/



































































































































Author: Найденов Е.В.
Tags: техника средств транспорта погруженные и плавающие тела механика судостроение
Year: 1983




Text
Е. В. НАЙДЕНОВ
КОНТРОЛЬ ПОСАДКИ и остойчивости
СУДНА
Библиотечка судоводителя
Е. В. НАЙДЕНОВ
КОНТРОЛЬ ПОСАДКИ и остойчивости СУДНА
МОСКВА «ТРАНСПОРТ» 1983
УДК 629.12:532.321
Найденов Е. В.
Контроль посадки и остойчивости судна. — М.: Транспорт, 1983.— 141 с.
Обеспечение остойчивости морских судов является одним из важнейших условий безопасности их плавания. На флоте использу ются различные приборы, по которым можно определить параметры посадки судна и вести контроль за его остойчивостью в эксплуатационных условиях. Книга в основном посвящена описанию таких приборов, установленных на ряде судов, а также проектируемых для внедрения на морском флоте автоматизированных систем с применением средств вычислительной техники.
Книга предназначена для судоводителей транспортных и промысловых судов морского и речного флота и может быть использована в качестве учебного пособия учащимися судоводительской специальности морских и речных высших и средних учебных заве-.деиий.
Ил. 53, табл. 2, библногр. 13 иазв.
Рецензент Л. Р. Аксютин
Заведующий редакцией И. В. Макаров
Редактор О. Д. Моралевич
3605040000-188
Н 049 (01)-83 ‘
188-83
© Издательство «Транспорт», 1983
ВВЕДЕНИЕ
Аварии из-за потери остойчивости судна возможны не только в штормовых условиях, но и при совершенно благоприятной погоде, даже при стоянке судна у причала. Случаи гибели судов от опрокидывания описаны в ряде книг [1, 2, 6, 11, 12]. Аварии от опрокидывания судов связаны с гибелью людей и потерей больших материальных ценностей.
В настоящее время задача предотвращения аварий от потери остойчивости решается путем улучшения конструктивных характеристик судов и нормирования их остойчивости.
Однако во время эксплуатации остойчивость судна изменяется в зависимости от его загрузки и других условий. Поэтому постоянный контроль за изменением параметров посадки и остойчивости судна, оценка этих изменений с целью принятия своевременных мер для восстановления надлежащей остойчивости являются одной из важнейших задач обеспечения безопасности мореплавания.
Для контроля соответствия планируемых (при составлении >рузрвого плана) и фактических (после погрузки судна) характеристик посадки и остойчивости их нормированным значениям необходимо произвести как предварительный расчет, так и расчет или непосредственное определение их фактических величин. Процесс контроля посадки и остойчивости разбивается на два отдельных этапа: так называемая «прямая задача» — предварительный расчет параметров посадки и остойчивости в зависимости от размещения планируемых к перевозке грузов и определение этих же характеристик в зависимости от фактической загрузки судна, так называемая «обратная задача». Обе задачи можно решить расчетным способом, который базируется на знании координат и массы погружаемых на борт отдельных грузов.
В условиях современной интенсивности обработки судов в портах определение фактических координат и мас-
з
сы отдельных грузов часто становится невозможным, что ведет к нерациональному их размещению. Фактические координаты и массы погруженных грузов могут значительно отличаться от запланированных при расчете предварительного грузового плана. Следствием указанных факторов являются неудовлетворительные мореходные характеристики судов.
В данной работе приведены способы определения остойчивости транспортных судов как с помощью расчетов, доступных штурманскому составу, так и с помощью различных приборов, устройств и систем, предназначенных для контроля посадки и остойчивости судна в эксплуатационных условиях.
Приборы, базирующиеся на расчетном методе, применимы в основном при составлении или проверке грузового плана. При использовании этих приборов в целях проверки фактической остойчивости следует обращать внимание на два важных фактора, существенно влияющих на точность конечных величин. Результаты исследований определяющей формулы (в книге не рассматриваются) показывают, что расчетный метод может привести к значительным ошибкам из-за сложности самой формулы. Вторым источником ошибок служит невозможность установить с достаточной точностью фактические координаты и массу погруженных грузов.
Для автоматизации расчетного способа необходим, главным образом, компьютер, работающий по приспособленной к данному типу судов программе. С развитием вычислительной техники приборы расчета загрузки судна стали разрабатываться и внедряться на всех флотах широким фронтом.
Последние годы характеризуются интенсивным строительством специализированного транспортного и промыслового флота, особенностью которого является комплексная автоматизация всех судовых процессов. Значительно повысилась интенсивность обработки таких судов. в портах. Поэтому в нашей стране проблеме автоматического расчета посадки и остойчивости судна придавалось должное внимание. С конца 60-х годов начинается разработка и внедрение на отечественных судах приборов загрузки судна типа ПКЗ, выпускаемых Львовским заводом. Для повышения безопасности мореплавания в последние годы начинают внедряться ав-4
томатизированные комплексы типа «Бриз». На основе микропроцессоров в настоящее время создается система автоматизированного расчета мореходно-прочностных характеристик судна, внедрение которой планируется на судах Министерства морского флота.
Описание приборов и систем для контроля остойчивости судна, которые в настоящее время используются на- транспортных судах, дано в гл. 4. В этой же главе рассматриваются перспективы создания автоматйческих систем, с помощью которых может осуществляться надежный контроль за посадкой и остойчивостью судна в эксплуатационных'и аварийных условиях.
Автор
Глава 1
РАСЧЕТНО-ГРАФИЧЕСКИЕ МЕТОДЫ
ОПРЕДЕЛЕНИЯ ПОСАДКИ
И ОСТОЙЧИВОСТИ СУДНА
РАСЧЕТ ПОСАДКИ И ОСТОЙЧИВОСТИ
НЕПОВРЕЖДЕННОГО СУДНА
ПОСАДКА СУДНА
Положение, которое занимает судно относительно поверхности спокойной воды, называется посадкой судна.
Основные силы, определяющие посадку. Всё силы,
определяющие ту или иную посадку судна относительно поверхности спокойной воды, можно представить в виде двух сил (рис. 1):
Р — сила веса, приложенная центру тяжести G всего судна направленная вниз перпендикулярно поверхности воды;
D — равнодействующая сил давлений воды на погруженную поверхность одна (си-
Рис. 1. Схема действия опреде- ,Г1а плавучести: валяющих посадку судна правленная согласно
закону Архимеда вертикально вверх и приложенная центру тяжести С погруженного в воду объе судна. Точка С взывается
центром величины.
Две силы уравновешиваются, когда действуют по одной прямой и направлены в противоположные стороны. В процессе эксплуатации в зависимости от изменения загрузки судна и влияния на судно внешних сил (ветра, волнения и т. п.) точки приложения этих сил меняют свое положение относительно друг друга в продольном, поперечном (см. рис. 1,а) и вертикальном направлении. При этом образуется момент пары сил, который изменяет положение судна относительно поверхности воды до тех пор, пока сила веса и равнодействующая сил
6
давления воды не будут лежать на одной вертикальной прямой и их момент будет равен нулю, а судно в результате займет определенное положение относительно поверхности воды (см. рис. 1,6).
Основные параметры посадки. Во время эксплуатаций судна требуется определять основные параметры его посадки: углубление, осадку, дифферент и крен. Контроль указанных характеристик необходим для оценки остойчивости судна и прочности его корпуса, обеспечения надлежащих мореходных качеств судна (ходкость, управляемость, поведение на волнении), безопасного прохода мелководья, определения водоизмещения и количества груза на борту и т. п.
При значительных отклонениях судна от прямого положения в теории корабля для определения посадки, кроме указанных параметров, используют другие характеристики, которые в условиях эксплуатации применяются очень редко и поэтому в данной книге не рассматриваются.
На рис. 2 показаны эксплуатационные параметры посадки судна.
Рис. 2. Основные параметры посадки судна
Углубление—.расстояние между действующей ватерлинией и основной линией.
Углубление носом — расстояние аб, измеряемое при носовом перпендикуляре (НП).
Углубление кормой — расстояние вг, измеряемое при кормовом перпендикуляре (КП).
7
Углубление на миделе — расстояние между ватерлинией и основной линией, измеряемое в плоскости миделя.
Осадка, — расстояние между действующей ватерлинией и самой нижней деталью, корпуса судна, т. е. осадка учитывает габариты подводной части судна с выступающими частями. Осадка судна обычно больше его углубления, однако относительная разница между их величинами мала. Поэтому на практике пренебрегают различием между терминами «углубление» и «осадка».
Осадка носом (Гн)—расстояние, измеряемое при носовом перпендикуляре между ватерлинией и линией, параллельной основной и проходящей через нижнюю кромкукиля.
Осадка кормой (Тк) — расстояние, измеряемое аналогично при кормовом перпендикуляре.
Средняя осадка судна равна среднему углублению плюс высота выступающих частей в районе сечения шпангоута, проходящего через центр тяжести площади действующей ватерлинии. Сечение, проходящее через центр тяжести площади ватерлиини, нт транспортных и промысловых судах находится на нг «начительном расстоянии от миделевого сечения. Поэтому погрешностью от несовпадения плоскости мидель-шпангоута ц сечения, проходящего через центр тяжести площади ватерлинии, на практике пренебрегают и среднюю осадку (Тер) принимают равной осадке на миделе (Гм). Определяются они полусуммой осадок носом и кормой-;
Тер = Тм = — (Тн + Тк).
Осадка измеряется в метрах (сантиметрах) или футах (дюймах).
Дифферент судна (d) — разность осадок носом и кормой:
d = 7’1I-7’K. (1)
Из формулы видно, что дифферент судна положителен при осадке носОм больше осадки кормой и называется дифферентом на нос. Отрицательным дифферентом является дифферент на корму. В соответствии с рис. 2 можно записать 8
где ф — угол дифферента, град;
L — длина судна между перпендикулярами, м.
При малых углах дифферента tg ф=ф, поэтому
(2)
Дифферент судна контролируется по осадкам носом и кормой и в редких случаях прибором — дифферентометром, Дифферент измеряется в метрах.
Крен судна — угол .6 между вертикалью и диамет-. ральной плоскостью судна. Крен считается положительным, если правый борт судна погружем больше левого. Крен измеряется в градусах с указанием на какой борт. Для контроля крена все суда имеют приборы — кренометры. Величину крена можно также определить по разности осадок правого Тп,6 и левого Тл.б бортов судна:
. п Уп.б — Т’л.б
tg О = ---«---- (3)
D
где В —ширина судна.
Если'- плоскость ватерлинии параллельна основной, плоскости (^=7^0; ф=0; 0 = 0), то посадка судна определяется лишь одним параметром — величиной средней осадни .7С₽, которая постоянна по всей длине судна. Судно, имеющее такую посадку, считается сидящим прямо и на ровный киль.
Если ватерлиния не параллельна основной плоскости, а диаметральная плоскость перпендикулярна плоскости ватерлинии- (7Н#=7К, ф=#0, 0 = 0), то судно сидит прямо, но не на ровный киль (с дифферентом). Для контроля такой посадки судна пользуются двумя характеристиками: осадкой носом и. осадкой кормой.
Если не имеется дифферента, но диаметральная плоскость не вертикальна (7н=7к¥=04 ф=0, 0=0), то судно сидит с креном, .но на ровный киль.
В современных условиях эксплуатации судов для оценки посадки термины «на ровный киль» и «прямо» используются мало. Положение судна обычно характе-
9
^riikxx
ризуется терминами «без дифферента», «с дифферентом», «без крена» или «с креном».
Марки углубления и грузовая марка судна. Для определения осадки в процессе эксплуатации судна используются марки углубления, или марки осадки — цифры, которые наносят на его бортах, на носу, на корме и миделе (у больших судов). Обычно с левого борта арабские цифры (рис. 3), высота которых и интервалы между нижней и верхней кромками рядом стоящих цифр равны 10 см, а с правого борта — римские, высота каждой из них и интервалы между ними равны б дюймам (152 мм) Арабские цифры наносят только четные. В последнее время чаще наносят с обоих бортов только арабские цифры. Если судно сидит в воде по нижнюю кромку циюры 30, .то осадка судна 3 м, если по верхнюю кромку этой же цифры (т. е. вода закрывает всю цифру, но не выше ее), то осадка судна 310. см. В промежуточном положении необходима интерполяция «на глаз». В практических условиях в порту или на рейде, особенно в открытом море (не на .ходу), из-за качки судна и волнения уровень воды колеблется. В таких условиях берут замеры нескольких колебаний крайних значений уровней роды и осред-
няют результаты. Визуальное определение осадки судна по маркам углубления является неточным и в некоторых случаях, например при большом волнении у прича--ла, практически неприемлемым.
Из-за конструктивных особенностей судов, например ролкеров, контейнеровозов, СРТ и других, марки углубления нельзя нанести на перпендикулярах. На практике же необходимо знание осадки на перпендикулярах. В таких случаях следует пользоваться схемой марок углубления, которой снабжаются суда (рис. 4). Схема дает возможность по маркам углубления, нанесенным по бортам судна, определить осадку на носовом и кормовом перпендикулярах. Для этого на шкалах схемы марок углубления откладывают соответствующие числен-10
i
421
1
ГК
Б
Рл 3. Марки углубления
Рпс. 4. Схема марок углубления
ные значения осадок судна по маркам углубления при. данной его посадке и через эти точки проводят прямую. По точкам пересечения прямой с перпендикулярами определяют осадку носом и кормой. Например, по маркам углубления сняли осадку носом 5 м, кормой 6,81 м. Используя схему марок углубления, получаем значение осадки на перпендикулярах Тн = 5,1 м, Тк=6,6 м. При отсутствии схемы марок углубления и несовпадении марок осадки с плос
костями носового и кормового перпендикуляров (см. рис, 2) вместо схемы марок углубления можно использовать следующие зависимости:
Гер = (Г',, - Гк) —+ Г'к; £Н -Т Ьк
де Т„' Т1;' — осадка носом и кормой, определяемая
по маркам углубления;
Lu LK — отстояние носового и кормового перпендикуляров от миделя.
Судно обычно имеет посадку со значениями дифферента крена, отличными от нуля. На миделе марки углубления находятся на расстоянии друг от друга, равном ширине судна. На значительном расстоянии друг от Друга могут находиться марки углубления и на корме. Поэтому для устранения погрешностей при расчете осадки судна, имеющего крен, следует осадку на миделе, корме, иногда и на носу определять с обоих бортов брать их среднее значение.
11
Кроме того, дополнительная погрешность в определении осадки возникает потому, что при крене и дифференте линия марки углубления направлена не по нормали к горизонту. Например, у судна с осадкой 10 м, имеющего крен и дифферент по 5°, погрешность в определении осадки может достигать 5,5 см.
Изменение характеристик посадки. Посадка судна в процессе эксплуатации непрерывно меняется. Изменения положения судна относительно уровня воды зависит от многих причин (изменение нагрузки, плавучести и др.). Влияние этих факторов приводит к посадке судна, соответствующей новому положению ватерлинии, поэтому важно прогнозировать величину изменения параметров посадки в зависимости от известных изменений условий эксплуатации судна. Наиболее часто изменение эксплуатационных условий, происходит вследствие увеличения нагрузки судна в результате приема гр^за и судовых запасов и уменьшения нагрузки судна при выгрузке грузов и расходовании запасов, а также при переходе судна в воду другой плотности.
Рассмотрим характер изменения посадки и способы ее определения в зависимости от приема грузов и судовых запасов.
После приема груза в произвольную точку судна его начальные параметры посадки Теро, Тно, Тк0, d0, 0О изменят свои значения на величину приращений ДТср, АТН, ДТК, Ad, Д0. В результате значения осадки, дифферента и угла крена будут соответственно:
Т’ср = Теро + Д Т’ср!
Тн = Тн1 + Д Тн;
Тк — Ткг, + Д Тк;
d = d„ 4- Д d\
ДО.
Важной задачей на практике считается прогнозирование величины приращения средней осадки в результате приема определенного количества груза или определение массы груза по заданной величине приращения осадки.
Изменение осадки от приема груза. В соответствии с основами теории плавучести масса судна Р равна мас-12
се вытесненной им воды D, т. е, водоизмещению в тоннах,
Р= D
где р — плотность забортной воды, кг/м3;
V— объем воды, вытесненной подводной частью судна, м3.
Определение АТср равносильно задаче определения приращения осадки судна от приема груза с сохранением дифферента и крена. При таком изменении посадки судна между начальной и конечной (после приема груза) ватерлиниями заключается некоторая часть судна, называемая добавочным слоем, а объем этой части называется объемом добавочного слоя.
Если для судна в целом справедлива формула (4), то для принимаемого груза р и объема добавочного слоя v справедлива зависимость
p=pv. (5)
Если масса принимаемого груза невелика — не превышает 10% водоизмещения судна, то можно считать с достаточной>для условий эксплуатации точностью пло? щади начальной и конечной ватерлиний равными. Тогда объем добавочного слоя будет
v = S А Тдр, (6)
где S — площадь ватерлинии, м2.
Подставляя значение и в формулу (5), получим
р р S Л Тер, (7)
откуда
Д Тср = (8)
Значение площади ватерлинии можно получить из кривых элементов теоретического чертежа, которыми
снабжаются суда. Кривая площади ватерлинии дается
в зависимости от осадки.
Шкала числа тонн на 1 см осадки. С помощью формулы (7) можно определить массу принятого груза, со-
13
ответствуюшую изменению средней осадки на 1 см. Для этого в формулу подставим значение АТср, равное 0,01 м. В результате получим
p-0,01?S. (9)
Число тонн на 1 см осадки представляет собой приращение водоизмещения в тоннах при изменении осадки на 1 см и для транспортных судов на грузовой шкале изображается в виде отдельной шкалы. С помощью этой шкалы можно также определить изменение средней осадки от принятия (снятия) груза на судно. Шкала числа тонн на 1 см осадки используется преимущественно па судах со 'значительными изменениями абсолютных значений осадки в процессе эксплуатации.
Кривая водоизмещения и грузовой азмер. Морские суда, как правило, не являются прямобортными, поэтому при погрузке или выгрузке большой массы груза пользоваться формулами (7) и (8) нельзя, так как в пределах значительных изменений осадки судна площади ватерлиний при начальной и конечной осадках не будут равны. В этом случае определять величину осадки при приеме и снятии груза или массу груза по изменению осадки следует по кривой водоизмещения и грузовому размеру Кривая водоизмещения показывает зависимость объема погруженной части судна от величины осадки. Характер кривой водоизмещения зависит от формы обводов судна. Если судно прямобортное с плоским днищем, то все площади ватерлиний равны между собой и кривая водоизмещения является наклонной прямой, проходящей через начало координат.
Значение ординаты кривой водоизмещения, умножение плотность забортной воды в данном геог.рафиче-ком месте, даст величину водоизмещения (в тоннах) для различных осадок. Кривая, отображающая зависимость между средней осадкой и водоизмещением судна, называется грузовым размером.
На чертеж. кривых элементов теоретического чертежа наносится грузовой размер, исправленный на влияние выступающих частей корпуса судна, или дается два грузовых .размера: один без учета выступающих частей корпуса судна, а другой с учетом выступающих частей корпуса.
14
Дополнительный объем от выступающих частей вместе с наружной обшивкой редко превосходит 2% водоизмещения без выступающих частей. Поэтому чаще всего переход к действительному объему воды, вытесняемому плавающим судном, осуществляется с помощью коэффициента, равного 1,005—1,02. В этом случае отпадает необходимость в построении кривой водоизмещения и грузового размера с учетом выступающих частей.
По кривой водоизмещения и грузовому размеру можно для конкретной средней осадки Гср определить объемное водоизмещение V и по кривой D водоизмещение в тоннах. Если по оси абсцисс отложить количество тонн принятого на судно или выгруженного груза, то по оси ординат можно установить, насколько изменится средняя осадка в результате погрузки или выгрузки этого груза. По грузовому размеру также определяют массу груза, необходимую для изменения средней осадки судна до ее заданной величины.
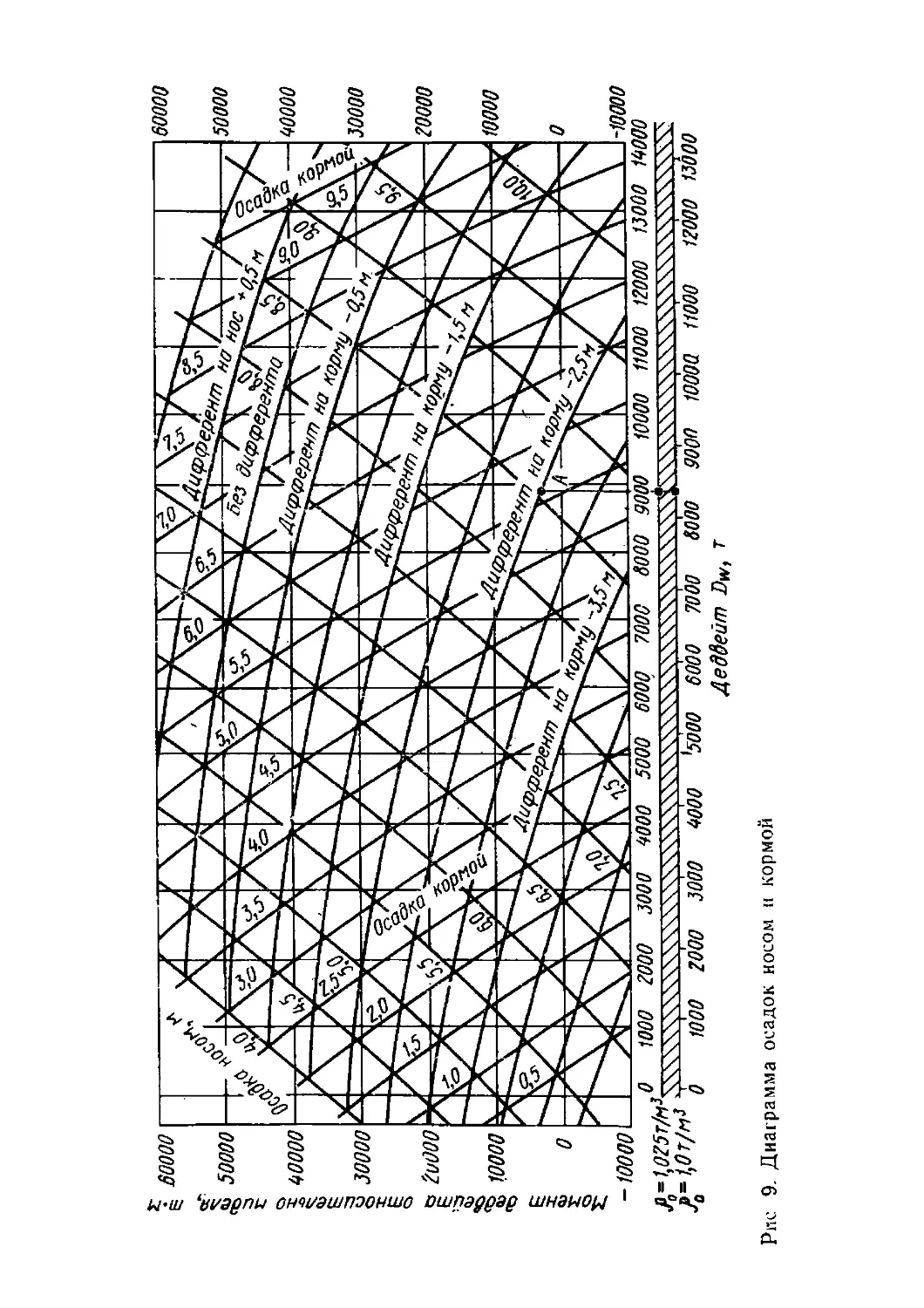
Грузовая шкала. На транспортном флоте широкое применение получила вместо кривой объемного водоизмещения и грузового размера грузовая шкала (рис. 5).
Рядом с равномерной шкалой осадок построена соответствующая ей неравномерная шкала водоизмещения в тоннах. Осадка принимается в качестве независимой переменной. Грузовая шкала рассчитывается и изготовляется при постройке каждого головного серийного судна, и ею .снабжаются все суда транспортного флота соответствующего типа. В основном ее используют во время грузовых операций. Обычно на грузовой шкале дополнительно строят шкалы: водоизмещения и грузоподъемности в пресной и морской воде на единицу осадки; числа тонн на 1 см осадки; высоты надводного борта; числа тонн на дюйм осадки; момента, дифферентую-щего на 1 см, и другие шкалы. Количество и наименование шкал могут быть различными.
С помощью грузовой шкалы можно решать различные задачи, возникающие при эксплуатации судна. Например, судно грузится в реке. Необходимо рассчитать, сколько можно взять груза, если наибольшая глубина фарватера при проходе устья реки 8 м. Допустим, что запас воды под килем на речном участке пути установлен 0,5 м. Следовательно, осадка судна не должна пре-
15
Осадка судна, м Водоизмещение, Т Водоизмещение, б морской боде на единицу осадки Грузоподъемность, т
Морская бода Пресная бода т/см т/дюйн Морская бода Пресная бода
9,0 -j
32000 Ё 31000 Е 3 - 2 - 1 - 91,0 105 - 12000 Ё ииии -
11000~\
-
31000 Ё
11000 Ё
3000b Е 10000 Е
8,5 Ч
10000 Е
h vq Go ЧЭ 1 1 1 1 109 -
30000 Ё 29000 Е 9000~\
29000- Ё
28000 Е 9000 Ё 8000 Ё
103 -
28000 Ё 27000 Е 8000 Ё 7000 -
5- 9 - 3 - г- 90,0 102 -
'I
27000 Ё 26000 Е
7000 Ё 6000 Е
7,5 ; 26000 Ё 25000 Е 6000 Ё 5000~\
-
7,0-^ 25000 Ё
5000 Ё 9000 Ё
29000 Z
9 - 8 - 7 - 6 - 5 - 9 - 3 - 2 - п
101 - —
29000 Ё 9000 Е
23000 =
100 -
— — JfJUU з-
— 3000 Ё 2000 |
23000 Ё
6,5 —з 22000 Е —
— 1000~У
22000 Ё
2000~i
t Z 99 - —
21000 ч 1000 . Е 0 Ё
! 4 21000 Ё
-
20000 Ё 0 Ё
6,0^ j = 2000(П —Е
19000 г
1 J
3,0
3,5
‘±0_
9,5
5,0
Рис. 5. Грузовая шкала судна
Надбод-ный борт, м
6JL
। I । 11 । । । Г । 'г гг
16
вышать 7,5 м. Прикладывая линейку к цифре 7,5 на шкале осадки, находим значение^ по шкале дедвейта (грузоподъемности) в пресной воде, равное 6000 т. Вычитая из этого количества запасы топлива и воды, получим чистое количество тонн груза, которое судно может принять у речного причала для прохода устья реки при условии отсутствия дифферента к концу погрузки.
Изменение дифферента в результате приема груза относительно-небольшой массы, когда его место погрузки (абсцисса) известно, определяется с помощью шкалы по моменту, дифферентующему на 1 см. Для этого массу принимаемого груза умножают на его известную абс? циссу. Полученное значение делят на величину момента, взятую по грузовой шкале при данной Средней осадке. В результате получаем величину изменения дифферента от принятия данного груза в заранее известное место. При погрузке груза в кормовую от миделя часть судна приращение дифферента имеет знак минус, а в носовую часть — плюс. Изменение дифферента при снятии груза определяют тем же порядком. Знаки при этом будут соответственно противоположными. При использовании грузовой шкалы для контроля дифферента возникает ошибка от несовпадения центра тяжести площади ватерлинии с миДелем судна. Специальная шкала изменения осадок носом и кормой от принятия 100 т груза — шкала дифферентов — позволяет избежать указанной ошибки. Шкала дифферентов (рис. 6) строится в масштабе судна ниже чертежа его общего вида. Для определения изменения осадок необходимо из места планируемого расположения центра тяжести груза опустить перпендикуляр на шкалу, соответствующую средней осадке судна на данный момент, и определить приращения осадки носом й кормой- с их знаками от принятия 100 т груза. Полученные значения приращения осадок носом и кормой следует умножить на частное от деления общей массы принимаемого груза на 100 т.
Влияние плотности воды на осадку судна. На вели-ну осадки или ее изменение влияет плотность воды.
При переходе судна из воды с большей плотностью в воду с меньшей плотностью осадка судна увеличивается и наоборот. Обозначим через pi большую плотность воды и через рг — меньшую. Так как масса судна в данном случае величина постоянная, то при переходе его 2—430 17
из воды с большей плотностью в воду с меньшей плотностью увеличивается лишь его подводный объем (объемное '"водоизмещение). Следовательно, можно записать
Я- 17j (У, + Л17) ?2(l7l + SATcp), (10)
где Vi V? — объемное водоизмещение судна соответственно в воде с большей и меньшей плотностью.
Решая полученное уравнение относительно ДЛР, получим
ЛГср= ’ (11)
18
Изменение осадки суХна от перехода из морской воды в пресную не превышает 2% первоначальной его осадки.
Влияние обледенения на посадку судна. Обледенение оказывает сильное влияние на посадку рыболовецких судов малого водоизмещения типа СРТ, МРС и др. Лед, который образуется на палубе, корпусе, надстройках- во время заливания и забрызгивания судна при -низких температурах воздуха, является, по существу, дополнительно принимаемым грузом. Он вызывает увеличение осадки и уменьшение запаса плавучести. Накопление льда обычно происходит неравномерно по всей площади палуб и надстроек, поэтому у судна, кроме увеличения средней осадки, изменяется дифферент и крен, что, в свою очередь, ведет к еще большей заливаемости и ухудшению мореходных качеств судов, увеличивается вероятность проникновения воды в судно. В условиях эксплуатации величина общей массы льда на малых рыболовных судах иногда достигает 10—12% водоизмещения [3]-. Потеря же плавучести наступает у судов в среднем при массе льда 15—40% водоизмещения. Потеря остойчивости судна из-за обледенения является реальной причиной гибели судов.
ОСТОЙЧИВОСТЬ
Характеристики остойчивости. Оценка характера изменений и предварительный расчет окончательных значений параметров посадки, например к концу грузовых операций, связаны с определением характеристик остойчивости. Поэтому определение и оценку посадки судна -.ксплуатационных условиях необходимо проводить совместно с контролем остойчивости.
Восстанавливающий момент. Эксплуатация судов (погрузка, выгрузка и перевозка грузов, морской промысел, расходование судовых запасов и др.) обусловли-вас- практически непрерывное изменение координат точек приложения и значений силы веса Р и силы плавучести D Однако при наклонениях судна в результате Действия момента внешних сил изменяет свои координаты лишь точка приложения силы плавучести и поэтому образуется пара сил. Момент этой пары называется 2* ' 19
Рис. 7 Схема действия поперечного восстанавливающего момента
восстанавливающим. В общем случае судно под действием внешних сил наклоняется одновременно в продольном и поперечном направлении. Поэтому восстанавливающим моментом называют составляющую полного момента пары сил веса и плавучести, действующую в плоскости наклонения. Наклонению в поперечной плоскости соответствует минимальная остойчивость. Поэтому наклонениям судна в поперечной плоскости придается большое значение.
Плечо восстанавливающего момента, действующее в попе-, речной плоскости судна и представляющее собой кратчайшее расстояние между направлениями сил веса и плавучести судна (рис. 7), называется плечом поперечной остойчивости. Восстанавливающий момент Ма в этом случае представляет собой про
изведение водоизмещения судна на плечо остойчивости I:
Ma = Dl. (12)
Если восстанавливающий момент стремится отклоненное от положения равновесия судно вернуть в исходное положение, то это судно считается остойчивым. При расположении точки приложения силы веса в другом месте, например в точке G\, действие момента внешних сил будет способствовать увеличению крена судна и его опрокидыванию. В этом случае судно неостойчиво. Таким образом, вопрос остойчивости еудна решается в зависимости от действия восстанавливающего момента.
При различных наклонениях судна точка С будет передвигаться по определенной кривой, радиус кривизны которой называется поперечным метацентрическим радиусом, а соответствующий ему центр кривизны (точка т) называется поперечным (малым) метацентром. При малых наклонениях (10—12е) поперечный метацентр практически не меняет своего положения, а точка С движется по дуге окружности.
20
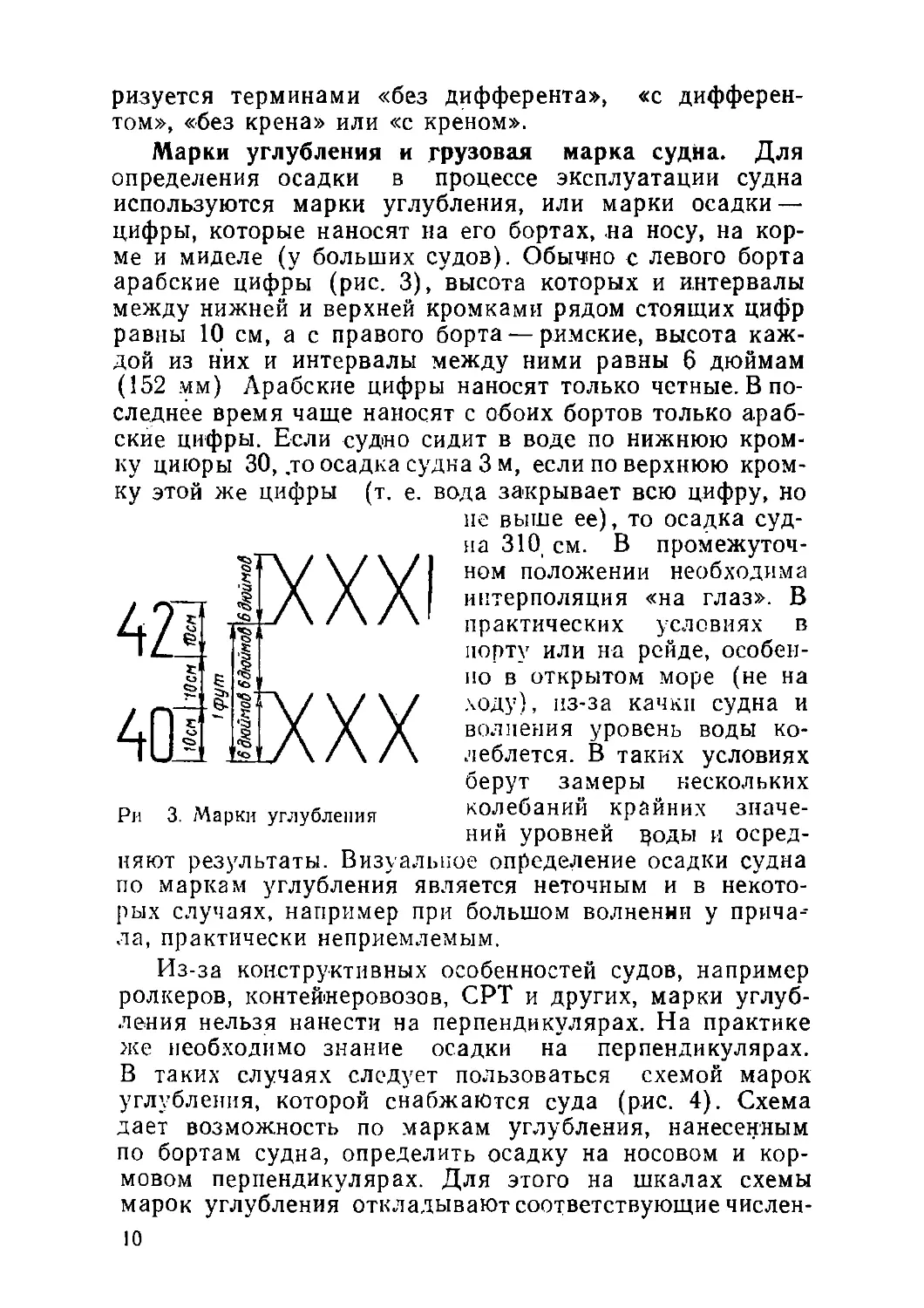
Метацентрическая высота. Расстояние между мета-
центром и центром тяжести судна называется метацентрической высотой.
Метацентрическая высота является. одним из параметров контроля остойчивости судна. Если пользоваться этим понятием, то условием остойчивости судна будет положительное значение поперечной метацентрической высоты. При положительном значении этого параметра (когда поперечный метацентр находится выше центра тяжести) судно, отклоненное от положения равновесия после прекращения действия внешней -силы, всегда будет возвращаться в исходное положение. При нулевом значении метацентрической высоты (метацентр, совпадает с центром тяжести) равновесие судна становится безразличным. Судно будет оставаться в том же поло
жении, в которое оно приведено, и
действия внешних сил, т. е. не вернется в первоначальное положение, равновесия. При отрицательном значении поперечной метацентрической высоты (метацентр ниже центра тяжести) пара сил PhD образуют не восстанавливающий, а кренящий момент. Судно не остойчиво.
после прекращения
Если обозначить через zm рис g Основные параметры аппликату поперечного ме- начальной остойчивости тацентра, измеренную от основной плоскости (рис. 8),
через zg аппликату центра тяжести судна, то поперечная метацентрическая высота будет их разностью:
ft — Zm Zg.
(13)
Поперечную метацентрическую высоту можно выразить также через разность между метацентрическим радиусом г и возвышением а центра тяжести судна G над "го центром величины С:
й = г — а.
(14)
Из этого следует, что поперечная метацентрическая высота является одной из характеристик поперечной
21
остойчивости. Продольная остойчивость аналогично зависит от продольной метацентрической высоты — расстояния между продольным метацентром и центром тяжести судна.
Однако продольный метацентр расположен намного выше поперечного, и продольная метацентрическая высота значительно больше поперечной метацентрической высоты, поэтому восстанавливающий момент, если судно не повреждено, всегда будет возвращать его в первоначальное положение. Для продольной метацентрической высоты Н по аналогии с поперечной получим
H — R — а или Н R — 2g.
(Здесь 2С — аппликата центра величины, R— продольный метацентрический радиус).
Обычно возвышение центра тяжести над центром величины составляет 1—3% от продольного метацентрического радиуса. Поэтому можно считать, что продольная метацентрическая высота примерно равна продольному метацентрическому радиусу.
Некоторые примерные данные о величине поперечной метацентрической высоты (в метрах) для судов различных типов приведены ниже.
Пассажирские 0,5—0,8
Лесовозы 0,1—0,5
Буксиры 0,5—0,8
Ледоколы 2,0—4,0
Танкеры 1,0—3,0
Контейнеровозы 0,3—2,0
Ролкеры * 0,1—0,6
БМРТ 0,4—1,5
СРТ 0,2—0,8
Сухогрузны 0,3-1,0
Лихтеровозы 1,2—1,5
Газовозы 0,8—1,2
Барже-букспрные
(составные) 2,5—3,5
Чн \левые 0,8—1,2
Паромы 0,5—1,9
Китобазы 0,3—1,8
Китобойные 0,6—0,9
Рудовозы 0,8—3,1
Коэффициент остойчивости. Метацентрическая высота не в полной мере характеризует изменение остойчивости судна при изменении его водоизмещения. При увеличении водоизмещения сопротивляемость судна наклонениям' возрастает даже при неизменном значении метацентрической высоты. Это обстоятельство учитывает другая характеристика, так называемый коэффициент остойчивости, представляющий собой произведение метацентрической высоты на водоизмещение.
2'2
В соответствии с этим коэффициент поперечной остойчивости будет равен
k = Dh,
(15)
а коэффициент продольной остойчивости K=DH.
Коэффициент остойчивости применяется для оценки влияния водоизмещения на остойчивость однотипных судов.
РАСЧЕТНО-ГРАФИЧЕСКИЕ СПОСОБЫ
ОПРЕДЕЛЕНИЯ ПОСАДКИ И ОСТОЙЧИВОСТИ
Кривые элементов теоретического чертежа. Многие характеристики, необходимые для расчета начальной остойчивости судна, в зависимости от величины его осадки представлены в виде совокупностй кривых (гидростатические кривые).
Чтобы иметь возможность решать задачи контроля осадки и остойчивости, необходимо иметь кривые, по которым определяются следующие элементы теоретического чертежа:
I) площадь ватерлиний S (из строевой по ватерлиниям) ;
2) водоизмещение D (по грузовому размеру);
3) положение центра величины по длине судна (по ивой абсцисс хс центра величины);
4) положение центра величины по высоте (по кри-)й аппликат гс центра величины);
5) положение центров тяжести площадей ватерлиний длине судна (по кривой абсцисс х/ центров тяжести площадей ватерлиний);
6) возвышение zm поперечного метацентра над ки-Д'м (по кривой поперечного метацентра);
7) возвышение гп продольного метацентра над килем ПО кривой продольного метацентра или по кривой продольного метацентрического радиуса /?);
8) продольный момент инерции 7 площади ватерлинии (по кривой продольных моментов инерции площади атерлинии);
23
9) площади шпангоутов (по масштабу Бонжана).
Все эти элементы теоретического чертежа строятся в функции от осадки судна.
При изменении нагрузки судна (погрузка или выгрузка груза, прием или расходование запасов топлива и т. п.) поперечная метацентрическая высота меняется.
При погрузке на судно груза в соответствии с формулой (13) для расчета поперечной метацентрическрй высоты достаточно знать величину аппликаты центра тяжести судна и аппликаты метацентра.
Значение аппликаты поперечного метацентра zm определяется по кривым теоретического чертежа.
Значение аппликаты центра тяжести судна можно рассчитать по формуле
D„ I Pt г{ ~ D 2°п D
(16)
где Dn — водоизмещение порожнего судна, т;
zgn — аппликата центра тяжести порожнего судна, м;
Pi — масса каждого погружаемого на судно груза, т;
— аппликата каждого погружаемого на судно груза, м.
Расчетный метод определения аппликаты центра тяжести судна и метацентрической высоты требует знания аппликат и масс погружаемых на судно грузов, судовых запасов и балласта. Теоретически затруднений в вычислении момента для отдельного груза, балласта и запасов нет. Массу каждого груза можно определить из предварительного или исполнител'ьного грузового плана. Расположение и массы отдельных судовых запасов известны из ежедневных замеров. Для определения аппликат грузов пользуются схемой размещения грузов на судне, на которой указаны вертикальные шкалы по каждому трюму. Шкала расположена для грузовых помещений на линии их центров тяжести и выражает зависимость объема и аппликаты центра тяжести грузового помещения от высоты уровня заполнения его однородным грузом. Схема размещения грузов обычно поступает на судно вместе с судовой документацией после его постройки или является приложением к информации об остойчивости.
24
Водоизмещение судна рассчитывается суммированием массы порожнего судна и массы всех переменных нагрузок
D = Dn + \Pi. (17)
Таким образом, использование расчетного способа дает возможность по предварительному грузовому плану определить расчетную метацентрическую высоту судна, т. е. можно прогнозировать степень остойчивости, которая будет у судна в результате погрузки запланированных грузов и судовых запасов. После окончания грузовых операций по-фактическим координатам и массе принятых на борт грузов можно определить значение метацентрической высоты.
Практическое определение моментов piZ( ш р-х, для всех переменных нагрузок относительно простая, но очень трудоемкая работа. В информации об остойчивости и прочности грузового судна приводится расчет параметров остойчивости для типовых случаев загрузки и дается схема расчета для нетиповых случаев. Однако подавляющее большинство случаев загрузки, особенно в условиях эксплуатации грузового и промыслового судна, являются нетиповыми. Современная интенсивность обработки в портах, особенно специализированных судов (ролкеров, контейнеровозов, лихтеровозов), велика. Применение расчетного метода при контроле остойчивости становится все более затруднительным. Поэтому в последнее время широким фронтом внедряются приборы контроля загрузки судна, базирующиеся на расчетном способе определения метацентрической высоты, и начали разрабатываться автоматические системы для непосредственного измерения характеристик остойчивости.
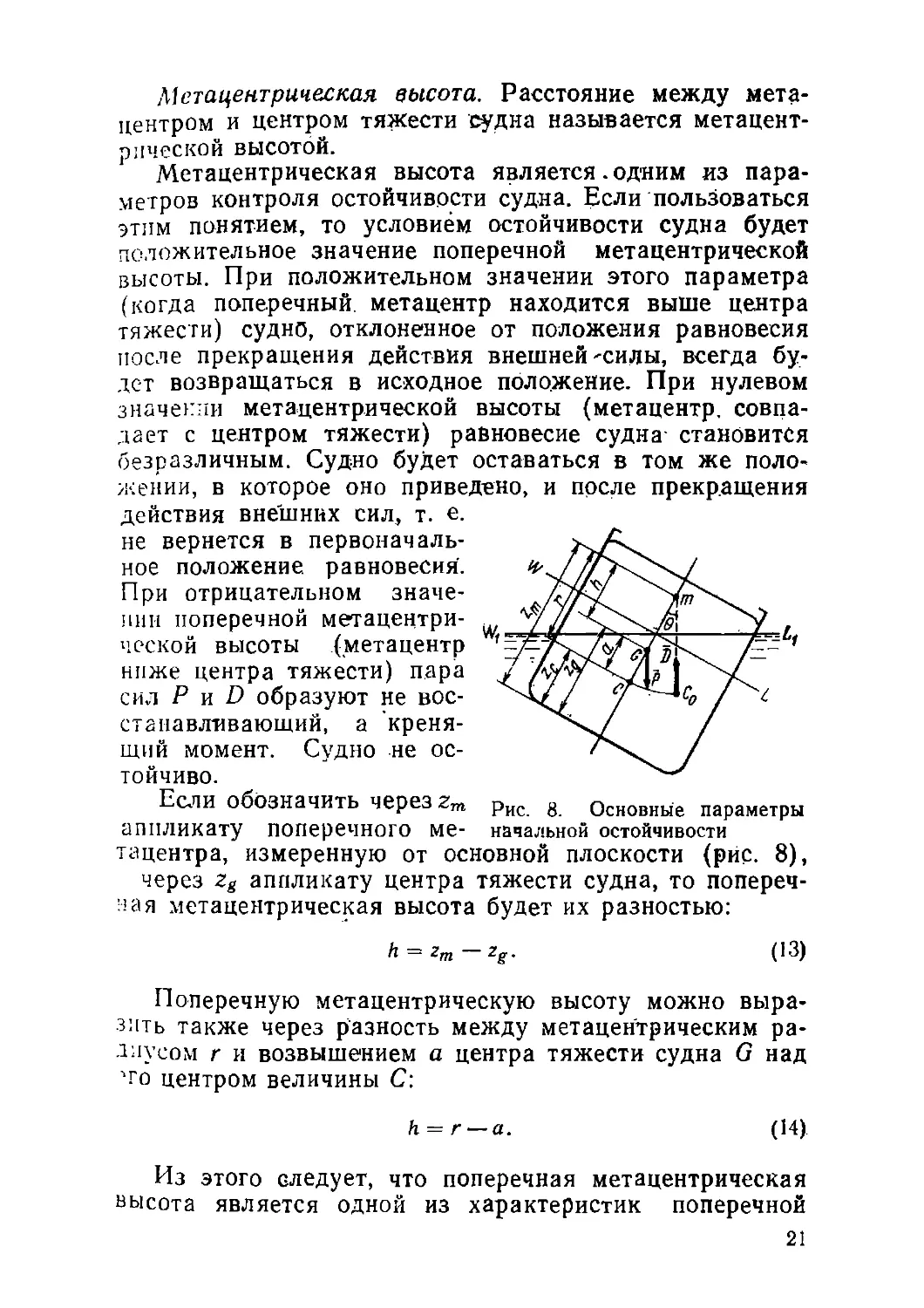
Диаграмма осадок носом и кормой. Фактическая посадка судна (осадка носом и кормой) может быть определена визуально после окончания погрузки. Однако в условиях эксплуатации необходимо знать до начала погрузки, какая будет посадка судна после полного окончания планируемых грузовых операций и приема судовых запасов перед выходом в .рейс или в районы промысла. В реальных условиях не всегда имеется возможность визуального определения осадок после погрузки, например, прием груза в море, на промысле и т. п.
. 25
Для определения посадки судна служит диаграмма осадок носом и кормой, которая прилагается к информации об остойчивости.
Диаграмму осадок носом и кормой строят следующим способом. По оси абсцисс (рис. 9) откладывают значение водоизмещения D или дедвейта Dw, а по оси ординат—момент водоизмещения или момент дедвейта относительно миделя. На диаграмму наносят два семейства кривых: кривые постоянной осадки носом и кривые постоянной осадки кормой в метрах. Проводят серию наклонных ватерлиний для одной осадки и вычисляют для этих ватерлиний водоизмещение с помощью масштаба Бонжана или дедвейт по разности водоизмещения судна для данной ватерлинии и водоизмещения порожнем или как сумму всех переменных нагрузок по формуле
Dw = S Pi.
(18)
Дифферент судна зависит от положения абсциссы центра тяжести судна, Поэтому для использования диаграммы требуется определить момент водоизмещения MDx или момент дедвейта MDwx по формулам;
— &П -*П + Е Pl Х1 MdWx= ^Pixj,
(19)
(20)
где хп — абсцисса центра тяжести порожнего судна, величина которой указывается в информации об остойчивости судна;
Х{ — абсцисса i-й переменной нагрузки.
Осадки носом и кормой по диаграмме определяют следующим способом: по нижней шкале откладывают значение дедвейта и проводят вертикаль. На вертикали откладывают значение момента дедвейта относительно миделя и ставят точку «А». По точке «А», интерполируя между кривыми постоянных значений осадок на перпендикулярах судна, определяют осадку носом и кормой.
С помощью схемы марок углублений (см. рис. 4) определяют углубления носом и кормой на оконечностях судна. Решая обратную задачу, можно получить по значениям осадок носом и кормой дедвейт или водоизмещение судна в тоннах с учетом его дифферента.
26
। Момент дедвейта относительно миделя, т-м
Ркс 9. Диаграмма осадок носом и кормой
Метацентрические формулы остойчивости. Представим формулу (12) через значения метацентрической высоты. Для этого I выразим через h sin 0, тогда восстанавливающий момент будет
Ме = D Л sin С. (2 )
Аналогично для продольной остойчивости восстанавливающий момент будет равен
(22)
Формулы (21) и (22) называются метацентрическими формулами остойчивости. Их можно использовать исходя из условия, что в процессе наклонения судна положение его метацентра не меняется, а кривая изменения положения центров величин является дугой окружности. Такое условие справедливо лишь для малых наклонений. Метацентрические формулы являются основными формулами для определения начальной остойчивости судна. Следует иметь в виду, что для транспортных судов при углах крена, когда палуба входит в воду или скула выходит из воды, погрешности расчета по метацентрической формуле (21) возрастают до недопустимых для условий эксплуатации пределов.
Точность расчета по этой формуле зависит также от отношения метацентрической высоты к метацентрическому радиусу. Малые значения отношения Л/r при больших углах крена еще больше увеличивают погрешность в конечных результатах.
Применять метацентрические формулы можно лишь при малых углах крена, для которых синусы углов близки по своей величине к самим углам. В этом случае формулу (21) можно записать в более простом виде:
Л1В = D h в, (23)
.де 0 выражен в радианах, а при измерении углов крена в градусах:
По формулам (23) и (24) можно определить либ» восстанавливающий момент, либо коэффициент остой-28
чивости, либо крен судна — в зависимости от того, какая из этих величин неизвестна.
Кренящий и дифферентующий моменты. Часто метацентрическую формулу для наклонений в поперечной плоскости записывают в, виде, удобном для определения угла крена
При этом под МКр подразумевается не восстанавливающий момент при угле крена 0, а равный ему. по величине кренящий момент, например, от принимаемого или перемещаемого в поперечном направлении груза.
Когда судно имеет начальный крен, формулу (24) можно выразить в следующем виде:
где Л0— приращение угла крена, равное разности углов
крена 02, полученного в результате приложения к судну момента Мнр, и начального 0ь град. *
Для равнбобъемного наклонения судна в продольной плоскости можно получить аналогичную формулу для угла дифферента
где Мд — дифферентующий момент, т-м.
Дифферент судна из формулы (2), выраженный через разность осадок носом и' кормой, будет
d — L tg Ф х L<L,
(2F)
тогда формулу (27) можно представить в виде
Dh d
(29)
29
Если по известной величине дифферентующего момента определять дифферент, то получим
. L а -----
DH
Из формулы (26) легко получить выражение для момента, .кренящего судно на Г Подставив в нее значение для приращения угла крена, равное одному градусу, имеем
Dh
Af'Kp“ 57,3
(30)
Таким же способом из формулы (29) можно получить выражение для момента, дифферентующего судно на 1 см. Для этого в формулу подста'вим значение дифферента, равное 1 см,и получим
DH
ЛР. =-----
А 100L
(31)
Численные значения моментов, кренящего на 1° и диюферентующего на 1 см, важно знать для быстрого предварительного вычисления крена и дифферента судна по заданному кренящему и .дифферентующему моментам. Так, например, если известны кренящий на 1° и диффёрентующий на 1 см моменты, то изменение крена и дифферента под действием заданных моментов легко определяется из соотношений
'Мкр
Л п -------
М'кр
Id
-и., лпд
° и
кренящий на от средней осадки и При этом величина
дифферентуюший на аппликаты центра тя-аппликаты центра тя-
Моменты, 1 см, зависят жести судна, жести существенно влияет на величину момента, креня
щего на 1° и мало сказывается на величине момента, дифферентующего на 1 см.
Опыт кренования. Опыт кренования судна является наиболее точным способом определения начальной мета-30
центрической высоты. Этот способ применяется в эксплуатационных условиях в тех случаях, когда расчетный способ неприменим из-за невозможности определять аппликату и массу отдельных грузов, например разный лес в одном трюме.
Принцип опыта кренования заключается в искусственном накренении судна известным кренящим моментом с замером водоизмещения и полученного в результате накренения приращения угла крена судна. Кренящий момент можно создавать перемещением поперек судна автопогрузчика, перекачкой жидких грузов (балластной воды), постановкой на борт судна контейнера или другими способами.
Опыт кренования позволяет определит^ метацентрическую высоту из формулы (26)
Кренящий момент представляет собой произведение массы кренящего груза рКр на расстояние /кр между диаметральной плоскостью судна и центром тяжести кренящего груза.
Окончательная формула (32) опыта кренования после подстановки значения кренящего момента примет вид
Ркр ^кр /1=57’3^у- <33>
В этой формуле- все переменные величины тщательно измеряются в процессе кренования. Водоизмещение судна рассчитывается по масштабу Бонжана или определяется по грузовой шкале (при отсутствии дифферента).
Опыт кренования с особо тщательными замерами необходимых переменных (D„, А0, pKP, ZKP) проводится после постройки судна с целью определения аппликаты центра тяжести судна порожнем.
Определение метацентрической высоты по периоду свободных колебаний судна. Наиболее просто, но с относительно большой погрешностью начальная метацентрическая высота определяется по периоду свободных
31
колебаний судна, для чего судно раскачивается искусственно и измеряется период бортовой качки в эксплуатационных условиях. Ошибка указанного метода [2] может достигать 20%;
Искусственное раскачивание судна следует проводить при отсутствии волнения. Качка судна не должна ограничиваться швартовыми. Глубину под килем желательно иметь больше двух осадок,„а расстояние от причала не менее ширины судна. Несоблюдение этих условий влечет за собой еще большие ошибки в определении периода свободных колебаний судна из-за сильного влияния ограниченного пространства вокруг судна на величину момента инерции присоединенных масс воды. Кроме того, метод свободных колебаний может не дать правильных результатов при наличии в грузовых помещениях судна больших свободных поверхностей жидких грузов. Суммарная поправка на свободные поверхности таких грузов, превышающая 10% от величины ожидаемой начальной метацентрической высоты, неприемлема.
Раскачивать суда малого водоизмещения (СРТ, МРС, буксиры и т. п.) можно силами судовой команды. Люди, сделав несколько перебежек с борта на борт, выстраиваются в диаметральной плоскостй. Перебежка делается так, чтобы люди бежали «в гору». Раскачивание ведется до тех пор, пока амплитуда колебаний достигает 3—5° Раскачивать судно можно поднятием и опусканием стрелой груза с причала, поднятием и опусканием на борт судна груза береговым краном, подъемом или опусканием на причал судовой рампы. На малых судах, где легко достигается искусственное раскачивание, хорошо заметное для глаза, период колебаний замеряют с помощью секундомера. Секундомер пускают в момент наибольшего наклонения судна на какой-либо из бортов и останавливают после того, как судно совершит несколько полных колебаний с борта на борт. Разделив общее время полных колебаний на их число, получают период. На судах большого водоизмещения для фиксирования периода колебаний судна применяется прибор, называемый инклинографом. Чаще всего определяют период собственных колебаний судна по периоду качки на естественном волнении. В условиях нерегулярного волнения бортовая качка происходит со средним периодам, близким к периоду собственных колебаний судна. Для 32
определения периода необходимо измерять около десяти хорошо выраженных колебаний, а затем рассчитать их среднее значение.
Если из предыдущего определения известен период поперечных колебаний т0 и начальная метацентрическая высота h<j, то метацентрическая высота h определяется по формуле
-ЧтГ
(34)
где т— период поперечных свободных колебаний, определенный на данный момент.
При неизвестных То и hG применяется формула
Л
(35)
где с — эмпирический коэффициент, зависящий от типа судна;
В — ширина судна, м;
т—период поперечных колебаний, с.
Приближенное значение коэффициента с зависит от типа судна:
Тип судна Коэффициент с
Малое пассажирское Пассажирское (£> = 27000 т) Пассажирское (£ = 40000 т) Грузовое в балласте Грузовое в полном грузу СРТ Буксир Большой катер 0,77 0,81 0,87 0,81 0,78 0,76 0,76 0,80
В типовой информации .об остойчивости и прочности "рузового судна [10] дается таблица и шкала соответствия периода бортовой качки величине метацентрической высоты, судна.
3-430 33
Определение метацентрической высоты по изменению угла крена на циркуляции. Метацентрическую высоту можно определить по приращению угла крена судна, который возникает на циркуляции при перекладке руля. Изменение крена в этом случае происходит под действием центробежной силы, возникающей вследствие движения судна по криволинейной траектории. Метацентрическая высота в этом случае будет
h = 0,233 , (3G)
2tfugsinA9 -0,466 Ь=ц 1 '
где Уц — скорость судна на установившиеся циркуляции, уз;
zm — аппликата метацентра (снимается с кривых элементов теоретического чертежа по средней осадке), м.
Ru — радиус циркуляции, м;
g— ускорение силы тяжести, м/с2;
Д0 — величина изменения статического угла крена на циркуляции, град;
Для определения радиуса циркуляции служит зависимость:
/?ц = 59,1 “„т, иц. (37)
Д лл
где ДАК— изменение компасного курса, град;
t — время, за которое компасный курс изменился на величину ДАА, с.
ОСТОЙЧИВОСТЬ СУДНА НА БОЛЬШИХ УГЛАХ КРЕНА
Расчет остойчивости. При наклонениях -судна на 12° « более у большинства судов обводы таковы, что кривая перемещения центров величины в проекции на плоскость мидель-шпангоута и на диаметральную плоскость представляет собой некоторую вытянутую неправильную кривую Со, Ci, С2, С3 (рис. 10), а не дугу. окружности. Для каждого небольшого участка кривой, например С0Сь при наклонении 10—12° может быть найден свой 34
центр кривизны, т. е. свой метацентр то, т\. При наклонении судна на большие углы метацентр смещается. Отсюда делаем вывод о том, что метацентрические формулы начальной остойчивости, выведенные из предположения о постоянстве положения метацентра, можно использовать только при малых углах наклонения. Применительно к задачам определения продольной остойчивости это допущение не может быть источником больших погрешностей, так как дифференты обычно не превышают величин, при которых-палуба в оконечностях входит в воду. При поперечных условиях эксплуатации судна
Рис. 10. Траектория перемещения метацентра, центра тяжести и центра величины при больших наклонениях судна
наклонениях в реальных возникают большие углы
крена, поэтому метацентрическую формулу начальной остойчивости, где допускается линейная зависимость между восстанавливающим моментом й углом крена, применять нельзя, что приводит к необходимости обращаться к теории остойчивости судна при больших на-
клонениях.
Главной задачей теории остойчивости на больших углах крена является установление зависимости между углом крена судна и величиной его восстанавливающего
момента.
Подставим (см. рис. 8):
в формулу (21) вместо h разность г — а
Мв — D (г — a) sin 0 (38)
ИЛИ
D I D г sin 0 — D a sin 0, (39)
Величина г в основном зависит от размеров и формы обводов корпуса судна, а величина а от расположения центра тяжести судна. Поэтому первое слагаемое фор-з* 35
мулы (39) называют моментом остойчивости формы, а второе — моментом остойчивости массы.
Из формулы (39) можно определить значение восстанавливающего плеча
I = г sin 0 — a sin 0. (40).
Выражение rsin 0 называется плечом остойчивости формы /ф, а выражение asin 0 плечом остойчивости массы /в. В результате можно записать
(41)
/ — /ф /ц .
Рис. 11. Схема к определению плеча восстанавливающего момента
Из рис. 11 видно, что отрезки е и f плеча остойчивости формы соответственно равны е=г/0 cos 0 и f— =2е sin 0 (здесь у& и г» — координаты центра тяжести, зависящие от угла крена).
После подстановки значений е и f в уравнение (40) получим формулу для плеча остойчивости
I = уе cos в 4- гв sin 0 — a sin в, (42)
Формула (42) является основной формулой остойчивости на больших углах крена. Два первых слагаемых зависят в основном от главных размеров и от формы 36
обводов корпуса судна. Форма обводов корпуса судна не выражается аналитически, а задается графическим чертежем. Поэтому функцию I (9) можно выразить толь
ко графическим путем.
Диаграмма статической остойчивости. Графическая зависимость между плечом восстанавливающего момента и углом крена судна, построенная в прямоугольных координатах, называется диаграммой статической остойчивости (рис. 12).
Характерными точками статической диаграммы ос-
Рис. 12. Диаграмма статической остойчивости
тойчивости являются: 0тах— угол крена, при котором плечо статической остойчивости и восстанавливающий
момент имеют наибольшее значение; угол заката 0зак —
угол крена судна, при котором кривая пересекается с осью абсцисс.
Диаграмма статической остойчивости является важнейшей характеристикой поперечной остойчивости судна на больших нацлонениях. Диаграмма описывает процесс накренения судна под действием Внешнего момента. Если судно из прямого положения накренить на угол 0ь а затем устранить действие сил, вызвавших накренение, то судно будет возвращаться в исходное прямое положение. Указанная закономерность справедлива лишь до угла 0тах- Судно, накрененное на угол больший, чем 0тах, будет находиться в неустойчивом положении равновесия. При накренении-судна до значения угла крена, равного 0тах, и при условии продолжения возрастания внешнего кренящего, момента судно может опрокинуться. Наибольшую ординату диаграммы статической остойчивости называют максимальным плечом /тах, которая соответствует максимальному восстанавливающему моменту А1в и определяет величину предельного кренящего момента, постоянное приложение которого к судну еще не вызывает его опрокидывания.
Часть диаграммы, близкая к началу координат, обычно представляет собой прямую линию. Размер перпендикуляра, восстановленного из значения уг’ла крена, равного 57,3°, до пересечения с касательной к диаграм-
7 37
ме, проведенной из начала координат, является в масштабе восстанавливающего плеча поперечной метацентрической высотой.
Конкретный вид диаграммы статической остойчивости обусловлен данной загрузкой судна. Кроме того, различный тип судов имеет свой отличительный вид диаграммы. Ее форма зависит от соотношения главных размерений и характера обводов непроницаемого'корпуса, типа и расположения надстроек, учитываемых при вычислении плеч остойчивости формы судна. Для образца на рис. 13 приведены три характерных типа диаграмм статической остойчивости.
Кривая 1 относится к судам с небольшим надводным бортом и достаточно большой метацентрической высотой (танкеры, рудовозы).
Кривые 2 и 3 представляют собой диаграммы статической остойчивости судов с малой метацентрической высотой и высоким надводным бортом (контейнеровозы) 38
или с сильно развитыми надстройками. Подобная форма диаграммы называется S-образной. Кривая 3 изображает частный случай S-образной диаграммы статической остойчивости судна (некоторые серии лесовозов) с отрицательной начальной метацентрической высотой. Судно, имеющее такую диаграмму статической остойчивости, будет плавать с креном, равным его значению в точке пересечения восходящей ветви с осью абсцисс.
Суда с сильно развитыми надстройками имеют иногда диаграмму статической остойчивости (кривая 4) с двумя максимумами.
В практических условиях работа судов диаграмма статической остойчивости применяется для анализа остойчивости на конечных углах кр,ена и для решения некоторых производственных задач, связанных с действием внешних моментов, вызывающих большие углы крена судна.
Подставляя в формулу (42) значение а, равное zm— —h—zc (см. рис. 8), получим выражение для плеча статической остойчивости
I = yg cos 0 + ze sin 0 — (zm — ft — zc) sin 0. (43)
Первые два слагаемых определяют размер плеча остойчивости формы и являются функцией угла крена, координат центра величины и водоизмещения судна. Кривые плеч формы строятся для различных углов крена в функции водоизмещения и имеются на судне. Эти кривые носят название пантокарен или интерполяционных кривых. С помощью пантокарен легко получить диаграмму статической остойчивости. Для этого необходимо знать осадку и метацентрическую высоту судна. По значению средней осадки с кривых элементов теоретического чертежа снимают значения zm, и объемное водоизмещение. Более точно объемное водоизмещение получают по диаграмме осадок носом' и кормой. Для соответствующих значений объемного водоизмещения при различных углах крена обычно, на каждые 10° и в диапазоне от 10 до 90° по пантокаренам получают значения плеч остойчивости формы. Затем рассчитывают для этих же углов размер плеча остойчивости массы. После чего вычисляют плечи диаграммы статической остойчивости для выбранных углов крена как разность между плечом остойчивости формы и плечом остойчивости массы.
39
Рис. 14. Универсальная диаграмма статической остойчивости
Для построения диаграммы статической остойчивости судна можно использовать универсальную диаграмму статической остойчивости (рис. 14), которой снабжаются суда. Интерполируя между кривыми, проводят кривую плеч (пунктир) 1С' универсальной диаграммы для заданного дедвейта, например Dw = 12100 т. Затем по шкале оси ординат откладывают'значение метацентрической высоты (в нашем ‘примере 0,8 м) и проводят прямую через точку, соответствующую ее значению на шкале, и начало-координат. Плечи статической остойчивости для данной загрузки и соответствующих углов крена получают измерением в масштабе метацентрической высоты вертикального расстояния ab между кривой’// и прямой. Например, для угла крена и дедвейта соответственно равных 40° и 12 100 т получаем плечо диаграммы статической остойчивости, равное 0,490 м.
Задачи, решаемые с помощью диаграммы статической остойчивости. Пользуясь диаграммой статической остойчивости, можно решать некоторые задачи, возникающие в процессе эксплуатации судна. Прежде всего судоводителя интересует вопрос определения значения максимального,..-статически приложенного кренящего- момента, который может выдержать судно при данной загрузке, не опрокидываясь, и какой крен судно при этом будет иметь. Для этого необходимо провести параллель-40
но оси абсцисс касательную и диаграмме и отметить точку, касания А (рис. 15). Пересечение касательной с осью ординат в точке В дает значение максималь
ного статического
момента Угол кое- Рнс‘ Определение максимального „ кренящего момента
на, соответствующий
точке А, является максимальным, который .судно будет иметь. Если на диаграмме не нанесены значения восста
навливающего момента, их можно получитв, умножив значение плеч на водоизмещение судна в тоннах.
При известном значении., внешнего кренящего момента можно определить вызываемый, им угол крена. Судно, кренится до тех пор, пока кренящий момент не уравновесится восстанавливающим. Поэтому, отложив на Шкале моментов известное значение кренящего момента МкрЬ получим соответствующий ему крен судна 0ь По такому же принципу решается и обратная задача. Практически на судне подобным методом решается задача определения угла крена, который получит судно от перемещения груза в поперечном направлении. Момент от перемещения груза Л4нр2 зависит от угла крена, так как с увеличением угла крена уменьшается плечо момента на величину /кр (1 —sin 0). Поэтому Мкр2 на диаграмме должен быть изображен линией Мкр2 СД. Для практических задач значение Мкр2 от переместившегося груза можно считать постоянным и выразить параллельной оси абсцисс прямой Мкр2Е.
Диаграмма статической остойчивости позволяет определить количество необходимого груза (балласта) для получения заданного угла крена, чтобы обнажить борт для ремонтных работ. Для этого предварительно вычисляют необходимый угол крена по формуле
вобн = arctg --°б>< • (44)
£>
где Яобн — расстояние от заданной точки обнажения корпуса судна до действующей ватерлинии;
В — ширина судна.
41
Затем по диаграмме получаем значение необходимого для создания крена кренящего момента
Л^кр — Ркр 4<р>
(45>
где рКр — количество необходимого груза, которое следует принять на борт или снять с судна на расстоянии /кр от диаметральной плоскосуи.
Этим методом можно пользоваться только на небольших углах крена и при малых значениях метацентрической высоты. При большом значении метацентрической высоты необходим большой груз для создания требуемого угда крена. Прием же большого дополнительного' груза влечет за собой изменение диаграммы остойчивости. При малой остойчивости судну необходимо небольшое количество 'кренящего груза и, следовательно, значительного изменения диаграммы не происходит.
Опасным для потери остойчивости является случай воздействия на судно внезапно приложенного момента. Кренящий момент от давления ветра Mv определяется по формуле
М„ = 0,001 pvAozv, (46>
де р,;— условное расчетное давление ветра, кгс/м2, определяется по табл. 1;
Л„ — площадь парусности, м2;
г„ — расстояние между центром парусностц действующей ватерлинией, м.
Таблица Т
Условное давление ветра
рг„ к гем- при г(|. м
[ s S
0,5 1.0 1.5 2,0 2,5 3,0 3,5 4.0 4,5 5,0 5.5 6.0 6.5 о =.
Неограниченный Ограниченный I Ограниченный II
80 88
46 50
22 24
94
53
26
103 10? 1.10
58 60 62
"28 29 30
113
63
31
68
33
122
70
34
124
71
35-
Под действием этого момента судно будет крениться до тех пор, пока работа кренящего момента не уравно-42
весится работой восстанавливающего момента. Образо? вавшийся при этом угол крена называется динамическим.
В отличие от статического момента, при котором в каждый момент времени наблюдается равенство кренящего и восстанавливающего моментов, динамический момент в течение некоторого промежутка времени с начала его приложения может превышать восстанавливающий. Динамический крен достигает своего наибольшего мгновенного значения тогда, когда работа кренящего момента полностью погашается работой восстанавливающего. В дальнейшем из-за сопротивления среды происходит постепенное затухание колебаний около положения статического равновесия судна. При полном затухании колебаний судно может иметь статический крен.
Если внешний момент приложен мгновенно к судну, находящемуся в прямом положении, то для определения угла динамического крена необходимо отложить значение этого момента по оси ординат (точка В на рис. 16) и провести через эту точку прямую, параллельную осп абсцисс. Эта
прямая пересечет диаграмму статической остойчивости в некоторой точке (точка А). Угол динамического крена Од определится отрезком О 6Д на оси абсцисс, в пределах которого площадь ОБА между кривой восстанавливающих (ОД) и прямой кренящих (БА) плеч до точки пх пересечения А будет равна площади АДС после этой точки.
Определение динамического угла крена по диаграмме статической остойчивости связано с вычислением площадей сложных фигур. Чтобы найти значение угла крена, необходимо глазомерно наметить его на диаграмме и проверить путем вычисления площадей, насколько удовлетворяется это условие и какие необходимо внести исправления.
Динамический угол крена без вычисления площадей определяется по диаграмме динамической остойчивости.
43
Рис. 16. Определение динамического угла крена
Диаграмма динамической остойчивости. При определении угла динамического крена теория динамической остойчивости исходит из равенства работ кренящего и восстанавливающего моментов. Работа восстанавливающего момента определяется из выражения
е
(47) о
Однако в расчетах чаще применяют другую относительную меру динамической остойчивости плечо динамической остойчивости, определяемое по формуле
А °
'.= Ъ Ч'-7"-о
(18)
Рис. 17 Определение статического и динамического углов крена по диаграмме динамической остойчивости
Построение диаграммы динамической остойчивости для данной загрузки судна связано, как видно из формулы (48), е интегрированием плеча статической остойчивости. При наличии диаграммы динамической остойчивости
задача определения динамического и статического углов крена решается проще, чем по диаграмме статической остойчивости. Для этого на оси абсцисс из точки А (рис. 17), определяющей значение угла крена в один радиан, восстанавливают перпендикуляр АВ, равный длине плеча кренящего момента
AfKp I = ---
D
Полученную точку В соединяют с началом координат. Из точки пересечения С кривой диаграммы динамической остойчивости с прямой ОВ опускают перпендикуляр и получают величину динамического угла крена Од. После этого проводят касательную к кривой диа-44
граммы динамической остойчивости на участке между началом координат и точкой В параллельно прямой ОВ. Перпендикуляр, опущенный из точки касания Л на ось абсцисс, дает значение статического угла крена судна'0ст.
Наиболее опасный случай, когда к судну, уже имеющему крен, прилагается динамический момент внешних сил. Например, на судно, имеющее крен от смещения груза, налетает шквал.
Пусть судно под действием статического момента плавает с начальным креном 0о (рис. 18). В ту же сторону прилагается динамический момент, в результате чего судно оказывается'под действием суммарного момента. Статический
угол крена 0а определится точкой.А пересечения суммарного момента с диаграммой статической остойчивости. Для определения динамического угла крена 0Д проводят линию ДС таким образом, чтобы она отсекала площадь ДАС, равную по величине площади АЕК.
При шквале, направленном с того же борта, куда наклонено судно, сравниваются (рис. 19) площади фигур АЕК и ДАС. Угол начального крена равен 0о, а абсолютная величина кренящего момента равна отрезку КЕ. Для построения достаточно через точку 0о провести перпендикуляр до пересечения с отрицательной ветвью кривой диаграммы, отложить от
Рис. 18. Определение динамического угла крена судна при начальном крене и действии ветра, с одного борта
Рис. 19. Определение динамического угла крена судна при начальном крене и действии ветра с того же борта, куда наклонено судно
45
точки К вверх величину, кренящего момента КЕ и через точку Е провести прямую, параллельную оси абсцисс такой длины, чтобы соблюдалось равенство площадей заштрихованных фигур.
Расчет приращений характеристик посадки и остойчивости судна. Почти все формулы и графические зависимости служат для определения характеристик посадки и остойчивости на данный момент или после окончания поррузки судна. Расходование судовых запасов, прием или откачка за борт жидкого балласта, прием или сдача рыбы на промысловых судах, ведение промысла орудиями лова обусловливают изменение посадки и остойчивости. Ранее были показаны методы определения изменения средней осадки, осадок носом и кормой, дифферента графическим путем. Расчет изменения параметров посадки и остойчивости при приеме или снятии груза выполняется по приведенным ниже формулам.
1. Приращение поперечной и продольной метацентрических высот.
а) Для прямобортного участка судна
± р ( Л Т’ср
ДЛ=^ Иср + ~ ^"Л);
\н =
+ Р / А Т'ср О±р (Тср + 2 “
(49)
(50)
где zP — аппликата погружаемого (выгружаемого) груза.
б) Для непрямобортного участка судна
где dJx dJy — приращения моментов инерции площади ватерлинии относительно осей х и у,
dV—приращение объемного водоизмещения.
46
в) В общем случае приближенные формулы
А Л =: 8 гт + d р (Zp 2g) ’ АН — bZm± (ZP — ^g).
(53)
(54)
где и dZM — соответственно изменения аппликат поперечного и продольного метацентров.
Формулы (49—52) приемлемы для малых грузов массой не более 10% водоизмещения, а формулы (53 и (54) для грузов любой массы.
2. Приращение восстанавливающего момента определяется из выражения
А Л4В = + p' I +
Д7,ср\
Тер 2 / 5'П
(55)
3. Для расчета величины приращения плеча ческой остойчивости служит формула
/ ( Л Гср \
/ t Zp — Тср — 1 s i п 6
стати-
(56)
4. Величина приращения угла крена определятся из выражения:
А 0 =-------—------- 0„.
(D±p)(h± ДА)
(57)
где ур — ордината принимаемого груза;
6о— угол крена, который имело судно до приема груза.
5. Приращение формуле
угла дифферента определяется по
M =
P
Дф =
± р (д-р — Xf)
(D ± р) (Н + к Н)
(58)
где X) — абсцисса центра тяжести площади ватерлинии; тро — угол дифферента, который имело судно до приема груза.
47
6. Приращение осадки носом и кормой
ДТя-ДТср^у-^Дф; (59)
ДТк = ДГСр—^2 + -*у^Аф*
(60)
На транспортных судах возникает необходимость корректировки предварительного грузового плана с целью повышения остойчивости судна или изменения его посадки, особенно для придания нужного дифферента. В эксплуатационных условиях углы, дифферента достаточно малы и поэтому перемещение груза в продольном направлении не изменяет величину средней осадки. Следовательно, формулы (59) и (60) будут иметь вид:
ЛТн = (у-х^Дф; А Т’к ~ (-х- + л ф.
(61)
(62)
Продольный перенос груза почти не изменяет продольной остойчивости и совсем не меняет поперечной остойчивости, поэтому формулу (58) можно представить в следующем виде:
д Ф =
р(ха—X,) ОН
(63)
где Xi и х2 — абсциссы перемещаемого груза до н после его переноса соответственно.
Изменение метацентрической высоты при вертикальном переносе груза определяется из выражения
р
(г.г — г^, (64)
где Zi и z2 — соответствующие аппликаты переносимого груза до и после его перемещения.
48
Приращения плеч остойчивости будут определяться
Д l =(zgi — zgi) sin в, (65)
где zgl и zg2 “ аппликаты центра тяжести судна до и после перемещения груза.
Система нескольких грузов, из которых одни принимаются на судно, а другие снимаются, может быть заменена одним эквивалентным грузом, масса рс и координаты х& ус, zc центра тяжести которого определяются по формулам
Pc = У, Рь
i-l
1 п
Хс= ----- S Pi Xi\
1 "
Ус = — 2 Pi у,-;
Рс
1 п гс= — У Pi Pc i=l
(66)
(67)
(68)
(69)
где n — количество принимаемых и выгружаемых грузов.
По этим формулам принимаемые на судно грузы следует считать со знаком плюс, снимаемые — со знаком минус.
Как уже указывалось выше, кроме изменения нагрузки, на остойчивость судна влияет изменение плотности морской воды, свободные поверхности жидкого груза и обледенение. Переход судна из воды одной плотности в воду другой плотности вызывает изменение осадки. Так как при этом изменяется величина метацентра, то происходит изменение остойчивости судна. Приращение метацентрической высоты Д/гс от изменения плотности воды можно определить по формуле
6 р
Дйс=— (г1П-Тср), (70)
Р
где 5, — разность плотностей воды с большей и с меньшей соленостью;
р — плотность воды с большей соленостью.
4-430
49
Плотность воды (в т/м3) в различных регионах:
Море Северное 1,026
Азовское Балтийское Баренцево 1,006 1,011 1,028 Средиземное Черное Японское 1,026 1.014 1,024
Белое Берингово 1,019 1,023 Океан
Каспийское 1,025 Атлантический 1,024
Охотское 1,025 Тихий 1,026
Если танк с жидким грузом (балластом) заполнен менее чем на 95%, то свободная поверхность жидкости влияет на остойчивость судна. Приращение метацентрической высоты Д/гж в этом случае определяется по формуле
(71>
где рж — плотность жидкого груза;
гж — момент инерции свободной поверхности жидкости.
Ниже приведены данные о плотности (в кг/.м3) жидких грузов.
Бензин 6,96—7,46 Керосин 7,65—8,63
Дизельное топливо 8,50—8,63 Соляровое масло 8,63—8,83
Моторное топливо 8,44—8,83 Мазут 8,64—9,12
Численное значение момента инерции зависит от формы поверхности жидкости, т. е. от формы танка- на уровне жидкости. Для танков с прямоугольной формой величина инерции определится из выражения
1т Ыт
12
(72)
где /т и &т —длина и ширина танка соответственно.
Причем длина танка измеряется вдоль судна, а ши рина — поперек. 50
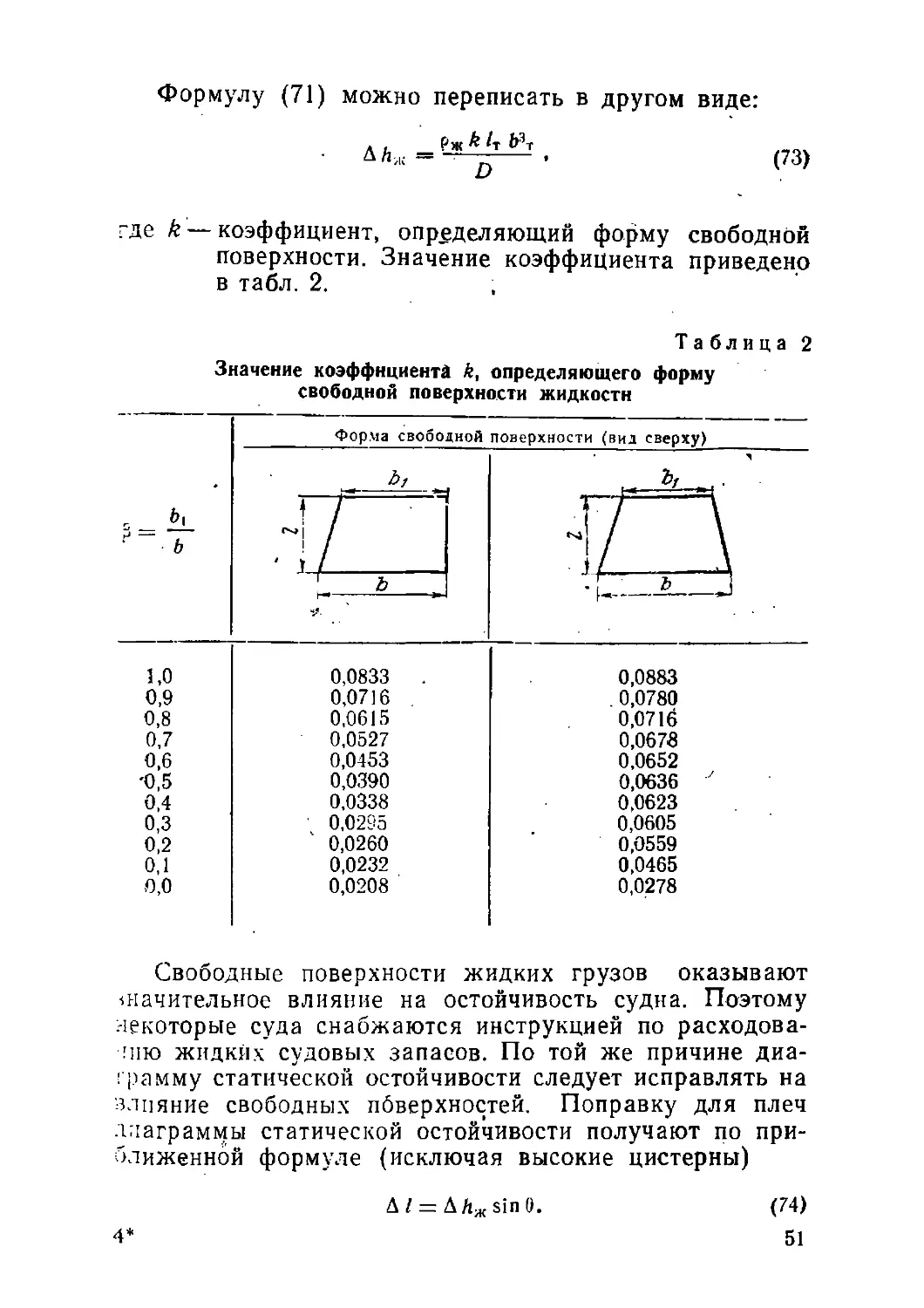
Формулу (71) можно переписать в другом виде:
Д йж
Рж Ь3т
D
(73)
где k — коэффициент, определяющий форму свободной поверхности. Значение коэффициента приведено в табл. 2.
Таблица 2
Значение коэффициента k, определяющего форму свободной поверхности жидкости
Форма свободной поверхности (вид сверху)
1,0 0,0833 . 0,0883
0,9 0,0716 . 0,0780
0,8 0,0615 0,0716
0,7 0,0527 0,0678
0,6 0,0453 0,0652
'0,5 0,0390 0,0636 7
0,4 0,0338 0,0623
0,3 0,0295 0,0605
0,2 0,0260 0,0559
0,1 0,0232 0,0465
0,0 0,0208 0,0278
Свободные поверхности жидких грузов оказывают значительное влияние на остойчивость судна. Поэтому некоторые суда снабжаются инструкцией по расходованию жидких судовых запасов. По той же причине диаграмму статической остойчивости следует исправлять на влияние свободных пбверхностей. Поправку для плеч диаграммы статической остойчивости получают по приближенной формуле (исключая высокие цистерны)
Д / = Д Лж sin 0.
(74)
51
4*
При обледенении возрастает водоизмещение, увеличивается возвышение центра тяжести судна, смещается метацентр к центру величины. Вследствие неравномерного распределения веса льда появляется крен и дйф^ ферент, поэтому при обледенении прежде всего теряется запас остойчивости. У некоторых судов потеря остойчивости может произойти при достижении веса льда около 2% водоизмещения судна. Потеря же плавучести происходит, как указывалось выше, если масса льда составляет 1-5—40% водоизмещения.
Так как. массу намерзшего льда-и координаты его центра тяжести в морских условиях определять трудно, контроль метацентрической высоты удобнее в этом случае вести по периоду бортовой качки.
.С ростом льда на палубе, надстройках, контейнерах, палубном грузе и т. п. увеличивается водоизмещение судна и, следовательно, его средняя осадка. Так как центр тяжести льда располагается выше палубы, общий центр тяжести судна повышается, а это влечет за собой уменьшение метацентрической высоты и ухудшение всех параметров диаграммы статической остойчивости: угла максимума, угла заката и максимального плеча восстанавливающего момента. Период и амплитуда бортовой качки растут с увеличением массы льда.
Кренящий момент от действия ветра возрастает за счет увеличения парусности и повышения центра парусности судна. Отсюда происходит уменьшение величины критерия погоды — одного из основных характеристик остойчивости судна. Критерием погоды Kv называется отношение динамически приложенного кренящего момента от давления ветра Mv, определяемого по формуле (46), к минимальному опрокидывающему моменту Мс.
В соответствии с нормами Регистра СССР критерий погоды, должен всегда иметь положительное значение, т. е. Величина опрокидывающего момента опре-
деляется с помощью диаграммы статической остойчивости (см. рис. 19). Для этого влево от начала координат откладывают величину амплитуды качки (отрезок Обо) и восстанавливают перпендикуляр КЕ. Затем проводят прямую ЕС так, чтобы соблюдалось равенство фигур КЕА и АДС. Отрезок Д0д в масштабе моментов представляет собой момент Мс.
52
Диаграмма контроля остойчивости. Типовая информация об остойчивости судна [10] предусматривает включение в информацию об остойчивости для конкретного типа судов диаграммы контроля остойчивости.
Диаграмма контроля остойчивости (рис. 20) служит для определения допустимых значений метацентрической высоты для данной загрузки судна, удовлетворяющих нормируемым Регистром СССР характеристикам остойчивости: критерию погоды, максимальному плечу и углу заката диаграммы статической остойчивости.
По оси абсцисс диаграммы откладывают величину дедвейта или соответствующую ему величину средней осадки. Осадку можно отложить та прямой, параллельной оси дедвейта «Осадка Т, м». По оси ординат откладывается значение метацентрической высоты. На диаграмме проведены наклонные кривые момента дедвейта MDwz. Для определения значений метацентрической высоты, минимально допустимых для данной загрузки судна, на диаграмме имеются несколько контрольных кривых, соответствующих минимальным (критическим) значениям метацентрической высоты по различным-критериям остойчивости. Кривые 1а и 16 соответствуют допустимому значению метацентрической высоты по критерию погоды «Кг>=1». Таких кривых может быть несколько. Например, кривая 1а для судна с генеральным: грузом, кривая 16 для перевозки двух ярусов контейнеров на палубе. Кривые 2, 3, 4 отвечают требованиям,, предъявляемым к диаграмме ’статической остойчивости-соответственно по величине максимального плеча /max = 0,2 м и углу заката диаграммы статической остойчивости 0г>='60° или 0v=55° (для судов, которым разрешено плавать при уменьшенном угле заката диаграммы) Самые нижние участки контрольных кривых соединяются в одну огибающую АВСД. Для примера загрузки судна с двумя ярусами контейнеров на палубе такой огибающей >будет только кривая 1, б, соответствующая критическому значению метацентрической высоты по’ критерию погоды.
Метацентрическая высота для большинства типов судов имеет ограничение и по своей максимальной величине для исключения нежелательных-ускорений, возникающих при резкой качке с большой амплитудой. Дл?г определения значений метацентрической высоты макси-53:
СЛ
Метацентрическая высота Ь,н
Метацентрическая высота h,n
j________I_______L--------1-------1_________________I________I_________I________I_________I________I-------I
5/ 5,5 4,0 4,5 5,0 5,5 6,0 6,5 1,0 7,5 8,0 8,5 9,0
Осадка. Т,м
Рис. 20. Диаграмма контроля остойчивости судна
мально допустимых йтах для данной загрузки судна на диаграмме приведена кривая 5.
Проверку соответствия остойчивости судна нормам Регистра СССР по диаграмме контроля остойчивости выполняют следующим порядком. Например, дедвейт равен 13660 т (осадка 9,5 м), AfDwz = 86850 т.с-м, судно-с генеральным грузом и 100%-ным запасом. На диаграмме для данного значения дедвейта (осадки) по вертикали откладывают величину расчетного момента1 MDwz=86850 тс-м (точка X). По шкале ординат определяется расчетная метацентрическая высота йр=1,6 м.. Допустимые значения ftmax, MDwzmax и Mdwz min-,
определяют на диаграмме по точке пересечения вертикальной прямой с предельными кривыми 1,а и 5. В результате для данного примера из диаграммы контроля остойчивости видно, что остойчивость судна при данной загрузке удовлетворяет требованиям правил Регистра СССР, так как точка К лежит между предельной кривой минимально допустимой остойчивости (/imin = 0,33 м при Mdwz max= 11250 тс-м) и кривой максимально допустимой ОСТОЙЧИВОСТИ (/lmax=3,32 М при Mdwz min — = 54270 тс-м).
ОПРЕДЕЛЕНИЕ ПОСАДКИ И ОСТОЙЧИВОСТИ АВАРИЙНОГО судна
Расчетный способ. Контроль посадки и остойчивости аварийного судна заключается в прогнозировании величин приращений водоизмещения, осадки, крена, дифферента, метацентрйческой высоты и плеч диаграммы статической остойчивости в случае поступления в один или несколько отсеков забортной воды вследствие аварии. В данном случае рассматривается авария, в результате которой естественно (пробоина, трещина в корпусе и др.) или искусственно (заполнение отсека забортной водой в результате тушения пожара, открытие донных кингстонов для преднамеренной посадки на мель и др.) забортная вода поступает в какой-либо отсек. При авариях, связанных с нарушением водонепроницаемости корпуса, поступление воды в отсеки может привести к гибели судна из-за потери запаса плавучести или остойчивости или по той и другой причине вместе. В борьбе-за живучесть судна важное значение имеет определение
55-
тех крайних значений параметров посадки и остойчиво* сти, которые будут у судна после аварии. Знание значений предельных приращений посадки и остойчивости «судна нужно для того, чтобы выяснить необходимость или .возможность принятия дальнейших мер по его спасанию экипажем.
В результате аварии, связанной с поступлением воды, оценка./состояния судна может быть следующая:
1) удовлетворительная даже без принятия мер со •стороны экипажа;
2) . неудовлетворительная и без принятия экстренных мер, улучшающих параметры остойчивости и посадки, судно погибнет;
3) крайне неудовлетворительная, возможность сохранения судна маловероятна при принятии любых мер.
Решать задачу непотопляемости судна можно двумя методами: методом постоянного водоизмещения и мето* дом приема груза.
При расчете методом постоянного водоизмещения «считается, что объем воды в затопленных отсеках исключается из объема судна и что эти отсеки уже не принадлежат судну. Водоизмещение судна и положение его центра тяжести в этом случае остаются одинаковыми до и после затопления, а изменяется только форма подводного объема судна.
При решении задач непотопляемости методом приема груза считается, что судно приняло жидкий или «твердый» (при отсутствии свободной поверхности) груз, масса которого равна массе влившейся воды. В- этом случае центр тяжести судна изменит свое положение. Методы и формулы определения посадки и остойчивости рассмотрены выше.
Регистром СССР рекомендуется для расчетов характеристик аварийной посадки и остойчивости метод постоянного водоизмещения. При иопользовании этого способа следует считать, что в результате поступления воды в отсек изменяется средняя осадка, положение центра величины, элементы площади ватерлинии, метацентрические радиусы, крен и дифферент.
Все случаи затопления отсека можно разделить на три основных:
1. Отсек заполнен полностью, свободная поверхность отсутствует. Приращения характеристик посадки и ос-:56
тойчивости в этом случае рассчитываются по методу приема твердого груза, применяя расчетно-графические-методы, рассмотренные выше. Центр тяжести воды принимается в центре тяжести объема заполненного отсека.
В процессе эксплуатации судна отсеки (трюмы) бывают пустыми или заполненными различными грузами на произвольную высоту. Поэтому для учета загрузки отсека вводится коэффициент проницаемости х (или коэффициент заполнения). Он имеет разные значения для различного- рода грузов, которые приведены в специальной таблице [8].
где VB — объем влившейся Воды в отсек при нахождении в нем данного груза, м3;
Vo — объем отсека, определяемый по теоретическому чертежу, м3.
2; Отсек заполнен не полностью и поэтому имеется свободная поверхность. Отсек не сообщается с забортной водой: В этом случае изменение характеристик посадки и остойчивости определяется методом приема жидкого-груза, центр тяжести которого лежит в центре тяжести затопленной части отсека.
3. Отсек заполнен не полностью и сообщается с забортной водой. Этот случай является наиболее сложным,, так как уровень воды в отсеке изменяется одинаково с уровнем забортной воды.
Рассмотрим третий случай затопления отсека.
Для вычисления приращений характеристик аварийной посадки и остойчивости методом постоянного, водоизмещения необходимо до аварии иметь слёдующие данные:
So — площадь ватерлинии;
р — плотность забортной воды;
£>о — водоизмещение судна;
Xfo—абсцисса центра тяжести площади ватерлинии до затопления отсека;
/70 и /г0 — продольная и поперечная метацентрическая высоты;
L — длина судна между перпендикулярами;
и Тц— осадка носом и кормой.
57
После аварии необходимо получить для выполнения расчета дополнительные данные:
ix’H-ty — моменты инерции относительно продольной и поперечной осей площади ватерлинии, потерянной в результате затопления отсека;
xs и ys—координаты центра тяжести потерянной площади ватерлинии;
Sn — потерянная площадь ватерлинии в результате затопления отсека;
р—масса влившейся в отсек воды до уровня аварийной ватерлинии;
хр, уР, zp — координаты центра тяжести влившейся воды.
Формулы для определения новых параметров посадки и остойчивости имеют следующий вид:
Д h — Do
Гер
Д rCn = ------ I
Cp p(Sp-S)
ДТср 2
P (lx + S y2s )
-------r—
tgO =
(76)
(77)
р [iv 4- S (a-s —
Д ГСр
T" " p
p Ур (So — S) — S ys
~D (So - S) (ft0 + Д ft) ’
ZP~
(78)
(79)
= Пр +
Z>o I
p s (Xs — */<,) + (Xp — xfa) (So — S)
~D (So- S)(H + & H)
(80)
AT = A7cp>-
S (Xs — x/0)
tg Ф;
(SI)
(82)
(8S)
Таким образом, расчет приращений характеристик посадки и остойчивости по данным формулам методом приема груза дает возможность определить состояние аварийного судна после аварии на данный момент и 58
прогнозировать посадку и остойчивость на момент, когда» аварийный отсек будет заполнен полностью.
Предварительно вычисленные (по приведенным выше формулам) изменения и конечные значения параметров посадки, остойчивости и .запаса плавучести (ТЗП) для случая затопления каждого отдельного отсека и для фиксированных значений водоизмещения дадут возможность оценить аварийную посадку и остойчивость. Обычно все сведения сводятся в таблицу, в которой на каждое фиксированное значение водоизмещения по отсекам-' приводятся данные о приращении характеристик непотопляемости (см. форму таблицы ниже).
Графический способ. Определять приращения метацентрической высоты и осадок судна можно также По различным диаграммам [8].
Для определения изменений плеч восстанавливающих моментов и построения диаграммы статической остойчивости предлагается универсальный планшет остойчивости УПО-2, разработанный в Одесском высшем инженерном морском училище-
Планшет представляет собой условную «врезку? в плоскость мидель-шпангоута в пределах эксплуатационных диапазонов возвышений центра тяжести над основной плоскостью и строится в прямоугольных координатах (zg—аппликаты центра тяжести судна и /ф— плеча остойчивости формы) с лучами прямых, проведенными через каждые 10° Ось ординат (рис. 21) разбивается в масштабе равномерной шкалой, соответствующей эксплуатационным значениям возвышения центра тяжести судна zg над основной плоскостью. Ось абсцисс и лучи
59
разбиваются в масштабе значений плеч остойчивости формы с учетом угла крена. Для этого сначала из точек, соответствующих целым значениям zg на оси' ординат, опускаем перпендикуляры на, каждый луч и получаем место определяющих точек, соответствующих значениям плеча остойчивости формы на сбоем луче. Между определяющими точками луч разбивается в том же масштабе, что и ординаты zg.
Рис. 21. Универсальный планшет остойчивости
Рис. 22. Определение величины восстанавливающего момента с помощью универсального планшета остойчи-хвости w
Плечи остойчивости формы выбирают для данных значений углов крена из пантокарен и сводят в таблицу, форма которой приведена ниже.
D /ф при в, град
10 20 30 40 50 60 70
17000 18000 21000 •
60
Отложив рассчитанное и исправленное на свободные поверхности значение аппликаты центра тяжести судна на оси ординат (рис. 22), опускают перпендикуляр на луч, соответствующий конкретному углу крена. В результате получаем условную линию направления действия силы тяжести и ее точку пересечения А с-восстанавливающим плечом ZB. Отложив из начала координат значение плеча остойчивости формы для данного водоизмещения, взятого из таблицы, на этом же луче получаем вторую точку В, в которой условней линия действия сил поддержания пересекается с восстанавливающим плечом. Расстояние АВ является длиной (значением) плеча остойчивости I, определяемой в том же. масштабе.
Опускать перпендикуляр можно, пользуясь треугольником с прямым углом с градуировкой одного катета в сантиметрах для снятия значений плеча остойчивости.
Операция повторяется для каждого луча. По полученным величинам плеч остойчивости строится-диаграмма статической остойчивости аварийного судна.
Планшет строят на большом листе бумаги, и помещают под стекло на ходовом мостике.
Глава 2
ДАТЧИКИ, ИСПОЛЬЗУЕМЫЕ В СИСТЕМАХ И ПРИБОРАХ ПОСАДКИ И ОСТОЙЧИВОСТИ
ТРЕБОВАНИЯ' К ТОЧНОСТИ ИСХОДНОЙ ИНФОРМАЦИИ
Некоторые способы определения метацентрической высоты, например по опыту кренования, по углу крена на циркуляции, периоду собственных- колебаний судна, требуют использования инструментов или приборов для измерения ряда необходимых физических величин, заложенных в основную формулу расчетного метода. При проектировании автоматических систем контроля фактических характеристик остойчивости, базирующихся на том или ином способе, возникает необходимость надежного автоматического измерения исходных данных и дистанционной их передачи. Для выполнения этого условия необходимы датчики исходной информации (кренометры, уровнемеры,, осадкомеры и др.). Кроме требования к надежности, датчики информации должны измерять физические величины с достаточной, точностью, в противном случае большие погрешности в измерениях приведут к недопустимым ошибкам в определении конечных величин параметров остойчивости. Требования к точности приобретают особенно большое значение, когда характеристики остойчивости близки к своим предельным значениям, т. е. в опасных ситуациях. Одним из наглядных примеров может служить определение метацентрической высоты при наличии S-образной диаграммы статической остойчивости (рис. 23). Допустим, после погрузки разного леса лесовоз в действительности имеет S-образную диаграмму статической остойчивости (см. рис. 23,а). Тогда значение метацентрической высо-62
ты может оказаться отрицательным, например — 5 см, что вполне естественно при такой форме диаграммы. При определении же метацентрической высоты расчетным способом -погрешности в измерении аппликат и массы принимаемого груза и судовых запасов, ошибки в расчете и т. д. привели к абсолютной погрешности, равной. ±15 см. Тогда рассчитанное значение метацентрической высоты может оказаться
Рис. 23. Определение метацентрической высоты по диаграмме статической остойчивости
равным + 10 см. В та-
кой ситуации можно неверно посчитать, что диаграмма имеет другую форму (см. рис. 23,6) и что причиной, вызвавшей крен судна 0о, который всегда существует при S-образной диаграмме, является несимметричность
загрузки судна, а не отрицательная начальная метацентрическая высота. Неверное предположение может привести к неверным, даже опасным действиям по спрямлению судна симметричным приемом груза или балласта, что в конечном итоге ведет либо к увеличению угла крена, либо к. потере остойчивости.
Для того чтобы осуществлять контроль остойчивости, штурманский состав должен получить оперативную и надежную информацию исходных данных, определяющих остойчивость судна.
ИЗМЕРИТЕЛИ УГЛА КРЕНА
Судовой кренометр. Многие операции на- судне, например выравнивание крена после погрузки, создание крена для выгрузки тяжеловесных грузов на воду, а также в случае необходимости определения численного значения максимальной амплитуды бортовой качки судна во время шторма для записи в судовой журнал, опре-
63
деления угла крена судна при авариях и в других слу-* чаях необходимо измерять крен с точностью до Г Для этого служат судовые кренометры. Наиболее распространены на судах морского флота кренометры типа КМ (кренометр морской). Судовые кренометры являются простейшими физическими маятниками и состоят из ме-таллической рейки, которая верхним концом свободно подвешивается на оси (иголках) к корпусу кожуха прибора, нижний конец рейки выполнен в виде стрелки. Длина рейки обычно 10—15 см. К ннжнему концу рейки подвешен груз. Рейка может свободно колебаться в плоскости кожуха прибора, описывая своим нижним концом (стрелкой) дугу, которая калибруется через градус, иногда через 0,5° и наносится на кожухе. Диапазон градуировки обычно от 0 до 60° на оба борта. Кренометр располагают так, чтобы его плоскость была параллельна плоскости мидель-шпангоута. Обязательные места установки кренометров: рулевая рубка, центральный пост управления МКО и пост управления грузовыми операциями. Кренометры также могут быть размещены в каютах капитана и грузового помощника капитана и в других помещениях.
Вески. Для измерения приращения угла крена с большой точностью при проведении опыта кренования служит весок, который состоит из груза (крылатки), подвешенного на нити, и рейки с миллиметровой бумагой. Для демпфирования (принудительного успокоения) колебаний веска крылатку опускают в ведро с машинным маслом.
В настоящее время весками пользуются при определении центра тяжести порожнего судна при его постройке или после больших конструктивных изменений. В таких случаях* проводят опыт креновая с установкой не менее трех весков и с применением специального крен-балласта. В эксплуатационных условиях при отсутствии шлангового ватерпаса можно применять один весок. Если на судне предусмотрена креновая цистерна, ее можно использовать для накренения судна.
Плавающее судно всегда испытывает динамические колебания-. В подавляющем же большинстве случаев в ксплуатационных условиях требуется измерять статический угол крена. Для этого необходимо из суммы статических и динамических наклонений судна выделить 64
статические углы крена, т. е. отфильтровать динамическое отклонение.
При измерении статических углов крена на тихой воде с помощью веское в условиях правильных гармонических колебаний судна отсеивание динамических гармоник можно произвести «на глаз». Для этого измеряют крайние положения динамических отклонений веска. Среднее значение между крайними положениями веска является величиной угла крена судна.
В реальных условиях судно не всегда совершает правильные гармонические колебания. Поэтому крайние положения веска не будут постоянными и будут изменяться в соответствии с изменением амплитуды колебаний судна, вызванных переменой воздействий внешних сил на корпус судна. Поэтому осреднение значений динамических углов крена при относительно больших колебаниях судна затруднительно.
Инклинограф. Облегчить эту задачу можно записью колебаний маятника в течение всего времени наблюдения на бумагу. По записи колебаний с высокой точностью можно определить величину статического угла крена. Демпфирование такого маятника не требуется, так как будут записаны суммарные колебания суднами на каждом участке записи представляется возможность графическим или расчетным способом отделить статическую составляющую. Возможность записи колебаний судна реализована в отечественном приборе—инклино-графе. Прибор представляет собой короткопериодный маятник (рис. 24), подвешенный на призмах в точке С. К маятнику в точке О крепится рычаг В, на конце которого имеется перо с запасом чернил. Перо касается масштабной ленты, обернутой вокруг барабана. Барабан вращается часовым механизмом. Для
5-430 65
Рис. 24. Схема инклинографа
уменьшения влияния сухого трения на запись предусмотрен зуммер, сообщающий пишущему рычагу легкое дрожание при помощи тяги А.
Рычажная передача увеличивает значение угла наклонения судна в bvjav раз в соответствии с равенством
Лр02=Ьр°1» (84)
где Яр — расстояние между точкой 0 и тягой Я;
Ьр — расстояние между точкой С подвеса маятника и точкой 0.
Такая конструкция обеспечивает перемещение пера на барабане, соответствующеее углу наклонения судна,
Ьр х 0t—-Lp, (85)
ар
где Lp^ длина рычага В с пишущим пером.
Рычажная передача имеет ползун (на рис. 24 не показан), с помощью которого можно регулировать передаточное число и соответственно величину х. Ползун может занимать три фиксированных положения, отвечающие трем масштабам записи углов крена на барабане. Верхнему положению ползуна отвечает самый мелкий масштаб, нижнему — самый крупный. Обычная величина масштабов записи: малый — 3 мм на 1° крена, средний—40 мм на 1°, большой — 20 мм на Г крена. Точная величина масштабов указывается в паспорте прибора.
Для записи углов крена инклинограф устанавливается на судне так, чтобы плоскость качаний маятника лежала в плоскости шпангоута. При помощи регулировоч-
Рис. 25. Инклинограмма
66
ных винтов в основании прибора записывающее перо приводится на середину барабана, а основанию прибора придается примерно горизонтальное положение. В нерабочем состоянии маятник стопорится арретиром.
Пример записи инклинограммы показан на рис. 25.
Величина крена определяется по средней линии записанных прибором наибольших колебаний судна вокруг равновесного положения. Если крен судна после прекращения действия кренящего момента продолжает меняться, это свидетельствует о наличии на судне медленно переливающихся жидких грузов. Участок нарастание крена не следует принимать во внимание при обработке инклинограммы.
Гировертикаль. Длинопериодные маятники предпочтительнее короткопериодных, так как могут быть установлены в любой точке судна. Наиболее совершенным длиннопериодным маятником является гировертикаль (рис. 26), представляющая собой гироскоп 1, подвешенный на кардановом подвесе 2 так, что центр его тяжести совпадает с точкой пересечения О осей колец кар-данового подвеса. К внутреннему кольцу подвешен груз 3, центр тяжести которого расположен на продол-
жении оси гироскопа на некотором расстоянии ниже точки пересечения осей. Обычно гировертикали снабжаются приставкой — самописцем, состоящим из лентопро-
тяжного и часового механизма, а также двух перьев,
одно из которых записывает отметки времени, второе — угол крена. При вращении маховика гироскопа с большой скоростью прибор становится гироскопическим ма-
ятником (гировертикаль) с периодом собственных колебаний, пропорциональным угловой скорости вращения маховика. Период собственных колебаний гировертикали может быть увепиченн до нескольких минут, что позволяет более точно измерять угол крена.
Шланговый ватер-лас. Информацией об
х
Рис. 26. Схема гировертикали
Б*
67
остойчивости для современных судов многих типов (контейнеровозы, ролкеры, лихтеровозы), имеющих антикре-новые системы, предусматривается после окончания грузовых операций перед выходом в море проводить опыт кренования. Антикреновая система предназначена для выравнивания крена судна во время грузовых операций и имеет две или четыре креновых цистерны, расположенные симметрично по бортам судна. При проведении кренования цистерны на одних судах запрессовывают, на других заполняют частично от одного фиксированного уровня до другого. Таким образом, в любое время постоянный кренящий момент известен заранее.
Как было сказано выше, для уменьшения величины погрешности приращение угла крена при креновании следует измерять с большой точностью. Поэтому анти-креновую систему дополняют измерителем приращения угла крена — шланговым ватерпасом, который состоит из . двух, мерительных трубок, соединенных между собою резиновым шлангом или бронзовой трубкой. Место установки шлангового ватерпаса — рулевая рубка. Мерительные трубки устанавливаются вертикально в плоскости шпангоута как можно дальше друг от друга, обычно на бортовых переборках рулевой рубки. Расстояние между мерительными трубками называется базой ватерпаса. Соединительный шланг и мерительные трубки заполняют водой. Для этого от судовой системы к ватерпасу подводится пресная вода. Для заполнения и осушения ватерпаса служат ручные клапаны. Клапаны, соединительные и мерительные трубки закрыты судовой обшивкой.
Часть мерительной трубки, изготовленная из про-прозрачного материала, выведена из-под обшивки наружу и закреплена вертикально, вплотную к внутренней обшивке рулевой рубки. Под прозрачной частью мерительной трубки или рядом с ней расположена мерительная шкала, откалиброванная в градусах и минутах (или десятых долях градуса).
Перед началом проведения опыта кренования ватерпас заполняют водой до середины мерительных шкал. При наличии одной креновой цистерны, например левой (суда типа «Меркур»), левая мерительная шкала устанавливается выше правой. Тогда уровень воды заполняется в левой трубке до нижней, а в правой до верх
63
ней отметки шкалы с некоторым запасом для колебания уровня при бортовой качке.
При определении метацентрической высоты по опыту кренования .необходимо измерять только величину приращения угла крена. Поэтому уровень в мерительной трубке измеряется до и' после заполнения креновой цистерны. Разность между отсчетами дает величину приращения угла крена от накренения судна с помощью креновой цистерны.
Статико-динамический кренометр СДК-45. В отличие от шлангового ватерпаса, инклинографа и гировертикали, которые измеряют и записывают суммарный (статический и динамический) угол крена, прибор СДК-45 работает по принципу отфильтрования динамических отклонений. _
Идея фильтра состоит в том, что в систему прибора вводится демпфирование, пропорциональное скорости динамических перемещений маятйика. Наличие демпфирования не дает маятнику кренометра в течение полупериода одного колебания судна значительно переместиться. Однако чем больше сопротивление маятника, тем больше запаздывание в показаниях.
Рассмотрим закономерности, влияющие на ошибку в измерении и величину времени запаздывания показаний маятника. ~
Пусть гидравлический маятник, имеющий одинаковые по высоте уровни (линия АБ) в сосудах 1 и 2 (рис. 27), при нулевом статическом крене судна накренился на угол 0о (линия А'Б'). Тогда переливание жидкости из сосуда 1 в сосуд 2 (изменение уровня х) будет происходить по известному из гидродинамики закону
А а" 4- Тпа' + a — в0, (86)
где Да"—инерционный член;
Тв— постоянная времени маятника, характеризует время запаздывания изменения угла;
а' — угловая скорость;
а— угловое перемещение жидкости;
0о — угол мгновенного наклонения маятника, практически равный амплитуде колебаний судна. Инерционный член из-за его малости исключаем. В результате имеем
+ а = 0О. (87)
69
Рис. 27 Схема статико-динамического кренометра
Решение этого уравнения относительно а имеет вид
/ ___f_\
а = 0о \ 1 — е Тв J (88)
Входящие в уравнение (88) значения углового перемещения и угловой скорости жидкости можно заменить через линейные перемещения ее уровня, исходя из условия
а
0,5&ы
0,5Ьм
(89)
(90)
Выраженное через линейные перемещения уравнение запишется в виде показательного закона
/ _ t \
х=х0\1-е М" (91)
В общем виде данное уравнение можно изобразить графически в виде кривой, показанной на рие. 28. Время переходного процесса с точностью до 5% принимают равным ЗТв-70
Величина Т3 для гидравлического маятника определяется из выражения
k
где k — коэффициент гидравлического сопротивления маятника;
р — плотность жидкости в маятнике;
F — площадь свободной поверхности в обоих сосудах маятни-
Рис. 28. Кривые изменения величины перемещения уровня жидкости в сообщающихся сосудах
ка.
Из уравнения (91) и рис. 28 видно, что величина х достигнет значения Хо, т. е. кренометр покажет угол, соответствующий статическому углу крена судна, через промежуток времени задержки t3.
Решая уравнение (91) относительно t, получим пе
реходное время гидравлического кренометра
t = — тв in
Х0
(93)
Из этой формулы видно, что время задержки зависит от постоянной времени Тв, разности Хо—х и значения х0.
Выражение под логарифмом можно представить в виде относительной ошибки, если принять за абсолютную погрешность измерения величину Дх, равную
Д х — Хо —- хх
(94)
где Xi.— изменение маятника, В этом случае
х при заданном переходном времени называемом временем задержки t3.
Д х
t3 = Тв In-----
Хо
(95)
Таким образом, закономерность (95) показывает, что с увеличением относительной ошибки измерения угла 71
6
крена увеличивается время запаздывания показаний кренометра. Значительная
задержка в показаниях- кре-
Рис. 29. Схема кренометра с двойным демпфированием
нометра в эксплуатационных условиях нежелательна. Практически, же приемлемое время запаздывания,, например одна минута, может быть достигнуто лишь при малых значениях по-
стоянной времени, т. е. при слабом демпфировании. Конструкцией СДК-45 предусмотрено двойное демпфирование (рис. 29), которое значительно уменьшает величину постоянной времени Тв, не изменяя силы демпфирования. Гв выражается следующей зависимостью:
(96>
где о> — частота качки;
0о—амплитуда качки.
После подстановки этого выражения в формулу (95}
имеем
(97>
Двойное демпфирование 'Предусматривает движение жидкости в сосудах по системе уравнений
где Тд — постоянная времени двойного маятника;
Р — угловое перемещение жидкости во втором маятнике.
Для простоты можно принять равенство постоянных времени в обоих маятниках.
После решения системы уравнений получим значение для постоянной времени маятника с двойным демпфированием
(99>
72
Сравнение формул (95) и (97), а также кривых на рис. 28 показывает, что-у маятника с двойным демпфированием время запаздывания значительно меньше, чем у маятника без двойного демпфирования, при одной я той же абсолютной ошибке в показаниях.
Кренометр СДК-45 сконструирован таким образом, что выдает показания статического и динамического углов крена. Шкала 2 для измерения статического угла крена (рис. 30) расположена вертикально в левой части прибора. Шкала динамического крена 4 смонтирована в верхней части прибора. Гидросистема состоит из основного бачка 6, промежуточного бачка 3 и измерительной стеклянной трубки 1, соединенных между собой
Рис. 30. Схема кренометра СДК-45
73
медными трубками 8 и 7. Трубка 7 для удлинения изогнута по окружности. Основной бачок 6 соединен с промежуточным 3 соединительной воздушной трубкой 5.
Динамический кренометр представляет собой изогнутую полость, залитую керосином, в которой передвигается шарик из стекла. Керосин служит для демпфирования колебаний шарика.
Точность показаний статического кренометра при отсутствии качки составляет ±0,5°
Такая точность определения статического угла крена вполне допустима для борьбы за живучесть судна, но использовать кренометр в качестве датчика угла крена в автоматизированных системах контроля остойчивости на основе метода опыта кренования, как было показано выше, недопустимо.
Кренометром измеряется среднее значение углов динамического крена. При небольших статических углах крена, когда используется только прямой участок диаграммы, среднее значение динамического угла крена будет соответствовать углу статического крена. На больших углах статического крена это условие не выполняется. Практически судно колеблется около статического угла крена со значениями динамического угла крена, различными для правого и левого борта, а эта разница может достигать больших пределов.
ОСАДКОМЕРЫ
Пневмеркаторный осадкомер. Одним из самых первых осадкомеров, которые применялись еще до 1914 г., являются пневмеркаторные (рис. 31) Они используются на некоторых судах и в настоящее время. Например, ледокол типа «Москва» снабжен таким осадкомером. Пневмеркаторные осадкомеры фирмы «Кельвин Худ-жерс» (Kelvin Hughers») установлены на т/х «Поль Робсон».
Принцип действия осадкомера основан на измерении давления столба жидкости с помощью мембранной коробки, которая является, чувствительным элементом датчика и устанавливается в месте, соответствующем нижнему уровню измеряемой осадки.
Мембранный блок 1 с помощью капиллярной трубки 2 соединен с мембранной коробкой пневмоэлектриче-74
ского преобразователя 3. Чувствительный элемент датчика, капилляр и мембранная коробка являются герметически замкнутой системой, заполненной воздухом. Давление столба жидкости сжимает мембранный блок датчика до тех пор, пока оно не уравновесится давлением воздуха, заключенного внутри системы. Изменение давления передается на пневмоэлектрический преобразователь, что вызывает
Рис. 31. Схема пневмеркатор-ного осадкомера
перемещение плунжера ин-
дукционной катушки. Перемещение плунжера регистрируется отклонением стрелки измерительного прибора.
Резонансный осадкомер. На судах типа «Крым»
установлены осадкомеры, в основу которых заложен резонансный метод измерения уровня. Резонансный метод измерения основан на применении в качестве первичных преобразователей отрезков длинных линий.
Резонансные первичные преобразователи подобного типа представляют собой колебательную систему с рас
Рис. 32. Принципиальная схема резонансного осадкомера
пределенными параметрами резонансных частот, которые изменяются в зависимости от измеряемого уровня жидкости. Положительными сторонами этого метода являются простота конструкции первичного преобразователя, устойчивая его работа в условиях вибраций и наклонов судна, быстродействие. К недостаткам резонансных уровнемеров
75
следует отнести зависимость его показаний от электромагнитных характеристик контролируемой среды, г. е. от изменения удельной электропроводности морской воды, которая, в свою очередь, зависит от температуры и солесодержания. Однако дополнительная погрешность, вызванная этой причиной, имеет тенденцию к уменьшению с увеличением диапазона измерений. При диапазоне осадок судна 20 м ошибка не превышает 3%.
Принципиальная схема осадкомера (рис. 32) состоит из трех основных частей: первичного преобразователя, электронного блока и блока индикации.
Первичный преобразователь включает в себя измерительный элемент и детектор. Он состоит из нескольких секций труб с условным проходом 125 мм, вдоль цент-i ральной оси которых пропущен нержавеющий трос, не имеющий по всей длине промежуточных опорных изоляторов. В нижней секции труб, заглушенной фланцем, сделаны специальные боковые отверстия для дренажного трубопровода и забортной воды.
Трос, проходящий в центре секций труб, закрепляется в нижней секции. Он имеет гальванический контакт в нижней части преобразователя и изолирован в верхней части.
Опорный контур электронного блока настраивается на резонансную частоту не заполненного водой первичного преобразователя. Информация об осадке судна получается сравнением текущего значения резонансной частоты, определяемой уровнем заполнения первичного преобразователя забортной воды, с резонансной частотой порожнего первичного преобразователя.
Особенность электронной схемы осадкомера состоит не в непосредственном измерении частоты первичного преобразователя, а в выделении временного интервала между импульсами пустого и заполненного первичного преобразователя, пропорционального осадке судна.
Электронный блок состоит из корпуса с крышкой, изготовленного из алюминиевого сплава, в котором расположены монтажные платы электрической схемы осадкомера, трансформаторы и усилители. Размер электронного блока 285X200X130 мм.*
Блок индикации служит для преобразования аналогового сигнала об осадке в цифровой и индикации дан-76
них‘ на табло. Блок индикации выпол нен в виде металлического шасси размером 265X180X60 мм, на котором крепятся печатные платы с микросхемами й счетчиками.
Осадкомер «Норконтрол». На многих зарубежных судах установлен осадкомер фирмы «Норконтрол» («Norcontrol»). Он предназначен для измерения ^осадки с точностью до 1 % (до рекламным данным фирмы изготовителя), а также для измерения уровня жидких грузов и судовых запасов.
Принцип измерения осадки заключается в следующем. Когда открыт донный клапан 1 (рис. 33), забортная вода поднимается в приемную трубу 2 и измерительную друбу (меньшего диаметра) 6 до высоты аа', равной осадке судна (приемная труба на верхнем конце 3 имеет воздушный выход). После этого в измерительную трубу из воздушной системы (баллона) 4 подается сжатый воздух. Одновременно воздух подается в жидкостный манометр 5. Под давлением воздуха вода из измерительной трубы 6 будет выдавливаться до уровня б—б и воздух начнет уходить в приемную трубу 2. При таком положении давление в измерительной трубе уравновешивается давлением столба воды аб в приемной трубе. Манометр, отградуированный в сантиметрах, будет показывать 'осадку судна.
Осадкомер НДМ-100. Шведская фирма «Кокуме» («Kockums») выпускает системы измерения оеадки и уровня на резисторных чувствительных элементах (например, система измерения осадки НДМ-100 «Драфма-стер», система измерения уровня жидких грузов в танках и осадки НЛМ-200 «Левелмастер» и др.).
Система НДМ-100 включает в себя 2—4 резисторных датчика осадки. Каждый резисторный датчик свободно подвешивается в приемной трубе 5 (рис. 34).
Резисторный датчик представляет собой спиральное сопротивление 3 (резисторный элемент) с линейной характеристикой изменения сопротивления в зависимости от его длины.
Резисторный элемент 3 крепится вокруг опорной стальной полоски 2 с высокой токопроводящей поверхностью к изоляции 1. При отсутствии воды в «приемной трубе 5 он не касается опорной стальной полоски. Резисторный элемент и опорная полоска обернуты по всей
77
4
длине изоляцией 10. К изоляции прилегает мембрана 9, воспринимающая внешние механические давления.
Сверху мембрана закрыта защитным слоем 8 и наружной оболочкой 7 для предохранения от коррозии. Электрические контакты 4 подсоединены к входу и выходу резисторного элемента.
Под воздействием давления уровня воды в приемной трубе 5 мембрана прижимает резисторный элемент 3 к опорной полоске 2, в результате происходит уменьшение длины пезакороченной части резистора, находящейся над поверхностью воды. Сопротивление резисторного элемента меняется в соответствии с осадкой, электрический сигнал поступает в центральный блок, от которого он направляется на индикаторы в цифровой или аналоговой форме. Для выравнивания давления после пони-78
жения уровня воды и надежного отсоединения резисторного элемента от опорной полоски между ними подается воздух через трубку 6.
Система НДМ-100 построена на модульном принципе, что позволяет ее легко модифицировать и дополнять.
Осадкомер ДЖМ-1-2. На судах типа «Инженер Ма-чульский» установлен осадкомер шведской фирмы «Юнгнер Инструмент» («Jungner Instrument»). Принцип действия осадкомера заключается в измерении массы контролируемого столба забортной воды, высота которого соответствует осадке судна в измеряемой точке. Значения разности давлений между уровнем ватерлинии и точкой расположения чувствительного элемента передаются индикатору-регистру.
Принципиальная схема осадкомера показана на рис. 35. Давление столба воды между уровнем воды за бортом судна и сильфоном 1 датчика создает направленную вверх подъемную силу, величина которой пропорциональна расстоянию А по вертикали и плотности воды. Давление забортной воды, действующее на сильфон 1, передается через регулируемый штырь 2 на плечо рычага 3, закрепленного вместе с балансирным рычагом 5 на валу 15. Верхние концы рычагов соединены пружиной 8. К кулачку верхней части рычага 3 присоединен подвижный пружинный контакт 6, который совместно с системой неподвижных контактов 7 управляет работой серводвигателя 14. Когда система находится в состоянии равновесия, пружинный контакт 6 находится в нейтральном положении по отношению к неподвижному контакту 7 и серводвигатель застопорен.
При изменении осадки судна изменяется сила воздействующая на сильфон, в результате чего рычаг 3 перемещается, контакт 6 замкнется с контактом 7, вследствие чего серводвигатель начинает работать, вращая кулачковую шайбу 13. Посредством ролика 4 балансирного рычага 5 кулачковая шайба изменит силу натяжения пружины 8 и пружинный контакт 6 вновь займет нейтральное положение, в результате серводвигатель остановится. Пружина 12 служит лишь для прижатия ролика 4 к кулачковой шайбе 13. Форма рабочей поверхности кулачковой шайбы рассчитана так, чтобы частота вращения серводвигателя была всегда прямо пропорциональна изменению давления на мембрану 79
9 10
Рис. 35. Принципиальная схема осадкомера ДЖМ-1-2
сильфона, т. е. изменению величины осадки. Вращение серводвигателя передается на сельсин-датчик 11 и от него ia сельсин-приемник 10, который приводит в действие счетный механизм 9 индикатора.
При плотности воды 1 г/см3 сельсин-датчик делает 100 оборотов на 1 м изменения осадки. Точность осадкомера зависит от плотности забортной воды й географической широты места судна. В связи с чем необходимо применять корректировочную номограмму (рис. 36), предложенную инженером ЦНИИ морского флота В. Е. Саловым.
80
Для измерения осадки на стоянке судна (применительно к теплоходу «Инженер Мачульский») необходимо:
перевести все выключатели на пульте (рис. 37) в положение «Выключено»;
подать общее питание на осадкомеры (выключатель находится на ходовом мостике);
переключателем 2 «Power» на пульте управления подать питание к осадкомеру, который находится на посту управления грузовыми операциями;
при переходе границы резкого изменения плотности воды включить промывку осадкомеров переключателем 1 «Flush» на пульте управления и
Рис. 36. Корректировочная номограмма инженера В. Ё. Са-лова
промывать прибор в течение
2 мин, после чего промывку отключить;
переключателем 3 «Zeroset» подать питание к «Корректировка нуля» (рис. 38). При этом на показывающем
приборе носового и кормового осадкомеров должны появиться цифры 2,110 и 2,125 — значение Е в мм (см. рис. 36) На пульте управления загорается желтая лампа. Если фактические показания отличаются от этих значений, то их следует установить регулятором «Кор-
ректировка нуля», расположенным на показывающем приборе. Значение Е на показывающих приборах устанавливают при выключенном общем питании. После этого отключают питание «Корректировка нуля». Значение осадки, которое будет на показывающем приборе, необходимо откорректировать поправкой, учитывающей плотность воды на данной широте места судна, и с учетом этой поправки определить осадку на носовом и кормовом перпендикулярах судна.
6—430 ‘ 81
Рис. 37. Схема пульта управления работой осадкомера ДЖМ-1-2 »
Корректировка нуля
Рис. 38. Показывающий прибор осадкомера ДЖМ-
-1-2
Поправку к осадке ДТ определяют с помощью номограммы (см. рис. 36). На номограмме по оси абсцисс отложена осадка судна в метрах. По левой оси ординат— географическая широта места, а по правой оси ординат—плотность воды. Поправка АТ определяется следующим образом:
соединяют прямой линией точки, соответствующие плотности воды и географической широты данного места (например, широта 55°, плотность воды 1,010 кг/м3); отмечают точку пересечения этой линии с ординатой поправок (точка А на номограмме);
точку А и Е соединяют;
из точки, соответствующей осадке по показаниям прибора (в нашем примере 6 м), восстанавливают перпендикуляр ТС до пересечения с линией ЕА. Из точки С проводим прямую линию СК, параллельную оси абсцисс, до пересечения с ординатой поправки ДТ, получаем поправку к показаниям прибора на изменение плотности воды в данной широте места.
Номограмма построена для судов типа «Инженер Мачульский». Ее использование для других судов может привести к ошибкам.
Осадкомеры установлены на некотором расстоянии от носового и кормового перпендикуляров. При дифференте осадки на перпендикулярах будут отличаться от 82
показаний осадкомеров. Чтобы по измеренным приборам осадкам узнать осадки на перпендикулярах и на миделе судна, можно использовать схему марок углублений (см. рис. 4). Для этого необходимо дополнительно на схеме марок углубления по месту установки осадкомеров восстановить перпендикуляры и в соответствующем масштабе нанести на них градуировку осадки, одинаковую с градуировкой на схеме, и на этих перпендикулярах отложить значения осадок, полученных по осад-Комерам, исправленных на плотность воды. Через точки, соответствующие указанным значениям, проводят прямую. Значение осадок в точках пересечения этой прямой с остальными вертикальными линиями схемы марок углубления даст значение осадки судна на перпендикулярах, миделе и оконечностях судна.
6*
83
Глава 3
ЭЛЕКТРОМОДЕЛИРУЮЩИЕ ПРИБОРЫ КОНТРОЛЯ ЗАГРУЗКИ СУДНА
НАЗНАЧЕНИЕ УСТРОЙСТВ И ПРИБОРОВ
Классификация устройств. По характеру решаемых задач все устройства контроля посадки и остойчивости судна можно разделить на две большие группы. Первая группа включает в себя приборы, предназначенные для составления и проверки грузового плана с целью расчета рациональных характеристик посадки, остойчивости и прочности судна, т. е. решения так называемой «прямой задачи». Вторая группа приборов предназначена для измерения с помощью датчиков фактических характеристик посадки и остойчивости, получаемых в результате загрузки судна, т. е. решения «обратной задачи».
Первую группу приборов можно классифицировать по различиям в элементной базе. В этом случае их классификация будет соответствовать также истории развития этой отрасли приборостроения. По этому признаку устройства делятся на пять типов. К первому типу устройств относятся приборы, выполненные на основе простейших механических и графических элементов (планшетов, графиков). Второй тип — устройства, моделирующей элементной базой которых являются грузы. Третий тип основан на моделировании нагрузки с помощью напряженного состояния пружин, четвертый — на электрических схемах, пятый — на процессорах.
Устройства первого и второго типа начали внедряться на флотах еще в 20-х годах этого века, но наибольшее применение получили во время Великой Отечественной войны и в послевоенное время. К ним можно отнести дифферентометр Фридрихса, «Америкен Гидро-84
мате»; приборы остойчивости и дифферента — Козлова» Благовещенского, Павленко, Гансона; прибор для оценки прочности и дифферента судна Мэррея; приборы остойчивости — Кубасова, Базилевского, Ральсона; весы остойчивости Бенжамина; прибор «Стабилогейдж»; приборы типа ПКЗОС; приборы типа «Лодикатор».
Из всех перечисленных устройств на отечественном флоте нашли широкое внедрение лишь приборы типа ПКЗОС, «Лодикатор» и относительно небольшое применение прибор «Стабилогейдж».
Современные аналоговые, приборы расчета остойчивости, моделирующие массовую нагрузку судна, могут быть электрическими или механическими. Данные по неизменным характеристикам судна постоянно хранятся в соответствующем устройстве прибора. Путем вращения ручек на панели прибора оператор вводит в прибор данные, относящиеся к переменным нагрузкам, — груз, судовые запасы, балласт, планируемые к погрузке в каждый танк и трюм. Настройкой этих ручек оператор получает .на табло требуемую'информацию. Основное назначение этих приборов — определение остойчивости судна и напряжений в его корпусе.
Первый электрический отечественный прибор был предложен А. Ф. Кубасовым [4]. В качестве преобразователей массы нагрузки в электрический сигнал были применены потенциометры, выходные напряжения которых суммируются с использованием операционных усилителей.
Наиболее совершенным из отечественных средств; контроля нагрузки судна является прибор Типа УПВЗОС, построенный по мостиковой схеме с использованием преобразователей на магазинах сопротивлений. Их применение позволило исключить индивидуальную подгонку сопротивлений преобразователей и градуировку шкал в отличие от потенциометрических преобразователей.
Из зарубежных приборов контроля загрузки судна широкое применение получили приборы типа Сталоди-катор шведских фирм «Гетоверкен» («Getoverken») и «Кокумс». Приборы этих фирм установлены на зарубежных и отечественных судах.
В зависимости от решения задач и получения выходных данных фирмы выпускают различные модификации этих приборов. Приборы выполнены в основном по мо-
85.
стнковой электрической схеме («мост Уитстона») с реостатными преобразователями массы нагрузки.
Принцип действия приборов. По своему принципу действия приборы моделирования нагрузки судна не являются измерительными, а представляют собою простые счетно-решающие механизмы, аналоговые или цифровые вычислительные машины.
Следует отметить принципиальную особенность этих приборов. Определяемые с их помощью параметры посадки, остойчивости и прочности базируются на расчетных формулах. В этом случае на конечный результат будут влИять три рода ошибок: инструментальная ошибка самого прибора, ошибка в результате неточности расчетов из-за сложности формулы (погрешность метода) и ошибка в определении координат и масс погружаемого на судно груза. Как известно, наибольшую инструментальную погрешность дают различные графомеханические и механические приборы, моделирующие нагрузку судна с помощью грузиков -или пружин. Наименьшая погрешность у приборов, базирующихся на ЭВМ.
При проектировании приборов, работа которых основывается на расчетном методе с его характерными ошибками, следует учитывать особенности и закономерности изменения количественных значений погрешностей в конечных значениях определяемых величин при различных условиях использования прибора. Поэтому при пользовании приборами, моделирующими нагрузку, следует иметь в виду, что прибор будет давать значительную погрешность в метацентрической высоте как при расчете предварительного, так и при проверке исполнительного грузовых планов судна. Особенно же критически следует относится к значениям параметров остойчивости и прочности при их малых абсолютных значениях.
Расчет распределения груза является трудоемкой операцией (см. гл. I). Тем не менее, очень важно загрузить судно так, чтобы его параметры остойчивости, прочности, посадки были оптимальными или хотя бы безопасными. Кроме удовлетворения условиям мореходности при распределении груза, необходимо учитывать эксплуатационные и другие ограничения. При перевозке большого количества разных партий груза в современных условиях интенсивной обработки судов в портах .86
задача правильного распределения груза без помощи1 вспомогательных средств может оказаться невыполнимой.
За последние десятилетия разработано много различных устройств, облегчающих задачу контроля остойчивости и прочности. Среди них можно назвать устройства, моделирующие нагрузку судна, а также сложные,, специализированные автоматические системы контрол» остойчивости и прочности.
ПРИБОРЫ ТИПА УПВЗОС-1
Основные блоки и их размещение. Внешний вид серийно выпускаемого для использования на судах морского флота унифицированного прибора выбора загрузки и остойчивости судна (УПВЗОС-1) показан на рис. 39.
Все узлы прибора размещены в корпусе, защищающем их от внешних механических воздействий и выпол-
Рпс. 39. Прибор УПВЗОС-1
87
няющем роль магнитного экрана. Корпус состоит из блока отсчетных параметров У/ и блока грузовых помещений У2.
В блоке У1 размещены (рис. 40): блок рода работы, отсчетные блоки дедвейта, дифферента, прочности, остойчивости и статического момента дедвейта относитель-
Рис. 40. Схема лицевой панели прибора УПВЗОС-1 S8
но миделя; задающие блоки *(№ 1—12), моделирующие крайние значения загрузки помещений (полное или порожнее) с фиксированными координатами х и у; задающие блоки (№ 13—20), моделирующие массовую загрузку помещений с корректировкой координаты г; задающие блоки (/—V), моделирующие массовую загрузку пяти партий грузов с возможностью корректировки координат х и г; трансформатор, обеспечивающий питание всех блоков и ламп напряжением 10 В и фазочувствительной схемы напряжением 80 В; два предохранителя для защиты измерительной схемы прибора при перегрузке или замыкании цепи-; блок учета влияния свободных поверхностей танков, загрузка которых моделируется задающими блоками № 1—12; блок учета влияния свободных поверхностей танков, загрузка которых моделируется задающими блоками № 13—20.
На лицевую панель блока У1 (откидная крышка прибора) выходят (см. рис. 40,а):
микротумблер «Сеть» для включения питания;
рукоятка 1 переключателя «Дедвейт», «Дифферент», «Прочность», «Остойчивость»,. Afx, «Партии грузов», с помощью которого выбирается род проводимых измерений при работе с прибором;
лампы, сигнализирующие о роде проводимых .измерений (белая — дедвейт, зеленая — дифферент, красная— прочность, оранжевая — остойчивость, зеленая — А4Т, белая — партии грузов);
кнопки «Грубо» и «Точно» для включения нуль-ин-дикатора в измерительную цепь в момент измерения;
кнопка «Контроль», нажатием на которую и вращением рукоятки 3 «Уст. 0» устанавливается в нулевое положение стрелка микроамперметра 2;
микроамперметр 2, используемый в качестве нуль-индикатора;
рукоятка переключателя 4 й барабан «Дедвейт»,, предназначенные для грубого и точного отсчета, шкалы рукоятки и барабана проградуированы в тоннах;
барабан «Дифферент», по шкале которого при равновесии схемы прибора определяется отсчет дифферента, шкала барабана проградуирована в метрах;
барабан «Прочность», по шкале которого осуществляется отсчет арифметической полусуммы моментов сил
8»
Рис. 41. Шкала барабана «Прочность» прибора УПВЗОС-1
дедвейта относительно миделя (контроль прочности); шкала барабана проградуирована в т-м;
барабан «Остойчивость» Mz, по шкале которого осуществляется отсчет статического момента сил дедвейта относительно основной плоскости, шкала барабана проградуирована в т-м;
барабан «Мх», по шкале которого осуществляется отсчет статического момента сил дедвейта относительно миделя, шкала барабана проградуирована в т м;
барабан «Л4Х пор^, с помощью которого устанавливается момент массы судна порожнем. Барабан закрыт крышкой из оргстекла и опломбирован. С помощью барабана устанавливается момент массы судна порожнем. Шкала барабана отградуирована в т-м;
барабаны «Аз», служащие для корректировки координаты z (Az — отстояние центра тяжести груза от пайо-ла трюма). Шкалы барабанов проградуированы в метрах;
барабаны «Ах», служащие для корректировки координаты х (Ах — отстояние центра тяжести груза от центра объема помещения). Шкалы барабанов проградуированы в метрах;
тумблеры «т», используемые при
учете свободной поверхности в танках;
тумблеры «р», используемые при стопроцентном заполнении помещений № 1—12.
Барабан «Прочность» имеет несколько шкал. На шкале (рис. 41) нанесены допустимые пределы арифметических полусумм моментов дедвейта относительно миделя для конкретного судна. Шка
ла двухсторонняя, по всей длине разделена отметками на основные оцифрованные, органиченные линиями В
90
красного и Г желтого цветя интервалы 5 и деления 6. На шкале указаны запретные зоны 1 — для момента дедвейта при загрузке-выгрузке судна в порту и 2 — выходе его в море, а также нанесены отметки, соответствующие прогибу 4 и перегибу 3 корпуса судна.
Для учета абсолютной величины дедвейта при контроле прочности на панели прибора нанесены отметки:
«О» — соответствующая величина дедвейта, равного нулю;
«0,5» — соответствующая величина дедвейта, равного половине его максимального значения для конкретного судне;
«1» — соответствующая максимальному значению дедвейта конкретного судна.
Положение «0» шкалы барабана «Прочность» против указателя (при равновесии схемы прибора) соответствует величине изгибающего момента на тихой воде> равной нулю. Чем больше количество делений шкалы отстоит от указателя, тем менее оптимальной для прочности является нагрузка судна. Зоны на шкале барабана, ограниченные линиями красного и желтого цвета,, являются недопустимыми для распределения дедвейта на судне по полусумме моментов относительно миделя.
Для отсчета значения арифметической полусуммы моментов сил дедвейта относительно миделя в сторону прогиба или перегиба корпуса судна необходимо количество делений шкалы барабана, отстоящих от отметки «О» до указателя, умножить на цену деления.
В блоке грузовых помещений «У2» (см. рис. 40,6) размещены: задающие блоки (№ 21—40), моделирующие загрузку грузовых помещений с корректировкой координат х и у, переключатель на 23 положения; два тумблера на два рабочих положения, разъем и сигнальные лампы. \
На лицевую панель блока «У2» выходят:
барабаны «р» для установки значения массы груза> принимаемого в грузовые помещения, шкалы барабанов проградуированы в тоннах;
барабаны «Да» для корректировки координаты з; шкалы барабанов проградуированы в метрах;
барабаны «Дх» для корректировки координаты шкалы барабанов проградуированы в метрах}
переключатель «Номера грузовых помещений» для подключения грузовых помещений в измерительную схему прибора при загрузке их грузом двух или более партий (не более пяти). Положение переключателя должна соответствовать номеру помещения, в которое размещается груз;
тумблеры «Ах» и «Аг» для включения в измерительную схему корректируемых координат х и г;
сигнальные лампы, указывающие, род корректировки X ИЛИ Z.
Количество задающих блоков может меняться в пределах от 8 до 23 в соответствии с желанием заказчика прибора.
Для конкретного типа судов на лицевой панели крепится металлическая пластинка, на которой указан номер проекта судна, даны схема расположения грузовых помещений с нанесенными точками их центров объема и таблица объемов, а также грузовая шкала. На пластинке изображены диаграммы для определения центров тяжести в трюмах, твиндеках и на палубе, а также кривые допустимых статических моментов дедвейта относительно основной плоскости.
Подготовка прибора к работе. Для подготовки прибора к работе необходимо:
1) установить диски задающих блоков в нулевое положение (см. рис. 40,а), а тумблеры «р» и «т» в положение «Отключено»;
2) корректором установить стрелку микроамперметра 2 в нулевое положение;
3) включить питание прибора от сети;
4) включить микротумблер «Сеть», при этом должна загореться одна из ламп переключателя /;
5) установить стрелку микроамперметра 2 на нуль рукояткой 3 «Уст. 0» при нажатии кнопкй «Контроль».
Последнюю операцию рекомендуется проводить периодически в процессе работы (перед проверкой прочности, дедвейта, дифферента, остойчивости и статического момента сил дедвейта относительно миделя).
Ввод исходной информации. хПосле подготовки прибора ввод информации в прибор о загрузке судна производится двумя путями.
92
При загрузке судна однород-ным грузом:
1) установить дисками «р», «Дх» и «Дг» задающих блоков предполагаемую^ для загрузки данного трюма массу груза и координаты его центра тяжести (Дх— расстояние между центром тяжести груза и центром тяжести объема помещения и Дг— высота центра тяжести груза над пайолом грузового помещения);
2) установить тумблеры «р» задающих блоков № 1— 12 в' положение «включено» в случае загрузки более 50% массы груза, которая может быть принята в данное грузовое помещение;
3) установить тумблеры «/и», задающих блоков № 1—20 в положение включено для случая учета влияния свободных поверхностей в соответствующих помещениях судна.
При загрузке судна разнородным грузом:-
1) установить переключатель рода работы в положение «Партии грузов», при этом должна загореться белая сигнальная лампа;
2) установить переключатель «Номера грузовых помещений» в положение, соответствующее номеру помещения, в которое загружается груз разных партий;
3) установить дисками «р», «Дх» и «Дг» задающих блоков «Партии грузов» значения массы соответствующих партий грузов и координаты их центров тяжести (Дх и Дг);
4) установить диском «р» задающего блока помещения, в которое принимается груз, значение общей массы принимаемого груза разных партий;
5) установить тумблеры «Дх», «Дг» в положение «Дх» или «Дг»;
6) установить соответствующими дисками «Дх» и «Дг» задающего блока помещения, в которое принимают груз разных партий, координаты центра тяжести груза, а стрелку микроамперметра 2 — в нулевое положение при последовательно нажатых кнопках «Грубо» и «Точно».
Определение характеристик посадки, прочности и остойчивости судна. При определении этих характеристик соблюдают следующий порядок.
93
Определение дедвейта
1) установить предполагаемую для каждого помещения массу груза и координаты его центра тяжести, как указано выше;
2) установить переключатель рода работы в положение «Дедвейт», при этом должна загореться белая сигнальная лампа;
3) установить стрелку микроамперметра в нулевое положение поворотом рукоятки и диска «Дедвейт» при последовательно нажатых кнопках «Грубо» и «Точно».
4) определить дедвейт по сумме отсчетов показаний на шкалах рукоятки и диска «Дедвейт».
Определение дифферента
1) определить дедвейт, как указано выше;
2) установить переключатель рода работы в положение «Дифферент», при этом должна загореться зеленая сигнальная лампа;
3) установить стрелку микроамперметра в нулевое положение поворотом диска «Дифферент» при последовательно нажатых кнопках «Грубо» и «Точно»;
4) снять отсчет дифферента (на нос или на корму) по шкале «Дифферент».
Контроль прочности
11) определить дедвейт, как указано выше;
2) установить переключатель poda работы в положение «Прочность», при этом должна загореться красная сигнальная лампа;
3) установить стрелку микроамперметра в нулевое положение поворотом барабана «Прочность» при последовательно нажатых кнопках «Грубо» и «Точно».
Прочность корпуса является допустимой, если после распределения груза положение шкалы барабана против указателя не находится в зоне, ограниченной линиями желтого цвета «В порту» и красного цвета «В море».
Контроль остойчивости
1) установить переключатель рода работы в положение «Остойчивость», при этом должна загореться оранжевая сигнальная лампа;
94
2) установить стрелку микроамперметра в нулевое положение поворотом барабана «Остойчивость» Mz при последовательно нажатых кнопках «Грубо» и «Точно»;
3) по шкале «Остойчивость» Mz снять отсчет суммы моментов сил дедвейта относительно основной плоскости.
Распределение груза на судне для обеспечения достаточной остойчивости является допустимым, если значение полученной суммы моментов сил дедвейта относительно основной плоскости не выходит за допустимые границы кривой статических моментов дедвейта.
Определение статического момента д е д в е кт а Мх относительно миделя
1) определить дедвейт, как указано выше;
2) установить переключатель рода работы в положение «Л4Х», при этом должна загореться зеленая сигнальная лампа;
3) установить стрелку микроамперметра в нулевое положение поворотом диска «Мх'» при последовательно нажатых кнопках «Грубо» и «Точно»;
4) снять отсчет статического момента дедвейта относительно миделя по шкале «Л4Х».
Перед началом работы, если прибор не использовался длительное время, следует проверить точность показаний прибора по специальной таблице (программе), прилагаемой к паспорту прибора.
Для корректировки «Л4Х» с целью уточнения определения дифферента прибор имеет специальный винт с пломбой.
Основные эксплуатационные данные прибора. Питание прибора осуществляется однофазным переменным током 50 Гц, напряжением 220 В. Габаритные размеры прибора 805X480X340 мм, масса —до 70 кг. По паспортным данным погрешность прибора при температуре 25° С и относительной влажности воздуха не более 80% не превышает: при определении дедвейта—1%, дифферента — 0,2 м, момента дедвейта относительно основной плоскости (при контроле остойчивости) — 1,5%.
Дополнительная погрешность прибора, вызываемая отклонением температуры окружающего воздуха от 25°С 95
до любой температуры (в диапазоне до плюс 45° С) при влажности 80%, не превышает четверти значения допускаемой основной погрешности на каждые 10° изменения температуры.
Отечественная промышленность выпускает однотипный прибор УПВЗС-Г—унифицированный прибор выбора загрузки (рис. 42), предназначенный для контроля грузового плана наливных судов (определение посадку судна и прочности его корпуса по изгибающим моментам в районе миделя).
Рис. 42. Прибор УПВЗС-1
В основу прибора положена электрическая потенциометрическая схема с реостатно-трансформаторными преобразователями.
Унифицированные приборы загрузки (УПВЗОС и УПВЗС) получили распространение на судах морского флота, особенно на танкерном флоте. Приборы имеют различную модификацию в зависимости от типа судна. В настоящее .время завод-изготовитель приступил к разработке унифицированных приборов на новой элементной базе с применением интегральных микросхем, дис-плеев. и других схем. Предусматривается подключение к приборам датчиков информации (уровнемеров, угла 96
крепа т. п.). Функции таких приборов будут значительно расширены. Сейчас уже имеется два опытных образца электронного УПВЗОС-1, успешно прошедшего испытания и эксплуатируемого в учебных целях в Одесском высшем инженерном морском училище.
ПРИБОРЫ ТИПА «СТАЛОДИКАТОР»
Назначение и эксплуатационные характеристики. Прибор предназначен для расчета загрузки судна. С его помощью можно определить дедвейт, дифферент, метацентрическую высоту судна и общий изгибающий момент корпуса. Принцип устройства и эксплуатация приборов типа «Сталодикатор» в основном аналогичны принципу устройства и эксплуатации отечественных приборов типа УПВЗОС-1.
На судах типа «Новгород», «Комсомольск» и других установлен шведский прибор загрузки «Сталодикатор С-3», работающий на аналоговых электрических схемах. По паспортным данным инструментальная погрешность прибора при определении дедвейта менее 1, дифферента— 3, изгибающего момента — 5, метацентрической высоты — 3%.
Устройство прибора. На лицевой панели каждому грузовому помещению соответствует барабан ввода массы груза. Барабаны сгруппированы по однотипным помещениям, например грузовые помещения, бортовые тапки, диптанки и т. п. Для помещений большой грузоподъемности имеются по два барабана: один грубого и другой точного ввода величины массы груза. Барабан грубог ввода имеет ряд фиксированных положений величины загрузки с постоянными интервалами. Барабан точного ввода загрузки имеет сплошную шкалу, перекрывающую интервалы между двумя соседними положениями грубого ввода. Шкалы отградуированы в метрических тоннах.
Для помещений, имеющих большую вместимость и значительную высоту, предусмотрена корректировка вертикального положения центра тяжести груза по высоте грузового помещения. Корректировка производится специальным барабаном, отградуированным в метрах рас-7—430 97
стояния от дна помещения до центра тяжести груза в объеме помещения. Положение барабана, обозначенное ЦТ (CG), соответствует положению центра тяжести объема помещения ,по высоте.
Для каждой цистерны, имеющей большую свободную поверхность, при ее частичном заполнении предусмотрен переключатель учета свободной поверхности.
Переключатель рода работы имеет четыре положения «Дедвейт», «Дифферент», «Напряжение», «Остойчивость». При каждом переключении загорается лампа на панели, сигнализируя о режиме работы прибора. В соответствии с режимами работы на панели размещены барабаны отсчета значений дедвейта, дифферента, напряжения и остойчивости. Для отсчета дедвейта имеются два барабана: «Дедвейт грубо» и «Дедвейт точно». Барабан для точного отсчета дедвейта имеет непрерывную шкалу, перекрывающую интервал между двумя фиксированными положениями барабана, предназначенного для грубого отсчета дедвейта. Микроамперметр используется в качестве нуль-индикатора при равновесии электрической схемы прибора.
На панели отдельной таблицей дается схема помещений судна.
Прибор питается постоянным током напряжением 24 В и подключается к судовой сети только через трансформатор и выпрямитель, которые поставляются вместе с прибором.
Подготовка прибора к работе. Если «Сталодикатор» длительное время не эксплуатировался, то необходимо произвести его проверку готовности к работе. Для этого следует провернуть все барабаны несколько раз до отказа в обе стороны. Стрелка микроамперметра должна двигаться согласно вращению барабана от нуля до максимального значения. Проверяют правильность работы «Сталодикатора» по контрольному примеру, прилагаемому к инструкции по эксплуатации.
Если при включенном питании стрелка микроамперметра не стоит против нуля, ее необходимо подвести к нулю с помощью специального винта микроамперметра. Эта же операция повторяется и при выключенном электропитании прибора.
Ввод исходных данных. Значения нагрузок (масса груза, балласта, топлива и т. д.), планируемых к по-98
грузке или фактически погруженных, вводятся с помощью барабанов ввода массы груза. Если какое-либо помещение остается порожним, то их барабаны следует установить точно в нулевое положение. При необходимости (в случае загрузки грузового помещения или при загрузке разнородным грузом) нужно откорректировать положение центра тяжести груза. Если грузовой танк или цистерна имеют свободную поверхность жидкости, переключатель «СП» должен быть установлен в положение «Свободная поверхность».
Определение характеристик посадки, остойчивости и прочности судна. Для отсчета дедвейта необходимо повернуть переключатель режима работы в положение «Дедвейт». Загоревшаяся белая лампочка показывает, что прибор готов для измерения значений дедвейта. Затем вращением барабана «Дедвейт грубо» и «Дедвейт точно» стрелку микроамперметра точно устанавливают в нулевое положение. Сумма отсчетов обеих шкал барабанов равняется фактическому дедвейту. Хотя в паспорте прибора указывается инструментальная погрешность в определении дедвейта, равна 1%, следует иметь в виду, что «Сталодикатор» не предназначен для точного определения дедвейта. Прибор вычисляет дедвейт только для получения значений дифферента, напряжений в корпусе и метацентрической высоты.
При установке переключателя режима работы в положение «Дифферент» загорается зеленая лампа и прибор готов к измерению величины дифферента. Устанавливая стрелку микроамперметра в нулевое положение, получаем непосредственно на шкале барабана значение дифферента в метрах.
Контроль общего изгибающего момента выполняют в следующем порядке:
поворачивают переключатель режима работы в положение «Напряжение», при этом загорается красная лампа;
устанавливают стрелку микроамперметра на нуль, повернув барабан отсчета «Напряжение»;
снимают отсчет величины общего изгибающего момента на шкале барабана, которая указывает величину и знак «перегиб» или «прогиб» корпуса у миделя на тихой воде;
7* 99
полученное значение изгибающего момента сравнивают с допустимым моментом, указанным на панели «Сталодикатора».
Для определения метацентрической высоты необходимо:
довернуть переключатель режима работы в положение «Остойчивость». При этом зажигается желтая лампа;
установить стрелку микроамперметра в нулевое положение поворотом отсчетного барабана «Остойчивость». Отсчет на шкале барабана указывает исправленное на свободные поверхности значение метацентрической высоты с ее знаком.
С помощью «Сталодикатора» можно определить величину изменения дифферента и метацентрической высоты от перемещения груза при неизменном дедвейте. Для этого необходимо установить с помощью барабана ввода массы груза в помещение, где будет увеличена масса груза, значение ноль, а в помещение, в котором планируется уменьшить нагрузку, какое-нибудь большее значение массы груза. Установить барабан отсчета дедвейта на значение дедвейта. Повернуть переключатель режима работы в положение «Дифферент». Поставить отсчетный барабан «Дифферент» на .отсчет приблизительно посредине шкалы. Подвести стрелку микроамперметра на ноль с помощью барабана отсчета дифферента. Снять отсчет дифферента. Произвести планируемое изменение нагрузок, выставив на барабанах ввода массы груза- новые значения нагрузок для соответствующих помещений. Подвести стрелку микроамперметра снова на ноль с помощью барабана отсчета «Дифферента» и снять значение нового дифферента. Разница между обоими отсчетами на барабане дифферента покажет значение приращения дифферента от перераспределения нагрузки.
Приращение метацентрической высоты от переноса груза определяют в следующем порядке. Переключатель режима работы переводят в положение «Остойчивость».
Устанавливают отсчетный барабан «Остойчивость» на любую отметку посредине шкалы. Подводят стрелку микроамперметра в нулевое положение с помощью барабана «Остойчивость». Снимают отсчет метацентрической высоты. Вводят значение массы планируемого к 100
перемещению груза с помощью барабанов ввода масс нагрузки в соответствующих помещениях.
Подводят стрелку микроамперметра на ноль, поворачивая барабан «Остойчивость». Снимают отсчет метацентрической высоты. Разница между обоими значениями на барабане отсчета метацентрических высот дает разницу в метацентрической высоте, которая получится от переноса груза.
Определение дедвейта, дифферента и изгибающего момента с использованием «Сталодикатора» дает возможность рассчитать с помощью, например, клавишного микрокалькулятора или вручную необходимые осадки носом и кормой, перемещение нагрузок для улучшения характеристик остойчивости и прочности судна. Порядок проведения указанных операций дан в инструкции по эксплуатации к прибору.
Для использования прибора на контейнеровозах к «Сталодикатору» прилагается специальная инструкция.
АНАЛОГОВЫЕ ЭЛЕКТРОННЫЕ КОМПЬЮТЕРЫ И ДРУГИЕ ПРИБОРЫ РАСЧЕТА ЗАГРУЗКИ СУДНА
Прибор «Лодмастер А 10». Фирма «Кокумс» начала выпуск этого специализированного аналогового электронного компьютера в 1969 г. Сейчас уже около 1500 судов мирового флота имеют на борту этот довольно простой в эксплуатации и надежный прибор, который позволяет рассчитывать полную грузоподъемность, дифферент, осадку, метацентрическую высоту судна, а также изгибающий момент и перерезывающие силы.
Значение массы груза для стопроцентного заполнения грузовых помещений вводится в прибор при помощи клавишей, а для частичного — еще и при помощи поворотных ручек. Результаты немедленно отображаются на аналоговых индикаторах.
Изгибающий момент и перерезывающие силы в Усечениях даются в процентах к их допустимым значениям.
Прибор можно устанавливать на специальном столе или подвешивать на судовой переборке. «Лодмастер А 10» имеет модификации «Лодмастер А 11» и «Лодмастер А 12» для контейнеровозов, а также другие модификации для танкеров.
1Л1
Приборы «Перкоз» и «Аслог». Польский электрический аналоговый прибор «Перкоз» предназначен для планирования и контроля грузовых операций. Вводимые и определяемые величины моделируются в приборе с помощью сопротивлений. Ручки на лицевой панели прибора служат для настройки соответствующего сопротивления, пропорционально вводимым и определяемым значениям характеристик судна. С помощью этого прибора можно измерять водоизмещение, среднюю осадку, метацентрическую высоту, продольный изгибающий момент и дифферент. В начале измеряют водоизмещение, а затем другие указанные характеристики.
Прибор «Перкоз» установлен на судах типа «Николай Коперник». Прибор «Аслог» — аналоговый компьютер для расчета нагрузки судна и контроля грузовых операций установлен на судах типа «Маршал Буденный».
Прибор G70. Алгоритм, связанный с расчетом грузового плана, не отличается особой сложностью, но выполнение самих расчетов «вручную» достаточно трудоемко. Проще и точнее задача расчета нагрузки судна выполняется с помощью приборов, базирующихся на микропроцессорах. В настоящее время на судах применяется вычислительная техника от карманных клавишных микрокомпьютеров до электронно-вычислительных машин.
Выбор тех или иных средств вычислительной техники зависит от математических возможностей приборов и экономической эффективности, достигаемой при их применении на конкретном судне. С развитием микропроцессорной техники стали создаваться «Сталодикаторы» на новой элементной базе. Так, например, на многих судах типов «Александр Прокофьев», «Известия», «Казань», «Туапсе», «Стахановец Котов» установлены приборы G70 фирмы «Кокумс». Прибор G70 (рис. 43) предназначен для судов дедвейтом менее 15000 т. Прибор имеет цифровой компьютер с программой для вычисления дедвейта, дифферента, средней осадки, метацентрической высоты и изгибающего момента на миделе. Метацентрическая высота рассчитывается с учетом свободных поверхностей. Компьютер имеет постоянную и оперативную память и печатающее устройство. В постоянной памяти хранятся неизменные данные по судну и про-102
грамма вычислений. Оперативная память служит для временного хранения данных по грузу или промежуточных данных вычислений. Постоянные данные по судну и программа вычислений приспособлены для конкретного судна с момента его постройки, ио могут быть легко изменены для-другого судна.
Рис. 43. Прибор G70
Прибор G72 является модификацией прибора G70.
Размер прибора G72 334X250X85 мм, масса 5 кг, питание током 50—60 Гц, напряжением 110/220 В, потребляемая мощность 50 Вт, диапазон температур окружающей среды от 0 до +55° С.
Прибор «.Подмастер Д-50». Фирма «Кокумс» выпускает судовые приборы «Лодмастер Д-50», которые выполняют вычисления и воспроизводят результаты расчета на дисплее (рис. 44) дедвейта, осадки носом' и кормой, метацентрической высоты, перерезывающих-сил в 20 сечениях и изгибающего момента. С помощью прибора рассчитываются допустимые пределы характеристик прочности. Конструкция прибора базируется на микроЭВМ. Программа и неизменные данные по судну хранятся постоянно в запоминающих устройствах. Результаты вычислений можно хранить в оперативной памяти. Все электрические цепи построены на четырех печатных платах. В схеме электропитания предусмотрена вспомогательная батарея, которая обеспечивает сохранение информации в запоминающих устройствах на
103
случай неожиданного прекращения основного питания. На это время дисплей остается темным, клавиатура в нерабочем режиме, однако данные о погрузке сохраняются в запоминающем устройстве.
Рис. 44. Прибор «Лодмастер Д-50»
В случае превышения допустимых значений характеристик прочности на дисплее высвечивается место превышения и количественные значения характеристик прочности.
В приборе предусмотрено печатающее устройство. Питание прибора от сети 110/220 В±;10%, 50 Гц. Диапазон температур окружающей среды от +5 до + 55° С. Размер прибора 470X270X200 мм, масса 9 кг. Дисплей размером 80x200 мм. Прибор установлен на судах «Юлиус Фучик», «Джон Рид» и др. Предусмотрена мо-•дификация прибора Д-52.
Прибор «Лодмастер С 30» фирмы «Кокумс». Прибор представляет собой миникомпьютер с двойным дисковым накопителем, с экранным индикатором и пультом (рис. 45). Основные данные судна хранятся на магнитных дисках. Значения массы грузов и другие данные с помощью пульта вводятся в компьютер и результаты индицируются на экране. В приборе предусмотрен телетайп.
104
Рис. 45. Прибор «Лодмастер С 30»
Прибор «Лодмастер В 20» фирмы «Кокумс». Этот прибор является одним из новейших, предназначенных для расчета и проверки загрузки судна. Он состоит из процессора, дисплея, цифропечатающего устройства и коммутатора ввода данных. Его модификацией является прибор «Лодмастер В 24», в котором предусмотрено совмещение коммутатора ввода данных с цифропечатающим устройством. На дисплее отображается загрузка судна с указанием наименования, массы и объема груза,, а также процентного заполнения грузовых помещений, общей массы груза и запасов, осадок носом и кормой,, дифферента и другой информации о загрузке судна на данный момент. Предусматривается возможность корректировки и проигрывания ситуации изменения нагрузки судна. Питание прибора от судовой сети 222/110 В, 50/60 Гц. Общая масса прибора 32,5 кг.
Прибор «Лодметр-300». Этот прибор японской фирмы «Хитачи Зосен» («Hitachi Zosen») предназначен для вычисления дедвейта, водоизмещения, осадок носом, кормой и на миделе, общего изгибающего момента и перерезывающих сил в десяти сечениях, метацентрической. 105
высоты с ее допустимыми значениями в соответствии с требованиями ИМКО. Прибор имеет дисплей и цифропечатающее устройство.
Прибор «Лодмастер В 40». Этот прибор фирмы «Кокумс» рассчитан для использования его как на танкерах, так и на сухогрузных судах. С помощью прибора можно определить основные характеристики посадки, остойчивости и прочности судна, а также решать некоторые эксплуатационные вопросы (планирование грузовых операций с одновременной выгрузкой из нескольких танков, время окончания грузовых операций и др.). Размер прибора 430X410X290 мм, масса 14 кг. Питание от судовой сети 220/110 В; 50/60 Гц. Потребляемая мощность 100 Вт.
Калькулятор погрузки. Этот прибор выпускает фирма «Митцуи» («Mitsui Engineering Shipbuilding»). Прибор представляет собой электронное устройство, снаб-.женное телетайпом, микропроцессором и дисплеем. Стандартная модель прибора (рис. 46) предназначена .для расчета водоизмещения, остойчивости, прочности корпуса, дифферента судна.
Все вводимые данные и полученные результаты могут поступать на дисплей и цифропечать. Масса прибора 180 кг.
Рис. 46. Калькулятор погрузки фирмы «Митцуи» 306
Прибор «Лодмакс». Английский прибор «Лодмакс» состоит из трех блоков. На передней панели размещены клавиатура управления и два дисплея (цифровой и графический). Электронная система управления включает процессор, постоянную и оперативную память, интерфейс для стыковки с печатающим устройством и передней панелью. Предусмотрена цифропечать и графическая индикация изгибающих моментов и перерезывающих сил для 16 сечений. Элементная база прибора — интегральные микросхемы. Прибор имеет две модификации: «Лодмакс-100» и «Лодмакс-200». В компьютере «Лодмакс-100» не предусмотрен расчет остойчивости. В остальном приборы одинаковы. По рекламным данным фирмы изготовителя точность расчета осадки и метацентрической высоты составляет 0,4%. Точность расчета остальных параметров — в пределах требований морских классификационных обществ.
МикроЭВМ ЛМС. Специализированная ЭВМ выпускается канадской фирмой «Литтон» («Litton») для расчета и индикации на дисплее следующих величин: масс грузов, запасов и балласта; водоизмещения; дедвейта; осадок носом, кормой и на миделе; поперечной метацентрической высоты с поправкой на свободные поверхности жидкостей; дифферента и момента, кренящего судно на 1°; изгибающих моментов и перерезывающих сил в процентах от допустимых значений. Постоянное и оперативное запоминающее устройство выполнено на магнитных лентах. В системе предусматривается связь с цифропечатающим устройством.
Микрокомпьютер типа ХП-97. На судах Черноморского пароходства [5] нашел применение неспециализированный микрокомпьютер американской фирмы «Хив-лит-Паккард» («Hewlett Pacard»). Для судов разных типов готовятся программы расчета остойчивости и прочности судна и записываются па отдельных магнитных картах.
Предусмотрено несколько программ.
1. Программа «Посадка и остойчивость», по которой компьютер рассчитывает и выдает на цифропечатающее устройство следующие данные: массовое и объемное водоизмещение; осадку на перпендикулярах и иа миделе; аппликату и абсциссу центра тяжести судна; попе
107
речную метацентрическую высоту; период качки; момент массы судна; дифферент и дифферентующий момент.
2. Программа «Диаграмма Рида», которой предусматривается расчет плеч диаграммы статической остойчивости для значений углов крена 10, 20, 70°
3. Программа «Общая прочность», которая обеспечивает контроль перерезывающих сил и изгибающих моментов для пяти сечений.
Построение диаграммы статической остойчивости, определение максимального плеча диаграммы, угла максимума и угла заката диаграммы, а также эпюры перерезывающих сил и изгибающих моментов производится оператором вручную по специальной инструкции для капитанов по .использованию программ применительно к компьютеру. Инструкция разработана кафедрой сопротивления материалов и строительной механики корабля Одесского института инженеров морского флота и прилагается к прибору.
Морской грузовой компьютер. Этот специализированный прибор разработала японская фирма «Мицубиси». Он предназначен для расчетов водоизмещения, осадки, дифферента, перерезывающих сил, изгибающих моментов с возможностью их корректировки. В системе восьмибитовый процессор. Входные и выходные данные индицируются на дисплее в табличной форме. Распределение перерезывающих сил и изгибающих моментов представляется в графической форме. Документирование полученных результатов может быть осуществлено с помощью присоединяемого цифропечатающего устройства.
108
Глава 4
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ КОНТРОЛЯ ПОСАДКИ И ОСТОЙЧИВОСТИ СУДНА
СИСТЕМА «ИНТЕРИНГ»
Современные специализированные суда, например ролкеры, для избежания повреждений груза и судна во время интенсивных грузовых операций не должны иметь значительного крена. Сильная качка в море также вызывает подвижку перевозимой техники. Поэтому возникает необходимость обеспечения успокоения качки в море и выравнивания крена судна во время погрузо-раз-грузочных работ. Система успокоения качки и антикре-новая система конструируются на базе одних и тех же механических и автоматических элементов. В основном обе эти системы могут работать в режиме успокоения качки в море и выравнивания крена в порту. Использование системы для выравнивания крена позволяет при небольшом дооборудовании ее определять метацентрическую высоту судна.
Рассмотрим принцип устройства и работы системы в режиме выравнивания крена и определения остойчивости.
Система выравнивания крена состоит из двух одинаковых креновых цистерн 12 и 5 (рис. 47), расположенных симметрично по бортам судна. Между собою цистерны соединяются трубопроводом большого сечения, или обе цистерны и трубопровод могут представлять собой одну цистерну U-образной формы. Цистерны наполовину заполняются водой.
Для перемещения воды из одной цистерны в другую служит компрессор 11, который воздушными трубопроводами соединен с верхней частью цистерн. Для управления процессом выравнивания крена служат автоматические клапана 7—9 или управляемые вручную клапаны 6 и 10. Для определения степени заполнения цистерн служит указатель 3. Светофор 1 автоматически регулирует движением грузовых средств и симметричным распределением грузов по бортам. Сигнализаторы крайних
109
1
Рис. 47 Схема действия системы «Иитеринг» в режиме выравнивания креиа
значений уровня 4 и 13 вырабатывают сигнал о полном заполнении какой-либо из креновых- цистерн.
Когда судно без крена, все клапаны закрыты и уровень в цистернах одинаковый. Перед началом грузовых операций включается антикреновая система, при этом начинает работать компрессор 11 при открытом клапане 8. Как только появляется у судна крен, вызванный несимметричностью загрузки, например постановкой автомобиля 2, по сигналу от кренометра автоматически открываются клапаны 7 и 9. Воздух от постоянно работающего компрессора 11 под давлением Р3 поступает по воздухопроводу в верхнюю часть цистерны 5. В ре-ультате чего вода из цистерны 5 перетекает в цистерну 12 до тех пор, пока крен не выравнится. После выравнивания крена клапана 7 и 9 закрывается.
На указателе 3 индикатора стрелка отклоняется на величину изменения уровня воды в цистерне 12, а на свело
тофоре загорается стрелка, указывающая направление (борт) установки следующего груза. В нашем случае «горит» левая стрелка. Когда какая-либо из цистерн заполняется полностью, срабатывает сигнализатор верхнего уровня 4 или 13 и подаются звуковой и световой предупредительные сигналы для оператора.
Таким образом, в результате автоматического управления клапанами создается в противоположной крену борта цистерне избыток воды, который своим восстанавливающим моментом компенсирует кренящий момент, вызываемый грузом.
Кренящие цистерны располагают как можно ближе к бортам судна. Они могут быть двойными — разделенными по вертикали переборками, параллельными ми-дельшпангоуту.
Обычно компрессор и пневмоклапаны устанавливаются в машинном отделении, а указатель уровня 3 и светофор 1 — у грузовой рампы. Дополнительно светофоры устанавливаются на каждой грузовой палубе.
Проведение опыта кренования судна с целью определения метацентрической высоты требует дооборудования креповой системы двумя сигнализаторами уровня 8 и 9 и кренометром 1 (рис. 48).
Для определения метацентрической высоты из опыта кренования необходимо знать кренящий момент, водоизмещение судна и приращение угла крена, получаемое судном от приложенного к нему кренящего момента. Автоматическое определение метацентрической высоты обусловливает автоматическое определение указанных параметров и автоматическое вычисление конечного значения. Антикреновая система «Интринг» и другие подобные системы производят лишь автоматическое кренование судна, конечные же значения метацентрической выезды вычисляет оператор.
Автоматическое кренование судна производится с по-ющыо креновых цистерн с использованием сигнализаторов уровня. Трубопровод системы имеет четыре клапана 4, 5, 6, 7 Крен создают обычно на один борт. После включения системы в режим кренования вода из цистерны 2 под давлением воздуха, поступающего от компрессора 3, через автоматический клапан 5 перемещается в танк 10. Как только уровень воды в цистерне 10 достигнет сигнализатора 8, поступает сигнал на конт-
1Н
Рис. 48. Схема действия системы «Иитериш» режиме определения остойчивости
•
рольную панель 11, где по кренометру отмечается угол крена 01. В момент, когда уровень воды в цистерне подойдет к сигнализатору 9, поступает второй сигнал на контрольную панель и по кренометру отмечается угол 02. По разности отсчетов определяется приращение угла крена Л0. Кренящий момент является постоянной величиной, так как сечение цистерны, параллельное основной плоскости на уровнях установки сигнализаторов, всегда неизменно. Места установки сигнализаторов уровня фиксированы (Ah— const) и величина кренящего плеча /,,р всегда постоянна. Поэтому значение кренящего момента всегда постоянно. Метацентрическую высоту определяют по специальному графику, выгравированному на контрольной панели. -Параметрами для входа в диаграмму служат значения водоизмещения судна на данный момент и приращение угла крена А0. Определение водоизмещения на данный момент требует знания средней осадки, которую следует снять на момент кренования.
Точность определения метацентрической высоты в значительной части зависит от точности определения 112
приращения угла крена, которая, в свою очередь, зависит от конструкций кренометра. Например, на судах типа «Инженер МаЧульский» используется обыкновенный уровень с базой около 2 м. Точность определения приращения угла крена с его помощью — не более (М дубового градуса, что приводит к значительным ошибкам в конечных результатах.
ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫЕ КОМПЛЕКСЫ «БРИЗ-1551» И «БРИЗ-160Й» ✓
Комплексы типа «Бриз», выпускаемые отечественной промышленностью, предназначены для автоматизации процессов судовождения, планирования и контроля грузовых операций, а также решения общеэксплуатационных задач (на базе судовой ЭВМ).
Информационно-вычислительный комплекс «Бриз» имеет две модификации; «Бриз-1551» для крупнотоннажных танкеров и «Бриз-1609» для крупнотоннажных судов с горизонтальным способом погрузки.
В каждом, из комплексов предусмотрено решение задач контроля "мореходнр-прочностных характеристик судов, выполняемых с помощью системы «Грузовых операций» (Бриз-ГО). Эта система входит в Качестве составной части комплексов.
Система^Бриз-ГО» обеспечивает решение следующих задач: размещение грузов по судну; индикацию загрузки грузовых помещений; проверку последовательности погрузки и выгрузки грузов; распределение рейсовых запасов и балласта; корректировку каргоплана; расчет и индикацию характеристик посадки, остойчивости и общей прочности судна; документирование полученных конечных результатов..
Основой комплекса является специализированный цифровой вычислитель «Карат». Структура вычислителя универсальная с жестким программным управлением. Характер обработки'информации и передач кодор— параллельный. Быстрота действия— 150 ' тыс. операций в секунду. Аппаратура комплекса состоит из пульта гру-зовыхопераций, интерфейса, накопителя данных на магнитной ленте.
8—430
ИЗ
Взаимодействие человека с ЭВМ обеспечивается в форме оперативного диалога с использованием символики, максимально близкой к традиционно применяемой в практике морского флота. Имеется возможность наращивания объема задач и корректировки принятых программ с минимальными изменениями существующей аппаратуры.
ЭВМ дает возможность оперативно в режиме диалога использовать алгоритмы задач, входящих в ее математическое обеспечение, и, таким образом, подключает к решению максимальный объем знаний и накопленного опыта.
В системе «человек — машина» ЭВМ позволяет упорядочивать и систематизировать поступающую информацию; хранить и выдавать промежуточные и конечные результаты расчетов; выдавать информационно-справочные материалы, необходимые оператору в процессе работы; запрашивать и запоминать информацию, представляющую интерес для решения задачи; производить оценку ответов оператора по уточнению хода решения задачи и затребованной дополнительной информации; выполнять решение по частям и выдавать конечные результаты.
Оператор при работе с ЭВМ в диалоговом режиме имеет возможность непосредственно вмешиваться в процесс обработки информации, получать результаты на любом этапе работы, устранять ошибки и вводить дополнительную информацию. Оператору (грузовому помощнику) нет необходимости знать вычислительную машину, а использование в ее работе языка традиционной символики делает ее легкодоступной для любого судоводителя. Регистрация информации осуществляется на бумажной ленте печатью или перфорацией.
Основным элементом комплекса является пульт грузовых операций, который обеспечивает оперативное, достаточно наглядное предоставление графической и цифровой информации. Можно вызвать на мнемосхеме контуры любой палубы с учетом конструктивных элементов, загруженные участки и границы размещения грузов.
На знаковом табло можно индицировать текстовой и цифровой диалог с оператором, вводимую информацию, результаты промежуточных и конечных решений, 114
реализуемых команд управления и ввод координат размещения грузов.
Оператор имеет возможность, сохраняя продолжительное время информацию об общем состоянии загрузки палуб на мнемосхеме, независимо использовать знаковое табло при ведении диалога и оперативного выбора, наиболее удобного для работы совмещения информации.
Несмотря на указанные достоинства, все разработанные системы контроля мореходных и прочностных характеристик и управления грузовыми операциями из-за отсутствия необходимых датчиков первичной информации работают в режиме ручного ввода исходных данных, что существенно снижает эффективность системы и точность конечных решений.
СИСТЕМА АСКО
Принцип работы. В 1979 г. на теплоходе «Николай Голованов» установлена отечественная система АСКО — автоматизированного контроля посадки и остойчивости судна. В основе, принципа работы системы лежит опыт кренования судна? При этом опыт кренования проводится на волнении на ходу судна.
Приращение угла крена от приложения искусственного кренящего момента измеряют исходя из предположения о стационарности случайного процесса воздействия внешних сил (волн и ветра) на судно при его движении на постоянном курсе и при неизменной скорости за время между .накренениями.
Приращение угла крена определяют следующим порядком. Перед началом создания искусственного кренящего момента в течение некоторого промежутка времени от 0 до t} измеряют величины нескольких амплитуд колебаний судна (рис. 49), затем полученные мгновенные значения осредняют. В результате получают статический угол крена 0Ь который судно имело до начала кренования. В течение периода от Л до t2 выполняют кренование судна. После окончания кренования за период от t2 до t3 вторично измеряют амплитуды колебаний судна с последующим осреднением и. Получением статического угла крена в2.
8* 115
Рис. 49. Принцип измерения приращения угла крена судна системой АСКО
Для определения метацентрической высоты нет надобности определять фактические значения статических углов креНа 0( и 02 до и после кренования. Практически важно знать точное значение приращения угла крена судна Д0, которое будет у судна в результате приложения к нему известного кренящего момента. Поэтому системой измеряется среднее значение амплитуд колебаний судна на волнении, а истинноё значение статического угла крена заменяется оценкой его математического ожидания. Этим условиям при небольших значения Д0 отвечает формула (33).
Для реализации опыта кренования необходимо также знать кренящий момент и водоизмещение судна во время кренования. Поэтому в системе должны быть предусмотрены отдельные блоки, обеспечивающие измерения угла крена, кренящего момента, водоизмещения, а также вычислительное устройство.
Искусственный кренящий момент в системе АСКО создается с помощью специально встроенной для этой цели креновой цистерны, которая является основным узлом подсистемы накренения. Как показано выше, кренящий момент должен быть измерен с относительной точностью 0,02—0,03. В реальных условиях возникают ошибки в определении кренящего момента при использовании для накренения судна жидкого балласта от неточного измерения количества жидкости в кренящей цистерне, а также если не учтено влияние свободной по-, верхности жидкости в кренящей цистерне и в случае не-; точного измерения длины плеча кренящего момента и изменения массы жидкости в объеме кренящей цистерны 116
в зависимости от плотности этой жидкости. Для исключения источников погрешностей в АС КО подсистема на-кренения судна спроектирована так, что обеспечивается полное осушение и заполнение креновой цистерны. В этом случае отсутствует свободная поверхность жидкости, объем цистерны является постоянной величиной и точно известен. Расстояние ее центра тяжести до диаметральной плоскости (плечо кренящего момента) также является фиксированной величиной. В результате такой конструкции отпадает необходимость в измерениях состав-, ляющих кренящего момента (плеча и массы воды), так как они в любом случае постоянны. Что касается погрешностей, связанных с изменением массы воды в одном и том же объеме в зависимости от различной плотности (солености и температуры), то опыт кренования с использованием забортной воды для накрененйя судна позволяет избежать этой погрешности.
Формулу (33) можно записать в виде
Л = 57,3
^кр Fip ^Кр
У р Д0
(ЮО)
где Vkp — объем кренящей цистерны, м2;
Ркр — плотность жидкости, используемой'для создания крена судна, кг/м3;
/кр — расстояние от центра тяжести кренящей цистерны до диаметральной плоскости судна, м;
V — объемное водоизмещение судна, м3; р — плотность забортной воды, кг/м3.
При креновании забортной водой значение плотности кренящей жидкости рКр и плотности забортной воды р равны. Таким образом, Отпадает необходимость измерения плотностей кренящей жидкости и забортной воды при определении массового водоизмещения.
Недостатком использования кренящей цистерны фиксированного объема является зависимость значения приращения угла крена от значения метацентрической высоты. При большой остойчивости судна для получения достаточной величины Д0 необходим большой кренящий момент, т. е. необходима цистерна большого объема. Однако полная запрессовка цистерны большого объема при малых значениях метацентрической высоты ведет к накренению судна-на большой угол, неприемлемый в н/
реальных условиях. Объем установленной на теплоходе «Н. Голованов» креновой цистерны—18,5 м3; плечо кре-нищего .момента—11,8 м; кренящий момент — 224 т-м. Диапазон эксплуатационных водоизмещений судна от 11700 до 22700 т. Метацентрическая высота практически колеблется между значениями 0,26 и 1,72 м. После подстановки крайних значений водоизмещения в формулу (100), получим реальное приращение угла крена судна. При малой остойчивости (й = 0,26) и малом водоизмещении, например 12500 т, приращение угла крена около 4° При большой остойчивости (h=l,72 м) и полном водоизмещении 22700 т приращение угла крена составляет лишь 0,33° При таком абсолютном значении приращения угла крена судна его величина может оказаться сравнимой с погрешностью работы системы.
Прием воды в креновую цистерну изменяет расчетную остойчивость, поэтому ее объем должен быть минимальным, но в то же время достаточным для того, чтобы значение приращения угла крена могло быть выделено в качестве разности оценок математических ожиданий .случайного процесса бортовой качки до и после приложения к судну кренящего момента.
Устройство системы. В состав системы входят следующие основные элементы: датчики осадки судна; датчик угла статического крена; подсистема^ накренения с ручными и автоматическими управляющими клапанами; центральный блок управления; блоки сопоставления и индикации; источники питания; приемные трубопроводы с клапанами.
Структурная схема системы показана на рис. 50. С носового и кормового датчиков осадки сигналы, соответствующие фактической осадке, через формирователь сигналов посадки поступают в устройство управления для вычисления водоизмещения, дифферента, осадок носом, кормой и на миделе. Фактические значения осадок, дифферента и водоизмещения индицируются на табло. Сигнал, пропорциональный полученному значеникГводоизмещения, подается в аналоговое вычислительное устройство. С датчика угла крена снимается аналоговый сигнал, пропорциональный угловому отклонению маятника кренометра, и через формирователь сигнала остойчивости подается в устройство управления для индикации. у
113
Рис. 50. Структурная схема системы АСКО
Одновременно с датчика угла крена снимается сигнал в виде пачек импульсов, определяющих в дискретной форме значение отклонения маятника. Дискретные сигналы подаются в формирователь кода, управляющий четырьмя сумматорами, которые накапливают общее число импульсов, пришедших за время измерения до и после приложения кренящего’момента и соответствующих двум среднеарифметическим значениям угла крена, т. е. статическому углу крена.
В преобразователе «Код-аналог» получается разность значений статических углов крена до и после кренова-нжя. Таким образом на выходе преобразователя вырабатывается сигнал, пропорциональный приращению статического угла крена Д0.
Для определения метацентрической высоты судна сигналы о приращении угла крена, водоизмещении и кренящем моменте поступают в аналоговое вычислительное устройство, которое работает по алгоритму, базирующемуся на расчетной формуле опыта кремов а ния судна.
119
Рис. 51. Схема датчика осадки системы АСКО
Вычисленное значение метацентрической высоты выводится на индикатор и подается в устройство управления для контроля и сравнения ее с допустимыми значениями для данной загрузки судна. Датчик осадки, принципиальная схема которого показана на рис. 51, крепится’ с помощью фланца, имеющего уплотнительное кольцо, на верхнем фланце измерительной трубы 9, соединенной с забортной водой. Поплавок 8 соединен с помощью троса с барабаном следящей системы 10. Трос проходит через подвижный блок 7 на барабан. Натяжение троса воспринимается весами 5, которые с помощью контактов 4 управляют реверсивным мотором 3. Реверсивный мотор соединяет с барабаном 10 через .редуктор 2.
Через редуктор вертикальное перемещение поплавка с помощью вращающегося трансформатора 1 преобразуется в электрический сигнал. Для исключения возможности провисания троса при отключении следящей системы поплавок имеет отрицательную плавучесть. Не-120
достающая плавучесть компенсируется пружиной 6, которая служит для регулировки весов, управляющих следящей системой.
Датчик работает по следующей схеме. При понижении уровня воды в измерительной трубе поплавок опускается и рычаг весов 5 замкнет верхний контакт 4, В результате подается питание на реверсивный мотор 3, который вращает через редуктор барабан 10, трос поплавка сматывается с барабана и поплавок опускается. При повышении уровня' в измерительной трубе поплавок поднимается и ослабляет трос, включается нижний контакт 4 и реверсивный мотор 3 начинает вращаться в обратную сторону, вращая барабан, на который наматывается трос.
Таким образом отслеживается измерение уровня воды в измерительной трубе. Барабан 10 через редуктор соединен также с вращающимся трансформатором 1. В результате 'перемещение подлавка преобразуется в угол поворота вращающегося трансформатора, вырабатывая сигнал аналоговой формы. *
Датчик смонтирован в сварном корпусе с крышкой. Для выхода воздуха из измерительной трубы имеется отверстие, которое может перекрываться диафрагмой и использоваться для демпфирования колебаний визы в измерительной трубе при качке.
Система кренования судна состоит из креповой цистерны 5 (рис. 52) и устройств автоматического управления заполнением и осушением системы. Креновая цистерна размещена с левого борта ниже главной палубы и имеет также ручное управление ее заполнением и осушением из центрального’поста управления (ЦПУ) главным двигателем. Дистанционное автоматическое управление цистерной, применяемое при работе системы в режиме автоматического вычисления остойчивости, выполняется по командам с центрального блока АСКО. Креповая цистерна заполняется по трубопроводу 7 при помощи дистанционного управляемого клапана Кь Для полного освобождения от воздуха при заполнении цистерны имеется перепускная труба 4. Забортная вода подается из балластной системы 10 или из-за борта через водозаборник 11 водяного ящика, расположенного’ в двойном дне. Давление в магистрали создается балластным насосом 1. Дистанционное управление в режи-
121
Рис. 52. Схема системы кренования АСКО
ме контроля остойчивости судна осуществляв автоматически с помощью силового электрогидра! еского блока 8.
Электромагнитные манипуляторы I, II, III управляют положением золотников 3i, зп, зш, подклю,''’емых к гидравлической (масляной) магистрали 9. Через гидропривод золотники связаны с соответствующими запорными клапанами Кц и Кщ водяной системы балластного насоса. Верхний клапан Кп открывает доступ забортной воды к насосу, нижний клапан Кш служит для откачки воды от насоса за борт, верхний клапан Кт подает во-122
ду из креповой цистерны к насосу, нижний клапан Кц соединяет напорную магистраль насоса с цистерной, клапан Ki является также запорным клапаном креновой он-, стемы.. Дистанционное: включение балластного насоса производится с помощью электрических пускателей, помещенных в коммутационном ящике 2. Балластный насос имеет блокировку н включается не сразу по поступлении команды с Центрального блока 3 на заполнение
или осушение цистерны, а только после того, как замкнутся концевые выключатели, свидетельствующие о том, что клапаны Ki, кп, кш соответственно полностью открыты для заполнения или осушения цистерны. Информация о включении команды на заполнение и осушение от размещенных в цистерне датчиков 6 поступает в устройство управления центрального блока, где вырабатываются соответствующие команды на заполнение и осушение цистерны. Таким образом обеспечивается выполнение
Рис. 53. Схема датчика статического угла крена АСКО вращающегося трансформа-
цикла кренования в автоматическом режиме.
Датчик статического угла крена (рис. 53) устанавливается на поперечной переборке судна вблизи миделя. Чувствительным элементом датчика является маятник /, совершающий угловой отклонение от равновесного положения в плоскости шпангоута при бортовой качке судна. Ось подвеса маятника соединена с осью датчика угловых от* клонений 2 — безынерционного вращающегося трансформатора. Аналоговый сигнал, пропорциональный углу отклонения маятника, снимаемый_____г___________ _г___
тора, предназначен дЛя определения и непрерывной индикации изменения статического крена судна.
с
Для расчета средней арифметической величины угла ррена, т. е. статического крена за время выполнения каждого полуцикла кренования судна необходимы сиг-
123
налы в дискретной форме. Бесконтактный съем информации в дискретной форме осуществляется с помощью фотоэлектрического преобразователя углов отклонений маятника в импульсы тока. На подвесе маятника имеется поводок, несущий оптронную пару 7 (фотодиод и лампу). Две другие оптронные пары 4 и 6 расположены неподвижно 'на корпусе датчика. На оси подвеса маятника размещен диск 3, имеющий независимый привод от электродвигателя 5. Диск не имеет механического контакта с поводком. На диске 3, помимо растровых отверстий, имеются шесть световых прорезей, разбивающих диск на секции По 60° каждая. Фотодиод 4 расположен напротив растровых отверстий, а фотодиоды 7 и 6 — на радиусе световых прорезей. При вращении растрового диска 3, в момент прохождения световой прорези неподвижного фотодиода 6 начала отсчета включается цепы фотодиода 4 и открывается счет импульсов. Отсчет прекращается, когда световая прорезь достигнет фотодиода 7 Таким образом, за один оборот диска будет произведено шесть опросов значений мгновенных угловых отклонений маятника, отсчитанных от места установки оптронной пары.
Датчик спроектирован отдельным электромеханическим блоком, включающим следующие узлы: маятниковое устройство, аналоговый преобразователь угла отклонения маятника с усилителем фототоков, автоматическое и ручное стопорное устройство. Корпус датчика и растровый диск выполнены из алюминиевого сплава. На крышке корпуса имеется шлифованная контрольная площадка, служащая для установки датчика на поперечной переборке.
Формирователь сигналов посадки (см. рис. 50) предназначен для преобразования и масштабирования сигналов датчиков осадки с целью получения стандартных сигналов постоянного тока, пропорциональных осадке судна в местах установки датчиков.
В блоке формирователя сигналов посадки размещены схемы пороговых устройств повышения опасных уровней сигналов и два тумблера для ручного управления работой носового и кормового датчиков осадки.
Формирователь сигнала остойчивости предназначен для образования, масштабирования и сглаживания аналогового сигнала, поступающего с датчика угла крена, 124
и получения стандартных сигналов постоянного тока для непрерывной индикации угла крена судна.
Формирователь кеда служит для формирования кода числа,, пропорционального мгновенному значению угла отклонения маятника, снимаемого в дискретной форме с датчика угла креиа, и для формирования импульсов, пропорциональных заданному числу измерений.
Сумматор предназначен для счета импульсов, поступающих от датчика угла крена. Он состоит из двоичнодесятичного трехфазного счетчика и дешифратора, управляющего индикаторами.
Преобразователь «Код-аналог» служит для преобразования двоично-десятичного кода в напряжение постоянного тока, пропорциональное приращению угла крена.
Устройство управления предназначено для вычисления параметров посадки судна, выбора режима измерения, а также для цифровой индикации характеристик посадки и остойчивости судна. Устройство управления обеспечивает сигнализацию о выходе контролируемых величин за их предельные значения.
Аналоговое вычислительное устройство служит для вычисления поперечной метацентрической высоты по формуле опыта кренования. Аналоговое вычислительное устройство состоит из четырех время-импульсных преобразователей, модуля потенцирования и блока питания.
Эксплуатация системы. Включение системы производится двумя тумблерами?” расположенными на лицевой панели центральной стойки (тумблер 220 В, 50 Гц и тумблер 120 В, 400 Гц). Перед включением тумблеров необходимо убедиться, что кнопка включения кренования выключена. Измерения должны начинаться после стабилизации режима работы, но не ранее чем' через 5 мин после включения питания системы.
После прогрева системы определяется посадка судна. Для нахождения любой из характеристик посадки (осадка _.носом, кормой, на миделе, дифферент, водоизмещение’ статический _крен) нажимается соответствующая кнопка «Гн», «Тк», «Тм», «*/», «Д», «0», расположенная на панели устройства управления. Все искомые величины могут быть определены последовательно в любом порядке с интервалом времени, достаточным для визуального "снятия показаний с цифрового вольтметра.
'125
Для определения объемного водоизмещения необходимо нажать кнопку «реч» (пресная вода), а для определения значения массового водоизмещения при плавании судна в морской воде надо нажать кнопку «мор». Плотность соленой воды принята равной 1,025 т/м3.
Метацентрическая высота определяется в следующем порядке. Перед началом измерения необходимо в машинном отделении- закрыть все золотники клапанов ручного управления кренованием. После чего, исходя из условий плавания, нажать одну из кнопок, устанавливающих продолжительность цикла кренования. Система подготовлена к работе. С нажатием кнопки «Пуск» начинается выполнение измерения в автоматическом режиме. По окончании цикла кренования значение метацентрической высоты судна индицируется на цифровом вольтметре. Там оно сохраняется до окончания следующего полуцикла кренования. В период прохождения второго полуцикла цифровые значения непрерывно меня: ются, а по его окончании высвечивается новое или то же значение метацентрической высоты, которое сохраняется до окончания следующего полуцикла кренования, и т. д. Прекращение измерения происходит при повторном нажатии кнопки «Пуск». Работа подсистемы кренования в автоматическом режиме контролируется сигнальными лампами «Осушено», «Заполнено». Во время измерения остойчивости изменения нагрузки, курса и скорости хода судна не допускаются.
Система АСКО, обеспечивающая прямое инструментальное измерение метацентрической высоты, основанное на принципе опыта кренования судна, создана впервые на базе научно-технического сотрудничества между судостроителями ГДР и ЦНИИ имени А. Н. Крылова. Эта система представляет большой практический интерес для повышения безопасности мореплавания.
МЕТАЦЕНТРОГРАФ СЕВАСТЬЯНОВА И ДРУГИЕ СИСТЕМЫ КОНТРОЛЯ ПОСАДКИ И ОСТОЙЧИВОСТИ СУДНА
Метацентрограф Севастьянова. Этот прибор изготовлен в Калининградском институте рыбной промышленности. Он предназначен для определения метацентри-126
ческой высоты в море. Принцип работы прибора бази-руется на выводах, полученных по результатам опытных исследований. *
1. На регулярном волнении бортовая качка судна характеризуется средним периодом, весьма близким к собственному периоду колебаний судна, если сопротивление качки мало, т. е. судно не имеет успокоителей качки и имеет обычные соотношения главных размерений.
2. Заметные отклонения среднего периода качки от собственных колебаний получаются при малых амплитудах качки.
Действие прибора основано на измерении периода качки при колебаниях судна с большими амплитудами. После накопления достаточного количества колебаний с большими размахами прибор делит суммарное время этих колебаний на число размахов и передает результат на шкалу метацентрических высот.
Система контроля посадки фирмы «Сименс» (ФРГ), С помощью этой системы измеряется осадка в четырех точках судна. По полученным значениям осадки вычисляется угол крена судна и его дифферент. По данным фирмы, точность измерений, производимых с помощью системы, равна 0,1%. Применяемые осадкомеры точны лишь на тихой воде. На волнении стрелки приборов колеблются около средних положений, что значительно уменьшает точность показаний осадкомеров.
Прибор контроля остойчивости фирмы «Сименс». Прибор автоматически измеряет период колебаний судна. Для определения метацентрической высоты используется формула (35). Квадратическая зависимость метацентрической высоты от периода собственных колебаний судна дает возможность измерять даже малые изменения метацентрической высоты. Прибор наиболее пригоден для малых судов, имеющих относительно небольшую остойчивость. У таких судов собственные колебания могут быть вызваны с помощью небольших кренящих моментов. Шкала прибора выполнена в виде концентрических окружностей, каждая из которых соответствует определенной осадке судна. Шкалы имеют предупредительную окраску недопустимых значений.
Приборы контроля остойчивости Венделя (ФРГ). Широко известны приборы двух типов для контроля 127
остойчивости, разработанные под руководством профессора Венделя.
Прибор первого типа предназначен для определения параметров остойчивости на тихой воде при проведений опыта кренования. Кренящий момент создается перекачкой воды в креновых цистернах, специально для этого устанавливаемых на судне. При помощи дистанционных измерителей осадки судна автоматически определяется водоизмещение, а угол Крена вычисляют по разности осадок по. бортам. При помощи цифровых табло на панели прибора указываются осадки носом и кормой и метацентрическая высота, одновременно с этим в счетно-решающем устройстве прибора происходит' вычисление диаграммы статической остойчивости при имеющейся нагрузке.. Диаграмма в виде светящихся точек демонстрируется на передней панели прибора.
К недостаткам этого прибора следует отнести необходимость оборудования судна специальными цистернами, емкость которых должна составлять около 10% водоизмещения судна, изготовление прибора для судна определенного ^ипа и высокая стоимость изготовления прибора.
Прибор второго типа предназначен для определения остойчивости на взволнованном море. Конструкция прибора основана на принципе синхронного измерения угла крена и угловых ускорений. Токи, индуктированные датчиками ускорения и угла крена, через усилитель подаются па отклоняющие пластины катодно-лучевого осциллографа. Путь электронного луча на экране осциллографа представляет собой диаграмму статической остойчивости в масштабе плеч остойчивости, которая при небольших амплитудах качки будет прямой линией с наклоном, характеризующим начальную метацентрическую высоту судна. Достоинством прибора является его универсальность, его можно применить на любом судне, для чего необходимо произвести лишь тарировку путем проведения опыта кренования.
К недостаткам прибора следует отнести небольшую точность, связанную с осреднением направления наклона начальной ветви диаграммы остойчивости, которое производится на глаз, кроме того, прибор имеет очень сложное устройство и требует весьма квалифицированна
ного обслуживания. В связи с этим прибор нашел применение лишь для научно-исследовательских целей.
Система Т-90. В 1978 г. фирмой «Кокумс» разработана автоматическая система Т-90, которая в основном предназначена для операций, выполняемых при аварийных ситуациях. Весь расчет аварийной посадки и остойчивости судна производится на береговой ЭВМ по заранее заложенной применительно к данному ^удну и его рейсу программе, а судно сообщает по радио информацию о характере повреждения.
Система также решает задачи по^расчету эксплуатационной остойчивости и прочности судна. Расчетная программа пригодна для любого судна. Основным потребителем таких систем являются фирмы, занимающиеся спасанием судов.
Программа системы Т-90 и банк данных могут быть использованы широко распространенными ЭВМ. Согласно рекламе фирмы-изготовителя система обеспечивает расчет оптимального варианта выполнения спасательных операций в течение 1 ч. Указанное достоинство позволяет спасателям быстро и точно выполнить свои задачи по сведению к минимуму возможных повреждений судна после аварии, что особенно важно для уменьшения опасности загрязнения моря.
ПЕРСПЕКТИВЫ СОЗДАНИЯ АВТОМАТИЧЕСКИХ СИСТЕМ КОНТРОЛЯ ПОСАДКИ И ОСТОЙЧИВОСТИ СУДНА
Проблема контроля посадки и остойчивости грузового судна в первую очередь связана с составлением предварительного грузового плана. Существующие в настоящее время приборы и системы контроля загрузки судна типа УПВЗОС-1 и «Сталодикатор» выполняют лишь функции калькуляторов, работающих по программе расчета посадки и остойчивости по вводимым оператором данным о планируемом к погрузке или погруженном грузе. В случае несоответствия полученных характеристик посадки и остойчивости с запланированными оператор должен изменить предварительный грузовой план или, манипулируя балластом, изменить фактическую загрузку. При этом должны соблюдаться условия*рацио-9—430 129
нального использования грузоподъемности и грузовместимости судна, очередности погрузки или выгрузки в различных портах в предстоящем рейсе. Такая задача относительно легко решается береговыми или судовыми специалистами при перевозке нескольких партий однородных грузов (наливные, сыпучие и т. п.) в судах с традиционным делением на отсеки (трюмы, танки), с одной или двумя грузовыми палубами. Для современных многопалубных судов, например, ролкеров или ро-флоу, решение этой проблемы с помощью традиционных методов, основанных только на профессиональном опыте, даже с использованием приборов расчета загрузки наталкивается на определенные трудности вследствие значительного увеличения исходных данных задачи. Поэтому проблема автоматизированного составления оптимального грузового плана для многопалубного крупнотоннажного судна с применением новых методов и технических средств приобретает в настоящее время актуальное значение.
Грузовые операции на многопалубном судне производятся одновременно со всех палуб через одну откидную рампу с помощью самоходной техники, которая перемещается затем с палубы на палубу по аппарелям. В этих условиях появляется принципиально новая по сравнению с традиционной задача составления такого расписания движения техники, при котором ее простои в ожидании освобождения рампы и аппарелей, а также освобождение фронта работ на судне и на терминале были бы ’минимальными. Решение этой задачи значительно усложняется наличием целого ряда ограничений, которые должны выполняться в процессе грузовых операций. Основное ограничение — обеспечение остойчивости судна, которое не допускает одновременной работы многих погрузчиков на одном борту судна. Кроме того, необходимость обеспечения безопасного угла крена при максимально допустимом количестве погрузчиков на одном борту с учетом затруднений для их передвижения из-за конструктивных особенностей судна и наличия погруженных грузов также являются существенными ограничениями.
Решение указанной выше сложной задачи позволит получить обоснованное сокращение времени проведения грузовых операций.
130
Составленный по оптимальному варианту предварительный грузовой план является основным документом, регламентирующим характер и последовательность выполнения работ и распределения трудовых и технических ресурсов. Одиако в процессе погрузки-выгрузки могут возникнуть ситуации, когда исполнение предварительного грузового плана становится невозможным, например: из-за отсутствия части планируемого груза, при замене одного груза другим, в случае поломки механизмов, неисправности грузового места, предназначенного к отправке, и т. д. Возникновение таких ситуаций требует оперативного принятия решения для корректировки грузового плана. Причем вопросы оперативной корректировки приобретают особое значение, так как интенсивность обработки судна очень высока.
Использование сложных алгоритмов, реализующих решение задачи составления предварительного грузового плана, может оказаться неприемлемым, так как для получения результата потребуется много машинного времени. Поэтому разработка оптимальной корректировки грузового плана, учитывающей наименьшие потери времени, является перспективной задачей. Для ее эффективного решения необходимо не только найти новые математические методы, но и разработать такую систему оперативного управления, которая позволила бы в реальном масштабе времени собирать всю оперативную информацию и доводить до исполнителей принимаемых системой решений.
Таким образом автоматизация расчета оптимального грузового плана является определяющей задачей. Характеристики посадки и остойчивости входят в эту задачу как ограничения или один из множества критериев расчета о'птимального грузового плана судна.
Другая перспективная задача — обеспечить автоматическое определение остойчивости — заключается в разработке систем контроля фактических характеристик остойчивости судна.
В настоящее время нет систем автоматического определения фактической остойчивости. Существующие опытные образцы таких систем и приборов строятся на прин-циие получения информации о фактическом состоянии судна от ’датчиков или чувствительных элементов. В за-
9*
131
висимости от принципа используемого метода требуются различные датчики.
Современная вычислительная техника и элементы автоматизации позволяют обрабатывать информацию с высокой быстротой, точностью и надежностью. Однако основным препятствием для создания систем автоматического контроля остойчивости оказалось отсутствие надежных и точных датчиков первичной информации.
Последние исследования Ноказали, что при создании систем контроля фактических характеристик судна следует базироваться на методах, основанных на выводе судна из состояния равновесия (опыт кренования, измерение периода колебаний и др.). Наиболее приемлемым оказался опыт кренования судна как в море на ходу, так и при его стоянке у причала. Конструкция такой системы предусматривает использование в качестве датчиков— измерителей исходной информации — высоко* точных расходомеров, уровнемеров, кренометров, надежно работающих в морских условиях и имеющих выход на ЭВМ.
Отечественная промышленность выпускает все указанные датчики общепромышленного исполнения. Переход от таких датчиков к датчикам морского исполнения не представляет собой трудности. Для этого перед промышленностью необходимо поставить эту задачу. Таким образом отсутствие датчиков для систем автоматического контроля остойчивости можно объяснить отсутствием постановки вопроса о создании систем автоматического определения фактической остойчивости судна.
Системы, построенные по принципу вывода судна из состояния равновесия, имеют некоторые ограничения: необходимость прекращения грузовых операций, ограничения по погодным и другим условиям.
Такие ограничения исключаются при создании систем, построение которых основано на автоматическом измерении координат и массы погружаемых на, судно грузов. При этом используется расчетный способ определения метацентрической высоты. Кроме устранения ограничений, присущих способу, связанному с выводом судна из состояния равновесия, рассматриваемая система даст возможность непрерывно контролировать фактические характеристики с целью изменения их в требуемом направлении и заданных пределах. Дополни-132
тельно к контролю остойчивости такая система может фиксировать в памяти ЭВМ координаты и массу всех погруженных на судно грузов и запасов и по желанию оператора выдавать на табло схему их размещения. Основой устройства систем такого типа являются датчики информации, которые должны работать с большой точностью.
Специальные датчики массы и координат погружаемых грузов по предварительным исследованиям отличаются- сложностью. Их создание потребует значительного времени. Наиболее применимы для этой цели, по мнению автора, различные взвешивающие устройства и дальномерные приборы (лазеры, радиолокаторы, ультразвуковые и другие приборы).
Задача контроля посадки и остойчивости связана.с определением осадки судна на ходу. Современные осад-комеры предназначены для измерения осадки на стоянке. Всякие попытки, связанные с измерением с помощью осадкомеров глубины погружения судна на ходу, дают большую погрешность в конечных результатах. Как показывает практика, осадка судна на ходу значительно изменяется не. только на -мелководье, но и На больших глубинах. В итоге осадка судна на ходу является функцией многих переменных: места установки осадкомера, скорости и дифферента судна, высоты волны, диаметра входного отверстия измерительной трубы и др. Данный вопрос не исследован и до сих пор нет ни теоретических, ни эмпирических зависимостей, отображающих законе1 мерность изменения осадки судна (изменения уровня воды в измерительной трубе) на ходу от различных факторов. Такое положение требует особой осторожности при использовании на ходу судна существующих осадкомеров.
Не менее существенной перспективной задачей, которую следует решать специалистам, является автоматический контроль характеристик посадки и остойчивости аварийного судна.
Контроль аварийной посадки и остойчивости при нарушениях водонепроницаемости корпуса отличается громоздкостью расчетов. Автоматическое определение характеристик посадки и остойчивости аварийного судна связано с необходимостью ввода данных об осадке, остойчивости, проницаемости отсеков и другой инфор-* 133
мации о состоянии судна до аварии. Особую трудность представляет определение проницаемости отсека, которая зависит в основном от рода перевозимого груза. Требование о вводе данных об осадке и остойчивости на момент аварии вынуждает предварительно обеспечить задачу .непрерывного автоматического определения состояния судна в процессе рейса. Задача контроля аварийного состояния судна является эпизодической для конкретного судна, однако она может возникнуть в любое в'ремя эксплуатационного периода для любого судна. Поэтому в настоящее время намечается тенденция решения указанной задачи по принципу, заложенному в системе Т-90, когда весь расчет производится на берегу по заранее заложенной в ЭВМ применительно к данному судну и его рейсу программе, а судно сообщает по радио данные о характере аварии.
Для повышения эффективности борьбы с последствиями аварии на судне разрабатывается планшет, устраняющий основной недостаток существующих информаций об аварийной посадке и остойчивости — возможность получения данных об аварийном состоянии судна только для фиксированных его положений.
В разрабатываемом документе предлагается следующий путь решения аварийных задач.
На береговой ЭВМ с практически неограниченной памятью и высоким быстродействием выполняется расчет аварийных задач для данного судна с систематическим изменением эксплуатационных данных. Результаты расчета представляются в форме компактных полей решений, семейств функций и заранее передаются на судно. В момент аварии остается выбрать из полей решений частное решение, которое отвечает конкретному набору исходных данных. Решение задачи на судне можно выполнить или на судовой ЭВМ, или на специальном оперативном планшете.
Способ определения аварийного состояния судна с использованием береговой ЭВМ не является единственным. В принципе возможно создание" специализированной бортовой ЭВМ, решающей аварийную задачу сам®-стоятельно.
Определение характеристик посадки и остойчивовти судна входит составной частью в задачу контроля мореходных характеристик судна, которая в свою очередь К4
тесно связана с процессом управления грузовыми операциями на судне;
На морском флоте одним из наиболее важных и перспективных направлений научно-технического прогресса является разработка автоматизированной системы управления судном —АСУ «Судно» [9]. Другим не менее важным направлением считается автоматизация процесса обработки грузов в портах, которая входит в систему АСУ «Порт». В вопросах повышения общего уровня автоматизации морского флота автоматические системы управления грузовыми операциями и, в частности, системы контроля .мореходно-прочностных характеристик являются важным звеном как АСУ «Судно», так и АСУ «Порт». Однако уже сейчас ощущается значительное отставание и ненадежность этого звена в автоматизированной системе «Морфлот». Построение систем автоматического управления грузовыми операциями требует реализации одного из важных этапов1—автоматического дистанционного измерения координат и масс принимаемого груза. Как уже отмечалось выше, эта задача для сухогрузных судов практически еще не ставилась на повестку дня. Относительно успешно решается проблема автоматизированного управления грузовыми операциями на танкерах. Характер перевозимого груза на этих судах позволяет обойтись лишь одними уровнемерами при измерении координат и массы принимаемого на борт груза.
Современные автоматизированные системы управления грузовыми операциями на танкерах обеспечивают: дистанционные измерения уровня груза в танках и крена судна; управление грузовыми клапанами и насосной станцией; программированные погрузку, выгрузку, зачистку, дегазацию танков и производство балластных операций.
Примером может служить разработанный и внедренный на танкерах норвежской компанией «Norcontrol Norten» комплекс управления грузовыми операциями «Data Tank Systems». Автоматизированный комплекс имеет три модификации:
1. «Data Tank-1» обеспечивает: измерение уровня жидкости в грузовых, балластных и топливных отсеках и осадки в четырех точках; подачу аварийных сигналов при повышении или понижении уровня груза от задан-
135
«ого в программе и при появлении опасных напряжений в корпусе танкера; цифровую индикацию уровней во всех танках и цистернах; контроль прочности и остойчивости; дистанционное управление клинкетами и насосами, моделирование процесса погрузки или выгрузки и составление- наиболее рациональной схемы грузовых операций.
2. В комплексе «Data Tank-2» дополнительно к перечисленным операциям предусматривается возможность активного участия оператора для повышения эффективности грузовых операций,' автоматическое управление процессом погрузки или выгрузки.
3. «Data Tank-З» решает все задачи, заложенные в предыдущих модификациях, и дополнительно производит оценку расчетной и измеренной посадки судна, динамическое моделирование грузовых операций во всех деталях, расчет рациональной программы погрузки и выгрузки с выдачей рекомендаций оператору по этапам.
Эксплуатация иностранных танкеров с автоматизированной системой на борту показывает, что возникающие при этом дополнительные расходы окупаются быстро. Например, на танкере «Sea Sovereing» дополнительные расходы на установку автоматизированной системы управления грузовыми операциями составили 2 млн. долл, и окупились через три года.
Кроме систем, объединяющих в себе обеспечение многих функций разного направления на основе одной ЭВМ, намечается тенденция по применению нескольких специализированных вычислительных машин для решения каждого в отдельности производственного процесса. На построенном в Японии «суперавтоматизированном» судне установлены девять небольших ЭВМ, каждая из которых имеет свою автономную специализированную подсистему.
Следует отметить, что, несмотря на высокую относительную стоимость вычислительных устройств и сложность в составлении программ, спрос на системы контроля мореходно-прочностных характеристик судов увеличивается.
Создание автоматических систем типа «Data Tank», выполняющих функции расчета оптимального грузового плана, управления грузовыми операциями с контролем 136
фактических мореходных характеристик применительно к сухогрузным судам, является перспективной задачей. Такие системы должны дополнительно работать в режиме контроля аварийного состояния судна.
ЗАКЛЮЧЕНИЕ
Приведенный обзор современных способов контроля посадки и остойчивости судна показывает, что за последние два десятилетия произошёл значительный прогресс в создании приборов для расчета и проверки предварительного грузового плана, т. е. реализована проблема решения «прямой задачи». Этому способствовало бурное развитие средств вычислительной техники.
Внедрение таких приборов на флоте облегчило, задачу предварительной пройёрки загруЗки судна, а для некоторых видов грузов обеспечивает контроль,исполнительного грузового плана. Невысокая стоимость и удовлетворительная надежность приборов типа «Лоди-катор» или УПВЗОС позволяют сделать заключение о необходимости снабжения ими почти всех транспортных судов.
Что касается другой задачи — создание средств автоматического измерения фактических параметров посадки и остойчивости, то ее реализация значительно отстает от потребностей.
Такая ситуация сложилась по многим причинам. Еще двадцать лет назад К- С. Козлов в своей книге [4] писал о том, что «мало кому известно о. необходимости иметь на судне приборы для контроля остойчивости двух типов: приборы типа «Лодикатор», служащие для расчета элементов посадки и остойчивости судна до начала погрузки, а также приборы, автоматически измеряющие только фактическую, уже имеющуюся остойчивость судна». Это положение иногда бытует и сейчас. Даже капитаны считают, что значения параметров остойчивости, рассчитанные с помощью приборов тина УПВЗОС, достаточно близки к фактическим для всех видов грузов.
Другой причиной медленного внедрения приборов контроля фактической остойчивости судна является отсутствие надежных алгоритмов, обеспечивающих достаточно точное измерение необходимых характеристик в 138
эксплуатационных условиях'. Зависимости для определения параметров остойчивости, кроме формулы опыта кренования, являются либо эмпирическими, либо очень сложными длящих реализации современными средствами автоматизации.
Решение задачи создания автоматической системы контроля фактической остойчивости судна во всех слу-чаях требует применения специальных датчиков исходной информации (высокоточные кренометры, измерители угловых ускорений, периода колебаний и др.). Таких датчиков в морском исполнении промышленность -не создает. Разработанные же опытные образцы приборов (систем) автоматического измерения характеристик остойчивости (прибор Тушка, метацентрограф. Севастьянова, прибор остойчивости Венделя, АСКО и др.) базируются на применении многих оригинальных узлов и элементов в их конструкциях. Необходимость создания новых нет оерийных средств автоматизации для удовлетворения сравнительно небольшого спроса является одной из причин,* сдерживающих их широкое внедрение на судах.
Современный стремительный рост строительства специализированных судов, предназначенных для обработки их в портах с высокой интенсивностью, и значительное расширение номенклатуры перевозимых грузов обусловливает необходимость оперативного определения; фактической посадки, остойчивости и прочности судна как в порту во время грузовых работ, так и в море. Эту задачу можно решить только с помощью системы, предназначенной для прямого автоматического измерения указанных характеристик. Разработка и внедрение таких систем являются первоочередной задачей научно-исследовательских институтов и судовых специалистов.
СПИСОК ЛИТЕРАТУРЫ
1. Аксютин Л. Р., Благовещенский С. Н. Аварии судов от потери остойчивости. Л.: Судостроение, 1975. 198 с.
2. Аксют.нн Л. Р. Контроль остойчивости морского судна. М.: Транспорт, 1974. 112 с.
3. Аксют и н Л. ₽. Обледенение судов. Л.: Судостроение, 1979. 127 с.
4. К о з л о в К. С. Современные методы оценки посадки и остойчивости судна. Л.: Морской транспорт, 1963. 116 с.
5. К о з ы р ь Л. В., К о и д р а ш и х и и В. Т. ЭКВМ для судовых задач. Мор. флот, 1978, № 12, с. 30—31.
6. Максим ад ж и М. Н. Аварии судов от потери остойчивости из-за перегрузки. — В кн.: Анализ характерных аварийных случаев с судами флота рыбной промышленности и рекомендации по их предупреждению. Л.: Транспорт, 1970, с. 19—39.
7. Регистр СССР. Правила классификации и постройки морских судов. Т. I. Л.: Транспорт, 1977. 495 с.
8. С е м е н о в-Т я н-Ш а н с к и й В. В. Статика н динамика, корабля. Л.: Судостроение, 1973. 607 с.
9. С ыф л а й А. Г., М и ц е в и ч А. К-, М у ч н и к Л. Н. Основные направления научно-технического прогресса на морском транс-, портном флоте.— Тр. Института комплексных транспортных проблем при Госплане СССР, 1975, вып. 51, с. 5—15.
10. Типовая информация об остойчивости и прочности грузового судна I ЦРИА. М.: Морфлот, 1979, 92 с.
11. Эйдельман Д. Я-, Чуманенко А. Опрокидывание у причала. — Мор. флот, 1965, № 11, с. 41—42.
12. Э й д е л ь м а н Д. Я. Опрокидывание неповрежденных судов. —Мор. флот, 1963, № 8, с. 42—43.
13. Автоматизация судовождения / А. А. Якушенков, К- Н. Денисов, В. Т. Кондрашихин и др. Мл Транспорт, 1967. 364 с.
ОГЛАВЛЕНИЕ
Введение ч 3
Глава 1. Расчетно-графические методы определении посадки и остойчивости судна 6
Расчет досадки и остойчивости неповрежденного судна . . . 6
Посадка судна -6
Остойчивость ... . 19
Расчетно-графические способы определения посадки и остойчивости ... 23
Остойчивость судна на больших углах крена 34 Определение посадки и остойчивости аварийного судна 55
Глава 2. Датчики, используемые в системах и приборах посадки и остойчивости 62
Требования к точности исходной информации 62
Измерители угла крена 63
Осадкомеры 74
Глава 3. Электромоделирующие приборы контроля загрузки судна ' 84
Назначение устройств и приборов 84
Приборы типа УПВЗОС-1 87
Приборы типа «Сталоднкатор» . 97
Аналоговые электронные компьютеры и другие приборы расчета загрузки судна 101
Глава 4. Автоматизированные системы контроля посадки и остойчивости судна 109
> Система «Интерннг» 109
Информационно-вычислительные комплексы «Бриз -1551» и «Бриз-1609» 113
Система АСКО 115
Метацентрограф Севастьянова и другие системы контроля посадки и остойчивости судна 126
Перспективы создания автоматических систем контроля посадки и остойчивости судна 129
Заключение 138
Список литературы 140
141
Евгений Васильевич Найденов
Контроль посадки и остойчивости судна
Технический редактор Е. А. Тихонова Корректор-аычнтчик Н. А. Лобунирва Корректор М. Г Плоткина
ИБ № 2470
Сдано в набор 04.11.82. Подписано в печать 08.04.83. Т-07831.
Формат 84ХЮ8'/з2- Бум. тип. № 2. Гарнитура литературная. Выевкая печать. Усл. печ. л. 7,56. Усл. кр.-отт. 7,98. Уч.-изд. л. 7,15. Тираж 10 000 зкз. Заказ 430. Цена 35 коп. Изд. № 1-3-1/11 № 1591.
Ордена’«Знак fl счета » ‘ издательство «Т‘РАТ1СПбРТ»,
1OTI74, Москва, .Басманный ,туп., 6а ,
Московская типография № 19 Союзполиграфпрома нрн Государственном комитете СССР но делам издательств, полиграфии и кпиямюА торгмли, 107078, Мввква, Каланчевский туп., 3/5