери ориенти-
ровки Для повышения эффективности
визуальной ориентировки важно опре
делять и выдерживать предельно до-
пустимые расстояния меж ту точками
визуального контроля пути.
При расчете предельного расстоя
ния Sk.<> должны учитываться
дальность обнаружения D„r,„. за
висящая от метеорологической даль
ности видимости и может быть при-
нята 0.75
точность визуального МС при пос
зелием определении <^zMC пг 1/2 и
счисления пути А'Сч;
путевая скорость полета IV;
заданная гарантийная вероятность
невыхода ВС за пределы дальности
обнаружения прн РГ = О,95 (Х = 2).
характерность наземных ориенти-
ров. представленная про юлжителыю-
стью времени, необходимого для опоз-
навания местности т нли числом об-
ращений к полетной карте для сличе-
ния ее с местностью п.
Чтобы обеспечить заданный уро
вень надежности самолетовождения,
предельно допустимые расстояния
между контрольными ориентирами не
должны превышать:
•$к. о ”77 X
АГч
./^б(1-(Ц7П зоог
*1 -----------V--------“%<•
(Н 12)
где X — аргумент функции Лапласа,
определяемый согласно заданному
значению гарантииной вероятности
Ртр.
Для практического использования
данной формулы целесообразно для
тайного типа ВС (Л< const, U’’~
= V=const) составить график
Исправление пути производится
прн наличии уклонения ВС от линии
заданного пути Зафиксированное в
результате контроля линейно боковое
уклонение ВС Z требует от экипажа
выполнения специального маневра
для вывода его иа ЛЗП И.з всех ни
дон маневра самым неблагоприятным
с экономической точки зрения являет
ся S образный маневр, представляю
щий собой слитный разворот ВС на
угол и в одну, а затем в другую сто-
рону .тля плавного вписывания в ли
нпю заданного пути. При его выпол
нении имеет место наибольшее удли
некие фактической траектории ASM
по сравнению с продвижением по
маршруту за время маневра [см
(7.14)1.
Для приближенного расчета выраже-
ние (7.14) можно заменить более
простым
\SM 0.33Z1/ZT, (II. 13)
г тс Z— линейно-боковое уклонение
ВС от ЛЗП.
Можно также использовать при
ближенное выражение угла отворо
та в градусах:
а= 60VZ~R. (11-14)
При выполнении S-образного ма-
невра Ту-154 на скорости Т-900 км/ч
с креном 15° для вывода на ЛЗП пос
ле уклонения его на 8 км удлинение
пути достигает Д5Ы = 1,6 км.
11.5. Оптимизация измерения
навигационных элементов
попета
При отсутствии иа борту ВС
средств, позволяющих измерять угол
сноса и путевую скорость непосредст-
венно, навигационные элементы изме-
ряют косвенно — на контрольном
этапе или базисным способом с при
менением технических средств. Оии
требуют точной фиксации на карте
или экране БРЛС точек начала и
окончания промера Погрешность из-
мерения в основном зависит от точ
кости определения МС и от возмож
кого изменения ветра в процесса про
мера
На точность полученных навигаци
онных элементов в большой степени
нлняет глина контрольного этапа
(КЭ) или продолжительность ироме
ра При достаточно большой длине
КЭ ошибки определения МС имеют
малый «вео и оказывают незиачи
тельное влияние иа результаты изме
рения Однако увеличение длины КЗ
вызывает появление пропорциональ-
но возрастающей Vsb:, погрешности
из-за неучтенной изменчивости ветра
Вследствие противоречивости
влияния указанных факторов может
быть найдено оптимальное решение —
наиболее целесообразная длина кон-
трольного этапа, позволяющая произ
водить измерения УС и W с наи
меньшими ошибками.
Оптимальная протяженность уча
стка. при которой будет наименьшая
суммарная погрешность, определится
при измерении U"
^опт — 19,5 х
(II 15)
при измерении УС
где W— путевая скорость, км/ч, U—
предполагаемая скорость ветра в пре
делах 40—80 км/ч; от — радиальная
СКП определения МС, км; о>—СКП
отсчета времени, равная 0,3 с при от
счете времени по секундомеру и 25 с
прн округлении отсчета времени по
часам до целых минут.
Учитывая то. что измерения нави
гациониых элементов иа контрольном
этапе и при базисном способе имеют
общую принципиальную основу, полу
чеиная формула (11.15) может при
меняться и для одного, и для другого
способа.
При измерении угла сноса бариче-
ским способом при совместном ис-
пользовании барометрического выео
томера и радиовысотомера РВ 5 оп
тимальная продолжительность изме-
рения в минутах
йшт (12 250 IPp sin <р) г,
где IF. U — путевая скорость ВС и
скорость ветра, км/ч; ф — широта ме-
ста измерения, но ф>25°, ks — коэф
103
фицпенг изменчивости ветра, тля ско-
рости ветра 40—80 км/ч £з=0.035.
Прн измерении УС барическим
способом на самолете Ил-14 на широ-
те 70° прн IV'=320 км ч и предпола-
гаемом ветре 80 км ч оптимальная
продолжительность измерения угла
сноса равна 20 мин.
11.6. Требования к
оптимальному размещению
наземных
угломерно-дальномерных
РНС
Обеспечение натежного самолето-
вож тения, помимо точности измере-
ния навигационных параметров с по-
мощью РНС, предъявляет определен-
ные требования к их размещению
в толь воздушной трассы. Определяю-
щим показателем прн этом является
затанное значение вероятности невы-
хода ВС за пределы воздушной трас-
сы.
Основными требованиями к рас-
становке наземных радиомаяков илн
выбору их для применения в полете
являются: предельно допустимые зна-
чения расстояний между ними вдоль
воздушной трассы и боковых смеще-
ний РМ относительно осп ВТ.
Выполнение коррекции МС на оп-
тимальном удалении от траверза РМ
позволяет вывести самолет в преде-
лы рабочей области очередного ра
дномаяка с наименьшей суммарной
погрешностью (11.6).
Однако это не означает, что фак-
тическая средняя квадратическая по-
грешность ошибки самолетовождения
будет меньше допустимой o2J. —
агц1)1|=/(Рзад, Ь). Для выполнения
требований Ртр = Р™а необходимо оп
рсделить фактор, оказывающий ос-
новное влияние на точность самоле-
товождения Прн постоянных точно-
ствых характеристиках наземного и
бортового оборудования самолета
(On. Кеч) таким фактором является
расстояние между смежными радио-
маяками S£, измеренное вдоль воз-
душной трассы.
Предельно допустимое расстояние
''х max’ ПРИ котором минимальная по-
104
грешность o2J.,illn полученная в ре-
зхльтате послезней перед автономным
участком полета коррекции МС на
оптимальном удалении (11.8). будет
равна допустимой, может быть полу-
чено решением квадратного уравне
пня (11.6):
+ аг ~аг = °
пил доп
относительно неизвестного S£- При
этом
— Adj-ф X
Леч
1/пг )
г доп 'пил'
(11.16)
Максимальное значение
соответствует точке экстремума функ-
ции (11.16) по переменной dj. В дан
ном случае величина представляет
собой оптимальное удаление послед-
ней точки коррекции МС на выходе
из рабочей области РНС. После пре
образований
с -
°Smax
(Н.17)
гте А—коэффициент, рассчитывае-
мый по (11.7) или выбираемый по
табл. 11.1 для Ту-154; агдоп—пока-
затель потребной точности самолето-
вождения, зависящий от ширины ВТ
и вероятности ее выдерживания.
Применяя формулу (11.17), мож-
но получить максимально допустимое
расстояние между соседними (вдоль
полета) радиомаяками угломерно-
дальномерных РНС или радиолокаци-
онными ориентирами, прн котором ве-
роятность выдерживания воздушной
трассы будет не хуже заданной, но
при условии, что последняя коррек-
ция МС была выполнена иа оптималь-
ном удалении [см. (11.8)].
Анализ зависимости max от коэф-
фициента Кеч для двух значений оп
и трех значений А (рнс. Н-5) показы-
вает, что начиная с Кгч_ 0,02 пре-
дельно допустимое расстояние между
РМ или РЛО почти ие меняется. Прн
этом остается практически по
стоянкой
В табл. 11 1 приведены значения
предельно допустимых расстояний
’’iniax междУ угломерно-дадьномер-
нымн радиомаяками применительно к
самолету Ту-154 для различных соче-
тании использования наземных РНС.
Полученные значения 5£|11а> ис-
пользуются в период подготовки к
полету, когда планируется нспользо
ванне РНС и выбор конкретных ра
диомаяков для контроля пути срав-
нением фактических расстояний меж-
ду смежными угломерно- дальномер-
ными РМ с полученным для выбран-
ных условий. Если в результате срав-
нения какой-то пары РМ окажется,
что5£>5£|11их, то необходимо найти
тублирующее средство контроля ну
ти, с тем чтобы ошибка самолетовож-
дения не оказалась больше допусти-
мой.
Предельное смещение наземного
радиомаяка относительно воздушной
трассы определяется по условиям по-
лучения радиосигнала и по допусти-
мой погрешности определения МС:
zi> пр < } 13.7Н — (azдоп пп)2.
(П 18)
Это выражение показывает пре-
данное боковое смещение РМ или
РЛО. при котором погрешность изме-
рения радиопеленга и дальности бу-
дут не более допустимых. С помо-
щью графика (рис. 11.6), построенно-
го по выполнению (11.18), можно оце-
нить возможность использования того
пли иного угломерно-дальномерного
ра шомаяка. НРЛС или радиолокаци-
онного ориентира для выполнения
контроля пути с точностью не хуже
заданной. Заштрихованная часть на
нем показывает рабочую область
применения РИС (И, а„).
Например, радиомаяк (егп = 1°)
можно выбрать для коррекции МС,
если при оптимальной дальности, не
превышающей d=140 км. его боковое
смещение относительно ВТ не пре-
взойдет 200 км для высоты полета
5000 м и 330 м для высоты 10 000 м
Рнс. 11.5. Определение $Е1пах между
УД радиомаяками или РЛО
Рнс. 116 Определение допустимого
бокового смещения РМ (заштрихо-
ванная часть указывает границы ра-
бочей области РМ)
105
Глава 12
КОНТРОЛЬ КАЧЕСТВА САМОЛЕТОВОЖДЕНИЯ
12.1. Средства сбора полетной
информации
Бортовые регистрирующие системы
позволяют судить о приемах пилоти-
рования ВС, режимах работы и со
стоянии его агрегатов, получать ин-
формацию о текущем пространствен-
ном положении самолета, что iaer
возможность решать за гачи совер-
шенствования методики профессио-
нальной подготовки летного состава,
анализировать полученные данные,
отражающие качество выполнения по-
лета. Бортовые регистрирующие си-
стемы устанавливаются (ля рассле ю-
ван ня причин авиационных происше-
ствий и предпосылок к ним, по они
являются также важным источником
информации о качестве самолетовож-
дения.
Средства сбора полетной инфор-
мации (ССГ1И) различаются по
принципу их действия, числу регист-
рируемых параметров, типу носителя
информации и (ругим признакам.
Многообразие видов СС.ПИ обуслов-
лено непрерывным появлением новых,
более совершенных средств и разли-
чием типов ВС
Барограф АД-2 устанавливается
на легких самолетах н вертолетах и
представляет собой рычажный меха-
нический прибор с анероидной короб
кой. Изменение высоты полета вызы-
вает деформацию анероидной короб-
ки и смещение рычага, на котором
закреплено перо прибора. Носителем
информации является бумажная диа-
граммная лента (при температуре
ниже —35° запись производится по
закопченной поверхности глянцевой
бумажной ленты) с нанесенной на ней
криволинейной сеткой ординат вы-
сот полета. Лента закрепляется па
барабане, приводимом во вращение
часовым механизмом. Перед полетом
па лепту наносятся дата полета, бор-
товой номер ВС, фамилия команди-
ра, атмосферное давление, температу-
ра н время пуска часового механиз-
ма. Погрешности записи высоты с
помощью ДД-2 значительны и вызы
ваются трениями и люфтами в под-
вижных соединениях, температурны-
ми деформациями элементов и други-
ми причинами.
Трехкомпонентный самописец
КЗ-63 предназначен для записи в по-
лете барометрической высоты, инди-
каторной скорости н вертикальной
перегрузки. Регистрация высоты и
скорости основана на манометричес-
ком принципе, а перегрузка измеряет-
ся с помощью пружинных весов. За-
пись наносится царапанием специаль
ным резцом эмульсионного слоя кино-
пленки, перемещаемой электрическим
лентопротяжным механизмом. На
пленку наносятся также отметки
времени в виде штрихов, следующих
с интервалом 3 мин. Погрешности за-
писи приборной скорости и высоты
полета (без учета погрешностей де
шифровки) составляют ±4%.
Система автоматической регистра-
ции параметров полета САРПП-12Д
устанавливается на большинстве ти-
пов вертолетов и представляет собой
шлейфный осциллограф, производя-
щий запись световым лучом на фото
пленку. САРПП-12Д производит не-
прерывную запись шести аналоговых
параметров, сигналов девяти разовых
команд и отметку текущего времени.
Высота измеряется в диапазоне 50..
6000 м, индикаторная скорость ГЯр=
= 60 ... 400 км/ч, угол крена состав-
ляет ±60 , угол тангажа ±45°. Ос-
новная погрешность регистрации со-
ставляет ±5% от максимального зна-
чения диапазона регистрации.
Магнитная система регистрации
параметров МСРП-12-96 имеет 12 из-
мерительных каналов для регистра-
ции аналоговых величин, опрашивае-
мых последовательно с частотой
12 Гц. Запись на магнитную лентх
ведется в циклическом режиме с
непрерывным стиранием ранее запи-
санных сигналов так, что на ленте
всегда остается информация о послед
них 75 мин полета. Записываются
также дискретные сигналы в виде ра
106
зовых команд. Суммарная погреш-
ность регистрации и воспроизведения
данных не превышает ±3% (без
учета погрешности датчиков, состав-
ляющей для различных типов 2—3% )
Механизм помещен в защитный ша
рообразный контейнер, обеспечиваю-
щий сохранность записи при воздей-
ствии ударной перегрузки до 1000 ед,
статической нагрузки 10 000 Н, тепло-
вого удара 1000 “С в течение 10 мин
Магнитная система регистрации
параметров МСРП-64-2 регистрирует
на магнитной ленте 48 аналоговых
сигналов и 32 разовые команды. Ча
стота опроса трех наиболее быстро
меняющихся параметров составляет
8 Гц. а остальных 45 ... 2 Гц Осо-
бенностью системы является наличие
блока преобразования аналоговых
сигналов датчиков в цифровой код,
фиксируемый в виде серии импульсов
на магнитной ленте. Суммарная по-
грешность преобразования I ... 1,5%.
В каждый момент времени сохраня-
ется объем данных о полете продол
жительностью 25 ч.
Система МСРП-256 по своему наз-
начению и построению аналогична
МСРП-64-2, но имеет более широкие
возможности В ее состав входят экс-
плуатационный и аварийный накопи-
тели. Эксплуатационный накопитель
содержит информацию о 228 аналого-
вых параметрах и 128 разовых комаи-
тах, характеризующих полет за пос-
ледние 12,5 ч. Аварийный накопитель
работает в непрерывном режиме н
помещается в теплоуларозащищенный
цилиндрический контейнер.
Магнитная система регистрации
параметров полета ВС МВЛ и АР
образует малогабаритный автоном-
ный комплекс бортовых и наземных
устройств. Масса бортовой части си-
стемы БУР-1 составляет 14,1 кг. Си
стема позволяет регистрировать до
25 аналоговых величии (преобразуе
мых в цифровой код) и 48 разовых
команд в течение 50 ч полета. Сум-
марная погрешность регистрации па-
раметров полета 1.5%. Основными
навигационными параметрами, регист-
рируемыми системами типа МСРП,
являются курс, высота и скорость по-
лета.
Программа развития современных
ССПИ предусматривает создание ком
плексных систем сбора и обработки
параметрической информации Борто-
вая часть таких систем будет не
только измерять и регистрировать па-
раметры полета, но и анализировать
измеренные значения, выдавать экипа-
жу результаты анализа, документиро-
вать результаты измерений на магнит
ную ленту и печатный бланк
Аппаратура речевых сообщений
РИ-65 имеет в своем составе сигнали-
заторы достижения контролируемыми
параметрами заданного уровня значе-
ний Прн срабатывании сигнализато
ров магнитофон воспроизводит одно
из шестнадцати заранее записанных
на магнитной ленте предупредитель
ных речевых сообщений о неблагопрп
ятном событии. Каждое речевое сооб-
щение повторяется дважды в течение
10—12 с для прослушивания экипа-
жем и одновременно записывается на
бортовой магнитофон и передается в
эфир.
Группа регистраторов речи и зву-
ковой обстановки в кабине экипажа
включает магнитофон MC-6I и уст-
ройство МАРС-Б. Самолетный магии
тофон MC-6I осуществляет запись
речи с выходов радиоприемников и
СПУ на проволочный звуконоситель,
запаса которого достаточно на 5,5 ч
непрерывной работы. Имеется три ре
жима работы: непрерывный, запуска
от голоса и специальный (для инди
визуальной записи).
Устройство МАРС-БМ имеет так-
же внешние микрофоны для регист
рации звуковой обстановки в кабине
экипажа Для синхронизации речевой
информации с данными МСРП-64 и
МСРП-256 на пленке магнитофонов
фиксируется код текущего времени
вырабатываемый этими системами.
12.2. Применение средств
сбора полетной информации
Существующие в настоящее врс
мя средства сбора полетной информа
ции (ССПИ) не позволяют осущест
влять контроль качества самолето
вождения в полном объеме. Одной
из причин этого является отсутствие
107
записи координатной информации и
информации, поступающей от радио-
навигационных средств, что не дает
возможность точно восстановить тра-
екторию полета Однако путем ie-
шифровки данных ССПИ можно ус-
тановить факты грубого нарушения
режима полета, потерн ориентиров-
ки, нарушения технологии навигаци-
онной деятельности.
Дешифрование барограмм само-
писца АД-2 целесообразно осущест-
влять параллельно с использованием
информации, содержащейся в полет-
ном задании, записи радиообмена
и т п На основе анализа данных
расшифровки можно определить каче-
ство выдерживания заданной высоты
полета, возможные факты скрытых
вынужденных посадок и потерь ори-
ентировок и др. Барограмма расшиф-
ровывается с помощью координатной
сетки на диаграммной ленте или с по-
мощью шаблона.
Разметка времени поле-
т а осуществляется от времени взле-
та путем отсчета числа интервалов,
образованных отстоящими друг от
друга криволинейными ординатами.
При установке барабана барографа
на 6 ч цена большого деления равна
30 мнн, а малого — 6 мин (при пяти-
кратном разбиении большого деления)
или 5 мин (при шестикратном раз-
биении). При установке других ско-
ростей вращения барабана цена деле-
ний соответственно изменяется. Шаг
дешифрирования целесообразно выби-
рать исходя из характера изменения
записи по участкам: чем плавнее из-
меняется высота, тем больше можно
выбрать шаг Для определения баро-
метрической высоты полета относи-
тельно заданного уровня (изобариче-
ской поверхности, соответствующей
давлению 760 мм рт. ст илн мини-
мальному приведенному) использует-
ся уровень, соответствующий положе-
нию самолета на земле (перед выле-
том или после посадки). Пользуясь
данными давления аэродрома, запи-
санными иа барограмме, и значением
барометрической ступени (II м на
I мм рт. ст.), можно рассчитать ба-
рометрическую высоту полета.
Истинную высоту можно
приближенно оценить, если по време-
108
ни полета определить местоположе
ние самолета в заданный момент вре-
мени и снять с карты среднюю высо-
ту рельефа в данной местности. Вре
мя полета, полученное по барограм
ме, необходимо сопоставить с запи-
санным в полетном задании и штур-
манском бортовом журнале. По вре
мени и высоте снижения можно при
ближенно оценить вертикальную ско
рость. Следует учитывать, что вслед-
ствие низкой точности регистрации
погрешности определения высоты и
вертикальной скорости могут быть ве-
лики.
Информация, записанная самопис
цем КЗ-63, обрабатывается с помо-
щью аппарата «Микрофот> или
проекционного фонаря типа ЭДИ 452.
Расшифровка лент самописца заклю
чается в определении приборной ско-
рости, барометрической высоты и
вертикальной перегрузки и произво-
дится по шаблону, построенному по
тарнровочной ленте данного самопис-
ца. Цена делений шаблона составляет
200 м по высоте 20 км/ч по скоро-
сти. 0,1 ед. по перегрузке. По отмет-
кам, нанесенным штрихами через
каждые 3 мин, определяются участки
полета, соответствие выдерживаемых
высот полета заданным. По прибор-
ной скорости, высоте полета и тем-
пературе может быть приближенно
оценена истинная скорость ВС. По
записи перегрузки определяется вер-
тикальная перегрузка при посадке, а
также попадание ВС в зоны турбу
лентности.
Для дешифрирования данных
САРПП-12Д используются тарировоч
ные графики, устанавливающие связь
между измеряемым параметром и
значением ординаты линии записи
этого параметра на пленке. По тари
ровочным графикам строятся табло
ны или подвижные шкалы, облегчаю-
щие процесс дешифрирования. Де
шифрироваиие и анализ фотопленок
САРПП позволяют получить иифор
мацию о соблюдении требований без-
опасности полета и заданного режи
ма. Следует учитывать, что с учетом
погрешностей датчика и возможно
стей ручной дешифровки общая по
грешность записи и воспроизведения
достигает ±10—15%.
Декодирование полетной информа-
ции систечы МСРП-12-96 осуществля-
ется с помощью наземного декодиру-
ющего устройства ДУМС, а
МСРП-64-2 — устройства НДУ-8.
Эти декодирующие устройства за пи
сывают на фотобумагу несколько па-
раметров, зарегистрированных на маг-
нитной ленте (ДУМС — 4, НДУ-8 —
параметров). Одновременно с запи-
сью параметров полета на осцилло-
грамму наносятся поперечные линии
с интервалом I с. Расшифровка осу-
ществляется с помощью тарировоч-
ных графиков и позволяет оценить
число М барометрическую высоту и
индикаторную скорость (путем введе-
ния аэродинамических поправок), а
также другие параметры. По разно-
сти высот и времени снижения может
быть оценена вертикальная скорость.
Устройство «Луч-74» использует-
ся для обработки полетной информа-
ции, накопленной бортовыми регист-
раторами типа МСРП. Оно обеспечи-
вает автоматический количественный
и логический анализ полетной инфор-
мации и позволяет документировать
результаты обработки. Графическая
регистрация изменения параметров
осуществляется на специальной элек-
трохимической бумаге н вывод ре
зультатов производится на печатный
бланк с помощью электрифицирован-
ной пишущей машинки. Обработка
полетной информации, поступающей в
устройство «Луч 74», ведется в темпе
ее ввода.
При автоматизирован
иой обработке на график одно-
временно может выводиться 32 пара-
метра и 16 разовых команд, а также
метки времени с оцифровкой часов и
минут. На бланке цифропечати мо-
жет быть представлена информация
о значениях контролируемых пара-
метров и наличии разовых команд в
течение заданного интервала обработ-
ки (данные представляются ежесе-
кундно).
Экспресс-анализ полет-
ной информации с помощью
«Луч-74» заключается в послеюва-
тельном автоматическом сравнении
фактических значений параметров илн
скорости их изменения во времени с
их допустимыми значениями, установ-
ленными нормативной летно-техниче-
ской документацией. Обработка ин-
формации ведется по алгоритмам,
индивидуальным для каждого типа
самолета. На бланке экспресс-анализа
выводится информация о номере са-
молета. номере рейса, дате полета,
условный номер события отклонения,
иомер канала регистрации параметра
и максимальное (минимальное) фи
зическое значение параметра в период
существования события, время нача-
ла и окончания события отклонения.
Информация выводится в цифробук-
венном виде
Речевая информация, накопленная
на МС-61 и МАРС-БМ, воспроизво-
дится на специальных наземных маг-
нитофонах. Характерная информация,
полученная при прослушивании запи
си, наносится в соответствующих точ-
ках схемы полета ВС. Наиболее эф-
фективно совместное использование
звуковой и параметрической ииформа
цни. Запись позволяет восстановить
последовательность выполнения неко-
торых навигационных операций, про-
контролировать достоверность инфор-
мации в штурманском бортовом жур-
нале (курс, высота, время пролета
ППМ).
Эффективность использования
ССПИ для контроля качества само-
летовождения еше больше повысится
в будущем, когда увеличится их точ
ность и будет расширен объем реги
стрируемых навигационных парамет
ров.
12.3. Оценка качества
самолетовождения по данным
наземных радиолокационных
измерений
Контроль точности и надежности
самолетовождения по заданному
маршруту может быть осуществлен
наземными средствами с использова
нием наземных радиолокационных
станций (НРЛС). Сущность данного
способа заключается в регистрации
полярных координат ВС относительно
НРЛС, расчете координат, характе-
ризующих положение ВС относитель-
но заданной траектории полета, и
оценке необходимых показателей точ-
109
пости и надежности самолетовожде-
ния.
Запись траекторий полета может
осуществляться только в пределах
рабочей области НРЛС. Использова-
ние таких радиолокаторов. как
«Утес», «Скала-М», позволяет осуще-
ствлять контроль самолетовождения
в обширном районе радиусом 350..
400 км. Точность определения коорди-
нат ВС зависит от погрешностей из
мерения азимута и дальности с помо-
щью НРЛС, а также от удаления ВС
от радиолокатора. Нрн съеме коорди-
нат ВС с экрана РЛС вносятся до-
полнительные погрешности. Повыше
нне точности записи координат может
быть достигнуто путем использования
специальной аппаратуры типа «Стати-
стика», сопряженной с НРЛС и регн
стрнрующей координаты ВС иа пер-
фоленте, а также в АС УВД.
Запись координат ВС может про-
изводиться через равные промежутки
времени (например, на каждом обо-
роте антенны НРЛС) или при проле
те ВС определенного рубежа Если
координаты снимаются непосредст-
венно с экрана РЛС, на котором на-
несен заданный маршрут полета, то
сразу могут быть оценены линейное
боковое уклонение и продольная
координата. Если регистрируются по-
лярные координаты, то частпоорто
дромнческие координаты ВС:
z = zp + D sin (ПС — Р);
s=Sp4 D cos (ПС—-Р),
г ie zp, sp — частпоортодромпческпе
координаты НРЛС, ПС, D — измерен
пые значения пеленга и удаления ВС;
Р — путевой угол ЛЗП относительно
меридиана НРЛС.
Необходимо осуществлять предва-
рительный пересчет наклонной даль-
ности в горизонтальную по соотноше-
нию
£>= VZ.2—№.
где L — измеренная наклонная даль-
ность.
По парам рассчитанных значений
z и s для последовательных моментов
времени могут быть построены тра-
ектории полета и оценены показатели
качества самолетовождении, характе-
110
рпзующне точность полета по ЛЗП и
выдерживание воздушной трассы. За-
пись траектории полета — объектив
ное средство контроля качества нави-
гационной деятельности экипажа.
Регистрация траекторий ВС дает
возможность не только оценивать ка-
чество самолетовождения в каждом
отдельном полете, но п позволяет по-
лучать статистические оценки показа-
телей точности и надежности навига-
ции по совокупности всех траекторий
полета (или траекторий полетов, вы
полненных по данному маршруту
экипажами одной авиаэскадрильп.
одного авиапредпрнятия). Для этого
по записям каждой из п траекторий
полета определяются линейные боко
вые уклонения z<j в А заданных се-
чениях маршрута с продольными
координатами Для каждого сече
ния оцениваются математические ожи-
дания ЛБУ Zj и средние квадратиче-
ские погрешности самолетовождения
Точность самолетовождения на
рассматриваемом участке маршрута в
среднем оценивается средней кватра
тической погрешностью
о2
ср
о
2
Zi
Следует учитывать, что значения о2.,
о2ср, полученные по вышеприведен
пым формулам, будут завышенными
вследствие погрешностей измерения
ПС и D (а следовательно н z) с по-
мощью НРЛС. Аналогичные формулы
могут быть использованы при оценке
точности пролета заданного рубежа.
Оценка показателя надежности
самолетовождения рассчитывается
как отношение числа боковых уклоне
ний, не превышающих по абсолютной
величине половины ширины трассы, к
общему числу полетов. Расчеты по
приведенным формулам целесообраз-
но проводить с использованием ЭВМ.
Полученные с помощью наземного
радиолокационного контроля оценки
показателей точности и на (ежиости
самолетовождения могут быть ис-
пользованы тля анализа качества
штурманского обеспечения полетов и
навигационной деятельности экипа-
жей подразделений и авиапредприя-
тий.
12.4. Методика проверки
самолетовождения в полете
Основной метод оценки качества
навигационной работы штурманов и
пилотов — проверка техники самоле
товожтения н полете. Она осущест-
вляется должностными липами штур-
манской службы, включаемыми в со-
став экипажа в качестве проверяю-
щих по специальностям. Проверка
проводится в целях допуска пилота
или штурмана к самостоятельной ра
боте, повышения в классе, допуска к
полетам па В( нового типа, допуска
к полетам при установке на ВС но-
вых навигационных систем или
средств захода на посадку, допуска к
инструкторской работе, определения
или подтверждения квалификации по
специальности, продления срока дей-
ствия свидетельства, а также после
перерыва в летной работе. Проверка
техники самолетовождения в марш-
рутных производственных полетах
проводится у пилотов н штурманов
I го и 2-го классов не реже I раза в
год, 3-го и 4-го классов ие реже I ра-
<а в 6 мес, у штурманов-аэрофото-
съсмщиков перед началом сезона.
У пилотов и штурманов, работающих
иа ВС данного типа менее гота, про-
верка проводится не реже I раза в
3 мес независимо от присвоенного
класса. Продолжительность полета
прн проверке техники самолетовожде
ния должна быть не менее 1,5 ч.
Во время предполетной подготовки
проверяющий должен:
убедиться в знании проверяемым
членом экипажа аэронавигационной и
метеорологической обстановки, по-
рядка ведения радиосвязи, требова-
ний руководящих документов и iiiici
рукцнй. способов восстановления ори
ентпровкн на различных этапах по-
лета;
оценить быстроту и правильность
выполнения предварительного расче-
та полета, заполнения левой части
штурманского бортового журнала,
определения допустимой взлетной
массы, длины сбалансированной
нзлетиой дистанции и скоростей I i.
Vr, Vj;
проверить качество проверки и
подготовки навигационного оборудо
на и ня на ВС, а также готовность
проверяемого к выполнению полета
При выполнении взлета и маневра
отхода проверяющий должен ине
нить: выполнение проверяемым требо-
ваний технологии работы; соблюди
нне установленной с.х(мы выхода из
района аэродрома; своевременность
установки давления на высотомере
при пересечении высоты перехода
На этапах маршрутного полета
проверяющий еле шт за навигацион-
ной работой проверяемого члена эки-
пажа и оценивает ее, обращая особое
внимание на комплексное использова-
ние технических сре (стн самолетовож-
дения При обнаружении ошибок, ко-
торые могут повлечь уклонение В<’ от
заданной траектории и угрозу без
опасности полета, проверяющий обя-
зан вмешаться и принять меры к их
исправлению. Он оценивает знание
мето (ов самолетовож гения и экс-
плуатации навигационных средств
умение проверяемого выбирать в за-
висимости от аэронавигационной об-
становки основные и дублирующие
средства и методы навигации В по-
лете на ВС. обору (ованных ПНК.
проверяющий оценивает своевремен-
ность и правильность выбора режима
комплекса, установки исходных дан
пых. обращая основное внимание на
выполнение контроля пути и коррек-
цию счисленных коор шпат, ее своев-
ременность, правильный выбор
средств коррекции На ВС, не обору-
дованных ПНК, проверяющий кон-
тролирует правильность применения
отдельных навигационных средств и
систем для счисления пути и коррек
ции счисленных координат, качество
ведения визуальной ориентировки.
Ill
Необходимо фиксировать вес
ошибки или случаи нерационального
применения курсовых приборов, бор-
товых РЛС, АРК, РСБН н другого
навигационного оборудования. Для
повышения точности и надежности
самолетовождения оценивается ис-
пользование информации, полученной
от диспетчера УВД. В случае возник-
новения отказа проверяющий оцени-
вает своевременность его определения
проверяемым, правильность его дей-
ствий после обнаружения. Проверяю
щему при выполнении производствен-
ных полетов недопустимо имитиро-
вать аварийную обстановку или отка-
зы в работе систем, оборудования и
приборов.
При наличии в полете опасных
метеоявлений проверяющий оценива
ет своевременность их обнархжеиия
экипажем, обоснованность решения
об их обходе, расчет к выполнение
маневра обхода зон опасных метео-
явлений, точность выхода на ЛЗП
после маневра.
Проверяется своевременность и
точность определения навигационных
элементов полета: путевой скорости,
угла сноса, фактического путевого
утла, скорости и направления ветра
и др. Прн этом оценивается правиль
ность использования для этой цели
технических средств самолетоиожде
ния. Необходимо оцепить умение про-
веряемого проводить элементарные
навигационные расчеты в уме.
Во время предпосадочной подго-
товки проверяющий контролирует
правильность выполнения расчета
элементов снижения и захода па по
садку. Прн этом он оценивает качест-
во контроля проверяемым выдержи-
вания параметров снижения, своевре-
менность и правильность их коррек-
ции, выдерживание установленной
схемы захода на посадку, проверяет
выполнение требований технологии
работы и руководства по летной экс-
плуатации Проверяющий должен об-
ратить внимание иа способность про-
веряемого постоянно представлять
положение ВС относительно ВПП,
умение быстро и точно производить
расчеты для выхо ia в заданную точ
ку схемы захода па посадку, исполь-
112
зовать информацию радионавигацион-
ных средств и диспетчера УВД.
На всех этапах полета необходимо
следить за распределением внимания
проверяемого, ведением осмотритель
ностп н радиоосмотрнтельности. Важ
ио оценить взаимодействие проверяв
мого с другими членами экипажа, а
также умение правильно вести радио-
связь. Проверяющий контролирует
также ведение штурманом или вто-
рым пилотом штурманского бордово
го журнала.
Проверяющий несет ответствен-
ность за качество предполетной под-
готовки экипажа, точность самолето-
вождения и правильность эксплуата-
ции бортового навигационного обору
дования, сохранение экипажем ори
ентировки в полете и соблюдение ус
тановленного режима полетов, пра
вилыюсть определения уровня про-
фессиональной подготовки проверяе-
мого, объективность выставляемых
оценок и представляемых выводов.
12.5. Подготовка данных
для разбора полетов
Разборы полета — важные средст-
ва для обучения и воспитания лично
го состава, повышения школы летно
го мастерства.
Подготовка к разбору в штурман-
ском отношении включает в себя ана-
лиз качества самолетовождения в по-
летах, выбранных для контроля, раз-
работку плана проведения разбора и
подготовку необходимого иллюстра-
тивного материала.
Для разбора выбираются о гин или
несколько полетов, выполненных эки-
пажами подразделения. Обычно раз-
бираются полеты, в которых с помо-
щью средств объективного контроля
были выявлены нарушения, а также
и образцовые полеты, выполненные
лучшими экипажами. Детальный ана-
лиз выбранного полета в навигацион-
ном отношении проводится с обяза-
тельным привлечением данных
средств объективного контроля и по
летной документации. Выявляются
отклонения и ошибки, допущенные
экипажем при самолетовождении,
устанавливаются их причины (при не-
обходпмости проводится беседа с
экипажем). Должны быть также от-
мечены положительные стороны нави
гационнон деятельности экипажа
По материалам анализа подготав-
ливается необходимый иллюстратив-
ный материал: схемы плакаты, гра-
фики. На них могут быть отражены
траектории полета, элементы радио-
обмена экипажа с диспетчером, дай
ные средства объективного контроля
и другая информация. Для иллюстра-
ции полета эффективно использовать
такие технические средства, как дна
проекторы, эпидиаскопы, кодоскопы,
макеты местности и т. д.
При разборе полета в штурман-
ском отношении.
дается краткая характеристика
выполненного задания;
учитывается соблюдение экипа-
жем требований руководящих доку-
ментов;
приводится качественная характе-
ристика полета в штурманском отно
пенни (качество предполетной подго
товки, уклонения от маршрута, нали-
чие возврата на аэродром вылета,
вынужденных посадок и потерь ори
ентировкн);
дается характеристика точности
са молстовождеиня (вы держи вание
ЛЗП и высоты полета, определение
навигационных элементов н МС);
оценивается качество ведения по
летной документации;
анализируются допущенные нави-
гационные ошибки в полете;
выявляются основные причины не-
достатков.
При анализе ошибок, допущенных
экипажем, необходимо указать, како-
вы должны были быть правильные
действия. На разборе не следует при
водить глубокие и подробные теоре-
тические доводы и выводы, которые
лучше оставить для проведения раз-
личных форм учебы. После разбора
должны быть сделаны общие выводы
и даны конкретные указания экипа
жам для дальнейшей их работы.
РАЗДЕЛ ТРЕТИЙ
РЕШЕНИЕ НАВИГАЦИОННЫХ ЗАДАЧ ПРИ ПОДГОТОВКЕ
И ВЫПОЛНЕНИИ ПОЛЕТА
Глава 13
ШТУРМАНСКАЯ ПОДГОТОВКА К ПОЛЕТУ
13.1. Назначение штурманской
подготовки
Штурманская подготовка к полету
играет важную роль в обеспечении
точности и надежности самолетонож
депия Прн этом усовершенствование
бортового навигационного оборудова-
ния ВС предьявляет более высокие
требования подготовке к полету и
вместе с тем изменяет ее объем и со-
держание. Объем и содержание штур
майской подготовки зависят от ха-
рактера задания, типа ВС, аэронави-
гационной обстановки и некоторых
других факторов.
При выполнении визуальных поле-
тов на малых высотах и на неволь
шие расстояния штурманская подго-
товка сводится в основном к изучению
вопросов, обеспечивающих обнаружу
иие земных ориентиров, а также уче-
та рельефа пролетаемой местности
для обеспечения безопасности поле-
тов. Необходимые навигационные ве-
личины (углы н расстояния) в этом
случае допустимо измерять непосред-
ственно на полетной карте с помо-
щью масштабной линейки н транспор
тира.
При подготовке к полетам на
транспортных ВС, не оборудованных
ПНК, визуальная ориентировка прак-
тически исключается, в соответствии
с чем большее внимание в процессе
подготовки экипажи уделяют инстру-
ментальному самолетовождению, ком-
плексному применению технических
средств, режиму полетов и расходу
топлива. Штурманская подготовка на
ВС, оборудованных ПИК, требует до-
полнительного расчета исходных дап
114
иых или по дготовки пространственно
временной программы полета для
ввода их в ПНК. обеспечивающего
выполнение полета в автоматическом
режиме г соответствующей степенью
точности и на дежности
Неавтоматический режим полета в
чайных условиях является аварийным
н применяется при отказе ПНК или
отдельных его элементов. Следова-
тельно, штурманская подготовка к по
лету должна предусматривать воз
можность применения ПНК в полете
и возможность использования упро
щепных способов навигации, тех при
емов и способов навигации, которые
применяются при иеавтоматизироваи
ном самолетовождении.
Выполнение полетов в особых ус
лозичх, независимо от типа ВС и ква
лификации экипажа требует в про
цессе штурманской подготовки более
подробного изучения особенностей
аэронавигационной обстановки, ока
зывающих влияние на надежность
самолетовождения. Однако, несмотря
на некоторые различия в объеме и со-
держании штурманской подготовки,
характер ее остается о цшаковым для
всех экипажей независимо от условий
полета, задания и типа ВС. Все воп
росы штурманской подготовки в за
висимости от степени привязки к кои
кретному полету могут быть разделе
ны на следующие:
практически независимые от кон-
кретного задания, но определяемые
условиями полетов на данном типе
ВС. в данном районе. Изучение этой
группы вопросов ведется заблаговре-
менно в процессе общей наземной
штурманской подготовки. Она прово-
дится перед предварительной подго-
товкой со вновь прибывшими в под-
разделение членами экипажа, прн
подготовке лстиого состава к осенне-
зимней и весенне летней навигации,
при вводе в строй командиров ВС и
членов экипажа;
непосредственно связанные с вы-
полнением определенного задания.
Эти вопросы отрабатываются в пери-
од предварительной штурманской
подготовки накануне дня вылета:
касающиеся фактической аэрона-
вигационной обстановки в день выле-
та Эти вопросы решаются в период
предполетной подготовки непосредст-
венно перед вылетом Объем и содер-
жание их определяются фактической
аэронавигационной обстановкой и ме-
теорологическими условиями по за
данному маршруту.
В результате отработки всех воп-
росов штурманская подготовка к по-
летам предусматривает: изучение
правил полетов и аэронавигационной
обстановки иа воздушных трассах
СССР (международных воздушных
линиях), по установленным маршру-
там, МВЛ, в районе полетов; выбор
наиболее рациональных методов са
молетовождения, позволяющих комп-
лексно использовать технические
средства навигации при полетах в
различных условиях, подбор и полго-
товку необходимой штурманской до-
кументации и штурманского снаряже-
ния; выполнение расче>а навигацион-
ных элементов, необходимых для вы-
полнения точного и надежного само-
летовождения иа этапах полета; от-
работку действий экипажа в особых
случаях полета.
13.2. Общая наземная
штурманская
подготовка
Общая наземная штурманская
подготовка позволяет определить
уровень теоретических знаний i;
практических навыков членов экипа
жа по воздушной навигации, а также
провести штурманскую подготовку по
теоретическим и практическим воп
росам, решаемым в полете. Сои ржа-
ние, объем и порядок проведения об-
щей подготовки определены по каж
дому типу ВС программами подго-
товки летного состава, вводимыми
приказом министра гражданской
авиации.
Общая наземная подготовка
нредусматр ив а е т ознаком
лен не экипажа (пилота, штурмана) с
характером работы летного потразде-
леиия; изучение программы предстоя-
щих учебно-тренировочных полетов
(ввода в строй, провозки) п докумен-
тов, регламентирующих летную рабо-
ту; проведение собеседования с чле-
нами экипажа (пилотом, штурманом)
по вопросам теории п техники само-
летовождения для определения уров-
ня нх специальных знаний.
В процессе общей штурманской
подготовки подробно изучается
географическая и климатическая ха
рактеристики воздушных трасс и рай-
она полетов, аэронавигационная об
становка, инструкции по произведет
ву полетов на основных и запасных
аэродромах, инструкции по примене-
нию навигационного оборутоваиия
ВС и соответствующие разделы РЛЭ.
Завершается она обучением экипажа
на специализированных и комплекс-
ных тренажерах, в процессе которого
отрабатываются необходимые навыки
работы с навигационной аппаратурой
согласно технологии работы
13.3. Задачи штурманской
подготовки
Предварительная штурманская
подготовка — основной вид подготов-
ки к полету. Она организуется в со-
ответствии с характером предстояще-
го полета и носит более целенаправ
ленный характер. В соответствии с
этим обьем и содержание штурман
ской подготовки к полетам на транс-
портных ВС будут отличаться от
подготовки к полетам по МВЛ, вы-
полнению авиационных работ и уста-
новленным маршрутам. В процессе
предварительной штурманской подго-
товки к полету на транспортных ВС
решаются следующие основные
задачи
подбор и подготовка полетных
карт, необходимой .документации и
справочных материалов;
115
изучение маршрута, рельефа мест-
ности, расположения препятствии по
воздушной трассе и районе аэродро-
мов, характерных радиолокационных
ориентиров по маршруту и условий
контроля пути и ориентировки, ос-
новных и запасных аэродромов по
документам аэронавигационной ин-
формации;
изучение расположения павигаци
онных средств и особенностей их
использования, особенностей самоле-
товождения н эксплуатации навига-
ционного оборудования при выполне-
нии данного полета, выбор для каж-
дого участка маршрута способов и
средств навигации, обеспечивающих
требуемую точность самолетовожде
иия, изучение рубежей УВД, зон и
районов с особым режимом полетов,
приграничной полосы и ограничи-
тельных азимутов (при полетах июль
государственной границы СССР);
изучение методов восстановления
ориентировки иа различных участках
маршрута и действий экипажа на
случай ухудшения метеорологических
условий;
расчет исходных данных или под
готовка пространственно-временной
программы полета для ввода их
ПНК,
составление предвари гелыюго
расчета полета с заполнением штур-
манского бортового журнала, а при
необходимости — плана полета Ос
иовное внимание в период предвари
тельной подготовки вследствие этого
уделяется изучению и оценке воздуш
ной трассы Особое внимание уделя-
ется наличию радионавигационных
средств, радиолокационных (визуаль-
ных) ориентиров, находящихся вбли
зи воздушной трассы Определяются
области применения наземных РНС и
оценивается точность определения
места ВС при их использовании на
участках воздушной трассы. На осно-
вании детального изучения маршрута
экипажи выбирают для каждого уча
стка наиболее рациональные способы
самолетовождения, которые обеспечи
вают высокую точность выдержива-
ния линии заданного пути. Для комп-
лексного самолетовождения, помимо
основного способа, намечаются дуб-
лирующие, обеспечивающие уверен
116
нос непрерывное самолетовождение
в случае выхода из строя какого-ли-
бо навигационного средства или не-
предвиденного изменения аэронави-
гационной обстановки.
13.4. Подбор и подготовка
карт
Подбор и подготовка карт заклю-
чается в выборе масштаба, листов
карт, охватывающих заданный марш-
рут, в зависимости от скорости и вы-
соты полета, прокладка маршрута на
карте в виде линий пути, проходящих
через все заданные поворотные пунк-
ты маршрута Кроме того, на карту
наносятся различные обозначения,
повышающие информативность кар-
ты. Масштаб выбирается в зависимо-
сти от назначения карт. Они делятся
на полетные, бортовые, специальные
и радионавигационные
Объем и особенности подготовки
полетных карт в каждом случае оп-
ределяются характером выполняемо-
го полетного задания, однако во всех
случаях на полетные карты необхо-
димо наносить (рис 13 1)
пункты маршрута (ИПМ, ППМ,
КПМ) и пункты обязательных доне-
сений в виде треугольников высотой
4—6 мм;
липин заданного пути и расстоя-
ния между пунктами (в разрывах
ЛЗП, в прямоугольниках);
при выполнении полетов с орто-
дромнческими курсовыми прибора-
ми — ортодромическне магнитные
(истинные) путевые углы (ОМПУ,
ОПУ), измеренные от опорных мери-
дианов, и текущие МПУ — началь-
ные (на участках маршрута большой
протяженности повторяются при из-
менении на 3—5°) вдоль ЛЗП со
стрелкой в направлении полета;
при выполнении полетов с локсо-
дромическими курсовыми прибора-
ми — магнитные путевые углы, из-
меренные от средних меридианов
участков маршрута. В этом случае
иа участках маршрута большой про-
тяженности выбираются характерные
контрольные ориентиры через 50—
200 км, рядом с которыми указывают
ся новые значения МПУ,
максимальные абсолютные высоты
в полосе по 50 км в обе стороны от
оси маршрута В районе аэродрома
в радиусе 50 км от КТА (в прямо-
угольниках черного цвета);
значения магнитных склонений в
районе аэродрома и на каждом уча-
стке маршрута (в окружностях диа-
метром 8 мм), через 2—3°,
условные изображения ВПП в ви-
де отрезков, расположенных в ок-
ружностях размером 3—6 мм, обоз-
начающих аэродромы, в направлении
истинных посадочных путевых углов;
линии ограничительных рубежей
(пеленгов, азимутов);
границы районов УВД и их наи
менования;
профиль рельефа при полетах в
горных районах для самолетов с ГТД
наносится на участках снижения и
набора высоты, для самолетов с
ПД — по всему маршруту с горной
местностью. Профиль наносится на
полетной карте или отдельном листе
бумаги в полосе по 25 км в обе сто-
Рис. 13.1. Образец подготовки полетной карты для самолетов 1—3-го
классов
117
роны от оси трассы — для полетов по
ППП и в пределах ширины трассы
для полетов по ПВП н ОПВН.
Дополнительно в зависимости от
состава навигационного оборудова
ния ВС и характера выполняемого
задания па полетные карты нано-
сятся:
ОМПУ (ОПУ) от опорных мери
дианов у каждого ППМ с указанием
долготы опорного меридиана. ОМПУ
наносятся рядом с начальным мери
тканом, МПУ — перпендикулярно
с ним, а ОПУ — вдоль линии пути в
скобках;
поправки для коррекции гироско-
пических курсовых приборов прн по-
лете с ортодромнческими путевым!
углами (в кружках у меридианов,
справа от ЛЗП на удобном расстоя-
нии);
азимутальные круги (секторы) с
центрами в точках расположения
РТС. Оцифровка азимутов и рас-
стояний выбирается таким образом,
чтобы обеспечивалась необходимая
точность определения МС- (линии по
ложения):
расстояния до радиолокационных
ориентиров, а вдоль ЛЗП до ППМ
(ПОД) от траверза РЛО.
аэронавигационные данные, услов-
ные обозначения наземных РТС и
другая информация, необходимая для
выполнения полета
Для повышения наглядности по
летных карт рекомендуется наносить:
черным цветом — пункты маршрута
ПОДы, ЛЗП, расстояния, ОПУ. опор
ные меридианы, высоты, изображения
ВПП и др.; красным цветом—ОМПУ,
МПУ. магнитные склонения, ограни-
чительные рубежи, пеленги, азимуты,
азимутальные круги; желтым цне
том — радиолокационные орненти
ры; зеленым цветом — границы рай-
онов УВД и их названия.
Обеспечение самолетовож тения
транспортных ВС претусматривает
использование иолу маршрутных карт,
на которые топографическим спосо-
бом нанесен минимум навигационной
информации. Поэтому карта не тре
буст дополнительной графической ра
боты.
Бортовые карты предназначены
для обеспечения самолетовождения в
(18
случаях, когда ВС вынуждено выхо-
дить за пределы полетной карты, для
иолета на незапланированный запас-
ный аэродром, восстановления ориен-
тировки н в других случаях, а также
для применения радио- и астронави
рационных средств. Из этих сообра-
жений бортовые карты должны охва
тывать достаточно широкую (700—
1500 км) полосу относительно задан-
ного маршрута. В качестве бортовых
находят применение карты масштаба
I : 2 000 000 и 1 : 4 000 000. На борто-
вую карту наносят: основные марш-
руты, в том числе п для ухода на за-
пасные аэродромы, радиотехнические
навигационные средства в виде ус-
ловных обозначений; азимутальные
круги (секторы) с центром в местах
размещения РНС и средств УВД;
значения .магнитных склонений по
маршруту и на меридианах располо-
жения радиотехнических средств.
К специальным картам относятся
(микрофильмы), используемые в ин-
дикаторах навигационной обстановки
(НПО) и автоматических планшетах
навигационных комплексов, которые
подбираются в зависимости от марш-
рута полета, Масштаб их определи
ется типом навигационного комплек-
са. К специальным относятся также
топографические карты и планы, ис-
пользуемые при полетах по выполне
нию авиационных работ.
Радионавигационные карты явля-
ются документом аэронавигационной
информации и используются прн под
готовке и выполнении полетов. На
карте графически наносятся основные
сведения о пунктах УВД, воздушных
трасс СССР, аэродромах и их обору-
довании средствами связи и навига-
ции. «Нарезка* листов радиопавига
цнониой карты произведена на всю
территорию СССР и издается 11 лис
тов этой карты Номенклатура карты
состоит из номера соответствующего
листа регламента, сведения из кото
рого нанесены на карту, и дополни-
тельной цифры I, 2 или 3 в зависи-
мости от числа листов карты, пере-
крывающих район действия регламен-
та. Например, 11—3 означает третий
лист в зоне действия регламента по-
мер II (рис 13.2).
Рис. 13.2. Схема нарезки листов ра тнонавигациопных карт
В зависимости от насыщенности
районов воздушными трассами и от
носящейся к ней информации, пять
листов издаются в масштабе
1 : 2 000 000, а шесть листов—в мае
штабе I -4 000 000. Они не подлежат
склейке. В местах перекрытия объем
наносимой информации сокращен.
В процессе подготовки к полету ис-
пользовать листы карты не сверен-
ные с контрольными экземплярами,
запрещается
13.5. Предварительный
расчет полета
Предварительный расчет полета
выполняется в процессе предваритель-
ной штурманской подготовки к поле-
ту Его результаты заносятся в ле-
вую часть бортжурнала, озаглавлен-
ную Предварительный расчет поле
та>. Содержание и форма записи он
ределяются бортовым навигационным
оборудованием и классом ВС. В соот
ветствии с этим штурманские борто-
вые журналы бывают разных видов:
для самолетов, оборудованных нави-
гационным комплексом, для самоле-
тов 2 го и 3-го классов, ие оборудо-
ванных НК; для самолетов 4 го клас
са и вертолетов; для ВС, выполняю-
щего международные полеты
Однако независимо от вида борто
иого журнала левая часть его содер
жпт сведения, определенные НШС
I А Основными из них являются
длина участков маршрута межд}
ППМ: путевые углы предвычислен-
ные радиопеленги по боковым РНС;
время восхода и захода Солнца в
пунктах вылета и посадки, а также
иа запасных аэродромах.
Определение длины участков
маршрута. Длина каждого этапа
маршрута включает в себя прямоли
иейный участок Snp и путь, проходи
мый ВС в процессе разворота иа но-
вый этап SP:
S = Sn р S р.
Угол разворота УР определяют на
навигационной линейке (рис 13.3)
р ^УР ^зво(^Р 360)
= (2л/? 360) УР. (13.1)
Общая длина маршрута складывает-
ся из длин отдельных участков:
... + sn= V (13.2>
i= I
Определение магнитных путевых
углов. При использовании полетных
119
Рис. 13.3. Алгоритм вычисления элементов разворота ВС:
а времени; б — пути
карт в международной или косой ци-
линдрической проекции прямолиней-
ные участки пути небольшой протя-
женности между ППМ наносятся пря-
мыми линиями с помощью масштаб-
ной линейки. Поскольку магнитный
компас является локсодромическим
измерителем курса, а нанесенные уча-
стки маршрута очень близко подхо-
дят к ортодромическим. то во избе-
жание слишком больших прогибов
локсодромии от намеченной линии
пути длину участков для полета с
постоянным путевым углом выбирают
такой, чтобы начальный и конечный
путевые углы при условии следова-
ния по ортодромии ие отличались
более чем на 2—3°. Суммарная по
правка для приведения показаний
магнитного компаса в конце отрезка
к его показаниям в начале отрезка
А — (Xj X,) sin tfpp (Алы —
Учитывая невысокую точность пока
заннй магнитных курсовых приборов
и небольшую длину отрезков пути
для полета с постоянным путевым уг-
лом, путевые углы определяются ие
аналитическим способом, а простым
измерением направления отрезка на
карте с помощью транспортира. Из-
мерение локсодромического путевого
угла выполняется относительно ме-
ридиана средней точки участка мар-
шрута с учетом магнитного склоне-
ния этой точки, который именуется
заданным магнитным путевым углом
(ЗМПУ). В данном случае ЗМПУ=
= ИПУСр—Дм.ср. Однако для повы-
шения точности измерений рекомен-
дуется производить нх измерение в
двух точках, в начале и конце отрез-
120
ка, с учетом среднего значения маг-
нитного склонения этих точек
ЗМПУ- [ППУр-НШУн —
— ( Ам. н Ам. к) I 2.
Определение ортодромических пу-
тевых углов. При выполнении поле-
тов с применением курсовых систем
в режиме «ГПК» отсчет путевых уг-
лов производится от выбранных опор-
ных меридианов, которые могут быть
истинные или магнитные. Путевые уг-
лы, отсчитываемые от истинных или
магнитных опорных меридианов на-
чальных пунктов каждого ортодроми-
ческого участка маршрута, называют
начальными орто фомическими истин-
ными путевыми углами ОИПУи и
ортодромическими магнитными путе-
выми углами ОМПУн (рис. 13.4). Ес-
ли один истинный или магнитный ме
ридиан используется на протяжении
нескольких этапов или всего маршру-
та в качестве опорного, то отсчиты-
ваемые от него ортодромнческие пу-
тевые углы обозначаются ОЗИПУ и
ОЗМПУ соответственно. Метод опре-
деления ОПУ состоит в том, что в
начале последовательно определяются
ОППУн I, »=1, 2, 3, .... п. В зависи-
мости от типа курсовой системы и
требуемой точности ОППУ находят-
ся: измерением с помощью транспор-
тира от истинного меридиана началь-
ной точки ( го отрезка маршрута; пу-
тем аналитического расчета
с1бОИПУН( =
= cos<p, tg q>j+l cosec (Xj-i-j —
— Хг)—sin <pctg(Ai+l — X;), (13.3)
где q нормальная сферическая ши
рота.
При использовании в качестве
опорных магнитных меридианов на-
чальных точек маршрута
ОМПУн, О11ПУН|—Дмь (13.4)
где Дм i — магнитное склонение в на
чальной точке t-го отрезка маршрута.
При выборе одного истинного ме-
ридиана в качестве опорного на весь
маршрут (например, аэродрома вы-
лета) ОЗИПУ любого участка.
ОЗИПУ, ОИПУ,,,;
ОЗИПУ,
<-1
ОИПУ,,, V Да,,
I ।
где 1 = 2, п—I; Да,= (Х,—
—Xj+I)sin <р, р — азимутальная по
правка, учитывающая схождение ме-
ридианов на / участке маршрута,
__________ <— ।
/=1; п — 1; \ Да, —суммарная
/- •
азимутальная поправка на схожде-
ние меридианов для начальной точ-
ки i-ro участка маршрута.
При использовании карт поликоии-
ческой видоизмененной проекции <рсг
равна средней широте листа карты,
равноугольной проекции — широте
параллели с наименьшим масштабом
и стереографической проекции, рав-
ной 90°.
ОЗИПУ могут быть определены
следующим образом:
ОЗИПУ, = ОМПУ,„ + \Ч1.
ОЗИПУ t ОМПУ,„- +-
'(" У. Да, Дм,
/ '
(13.5)
При выборе одного магнитного
меридиана на весь маршрут
ОЗМПУ, = ОИПУ,,, —Дм ,,,
ОЗМПУ, ОППУ„,ф
< 1
+ Да,— Дм.о
/ i
илн
ОЗМПУ, ОМПУ,„
ОЗМПУ i ОМПУН,+
I
1 . ^а, —(Д.м.о — Д.м,)
/ I
(13 6)
ИЗ 7)
где Дм п — магнитное склонение опор
иого меридиана.
Измерение путевого угла и курса
ВС относительно магнитного мери-
диана аэродрома посадки. При вы-
Рис. 1,3.4 Система измерения ортол ромических путевых углов
121
Полпенни полетов в районе аэродро-
мом всех ведомств курс полета ВС
отсчитывается относительно магнит
ного меридиана. Поэтому при полете
по маршруту с помощью курсовых
систем в режиме «ГПК» после прохо-
да рубежа ухода (возврата) на аэро-
дром вылета намечается Г1ПМ, над
которым производится переход к из-
мерению курса относительно магнит-
ного меридиана аэродрома посадки.
При этом отсчеты ОЗИПУ. ОЗМПУ
и ОМК изменяются путем введения
поправок к текущему их значению
Если в качестве опорного меридиана
но маршруту полета принимается ис
тинный меридиан, то путевой орто-
дромический угол относительно маг-
нитного меридиана аэродрома посад-
ки
ОЗМПУ11оС ОЗППУ, 4-
I (^-нос ^-о) Ч'ср Зм.ног»
где ОЗИПУ, — текущее значение ор-
то дромического заданного путевого
угла; Липе — долгота аэродрома по-
садки; Х„ долгота опорного мери
шана: \м.и<>г магнитное склонение
аэродрома посадки.
При выборе магнитного меридиа
на в качестве опорного по маршруту
полета
ОЗМПУ,,,,,. ОЗМПУ,- 1 (Х„„г
sin 4< р~ (Ам „ — Ач нос) •
где ОЗМПУ; — текущее значение
ортодромического заданного магнит
кого путевого угла.
При иерехо ie к измерению ксрса
относительно магнитного меридиана
аэродрома посадки
ОМКное ГМКт I (X,,.,,.
Хмс) sill ipcp-( 'м.нос- 'м.мс).
где ГМКт гиромагнитный курс те
кущий. Хм. — долгота места согласо-
вания курса; \м мг — магнитное скло
пение места согласования.
В необходимых случаях осушсст
нляется инженерно-штурманский рас
чет полета, который является основой
1ля определения потребного количе-
ства топлива с учетом конкретных
условий.
122
13.6. Предполетная
штурманская подготовка
к полету
Предполетная штурманская подго-
товка организуется и проводится ко
мапдиром ВС перед каждым полетом
с учетом фактической аэроиавигаци
оиной обстановки и метеорологиче-
ских условий полета по воздушной
трассе. В процессе предполетной
штурманской подготовки решаются
все вопросы и задачи, которые не
могли быть решены заранее в процес-
се предварительной подготовки. Ос-
новными из них являются: изучение
метеорологической и уточнение аэро-
навигационной обстановки по трассе
(маршруту, району) полета, на аэро
дроме назначения и запасных аэрод-
ромах; расчет элементов взлета с за-
полнением палетки «Взлет — Посад-
ка»; расчет элементов полета по
маршруту, потребного количества
топлива, рубежа ухода (возврата) иа
аэродром вылета, при выборе его
запасным, расчет безопасных высот и
нижних безопасных эшелонов, изуче-
ние схем расположения площадок
для экстренной посадки ВС на аэрод-
роме вылета; штурманский контроль
готовности экипажа к полету; полу-
чение и введение программ полета в
навигационный комплекс; проверка
готовности навигационного оборудо-
вания к полету.
При наличии в аэропорту вылета
автоматизированной системы штур-
манского обеспечения полетов
(АСШОП) экипаж не рассчитывает
элементы полета, предусмотренные в
левой части штурманского бортового
журнала, а только осуществляет кон
троль и анализирует навигационные
расчеты, выполненные АСШОП При
меиеппе АСШОП повышает безопас-
ность полетов за счет точности и
объективности расчетов, экономиче
скую эффективность воздушных пере
возок прн выборе оптимального мар
трута и режима полетов. При этом
также повышается производитель-
ность трута летного состава, особен
но при полетах в сокращенном со-
ставе экипажа. Предполетный штур
мапский расчет, выполненный иа
ЭВМ, экипаж получает у дежурного
штурмана аэропорта и применяет его
в качестве основного расчета в соот
петствип с требованиями НШС ГЛ.
При наличии различных вариантов
предполетных штурманских расчетов
для полета в заданный аэропорт эки
паж выбирает наивыгоднейший.
Предполетные штурманские расче
ты, выдаваемые АС ШОП (форма 1),
включают следующие элементы:
МПУ начальный; ОЗМПУ от аэ-
родромов вылета и посадки, Р — рас
стояние между ППМ; С — истинные
воздушные скорости, рассчитанные с
учетом прогноза температуры по уча
сткам иа эшелоне полета; ПС — пу-
тевые скорости; В — время полета по
участку маршрута; ВН — нарастаю
щее время полета; РУ — убывающее
расстояние; ГУ — топливо убываю-
щее, которое для аэропорта вылета
является запасом перед взлетом, а
для аэропорта посадки — представ
ляет АИЗ, рассчитанный в соотнетст
вин с требованиями НПП ГА-85.
Раздел дополнительной ипформа
цни содержит: расстояние до рубежа
возврата и количество оставшегося
топлива иа рубеже возврата; наиме-
нование двух запасных аэродромов;
расстояние до запасных аэродромов;
время полета и расход топлива при
полете до запасных аэродромов;
взлетную массу самолета, посадоч
ную массу и массу снаряженного
самолета.
При функционировании АСШОП в
оперативном режиме, кроме того, вы
даются следующие данные: скорость
принятия решения; скорость отрыва
колеса передней стойки шасси, безо-
пасная скорость излета; направление
ветра, скорость ветра, давление, тем
пература иа ВПП; центровка и сба-
лансированная взлетная дистанция
Завершающий этап предполетной
штурманской подготовки — контроль
готовности экипажа к полету по за
данному маршруту и бортового иа
вигационного оборудования ВС эки-
пажем.
Расчет потребного количества топ-
лива иа полет. Потребное количество
Топлина на полет определяется иа ос-
нове ИШР. Для учета влияния фак-
тических условий в процессе полета
(ветра, температуры, плотности воз
духа и полетной массы) прн предпо
летной подготовке выполняется рас-
чет потребного количества топлива
В результате этого расчета учитыва
ются поправки к штилевому количе-
ству топлива (7.15) полученному сог
ласно ИШР:
Сзпр Qanp шг
+ AQT(-AQm. (13.10)
где Q .np шт — топливо, расходуемое с
момента запуска двигателей до по
садки ВС в штиль; AQH£ — поправка,
компенсирующая влияние ветра иа
участках горизонтального полета, на-
бора высоты и снижения. \QT
поправка, компенсирующая влияние
температуры воздуха; AQm — поправ-
ка, компенсирующая изменение рас-
хода топлива вследствие изменения
полетной массы ВС.
Поправка, компенсирующая влия
ние ветра иа этапах полета, прн ус-
ловии, если считать V,B = const и пре-
небречь изменением полетной массы
из-за дополнительной заправки ВС на
встречный ветер:
А<?В1
V-V'a
Quit
0,75Г/д
V,.p О,751/э
0,5t/a
V ср 0,51/»
Qch
(13 11)
Знак поправки определяется
знаком U.,. Поправка, компенс зрую-
щая влияние температуры нз часовой
расход топлива
AQt АСчГ+АСч/''+- -4-AC4iG=
п
= У (ДСЧ/),-. (13.12)
i= 1
Разница в часовых расходах меж
ду фактическими и стандартными ус-
ловиями
АС, = Сч. ст (J Г(Тн /ТНст) — 1)
(13.13)
123
ШТУРМАНСКИЙ БОРТОВОЙ ЖУРНАЛ №
ПРЕДПОЛЕТНУЮ ПОДГОТОВКУ ПРОВЕРИЛ.....ОЦЕНКА САМОЛЕТОВОЖДЕНИЯ
ДЕЖУРНЫЙ ШТУРМАН ............КОМАНДИР ВС ШТУРМАН АЗ .....
124
При расчете расхода топлива иа
определенную дальность удобнее
пользоваться километровым расходом
Ск = С.1/1/, который не зависит от из-
менения температуры.
Приближенно поправка, компенси-
рующая изменение расхода топлива
вследствие изменения полетной мас-
сы ВС,
~Кт [(тф тиШР) 'твз.т} Озпр
(13.14)
где К т коэффициент пропорцио-
нальности. При полете «по пототкам>
он равен 0,7, иа крейсерских высо-
тах — 0,8 и ниже их — 0,9.
В процессе предполетной подготов-
ки применяются номографический и
табличный способы расчета потребно-
го количества топлива на полет. Они
основаны на том, что полеты обычно
выполняются иа одних и тех же ре-
жимах работы двигателей, рекомен-
дованных РЛЭ ВС.
Исходными данными для расчета
являются: расстояния между аэрод-
ромами вылета и назначения; эквива-
лентный ветер иа высоте полета; эше-
лон полета. В результате расчета по-
лучают количество топлива, потребное
для полета от взлета до посадки.
Для определения общего количества
заправляемого топлива к полученно-
му добавляется АНЗ, расход топлива
иа Земле при рулении и невырабаты-
ваемын остаток.
Недостаток применяемых способов
заключается в том, что при построе-
нии таблиц и графиков применяются
постоянные осреднения исходных
данных расходов топлива по участкам
полета и не полностью учитываются
все возмущающие факторы, оказыва-
ющие влияние на расход топлива в
полете. Более правильный путь учета
этих факторов — автоматизация рас-
чета потребного количества топлива
на полет с применением АСШОП.
Расчет рубежа возврата. Он вы-
полняется в тех случаях, когда за-
пасным аэродромом выбран аэродром
вылета, полет до которого не обеспе-
чивается с ВПР аэродрома назначе-
ния. Рубеж возврата па аэродром
вылета
5рв = 0,5 (5ШТ-L) [ 1 -(U3 V)2!.
где L — длина пути в процессе раз-
ворота ВС иа обратный курс.
Штилевое расстояние складывает-
ся нз участков набора 5И, снижения
SCB и горизонтального полета Srn.
Suit — Sr-и +5г.п + 5И. ЕГО протяжен-
ность определяется располагаемым
количеством топлива
•^г.п = 0г.п Е’к.
где Ск — средний километровый рас-
ход топлива.
Располагаемое количество топлива
на горизонтальный участок согласно
(7.15)
Qrn = Озпр (Qn.o + Оз“Ь
+ Qm + Qch + Qh) •
Потребное количество топлива на
полет рассчитывается согласно
(13.10).
Глава 14
ОБЩИЕ ПРАВИЛА САМОЛЕТОВОЖДЕНИЯ
14.1. Основные этапы и правила
самолетовождения
Полеты ВС гражданской авиации
осуществляются по воздушным трас-
сам СССР, МВЛ, вне воздушных
трасс — по установленному для каж-
дого полета маршруту и в районах
полетов по применению авиации в на-
родном хозяйстве.
Общие правила самолетовождения
определяются основными задачами
воздушной навигации, к числу кото-
рых относятся: обеспечение точного
выполнения полетов по заданной воз-
душной трассе (МВЛ, маршруту вне
трассы) иа установленных эшелонах
(высотах); определение навигацион-
ных элементов полета в соответствии
с фактической обстановкой (прибы-
тие ВС в пункт назначения и посадки
125
в запанное время); безопасность са-
молетовож гения. Соблюдение уста-
новленных общих правил самолето
вождения способствует более полно-
му выполнению основных задач воз
душной навигации
При выполнении полетов по воз
душным трассам (маршрутам) МВЛ
установлен порядок самолетовож те-
ния, включающий н себя следующие
основные этапы: взлет и набор высо-
ты; выход на опорные пункты марш
рута (исходный, поворотный, конеч-
ный, контрольный ориентир), выход
на ЛЗП; полет по ЛЗП; определение
рубежа начала снижения; выход на
конечный пункт маршрута (КПМ).
аэродром посадки или заданный орн
ентир в установленное время и на за-
данной высоте; построение маневра
для захода иа посадку и выполнение
посадки.
Независимо от этана полета эки
паж обязан выполнять следующие об-
щие правила самолетовождения
планировать и выполнять полет с
учетом конкретной аэронавигацион-
ной обстановки, метеорологических
условий и характеристик навигацноп
ного оборудования самолета, а так-
же строгого выполнения требований
правил визуальных полетов (ПВП),
правил полетов по приборам (ППП)
и особых правил визуальных полетов
(О11ВП); вести непрерывное счисле-
ние пути (автоматическое или неавто-
матическое); использовать комплекс-
но технические средства и способы
самолетовождения; соблюдать расчет
ный (требуемый) навигационный ре-
жим полета путем непрерывного кон-
троля за курсом, скоростью н высо
той полета, а также временем полета
и остатком топлива;
непрерывно вести контроль пути
и в случае необходимости вносить ис-
правления в режим полета для вы
полнения заданной программы,
периодически в соответствии с
фактической обстановкой полета про-
нзвониь определение навигационных
элементов, своевременно осущест-
влять коррекцию курсовых приборов
и счисленных координат;
вести требуемую гокументацню и
применять бортовые средства объек
тинного контроля.
126
14.2. Взлет и набор высоты
Взлет и набор высоты осущест
вляются в соответствии с требования
ми РЛЭ ВС, инструкции по произ
водству полетов в районе аэродрома
и указаниями службы УВД.
В момент начала взлета включа-
ются бортовые часы, а па средине
ВПП — система автоматического
счисления координат. По достижении
высоты 200 м или заданной комаи-
гир ВС докладывает диспетчеру о
выполнении взлета
При пересечении высоты перехода
экипаж переводит шкалы давления
барометрических высотомеров на от-
счет 760 мм рт. ст. (1013,2 мбар) и
сличает показания высотомеров. На
бор заданного эшелона (высоты) по-
лета производится по указанию дис-
петчера службы движения в соответ-
ствии с установленной схемой выхо-
да на данном аэродроме и на режи-
мах определенных РЛЭ
В процессе набора высоты осуще-
ствляется выход иа исходный пункт
маршрута (ИПМ). Обычно в качест-
ве ИПМ берется аэродром вылета.
В отдельных случаях при выполнении
полетов вне воздушных трасс в ка
честве ИПМ может быть выбран ха-
рактерный ориентир, расположенный
на некотором удалении от аэродрома
вылета. Следовательно, маршрут по-
лета, как правило, начинается от
аэродрома. На первом участке его
прокладывают от контрольной точки
аэродрома до отдельной приводной
радиостанции (ОПРС), контрольного
ориентира (КО), географической точ-
ки (ГТ), обозначенной широтой и
долготой, фиксированной точки (ФТ),
указанной азимутом и дальностью от
носительно аэродромов РНС. Так как
направление взлета не всегда сов-
падает с направлением первого участ-
ка маршрута, то для каждого аэрод-
рома составляется схема маршрутов
выхода ВС из района аэродрома, ко-
торая вносится в Сборники аэрона-
вигационной информации по воздуш-
ным трассам СССР. На первом уча
стке полет ВС, как правило, контро
лируется наземными средствами дис
петчерского контроля. Контроль вы-
полнения полета экипажем осущест-
ваяется наиболее простым и падеж
ным способом, который в конкретных
условиях полета обеспечивает наи-
большую точность, надежность и без-
опасность полета на данном этапе.
Набор заданной высоты полета про-
изводится с одновременным продви-
жением ВС по участкам маршрута.
По окончании набора заданного эше-
лона показания высотомеров сверя-
ются и осредняются.
14.3. Вывод ВС на опорные
пункты маршрута и ЛЗП
Управление движением ВС по за-
данной траектории осуществляется
путем последовательного его вывода
в опорные пункты маршрута
(ОПМ)—ИПМ, ИПМ, КПМ и др.
В зависимости от того, по какому
параметру осуществляется управле-
ние, различают путевой, курсовой и
маршрутный способы полета по ЛЗП
и вывода ВС и ОПМ. Задача полета
но ЛЗП н вывода ВС в ОПМ путе-
вым способом решается в подвижной
системе полярных координат
(рис. 14.1,о) Полюс О совмещается
с МВС, а полярная ось направляется
в опорный пункт маршрута В путе-
вом способе управление движением в
боковом направлении осуществляется
с помощью путевого пеленга опорно-
го пункта маршрута фа. Для полета
по ЛЗП и последующего обеспечения
вывода ВС в ОПМ вектор путевой
скорости постоянно должен быть на-
правлен в заданную точку. Для этого
угол путевого пеленга маршрута
фи = Рэ— Рф = Рз— (у + о) необходимо
выдерживать равным нулю. Эти ус-
ловия обеспечат полет к заданной
точке по кратчайшему расстоянию по
ортодромии, проходящей через дан
ную точку и опорный пункт маршру
та. Это преимущество данного спосо-
ба. Однако при отклонении ВС от ли-
пин заданного пути способ не обеспе-
чивает выхода на нее, что является
некоторым его недостатком Если па-
раметры ветра неизвестны, то экипаж
считает угол сноса равным нулю, и
путевой способ превращается в кур-
совой.
Курсовой способ основан па ис-
пользовании связанной с ВС системы
координат, полярная ось которой ОА
совпадает с продольной осью самоле
та (рис. 14.1.6). В курсовом способе
управление движением в боковом
направлении осуществляется с помо-
щью курсового угла ф,;. который вы-
держивается рапным нулю. При от-
сутствии ветра ВС будет подходить
к ОПМ по кратчайшему расстоянию,
а в условиях ветра — но сложной тра-
ектории, не совпадающей с линии за-
данного пути. В ряде случаев воз-
можны значительные отклонения фак-
тической линии пути от заданной и
значительные отклонения направле-
ния выхода ВС в ОПМ от заданного.
Маршрутный способ полета по
ЛЗП и вывода ВС в ОПМ реализует-
ся при использовании АПК, когда
обеспечивается непрерывное опреде
ление и индикация координат г, s
Задача решается в системе земных
координат, одной из осей которой
служит линия заданного пути, а вто-
рой — перпендикулярное к ней на
правление (рис. 14 1, в). Управляю
щий параметр в маршрутном способе
управления полетом ВС — линейное
боковое уклонение от заданного мар-
шрута г. При г=О ВС следует по
заданному маршруту и обеспечивает-
ся его выход в опорный пункт марш-
рута. При управлении маршрутным
способом форма линии фактического
пути определяется формой заданной
линии пути. Если точки излома марш-
Рис 14 I. Способы управления дви-
жением ВС по ЛЗП:
а — путевой; б — курсовой; в — маршрут
ный
127
Рис. 14.2 Вывод ВС ив очередной
участок маршрута
рута, соединяются отрезками орто-
дромии, то маршрутный способ обес-
печивает движение по ортодромии.
Маршрутный способ является един-
ственным, обеспечивающим движение
ВС по заданным криволинейным мар-
шрутам (криволинейным участкам
маршрута). В этом его преимущество,
так как при отклонениях от заданно-
го маршрута ВС вновь выводится на
ЛЗП
В практике самолетовождения точ-
ный вывод на Г1М, как правило, не
производится: не толстая до него на
величину линейного упреждения раз-
ворота (ЛУР), экипаж выполняет
разворот на УР (точка /1 на
рис 14.2), и ВС выводится иа новый
участок маршрута (точка С) так,
чтобы в процессе разворота оно не
оказалось за пределами границы ши
рины трассы (ШТ). При полетах на
эшелонах разворот ВС иа новый уча-
сток маршрута выполняется, как пра-
вило, с креном 15°. Однако линия
фактического пути от точки начала
разворота \ ю точки конца разнорота
для обеспечения полета в пределах
ширины трассы 2Ь по кратчайшему
расстоянию должна проходить через
точки Д, В и С (см рис 14.2) и
Рис. 14.3. Алгоритм вычисления /?<1Пт
(а) и ЛУР [б)
128
представлять собой дугу окружности
оптимального радиуса
Я<.цт Ь 11 —cos(УР 2)|. (14.1)
Если /?>/?опт, то ВС выйдет за пре
делы ВТ если же R<Ruu-r, то в за
данных конкретных условиях (Ь. УР)
длина пути прн переходе с одного
хчастка маршрута иа другой не будет
наименьшей Для того чтобы факти-
ческий радиус разворота был равен
оптимальному, разворот необходимо
выполнять (при заданной скорости
полета Уи) с углом крена
/опт arctg
arctg (V® (1—cos УР 2; gb| (14 2)
где g — ускорение свободного паде-
ния.
При рассчитанном /?0Пт и задан-
ном УР линейное упреждение разво-
рота
ЛУР ₽„11TtgyP 2, (14 3)
а время разворота на заданный угол
УР
Гур Guo УР 360 (14.4)
Время выполнения разворота на 360°
Gw = 2л (/?onT Ku) (14.5)
Расчеты радиуса разворота Во«т (по
заданным Ув и и) и величины ЛУР
иа НЛ Юм выполняются по алгорит-
мам, приведенным иа рнс. 14 3, а вре-
мени разворота — на рис. 13.3, а.
14.4. Контроль и исправление
пути
При выполнении полета вследст
вне изменчивости ветра, неточного
выдерживания заданного режима по-
лета, погрешностей навигационного
оборудования, ошибок в навигацион-
ных измерениях и расчетах ВС мо-
жет уклониться от ЛЗП, выйти за
пре дел ширины трассы и не прибыть
иа контрольные ориентиры в назна-
ченное время Поэтому для обеспече-
ния точного следования по трассе и
вывода ВС в пункт назначения в за-
данное время экипаж в процессе по
лета ведет непрерывный контроль
пути и и нос ит необходимые исправ-
ления в навигационный режим поле-
та Ориентировка, контроль и исправ-
ление пути, взаимосвязанные между
собой, и являются единым процессом
самолетовождения
Контроль пути состоит в проверке
соответствия фактической линии пу
т«1 заданному маршруту и времени
прохода контрольных ориентиров в
заданное время Различают контроль
пути по направлению, по дальности
и полный контроль пути.
Контроль и исправление пути по
направлению. Контроль на каждом
участке маршрута начинается с про
верки правильности взятого направ
ления полета путем сравнения факти
ческого путевого утла с заданным.
В зависимости от аэронавигационной
обстановки полета и состава навига-
ционного оборудования ВС контроль
пути по направлению выполняется
различными способами и средствами
Но независимо от способа и средств
в процессе контроля определяются
ФПУ и линейно-боковое уклонение
ЛБУ. Контроль пути по направлению
осуществляется прежде всего неавто-
матическим или автоматическим счис-
лением пути. Неавтоматическое счис
ленив пути сводится к выдерживанию
курса, обеспечивающего равенство
ФПУ=К+УС=ЗПУ. При авточатиче
ском счислении контроль пути осуще
ствляется постоянным выдерживани-
ем г=*0. Причем контроль пути в
процессе полета должен быть непре-
рывным. Такой контроль обеспечива-
ется также при полетах с использова-
нием РНТ (приводная радиостанция,
маяки РСБН и ВОР), расположен
ных на ЛЗП При полете на РНТ
контроль нахождения ВС на ЛЗП
определяется равенством ПРИзм =
= ИРзал = ЗПУ, а при полете от
РНТ — ПСМэм=ПС1Од=ЗПУ. Если
это условие выполняется, то вектор
путевой скорости постоянно направ-
лен по ЛЗП (полет выполняется пу-
тевым способом), и наиболее вероят-
ное место ВС находится иа ЛЗП, т. е.
г = 0
При нахождении в районе полетов
маяков РСБН, ВОР'ДМЕ, наземного
ОРЛ или радиолокационного ориенти-
5 Зак. 639
ра, расположенных в стороне от
ЛЗП, периодический контроль пути
осуществляется аналитическим преоб-
разованием измеренных полярных
координат пеленга самолета и даль
ности в прямоугольные г и s Кон
троль пути по направлению осущест-
вляется также периодическим запро
сом места или пеленга ВС у диспет
чера службы УВД При обнаружении
уклонения ВС от ЛЗП экипаж выпол
пяет исправление пути. Поскольку та
кие средства самолетовождения, как
курсовые приборы. радиокомпасы,
бортовые радиолокаторы и радиоле
ленгаторы, обеспечивают контроль
пути с ошибкой -*-2°, то исправление
пути по направлению выполняется
только в том случае, если боковое ук
лоиенне ВС от C13II превышает точ
иость используемых средств для кон-
троля пути. Исправление пути но на
правлению выполняется вводом по
правки в курс (ПК) для выхода иа
КО, находящийся иа ЛЗП; пересче
том курса для следования по новой
ЛЗП; коррекцией счисленной коорди
паты при полете с использованием
АНК.
Исправление пути по направ.ге
нию внесением поправки в курс (ПК)
выполняется для вывода ВС на ЛЗП
(на КО или очередной ППМ) для
чего в расчетный курс полета АР
вносится поправка ПК, так как в мо
мент исправления пути берется курс
^испр Лр + ПК.
Па основании рнс. 14 4
ПК- БУ +ДП;
1£БУ=(ЛВУ Snp);
tgan (ЛБУ S0CT). (14.8)
где БУ — боковое уклонение, град;
ЛБУ — линейное боковое уклонение;
S„p — пройденное расстояние; 5ОГт —
оставшееся расстояние; ДП — допол-
нительная поправка на оставшееся
расстояние.
Так как углы БУ и ДП малы то
БУ = (ЛБУ Snp); ДП
=(ЛБУ 5ост) = БУ(.$11р S0CT). (14 9)
129
Тогда суммарная поправка
ПК=БУ+ДП БУ +
"Ь (‘^||р ^ост)= БУ (Зобщ SfIfT) .
(14.10)
Боковое уклонение отсчитывают
от ЛЗП к ЛФП вправо со знаком
плюс, влево со знаком минус. Допол-
нительную поправку берут с тем же
знаком, что и БУ. Знак поправки ПК
берется противоположным знаку бо-
кового уклонения.
Расчеты показывают, что данный
способ исправления пути приемлем
прн значениях ПК, не превышающих
30°. В тех случаях, когда поправка в
курс превышает 30° и оставшееся рас-
стояние до очередного ППМ доста-
точно велико, исправление пути вы-
полняется пересчетом курса следова-
ния. Для этого необходимо нанести
на карту МС, проложить новый мар
шрут от него до ПМ, к которому не-
обходимо вывести ВС, измерить путе-
вой угол (новый ЗПУ) и для него по
ветру, определенному в полете, рас-
считать новый курс следования.
При полетах иа ВС. оборудован-
ных АПК. исправление пути по на-
правлению осуществляется при кор-
рекции счисленной координаты, вы-
держиваемой равной нулю. В процес
се коррекции с использованием радио-
технических средств определяется
фактическое значение координаты гФ,
которое затем автоматически или
вручную устанавливается на счетчике
координат, после чего ВС выходит на
ЛЗП (гф=0).
Контроль и исправление пути по
дальности. Для выполнения полета
Рис. 14.4 Вывод ВС на КО с по-
мощью поправки в курс
130
по расписанию ведется контроль пути
по дальности, который заключается в
определении рубежа, которого достиг-
ло ВС к текущему моменту времени.
Экипаж определяет фактически прой-
денное SIip или оставшееся S„ct до
контрольного ориентира или поворот-
ного пункта маршрута расстояние.
Контроль пути выполняется различ-
ными способами и средствами, обес-
печивающими измерение пройденного
или оставшегося расстояния. Непре-
рынный контроль пути по дальности
выполняется неавтоматическим или
автоматическим счислением пути.
Контре гь пути неавтоматическим
счислением практически сводится к
выдерживанию скорости полета, обес-
печивающей выполнение временной
программы полета, рассчитанной по
прогностическому ветру. При авто-
матическом счислении пути контроль
ведется по показаниям счетчиков
координат.
При использовании радиодально-
мерных систем (или дальномерного
канала УДС), расположенных иа
ЛЗП, контроль пути по дальности
упрощается. В этом случае непрерыв-
но или дискретно определяется остав
шееся или пройденное расстояние в
зависимости от расположения РНТ.
Этот способ применим и для БРЛС,
с помощью которого измеряется даль-
ность до радиолокационного ориен
тира, расположенного на ЛЗП.
Контроль пути по дальности с
использованием боковых радиостан-
ций (угломерных каналов РНС) осу
ществлястся прокладкой линии поло-
жения или выходом на предвычислен-
иый пеленг. Прокладка линии поло-
жения от боковой РНС может быть
выполнена в любой необходимый мо
меит времени, однако данный способ
контроля ие оперативен и вызывает
дополнительные погрешности при гра-
фической работе на карте.
Контроль пути по предвычислен-
ному пеленгу — наиболее простой.
Расчет нредвычислеиного пеленга вы-
полняется в намеченных точках кон-
троля в процессе подготовки к поле-
ту. В момент ПНзм=Ппргда ВС будет
находиться на расчетном расстоянии
от КО (при полете по ЛЗП). При
выполнении контроля пути с исполь-
зоваиием бокового радиомаяка УДС
или бокового радиолокационного
ориентира измеренные полярные коор-
динаты пеленга и дальности самолета
преобразуются в прямоугольные г и
ж. При обнаружении неточного при-
бытия ВС в заданный пункт экипаж
пронзвотит исправление пути по
дальности. Для этого можно изменить
скорость полета, с разрешения дис-
петчера УВД сменить эшелон полета
с учетом распределения ветра по вы-
сотам или выполнить полет по спрям-
ленному маршруту (по согласованию
с диспетчером). Расчет изменения
скорости выполняется в слетующем
порядке:
измеряется Хост н определяется
потребное время полета по фактиче-
ской путевой скорости /ц=5<,гт/№’ф;
опре 1еляется располагаемое время
fpacti “Т’приб Т'контр- •
где Горил — время прибытия в пункт
назначения по расписанию; Гконтр —
время контроля пути;
рассчитывается потребная ско-
рость полета 1Г = Хогт//гя«:п
Поскольку ВС имеет ограничение
но воэ ।ушной скорости полета, а еле
довательио, и по максимально воз-
можной путевой скорости iV'niai. то
оценивается минимально необходимое
расстояние Xmin, на котором возмо
жен полет с расчетной скоростью,
Xm inв Wrnjx^pacn — ( Ей + Па)/расп- Ес*
ди Хппп<Хигт, то маневрирование
возможно, если же Xmu >Х,„ т, то ВС
в заданную точку прибудет с опозда-
нием.
Полный контроль пути состоит в
определении места ВС, что позволяет
судить о точности выдерживания ли-
нии заданного пути ВС и о его поло-
жении по дальности. Определение ме-
ста ВС осуществляется: счислением
пути (автоматическое или неавтома-
тическое) ; обзорно-сравнительным
способом; способом координатных
преобразований, пролетом над нави-
гационным ориентиром.
Высокая надежность контроля пу-
ти только комплексным использова-
нием технических средств самолето-
вождения. В условиях непрерывного
радиолокационного контроля с Земли
ВС юлжны иметь, как минимум, два
5*
независимых канала определения МС,
а при его отсутствии — не менее трех
независимых каналов контроля пути.
14.5. Предпосадочная
подготовка и снижение
с эшелона
Снижение с эшелона, построение
предпосадочного маневра и заход иа
посадку—это наиболее сложные и
ответственные этаны полета. На этих
этапах ВС приближается к земной
поверхности; полет выполняется с не
ременной высотой, воздушной скоро-
стью при непостоянном ветре. Перед
началом снижения с эшелона (высо-
ты) полета или до входа ВС в район
аэродрома посадки (при полетах ни-
же нижнего эшелона) экипаж прово-
дит предпосадочную подготовку.
Объем подготовки определяется
командиром ВС в соответствии с
Р.ЧЭ исходя из конкретных условий
предстоящей посадки. Навигационное
обеспечение полета иа данном этапе
состоит в определении рубежа и вре-
мени начала снижения, полете по за-
данным траекториям в соответствии
с выбранной схемой снижения и за
хода на посадку, вписывании в схему
захо да иа посадку в заданной точке,
полете по участкам прямоугольного
маршрута, определении момента на
чала четвертого разворота, обеспечи-
вающего выход на предпосадочную
прямую или рабочую область курсо
вого радиомаяка.
В процессе предпосадочной подго-
товки штурман (нилот) заполняет
палетку «Взлет — Посадка» и вру-
чает се командиру ВС, где на стороне
палетки «Посадка» записывает: ме-
теорологические условия аэродрома
посадки: ветер у Земли, иа высоте
100 м и иа высоте круга; встречную
и боковую составляющие вектора
ветра; МБВ аэродрома посадки в сек-
торе подхода; безопасную высоту в
районе подхода; время начала сниже-
ния с эшелона и расчетную верти
кальную скорость снижения; МНУ
посадки: эшелон перехода: ВПР для
основной и резервной системы захода
на посадку; минимальную видимость
(дальность видимости) для основной
131
и резервной систем захода на посад-
ку; состояние ВПП и коэффициент
сцепления; посадочную массу ВС, по-
садочный угол отклонения стабилиза-
тора и САХ; высоту полета по круге
и направление круга (правый, ле-
вый); скорость планирования по глис-
саде; посадочную скорость, МНР на-
чала четвертого разворота с учетом
заданного удаления выхода из чет-
вертого разворота и ветра иа высоте
круга; удаление ТВГ (с учетом изме-
нения фактической высоты ТВГ в за-
висимости от отклонения фактической
температуры воздуха от стандарт-
ной); высоты пролета ДПРМ и
БПРМ по схеме; высоту первого раз-
норота при уходе иа второй круг; пу-
тевой угол иа случай ухода ВС на
запасной аэродром с ВПР; запасном
аэродром и расстояние до него; коли
честно топлива на ВПР
Снижение ВС с заданного эшело-
на (высоты) полета выполняется по
разрешению диспетчера службы дни
жения с докладом экипажа о начале
снижения.
При снижении с эшелона экипаж
выполняет следующие действия: кон-
тролирует выдерживание режима сни-
жения при соблюдении установлен-
ных ограничений скоростей полета;
ведет контроль пути и вносит по-
правки для точного вывода ВС в за-
данную диспетчером службы движе-
ния точку; сравнивает давление, пе-
реданное диспетчером, с давлением,
полученным но метеоканалу, на эше
лоне перехода в горизонтальном по-
лете переводит шкалы давления баро-
метрических высотомеров с отсчета
«760» на отсчет, соответствующий
значению атмосферного давления иа
аэродроме посадки. Перевод шкал
давления выполняется в следующей
последовательности: командир ВС,
второй пилот, штурман. После вывода
ВС на аэродром посадки экипаж вы-
полняет маневр захода на посадку
строго по установленной схем»
Глава 15
ПОДГОТОВКА И ВЫПОЛНЕНИЕ ПОЛЕТА НА САМОЛЕТАХ
и вертолетах, не оборудованных анк
15.1. Особенности
штурманской подготовки
экипажей к внетрассовым
полетам
Полеты, выполняемые на самоле-
тах и вертолетах, не оборудованных
ХНК, производятся обычно на малых
и средних высотах по правилам ви-
зуальных полетов. Самолетовождение
основано на сочетании визуальной
ориентировки с применением магнит-
ных (гироскопических) курсовых при-
боров и угломерных РНС. Незначи-
тельный объем навигационной инфор
мации, которым располагает экипаж
в полете, требует от него тщательной
предварительной и предполетной под-
готовки и умения вести визуальную
ориентировку часто в условиях огра-
ниченной видимости.
Самолеты 4-го класса н вертолеты
выполняют полеты вне установленных
132
воздушных трасс, т. е. по маршру-
там, ие маркированным приводными
радиостанциями. Это накладывает
особые требования к подготовке к
полету. Помимо подготовки полетной
карты согласно требованиям 11ШС ГА
в полном объеме, экипажи должны
провести глубокий анализ аэрона-
вигационной н метеорологической об-
становки дли определения условий
ведения визуальной ориентировки и
выяснения опасных для полета явле-
ний;
тщательно изучить характер про-
летаемой местности и условия естест-
ве шого освещения.
продумать план ведения визуаль-
ной ориентировки и применения РНС
по ’этапам полета;
твердо знать расположения зон с
особым режимом полета.
Подготовка полетной карты пре-
дусматривает прокладку линии за-
данного пути, ее разметку и нанесе-
ние условных знаков, облегчающих
применение карты в полете. В каче-
стве полетной используется карта
масштаба 1 : I 000 000. Она должна
охватывать полосу местности не ме-
нее 10Э км по обе стороны маршру-
та. Для удобства ведения визуальной
ориентировки рекомендуется исполь-
зовать карты масштаба 1:500 000
и крупнее.
В результате изучения маршрута
экипаж должен запомнить расположе-
ние характерных точечных, линейных
и площадных ориентиров, запасных
аэродромов и площадок, пригодных
для вынужденной посадки, особен-
ность их опознавания, распределение
наземных радиомаяков вдоль марш-
рута.
При изучении синоптической обста-
новки экипаж определяет возмож-
ность встречи в полете с опасными
метеорологическими условиями и оце-
нивает условия визуальной видимости
пролетаемой местности: количество и
высоту облачности, горизонтальную
видимость. Если облачность ожидает-
ся ниже высоты полета, то вероят-
ность ведения визуальной ориенти-
ровки
/’наб.| = 0.75+ 0.24PJ,' > -0,56Р<9‘,
(15.1)
где Рп ’ и Рп”— вероятности появле-
ния ясной и пасмурной погоды, вы-
бираемые из метеорологических еже-
месячников для данного района н
времени полета.
Рассчитаем вероятность наблюде-
ния за земным ориентиром сквозь
разрывы в облаках, если в данном
районе и месяце ясных дней 7, а пас-
мурных — 10.
Вероятности появления облаков в
I и 9 баллов составят:
7 30 0,233; Pj91 = 10 30 -
=0,333;
Рвав.। =- 0.754-0,24 0.233—
—0,56 0,333 = 0,62.
Полеты по ПВП и ОПВП над об-
лаками разрешается производить, ес-
ли их количество не превышает трех
баллов. В этих условиях Риаг.л =
= 0,854-0,97. Увеличение облачности
на каждый балл снижает Р1,»пл в
среднем иа 0.05.
По величине метеорологической
горизонтальной видимости .можно су-
дить о дальности обнаружения зем-
ных ориентиров. Обычно принимают
7^огж - - 0,7aZ.M.
В период предполетной штурман-
ской подготовки экипаж на основа-
нии фактической аэронавигационной
н метеорологической обстановки вы-
бирает наиболее эффективные спосо-
бы навигации и порядок самолето-
вождения в полете, рассчитывает бе-
зопасные высоты и заполняет графы
предварительного расчета полета в
штурманском бортжурнале. Расчет
безопасных высот ведется от приве
денного минимального давления но
маршруту, которое устанавливается
нз барометрических высотомерах.
В результате штурманской подго-
товки к полету экипаж должен четко
представлять себе порядок самолето-
вождения при: выводе ВС на курс
следования, контроле и исправлении
пути; выводе ВС на заданные и пово-
ротные пункты маршрута; использо-
вании всех навигационных средств,
находящихся на борту ВС; потере
ориентировки и в особых случаях по-
лета; заходе на посадку визуально
и по системам ОСП и РСП.
15.2. Вывод ВС на курс
следования
На курс следования ВС выводится
иа каждом участке маршрута. Точ-
ный проход исходного, а в дальней-
шем поворотных пунктов и правильно
подобранный курс следования гарап
тирует строгое выдерживание задан-
ного маршрута. В основе определения
курса следования лежит учет факти-
ческого угла сноса:
МКСл ЗМПУ—УС. (15.2)
Вывод ВС на курс следования осу-
ществляется визуально по створу
ориентиров или линейному ориентиру
и по УС, измеренному в полете.
Если экипажу известен прогности-
ческий ветер или он был измерен в
полете, то курс следования опреде-
133
ляетея расчетом угла сноса на
НЛ-Юм (см § 3.5). Проход ИПМ
(ПИМ) и дальнейшее движение но
ЛЗП осуществляются с этим курсом
Днем при хорошеп визуальной ви-
димости курс следования подбирает
ся полетом июль линейного или ство-
ра характерных точечных ориенти-
ров, лежащих вдоль ЛЗП После
точного пролета НПА) с МК — ЗМПУ
экипаж наблюдает за боковым пере-
мещением ВС относительно земной
поверхности. Путем небольших пово-
ротов пилот подбирает такой курс,
чтобы ВС перемещалось параллельно
створу ориентиров. Далее ВС выво-
дится визуально на ЛЗП и следует
с курсом, полученным путем подбора
Если у экипажа есть возможность
измерять угол сноса на каждом уча-
стке маршрута, то после прохода
ИПМ (ППМ) с МК-ЗМПУ экипаж
измеряет угол сноса и разворачивает
ВС на эту величину «на ветер». Ча
ще всего этот способ применяется
при полете от радиостанции, напри-
мер, ОПРС (см. § 19.5).
15.3. Контроль и исправление
пути
Для контроля движения ВС по
ЛЗП в полете ведется полная про-
кладка ЛФП на полетной карте. Для
этого определяется фактический путе-
вой угол, с которым перемещается
ВС относительно земной поверхности
ФПУ КК<р+Ак УС (15 3)
Начало линии фактического пути
иа карте совмещается с точкой, соот
ветствующей достоверно опознанному
МС на момент Тк (рис. 15.1). Вслед-
ствие того что курс следования вы
держнвается по показаниям магнит-
ного (гиромагнитного) компаса, по-
лет выполняется по локсодромии, что
приводит к искривлению линии пути.
Максимальное боковое отклонение
локсодромии от ортодромии, соответ-
ствующее наихудшим условиям —
ИПУ=90° (270°), определяется выра
жением:
/м 2 10-s55tg-p, (15.4)
где S« н q — длина и широта участ-
ка маршрута.
Учитывая то. что погрешность из-
мерения и выдерживания курса с по-
мощью ГИК 1 составляет около
1.5°, ограничивают длину локсодро
мни:
5иред 445 I ctgif , (15 5)
допуская при этом методическую по-
грешность ие более /дои — 0,00955.
Предельная длина локсодромии
для различных широт следующая
q>° .... 10 20 30 40
5’предо, км 1060 740 600 485
<р°......... 50 60 70 80 85
Slipefl,0, км 410 310 270 185 130
В других направлениях при
ИПУ#=90° (270°) предельная длина
Рис. 15.1 Полная прокладка линии фактического пути ВС
134
Рис. 15.2. Штилевая прокладка ЛП ВС'
и порядок прокладки ЛП; б расчет вектора среднего ветра
участка маршрута увеличивается в
соответствии с ИПУ
^пред '^пред о ИПУ .
Суммарная погрешность измерения
навигационных элементов, расчета и
графической работы на карте доста-
точно стабильна и мало зависит от
условий полета. Она характеризуется
коэффициентом точности счисления
Кс ч = 0,074-0,09. В процессе полета с
увеличением пройденного расстояния
эта погрешность приводит к постепен-
ному накоплению линейной ошибки
самолетовождения.
Чтобы обеспечить уверенное обна
ружепие и опознавание очередного
контрольного ориентира с заданной
вероятностью, контроль пути должен
производиться не реже, чем через
каждые Sb.o (11.12).
Для условий полета над местно-
стью средней характерности п=3 прн
точности определения МС оГмс
=0,2 км для самолетов 4-го класса и
вертолетов рекомендуемые значения
SK о в километрах при разных путе
вых скоростях и метеорологических
видимостях приведены в табл. 15.1.
Потребная периодичность контроля
пути для Аи 2, если метеовидимость
£м = 5 км; 117=200 км/ч;оГмс=0,2 км,
составляет SK.o = 20 км. Это значит,
что в данных условиях аэронавига-
ционной обстановки через каждые
20 км экипаж должен контролировать
свое МС визуально, т е намечать иа
карте КО на расстояниях, не превы
шающих 20 км.
Иногда в полете создается обета
новка, когда невозможно полностью
проложить ЛФП из-за частой переме
ны курсов, как это имеет место при
обходе гроз или при выполнении не-
которых видов авиационных работ.
Тогда выполняют штилевую проклад-
ку, заключающуюся в нанесении иа
полетную карту участков воздушного
пути (рис. 15.2). Исходными данны
ми для подобной прокладки являют
ся средние значения истинного курса
ИК=МК + Ам и истинной воздушной
скорости полета. За начало штиле
вой прокладки берется последний до
стоверно опознанный КО, пройден-
ный в Тв (рис. 15.2,а).
Таблица 15.1. Расстояния
между КО, км
135
в) 7
®—ч------
@--------н
МУ 5пр
6У' ДП’-> ПК*=?
Зцст $пр $оСщ Ьлр'Зцст
Рис 15 3. Алгоритм расчета поправки п курс ВС.
а — БУ; б - ДП и ПК
В конце последнего отложенного
участка получают текущее шти-
левое М С, соответствующее вре-
мени Tv. Чтобы получить ф а к т и
ческое МС с учетом ветра, от
последней штилевой точки в изправ
леипи среднего ветра 6ср откладыва-
ется отрезок
AS = 6 tp (Гк-Гн), (15.6)
где Ucv — среднее зиачеине вектора
ветра (рис. 15.2,6), полученное гра-
фически или расчетом, C’cp=O,5(t/„ +
+ 6f(), бср —0,5 (би — 6к).
Независимо от способа самолето-
вождения в основе контроля пути ле
жит комплексное применение средств
и способов навигации, заключающее-
ся в определении МС ие только визу-
ально, ио и с помощью различных
радио- и астрономических средств,
находящихся на борту ВС.
Если в результате контроля пути
было зафиксировано уклонение ВС от
ЛЗП. то выполняется маневр для его
выводи на ЛЗП. Если уклонение не-
велико, то рекомендуется выполнить
S-образный маневр, отворотом иа
угол п (7.12). Если уклонение вели-
ко, то ВС выводится на очередной
контрольный ориентир. При этом по
правка в курс ПК рассчитывается по
формуле (7.11) или приближенно в
градусах по одной из зависимостей:
ПК 60
^пр ^^ост
^пр So(-T
ЛБУ или
ПК * =- 60
ЛБУ ЛБУ
—---- ! 60—----
'-'пр SoCT
(15.7)
где Sup и Soct — пройденное и остав-
шееся до КО расстояние; ЛБУ — ли-
нейное боковое уклонение ВС от
ЛЗП.
Для решения этого выражения иа
НЛ-10 м применяется алгоритм, при
веденный иа рис. 15.3. Если после
пролета 60 км было обнаружено ук-
лонение ВС вправо иа 12 км, до КО
осталось 120 км, то ПК=16 влево.
Если погравка превышает 20°. то не
обходимо произвести расчет курса
следования полностью по формуле
(15.2) по новому значению ЗМПУ.
Для фиксации фактических эле-
ментов полета заполняется правая
сторона штурманского бортжурнала,
где записываются в специальных гра
фах. время (расчетное и фактиче
ское) пролета ППМ; фактические зна-
чения курсов и высот полета; остаток
топлива; возможные отклонения от
заданной программы полета (напри-
мер, прн обходе гроз, полет в горах,
при восстановлении ориентировки
и т. д )
15.4. Ведение визуальной
ориентировки
Определение МС визуально ccv
ществляется в два этапа: сначала
опознается пролетаемая местность,
затем по относительному расположе-
нию земных ориентиров и БС опреде-
ляется его местоположение. Для того
чтобы избежать грубых ошибок, еле
дует соблюдать основные пр а
вила:
контроль пути должен произво-
диться иа расстояниях между кон-
трольными ориентирами, не превыша-
ющих предельно допустимые Sko!
исходной точкой для опознавания
местности должно быть счисленное
МС, отмеченное на карте;
карта должна быть ориентирована
по сторонам света:
136
появление характерного ориенти-
ра следует ожидать, т. е. вести ори-
ентировку «от карты к местности»;
начинать опознавание местности
от удаленного плана, обращая вни-
мание на крупные площадные и ли-
нейные объекты Постепенно сужая
зону обзора, переходить к опознава-
нию точечных ориентиров — детален
площадных, соблюдая принцип «от
общего к частностям»;
ни один из отличительных призна-
ков ориентира не должен противоре
чить изображению его на карте;
опознавание ориентира только по
одному признаку может привести к
грубой ошибке самолетовождения
все достаточно крупные ориенти-
ры. появляющиеся в процессе полета
вблизи ЛЗП. должны быть опознаны;
тщательная подготовка к полету
значительно упрощает и ускоряет
процесс обнаружения и опознавания
ориентиров.
Визуальное определение местопо-
ложения ВС заключается в нахожде-
нии положения его относительно ок-
ружающих ориентиров путем пеленга-
ции их и определения удаления.
В процессе пеленгации ориентира
определяется визуально его курсовой
угол (КУО). Расчет ИПС ведется по
формуле (6.11). Для облегчения опре-
деления КУО рекомендуется делить
угол 90° (от продольной оси ВС до
траверзного направления) иостедова-
тсльно на две или три части
(рис. 15.4).
Расстояния определяются расче-
том через вертикальный угол и высо
ту полета или использованием земных
ориентиров в качестве масштаба, л
также по времени пролета траверз-
ного расстояния. Зависимость верти
кальных углов (ВУ) и соответствую
щих им удалений, выраженных в вы
сотах, следующая:
ВУ°. ... 27 45 56 64 76 80
Удаление .0,5/7 \Н 1,5/7 2// 4Н 6Н
Углы отсчитываются «иа глаз» от
линии горизонта при ВУ>45° или от
местной вертикали при ВУ<45°.
Если опознанный ориентир нахо-
дится впереди, ио в стороне от ЛЗП,
то можно пустить секундомер в мо-
Рис. 15.4. Определение курсового уг-
ла ориентира
меит, когда он будет иа КУО=45°
(315'’), и остановить его. когда он
пересечет линию траверза. Удаление
до него будет равно расстоянию,
пройденному ВС за измеренное вре-
мя.
Для приближенного расчета прой-
денного расстояния ВС в уме реко-
мендуется следующий прием: если
отбросить последнюю цифру значения
путевой скорости, то оставшееся зна-
чение будет соответствовать пути,
проходимому ВС за 6 мии. Дальней-
шим делением этого расстояния на
части можно получить нужное зна-
чение
При наличии двух и более опоз-
нанных ориентиров можно использо-
вать прием глазомерной пеленгации
каждого из них. В точке пересечения
лнинй пеленгов будет находиться ВС
(рис. 15.5). Следует помнить, что чем
ближе к ВС находится ориентир, тем
точнее будет определено МС. Поэто-
му рекомендуется определять МС по
пролету опознанного ориентира.
Рис. 15.5. Определение МС по взаим-
ному расположению земных ориен-
тиров
137
15.5. Применение
радионавигационных средств
Самолеты 4-го класса н вертолеты
оборудуются автоматическими радио-
компасами и радиовысотомерами ма-
лых высот. Это позволяет экипажу в
полете определять направление на
работающую радиостанцию и изме-
рять истинную высоту полета до //
= 1 .>30 м. Радиокомпас ЛРК обеспе-
чивает инструментальный полет ВС
сна» и «от» наземного ра гнома яка
РМ. а также определение МС пелен-
гацией РМ.
Полет иа радиомаяк осуществляет-
ся пассивным и активным спосо-
бами.
Выполнение полета. Прн выполне-
нии пассивного полета на РЛ1 экипаж
непрерывно выдерживает КУР = О
Под влиянием бокового ветра траек-
тория ВС искривляется (см.
рис. 7.9). Максимальное уклонение
от первоначального направления по-
лета определяется выражением
(7.21), если вместо угла Р подста-
вить УС.
Полет на РМ активным способом
предусматривает учет бокового сно-
са ВС ветром, т. е. непрерывное вы-
герживание КУР ~ УС В этом случае
траектория полета бывает близка к
ортодромии и определяется только
погрешностями определения и выдер
живання КУР. Траектория полета
определится максимальным уклоне-
нием zmax, величина которого рас
считывается согласно (7.22), если
вместо Р подставить ок>р.
Недостаток и пассивного, и актив
ного способов полета — наличие иа
чальной ошибки Если в начальный
момент полета ВС находилось в сто-
роне от ЛЗП, то боковая ошибка
будет устраняться только постепенно,
по мере приближения к РМ Опреде
лить же ее в полете трудно Ограни-
чив полег 1ОПУСТНМЫМИ значениями
ЛБУ, можно получить предельную
начальную дальность полета на РМ,
при которой ВС не уклонится от
ЛЗП более установленного допуска
(рис 15 6). Считан приемлемой Ртр =
= 0,68, получим предельные началь-
ные дальности 80 и 56 км соответст-
венно для УС = 5 н 10°.
При отсутствии бокового ветра
(УС = 0) предельная дальность равна
95 км. Эта же дальность может быть
принята и для активного способа по-
лета. Для РТР = 0.95 при активном
способе полета дальность сокращает-
ся до 50 км.
Если на ВС установлен гиромаг-
нитный компас ГИК-1, то с помощью
совмещенного индикатора УГР-1, по-
зволяющего одновременно определять
н МК, и КУР. можно выполнять по-
Рис. 15.6. Вероятность невыхода ВС за пределы (2в= 10 км) при полете иа
PC пассивным способом
138
Рис 15 7. Вероятность невыхода ВС за пределы ВТ (2в=10 км) при полете
на PC по ЛРПР
лет по линии равных пеленгов радио-
станции (ЛРПР). Этим устраняется
недостаток, присущий пассивному и
активному способам — невозмож-
ность устранения начального уклоне-
ния ВС от ЛЗП. Для выполнения по-
лета на РМ стрелка курсозадатчнка
УГР-1 устанавливается на значение
ЗМПУ участка маршрута. Далее по-
следовательными доворотами ВС эки
паж постепеиио подбирает такой курс
следования, чтобы стрелка КУР все
время была совмещена со стрелкой
курсозадатчика. При полете от РМ
все делается так же, но с направле-
нием, указываемым курсозадатчнком,
совмещается обратный конец стрелки
КУР
При полете иа РМ и от РМ ВС
все время будет разворачиваться в
соответствии с изменением УС и
схождением меридианов. Это приво-
дит к искривлению траектории поле-
та. Максимальное значение бокового
уклонения ЛРПР от ортодромии на-
ходится на середине расстояния меж-
ду ВС и РМ
zmax ~ 2’3" Ю 4
sin ИПР
90— ф°
(15.8)
где S - расстояние между ВС и РМ,
км. ИПР — истинный пеленг РМ, со-
ответствующий ЛРПР; ч — широта
радиомаяка, °.
Ограничив себя допустимым ЛБУ,
можно получить предельную началь-
ную дальность полета способом вы-
держивания постоянного пеленга РМ.
при котором ВС не уклонится более
установленного допуска На рис. 15.7
приведен график вероятности невыхо-
да ВС за пределы полосы шириной
±5 км Считая приемлемой Ртр = 0,68,
для средних широт ф = 404-60° пре-
дельные начальные дальности будут
150—180 км.
Контроль пути по направлению
Если ПРС располагается на оси воз
душной трассы, то экипажи имеют
возможность определять боковое ук-
лонение ВС от линии заданного пути
и осуществлять вывод ВС иа иее.
Уклонение ВС имеет место, когда
МПР (МПС)=аЗМПУ. Сторона укло-
нения определяется из сравнения этих
величии (рис. 15.8):
МПС<ЗМПУ (полет от радио-
станции), МПР>ЗМПУ (полет на ра
диостанцию) уклонение влево;
МПС>ЗМИУ (полет от радио
станции),
МПР<ЗМПУ (полет на радио
станцию) — уклонение вправо
Порядок вывода ВС на ЛЗП за
ключается в следующем. Довернув
ВС в сторону ЛЗП на 20—30°, эки
139
Рис. 15.8 Вывод ВС на ЛЗП полетом «на» н «от» радиостанции
паж выполняет полет с постоянным
курсом. При этом МПР (МПС) будет
приближаться к значению ЗМПУ.
В момент выхода ЕС на ЛЗП стрел-
ка радиокомпаса покажет МПСВых =
=ЗМПУ, если радиостанция находит-
ся по полету сзади, и МПРВых =
= ЗМПУ, если впереди. Для удобст-
ва контроль можно осуществлять по
курсовому углу радиостанции. В этом
случае при выходе ВС иа ЛЗП стрел
ка АРК укажет:
КУВвых = ЗМПУ—МКвых прн по-
лете на PC;
КУРвых = ЗМПУ—МК»ых + 180 при
полете от PC.
Рис. 15 9 Определение МС с по-
мощью АРК
Дальнейшее следование ВС по
ЛЗП осуществляется одним из вы
ше указанных способов.
Определение МС с помощью АРК
выполняется графически прокладкой
линий радиопеленгов от двух назем-
ных радиомаяков на карте (рис.15.9).
Для расчета ИПС пользуются форму
лой (6.10).
Неодновременность измерения ра
диопеленгов требует переноса одного
нз них на S=W(T2—Tl} для приведе-
ния обоих измерений к одному мо
менту, обычно Т2 Однако, учитывая
низкую точность измерения радиопе-
ленгов с помощью АРК [оРц =
= (34-4)°], можно не осуществлять
переноса, если
(Т2-Т\) < 100(ДГр 1Р), (15 9)
что для 150 км составляет:
«7, км ч .100 150 200 250 300 350
(Л—Т2), с J50 100 75 60 50 43
Иногда используется радиопеленг
третьего РМ. Это дает возможность
не только оценить ошибку определе-
ния МС, но н повысить точность оп
ределення, выбрав в качестве МС
точку пересечения биссектрис в тре-
угольнике погрешностей.
Экипажи ВС, на которых установ
лены командные радиостанции, мог>т
использовать автоматические радио
пеленгаторы (УКВ) для контроля пу-
ти и полета иа и от АРП С этой це
140
лью запрашивается прямой (ПП) или
обратный (ОП) радиопеленги. Они
измеряются относительно магнитного
меридиана, проходящего через АРП:
пряной радиопеленг — в направ-
лении на ВС. Он используется для
контроля пути прокладкой истинного
радиопеленга ВС ИПС=ПП + Лм;
обратный радиопеленг — ВС иа
APII. Он приближенно равен магнит
ному курсу ВС на радиопеленгатор,
поэтому используется при обеспече-
нии и контроле полетов в районе аэ-
родрома.
Точность определения МС. полу-
ченного в точке пересечения линий
радиопеленгов, оценивается радиаль-
ной средней квадратической погреш-
ностью, рассчитываемой по (8.13).
Определим МС и оценим его точ-
ность, если на МК = 50° были измере-
ны: КУР =163°, КУР = 58°, а Чо=56,
спс —3,9е. Ар = 49, Ар = 53; Л = 50 ,
Лм 13°.
II ПС| = 50 + 13+ (49—50) sin 56 +
+ 163—180=45,2°;
ИПС2=50+13-+(53—50)sin 56+
+ 58+180=303,5°.
После получения МС на карте, на-
ходят w = 76°, D]= 136 км. D.= 176 км.
„ 0,0)75-3,9 ,------
Тогда 0,= " 76ё—}136?+1762=
= 15,6 км. Это значит, что с вероят-
ностью 0,63 можно утверждать, что
фактическое МС находится в преде-
лах кружка с радиусом 15,6 км.
Таблица 15.2. Исходные данные
дальностей и углов пересечения
линий радиопеленгов
РМ п
1 2 3
1—2 (D (0 Д1 д2 (0 Д> Дг (0
2—3 Д2 Дэ (0 Д2 Дз <0 Дг Дз (0 Дг Дэ (0
1 -3 Д.Дз (0 Д.Лз (0 Д1Д3 (0 ЛДз €0
1 -
Таблица 15.3. Распределение
радиальных СКП МС вдоль ВТ
РМ п
1 2 3 4...
1—2 о' Г( 1 — 2) °г(1-2) аГ... аг...
2—3 \ П2—3J э) оГ... оГ...
1—3 <j'f \ -э) °<(1-э) аГ... О г...
. . . ... ... •
Точность определения МС зависит
от удаления ВС от РМ и угла ы пе-
ресечения радиопеленгов. Наивысшая
точность бывает там, где ш=109°
поэтому целесообразно выполнять оп
ределенне МС именно в таких точках.
С этой целью при подготовке к поле-
ту рекомендуется строить график рас-
пределения Or вдоль заданного марш-
рута. Для чего на ЛЗП намечаются
точки л = 1, 2, 3 . .. отстоящие на
20—30 км одна от другой. Для каж-
дой из них измеряются и сводятся в
табл. 15.2 значения D и w всех пар
РМ, находящихся в пределах дально-
сти действия.
По полученным данным рассчиты-
ваются Or для каждой пары РМ
(табл. 15.3).
Согласно расчетным значениям ог
по точкам л=1, 2, 3 н т. д. строится
график распределения ошибок опреде
лення МС для каждой пары РМ
вдоль линии заданного пути
(рнс. 15.10) На ием наглядно вид
Рис 15 10. Распределение радиаль
ных СКП определения МС вдоль ВТ
1—2, 2-3, 3—4 — пары радиомаяков
141
ны н>чк|1, где нужно (A £, В. Г) и
г ie не нужно выполнять контроль пу
ти но РМ
15.6. Измерение навигационных
элементов полета
Ни самолетах 4 го класса н верто-
летах угол сноса н путевую скорость
можно измерить только дискретно,
т е. на контрольном этапе и базис
ным способом На контрольном этапе
1ля измерения используются зависи-
мости путевой скорости н УС
Основное условие успешного из-
мерения навигационных элементов на
контрольном этане уверенное опоз-
навание пролетаемой местности с точ-
ной фиксацией местоположения ВС в
начале и конце КЭ на полетной кар-
те.
Повышения точности измерения
УС и путевой скорости можно до-
биться. используя оптимальную зли
ну К'} (рис. 5.1)), которая для нет
ров средней скорости 40 80 км ч
рассчитывается но формуле (II 15)
Порядок расчета показан на гра-
фике стрелками Например, для ско-
рости ветра V=50 км/ч н разных
условий измерения оптимальная дли-
на контрольного этана составит 17,
30 и 49 км.
Рис 15 11 Определение оптимальной
длины контрольного этапа
/ прн определения времени по часам
(0^—25 <•), 2— при определении времени
ио e*-KyHaoMepv 0,3 с)
Измерение угла сноса и путевой
скорости базисным способом возмож
по на ВС, оборудованных бортовым
визиром ДБ 52
Выполняя полет от РМ, экипаж
может измерить УС и вывести ВС на
ЛЗП (см рнс. 15.8) Для этого с
МК = ЗМПУ и максимально возмож
нон точностью ВС выводится па РМ
По истечении некоторого времени из
меряется курсовой угол РМ. Затем
рассчитывается угол сноса по фор-
муле (6.7) или приближенно УС =
== КУР—180° Боковая ошибка при
пролете ВС над РМ приводит
к погрешности измерения 5 С Для
того чтобы эта ошибка не оказала
заметного влияния на результат из
мерсния УС. необходимо увеличить
расстояние до момента отсчета КУР
Минимальные значения этого рас
стояния в зависимости от фактиче-
ской ошибки Лг следующие:
. м 100 200 400 600 800 1000
511Ред. КМ 5 9 18 27 36 45
15.7. Определение времени
наступления моментов
естественного освещения
Расчет условий естественного ос
вешеиня для любой точки земного
шара можно производить с помощью
авиационного астрономического еже
готника (АЛЕ), календарного спра
ночника и специальных графиков
С помощью ЛАЕ можно опрсде
лять время восхода и захода Солн-
ца, продолжительность сумерек и мо
менты наступления рассвета и темно
ты, области незахоляшего и иевосхо
дящего Солнца, время восхода и за
хода Луны для поверхности Земли и
на высоте полета.
В календарном справочнике привс
депо время восхода, захода Солнца и
продолжительности сумерек по мо
сковскому декретному времени для
наиболее крупных городов мира.
Приближенное определение момен
тон восхода (захода) Солнца, на
ступления рассвета (темноты) пропз
водится с помощью графиков
142
(рис. 15.12 и 15.13). На них но 3d
данной дате (горизонтальная ось) и
широте пункта, указанной кривыми,
но вертикальной осн (слева нли
справа) отмечается время наступле-
ния момента соответствующего явле
ния по московскому декретному вре-
мени 7"3 на мери |иане 30°. Для онре
деления момента наступления соот
ветствующего явления на другой .юл
готе = А—30° прибавляется по-
правка Ху, за долготу места, которая
находится по согласованным шкалам
Л н ХТ) расположенным в нижней ча
сти графиков.
Для преобразования московского
декретного времени во время но дру-
гому часовому поясу необходимо
учесть разность часовых поясов А у
=Л‘ 3°
Определим моменты восхода и за-
хода Солнца но времени четвертого
пояса 20 июля в пункте с координа
тамн <| 62°00' с, л=7ОэЗО' в.
По графику в точке с координата
ми q «=62°00'. к = 30 00' определяем
время восхода (4 ч 00 мин), захода
(22 ч 00 мин), поправка за разность
долгот Лг^ составит 2 ч 10 мин, а за
разность часовых поясов +1 ч Тогда
момент восхода по времени четверто
го пояса составит 2 ч 20 мин, захода
20 ч 20 мин.
Определение момента и рубежа
встречи ВС с рассветом или темнотой,
В зависимости от за гании и аэрона-
вигационной обстановки полеты ны
полняются в светлое и темное время
суток Прн этом бывает необходимо
установить: последний срок вылета,
обеспечивающий выполнение посадки
ВС не позднее установленного време-
ни; время выхода иа рх-беж встречи
ВС с рассветом нли темнотой в поле
те и его удаление
Последний срок вылета юлжен
быть не позднее
Т'вы.ч T’uor--61 •
где Твое—предельное время, обссие
чивающее безопасность посадки, уста
новленное нормативными документа
ми для данных условий полета; t„ —
суммарное время полета от взлета до
посадки, включающее полет но мар-
шруту и маневрирование в районе
аэродрома вылета и посадки.
Определение момента встречи В(
с рассветом (темнотой) в полете мо-
жет производиться аналитически или
графически
Аналитически момент встречи рас
считывается по формуле
,, Т’выл
/ветр --------Г--7------(15.10)
I А
^выл — ТВы.| т- г
• Д** А . , 1 выл. / нос
' ЦОС — ' пос
время наступления рассвета (темно-
ты) на аэродромах вылета и посадки
(если полет выполняется на большой
высоте, то время должно быть ис-
правлено иа высоту полета), Тки.,,
1 пос — время вылета и поса гкп на
«ап чипированных аэродромах
Для графического опре геления
Гт-тр на листе бумаги строятся ibi-
параллельные, согласованные между
собой, шкалы времени. Одна для
аэродрома вылета, другая - посадки
(рнс. 15.14). Точки, соо1ветстнующие
времени вылета и посадки, а также
наступления темноты (рассвета) в
этих пунктах попарно соединяются
прямыми Точка пересечения их \ка
жет время встречи ВС с темнотой
или рассветом.
У юление рубежа вс гречи с рас-
светом (темнотой)
''негр — (7 в< т|> 7’ньь,|) IV (15.11)
Во избежание ошибок в расчетах
все моменты должны быть определе
иы ио единому времени ио которому
идут бортовые часы.
Рассчитаем момент встречи ВС с
темнотой и удаление рубежа встречи
(U —850 км ч), если в пункте вылета
темнота наступает в 21 ч, а пункте
посадки в 20 ч 30 мин (20.5 ч). Вы-
лет ВС намечается в 19 ч посадка
в 22 ч.
Для решения воспользуемся аиа
литическим н графическим методами
143
144
I Июль 1 Август 1 Сентябрь 1 Октябрь 1 Ноябрь । Декабрь ХДбёла'
зо ю го 31 ю го 31 ю го зо ю го 31 ю го зо ю го nfom
15 30 45 60 75 90 105 110 135 150 165 1002°
---------------Поправки ЗТЯ вычитаются
145
Январь 10 20 Февоаль 10 20 21 Март 10 20 J Апрель 10 20 I 30 Май 10 20 I 31 HvMb 10 20 30
1 О Q; Co 1 / !§/ 4>’ 59°
S ей "
3 155"
ез L 1 'очь 15
в 35 VJ.
5 35
а С1 у и 55 25'
в — ьи ГЧ ==^ —- 15
$ S 7 — JL^
е 8 9
а
12 13 к: / .с / К? i Со/ Со J 1ень
'S сс /
/с
16 17 18 19 20 21
i
5 <f-6 !• _ 1.5 -
i | V" 65’ во 55 45 r — — •25- •35- 45
Сз 22 23 35 25_ 55^
15 0 1 V co 58 "
24 Ночь —L \
.J d L - 59
10 20 31 10 20 28 10 20 31 10 20 30 10 20 31 10 20 30
Январь | Февраль | Март | Апрель | Май | Июнь |
14 12 10 8 6 9 Z
Г”»—I—Т—т—Т—1Г"»—Im»—т—Iг-1Г“1—I—I—’—1—|—»1—1»1—1т—т—7nq]1f—Г-1—»гнт—]—тг—i«—»—I—г~1Г’’—’
Lu__i-u—i—i—1—i—i—*—1 1, .1 £, t—4—i—i—1Uu1 » » 1 » 1 1 » » » t i » a i . i .
180 150 1Z0 90 60 30 O’
Поправки в прибавляются -*----------------------------------
Рис 15.13 Определение моментов наступления рассвета и темноты
146
Поправки Л Гд Вычитаются
147
Рис. 15.14 Определение времени
встречи ВС с темнотой (рассветом)
на маршруте полета
„ 21+ 1.33-20,5
^HCTD— -------------20,7 ч,
р 1 + 1.333
что соответствует 20 ч 43 мин. Тогда
«встР=850(20,7—19) = 1453 км.
15.8. Применение
астрономических
навигационных приборов
Определение курса ВС астрономи-
ческими средствами. Астрономические
компасы (АК) позволяют измерять
курс ВС н выдерживать его в поле-
те. Для измерения решают уравнение:
НК (УК) =А — КУС,
где А — азимут светила. В зависимо-
сти от выбранного мери шана изме-
ренный курс будет истинный при от-
счете азимута светила относительно
текущего географического меридиана
и условным — при его отсчете от од-
ного меридиана, например КПМ, выб-
ранного на все время полета; КУС —
курсоьой угол светила, измеряемый
либо поворотом корпуса ЛК вручную,
либо автоматическим вращением вп
зирной системы с помощью следяще-
го привода.
Расчет азимута светила произво-
дится автоматически самим астроком-
пасом по значениям;
географических координат ВС, вво-
димых в АК вручную непосредствен-
но перед измерением (при измерении
условного курса долгота не меняется);
склонения светила (устанавливает-
ся 1 раз на весь полет);
гринвичского часового угла свети-
ла. Вследствие суточного вращения
Земли /Гр непрерывно меняется. Это
изменение компенсируется часовым
148
механизмом, вращающим визирную
систему с угловой скоростью 15°/ч.
Совмещенный астрокомпас
АК-59п предназначен для измепсния
курса ВС в полете по Солнцу, плане-
там и звездам. Он может применять-
ся на всех широтах северного и
южного полушария. Астрокомпас
АК-59п имеет три визирные систему,
позволяющие применять его в любых
условиях полета: основная (нижняя)
предназначена для пелеш ации Солн-
ца днем; верхняя визирная система
служит для пеленгации звезд. Лупы
н других планет, поляризационная
визирная используется для пеленга-
ции Солнца в сумерки и тогда, когда
оно закрыто от прямого наблюдения
с помощью основной системы.
Перемещение ВС в процессе поле-
та в АК-59п не компенсируется,
вследствие чего возможно только
дискретное измерение мгновенного
значения истинного курса ВС в соот-
ветствии с установленными ф, X.
Дистанционный астрокомпас
ДАК-ДБ-5в предназначен для опре-
деления и выдерживания курса ВС,
разворота на заданный угол н выпол-
нения полета по ортодромии. Опре ее
ление истинного курса возможно при
высоте Солнца от 0 до 70" и скло
нения от 0 до ±23,5°. Нормальное
функционирование астрокомпаса обес-
печивается в северных и южных шп-
ротах от +90 до —90°. При совмест-
ной работе с перископическим сек-
стантом можно получить курсовую
информацию от звезд и планет, имею-
щих склонение от 30 до +60".
Астрокомпас позволяет произво-
ц'Ть полеты по участкам ортодро-
мии. нс превышающие 1100 км
Истинный курс выдается на
индикатор только дискретно соответ-
ственно введенным вручную значени-
ям: /гр, <f и X.
Наибольшее влияние на точность
измерения ИК астрокомпасами ока
зывают ускорения ВС в момент отче-
та н ошибки ввода географических
координат МС. Рекомендуется астро-
измерения курса производить только
в режиме установившегося горизон-
тального полета
Несоответствие между фактиче-
ским МС и географическими коорди-
натами, введенными в ЛК, вызывает
появление ошибки измерения
курса:
АИК$ =9-10 3 [tg (f sin ФПУ-ф
+ tg Л sin (А—ФПУ)] AS, (15.12)
где XS — абсолютная погрешность
МС; ФПУ — фактический истинный
путевой угол или азимут погрешности
\S. Максимального значения ошибка
AHKin)ax достигает при полете на
восток или запад, когда светило нахо-
дится в верхней кульминации, т. е.
имеет максимальную высоту и распо-
ложено в северном или южном на-
правлении. Допустимая ошибка, прн
которой погрешность измерения ис-
тинного курса не превысит допусти-
мого значения АИК.ч max, рассчитыва-
ется как
дик^тах
ДО" • tg(₽+ctg(T-«) '
(15.13)
Максимального значения при измере-
нии ПК Д5ДО11 (рис 15.15) дости-
гает на широте <р=±35° в дии
солнцестояния: зимнего в северном
полушарии, летнего—в южном. Наи-
более неблагоприятные условия изме-
рения имеют место в районах reoipa-
фических полюсов и в широтном
поясе — 40° 40°.
Применение условных мери типцов
и условных курсов расширяет воз-
можности использования астрокомпа-
сов. Ошибка, возникающая по мере
удаления от точки, географические
координаты которой были введены в
АК, возрастает в меньшей степени:
\ УКХ = 910—3 AS tg h sin
X (А —ФПУ). (15.14)
Допустимое значение
А УКХ
AS,|O11 111.2 ----------------.
',о" tg Л sin (А —ФПУ)
(15.15)
Или графически (рис. 15.16). При
необходимости применения другой
допустимой ошибки курса значение
Ааппп пересчитывается, например.
-80 -60 ~6О -20 0 20 60 60 f
Рис. 15.15. Определение допустимой
ошибки в установке координат МС
при измерении истинного курса
(АПК = 2°)
при ЛУК°=0,5с допустимое удаление
уменьшается в 4 раза.
Выдерживание направления по-
лета астрономическими средствами.
Астрокомпас АК-59п ие. имеет кор
ректирующего устройства для ком
Рис 15.16. Определение допустимой
ошибки в установке координат МС
при измерении условного курса
(ХУК = 2°)
149
цеисации перемещения БС относи-
тельно земной поверхности, поэтому
при выдерживании постоянного курса
происходит искривление ЛФП. Нан
большее уклонение Zmal бывает при
больших высотах светила, которое
находится на траверзе ВС. Если за
даться приемлемым значением укло-
нения ЛФП Zmax от ортодромии, то
допустимое расстояние
\топ 2arccosX
sin h
’ sin(h+910 3Zmax)
(15.16)
Например, если курс следования
выдерживается по \К прн высоте
Солнца /1 = 4-0°, то на участке nvin
550 км ВС уклонится от ортодромии
на 5 км, а на участке 780 км — па
10 км (рис. 15.17),
Чтобы ЛФП уклонялась от орто-
тромин не более чем на 5 км, смену
географических координат следует
производить не реже чем череа 700 км
при /t<30°; 500 км при Л= (304-60)°;
300 км при /1>60”.
Географические координаты при
установке их иа ЛК следует выби-
рать для средней точки участка
маршрута.
Рис. 15 17. Определение допустимой
дальности полета прн выдерживании
курса по астрокомпасу
150
Астрокомпас ДАК-ДЕ-5 имеет пу-
тевой корректор, обеспечивающий
выполнение полета по ортодромии
Одиако наличие угла сноса у ВС в
полете приводит к появлению погреш-
ности измерения и выдерживания ор-
тодромического курса
Л ОК" = 1.57-10 4 х
S УС” tg Л cos КУС, (15.17)
где S—удаление ВС от точки вклю-
чения путевого корректора; КУС —
курсовой угол светила.
Наихудшие условия полета при
КУС = 0 (180 ), т. е. когда Солнце
находится впереди или сзади ВС, До
пустимое расстояние, при котором
максимальное ЛБУ ВС не превысит
заданное значение гп.»х,
5Д1Ш 850 1 _^ctg/li.p
’ У Сер
(15.18)
Например, при высоте Солнца /1 = 80°
и УС=5°, чтобы уклонение ЛФП не
превзошло К) км, можно лететь по
ортодромии нс более 500 км.
На рис. 15 18 приведен график до-
пустимых значений Sn„n при условии
^шах"5 КМ.
Если ограничиться условием
-бпах = 5 КМ, ТО Прн УС=5° МОЖНО
рекомендовать следующий порядок
использования путевого корректора-
прн /К 30° он может включаться без
ограничений; при h= (304-50)° он
может оставаться включенным на
протяжении только 800 км; при
h— (604-80)” он может быть вклю-
ченным на участке длиной 400 км.
Наличие бокового уклонения ВС от
заданного ортодромнческого участка
маршрута приводит к ошибке курса,
сходной с погрешностью, возникаю-
щей из-за угла сноса.
Определение МС астрономически-
ми средствами. Высота небесного
светила, измеренная астрономически-
ми средствами, несет в себе позици-
онную информацию, т. е. сведения о
местоположении ВС в момент изме-
рения. Так как непосредственно изме
рнть координаты МС, кроме высоты
Полярной звезды, равной широте точ-
ки измерения невозможно, выполня-
ются косвенные измерения. Они тре-
буют дополнительной информации о
времени измерения и экваториальных
координатах небесного светила.
В результате чего получают линии
равных высот (ЛВР). Точка их пере-
сечения на карте определит МС. Воз
можны варианты измерения высот
двух небесных светил или одного, но
с определением высот в разное вре
мя. Для преобразования измеренных
высот светил в ЛРВ применяются:
Авиационный астрономический еже-
годник (ЛАЕ), Таблицы высот и
азимутов (ТВА) и Таблицы высот и
азимутов звезд (ТВАЗ)
Порядок расчета и построения
ЛВР:
измеряют высоту светила Л и фик-
сируют соответствующие этому мо-
менту: время Т (секунды, минуты, ча-
сы), географические координаты счис
лимого МС н фактический путевой
угол ВС;
вносят исправление в отсчет вре
меии на поправку часов 7’мепр = 7Ч-с
н преобразуют его в гринвичское
Тгр = Тиспр—V. Номер пояса N, по
времени которого идут часы, берут
с учетом декретного и летного време-
ни Для московского времени Ттр =
~Т„—4 летом и 7’гр = 7’п—3 зимой;
из ААЕ на дату измерения по це-
лому числу часов Тг₽ выбирают: для
Солнца и планет склонение б и за
патный гринвичский часовой угол
Лр, а для Луны дополнительно па-
раллакс, для звезд гринвичское звезд-
ное время Srp; по интерполяционным
таблицам определяются и прибавля
ются поправки к /гр за минуты и се-
кунды Ггр!
рассчитывают местный западный
часовой угол Z = /rp-t-X'. Прн этом
долгота X' берется близкой к ечнелн-
мой X, но так, чтобы t не содержал
минут и был четным Если Л>180\
то дополняют его до 360° и часовой
угол считают восточным;
если измерение выполнялось по
Солнцу илн планете, то пользуются
ТВА По склонению 6 находят нуж
ную страницу, а по t и <р определя-
ют азимут светила А, вычисленную
высоту Лв и поправку за минуты
Рнс. 15.18. Определение допустимой
дальности полета по ортодромии прн
выдерживании курса по астрокомпа
су Zmax —5 КМ
склонения /. Исправляют высоту
Лв= he+fhti Если в таблицу входи-
ли с западным часовым углом, то за
азимут принимается дополнение
табличного значения до 360°. Если из-
мерение выполнялось по звездам, то
пользуются ТВАЗ По значению ши
роты ечнелимого МС <р, целому числу
местного звездного времени S =
= Srp+X' в градусах н названию
звезты определяют вычисленную вы
соту и ее азимут;
измеренную высоту светила ис-
правляют поправками: секстанта с.
за рефракцию атмосферы г и за вра
щения Земли и с учетом путевого пе-
ленга ПП=А—ФПУ. Они выбира-
ются нз ТВАЗ. При этом Л„ = h 4~с—
— r-j-a.
Прн 0<ПП<180° поправка и бе-
рется со знаком плюс, при 180°<
<ПП<360° —со знаком минус;
разность высот между исправлен-
ной н вычисленной Ah' — hu—Лв, вы
раженная в угловых минутах, преоб
разуется в километры АЛ =1.853 Ah';
на карте из точки со счислимымн
координатами (<р и X'), выбранной
при расчете /. прокладывают линию
151
азимута светила А, если Д<1>0, то
отрезок \h откладывают от счисли-
мого ИС «на светило», если Ай<0—
откладывают в направлении «от све-
тила». Через полученную точку пер-
пендикулярно линии азимута светила
прокладывают линию равных высот.
Если измерялась высота Полярной
звезты. то, исправив ее на поправки
с, ' и а, рассчитывают широту МС:
ф = ^ЛОЛ “Ь ^фиоЛ •
где \фЯол — поправка Полярной
знезты, получаемая из ТВАЗ.
Расчет н построение ЛРВ от вто-
рого светила получают аналогичным
образом В точке пересечения двух
ЛРВ получают место ВС. При этом
1ля повышения точности нужно вы-
бирать светила, расположенные под
углом V1, близким к 90°, и учиты-
вать смешение второй ЛРВ вследст-
вие перемещения ВС в процессе из-
мерения.
Глава 16
ПОДГОТОВКА И ВЫПОЛНЕНИЕ ПОЛЕТА НА САМОЛЕТАХ,
ОБОРУДОВАННЫХ СИСТЕМАМИ И АВИАЦИОННЫМИ НАВИГАЦИОННЫМИ
КОМПЛЕКСАМИ С АНАЛОГОВЫМ ВЫЧИСЛИТЕЛЕМ
16.1. Авиационный
навигационный комплекс
Современные ВС, особенно маги-
стральные самолеты, оборудуются
большим числом навигационных
средств и систем. Часть нз них вхо-
дит в состав авиационного навигаци-
онного комплекса (АНК).
Авиационный навигационный ком-
плекс — совокупность функционально
взаимосвязанных бортовых средств и
систем, обеспечивающий автоматиза
пню решения навигационных задач с
представлением экипажу данных, тре-
бующихся для управления движением
центра масс ВС, или вводом нх в
систему автоматического управления
полетом (САУ).
Основными функциями,
выполняемыми с помощью АНК, яв-
ляются: запоминание информации о
Рис. 16.1. Обобщенная структурная
схема АНК
152
требуемом законе движения ВС
(программирования ЗПВТП); опреде
ление рассогласования между дейст
пительным и заданным законами дви-
жения: формирование управляющих
воздействий, обеспечивающих реали-
зацию программной траектории; отоб-
ражение навигационной информации.
Функции технических средств АНК
можно разделить на информацион-
ные. метрические, вычислительные и
иконографические. Поэтому в состав
АНК входят устройства: запомина-
ния информации; измерения навига-
ционных параметров; выполнение вы
числительных операций; отображения
навигационной информации.
Типовая обобщенная структурная
схема АНК (рис. 16.1) содержит:
датчики навигационной информации
(ДНИ); навигационное вычислитель-
ное устройство (НВУ); устройство
отображения информации (УО). На
нем показано также устройство уп
равлення (УУ): оно обычно является
составной частью НВУ и использует-
ся для программирования полета,
управления навигационным комплек-
сом (НК) и выбора параметров, вы-
даваемых на УО. Элементами пило-
тажного комплекса (ПК) служат:
датчики пилотажной информации
(ДНИ) и система автоматического
управления. Совокупность НК и ПК,
обеспечивающая решение задач пило-
тирования и навигации, представляет
собой пилотаж но-навигационный ком-
плекс (ПНК)
Известно много различных отече-
ственных и зарубежных структур
ГН 1 К, отличающихся составом
средств, принципом действия НВУ,
объемом решаемых задач и друтми
признаками. Эксплуатируемые АНК
условно можно разделить на две
группы: комплексы первого
поколения (АНК-1) с аналого-
выми НВУ и второго поколения
(АНК-Н) с цифровыми НВУ. ОпИ
ш значительно ра сличаются составом
входящих в них средств, но сущест-
венно — характеристиками отдельных
элементов и навигационными возмож-
ностями и целом.
Функциональная схема, алгорит-
мы счисления и коррекции, зависи
мости погрешностей решения задач
от первичных параметров в комплек-
сах первого и второго поколений во
многом одинаковы.
НВУ является центральным зве-
ном АНК, объединяющим вокруг себя
нее его элементы. Оно обеспечивает
счисление коор шнат, определение
расхождения между фактическим н
заданным законами движения, фор
мирование управляющих сигналов,
оптимальную обработку результатов
измерении, автоматическую коррек-
цию счисленных координат и многое
другое. В АНК имеются центральный
и специализированные вычислители.
ДИН служат для измерения на
рамстров воздушной среды, магнитно-
го и электромагнитною полей, по ко-
торым определяются навигационные
элементы: скорость, высота, курс, ко-
ординаты ВС и ДР. В зависимости
от характера определяемой величины
ДНИ телятся на гве группы:
первая обеспечивает опретеле-
пне навигационных элг ментов твиже
ния (V, IF, у, р, а, V.) С нспользо
ванном информации этих датчиков
ве гется автоматическое счисление ко-
ординат ВС;
вторая служит для определе-
ния навигационных параметров, ха
рактеризующих положение ВС отно-
сительно опорных линий и точек или
положения объектов относительно
ВС. Они предназначены для опреде-
ления МС в интересах коррекции
счисленных координат и автономного
контроля пути.
В состав У У входит: пульт ввода
и индикации (ПВИ). пульт подготов-
ки и контроля (ППК), пульт взлета
и посадки (ПВП), пульт управления
НВУ, ииднкаторы-задатчики коордн-
нат (ИЗК). индикатор-задатчик вет-
ра, блок программы маршрута и но-
са гки (БГ1МП) и др.
К УО относятся: индикатор нави-
гационной обстановки (ИНО), план-
шет автоматический (ПА), плановый
навигационный прибор (ПНП), табло
световой сигнализации (ТСС) и др.
Некоторые элементы УУ одновремен
ио используются и для отображения
информации (например, ИЗК). Кро
ме того, применяются указатели и
индикаторы средств и систем, входя
тих в АНК.
Функционирование АНК пронсхо
днт по следующей общей схеме Пе-
ред полетом в НВУ вводится
ЗПБТП. Прн разбеге самолета вклю
чается счисление пути. В полете дан-
ные о курсе, угле сноса и путевой
скорости поступают в НВУ. где не-
прерывно вычисляются текущнг ко-
ор пшаты ВС, которые индицируются
на УО. В соответствии с.э штурман-
ским планом полета или по мерс не-
обходимости периодически произво-
дится коррекция счисленных коорди-
нат НВУ сравнивает текущие счис-
ленные координаты с программными
и в случае нх расхождения ф< рмнру-
ет управляющие сигналы, которые
подактся в САУ для автоматической
реализации программной траектории.
16.2. Автоматическое
счисление координат
Выбор системы коор шнат для ре-
шения навигационных задач, в тем
числе для автоматического счисления
пути, определяется возможностями
НВУ, простотой алгоритмов и удоб-
ством использования получаемой с
помощью АЧК информации С этой
точки зрения, а также простоты ма
тематических зависимостей, описыва-
ющих решение навигационных задач,
наиболее приемлемой оказалась част-
ная ортодромическая СК OSZ, в ко-
153
торой ось OS совмещают с ЛЗП уча-
стка маршрута, a OZ строят перпен-
дикулярно первой оси. В МОСК все
вычисления выполняются по форму-
лам прямолинейной тригонометрии,
что существенно упрощает алгорит-
мы счисления и коррекции н снижает
требования к НВУ.
В любой системе координат, фор-
мулы счисления пути («.основные
уравнения счисления») имеют вид:
t t
0 1 0 s
(161)
где q0, g— абсолютные координаты
ВС в момент начала счисления
(/ = 0) или полученные в процессе
коррекции, Wj — составляющие
путевой скорости по осям использу-
емой навигационной СК.
В ЧОСК координаты ВС, опреде-
ляемые с использованием АНК:
t
•**<* -*о I IV л с// Sp S( l(1
о
г
Л- 2(Н f IV'2 dt г0 ' гсч.
о
(16.2)
Абсолютные координаты ВС в систе-
ме OSZ So и го выставляются вруч-
ную нли автоматически в момент на-
чала счисления или в процессе кор-
рекции. Вторые слагаемые в (16.2)
t t
«сч г<-ч | U' 2 dt (16.3)
0 о
получаются в результате счисления.
Они представляют собой относитель-
ные координаты или приращения аб-
солютных. Таким образом, счислен-
ными координатами являются только
' ч, 2сч, но в практике самолетовож
дения ими называют величины sr н
г<. Это понятие используется во всех
нижеследующих рассуждениях.
Относительные координаты s<.,,,
гсч могут определяться двумя мето-
дами.
двойным н итегриров а н и-
ем ускорений движения ВС
t t t t
sC4 -J| aa dtdf, гГч j j и2ФЛ,
ob oo
(16.4)
где а„ а, - измеренные акселеромет-
ром ускорения в направлении всей
OS и OZ
Этот метод используется в инерци-
альных навигационных системах:
интегрированием по вре-
мени составляющих путе-
вой скорости но осям навигацн
опной СК в соответствии с (16.3).
Путевая скорость может быть изме-
рена доплеровским измерителем или
вычислена решением навигационного
треугольника скоростей. Различают
режимы счисления: курсо-доплеров-
ский и курсо воздушный (азрометри-
четкий).
При курсо-доплеровском счислении
координат используется информация
о путевой скорости и угле сноса от
ДИСС и курса полета от КС. а также
величина вручную вводимого угла
карты (Р„), измеряемого от положи-
тельного направления начала отсчета
путевого угла (и курса) до оси OS.
При счислении в ЧОСК угол карты
равен путевому углу (Р„ = ОЗПУ),
так как ось OS совпадает с ортодро-
мической ЛЗП. Курсо-дгплеровское
счисление относительных координат
осуществляется решением уравнений
(рис. 16.2):
t t
s.-ч J IV'„<H | W соь(Рф—
0 о
Ри)Л f IV cos (у Pa- p„) dt-
b
zC4 |' Vzdt JU’sin^-
o b
t
- Pk) dt - I’ IV sin (y t a PH)t/r.
о
(16.5)
где рф фактический путевой угол
(P<i. = y+a).
В процессе работы АПК в курсо-
доплеровском режиме автоматически
154
Рис. 16.2. Счисдение пути в курсо-
доплеровском режиме
Рис. 16 3 Счисление пути в курсо-воз-
душном режиме
определяются и в ИВУ запоминают
ся направл<нне 6И и скорость вет-
ра U:
U, W’*— И, = IT cos (уф-
Н-а-Рк) — V cos (уф рк),
Uг Wt — 1ф —W' sin (уф-
+ « — ₽к) —^sm (1г’~Рк)
Используя величины U, и Ult нахо-
тим
4/=/^ + .
6н = Ркф-Л6. если У1>0;
6„ = 61<4 Абф-180, если Us^ О,
(16.6)
где АЛ = arc tg UJU, — острый угол
с учетом знаков, составляющих U,
и (7.
При курсовоздушном способе
счисления координат sC4, zC4 исполь-
зуется информация от датчика курса
и системы воздушных сигналов, угол
карты, а также параметры ветра, за-
помненные НВУ или вручную вве-
ло.1ные оператором. Перечисленные
навигационные параметры позволяют
получить составляющие воздушной
скорости и скорости ветра
(рис. 16.3)
VS=V cos (у—Рк) и Рг =
= V sin (у—р1:);
L'S^U cos (6Н —Рк) и Vг
— U sin (6Н —Рк)
а затем — необходимые для счисле-
ния координат составляющие путевой
скорости
1Г,= К,ф-4/, н 1г2 = кгф-4/г
Следовательно,
sC4= ( |Kcos (у-Рк) +
6
+ 4/ cos (6Н —Рк)1 dt,
?сч= 5 |V Sin (у —Рн) +
0
+ 4/ sin (6н-Рк)] dt.
(16.7)
К урсо-воз гушиый режим работы
АНК используется при отказе или
неустойчивой работе ДИСС.
16.3. Точность определения
координат ВС
при автоматическом
счислении
При определении МС счислением
пути возникают следующие погреш
ности:
выставки начальных абсолютных
координат oS(i,oz<i;
методические из-за счис-
ления в прямоугольной СК вместо
географической и использования фор-
мул элементарной тригонометрии вза-
мен сферической;
155
инструментальные <j.e О7в нави-
гационного вычислительного устрой-
ства;
счисления <Ь»еч. °гсч- вызванные
неверным измерением курса, скоро-
сти, путевого утла и утла сноса.
Поскольку все перечисленные по-
i решносги между собой не коррелкро-
ваны, то суммарная погрешность оп-
ределения координат МС
ose^(cl+o? + °S +°S2 У/2;
п-’е К + °£ 4-of +°2 У'2.
с V • М в гсч/
(16.8)
Начальные к зердияаты s0, г0 мо-
гут выставляться: на земле перед
взлетом: в полете вручную определе-
нием любым доступным способом; в
полете в процессе неавтоматической
или автоматической коррекции счис-
ленных координат. Поэтому диапазон
значений о. , о, будет весьма
3О £-0
широким.
Методическая погрешность исполь-
зования прямоугольной ортодромиче-
ской СК и прямолинейной тригоно-
метрии
(iS S) « (SZ М‘), (16.9)
где AS — искомая методическая по-
грешность; S — пройденное в процес-
се счисления расстояние; Z — откло-
нение ВС от ортодромии (оси OS);
Ra — радиус Земли.
При полетах в пределах ширины
трассы 2 6^29 км в зависимости от
SsgSy, методическая погрешность не
превышает от нескольких тысячных
до 0,01% от пройденного расстоя-
ния Например, при 2 6 = 20 км
(Z=10 км) и S = 500 i.m получается
AS/S=62-10~e или 62-10-4 %. Следо-
вательно, методическая погрешность
применения прямоугольной СК при
полетах по воздушным трассам очень
мала.
Инструментальные погрешности
Озв< 0zB аналогово-импульсных
НВУ составляют величину порядка
0,2% от Snp, а ЦВМ — сотые доли
процента и в принципе могут быть
снижены до сколь угодно малого зна-
чения.
Погрешности собственно счисле-
ния оч<ч- 0zC4 приближенно оценива-
ются по формулам:
°$сч ^сч» SnP;
^пр — ^сч2
+ ат+°а+°Вк S!>P =
= kC4 Snp,
(16 10)
где ^C46.^c4z-^c4—коэффициенты точ-
ности счисления координат и опреде-
ления МС.
Практикой эксплуатации АНК уста-
новлено. что 0Ч(.Ч и <TzC4 составляют
0,7—1,5% от Snp для АНК-1 и не-
сколько меньше для АНК-П-
Таким образом, методические и
инструментальные погрзшности суще-
ственно меньше ошибок выставки на-
чальных координат и счисления пу-
ти. Поэтому в формулах (16.8) ими
по сравнению с os>. 0sC4 и <tZj>. <t?ci
можно пренебречь и записать:
^с^(^о.к^^сч),/2’
(16.11)
где ой0 к и о1а_ к — погрешности иа
чалыюй выставки или коррекции ко-
ординат.
На практике обычно принимают
°гсч ~ пясч- Но специальные иссле
дования показывают, что при
мерно в 1,5—2 раза больше
Озсч(*гч2—(1 -5—2)*счр. Поэтому эки-
паж обязан особенно тщательно конт-
ролировать путь по на .равлепию (ко
ординате гс) и следить за исправно-
стью датчика курса.
156
16.4. Коррекция счисленных
координат
Эксплуатируемые ЛИК ведут счис-
ление пути методом интегрирования
по времени составляющих путевой
скорости или двойного интегрирова-
ния составляющих ускорения движе-
ния по осям принятой навигацион-
ной СК. В обоих случаях происходит
накапливание погрешностей определе-
ния МС. Поэтому счисленные коорди-
наты нуждаются в периодической
коррекции с использованием позици-
онных средств.
Коррекция счисленных координат
может выполняться с использованием
информации о местонахождении МС,
полученной с помощью РНС, БРЛС,
ИНС и АНС. Различают коррекцию
пассивную и активную, которые мо-
гут осуществляться вручную, полуав-
томатически и автоматически.
Пассивная коррекция представля-
ет собой замену счисленных коорди-
нат фактическими. Активная состоит
нз двух операций: пассивной коррек-
ции и устранения систематической по-
грешности в АНК, ведущей к появ-
лению ошибок в счислении пути.
В эксплуатируемых АНК обычно при-
меняется пассивная ручная, полуав-
томатическая it автоматическая кор-
рекция.
Пассивная автоматическая коррек-
ция в современных навигационных
комплексах производится с исполь
зоваиием радиотехнической системы
ближней навигации (РСБН, ТАКАН,
ВОР/ДМЕ.
С этой целью бортовая аппаратура
этой системы структурно вводится
в состав АНК.
Алгоритмы определения поправок
As, \z могут быть неодинаковыми в
разных АНК- Но какими бы они ни
были, при использовании РСБН фак-
тически решаются уравнения по пре-
образованию измеренных полярных
координат (наклонной дальности L и
пеленга самолета ПС), в частно-ор-
тодромнческпе с формированием от-
корректированных координат ВС
(рис. 16.4)
sK-sp+(/5-Яо1и),/2 cos X
X (ИПС —ИЗПУр);
ZK = Zp+(L ^отн)1^" X
X sin (ППС—ИЗПУр).
(16.12>
где Sp, Zp — координаты радиомаяка.
НОТн — высота полета относительно
уровня расположения РНТ; D =
= (L2 — H^f'2 — горизонтальная
дальность от РНТ до ВС; ППС =
= (ППС—ИЗПУр) — путевой пеленг
ВС; ИЗПУр — истинный заданный
путевой угол участка маршрута от-
носительно меридиана РМ.
Погрешности коррекции:
0«K=[0Ip + (07> cos ППС'2“1’
+ (DoIlnsinnnC)=j1/2; (16
а.к= + [оп sinППС)2 +
+ (О<тпп cos ППС)21!/2,
где о,р, а1р —погрешности опреде-
ления координат РНТ; До, Ouu —
ошибки измерения полярных коорди-
нат ВС.
С целью определения требуемого
интервала коррекции 5К0р формулы
(16.11). списывающие суммарную по-
грешность счисленных координат
ВС, с учетом (1610) представим в
ннде:
Рис 16.4. Преобразование полярных
координат в частно-ортодромические
координаты
157
+ of I-'2;
ПИ-lJ
’чЧЧ.р4-^* s‘ip,2t
+ 0’ l'/2.
nil II ।
(1614)
где % пр- °1k up ~ погрешности пре-
дыдущей (последней) коррекции;
°впил- °2iin i ~ ошибки пилотирова-
ния по координате г и s По экспери-
ментальным данным эксплуатации
отечественных ЛНК-1 значения 0гП11Л,
пвП11Л не превышает 0,2 км и поэто
му ими можно пренебречь.
Потребуем, чтобы <Ц. < О»Д(11|>
0zc<0zunil и имея в виду, что Snp
и есть интервал коррекции Si<n₽, полу-
чим
1
-о’ )*'2.
аК Пр/
Sk°^<_^7 C’U"
-oj ')'/2-
н пр
(16 15)
Допустимые погрешности контро-
ля пути по дальности и направлению
°®доп и °гдоп определяются из тре-
буемых вероятностей выхода на за
данный рубеж s3p±Xs и полета в
пределах установленной ширины
трассы ±Ь:
Р грт
—_\ (16 16)
Я- . /
Д'»п'
Поскольку kc4^s2^C4ii и требования
по точности контроля пути по на-
правлению более жесткие, чем ио
158
дальности, <ЪД(11,<0«ПО11. то при
~ °zK в соответствии с (1615)
^ы.рг оказывается меньше Skops-
Вследствие этого на практике необ-
ходимые интервалы коррекции счис-
ленных координат обычно рассчиты-
ваются по требуемой точности конт-
роля пути по направлению О/ДО1|»
Для решения задачи поиска опти-
мальной точки коррекции (ОТК), в
которой погрешности о3к, а-к будут
минимальны, воспользуемся (16.13).
Поскольку координаты радиомаяка
sp, zP расчетным путем могут быть
определены с любой требуемой точ-
ностью, то величины ir3f), uZ|) будут
малы и ими можно пренебречь. Тогда
°як ~ [(aD cos ППС)2 +
+ (Оа111151пППС)гГ/2;
°гк = 1(по5'пПГ1С)г +
+(D0nnCos ППС)2],/2.
(16.17)
Определение точек минимума
п3 °гк тРебует исследования функ-
ций (16.17) иа экстремум. Для упро-
щения этой задачи предварительно
преобразуем уравнения с использова-
нием следующих соотношений (см.
рис 16.4):
sin ППС =2р D;
cos
ППС =
(Р2-^)1'2
D
D =
гр_______
sin ППС cos ППС
Р2-^.
Преобразованные уравнения имеют
вид:
°’к [(% cos ППС)2 4-
+ (гР опи)2]1 2;
Ojk — [(oD sin ППС)1-!-
+ UP oun ctgnnQ’J1'2.
(16.18)
I D2-‘l
D "
1/2
4"(гр °iiii)2 •
°’к
I
+-
£>OTK — (z p °T) °iiii) "P1*
ZP < °£)/°П|1'
^отк=гр, если
zp °р/опи>
(16 22)
D
°гк l(zpao ^)2 +
+P2-^XI,/2.
2
<4
dr <Тд
1/2
4~(zp ^nti)2
(16.19)
(16 23)
dcoTn — 0
(на траверзе РНТ). если
zp &в!апп''
4po
]t/2
+ (de °nn)2
o-
* к
(16.20)
для координаты я при
ППСОТВ -±90°;
^отк = гр- dc оТК 0
(16 24)
Причем
о’н1пш = гР<тпп ~ 1.75 -10~2 о®,. гр.
Преимущество уравнении (16.18),
(16.19) и (16.20) перед (16 17) состо
нт в том, что они являются функ-
цией только одной переменной—или
ППС, или D, или dc соответственно,
так как гр постоянна ддя каждой
конкретной РНТ.
Минимумы погрешностей коррек-
ции имеют место:
для координаты г при
ппсоти= ± arcsin х
ар
гр<~~ •
°Н11
П11СОТК = i 99°
(90 и 270°), если
по
zp >----;
Ппп
(16 21)
Расчеты по (10.18) — (16.20) по-
казывают, что при г,,>(304-40) км
погрешность о,«н мало зависит от
ППС, D и dv, т е. выбор ТК для
координаты я оказывается некритич-
ным. Прн меньших гр имеется боль-
шая зависимость oS|( от перечислен-
ных параметров, но во всех варнан
тах оЯк существенно меньше °«доп-
и поэтому выбор ТК по дальности
практически роли не играет. Учитывая
чти обстоятельства, а также приори-
тетность коррекции гс перед sc, до-
пустимо корректировать последнюю
одновременно с координатой гс в
процессе автоматического выполне-
ния этой операции.
Трудно заранее предвидеть, по
какому из ППСотк. и doTK ока-
жется проще фиксировать момент
выхода в оптимальную ТК координа-
ты гг. Поэтому рассчитанные их зна-
чения целесообразно записать на кар-
те и внести в таблицу установочных
данных.
При автоматизированном полете с
использованием РМ ВОР отклонение
159
от заданного азимута АД, измерен-
ное агпаратурой КУРС МП, преобра-
зуется ИВУ н боковое уклонение от
ЛЗП и вы зается в САУ в виде уп-
равляющего сигнала, пропорциональ-
ного этому уклонению. Таким обра-
зом, полет выполняется по существу
в режиме непрерывной коррекции ко-
ординаты гг.
С помош! ю бортового ра днолока-
тора возможно осуществлять полуав-
томатическую и ручную коррекцию.
При полуавтоматической коррекции
координаты РЛС 5рло, Дрло вводят
в НВУ. В процессе коррекции по
координатам счисленным st, zc, ра-
диолокационного ориентира $Гл0. Zp.io
и высоте полета Н вычисляются
(рис 16.5):
ППР —arctg(zpno—z,.) (Sp.,„—sc),
D [('poo—M2 2.
где ППР — путевой пеленг радиоло-
кационного ориентира. Вычисленные
НИР и L подаются в индикатор
БРЛС, в результате чего па экране
•формируется электронное перекре-
стие, соответствующее полученным
11ПР и L Ьсли оно совпадает с от-
меткой РЛО, координаты которого
введены в НВУ, то погрешности в
счислении иет, и ВС находится иа
ЛЗП. В случае их несовпадения пере-
крестие принудительно совмещается
с отметкой (с помощью специальных
Рис. 16.5. Определение частпо-орто-
дргмических координат по данным
БРЛС
рукояток или изменением координат
на счетчиках), в процессе которого и
происходит полуавтоматическая кор-
рекция. Алгоритм вычисления ППР и
L, а также выработки и ввода по-
правок As, Az могут быть разными,
но во всех случаях по существу вы-
числяются н вводятся в счетчики
(16 25)
sK — Sp.i„— D cos ППР =
sp.i<>—(^-2 —WoTH)’ ‘ x
X cos (у I- Ф + fH);
zK - Zp.io—Osin ПНР =
= грЛ()-(^-^тн)’'2
• sin(T+i)’+pH).
В случае полета вне поля РСБН
или нецелесообразности полуавтома-
тической радиолокационной коррек-
ции эта операция выполняется вруч-
ную; т. е. любым способом, обеспечи-
вающим с помощью БРЛС определе-
ние МС точнее счисленного, вычисли
ются и вводятся в счетчики коорди-
наты Яф, z® ВС.
16.5. Авиационные
навигационные комплексы
с аналоговым вычислителем
В авиационный навигационный
комплекс АНК-1 среднего магистраль-
ного самолета вхо 1ят (рис. 16 6): для
автоматического счисления пути —
навигационное вычислительное уст-
ройство (НВУ), точная курсовая си-
стема (ТКС), доплеровский измери-
тель скорости и сноса (ДИСС'1 и си-
стема воздушных сигналов (СВС);
для коррекции счисленных коорди-
нат— НВУ и бортовая аппаратура
РСБН. На некоторых ВС с этой же
целью в состав АНК-1 включаются
аппаратур,, ближней навигации н
посадки (КУРС МП) н самолетный
дальномер (СДК).
Кроме того, на борту ВС имеют-
ся средства и системы, не входящие
в состав АНК: автоматический ра-
диокомпас, бортовая радиолокаци-
онная станция, самолетный дально-
мер (СД), барометрические и радио
технический высотомеры, приборы
скорости н др.
160
Рис. 16.6. Структурная схема АНК среднего магистрального ВС
В комплект НВУ, кроме аналого-
вого вычислителя, входят индикато-
ры задатчики координат (ИЗК), ин-
дикатор-задатчик путевых углов
(НЭПУ), задатчик угла карты, инди-
катор-задатчик ветра (НЗВ), пульт
управления (ПУ), автоматический
планшет (ПА) и др.
АНК-1 дальних магистральных са-
молетов имеет такой же состав, ио
НВУ содержит еще блок программы
маршрута и посадки (БПМП).
Совместно с входящими в состав
АНК средствами и системами НВУ
обеспечивает:
программирование полета по уча-
сткам маршрута,
непрерывное автоматическое опре-
деление и индикацию координат МС
в ЧОСК (оставшегося до очередного
ППМ расстояния и линейно-бокового
уклонения от ЛЗП);
преобразование текущих коорди-
нат ВС в координаты очередной
ЧОСК;
выполнение автоматической кор-
рекции счисленных координат по
данным РНС ближней навигации
(РСБН, ВОР/ДМЕ, ТА-КАН);
автоматическую коррекцию боко-
вого уклонения ВС от линии задан-
ного магнитного азимута полета по
данным радиомаяков ВОР (не во
всех АНК);
вычисление и запоминание навига-
ционного направления и скорости
ветра,
6 Зак 639
выдачу электрических сигналов в
ПА для индикации МС;
выдачу в бортовую САУ данных
для выполнения автоматического по-
лета по заданному маршруту.
При наличии в составе НВУ блока
программирования маршрута и по-
садки дополнительно обеспечивается:
программирование ППМ и точек
предпосадочного маневра (ТПМ)
тля выполнения автоматизированно-
го полета по коротким участкам мар
шрута и по схеме захода иа посадку;
выполнение автоматизированного по-
лета по прямоугольному маршруту
при повторном заходе на посадку.
Счисление координат осуществля-
ется электромеханическим счетно-ре-
шающим устройством в основном
(курсо-доплеровском) и вспомога
тельном (курсо-воздушном) режимах.
В первом случае решаются уравнения
(16.2) и (16.5), во втором—(16.2) и
(16.7). Средняя квадратическая по-
грешность счисления координат в
основном режиме около 0,01 5ир в
диапазоне 1Г= (7004-1000) км/ч и
0,015 Slip при других скоростях Точ
ность счисления по запомненным па-
раметрам ветра составит 0,022 Snp
Указанные точности скорее справед
ливы для oZc4 чем для о8)_ч.
Автоматический план
ш е т ПА-3 предназначен для не-
прерывного автоматического указания
МС по данным НВУ с помощью ви-
161
знра на движущейся карте масштаба
1 . 2 000 000 при полете по маршруту
и масштаба 1 500 000 — в районе
аэродрома. Максимальная погреш-
ность показаний координат визиром
ПА при полете по маршруту ±4 км,
а при полете в районе аэродрома
± 1 км.
Автоматическая коррекция счис-
ленных координат осуществляется с
использованием РСБН а в некото-
рых АНК — радиомаяков BOP'DME
и ТАКАН, азимут и дальность от ко-
торых измеряются с помощью
КУРС МП и СДК Имеется возмож-
ность непрерывной коррекции коор-
динаты zc в процессе полета на или
от радиомаяка ВОР.
Навигационную автономную систе-
му НАС-1 можно отнести к числу
АНК I Оиа предназначена для авто
магического счисления пути в прямо
угольной ортодромической СК и ав
тематического пилотирования самоле-
та по ЛЗП. Оиа состоит из двух ча-
стей: ДИСС и автономного навига-
ционного устройства (АНУ)- В состав
последнего входят датчик воздуш
ной скорости (ДВС), задатчик ветра
(ЗВ-1), задатчик угла карты (ЗУК-2),
счетчик координат (НИ-50СЧ) и блок
коммутации (БК-1). Для решения за-
дачи счисления пути АНУ сопрягает-
ся с каким-либо датчиком курса (КС
или ГПК). Специальные блок связи
и индикатор бокового уклонения
совместно с автопилотом образуют
САУ. В составе НАС 1 корректоров
нет
НАС-I имеет три режима работы:
«ДИСС» — основной режим,
при котором ведется курсо-доплеров-
ское счисление по тем же алгорит-
мам, что и в любом АНК-1 В про-
цессе работы в этом режиме опреде
ляются и запоминаются составляю-
щие ветра по осям текущей ЧОСК
(U,. U„). Точность счисления поряд-
ка 0,03 Snpi
«П амять» — кратковремен-
ный режим; включается автома-
тически прн кренах самолета более
10° или отсутствии сигналов от
ДИСС. Составляющие путевой скоро
сти для счисления пути определяются
W,— W!=VI+UI. Точность
162
счисления хуже, чем в основном ре-
жиме,
«АНУ» — вспомогательный
режим, при котором ведется кур
со-воздушное счисление. Параметры
ветра вводятся вручную. Погреш-
ность счисления составляет 5—7% от
пройденного расстояния
•»
16.6. Подготовка к полету
с применением навигационного
комплекса
Навигационную подготовку к по
лету с применением АНК проводят
по общим правилам подготовки в со
ответствии с требованиями НПП, ГА,
НШС ГА. РЛЭ и инструкций.
Основная форма подготовки к
конкретному полету — предваритель-
ная. На этом этапе выполняют вс<
работы, которые возможны накану-
не дня вылета без информации о ме
тсоусловиях, коммерческой нагрузке
и последних изменениях по САИ.
Особенности подготовки к полету
с применением АНК-1 состоят в необ-
ходимости проведения дополиитель
ных работ, кроме выполняемых пе-
ред любым полетом. К числу их от-
носятся: определение данных для ав-
томатизированного программирован
ного полета; выбор РНТ и расчет па-
раметров для автоматической и руч-
ной коррекции счисленных координат-
заполнение таблицы установочных
данных; подготовка карты для авто-
матического планшета.
Объем и характер требуемых для
программирования полета данных и
трудоемкость их определения зависят
от типа эксплуатируемого АНК и за-
ложенных в его НВУ алгоритмов ре-
шения навигационных задач При
этом необходимо определить геогра
фнческие координаты ОПМ. КО и
РНТ. Величины <рг, Хг или выбирают-
ся из специальных аэронавигационных
справочников, или определяются с
использованием крупномасштабных
карт.
При эксплуатации АНК 1 про-
граммирование производится в ГОСК
или ЧОСК Поэтому географические
координаты точек фг, Хг сначала пре-
образуются в нормальные сфериче-
Форма 2
Установочные данные
Маршрут . . . S общ • - Вилка- ......'мвыл— Умное— •••;
Координаты Названия ОПМ ОМ11Унач о с г 4“ 5 СО О ОЗИПУ выл ;пос 5уч км им 1'выл/пос
<fr
1 2 3 4 5 6 7 8 9
Продолжение формы 2
Названия пунктов ра- диомаяков № канала ИЗПУр Координаты РМ Но ППМ
Zp. км Sp. км А ° ЛППМ Ч1ПМ км
10 I 1 .2 .3 15 16 17
ские <(, л, а затем в ортодромиче-
ские х, г в ГОСК и s, г в ЧОСК
(выражения (1.1) — (1.3)).
Все необходимые для полета дан-
ные (ортодромические координаты
пунктов, путевые углы, параметры
для коррекции МС и курса) опреде-
ляются экипажем на этапе предвари
тельной подготовки. Они выбирают-
ся из специальных справочников или
рассчитываются штурманом н вно-
сятся в таблицу установочных дан-
ных (форма 2).
Порядок вычисления ОМПУНВч,
ОЗМПУ вы л/п<>с, ОЗИПУ ныл/пос» 5уч»
П и В приведены в гл. 13.
Для коррекции счисленных коор-
динат на участке между ППМ< и
ППМ1+1 с использованием радиомая-
ков вычисляются (рис. 16.7):
ортодромическое направление (ази-
мут) от ППМ на РМ
ctfMp cos <р; tg р cosec (Ip — Xj)—
—sin<f>, ctg(Xp — X,),
расстояние между ППМ и РМ
cos Dp = sin <j, sin <рр
-(-cos (pj cos <pp cos (Xp— Xf);
истинный заданный путевой угол
ИЗПУ i-ro участка относительно
истинного мери шана РМ
cos ИЗПУ р
сочОИПУ,, v
f
cos (Хр—Xj) —
— sinOHny,| sin (Хр Х;) <
X sin <j>i;
или ОЗПУр О11ПУН.+
| (Хр — ХД sin <Г' 2<Гр ;
(16 26)
координата г,, радиомаяка
sin Zp sin a sin Dp;
Zp 1.853z', (16 27)
где u = Ap—ОИПУН (знак а учи-
тывается);
6*
163
Рис 16.7. Определение частггоортодромическггх координат РМ
расстояние от ППМ; до траверза
РМ
siiiST ctgtztgZp;
(с учетом знаков а и гр);
Sr I.853S;;
(16.28)
координата радиомаяка
Sp = —(Sy4—ST).
Существующими регламентирую-
щими документами не предусмотрено
внесение в форму 2 координат ВС
относительно РМ РСБН, при которых
обеспечиваются минимумы о8(( и огк-
Однако в этом имеется практическая
необходимость. Поэтому целесооб-
разно дополнить ее графами для
НС<>тк = ППСпт.<+рв. Т^отк и doTHt ве-
личины которых рассчитываются по
(16.21) —(16.23).
Проверка работоспособности ДНИ
и НВУ осуществляется в соответст-
вии с РЛЭ и инструкциями по их
эксплуатации.
16.7. Выполнение полета
с применением АНК
Взлет и выход из района аэродро-
ма. Перед каждым полетом экипаж
ВС проверяет работоспособность все-
го навигационно-пилотажного обору-
дования (НПО) — авиационного на-
вигационного комплекса и не входя
щих в его состав средств.
Проверка функционирования НВУ
производится прн включенном элект-
ропитании КС. ДИСС, СВС, РСБН и
САУ в основных режимах его рабо-
ты с использованием системы встроен-
ного контроля. Операция осуществ-
ляется решением контрольных задач
по счислению и преобразованию ко
ординат, коррекции по РСБН и вы
даче управляющих сигналов в САУ.
После проверки работоспособности
НВУ осуществляется программирова-
ние (ввод установочных данных) по
лета по первому и второму участкам
маршрута, а также данных для кор-
рекции по РМ, расположенному в
районе аэродрома (РА) вылета, или
ближайшему по маршруту полета.
Начальная выставка гироагрега-
тов КС — важная операция предпо-
летной подготовки Точность измере-
ния курса с помощью ТКС во многом
определяется погрешностью началь-
ной выставки оуо гироагрегатов, ко
торая выполняется в процессе про-
верки КС в режиме МК на стоянке,
но точность ее низка из-за влияния
местных металлических предметов на
датчик магнитного курса.
Точная выставка осуществляется
во время руления по РД Она воз-
можна при следующих условиях: РД
должна быть прямолинейной и обес-
печивать руление по ней в течение
1,5—2,0 мин; выдерживания направ-
ления при рулении с погрешностью
ие более 1°; знания направления (пу-
тевого угла) РД. В этом случае обес-
печивается оуо~0,5°.
Выставка и уточнение гироагрега-
тов возможны и на исполнительном
старте. Для этого необходимо уста-
новить самолет по направлению оси
ВПП и по возможности прорулить по
ней 50—70 м. а затем сравнить пока-
зания всех указателей курса и оце-
нить их соответствие путевому углу
ВПП. При выставке КС по оси ВПП
уа„«0,7э.
Окончательное уточнение выставки
КС осуществляется на взлете: в про-
цессе разбега запоминается фактиче-
ское показание курса на УШ-3 и пос-
ле отрыва определяется разность
между МПУвпп и запомненным маг-
нитным курсом взлета. Затем в пря-
молинейном полете с помощью БДК
полученная разность вводится в КС
При разбеге самолета перед подъ-
емом переднего колеса автоматиче-
ски или вручную включается пере-
ключатель «Счисление» НВУ и с это-
го момента начинается отработка ко-
ординат sc. Zc на первом участке
маршрута. После достижения высоты
полета, регламентированной РЛЭ,
НВУ подключается к САУ для авто
матизированного полета по ЛЗП.
В тех случаях, когда маршрут по-
лета в РА состоит из нескольких ко-
ротких участков (5уч<70 км), вы-
ход производится в режиме главной
ортодромии (0Гл5гл/гл) Для этого
ИПМ (аэродром вылета) соединяют
Рис 16.8. Режим главной ортодромической системы координат
прямой на карте с концом последнего
короткого участка (рис. 16.8) и про-
граммируют параметры этой орто-
дромии (прямой) —ОЗМПУгл и 5гл.
В дальнейшем счисление координат
выполняют относительно нее. Полет
по коротким участкам осуществляет-
ся в штурвальном режиме (НВУ от-
ключено от САУ) по расчетному кур-
су. контроль выхода на ППМ ведет-
ся по показаниям ИЗК.
При полете по маршруту экипа-
жем решается задача обеспечения
следования ВС по программной тра-
ектории. Основными операциями эки-
пажа. кроме контроля за работой
всего НПО, являются периодическое
программирование очередного участ-
ка маршрута, коррекция КС и счие
ленных координат, определение ДУР
п ввод его, если оно автоматически
не вычисляется и не вводится в НВУ.
Для автоматизированного вожде-
ния ВС по ЛЗП должны быть запро-
граммированы (введены ОПУ и коор-
динаты z=0 н s=—Sy4) два участ-
ка маршрута — текущий и очередной,
тем самым моделируются две ЧОСК.
Если эта операция выполнена и на
ПУ НВУ переключатель поставлен в
положение «Счисление», то ведется
счисление координат гс, sc в текущей
ЧОСК и их преобразование в оче-
редной СК (рис 16.9)
пр —cos УР-
zc sin У Р -|-S2; 29)
zlip sr sin УРф-
+ zc cos УР.
164
165
ВС в новую
Рис 16.9 Преобразование координат
систему
части оортодромическую
Эта операция обеспечивает непре-
рывность счисления и определение
бокового упреждения разворота
(БУР) на новый участок маршрута.
Для автоматического удерживания
ВС на ЛЗП необходимо предвари-
тельно вывести его иа линию пути
координату гс привести к нулю),
развернуть на 311У и подключить
НВУ к САУ. После этого ВС будет
автоматически следовать по ЛЗП
(выдерживается го = О) текущего уча-
стка маршрута. Но поскольку счис-
ленным координатам присущи по-
грешности, то путь дополнительно
контролируется с помощью независи
мых средств РСБН, БРЛС, КУРС
МП, АРК Наглядную информацию о
МС выдает ПА Навигационные эле
менты полета контролируются по ин-
дикаторам соответствующих прибо-
ров. Кроме того, на плановом нави-
гационном приборе (ПНП) иидициру
ются текущий курс, угол сноса, ЗПУ
и ЛБУ (по планке г).
В процессе полета по маршруту
НВУ по данным КС, ДИСС и СВС
вычисляет и запоминает параметры
ветра U и 6Н, которые используются
для автоматического счисления коор-
динат в случае отказа ДИСС или не-
устойчивой его работы.
Точность автоматического счисле-
ния пути по направлению зависит
главным образом от погрешности из-
мерения курса полета. Поэтому эки
паж обязан с особой тщательностью
производить начальную выставку КС
166
и следить за ее работой в течение
всего полета.
Точность ортодром ического курса
aVz определяется погрешностями по-
следней коррекции Оу (которая по
существу представляет очередную
начальную выставку oVo) хранения
выставленного курса 0,5 a,, t (зна
с
чение <ос влияет на ЛБУ) и пилоти
рования по курсу о„
г иил
11/2
4-о;, • (16 30)
*11113 I
Хранение заданного курса зависит,
кроме «>с, также от методических
ошибок, вызванных перемещением ВС
и несоответствием вне денной широты
фактической, но вес их по сравнению
со слагаемыми (16.30) мал и ими .
можно пренебречь Очевидно, чем
меньше tic, тем реже требуется вы
полнить коррекцию КС. Причем пер- )|
вая коррекция после взлета должна
быть проведена не раньше, чем сум-
марная погрешность станет пре-
вышать ошибку корректора:
На современных ВС в качестве
корректора курса используется гиро-
магнитный канал КС с погрешностью
о„ >1°. Тогда при о «0,25°/ч и
т к с
ov «0,5° иа средних магистральных
самолетах с продолжительностью по-
лета до 4 ч коррекция КС может
оказаться нецелесообразной, так как
после ее выполнения погрешность в
курсе будет больше oVj,>r). чем
до коррекции.
Коррекция КС с использованием
результатов коррекции координаты ze-
Если при выполнении двух-трех по-
следовательных коррекций пути об-
наруживается уклонение в одну и
ту же сторону, то можно определить
поправку в курс ПК и ввести ее с
помощью БДК
ПК = arctg(zK sKop),
где Zh — максимальная ЛБУ в момент
коррекции; SKop— расстояние между
двумя последовательными точками
коррекции.
При определении ПК учитывают-
ся все факторы, вызывающие боковое
уклонение. Такую коррекцию можно
рассматривать как активную, ибо при
этом не просто исправляется курс по-
лета, но и компенсируются погрешно-
сти, вызывающие ошибку в направле-
нии полета Но такая ПК действи-
тельна только для текущего участка
маршрута.
Коррекция КС по РСБН при рас-
положении РМ на ЛЗП. Если в тече-
ние некоторого времени выполнять
полет с выдерживанием Л/7СНЗМ =
= ЗИПУ (от РМ) или ИПСНЗМ =
= ЗИПУ±180° (на РМ), то опреде-
ляется фактический курс полета (как
правило, ортодромическнй) К =
= ЗПУ—УС, который и надо ввести в
КС При расположении РМ в сторо-
не от ЛЗП в режиме непрерывной
коррекции по РСБН необходимо вы-
держивать zc = 0, что означает
ФПУ = ЗПУ, и ввести задатчиком кур-
са К =ЗПУ—УС.
При полетах с применением АНК
основную заботу экипажа составляет
коррекция счисленных координат в
соответствии с (16.15) она должна
выполняться не реже чем через
каждые 150 -200 км (26=10 км,
Рэп 0,95, 6СЧг я: 0,01).
Автоматическая коррекция произ
водится с использованием РСБН
Для этого необходимо предваритель-
но запрограммировать zp, sv и ИЗПУ
текущего участка маршрута относи
тельно истинного меридиана РМ и
на ПУ НВУ включить переключатель
«Коррекция». После этого решается
система уравнении (16 12) с автома
тнческнм вводом в ИЗК откорректи-
рованных координат. Погрешность ав
тематической коррекции <tZk » аЧн
«0,7 km-|-0,005D. Этой формулой
пользуются лишь для ориентировоч-
ной оценки. Точные значения о2к,
Ояк можно получить на основе рас
четов по (16.13) или (16 18) — (16.20).
Для этого иадо располагать инфор-
мацией о значениях о2р, oSp, оо и
Опс для каждого РМ.
Если по тем или иным причинам
автоматическая коррекция невозмож-
на, то она выполняется вручную. Для
этого определяются фактические ко
ординаты ВС, которые затем вводятся
в индикаторы. Между определением
Z®, s® и вводом их должен быть ми-
нимум времени. При полетах по воз-
душным трассам следует сначала
ввести s®, а затем z®, так как ско-
рость изменения первой во много раз
выше, чем второй.
Основным корректором и при
ручной коррекции являются отечест-
венная и зарубежная РСБН. Приме-
няются БРЛС, а также ОРЛ (по ин-
формации службы движения). Во
всех случаях фактические координа-
ты определяются аналитическим пре
образованием измеренных полярных
координат в частноортодромические
по формулам (16.12). Технология
этой операции упрощается при ис-
пользовании РМ, находящегося на
ЛЗП В процессе выдерживания
ПС„зм = ЗПУ или ПСнзМ=ЗПУ±
±180° необходимо выставить на
ИЗК Sc=—(D—sp), а затем zc=0
В тех случаях, когда канал авто-
матической коррекции неисправен или
в районе полетов отсутствуют РМ,
основным корректором становится
БРЛС. С ее помощью определяются
координаты ВС, которые затем вруч-
ную вводятся в ИЗК.
167
Для получения минимума погреш-
ности (а также оЯ(<) коррекция
должна производиться в момент вы-
хода в оптимальную ТК, которая од-
нозначно определяется парами пара
Метров: Doth, ПСотк!
dUTK, ПСотк. Эти величины берутся из
таблицы установочных данных, спе-
циальной таблицы или полетной кар-
ты. Величину </отк легко определить
с помощью номограммы (рис. 16.10),
построенной с использованием зави-
симости (16.23), приведенной к виду
^отк (гр~0,бо£)/аг111)2
= (0,5Ор /п„п)2
Это есть уравнение окружности ради-
уса /?=0,5 ос/опп с центром dOTK = 0
И =0,5 Od/Спп
В случаях выполнения полета в
сплошном поле радиомаяков РСБН
с One ^0,4° при эксплуатации АНК
С &Сч2 со,01 можно использовать ре-
жим непрерывной коррекции счислен-
ных координат Следовательно, в
этих условиях проблема выбора ОТК
практически отсутствует.
Если по маршруту полета иет
сплошного радионавигационного поля
РМ, то возникает задача определе-
ния моментов коррекций для обеспе-
чения минимальной погрешности ог<,
в процессе полета между двумя
168
смежными радиомаяками. В зависи-
мости от расстояния между ними
Sjj, погрешности измерения ПС оПс
и коэффициента точности счисления
ЛсЧ существует режим оптимальной
коррекции. Значение о2(. будет ми-
нимально при
2*с2чг
^(>1|Т 2 . , .j ZTiSv .
"пс + 4ЛСЧ2
где dont — удаление ВС от травер-
за первого РМ (в предположении
апс, °ПС2 Сне).
Вопрос оптимального режима кор-
рекции рассмотрен в гл. II.
Заход иа посадку. Независимо от
типа эксплуатируемого АНК для по-
лета в районе аэродрома (РА) и по-
строения маневра захода на посадку
используется прямоугольная система
координат OXZ с началом в центре
ВПП (или в ее начале) и осью ОХ,
направленной по оси ВПП. Измере-
ние курса ведется от магнитного ме-
ридиана аэродрома посадки. Полет
осуществляется в штурвальном режи-
ме. В этом случае после выполнения
необходимых процедур по програм
мировашию (на индикаторе-задатчике
путевых углов устанавливается
МПУ,.,,,) иа рабочих ИЗК будут от-
рабатываться координаты ВС относи-
тельно центра и оси ВПП. Руковод-
ствуясь этими координатами и марш-
рутами полетов в РА экипаж произ-
водит вписывание в схему захода на
посадку. Если на аэродроме имеется
устойчиво работающий РМ РСБН, то
АНК используется в режиме непре-
рывной коррекции В случае наличия
в РА нескольких коротких участков
маршрута полет выполняется по ме
тодике, используемой при выходе из
района аэродрома в режиме главной
ортодромии. Прн этом за конечную
точку коротких участков принимается
центр ВПП.
Если в составе AHKI имеется
блок программы маршрута и посад-
ки (БПМП), то он используется для
выхода из РА и входа в него и по-
лета по маршруту. Блок предназна-
чен для ввода программы маршрута
или предпосадочного маневра и выда-
чи программных значений ППМ илн
точек предпосадочного маневра
(ТПМ). Программирование произво-
дится в единой СК относительно вы-
бранного участка маршрута (глав-
ной ортодромии) в диапазоне
±500 км, а предпосадочного манев-
ра— в системе координат ВПП в
диапазоне ±200 км. Блок позволяет
программировать до 10 ППМ илн
ТПМ. При условии пыполнения неко-
торых переключений на БПМП осу-
ществляется автоматизированный по-
лет по введенной программе вплоть
до перехода к управлению ВС по сиг-
налам радиомаяков системы посадки
В процессе автоматизированного
полета в РА, по маршруту и захода
на посадку экипаж дополнительно
контролирует путь с использованием
информации РСБН, БРЛС, АРК, КС
и др. В случае выхода из строя ИВУ
все навигационные задачи решаются
автономным применением пилотажно-
навигационного оборудования ВС.
16.8. Применение
радиомаячной
угломерно-дальномерной
радионавигационной системы
Р адиом аячн ые угломерно-лально
мерные радионавигационные систе-
мы (УДС) состоят из наземной и
бортовой подсистем и одновременно
измеряют пеленг и наклонную даль
ность (НД) ВС от РНТ Это позво
ляет получить ЛРПС и ЛРР и с ис
пользованием их решать ряд навига-
ционных задач.
На воздушных трассах нашей
страны широко применяется радио
техническая система ближией нави-
гации (РСБН). В настоящее время
эксплуатируются наземные подсисте-
мы РСБН 2н, РСБН 4н, РСБН 6н и
бортовые — РСБН-2с, РСБН-2са,
РСБН 7с, РСБН МВЛ и др., которые
могут работать совместно с любым
из наземных радиомаяков. При этом
непрерывно автоматически измеряют
ся ИПС и НД от места установки
РМ
Подсистемы РСБН-2са и РСБН 7с
устанавливаются на ВС, оборудован-
ных АНК, входят в состав последних
в качестве корректоров счисленных
координат. Измеряемые ИПС и НД
индицируются на стрелочно цифровом
или цифровых ин 1икаторах. Это поз
поляет в случае необходимости ис
пользовать РСБН-2са и РСБН-7с и
автономно.
Аппаратура РСБН-МВЛ предна-
значена для оборудования ВС ближ-
них магистральных и МВЛ Служит
только для измерения ИПС и НД и
индикации их на прямопоказываю-
щем приборе дальности и азимута
(ИНДА)
Бортовая подсистема РСБН-2с
устанавливается на магистральных
ВС, не оборудованных АНК. В отли
чие от других типов в ее составе
имеется аналоговый счетно решающий
прибор (СРП), обеспечивающий вы-
числение ЛБУ от липни пути, задан-
ной ЛРПС, ЛРР и прямой произ
вольного направления
На зарубежных воздушных трас-
сах эксплуатируются наземные под
системы BOP/DME, DBOP'DME,
ТАКАН и др. Для совместной рабо
ты на отечественных ВС устаиавли
ваются аппаратура ближней иавига
цни и посадки КУРС МП и самолет-
ный дальномер СДК.
Радиомаячные УД РНС работают
в УКВ диапазоне радиоволн и поэте
му имеют дальность действия в пре-
делах радиовидимости, но практиче-
169
Таблица 16.2. Характеристики радиотехнических систем
ближней навигации
Радиомаяки О °ПС <Д>. м Пропускная способ- ность, шт Диапазон частот, МГц
РСБН-2м, РСБН-4н 0,125 100+0,015%Д 100 770—1000»
РСБН-бн 0,75 150+0,015%£> 30 770—1U00
ВОР-ДМЕ 2,5 130+0,025 % D 100 108—118. 960—1215
ДВОР/ДМЕ 0,25 130+ 0,025 % О 100 960—1215
ВОРТАК 0,25 130+0.025 %£ 100 960—1215
ски не более 500 км. При полетах на
высотах 10—12 км все типы РМ, за
исключением РСБН-бн, обеспечивают
взаимодействие с бортовыми подсн
стемами на расстояниях до 350—
370 км. Дальность действия
РСБН-бн — около 90 км прн // =
= 1000 м и 150 км при // = 3000 м
Нормы и параметры УД РНС приве-
дены в табл 16.2. Следует, однако,
заметить, что погрешности измерения
пеленга и дальности могут быть зна-
чительно больше указанных, иногда
на целый поря юк Это обусловлено
главным образом влиянием переотра-
жения радиоволн РМ от окружаю
ших предметов
С помощью УД РНС решается
широкий круг навигационных задач
Измеренные ПС и НД прежде всего
дают МС. Знание координат ВС, при-
чем с достаточно высокой точностью,
позволяет затем вести контроль пути,
производить коррекцию счисленных
координат, выполнять полет по ЛЗП,
выводить ВС в заданную точку, on
ределять ряд навигационных элемен-
тов полета и др Методика решения
этих задач определяется типом борто
ной подсистемы.
Радиомаячпые УДС опре (еляют МС
в полярной СК, но самолетовожде
ние осуществляется в географической
или ортодромической СК и поэтому
возникает проблема преобразования
координат. При эксплуатации
РСБН 2са и РСБН 7с эту задачу ав
томатически выполняет НВУ в ре-
жиме коррекции решением системы
170
(16.12). Этот вопрос рассмотрен в
п. 16.4.
Полярные координаты, выдавае-
мые подсистемой любого типа, могут
быть преобразованы в частноортодро-
мические с использованием НЛ-10М
или НРК-2. При этом также реша-
ется система (16.12) Точности опре-
деления г,- и Sr могут быть оценены
по формулам (16.13) и (16.18) —
(16.20). В этих уравнениях <т2<,
и °sc °sK- Располагая координата-
ми Ze и sc, можно вести контроль
пути по направлению и дальности,
осуществлять полет по ЛЗП, выво
дить ВС в ЗТ и др. Информация о
полярных координатах ВС позволяет
определить навигационные элементы
щижения базисным способом. Как
следует из рис. 16.11, пройденное за
время t расстояние (длина базы)
S | Д /)* - 2D, О2
X cos(nC2- ПС|)|,/2> (16.31)
а путевая скорость W — St
Фактический путевой угол
Рф ПС] ]- р, |
Рф ПС,-и ± 180е, I
(16.32)
где p = arcsin|-^ sin(riC2 IlC,)j<
5^90° с учетом знака разности
(ПСз- ПС,).
Первая формула системы (16 32)
используется, если измерения ПС,
Рис. 16 11 Определение ФПУ и VP базисным способом
выполнены после пролета траверзной
точки (ТТ) радиомаяка; вторая —
если ПС| измерялась до пролета ТТ
При вычисленном значении ФПУ
и известном курсе полета, отсчиты-
ваемых от истинного меридиана РНТ,
находим угол сноса «=0Ф— у. Если
имеется информация об УС, то опре-
деляется фактический курс полета
Уф = Рф—а Следовательно, РСБН мо
жет быть использована для коррек-
ции КС, работающей в режиме ГПК.
В частном случае, когда РМ раз-
мещен на ЛЗП или иа ее продолже-
нии, задача определения W и f су-
щественно упрощается, если строго
выдерживается ПСНзм=ПС3=ЗПУ
(ЗПУ±180°) Поскольку при этом
ПС2—ПС(=0; ц = 0, то из (16.31) и
(16.32) следуют;
Рф = ПС2 = ПС2 (при полете от РМ);
Рф = ПСк± 180° = ПС2±
±180° (при полете иа РМ);
S = |D1-D1|; W'=J-|Dl-D2|.
Погрешности определения W и р
будут равны:
= 1,41 - ,
| Dj — D2 |
%=(4W2
Заданный путевой угол ₽э может
быть рассчитан с любой требуемой
точностью. Тогда о₽ф ~ОпС1 т. е
ФПУ может быть определен с малой
погрешностью. Поскольку иа магист-
ральных самолетах угол сноса с по-
мощью ДИСС измеряется с оа <
^0,2°, то погрешность определения
курса полета Кф = ФПУ—УС будет
мала и имеется возможность коррек-
тировать КС точнее, чем по данным
магнитного или астрономического
корректоров.
Наличие в составе РСБН-2с спе-
циализированного вычислителя СРП
придает ей по сравнению с другими
171
Рис. 16.12. Полет в режиме «Азимут»
РСБН-2
подсистемами дополнительные каче-
ства: имеется возможность програм-
мированного полуавтоматизнрованно-
го полета в режимах «Азимут»,
«СРП», «Орбита», «Пробивание об-
лачности» и «Посадка». В граждан-
ской авиации нашли ‘применение пер-
вые ‘два режима.
Режим «Азимут» предназначен
для полета по ортодромической ЛЗП.
проходящей через РМ или совпадаю-
щей с направлением иа него
(рис. 16.12). Для выполнения полета
на щитке управления программиру-
ются: номер канала радиомаяка; ре-
жим работы «Азимут» («на» или
«от»); заданный пеленг (азимут) са-
молета (ПСз = 03ИПУ—при полете
от РМ; ПСз = ОЗИПУ±180° — для
полета от РМ. Заданные путевые уг-
лы отсчитываются от меридиана ра-
Рис. 16.13. Полет в режиме «СРП»
РСБН-2
диомаяка). Кроме того, на командно-
пилотажном приборе КПП-M уста-
навливается ЗПУ. При таком про-
граммировании автоматически вы-
числяется ЛБУ
1 >75-10-« D (ПС„ЗМ — ПС3),
которое индицируется иа КПП-М
вертикальной планкой. Приведением
ее в середину шкалы прибора (манев-
ром самолета) добиваются ПСИзМ—
—ПСз=0, т. е. Zc = 0 и ВС следует
по ЛЗП с погрешностью
oZc« V2-1,75- 10-я ап°с.изм D. (16.34)
Эта формула справедлива в предпо-
ложении, что One з пренебрежимо
мала, а инструментальная погреш-
ность вычислителя равна погрешности
измерения пеленга Опс.изм (этим об-
условлен в формуле множитель V2).
Режим «СРП» используется для
полета по любому прямолинейному
маршруту, не проходящему через РМ.
Линия пути однозначно задается
ОЗИПУ и полярными координатами
опорной точки (ОТ), находящейся на
ЛЗП или ее продолжении. Порядок
управления самолетом для удержа-
ния его на заданной траектории,
пользуясь показаниями КПП-М, та-
кой же. как и в режиме «Азимут».
Для выполнения полета на щитке уп-
равления и блоке управления необхо-
димо запрограммировать: номер ка-
нала РМ, режим работы «СРП», ор-
тодром ический ЗИПУ, полярные ко-
ординаты опорной точки До и По.
Если перечисленные параметры
установлены, то СРП вычисляет ЛБУ
(рис. 16.13):
zc ~ — zp = Dc s,n (Рз— ПСИ1М) —
— £>osin(P3 — По),
т. е. выполняет преобразование из-
меренных и программированных по-
лярных координат в координату
гг в ЧОСК.
Сигнал, пропорциональный zc, по-
дается иа вертикальную планку
КПП-М, что позволяет осуществлять
полуавтоматизированиое следование
по ЛЗП с выдерживанием планки иа
172
середине прибора (zc=0). Точность
полета по ЛЗП
oZ(, «3,5-10-2опис иэм dc. (16 35)
Режим «Орбита» используется для
полета ВС по дуге окружности ради-
уса R=Dc = const.
При эксплуатации РСБН можно
определить МС по двум дальностям
(дальномерный способ) с погрешно-
стью Or=oDV2sin~,ai Максимальная
точность ог~ 1,4od достигается в слу-
чае (i> = 90J.
16.9. Применение бортовой
радиолокационной станции
Бортовые радиолокационные стан-
ции (БРЛС) являются автономными
угломерно-дальномерными средства-
ми и служат для получения на экра-
не индикатора условного изображе-
ния пролетаемой местности, измере-
ния полярных координат — наклонной
дальности и курсового угла ориенти-
ра (КУО. if), а также обнаружения
воздушных объектов (самолетов, оча-
гов гроз, облаков).
Они служат также для предот-
вращения столкновений с наземными
препятствиями и встречными само-
летами в полете и попаданий в зоны
опасных метеорологических явлений.
Бортовые радиолокаторы позво-
ляют решать следующие зада-
ч и: вести общую ориентировку пу-
тем наблюдения за радиолокацион-
ным изображением местности и срав-
нения его с картой; осуществлять
полет на радиолокационный ориентир
(РЛО) и вывод иа него ВС; выво-
дить самолет на ЛЗП; определять
навигационные элементы полета; про-
изводить контроль пути по направле-
нию, дальности и месту; корректиро-
вать данные автоматического счисле-
ния координат ВС; выполнять манев-
рирование с целью обхода опасных
для полетов метеорологических явле-
ний; предотвращать столкновение с
наземными препятствиями и со
встречными ВС в полете.
Эффективность решения вышепе-
речисленных задач во многом опреде-
ляется такими характеристиками
БРЛС, как дальность обнаружения
РЛО, точность измерения полярных
координат и вероятность опознавания
обнаруженных объектов.
Дальность действия РЛС является
функцией длины рабочей волны, излу-
чаемой мощности, площади антенного
отражателя, чувствительности прием-
ника, состояния атмосферы, высоты
полета и отражающих свойств РЛО.
Современные радиолокаторы самоле-
тов гражданской авиации обнаружива-
ют крупные промышленные центры иа
расстоянии до 250 ... 300 км, средние
города — 150 ... 200 км, береговую
черту—100... 200 км, крупные реки
100...150 км, средние озера —
80... 100 км, грозовую облачность —
150... 200 км. Дальность опознава-
ния несколько ниже дальности обна-
ружения.
БРЛС «Гроза» имеет сравнитель-
но большое число модификаций при-
менительно к типу ВС, на котором
устанавливается. Дальности и КУО
измеряются глазомерной интерполя-
цией между масштабными метками
дальности и азимутальными. Погреш-
ность измерения расстояния Яо~
«0,1 \L, где ДБ — расстояние меж-
ду масштабными метками (цена де-
ления). В БРЛС «Гроза» ДБ=10км.
25 и 50 км (в некоторых еще 100 км).
Следовательно, Od^sI км, 2,5 км и
5,0 км. Погрешность измерения КУО
« 1,4ч-1.7° (возрастает по мере
увеличения КУО от 0° до ±90°). Ин-
дикаторы имеют масштабы 30, 50.
125, 250 и 375 км (с задержкой на-
чала развертки на 200 км).
Существуют радиолокаторы с
электронными азимутальными метка-
ми для измерения КУО и с измери-
тельной меткой дальности. В этом
случае а^ = Г, оп=0,15 км.
С помощью БРЛС место ВС оп-
ределяется визуальным обзорно-срав-
нительным способом, пролетом иад
РЛО и методами координатных пре-
образований.
Обзорно-сравнительный способ
обычно называют радиолокационной
ориентировкой. Им широко пользу-
ются при. полетах по воздушным
трассам. Ои заключается в сопостав-
лении изображения иа экране с кар-
той и визуальной оценке положения
ВС относительно опознанных РЛО.
173
При масштабах развертки 50 и 125 км
а, ~ (0,044-0,05) D.
Определить МС пролетом над РЛО
возможно в случае наличия на линии
пути характерных ориентиров. Ис-
пользуется масштаб 30—50 км. В мо-
мент прихода отметки ориентира к
границе высотного пятна ВС находит-
ся над РЛО. Погрешность МС
Ог= (14-2) км.
Методом координатных преобразо-
ваний место ВС может определяться
дальномерным (по двум дальностям
до двух РЛО), угломерным (по
двум ПС от двух опознанных отме-
ток) и угломерио-дальномерным (по
ПС и D от одного ориентира). Пре-
образование может выполняться как
прокладкой ЛП на карте, так и ана-
литическим решением системы урав-
нений.
Наибольшую точность определения
МС дает дальномерный способ, но
обычно пользуются угломерно-даль-
номерным в виду большей его просто-
ты, достаточности одного РЛО и воз-
можности аналитического преобразо-
вания измеренных полярных коорди-
нат в прямоугольные с помошью
НЛ-ЮМ. Такое преобразование осу-
ществляется по формулам (16.25).
Точность найденных координат оце-
нивается по выражению (16.13), в
котором вместо ППС используется
ППР. При этом обязательно учиты-
вать oZp. oSp. Координаты zc и sc
определяются без вычислений с по-
мошью РЛО, находящегося соответ-
ственно на траверзе или ЛЗП.
Для грамотного выбора РЛО, по
которому возможно определить МС
с точностью не ниже требуемой, опе-
ратор должен иметь ясное представ-
ление о рабочих областях БРЛС
(см. гл. 9). Кривые равных точностей
радиолокационного определения ко-
ординат zc п Sc описываются урав-
нениями
РКРТг = Кт-°гр-
— (oD sin ППР)2]1/2 X
X(aI1IlpcosnnPl-; (1сзб;
nKPTj-[o2T — о2р —
— (oD cos ППР)2]1 /2
X (OuHpSinnnP)-1, j
получаемыми кз (16.13), при эток
следует помнить, что площадь >
форма РО зависит от масштаба раз-
вертки, ибо он определяет точность
измерения дальности On-
Глава 17
ПОДГОТОВКА И ВЫПОЛНЕНИЕ ПОЛЕТОВ НА САМОЛЕТАХ,
ОБОРУДОВАННЫХ НАВИГАЦИОННЫМ КОМПЛЕКСОМ И СИСТЕМАМИ
С ЦИФРОВЫМ ВЫЧИСЛИТЕЛЕМ
17.1. Авиационные
навигационные комплексы
с цифровым вычислителем
В настоящее время эксплуатиру-
ются и внедряются авиационные на-
вигационные комплексы АНК-В с
цифровым вычислителем. Для сокра-
щения многотипиости разработаны
базовые навигационные комплексы
(БНК) отдельно для магистральных
дальних, средних и ближних самоле-
тов, а также самолетов МВЛ и вер-
толетов. Они построены по функцч-
174
оналыю-блочному принципу, что поз-
воляет комплексировать их по частям
с использованием унифицированных
базовых блоков.
Обобщенная структурная схема
БНК среднего магистрального само-
лета ничем не отличается от схемы
АНК-1 (см. рис. 16.1). Навигацион-
ным вычислителем в БНК служит
БЦВМ, а датчиком курса — базовая
система курса и вертикали с инерци-
альной курсовертикалью (БСКВ с
ИКВ), что придает комплексу новые
качества
Навигационное вычислительное
устройство (НВУ) состоит из БЦВМ,
пульта подготовки и контроля
(Г1ПК), пультов ввода и индикации
(ПВИ). пульта взлета и посадки
(ПВП), пультов управления индика-
цией иа плановом навигационном при-
боре (ПУ) и индикатора навигаци-
онной обстановки (ИНО). В свою
очередь ЦВМ состоит из устройства
ввода и вывода информации (УВВ),
цифрового вычислительного устройст-
ва (ЦВУ) и блоков постоянной
(ВПП) и оперативной памяти
(БОП).
НВУ предназначено для автома-
1изации решения навигационных за-
дач и обеспечивает:
автоматическое и ручное програм-
.шровапие маршрута полета;
вычисление географических коор-
динат МС;
вычисление и индикацию частио-
ортодромических координат ВС;
непрерывную индикацию заданных
и текущих параметров полета на
ИНО;
коррекцию счисленных координат
Г курса с использованием РСБН и
КУРС МП/СД, вычисление и индика-
цию поправок Az, As и Ау;
оперативное изменение программы
полета, включая уход и заход на по-
садку на запасном аэродроме;
вычисление и выдачу на индика-
тор ПВИ поправки А у при рулении
по РД или при разбеге по ВПП;
вычисление и индикацию направ-
ления и скорости ветра;
автоматическую настройку борто-
вых подсистем РСБН, КУРС МП/СД,
а также УКВ радиостанций;
управление индикацией ЗПУ на
ПНИ;
включение различных режимов ра-
боты АНК, алгоритмический конт-
роль навигационных средств комплек-
са при подготовке к полету.
Кроме этого, НВУ совместно с
САУ:
автоматический полет по запро-
граммированному маршруту;
автоматический предпосадочный
маневр;
автоматизированный уход на вто-
рой круг.
Пульт ввода и индикации обеспе-
чивает: ввод в БОП исходных дан-
ных программы маршрута при ручном
программировании и оперативном
изменении программы в полете; вклю-
чение алгоритмов решения навигаци-
онных задач; индикацию текущих или
программных параметров. В комплект
НВУ входят два ПВИ («правый» и
«левый»). Для вызова навигацион-
ных величин положение переключа-
телей ПВИ безразлично, причем ха-
рактер информации на одном ПВИ
не зависит от характера навигацион-
ной информации на другом.
Базовая система курса и вертика-
ги (БСКВ) предназначена для вы-
числения курса самолета и выдачи
электрических сигналов курса потре-
бителям. БСКВ имеет три канала ус-
ловного (ортодром ического) курса
(три блока согласования курса БСК)
и два — гиромагнитного курса (два
блока гиромагнитного курса БГМК).
Совместно с БЦВМ оиа измеряет и
формирует гироскопический (ГК) уг,
условный (УК) уу или ортодромиче-
скнй (ОК) уОрг и истинный (ИК) уи
и курсы. Рабочими (основными) кур-
сами являются ортодромнческий,
истинный и гиромагнитный. Имеется
три режима коррекции: «ВК» (внеш-
ней коррекции), «ГПК» и «МК».
Режим «ВК» — основной при ра-
боте с ЦВМ. Начальная выставка
курса и учет угловой скорости вра-
щения Земли осуществляются автома-
тически по сигналам ЦВМ. Режим
«ГПК» используется при отказе вы-
числительной машины. Режим
«МК» служит для коррекции ОК по
сигналу ГМК при автономном ис-
пользовании БСКВ.
Датчиком гироскопического курса,
а также углов крена и тангажа и
проекций скорости ВС на горизон-
тальные оси гироплатформы (ГП)
является инерциальная курсоверти-
каль (ИКВ), основу которой состав-
ляет горизонтально стабилизирован-
ная ГП.
Гироскопический курс подвергает-
ся широтной коррекции для исключе-
ния влияния вращения Земли, а за-
тем внешней коррекции и тем самым
формируется ОК.
175
В режиме «ВК» формируется
курс, вычисленный внешними датчи-
ками: ЦВМ, задатчиком курса (ЗК),
индукционным датчиком (ИД) отно-
сительно условного направления. Он
вводится периодически при нажатой
кнопке «Согл.» па ПУ или по сигналу
«Согласование» от БЦВМ в режимах
«МК» и «ГПК». В качестве условного
направления отсчета курса может
быть использован истинный или маг
нитный меридиан или любое другое
направление. Индикаторами ОК слу
жат ПИП и ИНО.
В режиме «ГПК» внешняя
коррекция не производится — БСКВ
сама вычисляет и индицирует угпк.
Для формирования гиромагнитного
курса в БГМК поступает уГПк, кото-
рый непрерывно корректируется сиг-
налами магнитного курса, индициру-
емого на КИ-13, от ИД. Индикатора-
ми у,мк являются РМИ, а также
ПНП, если выполняется полет по ра-
диомаякам «ВОР».
Ортодромический осредненный
курс используется для автоматическо-
го счисления координат
1
Торт ср 3 (Торп +т ортгЦ- Торта) •
где уО1.т i — курсы, выдаваемые тремя
каналами БСК. Погрешность хране-
ния ОК не превышает 0,3°/ч. Точ-
ность измерения ГМК не хуже 0,7°.
БСКВ имеет систему контроля на-
личия электропитания и исправности
работы следящей системы в блоках
БСК и БГМК. Кроме того, система
контроля по мажоритарной логике
проверяет БСКВ: сравнивает между
собой три сигнала у„рт; если один из
иих будет отличаться от двух дру-
гих более чем на 5°±2°, то опреде-
ляется отказавший канал и включает-
ся соответствующая сигнализация.
При отказе одного канала и рассогла
сования двух других на пороговую
величину выдается сигнал отказов
каналов ОК.
В АНК-И возможно счисление пу-
ти: курсо-доплеровское, инерциаль-
ное, инерциальио-доплеровское, кур-
со-воздушное . В эксплуатируемых
АНК-11 счисление координат произ-
водится курсо-доплеровским и курсо-
176
воздушным (аэрометрическим) мето-
дами. В последнем случае датчиком
воздушной скорости служит инфор-
мационный комплекс воздушно-ско-
ростных параметров (ИК ВСП),
предназначенный для решения тех же
задач, что и система воздушных сиг-
налов.
Автоматическое счисление частио-
ортодромнческих координат в курсо-
доплеровском режиме по существу
осуществляется по алгоритмам (16.2)
и (163), но с вводом поправки иа
несферичность Земли и относитель-
ную методическую погрешность из-
мерения путевой скорости MV7U7, что
уменьшает погрешности решения за-
дачи. Коэффициенты точности счисле-
ния k(.4t ~ 0,0085 и АСЧв аг 0,007.
БЦВМ выполняет комплексную обра-
ботку информации. В этом случае
fcc4j a kc4g ж 0.005. С использовани-
ем счисленных s,., zc и координат
ППМ начала и конца текущего уча-
стка маршрута вычисляются геогра-
фические ЧгХ-Г.
17.2. Особенности подготовки
к полету
Подготовка к полету с применени-
ем АНК-11 проводится в полном со-
ответствии с требованиями НПП ГА.
НШС ГА, РЛЭ и инструкций. Осо-
бенностями ее являются необходи-
мость подготовки данных для про-
граммирования полета и выполнение
этой операции.
Для программирования полета с
применением АНК-11 необходимо рас-
полагать географическими координа-
тами ОПМ, РНТ и аэродромов Вели
чины <рг, Хг или выбираются из спе-
циальных аэронавигационных спра
вочников, или определяются с макси-
мально возможной точностью с ис-
пользованием крупномасштабных
карт. Эти и другие данные вносятся
в таблицы «Исходных данных для
программирования полета» (фор
мы 3—5).
В этих таблицах даны следующие
обозначения: ПП — признак полуша-
рия Земли (северное, южное); Б—
продолжительность полета по участ-
ку маршрута, Лн, рн— магнитное
склонение в районе радиомаяка
рОР; NVK— номер частотно-кодового
канала РСБН; ИЗПУв11п—навран
Ленче оси ВПП; Лм аэр — магнитное
склонение в районе аэродрома;
Л/,.ф — номер аэродромного кадра
фильма И НО.
Подготовка массива аэронавига-
ционных данных по маршрутам по-
летов и перфокарт для автоматиче-
ского программирования занимается
группа наземного штурманского обес-
печения (НИЮ) полетов.
На этапе предполетной подготов-
ки для автоматизированного самоле-
товождения выполняется: проверка
исправности и готовности АНК, а
также другого бортового оборудова-
ния по технологии, установленной
РЛЭ (эта работа может быть возло-
жена на группу НИЮ); ввод про-
граммы полета; начальная выставка
датчика курса.
П редполетный контроль проводит-
ся с помощью встроенных средств
контроля (ВСК) в статическом и ди-
намическом режимах с автоматиче-
ской локализацией неисправностей.
Ему предшествует ввод в память
БЦВМ программы предстоящего по-
лета и установка кассеты с микро-
фильмом в ИНО
Необходимые для контроля авто-
матизированного самолетовождения
навигационные элементы полета, вно-
симые в левую часть штурманского
бортового журнала, выдаются АСШР
в отпечатанном виде или рассчитыва-
ются штурманом. В АНК с БЦВМ
полет программируется в географи
ческой СК.
Ввод информации в БОН осуще-
ствляется автоматически с перфокарт
через пульт ППК и вручную с по
мощью пульта ПВИ, используя таб-
лицы исходных данных для програм-
мирования полета
Составление программы конкрет-
ного полета предусматривает опреде-
ление основной ветви маршрута от
ИПМ до КПМ с использованием ча-
сти массива исходных данных, хра-
нящихся в памяти ЦВМ. Выбор про-
граммного маршрута иа данный по-
лет осуществляется либо автоматиче-
ски (по информации об ИПМ и КПМ.
Форма 3
Основные пункты маршрутов полета
с о Наименование ОПМ <Гг Хг МИН
1111 ПП °’'
Форма 4
Данные радиомаяков коррекции
содержащейся на перфокартах), либо
ручным вводом с пульта ПВИ номе-
ров начального NK и конечного NH
пунктов маршрута, также хранящих-
ся в БОП.
Ввод дополнительных данных пе-
ред вылетом обеспечивает учет прог-
ностического времени полета иа уча-
стке маршрута G и заданного вре-
мени прибытия в КПМ Т3. Информа-
ция о ti может вводиться либо со
специальной перфокарты, подготов-
ленной группой НШО непосредствен-
но перед вылетом, либо вручную с
пульта ПВИ.
Контроль правильности записи ис-
ходных данных в процессе програм-
мирования с перфокарт осуществляет-
ся автоматически по признакам, со
держащимся на самих перфокартах.
Имеется сигнализация о правильно
сти ввода. Предусмотрен контроль
хранения записанных в память ЦВМ
данных (после полного ввода) и
правильности хранения программы
данного полета. Возможен ручной
177
контроль введенной программы вызо-
вом на ПВИ исходных данных
Контроль работоспособности БСКВ
обеспечивается схемой оперативного
контроля (по правильности показа-
ния контрольной цифры), индикацией
технического состояния и схемой .ма-
жоритарной логики.
В АН К-Н под начальной выстав-
кой курса понимается процесс выра-
ботки поправки Ду к гирополуком
паевому курсу относительно истинно-
го или магнитного меридианов. При
работающей БЦВМ выставка сводит-
ся к определению поправки с исполь
зованнем внешней информации (руч-
ной вво I, от магнитного датчика) по
гиромагнитному курсу, отработанно-
му блоком БГМК; по запрограммиро-
ванному ЗПУ в1-|П и составляющим
путевой скорости на разбеге, полу-
чаемым от инерциальных датчиков
ПКВ; по известному курсу самолета
пли поправке к нему, вводимым вруч-
ную через ПВИ.
В процессе предполетного контро-
ля аппаратуры через 2 мии после
включения БСКВ по каналам
ИД-БГМК формируются МК и выда-
ются на радиомагнитный индикатор
(РМИ). Для получения и выдачи ОК
на ПИП и потребителям производит
ся согласование БСК по сигналам
ГМК. При этом МК и ОК содержат
погрешности, обусловленные местны-
ми железными предметами.
ПКВ включается одновременно с
включением БСКВ и после прогрева
автоматически приводится в рабочее
состояние.
Точная выставка ОК производит-
ся на РД нли при разбеге по оси
ВПП. При разбеге, кроме того, авто-
матически определяется Ду к ОК по
введенному в БОП заданному путево-
му углу ВПП с учетом того, что
продольная ось ВС совпадает с осью
ВПП Эта поправка запоминается в
БПП и используется в алгоритме
формирования курсовой информации
в полете.
Прн отказе с БЦВМ система кур-
са п вертикали используется в режи-
ме «ГПК». В этом случае начальная
выставка БСКВ по существу не от-
личается от аналогичной операции в
АНК-1-
178
17.3. Выполнение полета
с применением АНК
При разбеге по ВПП при воздуш
ной скорости, соответствующей мо-
менту прохо га самолетом середины
ВПП, автоматически (предусмотрено
и ручное) включается режим счисле
ния. В процессе разбега независимо
от экипажа осуществляется определе-
ние и запоминание БЦВМ выставоч-
ной поправки в курс по данным об
инерциальных скоростях, измеряемых
ИКВ
После излета ВС вручную пилоти-
руется в направлении оси ВПП по
курсу или по планке Z прибора ПНП,
на котором, кроме того, по вызову
индицируются ЗПУВГ)П, удаление
от центра ВПП и ЛБУ от ее оси.
На индикаторы ПВИ (по вызову) по
даются zc, s..
По достижении минимальной вы-
соты, необходимой для выпотнения
разворотов, ЦВМ строит частную ор-
тодромию от текущего МС в ИПМ
заданную его номером Nn. Самолет
по прежнему управляется вручную до
принятия решения о выходе на ИПМ
На ПНП индицируется Ан, а также
zr, sc и ЗПУ относительно построен-
ной частной ортодромии. Для выхо-
да на ИПМ экипаж может использо-
вать ПНП и прибор командный пило-
тажный (ПКП); возможно и автома-
тизированное вождение.
После набора необходимой высо-
ты полета включается управление по
летом от БЦВМ и начинается автома
тическое следование по ЛЗП.
В АНК-Н автоматически реализует
ся навигационная программа, опреде-
ляющая последовательность прохож-
дения самолетом всех ОПМ от ИПМ
до КПМ и время прибытия в пункт
назначения Кроме того, обеспечива-
ется программирование горизонталь-
ного маневра (схемы) захода иа по-
садку исходя из условий, задавае-
мых в полете. При автоматизирован-
ном полете в РА роль членов экипа-
жа сводится к включению режимов
работы АНК, наблюдению за функ
ционированнем последнего и дубли
рующему контролю пути по автоном-
ным датчикам информации и вызо
ном навигационных параметров на
индикаторы ПВИ. Если же полет вы-
полняется без подключения НВУ к
САУ (или неисправности их), то тех-
нология работы экипажа по самоле-
товождению аналогична полету с ав-
тономным использованием техниче-
ских средств и систем.
Полет по маршруту начинается с
выхода иа ИПМ. который назначает-
ся в РА как точка, в которую на-
правляется ВС после взлета и набора
высоты, допускающей включение уп-
равления боковым каналом от ЦВМ
В АНК-П действует система авто-
матического контроля выхода и по-
бита на заданном эшелоне с исполь-
зованием ИК ВСП: при подходе к
//ат за (150±60) м или отклонении
от него на (60±20) м и высвечива-
ется световое табло (СТ) «эшелон».
Во всех случаях автоматизирован-
ного полета контроль пути ведется
по карте ИНО, обеспечивающего на-
иболее наглядную информацию о те-
кущем МС по маркеру на фоне пере-
мещающейся карты. При этом обес
печивается: изображение места ВС
на фойе карты с погрешностью I мм
в масштабе карты; отсчет ФПУ. ор-
тодромического курса и УС; измере-
ние истинного пеленга ориентира
(НПО)
Контроль за полетом по ЛЗП ве-
дется (кроме использования ИНО)
вызовом большого числа параметров
на индикаторы ПВИ (гс. <Гс, А.с;
6, U; Tn, W; ЗПУ, S,,; Г
отклонений \1Е и АТ от требуемых
U7 и Т для выполнения временной
программы полета и др. Навигацион-
ные величины IV', УС, V, И, темпера-
тура на высоте полета Ти контроли
руются по соответствующим индика-
торам средств и систем. Кроме того,
ряд параметров индицируется на
ПНП: ЗПУ, номер начального пунк-
та участка маршрута NH, текущий
ОИК, координаты zc, sc На РМИ не-
прерывно подается ГМК
При подгете к ППМ по признаку
«Смена ЛЗП» бортовая ЦВМ произ-
водит ввод поправок к ОИК иа угол
схождения между истинными мери ди
анами конечного и начального ППМ
пройденного участка и на накопившу-
юся погрешность за время полета на
этом участке.
При пролете ИПМ и всех последу
юшпх ППМ проводится выставка —
согласование ОИК по сигналу ГМК
и заданному с ПУ магнитному скло-
нению Амп|1м Эта операция обеспе-
чивает измерение ортодромического
курса от истинного меридиана нача-
ла каждого участка маршрута. Фор
мированне ОИК участка маршрута
относительно пройденного ППМ осу
шсствляется в ЦВМ по у, с учетом
текущего МС и схождения меридиа-
нов соседних ППМ. При неработаю
щей БЦВМ ОИК формируется не-
посредственно в БСКВ с использова
ннем ИК ручной или полуавтомати
ческой (по БГМК) выставки началь
пого значения курса.
Благодаря осреднению курсов, вы
даваемых по трем независимым кана
лам, использованию мажоритарной
логики, автома гическому определе
нию и учету дрейфа гироскопов
БСКВ с ИКВ, сопряженной с БЦВМ,
обеспечивается высокая точность из
мерения курса. Поэтому и необходи
мость коррекции БСКВ возникает
реже. Прн необходимости эта опера
ция может производиться: автомати
чески по сигналам БГМК; методом
статической фильтрации сигналов с
применением данных позиционной
коррекции по РСБН; вручную, по
данным ИД и моделям магнитных
полей Земли и самолета. Практиче
ски по существу коррекция курса по
БГМК осуществляется при пролете
каждого ППМ Точность такой кор
рекции не хуже 0,7°. Статистическая
фильтрация является постоянно деп
ствующим методом обработки пози
пиониой и курсовой информации,
осуществляемым без вмешательства
экипажа Для выполнения этой опе-
рации на ПВИ необходимо нажать
на кнопки «КОРР. , РСБН» и
«КОРР. КУРСА».
В случае необходимости проводит
ся автоматическая коррекция счис
ленных координат по РМ РСБН: нли
автоматически выбранному БЦВМ,
или выбранному оператором из па-
мяти машины, или оперативно вве
дениому в полете. Вычисленные по-
правки \z и >s индицируются на
ПВИ.
Смена участков маршрута произ-
водится автоматически в соответст-
вии с введенной программой. Необ-
ходимые для счисления пути и авто
матического полета по ЛЗП заданные
путевые углы, 5}ч, элементы разворо-
та и другие БЦВМ рассчитывает с
использованием запрограммирован-
ных географических координат ОПМ.
Параметром для начала разворо
та па новый участок маршрута слу
жит боковое упреждение разворота
(БУР) — расстояние от ТНР до про-
должения очередной ортодромии —
оси OS очередной ЧОСК Бортовая
ЦВМ вычисляет БУР с учетом воз
душной скорости, углов разворота и
тангажа, скорости и направления вет-
ра. Для необходимого уровня ком
форта и безопасности наложены
ограничения: БУР>1300 м, креи нс
более 20°, скорость ввода в крен
27с. В алгоритме претусмотрена за
щита от преждевременного перехода
на очередной участок при УР^10°.
В АНК-П предусмотрен автоматиче-
ский полет с изменением ранее вве
денной программы.
Контроль выполнения временной
программы в АНК-П автоматизиро-
ван. С этой целью БЦВМ определяет
время прибытия в любой ОПМ на
текущей скорости полета, отклонение
от временного графика АГ; необходи-
мое изменение скорости полета \W.
Для решения этих задач в память
ЦВМ вводятся прогностические /,
каждого участка маршрута N, и вре-
мя прибытия в КПМ Т.,. Кроме того,
в ЦВМ имеется счетчик текущего
времени Вся временная информация
индицируется на ПВИ. Изменением
скорости полета экипаж добивается
\«7-»-0 и АГ-Ч) и тем самым обеспе-
чивается соблюдение временного гра-
фика С ТОЧНОСТЬЮ 01^1 мин.
Вход в район аэродрома (РА) оп-
ределяется автоматически по призна
ку где R — (fc, Хс, Фвпп»
Хвпп— удаление ВС от центра
ВПП; Ra = (70-^100) км.
Для вычисления текущей R до
входа в РА должны быть введены
в БЦВМ координаты аэродрома,
180
ИЗПУвпп, Am aj₽, а также номер
кадра фильма ИНО NK<t> с этим аэро-
дромом Задание этих параметров
осуществляется путем автоматическо-
го программирования с перфокарт
либо оперативным программировани-
ем до полета через ПВИ, либо опе-
ративным вводом их в полете (также
с помощью ПВИ). Отсчет ОПУ и ОК
ведется от магнитного меридиана
ВПП. По признаку входа в РА выда-
ется сигнал об индикации магнитно-
го курса на ПНП.
При автоматизированном полете в
РА счисление координат ведется од-
новременно в ГОСК и ЧОСК. Первая
строится с началом центра ВПП и
используется экипажем для контроля
пути в процессе предпосадочного ма-
невра, а вторая — автоматического
захода на посадку.
Автоматический полет по схеме
захода на посадку обеспечивается с
использованием пульта взлета и по-
садки С его помощью задаются ши-
рина прямоугольного маршрута, рас-
стояния по оси ОУ от центра ВПП до
точек первого — четвертого разворо-
тов, направление посадки и круг за-
хода (правый или левый). На нем
имеются кнопки табло сигнализации
подхода к точкам ТПМ (второй, тре-
тий и четвертый развороты), травер-
за ДПРМ сТр» и границы ВПП.
В случае изменения маршрута по
лета после входа в РА (например, в
связи с изменением условий посадки)
полет произвотится по запасной вет-
ви, для чего вводятся обычным спо
собой новые значения N„ и N,,. При
выполнении полета по непредусмот-
ренному маршруту осуществляется
оперативный ввод ОПМ управлением
непосредствеино от ППК либо вруч-
ную. В последнем случае, когда ЦВМ
не участвует в управлении полетом,
она ведет непрерывное счисление и
может в любой момент обеспечить
автоматический переход к полету по
схеме захода иа посадку.
При выходе ВС на последний
участок программного маршрута, ве-
дущего к КПМ, должно быть приня
то решение о том, в какую точку схе-
мы захода на посадку будет вписы-
ваться самолет, и нажата соответст-
вующая кнопка-табло на ПВП. Ког-
да ВС приходит иа ЛУР КПМ, на-
чинается разворот на выбранную точ-
ку ТПМ и одновременно в ПК выда-
ется сигнал «Подготовка посадки>.
На ПВИ вместо г и у начинают ин-
дицироваться координаты X и У. Ав-
томатизированный полет по сигналам
навигационного комплекса продол-
жается до начала четвертого разво-
рота. С этого момента самолет уп-
равляется ПК по сигналам курсово
го и глиссадного радиомаяков. Если
на предпосадочной прямой ВС в бо-
ковом направлении выйдет за допу-
стимые значения ±Дх, то формиру-
ется световое предупреждение.
АНК-И имеют развитую систему
автоматической сигнализации. Оиа
формирует и выдает ряд уведомляю-
щих и предупреждающих световых
сигналов и команд о состоянии нави-
гационного комплекса и необходимых
действиях, что облегчает работу эки-
пажа в воздухе, повышает надеж-
ность самолетовождения и безопас-
ность полетов.
17.4. Инерциальная
навигационная система
Инерциальная навигационная си-
стема (ИНС) — автономное устройст-
во, предназначенное для определения
координат ВС методом счисления пу-
ти и вычисления ряда других нави-
гационных элементов полета. Прин-
цип действия основан на измерении
возникающих при движении ВС аб-
солютных ускорений алрс в инерци-
альном (мировом) пространстве с
помощью акселерометров (AM), яв-
ляющихся одним из чувствительных
элементов ИНС. Интегрированием
ускорения а относительно земной по-
верхности по времени вычисляются
путевая скорость и пройденное рас-
стояние:
W = f adt; S = J W'dt = ]' J udtdt,
а с использованием составляющих пу-
тевой скорости — путевой угол, курс
полета, угол сноса, направление и
скорость ветра и др.
Преимуществами ИНС перед дру-
гими навигационными системами яв-
ляются: непрерывное с большой точ-
ностью определение фактического на-
вигационного режима полета (МС,
IV, ФПУ); полная автономность; аб-
солютная помехоустойчивость; выда-
ча информации независимо от района
полетов и метеоусловий.
Но ИНС имеют и недостатки. Точ-
ность информации о скорости и ко-
ординатах ВС убывает с течением
времени полета, поэтому необходима
периодическая их коррекция. Они
требуют много времени для началь-
ной выставки системы. К ним можно
отнести сложность и большую стои-
мость
Основными элементами ИНС яв-
ляются акселерометры, стабилизиро-
ванная в горизонтальной плоскости и
по азимуту гироплатформа (ГП) и
навигационное вычислительное уст-
ройство.
Акселерометры не различают
инерциальных ускорений, обусловлен-
ных движением ВС, от ускорений,
возникающих под действием силы тя-
жести. Поэтому для исключения вли-
яния гравитационного поля Земли на
точность решения навигационных за-
дач AM устанавливаются строго го-
ризонтально. Это достигается исполь-
зованием ГП.
Гироглатформа предиазиачена для
обеспечения акселерометрам незави-
симости от угловых перемещений са-
молета и удержания осей чувстви-
тельности AM в фиксированных на-
правлениях относительно Земли, а
также для выдачи в НВУ информа-
ции об угловых положениях ВС и
сигналов, пропорциональных ускоре-
ниям, воздействующим на платформу.
Она представляет собой площадку,
на которой размещены три гироскопа
и акселерометры.
На ГП размещаются три AM со
взаимно перпендикулярными осями
чувствительности: два из них распо-
лагаются в горизонтальной плоско
сти для измерений ускорений движе-
ния по направлениям выбранной СК
(как правило, географической), а тре-
тий — вертикально для измерения
вертикального ускорения
Ускорения, измеренные AM и пре-
образованные в соответствующие сиг-
налы, поступают в НВУ, где вычис-
181
ляется и выдается на индикацию в
цифровом виде большое число нави-
гационных параметров. Здесь же фор
мнруются сигналы на двигатели ста-
билизации гироилатформы в плоско-
сти горизонта Оси чувствительности
акселерометров с достаточной точно-
стью всегда располагаются в гори-
зонтальной плоскости.
НВУ представляет ЦВМ и пред-
назначено для решения задач при
по иотовке и выполнении полета.
В его состав входит устройство вво
га и индикации (УВИ), которое слу-
жит для набора исходных данных и
индикации навигационных парамет-
ров в цифровом виде. С помощью
УВИ осуществляется программирова
иие полета вводом географических
координат места стоянки и девяти
ОПМ. Выбор режимов работы («Обо-
грев», «Выставка», «Навигация»,
«Контроль») производится с пульта
управления (ПУ).
Для ориентации ГП по горизон-
ту и азимуту используются антоном
ные методы выставки одинарного и
двойного гирокомпасирования, за-
данного курса и курсовертикали.
Погрешность выставки 'гироилат-
формы в азимуте методом о шнарно-
го гирокомпасирования пропорцио-
нальна скорости собственного ухода
северного гироскопа стабилизатора
ГП по азимуту.
Если в ИНС используются гиро-
скопы невысокого качества с болыии
ми <о<, то для уменьшения ошибок
выставки ГП применяется метод
гвойиого гирокомпасирования. Он со-
стоит из дополнительного и основно-
го этапов. На первом этапе опреде-
ляется «>< северного гироскопа, а иа
втором осуществляется собственно
гирокомпасирование с учетом полу-
ченной угловой скорости.
17.5. Определение
навигационных элементов
полета с помощью ИНС
Инерциальная навигационная си-
стема (ИНС) предназначена для ре-
шения задач самолетовождения в
полете по воздушным трассам и вис
трасс и обеспечивает:
182
автономное или совместно с САХ
выполнение полета по маршруту в
соответствии с программой, введен-
ной в нее перед полетом или в по
лете;
непрерывное автоматическое счис-
ление и индикацию текущего МС в
географической и частноортодромиче
скои системах координат; •
формирование и индикацию ЗПУ
и ЛБУ для автоматизированного вож-
дения ВС в горизонтальной плоско
сти;
вычисление и индикацию путевой
скорости и угла сноса;
определение и индикацию време
ни полета и оставшегося расстояния
до ППМ, географические коордииаты
которого введены в НВУ;
вычисление и индикацию текущих
значений истинных путевого угла и
курса полета;
определение и индикацию навига-
ционного направления и скорости
ветра;
ручную коррекцию частноортодро-
мичсских координат МС;
индикацию географических коор-
1инат и номеров ОПМ, введенных в
систему;
информацию в цифровой форме
показателей готовности (ПГ) систе-
мы к работе, сигналов компенсации
уходов гироскопов и составляющих
путевой скорости.
Заданный и текущий путевые уг-
лы вычисляются относительно геогра-
фического меридиана начала текущей
ортодромии и, следовательно, явля-
ются ОИПУ. Истинный курс вычис-
ляется относительно меридиана фак-
тического МС. Обеспечивается изме
рсние и гироскопического курса. ГП
по своим свойствам подобна трехсте-
пенному гироскопу с горизонтально
расположенной главной осью. Поэто-
му она позволяет определять курс та-
кими же методами, как и другие ги-
роскопические курсовые приборы.
Для определения путевой скорости
на ГП устанавливается два взаимно
перпендикулярных AM: один направ
лен по географическому меридиану и
измеряет о»; второй — на восток и
Рис. 17.1. Изменение частных погрешностей инерциального счисления пути
выдает аЕ Это позволяет вычислить
составляющие путевой скорости:
«Ч = »лл + I “xdt;
о
^£ = «4+ \ “Edt,
о
а затем W' = W-’V4 WE.
(17 1)
Другие навигационные элементы
определяются как:
Фс — R * | WNdt;
О
^c = ^o + (/?cos<p) • х
i
X ]’ 1Г£Л;
б
Ри arctg(U7£/irv);
« = Ри —Ти
(17.2)
Частиоортодромические координаты
ВС получают преобразованием гео-
графических Хс, фс.
При программировании полета
производятся ввод фс, Хс места сто
яики и поворотных пунктов (в насто-
ящее время 9 ППМ) с помощью
УВИ. В случае необходимости в по-
лете можно ввести координаты до-
полнительных ППМ по мере пролета
запрограммированных. На основе
этой информации вычисляют ЗПУ и
боковое уклонение от ЛЗП для обес-
печения автоматизированного самоле-
товождения в горизонтальной пло-
скости .
Основными источниками погреш
ностеп определения скорости полета
и координат являются: неточная вы-
ставка ГП по горизонту и азимуту;
инструментальные погрешности AM;
собственный уход ГП.
1 Погрешность начальной выстав-
ки ГП по горизонту Vo приведет (при
отсутствии других источников ОШИ
бок) к погрешности определения пути
в выбранных направлениях
ASV« 1.85vUl— cos0,074/) (17,3)
где AS — выражается в километрах;
/ — берется в минутах
Значения Л1Г и AS достигают
максимума при/=- Гц, и t— - Ли
соответственно (рис 17 1). Современ-
ные ИНС позволяют выставлять ГП
с >о=Г, Тш = 84,4 мин
183
Рнс. 17.2. Изменение погрешностей инерциального счисления пути
2 Инструментальные погрешности
акселерометров Да прн измерении
ускорений вызывают колебательные
движения ГП такого же характера,
что и ошибки в начальной выставке
Vo (см. рис. 17.1). Погрешности оце-
ниваются по
ASa да 6371£-|Да(1—cos0,074/),
(17.4)
где Да выражена в долях от g (в со-
временных ИНС Додав-10~e g).
3. Погрешности ИНС по скорости
и положению из за неточной выстав-
ки ГП в азимуте ДЛ0 (в угловых ми-
нутах)
Д5Л да 0,115ДЛо sin 0,074/ —
— 1,85ЛЛ(> sin Q3/. (17.5)
Ошибки скорости и координат носят
колебательный характер и не накап-
ливаются во времени. Основную
часть погрешности МС создают коле
бания с частотой — угловой ско-
рости суточного вращения Земли.
4 Ошибки, возникающие при соб-
ственном уходе ГП Юс (°/ч),
ДД(|) да 1,85о>с (/—13.4 sin 0,074/),
(17.6)
носят другой характер, чем рассмот-
ренные выше: AS имеет колебатель-
ную и возрастающую пропорциональ-
но времени полета составляющие
(civ рис. 17 1) Последняя равна
\5'виэр=1,85 <1>сС если время выра-
184
жено в минутах и Д5'ВОзр= 111,2 uct,
если — в часах Уход современных
ГП <>)< = (0,01—0,05) °/ч.
Ошибки из-за собственного ухода
гироскопов — основная причина,огра-
ничивающая время автономной рабо-
ты ИНС.
Созместное проявление перечис-
ленных ошибок определяет погреш-
ности в счислении if, Л (5, г). Они
имеют вид возрастающей во времени
сложной кривой (рис. 17.2). Величи-
на радиальной СКП определения МС
эксплуатируемыми ИНС в среднем
<Jrcp равна одной дуговой минуте,
или 1,85 км на 1 ч полета (в первые
часы полета погрешности координат
не подчиняются этой закономерности
и могут быть больше). Составляю-
щие погрешности координат по вза-
имно перпендикулярным направлени-
ям независимы и распределены по
нормальному закону с МО, равным
нулю.
17.6. Подготовка и выполнение
полетов с применением ИНС
Для выполнения полетов с приме-
нением ИНС необходимо заранее оп-
ределить и составить таблицу устано-
вочных данных с географическими
координатами: места стоянки самоле-
та на основных и запасных аэродро-
мах, ОПМ основного и запасного
маршрутов полета, РНТ для коррек-
ции счисленных координат. Кроме
того, надо знать ИК самолета на
стоянке с точностью до единиц уг-
ловых минут.
Подготовка системы к полету со-
стоит в проверке ее работоспособно-
сти. выставке ГП ц вводе координат
ОПМ в НВУ. Режимы работы ИНС
при этом выбираются с ПУ.
Проверка работоспособности ИПС
на земле выполняется в режиме
«Контролы». При этом система имити-
рует полет по заданной криволиней-
ной траектории. Через определенные
интервалы времени автоматически
сравниваются текущие географиче-
ские координаты с расчетными и при
разнице между ними, превышающей
установленное значение, пытается
световой сигнал отказа.
Для выставки ГП с ПУ включа-
ются метод гирокомпасирования
(одинарное или двойное в зависимо-
сти от располагаемого времени до
вылета) и режим работы «Обогрев»
за максимально располагаемое время
(по нс более I ч 40 мин). Режим
«Обогрев» предназначен для созда-
ния необходимых температурных ус-
ловий работы ИНС и поддержания
их в течение всего полета. После по-
явления на ПУ световой сигнализа-
ции «Обогрев» включается режим
«Выставка» и начинается выставка
ГП по горизонту и азимуту На У ВИ
индицируется показатель готовности
ИГ 90 При определенном значении
ПГ (он убывает с 90 до 0) в УВИ
вводятся географические координаты
(начинать обязательно с широты)
места стоянки, а затем — координаты
(святи ИПМ предстоящего маршру-
та полета. Если число их превыша-
ет 9, то координаты последующих
ППМ вводятся в полете по адресам
пройденных. Адресом ППМ является
его номер. Ввод этой информации
осуществляется вручную с помощью
наборного поля УВИ Набранные
цифры высвечиваются на индикаторе
УВИ, что позволяет контролировать
правильность программирования
Ход гирокомпасирования контро-
лируется по значению ПГ в соответ-
ствии с текущим этапом выставки.
Начиная с определенного ПГ можно
наблюдать процесс вычисления ИК —
выставки ГП по азимуту. Значение
курса непрерывно меняется, прибли
жаясь к фактическому. При ПГ = 0
на ПУ загорается лампочка «Готов-
ность», сигнализирующая о готовно-
сти системы к работе и переходу в
режим «Навигация», который вклю-
чается до запуска двигателей и обя-
зательно перед началом выруливания
или буксировки со стоянки.
Выставка ГП с вводом известно-
го (с погрешностью не более 15')
истинного курса самолета на стоянке
выполняется аналогично одинарному
гирокомпасированию. Для этого на
ПУ устанавливается метод выставки
«ЗК», затем — режим «Выставка» и
с помощью наборного поля выбирает-
ся н вводится значение ИК с точно-
стью до единиц минут. Метод позво-
ляет выполнить выставку за меньшее
время, чем при одинарном и двойном
гирокомпасировании.
Режим «Курсо-вертикаль» (КВ)
предназначен прн отказе НВУ или
необходимости ускоренной подготов-
ки к полету. Время выставки пример-
но в 2 раза меньше, чем в режиме
«ЗК».
После выполнения полета с отклю-
ченной ИНС ее подготовка к следу-
ющему полету обязательно произво-
дится методом двойного гирокомпа-
сирования.
Выставка методом двойного ги-
рокомпасирования требует в 2 раза
больше времени, чем одинарный ме-
тод, ио обеспечивает более точную
ориентацию ГП. Показатель готовно-
сти в процессе выставки изменяется
с 90 до 0, а затем возрастает до 60 и
вновь уменьшается до нуля.
Выполнение полета с применени-
ем ИНС. Режим «Навигация» ис-
пользуется в полете. При этом си-
стема выдаст на индикацию иа УВИ
(по вызову) большое число навига-
ционных параметров и вырабатывает
сигналы, пропорциональные отклоне-
нию и скорости отклонения ВС от
ЛЗП. Кроме того, режим позволяет
автоматически переключать участки
маршрута полета, запрограммирован-
ные на земле, изменять маршрут в
полете, выполнять коррекцию счис-
лсиных координат.
Начальная фаза навигации (са-
молет начинает двигаться на взлет)
185
(включается в установке иа УВИ пер-
вого участка маршрута «О—1». Прн
соответствующем положении пере-
ключателя параметров на УВИ будут
высвечиваться текущие координаты
самолета <рс. Хс или sc, zc.
Управление самолетом прн поле-
тах с применением ИНС возможно в
режимах «Ручной» и «Автомат».
В первом случае выдаваемые систе-
мой параметры используются экипа-
жем в качестве освеюмляющсй ин-
формации. Во втором случае весь по-
лет по запрограммированному марш-
руту с момента подключения ИНС к
САУ будет выполняться автомати-
чески.
Изменить маршрут полета можно
гремя способами (на УВИ нажимает-
ся клавиша «Изменение маршрута»):
изменением порядка прохождения
запрограммированных ППМ. Вводят-
ся номер начального и конечного
ППМ нового участка маршрута;
построением маршрута с текущего
МС на любой запрограммированный
ППМ, номер которого вводится в
УВИ;
вводом в полете географических
координат новых ППМ, которые не
были запрограммированы
При необходимости выполняется
неавтоматическая коррекция счислен-
ных координат. Для этого с использо-
ванием любого средства, обеспечива-
ющего в данный момент определение
более точного МС, чем это информи-
рует ИНС, находят координаты хф,
гф н вычисляют поправки \s =
= Shhc—(без учета знаков sBBC и
?ф), Дг=г11Ис—гф (с учетом знаков
г»ис н гф), которые вводятся через
УВИ. После этого на индикаторах
будут высвечиваться откорректиро-
ванные координаты. Одновременно
корректируются (автоматически) и
счисленные географические координа-
ты, а также оставшееся время поло-
га до ППМ.
При прове гении коррекции необ-
ходимо сначала откорректировать 5,
а затем г. Коррекция только s или г
приводит к неправильному вычисле-
нию частноортодромическнх коорди-
нат после смеиы ЛЗП и, следователь-
но, требует повторения этой опера-
ции.
17.7. Сверхдлинноволновая
разностно-дальномерная
радионавигационная система
Разностио-дальномерные радио-
навигационные системы (РДРНС)
предназначены для измерения разно-
сти расстояний ДО от ВС до двух
наземных станций с известными ко-
ор гннатамп. Постоянному значению
измеренной \D соответствует ЛП —
линия равных разностей (ЛРРР),
представляющая собой гиперболу.
Наземные станции располагаются та-
ким образом, чтобы можно было од-
новременно измерить по крайней мере
две ДО, используя которые определя-
ют МС.
К настоящему времени в разных
странах разработано, внедряется и
эксплуатируется значительное число
типов РДРНС. Наибольшее примене-
ние нашла сверхдлинноволновая фа-
зовая система «Омега» (Хо=30 000 м,
/о =10,2 кГц). Восемь ее наземных
станций по всему земному шару раз-
мещены таким образом, чтобы прн
дальности действия 10—12 тыс. км
обеспечить определение МС практи-
чески в любой точке Земли днем и
ночью независимо от метеоусловий
Расстановка наземных станций поз-
воляет принимать на борту ВС сигна
лы 4 -5 станций, которые образуют
6—10 пар. Причем всегда имеется
возможность выбрать 3 станции (они
составят три пары), ЛП от которых
пересекаются под углами 60—120°.
Это создает благоприятные условия
для определения МС с максимально
возможной точностью.
В точке С (рис. 17.3) местона
хождения ВС (<рс, Хс) разность рас-
стояний до станции А и В (коордн
наты <pi, Xi)
ДО = О/1-Ов = г(ф/л-
= ^Ф hi ~ ^Ф *
гте 1>ф = 300 574 км/ч— фазовая ско-
рость распространения радиоволн
сверхдлинноволнового диапазона.
Конкретному значению Af=const
соответствует вполне определенная
ЛП (гипербола).
186
В фазовых РНС для определения
\D измеряется не Д/, а разность фаз
сигналов двух наземных станций
AD = Da-Db =
= (2л)1квФд. (17.7)
Разность фаз отсчитывается от О
до 2 л. Следовательно, если Д£>>Ло,
то значения Фи будут повторяться,
что приводит к неоднозначности из-
мерения До и определения МС.
Полоса, в пределах которой
Фв = 0ч-2л, называется фазовой до-
рожкой В этой полосе Фо нс повто-
ряется, и МС находится однозначно.
11а земной поверхности образуется
множество фазовых дорожек, на од-
ной из которых будет действительное
МС.
В бортовой аппаратуре при усло-
вии ввода фактических координат ВС
(например, аэродрома вылета) с по-
грешностью не хуже половины шири-
ны дорожки автоматически определя-
ется точное МС по измеренной Фп,
а в дальнейшем осуществляется ав-
томатическое слежение за номером
дорожки и непрерывное однозначное
определение места.
В соответствии с (17.7) погреш
ность определения разности расстоя-
ний
°дл = (2-’,)'‘ к0ОФ’
где Оф — СКП измерения разности
фаз.
В современных системах <Тф«
«0,01-2 л (один сантнцикл) Тогда
Одд «0,01 Ло, что иа Ло=30 000 м
дает Одд «300 м.
Погрешность определения ЛРР
ap = (2sini|) 2)-1оДд
На линии базы между станциями
ф=180° (см. рис. 17.3) и, следова-
тельно, погрешность ЛП здесь мини-
мальна.
Место ВС по двум ЛРРР при ус-
ловии некоррелированности ошибок
Рис. 17.3. Определение МО с помощью
разностно-дальномерной РНС
измерений Дц определяется с ради-
альной СКП
аг
1
sin ш
аЬР
sin <d
ф,
sin2 —
2
ф2 V / ф!
+ sin2----- I I 2sin---------- х
2 / \ 2
4 а
X sin —
— *РДС°Дд’ (17 8)
где £рдС—коэффициент точности оп-
ределения МС. Исследования показы
вают, что он достигает минимума,
равного 0,9185 прн ф!=ф2= 109°30'
Тогда <уг = £рпс °дл *
mln F^cinln аи
«0,92 Одд = 275 м. Малые значе
ния £РдС (рис 17.4) получаются при
ф|=ф2= (304-150)° Это свидетель-
Рис. 17.4. Зависимость коэффициента
точности от углов PC
187
ствует о том, что сверхдлинноволно-
вая РДРНС обладает очень высокой
потенциальной точностью определе-
ния МС. Но для реализации таких
возможностей необходимо ввести по-
правку на условия распространения
радиоволн.
Электромагнитные колебания двух
станций, принимаемые на ВС, распро-
страняются в различных условиях,
приводящих к изменению фазовой
скорости Оф. Кроме того, длина пути
радиоволн будет больше расстояния
от станции до ВС. Вследствие этого
Шо
измеренная Фс =— (£>л—Дв) для
г’ф
одной и той же фактической разности
дальностей ДО будет неодинаковой
в разное время суток и года и зави-
сит от района полетов. Это приводит
к появлению систематической погреш-
ности ДФп, которая во много раз
больше инструментальной, равной
примерно одному сантициклу. Поэто-
му точность навигационных определе-
ний с помощью PDC «Омега» прак-
тически полностью зависит от совер-
шенства методики расчета и ввода
поправок на условия распростране-
ния.
В современной бортовой аппара-
туре эти поправки заранее рассчиты-
ваются и хранятся в памяти ЦВМ и
автоматически вводятся с учетом
времени года (месяца), суток и
райоиа полетов. В этом случае МС
определяется с точностью, в основном
удовлетворяющей требованиям. Экс-
периментальные данные погрешностей
местоположения ВС приведены в
Таблица 17.4 Погрешности
определения места ВС
табл. 17.4. Установлено, что в любой
точке Земли, за исключением Грен-
ландии, Антарктики и подобных им
районов, место определяется с ради-
альной СКП не выше 8,5 км, а над
Северной Атлантикой 2,5—6,5 км.
При появлении аномальных явлений
в ионосфере, число которых увеличи-
вается в годы повышенной солнечной
активности, рассчитанные поправки
теряют свое значение и в этих усло-
виях точность определения может
быть хуже в 5 раз по сравнению с
приведенной.
Экспериментально доказана воз-
можность уменьшения ошибок опре-
деления МС до 0,3—0,7 км за счет
ввода дифференциальных поправок.
Для этого они непрерывно с высокой
точностью измеряются на земле, за-
<ем передаются на борт ВС и авто-
матически вводятся в цифровой нити
катор координат.
17.8. Определение
навигационных элементов
полета с помощью
разностно-дальномерной
системы
В настоящее время эксплуатирует-
ся большое число типов бортовой ап-
паратуры РД РНС, предназначенной
для установки на ВС всех классов
и решения различного объема нави
гационных задач. Наибольшее рас-
пространение получили автоматиче-
ские самолетные приемоиндикаторы
(СПИ). Оии состоят из аитениы с
предварительным усилителем, прием-
ника с цифровым вычислительным
устройством (П-ЦВУ) и пульта уп-
равления и индикации (ПУИ).
Самолетный приемоиндикатор
предназначен для программирования
полета, автоматического поиска, об-
наружения, измерения, синхронизации
и слежения за поступающими сигна-
лами, хранения н обработки данных
с выдачей результатов вычислений иа
цифровые индикаторы ПУИ.
В гражданской авиации СССР
эксплуатируются приемоиндикаторы
ОНС-УП, АД-1800 и СМА-771. Объем
и качество решаемых ими задач прак-
188
гически одинаковы. Они различаются
лишь конструктивным оформлением
и переключателями ПУИ.
Все названные СПИ имеют ре-
жимы:
разностно-дальномерный нли ги-
перболический — основной режим,
для реализации которого необходим
прием сигналов по крайней мере от
трех станций <Омега», оптимальных
по геометрии;
счисления — вспомогательный
кратковременный режим, используе-
мый при невозможности реализации
гиперболического; автоматическое оп-
ределение координат ведется по ин-
формации о ГМК и V„, поступающих
от внешних датчиков.
СПИ автоматически выбирает три
наиболее благоприятные станции.
Это позволяет получить систему из
трех уравнений с двумя неизвестны-
ми координатами ВС <рс, Хс, решени-
ем которой определяется МС.
Затем, располагая координатами
ВС, можно вычислить ряд навигаци-
онных элементов. Объем решаемых
задач зависит от возможностей бор-
тового оборудования, прежде всего
наличия в ием ЦВМ.
Самолетные приемоиндикаторы
ОНС-УП, АД-1800 и СМА-71 выпол-
няют следующие функции:
программирование маршрута поле-
та введением в СПИ географических
координат места стоянки и всех
ППМ, а также календарного месяца
и гринвичского времени;
хранение информации о поправках
на условия распространения радио-
волн и данных о магнитном склоне-
нии;
автоматический поиск наземных
станций, синхронизация и согласова-
ние начальных фаз колебаний борто-
вых эталонов частоты и времени,
выбор сигналов трех наземных
станций с наилучшим отношением
сигнала к шуму и наиболее благопри-
ятными геометрическими условиями
измерений;
слежение за сигналами трех на-
земных станций и измерение разности
фаз их сигналов (разности расстоя-
ний до них) с устранением многознач-
ности измерений и вводом поправки
на условия распространения,
определение географических коор-
динат ВС с выдачей их на световой
цифровой индикатор,
определение МС автоматическим
счислением пути в курсо воздушном
режиме при неустойчивом слежении
за сигналами наземных станций;
проверка работоспособности при
емоиндикатора;
индикация аварийных режимов
работы аппаратуры.
Затем используя координаты МС
и ППМ, бортовая ВМ вычисляет, за
поминает и в зависимости от положе
иня переключателя параметров ПУИ
иа цифровые индикаторы выдает
(рис. 17.5) заданные истинные путе-
вые углы и длины участков маршру
та; средние заданные МПУ; фактиче-
ский путевой угол; истинную воздуш
ную скорость; текущие ИК и МК по-
лета, путевую скорость и УС; метео-
рологическое иаправлеиие и скорость
ветра; линейное боковое уклонение и
расстояние от ВС до любого ППМ,
расчетное значение МК н поправку
в путевой угол (разность ЗПУ —
ФПУ) для полета с заданным путе-
вым углом; истинный пеленг ориенти-
ра (НПО) от текущего МС на ППМ.
время полета до ППМ и гринвичское
время прибытия, магнитное склоне-
ние и азимутальную поправку прн
измерении путевого угла и курса от
условного (гринвичского) меридиана
Бортовой СПИ типа ОНС VII, ис
пользуя координаты МС и ППМ, вы
числяет, запоминает и в зависимости
от положения переключателя пара
метров на цифровые индикаторы в
обозначениях на английском языке
выдает (см. рис. 17.5); заданные
истинные путевые углы (DTK), фак
тическин истинный путевой угол
(ТК), истинный (NDG) и магнитный
(СН), курсы, ППМ (WPT), МС
(POS), линейное боковое уклонение
(ХТК), расстояние до очередного
ППМ (D1S), истинный пеленг ориен
тира (BRG), угол сноса (DA), воз-
душную истинную (TAS) и путевую
(GS) скорости, величину отклонения
ФПУ от ЗПУ (ТКЕ), направление и
скорость ветра (WIND), магнитное
склонение (ДМ) и ряд других эле-
ментов. На рис. 17.5 MAG NORTH
означает северное направление маг-
189
Рис. 17 5 Навигационные параметры,
паратурой ОНС-7
вырабатываемые и индуцируемые ан
нитиого меридиана, a TRUE
NORTH — истинного.
Все управление СПИ осуществля
ется с ПУИ, имеющего переключа
тель режимов работы («Выключено».
«Ручной», «Автоматический» и
«Контроль работоспособности») и пе-
реключатель ввода и вывода ннфор
мацнн. С помощью последнего обес-
печивается управление отбором на
индикацию текущих навигационных
параметров и отображение всей вво-
димой информации.
17.9. Подготовка и выполнение
полета с применением
самолетного
приемоиндикатора
Перед полетом с применением
СПИ РДС экипаж проходит обычную
предполетную подготовку в полном
190
объеме требований руководящих до-
кументов. Для использования СПИ
необходимо подготовить данные о
географических координатах: места
стоянки на основных и запасных
аэродромах (при отсутствии их —
контрольных точек аэродромов); по-
воротных пунктов и КПМ основного
и запасного маршрутов; радионави-
гационных точек и КО. которые мо-
гут быть использованы для коррекции
координат, определяемых СПИ. Все
перечисленные величины вносятся в
таблицу установочных данных.
Предполетный контроль функцио-
нирования СПИ включает в себя про
верку синхронизации, ручную десе-
лекцию наземных станций системы и
ее снятие, а также проверку с ис-
пользованием встроенного контроля.
Правильность выполнения вычисли-
тельных операций проверяется вво
дом координат места и ППМ с после-
дующим сравнением рассчитанных
ИВУ заданных путевых углов и S>4
с соответствующими величинами, за
писанными в штурманском бортовом
журнале.
Аппаратура СПИ приходит в ра-
бочее состояние через 2—3 мин после
включения и выполнения программ!!
рования, а также окончания синхро-
низации. О (нако на стоянках некото-
рых аэропортов из-за искажения сиг
пазов аэродромными сооружениями
синхронизация может продолжаться
н дольше, а иногда не заканчиваться
и до выруливания со стоянки
На ПУ И индицируются номера
всех наземных станций, сигналы ко-
юрых принимаются; причем, харак-
тер свечения номера станции показы
васт, какие из принимаемых станций
являются оптимальными по располо-
жению и отношению сигнал/шум. Пе-
ред вылетом необходимо выбрать не
менее трех наиболее благоприятных
станций.
Программирование полета с при-
менением СПИ состоит в ручном вво-
де в НВУ: номера текущего месяца
и гринвичского времени; координат
исходного места самолета (стоянки);
координат 9 ППМ при программиро-
вании OHC-VII (если но маршруту
более 9 ППМ, то последующие вво
дятся в позете па место пройденных)
или до 19 ППМ—в СМА-771.
Виод в СПИ месяца, времени и
места стоянки необхо гим для пра
вильного отбора из запоминающего
устройства ЦВМ поправки на усло-
вия распространения pa i и о волн. Ко-
ординаты МС и ППМ вводятся для
автоматического расчета ЗПУ и Sy4,
а в полете — определения и выдачи
на индикатор ПУИ ряда фактиче-
ских н требуемых навигационных па
раметров, необходимых для полета
по программной траектории. После
проверки правильности функциониро
вання СПИ и программирования
маршрута полета перед выруливани-
ем система переводится в режим ав-
томатической работы.
До завершения набора заданного
эшелона и выхода ВС в горизонталь-
ный полет рекомендуется самолето-
вождение выполнять с применением
АНК в курсо доплеровском режиме с
коррекцией по РСБН. После взлета
и при полете в поле радиомаяков он
обеспечивает более высокую точность
счисления координат и надежность
контроля пути. Информация СПИ
при этом используется для дублиро-
вания работы АПК
Полет к первому ППД совершает-
ся, руководствуясь ИПО на поворот-
ный пункт маршрута, расстоянием и
временем полета до него, вырабаты-
ваемыми СПИ. Эти величины сравни
ваются и проверяются по данным
других навигационных средств и си-
стем. Выход на ППМ осуществляет-
ся с использованием показаний на
ПУП: координат ВС, ЛБУ. SOCT и
/,,ст-
За 1&.5 км io ППМ начинается
сигнализация о подходе к очередно-
му пункту маршрута. При прихо tc
ВС в точку начала разворота СПИ
автоматически производит переключе-
ние навигационной информации отно-
сительно очередной ортодромии, сиг-
нализируя об этом емгной номеров
начального и конечного ППМ участ-
ка. Все параметры участка маршру-
та, на котором находится ВС, эки-
паж получает с ПУИ.
Для контроля полета по каждому
участку маршрута можно использо-
вать: географические координаты те-
кущего МС; Л Bi от ЛЗП и остав-
шееся до ППМ расстояние; фактиче-
ский путевой угол и поправку к нему;
расчетный и фактический курсы поле-
та; истинный пеленг от текущего МС
на ППМ; путевую скорость, время
прибытия и оставшееся время полета
Ю ППМ, направление и скорость
ветра, угоз сноса и другие элементы
и параметры.
Выдерживание ЛЗП контролиру-
ется сравнением ФПУ с ЗПУ прн
условии ЛБУ = О; сопоставленном
ИПО с заданным путевым углом.
Изменение маршрута полета воз
можно тремя способами от текущего
МС к любому ППМ; изменением по-
следовательности прохождения ИПМ:
полной заменой программы полета
В первом и втором случаях использу-
ются запрограммированные координа-
ты ППМ При этом меняется лишь
порядок их прохождения для чего в
программу полета вводятся измене-
191
иия. В третьем случае необходимо
СПИ перевести в режим ручного уп-
равления и ввести координаты новых
ППМ
СПИ позволяет программировать
и выполнять полет с измерением пу-
тевых углов и курсов от условного
меридиана. Предусмотрен специаль-
ный режим для использования в рай-
онах, где информация о магнитном
курсе ненадежна. За опорный (услов-
ный) меридиан принимается гринвич-
ский. Если выполнены необходимые
процедуры па ПУН, то вычислитель
системы автоматически рассчитывает
азимутальную поправку, а также вы-
рабатывает условные путевые углы и
курсы.
При потере сигналов от наземных
станций или ненадежной синхрониза-
ции СПИ автоматически переходит в
режим курсо-воздушного счисления
пути по информации о гиромагнитном
курсе от ТКС и воздушной скорости
от СВС, а с появлением сигналов
возвращается в основной режим ра-
боты — автослежение за наземными
станциями В аппаратуре предусмот-
рен ручной ввод данных для автома-
тического счисления координат: на-
правления и скорости ветра, путевой
и истинной скоростей, магнитного
курса и угла сноса. Ручной ввод вы-
полняется, если значения перечислен-
ных элементов на индикаторах ПУИ
отличаются от показываемых датчн
ками этих параметров.
Несмотря на высокую точность ав
тематического определения МС. в
СПИ предусмотрена коррекция места
ВС ручным вводом географических
коор гинат (например, в момент про-
лета над КО и РНТ). Для повыше-
ния точности навигационной инфор-
мации осуществляется автоматиче-
ская и ручная деселекции станций,
сигналы которых не обеспечивают на-
дежное слежение. Для этой же цели
может применяться и ручной ввод
данных для счисления пути
Глава 18
ПОДГОТОВКА И ВЫПОЛНЕНИЕ ЗАХОДА НА ПОСАДКУ
18.1. Схемы захода на посадку
Маневрирование ВС в районе
аэродрома для захода на посадку
производится по установленным мар
шрутам которые рассчитываются и
включаются в схемы захода иа по-
садку. Схемы захода на посадку име-
ются в Инструкции по производству
полетов в районе каждого аэродрома
и в Сборниках аэронавигационной ин-
формации по воздушным трассам
СССР Параметры маршрутов манев
ра разнообразны и зависят от аэро-
навигационной обстановки, наличия
и расположения средств навигации
и посадки и от типов ВС, на которых
выполняются полеты в районе аэро-
грома.
В гражданской авиации применя-
ют следующие схемы захода на по-
садку: с прямой, по прямоугольному
маршруту (малому и большому), от-
поротом иа расчетный угол, стан-
192
дартиым разворотом и с обратного
направления
Заход иа посадку с прямой. Этот
маршрут является самым экономич-
ным Он применяется для всех типов
ВС если рельеф местности и воздуш-
ная обстановка позволяют осушест
вить снижение с маршрута до высоты
входа в глиссаду за 25—30 км до
аэродрома посадки при направлении
подхода, совпадающего с направле-
нием посадки илн отличающегося от
него в точке горизонтального полета
(ТГП) на угол не более 45°
(рис. 18.1).
Выполнение маневра По указа-
нию диспетчера экипаж занимает по
маршруту полета исходную высоту
начала маневра. Снижение с нее до
эшелона 3000 м на всех типах ВС с
ГТД выполняется со скоростью по
прибору н с вертикальной скоростью
согласно РЛЭ. С 3000 м до эшелона
перехода и палее до высоты входа в
Рис. 18.1. Заход на посадку с прямой
глиссаду снижение осуществляется
согласно установленным ограничени-
ям скоростей полета в районе поджо-
га и в зоне взлета и посадки После
входа в глиссаду ВС переводится иа
снижение со скоростью по прибору,
указанному в РЛЭ, и расчетной вер-
тикальной скоростью, обеспечиваю-
щей пролет ДПРМ п БПРМ на вы-
сотах, приведенных в схеме для дан-
ного аэродрома. Завершающий этап
захода на посадку выполняется визу-
ально с высоты принятия решения
пли раньше.
Заход на посадку по малому пря-
моугольному маршруту. Применяется
па аэродромах, в районе которых за-
труднен или невозможен заход на
посадку с прямой или углом отворо-
та, ио возможен безопасный выход
ВС к ДПРМ (БПРМ) пли в другую
точку маршрута иа высоте эшелона
перехода и ниже. Минимальной вы-
сотой выхода иа ДПРМ (БПРМ)
является высота полета по кругу.
При выходе ВС на аэродром к на-
правлению посадки под углом 45° и
менее маршрут захода начинается с
высоты выхода разворотом иа 180°
радиусом R. равным половине шири-
ны прямоугольного маршрута (0,5 L)
от ДПРМ (БПРМ) со снижением до
высоты круга у траверза ДПРМ
(рис. 18.2)
При проходе траверза ДПРМ вы-
пускаются шасси. От траверза
ДПРМ ВС следует с курсом, обрат-
7 Зак. 639
пым посадочному, в течение времени
/з, рассчитанного для схемы данного
аэродрома. По истечении расчетного
времени и при МПР3 (КУР3), ука
заниых в схеме захода, выполняется
третий разворот.
Момент четвертого разворота для
вывода ВС на предпосадочную пря
мую определяется по МПР4(КУР<).
На предпосадочной прямой заход иа
посадку выполняется аналогично, как
н при заходе на посадку с прямой.
При выходе на ДПРМ на высоте
круга или уходе ВС на второй круг
для соблюдения установленной шири-
ны прямоугольного маршрута после
193
Рис. 18.3. Заход на посадку по крат-
чайшему расстоянию
первого разворота на 90° в направле-
нии установленного маневра ВС сле-
дует в течение времени /г, после чего
выполняется разворот на курс, об-
ратный посадочному Дальнейший
заход по прямоугольному маршруту
выполняется аналогично рассмотрен-
ному
Для других направлений подхода
к аэродром)' маршрут захода начина
ется от выхода на него по кратчай-
шему расстоянию (рис. 18.3).
Рис. 18 4 Заход иа поеадку по БПМ
194
При подхоое ВС к направлению
посадки под углом более 45° мар
шрут подхода строится с учетом вы
хо га по касательной к ближайшему
развороту прямоугольного маршрута
или иа ДПРМ (БПРМ). Если мар
шрут подхода проходит через ДПРМ
(БПРМ) перпендикулярно к направ-
лению посадки со стороны маршрута
захода, то от ДПРМ (БПРЛ1) вы
полняется ра (ворот на 180°, в сторо
ну расположения ВПП и ВС выво-
дится в точку второго разворота ма
иевром, показанным иа рис. 18.3. При
подходе ВС к аэродрому с курсом,
обратным направлению посадки,
маршрут подхода строится в точку
траверза с одновременным занятием
высоты полета по кругу
Заход на посадку по большому
прямоугольному маршруту применя-
ется, когда выход к аэродрому по
садки ограничен высотой подхода по
условиям рельефа. интенсивностью
воздушного движения или метеоусло-
виями. Основой для построения этой
схемы захода на посадку служит ма-
лый прямоугольный маршрут. Шири-
на малого и большого прямоуголь-
ных маршрутов L устанавливается
руководящими доке ментами. Ндчалом
маневра является ДПРМ. на который
выводится ВС на эшелоне, располо
женном выше исходной высоты для
малого прямоугольного маршрута.
После пролета ДПРМ полет выполни
ется с поса го шым курсом со сниже
нш м до высоты разворота на 180’
(рис. 18.4). После выхода из разво
рота снижение ВС продолжается до
высоты полета по кругу с одновре
менным гашением скорости для вы-
пуска шасси на траверзе ДПРМ
Дальнейший заход выполняется так
же, как по малому прямоугольному
маршруту.
Заход иа посадку углом отворота
используется, когда ВС подходит к
аэродрому посадки с курсом, обрат-
ным посадочному или близким к не-
му, а рельеф местности или другие
ограничения не позволяют выполнить
заход по прямоугольному маршруту.
После пролета ДПРМ на исходной
высоте выпотияется отворот на рас-
четный угол и производится сниже-
ние (рис. 18.5). Курс после отворота
I
Рис. 18 6 Заход на посадку стандартным разворотом
195
и расстояние снижения го начала
разворота на поса точный курс указы-
вается на схеме захода. После про-
лети установ энного расстояния осу-
ществляется разворот на посадоч
ный курс со снижением для выхода
ВС в точку горизонтального полета
на высоте входа в глиссаду.
Заход иа посадку стандартным
разворотом применяется, когда на-
правление подхода к ДПРМ совпа-
дет с обратным направлением по-
садки или отличается от пего на
угол не более 45°, а рельеф местно-
сти или другие ограничения нс поз-
воляют выполнить заход па посадку
по другим маршрутам (рис. 18.6).
Над ДПРМ, иа высоте, равной высо-
те входа в глиссаду, ВС выводится
на курс, обратный посадочному, и в
горизонтальном полете следует до
точки начала стандартного разворо-
та (ТНСР). расстояние до которой
от ДПРМ указывается на схеме за-
хода. После выполнения стандартно-
го разворота ВС выводится на пред-
посадочную прямую. После входа в
глиссаду полет выполняется анало-
гично, как и при заходе с прямой.
Заход на посадку с обратного на-
правления применяется иа аэродро-
мах. оборудованных системами по-
садки с одного направления. Сниже-
ние ВС до визуального полета на
высоту круга осуществляется по лю-
бой из ранее рассмотренных схем.
Дальнейший заход выполняется по
маршрутам с обратного направления
Прн этом могут строиться прямоу-
гольный маршрут, маршрут с отворо-
том иа заданный угол или стандарт-
ным разворотом.
18.2. Расчет элементов
маршрута захода на посадку
Расчеты элементов маршрутов
выполняются для стандартных атмо-
сферных условий и штиля в соответ-
ствии с режимами полета, установ
ленными РЛЭ ВС. При этом необхо-
димо знать: посадочный МНУ; уста-
новленную схему захода на посадку
и сс геометрические размеры; угол
наклона глиссады (УНГ), удаление
196
ДПРМ от торца ВПП Зд11рм и вы-
соту входа в глиссаду Нвг, расстоя-
ние от начала ВПП до траверза ГРМ
на ось ВПП 5грм.
Расчет элементов маршрута захо-
да иа посадку с прямой выполняют
следующим образом:
время снижения tr„ с исходного
ЭШСЛОНа Нзш исх ДО ВЫСОТЫ ВХОД1Г в
глиссаду А/В.г (см. рис. 18.1):
__ Нзщ.исх — 3000
Ч-Н1 — . '
•• B1
с//ош= 3000 м до Дчи.п
3000 — //эш ,п
Т((эШ.И ЛО Нв.г
^ЯШ.П---^В.Г
‘сиз— .. Г'УГП-
С В2
При этом общее время снижения
fCHv = «сн14’ /енг + 'енз;
расстояние от рубежа снижения
до рубежа занятия эшелона Н1Ш —
= 3000 м
S, -= |Z( /СН1’.
от рубежа занятия //1ш = 3000 м
то рубежа
S2 ---* V2 (сна'.
от рубежа занятия Нзш п ДО точ-
ки горизонтального полета (ТГП)
S3 = V2 (сиз.
где V)—средняя истинная скорость
при скорости по прибору, установлен-
ной РЭЛ ВС; Рг — средняя истин-
ная скорость при скорости по прибо-
ру в соответствии с установленными
ограничениями.
При этом общее расстояние на
снижении
Sen =S1+S2-|-S3;
расстояние от точки входа в глис-
саду (ТВГ) до начала ВПП
Хв.г (Нв.г tgyilD-S ГРМ’ (18.1)
где -^грм — расстояние от начала
ВПП до траверза глиссадного радио-
маяка (ГРМ).
После вхота в глиссаду ВС перево-
1ится на снижение со скоростью по
прибору согласно РЛЭ и расчетной
вертикальной скоростью, обеспечива-
ющей пролет ДПРМ и БПРМ на вы-
сотах, указанных в схеме для дай
кого аэродрома. Вертикальная ско
рость снижения по глиссаде
Рис. 18.7. Алгоритм вычисления вре-
мени и вертикальной скорости сни-
жения ВС на глиссаде
V в - ^н.г Ан- (18.2)
Время снижения от ТВГ до торца
ВПП
1сн *$В.Г РцЛ>
где Рпл устанавливается в РЛЭ
ВС
Алгоритмы вычислений /си и Рв при-
ведены иа рис. 18.7.
Расчет элементов маршрута захо-
да иа посадку по малому прямо-
угольному маршруту. Используя ос-
новные исходные данные, определя-
ют элементы полета по прямоуголь-
ному маршруту:
магнитные курсы по участкам
прямоугольного маршрута: МКпос =
= ПМПУ; МК2 = ПМПУ±90°;МКз =
= ПМПУ±180°; МК« = ПМПУ±90°.
При определении МК2 по правому
прямоугольному маршруту к ПМПУ
следует прибавлять 90°, по левому —
вычитать. При определении МК« дей-
ствия выполняются в обратном по-
рядке;
угол крена при развороте на 180°
V’2
у- arctg—~ (18.3)
где Vieo — средняя истинная воздуш-
ная скорость разверста; R = L'2 —
радиус разворота.
Величина / вычисляется на
НЛ-10 м по алгоритму (см.
рис. 14 3. а);
расстояние от траверза ДПРМ до
начала третьего разворота
•^з = ^в.г~Ь^г.п — ^дпРМ —
ридиусы третьего и четвертого
разворотов:
лз=У5разв/(е‘8х); (18.4)
R« = r4pa3B/(fi 'б'/.)- (18.5)
Эти формулы реализуются на НЛ-10
(см. рис. 14.3);
время по 1ета от траверза ДПРМ
оо начала третьего разворота
G VS.
где Р3 — скорость согласно РЛЭ ВС
на данном этапе;
курсовой угол ДПРМ начала
третьего разворота:
при правом круге КУРз =
= 180° — arc tg (L/S3);
при левом круге КУРз =
= 180° + arc tg (L'S3);
курсовой угол начала четвертого
разворота:
при правом круге КУР4 =
= 90° — arc tg ((S:i I R.i)|;
при левом круге КУР4 =
= 90°+arctg|/?4/(Ss-f /?3)|;
расстояние от ТВГ до начала
ВПП определяется согласно (18.1).
Расчет элементов маршрута захо-
да на посадку отворотом на расчет-
ный угол:
радиусы третьего и четвертого
разворотов вычисляются по форму-
лам (18.4). (18.5);
расстояние от ДПРМ до проек-
ции центра третьего разворота на
предпосадочную прямую (см.
рис. 18.5)
Su=STrn+Snn-j-(Rt— Ля) •
где Snn — расстояние от точки гори-
зонтального полета до проекции цеит-
197
ра третьего разворота на предпоса-
дочную прямую;
угол отворота
УО 4-а2,
{ L-R3
где a, arctg—-------;
. R*
а2 ars sm —
2 S
Дальнейший расчет элементов
маршрута захода на посадку отворо-
том на расчетный угол аналогичен
расчету элементов по прямоугольно-
му маршруту.
Расчет элементов маршрута захо-
да на посадку стандартным разворо-
том (см. рис. 18.6):
радиус разворота при выполнении
маневра определяется согласно
(185).
расстояние от ДПРМ до точки на-
чала стандартного разворота
(ТНСР)
$нер ^в.г! *$ДПРМ ^г.п
После выполнения стандартного
разворота расчет элементов маршру-
та от точки горизонтального полета
выполняется так же. как н при за-
ходе на посадку с прямой.
Расчет элементов маршрута захо-
да иа посадку с обратного направле-
ния выполняется в последовательно-
сти, изложенной при расчетах эле-
ментов маршрутов захода на no'ta д-
ку по прямоугольному маршруту,
углом отворота на расчетный угол и
стандартным разворотом, с использо-
ванием соответствующих формул.
Отдельные элементы маршрута
рассчитываются следующим образом
с применением прямоугольного
маршрута (рис. 18-8) расстояние от
траверза ДПРМ до начала третьего
разворота
<'»:=5Д11Рм + ^В11Гт+ SB г4 Sr „.
где £впп—длина ВПП,
с применением маневра углом от
ворота на расчетный угол (рис. 18.9);
раитояние от ДПРМ до проекции
Рис. 18 8. Заход на посадку с обратного направления построением прямо-
угольного маршрута
s>
TBUJ
ТГП
Рис 18.9 Заход иа посадку с обратного направления построением маневра
отворотом иа расчетный угол
Рис. 18.10. Зах од иа посадку с обратного направления построением стандарт-
ного разворота
199
центра третьего разворота на предпо-
садочную прямую
^п = ^дпрм + ^ВП11+^»г +
+ «Г.П+(Я4-Кз).
а от ДПРМ до точки горизонтально-
го полета
5тгц = ^дПрм + Лвг1н bSB.r + S, п’,
с применением стандартного разворо-
та (рнс. 18.10) расстояние от ДПРМ
до точки начала стандартного разво-
рота
$нср —ЗдпРМ J-BIIII
"Ь^в.гт Sr.n 2R.
18.3. Расчет навигационных
элементов попета при заходе
на посадку с учетом ветра
Наиболее распространенный спо-
соб расчета навигационных элемен-
тов полета по схемам захода на по-
садку в практике самолетовожде-
ния — принцип учета ветра путем раз-
ложения его вектора ни составляю-
щие (рис. 18 11):
боковую t/p (7з1пУВ11оС;
встречную UB U cos УВпог.
(18.6)
где
УВ11ОГ = бм —ПМПУ. (18.7)
Формула (18.6) реализуется на
НЛ-Юм по алгоритму, приведенному
на рис. 18.12. При этом относ ВС в
процессе выполнения маневра за
время t составит:
в направлении предпосадочной
прямой
AS = {/„/;
♦
в боковом направлении от нее
Аг = U6t.
Данный принцип учета ветра уни-
версален и применяется для расчета
элементов полета при всех видах
маневра захода на посадку. Это до-
стигается исправлением штилевых
значений путем ввода поправок. На-
ибольшее применение в гражданской
авиации получил метод захода на
посадку по прямоугольному марш-
руту.
Расчет навигационных элементов
полета при заходе иа посадку по ма-
лому прямоугольному маршруту с
учетом ветра. Расчет выполняется
следующим образом:
определяется посадочный угол вет-
ра по формуле (18.7);
рассчитываются боковая и встреч-
ная составляющие ветра по соотно
шениям (18.6),
вычисляются углы сноса по участ-
ка» прямоугольного маршрута;
УС111)С arc tg((/c Vn..);
УС2 = arctg (UB V2);
УС3 —arc tg((7c lz3);
УС2 arctg (U„ V,).
где 1'пл, Vг, Гз и Vi — скорости, ре-
комендованные РЛЭ на участках
маршрута;
Рис. 18.11. Определение посадочного угла ветра
200
определяются магнитные курсы по
участкам маршрута захода на по-
садку:
МКпос = ПМПУ-(УСиоС);
МК, = ПМПУ,—(УС2);
МКз = ПМПУ,—(УС,);
МК4- ПМПУ, —(УС,);
рассчитываются путевые скорости
по участкам маневра при заходе со
встречно-боковым ветоом:
1Гпл^ипл-(/.; »,-=V,±l/c;
^Э=^+С/В;
вычисляется время полета по уча-
сткам прямоугольного маршрута:
от ДПРМ до начала первого раз-
ворота
G “^шт1 +2(7п*
где /шт । — штилевое время полета
самолета с посадочным курсом (для
всех ВС оно устанавливается 10 с);
от конца первого до начала вто-
рого разворота.
Это время определяет ширину
прямоугольного маршрута, поэтому
при его расчете следует учитывать от-
нос ВС боковой составляющей за
время полета от первого до второго
разворота и за время их выполнения:
^2 — *шт2 i ^упрг» ^упрг = ^оти 'М2 =
= Уб G111T2 + 2/90) '(V2 i t/g);
~ (^штг+ 2/flo);
fytip2 ~ ^6/2Z/(V2±(7g); (18.8)
от траверза ДПРМ до начала
третьего разворота
^з—^штз ^упрз» ^упрз~^отн ^з»
SoTll7— (*ШТэ + ^03 + ^904) ~
^упрз ^зе/(Уз~Ь^с)- (18.9)
х-ч У&пос 30-ЦВяас 90
ж
ж и
Рис. 18.12. Алгоритм вычисления бо-
ковой и встречной составляющих
ветра
Алгоритм вычисления /упр 2 и /упр 3
приведен на рис. 18.13;
время горизонтального полета от
момента окончания четвертого разво-
рота до точки входа в глиссаду
/гп~5гп/1Угп:
определяются время снижения и
вертикальная скорость по глиссаде
^сн = 5вг №пл: Ув = ^вг Л:н-
Расчеты ведут на НЛ-Юм по ал-
горитму (рис. 18.14);
рассчитываются курсовые углы
ДПРМ:
в точке траверза КУРУр =
=90°(270°) + (УС);
в точке начала четвертого разво-
рота
КУР4 = КУР41ит + (УС*) + (±ДКУР),
где
18 Д КУР,= Uа /90/ (S3-|- Ps);
ДКУР всегда имеет знак УСпос-
Упрощенный расчет навигацион-
ных элементов полета при заходе иа
посадку. В практике самолетовожде-
ния этот способ расчета навигацион-
ных элементов получил широкое рас-
пространение. В полете экипаж по
упрощенным формулам в уме рассчи-
тывает элементы полета, что значи-
тельно сокращает время и обеспечи-
вает требуемую точность. При вы-
Рис 18.13. Алгоритм вычисления времени fynp2 (а) и /упрз (б)
201
Рис. 1814. Алгоритм вычисления вре-
мени и вертикальной скорости ВС иа
глиссаде снижения с учетом ветра
полпенни упрощенного расчета нави-
гационных элементов полета для за-
хода иа посадку влияние ветра учи-
тывается по коэффициентам, которые
могут быть рассчитаны для каждо-
го типа ВС. Исходными данными для
расчета являются навигационные эле-
менты полета в штилевых условиях.
С применением упрощенного расчета
Можно определить:
составляющие вектора ветра рас-
считываются в уме, пользуясь следу-
ющей зависимостью:
УВПОС (90° —
— УВП0С) . . 15 30 45 50
(7С((7В) - - - .0,317 0,5(7 0.7(7 0.8(7
УВП0С (90° —
— УВиос) ... 60 70 80 90
(7С((7В) . . . .0,9(7 0,9(7 (7 (7
приближенное значение углов сно-
са по участкам прямоугольного мар-
шрута:
УСПОСз= 7Спос(з) ^б!
(4) = ^2 (4) •
ГДе Кпо<-(3) ’ - 60/1Л1ос(эь (^2(4) ===
= 60/V2(t). Коэффициент К рассчиты-
вается для конкретного типа ВС и
имеет постоянное значение иа участ-
ках прямоугольного маршрута;
время почета по участкам прямо-
угольного маршрута. Рассматривае-
мая задача может быть решена в
уме, если несколько упростить фор-
мулы (18.8) и (18.9). Учитывая, что
воздушная скорость ВС значительно
больше составляющих вектора ветра,
можно записать:
^упр* = (^2х/*,г) ^б:
^упрз = С^зх/^s) ^в-
Отношение t/\ представляет собой
коэффициент Д', позволяющий рас-
считать время упреждения. Подстав-
ляя полученные значения
(3 = ^шт i 67q; t3 Гщт—К,(7В;
вертикальная скорость снижения
по заданной глиссаде может быть оп-
ределена по упрощенной формуле:
Си -~ V н шт —
где К=1еУНГ.
При оптимальном УНГ = 2°40 К®
®0.05
18.4. Использование систем
посадки
Заход иа посадку по ОСП. Обору-
дование системы посадки (ОСП) яв-
ляется резервной, а при отсутствии
курсоглиссадных систем (КГС) —
основной системой захода на посад-
ку. Система ОСП позволяет постро-
ить маневр для вывода ВС в пло-
скость посадочного курса и контро-
лировать его положение относитель-
но расчетной, установленной глисса-
ды при пролете дальнего (ДПРМ) и
ближнего (БПРМ) приводных ра-
диомаяков. Таким образом, при ис-
пользовании ОСП экипаж определяет
положение ВС относительно двух
фиксированных точек иа земной по-
верхности и в соответствии с этим
строит маневр захода на посадку
(рис. 18.15).
Точность захода на посадку по
ОСП зависит от умения экипажа бы
стро считывать и сопоставлять МПР
с ПМПУ, от навыков в исправлении
курса на 2—3° и вертикальной ско-
рости в пределах 0.5--1 м/с, от чет-
кого взаимодействия между членами
экипажа Одно из главных условий
безопасного и точного завершения
захода иа посадку — пролет ДПРМ
иа установленной высоте. Начало
четвертого разворота определяется по
предвычислениому магнитному пе-
ленгу дальней приводной радиостан-
ции.
Система ОСП обеспечивает надеж-
ное снижение ВС до высоты 50—
60 м и вывод иа посадочный курс.
При этом на заключительном этапе
202
посадка осуществляется визуально с
использованием свето-технических
средств. По своим характеристикам
система ОСП ие превышает возмож-
ностей систем посадки первой кате-
гории. Она, как правило, использует-
ся в аэропортах с малой интенсив-
ностью воздушного движения.
Заход иа посадку по курсо-глис-
садным системам (КГС) в режиме
«ПСП». Курсоглиссадные системы
(СП 50, СП-50М, СП 68, СП 70.
НДС) обеспечивают экипаж непре-
рывной информацией о положении
ВС относительно линии курса и глис
сады снижения. Об отклонениях ВС
от заданной траектории полета эки-
паж судит по положению планок
курса и глиссады по специальному
указателю.
Начало четвертого разворота оп-
ределяется по пре шычислеииому маг-
нитному пеленгу ДПРМ в зависимо-
сти от удаления ВС от ВПП, скоро-
сти полета и боковой составляющей
ветра на высоте круга Точность вы
хода из четвертого разворота иа ось
ВПП достигается двукратным конт-
ролем: первый под углом 60° к оси
ВПП с помощью АРК и курсового
прибора; второй под углом 30° к оси
ВПП с помощью планки курса ука
зателя положения ВС относительно
равиосигиальной зоны В этой точке
должно наступить отшкаливаиие
планки курса. При его отсутствии
ВС выводится из креиа и выполняет-
ся полет до начала отшкаливаиия.
В случае преждевременного отшкали-
вания планки курса, что свидетельст-
вует о позднем вводе в разворот,
экипаж увеличивает крен
Последняя треть разворота вы-
полняется при непрерывном сопостав-
лении показаний курса с движением
планки указателя положения относи-
тельно равносигнальной зоны, кото-
рая в момент вывода должна занять
нейтральное положение. Курс при
этом должен быть равен посадочно-
му с учетом угла сноса:
МКпос- ПМПУ — УС. (18.10)
Вход в зону глиссадного маяки
осуществляется при полете ВС в зоне
курса без снижения. Момент начала
снижения определяется по планке
указателя положения ВС относитель
ио равносигнальной зоны глиссадного
маяка с одновременным уточнением
удаления от ВПП с помощью борто-
вых средств или информации диспет-
чера.
При подходе планки к центру
шкалы (черному кружку прибора)
экипаж приступает к снижению, плав
ио увеличивает вертикальную ско-
рость так, чтобы движение планки
замедлилось и прекратилось в момент
ее подхода к центру черного кружка.
При этом вертикальная скорость дол-
жна быть равна расчетной Выдержи
ванне глиссады обеспечивается со
хранением постоянного, подобранного
по вариометру для расчетной скоро-
сти угла таигажа. По мере прибли
жения к ВПП равносигнальные зоны
курса и глиссады сужаются, планки
указателя положения ВС относитель-
но равиосигиальной зоны более чув
ствительно реагируют иа отклонение
ВС, сказывается изменение направ
ления и скорости ветра. Все эти усло-
вия требуют четкого пилотирования,
внесения поправок в курс, равных
2—3°, и исправления вертикальной
скорости в пределах ±0,5 м/с. Сниже
иие выполняется до ВПР
Заход иа посадку по КГС в ди-
ректорией режиме. На аэродромах,
оборудованных курсо-глиссадными
системами (КГС), основной режим
захода иа посадку — директориый
Пилотироваиие ВС при заходе в этом
режиме осуществляется вручную по
лиректорным стрелкам. Директориый
прибор избавляет экипаж от перера
ботки и обобщения информации, по-
Рис. 18.15 Схема построения глисса
ды снижения по системе ОСП
203
лучаемой от многих приборов, по-
зволяет с большей точностью выдер-
живать глиссаду снижения и курс.
При заходе иа посадку в дирек-
торном режиме основные пилотажные
приборы (авиагоризонт, курсовой
прибор и вариометр) превращаются
в приборы контроля или вспомога-
тельные показания которых при пи-
лотировании становятся как бы вто-
ростепенными. Одиако для обеспече-
ния безопасности полета контроль
показаний этих и других навигацион-
но-пилотажных приборов должен
быть активным и комплексным.
Начало четвертого разворота при
заходе в директориом режиме опре-
деляется по предвычислениому маг-
нитному пеленгу ДПРМ в зависимо-
сти от удаления ВС от ВПП, скоро-
сти полета и боковой составляющей
ветра на высоте круга
Контроле четвертого разворота
для точного вывода ВС иа ось ВПП
выполняется: под углом 60° к ней
сравнением МПР с ПМПУ, а под уг-
лом 30° по отшкаливанию планки
курса иа приборе указателя положе-
ния. До входа в глиссаду полет вы-
полняется в зоне курсового маяка.
При этом командная стрелка удер-
живается в центральном кружке
прибора.
Момент начала снижения опреде-
ляется по положению планки глисса-
ды на указателе положения (прибли-
жение планки к центру шкалы прибо-
ра) с одновременным уточнением
удаления до ВПП с помощью борто-
вых средств или информации диспет-
чера. При подходе планки глиссады в
центр прибора экипаж приступает к
снижению, при этом командная стрел-
ка глиссады проводится в централь-
ный кружок прибора.
Для полета ВС по задан-
ной траектории командные
стрелки удерживаются в пределах
черного кружка шкалы прибора. Сни-
жение выполняется до высоты приня-
тия решения (ВПР).
Заход на посадку в автоматиче-
ском режиме. Ои является основным
при выполнении заходов на посадку
по минимумам I и 11 категорий Авто-
матический заход на посадку осво-
бождает пилота от выполнения фуик-
204
ций передаточного звена от приборов,
контролирующих режим полета, к ор-
ганам управления самолета, что зна
чительно облегчает командиру ВС
правильно оценивать обстановку и
принимать решения.
Определение момента начала чет-
вертого разворота и контроль за точ-
ностью выхода ВС на ось ВПП » вы
полияется по аналогичной технологии,
что и при заходе на посадку в дирек
торном режиме. В случае раннего или
позднего начала четвертого разворота
автоматическая система выводит ВС
на ось ВПП с запрограммированным
углом выхода.
В момент прохождения планки
глиссады через нулевое положение
(по прибору указателя положения)
происходит автоматический «захват»
глиссады и осуществляется автомата
веская стабилизация ВС по заданной
глиссаде. Контроль отклонения ВС от
заданной траектории по курсу и глис-
саде осуществляется по планкам
прибора положения в моменты про-
лета ДПРМ и БРПМ. При этом уста-
навливаются предельно допустимые
уклонения ВС в этих точках. Сииже
иие в автоматическом режиме вы-
полняется до ВПР.
Заход иа посадку по РСП. Радио-
локационная система посадки (РСП)
обеспечивает заход иа посадку по
командам диспетчера и применяется
при отсутствии на аэродроме КГС и
ОСП, а также неисправности навига-
ционного оборудования иа ВС. Кро
ме того, РСП служит для контроля
за выдерживанием ВС схемы захода
с использованием ОСП, КГС и борто-
вых автоматических систем захода на
посадку.
Четвертый разворот при заходе по
РСП экипаж выполняет по команде
диспетчера ДПСП. За 400 600 м до
входа в расчетную глиссаду по ко-
манде диспетчера экипаж переводит
ВС на снижение с расчетной скоро
стью. Задача экипажа по выдержнва
иию траектории снижения сводится к
точному выдерживанию заданных
диспетчером значений курса, скоррек
тированной штурманом вертикальной
скорости снижения и расчетной скоро-
сти полета по глиссаде до высоты
принятия решения.
18.5. Учет сдвига ветра
Сдвиг ветра — изменение направ-
ления и (или) скорости ветра в про-
странстве, включая восходящие и ни-
сходящие потоки (сдвиг ветра на
высоте 30 м слабый — до 2 м/с, уме-
ренный от 2 до 4 м/с, сильный от
4 до 6 м/с, очень сильный — 6 м/с
и более). Физическая сущность влия-
ния сдвига ветра заключается во вне-
запном изменении параметров движе
иия ВС вследствие изменения ветра.
Сдвиг ветра наиболее опасен в зоне
взлета и посадки, где ВС имеет малые
запасы скорости, высоты и управляе-
мости, вследствие чего он может
серьезно осложнить полет и привести
к летному происшествию.
При заходе на посадку в условиях
сдвига ветра необходимо:
увеличить расчетные скорости в
соответствии с требованиями РЛЭ
ВС;
осуществлять контроль за измене-
нием поступательной и вертикальной
скоростей и своевременно устранять
возникающие отклонения от расчет
них параметров и заданной траекто-
рии полета;
при заходе иа посадку немедленно
уйти на второй круг с использовани-
ем взлетного режима и следовать и а
запасной аэродром, если для выдер-
живания заданной глиссады сниже-
ния требуется увеличение режима ра-
боты двигателей до номинального и
(или) после пролета ДПРМ верти-
кальная скорость снижения увеличи-
лась иа 3 м/с и более от расчетной.
Заходить на посадку в условиях
сильного сдвига ветра запрещается.
Глава 19
ОСОБЕННОСТИ ШТУРМАНСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ
В РАЗЛИЧНЫХ АЭРОНАВИГАЦИОННЫХ УСЛОВИЯХ
19.1. Полеты
над малоориентирной
местностью
Трудность самолетовождения в по-
лете над малоориентирной местно-
стью состоит в том, что необходимо
вывести ВС иа малозаметный с воз-
духа ориентир — цель. При этом ви-
зуальная ориентировка затруднена
из-за малого числа земных ориенти-
ров по маршруту.
Вероятность обнаружения и опоз
навания заданного визуального ори-
ентира (рис. 19.1):
Г’оби — Ф
°2Е
. (19.1)
где Добн — дальность обнаружения,
связанная с высотой полета и метео-
рологической видимостью (4.4); т —
минимально необходимое время для
уверенного опознавания земного ори-
ентира, о2£—суммарная СКП са-
молетовождения, зависящая от ради-
альной СКП последнего определения
МСоГмс, точности счисления пути
Кеч и удаления от последней точки
контроля пути S (8.23).
Вероятность обнаружения значи-
тельно снижается, если под самоле-
том располагаются облака. Методика
оценки условий наблюдения приведе-
на в 15.1. Расчет вероятности наблю-
дения за ориентирами сквозь разры-
Рис. 19.1 Определение вероятности
обнаружения и опознавания визу-
альных ориентиров
205
Рис. 19.2 Определение вероятности
наблюдения за земными ориентирами
сквозь разрывы в облаках
вы в облаках в зависимости от фак-
тических значений Рп' и Рп6) приве-
тен на рис 19.2.
Задаваясь фактическими условия
ми полета, можно установить пре-
данное расстояние Sr0. при котором
с гарантийной вероятностью будет
выведено ВС иа заданный объект
или ориентир (11.12)
В зависимости от полученного зна
чеиия SKf. и отсутствии ограничиваю
ших факторов выбирается маршрут
полета. На последнем зтапе полета
перед выходом на цель необходимо,
чтобы расстояния между контрольны-
Рис 19 3. Определение Sko Для само-
лета Аи-2 (1^=250 км/ч; Кеч = 0,08,
Огм =0,5 км; Рг=0,95)
ми ориентирами не превышали пре-
дельные дальности. При изменении
условий видимости в полете частота
контроля пути изменяется (рис. 19.3).
Малое число ориентиров в районе
полетов требует от экипажа учета
всех, даже незначительных, естествен-
ных и искусственных объектов по
маршруту Поэтому при подготовка к
полету рекомендуется использовать
крупномасштабные карты, на которых
наносится большое число элементов
земной поверхности.
В случае невыхода иа Кб) или
пункт назначения и неопознаиии ме-
стности рекомендуется выполнять по
лет по прямоугольному маршруту-
вокруг заметного с воздуха местного
ориентира. Продолжительность ма-
невра для поиска заданного ориентн
ра должна обеспечиваться запасом
топлива
Если заданный пункт лежит на
линейном ориентире (река, газопро
вод, ЛЭП), то следует выводить ВС
не в заданный пункт непосредствен
но, а с заведомым уклонением для
того, чтобы экипаж четко зиал сто
рону разворота для вывода ВС на
заданный объект. Be дичина уклоне-
ния должна быть ие менее (24-
~ 3) Ozj.)
Сели по условиям полета экипаж
ограничен величиной необходимого
заведомого уклонения, то можно рас-
считать предельное расстояние, при
котором zBOI>^DoeH.
s -_-Ьх
°пр „ А
А.сч
vl/(г12?/-0-50^ (,92)
Предельное удаление заданного
пункта от последнего КО для самоле
таАн-2КгЧ- 0,08, если °Гмс —0,3 км.
а гдоп1 25 км, 5пр = 156 км для веро
ятности вывода ВС 0,95 (х=2) и
104 км для вероятности 0,997 (х = 3)
При полетах над малоориеитириой
местностью большую помощь могут
оказать всенаправленные радиомаяки
(ОПРС, ДПРМ, РВС), работающие в
тиапазоие бортовых радиокомпасов.
Оии ие обеспечивают высокую точ-
206
ность измерения, ио позволяют на-
дежно определять МС н вывозизь ВС
иа работающею радиостанцию.
Для повышения точности опреде-
ления МС можно рекомепдоватьпри-
менять АРК в оптимальных точках
маршрута (см. рис. 15.10), где ошиб-
ка аГмс минимальна. Целесообразно
заблаговременно прокладывать линии
МПР иа карте.
19.2. Полеты на малых высотах
Полеты на малых высотах в нави-
гационном отношении характеризуют-
ся ухудшением условии ведения визу-
альной ориентировки из-за сокраще-
ния дальности видимости и увеличе-
ния угловой скорости перемещения
земной поверхности. Малая продол
жительность наблюдения за земными
ориентирами не позволяет по не-
скольку раз обращаться к полетной
карте для сличения ее с пролетаемой
местностью. Поэтому иа земле в про-
цессе предварительной подготовки
необходимо особенно тщательно изу-
чить условия ведения ориентировки в
полете, т. е. определить расположе-
ние площадных, линейных и точечных
ориентиров с тем, чтобы в полете они
были своевременно обнаружены и
безошибочно опознаны.
Сложность изучения маршрута за
ключается в том, что на топографи
ческих картах изображение земной
поверхности и ориентиров иа ней да-
ется в плане, в то время как экипаж
в полете на малых высотах наблюла
ет их сбоку — в профиль. Поэтому
рекомендуется использовать крупно
масштабные карты. На них даются
условные обозначения отдельных
объектов, видимых издалека (завод-
ские трубы, телевизионные мачты,
элеваторы, ЛЭП и т. д.). На такие
ориентиры следует обращать особое
внимание при подготовке к полету.
Вследствие малой продолжитель-
ности наблюдения за земными ориен
тирами для упрощения процесса кон-
троля и исправления пути рекомен-
дуется, помимо общей подготовки
карты к полету, проводить дополни
тельную разметку (рис. 19.4). Она де
лается около линейного ориентира,
расположенного перпендикулярно
ЛЗП в обе стороны от линии пути
В момент пересечения этого рубежа
экипаж по деталям местности уточни
ет свое МС и определяет лпиейно-бо-
ковос уклонение. В целях ускорения
расчета нового курса следования для
выво la ВС на контрольный пункт
или ППМ вдоль линии траверза ука-
зываются значения поправок в курс.
Их расчет производится заблаговре
менно как по формуле (15.7) с помо
щью НЛ-Юм, так и графически из
мереиием углов на карте. Если укло
нение ВС было вправо, то ПК отри
цательна, влево — ПК положительна.
Быстрое угловое перемещение зем
ных ориентиров создает у экипажа
ложное представление о большей, чем
- 40
- 50
. ~ПК*
Рис. 19.4. Дополнительная разметка на полетной карте для вывода ВС на
линию пути
207
па самом деле, скорости движения
ВС и пройденного расстояния. Это
приводит к грубым ошибкам, затруд-
няющим ведение визуальной ориенти-
ровки. В целях создания благоприят.
ных условий для опознавания местно-
сти необходимо строго вести проклад-
ку ЛФП, чаще измерять путевую ско-
рость, заблаговременно рассчитывать
время выхода иа очередной ориентир
и ожидать его появление.
При полетах на малых высотах
рекомендуется производить нредвы-
численис всех событий.
Для обеспечения уверенного выво-
да ВС иа точечный объект, располо-
женный на линейном ориентире — ре-
ка, дорога, газопровод, целесообраз
но маршрут строить с заведомым ук
лонением (см. п. 19.1).
При погетах на малых высотах в
районах магнитных аномалий для на-
дежного выдерживания курса следо-
вания необходимо пользоваться гиро-
скопическими курсовыми приборами.
Рекомендуется при измерении пу-
тевой скорости и угла сноса иа кон
трольиом этапе для начала и оконча-
Таблица 19.1. Шкала скоростей ветра
Ба лл ы Характери- стика вегра Скорость, м(с Признаки для определения скорости ветра
0 Штиль 0-0,5 Дым поднимается вертикально Листья на деревьях неподвижны
1 Тихий 0,6—1,7 Дым поднимается наклонно. Листья слабо колеблются. На воде рябь
2 Легкий 1,8 3,3 Листья и флаги колеблются. На от крытой воде образуются волны
3 Слабый 3.4—5.2 Небольшие ветки деревьев колеб- лются. На воде редкие барашки
4 Умеренный 5,3—7,4 Колеблются ветви без листьев. С земли поднимается пыль. Барашки видны во многих местах
& Свежий 7,5—9,8 Колеблются большие деревья. Вы- равниваются флаги. Море покрыто барашками
6 Сильный 9,9-12,4 Колеблются большие голые сучья деревьев Свист около домов. Море все покрыто барашками. Появляют- ся крупные волны
7 Крепкий 12,5—15,2 Колеблются стволы небольших де- ревьев. На закрытых водоемах ба- рашки. Затруднена ходьба против ветра
8 Очень крепкий 15.3—18.2 Летят ветви и сучья деревьев. Пепа на воде ложится полосами по ветру
9 Шторм 18,3—21,51 Сдвигаются с места мелкие предме-
10 Сильный шторм 21.6—25,1/ ты. Поверхность моря от пены ста- новится белой. Очень высокие горо подобные волны. Ухудшается види- мость Вырываются с корнями деревья. Вы-
11 Жесткий шторм 25.2—29,0 1 сота волн очень велика. Края волно- вых гребней повсюду разбиваются в
12 Ураган Более 29,0 1 тучи брызг. Видимость значительно ухудшается
208
ния промера выбирать линейные
ориентиры, расположенные перпенди-
кулярно ЛЗП. Иногда целесообразно
измерение IV и УС производить раз-
дельно.
Па малых высотах можно опреде
лить направление и скорость ветра по
местным признакам. Направление
удобно определять по движению ды
ма и пыли, наклону деревьев, волне-
нию иа воде. Скорость ветра может
быть определена по табл. 19.1.
Упрощенный способ численного
преобразования скорости бокового
ветра в угол сноса применяется иа
малых высотах Прн полетах на ско-
ростях 100—200 км ч
УС°= (3—0,ОН7) /7б,
где Ut, — боковая составляющая ско-
рости ветра, м/с; V — воздушная ско-
рость ВС, км/ч.
Например, при У=100 км/ч УС°=
= 24/о, а при У=180 км/ч УС°=
= 1,2 U.
Иногда для удобства измерения
УС у вертолетов иа смотровое стекло
наносится специальная градусная
разметка На малых высотах затруд-
нено одновременное пилотирование
ВС, наблютеиие за препятствиями и
ориентирами на местности, поэтому
рекомендуется счисление пути вести
визуально, а расчеты производить в
уме При этом расчет пройденного
расстояния производится по скорости
полёта: отбросив последнюю цифру,
получаем пройденное расстояние за
6 мин. При скорости 180 км/ч за
6 мин ВС пролетает 18 км. соответст-
венно за 3 мни—9 км, за 1 мин —
3 км, за 12 и 18 мин — 36 и 54 км.
На малых высотах усложняется
использование РНС, так как сокра-
щается дальность действия их. Осо-
бенно это относится к ЛРП и команд-
ным радиостанциям, работающим в
диапазоне УКВ.
Максимальная дальность получе-
ния радиосигналов в зависимости от
высоты полета имеет следующие зна-
чения-
Высота полета, м . .50 100 150 200
°тах. км............ 26 37 45 52
Высота полета, м . . 250 500 1000
Dmax, км............ 58 83 117
Вслетствие этого для получения
непрерывной навигационной ниформа
цни в полете рекомен туется исполь-
зовать каждое РНС, расположенное
вдоль ЛЗП, и находящееся в преде-
лах дальности действия D,naI.
19.3. Полеты над горной
местностью
В горной местности, когда высота
полета близка к высоте гор, условия
самолетовождения усложняются. При
этом заметно ухудшаются условия
ветения визуальной ориентировки, со-
кращается дальность действия РТС и
видимость световых ориентиров, по-
является стесненность мапеврирова
ния в горизонтальной н вертикальной
плоскостях. Зона просмотра местно-
сти при полетах в горах из-за зон за-
крытия и невозможности наблюдения
обратных склонов гор значительно
сокращается.
П родолжительность визуального
наблюдения ориентира, расположен
ного в ущелье или долине, выражает
ся в секундах:
где Л//Р— разность высот (рис. 19.5),
м; d — заложение между горизонта-
лями, соответствующими \//р, м;
Нк—истинная высота полета, м;
IV — путевая скорость ВС, км/ч.
Если полученное время наблюде-
ния меньше минимально необходимо
го т, что ие обеспечивает уверенного
опознавания ориентира, можно рас-
Рис. 19.5. Зона закрытия земных ори-
ентиров в горной местности
209
считать высоту полета, при которой
^наб1 = Т2
(Нт \
0.28------1 ЛНр (19 4)
d
Для обеспечения т=36 с необхо-
дима //«=2010 м.
Дальность действия наземных
РНС, работающих в диапазоне УКВ
и командных радиостанций в том
числе, ограничиваются препятствиями,
расположенными между РНС и ВС.
Дальность уверенного приема радио-
сигналов определяется согласно зави-
симости (4.4).
Минимальная высота, на которой
обеспечивается уверенный прием ра-
диосигналов иа заданной дальности
от РМ,
//mlI1 М0.073О-Й da+йпр.
где h, hnp — высота антенны РМ и
препятствия, dt, d2 — расстояние от
препятствия до РМ и ВС.
«Горный эффект», возникающий
при использовании угломерных РНС,
приводит к ошибкам пеленгования.
В большей степени «горному эффек-
ту» подвержены длинноволновые и
средневолновые радиостанции.
При выполнении полетов
в замкнутых долинах и
ущельях может возникнуть опас-
ная ситуация, когда при сужении до-
лины самолет ие сможет ни развер-
нуться, ни набрать высоту, с тем что-
бы преодолеть горный хребет или
перевал.
Вследствие возможных ошибок
выдерживания крена у при развороте
ВС, а также влияния внешних факто-
ров ширина ущелья должна быть ие
уже
V» / \
Шир> 0,016----- I 1+0,1 . — .
Р tgy sin 2у )
(19.5)
где V —воздушная скорость ВС,
км ч; о* — СКП выдерживания крена
ВС, градус.
Предельная ширина ущелья при
развороте с креном у—20°, скорости
ВС 200 км'ч и о х = 3° Шпр = 2578 м,
что соответствует 3 R, как это требу-
ет НПП.
Возможность набора высоты ВС с
целью преодоления горного хребта
определяется крутизной склона и рас-
полагаемой вертикальной скоростью
самолета. Необходимая вертикальная
скорость для преодоления склона
вверх Г« птР при отсутствии нисходя-
щих потоков воздуха должна быть
не более допустимой для данного ти
па ВС
Кв птр 0.28V—у^^Квдсп. (19-6)
где Ув — вертикальная скорость ВС,
м/с.
В процессе предварительной под-
готовки экипаж тщательно изучает
рельеф местности в полосе ие менее
±50 км от ЛЗП. направления уще-
лий и горных долин, господствующие
высоты, вычерчивает профиль релье-
фа местности вдоль маршрута, нано-
сит ограничительные радиопеленги.
При анализе метеоусловий особое
внимание уделяется выявлению уча-
стков восходящих и нисходяших по
токов воздуха. Признаком появления
вертикальных потоков являются ку-
чевые облака. Восходящий поток
следует ожидать непосредственно пе-
ред облаком, нисходящий — между
облаками. Эти явления значительно
усиливаются при грозовой деятельно-
сти, создавая чрезвычайно опасные
условия полета.
При выполнении верти-
кального маневрирования
в горной местности от эки-
пажей ВС требуется особая осмотри
тельиость. Набор высоты после взле-
та по маршруту разрешается только
тогда, когда безопасный эшелон мо-
жет быть достигнут до установлен-
ного рубежа. Снижение с безопасно
го эшелона для захода на посадку пс
ППП разрешается только после про-
лета ВС маркированного РНТ рубеж;
и при непрерывном радиолокацион-
ном контроле с земли.
Если атмосферное давление, соот-
ветствующее уровню ВПП, невозмож
но установить иа шкале барометриче-
ского высотомера, то при полетах в
районе аэродрома используются абсо
210
лютные высоты Н.6с =- //„гт4 Т/реп.
Для этого- перед вылетом иа высото-
мере устанавливается давление аэрод-
рома, приведенное к уровню моря;
перед посадкой диспетчер сообщает
экипажу абсолютную высоту аэродро-
ма и давление на аэродроме, приве-
1еиное к уровню моря. Это давление
экипаж устанавливает на высотомере.
В .момент приземления высотомер по-
кажет абсолютную высоту аэродрома.
19.4. Полеты жд водными
пространствами
Полеты над водными пространст-
вами морей и океанов связаны с дли-
тельным пребыванием ВС вне види-
мости берегов, что значительно огра
ничивает визуальную ориентировку.
Основная навигационная задача поле-
та над морем — вывод ВС в задан-
ную точку, например, обслуживаемые
корабли, в район поиска и т. д., илн
удержание ВС в заданном районе.
Визуальная ориентировка. В поле-
тах ВС нз малых и средних высотах
ври видимости берегов в основном
используется визмальная ориентиров
ка. Она выполняется по характерным
элементам берега: заливам, мысам,
населенным пунктам, прибрежным
островам. В период подготовки к по-
лету они тщательно изучаются и за
поминаются их отличительные призна-
ки. Следует обращать внимание иа
болотистые низменные берега, так как
они в периоды приливов и отливов
заметно .меняют свое очертание.
Большее постоянство конфигурации
имеют высокие обрывистые берега н
острова. В полете вдоль бер;говой
черты мысы и заливы кажутся боль-
ше, чем они изображены на карте.
Применение РНС. При полете в
М0Ре, кроме обычных радионавигаци-
онных средств, используются морские
всенаправленные РМ и секторные ра-
диомаяки типов ВРМ-5 и «Консол».
^^направленные РМ совместно с
обеспечивают определение МС в
прибрежной зоне. Дальность их дей-
ствии 150—300 км. Все они объединя-
ются в группы, работающие на одной
частоте в диапазоне 270—320 кГц.
одну группу входят не более шести
Р.М. Они работают в определенной
последовательности в течение шести
минутного цикла. В течение этого
цикла каждый из шести РЛ1 включа
ется 1 раз на 1 мин Расписание ра-
боты морских РМ в соответствии с
порядковым номером, присвоенным
к ждому из них, в минутах каждого
часа поясного времени следующее:
1 • - .00 06 12 18 24 30 36 42 48 54
И . . .01 07 13 19 2531 37 434955
111 . .02 08 14 20 26 32 38 44 50 56
IV . .03 09 15 21 27 33 39 45 51 57
V .04 10 16 22 28 34 40 46 52 58
^1 .05 11 17 23 29 35 41 47 53 59
Некоторые радиомаяки работают в
в течение 6 мин без перерыва.
С торные радиомаяки типов
ВРМ 5 и «Консол» предназначены
для определения МС в море и при-
брежных районах суши на больших
удалениях от берега. Дальность их
действия 1000—1500 км. Для работы
с ними применяется АРК или обыч-
ный средневолновый приемник. Сек-
торные РМ позволяют определять
ИПС с высокой точностью оп =
= (0,2±0,5)°. Для этого испозьзуются
специальные карты с нанесенными на
них линиями ортодромических радио-
пеленгов.
Полный цикл работы РНС имеет
продолжительность 60 с. В начале
цикла в течение 30 с передаются по-
зывные РМ и длительное тире для
пеленгации с помощью АРК. После-
дующие 30 с передается 60 сигналов
(точек или тире). По мере приближе-
ния к равносигнальной зоне — линии
радиопеленга, на которой находится
ВС в данный момент, громкость сиг
налов уменьшается. Для определения
нужного ИПС подсчитываются сигна-
лы до равносигнальной зоны
A’ —V,+ 0,5Aa h.thA'^Aj1-
+ 30-0,5(А, + Л-2),
где A.v выпадающее из расчета
число знаков в пределах равиосиг-
нальной зоны; и Л*2 — число зна
ков до и после равносигнальной зо-
ны. Сумма /Vi, \N и N2 должна рав-
няться 60. В соответствии с получен-
211
Таблица 19.2. Рекомендуемые
удаления точек коррекции МС, км
С1МОЛРТЫ
Ту-154,
Ил-62
Ил-76
Ту-134,
Ил-18
Аи-12
DH. км
100 >00 300 100 500 S00
47 94 141 188 2.35 376
69 138 207 276 345 —
Оптимизация применения РНС.
Для повышения точности вывода ВС
в заданную точку, удаленную D„ от
берега, рекомендуется последнее оп
ределение МС производить в опти
мальных точках
При использовании угломерно-
да иономерных РИС
по истечении некоторого времени
полета с постоянным курсом в мо-
мент Т2 измеряется КУР2;
с помощью НЛ 10м рассчитывает-
ся удаление ВС от радиомаяка
D2-
d<>nT
sin (КУР,— УС)
sin (КУР2 — КУР,)
S, (19.9)
пым числом знаков N интернолирова
пием находят нужную изолинию на
карте
Тостоинством секторных ра
тиомаяков являются: независимость
определения ИПС от курса ВС, маг-
нитного склонения, схождения мери-
дианов: высокая точность и неограни-
ченная пропускная способность; прос-
тота графической работы.
К недостаткам следует от
н. сти: отсутствие непрерывной на-
глядной индикации радиопеленгов,
трудность распознавания сектора
(точки или тире), в котором находит
ся ВС; низкая оперативность опреде-
ления линии положения и МС.
Секторные радиомаяки обеспечи-
вают определение МС при полетах в
Баренцевом и Охотском морях
(ВРМ-5) и северной части Атланти-
ческого океана («Коисол»), По мере
удаления от берега возможность ис-
пользования РНС сокращается, а по
грешности измерения возрастают.
В табл. 19.2 приведены значения
оптимальных удалений последней
коррекции счисленных координат МС
для разных значений DH.
Если контроль пути выполняете!
с помощью бортовой радиолокациоп
ной станции, то г/о„т=0,6 £>„ Пр>
этом d„llT не может превышать мак
симальиой дальности действия БРЛС
При использовании береговых уг
домерных РМ оптимальное удалешв
последней точки коррекции можш
получить только графически. Для это
го, задаваясь последовательно раз
личными точками на ЛЗП от 0 до
Он, по результатам расчета по фо1
муле
о. =
' у
|^/ (0,0175а°)2
D; \ Dj
sin а»
+ К?Ч (Он-d)1
(19.8)
Рис. 19.6. Зависимость СКП вывода
ВС в заданную точку (Он = 250 км)
от удаления последней точки кор-
рекции МС
строят график суммарной СКП выв<
да ВС иа заданную дальность О„
Наименьшее значение радиальж й
СКП пГр соответствует оптима.тьш й
дальности dPUT. отсчитываемой ст
берега вдоль ЛЗП (рис. 19.6). Д.'Я
удобства определения МС по дву я
радиомаякам целесообразно подгот<
внть заблаговременно иа карте сетгз
линий равных радиопеленгов от каж
Лого берегового РМ.
При малом числе радиомаяке ч
применяется метод определения МС
по одной боковой радиостанции Д. т
этого:
с помощью АРК измеряется КУ Pi
и запоминается момент 73;
где S — путь, пройденный ВС между
моментами Ti и Г2; иа карте прокла-
дывается линия второго ИПС и иа
ней от РМ откладывается расстояние
О>. Это и будет МС па момент Т2.
МС по одной PC можно также оп
ределить графически переносом пер-
вой линии ИПС на S=U7(72— Г,)
вдоль линии фактического пути ВС.
Измерение навигационных элемен-
тов При отсутствии других средств
для измерения НЭ полета удовлетво
рительиый эффект дает барический
способ измерения УС, основанный на
сочетании работы барометрического и
радиовысотомеров:
УС0 = (138705/7) (УЧ sinф). (19 10)
Разность высот изобарических по-
верхностей, измеренная в двух точ-
ках,
... ((//p-Wc)'-(Wp-Wo)";
|/7'—Я" при /7С -const.
(19.11)
где Нр—истинная высота полета, из-
меренная радиовысотомером; Hr, —
барометрическая высота, выдержи-
ваемая в полете.
Расчет может выполняться на
НЛ-Юм или с помощью графика, по-
строенного для данного типа ВС
(V=const) и района полета (ф). Для
полетов самолета Ил 14 иа широте
Баренцева моря УС° = 14А/7//, где
Ml берется в метрах, at — в мину-
тах Точность измерения УС бариче-
ским способом Сус = (2-?2,5)°.
Оптимальная протяженность уча-
стка промера УС для ветра со скоро-
стью 40^(7^80 км/ч
SO1IT 1,9-10»» ((7sin«p)~*.
Расчет S<>ni приведен иа рис. 19.7.
Оптимальная протяженность и про
должительиость участка измерения
Рис. 19.7. Определение 50пт прн из-
мерении УС барическим способом
УС для условий (7=40 км ч, ф=55°
и 1Г=260 км/ч составляет 185 км и
43 мин полета. Решение этого при-
мера показано иа рис. 19.7 стрелка-
ми. При больших скоростях полета
и ветра оптимальная продолжитель-
ность измерения сокращается
Измерения УС барическим спосо-
бом рекомендуется производить в ви-
де непрерывной серии последователь
ных измерений на каждом участке
маршрута в течение всего полета над
морем. При этом конец предыдущего
измерения является началом после-
дующего.
Полеты ВС на высотах, меньших
4000 м иад береговыми лежбищами
морского зверя, запрещаются.
19.5. Особенности
естественного освещения
и применения курсовых
приборов в полярных
районах
Полеты в полярных районах про
исходят иад обширными необжитыми
пространствами океана в Северном
полушарии и материком Аитаркти
да в Южном, большая часть кото-
рых всегда покрыта льдом. Специфи-
ческие особенности проявления неко-
торых факторов, влияющих иа само-
летовождение, требуют от экипажей
тщательного их учета прн подготов
ке и выполнении полетов.
Особенности естественного осве-
щения проявляются в увеличении
продолжительности нахождения
213
Солнца над н под горизонтом. Нг
широте 70° Солнце восходит и захо-
дит всего 241 сут в течение года, на
широте 82° Солнце ие заходит 150 и
не восходит 133 сут. На географиче-
ском полюсе — соответственно 189 и
176 сут.
Моменты начала и окончания
светлого и темного периодов года иа
разных широтах приведены в
табл. 19.3.
Для экипажей, находящихся иа
эшелоне полета, восходы наблюдают
ся раньше, заходы — позже.
В полярных районах отмечаются
более продолжительные сумерки.
Весной и осенью иа широте 70° ут-
ренние и вечерние сумерки составля-
ют 20%, а иа широте 80° почти 40%
продолжительности суток.
Условия естественного освещения
в полярных широтах Южного полу-
шария подобны описанным выше, од-
нако существуют некоторые отличия,
которые выражаются: в обратном
для наблюдателя движении небесных
светил, противоположном холе смены
времен года (когда в Северном полу-
шарии зима, в Южном лето и наобо-
рот).
Применение курсовых приборов.
Границей устойчивой работы магнит-
ных компасов считается изодинама
/7 = 0,05 Э. Она проходит через север
Гренландии Землю Франца Иосифа,
полуостров Таймыр и далее иа север.
Таким образом, большая часть Арк-
тики оказывается в зоне иеустойчи
вой работы магнитных компасов. Гра-
ница неустойчивой работы магнитных
компасов в Антарктиде проходит на
расстоянии 400 км от южного маг
нитиого полюса.
Сравнительно малое расстояние
между магнитными и географически-
ми полюсами приводит к большим
значениям магнитного склонения от
0 до 3-180° и скорости его изменения
в полете.
Во время ма1нитиых бурь резко и
с большой амплитудой изменяются
составляющие напряженности магнит
ного поля, углы магнитного склоне-
ния и иаклонеиня. Это приводит к
колебаниям показаний магнитных
курсовых приборов. Область наи-
большего повторения полярных сия-
ний проходит вдоль параллели <р—
= 70°. Севернее и южнее ее они по-
вторяются реже.
В пределах зоны устойчивой рабо
ты магнитных компасов из-за боль
шого схождения меридианов длина
локсодромических участков пути ог-
раничивается (15.5).
Использование астрономических
компасов в полярных широтах имеет
меньше ограничений в работе Одна-
ко при измерении истинного
курса существует предельно допу-
стимая ошибка AS в установке коор-
динат МС, которая изменяется в за
висимости от широты и направления
полета (15 13).
Для обеспечения точности измере-
ния истинного курса ДИК-2° допус-
тимая сшибка AS не должна превы-
шать следующих значений:
Широта, ... 70 75 80 85
AS, км ... 70 50 35 20
Ограничений в установке коорди
пат МС иет, когда полет выполняет-
ся иа север или юг в середине дня
При полетах же утром или вечером
Таблица 19.3. Моменты изменения условий естественного освещения
Широта, с Солнце не заходит (с ... до) Солнце не восходит (с ... до)
70 12 мая ..28 июля 26 ноября ... 17 января
74 2 мая . 12 августа 10 ноября ..3 февраля
78 20 апреля ... 25 августа 28 октября . 15 февраля
«2 9 апреля . . 6 сентября 17 октября . 27 февраля
86 30 марта . 15 сентября 5 октября 9 марта
90 19 марта ... 25 сентября 25 сентября — 19 марта
214
точность установки коортнат МС ог-
раничивается табл 19 4
Выдерживание наира в
леи и я полета по астроком-
пасу с неизменными координатами
места ВС приводит к уклонению
астрономической локсотромии от ор-
тодромии. Если в АК вводятся <р и 7
сретней точки участка маршрута, то
при допустимом ЛБУ — 10 км длина
участков пути не должна превышать
следующих значений:
Широта. ° . 70 75 80 85 90
Хдоп.км . .255 800 880 970 1080
При полете утром и вечером незави
симо от широты МС 5 (Оп увеличива
ется до 1000—1700 км.
Для расширения возможностей
использования астрокомпасов приме
ияются условные меридианы
При полете в серетиие дня, когда
Солнце находится на траверзе ошиб
ка условного курса (\S—300 км) до-
стигает наибольших значений
Широта. ° . 70 75 80 85 90
ДУК5.° . .2,6 2,15 1,8 1,5 1,2
При выдерживании направления
полета по АК. если считать ЛУК=2°,
допустимая длина участка маршрута
SJUn для наихудших условий, когда
Солнце находится и а траверзе, при-
нимает значения:
Широта. ° . 70 75 80 85 90
Хдоц. км 234 280 340 410 510
При полете утром и вечером, а так-
же в направлении иа и от Солнца
5дои неограничено
Эту же задачу можно решить с
помощью номограммы (рис. 19.8), ко
торая позволяет определять: допусти-
мое удаление ДА от условного ме
ридиана; широтные ограничения об-
ласти применения условных меридиа-
нов; возможную (максимальную)
ошибку в условном курсе. Входными
данными в номограмму являются:
склонение Солнца в момент иаблюде
ния б, разность долгот средней точки
Участка маршрута и долготы выбран-
ного условного меридиана ДА, широ-
та ее и допустимая погрешность
курса ДУКгаат-
Таблица 19.4 Допустимые
ошибки в установке координат МС,км
Месиц года Широты. °
70 80 85 90
Март и сен- 610 830 1260 2540 оо
тябрь Апрель и ав- 385 480 610 830 1260
густ Май и июль 285 340 420 525 485
Июнь 240 285 340 420 525
Порядок пользования номограм-
мой показан стрелками. Если в каче-
стве условного меридиана выбирается
срегний меридиан участка маршрута,
то общая протяженность его может
быть не более удвоенного значения
допустимой разности долгот.
При выполнении полета по
ортодромии с помощью путево-
го корректора ДАКДБ-5 наибольше-
го значения ошибка ОК достигает
при нахождении Солнца впереди и
сзади ВС:
на широте 70° ДОКщах 0.16-УС°; Л
иа широте 90° ДОКтЯх 0 075- УС°. J
(19.12)
Рис. 19.8. Определение предельных
условий применения АК
215
Чтобы самолет ие уклонился бо-
лее чем иа 10 км от ортодромии при
наличии угла сноса 10°, путь, прохо
днмый с выдерживанием ортодроми
ческого курса, не должен превышать
на широте 70° 880 км, а на широте
<[^82° путевой корректор может ис-
пользоваться до 1100 км
Применение гироскопических полу-
компасов. Так как магнитные и аст-
рономические компасы имеют ограни
чсиия в работе, основными средства-
ми выдерживания направления поле-
та являются ГПК и курсовые систе-
мы в режиме «ГПК».
Для начальной установки (вы
ставки) ортодромического курса, кро
ме традиционных способов, приме
няется оптический способ, основан
иый на использовании теодолита или
пеленгатора.
Сущность его заключается в пе-
ленгации ориентиров, образующих
створ вблизи стоянки ВС (рис. 19.9,
точки А и В) . Истинный азимут ство-
ра АВ
лав -А~ — i
где 9 *—горизонтальный угол, из-
меряемый в произвольной точке АВ и
заключенный между линией створа и
направлением иа Солнце; —истин-
ный азимут Солнца, соответствующий
месту (<р, X) и моменту Т измерения
О' . Азимут Солнца определяется с
помошью таблиц ТВА и ААЕ.
Рис. 19.9. Определение истинного
стояночного курса ВС
216
По полученному азимуту створа
А ап определяют стояночный курс
ВС. Для этого в точке Б теодолитом
измеряют курсовой угол а ориентира
.4, а затем, перенеся теодолит в точ-
ку Л и угол р, заключенный между
направлениями иа точку Б (линия
отвеса от реперной точки ВС) и ори
ентир В. Тогда стояночный курьр ВС
ИК-=4АВ-(Р-а).
Полученное значение ПК устанав-
ливается на индикаторе ГПК задат-
чиком курса. Азимут створа АВ из-
меряется 1 раз, так как он ие меняет
ся Стояночный же курс ВС и выстав-
ка курсового прибора производятся
перед каждым полетом.
Рекомендуется после посадки ВС
и заруливания иа стоянку перед вы
ключенисм двигателей запомнить его
последний гироскопический курс с
тем, чтобы перед выруливанием для
следующего полета восстановить его
вновь. Если же посадка ВС произво
дилась иа ледовом аэродроме, этот
способ начальной выставки ГПК дает
эффект только тогда, когда экипаж
уверен в том, что льдииа за время
стоянки в процессе дрейфа ие развер
нулась.
Для коррекции в полете
гироскопического курса,
отсчитываемого от опорного истинно-
го меридиана X, в зависимости от
аэронавигационной обстановки ис
пользуются
магнитные компасы, где /7^0,05 Э
при строгом выдерживании горизои
тального полета в течение 5 мин
Условный истинный курс
УК = МК + А.мд-(Х1>м-Х);
астрономические компасы при кор-
рекции требуют ие только выдержи
ваиия строго горизонтального полета,
ио и полета без ускорений. При этом
условный истинный курс УК=ИК+
4- (Хом—X);
створ мачт кораблей прн извест-
ном курсе его следования;
направление створа характерных
и известных визуальных или радио-
локационных ориентиров.
направление прямолинейных уча-
стков береговой черты или русл рек
достаточной длины
Прокладки ЛЗП и ЛФП выполня-
ются иа полетной карте, построенной
в стереографической проекции с М=
= 1:2 000 000. На карте красным и
синим цветами нанесены условные ме-
ридианы, соответствующие долготам
О и 1ЫГ, 90 и 270°, что облегчает вы-
бор опорных меридианов и работу с
курсовыми приборами в полете.
Длина ортодромии, прокладывае-
мая иа карте с ИГ1У=90’ (270°) в
вите прямой, ограничивается предель-
ным значением
О11р =300
cos <р
| 1 —sin <р |
(19 13)
Для разных широт предельная длина
ортодромии имеет значения:
Широта, ° . 70 75 80 85 90
D„p, км .700 810 990 1400 не огра-
ничено
Если направление ЛЗП отличается
от 90 или 270°, то предельная длина
ортодромии, прокладываемая в виде
прямой, увеличивается пропорцио-
нально cosec И ПУ.
Выполнение полета в районах гео-
графических полюсов. При полете иа
полюс с ледового аэродрома или от
него и выдерживании курса по астро-
компасу или с применением ГПК со-
блюдается следующая последователь-
ность действии:
в АК устанавливается широта
средней точки маршрута при исполь-
товаиии путевого корректора — ши-
роте ИПМ,
устанавливается долгота меридиа-
на, вдоль которого предполагается
производить полет на полюс или от
него;
вводятся экваториальные коорли
наты светила, выбранного для пелен-
гации, и выполняется «захват» све-
тила,
после взлета производится разво-
рот ВС до выхода на курс следова-
ния ИК = 360 —УС при полете иа
северный полюс или прн полете от
него ИК = 180°—УС, при полете на
южный географический полюс ИК =
= 180°—УС и ИК=360°— УС при по-
лете от него;
при использовании ДАК-ДБ-5 пу-
тевой корректор включается в момент
пролета иад ИПМ или когда ВС лег-
ло на курс следования по маршруту.
В последнем случае должны быть
введены соответствующие <р и X.
Если для выдерживания курса
следования применяется в полете
ГПК, то до взлета его показания
сличаются с показаниями астроком-
паса.
19.6. Определение места ВС
и навигационных элементов
полета в полярных районах
При полетах в центральной Арк-
тике или над Антарктидой почти
полностью исключается ориентировка
ввиду отсутствия визуальных и ра-
диолокационных ориентиров.
Визуальная ориентировка в перифе-
рийной части рассматриваемых райо-
нов летом мало отличается от нави-
гации в средних широтах, так как бе-
реговая черта, очищающаяся ото
льда, и сравнительно большое число
островов создают для этого благо-
приятные УСЛОВИЯ.
Трудности иногда возникают при
полетах иад тундрой из-за непостоян-
ства размеров и конфигурации озер
и берегов морей после обильных
дождей или сухих периодов. Зимой
все водоемы, скованные льдом и за-
сыпанные снегом, различаются с тру-
дом, но сравнительно легко обнару-
живаются при боковом солнечном ос-
вещении низко стоящего Солнца или
со скудной, однако заметной с возду-
ха растительностью
Непривычную картину представля-
ет радиолокационное изображение
тундры. Летом оно обычное: суша
представляет собой совокупность све-
тящихся точек на экране БРЛС, а
море без засветок — темное. Зимой
же все наоборот. Торосистый лед на
водных пространствах дает больше
отраженных сигналов, чем гладкая
заснеженная поверхность тундры. По-
этому среди сплошного поля засветок
от моря на экране БРЛС острова и
берега изображаются в виде темных
217
пятен Дальность видимости высоких
обрывистых берегов составляет 200 -
250 км, берега высотой 20—30 м об-
наруживаются БРЛС иа дальности
80—100 км корабли во льдах при
высоте полета 500 м обнаруживаются
на дальности 200 км.
При полетах вдоль берегов Барен-
цева. Карского и Охотского морей,
а также в северной части Атлантиче-
ского и Тихого океанов для опреде-
ления МС при контроле пути могут
применяться береговые радиомаяки
типов ВРМ-5 и «Коисил» (см. п. 19.4).
В Антарктиде условия распростране-
1ия радиоволн среднего диапазона
определяются влиянием ледяного ши-
та Из-за этого сокращается даль-
ность действия проводных PC в сто-
рону материка до 150 км, но в сторо-
ну моря дальность возрастает Авто-
матические радиопеленгаторы в диа-
пазоне УКВ работают обычно лучше,
чем в средних широтах. Дальность
действия их иногда превышает даль-
ность прямой видимости. Однако точ-
ность пеленгования невысока.
По мере удаления от берега в глу-
бину полярного бассейна возрастает
удельный вес астрономических изме-
рений для определения МС.
Благодаря близости к географиче-
скому полюсу при 80° можно при-
менить упрощенный способ расчета
линии равных высот без использова-
ния ТВА. В основе его лежит равен-
ство б = б и совпадение линии азиму-
та светила с меридианом ГМС Реко
мендуется следующий порядок расче
та:
измерить высоту светила и запи
сать момент измерения Т\
Таблица 19.5. Поправки
за рефракцию, '
ft,® 1. °C
-30 - 25 -20 - 15 10
2 4 4 3 2 2
3 3 3 2 2 1
4 2 2 2 1 1
5 2 2 1 1 I
6 2 1 1 1 1
7 1 1 1 1 1
ввести поправки в измеренную вы
соту (п. 15 8). Если й^7°, то поправ-
ка за рефракцию атмосферы находит-
ся по табл 19.5;
по ААЕ наити значения б-р и б,
соответствующие Т;
определить меридиан ГМС ^-гмс~~
~^р- Следует помнить, часовые углы
в АЛЕ даются западные, поэтому ес-
ли часовой угол меньше 180°, то дол-
гота будет также западная. Если
часовой угол получился более 180°,
то ХЕмс = 360°-^ = /Е;
рассчитать разность высот Ah'=
= бяспр—б. Минуты дуги преобразо
вать в километры Ап =1,853 Ah';
вдоль меридиана ГМС от точки
полюса отложить \б. При АЛ>0 в
направлении иа светило, при Дб<0—
от него;
через полученную точку провести
перпендикуляр — ЛРВ.
В высоких широтах при астроопре-
делениях допустимы большие ошибки
в отсчете времени. Так, на широте
70° допустима ошибка АТ = 6 с, на
широте 80° — уже 11 с, а иа полюсе —
23 с.
Измерение навигационных элемен-
тов полета. Если ВС не оборудовано
ДИСС, то экипаж в полете вынуж
ден производить измерение навигаци-
онных элементов и ветра дискретно
Однако отсутствие достаточного чис-
ла визуальных ориентиров исключает
измерения иа контрольном этапе.
Поэтому УС и IV' измеряются с по
мощью бортового визира АБ-52.
В окуляр визира видно перемещение
земной поверхности. В момент, когда
визирная точка, в общем случае про
извольная, пересечет первую линию
времени, включается секундомер Он
останавливается в момент прохода
выбранной точки через вторую линию
времени. Тогда U/=0,5 Hit. Высота
полета Н определяется по радиовы
сотомеру. Расчет путевой скорости
производится с помощью счетного
‘ устройства самого визира или
НЛ-Юм
Измерение угла сноса с помощью
\Ь-52 осуществляется по «бегу» зем-
ных ориентиров Наблюдая в поле
зрения за перемещением визирных то-
чек, разворачивают сетку визира так.
218
чтобы оно происходило вдоль про-
дольных линий. Отсчет мгновенного
значения УС ведется по шкале угла
споса против неподвижного индекса
Для повышения точности измерения
в условиях турбулентной атмосферы
применяется специальное устройст-
во — пантограф, позволяющий осред-
нять значения измеренного угла сно
са Точность измерения УС по «бегу>
земных ориентиров зависит от вытер-
живаиия прямолинейного полета, осо
беино вредны поперечные крены ВС
Точность измерения УС этим спосо-
бом характеризуется оус= (1.54-2,0)°
При определении ветра измерение
УС производится на трех курсах с от
воротом иа 60° один от другого
Дальнейшее решение удобнее произ-
водить с помощью ветрочета или на-
вигационного расчетчика, позволяю
ших определять вектор ветра нагляд
но и с меньшими погрешностями в
расчете
При полете над океаном или туп
дрой. даже в зимних условиях, когда
высота торосов не превышает 3 5 м.
можно измерять УС барическим спо
собом
Малое число и большие удаления
запасных аэродромов требуют завы-
шенного АНЗ топлива. Ои должен
обеспечивать возврат ВС на аэродром
вылета При этом с особой тгпатедь
ностью рассчитывается рубеж возвра
та или ухода иа запасной аэродром
В любом случае АНЗ не должен быть
меньше количества топлива, необхо
димого для двухчасового полета, как
«того требует НПП ГА
В полете над ледниками и особен
но над ледяным щитом в Антарктиде
радиовысотомеры дают большие
ошибки в сторону завышения высот,
что особенно опасно. Оии возникают
вследствие отражения радиосигналов
не от поверхности льда, а от поверхио
сти материка Толщина же льда мо
жет быть значительной.
Глава 20
ШТУРМАНСКОЕ ОБЕСПЕЧЕНИЕ АВИАЦИОННЫХ РАБОТ
20.1. Требования к
штурманскому обеспечению
авиационных работ
Полеты по выполнению авиациои
ных работ (АР) осуществляются, как
правило, визуально на малых и пре-
дельно малых высотах. Для этих ра-
бот применяются обычно самолеты
четвертого класса и вертолеты. Полет
складывается из перелета к месту ра-
боты. непосредственно выполнения
затанпя и возврашеиия па аэродром
посадки. Если район работы располо-
жен на удалении, большем 15 км от
аэродрома базирования, то расчет по
лета производится в полном объеме
Главными требованиями к штур
майскому обеспечению АР являются
вы герживаиие ЛЗП с высокой
точностью;
строгое выдерживание истинной
высоты полета над заданными гори
зонтами;
вывод ВС в заданную точку иа
земной или водной поверхности;
построение специального маневра
в заданном районе,
обеспечение безопасности полета в
штурманском отношении
Основной ви .1 контроля пути эки
пажем — визуальная ориентировка в
сочетании с применением радиокомпа
са или АРП
20.2. Штурманское
обеспечение воздушного
фотографирования
Основная навигационная задача
воздушного фотографирования
(ВФ) — выполнение полета иа рас
четной истинной высоте по согласо
ванным между собой маршрутам с
высокой точностью. Для выполнения
штурманских расчетов в качестве
исходных данных используются, раз
219
меры заданного района фотографиро-
вания £iXG; масштаб съемки тг;
заданное перекрытие между снимка-
ми Рх и между маршрутами Pv; па-
раметры АФА (фокусное расстояние
/, размер кадра lxXlv).
Расчет элементов воздушного фо-
тографирования. На основании исход-
ных данных перед полетом рассчиты-
вают:
1. Истинную высоту полета па ВФ
W*=/itWr с учетом среднего уровня
рельефа местности. Высота полета
выдерживается по барометрическому
высотомеру, установленному по дав-
лению ро=76О мм рт. ст.
2. Полезный базис аэрофото-
снимка:
ЬЛ=0,01/х(Ю0—Рх);
Ь„-0.0П„(И>0—Р„).
3. Базис изображения земной по-
верхности:
Вх-=Ьхтг-, Ву = Ьутс.
4. Вертикальный угол для привяз-
ки маршрута фотографирования к
соседнему маршруту
tg Нф-
5. Интервал ВФ — промежуток
времени между экспозициями Гф =
= ВД/1Г для разных путевых скоро-
стей W.
6. Минимальную высоту фотогра-
фирования с учетом допустимого
сдвига изображения на аэрофото-
снимке ДЬх=0,05 мм
Т^иИп — 200U7max т/к-|-Дй, (20.1)
г те т — продолжительность экспози-
ции, с.
Разность высот рельефа (в мет-
рах) в пределах района ВФ
ЛЛ = йП1ах —й,.р.
7. Предположительный расход фо-
томатериалов. При этом определено:
число аэрофотоснимков в маршруте
Л'сн= (Lx/Bx) +3; чисто маршрутов
Nn — (LVIBV) + 1; общий запас аэро-
фотоснимков Л/об=йсЛснА,1|, где Ас=
= 1.1 для равнинных участков мест-
ности и fec=l,5 — для горных.
220
8. Начало и окончание периода
времени, удобного для ВФ,
Т’нс (кс) Т'восх (зах) ± Go>
где Go— время от восхода до захода
Солнца до достижении им высоты
20°.
Время tio может быть рассчитано
аналитически *
соз (/Гр~Ь М —
sin (20* —л) sin <р sin 6s
cos <р cos
где <р — средняя широта участка ВФ;
6е’ —склонение Солнца па время ВФ;
п — понижение горизонта на высоте
ВФ с помощью ТВА и ААЕилиири-
/ <р ,2
ближенно по формуле Go—Дод-Ь'Ч -
Подютовка рабочих карт. Помимо
расчетов, прн подготовке к полету
экипажи готовят рабочую карту, на
которую наносят границы участков
ВФ, оси аэросъемочных маршрутов и
линии включения и выключения
АФА.
У самолетов Ан-30, специально
предназначенных для воздушного фо-
тографирования и оборудованных
цифровыми навигационными вычисли-
телями НВМ-ФК с автоматами раз-
ворота, процесс построения маршру-
тов фотографирования автоматизиро-
ван.
20.3. Штурманское
обеспечение
авиационно-химических
работ
Авиационно-химические работы
(АХР) выполняются в светлое время
суток на высотах не ниже 5—10 м
иад обрабатываемой растительностью
по прямолинейным участкам — гонам,
маркируемым сигнальщиками
Основными навигационными зада-
чами АХР являются обеспечение: точ-
ности полета ВС на каждом гоне;
безопасности полетов на предельно
малой высоте; экономичности постро-
ения маршрутов.
Полеты ВС к обрабатываемым
участкам н обратно выполняются по
кратчайшему безопасному маршруту
на высоте не менее 50 м над препят
стниями.
Штурманское обеспечение АХР.
При челночном способе АХР заход
на очередной гон осуществляется раз-
воротом на 180° или стандартным
разворотом на угол «. Разворот на
180° выполняется, когда ширина за-
хвата местности распыленными хими-
катами равна или больше удвоенно-
го радиуса разворота ВС: Ш>2Д.
Если Ш<2/?, то выполняется стан-
дартный разворот с отворотом ВС на
заданный угол (7.9).
Для обеспечения вывода ВС па
очередной гон по дальности отворот
на угол а должен начинаться на ли-
нейном упреждении ЛУР = 2Д sin и.
Суммарное время разворота с учетом
ЛУР
Р Г / а” \ 1
'хрязг =V [Л I 1 +-9rJ 1 2sina]
(20.3)
Для повышения эффективности
АХР применяются загонный и совме-
стный способы обработки полей Пер-
вый из них предусматривает вывод
ВС не на соседний гон, а с пропус-
ком числа гонов
Д = (2Д Ш) —1. (20 4)
Обычно обработка ведется через два
гона на третий.
Совместный способ обработки по-
лей применяется тогда, когда среднее
время перелета ВС с одного участка
на другой меньше суммарного време-
ни выполнения одного разворота на
очередной гон.
Безопасность полетов при АХР
в штурманском отношении обеспечи-
вается: выдерживанием безопасных
удалений границ обрабатываемых
участков от препятствий; определе
нием опасных периодов и направле-
ний полетов в зависимости от поло-
жения Солнца.
Удаление сигнальных знаков от
препятствий может рассчитываться
для двух вариантов:
когда разворот ВС осуществляет-
ся до подлета к препятствию
(рис 20.1, а). Дразв^^Апр
. , _ Дразв —Др
''без у кнаб(сн)~г
+ 3R-H, (20.5)
где Дра.<а — высота безопасного раз
ворота; hnp — высота препятствия;
Др — рабочая высота полета на гоне;
I— допустимое расстояние прибли-
жения к препятствию; Рнасссн,, Vb —
поступательная и вертикальная ско
роста полета ВС,
когда разворот ВС осуществляет
ся над препятствием (рис. 20.1,6)
I" _ Ну
б'3~ VB
''наб (сн)> (20 6)
где Дп — безопасная высота пролета
иад препятствием. Обычно Hu — hnp+
+10 м.
Рис 20.1 Обеспечение безопасного маневрирования ВС при АХР
221
При одновременной работе двух
ВС на соседних участках, располо
женпых в створе друг к другу, без
опасное расстояние между ними
I <>( ^р13И~ Нр
-б*3 V
X k в
''наб (СН.^ЗЛ)
Н- (20 7)
Выполнение полетов на предельно
малых высотах в направлении на
Солнце, когда оно находится низко
над горизонтом, сопряжено с повы-
шенной опасностью столкновения ВС
с земными препятствиями. Поэтому
КПП ГА запрещает обрабатывать
участки, выполнять взлеты и посадка,
кот >а высота Солнца над горизонтом
меньше 15°, а курсовой угол его ме-
нее az30°. Для обеспечения безопас-
ности полетов заблаговременно, в пе-
риод планирования АХ)’, можно
установить опасные периоды и на
правления полетов.
Промежуток времени в часах меж-
ду восходом (заходом) Солнца и до-
стижением им высоты 15° может
быть определен с помощью ТВЛ и
ААЕ, при отсутствия ТВА рассчитан
аналитически
---—-----7-------—. (20.8)
sin (^~H-)sin <psin 6 ’
где 'гр 6' — гринвичский часовой
угол Солнца в момент восхода и за-
хода и его склонение, выбираемые из
ААЕ; <р, Л—географические коорди-
наты района полетов
Таким образом, опасный период
не летов определится промежутком
времени ОТ Твое» ДО (Г восх + ЛГ) и
ОТ (7<ах АТ/ ДО Гзвх
Азимуты Солнца в моменты, кот
да оно имеет высоту 0 и 15°, рассчи-
тываются аналитически
sin (360 - А ) =
cos 6“
-^-ь<п(/;р + Х), (20.9)
или определяются с помощью ТВА
о иювременно с t
222
Опасные направления полетов бу-
дут соответствовагь путевым углам
ИПУ=А " ±30°. Их следует исклю
чать при планировании АХР.
20.4. Штурманское
обеспечение съемочных работ
Съемочные работы выполняюсь»
па предельно малых высотах со стро
гим выдерживанием истинной высоты
полета н заданных маршрутов. Эт<
требует специального штурманского
обеспечения- часгого контроля теку
щего места ВС; контроля за правиль
ностъю показаний барометрических
высотомеров; четкого сопряжения
смежных маршрутов при полетах по
заданным горизонталям; обеспечения
безопасности самолетовождения в го-
рах.
Расстояния между контрольными
ориентирами, по которым уточняется
ЛФП,
должны строго выдерживаться в по
лете. Допустимая погрешность задан
ного маршрута о, обычно равна
доп
2—4 мм в масштабе применяемой ра
бочей карты, точность визуального
определения МС н нанесения его на
карту соответствует 1—2 м в масшта
бе карты. Для рабочей карты мае
штаба 1 100000 5но = 0,26/Л’гЧ Раз
личным значениям Кея соответствуют
потребные расстояния между кон
грольными ориентирами:
Д' .. ,0.050.06 0.07 0.080,09
км .5,2 4,3 3,7 3,25 2,9
Выполнение контроля пути с ча
стотой tKO = SHo'W' обеспечит задан
ный уровень точности самолетовожде
ния.
Наибольшую сложность представ
ляют поисково-съемочные полеты, вы
полняемые на предельно малых вы
сотах с выдерживанием постоянной
истинной высоты при полете вдоль
»аданных горизонталей и поперек
склона
При выполнении полета поперек
склона «подъемом» вверх с сохране
иием постоянной истинной высоты
всегда должно соблюдаться условие:
потребная вертикальная скорость по-
чета должна быть не более допусти-
мой для данного типа ВС (19.6).
При полете вдоль заданных гори-
зонталей на постоянной истинной вы
сотч сложно одновременно выдержи-
вать постоянные значения истинной и
абсолютной высот. Для обеспечения
этого используются и барометричес-
кий и радиовысотомеры совместно.
Получение правильного значения
абсолютной высоты в полете певоз
можно без тарировки барометричес-
кого высотомера (рис. 20.2). Она вы-
полняется в следующем порядке:
на карте выбирается характерная
возвышенность с высотой рельефа
близкой к заданной горизон-
тали;
в момент пролета над ней по ра-
диовысотомеру фиксируется истинная
высота, а на барометрическом высо-
томере рукояткой изменения давле-
ния ро устанавливают отсчет абсо
лютной высоты, равный //авс = //ре 4-
4" ДиСТ J
ВС выводится на заданную чорчч-
зопталь /Угор При этом радиовысото-
мер должен показывать заданную ис-
тиччнучо высоту работы Нзад, а баро
метрический высотомер //влг =//гор-*-
4" Дзад.
Вследствчче того что с течением
времени меняется давление иа уровне
чемли, установленное на высотомере
Ро не будет уже соответствовать
фактическому давлению, ччриведенио-
mv к уровню моря. Это требует пов-
торччочч тарировки высотомера. В про-
тивном случае произойдет «сполза-
ние» ВС, с заданной горизонтали
(рис 20.3) Если давление ччадает, то
ВС «сползает» вниз по склону на ве-
личину
АН=
где k — барометрическая ступень, ран-
ная 8,25 м .мбр, —изменение дав
леиия за время между тарировками
барометрического иысотомера.
Если давление растет, то ВС,
наоборот, поднимается по склону
Рис. 20 2. Тарировка показаний ба-
рометрическою высотомера
вверх. В результате задание на ччолет
ие выполняется
Необходимый интервал тарировки
барометрического высотомера в часах
определяется из формул:
0.36
/цН7 —
0.36
^//д»н
“Ч
^дчи
(20.11)
где \'р —тенденция ччзменения давле
ния за последние 3 ч.
Первая формула применяется, ког
ча установлена допустимая очччнбка в
выдерживаничч высоты полета \На„п.
вторая — когда установлено допусти
мое боковое уклонение ZnoB от за-
данной горизонтали.
Еслчч 2доп=100 м прчч Др -
= 0,5 мбр, разчюстчч высот горизонта
леч'ч Д/ч=-50 м и заложением между
ними d=1800 м, то /инг = 2 ч. Это
зч.ачит что через каждые 2 ч гребу
ется выччолччять тарч:ронку барометрч.
ческоч'о высотомера
Особую сложность в выполнечччччч
полета но горизонталям представля-
ют сопряжения двух маршрутов в
горных условиях при сосдиненичч чо-
лин. Для плавного вписывания в еле
Рис. 20 3. «Сползание» ВС с задан
ноч'ч горизонталчч при изменении атмо
еферного давления
223
дующий участок маршрута выполня-
ется специальный маневр, осущест
вляемый двумя способами (рис. 20.4).
Прн первом способе ВС выполняет
разворот на угол р по истечении рас-
четного времени прямолинейного по-
лета после прохода точки А
(рис. 20.4, а), а при втором — предва-
рительный разворот на угол а после
пролета точки Л, а затем уже разво
рот на угол р (рис. 20 4,6).
Исходными данными для расчета
и построения маневра являются: по
ложение точки пересечения касатель
ных к горизонталям «вершина угла
отрога» А и угол между ними —
«угол отрога» <р.
При первом способе па кар
те измеряется угрл q, рассчитывают
ся: угол Р, длина прямолинейного
участка SM и продолжительность по
лета на нем /м:
Р = 180-J- q;
МПУ, = МПУ, ± (180—9);
а
Sm — SM V.
Если угол отрога гр = 60°, V—
= 190 км'ч (53 м/с). $ = 780 м, то
Р=180° + 60°=240°, 5м = 780 ctg 30° =
= 1350 м, /„ = 1350'53 = 26 с.
Это значит, что пролетев 26 с пос-
ле прохода вершины отрога А. необ-
ходимо развернуться на угол 240°
и далее следовать то выхода снова в
точку А При этом МПУ2=ЧПУ1±
±120°
Рис. 20.4 Способы сопряжения со
седних участков съемочных марш-
рутов
224
Второй способ более эконо-
мичен, но сложнее в выполнении.
После измерения на карте утла q
рассчитываются
cos 0,5q>
Р = 360° — 2 arc sin-----------;
2
а = 0,5 (Р— гр) — 90°; МПУ, »
=МПУ, ± (180 —q).
(20 13)
Для условий первого способа име-
ем: гр = 60°; Р = 360°— 2-25°40'«308°;
<1 = 0,5 (308°- 60°) — 90е = 34°; МПУ2=
=МПУ,±!20°
Это значит, что в момент пролета
вершины отрога (точка Л) следует
начать разворот на угол 34°, затем
выполнить разворот в обратную сто
роиу на угол 308’. После этого еле
дует довернуть ВС в противополож
иую сторону на угол 34°. Если манев
ры были выполнены правильно, то
при проходе вершины отрога у ВС
будет МПУ2=МПУ,±120°.
Для облегчения маневрирования
удобно отсчет курсов и углов разво
ро га производить по гирополукомпа -
cv. установив его на начальный
ОК—0. Для упрощения расчетов ут
лов п и Р можно использовать таб
личный способ.
Эффективность применения каж
дого из этих способов может быть
оценена сравнением продолжнтель
ности маневрирования в процессе
разворота на следующий участок
Суммарная продолжи
тельность разворота первым
способом
/^ = — [2 etg — +
х 1'1 2
-г 0.0175(180° ч) : (20 14)
взорым способом
R I
- 0,0175— |54о°—ф —
— 4 arc sin
cos 0,5q
2
(20 15)
Продолжительность маневрирова-
ния при втором способе практически
не зависит от угла <р. Для условии
изменения угла <] от 20 до 120е про-
должительность маневрирования из-
меняется от 105 до 95 с в то время
как при маневрировании первым спо-
собом это время изменяется от 223
Ю 96 с При <,.>120° оба способа по
продолжительность и теитпчпы.
Обеспечение безопасности самоле-
товождения достигается предотвра-
щением столкновения ВС с земной
поверхностью. В соответствии с этим
полеты запрещаются:
ь замкнутых долинах и горных
ущельях, ширина которых па задан-
ной высоте меньше трех радиусов
разворота ВС при крене 20° (19.5);
против Солнца в равнинной и ход
мистон местностях на истинных высо-
тах менее 100 м, а в горной—менее
200 м прн высоте Солнца над горн
зонтом менее 15’ и курсовом угле
менее 30° (20.8) н (20 9)
20.5. Штурманское
обеспечение ледовых
авиаразведок
Ледовые авиаразведки произво
..ятся с целью выявления состояния
ледового покрова на озерах и морях
в основном в полярных районах. По
леты выполняются с береговых и ле-
довых аэродромов самолетами Ил 14,
Ан-24, Ил 74 н другими, имеющими
два двигателя, а также вертолетами
с борта морских судов. Выполняется
ледовая авиаразведка визуально или
с применением радиотехнических
средств наблюдения. Высота полета
при хорошей видимости не превыша-
ет 1000 м, в сумерках — 250—300 м
и 150—200 м с фарой
Основные навигационные задачи:
выполнение точного самолетовожде
чня в продолжительных полетах на
больших удалениях от берега мате-
рика; обеспечение вывода ВС в за-
данную точку- моря с высокой точно-
стью; умение применять астрономиче
ские средства и способы навигации;
готовность в любой момент полета
определить текущее МС; умение бы
стро и точно измерять навигационные
8 Зак. 639
элементы полета всеми доступными
средствами и способами; обеспечение
безопасности самолетовождения.
В зависимости от характера поле-
та в качестве полетных карт исполь-
зуются. карты масштаба 1 2 000 000
стереографической проекции; карты
масштаба 1:1000 000 видоизменен-
ной поликонической проекции, мор
ские крупномасштабные карты
1 : 5 000 000 и 1 : 2 000 000 равноуголь-
ной цилиндрической проекции.
Помимо обычной подготовки кар-
ты согласно НШС ГЛ (см. гл. 13),
дополнительно «поднимается» берего
вая черта, отмечаются границы тер
риториальных вод, высоты береговой
черты материка и островов, точки
возможной встречи с морскими су
дамп.
Обзорные ледовые авиаразведки
выполняются по стандартным марш
рутам па удалении 1000 км и более
от берегов Для привязки ЛФП к ме
стпости полет выполняется с перио-
дическим выходом на берег для вос-
становления детальной ориентировки
Для вывода ВС в заданную точку на
берегу предельная дальность авто-
номного полета в сумме не должна
превосходить
пред- --------—
А< ч 1/—(I г)
(20 16)
где Рг — гарантийная вероятность вы
вода ВС в заданную область с радиу-
сом R, равным метеорологической
видимости или дальности действия
береговых РНС.
Если предстоящий полет будет
проходить в пределах рабочих обла-
стей береговых РНС, то контроль
пути следует производить в опти-
мальных точках (см. § 19.4).
Поисковые по четы для поиска ба-
зирования дрейфующих станций «Се-
верный полюс» выполняются па боль-
шие удаления от аэродрома вылета
и требуют высокой точности самоле-
товождения, так как участки маршру-
та в районе поиска располагаются на
малом расстоянии, не превосходящем
20 км при начальном обследовании
заданного района н 5—10 км при де-
тальном.
Инструментальная ледовая авиа
разведка ведется обычно с помощью
225
радиолокационной станции бокового
обзора. Бортовая РЛС «Торос» но
зволяет подробно просматривать две
полосы местности или льда вдоль
ЛФП по обе стороны от продольной
оси ВС от 5 до 40 км Точность из
мереиия дальности на траверзе
ztl км
Дефицит метеорологической ин-
формации в Полярном бассейне мо-
жет быть частично компенсирован
измерением атмосферного давленич
на уповне моря экипажами ВС, вы-
полняющими полеты на ледовую раз
ведку, без посадки на лед. Для этой
цели используются барометрический
высотомер совместно с ратновысото
мером или барометрический высото-
мер с бортовым визиром АБ-52.
В первом случае отсчет ис-
тинной высоты полета, снимаемый е
радиовысотомера //рв, устанавливает-
ся с учетом ниструментальной
ДНннст и методической \Hi поправок
на барометрическом высотомере пу-
тем поворота рукоятки начального
давления Ро-
"бар (р„) WpB —(AWI1IlrT AW/).
(20.17)
Мето /ическая температурная поправ-
ка учитывается на НЛ-Юм.
Во втором случае истинная
высота полета рассчитывается с по-
мощью визира АБ-52 по измеренным
Рис. 20.5. Определение Н„аг для об-
наружения точечных ориентиров
значениям времени / пролета базы
0,5W„ct и путевой скорости, полу-
ченной от ДИСС или расчетом но
ветру, измеренному на трех (двух)
курсах. Опре деление атмосферное
давления на уровне моря производит
ся также установкой начального дав
ленпя р0 на барометрическом высо-
томере на отсчет высоты
"баром ..... AW/).
(20.18)
Эффективность сно оба определе
ния атмосферного дазления и целе
сообразность использования его для
прогноза погоды м >жет быть опреде
лена из значении СКП измерения
давления на уровне моря
для первого варианта
о, 0.(19 I of, ~of (20 19)
’ "рв "бар
для второго варианта
о 0.09 1 (2Uo,f (2тп„.)* ojf
Г» ’ "бар
Для создания наилучшпх условий
вилца гьного наблюдения рекоменду-
ется выполнять полеты на оптималь
ных высотах, рассчитанных по фор-
мулам (11.1) и (11-2). Наивыгодней-
шие высоты полета, рассчитанные пи
формуле (11.2), для трех значений
воздушной скорости приведены на
рис. 20.5.
Минима 1ьная высота полета в
метрах для надежной работы БРЛС
определяется выражением (11.3).
Для использования наиболее бла-
гоприятных условий естественного
освещения время вылета выбирается
с учетом прибытия ВС в заданный
район в момент нахождения Солнца
в верхней кульминации. Зимой, когда
оно все время ниже горизонта, удов-
летворительные наблюдения могут
производиться прн высоте Солнца—7°
в начале срока и —10° в конце на
блюдения. При выборе момента вы
лета необходимо учитывать большое
схождение меридианов в полярных
широтах Для быстроты расчетов
следует помнить, что разность долгот
в 1° соответствует 4 мин во времени
Для уточнения ЛФП уже выпол-
ненного полета на ледовую разведку
применяется обратная прокладка пу
ти. Она основана на пропорциональ-
ном распределении «невязки», зафик-
сированной в момент выхода ВС на
береговую черту (рис. 20.6). Смеще-
ние каждой поворотной точки марш-
рута рассчитывается следующим об-
разом:
Т___Т
A«i --------A A-Sv, (20.20)
'К-- ' и
где Т„. Тк — время фактического про-
хода ИПМ и расчетного КПМ; Г, —
моменты времени разворотов по мар-
шруту; ASj; —невязка, рассточние от
фактического до заданного МС, при-
веденных к одному времени Тк. По-
лученные таким образом смещенные
точки разворота (ППМ) в направле-
нии соединяются линией (см.
рис. 20.6), которая является уточнен-
ной ЛФП.
Для обеспечения безопасности са-
молетовождения при подготовке к
полету учитывается возможность вы-
вода ВС из любой точки маршрут!
на основной иди запасной аэродром
посадки. При выполнении инженерно-
штурманского расчета топлива опре-
деляют максимально возможное нре-
мя нахождения ВС в полете, предель-
ную длину маршрута и возможные
изменения его, рубежи ухода на за-
пасные аэродромы, если их несколько,
АНЗ, у штывающий непредвиденный
дополнительный расход топлива в по-
лете.
Особую опасность представляет
снижение ВС до рабочей высоты с
необходимостью пробивания облачно
сти. Если ле довня авиаразведка про-
изводится вблизи берега, то снижение
выполняется в сторону моря после
пролета береговой ра диостанции нлн
характерного РЛО. Расчет элементов
снижения в направлении, контроли-
руемом по курсу, производится так,
чтобы занять рабочую высоту па без-
опасном удалении от берега.
Полеты по ПВП вблизи берега ма
(ерика н островов производятся иа
безопасной высоте, которая должна
быть^запята на удалении, не меньшем
чем 5 км от наивысшего препятствия,
г-сли полет выполняется со стороны
“оря к суше, то путем совместно'о
R*
Рис. 20.6. Обратная прокладка линии
фактического пути ВС
использования радио- и барометриче-
ского высотомеров можно привести
показания барометрического высото-
мера к высоте от уровня моря. Для
этого на барометрическом высотоме
ре поворотом рукоятки устанавлива-
ется значение высоты, снятой с РВ.
Тогда приборная безопасная высота
Woea нриб Wnf-3 ист Wpen. (20.21)
Поправки AHt и \НР учитываются
автоматически при установке //о»р =
= Нрп-
Полеты вертолетов, базирующихся
на ледоколах, ограничиваются зоной
уверенного радиолокационного кон-
троля и радиосвязи с кораблем, и
обычно не превышают 60 км. Для
удобства работы пилоты подготавли-
вают полетную карту н укладывают
ее в планшет так, чтобы исключить
излишнюю работу с ней. Дополни-
тельно на видном месте в кабине вы-
вешивается схема намеченного марш-
рута с указанием ППМ, характерных
ориентиров, магнитных путевых углов
п расстояний. Вертолеты дополни
тельпо оборудуются ГПК-52. АК-59п
и И \С-1.
20.6. Штурманское
обеспечение поисковых работ
Поисковые полеты организуются
при выполнении аварийно-спасатель-
ных работ. Поисковая операция скла-
дывается из этапов: подготовки,
включающей в себя опре (еление гра-
227
226
Рис. 20 7. Определение размеров рай-
она поиска
где То время последнего достовер
пого местоположения ВС (точка А на
рис. 20.7); Т предполагаемое время
бе 1СТВИЯ.
Для успешного поиска скорость
полета, терпящего бедствие ВС, I
может браться завышенной, вплоть до
максимальной. Если нз всех направ-
лений движения можно выбратггнан
более вероятное, то район поиска бу
дет иметь форму сектора с точкой 1
в верппше. Для удобства построения
поисковых полетов полученный район
приводят к форме прямоугольника с
размерами Л1х£.
Возможное удаление района поис
ка от аэродрома базирования
ниц района поиска, выбора способа
поиска и состава необходимых снл и
непосредственного выполнения по-
иска.
Размеры и конфигурация района
поиска зависят от располагаемой ин-
формации о месте и времени послед-
него достоверного местоположения
ВС или другого обд.екта, терпящчо
бедствие, вероятного направления его
движения на последнем этапе Если
сведений о курсе нет, то раной поис-
ка принимают за крут с радиусом
R^\(T-Tn), (20.22)
Рис. 20 8. Построение маневра НС
ио способу спирали
228
„ _ V (Рмарш Qah.<) ,,
-’max — п •
(20 23)
где —суммарная длина всех гал-
сов прн поиске; Сч — часовой расход
топлива; Q4ariu — располагаемый за-
пас топлива непосредственно на по-
лет.
Поиск выполняется визуально или
с применением радиотехнических
средств. Визуальный поиск произво-
дится способами за 1анного маршру-
та, гребенки, галсиронания и спира-
ли. Выбор того пли иного способа
определяется располагаемыми сред
стн.змп и потребным числом галсов.
Поиск способом заданного марш
рута выполняется одним ВС. когда
удвоенная дальность обнаружения
превышает ширину района поиска
Длина галса равна длине заданного
района S,i = £.
Способ гребенки выполняется прн
наличии нескольких ВС в поисковой
группе. Этот способ представляет со
бой совокупность согласованных меж
ду собой по месту и времени «за дан
вых маршрутов» нескольких воздуш
пых судов. Длина галса каж юго нз
ВС 5„ = £
Способ галсирования выполняется
одним ВС. Оно маневрирует так, чп
бы просмотреть всю заданную пл<
та ib Каж 1ЫЙ галс отстоит от сосе i
пего на удвоенную дальность обнару-
жения. Суммарная длина всех галсов
S„ = I т,
где т = Mr2Dnr,K — число галсов
Способ спирали применяется при
тех же условиях, что и галсирования.
Предпочтение способу спирали отда
ется, когда форма района поиска
близка к квадрату И = £ н имеются
предварительные сведения о вероят-
ном месте нахождения группы, тер
пищей бедствие. Это место и выбира-
ется за исходную точку начала поис-
ка. Полет выполняется по прямо-
угольному маршруту с последова-
тельным увеличением длины галсов
(рис 20.8).
Суммарная длина всех галсов
Si Oor,„(2m2—2m—I) ) ,И, (20.24)
Для избежания ошибок расчета
во всех слх чаях значение т округля-
ется до целого числа в большую сто-
рону Дчя повышения эффективности
выполнения визуального поиска то-
чечных ориентиров полет рекоменду-
ется выполнять на оптимальной вы-
соте (11.2)
Минимальная высота полета прн
использовании АРК-У2 пли команд-
ной PC УКВ рассчитывается по фор-
муле (11.3). При средней дальности
действия аварийной радиостанции
60 км минимальная высота полета
равна 300 м.
Для повышения вероятности об-
следования заданного района увели-
чиваются размеры его (рис. 20 9, и)
на
ЛМ AOZv; A/ =a<tSv
(20.25)
где х—аргумент функции Лапласа
для выбранной гарантийной вероят-
ности обследования; а? , Ос — СКП
накопившиеся к моменту вывода ВС
в точку начала поиска.
Увеличения вероятности непосред-
ственного обследования можно до-
стичь увеличением числа галсов
(рис. 20.9,6), т. е. за счет сокраще-
ния расчетной величины дальности
обнаружения. Этим с принятой веро-
ятностью исключается пропуск како-
го-либо участка в заданном районе
поиска.
229
Глава 21
ПУТИ ЭКОНОМИИ ТОПЛИВА В ПРОЦЕССЕ САМОЛЕТОВОЖДЕНИЯ
21.1. Принцип оценки
штурманского обеспечения
экономичности полета
Экономичность полета ВС в штур-
манском отношении определяется в
основном по экономии топлива, т. е.
сравнением избыточного расхода топ-
лива по отношению к некоторому ми
пнмальному его количеству, соответ-
ствующему оптимальным (нлнвыгод
иейшнм) условиям полета \Q
— Qpac ч‘ Qmln.
В основе определения рациональ-
ных путей экономии топлива в про-
цессе самолетовождения лежит прин
цип влияния частных факторов:
условий полета и режимов работы
«вигателей, обеспечивающих наимень-
ший километровый расход топлива
Скм;
исключения пепрои «во дизельного
полета VS, т. е. полета без продви-
жения по маршруту и сближения с
аэродромом посаткп
(21
где — общая длина воздушной
трассы.
К непроизводительному расходу
топлива приводит полет на этапе ма-
неврирования ВС в районах аэро «ро-
мов вылета и посадки.
Общее удлинение воздушных трасс
по сравнению с ортодромическим рас-
стоянием между пунктами вылета и
носа тки
п
VSB т V |SO (чес а—!)], >
* 1
1 AS*," VS7'+SS2. (21.2)
где 5О, а — участки маршрута и углы
излома (рис. 21.1); \SM удлинение
пути при маневрировании в районе
аэродрома относительно минимально
необходимого; \SZ — удлинение пу-
ти, вызванного случайными фактора
мн: обходом грозовых очагов, уходом
па запасно«« аэродром, погрешностя-
ми самолетовождения.
Для уменьшения километрового
расхода топлива создаются условия,
позволяющие выполнять полет на бо-
лее экономичных режимах работы
двигателей пли уменьшающие путь,
проходимый ВС относительно возду-
ха. Например, за счет увеличения ис-
тинной воздушной скорости полета
при 1/П|)(м) = сопк1 или пол влиянием
попутного ветра U-J.
21.2. Штурманское
обеспечение экономичности
на этапе организации
и планирования полетов
Основными факторами, снособст
вуюшимн экономичности полетов в
штурманском Отношении на этапе ор-
ганизации и пданироваппя, являются
Рис. 21.1. Удлинение ЛЗП при изломах маршрута
>30
оп1пмизация структуры воздушных
трасс (ВТ) и МВЛ; сокращение норм
эшелонирования, построение рацио
нальных схем полетов в районах
аэродромов, совершенствование ра-
дионавигационных средств самолето-
вождения и посадки; повышение про-
фессионального мастерства летного
состава; выполнение «полетов» для
отработки элементов самотетовожде
ния на тренажерах.
Оптимизация структуры ВТ и
МВЛ. Наиболее экономичными явля-
ются полеты по оргодромнческим ли
ниям пути. Однако существующие ВТ
и МВЛ не совпадают с ними. Чем
больше удаление ЛЗП от ортодромии
и чем больше изломов ВТ. тем боль-
ший дополнительный путь, проходи
мый ВС (21.2), и большим расход
топлива в полете:
AQh. г — А5В т.
Оптимизация структуры В Г заклю-
чается в снижении до минимума из-
лишнего расхода топлива на всех т
трассах данного региона
С целью сокращения Д5В т при су-
ществующей структуре воздушных
трасс целесообразно сокращать марш
рут за счет их спрямления путем про
пуска одного илн нескольких ППМ.
В настоящее время среднее значение
изломов ВТ составляет <1<-Р = 23о, что
приводит к удлинению маршрутов на
8%. Это является значительным ре-
зервом повышения экономичности по-
летов по маршруту'.
Прн выборе варианта основного
маршрута из нескольких необходимо
учитывать распределение ветра в рай-
оне полетов. В этом случае выбирает-
ся тот вариант, у которого общее
время полета по ВТ имеет минималь-
ное значение.
Сокращение норм эшелонирования
Лля каждого типа ВС выполняюще-
го полет из одной точки земного ша-
ра в другую, может быть найдена
для определенных аэронавигационных
и метеорологических услоиий единст-
венная наивыгоднейшая траектория
полета. Перемещение ВС по ней обес-
печивает наименьший расход топли
ва. Отклонение от нанвыгодиейшей
траектории как по вертикали, так н
но горизонтали ведет к увеличенному
расходу топлива
Полет но заданным ВТ и на уста-
новленных эшелонах исключает воз
можность использования наивыгод
неншей траектории. Однако сокраще-
ние норм эшелонирования позволяет
приблизить фактическую (разрешен
нею) траекторию к нанвыго дненшен.
Вертикальное эшелонирование
В общем случае нн один эшелон не
совпадает с наивыгодненшей высотой
полета. В наихудшем случае она рас-
полагается посередине между двумя
возможными смежными попутными
эшелонами, т. е. на расстоянии, рав-
ном норме вертикального эшелониро
вания между встречными эшелонами:
\//,ш = 300 м до Н-=Ь\00 м. AH„„ =
= 500 м на высотах 8100... 12 100 м и
далее 1НДШ=1000 м. Наибольшее
влияние на общий расход топлива за
полет при изменении эшелона оказы-
вает изменчивость ветра с высотой и
изменение температуры, если выдер-
живается постоянная истинная ско-
рость полета.
Приближенная формула относи
тельного расхода топлива (в процен-
тах) вследствие изменчивости ветра
при отклонении эшелона от нанвыгод
неншей высоты полета
AQ„ Q 0.024 (ЛЯ,ш 11. (21.31
где Q — заправка ВС топливом
Относительный расход топлива ВС
с 1 =850 км/ч при различных значе-
ниях ДЯЗШ составляет:
АЯ-,Ш, м . . . 300 500 1000
(AQH Q). % -0.0085 0,014 0,028
Если в полете выдерживается по-
стоянная приборная воздушная ско-
рость, то за счет изменения темпера-
туры с высотой меняется часовой рас-
ход топлива. При этом относительный
расход в процентах
ДОТ
—=0.0013АЯ:.ш. (21.4)
Расчетный относительный расход
топлива составляет:
ЛЯЗШ, м . . . 300 500 1000
(AQt/Q), °о . - 0,39 0,65 1,3
231
При занятии ВС не только сосед-
них (f=±l) эшелонов, но и после-
дующих как выше, так и ниже общий
относительный расход топлива в про
центах прг полете на п эшелонах
Q
Л
V р, (2.4-10-2 V I ±
1,3-10-3) (2i— I)A//J1U- (21.5)
где i— порядковый помер эшелона,
отстоящего от наивыголнейшей высо-
ты; Pj весопой коэффициент ис
пользования i-го эшелона.
Знак « + » в формуле берется нрн
использовании нижних, а «—» верх
них эшелонов относительно наивыгод-
нейшей высоты. Весовой коэффици
ент в расчетах может быть принят
равным проценте загруженности дан-
ного эшелона.
Боковое эшелонирование Смеше
ние траектории ВС в боковом накрав
ленни относительно наивыгоднейшей
приводит к выполнению полета в ме
нее выгодных ветровых условиях
Учитывая изменчивость ветра, для
приближенной опенки относительного
расхода топлива в процентах при
смешении траектории на величину Z
может быть использована зависимость
XL- V/
----- 1/1 ------
Q I
(21.6)
Для ВС со скоростью полета
850 км ч относительное увеличение
расхода топлива при различных сме-
щениях траектории составит:
Z. км........... 50 100 150 200
(А<22 Q), % . 1,5 2.1 2.6 2.9
Выбор
иия ВПП.
взлетов и
классов с
оптимального использова-
Возможность выполнения
посадок ВС 1 го и 2-го
боковым и даже попутным
ветром дает возможность выбрать оп-
тимальное направление взлетов и по
садок. Оптимизация производится по
критерию минимального расстояния,
проходимого ВС прн маневрировании
для полета на ИПМ (от КПМ) или
входные (выходные) коридоры райо-
на аэродрома.
Исходными данными являются:
расположение входных и выхо ihijx
коридоров относительно аэродрома;
«роза» ветров, определяющая средне
годовое распре юление ветра в прн
земном слое в районе аэродрома;
естественные п искусственные препят
ствпя в районе подхода
При оптимизации определяется та
кое напрагленне ВПП, при котором;
суммарный путь, проходимый ВС
после взлета -SM во все л коридоров
и при заходе на посадку S" от каж-
дого из т коридоров, был минималь-
ным:
Ч 1 (W
/— 1
гм
/=|
выбранное направление ВПП
(МПУпы) обеспечивало наименьшую
боковую Ur, и попутную ( -(А) со-
ставляющие среднегодового ветра:
Uc (7|sin (ПМПУ — 6)|=>iTiin,
U,, 1'1 cos (ПМПУ —
(21.8)
— b ± 180) | => min.
Рельеф местности п искусственны!
препятствии на ней в районеаэродро
ма являются ограничивающими фак
торами. Расчет должен производиться
для всех типов ВС, эксплуатирую
щп.хся на данном аэродроме.
21.3. Штурманское
обеспечение экономичности
в процессе подготовки
к полету
Основными направлениями доедп
жения экономичности при подготовке
к полету являются спрямление ВТ и
выделение экипажу наивыголпейшего
эшелона. Отрицательное влияние на
экономичность оказывают: завышен
ное количество заправляемого топлп
на на полет; неоправдываемость прог
нозов погоды и готовности аэродрома
посадки, задержки с вылетом.
232
Спрямление воздушных трасс,
обеспечивающее сокращение расстоя-
нии. проходимого ВС в полете (21.2).
дает существенную экономию топлива.
Каж 1ын пропуск ППМ (рис. 21.2)
позволяет сократить путь:
(S^ sec a, t SJ sec а2) —
(-Sq — Sn). (21.9)
Величину сокращения пути удобнее
опре гелять по графику на рис. 21.3.
Выбор иаивыгодиейшего эшелона
иа этапе подготовки к полету заклю-
чается в предоставлении для полета
эшелона, наиболее близкого к опти-
мальной высоте (табл. 21.1). Расчет
Нквяв может производиться разлил
ними способами.
Наиболее простой учитывает даль-
ность полета, а иногда и температуру
возду ха.
Для большей точности выбора
Днан> учитываются также метеороло-
гические факторы: ветер и температу-
ра на высоте полета.
Наиболее совершенный способ пре-
(усматривает выполнение серии рас-
четов количества расходуемого топли-
ва на различных эшелонах.
В результате сравнения определи
ется наивыгодненшнй. Этот способ
реализуется в ЭВМ с большим быст-
родействием н объемом памяти. Ос-
Рис. 21.2. Увеличение длины ЛЗП от
бокового смещения ППМ
пивная проблема, затрх дняющая
внедрение. — сложность информаци-
онного обеспечения фактическими
(прогностическими) данными о ветре
и температуре на всех эшелонах по
маршруту.
Более простой и доступный экипа-
жам (дежурным штурманам) — спо-
соб сравнения изменения расхода топ-
шва на двух смежных эшелонах и
влияния ветра. Если попутная состав-
ляющая ветра оказывает большее
влияние на расход топлива за счет
сокращения полетного времени, чем
снижение высоты, то полет на низшем
эшелоне целесообразен, так как при-
ведет к меньшему количеству расхо-
дуемого топлива. Для этого должно
соблюдаться условие
U7H U7B>CH Сн, (21.10)
где С», (Гв — средние значения часо-
вого расхода топлива и путевой ско
Таблица 21.1. Рекомендуемые эшелоны для различных типов ВС, м
S, км Ил-86 Ил 62М Ту-154Б Ту 134 Я к -42
100 __ 1 500—1 800
200 — — 5 700—6 000 3 300—3 600 5 700—6 000
100 — — 8 100-8 600 5 100—5 400 —
400 — 9 100—8 600 9 100-8 600 6 900—7 200 8 100—8 600
500 8 100—8 600 10 100— 9 600 11 100—10 600 9 100—9 600 —
600 9 100—9 600 11 100- 11 600 12 100—11 600 11 100—10 600 9 100—8 100
700 10 100— 10 600 И 100— 11 600 12 100 11 600 II 100 10 600 9 100—8 100
800 И 100— 10 600 11 100— И 600 12 100-11 600 11 100—10 600 9 100 8 100
900 и более 11 100— 10 600 11 100— 11 600 12 100—11 600 11 100—10 600 9 100 8 100
233
Рис. 21.3. Определение Аэ при спря-
млении ВТ
роста на высшем выбранном эшело-
не (см табл. 21.1): Си. —средние
значения часового расхода топлива и
путевой скорости на соседнем низшем
эшелоне полета.
Другой упрощенный способ осно-
нан на расчете ветчины приращения
эквивалентного ветра на низшем эше-
лоне. Прн соблюдении неравенства
Гн-1Гв>Д1/1,агУв(Ся С„—1)
(21 И)
экономичнее лететь на низшем эшело-
не Если уменьшение встречной со-
ставляющей эквивалентного ветра
или увеличение попутной превышает
\U.,, то целесообразно снижать эше-
лон полета (рис. 21.4). Порядок рас-
чета указан стрелками. Например, ес-
ли на эшелоне 10 100 м попутная
составляющая ветра больше А(Л=
= 40 км/ч, то вместо 11 100 м эконо-
мичнее летать на 10 Г00 м
Рис. 21.4. Определение Аи для
Ту-154 (М 0.82) при выборе наи
выгоднейшего эшелона полета
Избыточная полетная масса ВС,
не учтенная при ИШР топлива, или
завышенное количество заправляемо
го топлива приводят к увеличению
расхода его в полете. Допотнитеть-
пый расход за весь полет
^1,0.1 ф
^по.т ра< ч
Q.iaup •
(2Г 12)
X
ГДе Шпол.ф; ГПгюл pact — масса В(
фактическая и расчетная; km — коэф
фициеит пропорциональности, равный
при полете «по потолкам» 0.7, на
крейсерских высотах — 0.8 и ниже
нх — 0.9
Автоматизированная система
штурманско* о обеспечения полетов
(АСШОП), построенная на базе
ЭВМ. рассчитывает исходные данные
для полета по маршруту, вырабаты-
вает полетную штурманскую докумен-
тацию с учетом фактических (прогно-
стических) метеоусловий и оптимнзи
рзет параметры полета. Повышение
точности исходных данных позволяет
снизить погрешности самолетовожде-
ния. повысить экономичность и реп
лярность полетов, которая достигает
1 2 мин при пролете КО и 4- 3 мин
на посадке.
Неучет экипажами и службой
УВД рекомендаций АСШОП прн вы
боре наивы однейшего эшелона при
водит к увеличению расхода топлива
до 10%. Оправдываемость расчетов
составляет 80—89%.
21.4. Штурманское
обеспечение экономичности
полета по маршруту
Расход топлива на разных этапах
полета меняется. Чем продолжитель
нее этап, тем большей экономии па
нем можно добиться. Распределение
полетного времени и количество рас
ходуемого топлива при двухчасовом
полете самолета Ту-151Б приведено
в табл. 21 2.
Основные направления экономии
топлива при полете по маршруту: ра
бота двигателей на оптимальном ре
жиме; бесступенчатый набор высоты
234
и снижения; расчет рубежа начала
снижения с учетом ветра и давления
на аэродроме посадки; повышение
точности самолетовождения: рацио-
нальное маневрирование при выпол-
нении авиационных работ; повышение
надежности проектирования погоды
по маршруту и состояния аэродрома
назначения; своевременное принятие
решения на уход на запасной аэрод-
ром; совершенствование летного мас-
терства экипажей, позволяющее сни-
зить посадочный метеомннимум.
Сокращение почетного времени на
любом из этапов полета, как правило,
приводит к экономии топлива. Осред
ненное количество расходуемою топ-
лива в килограммах за 1 мнн работы
двигателей у разных типов ВС при
ведсно в табл. 21.3.
Для повышения точности расчета
потребляемого ко; нчества топлива по
маршруту необходимо учитывать
влияние ветра и пользоваться неправ
ленным значением километрового рас-
хода
= Скм ’ (2113)
Набор высоты с площадками
(рис. 21.5) по отношению к оптималь
ной траектории приведет к повышен-
ному расходу топлива
ч>вп0= v
i= 1
(2114)
i=i
где Скы и Скм Н— километровые рас-
ходы топлива на площадках и задан-
ном эшелоне полета; п. S — число
площадок и нх длина
В полете на заданном эшелоне
большое значение имеет выбор опти
пильного режима работы двигателей.
В зависимости от навигационной за
дачи, стоящей перед экипажем, опти
мальными режимами будут
крейсерский, когда необходи-
мо преодолеть большое расстояние
При этом режиме обеспечивается ми-
нимальный километровый расход топ-
лива;
Таблица 21.2. Продолжительность
этапов полета и расход топлива
Этап полета t. мнн Q. кг
Запуск 3 180
Выруливание 8 670
Взлет I 440
Набор высоты 16 ЗОЮ
Полет на эшело- 1,02 6 780
НС Снижение 12 450
Заход на посад- 10 1 240
ку и посадка Заруливание 6 270
Всего 1,58 J13040
экономический, когда необ
ходимо добиться наибольшей продол
жительности полета. Этому режиму
соответствует минимальный часовой
расход топлива.
По мере уменьшения полетной
массы ВС за счет выработки топлива
Таблица 21.3. Средние минутные
расходы топлива
Расход топ- лива, кг/мия Расход топ- лива, кг мин
СО ъ се ед <L>
ч Е Ч X о
X о
Н X «5 СП ЕС н X « «
Ил-86 98 102 Як-42 23 48
Ил-62 65 40* 134 'Як-40 7 22
Ил-76 65 152 Л-410 2 15
Ил 18 27 40 Ми-2 1 .8 4
Ил-14 2 7 Ми 4 1,2 3,8
Ту-154 50 20* 110 Ми-6 18 39
Tv 134 15 55 |Ми-8 4 10
Ан-12 27 42 Ми 10 18 39
Ан-24 6 15 Ми-15 3 8
Ан-26 8 18 |Ка-26 0.6 2
Дн 30 Ан-2 8 .0 8 15 2
• В числителе — расход топлива на
даух. а н знаменателе иа одном работай
щем двигателе при рулении.
235
Рис. 21.5. Ступенчатый набор высоты
Рис 216. Зависимость V'B от числа
М и температуры
уменьшается выдерживаемое число
М. Оно уточняется в зависимости от
ветра. При встречном ветре число М
увеличивается прн попутном умень-
шается.
Если температура на высоте tn
полета отличается от стандартной
t‘n. са. то при выдерживании постоян-
ной приборной скорости полета пли
числа М изменяется истинная ско-
рость полета. При tn<tn.ca она
уменьшается, при О/ > tH.ca увели
чивается на каждые At=(4-j-5)° по
1% (рнс 21.6). В таком же соотноше-
нии изменяется и часовой расход топ-
лива. При этом километровый расход
не меняется. Если же выдерживается
постоянной истинная воздушная ско-
рость полета, то он меняется.
Точность самолетовождения ока
зывает заметное влияние на эконо-
мичность полета. В результате укло
нений ВС от ЛЗП и их исправлений
после контроля пути оно проходит
дополнительный путь
ASO = SO |0,17 (I +
Рис. 21.7. Удлинение линии фактиче-
ского пути от ошибок самолетовож-
дения
Рис 21 8 Способы исправления пу-
ти ВС
+ 1/1 + 40(Z,nax So)« +
-4-4 V 1 + 20 (Z11)ax SnF )-11, (21 15)
где Su — осредненное расстояние
между точками исправления пути;
Zmax — максимальное значение ЛБУ
от заданной линии пути. Оно может
быть принято равным 3<тг1;.
Характер зависимости SS« пока
зан иа рис. 21.7. Общее удлинение
пути при п исправлениях ASs = nASo
а дополнительный расход топлива
(21.16)
Исправление пути может выпол
няться разными способами. Наиболь
шее распространение нашли: S-образ
ный маневр, выход на ЛЗП под за
данным углом Af н выход на очеред
ной ППМ (рис. 21.8). В первом
случае (S образный маневр) удли
нение ЛФП по сравнению с расстоя
нием. проходимым ВС за это же вре
мя вдоль ЛЗП,
AS'=2/? (а— sin а), (21.17)
где а — угол отворота (7.12), R —
радиус разворота ВС.
236
Приближенный расчет может про-
изводиться по формуле (11.13).
Вс втором случае — выводе
ВС на ЛЗП под заданным углом
\S* — Z (cosec Др — ctg АР) ~
=rO.OO9ZApe. (21.18)
В третьем случае — выводе
ВС на очередной ППМ
\S"' SoctC|/1 + (4'S.,ct)2-1)^
(2SOCT). (21.19)
С помощью графика (рис. 21.9)
можно выбрать наиболее рациональ-
ный способ исправления ЛП для тех
или иных конкретных условий по
лета
При задержке ВС с вылетом на
V экипаж имеет возможность ком-
пенсировать опоздание и прибыть в
заданный пункт в назначенное время.
Однако это требует повышенного ре-
жима работы двигателей и. следова-
тельно, увеличенного расхода топ-
лива
К
С'_ __С"
= V2 ——км Д/, (21.20)
где Скм и Скм — километровые расхо-
ды топлива до и после увеличения
скорости полета.
Потребное увеличение воздушной
Рис. 21.9. Удлинение ЛФП при раз
личных способах исправления пути
скорости ВС для своевременного при
бытия в пункт назначения
121
гле Sa — расстояние между аэродро-
мами
При снижении ВС с эшелона нз
лишний расход топлива происхолит
из-за ошибок в расчете удаления ру
бежа начала снижения вследствие
немчета ветра в полете, давления иа
аэродроме посадки и снижения с
площа щами. В результате этого ВС
не выхолит в заданную точку на
установленной высоте. Оно либо за
Рис 21.10. Ступенчатое снижение высоты полета
237
нимает заданную высоту раньше, на
пример при встречном ветре, и еле iv-
ет на малой высоте, либо выходит в
заданную точке (ДПРМ) на большей
высоте (рис. 21 10), и для снижения
ему требуется дополнительное время.
Избыточный расхот топ тина при этом
(Сц 17ьр)
п
(21.22)
(Сч VKp) Uv /€Н
где Сч и V кр — часовой расход топ
лива и воздушная скорость полета на
установленной высоте (круга).
Если давление на аэродроме по-
садки не учитывают, то лополнитель
ный расход топлива
WP 3-!-££-(760-Pa)CKM. (21.23)
* в
Tie V» — среднее значение верти-
кальной скорости ВС. м/с; V'Kp — воз-
душная скорость, км/ч, ра — давле-
ние на аэродроме посадки
Недостаточно надежный прогноз
метеорологической обстановки к мо-
менту прибытия ВС на аэродром наз
начения и его состояния приводит к
завышенному расходу топлива. Если
фактическая погода оказалась ниже
установленного минимума или аэрод-
ром оказался непригодным к приему
ВС, то экипаж вынужден следовать
иа запасной аэродром. При этом до-
полнительный расход включает в себя
топливо, расходуемое при полете от
точки ВПР аэродрома назначения до
запасного, а также для перелета от
запасного до аэродрома назначения
21.5. Штурманское
обеспечение экономичности
при выполнении авиационных
работ и полетов в районе
аэродрома
Основными путями экономии топ-
лива от запуска двигателей до их вы
ключения при выполнении авиапион-
238
ных работ и полете в районе аэродро-
ма являются: буксировка ВС или ру-
ление на части работающих двигате
лей перед взлетом и после посадки,
взлет без остановки на исполнитель
ном старте (роллинг-старт), выпол-
нение полета по рациональной траек-
тории вывода ВС из района аэродро
ма; сокращение длины пути пр,и вы
полпенни авиационных работ, особен
по при разворотах иа очередной гон
(маршрут), упрощение схем захода
на посачку; оптимизация режима по
лета при снижении на предпосадоч
ной прямой
Экономия топлива после взлетз
ВС и выхода его из района аэродро
ма достигается сокращением прой
денного расстояния и снижением ки
лометрового расхода топлива. Для
этого после прохода точки начала
разворота (ТНР) ВС следует п-
кратчайшему расстоянию в выходиы.
коридоры и далее по заданной воз
душной трассе (рис. 21.11). При от
сутствии ограничивающих факторов
должны быть соблюдены условия
(21 7) и (218).
Снижение километрового расхода
топ пива достигается сокращением
времени полета на малых высотах
т. е. исключением площадок в про
пессе набора высоты
При оптимизации схем маневриро
вания захода ВС на посадку следует
исходить нэ того, что обязательным
элементом любой схемы является по
садочная прямая от точки входа ВС
в глиссаду (ТВГ). Остальные элемен
ты схем маневрирования не являются
обязательными и определяются нави
гациоииымн возможностями и соста
вом бортовых н наземных радиотех
нических систем Наибольшую эконо
мию на этом этапе дает полет от
входного коридора по кратчайшем:
расстоянию в ТВГ. что допустимо
только прн уверенном РЛК и управ
лении полетом ВС с земли или нали
чии бортовой РНС или ПНК, обеспе
чивающих автоматический полет в
районе аэродрома. Большое влияние
иа экономичность оказывает органи
зация полетов в районе аэродрома.
Полет в зоне ожидания или повтор
ный заход БС на посадку приводит
к значительному дополнительному
Рис. 21.11. Вывод ВС из района аэродрома по
кратчайшему расстоянию
расходу топлива (см. табл. 21.3). ко-
торый не всегда удается компенсиро-
вать на других этапах полета.
Выполнение некоторых видов
авиационных работ (АХР, ВФ пт д I
требует частых разворотов ВС н точ
ного смещения одного маршрута (го-
па) относительно другого на инреде
ленное расстояние (см. рнс. 7 5)
Минимальное время разворота ВС
при 111 = 2 R. Вели же Ш<2/С это вы-
зовет увеличение времени для выпол-
нения дополнительного разворота на
угол 2«. 1'сли учесть, что при сред-
ней продолжительности гонов 1,5 •
2 мин удельный вес разворотов со
ставляег 45—50% летного времени,
го выполнение АХР при Ш<2/? чел
ночным способом становится невыгод-
ным Для повышения эффективности
работ рекомендуется выполнять раз
вороты «на ветер» (7.9), применять
загонный и совместный способы об-
работки полей.
Для оценки целесообразности вы-
полнения совместной обработки полей
необходимо, чтобы среднее время на
перелеты от одного участка к друго
му было меньше суммарного времени
на выполнение стандартного разворо-
та. Совместная обработка нескольких
ччастков может повысить произво ш
телыюсть ВС. выполняющих АХР, па
30- 60%
Особую сложность в выполнении
поисково-съемочных полетов пред-
ставляет сопряжение двхх маршрутов
при соединении юлин. Для плавного
вписывания в следующий участок
маршрута выполняется специальный
маневр, осуществляемый двумя спо-
собами (см. рис. 20.4). Эффектив
ность применения того пли иного спо
соба разворота ВС можно получить
сравнивая длины траекторий или их
продолжительность
Разность во времени выполнения
разворотов первым (20 14) и вторым
(20.15) способами составляет
2R
I'
<1
etg ——0.01'5 ч
X Ч °+ 2 arcmin
0,5 cos — —
2 /
м
— 180°
Чем меньше угол отрога if, Тем
больше разница во времени. Продол
жительпость маневрирования при вто
ром способе практически не зависит
от утла <г и остается почти постоян-
ной. При маневрировании же первым
способом прн малых углах <г время
разворота возрастает более чем в
2 раза. Поэтому при <р<90‘ выпол
пять разворот первым способом неце-
лесообразно, это приведет к зиачи
тельному' увеличению времени мапев
рирования и перерасходу топлива.
I ели ч>>120° оба способа по длине
траектории и продолжительности
идентичны.
При проведения любых меропрпя
тий для повышения экономичности
полета следует всегда помнить, что
они не должны проводиться в ущерб
безопасности полета.
239
РАЗДЕЛ ЧЕТВЕРТЫЙ
ШТУРМАНСКОЕ ОБЕСПЕЧЕНИЕ БЕЗОПАСНОСТИ ПОЛЕТОВ
Глава 22
ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ
22.1. Общие положения
Безопасность полетов комплекс-
ная характеристика воздушного
транспорта и авиационных работ,
определяющая способность выполнять
полеты без угрозы 1ля жизни и з ю-
ровья людей. Опа зависит от внеш-
них условий, организации выполнения
п обеспечения полетов, надежности
управления полетами, квалификации
и действий экипажа, грамотной экс-
плуатации авиационной техники.
В этой проблеме важное место зани-
мает обеспечение безопасности само-
летовождения, предусматривающее
предотвращение: опасных сближений
п столкновений ВС с наземными пре-
пятствиями; опасных сближений и
столкновений ВС между собой в по-
лете; попадания ВС в зоны опасных
метеорологических явлений; потери
ориентировки и нарушения государ-
ственной границы СССР.
Для обеспечения безопасности
установлены следующие правила,
обязательные для экипажей всех ВС,
выполняющих полеты в воздушном
пространстве СССР: вылета и приле
та ВС: установки шкалы (явления
барометрического высотомера; опре-
1еления и выдерживания безопасных
высот полета; визуальных п< тетов
(ПВП); полетов по приборам (ППП);
особые правила визуальных полетов
(ОПВП): вертикального, продольного
в бокового эшелонирований; измене-
ния эшелона (высоты) полета п пере-
сечения воздушных трасс; полетов по
воздушным трассам. МВЛ и установ-
ленным маршрутам; полетов в районе
аэродрома; полетов в зоне ожидания;
определения аэронавигационного за-
240
паса топлива; полетов в воздушном
пространстве приграничной полосы
С той же целью установлены мини
.чумы: коман жра ВС для взлета, п<
сачки и визуального полета но ПВП
аэродрома и ВС ыя взлета и посад
ки.
Безопасность полетов, кроме соб-
людения перечисленных правил, до
стигается: проведением всесторонней
высококачественной штурманской
подготовки к полетам; точным выпол-
нением требований руководящих до
кумеитов, регламентирующих летнею
деятельность; четким выполнением
своих функциональных обязанностей
всеми членами экипажа и работника
ми службы движения; тесным взан
модействием экипажа с диспетчерами
УВД; высокой дисциплиной; строгим
контролем за режимом полета; со дер
жапием параметров технических
сре 1ств самолетовождения в пре ie.iax
норм технических условий; комплекс
пым применением навигационной ап
паратуры.
Гарантией безопасности полетов в
штурманском отношении служит на-
дежность павшашш Рни. наиболее
полно оцениваемая вероятностью по-
лета в пределах параллелепипеда
эшелонирований (объема безопасно-
сти Р„г,). размеры которого определи
ются интервалами вертикального, бо
кового и продольного эшелонирова
нин:
Р ни Г3 Р Ц.! Р верх-..ни
^бок-эш ^Пр.ЭШ'
Где Рверт ин, Рйик :«m. Рир-эш — Веро
ятности соблюдения каждым ВС ип
тервалов вертикального, бокового и
продольного эшелонирований.
22.2. Безопасные высоты
попета
Причинами столкновений ВС с
земной или водной н< верхностыо нлн
препятствиями на ней являются: сни-
жение до высоты менее безопасной в
условиях неточного знания своего
МС; несоблюдение схемы снижения и
захо ia на посадку; неправильная ус-
тановка давления на барометричес-
ком высотомере. Большую опасность
представляет попадание ВС в лока-
лизованную область ствига ветра иа
этапах взлета н посадки. Поэтому
безопасность от столкновений с на-
земными препятствиями в условиях
отсутствия или ограниченной видимо
сти достигается: вы держивани-
ем безопасной высоты полета; обес-
печением полета в пределах установ-
ленной ширины трассы; постоянным
достоверным знанием своего место-
нахождения. организацией информа
инн о сдвиге ветра в районе аэрод
рома.
Опасность столкновений с землей
возрастает в сложных метеорологиче
ских условиях и ночью, когда эки-
паж без визуального контакта с зем-
ной поверхностью снижается до вы-
соты менее безопасной, не располагая
достоверной информацией о своем
местонахождении.
Поэтому перед пробиванием об-
лачности надо наиболее точно опре-
зелить место самолета, оценить рель
еф местности и высоту иижчей гра-
ницы облаков
Высота полета контро-
лируется с помощью барометри-
ческого высотомера (БВ). Оиа изме-
ряется: в районе аэродрома в предо
лах аэродромного круга полетов, на
высоте перехода и ниже от уровня,
соответствующего атмосферному дав-
лению на аэродроме раар, на эшело-
не перехода п выше от уровня, соот
вегствующего стандартному атмос-
ферному давлению 760 мм рт. ст.,
ниже нижнего эшелона по маршруту
от уровня, соответствующего минн
мальному давлению на земной по
верхиостн но маршруту (участку
маршрута), приведенному к уровню
МОрЧ Рпривпнп-
Па предварительном старте эки
паж обязан установить стрелки БВ
па «нуль» высоты и сравнить отсчет
давления с давлением на аэродроме
Ря»р. Прн наборе высоты для полета
на эшелоне установка шкалы давле
ния БВ с раэр на отсчет «760» произ-
водится нрн пересечении высоты
перехода.
Перед заходом на посадку шкала
давления с отсчета «760» переводит
ся на раэр в горизонтальном полете
на эшелоне перехода после разреше-
ния диспетчера о дальнейшем еннже
нии. Эшелон перехода — это ииж.чнй
эшелон в районе аэродрома
При полете по маршруту па высо
тах ниже нижнего эшелона уставов
ка шкалы давления БВ с ра,р на от
счет, соответствующий рПрИи nun. про
нзво штся в момент выхода из зоны
взлета и посадки (аэродром hoi <
крута полетов), а обратная переста
ИОВКа С Рприв.тш НЭ рапр — При BXO
де в зону взлета и посадки (аэрод
ромного круга полетов — на аэрод
ромах МВЛ)
Для предупреждения столкнове
ний с наземными препятствиями уста
повлеки безопасные высоты полета
(БВП). Безопасной называется мини
мально допустимая истинная высота
полета 7/бм.ист, гарантирующая ВС
от столкновения с земной и водной
поверхностью или препятствиями иа
ней. Допустимые истинные высоты
для полетов по ППП, ПВП и ОПВП
даются в НПП ГА в зависимости от
рельефа местности и высоты нскусст
венных препятствий на ней При этом
учитываются используемые правила
полетов, скорость ВС, допуски в точ
ности пилотирования и самолетонож
дения, погрешности БВ и возможные
вертикальные отклонения от траскто
рнп полета в условиях турбулентно
сти атмосферы и орнитологической
обстановки.
Перед каждым полетом по ППП
по сборникам аэронавигационной ин
формации (инструкциям по произвот
ству полетов в РА) определяют вы
соту полета по аэродромному круге
НКр, минимальную безопасную вы
соту в районе аэродрома (МБВ|
и безопасную высоту полета в райо
не подхода 7/без.подх; рассчитывают
241
высоту нижнего безопасного эшелона
Н без am
Перед каждым полетом но ПВП
(ОПВП) рассчитывают: безопасную
высоту в РА при полете ниже нижне-
го эшелона /7ьез...р, безопасную вы-
соту почета по маршруту (району
авиационных работ) инже чнжнего
эшелона //оеа.први, высоту нижнего
безопасного эшелона Нтео пяжн
22.3. Расчеты безопасных высот
полета
Безопасная еысога полета по ат
мосфсрному давлению 760 мм pi ст.
(1013.2 мбар)
^бет.766 ^7без.ист 1“ 7/рсл—
- А/Л-Н760-рПрИВ,1П1п) II: (22.1)
^безлиз.г ^без истЧ' ^рел
-AWj+dOB.S-ририв .„>,„) 8,25.
1 те //без яст - установленное значе-
ние истинной безопасной высоты по
лета по маршруту на эшелоне, м;
//рел — абсолютная высота наивысшей
точки рельефа местности с счетом вы
соты искусственных препятствий на
ней в пределах установленной шири
ны ПОЛОСЫ, М Рирке miu МПНИМЙЛЬ
ное атмосферное давление по маршру
ту (участку) полета, приведенное к
уровню моря мм рт ст (мбар)
Методическую температурную по-
правку высотомера определяют на
навигационной линейке в метрах или
по формуле
лн' °300 Н,,спр==
/0 — 15°
(7/бел ист Нре.|)• (22.2)
где t0 t„ai. марш фактическая мп
нимальная температура по маршруту
у земной поверхности, ДиепР =
=-(//сеа.ист + НРс i) безопасная ны-
сота относительно уровня моря, м.
Минимальное атмосферное давле
пне по маршруту выдается метеостан
242
цией илн вычисляется следующим
образом.
PnpiiB.tnlii Pm In марш
4 (^рчд.мс И), (22.3)
где Рпцп магш и /Урел.мг —давление и
высота рельефа в точке минимально
го давления по маршруту. »
Например, рассчитываем Нг,ез к
для полета по ППП по воздушной
трэссе в хочмистой местности
(Ярел= 450 м) при /о= —15 °C, мини
мальном давлении по маршруту
Piiiiu марш =740 мм рт. ст., высота
рельефа в точке минимального атмо
сферного давления Яргл.Ы£ =330 м.
Для этого определим /йез.ист
Для полетов по ППП по маршруту
в холмистой местности она равна
600 м
Приведенное к ypoei ю моря мини
мальное давление вычислим по
330
(22 3) рирк niin=740+ Ji =770 мм
рт. ст.
Рассчитаем температурную по
правку по (22.2).
1^00>5~ (600 450) “ ~ 105 м
Определим безопасную высоту по
лета по (22 1):
//без 7бо 600-J-450 ( 105)-*
4- (760 — 770) 11 1045 м.
Нижним безопасным эшелоном
Нксз чш называется ближайший к
Ньглво расчетный эшелон полета
расположенный выше Нйгзлво- Он оп
ределяется с увеличением полученной
W6P.1.760 До высоты ближайшего попут
него эшелона.
Например, определим нижний
безопасный эшелон Нвп.зш примени
тельно к условиям первого примера
для полета с И11У =90°.
Имеем Дьез 760= Ю45 м. При поле
те с ИПУ = 90° ближайший к //безлес
эшелон равен 1500 м. Следовательно
Н оез.зш я 1500 М
Безопасная высота полета по ат
мосферному давлению 760 мм рт ci
(1013,2 мбар) в районе подхода рас
считывается для включения в Инсд
рукцию по производству полетов в
РА и в сборники аэронавигационной
информации:
((без.подх ^бе.-,.ист'1_ ^реЛ —
А7/< + (760 Рцрив нар) 41
(^6 под! = ^беэ.ист + ^рел АН, f-
+ (1013,2 — Рцрив.аар) в,25,
где А/оез »ст — установленное значе-
ние безопасной высоты в районе под-
хода.
Величина АН, вычисляется по
формуле (22.2), в которой средиего-
ювая температура ^-/гргид берется
иа аэродроме по многолетним иаблю
,дениям. Минимальное атмосферное
давление иа аэродроме по многолет-
ним данным приведенное к уровню
моря Рпряп.аар, ВЫЧНСЧЯеТСЯ ПО фор-
мсле (22.3), в которой вместо
Пред ыг берется //аэр, а вместо
pintn мярш —Раэр.пЯть
Вычисленное значение //лгл.иолх
округляется в сторону увеличения
до значения, кратного 10
Высота полета по аэродромному
кругу (высота круга) рассчитывает
ся для включения в Инструкцию по
производству полетов в районе аэрод-
рома и в сборники аэронавигационной
информации
(7«р = 7/бев.иет ~Ь А/7рел—АН,,
где \Hpr,t — высота наивысшей точки
рельефа с учетом искусственных пре-
пятствий относительно урозня аэро-
дрома в пределах установленной ши-
рины полосы м; Нвга.ист берется
тля зоны взлета и посадки
Методическая температурная по-
правка АН, вычисляется по формуле
(22.2), в которой (о=^ср.гол! 7/асар =
= //беа.игт4-А/( рел.
Вычисленная величина //КР округ
ляется в сторону увеличения до зна-
чения, кратного 100
Например, рассчитаем высо-
ту полета по аэродромному кругу
для полетов по ПВП иа ВС со ско-
ростью полета по кругу Уи =
= 350 км,*!. Известны АНРел = 227 м
И /грглд = 5°С.
Для ЭТОГО определим Ябез игт-
Она для полетов по ПВП с VB =
= 350 км/ч равна 200 м. Вычислим
температурную поправку АН,=
5—15
-——(200+227) =-15 м. Опреде-
лим ЯкГ, = 20о+ 227+15 = 442 м Это
значение увеличим до числа, кратно-
го 100, и получим //Кр=500 м.
Минимальная безопасная высота
(МБВ) в районе аэродрома опреде-
ляется для включения в Инструкцию
по производству полетов в РА и сбор-
ники аэронавигационной информации
МБВ = 300+АНрел —А/Л,
где А/т'рел — высота наивысшей точки
рельефа местности с учетом искусст-
венных препятствий относительно
уровня порога ВПП по направлению
захода иа посадку, м. Она берется в
радиусе 50 км от КТА.
Величина \Н, вычисляется по
формуле 22.2), в которой /о = /сРгод:
/7исир = ЗОО+ АНрел. Вычисленная ве
личина МБВ округляется в сторону
увеличения до значения, кратного 10.
Например, рассчитаем МБВ
ПрН А// ре л “ 122 М И /ср год — 5 С.
Для этого:
вычислим температурную поправ-
5—15
ку \Я, = -^-(300+122)=—14 м,
определим МБВ = 300+122+14 =
= 436 м,
округлим полученное значение до
числа, кратного 10. в сторону увели-
чения (МБВ = 44О м)
Безопасная высота в районе аэро-
дрома (по давлению на аэродроме)
при почете ниже нижнего эшелона
^Сез.аэр = 77без.мит4" А//Прец— АН,.
где Нбеэ.мст — установленное значе-
ние //бел.«ст в зоне взлета и посадки;
AWnpen — высота наивысшей точки
рельефа местности с учетом естест-
венных препятствий на ней относи
тельно уровня аэродрома. Высота
искусственных препятствий /iupen учи-
тывается В AWupen при скорости по-
лета более 300 км/ч, а в горной ме-
стности — во всех случаях независи-
мо от скорости полета в пределах
установленной ширины полосы
Значение АН, вычисляется по
формуле (22.2), в которой фактнче-
243
свая температура на аэродроме /о =
==7ф.п-‘р; //испр = //cej иет4АНиреп.
Например, определим //села.р для
полетов по ПВП в равнинной и хол-
мистой местности при полетах на
скоростях Ии = 250 и 350 км/ч
в горной местности (горы менее
2000 м) прн V'„ = 250 км/ч. Извест-
ны: высота наивысшей точки рельефа
холмистой местности с учетом есте-
ственных препятствий \//преП=150м;
высота искусственного препятствия
/lli|>eil~S0 М; /ф алр = 21°.
При полетах в равнинной и хол-
мистой местности при V„ = 250 км/ч
(//.-.»> игт= ЮО м):
^"иреп 150 м; //иепр—
100 4-150 250 м;
21 — 15
АН, =------------250 =5 м;
300
^без.а»р - 100+150 —5 - 245 м.
Г1ри полетах в равнинной и хол-
мистой местности при скорости
350 км/ч (//г,р.|.ист = 200 м):
^//ц|>еп~ 150-]-50 =200 м; Нисп^ —
200 + 200 = 400 м;
21 — 15
XHt ------------- 400 = 8 м,
300
^Сеэ.аар-- 200 4 200— 8 = 392 м.
При полетах в горной местности
При Vи — 2о0 км/ч (//flea.lieт - 100 м):
-^//цреп - 150 + 50 --200 м;
Яиспр-100 + 200 300 м;
21 — 15
\Н, -----------300 = 6 м;
300
^без.азр 100 4 200 — 6 = 294 м.
Безопасная высота полета по
маршруту и району авиационных ра-
бот (по приведенному минимальному
давлению) ниже нижнего эшелона
^без.прив //без.ист ^врен — АН,,
где //, абсолютная высота наи-
высшей точки рельефа местности с
учетом естественных препятствий на
ней.
Высота искусственных препятст-
вий ЛПр,п учитывается в //ПГгп при
скорости полета более 300 км/ч, а в
горной местности — во всех случаях
независимо от скорости полета.
Температурная поправка Л//( рас
считывается по фактической темпера-
туре /о = /ф н<|> на аэродроме взлета
нлн посадки (меньшей из них) п аб
солютной безопасной высоте псхлета
//ие ПК = //бел ие т 4 реп-
Высота нижнего эшелона зоны
ожидания
//?в0 НИ1КН ^кр+ 300 \//| +
. ( 60 — /’аэр) 11 •
''1012.2 нижи //>;р +
+300— XHt-t (1013,2— />а<р) 8,25.
Величина поправки АН, рассчиты-
вается по формуле (22 2), в которой
/о = /ф.а<р И ( Нир +300) = //нс пр.
Прн выполнении полета рассчитан-
ные высоты полета выдерживаются
по барометрическому высотомеру с
учетом суммарной поправки Л//^.
22.4. Погрешности измерения
высоты полета
Для предотвращения столкнове-
ния ВС с наземными препятствиями
необходимо:
чтобы выдерживаемая в данный
момент истинная высота полета Н«,-,
была больше истинной опасной //.,„.
на которой н ниже ее возможно
столкновение с наземными препятст-
виями. Высота НОП меньше //бел.ист-
Она определяется //рел н зависит от
конструктивных особенностей ВС.
Вероятность того, что ВС будет на
холиться выше Н„п (при нормаль-
ном законе распределения погрешно-
стей контроля пути по высоте):
244
где °ц — погрешность измерения
и выдерживания рассчитанной высо-
ты полета;
чтобы линейное боковое уклоне-
ние г от ЛЗП не выходило за пре-
делы ±~доп, в которой учитываются
рельеф местности и препятствия при
расчете Нс,ез. Вероятность этого со-
бытия
Р ( гдоп < г < гдоц) =
= ф (гд|>и %.) • <22-5)
где — погрешность контроля пу-
ти по направлению.
Тогда потенциальная вероятность
предотвращения столкновенья с на-
земными препятствиями
"пр.ст.на.» — Р {^ист >
> "on) Р (-^дои < г < гдо11). (22.6)
Вероятность предотвращения
столкновений ВС с наземными пре-
пятствиями зависит от точности из-
мерения высоты полtта и грамотной
эксплуатации высотомеров.
Барометрические высотомеры
(БВ) служат основным средством
контроля высоты полета На ВС их
устанавливают не менее Двух. Им
присущи инструментальные, аэроди-
намические н методические погреш-
ности
Инструментальные погрешности
\Н„ возникают из-за несовершенст-
ва изготовления и износа деталей и
механизма конкретного БВ. Они но-
сят систематический характер и оп-
ределяются при лабораторной про-
верке.
А зродина мическая погрешность
АПЛ вызывается неточным измерени-
ем статического давления на данном
ВС. Она зависит от места установки
приемника воздушного давления
(ПВД), скорости и высоты полета.
Определяется ДНа при летных испы-
таниях ВС
Поправки на инструментальную и
аэродинамические погрешности объ
едпняются в одну суммарную поправ-
ку \Ну. — \НК + АН3. Для точного
выдерживания заданного эшелона
Ягг.о к каждому БВ для наивыгодней-
1них скоростей полета на борту ВС
Таблица 22.1. Показания
высотомера для полета на
заданных эшелонах
Высита эше- лона. м Приборная скорость. км ч Пока-гания высотоме- ра с уче том Л?/£. м
900 830 950
1200 820 1230
босо’ '705' 6080
и т. д. и т. д. и 7. Д.
требуемых ноказа-
учстом суммарной
имеется таблица
нкй высотомера с
поправки, (табл. 22.1).
Методические погрешности БВ об-
условлены косвенным методом наме-
рения — вместо высоты измеряется
атмосферное давление, которое пере-
считывается в высоту полета. При
этом используется закон изменения
давления с высотой (6.8).
Начальная высота полета // = ()
устанавливается перед взлетом, она
соответствует давлению ряз11.
Источниками методических но
грешностей являются несоответствия
фактических значений р и Т у земли
и на высоте расчетным их значенп
ям. принятым при гра дуировке при
боров.
Погрешность из-за неправильной
установки начального давления
П^ро =11 ор0 (в условиях стандарт
нон атмосферы). По техническим ус-
ловиям допускается несовпадение
шкалы БВ с фактическим давлением
до ±1.5...2.0 мм рт. ст. Следователь-
но, аН„
шах „2 -11 г7 м
О
Погрешность из за неточного из-
мерения давления на высоте по tern
Рн носит такой же характер, что и
ошибка установки начального |авле
ння. Но с увеличением высоты баро
метрическая ступень возрастает: на
// 6000 м, 10 000 н 12 000 м она
соответственно равна 20. 33 и
245
44 м/мм рт ст. Тогда иа Н=-12 000 м
возможна ~~ 2-44» 30 м.
Погрешность определения
Рпря. ш.п по формуле (22.3) из за
неточности информации о минималь-
ном атмосферном давлении по марш-
руту. используемой при расчете
7/л.-а. 76ft по (22.1).
Т е мпературная по (решность \Н,
образуется из-за несоответствии фак-
тической температуры воздуха иа
высоте стандартной, принятой при
тарировке шкалы БВ. Она может
быть оценена по (22.2). Бзлее точно
\Н t учитывается при расчете при-
борной высоты на НЛ-10м.
Суммарная погрешность измере-
ния высоты БВ формируется всеми
вышеперечисленными причинами По
имеющимся экспериментальным дан-
ным систематические погрешности в
метрах следующие:
Ту-134 Ту-154Ил-62 Ан-24
При взлете .1 0 26 10
При посадке 4 7 0,5 12
Суммарные СКП высотомеров иа
предельно малых высотах (//«:50 м)
равны оН£ ~ 13 м для УВИД.
12 м—для ВМ 15, 16 м —для
ВД-10. С увеличением высоты поле-
та суммарная погрешность измере-
ния возрастает. Кроме того, прн
оценке точности выдерживания НЛта
необходимо учитывать погрешность
пилотирования: ручного ег//п„л“3(1 м
и автоматического о//п«л~Ю м.
Применение радиовысотомеров. На
истинных высотах полета менее
600 . . 750 м эффективным средством
предотвращения столкновений с из-
юмными препятствиями служат ра-
щовысотомеры малых высот, пред-
назначенные для измерения истинной
высоты, а также формирования све-
товой и звуковой сигнализации задан-
ных высот
В гражданской авиации на ВС
останавливаются радиовысотомеры
РВ-2, РВ-УМ, РВ-ЗМ. РВ-5. Они об-
ладают практически одинаковыми
точностными характеристиками. На-
пример, СКП измерения высоты
РВ-5 равна 0.3 м иа /7=0... 10 м и
3 м на Н— 10...750 м по автоматн-
246
ческому выходу и 0 4 и 4 м соот-
ветственно по указателю высоты
(УВ). Погрешность сигнализации за-
данной высоты составляет 05 и 5 м
на высотах 2.. 10 и 10...75С м
соответственно.
Необходимо иметь в виду, что
прн потегах над толстым снежным
ши ледяным покровом радиовывото
мер может давать показания с
большими ошибками, так как отр?
женный сигнал поступает не отсяеж
ной (ледяной), а от земной (водной)
поверхности.
22.5. Системы предупреждения
опасных сближений с земной
поверхностью
Потенциально возможная вероят
ность предотврати ния столкновений
с наземными препятствиями (22 6),
обуславливаете-! погрешностями кон-
троля пути по высоте н направлению.
В формуле не учитываются сниже
нне ниже Н„„ в условиях неточной
знания экипажем своего МС (это
равнозначно неверному учету /7ря,),
н.правильная установка давления иа
шкале БВ и неверное определение
температурной поправки. На практи-
ке столкновения с наземными препят-
ствиями происходят чаще всего имен-
но по этим субъективным причинам,
л также из-за недисциплинированно-
сти экипажей. Поэтому иа современ-
ных ВС устанавливаются средства
автоматического предупреждения об
опасности столкновения—система
сигнализации об опасной скорости
сближения с землей (ССОС) и систе-
ма сигнализации достижения задан-
ных высот.
ССОС формирует сигналы преду-
преждения в случае, если вертикаль-
ная скорость снижения VB превыша-
ет допустимое для дайной высоты
значение, при котором обеспечивает-
ся безопасное управление ВС.
Источниками информации о ско-
рости снижения служат: радиовысо-
томер, акселерометр и БВ Диффе-
ренцированием данных от БВ опреде-
ляется барометрическая скорость
снижения ВС, а сигналов РВ — ра-
днотсхничсская скорость; интегриро-
ванием выходных данных акселеро
метра получают инерциальную ско-
рость снижения. Осреднение баромет-
рической и инерциальной скоростей
дает так называемую бароинерциаль
ную скорость IБИ, а осреднение
от всех датчиков позвотяет получить
барорадвоннерциальную скорость
вертикального снижения V Брр
Таким образом, с высокой точностью
определяется V„.
Информация о вертикальных ско
ростях и истинной высоте имеете с
информацией о положении шасси и
об угле атаки анализируется специа-
лизированным вычислительным уст-
ройством, н при возникновении опас-
ных ситуаций формируются световой
и звуковой сигналы предупреждения.
Сигнализация об опасной скоро-
сти снижения сб нлжения производит-
ся в следующих случаях
в режиме набора высоты после
взлета и уборки шасси на истинной
высоте полета 50—250 м. если ВС
начнет снижаться с вертикальной
скоростью V»> 1,6 м/с:
прн снижении в диапазоне истин-
ных высот G00 50 м, если вертикаль-
ная скорость снижения превышает
опасное значение для текущей высо-
ты полета (прямая /. рис 22.1) и в
случае снижения с убранным шасси
на Н <250 м;
в полете над горной местностью в
диапазоне истинных высот 50—400 м.
если вертикальная скорость сближе-
ния с неровностями рельефа превысит
опасное для текущей высоты полета
значение (прямая 2, рис. 22.1).
Система енгиалнзацнн достиже-
ния заданных высот основана на ис-
пользовании радиовысотомера малых
высот.
Перед полетом треугольный ин-
декс УВ командира ВС устанавлина
ется на значение ВПР, а УВ второго
пилота (и штурмана)—на высоту
крута ЯЬр. На самолетах, оборудо-
ванных одним комплектом ралновы
сотомера, треугольный индекс УВ
устанавливается на высоту круга
Прн атом засветятся желтые лампоч
кп и сработает звуковая сигнализа-
ция. После взлета и прохода высог.
Рис. 22.1. Допустимые скорости сни-
жения-
I — в процессе снижения; 2 прн полете
над горной местностью
на которые установлены треугольные
индексы УВ, желтые лампочки гас
нут, на //=750 м стрелки придут в
затемненный Сектор, а на Н—3500 м
радиовысотомеры автоматически вы
ключаются.
В процессе снижения с эшелона
иа той же высоте 3500 м РВ авто-
матически включаются и засветятся
красные лампочки С высоты 750 м
УВ показывают истинную высоту в
красные лампочки гаснут. Прн гости
женин высоты полета по кругу сра
батынают желтые лампочки, а при
одном РВ — и звуковая сигналила
цня
Перед третьим разворотом или иа
удалении 18 20 км от ВПП прн за-
ходе с прямой треугольные индексы
всех УВ устанавливаются на значе
ние ВПР По достижении этой высо
ты на всех УВ загораются желтые
лампочки и срабатывает звуковая
сигнализация.
Определенный эффект в преду-
преждении столкновения тает приме
нение БРЛС со стабилизированной
антенной (рис 22 2) Заданным Н<„
и к соответствует контрольная на
клонная дальность
LK-=//6e3sin €,
247
Pin 22 2. Предотвращение столкно-
вения ВС е земными препятствиями с
помощью БРЛС
где е половина ширины луча в вер-
тикальной плоскости.
При L>L,t наземное препятствие
наблюдается на экране. По мере
сближения ВС с препятствием его
отметка перемещается к центру экра
па и при L<ZLK пропадает. Напри
мер, при //6ез=900 м радиус секто-
ра, в котором на экране нс наблюла
стся земная поверхность. Гь«35 км
(0н = Я°). Если отметка исчезает на
L>L„, то ВС идет выше //л»л, если
на то ниже.
Из-за неточности 0в и погрешно-
сти стабилизации антенны пропада-
ние отметки препятствия иа LK не га
рантпруст пролет над ннм иа //сел.
Только комплексное использование
БВ, РВ и ССОС, грамотная нх экс
плуатация, строгое соблюдение уста
повленных правил полетов и высокая
точность контроля пути по направле
нню и дальности гарантируют пред-
отвращение столкновений с наземны-
ми препятствиями.
Глава 23
ПРЕДОТВРАЩЕНИЕ ОПАСНЫХ СБЛИЖЕНИЙ И СТОЛКНОВЕНИЙ
ВС В ПОЛЕТЕ
23.1. Меры
по предотвращению опасных
сближений и столкновений ВС
Предупреждение опасных сбли-
жений и предотвращение столкнове
ний ВС между собой достигается це-
лой системой мероприятий: верти
кальным, продольным и боковым эше-
лонированиями; точным выполнением
за данной пространственно временной
трзек торин полета; соблюдением
остановленных правил полетов; на-
дежным управлением воздушным
движением; применением технических
средств предупреждения опасных
сближений; осмотрительностью эки
пажей прн полетах в условиях низу
альной видимости. Особенно внима-
тельным должен быть экипаж при
пролете аэродромов н точек пересече-
ния воз гушных трасс и м.-стных воз
душных линий.
Главное требование - точное вы
держивание интернатов эшелониро
пиний Нормы эшелонирований уста-
навливаются с учетом используемого
правила полетов (ППП. ПВП.
ОПВП), точностных характеристик
навигационно-пилотажного оборудо
246
вания, средств УВД и требуемого
уровня безопасности. Учитываются
также оснащенность воздушных трасс
наземными обзорными раднолокато
рамп, скорость полета ВС. район по
лотов ч углы пересечения маршрутов
Эти нормы приводятся в НПП ГА.
очи периодически пересматриваются
Полеты ВС по воздушным трас
сам. МЕЛ и установленным маршру
там выполняются на заданных эше-
лонах (высотах) в пределах ширины
трассы с соблю гением интервалов
продольного эшелонирования по
ППП, ПВП или ОПВП в зависимо
сти от скорости и высоты полета,
времени суток, наличия непрерывного
радиолокационного контроля с чем
зи, высоты пнжнен границы облаков
и видимости. Самовольное спрямле
нпе или отклонение от заданного
маршрута запрещается. В необходи
мых случаях они производятся с раз
решения диспетчера
Изменять назначенный эшелон
(высоту) разрешается с соблюдением
мер безопасности и по согласованию
с диспетчером. Прн возникновении
угрозы безопасности полета на за
данном эшелоне (встреча с опасны
ми метеоявленнями, отказ авиатех
гики) командиру ВС предоставляет-
ся право самостоятельно изменять
«шелон полета и немедленно доло-
жить об этом службе УВД.
Заданный эшелон полета 7/аш вы-
ц-рживаегся по барометрическому
высотомеру, шкала давления которо-
го устанавливается на 760 мм рт. ст.,
с учетом суммарном поправки к БВ,
г. е. Н.ш пр = Й.ш— \Н£ Показа-
ния высотомера с учетом Л//£ сво-
еятся в специальную табл. 22.1, кото-
рой экипаж пользуется в полете.
Высота за тайною эшелона долж-
на выцржнваться по высотомеру ко-
мли еира корабля с учетом осреднен-
,юго показания всех бортовых высо-
томеров Это требование введено для
повышения безопасности полетов и
своевременного выявления неисправ-
ностей высотомерного оборудования
ВС. Показания БВ с отклонениями
по абсолютному значению то 60 м
на эшелонах с интервалами 300 м и
д > 100 м на эшелонах с интервалом
500 м считаются нормальными. Если
же отклонение хотя бы одного из вы
сотомсров превышает соответственно
60 и 100 м то необхо 1Н.мо осредиить
показания БВ Н затем вы крживать
эшелон полета по высотомеру ко-
мандира ВС, а при прилете на аэро-
дром дать указание о проверке БВ и
приемников статистического дав
лення.
Осреднение показании высотоме-
ров произво 1нтся в следующем но
рятке. ВС выво ттся на за таниый
эшелон по показанию БВ комантира
корабля с учетом суммарной по-
правки //„., указанной в бортовой
таблице для заданного эшелона
(табл 23 11
Например, /Сш=8о00, //К| —
— 8710 м Правильность выдержива-
ния требуемой высоты контролирует-
ся по высотомерам второго пилота
//ги н штурмана Нш, для чего опре-
деляются отклонения показаний этих
высотомеров от табличных \Н,=
= //прф — //табл (с учетом знака),
а затем вычисляется осреднепная по-
правка \//,.гр к барометрическому
высотомеру командира ВС
Л//Оср АЛ/i *
Т а б л и ц а 23.1. Осреднение
показаний высотомеров, м
Показания высотомеров "к! Н2П «ш "и,
Р.ф 8710 8740 8770 8640
Н габ.т 8710 8620 8680 —-
0 120 90 —70
где п - число высотомеров, пспользу
емых для осреднения
Согласно данным табл. 23.1
V/.HP —у(\//м ЬД//2П |-
4-5/7.,.) = — -—(04-120 -90)
= —70 м.
Новое значение приборной высоты
на II,= 8600 для БВ комап шра ВС
после осреднения Н„г = Н,<1 +
±5/7Оср = 8710— 70 = 8610 м. Эта вы
сота должна выдерживаться с откло-
нениями не более ±30 м па многоме
стных и ±50 м на одноместных ВС
Поправка к высотомеру КВС вводит
ся только в случае 5/7„ср>|20 м|.
Современные магистральные ВС
(например, Ил-86) оборудуются ин-
формационным комплексом высотно-
скоростных параметров (ПК ВСП).
который при подходе к заданному
эшелону за (150±60) м и при откло-
нении от /7,1И1 на (60^20) м выдает
световую сигнализацию (высвечнва
ется табло «Эшелон»),
После вывода ВС на новую высо
ту полета Н>.> командир должен \бе
ШТ1.СЯ в правильности осреднения
если отклонения показаний высотоме-
ров второго пилота и штурмана от
табличных уменьшились, то вычисле-
ния Д//,>ср и 7/иг произведены нра
вильно; если же они увеличились, то
была допущена ошибка в расчетах п
осреднение высоты необходимо про-
извести заново.
В случаях когда 5/7, второго пи-
лога и штурмана но абсолютному
значению превышают 100 м на эше
249
лоиах с интервалом 300 м и 200 м
на эшелонах с интервалом 500 м,
командир обязан запросить у диспет-
iepa непрерывный контроль за его
полетом наземными средствами. Ре-
шение о том, по какому БВ выдержи
зать заданный эшелон, принимает ко-
мандир в зависимости от конкретных
условий.
При полетах но ПВП соблюдают
с следующие правила, направленные
на предотвращение столкновения ВС
между собой:
обгон впере ги летящего ВС дол-
жен произво гиться с правой сторо
ны, а при полете по кругу — с внеш
ней стороны круга с интервалом не
менее 500 м;
при полетах па пересекающихся
курсах командир ВС, заметивший
встречное ВС на той же высоте сле-
ва от себя, должен уменьшить высо-
ту полета, а командир ВС, обнару-
живший другое ВС справа от себя,
голжен увеличить высот; полета та-
ким образом, чтобы разность вькот
обеспечивала им безопасное расхож-
генче. Если при этом изменить высо-
ту невозможно (наличие облачности
полет иа или другие ограниче
ни), то командиры обязаны обеспе-
чить расхождение ВС разворотом.
В процессе выполнения маневра пи-
лоты должны вести визуальное на-
блюдение друг за другом;
встречное движение ВС на о гной
высоте по одному маршруту ниже
нижнего эшелона запрещается. В слу-
чае непреднамеренного сближения
на встречных курсах командиры ВС
должны отвернуть ВС вправо для
расхождения их левыми бортами на
безопасных интервалах.
Служба УВ Ц предотвращает
столкновение ВС, осуществляя не
прерывный контроль за выполнением
полетов. Она не должна допхекать
отклонений ВС от установленных
воздушных трасс, коридоров и марш-
рутов, а также сближения их на рас-
стояние, менее безопасного.
При отсутствии непрерывного ра-
диолокационного контроля на каж-
дом эшелоне в зоне ожидания, а так-
же в районе аэро грома на одной вы
соте может находиться не более од
ного ВС.
250
23.2. Применение систем
предупреждения столкновений
Взаимное расположение двух ВС.
движущихся с гюсдояннымн скоро-
стями lzi и Г. по прямолинейным
пересекающимся траекториям, распо-
ложенным в горизонтальной плоско-
сти на одной и той же высоте пока-
зано на рнс. 23.1
Интервал времени с до момен-
та, когда L будет минимальным.
/cG.i^i-в ',’отн (2 -С 0
а расстояние- между ВС в момент на-
ибольшего сближения
*mhr ' и VHOPM VO;H‘ (23.2)
Основным критерием показателя
опасности столкновения является
прогнозируемое значение Е1Пт Если
/-min превышает опасное расстояние
Бол. то вероятность столкновения от-
сутствует. Если же Emin<Eon, то не-
обходимо определить вид маневра
расхождения и время, оставшееся до
столкновения, и принять меры по
предотвращению этого проих шествия.
Наиболее опасными являются си-
туации. когда близка к нулю,
т. е. Ислч^Уотк Поэтому в форму-
ле (23.1) вместо Votk МОЖНО НО1СТЗ"
вить 1'ег,л и получить значение вре-
мени до столкновения в наиболее не-
благоприятной ситуации
т = Е„ Еи Уот2 = Ен Ев Ус62
- Ен Е„ LH 2 —Ен Ен ,
условно называемое показателем т.
Он связан с временем до наибольше
го сближения соотношением
Дли определении /слл и Ещп, не-
обходимо располагать весьма обшир-
ной информацией о параметрах дви-
жения ВС, получить которые слож-
но. Поэтому прн разработке ряда
СПС приняты прием демыми маневры
по расхождению лишь в вертикаль
ной плоскости, которые можно реалп-
зовзть. располагая данными о высо-
тах конфликтующих судов.
Отечественная СПС типа «Эше-
лон» — асинхронная бортовая систе-
ма импульсного типа, обеспечиваю-
щая обнаружение угрозы столкнове-
ния и определение взаим.чо-'коордпни-
рованных вертикальных маневров ВС
по уклонению от столкновений. Ин-
формация о необходимых маневрах
отображается на специальном инди-
каторе.
Опасность столкновения выявляет
ся на основе получения и анализа
данных о высотах ВС, а затем по
информации о расстоянии между ни-
ми и скорости его изменения. Сведе-
ния об относительной высоте получа-
ют путем обмена данными между
двумя ВС о барометрических высо-
тах полета. Запросный сигнал СПС
содержит тайные о высоте ВС, с
борта которого он излучается. Ответ-
ное излучение несет информацию о
высоте отвечающего ВС.
В канате определения высот ис-
пользуется сложная система логиче-
ского анализа обстановки. Для этого
воздушное пространство в окрестно-
стях ВС делится по высоте на
(рнс 23.2): совысотную зону, грани
гы которой удалены иа расстояние
±160 м относительно высоты данного
ВС; две зоны предупреждения с ши-
риной ио 500 м, безопасные зоны,
расположенные за внешними грани-
цами зон предупреждения.
В тех случаях, когда отвечающий
на запрос данного ВС самолет ока
зывается в зоне предупреждения или
совысотпой зоне, бортовая СПС вы-
полняет операции по определению
опасности столкновения путем изме-
рения /.к, СИ и показателя т. После
этого сравниваются текущее расстоя-
ние L и текущее значение показателя
т с двумя критериальными значения
ми этих показателей. Первые крите-
риальные значения £к, и Тц соответ-
ствуют расстоянию и времени, когда
голжно быть начато формирование
взаимно координированных маневров
по уклонению, вторые £кг и тЕг ука
зыкают момент начала выполнения
этого маневра. Причем допускаются
только вертикальные маневры по
расхождению. Если конфликтующие
Рис. 23.1. Конфликтная ситуация при
сближении ВС:
Ln и L — начальное и текущее расстояния
между ВС; Vc6j — скорость сближения
ВС; Уота — Vi — V2 -относительная___ ско-
рость перемещения, Уисрм — Уота У<.бл—
нормальная (тангенциальная! скорость от
ноентлпыюго движения
самолеты находятся в зонах преду
преждеиля, то при их сближении до
критического расстояния или дести
женин критического времени им пере-
дастся команда запрещающая набор
высоты или снижение. Когда ВС ока-
зываются в ссвысотной зоне или при-
Рис 23.2. Деление воздушного про-
странства самолета на зоны
251
Снижаются друг к другу иа опреде-
ленное расстояние, начинается выра-
ботка взанмио-координирова иного
маневра по уклонению от столкно-
вения.
Аппаратура СПС «Эшелон» связа-
на с ответчиком ВРЛС и с самолет-
ным переговорным устройством. Че-
рез бортовой передатчик ВРЛС на
землю автоматически перелается ин-
формация об обнаруженной с по-
мощью СПС конфликтной ситуации и
о предполагаемых маневрах по укло-
нению. В самотетное переговорное
устройство вводятся сигналы опове-
щения экипажа сам >лета об угрозе
столкновения. Эти сигналы имеют
форму прерывистых звуковых посы-
лок.
Бортовая радиогокационная стан-
ция является неспециализированным
средством предупреждения опасных
сближений. Благодаря применению
узкого луча диаграммы направленно-
сти антенны на экране индикатора
БРЛС появляются отметки только
ВС, летящих на высотах, близких к
высоте полета набтю даемого ВС
Если его последовательные отметки
/. 2, 3, . , наблюдаемые на экране,
перемещаются строго к центру, то
это свидетельствует о возможности
столкновения (рис. 23.3) Когда от
метки обнаруженного ВС движутся
не к центру экрана, столкновения нс
произойдет.
Из-за малой дальности обнаруже
ния самолетов БР.ЧС достаточно эф-
фективна для предотвращения столк-
новений только при попутно-пересека-
ющихся курсах конфликтующих ВС.
Если же ВС перемещаются на
встречных или встречно пересекаю-
щихся курсах, то слишком малым
Рис 23.3. Отметки движения ВС на
экране РЛС
252
оказывается проюлжительность ра-
диолокационного контакта. Кроме
того, для предупреждения опасных
сближений с использованием бортово
го радиолокатора требуется практи-
чески непрерывное наблюдение за
экраном, что невозможно по техноло-
гии работы экипажа.
23.3. Вероятность
предотвращения опасных
сближений Е С
Для предотвращения опасных
сближений двух ВС необходимо, что
бы фактическое относительное рас-
стояние между ними Е,1Ти ф(Л в лю-
бой момент времени и при любом их
маневре было не меньше заданной
дистанции опасного сближения L„„
Если ВС не оборудованы аппарату
рой измерения относительного рас-
стояния L, то оно определяется как
разность измеренных координат ВС
но координатной оси L, т е
L ти.кзч = Е|—Ь2 Например, относи
тельн >е расстояние по высоте двух
ВС в момент их встречи, на каждом
из которых измеряется высота от за
данного уровня, К,твилм = ^,—Н2
Прн следовании двух ВС ио од
ной и той же траектории полета
Зртн.мэм =51 '$2.
где Si и s? — измеренные текущие
расстояния ВС от некоторого задан-
ного рубежа.
В общем случае относительное
расстояние может быть вычислено с
использованием текущих координат
ВС по трем взаимно перпендикуляр
иым иаппавлениям Н. s и г:
^-отн нам “ (^отн. нзм ^~®отн.изм
д-г2 )* 2.
отн изм/
Вероятность того, что фактическое
относительное расстояние LOTK ф
между двумя ВС будет не меньше
дистанции опасного сближения L„u.
т. е. Р(Еотн.ф^Еэи), зависит от за
кона распределения ошибок М, и
\L-> измерения величин Li и L*.
Пусть случайные величины At< и
)(.-> распределены по нормальному
законе со средними квадратическими
отклонениими и СТ; . Обозна-
чим ^отн изм~~i-on- В этом слу-
чае
Р (^оти.Ф ^-оп) —0,5-4“
1 Ф / ^отв.нзм--^оп \
2 \ I °t, I
В случае aL =/= oL формулы расче-
та P(Loltl.^^Lnn) для расг.ределе-
ния Лапласа оказываются громозд-
кими н поэтому здесь не приводятся.
Для предотвращения опасных
сближений, например с вероятностью
0,9999. необходимо, чтобы:
прн нормальном законе распреде-
ления
При О, oL oL
Р (^-отн.Ф ^-оп) 0»5"i
1 , L* \
4 —Ф -------------— У (23.3)
\ О J 2 /
Каж 1ая из случайных величин
\L, н \L2 распределена по закону
двусторонней экспоненты (распреде-
ление Лапласа) но, = о, =а1 .
Тогда
(-*—Г-отн иэм Рпп
> 5,35а, или ^-отн.иям 5^
5.35а, (- ('п *
при двойном экспопенннальном
распределении
L*—Г-отп.изм— £(1П
10Од НЛИ Тотн.пзм ^-оп •
Сколь бы ни были совершенны
технические средства предупрежде
ния столкновений, применение только
нх нс гарантирует полностью пред
отвращение опасных сближений и
столкновений. Эта за гача решается
комплексом мероприятий и действий,
включающим, кроме использования
СПС, непрерывный контроль пути по
всем трем координатам, контроль
выдерживания интервалов эшелони
рований, взаимную информацию
между экипажами н службой движе
ния о времени пролета контрольных
рубежей н управление воз душным
движением с земли.
Глава 24
ПРЕДОТВРАЩЕНИЕ ПОТЕРИ ОРИЕНТИРОВКИ
24.1. Причины потери
ориентировки
Для обеспечения безопасности са-
молетовождения экипаж (пилот) не-
зависимо от условий полога обязан
сохранять ориентировку, т. е. знадь
местонахождение ВС с точностью, не-
обходимой для выполнения задания
В противном случае ориентировка
считается потерянной. Различают
полную и временную потерю ориенти-
ровки.
Ориентировка считается полностью
потерянной, если экипаж ио этой
причине произвел вынужденную по-
садку нс на аэродроме назначения
253
Ориентировка считается временно по
терянной, если ВС выведено экипа-
жем самостоятельно илн с помощью
наземных РТС на за тайный маршрут
с послетующей посаткой на аэродро-
ме назначения.
Основными причинами потери
ориентировки являются:
Неудовлетворительная подготовка
якипажа (пилота) к полету: слабое
знание маршрута (района) полета,
аэронавигационной обстановки, осо-
бенностей самолетовождения и экс-
плуатации навигационного обору ю-
нання при выполнении тайного зада-
ния; неграмотный выбор для каждого
участка маршрута способов и средств
навигация, обеспечивающих требуе-
мую точность решения навигацион-
ных задач; неправильная илн небреж-
ная подготовка карт, неполный под-
бор документации необходимых для
выполнения полета; ошибочный илн
неполный расчет навигационных эле-
ментов полета по участкам трассы
(маршрута) и небрежное заполнение
штурманского бортового журнала
неправильное введение программ по-
лета в АНК; некачественная провер-
ка и по гготопка навигационного обо-
ру юааиия ВС к полету.
Парумение в полете основных
правил самолетовождения вследст-
вие халатности и недисциплиниро-
ванности экипажа выполнение поле-
та с отклонениями от плана, запи
санного в левой части штурманского
бортового журнала, несоблюдение
требования ППП ГА о необходимо-
сти постоянного знания своего ме-
стонахождения, произвольное без иа
дойности изменение режима почета
без точного учета курса, скорости и
времени полета; пренебрежение неав
томатигескчм счислением пути; допу
щение грубых ошибок в определении
фактических элементов полета; невы-
полнение контроля пути по направле-
нию и дальности, незаполнепие пра-
вой части штурманского бортового
журиата записями фактических зна-
чений навигационных элементов поле-
та н раьильный учет поправок к
курсовым приборам
Некомплексное использование спо-
собов и технических средств самоле-
товождения. применение только од-
254
ного средства из нескольких имею-
щихся для решения той или иной на
«игационной задачи, переоценка од-
них средств и пренебрежение дру-
гими
Неподготовленность чкипажа к
полету в усложнившихся условиях
из-за низкого уровня штурманской
подготовки: неожиданное ухудшение
погоды; вынужденный полет в обла
ках, сумерках или ночью; попадание
н район магнитной аномалии иа ма
дых высотах
Неудовлетворительная организа-
ция полетов и управления ими: нека-
чественная, не в полном объеме про-
веденная предварительная и предпо-
летная подготовка; недостаточный
контроль готовности экипажа к поле-
ту; слабое внимание иа разборах по-
летов к ошибкам в решении навига
циониых задач; отсутствие контроля
с земли за выполнением ЗПВТП и
управления полетами со стороны
службы движения
Неисправность пли гголный отказ
навигационного оборудования ВС в
полете.
24.2. Меры
по предотвращению потери
ориентировки
Предотвращение потери ориенти-
розкн достигается точным соблюде
нием основных правки самолетовож-
дения, главным из которых примени
только к рассматриваемой проблеме
является требование обязательного
определения МС непрерывным счис
леиием пути (автоматическим пли
неавтоматическим) и периодической
коррекции счисленных координат
Успешное выполнение полета по за
дайной траектории возможно только
комплексным применением техаиче
скнх средств самолетовождения в
сочетании с визуальной ориентиров
кой.
Экипаж „олжен выбирать для
решения тех или иных задач воздуш-
ной навигации такие средства из
имеющихся в его распоряжении, ко-
торые в данных условиях полета и
фактической аэронавигационной об-
становии обеспечат успешное без
опасное выполнение задания
Меры по предотвращению потери
ориентировки подразделяют на реа-
лизуемые иа земле перед полетом и
на применяемые в процессе выполне
пня полета. На этанах общей (забла-
говременной), предварительной и
предполетной подготовки к ио тетям
проводится ряд работ, а также раз-
рабатываются меры, которые реали-
зуются в полете
На этане общей навигационной
подготовки формируется профессии
изльный уровень летного состава.
Б процессе самостоятельной работы,
организованной учебы, участия в
соора.х и разборах полетов приобре
таются навыки оптимального реше-
ния штурманских задач, в том числе
пре чотвращения потери ориентиров-
ки. Поэтому необходимо постоянно
совершенствовать теоретическую и
практическую подготовку экипажей
по самолетовождению. Большую роль
шрают хорошо подготовленные и
организованно проветочные разборы
полетов, когда вскрываются недо-
статки и неправильные действия, до-
пущенные экипажами ВС при само
летовожденни, даются указания по
нсключеиню этих ошибок, изучаются
и анализируются слу чаи потери ори-
ентировки, нарушения правил и ре
жима полетов, выявляется положи-
тельный опыт но обеспечению выпол-
нения ЗПВТП.
Основная форма подготовки к
конкретному полету— предоарите.1в
ная. На этом этапе проводятся исс
работы, которые можно выполнить
без информации о метеоусловиях, ра
днотехническом обеспеченна полетов
и коммерческой нагрузке. В процес-
се предварительной по цотонкн мо
жет быть принят ряд мер по пред-
отвращению потери ориентировки и
разработаны меры по ее предупреж-
дению в процессе самого полета.
С этой целью ш зависимо от харак-
тера предстоящего полета и условий
самолетовождения изучаются; марш-
рут полета, запасные и основные
аэродромы; расположение радиотех
нпческих средств обеспечения голе
тов и способы их использования; осо-
бенности самолетовождения и экс
изуатации нгвигационного оборую
нация при выполнении данного поле-
та; рубежи приема и передачи vu
равления воздушным .движением
между пунктами УВД по маршруту,
приграничные полосы и ограничи-
тельные пеленги; зоны (районы) с
особым режимом полетов
Кроме того, в зависимости от на-
значения, района, высоты фпзико
географических факторов и времени
суток полета, условий пи’.ютпроьа
пня и самолетовождения на этапе
предварительной подготовки выпол
няегся ряд дополнительных работ в
штурманском отношении.
При подготовке к полетам по
международной воздушной трапе
дополнительно изучаются: правила
полетов в воздушном пространстве
иностранных государств; маршрут
полета по аэронавигационным кар
там издания САИ LIV3PTOC ГА и
зарубежных изданий; Инструкция по
производству полетов на междуна
ро ;ной воз гушиой линии: порядок
использования иностранных ра тио
технических сре тств обеспечения по-
летов; климатические особенности го
сударств, в воздушном нространстве
которых производятся потеты.
Подготовка к полетам в полярных
районах и над водным пространством
ion >лннтелЬ|.о включает: подбор от-
рывных листов авиационного астро-
номического ежегодника н таблиц
высот и азимутов Солнца, Луны,
планет и звезд; подготовку вспомо
гатсльных таблиц и бланков для рас-
чета астрономических линий положе-
ния и данных для отсчета путсных
углов, курсов н пеленгов от условных
меридианов; по фобное изучение бе
рсговой карты; консультацию по воп
росам Самолетовой депия с другими
экипажами имеющими опыт полетов
в данном районе.
В процессе подготовки к полетам
по МВЛ и ПАНХ, а также к полетам
ВС летных училищ дополнительно
изучаются: особенности ведения ни
зуальной ориентировки при полеге
на малых высотах; специальные нн
струкцин и руководства MI А регла
монтирующие организацию и выгод-
псине полетов по каждому виду ра-
бот но ПАНХ; детально райин ноле
255
тов и характерные ориентиры, осо-
бенно в приграничной полосе. Отра-
батываются навыки выполнения рас-
четов в уме.
Для самолетовождения над без-
ориентирной местностью прн полетах
по ПВП тщательно изучаются харак-
терные особенности местности по
маршруту, помогающие ведению ви-
гу альнон ориентировки, а также уда-
ленные боковые ориентиры (вершины
гор, большие реки, озера, берега мо-
рен н пр ), которые могут быть ис-
пользованы для визуального пелен-
гования. На картах уточняются гра-
ницы распространения барханов
русл рек и высохших озер, пригодных
ДЛЯ ве гения низуальной ориентиров
кн При по гготовке к полету в труд-
иоонознаваемые с вогтуха населен
ные пункты или объекты маршрут
на картах прокладывается на бли-
жайший к нему характерный ориен-
тир, от которого рассчитывается курс
следования и время полета до пунк-
та назначении. Полезно проводить
консультации по вопросам ведения
ориентировки с другими экипажами,
имеющими опыт полетов по данному
маршруту.
Если полет над безорпентнриой
местностью выполняется по ППП. то
при подготовке к нему изучаются
особенности ведения радиолокацион-
ной ориентировки, выбираются н вы-
геляются на карте возможные РЛО;
изучаются методы ведения ориенти-
ровки с помощью астрономических
ере 1ств н способы применения систем
дальней навигации; намечаются точ-
ки коррекции счисленных координат
Подготовка к полету в горной ме-
стности дополнительно требует: изу-
чения рельефа местности (отдельные
вершины, направления хребтов, уще-
лий, горных долин п их взаимное
расположение) в полосе не менее чем
по 50 км в об>е стороны маршрута
полета; изученья и отметки на карте
мест, которые .могут быть нспотьзо-
наны для вынужденной посадки.
В результате всей этой работы на
этапе предварительной подготовки
для каждого участка маршрута вы-
бираются способы и средства нава
гацин, обеспечивающие требуемую
точность самолетовождения, и опре-
1сляются методы по восстановле-
нию ориентировки в случае ее поте-
ри. а также порядок действий экипа-
жа прн ухудшении метеорологиче-
ских условий.
Предполетную подгото в-
к у экипажа проводят с учетом кон-
кретной аэронавигационной обстанов
кн н метеорологических условий. При
этом особое внимание обращают на
расположение зон с опасными метео
рологическими явлениями по марш
руту полета. Расчет навигационных
элементов полета по участкам трас-
сы выполняют с учетом прогноза вет-
ра по высотам. В случае принятия
решения па вылет в условиях грозо-
вой деятельности определяют методы
и средства самолетовождения, кото-
рыми мо/кно пользоваться при ухуд-
шении работы РТС, намечают поря
док обхода грозовых очагов, пред-
усматривают обходные маршруты и
способы восстановления ориентиров-
ки по этапам полета.
В завершении предполетной подго-
товки осуществляется штурман-
ский контроль готовности эки-
пажа к полету. При этом проверя-
ют: качество подготовки полетной и
бортовой карт; наличие необходимых
документов аэронавигационной ин-
формации и справочных материалов;
правильность выполнения навигаци-
онных расчетов н записей нх в бор-
товом журнале, знание членами эки-
пажа правил и режимов полета ме-
теорологической обстановки, располо-
жения средств самолетовождения по
трассе и району полетов, характер их
работы и дальность действия и ip.
По прибытии экипажа на ВС тща-
тельно проверяют навигационное
оборудование. При наличии иа бор-
ту АНК производится программиро-
вание полета.
В целях предо!вращения потери
ориентировки в полете необхо тмо
строго соблюдать основные правила
самолетовождения Для обеспечения
безошибочного следования по задан-
ной трассе (маршруту), точного вы-
хода на КО, ОПМ и аэродром по-
садки по месту н времени экипаж
обязан непрерывно нести контроль
пути счислением и комплексным ис-
пользованием технических средств и
256
способов самолетовождения. При по-
летах на ВС с любым составом на
ннгапнонного оборудования, безуслов-
но, нельзя полагаться на результат
измерения какого-либо параметра с
использованием только одного сред-
ства. Для измерения необходимо ис
пользовать два-три независимых ка-
нала. В этом состоит одно из важней-
ших правил самолетовождения.
Особое внимание необхо ihmo уде-
лять строгому выдерживанию рас-
чел него ку|ка следования, постоянно
следить за показанием всех курсовых
приборов, корректиропать основной
датчик курса с использованием вс по
могательных и ра шотехннческих
средств, не допускать ошибок прн
вводе поправок в КС в процессе кор
рекции и перехода к измерению курса
от меридиана аэродрома посадки.
Контроль пути по направлению сле-
дует вести всеми имеющимися сред
ствами и способами. Если обеспечи
вается по ict по ЛЗП, то практиче-
ски гарантируется предотвращение
потери ориентировки.
Контроль с земли за выполнением
ЗПВТП и управление воздушным
вижением должны быть постоянны
мн — диспетчеры не должны допу-
скать отклонений ВС от установлен
пого маршрута. В случае необходн
мости 1ля обеспечения безопасности
полетов они должны быть согласо-
ваны со службой движения.
Кроме вышеприведенных общих
мер, обязательных для всех ВС неза-
висимо от характера полета, имеют-
ся специфические конкретные меры
по предотвращению потери ориенти-
ровки применительно к особенностям
самолетовождения в различных фи
Зико географических условиях.
При выполнении полетов на ма-
лых и предельно-малых высотах не-
обходимо: основное внимание уде-
лять точности выдерживания курса
следования, заданной скорости и вы
соты полета; контролировать путь
счислением, визуальным методом в
комплексе с радиокомпасом, в случае
необходимости вводить поправки в
курс полета, уточнять время прнбы
тия в пункт назначения; по местным
признакам оценивать и уточнять на
правление и скорость ветра; следить
9 Зак. 639
за н ).мепением метеоусловий, чтобы
быть готовым принять правильное
решение в усложнившейся обста-
новке.
Самолетовождение над малоори-
ентирной местностью и пустыней по
ПВП осуществляется точным выдср
жнванпе.м расчетного курса следова-
ния с периодическим уточнением уг-
ла сноса; особое внимание уделяется
определению путевой скорости. При
полетах вне трасс разрешается в
случае невыхода в заданную точку,
учитывая запас топлива, отыскивать
объект, выполняя полет по прямо-
угольному маршруту (кругу) вокруг
выбранного на местности ориентира.
Если после 15—20 мин поиска пункт
назначения не будет обнаружен, то
экипаж обязан возвратиться в пункт
вылета пли уйти на ближайший за-
пасной аэродром. Самолетовождение
при полетах по ППП предусматрива-
ет строгое выдерживание расчетного
режима полета, периодическое внесе-
ние необходимых поправок в курс и
скорость, комплексное использование
навигационных средств и систем
Самолетовождение над горной ме-
стностью на высотах, превышающих
наибольшие вершины гор на 1000 м
и более, выполняется по общим пра-
вилам согласно НПП ГА и инструк-
циям по производству полетов, раз-
рабатываемым для каждой МВЛ,
пролегающей над горной местностью.
Поскольку в горных районах ветро-
вой режим неустойчив, то скорость и
направление ветра необходимо опре-
делять с интервалом 20-35 мин. а
также при переходе от горной мест-
ности к равнинной и наоборот. По
этой же причине следует больше уде-
лять внимания визуальной ориенти-
ровке и применению РТС, учитывая
влияние горного эффекта на точность
радноко.мпасных измерений. В каче-
стве ориентиров, кроме крупных на-
селенных пунктов, рек и озер, можно
использовать вершины гор и хребтов,
ущелья и долины. Вершины гор и
хребтов служат также хорошими
РЛО.
При полетах в полярных районах
Северного и Южного полушарий ос-
новным датчиком курса служат ГПК
и КС в режиме ГПК, периодически
257
корректируемые по астрокомпасу. По-
леты выполняются то 1ьк<> по орто-
дромиям с использованием специаль-
ной сетки условных меридианов,
впервые предложенной (применитель-
но к району полюсов) В. И. Аккура-
товым. Путь контролируется по ра-
диотехническим н астрономическим
средствам, ведется прокладка пути
и визуальная ориентировка. При ис-
пользовании наземных РТС пред-
почтение отдается радиолокаторам,
УКВ радиопеленгаторам, разностно-
далыюмерной системе и радиомаякам
типа ВРМ-5. Независимо от запроса
диспетчера экипаж каждые 30 мин
сообщает ему свое МС.
24.3. Восстановление
ориентировки
При потере ориентировки экипаж,
сохраняя спокойствие и выдержку,
нс допуская необдуманного решения
и полета с произвольными курсами,
обязан: включить сигнал бедствия
системы радиолокационного опозна-
вания н передать по радио сигнал
«Полюс»; доложить диспетчеру о
потере ориентировки, остатке топли-
ва и условиях полета; запять эше
лон, обеспечивающий нанлучшнй об-
зор .местности и условия для обна-
ружения ВС и оказания помощи на-
земными радиотехническими средст-
вами; перейти на режим максималь-
ной продолжительности полета; оце-
нить обстановку и в зависимости от
условий полета и остатка топлива
применять наиболее рациональные в
данное обстановке способы восста-
новления ориентировки, предусмот-
ренные ПШС ГА и специальными
указаниями, разработанными для
данной воздушной трассы. Если вос-
становить ориентировку нс удается,
то следует заблаговременно до пол-
ного израсходования топлива или до
наступления темноты совершить по-
садку на любом аэродроме нли вы-
бранной с воздуха площадке.
Восстановление потерянной ориен-
тировки во всех случаях следует на-
чинать е определения места ВС за-
просом его у службы движения, ис-
258
пользования данных устройств авто
матического счисления пути и приме-
нением РИС. Если эти действия или
невозможны, или нс дают результата,
то экипаж обязан проверить расчет-
ные данные, записи фактического ре
жима полета, правильность учета
ветра и определить МС прокладкой
пройденного пути от последнего-опо-
знанного ориентира. Способы опре-
деления места следует дублировать
Если при этом опре юлить свое- ме-
стонахождение не у алось, то необ-
ходимо восстановить ориентировку
одним из следующих способов: выхо-
дом на РНТ; использованием ЛП.
выходом на характерный линейный
или крупный площадной ориентир.
Восстановление ориентировки вы
ходом на РНТ (привощую радио
станцию, радиопеленгатор, радиома-
як, РЛО, ОРЛ)—наиболее простой
и надежный спогоб. Он применяется
во всех случаях, особенно когда РНТ
расположена близко к ЛЗП, пункту
назначения или к одному из запас-
ных аэродромов. Начиная полет на
выбранную радиостанцию, необходн
мо внимательно прослушать ее по-
зывные, чтобы ошибочно не выйти
на другую РНТ.
Восстановление ориентировки с
использованием ЛП широко примени
ется в практике самолетовождения
При прочих равных условиях пред-
почтение следует отдавать той ЛП.
которую быстрее и проще получить и
построить с малой вероятностью
субъективных ошибок оператора.
Восстановление ориентировки вы
ходом на характерный линейный или
крупный площадной ориентир ноз
можно в условиях визуального поле
та нли применения бортового радис
локатора.
Прежде чем взять курс для выхо
да иа линейный ориентир,-необходи-
мо оценить возможный район место
нахождения ВС и выбрать такой ори-
ентир, который находится за преде-
лами этого района. На ВС должно
быть достаточно топлива для поле-
та к ориентиру и далее к пункту на-
значения или ближайшему аэродро
му. Выходить на характерный линей
пый ориентир следует с курсом, пер-
пендикулярным к нему.
Если за районам потерн ориенти-
ровки имеется характерный крупный
площадной ориентир, то она восста-
навливается выходом на него. Дан-
ный способ может успешно приме-
няться, если предварительно получить
и проложить на карте ЛП. проходя-
щую через намеченный ориентир. За-
тем берется курс вдоль этой линии в
сторону расположения ориентира.
В визуальном полете ночью для
восстановления ориентировки, кроме
общих способов определения МС, це-
лесообразно использовать выход иа
световой ориентир или световой маяк.
Восстановив ориентировку в за-
висимости от характера выполняемо-
го задания, располагаемого запаса
топлива и времени суток экипаж
обязан принять одно из следующих
решений: продолжать полет в пункт
назначения, вернуться на аэродром
вылета или совершить вынужденную
посадку иа ближайшем запасном
аэродроме илн в другом безопасном
месте, согласовав свои действия со
службой движения.
Диспетчер, получив сообщение
экипажа о потере ориентировки, дол-
жен определить местонахождение ВС
с помощью радиолокационных
средств и передать экипажу маршрут
следования для выхода на трассу,
аэро гром назначения нлн запасной
аэродром.
В тех случаях, когда экипажу не
удается восстановить ориентировку,
командир обязан произвести посадку
на любом аэродроме нли пригодной
для этого площадке до момента пол-
ного израсходования топлива и на-
ступления темноты. В ночном полете,
если позволяет запас топлива, следу-
ет продержаться в воздухе до рас-
света, а при невозможности — произ-
нести посадку на любом аэродроме
или выбранной с воз гуха площадке,
используя осветительные ракеты.
Глава 25
ПРЕДОТВРАЩЕНИЕ ПОПАДАНИЙ ВС В ЗОНЫ ОПАСНЫХ
МЕТЕОРОЛОГИЧЕСКИХ ЯВЛЕНИЙ
2S.1. Опасные для полетов
метеорологические явления
Метеорологические условия во
многом определяют безопасность, ре-
гулярность и экономичность полетов.
Именно в плохих метеоусловиях ча-
ще всего создается обстановка, в
которой возможны столкновения ВС
меж гу собой и наземными препятст-
виями, потеря ориентировки, попа га-
ния в области болтанки и обледене-
ния. Поэтому весь процесс подготов
ки к полетам и их выполнения дол-
жен строиться таким образом, чтобы
исключался вход ВС в область опас-
ных мстеоявленип.
К опасным для полетов метеояв
ленияч относятся:
на аэродромах вылета и
посадки — гроза. град, сильная
9*
болтанка, сдвиг ветра, гололед, силь-
ное обледенение, смерч, ураган, сидь-
ная пыльная буря, низкая обзач-
ность, высота которой равна и мень-
ше минимума командира ВС, ВС
илн аэродрома, дальность видимости
на ВПП. равная илн меньшая мини-
мумов;
по маршруту полета
мощные кучевые и кучево-дождевые
облака, турбулентность прн ясном
небе, град, смерч, обледенение, силь-
ная болтанка, низкая облачность, вы-
сота которой равна нли ниже мини-
мума командира ВС для полетов по
ПВП
Большую опасность пре гставляст
турбулентность в виде сдвига ветра
иа предельно малых высотах полета
на этапе захода на посадку. Сдвиг
ветра—это изменение скорости вет-
ра в вгртикальной н горизонтальной
259
плоскостях н ограниченном простран-
стве Особенно опасны локализован-
ные нисходящие' турбулентные' потоки
высокой интенсивности, названные'
микропорывами, имеющие диаметр
порядка I км (максимум 2.5 км), а
также крупномасштабные турбулепт
ныс потоки с диаметром до 10 км.
которые, приближаясь к земной по-
верхности, растекаются от центра в
разные стороны, создавая сильные*
сдвиги ветра. Продолжительность
микропорывов высокой интенсивно
сти 1—5 мин, изменение горизонталь-
ной скорости ветра до 270 км/ч, вер-
тикальной скорости нисходящего по-
тока до 20 м/с
С твит ветра может привести к
опасным скоростям снижения ВС,
прежде чем пилот или автоматиче-
ская система управления полетом
обеспечат коррекцию параметров по
лета. Метеослужбы и службы УВД
аэропортов в настоящее время лишь
вообще предупреждают о возможно-
сти возникновения сдвига ветра, од-
нако сообщить его местонахождение
или оценить интенсивность не могут.
С мощными кучево-дождевыми об-
лаками связаны грозы, представляю-
щие собой комплексное атмосферное
явление с многократными электриче-
скими разрядами в виде молний При
грозах наблюдаются лиииевые осадки
в виде дождя, града, а иногда и
снега.
Пометы в грозу опасны: из-за
сильной турбулентности в облаках,
способной вызвать сильную болтанку
и перегрузки ВС, превышающие пре-
дельно допустимые, вследствие обле-
денения ВС на высотах, где темпера-
тура ниже 0° С; из-за возможности
поражения ВС молниями.
Г розовые облика характеризуются
максимальной вертикальной протя
женностыс 7 9 км, но зафиксирова-
ны они и до 13 20 км. В них наблю-
еается сильная турбулентность чере
дующихся восходящих и нисходящих
струй со скоростью то 60 м/с. Вслед
стиие больдной водности кучсво-дож
левых облаков и их смешанной струк-
туры при отрицательных температу-
рах нелика вероятность иблеленения
ВС
25.2. Меры
по предупреждению
попадания ВС в опасные
метеорологические явления
Разработка мер но предупреж де
пию попадания ВС в зоны опасных
метеорологических явлений начищает-
ся еще на этапе' предварительной
подготовки к полетам. В процессе
изучения маршрута и характеристик
аэродромов анализируются метеоро-
логические особенности по воздудн
ной трассе в данное время года, в
районе работ и на аэро дроме по-
са дки
Метеорологиче! кую подготовку
проходит экипаж перед вылетом. Ее
обьем зависит от продолжительности
полета, используемого правила поле1
тов, характера задания и типа ВС.
При этом он обязан получить на ме
теостанцпи подробную консультацию
и изучить метеорологическую обста-
новку: фактическую погоду по трассе
(маршруту, району) полета, на аэро-
дромах вылета, пека дки и запасных,
прогноз погоды по трассе, на основ
ном и запасном аэродромах. Особое
внимание экипаж обращает на синоп-
тические проддессы, при которых мо-
гут существенно ухудшиться метеоус-
ловия: понижение облаков, ухудше
нис видимости, возникновение грозы
и турбулентное .и и т. п. Экипажу
дается информация об изменении ат
мд)сфсрного давления по трассе и егд)
минимальном значении, приведенном
к уровню моря, а также о фактиче
еких температуре и давлении на аэро-
дроме посадки. При полетах в гор
ной местности для определения ниж-
него безопасного эшелона указывает
ся высота изобарической поверхности
в районе минимального превышения
по трассе. Если полет по ПВП н осо
бым ПВП производится в горной мд
стности, то опасные для полетов мд
теоявлення в прогнозе должны ука-
зываться в полосе не менее 50 км пд>
обе стороны от оси вддздушной трас
сы, а ког да маршрут полета прохо
дит над равнинной местностью на
удалении до 25 км от горного хреб-
та, в тексте прогноза дополнительно
260
сообщаются ожидаемые метеоусло-
вия над горами.
После метеорологической подго-
товки экипаж снабжается метеороло-
гической документацией. Экипажам
запрещается использовать прогнозы,
срок действия которых меньше рас
четного времени полета плюс 30 мин.
Прн принятии решения ни полет в
районе грозовой деятельности коман-
!ир ВС должен учитывать: характер
гроз (виутрнмассовые. фронтальные),
расположенно и перемещение грозо-
вых (ливневых) очагов, возможные
маршруты обхода, необходимость до-
полнительной заправки топливом.
Принимать решение ему па вылет по
ПВП и ОПВП ниже нижнего эшело-
на запрещается, если в горной мест-
ности имеются или прогнозируются
фронтальные грозы.
При подходе к зо ie грозовой дея
гельиостп командир ВС обязан оце-
нить возможность продолжения по-
лета, принять решение на обход опас-
ной зоны иа полет на свой аэродром
в согласовать свои действия с дис-
петчером.
В случае визуального обнаруже
ния в полете мощных кучевых и ку-
чево дождевых облаков, примыкаю-
щих к грозовым очагам, разрешается
обходить их па удалении ие менее
10 км. Прн невозможности их обхода
на заданной высоте разрешается ви-
зуальный полет под облаками и выше
их. Полет под такими облаками раз-
решается только днем, вне1 зоны
осадков, если:
высота полета ВС над рельефом
местности и искусственными препят-
ствиями не менее Нсммст. но во
всех случаях не меиее 200 м в рав-
нинной и холмистой местностях и ие
менее 600 м в горной местности;
вертикальное расстояние от ВС до
нижней границы облаков не меиее
200 м.
При обнаружении бортовыми ра
диолокаторами мощных кучевых и
кучево-дождевых облаков разрешает-
ся обходить их на удалении не меиее
15 км от ближней границы засветки
Пересечение фронтальной облачности
с отдельными грозовыми очагами мо
жет произво гиться в том месте, где
расстояние между границами засве-
ток на экране БРЛС не менее 50 км.
Экипажам ВС запрещается преднаме
ренно входить в мощные кучевые и
кучево-дождевые облака.
Полет над верхней границей мощ-
ных кучевых и кучево-дождевых об-
лаков при визуальном и радиолока-
ционном обнаружении разрешается
производить с превышением над ни
ми не менее 500 м.
В процессе подготовки к полету
в горной местности экипаж дополни-
тельно обязан: проанализировать ме-
теоусловия и оценить возможность
образования сильных восходящих и
нисходящих потоков воздуха, куче-
во-дождевых облаков и гроз, а также
орографической болтанки в зоне взле-
та н посадки; наметить обходные
маршруты на случай встречи е опас-
ными метеоявленнями.
При пересечении горного хребта
по ПВП командир ВС обязан учиты-
вать наличие восходящих и нисходя-
щих воздушных потоков. Если при
приближении к горному хребту на-
блюдаются нисходящие потоки возду-
ха и для выдерживания горизонталь-
ного полета требуется увеличить ре-
жим работы двигателей до номиналь-
ного, то пересекать горный хребет на
высотах меиее 900 м над рельефом
местности запрещается. При полетах
по ПВП на высоте менее 900 м над
горами и попадании в зону сильной
болтанки командир ВС с разрешения
диспетчера должен вывести ВС из
нес с набором высоты или возвра
тнться иа аэротром вылета (запас
ной). В случае попадания ВС в зону
болтанки на больших высотах необ-
ходимо с разрешения диспетчера из-
менить высоту полета. Причем сни-
жение допускается только до высоты
нс менее 500 м над верхней границей
кучево-дождевых облаков. Пилоти-
рование в зоне болтанки выполняется
в соответствии с требованиями РЛЭ.
Заход на посадку в условиях бол-
танки производится в соответствии с
рекомендациями РЛЭ. На снижении
при попадании подготовленного к по-
садке ВС в интенсивный нисходящий
поток, приводящий к увеличению
установленной вертикально! скоро-
сти снижения по вариометру более
3 м с. или при превышении прираще-
261
ния перегрузки по акселерометру бо-
лее ±0,4 ед командир ВС обязан
принять решение об уходе иа второй
крут.
Вертикальные вихри, ие связанные
с облаками и обнаруживаемые визу-
ально, обходятся стороной; вихри
(смерчи), связанные с кучево-дожде-
выми облаками, обнаруживаемые ви-
зуально, экипаж обязан обходить на
удалении не менее 30 км от их види-
мых границ.
При встрече с пыльной бурей на
маршруте экипаж принимает меры к
обходу ее визуально стороной или
сверху. Заход на посадку и посадка
ВС в условиях пыльной бури прн
наличии сильной болтанки запрета
ются.
Полеты в зонах обледенения на
ВС, не имеющих допуска к эксплу-
атации в этих условиях запрещаются.
На всех этапах полета необхотимо
включать противообледенительное
оборудование до входа в опасную
область. Если принятые экипажем
меры по борьбе с обледенением ока
зываются неэффективными и продол-
жать полет небезопасно, то командир
ВС обязан, применив сигнал срочно-
сти, по согласованию с диспетчером
изменить высоту или маршрут полета
для выхода в район, где возможен
безопасный полет.
Диспетчер, используя радиолока-
торы и сообщения с бортов ВС, а
также метеоинформацию, обязан ин-
формировать экипажи ВС о характе-
ре облачности, всех опасных метеояв-
леннях, направлении их смещения и
давать рекомендации по их обходу.
Изменять высоту или маршрут по-
лета для обхода опасных метеороло-
гических явлений разрешается только
по согласованию с диспетчером, за
исключением случаев возникновения
угрозы безопасности полета на за-
данном эшелоне В этом случае ко-
мандиру ВС предоставляется право
самостоятельно изменять эшелон и
немедленно доложить об этом органу
УВД В этом случае командир ВС,
выполняющий полет по воз душной
трассе или МВД первой категории,
обязан, не изменяя эшелона полета,
отвернуть ВС, как правило, вправо
на 30° от оси трассы и, пройдя 20 км,
262
вывести его на прежний курс с од-
новременным изменением высоты до
выбранного эшелона и сообщить об
этом органу УВД. Заняв новый эше-
лон, командир по согласованию с
диспетчером выводит ВС на воздуш
ную трассу или МВД.
Для сохранения ориентировки пе-
ред началом маневра по обходу зон
опасных метеоявлений следует'точ-
нее определить .МС и в дальнейшем
вести счисление пути. Выход иа ЛЗП
после обхода зоны опасности проще
всего осуществляется с использовани-
ем АНК или РСБН.
25.3. Применение бортового
радиолокатора для обхода
очага грозы
В предупреждении попадания В<
в зоны грозовой деятельности боль
шую роль играет бортовая радиоло-
кационная станция. При полетах в
зоне мощных кучево-дождевых обла
ков она обеспечивает: обнаружение
очагов гроз иа удалениях 150
250 км; определение положения зо
ны грозовой деятельности отиоситсль
но ВС и ЛП, оценку протяженности
грозовой зоны; определение степени
вертикального развития очага грозы;
выделение наиболее опасных областей
грозовой деятельности; выбор рацио
пильного решения по обходу очага
грозы.
Заблаговременное обнаруженш
очагов гроз позволяет экипажу вы
полнить необходимые измерения и
расчеты и по согласованию с диспет
чером принять решение о дальней
ших действиях — или обойти очаг
грозы стороной на заданном эшелоне,
или обойти его сверху, или лететь иа
запасной (возвращаться на свой)
аэродром. Выбор способа обхода
должен производиться с точки зре
ния обеспечения безопасности полета
Однако следует учитывать и вопросы
регулярности и экономичности поле
тов. а также технологичность one
раций.
Обход очагов гроз сверху возмо-
жен, если рабочий потолок ВС поз
воляст это сделать. Этот способ
г)
, Vu Убчз S0°
о *• • • ।
4--------------------------
5 —----------------------*—
^гр ^без Etp
Рис. 25.1. Обход грозового очага без изменения эшелона полета:
а при 1ргр>0: •фс«-з>0: 6 при iprpCO: iJ>6ea<0: в при itrp<0. фбга>0: г- расчет
элементов обхода грозового очага
практически не влияет иа экономии
иость и регулярность полетов. В этом
случае ие возникает трудностей в со-
хранении ориентировки, но имеют
место пересечения встречных и по-
путных эшелонов Поэтому необхо-
димо принять все меры для пред-
отвращения столкновении ВС.
Обход очага грозы стороной на
заданном эшелоне ведет к увеличе-
нию продолжительности полета и,
следовательно, к снижению регуляр
пости и экономичности полетов. Из
менеиие маршрута полета усложняет
ориентировку и создает предпосылку
ее потери. При возможном персссче
нии параллельных и расходящихся
воздушных трасс возникают условия
для встречи и столкновения с дру-
гими ВС.
Для обхода очага грозы стороной
без изменения высоты излета необхо-
димо:
измерить курсовой угол грозы
4ri> (угол между продольной осью
самолета и направлением иа бли-
жайшую к линии курса границу оча
га грозы) и дальность до него Drp
(рнс. 25.1), причем величине трГр при-
писывается знак плюс, если очаг гро-
зы справа от линии курса, и наобо-
рот;
рассчитать боковое расстояние от
границы грозы до линии курса
Zip = £>rp sin |фгр|. Если оно меньше
безопасного расстояния прохода ми
мо очага грозы гвез=15 км, то не-
обходимо изменить курс полета для
пролета иа безопасном удалении;
определить безопасный курсовой
угол грозы (приписав ему знак плюс
ИЛИ минус) ^?беэ = агс SinfZnea/Drp)
Знак его берется аналогично знаку
курсового утла фгр в зависимости от
стороны обхода (справа — минус,
слева — плюс)грозового очага;
рассчитать поправку в курс поле-
та (с учетом знаков ф,и 1рбеэ)
Ду хррр—фбеэ- Поправка Ду практи-
чески непосредственно определяется
по экрану индикатора радиолокацион-
ной станции как дополнительный угол
отворота УО от начального фГр до
4'бе.-1, Т. е. УО = Ду = Ч1гр—Ч’веэ- Сле-
довательно, отвороту влево приписы-
вается знак минус, а вправо — плюс;
определить курс полета у6ез =
=у + Ду, где у — курс полета до на-
чала отворота от очага грозы.
В дальнейшем выдерживается
рассчитанный у,-.1Э и ведется наблю-
дение за положением границы очага
грозы относительно линии курса.
263-
Рис. 25.2. Обход грозового очага сверх)
/ расчетная траектория набора высоты ВС: 2 касательная к диаграмме направлен-
ности ЬРЛС; 3 траектория распространения радиоволн; 4 линия местного юризоита
ВС в исходной точке
Поскольку грозовой очаг и ВС
сносятся ветром ие совсем одинако-
во, по мере сближения с очагом гро-
зы необходимо следить за значением
zr|, (так как значения фгр и флез не
постоянны) и в случае 2г|.<Сгве,1 про
изводить дополнительные отвороты.
При встрече с мощными фрон
тальными кучевыми и кучево-дожде-
выми облаками, которые невозможно
обойти иа заданном эшелоне, обход
производится над очагом грозы с
превышением не менее V/(-,ej = 500 м.
Причем надежный обход сверху воз-
можен только при оборудовании са-
молета радиолокатором, имеющим
стабилизированную антенну с узким
лучом в вертикальной плоскости, и
на самолете, рабочий потолок кото-
рого больше суммарной высоты
Нпот + ^/наГ..
где Нап.1 — высота (эшелон) полета
в момент измерений; \НИяа — требуе-
мый набор высоты для пролета над
очагом грозы с превышением Х//г.Вз>
>500 м (рис, 25 2).
Требуемая высота набора являет-
ся функцией измеренных дальности
Огр и угла превышения грозы Игр,
рефракции радиоволн в вертикальной
ПЛОСКОСТИ И ДНг.ез.'
^^наб- А//рр ф-(-Л//с1 д-А//г,рз
= (Л^гр.изм —АА/реф) "Ь
+ A//CT-+ АА/без>
где А//гр нзм — 1,7о -10 ® осгр Drp —
измеренное превышение очага грозы
над плоскостью стабилизации антен-
ны; Д/Ареф «а 0,02 Огр —разность вы
сот измеренного и фактического пре-
вышения грозы пол действием ре
фракции; АА/СТ«0,08 О?р —превы
шеиие плоскости стабилизации антен-
ны над эшелоном полета в районе
грозы.
Рабочая формула расчета требуе-
мой высоты набора в метрах
АА/наб ~ 17,5arp Drp -j-
-i 0 060*р4-500, (25.1)
где Огр выражается в километрах, а
«гр — в ipa.iycax; 17,5 и 0,06 - ко
эффициенты перевода.
Угол превышения грозы
аГр ад—0,50н,
где и х угол подъема антенны до
исчезновения с экрана индикатора
БРЛС отметки грозы; 0В— ширина
диаграммы направленности антенны
в вертикальной плоскости. Экипаж
рассчитывает АА/И»г., время полета
ю грозы /пол (с учетом расстояния
безопасного сближения Dc,t.,—15 км)
и требуемую вертикальную скорость
набора высоты Ув т:
/п<>л= (Б)Гр — Преа) 1АИ,
Рр. т АНнаб /пол-
264
где Vm—истинная скорость полета
ВС.
Если после выполнения расчетов
окажется, что Нп„л+УНилб меньше
рабочего потолка, а располагаемая
вертикальная скорость Е'в больше
требуемой I „ т, то можно начать ма-
невр обхода очага грозы сверху.
Погрешность определения ХНнап
является функцией расстояния до
очага грозы, а также ошибок стабн
дизации антенны радиолокатора в
горизонтальной плоскости, передачи
положения антенны па шкалу утла
наклона, отсчета угла наклона, опрс
деления ширины диаграммы направ-
ленности и измерения дальности. Она
может быть оценена по приближенной
формуле, следующей из (25.1),
п'//няб = 17.5Drp о-х1р = ЮО1р,
в которой О,,, берется в километрах,
а получается в метрах.
Требуемый набор высоты опрс гсляет-
ся с большой погрешностью: напри-
мер, при Drr=10() км о ... =
'наб
АГ 101)0 м. Поскольку обходы сверху
будут совершаться вблизи рабочего
потолка самолета, то такие погреш-
ности недопустимы.
Для надежного обеспечения обхо-
да очага грозы сверху необходимо
по мере сближения с ним нсрио шче-
скн оценивать возможность выпол
нения вертикального маневра. Это
проще всего сделать по характеру
изменения угла грозы Если по мере
сближения с грозовым очагом при
наборе высоты угол грозы не умень-
шается, то обход сверху невозможен.
В случае убывания этого угла обход
может оказаться возможным, если
ВС обладает запасом рабочего по-
толка и удаление очага грозы тако-
во, что ВС успеет набрать высоту
прежде, чем сблизится на безопас-
ное расстояние Dr,f3. Если же через
некоторое время полета с набором
высоты на D, 15 км угол наклона
грозы станет равным нулю, то можно
перейти в режим горизонтазьного по-
лета, так как набранная высота га-
рантирует (при 0,^4 ) пролет над
очагом грозы с превышением ие ме-
нее 500 м.
ПРИЛОЖЕНИЯ
1. ОСНОВЫ СФЕРИЧЕСКОМ ТРИГОНОМЕТРИИ
Сферой называется замкнутая по-
верхность, вес точки которой одина-
ково удалены от некоторой точки О
(центра сферы).
Большой круг — окружность на
поверхности сферы, образованная се-
чением сферы плоскостью, прохо 1Я-
щей через ее центр. Ратнус большого
круча равен радиусу сферы. Через
любую точку сферы может прохо-
1нть бесчисленное множество кругов
Положение дуги большого круга оп-
ределяется двумя точками на сфере
(при условии, что они не лежат иа
концах одного диаметра сферы). Лю-
бые две точки большого круга делят
его на две дуги, меньшая из которых
является линией кратчайшего рассто-
яния на поверхности сферы между
этими точками (геодезической ли-
шен).
Малый круг—окружность на по-
верхности сферы, образованная сече-
нием сферы плоскостью, ие проходя-
щей через ее центр
Длина дуги большого круга с
центральным углом а (в радианах)
равна Ra, где R — радиус сферы
Обычно рассматривают сферу единич-
ного радиуса, тогда длина дуги рав-
на а
Угол, образованный на сфере дву-
мя дугами большою круга, пересека-
ющимися в некоторой точке, измсря-
Рнс. П.1. Сферический треугольник
266
юг линейным углом между касатель-
ными к дугам в данной точке или
(что то же самое) двугранным уг-
лом между плоскостями больших
кругов. ,
Сферическим треугольником назы-
вается фигура на сфере, образован
ная тремя попарно пересекающимися
дзгамн больших кругов Три боль
ших круга образуют иа сфере не-
сколько треугольников (рнс. П. 1). Во
всех задачах рассматривается тот из
них, все стороны которого меньше
180°. Сумма углов сферического тре-
угольника всегда больше 180е. Сфе-
рическим избытком треугольника на-
зывается разность
е= 4+В4-С —180е. (П.1)
Площадь сферического треугольника
S = Rze (е — в радианах)
Элементы сферических треуголь-
ников в практических задачах выра-
жают в градусной мере, а при рас-
смотрении теоретических вопросов —
в радианах.
Сферический треугольник считает-
ся заданным, если известны три лю-
бых его элемента. Под решением тре
уюльника понимается отыскание его
неизвестных элементов.
Формула косинуса сто
р о н ы. В сферическом треугольнике
косинус стороны равен произведению
косинусов двух других сторон плюс
произведение синусов этих сторон иа
косинус угла между ними (т. е. на
косинус угла, противолежащего ис-
комой стороне). Для стороны а
cos a = cos b cos c-|-sin b sin c cos A
(П.2)
Формула косинуса угла.
Косинус утла сферического треуголь-
ника равен отрицательному произве-
дению косинусов двух других углов
плюс произведение синусов этих уг-
лов на косинус стороны между ними
(т. е. па косинус стороны, противоле
жащей искомому углу).
1ля угла .4
cos .4 = — cos В cos С 4-
4-sin В sin C cos а. (П.З)
Формула синусов. В сфе-
рическом треугольнике синусы сторон
относятся как синусы противолежа-
щих углов:
sin a sin A = sin b 'sin В
= sin с sin С. (П.4)
Формула котангенсов
(формула четырех рядом лежащих
элементов). Она связывает четыре
элемента треугольника, лежащие ря-
дом, например АсВа (см. рис. П.1).
Из них всегда — два угла и две сто-
роны. Одни угол всегда крайний,
(ругой внутренний и одна сторона
крайняя, другая внутренняя Форму
ia читается следующим образом
произведение котангенса крайнего
хгла на синус среднего угла равно
произведению котангенса крайней
стороны на синус средней стороны
минус произведение косинусов сред-
них элементов.
Например,
etg A sin В =ctg a sin с—
— cos с cos В. (П.5)
Формула пяти элементов
связывает три стороны и два угла
сферического треугольника.
В ием синус стороны, умноженный
иа косинус прилежащего угла равен
произведению косинуса стороны, про
тиволежащей этому углу, на синус
третьей стороны минус произведение
синуса противолежащей стороны на
косинус третьей стороны и на косинус
угла между ними.
Например,
sin a cos B = cos b sin с—
— sin b cos c cos A. (П.6)
Формулы полупериметра
используются для вычисления уыов
треугольника А, В. С по заданным
трем сторонам а, Ь, с:
₽=—г~;
. / sin (p — iA sin (р—
V sin р
— b) sin (p—c)
sin p
A R
tg — = -------------;
2 sin (p—a)
В R
tg — = -------------;
2 sm (p—b)
C R
tg---= ------------- (П 7)
2 sin (p—c)
Эти же формулы могут быть исполь-
зованы для определения сторон тре-
угольника по известным углам. Для
этого определяют стороны полярного
треугольника
«’ = 180 —Л, 5' —180° — В;
с’ = 180 —С
и подставляют их в приведенные вы
ше формулы. После определения по
(П.7) углов полярного треугольника
Д', В', С, осуществляется переход к
искомым сторонам заданного тре-
угольника
а= 180—Д'; 6 180°—В',
с =180°— С
Приведенные формулы позволяют
решать произвольные (косоугольные)
треугольники. Для исключения оши
бок рекомендуется переобозначить
стороны и углы решаемого треуголь
инка в соответствии с обозначениями
в приведенных формулах.
Если один из углов сферического
треугольника является прямым (ра
вей 90°), то решение треугольника
существенно упрощается. При реше-
нии прямоугольных треугольников по
двум заданным элементам отыскива
ется третий. Для решения может ис
пользоваться одно из следующих
правил:
косинус гипотенузы равен произ
ведению косинусов катетов;
синус каждого из катетов равен
синусу гипотенузы, умноженном у иа
синус противолежащего угла;
267
тангенс каж того катета равен про-
изведению тангенса гипотенузы на ко-
синус угла, ему прилежащего,
тангенс одного нз катетов равен
произведению синуса другого катета
на тангенс противолежащего утла,
произведение котангенсов углов,
прилежащих к гипотенузе, равно ко
синусу гипотенузы;
косинус одного нз углов равен
произведению косинуса противолежа-
щей стороны на синус другого угла.
Мнемоническое правило
Непера объединяет приведенные
выше формулы решения прямоуголь-
ных треугольников. Катеты следует
считать лежащими рядом (прямой
угол как бы нс считается элементом),
а вместо катетов еле дует брать до-
полнения их до 90°. изменяя соответ-
ственно наименования тригонометри-
ческих функций (например, если по
формуле следует брать косинус кате-
та, равного 30°. то берется косинус
60е). Правило формулируется следу-
ющим образом: если три элемента
треугольника лежат рядом, то коси
нус среднего элемента равняется про
неведению котангенсов крайних эле
ментов, если элементы ис лежат ря-
дом, то косинус отдельно лежащего
элемента равен произведению chhVcof
элементов, лежащих рядом
Если все стороны сферического
треугольника малы, то его можно ре
шать как плоский треугольник.
Если в прямоугольном сфериче
ском треугольнике один из углов и
противолежащий ему катет — величи
ны малые, те) гипотенуза приблн
женио равна второму катету, а ма
лый катет приближенно равен протн
вотежаидему углу, умноженному на
гипотенузу.
2. ОСНОВЫ АВИАЦИОННОЙ АСТРОНОМИИ
Небесная сфера (рнс. П 2) — вооб-
ражаемая сфера произвольного ра-
1иуса, центром которой является на-
блюдатель (О). В авиационной аст-
рономии размерами Земли при этом
пренебрегают поэтому центр небес-
ной сферы можно считать совмещен-
ным с центром Земли
Ось пира (РР'} — прямая, парад
.тельная осн вращения Земли. Точки
Рис П.2. Элементы небесной сферы
2W
пересечения ее с небесной сферой иа
зывают соответственно северным и
южным полюсами мира.
Зенит (Z) — точка иа иебсснои
сфере, расположенная по вертикали
над головой наблюдателя
Надир (Z') — точка на небесной
сфере, противоположная зениту
Истинный горизонт (СВЮЗ) —
большой круг на небесной сфере
плоскость которого перпендикуляр
на вертикальной линии
Небес ный меридиан — большой
крут на небесной сфере, проходящий
через полюс и зенит наблюдателя
Небесный экватор (Q3Q'B)
большой круг на небесной сфере, пло
скость которого перпендикулярна оси
мира.
Пересечение небесного меридиана
с истинным горизонтом в точке С иа
зывается точкой севера, а в точке
Ю — точкой юга. Пересеченние небес
ного экватора с истинным горизон
том в точке В называется точкой во
стока, а в точке 3 — точкой запада
Погуденная линия—прямая, со
единяющая точки С и Ю.
Вертикал светила (ZMZ')— боль
шой крут небесной сферы, проходя
щий через зенит и светило Вертикал,
прохотящий через точки 3 и В, на-
зывается первым вертикалом.
Круг склонения светила (РМР'} —
большой круг, проходящий через по-
люсы мира и светило.
Альмукантарат (D.WD') — малый
круг на небесной сфере, параллель-
ный пдоекости истинного горизонта
Суточная параллель светила
iqMq')— малый круг иа небесной
сфере, проведенный через светило па-
раллельно небесному экватору.
В авиационной астрономии ис-
пользуются горизонтальная н эквато-
риальная системы координат.
В горизонтальной системе (рис.
П.З) координатами являются высота
светила (или зенитное расстояние) и
азимут светила.
Высота светила h — угол между
плоскостью истинного горизонта и
направл иием на светило. Он отсчи-
тывается от 0 до ±90° (к зениту вы-
сота положительна, к надиру — отри
цательна).
Зенитное расстояние г— угол
между вертикалью наблюдателя и
направлением иа светило М. Зенитное
расстояние и высота светила связаны
соотношением й+ z=90°.
Азимут светила Л — угол в пло-
скости истинного горизонта между
северным направлением полуденной
липин и плоскостью вертикала свети
ла. Оп измеряется от 0 до 360° в во-
сточном направлении.
В экваториальной системе (рис.
П.4) координатами являются склоне
иие светила и прямое восхождение
светила (или часовой угол).
Склонение светила С — угол меж-
ду плоскостью небесного экватора и
направлением на светило. Он изме-
ряется от 0 до ±90° (положительное
направление—к северному полюсу
мира)
Прямое восхождение светила а —
угол между плоскостью круга скло-
нения точки весеннего равноденствия
и плоскостью круга склонения свети
ла. Он измеряется от 0 до 360° про-
тив направления суточного вращения
небесной сферы.
Часовой угол светила t — угол
между южной частью плоскости не-
бесного меридиана и плоскостью
Рис. П.З. Горизонтальная система не
бесных координат
круга склонения светила Он нзмсря
ется от 0 до 360° в западном направ-
лении (западный часовой угол) или
от 0 до ±180° в восточном и запад-
ном направлениях
Параллактический треугольник
(рис. П.5)—сферический треуголь-
ник на небесной сфере, вершинами
которого являются полюс мира, зенит
и светило. Сторонами параллактиче
ского треугольника служат зенитное
расстояние г = 90°—h, полярное рас-
стояние р —90’—б, дополнение ши
роты наблюдателя до 90°. т. е.
(90е—if). Значения утлов параллак-
тического треугольника /, 360°—A. q
(параллактический угол) Параллак
Рис. П.4. Экваториальная система не
бесиых координат
269
Рис П.5. Параллактический треу
гольник
тический треугольник связывает гори
зонтальные координаты светила, эк
ваториальные координаты светила и
коор динаты места наблюдателя, что
дает возможность определять Место
самолета.
Поскольку небесный меридиан со-
ответствует географическому мериди-
ану наблюдателя, то часовые углы
для наблюдателей иа разных мериди-
анах различны. Местный часовой угол
светила равен сумме гринвичского ча-
сового угла (часового угла светила,
отсчитываемого от Гринвичского ме
Рис П6 Области расположения вос-
ходящих и незаходящих небесных
светил.
I — нсзаходящне; // — восходящие и за
ходящие; III — невосходящне
ридиана) и долготы места наблюда
теля X
t — ^гр~|“ А.
Решение параллактического тре
угольника позволяет получить следу-
ющие основные соотношения, исполь-
зуемые в авиационной астрономии:
sin h sin <р sin б+
-f cos <f cos 6 cos (/rp-)-X);
etg A =sin <p etg (trp + ^) —
— cos <p tg 6 cosec (<rp + :
sin t cos 6
sin A -—-------------;----;
cos n
sin S = sin <p sin h-j-
-f-cos <ji cos h cos A,
etg (frp + A,) sin <p etg A —
— cos <p tg h cosec A.
(П.8)
Вследствие вращения Земли во
круг своей оси происходит видимое
суточное движение небесных светил
на небесной сфере с востока на за-
пад. Небесные светила, имеющие по-
стоянные склонения и прямые вос-
хождения движутся по суточным па-
раллелям. Часовые углы равномерно
изменяются, увеличиваясь на 15° за
1 ч Азимуты и высоты светил изме-
няются неравномерно.
Светила, для которых 6^ (90°—<f>)
не заходят за горизонт, а светила,
для которых — (90°—<р), никогда
ие восходят над горизонтом (рис
П >) Остальные светила в течение
суток восходят и заходят. На север
иом (южном) полюсе Земли видна
только северная (южная) часть небес
нон сферы. Все звезды там ие захо
дят, двигаясь параллельно видимому
горизонту. На экваторе все звезды
восходят и заходят. Все светила
дважды в сутки пересекают небес-
ный меридиан.
Кульминацией светила называют
момент его прохождения через небес-
ный меридиан Различают кульмииа
цню верхнюю, когда светило ближе к
зениту (высота светила наибольшая),
и нижнюю, когда светило ближе к
на диру (высота светила иаимень
270
шан). При верхней кульминации вы
сота светила й = 90°±(6 <р) (знак
минус, если светило кульминирует
между полюсом и зенитом), а часо-
вой угол равен 0°. При нижней куль-
минации h = t> + q—90°, а часовой
угол равен 180°.
Вследствие вращения Земли во-
круг Солнца происходит кажущееся
цшженне Солнца по небесной сфере
в направлении, обратном ее вра-
щению
Эклиптикой называется большой
круг небесной сферы, по которому в
течение года перемещается центр
Солнца. Эклиптика наклонена к ие
бесному экватору на 23°27' и пере-
секает его в точках весеннего равно-
денствия Т (переход Солнца из
южной полусферы в северную 21 мар
га) и осеннего равноденствия /1 (пе-
реход Солнца из северной полусферы
в южную 23 сентября). Точки, в ко-
торых склонение Солнца наибольшее,
называется точкой летнего солнцесто-
яния (22 июня), а в которой склоне-
ние наименьшее - точкой зимнего
со шцестояния (22 текабря). На ши-
ротах, которые больше широты север-
ного (<f=66°33') пли меньше широ-
ты южного (<р =—66°33') полярного
круга. Солнце часть года не восхо-
дит, а часть года не заходит
Луна обращается вокруг Земли
по эллиптической орбите и пре дстав
ляется наблюдателю перемещающей-
ся по небесной сфере против ее вра
щепня со скоростью около 13° в сут
кн. В зависимости от положения Лу-
ны относительно Земли и Солнца оиа
имеет различный ви i (фазы) Фаза,
копа Луна обращена к Земле неосве-
щенной стороной, называется новолу
иисм, а когда освещенной полнолу
пнем. В промежуточных положениях
видна большая пли меньшая часть
освещенного диска Луны.
Звездное время s равно часовому
углу точки весеннего равноденствия
s = /T.
Его определяют, зная прямое восхож-
дение и часовой угол светила-
s = /-(-a. (П.9)
Промежуток времени между двумя
последовательными кульминациями
точки Т называется звездными сут
ками, они равны 23 ч 56 мин 04 с.
Истинное солнечное время /. из-
меряется западным часовым утлом
центра истинного Солнца. Так как
эклиптика наклонена к небесному эк-
ватору и Солнце движется по ней
неравномерно, продолжительность
чстиннпых солнечных суток (проме-
жутка времени между кульминациями
истинного Солнца) непостоянна
Среднее солнечное время m из-
меряется западным часовым углом
среднего (условного) Солнца, дни
жущегося равномерно по небесному
экватору. Разность между средним и
истинным солнечным временем налы
вается уравнением времени ц =
= т— .
Время, отсчитываемое от средней
полуночи, называется гражданским
временем Т Ойо отличается от сред
него времени на 12 ч, т е. Т=
= т± 12 ч.
1 ак как звездное и солнечное вре-
мя измеряется часовым углом, отсчи-
тываемым от небесного меридиана
наблюдателя, то на каждом мерили
ане Земли будет свое* время (звезд-
ное, истинное, среднее, граждан-
ское)
Местным временем называется
время, отсчитываемое от меридиана
наблюдателя. На различных мериди-
анах местное время отличается на
разность долгот.
Местное (гражданское) время на
Гринвичском меридиане (А=0) назы-
вается гринвичским (всемирным) вре
менем
Земной шар разбит на 24 часовых
пояса, каждый из которых имеет свой
номер /V (О^А'^23) и отстоит один
от другого на 15°. Гринвичский мери-
диан находится в середине нулевого
часового пояса.
Поясное время Гл —время, ранное
местному (гражданскому) времени
среднего меридиана данного часового
пояса.
В СССР время сдвинуто зимой на
I ч вперед по сравнению с поясным
(декретное время Т-д, а летом иа
2 ч вперед (летнее время Тл).
271
Переход к различным системам
отсчета времени осуществляется еле
дующим образом.
Г=Г,.р1-Х; Тгр=-Т-Х;
Т ГЛ, —У4-Л; 7\ =Г—X4-.V;
Тл Гv г 1 Гя Т.л^\
= 7\-+2.
(П.10)
В праве 1ениых формулах долготу
л необходимо подставлять в дуговой
мере Перевод ее тчин из угловой ме-
ры во временную и обратно осуще-
ствляется на основе следующих соот-
ношений:
1ч = 15 ; 1=4 мин;
1 ,мин = 15'; 1'=4 с;
1 с --15"; Г 0,0 (6) с.
На всей небесной сфере невоору-
женным глазом можно нзблюдать
около 6000 звезд. Небесная сфера
разделена иа 88 участков, называе-
мых созвездиями. Звезды в каждом
созвездии обозначают буквами гре-
ческого алфавита в порядке убывания
яркости (а — самая яркая и т. д.), за-
тем латинскими буквами или цифра-
ми. 257 ярких звезд имеют, кроме
того, собственные названия. >
Яркость звезд .характеризуют
звез 1ной величиной m так, что с уве-
личением m яркость звезд уменьшает-
ся, а звезда ш-й величины в 2,512 ра-
за ярче звезды (т+1)-й звездной
величины Невооруженным глазом
B1I шы звезды ДО 6 й величины (в яс
ную безлунную ночь) У ярких звезд
и планет звез щая величина может
быть отрицательна.
Для навигационных определений
могут использоваться любые вн ди-
мые звезды, но обычно используются
наиболее яркие, называемы навига-
ционными (табл. П.1). Поскольку
Таблица П.1. Основные навигационные звезды
Назва мне •иезды Обозначение и созвездие Зне*д>и«я ве личина Экваториальные координаты (1985 г.| Цвет Верхняя кульминации около полуночи
а 6
Полярная u М. Медведи- цы 2,14 31J51' 89 09' Оранже- вый Октябрь
Лльдеба- ран и Тельца 1,06 68 37 -'-16 28 То же Декабрь
Ригель [5 Ориона 0.34 78 20 — 8 14 Белый Декабрь
Капелла а Возничего 0,21 78 3J 45 58 Белый Декабрь
Бетель- гейзе и Ориона 0,92 88 27 + 7 24 Красный Декабрь
Сириус а Б Пса — 1,58 101 00 — 16 41 Бел ый Январь
Проциои •г М Пса 0,48 114 30 ‘-5 17 Желтый Январь
Поллукс )> Близнецов 1,21 115 57 - 28 05 Белый Январь
Регул и Льва 1,34 151 45 12 05 Белый Февраль
Спика а Девы 1,25 200 59 — II 02 Голубой Апрель
Арктур а Волопаса 0 24 213 37 19 19 Оранже- вый Апрель
Вега а Лиры 0.14 279 02 38 46 Белый Июль
Альтаир <1 Орла 0,89 297 24 + 8 48 Белый Июль
Денеб а Лебедя 1,33 310 09 45 11 Белый Август
Голиман а Центавра 0.06 219 29 —60 44 Оранже- вый Май
Антарес а Скорпиона 1,22 246 59 —26 23 Красный Май
Фомаль- гаут « Южной Ры- бы 1,29 344 05 —29 45 Белый Сентябрь
272
вследствие годовой прецессии эквато
риальныс координаты звезд меняют
ся (юли угловой минуты В год), ГОЧ
пыс их коор динаты для навигацион-
ных определений нсобхо днмо брать
из Авиационного астрономического
ежегодника соответствующего года.
Опознавание навигационных звезд
осуществляется но их расположению
средн других звезд, по ярксити и цве-
ту с помощью карты звездного неба
(рис П.7).
В северной части неба хорошо
ви 1но созвездие Большой
Медведп ц ы, семь ярких звезд
которого образуют так называемый
Большой Ковш. С его помощью лег-
ко найти Полярную звезду, проведя
линию через две крайние* звезды ков-
ша и отложив примерно пятикратное
расстояние меж iy ними. Полярная
звезда нахо ihtch в непосре дственной
близости от полюса мира и может
служить для определения направле
ния па север. Высота Полярной с
точностью ю одного градуса равна
широте места. Линия, проведенная
через другие две звезды ковша (см.
рис. П.7), приведет в созвездие
.'I ь в а с яркой навигационной звез
дой Регул. Дуга, продолжающая руч
ку ковша, покажет яркую звезду
Арктур из созвез шя Волопаса.
В летнее время в южной части не-
ба хорошо ви юн большой треуголь-
ник из ярких звезд, называемый
Летним (рис. П.8). Он состоит из
звез i разных созвез inй: Лиры Лебе-
дя и Орла. Звез ia Вега из неболь-
шого созвездия Лиры — самая яркая
звезда северной части небесной сфе-
ры Возле нее можно заметить ма-
ленький параллелограмм из неярких
звезд. Второй звездой Летнего тре
угольника является Денеб из созвез-
дия Лебедя, по форме напоминающе-
го крест. Третья звезда треугольни-
ка — Альтаир из созвездия Орла
В южной части зимиего неба хо-
рошо видно красивейшее созвез
дие Ориона, состоящее из ярких
звезд Его легко опознать по трем
звездам примерно одинаковой ярко-
сти, расположенным в одни ряд (пояс
Ориона). В этом созвездии находятся
Две навигационные звезды — Ригель
и Бетельгейзе (рис. П 9) Бетельгейзе
10 Зак. 639
Рис. П.7. Навигационные созвездия
северной части небесной сферы
имеет характерный красный цвет.
К западу от Ориона и ближе к по-
люсу мира находится оранжевая
звезда Альдебараи нз созвездия
Тельца. Ее легко опознать по распо-
ложенной поблизости тесной группе
звезд различной яркости (Плеяды).
Люди с нормальным зрением разли-
чают в Плеядах 6—8 звезд. Восточ
нее Ориона можно наблюдать нави-
гационную звезду Процноп, а ближе
от пего к полюсу —две расположен-
ные рядом звезды примерно одинако-
вой яркости Это Кастор и Поллукс,
входящие в созвездие Близнецов.
Возле созвездия Ориона находится и
Рис П8 Летний треугольник нави-
гационных звезд
273
Рис. П 9. Расположение навигацион-
ных созвездий зимой
созвездие Большого Пса с самой яр-
кой звездой небосвода — Сириусом
(с.м. рис. П.9).
Видимое перемещение планет на
небесной сфере является сложным н
неравномерным, так как зависит от
движения Земли вокруг Солнца и
Горизонт
Рие. П.10. Определение времени по
Большой Медведице
движения самих планет. Для навига-
ционных определений используются
Вейера, Марс и Юпитер. Яркость
планет со временем значительно ме-
няется. Следует учитывать, что при
прохождении планет через созвездия
они могут изменить их внешний вид
Экваториальные координаты планет
(прямое восхождение, гринвичский
часовой угол и склонение) приведены
в ААЕ на каждый час гринвичского
времени.
По звездам можно ориентировать
ся но сторонам горизонта и во вре
мен и. Направление иа север
легко можно найти по Полярной звез
де. Для определения в р е м i
и и используется созвездие Большой
Медве 1ицы. Необходимо представить
себе большой циферблат с центром в
Полярной звезде с цифрой 6 над
точкой севера. «Стрелкой» служит
воображаемая линия, проведенная че
рез Полярную и две крайние звезды
Большого Ковша (рис. П.10).
Для определения времени необхо
димо: на воображаемом циферблате
отсчитать показание небесной стрел-
ки; определить порядковый номер mi
сяца в году с десятыми долями (каж
дые три дня считать за одну деся
гую); полученное число сложить с по
казаииямн стрелки и умножить иа
два; вычтя это числи нз постоянной
величины 54,3 (ее надо запомнить),
получим время в данный момент (ес
ли получилось число больше 24, то
необходимо вычесть 24).
Для решения практических задач
авиационной астрономии используют
ся следующие основные астрономиче-
ские таблицы: Авиационный астроно-
мический ежегодник (ААЕ); таблицы
высот и азимутов Солнца, Луны и
планет (ТВА); таблицы высот и
азимутов звезд (ТВАЗ)
Авиационный астрономический
ежегодник содержит исходные дан-
ные для решения практических за-
дач, связанных с учетом астрономи-
ческих явлений, и применения в по-
лете астрономических систем и
средств навигации. Ои содержит еже-
дневные и вспомогательные таблицы.
Ежедневные таблицы содержат мо-
менты видимого восхода и захода
Солнца и Луны, продолжительность
гражданских сумерек, гринвичские
часовые углы и склонение Луны и
планет (Вейера, Чарс, Юпитер), па-
раллакс и фазы Луны, звездное вре-
мя, экваториальные координаты Солн-
ца. Вспомогательные таблицы содер-
жат другие данные, необходимые для
пользования ААЕ.
Таблицы высот и азимутов Солн-
ца, Луны н планет представляют со-
бой свод решений параллактического
треугольника. Для заданных значений
склонения, местного часового угла и
широты рассчитаны высоты и азиму-
ты светил.
ТВА изданы в трех книгах: ТВА-1
для ТВА-Н для 30
<4’^60°; ТВА-111 для 60 ф gj
< 88е.
Таблицы высот н азимутов звезд
J. ОСНОВЫ ТЕОРИИ ПОГРЕШНОСТЕЙ
Измерение некоторой величины за-
ключается в сравнении ее с другой,
принятой за единицу. Различают пря-
мые и косвенные измерения.
Прямые (непосредственные) изме-
рения предполагают непосредственное
сравнение измеряемой величины с
единицей измерения.
Косвенные (посредственные) измс
рения -это измерения, когда измеря-
емая величина рассчитывается как
функция от одной нли нескольких
других, прямо измеряемых величин.
Погрешность \ -разность между
измеренным значением величины .г и
ее истинным значением х„ст:
А= .г — Хиет-
По происхождению погрешности
подразделяют на личные, инструмен-
тальные, внешние, методические, по-
грешности модели, погрешности клас-
сифи ,ации.
Личные погрешности возникают
вследствие ограниченных возможно-
стей органов чувств наблюдателя.
Например, личная погрешность изме-
рения высоты светила секстантом.
И нструментальные (приборные)
погрешности вызваны неточностью
изготовления, установки и настройки
10*
также представляют собой сборник
рушений параллактического треуголь-
ника. Они предназначены для опре-
деления: вычисленных высот и ази-
мутов звезд, поправки к измеренной
высоте Полярной звезды.
Таблицы помещены в шести кни-
гах (три для северного полушария и
три для южного). Для северного по-
лушария изданы ТВАЗ: для север-
ных четных широт С-1 - 0°^ф^32 ;
С 11 — 28° s^<(s£60 ; С-П1 — 56Js^
^Ф^88°.
Аналогичные книги изданы для
южного полушария (ТВАЗ Ю-1,
ТВАЗ Ю-11, ТВАЗ Ю-111). В табли-
цах приведены высоты с точностью
до Г и азимуты с точностью до 1°.
Таблицы составлены для 25 навига-
ционных звезд.
прибора, с помощью которого осуще-
ствляются измерения.
Внешние погрешности связаны с
влиянием иа прибор внешней среды
(например, толчки, вибрация, колеба-
ния температуры).
Методические погрешности вызва-
ны несовершенством методов изме-
рений, заложенных в приборе, и об-
работки их результатов. Эти по-
грешности порождаются неучетом
различных факторов, аппроксимация-
ми, округлениями и т, д.
Погрешности модели возникают
вследствие несовпадения реального
измеряемого объекта и его математи-
ческой модели, принятой в выбран-
ном методе измерения. Например,
расстояние, измеренное иа карте, со-
держит погрешность, обусловленную
выбранной картографической проек-
цией.
Погрешности классификации воз-
никают тогда, когда параметры по-
стороннего объекта относятся к рас-
сматриваемому объекту. Пример: пс
ленгация неверно опознанного ори-
ентира.
По своему характеру погрешности
классифицируются па систематические
и случайные.
275
274
Систематическими называются по
грешности, возникающие всякий раз
при данных условиях измерения. Си-
стематические погрешности подразде-
ляют на постоянные и переменные.
Постоянные систематические по-
грешности сохраняют свой знак и ве-
личину в широком диапазоне условий
измерения. Например, погрешность
измерения стрелочным прибором с
равномерной шкалой, вызванная не-
точной установкой стрелки иа оси.
Переменные систематические по-
грешности зависят от времени или
значения измеряемой величины. На
пример, погрешность отсчета времени
ио часам, вызванная их суточным хо-
дом
Случайными называются погреш-
ности, зависящие от большого числа
различных причин Они могут ириии
мать различные значения при много-
кратных измерениях в одних и гех же
условиях.
Грубой погрешностью (промахом)
называется частный вид случайной
погрешности, когда она намного пре-
восходит заданные (нормальные, пас-
портные) характеристики измеритель-
ного прибора. Промахи возникают
при резком нарушении условий изме-
рения, неисправности прибора, гру-
бых ошибках персонала Погрешности
классификации всегда относятся к
категории промахов
Погрешность \ называют абсолют-
ной погрешностью измерения.
Относительная погрешность изме-
рения — это отношение абсолютной
погрешности к измеряемой величине
Д,>ГН А ’|1<Г-
Поправкой и называется величи-
на, отличающаяся от абсолютной по-
грешности только знаком и служа
щая для определения истинного зна-
чения измеряемой величины:
1’азделение погрешностей иа си-
стематические и случайные является
в известной мере условным и зависит
от того, что понимать под условиями
измерения.
Систематические погрешности ча-
сто могут быть определены и устра-
276
пены, поэтому болыщ-е внимание уде
лястся изучению случайных иогреш
постен С этой целью используется
математический аппарат теории веро
ясностей и математической стати
стики.
Случайным событием называется
такое явление, которое при выполие
иип заданного комплекса условий
(озределенного опыта) моэцет про
изойти нлн не произойти.
Полной группой событий называ
стея совокупность событий, из кото
рых при выполнении опыта хотя бы
одно должно непременно произойти 1
Несовместными называют такие
события, появление одного из кото
рых в опыте исключает возможность
иоинлеиия другого.
Противоположными называются
тва события, образующие полную
группу несовместных событий. В рт
зультате опыта обязательно произой
тет либо одно, либо другое собы ги<
но нс оба одновременно.
Вероятностью случайного события
называется число, характеризующее
степень возможности наступления
этого события прн определенных ус
ловиях. Вероятность события Л обо
значается Р(А) или Р и принимал
значения от 0 до 1.
Событие, которое прн выполнении
определенных условий должно непре |
менно произойти, называется досто
верным. Если Л достоверно, то ,
РМ) = 1.
Событие, противоположное досто
верному, называется невозможным
Оно не может произойти при тайных
условиях. Для невозможного события
Р(А)=О.
Условной вероятностью события А
называется вероятность этого собы
тия. вычисленная прн условии, что
произошло тругое событие В Об i
значается P(AjB).
Два события называются незини
самыми, если появление одного из
них не изменяет вероятности появле
ния другого.
Суммой нескольких событий иазы
вается событие, состоящее в появле
кип хотя бы одного из них.
Произведением нескольких собы
тий называется событие, заключаю
щесся в совместном их появлении
Для любых двух событий А и В
справедливы следующие выражения
(А и А обозначают противополож-
ные события):
Р (А)-(-Р (А)-1:
Р (АВ) Р (А) Р (В А)
Р (В)Р(А В).
Для несовместных событий
Р (А4-В) -Р (A) | Р (В).
Для независимых событий
Р (АВ) Р(А)Р(В).
Если событие А может произойти
вместе с одним из событий Ht,
Hi, •. Нп, образующих полную
группу несовместных событий, то
справедливо соотношение (формула
полной вероятности):
I >1
Р (А) У Р (Hf) Р (А 1Ц). (П.Н)
Если известно, что событие А про
изошло, то вероятность того, что оно
произошло вместе с событием //,,
может быть оценена по формуле Бай-
еса:
Р А)
Р (Hj) Р (А Н^
У Р (Н,) Р (A Hi)
(П.12)
Частотой события А называется
отношение числа m появлений собы-
тия А к общему числу опытов п:
j m п.
При неограниченном увеличении
чис ia одноротных независимых опы-
тов с практической достоверностью
можно утверждать, что частота со-
бытия будет сколь угодно мало от-
личаться от его вероятности в от-
дельном опыте.
Случайной называется величина,
которая в результате опыта может
принимать различные заранее неизве-
стные числовые значения. Различают
декретные и непрерывные случай-
ные величины. Дискретная случайная
величина может принимать только от-
дельные, изолированные значения.
Непрерывная случайная величина мо-
жет принимать любые значения из
некоторого интервала.
Всякое соотношение, устанавлива-
ющее связь между возможным зна-
чением случайной величины и вероят-
ностью его появления называют зако-
ном распределения.
Функцией распределения F(x) на-
зывается вероятность того, что слу-
чайная величина х* примет значение,
меньшее некоторого значения х:
F (х) Р (х* <, л I.
Функция распределения обладает
следующими свойствами
О F (х) < 1,
F (х,) < F (х2) при Xi < х2
Для непрерывных случайных вели-
чин в качестве закона распределения
часто используется плотность распре-
деления. определяемая как производ-
ная от функции распределения
f(x)=F'(x). Она обладает следую-
щими свойствами:
+ с*
f(x)>0; f l(x)dx 1
— ос
Характеристикой центра распреде-
ления является математическое ожи-
дание случайной величины, определя-
емое для дискретных и непрерывных
величин
тх
п
v Pi хр,
1
"'х
-l-oo
J x/(x)di,
--30
где Xj, pt —значения дискретной слу-
чайной величины и соответствующие
нм вероятности.
Математическое ожидание тх ха-
рактеризует среднее значение случай-
ной величины, относительно которого
рассеиваются все возможные ее зна-
чения. Математическим ожиданием
погрешности измерения является си-
стематическая погрешность.
Дисперсией Dx случайной величи-
ны называется математическое ожида-
ние квадрата отклонения случайной
277
величины от ее математического ожи-
ta-ния тх:
п
Dx — ^Pi Сч—^г);
I
4-00
Dx — J (x—тх)2 f (x) dx
Часто используется среднее квад
рагическое отклонение случайной ве-
личины, определяемое как положи-
тельное значение квадратного корня
из дисперсии пх =+Vd.
Применительно к погрешностям
используется термин средняя квадра-
тическая погрешность (СКП) измере-
ния. Дисперсия и СКП характеризу-
ют меру рассеяния случайной величи
ны (погрешности) относительно ее
математического ожидания (среднего
значения)
Для вероятности того, что случай-
ная величина отклонится от сво-
его математического ожидания на
величину, большую, чем k средних
квадратических отклонений,
Пусть Vf[x*] и £>[х*] —символы
взятия математического ожидания и
(исперсин Тогда, если с — постояи
нос число, то
М |с] =0; D[c] 0;
Л1|сх*| -сЛ1[х*|;
О|сл»| = с2Р[х*|. (П 14)
Вероятность того, что непрерыв-
ная случайная величина с функцией
распределения F(x) и плотностью
распределения f(x) примет значение
в интервале от а до может быть
определена как
Р (а < х* < Р) Р(Р)-Р(а)
₽
-J/(x)Jx. (П 15)
а
Корреляционным моментом слу-
чайных величин х* и у* называется
математическое ожи гание пронзведе-
278
ния отклонений этих случайных ве
личии от их математических ожила
нпй гпж и ту:
Кхи м |(х*—тх}
Величина, определяемая соотиошс
иисм p = KiUl(OxCv), называется ко
лффициентом корреляции. Ои лежит
в пределах —1^р<Д1 и херактс
ризует степень вероятностной связи
двух случайных величии. Для неза
висимых случайных величин р = 0.
О шако это равенство ие является до-
статочным условием их независимо
сти. При р=±1 между х и у имеет
ся функциональная (невероятиост-
ная) связь.
Для описания случайных погрет
иостей нзмсреиия наиболее часто нс
пользуются законы распределении
равномерной плотности: нормальный,
двусторонний экспоненциальный и
Рэлея (рис. П.11).
Нормальный закон распределения
имеет место, когда погрешность из-
мерения является суммой многих ма
лых погрешностей. Плотность иор
мального распределения
(*-wv)2
1 2сг
/(х) -----е х . (П.16)
|/2л ах
где тх — математическое ожидание;
Ол—среднее квадратическое откло-
нение.
Функция распределения
(Г m )*
<1/.
’1ля удобства выполнения расче-
тов при использовании нормального
закона введена функция
Ф(х) =
2
УЙ?
dt, (П 17»
которая затабулпронапа (табл. П2)
Эта функция является нечетной
Ф(х)=—Ф(х).
Формулы дли определения веро-
ятности попадания нормальной слу-
чайной величины в заданный интер-
вал приведены в табл. П.З. Для нор
мального закона вероятность откло-
нения случайной величины от своего
математического ожидания иа вели-
чину меиее <тх составляет 0,68, на ве-
личину менее 2 <тх — 0,95, а иа вели
чипу менее 3 <тх — 0,997. Последнюю
величину часто считают практически
равной единице, а \та1 = 3 <тх назы-
вают максимальным отклонением
(«правило трех сигм»).
Если случайная величина с очи
наковой вероятностью может при-
нять любое значение иа интервале
[ль -/, "Ы-/], то она распределена
по закону равномерной плотности
f(x) =
1
— при mx—
0 при с < тх—I и х>тх д-I.
(П 18)
Характеристики этого распределения
приведены в табл. П.З.
Плотность распределения двусто-
роннего экспоненциального закона
(распределение Лапласа)
У 2
г 1 х
I (х) ----—----е
"V 2 °х
(П.19)
где тх — математическое ожидание;
о» — среднее квадратическое откло-
нение.
При выполнении косвенных изме-
рений измеряемую величину у иахо
Дят функциональным преобразовани
ем результатов прямых измерений
нескольких величин х,:
У- f(xi< хг,., х„).
В этом случае для оценки харак-
теристик погрешностей определения у
Пользуются методом линеаризации.
Математическое ожидание погрешно-
сти (систематическая погрешность)
a)f(x)
1 1
л
Рис. П.11. Плотности законов рас
пределеиия случайных величии
а — равномерной плотности. б — двусто-
ронний экспоненциальный (Лапласа); в —
нормальный; г — Рэлея
. df
mv — = m*. + Д т*.
dxt • дхг ’
4-...+—(П.20)
dx„ п
а средняя квадратическая погреш-
ность (при независимых погрешно-
стях измерения величин х,)
279
X-------
2 Г 2
Таблица П.2. Значения функции Ф (х) =---------— I е dt
X Ф<х) X Ф(Х) X Ф(х) Д’ Ф(Х) X Ф(х) X Ф(Х)
0.00 0 ,0000 0,45 0.3473 0,90 0,6319 1.35 0,8230 1,80 0.9281 3,50 0,99953
01 0.0080 46 0,3545 91 0,6372 36 0,8262 81 0,9297 60 0,99968
02 0,0160 47 0.3616 92 0,6424 37 0.8293 82 0,9312 70 0,99978
03 0,0239 48 0,3688 93 0.6476 38 0,8324 83 0,9328 80 0,99986
04 0.0319 49 0,3759 94 0.6528 39 0,8355 84 0,9342 90 0,99990
0,05 0.0399 0.50 0.3828 0.95 0,6579 1,40 0.8385 1,85 0,9357 4,00 0,99994
06 0,0478 51 0.3899 96 0,6629 41 0,8415 86 0,9371
07 0,0558 52 0,3969 97 0,6680 42 0,8444 87 0,9385
08 0,0638 53 0.4039 98 0,6729 43 0,8473 88 0,9399 4,417 1 — 10 s
09 0,0717 54 0.4108 99 0,6778 44 0,8501 89 0,9412
0.10 0.0797 0.55 0.4177 1 ,00 0,6827 1,45 0,8529 1 90 0,9426 4,892 1 — 10—6
II 0,0876 56 0,4245 01 0,6875 46 0.8557 91 0,9439 5,327 1—10-5
12 0.0955 57 0.4313 02 0,6923 47 0,8584 92 0,9451
13 0,1034 58 0,4381 03 0.6970 48 0,8611 93 0,9464
14 0,1113 59 0,4448 04 0,7017 49 0,8638 94 0,9476
0.15 0,1192 0,60 0,4515 1 .05 0,7063 1.50 0,8664 1,95 0,9488
16 0,1271 61 0.4581 06 0,7109 51 0,8690 96 0,9500
17 0.1350 62 0,4647 07 0,7154 52 0.8715 97 0.9512
18 0,1428 63 0.4713 08 0,7199 53 0,8740 98 0,9523
19 0.1507 64 0.4778 09 0.7243 54 0,8764 99 0,9534
0,20 0,1585 0.65 0,4843 1,10 0,7287 1,55 0,8789 2,00 0,9545
21 0,1663 66 0,4907 И 0-7330 56 0.8812 05 0,9596
22 0.1741 67 0,4971 12 0,7373 57 0,8886 10 0,9643
23 0,1819 68 0.5035 13 0.7415 58 0,8859 15 0.9684
24 0.1897 69 0,5098 14 0.7457 59 0.8882 20 0.9722
0.25 0.1974 0.70 0,5161 1.15 0,7499 1 60 0 8904 2,26 0.9756
26 0.2051 71 0,5223 16 0,7540 61 0,8926 30 0,9786
27 0,2128 72 0.5285 17 0,7580 62 0,8948 35 0,9812
28 0.2205 73 0.5346 18 0,7620 63 0,8969 40 0,9836
29 0,2282 74 0.5407 19 0,7660 64 0,8990 45 0,9857
0,30 0.2358 0,75 0.5467 1 .20 0,7699 1.65 0,9011 2,50 0,9876
31 0.2434 76 0,5527 21 0,7737 66 0,9031 55 0.9892
32 0,2510 77 0.5587 22 0.7775 67 0,9051 60 9,9907
33 0,2586 78 0,5646 23 0,7813 68 0,9070 65 0,9920
34 0,2661 79 0.5705 0.7850 69 0,9093 70 0,9931
0.35 0,2737 0.80 0,5763 1.25 0,7887 1,70 0,9109 2,75 0,9940
36 0,2812 81 0,5821 26 0,7923 71 0,9127 80 0,9949
37 0,2886 82 0,5878 27 0,7959 72 0,9146 85 0,9956
38 0,2961 83 0,5935 28 0,7995 1 73 0,9164 90 0,9963
39 0.3035 84 0,5991 29 0,8029 74 0,9181 95 0,9968
0,40 0.3108 0,85 0.6047 1,30 0.8064 1,75 0,9199 3,00 0,99730
41 0,3182 86 0.6102 31 0.8098 76 0,9216 10 0,99806
42 0,3255 87 0,6157 32 0,8132 77 0,9235 20 0,99863
43 0,3328 88 0,6211 33 0.8165 78 0.9249 30 0,99903
44 0,3401 89 0,6265 34 0,8198 79 0,9265 40 0,99933
280
где т.ц — математические ожидания
погрешностей измерения х<; avj —
средние квадратические погрешности
df
измерения х,; —значения част-
ных ПРОИЗВОДНЫХ фунКЦИИ f ПО Xi в
точке, соответствующей измеренным
значениям х,-.
Формулы (П.20), (П.21) примени-
мы в случае, если соответствующие
производные не обращаются в нуль.
Некоторые частные случаи форму-
лы (П.21) приведены в табл. П.4.
Если Xt являются зависимыми, то
вид формул для расчета СКП изме
нится. Так, если погрешности измере-
ния Xi н х2 коррелнрованы с коэф-
фициентом корреляции р, то для
функции
У = х, + х2
формула расчета СКП будет иметь
вид
о у | aj, 4-<г^ + 2роХ1 oXj. (П.22)
Если результат опыта описывает-
ся не одной, а двумя или более слу-
чайными величинами, то они образу-
ют систему случайных величин (слу-
чайный вектор). Систему двух слу-
чайных величин (х*, у*) можно изоб-
разить случайной точкой на плоско-
сти с координатами х, у.
Плотность распределения системы
двух случайных величин, подчинен-
ных нормальному закону, описывает-
ся формулой
I
2лод-Оу f/1 — р2
2п(> тх}(у ту) (у р
о* ]]
(П.23)
где тх, ту— математические ожида-
ния случайных величин х и у, ах,
ач -средние квадратические откло-
нения случайных величин; р— коэф-
фициент корреляции.
Сечение поверхности распределе-
ния (рис. П.12) плоскостью, нарал-
Рис. П.12. Поверхность плотности
двухмерного закона нормальною рас-
пределения
Рис. П.1.3. Эллипс рассеивания и
средняя квадратическая радиальная
погрешность
дельной плоскости OXY, дает эллипс,
называемый эллипсом рассеивания.
В теории погрешностей измерения его
называют также эллипсом ошибок
(рнс. П.13). При р#=0 оси эллипса
ошибок образуют с осями X и Y не-
который угол
tg 2а 2рот Oy/(oJ—о2) (П.24)
Если оси системы координат вы
брать параллельными главным осям
эллипса, а начало координат в точке
/лж, mVt то в новой системе коорди-
нат OXY уравнение двухмерного нор-
мального закона
f(x, у) -
X1 V2
] 20? 2Оу
--------е , (П.25)
2па у ау
281
Таблица П 3. Распределения
Закон Плотност»» распределения Математи- ческое ожи данне
Равномерной плотности 1 /(л) '^*,рИХ lmv —1- + 0 при XI1 |т*— Р тх + П м /л v
Нормальный е I 2°х / ( а) _ е У 2л <тд. rn v
Лапласа I /(а) е У 2 Ох mx
Рэлея X >иг 1(х)-> — е при л>0 0 при х < 0 Ф 1
а новые случайные величины х* и у*
будут некоррелированными
Единичным эллипсом рассеивания
называется эллипс рассеивания, у ко-
торого полуоси равны <тх и о„ (глав-
ным СКП двухмерного нормального
распределения).
Вероятность попадания случайной
точки в эллипс в с раз больший еди-
ничного (с полуосями со, и cav)
2
Р-=1—е , (П 26)
а значения с, соответствующие задан-
ной вероятности Р,
С = Д/2 У — ln(l—Р)
Значения J—ln(l—Р) приведен!
в табл. П.5.
Если главные СКП равны между
собой, то распределение (П.25) назы
вается круговым (эллипсы нревра
щаются в окружность).
Средним квадратическим радиаль
ным отклонением (в теории погреш
ноет», й — средней квадратической ра
диа гьной погрешностью) называется
величина, численно равная диагонали
прямоугольника, построенного на по
луосях единичного элзипса рассей
вания
ar = ] aj-4oj. (П.27)
282
погрешностей измерений
Среднее кваЛ
ратичсское
отклонение
Р (а U)
Г(1 х* | < а)
Р —сс
21
при а, Р £ |тд.— /,
а
/
при тх 0 н а < I
I —е
прн тх О
<** Р*
2п* 2а’
е —е
Для кругового распределения
0x = Ov и Or = Д/2 ах = V2 иу-
В теории погрешностей двухмер
ное нормальное распределение при
приближенных расчетах иногда за-
меняют круговым распределением
При этом средняя квадратическая по
грешность по любому направлению
от центра рассеивания ои — Ог1}'2.
Вероятность попадания в круг задан-
ного радиуса /"зад
2
зад
Р=1 — е . (П 28)
При rJaH=or вероятность состав-
ляет Р=0,63, при Гзад = 2 Or Р=0,98,
а прн гзла = 3ог Р=0,95. Формула
(П 28) дает тем более точный резуль-
тат, чем ближе рассеивание к круго
вому (чем ближе друг к другу ох и
Оц) По заданной вероятности можно
найти
г3ад =or V —1п(1—Р) (П.29)
Если обозначить через г расстоя-
ние случайной точки, подчиненной
круговому закону распределения, от
центра рассеяния (ие путать с коэф
фициентом корреляции), то г будет
распределена по закону Рэлея с па-
раметром а=аг/)'2 (см. табл П.З).
При экспериментальной оценке
точности навигационных определений
283
Таблица 11.4 Средние квадратические погрешности
косвенных измерений
Функции Расчет СКII
У -=Х| +х2 У = "i -И ~а2 т4+ . .. +и„ л „ 4-Л У М Ч У Ч Ч 1 + н ‘'%пхп <ч = | ч!°?, 1/ аи У 2 2 » П хг
возникает необходимость оценки тж,
т„ коэффициента корреляции р по
экспериментальным данным Пусть в
п опытах получены значения х, слу-
чайной величины х*. Тогда оценка
математического ожидания
(П.30)
а среднего квадратического откло
нения
Поскольку измеренные значения
X, являются случайными, то и оценки
тж, Ох также являются случайными.
Они тем ближе к фактическим значе-
ниям nix, ож, чем больше число опы
тов. Для нормального распределения
средние квадратические отклонения
этих оценок
- пт
о|Ол1~ -----
) 2п
(П.32)
Менее точная, но более простая
оценка среднего квадратического от
клопсния величины х* может быть
получена с помощью размаха.
Размахом пыборки (совокупности
измеренных значений х>) называется
разность максимального хгаах и ми-
Та блица П.5 Значения функции у=~\/— 1п(1 — Р)
р ° 1 2 3 4 5 6 1 8 9
0,0 0,0 0,100 0,142 0,175 0,202 0,226 0,249 0,269 0,289 0,307
0,1 0,325 0,341 0,358 0,373 0,388 0.403 0,418 0,432 0,445 0,459
0,2 0,472 0,486 0,498 0,511 0,524 0,536 0,549 0,561 0,573 0,585
0,3 0,597 0,609 0,621 0,633 0,645 0,656 0,668 0,680 0,691 0,703
0,4 0,715 0,726 0,738 0,750 0,761 0,773 0,785 0,797 0,809 0,821
0,5 0,833 0,845 0,857 0,869 0,881 0,894 0,906 0,919 0,931 0,944
0,6 0,957 0,970 0,984 0,997 1 011 1,025 1,039 1,053 1,067 1,082
0,7 1 097 1,113 1,128 1,144 1,161 1,177 1,195 1,212 1,230 1,249
0,8 1,269 1,289 1,310 1,331 1,354 1,377 1,402 1,428 1,456 1,486
0,9 1,517 1,552 1,589 1,631 1,677 1,731 1,794 1,873 1,978 2,146
284
Таблица П.6. Значения функции у е
Л е-х х е~* X е х X е~*
0,0 1,0000 2,00 0,1353 4,00 0,0183 6,00 0,0025
0,05 0,9512 2,05 0,1287 4,05 0.0174 6,05 0,0024
0,10 0,9048 2,10 0,1225 4,10 0,0166 6,10 0,0022
0,15 0,8607 2,15 0,1165 4,15 0,0158 6,15 0,0021
0,20 0,8187 2,20 0,i108 4,20 0,0150 6,20 0,0020
0,25 0 7788 2,25 0,1054 4,25 0 0143 6,25 0,0019
0,30 0,7408 2,30 0 1003 4 30 0,0136 6,30 0,0018
0,35 0,7047 2,35 0,0954 4,35 0,0129 6,35 0,0017
0,40 0,6703 2 40 0,0907 4,40 0,0123 6.40 0 0017
0.45 0,6376 2,45 0,0863 4,45 0,0117 6,45 0,0016
0,50 0,6065 2 50 0,0821 4,50 0,0111 6,50 0,0015
0,55 0,5769 2,55 0,0781 4,55 0,0106 6,55 0 0014
0,60 0,5488 2,60 0,0743 4,60 0,0101 6,60 0 0014
0,65 0,5220 2 65 0,0707 4,65 0,0096 6,65 0,0013
0,70 0,4966 2,70 0,0672 4,70 0.0091 6,70 0,0012
0,75 0,4724 2 75 0,0639 4,75 0,0087 6,75 0 0012
0,80 0,4493 2,80 0,0608 4,80 0,0082 6,80 о’оон
0,85 0,4274 2,85 0,0578 4,85 0,0078 6,85 o’ooi1
0,90 0,4066 2,90 0,0550 4,90 0,0074 6,90 0 0010
0,95 0,3867 2,95 0,0523 4,95 0,0071 6,95 0 0010
1.00 0,3679 3 00 0,0498 5,00 0,0067 7,00 о.'оооэ
1,05 0,3499 3,05 0 0474 5,05 0,0064 7,05 0 0009
1 ,ю 0,3329 3,10 0 0450 5,10 0,0061 7,10 0,0008
1,15 0,3166 3,15 0,0429 5,15 0,0058 7,15 0 0008
1 ,20 0,3012 3,20 0 0408 5,20 0,0055 7 20 О’,0007
1,25 0,2865 3,25 0 0388 5,25 0,0052 7,25 0,0007
1 ,30 0,2725 3,30 0 0369 5,30 0,0050 7.30 0,0007
1,35 0,2592 3,35 0,0351 5,35 0,0047 7.35 0 0006
1,40 0 24G6 3,40 0,0334 5,40 0,0045 7,40 0,0006
1,45 0,2346 3,45 0 0317 5,45 0,0043 7,45 0 0006
1,50 0,2231 3,50 0 0302 5.50 0,0041 7,50 о'.ОООб
1,55 0,2122 3,55 0,0287 5,55 0,0039 7,55 0 0005
1,60 0,2019 3,60 0 0273 5,60 0,0037 7,60 0 0005
1 65 0,1920 3,65 0,0260 5,65 0,0035 7,65 0,0005
1.70 0,1827 3,70 0,0247 5,70 0,0033 7,70 0,0005
1,75 0,1738 3,75 0,0235 5,75 0,0032 7,75 0.0004
1,80 0,1653 3,80 0,0224 5,80 0,0030 7 80 0,0004
1,85 0.1572 3,85 0,0213 5,85 0 0029 7,85 0,0004
1,90 0,1496 3,90 0,0202 5,90 0,0027 7,90 0,0004
1,95 0,1423 3,95 0,0193 5,95 0,0026 7,95 0,0004
начального Xmin из измеренных зна- где коэффициент k зависит от п и
ченни х,-: vinax — Xmln- Среднее квадратическое ине в этом случае ох = kR, отк лоне- СП. 33) приближенно может быть рассчитан как ! з т k х Io,17-|--£— 1 прил<20. (П.34)
285
Оценка коэффициента корреляции
случайных величин х* и у*
I
р =-----------
ПОХ Оу
tn
У Xi yt — тх Шу
।
<П 35)
Статистические данные часто пред-
ставляются графически в виде гисто-
граммы. С этой целью весь интервал
измеренных значений х,- от xmm до
Xmai делят на m разрядов (обычно
т = 8 .. 12) равной или неравной ве-
личины так, чтобы в каждый разряд
попало не менее 5 значений х,. Затем
подсчитываются частоты rij, /=1, m
(число измеренных значений, попав
шнх в данный разряд). На гисто-
грамме строят столбики с высотой,
равной п>.
Для оценки возможности описать
полученные экспериментальные дан
ные каким-либо выбранным законом
распределения используются крите-
рии согласия. Для проверки гипотезы
о том, что имеющиеся эксперимен-
тальные статистические данные нс
противоречат выбранному закону
распределения, может быть использо-
ван критерий хи-квадрат
i m
/=1
(nj -пр,)1
npj
(П.36)
где п, — число измеренных значений,
попавших в / й разряд; р, — теорети-
ческая вероятность попадания слу-
чайной величины в данный разряд
при выбранном законе распределения.
Значения р, рассчитываются по
формулам, приведенным в табл. П.2
со значениями а н р, соответствую
щимп границам соответствующей
разряда. Затем опре деляется числи
степеней свободы
k гп— 1 —/,
где / — число неизвестных царамет
ров распределения, определяемых по
данным выборки (для законов Лап
ласа н нормального 1 = 2, для зако
нов Рэлея н равномерной плотности
1=1)
Затем задаются уровнем значн
мости о. Значение « имеет смысл до-
пустимой вероятности того, что будет
принято ошибочно? решение о песо
ответствии экспериментальных дан
пых выбранному распределению
Обычно принимается « = 0,1 ...0,001
После этого с помощью специаль
пых таблиц распределения хи-квад
рат по заданным значениям а и k on
2
рсделяется критическое значение хкг
Если рассчитанное значение х7 мень
шс критического, то считают, что экс
пери ментальные данные нс противоре-
чат предполагаемому теоретическому
распределению (следует иметь в ьн
ду, что один н те же эксперимен-
тальные данные могут нс противоре
чить различным распределениям).
При приближенной оценке исполь
зустся правило Романовского: эксне
риментальные данные не противоре
чат теоретическому распределению,
если
IX*—* I
1Л _ <3. (П.37)
Значения функции у = е * приве
дены в табл. П.6.
СПИСОК ЛИТЕРАТУРЫ
Автоматизация самолетовождения
и управления воздушным движени-
ем / П. А. Агаджанов, В. Г. Во-
робьев, А. А. Кузнецов и др. М.
Транспорт, 1980 357 с.
А д а м ч е и к о В. Н. Обработка
радионавигационных измерений. М.:
Транспорт, 1983. 56 с.
Астафьев Г II., Оля
н ю к П В Радиотехнические сред-
ства навигации и посадки. М.: Транс-
порт, 1982. 128 с.
А с т а ш к е в и ч А. Н. Штурман-
ское обеспечение полетов. М.: Транс-
порт, 1969. 160 с.
Байков Н. С., Трясуч-
к и н М А, Иванов В. А Само-
летовождение при аэрофотосъемке.
М : Недра, 1973. 232 с
Бамбуркин А Г!.. Кузне-
цов В А. Наземные радиосвето-
техинческие средства обеспечения по-
летов. М.: Транспорт, 1973. 244 с.
Баранов А. М., Соло-
н и н С. В. Авиационная метеороло-
гия Л.: Гидрометеоиздат, 1981.
383 с.
Барановский И. М Навига-
ционный расчетчик НРК-2 М. Транс-
порт, 1971. 116 с.
Беляевский Л С., Нови-
ков В. С., О л я н ю к П. В Осно-
вы радионавигации. М.: Транспорт,
1982 288 с.
Бог данченко Н. М. Курсо-
вые системы и их эксплуатация на
самолетах. М.: Транспорт, 1983.
224 с.
Богуславский И. А. Мето-
ды навигации и управления по непол-
ной статистической информации. М.:
Машиностроение, 1970. 256 с.
Бондарчук И Е. Летная
эксплуатация радионавигационного
оборудоваиия. М.: Транспорт, 1978.
272 с.
Быков В И. Радионавигацион-
ная система «Омега». М.: Транспорт.
1978. 88 с.
Вагущеико Л. Л. Обработка
нави1 анионных данных иа ЭВМ. М,-
Транспорт, 1985. 144 с.
Василинин В. Н Автомати-
зированное вождение тяжелых само-
летов М.: Воениздат, 1973. 199 с.
Воробьев Л. М. Астрономи-
ческая навигация летательных аппа-
ратов М.: Машиностроение, 1968.
280 с.
Воробьев Л. М. Воздушная
навигация. М.: Машиностроение,
1984 255 с.
Гарнфулин К. К. Изменчи-
вость ветра в свободной атмосфере.
Л.: Гидрометеоиздат, 1967. 143 с.
Давыдов П. С., Сое ио в-
с к и й А А., X а й м о в и ч И. А
Авиационная радиолокация: Справоч-
ник М Транспорт, 1984 223 с.
Демин В. М. Теория и практи-
ка применения карт в авиации. М.:
Машиностроение, 1969. 204 с.
К и н к у л ь к и н И. Е., Руб-
цов В. Д, Фабрик М. А. Фа-
зовый метод определения координат.
М.: Советское радио, 1979. 280 с.
Колчииский В Е, Манду-
ровский И. А., Константи-
новский М. И. Автономные доп-
леровские устройства и системы на-
вигации летательных аппаратов. М.:
Советское радио, 1975. 430 с.
Кондрашихии В. Т. Теория
ошибок и ее применение к задачам
судовождения. М.: Транспорт, 1969.
256 с.
Кузнецов А. А, Дубров-
ский В. И., Уланов А. С.
Эксплуатация средств управления
воздушным движением: Справочник.
М.: Транспорт, 1983. 256 с.
Лейзерах А. А. Сборник за-
дач по самолетовождению. М.:
Транспорт, 1973. 320 с.
Л и п ч и н П. Н , Л и п-
ч и н Л П. Надежность самолетных
навигациоино вычислительных уст-
ройств М.: Машиностроение. 1973.
196 с.
Марков Г В., Остро г-
ский Л. А. Справочник .пилота и
287
штурмана гражданской авиации. М.;
Транспорт, 1971. 328 с.
М а х о в е р 3. М., Наровлян-
ский Г. Я.. Со л о вин С. В. Ме-
теорологические условия на междуна-
родных воздушных трассах. Л.: Гнд-
рометеоиздат, 1973. 218 с.
Меньшой А. Н„ Рыль-
ский Г. И. Человек в системе уп-
равления летательными аппаратами
(эргономика) М Машиностроение,
1976 191 с.
Метеорологические условия поле-
тов воздушных судов в верхней тро-
посфере и нижней стратосфере над
территорией СССР. М.: Гидрометео-
издат, 1982. 180 с.
Методика определения миниму-
мов эшелонирования, применяемых
для разделения параллельных линий
пути в структурах маршрутов ОВД.
Циркуляр ИКАО I20-AN/89/2. Мон-
реаль, 1976. 267 с.
Молоканов Г. Ф Объектив
иый контроль точности самолетовож-
тения М.: Воеииздат, 1980. 126 с
Молоканов Г. Ф. Точность
и надежность навигации летательных
аппаратов. М : Машиностроение, 1967.
216 с
Мудро в В. 11., Куш ко В. Л.
Методы обработки измерений. Квази-
правдоподобные оценки М : Радио и
связь. 1983. 304 с.
Наставление по штурманской
службе в гражданской авиации
СССР (НШС ГА-86) М.: Воздуш-
ный транспорт, 1985. 150 с.
Одинцов В. А. Радионавига-
ция летательных аппаратов. М.: Ма-
шиностроение, 1968. 408 с.
Олянюк П. В, Астафь-
ев Г П. Грачев В. В. Радио-
навигационные устройства и системы
гражданской авиации. М.: Транспорт,
1983. 320 с.
О с а д ш и й В. И Воздушная
навигация. М.. Транспорт, 1972. 288 с.
Осадший В. И., Черны-
шев Г. А. Воздушная навигация.
М.: Транспорт, 1969 428 с.
Петухов Г. В., Михай-
лов В В. Устройство, принцип
функционирования и дешифровки
средств сбора полетной информации.
Л.: ОЛАГА, 1983. 76 с.
288
II о м ы к а е в 11. И., Се лез
н е в В. П., Д м н т р и ч е н
ко Л А. Навигационные приборы
и системы. М.: Машиностроение, 1983
456 с.
Рпвкин С. С., Иванов
ск ий Р И, Костров А. В. Ста
тистнческая оптимизация иавигацион
ных систем. Л.: Судостроение, 1976
280 с.
Самаржаян Ш С Расчеты
и глазомер в авиации М.: Воеииз
дат, 1980. 128 с.
Самолетные навигационные систе
мы (сборник материалов). М.: Воен
издат, 1973 462 с.
Самолетовождение / Под ред.
В Ю Поляка. VI.: Военнздат, 1975
2С8 с.
Самолетовождение. Геотехиичс
ские средства самолетовождения и их
применение / Под ред. Г. Ф Моло
канона. Ч. I. М.: Военнздат, 1972
291 с.
Самолетовождение. Применение
радиотехнических, астрономических
средств самолетовождения и комп
лексных навигационных систем / Под
ред В М. Лавского. Ч 2. М: Воен
издат, 1974. 403 с.
Сое но вс к ий А. А., Хай мо
вич 11. А. Авиационная радионави-
гация: Справочник. М.: Транспорт,
1980 255 с.
Справочник летчика и штурма
на / Под ред. В. М. Лавского. М
Военнздат, 1974. 504 с.
X и в р н ч 11 Г.. Миронов
И. Ф, Белкин А. М. Воздушная
навигация М : Транспорт, 1984. 328с
Хиврич II Г., Белкии А. М
Автоматизированное вождение во
душных судов. М.: Транспорт, 1985
328 с.
Черный М А. Авиационная
астрономия. М: Транспорт, 1978
208 с.
Черный М А., Кор а блин
В. И. Воздушная навигация М
Транспорт, 1983. 384 с.
Чуров Е. П. Спутниковые си-
стемы радионавигации. М.: Советское
радио, 1977. 390 с.
Ярлыков М. С. Статистичс
ская теория радионавигации. М.: Ра-
дио и связь, 1985. 314 с.
предметный указатель
АБ-52 142, 218, 226
Авиационный астрономический еже-
годник 151, 218, 222, 274
Авиаразведка инструментальная 226
— ледовая 225
обзориая 225
Авиационные работы 219, 239
Лниахимработы 220, 239
Аэрофотографированне 55
Авиационный навигационный комп-
лекс II, 35. 67, 132—153, 160-162
Автоматическое счисление координат
95, 98. 100, 126, 129, 136, 153—155,
227
Автоматический радиокомпас 161,
166, 57, 140. 207, 211
— планшет 118
— пеленгатор 58, 218
Автономное средство 34
Азимут истинный 216
- ориентира 216
— светила 148, 151, 269
— Солнца 216, 222
Азимутальная поправка 121
Акселерометр 52, 154, 181
АК 59П 148, 215, 227
Алгоритмы решения 44,51, 56. 59. 136
Альмукантарат 269
Ан-2 63, 135, 206
Ан-24 225
АНЗ 219, 227, 228
Аномалия магнитная 208
Антарктида 213, 217, 218
Арктика 213. 217
АСШОП 122, 125, 234
ЛСШР 117
Астрономическая линия положения 26
Астрономические средства 36, 118,
148. 214, 222
Аэронавигационная информация 118
— обстановка 114, 115, 122, 129, 133,
206, 219
Базисный способ 54, 142
Базовая система курса 175
Базовый навигационный комплекс
174
Барический угол сноса 103, 213
Барометрическая ступень 56, 223
Барограф 106
Барометрические высотомеры 56, 223,
226, 227, 241 246
Безопасная высота полета 241—244
---в районе аэродрома ниже ниж-
него эшелона 243 244
--- подхода 241
---по давлению 760 м.м рт. ст. 242
---по маршруту ниже нижнего
эшелона 244
Безопасность полетов 7, 8, 11. 221,
226, 240 265
— самолетовождения 227, 240
Боковое смещение радиомаяка 105
— уклонение ВС 63, 64
--- локсодромии от ортодромии 17
— упреждение разворота 166, 180
Болтанка 259—261
Большой круг 266
Бортовая РЛС 39, 55, 58, 105, 160.
173 174, 217
— ЦВМ 174
Бортовые карты 118
Блок гиромагнитного курса 175
— дистанционной коррекции 167
— оперативной памяти 175
— постоянной памяти 175
— программы маршрута н посадки
153, 161, 169
— согласования курса 175
БПРМ 193, 203
Вакуумно-люминесцентные элементы
46
Вектор:
ветра 53, 136, 205, 209
289
скорости 54, 103
состояния 8, 11
Вероятность:
безотказной работы 38, 83
гарантийная 138, 225, 206
наблюдения 133, 206
нормального функционирования в
помехах 83
нахождения в пределах ВТ 77, 102,
104, 138, 206
обнаружения и опознавания 83, 205
обслуживания 83, 84
предотвращения столкновений 245,
252
применения навигационных средств
82, 83
случайною события 276
Вертикал 14, 268
Вертикальные вихри 262
Ветер 28
средний 30, 135
— эквивалентный 29, 66, 234, 287
Ветровые условия 231
Вес погрешности 103
Видимость 98, 102, 205, 218
Виды маневра 63, 221, 228
Визуальные ориентиры 114, 126, 136,
205, 209, 211
Воздушная навигация 115
— трасса 7
Воздушное судно 6
— фотографирование 219
Восстановление ориентировки 258
ВОР/ДМЕ 39,57.59, 157, 161. 162, 169
ВРМ 5 36
Время 271
— восхода, захода 220
— вылета, посадки 143
— гринвичское 151, 218, 271
— местное 151, 220
— московское 143
— минимальное 205
— располагаемое 66
— системное 12
Временные характеристики деятель-
ности навигатора 94
ВПП 165
Встреча с темнотой (рассветом) 143
Вторичный радиолокатор 252
Выбор карты ‘116
Высота:
абсолютная 211
барометрическая 56, 213
безопасная 221, 227, 241
истинная 56, 108, 209, 210, 226
круга 241, 243
минимальная 210, 226, 229
290
наблюдения 225
нанвыгоднейшая 98, 231
нижнего эшелона зоны ожидания
244
оптимальная 98
перехода 126
препятствия 221
приборная 56
принития решения 131 «
рельефа 227
Полярной зьезды 152. 273
светила 26, 269
Высотомеры барометрические 12, 55,
226, 241
Выставка КС 161, 165, 178
Выполнение полета 138, 215
— — в районе полюса 217
---- но ортодромии 215
---- прн поиске 228
Газотурбинный двигатель 192
Геоид 12
Геотехнические средства 35
Глобал! пая РНС 36
ГМС 218
ГИК-1 138
Гирополукомпас 48, 50, 162
Гирокомпасирование 181
Гнронлощадка 181
ГПК-52 50. 216, 227
Горизонт 214, 222, 226
Горизонталь 223
Горный эффект 210
Градиент навигационного параметра
70
— температурный 231
Газовые облака 260
Давление атмосферное:
изменение 51
минимальное 56
на аэродроме 241
на уровне земли 226
приведенное 56
ДАК ДБ 5 148, 150. 215
Датчики воздушной скорости 51, 162
— навигационной информации 153
Дальность:
видимости 98, 102. 205. 218
горизонтальная 59
допустимая 149, 150, 214
максимальная 38, 209, 217
минимальная 38
наклонная 59, 157, 169
обнаружения 102, 205
прямой видимости 40
радиовидимости 40
Девиация 48, 49
Декодирование полетной информа-
ции 109
Дешифрирование барограмм 108
Дисперсия ошибки 38, 277
ДИСС 52, 160. 226
Диапазон радиоволи 39
Длина:
галсов 228
допустимая 215
контрольного этапа 53, 103, 142
локсодромии 16
маршрута 64 , 227, 236
ортодромии 15
предельная 134, 217
Долгота:
астрономическая 14
геодезическая 14
нормальная сферическая 15
Дрейф гироскопа 179
ДПРМ 193 -203
Естественное освещение 142, 145—
147, 271
Жидкие кристаллы 46
Журнал см. Штурманский бортовой
журнал
Задатчик курса 176
— угла карты 162
Задача воздушной навигации 7- 12
Законы распределения см. Распреде-
ление
Запасной аэродром 118, 122
Загонный способ 221, 239
Затожение 223
Заправка топливом 65, 228, 231
Заход на посадку 205, 238
Зенит 268
Зенитное расстояние 269
Звезды навигационные 272
Зона:
безопасности 25!
предупреждения 251
совысотная 251
обледенения 262
ЗПВТП 6. 7
Излом маршрута 231, 233
Изменение расхода топлива 64, 231,
237
скорости 66
Изменчивость ветра 28. 29, 103, 205,
231. 232
— температуры 231
давления 223
Измерение 275
атмосферного давления 226
— барометрическим способом 103, 213
— дальности 59
дискретное 53
ветра 226
воздушной скорости 51
высоты полета 55, 226
— курса 48. 216
направлений 57
путевой скорости 52, 142. 218. 226
— угла сноса 53, 142, 209, 218
ускорения 52
И югоны 48
Изодинама 214
Ил 14 213, 225
Индикатор навигационной обстанов-
ки 118, 153
Индикатор-задатчик координат 153
ветра 161
Инерциальная навигационная систе-
ма 35, 52, 181 — 186
Инерциальная ктрсо-вертикаль 175
И К ВСП Г4, 176, 249
Интервалы эшелонирования 248
Интервал
измерения 101, 103, 142. 213. 223
коррекции 101, 157, 158
контроля пути 102, 206, 222
тарировки высотомера 223
эшелонирования 231
Информация:
курсовая 48
осведомляющая 8
Искажение:
длин 17. 20. 22. 23
направлений 17, 22. 23
Исправление:
пути 102, 135, 236
скорости 51
высоты 56
ИШР 64, 123. 227, 234
Картографическая проекция 17
цилиндрическая 18
азимутальная 18
— коническая 18
— поликоническая 19
— центральная полярная 19
— полярная стереографическая 19
— равноугольная цилиндрическая
Меркатора 20
— поперечно-цнлнндрнческая Гаусса
20
— равноугольная коническая 21
— видоизмененная поликоническая
21. 25
291
международная 21. 25
Карта 133, 217, 223, 227
полетная 22
— бортовая 22
К ГС 203
Квазнгеонд 13
Квалификация экипажа 231, 235
Классификация ТСС 34
Количество топлива 64, 231
Комбинированный измеритель 34
Компасы 49
— совмещенные 50
гнроиндукциониыс 50, 138
Комплексное применение навигацион-
ных средств 87, 96, 115, 116, 126, 135
Комплексный тренажер 115
Контроль пути 92
— по дальности 129, 130
по направлению 139
— полней 98. 131, 124, 135
визуальный 101, 136, 222
Контр льный этап 53, 103, 142
Контрольный ориентир 162
К< ординаты:
то :ки вертекса 16
географические 9, 57, 151
полярные 10, 99, 157, 170, 173
прямоугольные 99
абсолютные 24, 154
относительные 24, 154
частно-ортодромнческие 9, 154
Коррекция
курса 118, 126, 216
МС 101, 212
Коррекция курсовой системы 166,
175, 179
Коррекция счисленных координат 24
92, 153, 157, 160, 186
Коррекция:
активная 157
пассивная 157
автоматическая 157, 167, 179
не автоматическая 157, 160, 167
полуавтоматическая 157, 160, 161
Корреляционный момент 278
Корректор 166, 167
путевой 150
Коэффициент точности РДРНС 187
— изменчивости ветра 103
корреляции 72, 278, 281
счисления 100, 104, 135
поправочный 65, 234
пропорциональности 65, 67, 72
143, 234
Коэффициент точности счисления 73,
75, 156, 161, 176
Кривая равной точности 40
292
Критерий онтнмн 1зцин 7
Кронштадтский футшток 12
Круг склонения свесила 269
Кульминация светила 270
Курс 8, 27, 48. 75, 164, 166
гиромагнитный 175. 176, 178
— гироскопический 50. 175, 182
истинный 49, 148, 179, 214, 217
— магнитный 48, 49, 53, 133, 165
ортодромнческий 150, 176, 178,
215
следования 133
средний 55
— условный 51, 149
Курс МП 160, 162
Курсовые приборы 98
Курсовая система 51, 120, 122, 162
Курсовой угол:
радиолокационного ориентира 173
радиостанции 55, 57, 138, 141
ориентира 54, 137
светила 148, 150
Курсовой способ полета по ЛЗП 127
КУС 730/1100 51
Линия положения 25, 169, 186
Лнння равных высот 151, 218
— пеленгов радиостанции 25, 71,
139
----пеленгов самолета 25. 58, 71,
169
— разностей расстояний 26, 71,
186
----расстояний 26. 59, 71, 169
Линия.
заданного пути 6, 67, 135, 166, 207
фактического пути 6, 134, 217, 227
Линейное боковое уклонение 103, 166
упреждение разворота 128, 165
Локсодромия 11. 16. 20. 134
Локсодромический ктрсовой прибор
116
— путевой угол 120
Луна 271
Магнитная аномалия 208
Магнитное поле:
наклонение 216
напряженность 216
склонение 28, 48, 53, 134, 214
Магнитный компас 48, 133, 214
Магнитофон МС-61 107
Малый круг 266
Малые ЭВМ 47
Масса ВС.
избыточная 264
коммерческая 234
полетная 65
снаряженного 65
фактическая 234
Мажоритарная логика 176
Масштаб:
сланный 17
длины 17
карты 133, 217, 223
общин 17
площадей 17, 18
развертки 173—174
частный 17 20
Маневрирование:
боковое 62, 135
вертикальное 61, 210
в районе аэродрома 122, 239
продольное 61
Маршрут полета:
заданный 6, 227
оптимальный 122
фактический 6
установленный 115, 125
Маршрутный способ полета 127—128
Математическое ожидание 38, 277
Методика проверки самолетовожде-
ния 111
Метод имитационного моделирования
86
Метод линеаризации 279
Методы определения координат:
обзорно-сравнительный 24
параметрический 24
пролета ориентира 24
Меридиан аэродрома посадки 122
истинный 48, 149, 214
магнитный 48, 49, 122
опорный 51, 118—122, 216
— ортодромнческий 51
условный 149, 215
Местная воздушная линия 107, 132
Место самолета 7, 26
пространственное 6, 7, 25, 55
расчетное 213
счисленное 151
фактическое 99, 135, 140, 152
штилевое 135
Местность горная 41, 209
малоориентнрная 205
равнинная 40
Метеорологическая обстановка 237
подготовка 260
Микрокалькулятор 47
Микрофильм 118, 177
Минимальная безопасная высота 131,
241. 243
Минимальное приведенное давление
241
Минимальное чисто коррекций МС
101
Минимальные навигационные требо-
вания 37, 78
— характеристики 37
Моменты естественного освещения
142. 214. 271
Набор высоты 61, 210, 235
Навигация воздушная 7
Навигационная задача:
методы решения 11
основная 7
постановка 10
частные 8
Навигационная автономная система
162
линейка 42, 51, 56, 59, 136, 207—
213, 226
— система 34
Навигационное вычислительное уст-
ройство 37, 153, 160, 161
Навигационные характеристики ТСС
37
— элементы полета 7, 26, 48, 52, 114
Навигационный комплекс 34
— параметр 24, 70, 71
Навигационно-пилотажное оборудо-
вание 164
Навигационный расчетчик комбини-
рованный 44
— треугольник скоростей 30
Надежность воздушной навигации 84
— контроля пути 128—130
самолетовождения 102
— ТСС 38
Надир 268
Направление ветра метеорологическое
28
— навигационное 28, 31
Напор скоростной 51
Небесная сфера 268
Небесный меридиан 268
— экватор 268
Невязка счисления 33, 227
Неавтоматизированное самолетовож-
дение 114
Нижинй безопасный эшелон 242
Номограмма 46, 102, 168
Номер временного пояса 147, 151.220
Номенклатура карт 22
Нормальная сетка 18
Нормальный закон распределения 38
Нормы эшелонирований 231
НШО 177
293
Обзорный радиолокатор 167
Обнаружение очагов гроз 261
— ориентиров 102. 137
Область применения 78
Обобщенный метод ЛП 24
Обход очагов гроз:
— сверху 264
— стороной 263
Обработка измерений 88
Общая наземная штурманская подго-
товка 115
Общие правила самолетовождения 125
Ограничение полетов 213
Ограничительный азимут 116—117
Омега 39, 186
Опасные метеоявления 259
Определение МС визуально 137
---прокладкой ЛП 58
--- пролетом ориентира 24, 137
---с помощью РНС 99, 140
Оптимальная точка коррекции 158
Оптимизация определения высоты
полета 98
— момента коррекции МС 101, 212
применения РНС 213
— путевой скорости 103
— решения навигационной задачи 96
— угла сноса 103, 213
Оптимизация структуры воздушной
трассы 231
схем маневрирования 238
Опорные пункты маршрута 6, 127
Оптический способ определения И К
216
Ориентир:
линейный 209
искусственный 207
радиолокационный 227
Ортодромия II, 15, 20, 23
Ориентировка визуальная 101, 137,
205,211,217
— радиолокационная 217
Основы самолетовождения И
ОСП 202
248
Особые правила визуальных полетов
— отсчетов ветра 136
Особенности освещения 214, 217
полета 205, 207, 209, 211, 213, 217
радиолокационного изображения
217
Ошибка допустимая 218. 223
— измерения курса 149
расчета 237
установочная 50
Оценка надежности воздушной нави-
гации 85
294
Параметры земных референц-эллип-
соидов 13
Пеленг прямой, обратный 141
— путевой 151, 157
— радиостанции 57, 139, 207
самолета 57. 139, 157. 211, 212
Период колебаний 52
измерения 103, 142, 213, 223
Перфокарта 177 „
Пнлотажно-навигационный комплекс
35
План полета 116
Планирование сетевое 97
Плановый навигационный прибор 153
Планшет автоматический 153, 161
Плотность распределения 277
Поверхность положения 24
Погрешность аэродинамическая 51,
56. 215
— выдерживания параметров полета 76
графической работы 53. 222
— допустимая 101. 206
измерения 37, 53. 75. 226, 275
— инструментальная 51, 56. 245
— карты 222
— коррекции 100, 158
линни положения 141
— максимальная 32
— методическая 59, 226, 245
— отсчета времени 53. 226
полета иа заданной высоте 76
— радиальная 72. 135, 141. 281. 282
— работы на карте 23
систематическая 59, 68
средняя квадратическая 38, 226
— суммарная 76, 100
— счисления 74, 156, 161
— частно-ортодромнческой системы
координат 156
Подготовка к полету 132, 133, 207
— данных для разбора полетов 112
— полетной карты 132
Подсистема бортовая 34. 169, 170
— наземная 34, 169
Показатель готовности ИНС 182, 185
Полнмаршрутные карты 118
Полярные координаты 157
Поправка дополнительная 64
инструментальная 51. 56
— дифференциальная 188
курса 64. 135. 167
методическая 51, 56, 227
распространения радиоволн 188
суммарная 245
Полет на радиостанцию 55. 67, 138
поисковый 222, 225, 227
— но ортодромии 215
Потребное количество топлива 122,
125
Потеря ориентировки 253—259
— полная 253
— временная 254
Правило Романовского 286
— Непера 268
Правила ведения ориентировки 136
— полетов 115
визуальных полетов 248
— полетов по приборам 248
— самолетовождения 126
Предварительная подготовка 116, 119.
255
Предполетная подготовка 115, 122,
125. 256
Преобразование координат 158, 159
Предвычисление радиопеленга 119
Приемник воздушного давления 245
Применение астрономических средств
148. 214, 222
— средств сбора полетной информа
цип 107
Программирование полета 97, 114,
116, 176, 180, 183
Продолжительность наблюдения 209
Проекция карт 57, 217
Прокладка линии положения 58, 152
— полная 33. 134
— обратная 33, 227
— штилевая 33, 135
Продолжительность измерения 209
— набора, снижения 61, 62
- разгона 61
Пространственное МС 26
Промежуточные точки ортодромии 16
Профиль полета 7, 65, 235, 238
— рельефа 117
Прямое восхождение 269
Пульт ввода и индикации 152, 175
— взлета и посадки 153, 1"5
— подготовки и контроля 153, 175
— управления 167, 175
Пункт маршрута исходный 6. 134
---конечный 6
--- основной 6
---поворотный 6, 134, 233
--- обязательного донесения 116
Путевой угол 11, 116
— заданный 11, 163
— локсодромический 16
— ортодромический 15. 163
Путевой способ полета 127
Рабочая область 39, 79—81, 101
Радиоволны 41
Радиовысотомер 35, 56, 226
Радиодевиация 57
Радиокомпас 57, 67, 138, 161, 166,
207, 211
Раднокомпасная система 36
Радиальная СКП 72. 135, 141, 281,
282
Радиолокационная ориентировка 173
Радиолокационный ориентир 116,
118, 129, 173
Радномагнитный индикатор 178
Радиомаяки:
ВОР 36. 157, 161
ВРМ-5 36. 211
всенаправленные 211
ДМЕ 36. 157
«Консол» 36, 212
секторные 211, 218
Радиовысотомеры 56, 226
Радиомаячная система 36, 169
Радионавигационная карта 118
— точка 162
— система 35
Радиопеленгатор 36
Радиус Земли 8, 98
— разворота 62, 128
Разграфка карт 22
Разметка дополнительная 207
Разность фаз 187
Район аэродрома 168, 238
— поиска 228
— полярный 79, 213
— с особым режимом полета 116
— УВД 117
Распределение двустороннее экспо-
ненциальное 77, 279, 282, 283
— круговое 72
— Лапласа 77, 279, 282, 283
— нормальное 77, 278. 282, 283
— равномерной плотности 279, 282.
283
Рэлея 279, 282, 283
Расстояние допустимое 104
— между КО 222
— минимальное 66, 142
— предельное 135, 206
Расход топлива километровый 64,
238
---- часовой 64
РДРНС .186-192
Регулярность полетов 66, 237
Режим полета 62, 122, 126, 235
----пилотажный 205, 235
----оптимальный 235
----установившийся 61
— работы РСБН 172, 173
— счисления 154, 164
----аэрометрический 154
295
—---вспомогательный 161, 162
----курсовоздушный 74. 155, 161
---- курсодоплеровскин 154, 161
----основной 161, 162
----«Память» 162
Рельеф 56, 209, 210, 223
Референц-эллипсоид 13
Рефракция радиоволн 40
РСБН 36, 39, 58, 99, 169—173, 212
РСП 204
Рубеж набора 65, 237
— снижения 65, 237
— ухода 122, 125, 227
Руководство по летной эксплуатации
162, 164
Рулежная дорожка 164, 165
Самолетный приемонндикатор 188 —
192
Самолетовождение 8
Самописец трехкомпонентный КЗ-63
106
Сборник аэронавигационной инфор-
мации 126
Светоизлучающие диоды 46
Светотехническое средство 36
СД 160
Сдвиг ветра 205, 259
СДК 160, 169
Система автоматического управления
12
— автоматической регистрации па-
раметров полета 106, 107
— ближней навигации 36
— воздушных сигналов 166
— дальней навигации 36
— координат 8
----астрономическая 8, 14
---- биполярная 10
----географическая 9. 14, 57
---- геодезическая 8, 14
----главная ортодромнческая 9. 33
---- горизонтальная 269
------ нормальная сферическая 9. 14
----ортодромнческая сферическая 9
---- полярная 10, 100
---- прямоугольная 60
----прямоугольная ортодромнческая
10
----частная ортодромнческая 9, 25,
33, 154
---- экваториальная 269
— предупреждения столкновений 250
— сигнализации опасной скорости
сближения 246
----достижения заданных высот 247
Сияния полипные 214
296
Склонение магнитное 53, 58
— светила 269
Скорость вертикальная 27, 28, 210
— воздушная 55, 237
— звука 52
— истинная 27
— потребная 66
— путевая 27
— снижения барическая 247
--- бароинерциальная 247
--- опасная 247
— угловая 50
— эквивалентного ветра 29, 30
Случайная величина 38, 277
Смещение ЛП 140, 213
Созвездие 273
Сокращение полетного времени 235
Сопряжение маршрутов 223
Специализированный тренажер 115
Специальные карты 118
Сползание с горизонтали 223
Способ базисный 54, 142
— барический 103
исправления пути 102, 135
— обзорно-сравнительный 173
— поиска 228, 229
— счисления 134, 135, 227
— упрощенный 209, 234
Способы комплексной обработки иа
вигационной информации 88
Спрямление ВТ 233
СПС «Эшелон» 251, 252
Спутниковая навигационная система
34
Среднее квадратическое отклонение
278
Средняя квадратическая погрешность
278, 279, 284
---радиальная погрешность 72,
281, 282
Средства астрономические 148, 214
— объективного контроля 126
— радиотехнические 116, 118
— сбора полетной информации 106
Стандартная атмосфера 64
Стандартное атмосферное давление
241
Ступенчатый набор (снижение) 235.
237
Ступень барометрическая 245
Суточная параллель 269
Сфера Каврайского 15, 266
Сферичность земли 60
Схождение меридианов 57
Счетные инструменты 42
Счисление пути 24, 32, 33. 91, 153,
155, 182, 183'
----автоматизированное 33, 73,
153 155, 182, 183
--------------------------------курсовоздушное 74
-------------------------------- курсодоплеровское 74
--------------------------------неавтоматизированное 33, 73
Таблица высот и азнмчтов Солнца 1,
51. 222. 275
--------- звезд 275
ТАКАН 161, 170
Тарировка высотомера 223
Техника самолетовождения 115
Технические средства самолетовожде-
ния 34—42
Технология работы 95
ТКС 51, 160
ТНР 180
Траверз РНТ 164, 170
Траектория полета 6, 67
— наивыгоднейшая 231
— программная 6, 8, 10
Требования к контролю пути 138
- подготовке к полету 133
- полетным картам 207
размещению РНС 104
- штурманскому обеспечению 219
Требуемый набор высоты 214
Треугольник параллактический 269
— сферический 266
«Торос» 226
Точка вертекса 9, 15
— заданная 7
— весеннего равноденствия 27I
— осеннего равноденствия 271
— летнего солнцестояния 271
— зимнего солнцестояния 271
— коррекции 100, 168, 212
— горизонтального полета 192
— предпосадочного маневра 161, 169
Точность графической работы 52, 222
— карты 25
— измерения 37—38, 53, 54
— выхода на заданный рубеж по
времени 76
— определения ЛП 70
— определения МС 71, 72
— самолетовождения 69, 70, 99, 135,
222
— счисления пути 73
— общая 76
— потребная 78
Турбулентность атмосферы 219
Гу-154 101, 101, 105
Угловая скорость вращения Земли 50
--- собственного схода гироскопа
51
Угол атаки 27
— вертикальный 137
— ветра 30
— дирекционнын 21
— излома воздушной трассы 231
— крена 63, 216
— отрога 224, 239
— путевой 27, 53, 134
— превышения грозы 264
— разворота 63
— скольжения 27
— сноса 27, 31, 53, 55. 103, 142, 213
— схождения меридианов 16, 51
— тангажа 203
— часовой 269
УГР-1 139
Удаление сигнальных знаков 221
— точек коррекции 101, 212
Указатель штурмана 165
Уклонение заведомое 206
Универсальные ЭВМ 47
У протейный расчет 137, 209
Уравнение динамики полета 60
— линий положения 169
— локсодромии 16
— ортодромии 15
Ускорение 52, 154
— абсолютное 181
относительное 18!
— силы тяжести 52, 181
Условия наблюдения 133, 227
— распространения радиоволн 40, 59,
186, 187
Устройство ввода н вывода 175
— ввода и индикации 182
— отображения 153
— управления 152
Участок набора 61
— разгона 61, 235
— снижения 62, 237
Учет нетра 62, 63, 65
— температуры 65, 231
— полетной массы 65
Фазовая дорожка 187
— скорость 186
Форма Земли 12
Формула Байеса 277
— косинуса стороны 266
— косинуса угла 266
котангенсов 267
— нолунернметра 267
— пяти элементов 2G7
— синусов 267
Фортран-IV 48
Фронт радиоволн 57
Функция распределения 277
297
Хронометр авиационный 12
Характеристика эргономическая 93
Цикл работы РНС 211
Часовой расход топлива 65, 228
— угол 151, 220, 222, 269
Часы авиационные 12
Частная ортодромия 9, 33. 154, 178
Челночный способ 221
Число коррекций МС 101
Ширина визуального наблюдения 223
— воздушной трассы 7, 104, 118, 128
— допустимая 210
Широта 14
Шкала скорости ветра 208
Штурманский бортовой журнал 116,
119
— контроль 256
--- готовности к полету 122
Штурманское снаряжение 115
Штурманская подготовка к полету
119-122
Шум 93
Эклиптика 271
Элементы движения 51
— маневра 61
— разворота 63
— положения 57
— полета 7
Электронный микрокалькулятор 46
Эллине рассеивания 71, 72, 281, 282
Эллипсоид общеземной 13
Эргатическая система самолетовож-
дения 84
Эргономические характеристики на-
вигатора 93
Этап горизонтального полета 65, 66,
235
— контрольный 53, 206
— полета 61
— снижения, набора 61, 62, 65, 237
Эффект береговой 41
— горный 41, 210
— ночной 41
Эффективность визуальной ориенти-
ровки 102
воздушной навигации 95
— выполнения ЛР 239
— использования воздушного про-
странства 76
— поиска 229
— применения 239
— штурманского обеспечения 95
Эшелон наивыгоднейший 55, 223
— полета 7, 248
— перехода 241
Эшелонирование вертикальное 231,
240
— боковое 232, 240
— продольное 240
Южное полушарие 213
Южный магнитный полюс 214
— географический полюс 217
ОГЛАВЛЕНИЕ
Условные сокращения . . ... .3
РАЗДЕЛ ПЕРВЫЙ
ОСНОВЫ ТЕОРИИ ВОЗДУШНОЙ НАВИГАЦИИ
Глава 1. Задачи воздушной навигации и методы их решения 6
ЕЕ Основные нанигацнониые понятия и определения . 6
1.2. Задачи воздушной навигации 7
1 3 Земные навигационные системы координат 8
I 4 Методы задания траектории полета Ю
Е5. Методы решения основной задачи воздушной навигации 11
Глава 2 Авиационная картография
2 I Форма и размеры Земли .... 12
2.2. Системы координат иа эллипсоиде и сфере 13
2.3. Расчет элементов ортодромии и локсодромии 15
2.4. Основные понятия теории искажений 17
2.5. Характеристика картографических проекций 18
26 Авиационные карты . 22
Глава 3 Методы реализации траектории полета 24
3.1 Методы определения координат 24
3 2 Обобщенный метод линий положения 24
3.3. Навигационные элементы положении и движения 26
3.4. Ветер и его характеристики 28
3.5. Навигационный треугольник скоростей 30
3.6. Методы счисления пути . . ... 33
Глава 4. Навигационная характеристика технических средств само-
летовождения 34
4 Е Классификация технических средств самолетовождения 34
4 2 Навигационные характеристики . . 37
4.3 Влияние условий распространения радиоволн иа характе-
ристики радионавигационных средств 40
Глава 5. Вычислительные средства 42
5.1 . Счетные инструменты .... 42
5 2 Применение электронных вычислительных машин 46
Глава 6 Измерение навигационных элементов 46
6 I Принципы измерения навигационных элементов 46
6 2 Применение курсовых приборов ... .18
6.3 . Измерение элементов движения ВС . . .... 51
299
6.4 Измерение угла сноса и путевой скорости 52
6.5 . Измерение высоты полета............................ .55
6.6 . Измерение элементов положения с помощью РТС 57
Глава 7. Основы динамики полета и маневрирования 60
7.1. Уравнение динамики полета............................. 60
7.2. Расчет элементов пространственного маневра ВС 61
7.3. Иижснсрно-штурманскнй расчет топлива 64
7.4. Штурманское обеспечение регулярности полетов ... 66
7.5. Траектория движения при автоматическом управлении Ьс 66
РЗЗПЕ.1 второй
МЕТОДЫ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ВОЗДУШНОЙ
НАВИГАЦИИ
Глава 8. Точностные характеристики навигационных измерений 69
8.1 Понятие точности самолетовождения . 69
8.2 . Точность определения ЛП и места ВС 70
8.3 . Оценка точности счисления пути 73
8 4. Общая точность самолетовождения 76
Глава 9. Надежность воздушной навигации 77
9.1. Вероятность выдерживания воздушной трассы 77
9.2 Потребная точность самолетовождения ... 78
9.3 Области применения навигационных средств и рабочие об-
ласти радионавигационных систем .... . 78
94. Построение рабочих областей радионавигационных систем 60
9.5. Вероятность применения навигационных средств 62
9.6. Показатели надежности воздушной навигации 64
9 7. Оценка показателей надежности . . 85
9.8. Аналитическая оценка надежности воздушной навигации 86
Глава 10. Комплексное применение навигационных средств 87
10.1 Понятие комплексного применения навигационных средств 87
10 2. Способы комплексной обработки навигационной инфор-
мации ............. . 88
10.3. Основы комплексного применения навигационных средств
экипажем . . ,90
10.4. Эргономические характеристики навигатора 93
1 лава 11. Повышение эффективности штурманского обеспечения по-
лета и оптимизация навигационных определений 95
111. Эффективность штурманского обеспечения полетов 95
11.2. Методы оптимизации способов действия 96
11.3. Оптимизация выбора высоты полета ... 98
11.4. Оптимизация контроля н исправления пути 98
115. Оптимизация измерения навигационных элементов полета ЮЗ
11.6. Требования к оптимальному размещению наземных угло-
мерно-дальномерных РНС . ... 104
1 лава 12. Контроль качества самолетовождения . 106
12.1. Средства сбора полетной информации . . 106
12 2. Применение средств сбора полетной информации . . 107
12.3. Оценка качества самолетовождения по данным наземных
радиолокационных измерений . ...... 109
12.4 Методика проверки самолетовождения в полете 111
12.5. Подготовка данных для разбора полетов.............112
300
/<1 ШЕЛ ГРЕТИН
РЕШЕНИЕ НАВИГАЦИОННЫХ ЗАДАЧ ПРИ ПОДГОТОВКЕ П
ВЫПОЛНЕНИИ ПОЛЕТА
Глава 13. Штурманская подготовка к полету 114
13.1. Назначение штурманской подготовки 114
13.2. Общая наземная штурманская подготовка 115
13.3. Задачи штурманской подготовки . 115
13.4. Подбор и подготовка карт 116
13.5. Предварительный расчет полета................... 119
13.6. Предполетная штурманская подготовка к полету 122
Глава 14 Общие правила самолетовождения 125
14.1. Основные этапы и правила самолетовождения 125
14 2. Взлет н набор высоты . . . 126
14.3. Вывод ВС на опорные пункты маршрута и ЛЗП 127
11.4 Контроль и исправление пути ... 12b
14 5 Предпосадочная подготовка и снижение с эшелона 131
Глава 15. Подготовка и выполнение полета на самолетах и вертоле-
тах. не оборудованных АНК 132
15.1. Особенности штурманской подготовки экипажей к вне-
траесовым полетам ... . . 132
15 2 Вывод ВС на курс следования 133
15.3 . Контроль и исправление пути . 134
15.4 Ведение визуальной ориентировки 136
15 5 Применение радионавигационных средств 136
15.6 Измерение навигационных элементов полета 142
15.7 . Определение времени наступления моментов естественной»
освещения .... 142
15.8 . Применение астрономических навигационных приборов 148
1 лава 16 Подготовка и выполнение полета на самолетах, оборудо-
ванных системами и авиационными навигационными ком-
плексами с аналоговым вычислителем
16 1. Авиационный навигационный комплекс
16.2 Автоматическое счисление координат
16.3 . Точность определения координат ВС при автоматическом
счислении
16.4 Коррекция счисленных координат ...
16.5 . Авиационные навигационные комплексы с аналоговым вы-
числителем
16.6 Подготовка к полету с применением навигационного ком
плекеа .......................
16 7 Выполнение полета с применением АНК
16.8 . Применение радиомаячной угломерно-дальномерной ра-
дионавигационной системы ....
16 9 Применение бортовой радиолокационной станции
Глава 17 Подготовка и выполнение полетов на самолетах, оборудо-
ванных навигационным комплексом и системами с цифро-
вым вычислителем
152
153
155
157
160
162
164
IG9
ПЗ
174
17.1. Авиационные навигационные комплексы с цифровым
числителем
17.2. Особенности подготовки к полету
17.3. Выполнение полета с применением АНК .
вы-
174
176
178
301
17.4. Инерциальная навигационная система..................181
17.5. Определение навигационных элементов полета с помощью
ИНС................................................... ... 182
17.6. Подготовка и выполнение полетов с применением ИНС 184
17.7. Сверхдлииноволновая разностно-дальномерная раднонавп
гациоиная система..................................... ... 186
17.8. Определение навигационных элементов полета с помощью
ра 1ностно-дальномерной системы . . . 188
17 9 Подготовка и выполнение полета с применением самолет-
ного приемоиндикатора . . . . . . 190
I I а в а 18 Подготовка н выполнение захода на посадку 192
18 1 Схемы захода на посадку . 192
18.2. Расчет элементов маршрута захода на посадку . 196
183. Расчет навигационных элементов полета прн заходе на
посадку с учетом ветра 200
18.4 Использование систем посадки 202
18.5. Учет сдвига ветра................................. . 205
Глава 14 Особенности штурманского обеспечения полетов в различ-
ных аэронавигационных условиях................................. 205
19.1 Полеты над малоорпентнрнон местностью . 205
19 2. Полеты на малых высотах 207
19 3 Полеты над горной местностью 209
19 4 Полеты над водными пространствами 211
19.5 Особенности естественного освещения и применения курсо-
вых приборов в полярных районах 213
19 6 Определение места ВС и навигационных элементов поле-
та в полярных районах .... .217
Глава 20 Штурманское обеспечение авиационных работ . 219
20.1 Требования к штурманскому обеспечению авиационных
работ................................................ 219
20 2 Штурманское обеспечение воздушного фотографирования 219
20 3 Штурманское обеспечение авиационно-химических работ 220
20.4 Штурманское обеспечение съемочных работ 222
20 5. Штурманское обеспечение ледовых авиаразведок 225
20.6 Штурманское обеспечение поисковых работ . . 227
1 лава 21 Пути экономии топлива в процессе самолетовождения 230
21 1 Принцип оценки штурманского обеспечения экономично-
сти полета . 230
21 2 Штурманское обеспечение экономичности на этапе орга-
низации и планирования полетов ... 230
213 Штурманское обеспечение экономичности в процессе под-
готовки к полету 232
21.4 Штурманское обеспечение экономичности полета по
маршруту . . ... . 234
21.5 Штурманское обеспечение экономичности прн выполнении
авиационных работ и полетов в районе аэродрома 238
/' ! ЧЕТВЕРТЫЙ
111 ГУРМАНСКОЕ ОБЕСПЕЧЕНИЕ БЕЗОПАСНОСТИ ПОЛЕТОВ
Глава 22 Предотвращение столкновений с наземными препятствиями 240
22 1. Общие положения 240
22.2. Безопасные высоты полета............................241
Ю2
22.3. Расчеты безопасных высот полета .... . 242
22.4. Погрешности измерения высоты полета.................244
22.5. Системы предупреждения опасных сближении с «емкой по-
верхностью ... ...........................246
Глава 23. Предотвращение опасных сближений и столкновений ВС
в полете ... .... 243
23.1. Меры по предотвращению опасных сближений и столкно-
вений ВС................................................ 243
23.2. Применение систем предупреждения столкновений 250
23.3. Вероятность предотвращения опасных сближений ВС 252
1 лава 24 Предотвращение потери ориентировки . 253
24.1 Причины потери ориентировки .... 253
24.2. Меры по предотвращению потерн ориентировки 254
24.3. Восстановление ориентировки 253
Глава 25 Предотвращение попаданий ВС в зоны опасных метеоро-
логических явлений . . .... 254
25.1. Опасные для полетов метеорологические явл< ния 25?)
25.2. Меры по предупреждению попадания ВС н опасные метео-
рологические явления . . 260
25.3 Применение бортового радиолокатора для обхода очага
грозы ... 262
Приложения . .... . 266
Список литературы............................................. . 237
Предметный указатель.......................................... 23?)
II