/




























Text
М.Г.Котик
ДИНАМИКА ВЗЛЕТА
И поездки САМОЛЕТОВ
Москва «Машиностроение» 198-4
ББК 39.57
К73
УДК 629.7.05
Рецензент канд. техн, наук К- К- Васильченко
Котик М. Г.
К73 Динамика взлета и посадки самолетов. М.: Машиностроение, 1984.— 256 с., ил.
В пер. 1 р. 20 к.
Рассмотрен один из наиболее сложных и важных разделов аэродинамики самолета-динамика полета на этапах взлета и посадки. Изложены методы расчета и анализа взлетно-посадочных режимов и их классификация. Исследованы особенности поведения н пилотирования современных самолетов различных типов при взлете, посадке и уходе на второй круг.
Книга предназначена для инженеров и летного состава авиационной промышленности, ВВС и МГА.
К
3606030000-045
038(01 )-84
ББК 39.57
6Т5.1
©Издательство «Машиностроение», 1984 г.
ВВЕДЕНИЕ
Взлет и посадка являются одними из наиболее сложных и потенциально опасных режимов полета. Поведение и пилотирование самолета на этих режимах существенно отличаются от поведения и пилотирования на всех других режимах полета. Динамические характеристики взлета и посадки отличаются от динамических характеристик основных режимов полета особенно сильно у современных самолетов, которым свойственно значительное расширение диапазонов эксплуатационных режимов и условий полета (скоростей и чисел М, высот полета, перегрузок и т. п.). Требования, предъявляемые к самолету исходя из условий полета на больших сверхзвуковых скоростях и больших высотах полета, противоречат требованиям, обусловленным необходимостью обеспечения приемлемых взлетно-посадочных характеристик. Нахождение оптимального решения этой противоречивой проблемы является одной из основных задач конструктора самолета и специалиста по динамике полета. В общем случае условия обеспечения приемлемых взлетно-посадочных характеристик не совпадают с условиями достижения требуемых характеристик всех остальных эксплуатационных режимов полета. В первую очередь это обусловливается спецификой взлета и посадки, определяемой влиянием близости Земли и контактами с поверхностью летной полосы (на разбеге и пробеге), а также необходимостью полета на малых скоростях, весьма малых (вплоть до околонулевых) высотах и выполнения достаточно сложных эволюций самолета (особенно при посадке).
Совершенствование конструктивно-аэродинамических компоновок самолетов и их функциональных систем, развитие автоматизированных систем управления играют большую роль в улучшении пилотажных характеристик самолета и повышении уровня безопасности полета. Для выбора рациональных методов пилотирования, средств и способов автоматизации управления самолетом необходимо знание его динамических характеристик и, в частности, траекторных (маневренных), балансировочных, характеристик устойчивости и управляемости. Все они должны быть известны как для нормальных эксплуатационных, так и для отказных режимов полета во всех ожидаемых условиях эксплуатации самолета.
Исследование динамики взлета и посадки характеризуется спецификой и сложностью, обусловленными:
— существенной нестационарностью рассматриваемых режимов с большими изменениями параметров полета (непрерывное изменение высоты, существенные изменения скорости и т. п.);
— существенно нелинейным характером аэродинамических характеристик самолета на больших (взлетных и посадочных) углах атаки;
— значительным проявлением перекрестных связей продольного и бокового движений самолета;
— значительным и существенно нестационарным (в частности, при изменении высоты полета) влиянием близости Земли как на аэродинамические характеристики, так и непосредственно на условия пилотирования самолета;
— наличием принципиально особых (отличных от всех обычных полетных) эволюций самолета — отрыва и касания, а также участков движения самолета по летной полосе;
— значительным повышением психофизиологической нагрузки на летчика (экипаж) в связи с резким возрастанием объема и сложности задач, которые должны быть решены в течение сравнительно кратковременных режимов полета;
— необходимостью применения особых, отличных от используемых в течение всего остального полета методов пилотирования самолета (требующих, в частности, большой точности и четкости действий летчика, строгого взаимодействия всех членов экипажа между собой и с соответствующими наземными службами);
— значительной и весьма многообразной зависимостью характеристик полета от условий эксплуатации (внешних — атмосферных условий, особенностей работы аэродромных служб; внутренних— условий работы функциональных систем самолета и т. п.);
— существенным эксплуатационным разбросом параметров рассматриваемых режимов полета.
Под взлетно-посадочными характеристиками (ВПХ) следует понимать траекторные (характеристики динамики материальной точки — центра масс самолета), системно-динамические (характеристики самолета как систем материальных точек в общем случае аэроупругой системы) и пилотажные характеристики самолета на этапах полного взлета и полной посадки, а также на режимах прерванного взлета и ухода на второй круг. Эти характеристики рассматриваются во всех условиях нормальной эксплуатации самолета и при всех расчетных отказных ситуациях. Иногда пользуются терминами: траекторные ВПХ, системно-динамические ВПХ и пилотажные ВПХ. В некоторых случаях условно значение термина ВПХ сужают, понимая под ним только траекторные ВПХ.
Основы методов расчета взлетно-посадочных характеристик самолета были заложены в классических трудах Н. Е. Жуковского и В. П. Ветчинкина. Первые капитальные исследования, позволившие глубоко понять и проанализировать физическую картину яв- , лений, происходящих при взлете и посадке самолета, дать научную основу современных методов расчета динамических характеристик и широкие практические рекомендации по оптимальным приемам пилотирования самолета на этих режимах, были проведены В. С. Пышновым и изложены в его основополагающих теоретических работах по динамике полета. Большую роль в развитии аналитических и экспериментальных методов изучения взлетно-посадочных характеристик сыграли труды Б. Т. Горощенко, И. В. Осто-
славского и М. А. Тайца. Значительный вклад в развитие современных методов исследования динамических характеристик самолетов и, в частности, его взлетно-посадочных характеристик, внесен работами академика Г. С. Бюшгенса и его учеников.
В книге обобщены результаты всех этих работ и ряда исследований автора по рассматриваемому вопросу, проанализированы пути дальнейшего развития и совершенствования теоретических и экспериментальных методов изучения взлетно-посадочных характеристик, а также особенностей проявления указанных характеристик у современных самолетов. Основное внимание уделено исследованию физической сущности и анализу качественных особенностей изучаемых явлений, установлению общих их закономерностей и выбору оптимальных методов пилотирования. С этой целью рассмотрены как обобщающие аналитические зависимости, так и приближенные методы расчета, а также наиболее распространенные в настоящее время методы анализа влияния параметров самолета и условий его эксплуатации на динамику взлета и посадки.
Глава I
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
1.1. ТРАЕКТОРНЫЕ ХАРАКТЕРИСТИКИ ПОЛНОГО ВЗЛЕТА И ПОЛНОЙ ПОСАДКИ
1.1.1. Полный взлет
Полный взлет — это первый этап полета, начинающийся с момента страгивания самолета на линии старта (в начале его разбега по ВПП) и заканчивающийся по достижении высоты и скорости завершения полного взлета, установленных для данного типа самолета и обеспечивающих безопасность и наибольшую эффективность выполнения полета. Высота завершения полного взлета Япв принимается равной высоте круга Нк (в отечественной практике установлена высота круга /Ук = 400 м) над уровнем ВПП в точке отрыва самолета или высоте полета, достигаемой в момент окончания перехода от взлетной к полетной конфигурации самолета, если эта высота оказывается большей Нк. Скорость завершения полного взлета V4 принимается равной регламентированной руководством по летной эксплуатации (РЛЭ) для данного типа самолета скорости начала набора высоты (при полетной конфигурации самолета), обеспечивающей оптимальный режим выхода самолета на рабочие высоты.
Полный взлет заканчивается только по достижении обоих параметров — как высоты, так и регламентированной скорости.
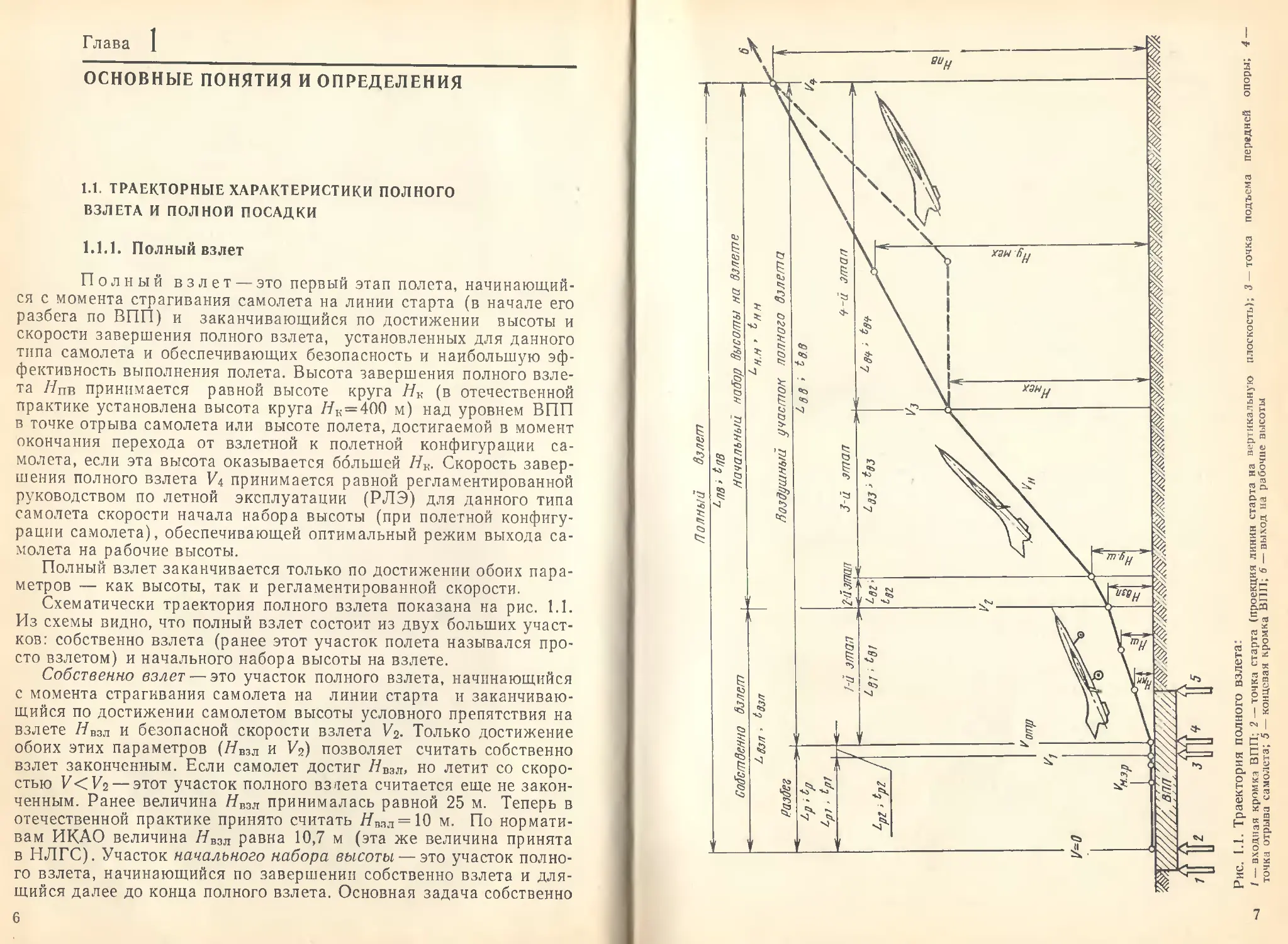
Схематически траектория полного взлета показана на рис. 1.1. Из схемы видно, что полный взлет состоит из двух больших участков: собственно взлета (ранее этот участок полета назывался просто взлетом) и начального набора высоты на взлете.
Собственно взлет — это участок полного взлета, начинающийся с момента страгивания самолета на линии старта и заканчивающийся по достижении самолетом высоты условного препятствия на взлете Нвзл и безопасной скорости взлета Vs. Только достижение обоих этих параметров (Нвзя и Уг) позволяет считать собственно взлет законченным. Если самолет достиг //Взл> но летит со скоростью V<Vs— этот участок полного взлета считается еще не законченным. Ранее величина Двзл принималась равной 25 м. Теперь в отечественной практике принято считать ДВлЛ = Ю м. По нормативам ИКАО величина Нвзл равна 10,7 м (эта же величина принята в НЛГС). Участок начального набора высоты — это участок полного взлета, начинающийся по завершении собственно взлета и длящийся далее до конца полного взлета. Основная задача собственно
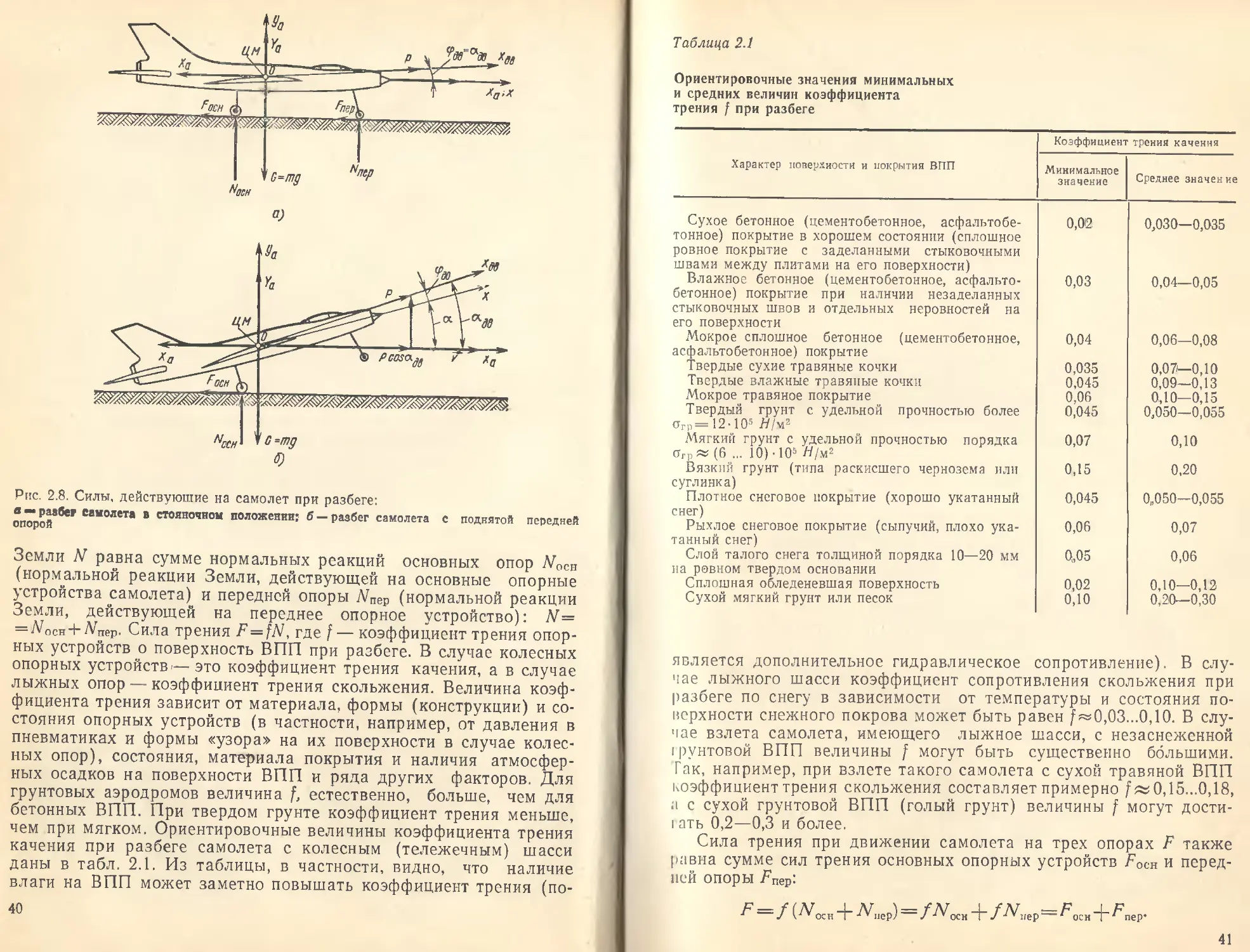
Рис. 1.1. Траектория полного взлета:
/ — входная кромка ВПП; 2 — точка старта (проекция линии старта на вертикальную плоскость); 3— точка подъема передней опоры;
точка отрыва самолета; 5 — концевая кромка ВПП; 6 — выход на рабочие высоты
взлета —это отрыв самолета от поверхности ВПП с дальнейшим набором высоты и разгоном самолета, обеспечивающими безопасное и наиболее эффективное завершение этого участка полета, протекающего в непосредственной близости земли. Основная задача начального набора высоты — выход самолета в зоне аэродрома на высоты и скорости, позволяющие безопасно и наиболее эффективно переходить к следующему этапу полета (к непосредственному выполнению задачи полета). Разделение полного взлета на такие два существенно различных участка широко используется, в частности, при нормировании критериев полного взлета.
Собственно взлет в свою очередь состоит из двух последовательных участков: разбега и воздушного участка собственно взлета. Границей между этими двумя участками служит точка отрыва самолета— та точка, в которой происходит отрыв (отделение) последнего основного опорного устройства от поверхности ВПП. Под последним опорным устройством понимается опорное устройство, которое последним отрывается от поверхности ВПП.
Существуют три наиболее распространенные схемы опорных устройств (шасси) самолета: трехопориая схема шасси с носовым колесом (так называемое трехколесное шасси с носовым колесом), трехопорная схема шасси с хвостовым колесом или костылем (иногда называется двухстоечным шасси) и велосипедная схема шасси. В настоящее время чаще всего применяется трехопорное шасси с передней опорой (передним колесом) или передней тележкой, состоящее из основных опор (двух, а иногда и четырех — название «трехопорное» и в этом случае формально используется) и передней опоры (стойки). Поэтому в основном все взлетно-посадочные характеристики (ВПХ) в данной книге рассматриваются применительно к самолетам с шасси этой схемы. При наличии такого шасси последним опорным устройством оказываются основные опоры (точнее—колеса или тележки основных опор). Случаи применения лыжного и других специфических видов шасси в дальнейшем будут оговариваться особо.
Исходя из существующих специфических различий в особенностях движения самолета по земле и в воздухе в процессе полного взлета, можно рассматривать этот этап состоящим из участков разбега (взлетного разбега) и воздушного участка полного взлета (см. рис. 1.1). Воздушный участок в свою очередь делится па следующие четыре этапа:
— 1-й этап, заключающийся в наборе высоты с момента отрыва самолета до выхода на высоту Нъзл с достижением скорости V2 (это и есть воздушный участок собственно взлета);
— 2-й этап, в процессе которого заканчивается уборка шасси (если шасси оказывается убранным на протяжении 1-го этапа, то второй этап просто отсутствует);
— 3-й этап, заключающийся в наборе высоты начала уборки механизации Ямех с одновременным разгоном самолета до скорости начала уборки механизации Уз;
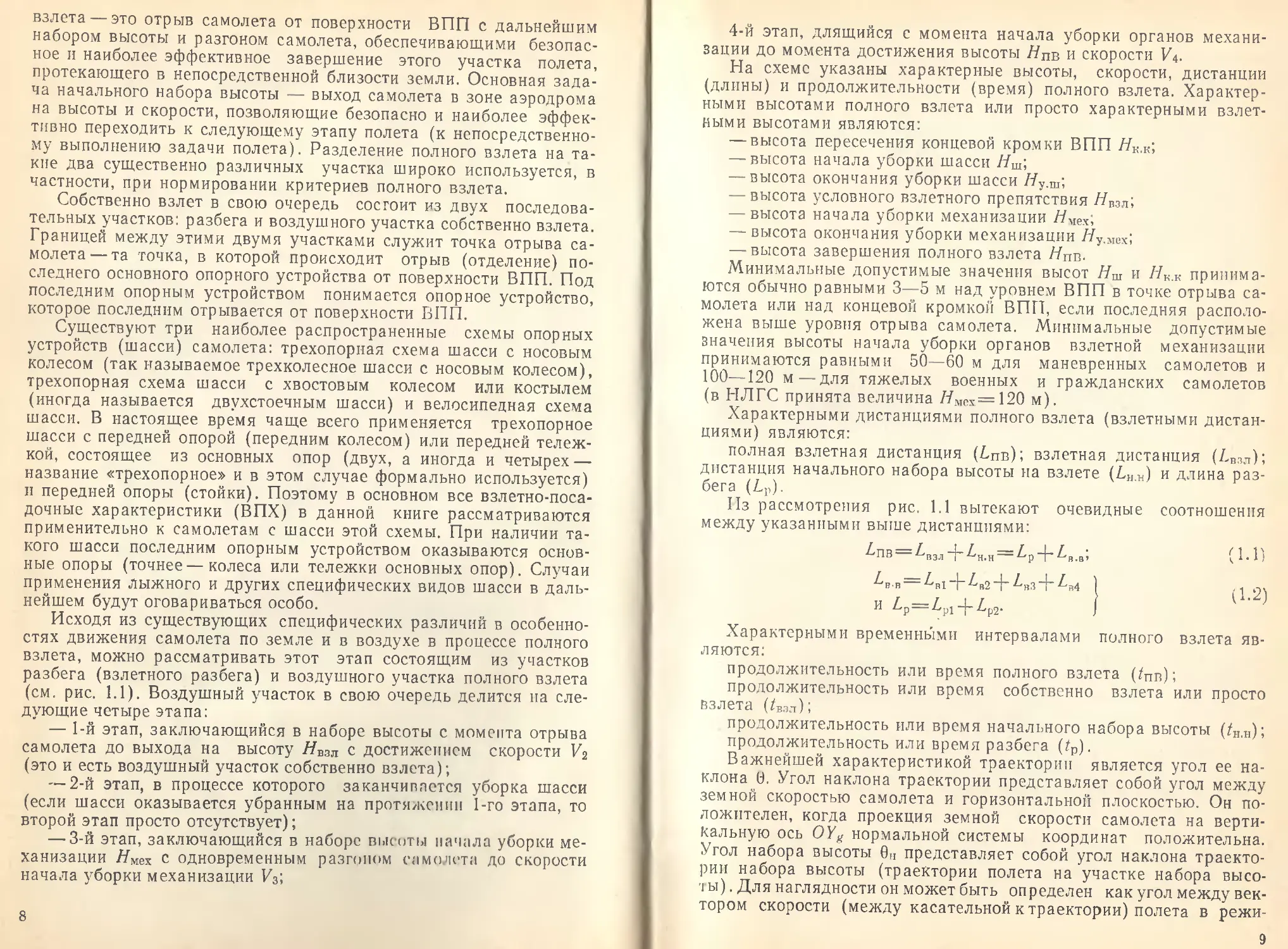
4-й этап, длящийся с момента начала уборки органов механизации до момента достижения высоты Нпв и скорости Vi.
На схеме указаны характерные высоты, скорости, дистанции (длины) и продолжительности (время) полного взлета. Характерными высотами полного взлета или просто характерными взлетными высотами являются:
— высота пересечения концевой кромки ВПП Як.к’,
— высота начала уборки шасси Яш;
— высота окончания уборки шасси Ду.ш;
— высота условного взлетного препятствия Явзл;
— высота начала уборки механизации Ямех;
— высота окончания уборки механизации Яу.мех;
— высота завершения полного взлета ЯПв.
Минимальные допустимые значения высот Нш и Як.к принимаются обычно равными 3—5 м над уровнем ВПП в точке отрыва самолета или над концевой кромкой ВПП, если последняя расположена выше уровня отрыва самолета. Минимальные допустимые значения высоты начала уборки органов взлетной механизации принимаются равными 50—60 м для маневренных самолетов и 100—120 м — для тяжелых военных и гражданских самолетов (в НЛГС принята величина Ямех=120 м).
Характерными дистанциями полного взлета (взлетными дистанциями) являются:
полная взлетная дистанция (Апв); взлетная дистанция (АВзл); дистанция начального набора высоты на взлете (Ан.н) и длина разбега (Ар).
Из рассмотрения рис. 1.1 вытекают очевидные соотношения между указанными выше дистанциями:
^'ПВ== АвзлАн н = АрАв в, (!•!)
в = ^в14"^в2Н_^вз + ^в4
И Ар —Ар1-|~Ар2.
Характерными временными интервалами полного взлета являются:
продолжительность или время полного взлета (/пв);
продолжительность или время собственно взлета или просто взлета (/взл);
продолжительность или время начального набора высоты (fH.H); продолжительность или время разбега (/р).
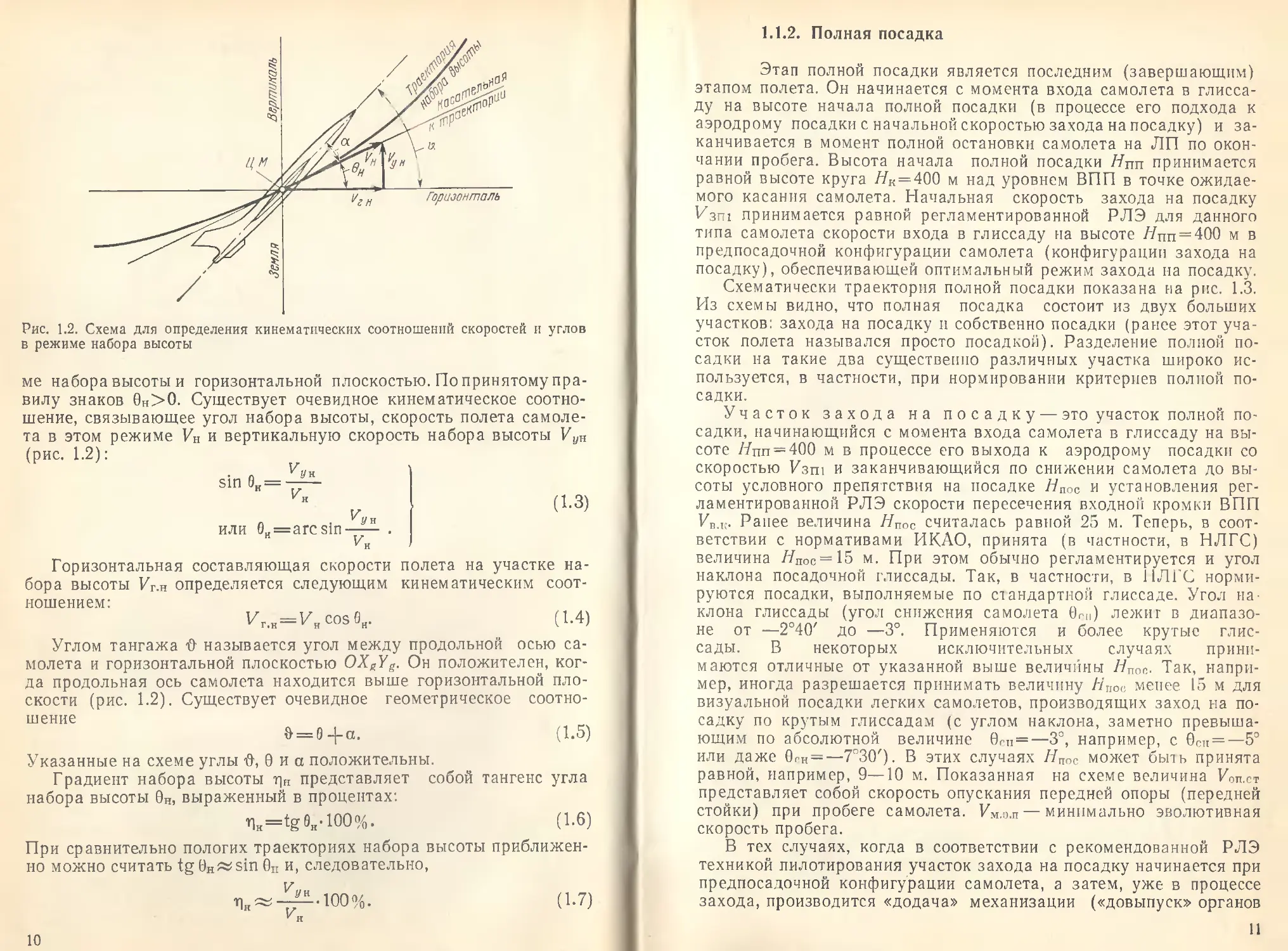
Важнейшей характеристикой траектории является угол ее наклона 0. Угол наклона траектории представляет собой угол между земной скоростью самолета и горизонтальной плоскостью. Он положителен, когда проекция земной скорости самолета на вертикальную ось OYg нормальной системы координат положительна. Угол набора высоты 0(1 представляет собой угол наклона траектории набора высоты (траектории полета на участке набора высоты) . Для наглядности он может быть определен как угол между вектором скорости (между касательной к траектории) полета в режи
(1.2)
Рис. 1.2. Схема для определения кинематических соотношений скоростей и углов в режиме набора высоты
ме набора высоты и горизонтальной плоскостью. По принятому правилу знаков 0н>О. Существует очевидное кинематическое соотно-
шение, связывающее угол набора высоты, скорость полета самолета в этом режиме Ун и вертикальную скорость набора высоты ГуИ
(рис. 1.2):
sin 9„ =----
н
д . И/н
или 9„=arcsin------- .
н Т7
(1.3)
Горизонтальная составляющая скорости полета на участке набора высоты Уг.н определяется следующим кинематическим соотношением:
1/г>н = Ун cos 0Н. (1.4)
Углом тангажа О называется угол между продольной осью самолета и горизонтальной плоскостью OXBYg. Он положителен, когда продольная ось самолета находится выше горизонтальной плоскости (рис. 1.2). Существует очевидное геометрическое соотношение
& = 9-|-а. (1.5)
Указанные на схеме углы #, 0 иа положительны.
Градиент набора высоты т]н представляет собой тангенс угла набора высоты 0Н, выраженный в процентах:
T]H = tg 0к-100 % • (1>6)
При сравнительно пологих траекториях набора высоты приближенно можно считать tg 0Н~ sin 0П и, следовательно,
т]н^-5~100%. (1-7)
1.1.2. Полная посадка
Этап полной посадки является последним (завершающим) этапом полета. Он начинается с момента входа самолета в глиссаду на высоте начала полной посадки (в процессе его подхода к аэродрому посадки с начальной скоростью захода на посадку) и заканчивается в момент полной остановки самолета на ЛП по окончании пробега. Высота начала полной посадки Нтт принимается равной высоте круга Як = 400 м над уровнем ВПП в точке ожидаемого касания самолета. Начальная скорость захода на посадку Пэт принимается равной регламентированной РЛЭ для данного типа самолета скорости входа в глиссаду на высоте Япп = 400 м в предпосадочной конфигурации самолета (конфигурации захода на посадку), обеспечивающей оптимальный режим захода на посадку.
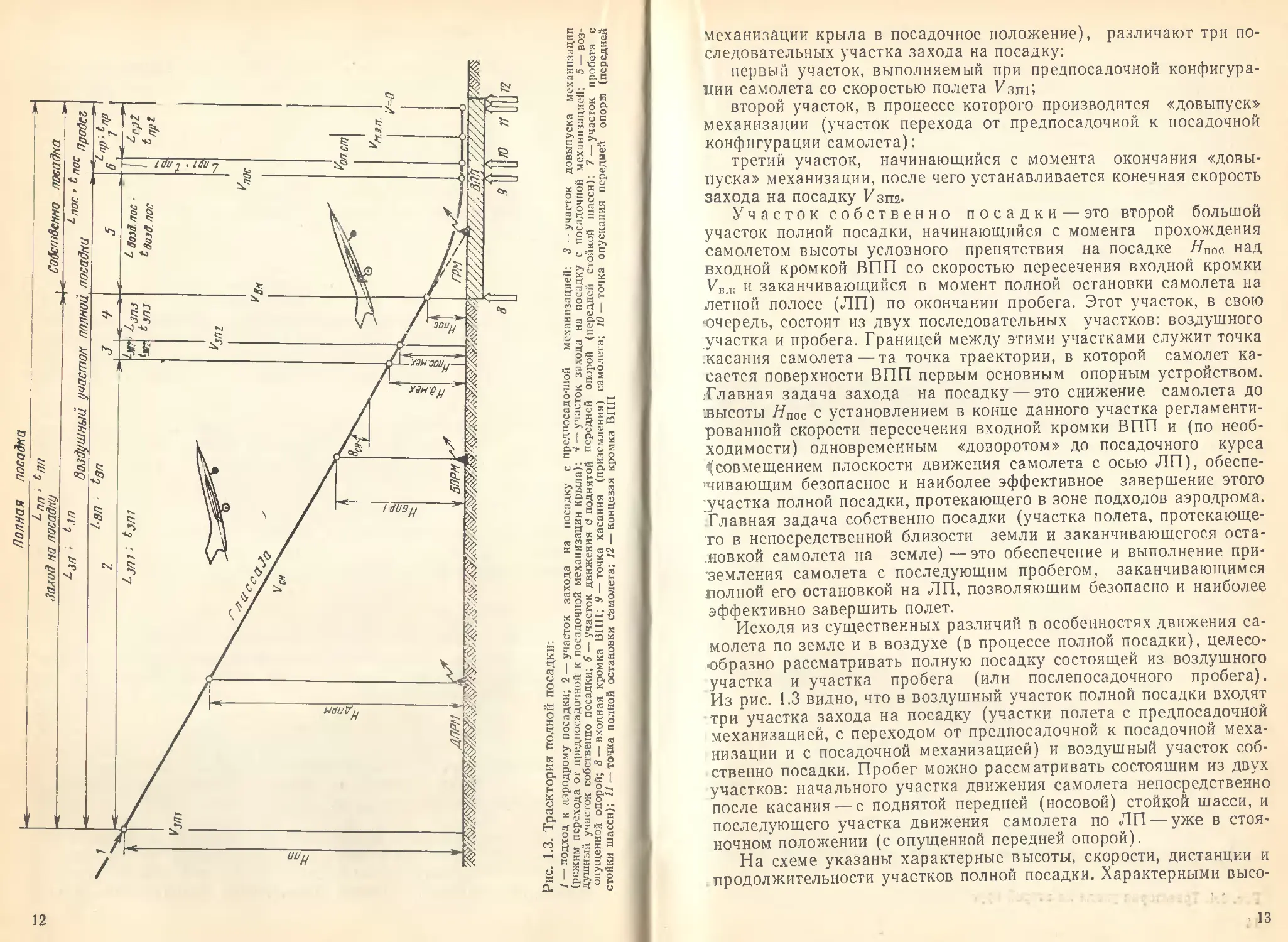
Схематически траектория полной посадки показана на рис. 1.3. Из схемы видно, что полная посадка состоит из двух больших участков: захода на посадку и собственно посадки (ранее этот участок полета назывался просто посадкой). Разделение полной посадки на такие два существенно различных участка широко используется, в частности, при нормировании критериев полной посадки.
Участок захода на посадку — это участок полной посадки, начинающийся с момента входа самолета в глиссаду на высоте Япп = 400 м в процессе его выхода к аэродрому посадки со скоростью Узш и заканчивающийся по снижении самолета до высоты условного препятствия на посадке /Люс и установления регламентированной РЛЭ скорости пересечения входной кромки ВПП Ув.к- Ранее величина Нпос считалась равной 25 м. Теперь, в соответствии с нормативами ИКАО, принята (в частности, в НЛГС) величина ЯПос = 15 м. При этом обычно регламентируется и угол наклона посадочной тлиссады. Так, в частности, в 11ЛГС нормируются посадки, выполняемые по стандартной глиссаде. Угол наклона глиссады (угол снижения самолета 0РМ) лежит в диапазоне от —2°40' до —3°. Применяются и более крутые глиссады. В некоторых исключительных случаях принимаются отличные от указанной выше величины Нпое. Так, например, иногда разрешается принимать величину /7Г10с менее 15 м для визуальной посадки легких самолетов, производящих заход на посадку по крутым глиссадам (с углом наклона, заметно превышающим по абсолютной величине 0Сц =—3°, например, с 0Сп = —5° или даже 0РН = —7°30'). В этих случаях Нлос может быть принята равной, например, 9—10 м. Показанная на схеме величина Уоп.ст представляет собой скорость опускания передней опоры (передней стойки) при пробеге самолета. Ум.о.п — минимально эволютивная скорость пробега.
В тех случаях, когда в соответствии с рекомендованной РЛЭ техникой пилотирования участок захода на посадку начинается при предпосадочной конфигурации самолета, а затем, уже в процессе захода, производится «додача» механизации («довыпуск» органов
12
механизации крыла в посадочное положение), различают три последовательных участка захода на посадку:
первый участок, выполняемый при предпосадочной конфигурации самолета со скоростью полета Узш;
второй участок, в процессе которого производится «довыпуск» механизации (участок перехода от предпосадочной к посадочной конфигурации самолета);
третий участок, начинающийся с момента окончания «довы-пуска» механизации, после чего устанавливается конечная скорость захода на посадку Узпг.
Участок собственно посадки — это второй большой участок полной посадки, начинающийся с момента прохождения самолетом высоты условного препятствия на посадке ЯПОс над входной кромкой ВПП со скоростью пересечения входной кромки Ув.к и заканчивающийся в момент полной остановки самолета на летной полосе (ЛП) по окончании пробега. Этот участок, в свою очередь, состоит из двух последовательных участков: воздушного участка и пробега. Границей между этими участками служит точка .касания самолета — та точка траектории, в которой самолет касается поверхности ВПП первым основным опорным устройством. Тлавная задача захода на посадку — это снижение самолета до .высоты /7Пос с установлением в конце данного участка регламентированной скорости пересечения входной кромки ВПП и (по необходимости) одновременным «доворотом» до посадочного курса <( совмещением плоскости движения самолета с осью ЛП), обеспечивающим безопасное и наиболее эффективное завершение этого ^участка полной посадки, протекающего в зоне подходов аэродрома. Тлавная задача собственно посадки (участка полета, протекающего в непосредственной близости земли и заканчивающегося остановкой самолета на земле) —это обеспечение и выполнение при-земления самолета с последующим пробегом, заканчивающимся полной его остановкой на ЛП, позволяющим безопасно и наиболее эффективно завершить полет.
Исходя из существенных различий в особенностях движения самолета по земле и в воздухе (в процессе полной посадки), целесообразно рассматривать полную посадку состоящей из воздушного участка и участка пробега (или послепосадочного пробега). Из рис. 1.3 видно, что в воздушный участок полной посадки входят три участка захода на посадку (участки полета с предпосадочной механизацией, с переходом от предпосадочной к посадочной механизации и с посадочной механизацией) и воздушный участок собственно посадки. Пробег можно рассматривать состоящим из двух участков: начального участка движения самолета непосредственно после касания — с поднятой передней (носовой) стойкой шасси, и последующего участка движения самолета по ЛП — уже в стояночном положении (с опущенной передней опорой).
На схеме указаны характерные высоты, скорости, дистанции и продолжительности участков полной посадки. Характерными высо
тами полной посадки (характерными посадочными высотами) являются:
высота начала полной посадки (ЯПп); высота прохода дальнего приводного (ДПРМ) или дальнего маркерного (ДМРМ) радиомаяка (Ядпрм); высота прохода ближнего приводного (БПРМ) или ближнего маркерного (БМРМ) радиомаяка НЪПР1Л; высота «довыпуска» механизации (Яд.Мрх); высота установления посадочной механизации (ЯИОс.мех); высота условного препятствия на посадке (Япос).
Характерные посадочные скорости рассмотрены ниже (см. разд. 1.3). Характерными дистанциями полной посадки (характерными посадочными дистанциями) являются:
полная посадочная дистанция (ЛПп); дистанция захода на посадку (Азп); посадочная дистанция (1Пос); дистанция воздушного участка полной посадки (Z-вп) и длина пробега (Лир).
1.1.3. Уход на второй круг
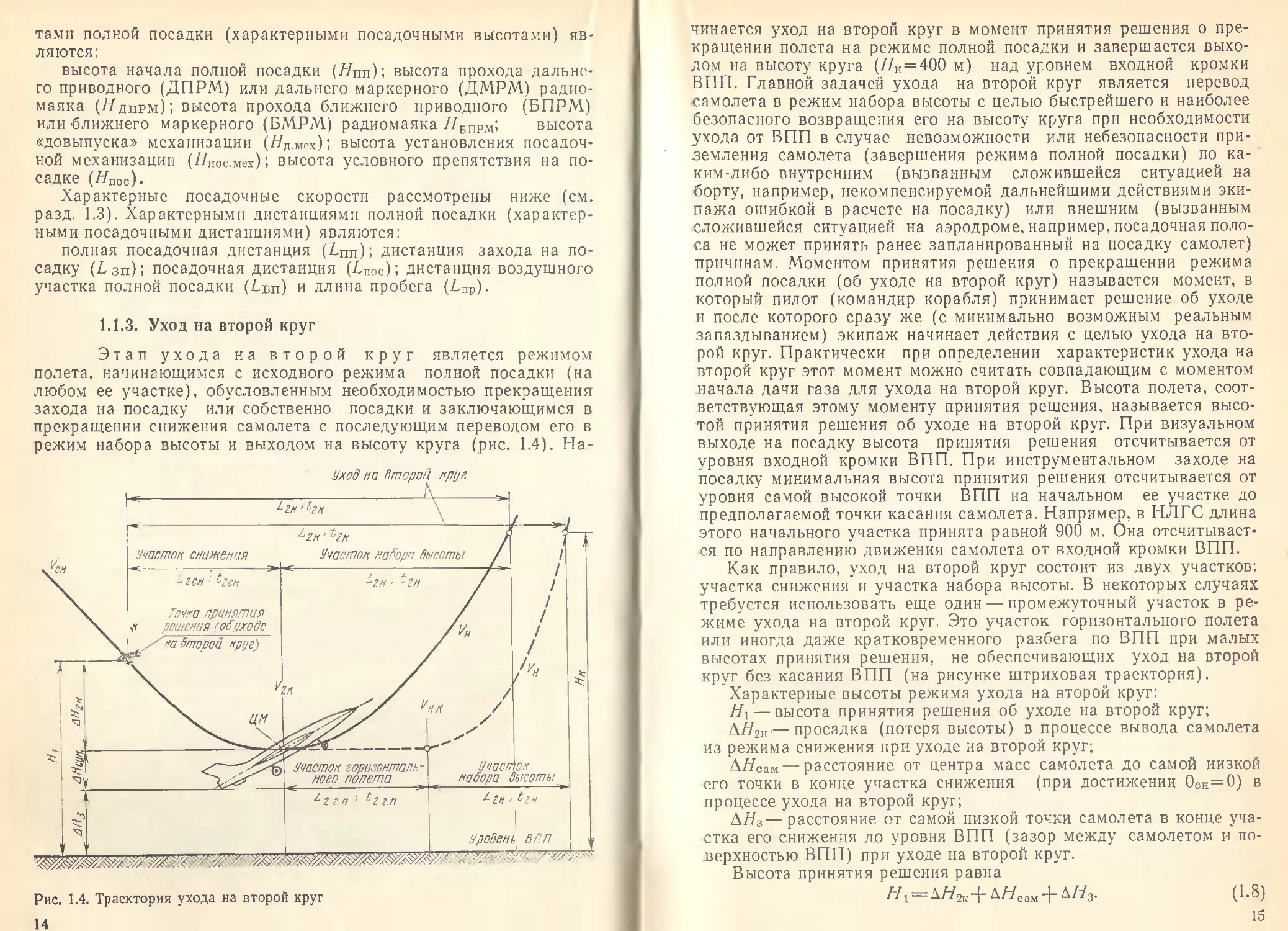
Этап ухода на второй круг является режимом полета, начинающимся с исходного режима полной посадки (на любом ее участке), обусловленным необходимостью прекращения захода на посадку или собственно посадки и заключающимся в прекращении снижения самолета с последующим переводом его в режим набора высоты и выходом на высоту круга (рис. 1.4). На-
Лги? на второй круг
Участок снижения
- ген '• hen
-гн -гн
им
^2к ’ Я/Г
Участок набора высоты
Точка принятия решения (Обухове »а Второй круг)
в-гн •
Уровень впп
*
Участок горизонталь-\ Участок ного полета набора высоты
2 г п г.п
Рис. 1.4. Траектория ухода на второй круг
чинается уход на второй круг в момент принятия решения о прекращении полета на режиме полной посадки и завершается выходом на высоту круга (Як = 400 м) над уровнем входной кромки ВПП. Главной задачей ухода на второй круг является перевод самолета в режим набора высоты с целью быстрейшего и наиболее безопасного возвращения его на высоту круга при необходимости ухода от ВПП в случае невозможности или небезопасности приземления самолета (завершения режима полной посадки) по каким-либо внутренним (вызванным сложившейся ситуацией на борту, например, некомпенсируемой дальнейшими действиями экипажа ошибкой в расчете на посадку) или внешним (вызванным сложившейся ситуацией на аэродроме, например, посадочная полоса не может принять ранее запланированный на посадку самолет) причинам. Моментом принятия решения о прекращении режима полной посадки (об уходе на второй круг) называется момент, в который пилот (командир корабля) принимает решение об уходе и после которого сразу же (с минимально возможным реальным запаздыванием) экипаж начинает действия с целью ухода на второй круг. Практически при определении характеристик ухода на второй круг этот момент можно считать совпадающим с моментом начала дачи газа для ухода на второй круг. Высота полета, соответствующая этому моменту принятия решения, называется высотой принятия решения об уходе на второй круг. При визуальном выходе на посадку высота принятия решения отсчитывается от уровня входной кромки ВПП. При инструментальном заходе на посадку минимальная высота принятия решения отсчитывается от уровня самой высокой точки ВПП на начальном ее участке до предполагаемой точки касания самолета. Например, в НЛГС длина этого начального участка принята равной 900 м. Она отсчитывается по направлению движения самолета от входной кромки ВПП.
Как правило, уход на второй круг состоит из двух участков; участка снижения и участка набора высоты. В некоторых случаях требуется использовать еще один — промежуточный участок в режиме ухода на второй круг. Это участок горизонтального полета или иногда даже кратковременного разбега по ВПП при малых высотах принятия решения, не обеспечивающих уход на второй круг без касания ВПП (на рисунке штриховая траектория).
Характерные высоты режима ухода на второй круг:
Ну— высота принятия решения об уходе на второй круг;
ДЯ2К.—просадка (потеря высоты) в процессе вывода самолета из режима снижения при уходе на второй круг;
АЯсам — расстояние от центра масс самолета до самой низкой его точки в конце участка снижения (при достижении 0сн=О) в процессе ухода на второй круг;
Д/73— расстояние от самой низкой точки самолета в конце участка его снижения до уровня ВПП (зазор между самолетом и поверхностью ВПП) при уходе на второй круг.
Высота принятия решения равна
(1.8)
Минимальная высота принятия решения Н\тщ— это наименьшая высота, на которой еще допустимо принятие решения об уходе на второй круг. При отсутствии других ограничений (например ограничений, обусловленных наличием препятствий в зоне подходов к аэродрому) величина Ядат определяется из условия
^imin А^2кт1П ~ АЯсач-|- mln’
где ДЯ2кт1п— минимальная просадка самолета в процессе ухода на второй круг; Д//Зтш — минимальный зазор между самолетом и поверхностью ВПП, принимаемый, как правило, равным 0,5АЯ2ктш или 5 м (выбирается обычно большая из этих двух величин).
В особых случаях иногда принимают величину \Нзт-т равной нулю, т. е. производят уход на второй круг с касанием поверхности ВПП. При этом уход на второй круг осуществляется по следующей схеме: снижение самолета с высоты принятия решения до уровня ВПП — касание ВПП с последующим коротким разбегом — отрыв самолета от поверхности ВПП — набор высоты круга.
1.2. КЛАССИФИКАЦИЯ ВЗЛЕТОВ И ПОСАДОК
1.2.1. Отказные и безотказные режимы полета
С точки зрения оценки уровней безопасности полета (см. гл. 4) классифицируют и анализируют отдельно нормальные и отдельно отказные взлетно-посадочные режимы. Нормальными или безотказными называются эксплуатационные режимы полета, протекающие при безотказной работе функциональных систем самолета и их элементов, т. е. при отсутствии функциональных отказов.
Отказные режимы —это режимы полета, перед началом или в процессе которых произошел (и в дальнейшем не был устранен, по крайней мере, до окончания рассматриваемого режима) функциональный отказ. Функциональным отказом называется событие в функциональной системе или в каком-либо элементе (соответственно отказ функциональной системы или отказ элемента функциональной системы), заключающееся в нарушении работоспособности этой функциональной системы (элемента функциональной системы), т. е. в переходе системы (элемента) к состоянию, при котором она не способна (он не способен) выполнять заданные функции с параметрами, установленными требованиями технической документации на эту систему (этот элемент).
Расчетным функциональным отказом называется отказ функциональной системы или какого-либо элемента функциональной системы, возникновение которого приводит к существенному влиянию на характеристики движения самолета, при этом имеющийся опыт анализа функциональных систем не позволяет считать данный отказ практически невероятным.
Расчетными или нормируемыми отказными режимами называются режимы полета, обусловленные возникновением расчетного функционального отказа или расчетных функциональных отказов.
При определении диапазонов вероятностей функциональных отказов (так же как и при определении частот возникновения особых ситуаций в полете, о чем будет сказано в гл. 6) обычно применяются (см., например, Британские нормы летной годности гражданских самолетов, BCAR) следующие оценки повторяемости событий, характеризующие отношение числа возникновений этих событий к общему количеству полетов (повторяемость событий, отнесенных к одному полету):
— частые события, вероятность (частота) возникновения которых оказывается более 1-10-3 = (т. е. более одного такого
события происходит за 103=1000 полетов);
— умеренно вероятные события, вероятность (частота) возникновения которых находится в пределах от 1•10-3 до 1 • 10-5 (частота возникновения 1-10-3 означает, что из 1000 полетов в одном из них происходит отказ, а остальные 999 остаются безотказными);
— маловероятные события, вероятность (частота) возникновения которых лежит в пределах от 1 • 10-5 до 1 • 10-7;
— крайне маловероятные события, вероятность (частота) возникновения которых оказывается менее 1-Ю-7;
— практически невероятные события, вероятность (частота) возникновения которых оказывается значительно (на несколько порядков) ниже 1 • 10_7 (например 1-Ю-9),
В соответствии с этим отказы делятся на частые, умеренно вероятные, маловероятные, крайне маловероятные и практически невероятные.
К классу нормируемых нормальных (безотказных) взлетно-посадочных режимов относятся: нормальный полный взлет, нормальный собственно взлет (или просто нормальный взлет), нормальный начальный набор высоты, нормальная полная посадка, нормальный заход на посадку, нормальная собственно посадка (или просто нормальная посадка) и нормальный уход на второй круг. К классу нормируемых отказных взлетно-посадочных режимов относятся: прерванный и продолженный взлеты (собственно взлеты), продолженный начальный набор высоты, продолженный полный взлет, прерванная и продолженная посадки (собственно посадки), прерванный и продолженный заходы на посадку, продолженный уход на второй круг. На основании анализа возможных отказов функциональных систем самолета, их элементов и влияния последствий этих отказов на взлетно-посадочные характеристики самолета выявляются практически наиболее вероятные и наиболее опасные для данного типа самолетов на рассматриваемом режиме полета (или движения самолета по Земле) функциональные отказы. При этих отказах и определяются затем характеристики отказных взлетно-посадочных режимов.
1.2.2. Нормальные и отказные взлеты и посадки
Как правило, характеристики отказных взлетных режимов определяются только при одном отказе, а отказных посадочных режимов — при одном и двух отказах (например на тяжелых многодвигательных самолетах). Так, например, характеристики прерванных и продолженных взлетов с отказом в силовой установке по требованиям НЛГС-2 определяются на всех самолетах при отказе только одного критического двигателя, а характеристики прерванных и продолженных посадок и заходов на посадку — при отказе как одного, так и двух (на самолетах с тремя и большим количеством) двигателей.
Нормальный полный взлет — это полный взлет при нормальной (безотказной) работе всех функциональных систем (всех двигателей, отдельных систем и агрегатов самолета), выполняемый с использованием предусмотренной РЛЭ техники пилотирования самолета и позволяющий производить дальнейший нормальный полет.
Нормальный взлет — это собственно взлет при нормальной (безотказной) работе всех функциональных систем, выполняемый с использованием предусмотренной РЛЭ техники пилотирования самолета и позволяющий производить нормальный начальный набор высоты. Нормальный начальный набор высоты — это начальный набор высоты на взлете при нормальной (безотказной) работе всех функциональных систем, являющийся продолжением нормального взлета и выполняемый с использованием предусмотренной РЛЭ. техники пилотирования самолета. Нормальная полная посадка — это полная посадка при нормальной (безотказной) работе всех функциональных систем самолета, выполняемая с использованием предусмотренной РЛЭ техники пилотирования самолета. Нормальная посадка—это собственно посадка при нормальной (безотказной) работе всех функциональных систем самолета, являющаяся продолжением нормального захода на посадку и выполняемая с использованием предусмотренной РЛЭ техники пилотирования самолета. Нормальный заход на посадку — это заход на посадку при нормальной (безотказной) работе всех функциональных систем самолета, выполняемый с использованием предусмотренной РЛЭ техники пилотирования самолета и позволяющий производить нормальную посадку. Нормальный уход на второй круг — это уход на второй круг при нормальной работе всех функциональных систем самолета, выполняемый с использованием предусмотренной РЛЭ техники пилотирования самолета и начинающийся с исходного режима нормальной посадки (нормального захода на посадку или нормальной посадки).
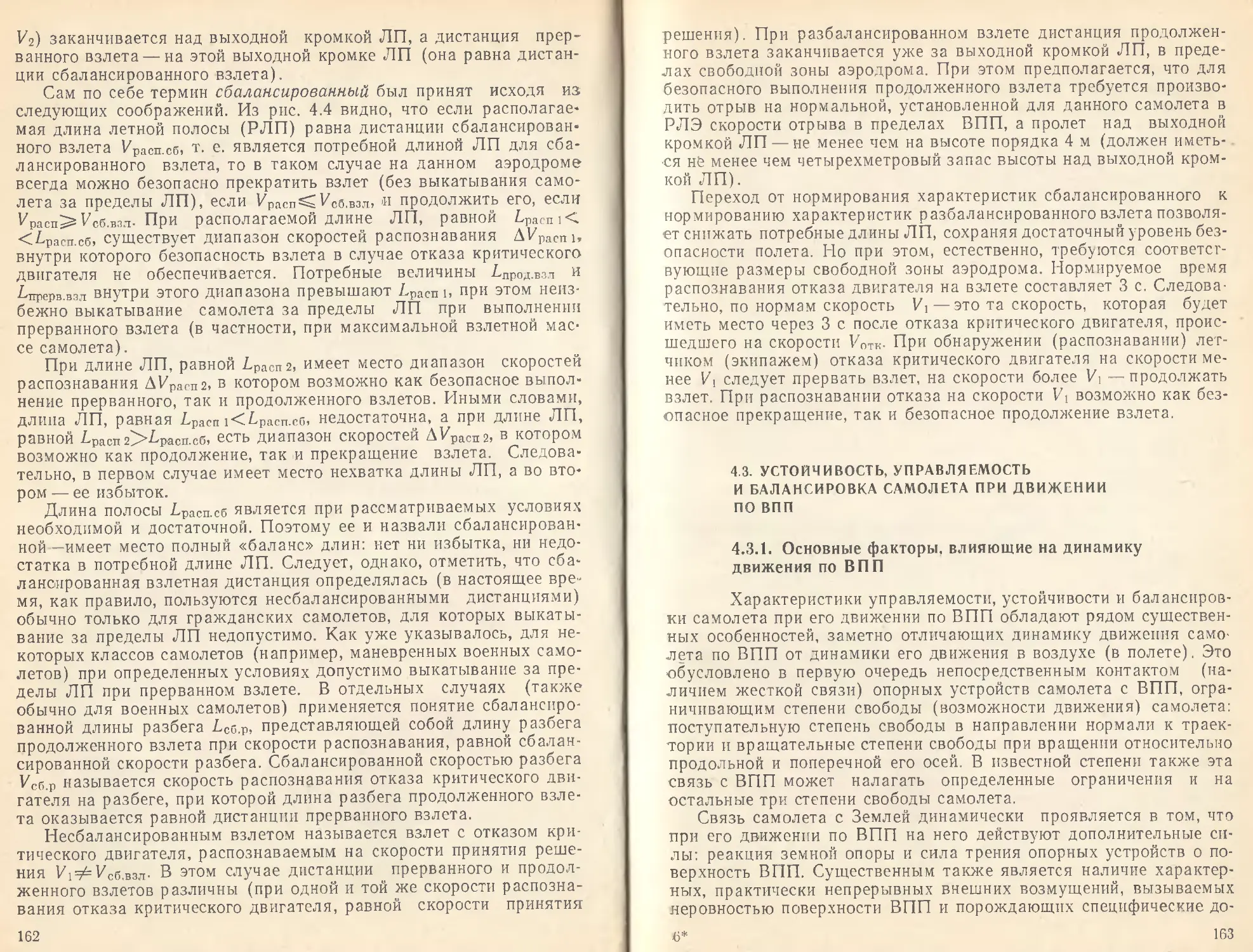
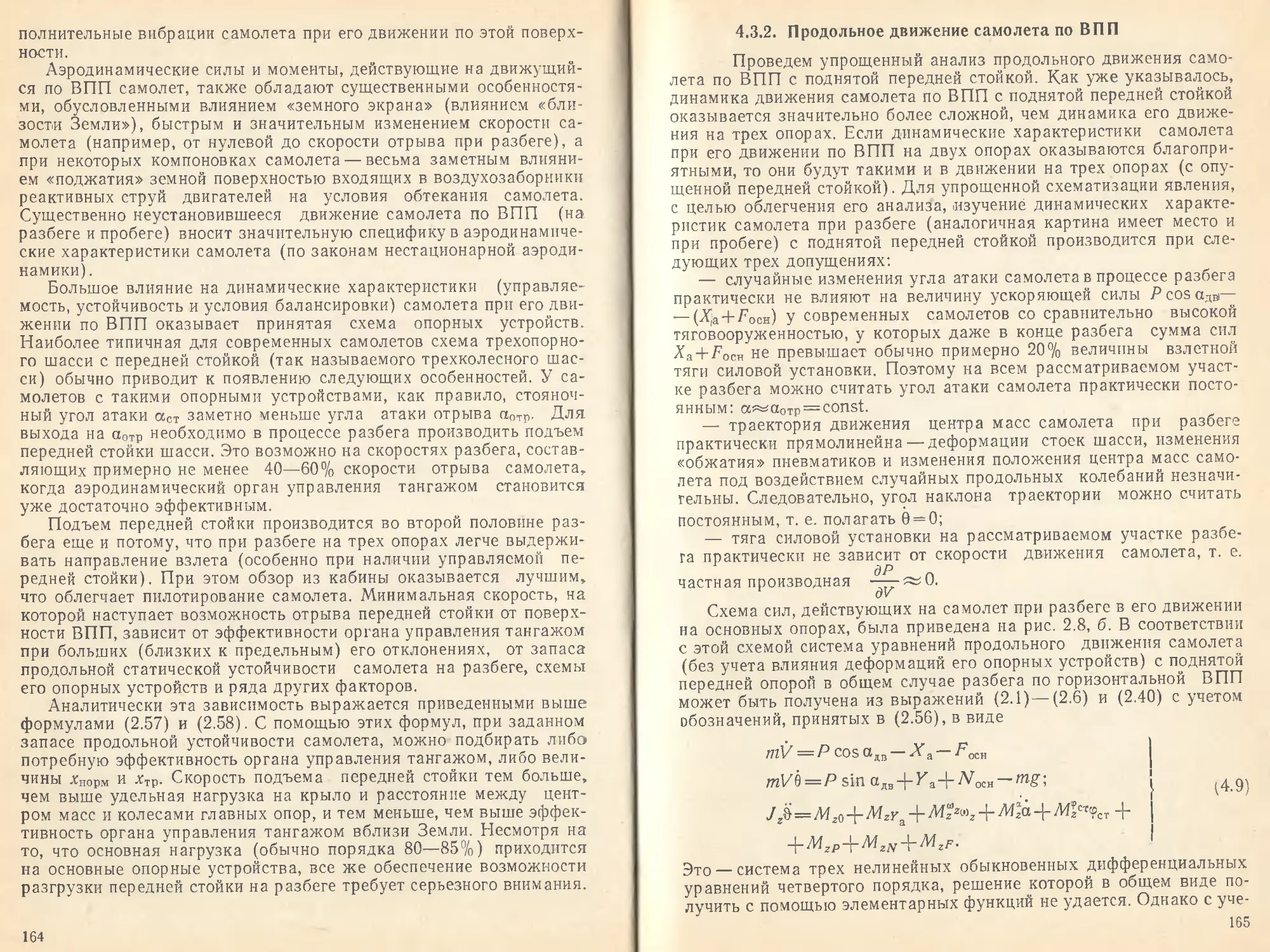
Прерванный взлет — это взлет, протекающий как нормальный до момента возникновения отказа какой-либо функциональной системы или какого-либо элемента функциональной системы (отказ которых существенно влияет на характеристики взлета и в рассматриваемых условиях вызывает необходимость его прекращения) в процессе этого взлета, после чего (по распознавании экипажем этого отказа) начинаются действия экипажа по прекращению взлета с последующим торможением самолета (с этим функциональным отказом) до полной его остановки на ЛП. Продолженный взлет — это собственно взлет, протекающий как нормальный до момента возникновения отказа какой-либо функциональной системы или какого-либо элемента функциональной системы (отказ которых существенно влияет на характеристики взлета, но позволяет продолжить его) в процессе этого взлета, после чего взлет продолжается и завершается отказом. Продолженный уход на второй круг — это режим ухода на второй круг, начинающийся как нормальный уход на второй круг, в процессе или перед началом которого возникает отказ (возникают отказы) какой-либо функциональной системы или какого-либо элемента функциональной системы, отказ (отказы) которых существенно влияет (влияют) на характеристики ухода на второй круг, но позволяет (позволяют) ею продолжить, и затем завершающий с этим функциональным отказом (с этими функциональными отказами).
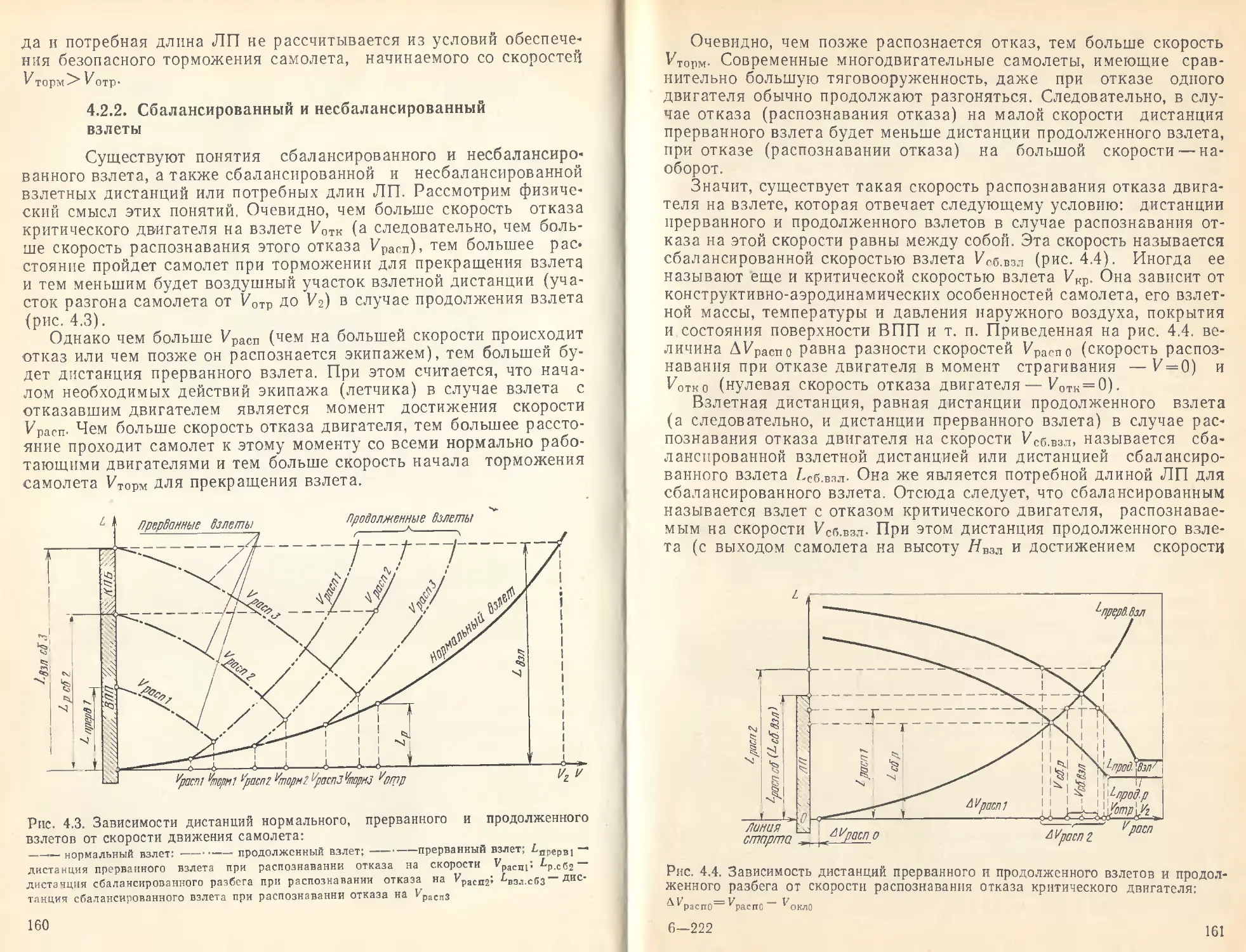
При рассмотрении отказных взлетных режимов основное внимание, как правило, уделяется исследованию и нормированию прерванных и продолженных взлетов с отказом в силовой установке — с отказом двигателя и, в частности, критического двигателя. Критическим называется двигатель, отказ которого приводит к наиболее неблагоприятным изменениям в поведении и условиях пилотирования самолета. Прерванным взлетом при отказе двигателя (часто его назы-
Продолжение:?. Взлет Дистанция лраве.’иненнсзо взлета^ (
^Возд.проЗ ?SivlnpoO [5
лрсз вел. • tnpoS езл.
2
it.
^рл/ов’ tp.npot>-3
Lpn'tp.H Ypomio,, -s
Vi Ьрепч<>тР^^ % I
I *
IdfO
r=
Прерванный взлет
Прарипь траектории движения самолета
’/> ^отк
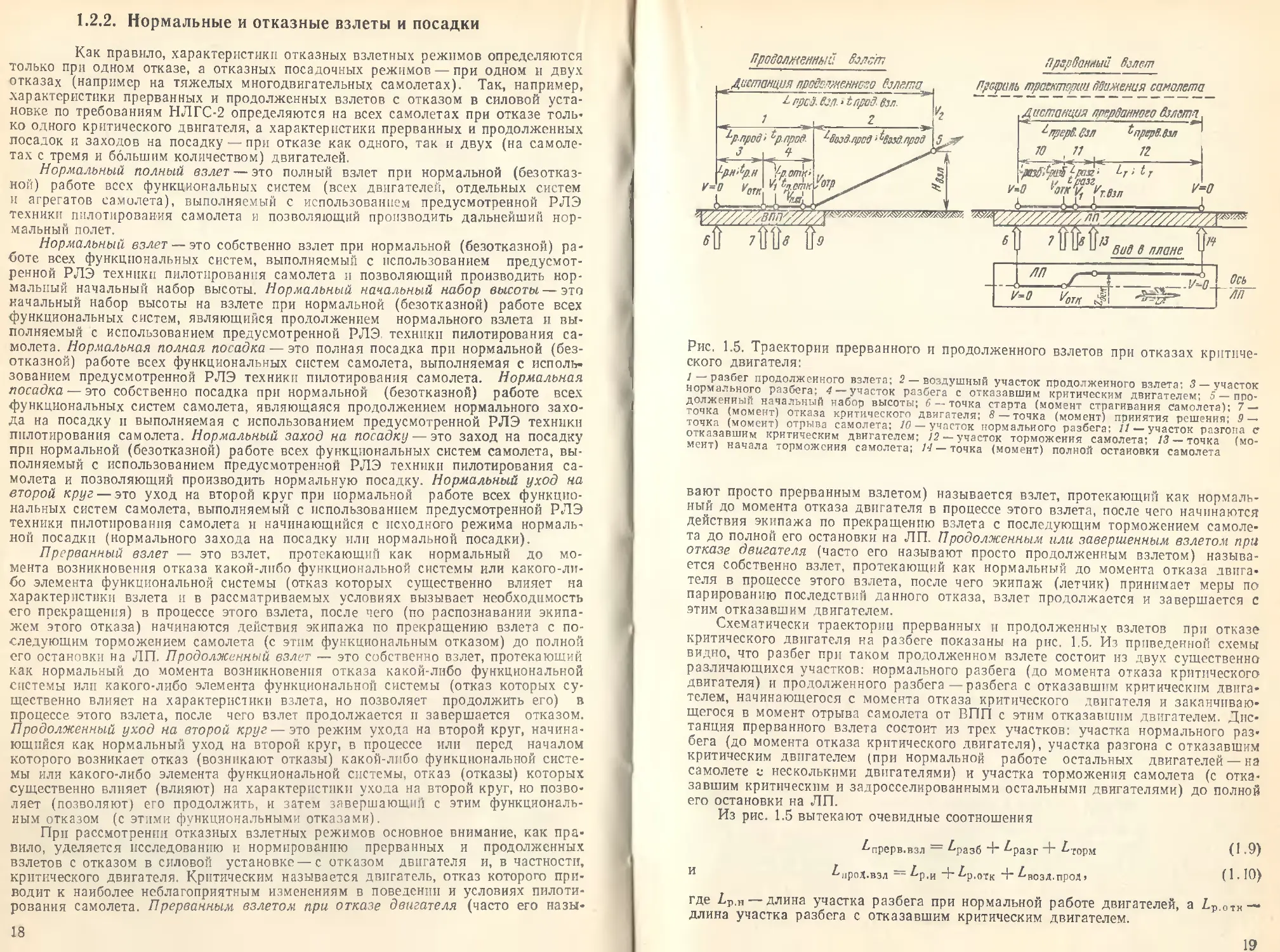
Рис. 1.5. Траектории прерванного и продолженного взлетов при отказах критического двигателя:
1 — разбег продолженного взлета; 2— воздушный участок продолженного взлета; 3 —участок нормального разбега; 4 — участок разбега с отказавшим критическим двигателем; 5—продолженный начальный набор высоты; 6 — точка старта (момент страгивания самолета); 7 — точка (момент) отказа критического двигателя: 3 —точка (момент) принятия решения; 9 — точка (момент) отрыва самолета; 10— участок нормального разбега; 11— участок разгона с отказавшим критическим двигателем; /2 —участок торможения самолета; 13 — точка (момент) начала торможения самолета; 14 — точка (момент) полной остановки самолета
вают просто прерванным взлетом) называется взлет, протекающий как нормальный до момента отказа двигателя в процессе этого взлета, после чего начинаются действия экипажа по прекращению взлета с последующим торможением самолета до полной его остановки на ЛП. П родолженным или завершенным взлетом при отказе двигателя (часто его называют просто продолженным взлетом) называется собственно взлет, протекающий как нормальный до момента отказа двигателя в процессе этого взлета, после чего экипаж (летчик) принимает меры по парированию последствий данного отказа, взлет продолжается и завершается с этим отказавшим двигателем.
Схематически траектории прерванных и продолженных взлетов при отказе критического двигателя на разбеге показаны на рис. 1.5. Из приведенной схемы видно, что разбег при таком продолженном взлете состоит из двух существенно различающихся участков: нормального разбега (до момента отказа критического двигателя) и продолженного разбега—разбега с отказавшим критическим двигателем, начинающегося с момента отказа критического двигателя и заканчивающегося в момент отрыва самолета от ВПП с этим отказавшим двигателем. Дистанция прерванного взлета состоит из трех участков: участка нормального разбега (до момента отказа критического двигателя), участка разгона с отказавшим критическим двигателем (при нормальной работе остальных двигателей — на самолете с несколькими двигателями) и участка торможения самолета (с отказавшим критическим и задросселированными остальными двигателями) до полной его остановки на ЛП.
Из рис. 1.5 вытекают очевидные соотношения
^•прерв.взл = ^разб 4* ^разг 4- ^торм (1 -9)
И ЛфоХ.взл = ^р.и 4- ^р.о’Гк 4* ^возд.прод> (1-10)
где /.р.н — длина участка разбега при нормальной работе двигателей, а ЛР.О™ — длина участка разбега с отказавшим критическим двигателем.
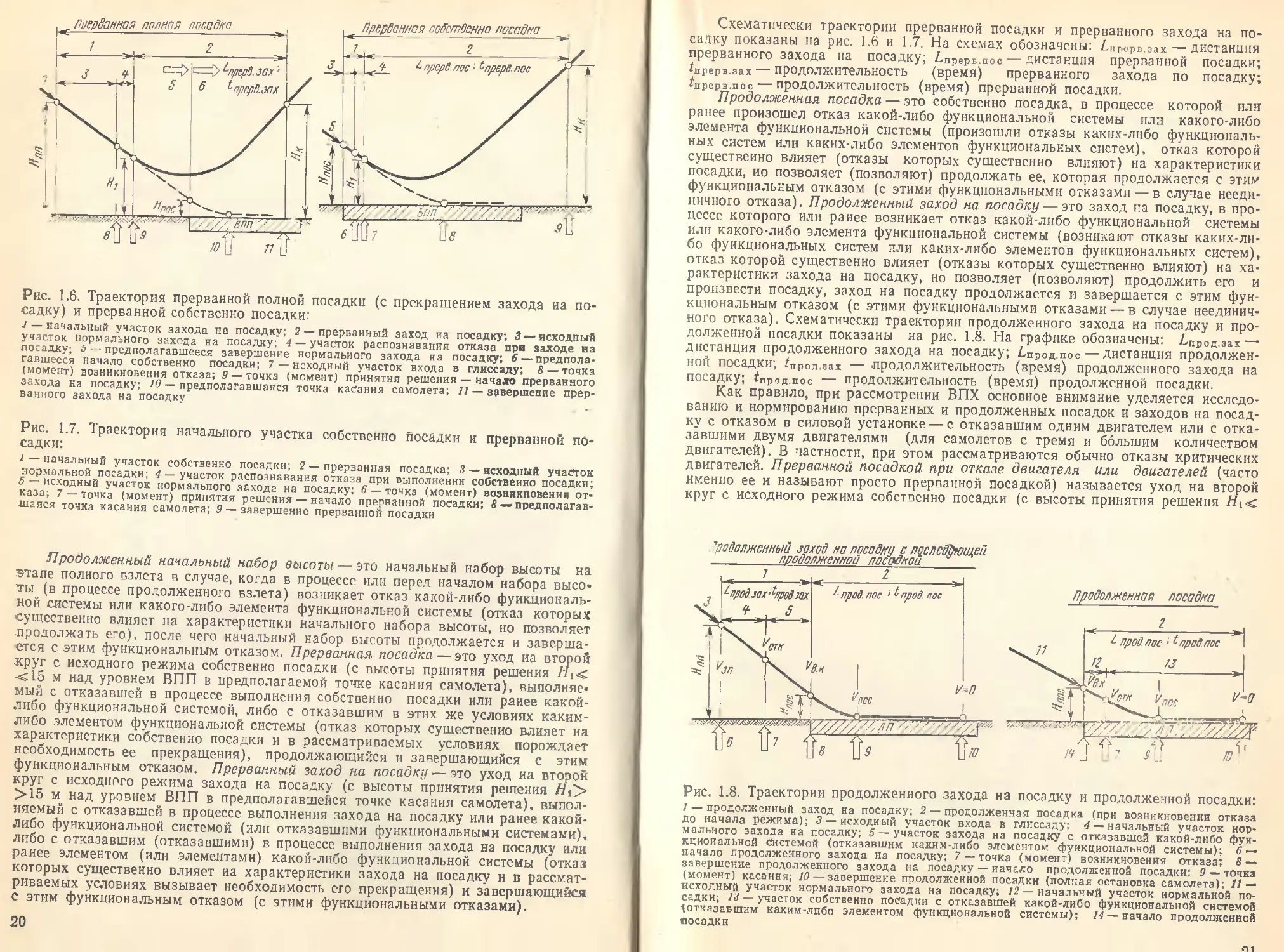
Рис. 1.6. Траектория прерванной полной посадки (с прекращением захода иа посадку) и прерванной собственно посадки:
J —начальный участок захода на посадку; 2 — прерванный заход иа посадку, 3 —исходный участок нормального захода на посадку; 4 — участок распознавания отказа при заходе на посадку; 5 предполагавшееся завершение нормального захода на посадку; б —предполагавшееся начало собственно посадки; 7 — исходный участок входа в глиссаду; 8 — точка (момент) возникновения отказа; 9 — точка (момент) принятия решения — начало прерванного захода на посадку; 10 — предполагавшаяся точка касания самолета; 11 — завершение прерванного захода на посадку
Рис. 1.7. Траектория начального участка собственно Посадки и прерванной посадки:
/—начальный участок собственно посадки; 2 — прерванная посадка; 3 — исходный участок нормальной посадки; 4 — участок распознавания отказа при выполнении собственно посадки; 5 — исходный участок нормального захода на посадку; 6 — точка (момент) возникновения отказа; 7 — точка (момент) принятия решения — начало прерванной посадки; S-• предполагавшаяся точка касания самолета; 9 — завершение прерванной посадки
Продолженный начальный набор высоты — это начальный набор высоты на этапе полного взлета в случае, когда в процессе или перед началом набора высоты (в процессе продолженного взлета) возникает отказ какой-либо функциональной системы или какого-либо элемента функциональной системы (отказ которых существенно влияет на характеристики начального набора высоты, но позволяет продолжать его), после чего начальный набор высоты продолжается и завершается с этим функциональным отказом. Прерванная посадка — это уход иа второй круг с исходного режима собственно посадки (с высоты принятия решения Hi < с 15 м над уровнем ВПП в предполагаемой точке касания самолета), выполняемый с отказавшей в процессе выполнения собственно посадки или ранее какой-либо функциональной системой, либо с отказавшим в этих же условиях каким-либо элементом функциональной системы (отказ которых существенно влияет на характеристики собственно посадки и в рассматриваемых условиях порождает необходимость ее прекращения), продолжающийся и завершающийся с этим функциональным отказом. Прерванный заход на посадку — это уход иа второй круг с исходного режима захода на посадку (с высоты принятия решения Й1> >15 м над уровнем ВПП в предполагавшейся точке касания самолета), выполняемый с отказавшей в процессе выполнения захода на посадку или ранее какой-либо функциональной системой (или отказавшими функциональными системами), либо с отказавшим (отказавшими) в процессе выполнения захода на посадку или ранее элементом (или элементами) какой-либо функциональной системы (отказ которых существенно влияет иа характеристики захода на посадку и в рассматриваемых условиях вызывает необходимость его прекращения) и завершающийся с этим функциональным отказом (с этими функциональными отказами).
Схематически траектории прерванной посадки и прерванного захода на посадку показаны на рис. 1.6 и 1.7. На схемах обозначены: £Ир«рв.зах— дистанция прерванного захода на посадку; Лпрерв.пос— дистанция прерванной посадки; ^прерв.зах — продолжительность (время) прерванного захода по посадку; Лтрера.пос — продолжительность (время) прерванной посадки.
Продолженная посадка — это собственно посадка, в процессе которой или ранее произошел отказ какой-либо функциональной системы пли какого-либо элемента функциональной системы (произошли отказы каких-либо функциональных систем или каких-либо элементов функциональных систем), отказ которой существенно влияет (отказы которых существенно влияют) на характеристики посадки, ио позволяет (позволяют) продолжать ее, которая продолжается с этим функциональным отказом (с этими функциональными отказами — в случае неединичного отказа). Продолженный заход на посадку — это заход на посадку, в процессе которого или ранее возникает отказ какой-либо функциональной системы или какого-либо элемента функциональной системы (возникают отказы каких-либо функциональных систем или каких-либо элементов функциональных систем), отказ которой существенно влияет (отказы которых существенно влияют) на характеристики захода на посадку, но позволяет (позволяют) продолжить его и произвести посадку, заход на посадку продолжается и завершается с этим функциональным отказом (с этими функциональными отказами — в случае неединичного отказа). Схематически траектории продолженного захода на посадку и продолженной посадки показаны на рис. 1.8. На графике обозначены: £Прод.зах— дистанция продолженного захода на посадку; Z-прод.пос—дистанция продолженной посадки; /прод.зах — продолжительность (время) продолженного захода на посадку; /Прод.пос — продолжительность (время) продолженной посадки.
Как правило, при рассмотрении ВПХ основное внимание уделяется исследованию и нормированию прерванных и продолженных посадок и заходов на посадку с отказом в силовой установке — с отказавшим одним двигателем или с отказавшими двумя двигателями (для самолетов с тремя и большим количеством двигателей). В частности, при этом рассматриваются обычно отказы критических двигателей. Прерванной посадкой при отказе двигателя или двигателей (часто именно ее и называют просто прерванной посадкой) называется уход на второй круг с исходного режима собственно посадки (с высоты принятия решения <
Рис. 1.8. Траектории продолженного захода на посадку и продолженной посадки: 1 — продолженный заход на посадку; 2 — продолженная посадка (при возникновении отказа до начала режима); 3— исходный участок входа в глиссаду; 4 — начальный участок нормального захода на посадку; 5 — участок захода на посадку с отказавшей какой-либо функциональной системой (отказавшим каким-либо элементом функциональной системы); 6 — начало продолженного захода на посадку; 7 — точка (момент) возникновения отказа; 8 — завершение продолженного захода на посадку — начало продолженной посадки; 9 — точка (момент) касания; 10 — завершение продолженной посадки (полная остановка самолета); 11 — исходный участок нормального захода на посадку; 12— начальный участок нормальной посадки; ГУ —участок собственно посадки с отказавшей какой-либо функциональной системой ^отказавшим каким-либо элементом функциональной системы); 14— начало продолженной посадки
Oi
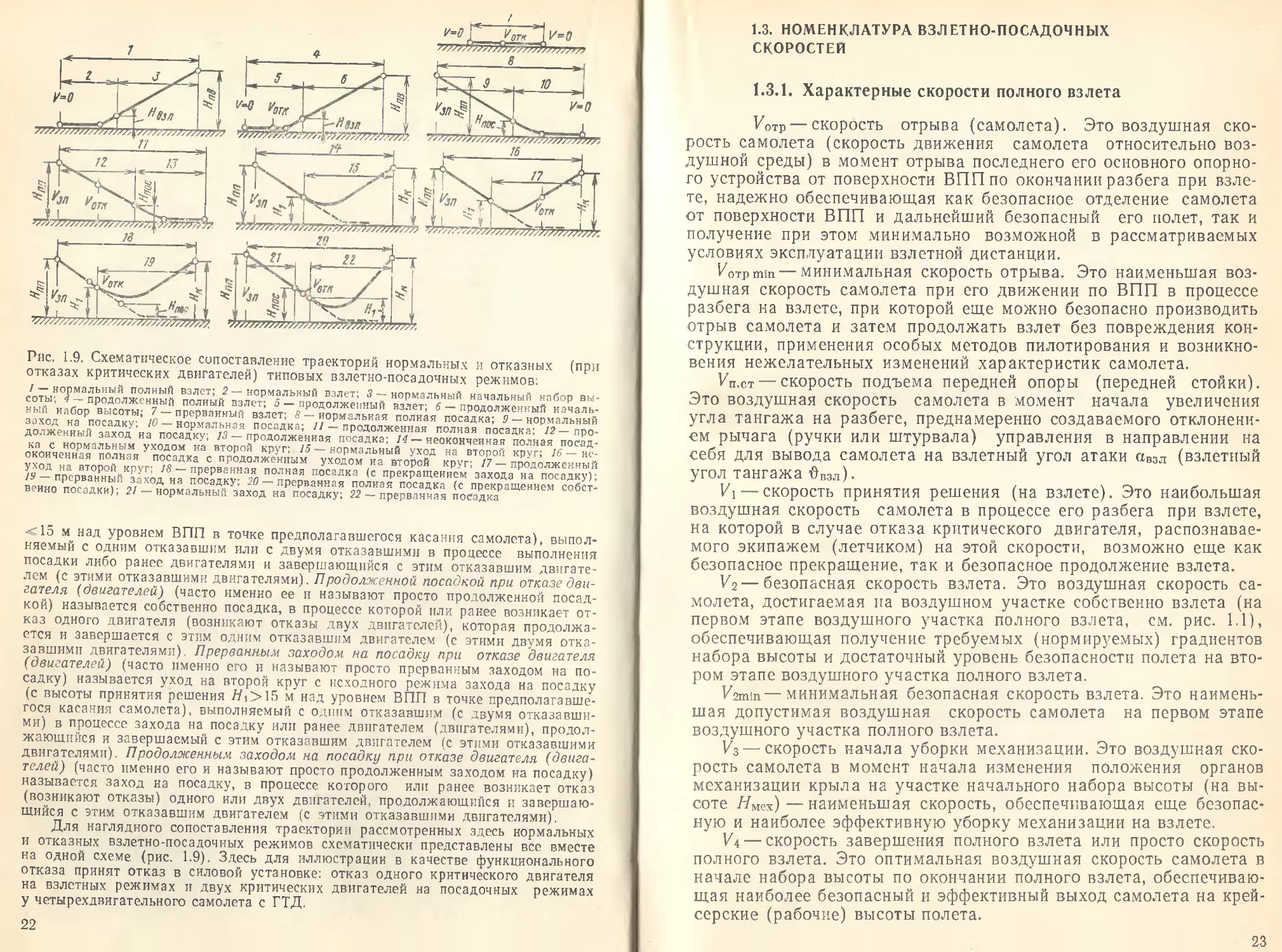
Рис. 1.9. Схематическое сопоставление траекторий нормальных и отказных (при отказах критических двигателей) типовых взлетно-посадочных режимов:
1 — нормальный полный взлет; 2—нормальный взлет; 3 — нормальный начальный набор высоты; 4 — продолженный полный взлет; 5 — продолженный взлет; б — продолженный начальный набор высоты; 7 — прерванный взлет; 8 — нормальная полная посадка; 9 — нормальный заход на посадку; 10 — нормальная посадка; // — продолженная полная посадка; /2—продолженный заход на посадку; 13— продолженная посадка; 14— неоконченная полная посадка с нормальным уходом на второй круг; 15 — нормальный уход на второй круг; 16 — неоконченная полная посадка с продолженным уходом на второй круг; 17 — продолженный уход на второй^круг; 18 — прерванная полная посадка (с прекращением захода на посадку); 19 — прерванный заход на посадку; 20 — прерванная полная посадка (с прекращением собственно посадки); 21 — нормальный заход на посадку; 22 — прерванная посадка
-<15 м над уровнем ВПП в точке предполагавшегося касания самолета), выполняемый с одним отказавшим или с двумя отказавшими в процессе выполнения посадки либо ранее двигателями и завершающийся с этим отказавшим двигателем (с этими отказавшими двигателями). Пройолженной посадкой при отказе двигателя (двигателей) (часто именно ее и называют просто продолженной посадкой) называется собственно посадка, в процессе которой пли ранее возникает отказ одного двигателя (возникают отказы двух двигателей), которая продолжается и завершается с этим одним отказавшим двигателем (с этими двумя отказавшими двигателями). Прерванным заходом на посадку при отказе двигателя (двигателей) (часто именно его и называют просто прерванным заходом на посадку) называется уход на второй круг с исходного режима захода на посадку (с высоты принятия решения 7Л>15 м над уровнем ВПП в точке предполагавшегося касания самолета), выполняемый с одним отказавшим (с двумя отказавшими) в процессе захода на посадку или ранее двигателем (двигателями), продолжающийся и завершаемый с этим отказавшим двигателем (с этими отказавшими двигателями). Продолженным заходом на посадку при отказе двигателя (двигателей) (часто именно его и называют просто продолженным заходом на посадку) называется заход на посадку, в процессе которого или ранее возникает отказ (возникают отказы) одного или двух двигателей, продолжающийся и завершающийся с этим отказавшим двигателем (с этими отказавшими двигателями).
Для наглядного сопоставления траектории рассмотренных здесь нормальных и отказных взлетно-посадочных режимов схематически представлены все вместе на одной схеме (рис. 1.9). Здесь для иллюстрации в качестве функционального отказа принят отказ в силовой установке: отказ одного критического двигателя на взлетных режимах и двух критических двигателей на посадочных режимах у чстырехдвигательного самолета с ГТД.
1.3. НОМЕНКЛАТУРА ВЗЛЕТНО-ПОСАДОЧНЫХ
СКОРОСТЕЙ
1.3.1. Характерные скорости полного взлета
Иотр — скорость отрыва (самолета). Это воздушная скорость самолета (скорость движения самолета относительно воздушной среды) в момент отрыва последнего его основного опорного устройства от поверхности ВПП по окончании разбега при взлете, надежно обеспечивающая как безопасное отделение самолета от поверхности ВПП и дальнейший безопасный его полет, так и получение при этом минимально возможной в рассматриваемых условиях эксплуатации взлетной дистанции.
Vorpmin — минимальная скорость отрыва. Это наименьшая воздушная скорость самолета при его движении по ВПП в процессе разбега на взлете, при которой еще можно безопасно производить отрыв самолета и затем продолжать взлет без повреждения конструкции, применения особых методов пилотирования и возникновения нежелательных изменений характеристик самолета.
^п.ст — скорость подъема передней опоры (передней стойки). Это воздушная скорость самолета в момент начала увеличения угла тангажа на разбеге, преднамеренно создаваемого отклонением рычага (ручки или штурвала) управления в направлении на себя для вывода самолета на взлетный угол атаки аВЗл (взлетный угол тангажа Овзл)
Vi— скорость принятия решения (на взлете). Это наибольшая воздушная скорость самолета в процессе его разбега при взлете, на которой в случае отказа критического двигателя, распознаваемого экипажем (летчиком) на этой скорости, возможно еще как безопасное прекращение, так и безопасное продолжение взлета.
V2 — безопасная скорость взлета. Это воздушная скорость самолета, достигаемая на воздушном участке собственно взлета (на первом этапе воздушного участка полного взлета, см. рис. 1.1), обеспечивающая получение требуемых (нормируемых) градиентов набора высоты и достаточный уровень безопасности полета на втором этапе воздушного участка полного взлета.
Vanin—минимальная безопасная скорость взлета. Это наименьшая допустимая воздушная скорость самолета на первом этапе воздушного участка полного взлета.
Уз — скорость начала уборки механизации. Это воздушная скорость самолета в момент начала изменения положения органов механизации крыла на участке начального набора высоты (на высоте //мех)—наименьшая скорость, обеспечивающая еще безопасную и наиболее эффективную уборку механизации на взлете.
У4— скорость завершения полного взлета или просто скорость полного взлета. Это оптимальная воздушная скорость самолета в начале набора высоты по окончании полного взлета, обеспечивающая наиболее безопасный и эффективный выход самолета на крейсерские (рабочие) высоты полета.
Ум.э.р — минимально эволютивная скорость разбега. Это наименьшая воздушная скорость самолета при его движении по ВПП на разбеге, обеспечивающая еще возможность при внезапном полном отказе критического двигателя (распознаваемом экипажем на этой скорости), возникшем в процессе разбега, безопасно и эффективно восстанавливать управление самолетом и затем сохранять прямолинейность его движения с неработающим (отказавшим) критическим двигателем при помощи одних только основных аэродинамических органов управления самолета. Под основными аэродинамическими органами управления самолета понимаются аэродинамические органы управления, приводимые в действие непосредственно отклонениями рычагов управления самолета.
Ум.э.в — минимально эволютивная скорость взлета. Это наименьшая воздушная скорость самолета при полете на воздушном участке полного взлета, обеспечивающая еще возможность при внезапном полном отказе критического двигателя (распознаваемом экипажем на этой скорости), возникающем в процессе полного взлета на исходном установившемся режиме прямолинейного полета без крена и скольжения, восстанавливать управление самолетом и затем сохранять установившийся режим прямолинейного полета на этой скорости с неработающим критическим двигателем при помощи одних только основных аэродинамических органов управления самолета.
1.3.2. Характерные скорости полной посадки и ухода на второй круг
Vnoc — посадочная скорость (самолета).
Ув.к— скорость пересечения входной кромки (ВПП).
Vзп—скорость захода на посадку. Это воздушная скорость самолета при его снижении по глиссаде на участке захода на посадку, обеспечивающая безопасное и наиболее эффективное выполнение последующего режима собственно посадки.
V2K — скорость ухода на второй круг. Это воздушная скорость самолета в момент начала ухода (в момент принятия решения об уходе) на второй круг.
VH.K — скорость набора высоты круга. Это воздушная скорость самолета, с которой он выходит на высоту круга в процессе ухода на второй круг.
V3111 —скорость захода на посадку самолета в предпосадочной конфигурации (на начальном участке захода на посадку).
Узпа — скорость захода на посадку самолета в посадочной конфигурации (на конечном участке захода на посадку).
Глава
УРАВНЕНИЯ ДВИЖЕНИЯ САМОЛЕТА И ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ПОЛНОГО ВЗЛЕТА
2 1. УРАВНЕНИЯ ДВИЖЕНИЯ САМОЛЕТА В ОБЩЕМ ВИДЕ
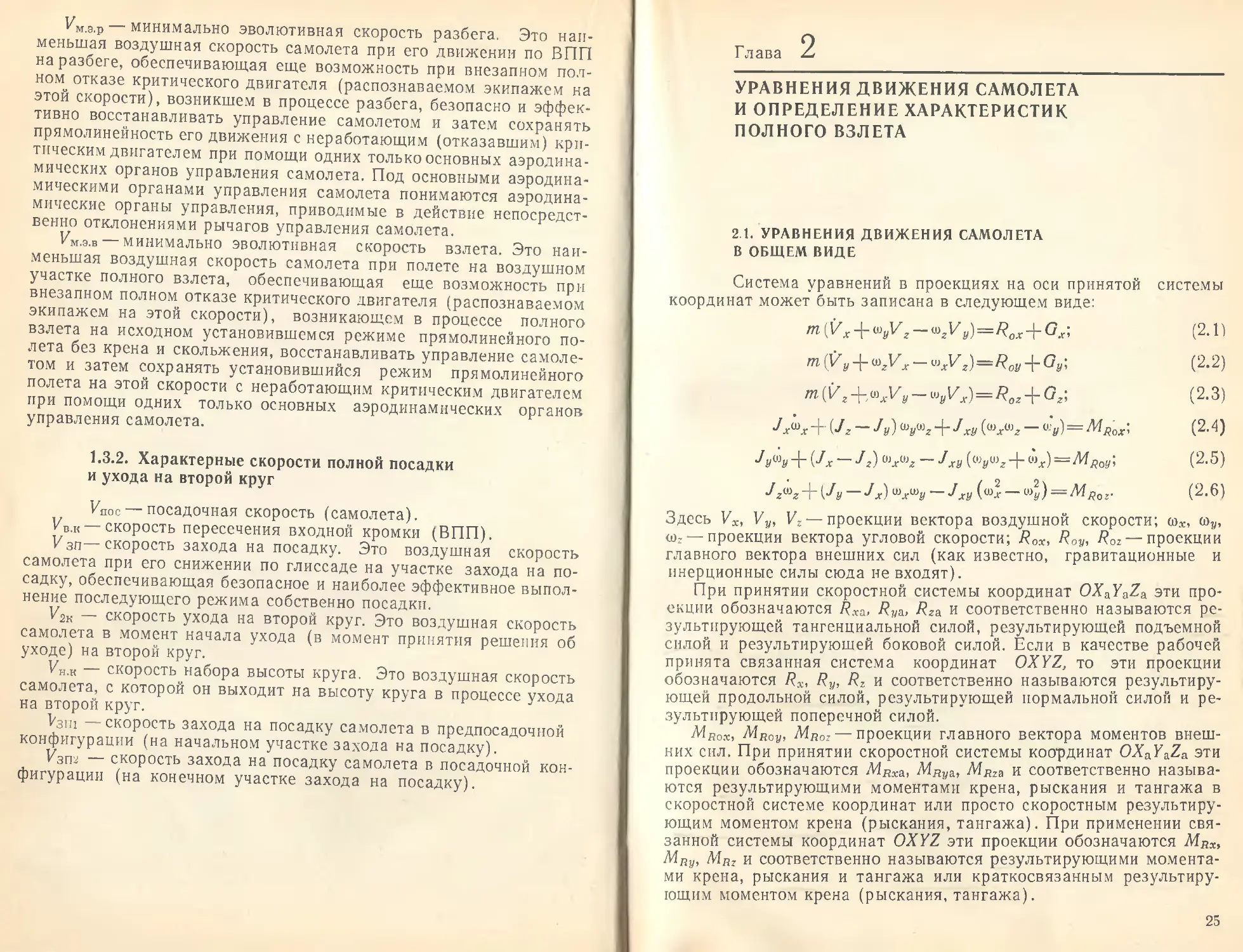
Система уравнений в проекциях на оси принятой системы координат может быть записана в следующем виде:
«(Vx+»>yVz - ^Vy)=R0X+Ох, (2.1)
т {Vy + - WxV,)=RoU + О,; (2.2)
т <Уг ^xVy - WyVx)=Roz + Gz, (2.3)
Ашх + — ^г + ^хУ (.^z — °-'v) = ^ox; (2-4)
Jywy 4” (A — Jz) tuxtu2 — А» (o,0wz + wx) =Мдоу‘, (2‘5)
Jz">z + ^y— Jx^x^y— Jxy^x — '»y) = MRoz. (2.6)
Здесь Vx, Vy, Vz — проекции вектора воздушной скорости; wy, — проекции вектора угловой скорости; R0X, Roy, Roz — проекции главного вектора внешних сил (как известно, гравитационные и инерционные силы сюда не входят).
При принятии скоростной системы координат OXaYaZa эти проекции обозначаются Rxa, Rya, Rza и соответственно называются результирующей тангенциальной силой, результирующей подъемной силой и результирующей боковой силой. Если в качестве рабочей принята связанная система координат OXYZ, то эти проекции обозначаются Rx, Ry, Rz и соответственно называются результирующей продольной силой, результирующей нормальной силой и результирующей поперечной силой.
МПох, Мяоу, MRoz— проекции главного вектора моментов внешних сил. При принятии скоростной системы координат OXaYaZa эти проекции обозначаются /ИДл.а, Л4Дуа, АГД2а и соответственно называются результирующими моментами крена, рыскания и тангажа в скоростной системе координат или просто скоростным результирующим моментом крена (рыскания, тангажа). При применении связанной системы координат OXYZ эти проекции обозначаются MRx, MRy, MRz и соответственно называются результирующими моментами крена, рыскания и тангажа или краткосвязанным результирующим моментом крена (рыскания, тангажа).
Gx=>ngx, Gy = mgy, Gz = mgz— проекции силы тяжести (гравитационной силы) mg на соответствующие оси принятой системы координат, где gx, gy, gz— проекции вектора ускорения силы тяжести на соответствующие оси этой системы координат; Jx, ]у, Jz — моменты инерции самолета относительно соответствующих осей принятой системы координат, a Jxy — центробежный момент инерции самолета.
Система из шести скалярных уравнений движения (2.1) — (2.6) —это динамические уравнения. Первые три уравнения системы представляют собой уравнения поступательного движения самолета (движения его центра масс)—уравнения динамики центра масс (материальной точки), так называемые силовые уравнения. Следующие три — уравнения вращательного движения самолета (его вращения относительно своего центра масс)—уравнения динамики тела (системы материальных точек), так называемые моментные уравнения.
Для того чтобы замкнуть систему уравнений, т. е. сделать равным число уравнений и число искомых переменных, необходимо использовать еще и уравнения кинематических связей, так называемые кинематические соотношения. Всего искомых переменных двенадцать — это двенадцать функций от времени рассматриваемых параметров движения самолета:
V = V(t)-, L=L(ty, Lz=Lz(t)’, 9 = 9(Z);
cp=<PlO; &=&(*); y=y(O;
Ф=Ф(*); шх=сих(^);
шу = шу(*} и ц>г = 0>г(/),
где И — вертикальная, а Л и Lz — горизонтальные (продольная и боковая) координаты центра масс самолета; ср — угол поворота горизонтальной проекции траектории полета; ф — угол рыскания.
Первые шесть параметров характеризуют движение центра масс самолета (траекторные характеристики), вторые шесть параметров определяют движение самолета как твердого тела (характеристики вращения относительно центра масс).
Пока имеем только шесть уравнений: три силовых и три моментных. Для получения замкнутой системы к этим шести уравнениям движения самолета (2.1) — (2.6) добавим еще шесть уравнений кинематических связей — три уравнения, характеризующие изменения координат центра масс самолета, и три уравнения для поступательного движения самолета, которые в приближенном виде могут быть представлены как
L=V cos 9 cos<p;
Н =V sin 9; (2.7)
Lz = — И cos 9 sin
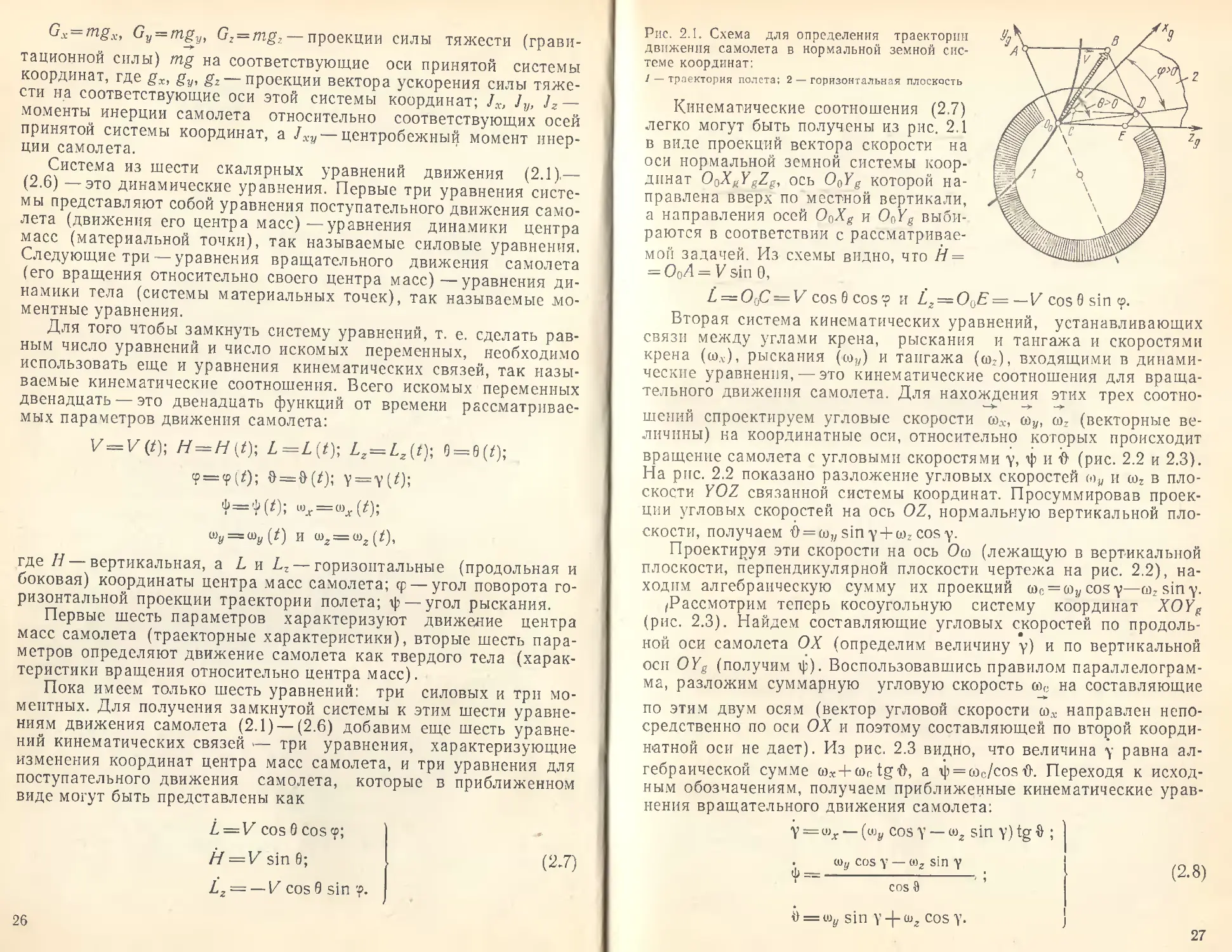
Рис. 2.1. Схема для определения траектории движения самолета в нормальной земной системе координат:
/ — траектория полета: 2 — горизонтальная плоскость
Кинематические соотношения (2.7) легко могут быть получены из рис. 2.1 в виде проекций вектора скорости на оси нормальной земной системы координат O0XgYgZg, ось O0Yg которой направлена вверх по местной вертикали, а направления осей O0Xg и OnYg выбираются в соответствии с рассматриваемой задачей. Из схемы видно, что Н = = О0Л = V sin 0,
L = O()C=V cos 0 cos? и Lz — OJZ = — V cos 0 sin <?.
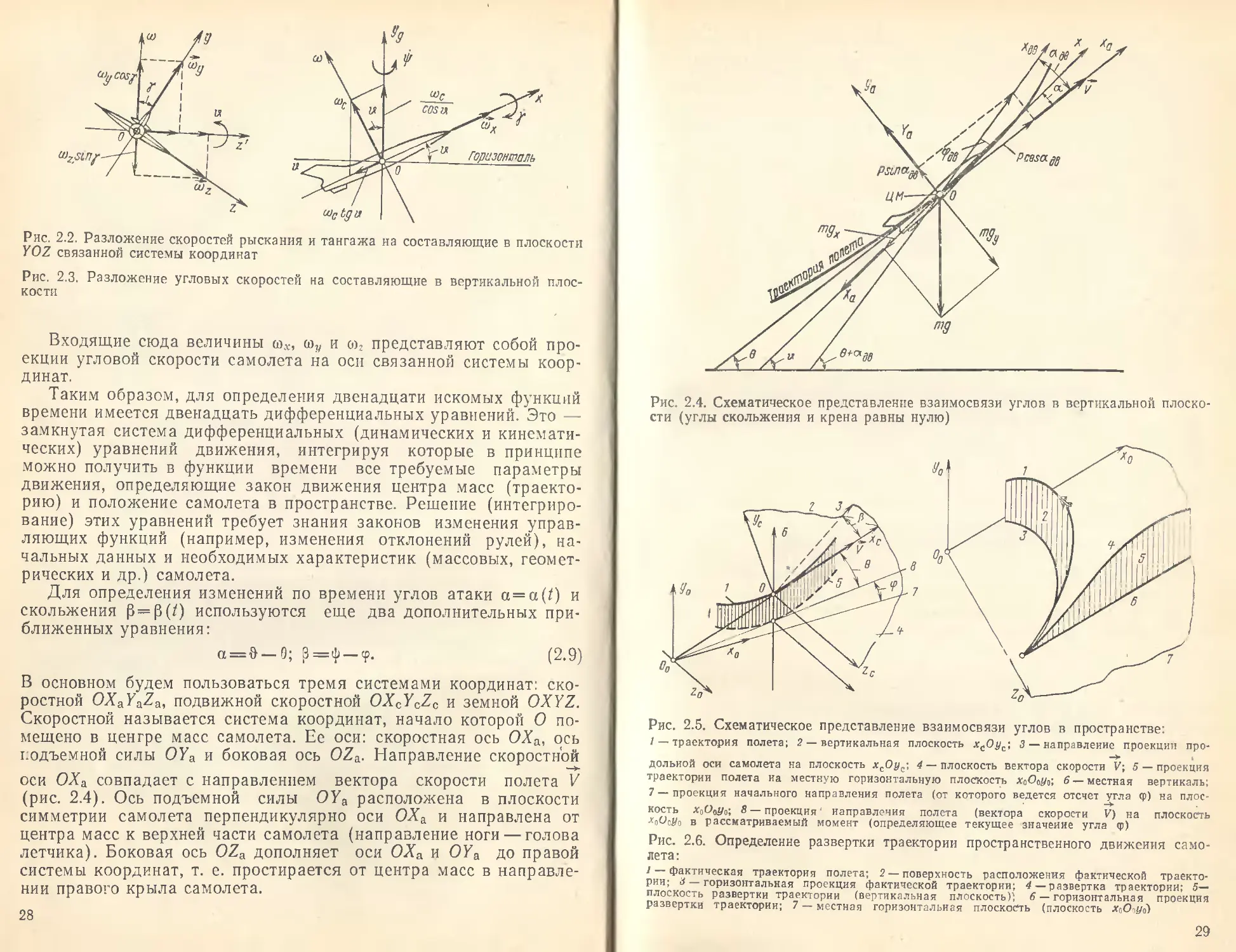
Вторая система кинематических уравнений, устанавливающих связи между углами крена, рыскания и тангажа и скоростями крена (io.v), рыскания (юу) и тангажа (<о2), входящими в динамические уравнения, — это кинематические соотношения для вращательного движения самолета. Для нахождения этих трех соотношений спроектируем угловые скорости сщ, соу, coz (векторные величины) на координатные оси, относительно которых происходит вращение самолета с угловыми скоростями у, i|? и & (рис. 2.2 и 2.3). На рис. 2.2 показано разложение угловых скоростей (оу и сог в плоскости YOZ связанной системы координат. Просуммировав проекции угловых скоростей на ось OZ, нормальную вертикальной плоскости, получаем O = toy sin y + wz cos у.
Проектируя эти скорости на ось Оа (лежащую в вертикальной плоскости, перпендикулярной плоскости чертежа на рис. 2.2), находим алгебраическую сумму их проекций wP = wycosy—cozsiny.
/Рассмотрим теперь косоугольную систему координат XOYg (рис. 2.3). Найдем составляющие угловых скоростей по продольной оси самолета ОХ (определим величину у) и по вертикальной оси OYg (получим хр). Воспользовавшись правилом параллелограмма, разложим суммарную угловую скорость сос на составляющие по этим двум осям (вектор угловой скорости (£>х направлен непосредственно по оси ОХ и поэтому составляющей по второй координатной оси не дает). Из рис. 2.3 видно, что величина у равна алгебр аической сумме ыж + (Ос tg О, a тр = cdc/cos т&. Переходя к исходным обозначениям, получаем приближенные кинематические уравнения вращательного движения самолета:
у = Шд. — (шу cos у — wz sin у) tg S ;
cos у — <вг sin у (2 fp
cos 9
Рис. 2.2. Разложение скоростей рыскания и тангажа на составляющие в плоскости YOZ связанной системы координат
Рис. 2.3. Разложение угловых скоростей на составляющие в вертикальной плоскости
Входящие сюда величины (ож, <и„ и со2 представляют собой проекции угловой скорости самолета на оси связанной системы координат.
Таким образом, для определения двенадцати искомых функций времени имеется двенадцать дифференциальных уравнений. Это — замкнутая система дифференциальных (динамических и кинематических) уравнений движения, интегрируя которые в принципе можно получить в функции времени все требуемые параметры движения, определяющие закон движения центра масс (траекторию) и положение самолета в пространстве. Решение (интегрирование) этих уравнений требует знания законов изменения управляющих функций (например, изменения отклонений рулей), начальных данных и необходимых характеристик (массовых, геометрических и др.) самолета.
Для определения изменений по времени углов атаки a=a(t) и скольжения р = р(/) используются еще два дополнительных приближенных уравнения:
а = & —0; p=tp —<р. (2.9)
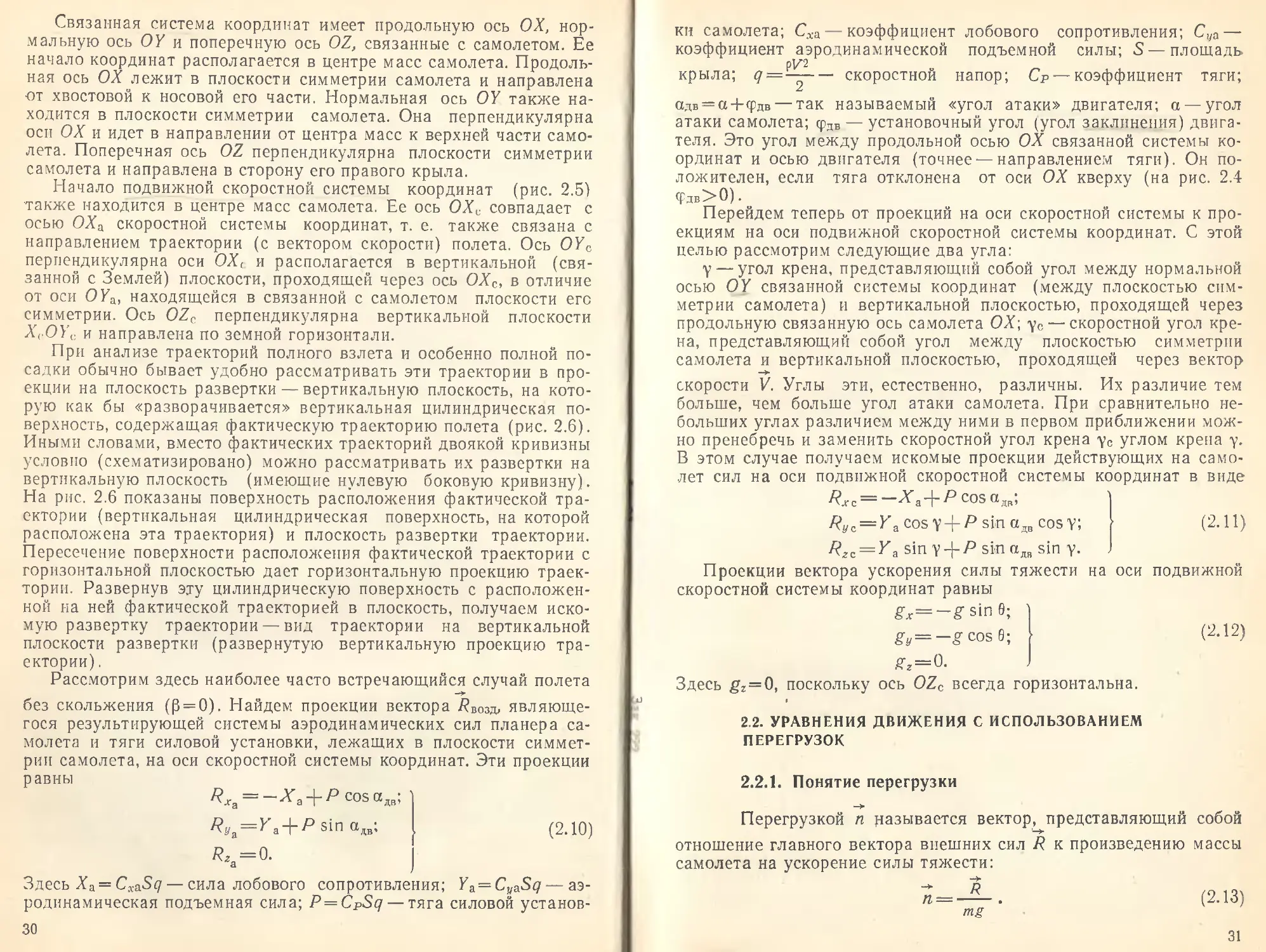
В основном будем пользоваться тремя системами координат: скоростной ОАаУа^а, подвижной скоростной OXCYCZC и земной OXYZ. Скоростной называется система координат, начало которой О помещено в центре масс самолета. Ее оси: скоростная ось ОХа, ось подъемной силы OYa и боковая ось OZa. Направление скоростной оси ОХа совпадает с направлением вектора скорости полета V (рис. 2.4). Ось подъемной силы ОУа расположена в плоскости симметрии самолета перпендикулярно оси ОХа и направлена от центра масс к верхней части самолета (направление ноги — голова летчика). Боковая ось OZa дополняет оси ОХа и ОУа до правой системы координат, т. е. простирается от центра масс в направлении правого крыла самолета.
Рис. 2.4. Схематическое представление взаимосвязи углов в вертикальной плоскости (углы скольжения и крена равны нулю)
Рис. 2.5. Схематическое представление взаимосвязи углов в пространстве
/ — траектория полета; 2 — вертикальная плоскость хсОус; 3 — направление проекции про-
—1> I
дольиой оси самолета на плоскость хсОус; 4 — плоскость вектора скорости V; 5 — проекция траектории полета иа местную горизонтальную плоскость x000t/o; б —местная вертикаль; 7—проекция начального направления полета (от которого ведется отсчет угла ср) на плоскость ХцОоУо', — проекция' направления полета (вектора скорости V) на плоскость ло^о^о в рассматриваемый момент (определяющее текущее значение угла (р)
Рис. 2.6. Определение развертки траектории пространственного движения самолета:
/ — фактическая траектория полета; 2 — поверхность расположения фактической траектории; 3 — горизонтальная проекция фактической траектории; 4 — развертка траектории; 5— плоскость развертки траектории (вертикальная плоскость)', 6 — горизонтальная проекция развертки траектории; 7 — местная горизонтальная плоскость (плоскость XoOij/o)
Связанная система координат имеет продольную ось ОХ нормальную ось OY и поперечную ось OZ, связанные с самолетом. Ее начало координат располагается в центре масс самолета. Продольная ось ОХ лежит в плоскости симметрии самолета и направлена от хвостовой к носовой его части. Нормальная ось OY также находится в плоскости симметрии самолета. Она перпендикулярна осп ОХ и идет в направлении от центра масс к верхней части самолета. Поперечная ось OZ перпендикулярна плоскости симметрии самолета и направлена в сторону его правого крыла.
Начало подвижной! скоростной системы координат (рис. 2.5} также находится в центре масс самолета. Ее ось ОХС совпадает с осью ОХа скоростной системы координат, т. е. также связана с направлением траектории (с вектором скорости) полета. Ось OYC перпендикулярна оси ОХ< и располагается в вертикальной (связанной с Землей) плоскости, проходящей через ось ОХС, в отличие от оси OYa, находящейся в связанной с самолетом плоскости его симметрии. Ось OZC перпендикулярна вертикальной плоскости Xt-OY,. и направлена по земной горизонтали.
При анализе траекторий полного взлета и особенно полной посадки обычно бывает удобно рассматривать эти траектории в проекции на плоскость развертки — вертикальную плоскость, на которую как бы «разворачивается» вертикальная цилиндрическая поверхность, содержащая фактическую траекторию полета (рис. 2.6). Иными словами, вместо фактических траекторий двоякой кривизны условно (схематизировано) можно рассматривать их развертки на вертикальную плоскость (имеющие нулевую боковую кривизну). На рис. 2.6 показаны поверхность расположения фактической траектории (вертикальная цилиндрическая поверхность, на которой расположена эта траектория) и плоскость развертки траектории. Пересечение поверхности расположения фактической траектории с горизонтальной плоскостью дает горизонтальную проекцию траектории. Развернув эту цилиндрическую поверхность с расположенной на ней фактической траекторией в плоскость, получаем искомую развертку траектории — вид траектории на вертикальной плоскости развертки (развернутую вертикальную проекцию траектории) .
Рассмотрим здесь наиболее часто встречающийся случай полета без скольжения (р = 0). Найдем проекции вектора /?Возд> являющегося результирующей системы аэродинамических сил планера самолета и тяги силовой установки, лежащих в плоскости симметрии самолета, на оси скоростной системы координат. Эти проекции равны
/?.ra = -Xa + PcosaM;
= + Р Sin а№' /\ = 0.
(2.10)
Здесь = CxaSq — сила лобового сопротивления; Ya = CvaSq— аэродинамическая подъемная сила; P=CPSq— тяга силовой установ-
ки самолета; Схя— коэффициент лобового сопротивления; Суа— коэффициент аэродинамической подъемной силы; 3—площадь рУ2
крыла; q =------скоростной напор; Ср — коэффициент тяги;
адв = а+(рдв — так называемый «угол атаки» двигателя; а — угол атаки самолета; <рдв — установочный угол (угол заклинения) двигателя. Это угол между продольной осью ОХ связанной системы координат и осью двигателя (точнее — направлением тяги). Он положителен, если тяга отклонена от оси ОХ кверху (на рис. 2.4 <4дв>0).
Перейдем теперь от проекций на оси скоростной системы к проекциям на оси подвижной скоростной системы координат. С этой
целью рассмотрим следующие два угла:
у — угол крена, представляющий собой угол между нормальной осью OY связанной системы координат (между плоскостью симметрии самолета) и вертикальной плоскостью, проходящей через продольную связанную ось самолета ОХ\ ус— скоростной угол крена, представляющий собой угол между плоскостью симметрии самолета и вертикальной плоскостью, проходящей через вектор скорости V. Углы эти, естественно, различны. Их различие тем больше, чем больше угол атаки самолета. При сравнительно небольших углах различием между ними в первом приближении можно пренебречь и заменить скоростной угол крена ус углом крена у. В этом случае получаем искомые проекции действующих на самолет сил на оси подвижной скоростной системы координат в виде
Rxc— zYa-|-P cos адв,
Ryz = Ya cos y + P sin адв cos y;
Rzz = Ya sin у-фР sin адв sin y.
Проекции вектора ускорения силы тяжести на оси скоростной системы координат равны
g-.r=-£Sin9;
gy== —cos 9;
(2.П) подвижной
(2.12)
Й-г = 0.
Здесь £г = 0, поскольку ось OZC всегда горизонтальна.
2.2. УРАВНЕНИЯ ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ПЕРЕГРУЗОК
2.2.1. Понятие перегрузки
Перегрузкой п называется вектор, представляющий собой отношение главного вектора внешних сил R к произведению массы самолета на ускорение силы тяжести:
« = -£-. (2.13)
mg
Перегрузка представляет собой безразмерный вектор. Она показывает, во сколько раз внешние силы или кажущаяся масса находящегося в маневрирующем самолете летчика (члена экипажа или пассажира) превышают истинную его массу. Проектируя вектор п на осн выбранной системы координат, получаем соответствующие составляющие перегрузки (скалярные величины). При анализе взлетно-посадочных характеристик в основном используются проекции перегрузки на оси скоростной и связанной систем координат.
Составляющие перегрузки по осям скоростной системы координат ОХаУа^а (тангенциальная, нормальная скоростная и боковая перегрузки) равны
п
Rxa mg
Ryа t Rza
--- и йга=— mg-mg
(2.14)
Составляющими перегрузки по осям связанной системы координат OXYZ являются продольная пх, нормальная пу и поперечная nz перегрузки, определяемые аналогично составляющим перегрузок в скоростной системе осей:
Rx Я» Rz
пх =—пу=----- и пг = —^~.
mg mg mg
Составляющие перегрузки по осям подвижной скоростной системы координат OXCYCZC (тангенциальная нормальная скоростная и боковая) соответственно равны
Rxc
mg
^Ус
Rye mg
Rz С mg
(2.15)
2.2.2. Уравнения движения в перегрузках
Рассмотрим уравнения динамики центра масс самолета — три уравнения (2.1) — (2.3). Левые их части представляют собой составляющие результирующего ускорения jx, ;у и jz в проекциях на соответствующие оси координат. В принятой скоростной системе координат VX=V, Vy=Vz=0, toy = cf cos0 и (oz = 9. При этом тангенциальное (/х), нормальное (jy) и боковое (/г) ускорения принимают вид
Jx —х + шУ^г — шгУу — V!
Jz=Vz + MxVy — = ~ ^COS 0?.
(2.16)
С учетом (2.11), (2.12), (2.16) и после несложных алгебраических преобразований три уравнения (2.1)—(2.3) в проекциях на оси подвижной скоростной системы координат для воздушных уча-
стков полного взлета и полной посадки могут быть представлены в виде
/Р cosajR — Ха . с
V =g I-------12-----2— sin 9
” \ mg
g_ g (Р Sin адв + Y И
— Cos Y — COS 9) ; mg J
g P sin a,„ + Ka .
®=----------------12——sin Y-
т И sin 6
(2-17)
mg
Подставляя сюда вместо отношений сил соответствующие перегрузки, приведенные в выражении (2.15), получаем уравнения динамики центра масс самолета с использованием перегрузок (так называемые уравнения в перегрузках) в системе координат OXCYVZC:
V =g (Пд.— sin 6);
9 = -^- (tty cos Y— cos 9);
• _ g sin у
Ф---- till*
V cos fl *
(2.18)
Эти уравнения позволяют определять траекторные характеристики через перегрузки. Из первого уравнения находим изменение скорости полета. Второе уравнение характеризует искривление траектории полета в плоскости ее развертки. Третье уравнение определяет искривление горизонтальной проекции траектории (искривление поверхности расположения траектории, рис. 2.6). Иными словами, эти три уравнения полностью определяют вектор скорости самолета: первое — его модуль, а второе и третье — соответственно углы его поворота в вертикальной и горизонтальной плоскостях.
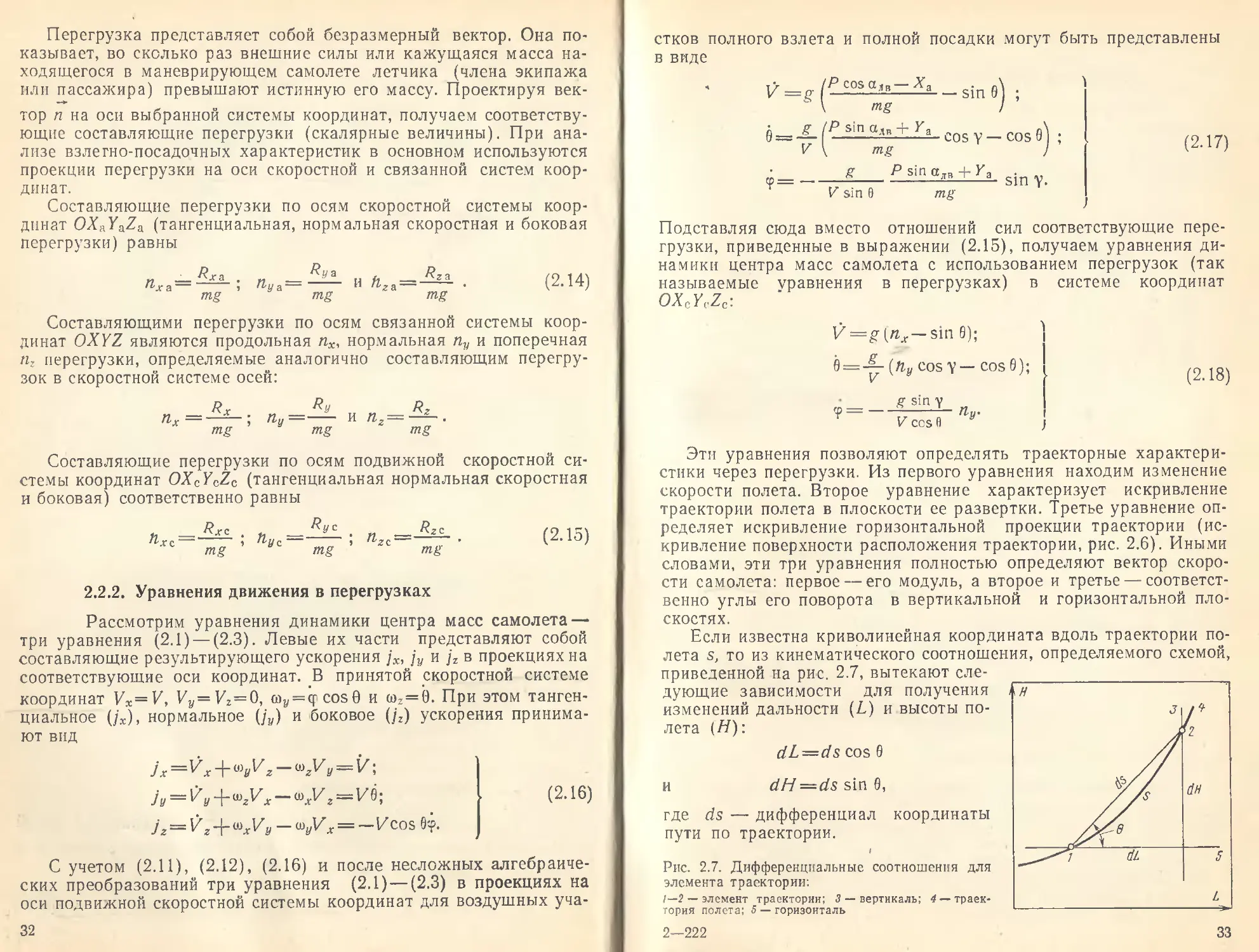
Если известна криволинейная координата вдоль траектории полета s, то из кинематического соотношения, определяемого схемой, приведенной на рис. 2.7, вытекают следующие зависимости для получения изменений дальности (Л) и высоты полета (77):
dL — ds cos 9
и dH=ds sin 9,
где ds — дифференциал координаты пути по траектории.
I
Рис. 2.7. Дифференциальные соотношения для элемента траектории:
1—2 — элемент траектории 3 — вертикаль; 4 — траектория полета; 5 — горизонталь
2.3. ЭНЕРГЕТИЧЕСКИЙ МЕТОД РАСЧЕТА
2.3.1. Понятие энергетической высоты
В качестве полной механической энергии самолета как движущегося твердого тела можно рассматривать механическую энергию движения центра масс самолета Ес относительно Земли. Она слагается из кинетической Ек и потенциальной Еп энергий самолета (его центра масс):
Ec=EK + En = ^ + mgH, (2.19)
где Н— геометрическая или абсолютная высота самолета (высота центра масс самолета, отсчитываемая от принятого в стандартной атмосфере среднего уровня моря).
Практически удобнее пользоваться удельной механической энергией самолета ес, представляющей собой полную энергию единичной гравитационной силы, т. е. энергией, приходящейся на единицу действующей на самолет гравитационной силы mg (как бы отнесенной! к условной массе, равной 1/g):
ес=-^-=Нк+Н=Нэ, (2.20)
mg
где HK = V2/2g.
Все члены формулы (2.20) имеют размерность длины, поэтому их можно рассматривать как соответствующие высоты. Вместе с тем они являются слагаемыми удельной механической энергии самолета. Геометрическая высота Н представляет собой удельную потенциальную энергию центра масс самолета, высота Нк— удельную кинетическую энергию центра масс самолета. Поэтому Нк можно назвать кинетической высотой. Сумма кинетической и геометрической высот называется энергетической высотой и обозначается через Нэ. Энергетическая высота представляет собой суммарную удельную механическую энергию самолета, т. е. сумму потенциальной и кинетической энергий самолета, отнесенную к единице силы mg. Понятие энергетической высоты имеет определенный физический смысл. Поясним его на следующем примере.
Самолет, летящий со скоростью Vo на геометрической высоте
Но, обладает энергетической высотой Л7эЭ=——\-Ho- Допустим, что с этого исходного режима полета начинается восходящий вер-тикальный маневр самолета (типа горки), в процессе которого скорость движения самолета падает до нуля. Предположим, что данный маневр выполняется изоэнергетически (без потерь энергии), т. е. за время маневра механическая энергия движения самолета остается неизменной. Следовательно, в конце маневра, при нулевой скорости, геометрическая высота полета /701; (геометрическая высота окончания маневра) окажется равной энергетической высоте
окончания маневра Нп.ок: 0+Н(,к=На.ок- Но по принятому условию изоэнергетичности выполнения маневра /73=const, т. е. 11э.ок=На0. Значит, высота полета самолета в конце такого маневра равна его начальной энергетической! высоте: Нок=Нэ0. Отсюда видно, что энергетическая высота представляет собой такую высоту полета, которая могла бы быть достигнута при выполнении восходящего изоэнергетического маневра с торможением самолета до полной его остановки в воздухе (до К=0), а кинетическая высота представляет собой приращение высоты в процессе выполнения указанного маневра: Нк=Нпк—Но.
Высота полета самолета однозначно связана с его энергетической высотой и скоростью полета. Из (2.20) следует, что
= g- = F(tf3,I/)- (2-21)
Соответственно
Y=V2g(H9-H)=$(H3,H). (2.22)
Поэтому энергетическую высоту удобно использовать в качестве обобщенного параметра, объединяющего как высоту, так и скорость полета самолета.
Таким образом, выполнение восходящих маневров самолета позволяет перераспределять энергию его движения и набирать высоту за счет уменьшения скорости полета. При изоэнергетических маневрах (в случае отсутствия потерь механической энергии) самолета энергетическая высота остается постоянной, а следовательно, ее дифференциал dHa равен нулю:
dHэ = +dH = у dV + dH = 0.
Отсюда dH =—— dV. (2.23)
£
Переходя от дифференциалов к конечным приращениям, получаем
Д/7<^-—ДИ. (2.24)
g
Из (2.24) следует, что приращение высоты Л/7 в изоэнергстическом маневре, сопровождаемое падением скорости на величину ЛК, пропорционально начальной скорости полета V.
2.3.2. Уравнения движения в энергетической форме
В некоторых случаях, в частности, для анализа режимов полета с набором высоты и одновременным изменением скорости полета удобнее рассматривать уравнения движения самолета в энергетической форме, принимая в качестве независимой переменной энергетическую высоту. Это особенно удобно в тех случаях, 2 35
когда требуется знать не форму траектории полета, а, например, только скорость и высоту полета в начальной и конечной точках траектории (только дискретные изменения скорости и высоты). Поэтому при преобразовании уравнений движения в энергетическую форму из них исключают уравнения, определяющие, в частности, такую характеристику траектории, как ее кривизна.
Условно приняв допущение о прямолинейности траектории (0 = (р = О), поскольку ее кривизна в данном случае не имеет значения, получаем из третьего уравнения системы (2.18) условие у = 0 (так как ny#=0, V и cos0— конечные величины), а из второго уравнения находим ny = cos0. Такое пренебрежение отличием фактической траектории полета от прямолинейной вполне допустимо для приближенного энергетического расчета, в частности, при определении характеристик скороподъемности самолета.
С учетом сказанного, получаем из (2.7) и (2.18) систему уравнений движения самолета:
V^g^-sin 6); |
Z = I/cosO; (2.25)
H = V sin 0;
пу= cos 0.
Как уже отмечалось, для записи уравнений движения в энергетической форме в качестве независимой переменной удобнее использовать энергетическую высоту Яя. Для введения Нэ найдем выражение для производной Нэ, которая может быть названа энергетической скороподъемностью самолета.
Умножив правую и левую части первого уравнения системы (2.25) на V/g, воспользовавшись третьим уравнением этой системы и заменив выражение VdV выражением — dV2, найдем
1 dVt ,, л -------— nxV — Н, 2g dt
Т/ 1 dV2 , g. d ( V2 .
откуда nxV = —-------\~ H =—— ——\-H\=H3.
J x 2g di 1 dt \ 2c /
Следовательно, энергетическая скороподъемность самолета
Н3 = nxV. (2.26)
Введем теперь новую независимую переменную в уравнения движения самолета: перейдем от дифференцирования по t к дифференцированию по Нэ. Из уравнения (2.26) находим, что dt= = dH3/nxV. Подставляя это выражение во второе уравнение системы (2.25), определяем dLldH^. Вместо первого и третьего уравнений системы (2.25) с введением новой независимой переменной Дэ получаем уравнение (2.26), откуда легко может быть найдена производная dtldHz. Таким образом, при принятых допущениях систе
ма уравнений движения самолета в энергетической форме может быть представлена в виде
dt 1 dL cos 0 /о
dH3 nxV ’ dH3 nx
При сравнительно небольших углах наклона траектории приближенно можно считать cos 0^1.
Интегрируя уравнения (2.27), находим формулы для определения горизонтальной дальности и продолжительности (времени) полета при изменении энергетической высоты от ее начального #эо до конечного значения НэОк;
и
cos В
пх
анэ
ан3 nxV
(2.28)
(2.29)
В некоторых случаях требуется определять длину пути по траектории. Изменение удельной механической энергии самолета определяется работой сил, действующих по направлению его дви-анэ
жения, т. е. —- — пх, где s — координата по траектории движения ds
самолета. Отсюда длина пути по траектории определяется как
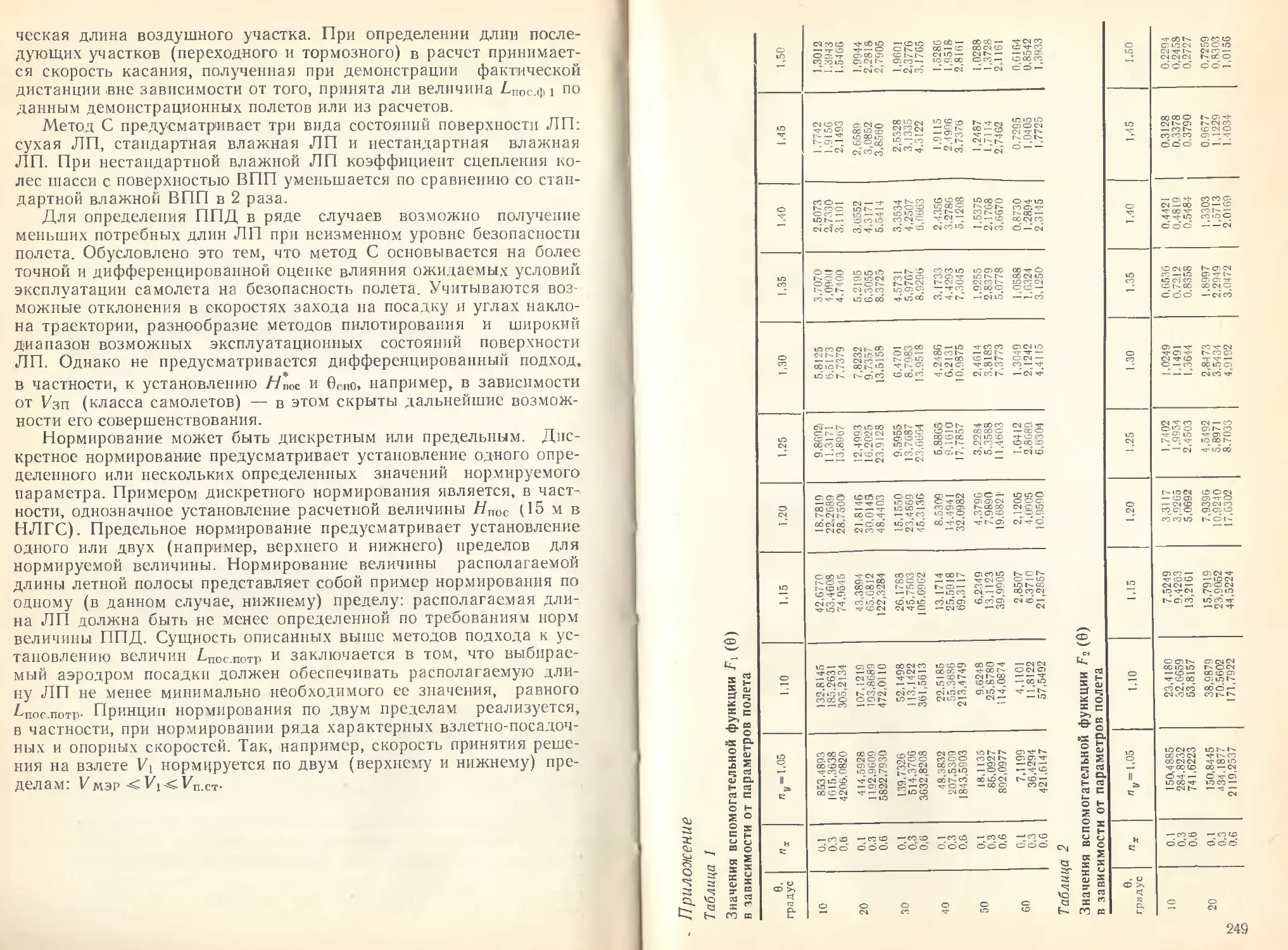
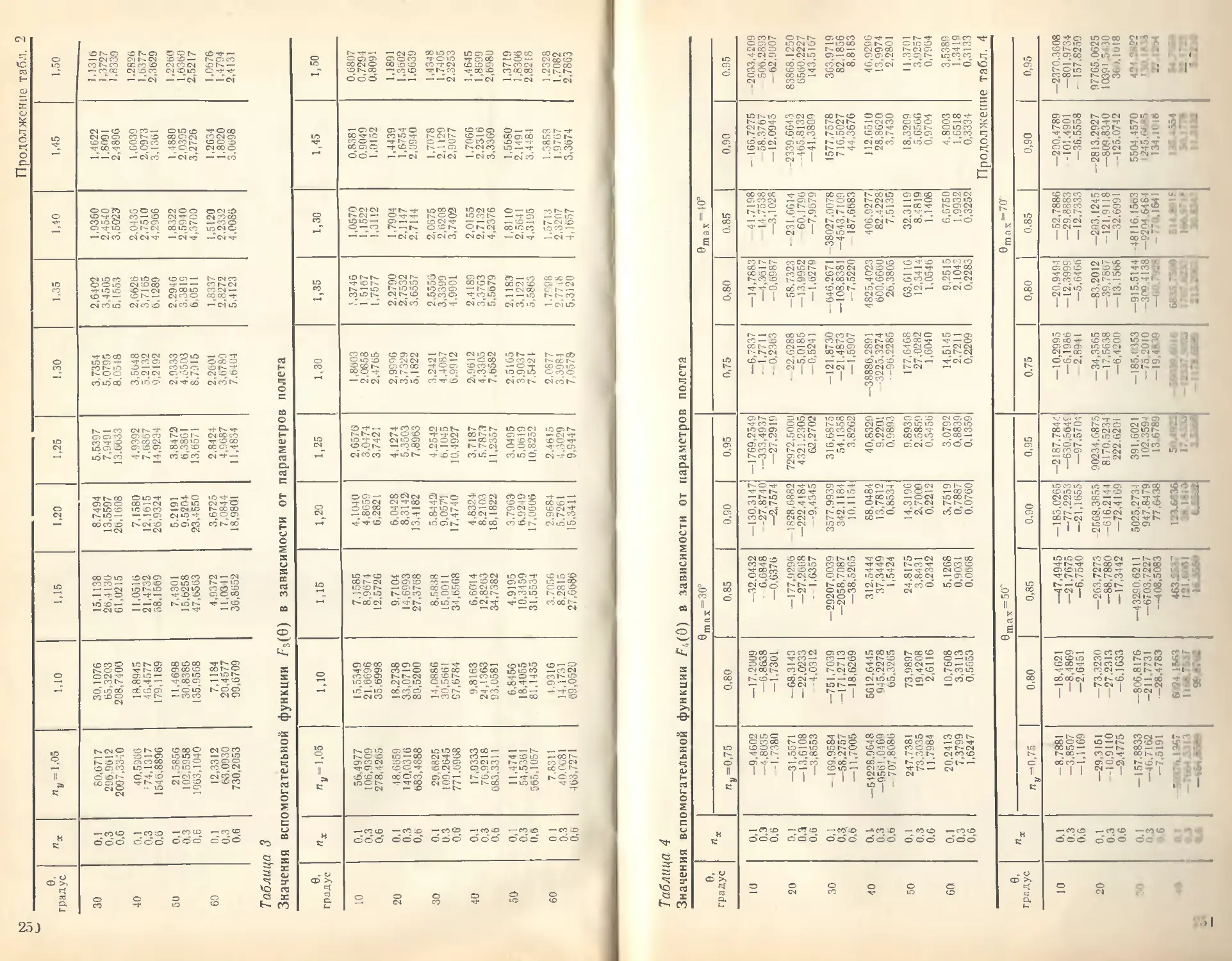
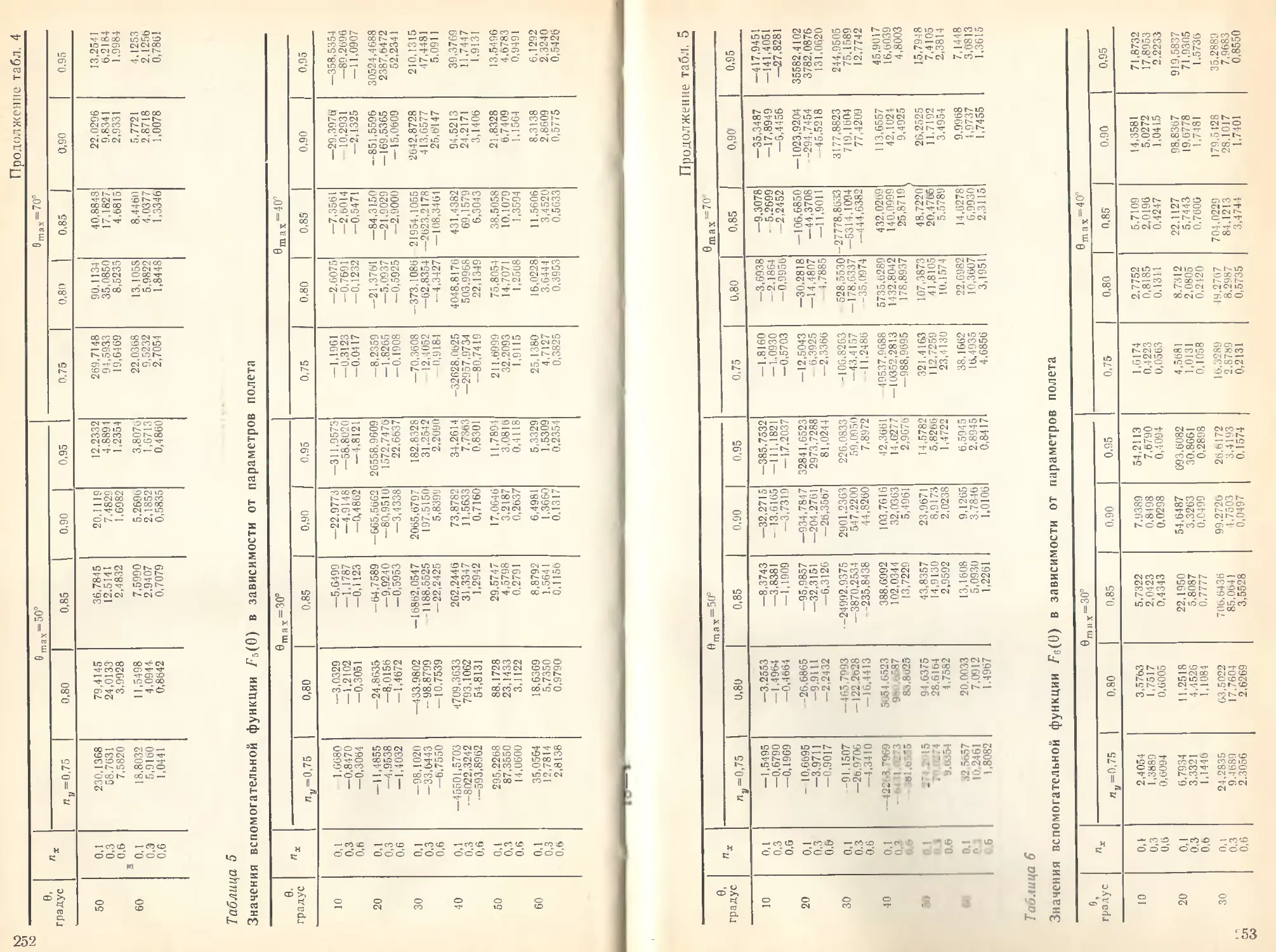
Определение величин L, t и s интегрированием по переменной Н3 производится обычно методом графического интегрирования с использованием вспомогательных графических зависимостей
и Г3(//э)=^-.
пх nxv пх
2,3.3. Геометрический и энергетический показатели скороподъемности самолета
Скороподъемностью самолета называются его летные характеристики, определяющие способности набора им высоты. К этим характеристикам относятся вертикальные скорости, продолжительности набора высоты и наивыгоднейшие скорости полета, определяющие наивыгоднейшие режимы набора высоты. Вертикальные скорости и продолжительности набора высоты являются непосредственными показателями скороподъемности. Вертикальные скорости представляют собой дифференциальные, а продол
жительности набора высоты — интегральные показатели скороподъемности. Различают еще геометрические и энергетические показатели скороподъемности. Геометрическим дифференциальным показателем скороподъемности является производная H=VU= = Г sin 0, а энергетическим дифференциальным показателем — производная H3=Vy3 — nxV (иногда для краткости их просто называют геометрической и энергетической скороподъемностями самолета) .
Найдем связь между этими двумя показателями скороподъемности. Из первого уравнения системы (2.25) получаем
sin 0 =л,-------.
g
(2.30)
Следовательно, Vy=V sin 6 = /zxIZ—— IZ = V'„ э——V, g g
откуда Vy3 — Vy-\- — V. (2.31)
g
Величина Vy3 характеризует избытки тяги (в виде перегрузки пх), создаваемые силовой установкой самолета, т. е. энергию, сообщаемую самолету силовой установкой. Из (2.31) видно, что сообщаемая самолету энергия может перераспределяться: либо на набор высоты (Vy), либо на разгон самолета (Й), либо на то и другое одновременно (эта возможность в руках летчика). При разгоне самолета (Й>0) Vya>Vy, при торможении (Й<0) Ууя< (в таком случае набор высоты происходит не только за счет энергии силовой установки, но и за счет предварительно накопленной кинетиче-
V •
ской энергии самолета). При ИуЭ = 0 имеем Vy =----V. Это оз-
g
начает, что в данном случае набор высоты возможен только за счет торможения самолета.
Представив в (2.31) V в виде ~ Vy,
получим
Г dV g dH
(2.32)
Входящая сюда производная dVIdH определяет степень изменения скорости по высоте. Она, в частности, характеризует разгон самолета в процессе набора высоты. Формула (2.32) наглядно показывает, что при неизменном режиме работы силовой установки (JA3 = const) набор высоты с одновременным разгоном самолета ~^> oj , т. е. увеличение скорости полета по высоте снижает геометрическую скороподъемность, и наоборот.
Интегральным показателем скороподъемности является время набора высоты tn, определяемое очевидным соотношением
(2.33)
Иногда удобнее определять время набора записанных в энергетической форме:
высоты из уравнении.
Г _dH^
^эО
(2.34)
Входящие в (2.33) и (2.34) интегралы определяются также методом графического интегрирования с использованием вспомогательных графических зависимостей /i(//) = l/Va и 1/Уаэ.
Приведенные здесь формулы и рассуждения в принципе могут быть использованы также для расчета и анализа характеристик скороснижаемости самолета (естественно, при соответствующей замене пределов интегрирования). Скороснижаемостью самолета называются его летные характеристики, определяющие способность потери им высоты (способность снижения). В совокупности характеристики скороподъемности и скороснижаемости образуют класс характеристик изменения высоты.
2.4. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК РАЗБЕГА
2.4.1. Система уравнений движения при разбеге
Рассмотрим внешние силы, действующие на самолет при разбеге, в случае его движения с симметричной тягой силовой установки, без крена и скольжения. При этом все действующие на самолет силы располагаются в плоскости его симметрии. Начнем с первого участка разбега, на котором самолет движется по ВПП в стояночном положении (с опущенной передней стойкой шасси). На этом участке система действующих на самолет сил (рис. 2.8, а) состоит из:
— аэродинамических сил (силы лобового сопротивления Х& и аэродинамической подъемной силы Уа);
— тяги силовой установки (суммарной тяги всех двигателей с учетом потерь во входных устройствах и т. п.) Р;
— силы тяжести (гравитационной силы) G = mg, где т — взлетная масса самолета (приближенно принимаемая постоянной величиной);
— сил реакции Земли (земной опоры): нормальной силы (нормальной реакции Земли) W и тангенциальной силы (силы трения опорных устройств самолета о поверхность ВПП) F.
При движении самолета на трех опорах нормальная реакция
Рис. 2.8. Силы, действующие на самолет при разбеге:
а— разбег еаиолета в стояночном положении; б —разбег самолета с поднятой передней опорой
Земли У равна сумме нормальных реакций основных опор Уосн (нормальной реакции Земли, действующей на основные опорные устройства самолета) и передней опоры Упер (нормальной реакции Земли, действующей на переднее опорное устройство): N= = Уосн4-Упер. Сила трения F=fN, где f— коэффициент трения опорных устройств о поверхность ВПП при разбеге. В случае колесных опорных устройств— это коэффициент трения качения, а в случае лыжных опор — коэффициент трения скольжения. Величина коэффициента трения зависит от материала, формы (конструкции) и состояния опорных устройств (в частности, например, от давления в пневматиках и формы «узора» на их поверхности в случае колесных опор), состояния, материала покрытия и наличия атмосферных осадков на поверхности ВПП и ряда других факторов. Для грунтовых аэродромов величина f, естественно, больше, чем для бетонных ВПП. При твердом грунте коэффициент трения меньше, чем при мягком. Ориентировочные величины коэффициента трения качения при разбеге самолета с колесным (тележечным) шасси даны в табл. 2.1. Из таблицы, в частности, видно, что наличие влаги на ВПП может заметно повышать коэффициент трения (по-
Ориентировочные значения минимальных и средних величин коэффициента трения f при разбеге
Характер поверхности и покрытия ВПП Коэффициент трения качения
Минимальное значение 1 Среднее значение
Сухое бетонное (цементобетонное, асфальтобетонное) покрытие в хорошем состоянии (сплошное ровное покрытие с заделанными стыковочными швами между плитами на его поверхности) 0,0й 0,030—0,035
Влажное бетонное (цементобетонное, асфальтобетонное) покрытие при наличии незаделанных стыковочных швов и отдельных неровностей на его поверхности 0,03 0,04—0,05
Мокрое сплошное бетонное (цементобетонное, асфальтобетонное) покрытие 0,04 0,06—0,08
Твердые сухие травяные кочки 0,035 0,07—0,10
Твердые влажные травяные кочки 0,045 0,09—0,13
Мокрое травяное покрытие 0,06 0,10—0,15
Твердый грунт с удельной прочностью более <тгр=12-105 Н/м2 0,045 0,050-0,055
Мягкий грунт с удельной прочностью порядка Огр» (6 ... 10) ДО5 Н/М2 0,07 0,10
Вязкий грунт (типа раскисшего чернозема или суглинка) 0,15 0,20
Плотное снеговое покрытие (хорошо укатанный 0,045 0,050—0,055
Рыхлое снеговое покрытие (сыпучий, плохо укатанный снег) 0,06 0,07
Слой талого снега толщиной порядка 10—20 мм ла ровном твердом основании 0,05 0,06
Сплошная обледеневшая поверхность 0,02 0,10-0,12
Сухой мягкий грунт или песок 0,10 0,20—0,30
является дополнительное гидравлическое сопротивление). В случае лыжного шасси коэффициент сопротивления скольжения при разбеге по снегу в зависимости от температуры и состояния поверхности снежного покрова может быть равен f 0,03...0,10. В случае взлета самолета, имеющего лыжное шасси, с незаснеженной [рунтовой ВПП величины f могут быть существенно большими. Гак, например, при взлете такого самолета с сухой травяной ВПП коэффициент трения скольжения составляет примерно 0,15...0,18, а с сухой грунтовой ВПП (голый грунт) величины f могут дости-। ать 0,2—0,3 и более.
Сила трения при движении самолета на трех опорах F также равна сумме сил трения основных опорных устройств FOch и передней опоры Гпер:
F = / (AU + М.е₽) = fNKn + /7Vnep=FoCH+Fnep.
На втором участке разбега, при движении самолета по ВПП с поднятой передней опорой, система действующих на самолет сил несколько упрощается. В этом случае (рис. 2.8, б)
Лг = ЛГосн и F=FOCH(2Vnep=Fnep=0).
Для получения уравнений движения самолета при разбеге воспользуемся скоростной системой координат. Рассмотрим первое уравнение системы (2.1) — (2.6). При разбеге самолета в стояночном положении по горизонтальной ВПП без крена и скольжения
V\ = IZ; шу = шг = Уу = Уг^=Ох=0-,
Рол- = Р cos а дв - zYa — F.
В этом случае из уравнения (2.1) получаем первое динамическое уравнение разбега:
тУ —Р cos адв — Xa — F. (2.35)
При разбеге по наклонной ВПП в правой части уравнения (2.1) сохраняется составляющая силы тяжести (гравитационной силы) Gx = mgx = mg sin 0впп, где 0впп—угол наклона ВПП (угол наклона поверхности ВПП по отношению к горизонтальной плоскости). Эта сила будет действовать в направлении движения самолета на разбеге в случае отрицательного уклона ВПП и против движения — при положительном уклоне ВПП (подъем ВПП в направлении движения самолета). Под уклоном ВПП понимается величина
T]Bnn=tg бвпп-100% ~ sin бВГпт 100%.
Для разбега по наклонной ВПП вместо (2.35) получаем первое динамическое уравнение разбега в виде
mV=P cos адв — Xа — F — mg sin 0Впп. (2.36)
В уравнении (2.2) в случае разбега по горизонтальной ВПП при рассматриваемых условиях
шг=шх = Уу = Уг=0; ROy = P sin алв + Га + 2V и Oy=mg.
При этом второе динамическое уравнение разбега по горизонтальной ВПП
Р sina„ + ra + 2V-rcg=0. (2.37)
Для разбега по наклонной ВПП получаем
Р sin адв-|-Ка4-.(У —/ngcos бВПп=0. (2.38)
Из первого уравнения системы (2.7) для общего случая разбега по наклонной ВПП получаем первое кинематическое уравнение разбега:
L = y cos бвпп.
(2.39)
Первое динамическое уравнение разбега определяет продольное ускорение, а следовательно, дает возможность найти закон изменения скорости движения самолета при разбеге. Из второго динамического уравнения разбега может быть найдена нормальная реакция Земли, а значит, и сила трения, а также скорость отрыва. Преобразуем оба эти уравнения, выразив силу трения через нормальную реакцию Земли. Из уравнения (2.37) находим /V = = mg— Уа—Р sin адв. Следовательно, F=f(mg— Уа—Р sin адв). Подставляя это выражение в уравнение (2.35), получаем систему уравнений движения самолета для анализа траекторных характеристик при разбеге по горизонтальной ВПП;
mV=PcosaM — Xa — f(tng — Уа — Psvna№y, ) Р sin aAB4-Ka-{- N — mg =0; j-
L = V.
(2.40)
Если при разбеге самолета угол между вектором тяги силовой установки и направлением движения самолета достаточно мал, то можно считать созадв~1, а зшадв«=0. Тогда система уравнений (2.40) упрощается и принимает вид
тV = Р — Ха — f (mg — Ка); уа + ^-щ^ = 0;
L = v.
.'2.41)
2.4.2. Определение скорости отрыва, длины и времени разбега
По мере роста скорости разбега аэродинамическая подъемная сила самолета увеличивается и, следовательно, сумма сил Fa + Psin адв возрастает. Когда направленная вверх (на отрыв самолета) эта суммарная сила становится равной направленной вниз (препятствующей отрыву) гравитационной силе mg, то это означает достижение самолетом в процессе разбега скорости отрыва Иотр. На этой скорости нормальная реакция Земли .V становится равной нулю. Достижение скорости отрыва должно производиться при взлетном угле атаки аВЗл, обеспечивающем безопасность полета самолета. Из второго уравнения системы (2.40), полагая М = 0, получаем
Р sin адв4-Ка.отр —
Отсюда находим скорость отрыва самолета:
2/?уД ( 1 — евзл s-n а,(н)
рСу отр
(2.42)
(2.43)
Для определения длины разбега Lp воспользуемся третьим уравнением системы (2.40). Величина Lp в принципе может быть
найдена непосредственно интегрированием выражения dL = Vdt, однако при определении пути в качестве независимой переменной удобней принять не время, а скорость. Это позвонит сразу и точно определить пределы интегрирования, поскольку уже известна скорость отрыва самолета. Найдем величину dt из выражения для тангенциального ускорения /х в (2.16):
dt=dVljx. (2.44)
гг f dL dV
Представив производную L в виде-----------и заменив здесь
dV dt
V на jx, получаем L = —jx = V,
Отсюда dL = ^-=—. (2.45)
Jx 2jx
Интегрируя это уравнение в пределах от L = 0, V2 = 0 до Л = ТР, 1/2=1/ , находим выражение для определения Lp:
г
L отр
Lp=\dL=±- Г (2.46)
V J Jx
О О
Интегрированием уравнения (2.44) в соответствующих пределах получаем выражение для определения продолжительности (времени) разбега tp:
dV
Jx
(2.47)
Из уравнений (2.46) и (2.47) видно, что длина и продолжительность разбега зависят от скорости отрыва и ускорения в процессе разбега.
Величина продольного ускорения jx может быть определена из уравнения (2.35):
mV — mjx=P созалв —А'а —F,
. _Рсозадв — А'а — f {mg — Га - Р sin аДв) /о дя>
откуда Jx =-----------------------------------— • (2.48)
При сравнительно малых углах атаки самолета на разбеге (в пределах авзл порядка 10°) и углах установки двигателей (порядка 2—3°) можно считать со5адв~1 и 5ШаДв~адв. Тогда выражение (2.48) принимает вид
; —P — xz — f(mg—Ya — Pa№)
J X ’
(2.49)
Рассмотрим входящие в числитель этого выражения два члена, содержащие тягу. Их сумма может быть представлена в виде
Р(1-г/адв). Оценим порядок величины второго слагаемого в скобках. При /=0,05 и адв=13° оно равно =0,01134, т. е. в пер-вом приближении по сравнению с единицей им можно пренебречь и, следовательно, считать Р( 1-Ь/анд) (в рассмотренном примере это эквивалентно занижению тяги примерно на 1,1 %). При таком дополнительном допущении из (2.49) получаем следующее приближенное выражение для определения ускорения самолета при разбеге: ,
jx = p-x^-fkmS-Y^ . (2.50)
Отсюда видно, что для расчета длины и продолжительности разбега необходимо знать зависимости сил Р, Ха и Уа от скорости движения самолета: P = P(V); Xa = Xa(V) и ya = ya(V). По ним можно определить зависимость ускорения самолета от скорости разбега: jx=jx(V)- Далее величины Лр и tp находятся графическим интегрированием уравнений (2.46) и (2.47) (методом площадей). С этой целью строятся графические функциональные зависимости
_L=F1(V2) и -±_=f2(V).
Jx Jx
Типовые примеры таких зависимостей показаны на рис. 2.9 и *2.10. По этим зависимостям численно (в соответствующих масштабах) определяются площади фигур, ограниченных указанными графическими зависимостями и осями абсцисс на соответствующих графиках: SLp и Stp. Искомые величины равны Ар=-^~ SLp и ZP=S,P. Очевидно, в процессе разбега сила F изменяется от максимального своего значения (в момент страгивания самолета) до .нуля (в момент отрыва). Сила Ха при этом изменяется обратным
Рис. 2.10. Пример графической зависимости 1//х=Г2(У), используемой для численного определения продолжительности разбега
Рис. 2.9. Пример графической зависимости {/jx = Fi(V2), используемой для численного определения длины разбега
образом: от нуля в начале разбега (в момент страгивания) до своего максимального значения в момент отрыва. Поэтому приближенно можно считать, что в начале разбега сила сопротивления движению самолета Хг, равная сумме сил Xa+F, определяется в основном силами трения опорных устройств самолета о поверхность ВПП, а в конце разбега—только силой лобового сопротивления самолета. При этом обычно оказывается, что сама величина Хс изменяется в процессе разбега незначительно. Тяга силовой установки при разбеге также, как правило, значительно не изменяется. В результате оказывается, что разность сил Р—Хс изменяется при разбеге сравнительно мало. Следовательно, и величина р_______ X
jx=-----— в процессе разбега изменяется незначительно, т. е.
т
движение самолета можно считать сравнительно близким к равноускоренному. Осрсдняя величину ускорения /х на протяжении разбега и принимая ее постоянной (равной /ХСр), интегрированием уравнений (2.46) и (2.47) находим следующие важные приближенные выражения для определения Ар и /р:
и
[Z2
Р 2Лгр
₽ /л-ср
(2.51)
(2.52)
Подставляя сюда выражение для определения скорости отрыва из (2.43) и среднее значение ускорения из (2.48), получаем удобные для наглядного анализа влияния отдельных параметров на характеристики разбега развернутые выражения:
, Рул ( 1 евзл Sln алв) /О ГО,
Lp~-------------------=-------------=-----:---- (2.00)
S?Cy ofp [евзл с°ч Ядв — 71 а — /(1 — У а ~ Евзл s*n U ли)]
, ) 2pVJ (1 е нзл siii а 1в)
и F ——г .-----------=---------=-------;, (2.54)
& У 1₽в3л cos алв — Ха — f (1 Уа — евзл sin алв)]
__ _Y
где Хя = ——составляющая тангенциальной перегрузки, обуете
— у
ловленная силой лобового сопротивления самолета; Уа =—— = mg
= «ман— маневренная перегрузка (составляющая нормальной перегрузки, обусловленная аэродинамической подъемной силой).
2.4.3. Определение скорости подъема передней стойки, длины и продолжительности
участков разбега
К моменту времени непосредственно перед началом подъема (отрыва) передней опоры шасси носовое колесо еще практически не отделилось от поверхности ВПП, а приходящаяся на него
Рис. 2.11. Силы, действующие на самолет непосредственно в момент отрыва передней опоры
нагрузка и, следовательно, действующие на него силы реакции Земли (нормальная реакция и сила трения) уже стали равными нулю. На рис. 2.11 показана схема сил, действующих на самолет в вертикальной плоскости в момент, когда передняя опора только-только начала отделяться от поверхности ВПП. На схеме показаны плечи сил (относительно центра масс самолета):
z/дв — плечо тяги силовой установки Р;
* норм — плечо нормальной реакции Земли (VOch;
Утр — плечо силы трения Focni
У л-а — плечо силы лобового сопротивления Ха;
1го — плечо ГО (плечо аэродинамической подъемной силы горизонтального оперения Уго), а также абсциссы центра масс самолета Хм и аэродинамического фокуса F самолета хР. Величины удв, Хпорм, Утр, Уха и Lro считаются положительными, если отсчет их ведется от центра масс самолета в положительном направлении соответственно продольной и нормальной осей связанной системы координат.
В рассматриваемом режиме на самолет действует суммарный момент тангажа М:, являющийся алгебраической суммой следующих составляющих:
моментов аэродинамических сил
— момента аэродинамической подъемной силы самолета без ГО
— момента аэродинамической подъемной силы ГО А1гго=)Лго-го;
— нулевого аэродинамического момента тангажа (зависящего у данного самолета в рассматриваемой конфигурации только от скоростного напора, чисел М и Re и не зависящего от угла атаки) мг0;
— момента силы лобового сопротивления
MzXa = X
момента тяги силовой установки
MzP = -РУ№-
моментов сил реакций земной опоры
— момента нормальной силы Уосн
№ осн^норм ’
— момента силы трения Focu
МzF~ ос и У rp~ f о'.пУ гр-
Величина JW2ro может быть представлена в виде:
а) для самолетов с органом управления тангажом в виде руля высоты, имеющих переставной стабилизатор
Мгы = М^ + М^в = М^ +
дЛЛ г pq
где Л4”<р = —-----производная аэродинамического момента танга-
жа, создаваемого горизонтальным оперением, по углу установки стабилизатора ср (степень эффективности переставного стабили-
ро
затора); Мгя =------ — производная аэродинамического момен-
дъв
та тангажа, создаваемого горизонтальным оперением, по углу отклонения руля высоты дп (размерный коэффициент эффективности руля высоты); £,-д— коэффициент запаса по отклонению руля высоты при взлете (обеспечивающего возможность управления самолетом на взлетном угле атаки при воздействии случайных факторов, например, порыва ветра); бвтях—максимальный угол отклонения руля высоты (предельно возможный по кинематической схеме системы управления тангажом угол отклонения руля высоты);
б) для самолетов с цельноповоротным (управляемым) стабилизатором
Мг г О = 1 т = 1 К -ОС.Г 'Уст max >
.,ta ^^сГО
где /14г‘‘т==-----производная аэродинамического момента тан-
гажа, создаваемого горизонтальным оперением, по углу отклонения цельноповоротного стабилизатора (размерный коэффициент эффективности иельноповоротного стабилизатора); к®Ст~ коэффициент запаса по отклонению цельноповоротного стабилизатора при взлете; фот max — максимальный угол отклонения цельноповоротного стабилизатора (аналогичный битах).
Обычно в расчетах для обеспечения возможности управления самолетом при взлетном угле атаки принимается примерно 20% -48
ный запас от максимального угла отклонения органа управления тангажом. В таком случае примерно 80% этого максимального отклонения может быть использовано для создания управляющего момента тангажа, направленного на подъем передней стойки шасси, т. е. можно принимать Кгв и к?с,г равными 0,8.
Для определения скорости подъема передней стойки шасси 14т.ст рассмотрим второе силовое и третье моментное уравнения системы (2.1) — (2.6). В данном случае (самый начальный момент подъема) a)x = (i)y = o)2= V3/ = 0. Для разбега по горизонтальной ВПП получаем
Ка-Кго + Z3 sinaM + ?70CH —zng- = O: (2.55)
^г0 4“ а “Ь ^гго “Ь %- Мгр 4" MZN 4“ MZF = 0. (2.56)
При приближенном определении величины Уп.ст можно считать sin адв=»аДв, г/ха^О, а величиной Уго в уравнении равновесия сил пренебречь по сравнению с величиной Ка: Ка —/Го = ^а^ —
У \
----— ]^/а. Однако у самолетов с цельноповоротным
Ya /
стабилизатором, при сравнительно больших его потребных отклонениях на отрыве, последнее допущение оказывается уже неприемлемым.
В качестве критерия при выборе Уп.ст принимается обычно минимальное ее расчетное значение Уп.стпип- Минимальной расчетной скоростью подъема передней стойки шасси Vn.crmin можно считать ту скорость разбега самолета, при которой управляющий аэродинамический момент, создаваемый отклонением органа управления тангажом на заданную расчетную величину от максимально возможного его значения, уравновешивает алгебраическую сумму остальных слагаемых полного продольного момента. Так, например, в случае самолета с цельноповоротным стабилизатором это соответствует условию
I | = | М г0 4" Мгу а 4“ Мгх а 4“ Мгр -ф- 4“ -MzF | •
Подставив в (2.56) выражение для МОсн из (2.55), произведя соответствующие преобразования и выразив аэродинамические силы и моменты через их коэффициенты, находим (с учетом принятых выше допущений) выражения для определения Уп.сттш.
Для самолетов с рулем высоты
. . . 1 / ________ЕВ3.1 (Удв 4~ НопДДв) Нол__ (2 57)
п-стт1п— су I/ + —р.о„)Су.С1 + т’<р-|-т°вк6вВвтах
Для самолетов с цельноповоротным стабилизатором
[Z _____TZ 1 / _______Емл (Удв + НопаДв) Нов_____ /П 58)
у m2o + (/n^_(xon)Ci(c,+4EtWcTmax ' '
Здесь ^ = -[/^11
условная скорость прямолинейного горизон-
тального полета на высоте аэродрома при Су==1;
— САХ крыла;
•*норм + /г/m
Fou=-------------условное суммарное относительное плечо реак-
°А ции опоры; тгу = ——£-=хм — xf — коэффициент продольной статической устой-ОС у
- Хк - Хр
чивости самолета; Лм = —-—, xF =----------соответственно коорди-
наты (положения) центра масс и фокуса самолета в долях САХ; fn'z= z и /n'zCT=---------соответственно коэффициенты эффск-
о?
тивности переставного и цельноповоротного стабилизаторов; су гт — коэффициент подъемной силы самолета при стояночном угле атаки.
При пользовании формулами (2.57) и (2.58) необходимо помнить, что входящие в них аэродинамические коэффициенты и их производные должны быть определены для первой взлетной конфигурации самолета с учетом влияния Земли. Из формулы (2.58), в частности, следует, что если алгебраическая сумма ЕВЗл(удвН-4-Цопадв)—Цоп>0, то необходимым расчетным условием возможности подъема передней стойки шасси является
mJ”K?c.r<p„max>rn2o+ (mzu— су„. (2.59)
Это означает, что необходимый для подъема (отделения от поверхности ВПП) передней опоры шасси кабрирующий момент, создаваемый отклонением цельноповоротного стабилизатора, должен быть не менее результирующего пикирующего момента, стремящегося удерживать переднюю стойку прижатой к поверхности ВПП.
Расчетные величины Вп.ст и Уп.сттт связаны между собой соотношением
l/n.cT>VZn.crmin- (2-60)
Определив величину Vп.стл можно наити по ней и искомые пара-метры АР1, /Р1, Lp2 и /р2. Аналогично выражениям (2.46) и (2.47) получаем
^11.СТ
г 1 Р . ГО fill
Zpi = — J ’ (2.61)
о
у п.сг
*P1= J (2,б2)
о
о
Приняв пределы интегрирования соответственно от V2 — Vn. до V’2=l/„Tp и от У=УП.СТ до У=Уотр, находим из (2.45) и (2.44) у2 отр
(2.63)
^р2 2 |
V2 if. %Гр ₽2 J 11.ст
ix
(2.64)
Искомые длины и продолжительности участков разбега могут быть определены графически. По графическим зависимостям (рис. 2.12) находят численные значения интегралов, по которым и определяются искомые величины:
5,ip2;
/pl = ^fpl и tp2~$tp2‘
Осредняя величины ускорений на первом (Jxcpi) и втором (/херг) участках разбега, получаем приближенные выражения для определения величин LPi, Lp2, /pi и /Рг:
Z2 — И2
Т-р2~ °тр9. п-ст ; (2.66)
^Ухср2
(2.67) Zrcpl
. (2.68)
Jxcp2
Входящие в эти выражения величины средних ускорений нахо-,им соответствующим осреднением правой части равенства (2.49):
jх.ср~ё (I Евзл а F |ср),
где F = /(l — Га —гвзлсц„) устройств о поверхность ВПП.
Выполняя это осреднение в диапазоне скоростей от V = 0 до У=Уп.стл получаем величину Jxcp.i, а в диапазоне скоростей ОТ 7=Кп.ст ДО V = Уотр — НеЛИЧИНу /хер.2-
Рис. 2.12. Типовые зависимости, используемые при графическом интегрировании для определения Lpi, 1Рг, /|.< И /р2
— относительная сила трения опорных
Ул V4
2.4.4. Сравнение методов приближенного определения длины и продолжительности разбега
Длина и продолжительность разбега самолета приближенно могут определяться как по формулам (2.51) и (2.52) (по осред-ненному для всего участка разбега ускорению Дер), так и несколько более точно суммированием соответствующих искомых величин для первого и второго участков разбега (по осредненным для каждого участка разбега ускорениям ДСР1 и Д ерг):
Z.p = Zpi-|-Z,p2 И Zp = /pj-|-/p2.
В тех случаях, когда величины Дср1 и Дсрг достаточно близки между собой, так что приближенно можно считать ДсР2»Дср1»Д ср, указанное суммирование в итоге приводит к полученным выше приближенным выражениям (2.51) и (2.52). Обычно ими и пользуются для прикидочных оценок искомых величин Лр и Д. Однако иногда (например, при применении особых методов пилотирования самолета на взлете, при значительном изменении тяги силовой установки по скорости в диапазоне скоростей разбега AV=0...VOTp и т. п.) это упрощение оказывается уже слишком грубым. Для оценки допустимости возникающих при таком приближенном определении искомых величин погрешностей необходимо анализировать изменение тангенциального ускорения или тангенциальной перегрузки по скорости в процессе разбега. С этой целью удобно воспользоваться выражением (2.48). Типовой характер изменения величины nx=jx!g и ее составляющих Длх при разбеге современного маневренного самолета с ТРД представлен на рис. 2.13. Если изменение пх в процессе разбега не превышает примерно 5—7%, то для приближенных расчетов этим изменением обычно пренебрегают. В таких случаях считается справедливым допущение Дср2~ »Дср1» Дер» const при прикидочном определении величин Ар и Д, т. е. допускается использование формул (2.51) и (2.52). Переходя от средних ускорений к средним перегрузкам, получаем вместо этих формул следующие (часто применяемые, например, при обработке и анализе материалов летных испытаний самолетов) при-
2.4.5. Аппроксимация тангенциального ускорения разбега полиномом
При расчете характеристик разбега часто удобнее аппроксимировать тангенциальное ускорение (тангенциальную перегрузку) самолета степенным полиномом. Рассмотрим метод приближенного определения характеристик первого участка разбега с использованием аппроксимации зависимости тяги силовой установки от скорости самолета полиномом. Обычно для режимов разбега современных самолетов с ТРД достаточно аппроксимировать тягу полиномом второй степени: P — P(V) «Po+PiV+PzV2- Коэффициенты этого полинома определяются методом наименьших квадратов.
Рассмотрим вначале первый участок разбега. Воспользовавшись выражениями (2.61) и (2.62), подставив в них величину /Ж=К из первого уравнения системы (2.40) и перейдя от переменной интегрирования V2 к переменной V в интеграле для определения Lpi, получаем
Рп'ст______________________VdV_____________________
J * Р соэаяв — Хя — fmg +fYz +fP sin адв о
/Р1 =т
и
_____________dV____________
Р cos адв — А'а — fmg + fY^+fP sin дДв ’
На протяжении первого участка разбега можно считать а~const (а следовательно, и адв«const), сжа«const и cVa«const. В этом случае аэродинамические силы оказываются функциями только квадрата скорости. Подставляя в это выражение вместо Р приведенный выше полином и группируя члены с одинаковыми степенями V, получаем приближенные выражения для определения Lpl и tvt:
ДР1 = т
VdV f
—— и /pl = т I
dV
R9
тде 7?р = /?р(У) = ар + 6рК+СрУ2 — полином второй степени относительно V. Его коэффициенты — постоянные величины, равные
аР = Л)Р-р — fm-g, ftp = Р1(ар
р
Ср = (сха -Г f Су >
a pip = cos адъ+f sin адв. Входящие сюда интегралы — табличные. Их значения легко могут быть определены с помощью существующих таблиц интегралов *. Эти значения зависят от знака и величины дискриминанта квадратного уравнения /?р(У)=0, определяемого выражением
Др = 4арср — ftp = 4 (Р0Рр — Р2Н> — S — (сЛ. a -f- fey а) — .
Возможны три принципиально различных варианта решения: при Др>0, Др<0 и Лр = 0.
1 См., например, Градштейн И. С. и Рыжик И. М. Таблицы интегралов, сумм, рядов и произведений. Изд. 4-е. М.: Физматгиз, 1962.
Для случая Ар>0 получаем / V..... \
2ср
In
2ср
4Z>p ।
arctg-
-4- 2срИ 1
Здесь
Rp (Уп.ст)
Яр(0) 2т ^р Н* 2срУ
Ry Уп.ст)
Rv (0) = '
При Ар<0 получаем
₽1 ~ 2ср
dV
Rp (^п.Сг) In
т Тс.
Р L
ЛР(О)
(Р1 =
г-„
I Ар
46p / Cp
—arctg -7=- - arctg
V Др \ V Др
v
/>п -г 2с,,И,
ст 2m (
= —— arctg
Mp \
+ —Ип.ст+—-/2CT-
Up Up
‘Р
) 71
Ар + 2Ср 7 гьСТ Ар
-----т=------— arctg—=г
i' -^р т Ар
р
2ЬР
т
2с р
In /?р
2&р
Ьр + 2ср7,
йр 2срУ<
Ar th—7----
— Ar th ,---
+ 2ср7,,.„
2m "+ 2cpl^
----Ar th —r------ Др ) —Ap
' bp bp
1 —Ap \ Y Ap | —Др j
Определение гиперболических ареатангенсов (Arth) производится щим таблицам i. При Др = 0
по
V,
существую-
г т / < гл
£р1 — 2с^ I In Яр
m I 2,b.
= "o I In + 7 j \ 2cp \ bp -+- 2Cp
Яр П.Ст)
26Р
' j -f ' л--*' _________r 2
2cp I" Rp (0) +/>p+2cpFllrC.f
I'n.cr 4CpV,bC.f
,pl », + 2»,И
(^р + 2срVп.ст)
^Р1
т
т
и
и
и
О
о
т Г г = т ~— In
2ср [
э
2
О
р
о
V
о
Др
о
На втором участке разбега приближенно можно считать тягу постоянной, не зависящей от скорости (кратковременный участок движения самолета с малым изменением скорости от Уп.ст до Уотр), а в качестве величин а, сх а и су а принимать их осредненные для этого участка значения аСр (и, следовательно, формулы
1 См. например, Комрп Л. Дж. Шестизначные математические таблицы Чемберса. М.: Наука, 1964; Сегал Б. И., Семендяев К. А. Пятизначные математиче» скне таблицы. М. — Л.: Изд-во АН СССР, 1950.
<хдв ср), с* ер п Су ср. В этом случае из
(2.63) и (2.64) получаем приближенные
V2 отр т Р dV2
р2 = “1 я„
V2 п.ст
—
т
Здесь Rn = Rn(V) =aa+bnV2 — бином, аппроксимирующий тангенциальное ускорение самолета на участке разбега с поднятой передней стойкой шасси. Его коэффициенты равны:
аа =Р|лп — fmg = const и = 5 ~ (fcu4> — сл-еР) = const,
где р-п = cos Одз.ср -+- f sin адв.сР.
Интегрируя первое выражение в указанных выше пределах, получаем
^р2
1п/?„
V2 отр
V П.СТ
=к'п
"4“ ^п^огр ап + ^П^п.ст
т
В формуле для определения fp2 решение зависит от знаков коэффициентов или знака произведения коэффициентов бинома апЬп. При ап&п<0 (а также в случае разных знаков ап и 6П) получаем
t с = __m It] а" + V У^а"Ь'- И°г₽ =
р2 2/—аиЬ„ П ап— И) —Мп И,|СТ
т (ап ”Ь ^огр У--------------(аи ^U.C't V
2 I Л|А (лл -------- Иф-fp ) ЯцМ (^и 4” П.СТ Т ^11^11)
При ап&п>0 (а также в случае одинаковых знаков ап и &п) будем иметь
Нетрудно показать, что для самолетов с колесным шасси практически всегда выполняется условие: ап&п<0, поскольку всегда ап>0, а &п<0. Для подтверждения этого представим первый коэффициент бино.ма в виде
Р ( f
an=p^n — f------ =Р (ип —-----
евзл \ евзл
Выражение в скобках всегда положительно, так как величина цп обычно близка к единице, а отношение //евзл для самолетов с колесным шасси сравнительно мало (чем выше взлетная тяговооруженность, тем оно меньше). Действительно, при малых углах адв.ср величина cos адв.Ср близка к единице, а к ней еще добавляется хоть и небольшое, но положительное произведение f sin адв.сР. При больших адв.ср величина косинуса относительно мала, но зато возрастает величина синуса во втором слагаемом. А отношение //евзл всегда намного меньше единицы (для самолетов с колесным шасси, особенно обладающих большой
взлетной тяговооруженностью, при разбеге по бетонной ВПП). Поэтому разность (л,, —--- всегда оказывается положительной, а следовательно, и ап>0.
евзл
Представим второй коэффициент бинома в виде
5 2 ^'Л'Ср(/КСр—1)»
су ср где кСр =----— среднее аэродинамическое качество самолета на рассматриваемом
Слср
участке разбега самолета. Произведение /кСр всегда положительно и обычно намного меньше единицы. Поэтому стоящая в круглых скобках алгебраическая сумма, как правило, меньше нуля. Следовательно, и &п<0.
Проиллюстрируем сказанное числовым примером. Пусть адВ.ср=15“ (cos 15° = 0,966, a sin 15°=0,259) и тяговооруженность самолета при разбеге составляет всего лишь «ВЗл = 0,15. Примем даже / = 0,05 (в соответствии с табл. 2.1 это среднее значение коэффициента трения при разбеге самолета с колесным шасси по влажной бетонной ВПП; для сухой бетонной ВПП величина f еще меньше). Тогда pin = 0,966+0,05• 0,259 = 0,999, а [хп—-^- = 0,999 —-±т|= £взл 9,15
= 0,666 >0. Предположим даже, что кср = 15 (обычно у современных самолетов при разбеге величины кср бывают существенно меньше). Тогда /кСр = 0,05-15 = = 0,75, а следовательно, /кср—1 = 0,75—1<0. Значит, и Ьп<0. И только при Кср>20 произведение /кср было бы больше единицы. А вот для самолетов с лыжным шасси возможно Ьа>0.
Метод аппроксимации тангенциального ускорения полиномом по степеням скорости (с постоянными коэффициентами) может применяться для определения траекторных характеристик самолета и на других режимах полета, в частности, на таких, на которых коэффициенты аэродинамических сил и угол атаки самолета изменяются сравнительно мало (практически не изменяются), так что приближенно они могут быть заменены постоянными осредненными их значениями. Иными словами, применение аппроксимации тангенциального ускорения полиномом по степеням скорости целесообразно тогда, когда тяга и остальные действующие на самолет внешние силы представляют собой степенные функции скорости п
(только скорости) полета в виде полинома У, , где A^ = const, а а = 2 или А=о
в крайнем случае 3 (в частных случаях какие-то из коэффициентов этого полинома могут быть в отдельности или одновременно равны нулю). Применение аппроксимации полиномом третьей степени (л=3) значительно усложняет расчеты. При л = 3 аналитическое определение интегралов является уже значительно более трудоемким процессом. Если же требуется аппроксимация полиномом с п>3, то решение целесообразно получать машинными методами (методами машинной математики).
2.5. МЕТОДЫ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОГО УЧАСТКА ПОЛНОГО ВЗЛЕТА
2.5.1. Типовые схемы воздушного участка полного взлета
Представляет практический интерес рассмотрение трех условных типовых схем воздушного участка полного взлета (трех типовых схем взлета). Первая типовая схема приведена на рис. 2.14. По этой схеме первый этап воздушного участка взлета (участок 1—2 траектории) представляет собой режим прямолинейного набора высоты с непрерывным разгоном самолета (в первой взлетной конфигурации) до скорости V2, достигаемой одновременно с выходом его на высоту Нвзв. Уборка шасси начи-56
Рис. 2.14. Первая типовая схема воздушного участка полного взлета
Рис. 2.15. Вторая типовая схема воздушного участка полного взлета
нается на высоте 7/ш. Затем идет режим прямолинейного полета с разгоном самолета в процессе окончания уборки шасси (участок 2—3), заканчивающийся по завершении уборки шасси с одновременным выходом самолета на скорость Уг*>Уг. Участок траектории 3—4 — это прямолинейный набор высоты самолетом во второй взлетной конфигурации с одновременным разгоном его до скорости начала уборки закрылков Уз- Участок 4—5 — это набор высоты, в процессе которого производится уборка закрылков, сопровождающаяся разгоном самолета до скорости Уз*>Уз в точке 5. И, наконец, участок 5—6, проходимый самолетом в полетной конфигурации и заканчивающийся выходом его на высоту полного взлета с одновременным достижением скорости Уд.
Вторая типовая схема показана на рис. 2.15, При взлетело этой схеме также непосредственно после отрыва самолета начинается прямолинейный его разгон с одновременным набором высоты, в процессе которого самолет разгоняется от скорости У0Тр до скорости У2, достигая ее на высоте конца разгона //к.р<77взл. Затем продолжается режим прямолинейного набора высоты (до выхода самолета на высоту ЯВЗЛ) с постоянной скоростью У2. Такой «двухфазный» воздушный участок собственно взлета можно считать заканчивающимся одновременно с окончанием уборки шасси (начало уборки шасси считаем совпадающим с началом второй фазы этого участка взлета). Второй этап воздушного участка полного взлета (окончание уборки шасси на высотах Я>НВЗП) здесь отсутствует. Участок траектории 3—4 — это прямолинейный полет с набором высоты и одновременным разгоном самолета до скорости Уз, достигаемой на высоте начала уборки механизации ЯКех. Далее идет горизонтальный участок разгона самолета — вначале до скорости Уз*>Уз в процессе уборки закрылков (начинающийся в точке 4 и заканчивающийся в точке 5), а затем разгон самолета либо до скорости У4 (первый вариант второй типовой схемы), либо до скорости У4*<У4 (второй вариант). Участок 6—7 — это набор высоты полного взлета с постоянной скоростью У4 (первый вариант) или с разгоном самолета от начальной скорости наивыгоднейшего набора высоты У4* до У4 (второй вариант данной схемы). Набор высоты на этом участке производится с углом наклона траектории 6нп4 (при втором варианте он равен углу наивыгоднейшего набора 6П.Н).
Третья типовая схема дана на рис. 2.16. Ее участок 1—2 представляет собой криволинейный отрезок траектории полета с одновременным разгоном самолета и набором высоты. На высоте /7ВЗЛ достигается скорость полета Уз и устанавливается угол наклона трЭСКТОрИИ 0ш.тах (максимальный угол набора высоты с неубранным полностью шасси), с которого начинается дальнейший набор высоты на участке окончания уборки шасси. Участок, на котором заканчивается уборка шасси (участок 2—3), соответствует режиму криволинейного полета с постоянной скоростью У2, закапчивающемуся выходом самолета на максимальный угол набора высоты при второй его взлетной конфигурации бп.тах- Следующий участок (3—4) также криволинейный, протекающий с разгоном самолета 58
Рис. 2.16. Третья типовая схема воздушного участка полного взлета
от скорости У2 до скорости начала уборки закрылков Уз. На участке 4—5 производится уборка закрылков с одновременным прямолинейным разгоном самолета до скорости У3*>Уз. Последний участок траектории (участок 5—6) соответствует режиму прямолинейного разгона самолета в полетной конфигурации до скорости У4 с одновременным набором высоты полного взлета при наивыгоднейшем угле наклона траектории 0п.н. В дальнейшем рассмотрение методов расчета траекторных характеристик воздушного участка полного взлета будем вести применительно к этим трем типовым схемам (или к отдельным их участкам).
Строго говоря, воздушный участок собственно взлета и в случае прямолинейного набора высоты Явял всегда имеет начальный криволинейный участок. Это — участок начального искривления траектории взлета, на протяжении которого создается требуемый угол набора высоты. Участок начального искривления начинается с момента отрыва самолета и заканчивается выходом его на заданный Viол набора высоты. Часто при определении траекторных характеристик взлета этим участком в первом приближении пренебрегают. В некоторых случаях (например, при больших скоростях отрыва и Vi лах дальнейшего набора высоты) этого делать нельзя. Тогда воздушный участок собственно взлета следует рассматривать состоящим из двух частей: начального криволинейного участка (начальное искривление траектории взлета) и следующего за ним прямолинейного участка (разгон с набором высоты). Расчет характерис
тик участка начального искривления траектории взлета в принципе производится так же, как и криволинейного участка 1—2 по третьей типовой схеме (рис. 2.16).
2.5.2. Приближенное определение характеристик первого этапа
Рассмотрим первую типовую схему взлета (см. рис. 2.14). Силы, действующие на самолет на первом этапе воздушного участка полного взлета, выполняемого по такой схеме, показаны на рис. 2.17. В этом случае первое и второе уравнения системы (2.1) — (2.6) принимают вид
mV=Р cos адв — Ха — mg sin 9Н; 0=Р sin адп4-Ха — mg cos 9Н.
Для получения замкнутой системы добавим к этим двум силовым уравнениям первое и второе кинематические уравнения из системы (2.7) (при рассмотрении движения самолета в вертикальной плоскости угол <р = 0):
Z=Vcos 9Н; H = V sin 6Н. (2.71)
Система уравнений (2.70) и (2.71) полностью позволяет рассчитывать и анализировать траекторные характеристики движения самолета на воздушном участке полного взлета при условии 6П = const X
(2.70)
Рис. 2.17. Схема сил, действующих на самолет при разгоне с одновременным набором высоты на воздушном участке собственно взлета
Х(0Й=О). Начнем с определения градиента набора высоты. Предельно допустимый угол наклона траектории набора высоты 0п.пред определяется условием прекращения разгона самолета, т. е. достижением /ж= К = 0 (торможение самолета на этом участке траектории Недопустимо). Соответствующий этому углу предельно допустимый градиент набора высоты 1]и.пРед = tgОн.пред• 100% легко может быть получен из двух уравнений (2.70) при условии V=0\
(2.72)
Л OHJ U Д р —| - 1 д
Набор высоты после отрыва самолета при взлете должен производиться с углом наклона траектории 0н<Он.пред, обеспечивающим возможность одновременного разгона самолета для достижения скорости У2 к моменту его выхода на высоту Нтл. Потребное для этого тангенциальное ускорение V может быть определено с использованием второго кинематического уравнения (2.71) следующим преобразованием:
dV dV dH dt ~ dH dt
dV dH
V sin 9H
1 dV2
2 dH
sin 9H.
Переходя от дифференциалов к конечным приращениям, получаем приближенную формулу для определения среднего тангенциального ускорения:
1 Л (^2) • о .
V ----------—— sin 'н
2 ДЯ
(2.73)
В процессе разгона с набором высоты квадрат скорости самолета должен возрасти на величину A(V’2), а высота — на величину \Н. Найдем их значения для рассматриваемого участка полета (относящиеся к нему параметры обозначаются нижним индексом «В1» — воздушный участок первый). Воспользуется коэффициентом запаса по скорости ку(ку^1). Выразим V2 через УОтр с помощью этого коэффициента, который применительно к V2 обозначается соответственно Ку-2. Получаем V'2 = Kv2V„Tp, где Ку2^1. Тогда A(V2) можно представить как А (Ув1) = 1/2 —1/огр=(ку2—1) 1/(,т • Прирост высоты с момента отрыва (77 = 0) до момента выхода на высоту Н = Нтл (до момента окончания собственно взлета) равен А771_2 = ЯВзл—0=77вал- Подставляя эти выражения для приращений квадрата скорости и высоты полета в (2.73), получаем приближенную формулу, позволяющую определять потребное среднее касательное ускорение на первом этапе VBi:
у 2 ^B1«_^-(K|2-l)sin9H.B1. (2.74)
^/7 вЗЛ
Подставив это значение VBi в первое уравнение (2.70), находим
9HB1 = arcsin
2jf77вэл (eR3jt COS Q^B Xa) взл + ^отр(кИ2- 0
(2.75)
Из рис. 2.17 видно, что величина АВ| приближенно может быть найдена из геометрического соотношения (как катет прямоугольного треугольника):
tg ”н. Bl
Полагая в (2.74) Йв1«-^-, ^В1
где Д1/п1 = 1/2 Иотр и д/в1 = /в1 —0=/в1,
получаем
^огр (КК2 + •) s;rl 0Н.В1
Из первого уравнения (2.70) находим
dt = -------------. (2.78)
g евзл cos аЯв — А’а — sin 0Н
Определяя dL из первого уравнения (2.71) и подставляя в него dt из (2.78), получаем
d L = -!---------------------rfl/2. (2.79)
2g «взл c°s «лв —-Va—sin 9H
Следовательно,
41 = f dL=^- [ ---------------------cosS^------------rfl/2. (2.80)
J 2g J Евзл cosa4B —A'a — sin 6H
0 1/2
OTP 'в! V,
iBl = dt = — f ----------------------. (2.81)
J g J Евзл COS С1Дв— Ла — sin 6H
0 ^orp
Входящие в эти выражения величины 0Г можно определять приближенно, принимая их равными осредненному значению, находимому из (2.75). Тогда дальнейший! расчет LBi и /в) по формулам (2.80) и (2.81) может быть выполнен графическим методом.
В случае взлета по второй типовой схеме величины Ащ и /Bi определяются простым суммированием соответствующих значений L и t, определяемых раздельно для первой и второй фаз рассматриваемого участка взлета (см. рис. 2.15). Длина и продолжительность второй фазы определяются следующим образом. Из уравнений (2.71) легко получить при условии У = 0
dL = dH — -взл sin аДв 4- Ка
sin 0н
dH.
Евзл cos сьдв — Аз
Определяя dt из первого уравнения (2.71) и подставляя в него полученное выражение для dL, находим
*В1 Ивзл
= Crf/=_L Г -----------
J 1^2 J £взл ГОЗ (Хдв -Ya
2.6. АНАЛИТИЧЕСКИЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ ТРАЕКТОРНЫХ ХАРАКТЕРИСТИК
2.6.1. Общие зависимости и методы их решения
Рассмотрим теперь более общие аналитические методы интегрирования уравнений движения самолета, позволяющие точнее (с более высокой степенью приближения) определять искомые его траекторные характеристики. Для этого удобнее воспользоваться уравнениями движения самолета в перегрузках. Вначале получим необходимые вспомогательные аналитические соотношения, связывающие траекторные характеристики самолета с перегрузками, а также и между собой. Воспользуемся первым и вторым уравнениями системы (2.18) и двумя кинематическими соотношениями — вторым и третьим уравнениями системы (2.25)—для определения дифференциалов искомых траекторных характеристик самолета.
С помощью первого уравнения системы (2.18), характеризующего равновесие тангенциальных сил, применив подстановку dV dV dL j- _
=------и подставив сюда L из второго уравнения (2.25), наи-dt-----------dL dt
дем следующее дифференциальное соотношение:
dL = —-----——dV. (2.82)
g пх — sin 0
Заменив независимую переменную V в правой части дифференциального выражения (2.82) переменной V2 и выполнив подстановку VdV=-^-dV2, получаем вместо (2.82)
-cosB dVL пх — sin 0
--- и подставляя сюда V из перво-dt
помощью третьего уравнения (2.25)
sin fi ...
----------dV.
пх — sin 0
dL
2g dH dV
(2.83)
Представив H в виде го уравнения (2.18), находим с
dH= —
(2.84)
Переходя к переменной V'2, получаем dH— —----------------------------—-----dVL
2g n,r—sin0
(2.85)
Из третьего уравнения (2 25) имеем
di
dH
V sin в
(2.86)
Подставляя сюда выражение для dH из (2.84), находим
di=±-----d^—
g пх — sin 6
(2.87)
Соотношения (2.82) — (2.87) представляют собой обыкновенные дифференциальные уравнения с разделенными переменными, позволяющие определять искомые характеристики L, Н и t в тех случаях, когда удобнее производить интегрирование по скорости (при заданных пределах изменения скорости полета) и когда известны зависимости nx=nx(V) и 0 = 0 (У), или в случае, когда nx = const и 0 — const (либо только одна из этих величин постоянна).
В случае необходимости интегрирования уравнений движения самолета по углу наклона траектории (при заданных пределах изменения этого угла) дифференциальные соотношения для определения dL, dH и dt должны быть представлены в ином виде. Для их определения воспользуемся вторым уравнением системы (2.18), характеризующим равновесие нормальных сил. Применяя преоб-rfQ rf6 dL ,п о. •
разование -----=--- — во втором уравнении (2.18) и подстав-
dt dL dt
ляя сюда L из второго уравнения (2.25), получаем при условии полета без крена (у=0)
cos 0 ,д dL —-----------Й0.
g Пу—cos О
Вводя промежуточную переменную Н в дифференциальное выра-л М dH
.жсние для 0, т. е. представив 9=-------во втором уравнении
dH dt
(2.18) и используя третье уравнение (2.25), получаем
rf9 rfo dH da . g .
--------=-----V sin 6=— —cos6 .
dH dt dH V v y ’
(2.88)
dt
Отсюда
,,, V2 sin 0 ,o dH =----------------dL.
g ny — cos 6
Из второго уравнения системы (2.18) при у = 0 имеем дифференциальное соотношение для dt-.
(2.89)
dt=—---------------. (2.90)
g Пу — cos 9
Подставляя выражение для dt из (2.90) в первое уравнение системы (2.18), получаем обыкновенное дифференциальное уравнение с разделяющимися переменными, позволяющее определять зависимость изменения скорости полета по углу наклона траектории
(при заданных в качестве параметров величинах тангенциальной и нормальной перегрузок):
dV
И Пу — cos Ь
Из уравнения (2.91) найдем зависимости для определения соотношения между скоростями самолета и углами наклона траектории полета. Рассмотрим частный случай: nx = const и n^const. Решение ищем для режима криволинейного полета с начальными условиями 1/=1/нач, 0 = 0нач И КОНеЧНЫМИ УСЛОВИЯМИ V’=V’koh, О = 0кон. Интегрируя левую и правую части уравнения (2.91) в указанных пределах, получаем ^кон
^L°-d0.
(2.91)
е кон
ПЛ-— Sin 6
Пу — cos 6
(2.92)
^нач ®нач
Оба интеграла в рассматриваемом выражении табличные1. Первый из них равен
1 кон
V
нач
(2.93)
(2.94)
KOH
=ln Ркач нач
Определенный интеграл, стоящий в правой части выражения (2.92),
рассмотрим вначале в общем виде. Возьмем следующий неопределенный интеграл:
f A±£±lL(/9==_A1n(a + 6cOS0) + A f---------
J a+6cos0 b J a + b cos 0
Здесь и в дальнейшем при рассмотрении неопределенных интегралов в общем виде условно (для простоты записи) опускаем постоянную интегрирования. Для рассматриваемого случая в (2 94) должны быть приняты следующие значения постоянных параметров:
Д = В = — 1, а = пу и b= — 1.
Формула для определения интеграла в правой части (2.94) зависит от соотношения квадратов величин а и Ь. При а2>Ь2 имеем -------------------------------------------- 6 „-------------------------------------------— Z?2 tg —
Г dfl 2 . 2
------------== . —arctg -------- J а b cos 6 ]Ла2 — b- а+ Ъ
В случае а2<Ь2
(2.95)
_ 1 rifi-aUg-^+a + b
a + 6cos6 | Z>2_a2^ --- e
yb'2 — a^tg — — a — b
(2.96)
1 Они приведены, например, в справочнике: Градштейн И. С., Рыжик И. М. Таблицы интегралов, сумм, рядов и произведений. М., Физматгиз, 1962.
Следовательно, при a2>b2 получаем
Р А + В sin 0 В । , . , ,, .
——-------г/6=-----In а4-й cos 9)4-
J а + 6 cos 0 b к 1 г
rfl2_^tgT
4—arctg------------------— .
1 1 аА—№ & а + Ь
В случае а2<Ь2 имеем
(* А + В sin О В * , . . ,
I —!-----й6 =------In (а A-b cos 6)4-
J а + b cos 0 b '
_____0
} 62 _ a? tg — + а + b
+ -- In------------------ .
1 УЬ2 — а2 г------ 0
J, 62 — д2 tg — — а — b
(2.97)
(2.98)
Для частного случая о2 = &2 полученные ранее формулы (2.95) — (2.97) неприменимы. Однако к рассматриваемой задаче этот случай не относится, так как при пу=\ (прямолинейный горизонтальный полет без крена и скольжения) получаем 0 = 9 = 0. Для частного случая с пу= \ расчет должен вестись по другим исходным формулам, полученным при условии 0 = 0.
Подставляя в (2.92) вместо левой части ее значение из (2.93), а в правую часть — соответственно выражения (2.97) и (2.98) для заданных пределов интегрирования, получаем следующие два соотношения. Для случая а2>Ь2, т. е. в рассматриваемой задаче при пу>1 имеем
~ cos 6) 4- 21^, arctg---------------
Ь У а2—Ь2
Переходя здесь (в правой части рассматриваемого выражения) от постоянных коэффициентов А, В, а, b к указанным выше их значениям (соответствующим решаемой задаче) и подставляя в правую часть пределы 0Нач и Экон, получаем
Здесь
2п, rn
in ±BL = ln +
^нач пу cos ^кон
r„tg^- r„tg^
arctg---------arctg-------
Упу
rn=Vn2- 1 и Длу = йу-1.
(2.99)
Для удобства дальнейшего использования целесообразно преобразовать это выражение; вначале представим его в виде
._ 9нач \
гп \
Д»у )
Дион
Oltg — ----------arctg
Anv
Потенцированием находим из этого выражения ^кон (пу — cos ек0н)
. ^кон('гу C°S0KOH) 2п 1п — V,
=—-arctg
нач C°S внач) fn
=ехрХ=е\
Vнач (пу — cos ^нач)
или, получая V’koh, имеем
X'
где Х=Х(6нач, 9К0Н)
v пи-cos 0нач v кон — v нач л е ’
COS Окон r„tg^
arctg-----------arctg
Д;ги
(2.100)
^нач 2
A'ly
формула (2.101)
'„tg
. (2.101)
гп
Из указанных выше ограничений следует, что справедлива лишь в случае полета с ny = const> 1. При условии «2<&2, что соответствует случаю пу<1 применительно к рассматриваемой задаче, получаем
In Ks22- = ^кач
— -у- In (a b cos 9) -[
6
] bi — di tg—-ya + b
In---------------------
1 b- — a2 г------- 6
у Ь2 — ач tg — — а — b
9 кон
- ®нач
Используя преобразования и подстановки, аналогичные примененным выше при выводе формулы (2.100), находим
V Пи — COS 0„яч
In !-к£и_=1п
^нач COS0KOH
Потенцируя, получаем
ktg-^ + Дл, K„tg^— где Д> = Г)(9нач, 6КОН) = 4---------(2.103)
(кл tg - Дн,) tg 4- Дп,)
Х = -^- И Кл = ]/1 — 7/2
КЯ У
(2.104)
0 • ss —, a arctg-
2'2 &
При малых 0 приближенно можно считать tg — 9
Гл tg V г fl
______2 rnQ
Ьпу 2\пу
В этом случае вместо (2.101) и (2.103) получаем
X — Х(6нач, 9КОН)~ . (бион ®нач)» ^пИ
Г) Г) (ft' fl 'l ~ (Мкон + 2Дп,)(к„6нач — 2Диу) = 1нач’ №н)~ (Мкон - 2Дпу) (кл9кач + 2Диу)
Как уже указывалось, формула (2.102) соответствует условию полета с wy = const<l. С помощью (2.91) могут быть также получены и соотношения текущих значений скорости и угла наклона траектории с их фиксированными (например, начальными или конечными) значениями. Найдем формулы для определения зависимости текущих значений скорости набора высоты Ун от текущих значений угла набора высоты 9И и начальных значений этих параметров Унач и 011ач. В этом случае в качестве пределов интегрирования в (2.92) следует брать Унач, 9ИЯЧ и Уя, 9Н (вместо УКОн, 9Кон). Тогда аналогично (2.100) и (2.102) можно получить следующие соотношения.
Для режимов набора высоты с иу>1 (9>0)
Ун = Уйач ^-cos0"a4 .ех*
Пу — cos Oh’
(2.105)
/ 9нач . ZD
2п ( Гп s Т Гп g Tl 2 где Хн=хн(енач, 6Н) = —i arctg——--------------------arctg - - .
л \ ^Пу *
Для режимов набора высоты при пу<1 (0<О)
Л?// — COS Own u v
Ун = Унач (2.107)
пу — cos 0н
(«П tg V + tg— ДПу)
где £)н = Л)н(0нач, 9Н) = '------(2.108)
f КЛ 2 - (к« ‘g 2 +
Нетрудно видеть, что выражения (2.105) и (2.107) могут быть получены просто формальной заменой УКОя и Окон соответственно на Ун и Он в формулах (2.100) и (2.102).
Рассмотрим теперь режимы набора высоты (аналогично могут быть также рассмотрены и режимы снижения самолета), в которых нормальная перегрузка не изменяется по скорости. Из уравнений (2.88), (2.89) и (2.90), подставляя в них вместо У текущее значение скорости набора высоты Ун, а вместо 9 — соответственно теку-
щее значение угла набора высоты Он, получаем зависимости dL, dH и dt от угла наклона траектории полета. Это делается в предположении, что пу = пу(9н) или (в частном случае) nw = const.
Для набора высоты с пу>1 находим dL=<DL(eH)de„, где ФЛ(6н)=Ф1дФ2л;
_ Гнач(лР — cos ®нач)2
®1Л =
(2.109)
g
P2XK cos 0H Ф2/=Ф2Д)=4--------гтг
(ny — cos eH)3 ^Я=Фя(9н)С?9н, где Фя(9н)=ФшФ2я;
т __ ^нач <пУ Cos ®нач)2
ФШ —
J
(2.110)
(2.111)
g
as fa >__ е s,n ®н
— ®2// ( “н )-ГТ7
(Пу — cos 0н)3
г//=ФД9н)г/9н,
где ФД9Н)=Ф1(Ф2<; нач — cos ^нач)
Фи =
g
Л
Ф2<=Ф2Д0н)- , РГ . ,, -(Пу — COS 0Н)2 >
Для случая полета с набором высоты при пу<\ получаем
dL=9L{^)d^,
где £z(6H)=^ii^2i;
<g _ ^нач(л7-с°з6нач)2 —
g cos 0н
£2л = $2L (9H) =—-——. (^-COS0H)3
d/7=S^(9H)d9H, где (бн)=
С ^нач(Пу-СО3 0йач)2
\н —
g
sin 0H
^я=^(9н)= 1П н -з (Пу — cos 0Н)3
J
(2.112)
(2.113)
(2.114)
(2.115)
(2.116)
(2.117)
(2.118)
dt:=$t(6„)de„,
(2.119)
(2.120)
1
где SM0H)=S\^2<;
гл ^нач (пу— C°S 9нач)
•У 1/ = ;
g
S^ = SWh) = 7------
(Пу — cos 0н)2
Из приведенных выражений видно, что в
I
ix первые множители в формулах для dL и dH равны: Фи=Ф1н=^’ ih- Аналогичная картина имеет место и в отношении первых коэффициентов в дифференциальных выражениях для dt. Фц = 3 и. Это следует иметь в виду при проведении расчетов по указанным формулам. Однако для большей четкости формализованной записи целесообразно оставить указанные формулы в приведенном выше виде.
В дальнейшем при интегрировании дифференциальных уравнений (2.109), (2.111), (2.113), (2.115), (2.117) и (2.119) для получения траекторных характеристик на режимах криволинейного набора высоты (аналогично и для определения характеристик криволинейных режимов снижения самолета) возникает необходимость определения интегралов, аналитическое нахождение которых оказывается практически весьма сложным. Интегралы определяются при постоянных значениях перегрузок пх и пу, задаваемых в качестве исходных параметров. В этом случае величины Фн и 3 ц (i=L, Н, t) рассматриваются при интегрировании как постоянные коэффициенты, зависящие только от заранее задаваемых исходных значений входящих в них соответствующих параметров (УНач, 0пач, пх, пу). Так, например, интегрируя (2.109) в пределах от начальных L —0, 0ц = 0 до конечных значений L = LKmt, 6 = Окоп, получаем
рКОН р'кон
^кон = ] = (^нач’ ®нач’ П-у] J
0 О
^нач (Лу — COS внач)2 Скон е н cos ()н g J (Пу — coseH)3
о
Иными словами, при интегрировании указанных дифференциальных выражений эти первые коэффициенты выносятся за знак интеграла. В подынтегральном выражении остаются только вторые коэффициенты.
Для универсальности записи заменим в рассматриваемых интегралах верхний предел Окон на Он, а переменную интегрирования 0н на 0. Тогда получим
р н р» Р2Х „
Р,=Л(9.)=) (2.121)
о о
^2 = ^(6Н)=1 0 з(®н) = С ’н | ф2я (9)^=1 0 G |’H®2/(9)fi?9=j 1 0 е2х sin 9 i «0: 1 (ny — cos 0)3 ’н ex й'9, (Пу — COS 0)2 (2.122) (2.123)
где в соответствии с (2.106)
Х=Х(9)=-^ гп , в rn tg — arctg < ^у внач \ " g"T 1 (2.124)
drLLg / » ДЛу ,
/74 = ^4(9Н)=1 6 I ^(9)^6 = с сн Z)a cos 8 —2 .d^ ) (пу — .cos 0)3 (2.125)
(®)и = J 0 н ^2H(9)rf9 = ' 0 ?Н —° S1-8 -rf9; ) (Лу — cos О)3 1 (2.126)
? б(®н) = вн =J SM9)dt--0 _ сн ^0 (2.127)
J (ny — cos 0)2 ’
Рис. 2.19. Графическая зависимость Г2(0)
Рис. 2.21
Рис. 2.23. Графическая зависимость Ге (9)
где в соответствии с (2.108)
8
Kn tg 9 + ±Пу D0=D0№=------------=-------.
Kn tg -- Ally
(2.128)
Интегралы F, (j = l, 2, 3, 4, 5, 6) определяются по рассчитанным автором на ЭВМ для решения задач по определению взлетно-посадочных характеристик графикам (рис. 2.18—2.23). Эти интегралы находятся по заданным значениям входящих в них исходных параметров. Более точно величины F/ могут быть получены по приведенным в приложении таблицам.
2.6.2. Аналитическое определение траекторных характеристик первого этапа
С помощью полученных соотношений найдем аналитические
зависимости для определения траекторных характеристик первого этапа воздушного участка полного взлета. Вначале рассмотрим взлет, выполняемый по первой типовой схеме (см. рис. 2.14). Как уже указывалось, в этом случае первый этап представляет собой участок прямолинейного полета с непрерывным разгоном самолета от скорости Котр до скорости V2 при угле наклона траектории 0н.в1 = const. Принимаем допущение о постоянстве среднего значения тангенциальной перегрузки в режиме пх~пх ср = const. При этих условиях получаем из (2.83), интегрируя это выражение в пределах от L — 0, У=(/отр до L = LBi, V=V2, следующее приближенное выра-
жение:
Лв1 2g
4QS вн.в1
Пхср SIП 9н.в1
V2
j dvi
V2 отр
т/2 г/2
и2~~ иогр____________COS 9Н.В1
2g пХср— sin 0н.в1’
(2.129)
Интегрированием уравнения (2.87) в соответствующих пределах находим приближенное выражение для определения /вь
/В1= —-------—--------[ dV=----------—К°тр--------. (2.130)
S \.пх ср sin 9Н.в1) J g (пхср — sin 0Н.вi)
''отр
При взлете по второй типовой схеме аналогичным образом получаем приближенные характеристики первой фазы — режима прямолинейного полета с разгоном самолета от скорости /отр до скорости
12, достигаемой на высоте конца разгона самолета Як.р 2.15): (см. рис.
г» ^~УОТР C0S Cl . 2g л.гср — sin 6H Bi ,» 1^2 — l^orp / • л* \ ’ .?(nzcp-sin 0HiBl) „ Hj-^Tp sin Ci K.P n A* 2g "zcp-c°sOH.Bl (2.131) (2.132) (2.133)
Для второй фазы воздушного участка собственно взлета (первого этапа воздушного участка полного взлета) имеем
Д//2_з=//взл-/Ук.р (2.134)
Интегрируя (2.86) при условии V = H2 = consl и 6 = 9H.ni =const (рис. 2.15), находим
Нвзч
=------!__С dH=----------Л/У2~3 . (2.135)
и2 sin O^I J ^sine-,
* к-p
Из второго уравнения системы (2.25) имеем
в1 = V2 ^н.в1
**
В1
dt — И2 COS *—
А/^2—3 ‘sCi
(2.136)
Полученные выражения совпадают с найденным выше упрощенным методом выражениями для определения характеристик второй фазы воздушного участка собственно взлета.
И, наконец, взлет по третьей типовой схеме (см. рис. 2.16). На участке 1—2 имеет место режим неустановившегося криволинейного полета с одновременным разгоном самолета. Самолет выходит на высоту //мл со скоростью V2 и с максимальным углом набора высоты при этой скорости Ош.тах (с неубранным, еще частично выпущенным шасси). В данном случае также принимаем допущение об осреднении величин тангенциальной и нормальной перегрузок: nv^ny Cp=const> 1 (траектория полета искривляется кверху) и Пх = Пх ср = const>0 (происходит разгон самолета). Здесь удобно пользоваться выражениями для определения траекторных характеристик, представляющими собой зависимости искомых величин от угла набора высоты (2.88) и (2.90). Входящее в них текущее значение скорости полета V' определяем с помощью (2.91). Интегрируя левую и правую части (2.91) в пределах от V= V'oTP, 0 = 0 до произ-
вольных текущих значений скорости самолета и угла набора высоты V = V'H, 0 = 0н, получаем соотношение ин 5
- Леер—Sine -----------а 9. ПуСр — cos 0
(2.137)
Уо1Р °
Поскольку на участке траектории 1—2 ггу Ср> 1, т. е. выполняется условие а2>Ь2, находим из (2.100) решение, принимая Vkoh=VH) Уцач=1Л>тр, Окон = 0н И 0нач = О:
ДЛц
V =v J v н — v отр
----------еА°, tty ср—cos
(2.138)
где
2лгср Гп % 2
Хо=Хо(0, ен)=-—<-arctg ——±-Гл АЛр
(2.139)
Подставляя в (2.90) выражение для скорости из (2.138), получаем при принятых допущениях следующее приближенное дифференциальное соотношение1.
УотрЛп^ е -
------- -------------d чн-g (Пуср —cosOH)2
Это же выражение можно было получить и из (2.114), подставляя в него указанные выше значения параметров: УНач= V0Tp,
dt
(2.140)
9нач Пу ^рср Хн — Хн (0, 6Н) Xq-
Интегрируя (2.140) в пределах от / = 0, 0Н = О до t=tB\, 0п = 6ш.шах, находим приближенное аналитическое выражение для определения продолжительности полета на участке 1—2 (см. рис. 2.16):
t fl
Ав1 -шипах
i„ = f = о ё о
Аналогично из (2.109) получаем
V"2 Ал2 rf/,=—orp g
(.Пу Ср — COS 0Н)2
^9Н.
(2.141)
(2.142)
(лpep — cos flH)3
Интегрируя в пределах от L = 0, 0Н = О до L = LBi, Оп = 0ш.тах, получаем приближенное аналитическое выражение для определения дистанции воздушного участка собственно взлета в виде
”’2 ‘ 2 «ш max 91
| ——-----------dOH. (2.143)
/ (.Пу ср — COS 0Н)3
И L-t “ I
g J
о о
е
е
Интегралы, входящие в (2.141) и (2.143), соответствуют выражениям (2.123) и (2.121), куда в рассматриваемом случае должны
быть подставлены следующие значения верхнего предела интегрирования и параметров, входящих в подынтегральную функцию:
вщ max
2nzcp rnls 2 max’ ^mraai)= HFCtg - И
rn Ьп у
Определяются эти интегралы указанным выше численным методом по соответствующим значениям и Fj с помощью графиков, представленных на рис. 2.20 и 2.18, или по заранее рассчитанным таблицам.
2.6.3. Определение скоростей набора высоты
Считаем движение самолета при начальном наборе высоты в процессе полного взлета происходящим в вертикальной плоскости (в плоскости развертки траектории). В этом случае оно описывается уравнениями (2.70) и (2.71). Рассмотрим допустимый диапазон скоростей для режимов прямолинейного набора высоты. Из
Ру2 второго уравнения системы (2.70), подставив в Heroya=QHS , получаем выражение для потребной скорости прямолинейного набора высоты:
или
-г / 2/>уд (cos вн ЕВЗЛ sin Одв)
' СунР
.. 1 / 2РудСО5^н ---т-
н I/ — ^г.и г COS ®н’
г сун?
(2.144)
(2.145)
где Уг.п — потребная скорость прямолинейного горизонтального полета с Су = суп. Отсюда видно, что потребная скорость набора высотыменьше потребной скорости горизонтального полета на величину 1 cos9„<4. При углах наклона траектории 0Н =С25° величина ]/cos9Н>-0,952. В этих случаях различием величин VH и Уг.ц практически можно пренебречь. Из первого уравнения (2.70) при Ё = 0 получаем
Р cosa,B=J(ra-)-zng sin 9Н. (2.146)
Из уравнения (2.146) могут быть найдены минимальная (Уитт) и максимальная (VHmas) скорости установившегося набора высоты с данным углом наклона траектории 0Н. Удобно решать это уравнение графически с помощью кривых Н. Е. Жуковского (методом потребных и располагаемых тяг). С этой целью строятся диаграммы типа приведенной на рис. 2.24: сетка зависимостей РПотр = Рцотр(V) и Ррасп = Ррасп(У) при различных значениях Он для заданных высоты полета, режима работы силовой установки и конфигурации самолета. Здесь Pn0Tp = A’a + mg sin 0в — потребная тяга, а Ррасп=
Рис. 2.24. Кривые Жуковского для режимов прямолинейного набора высотн
Рис. 2.25. Полярная диаграмма скоростей набора высоты при взлете: ''“'''Чах’
(в — a) I OV
= Рсозадв— располагаемая тяга. Пересечения кривых РПотр и £расп характеризуют режимы полета с V,,mtn и Унтах при рассматриваемых значениях 0Н, Очевидно, с увеличением 0Н величина Унтах убывает. При скоростях У<УНт1п и У> Унтах возможен только полет с торможением самолета. Первая (левая) область режимов полета только с торможением самолета ограничивается слева минимально допустимой скоростью Упипдоп. Вторая (правая) область этих режимов полета ограничивается справа предельной скоростью Упред- Полученные отсюда величины Ун mm и У„тах показаны Б ВИДе ПОЛЯрНЫХ зависимостей Ун max= Уцтах (Он) И Ул min= = Уптт(0и) на диаграмме на рис. 2.25.
Диаграмма построена для полета с набором высоты при задан» ном (взлетном) режиме работы силовой установки и заданной высоте аэродрома взлета. Каждому углу наклона траектории на диаграмме соответствуют своя максимальная и своя минимальная (или минимально допустимая) скорость полета. Кривая, представляющая собой геометрическое место точек, характеризующих режимы прямолинейного набора высоты на предельных скоростях Унтах и Унтт, называется указательницей глиссад набора высоты (кривая, проходящая через точки 1—5—7). Обычно при больших углах 0Н ограничением со стороны малых скоростей набора высоты является Ун min, а при малых — Уmin доп, пропорциональная cos 0Н при заданной величине су ЛОп. Центральная часть диаграммы соответствует режимам прямолинейного набора высоты с одновременным разгоном самолета. При пониженных режимах работы силовой установки (меньше взлетного) в этой области скоростей полета и углов наклона траектории появляются режимы прямолинейного набора высоты с торможением самолета. Области диаграммы с клетчатой штриховкой соответствуют режимам полета, на которых набор высоты возможен только с торможением самолета (УНтах< < У < У пред) •
Каждой фигуративной точке на плоскости диаграммы соответствует определенная вертикальная скорость набора Уг/ н= Ун sin 0н-Вертикаль, опущенная на ось ОУ, представляет собой на этой диаграмме величину Уун в масштабе оси ОУ. Так, например, фигуративной точке 3 соответствует вертикальная скорость набора высоты Уу нз = Унз sin 0нз, величина которой графически определяется длиной отрезка 3—4. Это становится очевидным из рассмотрения треугольника О—3—4, в котором гипотенуза 0—3 представляет собой в масштабе оси абсцисс скорость Унз, а отрезок 3—4 является катетом, противолежащим углу 0нз-
При наборе высоты с постоянным (заданным) углом наклона траектории величина Уу11 будет наибольшей при скорости набора Ун= Унтах- Например, при наборе высоты с углом 0нз наибольшая вертикальная скорость будет соответствовать точке 7 диаграммы. Величина этой вертикальной скорости Уу п?= УП7 sin 0нз (графически представлена на диаграмме ординатой 7—5).
Режим установившегося прямолинейного полета с максимальным углом набора высоты 0Нтах соответствует точке 1 фазовой ’
Рис. 2.26. Кривые Жуковского для режимов прямолинейного набора высоты с углами би тая И бнапв
плоскости диаграммы. Это — режим полета на скорости Рощах с вертикальной скоростью /увтах =
— Ее щах sin 0И щах- При битах суше-ствует только одна единственная скорость установившегося прямолинейного набора высоты, когда кривые потребных и располагаемых тяг соприкасаются только в одной точке (избытки тяги равны нулю), рис. 2.26. В этой точке градиент набора высоты естественно также максимален:
Пнтах = *£ 0нтах-ЮО%,
лли приближенно (при сравнительно небольших величинах битах)
__ max
Лнтах ' у
б max
100%.
Максимальная вертикальная скорость Еутах достигается в точке 5 диаграммы (рис. 2.25), в которой указательница глиссад набора высоты имеет горизонтальную касательную (а—я). Ей соответствует наивыгоднейшая скорость набора высоты Енаив (при которой обеспечивается быстрейший набор высоты самолетом в установившемся прямолинейном полете). Величине Еутах на диаграмме соответствует ордината 5—6. Из диаграммы, в частности, видно, что режимы (скорости) установившегося прямолинейного полета с битах и кутах в общем случае не совпадают. Объясняется это тем, что причины, обуславливающие их существование, существенно различны. Появление режима полета с битах обусловлено возрастанием' потребной тяги (за счет увеличения препятствующей разгону самолета гравитационной составляющей mg sin 0) настолько, что избыток тяги ЛРцзб = -Ррасп—Атотр становится равным нулю. Режим полета с Еутах имеет место при максимальном избытке тяги АРизбmax. В зависимости от конкретных условий взлета выбирается режим полета на участке начального набора высоты, обеспечивающий наиболее быстрый (полет на Епаив) или наиболее крутой (полет на Ее max) набор высоты, либо по крайней мере по возможности наиболее близкий к одному из этих режимов.
2.6.4. Определение характеристик второго этапа воздушного участка полного взлета
Рассмотрим приближенные методы определения характеристик различных этапов начального набора высоты. В общем случае этих этапов, как уже указывалось, три. Это второй, третий и
четвертый этапы воздушного участка полного взлета. Определим траекторные характеристики второго этапа для случая полного взлета, протекающего по первой типовой схеме (см. рис. 2.14). Это режим прямолинейного набора высоты с разгоном самолета в процессе уборки шасси от скорости V2 до V2*. Продолжительность данного этапа ZB2 (в2 — второй этап воздушного участка) определяется как разность двух величин:
^в2 = б.ш
где /уб.ш — время уборки шасси (конструктивный параметр), определяемое экспериментально, вначале приближенно, по материалам стендовых испытании, а затем уточняемое в летных испытаниям. Для современных самолетов величины /Уб.ш лежат обычно в пределах примерно от 6—8 с до 11—15 с (тяжелые самолеты); /Ш1 — время полета с убирающимся шасси — это время, прошедшее с момента начала уборки шасси на высоте Яш до момента завершения собственно взлета (время набора высоты Д/Яш = Явзл—/7Ш). Приближенно, полагая набираемую высоту пропорциональной времени набора, можно считать /ш1=^в|(1—Дш/Двзл)- При /ш!>^уб.ш второго этапа вообще не существует (см. рис. 2.15).
Приращение высоты на этом этапе может быть приближенно определено как ДДг-з®5 ^ср.вг sin 0НВ2 ^в2. Средняя скорость полета на участке 2—3 равна 1/ср.в2 =-j-(Iz2 4-1/2)=-j- И2(’ку2*4- 1),
где К/2-— коэффициент запаса по скорости для V2 (ккг*>1). Следовательно,
Д/72_3~ — I/2 (K^-h 1) Sin ®н.в2^в2 = ~ ^огрКИ2 (КЦ2*4“ 1) Sin 9н,в2^в2.
(2-147)
Потребный угол набора высоты на участке 2—3, когда обеспечивается разгон самолета от У2 до И2*, определяется следующим образом. Из формулы (2.73), подставляя в нее
дУв, = (У2)2—44=14(К72«— 1) и ДЛ/2_3 из (2.147), получаем
Йв2=^И2(кк2*- 1).
Подставляя это приближенное выражение для VB2 вместо V в первое уравнение (2.70), находим
^2 (к1/2*— 1)
sin 6нв2 ®взл cos ctлв 2Са
gttfl
Входящая в последнее уравнение величина .Ха приближенно может быть определена при указанной выше средней скорости VCp и осред-
ненном коэффициенте лобового сопротивления самолета cxcp~cxa 4* _|_-^-ДСд.ш, где схя— коэффициент лобового сопротивления самолета во второй взлетной конфигурации (при убранном шасси), а Дст1П — прирост коэффициента лобового сопротивления самолета при выпуске шасси (прирост сха за счет выпуска шасси). По этой величине 0Нв2 находится и градиент набора высоты на данном участке траектории. Высота конца второго этапа (высота полета в момент окончания уборки шасси) равна Ну.ш = Нвзл-+-\Н2-з- По аналогии с (2.76) получаем
, А Т/д—з
^в2 _ Q
tg 0н.в2
(2.148)
Аналитическое выражение для определения Lb2 находим, интегрируя (2.79) в пределах от L = 0 V=V2 до L = Lb2, V=V2*:
(^)2
1_Р ______________cos 0н_________
J Евзл cos адв Xа sin
Определяя dH из второго уравнения (2.71) и подставляя в него dt из (2.78), получаем
dH = ---------------------------dV2. (2.149)
2g евзлс08аХв — Хл — sin 0Н
Отсюда находим аналитическое выражение для определения А Н2-2'.
Д^2-з= ГШ dH = -±- f ------------------------ dV2.
J 2g J евзл COS (Хдв zCa Sin
"взл v2
Эти и приводимые в данном разделе аналитические выражения позволяют получать уточненные значения искомых характеристик численными или упомянутыми выше графическими методами.
2.6.5. Третий этап воздушного участка полного взлета
Рассмотрим характеристики третьего этапа воздушного участка полного взлета также на примере первой типовой схемы (для третьего этапа полного взлета по второй типовой схеме легко могут быть получены аналогичные результаты) По первой типовой схеме (см. рис. 2.14) третий этап начинается на высоте /7У.Ш при скорости полета V2* и заканчивается по достижении самолетом вы
соты /7мех с одновременным разгоном его до скорости У3. Прирост высоты на протяжении этого этапа составляет \Н3-4=Нмек—Ну ш. Скорость полета в конце третьего этапа должна возрасти до V3 = = кгз1'2*, где Куз — коэффициент запаса по скорости для V3 (ку3^1). Прирост квадрата скорости на этом этапе полета составляет ЛУв32=Уз2—(^2*)2= (Р’2*)2(куз2—1). Подставляя выражение для ЛКэз2 и АЯ3-4 в (2,73), получаем приближенную формулу для определения потребного среднего тангенциального ускорения на третьем этапе VB3:
(кг)~ (Ккз~ 1) j л Sln ®н.вЗ-
(2.150)
2ЛНз-4
Воспользовавшись соотношениями И2—КигЛЛг; I/2=kv2VOtP и формулой (2.150), получаем из первого уравнения системы (2.70) приближенное выражение для определения потребного угла набора высоты на третьем этапе 0н.вз:
sin 0„.п3~
2.?ДЯ3_4 (евзд COS Идя — Хя)
+ ^отрКИ2кИ2* (кгз— 1)
(2.151)
Воспользовавшись (2.151) и найдя выражение для соэОн.вз из второго уравнения системы (2.70), получаем и приближенное выражение для среднего градиента набора высоты на третьем этапе:
Пн.вз =tg 6н.в3-1ОО16 =Л|П-М1.1000/6 «
COS0H.B3
~_____________2gA/73_4 _______ eB31 cosaJB— Ла
2g’A//3_4 + V2ipK^2Ki>2* (КИЗ — 1) Евзл sin аДв + Fa
Входящие сюда величины ХА и Уа определяются для самолета во второй взлетной конфигурации при средней скорости 1Лр.в.= = —Иг(киз4-1). Дистанция LB3 приближенно находится с помощью очевидного геометрического соотношения
<2Л52>
Он.вЗ
Подставляя в (2.150) , где
-^вЗ
АИв3==И3 —1/2 = И2(ККЗ—1) = 1/отрКи2КК2*(Киз—1) и А/в3=/а3»
получаем приближенное выражение для определения /вз:
2Л//3 4
/в3. _
1^отркК2КИ2* (KV3 "Г I) s'n ®н.вЗ
(2.153)
Аналитические выражения для более точного определения величин Lb3 и Дз получаются интегрированием (2.79) и (2.78) в соответствующих пределах:
vl
1 С _________________cos f)H___________
2g J бВзл cos аДв — Xa — sin аЛв (И)2
(2.154)
(2.155)
___________dV____________
евзл cos аДв .Ya sin 6H
2.6.6. Четвертый этап воздушного участка полного взлета
Рассмотрим вначале характеристики четвертого этапа полного взлета, выполняемого по первой типовой схеме (см. рис. 2.14). Он состоит из двух подэтапов. Первый из них — это режим разгона самолета с набором высоты в процессе уборки закрылков. Задана его продолжительность — это время уборки закрылков = (конструктивный параметр). Второй из них — разгон самолета в полетной конфигурации с одновременным набором высоты. Здесь задан перепад высот SH^-.6=HnB—/7уМех. На первом подэтапе самолет разгоняется от скорости У3 до скорости V3*. По аналогии с (2.147) и (2.148) получаем для этого участка траектории (участка 4—5)
Д/7 д-5 я ^отрК|/2КК2*К1/3 (К1/з*-|- 1) sin Он.мС (2.156)
и . * S1TI Sh.b4 ®взл Т7 1ЛОЦ|К^2КИ2*К1,3 (KV3*— 1) cosaAB X а / ^в4 (2.157)
Т* -^4-5 (2.158)
а ‘g »н.В4 '
Для участка тр находим аектории 5—6 по аналогии с (2.151) и (2.153)
fl** . ~ r (евзл COS (Хдв —*^а) (2.159)
2gAAZ3_6 + ^отрКу2кИ2*кИЗкИЗ* (К74— ')
*в4 2А//5-6 (2.160)
^О1ркК2кИ2*кГЗкЦЗ* (КИ4 + • ) sin 6н.в4
а • /** Д//.5-6 Ьв4 — ta й** ’g 0н.в4 (2.161) 83.
Здесь кгз=У3*/У3 — коэффициент запаса по скорости для У3*, и кГ4=У4/У3* — коэффициент запаса по скорости для Г4 (каждый из них не менее единицы).
Перейдем к рассмотрению второй типовой схемы (см. рис. 2.15). Горизонтальный участок разгона самолета на четвертом этапе также состоит из двух частей: участка 4—5, на протяжении которого происходит уборка закрылков с одновременным разгоном самолета от скорости V3 до скорости Г3* (очевидно, абсолютные величины скоростей V3 и Г3* при взлете по второй типовой схеме в принципе могут заметно отличаться от аналогичных величин скоростей при взлете, например, по первой типовой схеме), и участка 5—6, на котором производится разгон самолета в полетной конфигурации от скорости И3* до скорости начала набора высота полного взлета V4* или до V’4. На участке 4—5 угол наклона траектории 6*н.в4=0 и А//4-5=0. Приращение скорости на этом участке ДИ*4=
= Ид — — V3 (киз*— Г) = И0ТРКг2Кнз (Киз*— 1).
Определив из первого уравнения системы (2.76) величину dt и переходя от дифференциалов к конечным приращениям, получаем после несложных преобразований приближенное выражение для определения продолжительности участка 4—5:
.* Иотр к^Куз (кнз*— 1) £(евзл cosctjB —Ла)
(2.162)
Аналогичным образом находим из первого уравнения системы (2.71), подставляя в него f*4 из (2.162) и среднюю скорость 1/*ср.в4='^“ 4"И3), следующее выражение:
, Иртр Ку2Куз (Куз* — ' ) В ~2£(евзлС05аДв —Ха)
(2.163)
Таким же способом находим и траекторные характеристики участка 5—6, например, для случая разгона самолета до скорости V4:
** Г0Гр КурК^зКр-д.;, (Кр,4 —I)
Гв4~
(2.164)
(2.165)
и
g (евЗЛ cosaJB — Ха) ^отр КУ’2КУ’3КИЗ* (КУ4 ') 2g (евзл cos адв —Ха) Характеристики участка 6—7 в случае разгона самолета от V* до У4 определяются аналогично тому, как это было сделано, в частности, при определении характеристик участка 5—6 первой типовой схемы взлета. В случае набора высоты на участке 6—7 с постоянной скоростью V4
.................................. (2.166)
(2.167)
(2.168)
ДЛ7б—7 — 7/цв 7Умех;
sin 6н*в4=ев3л cbs адв — ,** ДЯб-7 /**________ Д-^6-7
tge::B4 ^sine::B4
Аналогично находятся и приближенные характеристики остальных участков рассматриваемых траекторий. Дистанции и продолжительности воздушных участков полного взлета получаются суммированием соответствующих величин для всех этапов. Так, например, суммарные дистанции и продолжительность начального набора высоты по первой типовой схеме (см. рис. 2,14) определяются следующим образом:
^н.и = ^В1 + ^в2 + £В3 + + £в4
м
^н.н = ^В1 + ^в2 + *в3 + ^в4 + ^в4.
Аналитические выражения для более точного определения указанных характеристик (методами численного или графического интегрирования) также могут быть получены для всех участков рассмотренных траекторий описанными выше методами.
2.7 . РАСЧЕТ ХАРАКТЕРИСТИК НАБОРА ВЫСОТЫ ЭНЕРГЕТИЧЕСКИМ МЕТОДОМ
Дистанции и продолжительности полета на режимах набора высоты с одновременным разгоном или торможением самолета в некоторых случаях целесообразно определять, используя уравнения движения самолета в энергетической форме. Из второго уравнения системы (2.27), переходя от дифференциалов к конечным приращениям, находим приближенное выражение для определения приращений дистанции в зависимости от приращений энергетической высоты (от изменения удельной механической энергии самолета) в режимах набора высоты:
д/уд. (2.169)
\ пх / р
Здесь индекс «ср» означает среднее значение. Приближенно считая среднюю величину отношения равной отношению средних величин делимого и делителя, получаем
COS би,со дА~-----------!1±д/уэ,
лхср
(2.170)
При сравнительно пологом наборе высоты можно приближенно принять cos Ог.ср~ 1, и тогда
ДА ж
дЯ3
Я* ср
Д$,
(2.171)
где As — приращение дальности полета по траектории. В частном случае полета с постоянной скоростью nXCp=sin 0н.ср, и тогда формула (2.170) принимает вид
дд ~ .
6ц,ср
В этом случае, естественно, приращение энергетической высоты оказывается равным приращению высоты геометрической. Аналогичным путем находим из первого уравнения системы (2.27) приближенное выражение для приращения времени полета в зависимости от приращения энергетической высоты;
-~э (2.172)
(^Х^н)ср Пх. Cpt^H.ср
где VH.Cp — средняя скорость набора высоты.
Для набора высоты с постоянной скоростью получаем из (2.72):
Найдем вначале характеристики первого этапа воздушного участка полного взлета. Из соотношения (2.20), подставляя в него параметры первого этапа, получаем выражения для энергетической высоты в начале (Яэов1) и в конце (Яэ.ь) первого этапа (обозначаемого индексом «в1»):
и
^Э.в1 ^к.в!“
Z2.
/^э0в1 = ННОл= -°-р-0 2g
V2
~g Ь^взл-
Здесь Яков; и Яов1 — соответственно удельная кинетическая энергия и удельная потенциальная энергия (геометрическая высота) центра масс самолета в начале первого этапа, а Як.в1 и Н3\— аналогичные величины в конце первого этапа. Находим приращение энергетической высоты на первом этапе ДЯэ.в1:
вал
Уогр . _ ^-^огр + З^Явзл 2g 2g
Определим теперь из (2.170) приближенную величину дистанции первого этапа воздушного участка полного взлета £вЬ подставив в него полученное выражение для ДЯэ.вь
И2 — И2гр + 2g//B3J 2gnxep
COS 0H,cp
Vl— iz2 __ 2 v огр
2gAf Cp
cos 9H1CP
^ИЗЛ COS 0H.Cp nx cp
(2.173)
Проанализируем двучлен, стоящий в правой части этого выражения. Первый его член характеризует приращение дистанции за счет изменения (в данном случае — возрастания) скорости полета при заданных средних значениях би и пх, а второй — приращение дистанции за счет набора высоты при тех же условиях. Сравним это выражение с полученным выше из геометрических соображений приближенным соотношением (2.76). Кстати говоря, такое же приближенное
Рис. 2.27. Сравнение траекторий набора высоты с 0=var; V=var (траектория 1) и с 6 = const, V= const (траектория 2)
выражение для дистанции, как (2.76), может быть получено почленным делением кинематических соотношений (2.71) с последующим переходом от дифференциалов к конечным приращениям при
условии постоянства величины 0 (или его среднего значения 0н.ср).
Нетрудно видеть, что в случае набора высоты с постоянной скоростью первый член правой части (2.173) оказывается равным нулю, а второй член принимает вид правой части выражения (2.76), по
скольку при У = 0 получаем пх cp = sin 0H.cp. Отсюда следует, что фор-, мула (2.173) является более общей и позволяет более точно определять величину ЛВ|. Иными словами, осреднение, принятое при выво-
де формулы (2.76), не позволяющее учитывать изменения скорости
и кривизны траектории, может приводить к заметным дополнительным погрешностям. Это соображение может быть, в частности, проиллюстрировано на примере графика, приведенного на рис. 2.27. Здесь показаны две траектории набора высоты: фактическая криволинейная (/) и схематизированная прямолинейная (2). Угол наклона траектории / равен среднему углу наклона траектории 2: fij =-£- (62+ 63) — ®с₽- Определяя здесь дальность по приближен
ной формуле (2.76), в обоих случаях получили бы один и тот же результат, хотя в действительности дальности полета в этих двух случаях различаются на величину XL. Уточненная формула (2.173) в какой-то степени позволяет эту разность учитывать. Даже если бы не было изменения скорости между начальной и конечной точками рассматриваемой криволинейной траектории (при ЛУ = 0, т. е. при
равенстве нулю левого члена, содержащего разность квадратов скоростей в этой формуле), то все же правый член в (2.173) в принципе позволил бы учитывать изменение величины V на протяжении этой траектории (через /?ЖСр). Значит, двучленное выражение правой части формулы (2.173) позволяет учитывать как влияние изменения скорости, так и изменения кривизны траектории полета. Первый член правой части (2.173), отсутствующий в выражении (2.76) и характеризующий приращение дистанции за счет изменения скорости, может быть назван кинематическим (или точнее динамическим), а второй — геометрическим членом. Подчеркивая принципальное различие между этими выражениями, формально можно говорить о том, что соотношение (2.76) определяет геометрическую, а соотношение (2.173) —энергетическую дистанцию.
Аналогичным образом можно получить из (2.172) приближенное
выражение для определения продолжительности первого этапа воз-
душного участка полного взлета ZBi, приняв среднюю скорость равной Ин.ср=-^-(И2+Иотр):
J ^2 ~ ^отр + 2£^взл ^2 — ^огр 2//взл ^2 174 j (У1 + V’orp) ёпх ср £Цгср (^2 + ^отр) Пх ср
Сравнивая (2.174) с полученной выше формулой (2.77), приходим к аналогичным выводам. Наличие первого члена в правой части формулы (2.174) позволяет более полно и точно, чем с помощью (2.77), оценивать величины /в,. В частном случае набора высоты бе? разгона самолета (Iz2=V0Tp) первый член двучлена в (2.174) оказывается равным нулю, а второй член принимает вид правой части (2.77), поскольку V'2 + Йотр = К>тр(ку2+ 1).
Более точные выражения для определения LBi и /В1 энергетическим методом получаются непосредственным интегрированием первого и второго уравнений системы (2.27):
Я90в1
dH3 nxV
и
^Э.В1
£в1 = f
J Пх
Яэов1
Эти интегралы в общем случае находятся только численными или графическими методами,
Найдем характеристики второго этапа воздушного участка полного взлета, производимого по первой типовой схеме (см. рис. 2.14). Приращение энергетической высоты на этом этапе полета равно
Л« Н +2^-3
Д/Л.В2- —+ ну.ш-—- Нвзл=----------------------- .
В соответствии с этим выражением из (2.170) находим приближенное выражение для определения дистанции второго этапа:
~ (Z*)2-V2+2gA772_3 _ (^)-У
В2~ 2g«xrp COS9h'"2 2g«.rcp
+ cos 9„.в2. Я.гср
Средняя скорость для этого этапа ИН1Ср,В2 = -^- (^2+ И2) .
COS ®н.в2 +
(2.175)
Тогда из (2.172) получаем
( (И*)2 - Zj + 2gA//2_3 У'2-У2
°2 (V2 + H2)gnxcp g'lxcp
j____2SH 0—3
(^2 + V2) «хгр j
(2.176)
Правые части формул (2.175) и (2.176) также представляют биномы, содержащие кинематический (первый) и геометрический (второй) члены. Сопоставляя формулы (2.175) и (2.148), видим, что вторая из них является частным случаем первой при условии = (установившийся полет, пх cp = sin Он.вг) • Из формулы (2.176) при условии V2* = ^2 легко получить приведенное выше для приближенного определения Д772-з выражение (2.147).
Для третьего этапа воздушной части первой типовой схемы полного взлета получаем аналогичные формулы. Приращение энергетической высоты здесь составляет
_Z3 _L„ Н 2^3-4
Л/7э.вЗ— , "мех 2g "у,ш —
Средняя скорость на этом этапе может быть принята равной '/н.ср.вз= — (И3+У2) В соответствии с этим находим из (2.170) и (2.172) следующие приближенные выражения:
L cos 9Н пз + АЯ-3~4-С0-5-н-в2. (2.177)
2^ЛЛСр пхср
и /в3 ~ . 2А"3.~4—. (2.178)
Эти формулы также являются общим случаем полученных выше формул (2.152) и (2.153). И наконец, для четвертого этапа воздушного участка полного взлета, выполняемого по первой типовой схеме, находим
(^)2-7| + 2^ДЯ4-5
Лв4 п
2^ ср
* ~ (z3*)2- + 2^4-5
"4 ' (Н + Гз)^х(.р '
COS 6н,в45
а также
742-(^*)2+2^s_6 „ i
-----—----------- COS0h.b4;
^Snx<-p
Z2-(r*)2+ 2^ЛЛ/5-6
в4~ (к4+^л,ср •
(2.179)
(2.180)
Сравнение полученных здесь формул с приближенными выражениями для определения характеристик начального набора высоты показывает, что последние могут быть получены из соответствующих формул, найденных с помощью уравнений в энергетической форме, в виде частных решений (для случая установившегося полета). Таким образом, энергетический метод позволяет получать более
общие решения в тех случаях, когда, например, по заданным начальным характеристикам какого-либо участка траектории полета с разгоном самолета при одновременном наборе высоты требуется найти характеристики в конечной точке этого участка.
2.8 АНАЛИТИЧЕСКИЙ РАСЧЕТ ХАРАКТЕРИСТИК НАЧАЛЬНОГО НАБОРА ВЫСОТЫ ПО УРАВНЕНИЯМ В ПЕРЕГРУЗКАХ
Рассмотрим более строгий аналитический метод расчета характеристик воздушного участка полного взлета, основанный на использовании уравнений движения самолета, выраженных в перегрузках. Траекторные характеристики участков начального набора высоты, выполняемого при взлете по первой типовой схеме (см. рис. 2.14), соответствующих режимам прямолинейного полета с разгоном самолета при постоянном угле набора высоты (участки 2—3, 3—4, 4—5 и 5—6), определяются методом, аналогичным использованному выше при выводе формул (2.129) — (2.136). Так, например, для участка 2—3 по аналогии с (2.129) легко можно получить из (2.83), интегрируя это выражение в пределах от £ = 0, V=V2 до L=LB2, V=V2*, следующее выражение для определения Li>2‘
№
т 1 COS 0н.в2 в2 — X--------------
2g Лгср — sin 9н,в2
Аналогично (2.130) г
21 -
2g
I dV2 .2 2 одим из (2.87)
2 cos 0h.b2
nx cp sin 6H.B2
(2.181)
H-^2 g(nXCp— sin 0h.b2)
(2.182)
sin 9h.b2)
g {tlx ср
Также находим приращение высоты на участке 2—3, интегрируя уравнение (2.85):
(и*,)2
' У /Iz*\2 IZ2
д//2-3=----------sin °н-в2----- С б/1/2==_1_£2----------I-----52п .
2g (Пх ср — Sin 9н.вэ) J 2g Mjccp sin 0H1B2
(2,183)
Подобным же образом определяются и характеристики участков <5—4, 6—7 при взлете по второй (см. рис. 2.15) типовой схеме (второй вариант схемы — разгон на участке 6—7 от V4* до V/,), а также участков 4—5 и 5—6 при взлете по третьей типовой схеме (см, рис. 2.16). Участок 4—5 при взлете по второй типовой схеме — это режим прямолинейного горизонтального полета с разгоном самолета
(2.184)
(2.185)
от У3 до Уз* в процессе уборки закрылков. Интегрируя (2.83) и (2.87), получаем для этого участка полета с 0 = 0
г, . (П)2-^
"4 2,?«хср
.. ^з-Из и ^в4=---------•
§пх ср
Также находятся и характеристики участка 5—6. Характеристики участка 6'—7 при взлете по второй типовой схеме для второго ее варианта (набора высоты с постоянной скоростью У4) легко определяются интегрированием упомянутых выше дифференциальных соотношений:
СТ=-^~ (2.186)
tg ”н.в4
И = • (2-187)
V4SinOHB4
Перепад высоты на этом участке полета равен
Д/У6_7=//пв - tfK.p - Д//2-з - Д/73_4. (2.188)
Рассмотрим теперь два криволинейных участка начального набора высоты при взлете по третьей типовой схеме (см. рис. 2.16). Первый из них (участок 2—3) представляет собой отрезок траектории полета с набором высоты при постоянной скорости полета У2. На этом участке заканчивается уборка шасси, поэтому сила лобового сопротивления уменьшается и благодаря этому угол набора высоты непрерывно нарастает (возрастают избытки тяги). Здесь
0Н>О и Пу=пуср=const> 1.
Интегрируя дифференциальное соотношение (2.88) в пределах от А = 0, 0 = Ош max ДО T. = Z-b2, 6—-битах, НЭХОДИМ
Iz2 ®нтах
f СО59- -^ен.
S J Пу cp cos 6H max
Входящий в (2.189) интеграл берется следующим образом:
f —— ^бн= _ 0и4. ^ср С-----------.
J ср—СО5вн J Пу ср—COS0H
(2.189)
(2.190)
При пуСр>1 интеграл в правой части выражения (2.190) как это показано в (2.95). Таким образом, получаем
arctg-----------
. ^у
V2
т _______1
в2 g
I ^Иуср fi ____ fl —I— ______
°штах оитах~Г’ 'п
Аштах
Гп tg——
— arctg-----------
берется,
Г (2.191)
Из (2 89) находим
Д/72_3=-^-g
л нmax
®штах
sin ' м.
Пу ср - COS 6ц
(2.192)
С помощью (2.97), принимая Д = 0, В — 1, a=ny.cv и Ь= —1, получаем
V2
M-f2-3=—- ln(nycp— cos 9„) g
0
нтах T/2
= 21 in
0 £
ш max
пУ ср — COS битах
Пу ГР — COS бштах
(2.193)
Интегрируя (2.90), приходим к выражению
9нтах
/в2 = ^ [
g J
®штах
Пу ср ~~ cos 9д
ГП tg^ arctg----------
. ^у
— arctg
. бш max r«tg
(2.194)
Перейдем теперь к определению характеристик третьего криволинейного участка траектории полного взлета по третьей типовой схеме (участка 3—4). На нем происходит разгон самолета от скорости V2 до скорости Уз, в процессе которого угол наклона траектории непрерывно уменьшается от битах (максимального угла набора высоты самолетом во второй взлетной конфигурации) до Он.в4 (наивыгоднейшего угла набора высоты в процессе уборки органов механизации крыла). На этом участке пу^пу ср = const< 1 (угол набора высоты уменьшается: 9н.в4<С Мтах)» апх«птср = = const>0 и 0Н<О. Интегрируя (2.91) в пределах от начальных значений V—V2, 0н=0нтах до текущих значений скорости и угла набора высоты Ун, 0Н, получаем
IZ ,гг/ср COS 9Нтах
— V 2 -
Пу ср — cos 9
(2.195)
где
(к„ tg у + Miy^ (к„ tg 2^ - Хпу^ (Kntg-^-A^(K„tg-^4-A^
Подставляя это выражение для VH в (2.90) и интегрируя его в соответствующих пределах, находим
где
®н.в4
®итах
(Пуср — COS0H)2’
И2 (Пу ср cos max)
g
(2.196,
(2.197)
Нетрудно видеть, что выражение (2.196) могло бы быть получено и непосредственным интегрированием (2.119) в соответствующих пределах после подстановки в него принятых здесь исходных условий: Vna4= V2, Пу=пу Ср< 1. Определим Ав3 и Д//3-4, уже непосредственно интегрируя (2.115) и (2.117) в этих же пределах:
где
<В4 4з=^1Л J о нтах
-------------d%, («уср —cos0H)3
(2, ^г(ПУСР— COS0H'ln2x)
^li= g ’
А/73-4= 3 \н
h.b4
f D*
-------------d^
(ny ср —cos0H)3
'нтах
(2.198)
(2.199;
(2.200)
где 3 1н— 3 It-
Входящие в (2.196), (2.198) и (2.200) интегралы определяются указанными выше численными методами.
Глава
ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ПОЛНОЙ ПОСАДКИ И УХОДА НА ВТОРОЙ КРУГ
3.1. ЗАХОД НА ПОСАДКУ
3.1.1. Определение траекторных характеристик по уравнениям в классической форме
Снижение самолета на участке захода на посадку произ водится по глиссаде, имеющей постоянный (заданный) угол наклона. Это — прямолинейное или весьма близкое к прямолинейному движение самолета с постоянной или уменьшающейся (обычно во второй половине режима) скоростью полета. Для формализации расчетных вариантов траекторий таких режимов полета, необходимой с целью внесения определенности в схемы расчета, условно можно принять следующие две типовые схемы выполнения захода на посадку.
Первая типовая схема (рис. 3.1)—это прямолинейное снижение самолета по заданной глиссаде при постоянной скорости Гзп с высоты Нпп и до высоты Н бпрм, после чего начинается торможение самолета до скорости Увк, достигаемой на высоте Дпос- Конфигурация самолета на протяжении всего режима захода на посадку по данной схеме остается неизменной.
Вторая типовая схема (рис. 3.2) заключается в прямолинейном снижении самолета по заданной глиссаде при постоянной скорости V зш с высоты Н пп и до высоты Дд.мех. после чего начинается выпуск механизации до посадочного ее положения. Это положение органов механизации достигается на высоте -^пос.мех, гДе скорость полета оказывается равной Кзпг<Узп1 . Затем на участке полета от высоты //Пос.мех до высоты Япос производится дальнейшее падение скорости с таким расчетом, чтобы при выходе на высоту 7/пос скорость оказалась равной VBK.
Как правило, у современных реактивных самолетов (особенно имеющих мощную механизацию крыла) тяга силовой установки на режиме захода на посадку оказывается значительной, так что пренебрегать ею нельзя (в отличие от того, как это делалось ранее в отношении самолетов с ВМГ). Поэтому схема сил, действующих на самолет при заходе на посадку, в принципе аналогична схеме сил на воздушном участке полного взлета (см. рис. 2.17), однако в данном случае направление тангенциальной составляющей силы mg совпадает с направлением тяги, т. е. способствует увеличению скорости полета (рис. 3.3).
Рис. 3.1. Первая типовая 1 — первая часть траектории (HCB=var)
схема построения траектории захода на посадку:
захода (VCH = Vgj}=const); 2 — вторая часть траектории захода
Рис, 3.2. Вторая типовая схема построения траектории захода на посадку:
1 — первая часть траектории захода (участок захода на посадку с предпосадочной механизацией, к сн = Узп =const); 2 — участок довыпуска механизации (режим перехода от предпосадочной механизации, ==var)? 3 — третья часть траектории захода (участок захода с посадочной механизацией, V’CH=var)
Как уже указывалось, в основном будем рассматривать движение самолета без крена и скольжения, с симметричной тягой силовой установки, т. е. при условии расположения результирующей всех действующих на самолет внешних сил в плоскости его симметрии. В этом случае движение самолета по траектории описывается следующей системой уравнений, полученной из (2.1) — (2.6) и (2.7) при сделанных выше предположениях:
mV = Р cos алв — Ха — mg sin ?сн;
mg-cos9CH = Psinaw + ra;
(й. 1/ L = V cos 6СН;
H = V sin 6CH.
По принятому правилу знаков 0CH<O(sin 0СН<О) и, следовательно, в первом уравнении знаки членов с Р и mg одинаковы (рис. 3.3). Второе уравнение представляет собой условие прямолинейности траектории (Ьсн=0). При малых углах наклона глиссады cos 0Си~ 1, и тогда
mg = P sinaOT-f-Ka.
(3.2}
Рис. 3.3. Схема сил, действующих на самолет на воздушном участке по* садки
Аналогично (2.73) получаем с помощью четвертого уравнения системы (3.1) приближенное выражение для определения среднего ускорения на участках снижения с изменением скорости (VcH=var):
y~J_i(!21sin0 (3.3)
2 ДЯ сн k ’
Здесь A(V2) —уменьшение квадрата скорости при падении высоты на величину Д/7 в процессе снижения самолета с одновременным его торможением.
При заходе на посадку по первой типовой схеме (см. рис. 3.1) для первого участка траектории (участка 1—2) из третьего и четвертого уравнений системы (3.1) получаем
где
ЯБПРМ
япп
А//1-2 tg всН
(3.4)
Д/У1-2 = НБПРМ - нпп-
Из четвертого уравнения системы (3.1) находим
*зп
^зп= У (it —
^БПРМ
-----1----- С dH= AZ/1~2 lAjn s'n ®сн J ^ЗП s*n вей
#пп
(3.5)
Для второго участка захода на посадку по первой типовой схеме (участка 2—3) аналогично получаем
£”=-^3, (3.6)
tg вен
где ДЛ/2-з=^пос — А^бпрм (3.7)
,** 2Д//2—з /о о\
и /зп = —---------, ,ч - р-’ (d>°)
^ЗП (KF в.к1 + 1) sin0CH
где к vb.ki = Vb.k/V зп — коэффициент торможения (падения скорости) на втором участке захода на посадку по первой типовой схеме (К v в,к!<1).
где
Аналогичным образом получаем (см. рис. 3.2)
Z ____ ДА/ 1—2 „ / !-2
ЬЗП1----—---- и Г3П1=—-----——
tg 0сн ^ЗП1 5111 ^сн
ДА/ 1-2=А/д.мех — А/пп; 2дА/г—з
(3.9)
где
Азп2= 3 и /3П2 = ------------------——;-----,
tg 6СН ^ЗП1 (КИЗП2 + 1) sln вен
^ЗП2
А^2—3 ^пос.мех ^д.мех’ ^КЗП2 — И
ИЗП1
точное определение продолжительностей
т. д.
(3.10)
Более
стков захода на посадку с переменной скоростью
тественно, непосредственным интегрированием (в соответствующих пределах) легко получаемого из первого уравнения (3.1) следующего дифференциального уравнения:
<//=-* dV
g
ЕЗП COS С1дв -Ха — Sin 6СН
отдельных уча-получается, ес-
(З.П)
где езп =A,3n/mg’ — тяговооруженность самолета при заходе на посадку; Рзп —тяга силовой установки на этом режиме полета.
3.1.2. Определение траекторных характеристик энергетическим методом
Воспользовавшись описанным выше энергетическим методом расчета, получаем по аналогии с (2.170) и (2.172) приближенные выражения для определения дистанций и продолжительностей режимов снижения самолета в виде
COS 0СН.ГП
ДА —-----— (3.12)
пх ср
И Д/~, (3.13)
Сн.ср
1Де Усе.ср — средняя скорость снижения самолета на рассматриваемом участке полета.
Воспользуемся этим методом для определения траекторных характеристик на примере захода на посадку по первой типовой схеме. Очевидно, выражения (3.12) и (3.13) для определения дистанции и продолжительности полета на первом участке траектории (участке 1—2, рис. 3.1) совпадают с выражениями, полученными по формулам (3.4) и (3.5) при условии снижения самолета с постоянной скоростью (в этом случае пх cp=sin 0ен.ср, так как V=0). Для второго участка захода на посадку по рассматриваемой схеме получаем приращение энергетической высоты в виде
/2 V2
э2-3= „ВК + /^пос-----7^---Н БПРМ.
2ff 4g
Подставляя это выражение для ДЯЭ2-з в (3.12) и (3.13), соответст
венно находим
,** П?п (Кквк1— ') । ДЛа-’з д
ьзп=----------------------i---------cos sCH.cp
Sg'MjfCp rtjrcp
и
J** ^ЗП (kVb.k1 ~ 1) I 2A^2-3
гзп=------------------------Г77---------------------•
•?л.гср Изи (кИв.к1 4" •) nxrp
(3.14)
(3.15)
Такая двучленная запись правых частей формул (3.14) и (3.15) помогает наглядному их анализу. По структуре они аналогичны, например, полученным выше формулам (2.175) и (2.176) для воздушного участка полного взлета. В этих двучленных формулах первый член характеризует влияние изменения одной только геометрической высоты, а второй член формулы (3.15) —влияние изменения геометрической высоты и скорости. Остальные входящие в эти два члена величины представляют собой осредненные (постоянные) на рассматриваемом участке полета параметры. Сравнение формул (3.14) и (3.15) с ранее полученными формулами (3.6) и (3.7) показывает, что формулы (3.6) и (3.7) являются частным случаем полученных здесь формул при условии постоянства скорости на рассматриваемом участке траектории (&ув.к1 = 1> Ср= — sin Осп.ср). Иными словами, в формулах (3.14) и (3.15) имеются дополнительные первые члены, характеризующие как бы «динамичность» процесса. Чем меньше изменяется скорость в рассматриваемом режиме, т. е. чем менее «динамичным» (или «динамическим») является этот режим, тем меньше расхождение между сравнительными формулами, и наоборот. В пределе (при Vz->0) эти выражения соответственно совпадают. Поэтому, в частности, в формуле (3.14) первый член может быть назван кинематическим (или точнее — динамическим), а второй — геометрическим (характеризующим геометрическую взаимосвязь приращений горизонтальной и вертикальной координат центра масс самолета).
В некоторых особых случаях полета необходимо производить заход на посадку с интенсивным торможением самолета, в процессе которого величина тангенциальной перегрузки может весьма существенно изменяться на протяжении режима. При этом осреднение пх может приводить уже к недопустимо большим погрешностям. В таких случаях для определения величин Ьзп и /зп следует использовать непосредственно выражения (2.28) и (2.29). Для такого существенно «динамичного» («динамического») режима снижения самолета из этих уравнений получаем
э.нос
Азп= С (3.16)
J ПХ
/7эПП ^э.пос
И /зп= f (3.17)
иэ ПП
V2 z2
где /уэПП = —^ + /Ynn, a//3iioc = ^L + //uoc.
Для случая такого «динамичного» («динамического») снижения при заходе на посадку со сравнительно небольшой тягой силовой установки и достаточно малым угло,м наклона глиссады (например, при снижении самолета по стандартной глиссаде с углом fiCH= —2°40') получаем следующие выражения. Поскольку здесь
п _ р sing^B—А~а zYa ____________1_
mg Ка ’
^3.1.ОС ”э.1,ОС
то Z3n~- [ Каа7/Эи/Зп=- f -^-с//Уэ. (3.18)
J J сн
Нз ПП Нэ пп
Для грубо приближенной оценки величин Z-зп и /зп на таких режимах можно пользоваться осредненными значениями аэродинамического качества и скорости снижения самолета:
£зп ~ — Ка.срД//э зп; /зп ~ ~—- ДА/Э зп,
сн.ср
где Д/^пзп =Дэ.пос—НэШ1 —приращение энергетической высоты в режиме захода на посадку (отрицательная величина—падение энергетической высоты).
Отсюда, в частности, видно, что для режимов экстренного (аварийного) снижения самолета при заданном перепаде энергетических высот требуется иметь (Ка.ср/Узп )тш, т. е. лететь на режиме максимальной скороснижаемости самолета.
3.1.3. Скорости и указательницы глиссад снижения самолета
Скорость снижения самолета определяется известным выражением _____________________
1/сн = -|/^±^>-e3nSing.,Bf _ g)
Т Рс#сн
Как уже указывалось, у современных самолетов с мощной посадочной механизацией крыла тяга силовой установки при заходе на посадку может достигать относительно больших величин, при которых тяговооруженность некоторых самолетов доходит до г зп ~ 0,3 ...0,4 и даже более, т. е. сопоставима с порядком величины cos бен- В этих случаях вторым членом в скобке подкоренного выражения формулы (3.19) пренебрегать нельзя. При снижении самолета по пологим глиссадам (cosOCn близок к единице) со сравнительно небольшой тяговооруженностью эта формула-может быть упрощена:
Рис. 3.4. Полярная диаграмма скоростей снижения самолета при заходе на посадку:
Рис. 3.5. График для определения установившихся скоростей снижения самолета при нулевой тяге
В случае снижения самолета по крутой глиссаде (cos 0Н заметно меньше единицы) с пренебрежимо малой величиной тяговооружен-ности
(3.20)
где Vr.n — скорость прямолинейного горизонтального полета с су= СУ СП.
Рассмотрим возможные диапазоны скоростей снижения самолета при заходах на посадку с различными углами наклона глиссады. Для определения скоростей установившегося снижения самолета при заходе на посадку из первого уравнения системы (3.1) получаем
P3ncosaw — Ха — mg sin 9са = 0. (&2D
Здесь величины Хл и адв определяются для самолета в предпосадочной конфигурации.
Решая это уравнение графическим методом с использованием кривых Жуковского, как это было показано при решении уравнения (2.146), получаем полярные зависимости скоростей снижения-самолета от углов наклона глиссады. Пример такой зависимости показан на рис. 3.4. Диаграмма построена для режимов снижения самолета с заданным режимом работы силовой установки (Рзп ~ «const) при заданной высоте аэродрома посадки. Каждому углу
наклона глиссады соответствует своя максимальная скорость снижения самолета Рентах (при рассматриваемом режиме работы силовой установки nnB=const и Рзп «const#=0). Минимальные скорости установившегося снижения самолета УСнтт при заданных углах наклона глиссады определяются условиями снижения с нулевой тягой, когда касательная составляющая гравитационной силы уравновешивается силой лобового сопротивления самолета в конфигурации захода на посадку: Ха=—mg sin 0СН. Величины V'ch пип определяются графическим методом, как это показано на рис. 3.5. Кривые, представляющие собой геометрические места точек, характеризующих режимы прямолинейного снижения самолета с предельными (максимальными и минимальными) скоростями Рентах и VCH тш, называются соответственно указательницами глиссад при работающих и неработающих двигателях (последняя называется еще и глиссадой планирования). Центральная часть диаграммы рис. 3.4 (от Ктшдоп до Vmax) характеризует режимы прямолинейного снижения как с разгоном, так и с торможением самолета. В частности, режимы торможения в этой области скоростей полета и углов наклона траектории соответствуют условиям полета с малой и нулевой тягой, а режимы разгона — условиям полета с тягой, равной Рзп (при которой были определены величины Кентах)- В области, покрытой наклонной штриховкой, возможен только полет с торможением самолета (при тяге силовой установки не более Рзп)-
Каждой фигуративной точке на плоскости диаграммы (см. рис. 3.4) соответствует определенная вертикальная скорость снижения Vy сн= VCH sin 0ОН. Вертикаль, проведенная из этой точки до пересечения с осью абсцисс, представляет собой в масштабе оси OV величину Vy сн- Так, например, фигуративной точке 3 соответствует вертикальная скорость снижения Vy спз= ^нз sin 0снз, абсолютная величина которой графически определяется длиной отрезка /—3. Это становится очевидным из рассмотрения треугольника О—1—3, в котором гипотенуза 0—3 представляет собой в масштабе оси абсцисс скорость Усн3, а отрезок 1—3 является катетом, противолежащим углу 0он3. По принятому правилу знаков 0СП<О и Vy сн отрицательна.
Режим установившегося прямолинейного планирования с минимальным по абсолютной величине углом наклона траектории |0сн|т1п соответствует точке 4 диаграммы. Это режим полета со скоростью по траектории Ve mm при вертикальной скорости
^yOmln:= ®снгп1п*
Точке 4 графика на рис. 3.4 соответствует точка 1 графика рис 3.5, в которой прямая mg sin |0СН| = const оказывается нижней касательной к кривой Л"а = Ха(У).
Градиент снижения самолета т]Сн может быть определен графически с помощью диаграммы на рис. 3.4. Для графического определения градиента снижения в полете с заданной скоростью по траектории и заданным углом снижения из точки на оси абсцисс, со-
ответствующей заданной скорости, опускается вертикаль до пересечения с соответствующим лучом 0CH = const. Полученный при этом пересечении отрезок вертикали, определенный в масштабе оси абсцисс, делится на величину скорости и умножается на 100,%- Если заданной оказывается вертикальная скорость, а не угол снижения, то поступать можно следующим образом. Из точки на оси ординат, соответствующей данной величине Vy сп, проводится горизонталь до пересчения с дугой окружности, проведенной радиусом ЕСп из центра 0. Проходящий через эту точку пересечения луч из центра координат и образовывает с осью абсцисс искомый угол 0СИ.
Это можно показать на примере для скорости ЕСпз и вертикальной скорости Еуснз- Из треугольника 0—2—4 видно, что tg0Cn3 = = |2—4|/|0—2| (отношение катетов). Если, например, известны скорости Vch=Vch3 и Vv сп= Vy спз, то проведя из точки 5 горизонталь, а из точки 0 — дугу радиусом 0—2, находим нужную нам точку их пересечения 3. Проходящий через нее луч 0—3 и дает искомый угол снижения 0снз- Можно также воспользоваться и треугольником 0—1—3. Зная Е,/гнз и 0спз, проводим вертикаль через точку 3 до пересечения с осью абсцисс. Определив длину отрезка 0—1 в масштабе скоростей, получаем
”-=]т5тг-,00«-
Максимально допустимая вертикальная скорость снижения самолета Еусптах определяется точкой пересечения кривой Усншах с дугой радиусом Есн=7Пред из начала координат на графике рис. 3.4. Проходящий через эту точку луч показывает максимально допустимый по абсолютной величине угол наклона траектории снижения самолета при рассматриваемом режиме работы силовой установки |0Си|тах, при котором скорость снижения становится равной предельной скорости полета ЕПред (в конфигурации закона на посадку). Это и есть режим максимальной скороснижаемости самолета, который может быть использован, например, в случае экстренного снижения самолета.
Если угол |0сн|тах оказывается больше предельно допустимого (например, по нормам летной годности) угла наклона глиссады 0снпред, то выход на него в условиях массовой летной эксплуатации самолета, естественно, недопустим. В таком случае наибольшая скороснижаемость самолета достигается в полете со скоростью ПО траектории 0Сн.пред при вертикальной СКОРОСТИ Еуснпред-
3.2. СОБСТВЕННО ПОСАДКА
3.2.1. Типовые схемы воздушного участка собственно посадки
Рассмотрим три условные типовые схемы построения воздушного участка собственно посадки для различных современных самолетов. Первая типовая схема (классическая схема
посадки) вает (рис
Рис. 3.6. Первая типовая схема построения воздушного участка собственно посадки:
I — снижение; 11 — выравнивание; Ill — выдерживание; IV — участок парашютирования; V — входная кромка ВПП; VI — точка касания
предусматри-. 3.6) прямо
линейное снижение самолета с высоты Я по с до высоты начала выравнивания //выр, производимое с некоторым уменьшением скорости (от VBiK до скорости начала выравнивания
Увыр). После этого начинается выравнивание — криволинейный режим полета, выполняемый с торможением самолета от скорости Увыр до скорости начала выдерживания самолета Уг.ыд, достигаемой на высоте начала выдерживания /7ВЬ1Д (в конце участка выравнивания). Затем производится выдерживание I— прямолинейный режим полета с гашением скорости, заканчивающийся достижением посадочной (или весьма близкой к ней) скорости и парашютированием самолета до момента касания основными опорными устройствами поверхности ВПП.
Вторая типовая схема (рис. 3.7), по которой на всем перепаде высот от ЯПоС до Н=0 производится криволинейный по-
Рис. 3.7. Вторая типовая схема построения воздушного участка собственно посадки;
/—воздушный участок собственно посадки; 2 — входная хромка ВПП; 3 — точка касания
Рис. 3.8. Третья типовая схема построения воздушного участка собственно посадки:
> — воздушный участок собственно посадки; 2 — участок снижения практически с исходным углом таигажа; 3 — участок интенсивного увеличения угла тангажа; 4 — входная кромка ВПП; 5 — точка касания
лет с торможением самолета от скорости VB K до скорости УПоо • достигаемой практически у самой поверхности ВПП), который завершается касанием поверхности ВПП и последующим торможением самолета при пробеге до скорости V = 0. Третья типовая схема (посадка без выравнивания) — это посадка (рис. 3.8), выполняемая без (или практически без) режима выравнивания, когда на всем интервале высот (от Нпос до //«0) производится прямолинейное снижение самолета с неизменным исходным углом наклона глиссады 0сно, в процессе которого самолет постепенно теряет скорость. Лишь в самом конце этого прямолинейного снижения самолета (практически у самой поверхности ВПП), непосредственно перед ожидаемой точкой касания, по достижении скорости, весьма близкой к посадочной, производится быстрое, энергичное увеличение угла тангажа до посадочного ФПос, завершающееся касанием поверхности ВПП при скорости УПос-
3.2.2. Определение характеристик воздушного участка посадки по первой типовой схеме
Снижение при посадке
Рассмотрим методы определения характеристик собственно посадки, выполняемой по первой типовой схеме (см. рис. 3.6).
При прохождении воздушного участка посадки снижение самолета выполняется с целью дальнейшей потери высоты и, по необходимости, скорости, в процессе которых пилот уточняет расчет на завершение посадки и окончательную ориентировку, дает все команды (на самолетах с многочисленным, например, трехчленным, экипажем) и выполняет все действия, необходимые для безопасного и успешного завершения посадки.
Дистанция и продолжительность участка снижения определяются по аналогии с тем, как это было сделано для захода на посадку. Дистанция снижения может быть определена по формулам:
Лсн« -внрЗ.Я-п0_с или Лсн « - К,ср ДЯ,СН, (3.22) 1g Осн
__ у2
где Д/Уэ.сй= ВЬ'Р9„ в'+/ЛмР-/Л.ос- (3.23)
Продолжительность режима ной скоростью равна
при снижении с практически постоян-
ней
^выр ^пОС в.к sin бен
(3.24)
При снижении с уменьшающейся (от VB.K до УВыр) скоростью величина /сп определяется как
/сн _ . 2(//в„р-Я,|Ос)---- , (3.25)
*)sinOcH
где Кувыр =VBbip/VB.K — коэффициент падения скорости на участке снижения воздушной части собственно посадки (ку ^1).
Выравнивание
Выравнивание представляет собой участок собственно посадки, в процессе которого самолет, двигаясь по криволинейной траектории, переходит от снижения по глиссаде к полету по траектории с малым или вообще с нулевым углом наклона к поверхности ВПП. В некоторых случаях выравнивание начинается практически на высоте Нпос (участок снижения просто отсутствует) и осуществляется в основном с целью гашения вертикальной скорости в конце снижения самолета и перехода на горизонтальную или близкую к ней (параллельную или почти параллельную поверхности ВПП) траекторию — траекторию выравнивания. Для этого увеличивается угол атаки самолета — создается центростремительная сила (возрастает подъемная сила), что приводит к искривлению траектории полета. В процессе выравнивания самолет движется по криволинейной траектории, сопрягающей глиссаду и прямую, параллельную или имеющую весьма небольшой наклон к поверхности ВПП. Перед началом или в процессе выравнивания
уменьшается тяга силовой установки обычно до тяги земного малого газа Рзпг. При посадочной конфигурации самолета сила лобового сопротивления велика и заметно превышает сумму составляющих тяги и силы mg, поэтому скорость полета уменьшается.
Строго говоря, траектория выравнивания представляет собой сложную кривую переменной кривизны. Обусловлено это тем, что обычно в начале выравнивания нормальная нагрузка плавно увеличивается до заданного своего значения для этого режима, а к концу выравнивания плавно уменьшается до пу=\ (или пух\— в случае дальнейшего движения самолета при выдерживании не по горизонтальной траектории). Однако в первом приближении для визуальных посадок реальные траектории выравнивания можно аппроксимировать дугами окружностей. Для случая автоматической посадки необходимо рассматривать движение самолета при выравнивании по более сложным кривым. В частности, в случае автоматической посадки гражданских самолетов можно считать траекторию выравнивания экспонентой.
1. Упрощенный метод расчета. Рассмотрим вначале характеристики выравнивания в предположении, что траектория выравнивания является дугой окружности, а, следовательно, радиус кривизны траектории выравнивания 7?выр постоянен. Воспользовавшись известным из теоретической механики выражением для составляющей ускорения по нормальной оси координат V2/R, получаем, проектируя действующие силы на нормаль к траектории (полагая Рзмг ~0),
т И сР _ у* _ mg CQS (3.26)
''выр
. . ^выр + ^выЛ 1/выр(«Ивыд+ О
где V „ыр.ср 2 2 "
Отсюда
/?выр «-------. (3.27)
Ка — mg cos Овыр.ср
Переходя от сил к перегрузкам, находим
. / вснП \ g^ny
\Пу — cos —I
(3.28)
Здесь Ку выд= VBbW/VBbIp — коэффициент падения скорости при
выравнивании (кувыд < 1); ?пыр.ср~ —---=—
Как уже указывалось, хотя реальные траектории выравнивания и отличаются несколько от дуг окружностей, в первом приближении можно все же считать их дугами окружностей некоторого средне
го радиуса. При выравнивании по такой траектории в виде дуги окружности угловая скорость самолета с учетом (3.28) приближенно равна
^выр
Ш=--------=------- .
z р т/
/увыр v выр
(3.29)
Угловая скорость будет практически максимальной, а радиус кривизны траектории — практически минимальным при максимально допустимой нормальной нагрузке (A/iy шах доп) самолета в таком режиме выравнивания. В этом случае
^Bbipmin
V2 выр
шахЛоп
Потеря высоты при выравнивании А//Выр может быть определена как разность (рис. 3.6):
02
А^выр ^выр /?„ь,р COS 9сн0 = ^?выр(.1 COS 6Сно) ~ ^?выр ~
Подставляя сюда /?выр из (3.28), находим
Д/У
выр
tz 2 л2 v выр °снО
(3.30)
Потеря высоты при выравнивании, а следовательно, и высота начала выравнивания /7выр зависят от величины вертикальной скорости снижения самолета в начале выравнивания. Полагая, что при малых углах снижения Vy сн« VcnSin 0СН~ УснОсш получаем
V2 f/снО
(3.31)
Отсюда видно, что потеря высоты при выравнивании прямо пропорциональна квадрату вертикальной скорости в конце участка снижения (в начале выравнивания) Vy сно- Из формулы (3.31) следует, что при выравнивании удельная кинетическая энергия самолета по вертикали V^CHo/2 (вертикальная составляющая удельной кинетической энергии) гасится работой избытка подъемной силы над силой mg (этот избыток характеризуется величиной Anw), производимой на составляющей пути по вертикали АЯПыр-
При визуальной посадке выравнивание заканчивается обычно выходом самолета на высоту, при которой расстояние от нижних точек основных опорных устройств (от нижней точки шасси) самолета до поверхности ВПП составляет примерно 0,5—1,0 м (зазор между основными опорными устройствами самолета и поверхностью ВПП). Расстояние от центра масс самолета до нижней точки основного опорного устройства A/У i в конце выравнивания определяется геометрическими характеристиками самолета и
его углом тангажа в этот момент. Высота начала выравнивания находится как сумма трех слагаемых:
//выр = Д^выр + Д/Л + ЬН 2* □ nip DPip I 1 I "
Дистанция выравнивания приближенно равна
4.ыр~ЯвырI sin 6сн0|^ (3.32)
Время выравнивания приближенно может быть найдено как
, ^выр
Гвыр ~Г.
v выр
^выр | вснп | ^выр
где Звыр — длина дуги траектории выравнивания. Подставляя сюда /?выр из (3.29), находим
, V'bhp I ’’ено I
^выр ~ 7 ““
gtMly
(3.33)
2. Учет изменения скорости в режиме. Рассмотрим характеристики выравнивания с учетом изменения скорости полета в режиме. Соотношение между скоростями полета в начале (УВыр) и в конце (Увыд) режима выравнивания (см. рис. 3.6) можно определить из условия, что сумма кинетической и потенциальной энергий самолета в конце рассматриваемого режима отличается от суммы кинетической и потенциальной энергий в начале выравнивания на величину работы внешних сил на пройденном самолетом пути s:
wl/”- mV* р
-тГ+^выд = -^ + ^выр+ f (Pcosa„-^a)rfS. (3.34) Z Z
5пыр
В первом приближении можно предположить, что в процессе выравнивания тяга силовой установки уравновешивает силу лобового сопротивления самолета. Тогда интеграл по контуру sBbip в выражении (3.34) становится равным нулю. При этом получаем
l/2B,«=l/LP + 2gA/yBhlp, (3.35)
ГДе Д//Выр — ДВыр—/^выд-
Аналогичный результат был бы получен и при использовании выражения (2.20).
При сделанном допущении получаем из первых двух уравнений системы (2.18) при условии у = 0 следующие уравнения.
V=-g sin 0С„
9СН= (.^у C°s ®сн) •
Найдем отсюда связь между скоростью полета и углом наклона траектории. Разделив почленно первое уравнение (3.36) на второе, после несложных преобразований получаем уравнение с разделенными переменными:
_dV_= sin Ос»— (3.37)
V cos Осн — пу
Полагая приближенно нормальную перегрузку в режиме величиной постоянной и равной среднему ее значению (nyxnycv= = const>l) и интегрируя (3.37) в пределах от V'=VBbip, 0сп = ОСно до V= VBbW, Осн «О, получаем
^выХ О
In У | = — ln(cos9CH0—и^ср) J > ^выр ® СНО
,, TZ cos ОснО —П(/ер /QQQX
ИЛИ ИВь,л = 1/выр ----------- . (3.38)
1 — П у ср
Подставляя полученное выражение для Увыд в (3.35), находим зависимость потери высоты при выравнивании от скорости, перегрузки и угла наклона траектории начала выравнивания в виде
„ __ Ср (2”р ср - 1 - cos Осно) (1 - COS 8снП) 3
ВЫР 2g (l-nycp)2 ' '
Время выравнивания /выр при рассматриваемых условиях можно найти, интегрируя выражение для dt, найденное из второго уравнения (3.36), в соответствующих пределах:
о =о сн
^,р=— f -----------mcCH . (3.40)
g J Пуср — COS бен
®снО
Интегрируя уравнение (3.37) в пределах от КВыр, Осно До К Осн при условии пу ср-—-const, получаем
У=Увыр n^-cos9f*>.. (3.41)
fly ср — Вен
Подставляя выражение для V из (3.41) и (3.40) и производя интегрирование в соответствующих пределах, находим
. вснО -
, ^выр . - . 2ПуСр(Пуер — IcosOcho) , П 2 /о лох
/вь1р=—г sin9CH0H-----------------------arctg------------ . (3.42)
g К„ rn briy J
Здесь кп=}/' 1 —^сР; ''л=1/Г«уср —1
•и А^=йрср-1.
При малых начальных углах снижения, для которых tg 0спо/2«О, получаем
Ивмр ®:п ^сно
^выр
2 ёкп
(3.43)
Здесь 0СН<О и, следовательно, sin 0chq<O. Представив ПуСу — 1 = = («Уср—U (Луср+1) = д«!/(«уср+приняв sin 0сно«0снй и заменив—0Сно через 10сно| из (3.43) находим
J _ ^8ыр|6снэ1 1 ^пмр const ^выр , , , - , »
g'Arty И^ср+ 1 Пуср + 1
где через /ВЫр const обозначено время выравнивания, полученное из (3.33) в предположении о постоянстве скорости в режиме ( ^сн= VВЫр = const) . .
Поскольку Пу Ср>0, то 4ыр<^выр const- Это становится очевидным из рассмотрения физической картины явления: торможение самолета в режиме приводит к быстрейшему завершению выравнивания. На рис. 3.9 для сравнивания показаны две расчетные траектории выравнивания, определенные при условии V=const (траектория представляет собой дугу окружности) и V = var (траектория представляет собой как бы «распрямленную» дугу окружности меньшей длины) в режиме. Поскольку пуср>1, то расчетная величина /выр const более чем в два раза превышает ^выр. Фактическое различие между ними оказывается меньшим — определяемая из (3.43) величина /выр оказывается несколько заниженной за счет принятого допущения о постоянстве нормальной перегрузки в режиме.
Находя из первого уравнения (2.7) выражение для dL при <р= = 0, подставляя в него dt из второго уравнения (3.36) и V из (3.41), получаем
dL____COS Асий)2 COS бен^веи
g («аср — cosefH)3
(3.44)
Производя интегрирование в пределах [0Сно, 0], находим дистанцию участка выравнивания (длину выравнивания):
г ____ '/вырл.'/ср (лг/сР — ccs Осно)2 Г sin 0Сно i
^выр 2 п / Л чг» Т
ё к/г L^(^cp — cos 0сно)2
Гп tg
,+о п g 2
----arctg п
(3.45)
Рис. 3.9. Сравнение расчетных траекторий выравнивания, определенных при условии постоянства ()) и изменения (2) скорости в режиме
В случае tg 0сно/2«О получаем
zt.Pnf/cpsiu
2^ К«
7-выр
(3.46)
Эту формулу также можно представить в виде
7*выр
^j/cp^HMpconst 2 (Пу ср + ')
где Лвыр Cnnst — величина дистанции выравнивания, определенная приближенным расчетом в предположении о постоянстве скорости в режиме [по формуле (3.32)]. Дистанция, определенная по формуле (3.46), оказывается меньше дистанции, рассчитанной по форму-пг/ср 1
ле (3.22), на величину л-----— =—---------:—— . Пределом этого
2 (Пу <-р 4- 1) 2I1-J-—— |
' ср /
выражения при пу ср->1 будет 1/4.
Практически реализуемые наибольшие значения пу на участке выравнивания обычно бывают относительно невелики — порядка 1,1 —1,3 (средние значения перегрузки пу ср и того меньше). Обусловлено это тем обстоятельством, что в конце участка снижения и в дальнейшем на участке выравнивания скорость полета оказывается уже сравнительно небольшой — она ненамного превышает посадочную скорость. Следовательно, разность между коэффициентами подъемной силы в начале выравнивания и в момент касания (Су пос) относительно мала, что не позволяет реализовать более высокие перегрузки при выравнивании (на гражданских самолетах это к тому же еще связано и с условиями обеспечения должного комфорта для пассажиров).
3. Выравнивание по экспоненциальной траектории. Экспоненциальные траектории выравнивания, как уже указывалось, применяются в настоящее время для расчета характеристик автоматической посадки гражданских самолетов. При определении таких траекторий следует учитывать, что в каждый момент вертикальная скорость снижения самолета пропорциональна его текущей высоте. Эта закономерность может быть представлена следующей дифференциальной зависимостью, представляющей собой изменение высоты h по времени т (изменение вертикальной скорости снижения самолета):
dh h
7\
(3.47)
где 71 = const — постоянная экспоненты для зависимости высоты от времени полета (ее размерность — секунда).
Из (3.47) получаем dhlh = - -dx]T\. Интегрируя это выражение в пределах от начальных условий h = HBblp и т=0 до текущих значений высоты h = H и времени r=t, находим
= (3.48)
Это — уравнение экспоненциальной траектории в координатах время — высота. Предположим, что скорость полета в процессе выравнивания постоянна и равна средней величине Уор. Тогда текущее значение дальности полета может быть представлено в виде /- = Vcpt. Находя отсюда t и подставляя его в правую часть выражения (3.48), получаем
/У=Я(А)==/Увыре~, (3.49)
где 72=7IV/cp— постоянная экспоненты для зависимости высоты от дальности полета.
Выражение (3.49)—это уравнение экспоненциальной траектории в координатах дальность—высота.
Условием обеспечения плавности перехода от снижения по глиссаде к выравниванию является совпадение касательной к экспоненте в точке начала выравнивания с направлением глиссады. Это возможно при условии (рис. 3.10)
7Э = ГСР71 = -^-.
„ Э СР 1 |tg0CHO|
Полагая tg 0снО~ 6гн0, находим
у, ^ннр
Уср I 0снО I
^3.50)
Найдем зависимость для определения изменения вертикальной скорости снижения самолета при выравнивании Vv Выр от времени.. Дифференцируя правую и левую части (3.48) по времени, имеем
ЛГ=И,внр=-Дй*е (3.51)
11
При / = 0 V уц=-— .С учетом этого из (3.51) получаем
^Bbip = V>e (3.52)
Рис. 3.10. Экспоненциальная траектория выравнивания с асимптотой экспоненты на уровне ВПП:
1 — глиссада; 2— начало выравнивания;
3 — экспонента; 4 — асимптота экспоненты (на уровне ВПП)
Аналогично может быть получена и зависимость вертикальной скорости от пройденного самолетом пути L\
^Вь,р=^о е“Ч
Из приведенных выражений легко найти формулы для определения зависимостей угла наклона траектории выравнивания, угловой скорости поворота (изменения угла наклона) траектории и радиуса кривизны траектории выравнивания от времени и пройденного самолетом расстояния. Например,
_ t_
9сн = 9сн^) = 9сиое Л;
л Осн“Г
ш_ш(/)_9сн_ Л е >; ,3 53)
р _р Иср _ ZcPri
ш (О _ L
I 9ск I е т'
В начале выравнивания (t = 0) радиус кривизны траектории ми-И срГ ]
нимален: /?Вырт1п==|---• Воспользовавшись ранее полученным
I 0СН0 1
из (3.29) выражением для /?Выртт и приравнивая его данному (приняв Увыр=^ср). получаем
7\ _ Иср
I 6сн0 I max доп
(3.54)
Подставив в (3.54) значение Т\ из (3.50), находим выражение для определения минимальной высоты начала выравнивания при полете со скоростью Уср по глиссаде с углом наклона 0,-но:
/<ырт.п= ^р|Вгн°|2 . (3.55)
тахД'оп
Начало выравнивания на высотах И<^Нвырт-1П недопустимо, так как для выполнения такого выравнивания требуется превышение перегрузки пу тах доп. Числитель правой части формулы (3.55) представляет собой вертикальную скорость снижения самолета по глиссаде. При выравнивании по экспоненциальной траектории эта высота //Выр min обычно и принимается за расчетную высоту начала выравнивания. Следовательно, расчетная высота начала выравнивания по экспоненциальной траектории пропорциональна квадрату вертикальной скорости снижения самолета в начале выравнивания.
Определим длину выравнивания Авыр при движении самолета по экспоненциальной траектории. При движении по экспоненте самолет снижается с вертикальной скоростью, уменьшающейся с приближением его к земле по закону (3.47). Строго теоретически
длина выравнивания при движении самолета по экспоненциальной кривой в случае, когда асимптота экспоненты располагается на уровне ВПП, равна бесконечности. Из (3.49), логарифмируя и выполняя несложные преобразования, получаем
Л = 7,21п-^ 2 и
(3.56)
При Н-^0 получаем Л->-со. Однако практически длина выравнивания и в этом случае, естественно, конечна. Но ее величина может оказаться очень большой. Для сокращения длины выравнивания в случае движения самолета по экспоненциальной траектории нужно, чтобы в момент касания самолет имел некоторую допустимую ненулевую вертикальную скорость Vy Кас=#0- В соответствии с (3.47) эта скорость достигается на высоте, которая условно может быть названа глубиной асимптоты Нас:
Н^=-Туук!Л. (3.57)
Для того чтобы касание поверхности ВПП произошло с этой вертикальной скоростью Уукас, необходимо, чтобы асимптота экспоненты находилась ниже уровня ВПП на величину Нас (рис. 3.11). Так, например, при Т; = 2... 5 с и Vy Кас=0,3 ... 0,6 м/с асимптота экспоненты должна лежать ниже поверхности ВПП на Нас = = 0,6... 3,0 м. Длина выравнивания при касании поверхности ВПП основными опорными устройствами с вертикальной скоростью Уукас определяется из выражения (3.56) путем подстановки в него в качестве конечной высоты величины Н&с из (3.57):
Z, =Г21п——
Р (-Л^кас)
Рпс. 3.11. Экспоненциальная траектория выравнивания с асимптотой экспоненты ниже уровня ВПП:
1 — глиссада; 2 — начало выравнивании; 3 — экспонента; 4 —асимптота экспоненты (ниже уровня ВПП)
Рис. 3.12. Зависимость вертикальной скорости снижения самолета от высоты полета при выравнивании по экспоненциальной траектории
Здесь Н выр— условная высота начала выравнивания, отсчитыва-емая от асимптоты экспоненты. Фактическая (геометрическая) высота начала выравнивания в этом случае равна А/Выр.ф = =//выр — Нпх. Типовое изменение вертикальной скорости снижения самолета при выравнивании по экспоненциальной траектории в зависимости от высоты показано на рис. 3.12.
Существующая условная градация посадок современных самолетов по величине VyKac (по степени «мягкости» приземления самолета) предусматривает деление их на следующие три (нестрого ограниченные предельными величинами вертикальной скорости самолета в момент касания) разновидности этих режимов:
— мягкая посадка, при которой вертикальные скорости касания не превышают по абсолютной величине примерно VyKac~ « —0,5 ... —0,6 м/с;
— жесткая или грубая посадка, при которой вертикальные скорости касания ориентировочно лежат в пределах от VyKac~ as —0,5 ... 0,6 м/с до Vy кас~ —1,2 м/с;
— очень жесткая или очень грубая посадка, ориентировочно соответствующая величинам | Vy кас | > 1,2 м/с.
Следует только иметь в виду, что приведенные здесь цифры предельных значений VyKac являются сугубо ориентировочными, так как «мягкость» посадки определяется не только величиной \’у „ас, но и совершенством (в частности, энергоемкостью) амортизации основных опорных устройств самолета. При высокой степени эффективности системы амортизации шасси даже, например, посадка с вертикальными скоростями порядка | Vy кас | = 1 м/с (а иногда и более) может восприниматься как достаточно мягкая.
Для определения продолжительности выравнивания в рассматриваемом случае, логарифмируя (3.48) и производя простые преобразования, получаем
t = 7\ 1п-^-.
1 Н
Из условия касания поверхности ВПП с заданной скоростью Vy кас имеем
/выр= Л In ——— . (3.59)
Р (-ТУу кас) ’
В случае выравнивания по экспоненциальной траектории участок выдерживания отсутствует (он как бы сливается с конечной частью траектории выравнивания).
Выдерживание
Выдерживание производится с целью уменьшения скорости полета до посадочной (путем увеличения коэффициента подъемной силы самолета до посадочного). На участке выдерживания
полет происходит по прямой либо на неизменной высоте, либо с весьма небольшим углом снижения (порядка 0СП» —Г или даже менее). Тяга силовой установки практически равна нулю (при отсутствии реверса тяги). Под действием силы лобового сопротивления при имеющих место на этом режиме полета больших углах атаки скорость самолета непрерывно уменьшается. С целью поддержания прямолинейности полета (выполнения условия Уа= = mgcos0CI!) при уменьшающейся скорости летчик непрерывно увеличивает угол атаки (коэффициент подъемной силы) самолета. Выдерживание заканчивается по достижении величин скорости и коэффициента подъемной силы УПос и сУщ>е- После этого увеличение угла атаки прекращается и равенство Ya = tng cos 0СН нарушается. Вследствие падения скорости без дальнейшего увеличения угла атаки подъемная сила уменьшается (Уа<^cos0СН) и начинается снижение самолета (парашютирование). В результате этого снижения и происходит касание основными опорными устройствами самолета поверхности ВПП. На современных самолетах опытные летчики в конце выдерживания (к моменту достижения посадочной скорости) как бы «притирают» самолет к земле так, •что при этом высота начала парашютирования оказывается практически равной нулю. Высота начала выдерживания равна
Таким образом, уравнения движения самолета при выдерживании (уравнения равновесия сил в направлении скоростной оси ОХа и «оси подъемной силы ОУа) должны иметь вид
I (3.60)
и Va=mg ccs mg. )
Деля почленно первое из этих уравнений на второе, воспользовавшись соотношением
dV __ dV dL _ dV dt ~ dL dt ~ L
1 dV2 „ Xa
------и подстановкой —-
2 dL mg
находим выражение для определения длины участка выдерживания:
К2 выд £ВНд=~ f J к2 нос
(3.61)
Входящий сюда интеграл определяется графически по заданному закону изменения аэродинамического качества в функции квадрата скорости (скоростного напора): Ка=Ка(К2).
Как уже отмечалось, в процессе выдерживания угол атаки самолета непрерывно возрастает и, следовательно, непрерывно изменяется его аэродинамическое качество. Однако для приближенных
прикидок можно считать аэродинамическое качество самолета при выдерживании постоянным и равным среднему его значению Кер. В этом случае из (3.60) получаем
£внд~^(^Ыд-^0С). (3.62)
Аналогично из уравнений (3.60) получаем формулу для определения продолжительности выдерживания:
I/ выД
Ч=7~ I KarfK (3,63)
у v пос
Осредняя аэродинамическое качество самолета на режиме выдерживания, находим приближенную зависимость
rz
^д-^^выд-^пос). (3.64)
Парашютирование
Посадка современных самолетов обычно производится таким образом, что участок парашютирования в явном виде у них практически отсутствует. На участке выдерживания происходит непрерывное снижение самолета, в конце которого достигаются скорость полета и угол атаки (коэффициент подъемной силы), почти равные посадочным. Затем летчик прекращает намеренное увеличение угла атаки самолета. Последующее хотя и незначительное падение скорости полета приводит к тому, что подъемная сила оказывается меньше силы mg. Это изменение скорости происходило бы даже и при неизменном угле атаки за счет большого лобового сопротивления самолета в посадочной конфигурации на таких сравнительно больших углах атаки. В действительности же, в процессе парашютирования (за счет искривления траектории) происходит дополнительное непреднамеренное увеличение угла атаки самолета, способствующее быстрейшему уменьшению скорости самолета. Под воздействием избытка силы mg (Ya<mg) происходит снижение, заканчивающееся приземлением самолета. Скорость самолета в момент приземления (касания основными опорными устройствами поверхности ВПП) и является его посадочной скоростью. Даже в тех случаях, когда посадка производится с явным (четко выраженным) участком парашютирования, его длина и продолжительность оказываются весьма небольшими. Однако несмотря на малую протяженность этого режима сам по себе процесс парашютирования чрезвычайно важен, так как он определяет очень важную характеристику самолета — посадочную скорость, от которой зависит длина пробега, а также вертикальную скорость касания (определяющую «жесткость» посадки). Чем меньше вертикальная скорость касания, тем, как уже указывалось, менее
«жесткой» (более «мягкой», более безопасной и комфортабельной) является посадка.
При рассмотрении процесса парашютирования могут быть приняты следующие четыре допущения, упрощающие анализ режима без нарушения качественной картины этого процесса.
1. Коэффициент подъемной силы самолета в процессе парашютирования су п сохраняется постоянным. Это допущение обусловлено тем обстоятельством, что при парашютировании угол атаки самолета изменяется в сравнительно небольших пределах. При этом величина суп изменяется относительно мало.
2. Продолжительность и длина участка парашютирования пренебрежимо малы по сравнению с аналогичными характеристиками остальных участков посадки (ввиду малости высоты начала парашютирования и сравнительно короткого снижения самолета в результате падения подъемной силы).
3. Тангенциальное ускорение самолета в режиме парашютирования сохраняется постоянным и равным ускорению в конце режима выдерживания. Это допущение обусловлено тем обстоятельством, что в процессе парашютирования скорость полета убывает, но коэффициент лобового сопротивления возрастает, так что приближенно тормозящая сила (сила лобового сопротивления) остается практически постоянной.
4. Вертикальная скорость снижения самолета при парашютировании мала по сравнению с его горизонтальной скоростью. Так, например, если у современных самолетов вертикальные скорости снижения в начале парашютирования лежат обычно в пределах порядка 2—6 м/с, то горизонтальные составляющие скорости достигают 50—80 м/с, а иногда даже и более.
В соответствии с принятыми допущениями скорость самолета при парашютировании Кп может быть представлена в виде
^п=^кв-1// = /кв-^-Л
где Кк.в — скорость конца выдерживания (скорость полета в кон-
це участка выдерживания): Ка=—- — ---аэродинамическое
-Та Ха
качество самолета в конце участка выдерживания.
Тогда аэродинамическая подъемная сила может быть выражена как
Ya = cy„S-^- = cynS -^(vKn—^tY^cunSP a yn 2 уп 2 у кв к / » п '
____ Z- С Г. сг 1 в
t ^gmVK.n
2gmVK.a
mg
Ка/к.в
Отсюда получаем
_____
m & Ka/K.H
(3.65)
Для определения вертикального ускорения самолета продифференцируем по времени выражение Vy=V sin 0:
Vy=V sin 9-j-1/6 cos 6.
С учетом принятого третьего допущения и поскольку касательное ускорение в конце режима выравнивания невелико, а также ползая сравнительно малым угол наклона траектории парашютирования, приближенно можно считать в данном случае произведение Vsin 0«0 (произведение двух достаточно малых величин). Полагая созО»! и подставляя в полученное выражение для Vy величину 0 из (2.17), приняв Р = у = 0, с учетом (3.65) получаем
Га
dl т Ка 7к.а
Интегрируя это уравнение в пределах от Vy = 0, т=0 до Vv=Vym, r=t, находим формулу для определения вертикальной скорости снижения самолета при парашютировании:
V = — —g2 t2 усп КаИк.в
Представив здесь вертикальную скорость в виде Н и интегрируя (3.66) в пределах от Н = НВ, /=0 до Н = 0, t=tB, находим формулу для определения зависимости изменения высоты при парашютировании самолета Нп от времени парашютирования tB:
н — /3
п ЗКаИк.в "
Отсюда, естественно, может быть найдено и время парашютирования tB с заданной высоты Нп\
, 3 /ЗЯ„ Ка Ик,в
4п 1/ 1
V s2
(3.66)
(3.67)
(3.68)
Подставляя эту величину ta в полученное выше выражение для скорости парашютирования Vn> получаем формулу для определения посадочной скорости (поскольку в конце режима парашютирования скорость самолета равна посадочной Уп=1/пос):
Здн
V v пос
к2 / iXa v к.в
(3.69)
при вн-
из
Если принять следующие средние цифры, порядок которых более или менее типичен для современных самолетов: высоту парашютирования равной м, аэродинамическое качество
посадочной конфигурации самолета Ка~5 и скорость в конце равнивания (в начале парашютирования) VK,B«50 м/с, то
(3.69) получим осредненное значение коэффициента торможения самолета при посадке
Тогда
кк пос=-Кда£^0,94. ^к-в
(3.70)
Ппос~0,94
(3.71)
где су со — коэффициент подъемной силы сваливания посадочной конфигурации.
При Ya.nocWmg
самолета в
I/ у пос
(3.72)
3.2.3. Определение характеристик воздушного участка посадки по второй типовой схеме
При выполнении посадки по второй типовой схеме (см. рис. 3.7) имеет место непрерывно-криволинейный участок полета с момента прохождения самолетом высоты Наос до момента касания. В этом случае выравнивание производится с таким расчетом, чтобы погасить вертикальную скорость снижения, уменьшить скорость полета до посадочной и подвести («притереть») самолет к поверхности ВПП в ожидаемой точке касания практически на нулевой высоте. Скорость полета на протяжении такого режима (от высоты Наое до Н = 0) непрерывно изменяется: от VB,K до Йпос. По аналогии с формулами (3.42) и (3.45) для данного случая находим
t -
^яозд-пос — 2
0 I 2иуСр(л^ср — cos 0СнО)
sin 6сн0 Ч---------------------arctg
гп
Осип r”tg—
Дл^
(3.73)
п
Ч,кпу ср [пу Ср — COS 0сно)2
sin 9еи3________
. - {Пу ср COS Ocho)2j
_ 0снО „2 + 5 rn tg — '£уср । ° а 2.
------arctg Г и---Xfly
(3.74
где (как указывалось)
Кв=1/ 1—Пуср, Гп=УП2усР— 1 И ^Пу = Пу.р— 1.
?супос
и
При малых углах наклона глиссады, когда приближенно можно считать tg 0Сно/2«0, получаем вместо (3.73) и (3.74) упрощенные выражения для определения /возд.пос и ^воэдлос:
j. ^в.к sin ОснО
^возд.пос' ' 2|
S кп
, __ ^в.кпУ СР ®'П ®сно
возд пос ~ 2^
(3.75)
(3.76)
3.2.4. Определение характеристик воздушного участка посадки по третьей типовой схеме
При выполнении посадки по третьей типовой схеме (посадка без выравнивания) вертикальная скорость при касании основными опорными устройствами самолета поверхности ВПП оказывается обычно несколько большей, чем в случаях посадок по первым двум схемам. Здесь для обеспечения «мягкой» посадки требуется уменьшить скорость снижения самолета (скорость по траектории) и повысить энергоемкость амортизации стоек основных опорных устройств самолета. Скорость VB.K принимается сравнительно близкой к Vnoc. По аналогии с (3.14) и (3.15) находятся формулы для определения дистанции и продолжительности основного участка воздушной части собственно посадки (участка снижения самолета практически с исходным углом тангажа, равным бсп.ср) 7-ВОЗД.ОСН и ^аозд-осн:
г -_____^в.к (КИ пос 0 1 ^9 нос л /9 77\
4озд.ос„~-------------1---------- C°S 6сн.ср, (3.77)
^Snx ср пхср
где Кгпос = Упос/Ув.к — коэффициент падения скорости на воздушном участке посадки (кУПос^1); — высота начала движения тангажа — начала участка энергичного увеличения угла тангажа самолета (начала интенсивного его вращения для создания угловой скорости тангажа <ог). Этот участок выполняется с целью увеличения угла тангажа от соответствующего режиму прямолинейного СНИЖеНИЯ (б'сн) ДО ПОСаДОЧНОГО ('Опое)
2("*-”ПОе)
^в.к (кИпос + 1) nJrcp
Продолжительность участка увеличения угла тангажа (участка интенсивного вращения самолета) относительно мала. Однако ее требуется знать, поскольку потребное время вращения самолета (время, потребное для создания посадочного угла тангажа) на этом участке определяет потребную высоту начала увеличения угла тангажа (начала вращения самолета) Н&. Эта высота находится из условия начала энергичного увеличения угла тангажа, обусловленного созданием практически максимально допустимой на этом режиме полета скорости кабрирования. Последняя обеспечи-121
t^n.K (КК пос ’ )
(3.78)
^возд.осн
2,?Цгср
вает возрастание угла тангажа, достигающее к моменту касания самолетом поверхности ВПП величины фпос. Иными словами, этот участок полета призван обеспечить точный и безопасный выход самолета на нулевую высоту (на уровень ВПП в точке касания самолета) с посадочным углом тангажа. Это хотя и кратковременный, но чрезвычайно важный участок посадки, связанный с необходимостью выполнения довольно сложной эволюции самолета у самой поверхности ВПП. Надежность и уровень безопасности выполнения такого режима должны быть достаточно высокими.
Определим потребную высоту начала увеличения угла тангажа. Воспользуемся с этой целью известными выражениями О=со2 и H = V sin 0. Находя из первого выражения dt — d$laz и подставляя его во второе, получаем
ан= - "ос ~'п 6сн db.
Осредняя входящие сюда величины 0СП, сщ и интегрируя в пределах от Но, 0CH до Н = 0, ОПос, находим приближенное выражение для определения Но-
^ПОС sin Осн.ср Осн ^||Ос) ^"[(рсОсн.Ср Осн »пос) П » ~~ .
ср “г ср
Найдем длину этого участка вращения. Из очевидного рического соотношения она может быть определена как
геомст-
(3.80)
выпол-
IS Осн. ср
Общая длина воздушного участка собственно посадки, няемой по третьей типовой схеме, равна ЬВозд.пос = £возд.осн+^-
Продолжительность участка вращения самолета находится интегрированием приведенного выше выражения для dt-.
Z9^-^10C—Сн . (3.81)
Общая продолжительность воздушного участка посадки по рассматриваемой схеме находится как сумма /Возд.пос = ^возд.осн + + /#. Более точно величины /#, и Н-, могут быть найдены следующим образом. Из уравнения (2.6) для данного случая получаем
J ^г=М\^Ъв-\-МсгУ^су-\-М^г. (3.82)
Здесь Mza=-^-=mzBSbA /п'в==-^__коэффициент эффек-<эза 2 дЗв
тивности руля высоты; Mczy — -^-=mczySbA ; тегУ=—^----ко-
дСу 2 дСу
эффициент продольной статической устойчивости самолета (при
I/=const и ш = const); Mzz=-^^-=mz2SbA^—, mzz=-^-— раз-дшг 2 d«)2
мерный коэффициент демпфирования тангажа (производная тг по размерной скорости тангажа). В случае самолетов с цельноповоротным стабилизатором в качестве органа управления танга-жом вместо члена ТИ2вДов в правой части уравнения (3.82) должен стоять член ТИг^Д^.,. Дифференцируя выражение «ц = О по времени, получаем ~~~ =#• Приращения параметров дви-
жения и управления самолета равны Aw2 = co2—со2Сн~со2 (скорость тангажа в режиме снижения самолета w2 Сн практически равна нулю); Д Су = Сд Да = с у (а — асн) = сау [ft — 0 — (ftCH — 9СН)] сау (ft — ftCH), ПОСКОЛЬКУ U ~ ОспConst; Л6в =-бв.пос—бв.сн, ГДе дв-пос И дв-сп соответственно посадочное и определенное для режима снижения балансировочные отклонения руля высоты. Обычно дВ1Пос^
(0,8 ... 0,9) бв max-
Воспользовавшись указанными подстановками и производя несложные алгебраические преобразования, приводим рассматриваемое уравнение движения самолета к виду
(3.83)
М'цс* Л4'вД8в —Л4^с’»Сн
где р =-----------; q =----------г-^~ ; а =-----------------------
J г J г J z
Это — неоднородное линейное дифференциальное уравнение с постоянными коэффициентами (аэродинамические производные, скорость и высота в рассматриваемом ре-жиме полета практически неизменны) и постоянной правой частью.
Рассмотрим соответствующее ему характеристическое уравнение
<р (Л) = №-{-pkq =0. (3.84
Его корни k[ и /г2 равны
(3.85)
Здесь первый член подкоренного выражения всегда положителен, а второй (при наличии продольной статической устойчивости самолета по перегрузке: тсгу < 0) всегда отрицателен. Если первый член больше абсолютной величины второго, получаем два различных вещественных корня характеристического уравнения и fe. В этом случае решением рассматриваемого дифференциального уравнения будет
&^C1eft‘/+C2eft=/4-fi. (3.86)
Здесь Ci и Сг — произвольные постоянные, а В — частное решение уравнения (3.83). Это частное решение равно
я=7=*“
Л4®вА8в М'уСу
Второй член правой части этого выражения всегда положителен, ПОСКОЛЬКУ Cy>0, ^"<0, 7П><0 И А6в<0(бв.пос<0, а | бв.пос | > | бв.сн |)
Если первый член подкоренного выражения (3.85) меньше второго, решением характеристического уравнения будут два различных комплексных корня ki = ak+&ki и k2 = ak—fW (где р^О). Тогда решением дифференциального уравнения (3.83) будет
»=е’*' (Ct cos +С2 sin ^) + В. (3.87)
В случае двух равных вещественных корней kx и k2 (подкоренное (Мюг \2 / Мсчс'1 \
—~ ) = \'
2/z / \ Jz /
Решением является
& = eft-<(C1H-C2/) + S. (3.88)
Представив соответствующее решение тР = -&(0 (одно из указанных выше трех) в виде графической зависимости типа приведенной на рис. 3.13, находим по ней величину 7, соответствующую значению О==ОпОс- Это и будет искомая уточненная величина /#. По ней затем определяются уточненные величины 77# и L#. Делается это следующим образом. Из кинематического соотношения для Н в (3.1) находим dH = V sin QCHdt. В данном случае (У = = Vnoc) величину 0СН приближенно можно принять равной 9сн.ср-Интегрируя найденное таким образом выражение в пределах от /7=77#, 7 = 0 до 77 = 0, 7=7#, получаем
/7# = -Ипос sin 9сн.ср7э. (3.89)
Аналогично из кинематического соотношения для L находим
7.# Ипос COS 9CHiCp/#.
Нетрудно видеть, что подставив сюда вместо V
ную из (3.89) величину--------------—
sin 6
(Д.90) пос COS Осн.ср найден-
, приходим от (3.90) к найден-сн.ср
ной выше формуле (3.80). Однако сюда уже должна входить уточненная величина 77#, определяемая по формуле (3.89) через уточненную величину /#.
При оценке и нормировании характеристик управляемости и устойчивости самолета на посадке в качестве одного из критериев переходных процессов используют время срабатывания по тангажу /ср#. Это интервал времени, необходимый для достижения
Рис. 3.13. Графическая зависимость для определения
95% установившегося прироста угла тангажа Л’в95 = 0,95ЛйПос:=: = 0,95(Опос—Фен). За это время достигается угол срабатывания '&ср='0'сп+0,95Д17пос. В тех случаях, когда известна величина /ср0, ее можно приближенно принимать в качестве искомого значения/#.
Указанный на рис. 3.13 переходный процесс, приводящий к созданию угла &пос> возникает в ответ на возмущение, порожденное ступенчатым отклонением руля высоты на величину Дбв=6в.пос— —бв.сн- При этом не сразу, естественно, устанавливается требуемая величина Опое- Возникающий при этом заброс по углу тангажа Д'б'заб зависит от динамических характеристик самолета, величины и резкости приложения возмущающего воздействия (управляющего импульса органа управления тангажом). Относительный (по отношению к установившемуся приращению) заброс по углу тангажа при ступенчатом отклонении органа управления тангажом равен Д&ззб=-да336 >100%. Его величина в (зависимости от '|ос класса самолета) не должна превышать примерно 20—30%.
3.3. ПРОБЕГ САМОЛЕТА
Пробег самолета при посадке или, как его иногда ошибочно называют, послепосадочный пробег (в действительности он производится не после, а в процессе выполнения посадки — только после касания поверхности ВПП) выполняется с целью торможения самолета до полной его остановки или до скорости руления на ЯП. Расчетным является пробег с торможением самолета до полной его остановки. У самолетов, имеющих шасси с передней опорой, приземление производится на основные опорные устройства, и первая фаза пробега происходит на них. При замедлении самолета до определенной скорости пилот опускает переднюю опору и далее уже пробег происходит в трехточечном положении (на всех опорных устройствах). При пробеге по возможности наиболее полно используются все средства торможения самолета: средства увеличения силы лобового сопротивления самолета, реверс тяги (если он имеется), тормоза колес и т. п. Делается это с целью сокращения длины пробега. При этом, естественно, уменьшается и его продолжительность.
В процессе пробега на самолет действуют аэродинамические силы Ха и Уа, гравитационная сила mg, реверсированная тяга Ррсв (при наличии на самолете реверсора тяги), а также силы, обусловленные реакцией земной опоры Еосн, Мосн, Епср и А’пср (рис. 3.14). При посадке с тормозным парашютом на самолет действует еще и дополнительное тормозящее усилие, обусловленное лобовым сопротивлением парашюта Хпар. Можно упрощенно предположить, что как на второй, так и на первой фазе пробега движение самолета происходит при неизменном угле атаки (коэффициенты аэродинамической подъемной силы и силы лобового сопротивления на каждом из этих участков постоянны).
Рис. 3.14. Схематическое представление траектории пробега: /—первая фаза пробега; 2 — вторая фаза пробега
Силовые уравнения движения самолета на пробеге по прямолинейной ВПП (бвпп =0) в общем случае могут быть записаны в виде
mjx = mV = -Xa — zYnap — Ррев cosaaB — F — mg sin 9ВПП; mJ у=Y а — Ррев sin адв -j-ДГ — mg cos бвпп =0.
(3.91)
Здесь 0впп —угол наклона поверхности ВПП.
Для упрощения расчета приближенно принимаем, что силы реакции земной опоры можно определять в предположении, что суммарный момент аэродинамических сил относительно центра масс самолета равен нулю. Кинематическое соотношение, позволяющее определять длину пробега (горизонтальную составляющую длины пути самолета), может быть представлено в виде
L = V cos бвпп- (3.92)
Па первой фазе (первом участке) пробега сила трения F=F0CH (сила трения основных опорных устройств самолета), а нормальная реакция W=AroCH (нормальная реакция основных опорных устройств самолета). Сила Focw выражается через нормальную реакцию основных опорных устройств и соответствующий им (а также состоянию поверхности ВПП) коэффициент трения /осн:
ОСН== /ОСН^ОСН-
Из второго уравнения (3.91) находим
WOCH=mgcos бвпп — Yа — Ррев sin адв.
Следовательно, ДОсн = /осн(от cos евпп —Ка —Ррев sin адн). (3.93)
гг dV dV dL 1 rfZ2
Применив подстановку — =---------=--------cos бвпп и используя
dt dL dt 2 dL
формулу (3.93), находим, интегрируя первое уравнение системы (3.91), выражение для определения длины первой фазы пробега в общем виде (для случая пробега по наклонной ВПП):
г ____ m cos flBnn
^npi— 2
v2
on,CT
I
ПОС
dV2
S^npl
(3.94)
где Von.CT — скорость опускания передней опоры (стойки), а Д ^пРЛ= -^а -^пар ^рев ^OS Одв
— /осн COS бвпп — Уа — Ррап Sin Одв) - mg Sitl бВПП.
Интегрируя первое уравнение системы (3,91) с учетом (3.93), находим выражение для определения продолжительности (времени) первой фазы пробега в общем случае:
V
ОП.С’Г
( 4^- (3.95)
J -ЛПр1 пос
Передняя величину ускорения торможения на первой фазе пробега (/х«/ср1)1 находим следующие приближенные выражения для длины и продолжительности первой фазы:
^-пр!
у2 ______у2
_ оп.ст пос
2?ср 1
/ ^О1Г. ст-- ^„ос
Гпр1 ~
Уср!
(3.96)
Для второй фазы (второго участка) пробега (при стояночном — трехточечном положении самолета) из второго уравнения системы (3.91) получаем
N=ЛГОСН + ?/пер = mg cos бвпп - у а + ^рев s i и адв = VKlip2. (3.97-
Для определенности расчета можно считать, что торможение самолета при пробеге с помощью тормозов колес шасси начинается с момента опускания передней опоры. С учетом предположения о равенстве суммарного момента аэродинамических сил относитель-
ио центра масс = перепер- самолета нулю имеем (рис. 3.14) N осн-^осн
Отсюда N ЯГ11р2 дг — ^гпр2 (3.98)
1 * осн ] j •^пер 1 * пер , xnep 1 + •Тосн
Следовательно, суммарная сила трения опорных устройств о по-
верхность ВПП равна
Н- ^"пер ./"осн^оси Уиер^пер — J пр^^прЗ»
Рис. 3.15. Зависимость /П1,=/пр(У) при пробеге тяжелого самолета с ТРД
Рис. 3.16, Изменение посадочной дистанции самолета Боинг В-747 SP в зависимости от реализуемого значения коэффициента трения при пробеге:
/—посадочная дистанция, полученная без реверсирования тяги; 2 —посадочная дистанция, полученная с применением реверса вентиляторов; 3 — посадочная дистанция, полученная при одновременном применении реверса вентиляторов и газовой струи; 4 — величина fnp в случае посадки без использования тормозов колес шасси; 5 — величина ?пр в случае посадки на обледеневшую ВПП: б —величина fnp в случае посадки на мокрую бетонную ВПП; 7 —величина fnp в случае посадки на сухую бетонную ВПП
где /осп и fnep — соответственно коэффициенты трения основных и передних опорных устройств о поверхность ВПП, a fnp — приведенный коэффициент трения, равный
/пр=—+ (3-99)
( . ^осн -^пер
1 + -- 14----
хчер Хосп
Величина приведенного коэффициента трения при пробеге зависит от всех факторов, влияющих на коэффициент трения при разбеге. Однако в случае пробега важнейшую роль играют средства и способы торможения колес шасси (наличие автоматов торможения колес с противогазовым устройством, законы настройки этих автоматов и т. п.). В зависимости от этого величина /щ, у различных самолетов при пробеге может изменяться в весьма широких пределах. Так, например, при пробеге по сухой бетонной ВПП f„p у современных самолетов порядка 0,15—0,45 (известны отдельные случаи frip«0,65 ...0,75). Величина fnp зависит и от скорости пробега, т. е. fnp=fnp(V).
Пример такой зависимости для посадки тяжелого самолета с ТРД приведен на рис. 3.15. Длина пробега Лпр, а следовательно, и посадочная дистанция Laoc существенно зависят от реализуемой величины /пр (рис. 3.16). На графике показаны три кривые зависимостей Лпос = Лпос(/пр): при посадке без реверсирования тяги силовой установки, с применением реверса вентиляторов, а также с одновременным применением реверса вентиляторов и газовой
струи. На графике стрелками отмечены характерные величины приведенного коэффициента трения: без применения тормозов колес шасси, при обледеневшей ВПП, при мокрой: и сухой бетонной ВПП. Для второй фазы пробега в общем случае получаем аналогичные выражения, позволяющие определять длину и продолжительность режима:
Щ=о
Д.р2=--СуВПП f (3.100)
2 J пр2
V2
ОП.СТ
где
ZAZ„V2=-^a-^,.ap-^pen COSaiB-/n]Vrnp2_m<7 sill 9впп;
К-0 J «V (3.101) S*np2 '
о п.ст
Для частного случая пробега по горизонтальной ВПП без тормозного парашюта и реверса тяги получаем
V2
ОП.СТ dV2
, т р —-----------------------——
^*пр2 X- I а + f пр (mS—'а)
Н’-О
коп.ст dV
П | .
J А’а +/|1Р — Га)
(3.102)
(3.103)
Осредняя величину ускорения торможения на второй фазе пробега (/я«/ср2), получаем
Г2
Lap2^~-^- (3.104)
2Jcp2
И /ПР2~“^. (3.105)
Jcp2
□средняя величину тангенциального ускорения для всего режима пробега (/х«/хср), имеем следующие широко используемые приближенные выражения.
V2
L„^-~(3.106) 2/ср
и /пр~__(3.107)
7 ср
Переходя от среднего тангенциального ускорения Jcp к средней тангенциальной перегрузке «хер, находим
£пр«—(3.108)
2gnxcp
и /пр«_Д^, (З.Ю9)
2/<ХСр
3.4. УХОД НА ВТОРОЙ КРУГ
3.4.1. Типовые схемы ухода на второй круг
Уход на второй круг выполняется с целью прекращения за’ хода на посадку или собственно посадки в случае невозможности или небезопасности их продолжения, для чего прекращается снижение самолета (действия по прекращению режима снижения начинаются на высоте принятия решения Н\) и выполняется набор высоты вплоть до высоты круга Дк = 400 м. Для формализации методов расчета можно выделить три типовые схемы ухода на второй круг.
Первая типовая схема ухода на второй круг (классический уход на второй круг с наиболее крутым начальным набором высоты, рис. 3.17) заключается в следующем. На высоте принятия решения энергично отклоняются рычаги управления двигателями до положения, соответствующего режиму работы силовой установки, принятому для ухода на второй круг. Одновременно с этим начинается вывод самолета из режима снижения («переламывание» траектории) с постоянной скоростью полета, равной скорости начала ухода на второй круг Угк- По окончании снижения самолета (по достижении угла наклона траектории 0 = 0 — точка 2
Рис. 3.17. Первая типовая схема построения траектории ухода на второй круг:
1 — участок снижения (V= V2K=const); // — участок набора высоты круга; /// — первый криволинейный участок набора высоты (V=V24=const); /V — второй криволинейный участок набора высоты (V=var); V — последний (прямолинейный) участок набора высоты
Рис. 3.18. Вторая типовая схема построения траектории ухода на второй круг:
/ — участок снижения (V= V2K=const); // — участок набора высоты; /// — участок криволинейного набора высоты с разгоном самолета (V=var); /V — установившийся прямолинейный набор высоты
на графике) сразу же начинается перевод самолета в режим интенсивного (наиболее крутого) начального набора высоты. При этом на первом криволинейном участке набора высоты 2—3 скорость полета постоянная и равна Изк, а нормальная перегрузка ny = const> 1. Данный криволинейный участок заканчивается выходом самолета на максимальный безопасный угол набора высоты в этом режиме битах. На втором криволинейном участке траектории набора высоты (участке 3—4)скорость полета переменная (V=var)—происходит разгон самолета от скорости Угк До наивыгоднейшей скорости набора высоты круга VH.K при ny=const и устанавливается наивыгоднейший угол набора высоты 9Н.Н (в точке 4). На прямолинейном участке траектории (участке 4—5) скорость полета сохраняется постоянной (V= VH.K = const). Здесь выполняется установившийся прямолинейный набор высоты с постоянной перегрузкой при 0n=0H.H=const.
Вторая типовая схема (классический уход на второй круг с наиболее быстрым начальным набором высоты, рис. 3.18) отличается от первой тем, что по окончании снижения самолета (в точке 2) начинается участок криволинейного набора высоты (участок 2—3) с разгоном самолета от скорости Угк до скорости наивыгоднейшего набора высоты круга Vh.k и выходом на наивыгоднейший угол набора высоты 0н.н (в точке 3). После этого производится
Рис. 3.19. Третья типовая схема построения траектории ухода на второй круг (уход с горизонтальным разгоном самолета):
/ — участок снижения (V— 72K=const); / — участок горизонтального полета (V=var; У>0); 1/1 — участок набора высоты круга; /V — криволинейный участок набора высоты; V — прямолинейный участок набора высоты
установившийся прямолинейный набор высоты на режиме наивыгоднейшей скороподъемности (Vyu = Vj/max)
Третья типовая схема (рис. 3.19) отличается от первой наличием среднего участка прямолинейного горизонтального полета. Этот участок выполняется с разгоном самолета от скорости Как до скорости набора высоты круга Ун.к, после чего начинается криволинейный участок полета с набором высоты при постоянной скорости VH.K, заканчивающийся выходом самолета на наивыгоднейший угол набора высоты 9Н,Н. Затем производится набор высоты (до выхода на высоту круга) в режиме установившегося прямолинейного полета с углом наклона траектории 0iIH=const и скоростью V|I.K = const.
Четвертая типовая схема — это уход на второй круг с касанием ВПП (рис. 3.20). По этой схеме снижение самолета с высоты принятия решения производится до уровня ВПП, после чего происходит касание с дальнейшим сравнительно коротким разбегом самолета по ВПП до скорости отрыва для ухода на второй круг Угк.отр- Самолет отрывается от ВПП и начинает набор высоты круга.
Рис, 3.20. Четвертая типовая схема построения траектории ухода на второй круг (уход с касанием):
/ — участок снижения (7= V2I(=const); // — участок разбега после касания; /// — воздушный участок (траектория набора высоты круга); IV — криволинейный начальный участок режима набора высоты; V — прямолинейный участок режима набора высоты; VI — точка касания ВПП; VII — точка отрыва самолета
3.4,2. Определение характеристик ухода на второй круг по первой типовой схеме
Снижение при уходе на второй круг
В первом приближении будем считать радиус кривизны участка траектории снижения самолета при уходе на второй круг /?си постоянным. В этом случае нормальная составляющая ускорения самолета на рассматриваемом участке полета будет также постоянна и равна 1/2к2/^?сн- Проектируем действующие на самолет внешние силы на нормаль к траектории (рис. 3.21):
m (vlKlRCK)=Psin адв4-Ка — mgcos0CH. (3.110)
Находим (из 3.110) радиус траектории снижения в виде
Т/2 г/2
И2к v2k
/ Осип \ £ (Пу — 1)
£ \Пу — COS-y-l
(3.111)
Потеря высоты при уходе на второй круг («просадка» самолета) ДД2к приближенно может быть представлена как разность
^?сн ^сн COS 9СнО ^си (COS 9сно).
О2
Полагая cos 0сиО~ 1------получаем
fl2
Д^2к ~^?сн •
Подставляя сюда /?г„ из (3.111), находим
ДЛ/2к~
^2к0снО 2£Д/гу
(3.112)
Определим зависимость потери высоты Д//2к от вертикальной скорости снижения самолета в начале ухода на второй круг 7уСно. При малых углах 0CHo Vy сно= V2k sin Оспо~ V2k0cho- Следовательно,
Д^2к
V А
у скО
(3.113)
Отсюда видно, что потеря высоты при уходе на второй круг прямо пропорциональна квадрату вертикальной скорости снижения самолета. Из формулы (3.113) также следует, что на участке снижения самолета при уходе на второй круг удельная энергия самолета по 72
вертикали —|сн гасится работой силы, равной разности суммарной подъемной силы (суммы реактивной нормальной составляющей тяги силовой установки Psinc^B и аэродинамической Уа подъемных сил) и силы тяжести mg на пути Д//2к. Указанная разность сил в формуле (3.113) характеризуется величиной \пу.
Длина участка снижения при уходе на второй круг приближенно может быть представлена как
Г П I • fl I ^2к10сно1
^2к ^?сн Sin ®снО ~ " •
g^iy
(3.114)
Продолжительность рассматриваемого участка снижения находится из выражения
/ _ ScH _ *сн |9сн( I ^2 к 1^Сн!)1
^2к.сн— ГЛ IZ .
^2к ^2к -ё^Пу
(3.115)
Рис. 3.21. Схематическое представление элемента дуги траектории ухода на второй круг
Здесь $сн — длина дуги траектории на участке снижения самолета при уходе на второй круг (участке 1—2 на рис. 3.17).
Траекторные характеристики участка снижения 1—2 могут быть найдены следующим образом. На криволинейном участке полета с постоянной скоростью Угк приближенно считаем путпуср=const> >1 и пх~Пхср=const.
Можно принять пЛ.ср^ sin 9сн.ср~ sin >
где 0СНО<О.
Из (2.88) в рассматриваемом случае получаем
dL = — d 9СН; (3.116)
g П^ср —cosOch
Интегрируя (3.116) в пределах от Л=0, 0 = 0Сно До находим
т/2 5сн = 0
^2ксн = — f ------------
£ J Пу ср — COS бен
9снО
L — Lzk.ch, 0 — 0,
(3.117)
Полученный здесь интеграл берется по аналогии с (2.190). при принятых пределах интегрирования получаем
Тогда
/ * ®£н
vl I 2ПуСр . Гл S 2
^2к.сн =-----------°си +—---------arctg -------------
g \ гп ЬПу
гп
о
9СнО
вснО
п. , 2пУ^ * Гп S 2
0сВо+—arctg-----------
гп ^пу
(3.118)
Здесь в правой части формулы стоит знак минус и 0снО по принятому правилу знаков также отрицателен.
Из (2.89) получаем
г/ 2
dH = —------------------Г/9СН. (3.119)
g Пуср—cosOeH
Интегрируя выражение (3.119), находим выражение для определения потери высоты при уходе на второй круг:
sin 6Сн
у2 О и2к р
LH 2к = „
to
rZ9CH. пу ср — 0сц
(3.120)
Найдем стоящий в правой части данного выражения интеграл. Этот интеграл легко может быть определен с помощью (2.97) при условии Д = 0, В=1, а=и2/Ср (случай иуСр>1) и b——1:
f -----^£H_d9cH==ln -------.
J Пу ср — COS Осн Пу ср COS0CHO
вснО
Следовательно,
И?.. Д/1„
ДЯ2к =-----±-1п---------------. (3.121)
g пуср — COS Всно
Поскольку логарифмическая форма записи несколько усложняет пользование расчетной формулой, попытаемся ее упростить. Воспользуемся известным представлением логарифмической функции в виде функционального ряда:
lnx = V(-ir+i-^=^-=(x-l)--i-(x-l)2+-L(X-l)3-....
Эта формула справедлива для всех х в пределах 0<х^2. В данном случае
0<х = ^р-1 ..<i,
яуср — cos SchO
поскольку nycp>l, a O<cos0CHo<l (0Сно физически не может быть равен нулю в рассматриваемом режиме полета). Так, например, при пу Ср= 1,2 и 0снО=— 3° получаем
—-----= 1-2~.1’0 ~ 0,995.
Пу ср — COS0CHQ 1,2— 0,999
Приближенно, ограничиваясь тремя первыми членами разложения (обычно практически достаточно бывает первых двух), получаем
Д/У
2к
[Л2 2 2к
g
1 — COS ВснО Пу ср — COS Всно
COS ВснО — 1
Пу ср — COS ВснО
1 ( cos Всно — 1
3 \ Пу ср COS ВгнО
Для определения ^к.сн воспользуемся уравнением ставив его в виде
(3.122)
(2.90), пред-
dt=^~ --------------------. (3.123)
g Пу.ср — COS Вен
Интегрируя (3.123), находим
о
„ Я" . (3.124)
g J пу-ср — cos Вен
9сн0
С помощью (3.74) получаем ._ 0СНО „„ rn tg ——
= arctg (3.125)
grn bllg
Здесь также перед правой частью формулы стоит знак минус и 0сно<О, а следовательно, и арктангенс отрицателен.
Характеристики первого криволинейного участка набора высоты
Движение самолета на криволинейном участке траектории набора высоты 2—3 протекает при условии Р= 1/2к = const. В рассматриваемом случае приближенно можно считать ny=nycp= = const>l. Тогда по аналогии с (3.124) и (3.125) находим
^н.шах
w rn tg ——
12Ч.ц = —— arctg----------, (3.126)
grn ^nu
ГДе Ou max — максимальный угол (угол наиболее крутого) набора высоты.
Аналогично (3.117) получаем
(, 2нтах \
tg \
2 д /О 1073
arctg-------------®нтах I • (3.127)
Гп )
Также по аналогии с (3.121) находим выражение для определения приращения высоты на участке траектории 2—3:
. 3.128) g ^Пу
Выражение (3.128) можно сделать более удобным для пользования, избавляясь от логарифмической зависимости. С этой целью заменяем его приближенным выражением, полученным с помощью представления логарифмической функции в виде функционального ряда, как это было сделано при упрощении формулы (3.121), либо упрощаем выражение (3.128), потенцируя его и приводя к виду
.. сомитах ^АЛ72_3 о . i)n.
ек=---------------, где к = ——А-- . 3.129
Разлагая еь в степенной ряд и оставляя только три первых члена разложения, получаем следующее приближенное уравнение:
ек ~ 1 + 4г- + •$- Д^2-з.
И2к ~У2к
Подставляя это приближенное выражение в (3.129) и производя там несложные алгебраические преобразования, получаем следующее квадратное уравнение относительно ЬН2_3:
-С- Д/Уг-з + -4- Дг/2-з + Г -•°НП1а* ~ 1 ~==0.
2^2к ^2к ' , ^пУ 1 1 й
Отсюда находим приближенное выражение для определения А//2-3 в виде
Д/72_3^—14-2 '-С05||"« -Л. (3.130)
g \ V кПу /
Второе решение указанного квадратного уравнения не имеет физического смысла, так как дает отрицательную величину ДД2_з.
Характеристики второго криволинейного участка набора высоты
1. Общий метод определения характеристик. Для определения характеристик второго криволинейного участка набора высоты 3—4 при уходе на второй круг по первой типовой схеме удобно пользоваться уравнениями движения самолета в перегрузках, которые в данном случае (при условии у=0) могут быть получены из (2.18) в виде
0H=-^-(/is-cos0H)
и V=g{n,x— sin 0Н).
(3.131)
На рассматриваемом сравнительно кратковременном участке траектории со сравнительно плавным изменением величин пх и пу приближенно можно заменить их средними постоянными значениями: пхтипх cp = const>0 и пу~Пу Cp=const< 1. Угол наклона траектории на данном участке полета уменьшается, поскольку угол наиболее крутого набора высоты 0H.max больше угла наивыгоднейшей скороподъемности (наивыгоднейшего набора высоты) 0Н,Н — угла наклона траектории при наиболее быстром наборе высоты, т. е при наборе высоты с максимальной вертикальной скоростью набора Vymax- Поэтому здесь пуор<1. Из (2.102), подставляя в него УКон=1/н.к (скорость наивыгоднейшего набора высоты круга), Унач==У2к, 9пач = 0ншах, Окон==0н.н и Пу-п-у^р, получаем выражение для приближенного определения соотношения между скоростями и углами наклона траектории в начале и в конце участка 3—4:
пуср — cos ®нтах
где
(K.tg^ + A»,)(K.lS!=-A»,)
A»,) («V-’f1 + А%)
(3.132)
(3.133)
- ср
кл = У1-^ ; Д^ = ^ср-1 их=—.
Зависимость текущей скорости VH от текущего угла наклона траектории 0Н (параметров траектории в произвольной ее точке внутри
участка 3—4) и начальных значений V=V2k, 0 = Он max (в началь-ной точке участка 3—4) может быть получена также из (2.102) соответствующей подстановкой;
Ин = У2к n^-cnsfl—. д’, (3.134)
Пу ср — COS бн
где DH = 4----. (3.135)
K„tg^—Any (Kntg^ + AHy
Подставляя это выражение для VH вместо V в уравнение (2.90), заменяя там также пу на пуср и 0 на 0Н [получаемое таким образом выражение для dt легко может быть получено и непосредственно из первого выражения (3.131)] и интегрируя полученное дифференциальное уравнение в пределах от t=0, 0п=0птах до /=^2к.н, 9н = ®н.н’ находим
9н.н /Гк.н= ( Ы L , (3.136) J (Пуср —COS0H)2 битах
где ОУ ^2к ср— COS 0H max) Пн
Нетрудно видеть, что выражение (3.136) легко могло бы быть получено и непосредственным интегрированием (2.119) в соответствующих пределах с подстановкой принятых здесь начальных условий в (2.120). Аналогично получаем, уже непосредственно интегрируя уравнение (2.115) при соответствующих условиях,
/•2к.н— ^1£Н
®нтах
Cos
(Пу Ср — cos9H)3
(3.137)
где
2к ср — cos тзх)2
1£н =--------------------------
g
Таким же путем находим и выражение для определения приращения высоты на участке траектории (3—4) интегрируя приве-
денное выше уравнение (2.117):
^н.н "3
хн^=щ-н,= $1нД sinMflH (3л38)
J (Луср —cosOhP
®ншах
где ^шн = ^Пн-
Входящие в (3.136), (3.137) и (3.138) интегралы определяются указанным выше численным методом.
2. Упрощенное решение. Попробуем теперь найти более простые приближенные аналитические частные решения для определения характеристик рассматриваемого участка траектории. Разберем два варианта таких частных решений. Вариант первый; при сравнительно близких значениях битах и бн.н можно для грубых прикидок принять допущение о постоянстве первого сомножителя DJ* в подынтегральных функциях выражений (3.136), (3.137) и (3.138) и о замене его осредненным значением. Примем, что £>н(9нтэх- бн)~ ~^и (битах- еи.ср) = £)н.ср = conSt гДе 9н.ср = . В ЭТОМ
случае для грубо приближенного определения величин /2*-.н получаем из (3.136) формулу
й:.н« А- ди Г sin онтах - sin 9Н.„+
L Ди
4- А,па?Пуср- In---!-----1. (3.139)
б)н (йн тах, 9Н) J
Здесь Дтах=Дрср—COS битах и Дв=п» cjr-cos 0н.п- В случае, когда углы битах и бн.н весьма близки между собой и сравнительно неве лики, можно прийти к дальнейшему упрощению рассматриваемых формул (второй вариант упрощенного расчета). С этой целью преобразуем выражение для Он, представив в нем числитель и знаменатель в виде полиномов (перемножив стоящие там в скобках выражения). Поделим затем эти полиномы почленно на tg (что допустимо, поскольку всегда бнтах^О). Тогда вместо (3.135) получим
(3-140)
2
где ----------(1 — Ktg);
tg-2~
. 0н
Ди2 g ~
Dz = Kntg^~-------1------KnA«y(l~Ktg), a Ktg=— --------.
2 frT ”нтах tr ита»
При сделанном допущении приближенно можно пренебречь членами в выражениях для D\ и D2, содержащими круглые скобки, так как в данном случае отношение тангенсов полууглов близко к единице (особенно при малых величинах битах и бп.н). Тогда можно также пренебречь третьими слагаемыми в выражениях для D\ и D2 и, следовательно,получить 7)н«1.Вэтом случае вместо (3.139) будет
/2К.Н« (sin 0Н max — sin 9Н.Н
g*n \ Дн
(3.141)
Таблица 3.1
Характеристики второго криволинейного участка траектории набора высоты по первой типовой схеме
Характеристика режима полета Начале участка (точка 3) Середина участка Конец участка (точка 4)
ПУ Пу max Пу ср пу mln
Пн Пн max ^н.ср Ннт1п = ®н.н
cos 0Н (cos 9Н) min (cos 0н)Ср (cos 6н)тах
Проанализируем выражение, стоящее в скобках в правой части формулы (3.141). Из первого уравнения системы (3.131) видно, что поскольку в данном режиме полета угол наклона траектории уменьшается (0„<О), то cos 0п>Пу, так как здесь иу>0 и cos 0П>О. Следовательно, в каждой точке траектории набора высоты (в том числе и на рассматриваемом участке 3—4) разность пу—cos 0Н<О, а \пу—COS0H| <1.
Рассмотрим таблицу характеристик исследуемого режима полета (табл. 3.1). Максимальная величина пу в режиме имеет место в точке 3, а минимальная — в точке 4 (летчик отдает штурвал от себя для уменьшения угла наклона траектории). Для косинусов углов наклона траектории имеет место обратная картина — косинус минимален в точке 3 и максимален в точке 4. Поскольку cos0H.Cp> >пУСр (это условие соблюдается во всех точках данного участка траектории), a cos 0H.H>cos 0n.Cp, то и cos 0н.н>Пуср. Следовательно, в выражении Amax/Ан знаменатель всегда отрицателен. А раз •COS0 н max"''’Чу max, Э Пу max > ср, ТО И COS 0нтах>И.у ср. ЗнЭЧИТ, И числитель в этом выражении всегда отрицателен. Поскольку cos 0H.H>cos битах, то рассматриваемая дробь правильная — числитель меньше знаменателя. Отсюда вытекает, что второй член стоящего в скобках в выражении (3.141) двучлена всегда меньше первого (поскольку 0нтах>0н.н, a sin0H>O). Следовательно, предельное значение ^к.н равно ^2к siri2Hmax (фактические величины f** g к‘ к,н
всегда меньше этого предельного значения). Аналогичные приближенные выражения могут быть получены и для других характеристик этого участка. Для определения величин Л2*.н, принимая первое допущение (углы 0птах и 0Н1Н сравнительно близки между собой), получаем из (3.137)
д2 \
SilT ^ншах ‘ %.ц I
/
sin 9Н.Н—sin 8Hma,Yy-cp2+2- Ап,ах+^-1пВ„(8итах, 6Н) .
\ ан / КЛ КЛ
гл2
г** _____
^2к.н — “ б” ^-'н.ср
2£к„
(3.142)
Приняв второе допущение (углы 0Ншах и 0Ы.Н весьма близки между собой и сравнительно невелики), приходим к дальнейшему упрощению формулы (3.142):
. **
Мк.и
у-2
И2к
sin 9Htnax
А \
~~~ sin 9Н.Н I /iyCp-f-
„2 । 9
niax sin 9 _____sin 0 1 ———------ Л
ош ин.н зш интах ) о -‘max
Ан / кп
(3.143)
Аналогично могут быть получены и приближенные выражения для определения перепада высот на участке 3—4.
Суммарные характеристики
На последнем участке траектории набора высоты при уходе на второй круг
^к = ^2кт1п + ^^2 -з+^^3-4+^^4-5’>
ДУУ4_5 = /У к — Н 2Kmin Д/У 2-3 3—4»
.**» ДЛ<4-5 „ J*** ^2к.н ' И *2к.н А ЛУд-5
tgflH.H Ин.к Sin ^н.н
(3.144)
(3.145)
(3.146)
3.4.3. Определение характеристик ухода на второй круг по второй типовой схеме
Методы определения характеристик ухода на второй круг по второй типовой схеме (см. рис. 3.18) определяются в принципе так же, как это делалось в случае ухода на второй круг по первой типовой схеме. Для определения характеристик участка 2—3 — криволинейного участка траектории неустановившегося полета (V= =var) —воспользуемся уравнениями (3.131). При этом также примем допущение о постоянстве перегрузок в режиме пу^пуср = = const>l и ср = const>0. Траектория полета на участке
2—3 непрерывно искривляется вверх — угол наклона траектории возрастает от 0 = 0 до 0 = 6н.н. Для этого случая получаем из (2.100), подставляя туда 1^нач=: У'2К, Vкон—I^h.k, 0нач — 0 И Окон — = 0н.н, соотношения'для скоростей 1/и.к и У2к в зависимости от 0Н![ И Пу ср:
A/Iy
Пу ср — COS бн.н
где
. Рн я
2пХср "lg 2
ХН = ХН(9Н.Н)= ~ arctg ——— Г п АПу
(3.147)
(3.148)
Подобным же образом получаем из (2.100) и соотношение, определяющее взаимосвязь текущих значений скорости VH и угла наклона траектории 0н с начальной скоростью V2K:
(3.149)
где
2к ——--------е\
Иуср — COS 6Н
2„ гп tg
. .,/. 2лхср 2
Х = л (6Н) =------arctg — ------
Гп
Подставляя величину VH из (3.149) вместо V в дифференциальное уравнение (2.90), заменяя пу на nycv и 0 на 0Н, а затем интегрируя в пределах от t=0, 0Н=О до t=t2K.K, Он=0п.н, получаем выражения для определения продолжительности криволинейного участка набора высоты:
Н.н
‘2k.к— g
rfOH
ср — COS 6Н)2
(3.150)
о
Аналогично получаем из выражения (2.88), подставляя в пего VH из (3.149) и производя интегрирование, формулу для определения дистанции криволинейного участка набора высоты:
j "
•О2К.К —
&
н.н Г е; J (Пу ср— COS0H)3
Таким же образом с помощью (2.89) и (3.149) находим выражение для определения приращения высоты на участке 2—3 траектории ухода на второй круг по второй типовой схеме
v2Kbn2u V „ Д/72_3=//3—/72= —2 у- е2х g J (Пуср —cos6H)3
Характеристики прямолинейного (второго) участка траектории набора высоты 3—4 определяются аналогично характеристикам участка 4—5 траектории ухода на второй круг по первой схеме:
COS
(3.151)
sin 0Hrf9H
(3.152)
типовой
^^3—4 ^1^2—з ^2кт!п’
_ Д//.3-4 4 ЬНз-4
--------- и г2к.п— —------—-----
v н.к s n 0H.H
^2к'П
tg Oh.H
(3.153)
(3.154)
3.4.4. Определение характеристик ухода на второй круг по третьей типовой схеме
Характеристики горизонтального участка
При уходе на второй круг по третьей типовой схеме (см. рис. 3.19) характеристики участка снижения определяются так же, как и в двух предыдущих случаях. На втором участке (участке
2—3) происходит разгон самолета от скорости ^2к до скорости ]/пк в прямолинейном горизонтальном полете. Для прямолинейного горизонтального полета (0 = 0 = 0) из (3.131) получаем
l/ = g-ftv; пу=\, (3.155)
где
р/2
Р cos адв — cxaS
Пх =----------------------—
mg р/2
Р sin адв + Су aS
(3.156)
Отсюда находим
,, dV mdV О1_
dt= ------=-------------------—— ; (3.157)
gnx в. „ Q IKL P cos аЛв — cxaS
__________dV________
pl/2
Pcosa4„ — cxaS ——
(3.158)
Поскольку в данном случае dL=Vdt, получаем
_________d)/2_________
о Р^2
Pcosa,lB — cxaS
(3.159)
Использование аппроксимации тангенциального ускорения полиномом
Применим здесь описанный выше (при определении характеристик разбега) метод аппроксимации тангенциального ускорения полиномом для определения характеристик ухода на второй круг применительно к горизонтальному участку траектории. При относительно небольших изменениях угла атаки и сравнительно больших избытках тяги для определения силы лобового сопротивления приближенно можно принять вместо cxa = cxa(a) среднюю величину коэффициента лобового сопротивления cxtp=const, а вместо текущего значения угла атаки a — средний угол атаки acp = const (и соответственно адв.ср = const). Аппроксимируем зависимость тяги силовой установки от скорости полета степенным полиномом. Здесь так же, как и в случае разбега (особенно для сравнительно небольшого диапазона изменения скорости) обычно достаточно бывает полинома второй степени P=P(V) xP0 + PiV+P2V2. Коэффициенты этого полинома определяются способом наименьших квадратов.
Подставляя в знаменатель подынтегральной функции формулы (3.158) это выражение для P=P(V), получаем
и
(3.160)
%
где 7?2k = /?2k(V') =Я2к+Й2к1/ + С2к1/2 — полином второй степени с постоянными коэффициентами, аппроксимирующий результирующую тангенциальную силу (/?2к/^ аппроксимирует результирующее тан» гснциальное ускорение).
Коэффициенты полинома /?2к равны
^2к^=^0 COS адв,ср, ^2к COS СЬдвср’
с2к = Л созадв.ср-сд„р5-^-.
Определяемое формулой (3.160) решение зависит от знака дискри» минанта квадратного уравнения /?2к(К) = 0, который находится по формуле
Д2к— 4о2к^2к ^2к — 4Л>дА,2 cos-адв.с^ 4/%CX(.p5 2 COS ССдв.ср
— Pl cosa„.Cp.
Для самолетов с большой тяговооруженностью (особенно тяжелых) обычно Д2к>0. В этом случае решением (3.160) будет
arctg
1 -*2К I А2к
И2к
2/л /
—= arctg
F Л2к \
^2к ~Ь с2к^н к I Л2к
-arctg ^ + С2к^2к\ (3161)
1 Д2к /
При Дгк<0 получаем
/2к ~-----2^— Arth-Ч^Ж^ =——— (Arth —2к— 2с-^--------
1 — Д2к I — ^2к I — А2к \ 1 — ^2к
У2к
_ Arth *2к + .
I - а2к )
В случае Д2к=0 имеем
1>2к + I \ Й2К -г 2с2к^2к ^2к + 2с2к/н.к
И2к
Аналогичное выражение получаем аппроксимацией тяги полиномом и для определения дистанции участка 2—3 траектории ухода на
второй круг по третьей типовой схеме (в этом случае в подынтегральной функции выражения для определения L удобней принимать в качестве независимой переменной V, а не V2):
^2к.г~т I “Z vl
(3.162)
Здесь также возможны три решения в зависимости от знака дискриминанта Д2к. При Д2к>0 получаем
, т
Ь2к.г---—
2с2к
*M^+4^Uarctg 1 Д2К \
— arctg b2x + 2с2к^н-к 'l I
Я2к(И2к)
bin + 2c2kZ2k
/Д2<
/л2к Л’
^?2к (Ин.к) = а2к + 62кУ н,к -ф- с2кИ н.к!
^2к (У2к) = а2к 4" Ь2кУ 2к 4" С2)У 2к-
В случае Д2к<0 имеем
г т
^2к.г ~ 2б2к
Здесь
д wt,*2K + 2с2кИ2к — Д2к
•^2к (Ин,к) । д ^2к + 2С2к^> ^2к(И2к) / = дгк
При Д2к=0 будем иметь /?2к (^и.к) ЯгкО^гк) ' *2К + 2c2kRh.k Ь2к + 2c2kZ2k
н-к
т
^2к.г~ „
2с2к
2Ь2к
2/>2,
Характеристики участков набора высоты
На участке 3—4 происходит искривление траектории от 6 = 0 (в точке 3) до 0 = 0Н.Н (в точке 4) при постоянной скорости полета И= 1/п.к=const. В этом случае также приближенно можно считать средние перегрузки постоянными: ny~nv Cp=const> 1 и пхлигх cp = const>0. По аналогии с формулами (3.126), (3.127) и (3.128) находим продолжительность и длину участка набора высоты траектории ухода на второй круг (участка 3—4):
^Н.н Гп tg -~
\Пу 9 rn tg —9
------------0НН
ДЛу , nycp cos 9н.н In-------------.
Лк.н = ^!и£- arctg grn
V2 г* ' н.к
**2к.н—------
g
2пу ср arctg
н.н
Д// 3-4
Гп
V2 и.к
g
Дпу
(3.163)
(3.164)
(3.165)
Вместо (3.165) по аналогии с (3.130) можно получить более удобное упрошенное выражение в виде
гл 2 / f-
ДЯ 1-1-2 1 -С()5°н-" - 1) . (3.16)
g \ )
Характеристики последнего участка (участка 4—5) траектории определяются подобно характеристикам последнего участка траектории ухода на второй круг по первой и второй типовым схемам:
2к.н
ДТГ}-5
и
Л* _ Д^4-5
*2к.н — —----:—-—
Кн,к sln ^н.н
(3.167)
(3.168)
Д^4-5— Нк — 3-4 — 2кш1п-
3.4.5. Определение характеристик ухода на второй круг по четвертой типовой схеме
Характеристики участков снижения и разбега
Методы определения траекторных характеристик ухода на второй круг по четвертой типовой схеме аналогичны предыдущим. Характеристики первого участка (участка 1—2) определяются так же, как и в случаях трех предыдущих схем. Потеря высоты на участке снижения равна высоте принятия решения Д#2к=^1- Величины Агк.сн и /гк.сн определяются по формулам (3.114) и (3.115).
Участок 2—3 — это участок разбега самолета по ВПП — от скорости Угк ДО скорости отрыва самолета в конфигурации ухода на второй круг Угкотр- По аналогии с (2.46) и (2.47) получаем для участка разбега режима ухода на второй круг
где
dVi jx
Р cosa3B — Л'а— / (mg — Г3 — Р sin адв)
(3.169)
(3.170)
и
Рассматривая данный сравнительно короткий участок разбега как равноускоренный, т. е. полагая среднее продольное ускорение /жср«
f^const и переходя от среднего ускорения ср к средней перегрузке пхср, получаем
Г ____ И>к.отр~^2к , ^2к.огр — ^2к
^2к.р п И ^2к.р —’
2/?«xcp й'Яхср
где Угк.отр — скорость отрыва самолета при разбеге в случае ухода на второй круг с касанием ВПП.
(3.171)
Характеристики участков набора высоты
1. Общие решения для первого участка. Первый участок ветви траектории набора высоты — это участок 3—4. Он представляет собой криволинейный участок начала набора высоты, в процессе которого самолет разгоняется от скорости Уак.отр До скорости Ин.к- В конце этого участка одновременно достигаются скорость Уик и угол наклона траектории 0П.Н. На данном участке также можно приближенно осреднять величины перегрузок и считать, что пужпу Cp=const> 1, а пх^пх cp = const>0. Для этого участка методами, аналогичными использованным, например, при нахождении характеристик набора высоты при уходе на второй круг по второй типовой схеме (разд. 3.4.3), получаем выражения для определения соответствующих траекторных характеристик. По аналогии с (3.149) находим соотношения, определяющие взаимосвязь текущих и начальных, а также начальных и конечных значений скорости и угла наклона траектории на участке 3—4:
где
Изк.отр ПУ ср А Пу — CCS fiH е’(М; (3.172)
^н.к — ^2к.отр A/iy .еХн(8н.н), (3.173)
Яуср — cosflH.H
0Н
, г Л 2/iXCp rn tg 2
'н7—-----
Гп
Вн,н
2«л-ср Гп tg 2
S, (9HJ =-------arctg-------------.
Г п лпу
По аналогии с (3.150) и (3.151) определяем продолжительность и дистанцию полета на рассматриваемом участке траектории:
0н.н
Р . d0„
| ех---------н;
(riy Ср — cos 0„)-
,* ___ ^к.отр^Иу
*2к,н —
(3.174)
г* ^2к.отр^иу
Ь2к.н —-------------
g
о
8Н н
f е
cos 9HrfOH
(Иуср— COS0H)3
(3.175)
g
о
Подобно (3.152) получаем и выражение для определения приращения высоты на участке 3—4 траектории ухода на второй круг по четвертой типовой схеме:
г/2 * 2 6н-н
д/у С е2х - S12.M?H—. (3.176)
g J («уср—COS Он)3
Как уже указывалось, аналитическое определение интегралов типа входящих в правые части выражений (3.174), (3.175) и (3.176) практически чрезвычайно сложно. Они находятся описанным в гл. 2 численным методом.
2. Упрощенные решения для первого участка. При весьма малых тяговооруженностях самолета и углах наивыгоднейшего набора высоты (например, в случае ухода на второй круг тяжелого
четырехдвигательного самолета с двумя отказавшими двигателями, когда избытки тяги очень малы) грубо приближенно можно считать Х«0, т. е. е’,=е2Х= 1. В этом случае получаем следующие весьма приближенные выражения для искомых характеристик участка 3—4 траектории ухода на второй круг по четвертой типовой схеме (при условии n,JCp>l)- Продолжительность полета
/ вн.н \
4 н ~ И2к-°?А-Я£. ---------------+^21 arctg —----------2—].
grn ' ”уср — COS0H.H Гп \Пц /
(3.177)
При весьма малом полуугле наивыгоднейшего набора высоты последний член выражения (3.177) может быть опущен:
.* ^2K-orp4nv sjn f)H н
^2к.н-~ о ~ •
grn ПуСр —cosOH.H
Дистанция полета на этом участке равна
,« __ ^2к.отрД”у ГпПуСр гппУЧ>
•Мк.и~ “ 7 “ - — , о
2ёгп L ("уср —c°s бн.н)2 бн.н '
, (4cp+2)Sin0H.H | 6nycp
_|---2-1------------1------arctg------------
пуср — COS бн,н Гп
И, наконец, приращение высоты
ДЛ/з-4
/о 2к.отр
2g
(пу.ср -- COS бн.„)-
(3.178)
(3.179)
Как уже отмечалось, все приведенные в гл. 2 и 3 типовые схемы траекторий являются в известной степени условными — в массовой летной эксплуатации самолетов реализуется значительно большее многообразие траекторий рассмотренных здесь режимов полета, чем это отражено в указанных типовых схемах. Однако при необ-
ходимости расчета траекторных характеристик таких режимов, как правило, все они могут быть формализованы и представлены в виде сочетания отдельных элементов траекторий («набраны» из участков траекторий), методы расчета которых изложены в данных главах.
ОСОБЕННОСТИ ПОЛНОГО ВЗЛЕТА
4.1. ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА ХАРАКТЕРИСТИКИ ВЗЛЕТА
4.1.1. Основные конструктивно-аэродинамические и эксплуатационные факторы
Скорость отрыва самолета, продолжительность разбега и воздушного участка собственно взлета [см. (2.43), (2.53), (2.54), (2.78) и (2.79)] определяются тяговыми характеристиками силовой установки, аэродинамическими характеристиками самолета во взлетной конфигурации, его массой и характеристиками сцепления опорных устройств с поверхностью ВПП (при разбеге), т. е. рядом конструктивно-аэродинамических и эксплуатационных факторов. Так, например, из формулы (2.43) следует, что увеличение удельной нагрузки на крыло приводит к возрастанию скорости отрыва, а увеличение взлетной тяговооруженности и несущих свойств самолета — к уменьшению У0Тр. Длина разбега зависит от величины ускоряющей силы (тангенциального ускорения), возрастает с ростом удельной нагрузки на крыло и силы трения опорных устройств о поверхность ВПП н уменьшается с увеличением подъемной силы самолета и его тяговооруженности.
Чем больше взлетная масса самолета, тем большая скорость требуется для создания подъемной силы, необходимой для отрыва самолета. Но для получения большей скорости требуется (при неизменных прочих факторах) большая длина разбега. Кроме того, возрастание взлетной массы при неизменной ускоряющей силе приводит к уменьшению тангенциального ускорения, а также и к увеличению силы трения о поверхность ВПП. Поэтому возрастание взлетной массы приводит к увеличению длины разбега по степенной зависимости с показателем степени более двух. Существенное влияние, в частности, на длину разбега оказывают характеристики механизации крыла. Использование взлетной механизации повышает несущие свойства (увеличивает с„отр), благодаря этому необходимая для отрыва самолета подъемная сила возникает на меньшей скорости. Для достижения такой скорости требуется меньшая длина разбега. Однако применение очень мощной взлетной механизации нецелесообразно, поскольку это приводит не только к увеличению аэродинамической подъемной силы, но также и к значительному возрастанию лобового сопротивления самолета. Последнее приводит к тому, что тангенциальное ускорение разбега падает и в результате для достижения даже этой уменьшенной (благодаря большим величинам су Отр) скорости отрыва требуется большая длина разбега. Следовательно, необходимо добиваться повышения аэродинамического качества самолета. Возрастание аэродинамического качества приводит к уменьшению длины разбега самолета. Обусловлено это тем, что создание необходимой для отрыва самолета подъемной силы при большем качестве обеспечивается с меньшим лобовым сопротивлением самолета. Следовательно, нарастание скорости до момента отрыва происходит за меньший отрезок времени и на меньшем пути. Потери в аэродинамическом качестве приводят к возрастанию длины и продолжительности разбега.
Весьма существенно для улучшения взлетных характеристик увеличение нормальной и тангенциальной составляющих взлетной тяговооруженности самолета— баз л норм == Свзл. sin Ядв и евзл.танг== Бвап cos Ядв. Увеличение Евзл.норм приводит к уменьшению скорости отрыва самолета, а возрастание еВзл.танг вызывает возрастание ускоряющей силы (тангенциального ускорения), благодаря чему самолет быстрее и на меньшем пути набирает скорость, равную скорости отрыва. Увели-
чение ёвзл.норм и Ввзл.танг на современных самолетах достигается форсированием тяги двигателей на взлете, применением специальных стартовых ускорителей (например, пороховых или жидкостных ракетных ускорителей) и иными средствами, приводящими к увеличению тяги силовой установки, а также поворотом вектора тяги (изменением адв). Эти факторы влияют как на характеристики на-земной, так и воздушной частей траектории полного взлета. Длина и продолжительность разбега существенно зависят от величины силы трения опорных устройств о поверхность ВПП. Сила трения зависит от ряда факторов: удельной нагрузки на опорные устройства, пх формы, материала и состояния их поверхности (например, от «рисунка» на поверхности пневматика в случае колесного шасси), материала и состояния поверхности ВПП п др. Чем меньше коэффициент трения опорных устройств о поверхность ВПП, тем больше ускоряющая сила и, естественно, меньше продолжительность и длина разбега.
Большое влияние на траекторные характеристики взлета оказывают атмосферные условия, в частности, наличие ветра (направление и скорость ветра), температура и давление наружного воздуха. Скорость отрыва, при которой создается необходимая для отрыва самолета от поверхности ВПП подъемная сила (по своему физическому смыслу представляющая собой воздушную скорость — скорость движения самолета относительно массы окружающею его воздуха), существенно зависит от наличия ветра. При наличии ветра эта воздушная скорость Иотр алгебраически складывается из скорости самолета относительно Земли в момент отрыва (путевой скорости) Уотр.пут и продольной составляющей скорости ветра
^отр = ^отр.пут i ^п- (4.1)
При наличии встречного ветра эти скорости складываются (в формуле берется знак плюс), при попутном ветре — вычитаются (в формуле остается знак минус). Следовательно, как это хорошо известно, разбег самолета выгодно производить против ветра — в этом случае скорость самолета относительно массы окружающего воздуха (или скорость воздуха относительно самолета) будет большей, чем путевая скорость (скорость самолета относительно поверхности ВПП), и отрыв произойдет раньше. Поэтому всегда по возможности взлет производится против ветра (навстречу ветру). Взлет по ветру увеличивает длину и продолжительность разбега — воздушная скорость в этом случае равна разности скоростей (путевой и скорости ветра). Однако у современных скоростных реактивных самолетов обычной схемы скорости отрыва сравнительно велики, поэтому влияние ветра на длину и продолжительность разбега у них проявляется относительно слабо. Температура и давление наружного воздуха влияют как на тягу силовой установки, так и на аэродинамические силы (через плотность воздуха). Известно, что с возрастанием температуры воздуха или с уменьшением его давления тяга реактивных двигателей уменьшается. Следовательно, уменьшается тяговооруженность самолета п ее составляющие евзл.норк и еВЗл.танг— нормальная и ускоряющая силы становятся меньшими.
4.1.2. Влияние метода пилотирования
Значительное влияние на характеристики взлета может оказывать выбранный метод пилотирования самолета. Обычный взлет (взлет с разбегом), как это уже указывалось, состоит из двух участков: разбега и воздушного участка собственно взлета (разгона с набором высоты условного препятствия на взлете). Перед началом разбега летчик, удерживая самолет на тормозах, устанавливает (или дает команду установить, например, на многоместном тяжелом самолете, где это входит в обязанности другого члена экипажа) рычаги управления двигателями (РУД) на взлетный режим. Если не удерживать самолет на тормозах, то после (или обычно — в процессе) установления взлетного режима работы двигателей
начнется движение самолета с ускорением, постепенно увеличивающимся в соответствии с нарастанием тяги силовой установки (в соответствии с приемистостью двигателей). После выхода двигателей на взлетный режим контролируются параметры работы силовой установки, а затем летчик отпускает тормоза — начинается разбег самолета. Если тормоза не удерживают самолет на месте при взлетном режиме силовой установки, то, естественно, разбег начинается раньше — еще до момента установления взлетного режима. Последнее имеет место в случае высокой взлетной тяговооруженности самолета, когда справедливо неравенство, определяемое из (2.48) при условии Е = 0:
COS аЛв Д* т
jX
или рВЗл cos адв > /торм (/и <7 - Рпзл sin адв).
При малых углах адв получаем еЮл>/торм- Следовательно, самопроизвольное страгивание самолета с зажатыми тормозами на старте при выводе двигателей на взлетный режим возможно лишь в том случае, когда взлетная тяговооруженность самолета еВзл превышает коэффициент трения торможения при стоянке fT0Pv У современных маневренных сверхзвуковых самолетов это, как правило, и имеет место, так как величины еВЗд бывают даже близки к единице, а /Торм обычно не превышает 0,45—0,55.
На начальной стадии разбега, ввиду малой скорости движения самолета, аэродинамические рули практически неэффективны. Однако с ростом скорости их эффективность возрастает. Поэтому начинать разбег следует с нейтральным положением руля направления и элеронов, чтобы затем не возникали возмущающие моменты крена и рыскания. При этом руль высоты целесообразно держать отклоненным «от себя» во избежание появления момента на кабрирование, могущего привести к преждевременному «подрыву» самолета.
Самолет начинает разбег на трех опорах (в стояночном положении), выдерживание направления осуществляется главным образом за счет раздельного (несимметричного) торможения колес шасси либо управлением передней опорой. По достижении скорости подъема передней опоры летчик отклонением руля высоты (цельноповоротного стабилизатора) отрывает ее от поверхности ВПП и начинает выводить самолет в положение, близкое ко взлетному (создавать близкий ко взлетному угол тангажа), и в таком положении продолжает разбег. Возрастание скорости приводит к увеличению подъемной силы. Вскоре по достижении скорости отрыва самолет отрывается от Земли (к этому моменту он должен, естественно, иметь взлетный угол тангажа). Это и есть упоминавшиеся выше две фазы разбега. Первая фаза — движение самолета на трех опорах до достижения им скорости Еп.ст, вторая — движение его на основных опорах (с поднятой передней стойкой) до выхода на скорость Еотр. Такой «двухфазный» способ разбега имеет наиболее
широкое распространение у современных самолетов. Другой способ выполнения разбега состоит в том, что весь разбег производится при стояночном положении самолета (на трех опорах), и только по достижении скорости, весьма близкой к (практически равной) скорости отрыва, летчик энергичным отклонением руля высоты на себя практически сразу же создает взлетный угол тангажа — устанавливает самолет во взлетное положение. После этого самолет сразу же отделяется от поверхности ВПП. Отрыв производится практически с исходного трехточечного положения самолета (трехточечный взлет). У современных самолетов обычной схемы с турбореактивными или турбовинтовыми двигателями длина разбега (в зависимости от аэродинамической компоновки, тяговооруженности самолета и ряда других факторов) обычно равна Lp« 400... 2000 м, а время разбега — /р^20 ... 50 с.
В момент начала разбега летчик (член экипажа) нажимает кнопку секундомера отсчета времени. На протяжении разбега у тяжелых самолетов обычно устанавливается одна или две дополнительные контрольные точки — точки контроля параметров разбега по достижении контрольного времени (английский термин check time) или контрольной скорости движения самолета (check speed). Найдем выражение для определения оптимального угла атаки разбега. Предположим, что проекция тяги на скоростную ось (ось ОХа скоростной системы координат) не зависит от угла атаки, т. е. что углы атаки при разбеге настолько малы, что Рвял cos адв«Рвзл = = const. Представим Ха и Ya в виде
Xa = (cx0 + Ac2y)SP-^- и Ya=CySP^- , где Д=-^ =-L. 2 2 иСу ллфэ
— коэффициент отвала взлетной поляры самолета, характеризующий индуктивное сопротивление с учетом влияния Земли, а ХЭф— эффективное удлинение крыла.
Подставляя эти выражения в (2.48), получаем
IZ2 / V2 \
^взл — (схо + Ac A Sp — f I — CySp I
/, ==-------------------2-----i. (4.2)
^ВЗЛ
Найдем оптимальное значение коэффициента подъемной силы Cyopt, при котором ускорение будет максимальным. Оно определяется из условия равенства нулю первой производной по су:
= ^+/SpJC-)=o.
Отсюда С//=С|,.0ПТ=-2—. (4.3)
Воспользовавшись выражением су=с“(а—а0), находим из (4.3) формулу для оптимального угла атаки при разбеге:
«опт “о +
(4.4)
Оптимальные значения су и а пропорциональны коэффициенту трения f и обратно пропорциональны коэффициенту А. Следовательно, при разбеге по ВПП с большим коэффициентом трения для обеспечения максимального ускорения угол атаки (коэффициент подъемной силы) требуется увеличивать. Увеличение эффективного удлинения крыла понижает его индуктивное сопротивление (коэффициент А уменьшается), что приводит к возрастанию величин cy0WT и аОпт- Применение взлетной механизации крыла обычно сравнительно мало влияет на величину суот (величину Д), тогда как величина аопт при этом существенно изменяется. Последнее в основном определяется влиянием отклонения закрылков на величину <х0-
Применение взлетной механизации типа закрылков позволяет повысить коэффициент суОтр, а также приводит к смещению кривой су=су(а) влево, т. е. к смещению ао в сторону отрицательных углов атаки. Использование механизации крыла на разбеге не только повышает несущие свойства самолета, но при этом еще и вызывает рост лобового сопротивления. Отклонение закрылков на большие углы приводит к значительному уменьшению аэродинамического качества самолета в результате интенсивного возрастания лобового сопротивления Уменьшение аэродинамического качества вызывает увеличение Lp и /р. Это обусловливает необходимость ограничения углов отклонения закрылков на взлете. Обычно углы отклонения простых закрылков на взлете не превышают примерно б3«20... 25°, тогда как на посадке (где повышение лобового сопротивления— положительный фактор) они достигают 63~55 ..65°, а иногда и более.
При небольших коэффициентах трения для получения максимального ускорения разбег должен выполняться с малыми углами атаки. При разбеге по мягкому грунту или по заснеженному аэродрому (большие значения f) выгодно выдерживать большие углы атаки, уменьшая тем самым давление на грунт (за счет увеличения аэродинамической подъемной силы), а также и силу трения, которая в таких случаях преобладает над силой лобового сопротивления. При сравнительно небольших отклонениях угла атаки при разбеге от его оптимального значения ускорение уменьшается сравнительно мало, так как зависимость /х=ф(а) имеет достаточно пологий максимум. Поэтому пилот должен выбирать закон управления самолетом при разбеге, успешно сочетающий выполнение как требования получения максимального ускорения, так и требования обеспечения наибольшей простоты управления самолетом (в част-гости, сведения к минимуму затрат внимания пилота на выдерживание нужного а), хорошего обзора из кабины и оптимизации других пилотажных характеристик.
Исходя из этих условий, для конкретного типа самолета в заданных условиях эксплуатации устанавливается оптимальный метод выполнения разбега. Наиболее распространены методы «двухфазного» и «трехточечного» разбега. Как уже указывалось, при «двухфазном» разбеге самолет разгоняется на трех опорах (в стоя
ночном положении, т. е. при наименьшем возможном угле атаки) до скорости подъема передней стойки 1/п.ст, после чего производится отрыв передней опоры.
4.1.3. Количественная оценка влияния отдельных факторов
Изменение взлетной массы самолета существенно сказывается на его взлетных характеристиках. Рассмотрим это на примере длины и продолжительности разбега. Для грубой качественной оценки характера влияния взлетной массы на эти параметры предположим, что величина адв достаточно мала, так что евзл sinaaB^0, а соэадв^!. Тогда из (2.53) и (2.54) получаем
и
SpCy.oip [Р взл -Та f (mn3Jlg У а))
р -7=----------------LS-----------------т^.
1 *$Р£уо'гр взл f О^взл^ ^а)]
(4.5)
(4.6)
Из (4.5) и (4.6) следует, что длину разбега приближенно можно считать пропорциональной квадрату взлетной массы, а время разбега— пропорциональным взлетной массе самолета в степени 1,5. Это значит, что возрастание взлетной массы на 10% приводит к увеличению длины разбега примерно в 1,1-1,1=1,21 раза, а времени разбега— примерно в VI,21 • 1,1« 1,15 раза. С учетом влияния возрастания взлетной массы на силу трения (знаменатели рассматриваемых формул при этом уменьшаются) указанные цифры в реальных условиях будут еще несколько большими. Иными словами, фактическая зависимость Lp и tp от взлетной массы содержит параметр /Пвзл в степенях, соответственно несколько больших 2 и 1,5. Если из формул (2.53) и (2 54) найти дифференциалы
dtp
dL„ =-----dm и dt„=------dm,
p dm p dm
dLp dtp
то нетрудно увидеть, что частные производные ------и —— сами по
себе содержат величину т. Следовательно, степень влияния приращения взлетной массы на Lv и tp зависит не только от ее приращения, но и от самой исходной величины этой массы. Ориентировочно показатель степенной зависимости Лр^кртв^л, где кр — принимаемый приближенно постоянным коэффициент пропорциональности, значение которого становится ясным из рассмотрения формулы (4.5), можно считать равным для маневренных самолетов /zp^2,l ... 2,2, а для тяжелых самолетов /гр>=а2,3... 2,5 (и даже может достигать величин порядка 2,7 ... 2,8 в зависимости от значения еВЗл). Приближенно приращение длины разбега АЕрт в зависимости от приращения взлетной массы Атвзл может быть оценено по формуле
'«взл
Так, например, при пр = 2,5 возрастание взлетной массы на 10% приводит к увеличению длины разбега примерно на 2,5-10% — = 25% • Аналогичный упрощенный анализ в отношении влияния тяги силовой установки, в частности, на величины Лр и /р показывает следующее. Например, при увеличении тяги величины Lv и /р возрастают не обратно пропорционально величине РВзл> а в несколько большей степени. Обусловлено это, во-первых, тем, что ускорение разбега зависит не непосредственно от величины тяги, а от разности величин тяги и суммы сил лобового сопротивления и трения. Поэтому ускорение разбега изменяется сильнее, чем по закону прямой пропорциональности в зависимости от тяги.
Приближенно зависимость приращения длины разбега ALpp от приращения взлетной тяги силовой установки АРВЗЛ может оцениваться по формуле
— ДРвзлкр, * взл
где кр = кр(еВзЛ) <0, и для самолетов с ТРД приближенно составляет:
Крж —1,00...—1,05 при гвзл^;0,7...0,9,
кр»— 1,10...—1,18 при евзл=^0,4...0,5
и
кр ~ — 1,20... —1,35 при евзл ss 0,25...0,30.
Зависимость приращения взлетной тяги ТРД от приращения температуры наружного воздуха АТ и приращения давления наружного воздуха (изменения высоты аэродрома взлета А/Д) определяется следующими приближенными формулами:
Р д Р ~ г пз-1 а/ В3.1 rj,
кТкг,
Д^взл ~ ^взл^Т/аК/у,
где кг^—2,0... —2,5, а 0,0714.
Влияние ветра на длину и время разбега обусловлено тем, что при неизменной воздушной скорости отрыва 1%тр путевая скорость самолета в момент отрыва Уотр.пут (скорость движения самолета относительно поверхности ВПП) зависит от направления и силы ветра. Из формул (2.51) и (2.52), используя выражение (4.1), получаем выражения для определения длины и времени разбега при наличии ветра Lp ш и /р к, показывающие, как эти величины зависят от скорости самолета относительно ВПП:
J И'о-гр Т Wll
7 1 ’
У-г ср
(4.7)
(4-8)
Рис. 4.1. Возникновение угла скольжения при наличии бокового ветра
Здесь знак минус берется при встреч-
ном ветре, знак плюс — при попутном. Влияние ветра тем больше, чем больше отношение скорости ветра к скорости движения самолета.
Из формул (4.7) и (4.8) легко получить приращения длины и времени
разбега, обусловленные влиянием продольной составляющей вет
ра ivn‘.
-Е2И0.(рте>1, + wn ^orp®’i[
--------------------~ ----------------
2 Jjc ср i Jx ср
Ух ср
Деля их на исходные значения Lp и /р, получаем
H-ZAp—— v отр
И
v ото
В' действительности же на величины Лр и /р влияет также и боковая составляющая скорости ветра а>б, обусловливающая возникновение угла скольжения (рис. 4.1): arctg ~-= Скольжение вызывает дополнительное балансировочное сопротивление, обусловленное отклонением руля направления для парирования тенденции к развороту самолета, может приводить к некоторым потерям тяги из-за возникновения дополнительных потерь на входе в воздухозаборник и т. п. Однако обычно это дает поправки второго порядка малости, которыми на практике можно пренебречь.
4.2. ПРОДОЛЖЕННЫЙ И ПРЕРВАННЫЙ ВЗЛЕТЫ
4.2.1. Определение точки принятия решения на взлете
Рассмотрим характеристики прерванных и продолженных взлетов многодвигательного самолета при отказе одного критического двигателя (эти характеристики, в частности, и нормируются в НЛГС). Одной из важнейших задач расчета собственно взлета и отработки рекомендаций по технике пилотирования самолета на взлете в случае отказа критического двигателя является решение
вопроса о том, при каких условиях обеспечивается и рекомендуется продолжение взлета, а при каких — его прекращение. Отказ критического двигателя (асимметричный отказ двигателя) приводит к нарушению равновесия действующих на самолет моментов (в общем случае всех трех: рыскания, крена и тангажа). При этом нарушается симметрия и равновесие действующих на самолет сил, заметно понижается (а в некоторых случаях и вообще пропадает) избыток тяги — происходит заметное снижение тангенциального ускорения самолета.
Летчик (экипаж) немедленно после распознавания отказа двигателя на взлете должен выполнять определенные действия, обеспечивающие в первую очередь выдерживание требуемого направления движения самолета по ВПП (парирование разворачивающего момента). Принятие решения о прекращении или продолжении взлета с неполной и несимметричной тягой принимается летчиком (экипажем) на основании показаний бортовых визуальных приборов, сигнализаторов отказа двигателя (при наличии таковых), оценки поведения и условий пилотирования самолета и анализа окружающей обстановки (в первую очередь, достаточности длины ВПП для прекращения взлета).
Принятие такого решения определяется следующими соображениями. С точки зрения обеспечения безопасности полета следует всегда стремиться к прекращению взлета в случае отказа двигателя (не начинать полет с имеющейся уже неисправностью на борту). Однако это противоречит условию обеспечения строгой регулярности полетов (выдерживания графика вылетов), условию обязательного выполнения боевой задачи. И все же продолжение взлета допустимо только тогда, когда его прекращение либо практически уже вообще невозможно, либо заведомо связано с еще большим риском, чем продолжение взлета (уход в полет) с отказавшим двигателем, когда оно может привести к возникновению аварийной ситуации. Если обеспечивается безопасное торможение самолета на ЛП после распознавания отказа двигателя на взлете, наиболее целесообразно прекратить (прервать) взлет. Принято считать, что безопасность торможения обеспечивается для гражданского самолета, если возможна полная его остановка в пределах ЛП, а для военного самолета, если в конце ЛП скорость его движения не превышает величины безопасной скорости Кбез, при которой выкатывание за пределы ЛП (выкатывание с полосы в свободную от препятствий зону аэродрома) не сопровождается опасными последствиями для экипажа и находящихся в самолете лиц. Когда самое энергичное торможение самолета при отказе двигателя на взлете не обеспечивает получение в конце ЛП скорости V^l/без, целесообразно продолжение взлета (естественно, если только это в принципе возможно).
Вероятность отказа двигателя на взлете при современном высоком уровне надежности авиационных силовых установок весьма мала (обычно менее 10-9). Сам взлет продолжается сравнительно короткое время (обычно в пределах минуты — порядка десятков
Рис. 4.2. Схематическое представление возникновения разворачивающего момента при отказе критического двигателя (отмечен крестом на схеме)
Р дв.взл
секунд). Вероятность того, что отказ двигателя, сам по себе крайне маловероятный, произойдет именно в этот короткий промежуток времени, оказывается еще меньшей, особенно с учетом того, что непосредственно перед взлетом производятся тщательный осмотр, проверка и опробование работы («гонка») всех двигателей, что еще больше снижает возможность возникновения отказа одного из них в ближайшие минуты после проведения всех этих операций.
Однако несмотря на то, что преднамеренный взлет с отказавшим критическим двигателем представляет собой чрезвычайно редкий режим полета, все же этот режим, так же как и прерванный взлет, являются нормируемыми расчетными случаями, которые по своей сложности заведомо перекрывают большинство практически вероятных полетных ситуаций, связанных с отказом критического двигателя в полете. Это обусловлено в первую очередь влиянием четырех факторов:
— наиболее сложными условиями пилотирования самолета в течение этого существенно неустановившегося режима его движения по Земле (на разбеге) или в непосредственной близости Земли (сразу после отрыва), требующего от летчика весьма быстрых и предельно четких действий, особенно с учетом влияния фактора неожиданности, определяемого возникновением редкого в летной практике режима движения самолета;
— возникновением больших разворачивающих моментов Муу= = -Рдв.взл/дв (/лв — плечо критического двигателя, рис. 4.2) вследствие большой величины взлетной тяги каждого двигателя Рдв.взл'.
— сравнительно малой эффективностью аэродинамических органов управления ввиду малой воздушной скорости самолета;
— необходимостью удовлетворения наиболее жестким требованиям к траекторно-динамическим параметрам движения самолета (особенно непосредственно после отказа двигателя), обусловленным в первую очередь влиянием близости Земли.
В качестве критерия, по которому летчик (экипаж) принимает решение о прекращении или продолжении взлета после отказа критического двигателя, используется скорость принятия решения Ур Принятие решения должно производиться в процессе разбега — при отказе двигателя после отрыва можно только продолжать взлет. Прерывать его уже нельзя, так как небезопасно производить приземление самолета сразу же после отказа критического двигателя,
да и потребная длина ЛП не рассчитывается из условий обеспечения безопасного торможения самолета, начинаемого со скоростей Vторм> Vотр-
4.2.2. Сбалансированный и несбалансированный взлеты
Существуют понятия сбалансированного и несбалансированного взлета, а также сбалансированной и несбалансированной взлетных дистанций или потребных длин ЛП. Рассмотрим физический смысл этих понятий. Очевидно, чем больше скорость отказа критического двигателя на взлете Р0Тк (а следовательно, чем больше скорость распознавания этого отказа Ураг.п), тем большее расстояние пройдет самолет при торможении для прекращения взлета и тем меньшим будет воздушный участок взлетной дистанции (участок разгона самолета от Ротр до V%) в случае продолжения взлета (рис. 4.3).
Однако чем больше УраСп (чем на большей скорости происходит отказ или чем позже он распознается экипажем), тем большей будет дистанция прерванного взлета. При этом считается, что началом необходимых действий экипажа (летчика) в случае взлета с отказавшим двигателем является момент достижения скорости 1/расп. Чем больше скорость отказа двигателя, тем большее расстояние проходит самолет к этому моменту со всеми нормально работающими двигателями и тем больше скорость начала торможения самолета 1/торм для прекращения взлета.
Рис. 4.3. Зависимости дистанций нормального, прерванного и продолженного взлетов от скорости движения самолета:
-----нормальный взлет:-------продолженный взлет;--------прерванный взлет; Ьпрерв1 — дистанция прерванного взлета при распознавании отказа на скорости Vpacnl; Ьр св2 — дистанция сбалансированного разбега при распознавании отказа на Красп2; Лвзл с53 — дистанция сбалансированного взлета при распознавании отказа на Грасп3
Очевидно, чем позже распознается отказ, тем больше скорость Уторм- Современные многодвигательные самолеты, имеющие сравнительно большую тяговооруженность, даже при отказе одного двигателя обычно продолжают разгоняться. Следовательно, в случае отказа (распознавания отказа) на малой скорости дистанция прерванного взлета будет меньше дистанции продолженного взлета, при отказе (распознавании отказа) на большой скорости — наоборот.
Значит, существует такая скорость распознавания отказа двигателя на взлете, которая отвечает следующему условию: дистанции прерванного и продолженного взлетов в случае распознавания отказа на этой скорости равны между собой. Эта скорость называется сбалансированной скоростью взлета Уеб.взл (рис. 4.4). Иногда ее называют еще и критической скоростью взлета VKp. Она зависит от конструктивно-аэродинамических особенностей самолета, его взлетной массы, температуры и давления наружного воздуха, покрытия и состояния поверхности ВПП и т. п. Приведенная на рис. 4.4. величина ДУраспо равна разности скоростей Vpapno (скорость распознавания при отказе двигателя в момент страгивания —V = 0) и Иотко (нулевая скорость отказа двигателя—VOTk = 0).
Взлетная дистанция, равная дистанции продолженного взлета (а следовательно, и дистанции прерванного взлета) в случае распознавания отказа двигателя на скорости Усб.взл, называется сбалансированной взлетной дистанцией или дистанцией сбалансированного взлета £Сб.в.зл. Она же является потребной длиной ЛП для сбалансированного взлета. Отсюда следует, что сбалансированным называется взлет с отказом критического двигателя, распознаваемым на скорости УСб.взл- При этом дистанция продолженного взлета (с выходом самолета на высоту 7/в.зл и достижением скорости
Рис. 4.4. Зависимость дистанций прерванного и продолженного взлетов и продолженного разбега от скорости распознавания отказа критического двигателя: л V = V — V ираспО граспО * оклО
Vs) заканчивается над выходной кромкой ЛП, а дистанция прерванного взлета — на этой выходной кромке ЛП (она равна дистанции сбалансированного взлета).
Сам по себе термин сбалансированный был принят исходя из следующих соображений. Из рис. 4.4 видно, что если располагав* мая длина летной полосы (РЛП) равна дистанции сбалансированного взлета VpaCn.c6, т. е. является потребной длиной ЛП для сбалансированного взлета, то в таком случае на данном аэродроме всегда можно безопасно прекратить взлет (без выкатывания самолета за пределы ЛП), если Vpacn^Рсб.взл, и продолжить его, если Урасп>Усб.взл- При располагаемой длине ЛП, равной Lpacni< <^расп.сб, существует диапазон скоростей распознавания AVpacni, внутри которого безопасность взлета в случае отказа критического двигателя не обеспечивается. Потребные величины £Лрод.взл и Лтрерв.взл внутри этого диапазона превышают LpaCni, при этом неизбежно выкатывание самолета за пределы ЛП при выполнении прерванного взлета (в частности, при максимальной взлетной массе самолета).
При длине ЛП, равной 1раСп2, имеет место диапазон скоростей распознавания AVpacn2, в котором возможно как безопасное выполнение прерванного, так и продолженного взлетов. Иными словами, длина ЛП, равная ЛраСп 1<Храсп.сб, недостаточна, а при длине ЛП, равной АрасП2>Ар.асп.сб, есть диапазон скоростей AVpacn2, в котором возможно как продолжение, так и прекращение взлета. Следовательно, в первом случае имеет место нехватка длины ЛП, а во втором — ее избыток.
Длина полосы Арасп.сб является при рассматриваемых условиях необходимой и достаточной. Поэтому ее и назвали сбалансированной —имеет место полный «баланс» длин: нет ни избытка, нн недостатка в потребной длине ЛП. Следует, однако, отметить, что сбалансированная взлетная дистанция определялась (в настоящее время, как правило, пользуются несбалансированными дистанциями) обычно только для гражданских самолетов, для которых выкатывание за пределы ЛП недопустимо. Как уже указывалось, для некоторых классов самолетов (например, маневренных военных самолетов) при определенных условиях допустимо выкатывание за пределы ЛП при прерванном взлете. В отдельных случаях (также обычно для военных самолетов) применяется понятие сбалансированной длины разбега £Сб.р, представляющей собой длину разбега продолженного взлета при скорости распознавания, равной сбалансированной скорости разбега. Сбалансированной скоростью разбега УСб,р называется скорость распознавания отказа критического двигателя на разбеге, при которой длина разбега продолженного взлета оказывается равной дистанции прерванного взлета.
Несбалансированным взлетом называется взлет с отказом критического двигателя, распознаваемым на скорости принятия решения 1/1=0= Усб.взл- В этом случае дистанции прерванного и продолженного взлетов различны (при одной и той же скорости распознавания отказа критического двигателя, равной скорости принятия
решения). При разбалансированном взлете дистанция продолженного взлета заканчивается уже за выходной кромкой ЛП, в пределах свободной зоны аэродрома. При этом предполагается, что для безопасного выполнения продолженного взлета требуется производить отрыв на нормальной, установленной для данного самолета в РЛЭ скорости отрыва в пределах ВПП, а пролет над выходной кромкой ЛП — не менее чем на высоте порядка 4 м (должен иметься н& менее чем четырехметровый запас высоты над выходной кромкой ЛП).
Переход от нормирования характеристик сбалансированного к нормированию характеристик разбалансированного взлета позволяет снижать потребные длины ЛП, сохраняя достаточный уровень безопасности полета. Но при этом, естественно, требуются соответствующие размеры свободной зоны аэродрома Нормируемое время распознавания отказа двигателя на взлете составляет 3 с. Следовательно, по нормам скорость V)—это та скорость, которая будет иметь место через 3 с после отказа критического двигателя, происшедшего на скорости Нотк При обнаружении (распознавании) летчиком (экипажем) отказа критического двигателя на скорости менее V1 следует прервать взлет, на скорости более IC —продолжать взлет. При распознавании отказа на скорости V[ возможно как безопасное прекращение, так и безопасное продолжение взлета.
4.3. УСТОЙЧИВОСТЬ, УПРАВЛЯЕМОСТЬ
И БАЛАНСИРОВКА САМОЛЕТА ПРИ ДВИЖЕНИИ ПО ВПП
4.3.1. Основные факторы, влияющие на динамику движения по ВПП
Характеристики управляемости, устойчивости и балансировки самолета при его движении по ВПП обладают рядом существенных особенностей, заметно отличающих динамику движения самолета по ВПП от динамики его движения в воздухе (в полете). Это обусловлено в первую очередь непосредственным контактом (наличием жесткой связи) опорных устройств самолета с ВПП, ограничивающим степени свободы (возможности движения) самолета: поступательную степень свободы в направлении нормали к траектории и вращательные степени свободы при вращении относительно продольной и поперечной его осей. В известной степени также эта связь с ВПП может налагать определенные ограничения и на остальные три степени свободы самолета.
Связь самолета с Землей динамически проявляется в том, что при его движении по ВПП на него действуют дополнительные силы: реакция земной опоры и сила трения опорных устройств о поверхность ВПП. Существенным также является наличие характерных, практически непрерывных внешних возмущений, вызываемых неровностью поверхности ВПП и порождающих специфические до
полнительные вибрации самолета при его движении по этой поверхности.
Аэродинамические силы и моменты, действующие на движущийся по ВПП самолет, также обладают существенными особенностями, обусловленными влиянием «земного экрана» (влиянием «близости Земли»), быстрым и значительным изменением скорости самолета (например, от нулевой до скорости отрыва при разбеге), а при некоторых компоновках самолета — весьма заметным влиянием «поджатия» земной поверхностью входящих в воздухозаборники реактивных струй двигателей на условия обтекания самолета. Существенно неустановившееся движение самолета по ВПП (на разбеге и пробеге) вносит значительную специфику в аэродинамические характеристики самолета (по законам нестационарной аэродинамики) .
Большое влияние на динамические характеристики (управляемость, устойчивость и условия балансировки) самолета при его движении по ВПП оказывает принятая схема опорных устройств. Наиболее типичная для современных самолетов схема трехопорного шасси с передней стойкой (так называемого трехколесного шасси) обычно приводит к появлению следующих особенностей. У самолетов с такими опорными устройствами, как правило, стояночный угол атаки аст заметно меньше угла атаки отрыва аОтр- Для выхода на а0Тр необходимо в процессе разбега производить подъем передней стойки шасси. Это возможно на скоростях разбега, составляющих примерно не менее 40—60% скорости отрыва самолета, когда аэродинамический орган управления тангажом становится уже достаточно эффективным.
Подъем передней стойки производится во второй половине разбега еще и потому, что при разбеге на трех опорах легче выдерживать направление взлета (особенно при наличии управляемой передней стойки). При этом обзор из кабины оказывается лучшим, что облегчает пилотирование самолета. Минимальная скорость, на которой наступает возможность отрыва передней стойки от поверхности ВПП, зависит от эффективности органа управления тангажом при больших (близких к предельным) его отклонениях, от запаса продольной статической устойчивости самолета на разбеге, схемы его опорных устройств и ряда других факторов.
Аналитически эта зависимость выражается приведенными выше формулами (2.57) и (2.58). С помощью этих формул, при заданном запасе продольной устойчивости самолета, можно подбирать либо потребную эффективность органа управления тангажом, либо величины хНОрм и хтр. Скорость подъема передней стойки тем больше, чем выше удельная нагрузка на крыло и расстояние между центром масс и колесами главных опор, и тем меньше, чем выше эффективность органа управления тангажом вблизи Земли. Несмотря на то, что основная нагрузка (обычно порядка 80—85%) приходится на основные опорные устройства, все же обеспечение возможности разгрузки передней стойки на разбеге требует серьезного внимания.
4.3.2. Продольное движение самолета по ВПП
Проведем упрощенный анализ продольного движения самолета по ВПП с поднятой передней стойкой. Как уже указывалось, динамика движения самолета по ВПП с поднятой передней стойкой оказывается значительно более сложной, чем динамика его движения на трех опорах. Если динамические характеристики самолета при его движении по ВПП на двух опорах оказываются благоприятными, то они будут такими и в движении на трех опорах (с опущенной передней стойкой). Для упрощенной схематизации явления, с целью облегчения его анализа, изучение динамических характеристик самолета при разбеге (аналогичная картина имеет место и при пробеге) с поднятой передней стойкой производится при следующих трех допущениях:
— случайные изменения угла атаки самолета в процессе разбега практически не влияют на величину ускоряющей силы Pcosa3Ei— — (Ха + Госн) у современных самолетов со сравнительно высокой тяговооруженностыо, у которых даже в конце разбега сумма сил ^а + Дэсн не превышает обычно примерно 20% величины взлетной тяги силовой установки. Поэтому на всем рассматриваемом участке разбега можно считать угол атаки самолета практически постоянным: алгаОтр = const.
— траектория движения центра масс самолета при разбеге практически прямолинейна — деформации стоек шасси, изменения «обжатия» пневматиков и изменения положения центра масс самолета под воздействием случайных продольных колебаний незначительны. Следовательно, угол наклона траектории можно считать постоянным, т. е. полагать 9 = 0;
— тяга силовой установки на рассматриваемом участке разбега практически не зависит от скорости движения самолета, т. е.
дР п частная производная ---^0.
Схема сил, действующих на самолет при разбеге в его движении на основных опорах, была приведена на рис. 2.8, б. В соответствии с этой схемой система уравнений продольного движения самолета (без учета влияния деформаций его опорных устройств) с поднятой передней опорой в общем случае разбега по горизонтальной ВПП может быть получена из выражений (2.1)—(2.6) и (2.40) с учетом обозначений, принятых в (2.56), в виде
mV = р cos адв — Ха — F0CH
mI/0=PsinaAB+ra+^H-mg;
JгЪ = М М. гга Мг 4“ Mza -ф- Мгс'"Рст 4"
Это — система трех нелинейных обыкновенных дифференциальных уравнений четвертого порядка, решение которой в общем виде получить с помощью элементарных функций не удается. Однако с уче
том принятых допущений она может быть заметно упрощена. Допущение о постоянстве угла атаки позволяет интегрировать первое уравнение системы (4.9) при условии a = aOTp=const (при >УП.СТ). Допущение о постоянстве угла наклона траектории позволяет заменить второе дифференциальное уравнение системы (4.9) конечным соотношением
Р8тадв4-Га + 7Уосн-/г?£=0. (4.10)
С учетом этих двух допущений оказывается возможным интегрирование первого уравнения системы (4.9) независимо от третьего и получение зависимости скорости от времени на рассматриваемом участке разбега: V=V(t). У современных самолетов эта зависимость близка к линейной (равноускоренное движение самолета). Таким образом, приближенное решение системы уравнений (4.9) сводится к решению третьего дифференциального уравнения этой системы с учетом соотношения (4.10) и найденной из первого уравнения упрощенной зависимости V=V(t). Из условий прямолинейного горизонтального движения самолета следует, что
&=а; ДИ==Да; &=а=<ог; &=a=wz и Д& = Да = Дшг. (4.11)
Полагая sinapB^a.w и используя уравнение (4.10), легко исключить величины Л^осн и Госп из третьего уравнения (4.9). В результате получаем упрощенное уравнение моментов, описывающее возмущенное вращательное движение самолета по углу атаки (тангажа) при движении по ВПП на основных опорах в виде:
/га = Л4.,о4-(лд[ — Хр) Yа-|-(^гг-[’^г)а'1_^гИеРст —
У ив “F (-^Л1 “Ь/Угр) ^ё (•гиорм4_ f Уч?) (Л-норм ~Г /У-ц^Р^
~(*норм + /Утр)Р<Рлв- (4-12)
Это уравнение записано для самолета с цельноповоротным стабилизатором. Аналогичное уравнение легко может быть получено и для самолета с рулем высоты. Для упрощенного анализа динамических характеристик самолета в продольном движении по ВПП на основных опорах линеаризуем уравнение (4.12). Влиянием изменения сжимаемости (числа М) и вязкости (числа Re) воздуха на аэродинамические коэффициенты при разбеге можно пренебречь. Следовательно, частные производные коэффициентов аэродинамических сил и моментов по скорости равны нулю. Плотность воздуха при разбеге можно считать постоянной. С учетом сказанного, произведя несложные преобразования, из (4.12) получаем
да _ J_ (м^ + М”) Да - ~ [Maz - (хн0Рч+/утр) (Г^ + Р)] Да -J z J z
— ^тл+тсгУСу + (т^+т*) Да — нол+от?”Д?ст] Sb^~
лр 1
Ч(*Н0рм+/УтР)адв + УдВ]д77 ДП = -^-Д?ст, (4.13)
J J z
где Mzz—mzlSb^q; Maz = tnzSbKq-,
..a a о хнорм + f У iv
У а =cyq 8; u.on =--------.
bk
Тягу силовой установки на рассматриваемом режиме полета можно считать практически постоянной, не зависящей от скорости. Сле-д Р
довательно, —0. Тогда второе слагаемое в фигурной скобке ле-dV
вой части выражения (4.13) равно нулю. Первое слагаемое в этой фигурной скобке содержит сомножитель в квадратной скобке, представляющий собо$ суммарный коэффициент момента тангажа самолета. Но при балансировочном отклонении цельноповоротного стабилизатора в исходном невозмущенном режиме полета этот суммарный коэффициент равен нулю. Следовательно, вся фигурная скобка оказывается равной нулю и уравнение (4.13) приводится к виду
Да-|-27п1,Да4-2лДа = яг?Д'Рст> (4.14)
М“г + Ма где 2tfin =-------------коэффициент затухания продольного
I z движения;
О2 — ~ (Хнорм + (Га + Р)
“п — -
J z
— частота собственных продольных колебаний самолета;
Л1’ст
mf =--------коэффициент относительной эффективности цельнопо-
1 z
воротного стабилизатора.
Уравнение (4.14) —это линейное неоднородное дифференциальное уравнение второго порядка с переменными коэффициентами. Его коэффициенты 2тп, Оп2 и тф пропорциональны квадрату скорости самолета и поэтому в процессе разбега быстро изменяются (скорость быстро возрастает). Решение уравнения (4.14) приближенно может быть найдено методом замораживания коэффициентов. Он заключается в том, что решение находится для некоторого сравнительно небольшого интервала времени, на протяжении которого коэффициенты уравнения приближенно считаются постоянными— замороженными (равными их значениям в начальный момент рассматриваемого интервала времени).
В данном случае для выбранного начального момента времени /о определяются коэффициенты уравнения при соответствующем значении скорости полета, и далее с течением времени (на рассматриваемом ограниченном временном интервале) они принимаются постоянными. Определяемое таким образом возмущенное продольное движение самолета, строго говоря, соответствует случаю движения с постоянной скоростью. Такой прием позволяет свести ре-
шенне уравнения (4.14) с переменными коэффициентами к решению такого же уравнения с постоянными коэффициентами.
Метод решения уравнений такого типа уже был рассмотрен применительно к уравнению (3.83). Решение данного уравнения находится при следующих начальных условиях t = t0, Да= \а0, Аао = 0. По замороженным значениям коэффициентов 2тп и Qn2 определяются частота, период и время затухания (или нарастания — в случае неустойчивого самолета) продольных короткопериодических колебаний самолета — собственные динамические свойства самолета в возмущенном по углу атаки (тангажа) движении при разбеге по ВПП на основных опорах. Затем исследуется переходная функция по углу атаки (тангажа) при заданном (например, ступенчатом) отклонении цельноповоротного стабилизатора на величину Дфгт.
Таким путем, в частности, определяется время выхода самолета на заданное установившееся значение угла атаки — практически это сводится к нахождению времени достижения самолетом величины приращения угла атаки Act95 = 0,95AayCT, где АаУет— установившееся приращение угла атаки, определяющее время срабатывания по углу атаки. Зная время срабатывания, выбрав заранее интервал времени между моментами подъема передней стойки и отрыва самолета, можно проверить, успевает ли самолет на протяжении этого интервала времени выйти на требуемый угол атаки (Хотр.
Потребное для вывода самолета на угол атаки отрыва (с исходного стояночного угла атаки) отклонение цельноповоротного стабилизатора Аф0Тр находится из выражения
й2
Д?отр=—(a0TP-aCT). (4.15)
С помощью уравнения (4.14) без правой его части можно оценивать характеристики устойчивости самолета в рассматриваемом режиме. Анализ выражения для коэффициента затухания 2тп позволяет сделать вывод, что при движении самолета по ВПП на основных опорах продольное возмущенное движение затухает медленней, чем в полете по криволинейной траектории. В таком полете, как известно, появляется дополнительное аэродинамическое демпфирование («демпфирование траектории»), приводящее к более быстрому затуханию возмущенного движения самолета. Из рассмотрения выражения для Пп2 также видно, что при движении самолета по Земле величина Оп2 оказывается меньшей. Обусловлено это отсутствием дополнительного демпфирования и наличием слагаемого (хнорм+^тр) (Уа“ + Р), поскольку величины Хнорм И !/тр отрицательны, а сумма ¥аа + Р>0. Это слагаемое как бы уменьшает абсолютную величину Мга, т. е. понижает запас продольной статической устойчивости самолета по углу атаки. Значит, самолет при продольном движении по ВПП на основных опорах менее устойчив, чем в полете. Продольная статическая устойчивость само-
лета при его движении на основных опорах обеспечивается при ус-ловии Qn2>0, т. е. когда xF — л\и > роп /1 -— I . Если это условие
\ !
не выполняется (мала степень продольной статической устойчивости самолета по перегрузке тсгУ—хм — хР), то самолет при рассматриваемом движении по ВПП статически неустойчив. Однако ввиду кратковременности такого режима последнее не является особо опасным. Физический смысл указанной неустойчивости заключается во влиянии сил F0CH и Л^осч- Сами по себе эти силы в условиях равновесия продольных моментов создают стабилизирующий (пикирующий) момент. Однако при нарушении условий равновесия моментов тангажа их действие оказывается уже дестабилизирующим. Так, например, при возникновении возмущения, приводящего к увеличению угла атаки, а следовательно, и Уа, возникает отрицательное приращение этих сил (они уменьшаются из-за разгрузки основных опор возросшей подъемной силой), создающее дополнительный кабрирующий, т. е. дестабилизирующий момент.
4.3.3. Боковое движение самолета по ВПП
Произведем упрощенную оценку характеристик путевой статической устойчивости и управляемости самолета при разбеге на трех опорах — в стояночном положении самолета (аналогичным методом оценивается управляемость и устойчивость движения самолета и при пробеге на трех опорах). Система уравнений движения самолета в рассматриваемом случае (при разбеге по горизонтальной ВПП) может быть получена из (2.1) — (2.6) в следующем виде:
mV = /?о.г;
0 = ^-^;
—mV? = /?Oz;
0 = ^;
Jушу = MRy\
v=mRz:
(4.16)
Первые три (силовые) уравнения системы (4.16) записаны в скоростной системе координат, моментные уравнения рассматриваются в связанной системе координат. При движении по ВПП самолет обладает тремя степенями свободы. Для описания этого движения достаточно трех уравнений. Путевое движение характеризуется первым, третьим и пятым уравнениями системы (4.16). Остальные три уравнения используются для определения связей сил, действующих на самолет в горизонтальной плоскости, с силами, действующими на самолет в вертикальной плоскости, и моментами крена и тангажа. Найдем из этих уравнений силы реакции,
NOCH mg
Рис. 4.5. Схема сил, действующих в вертикальной плоскости на движущийся по горизонтальной ВПП самолет
действующие на опорные устройства самолета. Величины Rny и MRx, входящие в уравнения равновесия сил и моментов, действующих на самолет в вертикальной плоскости, определяем с помощью схемы на рис. 4.5. Тогда второе и шестое уравнения системы (4.16) принимают вид
•^пер "Ь ^осн SIH адп 7И£ = 0; )
М г — Рудв —Л^пер^иер + ^перУтр-Ь^осн^тр"Т“-^осн-Чюрм 0. J
Поскольку Fnep=fA(nep и Т’осп==/Л/осн> то из (4.17) находим выражение для определения реакций основных и передних опор:
ЛГм=-(иг-Г.-Р sin c,.)x-”+/i''p+
’Гоп (4.18)
кг / п • \ -*пер + fy-t\> . Mz — Ру tn
^0CH=(/ng-)Za->DsinaSB)-----------+- г-
Лщ лш /
Здесь хш — продольная база шасси, равная хпер—Хнорм- Плечи сил берутся с соответствующими знаками.
Четвертое уравнение системы (4.16) может быть представлено в виде
Мг-|-ДЛ^нгш=0, (4.19)
где = + +
Здесь = ;Г_” производная аэродинамического момента кре-d?
на по углу скольжения (размерный коэффициент поперечной статической устойчивости самолета); М'х = —/—производная аэро-д?
• .,8„_дМ(
динамического момента крена по параметру р; мхэ — — про-
(7 0э изводная аэродинамического момента крена по углу отклонения органа управления креном (размерный коэффициент эффективно-
го
Рис. 4.6. Схема сил, действующих на движущийся по ВПП самолет в горизонтальной плоскости
. ,. з дМ г
сти органа поперечного управления); /И.гн=—- — производная аэродинамического момента крена по углу отклонения органа управления рысканием; ДМОсн — приращение нормальной реакции основных опор, возникающее под действием на самолет неуравновешенного момента крена Мх; zm — база (ширина колеи) шасси.
Из (4.19) получаем
ДЛ^0СН = -Л1,г/гш. (4.20)
Изменение величин нормальных реакций, действующих на правую и левую основные опоры, вызывает, естественно, изменение сил трения правого и левого опорных устройств. Это в свою очередь приводит к появлению разворачивающего момента (неуравновешенного момента рыскания). При отсутствии бокового ветра векторы воздушной и абсолютной скоростей совпадают. В общем случае движения самолета и без бокового ветра (рис. 4.6) вектор скорости самолета может не совпадать с направлением оси ВПП, когда угол курса <рд^О. Предположим, что случайное внешнее возмущение развернуло самолет в ту же сторону (влево на рассматриваемой схеме) так, что угол рыскания ф по модулю превысил угол курса. Возникло скольжение с углом р = ф—<р.
На рис. 4.6 приведена схема сил, действующих на самолет в горизонтальной плоскости при разбеге со скольжением. В этом случае на самолет действуют продольные и боковые силы. Продольные силы: трения Fnep, ^осн.прав и ^осн.лев, лобового сопротивления Хп и тяга силовой установки /э = РПрав + ^лев. Боковые силы: суммарная аэродинамическая Za и боковые силы трения. Суммарная боковая аэродинамическая сила равна
za=zfy+zfy+zAP?+z&„,
(4.21)
гпо 7^_. уР____dZa уй
где7а“^Г’ а
az.
Составляющая Z^p? является боковой аэродинамической силой, возникающей на входе в воздухозаборники двигателей при наличии скольжения [7]. Сила Za стремится сдвинуть самолет вбок с ВПП. При этом со стороны ВПП на опорные устройства самолета действуют силы бокового трения (трения скольжения), препятствующие боковому смещению самолета. Эти силы возникают на переднем (2Пер) и ОСНОВНЫХ (/осн.лев И /осп.прав) ОПОРНЫХ устройствах СЭМО-лета из-за того, что плоскости вращения колес опорных устройств составляют угол [3^=0 с вектором скорости самолета. Они направлены в ту же сторону, что и сила Zapp = Zap, и также пропорциональны углу скольжения. В случае управляемой передней стойки на нее может действовать дополнительная боковая сила, пропорциональная углу ее поворота 6Пер:
7* —75перх гле 7 8|лер— 7? — пер—^-пер Опер’ 1 пер —^-пер— •
dp
Суммарная боковая сила колес может быть представлена в виде
Z пер + Z0CH = Z (? + Зпер) + ^8 - Z + Z ^„ер, (4- 22)
где Z к Znep^ZocH, Э Zосн ——Z0CH-J1eBZ0CHinpaB.
Коэффициент боковой силы колес опорных устройств самолета cZK при малых углах скольжения представляет собой линейную функцию С помощью второго уравнения системы (4.16) дей-
ствующая на колеса суммарная боковая сила Z^ может быть представлена в виде
Z^=CL(/rag —Ка —Psin алв)
Эти боковые силы создают моменты рыскания. Боковая сила Za, приложенная в фокусе по углу скольжения, создаст моменты и Му-?=М$, боковые силы колес создают момент уи|кр=(—Z2снХн0рмН-перепер) а боковая аэродинамическая сила, возникающая в воздухозаборниках, создает момент Myp^=Z^p^x^. Отклонение руля направления и поворот передней стойки создают управляющие моменты рыскания М/8Н и
Му"6? 8пер, обусловленные соответственно отклонениями руля направления и плоскости вращения переднего колеса. При действии на самолет неуравновешенного момента крена Мх возникает дополнительный момент рыскания Myx = Mxf. В принципе возможно появление и других (дополнительных) моментов рыскания Л1удОю за счет несимметрии тяги двигателей, несимметрии обтекания при наличии несимметричных наружных подвесок, демпфирующего момента рыскания, появляющегося при случайных колебаниях само
лета в плоскости рыскания при разбеге, и т. п. С учетом этого получаем вместо первого, третьего и шестого уравнений (4.16):
mV = Р cos адв — — / (mg — Ya — P sin адн);
—mV<?=Zai + Zlp$ + clK(mg— Ya — P sin адв)рД-
+ Z. aHSH + Z ’"J₽8nep + Рг CK;
Jyu^y ~Му/ 4" My^ 4“ My pfj Zoch-^-hopm Znep-^nep 4“
4- ^'гск.пер-’|-пер4_ ^"гск.осн^-норм +мл./4_лЪдоп4_
4"Alj/"e₽8nep4_ Л4ЙН8Н + (/^торм.лев ^торм.прав) ~~g~• I
Здесь (^торм.лев-^торм.прав)^-- путевой управляющий момент, создаваемый различной степенью торможения колес левой и правой основных опор;
Ргск— ^"гск.лев -^гск.прав f ск (mg YB Р Sin Одв), где /ск — коэффициент трения скольжения. Величина /Ск зависит ют материала и состояния поверхности ВПП, формы, характера «рисунка», внутреннего давления и ряда других конструктивных параметров пневматиков, а также и от скорости движения самолета. При его движении по сухой бетонной ВПП величина /Ск составляет примерно 0,8, а по мокрой или обледеневшей ВПП — намного меньше (порядка 0,4—0,5 и даже ниже).
Для проведения приближенного анализа динамических характеристик путевого движения самолета по ВПП упростим эту систему нелинейных дифференцальных уравнений с переменными коэффициентами. Предположим, что движение самолета относительно оси OZ является установившимся (Vz = const) и что отсутствует вращение самолета относительно оси ОУ(соу = 0). В этом случае из (4.23) получаем
тУ=Рсозадв — Ха — f(mg-Y й — Р sin адв);
о =za^+ z^«8H 4-zi’en^8nep 4-^сК;
i (4 24) o=Af^4-AW4-MУ ДОП 4-^г ск.иер^пер “Ь z ск.осн^норм 4-
+ МупеР8пер 4- MX 4- (^осн.леп - ^осн.прав) у
Здесь приняты следующие сокращения для сумм производных по углу скольжения:
Zaz=Z^-\-Zlp-\-clK(ing — Ya — Р sin адв)
И Му с ==Му МуР Cz кАДсН-^НОрМ Cz K^VnepXnep.
Здесь Мус—суммарная степень путевой статической устойчивости самолета при его движении на трех опорах по ВПП.
Оценка статической устойчивости, статического равновесия сил относительно оси OZ и моментов относительно оси ОУ в рассматриваемом случае производится в предположении о непрерывном разгоне самолета вдоль оси ОХ. Для этого система уравнений (4.24) линеаризируется. Выполним упрощенный приближенный анализ этой системы уравнений. Первое ее уравнение не является уравнением статики. Интегрирование его позволяет определить закон изменения скорости движения самолета по ВПП V=V(t). Второе уравнение (уравнение статики) выражает условие прямолинейности траектории движения центра масс самолета. Третье уравнение (также уравнение статики) характеризует условие прямолинейного движения самолета без разворота.
Для упрощенного наглядного анализа примем, что момент крена Мх и дополнительный момент рыскания от несимметричных сил отсутствуют, т. е. что Mxf=Myдоп = 0. Аэродинамический момент рыскания обеспечивающий путевую устойчивость самолета (устойчивого в путевом отношении, т. е. имеющего производную туР<0) в полете, при движении по ВПП частично, а иногда даже и полностью нейтрализуется моментом от боковых сил трения скольжения. Однако если данный аэродинамический момент даже полностью нейтрализуется указанными боковыми силами трения, то это еще не свидетельствует об отсутствии путевой статической устойчивости самолета в его движении по ВПП.
Последнее обусловлено тем, что с появлением возмущения по углу скольжения (рыскания) возникают боковые силы Z0CH и Zmp, пропорциональные углу скольжения и нагрузке на опорные устройства. Чем больше нагрузка на основные опорные устройства, тем больше и сила Z0CH (по сравнению с силой Znep), а следовательно, и создаваемый этой силой стабилизирующий момент рыскания от ОСНОВНЫХ опорных устройств jWyK = —ZochXhopm- Момент рыскания от боковой силы передней опоры является дестабилизирующим, однако его величина относительно мала. Стабилизирующий момент от основных опор всегда заведомо превышает этот дестабилизирующий момент, а в случае свободно ориентирующегося переднего колеса его дестабилизирующее влияние вообще пропадает.
Следовательно, наличие путевой статической устойчивости самолета при его движении на трех опорах по ВПП определяется' знаком размерной производной Му к =дМУк/д'л, являющейся мерой путевой статической устойчивости самолета в рассматриваемом движении. При 0 самолет оказывается устойчивым в путе-
вом отношении при его движении по ВПП в стояночном положении. Поскольку производная Л4уК = Сгк(ЛГпер^иер — -^осЛорлД ТО, следовательно, ее абсолютная величина уменьшается с возрастанием скорости за счет разгрузки опорных устройств аэродинамической подъемной силой самолета.
К моменту подъема передней опоры при разбеге возрастает нагрузка на основные опоры и пропадает нагрузка на переднюю, что приводит к повышению меры путевой статической устойчивости.
К моменту отрыва производная 7Иук стремится к нулю, но при этом исчезает и пропорциональный квадрату скорости дестабилизирующий момент сопротивления основных опор самолета Ft ок.остЛюрм- В момент достижения скорости отрыва степень путевой устойчивости самолета определяется уже целиком «полетными» производными: Мус=Му-\- М^р. Следовательно, при движении самолета по ВПП на трех опорах с малыми скоростями (в начале разбега, в конце пробега), когда боковые силы трения скольжения сравнительно велики, путевая статическая устойчивость самолета обеспечивается в первую очередь восстанавливающим моментом от боковых сил основных его опорных устройств.
На сравнительно больших скоростях (в конце разбега, в начале пробега) при движении самолета на основных опорных устройствах боковые силы трения скольжения малы. Тогда путевая устойчивость самолета определяется в основном восстанавливающим аэродинамическим моментом = При промежуточных скоростях (в середине разбега или пробега) суммарная степень путевой статической устойчивости самолета (Мус₽) увеличивается с ростом скорости полета (практически пропорционально скоростному напору). Более подробное рассмотрение динамики путевого движения самолета по ВПП требует, в частности, анализа корней характеристического уравнения, определяемого третьим (моментным) уравнением системы (4.23). Корни находятся описанными выше при решении уравнения (3.83) способами с применением метода замораживания коэффициентов, как это было сделано применительно к решению уравнения (4.14).
4.3.4. Особые случаи взлета
Взлет с грунтовых и покрытых атмосферными осадками искусственных ВПП
1. Особенности взлета с грунтовой ВПП. Грунтовой называется ВПП, не имеющая специального (искусственного) покрытия. По своей формальной схеме, чисто внешне, взлет самолета с грунтовой ВПП в принципе (по форме траектории, числу и содержанию ее участков) не отличается от взлета с искусственной (имеющей искусственное покрытие) ВПП. Однако по существу такой взлет обладает весьма существенными особенностями, обусловленными в первую очередь прочностью, а также формой поверхности и структурой грунта, которые в некоторых случаях могут чрезвычайно затруднить выполнение взлета, а при весьма слабом грунте и привести к невозможности его выполнения. Естественно, что возможность и особенности выполнения взлета с грунтовых ВПП определяются не только характеристиками самих этих полос, но и конструктивно-эксплуатационными особенностями самолета (в первую очередь, его опорных устройств), например, раз-
мерами пневматиков и внутренним давлением в них, удельной нагрузкой на колесо и т. п.
При стоянке самолета на грунтовой полосе грунт под его опорными устройствами деформируется, оседает. Чем больше давление в пневматике, тем меньше площадь соприкосновения (контакта) его с поверхностью ВПП («пятно» на ВПП от пневматика), тем больше давление опоры на грунт, а следовательно, и деформация грунта. Этому же способствует увеличение удельной нагрузки на колесо (зависящее от взлетной массы самолета и количества колес в опорных устройствах самолета). При малом давлении в пневма-тиках они сравнительно легко деформируются под действием приходящейся на них силы тяжести самолета — площадь контакта их с грунтом увеличивается, а следовательно, давление их на грунт уменьшается. При действии на пневматик одной и той же силы давление его на грунт будет тем больше, чем выше давление в этом пневматике.
После длительной стоянки под колесами образуются лунки, В зимних условиях, при наличии снега и льда на поверхности ВПП, эти лунки заполняются водой, появившейся при таянии льда (снега) под давлением колес. При длительной стоянке колеса примерзают к поверхности ВПП в этих лунках. В таких случаях для страгивания самолета с места приходится прилагать усилия, значительно превышающие усилия страгивания при разбеге по ровной твердой ВПП. Коэффициент трения при страгивании самолета с грунта frv в общем случае значительно превышает коэффициент трения при страгивании на бетонной ВПП /дет:
/гр = /бег + Д/,
где Д/ — приращение коэффициента трения при страгивании с грунта. Приращение Д/ зависит от вида (характера и структуры) грунта, формы и состояния грунтовой полосы. Так, например, для грунтовых полос с низким травяным покрытием величины Д/ могут быть порядка 0,04—0,06, для слабого снега и гравия Д/«0,1, э для песчаной полосы, пахоты и покрытой гравием полосы — даже порядка 0,3—0,4. В общем случае прочность грунта существенно зависит от температуры и влажности воздуха, наличия и длительности атмосферных осадков и т. п. Эти факторы могут существенно изменять коэффициент трения при страгивании. При неблагоприятном их сочетании иногда взлет с грунтовой полосы вообще может оказаться невыполнимым. Это же может иметь место в некоторых случаях и при покрытых толстым слоем снега ВПП. Например, при наличии толстого слоя хорошо укатанного снега в случае повышения температуры наружного воздуха этот снеговой слой может настолько размягчиться, что вообще невозможно будет произвести взлет (выполнить разбег).
При взлете с мягкого, увлажненного или мокрого грунта, таи же как и с сильно заснеженных бетонных ВПП, значительно увеличивается сила сопротивления (сила трения F), возникающая при деформации грунта или снегового покрова колесами опорных уст-176
Рис. 4.7. Образование колеи при движении колеса по мягкому грунту
ройств с образованием глубокой колеи. Ускорение разбега при этом, естественно, уменьшается. Особенно сильно это может проявляться при взлете с раскисшего грунта или с ВПП, покрытой толстым слоем талого снега. Как уже указывалось,, при этом для уменьшения трения
необходимо как можно раньше уве-
личивать угол атаки до а0Тр, т. е. сразу же после подъема передней опоры производить разбег с оптимальным углом атаки (пропорциональным силе трения), который в этих условиях близок к а0Тр или даже равен а0Тр- При разбеге по сухой бетонной ВПП на преодоление суммы сил Xa+F обычно расходуется не более 15—20% всей энергии силовой установки самолета, используемой для взлета. Остальные 80—85% идут на придание самолету ускорения (преодо-
ление его инерции).
В случае разбега по вязкому, раскисшему грунту или по глубокому снегу картина качественно меняется. Здесь уже доля силы трения F в общем балансе действующих на самолет сил существенно возрастает. Это требует выполнения разбега на заметно больших углах атаки для повышения подъемной силы, способствующей разгрузке опорных устройств самолета и тем самым — снижению силы F. Тогда сила трения F=.f(mg— Уа) будет минимальной.
Во время движения самолета по грунтовой ВПП нагруженное колесо опорного устройства выдавливает в грунте канавку (образовывает колею), на что расходуется часть тяги силовой установки (рис. 4.7). Чем меньше прочность грунта, тем глубже оседает в нем колесо, тем глубже канавка и соответственно тем больше энергии тратится на ее образование (на выдавливание грунта). Одновременно с этим (как и при движении по бетонной ВПП) деформируется пневматик — чем меньше в нем давление, тем деформация его больше. Следовательно, энергия (тяга) силовой установки расходуется на преодоление собственно трения, на дефор
мацию грунта и пневматика, а также и на непрерывные подъемы колеса на величину Д/г, равную глубине канавки. Качение колеса шасси по грунтовой полосе по существу представляет собой непрерывное чередование подъемов и проседаний, в результате чего и образуется колея. Поэтому-то затраты энергии на преодоление трения при движении по грунтовой ВПП (особенно при сравнительно мягком грунте) и оказываются значительно большими, чем это имеет место при движении самолета по бетонной ВПП. Для уменьшения этой завышенной силы трения надо разгружать опорные устройства, что и достигается увеличением угла атаки (коэффициента подъемной силы) самолета при разбеге (на второй фазе разбега у самолетов с трехколесным шасси). При взлете с грунто-
-вых ВПП в особенно тяжелом положении оказываются самолеты с опорным устройством велосипедного типа, у которых весь разбег производится практически в стояночном положении.
При взлете с переувлажненной грунтовой полосы в первой половине разбега наблюдается обычно тенденция самолета к рысканию и боковым колебательным перемещениям, а после подъема передней стойки — к продольным колебаниям, заметно затрудняющим выдерживание заданного угла атаки. При взлете с ВПП со скользкой поверхностью (гололед, мокрый бетон) требуется точно выдерживать направление движения самолета в начале разбега, что обусловлено уменьшением коэффициента трения. Для обеспечения надежности оценок возможности выполнения взлета и достаточности длины ЛП для взлета необходим контроль за состоянием грунта (в случае взлета с грунтовых ВПП) или атмосферных осадков на поверхности ВПП (в случае ВПП с искусственным покрытием). Такой контроль осуществляется специальными приборами. Количественно прочность грунта оценивается с помощью прибора, показывающего усилие, потребное для продавливания в грунт стального цилиндрического стержня заданного диаметра на определенную глубину. Косвенно (качественно) о прочности грунта можно судить, в частности, по оставляемой на нем колее. Для количественной оценки коэффициента сцепления на данной полосе в рассматриваемых конкретных условиях применяются специальные самоходные динамометрические тележки (стандартизованные ИКАО).
2. Особенности взлета при наличии атмосферных осадков на ВПП. Характеристики устойчивости, управляемости и особенности поведения самолета в его движении по искусственной (в частности, бетонной) ВПП, покрытой атмосферными осадками, определяются в первую очередь тем, что при наличии осадков изменяются сопротивление самолета, силы трения и боковые силы передней и основных опор, управляющий момент колес передней опоры и моменты рыскания колес главных опор. Для конкретизации обстоятельств, характеризующих движение самолета по таким ВПП, различают пять видов расчетных (типовых) условий, возникающих на покрытых атмосферными осадками ВПП.
1. Влажная ВПП (наиболее распространенный случай) —это ВПП, покрытая жидкостной пленкой без скопления воды па ее поверхности. Такие условия возникают обычно при моросящем дожде, тумане или обильной росе. В этом случае толщина осадков не превышает средней высоты бугорков шероховатости поверхности ВПП.
2. Мокрая ВПП — это ВПП, поверхность которой залита водой, толщина слоя которой превышает среднюю высоту бугорков шероховатости.
3. Покрытая слякотью ВПП — это ВПП, на поверхности которой находится слой слякоти — жидкой смеси воды с небольшими кристалликами льда и снега. Нормируется плотность такой смеси в пределах 0,4—0,9 г/см3.
4. Заснеженная ВПП — нормируемая плотность снегового покрова менее 0,4 г/см3.
5. Обледеневшая ВПП.
Для современных самолетов, имеющих сравнительно большие скорости отрыва (и посадки), наличие атмосферных осадков на ВПП приводит к значительным трудностям. Большие скорости движения самолета по ВПП при наличии на ней атмосферных осадков первых четырех видов (из перечисленных выше пяти) может приводить к глиссированию самолета. Явление глиссирования (или как его еще иногда называют — акваглиссирование) связано с тем, что при некоторых параметрах пневматиков колес опорных устройств и определенной скорости движения самолета по покрытой осадками ВПП пневматики полностью отрываются от поверхности ВПП (начинают двигаться по поверхностному слою осадков на ВПП). Скорость движения самолета, при которой происходит отрыв пневматиков от поверхности ВПП, называется скоростью глиссирования и обозначается Ггл- Явление глиссирования в той или иной мере сказывается на характеристиках разбега всех самолетов (в случае их движения по покрытой слоем жидких осадков ВПП), производящих взлет (а также и посадку) с большими скоростями и имеющих пневматики высокого давления. Физическая сущность его объясняется следующим образом.
Глиссирование вызывается воздействием слоя воды (слякоти) и в конце концов приводит к образованию водяного вала (клина) между поверхностью ВПП и пневматиками опорных устройств самолета. Это сопротивление, обусловленное гидродинамическим давлением, имеет вертикальную составляющую, которая постепенно приподнимает пневматики и уменьшает площадь их контакта с поверхностью ВПП до тех пор, пока движение опорных устройств самолета не будет происходить полностью по поверхности слоя жидкости. При этом колеса опорных устройств оказываются уже неспособными обеспечивать ни путевое управление (за счет разности тормозных усилий), ни эффективное торможение самолета (например, при прерванном взлете). Силы сопротивления такому движению пневматиков опорных устройств самолета весьма малы. Соответствующая им величина коэффициента трения приближается к таковой при движении по обледеневшей ВПП. При боковом ветре глиссирование может приводить к несимметричному торможению колес правого и левого опорных устройств самолета. Глиссирование может вызывать значительное возрастание длины участка торможения самолета — порядка 25—50% и более.
Взлет с боковым ветром
В связи с явной тенденцией к повсеместному переходу от грунтовых аэродромов к аэродромам с бетонированными ВПП, а также с всемерным развитием регулярной всепогодной эксплуатации современных самолетов взлет с боковым ветром стал в летной практике даже более распространенным явлением, чем взлет в
Рис. 4.8. Схема сил, действующих на движущийся по ВПП самолет при наличии бокового ветра: с — вид сзади; б — вид в плане
плоскости ветра. С этим связан ряд особенностей поведения и пилотирования самолета. Основной особенностью пилотирования самолета, обусловливаемой наличием бокового ветра, является необходимость парирования возникающей при этом тенденции самолета к развороту, порождаемой его путевой статической устойчивостью.
Разберем подробнее влияние бокового ветра на путевое движение самолета по ВПП при разбеге (аналогично и при пробеге). Из схемы на рис. 4.8 видно, что в случае движения самолета по ВПП при наличии бокового ветра угол скольже
ния складывается из двух составляющих: р=ра + рв- Здесь (За — угол скольжения самолета в абсолютном движении, образовываемый вектором абсолютной скорости и плоскостью симметрии самолета. Угол |3В — это дополнительный угол скольжения, образующийся между векторами воздушной (относительной) скорости VB и абсолютной скорости Иа, различие между которыми равно взятому с обратным знаком вектору скорости бокового ветра: —
Скольжение приводит к появлению поперечной аэродинамической силы Zae = Za₽|3, а также аэродинамических моментов рыскания и крена Л1,;П = Л1у|5р и Мгв=Мж₽р. Момент путевой статической устойчивости направлен на ликвидацию скольжения — он стремится развернуть самолет по направлению вектора воздушной скорости Ив. Момент поперечной статической устойчивости Мх$ стремится накренить самолет, увеличивая тем самым нормальную реакцию подветренной опоры (в рассматриваемом примере — левой основной опоры Мосн.лев) и уменьшая нормальную реакцию наветренной опоры (УОсн.прав) • Возникает неравенство этих нор» мальных реакций (МОсн.лев>А,'осн.прав) и создается момент рыска*
180
ния (за счет разности сил трения: ГОСн.лев>^осн.прав)> стремящийся увеличить скольжение.
Момент поперечной статической устойчивости можно уменьшить или даже полностью уравновесить моментом от отклонения органов управления креном 7ИЛ8Э = И4ЖЭ3Э. Таким образом можно уравнивать силы МОсн.лев и Уосн.прав- Боковая сила Zap стремится сдвинуть самолет вбок (поперек оси ВПП). Она вызывает появление реакций ВПП — боковых сил трения скольжения, действующих на опорные устройства самолета: ZOCH.CK = ZocH..4eB + ZocH.iipaB и Znep.cK- Эти силы препятствуют боковому смещению самолета. Как уже указывалось, силы Z0CH.neB и 20Сн.прав порождают дестабилизирующий момент рыскания. Боковая сила скольжения передней опоры может быть представлена в виде Znep.c =Znep(?a4'&nep)* В зависимости от величин и знаков углов ра и бпер создаваемый этой силой момент рыскания может оказаться как стабилизирующим (уменьшающим скольжение), так и дестабилизирующим (увеличивающим скольжение).
При появлении угла скольжения ра в случае движения самолета но ВПП с боковым ветром летчик должен ликвидировать этот угол, т. е. установить плоскость симметрии самолета (вектор скорости Иа) строго по оси ВПП. Для этого он соответствующим образом отклоняет переднюю опору (подбирает соответствующую величину бпер) или создает разность тормозных усилий на колесах правой и левой основных опор самолета. Ликвидировав угол ра, летчик должен удержать самолет от разворота по вектору воздушной скорости, т. е. уравновесить момент М/рв. Последнее производится отклонением аэродинамического органа управления рысканием против скольжения, отклонением плоскости вращения колеса (колес) управляемой передней опоры, созданием разности тормозных усилий на колесах основных опор.
Определим скорость скольжения VCK— скорость движения самолета по ВПП, при которой боковая аэродинамическая сила Zap = ZaPp равна суммарной боковой силе сцепления колес опорных устройств самолета с ВПП Fzck (при большей скорости величина ZaP превышает эту суммарную боковую силу FZCk)- Данное условие может быть записано в следующем виде:
Иск? =/ск png -cyS Sin адв^ • t4-25)
Подставляя сюда p~sin р = 1Сб/УСк и решая полученное полное квадратное уравнение относительно ИСк, находим
Первое слагаемое в выражении (4.26) положительно при cz^<0. Перед радикалом опущен знак минус, так как очевидно, что абсо-
181
лютная величина второго слагаемого под радикалом в (4.26) больше абсолютной величины первого слагаемого, а скорость VCI(, естественно, не может быть отрицательной.
Подставляя в (4.26) 0пред= ^е.пред/Vск» находим предельную ско-рость бокового ветра а'г,.прсд для любого состояния поверхности и любого покрытия (любых условий сцепления на поверхности) ВПП. При подъеме передней стойки величина су возрастает и скорость скольжения уменьшается. Поэтому при сильном боковом ветре для предотвращения сноса самолета целесообразно увеличивать длину участка разбега с опущенной передней стойкой — выполнять взлет с подрывом. На влажных ВПП величина /ск уменьшается и Уск возрастает.
Глава О
ОСОБЕННОСТИ ПОЛНОЙ ПОСАДКИ И УХОДА НА ВТОРОЙ КРУГ
5.1. ПОСТРОЕНИЕ ЗАХОДА НА ПОСАДКУ
Посадка современного, особенно сверхзвукового, самолета представляет собой достаточно сложный режим полета, успешное выполнение которого зависит от большого числа факторов: летного мастерства экипажа, траекторно-динамиче--ских (траекторных и системно-динамических) характеристик самолета, данных его оборудования и функциональных систем, характеристик аэродрома, его систем и служб, метеорологических условий и т. п. Выход самолета к аэродрому посадки строится таким образом, чтобы обеспечить экипажу возможность наиболее благоприятного выполнения и успешного завершения этапа полной посадки на данном аэродроме в данных конкретных условиях. В летной практике существует понятие «расчет на посадку» (тогда как нет «расчета взлета», и это не случайно) — это производимый летчиком (экипажем) расчет выполнения одного из наиболее сложных этапов полета, связанный с необходимостью точного последовательного выполнения самолетом совокупности ответственных эволюций, требующих повышенного внимания, достаточно высокого мастерства летчика (экипажа) и выполнения им (экипажем) ряда важных операций. Расчет на посадку производится еще во время выхода к аэродрому и уточняется в процессе захода на посадку
Приближаясь с заданным курсом к аэродрому посадки, летчик заранее снижает скорость и теряет высоту полета таким образом, чтобы оказаться над аэродромом на высоте Н пп с заданной скоростью Узп. Траектория дальнейшего движения самолета представляет собой сочетание прямолинейных участков и разворотов с постепенно уменьшающейся скоростью. На протяжении этой тра« ектории выпускаются шасси и органы посадочной механизации самолета с таким расчетом, чтобы самолет оказался над входной кромкой ВПП с заданными высотой и скоростью, находясь при этом на участке траектории, лежащем в вертикальной плоскости, проходящей через ось ВПП. Пример такой траектории схематически показан на рис. 5,1. На схеме отмечены места выпуска шасси, органов механизации в первое предпосадочное положение (углы отклонения предкрылков ап3п и закрылков 6лЗП1 ), во второе предпосадочное (6зЗП2 ) и в посадочное положение (бп.пос, б3.Пос). Проход четвертого разворота знаменует собой выход самолета на последнюю (расчетную) прямую, на которой летчик имеет еше неко« торые (но уже довольно ограниченные) возможности усточнения расчета на посадку. От того, насколько удачно и правильно выполнен заход на посадку, зависят возможность, безопасность и качество выполнения собственно посадки.
Столь сложное движение, производимое в общем случае со многими разворотами и доворотами (для исправления ошибок расчета на посадку) самолета, делает этап полной посадки самым сложным. Это относится в первую очередь к сверхзвуковым самолетам, для которых характерны, в частности, более высокие-чем обычно у дозвуковых самолетов, скорости полета, меньшее аэродинамическое качество и большее лобовое сопротивление. Для четкого разграничения и систематизации режимов полета, существенно изменяющихся в зависимости от конкретных условий их выполнения, необходима пх формализация. Формализация способов захода на посадку позволяет выделить три принципиально различные схемы построения траектории захода: «по коробочке» (рис. 5.2), «с третьего раз-
Второй разворот
Выпуск шасси
Высота принятия • решения^
Выпуск предкрылков но &ЛЗЛ и . закрылков Л на 6зЗЛ1 //
Первый разворот
Довыпцск закрылков на <взт>с ипредкрыл ков на д„„т
Третий разворот
Четвертый разворот
Довыпуск закрылков на Уззлг
Рис. 5.1. Схема выполнения тяжелым реактивным самолетом захода на посадку и собственно посадки
ворота» (рис. 5.3) и «по прямой» (рис. 5.4). Наиболее распространенный и позволяющий летчику (экипажу) наилучшим образом подготовиться к посадке является заход на посадку «по коробочке».
При таком заходе у летчика (экипажа) имеется больше всего возможностей для выполнения правильного расчета на посадку (и по необходимости — для его корректировки) — наиболее широкий диапазон поддающихся корректировке параметров полета (скорость, высота, курс и т. п.) и способов их изменения, а также
Рис. 5.2. Схематическое представление траектории полной посадки с заходом на посадку «по коробочке» (Н3.& — высота входа в зону аэродрома)
Рис. 5.3. Схематическое представление траектории полной посадки с заходом на посадку «с третьего разворота»
Рис. 5.4. схематическое представление траектории полной посадки с заходом на посадку «с прямой»
наибольший запас времени на это. В некоторых случаях (малый запас топлива, неправильный курс, отказ какой-либо функциональной системы или ее элемента и т. п.) приходится уменьшать число разворотов. Это делается, когда самолет выходит в зону аэродрома с таким курсом, что уже нет возможности «вписаться» в схему «коробочки», либо когда не хватает времени или высоты для такого захода и т. д. Тогда выполняется заход «с третьего разворота» или даже «с прямой». Уменьшение количества разворотов (снижение располагаемого резерва времени на выполнение режима) затрудняет заход на посадку (особенно заход с прямой вообще без разворотов, являющийся наиболее трудным случаем), требует от летчика очень хорошего глазомера, весьма четкого пилотирования и значительно повышенного внимания к выдерживанию параметров движения самолета.
Это все вносит дополнительные затруднения в выполнение и без того сложного режима захода на посадку, затрудняет ввод самолета в регламентированный РЛЭ режим полета, обеспечивающий условия, наиболее благоприятные (а иногда и просто минимально необходимые) для выполнения собственно посадки. Все эти условия призваны обеспечить наиболее безопасное и эффективное выполнение завершающего, самого сложного и ответственного участка полной посадки—приземления самолета (приводнения гидросамолета) с последующим его пробегом по ВПП. Для успешного выполнения этой эволюции летчику необходим надежный визуальный контакт с ВПП (особенно в области ожидаемого касания самолета), поскольку в этом случае он получает объем информации, необходимый и достаточный для правильного пилотирования самолета. Чем раньше летчик сможет установить визуальный контакт с ВПП, тем выше вероятность успешного завершения воздушной части собственно посадки — безопасного, точного, надежного, обеспечивающего должный комфорт пассажиров и требуемую сохранность грузов касания ВПП. Возможность установления визуального контакта с ВПП практически полностью определяется видимостью в районе аэродрома посадки, которая в основном зависит от погодных условий. Немалую роль при этом играют и характеристики обзора из кабины.
5.2. ВЛИЯНИЕ ОТДЕЛЬНЫХ ФАКТОРОВ *
Ряд внешних факторов, в частности таких, как метеоусловия (и в первую очередь — условия видимости ВПП), значительно сильнее сказываются на характеристиках полной посадки, чем на взлетных характеристиках самолета. Обусловлено это тем, что на взлете самолет разбегается по ВПП и уходит от Земли (в случае нормального и продолженного взлета), а на протяжении полной посадки он тормозится, теряет высоту и непрерывно приближается к Земле. В результате потери высоты его опорные устройства вхо
дят в соприкосновение с поверхностью ВПП—эта эволюция для летчика, как правило, оказывается значительно более сложной, чем отрыв от поверхности ВПП в аналогичных условиях. При разбеге на взлете поверхность ВПП в какой-то степени сама стабилизирует движение самолета (в частности, препятствует возникновению крена), при этом летчик должен выдерживать в момент отрыва в основном только заданные величины скорости по траектории (сопоставляя момент достижения этой скорости с условием обеспечения достаточности длины ВПП для разбега) и угла тангажа (на разбеге однозначно определяющего угол атаки) самолета. Тогда как на посадке летчик должен обеспечить перед касанием выдерживание в заданных пределах значительно большего количества параметров: скорости по траектории и вертикальной скорости снижения (сочетая их значения с изменением высоты полета), углов атаки, тангажа, крена и рыскания, сочетая все это с необходимостью поддерживания практически непрерывного визуального контакта с ВПП.
Традиционный подход к оценке влияния температуры и давления наружного воздуха, заключавшийся в том, что их влияние учитывалось практически только на взлетные характеристики, для современных самолетов уже неприемлем. Современные тяжелые реактивные самолеты с мощной посадочной механизацией крыла требуют использования значительной тяги силовой установки на этапе полной посадки. Положение РУД, соответствующее потребной для этих режимов полета тяге, существенно зависит от температуры, давления, а в ряде случаев — и влажности воздуха,
Рассмотрим влияние некоторых конструктивно-аэродинамических и эксплуатационных факторов на посадочные характеристики самолета. Посадочная масса самолета znnoc оказывает существенное влияние на характеристики полной посадки. Разберем это влияние на примере скорости захода на посадку. При изменении исходной массы самолета тПос на величину Azn скорость захода на посадку изменяется на АУзПш- Воспользовавшись формулой (3.19), подставив в нее вместо массы самолета величину znnoc+Azn и рассматривая получающуюся при этом скорость захода на посадку как Узп +АУзпт, после несложных алгебраических преобразований находим ____________________
Кзп + 41/зп . ~ 1/2OTJ (“s ~ ‘зп -1Д + (5.1)
’ P-SCj/Сн
где Azn=Azra/znIIOC.
При малых относительных приращениях массы (Azn<l) можно считать I 1 1 -ф-Azn 2. Тогда из (5.1) получаем приближен-
ное выражение для определения относительного приращения скорости захода на посадку, обусловленного изменением массы самолета, в виде _
лТ/ ^ЗПт Azn /с п\
Д1/зпт = — =—т- (А2)
изп 2
Следовательно, изменение посадочной массы самолета, например на 2%, приводит к изменению скорости захода на посадку примерно на 1%. По такому же закону изменяется и посадочная скорость самолета в зависимости от приращения массы. Длина пробега зависит от квадрата посадочной скорости и среднего ускорения. Величина И20с при изменении массы, например на 1%, изменяется также примерно на 1%:
(Ипос + ДУП0С J2 = Иное (1 + 2 ~ Ип2ос (1 + М.
Приближенно можно считать, что среднее ускорение практически не меняется в зависимости от массы самолета. Следовательно, в первом приближении длина пробега изменяется пропорционально-массе самолета: AZ-nPm = АЛПр т/^-пр~Л/Ц. Аналогичным путем находим и приближенное соотношение для оценки влияния измене ния посадочной скорости и угла атаки на длину пробега: ALnpV~ л: 2Д 1/пос~-—Ла, где ДЙПОС = ДУПОС/УПОС, а Да = Да/(апос-а0).
Отсюда, в частности, видно, что относительное приращение длины пробега вдвое превышает обусловливающее его относительное приращение скорости (например, увеличение посадочной скорости на 10% приводит к возрастанию длины пробега на 20%). Зависимость относительного приращения длины пробега от относительных приращений плотности (Ар = Др/р), давления (Др = Др/р) и_гемперату-ры (Д7’=Д7'/Т) наружного воздуха равна Д£ПрР = —Др; AZnp.p = =<—tAp и ДАпрт = —ЛТ. Для высот менее 5 км приближенно можно принять градиент падения плотности равным 12% на километр. Следовательно, при увеличении высоты аэродрома на 1 км длина пробега возрастает примерно на 12%.
Зависимость длины пробега от относительного приращения суммарной тормозящей_силы AJcyM = ДГсум/^сум определяется выражением ДАпрр = —ДЛум, с помощью которого оценивается влияние изменения коэффициента трения, эффект от использования тормозного парашюта и т. п. Так, например, если при пробеге по сухой бетонной ВПП сила трения составляет примерно 70%, а сумма сил лобового сопротивления самолета и сопротивления тормозного парашюта равна 30% суммарной тормозящей силы, то при понижении силы трения вдвое, например, в случае посадки на мокрую ВПП 70
получается ——(-30 = 65%. Значит, суммарная тормозящая сила уменьшилась на 100—65 = 35%, на эту же величину возрастает длина пробега.
Влияние уклона ВПП определяется изменением тангенциального ускорения за счет составляющей силы тяжести mgsinOenn « mg&впп‘
. * Д?х =----------= — 5лвпп-
m
Следовательно, ДАпрв = —= S ВШ1~ •
/ср /ср
Представив среднее ускорение пробега в виде
£ (Х’а + Лер
£ 2
(5.3
где Ка.пос — аэродинамическое качество самолета при посадке, получаем относительное приращение Lnp за счет уклона ВПП:
евпп
Здесь 0впп берется в радианах.
Длина пробега при наличии продольного ветра определяется формулой
г (1Дос ? ®п)2 /К ЛЛ
п₽ 2Лр
Знак плюс в этой формуле относится к попутному, а знак минус — к встречному ветру. Отсюда легко получить следующее приближенное соотношение для относительного приращения ЛПр за счет продольной составляющей ветра:
\7 —9 w"
К 11OC
5.3. ПОЛНАЯ ПОСАДКА В ВОЗМУЩЕННОЙ АТМОСФЕРЕ
5.3.1. Ветровые атмосферные возмущения
Градиентный ветер у земли приводит к значительным изменениям модуля вектора скорости ветра по высоте. Изменение скорости ветра в приземном слое атмосферы может быть представлено в'виде следующей степенной зависимости:
w = w0|/—V, (5.5)
ШО/
где wо — модуль вектора скорости ветра на расчетной высоте Н& (например /70= 15 м); х —показатель градиента ветра по высоте. Величина х лежит обычно в пределах 0,2—0,5, однако при значительной температурной инверсии х может достигать значений порядка 0,7, а иногда даже и выше.
Обычно в расчетах рассматривается воздействие на самолет порывов конечной протяженности. При попадании самолета в вертикальный (восходящий или нисходящий) порыв со скоростью ветра угол атаки самолета изменяется на величину Да:
—
Да tg Да = + = + w„.
(5.6)
Здесь знак плюс относится к восходящему, а знак минус — к нисходящему порыву ветра. При боковом порыве происходит приращение угла скольжения самолета на величину
Д8 astg ДЗ = + = + w6. (5,7)
Здесь знак плюс означает, что порыв набегает на самолет со стороны правого, а знак минус — со стороны левого полукрыла.
При рассмотрении взлетно-посадочных характеристик рассматриваются порывы ветра на малых высотах (в приземном слое). Здесь характеристики воздушных течении меняются наиболее часто. В некоторых случаях оказывается возможным принимать в расчетах осредненные характеристики ветра. Однако в других (наиболее опасных) случаях турбулентность атмосферы носит случайный характер — возникают одиночные порывы ветра со случайными сильными изменениями вертикальной скорости воздушных масс. Так называемая турбулентность при ясном небе связана главным образом со струйными течениями и является следствием сдвига ветра — различных изменений скорости ветра на сравнительно малых расстояниях. При этом изменения скорости ветра в вертикальном направлении бывают намного меньше, чем в горизонтальном.
Сдвиг ветра на малых высотах в зоне расположения аэродрома представляет большую опасность для совершающих посадку (а также и взлет) самолетов. Во многих аэропортах существуют специальные службы замера сдвига ветра и турбулентности атмосферы. Информация об этих замерах передается на совершающие посадку или взлет самолеты с целью предупреждения их о возможности попадания в сложные условия (обычно в диапазоне высот 0—1000 м, но наиболее опасными являются высоты порядка 10—40 м). Такие замеры грубо могут производиться с помощью запускаемых с Земли шар-пилотов, однако последние сравнительно быстро проходят самые опасные приземные слои атмосферы (первые 30 м менее чем за 5 с). Поэтому замеряемые ими изменения скорости ветра значительно осредняются по высоте. Более точно эти замеры могут выполняться, например, акустическим доплеровским методом с Земли или с самолетов, пролетающих над аэродромом на различных высотах. Обработка материалов этих полетов позволяет получать практически мгновенную картину распределения ветра.
В общем случае попадание самолета в область сдвига ветра приводит к резкому появлению возмущающих аэродинамических енл (в первую очередь подъемной силы) и трех возмущающих моментов (крена, рыскания и тангажа). Обусловлено это внезапным резким изменением скорости ветра по высоте. Такое сильное и неожиданное для летчика изменение ветра весьма опасно. Экспериментальные исследования этого явления позволили установить следующее. Сдвиг ветра на малых высотах, связанный со значительными и резкими изменениями вертикальных и горизонтальных составляющих скорости ветра, может приводить к появлению весьма опасных ситуаций как при посадке, так и при взлете самолета. Вероятность того, что на высотах от 10 до 40 м над уровнем ВПП самолет встретится с сильным вертикальным сдвигом ветра, градиент изменения которого по высоте превышает 4 и 5 м/с на перепаде высот в 30 м, равна соответственно 2 п 0,4%. Сильные строго вертикальные сдвиги ветра с градиентом более 5 м/с на 30 м высоты встречаются обычно в период ночной инверсии в условиях спокойной атмосферы на высотах более 60 м. В турбулентной атмосфере такие сдвиги ветра могут возникать с градиентами, в 4—5 раз превышающими указанные для спокойной атмосферы.
5.3.2. Способы посадки при наличии бокового ветра
При посадке со стационарным боковым ветром после выхода на последнюю прямую (после четвертого разворота) летчик должен принимать специальные меры по борьбе с воздействием это-
го ветра. В противном случае движение самолета будет происходить под углом к оси ЛП — по исходному направлению вектора абсолютной скорости (рис. 5.5). Задача летчика заключается в Изменении направления вектора Va, чтобы он оказался параллельным оси ЛП. Летчик может достичь этого тремя способами.
Первый способ — посадка
«методом скольжения» или с парированием сноса от бокового ветра скольжением (0¥=О, ф = 0, у¥=0). Выполняя посадку по этому способу (рис, 5.6), летчик ориентирует самолет таким образом, чтобы его продольная ось оказалась в одной вертикальной плоскости с осью ЛП. При этом летчик отклонением руля направления и элеронов создает скольжение и крен в сторону над-ветренного (находящегося на стороне, откуда дует ветер) полукрыла. Величины потребных углов скольжения и крена зависят от скорости ветра:
— _ C^Q C^Q —
? = ± w6 и Jy -----= —-—
Рул Рул
Рис. 5.5. Движение самолета под углом к оси ЛП при наличии бокового ветра
Рис. 5.6. Движение самолета при посадке «методом скольжения»
При некоторых величинах й?б эффективность руля направления и элеронов может оказаться уже недостаточной для обеспечения балансировки и управления самолетом. Эти предельные величины относительных скоростей бокового ветра находятся из следующих приближенных выражений:
^б.прел.н ^б.пред.э _ ®б.пред.н я* Онтах j В* (5.8)
^б.пре'д.э пл
Г м о гп н Оэтах,
ХУ
где ----mJ; 8нтах = кн8нтах
ту"
и 8этах=кэ8этах. Здесь кп и кэ — соответственно коэффициенты запасов по отклонениям руля направления и элеронов, необходимых для управления самолетом. Ориентировочные величины этих коэффициентов: ки«кэ«0 85 ... 0,90 (по НЛГС требуется иметь 10%-ный запас по отклонению органов управления). В качестве предельного бокового ветра гТб.пред принимается меньшее из этих двух его расчетных значений, определенных по формуле (5.8): гГ'бпред.э и й>б.пред.н- Непосредственно перед приземлением летчик должен устранить крен для обеспечения возможности касания ВПП одновременно обоими основными опорными устройствами.
Второй способ — посадка «методом курса» или с парированием сноса от бокового ветра упреждением в курсе (р = 0, ф^О, у = 0). В этом случае (рис. 5.7) полет на последней прямой производится без скольжения. По мере уменьшения скорости полета для сохранения прямолинейности движения самолета летчик должен плавно увеличивать угол упреждения (изменять посадочный курс). Потребная величина фпотр определяется приближенно из выраже^ ния фпотр~агс1^йУб^й’б- Поскольку в этом случае направление продольной оси самолета не совпадает с направлением оси ЛП, постольку непосредственно перед приземлением летчик должен с помощью руля направления развернуть самолет по оси ЛП.
Третий способ — комбинированный, представляющий со« бой сочетание парирования сноса от бокового ветра скольжением и курсом (р=т^=О, ф=#0, уэ^О). В этом случае (рис. 5.8) полет производится со скольжением с одновременным изменением посадочного курса (продольная ось самолета отклонена от оси ЛП на угол ф<р). Потребный при таком комбинированном способе посадки угол крена находится из выражения — -------------------------------(и>б —Ф)-
Руд
Н? самолетах с прямым крылом борьбу со сносом при заходе на посадку с боковым ветром летчик стремится обычно производить скольжением и только в случае сильного ветра (№б>^б.пред) при-
Рис. 5.7. Движение самолета при посадке «методом курса»
Рис. 5.8. Движение самолета при комбинированном методе посадки с боковым ветром
меняет другие способы. Однако при заходе на посадку с боковым ветром на самолетах со стреловидным крылом создание скольжения вызывает большие сложности для летчика. Причина этого заключается в том, что на этих самолетах (в отличие от самолетов с прямым крылом) в полете на сравнительно больших углах атаки обычно имеют место большие запасы поперечной статической устойчивости. При возникновении скольжения это приводит к появле» нию значительных стабилизирующих моментов крыла, стремящихся вывести самолет из крена и скольжения. Для удержания самолета в режиме прямолинейного полета летчику приходится значительно отклонять элероны в сторону скольжения. Даже при сравнительно небольших р эти отклонения приближаются к своим предельным значениям. Дальнейшее увеличение скольжения оказывается уже невозможным (не говоря о том, что в этом случае у летчика не остается запаса по отклонению элеронов для парирования случайных внешних возмущений). Поэтому на самолетах со стреловидным крылом способ парирования сноса от бокового ветра скольжением практически неприемлем.
Посадка при наличии бокового ветра не позволяет эффективна использовать торможение колес, что приводит к возрастанию длины пробега. При наличии тормозного парашюта в случае посадки с сильным боковым ветром не следует выпускать его до момента
касания самолета — во избежание разворота самолета по ветру. Рывок самолета в сторону ветра, возникающий при выпуске парашюта после касания, парируется раздельным торможением колес опорных устройств.
Статистические исследования ИКАО, проведенные в США за десятилетний период, показывают, что свыше 20% выкатываний самолета за пределы ЛП при пробеге и более 10% случаев «недо< лета» (приземления до начала ЛП) на посадке обусловлены не-благоприятным влиянием ветра. Большинство этих случаев было связано с влиянием атмосферной турбулентности и сдвига ветра,
5,3.3. Определение условий балансировки и максимального угла крена при посадке с боковым ветром
Балансировка самолета
Рассмотрим условия балансировки самолета при заходе на посадку с боковым ветром. Для простоты рассуждений будем считать режим полета прямолинейным установившимся, протекающим в общем случае с ненулевыми углами крена и скольжения. Балансировка действующих при этом на самолет боковых моментов обеспечивается соответствующими отклонениями органов управле ния креном и рысканием. Балансировка поперечной силы производится созданием определенных углов крена. Для этого случая получаем из системы (2.1) -— (2.6) уравнения движения самолета в следующем виде (пренебрегая нормальной составляющей тяги силовой установки):
+ (59)
Да? + Дан8н + ^ sin Т=0;
Ка — mg cos у=0.
Подставив в третье уравнение этой системы выражение для mg из четвертого уравнения и перейдя от производных моментов и сил к производным их коэффициентов, получаем условия равновесия действующих на самолет в рассматриваемом режиме полета сил и моментов в виде
тх3 да.гэВэ Д- тхнЬИ — 0;
cytgY + c^4-c>8H=°-
(5.10)
Это — система линейных алгебраических уравнений с постоянными коэффициентами, из которой легко могут быть найдены баланси-
Рис. 5.9. Балансировочные кривые для полета со скольжением
ровочные значения углов отклонения органов управления и угол крена (в функции угла скольжения), обеспечивающие балансировку самолета в рассматриваемом режиме полета со скольжением:
(5.П)
Полученные зависимости позволяют определять балансировочные кривые для прямолинейного полета со скольжением. На рис. 5.9 приведен типичный пример балансировочных кривых отклонений руля направления по углу скольжения бп(₽), отклонений! элеронов по углу скольжения 6Э(Р) и балансировочной зависимости у(р) для двух случаев: для статически устойчивого в боковом отношении (сплошные линии) и статически неустойчивого (штриховые линии) самолета. На статически устойчивом самолете для балансировки его в полете со скольжением требуется создавать крен в сторону выдвинутого вперед (идущего впереди) полукрыла, а руль направления и элероны отклонять в сторону скольжения. Входящие в (5.11) углы скольжения в рассматриваемом случае равны р~г7б-Приведенные выше выражения (5.8) легко находятся из первого и второго уравнений (5.11) соответствующей заменой 8э=8этах при Р = И’б.пред.э И Вн=Вн1пах При р = Wб.пред.н-
Максимальный угол крена
Для анализа условий выполнения посадки с боковым ветром требуется оценивать возникающие на таких режимах полета максимальные углы крена. Реакция по крену на боковые порывы ветра у некоторых типов самолетов может быть значительной. В некоторых случаях развивающиеся при этом углы крена могут даже обуславливать полетные ограничения по величине допустимого бокового порыва ветра. Рассмотрим воздействие на самолет ступенчатого бокового порыва ветра. С целью получения приближенной оценки апмлитуды первого максимального заброса по углу крена Утах можно пренебречь изменением максимальной амплитуды угла скольжения. Полагая, что изменение угла скольжения происходит
по гармоническому закону с частотой собственных боковых колебаний самолета Qs, можем записать
Р(/)=Д3 cos26/, где ^? = arctgTO)6^w6,
а величина Qg находится из известного соотношения
7 „ / , ти \ 1Г>.
2б= — qSl\—— sin а0-г2-cos а0 I . (0.12)
\ ?Х Jy '
Из уравнения (2.4) и первого уравнения системы (2.8) получаем упрощенную систему уравнений, достаточно хорошо описывающую движение самолета относительно оси ОХ:
Jхшх=^^{тхх sin a) wx-\-gSlrrixA^ cos26/;
27 (- • -j)
у = (.0 г.
Первое уравнение этой системы удобно представить в виде
a -|- a2u>x = cos 2б/; (5-14)
где «1 = 1; «2 = —7777 (m"x + т?х sin а) .
Новая независимая переменная wx=—~ ш.г-
3 х
Это — неоднородное линейное дифференциальное уравнение с постоянными коэффициентами (аэродинамические производные, скорость полета и угол атаки в рассматриваемом режиме полета можно считать практически неизменными) с переменной правой частью. Подробней подход к решению уравнений такого типа был рассмотрен на примере решения уравнений (3.83). Как уже указывалось, решение такого уравнения находится в виде суммы общего (и*общ) и частного (Их части) решений. Суммарным решением уравнения (5.14) будет
Чг = И гобщ + Участи = -41е~Х' + Л Sin (26/ + <р), (5.15)
где Х=а2.
Коэффициент Д2, характеризующий отношение амплитуд юЛ- и |3 в установившемся движении, определяется как модуль передаточной функции:
А2=------, , (5.16)
й6 V 1 + >-2
где X=X/Q6.
Величина Л1 определяется из (5.16) при начальных условиях t = 0 и иж = 0:
Д1 = — А2 sin у.
Для определения сдвига фаз ср в первом приближении пренебрегаем общим решением в (5.16). Подставляя его затем в (5.14), получаем при t — 0:
А22б cos <? + \А2 sin <р= 1.
Отсюда находим А2 sin <р л; — (1 — А226).
X
Следовательно, величина Л] может быть представлена как
-41 = —j-[ 1 — Г7~—— 1 Поскольку Ixi < 1, то К14-Х2—1 X,
х L V 1 + Х2 J 2
a Aj = — 7- ——L-.
1 йб 2 + Х2 2йб
Интегрируя (5.15) в пределах / = 0, /=-^-=л2б, находим приближенную формулу для определения утях в собственном движении под воздействием ступенчатого порыва ветра:
32tj;X2—т9ху, (5.17)
3 ( h ту I • V1
где т.ху = — —±----cosa0+sin а0 .
К 'у тх /
5.4. НОРМАЛЬНЫЕ И ОТКАЗНЫЕ РЕЖИМЫ ПОЛНОЙ ПОСАДКИ И УХОДА НА ВТОРОЙ КРУГ
5.4.1. Маневрирование на воздушном участке
Сравнение методов выравнивания
Летчик должен добиваться сокращения посадочной дистанции с помощью высокой точности пилотирования, позволяющей, в частности, уменьшать перепад скоростей АК3п = Кзп—Ипос и по небходимости— использования повышенных режимов работы двигателей. Большую помощь при этом оказывают автоматические устройства регулирования тяги (управления положением РУД) при заходе на посадку, так называемые автоматы тяги. При этом оптимальная траектория полной посадки может быть реализована отклонением органа управления тангажом в последние секунды перед касанием (третья типовая схема воздушного участка собственно посадки, см. рис. 3.8). Это так называемый метод С («цэ») ИКАО (по принятой ИКАО для нормирования посадочных характеристик классификации методов посадки).
В таких случаях на последнем воздушном участке собственно посадки отмечается обычно заметное влияние эффекта земного эк
рана (эффекта воздушной подушки за счет экранирующего действия поверхности ВПП) на потребный метод пилотирования самолета в непосредственной близости ВПП. Обычно сбалансированный в полете по глиссаде самолет при подходе к поверхности ВПП сам стремится уменьшить скорость снижения путем искривления траектории, происходящего под воздействием воздушной подушки. Мягкая посадка получается в таком случае при сравнительно небольшом импульсном отклонении органа управления тангажом на кабрирование. Если же самолет не был предварительно сбалансирован в полете по глиссаде, то воздушная подушка играет уже роль дополнительного возмущающего фактора, способствует дальнейшему развитию допущенных летчиком ошибок пилотирования. Воздействие воздушной подушки в таком случае может только способствовать взмыванию или разбалтыванию самолета, выполнению грубой посадки с «козлением» и т. п.
В особых случаях, в частности, при недостатке тяги, неудобных подходах к ВПП (наличие близкорасположенных высотных препятствий в зоне подходов) или просто при достаточно грубых ошибках пилотирования снижение самолета (вынужденно или умышленно) производится по глиссадам, более крутым, чем стандартная. При этом, если даже скорости полета (скорости по траектории) сохраняются неизменными, вертикальные скорости снижения самолета могут оказаться уже существенно большими. Погашение этих вертикальных скоростей должно производиться на участке выравнивания. Проанализируем особенности этого процесса на примере сравнения нескольких видов траекторий воздушного участка собственно посадки.
На рис. 5.10 приведены различные траектории воздушного участка собственно посадки, выполняемой по первой и третьей типовым схемам (см. рис. 3.6 и 3.8), по второй типовой схеме (см. рис. 3.7), но только с началом выравнивания на траек-
тория с «подныриванием» под глиссаду (эквивалентна траектории в случае захода на посадку по более крутой глиссаде, чем стандартная — показана на графике штриховой линией). Траектории 1 и 4 примерно равнозначны по сложности выполнения и точности их выдерживания, поскольку имеют соответственно три (точки 5, 6, 7) и две (точки 5 и 8) точки изменения перегрузки (переключения по перегрузке). Обе они чувствительны к ошибкам в определении момента начала выравнивания и в выдерживании заданных приращений нормальной перегрузки.
Опыт летной эксплуатации показывает, что запаздывание с началом выравнивания в случае полета по траектории 1 и раннее выравнивание на траектории 4 одинаково могут приводить к опасным последствиям. В частности, позднее выравнивание на малой скорости при развившейся вертикальной скорости снижения (траектория 4) даже при дальнейшем выводе самолета на угол атаки, соответствующий доп (на аДоп), может закончиться весьма грубым (жестким) касаниеминогда даже с выходом на разрушающие перегрузки. Перевод двигателей на режим малого газа лишь усу-
Рис. 5.10. Сравнение нескольких видов траекторий воздушного участка собственно посадки:
1 — траектория воздушного участка собственно посадки, выполняемой по первой типовой схеме; 2 — траектория воздушного участка по второй типовой схеме с началом выравнивания на #выр<^Пос: 5— траектория воздушного участка, построенного по третьей типовой схеме; 4 — траектория воздушного участка с «подны,риванием> под глиссаду; 5—9 — точки переключения по перегрузке
губляет такое развитие событий из-за возникающего при этом дополнительного торможения самолета и снижения нормальной перегрузки в результате потери скорости. Попытки предотвращения грубой посадки путем энергичного отклонения рычага (ручки или штурвала) управления на себя опасны, так как могут привести к выходу самолета на недопустимо большие углы атаки (например, при полете с существенно задней центровкой самолета), а в некоторых случаях просто не эффективны (например, при передних центровках и сравнительно небольшой эффективности органа продольного управления). Поэтому при позднем выравнивании момент начала уборки газа должен быть по возможности ближе к моменту касания самолета, а скорость полета в таком режиме летчик не должен уменьшать до начала выравнивания.
Высокое выравнивание на повышенной скорости даже в случае незначительного возрастания су может приводить к появлению сравнительно больших нормальных перегрузок (в случае больших длу \
градиентов—— 1 и быстрому нарастанию угла 0. При этом само-0Су /
лет выходит на высокую пологую траекторию (кривая 1) и воздушный участок посадки затягивается. Уборка газа на сравнительно большой высоте и стремление уменьшить угол атаки приводят к возникновению траекторий типа 4 на рис. 5.10. В сочетании с уменьшением скорости полета это ведет к грубой посадке, чревато опасностью приземления на переднюю опору с последующими взмыванием и прогрессирующим «козлением» самолета. С другой стороны, парашютирование вследствие потери скорости с постоянным углом тангажа при большой начальной высоте (более примерно
2 м) недопустимо с точки зрения обеспечения прочности опорных устройств.
Следовательно, для снижения вероятности возникновения грубых ошибок пилотирования необходимо продолжение установившегося полета на сбалансированном самолете по глиссаде с неизменной тягой силовой установки до минимально возможной высоты начала выравнивания. Последующее выравнивание должно производиться за минимальное время. При этом активное управление скоростью полета можно начинать не ранее момента начала выравнивания. Одновременное соблюдение всех этих условий возможно при полете по траектории типа 2, обеспечивающей к тому же и практически наименьшую длину воздушного участка (траектория 4 позволяет получать еще более короткие воздушные участки, однако она небезопасна). Траектория 3 при исходных углах снижения самолета, по абсолютной величине больших примерно 1°, требует проведения дополнительных мероприятий, позволяющих производить безопасное и достаточно комфортное касание ВПП при отсутствии выравнивания. В частности, она требует значительного повышения энергоемкости амортизационной системы стоек основных опорных устройств, хорошей управляемости и хороших динамических характеристик самолета на посадочных углах атаки вблизи Земли и т. п.
Обеспечение безопасности полета и требуемого уровня комфорта при посадке по траектории 3 допускает простейшее пилотирование (требуются только четкие действия летчика при увеличении угла тангажа непосредственно перед касанием). При этом получается минимальная длина воздушного участка. В противном случае оптимальной является траектория типа 2, наиболее полно отвечающая требованиям максимальной простоты и точности реализации требуемых параметров посадки, а также позволяющая уменьшить посадочную дистанцию за счет сокращения длины воздушного ее участка (по сравнению со случаем полета по траектории /).
Определим зависимость нормальной перегрузки при выравнивании пвыр от высоты начала выравнивания //выр при посадке по траектории 2. Продолжительность выравнивания определяется по формуле (3.33). Высота начала выравнивания приближенно может быть представлена через среднюю скорость и средний угол наклона траектории в виде
Нвыр~ |^сн| ^выр— VBHP |6сн.сн| ^выр = ^выр 2 ^выр =
выр |6сно| , = о гвыр-
Подставляя сюда /ВЫр из (3.33), находим потребную нормальную перегрузку пвыр:
«выр — И
у2 п2
выр снО
выр
=н
V2 п v t/снО 2^^выр
(5.18)
Величина пвыр практически не зависит от метода выравнивания, в частности, от того, выполняется ли выравнивание с сохранением установленного на глиссаде режима работы двигателей до момента касания или с уборкой газа в момент начала выравнивания. Оценим приращение дистанции воздушного участка посадки Д£ВОЗд2— возрастание его при переходе от траектории 3 к траектории 2. Найдя изменение энергетической высоты на участке выравнивания, получаем следующее соотношение, связывающее приращение энергетической высоты с величиной LBUp:
И2 — V2
.rr г нос г выр __ J
1 э- 2g выр ^х^выр’
При LBbip~_^. + AL№3a2
величина ДТВОЗД2 определяется по формуле
/1 1 \ V1 — И2
----Ч-----=------=. (5.19)
\6cho «V / 2gnx
Оценка влияния воздушной подушки
Эффект воздушной подушки (экранирующее воздействие подстилающей земной поверхности) существенно сказывается на аэродинамических характеристиках самолета. Рассмотрим наглядную упрощенную схему движения самолета в конце воздушного участка собственно посадки, выполняемой по траектории типа 3 (рис. 5.10) в предположении о постоянстве угла тангажа, тяги и скорости полета, при нулевых крене и скольжении. Для количественной оценки влияния воздушной подушки второе уравнение системы (2.17) удобно представить в виде
тЙУси ~ Р sin адв Д- Г в Д- t\YаВП — mg cos 6СН, (5.20)
поскольку при I/=const V6CH=—(-7М Йусн. dt
Здесь ДУа вп — дополнительная аэродинамическая подъемная сила, обусловленная влиянием воздушной подушки. При начальных условиях:
/=0, П(,с‘ = 1/усн0=СОП81, Ка = Га0, ЛДаВП = 0, (X =а0,
^дв “СЬдвСЬ ®сн ^снО из (5.20) находим
Р si п адв0 — mg cos 6сн0 = — Yа0.
При малости нормальной составляющей тяги и угла снижения самолета (cos 0fH~cos 0сно~ I) приближенно можно считать
Р sin адв — mg cos 9СН Р sin адвЬ — mg cos 0снО.
Тогда из (5.20) получаем
тЙУсн^Ка-Па0 + ГаВП. (5.21)
Рис. 5.11. Влияние близости Земли на характер протекания зависимости су = =£»(«)
В соответствии с НЛГС будем считать, что влияние воздушной подушки проявляется до высоты Нвп, приближенно равной размаху крыла самолета. Пример, иллюстрирующий влияние эффекта близости Земли (экранирующего воздействия Земли) на характер протекания зависимости су= = Су(а), приведен на рис. 5.11. В первом приближении для диапазонов углов атаки, близких к
ctnoc, влияние воздушной подушки может быть представлено в виде линейной зависимости типа
Н ^вп
1
ДСуВП = ДСуВПО
Поскольку по допущению т) = const, то а = (>—0Сп и —ОГно-С учетом этого, принимая
eCH^si.nec„=
у V ’ »с«
и выражая аэродинамические силы через их коэффициенты, из (5.21) получаем
'Й+агН + а2Н=а3, (5.22)
где ал
Sfv .
2т Су'
SpV2
а2—т—г.—^су вп°;
2тЛВп
ХрИ^усно а ХрГ2
а3=— -----су —-— Дсу впо •
2т 2т
Это — неоднородное линейное дифференциальное уравнение с постоянными коэффициентами вида (3.83), решения которого были рассмотрены выше. В данном случае при принятых начальных условиях решением (5.22) будет
Н = УуСи0 COSM+ 2" <в" Sin М +/Увп’
L «2 \ «2 (а/у+Р//)Ф/ /J
(5.23)
D . / / Cli \2
где аи= ₽я = |/ °2-^—] •
При этом зависимость Уусн= К/сн(^) принимает вид
^сн=^сное’н< ( cos М — sin \ ?н
(5.24)
909
Рис. 5.12. Пример протекания зависимости VBH = = f(VBCBo)
Выражение (5.24) позволяет, в частности, находить величины вертикальных скоростей в момент касания самолетом поверхности ВПП Вук. Пример найденной с помощью
(5.24) зависимости VyK=f (Vy гн0) приведен 0 tyaimtnl l^wol на рис. 5.12. Обычно существует минимальная начальная скорость снижения Еуснтш, при (и, естественно, ниже) которой самолет сам как бы «садится» на воздушную подушку — подойдя к поверхности ВПП он летит, не касаясь полосы, не снижаясь: EWCH = 0, самолет «сидит» на воздушной подушке.
С помощью зависимости типа рис. 5.12 может быть определена практически максимально допустимая в массовой летной эксплуатации начальная вертикальная скорость снижения самолета по глиссаде Vycnmax, с которой еще возможно безопасное (с точки зрения запаса прочности шасси) приземление самолета без вмешательства летчика в управление с целью понижения величины VyK. При заданном коэффициенте безопасности /ш для шасси, соответствующем поглощению максимальной работы амортизационной системой (например, |ш= 1,3 или 1,5 в соответствии с требованиями НЛГС), находим максимально допустимую в эксплуатации нагрузку на шасси Рутах как Рутах=—-Руразр,гДе ^уразр—разрушающая НЭГруЗКа 7 ш
на шасси. По данным прочностных испытаний самолета находится приращение нормальной перегрузки Дгаутах, при котором достигается величина Рутах-Далее определяется максимальная вертикальная скорость касания У?/ктах, создающая приращение нормальной перегрузки, действующей на шасси: Дтг//Ш = тах.
При встречном уклоне ВПП получаем
^ук max У к доп “Ь ®ВПпЕ\.к,
где VXK — горизонтальная составляющая путевой посадочной скорости самолета.
Из последнего выражения находим наибольшую допустимую в летной эксплуатации самолета величину вертикальной скорости касания:
' у к доп ук max бвппИ гк.
По графику на рис. 5.12 находим наибольшую допустимую по условиям прочности шасси скорость снижения самолета по глиссаде Кусндоп, при которой достигается величина Вук доп- Обычно в таком расчете принимается т]впп=2,5%, т. е. Овпп —0,025 (при отсутствии фактических более высоких значений Овпп)-
Если летчик производит выравнивание для уменьшения вертикальной скорости касания, то расчетная величина \пуш находится как ш=Д/Гуmax A/zyBb!p. Здесь Аиувыр—Нвыр—1, где /1выр определяется по формуле (5.48).
5.4.2. Особые случаи полной посадки и ухода на второй круг
Особыми случаями полной посадки являются отказ одного или нескольких (всех) двигателей на этапе или перед началом этапа полной посадки, отказ каких-либо элементов функциональных систем на этапе или перед началом этапа полной посадки (например, элементов систем управления, стабилизации), посадка с убранными (невыпустившимися) опорными устройствами, посадка с убранной (невыпустившейся) механизацией, посадка на мягкий или сыпучий грунт, на залитую водой ВПП и т. п. Особыми случаями ухода на второй круг являются случаи, также связанные с отказом в полете одного или нескольких двигателей, элементов функциональных систем, с попаданием в зону градиентного сдвига ветра, сильной спутной струи летящего впереди самолета и т. д.
Посадка тяжелого самолета с неработающей силовой установкой
Посадка с неработающей силовой установкой является одним из наиболее сложных и опасных отказных режимов. При выходе из строя силовой установки самолет, лишенный тяги, должен перейти к планирующему полету и затем произвести посадку. Задача летчика — найти наиболее целесообразные в этом случае маневры. При достаточно высоком аэродинамическом качестве самолета в посадочной конфигурации (порядка Ка = 6...8 и более даже с выпущенным шасси, что обычно имеет место у тяжелых дозвуковых самолетов с крылом хорошей аэродинамической компоновки) действия летчика при посадке с полностью отказавшей силовой установкой (со всеми неработающими двигателями) с точки зрения применяемых методов построения посадочных траекторий в принципе близки к его действиям при посадке с нормально работающей силовой установкой. Однако такая отказная посадка обладает весьма существенной особенностью — необходимостью очень бережного расходования механической энергии самолета, поскольку в этом случае отсутствует возможность восполнения затраченной энергии. Поэтому посадка тяжелого многодвигательного (особенно пассажирского) самолета с полностью неработающей силовой установкой является весьма сложным и опасным режимом полета.
При отказе всей силовой установки еще до начала этапа полной посадки возможности предпосадочного маневрирования и «дотягивания» самолета до запланированного аэродрома посадки или до запасного аэродрома, выхода на посадочный курс и выдерживания необходимых траекторных параметров посадки оказываются чрезвычайно ограниченными. В такой ситуации может оказаться неизбежной даже вынужденная посадка вне аэродрома, сопровождаемая обычно значительными ударами самолета о неровности Земли. При этом возникает повышенная опасность получения тя-
Рис. 5.13. Требуемое положение пассажиров при вынужденной посадке вне аэродрома
желых травм пассажирами и возможны повреждения самолета, затрудняющие его покидание после приземления.
При попадании пассажирско
го самолета в такие условия
прежде всего возникает вопрос немедленной эвакуации пассажиров. Это требует от экипажа особой подготовки к приземлению в аварийной обстановке, повышенного внимания и особо четких действий, направленных на спасение пассажиров. Перед приземлением пассажиры должны принять позу для аварийной посадки: об-
хватить колени руками накрест и положить голову на руки (рис. 5.13). После остановки самолета необходимо незамедлительно его покинуть через аварийные выходы с использованием специальных трапов для аварийного покидания в случае вынужденной посадки на сушу (рис. 5.14). Экипаж покидает свою кабину с помощью аварийных канатов.
Если при такой посадке были выпушены все опорные устройства и они остались целы к моменту остановки самолета — это является самым благоприятным вариантом в данной ситуации (рис. 5.15, а). Посадка с невыпущенной передней стойкой (рис. 5.15,6) порождает наиболее сложные условия для покидания самолета пассажирами из хвостовой части салона и создает опасность повреждения носовой части фюзеляжа. Посадка с убранными (невыпущенными) опорными устройствами — так называемая «посадка на брюхо» пли «на фюзеляж» (рис. 5.15, в)—явля-
Рис. 5.14. Схема покидания самолета после вынужденной посадкп на сушу
Рис. 5.15. Возможные положения самолета после вынужденной посадки на сушу и расстояния порогов аварийных выходов (показаны вертикальными стрелками) от поверхности Земли
6)
ется наиболее опасной в первую очередь с точки зрения возможных повреждений конструкции самолета (в частности, нижней части фюзеляжа) и возникновения пожара.
Посадка маневренного самолета с отказавшими двигателями
Посадка сверхзвукового маневренного самолета (например, одно- или двухдвигательного) при отказе силовой установки с точки зрения применяемых методов построения траектории обладает значительными принципиальными особенностями. В частности, в отношении динамики полета она связана с весьма существенными дополнительными особенностями, обусловленными малым аэродинамическим качеством самолета с крылом большой стреловидности и малого удлинения (порядка 3—4 и даже менее с выпущенным и 6—7 — с убранным шасси). Условия выполнения всех эволюций, связанных с посадкой самолета, в этом случае существенно зависят от того, где и когда произошел отказ двигателей. Можно выделить три группы характерных обстоятельств выполнения такой посадки:
1. Отказ силовой установки в полете на большой высоте при большом удалении от аэродрома, когда в распоряжении летчика имеется достаточный запас высоты для маневрирования с целью выполнения оптимального захода на посадку (сравнительно наиболее легкий случай).
2. Отказ силовой установки на больших или средних высотах в районе аэродрома.
3. Отказ силовой установки в полете на небольшой высоте, когда у летчика остается минимальный запас высоты для обеспечения выхода на аэродром (чтобы только «дотянуть» до аэродрома) и не остается практически никаких резервов для предпосадочного маневрирования (наиболее тяжелый случай).
В первом случае благодаря наличию достаточного запаса высоты возможно заходить на посадку с третьего разворота пли даже 206
по схеме классической «коробочки», что расширяет возможности маневрирования и исправления расчета на посадку (изменениями угла крена, места начала разворота, отворотами и доворотами самолета и т. п.). В третьем случае при обнаружении отказа силовой установки необходимо сразу же развернуть самолет в сторону аэродрома, кратчайшим путем выйти на посадочный курс и заходить на посадку с прямой. При возникновении отказа силовой установки на большой скорости обычно бывает целесообразным набрать высоту, используя имеющийся запас кинетической энергии самолета (выполнить горку). При исходных сверхзвуковых скоростях полета такой меневр оказывается наиболее полезным как за счет существенного прироста высоты, так и благодаря повышению аэродинамического качества самолета на дозвуковых скоростях.
В тех случаях, когда выход самолета в район аэродрома после отказа силовой установки возможен по прямой (без разворота), самолет проходит наибольшее расстояние (рис. 5.16): £тах=#откЛтах, где Яотк — высота отказа силовой установки; Ктах — максимальное аэродинамическое качество самолета.
Для получения наибольшей дальности планирования целесообразно выпуск органов механизации и опорных устройств самолета производить незадолго до приземления — их выпуск приводит к значительному уменьшению качества. Профессор В. П. Ветчинкин показал, что наименьшая потеря высоты при движении само пета по спирали получается в режиме с у = 45° и су2/сх=тах (наивыгоднейшая спираль снижения). При этом потеря самолетом высоты по мере разворота оказывается минимальной. Она определяется производной
. (5.25)
d<f S^0,oc2a + cxa)
Эта зависимость позволяет приближенно определять максимальную зону досягаемости при посадке с отказавшей силовой установкой. Границей такой зоны является кардиоида. При отказе силовой установки в точке 1 (высота Яотк) область, ограниченная кардиоидой, является максимальной зоной досягаемости. Снижение не по наивыгоднейшей спирали приводит к уменьшению зоны досягаемости. При снижении без разворота самолет достигает аэродрома посадки, расположенного на расстоянии Атах. В случае снижения с разворотом он может выйти только на аэродром, расположенный
Рис. 5.16. Влияние разворота на дальность планирования самолета при заходе на посадку с отказавшей силовой установкой
<р=0
Рис. 5.17. Траектория посадки сверхзвукового самолета с двумя выравниваниями
на расстоянии L<r<Lmax. В этом случае для получения наибольшей величины Ц следует выполнять разворот самолета по наивыгоднейшей спирали (криволинейный участок траектории 2—3).
Из формулы (5.18) видно, что высота выравнивания пропорциональна вертикальной скорости снижения самолета:
iz2
’ У ено
выр~ 2£(пвыр-1)
(5.26)
При малом аэродинамическом качестве самолет планирует с большой вертикальной скоростью снижения, достигающей 50—70 м/с, а иногда даже и более 100 м/с — у современных маневренных сверхзвуковых самолетов в полете с отказавшей силовой установкой. Поэтому у них высота начала выравнивания оказывается очень большой. Так, например, при Vycno = 5O м/с и пвыр= 1,2 получаем /7выр ~-----—------= 637 м.
р 2-9,81(1,2—1)
У летчика отработаны методы расчета и построения траектории (методы посадки) при высотах начала выравнивания ЯВыр^Нпос = = 15 м. В процессе такого обычного выравнивания взгляд летчика обращен на ВПП (установлен визуальный контакт с землей) и управление самолетом производится соразмерно с темпом приближения к Земле. Необходимость выполнения «высотного» выравнивания лишает летчика возможности использования отработанных приемов выравнивания. К тому же при этом траектория выравнивания оказалась бы очень протяженной, что помимо существенного усложнения условий пилотирования привело бы еще и к весьма значительному (или даже просто недопустимому — менее УПОс) падению скорости полета (длительный полет с лу>1). Это недопустимо.
Метод выполнения посадки при малом аэродинамическом качестве самолета был предложен профессором В. С. Пышновым, показавшим возможность и целесообразность выполнения в подобных случаях посадки с двумя выравниваниями. Траектория посадки с двумя выравниваниями показана на рис. 5.17. По этой схеме и выполняется посадка маневренного сверхзвукового самолета с неработающей силовой установкой. Участок траектории 1—2— это установившееся крутое снижение самолета при постоянной скорости с большим углом наклона траектории Осш и значительной верти— калькой скоростью снижения У^снь На высоте 7/вырь определяемой 208
по формуле (5.26) при Vy Сно= Vy сш, начинается первое выравнивание, заканчивающееся в точке 3. Дальнейший полет выполняется таким образом, чтобы высота и вертикальная скорость начала второго выравнивания (точка 4) были примерно такими же, как в полете с нормально работающей силовой установкой. С этой целью на участке 3—4 выполняется пологое прямолинейное снижение самолета, что при малом аэродинамическом качестве сопряжено с возрастанием угла атаки и падением скорости. Торможение самолета на этом участке производится с таким расчетом, чтобы к высоте Т/Выр2 его скорость была близка к скорости начала выравнивания при нормальной посадке.
5.4.3. Возможность изменения высоты начала собственно посадки
Начало режима собственно посадки в некоторых случаях может регламентироваться выходом самолета на высоты, отличные от 15 м. В частности, при визуальной посадке эти отличия могут варьироваться в сравнительно широком диапазоне. При неизменном уровне безопасности полета высота пролета входной кромки BI1П (нестандартная высота пролета условного препятствия на посадке Д*пос) может изменяться в зависимости от характеристик самолета и условий выполнения полной посадки. При этом более легкие самолеты могут (по необходимости) заходить на посадку по более крутым глиссадам, проходить входную кромку ВПП на меньших высотах и затем производить посадку, сохраняя уровень безопасности полета таким же, как это имеет место в случае посадки тяжелого самолета с заходом по стандартной глиссаде (6сно= = —2°40' ... —3°) и пересечением входной кромки ВПП на высоте /Люс =15 м.
В принципе возможно использование достаточно широкого диапазона углов снижения самолета по глиссаде, определяемого характеристиками самого самолета и условиями его эксплуатации: оснащенностью самолета навигационно-посадочными средствами, посадочными минимумами самолета и аэродрома, углами залегания глиссады (в случае инструментальной посадки) и т. п. Для самолета, производящего визуальный заход на посадку, могут использоваться повышенные значения углов глиссады. Очевидно, эти углы, с одной стороны, ограничиваются их оптимальными значениями, превышение которых нецелесообразно из-за возможного при этом заметного возрастания длин воздушных участков посадки (в результате увеличения VycH), а с другой стороны, — необходимостью обеспечения возможности ухода на второй круг при заданных высотах принятия решения.
В этом случае высота fiuoc может определяться по установленному для рассматриваемого типа самолета значению угла наклона траектории с помощью полученного Р. А. Теймуразовым для гражданских самолетов экспериментального соотношения
Нпос — нпос (1/Усво) — 7,5 + 0,61/уснО-
Рис. 5.18. Изменение высоты пролета над входной кромкой ВПП в зависимости от скорости захода на посадку
Рис. 5.19 Гистограмма распределения высот пролета над входной кромкой ВПП
На основании этого соотношения построена ориентировочная зависимость /У"° = А/„ос(1/зп) (рис. 5.18) при условии, что 0сиО=>—3°, а ошибка в высоте пересечения входной кромки ВПП («точность прицеливания») A/7B.K=const = 5 м. Такое изменение величины в зависимости от Тзп логично еще и потому, что потребная высота начала выравнивания при прочих равных условиях является функцией скорости захода на посадку. Из графика видно, что величина //„ос=15 м в данном случае имеет место при скорости захода на посадку V3n=252 км/ ч. Для легких самолетов, имеющих меньшие величины Взп, значения Л/,10с по этой зависимости оказываются меньшими. На рис. 5.19 показаны результаты экспериментальных данных по определению высот пролета входной кромки ВНП для самолетов Боинг В-707 и В-747, Дуглас ДС-8 и ДС-10, у которых скорости захода на посадку лежат в диапазоне 240— 260 км/ч. Статистический материал получен из 258 полных посадок. Анализ показывает, что в данном случае (при заданных стандартных величинах ЯПос=15 м) математическое ожидание величины Нпос составило М [//пос] = 13 м.
5.4.4. Продолженный и прерванный заходы на посадку
Возникновение отказной ситуации при заходе на посадку требует от летчика принятия решения: продолжать заход или прерывать его. Завершение этапа полной посадки в принципе всегда является лучшим решением, поскольку, во-первых, в случае возникновения отказа всегда лучше по возможности поскорее оказаться на земле, и, во-вторых, продолжение режима наиболее желательно и с точки зрения сохранения запланированной организации полетов.
Прекращение захода на посадку дополнительно загружает воздушное пространство аэродрома, приводит к большей загрузке его наземных служб (что крайне нежелательно в период большой загрузки аэродрома частыми взлето-посадками). Необходимость повторного захода на посадку может помешать плановой посадке других самолетов, нарушить плановую регулярность посадки (приводит к запаздыванию пассажиров, если это пассажирский самолет), создать повышенный расход горючего и т. п. Нарушение привычного режима посадки оказывает нежелательное психологическое воздействие на пассажиров, дополнительно утомляет экипаж. Однако в некоторых случаях прекращение захода на посадку при возникновении функционального отказа (отказа функциональной системы или ее элемента) может оказаться необходимым, например, для получения выигрыша во времени с целью парирования действия этого отказа, изменения режима захода с учетом влияния этого отказа и т. д.
Типовым нормируемым (в частности, в НЛГС) функциональным отказом при заходе на посадку многодвигательного самолета является отказ критического двигателя. При распознавании такого отказа выше минимальной высоты принятия решения Н} или на этой высоте в принципе возможно как продолжение, так и прекращение захода на посадку, ниже этой высоты необходимо только продолжать его (выполнять продолженный заход на посадку с последующей продолженной посадкой).
При определении высоты самолета с помощью радиотехнических средств (в частности, по радиовысотомеру Нрв) находится геометрическая высота антенны приемного устройства. Различное расположение антенны на носовой части фюзеляжа (особенно у крупногабаритных тяжелых самолетов и сверхзвуковых самолетов с длинным фюзеляжем) приводит к заметному различию в замерах высоты радиотехническими средствами (высота по радиовысотомеру Нрк), бортовыми барометрическими приборами (барометрическая высота Нв) и устройствами для замера геометрической высоты. Геометрическая высота или высота по траектории //Тр, в частности, может быть определена методами внешие-траекторных измерений, например кннотеодолитных. При малых абсолютных величинах И\ это различие замеров высоты необходимо строго учитывать, задавая летчику в РЛЭ высоту (по бортовому визуальному прибору), соответствующую требуемой геометрической высоте по траектории центра масс самолета. Возможные различия высот отдельных точек самолета в режиме прерванного захода на посадку показаны на рис. 5.20. Из графика видно, что высота самой низкой точки самолета /7Н.Т в рассматриваемом примере вдвое меньше высоты носовой части фюзеляжа в низшей точке траектории. Положением самой низкой точки самолета (в нормальных условиях это нижняя точка колес основных опорных устройств) относительно поверхности ВПП определяются, в частности, момент касания самолетом поверхности ВПП (момент достижения //н.т = 0) и минимально допустимый зазор при уходе на второй круг. Разли-
Рис. 5.20. Различия высот точек на носовой части фюзеляжа и наинизшей точки тяжелого дозвукового самолета в режиме прерванного захода на посадку:
/ траектория точки на носовой части фюзеляжа; 2 — траектория наинизшей точки самолета; 3 — глиссада; 4 —-высота принятия решения; 5 — поверхность ограничения препятствий при заходе на посадку; 6 — внутренняя поверхность захода на посадку (для посадки по категории II ИКАО); 7 — поверхность прорванной посадки (для посадки по категории II ИКАО)
Рис. 5.21. Гистограмма распределения величин просадок самолета при прерванном заходе на посадку
чия трех высот ЯТр, Нрв и Ннл всегда следует иметь в виду при рассмотрении посадочных характеристик самолета. В частности, в момент касания (и далее при пробеге) Ятр¥=0 и HVB^=0.
Как уже было показано (см. рис. 3.17), минимальная высота ухода на второй круг Hi определяется суммой величин просадки самолета (ЛЯ2к или АЯ1-2 на рис. 3.18), удаления низшей точки самолета от низшей точки траектории (Л//Кон) и допустимым запасом по высоте от поверхности ВПП (А/Дап). Однако на практике при определении величины Hi следует брать не детерминированные значения указанных ее составляющих Л//, а их вероятностные значения (математическое ожидание), поскольку разброс замеряемых в летных испытаниях (а тем более, в массовой летной эксплуатации) значений ЛЯ может быть значителен. На рис. 5.21 приведена гистограмма, характеризующая определенный по статистическим данным летных испытаний (из 60 режимов прерванного захода на посадку) разброс величин ДН2к. Стрелкой на графике показано математическое ожидание Л1[ДЯ2к] этой величины, равное в данном примере 15 м. Замеренные экспериментальные значения Д//2к лежат в пределах 12—18 м.
5.5. УСЛОВИЯ ВЫПОЛНЕНИЯ ПОСАДКИ ПО КАТЕГОРИИ ИКАО
В сложных погодных условиях (низкая облачность, дождь, туман и т. п.) отдельные участки полной посадки или даже весь этап полета должны выполняться в условиях отсутствия видимости земли (при отсутствии у летчика визуального контакта с ВПП).
В этих случаях заход на посадку, а иногда даже и собственно посадка, производятся по радиотехническим системам посадки. Международной организацией гражданской авиации (ИКАО) введены эксплуатационные категории посадки, каждая из которых, в частности, характеризуется высотой принятия решения об уходе на второй круг (рис. 5.22). В сложных условиях требуется автоматизация посадки при условии обеспечения высокой вероятности (надежности) успешного выполнения и завершения всего режима полной посадки. При отсутствии надежного визуального контакта с ВПП, или если по результатам визуальной либо инструментальной оценки оказывается, что самолет занимает в воздушном пространстве положение, не гарантирующее успешного выхода на ВПП (успешного приземления), или в случае определенных функциональных отказов производится уход на второй круг. Категории ИКАО определяются максимальной дальностью видимости на ВПП (горизонтальной видимости /гор) и высотой принятия решения Н\, т. е. минимально возможной высотой полета, на которой летчик впервые может точно определить свое положение по визуальным ориентирам и должен принять решение о продолжении полной посадки или об уходе на второй круг. В определенной степени величина Н\ соответствует высоте нижней кромки облаков (максимальной вертикальной видимо-СТИ /верт ). Существуют следующие посадочные категории ИКАО: категория I, соответствующая высотам принятия решения ТЛ^бО м, /гор=800 м;
категория II, соответствующая высотам принятия решения в диапазоне 30 м<//(^60 м, /гор = 400 м;
категория III разбита на три подкатегории:
III А — характеризуется высотами принятия решения в диапазоне 0^7/1^30 м и наличием визуальных ориентиров при движении самолета по ВПП, /гор = 200 м;
Рис. 5.22. Траектория ухода на второй круг при автоматической посадке (в вертикальной плоскости развертки):
1 — стандартная глиссада; 2 — минимально допустимое отклонение глиссады; 3— линия ограничения препятствий; 4 — препятствие в зоне подходов аэродрома
Ill В — характеризуется нулевой высотой принятия решения (отсутствием высоты принятия решения, т. е. возможности ухода на второй круг) и практически полным или частичным отсутствием визуальных ориентиров при движении самолета по ВПП, /гор=50 м;
III С — характеризуется нулевой высотой принятия решения и полным (абсолютным) отсутствием визуальных ориентиров при движении самолета по ВПП, /г<>р=0.
Аэродрому и самолету присваивается одна из (они сертифицируются по одной из) указанных категорий посадки в зависимости от оснащенности специальным оборудованием и других характеристик. Более высокая категория посадки обеспечивает большую регулярность полетов. В гражданской авиации обеспечение регулярности полетов необходимо для соблюдения графика движения пассажирских и грузовых самолетов (в пределах допустимых отклонений от расписания) и обеспечения высокой экономической эффективности их использования. В военной авиации обеспечение регулярности полетов необходимо для возможности использования самолетов днем и ночью в любых метеорологических условиях, что повышает эффективность их боевого применения.
Автоматизация посадки для полетов в условиях метеоминимума категории I ИКАО в принципе необязательна. Высококвалифицированные летчики успешно выполняют визуальную посадку при /верт = 60 м и /ГОр=800 м. Однако в расчете на летчиков средней и малой квалификации автоматизация захода на посадку в указанных условиях уже считается необходимой. Для выполнения посадок в условиях категории II ИКАО необходима автоматизация выхода на ось ЛП и снижения по глиссаде. Для посадок в условиях категории III А, дополнительно к сказанному в отношении категории II, требуется автоматизировать еще и процесс выравнивания, т. е. обеспечить автоматическую посадку вплоть до момента приземления самолета (с ручным парированием сноса). При посадках в условиях категории III В летчик не имеет достаточных визуальных ориентиров для парирования сноса самолета и выполнения пробега, поэтому здесь все участки полной посадки должны быть автоматизированы. И, наконец, в условиях категории III С автоматизируются все участки полной посадки (включая пробег), а также и этап руления самолета.
5.6. АНАЛИЗ ХАРАКТЕРИСТИК ТРАЕКТОРИЙ ЗАХОДА
Снижение самолета в процессе захода на посадку выполняется по траектории, весьма близкой к прямолинейной, с постепенной или несколько уменьшающейся скоростью. На старых самолетах двигатели в режиме предпосадочного снижения были обычно сильно задросселированы, так что тяга их практически была равна нулю, тогда как у современных самолетов с мощной посадочной механизацией, создающей значительный прирост лобового сопротивления самолета, двигатели при заходе на посадку работают на 214
таких оборотах, при которых тяга значительна (она может достигать тяги номинального режима, а иногда даже и более).
Существенное возрастание лобового сопротивления самолета при выпуске механизации в посадочное положение требует, в частности, предварительной (с учетом времени приемистости двигателей) дачи газа—до начала выхода механизации. Увеличение режима работы двигателей производится с таким расчетом, чтобы к моменту выхода механизации имелась повышенная тяга силовой установки, компенсирующая прирост лобового сопротивления самолета. Если не учитывать эту особенность пилотирования, то это может приводить к серьезным осложнениям. Так, в частности, имели место несколько катастроф на самолетах Боинг В-727 при заходе на посадку (одна из них — при заходе на посадку в аэропорту Токио): после довыпуска механизации самолет начинал резко терять высоту и падал, не дотянув до ЛП. Обусловлено это было тем, что летчик начинал выпуск механизации одновременно с установкой РУД в положение, соответствующее повышенной тяге (без предварительной дачи газа). Возрастание лобового сопротивления самолета, не компенсированное еще увеличением тяги (в первые секунды после дачи РУД), приводило к резкому и весьма значительному возрастанию крутизны траектории полета, которое летчик уже не мог перебороть.
Сочетание сравнительно высоких скоростей движения современных реактивных самолетов по траектории и их сравнительно низкого аэродинамического качества на участке захода на посадку (при выпущенных шасси и органах механизации) требует использования значительной тяги силовой установки для обеспечения приемлемых углов наклона траектории с целью получения требуемых (недопущения повышенных) вертикальных скоростей снижения самолета. Особенно заметно это проявляется у самолетов с крылом малого удлинения. Определим зависимость угла наклона траектории снижения самолета при заходе на посадку бзп от конструктивно-аэродинамических факторов. Из первого уравнения системы (3.1) находим
. n Р cos иЛв -У а I
sin бзп = --------------------.
mg
Полагая V и ~0, производя замену mg= Уа/cos бзп , Уа = Уа/Ка.сн (где Ка.сн — аэродинамическое качество самолета на режимах снижения),
„ Г1 , Р cos ал„
COS 63П 1 И бзп танг-
mg (тангенциальная тяговооруженность самолета при заходе на посадку), из (5.1) получаем
fl 1
51П Озп ~ £ЗП ганг-—--- •
г^а.сн
Отсюда, в частности, видно, что при постоянной тяговооруженности минимальный угол снижения самолета имеет место при заходе на посадку на режиме максимального аэродинамического качества. Чем больше езп танГ) тем меньше абсолютная величина 0зп (поскольку 0зп <0, а Ка.сн>0). При уменьшении аэродинамического качества (повышении Ха или понижении Уа) для обеспечения неизменного угла наклона траектории снижения требуется увеличивать езп тапг- У современных самолетов максимальное аэродинамическое качество с убранными шасси и органами механизации лежит в пределах порядка Латах~7...16 (иногда достигая даже предела 18). Выпуск посадочной механизации приводит к увеличению сузп при том же угле атаки, однако Ка.сп при этом уменьшается из-за возрастания Ха. Выпуск шаси приводит к еще большему снижению аэродинамического качества. Практика летной эксплуатации показывает, что посадка самолета наиболее проста, если его аэродинамическое качество не очень велико, но и не очень мало. При малом аэродинамическом качестве для сохранения пологой глиссады требуется значительная тяга силовой установки. Разворот при снижении приводит в этом случае к большой потере высоты, высота начала выравнивания возрастает. При очень большом аэродинамическом качестве снижение происходит очень полого и самолет медленно теряет скорость. В этом случае расчет местоположения точки касания оказывается менее точным. Наиболее благоприятное, с точки зрения посадочных характеристик, аэродинамическое качество лежит в пределах 6—7. У современных сверхзвуковых самолетов с крылом очень большой стреловидности, с треугольным крылом или крылом относительно малой стреловидности, имеющим профили весьма малой относительной толщины, аэродинамическое качество в посадочной конфигурации составляет примерно 3—5, а иногда и меньше (даже порядка 2).
У многих современных самолетов в посадочной конфигурации аэродинамическое качество оказывается обычно порядка 4—6 (иногда оно достигает величин порядка 7). В табл. 5.1 приведены потребные величины Ка.сн и езп ,ганг> обеспечивающие установившийся заход на посадку с углом 0зп = —0,1 (порядка—6°). Величина скорости захода на посадку с постоянным углом скольжения определяется формулой (3.19). Из формулы следует, что для получения меньших скоростей захода на посадку (при неизменной удельной нагрузке на крыло) требуется повышать сугн и нормаль-
Таблица 5.1
Величины Ка.сн и еЗПтанг, потребные для установившегося захода на посадку с 0зп =—0,1
Ка сн 3 4 5 6 8 10
ЕЗП танг 0,433 0,350 0,300 0,267 0,225 0,200
ную тяговооруженность самолета при заходе на посадку ЕЗПиерм = = езп sin адв (последнее достигается увеличением и, если это возможно, поворотом вектора тяги силовой установки на рассматриваемом режиме). Чем меньше скорость захода на посадку и угол снижения самолета на этом режиме, тем меньше вертикальная скорость снижения самолета: Уусн=¥зп sin бзп . Задача летчика заключается в том, чтобы подбором угла атаки и величины тяги получить нужные характеристики движения самолета. Большие вертикальные скорости снижения недопустимы — они, в частности, очень затрудняют выравнивание, понижают уровень безопасности и комфорта при выполнении такой сложной эволюции самолета на этапе полной посадки, как касание.
Большой интерес представляет предложенный профессором В. С. Пышновым способ пилотирования самолета при заходе на посадку и на посадке по углу атаки (в отличие от применяемого теперь— по скорости). Сущность метода ясна из его названия — летчик выдерживает заданный режим полета по углу атаки, а не по скорости. Для этого требуется наличие на самолете бортового визуального указателя угла атаки (лучше двухстрелочного с индикацией фактических и предельно допустимых углов атаки). Пилотирование по углу атаки сулит большие преимущества, может существенно повысить безопасность полета. С точки зрения самой физической сущности пилотирования индикация летчику угла атаки, а не скорости полета, является более правильной: в руках летчика находится орган управления, непосредственно изменяющий именно угловое положение (а следовательно, и угол атаки) самолета — ручка или штурвал управления. Органа управления непосредственно скоростью полета на самолете нет. Изменение скорости полета — явление вторичное, обусловленное первичным изменением угла атаки (лобового сопротивления) или тяги силовой установки (с помощью РУД). Срабатывание по углу атаки (при управлении углом атаки) происходит значительно быстрее, чем по скорости полета.
Заход современных самолетов на посадку выполняется с помощью радиотехнических средств либо визуально. При автоматическом (автоматизированном) заходе на посадку с последующим переходом на визуальный полет (один из наиболее сложных случаев захода) в момент этого перехода самолет обычно имеет некоторое отклонение от линии посадки, а вектор его путевой скорости бывает несколько отклонен от направления посадки. Кроме того, самолет может иметь отклонение от заданной глиссады. В результате возникает необходимость выполнения дополнительных (корректирующих) маневров для обеспечения приземления самолета в заданном месте ВПП.
В общем случае такого захода самолета на посадку возможны линейные и угловые отклонения от заданной глиссады как в вертикальной, так и в горизонтальной плоскостях. Линейные отклонения могут возникать, в частности, вследствие колебаний траектории самолета (например, боковые линейные отклонения — вследствие траекторных колебаний самолета относительно курсовой линии), 217
угловые (отклонения вектора путевой скорости самолета от направления посадки)—в основном в результате как траекторных колебаний самолета, так и неточного определения угла сноса. Худшим сочетанием линейного и углового отклонений является такое, при котором самолет, например, вследствие горизонтального углового отклонения уходит от посадочной траектории, увеличивая уже имеющееся линейное боковое отклонение (уклонение). Для устранения этих отклонений необходим разворот самолета вначале в одну, а затем — в другую сторону. При этом траектория полета подобна растянутой латинской букве 5, вследствие чего такой корректирующий маневр часто называют S-образным маневром или «змейкой» (маневром типа «змейка»). Возможны и другие виды корректирующих маневров.
Существуют зависящие от характеристик самолета и конкретных условий его эксплуатации предельные величины указанных отклонений от заданной траектории, превышение которых приводит уже к невозможности успешного и безопасного завершения посадки. Имеется определенная область пространства вокруг заданной (расчетной) глиссады (трубчатая область а на рис. 5.23), нахождение самолета (точнее — его центра масс) внутри которой является необходимым условием решения указанной задачи. Очевидно, радиальные размеры £г и ев «трубки» о (пространства допустимых отклонений самолета) зависят от конкретных условий посадки, динамических характеристик рассматриваемого самолета, возможных видов применяемых на нем корректирующих маневров, квалификации и тренированности экипажа, установленной для данного само-
Рис. 5.23. Схематизированная модель посадки, показывающая область допустимых отклонений фактических траекторий от заданной (область о):
/, 2 — области допустимых отклонений фактических траекторий от заданной глиссады; 3 — допустимая область касаний самолета (световой ковер); 4 — допустимая область концов пробега (геометрическое место допустимых точек полной остановки самолета)
Рис. 5.24. Графический способ определения высоты принятия решения
лета техники пилотирования и ряда других факторов. При недостаточно точном выводе самолета в точку траектории, в которой следует переходить к визуальному полету, могут появиться столь большие отклонения самолета, которые практически невозможно безопасно устранить корректирующим маневром. При таких неточных заходах на посадку необходим уход па второй круг.
В точке перехода к визуальному полету летчик, используя наземные ориентиры (в первую оче
редь, огни светооборудования аэродрома), может начинать корректирующий маневр. Однако при этом ему потребуется еще некоторое время, зависящее от конкретных условий захода на посадку, и,
в первую очередь, от видимости земных ориентиров, для принятия решения о возможности и целесообразности выполнения корректирующего маневра или о необходимости ухода на второй круг. В этом случае минимальной высотой принятия решения (или просто — высотой принятия решения) считается высота, на которой должен быть начат маневр ухода на второй круг. Последнее необходимо, если до выхода самолета на эту высоту летчиком не был установлен надежный визуальный контакт с огнями светооборудования аэродрома или другими ориентирами по курсу посадки, позволяющий безопасно произвести посадку, а также если отклонения самолета от посадочной траектории превышают допустимые их
значения.
Высота принятия решения в соответствии с приведенным определением может быть найдена, например, графически (рис. 5.24) совмещением границ областей допустимых (кривые 1) и возможных— практически реализуемых боковых отклонений (кривые 2). Пересечение этих кривых (точка /<) определяет потребную дистанцию корректирующего маневра LK. При расстоянии самолета (по горизонтали) до входной кромки ВПП, меньшем LK, летчик уже не
успевает исправить траекторию полета с помощью корректирующего маневра. Точка траектории, горизонтальная проекция которой отстоит от входной кромки на расстоянии LK, и характеризует высоту принятия решения Н\. Статистический анализ показывает, что при определении высоты принятия решения таким методом частота уходов самолета на второй круг равна тн=1/60. Понижение высоты Нх ведет к повышению ун — самолеты вынуждены чаще прерывать режим полной посадки. Завышение высоты принятия решения неблагоприятно сказывается на регулярности полетов.
5.7. ПОПАДАНИЕ В СПУТНУЮ СТРУЮ САМОЛЕТА
Возросшая массовость полетов, уплотненные графики работы крупных аэропортов (чередование взлето-посадок с интервалами менее минуты) приводят к тому, что в последнее время участились случаи попадания самолетов в спутные струи, оставленные другими самолетами или иного типа летательными аппаратами.
Особо опасно попадание самолета в спутную струю при групповых посадках, осуществляемых с малыми временными интервалами, в течение которых спутная струя не успевает опуститься ниже глиссады.
Спутная струя за летящим самолетом создается пограничным слоем, сбегающим с его поверхности (с поверхностей крыла, фюзеляжа, оперения и т. п.), концевыми вихрями (вихревыми жгутами) крыла, связанными с образованием подъемной силы, и реактивными струями двигателей.
Это еще один случай внезапного попадания самолета в область возмущенной атмосферы — попадание в спутную струю (спутный или вихревой след) другого летательного аппарата. Мощность (количество движения) этой струи определяется геометрическими размерами самолета, скоростью и высотой полета, углами атаки и скольжения и другими характеристиками. Такая струя достаточно устойчива, поэтому протяженность ее может быть значительной. Воздействие спутной струи тяжелого самолета на попадающий в нее легкий самолет может быть настолько сильным, что у последнего даже при мгновенном полном отклонении органов управления на парирование этого воздействия может не хватить управляющих моментов для восстановления нормального режима полета.
Известны случаи аварий и даже катастроф при попадании летящего самолета в область спутной струи. Спутная струя тяжелого скоростного самолета может перевернуть современный истребитель, летящий за ним даже на расстоянии порядка 2 км. Чем больше размеры, масса, скорость и высота самолета, тем более интенсивную струю оставляет он за собой. Основным источником создания спутной струи самолета обычно является спутная струя крыла. Механизм образования спутной струи самолета схематически представлен на рис. 5.25 и 5.26. Приближенная картина возникновения спутной струи крыла самолета выглядит следующим образом. У концов крыла образуются два вихревых жгута (рис. 5.25), расстояние между которыми составляет обычно около 80% размаха крыла (0,8 /). Причина образования этих жгутов — перетекание воздуха из-под крыла (из области повышенного давления) в область пониженного давления на его верхней поверхности, происходящее через торцовые поверхности крыла. Направление вращения этих вихревых жгутов таково, что между ними воздух отбрасывается вниз, а по внешним их сторонам — вверх. Соответствующее направление имеет и скос потока за крылом, определяемый величиной подъемной силы. Наибольший скос потока возникает вблизи центра вихря (рис. 5.26).
V
Рис. 5.25. Схематическое представление механизма образования и развития спутной струи крыла самолета
Рис. 5.26. Влияние скоса потока в спутной струе крыла иа летящий сзади самолет:
I — механизм образования внешнего креиа у самолета во внешней части спутной струн; II— механизм образования внутреннего крена у самолета, находящегося в спутной струе под осью вихревого жгута крыла; III — механизм образования внешнего крена у самолета во внутренней части спутной струн; IV—полет в спутной струе без крена
Спутная струя крыла весьма устойчива. Даже примерно через _VK~20... 25 с после пролета самолета вихревые жгуты крыла создают еще достаточно сильные возмущения. Эффективная ее протяженность (в направлении полета) составляет £К=Д/Н1/ (в метрах), где V — скорость полета в м/с.
Струи от реактивных двигателей обладают высокими скоростями и температурами. Однако они сравнительно быстро теряют свою энергию. На расстоянии порядка 100—150 м (в случае двигателей с очень большой тягой это расстояние может возрастать примерно до 200 м) такие струи уже практически размываются. Это сравнительно узкие струи. Попадание струи от ТРД в воздухозаборник летящего сзади самолета может привести к помпажу и самовыключению двигателя на этом самолете. Спутные струи фюзеляжа и оперения также быстро теряют свою энергию. Наибольшее воздействие на летящий сзади самолет оказывает спутная струя крыла, попадание в которую приводит к весьма значительным изменениям углов крена, атаки и скольжения, т. е. к сильным нарушениям исходного режима полета. При попадании самолета в спутную струю сбоку (с внешней стороны) он вначале подвергается сильной тряске, а затем начинает крениться — возникает внешнее (по отношению к летящему впереди самолету) кренсние (случай I на рис. 5.26). При попадании самолета в область ядра вихревого жгута (случай II) возникает интенсивное внутреннее кренсние самолета. Накренение может сопровождаться значительной потерей высоты (до 50—100 м и более), что особо опасно, например, при заходе на посадку.
Глава
МЕТОДОЛОГИЯ ИССЛЕДОВАНИЙ
И НОРМИРОВАНИЯ ВЗЛЕТНО-ПОСАДОЧНЫХ
ХАРАКТЕРИСТИК
6.1. КОМПЛЕКСНАЯ МЕТОДИКА ИССЛЕДОВАНИЯ ВЗЛЕТНО-ПОСАДОЧНЫХ ХАРАКТЕРИСТИК
6.1.1. Сущность комплексной методики
Наиболее полное (по широте охвата, глубине анализа характеристик и их взаимосвязи) исследование взлетно-посадочных характеристик достигается при использовании комплексной методики. Комплексная дискретно-статистико-вероятностпая методика исследования взлетно-посадочных характеристик самолетов представляет собой взаимосвязанное и взаимодополняемое органическое сочетание методов (полунатурного и натурного) физического и математического моделирования, аналитического расчета по приближенным формулам, расчета на ЭВМ по полной системе и отдельных расчетов по упрощенным системам уравнений движения самолета на рассматриваемых режимах и летного эксперимента (натурного и модельного). Эта методика позволяет изучать все взлетно-посадочные характеристики, особенности поведения и пилотирования самолета во всем диапазоне ожидаемых условий его эксплуатации, анализировать влияние изменения различных конструктивно-аэродинамических и эксплуатационных факторов и наиболее вероятных их сочетаний на указанные характеристики как в условиях нормальной летной эксплуатации, так и при возникновении наиболее вероятных и наиболее опасных для данного самолета отказов функциональных систем и их элементов. Она помогает также определять возможности улучшения и перспективы дальнейшего совершенствования взлетно-посадочных характеристик.
Комплексность методики заключается в том, что она гармонично сочетает в себе методы расчета, моделирования и натурного эксперимента, применение которых в совокупности значительно расширяет и углубляет возможности анализа исследуемых характеристик, а также ускоряет и удешевляет получение конечных результатов. Иными словами, комплексность методики предусматривает взаимодополняющее и взаимокорректнрующее определение взлетно-посадочных характеристик самолета во всей их совокупности несколькими взаимосвязанными методами: классический аэродинамический (дискретный) и статистико-вероятностный расчеты, испытания в аэродинамических трубах, на функциональных и пи
лотажных стендах (тренажерах), моделирование и летные испытания.
Предусмотренное этой методикой взаимосогласованное использование методов анализа дискретных и статистико-вероятностных характеристик значительно расширяет ее возможности, позволяет получать более полные и более достоверные результаты, основанные на анализе данных о ВПХ, полученных непосредственно из летных испытаний и летной эксплуатации рассматриваемого самолета, а также и из массовой летной эксплуатации самолетов аналогичных типов с использованием материалов статистических испытаний. Использование статистических материалов играет большую роль в изучении таких жизненно важных, но существенно нестабильных (под влиянием неизбежного в летной практике разброса в технике пилотирования, в атмосферных, эксплуатационных условиях и т. п.) характеристик, как взлетно-посадочные. Такой доведенный до уровня широкой практической применимости рациональный комплексный метод исследований позволяет получать важные как с точки зрения теории полета, так и с точки зрения практики массовой летной эксплуатации современных самолетов результаты.
Впервые принципы создания комплексной методики определения дискретных и статистико-вероятностных значений параметров полного взлета, полной посадки и ухода на второй круг как в нормальном полете, так и в наиболее вероятных и наиболее опасных для данного самолета отказных ситуациях для всего диапазона условий эксплуатации самолета (с применением методов расчета, моделирования, стендовых и летных испытаний) были разработаны автором в 1966 г.
Применение комплексной методики позволяет:
1) значительно расширить круг вопросов, связанных с исследованием взлетно-посадочных характеристик и факторов, влияющих на эти характеристики;
2) проводить углубленные исследования динамики режимов взлета, посадки и ухода на второй круг: исследования по улучшению взлетно-посадочных характеристик существующих самолетов, параметрические и поисковые исследования для разработки рекомендаций по выбору оптимальных сочетаний конструктивно-аэродинамических характеристик, методов пилотирования и обслуживания в различных условиях эксплуатации опытных и перспективных самолетов и т. п.;
3) существенно сократить объем и снизить стоимость летных испытаний по определению взлетно-посадочных характеристик, значительно повысить безопасность их проведения, объем и надежность получаемой при этом информации;
4) проводить полную оценку изменения уровней летной годности самолета и безопасности полета (оценку опасности возникающих полетных ситуаций) при возникновении на взлете, посадке и непосредственно перед посадкой, а также при уходе на второй круг всех вероятных и наиболее опасных (даже практически невероятных) сильных внешних воздействий и функциональных отказов на
самолете и в системах наземных служб, обслуживающих взлет и посадку, в том числе и на отдельных режимах, выполнение которых (особенно намеренное) в летных испытаниях недопустимо или просто практически невыполнимо;
5) отрабатывать оптимальные методы пилотирования и тренировки экипажей в полном объеме ожидаемых условий эксплуатации самолета (при нормальных и отказных режимах полета);
6) определять в комплексе полный объем точечно-динамических (динамических характеристик самолета как материальной точки, г. е. траекторных характеристик) и системно-динамических (динамических характеристик самолета как системы материальных точек: устойчивости, управляемости, балансировки) взлетно-посадочных характеристик самолета во всех ожидаемых условиях эксплуатации;
7) производить глубокую всестороннюю (как предварительную, так и окончательную) оценку взлетно-посадочных характеристик новых самолетов на всех этапах их создания (начиная с этапа эскизного проектирования) во всех ожидаемых условиях эксплуатации в значительно большем объеме, чем это может быть сделано с помощью только летных испытаний самолета;
8) исследовать особенности динамики полета и отрабатывать методы пилотирования перспективных самолетов принципиально новых схем (гиперзвуковых самолетов, самолетов новых конструктивно-аэродинамических компоновок и т. п.);
9) всесторонне исследовать особенности поведения и пилотирования самолета на режимах, которые в принципе не могут быть проверены при летных испытаниях ввиду их особой опасности, дороговизны и т. п. (например, характеристики посадки на одну основную опору, на фюзеляж, массово-статистические характеристики и т. п.).
Типовая схема проведения исследования взлетно-посадочных характеристик по комплексной методике предусматривает следующий Порядок действий.
1. Прикидочный аэродинамический расчет.
2. Определение исходных аэродинамических коэффициентов по Материалам испытаний моделей в аэродинамических трубах (в том числе и испытаний с экраном, имитирующим влияние земли),
3. Уточненный аэродинамический расчет.
4. Математическое моделирование.
5. Стендовые испытания, полунатурное и натурное моделирование (с использованием функциональных пилотажных стендов и натурных тренажеров, соединенных с ЭВМ).
6. Летные испытания и исследования.
7. Математическое и физическое моделирование как по полной, Так и по упрощенным системам уравнений движения самолета нормальных и расчетных отказных режимов полного взлета, полной посадки и ухода на второй круг на основании уточненных в процессе летных испытаний аэродинамических коэффициентов (опре-
деление всех особенностей выполнения режимов, их характеристик и отработка оптимальных методов пилотирования).
8. Заключительный этап летных испытаний и исследований по окончательному определению зачетных характеристик и установлению методов пилотирования самолета на указанных режимах во всем диапазоне ожидаемых условий эксплуатации.
В результате исследований взлетно-посадочных характеристик, проведенных по комплексной методике, получают:
1) дискретные значения всех траекторных и системно-динамиче-гких взлетно-посадочных характеристик самолета;
2) статистико-вероятностную оценку нормируемых взлетно-посадочных характеристик;
3) перечень всех опасных ситуаций на этапах полного взлета, полной посадки и ухода на второй круг, которые могут возникать только при наиболее вероятных или наиболее опасных на данном типе самолетов функциональных отказах либо наиболее опасных расчетных сильных внешних воздействиях и их сочетаниях (оцениваются возможные последствия и способы парирования этих явлений) ;
4) оценку соответствия рассматриваемых характеристик самолета требованиям нормативных документов (требованиям НЛГС в случае гражданских самолетов и т. п.);
5) отработанные для включения в РЛЭ методы пилотирования и обслуживания самолета на всех указанных режимах;
6) рекомендации по способам дальнейшего совершенствования взлетно-посадочных характеристик данного самолета или возможных его модификаций;
7) оценку уровней безопасности полета на режимах полного взлета, полной посадки и ухода на второй круг.
Дискретные расчетные значения всех параметров полного взлета, полной посадки и ухода на второй круг определяют методами аэродинамического расчета, изложенными в предыдущих главах. Эти характеристики находятся во всем диапазоне ожидаемых условий эксплуатации самолета как для нормального полета, так и для случаев полета с расчетными функциональными отказами и внешними воздействиями. Расчетными считаются такие функциональные отказы (одиночные отказы или наиболее вероятные их сочетания), вероятность возникновения которых выше или равна 1-10-9 (один отказ на 1000000 000 полетов, т. е. взлето-посадок), а также и особо опасные отказы, вероятность возникновения которых оказывается ниже 1 • 10-9, но которые специально оговариваются при нормировании взлетно-посадочных характеристик. К последним может относиться, в частности, отказ критического двигателя на взлете, оценка последствий которого обязательна по требованиям НЛГС (хотя для многих самолетов вероятность такого отказа, возникающего непосредственно после всех предполетных проверок самолета и его функциональных систем, может составлять, например, 1 -10_ 10 и менее). На основании анализа возможных последствий расчетных отказов (во всех ожидаемых условиях эксплуата-
цип самолета, при методах пилотирования и действиях членов экипажа в соответствии с РЛЭ) производится оценка вероятностей возникновения в полете особых ситуаций различной степени опасности. Общие принципы построения этой методики были разработаны автором в 1967 г.
6.1.2. Летная годность и безопасность полета
Оценка уровня летной годности самолета, а следовательно, и уровня безопасности полета, предполагает определение вероятности непоявления в полете аварийной или катастрофической ситуации. Определение уровня летной годности самолета, как и уровня безопасности полета, производится на основе статистического моделирования (с помощью ЭВМ) системы расчетных случаев.
Под летной годностью понимается свойство самолета выполнять полет во всем диапазоне ожидаемых условий его эксплуатации (как при безотказной работе функциональных систем, так и при расчетных функциональных отказах) при действиях экипажа, служб УВД и эксплуатации в соответствии с указаниями РЛЭ и остальной регламентирующей всю летную эксплуатацию самолета нормативно-технической документации (НТД) с достаточно малым риском возникновения особых ситуаций в полете. Летная годность самолета характеризует заложенные при его создании и реализованные в его конструкции общие принципы, обеспечивающие безопасное выполнение полетов.
Под безопасностью полета понимается свойство авиационного комплекса (авиационной транспортной системы в гражданской или боевого авиационного комплекса — в военной авиации) осуществлять полеты (воздушные перевозки в гражданской или боевые задания в военной авиации) без угрозы для жизни и здоровья людей (не являющихся объектом военных действий — в случае военной авиации) на борту и на Земле. Иными словами, под безопасностью полета понимается свойство этого полета быть завершенным без летного происшествия.
Авиационная транспортная система включает в себя (в качестве подсистем) самолет, экипаж, службу УВД, службы эксплуатации (подготовки и обеспечения полета). В боевой авиационный комплекс входит еще и система вооружения. Уровень летной годности самолета — это его количественная характеристика, определяемая вероятностью того, что в полете не возникнут катастрофическая или аварийная ситуации по связанным непосредственно с самим этим самолетом техническим причинам, т. е. отказами функциональных систем самолета или их элементов, специфическими особенностями характеристик самолета в особых случаях полета пли опасными внешними воздействьями на этот самолет (ударами молний, сильными градиентными сдвигами ветра и т. п.) в пределах ожидаемых условий его эксплуатации.
Уровень летной годности оценивается вероятностью невозникновения в полете указанных ситуаций для каждого из самолетов данного типа из общего количества планируемого (действующего) их парка в течение всего периода их летной эксплуатации. Однако практически в качестве численного критерия (показателя) уровня летной годности используют обычно обратную величину: вероятность возникновения в полете катастрофической пли аварийной ситуации по указанным причинам. Эта вероятность выражается соотношением рс=п/У, где рг—вероятность возникновения катастрофической или аварийной ситуации, отнесенная к одному полету (к одной взлето-посадке) для всего парка самолетов данного типа за весь период пх летной эксплуатации; N — общее количество полетов, выполняемых за период летной эксплуатации всеми самолетами рассматриваемого типа; п — число обусловленных уровнем летной годности возникновений катастрофической или аварийной ситуаций за период эксплуатации парка самолетов данного типа.
Уровень безопасности полета — это характеристика авиационной транспортной системы (боевого авиационного комплекса в случае военных самолетов), определяемая вероятностью того, что в полете не возникнут катастрофическая или аварийная ситуация по любой причине, связанной с функционированием этой авиационной транспортной системы (этого боевого авиационного комплекса) в
целом, т. е. как по техническим причинам, связанным с самим самолетом, так и по причинам, связанным с деятельностью всех наземных служб. Уровень безопасности полета оценивается вероятностью невозникновения указанных ситуации по данным причинам в полете каждого из эксплуатируемых самолетов данного типа в течение всего периода летной эксплуатации. Практически в качестве численного критерия (показателя) уровня безопасности полета используют обычно обратную величину: вероятность возникновения катастрофической или аварийной ситуации по указанным причинам, отнесенную к одному полету, или количество катастрофических либо аварийных ситуаций, приходящихся на один полет (осредненная оценка по всему действующему парку самолетов данного типа).
Если при оценке расчетных случаев оказывается, что, например, какой либо функциональный отказ приводит к возникновению катастрофической или аварийной ситуации, то для обеспечения летной годности самолета необходимо, чтобы уровень вероятности их возникновения был достаточно низким. Допустимыми значениями вероятностей их возникновения (отнесенными к одному полету) могут быть, например, следующие: для катастрофической ситуации 110 ’, для аварийной ситуации 1-Ю-6
При анализе летной годности и безопасности полета в первую очередь рассматриваются этапы полного взлета и полной посадки. Условиям обеспечения безопасности полета на этих режимах уделяется основное внимание. Обусловлено это тем, что данные режимы — потенциально наиболее опасные. Это подтверждается, в частности, статистикой аварий и катастроф. Так, например по данным Национального Комитета по безопасности перевозок США за последние десять лет на реактивных самолетах, эксплуатируемых американскими авиакомпаниями, на этапы взлета и посадки пришлось 52% всех катастроф и 37% всех аварий.
6.1.3. Методы моделирования
Моделирование является наиболее перспективным методом предварительного определения характеристик самолета (как дискретных, так и статистико вероятностных их значений) до начала летных испытаний, в процессе их проведения и по окончании испытаний для распространения полученных в результате испытаний данных на весь объем ожидаемых условий эксплуатации. В зависимости от поставленной задачи принимаются различные упрощающие допущения, облегчающие проведение моделирования.
Для общего случая моделирования используется обычно полная система уравнений движения самолета, получаемая из системы (2.5) и кинематических соотношений при следующих допущениях. Предполагается, что углы скольжения относительно невелики, так что sin и cosp~l, а тяга направлена по продольной оси самолета. Влиянием чисел М и Re на аэродинамические коэффициенты и тягу силовой установки пренебрегают. Зависимость тяги от скорости и высоты задается в виде графической зависимости либо аппроксимируется полиномом. Влияние режима работы двигателей на аэродинамические характеристики самолета обычно не учитывается. Для моделирования динамики как нормальных, так и отказных режимов полета удобней принимать систему связанных осей, приближенно полагая, что ее оси совпадают с главными осями инерции самолета. При сделанных допущениях система уравнений движения самолета для моделирования взлетно-посадочных характеристик может быть представлена в следующем виде:
a = au-^— c (a)+a12 ——f- a13«>2+a14 cos a cos a
cos '8 cos у
V cos a
, V tg a , pV « z \ I pV’ .
4" «15--77--h«16-------CyB (a) 4“ «17 ДЛ/возм!
V cos a cos a
p= П21Р(a) 4-a22wy c°s « 4“ «23w.r sin a 4"«24 ct)S^‘n v 4-
~i~a25~^7---Н«2бР^czH (a)4~Q27P^ACZRO3M1
a>4=а31шушг 4- a32pl/26znx (a) 4- «ззР VX’X (a) 4- (a) +
+ a35pV2«iZm“y (a) 4- a36pV2/n> (a) 4- a37P У2тр (а)+азврУ2ДтХВ03М;
u>y=«41“Л 4“««г?^2?^ (a) 4- «4зР1 * * * *'/2?^ (a) + аирУ2шхт.у-* (a) -ф 4-tz45pV2wywz“t/ (a) 4-a46w^ + a47pl/2m®H (a) 4-а4ЧрУ2/и> (a) 4- _
4-«49PV/2A«Z1/bO3M> I
‘»z=«siV^ 4- «52 P V2$rr£ (a) 4- +a54p V2^zm^ 4-
4- е55р]/2тг pa) 4- a56pV2amz (a) 4- a57p V2/n'B (a) 4- a5spl/2A//z2 B03M;
&= «6i°Vsin у4-«62ш2 cos y;
4=a71oJjc-|-a72<uy cosvtg&4-«73wz sin ytg »;
у = «81CP (V, P) 4- a82 cx (a) 4- a^ya tg a 4-
cos a cos a
I 1Z i I Vl°y? . sin 8 . pK2 J , , .
4- «Р4У w2 tg a 4* «85---h «86-------Г «87 ----C vB (a) 4~
cos a cos a cos a
I P^2 л
4~«88------ Довози!
cos a
H=asiy cos a sin & 4" «92s’n a cos& cos у4’«вз^/Р cos & sin y.
Здесь индексом «возм» обозначены возмущающие приращения коэффициентов действующих на самолет сил и моментов. Возникновение этих возмущающих приращений может быть обусловлено появлением самых различных причин. Так, например, при отказе одного двигателя величина ДсА-ВОЗм определяется падением тяги силовой установки и появлением дополнительного сопротивления от авторотирующего двигателя, а величина Атувозм — возникновением разворачивающего момента в результате появления асимметрии тяги силовой установки и т. п. Коэффициент cp = P)Sq^ Входящие
в систему (6.1) коэффициенты ац определяются следующими выражениями:
ап = S 2т > «12— 1, «13—«14" =g; «15=-!;
«16= S 2т H\ S S , ^SB(/j, <j17 , a2) „ , «22 1> 2m 2m
«23 = 1; Й24 = S, «25 L «26 „ 2m «27 „ • Zm
Jy Jz SI SI SI
а31 Jx * Cl Qi — ’ 2JV
SI 2/х ’ «36 = —-ДМ*); «37 = - — ASsW; 2JX
«зз S! 2]х ’ J, — Jx SI «41 z. ; «42- 9. J у у SI ’ “°” 2/, '
SI SI
«44 21у ’ «45- > «46 , У J у
Д8н(Н; а43=-^- ДЗ (7); 2Jy нК ’ 43 2J у э‘ h SI &49— j 2Zy
*х Iу S6 A ~ p"1 p
«51 = Iz ’ 02 21z ’ Jz nP;
SbA SbA SbA
«54 2Jz ’ 2JZ ’ Gbb 2JZ ’ a57==^T~
«58 SbA 2JZ ’ «6i = h «62 = 1; «7i = h «72= — 1;
«81 = 5 2m _ s i ’ 2m ’ °83— * «84= — 1;
«85 = s 1; «86= g; «87— „ 2/n
«88 = s 2m » «91 — > «92 — 11 «93 = — 1. j
Здесь Jp и Юр — соответственно полярный момент инерции и угловая скорость ротора двигателя; пр — число работающих двигателей (вращающихся роторов двигателей) на самолете.
В зависимости от конкретных задач и условий моделирования данная система уравнений может упроститься или, наоборот, дополниться новыми членами. Так, например, в случае моделирования условий движения самолета по земле в нее должны добавляться рассмотренные выше члены, характеризующие действие реакций земной опоры. На ранних этапах исследований (например, на этапе эскизного проектирования самолета) эта система уравнений может быть заметно упрощена.
Для приближенного пересчета взлетно-посадочных характеристик (например, полученных из летного эксперимента данных на более широкий диапазон внешних условий) и статистического моделирования последствий расчетных случаев применяются регрессионные уравнения. Это делается как для отказных, так и для нормальных (безотказных) режимов полета. Обычно с этой целью бывает достаточно аппроксимировать регрессию линейной функцией. Из теории вероятности известно, что если, например, дано распределение системы двух случайных величин xt и х2, то регрессией Xi на х2 называется любая функция F2(xx), приближенно представляющая собой статистическую зависимость х2 от хь При этом величина х2 представляется как сумма двух случайных величин: X2=Fz(X\) +fz(xi, х2), где f2(xt, х2) рассматривается в качестве поправочного члена. Линейной регрессией х2 на Xi будет
F 2(Х1) = ^2"ЬР21 (л'1 £1)»
где Р21 — коэффициент регрессии х2 на Х|.
Это — линейная функция вида ах1 + Ь, коэффициенты которой a = p2i и b = g2—₽2i^i минимизируют среднее квадратичное отклонение М[х2—F2(x1)]2 = A1[x2—(tzxi + fc)]2.
Кривая х2 = Л/{х2|х|} называется кривой средней квадратичной регрессии величины х2.
Регрессионные уравнения, приближенно представляющие собой изменения взлетно-посадочных характеристик самолета в виде линейных функций ряда характерных факторов, записываются в виде
k
^=^о + У-^-8ху> (В-3)
<)xj J’
/1
где Fi — рассматриваемая взлетно-посадочная характеристика (i-я по счету в полном наборе взлетно-посадочных характеристик); Fi0 — осреднениое (номинальное или опорное) значение этой характеристики; х3 — j-й параметр (из всего рассматриваемого пабо ра k параметров), характеризующий расчетные условия полета: a i мосферные условия, эксплуатационные и конструктивно-аэродипа мические факторы, применяемые методы пилотирования (парамо ры управления) и т. д.; 6х,— отклонение j-ro параметра расчетных условий полета от его осредненного (номинального или опорного) значения. В качестве Fi0 может быть принята, в частности, опенка математического ожидания характеристики : Л1[Ег]. Это—.мио dFt
гомерная регрессионная модель. Ее коэффициенты (частные производные, определяющие степень влияния отдельных факторов на рассматриваемую характеристику) находятся расчетным пу к м либо по материалам летного эксперимента. Наиболее точно тначе ния коэффициентов регрессионных уравнений могут быть получены путем линейной аппроксимации результатов скорректированною математического моделирования — численного интегрирования пот
ной системы уравнений движения самолета, коэффициенты которых уточнены по данным летных испытаний. Следует, однако, иметь в виду, что линейная модель имеет ограниченное применение — она дает результаты, в общем случае практически применимые только для пересчетов в сравнительно узком диапазоне изменения параметров расчетных условий Xj.
Для примера примем в качестве Fi длину пробега самолета £Пр- Тогда из (6.3) получим
^пр = ^пр l^noc» lAioc» ^А’)-М Н " ^^посД"
CWl|l0C
<Э^-ир д1Дос
л/ I ^"Р "T 1 д^нр . I I ^1<Р 8^пос Н---— (‘Т Н-----—— <‘Р + ••• + —— — 8-Xj
дТ др дхь
Считая производные постоянными величинами, можно получить отсюда, в частности, линейную зависимость величины Lav от приращения посадочной массы самолета 6тпос (при равенстве остальных приращений нулю). Это справедливо весьма приближенно, да и то только в узком диапазоне изменения rnmc (выше было показано, что данная зависимость степенная, с показателем, существенно отличным от единицы). Для получения более точных результатов в сравнительно широком диапазоне изменения величин х, можно аппроксимировать функцию (характеристику) Fi кусочнолинейной зависимостью со сравнительно небольшими интервалами, соответствующими достаточно малым частным значениям бх,. Еще более точные результаты могут быть получены с помощью нелинейных регрессионных моделей, в которых регрессия аппроксимируется более точно, например, с помощью многочлена степени m> 1 (параболическая регрессия порядка т) или с помощью других функций, коэффициенты которых выбираются таким образом, чтобы минимизировать средний квадрат отклонения M[f2(xh х2)]2-
6.2. ЛЕТНЫЕ ИСПЫТАНИЯ ПО ОПРЕДЕЛЕНИЮ ВЗЛЕТНО-ПОСАДОЧНЫХ ХАРАКТЕРИСТИК
6.2.1. Особенности летных испытаний
Летные испытания современных самолетов и, в частности, испытания по определению их взлетно-посадочных характеристик существенно отличаются от испытаний самолетов, проводившихся до последнего десятилетия. Принципиальные отличия форм, методов и организационной структуры летных испытаний современных самолетов обусловлены в основном следующими причинами:
1) существенным усложнением и разнообразием геометрической, конструктивно-аэродинамической и массовой компоновок современных самолетов и выполняемых этими самолетами задач;
2) существенным усложнением и расширением номенклатуры функциональных систем современных самолетов (с широким ис
пользованием средств автоматики, радиоэлектроники и бортовых ЭВМ);
3) значительным расширением объема и усложнением функциональных задач, средств и методов наземного обеспечения полетов и наземного обслуживания самолетов;
4) большим многообразием и значительным расширением диапазонов изменения параметров, определяющих условия летной эксплуатации современных самолетов (всепогодные инструментальные полеты, полеты на до-, около-, сверх- и гиперзвуковых скоростях в весьма широком диапазоне высот и т. п.);
5) возможностью значительных изменений компоновочных, массовых, функциональных и других характеристик современных самолетов (применение изменяемой в полете геометрии, изменение полетной массы часто более чем на 50% и т. д.) на протяжении одного полета;
6) значительным удорожанием 1 часа полета современных самолетов (например, стоимость 1 часа полета самолета Локхид L-1011 составляет 10 тыс. долларов, тогда как у старых самолетов стоимость часа была ниже 1 тыс. долларов);
7) возросшими требованиями к обеспечению безопасности полета и надежности эксплуатации (а следовательно, и регулярности полетов) современных самолетов;
8) появлением гражданских самолетов (в частности, широкофюзеляжных аэробусов) с большим количеством людей (порядка нескольких сот человек) на борту;
9) заметными различиями в характеристиках современных военных и гражданских самолетов и их функциональных систем, обусловленными различием предъявляемых к ним требований;
10) появлением на современных самолетах принципиально новых силовых установок,
11) значительным возрастанием объема и усложнением характера задач экипажей (летных и наземных) современных самолетов.
Оценка любого нового (опытного) или модифицированного самолета не может быть сделана без таких летних испытаний, призванных подтвердить (или опровергнуть) приемлемость его летных и пилотажных характеристик; устойчивости и управляемости, характеристик силовых установок и функциональных систем, агрегатов и оборудования, экономичности эксплуатации самолета, его эксплуатационной надежности и т. д. Ряд характеристик самолета может быть получен или по крайней мере подтвержден только в летных испытаниях. Поэтому на летные испытания в процессе создания современных самолетов расходуются значительные средства. Окончательная и полная оценка характеристик самолета во всем их объеме может быть дана только путем комплексного анализа материалов наземных испытаний, расчетов, моделирования и летных испытаний.
Условия проведения летных испытаний не могут обеспечить полную проверку влияния на характеристики самолета и условия работы на борту всех внешних факторов во всем объеме их измене
ния в ожидаемых условиях массовой летной эксплуатации самолета (из соображений обеспечения безопасности полета, дороговизны и сроков проведения летного эксперимента и т. п.). Значительно шире и глубже влияние всех этих факторов может и должно быть оценено по материалам аналитических расчетов, испытаний в аэродинамических трубах, на натурных пилотажных стендах и т. д. Это касается всесторонней оценки влияния атмосферных условий (температуры, давления и влажности воздуха, турбулентности атмосферы, например, градиентных сдвигов ветра у Земли, и т. д.), изменения массы и положения центра масс самолета, влияния различных отказов .на динамику полета и т. п. Только часть области возможных режимов полета целесообразно (или даже допустимо) обследовать в летных испытаниях.
Летные испытания являются необходимым, но еще не достаточным условием полного подтверждения выполнения требований всей научно-технической документации и оценки летной годности современных самолетов. Необходимым и достаточным условием полной всесторонней оценки характеристик самолета, его надежности и уровня безопасности полета является указанный комплексный анализ материалов летных и наземных (модельных, стендовых и т. п.) испытаний. В соответствии с комплексной методикой летные испытания в определенной степени дополняют, а в какой то части просто подтверждают материалы (дают контрольные точки для оценки достоверности материалов) наземных исследований.
Основные особенности методологии (методов и условий) проведения летного эксперимента при испытаниях новых (опытных) современных самолетов по определению их взлетно-посадочных данных, связанные как со спецификой характеристик самих этих самолетов и их систем, так и с условиями дальнейшей массовой эксплуатации этих самолетов, о чем было сказано выше, кратко могут быть сформулированы следующим образом:
1. Комплексный подход к проведению летных испытании для обеспечения максимальной полноты использования полетного времени (максимального объема получаемой информации по различным характеристикам за единицу полетного времени) и учета всех сложных взаимосвязей явлений и характеристик. С этой целью разрабатываются и широко применяются комплексные методы, позволяющие получать одновременно (из одних и тех же режимов полета, так называемых комплексных контрольных маневров) различные характеристики самолета, оптимизировать последовательность выполнения отдельных режимов полета, свести к минимуму интервалы между выполнением зачетных режимов и т. п. Это обеспечивает возможность наиболее глубокого и разностороннего изучения всех сложно взаимосвязанных характеристик и явлений, ускоряет проведение испытаний, позволяет уделять достаточное внимание как важнейшим вопросам, так и кажущимся мелочам (несколько на первый взгляд мелких, малозначащих одновременных отказов в различных системах в своей совокупности могут иногда привести к весьма серьезным последствиям). Комплексный подход
требует более четкой и всесторонней подготовки к испытаниям. Применение комплексных контрольных маневров для одновременной качественной (непосредственно экипажем в полете) и количественной [приближенной — непосредственно в полете по бортовым указателям и уточненной — после полета по записям контрольнозаписывающей аппаратуры (КЗА)] оценок всех характеристик самолета обеспечивает выполнение этой задачи на всех режимах полета с учетом совокупности и взаимодействия всех реальных факторов (условий обзора из кабины, удобства пользования приборным оборудованием и рычагами управления, влияния воздействия перегрузок и т. п.). Для качественной оценки самолета экипажем широко применяются системы контрольных критериев (например, шкала Купера).
2. Дифференцированный подход к исследованию в полете нормальных (обычных) эксплуатационных и предельных (крайних) эксплуатационных режимов полета. Первые — это наиболее часто встречающиеся в массовой эксплуатации самолета режимы полета (менее опасные, но зато в целом значительно более продолжительные). Вторые — это наиболее опасные, но значительно реже встречающиеся режимы. Они отделяют область нормальных эксплуатационных от неэксплуатационных режимов полета. Продолжительность пребывания на предельных режимах относительно невелика, а возможность возникновения особой ситуации в полете на таких режимах заметно выше. Однако как на тех, так и на других указанных эксплуатационных режимах должен быть обеспечен и проверен в летных испытаниях достаточный уровень безопасности полета.
3. Широкое использование моделирования (математического и физического — полунатурного и натурного) при подготовке полетных заданий, тренировке экипажа и анализе материалов летного эксперимента. Это позволяет по существу получать в полете лишь отдельные контрольные точки, призванные подтверждать или корректировать материалы моделирования. При таком подходе по материалам моделирования определяются сетки характеристик самолета (в зависимости от какого-либо параметра, например, скорости полета), которые затем либо подтверждаются, либо корректируются по данным летных испытаний (рис. 6.1).
4. Проведение испытаний в основном на неустановившихся режимах полета. Это отражает тенденцию к снижению удельной значимости (значительному сокращению) или даже вовсе практическое отсутствие у многих современных самолетов установившихся режимов полета. Такой подход позволяет значительно экономить полетное время. Переход к существенно неустановившимся режимам полета налагает новые дополнительные требования на КЗА (по частотным характеристикам приборов, скорости записи параметров и т. п.). Уменьшение полетного времени при выполнении неустановившихся маневров вместо установившихся у сверхзвуковых самолетов может достигать порядка 70%. Разработка улучшенных датчиков перегрузок, углов атаки и т. п., обладающих хо-
Рис. 6.1. Сетка характеристик самолета, полученных по материалам моделирования и скорректированных по данным летных испытаний:
----результаты предварительного (исходного) моделирования; ---результаты моделирования,
скорректированного по данным летных испытаний; А — данные летных испытаний
рошей реакцией в области сравнительно высоких частот, помогает проведению таких испытаний. Это также позволяет значительно сократить объем ненужной информации по материалам летных испыта
нии и помочь инженеру-испытателю в систематизации результатов летного эксперимента.
5. Исследования в полете в первую очередь (и в основном) характеристик, непосредственно или по крайней мере достаточно близко связанных с безопасностью полета (летной годностью самолета). Для гражданских самолетов это и есть характеристики, регламентируемые НЛГС. Значительное увеличение относительного (а в некоторых случаях — и абсолютного) объема испытаний, номенклатуры и степени исследования характеристик на особых режимах и в специфических условиях полета (в турбулентной атмосфере и в условиях обледенения, испытаний аэроупругой устойчивости, работы систем активного управления, непосредственного управления подъемной силой на посадке и т. п.).
6. Заметное уменьшение соотношения объемов испытаний в идеальных атмосферных и эксплуатационных условиях (при абсолютной видимости, на сухой бетонной ВПП, в безветрии, при дневном освещении, при средней полетной массе самолета и т. п.) и испытаний в предельных (расчетных) условиях (при предельных температуре и давлении воздуха, максимальной полетной массе самолета и т. п.) —переход к испытаниям в основном в расчетных условиях. Изменение этого соотношения может приводить к некоторому возрастанию объема и сроков выполнения непосредственно летного эксперимента, но зато значительно сокращает последующую обработку материалов (приведение к расчетным условиям) и повышает точность результатов, что в целом позволяет сокращать сроки проведения испытаний. При этом .необходимы особо тщательная подготовка летного эксперимента, широкое использование материалов моделирования и строгое соблюдение принципа постепенности перехода от простых полетных заданий к более сложным в процессе глубокого всестороннего изучения характеристик самолета. Такой подход позволяет определять (или выборочно проверять и уточнять) взлетно-посадочные характеристики, необходимые для оценки соответствия самолета требованиям нормативно-технической документации (НТД) во всем диапазоне ожидаемых условий его эксплуатации. Широкое применение получили натурные
климатические испытания самолетов и длительные испытания их систем в климатических ангарах.
7. Широкое применение методов теории подобия режимов полета и работы функциональных систем самолета для приведения (пересчета) летных и динамических характеристик самолета, характеристик его систем на этапах полного взлета и полной посадки к заданным (расчетным) атмосферным и эксплуатационным условиям, в связи с широкими диапазонами изменения взлетных и посадочных масс самолета, температур, давления, влажности наружного воздуха и т. п. Это обусловлено необходимостью приведения значительного количества определяемых в полете характеристик самолета к заданным (расчетным) атмосферным и эксплуатационным условиям, определения в летном эксперименте зависимостей аэродинамических и летных характеристик самолета от критериев подобия режимов полета (числа М, угла атаки, числа Рейнольдса и т. и.), строгой регламентации условий и методов проведения летных испытаний (атмосферных условий, режимов полета и т. п.) для достаточно полной и глубокой оценки всех характеристик самолета и его функциональных систем.
8. Относительное возрастание объема испытаний по определению взлетно-посадочных характеристик при расчетных отказах (прерванных и продолженных взлетов, посадок и заходов на посадку с имитацией отказов критических двигателей, авиагоризонта, системы подачи статического давления в ПВД и других наиболее вероятных и наиболее опасных для данного самолета одиночных отказов и их сочетаний). При этом основное внимание уделяется изучению особенностей полета и пилотирования самолета на режимах захода на посадку и посадки с частично и полностью выпущенной механизацией, влияния мощной механизации крыла на силовые и моментные характеристики самолета, взлета с неполной тягой (малошумный взлет, экономия ресурса двигателей) и т. д., а также широкой неменклатуры опорных и определяемых по ним характерных эксплуатационных скоростей взлета и посадки (для надежного выбора достаточных запасов от опорных скоростей, обеспечивающих требуемый уровень летной годности и безопасности полета) и другим вопросам.
9. Тщательное изучение характеристик переходных процессов в динамике полета как в нормальных эксплуатационных условиях, так и при возникновении различных отказных ситуаций в полете.
10. Большой объем специальных видов испытаний на режимах полных взлета и посадки: надежностных, ресурсных, аэроакус-тических (по оценке допустимости и доводке уровней шумов в салонах самолета и на местности), вибрационных, по оценке средств обеспечения комфорта пассажиров и средств аварийного покидания самолета пассажирами и экипажем при аварийных ситуациях, по статистико-вероятностной оценке характеристик самолета, уровней летной годности самолета и безопасности полета и т. п.
11. Широкое использование средств и методов автоматизированной обработки материалов летных испытаний (с применением
магнитной записи, методов машинной обработки данных с помощью бортовых и наземных ЭЦВМ, графопостроителей и т. п.), современных методов управления летным экспериментом, что связано с использованием большого количества сложного экспериментального оборудования и аппаратуры. Применение автопилотов и автоматических устройств, которые заранее программируются для получения оптимального объема полезной информации в каждом испытательном полете, программированной помощи и сигнализации экипажу в полете. Такие устройства помогают экипажу во время выполнения заранее заданной программы полета и предостерегают при приближении параметров полета к предельным их значениям. Например, автоматическая система предостережения на указателе скорости может использоваться для оповещения летчика, когда скорость выходит за пределы, установленные на время данных испытаний.
12. Использование научно обоснованных методов и условий испытаний, позволяющих оценивать экономичность эксплуатации самолета, его ресурс, эксплуатационную технологичность (в первую очередь, с точки зрения обеспечения надежной и регулярной массовой летной эксплуатации), а также эффективность эксплуатационные и технико-экономические характеристики всей авиационнотранспортной системы в целом, в частности, применительно к этапам полного взлета и полной посадки.
13. Значительное возрастание объема и сложности проведения наземного подготовительного этапа испытаний.
14. Применение специальных систем измерений (наземных и бортовых), позволяющих производить высокоточностные замеры в полете большого числа обобщающих параметров, по которым затем можно находить уже отдельные частные результаты измерений. Это связано с потребностью получения полетных замеров большого количества параметров на этапах полного взлета и полной посадки (более тысячи на современном тяжелом опытном самолете, тогда как на старых опытных самолетах требовалось замерять не более 100—200 параметров).
Перед началом летных испытаний по определению взлетно-посадочных характеристик должны быть проведены испытания на больших углах атаки. По окончании испытаний на больших углах атаки, после определения таких важных опорных скоростей, как скорости сваливания и минимально эволютивные скорости самолета во взлетных и посадочных конфигурациях, уточняются запасы нормируемых характерных скоростей взлета и посадки (от этих опорных скоростей). После этого можно приступать к определению зачетных взлетно-посадочных характеристик самолета во всем диапазоне ожидаемых условий эксплуатации: характерных скоростей взлета и посадки, дистанций наземных и воздушных участков взлета и посадки, градиентов набора высоты (при взлете, уходе на второй круг) и снижения (при посадке), особенностей устойчивости, управляемости, балансировки и способов пилотирования самолета на рассматриваемых режимах.
6.2.2. Управление летным экспериментом
Особенности современных, особенно сверхзвуковых, а тем более гиперзвуковых самолетов приводят к необходимости существенного совершенствования всей организации, методов проведения и средств методологического обеспечения летных испытаний этих самолетов. Такой подход к испытаниям вызван необходимостью получения с достаточной точностью и высоким качеством максимально возможного объема информации из каждого полета, сокращения промежутков между полетами (обусловленных обработкой и анализом полетных материалов) и продолжительности всего цикла летных испытаний в целом. В значительной степени успешному решению этих задач способствует внедрение автоматизированной системы обработки и анализа экспериментальных материалов в реальном масштабе времени на протяжении полета. Такая система позволяет активно управлять ходом летного эксперимента, .повышать качество и информативность летных испытаний, а также значительно повышать уровень безопасности проведения испытательных полетов. Системы автоматизированной обработки в реальном масштабе времени и активного управления летным экспериментом находят широкое применение при летных испытаниях современных (особенно сверх- и гиперзвуковых) самолетов.
Управление летным экспериментом предусматривает заблаговременное предсказание ожидаемых значений искомых параметров, отбраковку и повторение некондиционных режимов полета, предупреждение экипажа о приближении к предельным (предельно допустимым или предельно достижимым) значениям параметров полета, оперативный контроль за получением нормируемых критериев (например, градиентов набора высоты, коэффициентов устойчивости, градиентов нарастания усилий на рычагах управления и т. п.) и важнейших обобщенных характеристик (поляры самолета, кривой подъемной силы по углу атаки и т. п.) в процессе полета, а также сокращение времени выполнения отдельных режимов, выдачу рекомендаций по комплексированию режимов полета и т. д. В качестве вычислителей в таких системах применяются мощные быстродействующие процессоры (с быстродействием порядка 200— 250 тыс. операций в секунду и более).
Большую роль играет разработка оптимальных средств математического обеспечения возможности управления ходом летного эксперимента. Для современных самолетов с большим количеством сложных функциональных систем натурный летный эксперимент является наиболее надежным средством получения достоверной информации о самолете в целом и объективного контроля реальных его характеристик (динамических свойств, пилотажных качеств, способности выполнять свое основное назначение с достаточной степенью надежности и т. п.). От качества, полноты и быстроты обработки информации, получаемой при летных испытаниях самолета, зависит своевременное выявление и устранение всех его
I - Поток экспериментальных банных
- Поток управляющих воздействий -Канал информации от летчика-испытателя _ А копал корректирующих воздействий ЕШ Ш ЕЙ шр> ведущего инженера
Рис 6.2. Блок-схема общей системы автоматизированного управления летными испытаниями
недостатков, достаточно полное определение его паспортных данных, а также сокращение объема и сроков проведения испытаний.
Укрупненная блок-схема общей системы автоматизированного управления летными испытаниями современного самолета представлена на рис. 6.2. Это — полуавтоматическая система типа человек — машина, состоящая из трех принципиальных подсистем, представляющих собой три замкнутых контура управления. Первый контур: объект испытаний -> поток информации -> летчик-испытатель—>-->поток управляющих воздействий -> объект испыта-
ний. Второй контур: летчик-испытатель —> поток информации ведущий инженер —> поток корректирующих воздействий летчик-испытатель. Третий контур: объект испытаний —система измерений и передачи информации -> система обработки данных летного эксперимента —> поток информации -> ведущий инженер -> поток корректирующих воздействий -> летчик-испытатель -> объект испытаний.
Первые два контура имеют место и при обычных методах проведения летного эксперимента, когда находящийся на земле ведущий инженер не имеет объективных данных о ходе выполнения по
летного задания непосредственно в процессе выполнения летного эксперимента. При наличии третьего контура ведущий инженер становится уже активным участником летного эксперимента. В этот случае имеет место тесное взаимодействие всех трех указанных контуров управления испытательным полетом. Такая автома-
тизация управления летным экспериментом непосредственно в процессе выполнения испытательного полета обеспечивает оптимальное решение ряда задач летных испытаний, важнейшими из которых являются: повышение безопасности проведения летных испытаний, повышение качества выполнения летного эксперимента и
получаемых из него экспериментальных данных, ускорение и удешевление летного эксперимента, повышение информативности, уде-
лъного съема полетной информации (количества информации, получаемой за единицу полетного времени).
Решение этих задач при автоматизированном управлении лет ным экспериментом достигается путем активного участия ведущего инженера в процессе выполнения испытательного полета с целью оценки возможности продвижения по критическому параметру (например, по углу атаки) исследуемого режима полета для уточнения или выбора шага такого продвижения, оценки качества выполнения испытательного режима, корректировки условий выполнения летного эксперимента, оценки достаточности количества выполненных режимов, корректировки хода и задач испытательного полета по определению взлетно-посадочных характеристик.
Система управления летным экспериментом имеет средства для двухсторонней или даже многосторонней радиосвязи ведущего инженера с летчиком-испытателем (членами экипажа) и руководителем полетов. Следует, однако, отметить, что даже при автоматизированном управлении летным экспериментом, возглавляемом ведущим инженером по испытаниям самолета, за летчиком-испытателем остается право окончательного выбора средств и действий в тех случаях, когда возникают противоречия между командами ведущего инженера и оценкой полетной ситуации самим летчиком.
Более подробное изложение методик проведения летных испытаний по определению взлетно-посадочных характеристик и приведению их к заданным (расчетным) атмосферным и эксплуатационным условиям содержится в работе [8].
6.3. НОРМИРОВАНИЕ ВЗЛЕТНО-ПОСАДОЧНЫХ ХАРАКТЕРИСТИК
Нормирование взлетно-посадочных характеристик производится с целью установления регламентированного уровня безопасности полета на этих режимах, определяющего минимальные государственные требования к ним по обеспечению безопасности полета, выполнение которых обязательно для получения официального допуска самолета к летной эксплуатации. Нормирование характеристик гражданских самолетов (в том числе и их взлетно-посадочных характеристик) осуществляется НЛГС, содержащими минимальные государственные требования к летной годности, направленные на обеспечение безопасности полета. Выполнение этих требований обязательно для допуска к эксплуатации гражданских самолетов, предназначенных для перевозки пассажиров, почты или грузов. В НЛГС нормируются следующие группы взлетно-посадочных характеристик и связанных с ними факторов для режимов полного взлета, полной посадки и ухода на второй круг: опорные, предваряющие (например Увк) и характерные эксплуатационные скорости; градиенты набора высоты и снижения; потребные длины дистанций; характеристики управляемости, устойчивости и балансировки самолета; отдельные требования к технике пилотнро-
вания; общий подход к определению ограничивающих, предваряющих и опорных параметров (величин аД01ъ параметров точек принятия решения и т. п.); некоторые особые условия выполнения указанных режимов полета.
Основными общими принципами нормирования взлетно-посадочных характеристик современных как дозвуковых, так и сверхзвуковых самолетов являются:
1. Широкий комплексный подход к определению диапазонов нормируемых значений параметров, определяемых в качестве оптимальных, с одной стороны, из условий обеспечения минимально необходимого уровня безопасности полета и достаточно высокой регулярности полетов и, с другой стороны, с учетом технико-экономических и эксплуатационных требований (показателей), предъявляемых к современным самолетам.
2. Нормирование опорных параметров (опорных скоростей, углов атаки), от которых с заданным запасом отсчитываются нормируемые взлетно-посадочные характеристики, а также предваряющих и ограничивающих параметров.
3. Нормирование широкой номенклатуры характерных эксплуатационных скоростей (углов атаки), градиентов набора высоты, дистанций и системно-динамических (управляемости, устойчивости, балансировки) характеристик самолета на этапах полного взлета, полной посадки и ухода на второй круг.
4. Статистико-вероятностный подход как к выбору коэффициентов запаса для определения нормируемых характеристик, так и к определению отдельных нормируемых характеристик.
5. Дифференцированный подход к нормированию характеристик обычных (средних) эксплуатационных и предельных эксплуатационных режимов полета, характеристик нормальных (безотказных) и отказных режимов полета в зависимости от категорий самолетов, обеспечивающий неизменный уровень безопасности полета на всех этих режимах. При этом главное внимание уделяется характеристикам средних или обычных (и, в первую очередь, обычных отказных) режимов полета.
6. Комплексный подход к нормированию взлетно-посадочных характеристик (определяемых как с учетом требований нормальных, так и отказных режимов полета во всех ожидаемых условиях эксплуатации).
7. Широкое использование комплексных маневров для одновременной качественной и количественной оценок траекторных, системно-динамических и пилотажных характеристик самолета.
8. Разработка нормативных требований только на характеристики, непосредственно или косвенно (но достаточно близко) связанные с условиями обеспечения достаточного уровня безопасности полета.
9. «Оконтуривание» диапазонов эксплуатационных режимов полета (ненормируемые промежуточные эксплуатационные режимы оказываются в «вилке» нормируемых).
10. Раздельное нормирование и максимальная конкретизация нормируемых характеристик на отдельных этапах полета.
И. Основной упор на нормирование количественных параметров или качественных, но поддающихся объективной оценке (например, оценке характеристик самолета летчиками по шкале Купера, экспертных оценок специалистов по унифицированным методикам и т. п.).
12. Обеспечение возможности полной и однозначной оценки соответствия взлетно-посадочных характеристик самолета требованиям всех соответствующих разделов (пунктов) НЛГС или НТД с обеспечением требуемого уровня летной годности при минимальном объеме нормируемых параметров — отработки комплексных критериев нормирования (например, комплексного критерия нормирования посадочных характеристик, включающего требования к потребной посадочной дистанции, простоте и надежности управления самолета, точности выдерживания заданной траектории и т.п.).
13. Существенное расширение объема внимания к вопросам нормирования характеристик переходных процессов.
14. Использование эргономических и психофизиологических критериев нормирования взлетно-посадочных характеристик.
15. Основной упор на нормирование характеристик полета в сложных условиях (при наличии градиентных сдвигов ветра, в условиях обледенения и т. п.).
Нормирование траекторных взлетно-посадочных характеристик в основном сводится к регламентированию следующих их групп:
— дистанций собственно взлета, собственно посадки и отдельных их участков;
— характерных и опорных скоростей полного взлета, полной посадки и ухода на второй круг;
— градиентов набора высоты и снижения самолета.
Требования, предъявляемые к нормируемым взлетно-посадочным характеристикам, как правило, оказываются противоречивыми. Это обусловлено тем обстоятельством что, с одной стороны, они призваны обеспечить минимально необходимый (достаточно высокий) уровень летной годности самолета (а в конечном счете — уровень безопасности полета) и поэтому должны быть по возможности более жесткими, а с другой стороны—-должны позволять добиваться достаточно высокого уровня технико-экономической эффективности эксплуатации самолета и всей авиационно-транспортной системы (боевой эффективности всего боевого авиационного комплекса в военной авиации) в целом.
Основная задача выбора критериев нормирования и заключается в нахождении оптимальных значений параметров с учетом этих двух противоречащих один другому видов требований. Сказанное может быть наглядно проиллюстрировано на примере нормирования коэффициента запаса ио длине посадочной полосы. Потребная для посадки длина летной полосы £Пос. потр определяется с запасом от фактической величины посадочной дистанции £ПОс. ф-
Существует два принципиально различных подхода к определению нормируемых величин £Пос. потр-
1. Определение кпос.потр с нормируемым коэффициентом запаса Кпос. потр по отношению к суммарной величине Lnoc. о>:
^поопотр ^иос.потр^'пос.ф* 6.4)
2. Определение Lnoc. потр по отдельным составным элементам фактической посадочной дистанции с различными (в принципе) коэффициентами запаса:
т
^пос.погр Кцос.почр^иос.ф/’ (^-^)
(=1
Здесь т— принятое в методике определения суммарной величины ^-пос.ф количество ее составных элементов £ПОс.фг- Величина £Пос.ф т
является суммой V Д,ос.фСуммарная величина кПОс.потр и вели-1-1
чины кПос.потр г выбираются с учетом вероятного разброса всех конструктивно-аэродинамических, эксплуатационных факторов (с учетом расчетных функциональных отказов) и приемов пилотирования самолета таким образом, чтобы появление в практике летной эксплуатации самолетов данного типа наибольшей величины £ПОс.ф, превышающей определенную по средней величине Ьпос.ф (или по средним величинам ее составляющих) с этим коэффициентом запаса (или с этими коэффициентами запаса — для каждой составляющей £Пос.ф*) величину Ьпос.потр (величину равной ей располагаемой посадочной дистанции), было событием практически невероятным. Очевидно, что чем выше надежность и стабильность функционирования всей авиационно-транспортной системы (всего боевого авиационного комплекса) в целом, тем меньшими могут быть нормируемые значения этого коэффициента при неизменном уровне безопасности полета.
Как уже указывалось, коэффициент запаса кп0Г.Потр учитывает возможный разброс в методах пилотирования, в параметрах атмосферы, состоянии поверхности ЛП (а следовательно, в величинах коэффициента трения), характеристиках самолета и его функциональных систем, условиях обзора из кабины экипажа и ряде других важных конструктивно-аэродинамических, пилотажных, эксплуатационных и других факторов. Для обеспечения достаточного уровня безопасности полета, а также высокой регулярности полетов и минимальной утомляемости экипажа требуются по возможности большие значения кПОс.потр- Однако с точки зрения эксплуатационной экономичности не следует допускать завышения этих величин. Излишне большие значения кпос.потр (излишне большие потребные посадочные дистанции) требуют увеличения длины ЛП. Для современных сверхзвуковых и тяжелых дозвуковых самолетов, требующих высокопрочных покрытий ЛП (из-за больших удельных нагрузок на колесо, применения пневматиков высокого
давления и т. п.), широких полос, дорогостоящего их оснащения и доработки всех служб аэродрома, увеличение потребных длин ЛП приводит к дополнительным затратам либо к значительному снижению пригодных для посадки аэродромов. Величина кПОс.потр должна выбираться оптимальной. Допустимый диапазон коэффициентов запаса длины полосы, из которого могут быть выбраны нормируемые величины кпос.потр> наглядно иллюстрируется графиком на рис. 6.3. В правой части графика показана взаимозависимость величины коэффициента запаса и количества полетов, за которое может произойти одно выкатывание самолета за пределы ЛП в его массовой летной эксплуатации (кривая /). Ось абсцисс графика имеет логарифмическую шкалу. Если принять, что допустимо (что является вероятным) одно выкатывание на 109 полетов (посадок), то допустимое нижнее значение кПО(..ПоГр определяется точкой 5 на графике. Слева на графике показана зависимость количества аэродромов рассматриваемого региона, отвечающих условию ППД= РПД для рассматриваемой категории самолетов при данном значении кПОс.потр (кривая 3). При заданном количестве аэродромов эксплуатации (точка 2) величина кп0с.потр не должна превышать значения, определяемого точкой 6. Следовательно, отрезок оси абсцисс 5—6 и дает допустимый диапазон значений кП(,г.Потр-В случае возможной реконструкции аэродромов (удлинение ЛП на величину А£лп — кривая 4 на графике) или возможного уменьшения фактической посадочной дистанции (доработки самолета, позволяющие уменьшить ППД в рассматриваемом примере на величину АЕппд = А£лп, допустимый диапазон к,1О(.Потр расширяется (на величину отрезка 6—7).
В ИКАО разработаны три альтернативных метода нормирования потребных посадочных дистанций, обозначаемые латинскими буквами А, В и С1. В этих методах четко формулируются основные методические требования к условиям определения потребной посадочной дистанции £Пос.потр- Кратко сущность указанных методов сводится к следующему.
Метод А. Это — метод определения ППД при посадке на влажную ЛП. Им предусматривается определение величины Апос.потр по (6.4), где КцоС потр= 1 > 15 ... 1,10, а также Z1]CC^ при /7ПОС=Ю,7 м, |0сно1<3. В методе рассмотрены определенный подход к выбору Ув.к и приведение к стандартной влажной поверхности ЛП. В качестве стандартной влажной поверхности принята влажная ЛП с определенным (стандартным) коэффициентом сцепления. Получаемую из летного эксперимента на влажной ЛП при каком-то фактическом значении коэффициента сцепления (специально замеряемом при испытаниях) величину £ПО(..Ф пересчитывают на стандартное его значение. По методу А регламентируются и приемлемые условия пилотирования самолета. В частности, требуется, чтобы при демонстрации фактической посадочной дистанции не допускались значительные изменения режима работы силовой установки самолета в диапазоне высот АН = 60 ... 10,7 м, а также чтобы вертикальная скорость снижения самолета в момент касания не превышала по абсолютной величине |Уук|=1 м/с. При этом устанавливаются диапазоны допустимых отклонений органов управления самолета и усилий на рычагах управления и ряд требований к характерным скоростям посадки. Метод непосредственно регламентирует разброс эксплуатационных факторов, таких, как, например состояние поверхности ЛП, отклонения в величинах скоростей и уровень надежности работы силовой установки. Отклонения (разброс) остальных факторов, влияющих на уровень безопасности посадки, учитываются суммарным коэффициентом кпос.потр.
В национальных НЛГС возможно применение этого метода с некоторыми модификациями. Так, например, в Британских нормах летной годности (BCAR) принят метод А со следующей корректировкой: величина A/iIOc=9 м, а кПОСПО1Р является функцией критерия кг = СГПР/Схвыр, где С.хпрИ Сх вы,, — соответственно коэффициенты лобового сопротивления самолета на пробеге и при выравнивании. Это позволяет конструктору самолета добиваться за счет значительного увеличения СЖПр снижения величин кПОс.потр (до 1,11—1,08). Маскимальные же значения Кпос.потр по BCAR составляют 1,24 и 1,19 соответственно для случаев посадки с нормально работающей силовой установкой и с неработающим одним критическим двигателем.
Метод В. Этот метод предусматривает определение Апос.ф для случая сухой ЛП при следующих условиях: Н10с— 15 м, Пзп^> >1/со, Осно = —3°. Он также основывается на применении формулы
1 International Civil Aviation Organization, Doc. 9051-AN/896. Airworthiness technical manual, 1974.
(6.4). Но в данном случае величины кпос.потр берутся равными ^•IIOC.IlOip 1 , _
«„ос-потр—-------—-----= Н6/ для посадки на основной аэродром и
^•ПОС.ф 0,6
—=1,43— для посадки на запасной аэродром. Последнее объясняется вероятностным подходом к оценке расчетных отклонений параметров посадки при неизменной степени риска выкатывания самолета за пределы ЛП: вероятность посадки на запасном аэродроме существенно меньше единицы, а выкатывание за пределы ЛП должно быть событием практически невероятным. Поскольку сама по себе вероятность посадки на запасной аэродром сравнительно невелика, то и верятность появления такого не часто случающегося события, как выкатывание, на этом аэродроме и подавно чрезвычайно мала. Учет влияния влаги на поверхности ВПП по этому методу предусматривает дополнительное увеличение кПОс.потр на 15% (по сравнению с принятым для сухой ВПП).
МетодС. По этому методу ППД определяются с помощью формулы (6.5) в виде суммы трех участков: £Пос.ф i — дистанции воздушного участка посадки, длящегося с момента прохождения высоты 15 м до момента касания, £пос.ф2 — дистанции переходного участка, длящегося с момента касания и до момента включения в работу всех средств торможения самолета (предусмотренных РЛЭ для нормальной посадки), £пос.фз— участка торможения (вплоть до полной остановки самолета). При определении ППД по методу С предполагается для каждого из этих трех участков учитывать присущий именно данному участку разброс параметров, влияющих на посадочную дистанцию,— это основная отличительная черта метода С. Такой подход позволяет более точно учитывать фактические условия летной эксплуатации самолета.
При демонстрации фактической посадочной дистанции по методу С должны учитываться возможные отклонения Рзп и 6гно, возникшие в результате ошибок пилотирования (перед началом выравнивания). Эти отклонения принимаются различными для случаев нормальной посадки и посадки с отказавшим одним критическим двигателем. Проведенные в США экспериментальные исследования показывают, что, например, для самолетов типа Локхид L-1011 реальные скорости захода на посадку могут превышать расчетные примерно на 18—20 км/ч, а фактические величины Огпо отклоняться от расчетных примерно на 1° в массовой летной эксплуатации. Такие отклонения и принимаются за основу для определении ППД методом С в случае нормальной посадки. Для посадки с одним неработающим двигателем они принимаются вдвое меньшими.
При нормировании отклонений параметров, влияющих на процесс выравнивания, используются в качестве контрольных параметров средняя нормальная перегрузка nl/cv и вертикальная скорость в момент касания VyK. Для расчета принимаются минимальные их значения: «;/ср=1,05 и l£/K~0. По методу С выбирается наибольшая из всех полученных в демонстрационных полетах факти
ческая длина воздушного участка. При определении длин последующих участков (переходного и тормозного) в расчет принимается скорость касания, полученная при демонстрации фактической дистанции вне зависимости от того, принята ли величина Лтос.ф i по данным демонстрационных полетов или из расчетов.
Метод С предусматривает три вида состояний поверхности ЛП: сухая ЛП, стандартная влажная ЛП и нестандартная влажная ЛП. При нестандартной влажной ЛП коэффициент сцепления колес шасси с поверхностью ВПП уменьшается по сравнению со стандартной влажной ВПП в 2 раза.
Для определения ППД в ряде случаев возможно получение меньших потребных длин ЛП при неизменном уровне безопасности полета. Обусловлено это тем, что метод С основывается на более точной и дифференцированной оценке влияния ожидаемых условий эксплуатации самолета на безопасность полета. Учитываются возможные отклонения в скоростях захода на посадку и углах наклона траектории, разнообразие методов пилотирования и широкий диапазон возможных эксплуатационных состояний поверхности ЛП. Однако не предусматривается дифференцированный подход, в частности, к установлению /У„ос и 6(.по. например, в зависимости от Узп (класса самолетов) — в этом скрыты дальнейшие возможности его совершенствования.
Нормирование может быть дискретным или предельным. Дискретное нормирование предусматривает установление одного определенного или нескольких определенных значений нормируемого параметра. Примером дискретного нормирования является, в частности, однозначное установление расчетной величины Нпос (15 м в НЛГС). Предельное нормирование предусматривает установление одного или двух (например, верхнего и нижнего) пределов для нормируемой величины. Нормирование величины располагаемой длины летной полосы представляет собой пример нормирования по одному (в данном случае, нижнему) пределу: располагаемая длина ЛП должна быть не менее определенной по требованиям норм величины ППД Сущность описанных выше методов подхода к установлению величин Гпос.потр и заключается в том, что выбираемый аэродром посадки должен обеспечивать располагаемую длину ЛП не менее минимально необходимого ее значения, равного ^пос.потр- Принцип нормирования по двум пределам реализуется, в частности, при нормировании ряда характерных взлетно-посадочных и опорных скоростей. Так, например, скорость принятия решения на взлете V] нормируется по двум (верхнему и нижнему) пре-делам: Гмэр <1Л-^Ггп.ст-
Таблица 1
Значения вспомогательной функции Л (0) в зависимости от параметров полета
е. градус пх пу = 1,05 1,10 1,15 1,20 1,25 1,30 1,35 1,40 1,45 1,50
30 0,1 80,6717 30,1076 15,1138 8,7494 5.5397 3,7354 2,6402 1,9360 1,4622 1.1316
0,3 296,9612 26,4130 13,5597 7,9491 5,0795 3,4505 2,4540 1.8091 1,3727
0,6 2007,3340 208,7400 61,0215 26,1608 13.6633 8.0518 5,1553 3,5023 2,4896 1,8330
40 0.1 188945 11,0516 7,1580 4,9392 3,5648 2,6626 2,0436 1.6039 1,2826
0,3 :74,1317 46,4577 21,4732 12,1615 7,6867 5,2132 3,7165 2,7510 2,0973 1,0377
0,6 1546,8896 179,1189 58,1569 26,9324 14,9234 9,2192 6,1289 4,2966 3,1361 2,3629
60 0,1 21,5850 11,4698 7,4301 5.2191 3,8472 2,9333 2,2946 1,8322 1,4880 1,2260
0,3 102,5958 30,8386 15,6258 9.5104 6,3861 4,6503 3.3819 2,5910 2,0395 1,6360
0,6 1063,1040 135,9568 47,6563 23,4550 13,6571 8,7915 6,0511 4,3700 3,2726 2,5217
60 0,1 12,3312 7,1184 4,9372 3,6725 2,8424 2,2601 1,8337 1,5120 1,2634 1,0676
0,3 63,0930 20,4577 11,0311 7,0844 4,9687 3,6789 2,8272 2,2332 1,8020 1,4794
0,6 730,2053 99,6709 36,8652 18,9801 11,4834 7.М04 5.4123 4,0086 3,0698 2,4131
Таблица 3
Значения вспомогательной функции ^з(0) в зависимости от параметров полета
9. градус «X пу--= 1,05 1,10 1,15 1,20 1,25 1,30 1,35 1,30 1,45 1,50
10 0,1 0,3 56,4977 106,9309 15,5349 21,6696 7,1585 8,9674 4,1040 4,8659 2,6576 3,0474 1,8Ь03 2,0858 ,',3746 1 5167 1,0570 1,1522 0,8381 0,9049 0,6807 0,7294
0,6 278,4265 35,6998 12,5726 6,2821 3,7421 2,4765 1,7577 1,3112 1.0152 0,8091
20 0,1 18,2738 9,7104 6.6428 4,1274 2,9996 2,2790 1,7904 1,4439 1,1891
0,3 140,0316 33,0719 14,6993 8,3142 5,3503 3,7329 2,7532 2,1147 1,6754 1,3b02
0,6 683,4888 80,5200 27,3768 13,4182 7,8963 5,1822 3,6557 2,7144 2,0940 1.6639
30 0.1 29,6825 14,0886 8,5838 5,8442 4,2542 3,2421 2,5556 2,0675 1,7078 1,4348
0,3 109,2645 15,0011 9,0571 6.1045 4,4087 3,3399 2,6208 2,1129 1,7405
0,0 771,6968 97,6784 34,Ь568 17,4740 10,4927 6,9912 4,9901 3,7402 2,9077 2,3253
40 0,1 17,9333 9,8163 6,60'14 4,8324 3,7187 2,9612 2,4189 2,0155 1,7066 1,4645
0,3 76,9218 24,1363 12,8263 8,2103 5,7873 4,3305 3,3703 2,7132 2.2316 1,8699
0.6 683,3311 93,0581 34,7382 18,1822 11,2357 7,6582 5,5b79 4,2376 3,3369 2,6980
50 0,1 11,4741 6,8456 4,9195 3.7963 3,0495 2,5165 2,1183 1,8110 1,5680 1,3719
0,3 18,4055 10,3459 6.9219 5,0619 3,9037 3,1221 2,5641 2,1491 1,8306
0,6 565,1057 81,1435 31,5534 17,0606 10,8252 7.5421 5,5863 4,3195 3,4484 2,8218
60 0 1 7,8311 1.9316 3,7056 2,9684 2,4615 2.0877 1.7998 1,5713 1.3858 1.2328
0 3 40.0681 14,1731 8.2815 5,7261 4,3029 3,3984 2,7718 2,3207 1.9767 1,7082
0,6 163,7271 69,0520 27,6686 15,3411 9,9447 7,0578 5,3120 4,1(557 3,3674 2,7863
Таблица 4
Значения вспомогательной функции в зависимости от параметров полета
0, градус «Х 9тах = 30°
nJ/ = 0,75 0,80 0,85 0,90 0,95 0,75 0,80 0.85 0,90 0.95
10 0,1 —9,4602 — 17,2009 --32,0432 —130,3147 -1769,2549 —6,7837 — 14,7883 41,7198 - 166,7275 -2033,4209
0,3 -4,8035 —6.8638 - 6,6848 -27,8740 --333,4937 1,7711 —4,3617 14,7538 -58,3767 506,2893
0,6 -1,7380 -1,7301 —0,6376 —2,7574 —27,2919 - 0,2363 -0,6987 —3,1028 — 12,0945 —62,9007
20 0,1 —31,5571 —68,3143 — 177,9296 - 1828,6882 72972,5000 22.6288 -58.7323 231.6614 2339,6643 83868,1250
0,3 — 13,6108 -22,0233 —27,2668 —222.4184 4321,2305 —5.0185 —13,9952 60.1796 -465,8132 6560.2227
0,6 -3,8553 -4,0312 - 1,6357 -9,4345 62,2702 —0,5241 -1,6279 —7,9679 -41,3809 143,5167
30 0,1 - 169,9584 --751,7039 —29207,0039 3577.9939 316,6875 -121,8730 —646,2671 -38027.0078 1577,7578 363,9719
0,3 —58,2757 — 171,2713 —2058,7087 342,1184 54,1358 —21,4873 — 108,8381 —4543,7109 716,5027 82,1856
0,6 — 11,7005 — 18 6269 —38,5265 10,1151 3,8262 -1,5907 -7,5220 187,6683 44,3676 8.8183
40 0,1. —51228.9648 5612,6445 312.5444 88,0484 40,832.9 —38886,2891 4825,4023 406,9277 112,6510 46,9296
0,3 —951 1,0469 945.2278 37,3449 13,7812 9,2201 -3225.3274 600,6660 82.4228 28,8620 13,9974
0,6 707,8086 65.3265 1,5424 0,8534 0,9893 •-96,2285 26,3805 7,5135 3,7430 2,2801
50 0,1 247,7381 73,9897 24,8175 14,3196 9,8930 177,6468 63,6116 32.3119 18,3209 1 1,3701
0,3 73,3035 19,4208 3,8431 2,7009 2.5859 27,0282 12,3414 8,4819 5.6566 3,9257
0.6 11.7984 2,6116 0,2342 0,2212 0,3456 1,6040 1,0546 1,1408 0,9704 0,7964
GQ 0 1 20,2413 10,7608 5,1268 3,7519 3,0792 14,5145 9,2515 6,6750 4,8003 3,5389
0,3 7,3799 3,3113 0,9031 0,7887 0,8839 2,7211 2,1043 1,9932 1,6518 1,3419
б;б 1,6247 0,5653 0,0668 0,0760 0.1359 0,2209 О',2283 0,3252 0,3334 0,3133-
Продолжение табл. 4
е, градус «X 9тах = 50" 9m ax = 70
пу=0,75 0,80 0,85 0,90 0,95 0,75 0,80 0.85 0,90 0,95
10 0 1 8,7881 18,4621 -47,4945 — 183.0265 -2187,7844 -10,2995 —20,9494 —52,7886 -200,4789 —2370,3608
0 3 —3,8507 —8,4869 -21,7675 —77,2253 —630,5649 —6,1986 -12,3999 —29,8883 -101,4901 —801,9734
о'б -1,1169 —2.6451 —6,7540 —21,1655 —97,5701 2,8941 —5,6466 — 12,7333 -36.5558 - 157.8259
О 1 —29,3151 —73,3230 —263,7273 -2568,3855 90234,6875 -34,3565 —83,2012 —203,1245 —2813,2927 97765.0625
0 3 -10,9110 —27,2313 —88,7880 -616.2144 8170,5234 -17,5638 —39,78b" -121,9118 —809.8340 1039 L54 30
0^6 -2,4775 —6.1633 -17,3442 —72,4169 222.6201 —6,4200 -13.(568 -32.6991 -125.0742 3G->. Iul8
0 1 — 157.8833 —806.8176 —43290.6211 5025,2734 391,6021 -185.' 153 —915.5144 -48116,15o3 5501.4570 421
о 3 —46,7162 -211.7731 —6703.7227 947,8479 102.359' -75.2010 -30° 4138 -92' I 6484 •245,1 -5
6 -73191 —28.4783 —408,5083 77,6438 13,6789 —19,4*39 -77 ,1641 134,1018 - я
6104 1563 463 SSJ7 123.6636 5 —•И a="O 135.4554 54.'
ПбВ.Гэ 121.1 М _•» l*iO К ,4-kto 1- •-•.* 5-ijr • —
—‘НГГвбЭД 5 ДОС '1^—2:' — 117K65* i; Jim *-*X-*V
252
о, градус «X «тах = 50’ 9тах = 70°
п„ = 0,75 0.80 0.85 0,90 0,95 0,75 0,80 0,85 0,90 0.95
50 0.1 230,1368 79,4145 36,7845 20.1119 12,2332 269,7148 90.1134 40,8848 22.0296 13,2541
0,3 58.7631 24,0133 12,5141 7.4829 4.8891 94,5933 35,0850 17,1827 9,8341 6,2184
0.6 7,5820 3,9928 2,4832 1.6982 1,2354 19,6469 8,5235 4,6815 2,9331 1,9984
60 0,1 18.8032 11,5498 7,5990 5,2696 3,8076 22.0368 13,1058 8,4460 5,7721 4.1253
0,3 5,9160 4,0944. 2.9407 2,1852 1,6713 9,5232 5.9822 4.0377 2,8718 2,1256
0,6 1,0441 0.8642 0,7079 0,5835 0,4860 2,7054 1,8448 1,3346 1,0078 0,7861
Таблица 5
Значения вспомогательной функции в зависимости от параметров полета
е. градус "х 9m ах =30“ ^пш 40
пу = 0,75 0,80 0.85 0,90 0,95 0,75 0.80 0,85 0,90 0,95
10 0,1 1,0680 —3,0329 -5,6499 -22,9773 -311,9573 — 1,1961 —2,6075 —7,3561 —29,3976,' —358,5354
0,3 —0,8470 — 1,2102 -1.1787 —4,9148 —58.8020 —0,3123 -0,7691 —2,6014 10,2931 —89,2696
0,6 —0,3064 -0.3051 —0,1123 —0,4862 —4,8121 —0,0417 —0,1232 —0,5471 —2,1,325 -11,0907
20 0.1 — 11,4855 -24,8635 -64,7589 -665,5662 26558,9609 -8,2359 -21,3761 -84,3150 -851,5596 30524,4688
0,3 —4,9538 —8,0156 —9,9240 —80,9510 1572,7476 — 1,8265 —5.0937 —21.9029 — 169,5365 2387,6472
0,6 -1.4032 -1 4672 -0,5953 -3,4338 22,6637 —0,1908 -0,5925 —2,9000 — 15,0609 52,2341
30 0.1 -98.1020 -433.9802 -16862,0547 2065,6797 182,8328 —70.3608 -373,1086 21954.1055 2642.8728 210,1315
0.3 -33.6443 - 98,8799 -1188,5525 197,5150 31,2542 12,4052 —62,8354 —2623,2178 413,6577 47,4481
0,6 —6,7550 — 10,7539 -22,2425 5,8399 2,2090 0,9184 -4,3427 — 108,3461 25,6’147 5,0911
40 0.1 —45501,5703 4709,3633 262,2446 73,8782 34.2614 -32628,0625 4048.8176 431,4382 94.5213 39,3769
0,3 —8022,3242 793 1062 31,3347 11,5633 7,7363 —2957,9734 503,9968 69,1579 24,2171 11,7447
0,6 —593,8962 54,8131 1,2942 0,7160 0.8301 —80,7419 22,1349 6.3043 3,1406 1,9131
50 0.1 295,2268 88,1728 29,5747 17,0646 11,7894 211,6999 75,8054 38,5058 21,8328 13,5496
0,3 87,3550 23,1433 4,5798 3,2187 3,0816 32,2093 14,7071 10,1079 6,7409 4,6783
0.6 14,0600 3,1122 0,2791 0,2637 0,4118 1,9115 1,2568 1,3594 1,1564 0,9491
60 0,1 35,0564 18,6369 8,8792 6,4981 5,3329 25,1380 16,0228 11,5606 8,3138 6,1292
0,3 12,7814 5,7350 1,5641 1.3660 1,5309 4.7127 3.6444 3,4520 2,8609 2,3240
0,6 2,8138 0,9790 0,1156 0,1317 0,2354 0,3825 0,3953 0,5633 0,5775 0,5426
Продолжение табл. 5
е, градус ”х f»max=50p 9тах°~0
Пу =0,75 0,80 0,85 0,90 0,95 0,75 0.80 0,85 0,90 0,95
10 0,1 — 1,5495 -3.2553 -8,3743 —32,2715 -385,7532 -1,8160 —3,6938 —9,3078 -35,3487 -417,9451
0.3 —0,6790 — 1,4964 —3.8381 - 13.6165 -111.1821 — 4,0930 —2.1864 - 5,2699 — 17,8949 — 141,4051
0,6 —0,1969 —0,4664 — 1,1909 —3,7319 -17,2037 —0,5703 -0,9956 -2,2452 —6,4456 —27,8281
20 0 1 - 10,6695 -26.6865 - -95,9857 —934,7847 32841,6523 — 12,5043 —30.2818 — 106,6850 — 1023,92,04 35582,4102
0 3 —3,9711 -9 9111 —32,3151 —204,2761 2973,7288 - 6,3925 —14,4807 —44.3708 -294,7454 3782,0876
0.6 -0,9017 —2,2432 -6,3126 -26,3567 81,0244 —2,3366 4,7885 —11,9011 -45.5218 131,0620
30 0,1 -91,1507 —465.7993 -24992,9375 2901,2363 226.0833 -106.8263 528,5530 -27778,8633 3177,8823 244,9505
0 3 —2b,9706 -122 2628 -3870.25,34 547.2200 59,0950 -43,4157 — 178,6337 —5314.1094 719,1604 75,1589
0,6 —4,3410 — 16,4413 235,8438 44.8260 7,8972 -11.2486 -35,0974 —444,6382 7 / ,4209 12,7742
40 0,1 —422'3. ”969 5'34.6523 388,6992 103,7616 42,3661 49537,9688 5735.6289 432,0269 113,6557 45,9017
0 3 - 1 П’ГЗ 9' . -• -87 102,0344 32,0363 14,6877 -10352,2813 1432.8042 140,0999 42,1024 16,6039
- В1Лз'>’5 8о,8и25 13,7229 5,4961 2,9676 -988,9695 178,8937 25.8719 9,4925 4,8003
50 0 1 . 15 94,6375 43,8357 23,9671 14,5782 321,4163 107,3873 48,7220 26,2525 15,7948
7 0174 28,61Ь4 14,9130 8,9173 5,8266 112,7259 41,8105 20,4766 11,7192 7,4105
D.6 9.U.154 4.7582 2,9592 2,0238 1,4722 23,4130 10.1574 5,5789 3.4954 2,3814
0.1 з2 5о57 20.0033 13,1608 9,1265 6,5945 38,1662 22,6982 14,6278 9.9968 7,1448
CJ 10.2461 7.0912 5,0930 3,7846 2,8945 16,4935 10,3607 6,9930 4,9737 3,6813
0.6 1,8082 1.4967 1,2261 1,0106 0,8417 4,6856 3,1951 2,3115 1,7455 1,3615
Таблица 6
Значения
вспомогательной функции Г6(0) в зависимости от параметров полета
5, градус "х 9тах = 30° ®тах 40
Пу = 0,75 0.80 0,85 0,90 0.95 0.75 0,801 0,85 0.90 0,95
10 0,1 2.4054 3,5763 5,7322 7.9389 54,2113 1,6174 2,7752 5,7109 14,3581 71,8732
0,3 1,3889 1,7517 2,0423 0,8198 7,6790 0,4223 0,8185 2,0196 5,0272 17,8953
0,6 0,6094 0,6005 0,4343 0.0298 0,4094 0,0563 0.1311 0.4247 1,041.5 2.2233
20 0,1 6,7934 11,2518 22,1950 54,6487 693.6082 4,5681 8.7312 22.1127 98,8367 919.5837
0.3 3.3321 4,4526 5,8087 3,3263 30.8661 1,0131 2,0805 5,7443 19,6778 71,9305
0,6 1,1446 1,1084 0.7777 0,0499 0,2898 0,1058 0,2120 0.7606 1,7481 1.5736
30 0.1 24.2835 63,5022 99.2726 26.6172 10.3289 19,2767 704.0229 179,5128 35.2889
0.3 9.4689 17.7604 85,0641 1.7503 3.4193 2.8789 8.2987 84,1213 28,1017 7,9683
0,6 2.3056 2.6269 3.5528 0,0497 0.1574 0,2131 0,5735 3,4741 1,7401 0.8550
Продолжение табл.
СПИСОК ЛИТЕРАТУРЫ
I Бюшгенс Г. С., Студнев Р В. Аэродинамика самолета. Динамик.! про ю ного и бокового движения. М.: Машиностроение, 1978. 349 с.
2 Временные нормы летной годности сверхзвуковых гражданских c.imo.u-ioii СССР. Междуведомственная комиссия по нормам летной годности грлж ыиски самолетов и вертолетов СССР, 1976, 327 с.
3. Галлай М. Л. Полет самолета с неполной и несимметричной тягой. М М । шиностроение, 1970. 191 с.
4 Динамика полета/Под ред. А. М. Мхитаряна. 2-е изд. М.: Машпнос1р.ниш 1978. 424 с.
5. Жуковский Н. Е. Избранные сочинения. М.-Л.: ТИТТЛ, 1948. Т I 3'1.’ Т. 2|, 4'22 с.
6. Котик М. Г. Динамика штопора самолета. М.: Машиностроение, 197ь 327 с.
7. Котик М. Г. Критические режимы сверхзвукового самолета. М.: Машино строение, 1967. 1228 с.
8. Летные испытания самолетов/М. Г. Котик, А В. Павлов, И М Наш . скип и др. 2-е изд. М.: Машиностроение, 1968. 423 с.
9. Нормы летной годности гражданских самолетов СССР. 2-е изд. Me к ш действенная комиссия по нормам летной годности гражданских самолетов и вер толетов СССР. 1974, 327 с.
10. Остославский И. В., Стражева И. В. Динамика полета: Траектории г тельных аппаратов. М.: Машиностроение, 1963. 430 с.
11. Практическая аэродинамика маневренных самолетов/Под ред. И. М Лы сенко. М.: Воениздат, 1977. 439 с.
12. Airworthiness Technical Manual, Doc. 9051-AN/896, Internation.il < ivfl Aviation Organization, 1974, 300 p.
13. Britisch Civil Airworthiness Requirements. Section D. Aeroplanes. Issue I ’ Civil Aviation Authority, London, 1974, 438 p.
14. Eiila E. Technologie future nell’aviazione commerciale. «L’Acroh-i linicit Missili E. Spaziofc, 1977, IX, vol. 56, N 3, p. 149—162.
15. Federal Aviation Regulations. Airworthiness Standards: transport cnleg.it) airplanes. Part 25, Federal Aviation Agency, Washington, 1975, 119 p.
16. Kalemaris S. G., Cea R. A. Effects of techonlogy level on V/STO1 aiici.ift AIAA Paper N 77—1238, 1977, 4 p.
17. Langford P. S. The principles and practice of airworthiness cniiti»! Aeronautical Journal, 1976, I, vol. 80, N 781, p. 20—28.
18. Nancoo M. E. A status report on low level turbulence and wind sIh.ii effects on aircraft. JCAO Bulletin, 1974, IX, vol. 29, N 9, p. 16—21.
19. Nitsche V. Ein Beitrag zum Problem des Fluglarms bei Start und 1 .nulling von VTOL — Flugzeugen. «Zeitschrift fur Flugwissenschafteni», 1975, X, vol 2.1 N 10, S. 356—364.
20. Perez D. J. The development and fiigth testing of the XC-8A Air ( ushioii Landing System (ACLS). SAE Preprint. N 760920, 1976, 25 p.
21. Perry D. H„ Port W. G. A., Morrall J. C, A flight study of the s>,|r lip maneuver during landing. ARC R & M N 3374, 1964, 61 p.
ОГЛАВЛЕНИЕ
Стр.
Введение............................................................... 3
Глава 1 Основные понятия и определения ................................ 6
1.1. Траекторные характеристики полного взлета и полной посадки 6
1.2. Классификация взлетов и посадок.......................... 16
Глава 2 Уравнения движения самолета и определение характеристик полного взлета............................................................ 25
2.1. Уравнения движения самолета в общем виде................. 25
2 2. Уравнения движения с использованием перегрузок . . . 31
2.3. Энергетический метод расчета............................ 34
2.4. Определение характеристик разбега........................ 39
2.5. Методы определения характеристик воздушного участка полного взлета................................................... 56
2.6. Аналитические методы определения траекторных характеристик .......................................................... 63
2.7. Расчет характеристик набора высоты энергетическим методом 85
2.8. Аналитический расчет характеристик начального набора вы-
соты по уравнениям в перегрузках ....................... 90
Глава 3 Определение характеристик полной посадки и ухода на второй круг............................................................. 94
3 1. Заход на посадку........................................ 94
3.2. Собственно посадка..................................... 102
3.3. Пробег самолета......................................... 125
3.4. Уход на второй круг..................................... 130
Глава 4 Особенности полного взлета................................... 150
4.1. Влияние различных факторов на характеристики взлета . . 150
4.2. Продолженный и прерванный взлеты........................ 157
4.3. Устойчивость, управляемость и балансировка самолета при движении по ВПП.............................................. 163
Глава 5 Особенности полной посадки и ухода на второй круг .... 183
5.1. Построение захода на посадку........................... 183
5.2. Влияние отдельных факторов..............................186
5.3. Полная посадка в возмущенной атмосфере................. 189
5.4. Нормальные и отказные режимы полной посадки и ухода на второй круг.................................................. 197
5.5. Условия выполнения посадки по категориям ИКАО . 212
5.6. Анализ характеристик траекторий захода.................. 214
5.7 Попадание в спутную струю самолета...................... 220
Глава 6 Методология исследований и нормирования взлетно-посадочных характеристик ........................................................ 223
6.1. Комплексная методика исследования взлетно-посадочных характеристик .......................................... 223
6.2. Летные испытания по определению взлетно-посадочных характеристик .......................................... 232
6.3. Нормирование взлетно-посадочных характеристик .... 241
Приложение . . .......... .... 249
Список литературы............................................ 255