/




































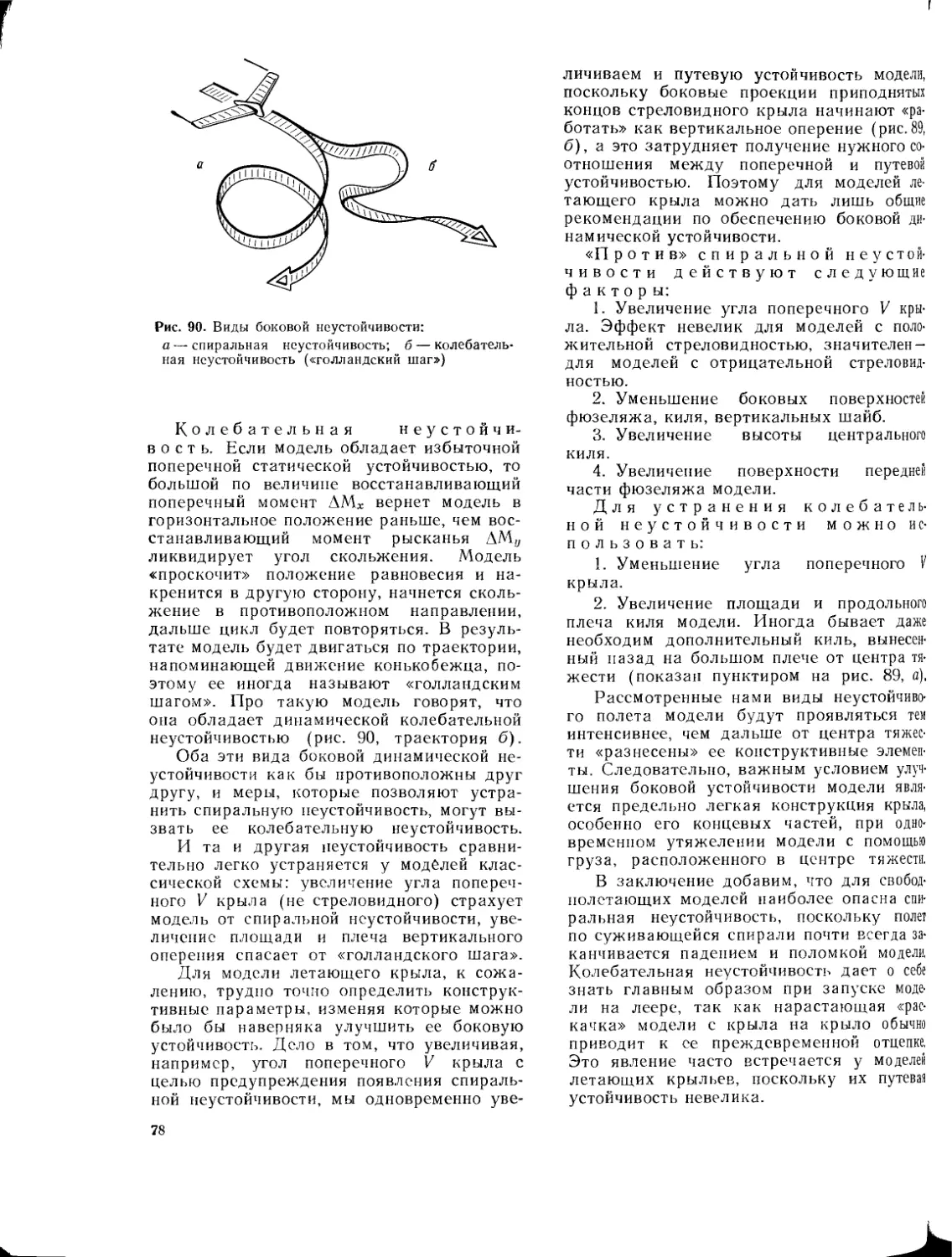



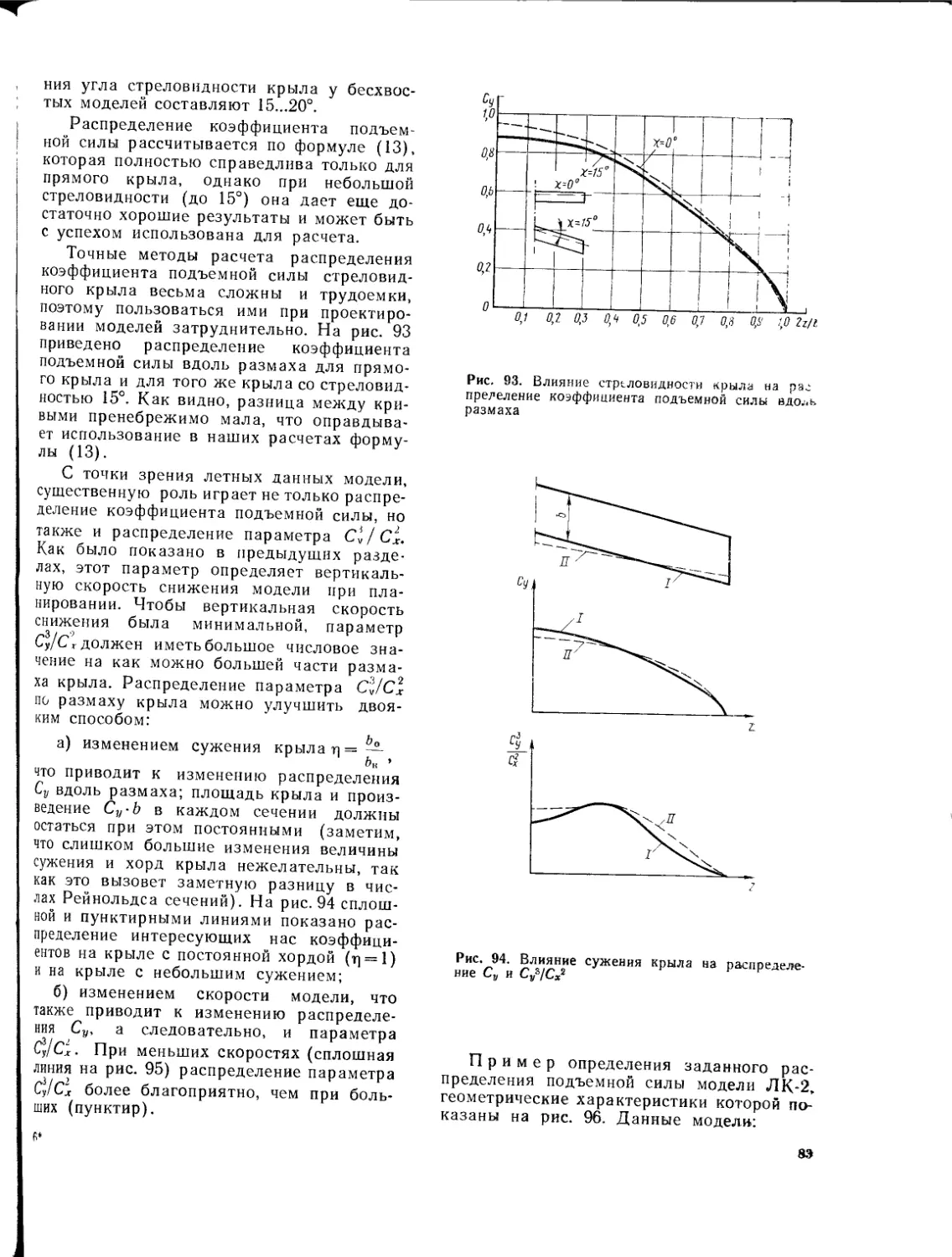




















Text
ЯЦЕК КАПКОВСКИЙ
ЛЕТАЮЩИЕ КРЫЛЬЯ
МОДЕЛИ КЛАССА F-IA
МОСНВА ИЗДАТЕЛЬСТВО ДОСААФ СССР
1988
ББК 75.725 К 20
От переводчика
Книга Я. Капковского несомненно будет с интересом встречена советскими авиамоделистами. У нас мало, если не сказать нет, отечественной литературы по моделям типа «летающее крыло» класса F-1A и невелик опыт в их постройке и испытаниях. Между тем, как справедливо отмечает автор, модели этой схемы обладают рядом положительных качеств и потому весьма перспективны.
К достоинствам книги нужно отнести наличие в ней кратких сведений об особенностях аэродинамики и устойчивости бесхвостых моделей, без знания которых нельзя добиться высоких результатов в их конструировании. В то же время процесс проектирования и создания базовой модели иллюстрирован в книге конкретными расчетами, что облегчает авиамоделисту «вхождение в роль» конструктора и дальнейшее продвижение в эюй области. Автор не скупится на освещение собственного опыта создания бесхвостых моделей, его практические советы по постройке и доводке модели могут быть полезны всем авиамоделистам, занимающимся свободнолетающими моделями.
При переводе книги ряд обозначений и терминов, а также система координат аэродинамических сил и моментов были приведены в соответствие с теми, которые приняты в нашей стране. Список литературы в конце книги дополнен несколькими доступными советскому читателю позициями, ознакомление с которыми поможет ему в проектировании, в том числе в выполнении расчетов прочности модели летающего крыла.
К
42020.000.00—048
072(02)—88
37—88
ISBN 5—7030—0062—9
© Издательство ДОСААФ СССР, 1988 г.
ВВЕДЕНИЕ
В период бурного развития техники, в том числе авиационной, создание летающих моделей может стать первой важной ступенью в подготовке будущих авиационных специалистов — если только авиамоделист не ограничится постройкой моделей по готовым чертежам, а будет стремиться и сможет создавать собственные конструкции. Необходимое условие для творческого авиамоделизма — твердое знание теории полета модели и умение применять ее на практике.
Поэтому основной задачей, стоявшей перед автором этой книги, было помочь читателю в проектировании и создании новых моделей планеров, выполненных по схеме летающего крыла. Почему выбран именно этот класс моделей? По двум причинам. Во-первых, в довольно обширной литературе по моделированию практически нет учебника по летающим крыльям. Во-вторых, по убеждению автора, именно в этой области моделирования еще имеются большие неиспользованные резервы.
Действительно, конструкция моделей планеров обычной схемы в настоящее время практически доведена до совершенства, а незначительные улучшения здесь обычно касаются только техники запуска и технологии изготовления моделей. Класс летающих крыльев, популярный несколько лет тому назад, в последнее время несправедливо забыт, и одной из причин этого является отсутствие специальной литературы. Настоящая книга призвана хотя бы частично устранить этот пробел, и наибольшим удовлетворением для автора будет оживление интереса авиамоделистов к созданию моделей летающих крыльев и прогрессивное их развитие.
Несколько слов о самой книге. Материалы в ней изложены в форме, доступной авиамоделисту со средней подготовкой, при этом главное внимание уделено физическим основам явлений, а теоретические аспекты сведены до минимума. В разделах книги последовательно рассмотрены все этапы проектирования модели летающего крыла. Примеры расчетов, иллюстрирующие рассматриваемые проблемы, при первом изучении книги можно опустить и вернуться к ним лишь во время самостоятельного проектирования.
И еще одно замечание. Проектирование, изготовление и особенно регулировка моделей летающего крыла являются делом достаточно сложным, а потому желательно, чтобы авиамоделист, приступающий к этой работе, имел хотя бы небольшой опыт по созданию моделей обычной схемы.
з
ОБОЗНАЧЕНИЯ
£
а= —наклон кривой коэффициента подъемной силы;
Ла
а — угол атаки;
а0 — угол атаки при нулевой подъемной силе;
Си — коэффициент полной аэродинамической силы;
Сх — коэффициент сопротивления крыла;
Схвр — коэффициент вредного сопротивления;
Схы — коэффициент сопротивления модели;
Су — коэффициент подъемной силы крыла;
СуЫ — коэффициент подъемной силы модели;
Ст0 — коэффициент продольного момента профиля при Су = 0;
т-го — коэффициент продольного момента крыла относительно 0,25 средней аэродинамической хорды (фокуса);
тг — коэффициент продольного момента крыла относительно центра тяжести модели;
I — размах крыла;
S — площадь крыла;
SCT — площадь стабилизирующих поверхностей;
— полная площадь модели;
b — хорда профиля (крыла);
ЬА— средняя аэродинамическая хорда (САХ);
ЬСр — средняя геометрическая хорда;
(хцт)к — расстояние центра тяжести от 0,25 САХ;
К — качество модели;
X — удлинение крыла;
ЛЭф — эффективное удлинение крыла;
X — угол стреловидности крыла;
ф — угол поперечного V крыла;
фуст — угол установки стабилизирующих поверхностей;
Р, Q, R — обозначения сил;
р — массовая плотность воздуха;
0 — угол наклона траектории полета;
V — скорость полета;
Vv — вертикальная скорость снижения.
КРАТКИЙ ИСТОРИЧЕСКИЙ ОЧЕРК
Развитие авиационной техники после начального периода простейших опытов с летательными аппаратами тяжелее воздуха, изготовление которых основывалось на интуиции и подражании природе, тесно связано с моделированием. Конструкторы, прежде чем доверить своим летательным аппаратам человеческие жизни, проводили многочисленные эксперименты на моделях. В результате многих исследовательских работ авиационная техника уже имела к этому времени теоретическую базу, благодаря чему опыт, полученный при испытании моделей, мог быть успешно использован при проектировании самолетов и планеров. Предварительные испытания моделей особенно необходимы при создании конструкций типа «летающее крыло». Прежде чем они появились, были проведены буквально тысячи экспериментов на моделях с целью проверки теоретических предпосылок и расчетов.
Идея использования в авиации схемы летающего крыла зародилась в тот период, когда теория и практика летательных аппаратов имела большие успехи. Но уже недостаточно было, чтобы самолет надежно летал, конструкторская мысль настойчиво искала пути существенного улучшения летных характеристик самолетов и планеров. Схема летающего крыла, лишенная элементов, приводящих к появлению дополнительного вредного сопротивления (фюзеляж и горизонтальное оперение), казалась с этой точки зрения весьма заманчивой. Однако сразу же возникли и трудности с обеспечением устойчивости летающего кры
ла, которые в значительной мере снижают аэродинамические преимущества такой схемы. Именно поэтому схема летающего крыла до сих пор не нашла широкого распространения в авиации, за исключением довольно многочисленных удачных конструкций планеров *.
В авиамоделизме модели летающих крыльев выделяются в отдельный подкласс, а показанные ими в спортивных соревнованиях результаты не сравниваются с достижениями моделей обычной схемы.
Как и в настоящей авиации, в авиамоделизме наиболее высокими результатами отличаются модели летающих крыльев — планеров. Создание удачных моделей этой схемы с резиновым или другим двигателем по-прежнему остается сложной проблемой, главным образом из-за упомянутых выше трудностей с обеспечением устойчивости моделей.
1.1. Развитие конструкций моделей
Заслуживающие внимания рекордные модели летающих крыльев, как и весь класс моделей планеров, появились в 40-х
* О всех самолетах, построенных по схеме летающего крыла в нашей стране и за рубежом, а таюке о использовании моделей в научных и практических целях можно прочитать в книгах [7] и [8]. (Примем, переводчика).
5
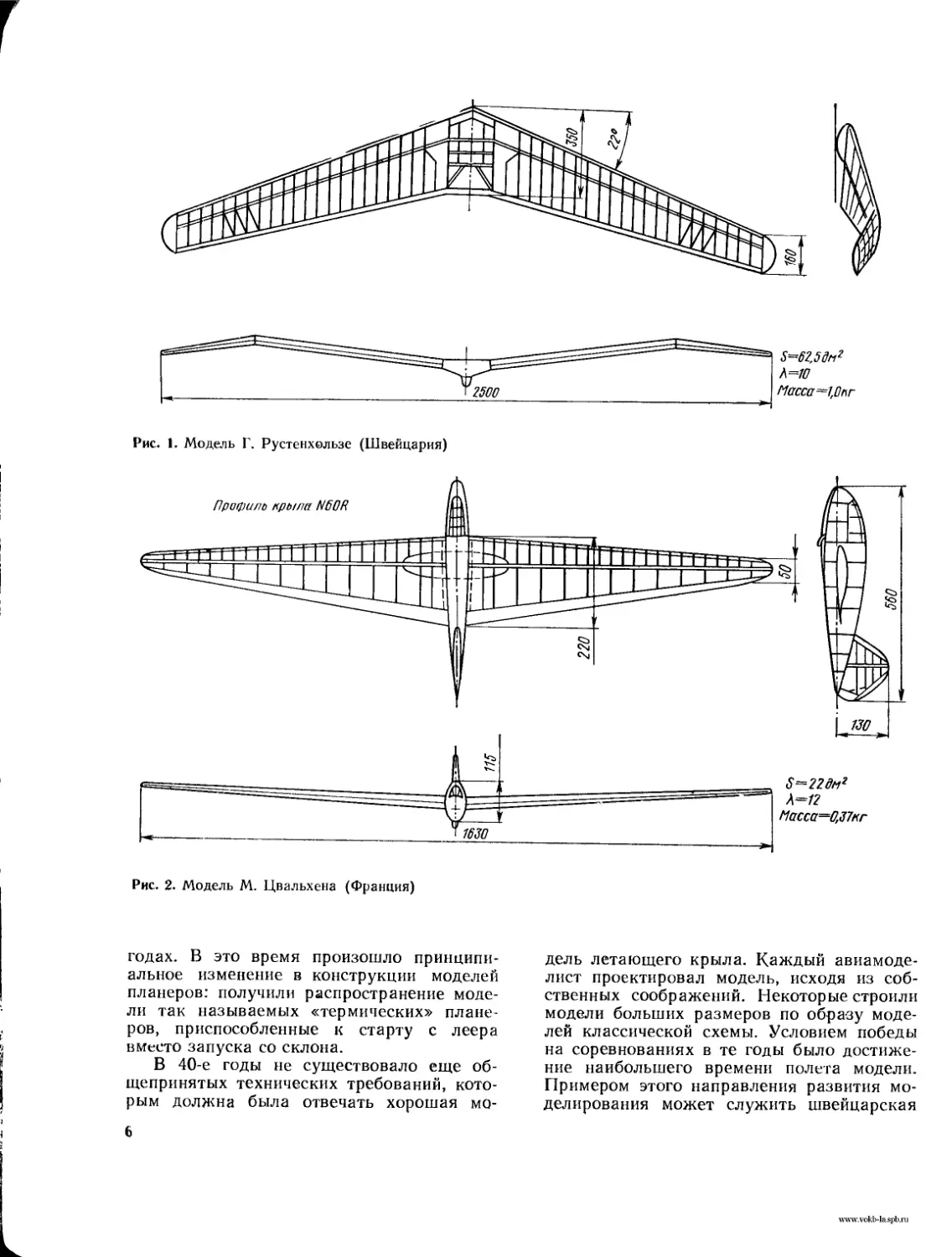
Рис. 2. Модель М. Цвальхена (Франция)
годах. В это время произошло принципиальное изменение в конструкции моделей планеров: получили распространение модели так называемых «термических» планеров, приспособленные к старту с леера вместо запуска со склона.
В 40-е годы не существовало еще общепринятых технических требований, которым должна была отвечать хорошая мо-
6
дель летающего крыла. Каждый авиамоделист проектировал модель, исходя из собственных соображений. Некоторые строили модели больших размеров по образу моделей классической схемы. Условием победы на соревнованиях в те годы было достижение наибольшего времени полета модели. Примером этого направления развития моделирования может служить швейцарская
Рис. 3. Модель В. Муращенко (СССР)
модель (рис. I). На соревнованиях в Лионе в 1946 г. сумма времени трех полетов этой модели достигла 214 с.
Другим направлением конструирования, весьма распространенным в то время, были модели летающего крыла без стреловидности с самобалансирующимся профилем. Характерной моделью этого типа является модель француза М. Цвальхена (рис. 2).
В начале 50-х годов появился международный класс моделей планеров, названный А-2, а потом F-1A, с определенными главными параметрами (несущая поверхность 0,32 ... 0,34 м2, минимальная масса 0,410 кг). Для этого класса моделей в 1951 г. были проведены первые международные соревнования, послужившие толчком к распространению моделей класса F-1A. На рис. 3 представлена модель советского авиамоделиста Муращенко (1951 г.), которая, правда, не соответствует требованиям класса F-1A, однако конструкция ее близка к современным моделям. Модель Муращенко достигла рекордного времени полета 3 ч 16 мин 32 с, пролетев 32 км 566 м.
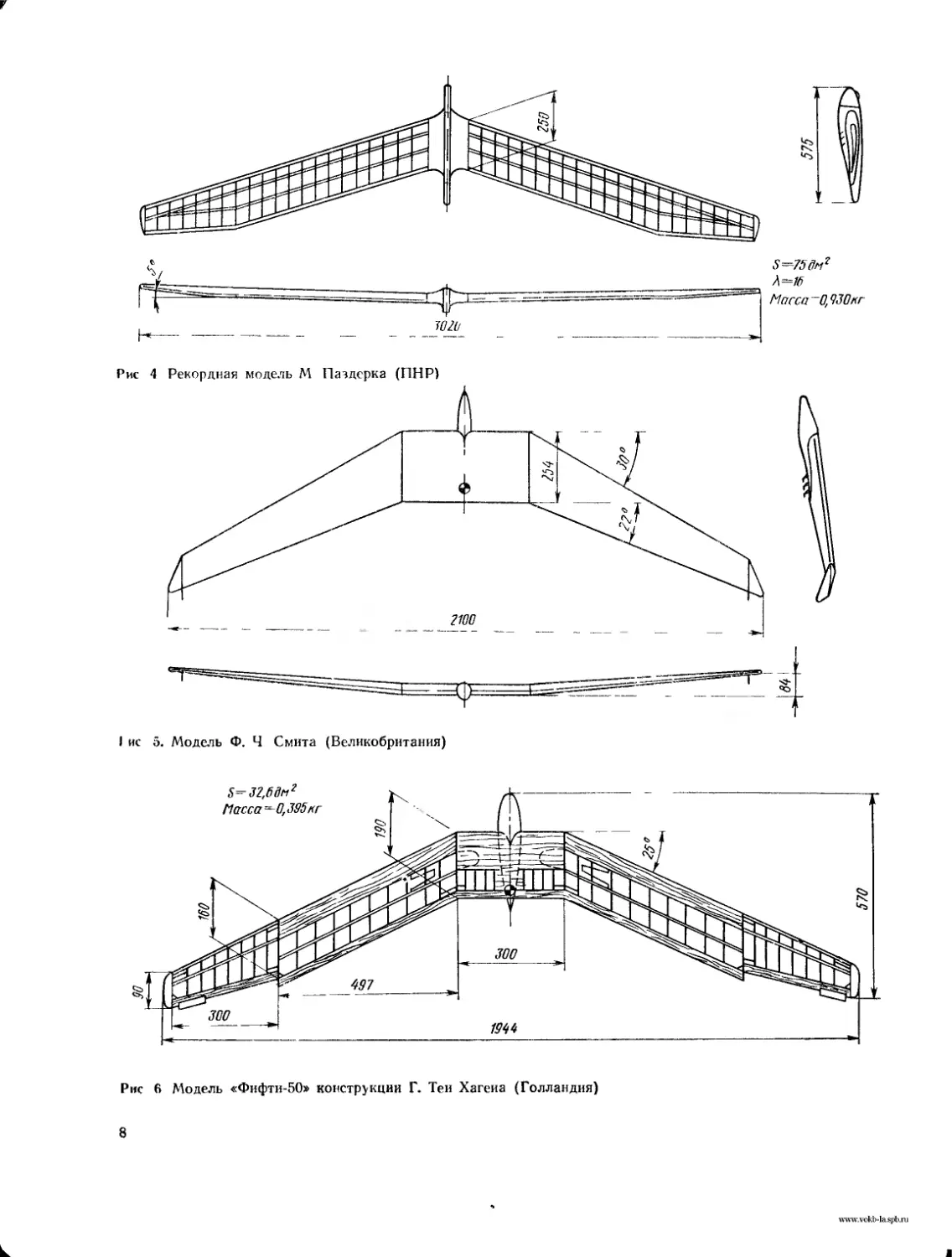
Рекорд Польши в классе летающих крыльев принадлежит умершему несколько лет назад М. Паздёрку, модель которого на XVII Общепольских соревнованиях 1952 г. продержалась в воздухе 19 мин; ее чертеж приведен на рис. 4. На рис. 5 показана модель Ф. Смита (1952 г.), которая имела параметры, близкие к классу F-1A. Эта модель в сумме времени трех полетов достигла 371 с, что для тогдашнего уровня развития моделей этого класса является очень хорошим результатом.
В 1956 г. на международных соревнованиях моделей летающих крыльев также победила модель Смита, достигшая в сумме времени пяти полетов 550 с.
Очень близкой к классу F-1A была и голландская модель летающего крыла 1956 г., представленная на рис. 6.
В настоящее время свободнолетающие модели планеров типа «летающее крыло» изготовляются практически всегда по условиям класса F-1A. Поэтому именно этот класс моделей рассматривается в настоящей книге.
7
I ис о. Модель Ф. Ч Смита (Великобритания)
Рис 6 Модель «Фифти-50» конструкции Г. Теи Хагеиа (Голландия)
8
1.2. Обзор результатов соревнований авиамоделистов
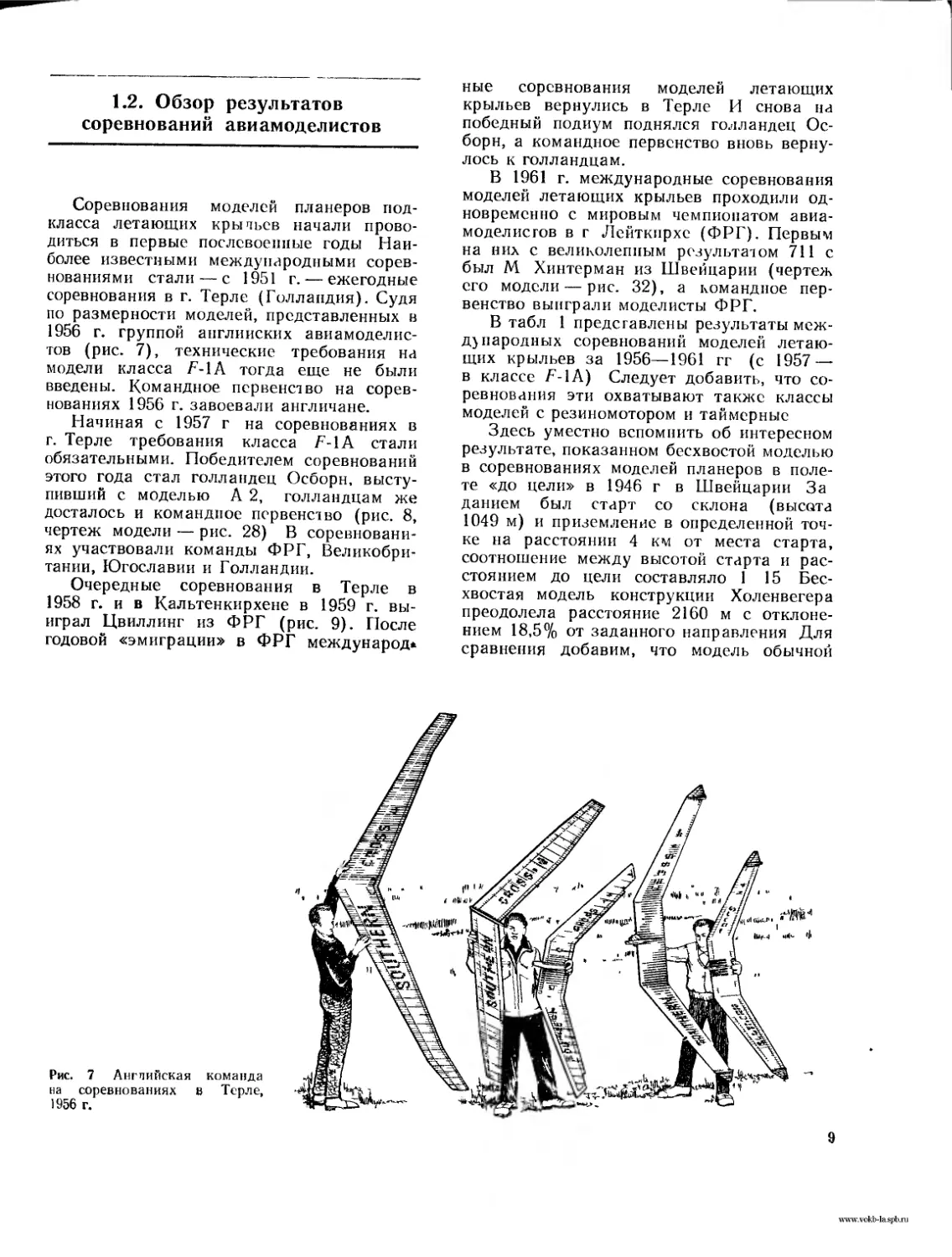
Соревнования моделей планеров подкласса летающих крычьев начали проводиться в первые послевоенные годы Наиболее известными международными соревнованиями стали — с 1951 г. — ежегодные соревнования в г. Терле (Голландия). Судя по размерности моделей, представленных в 1956 г. группой английских авиамоделистов (рис. 7), технические требования на модели класса F-1A тогда еще не были введены. Командное первенство на соревнованиях 1956 г. завоевали англичане.
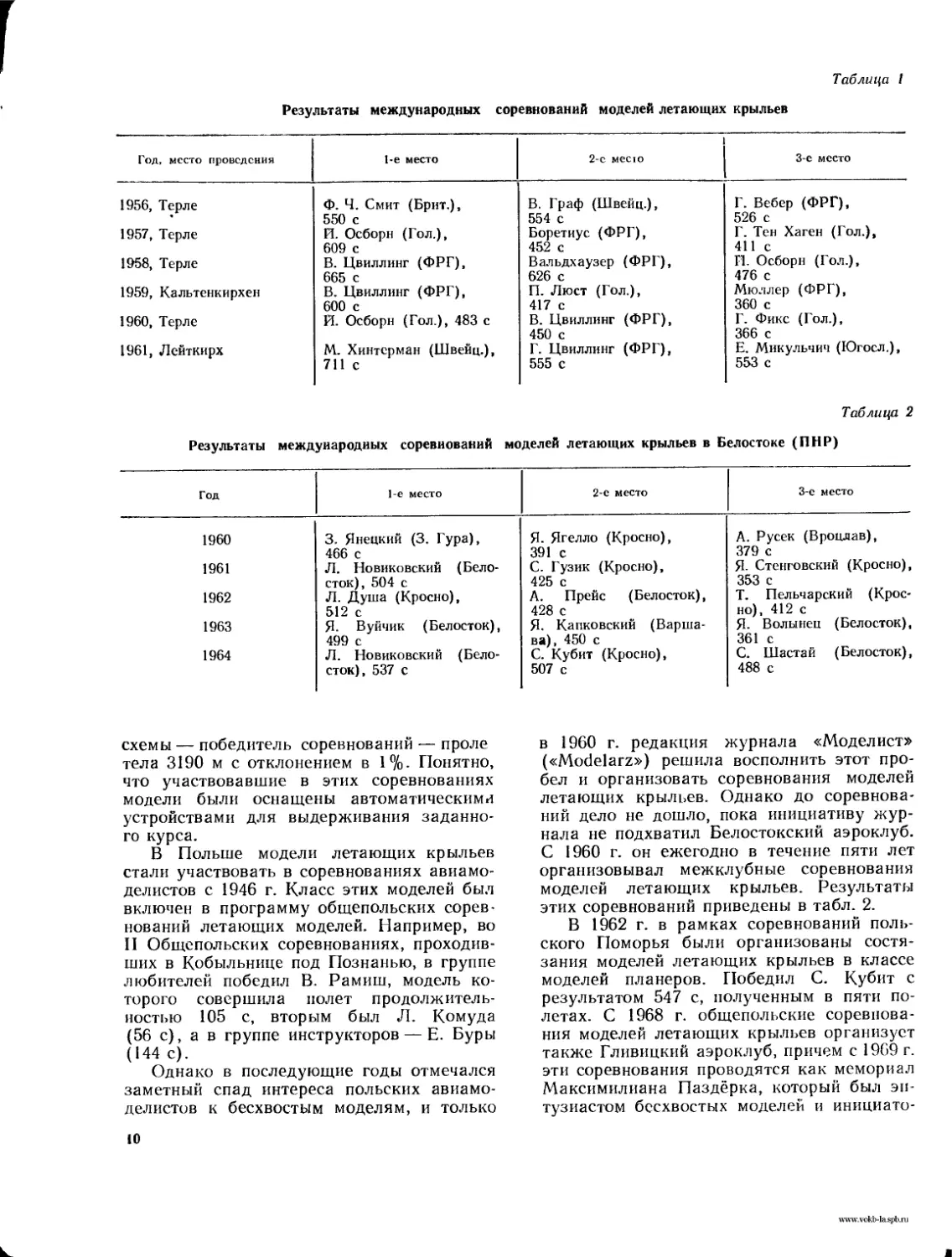
Начиная с 1957 г на соревнованиях в г. Терле требования класса F-1A стали обязательными. Победителем соревнований этого года стал голландец Осборн, выступивший с моделью А 2, голландцам же досталось и командное первенство (рис. 8, чертеж модели — рис. 28) В соревнованиях участвовали команды ФРГ, Великобритании, Югославии и Голландии.
Очередные соревнования в Терле в 1958 г. и в Кальтенкирхене в 1959 г. выиграл Цвиллинг из ФРГ (рис. 9). После годовой «эмиграции» в ФРГ международ*
ные соревнования моделей летающих крыльев вернулись в Терле И снова на победный подиум поднялся голландец Осборн, а командное первенство вновь вернулось к голландцам.
В 1961 г. международные соревнования моделей летающих крыльев проходили одновременно с мировым чемпионатом авиамоделистов в г Лейткпрхе (ФРГ). Первым на них с великолепным результатом 711 с был М Хинтерман из Швейцарии (чертеж его модели — рис. 32), а командное первенство выиграли моделисты ФРГ.
В табл 1 представлены результаты международных соревнований моделей летающих крыльев за 1956—1961 гг (с 1957 — в классе F-1A) Следует добавить, что соревнования эти охватывают также классы моделей с резиномотором и таймерные
Здесь уместно вспомнить об интересном результате, показанном бесхвостой моделью в соревнованиях моделей планеров в полете «до цели» в 1946 г в Швейцарии За даннем был старт со склона (высота 1049 м) и приземление в определенной точке на расстоянии 4 км от места старта, соотношение между высотой старта и расстоянием до цели составляло 1 15 Бесхвостая модель конструкции Холенвегера преодолела расстояние 2160 м с отклонением 18,5% от заданного направления Для сравнения добавим, что модель обычной
Рис. 7 Ангпийская команда на соревнованиях в Терле, 1956 г.
9
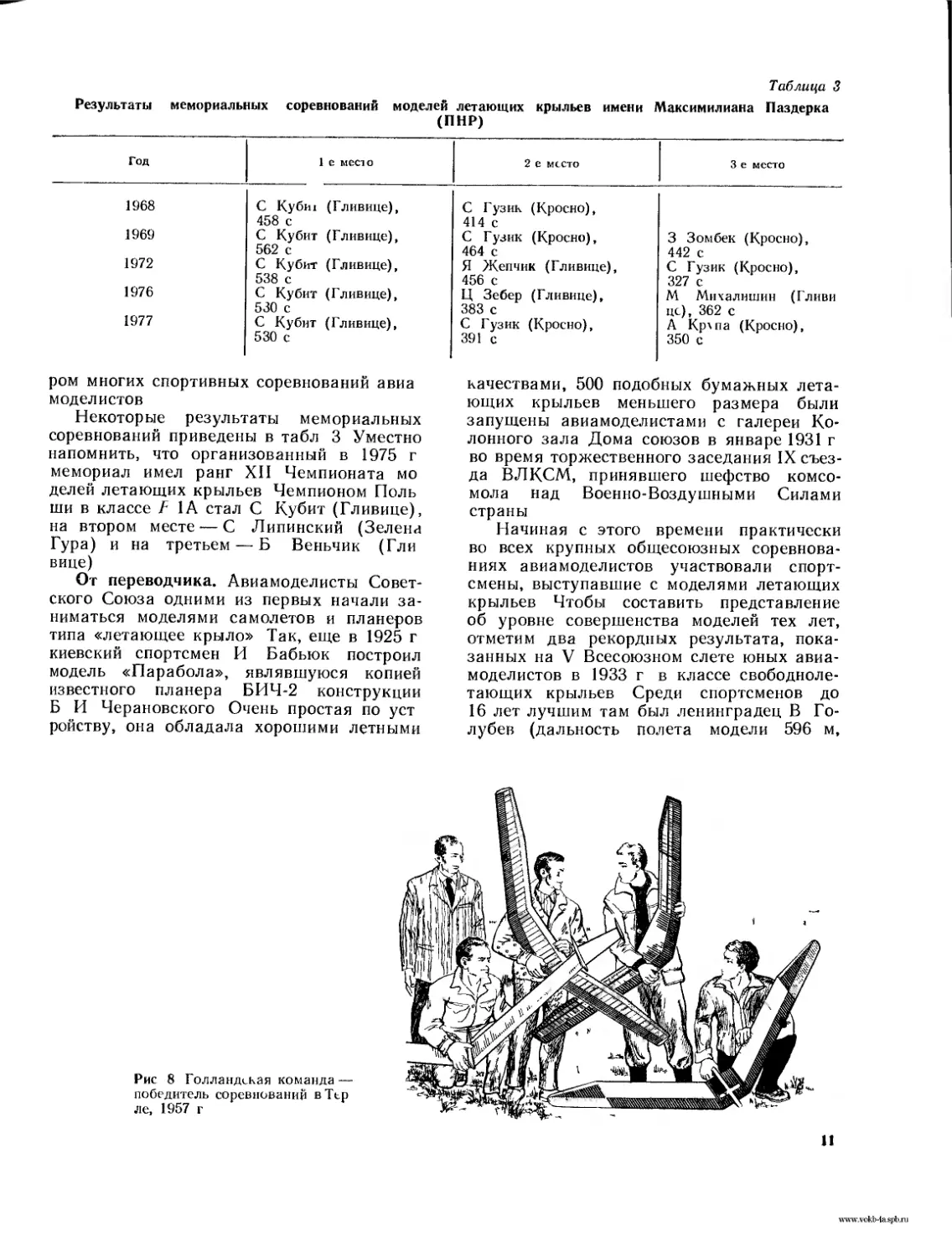
Результаты международных соревнований моделей летающих крыльев
Год, место проведения Ге место 2-е месю 3-е место
1956, Терле Ф. Ч. Смит (Брит.), В. Граф (Швейц.), Г. Вебер (ФРГ),
550 с 554 с 526 с
1957, Терле И. Осборн (Гол.), 609 с Боретиус (ФРГ), 452 с Г. Тен Хаген (Гол.), 411 с
1958, Терле В. Цвиллинг (ФРГ), 665 с Вальдхаузер (ФРГ), 626 с И. Осборн (Гол.), 476 с
1959, Кальтенкирхен В. Цвиллинг (ФРГ), 600 с П. Люст (Гол.), 417 с Мюллер (ФРГ), 360 с
1960, Терле И. Осборн (Гол.), 483 с В. Цвиллинг (ФРГ), 450 с Г. Фикс (Гол.), 366 с
1961, Лейткирх М. Хинтерман (Швейц.), 711 с Г. Цвиллинг (ФРГ), 555 с Е. Микульчич (Югосл.), 553 с
Таблица 2
Результаты международных соревнований моделей летающих крыльев в Белостоке (ПНР)
Год 1-е место 2-е место 3-е место
1960 3. Янецкий (3. Гура), 466 с Я. Ягелло (Кросно), 391 с А. Русек (Вроцлав), 379 с
1961 Л. Новиковский (Белосток), 504 с С. Гузик (Кросно), 425 с Я- Стенговский (Кросно), 353 с
1962 Л. Душа (Кросно), 512 с Л. Прейс (Белосток), 428 с Т. Пельчарский (Кросно), 412 с
1963 Я. Вуйчик (Белосток), 499 с Я. Капковский (Варшава), 450 с Я. Волынец (Белосток), 361 с
1964 Л. Новиковский (Белосток), 537 с С. Кубит (Кросно), 507 с С. Шастай (Белосток), 488 с
схемы — победитель соревнований — проле тела 3190 м с отклонением в 1%. Понятно, что участвовавшие в этих соревнованиях модели были оснащены автоматическими устройствами для выдерживания заданного курса.
В Польше модели летающих крыльев стали участвовать в соревнованиях авиамоделистов с 1946 г. Класс этих моделей был включен в программу общепольских соревнований летающих моделей. Например, во II Общепольских соревнованиях, проходивших в Кобыльнице под Познанью, в группе любителей победил В. Рамиш, модель которого совершила полет продолжительностью 105 с, вторым был Л. Комуда (56 с), а в группе инструкторов — Е. Буры (144 с).
Однако в последующие годы отмечался заметный спад интереса польских авиамоделистов к бесхвостым моделям, и только
10
в 1960 г. редакция журнала «Моделист» («Modelarz») решила восполнить этот пробел и организовать соревнования моделей летающих крыльев. Однако до соревнований дело не дошло, пока инициативу журнала не подхватил Белостокскнй аэроклуб. С 1960 г. он ежегодно в течение пяти лет организовывал межклубные соревнования моделей летающих крыльев. Результаты этих соревнований приведены в табл. 2.
В 1962 г. в рамках соревнований польского Поморья были организованы состязания моделей летающих крыльев в классе моделей планеров. Победил С. Кубит с результатом 547 с, полученным в пяти полетах. С 1968 г. общепольские соревнования моделей летающих крыльев организует также Гливицкий аэроклуб, причем с 1969 г. эти соревнования проводятся как мемориал Максимилиана Паздёрка, который был энтузиастом бесхвостых моделей и инициато-
Результаты мемориальных соревнований моделей летающих крыльев имени Максимилиана Паздерка (ПНР)
Год 1 е место 2 е место 3 е место
1968 С Кубш (Гливице), 458 с С Гузик (Кросно), 414 с
1969 С Кубит (Гливице), 562 с С Гузик (Кросно), 464 с 3 Зомбек (Кросно), 442 с
1972 С Кубит (Гливице), 538 с Я Жепчик (Гливице), 456 с С Гузик (Кросно), 327 с
1976 С Кубит (Гливице), 530 с Ц Зебер (Гливице), 383 с М Мнхалишин (Гливи цс), 362 с
1977 С Кубит (Гливице), 530 с С Гузик (Кросно), 391 с А Крхпа (Кросно), 350 с
ром многих спортивных соревнований авиа моделистов
Некоторые результаты мемориальных соревнований приведены в табл 3 Уместно напомнить, что организованный в 1975 г мемориал имел ранг XII Чемпионата мо делен летающих крыльев Чемпионом Поль ши в классе F 1А стал С Кубит (Гливице), на втором месте — С Липинский (Зелена Гура) и на третьем — Б Веньчик (Гли вице)
От переводчика. Авиамоделисты Советского Союза одними из первых начали заниматься моделями самолетов и планеров типа «летающее крыло» Так, еще в 1925 г киевский спортсмен И Бабьюк построил модель «Парабола», являвшуюся копией известного планера БИЧ-2 конструкции Б И Черановского Очень простая по уст ройству, она обладала хорошими летными
качествами, 500 подобных бумажных летающих крыльев меньшего размера были запущены авиамоделистами с галереи Колонного зала Дома союзов в январе 1931 г во время торжественного заседания IX съезда ВЛКСМ, принявшего шефство комсомола над Военно-Воздушными Силами страны
Начиная с этого времени практически во всех крупных общесоюзных соревнованиях авиамоделистов участвовали спортсмены, выступавшие с моделями летающих крыльев Чтобы составить представление об уровне совершенства моделей тех лет, отметим два рекордных результата, показанных на V Всесоюзном слете юных авиамоделистов в 1933 г в классе свободнолетающих крыльев Среди спортсменов до 16 лет лучшим там был ленинградец В Голубев (дальность полета модели 596 м,
Рис 8 Голландская команда — победитель соревнований вТср ле, 1957 г
Рис. 9. Модель В Цвиллипга (ФРГ)
'Л PAZDZ1ORKA
ZAWODV /AODCLI LATA ] SKPZVDC-t О /ЛЕ/AORIAt
AEkOKI.UP. GLIMCKI
GLIWlCE
12 Ю 1969
Рис. 10. Афиша
2-го мемориала
М Паздерка (ПНР)
продолжительность — 2 мин 5 с); в старшей возрастной группе отличился тоже ленинградец— Н. Петров, модель которого пролетела 5510 м за 2 мин 55 с.
Соревнования моделей летающих крыльев в нашей стране, в которых многими авиамоделистами были достигнуты высокие результаты, проводились кроме военных и первых послевоенных лет достаточно регулярно до 1955 г., после чего в них наступил перерыв, связанный отчасти с тем, что Международная авиационная федерация (ФАИ) перестала регистрировать рекордные достижения авиамоделистов. Возобновились эти соревнования в 1967 г. по инициативе спортсменов из подмосковного города Серпухова. В борьбе за приз газеты «Комсомольская правда» в классе свободнолетающих крыльев успеха добился школьник А. Батанин, модель которого в сумме пяти полетов показала время 327 с (156+31+40 + 52 + 48 с).
После 1968 г. соревнования по моделям летающих крыльев проводились раз в два года в виде матчевых встреч городов раз-
Рис. 11. Старт модели летаю тцего крыла на соревнованиях в Гливипах (ПНР)
Рис 12. Победители мемориала M Паздерка, 1976 г.: Ц 3< бер (Гливице)—II место, С Кубит (I л пвице) — 1 место, М Мпхалпшин (Гливице) — III место
« в
<wA 11
..I v->i;
ных республик В последнее время на них разыгрывается также приз памяти Генерального конструктора А. Н. Туполева и приз журнала «Моделисг-конструктор», которые присуждаются за личное первенство по каждому из классов моделей: по моделям планеров, резиномоторным и таймерным Из лучших результатов, достигнутых на этих соревнованиях в классе свободнолетающих крыльев, можно отметить результат модели эстонского спортсмена А Роотса, показавшей суммарную продолжительность полета за пять туров 687 с (1976 г ).
В целях стимулирования авиамодельного творчества и развития экспериментального авиамоделизма на Тушинском аэро
дроме столицы с 1973 г. проводятся, обычно осенью, ежеюдные матчевые личнокомандные встречи авиамоделистов под девизом «Эксперимент», в которых участвуют спортсмены из Москвы, Ленинграда, Таллина, Харькова, Серпухова, Волгограда и других городов Эти встречи, как правило, проходят очень интересно и знакомят их участников и зрителей со многими отлично выполненными, а зачастую и оригинальными моделями летающих крыльев и вертолетов, в том числе радиоуправляемых. Результаты соревнований «Эксперимент», а также чертежи и описания лучших моделей приводятся, как правило, ежегодно в одном из первых номеров журнала «Моделист-конструктор».
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ МОДЕЛЕЙ ТИПА «ЛЕТАЮЩЕЕ КРЫЛО»
Перед началом проектирования модели летающего крыла класса F-1A необходимо вспомнить международные нормы, обязательные для этого класса. Они определяют следующие параметры модели:
полная несущая поверхность — 0,32... 0,34 м2;
полная масса модели — 0,410 кг;
длина леера — 50 м.
Модели летающих крыльев могут иметь различные формы несущих поверхностей, которые, однако, принципиально отличаются от формы крыльев моделей обычной схемы. Эти отличия вызваны тем, что продольная устойчивость и балансировка модели, у которой отсутствует горизонтальное оперение, должны обеспечиваться самим крылом.
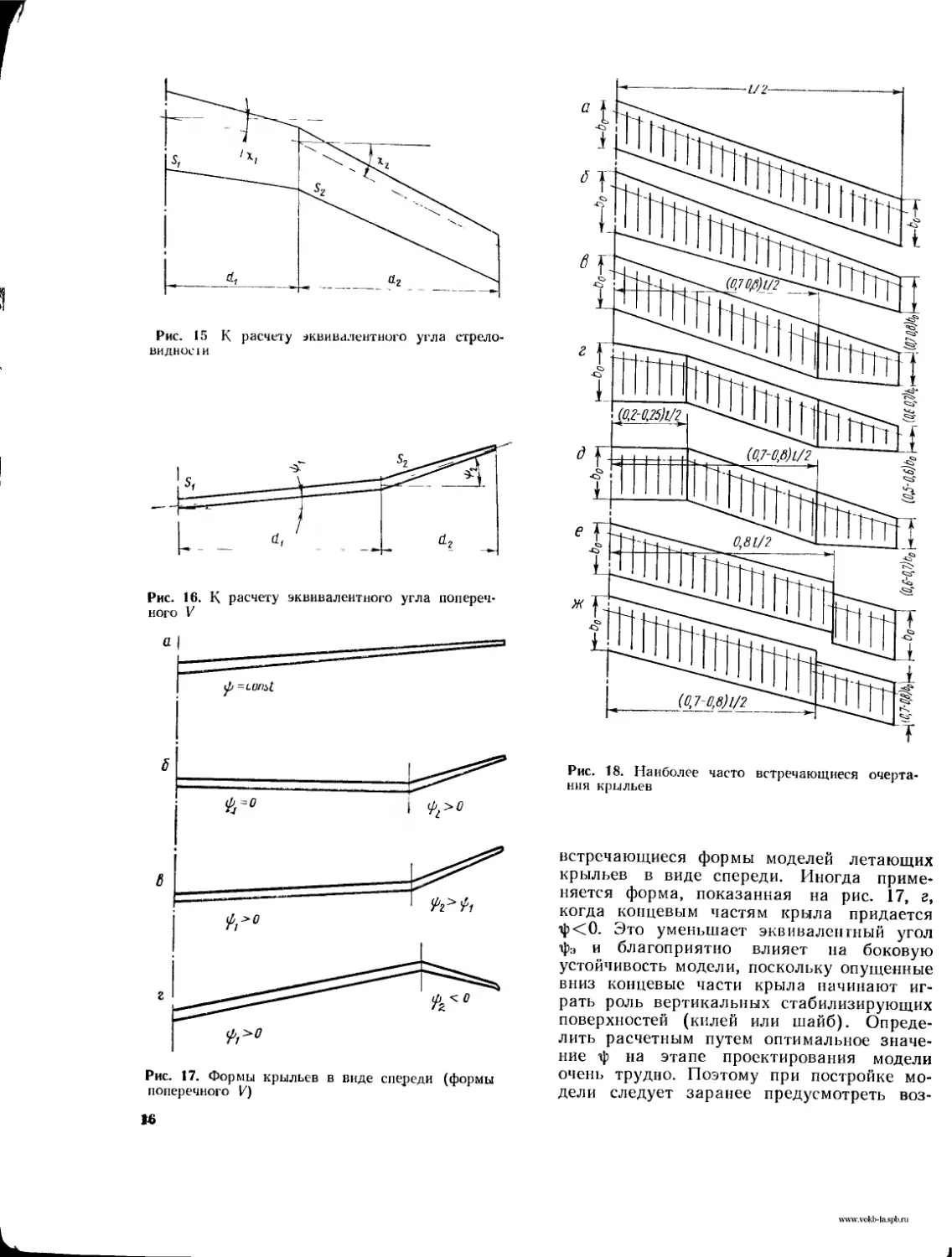
На рис. 13 представлены три основные формы моделей летающих крыльев (в виде сверху).
Продольная устойчивость прямого крыла без стреловидности (рис. 13, а) обеспечивается за счет применения специального профиля с обратным смещением центра давления — так называемого самобалансирующегося профиля. Следует заметить, что такие профили имеют значительно худшие аэродинамические характеристики, чем обычные двояковыпуклые, чаще всего используемые в моделировании. Поэтому прямые летающие крылья встречаются редко.
Крыло с положительной (прямой) стреловидностью (концы крыла смещены назад по отношению к центральной хорде) показано на рис. 13, б.
Крыло с отрицательной (обратной) стреловидностью (концы крыла выдвинуты вперед) изображено на рис. 13, в.
Продольная устойчивость летающего крыла с прямой или обратной стреловидностью и обычным профилем может быть без больших трудностей обеспечена за счет соответствующей крутки крыла. Однако практически все лучшие современные модели летающих крыльев выполняются с прямой стреловидностью, которая имеет ряд преимуществ перед обратной. К числу этих преимуществ относится прежде всего большая путевая устойчивость, что очень важно при буксировке модели. Поэтому ниже рассматриваются крылья только с прямой стреловидностью.
2.1. Геометрия крыла
Характерные геометрические параметры летающего крыла представлены на рис. 14: площадь крыла SM (0,32...0,34 м2);
размах крыла I (1900...2400 мм);
средняя геометрическая хорда Ьст>, определяемая по формуле
b — — •
Пер — ,
осевая хорда Ьо обычно используется для определения положения центра тяжести модели или буксировочного крючка;
14
концевая хорда Ьк (чаще всего это наименьшая хорда крыла); для обеспечения хороших аэродинамических характеристик крыла (безотрывное обтекание при минимальных значениях числа Рейнольдса) длина концевой хорды не должна быть меньше 100 мм;
удлинение крыла X — величина, характеризующая «удлиненность» несущей поверхности крыла. Определяется по формуле
Ь= -L .
Sm bcp
Чем больше удлинение крыла, тем меньше его сопротивление и лучше летные характеристики модели. Однако при ограниченной международными нормами площади крыла произвольно увеличивать его удлинение нельзя, поскольку это приведет к чрезмерному уменьшению хорд, а последнее отрицательно скажется на характере обтекания крыла. У моделей летающих крыльев класса А-1А удлинение Z.= 10...18;
угол стреловидности крыла % измеряется между поперечной осью модели z и линией 0,25 хорд крыла.
Стреловидность крыла, необходимая для обеспечения продольной устойчивости модели, отрицательно сказывается на ее аэродинамических характеристиках. Поэтому при выборе угла стреловидности решение обычно бывает компромиссным. Некоторые авторы [12] утверждают, что большая стреловидность крыла у моделей планеров затрудняет также их буксировку на полной длине леера при запуске. При углах стреловидности крыла х>25° модель становится избыточно устойчивой на леере, что проявляется в нарастающих по амплитуде маятниковых колебаниях и часто требует преждевременной отцепки модели. У лучших моделей класса F-1A угол стреловидности составляет обычно 15...22°. Если угол стреловидности отдельных частей крыла не одинаков, то в целях сравнения подсчитывается так называемый эквивалентный угол стреловидности (рис. 15):
Рис. 13. Формы крыльев в плане
Рис. 14. Основные геометрические параметры крыла
уже придает летающему крылу большую поперечную устойчивость. Довольно часто угол ф выполняется переменным по размаху крыла (рис. 16), тогда по формуле
__ S|-d|-%i+S2'X2(2di+dz) .
(Si+S2) (di+dz)
угол ф поперечного V крыла. По сравнению с моделями обычной схемы у летающих крыльев угол ф невелик и составляет 2...6°, поскольку прямая стреловидность
(Si+S2) (d|+d2)
подсчитывается эквивалентный угол поперечного V модели. Опыт показывает, что применение излишне больших углов ф не дает положительных результатов. На рис. 17, а, б, в показаны наиболее часто
13
Рис. 18. Наиболее часто встречающиеся очертания крыльев
Рис. 15 К расчету эквивалентного угла стреловидное! и
Рис. 16. К расчету эквивалентного угла поперечного V
встречающиеся формы моделей летающих крыльев в виде спереди. Иногда применяется форма, показанная на рис. 17, г, когда концевым частям крыла придается ф<0. Это уменьшает эквивалентный угол ф;) и благоприятно влияет на боковую устойчивость модели, поскольку опущенные вниз концевые части крыла начинают играть роль вертикальных стабилизирующих поверхностей (килей или шайб). Определить расчетным путем оптимальное значение ф на этапе проектирования модели очень трудно. Поэтому при постройке модели следует заранее предусмотреть воз-
wvv«\vokb-!a.spbju
можность его изменения при отладке модели во время летных испытаний.
В качестве итога рассмотрения геометрии летающего крыла остановимся на наиболее распространенных компоновках моделей (в виде сверху). Они представлены на рис. 18. Самая простая форма летающего крыла с постоянной хордой показана на рис. 18, а. Незначительное сужение крыла к концам (рис. 18, б) приводит к улучшению аэродинамических характеристик (сравни с разделом 6). Часто применяется форма крыла, представленная на рис. 18, в, когда центральная часть крыла имеет постоянную хорду, а концевые части выполнены с небольшим сужением.
Центроплан крыла иногда выполняется с малой или даже нулевой стреловидностью (рис. 18, г, д), однако это решение навряд ли можно считать удачным, поскольку небольшие аэродинамические преимущества такой схемы достигаются за счет усложнения конструкции и увеличения веса модели из-за наличия изломов у продольных силовых элементов крыла. Для моделей с небольшой стреловидностью часто применяется форма, показанная на рис. 18, е. Заключительная компоновка (рис. 18, ж) находит в последнее время все большее распространение. Она является в некотором роде модификацией компоновки, показанной на рис. 18, е.
2.2. Крутка крыла
Как упоминалось выше, для обеспечения устойчивости модели летающего крыла кроме стреловидности необходимо применение крутки, которая дает возможность получить соответствующее распределение подъемной силы на крыле. Для моделей с положительной стреловидностью крутка должна обеспечивать уменьшение подъемной силы концевых частей крыла. Различают два вида крутки крыла:
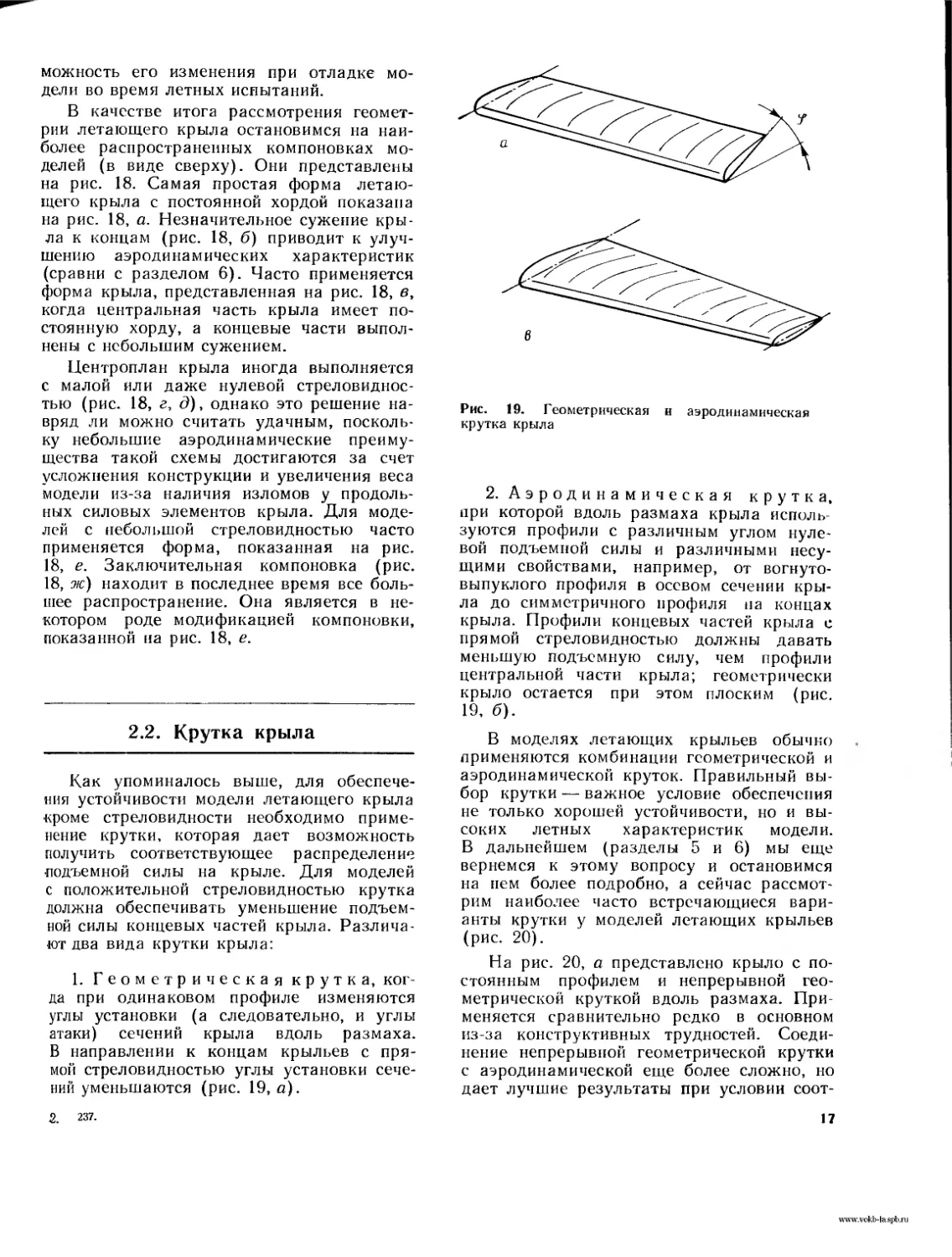
1. Геометрическая крутка, когда при одинаковом профиле изменяются углы установки (а следовательно, и углы атаки) сечений крыла вдоль размаха. В направлении к концам крыльев с прямой стреловидностью углы установки сечений уменьшаются (рис. 19, а).
2. 237.
Рис. 19. I еометрическая и аэродинамическая крутка крыла
2. Аэродинамическая крутка, при которой вдоль размаха крыла используются профили с различным углом нулевой подъемной силы и различными несущими свойствами, например, от вогнуто-выпуклого профиля в осевом сечении крыла до симметричного профиля на концах крыла. Профили концевых частей крыла с прямой стреловидностью должны давать меньшую подъемную силу, чем профили центральной части крыла; геометрически крыло остается при этом плоским (рис. 19, б).
В моделях летающих крыльев обычно применяются комбинации геометрической и аэродинамической круток. Правильный выбор крутки — важное условие обеспечения не только хорошей устойчивости, но и высоких летных характеристик модели. В дальнейшем (разделы 5 и 6) мы еще вернемся к этому вопросу и остановимся на нем более подробно, а сейчас рассмотрим наиболее часто встречающиеся варианты крутки у моделей летающих крыльев (рис. 20).
На рис. 20, а представлено крыло с постоянным профилем и непрерывной геометрической круткой вдоль размаха. Применяется сравнительно редко в основном нз-за конструктивных трудностей. Соединение непрерывной геометрической крутки с аэродинамической еще более сложно, но дает лучшие результаты при условии соот-
17
Рис. 20. Различные виды крыла с круткой
Передняя кромка
ветствующего подбора профилей и распределения углов поворота сечений.
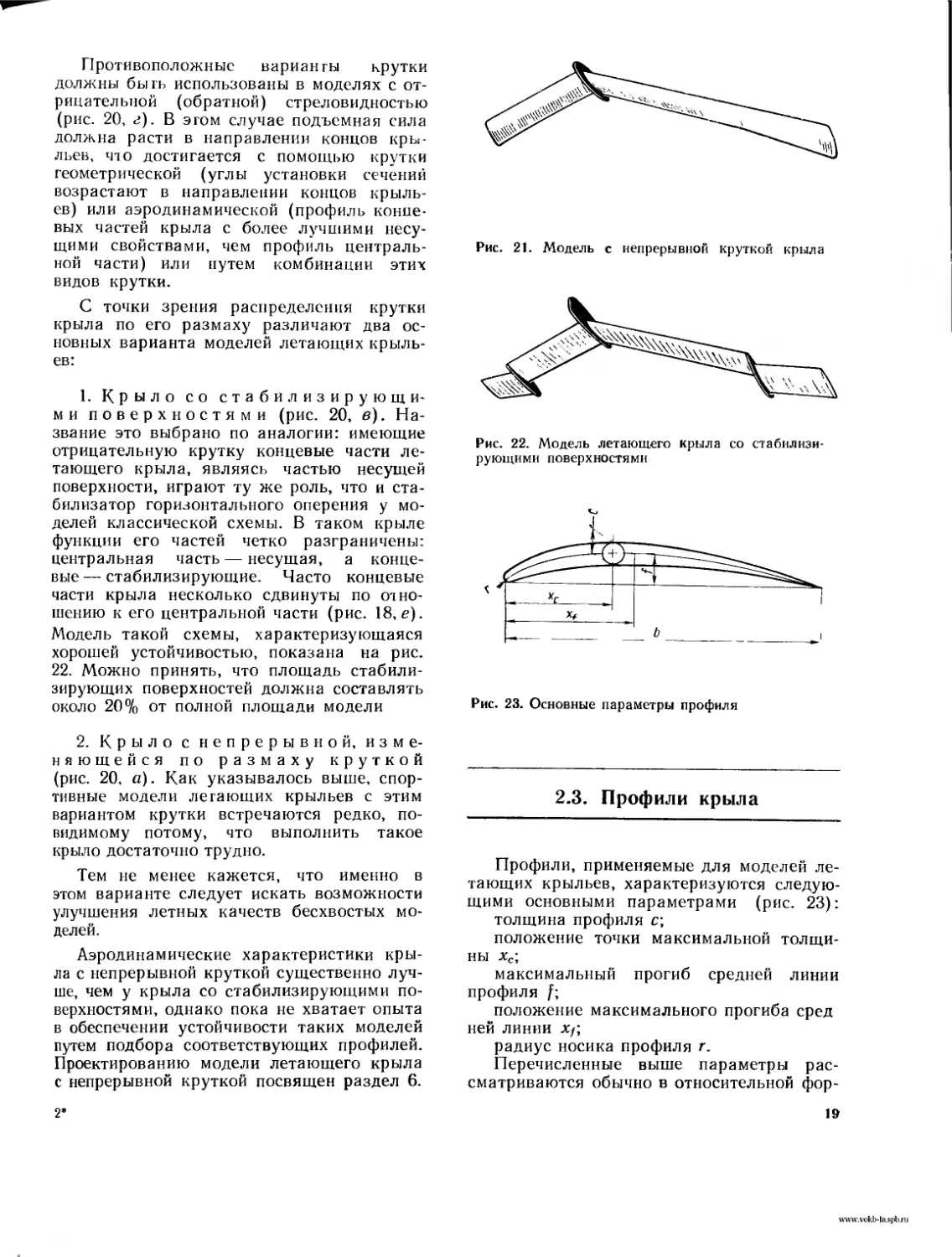
На рис. 20, б приведен довольно распространенный вариант крутки, когда у центральной части крыла крутка отсутствует, а концевые его части имеют непрерывную аэродинамическую и геометрическую крутку (рис. 21).
Очень часто применяется крыло со ступенчатой круткой (рис. 20, в), когда цент-18
ральная часть крыла не имеет ни геометрической, ни аэродинамической крутки, а его концевые части устанавливаются с некоторым отрицательным углом <руст и имеют постоянный профиль. Центральная и концевые части крыла разделены вертикальными шайбами, которые снижают общее сопротивление крыла за счет уменьшения интерференции между частями крыла, работающими в различных условиях.
Противоположные варианты крутки должны быть использованы в моделях с отрицательной (обратной) стреловидностью (рис. 20, г). В этом случае подъемная сила должна расти в направлении концов крыльев, что достигается с помощью крутки геометрической (углы установки сечений возрастают в направлении концов крыльев) или аэродинамической (профиль концевых частей крыла с более лучшими несущими свойствами, чем профиль центральной части) или путем комбинации этих видов крутки.
С точки зрения распределения крутки крыла по его размаху различают два основных варианта моделей летающих крыльев:
1. Крыло со стабилизирующими поверхностями (рис. 20, в). Название это выбрано по аналогии: имеющие отрицательную крутку концевые части летающего крыла, являясь частью несущей поверхности, играют ту же роль, что и стабилизатор горизонтального оперения у моделей классической схемы. В таком крыле функции его частей четко разграничены: центральная часть — несущая, а концевые — стабилизирующие. Часто концевые части крыла несколько сдвинуты по отношению к его центральной части (рис. 18, е). Модель такой схемы, характеризующаяся хорошей устойчивостью, показана на рис. 22. Можно принять, что площадь стабилизирующих поверхностей должна составлять около 20% от полной площади модели
2. Крыло с непрерывной, изменяющейся по размаху круткой (рис. 20, а). Как указывалось выше, спортивные модели летающих крыльев с этим вариантом крутки встречаются редко, по-видимому потому, что выполнить такое крыло достаточно трудно.
Тем не менее кажется, что именно в этом варианте следует искать возможности улучшения летных качеств бесхвостых моделей.
Аэродинамические характеристики крыла с непрерывной круткой существенно лучше, чем у крыла со стабилизирующими поверхностями, однако пока не хватает опыта в обеспечении устойчивости таких моделей путем подбора соответствующих профилей. Проектированию модели летающего крыла с непрерывной круткой посвящен раздел 6.
2*
Рис. 21. Модель с непрерывной круткой крыла
Рис. 22. Модель летающего крыла со стабилизирующими поверхностями
Рис. 23. Основные параметры профиля
2.3. Профили крыла
Профили, применяемые для моделей летающих крыльев, характеризуются следующими основными параметрами (рис. 23): толщина профиля с;
положение точки максимальной толщины хс;
максимальный прогиб средней линии профиля f;
положение максимального прогиба сред ней линии xf;
радиус носика профиля г.
Перечисленные выше параметры рассматриваются обычно в относительной фор-
19
Рис. 24. Виды профилей, используемые в авиамоделизме
ме, т. е. в % от хорды профиля. Очевидно, что они не определяют полностью форму профиля, однако позволяют сравнить между собой классы профилей.
С точки зрения формы профили можно поделить па следующие виды (рис. 24):
симметричные (рис. 24, а), у которых средняя линия профиля прямая (характерной особенностью этих профилей являются одинаковые аэродинамические свойства при положительных и отрицательных углах атаки);
вогнуто-выпуклые (рис. 24, б), преимущественно используемые в моделях летающих крыльев в связи с их хорошими несущими свойствами;
двояковыпуклые (рис. 24, в), одним из вариантов в которых являются плосковыпуклые, также широко используемые в авиамоделировании.
Имеется класс профилей, средняя линия которых имеет вид опрокинутой на бок буквы S (рис. 24, г). Профили эти называются самобалансирующимися, поскольку они могут обеспечить продольную устойчивость крыла, даже не имеющего стреловидности. Характерной их особенностью яв-
20
ляется обратное по сравнению с обычными профилями смещение центра давления при изменении угла атаки.
В последние годы для моделей летающих крыльев все чаще применяют ламинарные профили (рис. 24, д), у которых максимальный прогиб средней линии заметно смещен назад (на 60...70% хорды). Используя ламинарные профили, можно улучшить аэродинамические характеристики крыла (при условии точного выдерживания профиля и высокого качества поверхности— уменьшить Сх модели).
Принципиально для моделей летающих крыльев могут быть использованы те же профили, которые хорошо зарекомендовали себя в моделях обычной схемы. Однако есть и дополнительные условия, специфические для моделей летающих крыльев:
следует избегать применения профилей с большим диапазоном перемещения центра давления, поскольку это обязательно вызовет трудности в обеспечении продольной устойчивости. По этим же соображениям не рекомендуются профили с сильно изогнутой средней линией (напоминающие профиль крыла птицы);
толщина профиля не должна быть слишком малой, поскольку это не позволит создать прочную и жесткую на кручение конструкцию (следует иметь в виду, что крыло бесхвостой модели сильно нагружено кручением и недостаточно жесткая конструкция может поломаться, например, при увеличении скорости во время буксировки модели);
профили, применяемые для стабилизирующих поверхностей, должны иметь больший прирост подъемной силы (больший наклон кривой Cv=f(a), чем профили центральной части крыла: это увеличивает продольную устойчивость. Поэтому некоторые моделисты используют для стабилизирующих поверхностей профили с большим прогибом средней линии.
В центральной части крыла чаще всего применяются профили с закругленной передней кромкой и максимальным прогибом средней линии порядка 6%, расположенным на 30—40% хорды. Толщина профиля составляет 6...12%.
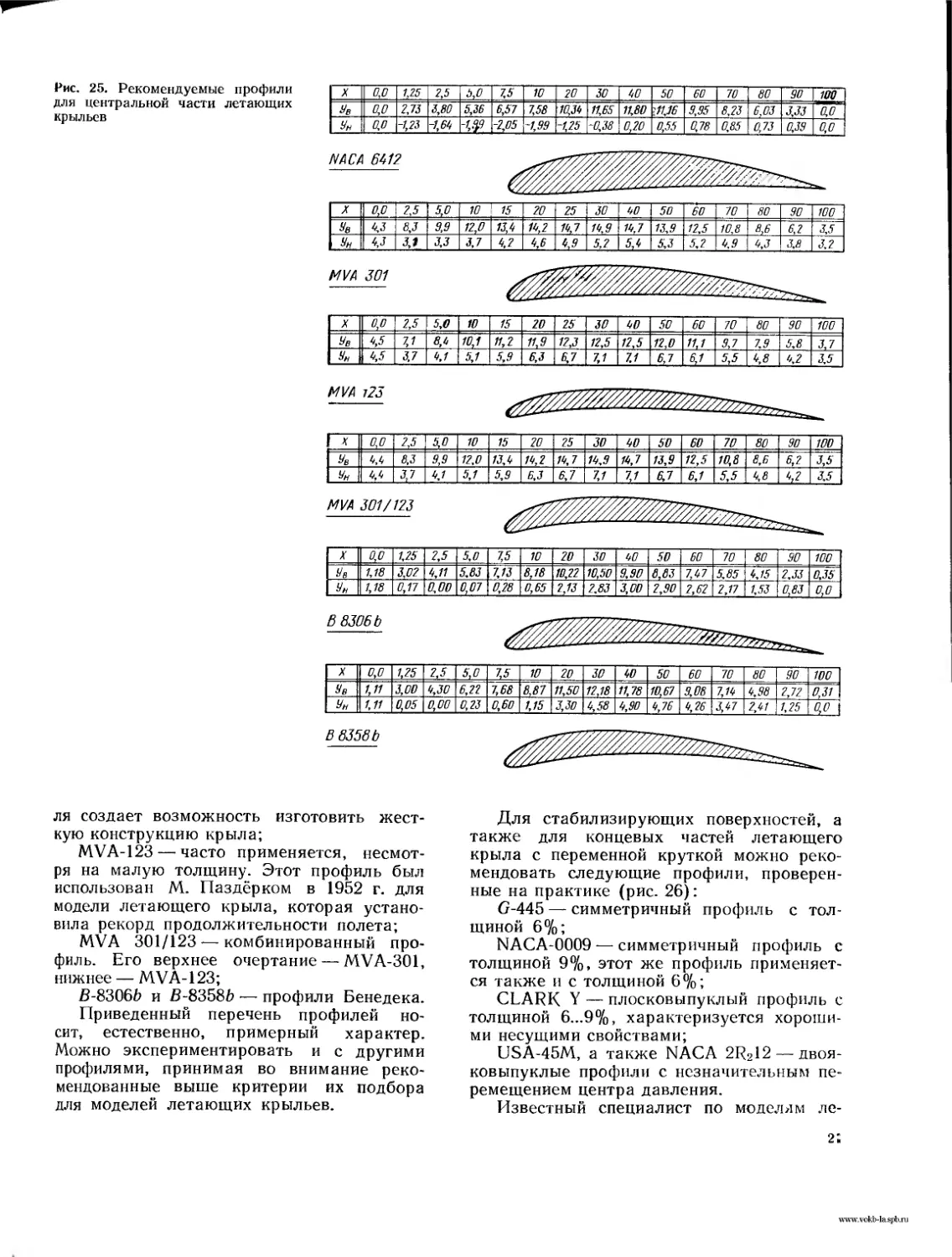
Дадим краткую характеристику некоторых известных профилей, широко применяемых для центральных частей моделей летающих крыльев (рис. 25):
MVA-301 — хорошие аэродинамические свойства;
NACA-6412 — большая толщина профи-
Рис. 25. Рекомендуемые профили для центральной части летающих крыльев
X 0,0 1,25 2,5 5,0 7,5 10 20 30 30 50 60 10 80 90 wo
Яв 0,0 2,73 3,80 5,36 6,57 7,58 10,36 11,65 11,80 -.11,16 9,95 8,23 6,03 3,33 0,0
Ун 0,0 -1,23 -1,60 -Ц9 -2,05 -1,99 -1,25 -0,38 0,20 0,55 0,18 0,85 0,13 0,39 0,0
X 0,0 2,5 5,0 10 15 20 25 30 ьо 50 60 10 80 90 100
Ув 6,3 8,3 9,9 12,0 13,6 16,2 16,7 10,9 16,7 13,9 12,5 10,8 8,6 6,2 3,5
Ун 9,3 3,1 3,3 3,1 6,2 6,6 6,9 5,2 5,3 5,2 6,9 6,3 3,8 3.2
MVA 301
X 0,0 2,5 5,0 10 15 20 25 30 60 50 60 70 80 90 100
Ув 6,5 7,1 8,6 10,1 11,2 11,9 12,3 12,5 12,5 12,0 11,1 9,7 7.9 5,8 3,7
Ун 6,5 3.7 6.1 5,1 5,9 6,3 6,7 7,1 7.1 6,1 6,1 5,5 6,8 6,2 3.5
MVA 123
X 0,0 2,5 5,0 10 15 20 25 30 60 50 60 70 80 90 100
УВ 6,6 8,3 9,9 12,0 13,6 16,2 16,7 16,9 16,7 13,9 12,5 10,8 8,6 6,2 3,5
Ун 6,6 3 7 V 5,1 5,9 6,3 6,7 7,1 7,1 6,1 6,1 5,5 6,8 SL. 3.5
MVA 301/123
X °,° 1,25 2,5 5,0 7,5 10 20 30 50 60 70 80 90 100
Ув 1,18 3,02 6,11 5.83 7,13 8,18 10,22 10,50 9.90 8,63 7.67 5.85 6,15 2,33 0,35
Ун 1,18 0,17 0,00 0,07 0,28 0,65 2,13 2.83 3,00 2,90 2,62 2,17 1,53 083 0,0
В 8306 b
X 0,0 1,25 2,5 5,0 7,5 10 20 30 60 50 60 70 80 90 100
Ув 1,11 3,00 6,30 6,22 7,68 8,87 11,50 12,18 11,78 10,67 9,08 7,16 6,98 2,72 0,31
Ун 1,11 0,05 0,00 0,23 0,60 1,15 3,30 6,58 6,90 6,76 6,26 3,67 2,61 1,25 00
В 8358b
ля создает возможность изготовить жесткую конструкцию крыла;
MVA-123— часто применяется, несмотря на малую толщину. Этот профиль был использован М. Паздёрком в 1952 г. для модели летающего крыла, которая установила рекорд продолжительности полета;
MVA 301/123 — комбинированный профиль. Его верхнее очертание — MVA-301, нижнее — M.VA-123;
B-8306Z? и B-8358Z? — профили Бенедека.
Приведенный перечень профилей носит, естественно, примерный характер. Можно экспериментировать и с другими профилями, принимая во внимание рекомендованные выше критерии их подбора для моделей летающих крыльев.
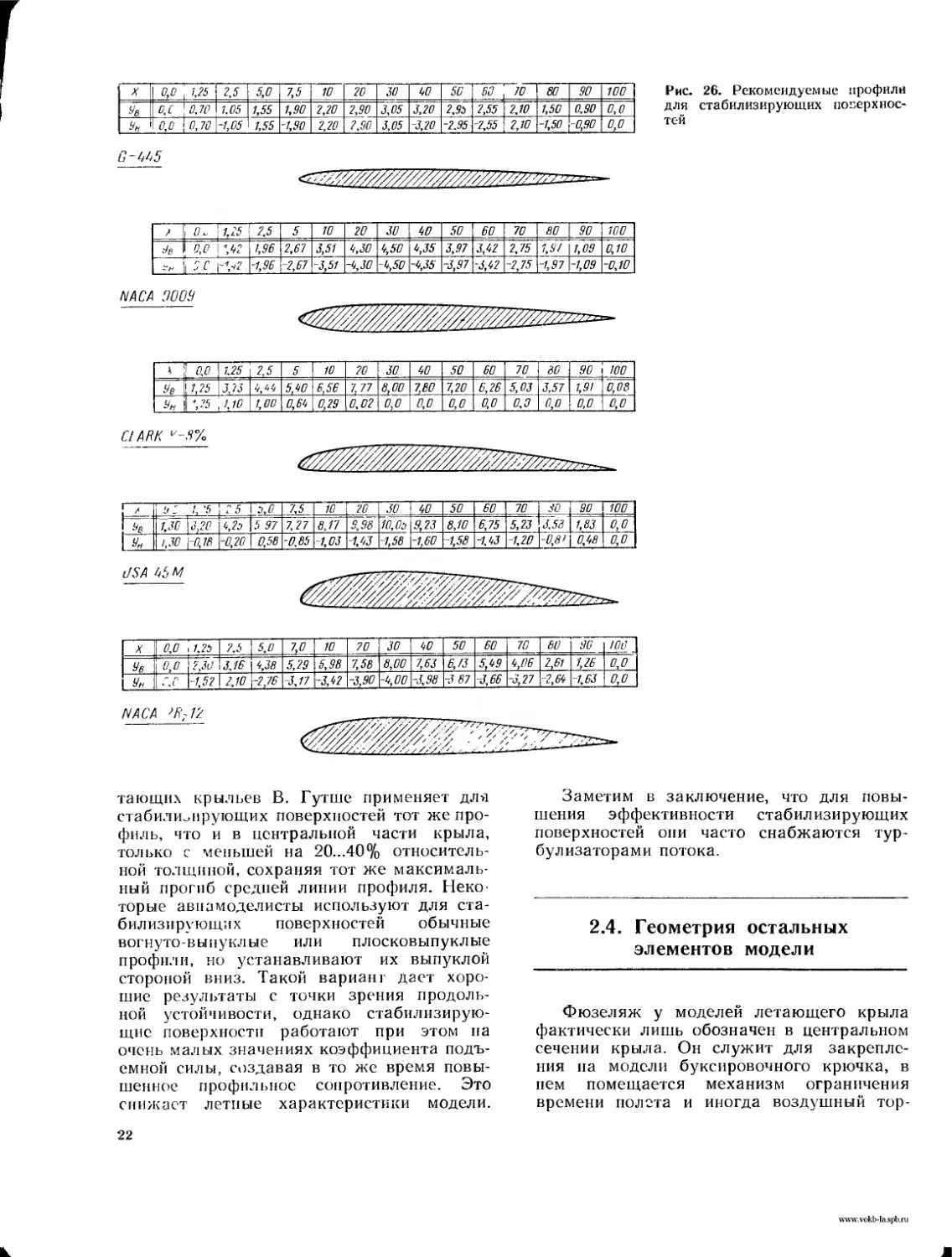
Для стабилизирующих поверхностей, а также для концевых частей летающего крыла с переменной круткой можно рекомендовать следующие профили, проверенные на практике (рис. 26):
G-445 — симметричный профиль с толщиной 6%;
NACA-0009 — симметричный профиль с толщиной 9%, этот же профиль применяется также и с толщиной 6%;
CLARK Y — плосковыпуклый профиль с толщиной 6...9%, характеризуется хорошими несущими свойствами;
USA-45M, а также NACA 2R212 — двояковыпуклые профили с незначительным перемещением центра давления.
Известный специалист по моделям ле-
2;
Л 0,0 I Vi г,5 5,0 7,5 10 70 30 60 50 50 10 80 90 100
Ур о Л 0,70 1,05 1,55 1,90 г,ю 2,90 3,05 3,20 2,95 7,55 2,10 1,50 0,90 0,0
Ун 0,0 1 0,10 -1,05 1,55 -1,90 7,70 7,90 3,05 -3,70 -2.95 -7,55 2,10 -1,50 -0,90 0,0
Рис. 26. Рекомендуемые профили для стабилизирующих поверхностей
G 005
7 I 0„ 1,75 2,5 5 10 20 30 60 50 60 10 80 90 100
л 1 0,0 \бг 1,96 2,67 3,51 0,30 6,50 6,35 3,97 3,62 2,15 1,91 1,09 0,10
Л-2 -1,96 -7,61 -3,51 -6,30 -6,50 -6,35 -3,91 -3,62 -2,15 -1,91 -1,09 -0,10
ПАСА JO09
0,0 1,25 2,5 5 10 70 30 60 50 60 70 30 90 100
Ув 1J5 3,13 5,60 6,56 7,77 8,00 7,80 7,20 6,26 5,03 3,57 1,91 0,08
Ун ',25 1,10 1,00 0,60 0,29 0,02 0,0 0,0 0,0 0,0 0,9 0,0 0,0 0,0
Cl ARK
о: ' 1, '5 2 5 9,0 7,5 10 20 30 60 50 60 70 30 I 90 100
\ Л 1,30 \б,20 6,29 5 97 7,77 8,17 9,98 10,0в 9,23 8,10 6,75 5,73 '3.53 I 1,83 0,0
Ун 1,30 \-0,18 -0,20 0,58 -0,85 -1,03 -1,63 -1,58 -1,60 -1,58 -1,63 -1,20 -0,8>\ 0,68 о,о
dSA 45 М
0,0 ,1.25 7,5 5,0 7,0 10 70 30 60 50 60 70 80 90 100 _
Ур 0Л 2,30 3,16 6,38 5,29 5,98 7,58 8,00 7,63 6,13 5,69 6,06 2,61 1,26 0,°
Ун -1,52 -7,76 -3,17 -3,62 -3,90 -6,00 -3,98 -3 87 -3,66 -3,27 -2,66 -1,63 °
NACA >R;12
тающих крыльев В. Гутше применяет для стабилизирующих поверхностей тот же профиль, что и в центральной части крыла, только с меньшей на 20...40% относительной толщиной, сохраняя тот же максимальный прогиб средней линии профиля. Некоторые авиамоделисты используют для стабилизирующих поверхностей обычные вогнуто-выпуклые или плосковыпуклые профили, но устанавливают их выпуклой стороной вниз. Такой вариант дает хорошие результаты с точки зрения продольной устойчивости, однако стабилизирующие поверхности работают при этом па очень малых значениях коэффициента подъемной силы, создавая в то же время повышенное профильное сопротивление. Это снижает летные характеристики модели.
Заметим в заключение, что для повышения эффективности стабилизирующих поверхностей они часто снабжаются турбулизаторами потока.
2.4. Геометрия остальных элементов модели
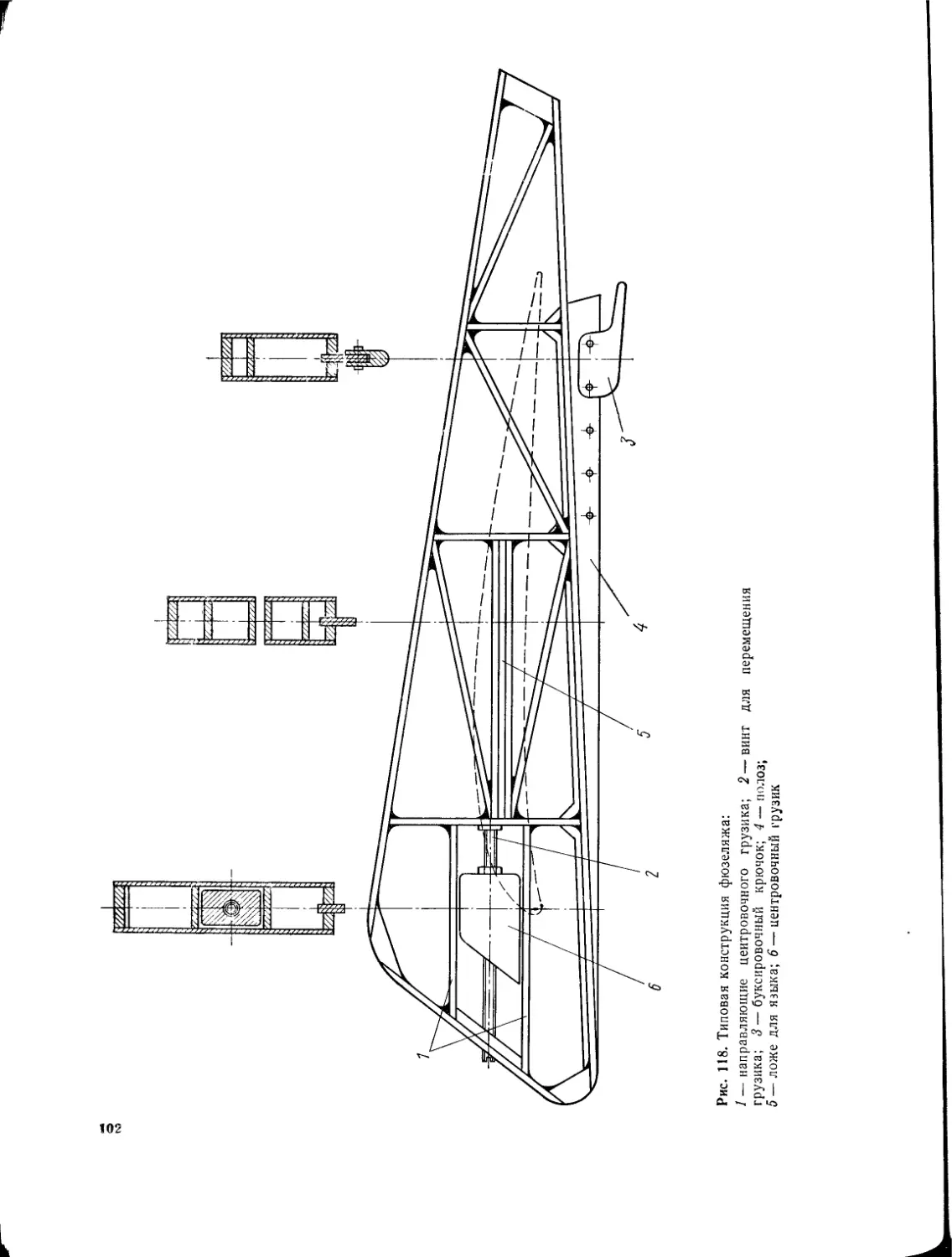
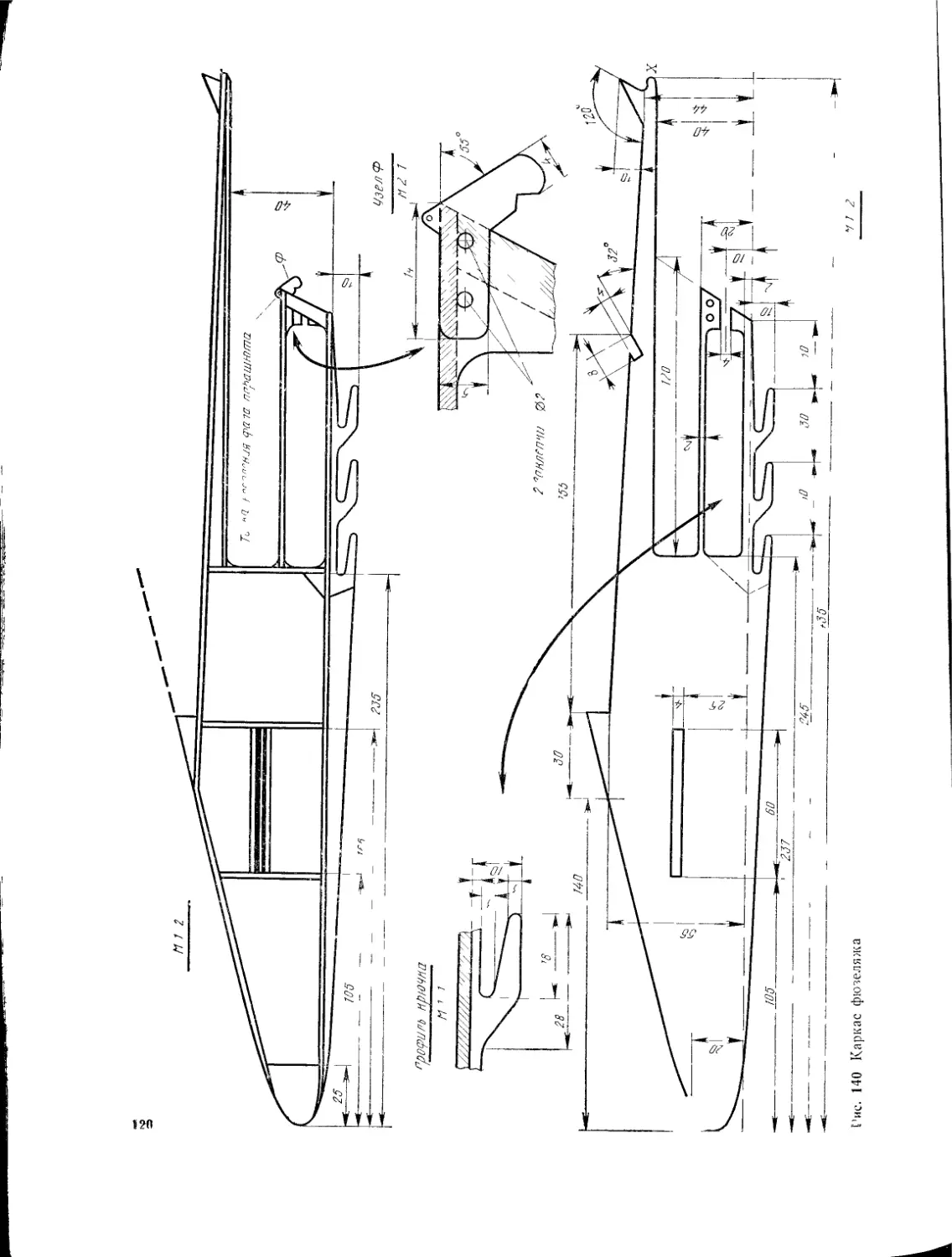
Фюзеляж у моделей летающего крыла фактически лишь обозначен в центральном сечении крыла. Он служит для закрепления па модели буксировочного крючка, в нем помещается механизм ограничения времени полета и иногда воздушный тор
22
моз, пластинчатый или парашютный. Форма фюзеляжа и его размеры не имеют большого значения.
В некоторых моделях с целью улучшения боковой устойчивости во время буксировки при запуске на фюзеляже устанавливается центральный киль; площадь киля составляет обычно 0,01...0,02 м2. Киль особенно необходим в моделях с обратной стреловидностью, у которых он сравнительно высок; его площадь у таких моделей может доходить до 0,03 м2.
В моделях летающих крыльев часто применяются вертикальные шайбы. Положение шайб может быть различно. Раньше их устанавливали на концах крыльев, имея в виду снижение индуктивного сопротивления модели. В настоящее время шайбы чаще размещаются примерно на 2/з размаха каждой половины крыла. Шайбы играют двоякую роль. Во-первых, они отделяют центральную часть крыла от стабилизирующих поверхностей, уменьшая тем самым, как указывалось выше, сопротивление интерференции этих частей крыла, работающих на разных углах атаки, во-вторых, они положительно влияют на боковую устойчивость модели. Кроме того, наличие шайб облегчает выполнение такой стыковки частей крыла, которая обеспечивает регулировку угла установки стабилизирующих поверхностей в процессе испытаний модели.
Практика показывает, что модели летающего крыла могут и не иметь вертикальных шайб, тем не менее они существенно улучшают поведение модели при буксировке. Площадь шайб составляет 0,005... 0,01 м2. Применяемые профили — тонкая пластина, симметричный или плосковыпуклый профиль, выпуклость которого направлена к плоскости симметрии крыла.
Для улучшения боковой устойчивости вертикальные шайбы устанавливаются под углом 5...8° к продольной оси модели (рис. 27).
2.5. Некоторые модели типа «летающее крыло» класса F-1A
Прежде чем приступить к проектированию модели, полезно ознакомиться с некоторыми существующими удачными образцами моделей рассматриваемого класса.
Они выбраны так, чтобы знакомство с ними помогло читателю понять общие тенденции в развитии конструкций моделей летающих крыльев класса F-1A. В табл. 4 приведены сведения о геометрии этих наиболее интересных моделей, ниже даны их краткие характеристики и чертежи.
Модель А - 2 голландского конструктора И. Осборна (рис. 28) — одна из первых спортивных моделей класса F-1A. На международных соревнованиях в Терле (Голландия, 1957 г.). Осборн занял первое место. В сложных атмосферных условиях его модель в сумме пяти полетов пробыла в воздухе 609 с (180+113+90+139+87 с). При хороших атмосферных условиях модель имела время полета 130—150 с. Схему модели Осборна применяли многие авиамоделисты, в том числе П. Люст (Голландия), который на очередных соревнованиях летающих крыльев в 1959 г. в Кальтенкирхене (ФРГ) занял второе место с результатом 417 с (рис. 29).
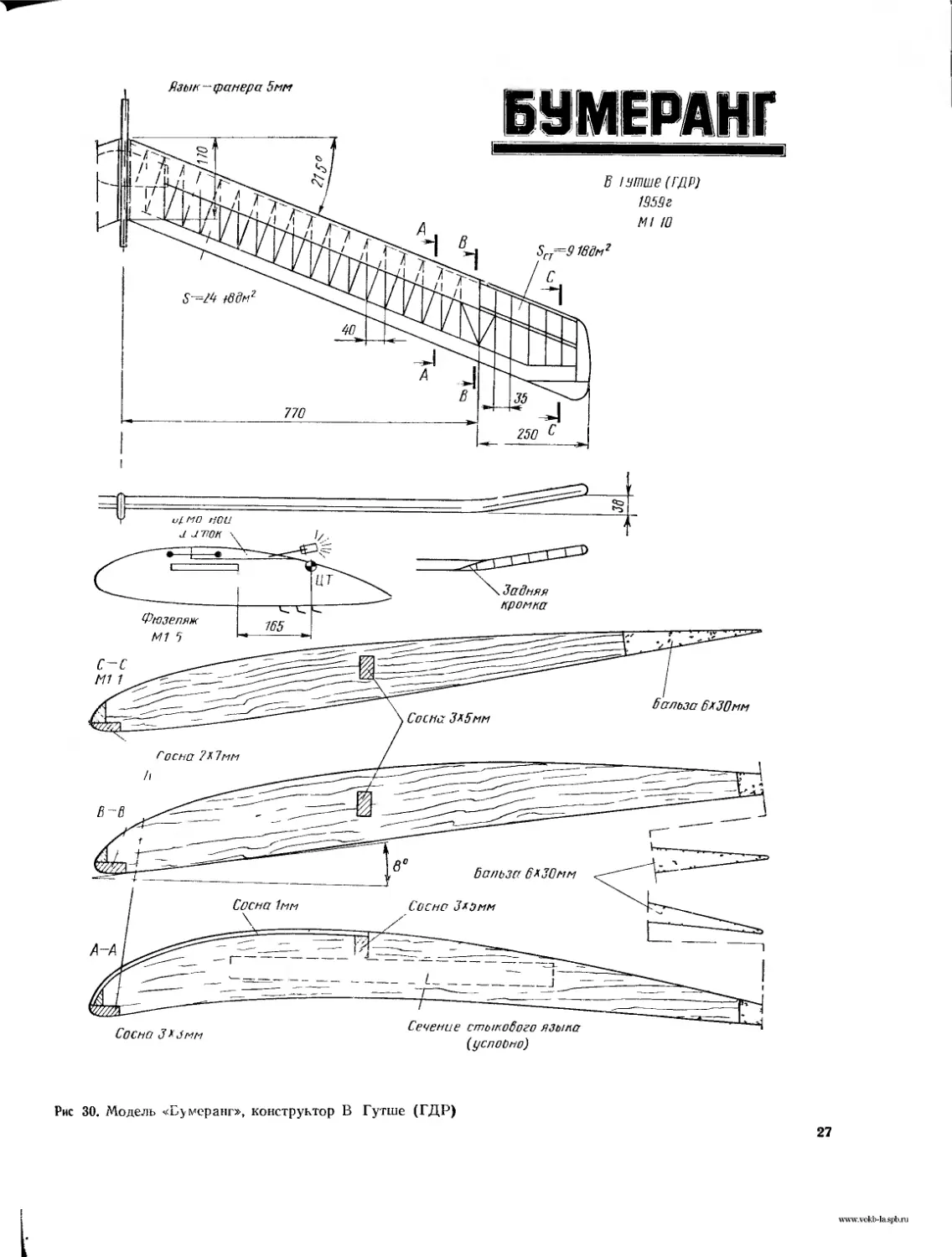
Модель «Бумеранг» конструктора В. Гутше из ГДР (рис. 30) отличается хо-
23
Основные геометрические характеристики рекордных моделей летающих крыльев
о s /127 й >> сз S
Kcd^ EKu<ti
рошей продольной устойчивостью и легко буксируется на полной длине леера. На концах крыла имеются переставные элероны, которые обеспечивают очень точную регулировку поперечной устойчивости модели.
Модель А -2 конструктора К- Вильке из ФРГ (рис. 31) получила первое место на чемпионате летающих моделей ФРГ в 1959 г. с результатом 599 с в пяти полетах. Профиль центральной части крыла S7-53507 с заостренной передней кромкой. Стабилизирующие поверхности имеют S-образный профиль.
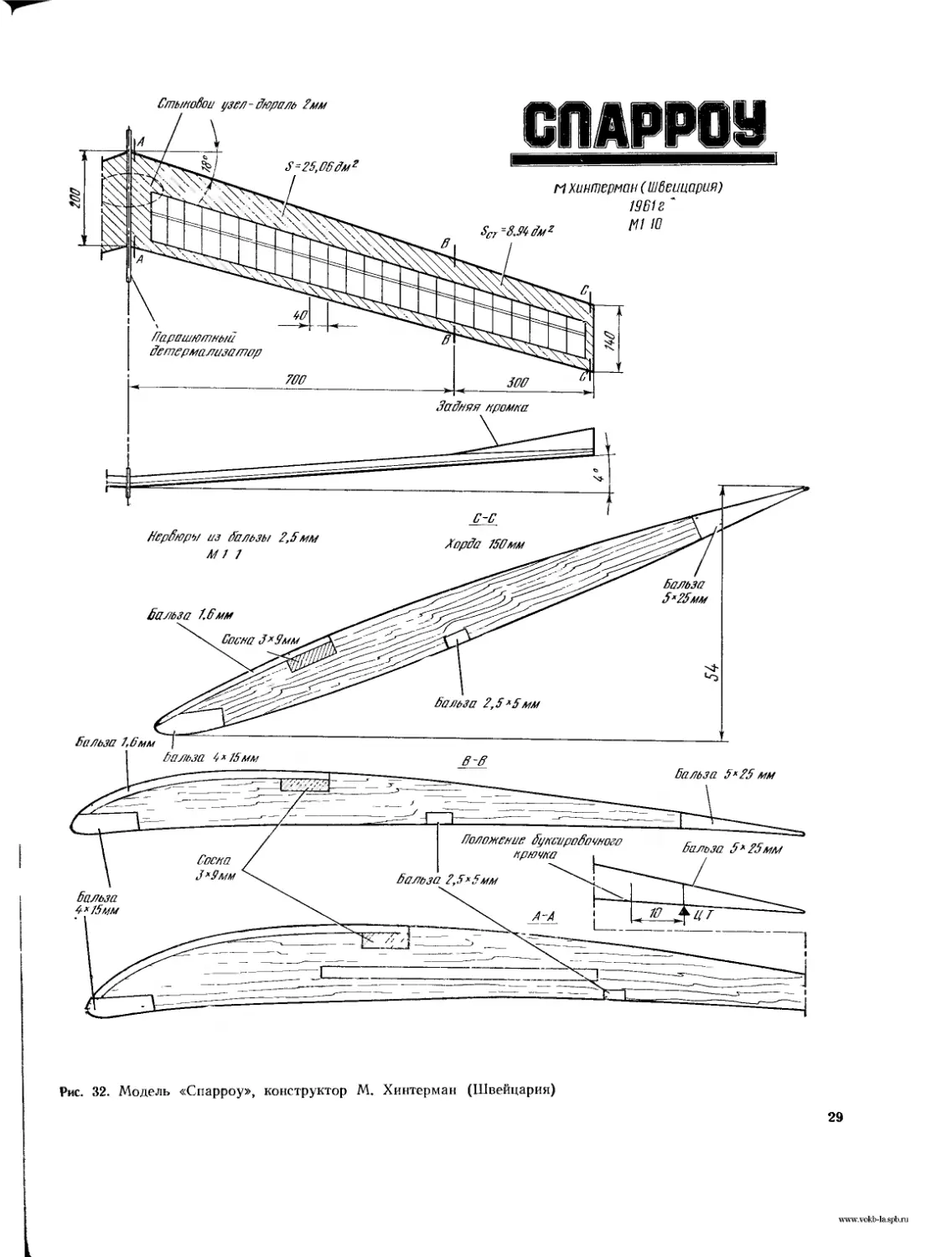
Модель «Спарроу» швейцарского-конструктора М. Хинтермана (рис. 32) имеет очень простую конструкцию и прекрасные летные характеристики. На международных соревнованиях в Лейткирхе в 1961 году она заняла первое место с результатом 711 с (180+180+11 + 67 + 173 с), что является очень высоким достижением-для модели планера, выполненной по схеме летающего крыла. Насколько лучше других была модель Хинтермана, свидетельствует результат второго места — только 555 с, а этим вторым был известный специалист по моделям летающих крыльев Г.Цвиллинг из ФРГ.
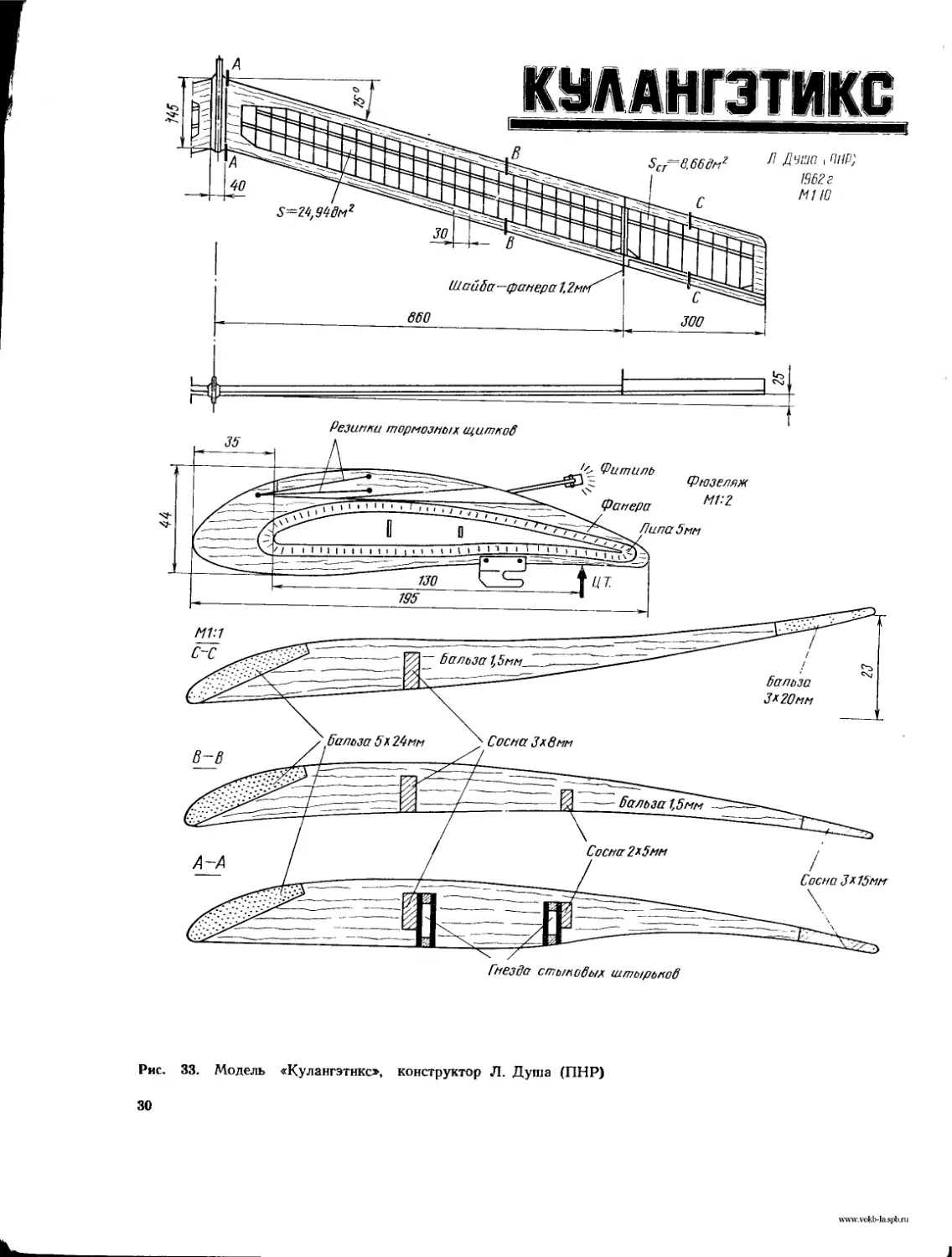
Модель «Кулангэтикс» польского конструктора Л. Душа (рис. 33) выделяется тщательно отработанными аэродинамическими формами. На III Международных соревнованиях моделей летающих крыльев в Белостоке в 1962 г. она заняла первое место с результатом 512 с (51 +39+ + 180+180+62 с).
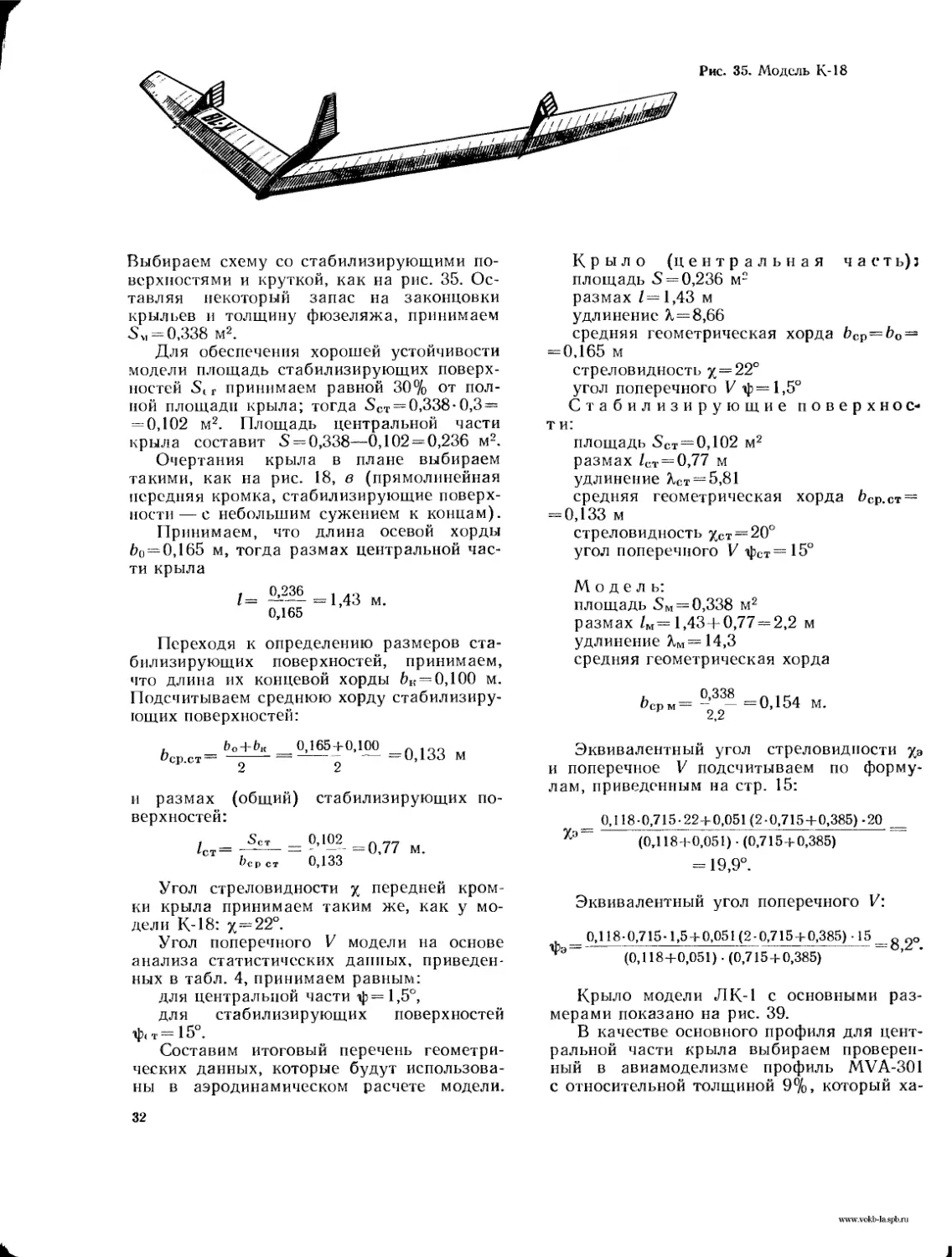
Модель К-18 польского конструктора Я. Капковского (рис. 34) была спроектирована, исходя из концепции обеспечения хорошей ее устойчивости даже в сложных атмосферных условиях. Поэтому в ней применены большие стабилизирующие поверхности с площадью около 30% от полной площади крыла (рис. 35). Среднее время по результатам нескольких десятков полетов, проведенных в различных атмосферных условиях, составило 100 с.
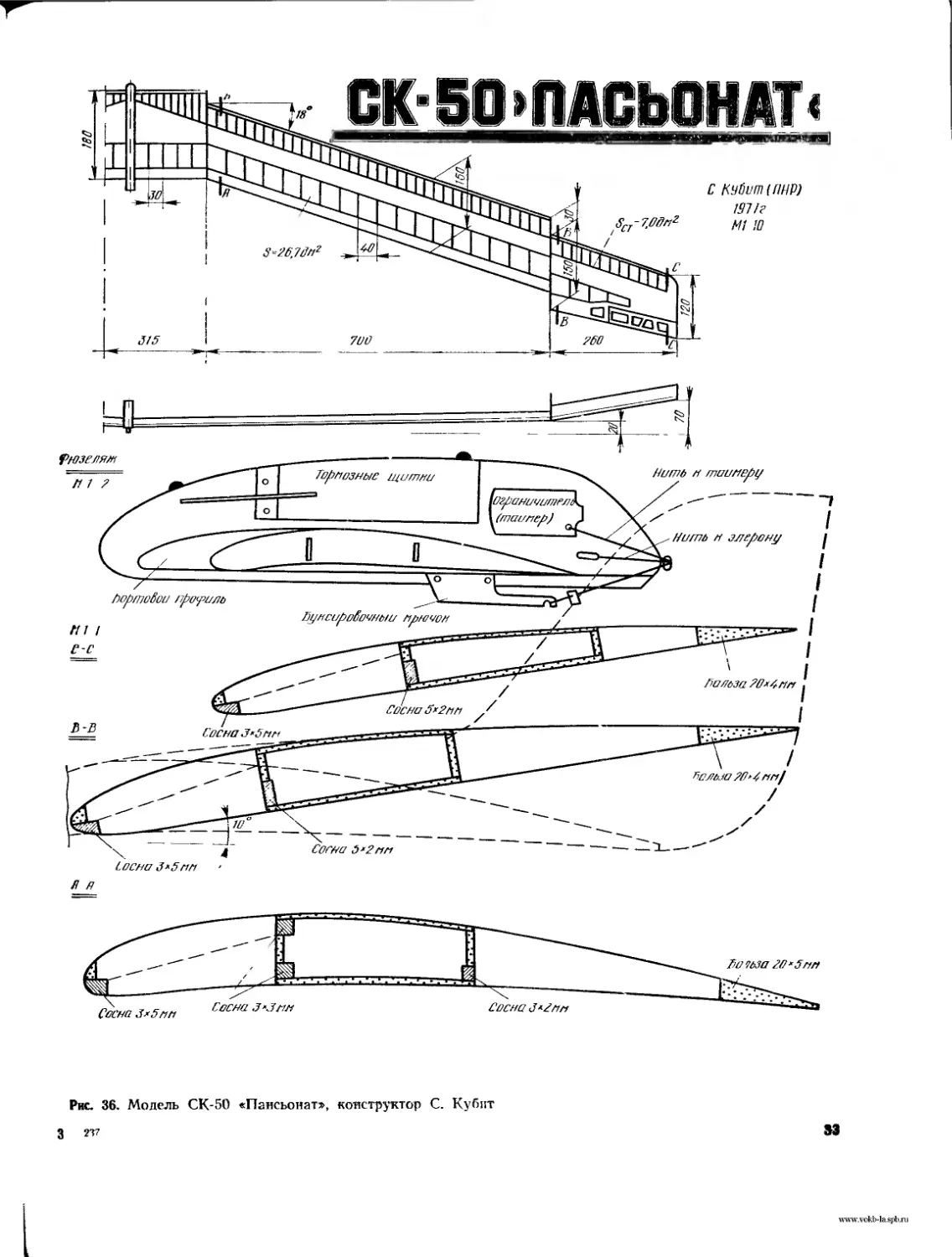
Модель СК-50 «Пасьопат» конструктора С. Кубита (рис. 36) построена ведущим польским авиамоделистом в категории летающих крыльев. На соревнованиях в Гливицах в 1977 г. модель Кубита
Рис. 28. Модель А-2, конструктор И. Осборн (Голландия)
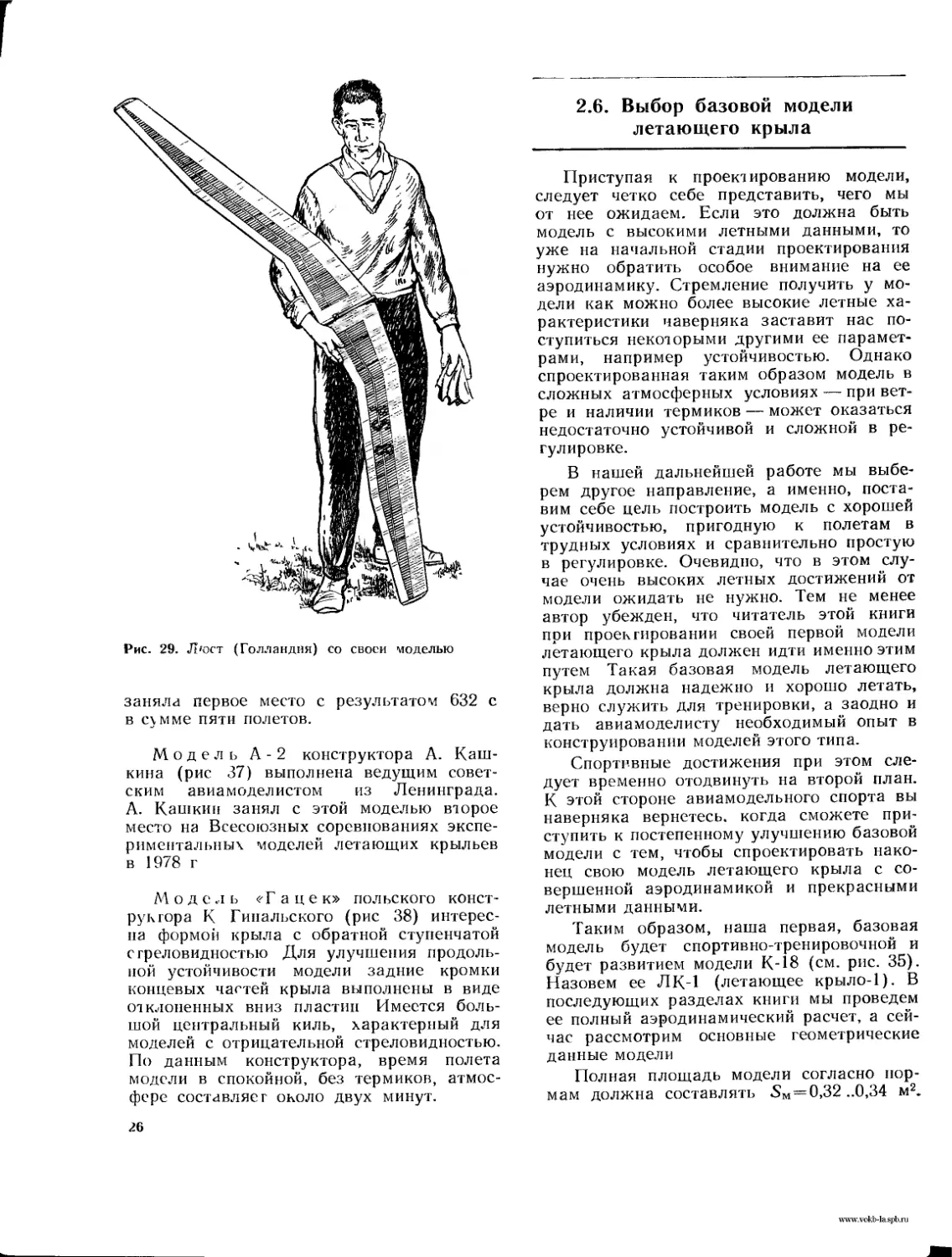
L
Рис. 29. Люст (Голландия) со свосн моделью
заняла первое место с результатом 632 с в сумме пяти полетов.
Модель А - 2 конструктора А. Каш-кина (рис 37) выполнена ведущим советским авиамоделистом из Ленинграда. А. Кашкип занял с этой моделью второе место на Всесоюзных соревнованиях экспериментальных моделей летающих крыльев в 1978 г
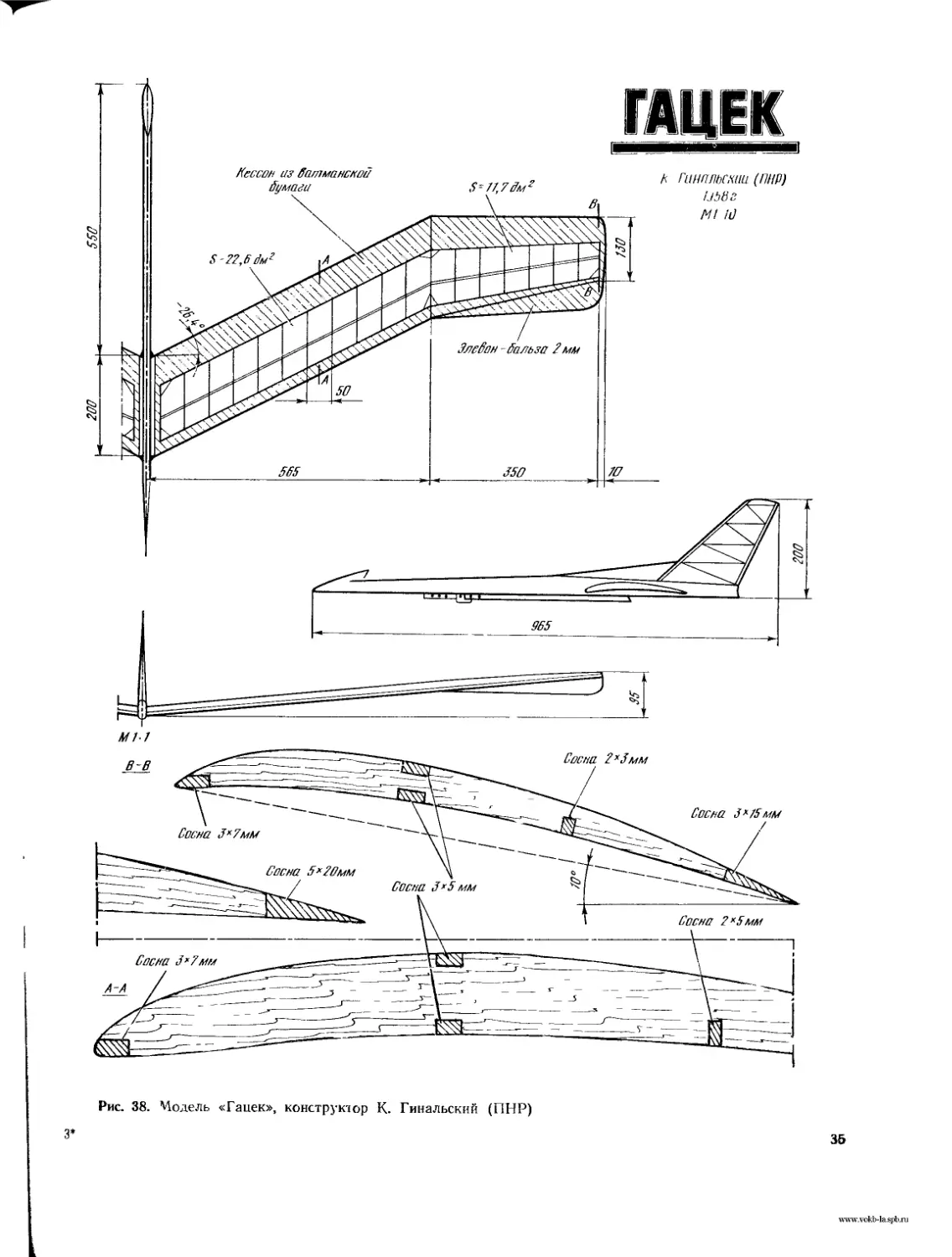
Модель еГацек» польского конструктора К Гипальского (рис 38) интересна формой крыла с обратной ступенчатой стреловидностью Для улучшения продольной устойчивости модели задние кромки концевых частей крыла выполнены в виде отклоненных вниз пластин Имеется большой центральный киль, характерный для моделей с отрицательной стреловидностью. По данным конструктора, время полета модели в спокойной, без терминов, атмосфере составляет около двух минут.
2.6. Выбор базовой модели летающего крыла
Приступая к проектированию модели, следует четко себе представить, чего мы от нее ожидаем. Если это должна быть модель с высокими летными данными, то уже на начальной стадии проектирования нужно обратить особое внимание на ее аэродинамику. Стремление получить у модели как можно более высокие летные характеристики наверняка заставит нас поступиться некоторыми другими ее параметрами, например устойчивостью. Однако спроектированная таким образом модель в сложных атмосферных условиях — при ветре и наличии термиков — может оказаться недостаточно устойчивой и сложной в регулировке.
В нашей дальнейшей работе мы выберем другое направление, а именно, поставим себе цель построить модель с хорошей устойчивостью, пригодную к полетам в трудных условиях и сравнительно простую в регулировке. Очевидно, что в этом случае очень высоких летных достижений от модели ожидать не нужно. Тем не менее автор убежден, что читатель этой книги при проектировании своей первой модели летающего крыла должен идти именно этим путем Такая базовая модель летающего крыла должна надежно и хорошо летать, верно служить для тренировки, а заодно и дать авиамоделисту необходимый опыт в конструировании моделей этого типа.
Спортивные достижения при этом следует временно отодвинуть на второй план. К этой стороне авиамодельного спорта вы наверняка вернетесь, когда сможете приступить к постепенному улучшению базовой модели с тем, чтобы спроектировать наконец свою модель летающего крыла с совершенной аэродинамикой и прекрасными летными данными.
Таким образом, наша первая, базовая модель будет спортивно-тренировочной и будет развитием модели К-18 (см. рис. 35). Назовем ее ЛК-1 (летающее крыло-1). В последующих разделах книги мы проведем ее полный аэродинамический расчет, а сейчас рассмотрим основные геометрические данные модели
Полная площадь модели согласно нормам должна составлять £м=0,32 ..0,34 м2.
Язык—фанера 5мм
БУМЕРАНГ
Рис 30. Модель «Бумеранг», конструктор В Гутше (ГДР)
27
Рис. 31. Модель А-2, конструктор К. Вильке (ФРГ)
28
СПАРРОУ
Рис. 32. Модель «Спарроу», конструктор М. Хинтерман (Швейцария)
29
Рис. 33. Модель «Кулангэтнкс», конструктор Л. Душа (ПНР)
30
Сосна 27 7мм
б аль за 5 * 20мм
Сосна 2* 7мм
1,бмм
Накладка-Бальза 0,6 x5мм
тУх
Сосна 2хбмм / ———
в-в
бальза дхвмм
— бальза!,6мм
Сосна 2хв мм
бальза О, в мм
Рис. 34. Модель К-18, конструктор Я- Капковский (ПНР)
бальза 6 x20мм
31
Выбираем схему со стабилизирующими поверхностями и круткой, как на рис. 35. Оставляя некоторый запас на законцовки крыльев и толщину фюзеляжа, принимаем Sv, = 0,338 м2.
Для обеспечения хорошей устойчивости модели площадь стабилизирующих поверхностей Str принимаем равной 30% от полной площади крыла; тогда SCT = 0,338-0,3 = = 0,102 м2. Площадь центральной части крыла составит S = 0,338—0,102=0,236 м2.
Очертания крыла в плане выбираем такими, как на рис. 18, в (прямолинейная передняя кромка, стабилизирующие поверхности— с небольшим сужением к концам).
Принимаем, что длина осевой хорды £>о = О,165 м, тогда размах центральной части крыла
, 0,236 . .„
I— —— =1,43 м.
0,165
Переходя к определению размеров стабилизирующих поверхностей, принимаем, что длина их концевой хорды Ьк = 0,100 м. Подсчитываем среднюю хорду стабилизирующих поверхностей:
, Ьо + Ьк 0,165 + 0,100 л 1 оо
bcp.ci= —-----=-------2 —=0,133 м
и размах (общий) стабилизирующих поверхностей:
I — —
1СТ- ,
Ьсг
0,102
- =0,77 м. 0,133
Угол стреловидности % передней кромки крыла принимаем таким же, как у модели К-18: %=22°.
Угол поперечного V модели на основе анализа статистических данных, приведенных в табл. 4, принимаем равным:
для центральной части ф = 1,5°,
для стабилизирующих поверхностей ф( т = 15°.
Составим итоговый перечень геометрических данных, которые будут использованы в аэродинамическом расчете модели.
Крыло (центральная часть)! площадь S = 0,236 м2 размах / = 1,43 м удлинение Х = 8,66 средняя геометрическая хорда bcp=bo — = 0,165 м
стреловидность % = 22°
угол поперечного V ф = 1,5°
Стабилизирующие поверхнос-т и:
площадь SCT = 0,102 м2
размах /ст = 0,77 м
удлинение ХСт = 5,81
средняя геометрическая хорда ЬСр.ст = = 0,133 м
стреловидность %Ст = 20°
угол поперечного V ipCT=15°
Модель:
площадь SM = 0,338 м2
размах /м= 1,43+0,77 = 2,2 м удлинение Хм=14,3
средняя геометрическая хорда
, 0,338 „1С.
ЬСрм= =0,154 м.
2,2
Эквивалентный угол стреловидности хэ и поперечное V подсчитываем по формулам, приведенным на стр. 15:
_ 0,118-0,715.22-1-0,051 (2-0,715 + 0,385)-20 _ (0,118 + 0,051) • (0,715+0,385)
= 19,9°.
Эквивалентный угол поперечного V:
0,118-0,715-1,5 + 0,051(2-0,715 + 0,385) 15 о оо lbэ =------------------------------=o,z .
(0,118+0,051) - (0,715 + 0,385)
Крыло модели ЛК-1 с основными размерами показано на рис. 39.
В качестве основного профиля для центральной части крыла выбираем проверенный в авиамоделизме профиль MVA-301 с относительной толщиной 9%, который ха-
32
СК-БО>ЛАСЬОНАТ<
5ст~7,Однг
S-26.7d/iz
С Кубит (ПНР) 1911?
Mi Ю
375
700
260
Рис. 36. Модель СК-50 «Пансьоиат», конструктор С. Кубит
3 7V
S3
34
Рис. 37. Модель А-2, конструктор А. Кашкин (СССР)
MI-1
Рис. 38. Модель «Ганек», конструктор К. Гинальский (ПНР)
3* 35
Рис. 39. Геометрия крыла модели ЛК-1
растеризуется небольшим перемешенном центра давления. Стабилизирующие поверхности будут иметь симметричный профиль NACA 0009.
Определим в заключение геометрию вертикальных поверхностей модели—центрального киля и двух вертикальных шайб, устанавливаемых на границах центральной части крыла и стабилизирующих поверхностей, на 65% размаха каждого полукрыла.
Площадь киля SK должна быть достаточно большой, поскольку «плечо» ее относительно центра тяжести модели невелико.
Поэтому принимаем SK = 0,0276 м2. Площадь каждой шайбы принимаем равной Зш = 0,005 м2; форма шайб выбирается такой, чтобы опа обеспечивала крепление стабилизирующих поверхностей и возможность регулировки угла их установки.
3.
АЭРОДИНАМИКА МОДЕЛИ ЛЕТАЮЩЕГО КРЫЛА
Завершив определение основных геометрических параметров модели, приступим к ее детальному аэродинамическому расчету, который позволит в известной степени предвидеть летные качества модели в полете.
Не нужно, однако, забывать, что расчеты имеют приближенный характер. Неточность расчетов и, как следствие этого, неполное соответствие ожидаемых летных качеств модели действительным объясняется несколькими причинами. Прежде всего, аэродинамические характеристики профилей крыла даны для идеальных, специально изготовленных для испытаний в аэродинамической трубе крыльев. Действительные же профили крыльев летающих моделей отличаются от идеала. Кроме того, методы расчета, доступные для большинства авиамоделистов, весьма упрощены, в них не учитываются некоторые менее принципиальные параметры, которые, однако, влияют на характеристики моделей в полете.
Вследствие этих и еще некоторых причин результаты аэродинамических расчетов, методика которых излагается ниже, нужно принимать в качестве исходных данных, а окончательная доводка моделей должна проводиться при их испытаниях в полете.
Несмотря на эти оговорки проведение аэродинамического расчета, пусть и приближенного, имеет свои преимущества, так как позволяет провести сравнение степени влияния различных геометрических параметров на летные характеристики модели, а также, что самое главное,— выбрать наи
выгоднейший вариант, например, набора профилей крыла, углов крутки, положения центра тяжести и т. п.
По этим причинам ниже приводится достаточно подробная методика аэродинами ческих расчетов. Их выполнение не только даст конкретные результаты, но и наверняка в какой-то степени приблизит читателя к проблемам аэродинамики полноразмерных планеров и самолетов.
Для начала вспомним основные сведения из математики и механики.
3.1. Необходимые сведения из математики
Тригонометрические функции
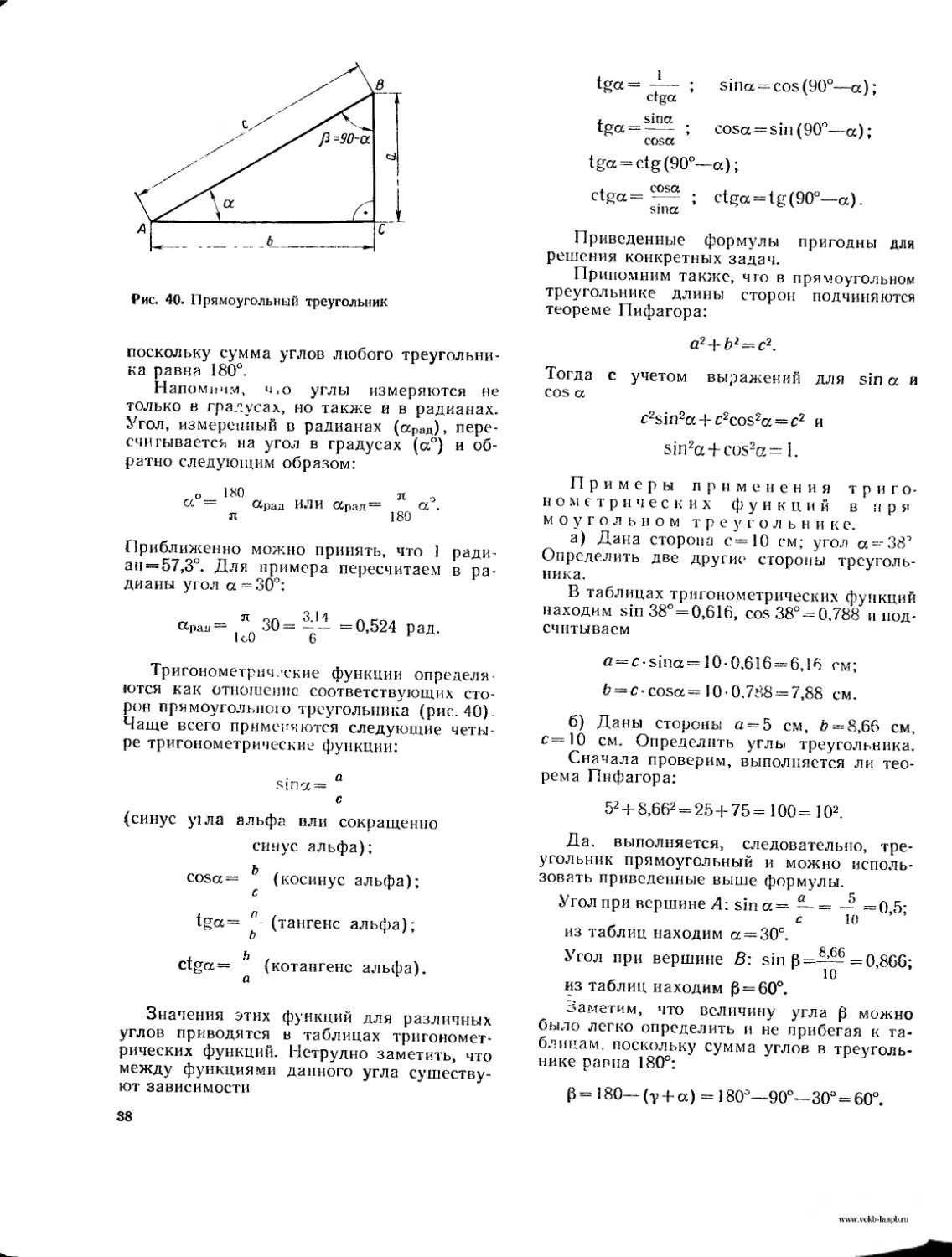
Тригонометрические функции — это математические зависимости, которые связывают между собой размеры сторон прямоугольного треугольника. Они позволяют очень просто определить величину углов треугольника, если даны длины его сторон, или наоборот, определить длины сторон, если заданы одна из них и углы треугольника.
На рис. 40 представлен треугольник АВС, в котором угол при вершине С прямой (равен 90°), что отмечено точкой внутри дуги, очерчивающей угол. Если угол при вершине А обозначить а (альфа), то угол при вершине В будет равен (90°—а),
Р
Рис. 40. Прямоугольный треугольник
tga = —— ; sin<z = cos(90°—а);
ctga
tga=—~ ; cosa = sin(90°—а);
cosa
tga = ctg (90°—а);
ctga= ; ctga = tg(90°—a). sina
Приведенные формулы пригодны для решения конкретных задач.
Припомним также, что в прямоугольном треугольнике длины сторон подчиняются теореме Пифагора:
поскольку сумма углов любого треугольника равна 180°.
Напомним, ч,о углы измеряются не только в градусах, но также и в радианах. Угол, измеренный в радианах (арад), пересчитывается на угол в градусах (а°) и обратно следующим образом:
□ 1W) „
• — «рад ИЛИ «рад— СС .
л, 180
Приближенно можно принять, что 1 ради-ан=57,3°. Для примера пересчитаем в радианы угол а = 30°:
арад = я 30= - — =0,524 рад. 1с0 6
Тригонометрические функции определяются как отношение соответствующих сторон прямоугольного треугольника (рис. 40). Чаще всего применяются следующие четы ре тригонометрические функции:
а
sma=
с
(синус утла альфа или сокращенно
синус альфа);
cosa= b (косинус альфа);
с
tga= п- (тангенс альфа);
£
£ ctga= ' (котангенс альфа).
а
Значения этих функций для различных углов приводятся в таблицах тригонометрических функций. Нетрудно заметить, что между функциями данного угла существуют зависимости
38
а2+Ьг — с2.
Тогда с учетом выражений для sin а и
cos а
c2sin2a + c2cos2a — с2 и
sinza+cos2a--1.
Примеры применения тригонометрических ф у н к ц и й в и р я м о у г о л ь и о м треугольнике.
а) Дана сторона с=10 см; угол a = 38' Определить две другие стороны треугольника.
В таблицах тригонометрических функций находим sin 38° = 0,616, cos38° = 0,788 и подсчитываем
a = c-sina = 10-0,656 = 6,16 см;
& = c-cosa= 10-0.788 = 7,88 см.
б) Даны стороны a = 5 см, fe = 8,66 см, с=10 см. Определить углы треугольника.
Сначала проверим, выполняется ли теорема Пифагора:
52 + 8,662 = 25 + 75 = 100= 102.
Да. выполняется, следовательно, треугольник прямоугольный и можно использовать приведенные выше формулы.
Угол при вершине A: sin а = — = — =0,5; с 10 из таблиц находим а = 30°.
Угол при вершине В: sin р = —-‘=0,866;
из таблиц находим 0 = 60°.
Заметим, что величину угла ₽ можно было легко определить и не прибегая к таблицам. поскольку сумма углов в треугольнике равна 180°:
6=180— (у+а) = 180°—90°—30°=60°.
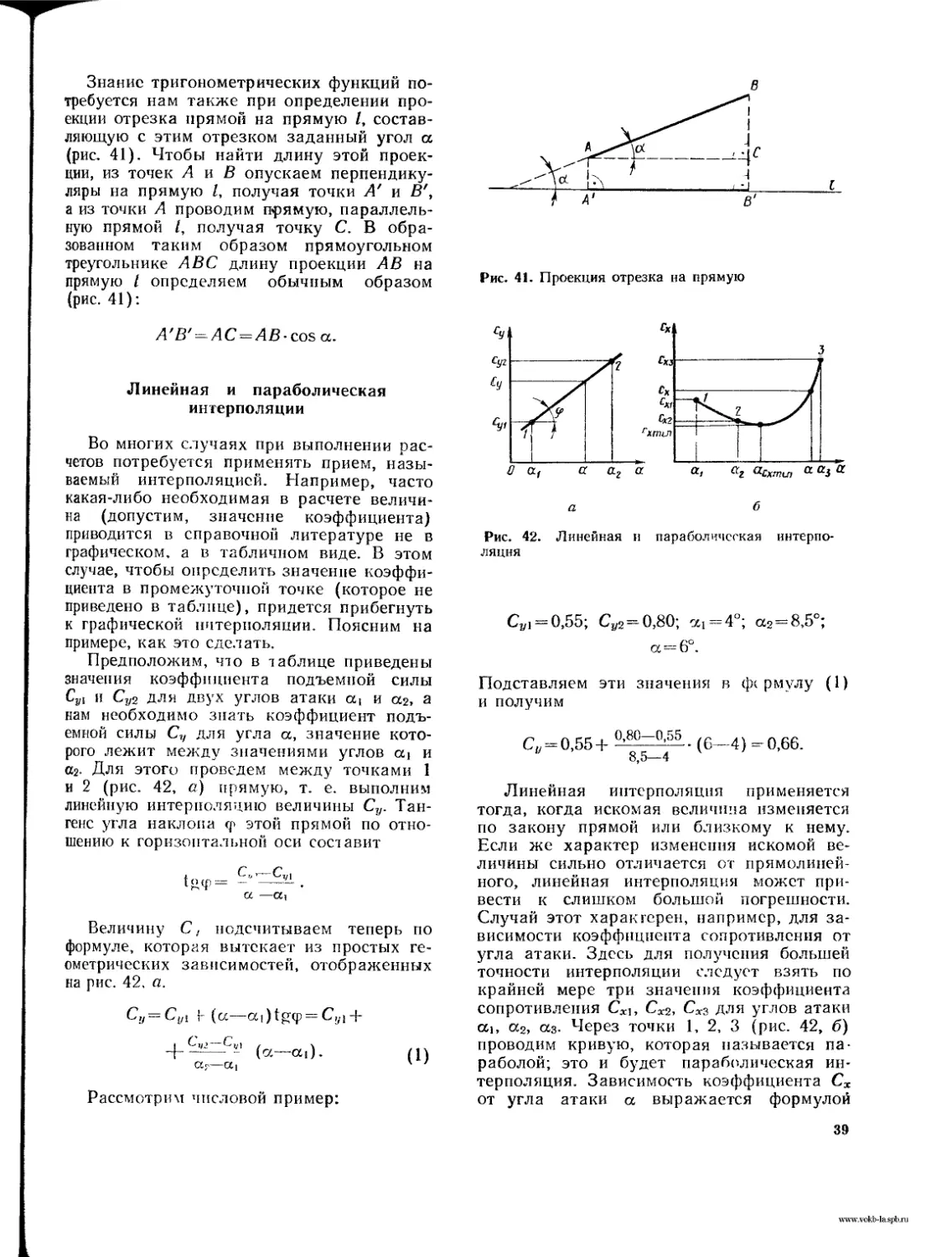
Знание тригонометрических функций потребуется нам также при определении проекции отрезка прямой на прямую /, составляющую с этим отрезком заданный угол а (рис. 41). Чтобы найти длину этой проекции, из точек А и В опускаем перпендикуляры на прямую I, получая точки А' и В', а из точки А проводим прямую, параллельную прямой /, получая точку С. В образованном таким образом прямоугольном треугольнике АВС длину проекции АВ на прямую / определяем обычным образом (рис. 41):
А’ В'^АС = АВ cos а.
Линейная и параболическая интерполяции
Во многих случаях при выполнении расчетов потребуется применять прием, называемый интерполяцией. Например, часто какая-либо необходимая в расчете величина (допустим, значение коэффициента) приводится в справочной литературе не в графическом, а в табличном виде. В этом случае, чтобы определить значение коэффициента в промежуточной точке (которое не приведено в таблице), придется прибегнуть к графической интерполяции. Поясним на примере, как это сделать.
Предположим, что в таблице приведены значения коэффициента подъемной силы Су1 и Су2 для двух углов атаки а, и а2, а нам необходимо знать коэффициент подъемной силы Су для угла а, значение которого лежит между значениями углов etj и а2. Для этого проведем между точками 1 и 2 (рис. 42, а) прямую, т. е. выполним линейную интерполяцию величины Су. Тангенс угла наклона q> этой прямой по отношению к горизонтальной оси составит
а —а.
Величину С, подсчитываем теперь по формуле, которая вытекает из простых геометрических зависимостей, отображенных на рис. 42. а.
C’j=Cut Р (a—-cci)tg(p = Cvi +
Рассмотрим числовой пример:
Рис. 41. Проекция отрезка на прямую
СУ1 = 0,55; Су2=0,80; ^=4°; а2 = 8,5°; а = 6°.
Подставляем эти значения в формулу (1) и получим
С. = 0,55+ 2^=2151. (6-4) =0,66. " 8,5—4
Линейная интерполяция применяется тогда, когда искомая величина изменяется по закону прямой или близкому к нему. Если же характер изменения искомой величины сильно отличается от прямолинейного, линейная интерполяция может привести к слишком большой погрешности. Случай этот характерен, например, для зависимости коэффициента сопротивления от угла атаки. Здесь для получения большей точности интерполяции следует взять по крайней мере три значения коэффициента сопротивления Сх1, Сх2, Сх3 для углов атаки ссь «2, аз- Через точки 1, 2, 3 (рис. 42, б) проводим кривую, которая называется параболой; это и будет параболическая интерполяция. Зависимость коэффициента Сх от угла атаки а выражается формулой
39
Сх = Аа?+Ва. + С, (2)
в которой коэффициенты А, В и С определяются следующим образом:
л=-Ь_
а3-а.
СхЗ 6x2 6x2 6х)
«3—<7-2—СС|
аз—«I
x[£^z£?L(a3+cC2)_fc£?i(a2+ai)l;
L а2—cti а3—«2 J
С— - [ (Сх1 + Сх2 + Схз) —
(а^+а^ + а-^А—(а| + а2 + аз) В].
Имея значения Cxt, Сх2, Схз, соответствующие углам атаки аь а2, аз (рис. 42, б), мы подсчитаем значения коэффициентов А, В и С, и, подставив в уравнение (2) угол а, значение которого лежит между значениями углов и аз, определим коэффициент Сх для этого угла. Заметим, что тангенс угла наклона касательной к данной кривой для любого значения угла а определяется по формуле:
Требуется определить минимальное значение коэффициента сопротивления и угол атаки, при котором этот минимум имеет место.
В первую очередь подсчитаем значения коэффициентов:
Д —. ____________ VZ
5,57—(-5,84) Л
Г 0,060—0,039 _ 0,039—0,067 1_Q 0007g.
Х [б,57— (-0,16) -0,16—(-5,84) J
В=--------!------X
5,57—(-5,84)
Г 0,039-0,067----(5 57—0,16) —
[ —0,16—(—5,84)
__ 0,060—0,039 . 5 84 _ 0д 6)1 = -0,00038;
5,57—(-0,16) J
С= ~ (0,067 + 0,039 + 0,060) —
— (5,842+0,162 + 5,572) -0,00076— — (5,84—0,16—5,57) - (-0,00038) =0,0388.
tg<p = 2Aa + B, (3)
т. е. он зависит от угла а.
В практике расчетов часто возникает необходимость определения наименьшего (минимального) значения коэффициента
Таким образом, зависимость коэффициента сопротивления от угла атаки будет иметь следующий вид:
Сх=0,00076a2—0,00038a+0,0388 .
сопротивления Cxmin ai ... аз- Угол а, при может быть найден
а (-xmin ~
в диапазоне углов КОТОРОМ Сх—Схтгп> из условия tg<p=O:
И)
Угол а, при котором коэффициент сопротивления имеет минимальное значение, будет равен по формуле (4):
-0,00038 п „го ггг . = —• ----------U.ZO .
хтш 2-0,00076
а минимальное значение коэффициента сопротивления определяется по формуле
Cxmin = C-^-. (5)
Для лучшего усвоения процедуры параболической интерполяции рассмотрим следующий пример.
Дано: СЖ1=0,067 для ai=—5,84°;
Сх2 = 0,039 для а2=—0,16°;
Сх3 = 0,060 для а3 = 5,57°.
40
Коэффициент сопротивления при этом угле атаки подсчитаем по формуле (5):
Cxmiw = 0,0388— (-°’°0038)2 = 0,0388.
4-0,000076
В приведенных примерах рассматривалась интерполяция зависимостей коэффициентов подъемной силы и сопротивления от угла атаки, однако рассмотренный порядок расчетов может быть использован, очевидно, и для других математических зависимостей, например для поляр профилей.
3.2. Необходимые сведения из механики
Скалярные и векторные величины
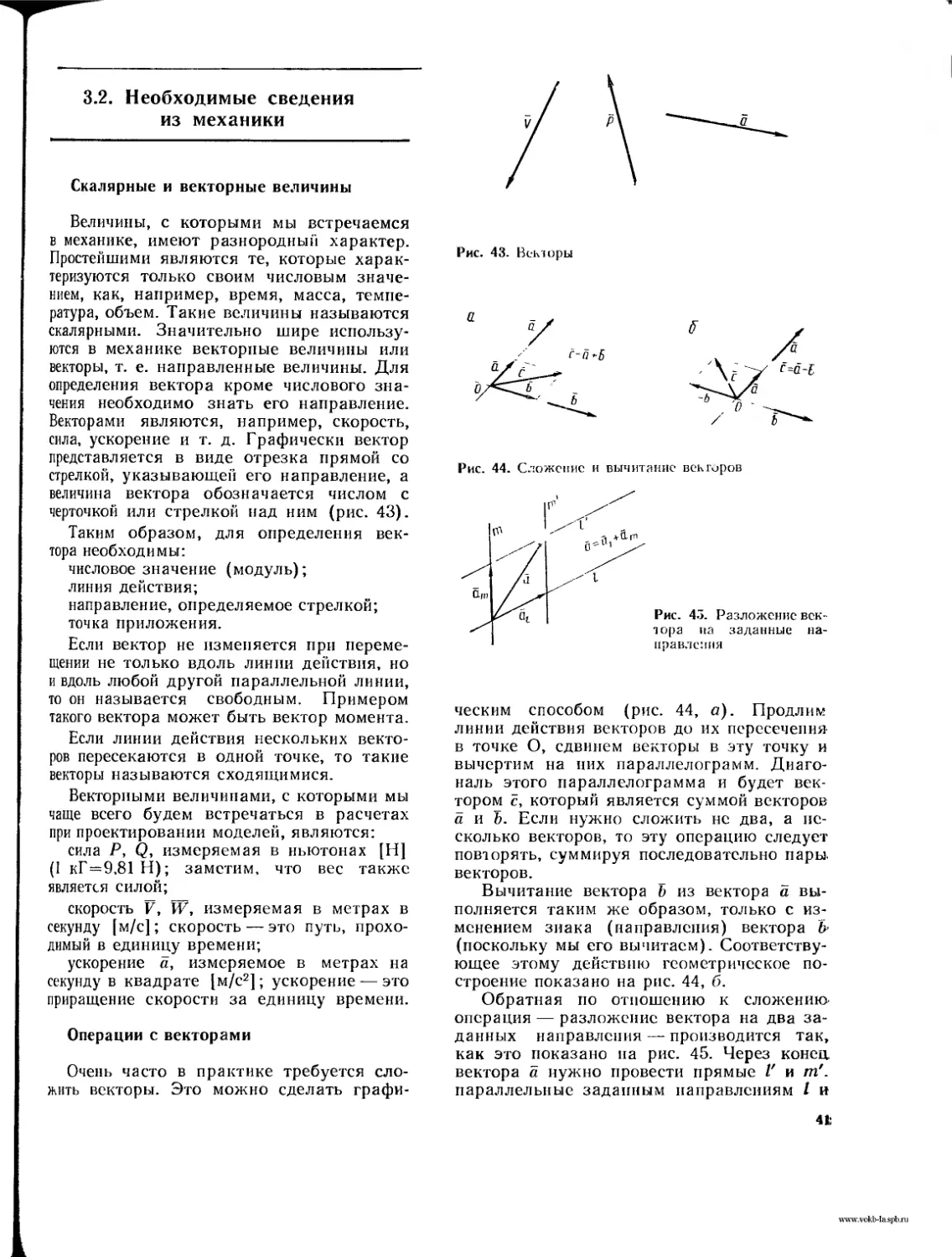
Величины, с которыми мы встречаемся в механике, имеют разнородный характер. Простейшими являются те, которые характеризуются только своим числовым значением, как, например, время, масса, температура, объем. Такие величины называются скалярными. Значительно шире используются в механике векторные величины или векторы, т. е. направленные величины. Для определения вектора кроме числового значения необходимо знать его направление. Векторами являются, например, скорость, сила, ускорение и т. д. Графически вектор представляется в виде отрезка прямой со стрелкой, указывающей его направление, а величина вектора обозначается числом с черточкой или стрелкой над ним (рис. 43).
Таким образом, для определения вектора необходимы:
числовое значение (модуль);
линия действия;
направление, определяемое стрелкой; точка приложения.
Если вектор не изменяется при перемещении не только вдоль линии действия, но и вдоль любой другой параллельной линии, то он называется свободным. Примером такого вектора может быть вектор момента.
Если линии действия нескольких векторов пересекаются в одной точке, то такие векторы называются сходящимися.
Векторными величинами, с которыми мы чаще всего будем встречаться в расчетах при проектировании моделей, являются:
сила Р, Q, измеряемая в ньютонах [Н] (1 кГ=9,81Н); заметим, что вес также является силой;
скорость V, W, измеряемая в метрах в секунду [м/с]; скорость — это путь, проходимый в единицу времени;
ускорение а, измеряемое в метрах на секунду в квадрате [м/с2]; ускорение — это приращение скорости за единицу времени.
Операции с векторами
Очень часто в практике требуется сложить векторы. Это можно сделать графи-
Рис. 43. Векторы
Рис. 44. Сложение и вычитание векторов
Рис. 45. Разложение вектора на заданные направления
ческим способом (рис. 44, а). Продлим линии действия векторов до их пересечения в точке О, сдвинем векторы в эту точку и вычертим на них параллелограмм. Диагональ этого параллелограмма и будет вектором с, который является суммой векторов а и Ъ. Если нужно сложить нс два, а несколько векторов, то эту операцию следует повторять, суммируя последовательно пары, векторов.
Вычитание вектора b из вектора а выполняется таким же образом, только с изменением знака (направления) вектора b (поскольку мы его вычитаем). Соответствующее этому действию геометрическое построение показано на рис. 44, б.
Обратная по отношению к сложению операция — разложение вектора на два заданных направления — производится так, как это показано на рис. 45. Через конец, вектора а нужно провести прямые V и т'. параллельные заданным направлениям I и
41:
. vy
V=^VK2 + Vy2'
3*ис. 46. Вектор в
прямоугольной системе коор-
чинат
Рис. 47. Момент силы относительно точки О
т. Точки Пересе tcum прямых I и т’, а также Г и т опредетят векторы щ и ат— составляющие вектора а па заданных направлениях / и in.
Частным случаем разложения вектора по двум направлениям является проектирование вектора на прямоугольные оси координат (рис. 46). Разница с предыдущей операцией состоит только в том, что параллелограмм в данном случае заменится прямоугольником, поскольку оси х и у перпендикулярны друг к другу. Над векторами и У„— составляющими вектора V — черточки не ставятся, так как известно, что они имеют направление осей х и у. Оперируя составляющими вектора в системе координат хоу, нетрудно заметить, что
42
вектор V можно также задать углом а и числовым значением V. Особой задачей является определение линии действия вектора У, но об этом речь пойдет несколько позже.
Приведем еще одно правило, знание которого необходимо при операциях с несколькими векторами: проекция на какую-либо ось равнодействующей суммы векторов равна сумме проекций отдельных векторов на ту же ось.
Момент вектора относительно точки
Моментом вектора Р относительно точки О называется произведение модуля вектора на расстояние линии его действия от точки О. Расстояние это называется плечом вектора относительно точки О (рис. 47). Следовательно, момент вектора Р относительно точки
Mo = P-h.
Если рассматривается система векторов, то часто используется правило: сумма моментов относительно некоторой точки нескольких векторов равна моменту равнодействующей этих векторов относительно той же точки.
Из этого определения вытекает правило переноса скользящего век юра на другую линию, параллельную к первоначальной линии его действия (рис. 48): если скользящий вектор Р с линией действия / перенести на линию параллельную /, то следует добавить момент, равный произведению модуля вектора на расстояние между линиями I и Г (на рис. 48 этот момент показан стрелкой в виде полукруга). Обе системы (о и б) на рис. 48 равнозначны.
Два равных, параллельных и противоположно направленных скользящих вектора называются парой сил (рис. 49). Их сумма (равнодействующая) равна нулю, а момент пары равен N[ = P-h.
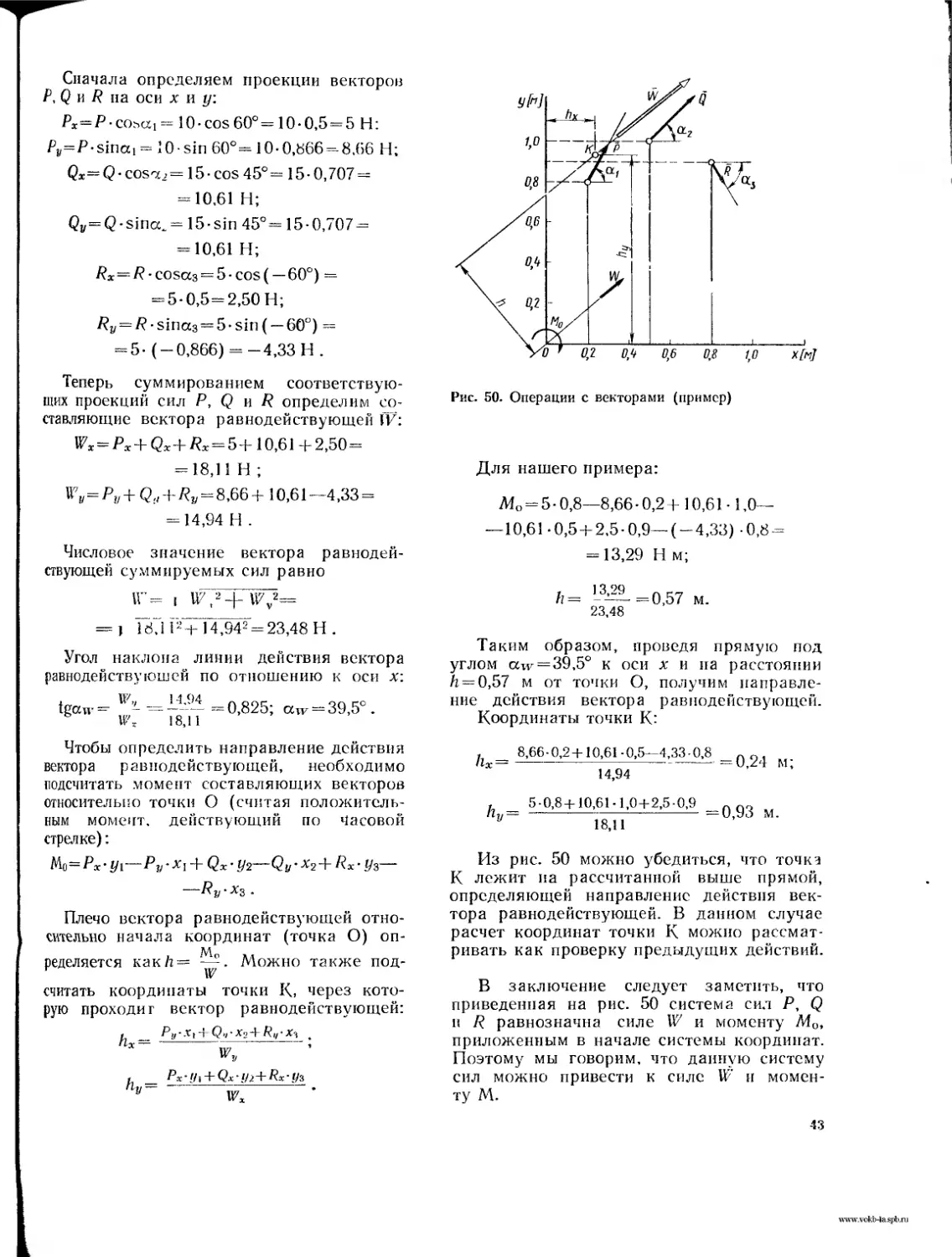
Пример операций с векторами.
В системе координат хоу даны три вектора, например, силы Р=10 II, Q = 15 Н, R = 5 Н (рис. 50). Найти равнодействующую этих векторов, если точки их приложения имеют координаты Х[ = 0,2 м, t/i=0.8 м, х2 = 0,5 м, уч= 1,0 м; х3 = 0.8 м, г/3 == 0,9 м, а направления действия векторов характеризуются соответственно углами c<i=6C’, «2 = 45° и а3 = —60°.
Сначала определяем проекции векторов P,Q и R па оси х и у:
Рх = Р-со>с-,= 10-cos60°= 10-0,5 = 5 Н:
Ру=Р-sinai = 10 - sin 60°= 10-0,666 = 8,66 Н;
Qx=Q-cosct,-= 15-cos 45°= 15-0,707 =
= 10,61 Н;
Qv=Q-sino^ = 15-sin 45°= 15-0,707 =
= 10,61 H;
Rx=R-cosa3 = 5-cos(—60°) =
= 5-0,5=2,50 H;
Rv = R • sina3 = 5 • sin (— 60°) =
= 5-(-0,866) =-4,33 H.
Теперь суммированием соответствующих проекций сил Р, Q и R определим составляющие вектора равнодействующей И':
= Рх + Qx-T Rx = 5+10,61 + 2,50=
= 18,11 Н ;
= Ру + Q.j + Rv = 8,66 + 10,61 —4,33 =
= 14,94 Н .
Числовое значение вектора равнодействующей суммируемых сил равно
U"= I IF ? + 117/=
= j 1871 Г2+ 14,94s’= 23,48 Н .
Угол наклона линии действия вектора равнодействующей по отношению к оси х:
tgan-= W’L = =0,825; aw = 39,5°.
18,11
Чтобы определить направление действия вектора равнодействующей, необходимо подсчитать момент составляющих векторов относительно точки О (считая положительным момент, действующий по Часовой стрелке):
М0 = Рх-1/1 — Ру'Х\ + Qx-1/2-Qy'Xz + Rx- Уз-
—Rv • х3 .
Плечо вектора равнодействующей относительно начала координат (точка О) оп-м
ределяется как/?= . Можно также под-
считать координаты точки К, через которую проходит вектор равнодействующей:
__ Q.l-x2+R,l-x<i .
< Px-yi+Qx-у2+Rx-ys
Рис. 50. Операции с векторами (пример)
Для нашего примера:
Мо = 5-0,8-8,66-0,2 Ь 10,61 -1,0— -10,61-0,5+2,5-0,9—(-4,33) -0,8 = = 13,29 Н м;
i 13,29 „„
й=--------=0,57 м.
23,48
Таким образом, проведя прямую под углом aw = 39,5° к оси х и па расстоянии й = 0,57 м от точки О, получим направление действия вектора равнодействующей.
Координаты точки К:
, 8,66-0,2 + 10,61 -0,5—4,33-0,8 „ „ ,
/гж=------------. . .----------=0,24 м;
14,94
, 5-0,8+10,61-1,0 + 2,5 0,9 _ п„
Пу= ----------------------- =0,93 М.
18,11
Из рис. 50 можно убедиться, что точка К лежит на рассчитанной выше прямой, определяющей направление действия вектора равнодействующей. В данном случае расчет координат точки К можно рассматривать как проверку предыдущих действий.
В заключение следует заметить, что приведенная на рис. 50 система сил Р, Q и R равнозначна силе IV' и моменту Л1о, приложенным в начале системы координат. Поэтому мы говорим, что данную систему сил можно привести к силе IV’ и моменту М.
43
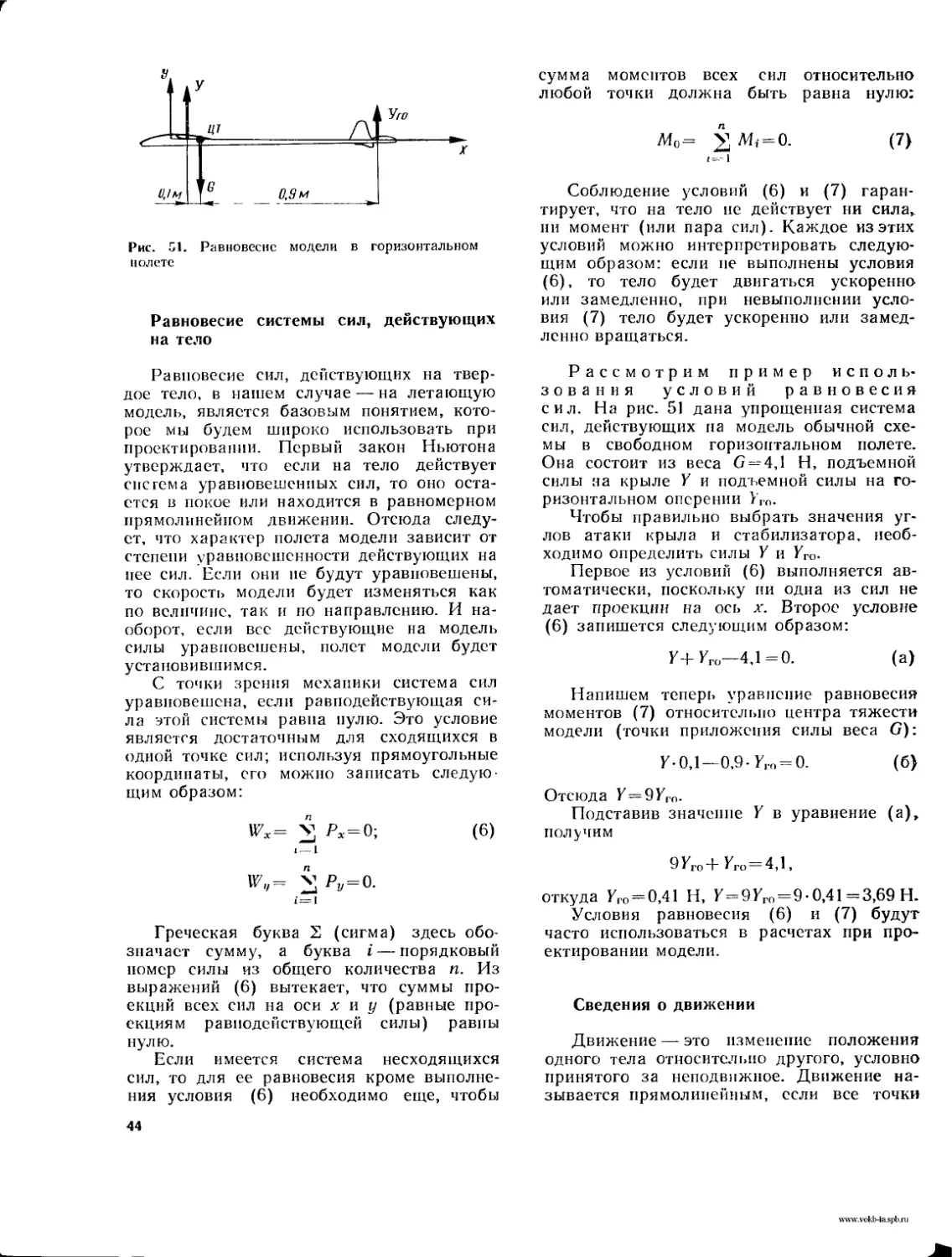
Рис. 51. Равновесие модели в горизонтальном полете
Равновесие системы сил, действующих на тело
Равновесие сил, действующих на твердое тело, в нашем случае — на летающую модель, является базовым понятием, которое мы будем широко использовать при проектировании. Первый закон Ньютона утверждает, что если на тело действует система уравновешенных сил, то оно остается в покое или находится в равномерном прямолинейном движении. Отсюда следует, что характер полета модели зависит от степени уравновешенности действующих на нее сил. Если они не будут уравновешены, то скорость модели будет изменяться как по величине, так и по направлению. И наоборот, если все действующие на модель силы уравновешены, полет модели будет установившимся.
С точки зрения механики система сил уравновешена, если равнодействующая сила этой системы равна пулю. Это условие является достаточным для сходящихся в одной точке сил; используя прямоугольные координаты, его можно записать следующим образом:
1ЕХ= V Рх = 0; (6)
—I
№,,= vpy = o. i=i
Греческая буква S (сигма) здесь обозначает сумму, а буква i— порядковый номер силы из общего количества п. Из выражений (6) вытекает, что суммы проекций всех сил на оси х и у (равные проекциям равнодействующей силы) равны нулю.
Если имеется система несходящихся сил, то для ее равновесия кроме выполнения условия (6) необходимо еще, чтобы
44
сумма моментов всех сил относительно любой точки должна быть равна нулю:
MG= £ М, = 0. (7)
i=i
Соблюдение условий (6) и (7) гарантирует, что на тело не действует ни сила, ни момент (или пара сил). Каждое из этих условий можно интерпретировать следующим образом: если не выполнены условия (6), то тело будет двигаться ускоренно или замедленно, при невыполнении условия (7) тело будет ускоренно или замедленно вращаться.
Рассмотрим пример использования условий равновесия сил. На рис. 51 дана упрощенная система сил, действующих па модель обычной схемы в свободном горизонтальном полете. Она состоит из веса G = 4,l Н, подъемной силы на крыле Y и подъемной силы на горизонтальном оперении Уго.
Чтобы правильно выбрать значения углов атаки крыла и стабилизатора, необходимо определить силы Y и Уго-
Первое из условий (6) выполняется автоматически, поскольку пи одна из сил не дает проекции на ось х. Второе условие (6) запишется следующим образом:
У+Уго—4,1=0.
(а)
Напишем теперь уравнение равновесия моментов (7) относительно центра тяжести модели (точки приложения силы веса G):
У-0,1—0,9-УГО = 0. (б)
Отсюда У=9УГП.
Подставив значение У в уравнение (а), получим
9УГО+Уго = 4,1,
откуда Уг0 = 0,41 Н, У=9УГО = 9-0,41 =3,69 Н.
Условия равновесия (6) и (7) будут часто использоваться в расчетах при проектировании модели.
Сведения о движении
Движение — это изменение положения одного тела относительно другого, условно принятого за неподвижное. Движение называется прямолинейным, если все точки
тела движутся по прямым линиям, и криволинейным, если точки движутся по кривым линиям. Движение будет поступательным, если все точки тела проходят одинаковый как по длине, так и по форме путь. Если же точки тела движутся по окружности, то мы имеем дело с вращательным движением (вращением).
С точки зрения скорости движение может быть равномерным установившимся, когда скорость тела постоянна, или неравномерным (неустановившимся), когда скорость изменяется во времени. Если скорость возрастает, движение называем ускоренным, если уменьшается — замедленным.
Движение равномерно ускоренное (или равномерно замедленное) имеет место, когда ускорение (или замедление) имеет постоянную величину.
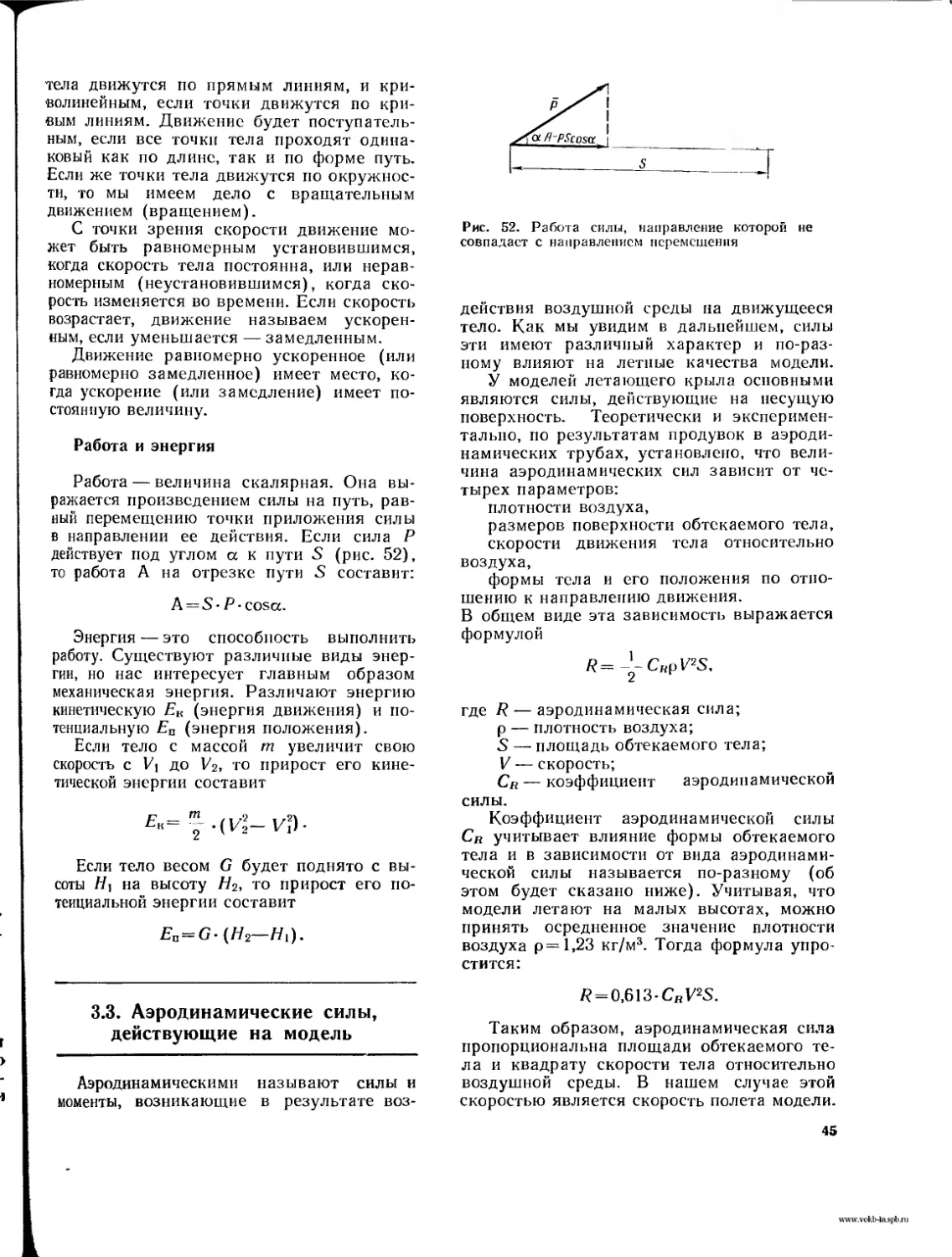
Работа и энергия
Работа — величина скалярная. Она выражается произведением силы на путь, равный перемещению точки приложения силы в направлении ее действия. Если сила Р действует под углом а к пути S (рис. 52), то работа А на отрезке пути S составит:
A = S-P -cosa.
Энергия — это способность выполнить работу. Существуют различные виды энергии, но нас интересует главным образом механическая энергия. Различают энергию кинетическую Ец (энергия движения) и потенциальную Еп (энергия положения).
Если тело с массой т увеличит свою скорость с Vi до то прирост его кинетической энергии составит
VD-
Если тело весом G будет поднято с высоты на высоту Н2, то прирост его потенциальной энергии составит
En = G-(tf2—
3.3. Аэродинамические силы, действующие на модель
Аэродинамическими называют силы и моменты, возникающие в результате воз-
Рис. 52. Работа силы, направление которой не совпадает с направлением перемещения
действия воздушной среды на движущееся тело. Как мы увидим в дальнейшем, силы эти имеют различный характер и по-разному влияют на летные качества модели.
У моделей летающего крыла основными являются силы, действующие на несущую поверхность. Теоретически и экспериментально, по результатам продувок в аэродинамических трубах, установлено, что величина аэродинамических сил зависит от четырех параметров:
плотности воздуха,
размеров поверхности обтекаемого тела, скорости движения тела относительно воздуха,
формы тела и его положения по отношению к направлению движения.
В общем виде эта зависимость выражается формулой
Сир V2S,
где R — аэродинамическая сила;
р — плотность воздуха;
S — площадь обтекаемого тела;
V — скорость;
Сд — коэффициент аэродинамической силы.
Коэффициент аэродинамической силы Сд учитывает влияние формы обтекаемого тела и в зависимости от вида аэродинамической силы называется по-разному (об этом будет сказано ниже). Учитывая, что модели летают на малых высотах, можно принять осредненное значение плотности воздуха р=1,23 кг/м3. Тогда формула упростится:
/? = 0,613-CKV2S.
Таким образом, аэродинамическая сила пропорциональна площади обтекаемого тела и квадрату скорости тела относительно воздушной среды. В нашем случае этой скоростью является скорость полета модели.
45
Рис. 53. Аэродинамические силы профиля
Рис. 54. Зависимость коэффициентов подъемной силы и лобового сопротивления профиля от угла атаки
Силы, действующие на профиль крыла
Рассмотрим для начала сечение крыла— его профиль. Представим себе, что на рис. 53 представлена очень тонкая «долька» крыла, причем хорда профиля установлена под углом а к потоку воздуха, направление движения которого параллельно оси х.
Полная аэродинамическая сила R, действующая на профиль, направлена под некоторым углом к оси х. Эту силу можно разложить на направление оси х и на перпендикулярную к нему ось у. Тогда составляющие полной аэродинамической силы определятся по формулам:
У=0,613-Сй-Р-S, (8)
Х = 0,613-Сж- V2-S,
где У — подъемная сила;
X — сила сопротивления.
В обеих формулах значения площади S и скорости V одинаковы, следовательно, можно сделать вывод, что аэродинамические свойства профиля характеризуются коэффициентами Сх и Су.
Механизм возникновения на профиле подъемной силы и силы сопротивления описан в любом учебнике по аэродинамике, поэтому повторять его здесь не имеег смысла *.
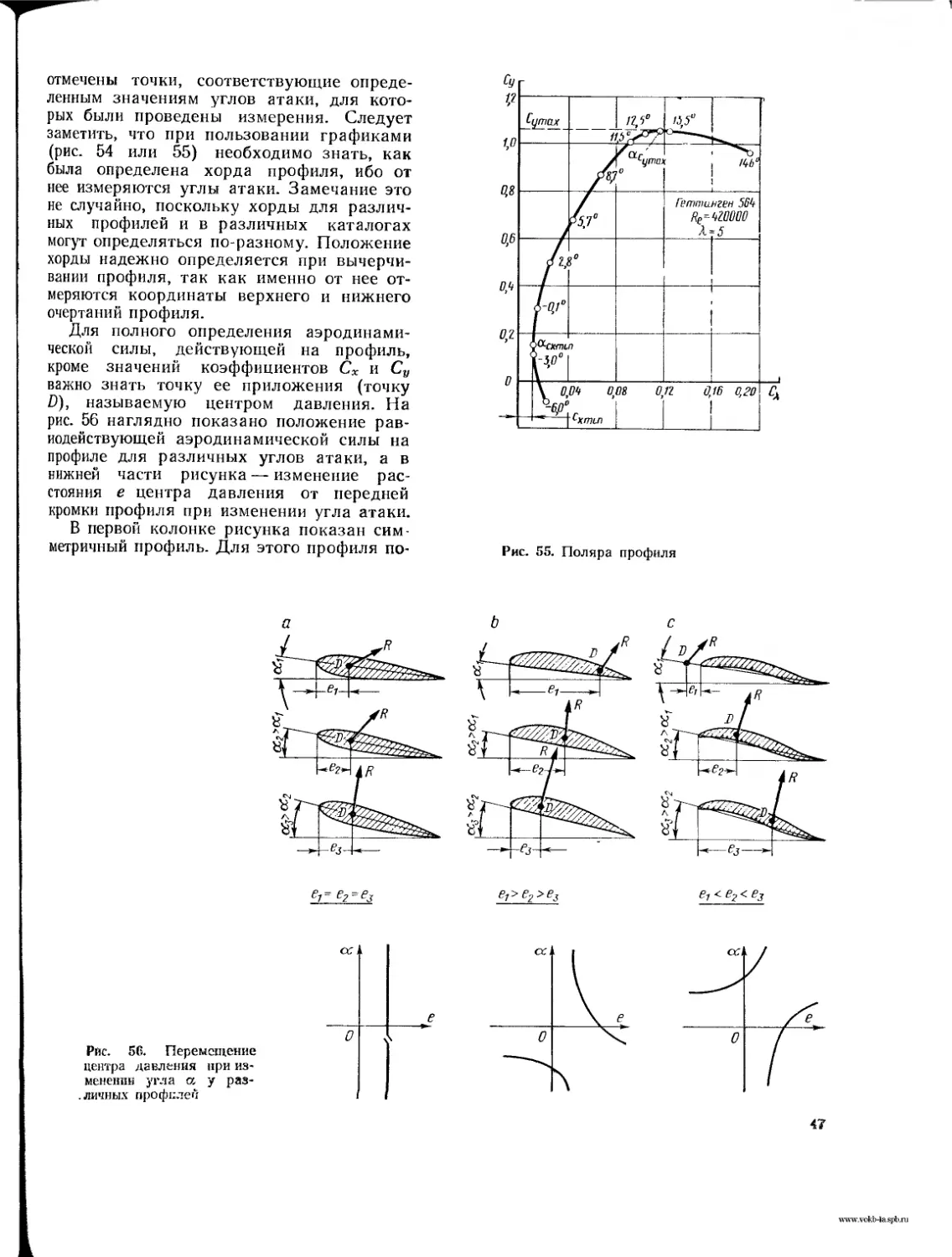
Коэффициенты подъемной силы Су и силы сопротивления профиля Сх определяются экспериментально в аэродинамических трубах. Их значения существенно зависят от угла а, называемого углом атаки. На рис. 54 показаны типичные кривые изменения этих коэффициентов в зависимости от изменения угла атаки (обратите внимание на то, что для увеличения точности отсчетов при пользовании этим графиком шкала горизонтальной оси для коэффициента Сх пятикратно «растянута» по сравнению со шкалой коэффициента Су). Из рассмотрения графиков можно сделать следующие выводы:
а) для каждого профиля существует некоторый угол «(I. при котором подъемная сила равна нулю (угол нулевой подъемной силы). Для симметричного профиля угол нулевой подъемной силы также равен нулю;
б) коэффициент подъемной силы имеет наибольшее значение при угле атаки аКр, при превышении этого угла, который называется критическим, подъемная сила резко падает, что связано с нарушением плавного безотрывного обтекания профиля — так называемым срывом потока;
в) коэффициент сопротивления профиля имеет наименьшее значение при угле атаки «с хт1П.
В аэродинамике в ряде случаев используется понятие «наклон кривой коэффици-
ДС„ ента подъемной силы»о= —- , который
Да определяется приращением коэффициента Су на единицу приращения угла атаки. Наклон этот постоянен вплоть до околокрити-ческих углов атаки.
Изменение коэффициентов аэродинамических сил на профиле часто представляют в виде одной кривой, которая называется полярой профиля (рис. 55). На поляре
* При желании об этом можно прочесть в книгах [1] или [4]. (Примеч. переводчика).
46
отмечены точки, соответствующие определенным значениям углов атаки, для которых были проведены измерения. Следует заметить, что при пользовании графиками (рис. 54 или 55) необходимо знать, как была определена хорда профиля, ибо от нее измеряются углы атаки. Замечание это не случайно, поскольку хорды для различных профилей и в различных каталогах могут определяться по-разному. Положение хорды надежно определяется при вычерчивании профиля, так как именно от нее отмеряются координаты верхнего и нижнего очертаний профиля.
Для полного определения аэродинамической силы, действующей на профиль, кроме значений коэффициентов Сх и Cv важно знать точку ее приложения (точку D), называемую центром давления. На рис. 56 наглядно показано положение равнодействующей аэродинамической силы на профиле для различных углов атаки, а в нижней части рисунка — изменение расстояния е центра давления от передней кромки профиля при изменении угла атаки.
В первой колонке рисунка показан симметричный профиль. Для этого профиля по-
Рис. 55. Поляра профиля
g7-
Рис. 56. Перемещение центра давления при изменении угла а у различных профилей
Рис. 57. Фокус профиля
ложение центра давления постоянно, изменяются только величина и направление полной равнодействующей силы (коэффициенты Сх и С„). Этот профиль можно назвать профилем с постоянным центром давления.
У несимметричных профилей: двояковыпуклых, плосковыпуклых или вогнуто-выпуклых (вторая колонка) — с ростом угла атаки центр давления перемещается вперед. Это профили с нормальным «поведением» центра давления.
У профилен двойной кривизны, средняя линия которых изогнута наподобие зеркальною отражения опрокинутой па бок буквы S, с задней кромкой, несколько отклоненной кверху,— центр давления с ростом угла атаки перемещается назад. Эти профили называются самобалансирующимися, именно они находят широкое применение в моделях летающих крыльев.
Аналогично формуле (8) запишется формула для момента М аэродинамической силы профиля относительно любой точки, которой может быть, например, передняя кромка:
Л1 = 0,613Сга V?Sb. (9)
Заметим, что в формуле появился дополнительный параметр — длина хорды профиля, которой пропорционально плечо аэродинамической силы. Момент считается положительным, если направлен на увеличение угла атаки (передняя кромка стремится уйти вверх) и наоборот.
Из рис. 56 видно также, что с изменением углов атаки изменяется не только величина равнодействующей силы, но и ее плечо относительно передней кромки. Установлено, что на хорде профиля имеется такая точка, относительно которой момент аэродинамической силы постоянен или почти постоянен в довольно большом диапазоне углов атаки; эта точка называется фокусом профиля. Можно принять, что для
большинства профилей в используемом на практике диапазоне углов атаки фокус лежит на 25% длины хорды профиля, считая от передней кромки.
Коэффициент момента относительно фокуса обозначается CmF (или Ст0,25); по величине он равен коэффициенту момента относительно передней кромки профиля при СУ=О : CmF=Cm0. Для большинства профилей в справочниках приводится среднее значение Ст0, поскольку, как мы уже выяснили, оно практически постоянно. У профилей с нормальным перемещением центра давления (рис. 56, б) Ст0— величина отрицательная, у профилей с обратным перемещением центра давления — положительная. а у симметричных профилей Cm0= = О. Момент полной аэродинамической силы относительно фокуса подсчитывается по формуле
Mo = O,613CmoV2Sb. (10)
Резюмируя наши рассуждения о перемещениях центра давления, можно заключить, что действие аэродинамической силы, приложенной в центре давления профиля, равнозначно действию этой же силы в фокусе профиля с учетом ее момента относительно фокуса (см. принцип параллельного переноса сил, раздел 3.2). При практических расчетах значительно проще оперировать этим вторым вариантом расположения сил (рис. 57, б).
При использовании справочных данных о величине аэродинамических коэффициентов очень важно знать, при каких условиях они были определены. Эти условия характеризуются в первую очередь числом Рейнольдса, которое может быть определено по формуле
Re=70Vb, (11)
где V — скорость обтекания, м/с;
Ь — хорда крыла, мм.
Коэффициенты профиля Сх, Су, Сто0, измеренные при определенном числе Рейнольдса, могут надежно использоваться для расчета модели, число Рейнольдса которой такое же. Однако, к сожалению, мы часто не будем располагать достаточным количеством данных по характеристикам профилей моделей в конкретных условиях их полета, и соблюдение этого условия поневоле не будет очень строгим.
Итак, в этом разделе мы коротко вспомнили основные сведения из аэродинамики
4«
авиационных профилей, которые наверняка потребуются нам при расчете летающих моделей. При необходимости более детального ознакомления с механизмом появления аэродинамических сил на профиле крыла и другими теоретическими вопросами можно использовать специальные публикации (например, II]. [2] или [4]).
Аэродинамические силы, действующие на несущие поверхности
В предыдущем разделе, рассматривая свойства авиационного профиля, мы ничего не говорили о форме несущей поверхности крыла. Наши рассуждения касались лишь очень узкой «дольки» крыла, его профиля. Несущая поверхность крыла может быть представлена как набор таких «долек», которые и создают определенную форму крыла, ее вид сверху (рис. 58).
Распределение коэффициента подъемной силы вдоль размаха крыла
Основной задачей в аэродинамике крыла является определение распределения коэффициента подъемной силы Су вдоль его размаха (вдоль оси г на рис. 58). Эта задача особенно важна для модели типа «летающее крыло», поскольку от распределения Су зависит продольная устойчивость модели. Подробному рассмотрению этого вопроса посвящены дальнейшие разделы.
Распределение коэффициента подъемной силы по размаху крыла можно рассчитать методом Шренка, который хотя и дает приближенные результаты, однако вполне приемлем для практических расчетов. В этом методе принимается, что коэффициент подъемной силы сечения крыла с координатой z определяется по формуле
Сусеч — Суср j 1 + — j, (12)
где Суср— средний коэффициент подъемной силы крыла;
b — текущая хорда крыла в сечении г; Ьзл— текущая хорда крыла эллиптического очертания, имеющего ту же площадь и размах, что и действительное крыло.
Необходимо добавить, что формула (12) верна только для крыла с постоянным профилем и без крутки.
4. iSl-
Рассмотрим пример применения формулы (12). Пусть требуется рассчитать распределение коэффициента подъемной силы для трех крыльев с размахом I — эллиптического, прямоугольного и трапециевидного с сужением
Площадь эллиптического крыла с размахом I и центральной хордой Ьо определяется формулой
5ЭЛ — , лЬо1.
4
Площадь прямоугольного крыла с махом I и хордой bnj) равна
ХПр=Ьщ>1.
Площадь трапециевидного крыла с махом I и сужением 2 равна
Хтр— “~ (Ьотр+ 0,5feOTp) I ~ Ьотр'С
(а)
раз-
(б)
раз-
Для того чтобы площади всех трех рассмотренных крыльев были равны, их хорды должны соотноситься между собой следующим образом:
bnp= п feo = 0,785feo (из уравнений (а) 4
И (б);
&отр= - Ьо— 1,047Ьо (из уравнений (а) 3
И (в).
Результаты расчетов по формуле (12) представлены в табл. 5, а также на рис. 59 в виде кривых распределения коэффициен та подъемной силы на половине размаха крыла. Из рисунка видно, что для эллиптического крыла коэффициент Cv имеет постоянную величину вдоль размаха; с точки зрения аэродинамических качеств модели это наиболее благоприятный вариант распределения Су. У прямоугольного крыла
49
Рис. 59. Распределение коэффициента подъемной силы вдоль размаха крыла различной формы в плане
Рис. 60. Распределение коэффициента подъемной силы вдоль размаха крыла при различных углах атаки
Таблица 5
Распределение коэффициента подъемной силы, рассчитанного по методу Шренка
2Z/Z »эЛ Прямоугольник Трапеция
fcnp с рсеч с уср ^усеч Суср
0 1,000 1,137 1,047 0,978
о,1 0,995 1,133 0,995 1,000
0,2 0,980 1,124 0,942 1,020
0,3 0,954 1,107 0,890 1,036
0,4 0,917 0,785ЬР 1,084 0,838 1,047
0,5 0,866 1,052 0,785 1,052
0,6 0,800 1,009 0,733 1,046
0,7 0,714 0,995 0,681 1,024
0,8 0,600 0,882 0,628 0,978
0,9 0,436 0,778 0,576 0,878
1,0 0 0,500 0,524 0,500
50
равнодействующая подъемной силы полукрыла смещена к плоскости симметрии, а у трапециевидного — к концам крыла.
Расчеты проведены для прямого крыла. Придание крылу стреловидности вызывает дополнительное смещение равнодействующей подъемной силы: положительная стреловидность смещает ее к концам, отрицательная — к плоскости симметрии крыла. Об этом нельзя забывать при проектировании бесхвостой модели, крыло которой, как правило, имеет стреловидность.
Распределение коэффициента подъемной силы существенно зависит от угла атаки, что наглядно иллюстрирует рис. 60. Для малых углов атаки характерно эллиптическое распределение Cv, с увеличением а сильнее несут концы крыла. Такая зависимость весьма неблагоприятна для модели летающего крыла с прямой стреловидностью, поскольку на больших околокритиче-ских углах атаки срыв потока и уменьшение подъемной силы будут происходить в первую очередь на концах крыла, а это может быть причиной продольной неустойчивости модели.
С точки зрения получения высоких летных характеристик бесхвостой модели выгоднее всего эллиптическое распределение коэффициента подъемной силы по размаху крыла. Однако необходимость обеспечить продольную устойчивость делает этот вид распределения Сч непригодным для моделей летающих крыльев. Поэтому часто уже на этапе проектирования выбирается такое распределение коэффициента Су, которое гарантирует удовлетворительные характеристики устойчивости модели, а затем это наперед заданное распределение Су реализуется путем соответствующего подбора
аэродинамической и геометрической крутки крыла.
Выгодное для бесхвостой модели распределение Су вдоль размаха крыла может быть получено с помощью формулы
бусеч — Суср
4 л
Формула содержит параметр о, который модифицирует эллиптическое распределение Cv, поскольку при 0 = 0 она дает эллипс.
В табл. 6 приведены результаты расчета СуСеч для коэффициентов g=0,5; 0; -0,5; —0,7; при этом среднее значение коэффициента подъемной силы Суср принималось одинаковым для всех вариантов расчета.
На рис. 61 табличные данные изображены графически, пунктирной линией показано треугольное распределение коэффициента подъемной силы. Из рисунка видно, что с ростом отрицательного значения параметра о большие значения Су смещаются к оси симметрии крыла и распределение подъемной силы приближается к треугольному. Для моделей летающих крыльев с прямой стреловидностью значения параметра о должны быть в пределах от -0,5 до —0,7.
Из рассмотренных выше материалов следует вывод, что при проектировании бесхвостых моделей можно идти двумя путями:
задавшись в качестве исходных данных геометрическими характеристиками крыла, мы определяем методом Шренка распределение коэффициента Су. Напомним, что метод этот может быть использован только для проектирования крыльев без крутки, следовательно, рассматриваться должна схема крыла без крутки со стабилизирующими поверхностями, также не имеющими крутки. Необходимое распределение коэффициента подъемной силы, обеспечивающее удовлетворительные летные качества модели, подбирается опытным путем за счет изменения угла установки стабилизирующих поверхностей или изменения формы крыла в плане;
выбрав оптимальное с точки зрения устойчивости распределение коэффициента подъемной силы, мы подбираем профиль и геометрическую крутку крыла, обеспечивающие реализацию такого распределения.
4’
Рис. 61. Распределение коэффициента подъемной силы вдоль размаха крыла при различных значениях параметра о
Оба эти способа проектирования модели летающего крыла будут рассмотрены ниже на конкретных примерах.
Индуктивное сопротивление и скос потока
Как известно, подъемная сила крыла образуется за счет разности давлений на
Таблица 6
Распределение коэффициента подъемной силы в зависимости от параметра о
22 1
0 = 0.5 0=0 о=—0.5 о=—0,7
0 1,132 1,273 1,455 1,543
0,1 1,132 1,267 1,441 1,525
0,2 1,132 1,248 1,398 1.470
0,3 1,129 1,215 1,326 1,380
0,4 1,120 1,167 1,227 1,256
0,5 1,103 1,103 1,103 1,103
0,6 1,069 1,019 0,955 0,924
0,7 1,006 0.909 0,784 0,724
0,8 0,896 0,764 0,594 0,511
0,9 0,693 0,555 0,377 0,291
1 Р 0 0 0 0
51
Рис. 62. Механизм возникновения индуктивного сопротивления
его верхней и нижней поверхностях: при а>0 на нижней поверхности давление обычно избыточное, на верхней — пониженное (разрежение) (рис. 62, а). Вследствие того, что давление стремится выровняться, на крыле возникает боковое обтекание (через торец крыла, рис. 62, б). Это приводит к некоторому изменению величины и направления вектора скорости потока воздуха на крыле, причем на верхней поверхности поток отклоняется к оси симметрии крыла, а на нижней — к его концам (рис. 62, в).
Появляются два дополнительных эффекта:
за крылом возникает вихревая пелена, вызывающая дополнительное сопротивление, которое называется индуктивным сопротивлением;
вихревая пелена отклоняет поток за крылом, а также под ним и за ним вниз; появляется так называемый скос потока, который уменьшает истинный угол атаки крыла *.
Очевидно, что оба эти эффекта проявляются только тогда, когда на крыле имеется подъемная сила; следовательно, и скос потока, и индуктивное сопротивление зависят от величины коэффициента подъемной силы крыла. Кроме того, степень влияния бокового обтекания на характеристики крыла зависит от формы крыла и
* Более подробно с механизмом появления скоса потока и индуктивного сопротивления можно ознакомиться в книгах [1] или [6]. (Примеч. переводчика) .
его удлинения. Для дальнейших расчета целесообразно воспользоваться понятием эффективного удлинения ЛЭф.
Коэффициент индуктивного сопротивления крыла рассчитывается по формуле
Л>Хэф
(14)
а скос потока определится формулой
Cv е = —— . лХэф
(15)
Формула (15) дает угол скоса в радианах; чтобы выразить его в градусах, следует умножить полученную величину на 57,3.
Эффективное удлинение крыла зависит от нескольких параметров, их влияние учитывается в формуле
(16)
где X — геометрическое удлинение крыла, /2 определенное по формуле Х= -
(см. раздел 2);
di •— коэффициент, учитывающий форму крыла модели; его значения для обратных сужений = 0,6..,1 ьо
приведены в табл. 7.
Таблица 7
Величина коэффициента 6, в зависимости от удлинения
К 2 4 6 8 10 12 14
6, 0,008 0,02о 0,036 0,052 0,065 0,080 0,094
62 — коэффициент, зависящий от величины положительной стреловидности крыла, которая измеряется углом между нормалью к плоскости симметрии и линией 1/4 хорд крыла; для углов стреловидности Х=о...ю° 62=1,о, а для х=10...20° б2=1,11; указанные значения б2 верны при геометрическом удлинении крыла Х = 3...14;
Кер — коэффициент, характеризующий величину поправки на влияние остальных частей модели; он определяется формулой
К!;р = 0,011лА„
52
а для моделей летающих крыльем К(.г ше всего принимается равным пулю, так как их фюзеляж обычно не развит;
АХ — поправка, учитывающая форму за-концовок крыла; ее значения приведены в табл. 8. Если на концах крыла имеются вертикальные шайбы (рис. 63), то поправка АХ определяется по формуле
АХ=1,9 — X.
//2
В заключение заметим, что определение эффективного удлинения крыла модели по формуле (16) предваряет расчет коэффициента индуктивного сопротивления и скоса потока.
Поляра крыла
Чтобы получить поляру крыла, имеющего определенное геометрическое удлинение, необходимо провести расчеты, которые учитывали бы изменение коэффициента сопротивления и угла атаки крыла, вызванное эффектом бокового обтекания. Действительное значение коэффициента сопротивления является алгебраической суммой коэффициента профильного сопротивления, полученного экспериментально при аэродинамических испытаниях крыла того же удлинения, и коэффициента индуктивного сопротивления крыла с эффективным удлинением:
Сж = СХр-ь~ СХ1.
Аналогично этому угол атаки крыла будет суммой угла, отмеченного на разметке экспериментальной поляры, и угла скоса потока у крыла с эффективным удлинением:
= Оаксп + 8.
Проиллюстрируем рассмотренные вопросы примерами.
Пример 1. Аэродинамические испытания профиля MVA-301 проведены на модели прямоугольного крыла без стреловид ности, с геометрическим удлинением Х=5; характеристики его поляры даны в первых трех столбцах табл. 9. Чтобы подсчитать эффективное удлинение этого крыла, необходимо определить поправки бь 62 и АХ:
величину поправки б| для Х=5 получим путем интерполяции по формуле (1) значений б>, приведенных в табл. 7.
ТаЪлица в
Поправки, учитывающие форму концов крыла
Форма концов, вид сверку вид спереди
прямая закругленная острая
пря моугольная 0 -0,22
прямоугольная -0.13
прямоугольная ~О32 -ОАО
эллиптическая ~О4О -0.20
трапециевидная —0,05 -025
‘/2
Рис. 63. Влияние концевых ! шайб крыла
б, = 0,020 + 0,036 °’-20 (5—4) =0,028;
6—4
поправка на стреловидность 62=1,0 (при х=0);
поправка на очертания и форму закон-цовок крыла АХ=0.
Теперь определим эффективное удлинение крыла, испытывавшегося в аэродинами ческой трубе:
Х-.1ф0 = —§-=4,86.
ф 1+0,028
Наша цель — пересчет табличных значений коэффициента Сх и угла а для крыла модели ЛК-1 со следующими параметрами:
размах крыла I— 1430 мм;
геометрическое удлинение Х = 8,66;
хорда крыла постоянна (ЬО/6К= 1,0);
стреловидность х = 22°:
на концах крыла установлены вертикальные шайбы высотой 25 мм.
Выполняем необходимые расчеты.
61=0,052+ °-065~0’052 (8,66—8) =0,056;
10—8
62 = 1,11 (для стреловидности )j=10... 20°);
53
Пересчет поляры профиля MVA = 30l
“°5 су Сх с»‘ 8° О' 0 8,66
-0,029-С 2 У — 1,664 й о + сх+дсх
1 2 3 4 5 6 / 8
—0.15 0,370 0,043 0,137 —0,004 —0,62 —0,77 0,039
1,79 0,490 0,042 0,240 —0,007 —0,82 0,97 0,035
3,36 0,590 0,045 0.348 —0,010 —0,98 2,38 0,035
5,77 0,730 0,054 0,533 —0,015 — 1,21 4,56 0,039
7,73 0,830 0,064 0,689 —0,020 — 1,38 6,35 0,044
9,68 0,950 0,078 0,903 —0,026 — 1,58 8,10 0,052
13,72 1,160 0,109 1,346 —0,039 — 1,93 11,79 0,070
17,14 1,380 0,155 1,904 —0,055 —2,30 14,84 0,100
Cxi8,73—
ДА, = 1,9- А5 -8,66 = 0,58.
715
л-8,73
Эффективное удлинение рассчитываемого крыла
Хэф= ----8^*-----+0,58 = 8.73.
1 + 1,11-0,050
Коэффициент индуктивного сопротивления крыла с удлинением Кэфо=4,86 согласно формуле (14) будет равен
следовательно, приращение коэффициента индуктивного сопротивления составляет
АСх— (Cxi) 8,73 (Cxi)4,86 —
к \8,73 4,86 /
=-0,029с*.
Схг4,86 —
с\, л • 4,86
Аналогичным образом определяем приращение угла атаки (в градусах):
а для крыла ЛК-1 с удлинением Х^ф = 8,73
дас = е°=
СЛ (J________
л \8,73 4,86 /
•57,3= - 1.664С,,.
Рис. 64. Поляра крыла с профилем MVA-301
Табл. 9 иллюстрирует последовательность расчетов. Полученная нами поляра модели ЛК-1 представлена на рис. 64 (7= = 8,66); для сравнения на этом же рисунке дана исходная поляра крыла (Л = 5).
Пример 2. Рассмотрим обратную, по сравнению с предыдущей, задачу: на основании табличных характеристик, полученных при продувках крыла с бесконечно большим удлинением Х=оо (первые три столбца табл. 10), рассчитаем поляру крыла конечного удлинения со следующими параметрами:
профиль — NACA 0009, симметричный;
геометрическое удлинение Х = 5,81;
стреловидность крыла у=20°;
форма трапециевидная Ьк/Ьо = 1:1,65;
Пересчет поляры профиля NACA 0009
а” СУ ^ХОО С2 У аСх1 е» “°S.3S Сх5,35
0,059- С 2 У 3.40-С„ а°+е® Схоо+ЛС*
1 2 3 4 5 6 7 8
0 0 0,017 0 0 0 0 0,017
0,94 0,1 0,017 0,01 0,001 0,34 1,28 0,018
1,89 0,2 0,019 0,04 0,002 0,68 2,57 0,021
2,94 0,3 0,021 0,09 0,005 1,02 3,96 0,026
4,00 0,4 0,024 0,16 0,009 1,36 5,36 0,033
5,15 0,5 0,029 0,25 0,015 1,70 6,85 0,044
6,31 0,6 0,040 0,36 0,021 2,03 8,34 0,061
законцовки крыла в виде спереди — закругленной формы bK/bo= 1:1,65;
61 = 0,020+ °-036-0’°ge (5,81—4) =0,034.
6—4
Очевидно, что эффективное удлинение «исходного» крыла равно геометрическому, т. е. Хэфо — оо.
Поправки, необходимые для подсчета эффективного удлинения нашего конкретного крыла конечного размаха:
АЛ =—0,25.
Его эффективное удлинение
- 5»81
Л®* 1 + 1.11-0,034
0,25=5,35.
Приращение коэффициента индуктивного сопротивления
С2
Аэродинамические силы, действующие на остальные части модели
При полете модели аэродинамические силы действуют не только на ее несущие поверхности, но и на остальные части. У летающего крыла к «остальным частям» относятся слабо развитый фюзеляж, стабилизирующие поверхности и, в некоторых случаях, киль и вертикальные шайбы. Принимается, что аэродинамические силы, действующие на все эти элементы, могут быть сведены к дополнительному сопротивлению, которое называют вредным сопротивлением. Как и любая аэродинамическая сила, вредное сопротивление определяется зависимостью
Хвр=0,613Схвр-5вр-1/2.
Вредное сопротивление модели равно сумме вредных сопротивлений отдельных ее элементов:
Авр — А вр.ф + X вр.киля + X вр.шайб
Приращение угла атаки из-за скоса потока
Асс° = е°= 57,3 = 3,40• Су.
п-5,35
Алгоритм расчета дан в табл. 10, а полученная в результате расчета поляра крыла— на рис. 65
Рис. 65. Поляра крыла с профилем NACA 0009
55
Коэффициенты вредного сопротивления
Элемент ^эсвр Поверхность отнесения
Фюзеляж многоугольного сечения, покрытый бумагой 0,20 Площадь миделя — наибольшего поперечного сечения плоскостью, перпендикулярной продольной оси фюзеляжа
то же, лакированный и полированный 0,28
овальный, покрытый бумагой 0,15
то же, лакированный и полированный 0,19
Киль симметричного профиля 0,020 Площадь киля
Вертикальная шайба (профиль — тонкая пластинка) 0,014 Плошадь шайбы
или, используя математический знак суммы S, сократим запись
^вр — S-^врг, /
где Хвр,- обозначает силы сопротивления отдельных элементов модели.
При расчете вредного сопротивления каждого отдельного элемента модели в формулу для ХЕр вместе с коэффициентом СЖВр нужно подставлять размер той поверхности (или сечения) этого элемента, которая использовалась при экспериментальном определении коэффициента Сжвр. Средние значения Схвр ненесущих элементов модели летающего крыла вместе с указанием «поверхности отнесения» приведены в табл. 11.
Суммарную силу вредного сопротивления чаще всего относят к полной площади крыла модели, поскольку тем самым упрощаются дальнейшие расчеты (см. следующий раздел). Используемый в них коэффициент вредного сопротивления всей модели определяется по формуле:
Сжвр=1,15- —XBPI'-Si .
5м
Коэффициент 1,15 учитывает здесь интерференцию (взаимное влияние) элементов модели, например, в месте соединения крыла с фюзеляжем, где появляются дополнительные вихри, увеличивающие общее сопротивление модели.
56
Заметим, что во всех рассуждениях, касающихся вредного сопротивления, мы принимали, что оно не зависит от угла атаки. Это не совсем точно, однако в практических расчетах моделей вполне приемлемо.
Пример. Подсчитаем коэффициент вредного сопротивления модели ЛК-1, схему и основные параметры которой мы определили в разделе 2.
Параметры модели:
фюзеляж — прямоугольного сечения, лакированный, площадь миделя
5Ф = 0,014-0,055 = 0,00077 м2, Сжврф=0,28;
киль — симметричного профиля, площадь SK = 0,0276 м2, Сжвр.к = 0,020;
вертикальные шайбы — из фанеры (профиль — плоская пластинка), площадь шайбы Sm = 0,005 м2; Сжвр.ш = 0,014. Коэффициент вредного сопротивления всех элементов
^хвр —
. , г0,00077- 0,28 +0,0276-0,020 + 2-0,005-0,014
1,1b-----------------------------—----------
0,338
= 0,003.
Поляра модели
Летные свойства модели характеризуются ее полярой — кривой, отображаю
щей связь между коэффициентами подъемной силы и сопротивления всей модели. Чтобы построить поляру модели, нужно учесть все силы, действующие на нее при различных углах атаки, т. е. фактически просуммировать и обобщить наши расчеты, выполненные в предыдущих разделах книги.
Очевидно, что подъемная сила модели создается только крылом, в то время как сопротивление является суммой сопротивлений крыла и всех остальных частей модели. Поскольку аэродинамические силы сопротивления при определении величины коэффициентов этих сил были нами отнесены к полной несущей поверхности модели, справедливо будет записать, что при каждом угле атаки
Сум = Су‘, СХМ — Сх + Схвр-
В частном случае модели летающего крыла без крутки, со стабилизирующими поверхностями, которые также не имеют крутки, но установлены под небольшим отрицательным углом <рУст по отношению к центральной части крыла, среднее значение аэродинамических коэффициентов можно подсчитать по так называемым «формулам смешения»:
с 4-Г .—
г с . г «г +
n — --- * 1----------—----
«Ss+'ScT SCT
+ sa
, (17)
__ Cx& ~ S& 4- C:
Ss 4~Sct
Sct
CCT ss
Ser
s,
где Cys, Cxs, S — аэродинамические коэффициенты и площадь центральной части крыла модели, Сует, Схст, ^ст — те же параметры стабилизирующих поверхностей.
Как видно из выражений (17), вследствие разграничения крыла на центральную часть и стабилизирующие поверхности расчет поляры модели летающего крыла не отличается от расчета моделей обычной схемы.
Пример. Рассчитаем и построим поляру модели летающего крыла ЛК-1- Ранее для центральной части крыла был принят профиль МКЛ-301, а ее поляра представлена в табл. 9 и на рис. 64. Стабилизирующие поверхности имеют симметричный профиль NACA 0009, их поляра представлена в табл. 10 и на рис. 65. Угол атаки стабилизирующих поверхностей меньше, чем у крыла, на угол установки фуст- Значение этого угла подбирается на этапе предварительных расчетов, приведенных далее в разделе 5. В данном примере примем его равным — 5,5°.
Последовательность расчета поляры модели показана в табл. 12. В столбцах 1—3 приведены данные поляры центральной части модели летающего крыла, взятые из табл. 9, а в столбцах 4—6 — данные поляры стабилизирующих поверхностей из
Расчет поляры модели ЛК-1
Таблица 12
Крыло Стабнл из и рующне поверхности Крылоч-стабилизирующие поверхности Модель
сг, Сх а» СТ Сует Сдест с УМ С 9 с" с *^згм
0.698Су + +0,302СуСТ 0.698Сх+ +0,302Схст 1Д5С ' X с" +0,003
I 2 з 1 5 6 7 1 8 •> 10
-0,77 0,370 0,039 -6,27 -0,465 0,039 0.118 0,039 0.045 0,048
0,97 0,490 0,035 -4,53 - 0,344 0,028 0,238 0,033 0,038 0,041
2,38 0,590 0,035 -3,12 -0,241 0,022 0,339 0,031 0,036 0,039
4,56 0,730 0,039 -0,94 -0,073 0,018 0,487 0,033 0,038 0,041
6,35 0,830 0,044 0,85 0,064 0,018 0,599 0,036 0,041 0,044
8,10 0,950 0,052 2,60 0,200 0,021 0,724 0.043 0,049 0,052
11,79 1,160 0,070 6,29 0,465 0,039 0,950 0,061 0,070 0,073
14,84 1,380 0,100 9,34 0,651 0,074 1,160 0,092 0,106 0,109
57
Рис. 66. Поляра модели ЛК-1
Рис. 67. Силы, действующие на модель
табл. 10. Коэффициент подъемной силы модели и коэффициент сопротивления системы «крыло — стабилизирующие поверхности» (столбцы 7—8) подсчитаны по формуле (17):
5CT/Ss = 0,432;
Cv= Cys + °-432C^T = 0,698C„g+0,302Суст;
1,432
Сх= ^-А432С*” = 0,698Сх,+0,302Схст.
1,432
В столбце 9 приведен коэффициент сопротивления системы «крыло — стабилизирующие поверхности», увеличенный на 15% на интерференцию, а в столбце 10 — окончательное значение коэффициента сопротивления модели с учетом коэффициента вредного сопротивления, равного Схвр = = 0,003. Поляра модели представлена на рис. 66.
58
3.4. Равновесие сил
В предыдущем разделе мы рассмотрели метод определения всех аэродинамических сил, действующих на модель в свободном полете.
Кроме аэродинамических сил на модель действуют еще силы тяжести (веса) отдельных ее частей. Эти силы при дальнейшем анализе мы будем учитывать их равнодействующей — силой веса всей модели, приложенной в центре тяжести модели.
Полная система сил, действующих на модель, представлена на рис. 67. Подъемная сила У, сила сопротивления X приложены в фокусе крыла, расположенном на 0,25 средней аэродинамической хорды (САХ), которая обозначается ЬА. САХ — это хорда равновеликого по площади прямоугольного крыла, эквивалентного в аэродинамическом отношении нашему крылу произвольной формы. Методы определения САХ будут рассмотрены ниже.
Кроме сил У, X и момента Afz0 на модель действует сила веса прило-
женная в центре тяжести модели. На рис. 67 показана также сила вредного сопротивления фюзеляжа Хф (для случая, когда он имеется). Сила сопротивления стабилизирующих поверхностей не учитывается ввиду ее малости.
В соответствии с первым законом Ньютона условием установившегося прямолинейного полета модели является равновесие всех действующих на нее сил и моментов.
Симметрия конструкции модели относительно плоскости Х0У (плоскость рис. 67) обеспечивает автоматическое выполнение условий равновесия проекций сил на ось z, а также равновесия моментов относительно осей х и у. Поэтому сосредоточим наше внимание на условиях продольного равновесия модели, т. е. на равновесии проекций сил на оси х и у, а также равновесии моментов этих сил относительно поперечной оси z, проходящей через центр тяжести модели (сравни с разделом 3.2).
Продольное равновесие модели
Продольное равновесие модели будет иметь место, если выполнены два условия:
1. Сумма продольных моментов всех сил относительно центра тяжести модели равна нулю.
2. Сумма проекций всех сил на оси х и у равна нулю. Первое из этих условий — определяющее, поскольку при его выполнении второе условие также будет выполнено.
Условие равновесия продольных моментов относительно центра тяжести модели для системы сил, представленной на рис. 67, имеет вид:
£Л4гП = Л42—Y- (%пт) F + X Ур—
-Хф-1/ф=0. (18)
Поделив все члены зависимости (18) на — ЗЬА, можно записать ее через коэффициенты аэродинамических сил:
т20-С,/м + Сх — —Схф — = 0 (19)
0а Ьл Ьа
(здесь тг0 — коэффициент продольного момента крыла относительно фокуса, а (xnT)f — координата центра тяжести относительно фокуса).
В целях упрощения дальнейшего анализа примем некоторые допущения, которые не вызовут существенных неточностей в расчетах:
ордината yF фокуса крыла относительно центра тяжести модели мала по значению:
ордината уф точки приложения силы вредного сопротивления фюзеляжа относительно центра тяжести также мала.
Тогда в формуле (19) можно опустить два последних члена, и условие продольного равновесия модели запишется в виде
mz0—Cyw =0. (20)
Ьа
Отсюда следует, что для обеспечения продольного равновесия модели ее центр тяжести должен находиться в точке с координатой (хЦт)р, измеренной от фокуса крыла, причем
(Хцт) F fTLzO | )
А Сум
При наличии прямой стреловидности и отрицательной крутки, свойственных схеме летающего крыла, коэффициент т20 в принятой системе координат будет положи-
Рис. 68. К расчету величины САХ крыла
тельным (момент направлен на кабрирование— стремится поднять нос модели).
(х )
Следовательно, и величина 1 nT,F >0, т. е.
Ьа центр тяжести модели должен располагаться впереди фокуса. Несколько забегая вперед, заметим, что —=Дхцт есть не что Ьа
иное, как запас продольной статической устойчивости модели (по центровке).
Наши выводы были сделаны в предположении, что сила Y вертикальна, а силы X и Хф — горизонтальны, тогда как в действительности они направлены перпендикулярно и параллельно к направлению полета. Однако такое допущение нс меняет сути дела, поскольку угол в между направлением полета и горизонталью (угол наклона траектории) обычно настолько мал, что можно принять cos0=l.
Средняя аэродинамическая хорда
Как видно из предыдущих разделов, в расчетах продольной устойчивости моделей важную роль играет понятие средней аэродинамической хорды крыла. Повторим и уточним данное выше определение: САХ — это хорда равновеликого по площади прямоугольного крыла без крутки и с постоянным профилем, характеризующегося теми же величинами аэродинамических сил и продольных моментов, что и рассматриваемое крыло произвольной в плане формы.
Средняя аэродинамическая хорда и коэффициенты Суя и тгОЭ эквивалентного крыла определяются следующим образом. Разобьем наше полукрыло (в виде сверху) на 5... 10 отрезков шириной Аг, считая при этом, что коэффициенты Су,- и СтОг на
59
Рис. 69. Графический метод определения САХ трапециевидного крыла
d
а б
Рис. 70. К определению САХ крыла с прямоугольным центропланом и эллиптического крыла
каждом из этих отрезков постоянны. Ось г проведем через точку фокуса осевой хорды (0,25ЬА) и направим ее перпендикулярно к оси симметрии крыла (рис. 68).
Принимая обозначения рис. 68, длину САХ можно рассчитать по формуле
ЬА =
Sfe,-Az
где X обозначает суммирование произведений b/-Az или Ьг--Az, подсчитанных для каждого из отрезков крыла. Очевидно, что выражение в знаменателе формулы —-это площадь полукрыла.
САХ полученной длины наносим на чертеж (вид сверху) полукрыла и тем самым определяем ее положение по размаху (координата zA). Аналогичную операцию проделаем на чертеже боковой проекции полукрыла, определяя координатой уА положение САХ по высоте (рис. 68, б).
Длину САХ трапециевидного крыла, об-60
ратное сужение которого характеризуется отношением Ьк/Ьо,можно также определить по формуле
г 2 1 Ч-Ьк/Ьр + (Ь,</Ьо)2 ,
Од=---------------------- Ро.
3 1 + bulb о
Положение САХ по размаху крыла в зависимости от вида распределения коэффициента подъемной силы в этом случае определяется следующим образом:
при постоянном Си вдоль размаха
г = 1 1+2(&„/&о) .
А 2 3(l+bK/fco) ’
при эллиптическом распределении Су
Если характер распределения подъемной силы вдоль размаха неизвестен, то для наиболее часто встречающихся форм крыльев в плане — трапециевидных и прямоугольных — размер и положение САХ можно приближенно определить графическим' методом, который показан на рис. 69. Последовательность действий такова:
делим хорды Ьо и Ьк пополам и через их середины проводим среднюю линию полукрыла—-прямую АВ;
на продолжении хорды Ьк откладываем отрезок длиной Ьо, а на продолженной в другую сторону хорде Ьо — отрезок длиной Ьк!
концы этих отрезков (точки С и D) соединяем прямой.
Точка пересечения прямых АВ и CD определит длину ЬА и положение гА САХ на плане крыла.
Если крыло состоит из прямоугольной части площадью Si и трапециевидной — площадью S2, графическое построение для нахождения САХ нужно провести отдельно для прямоугольной (ЬА)1 и трапециевидной (ЬА)2 частей крыла (рис. 70, а). Затем соединяем концы найденных хорд и определяем расстояние а. Через эту ючку проходит САХ. На рис. 70, б показано положение и длина САХ для крыла эллиптической формы.
После нахождения САХ следует подсчитать коэффициенты подъемной силы и продольного момента эквивалентного крыла.
Среднее значение коэффициента подъемной силы эквивалентного крыла Суя будет равно
Рис. 71. Определение САХ модели ЛК-1:
118 Si=0,118 м2; S2=0,051 м2; d=0,890—0,358=0,532 м; а = 0,532 =.
16,9
=0,371 м.
SCB,-fef-Az
S6, • Az
(22)
Коэффициент продольного момента эквивалентного крыла относительно его фокуса определяется по формуле
1
6аХ61-Дг
Щ?0:г—
X (SCyi-Xi-feiAz + SCmoi-fef-Az ) 4-
+ СуЭу— -tgx. " 4
(23)
Пример. Определение САХ крыла модели ЛК-1 и подсчет аэродинамических коэффициентов эквивалентного крыла.
Геометрия крыла и графические построения при определении САХ показаны на рис. 71. Поочередно определены САХ прямоугольной части (bA)i площадью $! =
= 0,118 м2 и трапециевидной части (feA)2 площадью .$2 = 0,051 м2; затем методом, показанным на рис. 70, а, определена средняя аэродинамическая хорда Ьл всего крыла. Пунктирной линией, проведенной через точки Е (0,25feo) и F (0,25йд), показана линия фокусов крыла. Вследствие небольшого сужения концевой части крыла угол стреловидности всего крыла, определяемый по линии фокусов, практически равен углу стреловидности крыла по передней кромке (Х=22°).
Переходим к расчету аэродинамических коэффициентов эквивалентного крыла. Крыло модели ЛК-1 состоит из двух частей, прямоугольной и трапециевидной, обе — постоянного профиля, без крутки. Поэтому крыло можно поделить только на два участка:
1. (Az) 1 = 0,715 м, £>1 = 0,165 м Zi = 0,358 м;
61
Xi = 0,358 -tg 22° = 0,145 м.
II. (Дг)2 = 0,385 м, z2 = 0,715 + 0,5-0,385 = = 0,908 м;
£>2 = 0.133 м;
х2 = 0,908-tg22° = 0,367 м.
Аэродинамические коэффициенты эквивалентного крыла подсчитываем для угла атаки центральной части крыла сс=11,2° (выбран из условий получения оптимальных летных данных модели — см. ниже, раздел 4.1). Из табл. 12 путем линейной интерполяции находим, что при этом угле ат аки
СУ1 = 1,125 и Су2=0,42.
Моментные характеристики использованных профилей известны:
для профиля MVA-301 Сто= — 0,099;
для профиля NACA 0009 Ст0 = 0.
По формуле (22) подсчитываем коэффициент подъемной силы эквивалентного крыла:
г _ 1,125-0,165-0,715 + 0,420-0,133-0,385 „ „
и 0,165-0.715+0,133-0,385
Как и следовало ожидать, это значение Cv, есть не что иное, как средний коэффициент подъемной силы крыла модели при том же угле атаки.
Коэффициент продольного момента эквивалентного крыла относительно его фокуса, расположенного на 0,25£>А, подсчитываем по формуле (23)
/«гоэ=------------- X
0,156-0,169 24
X 1(1-125-0,145-0,165-0,715) +
+ (0,420-0,367-0,133-0,385) +0,099Х
X (0,165)2-0,715] +0,912 -tg22° = 0,125.
Центровка модели
Для устойчивости модели летающего крыла особенно большое значение имеет центровка, т. е. размещение центра тяжести модели в строго определенном (относи тельно САХ) положении, которое рассчитывается по формуле (21).
У моделей классической схемы всегда имеется возможность компенсировать недостаточно точное положение ц. т. путем изменения угла установки горизонтального
62
оперения. У летающего крыла требуемые характеристики устойчивости также могут быть достигнуты с помощью переставных элевонов на концах крыла или за счет регулировки угла установки стабилизирующих поверхностей. Однако для моделей летающих крыльев такой способ корректировки характеристик продольной устойчивости, можно сказать, противопоказан, так как он связан с изменением распределения подъемной силы на крыле и может явиться причиной ухудшения всех летных характеристик модели. Поэтому добиваться хорошей продольной устойчивости модели летающего крыла выгоднее всего путем изменения положения ее центра тяжести. Реализуется это обычно с помощью небольшого балансировочного грузика, который можно перемещать вдоль продольной оси модели (вдоль оси х).
Расчет положения центра тяжести при проектировании модели — это как бы предварительная ее центровка, которую наверняка придется уточнять на готовой модели. Ниже даны ориентировочные параметры, необходимые для определения положения центра тяжести модели летающего крыла.
Крылья. Вес крыльев составляет 70... 80% веса модели. Центр тяжести конструкции лежит на 25—30% САХ. Если половинки крыла соединяются между собой с помощью дюралевого языка, ц. т. лежит ближе к 25% САХ; при других способах сочленения полукрыльев следует принимать большие значения хцт (до 30% САХ).
Фюзеляж. Вес фюзеляжа вместе со стартовым крючком, устройством принудительной посадки и килем составляет 10... 15% веса модели. Положение центра тяжести фюзеляжа принимается на 40% его длины, считая от носа фюзеляжа; если на фюзеляже имеется киль, то центр тяжести фюзеляжа занимает более заднее положение — на 45% его длины.
Подвижный балансировочный грузик. Вес грузика составляет 10—20% веса модели.
Приведенные значения весовых параметров являются средними статистическими для летающих крыльев класса F-1A.
Для определения положения центра тяжести в направлении оси х нужно выполнить чертеж модели в виде сбоку и нанести на нем положение центров тяжести всех частей модели (рис. 72). Вертикальной координатой центра тяжести можно практически не интересоваться: у моделей лета-
ющих крыльев она близка к нулю, т. е. ц. т. модели лежит почти на САХ, поскольку основную часть веса модели составляет вес крыла, а угол поперечного V крыла обычно невелик.
Координата ц. т. относительно фокуса крыла подсчитывается по формуле
(ХцТ) F--
Umi-Xi + ms-xo
ты
(24)
где OTj — масса отдельных элементов модели (кроме балансировочного грузика); Xi — координаты их центров тяжести относительно фокуса крыла на САХ; тъ — масса балансировочного грузика; Хб — координата, определяющая положение грузика;
тм — масса модели.
В выражении (24) нам известны /и, и хг, а также рассчитанная по формуле координата центра тяжести модели. Следовательно, можно определить хб, т. е. найти точку, в которой должен быть закреплен балансировочный грузик:
7Пм(Хцт)р /ос\
X6F— ------------- (ХО)
та
Пример расчета центровки модели ЛК-1-
Параметры;
масса модели тм = 0,410 кг;
масса крыла тк = 0,290 кг; хк = 0;
масса фюзеляжа тф = 0.060 кг; хф = = 0,118;
масса грузика т^ = 0,060 кг.
Используя формулу (21) и результаты расчета примера из предыдущего раздела, определим абсциссу точки, в которой должен находиться центр тяжести модели:
&а = 0,137 йа = 0,021 м.
Таким образом, центр тяжести модели должен находиться на 25—13,7=11,3% длины САХ (считая от ее носка).
Теперь по формуле (25) можно рассчитать положение балансировочного грузика относительно фокуса:
0,410-0,021—0,118-0,060 „ пос
хбк= -------------------:-=0,026 м.
0,060
Предусмотрим возможность перемещения грузика вперед и назад по 25 мм. Тогда при полном перемещении грузика вперед центр тяжести модели в соответствии с формулой (24) будет иметь координату (относительно 0,25 feA)
, . _ 0,118-0,060+ (0,021 +0,025)-0,060 _
(хцт)пер-------------—
= 0,024 м,
а при перемещении грузика назад
, ч __ 0,118-0,060+ (0,021—0,025)-0,060
= 0,017 М.
Таким образом, перемещая грузик между крайними положениями, мы имеем возможность изменять центровку модели в диапазоне 9,6 ... 14,1% САХ.
Пример показывает, что путем соответствующего подбора положения центра тяжести с помощью грузика можно сбалансировать модель на различных значениях коэффициента подъемной силы (на различ ных углах атаки), не изменяя при этом характеристики крыла (распределения углов крутки). Однако изменение центровки модели существенно влияет на ее летные характеристики, которые являются предметом рассмотрения в следующем разделе.
63
ДИНАМИКА ПОЛЕТА МОДЕЛИ ЛЕТАЮЩЕГО КРЫЛА
4.1. Расчет летных характеристик модели
Рассмотрев достаточно подробно силы, действующие на модель, займемся теперь вопросами поведения модели в полете. При этом нас будут интересовать как летные характеристики модели, так и ее устойчивость, особенно продольная, поскольку именно она наиболее важна для моделей летающих крыльев.
Согласно правилам соревнований в классе Г-1А модели оцениваются по продолжительности свободного полета. Поэтому главным параметром, определяющим пригодность модели для участия в этих соревнованиях, является скорость ее снижения. Проектируя модель, мы будем, очевидно, стремиться к тому, чтобы она имела минимальную скорость снижения.
Другим важным показателем совершенства модели является ее аэродинамическое качество, измеряемое отношением дальности планирования модели к высоте, с которой модель была запущена. Таким образом, от величины аэродинамического качества прямо зависит дальность свободного полета модели.
Для определения этих параметров, непосредственно характеризующих летные свойства модели, рассмотрим систему сил, действующих на модель при планировании (рис. 73).
64
Система сил находится в равновесии, поскольку полная аэродинамическая сила /? равна весу модели (mg)M. Обозначив через 0 угол планирования (угол наклона траектории планирования), можно составить уравнения равновесия проекций сил на направление полета и перпендикулярное ему:
У= (mg)M-cos0,
Х = (mg) м-sin©.
Учитывая, что подъемная сила согласно формуле (8) равна
y = 0,613CJ/MV2S, можно записать
(mg) м- cos© = 0,613CyM- V2S.
Поскольку угол 0 невелик и cos 0=1, отсюда можно определить скорость планирования
V= 1,265 1/ р--> (26)
Г СуМ
где р — удельная нагрузка на несущую поверхность модели, Н/м2.
Вертикальную скорость снижения модели можно определить по рис. 73:
V!Z=V-sin0, (27)
а угол планирования (вернее, его тангенс) определяется отношением
tge= f
(28)
Ввиду малости углов 0 можно принять, что tg0=sin0. Тогда уравнение (27) с учетом (28) примет вид:
=1,265 ]/ р|^, (29)
Г С ум
т. е. вертикальная скорость снижения моде-С3
УМ
ли зависит от отношения —~ , которое иногда называют коэффициентом снижения. Чем больше этот коэффициент, тем меньше будет скорость снижения. Отсюда можно сделать вывод, что при проектировании модели мы должны так сбалансировать модель, чтобы планирование проходило па угле атаки, прн котором коэффициент снижения наибольший. Этот режим полета в планеризме называется экономическим (экономическая скорость V3K, экономический угол атаки а.1К)-
Аэродинамическое качество модели, как это видно из рис. 73, будет определяться величиной, обратной тангенсу угла наклона траектории полета:
Рис. 73. Силы, действующие на модель при плани-
ровании
4,406 , , .
V-c‘ |,,/с1;
{м/с].
На рис. 74 представлены кривые изменения аэродинамического качества и коэффициента снижения в функции угла атаки. Для определения угла атаки, соотвегсгву-ющего минимальной вертикальной скорос-
Наибольшему аэродинамическому качеству модели соответствует наименьший угол наклона траектории. Это наивыгоднейший режим полета (паивыгоднейшая скорость Vnn, нанвыгодпейший угол атаки «вв) •
Как мы убедимся па примере расчета летных характеристик пашей модели, экономический и паивыгоднейший режимы полета осуществляются на разных углах атаки.
Пример расчета летных характеристик модели летающего крыла ЛК-1 приведен в табл. 13. Значения аэродинамических коэффициентов модели, необходимые для расчета, взяты из табл. 12. Скорость полета V и скорость снижения V,, определялись по формулам (26) и (29), в которые предварительно было подставлено конкретное значение удельной нагрузки на крыло р=12,13 Н/м2:
Рис. 74. Качество и коэффициент снижения модели ЛК-1
Расчет летнык характеристик модели ЛК-1
Таблица 13
а° СуМ См К с3 / с1 ум / хм V
См 4.406 , /с3"
См 1 С“ 4.40Ь 1/ ’ с2 хм
1 2 з 4 5 6 7
-0,77 0,118 0,048 2,46 0,71 12,83 5,218
0,97 0,238 0,041 5,80 8,02 9,03 1,556
2,38 0,339 0,039 8,69 25,61 7,57 0,871
4,56 0,487 0,041 11,87 68,71 6,31 0,531
6,35 0,599 0,044 13,61 111.0 5,69 0,418
8,10 0,724 0,052 13,92 140,3 5,18 0,372
11,79 0,950 0,073 13,01 160,9 4,52 0,347
14,84 1,160 0,109 10,64 131,4 4,09 0,384
ти снижения, по формулам (2) проведена параболическая интерполяция кривой коэффициента дЛЯ углов 8,1°; 11,79°;
14,84°.
С3
—Аа2+ Ва+ С;
а) = 8,1°; Cy/Ci= 140,3;
а;= 11,79°; Су/160,9;
аз= 14,84°; С’/Сх= 131,4.
Д _ 1 /131,4—160,9 _ 160,9—140,3 \ _
“ 14,84—8,1 А 14,34— 11,79 11,79—8,1 )
==-2,26;
В = ___----- 1160,9-140,3 . (14 84_|_ л уд) _
14,84—8,1 I 11,79—8,1
_ J 31Л-160.9 (8 j ! j 79) | = 5() 55
14,84—11,79 I
с= А [ (140,3+160,9+131,4) + (8,12+
+ 11,792 + 14,842) • 2,26—50,55(8,1 + 11,79+ + 14,84)] =-120,8;
С3
=—2,26-а2+50,55-а—120,8;
2-( — 2,26)
(Су / с; )тах = - 2,26 • (11,2)2 + 50,55 -11,2—
—120,8=161,8.
Таким образом, для экономического режима полета угол атаки центральной части крыла должен составлять 11,2°. Для этого угла с помощью линейной интерполя-
S6
ции значений, приведенных в табл. 12, подсчитаны коэффициенты:
Сум = 0,912; Су= 1,125; Cj/CT = 0,420;
Схм=0,069; Сх = 0,067; Схст = 0,036;
<х=11,2°; аст = 5,7о.
Далее определяем:
Качество д =
Угол планирования 0 = 4,33° (tg0 = = 0,0757).
Скорость планирования
У=1,2651/ =4,61 м/с.
У 0,912
Скорость снижения
К= 1,2651/ 12,13--------— =0,346 м/с.
У 161,8
Проверим теперь равновесие проекций сил на направление полета. Сила сопротивления
X = 0,613 - 0,338 • 4,612 • 0,069 = 0,304 Н.
Проекция силы тяжести на направление полета
(mg) м• sin© = 0,410- 9,81 • 0,0757 = 0,304 Н.
Условие равновесия выполняется.
Сравнивая между собой кривые (рис. 74), можно заметить, что они похожи одна на другую, однако смещены по углу атаки а.
Минимальная скорость снижения имеет место при большем угле атаки и большем коэффициенте подъемной силы, чем максимальное качество, т. е. аэк>аНв. Кроме того, кривая качества в своей верхней части более плоская, чем кривая вблизи
максимума. Это означает, что, регулируя модель на минимальную вертикальную скорость снижения, мы незначительно теряем на качестве, и наоборот, регулировка модели на максимальное качество приводит к существенному увеличению скорости снижения.
Часто летные характеристики свободнолетающей модели представляют в виде указательницы глиссад планирования (рис. 75). Кривая эта, построенная по данным табл. 13, показывает, что наиболее длительное планирование имеет место при скорости, значение которой меньше, чем скорость при максимальном качестве, т. е. УЭк< Уш>. Из поляры скоростей также видно, что диапазон регулировки модели лежит между Уэк и Vhb.
4.2. Устойчивость модели
Рис. 75. Указал слышна глиссад планирования модели ЛК-1
Понятие устойчивости
О1 евидно, что летные характеристики модели, которые мы определили в предыдущем разделе, могут быть реализованы на практике только в случае ее стабильного полета с расчетными параметрами. Рассмотрим, при каких условиях модель будет выполнять правильные, стабильные, а точнее, устойчивые полеты. Устойчивость — это такое свойство модели, которое позволяет ей в случае вывода из положения равновесия (в установившемся полете) вернуться в прежнее равновесное положение.
Прежде чем перейти к рассмотрению устойчивости модели, познакомимся с этим понятием на более простой механической схеме (рис. 76), которая состоит из двух различных по величине масс, размещенных на двуплечем рычаге. Условием равновесия схемы является равенство моментов сил тяжести обеих масс относительно оси вращения:
5’
Рис. 76. Устойчивость механической системы
67
Рис. 77. Связанные осн кооп шпат модели
(2ш») -/= (mg) -21.
Допустим, чю рычаг, из котором укреплены массы, отклонился от горизонталь-го положения равновесия на угол у (рис. 76, а). Теперь условие равенства моментов сил тяжести относительно оси поворота .примет вид
(2тg) I cosy = (mg) 21 • cosy.
После сокращения уравнения па cosy условие равновесия остается тем же, следовательно, и в новом положении схема будет в равновесии. О такой схеме говорят, что опа имеет нейтральную устойчивость.
Схема па рис. 76, б отличается от предыдущей тем, что рычаг в ней не прямой, а с изломом, так что массы приподняты относительно оси вращения. Если теперь рычаг отклонить, например вправо от положения равновесия, то момент правого груза М,;- (mg)(i2 сыщет больше момента левого груза Мл = (2mg)a[, т. е. МП>М.|. Таким обраюм равновесие здесь не сохраняется, а рычаг стремится еще больше отклониться вправо. Такая система называется неустойчивой.
На рис. 76, в представлена схема, похожая па предыдущую, только рычаг имеет излом книзу. После отклонения рычага вправо плечо правого груза относительно оси вращения 21 уменьшится до а2, а плечо левого груза / увеличится до ах. Неравенство моментов можно записать МЛ>МП; в результате вывода системы из равновесия появляется приращение момента /\М = = Мл—Мп>0, которое стремится вернуть ее обратно в положение равновесия. В со
ответствии с принятым выше определением устойчивости такая схема будет устойчивой.
Проведенные рассуждения, основанные па проверке: появляется ли после вывода рассматриваемой системы из равновесия момент, стремящийся возвратить ее в прежнее равновесное состояние,— называют проверкой статической устойчивости. Если же нас интересует сам процесс движения рассматриваемой системы после вывода ее из положения равновесия, то такой анализ называется проверкой динамической устойчивости.
Например, статически устойчивая система (рис. 76, в), будучи выведенной из положения равновесия, возвращается к нему после нескольких затухающих колебаний (как своего рода маятник), т. е. она устойчива статически и динамически. Однако если ту же систему поместить в вакууме и на идеальном (без трения) подшипнике, то колебания, возникшие после вывода ее из равновесия, продолжались бы бесконечно долго. Это означает, что в условиях вакуума система была бы устойчива статически, а динамически нейтральна.
Можно представить себе и такую систему, которая после вывода ее из положения равновесия будет чересчур интенсивно возвращаться в прежнее состояние и начнет совершать колебания с нарастающей амплитудой. Такая система будет, очевидно, устойчива статически, но неустойчива динамически.
Возврат к положению равновесия не обязательно сопровождается колебательными движениями. Можно себе представить, например, что схема, показанная на рис. 76, в. работает в вязкой жидкости (скажем, в масле), и тогда возвращение к положению равновесия будет происходить одним непрерывным движением, которое называется апериодическим.
В результате наших рассуждений можно сделать вывод, что необходимым, но недостаточным условием динамической устойчивости является устойчивость статическая. Дополнительные условия, обеспечивающие и динамическую устойчивость, могут быть получены путем проведения математического анализа движения системы после вывода ее из равновесия, при этом в расчетах должны учитываться такие факторы, как инерционные силы, демпфирование и т. п. В связи со сложностью таких расчетов мы не будем на них останавливаться, а ограничимся проверкой статической устойчивости
AMfij &x
Рис. 78. Влияние распределения подъемной силы на устойчивость модели летающею крыла
модели и рассмотрением физической стороны явления динамической неустойчивости. Кроме того, ниже будут даны практические рекомендации, которые помогут обеспечить динамическую устойчивость модели, поскольку совершенно очевидно, что она должна обладать как статической, так и динамической устойчивостью.
Анализ устойчивости модели летающего крыла достаточно сложен, поскольку угловые отклонения от положения равновесия могут иметь место вокруг трех связанных с моделью осей (рис. 77). Принимается, что положение равновесия модели — это ее прямолинейное, установившееся (с постоянной скоростью) планирование.
При рассмотрении статической устойчивости модели нужно решить три задачи:
1. Проверить ее продольную устойчивость, т. е. выяснить, имее*гся ли у модели тенденция к возвращению в положение равновесия в случае непреднамеренного изменения угла атаки, например из-за порыва ветра (поворот вокруг оси z).
2. Проверить поперечную устойчивость: имеется ли у модели тен
денция к возвращению в положение равновесия при случайном крене на крыло (поворот вокруг оси х).
3. Проверить путевую устойчивость—установить, имеется ли у модели тенденция к возвращению в положение равновесия при отклонении от направления полета (поворот вокруг оси у).
Анализируя динамическую устойчивость, можно заметить, что повороты модели вокруг осей х \\ у всегда взаимосвязаны, т. е. если модель накреняется па крыло (поворачивается вокруг оси х), то одновременно она начинает поворачиваться вокруг оси у, и наоборот. Поэтому обычно различают только два вида динамической устойчивости:
1. Продольную динамическую устойчивость, в которой рассматривается движение модели после возмущения ее равновесия вокруг оси 2.
2. Боковую динамическую устойчивость, когда анализируется поведение модели после появления крена на крыло или отклонения от направления полета.
69
Рис. 79. Невыгодное распределение коэффициента подъемной силы
Продольная статическая устойчивость
Как уже отмечалось, для моделей летающих крыльев первостепенное значение имеет хорошая продольная устойчивость. В моделях классической схемы она достигается с помощью горизонтального оперения. У моделей летающих крыльев продольная устойчивость обеспечивается соответствующим распределением аэродинамических сил па крыле, что требует придания крылу стреловидности, а также соответствующей аэродинамической крутки.
Выше мы установили, что статически устойчивая в продольном отношении модель характеризуется тенденцией к возвращению в прежнее положение равновесного установившегося полета после случайного поворота ее вокруг оси г. Возникновение восстанавливающего равновесие продольного момента ЛМ2 проще всего проанализировать на крыле с треугольным распределением подъемной силы вдоль размаха, рис. 78, а (заметим, что треугольное распределение подъемной силы с точки зрения продольной устойчивости схемы летающего крыла является оптимальным).
Для упрощения рассуждений примем, что крыло имеет постоянную хорду и профиль с постоянным положением центра явления, расположенным на 25% хорды. Примем также, что центр тяжести модели лежит в плоскости крыла, не имеющего поперечного V.
Продольное равновесие модели обеспечивается положением центра тяжести модели (в виде сбоку) на линии, соединяющей точки D, в которых приложены равнодействующие аэродинамические силы на левом и правом полукрыльях (эти точки — центры давления полукрыльев); точка D при треугольном распределении подъемной силы
лежит на */з размаха каждого полукрыла — в центре тяжести площади треугольной эпюры Су.
Пусть под действием вертикального порыва угол атаки крыла увеличится. Тогда подъемная сила возрастет, и треугольное распределение изменится на трапециевидное (кривая 1 на рис. 78, а). Центр тяжести площади трапеции расположен дальше от плоскости симметрии крыла, чем у треугольника, т. е. центры давления полукрыльев сместятся к концам крыла, а поскольку крыло имеет стреловидность, то и назад. Вследствие этого перемещения по явится момент ЛМг подъемной силы относительно центра тяжести модели, который стремится опустить ее нос, т. е. вернуть модель в прежнее равновесное положение.
При случайном уменьшении угла атаки реакция статически устойчивой модели будет опять противоположна возмущению: модель будет стремиться увеличить а до прежнего значения.
Подобное, но менее интенсивное проявление продольной статической устойчивости модели летающего крыла наблюдается и при эллиптическом (или близком к нему) распределении подъемной силы (рис. 78, б). В случае же прямоугольного распределения подъемной силы эффект перемещения равнодействующей подъ 'мной силы по размаху с изменением а отсутствует (рис. 78, в), и такое крыло, несмотря на стреловидность, неустойчиво.
Из проведенного нами анализа следует, что для получения продольной устойчивости у модели летающего крыла подъемная сила должна уменьшаться в направлении концов крыла. Опыт показал, что эллиптическое распределение подъемной силы, которое, как известно, является наиболее выгодным в аэродинамическом отношении, не обеспечивает летающему крылу продольной устойчивости. Выгодные с точки зрения продольной устойчивости формы распределения подъемной силы рассчитываются по формуле (13), однако нужно помнить, что такое распределение (отличное от эллиптического) приводит к увеличению индуктивного сопротивления крыла (примерно на 10%) и потому — к снижению летных показателей модели.
У некоторых моделей летающих крыльев встречается распределение подъемной силы, показанное на рис. 79. Такое распределение делает модель очень устойчивой, однако отрицательная подъемная сила на концах крыла вызывает увеличение ин
70
дуктивного сопротивления крыла примерно на 30%. Летные характеристики модели будут чересчур низкими, а потому такое распределение подъемной силы следует считать неприемлемым.
Рассматривая вопросы устойчивости, нужно припомнить замечание из раздела 3.3: распределение подъемной силы по размаху летающего крыла не может быть таким, чтобы на концах крыла она была больше, чем в центральной части крыла. Этот эффект часто проявляется на больших околокритических углах атаки (см.рис.60). Срыв потока и падение подъемной силы, начинающиеся на концах стреловидного крыла, приведут к перемещению центров давления полукрыльев к плоскости симметрии, а следовательно, вперед. В результате появится дестабилизирующий продольный момент (противоположный тому, что на рис. 78, а), под действием которого угол атаки модели возрастет еще больше, что может закончиться сваливанием и поломкой модели.
Как видно из предыдущих рассуждений, прямая стреловидность оказывает положительное влияние на продольную устойчивость бесхвостой модели. Возникает вопрос: какой же угол стреловидности выбрать для проектируемой модели летающего крыла?
Следует помнить, что увеличение угла стреловидности, благоприятно влияя на продольную устойчивость летающего крыла, в то же время снижает его несущие качества, а с ними и летные характеристики. Кроме того, полезное влияние стреловидности на устойчивость отмечается только до определенных ее значений. При излишне больших углах % центральная часть стреловидного крыла «работает» слабее, чем его концевые части, в результате чего положительный эффект смещения центров давления по. '.'крыльев практически пропадает, а продольная устойчивость модели может даже ухудшиться.
Поэтому оптимальные значения угла стреловидности для моделей летающего крыла лежат в пределах /=15 ... 20°.
Перейдем теперь к расчету продольной статической устойчивости модели. Система действующих на нее сил, отнесенных к средней аэродинамической хорде крыла, представлена на рис. 80. При этом в соответствии с упрощениями, принятыми в разделе 3.4, учитываются только те силы, которые существенно влияют на продольную устойчивость модели.
Условие продольного равновесия, запи-
Рис. 80. Продольное равновесие крыла
Рис. 81. Диаграмма зависимости коэффициента продольного момента mz от Св
санное в безразмерной форме, определяется формулой (20); повторим ее для эквивалентного крыла:
mz = m203—C.jj ^t)f- =0,
Ьд
(31)
где тгОэ и С,/;| — коэффициенты момента и подъемной силы эквивалентного крыла; тг — коэффициент продольного момента всего крыла относительно центра тяжести модели.
Относительная координата центра тяжести, определенная из условия равновесия, будет равна
(Хцт) F Ш-гй, ’ ьА ~ C,i:, '
Смысл продольной статической устойчивости лучше всего пояснить на графике, иллюстрирующем линейную зависимость продольного момента модели tnz от изме
71
нения коэффициента подъемной силы Су (рис. 81). Точка р соответствует условию равновесия моментов сил, действующих на модель, определенному но формуле (31). Если теперь угол атаки, а значит, и коэффициент подъемной силы возрастет на АС,,, то появится отрицательное приращение момента — Дтг, стремящееся уменьшить а и вернуть модель в положение равновесия; если угол атаки уменьшится — появится положительное приращение момента + Д/пг. Таким образом, в обоих случаях появляется момент, стремящийся вернуть модель в положение равновесия. Модель обладает продольной статической устойчивостью.
Если прямая m2—f(Cy) будет иметь другой наклон k (пунктирная линия на рис. 81), то приращения моментов, появляющихся в результате отклонения модели ог положения равновесия, будут иметь противоположные знаки. Нетрудно убедиться, что такая модель неустойчива.
Если коэффициент момента не зависит от Су (/г = 0 и прямая mz = f(Cv) совпадает с осью Су), то модель имеет нейтральную устойчивость, т. е. приращений продольного момента, стремящегося вернуть модель в положение равновесия или еще больше отклонить ее от этого положения, при изменении Cv вообще не возникает.
Таким образом, наклон зависимости mz=f(Cw) является мерой устойчивости модели. Этот наклон можно выразить формулой
/г = Дхцт= = (33)
А Су
где Хр и хцт — координаты фокуса и центра тяжести, отсчитываемые от носка САХ (— =.тцт — центровка модели).
Модель обладает продольной устойчивостью, если Дхцт>0, т. е. если координата центра тяжести положительна (согласно рис. 80 центр тяжести должен лежать перед фокусом крыла). Следовательно, критерий продольной статической устойчивости модели летающего крыла окончательно может быть представлен в форме
Атцт > 0.
Анализируя график на рис. 81, мы установили, что при Д.гцт = 0 модель имеет нейтральную устойчивость. Это граница, раз-
72
деляющая области продольной устойчивости и неустойчивости модели.
При какой центровке модель будет иметь нейтральную устойчивость? Из зависимости (33) легко заключить, что при ДхЦт = 0 центр тяжести модели совпадает с фокусом модели. Нейтральная устойчивость характеризуется тем, что модель летит по случайной траектории, и если под воздействием внешних возмущений она войдет в пикирование, то разобьется о землю.
Количественной мерой продольной устойчивости является расстояние между центром тяжести и фокусом модели. Расстояние это, измеряемое в долях средней аэродинамической хорды, называется запасом устойчивости и равно величине Д.тцт, рассчитанной по формуле (33).
Принято, что для обеспечения продольной статической устойчивости у моделей классической схемы запас устойчивости не должен быть меньше 0,12. У моделей летающих крыльев следует предусматривать возможность изменения положения центра тяжести в процессе облета и доводки; нижняя граница запаса устойчивости Д.гцт = = 0,15.
Пример. Подсчитаем запас продольной устойчивости модели ЛК-1- Он может быть определен по формуле (33) и данным примеров из раздела 3.4.
Запас устойчивости при расчетном положении балансировочного грузика;
= 0,137 f или =0,137 1
\ Ьа 0,156 /
Запас устойчивости при крайнем переднем положении балансировочного грузика:
. _ 0,024 „ , с .
Дхцт= ------=0,154;
0,156
при крайнем заднем положении балансировочного грузика:
Дхцт= =0,109.
0,156
Перемещение центра тяжести вперед (передняя центровка) увеличивает запас устойчивости, перемещение назад — уменьшает его; при центровке Хцт = 0,25 запас устойчивости становится равным нулю, а
модель будет иметь нейтральную устойчивость.
Результаты расчета представлены на графике (рис. 82).
Продольная динамическая устойчивость
Наличие у модели статической устойчивости еще не означает, что она будет выполнять устойчивые полеты, особенно в условиях, когда есть факторы, способные внезапно нарушить ее установившееся движение. Такими возмущающими факторами могут быть, например, вертикальные порывы воздуха или просто толчок в момент отцепки модели от леера. Анализ движения модели после вывода ее из положения равновесия каким-либо возмущающим фактором является предметом динамической устойчивости.
Представим себе, что вследствие вертикального порыва воздуха внезапно увеличился угол атаки модели, а следовательно, увеличился коэффициент подъемной силы Су. Дальнейший полет модели может происходить по-разному:
модель продолжает увеличивать угол атаки, теряет скорость и в конечной фазе разбивается о землю: это явление называется апериодической неустойчивостью (рис. 83, о);
модель начинает совершать колебания вокруг центра тяжести, попеременно то увеличивая, то уменьшая угол знаки и двигаясь по волнообразной траектории, причем амплитуда колебаний становится все больше, модель теряет скорость и разбивается; это явление называется колебательной неустойчивостью (рис. 83, б);
после вывода из положения равновесия модель также совершает продольные колебания, однако амплитуда их уменьшается, и через несколько секунд модель возвращается в положение равновесия, а дальнейший ее полет вновь становится установившимся; о такой модели говорят, что она обладает динамической устойчивостью (рис. 83, в).
Таким образом, чтобы модел-ь была динамически устойчивой и стабильно, надежно летала в реальных атмосферных условиях, она должна быть застрахована как от апериодической, так и от колебательной неустойчивости. Подробный анализ этой проблемы достаточно сложен, а потому ниже будут рассмотрены только факторы,
Рис. 82. Моментная характерист! к? модели JlK-t
Рис. 83. Траектории полета динамически устойчивой и неустойчивой модели
положительно влияющие на динамическую устойчивость модели.
Запас статической устойчивости и положение ц. т. Чем больше запас статической устойчивости модели, тем меньше вероятность, что у нее может проявиться апериодическая неустойчивость. Как мы помним, увеличение запаса устойчивости достигается более передней центровкой модели, однако чересчур большое перемещение центра тяжести вперед может привести к появлению у модели колебательной неустойчивости. Модель с очень передней центровкой (с большим запасом статической устойчивости) б\дет настолько интенсивно возвращаться в положение равновесия после отклонения от исч о, что
«проскочит» угол атаки, соответствующий положению равновесия, и начнет отклоняться в противоположную сторону, амплитуда колебаний будет нарастать. Таким образом, стремясь не допустить апериодической неустойчивости модели, мы можем вызвать колебательную неустойчивость, которая не менее опасна для модели, чем апериодическая.
Вывод напрашивается сам собой: чтобы обеспечить динамическую устойчивость модели, положение центра тяжести должно быть передним, по исключающим появление апериодической неустойчивости.
На основе обобщения экспериментальных данных можно принять, что запас устойчивости должен быть таким, который необходим для обеспечения статической устойчивости (см. предыдущий раздел), а именно: Дж цт = 0,15 ... 0,22.
Весовая компоновка модели
влияет прежде всего на быстроту затухания отклонений модели от положения равновесия при се колебательном движении. Для свободиолетающнх моделей принимается, что величина отклонений модели от положения равновесия (амплитуда колебаний) должна уменьшиться наполовину после примерно 1,5 полных колебаний продолжительностью 5 ... 5,5 с.
Колебания будут затухать тем быстрее, чем компактнее расположены массы отдельных элементов конструкции, т. е. чем ближе они к поперечной оси г, проходящей через центр тяжести модели. Поэтому у моделей классической схемы стараются сделать минимальными массы фюзеляжа и хвостового оперения, а кроме того, классическую модель обычно «догружают» балластом, размещенным в центре тяжести.
У моделей летающих крыльев такая проблема практически не возникает, посколь-
Рис. 84. Траектория полета модели при нарушении поперечного равновесия
ку у них все массы (в основном масса крыла) располагаются на небольшом расстоянии от оси z. Единственно, следуег порекомендовать, чтобы концевые части крыльев были выполнены как можно более легкими.
Суммируя наши замечания о продольной динамической устойчивости, еще раз подчеркнем, что самую важную роль в ее обеспечении играет положение центра тяжести. Поэтому при конструировании модели необходимо заранее предусмотреть как возможность изменения положения центра тяжести (с помощью подвижного балансировочного грузика), так и регулировку угла установки стабилизирующих поверхностей, чтобы можно было при испытании модели в полете «довести» ее с точки зрения динамической устойчивости.
Как показывает практика, модели летающих крыльев обладают обычно значительно меньшей продольной устойчивостью, чем модели классической схемы. Они более «нервно» реагируют на неспокойную атмосферу, и даже при самой точной регулировке в этих условиях у них могут наблюдаться небольшие продольные колебания.
Поперечная статическая устойчивость
Поперечная статическая устойчивость — это способность модели возвращаться в положение равновесия после случайного на-кренения, т. е. поворота вокруг продольной оси х. Механизм поперечной устойчивости состоит в следующем.
Если модель под действием внезапного порыва накренилась, то она начинает «скользить на крыло», т. е. летит под некоторым углом по отношению к прежнему направлению полета (рис. 84). Происходит это потому, что при крене вес модели (/ng)M и подъемная сила У не уравновешивают друг друга, и появляется равнодействующая сила Z, направленная в сторону опущенного крыла. Она и вызывает боковое движение модели со скоростью сколь
74
жения VCK (рис. 85). Обратим внимание на то, что при этом движении появляются дополнительные аэродинамические боковые силы Za на фюзеляже с вертикальным оперением и на вертикальных шайбах, направленные в сторону, противоположную скольжению.
Проанализируем разложение вектора скорости на левом и правом полукрыле модели при скольжении (рис. 86, вид модели сзади). Принимаем, что крыло имеет угол поперечного V, равный ф, и летит со скоростью V и углом атаки а.
При накрепении модели на правое полукрыло и скольжении со скоростью Угк направление скорости воздушного потока, набегающего на крыло, изменится. Благодаря наличию у крыла угла ф у правого полукрыла появится составляющая скорости 1У, направленная вниз, в результате чего воздушный поток будет как бы «поддувать» под него. Это вызовет увеличение угла атаки правого полукрыла на Аа (рис. 86, б), что в свою очередь увеличит коэффициент подъемной силы, а значит, и подъемную силу полукрыла на Асе.
На левом полукрыле (рис. 86, б), наоборот, угол атаки уменьшится на Асе, и появится отрицательное приращение подъемной силы (—АУ), направленное вниз. Противоположное по знаку изменение подъемной силы на правом и левом полукрыльях вызовет появление поперечного момента ЛЛ1Х, который, как видно из рис. 86, а, стремится ликвидировать крен модели, т. е. вернуть ее в положение равновесия.
Таким образом, наличие у крыла модели угла поперечного V положительно влияет на ее поперечную устойчивость. Чем больше угол поперечного V, тем больше будет момент АМТ, возвращающий модель в положение равновесия.
Добавим, что показанные на рисунке аэродинамические боковые силы Zam н 2аф также оказывают на модель стабилизирующее действие, однако вследствие небольшого плеча этих сил относительно центра тяжести модели приращение их моментов относительно оси х невелико. Значительно сильнее силы Zain и Z;,()l влияют на путевую устойчивость модели, о которой пойдет речь в следующем разделе.
Рассмотрим теперь влияние стреловидности крыла па поперечную устойчивость. Для этого проанализируем разложение вектора скорости при крене модели, например на левое полукрыло, которое при этом выдвигается вперед (рис. 87). Разложим
Рис. 85. Силы, действующие на модель при крене и скольжении
л Mxi =л У Ln I Восстанавливающие , .. у । Ltj J моменты
Л Myi =(Xn Xj[) J
Рис. 86. Влияние угла ф па угол атаки и подъемную силу крыла при скольжении
вектор скорости на каждом полукрыле на два направления: вдоль линии фокусов и на направление, перпендикулярное к нему (вдоль линии хорд). Как известно, величина аэродинамических сил крыла определяется только составляющими вектора скорости, нормальными к линии фокусов. Из рисунка видно, что нормальная составляющая скорости на левом полукрыле Ул больше, чем Уп на правом. Следовательно, подъемная с-ила, пропорциональная квад-
75
Рис. 87. Влияние стреловидности крыла иа по-
перечную устойчивость
Рис. 88. Влияние стреловидности крыла на путе-
вую устойчивость
рату скорости, на левом полукрыле будет значительно больше, чем на правом (Ул> >УП), т. е. налицо поперечный момент АМЖ, противодействующий крену модели, стремящийся вернуть ее в положение равновесия.
Таким образом, мы установили, что на поперечную устойчивость модели основное влияние оказывают угол стреловидности и угол поперечного V крыла.
Учитывая, что угол стреловидности крыла нашей модели определен условиями продольной устойчивостей (см. предыдущие разделы), требуемую степень поперечной устойчивости модели мы будем обеспечивать изменением угла поперечного V.
Для моделей летающих крыльев класса F-1A угол поперечного V принимается 8 диапазоне ф = 2... 4°. Как видим, он значительно меньше, чем у моделей классической схемы. Это объясняется тем, что основная часть стабилизирующего поперечного момента создается за счет стреловидности крыла.
Путевая статическая устойчивость
Путевая статическая устойчивость возвращает модель летающего крыла к положению равновесия при ее отклонении от направления полета (при повороте относительно оси у). Главным параметром, влияющим на путевую устойчивость модели, является стреловидность крыла.
Вследствие различия в величине «эффективных» составляющих скорости у левого и правого полукрыла модели, летящей со скольжением, будут разными не только подъемные силы, но также и силы сопротивления. При скольжении па левое полукрыло его сопротивление будет больше, чем у правого полукрыла (ХЛ>ХП, рис. 88). Разность сил сопротивления создает момент AMyi (он называется моментом рысканья), который ликвидирует скольжением придает модели путевую устойчивость.
Наличие у крыла угла поперечного V также способствует появлению разности сил сопротивления левой и правой половин крыла при скольжении, поскольку угол атаки у выдвинутого вперед левого полукрыла будет больше, чем у правого (см. рис. 86); эта разность сил сопротивления тоже создает стабилизирующий момент рысканья АМ!/2- Заметим, однако, что излишне большой угол поперечного V крыла
.может оказать неблагоприятное влияние на путевую устойчивость.
И наконец, на путевую устойчивость модели влияют ее боковые (вертикально расположенные) поверхности. У классических моделей такой поверхностью является прежде всего вертикальное оперение, которое в основном и определяет путевую устойчивость. У бесхвостых моделей боковая поверхность фюзеляжа вместе с килем и концевые шайбы расположены относительно близко к вертикальной оси модели у. Боковые силы Za(p и Zam этих поверхностей, появляющиеся при скольжении, действуют на малом плече относительно центра тяжести (рис. 89), и стабилизирующий момент АМ;/з от них невелик. Как показывает опыт, путевая устойчивость моделей летающего крыла, которая особенно важна при их буксировке на леере во время запуска, может быть улучшена путем увеличения площади вертикальных шайб, устанавливаемых на расстоянии 2/з полуразмаха крыльев от плоскости симметрии модели.
Крыло с прямой стреловидностью имеет еще одну особенность: увеличение у него угла поперечного V приводит к тому, что концевые части крыла как бы начинают играть роль боковых поверхностей. Это видно из рис. 89. б, на котором дан вид модели сбоку. Заштрихованная часть крыла сравнительно далеко отстоит от центра тяжести и действительно может «работать» как боковая поверхность, увеличивая путевую устойчивость модели.
Итак, основное влияние гга путевую устойчивость модели летающего крыла оказывают его стреловидность, а также размеры и расположение боковых поверхностей. У моделей, стреловидность крыла ко торых уже выбрана из других соображений, необходимую степень путевой устойчивости можно обеспечить за счет изменения величины и расположения боковых поверхностей.
В заключение заметим, что путевая устойчивость моделей летающих крыльев всегда существенно меньше, чем устойчивость моделей классической схемы.
Выше были рассмотрены поперечная и путевая устойчивость на примере крыла с положительной (прямой) стреловидностью. Иногда встречаются модели летающего крыла с отрицательной стреловидностью, когда концы крыла выдвинуты вперед. Следует иметь в виду, что трудности в обеспечении поперечной, а особенно путевой
Рис. 89. Влияние боковых поверхностей на путевую устойчивость модели
устойчивости таких моделей значительно больше, чем в нашем случае. Как правило, они должны иметь большой по площади киль (см., например, модель «Гацек», рис. 38).
Боковая динамическая устойчивость
Понятие боковой динамической устойчивости объединяет поперечную и путевую устойчивость модели, поскольку крен и скольжение модели всегда взаимосвязаны. Проведенный нами анализ статической устойчивости модели показал, что появление одного из этих возмущений всегда приводит к нарушению как поперечного, так и путевого равновесия модели. У устойчивой в поперечном и путевом отношении модели появляются восстанавливающие равновесие моментов АМХ и AM,,. Соотношение величины этих моментов и определяет характер дальнейшего движения модели.
Спиральная неустойчивость. Если путевая статическая устойчивость модели существенно больше ее поперечной устойчивости, то произойдет следующее: прежде чем восстанавливающий поперечный момент АМХ вернет модель в горизонтальное положение, превышающий его момент рысканья AMV повернет модель в направлении скольжения и введет ее в полет по спиральной траектории со снижением. Про такую модель говорят, что опа динамически спирально неустойчива (рис. 90, траектория а).
Рис. 90. Виды боковой неустойчивости:
а — спиральная неустойчивость; б — колебательная неустойчивость («голландский шаг»)
Колебательная неустойчивость. Если модель обладает избыточной поперечной статической устойчивостью, то большой по величине восстанавливающий поперечный момент АМХ вернет модель в горизонтальное положение раньше, чем восстанавливающий момент рысканья АМУ ликвидирует угол скольжения. Модель «проскочит» положение равновесия и накренится в другую сторону, начнется скольжение в противоположном направлении, дальше цикл будет повторяться. В результате модель будет двигаться по траектории, напоминающей движение конькобежца, поэтому ее иногда называют «голландским шагом». Про такую модель говорят, что она обладает динамической колебательной неустойчивостью (рис. 90, траектория б).
Оба эти вида боковой динамической неустойчивости как бы противоположны друг другу, и меры, которые позволяют устранить спиральную неустойчивость, могут вызвать ее колебательную неустойчивость.
И та и другая неустойчивость сравнительно легко устраняется у модёлей классической схемы: увеличение угла поперечного V крыла (не стреловидного) страхует модель от спиральной неустойчивости, увеличение площади и плеча вертикального оперения спасает от «голландского шага».
Для модели летающего крыла, к сожалению, трудно точно определить конструктивные параметры, изменяя которые можно было бы наверняка улучшить ее боковую устойчивость. Дело в том, что увеличивая, например, угол поперечного V крыла с целью предупреждения появления спиральной неустойчивости, мы одновременно уве
личиваем и путевую устойчивость модели, поскольку боковые проекции приподнятых концов стреловидного крыла начинают «работать» как вертикальное оперение (рис. 89, б), а это затрудняет получение нужного соотношения между поперечной и путевой устойчивостью. Поэтому для моделей летающего крыла можно дать лишь общие рекомендации по обеспечению боковой динамической устойчивости.
«Против» спиральной неустойчивости действуют следующие факторы:
1. Увеличение угла поперечного V крыла. Эффект невелик для моделей с положительной стреловидностью, значителен-для моделей с отрицательной стреловидностью.
2. Уменьшение боковых поверхностей фюзеляжа, киля, вертикальных шайб.
3. Увеличение высоты центрального
киля.
4. Увеличение поверхности передней
части фюзеляжа модели.
Для устранения колебательной неустойчивости можно использовать:
1. Уменьшение угла поперечного V крыла.
2. Увеличение площади и продольного плеча киля модели. Иногда бывает даже необходим дополнительный киль, вынесенный назад на большом плече от центра тяжести (показан пунктиром на рис. 89, fl).
Рассмотренные нами виды неустойчивого полета модели будут проявляться тем интенсивнее, чем дальше от центра тяжести «разнесены» ее конструктивные элементы. Следовательно, важным условием улучшения боковой устойчивости модели является предельно легкая конструкция крыла, особенно его концевых частей, при одновременном утяжелении модели с помощью груза, расположенного в центре тяжести.
В заключение добавим, что для свобод-полетающих моделей наиболее опасна спиральная неустойчивость, поскольку полет по суживающейся спирали почти всегда заканчивается падением и поломкой модели Колебательная неустойчивость дает о себе знать главным образом при запуске модели на леере, так как нарастающая «раскачка» модели с крыла на крыло обычно приводит к ее преждевременной отцепке, Это явление часто встречается у моделей летающих крыльев, поскольку их путевая устойчивость невелика.
ПРОЕКТИРОВАНИЕ МОДЕЛИ ЛЕТАЮЩЕГО КРЫЛА СО СТАБИЛИЗИРУЮЩИМИ ПОВЕРХНОСТЯМИ
5.1. Определение оптимального угла установки стабилизирующих поверхностей
Отдельные этапы аэродинамического расчета модели летающего крыла со стабилизирующими поверхностями были рассмотрены в разделах 3 и 4 на примере модели ЛК-1- Для окончательного оформления аэродинамического проекта модели нам остается только систематизировать ранее полученные данные и сделать некоторые дополнения.
При выполнении предварительного проекта модели были определены геометрические параметры и подобраны профили крыла. Как мы знаем, для обеспечения продольной устойчивости модели стабилизирующие поверхности должны иметь меньший угол атаки, чем центральная часть крыла. Разность между углами атаки крыла и стабилизирующих поверхностей мы назвали углом установки стабилизирующих поверхностей и обозначили его фуст- Угол (руст влияет не только на продольную устойчивость модели, но и на ее летные данные, поэтому его величина определяется в первую очередь. Порядок расчета следующий:
1. Производим расчет поляры модели для нескольких значений угла установки Фуст (например, —2°, —4°, —6°, —8°, —10°) пс схеме, представленной в разделе 3.3 (табл. 12).
2. Рассчитываем минимальную вертикальную скорость снижения модели для
каждого из выбранных значений угла фуст по методике, использованной в примере (раздел 4.1).
3. После определения средней аэродинамической хорды крыла для всех углов Фуст подсчитываем аэродинамические коэффициенты эквивалентного крыла по методике, приведенной в разделе 3.4.
4. Определяем запас продольной статической устойчивости модели для каждого из принятых значений угла установки фуст по методике, приведенной в разделе 4.2.
5. Полученные значения наносим на график, характеризующий зависимость минимальной скорости снижения и запаса устойчивости от угла установки фуст (для модели ЛК-1 он представлен на рис. 91).
Анализируя эту зависимость, мы видим, что при некотором значении угла фустскорость снижения модели при планировании имеет наименьшее значение; в нашем случае это угол фуст = —5,5°. Можно было бы без оговорок принять такой угол установки стабилизирующих поверхностей, если бы запас продольной устойчивости модели при нем не был так мал (А = 0,137, левая часть графика).
Как видно из графика, запас устойчивости при увеличении угла фуст растет, однако одновременно с этим растет и скорость снижения, т. е. летные качества модели ухудшаются. Чтобы уменьшить риск получения недостаточно устойчивой модели, обычно несколько увеличивают угол фуст по сравнению с его оптимальным значением, соответствующим минимальной скорости снижения.
Рис. 91. Выбор углов установки стабилизирую-
свои качества в части продолжительности полета. Если же погода неустойчива и полеты должны проходить при ветре или термических порывах воздуха, то центровку модели нужно сделать более передней, соответственно увеличив при этом угол сруСт> т. е. повысить запас устойчивости модели ценой увеличения скорости снижения.
5.2. Аэродинамический расчет модели
щих поверхностей
После определения оптимального угла установки стабилизирующих поверхностей можно приступать к оформлению аэродинамического расчета модели.
Последовательность расчета поляры модели рассмотрена в разделе 3 (табл. 12). Затем, по аналогии с примером, приведенным в разделе 4.1, определяем углы атаки крыла и стабилизирующих поверхностей, которые соответствуют минимальной скорости снижения.
Можно также рассчитать теоретическое время полета модели Т, принимая, чго модель отцепится от леера длиной 50 м на высоте Л = 48 м (угол отцепки ~75°):
Т= = 138 С.
0.346
Это можно сделать на этапе проектирования, отцентрировав модель при большом угле <р>Ст, например при (fj(r=--8o (запас устойчивости Л.гцт = 0,188), либо предусмотреть возможность изменения положения центра тяжести модели с помощью передвижного балансировочного грузика с тем, чтобы окончательно отрегулировать центровку во время испытательных запусков .модели.
Для модели ЛК-1 выбран второй способ— балансировочный грузик. Он имеет то дополнительное преимущество, что позволяет учитывать атмосферные условия, в которых осуществляются запуски модели.
Если полеты проходят в спокойном воздухе, запас устойчивости модели путем смещения грузика назад может быть сделан меньшим, и она сможет полнее проявить 80
5.3. Весовой анализ и центровка модели
Как было показано выше, расположение масс отдельных частей модели следует подбирать так, чтобы ее центр тяжести находился в точке, координата которой определяется формулой (21). Используя данные раздела 3.4, примем значения масс частей модели, а затем определим положение балансировочного грузика и диапазон его перемещения аналогично тому, как это сделано в примере раздела 3.4.
Очень важно, чтобы при перемещении грузика полет модели проходил на угле атаки, соответствующем наименьшей вертикальной скорости снижения при данной центровке, что требует соответствующего изменения угла установки стабилизирую
щих поверхностей. Определить величину угла фуст помогает график на рис. 92, на котором дана зависимость угла <pycT от положения центра тяжести модели (этот график — видоизменение рассмотренного ранее графика на рис. 91).
Во время испытательных полетов модели координату ее центра тяжести удобнее всего измерять от ребра атаки околофюзе-ляжной хорды (точка О на рис. 71). Формула для определения этой координаты может быть записана следующим образом:
(л-цт) Ьо = О,25Ьо + Za • tg%—k • bA,
где k — запас продольной статической устойчивости /г = Дхцт, который в зависимости от величины угла фуст определяется по левой части графика (рис. 91).
Расчет удобно выполнить в виде таблицы. Для модели ЛК-1 он выполнен по формуле
(xUT)bo = 0,25-0,165 + 0,519-tg22°— -0,156-£ = 0,251—0,156*
и приведен в табл. 14, а его результаты представлены графически на рис. 92. Жирной линией выделен диапазон регулировки модели ЛК-1 при принятых крайних положениях балансировочного грузика.
График на рис. 92 удобно использовать непосредственно во время летных испытаний модели: для конкретного значения
Расчет положения центра тяжести модели ЛК-1
1> ф уст k (Хцт> ь » о.
0,156-fe 0,251—0,156ft
1 2 3 4
— 4 0,108 0,017 0,234
-6 0,148 0,023 0,228
-8 0,187 0,029 0,222
-10 0,225 0,035 0,216
угла установки стабилизирующих поверхностей мы можем определить по графику положение центра тяжести модели относи тельно носка прифюзеляжной хорды и переместить балансировочный грузик в эту точку.
Для упрощения процесса регулировки модели разметку углов фуст и разметку положений центра тяжести целесообразно сделать заранее, еще до пробных запусков модели. Первая выполняется обычно (в градусах) на вертикальных шайбах, отделяющих центральную часть крыла от стабилизирующих поверхностей, вторая (в миллиметрах) наносится на нижней поверхности крыла модели в плоскости околофюзе-ляжной хорды.
F
6.
ПРОЕКТИРОВАНИЕ МОДЕЛИ ЛЕТАЮЩЕГО КРЫЛА С НЕПРЕРЫВНОЙ КРУТКОЙ
В этом разделе рассмотрены вопросы проектирования модели летающего крыла, имеющего аэродинамическую и геометрическую крутк\. В предлагаемой методике проектирования, разработанной Е. Графом |11|, используется обратный метод проектирования, когда заранее намечаются определенные свойства модели, а затем расчетом определяются ее геометрические параметры, в частности профили и углы крутки несущих поверхностей, которые обеспечивают реализацию этих свойств. Все этапы проектирования будут иллюстрироваться конкретными примерами, которые в итоге дадут полный комплекс расчетов модели летающего крыла ЛК-2 с теми же основными конструктивными параметрами, что и у модели ЛК-1. Таким образом, мы получим возможность сравнить между собой обе концепции создания моделей летающих крыльев — со стабилизирующими поверхностями и с непрерывной круткой крыла.
6.1. Подбор распределения коэффициента подъемной силы вдоль размаха крыла
Как уже говорилось в разделе 3.3, у свободнолетающих моделей следует стремиться к такому распределению подъемной силы по размаху, при котором индуктивное сопротивление крыла будет наименьшим.
А это, как мы знаем, имеет место при эллиптическом распределении подъемной силы.
У моделей летающих крыльев характер распределения подъемной силы существенно влияет не только на летные данные, но и на продольную устойчивость. Следова тельно, нужно искать решение, которое могло бы удовлетворить оба эти условия.
С точки зрения обеспечения устойчивости летающего крыла лучшим распределением является, как известно, треугольное. Таким образом, для получения достаточно хороших и летных данных и характеристик устойчивости модели приходится идти на компромиссное решение, т. е. принять среднее между эллиптическим и треугольным распределением подъемной силы вдоль размаха крыла. В разделе 3.3 рассматривалось такое распределение, характеризующееся коэффициентом о, который для летающего крыла должен иметь значение в пределах от —0,5 до —0,7.
Известно, что для обеспечения продольной устойчивости крыла, набранного из обычных профилей, ему необходимо придать стреловидность. Но стреловидность изменяет распределение подъемной силы на крыле и снижает летные данные модели: несущие качества крыла ухудшаются, а равнодействующие подъемной силы обеих половин крыла смещаются к концам крыла. Что же касается устойчивости крыла, то стреловидность увеличивает ее, однако до известного предела; при слишком большой стреловидности устойчивость может ухудшиться. Наиболее приемлемые значе-
ния угла стреловидности крыла у бесхвостых моделей составляют 15...20°.
Распределение коэффициента подъемной силы рассчитывается по формуле (13), которая полностью справедлива только для прямого крыла, однако при небольшой стреловидности (до 15°) она дает еще достаточно хорошие результаты и может быть с успехом использована для расчета.
Точные методы расчета распределения коэффициента подъемной силы стреловидного крыла весьма сложны и трудоемки, поэтому пользоваться ими при проектировании моделей затруднительно. На рис. 93 приведено распределение коэффициента подъемной силы вдоль размаха для прямого крыла и для того же крыла со стреловидностью 15°. Как видно, разница между кривыми пренебрежимо мала, что оправдывает использование в наших расчетах формулы (13).
С точки зрения летных данных модели, существенную роль играет не только распределение коэффициента подъемной силы, но также и распределение параметра С?/ Сх. Как было показано в предыдущих разделах, этот параметр определяет вертикальную скорость снижения модели при планировании. Чтобы вертикальная скорость снижения была минимальной, параметр Су/C,должен иметьбольшое числовое значение на как можно большей части размаха крыла. Распределение параметра Cv/Ci по размаху крыла можно улучшить двояким способом:
, Ъа
а) изменением сужения крыла т] = — ьк ' что приводит к изменению распределения Су вдоль размаха; площадь крыла и произведение Су-b в каждом сечении должны остаться при этом постоянными (заметим, что слишком большие изменения величины сужения и хорд крыла нежелательны, так как это вызовет заметную разницу в числах Рейнольдса сечений). На рис. 94 сплошной и пунктирными линиями показано распределение интересующих нас коэффициентов на крыле с постоянной хордой (т) = 1) и на крыле с небольшим сужением;
б) изменением скорости модели, что также приводит к изменению распределения Су, а следовательно, и параметра С^Сх. При меньших скоростях (сплошная линия на рис. 95) распределение параметра Cj/Ci более благоприятно, чем при больших (пунктир).
Рис. 93. Влияние стреловидности крыла на рас прелеление коэффициента подъемной силы вдоль размаха
Рис. 94. Влияние сужения крыла на распределение Су и Су3!Сх2
Пример определения заданного распределения подъемной силы модели ЛК-2, геометрические характеристики которой показаны на рис. 96. Данные модели:
Рис. 95. Влияние скорости полета модели на распределение Су и Су31Сх2 вдоль размаха крыла (I — малая скорость, II — большая скорость)
Расчет распределения коэффициента подъемной силы модели ЛК-2
Прямоу! ольное крыло Трапециевидное крыло
2г Сусеч/Суср с ^усеч b с ^усеч
0.155
из табл. 6 ь
1 1 2 1 3 1 4 1 5
0 1,455 1,330 0,175 1,178
0,1 1,441 1,317 0,171 1,149
0,2 1,398 1,278 0,167 1,185
0,3 1,326 1,212 0,163 1,15о
0 4 1,227 1,121 0,159 1,093
0,5 1,103 1,008 0,155 1,008
0,6 0,955 0,873 0,151 0,896
0,7 0,784 0,717 0,147 0,756
0,8 0,594 0,543 0,143 0,589
0,9 0,377 0,345 0,139 0,385
1,0 0 0 0,135 0
Рис. 96. Геометрия крыла модели ЛК-2
Среднее значение коэффициента подъемной силы будет равно:
Су^Л^ = °-410-0-81 - =0,914.
0.613SV2 0,613- 0,3379 -4,612
Рассчитанное распределение Су вдоль размаха для трапециевидного крыла пока зано на рис. 97, для сравнения там же помешен предыдущий график для прямо угольного крыла. Заметим, что все расчеты проводились как для нестреловидного крыла, хотя угол стреловидности крыла модели ЛК-2 больше 15°.
Число Рейнольдса в плоскости симметрии модели
Кео=70- 175-4,61 «56500,
размах крыла — / = 2,18 м;
полная плошадь— 5 = 0,3379 м2;
удлинение — Х= (2,18)2:0,3379 = 14,06;
средняя хорда /?ср = 0,3379:2,18 = 0,155 м, масса модели тм = 0,410 кг;
удельная нагрузка на несущмо поверхность р = 0,41-9,81:0,3379= 11,94 Н/м2.
Расчет распределения кодффинпепiа подъемной силы для значения параметра о= — 0,5 приведен в табл. 15; значения Сусеч/Суср прямоугольного КрЫЛЗ ВЗЯ ГЫ ИЗ табл. 6, а скорость принята такой же, как для модели ЛК-1, К = 4,61 м/с.
на конце крыла
А’ек = 70-135-4,61 «43600.
6.2. Выбор профилей крыла
После расчета распределения Су вдоль размаха подберем профиль или набор профилей крыла.
Выбор основного профиля
Основной профиль должен обеспечить сравнительно большие значения подъемной силы в центральной части крыла (табл.15). Следовательно, это должен быть не плоский, а вогнуто-выпуклый профиль, поскольку плоские профили имеют худшие несущие свойства. Крыло модели должно быть также достаточно жестким, а потому профиль не может быть слишком топким.
Главным критерием пригодности профиля для нашего крыла является максимальное значение коэффициента подъемной СИЛЫ Сутах, О КОТОрОМ МОЖНО СуДИТЬ ПО ПО-ляре профиля. На рис. 98 наглядно показано сравнение поляр трех различных профилей с точки зрения их пригодности для получения требуемого распределения Су. Очевидно, что профиль с низким значением Сутах (рис. 98, в) непригоден для модели, так как срыв потока при увеличении угла атаки будет начинаться в центральной части крыла, и модель окажется неустойчивой в продольном отношении.
Если же Сутах профиля значительно
Рис. 97. Распределение вдоль размаха коэффициента подъемной силы крыла модели ЛК-2
Рис. 98. К выбору профилей для модели ЛК-2
превышает наибольшее значение коэффициента подъемной силы на крыле (рис. 98, б), то это также невыгодно, поскольку несущие качества профиля не будут использоваться полностью. В итоге можно принять (и это подтверждается практикой постройки моделей типа ЛК-2), что Сутах профиля нашей модели должен на 15...20% превышать максимальное значение коэффициента подъемной силы на крыле (рис. 98, а).
При расчете поляры выбранного профиля удобнее всего пользоваться данными продувок крыла с удлинением Z,= oo в аэродинамической трубе. В этом случае сопротивление профиля будет суммой сопротив
ления при /. = оо и индуктивного сопротивления (см. также пример 2 в разделе 3.3ь
Сх - Схоо + ACxi.
(34)
Для определения индуктивного сопротивления при выбранном распределении С. вместо формулы (14) воспользуемся фор мул ой
У \ 9 л
АСХ1 = ----------(35)
ЛЧ1+ ¥ + То)
Стоит обратить внимание на то, что при эллиптическом распределении о=0, а
cl
ACsi = -* лЛ,
Выбор аэродинамической крутки
В случае использования вогнуто-выпуклого профиля на всем размахе стреловидного крыла истинные углы атаки сечений вблизи его концов всегда будут больше, чем в центральной части, что заметно уве личивает сопротивление крыла. Заменив профиль концевого сечения крыла на симметричный. т. е. применяя аэродинамическую крутку, мы можем значительно снизить сопротивление крыла. Аэродинамическая крутка положительно влияет и на продольную устойчивость модели.
На рис. 99 даны поляры профилей MVA-301 (вогнуто-выпуклый) и NACA 0009 (симметричный). Из сравнения поляр видно, что симметричный профиль действительно обладает значительно меньшим сспротивлением при небольших значениях коэффициента подъемной силы. Метод определения формы профиля на переходном участке крыла при аэродинамической крутке приведен в книге В. Нестоя [10].
Крыло модели ЛК-2 набрано из тех же профилей, что и крыло ЛК-1, т. е. в качестве основного (до сечений 2z// = 0,8) использован несущий вогнуто-выпуклый профиль MVA-301, а в концевом сечении крыла установлен симметричный профиль КАСА 0009. В табл. 16 профильные характеристики (Х=оо) пересчитаны на характеристики крыла модели ЛК-2 (Х= 14,06).
Индуктивное сопротивление подсчитано по формуле (35) при о=—0,5:
АСХ1 =
л -14,06
-0,5 (— 0,5)2
2_________4
-0,5 ( —0,5)2
2 + 10
= 0,024Су.
Обе рассчитанные поляры крыла модели ЛК-2 (при использовании для всего крыла профиля MVA-301 или профиля NACA 0009) приведены на рис. 99. Для каждой из поляр обозначены также
«о— угол нулевой подъемной силы: \с
=—-------наклон кривой коэффициента
Да
подъемной силы при А,= оо; эти величины потребуются нам в дальнейших расчетах. Углы даны в радианах. На полярах не нанесена разметка углов атаки, их нам еще предстоит подсчитать.
Таблица 16
Расчет поляр профилей модели ЛК-2
0 а сю СУ ^ХСЮ С2 У СХ14,ОЬ
0,024-С2 У ^Х<Х +Д^Х1
С? 1 1 2 1 3 4 5 6
> -1,50 0,370 0,034 0,137 0,003 0,037
0 0,490 0,027 0,240 0,006 0,033
1,21 0,590 0,023 0,348 0,008 0,031
3,11 0,730 0,020 0,533 0,013 0,033
4,70 0,830 0,020 0,639 0,017 0,037
6,21 0,950 0,021 0,903 0,022 0,043
9,49 1,160 0,023 1,346 0,032 0,055
12,11 1,380 0,034 1,904 0,046 0,080
S 0 0 0,017 0 0 0,017
0,94 0,1 0,017 0,01 0 0,017
< 1,89 0,2 0,019 0,04 0,001 0,020
< 2,94 0,3 0,021 0,09 0,002 0,023
Z 4,00 0,4 0,024 0,16 0,004 0,028
5,15 0,5 0,029 0,25 0,006 0,035
6,31 0,6 0,040 0,36 0,009 0,049
Необходимые значения ах и ао профилей на переходном участке в сечениях 2^/2 = 0,85; 0,90 и 0,95 определим, применяя линейную интерполяцию по формуле (1):
(йоо)г= (аоо)о,8+ (а°°)';О0~(0а”)о'8 (у-о,8) =
= 4,297 + -:47—4,297 /. о,8^1 = 0,2 \ z !
= 4,297 + 5,885 —0,8);
(ао)г=(ао)о,8+ -?0]'п\(я0)0’8 =
= -0,1122+ 9+0,1122 Ш —0,8) = 0,2 \ i )
= -0,1122 + 0,561 /'— — 0,8).
\ I /
Получаем следующие значения:
2z 1 = 0,85; аоо = 4,591 1/рад; «0 = -0,0842;
2г Z = 0,90; «оо = 4,886 1/рад; «0 = -0,0561;
2г = 0,95; «00 = 5,180 1/рад; «0 = -0,0281.
6.3. Расчет распределения углов атаки вдоль размаха крыла
Выбранное распределение коэффициента подъемной силы вдоль размаха реализуется путем соответствующего подбора углов атаки в сечении крыла, что достигается с помощью геометрической крутки. Введем обозначения углов в сечении крыла, которые потребуются нам в дальнейшем (рис. 100):
а.» — угол атаки, который необходим для получения заданного значения коэффициента подъемной силы в сечении крыла бесконечного размаха (Х=оо);
е — угол скоса потока;
а — угол атаки, обеспечивающий получение необходимого коэффициента подъемной силы в сечении крыла данного удлинения;
а' — угол между хордой профиля и прямой, проходящей через переднюю и заднюю кромки; угол этот вводится потому, что хорды профилей определяются по-разному: хорда вогнуто-выпуклого профиля MVA-301 проходит по касательной к его нижнему обводу, а для симметричного профиля NACA 0009 — это средняя линия профиля (а' = 0). При монтаже крыла необходимо иметь один и тот же уровень (плоскость) отсчета, за который в нашем случае принимается прямая, соединяющая переднюю и заднюю кромки профиля.
Из рис. 100 видно, что
a = 0Joo + s- (36)
Угол а,» для различных значений Су сечений крыла с У=оо можно определить непосредственно из результатов продувок (из характеристик профиля) или рассчитать по формуле
аоо= — +а0. (37)
G се
Для заданного распределения коэффициента подъемной силы, определяемого величиной параметра о, угол скоса потока в сечениях крыла рассчитывается по формуле
= Суср /1 + п Г3/2£)2-----L11 (38)
л/. I [ \ I ! 2 J)
где СуСр — среднее значение коэффициента подъемной силы крыла.
Рис. 99. профилей ЛК-2
Рис. 100. Характерные углы в сечении крыла
Таким образом, для различных сечений крыла, определяемых координатой 2г//, можно определить необходимые углы атаки, подсчитывая поочередно:
угол «ос — по формуле (37);
угол 8—по формуле (38);
угол а—по формуле (36).
Зная угол а', можно подсчитать так называемый монтажный угол по формуле
Окмонт “ ОС -Т ОС'.
Для построения шаблона, с помощью которого будет монтироваться крыло (см. раздел 7), потребуется знание угла крутки <р сечений относительно хорды основного профиля в плоскости симметрии крыла. Этот угол определяем по формуле
ф = ОСмонт— (оСмонт) о-
Рассмотренная методика расчета геометрической крутки крыла модели иллюст-
Рис. 101. Разбивка крыла на участки для определения коэффициента сопротивления
рируется примером. Для крыла ЛК-2, составленного из профилей MVA-301 и NACA 0009, в табл. 17 приведены значения углов атаки, а также необходимых для их реализации монтажных углов сечений. Углы скоса потока определялись по формуле (38) при
Суср = 0,914; Х= 14,06; о=-0,5;
Wli~0.5 [3m--0,5]) =
л -14,06 I I \ I I ]1
= 0,00517
Угол а' основного профиля MVA-301 в осевом сечении крыла (а')о = 0,011, для симметричного профиля NACA 0009 в концевом сечении о/ = 0. Углы а' профилей на переходном участке — =0,85; 0,9 и 0,95 определяются с помощью линейной интерполяции по формуле (1):
(a');M«')o+^^-(y-0,8j = 0,011-
_ О^ОП / J2г _0 8 ' =() 01 !_0 055/_0 g \ .
0,2 \ I / \ I !
Заметим, что в табл. 17 скорректировано небольшое снижение коэффициента Су вблизи плоскости симметрии ( — = 0...0,1
обусловленное наличием у крыла сужения: значение угла атаки в этом пределе принимается постоянным (столбец 9 табл. 17). В последнем столбце табл. 17 приведена разность высот задней и передней кромок, которую удобно использовать при изготовлении шаблона для монтажа крыла мо-
дели.
6.4. Расчет летных характеристик модели
В предыдущем разделе мы рассчитали углы атаки сечений крыла при заданном распределении вдоль размаха коэффициента подъемной силы. Теперь по формулам (34) и (35) необходимо определить значения коэффициента сопротивления для любого сечения крыла, а затем — среднее значение коэффициента Сх всего крыла. Для этого разделим крыло на п участков шириной Дг< (рис. 101) и примем, что па каждом из них коэффициент сопротивления имеет постоянное значение.
Среднее значение коэффициента сопротивления крыла составит
хер —
(39)
К полученному коэффициенту сопротивления крыла нужно добавить значения коэффициентов вредного сопротивления остальных элементов модели. Тогда с учетом влияния интерференции коэффициент лобового сопротивления модели будет равен
ХМ —
1,15 (СхСр+ СВр).
Определив Сжм, можно приступить к расчету летных характеристик модели по формулам, приведенным в разделе 4.1:
а) качество модели К = ;
б) угол планирования 0 определяем через tg©= :
в) вертикальная скорость снижения Vy= V-sin0.
Порядок и содержание расчета летных характеристик показаны на примере их определения для модели ЛК-2. Расчет коэффициента Сх дан в табл. 18. Значения СХоо в столбце 3 этой таблицы получены линейной интерполяцией данных табл. 16 для профиля MVA-301 {‘Iz/l в пределах 0...0.8) и профиля NACA 0009 ^при ~ = 1).
[’а чет распределения углов атаки для модели ЛК-2
2z// t. рад 1/рад ас, рад рад а, рад । а7, рад %олт’ (₽. рал ср, град /1. мм
0,005 1 "X г
~У 'х'-ьа %»Ят -0.2023 180 ср л ] b sirup0 ]
1 2 3 4 5 6 7 8 10 11 12
0 1,178 0,0259 0,1619 0,1878 0,2023 0 0 0
0,1 1,194 0,0256 0,1657 0,1913 0,2023 0 0 0
0,2 1,186 0,0246 0,1638 0,1884 0,1994 -0,0029 - 0.166 0,48
0,3 1,153 0,0231 0,1561 0,1792 0,1902 -0,0121 -0,693 1,97
0,4 1,093 0,0209 4,297 1 -0,1122 0,1422 0,1631 0,011 0,1741 -0,0282 -1,616 4,48
0,5 1,008 0,0181 0,1224 0,1405 0,1515 -0,0508 -2,911 7,87
0,6 0,596 0,0147 0,0963 0,1110 0,1220 -0,0803 -4,601 12,11
0,7 0,756 0,0107 0,0637 0,0744 0,0854 -0,1169 - 6.698 17,15
0,8 0,589 0,0060 ) 0,0249 0,0309 0.0419 -0,1604 -9,190 22,84
0,85 0,487 0,0034 4,591 - 0,0842 0,0219 0,0253 0,0083 0,0336 -0,1687 -9,666 23,67
0,9 0,385 0,0007 4,886 - 0.0561 0,0227 0,0234 0,0055 0,0289 — 0,1734 - 9,935 23,98
0,95 0,215 -0,0021 5.-180 - 0,0281 0,0134 0,0113 0,0028 0,0141 — 0.1882 -10,783 25,63
1,0 0 -0,0952 5,474 0 0 -0,0052 0 - 0,0052 -0,2075 - 11,889 27,8|
Расчет распределения аэродинамических коэффициентов для модели ЛК-2
2z/Z ^ХОО ДСХ> Сх cJ /с2 у / X
0,021 С 2 У Схт + + А С XI
1 2 3 1 4 1 5 6
0 1,178 0,024 0,033 0,057 503
0,1 1,194 0,025 0,034 0,059 489
0,2 1,186 0,024 0,034 0,058 496
0,3 1,153 0,023 0,032 0 055 507
0,4 1,093 0,022 0,029 0,051 502
0,5 1,008 0,022 0,024 0,046 484
0,6 0,896 0,021 0,019 0,040 450
0,7 0,756 0 020 0,014 0,034 374
0,8 0,589 0,023 0,008 0,031 213
0,85 0,487 0,026 0,006 0,032 113
0,9 0,385 0,028 0,004 0,032 56
0,95 0,215 0,026 0,001 0,027 14
1,0 0 0,017 0 0,017 0
Рис. 102. Изменение величии Сх и Су3/Сх2 вдоль размаха крыла модели ЛК-2
Определение величины Схоо профилей на переходном участке требует более подробного рассмотрения. Здесь также используется метод интерполяции, однако проводится она в два этапа:
1. Для профиля на переходном участке 22
в сечении =0,9 принимается, что значение СХоо является среднеарифметическим значением этих коэффициентов для профиля AAVA-301 и профиля NACA 0009 при Сг/ = 0,385:
для MVA-301 Схоо = 0,033;
для NACA 0009 СХоо = 0,024;
(Схоо)0,9=^-3^024 =0,0028.
2. Для сечений 0,85 и 0,95 применена параболическая интерполяция по формуле (2):
в сечении -у-= 0,8, Cyi = 0,589, Сх\ = 0,023;
» » 21 =0,9, С,/2 = 0,385, Схг = 0,028,
» » -р-=1,0, Сг/з = 0, Схз = 0,017.
Д — 1 /0,017—0,024 _ 0,028—0,023 \ _
“ -0,589 \ -0,385 0,385—0,589 /
= -0,0901;
g=-l-.[0'028-0^. 0.385-
-0,589 [0,385—0,589
_ 0^017-0,028 . /0 589 + 0 385) 1 = 0.0632;
-0,385 J
С= -у[ (0,023+ 0,028 + 0,017) +
4- (0,5892+ 0,3852)0,0901 —(0,589+0,385) +
X 0,0632] =0,017.
Из параболической зависимости следует, что
Схоо= — 0,0901 Су+ 0,0632Cv +0,017.
Окончательно в рассматриваемых сечени ях будем иметь:
в сечении —=0,85, Су = 0,487, Сх = 0,026, /
» » 2г-=0,95, С(/= 0,215, Сх = 0,026.
В таблице подсчитано также значение па раметра Су / С1; кривые распределения Сх и Су/Сг вдоль размаха крыла показаны на рис. 102.
Далее, оазделив крыло на участки шириной Д//2-= 0,1, прилегающие к сечениям 0,1; 0,2; ... 1,0, по формуле (39) определяем среднее значение коэффициента сопротив
0,007 пп._
ления крыла СхСр = — - = 0,045; сам рас 0,155
чет приведен в табл. 19.
Коэффициент вредного сопротивления модели ЛК-2, несмотря на то, что у нее
скорость снижения Vy = 4,61 -sin 3,44° = = 0,277 м/с.
Расчет коэффициента полного сопротивления модели ЛК-2
2Z/1 bi Az,. 5гЬг-^г сх,
1 2 3 4 о 6
0 0,175 0,05 0,00875 0,057 0,00050
0,1 0,171 0,10 0,0171 0,059 0,00101
0,2 0,167 0,10 0,0167 0,058 0,00097
0,3 0,163 0,10 0,0163 0,055 0,00090
0,4 0,159 0,10 0,0159 0,051 0,00081
0,5 0,155 0,10 0,0155 0,046 0,00071
0,6 0,151 0,10 0,0'51 0,040 0,00060
0,7 0,147 0,10 0,0147 0,034 0,00050
0,8 0,143 0,10 0,0143 0,031 0,00044
а.9 0,139 0,10 0,0139 0,032 0,00044
1,0 0,135 0,05 0,00675 0,017 0,00012
0,155 0,0070
6.5. Центровка модели и расчет запаса устойчивости
Вопросы, связанные с определением положения центра тяжести модели и испытаниями модели на продольную устойчивость, были достаточно подробно рассмотрены в предыдущих разделах. Используя приведенные в них зависимости, рассчитаем параметры эквивалентного крыла модели ЛК-2.
На рис. 103 показан графический метод определения средней аэродинамической хорды крыла; величина ее и положение по размаху составляют:
Рис. 103. Определение крыла модели ЛК-2
нет стабилизирующих поверхностей, принимаем таким же, как у модели ЛК-1, поскольку их сопротивление пренебрежимо мало (см. раздел 3.3). В итоге коэффициент сопротивления модели
Сжм = 1,15 0,045 + 0,003 = 0,055.
Теперь, рассчитаем летные характеристики модели:
,, 0,914 ,„с
качество д= -----= 16,о;
0,055
угол планирования tg0 = O,O6O2, 0 = =3,44°;
&а = 0,156 м и za = 0,518 м,
коэффициент подъемной силы эквивалентного крыла Суэ = 0,914 (это среднее значение Су, взятое из раздела 6.1).
Коэффициент продольного момента эквивалентного крыла целесообразно определить табличным методом, как это сделано в табл. 20.
Коэффициент момента Cm(ji для координаты 2г/1 = 0,9 рассчитан методом линейной интерполяции между (Сга0)0,8= — 0,99
Расчет коэффициента момента продольного крыла модели ЛК-2
22// к b l'^zl С У г 1 cmoi! xi J С/.Х* X&;-AZ; । ! Спо. I* Д21
1 2 3 4 | 5 е | 1 8 1 9
0 0,175 0,0545 0,0095 1,178 0,099 0 0 0,0002
0,1 0,171 0,109 0,0186 1,194 0,099 0,044 0,0010 0,0003
0,2 0,167 0,109 0,0182 1,186 0,099 0,088 0,0019 0,0003
0,3 0 163 0,109 0,0178 1,153 0,099 0,132 0,0027 0,0003
0,4 0.159 0,109 0,0173 1,093 0,099 0,176 0,0033 0.0003
0,5 0,155 0,109 0,0169 1,008 0,099 0,220 0,0038 0,0003
0,6 0,151 0,109 0,0165 0,896 0,099 0,264 0,0039 0,0002
0,7 0,147 0,109 0,0160 0,756 0,099 0,308 0,0037 0,0002
0,8 0,143 0,109 0,0156 0,589 0,099 0,352 0,0032 0,0002
0,9 0,139 0,109 0,0152 0,385 0,0495 0 396 0,0023 0,0001
1,0 0,135 0,0545 0,0074 0 0 0,440 0 0
0,169 0,0258 0,0024
и (Ст0) 1,0=0. Суммируя данные столбцов 4, 8 и 9 табл. 20, получим:
S6i-Azi = 0,169;
S Cyi • Xj • bi • Az. = 0,0258;
SCmoi-&? Az* = 0,0024.
Подставив эти данные в формулу (23), подсчитаем коэффициент момента эквивалентного крыла
mz03=---------!----(0,0258 + 0,0024) +0,914Х
0,156-0,169 ’
X—8 tg22° = o,157.
0,156
Далее определим координату центра тяжести относительно фокуса:
(хцт)к = ЬА = 0,172 6А = 0,027 м.
0,514
Следовательно, центр тяжести должен находиться на 7,8% САХ, считая от передней кромки.
Принимая весовые данные такими же, как у модели ЛК-1, подсчитаем положение балансировочного грузика относительно фокуса крыла по формуле (25):
0,410-0,027—0,118-0,060 „
х5Р= -------------------—=0,067 м.
0,060
Положение центра тяжести относительно 0,25&а при передней центровке:
, ч _ 0,118-0,060+(0,067 + 0,025)-0,060 _
(ЛЦТ ) п — ------------------------------ -
0,410
= 0,031 м,
при задней центровке:
, , _ 0,118 0,060+ (0,067—0,025) -0,060 _
= 0,023 м.
При принятом диапазоне перемещения грузика положение центра тяжести изменяется в пределах 5,0...10,3% САХ.
Запас устойчивости модели ЛК-2 составляет Атцт = 0,172; при перемещении грузика запас устойчивости будет изменяться:
при передней центровке А+цТ = 0,2;
_ С 0°3
при задней центровке Ахцт=-2-х- = 0,147.
0,156
6.6. Выводы
Сравнение моделей ЛК-1 и ЛК-2 показывает, что модель с непрерывной круткой
крыла (ЛК-2) имеет лучшие летные данные и большую продольную устойчивость: скорость снижения у нее на 20% меньше, а запас устойчивости на 25% больше, чем у модели ЛК-1- Такое сравнение характеристик моделей вполне обосновано, поскольку они имеют одинаковую геометрию и одинаковые весовые данные и различаются лишь видом крутки крыла.
Нетрудно убедиться, что более высокие летные показатели модели с непрерывной круткой достигаются в данном случае за счет преодоления дополнительных трудностей как при расчете модели, так и при ее изготовлении. Для упрощения расчетов на рис. 104 даны общие рекомендации по подбору непрерывной крутки крыла, разработанные на основе расчетных данных для ряда крыльев с различным набором профилей.
На рис. 104, а показана крутка крыла, у которого основной профиль — плосковыпуклый или вогнуто-выпуклый с небольшой кривизной средней линии. Такая крутка целесообразна для крыльев с удлинением 7=8...12 при размере средней хорды Ьср = = 0,18...0,25 м.
На рис. 104, б показана оптимальная крутка крыла с сильно выгнутым основным профилем, если крыло имеет удлинение порядка Х=12...15 при размере средней хорды Ьср = 0,14...0,18 м.
Из рисунка видно, что в обоих вариантах на 80% полуразмаха крыла основной профиль имеет геометрическую крутку, а концевые части крыла (от 80% до 100% полуразмаха) — аэродинамическую крутку при нулевом установочном угле сечений. Рекомендации рис. 104 можно использовать при предварительном проектировании модели.
Главные трудности при постройке модели связаны обычно с необходимостью выполнения монтажа крыла на специально изготовленных шаблонах. Подробное описание конструкции такого шаблона приводится ниже в разделе 7.
В заключение необходимо добавить, что автор не имел возможности проверить в летных испытаниях преимущества модели летающего крыла с непрерывной круткой. Вполне возможно, что ее продольная устойчивость на практике окажется несколько
Геометрическая крутка
кэродина-мическия
крутка
Основной
проршль(8О % полуразпаха^онцрвои
просриль
(20 °/о пот;-раз наха I [
Рис. 104. Схема распределения углов крутки
меньшей, чем у модели ЛК-1, хотя расчетами, вследствие использования приближенных методов, это нельзя было выявить.
Поэтому при постройке модели такого крыла нужно заранее, как и у модели ЛК-1, предусмотреть возможность регулирования углов атаки и изменения центровки модели. Можно, например, изготовить концевые части крыла отдельно от его основной части, что позволит при необходимости внести коррективы в угол их установки. Для регулировки положения центра тяжести модель обязательно должна иметь передвижной балансировочный грузик.
Несмотря на эти замечания, автор приветствовал бы повышение интереса авиамоделистов к созданию моделей летающих крыльев с непрерывной круткой. Сейчас большая часть моделей класса F-1A выполняется по схеме крыла со стабилизирующими поверхностями, и создается впечатление, что возможности дальнейшего улучшения летных характеристик таких моделей практически уже исчерпаны. Применение непрерывной крутки (аэродинамической и геометрической) обещает качественный скачок в развитии моделей летающих крыльев.
г
7.
КОНСТРУКЦИЯ МОДЕЛИ
7.1. Конструкция крыла
Конструкция модели летающего крыла не так сильно отличается от конструкции крыла моделей классической схемы. Поэтому, разбирая конструктивные решения отдельных элементов модели, мы будем обращать внимание главным образом на конструктивные особенности, характерные для летающего крыла.
Основное влияние па летные характеристики модели оказывает качество изготовления ее несущей поверхности, а строго говоря, точность соблюдения профиля крыла. Поэтому конструкция крыла должна быть спроектирована так, .чтобы после обклейки каркаса форма профиля была как можно ближе к заданной. Это особенно важно для верхней поверхности крыла. Вторым условием, которому должна удовлетворять модель летающего крыла, является достаточная прочность и жесткость конструкции при действии скручивающих нагрузок *.
У крыла бесхвостых моделей вследствие наличия стреловидности появляется большой крутящий момент, вызывающий дефор-
* К сожалению, такую важную сторону проектирования, как расчет конструкции модели на прочность, автор в книге не рассматривает. Необходимые сведения о нагрузках и работе конструкции, а также о способах расчета прочности крыла и других силовых элементов модели читатель может найти, например, в книге [11]. (Примеч. переводчика).
манию крыла, характер которой показан на рис. 105.
Деформации кручения крыла влекут за собой нежелательные последствия. Прежде всего изменяется распределение углов атаки и, следовательно, распределение подъемной силы. Летные характеристики модели ухудшаются. Большие деформации такого характера, как показано на рис. 105, могут привести к поломке — скручиванию крыла или к появлению крутильных колебаний в полете с большой скоростью.
Сразу подчеркнем: чтобы крыло было устойчиво по отношению к скручивающим нагрузкам, оно должно иметь достаточно жесткий на кручение каркас, т. е. быть жестким и без «обшивки». Некоторые авиамоделисты надеются, что оклейка каркаса бумагой и пропитка ее целлоном или эма-литом придаст крылу необходимую жесткость, однако такое покрытие при повышенной влажности воздуха становится эластичным, а крылу по-прежнему будет угрожать скручивание.
Для точного выдерживания профиля крыла шаг нервюр не должен превышать 35 мм (обычно он выполняется равным 30 мм). Нервюры, за исключением специальных, о которых пойдет речь впереди, изготовляются из бальзы средней твердости, толщиной 1,5...2 мм. Если нет бальзы, нервюры можно изготовить из фанеры толщиной 1 мм, с облегчением. К верхней кромке нервюр часто приклеиваются накладки из мягкой бальзы толщиной 0,8 мм и шириной 5...6 мм (рис. 106); сечение такой нервюры имеет форму буквы Т. Накладки
к
укрепляют нервюры, обеспечивают лучшую связь задней кромки с лонжероном, а значит, увеличивают устойчивость крыла к скручивающим нагрузкам и, кроме того, позволяют точнее выдержать верхнее очер |ание профиля. Именно поэтому для нервюр из тонкой фанеры толщиной 1 мм эти накладки желательны.
На рис. 107 представлено несколько наиболее часто встречающихся вариантов конструкций крыла. Последовательно рассмотрим их.
Рисунок 107, а — это классическая двухлонжеронная конструкция. Чтобы обеспечить точность формы верхней передней части профиля, между обычными полными нервюрами установлены носовые части нервюр (носки). Выполненные из тонкой фанеры диагональные раскосы, вклеенные между передним и задним лонжеронами, увеличивают жесткость крыла на кручение.
На рис. 107, б представлена модификация такой конструкции. Носки нервюр заменены в ней широкой накладкой, которая при тщательном (по шаблону) изготовлении лучше обеспечивает сохранение формы профиля. Однако заметим, что обе эти конструкции, несмотря на наличие диагональных связей между лонжеронами, не отличаются большой жесткостью по отношению к крутящим нагрузкам.
Как известно, наибольшей крутильной жесткостью характеризуются трубчатые (замкнутые) тонкостенные оболочки. Такая «труба», пусть и не круглого сечения, образованная передней или межлонжеронной частью крыла, называется кессоном.
Пример кессонной конструкции крыла показан на рис. 107, в. Кессон образован здесь тонким слоем бальзы (0,8...1 мм) на верхней и нижней поверхностях носка крыла и стенкой переднего лонжерона (также из бальзы или тонкой фанеры). Учитывая отсутствие заднего лонжерона, рекомендуется сделать на верхних кромках нервюр за кессоном накладки (как на рис. 106). Носок кессона по передней кромке крыла образован тонкой сосновой рейкой с наклейкой из бальзы, которой легче придать требуемую для передней кромки форму. Рейка приклеивается к нервюрам при сборке крыла, и к ней же приклеивается верхняя и нижняя обшивка кессона.
Другая конструкция того же типа показана на рис. 107, г. Кессон расположен между лонжеронами, поперечные сечения которых в этом случае могут быть более
Рис. 105. Закручивание стреловидного крыла
Рис. 106. Накладка нервюры
легкими. Передняя часть профиля крыла выдерживается с помощью нервюр, носки которых, как и в предыдущей схеме, скреплены продольной рейкой.
Конструкции, представленные на рисунках в и г, отличаются большой прочностью и жесткостью, однако по сравнению со схемами а и б они более тяжелы.
Конструктивные решения, представленные на рисунках дне, применяются для стабилизирующих поверхностей. Крутящие моменты на этих элементах невелики, поэтому жесткость конструкции на кручение не имеет такого большого значения, как для центральной части крыла. Для них важнее легкость конструкции при неизменных требованиях к точности формы верхней передней части профиля.
Особо остановимся на способе сборки крыла, имеющего крутку, а кроме того, двояковыпуклый или симметричный профиль. Такое крыло не удастся собрать на плоской поверхности, и потребуются специальные кронштейны, устанавливаемые на монтажной доске (рис. 108). Кронштейны обычно изготовляются из дюралевого листа и имеют вырезы для фиксации задней кромки крыла, причем высота вырезов должна точно соответствовать форме задней кромки при условии, что передняя
i
кромка будет лежать на доске. Таким образом, заданная крутка получается за счет разницы в высоте задней кромки крыла над плоскостью монтажной доски.
Поэтому в последнем столбце табл. 17 приведены разности высот между задней и передней кромками. Например, если высота передней кромки равна 0 мм, то высота кронштейна задней кромки на осевой хорде также равна 0 мм (h = 0), а на концевой хорде h = 27,8 мм. При монтаже крыла без крутки с двояковыпуклым или симметричным профилем кронштейны имеют одинаковую высоту.
Законцовки крыла лучше всего изготовить из мягкой бальзы (рис. 109, а). Если на концах крыла устанавливаются шайбы, то их приклеивают непосредственно к концевым нервюрам (рис. 109, б). Для уменьшения опасности поломки модели при посадке со скольжением концевые шайбы можно сделать наклонными (рис. 109, в), однако полезный аэродинамический эффект таких шайб значительно уменьшится.
Рис. 109. Виды законцовок крыла
7.2. Стыковка полукрыльев
Крыло модели обычно изготовляется из двух половин, которые при сборке соединяются в плоскости симметрии модели. Конструкция этого соединения является весьма ответственным элементом модели, поскольку в осевом сечении крыла действуют наибольшие нагрузки. Следовательно, узел стыковки полукрыльев должен иметь достаточную прочность и жесткость. Недостаточная жесткость узла при больших скоростях полета модели может привести к нежелательным колебаниям крыла и даже к его разрушению.
С другой стороны, конструкция узла должна обеспечить при необходимости расстыковку полукрыльев — хотя бы в случае удара крыла о препятствие или при неудачном приземлении модели. Тщательное выполнение узла должно исключить возможность изменения угла установки одной половины крыла относительно второй, но в то же время желательно, чтобы его конструкция позволяла регулировать угол поперечного V крыла.
Среди многих известных конструктивных решений для моделей летающих крыльев чаще всего применяются два: со-
Рис. 110. Языковое соединение полукрыльев
Рис. 11 L Модификация тонкого профиля в месте стыковки полукрыльев
Рис. 112. Разностороннее крепление языка и гнез-
да в полукрыльях
Рис. 113. Стыковка полукрыльев на штырьках: 1 — дополнительные лонжероны; 2 — гнезда штырьков
единение с помощью дюралевого языка и соединение на штырьках или на шпильках.
Языковое соединение (рис. ПО) удовлетворяет большинству сформулированных выше требований. Оно дает возможность легко и быстро смонтировать крыло и к тому же, благодаря специальной форме языка (рис. 111, а) в случае удара модели о какой-либо предмет или землю крыло саморасстыковывается без повреждений. Язык изготовляется из дюралевого листа толщиной 2 мм при ширине 60... 70 мм (в зависимости от размера околофюзеляжных
хорд крыла). Подгибанием языка можно изменять угол поперечного V крыла при регулировке модели во время пробных запусков.
Очень важно хорошо закрепить язык в крыле, и с этой точки зрения языковое соединение — не самый лучший вариант. Нагрузки передаются с лонжеронов на язык через нервюры, поэтому расположенные около фюзеляжа нервюры должны иметь повышенную прочность. Их изготовляют из фанеры толщиной 2 мм, а шаг нервюр около фюзеляжа уменьшается до 20 ... 25 мм. В нервюры вклеивается гнездо для языка — плоская коробочка, рамка которой сделана из фанеры той же толщины, что и язык (2 мм), а стенки — из фанеры толщиной 0,6 ... 0,8 мм. Чтобы узел был достаточно прочным, гнездо нужно вклеить по крайней мере в четыре нервюры.
Если крыло имеет малую толщину, возникают трудности с размещением гнезда в габаритах профиля, и тогда нужно утолстить профиль в прифюзеляжной части крыла, как это показано на рис. 111. Заметим, что отказ от гнезда и замена его только вырезами в нервюрах неприемлемы для моделей летающих крыльев, так как при отсутствии гнезда не обеспечивается необходимая прочность языкового соединения.
Язык стыковочного узла проходит через фюзеляж модели, в котором должны быть сделаны соответствующие вырезы. Часто гнездо делают в одном полукрыле, а основание языка укрепляют в другом (рис. 112). Тогда у моделей с тонким (до 15 мм) фюзеляжем при ударе о препятствие оба полукрыла отпадают обычно без повреждений. Основание языка проще всего вклеить в конструкцию одного из полукрыльев с помощью универсального клея, например, БФ-2. Для того чтобы использовать обычный клей, на дюраль с обеих сторон придется предварительно наклепать тонкую (0,6 ... 0,8 мм) фанеру.
Соединение на штырьках показано на рис. 113. Силовым элементом такого узла являются два плоских штырька из дюралевого или стального листа, которые входят в гнезда, закрепленные в нервюрах второй половины крыла. Соединение на штырьках жестче и легче, чем языковое, поскольку вертикально поставленные штырьки лучше работают на поперечный изгиб, чем плоский язык. Однако здесь
больше трудностей с размещением ответных гнезд в границах профиля крыла.
Чтобы стык на штырьках был прочным, рекомендуется дополнить конструкцию око-лофюзеляжной части каждого полукрыла двумя балками, перпендикулярными к плоскости разъема, к которым и прикрепляются штырьки (на одном полукрыле) и ответные гнезда для них (на другом). Сечения штырьков: переднего—1,5 ...2X8... ... 10 мм, заднего — 1,5 ... 2x6 ... 8 мм.
Монтажные углы обоих полукрыльев будут точно выдержаны только при очень тщательном изготовлении стыкового узла. Как и в предыдущем случае, в фюзеляже модели необходимо сделать тесные отверстия для прохода штырьков.
На участке размаха, занятом стыковочным узлом, конструкция крыла в каждом случае должна быть усилена путем двусторонней оклейки каркаса шпоном из бальзы, липы или осины.
7.3. Крепление стабилизирующих поверхностей
Рассмотрим теперь возможные конструкции соединения центральной части крыла со стабилизирующими поверхностями.
У некоторых моделей крепление стабилизирующих поверхностей к крылу выполняется неразъемным, а регулировка модели производится путем отклонения небольших дополнительных поверхностей — переставных элевонов.
Один из вариантов такого крепления показан на рис. 114. Продолжение верхнего лонжерона крыла служит нижним лонжероном стабилизирующей поверхности; передняя кромка также изготовлена из одной рейки. Такое крепление обладает большой прочностью и жесткостью.
С точки зрения аэродинамики регулировку модели выгоднее производить путем изменения угла установки не элевонов, а самих стабилизирующих поверхностей, что нужно обеспечить соответствующей конструкцией стыковочного узла. Задача несколько облегчается тем, что в плоскости соединения крыла со стабилизирующими , поверхностями обычно устанавливаются вертикальные шайбы, которые можно использовать для крепления стабилизирующих поверхностей.
Простейшим решением является закреп-7*
Рис 114. Неразъемное крепление сгабилнзчрую-щп, поверхности
общая передняя кромка, 2—фанера 1,5 мм 3 общий лонжерон
Рис. 115. Штыревое крепление стабилизирующей поверхности (1):
/ — впиты крепления шайбы к концевой нервюре крыла; 2 — штырь (стыковой винт); 3—концевая шайба
ление стабилизирующих поверхностей на штыре (рис. 115). Шайбы, изготовленные из фанеры толщиной 1,5... 2 мм, приклеиваются к концевым нервюрам крыла, причем для увеличения прочности крепления лонжероны, а также передняя и задняя кромки крыла вклеиваются в соответствующие отверстия в шайбах; места вклейки подкрепляются треугольными вкладками. Кроме того, каждая шайба стягивается с нервюрой болтиками М2; концевые нервюры изготовлены, как и шайбы, из фанеры
•Рис. 116. Штыревое двухточечное крепление стабилизирующей поверхности (II):
/ — дополнительные лонжероны; 2 — винты крепления шайбы к концевой нервюре крыла; <? — штырь стабилизирующей поверхности; 4 — конце-вая шайба; 5 — винт с гайкой, перемещением которого можно изменять угол установки стабилизирующей поверхности
Рис. 117. Простейшая конструкция фюзеляжа
толщиной 2 мм. Сегмент крыла, прилегающий к шайбе, рекомендуется с двух сторон оклеить тонкой бальзой или фанерой.
Аналогичным образом выполняются внутренние концевые части стабилизирующих поверхностей. Они заканчиваются нервюрой, которая имеет сверху треугольный выступ с отверстием для штыря (рис. 115). Дюралевый штырь диаметром 5... 6 мм имеет гайку (это, собственно, болт, а не штырь), и обе соединяемые части крыла (концевая шайба и концевая нервюра ста-шо
билизирующей поверхности) свинчиваются между собой.
Рассмотренное «точечное» крепление стабилизирующих поверхностей навряд ли можно считать очень надежным, и поэтому порекомендуем другой вариант узла стыковки, который к тому же окажется более удобным при регулировке модели (рис. 116).
Штырь из стальной проволоки диаметром 2 мм прикрепляется к дополнительному лонжерону, вклеенному в переднюю часть стабилизирующей поверхности перпендикулярно к ее торцу. Выступающий конец штыря длиной примерно 30 мм плотно входит в трубочку, вклеенную в отверстия последних нервюр крыла. Угол установки изменяется поворотом стабилизирующей поверхности вокруг оси штыря, а фиксируется он зажимным винтом М3, который перемещается в вырезе концевой шайбы.
Конневые шайбы и законцовки крыла и стабилизирующих поверхностей выполняются точно так же, как в предыдущем случае. Остается лишь добавить, что последний вариант стыковочного узла имеет еще и такое преимущество, как уменьшение опасности повреждения модели, если конец крыла заденет за какое-нибудь препятствие: удар может быть смягчен за счет выхода штыря из своего гнезда.
7.4. Конструкция фюзеляжа
В моделях летающих крыльев фюзеляж является вспомогательным элементом, и конструкция его очень проста. На фюзеляже всегда крепится буксирный крючок, имеются вырезы для стыковочных узлов крыла (языка или шпилек) и место для передвижного центровочного грузика. Кроме того, на фюзеляже может быть закреплено вертикальное оперение, а также приспособление, ограничивающее время полета.
Самым простым в конструктивном отношении является фюзеляж, изготовленный из фанеры толщиной 5...8 мм; он показан на рис. 117. Для изменения центровки модели служат балластные камеры, выполненные в виде сквозных вырезов, закрытых тонкой фанерой. У моделей летающих крыльев класса F-1A, построенных для участия в соревнованиях, такие фюзеляжи можно встретить сравнительно редко.
В большинстве случаев у современных
моделей фюзеляж выполняется в виде фермы из реек сечением 2X10 мм, которая е обеих сторон покрывается бальзой или тонкой фанерой (рис. 118). В передней части фюзеляжа имеется грузик, перемещающийся в направляющих, которые являются элементами фермы. Перемещение грузика и изменение центровки модели достигается вращением винта, гайка которого прикреплена к грузику.
В нижнюю рейку фермы фюзеляжа вклеен полоз (лыжа), к которому крепится буксировочный крючок, сделанный из дюраля или из проволоки. Крючок переставной, что позволяет добиться оптимального «поведения» модели на леере при запуске.
7.5. Управляющие устройства
Модель свободнолетающего планера должна иметь устройство, которое после отцепки от леера переводит ее в полет по круговой траектории. В этом случае исключается далекий отлет модели, особенно при запусках в ветреную погоду.
Как правило, модель нужно вводить в вираж только после отцепки от леера, хотя встречаются случаи, когда модель с самого начала отрегулирована на полет по кругу, а прямолинейность ее движения на леере обеспечивается другими способами (см. ниже). Кроме того, управляющее устройство должно позволять регулировать радиус траектории. Обычно стремятся, чтобы он был равен 30 ... 40 м.
Для обеспечения полета модели летающего крыла по круговой траектории можег быть использовано управление подъемной силой, управление боковой силой вертикальных поверхностей или управление силой сопротивления (рис. 119).
Управление подъемной силой (рис. 119, а). Модель вводится в вираж отклонением элевона, который увеличивает (если он отклонен вниз) или уменьшает подъемную силу полукрыла. Такой же эффект можно получить при несимметрично установленных стабилизирующих поверхностях (если углы их установки относительно крыла, а следовательно, и углы атаки неодинаковы).
Управление моделью путем изменения подъемной силы полукрыльев имеет неко
торые недостатки. Основным из них является склонность к углублению виража, в результате чего полет модели может превратиться в полет по суживающейся спирали со всеми вытекающими отсюда неприятными последствиями. Кроме того, отклонение элевона нарушает продольную устойчивость модели, поскольку оно изменяет распределение подъемной силы вдоль размаха крыла, а значит, смещает точку приложения ее равнодействующей. При использовании этого метода нужно обязательно предусмотреть возможность регулировки угла отклонения элевона во время пробных полетов модели. Рекомендуемая площадь элевона — 5 ... 10 см2.
Обратим внимание на следующее обстоятельство. Если элевон модели не управляемый, а переставной, т. е. все время (и при буксировке модели) находится в отклоненном положении, то для обеспечения прямолинейности движения модели на леере буксировочный крючок нужно сместить из плоскости симметрии модели в сторону крыла, которое в свободном полете будет обращено внутрь виража. Эю позволит избежать «голландского шага» модели на участке запуска.
Последнее замечание относится также и к случаю несимметрично установленных стабилизирующих поверхностей. В целом же отмеченный недостаток существенно ограничивает применение переставного элевона, поскольку у некоторых моделей могут появиться большие трудности в обеспечении устойчивости на этапе запуска.
Управление боковой силой вертикальных поверхностей модели (рис. 119, б). Модель вводится в вираж путем отклонения руля направления, размещаемого на центральном киле или на одной из концевых шайб. Такое управление недостаточно эффективно, потому что боковые силы, вызывающие поворот модели, действуют на малом плече относительно центра тяжести модели.
Управление с помощью сил сопротивления (рис. 11е1. в). Это наиболее эффективный способ уппавлення моделью летающего крыла. Представим себе, что на одной из концевых частей крыла в поток выставлена небольшая пластинка, своего рода воздушный тормозной щиток. Сопротивление полукрыла возрастет, и модель войдет в вираж в сторону этого полукрыла.
Очевидно, что тормозной щиток лучше разместить так, чтобы он как можно мень-
102
I
!
Рис. 118. Типовая конструкция фюзеляжа:
/ — направляющие центровочного грузика; 2—винт для перемещения грузика; 3 — буксировочный крючок; 4 — полоз;
5 —ложе для языка; 6—центровочный грузик
Рис. 119. Способы изменения траектории полета модели
Рис. 120. Управление моделью с помощью тормозного щитка
Рис. 121. Управление моделью с помощью руля направления:
1 — ограничитель отклонения руля; 2— пружинка; 3 — упор нейтрального положения руля в прямолинейном полете;
4 — руль
Рис. 122. Управление моделью путем изменения подъемной силы:
1 — ограничитель отклонения элевона; 2—пружинка; 3—нить или леска к освобождающему устройству; 4 — упор нейтрального положения элевона в прямолинейном полете; 5 — леер
me влиял на распределение подъемной силы по размаху, т. е. ближе к задней кромке крыла, на концевой шайбе; можно сделать его выдвигающимся из конца крыла. Плоскость щитка должна быть примерно перпендикулярна к направлению полета (к хордам крыла). Опыт показывает, что площадь тормозного щитка, размещенного на конце крыла, должна составлять 3 ... 8 см2.
Для облегчения работы авиамоделиста приведем некоторые конструктивные схемы устройств управления моделью летающего крыла.
Простейшим устройством является тормозной щиток — пластинка площадью 3 ... 4 см2, размещенная на конце крыла (рис. 120). Прямолинейный полет такой модели на леере обеспечивается несимметричным размещением буксировочного крючка — он смещен в сторону полукрыла с тормозным щитком. Нельзя не заметить, что запуск модели, отрегулированной на полет по круговой траектории, требует от авиамоделиста большого опыта и умения. Особенно трудным запуск может оказаться при ветреной погоде.
На рис. 121 показано одно из возможных конструктивных решений управления моделью с помощью руля направления, который размещен на концевой шайбе крыла. От рычага на руле через поддерживающие петли вдоль задней кромки крыла протянут к фюзеляжу отрезок нити или лески, заканчивающийся плоской вкладкой с отверстием. На фюзеляже установлен вилочный кронштейн, в котором вкладка удерживается чекой, привязанной к концу леера.
Натянутая леска держит руль в неот-клоненном положении. После отцепки модели падающий леер выдергивает чеку из вилочного кронштейна, и вкдадка лески освобождается. Резинка или пружина поворачивает руль на угол, определяемый установкой ограничителя, и модель начинает полет по установившейся спирали. Эту схему приведения в действие управляющего устройства можно использовать также для элевона и для тормозного щитка.
На рис. 122 представлен другой вариант аналогичного устройства — для отклонения элевона в момент перехода модели в свободный полет (лучше, чтобы элевон отклонялся вверх, а не вниз, так как при отклонении вверх уменьшается возможность его повреждения при посадке).
От рычага элевона внутри конструкции крыла проходит леска, заканчивающаяся маленьким колечком, которое нужно заце
пить за хвостик буксировочного крючка после того, как на крючок надето кольцо леера. В момент отцепки модели спадающий с крючка леер сбрасывает колечко лески, и освобожденный элевон отклоняется пружиной или резинкой на угол, определяемый установкой ограничителя.
Важным моментом является здесь правильный подбор усилия, необходимого для сброса колечка лески с хвостика буксировочного крючка. Если требуемое усилие чересчур велико, модель не освободится от леера, в противном же случае может произойти самопроизвольное срабатывание устройства, и элевон будет отклонен преждевременно. Нужную «чувствительность» устройства можно подобрать, изменяя глубину и угол прорези для колечка лески на хвостике буксировочного крючка.
В заключение отметим, что рассмотренные выше варианты конструктивного выполнения управляющих устройств хорошо проверены и широко используются в авиамоделизме. Описание конструкции управляющего устройства нашей модели дано в разделе 8.
7.6. Устройства, ограничивающие время полета
Время полета моделей на соревнованиях измеряется только до 180 с. Старты каждой модели в количестве от 5 до 7 следуют один за другим достаточно быстро, и поэтому необходимо иметь у модели устройство, ограничивающее продолжительность полета, чтобы можно было успеть доставить модель к месту старта и подготовить ее к следующему полету.
Действие таких устройств основано обычно на ухудшении аэродинамического качества модели, что ускоряет ее снижение. Однако нужно стремиться к тому, чтобы полет модели продолжал быть устойчивым, а вертикальная скорость снижения оставалась в границах, исключающих поломку модели при приземлении.
Ограничить время полета модели можно несколькими способами: путем увеличения ее лобового сопротивления, изменением центровки модели или изменением угла установки стабилизирующих поверхностей.
Увеличение сопротивления модели достигается введением в поток поверхностей, создающих большое допол-
Рис. 123. Аэродинамический тормоз:
1 — фитиль; 2 — пластины аэродинамического тормоза
Рис. 124. Тормозной парашютик:
1 — резинка, зажимающая конец фитиля; 2— контейнер для парашютика; 3 — резинка, выбрасывающая парашютик; 4 — зацеп на куполе парашютика; 5—фитиль
нительное сопротивление. Такими поверхностями могут быть открывающиеся в полете аэродинамические тормоза или тормозной парашют.
Наиболее распространенная конструкция аэродинамических тормозов показана на рис. 123. Две пластинки площадью 15... 25 см2 каждая, шарнирно прикреплены по обеим сторонам фюзеляжа над крылом и в закрытом положении плотно прижаты к фюзеляжу. По прошествии определенного времени полета модели пластины высвобождаются (в результате догорания фитиля или таймером) и усилием пружин или резинок открываются в обе стороны так, что их угол относительно поперечной оси модели составляет 30 ... 40°. Ограничителями отклонения пластинок служат обычно штырьки, выступающие над верхней поверхностью крыла модели.
Весьма надежным средством для обеспечения быстрого возвращения модели на землю является небольшой тормозной парашют (рис. 124). В заданный момент времени парашют выбрасывается из контейнера фюзеляжа, создавая дополнительное сопротивление, что значительно уменьшает аэродинамическое качество модели и увеличивает скорость ее снижения.
Тормозной парашют для свободнолетающих моделей класса F-1A должен иметь диаметр 20 ... 25 см; этого достаточно, чтобы уменьшить качество модели до значения 4 ... 5. Следует при этом обратить внимание на то, что точка прикрепления фала парашюта в фюзеляже должна находиться вблизи центра тяжести модели, чтобы сила сопротивления парашюта не создала слишком большого момента, способного нарушить продольное равновесие модели.
Рис. 125. Нарушение поперечного равновесия модели путем изменения положения центра тяжести
Рис. 126. Нарушение продольного равновесия модели путем изменения центровки модели на более переднюю:
1 — ось вращения рычага в плоскости симметрии фюзеляжа; 2—рычаг; 3 — грузик; 4 — фитиль
Рис. 127. Из хищение угла установки стабилизирующих поверхностей:
1 — пружинка; 2 — нить к освобождающему устройству
Чтобы парашют правильно раскрылся, он должен быть выброшен из контейнера с некоторой скоростью. Для этого к центру купола сложенного парашюта с помощью зацепа прикрепляется резинка, другой конец которой закреплен на хвостовике фюзеляжа. Когда парашют находится в кон
тейнере, резинка натянута, а зацеп удерживается освобождающим приспособлением (фитиль или таймер). В момент освобождения зацепа резинка сокращается и выбрасывает парашют из контейнера.
Изменение положения центра тяжести. В основе этого способа быстрого снижения модели лежит нарушение установившегося полета модели по круговой траектории. Чаще всего используется нарушение поперечного равновесия модели путем высвобождения грузика, подвешенного к одному из крыльев (рис. 125).
Во время нормального полета грузик удерживается зацепом в фюзеляже вблизи центра тяжести модели. После освобождения зацепа, для чего опять же используется фитиль или таймер, грузик повисает на нити, закрепленной на одной из концевых шайб, и модель переходит в полет по спирали в сторону полукрыла, на котором висит грузик. Оговоримся, однако, что приземление модели из полета по спирали всегда связано с большим риском ее поломки. Некоторые авиамоделисты предлагают использовать приспособление, нарушающее продольное равновесие модели, в результате чего модель переходит в достаточно крутое планирование. Рычаг с грузиком на конце размещается на верхней кромке фюзеляжа (рис. 126) и удерживается в прижатом положении зацепом. При срабатывании высвобождающего устройства рычаг пружиной перекидывается вперед, центровка становится более передней, модель начинает круто планировать. Следует, однако, помнить, что и здесь тоже велика опасность поломки модели при приземлении. Изменение угла установки стабилизирующих поверхностей (рис. 127). Этот способ ограничения времени полета аналогичен перестановке стабилизатора у моделей классической схемы. В нормальном полете угол установки стабилизирующих поверхностей фиксируется нитями (лесками), которые пропущены через петли и удерживаются общим освобождающим механизмом на фюзеляже. При его срабатывании концы лесок освобождаются, и обе стабилизирующие поверхности под действием пружин или резинок одновременно изменяют угол установки относительно крыла, как показано на рис. 127. Величина изменения угла подбирается экспериментально во время пробных полетов такой, чтобы скорость снижения не была слишком большой и не угрожала поломкой модели при приземлении.
8.
ПОСТРОЙКА МОДЕЛИ ЛЕТАЮЩЕГО КРЫЛА ЛК-1
8.1. Крыло
Раздел содержит подробное описание процесса изготовления модели ЛК-1, проектирование которой рассмотрено в разделе 5. Основными материалами для ее постройки являются сосна, бальза и фанера. Чертежи отдельных элементов модели выполнены в масштабе 1 : 1, а сборочные чертежи — в уменьшенном масштабе.
Изготовление крыла целесообразно начать с центроплана, который при сборке крыла рассматривается как отдельный узел.
Начинаем работу с подготовки нервюр. Для этого в соответствии с рис. 128 прежде всего изготовим из дюралевого листа два шаблона с базовыми отверстиями диаметром 2 мм, а затем по шаблону вырежем из фанеры толщиной 2 мм восемь нервюр (заметим, что для упрощения работы можно вырезать и затем обрабатывать сразу десять нервюр, поскольку еще две таких же нервюры из фанеры нам понадобятся в дальнейшем для концевых сечений крыла). Чтобы точнее выдержать форму нервюр, рекомендуется предварительно просверлить по шаблону отверстия в фанере и только потом, закрепив шаблон, намечать их внешние обводы.
Все нервюры, используя их базовые отверстия, стягиваем между шаблонами в общий пакет и окончательно обрабатываем их внешние обводы. После демонтажа па
кета в каждой нервюре центроплана нужно сделать прямоугольное отверстие для языка в соответствии с чертежами рис. 128, где через 1л ... 4л обозначены нервюры левого полукрыла, а через 1п ... 4п — правого.
Язык стыковочного узла (рис. 129) изготовляем из листа дюраля Д16Т толщиной 2 мм и после изготовления подгибаем его по линиям Л — Л и П — П, чтобы получить необходимый угол поперечного V крыла (1,5°). Язык несимметричен, трапециевидная его часть должна быть надежно вклеена в левую половину центроплана, а для правой его части нужно изготовить гнездо в другой половине центроплана.
Рамку гнезда выпиливаем из фанеры толщиной 2 мм и обклеиваем ее фанерой толщиной 0,8 ... 1 мм. В соответствии с формой левой части языка подготавливаем две накладки из фанеры толщиной 1 мм и приклепываем их к языку пятью трубчатыми заклепками.
Теперь приступим к сборке центроплана. Сборку нужно провести очень тщательно, потому что от ее точности зависит симметрия в углах атаки правой и левой половин крыла.
В первую очередь в соответствии с рис. 129 нужно выполнить монтажный чертеж центроплана в масштабе 1:1. Чертеж кладем на монтажную доску и начинаем сборку. На язык с приклепанными к его левой части накладками и одетым на правую часть гнездом нанизываем только две центральные нервюры 1л и 1п. Укладываем
0,8-1 нн
Рис. 128. Нервюры и шаблон нервюр центроплана крыла 108
к
Рис. 129. Язык и рамка гнезда стыковочного узла
s
Рис. 130. Каркас центроплана крыла в собранном виде
все это на чертеж, закрепляем булавками на доске и смазываем нитро- или эпоксидным клеем места соединения нервюр с языком и гнездом. Очевидно, что смонтировать и склеить сразу все нервюры центроплана нельзя, потому что язык не плоский.
После того, как клей полностью затвердеет, склеенные элементы снимаем с доски и нанизываем на язык нервюры 2л, Зл и 4л. Базируясь на уже приклеенной к нему нервюре 1л, монтируем всю левую часть центроплана на доске и проклеиваем ее. После высыхания клея повторяем ту же операцию с нервюрами 2п, Зп и 4п правой части, которые приклеиваются к гнезду языка. В итоге мы получаем полмостью собранный каркас центроплана (рис. 130), состоящий из двух частей, соответствующих принятому делению крыла: левой с языком и правой с гнездом для него.
Приведенное ниже описание изготовления крыла относится к правой его половине, но содержит также замечания по тем особенностям, которые нужно учесть для левого полукрыла.
Работа начинается с изготовления двадцати нервюр для каждого полукрыла. Нервюры лучше всего вырезать из бальзы средней твердости толщиной 1,5 мм, затем их нужно обработать для получения окончательной формы в ранее изготовленных шаблонах. При недостатке бальзы ее придется заменить тонкой фанерой.
Далее подготавливаем следующие элементы крыла: два лонжерона из сосновых реек сечением 2X8 мм, переднюю кромку из той же рейки, сечение которой предварительно обработано по форме носка профиля (см. рис. 128), а также заднюю кромку из бальзы (сечение задней кромки дано на рис. 128, при использовании липы ширину кромки нужно уменьшить). Заметим, что длина лонжеронов и кромок должна быть
по
взята с небольшим запасом, чтобы пре сборке полукрыла они на 10... 20 мм выступали с его торцов.
Сборку начинаем опять с выполнения монтажного чертежа в масштабе 1 : 1, который прикрепляем к ровной и плоской доске соответствующего размера (наиболее подходящей является столярная плита). Конструкция кессонного крыла достаточно сложна, поэтому описание последовательности операций при сборке поделим на 8 этапов.
I. Ставим на чертеж центроплан (правую часть) и нервюры 5 ... 24, а также ранее изготовленную концевую нервюру 25 I из фанеры. Предварительно во всех нервюрах следует немного расширить вырезы для лонжеронов, поскольку в шаблонах они были сделаны более узкими в расчете на | подгонку лонжерона, ось которого не перпендикулярна к плоскости нервюр. Чтобы не нарушить при сборке форму хвостовой части профиля, под заднюю кромку крыла необходимо подложить рейку соответствующей толщины (рис. 131, поз. 2).
II. На задней кромке в соответствии с монтажным чертежом делаем прорези для хвостиков нервюр и насаживаем на них кромку. В подготовленные ранее вырезы нервюр вкладываем лонжероны, к носкам нервюр приставляем сосновую часть передней кромки. Места соединений смазываем клеем.
III. После того как клей высохнет, снимаем собранный каркас полукрыла с доски, производим окончательную обработку передней кромки, подгоняя ее к форме носика профиля, а затем приклеиваем нижнюю обшивку кессона.
IV. В проделанные заранее отверстия в нервюрах 24 и 25 вклеиваем трубку, которая будет подшипником для штыря — оси вращения стабилизирующих поверхностей. Крепление трубки дополнительно усиливаем двумя сосновыми рейками сечением 2х Х5 мм, вклеенными между нервюрами 23 и 25 (рис. 132). Трубка изготовляется из технической кальки, которая покрывается нитроклеем и наворачивается на проволоку диаметром 2 мм. Трубка и подкрепляющие ее рейки располагаются (в виде спереди) параллельно лонжеронам крыла.
V. Снова укрепляем крыло на монтажной доске и вклеиваем между лонжеронами и нервюрами пластинки из бальзы толщиной 1 мм и размером 11X28 мм, которые образуют заднюю стенку кессона. Затем приклеиваем последовательно следую-
70В
A-A
Рис. 132. Крепление подшипника для штыря стабилизирующей поверхности
щие элементы верхнего покрытия каркаса, изготовленные из бальзы толщиной 1 мм (см. рис. 131, б):
обшивку кессона;
накладку задней кромки полукрыла;
обшивку центроплана;
обшивку концов крыла между нервюрами 23 и 25;
треугольники, усиливающие конструкцию корневой части крыла и предупреждающие провисание бумажного покрытия;
накладки на нервюры шириной 5 мм.
Накладка на задней кромке должна быть приклеена эпоксидным клеем. Если его нет, то верхний обвод хвостиков нервюр следует выполнить со «ступенькой», как показано на рис. 128.
VI. Перевернув полукрыло на монтажной доске, приклеиваем к каркасу те же элементы нижнего покрытия крыла, которые перечислены в этапе V, кроме накладки задней кромки, накладок на нервюры и обшивки кессона (выполнено раньше).
VII. Приклеиваем носик передней кромки крыла из бальзы толщиной 4 мм и после того, как высохнет клей, обрабатываем его до получения нужной формы в соответствии со специально изготовленным шаблоном. Зачищаем всю поверхность крыла мелкой шкуркой.
VIII. Обрезаем концы лонжеронов и кромок крыла, выступающие за нервюру 1, и наклеиваем на нее (из фанеры толщиной 1 мм) глухую торцовую нервюру, которая имеет только один вырез — «вход» в гнездо языка.
Внимание: концы лонжеронов и кромок, выступающие за плоскость нервюры 25, обрезать не нужно, они будут использованы для крепления шайбы.
Принятый способ сборки гарантирует получение жесткой конструкции крыла, у которой хорды всех сечений лежат строго в одной горизонтальной плоскости, т. е. отсутствует крайне нежелательная «производственная» крутка. Добавим, что у кессонного крыла можно не опасаться появления крутки и после обклейки крыла бумагой и покрытия эмалитом.
Последней фазой изготовления крыла является прикрепление концевых шайб (рис. 133), которые вырезаются из фанеры толщиной 1,5 мм. В шайбах нужно предварительно сделать отверстие для прохода штыря крепления стабилизирующих поверхностей и сделать несколько прорезей: для лонжеронов, для передней и задней кромок крыла, а также прорезь (по дуге) для винта, который является второй (регулируемой) точкой крепления стабилизирующей поверхности. Шайбу «нанизываем» на
выступающие концы лонжеронов и кромок и приклеиваем к концевой нервюре крыла, после склсип-н эпт концы обрезаем.
Изготовление левого полукрыла отличается лишь необходимое iwo включения ч конструкцию некоторых элементов, необхо димых для управления моделью. Прежде всего это петли, через которые пропуска ется леска к отклоняемому в полете рулю поворота пере' шайбы Петли лучше всего изготовит, из целлулоида толщиной 0,5... 1 мм, поел., чет о они вклеиваются в небольшие прорези в задней кромке крыла. Форма и ре мешение пешчь показаны на рис 134
Второй элемент левого полукрыла, ко торый выполнен по-другому, это концевая шайба Ее нужно оснастить рулем — небольшой нерест <зной пластиной, которая при освобождении чески отклоняется из нейтрального положения пружиной. Подробности устройства руля и его подвески на шайбе показаны на рис 135
Изтотовчеш’е стабилизирующих поверхностен начинаем с нервюр, для которых жетатет "о использовать бальзу толщиной 1,5 mv
Пэ тюралевнм шаблонам нервюр 1 и 14 выр< лаем из бальзы эти нервюры, а так же заготовки для остальных двенадцати нергюр Затеи монтируем их в пакет с шаблонами по , раям и обрабатываем так как 3iu быт описано в разделе 8 1. Подготавливаем продольные элементы карка са — рсГктт лс гжеронов тт об, кромки — пер тыс!' и аднюю их сечения и матери ал показ.о я па рис 1 >6 Монтаж каркаса про ,зво щт .я аналогично монтажу центре плана «пыл 1 отнтко \ .итывая что стаби ли ир' и ш 1 в т ш’ост! । меют симметрии ньтй пр км1 к ушыажьси дкк-' ттрикреп-ляе ! ко шт тс н’н к зк на рис 108
По< Ki г и ють операций при монтаж! огчг1 т ) /КС Вит в плане стаби лишр\ < щих пошрлпотк’ дан на рис. 137 Of » I >тея !лч вытючнептт монтаж ного 1Сл а в масштабе. ! 1 Как видно ЦТ рщ ЧЬССОН \ IX ЗаЦИ НС нИг рыт
поэтому к<01 н пеоа ши V эт тиа монтажа крыт lь (вклеивание между иерт ю| :ми п испито б I ы для 1301’ ЛТТЫ! сделки ле пл шэ1 а) о'ча т лот
Ц)то"о ко трик^есна верхняя оошив ка г т 1] I < /кпо rfi'ii'Ti . ттырь для КрСП’ 1 С Н I 3’ipy и) Ilf ч поверхности и тр\бч т то чт ни л’к< торна крыта Шгыр.» 1'зг010в’'’с-ся и "та н пс и право токи диа-метрое 2 м « по рис И8 его cneieei ттрн-
Продольная ось симметрии модели
Рис. 135. Руль направления левой шайбы
М1-1
Рис. 136. Нервюры стабилизирующих поверхностей
паять к кронштейну из латунного или медного листа толщиной 0,5 мм. Весь узел приклепываем к площадке из тонкой фанеры, вклеенной между нервюрами 1 и 2, сзади подкрепляем его рейкой, также вклеенной между этими нервюрами.
После окончания VIII этапа монтажа приклеиваем торцовые нервюры стабилизирующих поверхностей (см. рис. 136). Они изготовляются из фанеры толщиной 2 мм и имеют вырезы под лонжерон и обе кромки, а 1акже отверстие под штырь. Отверстие В служит для крепежного винта, конец которого проходит через заднюю дугообразную прорезь шайбы и зажимается на ней гайкой или барашком.
Законцовки стабилизирующих поверх ностей изготовляются из мягкой бальзы и приклеиваются к нервюрам 14, после чего придаем им требуемую окончательную форму.
Обклеивание и пропитка эмалитом
Поверхность готовых полукрыльев еще раз зачищаем очень мелкой шкуркой и обклеиваем одним слоем плотной японской или длинноволокнистой (микалентной) бумаги, используя для этого густой нитроклей
Каждое полукрыло обклеиваем сначала снизу, начиная с крайних нервюр (24—25). а затем обклеиваем последующие нервюры
кшп^чоч hi?i i —g i tn я 1 t t
•4i3oii\i oaou Inn и'иогь-' bi diaivod i 1И «
Рис. 138. Крепление штыря стабилизирующей поверхности
А-А
натягивая бумагу вдоль крыла (особенно тщательно нужно приклеить бумагу к нижней вогнутой поверхности нервюр). Затем обклеиваем переднюю и заднюю кромки, натягивая при этом бумагу в направлении, перпендикулярном к кромкам. Подобным образом обклеиваем верхнюю поверхность.
После обклейки нужно четыре раза покрыть крылья достаточно жидким эмали-том, высушивая их (каждый раз в течение нескольких часов) в закрепленном на монтажной доске состоянии. Чтобы избежать приклеивания к доске, нужно помазать вначале нижнюю поверхность полукрыла и закрепить его на доске, дав ей предварительно немного подсохнуть.
Стабилизирующие поверхности обклеиваем бумагой и затем покрываем их эма-литом в той же последовательности. Обклейку лучше начинать с внутреннего конца каркаса, т. е. с нервюр /.
Конечной операцией изготовления крыла является наклейка полосок миллиметровки вдоль дугового выреза на концевых шайбах. Их удобно использовать з дальнейшем для разметки углов установки стабилизирующих поверхностей.
8.2. Фюзеляж
Фюзеляж модели ЛК-1 (рис. 139) выполняется в виде усиленной фермы из сосновых реек. В фюзеляже монтируется цент
ровочный грузик, имеется окантованный вырез для прохода языка щыковочного уз ла полукрыльев, тормозной парашютик и буксировочный крючок. На фюзеляже размешен киль.
Конструкция фюзеляжа показана на рис. 140. Работу над фюзеляжем начнем с того, что из 2 мм фанеры выпилим внут рентою продольную сюпку, которая будет располагаться в плоскости симметрии фю зеляжа и модели. Для усиления буксиро вочпых крючков (их три) в нижней части стенки наклеиваем с обеих сторон накладки из фанеры толщиной 0,6 .. 1 мм. после чего окончательно профилируем крючки в соответствии с чертежом на рис. 140; поперечные сечения крючков должны быть овальными для облегчения соскальзывания буксировочного кольца. Приклепываем к стенке изготовленный из гонкого дюраля угольник Ф для прикрепления фитиля и привязи тормозною парашютика
После этой подготовительной работы с обеих сторон стенки приклеиваем сосновые рейки сечением 2X4 мм, как эго покатано на рис. 140, и вклеиваем носик фюзеляжа из липы, тоже состоящий из двух частей. Обратим внимание на то, что перед приклеиванием нижних реек в их задних концах на участке накладок буксировочных крючков и угольников Ф нужно сделать с внутренней стороны вырезы, соответствую щие толщине этих элементов.
Далее вклеиваем в заднюю часть фюзеляжа две наклонные липовые бобышки, опиливаем все выступающие концы реек в соответствии с очертаниями стенки и рас
сверливаем до диаметра 4 мм отверстие в задней части фюзеляжа для винта, которым будет регулироваться положение центровочного грузика.
Теперь остается вклеить в каркас элементы ложа языка, сочленяющего половины крыла, и зачистить шкуркой боковые поверхности фюзеляжа, подготовленного к окончательной обработке.
Центровочный грузик
В соответствии с ранее проведенными расчетами масса центровочного грузика должна составлять 0,060 кг. Грузик изготовляется из олова по рис. 141 и будет перемещаться вдоль продольной оси модели в направляющих, образованных самой конструкцией фюзеляжа.
К переднему торцу грузика приклепываем латунную пластинку с припаянной к ней гайкой М4. Передний конец винта М4 для перемещения грузика имеет проточку, которая вводится в прорезь кронштейна, изготовляемого из дюралевого листа толщиной 0,5 мм в соответствии с чертежом на рис. 141. Основание кронштейна нужно приклепать к фанерной пластинке толщиной 1 мм.
Монтаж центровочного грузика в фюзеляже проводится в следующей последовательности:
1) вкладываем грузик в нижний отсек фюзеляжа, вводим стержень винта в отверстие задней стенки и ввинчиваем его в грузик;
2) закладываем переднюю проточку винта в прорезь кронштейна;
3) приклеиваем кронштейн к решетке каркаса.
Киль
Конструкция киля выполнена из бальзы п представлена на рис. 142.
Изготовление начинаем с вырезки нервюр из бальзы толщиной 1,5 мм, которые надеваем на сосновые лонжероны сечением 2X4 мм. Выкладываем будущий каркас на монтажном чертеже и насаживаем на концы нервюр предварительно подготовленную заднюю кромку (бальза шириной 15 мм, обработанная на треугольник) и переднюю кромку, тоже из бальзы (толщина 4 мм). Склеиваем все элементы, затем обклеиваем переднюю часть киля лис-
говой бальзой толщиной 1 мм. Приклеиваем к верхней нервюре заготовку закон-цовки киля из мягкой бальзы. После полного высыхания клея окончательно формируем переднюю кромку и законцовку, а затем хорошо прошкуриваем весь киль мелкой шкуркой.
Окончательная отделка фюзеляжа
Фюзеляж обклеиваем с обеих сторон тонкой фанерой (0,8... 1 мм). Обратим внимание на то, что боковины фюзеляжа неодинаковы. В левой нужно прорезать щель, через которую можно будет контролировать положение центровочного грузика, а также приклепать к ней два угольника (узел К), которые образуют вилочный кронштейн для чеки устройства, управляющего отклонением руля поворота левой шайбы (см. рис. 139).
После приклейки боковин прошкуриваем фюзеляж мелкой шкуркой и приклеиваем киль, вложив конец его лонжерона в прорезь на верхней хвостовой части фюзеляжа. Затем фюзеляж с килем нужно обклеить длинноволокнистой бумагой и четыре раза покрыть эмалитом. После просушки можно покрыть фюзеляж нитролаком, что поможет предохранить его от влияния атмосферной влаги.
И, заканчивая отделку, нужно закрыть щель центровочного грузика, приклеив на нее полоску плексигласа или целлулоида, а чуть ниже щели наклеить полоску миллиметровой бумаги с разметкой характерных центровок модели. Кроме того, хорошо еще обклеить фюзеляж вблизи места прикрепления фитиля (узел Ф на рис. 139) металлической фольгой, что повысит пожарную безопасность модели.
Тормозной парашютик
Время полета модели ограничивается с помощью миниатюрного парашюта. Подробности его конструкции показаны на рис. 143.
Купол парашютика изготовляют из тонкой ткани (например, шифона) в форме квадрата со стороной 20 см. На углах квадрата закрепляем четыре капроновые нити, которые в точке К\ переходят в привязь (фал), заканчивающуюся проволочным крючком — зацепом П. Чтобы парашют самопроизвольно не отцепился от мо-
119
Рис. 139 Фюзеляж модели в виде сбоку
Рис. 140 Каркас фюзеляжа
Передний кронштейн
М г 7
Грузик
М 2:1
Рис. 141. Центровочный грузик
дели, крючок можно выполнить, например, в форме канцелярской скрепки.
В центре купола пришиваем фигурную двойную петлю Ле, которую также изготовляем из проволоки с применением пайки. Одна из петель служит для прикрепления резинки, выбрасывающей парашютик из контейнера, а вторая — для прикрепления узла /<2 вместе с концом фитиля к площадке угольника Ф (см. рис. 140, 124).
Подготовка тормозного парашютика к действию состоит в следующем. Зацепляем крючок П за ушко узла Ф на краю парашютного контейнера, аккуратно складываем парашютик и размещаем его в контейнере лямками вперед. Прикрепляем резинкой к крючку угольника Ф свободную петлю К2 купола парашютика и конец фитиля.
Резинку, выбрасывающую парашютик, надеваем на хвостик X фюзеляжа (см. рис. 140). Чтобы устройство сработало, остается поджечь фитиль перед стартом модели; время срабатыванья будет определяться длиной фитиля.
8.3. Сборка, регулировка и запуск мсдели
Сборку модели начинаем с закрепления стабилизирующих поверхностей па полукрыльях. Для этого вводим штырь стабилизирующей поверхности в трубчатый подшипник во внешнем торце полукрыла, а
Щель шириной 2мм-
Рис. 142. Конструкция киля и его элементов
Иис. 143. юрмизной парашютик
затем ставим на место и слегка затягиваем гайкой винт М3 второго, заднего узла крепления. Чтобы не повредить при этом края дуговой прорези в вертикальной шайбе, под гайку нужно подложить круглую прокладку диаметром около 10 мм из целлулоида или плексигласа толщиной 1 мм.
С помощью угломера устанавливаем стабилизирующую поверхность под углом Фуст =—5,5е по отношению к плоскости крыла. Теперь можно крепче затянуть гайку винта и отметить положение задней кромки стабилизирующей поверхности на полоске миллиметровки, приклеенной па шайбе вдоль прорези под винт.
После того, как оба полукрыла будут полностью готовы, соберем модель, для чего вложим язык левого полукрыла в прорезь фюзеляжа, а затем насадим на него правое полукрыло. Теперь нужно отрегулировать длину лески, управляющей отклонением руля поворота левой шайбы.
Длина лески должна быть такой, чтобы после фиксации ее конца чекой в вильчатом кронштейне, расположенном на левом борту фюзеляжа, руль поворота находился в нейтральном положении. Натяжение лески должно быть умеренным, иначе усилие для выдергивания чеки может оказаться чересчур большим, а это затруднит отцепку модели от леера.
Отрегулировав длину лески, поставим вместо чеки шплинт и зафиксируем его, поскольку при первых пробных запусках вводить в действие управляющее устройство и переводить модель в полет по круговой траектории нам не потребуется.
Перед началом облета модели устанавливаем центровочный грузик так, чтобы при зафиксированном нами положении стабилизирующих поверхностей (фуСт = —5,5°) центр тяжести модели находился на расстоянии 231 мм от передней кромки крыла (см. график, рис. 92).
Облет модели проводим следующими этапами:
I. При безветренной погоде выполняем предварительную регулировку модели, запуская ее с руки.
Прежде всего добиваемся удовлетворительной поперечной балансировки модели путем небольшой корректировки углов установки стабилизирующих поверхностей. При заблокированном устройстве управления п нейтральном положении руля поворота на левой шайбе модель должна планировать по прямой.
Второй объект внимания во время предварительных испытаний — продольная устойчивость и балансировка модели. Перемещением (от запуска к запуску) центровочного грузика находим такую центровку модели, при которой она будет г. мнировать с наименьшей скоростью снижения.
II. После выполнения предварительной регулировки модели можно перейти к запускам ее с короткого (10... 15 м) леера.
Леер (рис. 144) кроме кольца для буксировки модели л небольшого флажка имеет дополнительный конец, заканчивающийся чекой и предназначенный для приведения в действие устройства отклонения руля поворота. Этот дополнительный конец леера будет нами использован на последующих этапах облета модели. Пока же, при запусках с короткого леера, управляющее устройство оставим по-прежнему заблокированным.
При запусках «отрабатываем» те же элементы полета модели, что и на первом этапе,— поперечную и продольную устойчивость и балансировку. Особое внимание нужно уделить тому, чтобы движение модели и при больших скоростях буксировки на леере оставалось прямолинейным.
III. При запусках модели с леера полной длины используем управляющее уст-
г
Рис. 144. Леер для запуска модели:
I — флажок; 2 — кольцо, на.двзецое на буксчрово'шыи крючок мысли; 3 — чела, блокирующая управляющее устройство
1
ройство, для чего заменяем в узле К шплинт чекой дополнительного конца леера.
Проверяем поведение модели как в планирующем полете, гак и при буксировке на леере, а также добиваемся нужного радиуса круговой траектории, изменяя толщину прокладок под рычагом руля направления левой шайбы крыла.
Все запуски этого этапа производим без ограничения времени планирования модели тормозным парашютиком. Поэтому нужно выбирать для них дни со спокойным состоянием атмосферы, без восходящих потоков— терминов, иначе есть риск, что мы не сможем найти и вернуть модель к месту старта для последующих испытаний.
IV. После нескольких не ограниченных по времени полетов модели с полной длины леера проверяем действие тормозного парашютика, применяя вначале короткий фи тиль, который пережигает резинку крепления парашютика век фе после отцепки леера. Если модель с раскрытым парашюти-i эм снижается слишком медленно, нужно уменьшить его сопротивление, сделав в куполе несколько разрезов (показано тонкими линиями па рис. 143). Если же, наоборот, модель после раскрытия парашютика снижается чересчур быстро, нужно изготовить новый купол большей площади.
После выполнения всех этапов облета отметим на «шкале» фюзеляжа положение центра тяжести, при котором модель показала лучшие летные качества, а па «шка
лах» вертикальных шайб — соответствующее ему положение задних кромок стабилизирующих поверхностей. Облет модели можно считать в основном законченным.
Для подготовки модели к соревнованиям необходимо более основательно изучить ее свойства и особенности поведения в полетах с полной длины леера в различных атмосферных условиях. Может оказаться, что модель не обладает достаточной продольной устойчивостью в ветреную погоду, при повышенной турбулентности атмосферы. В этом случае модель следует проверить в полетах с более передней центровкой. Если же смещение центра тяжести вперед слишком сильно скажется на продолжительности полета модели, нужно изменить (симметрично на обоих крыльях) угол установки стабилизирующих поверхностей, используя график, приведенный ь разделе 5.
Возможные изъяны в боковой устойчи вости модели можно устранит!, путем изменения угла поперечного V крыла в соответствии с рекомендациями раздела 4.2. Изменение угла осуществляется подгибанием языка стыковочного узла крыла.
Изменяя в ряде запусков положение центра тяжести и угол установки стабилизирующих поверхностей, нужно отрегулировать модель так, чтобы она имела возможно большее время полета при одновременном сохранении хорошей продольной а боковой устойчивости.
Литература
I. Болонкин А. Теория полета летающих моделей,—М.: ДОСААФ, 1962.
2. Г' р а ф Е. Руководство по моделям типа «летающее крылом.— Цюрих: Аэроревю. 19.0
3. Гутшс В. Модели бесхвостых планеров,— Варшава. Авиамоделист (Моделяж), I960.
4. К а з н е в с к и й В. П. Аэродинамика в природе и технике.— М.: Просвещение, 1985.
5. К а ю н о в Н. Т., Назаров А. Ш., Наумов Н. С. Авиамодели чемпионов.— М.. ДОСААФ, 1978.
6. К о с т е и к о И. К. Проектирование и расчет мо (слеп планеров.— М/ ДОСААФ, 1958.
7 Костенко В. И., Столяров Ю. С. Модель и машина.-- М. ДОСААФ, 1981.
8 Костенко И. К. Летающие крылья.— М/. Машиностроение, 1985.
9. Л а и е я к а - М а к а р у к В. Механика полета : лат чзз.— Варшава: ВКЛ, 1979.
10. Нестои В. Профили летающих моделей.— Варшава: ВКЛ, 1980.
II. Смирнов Э. П. Как сконструировать и построить летающую модель.— М/ ДОСААФ, 1978.
12. Шульце X. Аэродинамика и летающая модель.— М.: ДОСААФ, 1963.
СОДЕ РЖА Н И Е
Введение 3
Обозначения 4
1. Краткий исторический очерк
1.1. Развитие конструкций моделей 5
1.2. Обзор результатов соревнований авиамоделистов 9
2. Основные характеристики моделей типа «летающее крыло»
2.1. Геометрия крыла 14
2.2. Крутка крыла 17
2.3. Профили крыла 19
2.4. Геометрия остальных элементов модели 22
2.5. Некоторые модели типа «летающее крыло» класса F-1A 23
2.6. Выбор базовой модели летающего крыла 26
3. Аэродинамика модели летающего крыла
3.1. Необходимые сведения из математики ' 37
3.2. Необходимые сведения из механики 41
3.3. Аэродинамические силы, действующие иа модель 45
3.4. Равновесие сил 58
4. Динамика полета модели летающего крыла
4.1. Расчет летных характеристик модели 64
4.2. Устойчивость модели 67
5. Проектирование модели летающего крыла со стабилизирующими поверхностями
5.1. Определение оптимального угла установки стабилизирующих поверхвостей 79’
5.2. Аэродинамический расчет модели 80
5.3. Весовой анализ и центровка моделв 80
6. Проектирование модели летающего крыла с непрерывной круткой
6.1. Подбор распределения коэффициента подъемной силы вдоль размаха крыла 82
6.2. Выбор профилей крыла 84
6.3. Расчет распределения углов атаки вдоль размаха крыла 87
5.4. Расчет летных характеристик модели 88
6.5. Центровка модели и расчет запаса устойчивости 91
6 6. Выводы 92
7. Конструкция модели
7.1. Конструкция крыла 94
7.2. Стыковка полукрыльев 97
7.3. Крепление стабилизирующих поверхностей 99
7.4. Конструкция фюзеляжа 100
7 5. Управляющие устройства 101
7.6. Устройства, ограничивающие время полета 104
8. Постройка модели летающего крыла ЛК-1
8.1. Крыло 107
8.2. Фюзеляж 117
8.3. Сборка, регулировка и запуск модели 121
ББК 75.725 К20
Рецензент кандидат технических наук О. Н. Арепьев
Редакторы: Н. М. Г у г л я р, В. Н. Уваров
Капковский Я.
К20 Летающие крылья / Пер. с польск. Ю. П. Терехова.—М.: ДОСААФ, 1988,— 127 с.
80 к.
В книге широко освещена история развития конструирования моделей планеров типа «летающее крыло», даются необходимые сведения по аэродинамике, проектированию и постройке моделей, их регулировке и запуску.
Для моделистов, руководителей авиамодельных кружков в Домах пионеров и школьников и спортивно-технических клубов ДОСААФ
к
4202000000—048
--------------37—88
072(02)—88
ББК 75.725 6Т5.5
ISBN 5—7030—0062—9
© Издательство ДОСААФ СССР, 1988
Яцек Капковский
ЛЕТАЮЩИЕ КРЫЛЬЯ
Перевод с польского Ю. П. Терехова
Заведующий редакцией В. Е. Волков
Художественный редактор Т. А. Хитрова
Технический редактор В. Н. Кошелева
Корректор Н. В. Матвеева
ИБ № 2127.
Сдано в набор 25 06 87. Подписано в печать 06 07 88 Г-22424. Формат
84X108'/, Бумага для глубокой печати. Гарнитура литературная. Печать высокая. 5сл. 11. л. 13,44. Усл. кр-отт. 14.70 Уч-изд л. 12,27. Тираж 75 000 экз. Заказ № 237. Цена 80 к. Изд. К» .>/д-735.
Ордена «Знак Почета-. Издательство ДОСААФ СССР, 129110. Москва. Олимпийский просп., 22
Областная книжная типография, 320091, Днепропетровск, ул. Горькою. 20.