






























































































































































































































































































































































































Author: Голдсмит А.
Tags: общее машиностроение технология машиностроения общая радиотехника микроэлектроника электроника издательство техносфера пособие для студентов журнал мир электроники беспроводные коммуникации
ISBN: 978-5-94836-176-5
Year: 2011



радиоэл
А.ГОЛДСМИТ
Беспроводные
коммуникации
ТЕХНОСФЕРА
мир
радиоэлектроники
А. ГОЛДСМИТ
БЕСПРОВОДНЫЕ
КОММУНИКАЦИИ
АНДРЕА ГОЛДСМИТ -
ПРОФЕССОР КАФЕДРЫ
ЭЛЕКТРОТЕХНИКИ
(СТЕНФОРДСКИЙ УНИВЕРСИТЕТ,
КАЛИФОРНИЯ, США),
АВТОР МНОГОЧИСЛЕННЫХ
ПУБЛИКАЦИЙ В ОБЛАСТИ
ТЕОРИИ ИНФОРМАЦИИ
И БЕСПРОВОДНОЙ СВЯЗИ
ОСНОВЫ ТЕОРИИ
И ТЕХНОЛОГИИ
БЕСПРОВОДНОЙ
СВЯЗИ
(Ц) ТЕХНОСФЕРА
РЕДАКЦИОННЫЙ СОВЕТ СЕРИИ КНИГ
«МИР РАДИОЭЛЕКТРОНИКИ»
Якунин Александр Сергеевич, директор Департамента радиоэлектронной промышленности
Минпромторга РФ - председатель редсовета
Члены совета:
Авдонин Борис Николаевич, ген. директор ОАО ЦНИИ «Электроника», д.т.н,, профессор,
г. Москва
Акопян Иосиф Григорьевич, ОАО «МНИИ «Агат», д.т.н., профессор, г. Москва
Анцев Георгий Владимирович, ген. директор ОАО «НИИ «Радар ММС», г. Санкт-Петербург
Белый Юрий Иванович, ген. директор НИИП им. В.В.Тихомирова МО, г. Жуковский
Боев Сергей Федотович, ген. директор ОАО «РТИ», д.т.н., профессор, г. Москва
Борисов Юрнй Иванович, первый заместитель председателя военно-промышленной комиссии при
правительстве РФ, д.т.н., профессор, г. Москва
Букашкии Сергей Анатольевич, ген. директор РГНПО «Автоматика», д.т.н., профессор, г. Москва
Бушуев Николай Александрович, ген. директор ФГУП «НПП «Алмаз», д.эк.н., профессор,
к.ф.м.н., г. Саратов
Васильев Андрей Георгиевич, ген. директор ФГУП «НПП «Пульсар», д.т.н., профессор, г. Москва
Верба Владимир Степанович, ген. директор ОАО «Концерн радиостроения «Вега», д.т.н.,
профессор, г. Москва
Верник Петр Аркадьевич, ген. директор компании «Золотой Шар», г. Москва
Вилкова Надежда Николаевна, ген. директор ЗАО «МНИТИ», д.т.н., профессор, г. Москва
Гуляев Юрий Васильевич, директор института радиотехники и электроники им.В.А.
Котельникова, академик РАН, г. Москва
Козлов Геннадий Викторович, ОАО «Концерн ПВО «Алмаз-Антей», д.т.н., профессор, г. Москва
Комяков Алексей Владимирович, ген. директор ФГУП «НПП «Полет» г. Нижний Новгород
Красников Геннадий Яковлевич, ген. директор ОАО «НИИМЭ и завод «Микрон», академик РАН,
г. Зеленоград
Мальцев Петр Павлович, директор Института СВЧ полупроводниковой электроники РАН, д.т.н.,
профессор, г. Москва
Меньшиков Владислав Владимирович, ген. директор ОАО «Концерн ПВО «Алмаз-Антей»,
г. Москва
Минаев Владимир Николаевич, ген. директор ОАО «Системы управления», д.т.н, профессор,
г. Москва
Муравьев Сергей Алексеевич, советник директора Департамента Радиоэлектронной
промышленности Минпромторга России, к.т.н., с.н.с., г. Москва
Немудрое Владимир Георгиевич, директор ФГУП «НИИ микроэлектронной аппаратуры
«Прогресс», д.т.н., профессор, г. Москва
Попов Владимир Васильевич, ген. директор ОАО «Светлана», к.т.н., г. Санкт-Петербург
Снгов Александр Сергеевич, ректор Московского государственного института радиотехники,
электроники и автоматики (технического университета), член-корр. РАН, г. Москва
Сидоров Юрий Викторович, ген. директор ОАО «Концерн «Созвездие», д.т.н., профессор,
г. Воронеж
Турилов Валерий Александрович, ген. директор ОАО «КНИИТМУ», к.т.н., доцент, г. Калуга
Федоров Игорь Борисович, президент Московского государственного технического университета
имени Н.Э.Баумана, академик РАН, г. Москва
Чаплыгин Юрий Александрович, ректор Московского государственного института электронной
техники (ТУ МИЭТ), член.-корр. РАН, г. Зеленоград
Шахнович Ильи Владимирович, шеф-редактор РИЦ «Техносфера», г. Москва
Шубарев Валерий Антонович, ген. директор ОАО «Авангард», д.т.н., профессор,
г. Санкт-Петербург
redsovet_knigi@electronics.ru
А. Голдсмит
Беспроводные
коммуникации
Перевод
с английского
Н.Л. Бирюкова,
Н.Р. Триски
Под редакцией
В.А. Березовского
ТЕХНОСФЕРА
Москва
2011
otvi<=*<vit7l НИИ II
(Od) OHIMlun
•«^^ипривояоСтроеиия
ДАЛЬНЯЯ РАДИОСВЯЗЬ
АППАРАТУРА И КОМПЛЕКСЫ.
УДК 621396
ББК 32.84
Издание осуществлено при поддержке
ФГУП "Омский научно-исследовательский
институт приборостроения "
Г60
Г60 ГолдсмитА.
Беспроводные коммуникации
Москва: Техносфера, 2011. - 904 с., ISBN 978-5-94836-176-5
Книга знакомит читателей с основами теории и технологиями беспровод-
ной связи, а также с аналитическими инструментами исследований в этой области.
Она способствует формированию у читателя комплексного понимания фундамен-
тальных принципов, лежащих в основе систем беспроводной связи.
Приведен обзор беспроводных систем и стандартов, представлены
характеристики беспроводных каналов, включая ограничения их пропускной
способности. Детально рассматриваются различные методы модуляции и коди-
рования, а также схемы обработки сигнала, включая современную адаптивную мо-
дуляцию, технологии широкополосной передачи, модуляции нескольких несу-
щих. Подробно рассмотрены технологии многоэлементных антенных систем. По-
следние главы посвящены системам множественного доступа, созданию сотовых
систем и специальных беспроводных сетей.
«Беспроводные коммуникации» — идеальное пособие для студентов и
аспирантов, ценный справочник для инженеров, IT-директоров и руководителей со-
ответствующих подразделений, а также всех специалистов, работающих в области
беспроводной связи.
УДК 621.396
ББК 32.84
Wir Hess
Cdffiftra’iiratiO*»
© Cambridge University Press 2005
©2011, ЗАО «РИЦ «Техносфера», перевод на русский язык, оригинал-макет,
оформление.
ISBN 978-5-94836-176-5
ISBN 0521837162 (англ.)
Содержание
Предисловие........................................................ 19
Сокращения......................................................... 26
Обозначения........................................................ 32
Глава 1
Обзор систем беспроводной связи.................................... 35
1.1. История беспроводной связи.................................... 36
1.2. Перспективы развития беспроводной связи....................... 41
1.3. Технические решения........................................... 44
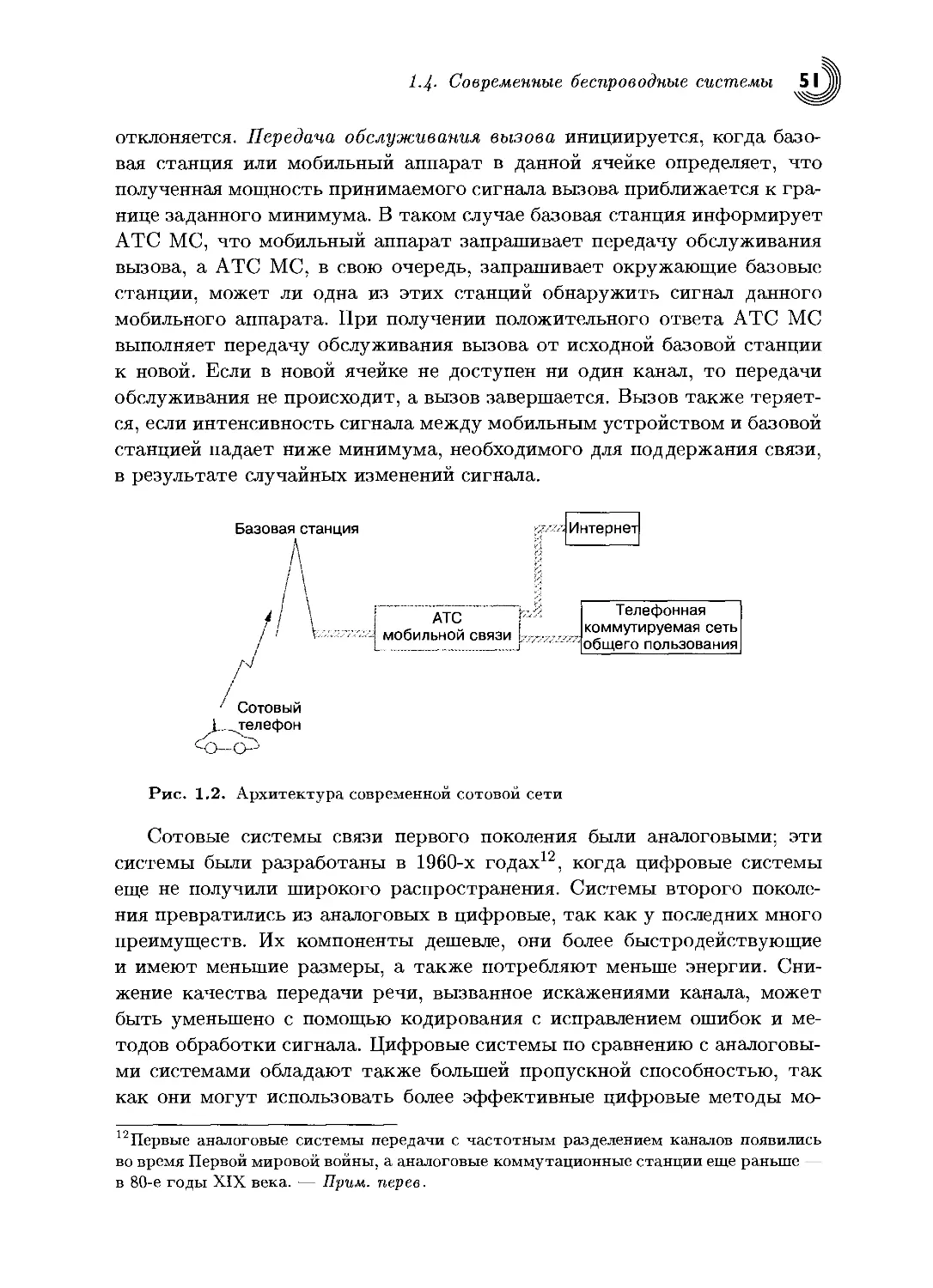
1.4. Современные беспроводные системы.............................. 47
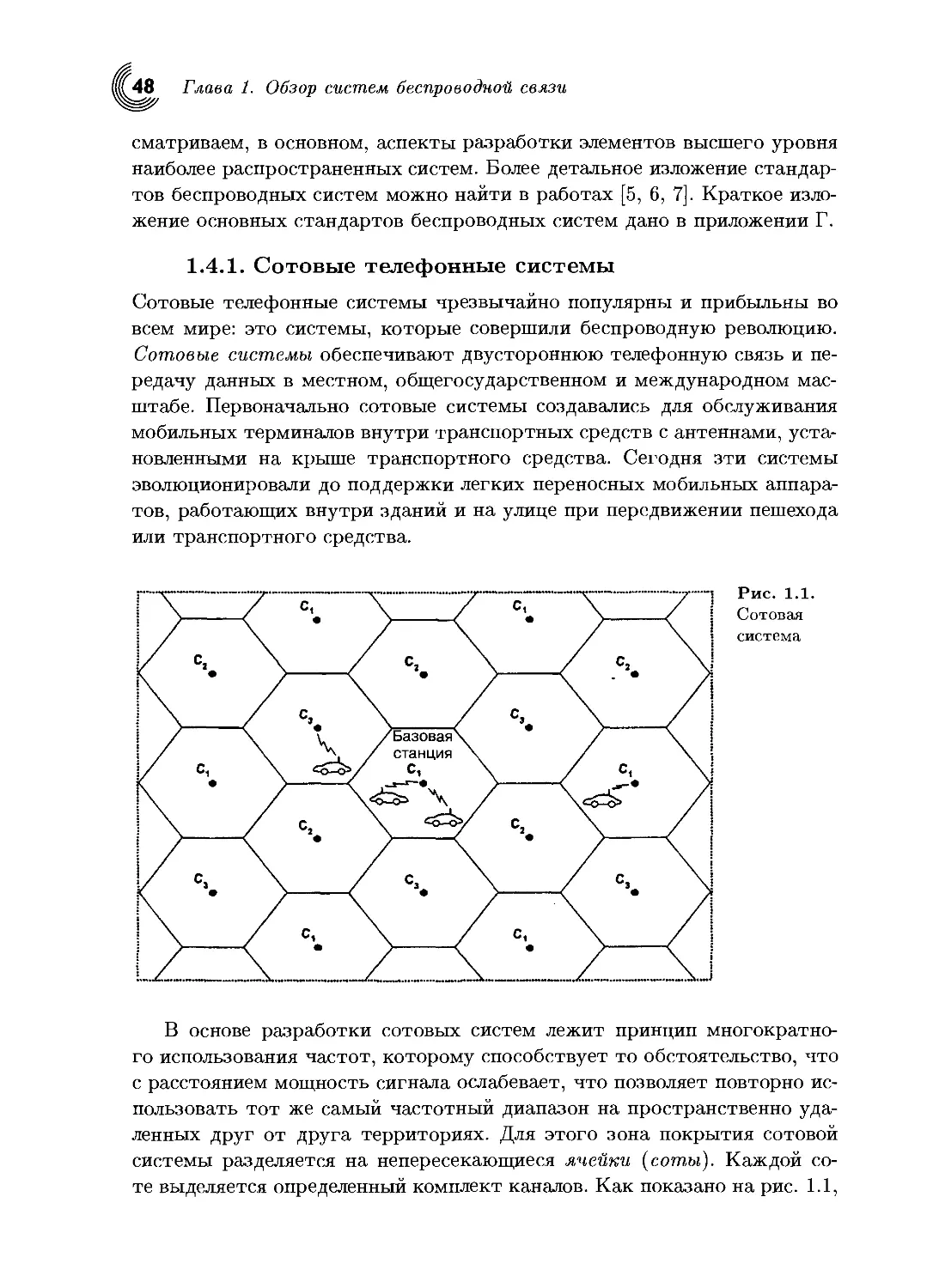
1.4.1. Сотовые телефонные системы................................ 48
1.4.2. Беспроводные телефоны.......................... 56
1.4.3. Беспроводные локальные вычислительные сети — бес-
проводные ЛВС........................................ 59
1.4.4. Региональные беспроводные сети передачи данных. 61
1.4.5. Широкополосный беспроводный доступ............. 62
1.4.6. Пейджинговые системы........................... 63
1.4.7. Спутниковые сети............................... 64
1.4.8. Недорогая радиосвязь малой мощности: Bluetooth и ZigBee... 66
1.4.9. Системы сверхширокополосной радиосвязи......... 68
1.5. Беспроводный спектр........................................... 69
1.5.1. Методы распределения спектра................... 69
1.5.2. Распределение спектра частот в существующих системах. 71
1.6. Стандарты..................................................... 73
Задачи........................................................ 74
Литература......................................................... 76
Глава 2
Потери на трассе распространения радиоволн и экра-
нирование ......................................................... 78
2.1. Распространение радиоволн..................................... 80
2.2. Модели передачи и приема сигнала.............................. 81
2.3. Потери при распространении сигнала в свободном простран-
стве .................................................... 84
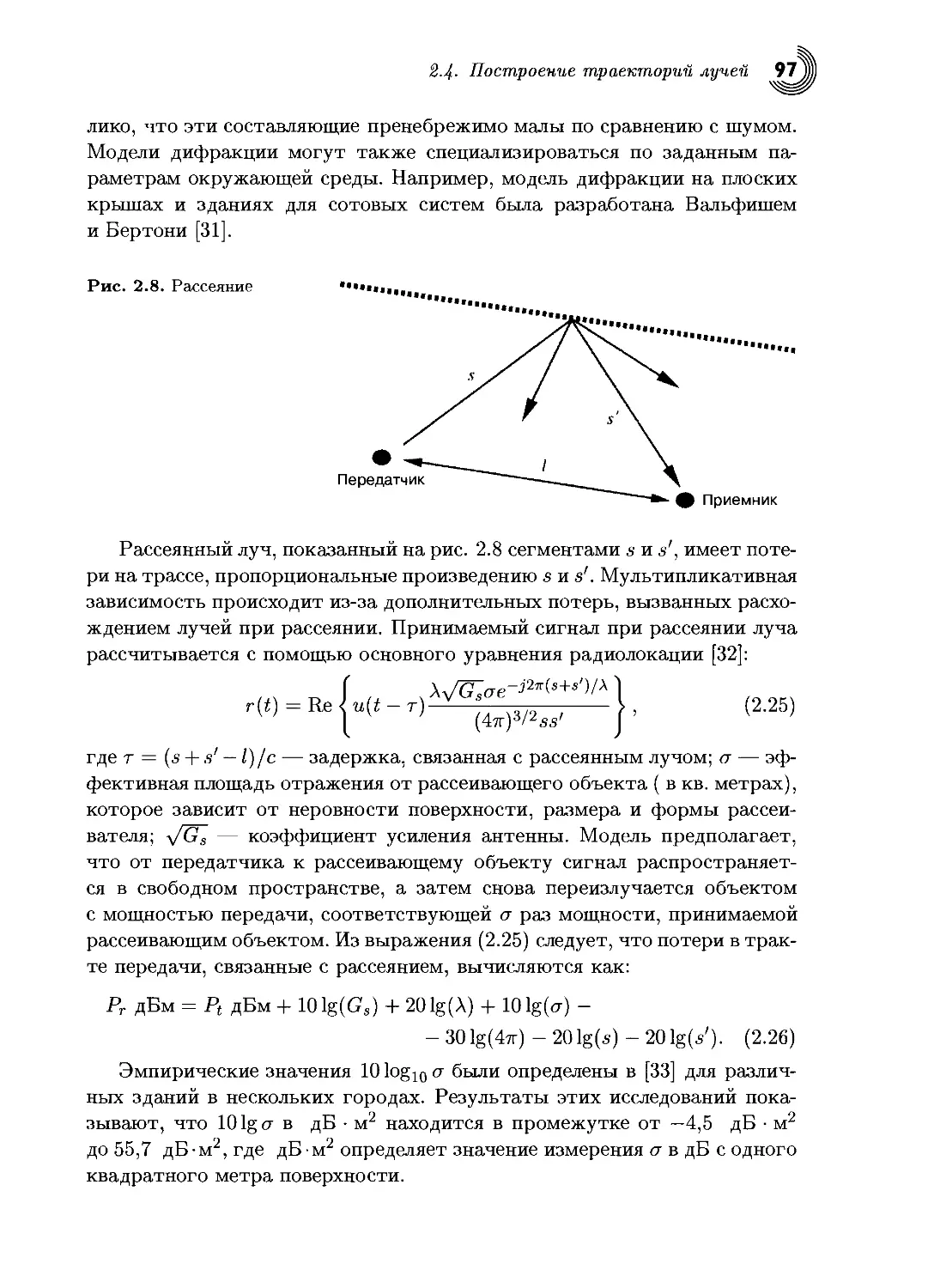
2.4. Построение траекторий лучей................................... 86
2.4.1. Двулучевая модель......................................... 88
2.4.2. Десятилучевая модель (диэлектрическое ущелье)............. 92
6 Содержание
2.4.3. Общая схема построения лучей.................... 94
2.4.4. Среднее значение локальной принимаемой мощности... 98
2.5. Экспериментальные модели потерь в тракте распростране-
ния сигнала......................................... 99
2.5.1. Модель Окумуры................................. 100
2.5.2. Модель Хата.................................... 101
2.5.3. Расширенная модель COST 231 Хата............... 101
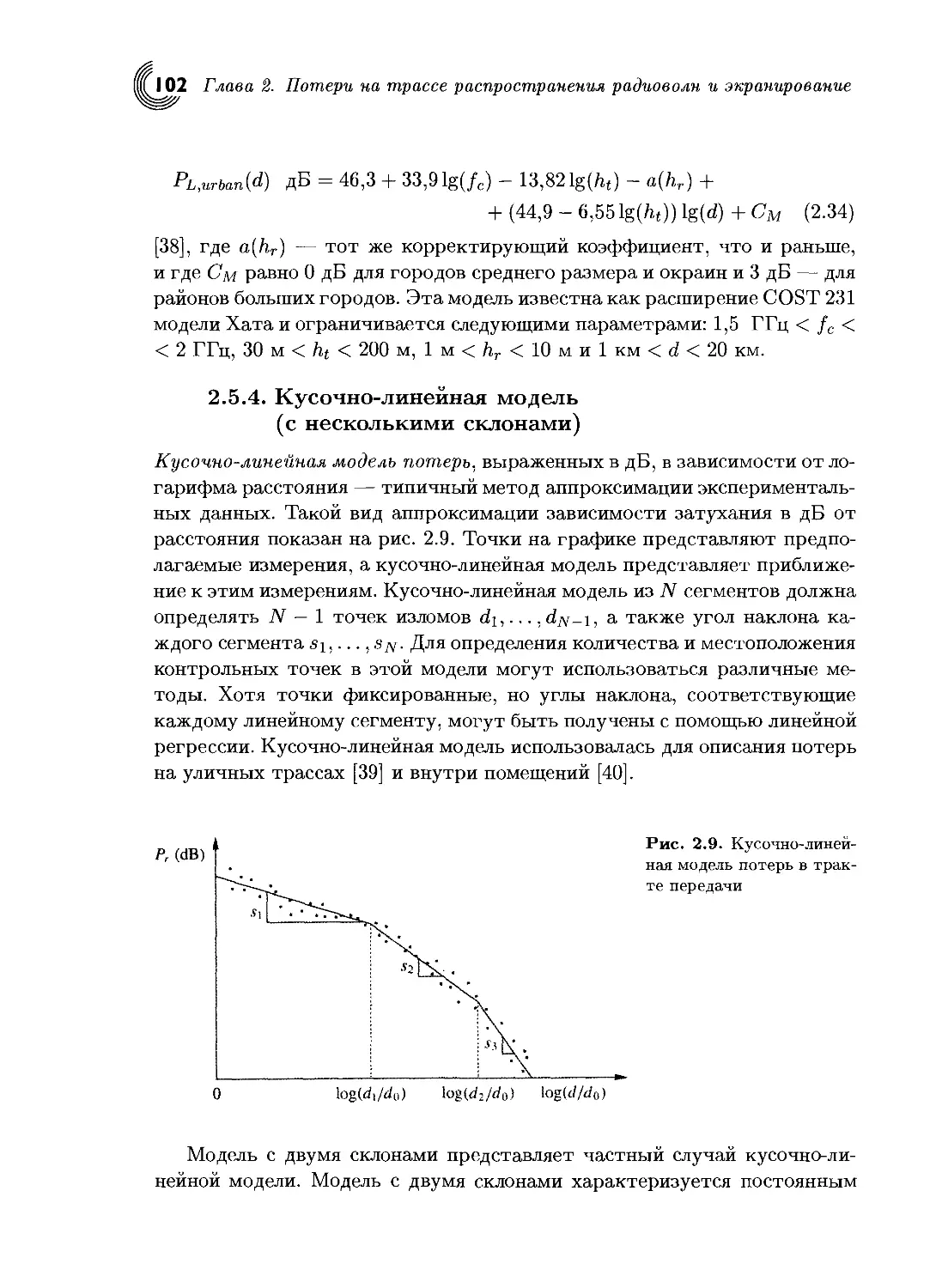
2.5.4. Кусочно-линейная модель (с несколькими склонами).. 102
2.5.5. Параметры затухания при распространении
внутри зданий................................... 103
2.6. Упрощенная модель потерь в тракте передачи......... 105
2.7. Замирания экранирования............................ 108
2.8. Комбинация потерь в тракте передачи и экранирования... 112
2.9. Вероятность перерывов связи в тракте передачи из-за потерь
и экранирования.......................................... 113
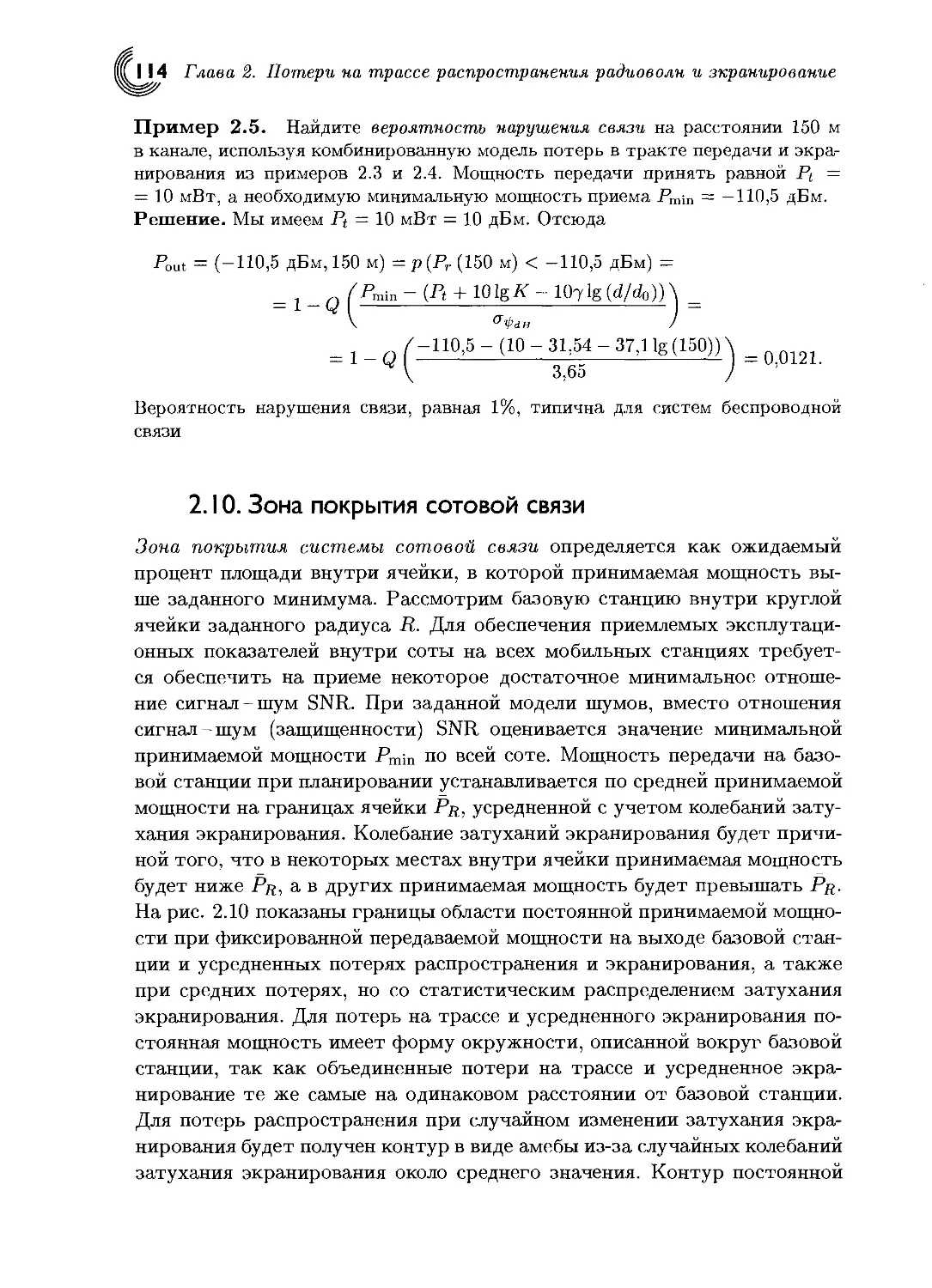
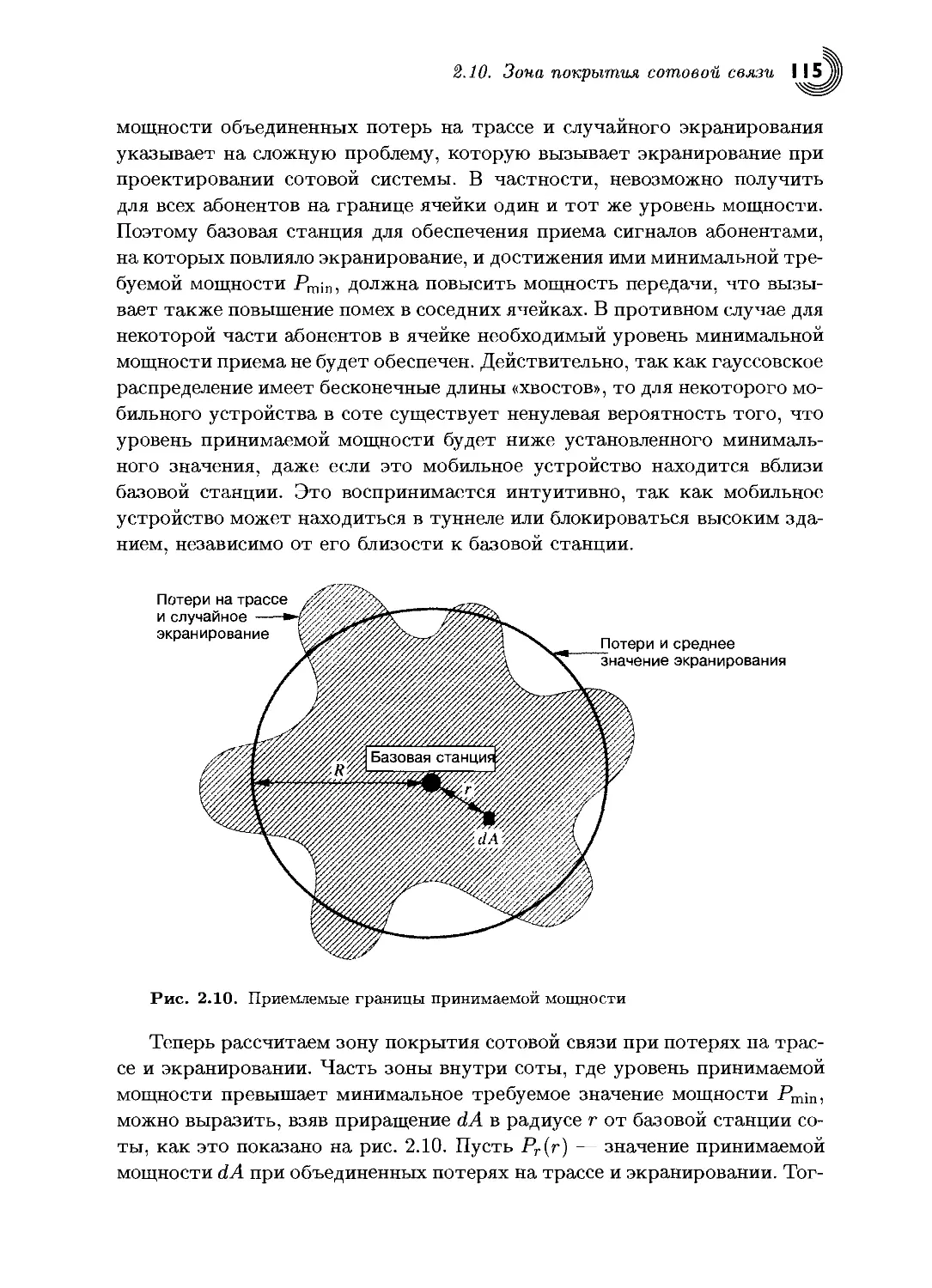
2.10. Зона покрытия сотовой связи.........................114
Задачи............................................. 118
Литература................................................124
Глава 3
Статистические модели каналов многолучевого
распространения...........................................128
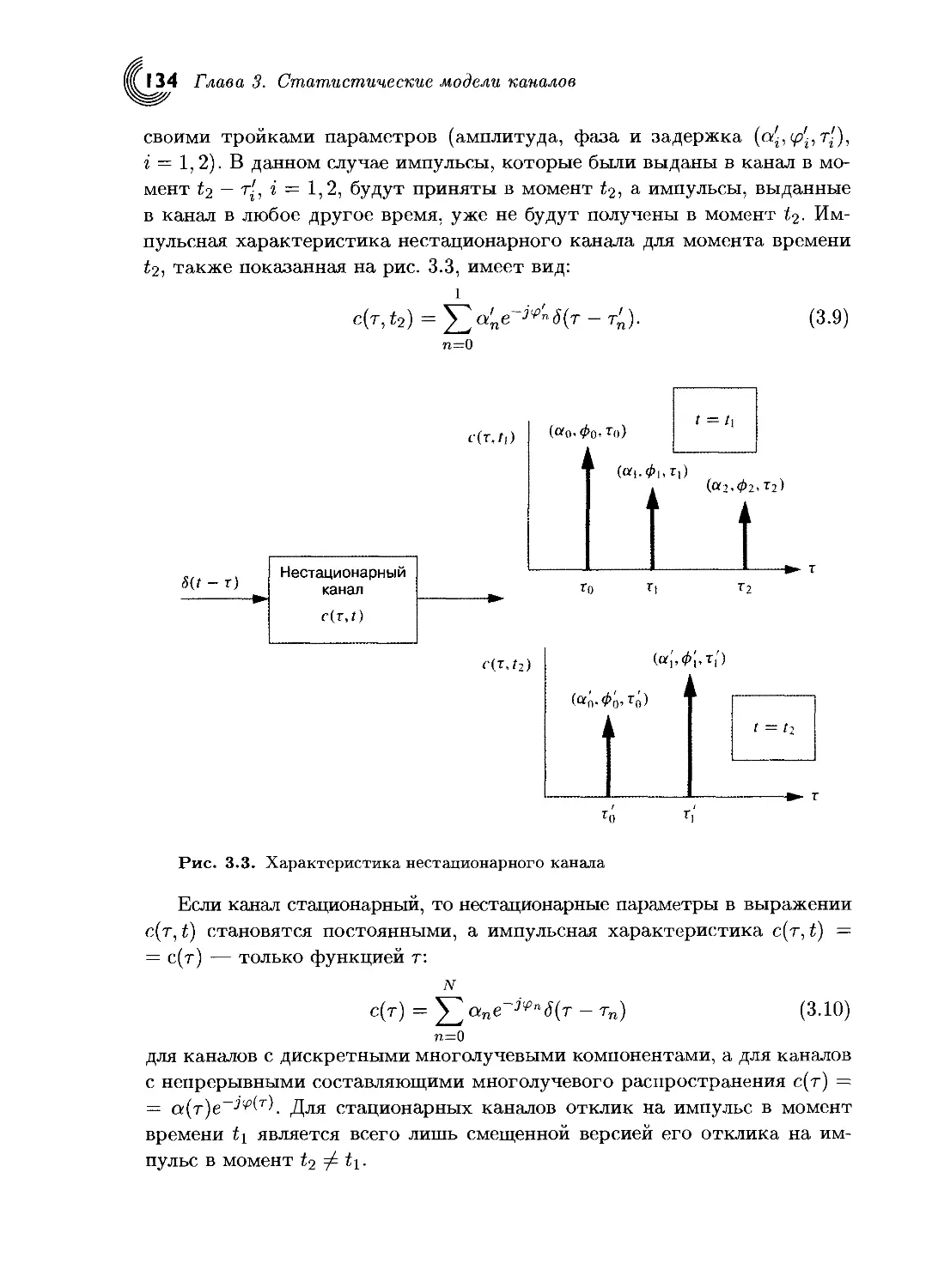
3.1. Импульсная характеристика нестационарного канала...... 129
3.2. Модели замираний в узкополосных каналах............ 136
3.2.1. Автокорреляция, взаимная корреляция и спектральная
плотность мощности..................................... 138
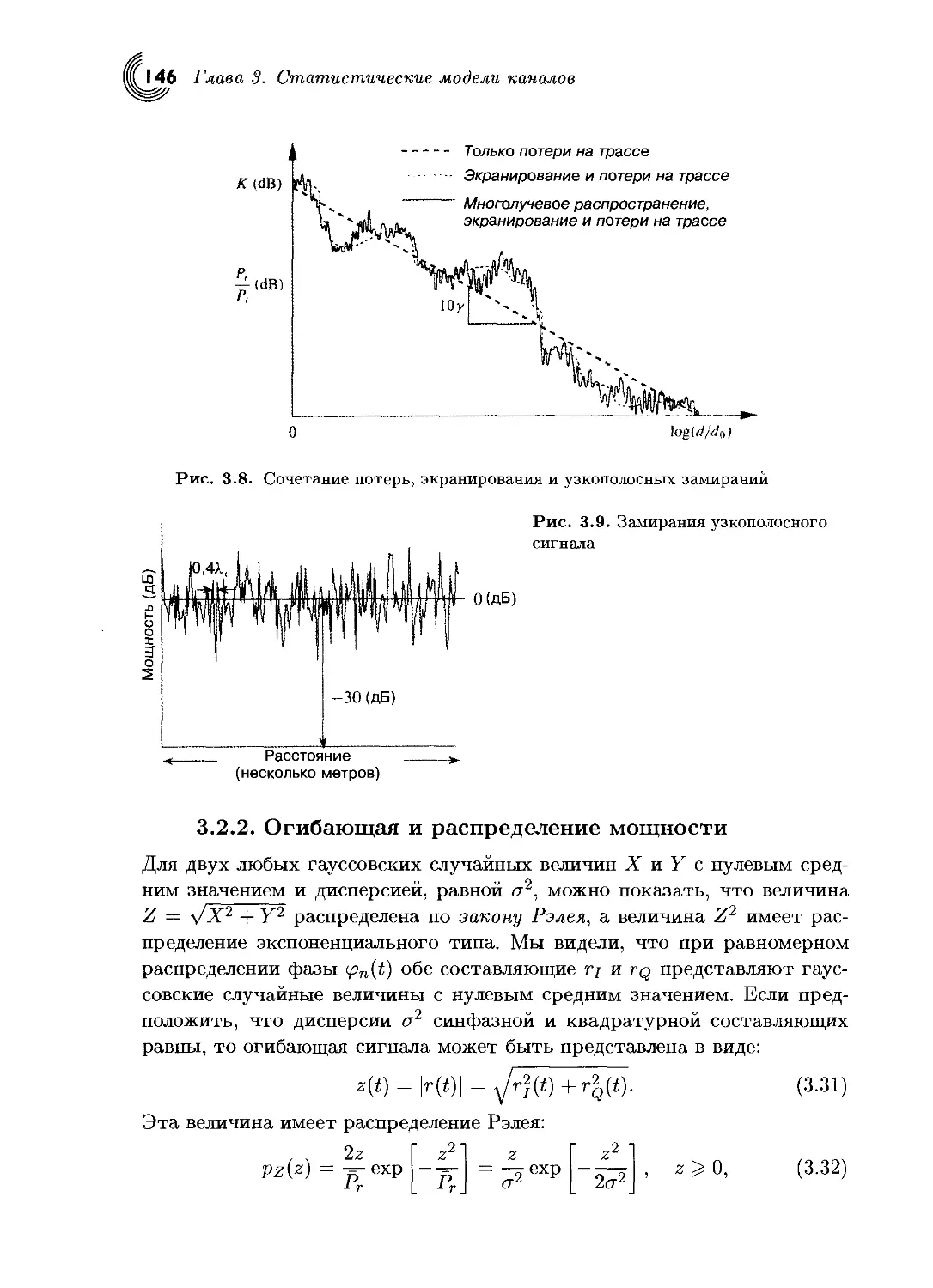
3.2.2. Огибающая и распределение мощности ............ 146
3.2.3. Скорость пересечения уровней и средняя продолжитель-
ность замираний........................................ 149
3.2.4. Каналы с конечным числом состояний Маркова..... 152
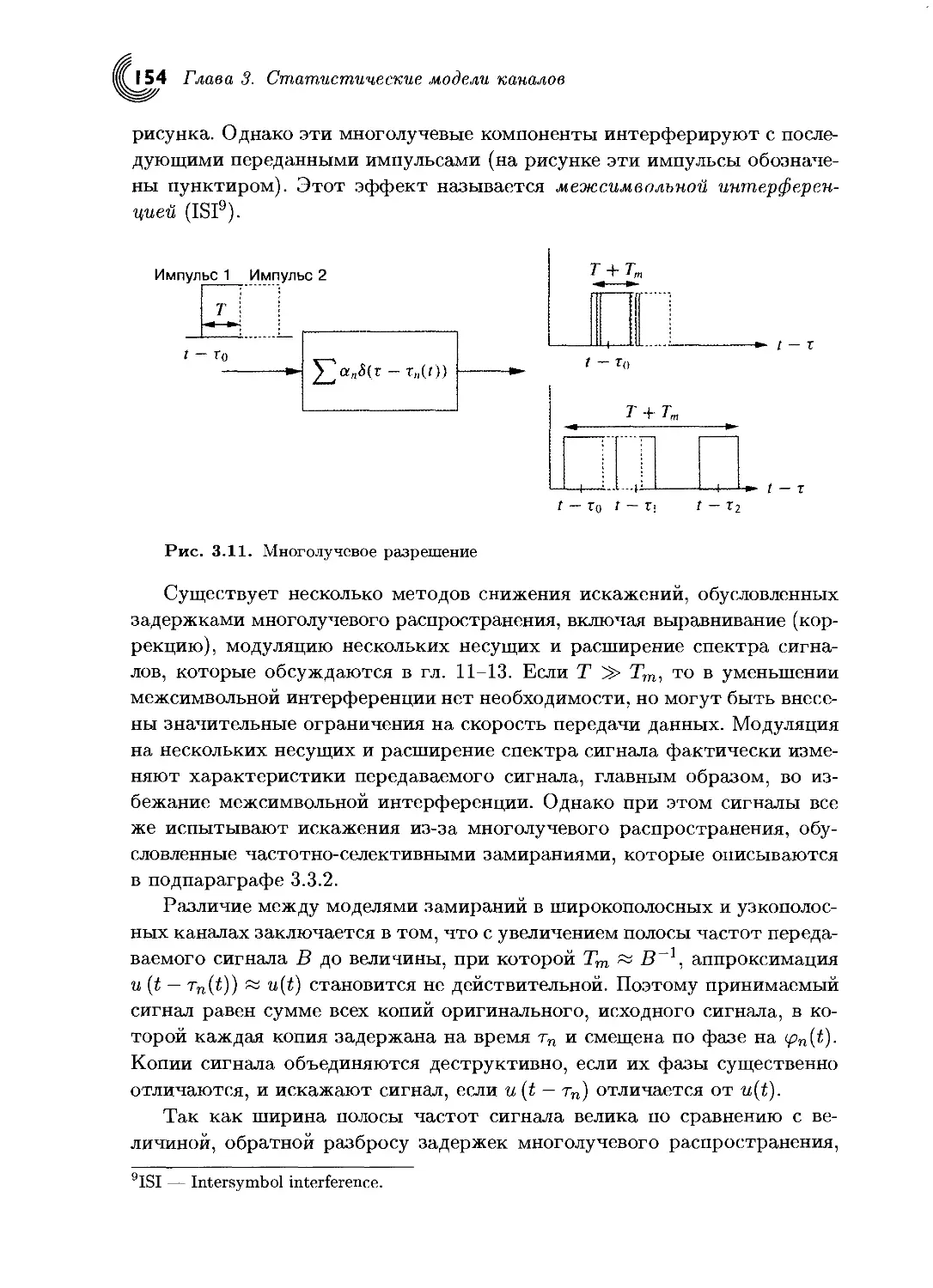
3.3. Модели замираний в широкополосных каналах.......... 153
3.3.1. Профиль задержек............................... 158
3.3.2. Полоса когерентности............................161
3.3.3. Доплеровский спектр мощности и время когерентности
канала................................................. 164
3.3.4. Преобразования автокорреляции и функции рассеяния. 165
3.4. Дискретно-временная модель.......................... 166
3.5. Пространственно-временные модели каналов............ 168
Задачи..............................................169
Литература................................................174
Содержание 7
Глава 4
Пропускная способность беспроводных каналов...............176
4.1. Пропускная способность канала с аддитивным белым гауссо-
вым шумом — AWGN......................................... 178
4.2. Пропускная способность каналов с амплитудными замираниями.. 180
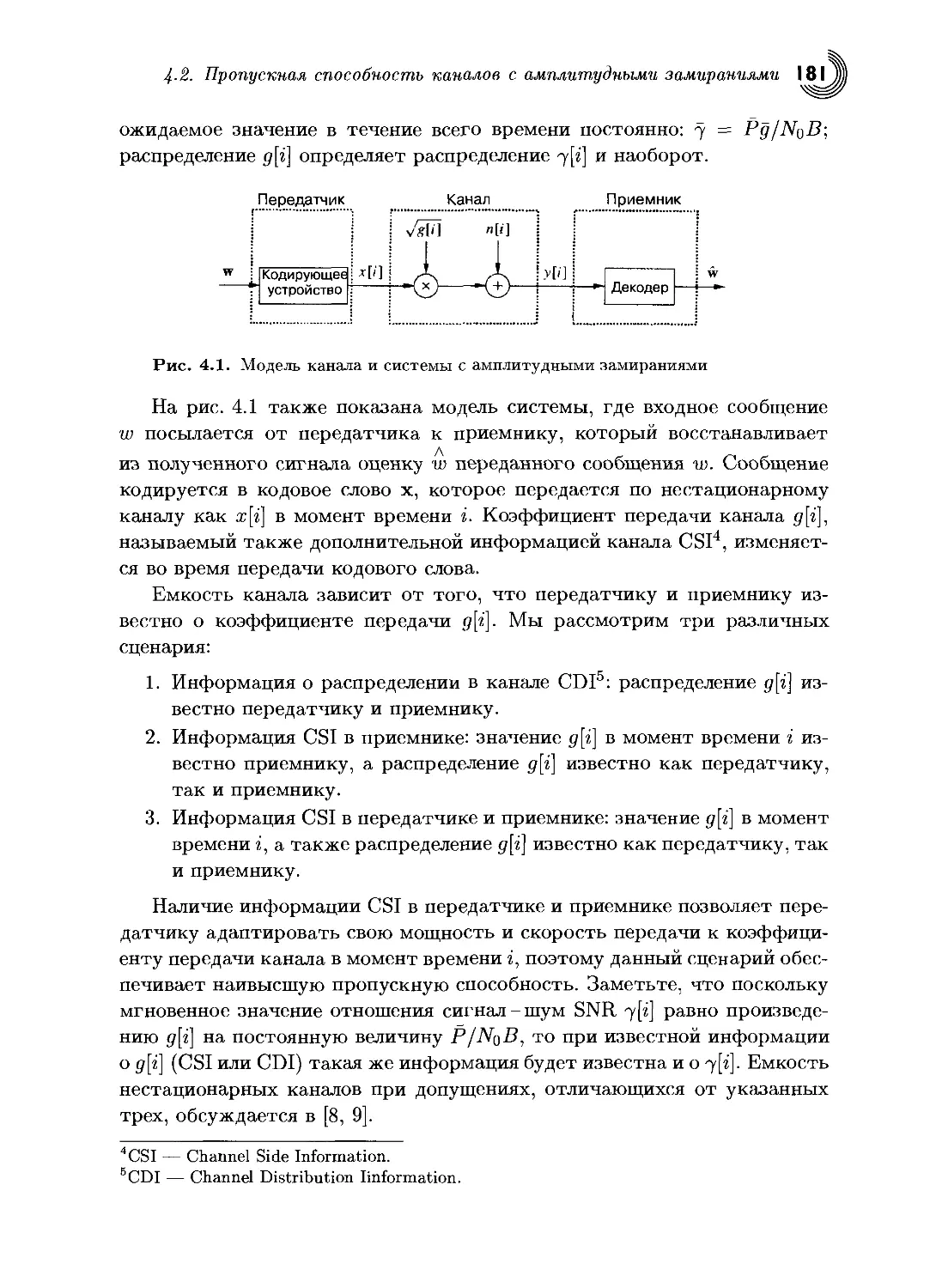
4.2.1. Модель канала и системы........................ 180
4.2.2. Известная информация о канальном распределении...... 182
4.2.3. Наличие дополнительной информации о канале в приемнике 183
4.2.4. Наличие дополнительной информация о канале в пере-
датчике и приемнике.................................... 188
4.2.5. Пропускная способность канала с разнесенным приемом. 198
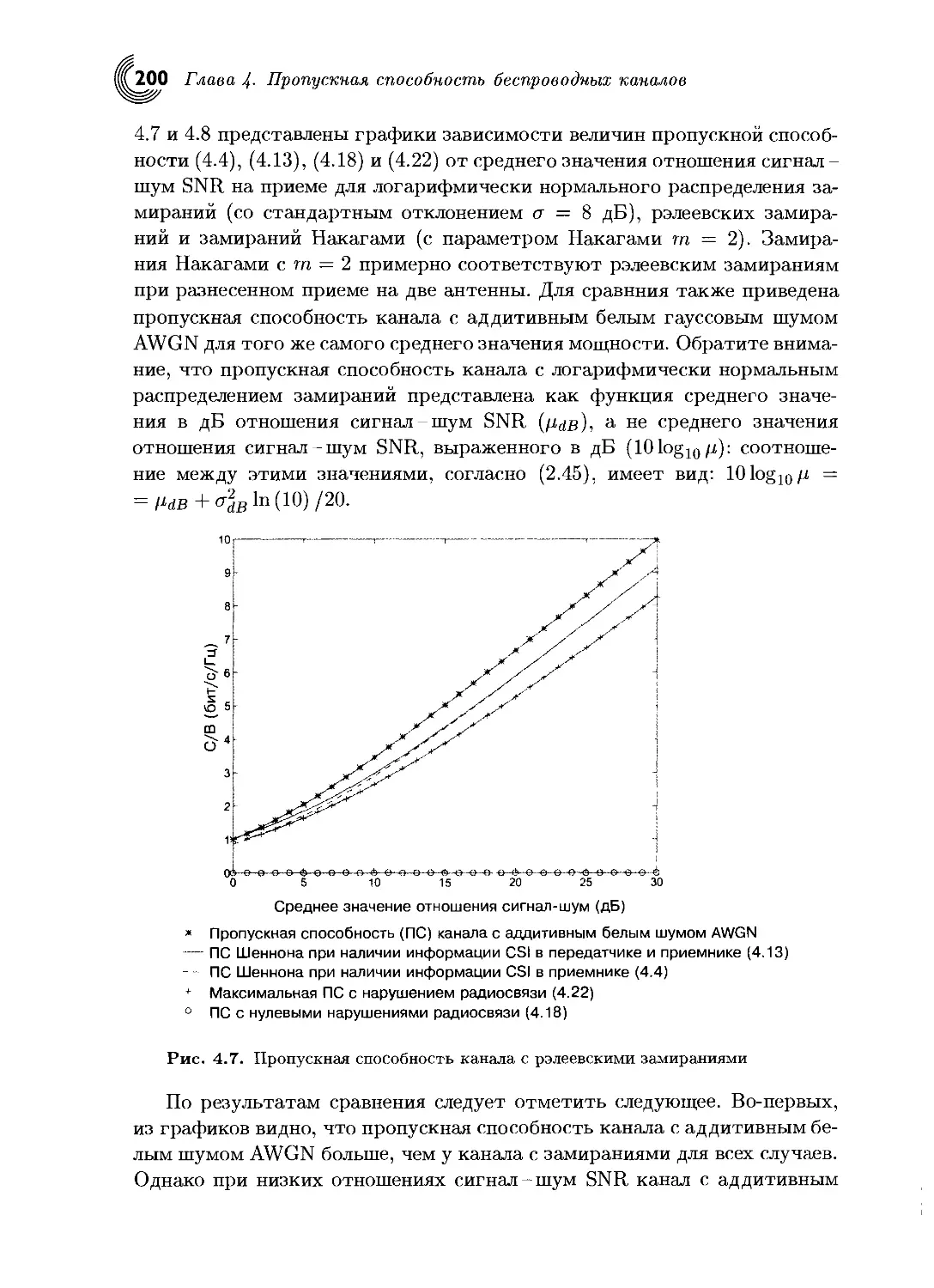
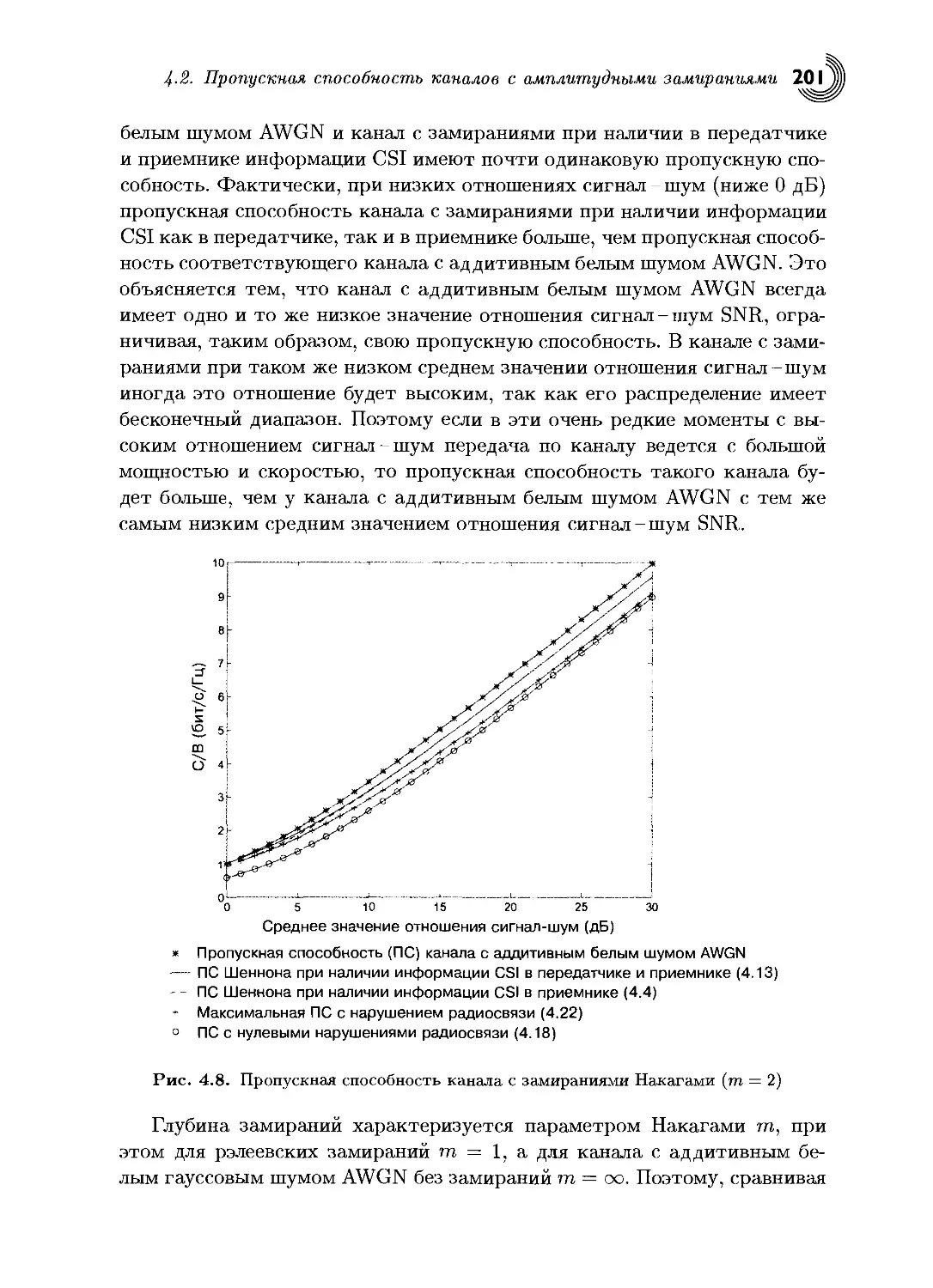
4.2.6. Сравнительная оценка пропускной способности.... 199
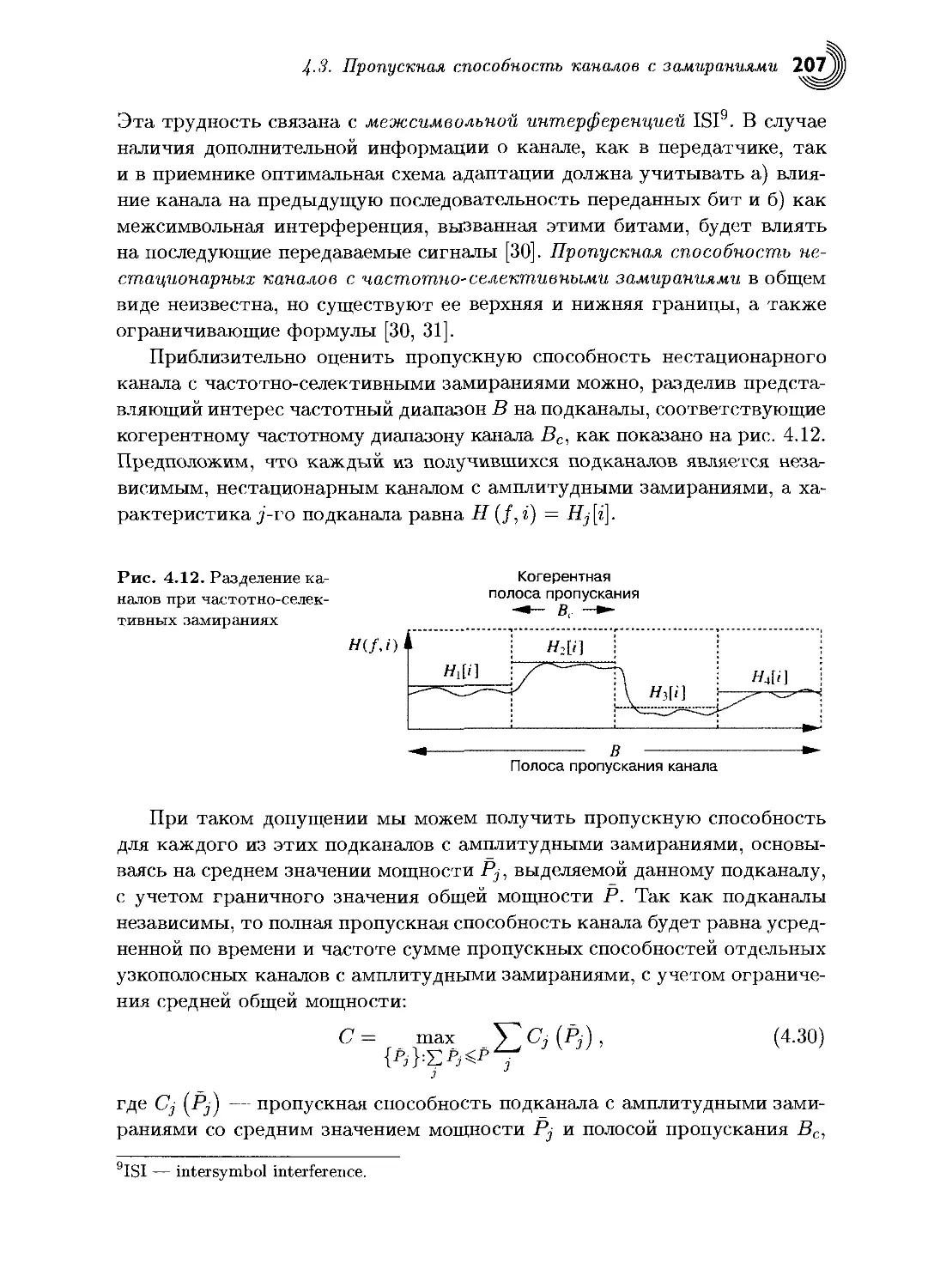
4.3. Пропускная способность каналов с частотно-селективными
замираниями...............................................203
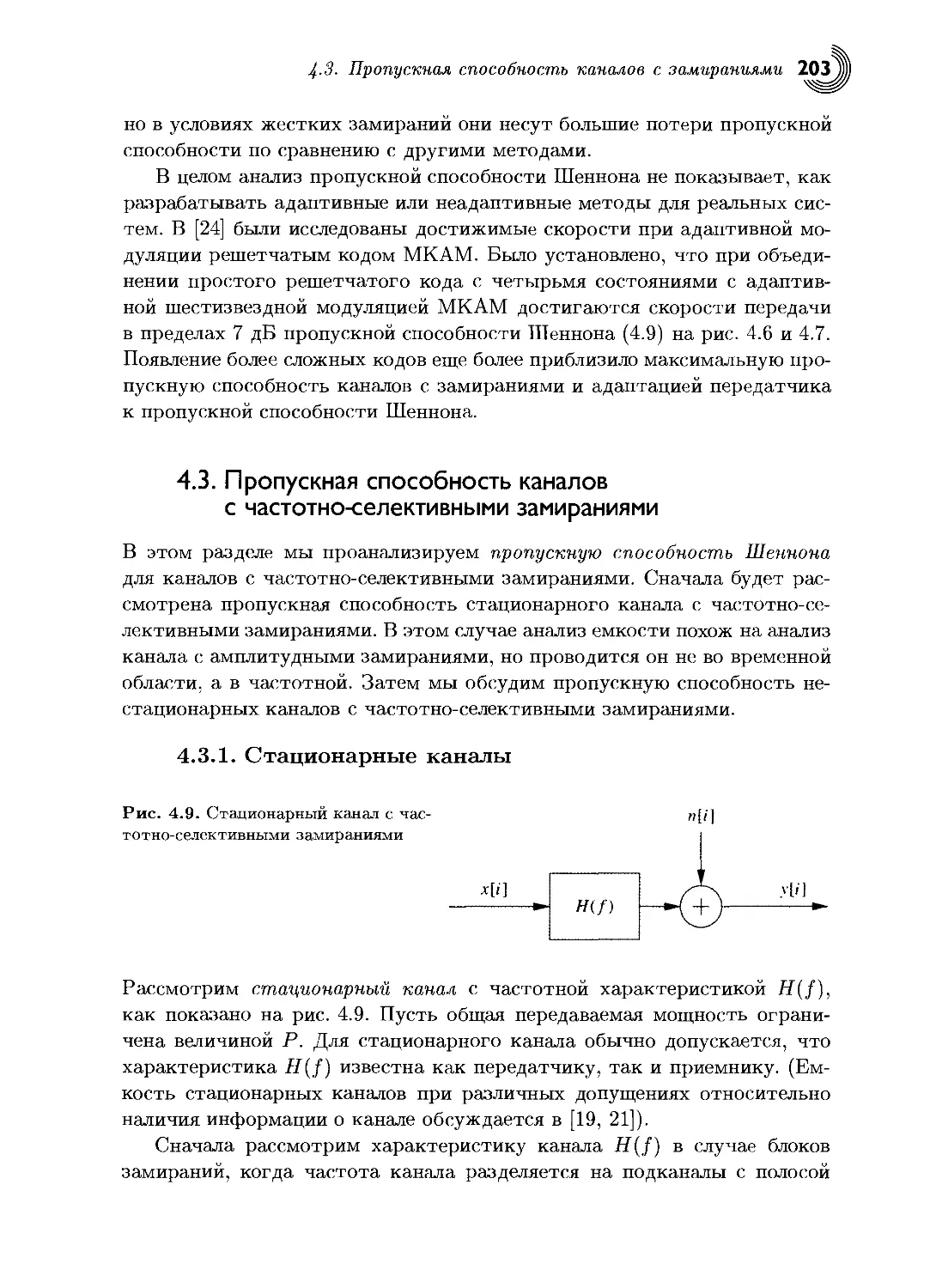
4.3.1. Стационарные каналы.............................203
4.3.2. Нестационарные каналы...........................206
Задачи..............................................209
Литература................................................214
Глава 5
Цифровая модуляция и демодуляция..........................216
5.1. Анализ пространства сигналов........................218
5.1.1. Модель сигнала и системы........................219
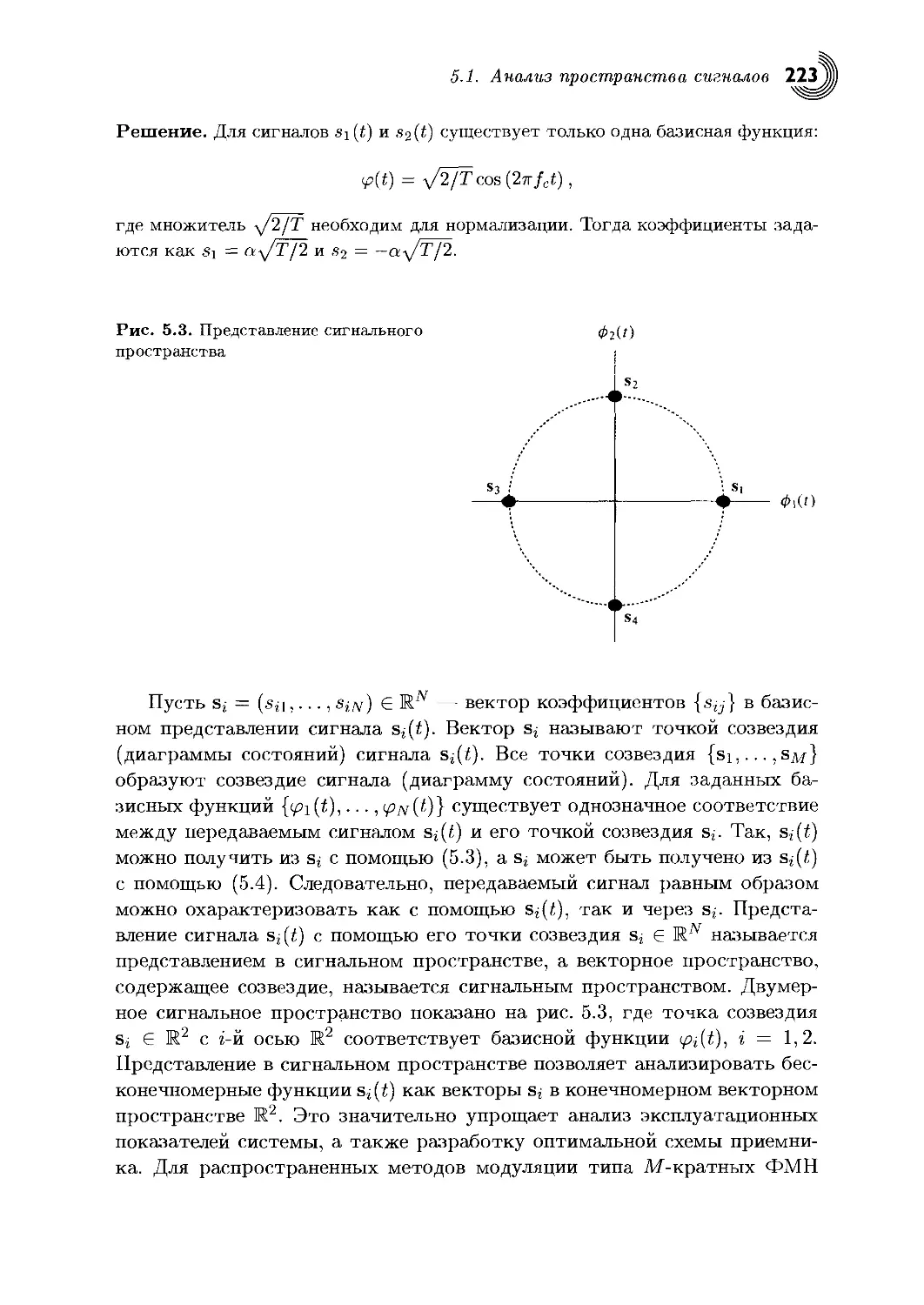
5.1.2. Геометрическое представление сигналов...........221
5.1.3. Структура приемника и достаточная статистика........224
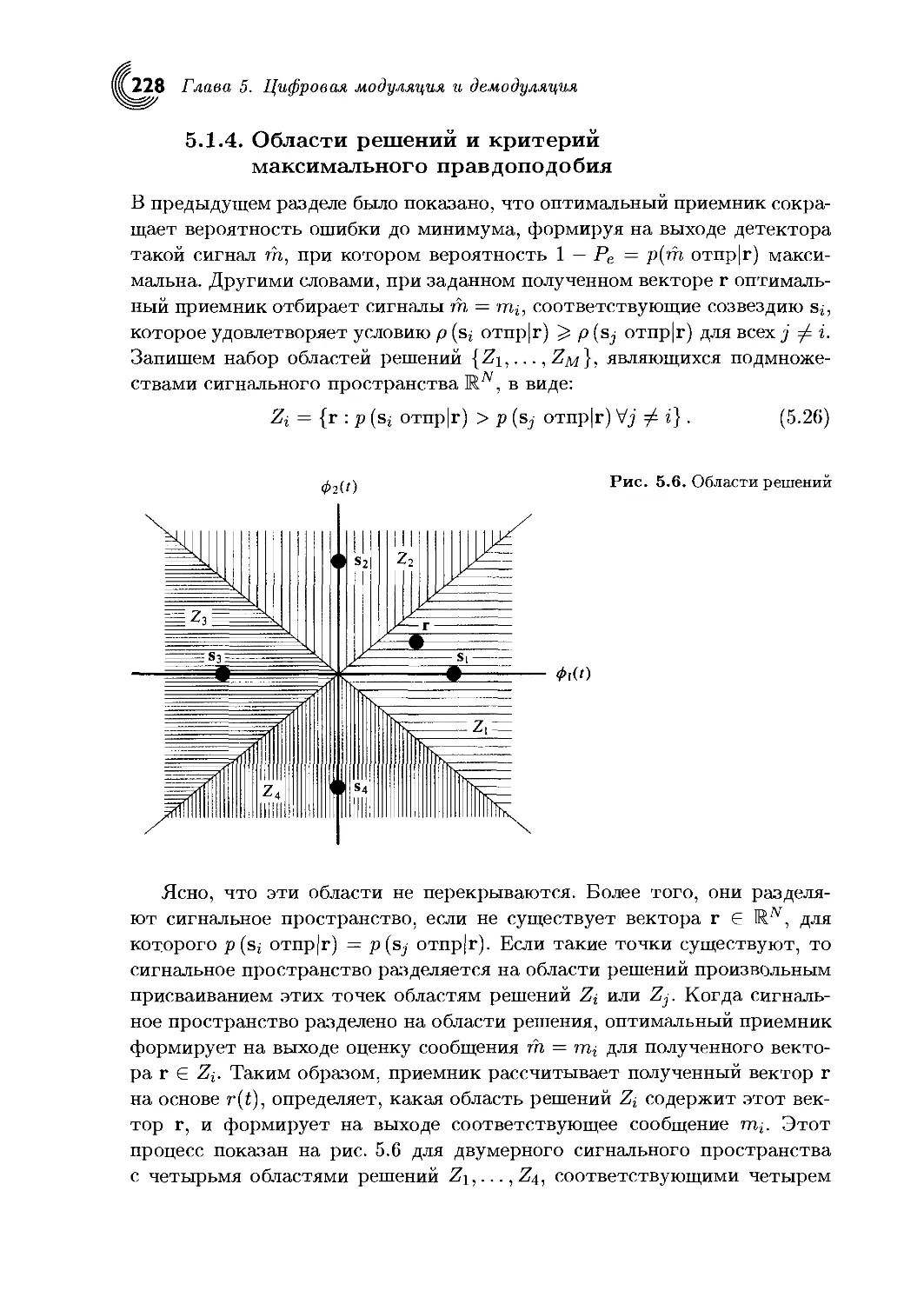
5.1.4. Области решений и критерий максимального правдопо-
добия...................................................228
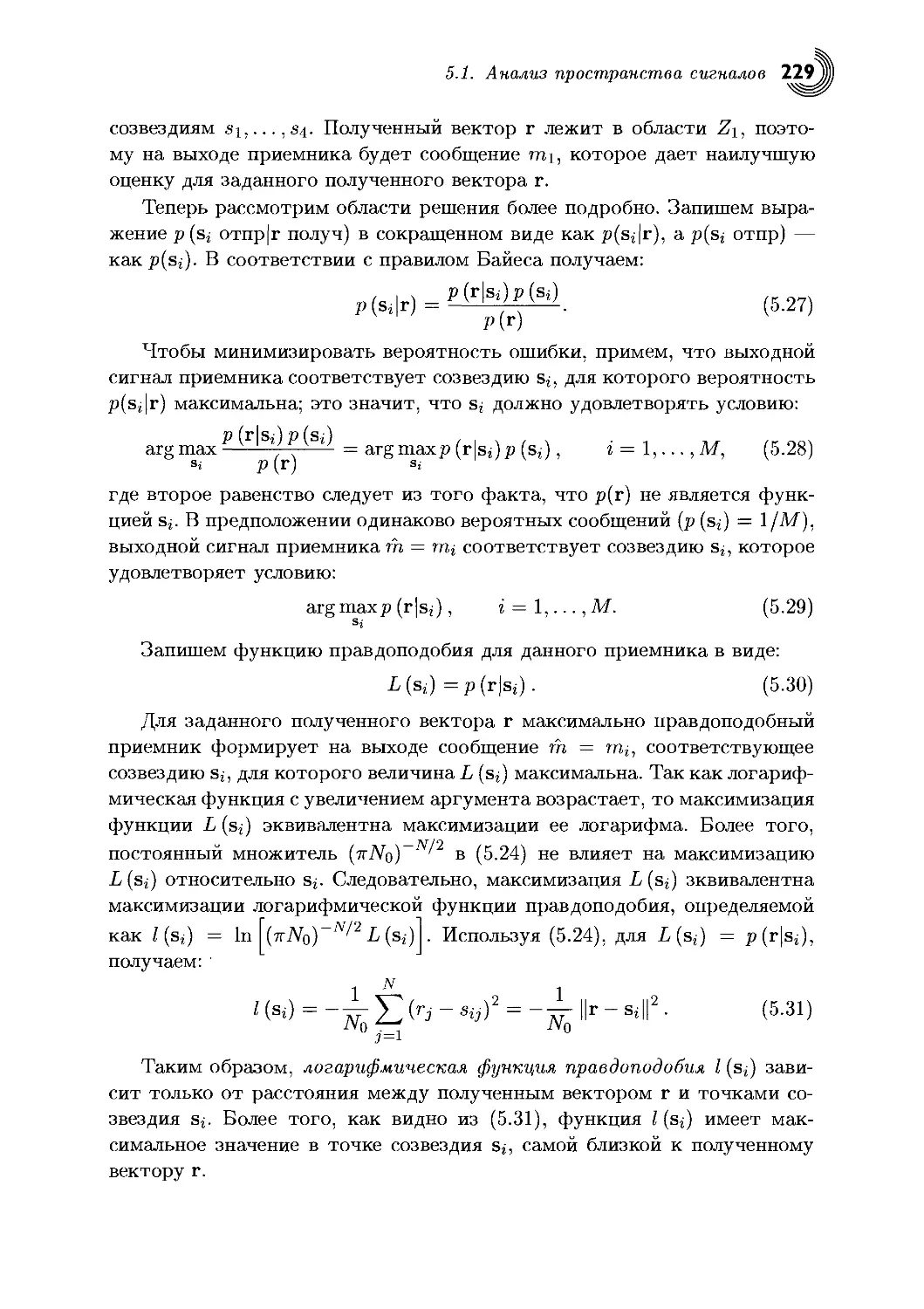
5.1.5. Вероятность ошибки и граница объединения........231
5.2. Принципы модуляции в ограниченной полосе пропускания....237
5.3. Амплитудная и фазовая модуляция.....................238
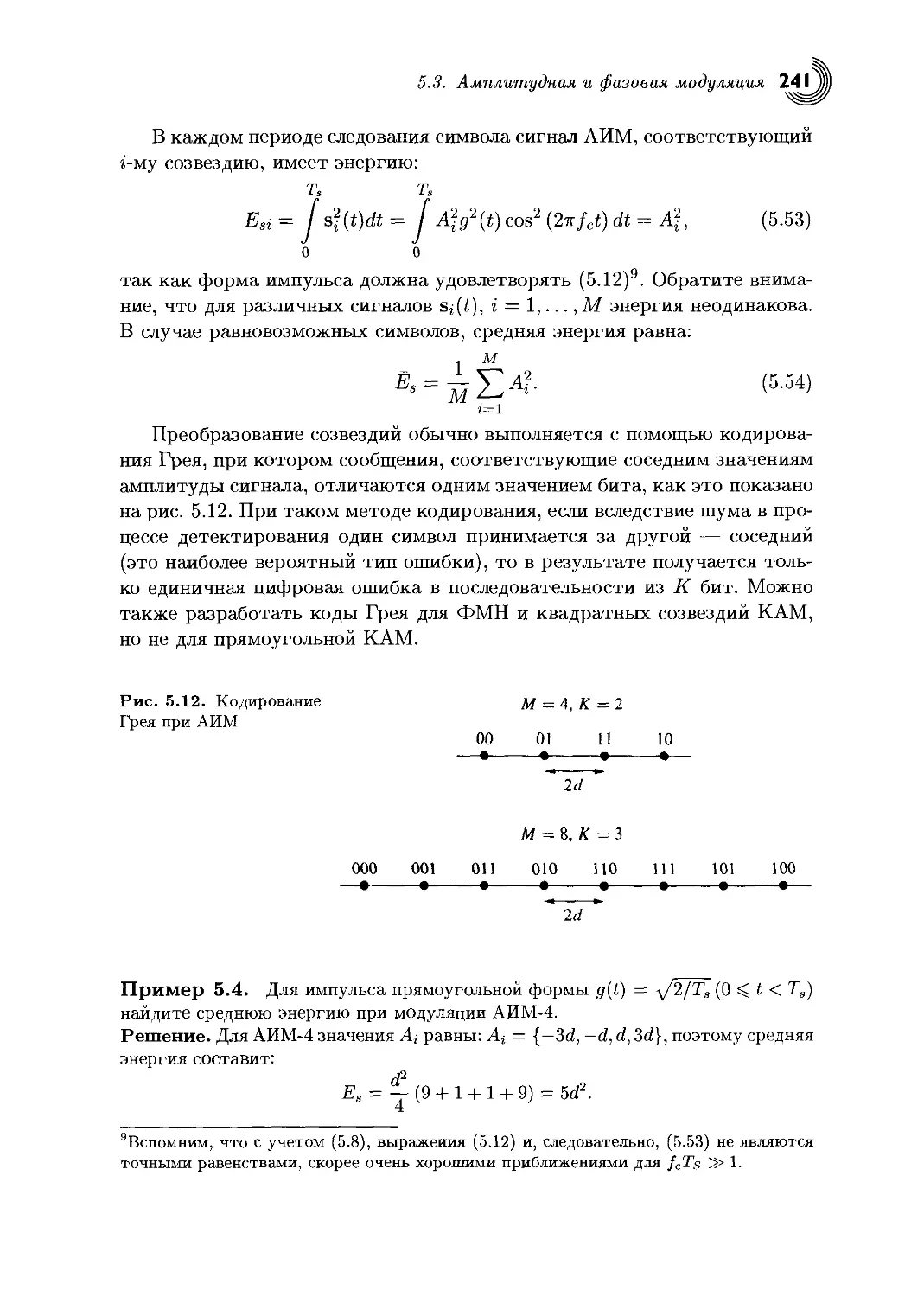
5.3.1. Амплитудно-импульсная модуляция — АИМ...........240
5.3.2. Фазовая манипуляция — ФМН.......................243
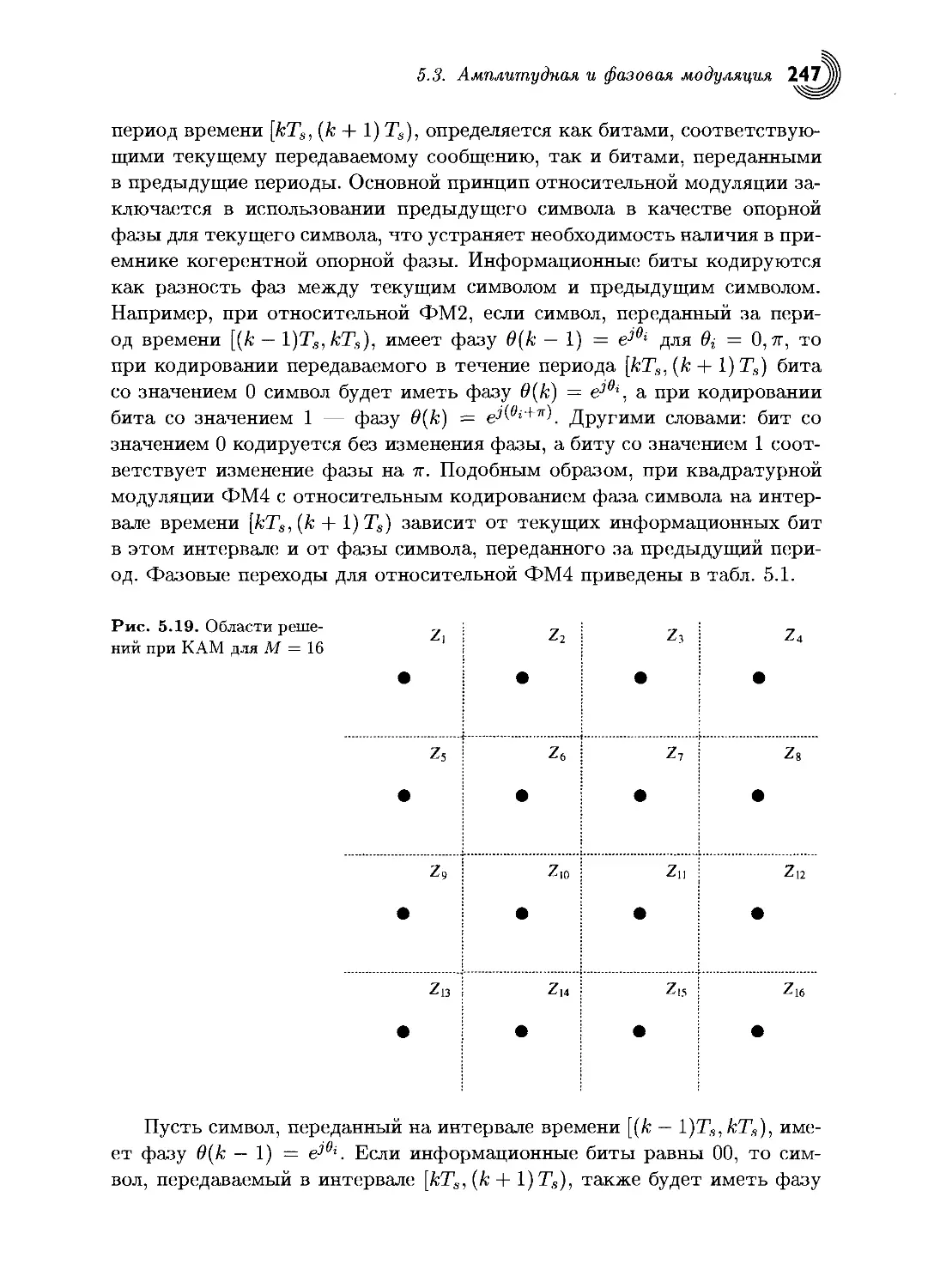
5.3.3. Квадратурная амплитудная модуляция — КАМ........245
5.3.4. Относительная модуляция.........................246
5.3.5. Формирование созвездий..........................250
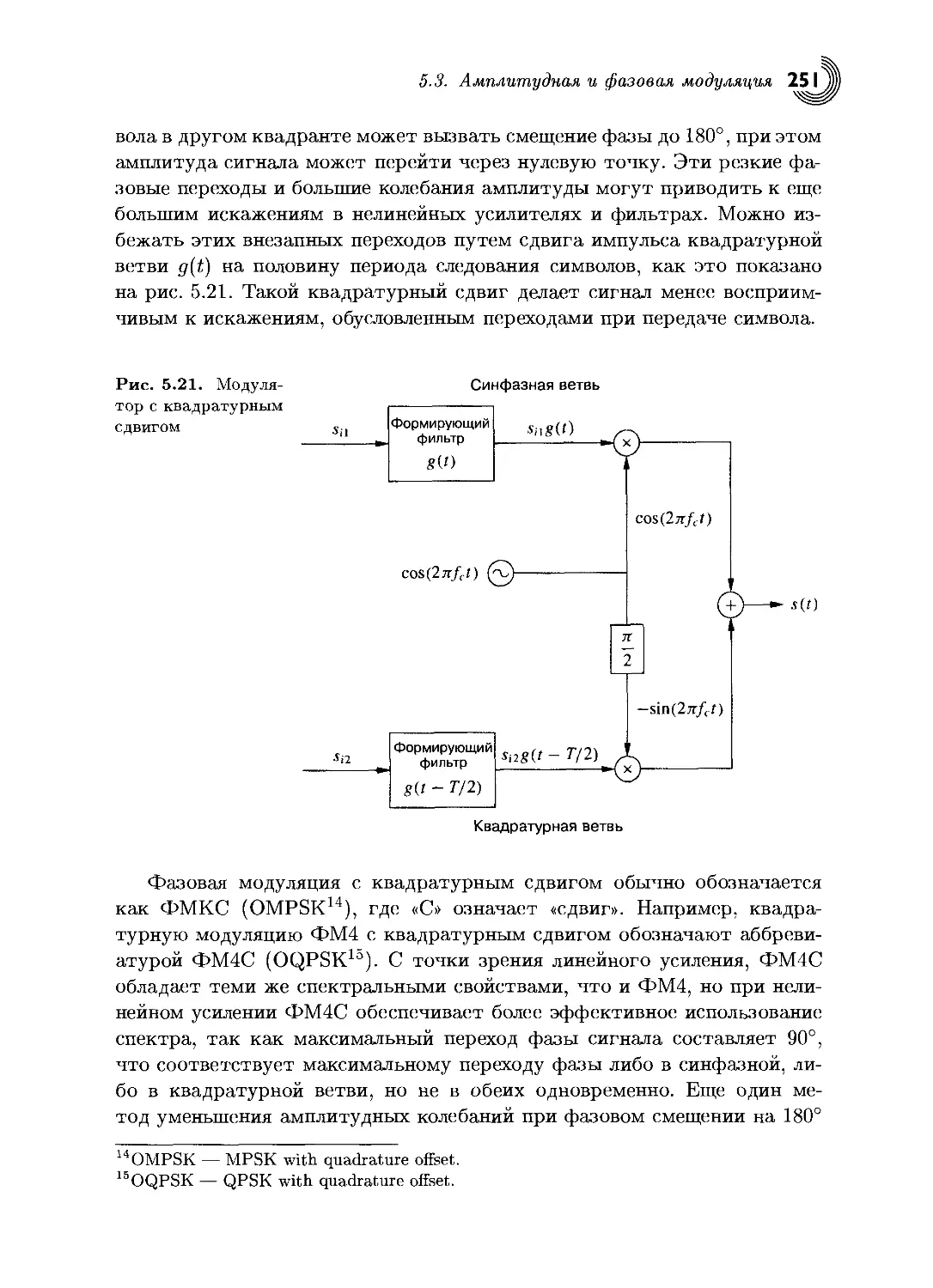
5.3.6. Квадратурный сдвиг..............................250
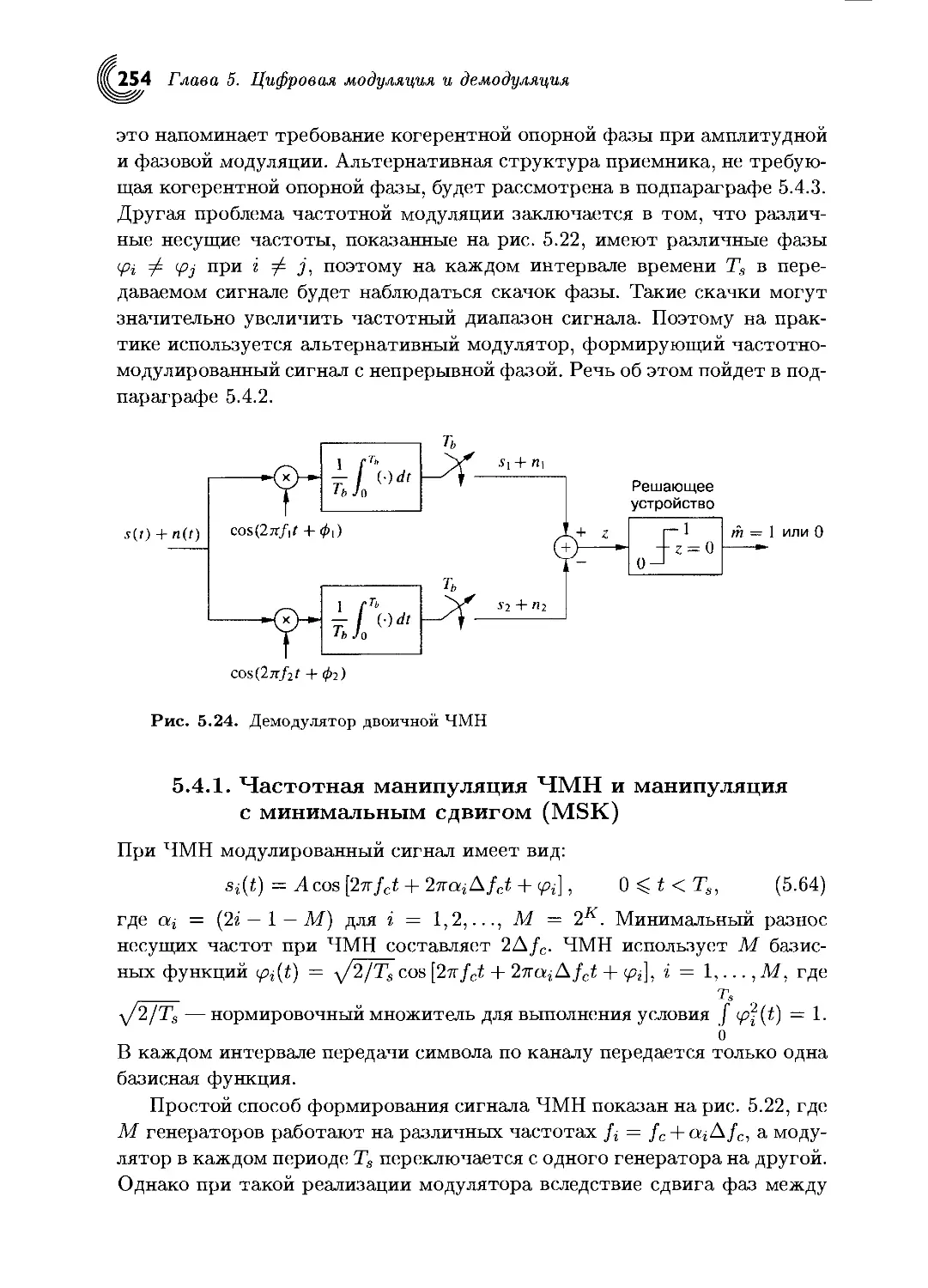
5.4. Частотная модуляция.................................252
5.4.1. Частотная манипуляция ЧМН и манипуляция
с минимальным сдвигом (MSK)......................254
8 Содержание
5.4.2. Частотная манипуляция с непрерывной фазой —
ЧМН-НФ..................................................255
5.4.3. Некогерентное детектирование при ЧМН.............256
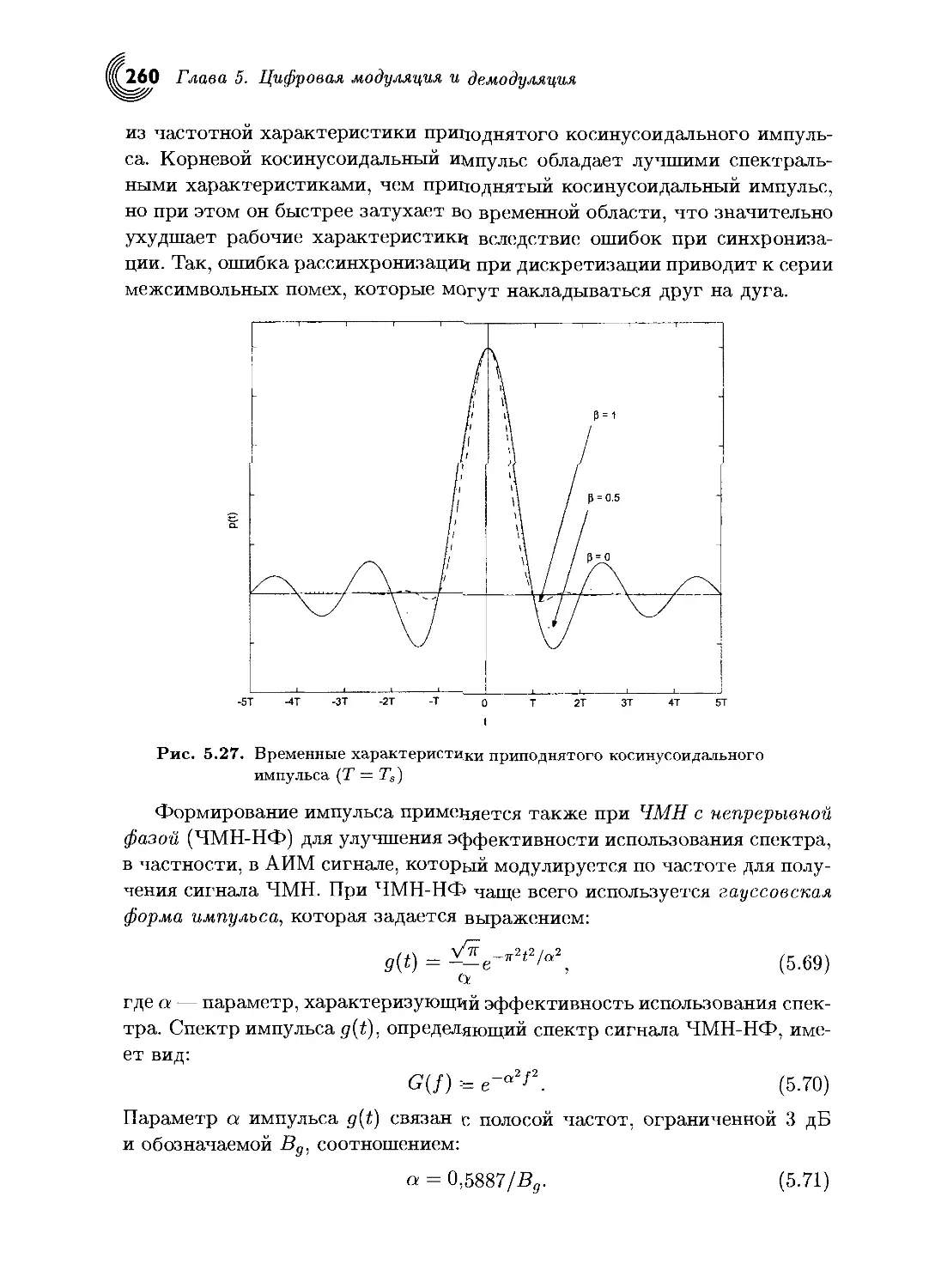
5.5. Формирование импульсов...............................257
5.6. Символьная синхронизация и восстановление фазы несущего
сигнала....................................................261
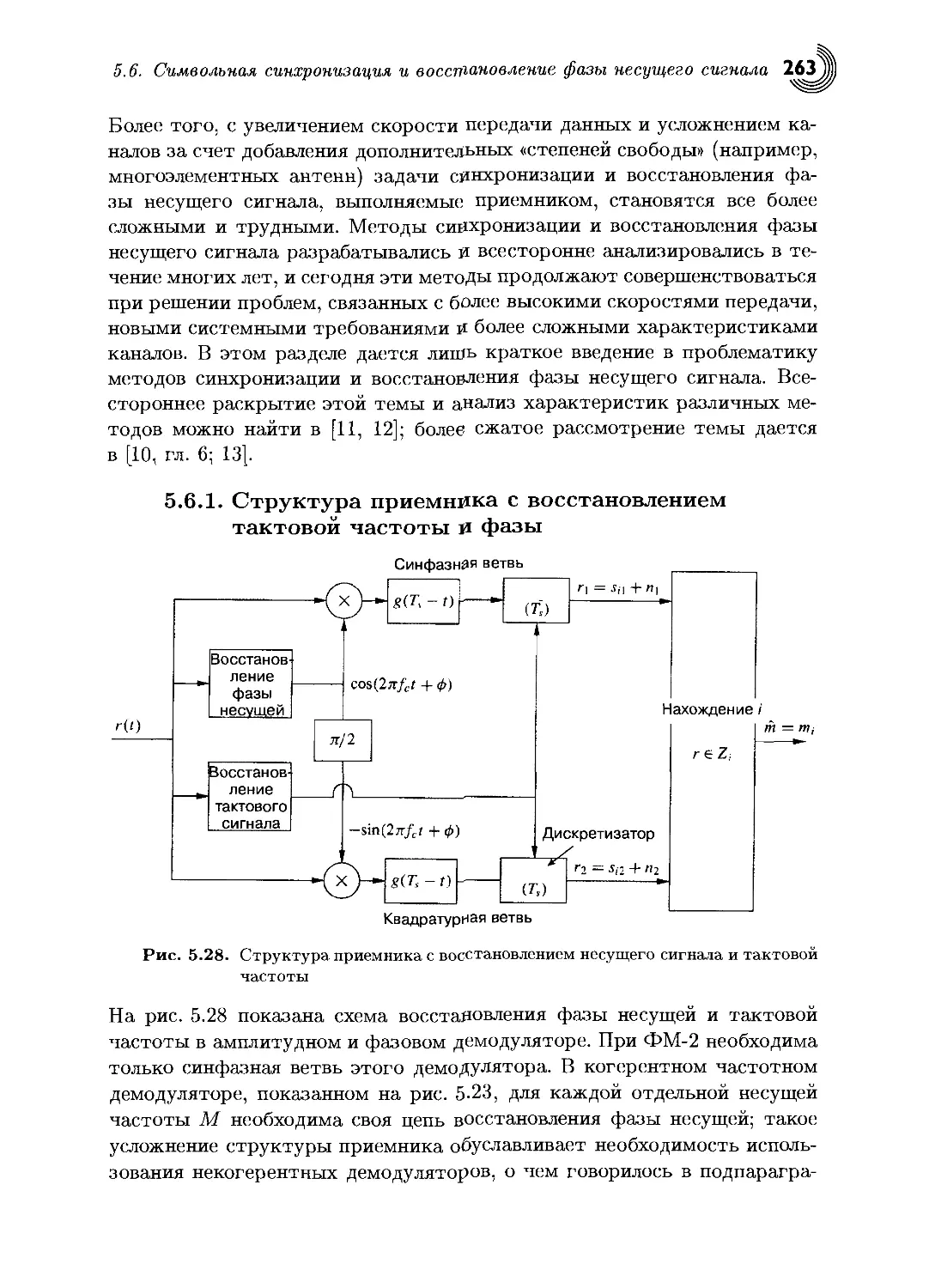
5.6.1. Структура приемника с восстановлением тактовой час-
тоты и фазы.............................................263
5.6.2. Оценка фазы по критерию максимального правдоподобия.... 265
5.6.3. Оценка сигнала тактовой частоты по критерию макси-
мального правдоподобия..................................268
Задачи...............................................271
Литература................................................275
Глава 6
Характеристики цифровой модуляции в беспроводных
каналах...................................................276
6.1. Каналы с аддитивным белым шумом AWGN.................276
6.1.1. Отношение сигнал-шум и энергия на бит или символ..277
6.1.2. Вероятность ошибки при ФМ2 и ФМ4................278
6.1.3. Вероятность ошибки при ФМН.......................280
6.1.4. Вероятность ошибки при АИМ и КАМ................282
6.1.5. Вероятность ошибки при ЧМН и ЧМН-НФ ............285
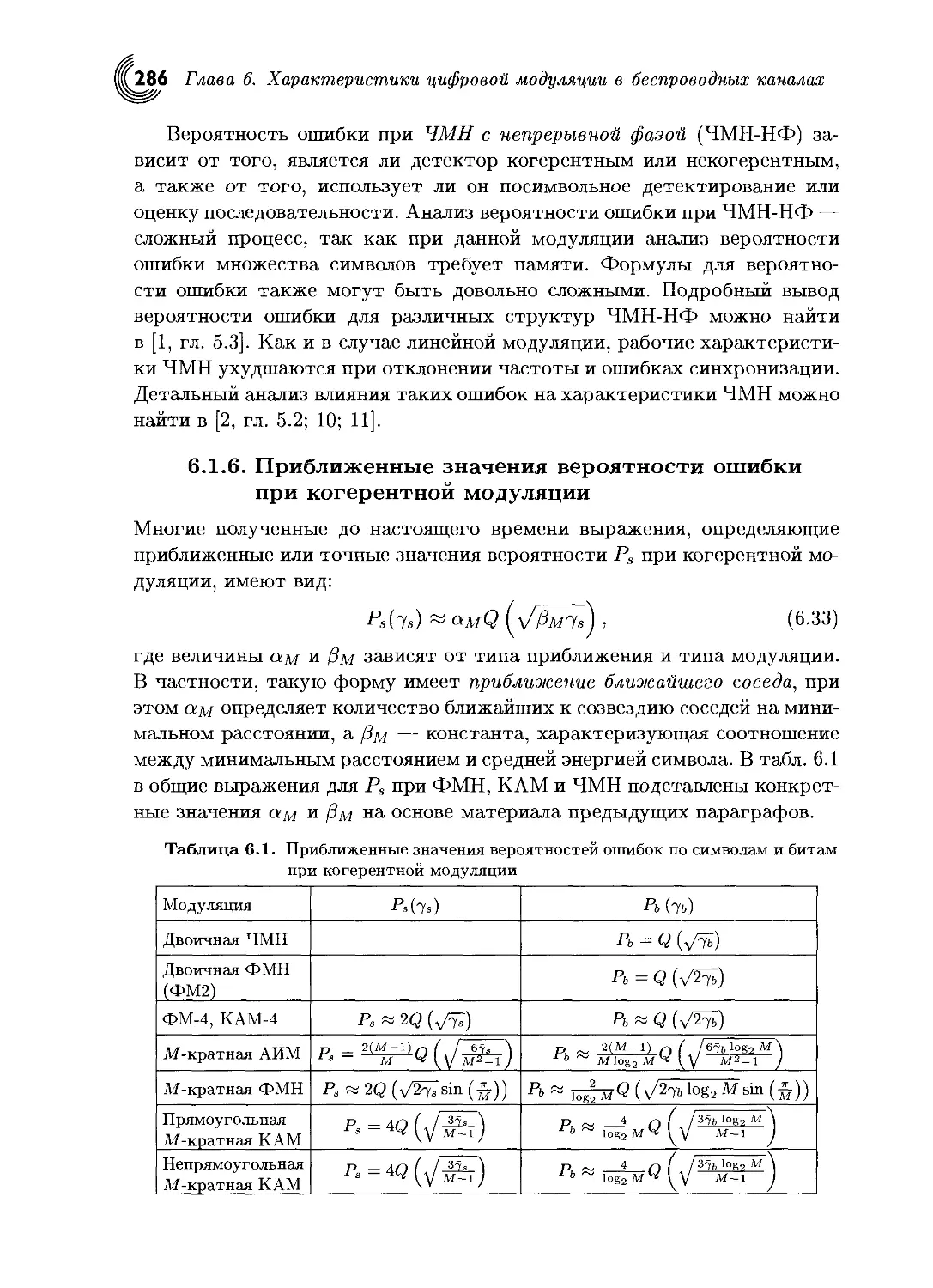
6.1.6. Приближенные значения вероятности ошибки при коге-
рентной модуляции ......................................286
6.1.7. Вероятность ошибки при относительной модуляции ..287
6.2. Альтернативное представление Q-функции...............288
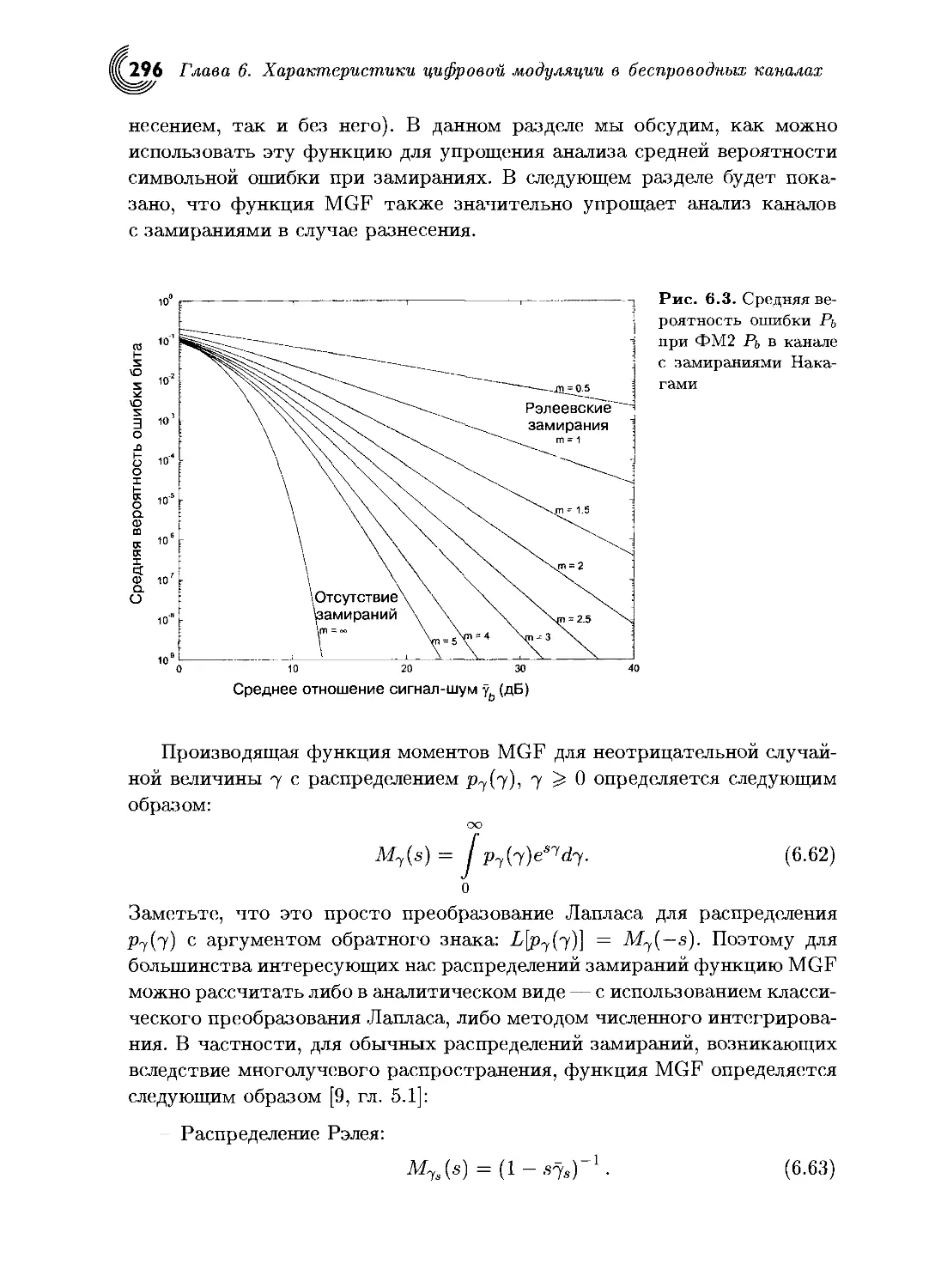
6.3. Замирания............................................290
6.3.1. Вероятность перерывов радиосвязи.................291
6.3.2. Средняя вероятность ошибки.......................292
6.3.3. Расчет средней вероятности ошибки через производящую
функцию моментов........................................295
6.3.4. Комбинация вероятности нарушения связи со средней ве-
роятностью ошибки.......................................301
6.4. Доплеровское расширение..............................303
6.5. Межсимвольная интерференция..........................306
Задачи...............................................309
Литература................................................317
Содержание 9
Глава 7
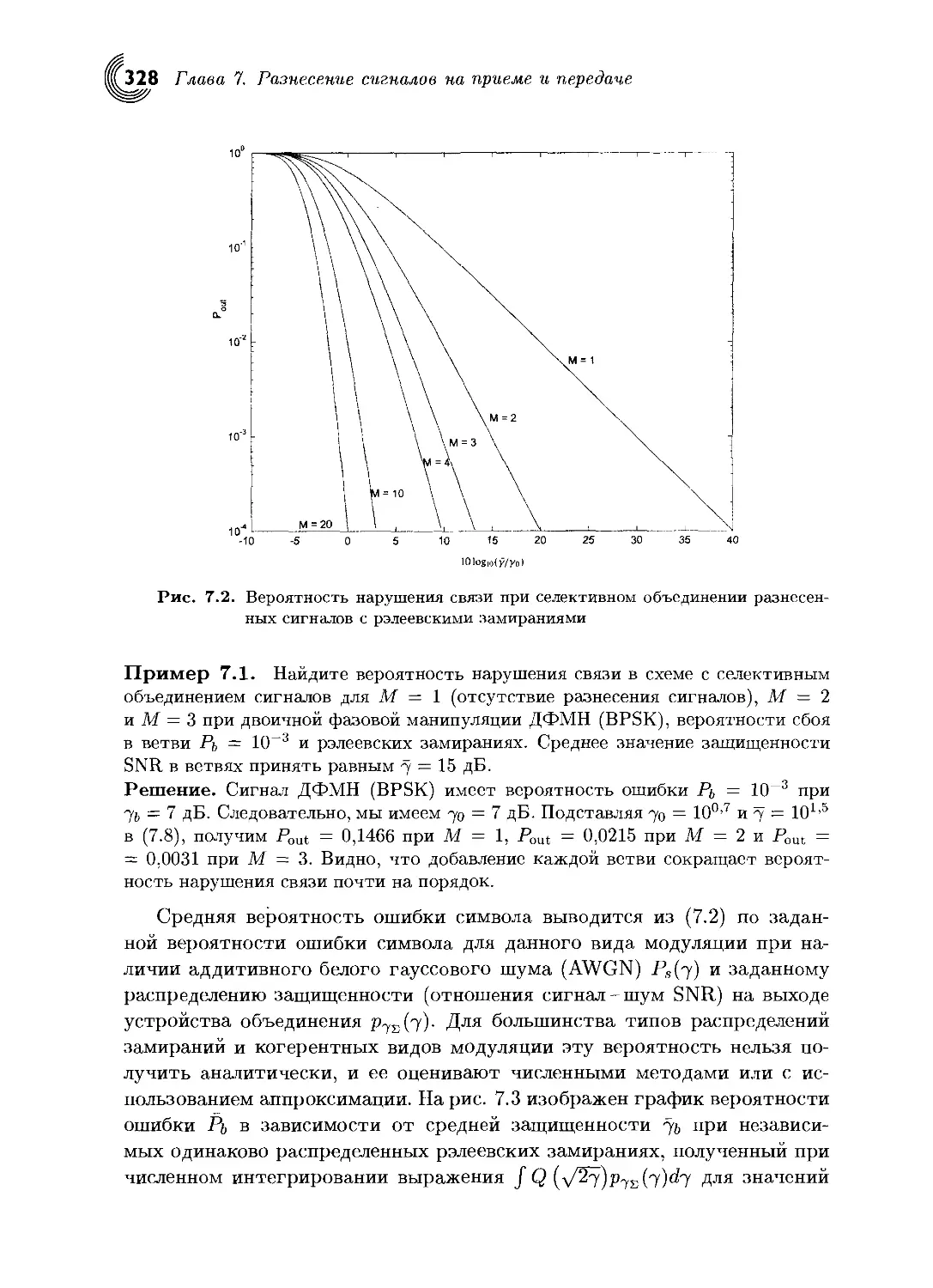
Разнесение сигналов на приеме и передаче.......................319
7.1. Реализация каналов с независимыми замираниями.............320
7.2. Разнесение сигналов в приемнике...........................322
7.2.1. Модель системы.......................................322
7.2.2. Селективное объединение..............................326
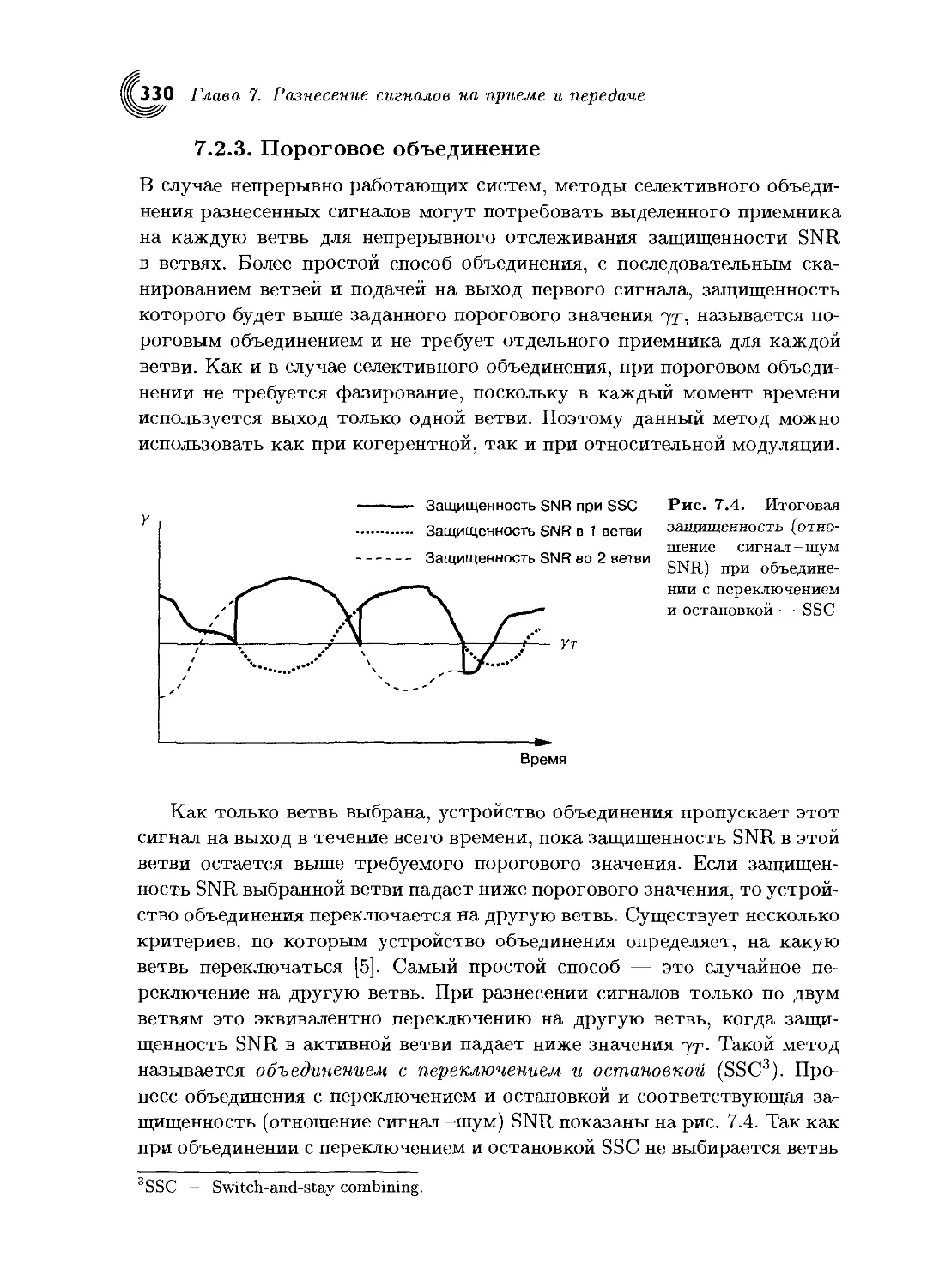
7.2.3. Пороговое объединение................................330
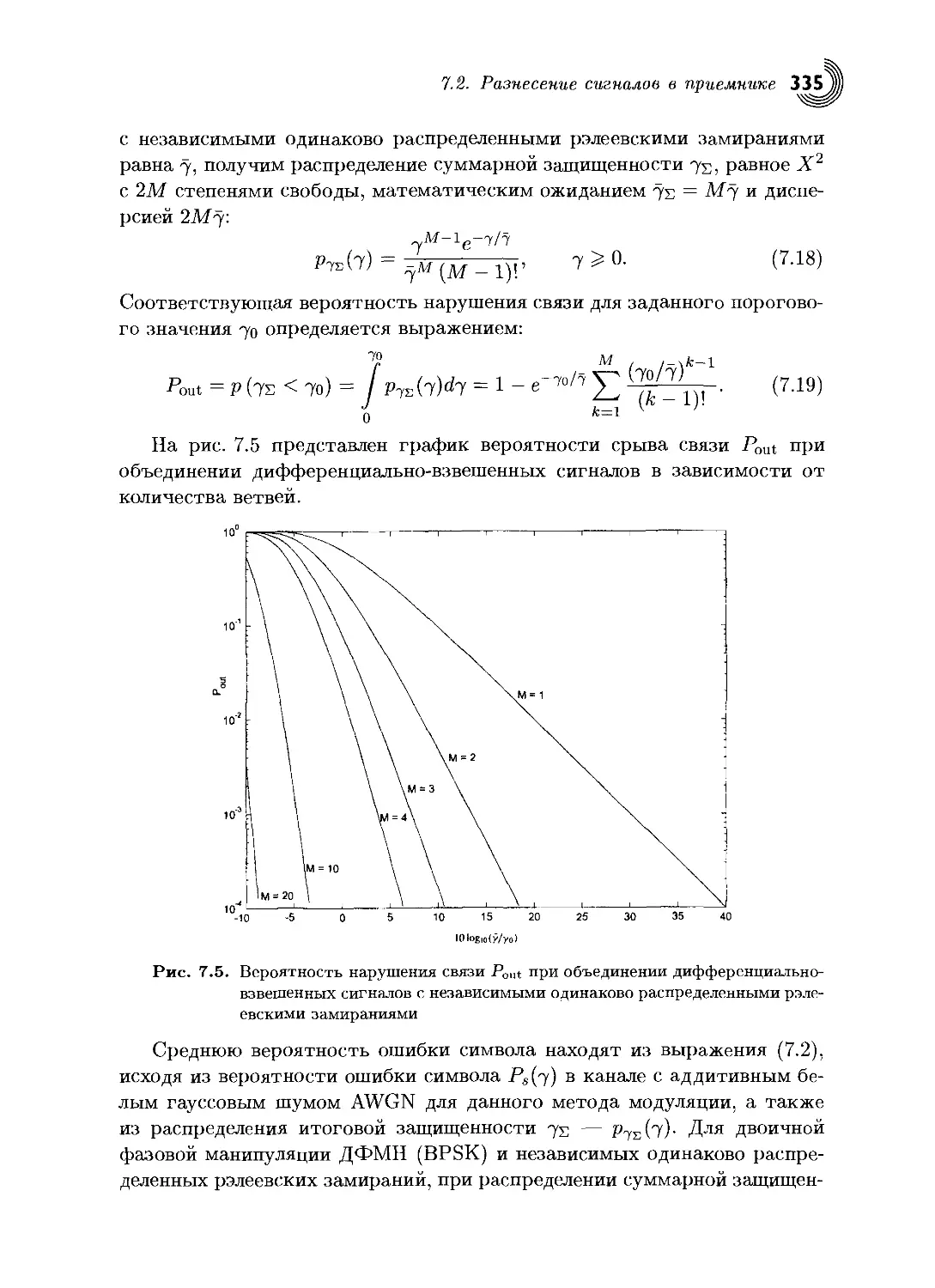
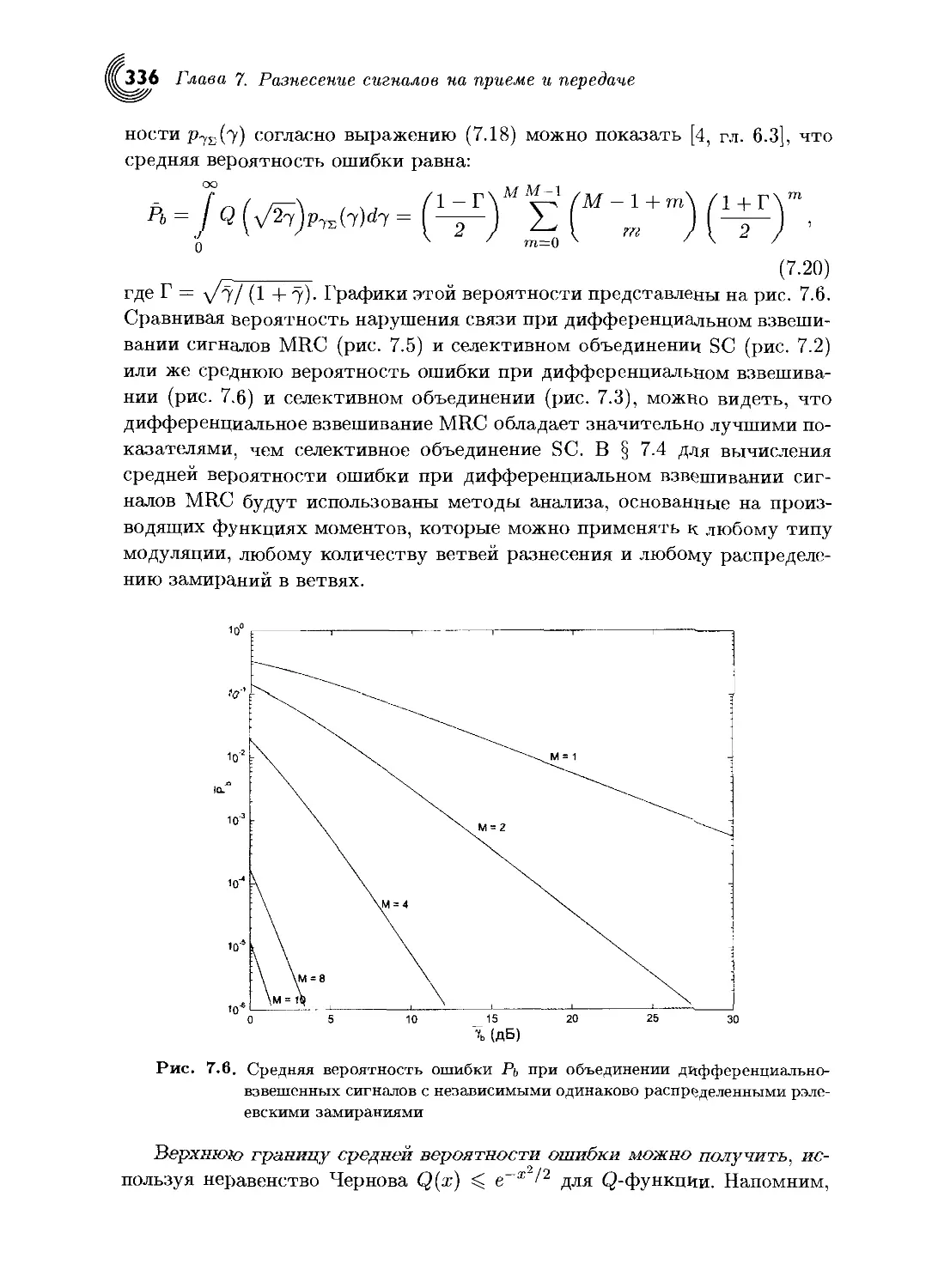
7.2.4. Суммирование дифференциально-взвешенных сигналов.... 333
7.2.5. Линейное объединение сигналов равной мощности....337
7.3. Разнесение сигналов в передатчике.........................339
7.3.1. Информация о канале, известная передатчику...........339
7.3.2. Схема Аламоути — передатчику неизвестна информация
о канале..............................................341
7.4. Анализ разнесения с помощью производящих функций
моментов..................................................343
7.4.1. Анализ разнесенного приема при дифференциальном
взвешивании MRC.........................................344
7.4.2. Анализ разнесения при линейном EGC и селективном SC
сложении сигналов.......................................349
7.4.3. Анализ разнесенного приема при некогерентной и диф-
ференциальной когерентной модуляции.....................350
Задачи...................................................350
Литература.....................................................353
Глава 8
Кодирование в беспроводных каналах.............................355
8.1. Обзор систем кодирования..................................356
8.2. Линейные блочные коды.....................................359
8.2.1. Двоичные линейные блочные коды.......................360
8.2.2. Порождающая матрица..................................362
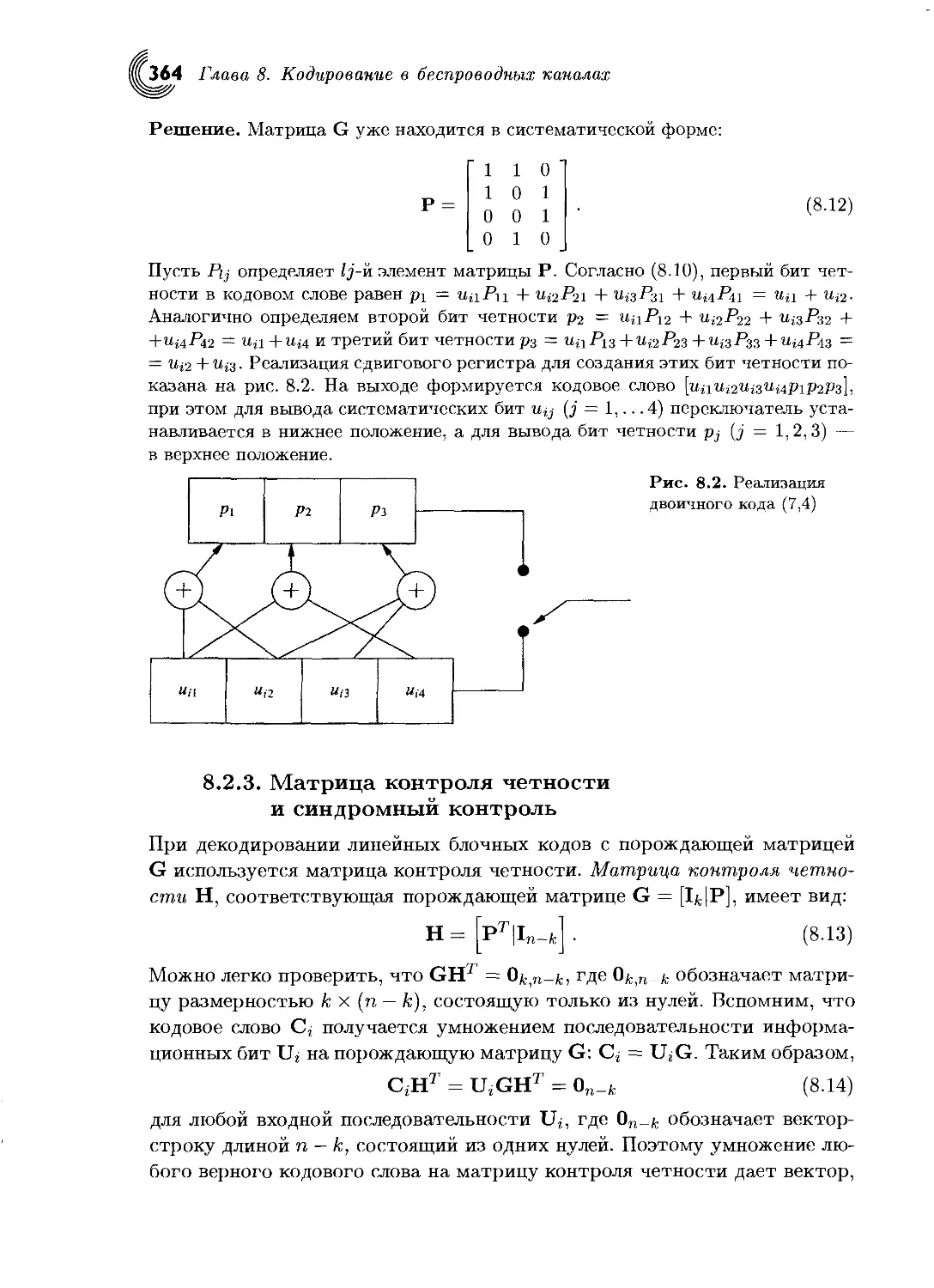
8.2.3. Матрица контроля четности и синдромный контроль..364
8.2.4. Циклические коды.....................................366
8.2.5. Декодирование с жестким решением.....................369
8.2.6. Вероятность ошибки при декодировании с жестким ре-
шением в канале с аддитивным белым шумом AWGN ..........372
8.2.7. Вероятность ошибки при декодировании с мягким реше-
нием в канале с аддитивным белым шумом AWGN.............375
8.2.8. Примеры распространенных линейных блочных кодов .....377
8.2.9. Недвоичные блочные коды: код Рида-Соломона ..........378
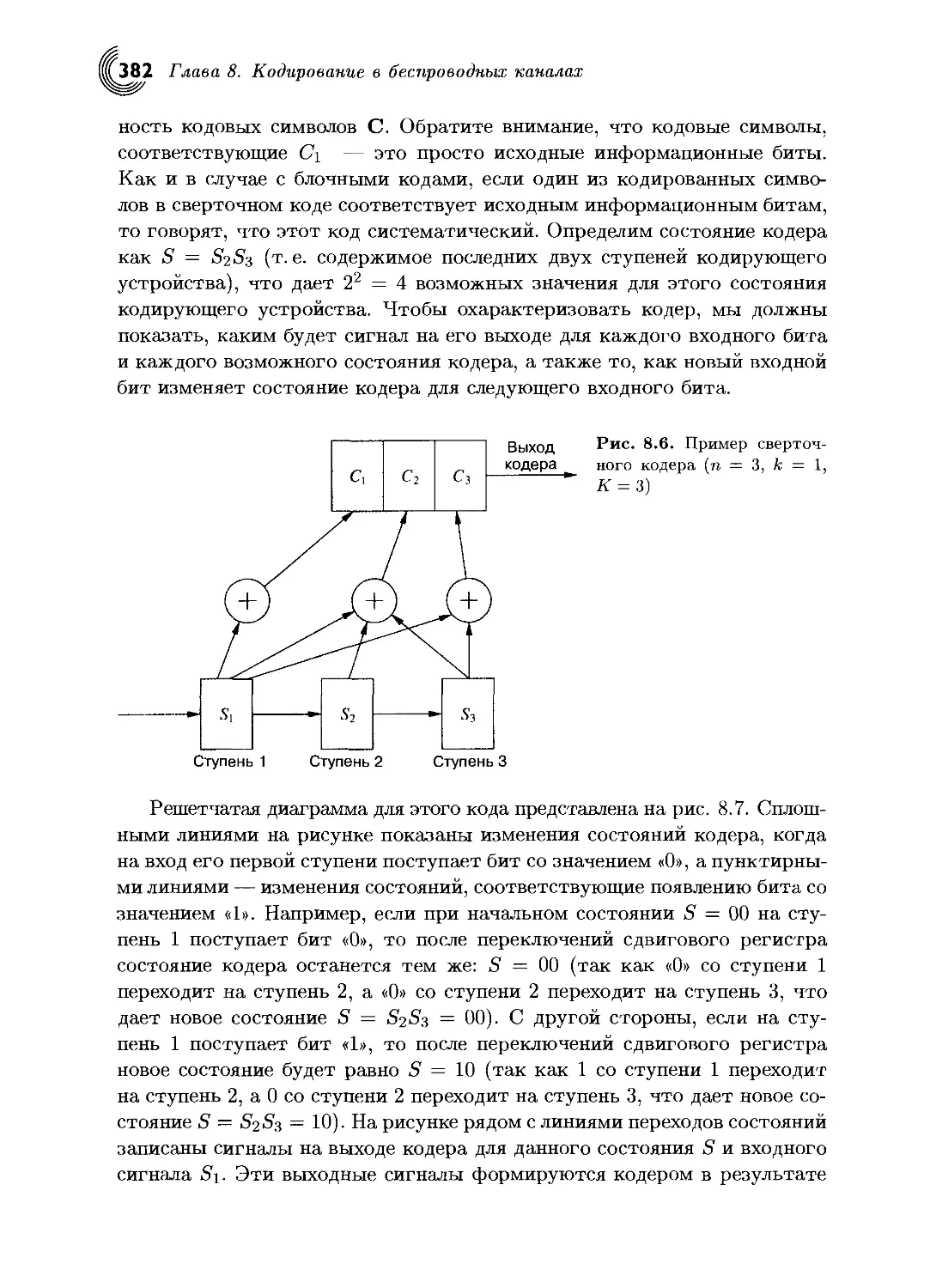
8.3. Сверточные коды...........................................380
10 Содержание
8.3.1. Характеристика кода: решетчатая диаграмма........381
8.3.2. Декодирование методом максимального правдоподобия ... 384
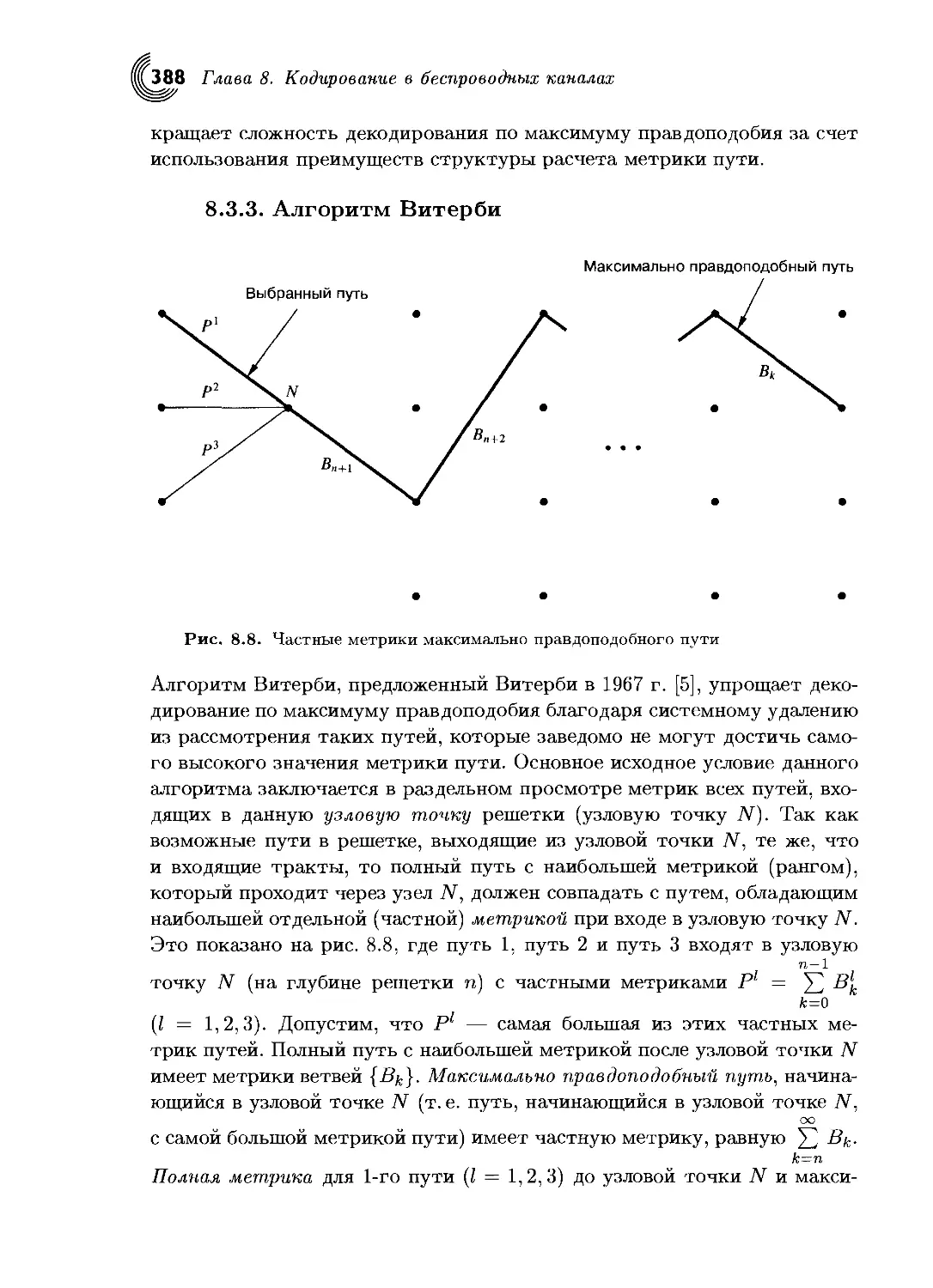
8.3.3. Алгоритм Витерби.................................388
8.3.4. Свойства расстояния..............................390
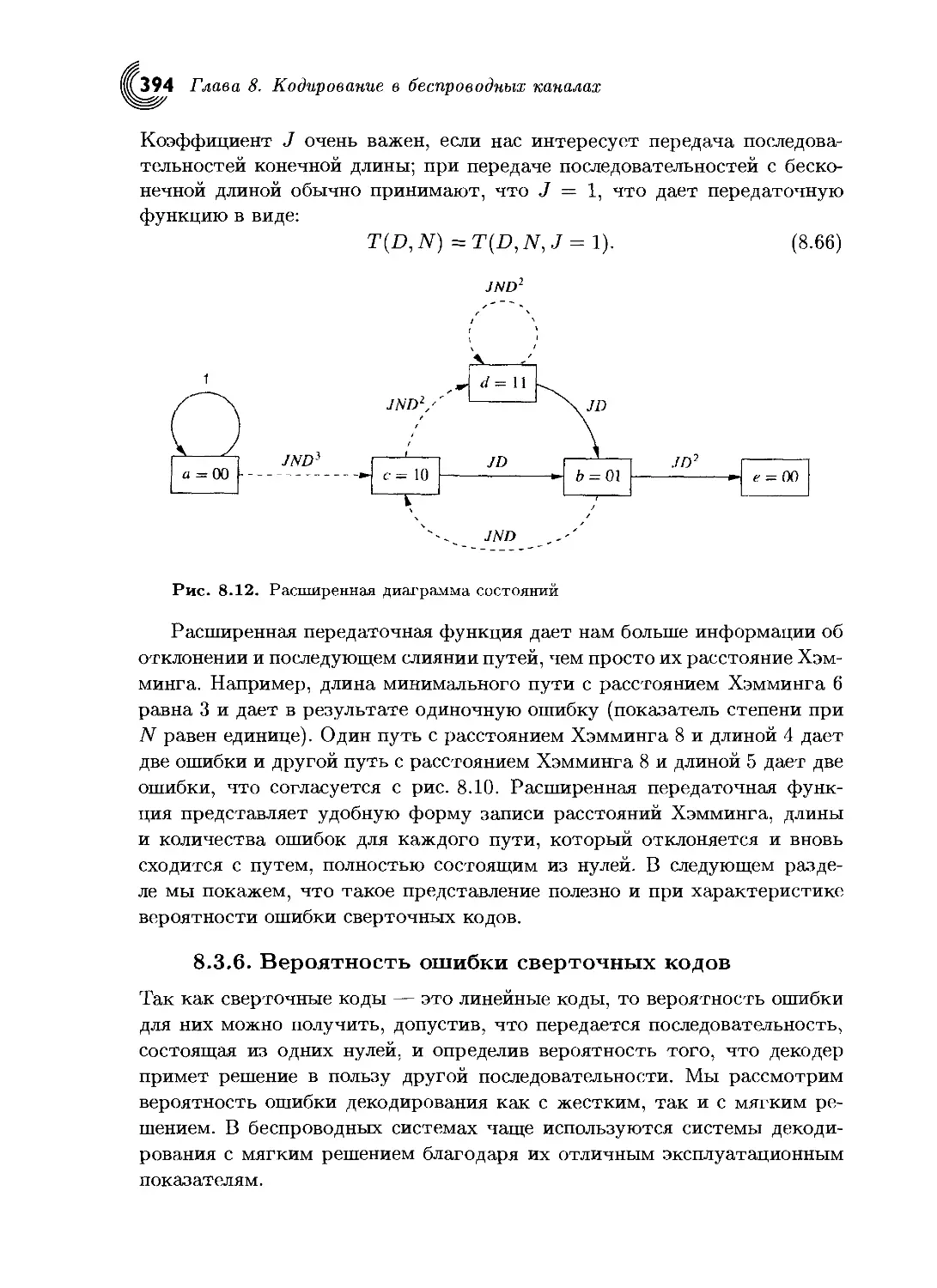
8.3.5. Диаграммы состояния и передаточные функции.......391
8.3.6. Вероятность ошибки сверточных кодов..............394
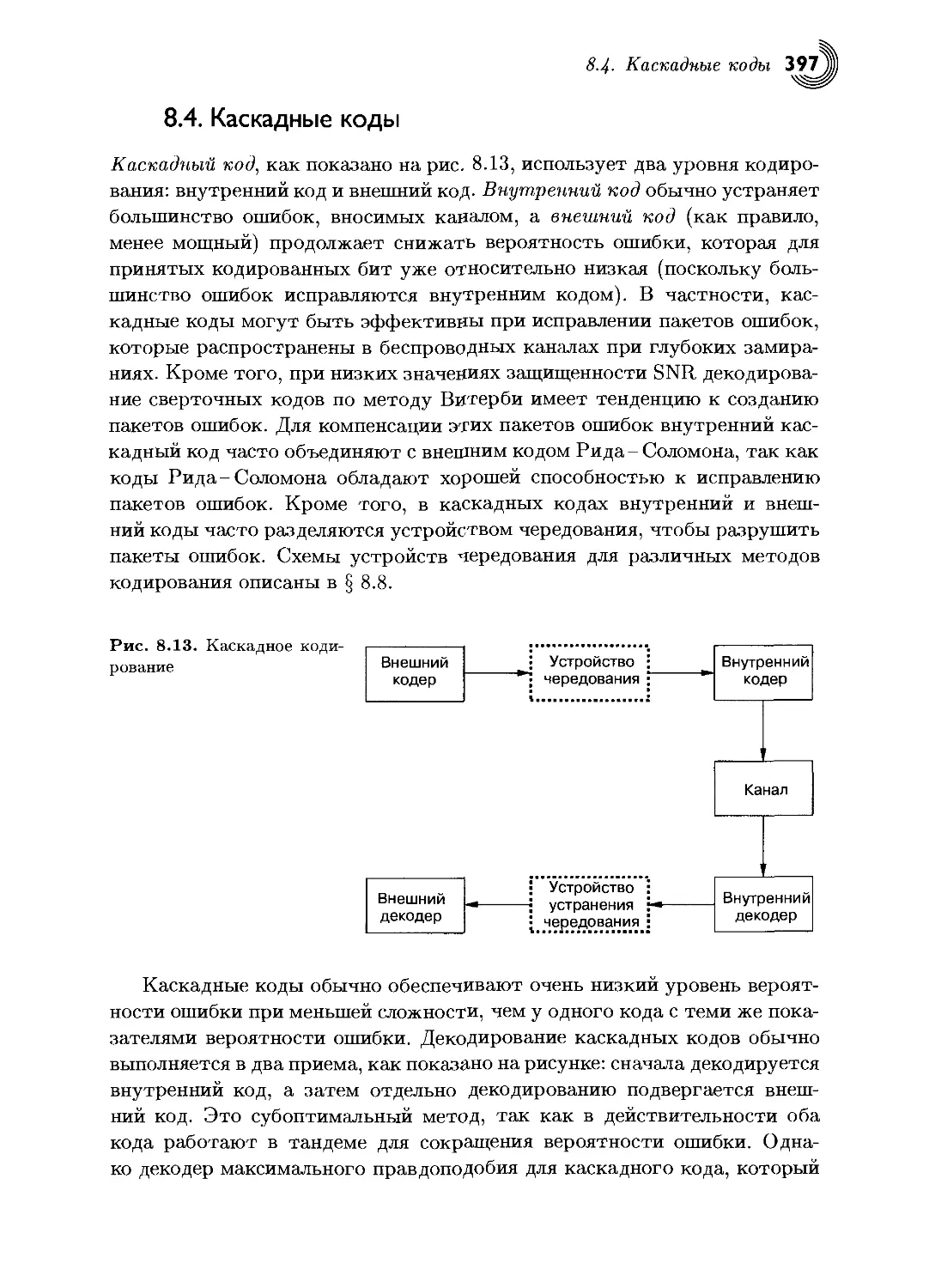
8.4. Каскадные коды.......................................397
8.5. Турбо-коды...........................................398
8.6. Коды с проверкой на четность низкой плотности........401
8.7. Кодовая модуляция....................................403
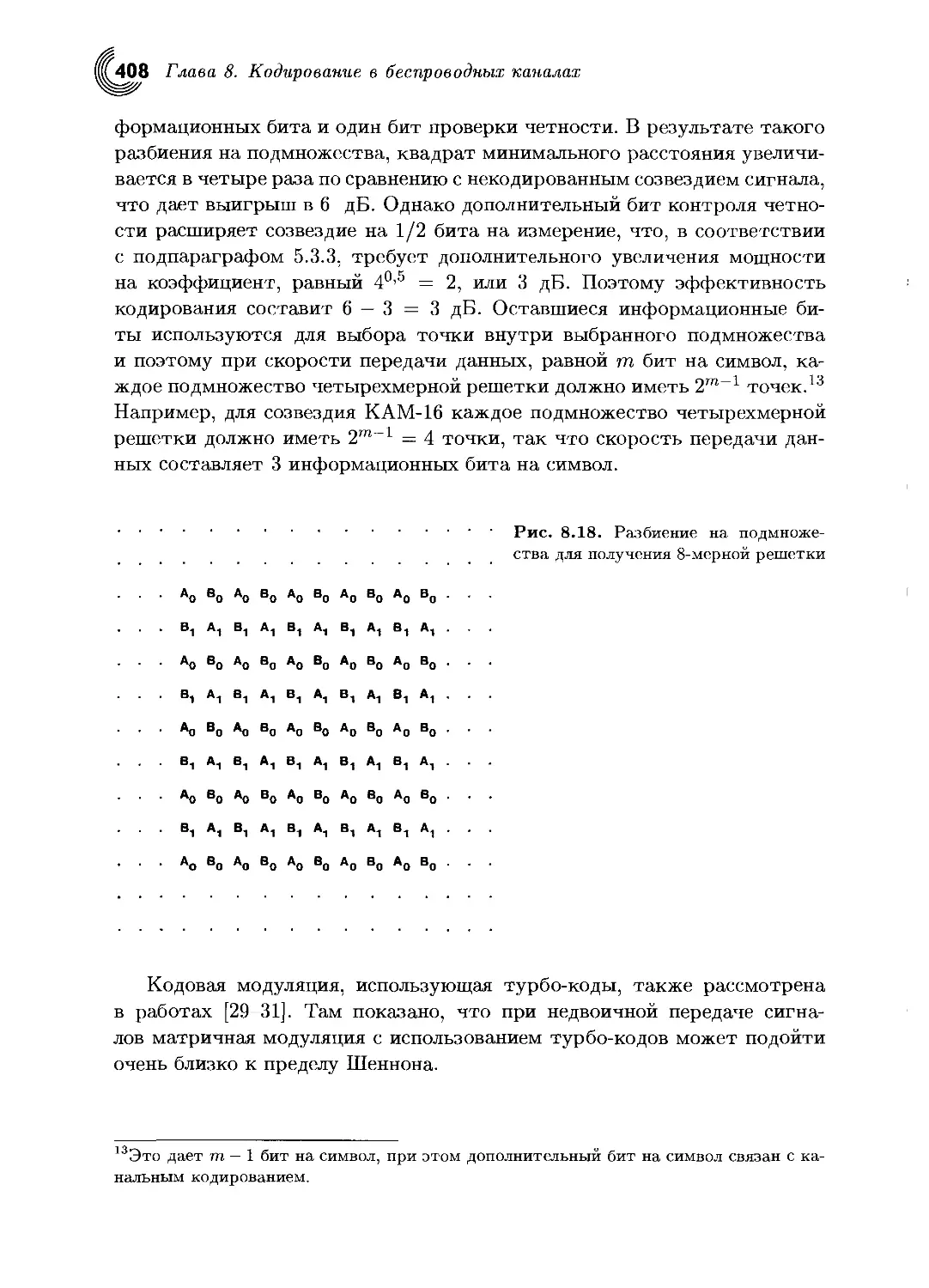
8.8. Кодирование и чередование в каналах с замираниями....409
8.8.1. Блочное кодирование с чередованием...............410
8.8.2. Сверточное кодирование с чередованием............413
8.8.3. Кодовая модуляция с чередованием символов/бит....414
8.9. Коды с неравномерной защитой от ошибок...............415
8.10. Совместное кодирование источника и канала............419
Задачи...............................................421
Литература.................................................426
Глава 9
Адаптивная модуляция и кодирование.........................431
9.1. Система с адаптивной передачей.......................432
9.2. Методы адаптации.....................................435
9.2.1. Методы адаптации, основанные на изменении скорости
передачи.................................................435
9.2.2. Методы адаптации, основанные на изменении мощности.436
9.2.3. Различная вероятность ошибки.....................438
9.2.4. Методы переменного кодирования...................438
9.2.5. Гибридные методы.................................439
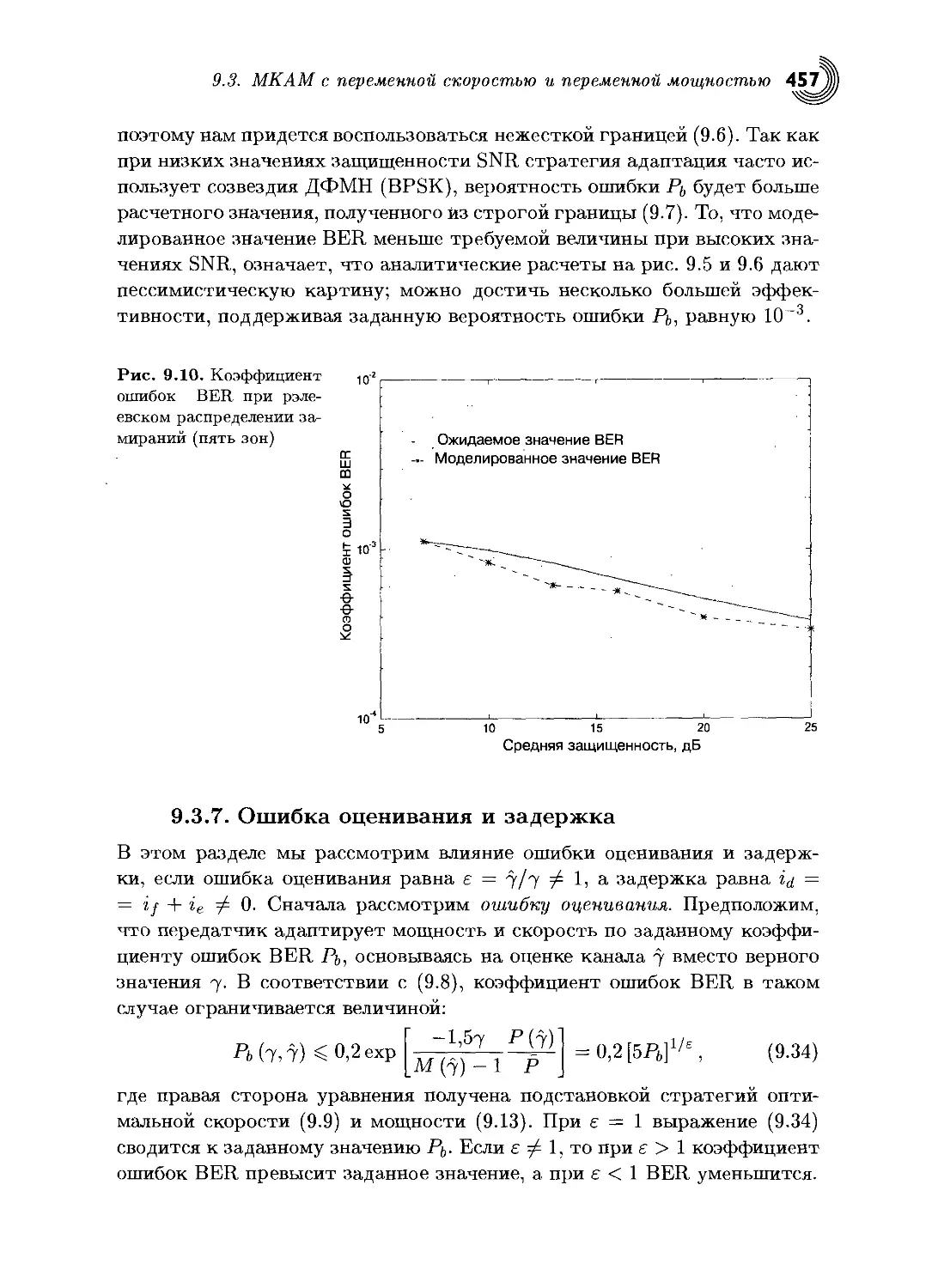
9.3. МКАМ с переменной скоростью и переменной мощностью.....440
9.3.1. Граничные значения вероятности ошибок............440
9.3.2. Схемы с адаптацией скорости и мощности...........441
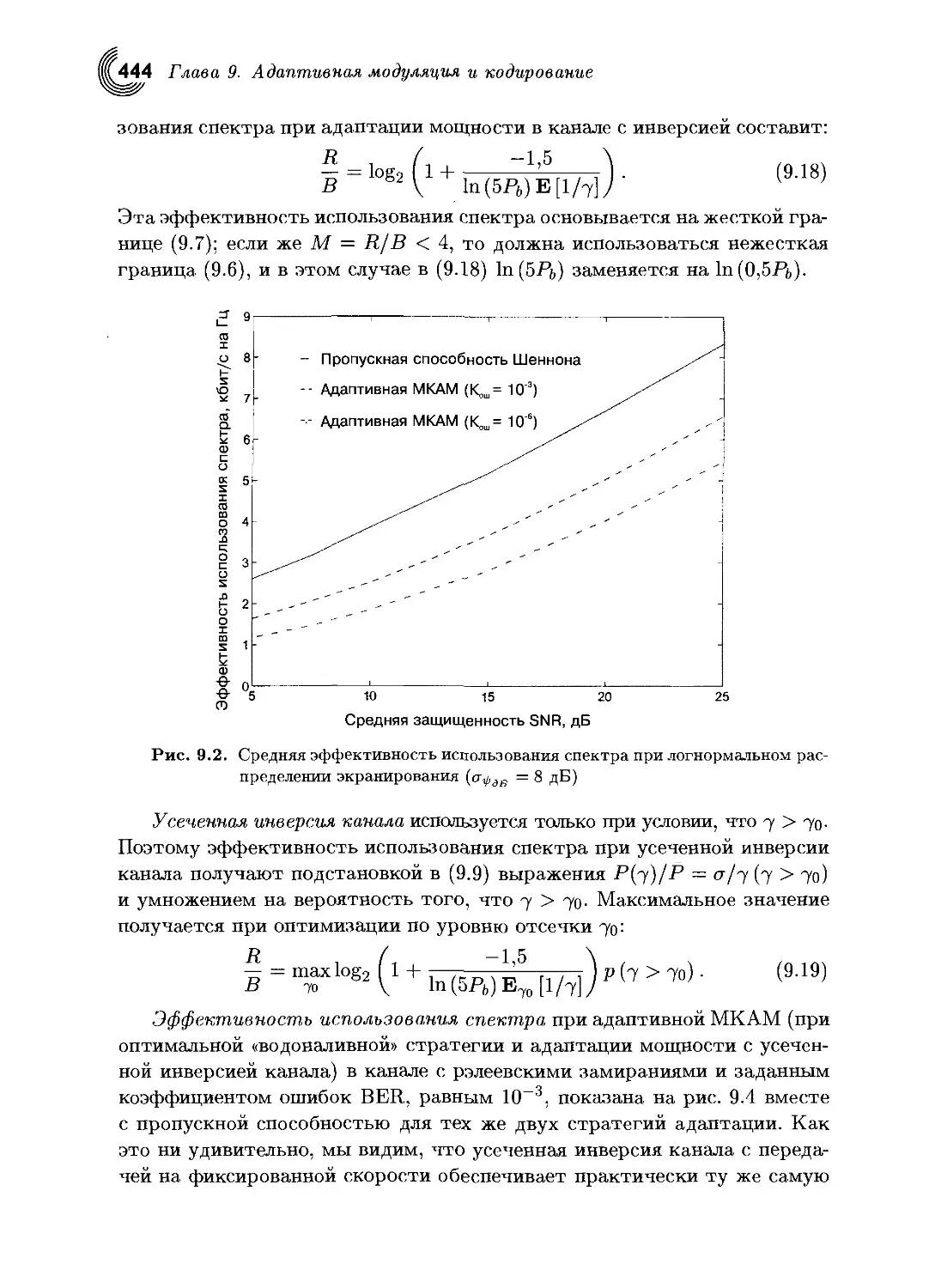
9.3.3. Инверсия в канале с фиксированной скоростью......443
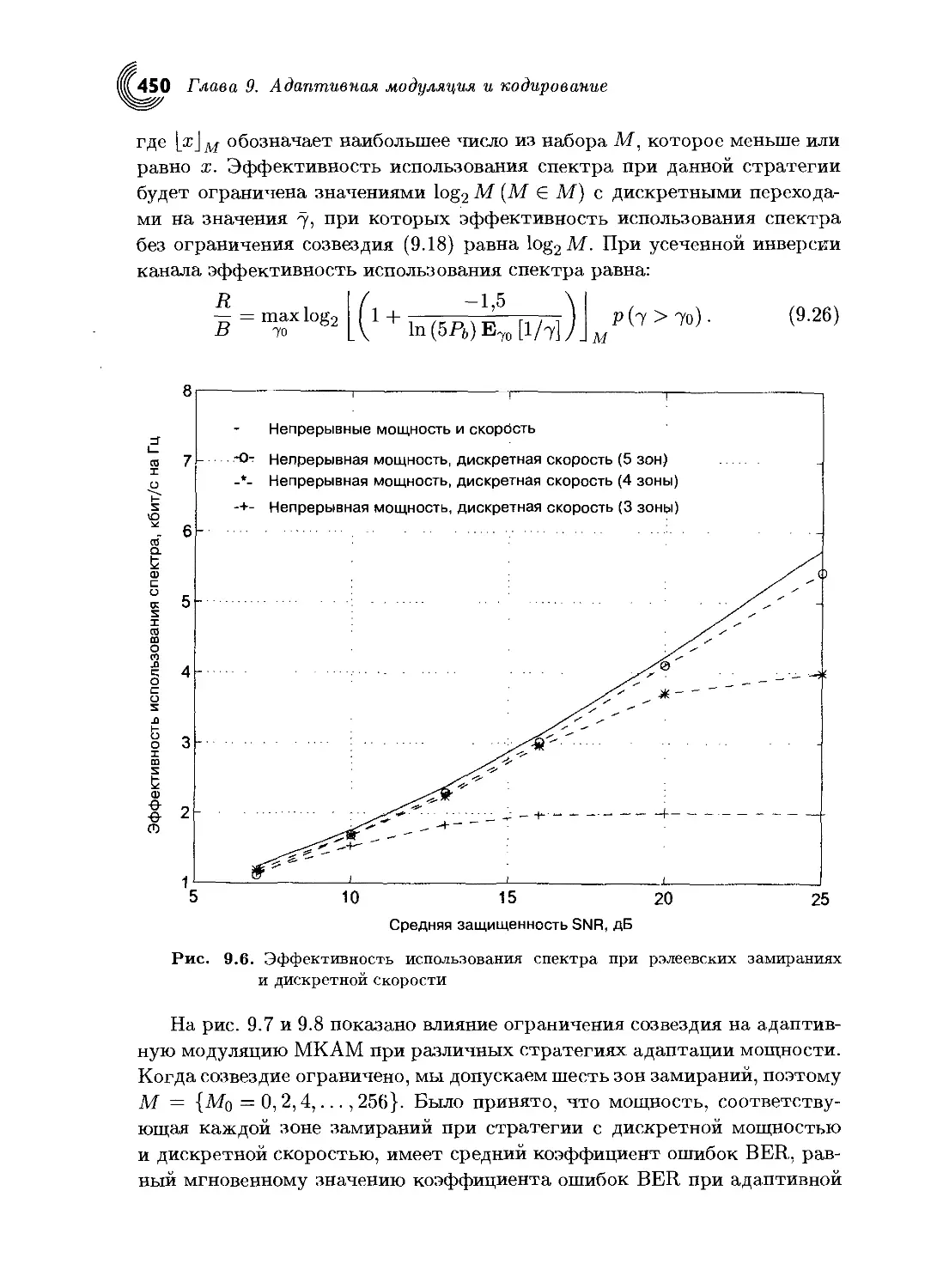
9.3.4. Адаптация при дискретной скорости................446
9.3.5. Средняя продолжительность зоны замираний.........452
9.3.6. Точная вероятность цифровой ошибки в сравнении с при-
ближенной................................................455
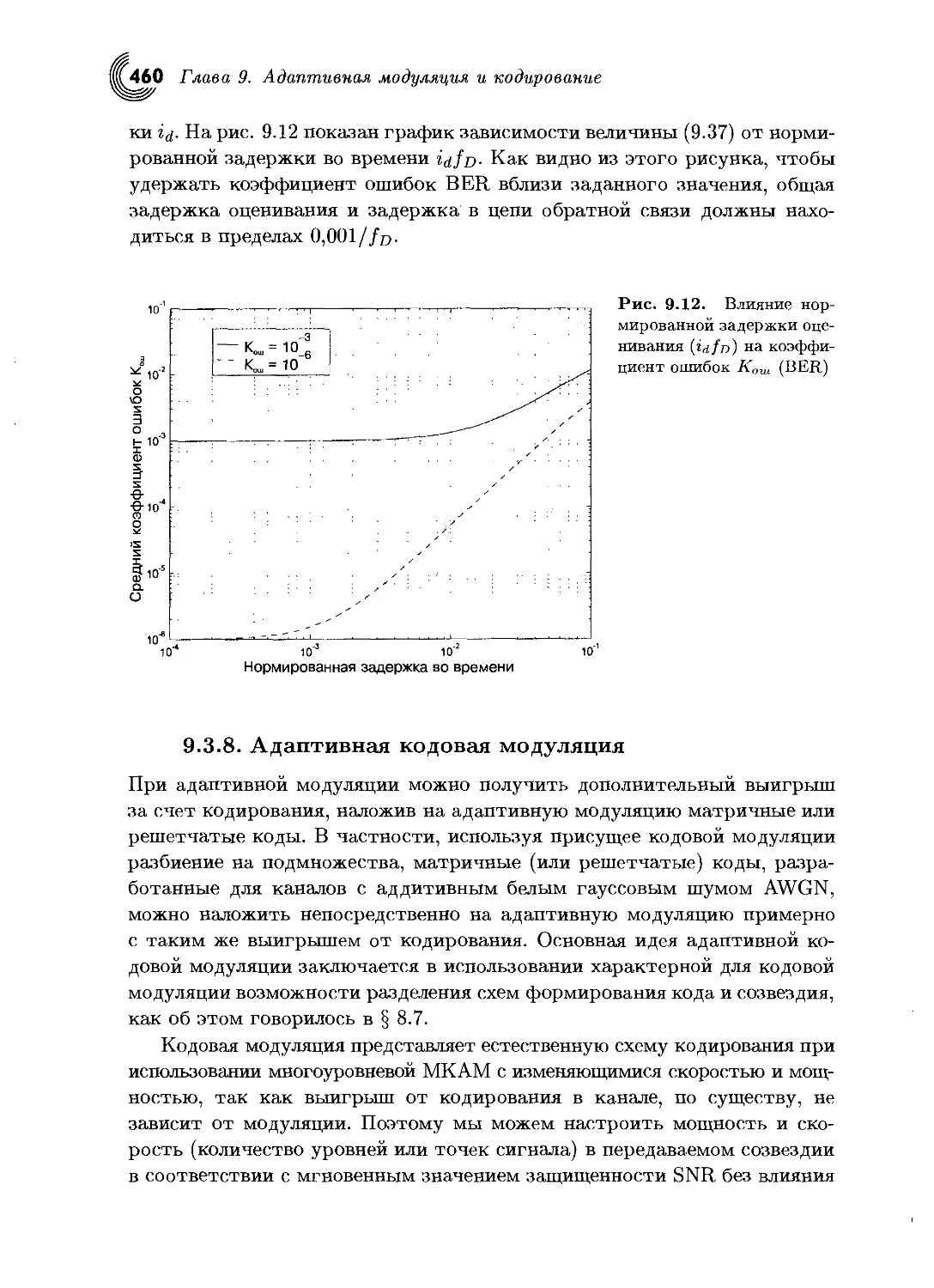
9.3.7. Ошибка оценивания и задержка.....................457
9.3.8. Адаптивная кодовая модуляция.....................460
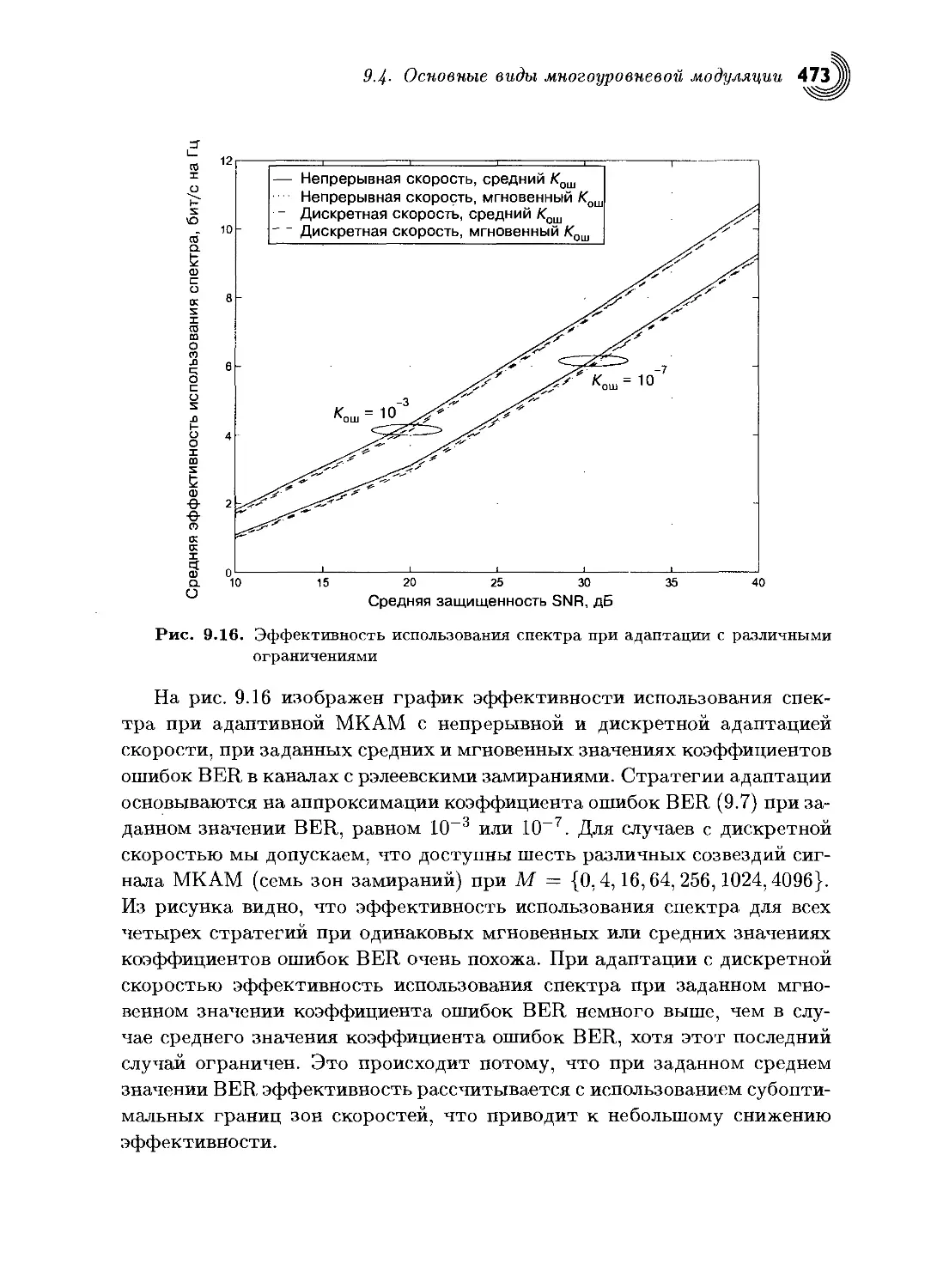
9.4. Основные виды многоуровневой модуляции...............463
Содержание
9.4.1. Адаптация с непрерывной скоростью................463
9.4.2. Адаптация с дискретной скоростью.................468
9.4.3. Среднее заданное значение коэффициента ошибок BER ... 469
9.5. Адаптивные методы при сочетании быстрых и медленных за-
мираний....................................................474
Задачи...............................................476
Литература....................................481
Глава 10
Многоэлементные антенны и пространственно-времен-
ные методы передачи.......................................484
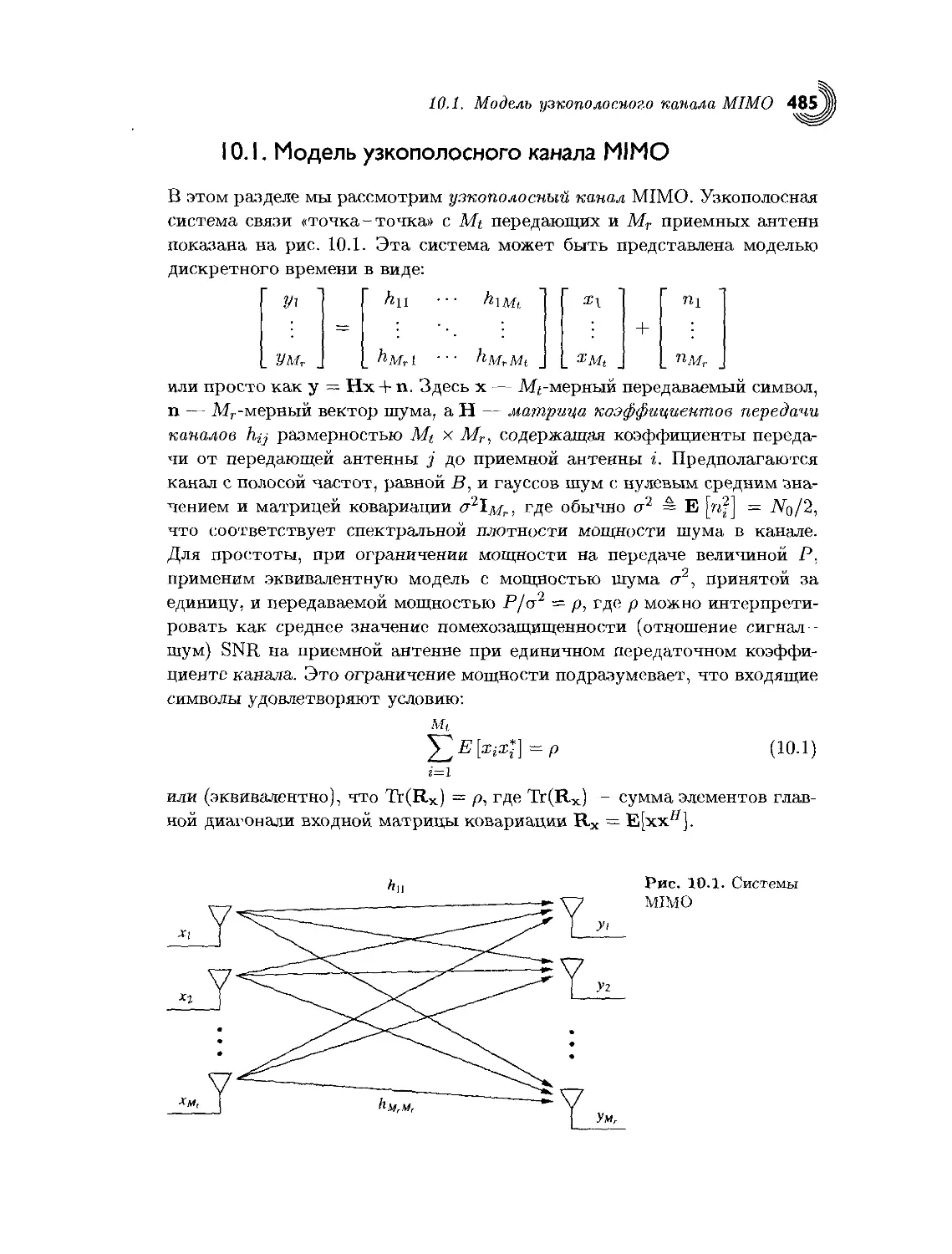
10.1. Модель узкополосного канала MIM0....................485
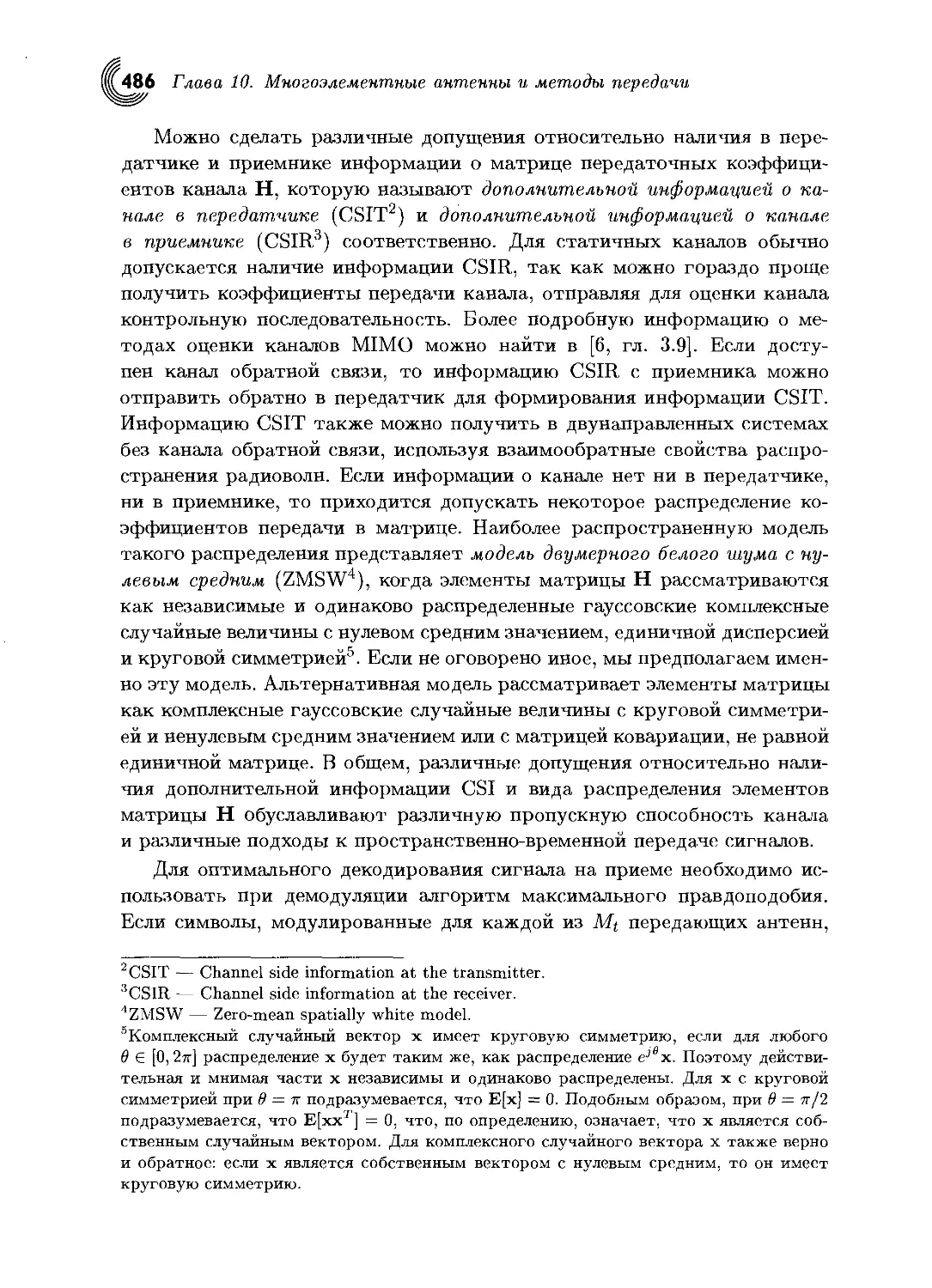
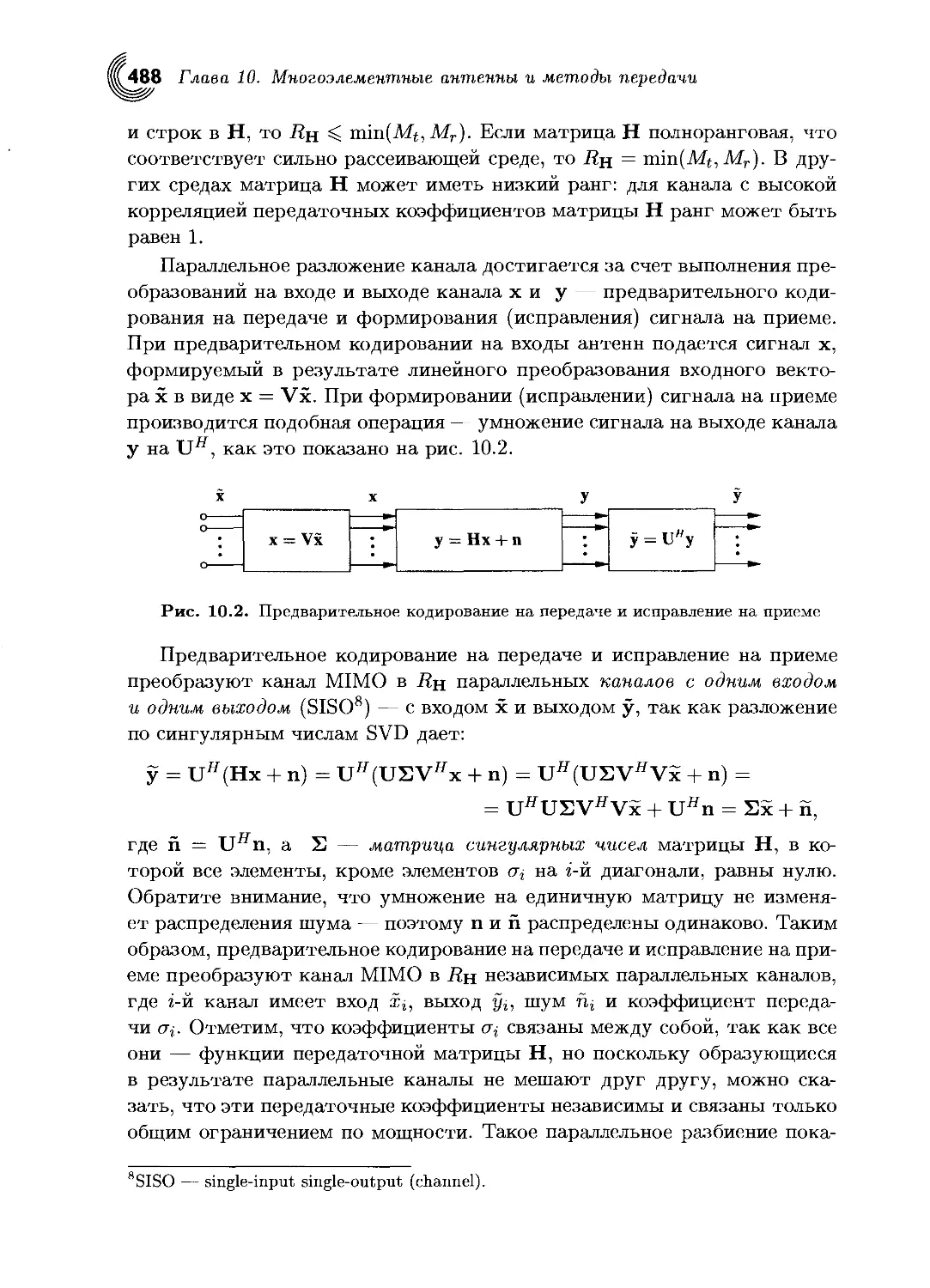
10.2. Параллельное разложение канала MIM0.................487
10.3. Пропускная способность канала MIM0..................490
10.3.1. Статичные каналы...............................490
10.3.2. Каналы с замираниями...........................496
10.4. Выигрыш от разнесения в системах MIMO: формирование
диаграммы направленности антенны.........................503
10.5. Компромиссы между разнесенным приемом и мультиплекси-
рованием.................................................505
10.6. Пространственно-временная модуляция и кодирование...507
10.6.1. Детектирование по максимуму правдоподобия и вероят-
ность парной ошибки....................................508
10.6.2. Критерии ранга и определителя..................510
10.6.3. Пространственно-временные решетчатые и блочные коды .... 510
10.6.4. Пространственное мультиплексирование и архитектуры
BLAST..................................................511
10.7. Каналы MIMO с частотно-селективными замираниями.....515
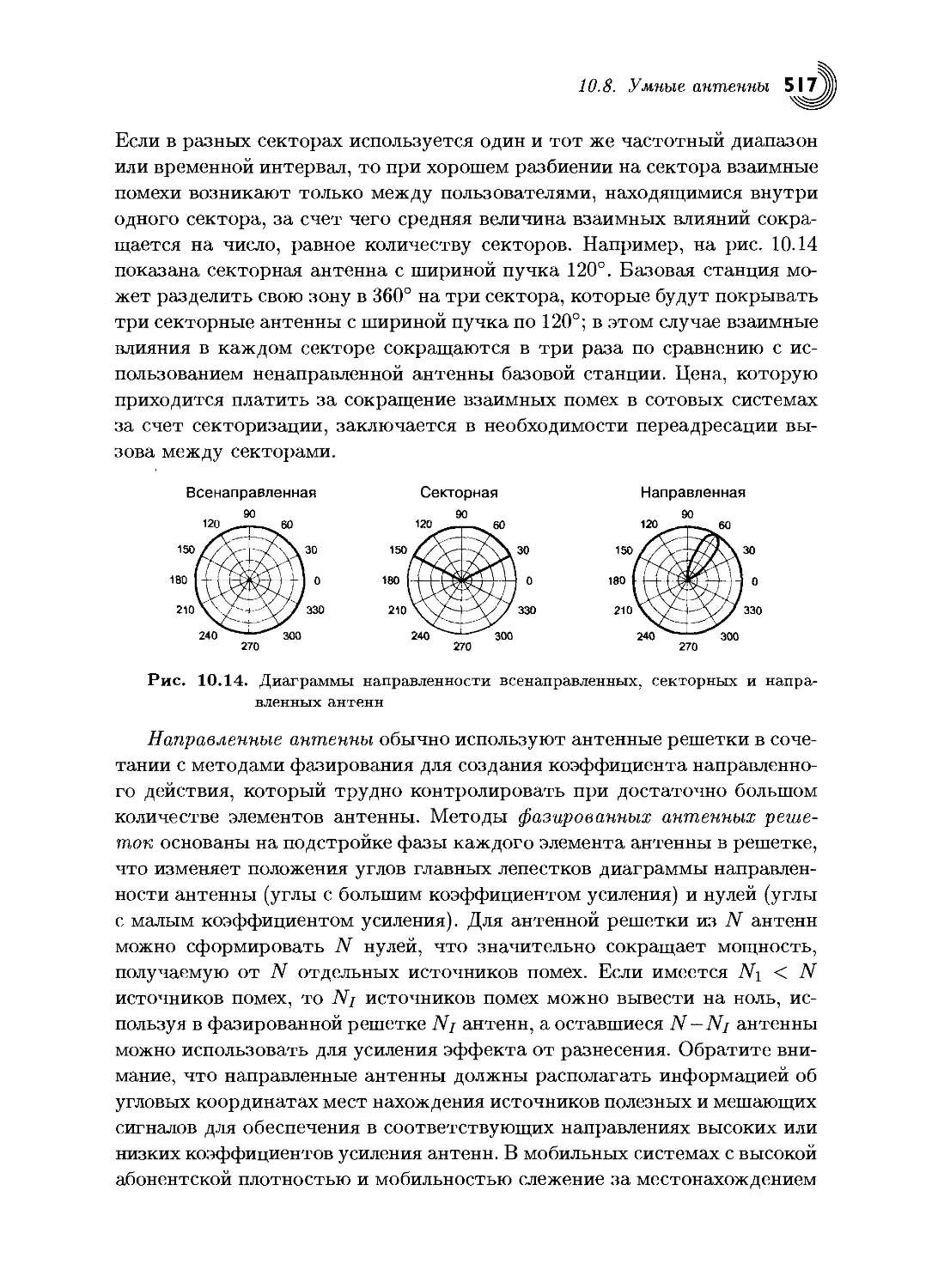
10.8. Умные антенны.......................................516
Задачи..............................................518
Литература................................................522
Глава 11
Выравнивание — коррекция каналов....................527
11.1. Повышение корректором шума..........................528
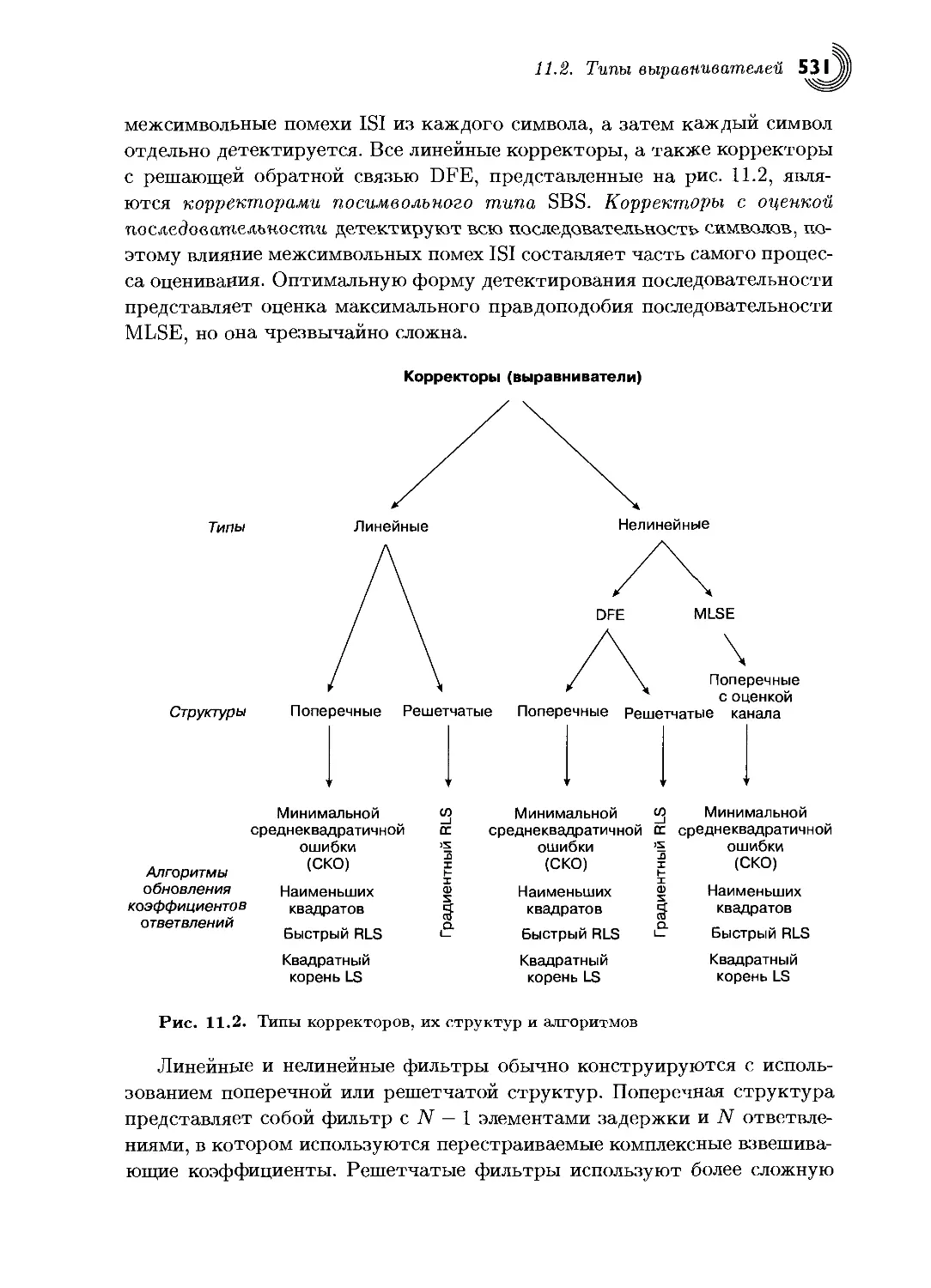
11.2. Типы выравнивателей.................................530
11.3. Сжатый спектр и условия передачи без межсимвольных иска-
жений ISI................................................532
11.4. Линейные корректоры.................................536
Содержание
11.4.1. Фильтры с обращением в нуль незначащих коэффициен-
тов (ZF)................................................537
11.4.2. Корректоры с минимальной среднеквадратичной ошиб-
кой (MMSE)..............................................539
11.5. Максимально правдоподобная оценка последовательности..543
11.6. Выравнивание с решающей обратной связью .............545
11.7. Другие методы выравнивания канала....................547
11.8. Адаптивные фильтры: настройка и слежение.............548
Задачи...............................................552
Литература.................................................558
Глава 12
Модуляция на нескольких несущих............................560
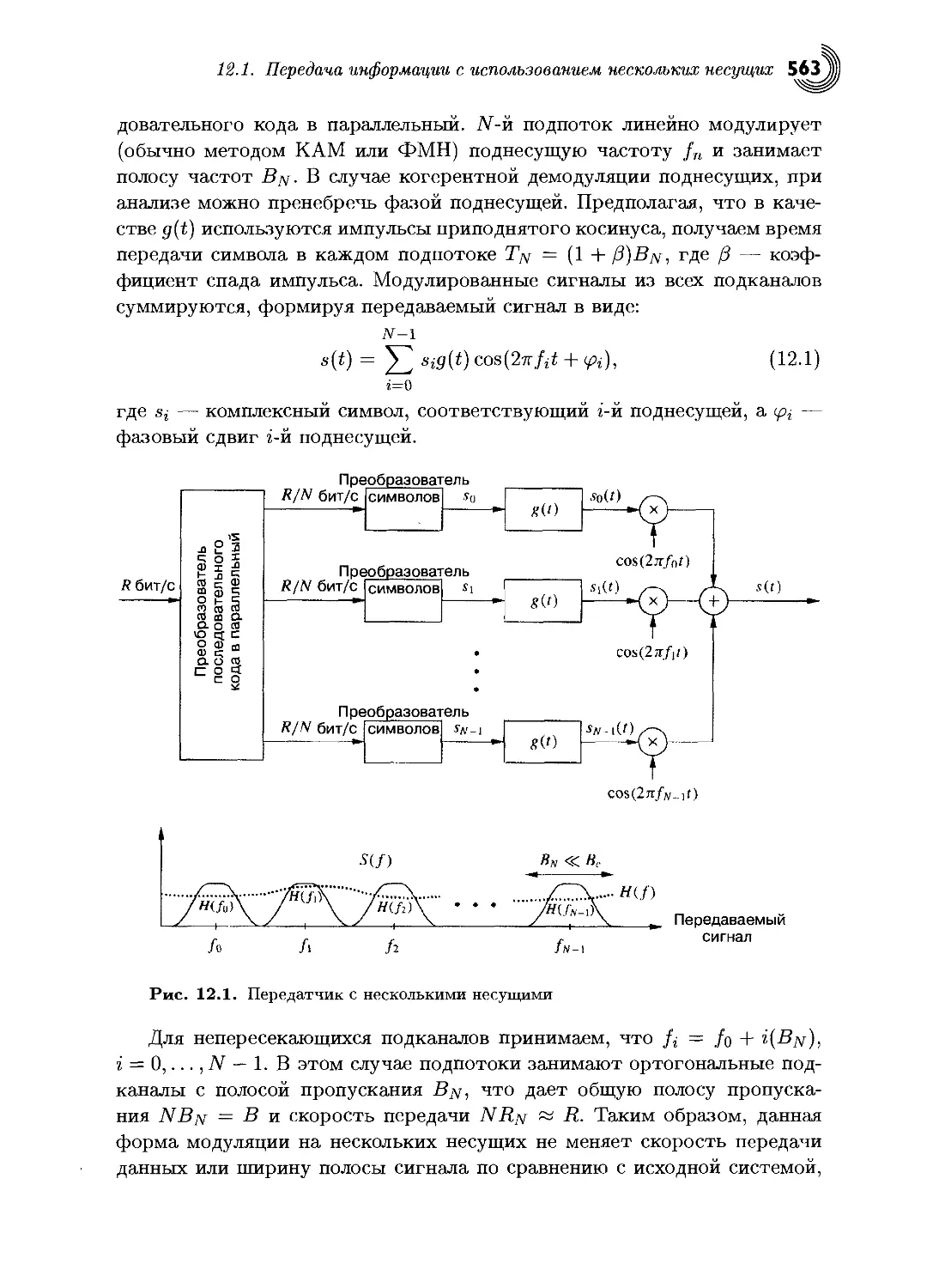
12.1. Передача информации с использованием нескольких несущих . 562
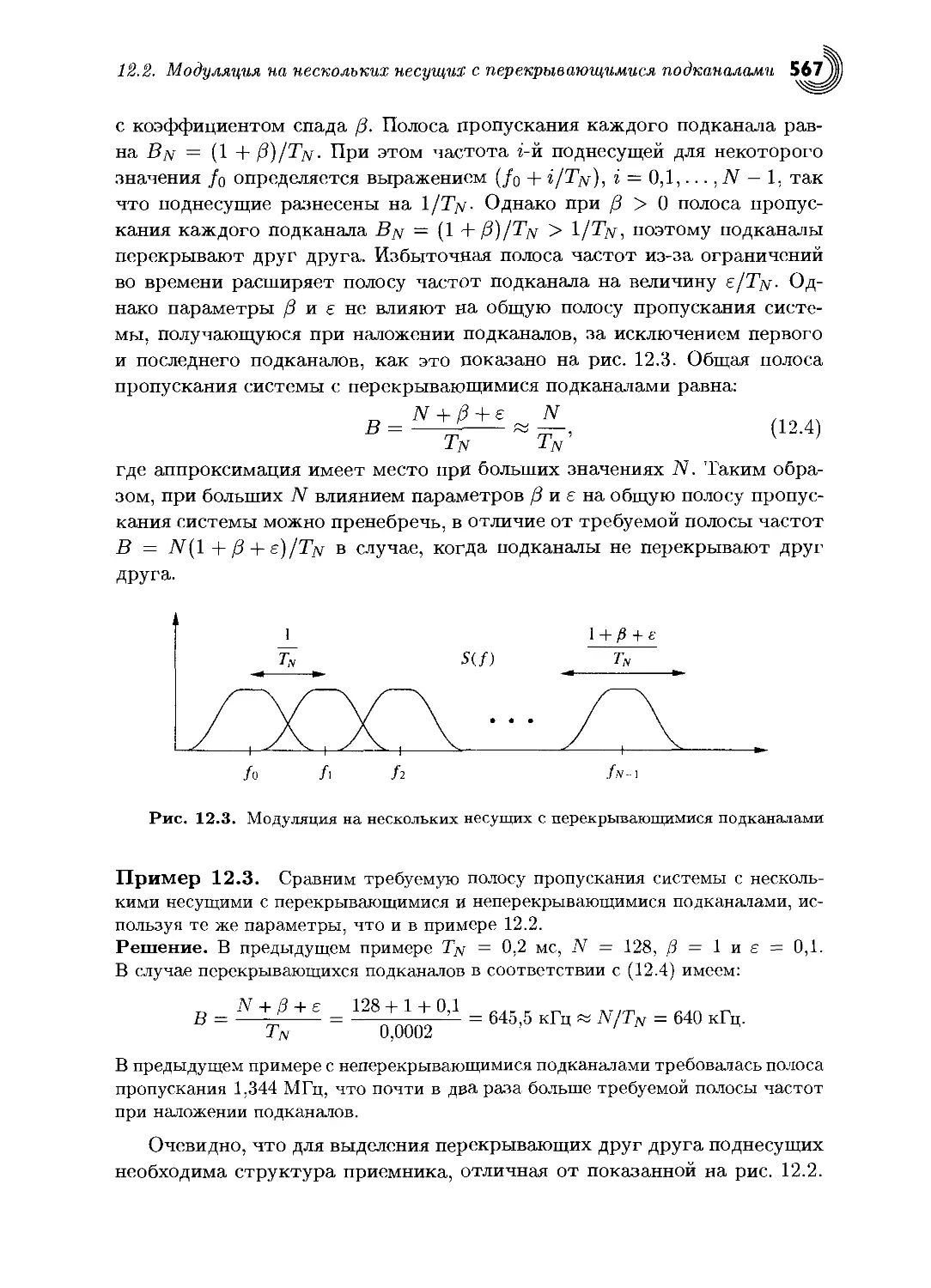
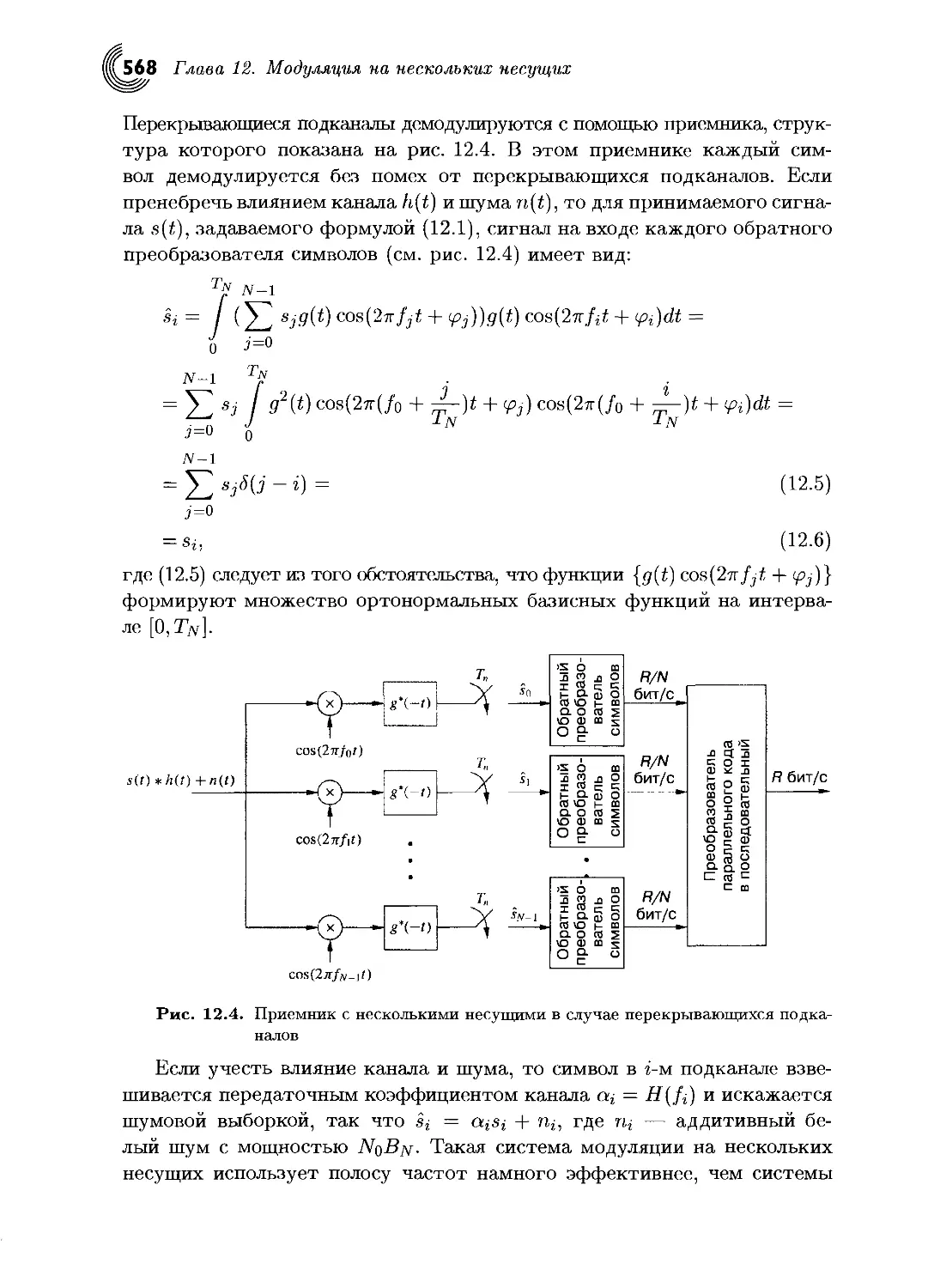
12.2. Модуляция на нескольких несущих с перекрывающимися под-
каналами ................................................566
12.3. Ослабление замираний поднесущей......................569
12.3.1. Кодирование с чередованием по времени и частоте.570
12.3.2. Коррекция частоты...............................570
12.3.3. Предварительное кодирование.....................571
12.3.4. Адаптивная нагрузка.............................571
12.4. Дискретная реализация модуляции на нескольких несущих.573
12.4.1. ДПФ и его свойства..............................573
12.4.2. Циклический префикс.............................575
12.4.3. Мультиплексирование с ортогональным частотным раз-
делением каналов — ортогональное ЧРКОЧРК................577
12.4.4. Матричное представление ОЧРК....................580
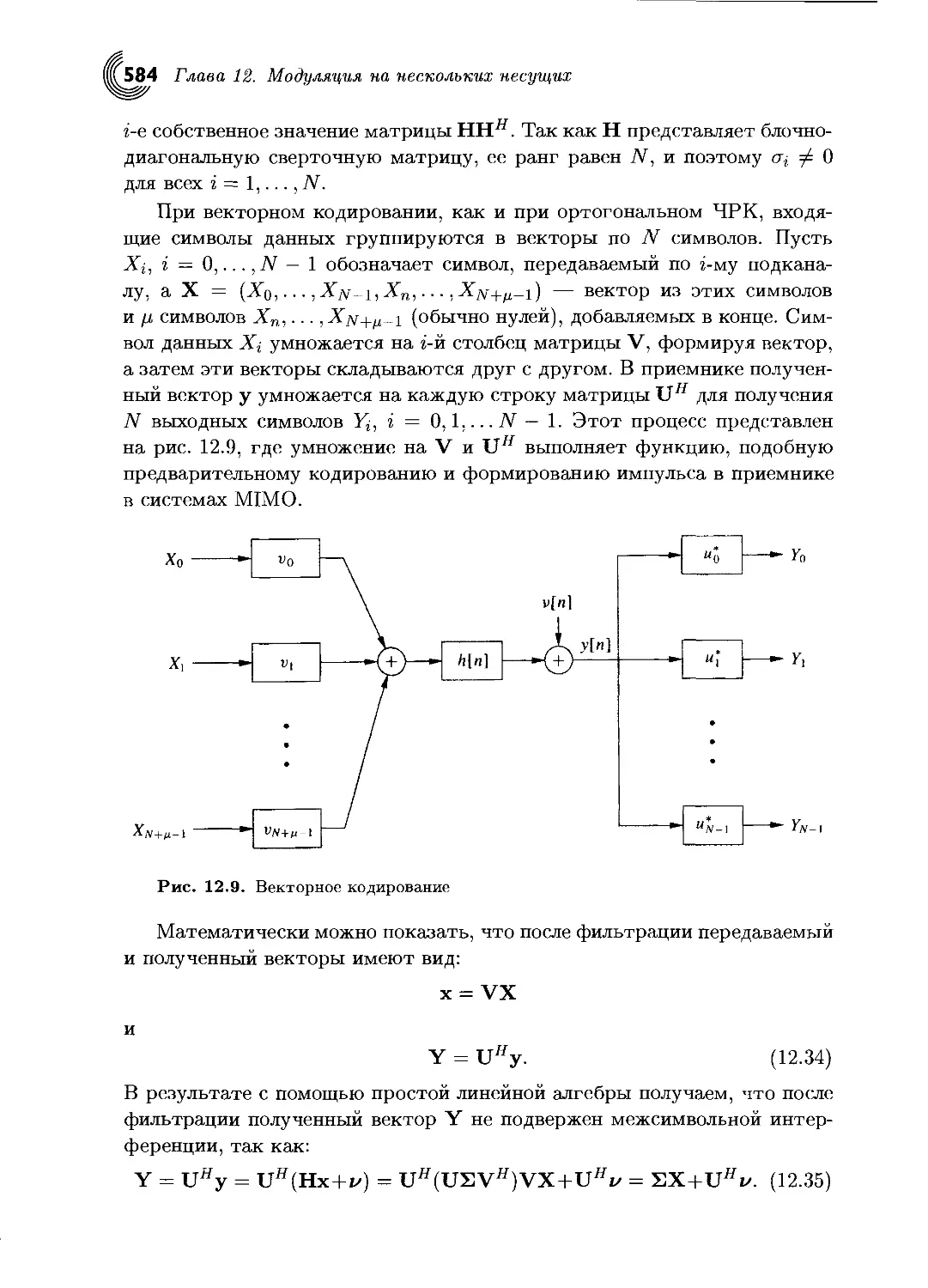
12.4.5. Векторное кодирование...........................583
12.5. Проблемы систем с несколькими несущими...............587
12.5.1. Отношение пиковой и средней мощностей...........587
12.5.2. Частотный и временной сдвиг.....................589
12.6. Рассмотрение конкретного случая: стандарт локальных бес-
проводных сетей IEEE 802.11а........................591
Задачи...............................................593
Литература.................................................597
Содержание
Глава 13
Широкополосные системы передачи..........................600
13.1. Принципы широкополосной передачи...................600
13.2. Метод расширения спектра прямой последовательностью —
DSSS................................................609
13.2.1. Модель системы DSSS ..........................609
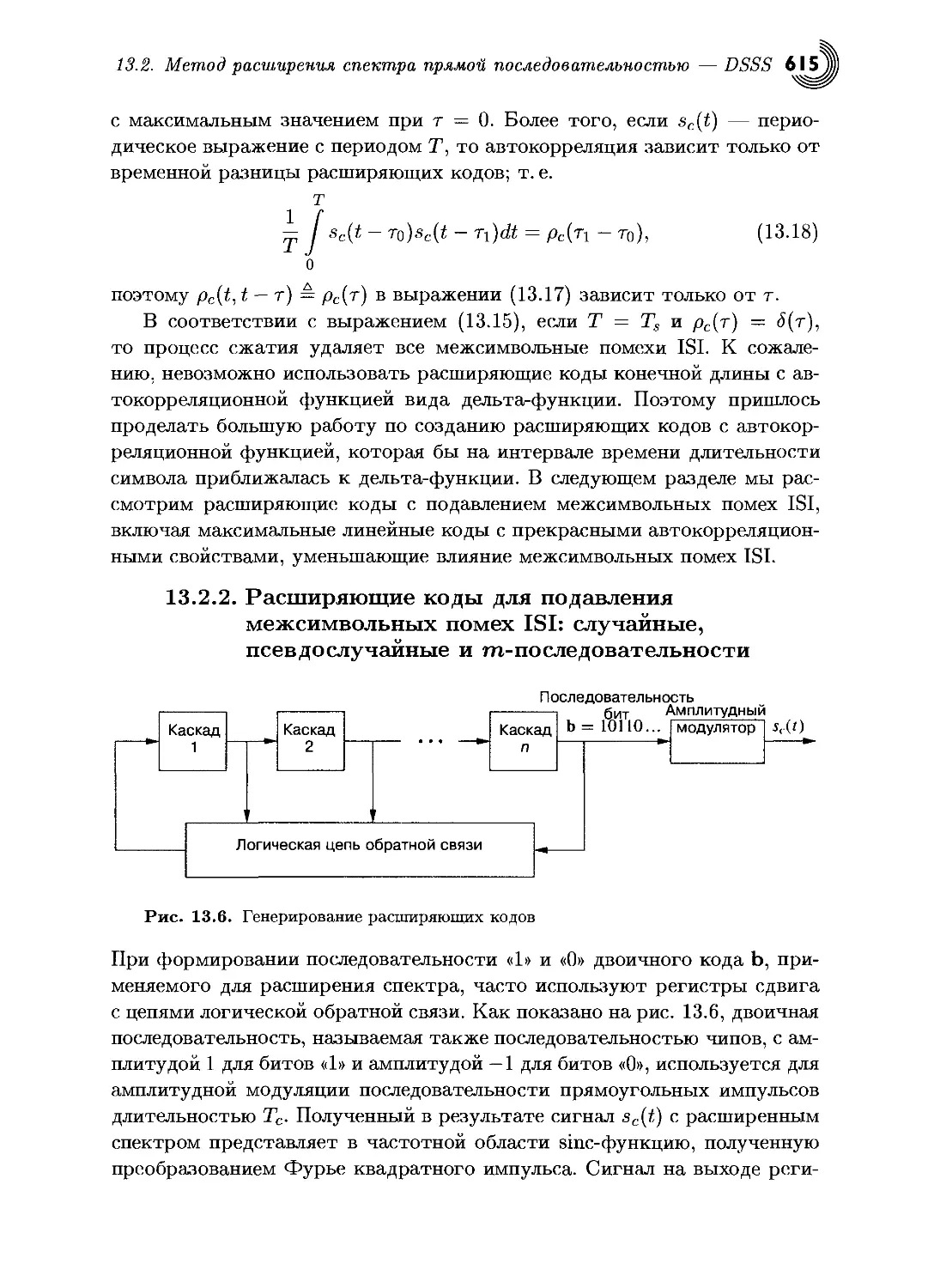
13.2.2. Расширяющие коды для подавления межсимвольных по-
мех ISI: случайные, псевдослучайные и т-последователь-
ности...........................................615
13.2.3. Синхронизация.................................620
13.2.4. Приемники RAKE................................624
13.3. Расширение спектра методом скачкообразной перестройки
частоты (FHSS)............................................627
13.4. Многопользовательские многоканальные системы с модуля-
цией прямой последовательностью DSSS .....................630
13.4.1. Расширяющие коды в многопользовательской DSSS..632
13.4.2. Нисходящие каналы.............................637
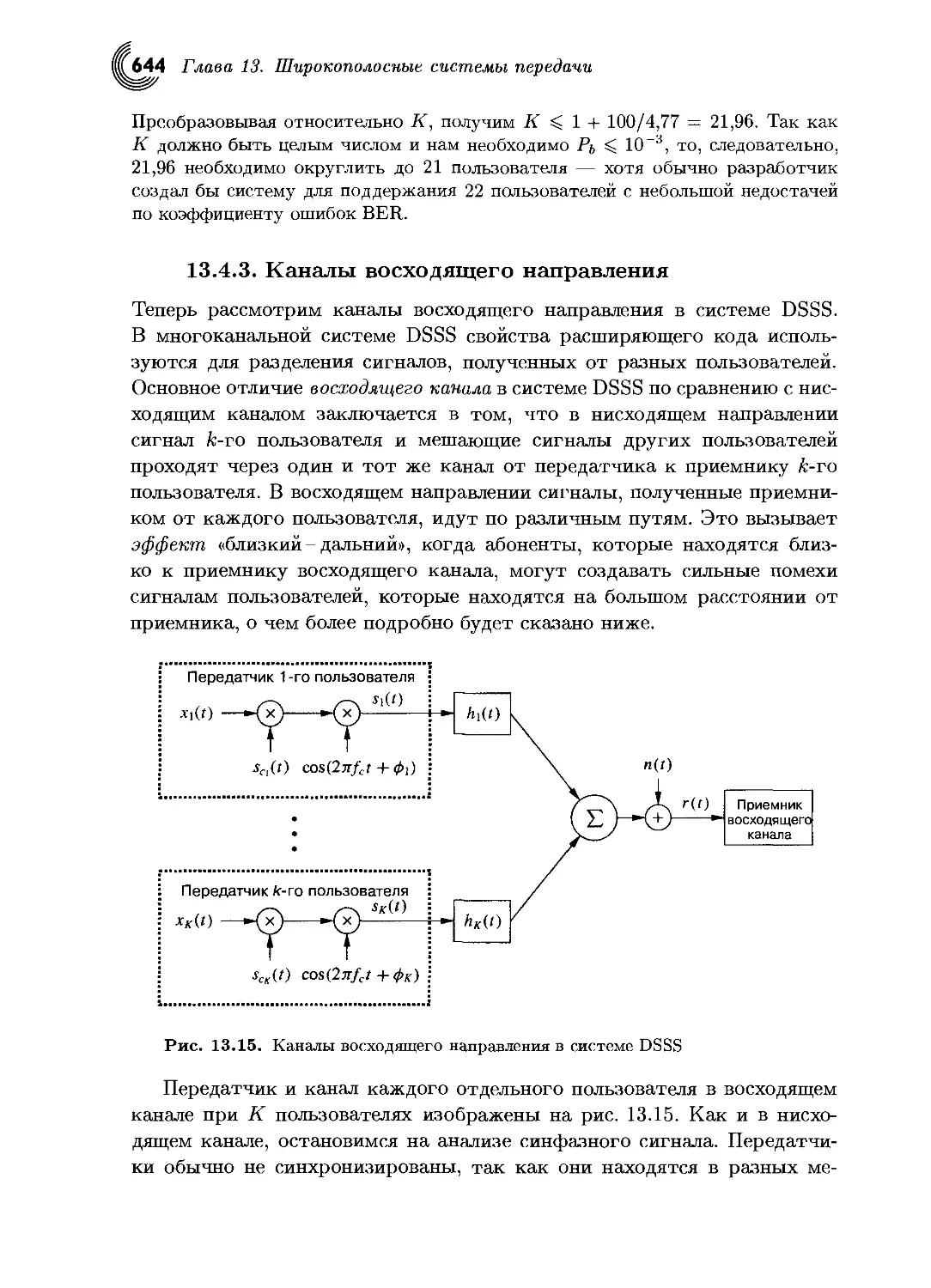
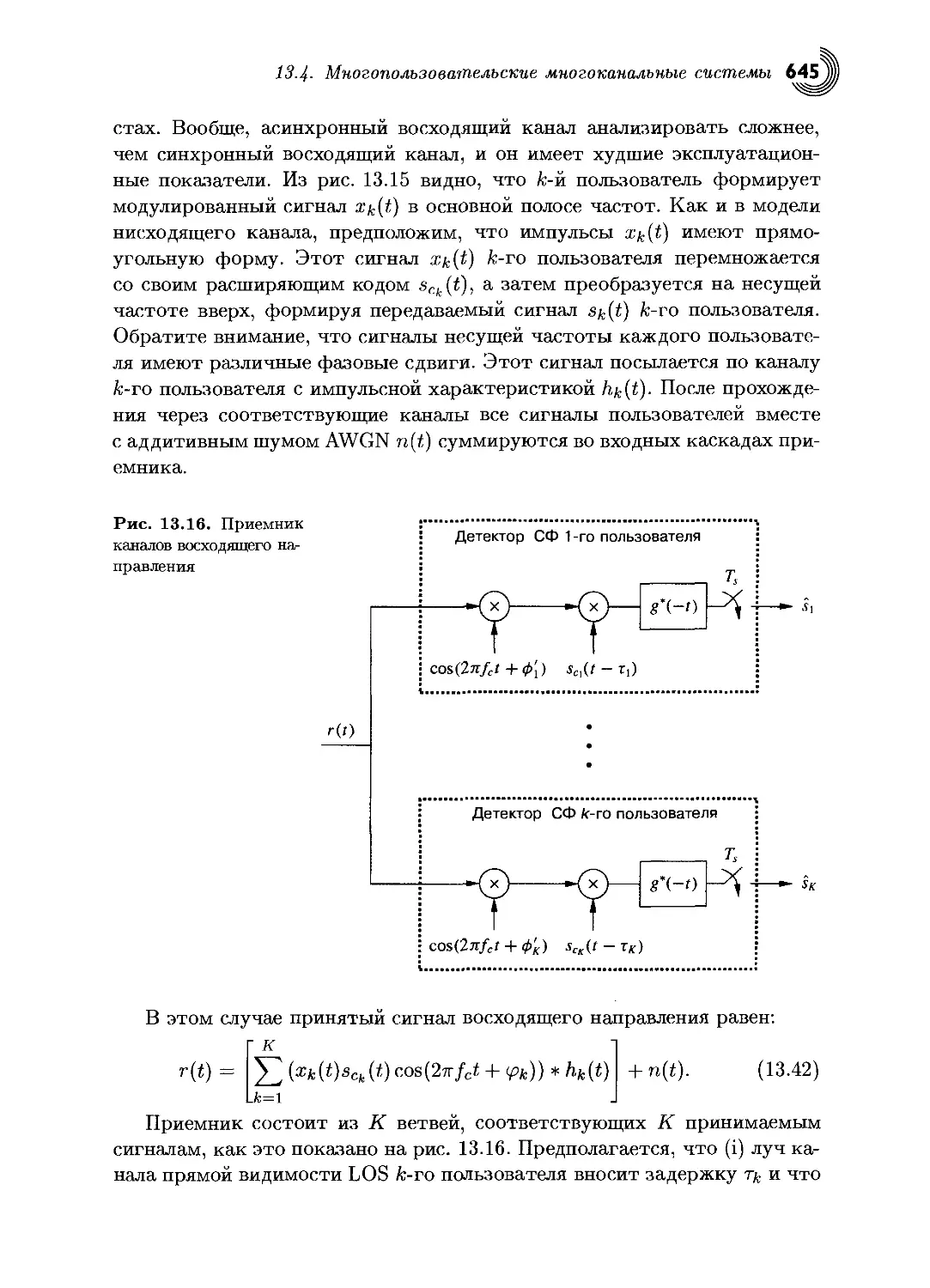
13.4.3. Каналы восходящего направления ...............644
13.4.4. Многоканальное детектирование.................650
13.4.5. Многочастотная МДКР (CDMA) — MC-CDMA..........655
13.5. Многопользовательская — многоканальная система с расши-
рением спектра методом частотного скачка FHSS.........658
Задачи..............................................659
Литература...............................................667
Глава 14
Многопользовательские многоканальные системы..............670
14.1. Групповые (многопользовательские) каналы радиодоступа:
восходящий и нисходящий каналы............................671
14.2. Многостанционный доступ............................673
14.2.1. Многостанционный доступ с частотным разделением —
МДЧР (FDMA)............................................675
14.2.2. Многостанционный доступ с временным разделением —
МДВР (TDMA)............................................677
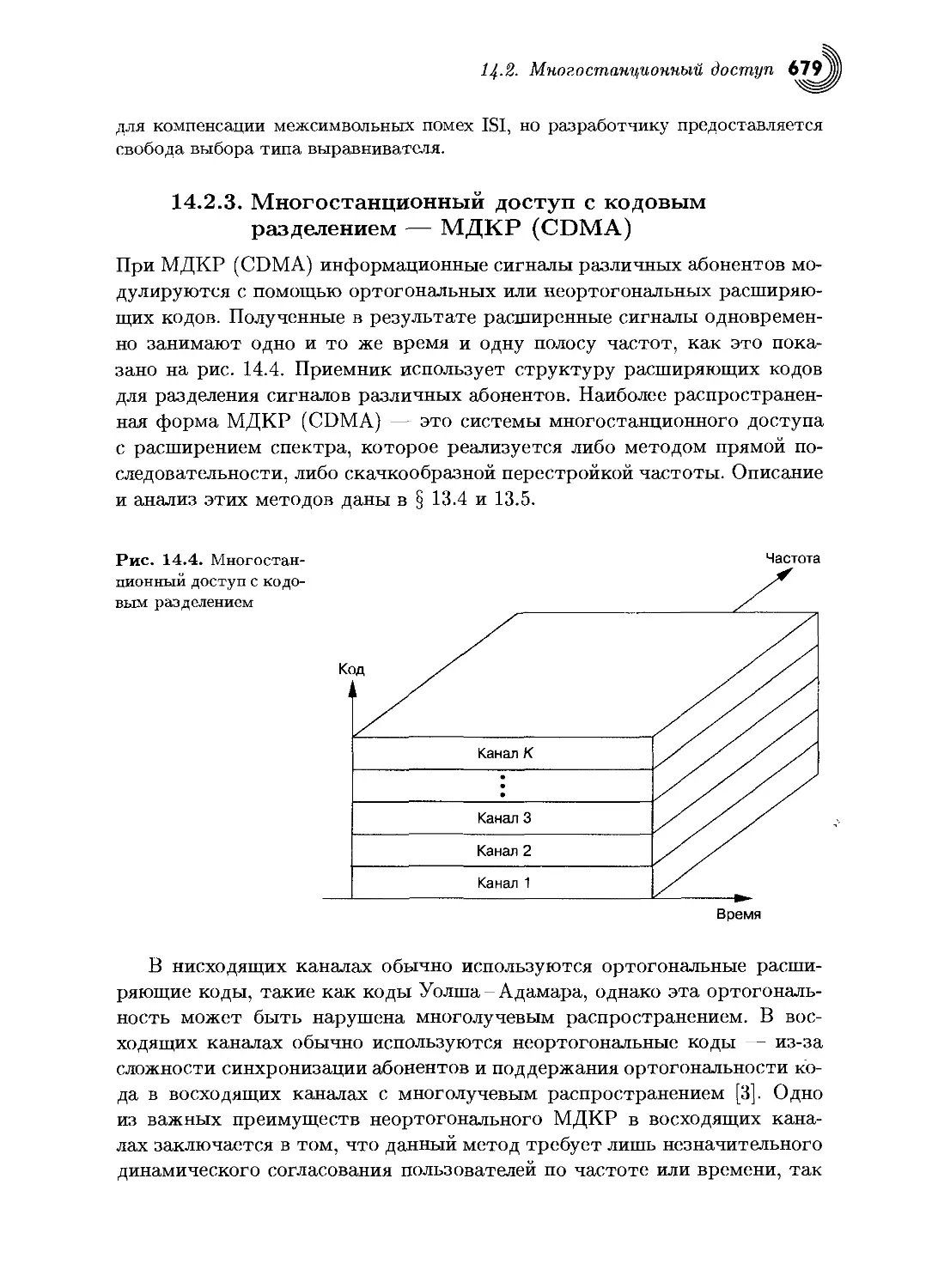
14.2.3. Многостанционный доступ с кодовым разделением —
МДКР (CDMA) ...........................................679
14.2.4. Многостанционный доступ с пространственным разделе-
нием — МДПР (SDMA) ....................................681
14.2.5. Гибридные методы...............................682
14.3. Случайный доступ...................................683
14.3.1. Простой алгоритм ALOHA...........................686
14.3.2. Синхронизированный алгоритм ALOHA................688
14.3.3. Многостанционный доступ с контролем несущей — CSMA .. 689
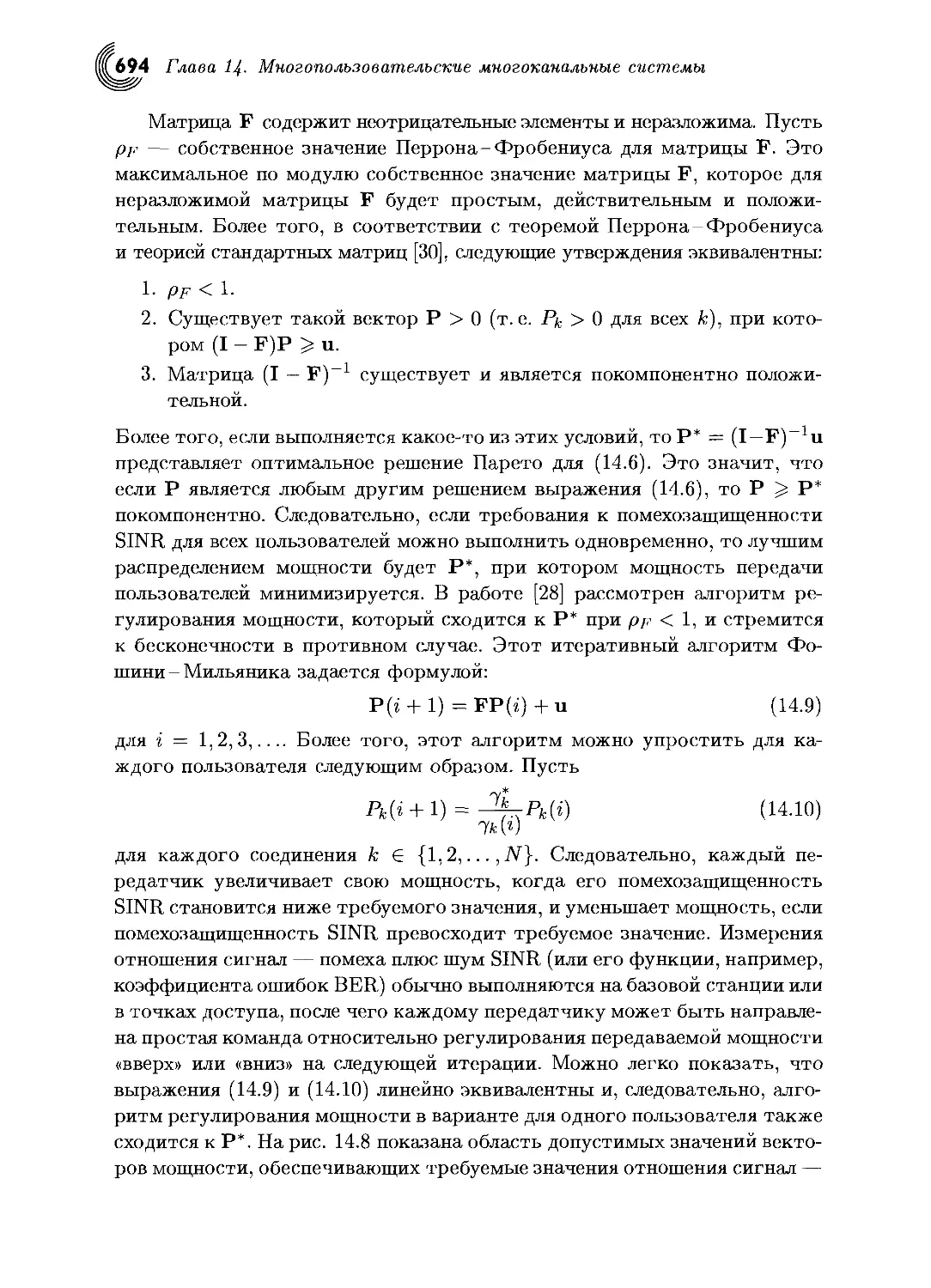
14.3.4. Планирование.....................................691
14.4. Регулирование мощности................................692
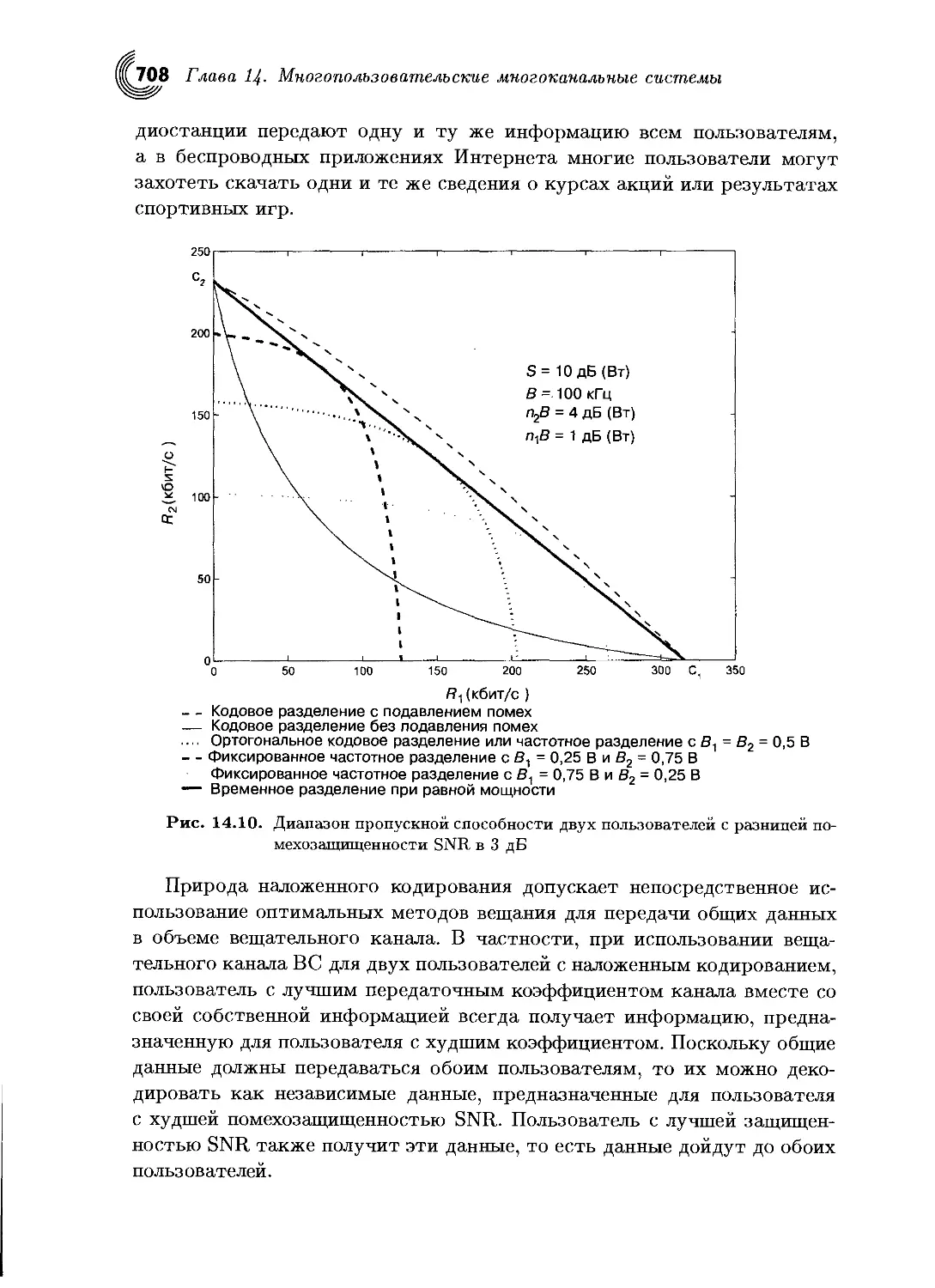
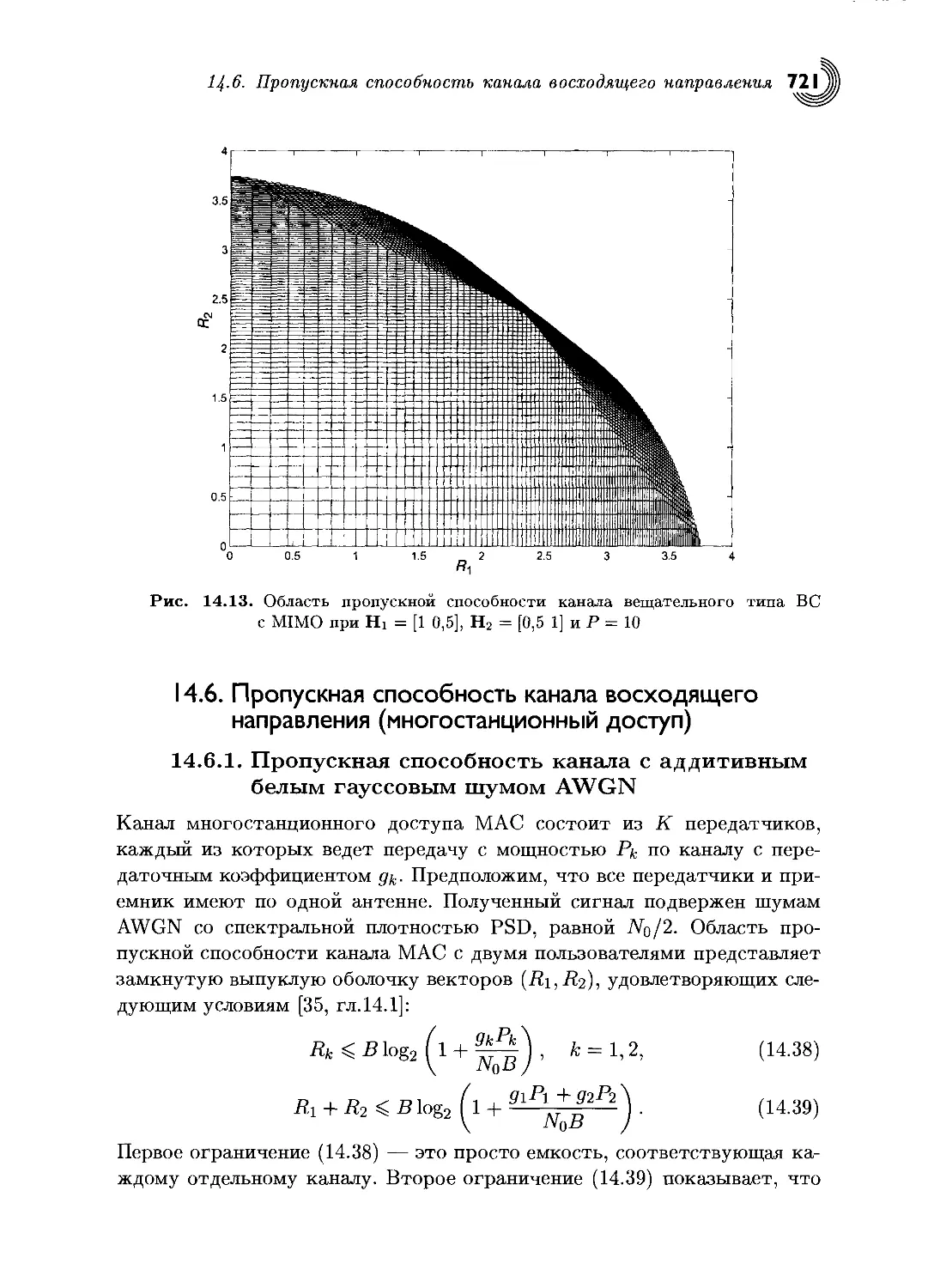
14.5. Пропускная способность нисходящего (вещательного) канала.696
14.5.1. Модель канала....................................697
14.5.2. Пропускная способность канала с аддитивным белым шу-
мом AWGN ................................................699
14.5.3. Общие данные.....................................707
14.5.4. Пропускная способность при замираниях............710
14.5.5. Пропускная способность многоэлементных антенн.......718
14.6. Пропускная способность канала восходящего направления
(многостанционный доступ) ..................................721
14.6.1. Пропускная способность канала с аддитивным белым
гауссовым шумом AWGN.....................................721
14.6.2. Емкость канала при замираниях....................726
14.6.3. Емкость каналов с многоэлементными антеннами.....729
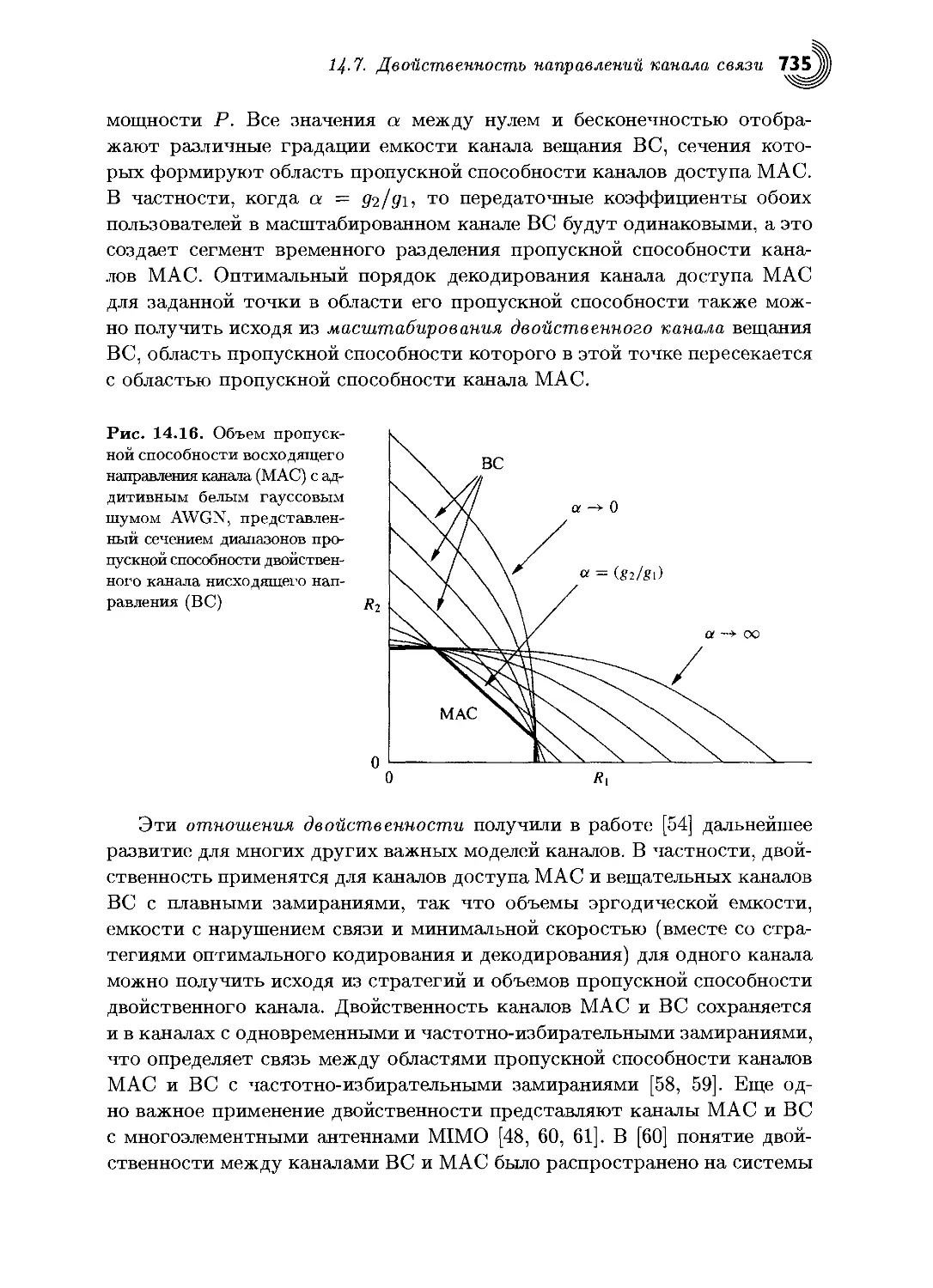
14.7. Двойственность восходящего и нисходящего направлений ка-
нала связи..................................................730
14.8. Разнесение каналов многих пользователей...............736
14.9. Многопользовательские системы MIMO....................740
Задачи................................................742
Литература..................................................747
Глава 15
Сотовые системы и беспроводные сети с базовой
инфраструктурой.............................................752
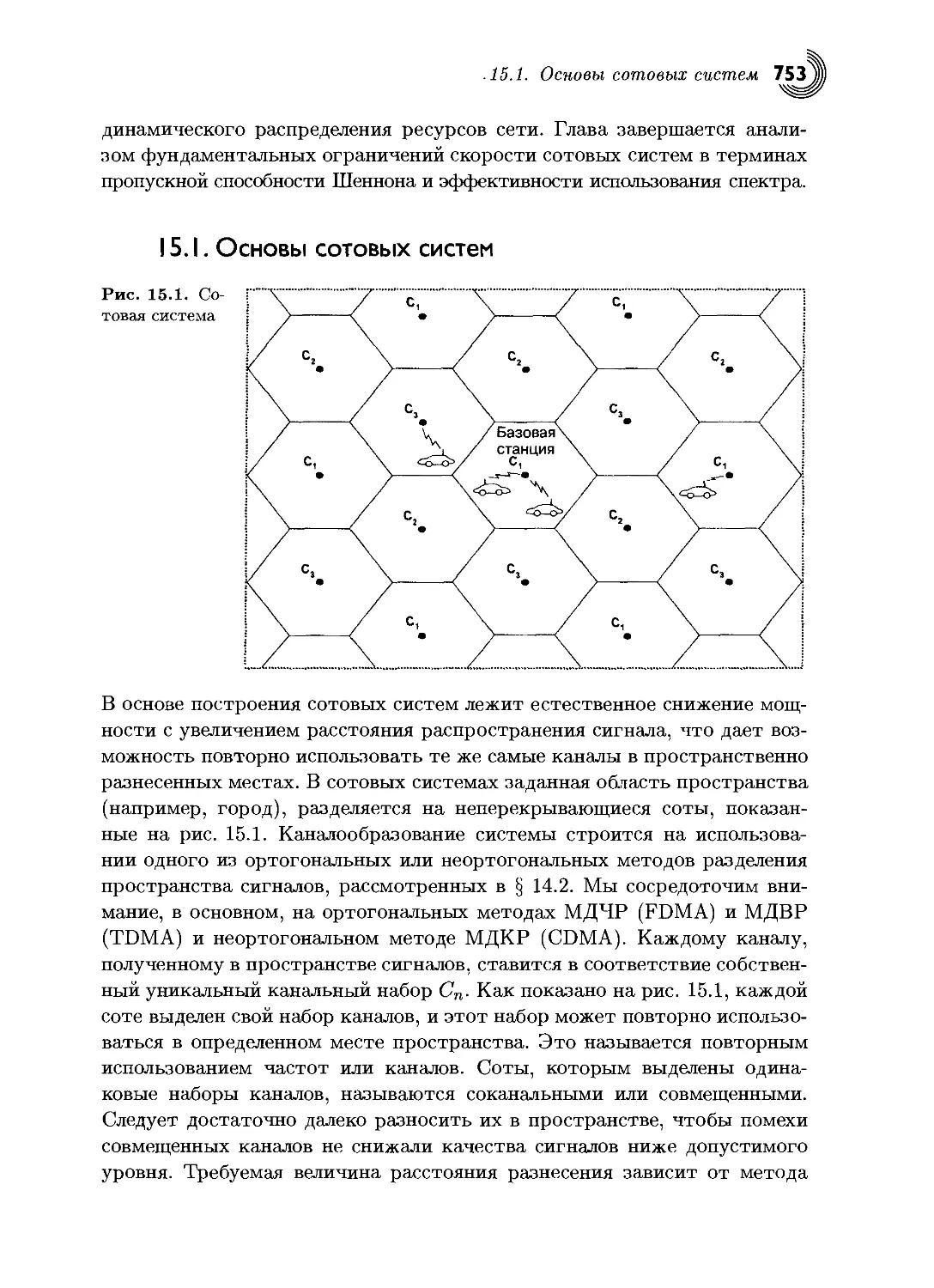
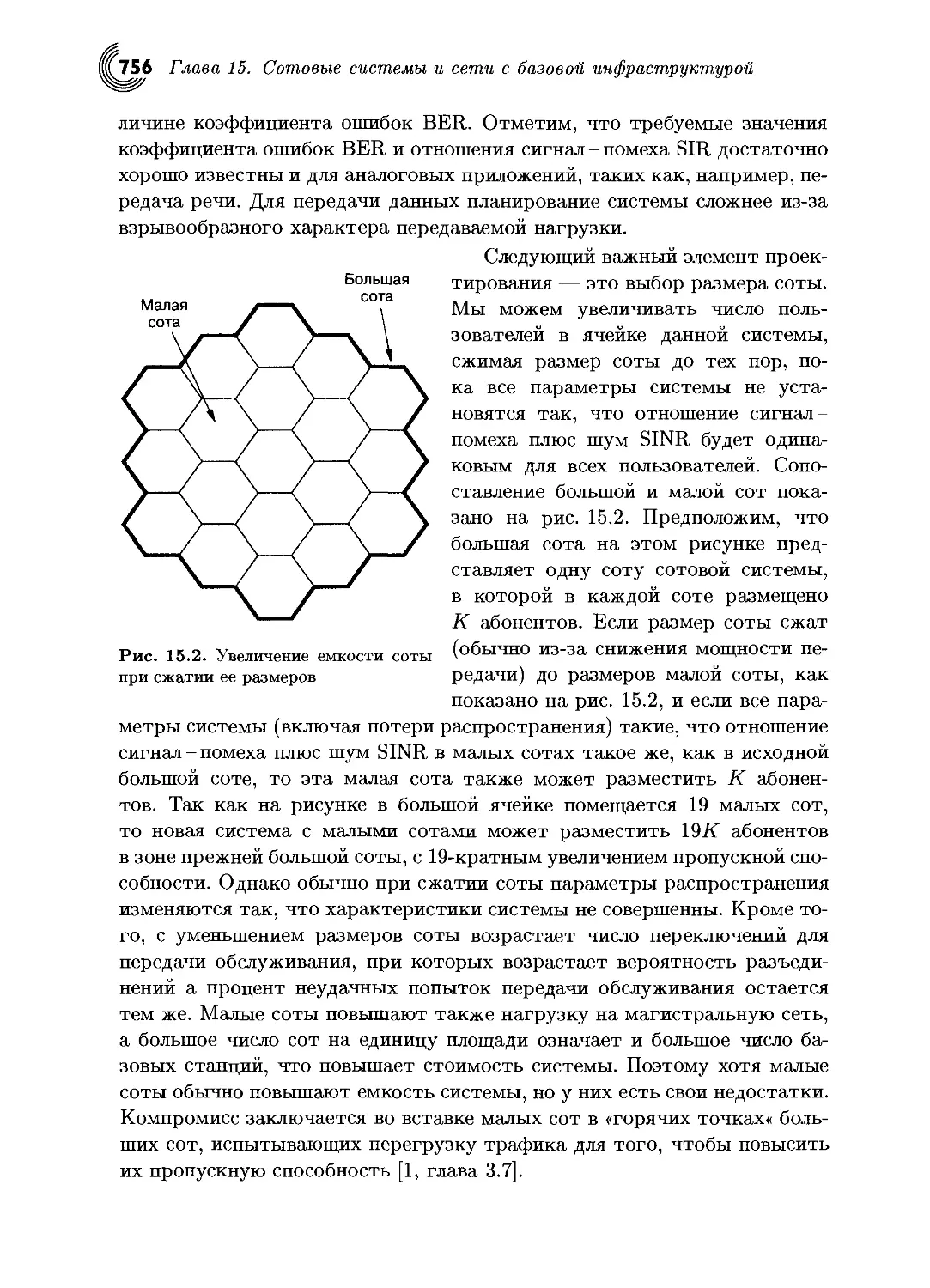
15.1. Основы сотовых систем.................................753
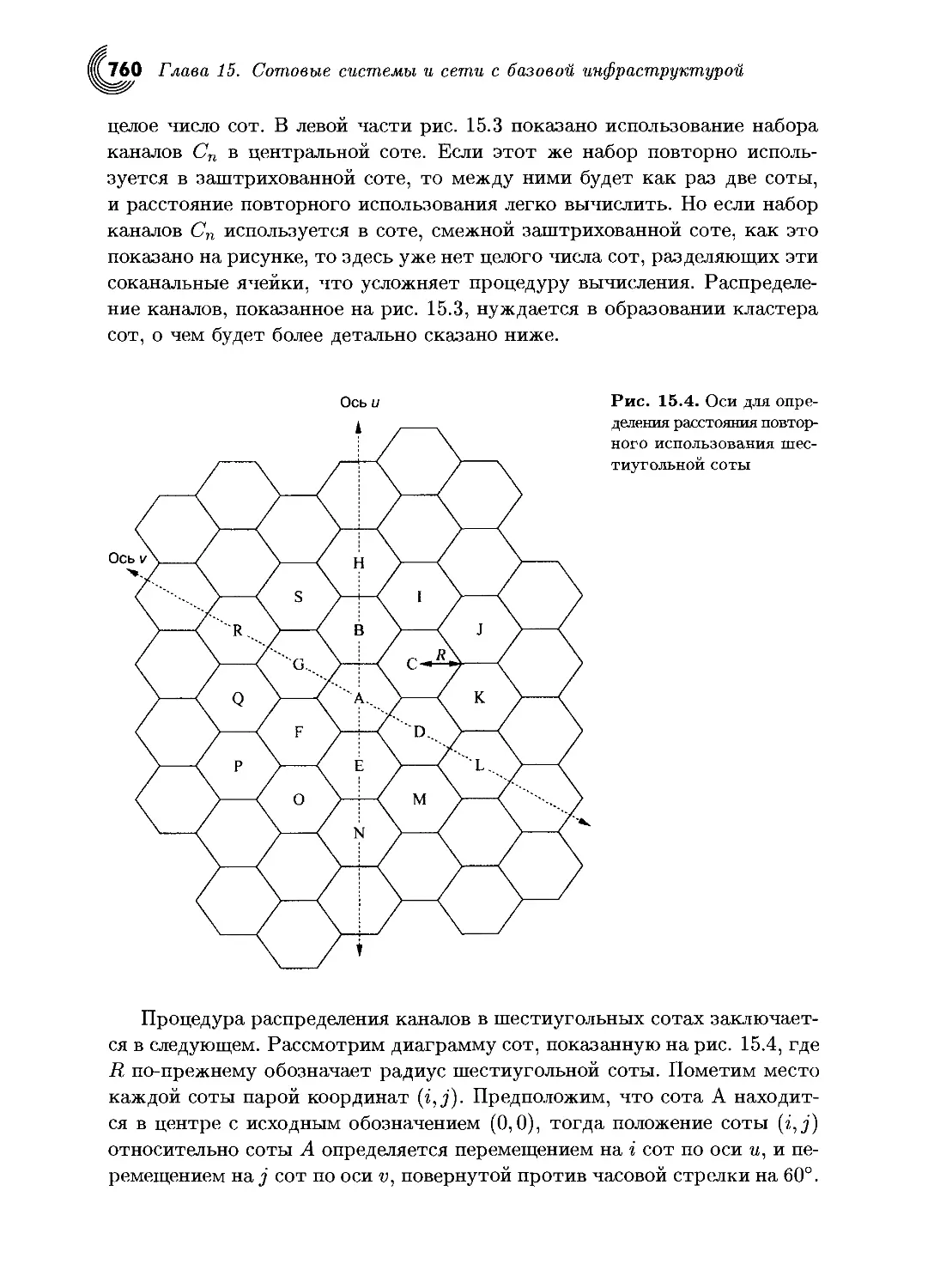
15.2. Повторное использование каналов.......................757
15.3. Емкость соты и отношение сигнал-помеха ...............763
15.3.1. Ортогональные системы МДВР (TDMA) и МДЧР (FDMA) .. 765
15.3.2. Неортогональные системы МДКР (CDMA) .............769
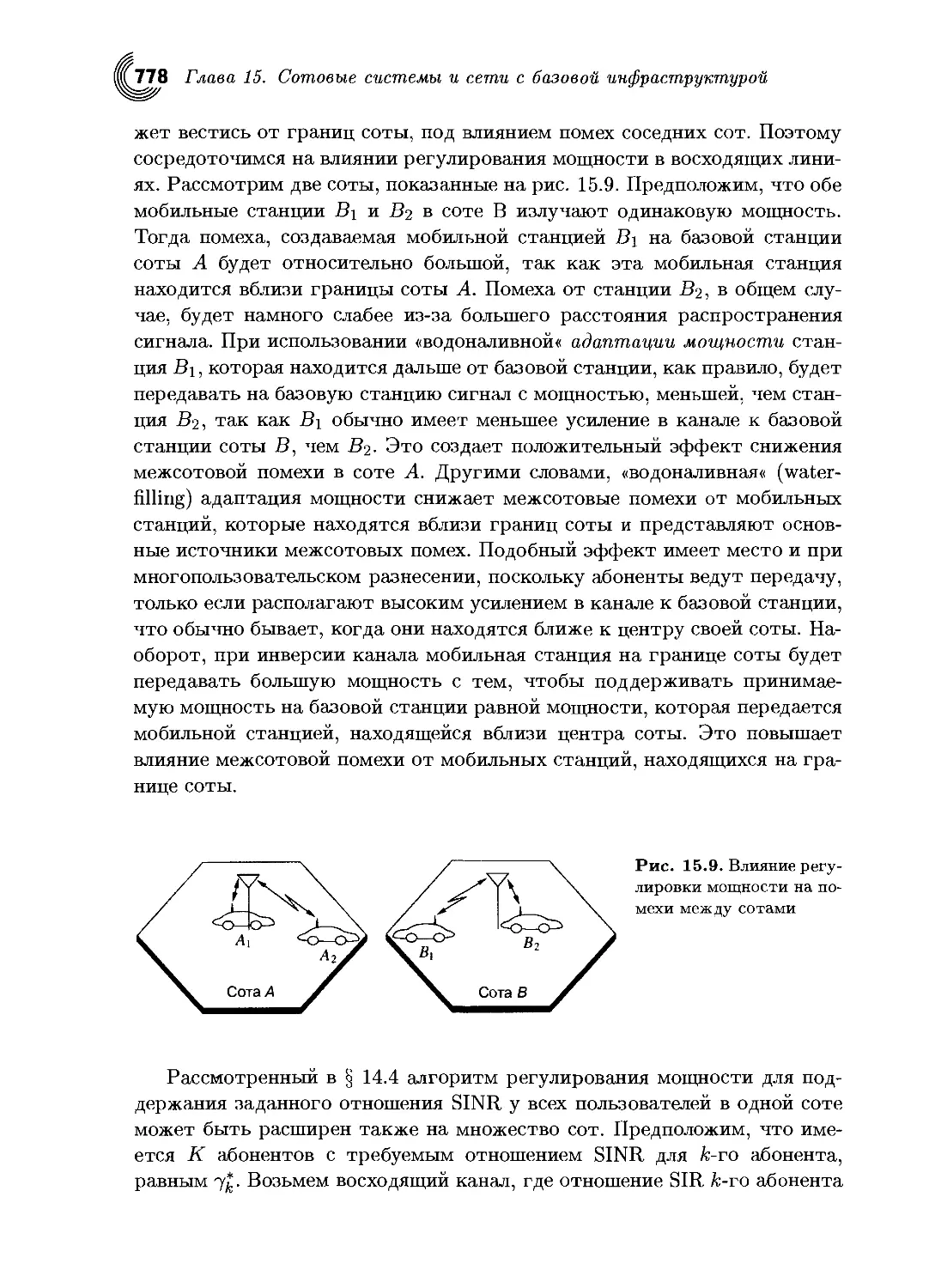
15.4. Методы снижения помех................................ 771
15.5. Динамическое распределение ресурсов...................774
15.5.1. Планирование.....................................774
15.5.2. Динамическое распределение каналов...............775
15.5.3. Регулирование мощности...........................777
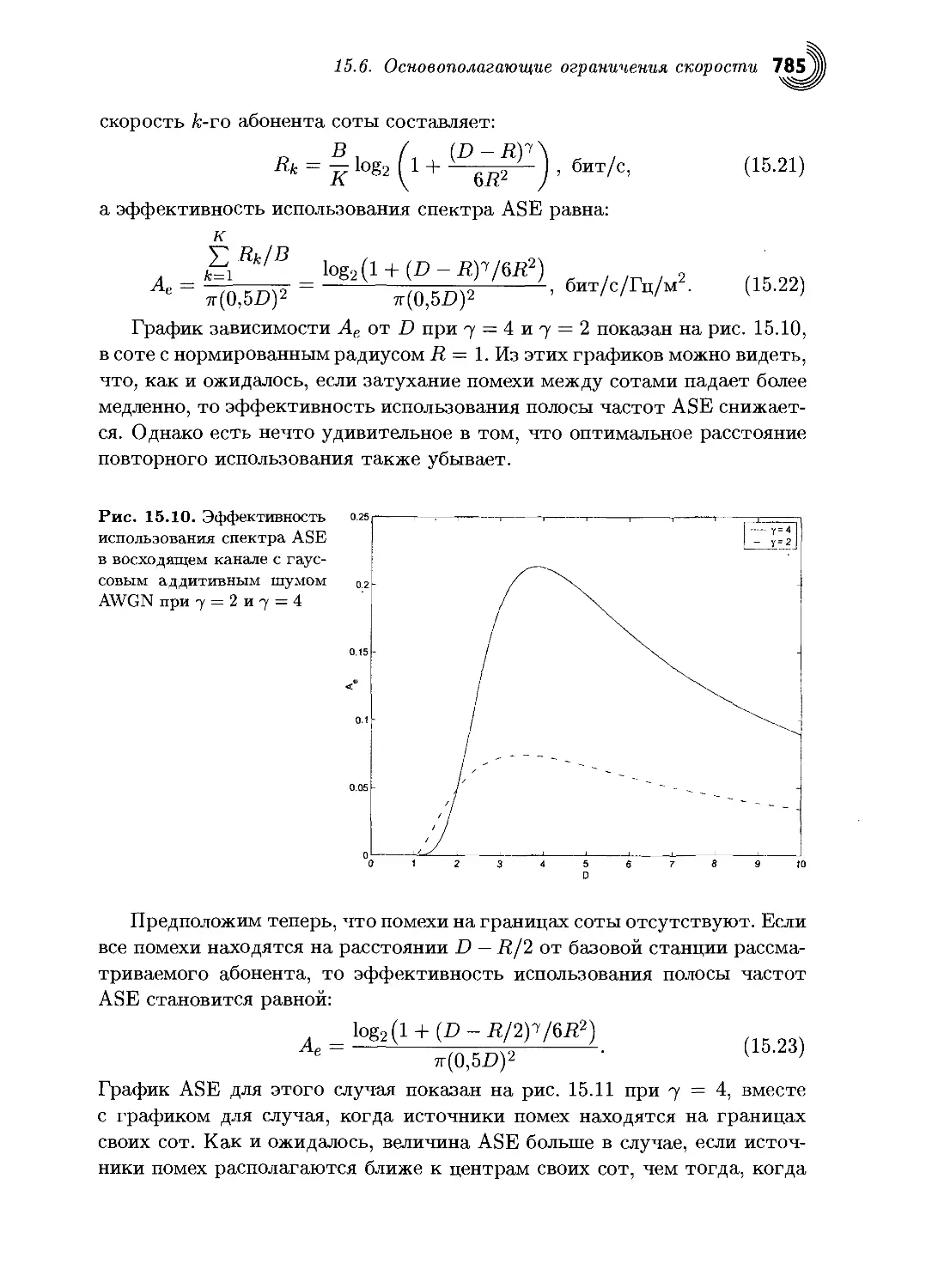
15.6. Основополагающие ограничения скорости.................780
15.6.1. Пропускная способность Шеннона в сотовых сетях......780
Содержание
15.6.2. Эффективность использования спектральной области.783
Задачи..............................................786
Литература...............................................790
Глава 16
Специализированные беспроводные сети.....................795
16.1. Приложения.........................................796
16.1.1. Сети передачи данных...........................797
16.1.2. Сети зданий....................................799
16.1.3. Сети устройств.................................800
16.1.4. Сети датчиков..................................800
16.1.5. Распределенные системы управления..............802
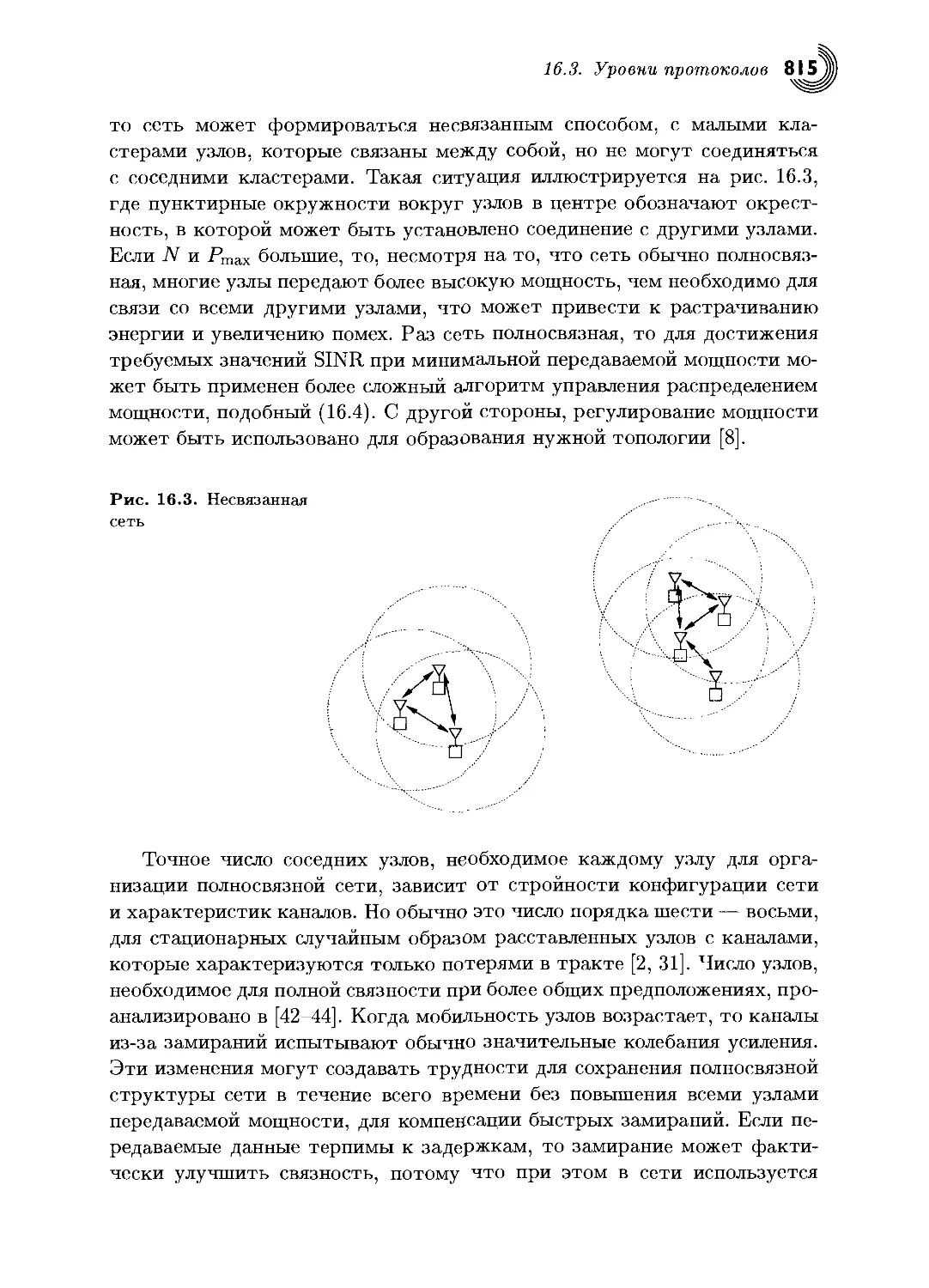
16.2. Принципы разработки и трудности....................803
16.3. Уровни протоколов..................................806
16.3.1. Разработка физического слоя ...................808
16.3.2. Разработка уровня доступа......................810
16.3.3. Разработка сетевого уровня.....................813
16.3.4. Разработка транспортного уровня................822
16.3.5. Разработка прикладного уровня..................823
16.4. Межуровневое проектирование........................825
16.5. Предельная пропускная способность сети.............829
16.6. Сети с ограничениями по энергопотреблению..........832
16.6.1. Модуляция и кодирование........................833
16.6.2. Системы MIMO и MIMO с взаимодействием..........835
16.6.3. Доступ, маршрутизация и режим ожидания.........836
16.6.4. Межуровневое проектирование в условиях ограниченно-
го энергоснабжения....................................838
16.6.5. Пропускная способность на единицу энергии......839
Задачи..............................................841
Литература...............................................844
Приложение А
Представление полосовых сигналов и каналов......851
Приложение Б
Теория вероятностей, случайные величины и случай-
ные процессы.............................................856
Б.1. Теория вероятностей................................856
Б.2. Случайные величины.................................857
Б.З. Случайные процессы.................................864
Содержание
Б.4. Гауссовские процессы.............................869
Литература............................................870
Приложение В
Матрицы: определения, операции и свойства.............871
В.1. Матрицы и векторы...............................871
В.2. Операции с матрицами и векторами.................873
В.З. Разложение матриц................................877
Литература............................................879
Приложение Г
Обзор стандартов беспроводной связи...................880
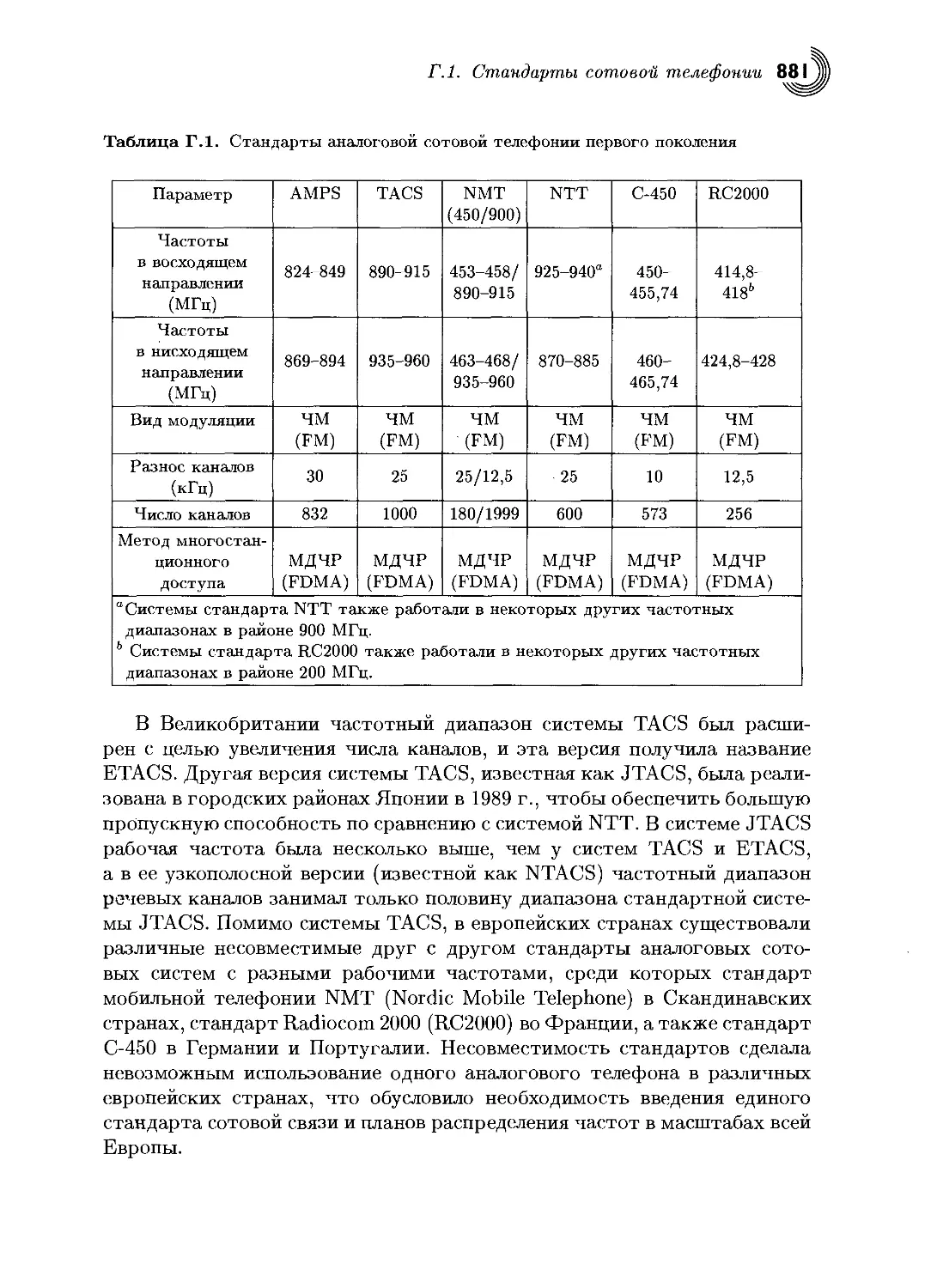
Г.1. Стандарты сотовой телефонии......................880
Г. 1.1. Аналоговые системы первого поколения........880
Г.1.2. Цифровые системы второго поколения...........882
Г. 1.3. Эволюция систем второго поколения...........885
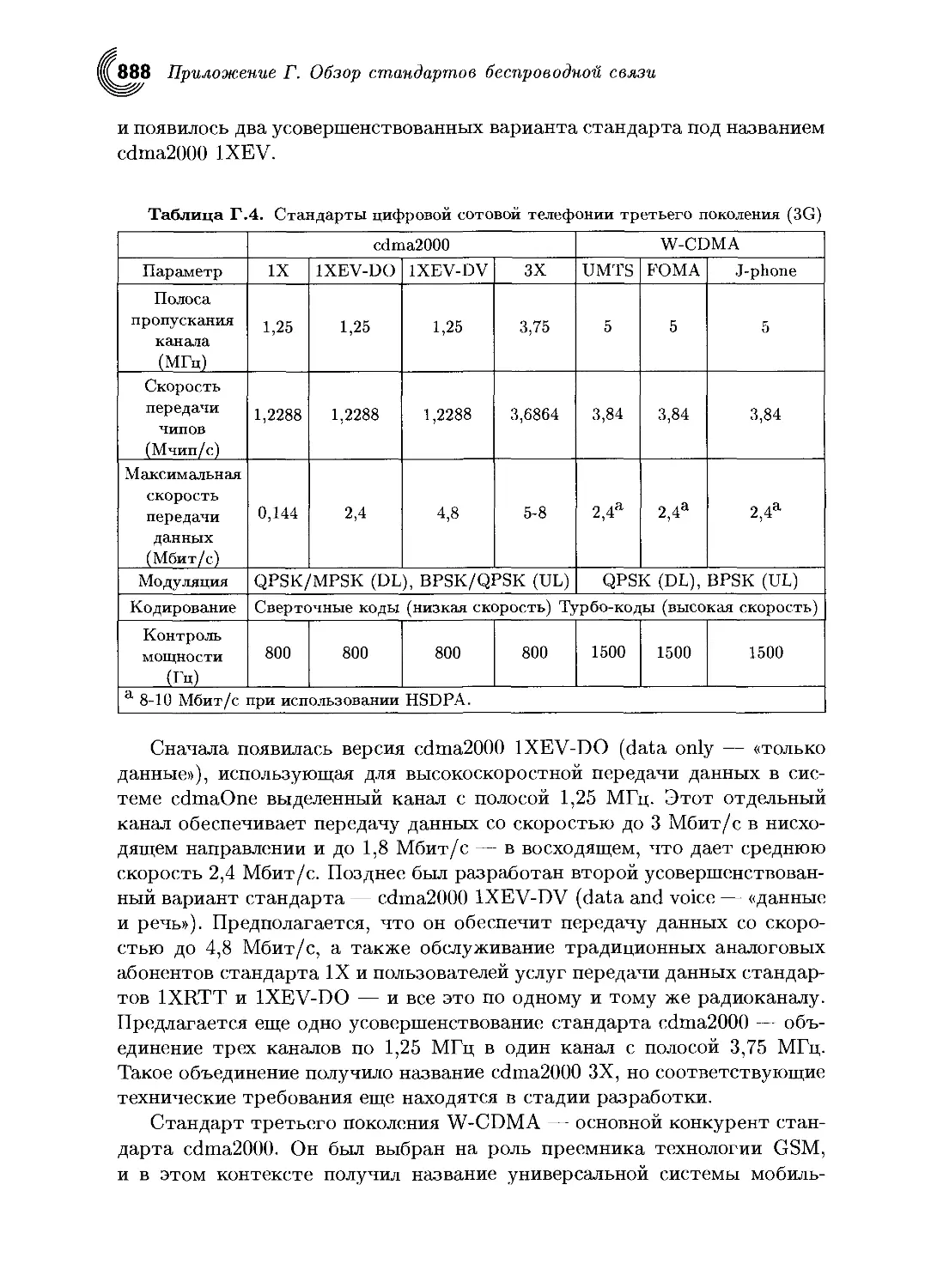
Г. 1.4. Системы третьего поколения..................887
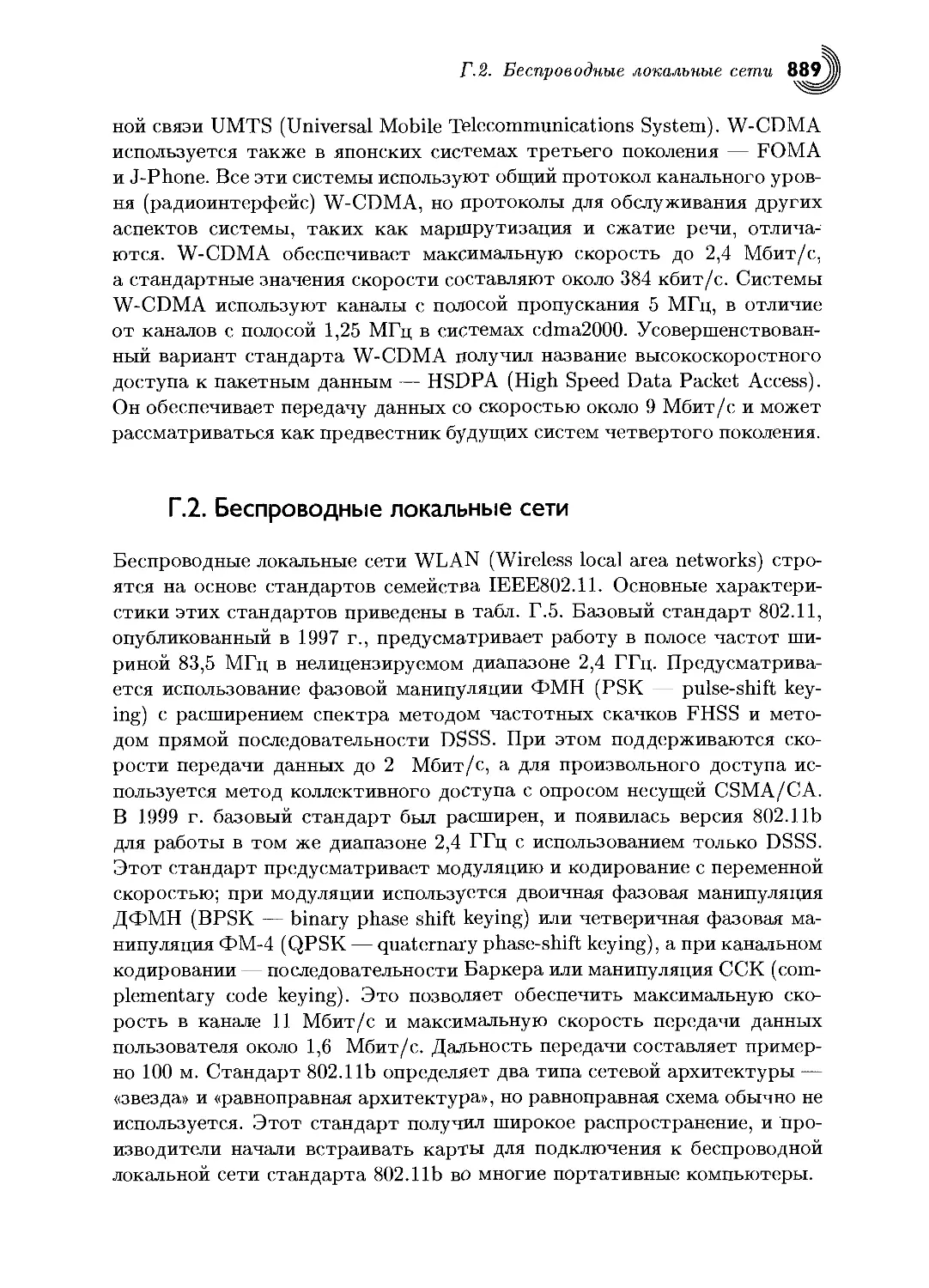
Г.2. Беспроводные локальные сети......................889
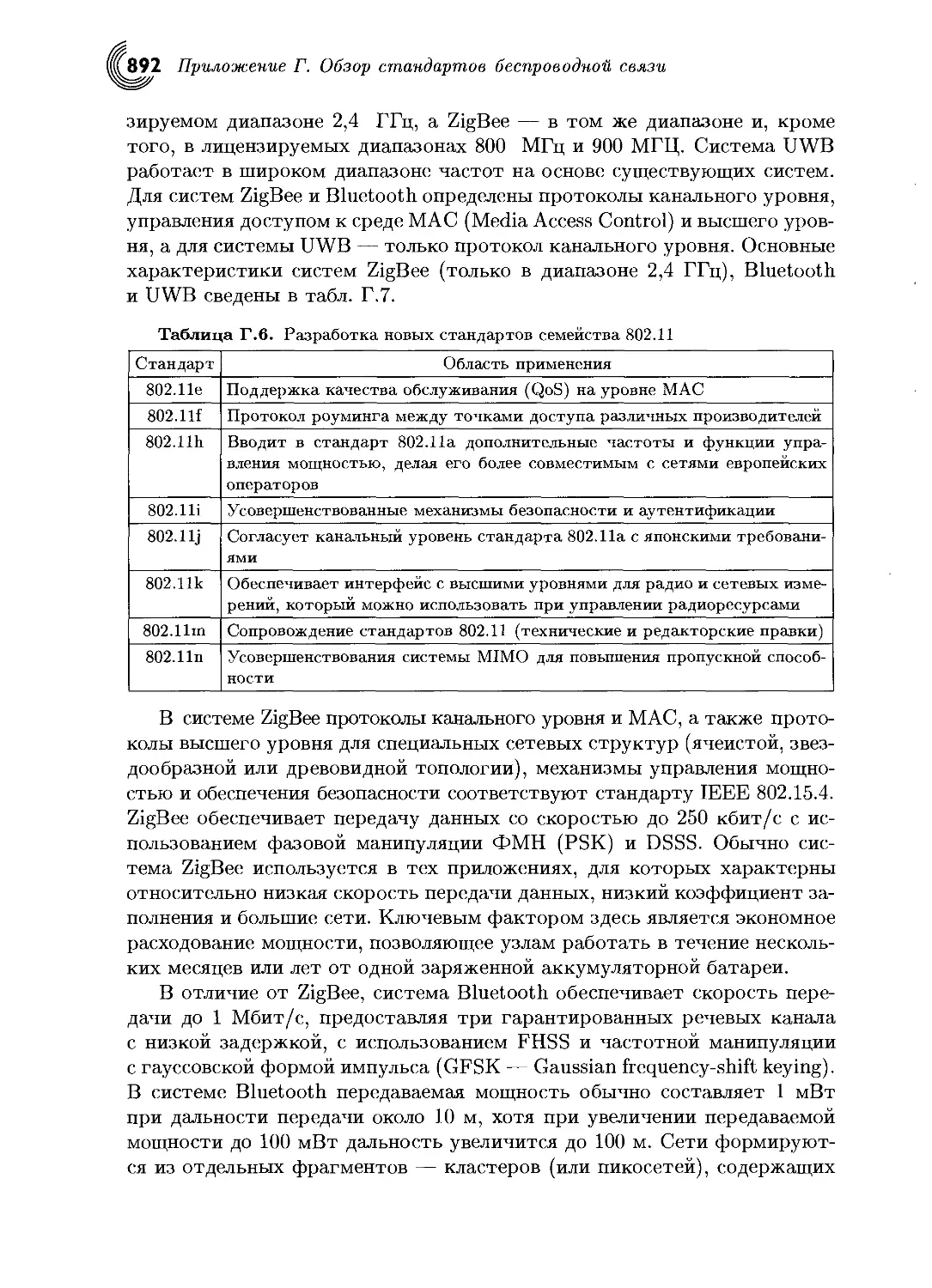
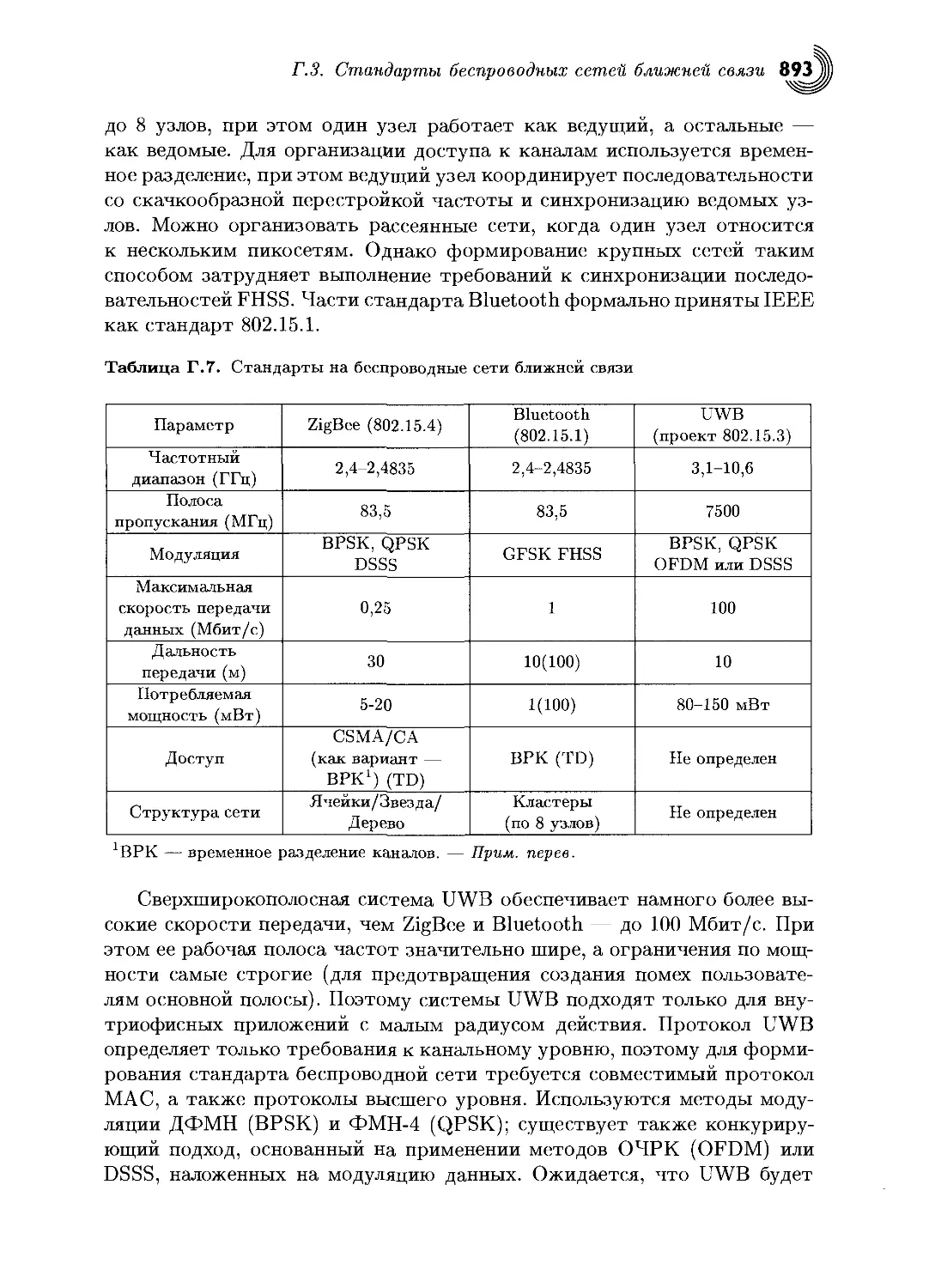
Г.З. Стандарты беспроводных сетей ближней связи.......891
Литература............................................894
Предметный указатель..................................895
Уважаемый читатель!
Представляя Вам монографию, хотелось
бы подчеркнуть ее своевременность и ак-
туальность для текущей фазы развития ин-
формационных технологий. Именно благода-
ря развитию и широкому внедрению беспро-
водных коммуникаций ускорились процессы
перехода человечества к качественно новому
уровню развития во всех сферах его деятель-
ности. При этом перспективы применения
беспроводной связи простираются далеко за
пределы сегодняшнего дня.
Данная монография соединяет в себе по-
следовательное изложение процессов разви-
тия, принципов построения и условий работы
систем беспроводной связи, научно-техниче-
ского фундамента, современного состояния
и перспектив развития техники связи. Она
охватывает практически все значимые проблемы беспроводной связи, не-
избежно встречающиеся при создании радиоэлектронной аппаратуры и
систем связи как специального, так и широкого применения. Привлека-
тельной стороной и достоинством книги является простота изложения
многочисленных проблем беспроводной связи во всех ее приложениях.
Книга позволяет читателю окунуться в многообразный и многоликий
мир беспроводной связи. Обобщение многолетнего опыта крупнейших за-
рубежных компаний, результатов фундаментальных и прикладных иссле-
дований научно-исследовательских и академических сообществ позволит
отечественным специалистам использовать монографию как настольный
справочник по многим аспектам радиосвязи.
Уверен, что книга А. Голдсмит будет интересна широкому кругу спе-
циалистов, студентам и аспирантам соответствующих специальностей.
Надеюсь, что это издание в течение долгого времени будет оставаться
полезным для отечественных разработчиков и исследователей.
Директор ФГУП «ОНИИП»,
к. т. н. В. А. Березовский
Справка о деятельности организации
ФГУП «Омский научно-исследовательский институт приборостроения»
был учрежден в 1958 году на базе специализированного конструкторского
бюро Омского завода им. Козицкого.
Начав свою историю с создания профессиональных радиоприемных
устройств, сейчас институт создает широкую гамму технических средств
от небольших портативных радиостанций до крупных комплексов, узлов,
радиоцентров мобильного и стационарного базирования.
Предприятие динамично развивается и активно вкладывает средства
в создание и внедрение передовых технологий. Институт гибко реагирует
на изменение потребностей рынка и уже сегодня работает над созданием
интеллектуальных программируемых радиотехнических систем и средств
дальней радиосвязи 6-го поколения с использованием СБИС «система на
кристалле».
Кроме того, ФГУП «Омский научно-исследовательский институт при-
боростроения» успешно внедряет передовые технологии и последние до-
стижения отечественной и зарубежной науки во всех сферах своей дея-
тельности, что позволяет создавать изделия на уровне лучших мировых
аналогов.
ФГУП «ОНИИП» является постоянным участником многочисленных
отечественных и международных выставок, демонстрирующих последние
достижения науки и техники.
Основной потенциал предприятия составляют высококвалифицированные
специалисты. Их богатый опыт и профессионализм позволяют решать и
реализовывать сложные технические задачи на высоком уровне.
Посвящается Артуро, Даниэлю и Николь
Предисловие
Беспроводная связь — это обширная и динамично развивающаяся область,
которая за последние десятилетия вызвала широкий научный резонанс
и дала толчок многим техническим достижениям. Цель данной книги —
сформировать у читателя комплексное понимание фундаментальных принци-
пов, лежащих в основе беспроводной связи. К этим принципам относятся
ограничения, накладываемые на характеристики и показатели качества
беспроводных систем, методы и математический аппарат, необходимые
для анализа таких систем, а также технические детали и компромиссы,
связанные с их разработкой. Чтобы обосновать эти фундаментальные
принципы и подтвердить их примерами, в книге рассматриваются су-
ществующие и будущие беспроводные системы. Книга может использо-
ваться в качестве учебника для студентов старших и выпускных курсов
высших учебных заведений или технического руководства для инжене-
ров, научных сотрудников академического и прикладного направлений,
работающих в области беспроводной связи.
Структура книги
Изложение материала начинается с обзора беспроводной связи в гл. 1.
Это история становления беспроводных систем, перспективы их дальней-
шего развития, а также обзор существующих систем и стандартов. Гла-
вы 2 и 3 посвящены характеристикам беспроводных каналов, с которыми
связаны многие проблемы, возникающие при разработке систем. Так,
в гл. 2 рассматриваются потери на трассе распространения радиоволн
и экранирование в беспроводных каналах, которые проявляются на отно-
сительно больших расстояниях. В гл. 3 дана характеристика амплитуд-
ных и частотно-селективных замираний, возникших при многолучевом
распространении, которые проявляются на значительно меньших рассто-
яниях — порядка длины волны сигнала. В гл. 4 рассматриваются фунда-
ментальные ограничения пропускной способности беспроводных каналов
и методы передачи, обеспечивающие эту пропускную способность. Хотя
эти методы достаточно сложны и вносят задержки, они помогают понять
и обосновать большинство практических схем, рассматриваемых в после-
дующих разделах. В гл. 5 и 6 речь идет о методах цифровой модуляции
и их характеристиках в беспроводных каналах. В этих главах показано,
20 Предисловие
что замирания могут существенно ухудшить качество передачи. Поэтому
в беспроводных системах с высоким качеством связи требуется примене-
ние специальных методов ослабления замираний.
Несколько следующих глав посвящены основным методам ослабления
амплитудных и частотно-селективных замираний. Так, в гл. 7 рассмо-
трены принципы, лежащие в основе методов разнесения, в том числе
и новый математический аппарат, который значительно упрощает анализ
характеристик. Эти методы позволяют устранить большинство вредных
воздействий при амплитудных замираниях. В гл. 8 подробно рассматрива-
ются методы кодирования, включая как традиционные методы блочного,
сверточного и решетчатого кодирования, так и последние разработки
в области каскадных кодов, турбо-кодов и кодов LDPC. В этой главе
показано, что хотя методы кодирования в каналах с помехами имеют ха-
рактеристики, близкие к оптимальным, все же остается еще множество
нерешенных проблем, связанных с разработкой и анализом характери-
стик кодов для беспроводных систем. В гл. 9 рассматривается адаптивная
модуляция при амплитудных замираниях, которая обеспечивает надеж-
ную связь и эффективное использование спектра, учитывая нестационар-
ность беспроводного канала. Кроме того, в этой главе методы и харак-
теристики адаптивной модуляции увязаны с фундаментальными грани-
цами пропускной способности в каналах с замираниями. 10 гл. посвящена
многоэлементным антеннам и пространственно-временным системам свя-
зи: дополнительное пространственное измерение обеспечивает высокие
скорости передачи и устойчивость к замираниям. В гл. 11 рассматри-
ваются методы коррекции, применяемые при обработке сигнала в при-
емнике при компенсации частотно-селективных замираний. Модуляция
на нескольких несущих, описанная в гл. 12, представляет более простой
и гибкий, по сравнению с коррекцией, способ ослабления частотно-селек-
тивных замираний. В гл. 13 описаны методы расширения спектра одного
или нескольких абонентов. Эти методы не только ослабляют частотно-се-
лективные замирания, но и позволяют нескольким абонентам совместно
использовать один и тот же спектр частот.
Три последние главы книги посвящены многопользовательским сис-
темам и сетям. В 14 гл. рассматриваются методы многостанционного
и случайного доступа, обеспечивающие совместное использование беспро-
водного канала множеством абонентов с непрерывной или пульсирующей
нагрузкой. В этой же главе описан механизм контроля мощности, позво-
ляющий уменьшить помехи между абонентами и в то же время гарантиро-
вать всем абонентам требуемые показатели качества. Глава завершается
обсуждением фундаментальных границ пропускной способности в мно-
гопользовательских каналах, а также методов передачи и совместного
Предисловие
использования каналов, позволяющих достичь границ этой пропускной
способности. 15 гл. посвящена вопросам разработки, оптимизации и ана-
лиза характеристик систем сотовой связи, включая актуальные проблемы
контроля мощности и фундаментальные ограничения на эти системы.
В последней, 16 гл., обсуждаются базовые принципы специализированных
беспроводных сетей и актуальные исследовательские вопросы, связанные
с такими сетями.
Необходимая база
Единственным необходимым условием для понимания материала данной
книги являются базовые знания по теории вероятностей и случайных
процессов, а также знания в области анализа систем и сигналов мето-
дами Фурье. Знание цифровой связи полезно, но не обязательно, так как
основные понятия из этой области освещены в книге. Базовый материал,
используемый в различных главах книги, изложен в трех приложениях.
Так, в приложении А описано эквивалентное низкочастотное представле-
ние полосовых сигналов и систем, которое упрощает анализ полосовых
систем. В приложении Б дается обзор основных понятий теории вероят-
ностей и случайных процессов, используемых в книге. В приложении В
рассмотрены определения, операции и свойства матриц, которые широко
применяются в гл. 10 и 12. Приложение Г обобщает основные параметры
существующих беспроводных систем и стандартов.
Особенности книги
Огромный объем исследовательских работ в области беспроводной связи
и сложность разработки беспроводных систем сделали невозможным все-
стороннее рассмотрение всех вопросов, затрагиваемых в данной книге.
Поэтому каждая глава содержит обширный перечень других источников,
которые дополняют и развивают изложенный материал. Также в книге
имеется около сотни решенных примеров, иллюстрирующих и подчерки-
вающих основные принципы и компромиссы. Кроме того, книга содержит
около 300 задач для самостоятельного решения. Эти задачи, относящиеся
к нескольким категориям, составлены таким образом, чтобы повторить
и закрепить материал книги. Некоторые задачи призваны проиллюстри-
ровать на примерах или пояснить более подробно основные рассмотрен-
ные принципы, а также получить или проиллюстрировать свойства бес-
проводных систем, использующих эти принципы. Задачи использованы
Предисловие
также для доказательства результатов, которые в тексте были сформу-
лированы без доказательства. Другая категория задач направлена на по-
лучение численных результатов, которые дают представление о рабочих
параметрах и показателях качества беспроводных систем в типичных
условиях. В задачах также представлены новые понятия и аспекты про-
ектирования систем, которые не нашли отражения в тексте. Все задачи
снабжены указаниями по решению.
Как использовать эту книгу
для формирования курса лекций
Книга построена так, чтобы обеспечить максимальную гибкость при
использовании ее в качестве учебника в зависимости от желаемой про-
должительности курса, базовой подготовки студентов и направленности
курса. Основу книги составляют главы с 1 по 6. В каждой из последую-
щих глав рассматривается отдельная тема, которая может быть опущена
или включена в другие курсы. Предпосылками, необходимыми для ис-
пользования данной книги в качестве основы для курса лекций, являются
базовые университетские курсы по теории сигналов и систем (как анало-
говых, так и цифровых), а также по теории вероятностей и случайных
процессов. Полезно, но не обязательно, знание основ цифровой связи,
в этом случае материал 5 гл. (а также связанный с ним материал дру-
гих глав) можно дать в виде краткого обзора.
Материал книги естественно распадается на три сегмента: основа
(1-6 гл.), построение однопользовательских беспроводных систем (7-13 гл.)
и многопользовательские беспроводные сети (14-16 гл.). Большая часть
материала книги может быть изложена на протяжении двух-трех четвер-
тей или двух семестров. Если курс длится три четверти, то при его
построении следуют естественному разбиению материала книги на гла-
вы, в конце курса возможна углубленная проработка исследовательского
проекта. Если курс рассчитан на два семестра или две четверти, то пер-
вую его часть можно построить на основе 1-10 гл. (однопользовательские
системы с амплитудными замираниями), а вторую часть — на основе
11-16 гл. (методы ослабления частотно-селективных замираний, много-
пользовательские системы и беспроводные сети). Если длительность кур-
са составляет одну четверть или один семестр, в его основу могут быть
положены однопользовательские беспроводные системы на базе материа-
ла 1-6 гл. и отдельных вопросов из 7-13 гл. В этом случае вторую (необя-
зательную) четверть или семестр можно посвятить рассмотрению много-
пользовательских систем и беспроводных сетей (часть 13 гл. и 14-16 гл.).
Предисловие
Я использую такое разбиение в Стэнфорде, где курс рассчитан на две
четверти, при этом вторая четверть предусматривается спустя год и по-
свящается изучению дополнительной литературы и углубленной прора-
ботке исследовательского проекта. Альтернативный вариант — это курс
длительностью в одну четверть или один семестр, рассматривающий как
однопользовательские, так и многопользовательские системы на основе
глав 1-6 и 13-16, а также некоторые дополнительные вопросы из 7-12 гл.,
если позволяет время.
На партнерском сайте в Интернете1 можно найти вспомогательные
материалы по данной книге, включая слайды лекций, дополнительные за-
дачи и список опечаток.
Благодарности
Написать книгу нелегко, и я глубоко признательна многим людям за их
помощь на различных стадиях работы над этим проектом. Прежде все-
го, хочется поблагодарить десять поколений студентов Калифорнийского
технологического института и Стэндфордского университета, испытав-
ших на себе ежегодные доработки моего курса по беспроводной связи: их
советы, точки зрения и впечатления были очень ценными при выборе во-
просов для рассмотрения и стиля изложения книги. Джон Проукис (John
Proakis) и несколько анонимных рецензентов дали ценные и глубокие
замечания и советы по ранним версиям рукописи, указав на недоработ-
ки и слабые места, что позволило значительно улучшить окончательный
текст. Мои сегодняшние аспиранты Раджив Агравал (Rajiv Agrawal),
Шугуань Чиу (Chuguang Cui), Ифан Линь (Yifan Liang), Ксяньен Лиу (Xi-
angheng Liu), Крис Hr (Chris Ng) и Тисянь Ю (Taesang Yoo) тщательно
вычитывали рукописи многих глав, предлагая новые ракурсы и подхо-
ды, проверяя вывод формул, отыскивая опечатки и отмечая мои ошибки
и недоработки. Мои бывшие аспиранты Тим Холидей (Tim Holliday), Са-
ид Джафар (Syed Jafar), Нихар Джиндал (Nihar Jindal), Нилех Мехта
(Neelesh Mehta), Ставрос Таумпис (Stavros Toumpis) и Шрирам Вишва-
нат (Sriram Vishwanath) внимательно изучили по одной или более глав
и внесли ценный вклад. Кроме того, все мои нынешние и бывшие сту-
денты (уже упомянутые, а также Мохаммед-Слим Алауни (Mohamed-Slim
Alouini), Сун-Цзи Чуа (Soon-Ghee Chua), Лифан Ли (Lifang Li) и Кевин Ю
(Kevin Yu)) дополнили содержание книги своими научными результата-
ми, особенно в гл. 4, 7, 9, 10, 14 и 16. Руководство по решению задач было
1 http://www.cambridge.org/9780521837163
Предисловие
разработано Радживом Агравалом (Rajiv Agrawal), Грейс Чжао (Grace
Gao) и Анкитом Кумаром (Ankit Kumar). Я также признательна многим
своим коллегам, которые, несмотря на занятость, по первому зову находи-
ли время, чтобы прочитать и обсудить отдельные главы. Они были очень
добры, великодушны и честны в своих оценках и критике. Их глубокие
и ценные замечания не только значительно улучшили книгу, но и да-
ли мне возможность узнать много нового о беспроводной связи. За это
я очень благодарна Джефу Эндрюсу (Jeff Andrews), Тони Эфремидесу
(Tony Ephremides), Майку Фитцу (Mike Fitz), Денису Гейкелю (Dennis
Goeckel), Ларри Гринштейну (Larry Greenstein), Ральфу Киттеру (Ralf
Koetter), П.Р. Кумар (P.R. Kumar), Мьюриэл Медар (Muriel Medard),
Ларри Милыптейну (Larry Milstein), Серджио Серветто (Sergio Servet-
to), Серджио Верду (Sergio Verdu) и Рою Етсу (Roy Yates). Дон Кокс
всегда был готов поделиться своими огромными инженерными знаниями
и посвятить меня во многие тонкости и допущения, касающиеся беспро-
водных систем. Я также благодарна многим сотрудникам, с которыми
проработала много лет, а также коллегам по совместной работе в ком-
паниях Maxim Technologies и AT&T Bell Laboratories, которые обогатили
мои знания в области беспроводной связи и смежных областях.
Я признательна преподавателям, студентам и руководству Стэндфорд-
ского университета за создание динамичной, стимулирующей и захва-
тывающей среды для научной и преподавательской работы, в которой
и появилась данная книга. Я также благодарна Управлению военно-мор-
ских исследований США (ONR2) и Национальному научному фонду США
(NSF3) за финансовую поддержку в течение всего времени написания кни-
ги. Огромной благодарности заслуживают также мои помощники по ад-
министративной работе Джойс ДеБолт (Joice DeBolt) и Пэт Оширо (Pat
Oshiro), которые взяли на себя все большие и малые заботы по поддержке
моих исследований и преподавательской работы. Также хочу поблагода-
рить корректора Мэтта Дернела (Matt Darnel) за его мастерство и вни-
мание к деталям в процессе выпуска книги. Мой редактор Фил Мейлер
(Phil Meyler) сопровождал эту книгу с самого начала и до сегодняшнего
дня — на протяжении десяти лет. Его поддержка и энтузиазм никогда
не ослабевали, а все мои изменения и задержки он воспринимал вежли-
во и благодушно. Я не могу представить лучшего редактора, с которым
можно было бы начать такое сложное, изнурительное и полезное дело.
Мне хочется выразить особую благодарность двум людям за поддерж-
ку данного проекта с самого начала и за все мои профессиональные
2ONR — Office of Naval Research.
3NSF — National Science Foundation.
Предисловие
достижения. Ларри Гринштейн (Larry Greenstein), благодаря своему глу-
бокому пониманию темы и исследовательскому опыту, первым пробудил
во мне интерес к беспроводной связи. Он стал для меня замечательным ис-
точником знаний, наставником и другом. Правин Варэя (Pravin Varaiya)
оказал на меня сильное влияние как научный руководитель — благодаря
своим обширным и глубоким знаниям в сочетании с удивительной строго-
стью, проницательностью и стремлением к совершенству. Я благодарна
ему за постоянную поддержку, вдохновение и дружбу.
Мои друзья и семья очень помогли мне своей любовью и ободрением,
за что я им глубоко признательна. Благодарю их за то, что не отвер-
нулись от меня, невзирая на мои долгие отсутствия на заключительном
этапе работы над рукописью, а также за поддержку, без которой эта
книга не могла бы быть закончена. Особо хочу поблагодарить Реми (Re-
my), Пенни (Реппу) и Лили (Lili) за любовь и поддержку, а также мою
мать Эдриен (Adrienne) за ее любовь и за то, что она передала мне свои
творческие способности и склонность к сочинительству. Мой отец Вер-
нер (Werner) оказал очень сильное (как прямое, так и косвенное) влияние
на эту книгу и всю мою карьеру. Это был старший профессор Голдсмит
(Goldsmith), успешный исследователь, автор и первопроходец во многих
областях механики и биомеханики. Советы отца заняться техникой дали
направление моей карьере, в которой он был моей главной «группой под-
держки». Его гордость, любовь и поддержка были для меня постоянным
источником вдохновения. Мне посчастливилось помогать отцу в работе
над его последней статьей, и в этой книге я пыталась наследовать его
строгость, внимание к деталям и волнение по поводу опечаток, которые
наблюдала во время нашей совместной работы.
И наконец, у меня не хватит слов, чтобы выразить свою признатель-
ность и любовь моему мужу Артуро (Arturo) и детям Даниэлю (Daniel)
и Николь (Nicole). Артуро всегда оказывал огромную поддержку, как при
написании этой книги, так и во всех других аспектах моей карьеры, ради
которой он пошел на многие жертвы. Его гордость, любовь, ободрение
и преданность ведут меня сквозь взлеты и падения университетской и се-
мейной жизни. Это лучший муж, отец и друг, о котором я могла мечтать,
и все, что он делает, обогащает мою жизнь. Даниэль и Николь, как лу-
чики солнца, освещают мой мир — благодаря их любви и очарованию
каждый день становится для меня светлее. Я счастлива, что могу разде-
лить свою жизнь с этими тремя самыми важными для меня людьми. Эта
книга посвящена им.
Сокращения
3GPP Объединение по разработке стандартов мобильной связи третьего поколения
АСК ACL AFD AFRD AGC AMPS АОА AODV Подтверждение приема пакета Асинхронный режим передачи, без установления соединения Средняя продолжительность замирания сигнала Средняя протяженность зоны замираний Автоматическое регулирование усиления Усовершенствованная мобильная телефонная система1 Угол падения (входа) радиолуча Протокол специализированной маршрутизации по запросу с вектором перемещения
АРР ARQ ASE AWGN ВС вен BER BICM BLAST Апостериорная вероятность Автоматический запрос на повтор передачи (протокол) Эффективность использования спектра (сот) Аддитивный белый гауссов шум Радиовещательный канал Боуза - Чоудхури -Хоквенгема, код БХЧ Коэффициент ошибок (по битам) Кодовая модуляция с чередованием бит Метод передачи на одной частоте, использующий несколько антенн на телефоне и на базовой станции
BPSK BS ССК CD CDF CDI CDMA Двоичная фазовая манипуляция (ДФМН, ФМ2) Базовая станция (точка беспроводного доступа) Манипуляция с дополнительным кодом Кодовое разделение Кумулятивная функция распределения Информация о распределении каналов Многостанционный (или коллективный) доступ с кодовым разделением каналов
CDPD CLT COVQ CPFSK CSI CSIR Сотовая цифровая система пакетной передачи данных Центральная предельная теорема Квантизатор векторной оптимизации каналов Частотная манипуляция с непрерывной фазой ЧМН-НФ Дополнительная информация о канале Дополнительная информация о канале на приеме
'В литературе встречается также другая расшифровка AMPS (American Mobile Phone
System) — Американская система мобильной связи. — Прим, перев.
Сокращения 27
CSIT CSMA Дополнительная информация о канале на передаче Многостанционный (коллективный) доступ с опросом несущей
CTS DARPA D-BLAST DCA DCS DECT Готовность к приему Агентство перспективных исследований МО США Диагональный BLAST Динамическое распределение каналов Цифровая сотовая система Усовершенствованная цифровая беспроводная связь (общеевропейский стандарт)2
DFE DFT D-MPSK Выравнивание с решающей обратной связью Дискретное преобразование Фурье, ДПФ Относительная (дифференциальная) многоуровневая ФМН
DPC Метод кодирования «грязных» — погашенных страниц документов
DPSK D-QPSK Относительная двоичная фазовая манипуляция ФМН Относительная квадратурная фазовая манипуляция ОФМ-4
DS DSDV Прямая последовательность Вектор последовательной маршрутизации (назначения интервалов маршрута)
DSL DSR DSSS EDGE EGC ETACS ETSI Цифровая абонентская линия Динамичная маршрутизация источника Расширение спектра методом прямой последовательности Усовершенствованная система передачи данных в GSM Линейное сложение сигналов Европейская система мобильной связи общего доступа Европейский Институт телекоммуникационных стан- дартов
EURO-COST FAF FCC FD FDD Европейское общество научно-технических исследований Коэффициент затухания на этаж Федеральная комиссия по связи США Частотное разделение Дуплексная передача с частотным разделением напра- влений
FDMA Многостанционный доступ с частотным разделением (МДЧР)
2 В литературе встречается также другая расшифровка DECT (Digital European Cord-
less Telecommunications) — Европейская цифровая беспроводная связь — Прим, перев.
28 Сокращения
FFH FFT FHSS Быстрая скачкообразная перестройка частоты Быстрое преобразование Фурье, БПФ Расширение спектра методом скачкообразной перест- ройки частоты
FIR FSK FSMC GEO GFSK GMSK Конечная импульсная характеристика, КИХ Частотная манипуляция Канал Маркова с конечным числом состояний Геосинхронная орбита Частотная манипуляция Гаусса Манипуляция Гаусса с минимальным сдвигом (ГЧМН-МС)
GPRS GRT Общая служба передачи пакетов в радиосети Общая схема построения трасс прохождения радиолучей (трассировка)
GSM GTD HDD HDR HDSL HIPERLAN HSCSD HSDPA ICI IDFT IEEE IFFT i.i.d. Глобальная система мобильной связи Геометрическая теория дифракции Декодирование с жестким алгоритмом принятия решения Высокоскоростная передача данных Высокоскоростная цифровая абонентская линия Высокоэффективная местная радиосеть3 Высокоскоростная система связи с коммутацией каналов Высокоскоростной доступ с коммутацией пакетов Взаимные влияния между несущими Обратное ДПФ Институт инженеров по электронике и электротехнике Обратное БПФ Независимые и одинаково распределенные случайные (величины)
IIR IMT IP ISI ISM Бесконечная импульсная характеристика, БИХ Международная система мобильной телефонии Интернет-протокол (IP-протокол) Межсимвольная интерференция; межсимвольные помехи Диапазон частот, выделенный для общественных, про- мышленных, научных и медицинских целей
ITU JTACS LAN LDPC LEO Международный Союз Электросвязи, МСЭ Японская система TACS Локальная (вычислительная) сеть, ЛВС Контроль четности с низкой плотностью Низкая околоземная орбита
3Европейский стандарт беспроводных ЛВС.
Сокращения
LLR LMA LMDS LMS LOS MAC MAI MAN MAP MC-CDMA MDC MEO MFSK MGF MIMO MISO ML MLSE MMDS Логарифмические критерии правдоподобия Среднее локальное затухание Местная многоточечная распределенная служба связи Минимальное среднеквадратическое Линия прямой видимости Канал многостанционного доступа Помехи (взаимные) многостанционного доступа Городская (вычислительная) сеть Максимум апотериорной (вероятности) CDMA на нескольких несущих Кодирование по множеству признаков Орбита средней удаленности от Земли М-кратная частотная манипуляция Производящая функция моментов Множество входов/множество выходов Множество входов/один выход Максимальное правдоподобие Оценка максимального правдоподобия последовательности Многоканальная многоточечная распределенная служба связи
MMSE MPAM MPSK MQAM MRC Минимальная среднеквадратичная ошибка М-кратная амплитудно-импульсная модуляция М-кратная фазовая манипуляция М-кратная квадратурная амплитудная модуляция Суммирование с дифференциальным взвешиванием сиг- налов
MSE MSK MTSO MUD N-AMPS NMT OFDM Среднеквадратичная ошибка (СКО) Манипуляция с минимальным сдвигом АТС мобильной связи (АТС МС) Многопользовательский детектор Узкополосная система AMPS Северная мобильная телефонная система Ортогональное мультиплексирование с частотным раз- делением (ОЧРК)
OFDMA O-QPSK Многостанционный доступ с OFDM (ОЧРК) Квадратурная фазовая манипуляция с фазовым сдвигом (ФМ4С)
OSI OSM PACS PAF Взаимодействие открытых систем, ВОС Бюро управления частотным диапазоном Система связи персонального доступа Распределенный коэффициент затухания
РАМ PAR РВХ PCS PDA PDC pdf PER PHS PLL PN PRMA PSD PSK PSTN QAM QoS QPSK RCPC RCS RLS rms RS RTS RTT SBS SC SCO SDD SDMA Амплитудно-импульсная модуляция (АИМ) Отношение максимальной мощности к средней (пик-фактор) Учрежденческая АТС (УАТС) Система персональной связи Электронный секретарь Персональная цифровая сотовая связь (стандарт) Плотность распределения (вероятности) Коэффициент пакетов с ошибками Система персональной мобильной телефонии Цепь фазовой автоподстройки частоты, ФАПЧ Псевдослучайный (псевдошумовой) Многостанционный доступ с резервированием пакетов Спектральная плотность мощности Фазовая манипуляция ФМН Телефонная сеть общего пользования, ТФОП Квадратурная амплитудная модуляция Качество услуг Квадратурная фазовая манипуляция, КФМН Совместимые по скорости пунктирные сверточные коды Эффективная площадь отражения цели Наименьшее квадратичное значение Среднеквадратичное значение (СКЗ) Код Рида-Соломона Запрос на передачу пакета Технология радиопередачи Посимвольно Избирательное объединение Синхронный, ориентированный на соединение Декодирование с мягким алгоритмом принятия решения Многостанционный (коллективный) доступ с пространствен- ным разделением каналов
SE SFH SHO SICM SIMO SINR Оценка последовательности (символов) Медленное скачкообразное переключение частоты Плавная, «мягкая» передача обслуживания Кодовая модуляция с чередованием символов Один вход/множество выходов Отношение мощности сигнала к мощности взаимных помех и шума
SIR SISO Отношение мощности сигнала к мощности помехи Один вход/один выход
Сокращения
SNR Отношение мощности сигнала к мощности шума (защи- щенность)
SSC SSMA STBC STTC SVD TACS TCP TD TDD Объединение с переключением и остановкой Многостанционный доступ с расширением спектра Пространственно-временные блочные коды Пространственно-временные решетчатые коды Разложение по сингулярным числам матрицы Система мобильной связи общего доступа Протокол управления передачей Временное разделение сигналов Дуплексная передача с временным разделением напра- влений
TDMA Многостанционный доступ с временным разделением (каналов)
TIA UEP UMTS U-NII Ассоциация промышленности средств связи (США) Коды с неравномерной защитой от ошибок Универсальная система мобильной связи Нелицензионная национальная информационная инфра- структура
US UWB V-BLAST VC VCO VQ WAN Некоррелированное рассеяние Сверхширокополосная радиосвязь Вертикальный BLAST Векторное кодирование Генератор, управляемый напряжением, ГУН Векторный квантователь Глобальная сеть (соединяет географически разделенные сети)
W-CDMA WLAN WPAN wss ZF ZMCSCQ Широкополосный МДКР (CDMA) Беспроводная локальная сеть, беспроводная ЛВС Беспроводные персональные сети Стационарный в широком смысле (процесс) Обращение в нуль (незначащих коэффициентов) Комплексная гауссова величина с нулевым средним и круговой симметрией
ZMSW ZRP Пространственная модель белого шума с нулевым средним Зоновый протокол маршрутизации
Обозначения
Приблизительно равно
А Равный по определению (а = Ь: а по опре- делению Ь)
Намного больше Намного меньше Оператор умножения
* arg шах[/(ж)] Оператор свертки Оператор круговой свертки Оператор кронекеровского произведения Корень n-й степени из х Значение х, при котором функция макси- мальна
argmin[/(x)] Значение х, при котором функция мини- мальна
Co(VT) <*(z) erfc(.r) exp [ж] [in{.r} Io (x) Выпуклая оболочка сферы W дельта-функция Дополнительная функция ошибок ех Мнимая часть (комплексного числа) х Модифицированная функция Бесселя 0-го порядка
J0(x) L(x) ln(.r) tog^y) log,, det [A] Функция Бесселя 0-го порядка Преобразование Лапласа по х Натуральный логарифм х Логарифм у по основанию х Логарифм определителя (детерминанта) матрицы А по основанию х
max/(.'j;) X modra(a:) N(/i,<r2) Значение f(x) максимизированное для всех х х по модулю п Гауссово (нормальное) распределение
Pr со средним ц и дисперсией ст2 среднее значение полученной энергии (мощ- ности) в данной точке
Q(x) R Re{.r} rect(.r) Q-функция Гаусса Область всех вещественных чисел Действительная часть (комплексного числа) Прямоугольная функция (rect(x) = 1 для |ж| 0,5 и 0 для остальных значений)
Обозначения 33
8П1ф) Е[-] Sinc-функция (sines = вттгж/тгж) Оператор математического ожидания Оператор условного математического ожи-
X дания Ожидаемое (среднее) значение случайной переменной X
X ~ Рх(х) Случайная переменная X имеет распределе- ние рх (х)
Var[A] Cov[X,y] Н(Х) H(Y/X) Дисперсия случайной переменной X Ковариация случайных переменных X и Y Энтропия случайной переменной X Условная энтропия случайной переменной Y при условии случайной переменной X
I(X-Y) Взаимная информация между случайными переменными X и Y
Mx(s) Производящая функция моментов случай- ной переменной X
Характеристическая функция случайной переменной X
•П] Оператор преобразования Фурье (УД-] — преобразование относительно х)
Оператор обратного преобразования Фу- рье (УдД-] — обратное преобразование от- носительно х)
DFT{-} IDFT{-} Оператор дискретного преобразования Фурье Оператор обратного дискретного преобра- зования Фурье
M у Yx Ы M ы Оператор скалярного произведения Комплексно сопряженный величине х Фаза х Абсолютная величина (амплитуда) х Размер алфавита (первичного кода) Наибольшее целое число, меньшее или рав- ное X
Ms Наибольшее число в множестве S, меньшее или равное х
{x : C} Множество всех значений х, удовлетворяю- щих условию С
{xi : i = 1,... ,n}, {xi}™=1 (xi : i = 1,... , n) IM Множество: xi,..., хп Вектор х = (xi,..., хп) Норма вектора х
34 Обозначения
I|A||f X* х" Норма Фробениуса матрицы А Комплексно сопряженный вектору х Эрмитов (сопряженный транспонирован-
хг А’1 Ан ный) вектор х Вектор, транспонированный х Матрица, обратная А Эрмитова (сопряженная транспонирован-
Ат det [А] Ъ-[А] ная) матрица А Транспонирование матрицы А Определитель матрицы А Сумма элементов главной диагонали ма- трицы А
vec(A) Вектор, полученный сложением столбцов матрицы А
N х М matrix diag[«i,... ,xN] Матрица с N строками и М столбцами Диагональная матрица N х N с диагональ- ными элементами xi,...,
Единичная матрица размером N х N (N можно опустить, если размер ясен из контекста)
ГЛАВА I
ОБЗОР СИСТЕМ
БЕСПРОВОДНОЙ
СВЯЗИ
Вне всяких сомнений, беспроводные средства связи сегодня представля-
ют самый быстро развивающийся сегмент отрасли связи. По этой причине
они приковали к себе внимание средств массовой информации и общества.
Последнее десятилетие охарактеризовалось бурным развитием систем со-
товой связи, и в настоящее время по всему миру насчитывается свыше
двух миллиардов пользователей таких систем. В самом деле, сотовые теле-
фоны стали важным инструментом бизнеса и частью повседневной жизни
в большинстве развитых стран, а во многих развивающихся странах они
стремительно вытесняют устаревшие проводные системы. Кроме того,
беспроводные локальные сети сегодня часто дополняют или заменяют
проводные сети в домашних условиях, на предприятиях и в студенче-
ских городках. Существует и множество новых приложений, включая бес-
проводные сети датчиков, автоматизированные производственные линии
и автомагистрали, «умные дома1» и бытовые приборы, а также телемеди-
цину, которые проходят путь от научных разработок до реальных систем.
Стремительный рост беспроводных систем в сочетании с распростране-
нием небольших портативных и карманных компьютеров предсказыва-
ет блестящее будущее беспроводным сетям — как в виде автономных
систем, так и в качестве составной части большой сетевой инфраструк-
туры. Впрочем, существует еще много нерешенных проблем, связанных
с созданием надежных беспроводных систем, которые обеспечили бы ра-
бочие характеристики, необходимые для поддержки новых приложений.
В этой вступительной главе представлен краткий исторический обзор
беспроводных систем, начиная от дыма сигнальных костров в доинду-
стриальную эпоху и заканчивая сотовыми, спутниковыми и другими бес-
проводными сетями сегодняшнего дня. Затем мы более детально обсудим
концепцию беспроводной связи, в том числе технические проблемы, кото-
рые ждут своего решения. Будут рассмотрены существующие беспровод-
1 Дома с централизованным компьютерным управлением всеми системами жизнеобес-
печения и подсобными службами: освещением, водоснабжением, отоплением, кондици-
онированием воздуха и т.п. — Прим, перев.
систем беспроводной связи
ные системы наряду с вновь появляющимися системами и стандартами.
Разрыв между уже существующими и возникающими системами и пред-
ставление о будущих беспроводных приложениях позволяют оценить, как
много еще нужно сделать, чтобы эти новые идеи и представления стали
реальностью.
1.1. История беспроводной связи
Первые беспроводные сети появились еще в древности. Эти системы пе-
редавали информацию на расстояние прямой видимости (которое потом
было увеличено за счет применения телескопов), используя дым сигналь-
ных костров, сигнальные лампы, мерцание зеркал, сигнальные вспыш-
ки или сигнальные флажки. Детально разработанный набор сигнальных
комбинаций позволял передавать сложные сообщения с помощью этих
элементарных сигналов. На вершинах холмов и вдоль дорог были оборудо-
ваны наблюдательные пункты, чтобы передавать сообщения по эстафете
на большие расстояния. На смену этим первым сетям связи пришли сна-
чала телеграф (изобретенный в 1838 г. Самуэлем Морзе), а позднее —
телефон. В 1895 г., спустя несколько десятилетий после изобретения теле-
фона, Маркони продемонстрировал первую радиопередачу с острова Уайт
на буксир, находящийся на расстоянии 18 миль, и таким образом родилась
радиосвязь. Радиотехнологии стремительно развивались, что позволило
вести передачу на большие расстояния с лучшим качеством, меньшей
мощностью и с помощью меньших по размеру и стоимости устройств,
и в результате появились общественные и частные системы радиосвязи,
телевидение и беспроводные сети.
Первые радиосистемы передавали аналоговые сигналы. Сегодня боль-
шинство радиосистем передают цифровые двоичные сигналы — биты,
непосредственно представляющие поток данных или полученные при пре-
образовании аналогового сигнала в цифровую форму. При цифровой ра-
диосвязи биты могут передаваться в виде непрерывного потока или груп-
пироваться в пакеты. Более поздний вид радиосвязи называется пакет-
ным радио. Такие системы часто характеризуются пульсирующим режи-
мом передачи: радио бездействует за исключением того времени, когда
идет передача пакета, хотя оно может передавать пакеты и непрерывно.
Первая радиосеть, использующая передачу пакетов, ALOHANET, была
разработана в Гавайском Университете в 1971 г. Эта сеть обеспечивала
связь между компьютерами вычислительных центров в семи университет-
ских городках, расположенных на четырех островах, и главным вычисли-
тельным центром, который находился на острове Оаху. Сетевая архитек-
1.1. История беспроводной связи
тура имела топологию «звезда», а в качестве концентратора использовался
компьютер главного вычислительного центра. Любые два компьютера
могли устанавливать между собой двунаправленные соединения, прохо-
дящие через центральный сетевой концентратор. Сеть ALOHANET ввела
первый набор протоколов для доступа к каналам и маршрутизации в па-
кетных радиосистемах, и многие принципы, положенные в основу этих
протоколов, используются и по сей день. Американские военные прояви-
ли чрезвычайный интерес к этой комбинации пакетной передачи данных
и радиовещания. За период с 1970-х до начала 1980-х годов Агентство
перспективных исследований МО США DARPA2 вложило значительные
финансовые средства в развитие сетей пакетной радиопередачи для так-
тических задач на поле боя. Узлы связи этих специальных беспроводных
систем могли самостоятельно конфигурироваться в сеть (или изменять
конфигурацию) без помощи какой-либо заранее установленной инфра-
структуры. Инвестиции DARPA в специальные сети достигли своего пика
в середине 1980-х, но полученные в итоге системы оказались далеко за
рамками ожидаемых результатов по скорости передачи и функциональ-
ным возможностям. Эти сети продолжали разрабатывать для военных
целей. Пакетные радиосети нашли также коммерческое применение в бес-
проводной передаче данных на большие расстояния. Эти услуги, впервые
введенные в начале 1990-х, обеспечивали беспроводной доступ к инфор-
мации (включая электронную почту, передачу файлов и просмотр веб-
страниц) на довольно низких скоростях порядка 20 кбит/с. Но в действи-
тельности устойчивый рынок беспроводной передачи данных на большие
расстояния так никогда и не сложился, в основном, из-за низкой скорости
передачи, высокой стоимости и отсутствия привлекательных примене-
ний — «приманок». В основном эти службы исчезли в 1990-е годы, вы-
тесненные потенциальными возможностями таких средств беспроводной
передачи данных, как сотовые телефоны и беспроводные локальные вы-
числительные сети ЛВС.
Появление проводной технологии Ethernet в 1970-х годах увело многие
коммерческие компании от технологий радиосетей. Скорость передачи
данных в Ethernet на уровне 10 Мбит/с превосходила все существующие
методы, основанные на использовании радио, и компании не возража-
ли против прокладки кабелей внутри и между своими зданиями, чтобы
2DARPA (Defense Advanced Research Projects Agency) — орган MO CIIIA, выполняю-
щий посреднические функции между этим ведомством и научно-исследовательскими
организациями. Занимается координацией ведения НИОКР, в том числе по супер-
компьютерам (программа НРСС), сетям, оборонной компьютерной инициативе и др.
проектам. Годовой бюджет — около 2 млрд. долл. В 1973 г. агентство DARPA создало
сеть DARPAnet, которая впоследствии дала начало Internet. — Прим, перев.
38 Глава 1. Обзор систем беспроводной связи
воспользоваться преимуществами таких высоких скоростей. В 1985 г. Фе-
деральная комиссия по связи США FCC3 выделила для коммерческого
использования беспроводными ЛВС полосу частот, санкционировав ее ис-
пользование для общественных, промышленных, научных и медицинских
целей — ISM4. Полоса частот ISM была привлекательной для производи-
телей беспроводных ЛВС, так как им не надо было получать лицензию
комиссии по связи FCC для работы в этой полосе частот. Однако бес-
проводным системам ЛВС не разрешалось пересекаться с первичными
пользователями частотных полос ISM, что заставляло их использовать
низкий диапазон мощностей и неэффективные схемы сигнализации. Более
того, помехи от первичных пользователей в этой частотной полосе были
довольно высокими. В результате у этих первых беспроводных ЛВС бы-
ли очень плохие технические характеристики как по скорости передачи
данных, так и по зоне покрытия. Эти невысокие технические характе-
ристики в сочетании с заботой о безопасности, отсутствием стандартов
и высокой стоимостью (узел доступа первой беспроводной ЛВС стоил
по каталогу 1400 долл., в отличие от нескольких сотен долларов за карту
проводного Ethernet) стали причиной плохих продаж. Немногие из таких
систем действительно использовались для информационных сетей: они
были низведены до уровня несложных приложений типа управления запа-
сами. Нынешнее поколение беспроводных ЛВС, основанное на семействе
стандартов IEEE 802.11, обладает лучшими техническими характеристи-
ками, хотя скорость передачи данных все еще остается относительно
низкой (максимальная групповая скорость передачи данных составляет
десятки Мбит/с), а зона покрытия совсем небольшая — около 100 м. Про-
водной Ethernet предлагает сегодня скорость передачи данных 1 Гбит/с,
а без выделения дополнительного спектра разрыв эксплутационных пока-
зателей между проводными и беспроводными ЛВС, вероятно, должен со
временем увеличиться. Несмотря на меньшую скорость передачи данных,
беспроводные ЛВС становятся все более предпочтительным средством
доступа в Интернет во многих домах, офисах и университетских город-
ках благодаря своему удобству и независимости от проводов. Тем не
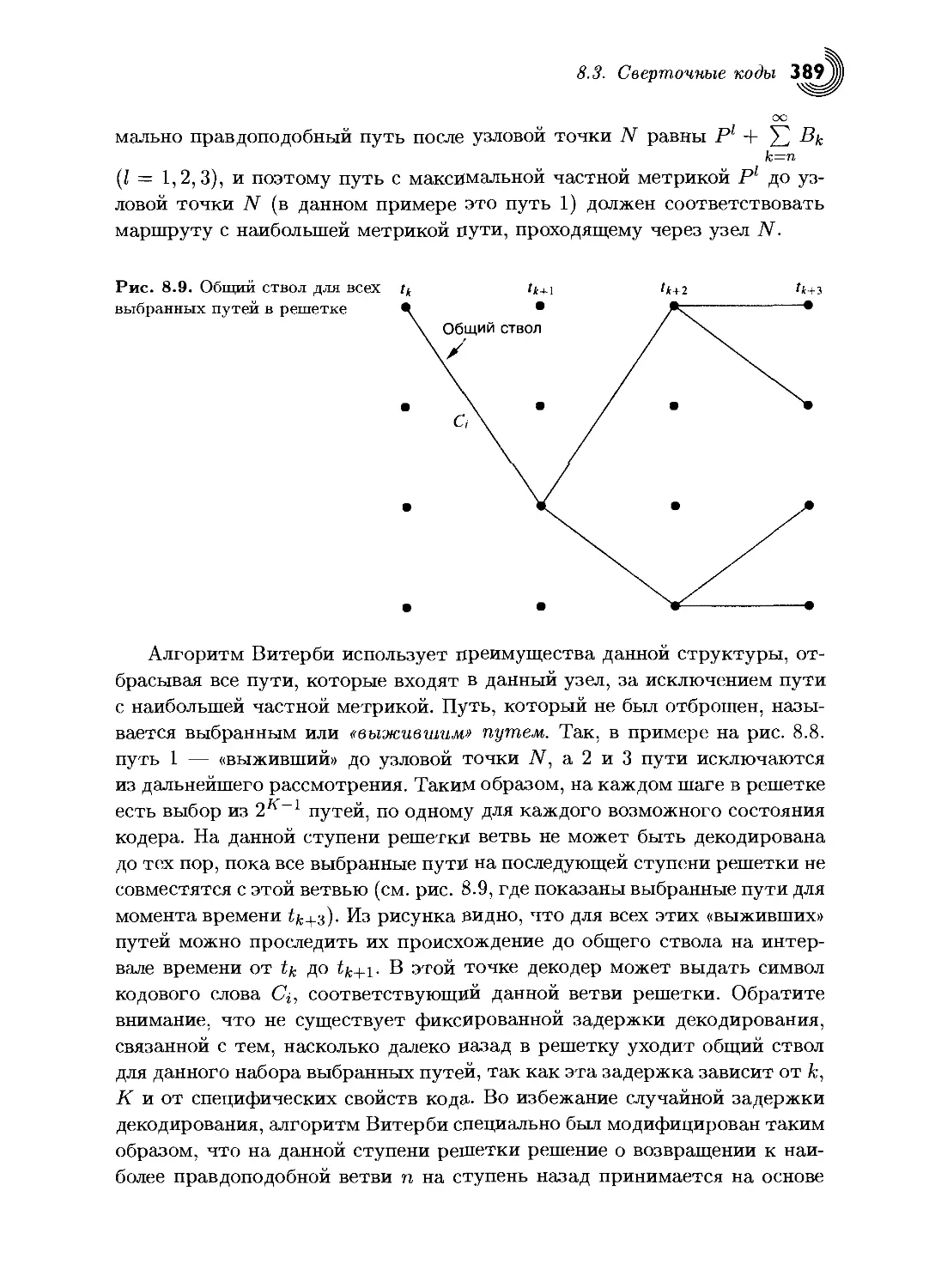
менее, большинство беспроводных ЛВС поддерживают приложения, про-
пускная способность которых невысока, например, электронную почту
и просмотр страниц в Интернет. Проблемой беспроводных ЛВС буду-
щего станет задача обеспечения одновременной работы большого числа
абонентов с приложениями, требующими высокой пропускной способно-
сти и не терпящими задержек, такими как, например, видео. Расширение
3FCC — Federal Communications Commission.
4ISM — Industrial, Scientific and Medical.
1.1. История беспроводной связи
диапазона частот также представляет важную задачу будущих беспро-
водных ЛВС.
Несомненно, наиболее успешное применение беспроводных сетей пред-
ставляет сотовая телефония. Корнями эта система уходит еще в 1915 г.,
когда была осуществлена беспроводная передача речи между Нью-Йорком
и Сан-Франциско. В 1946 г. была введена в эксплуатацию мобильная теле-
фонная сеть общего пользования в 25 городах по всей территории США.
Эта первая система использовала центральный передатчик для покры-
тия целого крупного города с его пригородами. Такое неэффективное
использование спектра радиочастот в сочетании с состоянием радиотех-
ники того времени значительно ограничивало емкость системы: спустя
тридцать лет после введения сети мобильных телефонов нью-йоркская
сеть могла обслуживать всего лишь 543 абонента.
Решение проблемы пропускной способности появилось в 1950-1960-е
годы, когда исследователи AT&T «Белл лэбраториз5» разработали концеп-
цию сотовой связи [1]. Сотовые системы использовали то обстоятельство,
что мощность передаваемого сигнала ослабевает с расстоянием. Таким
образом, два пользователя могут работать на одной и той же часто-
те в пространственно удаленных друг от друга местах с минимальны-
ми взаимными помехами. Это обеспечивает эффективное использование
частотного спектра, так что может быть подключено большое число поль-
зователей. Развитие систем сотовой связи от первоначальной концепции
до реализации отнюдь не было бурным. В 1947 г. компания AT&T за-
просила у FCC спектр частот для сотовой службы. Разработка системы
была, в основном, завершена к концу 1960-х годов, но первое полевое ис-
пытание было проведено лишь в 1978 г., a FCC дала свое разрешение
только в 1982 г. — к тому времени большая часть оригинальной тех-
нологии уже устарела. Первая аналоговая сотовая система, развернутая
в Чикаго в 1983 г., к 1984 году, когда FCC увеличила часть спектра,
предоставленную для сотовой системы, с 40 до 50 МГц, была уже пол-
ностью загружена. Стремительный рост сотовой индустрии ошеломил
буквально всех. Действительно, маркетинговые исследования, проведен-
ные AT&T перед развертыванием первой системы, предсказывали, что
спрос на сотовые телефоны ограничится докторами и очень богатыми
людьми. В 1980-х годах компания AT&T, в основном, прекратила сотовый
бизнес, сосредоточившись на волоконно-оптических сетях, но со временем
вернулась к этому бизнесу, когда его потенциал уже не вызывал сомне-
ний. К концу 1980-х годов, когда все больше и больше городов захватывал
Исследовательский центр компании «Белл телефон» [ Bell Telephone Со.]. Исследования
ведутся в области акустики, физики твердого тела, электроники, физической и орга-
нической химии и в ряде других областей. Находится в Нью-Йорке. — Прим, персе.
40 Глава 1. Обзор систем беспроводной связи
спрос на сотовые службы, возникла необходимость развития цифровой
сотовой связи для увеличения мощности и достижения лучших эксплуа-
тационных характеристик беспроводных систем.
Второе поколение сотовых систем, появившееся в начале 1990-х годов,
было основано на принципах цифровой связи. Переход от аналогового
к цифровому режиму был обусловлен большей пропускной способностью
цифровых систем, а также лучшими показателями цифрового оборудова-
ния по стоимости, скорости и энергопотреблению. Хотя сотовые системы
второго поколения первоначально предоставляли, в основном, речевые
услуги, но постепенно они были доработаны для поддержки информаци-
онных служб, таких как электронная почта, доступ в Интернет и корот-
кие сообщения. К сожалению, огромный рыночный потенциал сотовых
телефонов привел к пролиферации (росту числа) стандартов второго по-
коления сотовой связи: только в США существует три стандарта, свои
стандарты есть в Европе и Японии, и все они несовместимы друг с дру-
гом. Тот факт, что в разных городах существуют разные несовместимые
стандарты, делает роуминг внутри США и по всему миру на основании
только одного стандарта невозможным. Более того, в некоторых странах
уже вводятся услуги систем третьего поколения, для которых существу-
ют также несовместимые стандарты. В результате такой пролиферации
стандартов многие сотовые телефоны сегодня являются многорежим-
ными: они содержат разнообразные цифровые стандарты, обеспечива-
ющие как связь внутри страны, так и роуминг по всему миру, а также,
по возможности, поддерживающие аналоговый стандарт первого поколе-
ния, так как только этот стандарт обеспечивает универсальное покрытие
по всей территории Соединенных Штатов.
Спутниковые системы обычно характеризуются высотой орбиты спут-
ника: низкая околоземная орбита (высота низкой околоземной орбиты
LEO6 — приблизительно 2000 км), средняя околоземная орбита (МЕО7 —
примерно 9000 км) или геостационарная орбита (GEO8 — 40 000 км).
Геостационарные орбиты рассматриваются как стационарные по отно-
шению к Земле, в то время как спутники, вращающиеся по другим орби-
там, меняют зону своего покрытия в зависимости от времени. Концепция
использования геостационарных спутников для связи была предложена
писателем — научным фантастом Артуром К.Кларком в 1945 г. Однако
первые спутники — советский «Спутник» в 1957 г. и спутник НАСА/«Белл
лэбораториз» «ЕсЬо-1» в 1960 г.- не были геостационарными из-за слож-
ности подъема спутника на такую высокую орбиту. Первый геостацио-
6LEO — low earth orbit.
7MEO — middle earth orbit.
8GEO — geostationary earth orbit.
1.2. Перспективы развития беспроводной связи 41
парный спутник был запущен компанией «Хьюз» и НАСА в 1963 г., после
чего в течение нескольких десятилетий геостационарные спутники гос-
подствовали как в коммерческих, так и в государственных спутниковых
системах.
У геостационарных спутников большая зона покрытия, поэтому тре-
буется немного спутников (и долларов), чтобы охватить широкую зону
или даже обеспечить глобальное покрытие. Однако чтобы добраться до
спутника, необходима большая мощность сигнала и, кроме того, задерж-
ка прохождения сигнала обычно очень велика для приложений с ограниче-
нием на величину задержки, как, например, телефонии. Эти неудобства
явились причиной возврата в 1990-е годы назад, к спутникам на низ-
кой околоземной орбите [2, 3]. Была поставлена задача сделать рече-
вые и информационные службы конкурентоспособными по отношению
к сотовым системам. Однако спутниковые мобильные терминалы были
намного больше, потребляли намного больше энергии и стоили намно-
го больше, чем современные сотовые телефоны, что ограничивало их
привлекательность. Самое привлекательное качество этих систем — обес-
печение полного покрытия по всему миру, особенно в отдаленных районах
или в странах третьего мира, где нет наземных линий связи или инфра-
структуры сотовой связи. К сожалению, в таких местах, как правило,
нет большого спроса на услуги спутниковой связи или ресурсов для их
оплаты. Так как сотовые системы оказались более распространенными
по всему миру, они приносят больше дохода, чем спутниковые системы
LEO могли бы собрать в заселенных зонах. Большинство спутниковых
систем, работавших на низкой околоземной орбите, ушли из бизнеса из-
за отсутствия реальной рыночной ниши.
Естественная сфера применения спутниковых систем — транслиро-
вание развлекательных передач. Трансляция осуществляется в диапазоне
12 ГГц. Эти системы предлагают сотни телеканалов и составляют глав-
ную конкуренцию кабельному телевидению. Стало популярным также
цифровое радио с трансляцией через спутник. Такие системы, действую-
щие как в Европе, так и в США, предлагают цифровые звуковые передачи
на качественном уровне, приближенном к качеству CD.
1.2. Перспективы развития беспроводной связи
Предвидение дальнейшего развития беспроводных средств связи, поддер-
живающих информационный обмен между людьми или устройствами, —
это тот предельный уровень, которого они смогут достичь в течение
последующих нескольких десятилетий, при этом большая часть таких
Глава 1. Обзор систем беспроводной связи
средств уже существует в той или иной форме. Это предвидение предпо-
лагает мультимедийную связь с любой точкой земного шара с помощью
маленьких переносных устройств или небольших портативных компью-
теров. Беспроводные сети соединят карманные, небольшие портативные
и настольные компьютеры в любом месте в пределах офисного здания
или университетского городка. В доме эти сети создадут новый класс
интеллектуальных электронных устройств, которые смогут взаимодей-
ствовать друг с другом, а с добавлением Интернета — осуществлять
связь между компьютерами, телефонами и системами наблюдения и бе-
зопасности. Такие «умные дома» могут также помочь пожилым людям
и инвалидам в плане ухода за ними, наблюдения за состоянием их здоро-
вья или же в случае необходимости экстренного вызова. Беспроводные
развлекательные программы войдут в каждый дом и в любое другое
место, где есть люди. Видеотелеконференции будут проходить между
зданиями, находящимися друг от друга на расстоянии квартала или да-
же на другом континенте, эти конференции могут охватывать и тех,
кто находится в дороге, — от продавцов, опоздавших на свой самолет,
до директоров корпораций, плывущих в Карибском море. Беспроводная
видеосвязь соединит в будущем удаленные учебные классы, средства ди-
станционного обучения и далеко расположенные больницы во всем мире.
У беспроводных датчиков есть огромный диапазон приложений как ком-
мерческих, так и военных. Коммерческие приложения включают в себя
средства наблюдения для пожарной безопасности, видеоконтроль мест
хранения токсичных отходов, нагрузок и деформаций зданий и мостов,
движения углекислого газа, а также распространения химикатов и га-
зов в зоне бедствия. Эти беспроводные датчики автоматически конфи-
гурируются в сеть для осуществления и обработки измерений, а затем
передают эту информацию на централизованный пульт управления. Во-
енные приложения включают идентификацию и отслеживание вражеских
целей, определение химических и бактериологических атак, поддержку
неуправляемых человеком транспортных средств-роботов, а также анти-
террористические мероприятия. И, наконец, беспроводные сети позволя-
ют создать распределенные системы дистанционного управления устрой-
ствами, датчиками и исполнительными механизмами, связанными друг
с другом беспроводными каналами. Такие системы, в свою очередь, позво-
лят создать автоматизированные автомагистрали и мобильные роботы,
а также легко перестраивать промышленную автоматику.
Все описанные здесь разнообразные приложения формируют концеп-
цию беспроводной связи будущего. Так что же такое, собственно говоря,
беспроводная связь? Есть много способов разделить эту сложную тему
на классы по различным приложениям, системам или зонам покрытия [4].
Беспроводные приложения включают в себя радиотелефонную связь, до-
ступ в Интернет, просмотр страниц Интернет, поисковые и короткие
сообщения, службы информирования абонентов, передачу файлов, видео-
телеконференции, развлекательные программы, зондирование и распре-
деленное управление. Системы подразделяются на сотовые телефонные
системы, беспроводные ЛВС, беспроводные глобальные информацион-
ные системы, спутниковые системы и специализированные беспроводные
сети. Зоны покрытия могут быть внутри здания, университетского го-
родка, города, а также региональными и глобальными. Задача лучшего
определения беспроводной связи с учетом всех этих различных сегмен-
тов привела к существенной фрагментации данной сферы, о чем свиде-
тельствует множество различных беспроводных устройств, стандартов
и услуг, предлагаемых или предполагаемых. Одна из причин такой фраг-
ментации состоит в том, что разные беспроводные приложения имеют
разные требования. Так, телефонные системы имеют относительно низ-
кие требования к скорости передачи данных (около 20 кбит/с) и могут
допускать довольно высокую вероятность ошибок по битам (коэффици-
ент ошибок — BER9, равный примерно 10~3), но общая задержка долж-
на быть менее 100 мс, иначе это будет заметно абоненту10. С другой
стороны, информационные системы обычно требуют гораздо больших
скоростей передачи данных (1100 Мбит/с) и очень низкой величины
коэффициента ошибок BER (10~8 или меньше, при этом все ошибочно
принятые биты должны быть переданы повторно), но не имеют фиксиро-
ванных требований к задержке. Видеосистемы реального времени имеют
высокие требования к скорости передачи данных в сочетании с теми же
ограничениями к задержкам, что и системы передачи речи, в то время как
у поисковых систем и служб коротких сообщений невысокие требования
к скорости передачи информации и отсутствуют строгие ограничения
по задержкам. Эти различия в требованиях разных приложений затруд-
няют построение единой беспроводной системы связи, которая смогла бы
удовлетворить все эти требования одновременно. Проводные сети обыч-
но удовлетворяют различные требования разных приложений, используя
единственный протокол, а это означает, что большинство строгих требо-
ваний всех приложений должно быть удовлетворено одновременно. Это
возможно на некоторых проводных сетях — со скоростью передачи ин-
формации порядка Гбит/с и коэффициентом ошибок порядка 10-12, но не-
возможно в беспроводных сетях, которые имеют более низкие скорости
9BER — Bit Error Rate.
10Проводные телефоны имеют ограничение по задержке примерно в 30 мс. Сотовые
телефоны ослабляют это ограничение примерно до 100 мс, а при передаче речевых
сообщений через Интернет оно смягчается еще больше.
Глава 1. Обзор систем беспроводной связи
передачи и более высокие коэффициенты ошибок. Поэтому, по крайней
мере, в ближайшем будущем беспроводные системы будут оставаться раз-
деленными на классы и специализироваться на различных протоколах,
обеспечивающих требования различных приложений.
Стремительный рост использования сотовых телефонов и беспровод-
ного доступа к Интернет послужил поводом для большого оптимизма
в отношении беспроводных технологий в целом. Очевидно, что не все бес-
проводные приложения будут процветать. С одной стороны, многие бес-
проводные системы и компании наслаждались впечатляющими успехами,
с другой стороны, на этом пути было много неудач, включая беспровод-
ные ЛВС первого поколения, спутниковую систему «Иридий» (Iridium11),
большие информационные системы, такие как «Метриком» (Metricom),
и беспроводный фиксированный доступ к дому — беспроводный «кабель».
Поэтому, действительно, невозможно предугадать, какие взлеты и паде-
ния ждут беспроводную связь в будущем. Более того, инженерам и руко-
водителям следует быть достаточно гибкими и изобретательными, чтобы
добиться хотя бы незначительного успеха. Тем не менее, ясно, что и су-
ществующие и появляющиеся сегодня беспроводные системы в сочетании
с прогнозированием тех приложений, которые могут потребоваться, га-
рантируют блестящее будущее беспроводным технологиям.
1.3. Технические решения
Для реализации возможностей беспроводных систем необходимо решить
множество технических проблем. Эти проблемы пронизывают все аспек-
ты разработки системы. Так как в беспроводных оконечных устройствах
появляется больше функциональных возможностей, эти маленькие уст-
ройства должны поддерживать многочисленные режимы работы, различ-
ные приложения и информационные средства. Компьютеры обрабатыва-
ют звук, изображение, текст и видеоинформацию, но для выполнения мно-
гих операций в разных режимах в дешевом, легком, переносном устрой-
стве, необходим прорыв в схемотехнике. Абоненты не хотят использо-
вать большие батареи, которые часто нуждаются в подзарядке, поэтому
портативный терминал в режимах передачи и обработки сигналов дол-
жен потреблять минимум энергии. Обработка сигнала, необходимая для
поддержания мультимедийных приложений и сетевых функций, может
быть достаточно энергоемкой. Поэтому сети, основанные на беспровод-
ной инфраструктуре, такие как беспроводные ЛВС и сотовые системы,
по возможности, размещают большую часть нагрузки по обработке сиг-
11 Спутниковая система глобальной сотовой связи. — Прим, перев.
1.3. Технические решения 45
налов в стационарных пунктах с большими энергетическими ресурсами.
Наличие таких узких мест и ненадежных узлов крайне нежелательно для
системы в целом. Специальные беспроводные сети без инфраструктуры
чрезвычайно привлекательны для многих приложений благодаря своей
гибкости и устойчивости. В таких сетях вся обработка и контроль инфор-
мации должны осуществляться в узловых точках сети по распределенной
модели, что позволяет решить проблему эффективного использования
энергии. Энергия представляет особенно критичный ресурс в сетях, в ко-
торых узлы не могут подзаряжать свои батареи, — например, в сетях
датчиков. Создание сетей, которые бы удовлетворяли всем требованиям
приложений при столь жестких ограничениях в энергии, остается боль-
шой технологической проблемой. Кроме того, ограниченный диапазон
частот и случайные изменения параметров беспроводных каналов требу-
ют помехоустойчивых приложений, которые позволили бы сгладить ухуд-
шения параметров сети.
Из-за особенностей беспроводного канала разработка беспроводных
сетей существенно отличается от проектирования проводной сети. Такой
канал непредсказуем и представляет достаточно сложную передающую
среду. Прежде всего, спектр радиочастот — это ограниченный ресурс,
который необходимо распределять между множеством различных при-
ложений и систем. По этой причине использование спектра регулируется
соответствующими региональными и международными органами. Работа
региональной или международной системы в заданном частотном диапа-
зоне должна подчиняться ограничениям данного диапазона, установлен-
ным соответствующими органами. Диапазон частот может быть также
очень дорогим: во многих странах лицензии на пользование спектром час-
то продаются на аукционе по наиболее высокой из предложенных цен.
В Соединенных Штатах компании потратили свыше 9 миллиардов долла-
ров на лицензии сотовой связи второго поколения, а на аукционе в Европе
за использование спектра сотовой связи третьего поколения было собрано
около 100 миллиардов долларов. Для привлекательности инвестиций диа-
пазон частот, приобретенный на этих аукционах, должен использоваться
особенно эффективно. Он также должен снова и снова повторно использо-
ваться в одном и том же географическом регионе, что требует создания
сотовых систем с высокой производительностью и хорошими эксплутаци-
онными показателями. На сегодняшний день доступны радиокомпоненты
приемлемых размеров, потребляемой мощности и стоимости для беспро-
водных систем, работающих на частотах в несколько гигагерц. Однако
этот частотный диапазон чрезвычайно переполнен. Поэтому технологи-
ческие прорывы по обеспечению работы более высокочастотных систем
с той же самой стоимостью и эксплутационными показателями должны
систем беспроводной связи
значительно сократить недостаток диапазона частот. Однако у всенапра-
вленных антенн потери в тракте передачи на таких высоких частотах
больше, что также ограничивает используемый диапазон.
Распространяясь в беспроводном канале, сигнал испытывает случай-
ные флуктуации во времени из-за изменений отражений и затуханий при
движении передатчика, приемника или окружающих объектов. Поэтому
кажется, что характеристики канала беспорядочно изменяются во вре-
мени, из-за чего возникают трудности создания надежных систем с га-
рантированными эксплутационными характеристиками. В беспроводных
системах также сложно обеспечить безопасность, так как каждый мо-
жет перехватить радиопередачу с помощью высокочастотной антенны.
У аналоговых сотовых систем нет защиты, поэтому любой может про-
слушивать разговоры, просто сканируя аналоговый сотовый частотный
диапазон. Все цифровые сотовые системы обладают средствами, обеспе-
чивающими определенный уровень шифрования. Однако при достаточном
уровне знаний, времени и вычислительных ресурсов большинство этих
методов шифрования могут быть взломаны; и действительно, некоторые
из них уже были скомпрометированы. Для поддержания таких прило-
жений, как электронная коммерция и деловые операции с кредитными
картами, беспроводные сети должны быть защищены от подобных «слу-
шателей».
Таким образом, беспроводные системы стоят перед большими про-
блемами. Сеть при любых обстоятельствах должна быть в состоянии
определить местоположение данного пользователя среди миллиардов мо-
бильных аппаратов, распределенных по всему миру. Затем она должна
обеспечить соединение с этим абонентом, когда он передвигается со ско-
ростью до 100 км/ч. Конечные ресурсы сети должны быть распределены
четким и эффективным способом, в соответствии с изменяющимися тре-
бованиями и местоположением пользователя. Более того, в настоящее вре-
мя существует гигантская инфраструктура проводных сетей: телефонная
система общего пользования, Интернет, волоконно-оптические кабели, ко-
торые могут использоваться для объединения беспроводных систем в еди-
ную всемирную сеть. Однако беспроводные системы с мобильными поль-
зователями никогда не смогут соревноваться с проводными системами
в плане скорости передачи информации и надежности. Взаимодействие
беспроводных и проводных сетей с очень разными эксплутационными по-
казателями представляет собой сложную проблему.
Вероятно, наиболее значимой технической проблемой в создании беспро-
водных систем является пересмотр самого процесса их создания. Провод-
ные системы, в основном, разрабатываются в соответствии с многоуров-
невым подходом, когда протоколы, связанные с различными уровнями
1.4- Современные беспроводные системы
системы, создаются изолированно, при наличии базовых механизмов вза-
имодействия между уровнями. Уровни в беспроводной системе включают
в себя: канальный или физический уровень, который обеспечивает пере-
дачу бит в передающей среде; уровень доступа, который обеспечивает
совместный доступ к передающей среде; сетевой и транспортный уров-
ни, которые обеспечивают соединение и передачу информации «из конца
в конец», и уровень приложений, который определяет скорость передачи
данных «из конца в конец» и допустимые задержки, обусловленные при-
ложениями. Хотя методология разбиения на уровни снижает сложность
системы, обеспечивает модульность структуры и способствует стандар-
тизации, но она, из-за отсутствия оптимизации всей разработки, приво-
дит также к потерям и неэффективному использованию параметров сис-
темы. Высокая пропускная способность и надежность проводных систем
смягчают эту неэффективность во многих проводных сетевых приложе-
ниях, хотя она и мешает хорошей работе приложений, не допускающих
задержек, таких как передача речи и видео. В беспроводных системах си-
туация существенно отличается. Параметры беспроводных каналов могут
оказаться очень плохими. Эти параметры в зависимости от количества
пользователей и топологии сети изменяются во времени. В сущности, само
понятие беспроводной линии до некоторой степени представляет завуа-
лированный намек на саму природу распространения радиоволн и радио-
вещания. Переменчивая природа и низкая эффективность беспроводных
каналов связи указывают на то, что для таких каналов должны быть
оптимизированы высококачественные сети, которые должны быть устой-
чивы и адаптивны к изменениям радиоканала, а также к динамическим
свойствам сети. Поэтому эти сети требуют интегрированных и адаптив-
ных протоколов на всех уровнях, начиная с канального, до прикладного.
Разработка такой многоуровневой структуры протоколов требует меж-
дисциплинарной экспертизы в области связи, передачи сигналов, теории
и проектирования сетей.
В следующем разделе дан обзор существующих сегодня беспроводных
сетей. Из обзора ясно, что изложенные выше перспективы беспровод-
ных технологий остаются задачами будущего со множеством технических
трудностей, требующих преодоления. Эти трудности детально исследу-
ются в данной книге.
1.4. Современные беспроводные системы
Данный раздел содержит краткий обзор современных беспроводных сис-
тем. Структурные элементы этих систем постоянно развиваются, появля-
ются новые системы, а старые оказываются в стороне. Поэтому мы рас-
Глава 1. Обзор систем беспроводной связи
сматриваем, в основном, аспекты разработки элементов высшего уровня
наиболее распространенных систем. Более детальное изложение стандар-
тов беспроводных систем можно найти в работах [5, 6, 7]. Краткое изло-
жение основных стандартов беспроводных систем дано в приложении Г.
1.4.1. Сотовые телефонные системы
Сотовые телефонные системы чрезвычайно популярны и прибыльны во
всем мире: это системы, которые совершили беспроводную революцию.
Сотовые системы обеспечивают двустороннюю телефонную связь и пе-
редачу данных в местном, общегосударственном и международном мас-
штабе. Первоначально сотовые системы создавались для обслуживания
мобильных терминалов внутри транспортных средств с антеннами, уста-
новленными на крыше транспортного средства. Сегодня эти системы
эволюционировали до поддержки легких переносных мобильных аппара-
тов, работающих внутри зданий и на улице при передвижении пешехода
или транспортного средства.
В основе разработки сотовых систем лежит принцип многократно-
го использования частот, которому способствует то обстоятельство, что
с расстоянием мощность сигнала ослабевает, что позволяет повторно ис-
пользовать тот же самый частотный диапазон на пространственно уда-
ленных друг от друга территориях. Для этого зона покрытия сотовой
системы разделяется на непересекающиеся ячейки (соты). Каждой со-
те выделяется определенный комплект каналов. Как показано на рис. 1.1,
1.4- Современные беспроводные системы
тот же самый комплект каналов используется и в другой ячейке, которая
находится на достаточном удалении (Ci обозначает комплект каналов,
используемый в данной соте). Работа внутри ячейки централизованно
управляется базовой станцией, что будет подробно описано ниже. Взаим-
ные влияния, вызванные абонентами различных сот, работающих с одним
и тем же комплектом каналов, называются межсотовыми помехами. Раз-
деление ячеек, повторно использующих одинаковые комплекты каналов,
в пространстве, т. е. расстояние многократного использования частот,
должно быть по возможности меньше с тем, чтобы частоты использова-
лись как можно чаще, максимизируя, таким образом, эффективность ис-
пользования спектра. Однако при этом из-за сокращения расстояния меж-
ду влияющими друг на друга ячейками возрастают межсотовые помехи.
Поскольку для поддержания необходимых качественных показателей сис-
темы межсотовые помехи должны оставаться ниже заданного порога, то
расстояние многократного использования частот не может быть умень-
шено ниже определенного минимального значения. На практике довольно
сложно определить это минимальное значение, так как и передаваемые,
и мешающие сигналы подвержены случайным изменениям мощности, обу-
словленным характеристиками распространения радиосигналов. Чтобы
определить наилучшее расстояние многократного использования частот
и место размещения базовой станции, необходима точная характеристика
распространения сигнала внутри ячеек.
Первоначальные проекты сотовых систем главным образом отлича-
лись высокой стоимостью базовой станции, примерно один миллион дол-
ларов каждая. По этой причине первые сотовые системы использовали
относительно небольшое количество ячеек для покрытия целого города
или региона. При этом базовые станции размещались на высоких здани-
ях или горах и работали с очень высоким уровнем мощности, с зоной
покрытия ячейки в несколько квадратных километров. Такие большие
ячейки называются макросотами. Мощность сигнала распространялась
однородно по всем направлениям, поэтому при передвижении мобильно-
го аппарата по окружности вокруг базовой станции получаемый уровень
сигнала был примерно постоянным, если только прохождению сигнала не
мешал какой-либо объект, вносящий затухание. Этот круговой контур по-
стоянной мощности определяет шестиугольную форму ячейки в системе,
так как шестиугольник является самой близкой к окружности геометри-
ческой формой, которая позволяет покрыть заданную зону множеством
непересекающихся ячеек без просветов.
В настоящее время сотовые системы в городских районах чаще всего
используют ячейки меньшего размера, а базовые станции размещаются
близко к городским улицам и работают с намного меньшей излучаемой
систем беспроводной связи
мощностью. Такие меньшие по размеру ячейки называются микросота-
ми или пикосотами, в зависимости от их размера. Переход к ячейкам
меньшего размера произошел по двум причинам: это потребность в боль-
шей пропускной способности в регионах с высокой плотностью населения,
а также уменьшение объемов и стоимости электронного оборудования
базовой станции. Если система спроектирована надлежащим образом, то
ячейка любого размера поддерживает работу приблизительно одинако-
вого числа пользователей. Таким образом, для заданной зоны покры-
тия система с большим числом микросот имеет большее число абонен-
тов на единицу площади зоны, чем система с несколькими макросотами.
Кроме того, в системе с микросотами необходим меньший уровень пере-
дачи мобильных терминалов, так как они расположены ближе к базовым
станциям. Однако переход к меньшим ячейкам усложнил процесс проек-
тирования сети. Мобильные средства связи быстрее пересекают малень-
кую ячейку, чем большую, поэтому передача обслуживания вызова долж-
на происходить намного быстрее. Кроме того, усложняется определение
местоположения, так как внутри данной зоны находится больше ячеек,
в которых может находиться мобильный аппарат. Также сложнее разра-
ботать общие модели распространения сигналов для маленьких ячеек, так
как прохождение сигнала в этих ячейках сильно зависит от размещения
базовой станции, а также от геометрии окружающих отражателей. Так,
шестиугольная форма сот не дает хорошего приближения распростране-
ния сигнала в микросотах. Микросотовые системы часто проектируются
с использованием квадратной или треугольной формы ячеек, но у этих
форм более высокий допустимый коэффициент ошибок при аппроксима-
ции распространения сигналов в микросотах [8].
Все базовые станции данной географической зоны связаны высокоско-
ростными линиями связи с коммутационной станцией мобильной связи —
автоматической телефонной станцией мобильной связи АТС МС, как
это показано на рис. 1.2. Коммутационная станция действует как цен-
тральный контроллер сети: распределяет каналы внутри каждой ячей-
ки, координирует передачу обслуживания вызовов между ячейками, если
мобильный аппарат пересекает границу ячейки, а также осуществляет
маршрутизацию вызовов к мобильным абонентам и от них. Коммутаци-
онная станция может выполнять телефонные соединения с телефонной
сетью общего пользования (ТСОП) или обеспечивать доступ в Интернет.
Каждый новый абонент, расположенный в данной ячейке, запрашивает
канал, посылая вызов к базовой станции соты по отдельному управля-
ющему сигнальному каналу. Запрос передается на АТС МС, которая
принимает запрос, если в этой ячейке есть в наличии канал доступа. Ес-
ли в данный момент не доступен ни один канал, запрос на соединение
I.J. Современные беспроводные системы
отклоняется. Передача обслуживания вызова инициируется, когда базо-
вая станция или мобильный аппарат в данной ячейке определяет, что
полученная мощность принимаемого сигнала вызова приближается к гра-
нице заданного минимума. В таком случае базовая станция информирует
АТС МС, что мобильный аппарат запрашивает передачу обслуживания
вызова, а АТС МС, в свою очередь, запрашивает окружающие базовые
станции, может ли одна из этих станций обнаружить сигнал данного
мобильного аппарата. При получении положительного ответа АТС МС
выполняет передачу обслуживания вызова от исходной базовой станции
к новой. Если в новой ячейке не доступен ни один канал, то передачи
обслуживания не происходит, а вызов завершается. Вызов также теряет-
ся, если интенсивность сигнала между мобильным устройством и базовой
станцией падает ниже минимума, необходимого для поддержания связи,
в результате случайных изменений сигнала.
Интернет
АТС
мобильной связи
Рис. 1.2. Архитектура современной сотовой сети
Телефонная
коммутируемая сеть
общего пользования
Сотовые системы связи первого поколения были аналоговыми; эти
системы были разработаны в 1960-х годах12, когда цифровые системы
еще не получили широкого распространения. Системы второго поколе-
ния превратились из аналоговых в цифровые, так как у последних много
преимуществ. Их компоненты дешевле, они более быстродействующие
и имеют меньшие размеры, а также потребляют меньше энергии. Сни-
жение качества передачи речи, вызванное искажениями канала, может
быть уменьшено с помощью кодирования с исправлением ошибок и ме-
тодов обработки сигнала. Цифровые системы по сравнению с аналоговы-
ми системами обладают также большей пропускной способностью, так
как они могут использовать более эффективные цифровые методы мо-
12 Первые аналоговые системы передачи с частотным разделением каналов появились
во время Первой мировой войны, а аналоговые коммутационные станции еще раньше —
в 80-е годы XIX века. — Прим, перев.
52 Глава 1. Обзор систем беспроводной связи
дуляции и более эффективные технологии использования спектра. Также
цифровые системы могут использовать преимущества современных ме-
тодов сжатия и факторов активности речи. Кроме того, для защиты
цифровых сигналов от подслушивания могут использоваться криптогра-
фические методы защиты. Цифровые системы, помимо передачи речи,
могут также предложить новые информационные услуги, включая пере-
дачу коротких сообщений, электронную почту, доступ в Интернет и воз-
можность передачи изображений (видеотелефоны). Из-за более низкой
стоимости и более высокой эффективности цифровых систем поставщики
услуг использовали агрессивную ценовую политику для поощрения пере-
хода абонентов от аналоговых к цифровым системам, и сегодня аналого-
вые системы используются, главным образом, в местах, где нет цифровых
услуг. Однако цифровые системы не всегда работают так же, как анало-
говые. Абоненты могут столкнуться с плохим качеством звука, частым
сбрасыванием вызовов, а также неравномерным покрытием в определен-
ных зонах. Эксплуатационные показатели сотовых систем значительно
улучшились с развитием технологии и сетей. В некоторых районах со-
товые телефоны обеспечивают практически то же качество, что и про-
водные службы. И некоторые люди действительно заменили проводные
телефоны у себя дома на сотовое обслуживание.
Разделение по частоте в системах связи, называемое также мно-
жественным, многоканальным или многостанционным доступом, осу-
ществляется с помощью разделения пространства сигнала по времени,
частоте, и/или кодовой составляющей. При многостанционном досту-
пе с частотным разделением каналов (МДЧР)13 весь частотный диапа-
зон системы подразделяется на ортогональные14 частотные каналы. При
много станционном доступе с временным разделением каналов (МДВР)15
промежуток времени разделяется на ортогональные интервалы, и каж-
дый канал занимает всю полосу частот в течение выделенного ему вре-
менного интервала. Системы МДВР сложнее в реализации, чем системы
МДЧР, так как каналы должны быть синхронизированы по времени.
Однако в системах МДВР проще обеспечить многократное увеличение
скорости передачи данных, так как для одного абонента может быть
выделено несколько временных интервалов. Многостанционный доступ
с кодовым разделением каналов (МДКР)16 (CDMA) обычно использует
расширение спектра методами прямой последовательности или скачко-
образной перестройки частоты с ортогональными или неортогональными
13В англ. FDMA — от Frequency Division Multiple Access. — Прим, перев.
14То есть непересекакяциеся частотные полосы. — Прим, перев.
15В англ. TDMA — от Time Division Multiple Access. — Прим, перев.
16В англ. CDMA — от Code Division Multiple Access. — Прим, перев.
1.4- Современные беспроводные системы 53
кодами. При использовании метода прямой последовательности поток
бит данных каждого абонента модулируется различными последователь-
ностями чипов — более коротких бит, которые намного быстрее модули-
руемой последовательности бит данных. В частотной области узкополос-
ный сигнал данных перемножается с широкополосным сигналом потока
чипов, что приводит к образованию сигнала с более широким частотным
спектром, чем у исходного информационного сигнала. При скачкообраз-
ной перестройке частоты несущая частота, используемая для модуля-
ции узкополосного информационного сигнала, изменяется в соответствии
с последовательностью чипов, которая может быть быстрее или медлен-
нее потока данных. Это приводит к тому, что модулированный сигнал
«скачет» по различным несущим частотам. Сигналы с широкополосным
спектром обычно накладываются друг на друга в одном и том же диа-
пазоне частот. Приемник сигналов с широким спектром разделяет сигна-
лы с помощью отдельного декодирования индивидуальной расширяющей
последовательности каждого канала. Однако в случае неортогональных
кодов абоненты внутри ячейки мешают друг другу (внутрисотовые поме-
хи), а при повторном использовании кодов в различных сотах возникают
межсотовые помехи. Мощность как внутрисотовых, так и межсотовых
помех снижается при увеличении коэффициента расширения кода. Бо-
лее того, помехи в системах с расширением спектра могут быть в даль-
нейшем еще понижены за счет многопользовательского детектирования
или подавления помех. Более подробно о различных методах распреде-
ления спектра и анализе его характеристик можно прочитать в гл. 13
и 14. Разработка технических решений для распределения спектра связа-
на с очень сложными компромиссами, и решение о том, какой метод лучше
использовать для данной системы и рабочего окружения, никогда не было
прямолинейным. Разработка эффективных систем сотовой связи ограни-
чивается помехами, т. е. основное ограничение на систему накладывает
уровень помех, в противном случае к системе можно было бы подключить
больше абонентов. В результате любой метод снижения помех в сотовых
системах напрямую ведет к повышению емкости системы и ее эксплу-
тационных показателей. Среди методов снижения помех, используемых
сегодня или предлагаемых для будущих систем, — фрагментация сот,
направленные и «умные, интеллектуальные» антенны, многопользователь-
ское детектирование и динамическое распределение ресурсов. Подробно
об этих методах можно прочитать в гл. 15.
Сотовые системы первого поколения 1G, известные в Соединенных
Штатах под названием усовершенствованной мобильной телефонной сис-
темы AMPS17. использовали метод МДЧР (FDMA) с телефонными ка-
17AMPS — Advance Mobile Phone Service.
^54 Глава 1. Обзор систем беспроводной связи
налами шириной 30 кГц с ЧМ. Федеральная комиссия по связи США —
FCC — первоначально выделила для этой системы полосу шириной 40 МГц,
а в дальнейшем, вскоре после расширения системы для обслуживания
большего числа абонентов, увеличила ее до 50 МГц. Весь диапазон частот
был разделен на две полосы по 25 МГц, одна из которых предназначалась
для каналов связи в направлении от мобильного устройства к базовой
станции, а другая — для каналов в направлении от базовой станции к мо-
бильным устройствам. Для стимулирования конкуренции FCC разделила
эти каналы на два комплекта, которые в каждом городе выделялись двум
различным компаниям — поставщикам услуг. В Европе появилась похо-
жая система мобильной связи TACS18. В 1980-е годы стандарт AMPS рас-
пространялся по всему миру и до сих пор в некоторых регионах, включая
сельские районы США, остается единственной сотовой службой.
Многие сотовые системы первого поколения в Европе были несовмести-
мыми, и европейцы быстро разработали единый общий стандарт цифровых
систем второго поколения 2G, получивших название GSM19. Стандарт
GSM использует комбинацию МДВР (TDMA) и медленной скачкообраз-
ной перестройки частоты с частотной манипуляцией для модуляции ре-
чи. Напротив, в США стандарты, касающиеся второго поколения циф-
ровых сотовых систем, вызвали яростные дебаты по поводу методик
разделения спектра, в результате чего появилось несколько несовмести-
мых стандартов [9—11]. В частности, существуют два стандарта в поло-
се частот 900 МГц: IS-13620., использующий сочетание МДВР (TDMA)
и МДЧР (FDMA) с фазовой манипуляцией ФМН; и IS-95, использующий
метод прямой последовательности МДКР (CDMA) с ФМН и кодирование
[12, 13]. Спектр для цифровых сотовых систем PCS21 в диапазоне 2 ГГц
был продан с аукциона, поэтому поставщики услуг в своем спектре могли
использовать любые стандарты. В конечном итоге возникло три различ-
ных цифровых стандарта сотовой связи для этого частотного диапазона:
IS-136, IS-95 и европейский стандарт GSM. Цифровой сотовый стандарт
в Японии похож на IS-136, но работает в другом частотном диапазоне,
а система GSM в Европе — на другой частоте, нежели системы GSM
в Соединенных Штатах. Это распространение несовместимых стандар-
тов в США и в мире делает невозможным роуминг между системами
18TACS — Total Access Communication System.
19Аббревиатура GSM первоначально обозначала Group Special Mobile (специальная мо-
бильная группа) — название европейского документа, установившего стандарт GSM.
Когда системы GSM распространились по всему миру, данное сокращение было изме-
нено на Global Systems for Mobile Communications — Глобальные системы мобильной
связи.
20IS-136 является развитием более старого стандарта IS-54 и относится к его группе.
21 PCS — Personal Communication System.
1.4- Современные беспроводные системы
внутри страны или во всем мире без использования телефонов с несколь-
кими режимами и/или нескольких телефонов (и телефонных номеров).
Все эти сотовые стандарты второго поколения были усовершенствова-
ны для предоставления высокоскоростных услуг пакетной передачи дан-
ных [14]. Системы GSM при объединении всех временных канальных ин-
тервалов могут обеспечить одному абоненту скорость передачи данных
до 140 кбит/с. Такая модернизация получила название GPRS . Более фун-
даментальное усовершенствование технологии стандарта GSM (EDGE22)
увеличило скорость передачи данных до 384 кбит/с благодаря использо-
ванию формата высокоуровневой модуляции в сочетании с кодированием.
Эта модуляция более чувствительна к замираниям, поэтому для решения
данной проблемы EDGE использует адаптивные методы. В частности,
в EDGE применяются девять различных комбинаций модуляции и коди-
рования, каждая из которых оптимизирована для определенных значений
отношения «сигнал/шум» (SNR) на приеме. Величина SNR измеряется
на приеме и передается обратно на передатчик, и, таким образом, ис-
пользуется лучшая комбинация модуляции и кодирования для данного
значения SNR. Системы IS-136 для поддержания скорости передачи дан-
ных до 384 кбит/с также используют технологии GPRS и EDGE. Системы
IS-95 поддерживают скорость передачи данных до 115 кбит/с при объ-
единении расширяющих функций.
Сотовые системы третьего поколения 3G основываются на стандарте
широкополосного МДКР (CDMA), разработанном при содействии Меж-
дународного союза электросвязи МСЭ [14]. Этот стандарт, названный
«Международная мобильная связь 2000» — IMT-20 0023, в зависимости от
мобильности и местоположения обеспечивает различные скорости пере-
дачи данных: от 384 кбит/с для пешеходов до 144 кбит/с при исполь-
зовании транспортных средств и 2 Мбит/с при использовании внутри
зданий. Стандарт 3G несовместим с системами 2G, поэтому поставщики
услуг должны сначала обеспечить инвестиции в новую инфраструкту-
ру, прежде чем они смогут предоставлять услуги 3G. Системы 3G были
разработаны в Японии. Одной из причин того, что услуги 3G сначала по-
явились в Японии, оказался процесс распределения спектра 3G, который
был выделен без каких-либо предварительных расходов. В Европе и США
спектр 3G распределяется через аукционы, поэтому любой компании, же-
лающей предоставлять услуги 3G, требуются большие первоначальные
инвестиции. Европейские компании в общей сложности заплатили за ра-
бочий диапазон 3G на аукционах свыше 100 миллиардов долларов США.
22 EDGE — Enhanced Data rates for GSM Evolution.
23IMT — International Mobile Telecommunications.
56 Глава 1. Обзор систем беспроводной связи
В Европе было много дебатов по поводу распределения спектра 3G че-
рез аукционы. Компании жаловались на то, что сама природа аукционов
обусловливает чрезмерные переплаты и поэтому будет сложно, если не
невозможно, получить прибыль. Некоторые из компаний решили списать
свои вложения за диапазон 3G и не заниматься разработкой системы.
Действительно, системы 3G не развивались в Европе так, как ожидалось,
и оказалось, что усовершенствования передачи данных в системах 2G мо-
гут быть достаточными для удовлетворения потребительского спроса,
по меньшей мере, еще на какое-то время. Однако спектр 2G в Европе
очень перенасыщен, поэтому либо абоненты постепенно будут переходить
на 3G, либо правила будут изменены таким образом, что частотный диа-
пазон 3G сможет использоваться для услуг 2G (что в настоящее время
в Европе не разрешается). Развитие 3G в Соединенных Штатах намного
отстало по сравнению с Европой. Доступный в США спектр 3G составля-
ет примерно половину европейского. Из-за споров по поводу того, какая
из частей спектра будет использоваться, аукционы по продаже спектра
3G в США еще не проводились. Однако правила, действующие в США,
позволяют использовать для 3G спектры 1G и 2G, и эта гибкость боль-
ше способствует постепенному развертыванию и инвестированию систем
3G, чем все более ограничивающие требования к 3G в Европе. Оказалось,
что запаздывание с аукционами по продаже спектра 3G в Соединенных
Штатах дало возможность Федеральной комиссии по связи FCC и аме-
риканским поставщикам услуг учиться на ошибках и успехах Европы
и Японии.
1.4.2. Беспроводные телефоны
Беспроводные телефоны впервые появились в конце 1970-х годов и до сих
пор переживают бурное развитие. Во многих американских домах есть
только беспроводные телефоны, что может быть угрозой безопасности,
так как в отличие от проводных телефонов, они не работают при отсут-
ствии электроэнергии. Беспроводные телефоны были разработаны для
обеспечения соединений с телефонной сетью общего пользования ТСОП
при низкой себестоимости и низком уровне мобильности, т. е. для корот-
ких беспроводных соединений, замещающих проводную связь телефона-
базы с его трубкой. Поскольку беспроводные телефоны конкурируют с про-
водными трубками, они должны обеспечивать то же качество передачи
речи. Первоначально у беспроводных телефонов было плохое качество
передачи речи, и потребители быстро от них отказались. Первые беспро-
водные системы позволяли соединить с «базой» только одну телефонную
трубку, маленькой была также и зона покрытия — несколько комнат дома
или офиса. Это остается главным аргументом против беспроводных теле-
1-4- Современные беспроводные системы
фонов в Соединенных Штатах. Сегодня увеличилась также и зона покры-
тия, хотя некоторые «базы» поддерживают несколько трубок. В Европе
и Азии системы беспроводных цифровых телефонов эволюционировали
и обеспечивают покрытие намного больших зон как внутри, так и вне
дома, и по многим позициям схожи с сотовыми телефонными системами.
Базовые блоки беспроводных телефонов соединяются с ТСОП таким
же образом, как и проводные телефоны городских линий связи, и поэтому
не создают каких-либо дополнительных осложнений в работе телефонной
сети. Подвижность этих беспроводных трубок чрезвычайно ограничена:
трубка должна находиться внутри зоны передачи своей «базы». С другими
системами беспроводных телефонов связи нет, поэтому высокая плот-
ность этих систем в маленьких зонах (например, в высотном доме) может
привести к значительным взаимным помехам между системами. По этой
причине в беспроводных телефонах сегодня много речевых каналов, и они
сканируют эти каналы, чтобы среди них найти канал с минимальным
уровнем помех. Многие беспроводные телефоны используют методы рас-
ширения спектра для подавления помех, создаваемых другими системами
беспроводных телефонов или подобными системами типа радиосистем
наблюдения за ребенком — «радионянек» и беспроводных ЛВС.
В Европе и Азии цифровые беспроводные телефоны второго поко-
ления СТ-224 имеют широкий диапазон использования помимо квартир
или офисов. Внутри помещения эти системы действуют в качестве обыч-
ных беспроводных телефонов. Для расширения зоны вне пределов дома
базовые станции (также называемые фоун-пойнт или телепойнт25) уста-
навливаются в местах скопления людей: в торговых пассажах, на оживлен-
ных улицах, железнодорожных вокзалах и в аэропортах. Беспроводные
телефоны, зарегистрированные у провайдера телепойнта, могут делать
вызовы всякий раз, когда они находятся в зоне телепойнта. Тслепойнт
не позволяет абонентам принимать вызовы, так как у сети нет средств
поддержки связи с мобильными абонентами, хотя некоторые трубки СТ-2
имеют встроенные пейджеры для компенсации этого недостатка. Эти сис-
темы также не переадресуют вызов, если абонент передвигается между
различными телепойнтами, так что абонент должен оставаться внутри
зоны покрытия того телепойнта, где его вызов был инициирован в тече-
ние всего разговора. Служба телепойнта дважды вводилась в Великобри-
тании и оба раза терпела неудачу, но, начиная с середины 1990-х годов,
такие системы стремительно развивались в Гонконге и Сингапуре. Одна-
24 СТ-2 — cordless telephone, second generation.
25 Система, по которой абонент телефонной сети может звонить из общественного
пункта, используя собственный портативный телефон. Введена в 1989 г., постепенно
заменяет традиционную телефонную будку. — Прим, перев.
58 Глава 1. Обзор систем беспроводной связи
ко через несколько лет этот стремительный рост быстро пошел на спад —
после того, как операторы сотовой телефонии снизили цены, чтобы кон-
курировать со службой телепойнта. Основными недостатками в работе
телепойнта были недостаточная дальность радиосвязи и отсутствие пе-
реадресации вызова. Так как сотовые системы избежали этих проблем,
а цены были конкурентоспособными, у людей было мало причин исполь-
зовать службу телепойнта. Большинство этих служб сегодня исчезло.
Результат другой ветви эволюции беспроводных телефонов, создан-
ных первоначально для офисных помещений, представляет система стан-
дарта DECT26. Основной функций DECT является мобильная поддержка
абонентов, использующих внутреннюю домовую или учрежденческую те-
лефонную станцию (УАТС) с выходом в сеть общего пользования. В сис-
темах DECT «базы» устанавливаются по всему зданию, и каждая базо-
вая станция связывается через контроллер с УАТС здания. Телефонные
трубки связываются с ближайшей базовой станцией в здании, и соеди-
нения передаются по мере того, как пользователь передвигается между
базовыми станциями. В DECT можно также позвонить на трубку с бли-
жайшей базовой станции. Стандарт DECT также поддерживает службы
телепойнта, хотя это приложение не получило достаточного развития (в
основном, вероятно, из-за недостатков СТ-2). В настоящее время в Евро-
пе насчитывается около 7 миллионов пользователей DECT, но стандарт
еще не распространился на другие страны.
Более развитой является система беспроводных телефонов PHS27, ко-
торая появилась в Японии. Система PHS очень похожа на сотовую си-
стему; она обладает широкой сетью базовых станций, поддерживающих
механизмы передачи обслуживания и маршрутизации вызовов между ба-
зовыми станциями. Благодаря этим своим возможностям PHS не имеет
основных ограничений системы СТ-2. Первоначально системы PHS име-
ли самые высокие темпы роста, которые когда-либо испытывали новые
технологии. В 1997 г., два года спустя после введения системы PHS,
количество абонентов PHS возросло до максимального значения — при-
мерно 7 млн., но затем популярность PHS начала уменьшаться из-за су-
щественного снижения цен на услуги сотовой связи. В 2005 г. было около
4 млн. абонентов, которых привлекали абонентская служба с оплатой
по единому тарифу и относительно высокая скорость передачи данных
(128 кбит/с). Операторы PHS пытаются поднять скорость передачи дан-
ных до 1 Мбит/с, с которой сотовые операторы пока еще не могут со-
26DECT (European Digital Enhanced Cordless Telecommunications) — Европейский стан-
дарт усовершенствованной цифровой беспроводной связи. — Прим, персе.
27PHS (Personal Handy-phone System) — Система персональных мобильных телефо-
нов. — Прим, персе.
Современные беспроводные системы
стязаться. Основное различие между системой PHS и сотовой системой
в том, что PHS не может поддерживать передачу обслуживания вызо-
ва (хэндовер) со скоростью движения транспортного средства. Причина
этого недостатка заключается, главным образом, в динамической проце-
дуре распределения каналов, используемой в PHS. Динамическое распре-
деление каналов в значительной мере повышает количество телефонных
трубок, обслуживаемых одной базовой станцией, и, соответственно, ско-
рость передачи сигнала, что, в свою очередь, снижает стоимость системы,
но это также усложняет процедуру переадресации вызова. Учитывая дли-
тельную популярность PHS, маловероятно, что они в скором времени
пройдут тот же путь, что и СТ-2, особенно если им удастся достигнуть
еще большей скорости передачи данных. И все же из недавней истории
систем беспроводных телефонов видно, что для расширения зоны ис-
пользования этих систем за границы дома требуется либо гармонизация
с сотовыми системами, либо превосходство над ними в функционально-
сти, либо значительное сокращение стоимости.
1.4.3. Беспроводные локальные вычислительные
сети — беспроводные ЛВС
Беспроводные ЛВС (Wireless LAN) поддерживают высокоскоростную пе-
редачу данных в пределах небольшого пространства (например, универ-
ситетского городка или небольшого здания), когда пользователи пере-
двигаются с места на место. Беспроводные устройства, которые имеют
доступ к этим ЛВС, обычно стационарные или двигаются со скоростью
пешехода. Все стандарты беспроводных ЛВС в США действуют в нели-
цензируемом частотном диапазоне. Основные нелицензируемые полосы
частот — это диапазоны ISM на 900 МГц, 2,4 ГГц и 5,8 ГГц, а также
диапазон нелицензируемой национальной информационной инфраструк-
туры (U-NII) на 5 ГГц. В диапазонах ISM нелицензируемые пользователи
являются вторичными пользователями и поэтому вынуждены справлять-
ся с помехами, создаваемыми первичными пользователями в то время,
когда они активны. В диапазоне U-NII первичных пользователей нет. Для
работы в диапазонах ISM или U-NII лицензии Федеральной комиссии FCC
не требуется. Однако это преимущество является палкой о двух концах,
так как другие нелицензируемые системы также действуют в этих диа-
пазонах по той же самой причине, что может вызвать очень сильные
взаимные помехи между системами. Проблема интерференции уменьша-
ется при установлении для нелицензируемых систем ограничений мощно-
сти на единицу частотного диапазона. Беспроводные ЛВС могут иметь
либо соединение звездой с пунктами беспроводного доступа или концен-
траторами, расположенными внутри зоны покрытия, либо архитектуру
60 Глава 1. Обзор систем беспроводной связи
одноранговой вычислительной сети ЛВС, где беспроводные терминалы
автоматически конфигурируются в сеть.
В начале 1990-х годов появились десятки компаний — поставщиков
оборудования и услуг беспроводных ЛВС, стремившихся заработать на не-
удовлетворенном спросе на высокоскоростную беспроводную передачу
данных. Эти беспроводные ЛВС первого поколения базировались на несо-
вместимых пользовательских протоколах. Большинство из них действо-
вало в полосе 26 МГц частотного диапазона ISM 900 МГц, используя
расширение спектра прямой последовательностью со скоростью переда-
чи данных порядка 1-2 Мбит/с. Использовались как соединение звездой,
так и архитектура одноранговой сети. Отсутствие стандартизации в дан-
ной области привело к высокой стоимости разработки, мелкосерийному
производству и маленьким рынкам для каждого отдельного вида продук-
ции. Из всей этой оригинальной продукции только небольшое количество
было более-менее успешным. Всего лишь одна из беспроводных ЛВС пер-
вого поколения — «Альтаир» (Altair) фирмы Motorola — работала вне ча-
стотного диапазона 900 МГц. Эта система, работавшая в лицензируемом
диапазоне 18 ГГц, имела скорость передачи данных порядка 6 Мбит/с.
Однако применение «Альтаира» было затруднено из-за высокой стоимости
компонентов и больших потерь в тракте передачи на 18 ГГц, и «Альтаир»
был снят с производства через несколько лет после выпуска.
Беспроводные ЛВС второго поколения в Соединенных Штатах дей-
ствуют в полосе шириной 83,5 МГц в диапазоне ISM 2,4 ГГц. Стандарт
IEEE 802.11b для беспроводных ЛВС этого частотного диапазона был
разработан, чтобы избежать некоторых проблем с запатентованными
системами первого поколения. Стандарт определяет расширение спек-
тра методом прямой последовательности при скорости передачи данных
порядка 1,6 Мбит/с (максимальная физическая скорость передачи дан-
ных — 11 Мбит/с) и зоне покрытия около 100 м. Построение сети может
быть в виде соединений звездой или архитектуры одноранговой сети, хотя
последняя редко используется. Многие компании начали разрабатывать
свою продукцию, опираясь на стандарт 802.11b. После медленного пер-
воначального роста популярность беспроводных ЛВС стандарта 802.11b
значительно возросла. Появилось много небольших портативных компью-
теров со встроенными картами беспроводных ЛВС 802.11b. Компании
и университеты установили базовые станции 802.11b на своих терри-
ториях, а множество кафе, аэропортов и отелей для повышения своей
привлекательности предлагают беспроводный доступ, часто бесплатный.
Для обеспечения более высокой скорости передачи данных, чем в стан-
дарте 802.11b, были разработаны еще два дополнительных стандарта се-
мейства 802.11. Стандарт беспроводной ЛВС IEEE 802.11а занимает поло-
1.4. Современные беспроводные системы 61
су шириной 300 МГц в диапазоне U-NII 5 ГГц. Стандарт 802.11а базирует-
ся на модуляции нескольких несущих и обеспечивает скорость передачи
данных 54 Мбит/с в зоне примерно 30 м. Так как у системы стандар-
та 802.11а намного шире полоса пропускания и, следовательно, намного
больше каналов, чем у 802.11b, она может поддерживать большее число
пользователей при большей скорости передачи данных. Сначала были со-
мнения, не будут ли системы 802.11а значительно дороже, чем системы
802.11b, но в действительности они быстро стали конкурентоспособными
по цене. Другой стандарт, 802.11g, имеет ту же самую схему и скорость
передачи данных, что и 802.11а, но он работает в диапазоне 2,4 ГГц
с зоной около 50 м. Во избежание несовместимости, многие карты бес-
проводных ЛВС и приемопередатчики беспроводной сети поддерживают
все три стандарта.
В Европе развитие беспроводных ЛВС вращается вокруг стандартов
HIPERLAN28. Стандарт HIPERLAN/2 похож на стандарт беспроводной
ЛВС IEEE 802.11а. В частности, у него аналогичная схема канального
уровня, он также действует в полосе частот 5 ГГц, подобно U-NII. Сле-
довательно, у HIPERLAN/2 такая же максимальная скорость передачи
данных — около 54 Мбит/с, и та же зона покрытия — приблизительно
30 м, как и у 802.11а. Стандарт HIPERLAN/2 отличается от 802.11а про-
токолом доступа и встроенной поддержкой «гарантированного качества
обслуживания» (QoS).
1.4.4. Региональные беспроводные сети
передачи данных
Региональные беспроводные сети передачи данных предоставляют услу-
ги по беспроводной передаче данных высокомобильным пользователям
в большой зоне обслуживания. В этих системах данный географический
район обслуживается базовыми станциями, установленными на башнях,
крышах высоких зданий или в горах. Базовые станции могут соединяться
с магистральной проводной сетью проводными или специальными радио-
релейными многопролетными линиями.
Первоначально региональные беспроводные сети имели очень низкую
скорость передачи данных — ниже 10 кбит/с, которая постепенно воз-
росла до 20 кбит/с. На рынке этих услуг было два основных игрока:
компании Motient и Bell South Mobile Data (ранее — RAM Mobile Data).
Компания Metricom предоставляла похожие услуги, используя архитек-
туру, состоящую из большой сети маленьких, недорогих базовых стан-
28HIPERLAN — high-performance radio LAN — высокоскоростное радио-ЛВС. — Прим,
перев.
систем беспроводной связи
ций с маленькой зоной покрытия. Повышенная эффективность малень-
ких зон покрытия позволила компании Metricom обеспечить более высо-
кую, чем в других беспроводных системах, скорость передачи данных —
до 76 кбит/с. Однако высокая стоимость инфраструктуры Metricom в ко-
нечном итоге отбросила компанию на обочину, и система прекратила
свою работу. Какая-то часть инфраструктуры была куплена и действует
в некоторых зонах, например таких, как сеть Ricochet29.
Сотовая цифровая система пакетной передачи данных CDPD30 предо-
ставляет региональные услуги по беспроводной передаче данных поверх
аналоговой сотовой телефонной сети. Система CDPD использует рече-
вые каналы с частотным разделением МДЧР (FDMA) аналоговых систем,
так как многие из этих каналов не задействованы из-за роста цифро-
вой сотовой сети. Система CDPD обеспечивает передачу пакетов данных
на скорости до 19,2 кбит/с и доступна по всей территории США. Однако,
поскольку новые поколения сотовых систем также обеспечивают инфор-
мационные услуги на более высоких скоростях передачи данных, система
CDPD в большинстве случаев вытесняется этими более современными
услугами. В целом региональные беспроводные сети передачи данных не
были очень успешными. Новые системы, предлагающие широкополосный
доступ, могут быть более привлекательными.
1.4.5. Широкополосный беспроводный доступ
Широкополосный беспроводный доступ обеспечивает высокоскоростную
беспроводную связь между стационарными точками доступа и многочис-
ленными оконечными устройствами. Эти системы первоначально предназ-
начались для поддержки интерактивных услуг домашнего видео, но затем
область применений сместилась в сторону предоставления высокоскорост-
ного доступа (десятки Мбит/с) как в Интернет и «Всемирную паути-
ну», так и в высокоскоростные сети передачи данных для домашнего
использования и предпринимательства. В Соединенных Штатах для этих
систем было зарезервировано два частотных диапазона: часть спектра
28 ГГц для местных распределенных систем (LDMS)31 и полоса частот
в диапазоне 2 ГГц для многоканальной распределенной системы круп-
ных городов — MMDS32. Система LDMS представляет собой средство,
позволяющее новым поставщикам услуг вступить в конкуренцию на уже
сложившемся рынке проводных и беспроводных широкополосных услуг
[5, гл. 2.3]. MMDS — это телевизионная система и система связи с зо-
29Ricochet — Беспроводная сеть доступа к Интернет. — Прим, перев.
30CDPD — Cellular Digital Packet Data. — Прим, перев.
31 LDMS — Local Multipoint Distribution Service. — Прим, перев.
32MMDS — Multichannel (или Microwave) Multipoint Distribution Service. — Прим, перев.
1-4- Современные беспроводные системы
ной покрытия 30 50 км [5, гл. 11.11]. Пропускная способность системы
MMDS — более сотни цифровых видео, ТВ-каналов вместе с телефони-
ей и доступом в Интернет. Система MMDS будет конкурировать, глав-
ным образом, с существующими кабельными и спутниковыми системами.
В Европе разрабатывается стандарт Hiperaccess, схожий с MMDS.
Широкополосная беспроводная технология WiMax основана на стан-
дарте IEEE 802.16 [16, 17]. Этот стандарт содержит технические условия
для широкополосных систем беспроводного доступа, работающих в ча-
стотном диапазоне между 2 и И ГГц вне зоны прямой видимости, и в диа-
пазоне между 10 и 66 ГГц — в зоне прямой видимости. Скорость пере-
дачи данных составит около 40 Мбит/с для стационарных пользователей
и 15 Мбит/с для мобильных пользователей при зоне покрытия в несколько
километров. Многие производители небольших портативных компьюте-
ров и персональных электронных книжек PDA33 планируют встраивать
в эти устройства WiMax, благодаря чему можно будет удовлетворить
спрос на постоянный доступ в Интернет и обмен электронной почтой
из любого места. Система WiMax будет конкурировать с беспроводны-
ми ЛВС, услугами сотовых сетей третьего поколения 3G и, возможно,
с услугами проводных сетей и цифровыми абонентскими линиями DSL.
Способность WiMax бросить вызов этим системам или вытеснить их со-
всем будет зависеть от сравнительных эксплутационных характеристик
WiMax и ее стоимости, которые еще нужно оценить.
1.4.6. Пейджинговые системы
Пейджинговые системы передают короткие сообщения одновременно с
многих высоко расположенных базовых станций или спутников, рабо-
тая на очень высокой мощности (от сотен ватт до киловатт). Системы
с наземными передатчиками обычно размещены в обособленных геогра-
фических зонах, таких как крупный город или столица, тогда как гео-
синхронные спутниковые передатчики обеспечивают покрытие в обще-
государственном или международном масштабе. В системах обоих типов
не требуются ни местные системы управления, ни коммутация, так как
пейджинговое сообщение передается по всей зоне покрытия. Высокая
сложность и большая мощность пейджинговых передатчиков позволяют
использовать несложные карманные пейджинговые приемники, которые
могут работать от маломощных маленьких и легких батарей. Кроме то-
го, большая мощность передачи позволяет пейджинговым сигналам легко
проникать через стены зданий. Пейджинговые услуги — как сами уст-
ройства, так и месячная абонентская плата — стоят меньше, чем услуги
33PDA — Personal Digital Assistant.
(Гб4 Глава 1. Обзор систем беспроводной связи
сотовых сетей, хотя это ценовое преимущество в последние годы значи-
тельно снизилось из-за падения цен на сотовые услуги. Низкая стоимость,
маленькие и легкие приемники, долгое действие батарей и возможность
работать практически повсюду как внутри помещений, так и снаружи —
вот основные причины популярности пейджинговых устройств.
Первые пейджинговые радиосистемы передавали простейшие анало-
говые сообщения, подающие абоненту сигнал, что кто-то пытается с ним
связаться. Эти системы требовали ответного звонка по телефону назем-
ной линии связи, чтобы узнать номер абонента, пославшего пейджинго-
вое сообщение. Затем система эволюционировала до возможности посыл-
ки коротких цифровых сообщений, включая номер телефона и краткий
текст, который также посылался владельцу пейджера. Пейджинговые ра-
диосистемы первоначально были очень популярными, только в одних Со-
единенных Штатах насчитывалось до 50 миллионов абонентов. Однако их
популярность начала падать с широким распространением сотовых теле-
фонных систем с конкурентными ценами. В итоге конкуренция с сото-
выми телефонами заставила пейджинговые системы предоставить новые
возможности, например, ответа (т.е. двусторонней связи). Это потребо-
вало больших изменений в дизайне пейджеров, поскольку теперь возникла
необходимость не только принимать, но и передавать сигналы, а рассто-
яние до спутника или базовой станции при передаче может быть очень
большим. Пейджинговые компании также объединились с производителя-
ми карманных компьютеров, чтобы встраивать пейджинговые функции
в эти устройства [18]. Несмотря на эти разработки, рынок пейджинговых
устройств значительно сократился, хотя все еще существует рыночная
ниша для врачей и представителей других профессий, которые должны
быть на связи везде, где бы они ни были.
1.4.7. Спутниковые сети
Коммерческие спутниковые системы — еще одна главная составляющая
инфраструктуры беспроводных коммуникаций [2, 3]. Геосинхронные сис-
темы включают в себя международную систему спутниковой морской свя-
зи ИНМАРСАТ34 и систему OmniTRACS. Первая приспособлена в основ-
ном для аналоговой передачи речи из удаленных мест. Например, она ши-
роко используется журналистами для осуществления прямых репортажей
из зон военных конфликтов. Система первого поколения ИНМАРСАТ-А
была разработана для больших (с однометровой параболической зеркаль-
ной антенной) и довольно дорогих абонентских терминалов. Более со-
34INMARSAT — International Maritime Satellite Organization (Международная органи-
зация по морским спутниковым системам). — Прим, перев.
1-4- Современные беспроводные системы
временные поколения ИНМАРСАТ используют цифровые средства для
получения меньших по размеру и более дешевых абонентских терминалов,
размером примерно с портфель. Система OmniTRACS фирмы Qualcomm
обеспечивает двустороннюю связь, а также определение местоположения.
Система в основном используется для передачи буквенно-цифровых сооб-
щений и определения местоположения при грузоперевозках. Существуют
несколько основных трудностей при организации передачи речи и дан-
ных через геосинхронные спутники. Чтобы добраться до этих спутников,
необходима очень большая мощность. Поэтому абонентские устройства
обычно большого размера и громоздкие. Кроме того, существует большая
задержка при прохождении сигнала туда и обратно; эта задержка до-
вольно заметна при двусторонней связи. Геосинхронные спутники также
обладают довольно низкой скоростью передачи данных, менее 10 кбит/с.
По этим причинам более подходящими для организации передачи речи
и данных считаются низко орбитальные спутники LEO.
Системам со спутниками на низких орбитах LEO необходимо в сред-
нем 30-80 спутников для организации всемирного покрытия, и планы
развертывания таких систем были широко распространены в конце 1990-х
годов. В этот период была выведена на орбиту одна из наиболее амбициоз-
ных систем данного типа — спутниковая группа Iridium. Однако затраты
на постройку, вывод на орбиту и содержание этих спутников намно-
го выше, чем стоимость наземных базовых станций. Низкоорбитальные
спутниковые системы, конечно, могут дополнить наземные системы связи
в малонаселенных областях, а также будут привлекательны для путе-
шественников, которые хотят иметь только один телефонный аппарат
и один номер для всемирного роуминга. Однако развитие и снижение сто-
имости сотовых систем не позволили воплотиться многим амбициозным
планам, касающимся широкого распространения речевых и информаци-
онных систем на основе спутников-низколетов LEO. В конечном счете,
Iridium обанкротился и был расформирован, а большинство других сис-
тем так никогда и не было запущено. Исключением из этого списка неудач
была низкоорбитальная система Globalstar, которая в настоящее время
обеспечивает передачу речи и данных с большой зоной покрытия при
скорости передачи данных до 10 кбит/с. Остаются и действуют также
и некоторые из спутников Iridium.
Наиболее привлекательной сферой использования спутниковых сис-
тем остается транслирование телевизионных и аудиовещательных про-
грамм на большие географические районы. В среднем каждый восьмой дом
в Америке имеет прямой доступ к спутниковым передачам, а спутниковое
радиовещание становится популярной услугой. Подобные аудио- и те-
левизионные спутники ведут трансляции по всей Европе. Спутниковые
систем беспроводной связи
системы лучше всего подходят для радиовещания, так как они покры-
вают большую территорию и не зависят от задержки воспроизведения.
Более того, стоимость системы может погашаться в течение многих лет
и многими пользователями, что делает эти услуги конкурентоспособными
по стоимости в сравнении с наземными системами передачи развлекатель-
ных программ.
1.4.8. Недорогая радиосвязь малой мощности:
Bluetooth и ZigBee
Снижение стоимости и потребляемой мощности радиовещания сделало
его пригодным для внедрения во многие типы электронных устройств, ко-
торые могут использоваться для создания «умных домов», сетей датчиков
и других полезных приложений. В развитие этого направления появились
два типа систем радиосвязи: Bluetooth и ZigBee.
Стандарт Bluetooth35 обеспечивает радиосвязь близкого радиуса дей-
ствия между беспроводными устройствами и элементарные сетевые воз-
можности. Стандарт Bluetooth базируется на крошечной микросхеме при-
емопередатчика, которая встраивается в цифровые устройства. В таких
устройствах, как сотовые телефоны, небольшие портативные и карман-
ные компьютеры, портативные принтеры и проекторы, а также сетевые
узлы доступа, приемопередатчик занимает место соединительного кабе-
ля. Система радиосвязи Bluetooth, в основном, предназначена для связи
ближнего радиуса действия, например, от небольшого портативного ком-
пьютера до расположенного рядом принтера или от сотового телефона
до беспроводной телефонной трубки. Ее нормальный радиус действия —
10 м (при мощности передачи 1 мВт), эта зона действия может быть уве-
личена до 100 м посредством увеличения мощности передачи до 100 мВт.
Система действует в нелицензируемом частотном диапазоне 2,4 ГГц, по-
этому она может использоваться по всему миру без оформления каких-
либо лицензий. Стандарт Bluetooth предусматривает передачу данных
по асинхронному каналу со скоростью 723,2 кбит/с. В этом режиме, из-
вестном также как «Асинхронный без установления соединения» (ACL36),
есть еще и обратный канал со скоростью передачи данных 57,6 кбит/с.
Технические условия допускают также организацию до трех синхронных
каналов, каждый со скоростью 64 кбит/с. Этот режим, также известный
как «Синхронный режим, ориентированный на установление соединения»
35 Стандарт Bluetooth назван по имени Гаральда 1-го Влутуза, короля Дании, правивше-
го в 940 — 985 гг. н.э., который объединил Данию и Норвегию. Bluetooth обрабатывает
информацию, объединяя устройства посредством радиосвязи, отсюда и такое название.
36Asynchronous Connection-Less.
1-4- Современные беспроводные системы
(SCO37), в основном, используется в телефонных приложениях, например
в телефонных трубках, но может также использоваться и как инфор-
мационный канал. В результате эти различные режимы вместе дают
скорость около 1 Мбит/с. Маршрутизация потоков асинхронных данных
осуществляется с помощью протокола коммутации пакетов, основанного
на скачкообразной перестройке частоты (1600 скачков в секунду). Име-
ется также и протокол коммутации каналов для синхронных данных.
Стандарт Bluetooth использует скачкообразную перестройку часто-
ты для параллельного доступа с разносом несущих в 1 МГц. Обычно
в общем диапазоне частот 80 МГц используются до 80 различных час-
тот. В любой момент времени доступна полоса шириной 1 МГц, которую
могут одновременно использовать до восьми устройств. Различные логи-
ческие каналы (различные последовательности перескока частоты) могут
одновременно совместно использовать один и тот же частотный диапазон
80 МГц. Конфликты могут происходить, когда устройства в различных
пикосетях, находящиеся на различных логических каналах, одновременно
запрашивают использование одного и того же перескока частоты. Когда
число пикосетей в зоне увеличивается, количество конфликтов также уве-
личивается, ухудшая характеристики системы.
Стандарт Bluetooth был разработан совместно компаниями 3 Сот,
Ericsson, Intel, IBM, Lucent, Microsoft, Motorola, Nokia и Toshiba. Сегодня
стандарт принят более чем 1300 производителями, и многие виды потре-
бительской электронной продукции имеют встроенный Bluetooth. Сюда
входят беспроводные трубки сотовых телефонов, беспроводные разъемы
USB или RS232, беспроводные карты PCMCIA и беспроводные компью-
терные приставки к телевизору.
Технические условия системы радиосвязи ZigBee38 разработаны для
сферы потребления с более низкими ценовыми и энергетическими затра-
тами, чем Bluetooth [19]. Эти технические условия основываются на стан-
дарте IEEE 802.15.4. Система радиосвязи действует в том же диапазоне
ISM, что и Bluetooth, и способна объединить в сеть 255 устройств. При
этом поддерживается скорость передачи данных до 250 кбит/с с зоной
охвата до 30 м. Эти скорости передачи ниже, чем у Bluetooth, но энергопо-
требление при радиообмене между пользователями значительно меньше,
а зона охвата — больше. Назначение системы ZigBee состоит в обеспече-
нии работы радио в течение нескольких месяцев или лет без подзарядки,
что необходимо в сетях датчиков и складском учете.
37 Synchronous Connection Oriented.
38Название ZigBee происходит от «танца», который медоносные пчелы используют для
обмена информацией о вновь найденных источниках пищи с другими членами колонии.
(Гб8 Глава 1. Обзор систем беспроводной связи
1.4.9. Системы сверхширокополосной радиосвязи
Системы сверхширокополосной радиосвязи UWB39 имеют чрезвычайно
широкую полосу пропускания с очень высокими потенциальными скоро-
стями передачи данных [20, 21]. Начало концепции сверхширокополосной
связи положил искровой передатчик Маркони, который занимал очень
широкий диапазон частот. Однако из-за того, что весь спектр мог за-
нимать один низкоскоростной пользователь, широкополосные системы
связи были отвергнуты в пользу более эффективных способов. Повтор-
ный интерес к широкополосным средствам связи был спровоцирован ре-
шением Федеральной комиссии по связи FCC в 2002 г. разрешить ра-
боту устройств UWB поверх существующих пользователей в диапазоне
3,110,6 ГГц. Теоретически эта добавка создает помехи всем системам
в этом частотном диапазоне, включая безопасность и военные системы,
нелицензируемые системы беспроводных ЛВС типа 802.11 и Bluetooth,
а также сотовые системы, где операторы заплатили миллиарды долларов
за использование указанного спектра. Постановление FFC было довольно
противоречивым, учитывая законную заинтересованность этих пользо-
вателей в свободном от помех спектре. Для уменьшения влияния UWB
на первичных пользователей данного диапазона Федеральная комиссия
FCC ввела значительные ограничения на передаваемую мощность. Это,
в свою очередь, накладывает ограничения на расстояние между передат-
чиками и приемниками устройств UWB.
Сверхширокополосная радиосвязь продемонстрировала уникальные
преимущества, которые уже давно высоко оценены в радиолокации и элек-
тросвязи. Широкополосность создает возможности для более полного ис-
пользования диапазона. Более того, доступная полоса частот UWB по-
тенциально может обеспечить чрезвычайно высокие скорости передачи
данных. Наконец, ограничения по мощности обусловили малый размер
устройства и небольшое потребление энергии.
Первоначально системы UWB использовали ультракороткие импуль-
сы с простой амплитудной или позиционной модуляцией. Многолучевое
распространение может значительно снизить эффективность таких сис-
тем, предложения по уменьшению эффектов многолучевого распростра-
нения включают в себя выравнивание и модуляцию на нескольких не-
сущих. Высокоточная и быстрая синхронизация также представляет се-
рьезное испытание для этих систем. Хотя остается много технических
проблем, привлекательность технологии UWB вызвала большой интерес
к ней как в коммерческих, так и в исследовательских кругах.
39UWB — Ultra wideband.
1.5. Беспроводный спектр 69
1.5. Беспроводный спектр
1.5.1. Методы распределения спектра
В большинстве стран есть правительственные агентства, отвечающие за
распределение и контроль использования диапазона радиочастот. В Со-
единенных Штатах спектр распределяется Федеральной комиссией по свя-
зи FCC для коммерческого использования и Бюро управления частот-
ным диапазоном OSM40 — для военного использования. Распределение
спектра для коммерческих целей в Европе выполняется Европейским ин-
ститутом телекоммуникационных стандартов ETSI, а во всемирном мас-
штабе — Международным Союзом Электросвязи МСЭ. Правительства
решают, какую часть спектра распределить между коммерческими и во-
енными применениями, и это решение динамично связано с потребностя-
ми. Исторически сложилось так, что Федеральная комиссия по связи FCC
распределяла участки спектра для специального использования и выда-
вала лицензии на использование этих участков отдельным группам или
компаниям. Например, в 1980-х годах FCC выделила частоты в диапазо-
не 800 МГц для услуг аналоговой сотовой телефонии и на основе ряда
критериев выдала лицензии на использование спектров двум операто-
рам в каждой географической зоне. Федеральная комиссия FCC и со-
ответствующие организации в других странах до сих пор распределяют
радиочастоты для определенных целей, но сегодня эти частоты обычно
выделяются через аукционы по продаже спектра за огромные капитало-
вложения. Некоторые утверждают, что этот рыночный метод является
самым справедливым и эффективным способом правительств распреде-
лять ограниченные частотные ресурсы, и что это обеспечивает, кроме
того, значительный доход государству; другие считают, что этот меха-
низм душит инновации, ограничивает конкуренцию и мешает развитию
технологий. В частности, высокая стоимость спектра подразумевает, что
приобрести его могут только крупные компании или корпорации. Более
того, большие инвестиции, необходимые на приобретение спектра, замед-
ляют возможность инвестирования в инфраструктуру для развертывания
систем и обусловливают высокие начальные цены на услуги для конеч-
ного пользователя. В Европе аукционы по продаже спектра 3G, когда
несколько компаний в конечном итоге не выполнили свои обязательства,
укрепили тем самым позиции противников аукционов по продаже спектра.
Помимо аукционов по продаже спектра, определенные частотные диа-
пазоны оставляются для свободного, нелицензируемого использования с со-
блюдением ряда особых правил («правил этикета»). Эти правила могут
40OSM — Office of Spectral Management. — Прим, перев.
70 Глава 1. Обзор систем беспроводной связи
касаться особых стандартов электросвязи, уровней мощности и т. д. Цель
выделения таких нелицензируемых полос частот заключается в стимули-
ровании инноваций и недорогих разработок. Много чрезвычайно успеш-
ных беспроводных систем, включая беспроводные ЛВС, Bluetooth и бес-
проводные телефоны, работают в нелицензируемых полосах частот. Основ-
ная трудность в использовании нелицензируемых частот заключается в том,
что их может погубить собственный успех. Если на одной и той же часто-
те используется много нелицензируемых устройств, находящихся в непо-
средственной близости друг от друга, то они создают друг другу помехи,
что может сделать эту полосу частот непригодной для использования.
Другая альтернатива распределения спектра радиочастот — это сис-
темы «второго слоя». Такая система действует в качестве вторичного
пользователя частотного диапазона вместе с другими первичными поль-
зователями. Действия вторичных пользователей обычно ограничены, так
что первичные пользователи испытывают минимальные мешающие вли-
яния. Это обычно достигается путем ограничения мощности вторичных
пользователей из расчета на один герц. Примером такой системы «вто-
рого слоя» являются сверхширокополосные системы UWB — нелицензи-
руемые системы, работающие в частотном диапазоне ISM. Принимая во
внимания сложность оценки степени влияния на первичных пользовате-
лей, такие системы «второго слоя» могут быть чрезвычайно спорными.
Однако тенденция распределения спектра для «второго слоя» представля-
ется перспективной, в основном, из-за недостатка свободного спектра для
новых систем и приложений.
Спутниковые системы покрывают большие территории, охватывая мно-
го стран, а иногда и весь земной шар. Для беспроводных систем, которые
охватывают множество стран, спектр распределяется Рабочей Группой
сектора радиосвязи Международного Союза Электросвязи — МСЭ-Р.
Отдел стандартизации этой организации, МСЭ-Т, принимает телеком-
муникационные стандарты для международных систем, которые должны
взаимодействовать между собой через национальные границы.
В настоящее время среди органов регулирования по всему миру на-
блюдается движение к изменению способа распределения спектра. Дей-
ствительно, основной механизм распределения спектра серьезно не ме-
нялся с момента зарождения органов регулирования в начале и середине
1900-х годов, хотя аукционы по продаже спектра и системы «второго
слоя» — относительно новые явления. Целью изменения политики распре-
деления спектра является возможность воспользоваться преимуществами
технических достижений в радиотехнике, чтобы сделать распределение
спектра более эффективным и гибким. Одна из блестящих идей — по-
нятие об «умном» или «когнитивном» радио. Радио такого типа может
1.5. Беспроводный спектр
«чувствовать» свое спектральное окружение и определять временные, про-
странственные и частотные области, где оно не будет оказывать меша-
ющее влияние на других пользователей даже при умеренных и высоких
уровнях передаваемой мощности. Если бы такие типы радио смогли дей-
ствовать в широком частотном диапазоне, то это открыло бы большие
перспективы новых частотных диапазонов и новых беспроводных сис-
тем и приложений. Однако нужно преодолеть множество технологических
и политических препон, чтобы допустить такие радикальные изменения
в распределении спектра.
1.5.2. Распределение спектра частот
в существующих системах
Многие беспроводные приложения работают в радиодиапазоне частот
между 30 и 40 МГц. Эти частоты естественны для беспроводных систем,
потому что на них не оказывает влияние кривизна Земли, им необхо-
димы только антенны средних размеров, и они могут проходить сквозь
ионосферу. Примечательно, что требуемый для хорошего приема размер
антенны обратно пропорционален частоте сигнала, поэтому для систем
на высоких частотах нужны более компактные антенны. Однако мощ-
ность сигнала ненаправленных антенн обратно пропорциональна квадра-
ту частоты, поэтому сигналами более высоких частот сложнее обеспечить
покрытие больших площадей.
Как уже было сказано в предыдущем разделе, спектр выделяется в ли-
цензионных полосах частот (которые регулирующие органы выделяют
для отдельных операторов) или в нелицензируемых полосах (которые мо-
гут использоваться любыми субъектами рынка в соответствии с опре-
деленными системными требованиями). В табл. 1.1 показано распреде-
ление лицензионного спектра для основных коммерческих беспроводных
систем, работающих в настоящее время в США. Похожее распределение
существует в Европе и Азии.
Примечательно, что цифровому телевидению выделены те же самые
частотные полосы, что и телевизионному вещанию, так что все стан-
ции телевизионного вещания со временем должны перейти от аналоговой
передачи к цифровой. Широкополосный беспроводный спектр 3G в на-
стоящее время выделен в телеканалах 60-69 УКВ, но предполагается его
перераспределение. Аналоговые сотовые системы 1G и цифровые систе-
мы 2G занимают один и тот же диапазон 800 МГц, и поставщики услуг
сотовой связи решают, как распределить этот спектр между цифровыми
и аналоговыми системами.
Нелицензируемый спектр распределяется правительственными орга-
нами внутри каждой страны. Часто разные страны стараются согласо-
систем беспроводной связи
вывать свои планы распределения частот для нелицензируемого исполь-
зования таким образом, чтобы технологические разработки для этого
спектра были совместимы во всем мире. В табл. 1.2 показано распределе-
ние нелицензируемого спектра в Соединенных Штатах.
Таблица 1.1. Распределение лицензионного спектра в США
Услуга/система Диапазон частот
AM радио 535-1605 кГц
ЧМ радио 88-108 МГц
ТВ вещание (каналы 2-6) 54-88 МГц
ТВ вещание (каналы 7-13) 174-216 МГц
ТВ вещание (УКВ) 470-806 МГц
Беспроводный широкополосный доступ 746-764 МГц, 776-794 МГц
Беспроводный широкополосный доступ 3G 1,7-1,85 ГГц, 2,5-2,69 ГГц
Цифровая сотовая телефония 1G и 2G 806-902 МГц
Персональные системы связи (сотовая телефония 2G) 1,85-1,99 ГГц
Беспроводные службы связи 2,305-2,32 ГГц, 2,345-2,36 ГГц
Спутниковое цифровое радио 2,32-2,325 ГГц
Многоканальная многоточечная распределенная служба связи (MMDS*) 2,15-2,68 ГГц
Цифровое спутниковое вещание (спутниковое ТВ) 12,2-12,7 ГГц
Местная многоточечная распределенная служба связи (LMDS**) 27,5-29,5 ГГц, 31-31,3 ГГц
Стационарные беспроводные службы 38,6-40 ГГц
*MMDS — Multichannel Multipoint Distribution Service
**LMDS — Local Multipoint Distribution Service
Таблица 1.2. Распределение нелицензируемого спектра в США
Частотная полоса Частота
1 полоса ISM (беспроводные телефоны, 1G WLAN) 902-928 МГц
2 полоса ISM (Bloutooth, 802.11b и 802.11g WLAN) 2,4-2,4835 ГГц
3 полоса ISM (беспроводные УАТС) 5,725-5,85 ГГц
1 полоса U-NII (внутренние системы, 802.11а WLAN) 5,15-5,25 ГГц
2 полоса U-NII (внешние системы близкого радиуса дей- ствия, 802.11а WLAN) 5,25-5,35 ГГц
3 полоса U-NII (внешние системы дальнего радиуса дей- ствия, 802.11а WLAN) 5,725-5,825 ГГц
В первой полосе ISM лицензированные пользователи ведут передачу
с высокой мощностью, что оказывает отрицательное воздействие на не-
лицензируемых пользователей. Поэтому требования для нелицензируемо-
го использования в этой полосе чрезвычайно ограничены, а эксплутаци-
1.6.
онные показатели довольно слабые. Вторая полоса ISM в сумме имеет
300 МГц спектра (три отдельные полосы по 100 МГц), при этом ограни-
чения по мощности в различных полосах несколько отличаются. В этих
полосах работают многие нелицензируемые системы.
1.6. Стандарты
Взаимодействующие друг с другом системы связи нуждаются в стандар-
тизации. Стандарты обычно принимаются национальными или междуна-
родными комитетами. В США эту роль исполняет Ассоциация промыш-
ленности средств связи — TIA41. Эти комитеты принимают и стандарты,
разработанные другими организациями. Институт IEEE является глав-
ным действующим лицом в деле стандартизации в Соединенных Штатах,
тогда как институт ETSI выполняет эту роль в Европе. Обе группы идут
очень долгим путем разработки стандартов, которые затем принимаются
компаниями и другими заинтересованными сторонами, а также занима-
ются составлением детальных отчетов. Процесс стандартизации является
долгосрочным инвестированием, но компании участвуют в нем, так как
включение их идей в стандарт дает им преимущество в разработке ко-
нечной системы. Вообще, стандарты не содержат всех деталей по всем
аспектам разработки системы. Это позволяет компаниям вводить новше-
ства и отличать свою продукцию от других стандартизованных систем.
Основная цель стандартизации — это обеспечение возможностей взаимо-
действия различных систем.
Кроме обеспечения взаимодействия, стандарты позволяют экономить
ресурсы и снижать стоимость. Например, беспроводные ЛВС обычно дей-
ствуют в нелицензируемых частотных диапазонах, поэтому им не нуж-
но следовать определенным стандартам. Первое поколение беспроводных
ЛВС было нестандартизированным, поэтому для многих систем нужны
были специализированные компоненты, что вело к значительному росту
стоимости, а в сочетании с плохими эксплутационными показателями
привело к ограниченному применению. Этот опыт нашел свое отражение
в настойчивой поддержке стандартизации следующего поколения беспро-
водных ЛВС, результатом чего стало очень удачное семейство стандар-
тов IEEE 802.11.
Конечно, у стандартизации есть и свои недостатки. Процесс стандар-
тизации не безупречен, так как у компаний-участниц есть свои собствен-
ные намерения, которые не всегда совпадают с лучшими технологиями
или интересами потребителей. Кроме того, процесс стандартизации дол-
41Т1А — Telecommunications Industry Association.
Глава 1. Обзор систем беспроводной связи
жен завершиться в какой-то точке, после которой становится все сложнее
добавлять новшества и совершенствовать существующий стандарт. Нако-
нец, процесс стандартизации может стать довольно политизированным.
Это случилось со вторым поколением сотовых телефонов в Соединенных
Штатах и в конечном итоге привело к принятию двух различных стан-
дартов, что почти «оксюморон» (т. е. сочетание несочетаемого). Ставшие
результатом этого запаздывание и технологический раскол значительно
задержали США в развитии второго поколения сотовых систем по срав-
нению с Европой. Несмотря на промахи, стандартизация является оче-
видной необходимостью и составляющей, часто приносящей пользу при
разработке и эксплуатации беспроводных систем. Однако чтобы такую
пользу могли извлечь все участники рынка беспроводных технологий, не-
обходимо решить ряд проблем в области стандартизации.
Задачи
1.1. С увеличением емкости устройств хранения информации мы можем со-
хранять все большее и большее количество информации на все мень-
ших и меньших устройствах. Действительно, мы можем представить себе
микроскопические компьютерные микросхемы, которые сохраняют те-
рабиты информации. Предположим, что эта информация должна быть
передана на какое-то расстояние. Проанализируйте плюсы и минусы раз-
мещения большого количества этих запоминающих устройств на грузовик
(подвижную станцию) и транспортировки их в пункт назначения вместо
отправки этой информации в электронном виде.
1.2. Опишите два технических преимущества и недостатка беспроводных сис-
тем, использующих пульсирующую передачу данных вместо непрерывной
передачи данных.
1.3. Вероятность ошибки по битам в волоконно-оптическом кабеле обычно
равна Рь = 10-12. При использовании в беспроводной связи относитель-
ной фазовой манипуляции ОФМН (DPSK) эта вероятность равна Рь =
— 1/2у, где у — среднее отношение сигнал - шум (SNR). Найдите среднее
значение SNR, необходимое для получения в беспроводном канале такой
же вероятности Рь, как и в волоконно-оптическом кабеле. Так как тре-
буется чрезвычайно высокое отношение сигнал-шум, то беспроводные
каналы обычно имеют Рь намного больше 10~12.
1.4. Найдите величину задержки при передаче информации между спутником
и Землей для спутников с низкой, средней и геостационарной орбитами
(LEO, МЕО и GEO), принимая скорость света равной ЗЮ8 м/с. Если мак-
симально допустимая задержка для системы передачи речи составляет
30 мс, какая из этих спутниковых систем будет приемлемой для двусто-
ронней речевой связи?
1.5.
1.6.
1.7.
1.8.
1.9.
1.10
Какие приложения могли бы значительно увеличить спрос на беспровод-
ную информацию?
Эта задача иллюстрирует некоторые экономические проблемы, с которы-
ми сталкиваются поставщики услуг, когда они отходят от исключительно
речевых систем к системам со смешанными средствами связи. Предполо-
жим, что Вы — такой поставщик услуг, работающий с полосой частот
120 кГц, которую необходимо распределить между пользователями те-
лефонной связи и передачей данных. Для пользователей речевой связи
необходимо 20 кГц частотного диапазона, а для пользователей переда-
чи данных — 60 кГц диапазона. Итак, например, Вы могли бы выде-
лить весь Ваш диапазон частот для телефонии, получив в результате
шесть речевых каналов, или разделить частотный диапазон на один ин-
формационный канал и три речевых канала и т. д. Предположим далее,
что это система с временным разделением, временные интервалы имеют
длительность Т. Все запросы на соединения по всем речевым каналам
и каналам передачи данных поступают в начале временного интервала,
и в обоих случаях вызовы длятся Т секунд. Предположим, в системе су-
ществуют шесть независимых речевых пользователей: каждый из этих
пользователей запрашивает телефонный канал с вероятностью 0,8 и пла-
тит 20 долларов, если его вызов был осуществлен. Пусть в системе будут
два независимых пользователя передачи данных: каждый из этих пользо-
вателей запрашивает канал с вероятностью 0,5 и платит 1 доллар, если
его вызов был осуществлен. Как следует распределить свой частотный
диапазон, чтобы максимизировать предполагаемую выручку?
Опишите три недостатка использования беспроводной ЛВС вместо про-
водной ЛВС. Для каких приложений эти недостатки будут перевешены
преимуществами беспроводной мобильности? Для каких приложений эти
недостатки будут доминировать над преимуществами?
Сотовые системы переместились в сторону использования более малень-
ких сот, чтобы увеличить свою пропускную способность. Назовите ми-
нимум три спорных вопроса при использовании маленьких сот, которые
усложняют разработку системы при такой тенденции?
Почему минимизация расстояния повторного использования частоты мак-
симизирует эффективность использования спектра сотовой системы?
Эта задача демонстрирует увеличение емкости системы при уменьшении
размера сот. Рассмотрим квадратный город площадью в 100 кв.км. Пред-
положим, Вы разрабатываете сотовую систему для этого города с ква-
дратными ячейками, где каждая ячейка (вне зависимости от ее размера)
имеет 100 каналов и таким образом может поддерживать 100 активных
пользователей. (На практике количество пользователей, которые могут
обслуживаться каждой ячейкой, в основном, не зависит от размера ячейки
при условии соответствия модели распространения и шкалы мощности.)
а) Каково полное количество активных пользователей, которых система
может обслуживать при размере ячейки в 1 кв.км?
76 Глава 1. Обзор систем беспроводной связи
б) Какой размер ячейки Вы бы использовали, если бы Ваша система
должна была поддерживать 250000 активных пользователей?
Теперь рассмотрим некоторые финансовые следствия, основанные на том
факте, что пользователи не разговаривают постоянно. Примем, что пят-
ница с 17 до 18ч — самое напряженное время для пользователей сотовых
телефонов. В течение этого времени средний пользователь делает один
вызов, и продолжительность этого вызова составляет две минуты. Ва-
ша система должна быть построена таким образом, чтобы вероятность
блокировки вызова абонента в течение этого часа пик была не более
2 %. (Вероятная блокировка рассчитывается с использованием форму-
с
лы Эрланга: Ръ = (Ас'/С!)/(^2 Ак/к!), где С — количество каналов,
k=0
а А = UpH, где U — количество пользователей, р — среднее количе-
ство запросов за единицу времени на одного пользователя, а Н — средняя
продолжительность вызова [5, гл. 3.6].
в) Сколько всего абонентов могут поддерживать макросотовая система
(с размером ячейки в 1 кв.км) и микросотовая система (с размером
ячейки, полученным в пункте б))?
г) Если базовая станция стоит 500000 долл., какова стоимость базовых
станций для каждой системы?
д) Если ежемесячная абонентская плата в каждой системе составляет
50 долл., какова будет ежемесячная выручка в каждом случае? Сколько
потребуется времени, чтобы окупились затраты на инфраструктуру
(базовые станции) для каждой системы?
1.11. Сколько каналов передачи данных потребуется системе CDPD для дости-
жения такой же скорости передачи данных, как средняя скорость WiMax?
Литература
1. V.H. McDonald, «The cellular concept», Bell System Tech. J., pp. 15 49, Jan-
uary 1979.
2. F. Abrishamkar and Z. Siveski, «PCS global mobile satellites», IEEE Commun.
Mag., pp. 132-6, September 1996.
3. R. Ananasso and F. D. Priscoli, «The role of satellites in personal communication
services», IEEE J. Sei. Areas Commun., pp. 180-96, February 1995.
4. D. C. Cox, «Wireless personal communications: What is it?» IEEE Pers. Com-
mun. Mag., pp. 20-35, April 1995.
5. T. S. Rappaport, Wireless Communications — Principles and Practice, 2nd ed.,
Prentice-Hall, Englewood Cliffs, NJ, 2001.
6. W. Stallings, Wireless Communications and Networks, 2nd ed., Prentice-Hall,
Englewood Cliffs, NJ, 2005.
7. K. Pahlavan and P. Krishnamurthy, Principles of Wireless Networks: A Unified
Approach, Prentice-Hall, Englewood Cliffs, NJ, 2002.
Литература
8. A. J. Goldsmith and L.J. Greenstein, «А measurement-based model for pre-
dicting coverage areas of urban microcells», IEEE J. Sei. Areas Commun., pp.
1013-23, September 1993.
9. K. S. Gilhousen, I. M. Jacobs, R. Padovani, A. J. Viterbi, L. A. Weaver, Jr., and
CE. Wheatley III, «On the capacity of a cellular CDMA system», IEEE Trans.
Veh. Tech., pp. 303-12, May 1991.
10. K. Rath and J. Uddenfeldt, «Capacity of digital cellular TDMA systems», IEEE-
Trans. Veh. Tech., pp. 323-32, May 1991.
11. Q. Hardy, «Are claims hope or hype?» Wall Street Journal, p. Al, September
6,1996.
12. A. Mehrotra, Cellular Radio: Analog and Digital Systems, Artech House, Nor-
wood, MA, 1994.
13. J.E. Padgett, C. G. Gunther, and T. Hattori, «Overview of wireless personal
communications», IEEE Commun. Mag., pp. 28-41, January 1995.
14. J.D. Vriendt, P. Laine, C. Lerouge, and X. Xu, «Mobile network evolution:
A revolution on the move», IEEE Commun. Mag., pp. 104-11, April 2002.
15. P. Bender, P.J. Black, M.S. Grob, R. Padovani, N.T. Sindhushayana, and
A. J. Viterbi, «CDMA/HDR: A bandwidth efficient high speed wireless data
service for nomadic users», IEEE Commun. Mag., pp. 70-7, July 2000.
16. S. J. Vaughan-Nichols, «Achieving wireless broadband with WiMax», IEEE Com-
puter, pp. 10-13, June 2004.
17. S. M. Cherry, «WiMax and Wi-Fi: Separate and Unequal», IEEE Spectrum, p. 16,
March 2004.
18. S. Schiesel, «Paging allies focus strategy on the Internet», New York Times,
April 19,1999.
19. I. Poole, «What exactly is... ZigBee?» IEEE Commun. Eng., pp. 44-5, Au-
gust/September 2004.
20. L. Yang and G. B. Giannakis, «Ultra-wideband communications: An idea whose
time has come», IEEE Signal Proc. Mag., pp. 26-54, November 2004.
21. D. Porcino and W. Hirt, «Ultra-wideband radio technology: Potential and chal-
lenges ahead», IEEE Commun. Mag., pp. 66-74, July 2003.
ГЛАВА 2
ПОТЕРИ НА ТРАССЕ
РАСПРОСТРАНЕНИЯ
РАДИОВОЛН И
ЭКРАНИРОВАНИЕ
Беспроводным радиоканалам как средству надежной высокоскоростной
связи предстоит преодолеть ряд проблем. Такие каналы восприимчивы
к шумам, помехам и другим мешающим воздействиям, а из-за передвиже-
ний абонента и динамических свойств окружающей среды эти мешающие
воздействия изменяются во времени непредсказуемым образом. В насто-
ящей главе дается характеристика изменений мощности принимаемого
сигнала, вызванных потерями на трассе и экранированием, в зависимо-
сти от расстояния. Потери на трассе обусловлены рассеянием мощности,
излучаемой передатчиком, а также свойствами канала распространения.
Модели потерь на трассе обычно предполагают, что величина потерь
определяется заданным расстоянием между передатчиком и приемником
(т. е. предполагается, что модель потерь на трассе не учитывает эффекты
экранирования). Экранирование обусловлено наличием преград между пе-
редатчиком и приемником, которые ослабляют мощность сигнала за счет
поглощения, отражения, рассеяния и дифракции. Если ослабление сигнала
очень сильное, то сигнал блокируется. Изменения принимаемой мощности
из-за потерь на трассе проявляются на больших расстояниях (100-1000 м),
а изменения из-за экранирования проявляются на расстояниях, сопоста-
вимых с длиной препятствующего объекта (10-100 м на улице и меньше
внутри помещения). Так как изменения принимаемой мощности из-за по-
терь и экранирования на трассе проявляются на сравнительно больших
расстояниях, то эти изменения иногда называют широкомасштабными
эффектами распространения. В главе 3 будут рассмотрены колебания
принимаемой мощности, вызванные конструктивными и деструктивными
влияниями составляющих многолучевого сигнала. Эти колебания проис-
ходят на очень коротких расстояниях, порядка длины волны сигнала,
и их иногда называют мелкомасштабными эффектами распространения.
На рис. 2.1 в децибелах (дБ1) показано изменение отношения мощностей
Значение х в децибелах равно 101og10«.
приемника и передатчика в зависимости от логарифма расстояния при
совместном действии потерь на трассе, экранирования и многолучевого
распространения.
Iog(r/ )
Рис. 2.1. Потери на трассе, экранирование и многолучевое распространение в за-
висимости от расстояния
После краткого введения в проблемы распространения и описания ис-
пользуемой модели сигнала будет представлена самая простая модель
распространения сигнала: потери на трассе в свободном пространстве.
Распространение сигнала между двумя точками при отсутствии ослабле-
ний или отражений происходит по законам распространения в свободном
пространстве. Затем мы опишем модели лучевого распространения. Эти
модели обычно используются для аппроксимации распространения волн
в соответствии с уравнениями Максвелла. Такие приближения верны,
когда количество составляющих многолучевого распространения неве-
лико и физическая обстановка известна. Модели распространения луча
в значительной степени зависят от геометрии и диэлектрических свойств
пространства, в котором распространяется сигнал. Кроме того, будут
рассмотрены экспериментальные модели с параметрами, основанными
на результатах измерений в каналах как внутри помещений, так и сна-
ружи, а также простая обобщенная модель с несколькими параметрами,
которая позволяет учесть влияние потерь в тракте при анализе системы.
Рассматривается также логарифмически нормальная модель экраниро-
вания, верная при большом числе экранирующих объектов. Если число
компонентов многолучевого распространения велико, или если неизвест-
ны геометрия и диэлектрические характеристики среды распространения
сигнала, то следует использовать статистические модели многолучевого
распространения. Такие статистические модели описываются в 3 главе.
Глава 2. Потери на трассе распространения радиоволн и экранирование
Хотя в настоящей главе дается краткий обзор моделей каналов при
экранировании и потерях в тракте, но всесторонний охват каналов и мо-
делей распространения сигнала на различных частотах по праву заслу-
живает рассмотрения в отдельной книге, и действительно, на эту тему
есть несколько отличных публикаций [1, 2]. Модели каналов для специа-
лизированных систем (например, многоэлементных антенн и сверхширо-
кополосных систем) можно найти в работах [3, 4].
2.1. Распространение радиоволн
Первоначальные представления о природе распространения радиоволн вос-
ходят к новаторской работе Джеймса Кларка Максвелла, который в 1864 г,
сформулировал теорию электромагнитного распространения, предсказав-
шую существование радиоволн. В 1887 г. Генрих Герц продемонстрировал
физическое существование этих волн. Однако Герц не видел практическо-
го применения радиоволн, аргументируя это тем, что звуковые частоты
низкие, распространение плохое, следовательно, радиоволны никогда не
смогут переносить речевые сигналы. Труды Максвелла и Герца положи-
ли начало радиосвязи. В 1894 г. Оливер Лодж использовал эти принципы
для построения первой беспроводной системы связи, хотя зона ее дей-
ствия ограничивалась 150 метрами. К 1897 г. предприниматель Г. Мар-
кони сумел послать радиосигнал с острова Уайт на буксир, находившийся
на расстоянии 18 миль, а в 1901 г. беспроводная система Маркони смогла
преодолеть Атлантический океан. В этих первых системах для переда-
чи информации использовались телеграфные сигналы. Первая передача
речи и музыки была осуществлена Реджинальдом Фессенденом в 1906 г.
с помощью амплитудной модуляции, которая обошла ограничения по рас-
пространению на низких частотах, замеченные Герцем, за счет переноса
сигналов на более высокие частоты, как это делается и сегодня во всех
беспроводных системах.
Электромагнитные волны распространяются через окружающее про-
странство, где они рассеиваются, преломляются, отражаются от стен,
рельефа местности, зданий и других объектов. Наиболее точные характе-
ристики такого распространения можно получить с помощью уравнений
Максвелла с граничными условиями, отражающими физические характе-
ристики конкретных препятствий. Для этого требуется расчет эффектив-
ной площади отражения для больших и сложных структур. Так как эти
расчеты сложные, а необходимые параметры часто отсутствуют, были
разработаны приближенные методы определения характеристик распро-
странения сигнала без обращения к уравнениям Максвелла.
2.2. Модели передачи и приема сигнала
Наиболее известные способы приближения свойств распространения
радиоволн используют геометрическое представление в виде лучей. При
этом процесс распространения фронта электромагнитной волны разбива-
ется на простые части: модель описывает влияние на волновой фронт та-
ких явлений как отражение и преломление, но игнорирует более сложные
явления рассеивания, прогнозируемые дифференциальными уравнениями
Максвелла. Самая простая из таких моделей — двулучевая модель, ко-
торая точно описывает распространение сигнала в условиях, когда есть
одна траектория между передатчиком и приемником и одна траектория
отражения. Отраженный луч обычно отражается от земли, и двулучевая
модель представляет хороший способ приближения условий распростра-
нения вдоль автомагистралей или сельских дорог или над водной поверх-
ностью. Мы детально проанализируем двулучевую модель, а также более
сложные модели с дополнительными отраженными, рассеянными или ди-
фракционными составляющими. Многие условия распространения недо-
статочно точно характеризуются двулучевой моделью. В таких случаях
обычно разрабатываются аналитические модели, основанные на экспери-
ментальных данных, и несколько таких моделей, получивших широкое
распространение, будут рассмотрены в данной главе.
Часто сложность и изменчивость радиоканала осложняет получение
точной детерминированной модели канала. В таких случаях обычно ис-
пользуют статистические модели. Ослабление сигнала, вызванное прегра-
дами на его пути (строения или другие объекты) обычно характеризуется
статистически, как это описано в разделе 2.7. Статистические модели
также используются для описания конструктивной и деструктивной ин-
терференции при большом количестве компонентов многолучевого рас-
пространения, как это описано в гл. 3. Статистические модели наиболее
точны в средах с довольно регулярными геометрическими и однородными
диэлектрическими свойствами. Пространства внутри помещений менее
однородны, чем внешние открытые пространства. Геометрические и ди-
электрические характеристики внутри помещений существенно меняются
в зависимости от того, является ли внутреннее пространство открытом
складом, помещением с перегородками (кабинетами) или машинным це-
хом с большим количеством металла. Для всех этих сред существуют
компьютерные средства моделирования, помогающие прогнозировать ха-
рактеристики распространения сигнала [5].
2.2. Модели передачи и приема сигнала
Рассматриваемые здесь модели относятся, в основном, к сигналам диапа-
зонов УВЧ (UHF) и СВЧ (SHF), занимающих полосы частот 0,3-3 ГГц
Глава 2. Потери на трассе распространения радиоволн и экранирование
и 3-30 ГГц (соответственно). Этот частотный спектр довольно удобен
для функционирования беспроводных систем благодаря своим характе-
ристикам распространения сигнала и относительно небольшим размерам
антенн. Предполагается, что расстояния передачи сигнала по земле до-
вольно малы, так что на них не оказывает влияние кривизна земной
поверхности.
Все рассматриваемые нами передаваемые и принимаемые сигналы дей-
ствительные. Это связано с тем, что в схемах модуляторов используются
генераторы действительных, а не комплексных синусоидальных сигна-
лов. И хотя, для аналитической простоты, мы моделируем каналы с ком-
плексной частотной характеристикой, в действительности канал просто
вносит амплитудные и фазовые изменения на каждой частоте передава-
емого сигнала, поэтому принимаемый сигнал также будет действителен.
Для упрощения анализа действительные модулированные и демодулиро-
ванные сигналы часто представляют как действительную часть комплекс-
ного сигнала. Эта модель позволяет нам использовать для описания пере-
даваемых и принимаемых сигналов метод эквивалентного низкочастотного
представления полосовых сигналов. Более подробную информацию об экви-
валентном низкочастотном представлении полосовых сигналов и систем
можно найти в приложении А.
Передаваемый сигнал моделируется следующим образом:
s(t) = Re{u(t)ej2”fct} =
= Re{u(£)} cos(27r/cZ) — Im{it(Z)} sin(27r/cZ) =
= S](t) cos(27r/c£) - sQ(t) sin(2?r/ci), (2.1)
где u(t) = si(t)+jsQ(t) — комплексный исходный сигнал с синфазной сос-
тавляющей sift) — Re{u(Z)}, квадратурной составляющей sq(1) = Im{u(Z)},
шириной полосы пропускания Ви и мощностью Ри. Сигнал u(t) называют
огибающей комплексного сигнала или эквивалентным низкочастотным
сигналом для s(t). Мы называем u(t) огибающей комплексного сигна-
ла потому что величина u(t) равна величине s(t). Фаза it(£) включает
в себя смещение фазы несущего сигнала. Эквивалентное низкочастотное
представление сигнала с ограниченной полосой частот В fc допуска-
ет манипуляцию сигнала u(t) независимо от несущей частоты. Мощность
передаваемого сигнала s(t) равна Pt = Ри/1!.
Принимаемый сигнал будет иметь такой же вид, но с добавлением
шумовой составляющей:
r(t) = Re{v(t)e^27r^ct} + n(i), (2.2)
где п(Г) — шум, вносимый каналом, a v(t) — эквивалентный низкоча-
стотный сигнал, зависящий от канала, по которому распространяется
2.2. Модели передачи и приема сигнала
сигнал s(t). В частности, как показано в приложении А, если сигнал s(t)
передается по стационарному каналу, то v(t) = u(t) * c(i), где c(t) —
импульсная характеристика эквивалентного низкочастотного канала. Не-
стационарный канал будет рассмотрен в гл. 3.
Принимаемый сигнал (2.2) имеет две составляющих, первая из ко-
торых соответствует передаваемому сигналу после прохождения через
канал, а вторая — шуму, вносимому каналом. Отношение мощностей
сигнала и шума SNR в принимаемом сигнале определяется как мощность
первой составляющей, деленная на мощность второй составляющей. В на-
стоящей главе (а также в 3 гл.) при анализе мы будем пренебрегать
составляющей случайного шума n(t), так как основное внимание в этих
главах уделяется распространению сигнала, на которое шум не оказывает
влияния. Однако шум играет заметную роль при определении пропускной
способности и эффективности беспроводных систем, которые рассматри-
ваются в последующих главах.
Когда передатчик или приемник
движутся, принимаемый сигнал при-
обретает доплеровский сдвиг часто-
ты fo = v cos 0/А, где 0 — угол меж-
ду направлением поступления при-
нимаемого сигнала и направлением
движения, и — скорость движения
приемника в направлении к передат-
чику, а А = с/ f'с — длина волны
сигнала (с = 3 • 108 м/с — ско-
рость света). Геометрические пара-
метры, связанные с явлением допле-
ровского сдвига частоты, показаны
на рис. 2.2. Доплеровский сдвиг час-
тоты возникает из-за того, что при „ „ „
Рис. 2.2. Схема, поясняющая доплеров-
передвижении передатчика или при- ский эффект
емника в течение короткого интер-
вала времени Ai возникает некоторое изменение расстояния Ас/ =
= v At cos 0, которое должен пройти передаваемый сигнал по пути к при-
емнику. Фазовое изменение из-за этого различия в длине пути равно
А<д = 2-jrvAt COS0/A. Тогда доплеровский сдвиг частоты может быть вы-
ражен соотношением между частотой сигнала и фазой:
/р = = VCOST- (2-3)
Z7T At А
Если приемник движется по направлению к передатчику (т. е. если
—7г/2 в тг/2), то доплеровский сдвиг частоты положителен, а в про-
(Гв4 Глава 2. Потери на трассе распространения радиоволн и экранирование
тивном случае — отрицателен. В настоящей главе при рассмотрении мо-
дели распространения луча в свободном пространстве мы пренебрежем
доплеровским сдвигом, хотя для типичных значений скорости движения
транспорта (75 км/ч) и частот (около 1 ГГц) он составляет порядка
100 Гц [6]. Однако в гл. 3 при рассмотрении статистической модели за-
мираний доплеровские эффекты учитываются.
Предположим, что передаваемому по заданному каналу сигналу s(t)
с мощностью Pt соответствует принимаемый сигнал r(t) с мощностью Рг,
где Рг — усредненное значение по всем случайным отклонениям, обусло-
вленным экранированием. Потери на трассе распространения радиоволн
в канале определяются как отношение мощности передачи к мощности
приема:
Pl = ъ-- (2-4)
Обычно потери на трассе распространения радиоволн выражают в де-
цибелах — как разницу в дБ между уровнями передаваемой и принимае-
мой мощности сигнала:
PL дБ = 101g § дБ. (2.5)
Л1
Вообще, потери в тракте передачи в дБ — это неотрицательное число:
канал не содержит активных элементов, поэтому может только ослаблять
сигнал. Усиление в канале распространения в дБ — это затухание с обрат-
ным знаком Pg = —Pl = Igy/Pc; = — Pl = 101g рЧ дБ и обычно имеет
отрицательное значение. Мощность сигнала на приеме, из-за экранирова-
ния и случайных препятствий на трассе распространения, как мы пока-
жем в разделе 2.7, величина случайная.
2.3. Потери при распространении сигнала
в свободном пространстве
Предположим, что сигнал между приемником и передатчиком, располо-
женным на расстоянии d, распространяется в свободном пространстве.
Допустим, что между передатчиком и приемником нет препятствий, и что
сигнал распространяется между ними по прямой линии. Такая модель
канала распространения сигнала по линии прямой видимости называет-
ся каналом прямой видимости, а соответствующий принимаемый сигнал
называется сигналом или лучом прямой видимости. Потери на трассе
в пустом пространстве выражаются комплексным масштабным коэффи-
циентом [1], который дает следующее выражение принимаемого сигнала:
2.3. Потери при распространении сигнала в свободном пространстве
(2-7)
r(i) = Re { X^^- d/X > (2.6)
где y/G~i — произведение коэффициентов усиления передающей и прием-
ной антенн по линии прямой видимости, a e-P^dlx — сдвиг фазы при
прохождении волной расстояния d.
Мощность передаваемого сигнала s(t) равна Pt, поэтому отношение
принятой и переданной мощности, используя (2.6), можно записать как:
Л- = Г'/GA
Pt 4W
Следовательно, мощность принимаемого сигнала ослабевает обратно про-
порционально квадрату расстояния d между передающей и принимающей
антеннами. В следующем разделе мы увидим, что для других моделей рас-
пространения сигнала мощность полученного сигнала ослабевает более
быстро по отношению к этому расстоянию. Мощность принимаемого сиг-
нала также пропорциональна квадрату длины волны сигнала, так, если
несущая частота увеличивается, то принимаемая мощность уменьшает-
ся. Эта зависимость принимаемой мощности от длины волны сигнала А
обусловлена эффективной площадью принимающей антенны [1]. Однако
могут быть созданы направленные антенны, так что на линиях с высокой
степенью направленности мощность сигнала на приеме будет увеличи-
ваться с увеличением частоты [7]. Принимаемая мощность может быть
выражена в дБм следующим образом2
Рг дБм = Pt дБм + 101g(Gz) + 201g(A) - 201ё(4тг) - 20lg(d). (2.8)
Из модели потерь в свободном пространстве потери в тракте распростра-
нения определяются как:
Р GiX2
= = <2-9>
Соответственно усиление или выигрыш в свободном пространстве равно:
PG = -PL = 10 lg (2.10)
(4тга)2
Пример 2.1. Рассмотрим внутреннюю беспроводную ЛВС с рабочей ча-
стотой /с = 900 МГц, сотами радиусом 10 м и ненаправленными антеннами.
Предполагая, что потери в соте соответствуют модели свободного простран-
ства, определить мощность передачи в точке доступа, необходимую для того,
чтобы все приемные терминалы внутри соты получали минимальную мощность
23начение х в дБм — это его значение в дБ по отношению к милливатту: 10 log10(«/.001).
86 Глава 2. Потери на трассе распространения радиоволн и экранирование
10 мкВт. Какие произойдут изменения, если рабочая частота системы станет
равной 5 ГГц?
Решение. Мы должны найти такое значение мощности на передаче, при кото-
ром терминалы на границе сот принимали бы требуемую минимальную мощ-
ность. Формулу для вычисления необходимой мощности получим, преобразовав
выражение (2.7) к виду:
Pt=Pr
4кд 2
-УСцА
Подставляя значение Gi = 1 для ненаправленной антенны и значения А = с/ fc =
= 0,33 м, d = 10 м и Рг = 10 мкВт, получим Pt = 1,45 Вт = 1,61 дБ/Вт
(напомним, что для мощности Р в Вт уровень в дБ относительно 1 Вт равен
101g(F) дБ/Вт). При 5 ГГц изменяется только длина волны А — 0,06, поэтому
Pt = 43,9 Вт = 16,42 дБ/Вт.
2.4. Построение траекторий лучей
Рис. 2.3. Отраженные, дифрагированные
и рассеянные волновые компоненты
В типичной городской обстановке
или внутри помещений радиосиг-
нал, передаваемый от стационарно-
го источника, будет наталкивать-
ся на множество объектов в этом
окружении, в результате чего воз-
никают отраженные, диффрагиро-
ванные или рассеянные копии пере-
даваемого сигнала, как это показа-
но на рис. 2.3. Эти дополнительные
копии передаваемого сигнала, из-
вестные под названием компонен-
ты многолучевого распростране-
ния сигнала, могут быть ослаблены
по мощности, задержаны во време-
ни и смещены по фазе и/или час-
тоте относительно сигнала, который проходит к приемнику по линии
прямой видимости. Составляющие многолучевого распространения и пе-
реданный сигнал суммируются вместе в приемнике, в результате чего
в принятом сигнале в сравнении с переданным сигналом часто возникают
искажения.
При рассмотрении трасс прохождения лучей предполагается конечное
число отражателей с известным местоположением и диэлектрическими
свойствами. Затем детали многолучевого распространения сигнала могут
быть рассчитаны с использованием уравнения Максвелла с соответству-
2-4- Построение траекторий лучей
ющими граничными условиями. Однако сложность вычислений такого
способа решения делает его непригодным в качестве общего инструмента
моделирования. Методы построения трасс прохождения лучей, замещаю-
щие фронт волны простыми частицами, близки к картине распростра-
нения электромагнитных волн. Таким образом, эффекты отражения, ди-
фракции и рассеяния на волновом фронте рассчитываются приблизитель-
но с использованием простых геометрических уравнений вместо более
сложного волнового уравнения Максвелла. Погрешность приближенно-
го расчета трасс лучей меньше всего тогда, когда приемник принимает
большинство сигналов от близко расположенных отражателей и когда
все отражатели достаточно ровные и относительно велики по сравне-
нию с длиной волны. Сравнение метода построения лучей с опытными
данными показывает, что это точная модель расчета мощности прини-
маемого сигнала для сельской местности3 [8], городских улиц, когда пе-
редатчик и приемник расположены близко к поверхности земли [8 10]
и внутри помещений при соответственно скорректированных коэффици-
ентах дифракции [11]. Методы построения трасс прохождения сигнала,
кроме изменений мощности, не всегда достаточно хорошо отображают
другие эффекты распространения, как, например, задержку многолуче-
вого распространения [12].
Если и передатчик, и приемник, и отражатели неподвижны, то па-
раметры многих трасс прохождения сигналов неизменны. Однако, если
источник сигнала или приемник передвигаются, то параметры многолу-
чевого распространения изменяются во времени. Если количество, место-
положение и характеристики отражателей в любой момент времени из-
вестны, то эти изменения детерминированы. В противном случае должны
использоваться статистические модели. Подобным образом, если коли-
чество отражателей велико или поверхности отражателей не достаточно
гладкие, то мы должны пользоваться статистическими приближениями
характеристик принимаемого сигнала. Статистические модели замира-
ний при распространении сигналов рассматриваются в 3 гл. Гибридные
модели, которые объединяют графические методы построения лучей со
статистикой замираний, также можно найти в литературе [13, 14], однако
здесь они не рассматриваются.
Наиболее общая модель трассировки лучей включает в себя все осла-
бленные, дифрагированные и рассеянные компоненты многолучевого рас-
пространения. Такая модель использует все геометрические и диэлектри-
ческие характеристики объектов, окружающих передатчик и приемник.
Компьютерные программы, основанные на построении трасс прохожде-
3Более точно следует сказать: для среднепересеченной местности. — Прим, перев.
88 Глава 2. Потери на трассе распространения радиоволн и экранирование
ния лучей — такие как Lucent’s Wireless Systems Engineering (WiSe) (Ин-
женерные разработки беспроводных систем компании Lucent), Wireless
Valley’s Site-Planner®и Marconu’s Planet® EV широко используются при
планировании систем как внутри зданий, так и наружного окружения.
В этих программах для получения трехмерного геометрического изо-
бражения обстановки компьютерная графика соединена с фотографиями
местности (наружные каналы) или архитектурными чертежами (каналы
внутри зданий) [5].
Следующие разделы описывают несколько моделей трассировки лучей
по принципу от простого к сложному. Мы начнем с простой двулуче-
вой модели, которая прогнозирует изменения, вызванные отражением от
поверхности земли сигнала, интерферирующего с лучом, распространяю-
щегося по линии прямой видимости. Эта модель характеризует распро-
странение сигнала в отдельных районах с несколькими отражателями,
такими как сельские дороги или автомагистрали. Для обстановки внутри
зданий хорошей модели нет. Затем мы представим модель отражения с де-
сятью лучами, которая предсказывает характер распространения сигнала
вдоль прямой улицы или автомагистрали. Наконец, мы опишем общую мо-
дель, которая предсказывает характер распространения сигнала в любой
обстановке. Для двулучевой модели необходима информация только о вы-
соте антенны; для 10-лучевой модели нужна информация о высоте антен-
ны и ширине улицы или автомагистрали, а для общей модели необходима,
помимо этих параметров, также детальная информация о геометриче-
ских и диэлектрических характеристиках отражателей, дифракционных
и рассеивающих объектах окружающей среды.
2.4.1. Двулучевая модель
Как следует из рис. 2.4, двулучевая модель распространения использует-
ся тогда, когда единственное отражение от земли доминирует над эф-
фектом многолучевого распространения. Принимаемый сигнал состоит
из двух составляющих: луча прямой видимости, представляющего пере-
данный сигнал, распространяющийся в свободном пространстве, и отра-
женного луча, который также представляет переданный сигнал, отражен-
ный от поверхности земли.
Потери сигнала, принимаемого по линии прямой видимости, вычисля-
ются по формуле (2.6) для условий распространения в свободном про-
странстве. Отраженный луч показан на рис. 2.4 двумя частями х и х1.
Если мы проигнорируем эффект ослабления волны поверхностью земли4,
4Это допустимое приближение для антенн, расположенных на высоте большей несколь-
ких длин волны от поверхности земли.
2-4- Построение траекторий лучей
то тогда при наложении принимаемый сигнал в двулучевой модели вы-
глядит следующим образом:
r2—ray(t) —
X RVG~ru(t - т)е~зМ*+*')/А
4л I x + x1
(2.11)
где т = (х + х' — /)/с — время задержки луча, отраженного от земли
относительно луча, распространяющегося по линии прямой видимости,
\/Gi = y/GaGb — произведение коэффициентов усиления диаграмм напра-
вленности передающей и приемной антенн в направлении линии прямой
видимости, R — коэффициент отражения от земли, a y/G^ = y/GaGa —
произведение коэффициентов усиления диаграмм направленности переда-
ющей и приемной антенн, соответствующих направленности лучей х и х',
соответственно. Длительность задержки в двулучевой модели равна за-
держке между лучом, распространяющимся по линии прямой видимости,
и отраженным лучом (х + х' — /)/с.
Если переданный сигнал узкополосный относительно длительности за-
держки (т В~’), то u(t) « u(t — т). При таком допущении принимаемая
мощность в двулучевой модели для узкополосной передачи рассчитыва-
ется по формуле:
Pr = Pt
Л V
4тг
VGi
I
R^Gre-i^
х + х'
(2-12)
где Л у? = 27г(з: + х' — /)/А — разность фаз между двумя составляющи-
ми принимаемого сигнала. Как показано в [15], равенство (2.12) очень
хорошо согласуется с опытными данными. Если d обозначает разнос ан-
тенн по горизонтали, ht — высоту передающей, a hr — высоту приемной
антенн, то тогда, исходя из геометрических соображений, получаем:
х + х' - I = y/(ht + hr)2 + (р - y/(ht - hr)2 + d2. (2.13)
Если d намного больше ht + hr, то можем применить к (2.13) приближение
рядом Тейлора и получить
Л у? = 2тг(а? + х' — l)/X « ^hthrfXd. (2-14)
Коэффициент отражения от земли задан как
sin в — Z
sin0 + Z
в работах [6, 16], где
{у/ er — cos2 0/ег для вертикальной поляризации,
~ cos2 в для горизонтальной поляризации,
Глава 2. Потери на трассе распространения радиоволн и экранирование
а ег — диэлектрическая постоянная земли. Для поверхности земли или
дороги эта диэлектрическая постоянная — величина строго определенная
(реально значение ег близко к 15).
Рис. 2.4. Двулучевая модель распространения сигнала
Из рис. 2.4 и выражения (2.15) видно, что для асимптотически боль-
шого значения d, х + х' « I « d, 6 « О, Gi « Gr, a R « — 1. Подставляя
эти приближения в (2.12), получаем, что в этих предельных ограничениях
мощность принимаемого сигнала приблизительно равна
Рг
4тгс/
у/ G
Xd г d2
(2-17)
или, в дБ,
Рг дБм = Pt дБм 4- 101g(G() + 201g(hthr) — 40 lg(d). (2.18)
Итак, в пределе для больших значений d принимаемая мощность па-
дает обратно пропорционально четвертой степени расстояния d и не за-
висит от длины волны А. Сигнал на приеме становится независимым от
величины Л, так как принимаемая мощность сигнала на элементах на-
правленной антенны не обязательно убывает с частотой, а объединение
прямого и отраженного лучей формирует эффективную антенную решет-
ку. График выражения (2.12) в функции расстояния показан на рис. 2.5
для f = 900 МГц, R = —1, ht = 50 м, hr = 2 м, Gi = 1, Gr = 1, а мощ-
ность на передаче нормализована относительно 0 дБ. Эта схема может
быть разделена на три участка. На небольших расстояниях (с? < ht) два
луча складываются арифметически, а потери на трассе возрастают мед-
ленно. Если быть более точными, то они возрастают пропорционально
1/(с?2 + /г2), так как при небольших расстояниях расстояние между пе-
редатчиком и приемником равняется I = у/d2 + (ht + hr)2 поэтому при
ht hr l/l2 « l/(d2 + ^t), что характерно для данного случая. Для
расстояний, больших по сравнению с ht и до определенного критиче-
ского расстояния dc, волна испытывает конструктивную, усиливающую
2.4- Построение траекторий лучей
и деструктивную, ослабляющую интерференцию двух лучей, в резуль-
тате чего образуется волновая картина последовательных максимумов
и минимумов. Эти максимумы и минимумы также относятся к ограни-
ченному случаю многолучевого замирания, который будет более детально
рассмотрен в следующей главе. При критическом расстоянии dc обра-
зуется последний максимум. Мощность сигнала после него падает про-
порционально с?-4. Это стремительное падение с увеличением расстояния
происходит благодаря тому факту, что при d > dc составляющие распро-
странения сигнала объединяются только деструктивно, и таким образом
отличаются по фазе, по крайней мере на к.
Рис. 2.5. Величина мощности на приеме в зависимости с расстоянием при двулу-
чевой модели распространения
Приближенное значение dc может быть получено из (2.14), при подста-
новке А<р = л получаем dc = 4/г^/гг/А. Значение критической мощности
также показано на рисунке. Спад мощности в зависимости от расстояния
в двулучевой модели может быть аппроксимирован с помощью усреднения
значений локальных максимумов и минимумов. Это находит свое отра-
жение в кусочно-линейной модели с тремя сегментами, также показанной
на рис. 2.5. Для наглядности, график слегка смещен от действительных
значений ослабления мощности. В первом сегменте спад мощности по-
стоянный и пропорционален 1/7г^, при значениях между /г< и dc мощность
падает по —20 дБ на декаду, а для расстояний больших, чем dc, мощность
падает по —40 дБ на декаду.
(Г92 Глава 2. Потери на трассе распространения радиоволн и экранирование
Критическое расстояние dc может использоваться при разработке сис-
тем. Например, если распространение сигнала в сотовой системе подчи-
няется закономерностям двулучевой модели, то критическое расстояние
будет естественным ограничением радиуса соты, поскольку ослабление
мешающего влияния сигнала за пределами соты будет гораздо больше,
чем ослабление внутри соты. Однако определение радиуса соты по ве-
личине dc допустимо только для очень больших сот, как это показано
на рис. 2.5 и в следующем примере. Так как малые соты более предпо-
чтительны — для увеличения пропускной способности и для снижения
передаваемой мощности — радиусы сот обычно намного меньше критиче-
ского значении dc. Следовательно, в соответствии с двулучевой моделью
распространения, спад мощности сигнала внутри этих относительно ма-
леньких ячеек пропорционален квадрату расстояния. Более того, распро-
странение сигнала в сотовых системах редко происходит по двулучевой
модели, так как отраженные лучи редко подавляются во всех направле-
ниях.
Пример 2.2. Определим критическое расстояние городской микросоты по дву-
лучевой модели при /с = 2 ГГц и (ht = 10 м, йг = 3 м) и микросоты внутри
здания при (ht = 33 м, hr = 23 м).
Решение. Критическое расстояние dc = 4Jxthr / \ = 800 м для городской и 160 м
для внутренней микросоты. Сота радиусом 800 м в городской микросотовой сис-
теме немного больше: размер городских микросот сегодня порядка 100 м, что
позволяет обеспечить большую емкость системы. Однако, если бы мы исполь-
зовали соту размером 800 м при параметрах этой системы, мощность сигнала
падала бы как <Р, что значительно сократило бы ее. Точно также расстояние
160 м достаточно велико для радиуса внутренней соты, в которой обычно много
стен, через которые придется проходить сигналу при радиусах такого разме-
ра. Поэтому система внутри зданий обычно имеет соты меньшего радиуса —
порядка 10-20 м.
2.4.2. Десятилучевая модель (диэлектрическое ущелье)
Рассмотрим модель городских микросот, разработанную Амитеем [9].
В этой модели улицы предполагаются прямыми5 со зданиями по обеим
сторонам, с высотой подвеса передающих и приемных антенн, близкой
к уровню улицы. Здания, расположенные вдоль улиц, играют при распро-
странении сигнала такую же роль, как диэлектрическое ущелье. Теоре-
тически, от фасадов зданий может отражаться и попадать в приемник
бесконечно большое количество лучей. Кроме того, лучи также могут
отражаться от зданий позади передатчика или после приемника. Одна-
5Прямолинейный город плоский и имеет линейные улицы, которые пересекаются под
углом 90°, как в середине Манхэттена.
2-4- Построение траекторий лучей
ко, так как какая-то часть энергии сигнала рассеивается при каждом
отражении, траектории сигнала, соответствующие более чем трем отра-
жениям, в общем могут быть проигнорированы. Если улица относительно
прямая, обратные отражения также обычно не учитываются. Экспери-
ментальные данные показывают, что модель десяти отраженных лучей
близка к распространению сигнала в диэлектрическом ущелье [9]. Десять
лучей объединяют все тракты с одним, двумя или тремя отражениями:
в частности, существует линия прямой видимости (LOS), а также лучи,
отраженные от земли (GR), отраженные от стены один раз (SW), от-
раженные от стен дважды (РТУ) и трижды (ТЖ), отраженные от стены
и земли (ТУС) и отраженные от земли и стены (СТУ). Для каждой тра-
ектории существует по два луча каждого типа — по одному с каждой
стороны улицы. Вид сверху десятилучевой модели показан на рис. 2.6.
Рис. 2.6. Вид десятилучевой модели сверху
При десятилучевой модели распространения сигнал на приеме рассчи-
тывается по формуле:
Г10—ray (t) —
\/Giu(t)e-^ll* Л - Тг)е-^/Л
I + Xi
г=1
ej2irfct
(2-19)
где Xi обозначает длину пути г-го отраженного луча, Ti = (xi — 1)/с,
а — произведение коэффициентов усиления передающей и прием-
ной антенн, соответствующее г-му лучу. Для каждого тракта коэффици-
ент отражения Ri равен при одном отражении значению, вычисляемому
по формуле (2.15), а в тракте с несколькими отражениями — произве-
дению коэффициентов одиночных отражений, число которых равно чи-
слу отражений. Диэлектрические постоянные, используемые в (2.19) при-
близительно равны диэлектрической постоянной земли, поэтому во всех
расчетах Ri используется ег = 15. Если мы снова примем модель узкопо-
Глава 2. Потери на трассе распространения радиоволн и экранирование
лосного сигнала, где u(t) « u(t — тД для всех i, то в соответствии с (2.19)
мощность на приеме равна
Pr = Pt
-Г
4 л
VG~i
Riy/GXie-j^
(2.20)
где Д<дг = 2тг(х{ - 1)/Х.
Для передающих антенн как выше, так и ниже уровня зданий спад
мощности с расстоянием как в десятилучевой модели (2.20), так и со-
гласно эмпирическим данным в городах [15, 17, 18] обычно пропорциона-
лен d~2, даже на сравнительно больших расстояниях. Более того, степень
спада относительно нечувствительна к высоте передатчика. Этот спад
пропорционален квадрату расстояния благодаря преобладанию составля-
ющих многолучевого распространения, которые ослабевают пропорци-
онально d~2, над комбинацией лучей прямой видимости (LOS) и луча,
отраженного от земли (двулучевая модель), которая ослабевает в соот-
ветствии с d~4. Другие эмпирические исследования [19-21] получили спад
мощности, пропорциональный расстоянию d’\ где у находится где-то
между 2 и 6.
2.4.3. Общая схема построения лучей
Общая схема построения трасс прохождения лучей (трассировка) GRT6
может использоваться для прогнозирования интенсивности напряженно-
сти поля и разброса задержек при различных формах зданий и разме-
щения антенны [22-24]. Для этой модели информация о здании (высота,
месторасположение и диэлектрические свойства), а также о положении
передатчика и приемника относительно зданий должна быть точно ука-
зана. Так как эта информация довольно специфическая, модель GRT не
используется для получения общих теорий о параметрах системы и ее
планировке; скорее она объясняет основной механизм распространения
сигнала в городе и может использоваться для получения информации
о задержке и интенсивности сигнала для конкретных конфигураций пе-
редатчика и приемника в заданной обстановке.
При трассировке распространения луча прямой видимости (LOS) и от-
раженных сигналов GRT использует методы геометрической оптики, а
также элементы дифракционного и диффузионного рассеяния сигнала,
вызванного строениями. На число составляющих многолучевого распро-
странения при заданном месторасположении приемника не накладыва-
ется ограничений: интенсивность каждого луча рассчитывается точно,
основываясь на расположении зданий и диэлектрических характеристи-
6GRT (General Ray Tracing).
S-4- Построение траекторий лучей
ках. В целом, отраженные сигналы и сигналы прямой видимости пред-
ставляют доминирующие компоненты сигнала на приеме, так как потери
сигналов, обусловленные дифракцией и рассеяниями, достаточно высоки.
Однако в зонах, близких к рассеивающим или дифрагирующим поверхно-
стям, могут доминировать другие составляющие многолучевого распро-
странения, которые в других местах могут подавляться отраженными
лучами или лучами прямой видимости.
Рис. 2.7.
Дифракция
на остром крае
Модель распространения по линии прямой видимости LOS и отра-
женных каналов была конспективно представлена в предыдущем разде-
ле. Дифракция происходит в случае, если переданный сигнал по пути
к приемнику «огибает объект вокруг», как это показано на рис. 2.7. Ди-
фракция происходит в результате многих причин, включая закругленную
поверхность земли, холмистую или неровную местность, границы зданий
или препятствия, преграждающие линию прямой видимости (LOS) меж-
ду передатчиком и приемником [1, 5, 16]. Дифракция может быть точно
охарактеризована с использованием геометрической теории дифракции,
но сложность ее подходов помешала использовать эту теорию для моде-
лирования беспроводных каналов. Дифракция на клине (на остром крае)
упрощает анализ, допуская, что объект, который приводит к возникно-
вению дифракции, близок к форме клина, а не к какой-то другой, более
общей. Эта модель использовалась при анализе механизма возникновения
дифракции радиоволн на углах улиц, которая, при некоторых углах па-
дения, может приводить к потерям, превышающим 100 дБ [11, 24, 26, 27].
Хотя дифракция на клине упрощает анализ, все равно требуется числен-
ное решение для потерь в тракте [25, 28], поэтому она широко не использу-
ется. Чаще всего дифракция моделируется с помощью модели дифракции
на остром крае Френеля из-за ее простоты. Геометрия этой модели пока-
зана на рис. 2.7, где предполагается, что вызывающий дифракцию объект
асимптотически тонкий, что не всегда является верным для холмов, не-
ровной местности или дифрагирующих объектов клиновидной формы.
В частности, эта модель не рассматривает такие параметры объекта,
как поляризация, электропроводность и неровность поверхности, кото-
рые могут привести к погрешностям [26]. Подвергшийся дифракции сиг-
нал на рис. 2.7 проходит расстояние d + d', результатом чего становится
Глава 2. Потери на трассе распространения радиоволн и экранирование
фазовый сдвиг р = 27r(d+d')/A. Геометрия рисунка показывает, что для h
малого по отношению к d и d', сигнал должен идти по дополнительному
пути, соотносимому с каналом прямой видимости LOS приблизительно как:
Ас/
h2 d + d!
Т dd'
Соответствующий фазовый сдвиг соотносится с линией прямой види-
мости (LOS) приблизительно как:
Л 2тгА(7 7Г 9
А<^ = « -V2,
Л Z
где
v = h
2(d + d1)
Add'
(2-21)
(2.22)
называется дифракционными параметрами Френеля-Кирхгоффа. Потери
в тракте, связанные с дифракцией на остром крае, в основном являются
функцией V. Однако рассчитать эти потери на трассе, вызванные дифрак-
цией, довольно сложно, необходимо использование принципа Гюйгенса,
зон Френеля и сложного интеграла Френеля [1]. Более того, возникаю-
щие в результате дифракции потери в основном не могут быть найдены
в общем виде. Приближения для потерь в тракте в результате дифрак-
ции на остром крае (в дБ) относительно потерь в тракте по линии прямой
видимости, которые получены Ли [16, гл.2]:
L(y) дБ = <
201g[0,5 — 0,62ц],
20 lg[0,5e-°’95”],
20 lg[0,4 - ^/0,1184 — (0,38 — 0,1ц)2],
-0,8 v < 0,
0 О < 1,
1 v < 2,4,
(2.23)
_ 201g[0,225/v],
2,4 V.
Похожее приближение можно найти в работе [29]. Модель дифракции
на остром крае дает следующую формулу для принимаемого дифрагиро-
ванного сигнала:
r(Z) = Re {L(v)y/Gdu(t - T)e-j2<d+d'^x^^} , (2.24)
где y/Gd — коэффициент усиления антенны, а т = Ad/с — задержка, свя-
занная с лучом, испытавшим дифракцию, по отношению к линии прямой
видимости (LOS).
Кроме дифрагированных лучей могут быть также лучи, испытываю-
щие дифракцию множество раз, или лучи, которые одновременно явля-
ются отраженными и дифрагированными. Существуют модели, включа-
ющие все возможные изменения отражения и дифракции [30]; однако осла-
бление соответствующих компонентов сигнала в основном настолько ве-
2-4- Построение траекторий лучей
лико, что эти составляющие пренебрежимо малы по сравнению с шумом.
Модели дифракции могут также специализироваться по заданным па-
раметрам окружающей среды. Например, модель дифракции на плоских
крышах и зданиях для сотовых систем была разработана Вальфишем
и Бертони [31].
Рис. 2.8. Рассеяние
Рассеянный луч, показанный на рис. 2.8 сегментами s и s', имеет поте-
ри на трассе, пропорциональные произведению s и s'. Мультипликативная
зависимость происходит из-за дополнительных потерь, вызванных расхо-
ждением лучей при рассеянии. Принимаемый сигнал при рассеянии луча
рассчитывается с помощью основного уравнения радиолокации [32]:
r(t) = Re u(t - r) f---- , (2.25)
I (47Г)'}/255/ I
где т = (s + s1 — l)/c — задержка, связанная с рассеянным лучом; о — эф-
фективная площадь отражения от рассеивающего объекта ( в кв. метрах),
которое зависит от неровности поверхности, размера и формы рассеи-
вателя; y/G] — коэффициент усиления антенны. Модель предполагает,
что от передатчика к рассеивающему объекту сигнал распространяет-
ся в свободном пространстве, а затем снова переизлучается объектом
с мощностью передачи, соответствующей ст раз мощности, принимаемой
рассеивающим объектом. Из выражения (2.25) следует, что потери в трак-
те передачи, связанные с рассеянием, вычисляются как:
Рг дБм = Pt дБм + 101g(Gs) + 20lg(A) + 10lg(cr) -
- 301g(47r) - 201g(s) - 201g(s'). (2.26)
Эмпирические значения 10 log10 ст были определены в [33] для различ-
ных зданий в нескольких городах. Результаты этих исследований пока-
зывают, что 101g ст в дБ • м2 находится в промежутке от —4,5 дБ м2
до 55,7 дБ-м2, где дБ м2 определяет значение измерения ст в дБ с одного
квадратного метра поверхности.
98 Глава 2. Потери на трассе распространения радиоволн и экранирование
Принимаемый сигнал определяется наложением всех компонентов мно-
жества лучей. Таким образом, если мы имеем луч прямой видимости
(LOS), Nr — отраженные лучи, — дифрагированные лучи и Ns —
диффузно рассеянные лучи, общий сигнал на приеме будет иметь следу-
ющий вид:
Tk)e >27r(s*+sfe)/A )2тг^Д /о о7ч
+ > ------------—---------------- eJ >, (2.27)
V^sks'k ] J
где Ti, Tj и тк — временные задержки отраженных, дифрагированных
и рассеянных лучей, соответственно — приведенные к задержке луча
прямой видимости, как было описано ранее. Принимаемая мощность Рг
сигнала rtotal(t)-> соответствующие потери на трассе Pr/Pt рассчитывают-
ся затем по формуле (2.27).
Некоторые из этих многолучевых компонентов могут иметь допол-
нительный коэффициент ослабления, если их путь преграждают здания
или другие объекты. В этом случае коэффициент ослабления от загра-
ждающего объекта увеличивает потери членов выражения (2.27) в тракте
передачи. Эти потери, вызванные ослаблением, широко варьируются в за-
висимости от материала и глубины объекта [5, 34]. Модели случайных
потерь из-за ослабления сигнала описаны в разделе 2.7.
2.4.4. Среднее значение локальной
принимаемой мощности
Потери на трассе распространения, рассчитанные с помощью всех мо-
делей трассировки лучей, обусловлены неизменным местоположением пе-
редатчика и приемника. Траектория лучей, кроме того, может использо-
ваться для расчета среднего значения принимаемой мощности для данной
местности вблизи приемника суммированием квадратов значений всех
принимаемых лучей. Это создает эффект усреднения изменений условий
распространения из-за фазовых изменений в пространстве для условий
данной местности. Средняя мощность приема для данной местности —
хороший показатель качества линии связи и часто используется в сотовых
системах для функций управления мощностью и передачи обслуживания
вызова [35].
2.5. Экспериментальные модели потерь в тракте 99
2.5. Экспериментальные модели потерь в тракте
распространения сигнала
Большинство систем мобильной связи действуют в сложных условиях рас-
пространения сигнала, которые нельзя точно смоделировать с помощью
построения трасс прохождения лучей или потерь в свободном простран-
стве. Для расчета потерь на трассе в типичных условиях распростра-
нения, таких как большие городские макросоты и микросоты, в тече-
ние многих лет было разработано множество моделей потерь на трассе
[5, гл. 3]. Совсем недавно такие модели разработаны для условий распро-
странения внутри зданий. Эти модели основываются, главным образом,
на данных опытных измерений на заданном расстоянии в данном частот-
ном спектре для конкретных географических районов или зданий. Одна-
ко использование этих моделей не всегда ограничивается теми средами,
в которых были произведены измерения, что может скомпрометировать
точность таких эмпирически обоснованных моделей, когда они применя-
ются в более общих условиях. Тем не менее, многие беспроводные системы
используют эти модели в качестве основы для анализа технологических,
показателей. В нашем обсуждении мы начнем с общих моделей для город-
ских макросот, а затем опишем более современные модели для внешних
микросот и внутреннего распространения.
Аналитические модели характеризуют Pr/Pt как функцию расстоя-
ния, так что потери на трассе хорошо определяются. Напротив, эмпи-
рические данные по величине отношения Pr/Pt в функции расстояния
включают в себя эффекты потерь на трассе, экранирования и многолу-
чевого распространения. Чтобы убрать эффекты многолучевого распро-
странения, результаты измерений потерь на трассе обычно усредняют
по значениям принимаемой мощности и соответствующим потерям на
трассе для заданного расстояния на нескольких длинах волн. Эти усред-
ненные потери на трассе называются средним локальным затуханием —
LMA (local mean attenuation) на расстоянии ф и оно обычно уменьшается
с d вследствие потерь в тракте передачи в свободном пространстве и по-
мех прохождения сигнала. Среднее значение LMA в заданной среде, та-
кой как город, зависит от особенностей месторасположения передатчика
и приемника, соответствующих условиям измерений LMA. Чтобы охарак-
теризовать среднее значение LMA более обобщенно, измерения обычно
производятся по всей местности и по возможности во многих других ме-
стах с подобными характеристиками. Так, эмпирические потери в тракте
передачи Pb(d) для заданных условий (город, район предместий или зда-
ние) определяются усреднением всех измеренных значений LMA на рас-
стоянии d в заданном месте. Например, эмпирические потери в тракте
Глава 2. Потери на трассе распространения радиоволн и экранирование
передачи для типичной деловой части города с прямоугольной сетью улиц
могут быть получены с помощью усреднения измерений средних зату-
ханий LMA в Нью-Иорк-Сити, деловой части Сан-Франциско и деловой
части Чикаго. Все экспериментальные модели потерь в тракте передачи,
приведенные здесь, получены путем усреднения измерений затуханий LMA.
2.5.1. Модель Окумуры
Одну из наиболее общих моделей прогнозирования характера распро-
странения сигнала в большой городской макросоте представляет модель
Окумуры [36]. Эта модель может применяться на расстояниях 1-100 км
и в частотном диапазоне 150-1500 МГц. Для разработки набора кривых,
задающих среднее затухание распространения сигнала относительно его
распространения в свободном пространстве над пересеченной местно-
стью, Окумура использовал огромный объем измерений ослабления сиг-
нала между базовыми станциями и мобильными устройствами в Токио.
Высоты базовых станций в этих измерениях были на уровне 30-100 м,
верхний предел которых выше обычного на сегодня уровня подвеса ан-
тенн базовых станций. Эмпирическая формула Окумуры потерь на трассе
для расстояния d и несущей частоты /с имеет вид:
W) рВ = L(fc,d) + A^fjc^d) — G(ht) — G(hr) — Garea-, (2.28)
где L(fc, d) — потери на трассе в свободном пространстве на расстоянии
d и несущей частоте /с, d) — средние потери, дополнительные к по-
терям в свободном пространстве при различных окружающих условиях,
G(ht) — коэффициент усиления антенны базовой станции с высотой ht,
G(hr) — коэффициент усиления антенны мобильной станции высотой hr,
a Garea — коэффициент усиления окружающей среды. Значения A^fc, d}
и Garea получают из эмпирической схемы Окумуры [36, 5]. Окумура
вывел следующие эмпирические формулы для заданных значений G(hr)
и
G(ht) = 20 lg(/it/200),
G(hr) =
101g(/ir/3),
201g(/ir/3),
30 м < ht < 1000 m;
hr 3 m,
3 м < hr < 10 m.
(2.29)
(2.30)
В работе [36] также получены корректирующие коэффициенты в усло-
виях пересеченной местности, повышающие точность модели. Модель Оку-
муры имеет статистическую величину среднеквадратических отклонений
10-14 дБ между потерями на трассе, рассчитанными по модели, и поте-
рями на трассе, полученными в одном из измерений, использованных для
разработки этой модели.
2.5. Экспериментальные модели потерь в тракте 101
2.5.2. Модель Хата
Модель Хата [37] — эмпирическая формулировка графических данных
о потерях на трассе, разработанных Окумурой, которая верна приблизи-
тельно для того же частотного диапазона — 150-1500 МГц. Эта экспери-
ментальная модель упрощает расчеты потерь на трассе, потому что это
выражение, представленное в аналитическом виде, не учитывает различ-
ные эмпирические данные. Стандартная формула эмпирических потерь
на трассе в городских районах в соответствии с моделью Хата выглядит
следующим образом:
PL,Urban(d) дБ = 69,55 + 26,16lg(/c) - 13,82 lg(/it) - a(hr) +
+ (44,9 -6,55 lg(/it))lg(d). (2.31)
Параметры в этой модели такие же, как и в модели Окумура, a a(hr) —
корректирующий коэффициент для высоты антенны мобильной станции,
основанный на размере зоны покрытия. Для маленьких и средних городов
этот коэффициент рассчитывается следующим образом:
a(hr) = (1,1 lg(/c) - 0,7)/гг - (1,56 lg(/c) - 0,8) дБ,
[37, 5], а для больших городов при частотах около fc > 300 МГц — по формуле
a(hr) = 3,2(lg(l 1,75/ir))2 - 4,97 дБ.
Поправки к городской модели делаются для распространения в рай-
оне предместий и в сельской местности, поэтому эти модели выглядят
соответственно следующим образом:
Pl,suburban^) дБ = PL,urban(d) дБ — 2[lg(/c/28)]2 — 5,4 (2.32)
и
PL,rurai(d) дБ = PL,urban(d) дБ - 4,78[1g(Л)]2 + 18,33lg(/c) - К, (2.33)
где К находится на интервале от 35,94 (деревня) до 40,94 (пустыня).
В отличие от модели Окумуры модель Хата не предусматривает коррек-
тирующие коэффициенты для конкретного тракта. Модель Хата хорошо
совпадает с моделью Окумуры для расстояний d > 1 км. Следователь-
но, это хорошая модель для сотовых систем первого поколения, но она
не может хорошо моделировать распространение сигнала в современных
сотовых системах с малым размером сот и более высокими частотами.
Модель Хата не подходит также для обстановки внутри помещений.
2.5.3. Расширенная модель COST 231 Хата
Европейским обществом научно-технических исследований (EURO-COST)
модель Хата была расширена до 2 ГГц в виде:
102 Глава 2. Потери на трассе распространения радиоволн и экранирование
Pl,urban (d) дБ = 46,3 + 33,9 lg(/c) - 13,82 lg(/it) - a(hr) +
+ (44,9 - 6,55 lg(/it)) lg(d) + CM (2.34)
[38], где a(hr) — тот же корректирующий коэффициент, что и раньше,
и где См равно 0 дБ для городов среднего размера и окраин и 3 дБ — для
районов больших городов. Эта модель известна как расширение COST 231
модели Хата и ограничивается следующими параметрами: 1,5 ГГц < fc <
< 2 ГГц, 30 м < ht < 200 м, 1 м < hr < 10 м и 1 км < d < 20 км.
2.5.4. Кусочно-линейная модель
(с несколькими склонами)
Кусочно-линейная модель потерь, выраженных в дБ, в зависимости от ло-
гарифма расстояния — типичный метод аппроксимации эксперименталь-
ных данных. Такой вид аппроксимации зависимости затухания в дБ от
расстояния показан на рис. 2.9. Точки на графике представляют предпо-
лагаемые измерения, а кусочно-линейная модель представляет приближе-
ние к этим измерениям. Кусочно-линейная модель из N сегментов должна
определять N — 1 точек изломов di,..., djy-i, а также угол наклона ка-
ждого сегмента si,..., spf. Для определения количества и местоположения
контрольных точек в этой модели могут использоваться различные ме-
тоды. Хотя точки фиксированные, но углы наклона, соответствующие
каждому линейному сегменту, могут быть получены с помощью линейной
регрессии. Кусочно-линейная модель использовалась для описания потерь
на уличных трассах [39] и внутри помещений [40].
Рис. 2.9. Кусочно-линей-
ная модель потерь в трак-
те передачи
Модель с двумя склонами представляет частный случай кусочно-ли-
нейной модели. Модель с двумя склонами характеризуется постоянным
2.5. Экспериментальные модели потерь в тракте
Pr(d) дБ =
коэффициентом потерь в тракте передачи К и показателем потерь в трак-
те передачи 71 от начала отсчета do до критического расстояния dc, после
которого мощность падает с показателем потерь в тракте передачи 72:
Pt + К - Ю71 lg(d/d0), d0 d dc,
Pt + K- 1071 lg(dc/d0) - Ю72 lg(d/dc), d > dc.
(2.35)
Показатели потерь в тракте передачи К и dc обычно получают с по-
мощью регрессии экспериментальных данных [41, 42]. Двулучевая мо-
дель, описанная в разделе 2.4.1, для d > ht может быть аппроксимиро-
вана моделью с двойным наклоном, с одной контрольной точкой на кри-
тическом расстоянии dc и с наклоном затухания Л] = 20 дБ/декада и
S2 = 40 дБ/декада.
Множество уравнений в модели с двумя склонами могут быть обоб-
щены следующим приближением [19, 43]:
где
_ PtK
АГ1
До.
(2.36)
(2.37)
В этом выражении q является параметром, который определяет равно-
мерность потерь в тракте передачи в переходной области, близкой к кри-
тической точке излома dc. Эта модель может быть расширена для боль-
шего числа диапазонов [39].
2.5.5. Параметры затухания
при распространении внутри зданий
Условия распространения внутри помещений сильно отличаются друг от
друга из-за материалов, которые были использованы для строительства
стен и полов, планировки комнат, коридоров, окон и открытых проемов,
расположения и материалов объектов, препятствующих прохождению волн,
размера каждой комнаты и количества этажей. Все эти факторы оказыва-
ют сильное влияние на потери в тракте передачи внутри зданий. Поэтому
сложно найти общие модели, которые могут быть точно применены для
определения эмпирических потерь распространения в конкретных усло-
виях внутри помещений.
Модели потерь при распространении внутри помещений должны точ-
но отражать эффекты затухания на этажах из-за перегородок, а также
между этажами. Большой объем измерений в различных зданиях и в
широком диапазоне частот показывает, что самое большое межэтаж-
104 Глава 2. Потери на трассе распространения радиоволн и экранирование
ное затухание наблюдается на первом этаже, и затем оно ослабевает
с каждым последующим этажом. В частности, результаты измерений,
приведенные в [44, 45, 46, 47], показывают, что при частоте 900 МГц, зату-
хание сигнала между соседними этажами находится в границах 10-20 дБ,
для следующих трех этажей затухание составляет по 6-10 дБ на этаж,
а затем, выше четвертого этажа — по нескольку децибел на этаж. На
более высоких частотах потери из-за затухания сигнала на этаж обычно
больше [45, 48]. Считается, что с увеличением количества этажей зату-
хание сигнала на этаж уменьшается, за счет экранирования стен здания
и отражений от соседних зданий. Материалы и диэлектрические харак-
теристики перегородок сильно отличаются, поэтому сильно отличаются
и величины потерь. Измерения потерь на разных частотах для различных
типов перегородок можно найти в работах [5, 44, 49-51]. В табл. 2.1 пока-
зано несколько примеров потерь, вносимых перегородками из различных
материалов, измеренных в диапазоне частот 900-1300 МГц. Эксперимен-
тальные значения потерь, полученные различными исследователями для
одного и того же типа перегородки на той же частоте, сильно отлича-
ются друг от друга, поэтому сложно получить обобщенное выражение
потерь в перегородках для конкретного набора исходных данных.
Таблица 2.1. Типичные потери разделяющих перегородок
Разделяющий материал Потери, в дБ
Ткань 1,4
Двойная пластиковая стена 3,4
Изоляция из фольги 3,9
Бетонная стена 13
Алюминиевая обшивка 20,4
Все металлы 26
Экспериментальные данные о потерях между этажами и перегород-
ками могут быть добавлены к аналитической или эмпирической модели
потерь в тракте передачи в дБ Рь(д) в виде:
Nf Np
Рг дБм = Pt дБм - PL (d) - FAFi - PAFi, (2.38)
2=1 2=1
где FAFi — коэффициент затухания на этаж для г-го этажа, пройденного
сигналом, a PAFi — обозначает коэффициент затухания г-й перегородки.
Количество этажей и перегородок, пройденных сигналом, равно Nf и Np
соответственно.
Другим важным фактором работы беспроводных систем внутри зда-
ний, когда передатчик расположен вне здания, являются потери, вызван-
2.6. Упрощенная модель потерь в тракте передачи
ные проницаемостью стен зданий. Измерения показывают, что поте-
ри, обусловленные проницаемостью зданий, зависят от частоты, высоты
и материала, из которого построено здание. Потери, обусловленные про-
ницаемостью зданий, на частотах от 900 МГц до 2 ГГц на первом этаже
колеблются обычно в пределах от 8 до 20 дБ [1, 52, 53]. Потери незначи-
тельно уменьшаются с повышением частоты, но они также уменьшаются
примерно по 1,4 дБ на этаж на этажах выше первого. Это уменьшение
потерь обычно происходит из-за снижения помех на более высоких эта-
жах и большей вероятности образования канала прямой видимости (LOS).
Тип и количество окон в здании также оказывают существенное влияние
на потери, обусловленные проницаемостью стен [54]. Измерения потерь
экранирования показали, что потери в окнах примерно на 6 дБ ниже по-
терь в наружных стенах. Более того, зеркальное стекло имеет затухание
около 6 дБ, тогда как для освинцованного стекла затухание находится
в пределах между 3-30 дБ.
2.6. Упрощенная модель потерь в тракте передачи
Сложность распространения сигнала затрудняет вывод модели, которая
бы точно описывала потери в тракте передачи в различных средах рас-
пространения. Точные значения потерь в тракте, требуемые для строгого
соответствия радиосистемы техническим требованиям или для выбора
лучших мест размещения базовых станций или точек доступа, могут быть
получены из комплексных аналитических моделей или экспериментальных
данных. Однако при выборе компромиссного решения в проектах различ-
ных систем иногда лучше использовать простую модель, которая пока-
зывает только суть процесса распространения сигнала без использования
сложных формул потерь в тракте передачи, и приближенно представля-
ет реальную картину. При проектировании систем широко используется
следующая упрощенная модель зависимости потерь в тракте передачи от
расстояния:
Рг = PtK
'^Г
d
(2.39)
Соответственно, затухание в дБ выглядит следующим образом:
d
Рг (дБм) = Pt (дБм) + К (дБ) - 1071g
С?о_
(2.40)
В этом выражении К — безразмерная постоянная, которая зависит от ха-
рактеристик антенны и среднего затухания канала, df> — начало отсчета
расстояния дальней зоны поля антенны, а 7 — показатель потерь в тракте
передачи. Значения К, dc> и могут быть получены путем усреднения или
Глава 2. Потери на трассе распространения радиоволн и экранирование
с помощью аналитической или эмпирической модели. В частности, и мо-
дель потерь в тракте передачи в свободном пространстве, и двулучевая
модель, и модель Хата, и расширенная модель COST схемы Хата — все
они того же вида, что и (2.40). Из-за эффекта экранирования антенной
ближнего поля модель (2.40) верна только при расстояниях d > do, где do
обычно принимается 1-10 м внутри помещения и 10-100 м на улице.
Таблица 2.2. Типичные значения показателей потерь
Условия распространения Диапазон у
Городские макросоты 3,7-6,5
Городские микросоты 2,7-3,5
Здание предприятия (один и тот же этаж) 1,6-3,5
Здание предприятия (много этажей) 2-6
Склад 1,8-2,2
Завод (цех) 1,6-3,3
Дом 3
Когда для приближения данных эмпирических измерений использу-
ется упрощенная модель, то иногда, в предположении всенаправленной
антенны, значение коэффициента усиления в тракте свободного распро-
странения на расстоянии do устанавливается равным К < 1:
К дБ = 201g-А-, (2.41)
47ГЯ0
и это предположение подтверждается экспериментальными данными из-
мерений потерь при распространении в свободном пространстве при рас-
стояниях 100 м [41]. Коэффициент К может быть определен так же дру-
гим способом, по результатам измерений do или оптимизирован (один
или вместе с у) по минимуму среднеквадратичной ошибки — СКО рас-
хождения аналитической модели с данными измерений [41]. Значение по-
казателя потерь у зависит от условий распространения сигнала. Вели-
чина потерь у, в зависимости от условий распространения (по модели
свободного пространства или согласно двулучевой модели), устанавли-
вается равной 2 или 4 соответственно. Значение у для более сложных
сред распространения сигнала может быть получено при минимизации
среднеквадратической ошибки результатов измерений, как это показано
в примере 2.3. В противном случае величина потерь у может быть полу-
чена из модели, созданной по результатам измерений, которая учитывает
частоту сигнала и высоту антенны [41]. В табл. 2.2 подытожены значения
для различных сред (данные из [5, 33, 41, 44, 46, 47, 52, 55]). Показатели
потерь в тракте передачи на более высоких частотах имеют тенденцию
к увеличению [46, 51, 52, 56], а с увеличением высоты подвеса антенн —
2.6. Упрощенная модель потерь в тракте передачи
снижаются [41]. Обратите внимание на то, что большой разброс значений
эмпирических показателей степени потерь при распространении сигнала
внутри помещений может быть объяснен затуханием, вызванным этаж-
ностью, предметами и перегородками (см. раздел 2.5.5).
Таблица 2.3. Измеренные значения потерь в тракте передачи
Расстояние от передатчика, м М = Pr/Pt, дБ
10 -70
20 -75
50 -90
100 -110
300 -125
Пример 2.3. Рассмотрим данные эмпирических измерений Pr/Pt на частоте
900 МГц, приведенные в табл. 2.3 для системы внутри здания. Найдите показа-
тель потерь в тракте передачи , который минимизирует СКО между упрощенной
моделью (2.40) и данными измерений мощности в дБ, при условии, что do = 1 м,
а К определяется по формуле усиления канала в свободном пространстве при
этом значении do- (Мы предпочитаем минимизировать значение СКО в дБ, а не
в абсолютных значениях, потому что обычно это дает более точные резуль-
таты). Найдите принимаемую мощность на расстоянии 150 м по упрощенной
модели потерь в тракте передачи при вычисленном показателе потерь и мощно-
сти передачи, равной 1 мВт (0 дБ).
Решение. Сначала, для данных измеренной мощности в дБ, запишем уравнение
минимальной СКО в виде
5
Г(7) ~~ '^[^uaMepeHH.i.dj) Ммоделъ^г')] ,
г=1
где Миэмеренн.(^к) — измеренные значения потерь из табл. 2.3 на расстоянии di,
а Ммодель(d{) = К — 1071g(c/j) — потери на расстоянии di, вычисленные по (2.40).
Теперь, используя формулу потерь в тракте передачи в свободном пространстве,
получаем К = 20 lg(0,3333/(4тг)) = —31,54 дБ. Поэтому
F(7) = (-70 + 31,54 + Ю7)2 + (-75 + 31,54 + 13,017)2 +
+ (-90 + 31,54 + 16,997)2 + (-110 + 31,54 + 207)2 + (-125 + 31,54 + 24,777)2 =
= 21 676,3 - 11654,97 + 1571,4772. (2.42)
Дифференцируя Г(у) относительно 7 и устанавливая ее равной 0, получаем
^^ = -11654,9 + 3142,947 = 0 =+ 7 = 3,71.
07
Принимаемая мощность на расстоянии 150 м при упрощенной модели потерь
в тракте передачи с К = —31,54, 7 = 3,71 и Pt = 0 дБ, равна: Pr = Pt + К —
108 Глава 2. Потери на трассе распространения радиоволн и экранирование
— 10-у 1g(<7/е/о) = 0 — 31,54 — 10 • 3,71 Ig(150) = —112,27 дБм. Понятно, что резуль-
таты измерений отличаются от значений, вычисленных по упрощенной модели
потерь. Эти различия могут быть объяснены замираниями, вносимыми препят-
ствиями, которые описаны в разделе 2.7.
2.7. Замирания экранирования
Сигнал, передаваемый по беспроводному каналу, обычно испытывает слу-
чайные изменения из-за преград на трассе прохождения сигнала, которые
увеличивают случайные изменения мощности, принимаемой на данном
расстоянии. Такие изменения бывают также обусловлены изменениями
отражающей поверхности и рассеивающих объектов. Поэтому необходи-
ма модель затухания, учитывающая эти эффекты. Расположение, раз-
мер и диэлектрические свойства преград, а также изменения отражаю-
щих и рассеивающих объектов, которые вызывают случайное затухание,
в основном неизвестны, поэтому для расчета этого затухания использу-
ются статистические модели. Наиболее общую модель дополнительных
затуханий экранирования представляет логарифмически нормальное рас-
пределение. Эта модель была выведена опытным путем для точного вы-
числения изменений принимаемой мощности в условиях распространения
радиосигналов внутри и снаружи зданий (см. примеры в [41, 57]).
В модели экранирования с логнормальным распределением допускает-
ся случайный коэффициент передачи мощности от передатчика к прием-
нику гр = Pt/Pr с логнормальным распределением, вычисляемый следую-
щим образом:
р(тФ) = -------7 ехР
(101g^-Mto)2
2(7^
гр > 0,
(2.43)
где £ = 10/ In 10, ptydB — среднее значение случайной величины грав =
= 101gгр в дБ, a <T^dB — стандартное отклонение грав (также в дБ).
Среднее значение может быть принято равным значению, вычисленно-
му по аналитической модели или по данным измерений. При измерени-
ях p^,dB равно потерям на трассе, так как среднее затухание экраниро-
вания уже включено в эти результаты. Для аналитической модели
должно включать в себя как потери в тракте передачи (например, в мо-
дели свободного пространства или двулучевой модели), так и среднее
затухание экранирования. В противном случае потери в тракте передачи
и от экранирования могут рассматриваться отдельно — так, как это опи-
сывается в следующем разделе. Случайная величина, логарифм которой
имеет нормальное распределение, называется логнормальной случайной
величиной. Заметим, что если гр — логнормальная величина, то прини-
маемая мощность и отношение сигнал-шум (защищенность) на приеме
также будут иметь логнормальное распределение, так как эти величины
получаются путем умножения ф на постоянную величину. Для отноше-
ния сигнал-шум на приеме среднее значение и стандартное отклонение
логнормальной случайной величины также выражаются в дБ. Для мощ-
ности на приеме с логнормальным распределением случайная величина
выражается в единицах мощности, поэтому ее среднее значение и стан-
дартное отклонение могут выражаться в дБ/мВт или дБ/Вт вместо дБ.
Среднее значение ф (средняя абсолютная величина коэффициента пере-
дачи канала) может быть получена из (2.43) следующим образом:
Щ = Е = ехр
Pw,lB . °-фнВ
е 2е2
(2.44)
Преобразование среднего абсолютного значения в дБ в логарифмическое
среднее значение в дБ получается из (2.44) следующим образом:
2
101g^ = ^dB + ^. (2.45)
Технологические показатели при экранировании с логнормальным рас-
пределением обычно рассчитываются с помощью среднего значения ло-
гарифма которое рассматривается как среднее значение потерь
в тракте передачи в дБ и задается в дБ. При замене переменной мы
видим, что распределение ф, выраженное в дБ, представляет распределе-
ние Гаусса со средним значением p^dB и стандартным отклонением сг^ав:
= ~т=-----ехр
V2%o-^dB
№dB ~ l4dB)2
2<т2,
тав J
(2.46)
Логнормальное распределение определяется двумя параметрами: PwdB и <r^dB .
Так как ф = Pt/Pr всегда больше единицы, то, следовательно, p^dB все-
гда больше или равно нулю. Заметим, что логнормальное распределение
(2.43) определено на интервале 0 ф оо. Следовательно, для значений
ф < 1 получаем Pr > Pt, что физически невозможно. Однако эта вероят-
ность очень мала, когда значение p^dB велико и положительно. Поэтому
логнормальная модель наиболее точно представляет лежащее в ее основе
физическое явление, когда p^dB 0.
Если среднее значение и стандартное отклонение в модели экрани-
рования основаны на результатах измерений, то возникает вопрос, как
вычислить их значения: по результатам измерений — в абсолютных или
относительных величинах в дБ? Конкретно, при вычислении средних по-
терь тракта передачи по заданным результатам измерений (линейных)
N
потерь — должно использоваться выражение p^dB = (1/JV) 11, Pi
i=l
("О
Глава 2. Потери на трассе распространения радиоволн и экранирование
N
или щ = (1/N) ^2 lOlgPi? Подобный вопрос возникает при вычислении
i=i
эмпирической дисперсии. На практике общепринято определять средние
потери и дисперсию потерь в тракте передачи на усреднении результатов
измерений в дБ по нескольким причинам. Во-первых, как мы увидим, ма-
тематическое обоснование логнормальной модели основывается на изме-
рениях в дБ. Кроме того, обзор литературы показывает, что полученное
эмпирическое среднее значение, вычисленное по результатам измерений
потерь в тракте передачи в дБ, при оценочном расчете дает меньшую
погрешность [58]. Наконец, как мы видели в разделе 2.5.4, спад мощности
в зависимости от расстояния часто выражается при кусочно-линейном
приближении результатов измерений, выраженных в дБ [5].
Большинство эмпирических исследований наружных линий дают величи-
ну стандартного отклонения cr^dB в диапазоне между 4 и 13 дБ [6, 19, 59-61].
Средняя мощность Цфав зависит от потерь в тракте передачи и характе-
ристик (свойств) зданий в рассматриваемой зоне. Средняя мощность р-Фав
изменяется с расстоянием. Это обусловлено потерями в тракте передачи
и тем фактом, что средняя величина затухания из-за увеличения количе-
ства объектов, вносящих затухание, с расстоянием возрастает.
Применение модели Гаусса для распределения среднего значения при-
нимаемого сигнала в дБ может быть обосновано, если затухание от пре-
пятствий доминирует над экранированием. Затухание сигнала во время
его прохождения через объект зависит от глубины d, которое примерно
равно
s(d) = e-ad, (2.47)
где а — постоянная затухания, которая зависит от материалов, из ко-
торых изготовлен объект, и его диэлектрических характеристик. Если
мы предположим, что а приблизительно равна для всех блокирующих
объектов и что г-й препятствующий объект имеет случайную протяжен-
ность di, тогда затухание сигнала при его прохождении через эту область
определяется выражением:
-« Е di ,
s(dt) = e =e~adt, (2.48)
где df = di — сумма случайных значений протяженностей объектов,
через которые проходит сигнал. Если между передатчиком и приемником
находится много объектов, то согласно центральной предельной теореме
мы можем получить усредненное значение dt с помощью случайной гаус-
совской величины. Тогда log s(dt) = adt будет иметь распределение Гаусса
со средним значением ц и стандартным отклонением о. Значение ст будет
зависеть от окружающей среды.
2.7. Замирания экранирования
Пример 2.4. В примере 2.3 мы выяснили, что показатель степени, равный
7 = 3,71 в упрощенной модели потерь в тракте передачи, лучше всего соответ-
ствует результатам измерений, приведенным в табл. 2.3. Полагая, что потери
в тракте определяются упрощенной моделью с этим показателем степени и тем
же значением коэффициента К = —31,54 дБ, найти величину дисперсии o^,dB
средних потерь на трассе. Данные измерений влияния экранирования имеют лог-
нормальное распределение.
Решение. Выборочная дисперсия упрощенной модели потерь в тракте передачи
с 7 = 3,71 равна:
1 5
&PdB ~ 7 > \^иэмерен. (di) MMOdeM(di)\ ,
й i=l
где MU3MepeH\dt) — результат измерений потерь в тракте передачи в табл. 2.3
на расстоянии di, а Ммодель№) = К — 37,11 lg(d,). Откуда получаем
= | [(-70 - 31,54 + 37,1)2 + (-75 - 31,54 + 48,27)2 +
+ (-90 - 31,54 + 63,ОЗ)2 + (-110 - 31,54 + 74,2)2 +
+ (-125 - 31,54 + 91,90)2] = 13,29.
Таким образом, стандартное отклонение замираний экранирования в этом трак-
те равно aPdB = 3,65 дБ. Обратите внимание, что заключенный в скобки член
в этом выражении, при 7 = 3,71, равен минимальной СКО в (2.42) примера 2.3.
Для определения автокорреляционных свойств замираний, вызванных
препятствиями на трассе, был использован огромный объем измерений,
учитывающих расстояния, окружающую обстановку и частоту (см., напри-
мер, [60, 62-65]). Наиболее известная аналитическая модель этих свойств
впервые была предложена Гудмундсоном [60]. Модель основана на данных
измерений, в предположении, что процесс экранирования ip(d) соответ-
ствует авторегрессии первого порядка, а ковариация между замираниями
в двух точках, разделенных друг от друга расстоянием 6, определяется
в виде:
Л(<5) = E[(^dB(d) - pPdB)(^dB(d + 6)- pPdB)] = (2-49)
где рв — нормированная величина ковариации между двумя точками,
удаленными друг от друга на расстояние D. Эту ковариацию получают
опытным путем, и она изменяется в зависимости от среды распростра-
нения сигнала и несущей частоты. Измерения показывают, что для ма-
кросот пригорода (для /с = 900 МГц) Pd = 0,82 при D = 100 м, а для
городских микросот (для fc^ 2 ГГц) Pd = 0,3 при D = 10 м [60, 64]. Эта
модель может быть упрощена, а ее эмпирическая зависимость устранена
с помощью подстановки Рв> = А./е для расстояния D = Хс, что дает:
A(J)-^dBe-^. (2.50)
Глава 2. Потери на трассе распространения радиоволн и экранирование
В этой модели величина Хс означает декорреляционное расстояние,
при котором автоковариация сигнала равна 1/е его максимального зна-
чения, и имеет тот же порядок, что и величина препятствующих объектов
или групп этих объектов. Для наружных систем величина Хс обычно
находится в промежутке от 50 м до 100 м [63, 64]. Для пользователей,
движущихся со скоростью v, декорреляция экранирования за время т
определяется подстановкой vt = S в (2.49) или (2.50). Автокорреляция
относительно углового разброса, полезного для различных антенных сис-
тем, рассматриваемых в гл. 10, была изучена в [62, 64].
Модель корреляции с авторегрессией первого порядка (2.49) и ее упро-
щенная форма (2.50) просты для анализа и моделирования. В частности,
каждый сможет смоделировать tpdB-, генерируя сначала процесс белого
гауссова шума с мощностью а затем пропуская его через фильтр
о 5/D
первого порядка с характеристикой для ковариации, представленной
выражением (2.49) или с характеристикой e~s!Xc для ковариации, пред-
ставленной выражением (2.50). На выходе фильтра будет генерироваться
случайный процесс с нужными корреляционными свойствами [60, 61].
2.8. Комбинация потерь
в тракте передачи и экранирования
Модели потерь и экранирования в тракте передачи могут быть совмеще-
ны для выражения зависимости от расстояния спада мощности и случай-
ных потерь экранирования. В этой объединенной модели среднее значение
потерь в тракте передачи (j^dB) в дБ характеризуется моделью потерь
в тракте, а затухание экранирования со средним значением 0 дБ опре-
деляет разброс потерь на трассе, как это показано на кривой потерь
и экранирования на рис. 2.1. В частности, эта кривая показывает комби-
нацию упрощенной модели потерь в тракте передачи (2.39) и случайного
процесса экранирования с логнормальным распределением, представлен-
ным выражениями (2.46) и (2.50). Для этой комбинированной модели от-
ношение принимаемой мощности к передаваемой в дБ рассчитывается
по формуле
Р d
-^flB = 101gK-107lg--^B, (2.51)
П «о
где i/piH — случайная величина с гауссовским распределением, нулевым
средним и дисперсией (J^,dB- Согласно формуле (2.51) (см. рис. 2.1) потери
в тракте передачи уменьшаются линейно относительно 1g с? с наклоном
107 дБ на декаду, где 7 — показатель потерь. Отклонения, обусловленные
экранированием, изменяются более стремительно — кратно расстоянию
декорреляции Хс.
2.9. Вероятность перерывов связи в
В примерах 2.3 и 2.4 рассмотрена комбинированная модель распро-
странения в тракте передачи, включающая потери и экранирование с ло-
гарифмически нормальным законом распределения. В примерах исполь-
зованы данные измерений, приведенных в табл. 2.3. Потери в тракте
передачи удовлетворяют условиям упрощенной модели при К = —31,54 дБ
и показателе потерь 7 = 3,71. Разброс, обусловленный экранировани-
ем, удовлетворяет условиям логнормальной модели со средним значением,
равным величине потерь передачи, и стандартным отклонением cr^dB =
= 3,65 дБ.
2.9. Вероятность перерывов связи в тракте передачи
из-за потерь и экранирования
Объединенные эффекты потерь и экранирования на трассе оказывают
большое влияние на разработку беспроводных систем. В беспроводных
системах обычно есть минимальный планируемый уровень принимаемой
мощности Pmjn, ниже которого эксплутационные качества становятся не-
приемлемыми (например, качество передачи речи в сотовых системах
становится слишком плохим для понимания). Однако из-за экранирова-
ния принимаемая мощность на некотором расстоянии от передатчика
распределяется логарифмически нормально с некоторой вероятностью
падения ниже Pmm- Определим вероятность перерыва связи Pout(Pmin, d)
из-за потерь и экранирования на трассе как вероятность того, что при-
нимаемая мощность на заданном расстоянии d. Pr(d) упадет ниже Pmin’-
POut(Pmiin d) — p(Pr(d) < Pmin)- Для комбинированной модели потерь
в тракте передачи и экранирования из раздела 2.8 это дает:
„1Р1т<Р \ 1 n/-Pmin-(Pt+ Ю lg АГ-IO7 lg (<7/<70))\ .
p(Pr(d) $ Pmin) = 1 - у ------------------------------- , (2.52)
где Q-функция определяется как вероятность того, что гауссова случай-
ная величина X с нулевым средним значением и дисперсией 1 больше z:
00
Q(z) = р (X > z) = [ -L^^dy. (2.53)
J у Ztt
z
Соотношение между Q-функцией и дополнительной функцией распреде-
ления7 ошибки имеет вид:
1 f Z \
Q(z) = -efrc ( —= ) . (2.54)
Если ясен контекст или общие условия вероятности нарушения связи, то
параметрами Pout будем пренебрегать.
Называется также «функцией выживания». — Прим, перев.
Глава 2. Потери на трассе распространения радиоволн и экранирование
Пример 2.5. Найдите вероятность нарушения связи на расстоянии 150 м
в канале, используя комбинированную модель потерь в тракте передачи и экра-
нирования из примеров 2.3 и 2.4. Мощность передачи принять равной Pt =
= 10 мВт, а необходимую минимальную мощность приема Fmin = —110,5 дБм.
Решение. Мы имеем Pt = 10 мВт = 10 дБм. Отсюда
-Pout = (—110,5 дБм, 150 м) =р(Рг (150 м) < —110,5 дБм) —
_ 1 Р"‘"> ” (Pt + 10 ~ Wfe (d/dp)) >
аФ<1В 7
— 110,5 — (10 — 31,54 — 37,1 Ig (150)) \ =
3,65 /
Вероятность нарушения связи, равная 1%, типична для систем беспроводной
связи
2.10. Зона покрытия сотовой связи
Зона покрытия системы сотовой связи определяется как ожидаемый
процент площади внутри ячейки, в которой принимаемая мощность вы-
ше заданного минимума. Рассмотрим базовую станцию внутри круглой
ячейки заданного радиуса R. Для обеспечения приемлемых эксплутаци-
онных показателей внутри соты на всех мобильных станциях требует-
ся обеспечить на приеме некоторое достаточное минимальное отноше-
ние сигнал-шум SNR. При заданной модели шумов, вместо отношения
сигнал-шум (защищенности) SNR оценивается значение минимальной
принимаемой мощности Pmin по всей соте. Мощность передачи на базо-
вой станции при планировании устанавливается по средней принимаемой
мощности на границах ячейки Рц, усредненной с учетом колебаний зату-
хания экранирования. Колебание затуханий экранирования будет причи-
ной того, что в некоторых местах внутри ячейки принимаемая мощность
будет ниже Рд, а в других принимаемая мощность будет превышать Рд.
На рис. 2.10 показаны границы области постоянной принимаемой мощно-
сти при фиксированной передаваемой мощности на выходе базовой стан-
ции и усредненных потерях распространения и экранирования, а также
при средних потерях, но со статистическим распределением затухания
экранирования. Для потерь на трассе и усредненного экранирования по-
стоянная мощность имеет форму окружности, описанной вокруг базовой
станции, так как объединенные потери на трассе и усредненное экра-
нирование те же самые на одинаковом расстоянии от базовой станции.
Для потерь распространения при случайном изменении затухания экра-
нирования будет получен контур в виде амебы из-за случайных колебаний
затухания экранирования около среднего значения. Контур постоянной
2.10. Зона покрытия сотовой связи
мощности объединенных потерь на трассе и случайного экранирования
указывает на сложную проблему, которую вызывает экранирование при
проектировании сотовой системы. В частности, невозможно получить
для всех абонентов на границе ячейки один и тот же уровень мощности.
Поэтому базовая станция для обеспечения приема сигналов абонентами,
на которых повлияло экранирование, и достижения ими минимальной тре-
буемой мощности Pmin, должна повысить мощность передачи, что вызы-
вает также повышение помех в соседних ячейках. В противном случае для
некоторой части абонентов в ячейке необходимый уровень минимальной
мощности приема не будет обеспечен. Действительно, так как гауссовское
распределение имеет бесконечные длины «хвостов», то для некоторого мо-
бильного устройства в соте существует ненулевая вероятность того, что
уровень принимаемой мощности будет ниже установленного минималь-
ного значения, даже если это мобильное устройство находится вблизи
базовой станции. Это воспринимается интуитивно, так как мобильное
устройство может находиться в туннеле или блокироваться высоким зда-
нием, независимо от его близости к базовой станции.
Рис. 2.10. Приемлемые границы принимаемой мощности
Теперь рассчитаем зону покрытия сотовой связи при потерях на трас-
се и экранировании. Часть зоны внутри соты, где уровень принимаемой
мощности превышает минимальное требуемое значение мощности Pmin,
можно выразить, взяв приращение dA в радиусе г от базовой станции со-
ты, как это показано на рис. 2.10. Пусть Рг(г) — значение принимаемой
мощности dA при объединенных потерях на трассе и экранировании. Тог-
Глава 2. Потери на трассе распространения радиоволн и экранирование
да всю область внутри ячейки, в которой уровень принимаемой мощности
превышает требуемый минимальный уровень мощности, можно получить
интегрированием по всем приращениям, при которых этот минимум пре-
вышен:
> -Pmin в dA] dА
зона
ячейки
> Pmin в <L4]] dA, (2.55)
зона
ячейки
где 1[-] — обозначает функцию-индикатор. Определим вероятность
Рд = Р(Рг(^) > Pmin)
в зоне приращения dA. Тогда Рд = Е [1 [Рг(г) > Pmin в <L4]]. Произведя
подстановку в (2.55) и используя полярные координаты при интегриро-
вании, получаем
2тг R
-Ef JpArdrM.
о о
(2.56)
/
зона
ячейки
Вероятность перерыва связи в соте определяется как процент площади
внутри соты, в которой требуемое минимальное значение мощности Pmin
не обеспечивается, т. е. Рощта — 1 — С.
При логарифмически нормальном распределении экранирования получим
Рд — Р (Pr(r) Js Pmin) — Q
Pmin - (Pt + lOlgTf - 107lg(r/dO))
EpdB
= 1 -Pout (Pmin, r), (2.57)
где POut — вероятность нарушения сотовой связи, определенная в (2.52)
при d = г. Площади внутри соты, где принимаемая мощность ниже Pmin,
считаются местами неустойчивой связи.
Объединяя (2.56) и (2.57), получим8
R
С=Ъ2 [ rQ (а + bin-} dr, (2.58)
-ft J X 11 /
о
8Напомним, что (2.57), в общем случае, действительно только для г do, поэтому для
упрощения анализа мы использовали модель для всех г. Это приближение будет ока-
зывать слабое влияние на зону покрытия, так как do обычно очень мало по сравнению
с R, а вероятность нарушения сотовой связи для г < do незначительна.
2.10. Зона покрытия сотовой связи
где
а = (2.59)
а1раВ а1рг1В
а Рц = Pt + 101g/С — IO7 lg(J?/c?o) — принимаемая мощность на грани-
цах соты (на расстоянии R от базовой станции) с учетом только потерь
на трассе. Этот интеграл дает аналитическое решение для площади С
с подстановкой а и Ь:
С = Q(a) + exp
2 — 2ab
(2.60)
2 — 0,6 \
b J ’
Если нужный уровень минимальной принимаемой мощности равен сред-
ней мощности на границах ячейки, Pmin = Pr(R), то а = 0, а выражение
для зоны покрытия упрощается:
(7 = - + ехр
2^
1Р
2\
b) '
(2-61)
Q
Обратите внимание, что при таком упрощении площадь С зависит
только от коэффициента 7/(ppdB- Более того, благодаря симметрии гаус-
сового распределения вероятность перерывов связи при этом предполо-
жении на границах ячейки равна PoUt (Pr(R),R) — 0,5.
Пример 2.6. Найдите зону покрытия для ячейки с комбинированными мо-
делями потерь распространения и экранирования из примеров 2.3 и 2.4 в соте
радиусом 600 м, если мощность передачи базовой станции Pt = 100 мВт, а тре-
буемая минимальная мощность приема Pmin = —ПО дБм или Рт-т = —120 дБм.
Решение. Сначала мы рассмотрим Рт1П = —ПО и проверим, действительно ли
а = 0, чтобы понять, должны ли мы использовать полную формулу (2.60) или
упрощенную формулу (2.61). Имеем
РГ(Я) = Pt -+-К — IO7 lg(600) = 20 —31,54 —37,1 lg(600) = -114,6 дБм / -ПО дБм,
поэтому используем (2.60). Вычисляя а и Ь из (2.60), получаем а — (—110 +
+ П4,6)/3,65 = 1,26, а b = (37,1 • 0,434)/3,65 = 4,41. Подставляя эти результаты
в (2.60), получаем
С = Q (1,26) + ехр
2 — 2 (1,26 • 4,41)
4,412
0(2Н14^(4'41))=°,59
что будет означать очень невысокое использование зоны покрытия сотовой связи
(большое число абонентов с несостоявшимися вызовами). Теперь рассмотрим
не такую строгую величину минимальной мощности приема Fm;n = —120 дБм,
получаем а = (—120 + П4,9)/3,65 — —1,479 и то же самое b = 4,41. Подставляя
эти значение в (2.60), получаем С = 0,988, т.е. более приемлемое значение зоны
покрытия.
Глава 2. Потери на трассе распространения радиоволн и экранирование
Пример 2.7. Рассмотрим сотовую систему связи, спланированную таким
образом, что Ртщ = Pr(R). Это означает, что принимаемая мощность из-за
потерь на трассе и усредненного экранирования на границах ячейки равна ми-
нимальной принимаемой мощности, необходимой для приемлемых эксплутаци-
онных показателей. Найдите зону покрытия для значений потерь у = 2,4,6
и аФав = 4,8,12 и объясните, как изменится покрытие, если у и ОфЛВ увели-
чатся.
Решение. Для величины Pmin = Pr(R) имеем а = 0, поэтому площадь покрытия
задается формулой (2.61). Площадь покрытия зависит только от значения Ъ —
— 10у 1g (е) , которое в свою очередь зависит только от соотношения ^1офав
В табл. 2.4 приведены размеры зон покрытия, полученные по формуле (2.61) при
различных значениях у и a^dB
Неудивительно, что при фиксированном зна-
Таблица 2.4. Зона покрытия
при различных значениях у
И
7 a4>dB
2 0,77 0,67 0,63
4 0,85 0,77 0,71
6 0,90 0,83 0,77
чении у зона покрытия увеличивается, а дис-
персия cr^dB — уменьшается; это происходит
потому, что более маленькое значение a^dB озна-
чает меньшее отклонение потерь от их среднего
значения. При отсутствии экранирования мы по-
лучаем 100%-ное покрытие (поскольку Ртт —
РГ(ИУ) и так как дисперсия афав стремится к ну-
лю, то зона покрытия увеличивается до 100%.
Немного сбивает с толку тот факт, что при фик-
сированном значении дисперсии <Тфав площадь
покрытия увеличивается с увеличением у, хотя
большее значение у означает, что мощность полученного сигнала падает бы-
стрее. Но напомним, что мы приняли = Pr(R), так что более быстрый спад
мощности уже учтен (т.е., чтобы это равенство выполнялось, при у = 6 необ-
ходима более высокая мощность передачи, чем при у = 2). Причина увеличения
зоны покрытия с ростом показателя потерь на трассе заключается в том, что
если показатель у увеличивается, то для удовлетворения условия Ртт = Pr(R)
должна увеличиваться и мощность передачи. Это приводит к большему значе-
нию средней мощности по всей ячейке, и, следовательно, к большей площади
покрытия.
Задачи
2.1. Используя модель потерь при распространении в свободном простран-
стве, определите мощность передачи, необходимую для получения на при-
еме мощности, равной 1 дБ, в беспроводной системе с изотропными
антеннами (G; = 1) и несущей частотой / = 5 ГГц, приняв расстояние
d = 10 м. Повторите расчеты для d = 100 м.
2.2. Для двулучевой модели распространения при удалении приемника от пе-
редатчика на d = 100 м, ht = 10 м, /?.,. = 2 м, найдите интервал времени
задержки между двумя сигналами.
2.3. Для двулучевой модели покажите, как приближение рядом Тейлора при-
меняется к (2.13) для получения приближенного выражения:
2тг (х + х' — I) 4тг hthr
X ~ Xd ’
2.4. Для двулучевой модели выведите приближенное выражение для расстоя-
ний меньше критического расстояния dc, при котором сигнал принимает
нулевое значение.
2.5. Найдите критическое расстояние dc для двулучевой модели в большой
макросоте пригорода, в которой базовая станция установлена на башне
или здании высотой ht = 20 м, а приемники — на высоте hr = 3 м, при
fc = 2 ГГц. Это хороший размер радиуса пригородной макросоты? Если
да или нет, то почему?
2.6. Предположим, что двулучевая модель состоит из двух сигналов: один
по линии прямой видимости (LOS), а другой — отраженный от здания
слева (или справа) от линии прямой видимости, а не от земли. Где долж-
но быть расположено здание относительно передатчика и приемника для
этой модели, чтобы получить тот же результат, что и при двулучевой
модели с отражением от земли?
2.7. Рассмотрим двулучевой канал с импульсной характеристикой
h(t) = ai6(t) + a2h(t — 0,22/zs).
Найдите расстояние, разделяющее передатчик и приемник, а также ctj
и «2, полагая, что потери на трассе соответствуют условиям распростра-
нения в свободном пространстве, а коэффициент отражения равен — 1.
Принять, что передатчик и приемник расположены в 8 м над землей
и что несущая частота равна 900 МГц.
2.8. Направленные антенны являются мощным средством снижения эффек-
та многолучевого распространения и влияния помех. В частности, как
показано в этой задаче, антенны, направленные по линии прямой ви-
димости (LOS) двулучевой модели, могут сократить эффект затухания,
обусловленный отражением от поверхности земли. Начертите график за-
висимости мощности в дБ (101gFr) от логарифма расстояния (lg d) для
двулучевой модели с параметрами / = 900 МГц, R = — 1, ht — 50 м,
hr = 2 м, Gi — 1 при следующих значениях коэффициентов усиления
антенн Gr: Gr = 1,316; 0,1 и 0,01 (т.е. Gr = 0, —5, —10 и —20 дБ соответ-
ственно). Все четыре графика должны быть построены для расстояний от
d — 1 м до d = 100 км. Рассчитайте также критические расстояния dc =
= 4hfhr/X, отметьте их на каждом графике и нормируйте приблизительно
к 0 дБ. Наконец, покажите кусочно-линейную модель с равномерным спа-
дом мощности вплоть до расстояния ht, спадом 101g (с/"2) для значений
ht < d < dc и спадом 101g (с/-4) Для d^ dc. (График зависимости уровня
мощности от логарифма расстояния при кусочно-линейной аппроксима-
ции представляет собой набор из трех прямых линий с наклоном 0, 2 и 4
120 Глава 2. Потери на трассе распространения радиоволн и экранирование
соответственно.) Обратите внимание, что на большом расстоянии стано-
вится все труднее выдерживать условие Gr Gi, потому что это требует
чрезвычайно точной угловой направленности антенн.
2.9. Какой средний спад мощности с расстоянием можно ожидать в десятилу-
чевой модели? Почему?
2.10. Для десятилучевой модели допустим, что передатчик и приемник на-
ходятся на одной и той же высоте на середине улицы шириной 20 м,
расстояние между передатчиком и приемником составляет 500 м. Найди-
те величину задержки в этой модели.
Рис. 2.11. Система с рас-
сеянием для задачи 2.11
2.11. Рассмотрим систему с передатчиком, приемником и рассеивателем, как
показано на рис. 2.11. Допустим, что передатчик и приемник размещены
в двумерной сетке координат, находятся на высоте ht = hr = 4 м и отде-
лены друг от друга расстоянием d. Рассеиватель находится на расстоянии
0,5с/ вдоль обоих направлений, т.е. на такой сетке передатчик располо-
жен в точке (0,0), приемник — в (0, d), а рассеиватель — в (0,5с/, 0,5с/).
Допустим, что эффективная площадь отражения равна 20 дБм2, Gs = 1,
a f'с = 900 МГц. Найдите потери на трассе для рассеянного сигнала при
d = 1, 10, 100 и 1000 м. Сравните полученный результат с потерями
на этом же расстоянии, когда сигнал только отражается, с коэффици-
ентом отражения R——1.
2.12. При каких условиях упрощенная модель потерь (2.39) будет такой же, как
модель потерь в свободном пространстве (2.7)?
2.13. Рассмотрим приемник с мощностью шума в рабочей полосе частот, рав-
ной 160 дБм. Возьмем упрощенную модель потерь на трассе с do = 1 м
и коэффициентом К, полученным по формуле потерь сигнала в свободном
пространстве, при ненаправленных антеннах, если fc = 1 ГГц, а 7 = 4.
Для мощности передачи Pt — 10 мВт найдите максимальное расстояние
между передатчиком и приемником, чтобы отношение сигнал-шум при-
нимаемого сигнала было 20 дБ.
2.14. Эта задача показывает, как различные модели распространения сигнала
могут приводить к очень отличающимся значениям отношений сигнал-
шум SNR и, следовательно, к различным эксплутационным показателям
каналов данной системы. Рассмотрим сотовую систему с частотным раз-
делением, которая может работать вдоль автомагистралей или просе-
лочных дорог (рис. 2.12) Каждая сота работает в выделенном диапазоне
частот. И эти же диапазоны частот повторно используются в сотах, рас-
положенных на расстоянии d друг от друга. Допустим, что система имеет
квадратные соты со стороной 2 км, и что все мобильные устройства
излучают равную мощность Р. Для перечисленных ниже моделей рас-
пространения сигнала определите минимальное расстояние, на которое
должны быть удалены друг от друга соты, работающие в одном и том же
диапазоне частот, чтобы в восходящих (от мобильных устройств к базо-
вой станции) каналах связи отношение сигнал-шум SNR (т. е. отношение
минимальной мощности сигнала на приеме к мощности помехи) было
больше 20 дБ. При этом можно пренебречь всеми источниками помех,
кроме двух ближайших ячеек, работающих в том же диапазоне частот.
а) Распространение сигнала и помех между сотами подчиняется модели
распространения в свободном пространстве.
б) Распространение сигнала и помех между сотами подчиняется упро-
щенной модели потерь (2.39) при с/0 = 100 м, К = 1 и 7 = 3.
в) Распространение сигнала подчиняется упрощенной модели потерь на трас-
се с do = 100 м, К = 1 и 7 = 2, а распространение помехи — той же
модели, но с 7 = 4.
Рис. 2.12. Линейная со-
товая система для зада-
чи 2.14
Базовая станция / центр соты
2.15. Найдите средние потери на трассе по модели Хата, если /с = 900 МГц,
ht = 20 м, hr = 5 м, a d = 100 м — в большом городе, маленьком го-
роде, пригороде и сельской местности. Качественно объясните различия
в потерях на трассе для этих условий распространения сигнала.
2.16. Найдите параметры кусочно-линейной модели с тремя сегментами, чтобы
аппроксимировать потери на трассе при двулучевой модели распростра-
нения (2.12) и расстояниях от 10 до 1000 м, если ht = 10 м, hr = 2 м
и Gi = 1. Начертите график потерь на трассе и кусочно-линейное при-
ближение, используя эти параметры для всего интервала расстояний.
2.17. Используя модель затухания сигнала внутри помещения, определите тре-
буемую мощность передачи, чтобы сигнал, переданный на расстояние
100 м и прошедший через три этажа с затуханием 15, 10 и 6 дБ соответ-
ственно, а также через две двойные гипсокартонные стены, на приеме
имел мощность —110 дБм. Принять, что исходное расстояние d0 = 1, по-
казатель 7 = 4 и постоянная К = 0 дБ.
122 Глава 2. Потери на трассе распространения радиоволн и экранирование
2.18. В табл. 2.5 приведены данные измерений потерь на трассе.
а) Найдите параметры упрощенной модели потерь на трассе с экраниро-
ванием, имеющим логнормальное распределение, которые лучше всего
подходят для табличных данных.
б) Основываясь на этой модели, определите потери на трассе для 2 км.
в) Найдите вероятность перерывов связи на расстоянии d, допуская, что
принимаемая мощность на расстоянии d с учетом только потерь на
трассе превышает пороговую мощность, необходимую для отсутствия
перерывов связи, на 10 дБ.
Таблица 2.5. Результаты измерения потерь для задачи 2.18
Расстояние от передатчика, м Pr/Pt, дБ
5 -60
25 -80
65 -105
110 -115
400 -135
1000 -150
2.19. Рассмотрим сотовую систему, работающую на частоте 900 МГц, с поте-
рями сигнала, соответствующими условиям распространения в свободном
пространстве, и с дисперсией этих потерь из-за влияния экранирования
с логнормальным распределением, равной о = б дБ. Предположим, что
для приемлемого качества речи в мобильном телефоне требуется отно-
шение сигнал-шум, равное 15 дБ. Допустим, что мощность передатчика
базовой станции равна 1 Вт, а ее антенна имеет коэффициент усиления
3 дБ. В мобильном устройстве усиление антенны отсутствует, а шум при-
емника в интересующем нас рабочем диапазоне частот равен —40 дБм.
Найдите такой максимальный размер ячейки, при котором мобильная
станция на границах ячейки обеспечивала бы приемлемое качество ре-
чи в течение 90% времени.
2.20. В этой задаче мы смоделируем процесс затухания с логарифмически нор-
мальным распределением, опираясь на модель автоковариации (2.50). Как
описано в тексте выше, в процессе моделирования сначала генерирует-
ся белый шум, а затем он пропускается через фильтр первого порядка
с полюсом на е~6/Хе. В предположении, что расстояние Хс = 20 м, начер-
тите график зависимости замираний с логнормальным распределением
от расстояния d на интервале от 0 до 200 м, с шагом в один метр. Гра-
фик следует нормировать относительно 0 дБ, так как среднее значение,
обусловленное логнормальным экранированием, неизвестно из-за влияния
потерь на трассе.
2.21. В этой задаче мы рассмотрим влияние различных параметров экраниро-
вания с логнормальным распределением на вероятность перерывов сото-
Задачи I
вой связи. Рассмотрим систему сотовой связи, в которой мощность при-
нимаемого сигнала имеет логарифмически нормальное распределение со
средним значением ц дБм и стандартным отклонением crI/)dBm. Допустим,
что для приемлемых эксплутационных показателей мощность принимае-
мого сигнала должна быть выше 10 дБм.
а) Какова вероятность перерывов сотовой связи, если логарифмически
нормальное распределение имеет среднее значение = 15 дБм и СКО
сг,, = 8 дБм?
б) Для = 4 дБм найдите среднее значение необходимое для того,
чтобы вероятность нарушения сотовой связи была менее 1% — типич-
ное значение для сотовых систем.
в) Повторите пункт б) при = 12 дБм.
г) Один из предлагаемых методов снижения вероятности сбоев в сото-
вой связи заключается в использовании макроразнесения, при котором
сигнал с мобильного телефона принимается несколькими базовыми
станциями, а затем объединяется. Это может быть реализовано толь-
ко в том случае, если разные базовые станции в состоянии принять
сигнал с данного мобильного устройства, что представляет типичный
случай для систем с МДКР (CDMA). Объясните, почему это могло бы
снизить вероятность перерывов сотовой связи.
2.22. Выведите формулу для зоны покрытия (2.61), используя интегрирование
по частям в (2.59).
2.23. Определите зону покрытия микросотовой системы, в которой потери
удовлетворяют упрощенной модели (с 7 = 3, do = 1 и К = 0 дБ) и,
кроме того, присутствует экранирование с логнормальным распределе-
нием и СКО а = 4 дБ. Предположить, что радиус ячейки равен 100 м,
мощность передатчика составляет 80 мВт, а уровень необходимой мини-
мальной мощности на приеме равен Рт;п = 100 дБм.
2.24. Рассмотрим сотовую систему, в которой а) потери на трассе удовлетво-
ряют упрощенной модели с 7 = 6 и б) имеет место также экранирование
с логнормальным распределением и СКО а = 8 дБ. Если принимаемая
мощность на границах ячейки с учетом только потерь на трассе на 20 дБ
выше минимальной принимаемой мощности, требуемой для обеспечения
бесперебойной работы сотовой связи, то чему равен радиус зоны покры-
тия соты?
2.25. В микросотах показатели потерь на трассе обычно находятся в диапазоне
от 2 до 6, а стандартное отклонение из-за экранирования — в пределах от
4 до 12. Дана сотовая система, в которой принимаемая мощность с учетом
потерь на трассе на границах ячейки равна необходимому уровню для бес-
перебойной работы сотовой связи. Найдите параметры потерь на трассе
и экранирования в пределах указанных диапазонов, которые дают луч-
шую и худшую зону покрытия. Какова будет зона покрытия, если эти
параметры находятся в центре их типичных диапазонов?
124 Глава 2. Потери на трассе распространения радиоволн и экранирование
Литература
1. D. Parsons, The Mobile Radio Propagation Channel, Wiley, New York, 1994.
2. M. Patzold, Mobile Fading Channels, Wiley, New York, 2002.
3. IEEE J. Sei. Areas Commun., Special Issue on Channel and Propagation Mod-
eling for Wireless Systems Design, April 2002 and August 2002.
4. IEEE J. Sei. Areas Commun., Special Issue on Ultra-Wideband Radio in Mul-
tiaccess Wireless Communications, December 2002.
5. T.S. Rappaport, Wireless Communications — Principles and Practice, 2nd ed.,
Prentice-Hall, Englewood Cliffs, NJ, 2001.
6. W. C Jakes, Jr., Microwave Mobile Communications, Wiley, New York, 1974
[reprinted by IEEE Press].
7. A. S. Y. Poon and R. W. Brodersen, «The role of multiple-antenna systems in
emerging open access environments», EE Times Commun. Design Conf., Octo-
ber 2003.
8. T. Kumer, D. J. Cichon, and W. Wiesbeck, «Concepts and results for 3D digi-
tal terrain-based wave propagation models: An overview», IEEE J. Sei. Areas
Commun., pp. 1002-12, September 1993.
9. N. Amitay, «Modeling and computer simulation of wave propagation in lineal
line-of-sight microcells», IEEE Trans. Veh. Tech., pp. 337-42, November 1992.
10. J. W. McKown and R. L. Hamilton, Jr., «Ray tracing as a design tool for radio
networks», IEEE Network, pp. 27-30, November 1991.
11. K. A. Remley, H. R. Anderson, and A. Weisshar, «Improving the accuracy of ray-
tracing techniques for indoor propagation modeling», IEEE Trans. Veh. Tech.,
pp. 2350-8, November 2000.
12. H.-J. Li, C.-C. Chen, T.-Y. Liu, and H.-C. Lin, «Applicability of ray-tracing
techniques for prediction of outdoor channel characteristics», IEEE Trans. Veh.
Tech., pp. 2336-49, November 2000.
13. A. Domazetovic, L. J. Greenstein, N. Mandayan, and I. Seskar, «А new modeling
approach for wireless channels with predictable path geometries», Proc. IEEE
Veh. Tech. Conf., September 2002.
14. J.H. Tarng, W.-S. Liu, Y.-F. Huang, and J.-M. Huang, «А novel and efficient
hybrid model of radio multipath-fading channels in indoor environments», IEEE
Trans. Ant. Prop., pp. 585-94, March 2003.
15. A. J. Rustako, Jr., N. Amitay, G. J. Owens, and R. S. Roman, «Radio propaga-
tion at microwave frequencies for line-of-sight microcellular mobile and personal
communications», IEEE Trans. Veh. Tech., pp. 203-10, February 1991.
16. W. C.Y. Lee, Mobile Communications Engineering, McGraw-Hill, New York,
1982.
17. J.-F. Wagen, «Signal strength measurements at 881 MHz for urban microcells in
downtown Tampa», Proc. IEEE Globecom Conf., pp. 1313-17, December 1991.
18. R. J. C. Bultitude and G. K. Bedal, «Propagation characteristics on microcellular
urban mobile radio channels at 910 MHz», IEEE J. Sei. Areas Commun., pp.
31-9, January 1989.
Литература 125
19. J.-E. Berg, R. Bownds, and F. Lotse, «Path loss and fading models for microcells
at 900 MHz», Proc. IEEE Veh. Tech. Conf., pp. 666-71, May 1992.
20. J. H. Whitteker, «Measurements of path loss at 910 MHz for proposed microcell
urban mobile systems», IEEE Trans. Veh. Tech., pp. 125-9, August 1988.
21. H. Borjeson, C. Bergljung, and L. G. Olsson, «Outdoor microcell measurements
at 1700 MHz», Proc. IEEE Veh. Tech. Conf., pp. 927-31, May 1992.
22. K. Schaubach, N. J. Davis IV, and T. S. Rappaport, «А ray tracing method
for predicting path loss and delay spread in microcellular environments», Proc.
IEEE Veh. Tech. Conf., pp. 932-5, May 1992.
23. F. Ikegami, S. Takeuchi, and S. Yoshida, «Theoretical prediction of mean field
strength for urban mobile radio», IEEE Trans. Ant. Prop., pp. 299-302, March
1991.
24. M. C. Lawton and J. P. McGeehan, «The application of GTD and ray launching
techniques to channel modeling for cordless radio systems», Proc. IEEE Veh.
Tech. Conf, pp. 125-30, May 1992.
25. J. B. Keller, «Geometrical theory of diffraction», J. Opt. Soc. Amer., 52, pp.
116-30, 1962.
26. R. J. Luebbers, «Finite conductivity uniform GTD versus knife edge diffraction
in prediction of propagation path loss», IEEE Trans. Ant. Prop., pp. 70-6, Jan-
uary 1984.
27. C. Bergljung and L. G. Olsson, «Rigorous diffraction theory applied to street
microcell propagation», Proc. IEEE Globecom Conf, pp. 1292-6, December 1991.
28. R. G. Kouyoumjian and P. H. Pathak, «А uniform geometrical theory of diffrac-
tion for an edge in a perfectly conducting surface», Proc. IEEE, pp. 1448-61,
November 1974.
29. G. K. Chan, «Propagation and coverage prediction for cellular radio systems»,
IEEE Trans. Veh. Tech., pp. 665-70, November 1991.
30. К. C Chamberlin and R. J. Luebbers, «An evaluation of Longley-Rice and GTD
propagation models», IEEE Trans. Ant. Prop., pp. 1093-8, November 1982.
31. J. Walfisch and H. L. Bertoni, «А theoretical model of UHF propagation in urban
environments», IEEE Trans. Ant. Prop., pp. 1788-96, October 1988.
32. M.I. Skolnik, Introduction to Radar Systems, 2nd ed., McGraw-Hill, New York,
1980.
33. S.Y. Seidel, T. S. Rappaport, S. Jain, M. L. Lord, and R. Singh, «Path loss,
scattering, and multi-path delay statistics in four European cities for digital
cellular and microcellular radiotelephone», IEEE Trans. Veh. Tech., pp. 721-30,
November 1991.
34. S. T.S. Chia, «1700 MHz urban microcells and their coverage into buildings»,
Proc. IEEE Ant. Prop. Conf, pp. 504-11, York, U.K., April 1991.
35. D. Wong and D. C. Cox, «Estimating local mean signal power level in a Rayleigh
fading environment», IEEE Trans. Veh. Tech., pp. 956-9, May 1999.
36. T. Okumura, E. Ohmori, and K. Fukuda, «Field strength and its variability
in VHF and UHF land mobile service», Rev. Elec. Commun. Lab., pp. 825-73,
September/October 1968.
37. M. Hata, «Empirical formula for propagation loss in land mobile radio services»,
IEEE Trans. Veh. Tech., pp. 317-25, August 1980.
126 Глава 2. Потери на трассе распространения радиоволн и экранирование
38. European Cooperative in the Field of Science and Technical Research EURO-
COST 231, «Urban transmission loss models for mobile radio in the 900 and
1800 MHz bands», rev. 2, The Hague, September 1991.
39. E. McCune and K. Feher, «Closed-form propagation model combining one or
more propagation constant segments», Proc. IEEE Veh. Tech. Conf, pp. 1108-
12, May 1997.
40. D. Akerberg, «Properties of a TDMA picocellular office communication system»,
Proc. IEEE Globecom Conf, pp. 1343-9, December 1988.
41. V. Erceg, L. J. Greenstein, S.Y. Tjandra, S.R. Parkoff, A. Gupta, B. Kulic,
A. A. Julius, and R. Bianchi, «An empirically based path loss model for wireless
channels in suburban environments», IEEE J. Sei. Areas Commun., pp. 1205-11,
July 1999.
42. M. Feuerstein, K. Blackard, T. Rappaport, S. Seidel, and H. Xia, «Path loss,
delay spread, and outage models as functions of antenna height for microcellular
system design», IEEE Trans. Veh. Tech., pp. 487-98, August 1994.
43. P. Harley, «Short distance attenuation measurements at 900 MHz and 1.8 GHz
using low antenna heights for microcells», IEEEJ. Sei. Areas Commun., pp.
5-11, January 1989.
44. S.Y. Seidel and T.S. Rappaport, «914 MHz path loss prediction models for
indoor wireless communications in multifloored buildings», IEEE Trans. Ant.
Prop., pp. 207-17, February 1992.
45. A. J. Motley and J.M. P. Keenan, «Personal communication radio coverage in
buildings at 900 MHz and 1700 MHz», Elec. Lett., pp. 763-4, June 1988.
46. A. F. Toledo and A. M. D. Turkmani, «Propagation into and within buildings at
900, 1800, and 2300 MHz», Proc. IEEE Veh. Tech. Conf., pp. 633-6, May 1992.
47. F. C. Owen and C. D. Pudney, «Radio propagation for digital cordless telephones
at 1700 MHz and 900 MHz», Elec. Lett., pp. 52-3, September 1988.
48. S. Y. Seidel, T. S. Rappaport, M. J. Feuerstein, K. L. Blackard, and L. Grindstaff,
«The impact of surrounding buildings on propagation for wireless in-building
personal communications system design», Proc. IEEE Veh. Tech. Conf., pp.
814-18, May 1992.
49. C. R. Anderson, T. S. Rappaport, K. Bae, A. Verstak, N. Tamakrishnan, W. Tran-
tor, C Shaffer, and L. T. Waton, «In-building wideband multipath characteristics
at 2.5 and 60 GHz», Proc. IEEE Veh. Tech. Conf., pp. 24-8, September 2002.
50. L.-S. Poon and H.-S. Wang, «Propagation characteristic measurement and fre-
quency reuse planning in an office building», Proc. IEEE Veh. Tech. Conf,
pp. 1807-10, June 1994.
51. G. Durgin, T. S. Rappaport, and H. Xu, «Partition-based path loss analysis for
in-home and residential areas at 5.85 GHz», Proc. IEEE Globecom Conf, pp.
904-9, November 1998.
52. A. F. Toledo, A.M.D. Turkmani, and J.D. Parsons, «Estimating coverage of
radio transmission into and within buildings at 900,1800, and 2300 MHz», IEEE
Pers. Commun. Mag., pp. 40-7, April 1998.
53. R. Hoppe, G. Wolfle, and F. M. Landstorfer, «Measurement of building penetra-
tion loss and propagation models for radio transmission into buildings», Proc.
IEEE Veh. Tech. Conf, pp. 2298-2302, April 1999.
54. Е. Н. Walker, «Penetration of radio signals into buildings in cellular radio envi-
ronments», Bell Systems Tech. J., pp. 2719-34, September 1983.
55. W. C. Y. Lee, Mobile Communication Design Fundamentals, Sams, Indianapolis,
IN, 1986.
56. D.M.J. Devasirvathan, R. R. Murray, and D.R. Woiter, «Time delay spread
measurements in a wireless local loop test bed», Proc. IEEE Veh. Tech. Conf,
pp. 241-5, May 1995.
57. S.S. Ghassemzadeh, L. J. Greenstein, A. Kavcic, T. Sveinsson, and V. Tarokh,
«Indoor path loss model for residential and commercial buildings», Proc. IEEE
Veh. Tech. Conf, pp. 3115-19, October 2003.
58. A. J. Goldsmith, L.J. Greenstein, and G. J. Foschini, «Error statistics of real-
time power measurements in cellular channels with multipath and shadowing»,
IEEE Trans. Veh. Tech., pp. 439-46, August 1994.
59. A.J. Goldsmith and L.J. Greenstein, «А measurement-based model for pre-
dicting coverage areas of urban microcells», IEEE J. Sei. Areas Commun.,
pp. 1013-23, September 1993.
60. M. Gudmundson, «Correlation model for shadow fading in mobile radio sys-
tems», Elec. Lett., pp. 2145-6, November 7,1991.
61. G. L. Stuber, Principles of Mobile Communications, 2nd ed., Kluwer, Dordrecht,
2001.
62. A. Algans, K.I. Pedersen, and P. E. Mogensen, «Experimental analysis of the
joint statistical properties of azimuth spread, delay spread, and shadow fading»,
IEEE J. Sei. Areas Commun., pp. 523-31, April 2002.
63. M. Marsan and G. C. Hess, «Shadow variability in an urban land mobile radio
environment», Elec. Lett., pp. 646-8, May 1990.
64. J. Weitzen and T. Lowe, «Measurement of angular and distance correlation
properties of log-normal shadowing at 1900 MHz and its application to design
of PCS systems», IEEE Trans. Veh. Tech., pp. 265-73, March 2002.
65. W.Turin, R. Jana, S.S. Ghassemzadeh, V.W. Rice, and V. Tarokh, «Autore-
gressive modeling of an indoor UWB channel», Proc. IEEE Conf. UWB Sy st.
Technol., pp. 71-4, May 2002.
ГЛАВА 3
СТАТИСТИЧЕСКИЕ
МОДЕЛИ КАНАЛОВ
МНОГОЛУЧЕВОГО
РАСПРОСТРАНЕНИЯ
В настоящей главе рассматриваются модели замираний конструктивного
и деструктивного плана, вносимых различными составляющими в ка-
нале многолучевого распространения. Хотя при построении трасс про-
хождения лучей детерминированными методами многолучевые эффекты
учтены в моделях гл. 2, но на практике детерминированные модели ка-
налов встречаются редко, поэтому многолучевые каналы следует описать
статистическими методами. В этой главе мы смоделируем многолучевой
канал по его параметрам откликов на воздействие потока импульсов. Для
этой модели будут получены статистические характеристики и описаны
ее важные свойства.
Если по многолучевому каналу передается одиночный импульс, то сиг-
нал на приеме появится в виде последовательности импульсов, в которой
каждый импульс этой последовательности будет соответствовать сигна-
лу, пришедшему по линии прямой видимости и отдельным составляющим
многолучевого канала, связанными с разными рассеивающими объекта-
ми или их группами. Разброс временных задержек лучей, составляющих
многолучевой канал, может привести к существенным искажениям прини-
маемого сигнала. Этот разброс задержек равен разности между временем
прибытия первой составляющей сигнала, принятой по линии прямой ви-
димости, и последней составляющей, принятой по каналу многолучевого
распространения. Причем, эти составляющие относятся к одному и тому
же переданному импульсу. Если интервал разброса задержек мал по срав-
нению с величиной, обратной полосе пропускания сигнала, то принятый
импульс немного растянут по времени. Но, если разброс задержек отно-
сительно велик, и имеются значительные временные задержки сигнала
на приеме, то это может привести к существенным искажениям сигнала.
Другой характеристикой многолучевого канала служит его нестацио-
нарность — зависимость параметров от времени. Эта временная зависи-
мость возникает из-за того, что если передатчик или приемник находятся
в движении, то со временем изменяются места расположения отражате-
лей в тракте распространения сигналов, а число сигналов многолучевого
распространения увеличивается и изменяется во времени. Поэтому, ес-
ли мы опять передадим импульсы с движущегося передатчика, то при
каждом импульсе мы увидим изменения величины уровня, длительности
задержки и числа лучей многолучевого распространения. Однако из-за
конструктивного и деструктивного1 сложения составляющих многолу-
чевого распространения эти изменения происходят в гораздо большем
временном масштабе, чем замирания при неподвижном расположении пе-
редатчика или приемника. Сначала мы используем общую импульсную
характеристику нестационарного канала, чтобы охватить как быстрые,
так и медленные изменения канала. Затем мы ограничим эту модель за-
тухания узкополосным каналом, в котором ширина полосы частот канала
мала по сравнению с обратной величиной задержек. В этой узкополосной
модели предполагается наличие квазистатической среды с постоянным
числом составляющих многолучевого распространения, потери распро-
странения и влияние экранирования в каждой из них неизменны. Для этой
квазистатической среды мы затем дадим характеристику изменений, про-
исходящих на коротком расстоянии (мелкомасштабные изменения) из-за
конструктивного и деструктивного включения составляющих многолу-
чевого распространения. Также мы представим статистические характе-
ристики широкополосных многолучевых каналов, используя двумерные
преобразования импульсной характеристики. Кроме того, будут рассмо-
трены дискретные и пространственно-временные модели каналов.
3.1. Импульсная характеристика нестационарного канала
Предположим, что передается тот же сигнал, что и в гл. 2:
s(t) = Re |u(f)ej2,r^ct J = Re {u(i)} cos (2tvfct) — Im {u(i)} sin (2tvfct), (3.1)
где u(t) — эквивалентный низкочастотный сигнал для s(f) в частотном
диапазоне Ви и /с — несущая частота. Если пренебречь шумом, то соот-
ветствующий принимаемый сигнал равен сумме всех отраженных лучей
и сигнала:
[ w(t)
r(f) = Re (i - T„(t)) 5
I n=0
(3-2)
где n = 0 соответствует каналу прямой видимости. В этом выраже-
нии неизвестны: количество составляющих многолучевого распростра-
1 Имеются в виду такие совпадения по фазе, когда сигналы суммируются или вычита-
ются. — Прим, перев.
Глава 3. Статистические модели каналов
нения N(t), которые более подробно будут обсуждаться ниже; а также
длина пути rn(t), соответствующая задержка тп(С) = rn(t)/c, доплеров-
ское фазовое смещение и величина ап(Г) для всех составляющих
многолучевого распространения, включая канал прямой видимости.
Группа
отражателей
Рис. 3.1. Одиночный от-
ражатель и группа отра-
жателей
Каждая n-ая отраженная составляющая многолучевого распространения
может соответствовать многолучевому распространению от одного отра-
жателя или от нескольких сгруппированных отражателей, создающих эти
составляющие многолучевого распространения с похожими задержками,
как это показано на рис. 3.1. Если каждая составляющая многолучевого
распространения соответствует только одному отражателю, то для нее
величина a„(i) соответствует потерям на трассе и эффектам экранирова-
ния данного луча, изменение фазы соответствует задержке тп (£), равной
e-j2?r/cTn(t), а доплеровский сдвиг равен fon = v cos 0n(t)/X, где 0п(Г) —
угол между лучом и направлением движения. Этот доплеровский сдвиг
частоты ведет к доплеровскому смещению фазы <pDn = f 27r/pn(f)df.
t
Предположим, однако, что n-ная многолучевая составляющая образована
группой отражателей2. При многолучевом распространении два сигна-
ла с задержками 71 и 72 называются разрешаемыми (различимыми), если
разница их задержек значительно превышает величину, обратную ширине
диапазона частот сигнала: |тх — Тг| В~1. Многолучевые компоненты,
которые не удовлетворяют этому критерию разрешающей способности,
не могут быть разделены в приемнике, потому что u(t — ti) » u(t — 72),
2Группа отражателей, так же, как и одиночный «грубый» отражатель, может создавать
различные многолучевые компоненты со слабо отличающимися задержками.
3.1. Импульсная характеристика нестационарного канала
и поэтому такие компоненты являются неразрешимыми. Эти неразличи-
мые составляющие объединяются в одну составляющую многолучевого
распространения с задержкой т ~ ri ~ и с амплитудой и фазой, соот-
ветствующими сумме различных составляющих. Величина напряженно-
сти этого суммарного сигнала обычно подвергается быстрым изменениям
из-за конструктивного и деструктивного объединения неразличимых со-
ставляющих многолучевого распространения. В общем, широкополосные
каналы имеют такие различимые составляющие многолучевого распро-
странения, что каждый член суммы (3.2) соответствует либо одиночному
отражению, либо суммам неразличимых многократных составляющих.
В отличие от них, узкополосные каналы имеют тенденцию к суммиро-
ванию неразличимых составляющих в каждом члене (3.2).
Так как параметры an(t), тп(1) и связанные с каждой разли-
чимой многолучевой составляющей, изменяются во времени, то они пред-
ставляются как случайные процессы, которые мы предполагаем одновре-
менно и стационарными и эргодическими. Поэтому принимаемый сигнал
также представляет стационарный и эргодический случайный процесс.
Для широкополосных каналов, где каждый член в (3.2) соответствует од-
ному отражателю, эти параметры изменяются медленно в соответствии
с изменениями среды распространения. Для узкополосных каналов, где
каждый элемент в (3.2) образуется из суммы неразличимых составля-
ющих многолучевого сигнала, параметры могут изменяться быстро —
в зависимости от длины волны сигнала — благодаря конструктивному
или деструктивному суммированию различных составляющих.
Мы можем упростить выражение принимаемого сигнала г (£), полагая,
что фаза равна:
<Pn(t) = 2лfcrn(t) - <pDn- (3.3)
Тогда принимаемый сигнал можно представить следующим образом:
(3.4)
Так как an(t) представляет функцию потерь и экранирования, a <pn(t)
зависит от задержки и эффекта Доплера, то обычно предполагается, что
два этих случайных процесса независимы.
Выражение принимаемого сигнала г(£) выводится с помощью свертки
эквивалентного низкочастотного входного сигнала u(i) и эквивалентной
импульсной характеристики с(т, t) канала, представленного низкочастот-
ным фильтром, с последующим переносом на несущую частоту3:
3Информацию об эквивалентном низкочастотном представлении полосовых сигналов
и систем можно найти в приложении А.
132 Глава 3. Статистические модели каналов
r(t) = Re
c(r, t)u(t — r) dr I ej2"^ct
(3-5)
Обратите внимание, что c(r,i) имеет два временных параметра: вре-
мя t. когда отклик на импульс регистрируется в приемнике; и время
t — т, когда импульс наблюдается в канале после регистрации t. Если
в момент t в многолучевом канале с задержкой тп(С) = т нет никакого
физического отражателя, то с(т, £) = 0. Хотя, на первый взгляд, опреде-
ление импульсной характеристики с(т, Г) нестационарного канала может
показаться трудным для понимания, но эта характеристика должна за-
даваться именно так, чтобы обеспечивать совместимость с частным слу-
чаем стационарных каналов. В частности, для стационарных каналов мы
имеем с(т, t) = с(т, t + T\, поэтому отклик во время t на импульс во время
t — т равен отклику во время t + Т на импульс во время t + Т — т. Под-
ставляя Т = —t, мы получаем, что с(т, t) = с(т, t — t) = с(т), где с(т) —
импульсная характеристика стандартного стационарного канала: отклик
во время т на импульс, поступивший в нулевой момент времени.4
Из (3.4) и (3.5) можно видеть, что импульсная характеристика с(т, t)
должна быть равна:
(3.6)
w(t)
Ф, = ZL an(f)e~jipn^d (т - Tn(t)),
п=0
где ф, Г) представляет эквивалентный низкочастотный отклик канала
во время t на импульс во время t — т. Подставляя (3.6) обратно в (3.5),
получим (3.4), тем самым подтверждая, что (3.6) представляет собой
импульсную характеристику эквивалентного низкочастотного нестаци-
онарного канала
r(t) = Re
= Re
-T)dr ej2vfct
= Re
т — rn(t)) u(t — т) dr e>2vfct
_-оо "=°
W(t) / °?
£ / 6 (т - rn(t)) u(t - т) dr
n=o \ф
gjZnfct
4По определению с(т, 0) — это отклик на импульс за время от нуля до минус г, но так
как канал стационарный, то это соответствует отклику на импульс за время от нуля до т.
3.1. Импульсная характеристика нестационарного канала 133
= Re
w(t)
an(t)e~JVn^u (f - rn(f))
n=0
ej^fct >
где последнее уравнение следует из фильтрующих свойств дельта-функций:
6 (т - Tn(t))u(t -r)dr = Tn(t)) * u(t) = и (t — rn(t)).
Некоторые модели каналов допускают бесконечное множество многолу-
чевых задержек, при котором сумма в (3.6) становится интегралом, в ко-
тором каждая многолучевая задержка т сводится к изменяющейся во
времени комплексной величине:
с(т, t) = [а (£, (т - £)< = а(т, t)e~3^. (3.7)
Система в t.]
Рис. 3.2. Многолучевое распространение системы в два различных момента времени
Для примера рассмотрим конкретные импульсные характеристики не-
стационарной системы, показанной на рис. 3.2, где каждая составляющая
многолучевого сигнала соответствует одному отражателю. В момент вре-
мени ti есть три луча принимаемого сигнала со своими тройками параме-
тров — амплитудой, фазой и задержкой — («^(д^тД, i = 1,2,3. Поэтому
все импульсы, которые были выданы в канал в момент времени ti — 77,
i = 1,2,3, будут получены во время ti, а импульсы, посланные в канал
в любое другое время, не будут получены в момент Д (так как нет со-
ставляющей с соответствующей задержкой). Импульсная характеристика
нестационарного канала для момента времени ti равна:
2
с(тД1) = ^ane~3Vn5(r - тп). (3.8)
п=0
Импульсная характеристика канала в момент t = ti показана на рис. 3.3.
На рис. 3.2 показано также состояние системы в момент времени ^2, когда
присутствуют две многолучевые составляющие принимаемого сигнала со
Глава 3. Статистические модели каналов
своими тройками параметров (амплитуда, фаза и задержка (а', т-),
i = 1,2). В данном случае импульсы, которые были выданы в канал в мо-
мент i = 1,2, будут приняты в момент а импульсы, выданные
в канал в любое другое время, уже не будут получены в момент t2. Им-
пульсная характеристика нестационарного канала для момента времени
^2, также показанная на рис. 3.3, имеет вид:
1
c(r,f2) = - Тп). (3.9)
п=0
3(t — г)
Нестационарный
канал
с(т,?)
Рис. 3.3. Характеристика нестационарного канала
Если канал стационарный, то нестационарные параметры в выражении
с(т, t) становятся постоянными, а импульсная характеристика с(т, t) —
= с(т) — только функцией т:
N
с(т) = 52 ane~jVn^(r - тп) (3.10)
п=0
для каналов с дискретными многолучевыми компонентами, а для каналов
с непрерывными составляющими многолучевого распространения с(т) =
= а(т)е--7*’('г\ Для стационарных каналов отклик на импульс в момент
времени ti является всего лишь смещенной версией его отклика на им-
пульс в момент t2 ф /1-
c(r,t) = J
Пример 3.1. Рассмотрим беспроводную ЛВС, действующую на предприятии
вблизи ленточного конвейера. Между передатчиком и приемником находится ка-
нал прямой видимости с усилением а<). фазой <д0 и задержкой то. Через каждые То
секунд по конвейеру проходит металлическая деталь, создавая дополнительный
отраженный путь прохождения сигнала с усилением ац, фазой и задержкой ту .
Найдите импульсную характеристику с(т, t) этого нестационарного канала.
Решение. Для моментов времени t пТ0 (п = 1, 2,...) импульсная характери-
стика канала просто соответствует каналу прямой видимости. Для моментов
времени t = пТо импульсная характеристика канала включает в себя как канал
прямой видимости, так и отраженный канал. Поэтому импульсная характери-
стика с(т, t) будет равна:
аое^°6(т - т0), t пТ0,
аов^°6(т — то) + aie^1/5(т — тт), t = пТа.
Следует отметить, что для стандартных несущих частот п-й много-
лучевой компонент будет иметь fcTn(t) 1. Например, при fc = 1 ГГц
и тп = 50 нс (типичное значение для системы внутри здания), =
= 50 » 1. Наружные беспроводные системы имеют задержки, гораздо
большие 50 нс, так что данное свойство сохраняется и для этих систем.
Если fcTn(t) 1, то небольшое изменение задержки прохождения сигна-
ла rn(t) может привести к большому фазовому изменению в n-ном луче
с фазой <pn(t) = 2TvfcTn(t) — tpDn — фо- Стремительные фазовые изменения
в каждом луче вызывают конструктивное и деструктивное добавление
(или вычитание), что, в свою очередь, обуславливает стремительные из-
менения интенсивности принимаемого сигнала. Это явление, называемое
замиранием, более детально будет рассмотрено в последующих разделах.
Воздействие многолучевого распространения на принимаемый сигнал
зависит от того, насколько велик разброс задержки времени распростра-
нения сигнала, проходящего по линии прямой видимости, и других соста-
вляющих многолучевого прохождения по сравнению со временем, равным
обратной величине рабочей полосы частот канала. Если этот относитель-
ный разброс задержек в канале невелик, то линия прямой видимости
и все компоненты многолучевого распространения обычно неразреши-
мы — неотличимы друг от друга, а это приводит к модели узкополосных
замираний, которая рассматривается в следующем разделе. Если разброс
задержки большой, то сигнал по линии прямой видимости и все много-
лучевые компоненты обычно разрешимы только для некоторого количе-
ства составляющих, а это приводит к модели широкополосных замираний,
описанной в § 3.3. Следует заметить, что некоторые дискретные соста-
вляющие широкополосной модели состоят из неразрешимых составляю-
щих. Обычно разброс задержек оценивается относительно той составля-
ющей принимаемого сигнала, по которой синхронизируется демодулятор.
136 Глава 3. Статистические модели каналов
Следовательно, если в модели стационарного канала (3.10) демодулятор
синхронизируется по сигналу, проходящему по линии прямой видимости
и имеющему наименьшую задержку то, то разброс задержек неизменный
и равен Тт = maxn [тп — то]. Однако если демодулятор синхронизирован
по составляющей многолучевого распространения с задержкой, равной
средней величине задержки т, то разброс задержек определяется как
Тт = шах„ [тп — т]. В нестационарных каналах многолучевые задерж-
ки изменяются со временем, поэтому разброс задержек Тт становится
уже случайной величиной. Более того, некоторые принимаемые лучи име-
ют значительно меньшую мощность, чем другие лучи, поэтому неясно,
как задержка, связанная с такими компонентами, должна учитываться
при описании разброса задержек. В частности, если мощность составля-
ющей многолучевого распространения ниже уровня шума, она не должна
значительно влиять на разброс задержек. Чтобы избежать подобных про-
блем, разброс задержек обычно описывают, используя профиль параме-
тров задержек канала, определение которого дано в подпараграфе 3.3.1.
В частности, две распространенные характеристики разброса задержки
в канале — средний разброс задержки и среднеквадратический разброс
задержки — определяются по статистическим данным профиля задержек.
Иногда используются также другие характеристики разброса задержки,
такие как избыточный разброс задержки, окно и интервал задержек —
[1, гл. 5.4.1; 2, гл. 6.7.1]. Определение точных характеристик разброса за-
держки не принципиально для понимания общего принципа воздействия
разброса задержки на многолучевые каналы, пока речь идет о приблизи-
тельной оценке задержек, соответствующих значительным многолучевым
компонентам. В последующем изложении можно было бы использовать
различные подходящие характеристики разброса задержек Тт, но мы,
как правило, будем оценивать разброс задержек, выраженный в сред-
неквадратических единицах. Это наиболее распространенная характери-
стика, так как если демодулятор синхронизирован по сигналу со средним
значением разброса задержек, то среднеквадратическое значение разбро-
са задержек служит хорошим средством оценки изменений этого средне-
го. Разброс задержки в канале сильно зависит от среды распространения
сигнала. В каналах внутри зданий разброс задержки обычно находится
в пределах 10-1000 нс, в пригороде он варьируется в пределах 200-2000
нс, а в городских районах — в пределах 1-30 мс [1, гл. 5].
3.2. Модели замираний в узкополосных каналах
Предположим, что разброс задержки в канале Тт мал по сравнению с ве-
личиной, обратной полосе пропускания передаваемого сигнала В, т. е.
3.2. Модели замираний в узкополосных каналах
Тт <$С В-1. Как уже говорилось, разброс задержек Тт в нестационарных
каналах обычно оценивается в среднеквадратических значениях откло-
нения — СКО, но он может быть задан и другими способами. В боль-
шинстве случаев неравенство Тт <«С В-1 подразумевает, что задержка
г-го луча многолучевого распространения -ц Тт для всех г, поэтому
u(t — п) ~ u(t) для всех г, и можно переписать (3.4) в виде:
r(f) = Re
4 \ fl
(3.11)
Уравнение (3.11) отличается от исходного переданного сигнала масштаб-
ным коэффициентом в комплексной форме в больших круглых скобках.
Этот масштабный коэффициент не зависит от переданного сигнала s(i)
и, в частности, от эквивалентного низкочастотного сигнала u(i) — пока
удовлетворяется условие узкополосности Тт С В }. Чтобы описать слу-
чайный масштабный коэффициент при многолучевом распространении,
примем в качестве передаваемого сигнала s(t) смодулированную несу-
щую со случайным фазовым сдвигом <до, узкополосную при всех Тт:
s(t) = Re |e7(2’r^ct+v°) | = cos (2л fct + <до) • (3-12)
При таком предположении сигнал на приеме можно представить в виде:
ej2Ttfct > _ ri^ cos 2яfct — rq(t) sin2%fct,
(3.13)
где синфазная и квадратурная составляющие равны:
W(t)
п(<) = 52 «и (i) c°s ¥?„(«), (3.14)
n=l
W)
rq(t) = 52 an(i)sm^„(Z), (3.15)
71=1
а фазовый элемент
V’n(i) = 2л/ст„(£) - cpDn - <до (3-16)
W)
71=0
r(i) = Re
теперь включает в себя фазовый сдвиг <до; а также воздействие задержек
и эффекта Доплера.
Если N (£) велико, то мы можем применить центральную предельную
теорему и, используя тот факт, что an(t) и <дп(/.) независимы для различ-
ных компонентов, аппроксимировать ri(t) и rq(t) в виде совместных гаус-
совских случайных процессов. Гауссовское свойство также верно и при
малых N, если an(t) имеют рэлеевское распределение, a равномер-
но распределяются на интервале [—л, %]. В соответствии с центральной
138 Глава 3. Статистические модели каналов
предельной теоремой, это происходит в том случае, когда п-я составля-
ющая многолучевого распространения появляется в результате сложения
большого числа неразличимых составляющих, отраженных от группы от-
ражателей [3].
3.2.1. Автокорреляция, взаимная корреляция
и спектральная плотность мощности
Теперь проанализируем автокорреляцию и взаимную корреляцию синфаз-
ной и квадратурной составляющих принимаемого сигнала г/(£) и tq(£).
Наши выводы основываются на некоторых ключевых предположениях,
которые обычно используются в моделях распространения сигнала без
доминирующей составляющей по линии прямой видимости. Поэтому, при
наличии доминирующей составляющей распространения по линии пря-
мой видимости (LOS), эти формулы, как правило, не верны. В данном
разделе примем, что амплитуда ап(Г), задержка многолучевого распро-
странения rn(t) и доплеровская частота fDn(t) изменяются достаточно
медленно, чтобы рассматривать их как константы в течение интересую-
щего нас временного интервала: an(t) « ап, rn(t) ~ тпи. fon(t) ~ /о,,- Это
будет верно и в том случае, когда каждая разрешимая составляющая мно-
голучевого распространения связана с одним отражателем. При таком
допущении доплеровский фазовый сдвиг5 равен: <pDn(t) = f ^fDn dt =
t
= 2тгfnnt, а фаза п-й многолучевой составляющей становится равной <pn(t) =
= ^fcrn ~ ^font - <ро-
Теперь мы сделаем ключевое предположение: допустим, что для п-й
многолучевой составляющей член 2тг fcTn в выражении <pn(t) изменяется
быстрее всех других фазовых членов. Это обоснованное предположение,
потому что /с — большая величина, а поэтому член 2л fcrn может пройти
полный цикл в 360° при небольшом изменении многолучевой задержки тп.
При таком предположении величина <рп (£) распределена равномерно на ин-
тервале [—л, л]. Отсюда:
E[ri(t)] = Е ^a„cos^„(/)j = ^Е[ап]Е [cos = 0, (3.17)
где второе равенство следует из независимости ап и <рп, а последнее ра-
венство — из равномерного распределения <рп. Подобным образом можно
показать, что E[tq(£)] = 0. Поэтому принимаемый сигнал также имеет
Е [г(£)] = 0: это означает гауссовский процесс с нулевым средним значе-
нием. Если в канале есть доминирующая составляющая прямой видимости
LOS, то тогда фаза этой составляющей доминирует в полученном сигнале
5Так как доплеровский фазовый сдвиг не влияет на анализ, для простоты допустим,
что при t= 0 этот сдвиг равен нулю.
и может быть определена в приемнике, поэтому предположение случайной
равномерно распределенной фазы больше не выдерживается.
Рассмотрим автокорреляцию синфазной и квадратурной составляю-
щих. Используя независимость ап и <д„, независимость <рп и <рт (п т)
и равномерное распределение <дн, мы получим, что
Е [п(t)cq (t)] = Е ^2 ап cos <д„(f) "22 ат sin <рт (£) =
_ п т
= ^2^2 Е[апат]Е [cos sin <дт(£)] =
п т
= ^Е [«2]Е[cos¥?„(£)sin</?„(£)] = 0. (3.18)
п
Таким образом, величины г/(£) и rQ(t) некоррелированы, а поскольку они
обе представляют совместный гауссовский процесс, это означает, что они
независимы.
Используя вывод, аналогичный (3.18), получаем выражение для функ-
ции автокорреляции величины r/(f):
АГ1 (t,t + r) = Е [ri(t)n (t + т)] = ^2 Е [«„] Е [cos cpn(t) cos <д„ (t + т)].
(3.19)
Подстановки
= 2TvfcTn - 2irfDnt - (До и (pn(t + r) = 2nfcTn - 27rfDn(t + т) - (До
дают нам:
Е [cos <дп(<) cos <д„ (t + т)] =
= 0,5Е [cos 2л/рпт] + 0,5Е [cos (4л/стп - ^fDnt - 2irfDnr - 2<д0)] (3.20)
Так как член 2тг/стп изменяется относительно быстро по сравнению со
всеми другими фазовыми изменениями и распределен равномерно, то ма-
тематическое ожидание второго члена в (3.20) обращается в нуль, и по-
этому:
Ari (£, t + т) = 0,5 Е [««]Е tcos &rfDnr)] =
п
= 0,5 Е [с^ cos ^2тгтт cos -^ ) , (3.21)
п '
поскольку fun = v cos 0п/Х предполагается фиксированным. Заметим, что
Arj(t, t + т) зависит только от т, т. е. Ari(t, t + т) = АГ/(т), и поэтому ri(t)
является случайным процессом, стационарным в широком смысле.
Используя подобные соображения, можно показать, что квадратурная
составляющая также представляет случайный стационарный в широком
смысле процесс с автокорреляционной функцией ArQ(r) = АГ[(т). Кроме
140 Глава 3. Статистические модели каналов
того, взаимная корреляция между синфазной и квадратурной составляю-
щими зависит только от временного сдвига т и выражается как:
ArQ,ri (£, t + т) = ATQ,ri (т) = E[n(t)rQ(t + т)] =
= —0,5 ^2 Е [an] sin (ятгит cos J = —Е [rQffyrj (t + т)]. (3.22)
Используя эти результаты, можно показать, что принимаемый сигнал
r(t) = n(t) cos (2л/с£) - rQ(f) sin (2л/с£)
также представляет случайный стационарный в широком смысле процесс
с автокорреляционной функцией:
Аг (т) = Е [r(t)r (t + r)] = АГ] (т) cos (2лfcr) + Ari ,rQ (г) sin (2лfcr). (3.23)
Рис. 3.4. Плотное рассеивающее
окружение
Для дальнейшего упрощения выражений (3.21) и (3.22) следует вве-
сти дополнительные допущения о среде распространения. Воспользуемся
моделью равномерной рассеивающей среды распространения, предложен-
ной Кларком [4] и получившей дальнейшее развитие в работах Джейкеса
[5, гл. 1]. В этой модели канал состоит из большого числа рассеивателей,
плотно расположенных друг к другу в смысле углов падения, как это по-
казано на рис. 3.4. Поэтому предположим, что множество лучей N падает
под углом вп = пД$, где Д$ = 2л/IV. Предположим также, что все лучи
имеет одинаковую мощность, равную Е [ск^] = 2Pr/N, где Рг — общая
принимаемая мощность. Тогда (3.21) принимает вид:
Аг, (т) = — У cos ( 2лит cos 1. (3.24)
71=1 '
3.2. Модели замираний в узкополосных каналах
Подстановка N = 2 л/Ав дает:
Ач(г)
Pr N (
-Р У COS I 27TVT cos
2л \
71=1 4
Ав.
(3.25)
Теперь необходимо перейти к пределу, так как число рассеивателей ра-
стет до бесконечности, что соответствует равномерному рассеянию по
всем направлениям. Тогда .У —> сю, Ав —> 0, и в итоге (3.25) становится
интегралом:
2тг
О
(3.26)
где
7Г
уо(ж) = 1 у e-jxcos8de
о
представляет функцию Бесселя нулевого порядка6. Подобным образом
для этой равномерно рассеивающей среды получаем:
Р f ( (j\
Аг1гГ(}(т) = ^~ sin ( 2лптсо8 — 1 dd = 0. (3.27)
График функции 7о(2л/от) показан на рис. 3.5. Из этого графика
можно сделать несколько интересных наблюдений. Во-первых, мы видим,
что коэффициент автокорреляции равен нулю при /рт « 0,4 или, что
эквивалентно, от » 0,4А. Следовательно, в предположении равномерного
распределения угла вп, интервал корреляции равен половине длины волны.
Такая аппроксимация широко используется при практическом определе-
нии многих интересующих нас параметров системы. Например, в гл. 7 по-
казано, что тракты с независимыми замираниями, возникающие в случае
многоэлементных антенн, могут использоваться для подавления некото-
рых негативных эффектов замираний. Расположение антенн должно быть
таким, чтобы каждая антенна получала независимый канал с замиранием;
хотя, исходя из приведенного выше анализа, следует использовать разнос
антенн с шагом 0,4А. Еще одной интересной характеристикой данного
графика является то, что сигнал опять коррелирует после того, как стал
некоррелированным. Поэтому мы не можем считать, что сигнал остает-
ся независимым при удалении от своего первоначального значения d = 0
на расстояние, большее 0,4А. Благодаря этому свойству восстановления
6Уравнение (3.26) можно также получить, предположив, что 2ttvt cos вп/Х в выражени-
ях (3.21) и (3.22) представляет случайную величину, а угол вп распределен равномерно,
и затем перейдя к математическому ожиданию вп- Однако, исходя из используемой
физической модели, вп может считаться равномерно распределенным только в плотной
рассеивающей среде. Поэтому оба вывода эквивалентны.
Глава 3. Статистические модели каналов
корреляции марковская модель не совсем корректна при рэлеевских за-
мираниях. Однако при анализе многих систем корреляция ниже 0,5 не
приводит к существенному ухудшению характеристик системы по срав-
нению с некоррелированными замираниями [6, гл. 9.6.5]. В таких случаях
замирания могут моделироваться марковской моделью в предположении,
что корреляция близка к нулю при удалении, превышающем половину дли-
ны волны, и это остается верным на всех больших расстояниях.
Функция Бесселя
Рис. 3.5. График функции Бесселя в зависимости от for
Выражения спектральной плотности мощности синфазной и квадра-
турной составляющих г/(£) и обозначаемой как Sri(J) и SrQ(f)
соответственно, могут быть получены с помощью преобразования Фурье
соответствующих функций автокорреляции в зависимости от задержки т.
Так как функции автокорреляции равны, то равны и их спектральные
плотности. Поэтому:
SrI(f) = SrQ(f)=F[ArAr)] = \
ipr 1
VfD
о,
1/1 fD,
иначе.
(3.28)
Эта спектральная плотность показана на рис. 3.6.
Спектральную плотность мощности принимаемого сигнала г(£) при
равномерном рассеянии получим, используя выражение (3.23) при усло-
вии АГ/1Г<э(т) = 0, выражение (3.28) и простые свойства преобразования
3.2. Модели замираний в узкополосных каналах 143
Фурье:
Sr(f) = F Щт)] = 0,25 [5Г/ (/ - /с) + Sri (f + /с)] =
= < (3.29)
0, иначе.
Обратите внимание, что спектральная плотность включает всю принима-
емую мощность Рг.
Рис. 3.6. Спектральная плотность мощности синфазной и квадратурной соста-
вляющих: Sri (/) = SrQ (/)
Так как спектральная плотность определяет плотность мощности мно-
голучевых компонентов как функцию их доплеровской частоты, то ее
можно рассматривать как функцию плотности распределения вероятно-
стей случайной частоты, обусловленной эффектом Доплера при многолу-
чевом распространении. Из рис. 3.6 видно, что спектральная плотность
Sri (/) стремится к бесконечности при f = ±/р и, следовательно, спек-
тральная плотность Sr(j) стремится к бесконечности при f = ±/с ± fD.
Это не будет верно на практике, так как модель равномерного рассея-
ния — всего лишь аппроксимация, но для сред с плотным размещением
рассеивателей спектральная плотность обычно достигает максимальных
значений на частотах, близких к максимальной доплеровской частоте.
Это интуитивно понятно из природы косинусоидальной функции с уче-
том того факта, что (при наших предположениях) спектральная плот-
Глава 3. Статистические модели каналов
ность мощности соответствует функции распределения вероятностей слу-
чайной доплеровской частоты /р($).
Рис. 3.7. Аппроксимация косинусоиды и спектральной плотности мощности пря-
мыми линиями
Чтобы понять это, следует учесть сделанные предположения о рав-
номерном рассеянии сигналов, приходящих под разными углами с рав-
ной средней мощностью. Поэтому угол в случайно выбранного канала
может рассматриваться как случайная величина, равномерно распреде-
ленная на интервале [0, 2л]. Затем из плотности вероятности случайной
величины в может быть получена плотность вероятности Pfe(f) случай-
ной доплеровской частоты /(0). По определению, Pfe(f) пропорциональна
плотности расположения рассеивателей на доплеровской частоте f. Сле-
довательно, спектральная плотность мощности Sr/( J") также пропорцио-
нальна этой плотности, и мы можем выразить спектральную плотность
через плотность вероятностей pfQ (/). В качестве иллюстрации на рис. 3.7
приведен график функции /р($) = /г> cos($) = v/Acos(0) вместе с ку-
сочно-линейным приближением (показано пунктиром) функции f D(0) к
/р($). В правой части рисунка изображен график спектральной плотно-
сти Sri(f) и его кусочно-линейное приближение Sri(J) (показано пунк-
тиром), соответствующее доплеровской аппроксимации f D(0). Очевидно,
что cos в ~±1 в относительно большом диапазоне значений в. Поэтому
составляющие многолучевого распространения, приходящие под такими
углами, имеют доплеровскую частоту /р($) ~ ±fi>- Мощность этих со-
ставляющих при / » /р будет складываться в спектральной плотности.
В нашем примере это находит выражение в том, что участкам на графике
слева, на которых /р($) = ±/р, соответствуют дельта-функции на час-
тоте ±/р на графике спектральной плотности Sri( j) справа. Участки
на рисунке слева, где график f D(0) имеет одинаковый наклон, соответ-
ствуют ровной части спектральной плотности на рисунке справа,
3.2. Модели замираний в узкополосных каналах 145
поскольку есть только одна составляющая многолучевого распростране-
ния, которая вносит мощность при любом приращении угла. Это объ-
ясняет форму графика спектральной плотности Sri (/) при равномерном
рассеянии. Формулы автокорреляции и спектральной плотности при не-
равномерном рассеянии, в большей степени соответствующие типичным
микросотам и условиям распространения внутри помещений, можно най-
ти в [5, гл. 1; 7, гл. 2].
Спектральная плотность мощности полезна при моделировании про-
цессов замираний. Общий метод моделирования замираний огибающей
узкополосного процесса состоит в пропускании двух независимых сигна-
лов белого гауссовского шума со спектральной плотностью Nq/2 через
фильтр нижних частот с амплитудно-частотной характеристикой -Il(f).
удовлетворяющей выражению:
SrAf) = SrQU) = ^\H(f)\2. (3.30)
Сигналы на выходе фильтра соответствуют синфазной и квадратурной
составляющим узкополосного процесса с замираниями и спектральной
плотностью Sri(f) и SrQ(f). Подобная процедура с использованием дис-
кретных фильтров может быть использована для генерации дискретных
процессов замираний. Большинство программных имитационных пакетов
(например, Matlab, COSSAP) имеют стандартные модули, которые моде-
лируют замирания узкополосных процессов, основанные на этом методе.
Более подробно о данном методе моделирования, а также об альтерна-
тивных методах, можно прочитать в [1, 7, 8].
Итак, мы завершили рассмотрение трех параметров мощности в уз-
кополосных беспроводных каналах в зависимости от расстояния. Итого-
вая характеристика, полученная суммированием потерь распространения
и экранирования, описанных в гл. 2, и узкополосных замираний, показана
на рис. 3.8. На этом рисунке можно наблюдать снижение мощности сигна-
ла из-за потерь на трассе по закону d'1 (у — показатель потерь на трассе);
быстрые изменения, обусловленные экранированием, которые колеблются
с периодом, равным интервалу корреляции Хс: и очень быстрые флукту-
ации с периодом порядка половины длины волны сигнала. Если выделить
маленький участок графика, на котором потери распространения и экра-
нирования постоянны, то мы получим рис. 3.9, который представляет
график флуктуаций принимаемой мощности в дБ в зависимости от рас-
стояния d = vt в линейном, не логарифмическом масштабе. На этом
графике усредненная принимаемая мощность Рг приведена к 0 дБм. Мо-
бильный приемник, который движется с постоянной скоростью v, будет
испытывать стационарные и эргодические изменения принимаемой мощ-
ности во времени, показанные на рисунке.
Глава 3. Статистические модели каналов
Только потери на трассе
logW/Уо)
Рис. 3.9. Замирания узкополосного
сигнала
Рис. 3.8. Сочетание потерь, экранирования и узкополосных замираний
__________*______
Расстояние
(несколько метров)
3.2.2. Огибающая и распределение мощности
Для двух любых гауссовских случайных величин X и Y с нулевым сред-
и о о
ним значением и дисперсией, равной , можно показать, что величина
Z = \/Х2 + У2 распределена по закону Рэлея, а величина Z2 имеет рас-
пределение экспоненциального типа. Мы видели, что при равномерном
распределении фазы обе составляющие г/ и tq представляют гаус-
совские случайные величины с нулевым средним значением. Если пред-
положить, что дисперсии о2 синфазной и квадратурной составляющих
равны, то огибающая сигнала может быть представлена в виде:
= \r(t)\ = y/r2(t)+r2Q(f).
Эта величина имеет распределение Рэлея:
2г
Pz(z) = exp
О
2 *1 Г 2 *1
Z Z Z*
Р>Г^еХР [“2^.’
О о,
(3.31)
(3.32)
3.2. Модели замираний в узкополосных каналах
где Рг — [а2] = 2 а2 — средняя мощность принимаемого сигнала,
полученная1 только с учетом потерь распространения и экранирования.
Распределение мощности получим с помощью замены переменной z2(f) =
= |г(/)|2 в (3.32):
Pz> (ж) = х > 0. (3.33)
Pr 2<rz
Таким образом, мощность принимаемого сигнала имеет экспоненциаль-
ное распределение со средним значением 2<т2. Эквивалентный низкоча-
стотный сигнал для r(f) задается в виде rpp(t) = 77(f) + jrQ(t), с фазой
в = arctg (rQ(t)/ri(ty). Для некоррелированных гауссовских случайных ве-
личин 77(f) и tq(^) можно показать, что фаза в распределена равномерно
и не зависит от |гьр|. Поэтому r(t) имеет амплитуду с распределением
Рэлея и равномерную фазу, и эти две величины взаимно независимы.
Пример 3.2. Рассмотрим канал с рэлеевскими замираниями и средней прини-
маемой мощностью Рг = 20 дБм. Найдите вероятность того, что принимаемая
мощность будет ниже 10 дБм.
Решение. Мы имеем Рт = 20 дБм = 100 мВт. Нужно найти вероятность того,
ю
что Z2 < 10 дБм = 10 мВт. Откуда: p(Z2 < 10) = f т^ое~х^1О° dx = 0,095.
о
Если канал имеет постоянную составляющую на линии прямой ви-
димости (LOS), то случайные величины 77(f) и tq(£) имеют ненулевые
средние значения. В этом случае принимаемый сигнал представляет су-
перпозицию комплексной гауссовской составляющей и составляющей ли-
нии прямой видимости (LOS). Можно показать, что в данном случае
огибающая сигнала будет иметь распределение Райса [9], задаваемое сле-
дующим образом:
Pz(-z) = — ехр
- (г2 + s2)
2g
log),
(3.34)
где 2<т2 = Е [а2] — средняя мощность составляющих многолучево-
п,п=£0
го распространения, не совпадающих с линией прямой видимости (LOS),
a s2 = «о — мощность составляющей распространения по линии прямой
видимости (LOS). Функция /о — это модифицированная функция Бес-
селя нулевого порядка. Средняя принимаемая мощность при замираниях
с распределением Райса определяется выражением
СЮ
Рг = У z2pz(z) dz — s2 + 2<т2. (3.35)
о
Замирания с распределением Райса часто характеризуются параме-
тром замираний К:
К = s2/2<j2. (3.36)
Параметр К представляет отношение мощности составляющей сигнала,
распространяющейся по линии прямой видимости (LOS), к мощности дру-
гих, распространяющихся не по линии прямой видимости, составляющих
многолучевого процесса. При К — 0 мы наблюдаем рэлеевское зами-
рание, а при К = оо замирания отсутствуют (т. е. это канал только
с одной составляющей, распространяющейся по лини прямой видимости).
Таким образом, параметр К служит показателем степени замирания: не-
большие значения К предполагают интенсивные замирания, а большие
значения К — относительно мягкие замирания. Выполнив подстановки
s2 — KPr/(K + 1) и 2<т2 = Pr/(K + 1), мы можем выразить распределение
Райса через К и Рг следующим образом:
, ч 2г (К +1) Г (# + 1)г21 т ( 1к(К + 1)\
Pz{z) = —^-=---ехр I0l2zJ-^-------П, г^О.
(3.37)
Как распределение Рэлея, так и распределение Райса могут быть по-
лучены с помощью математических методов, отражающих основные фи-
зические свойства моделей канала [3, 9]. Однако некоторые эксперимен-
тальные данные не очень хорошо совпадают с этими распределениями.
Поэтому было разработано более общее распределение замираний, па-
раметры которого можно регулировать так, чтобы они согласовались
с различными эмпирическими результатами. Такое распределение назы-
вается распределением замираний Наказами и задается в виде:
Pz(z) = . exp ,
Г (m) Prm |_ Pr
m 0,5,
(3.38)
где Pr — средняя принимаемая мощность, а Г( ) — гамма-функция. Рас-
пределение Накатами характеризуется величиной Рг и параметром зами-
рания т. Для т = 1 распределение (3.38) сходится к замираниям Рэлея.
При т = распределение (3.38) дает приближение замираний Рай-
са с параметром К. При т — оо замирания отсутствуют, a Z = \/Р^ —
величина постоянная. Таким образом, распределение Накагами может мо-
делировать как распределение Рэлея, так и распределение Райса, а также
распределения более общего вида. Следует отметить, что некоторые эм-
пирические данные имеют значения параметра т менее единицы, и в этом
случае замирания Накагами обуславливают более серьезные ухудшения
показателей системы, чем замирания Рэлея. Распределение мощности при
замираниях Накагами может быть получено заменой переменных:
pZ2(ж) =
хт~1
НТ~\ехР
Г (т)
—тх
(3.39)
3.2. Модели замираний в узкополосных каналах
3.2.3. Скорость пересечения уровней и средняя
продолжительность замираний
Скорость пересечения уровней огибающей Lz определяется как ожидае-
мая скорость (в пересечениях за секунду), на которой огибающая сигнала
пересекает уровень Z вниз. Вывод выражения для Lz требует знания
совместного распределения p(z,z) огибающей сигнала z = |г| и ее про-
изводной по времени z. Теперь получим Lz, основываясь на совместном
распределении.
Рис. 3.10. Скорость
пересечения уровней
и продолжительность
процесса замираний
Рассмотрим процесс замираний, изображенный на рис. 3.10. Ожидае-
мое суммарное время, в течение которого огибающая сигнала находится
на интервале (Z, Z + dz) с наклоном в пределах [г, z + dz] на промежутке
времени dt, равно А = p(Z, z)dzdzdt. Время, необходимое для прохожде-
ния от Z до Z + dz при одиночном пересечении и заданном наклоне
огибающей i, равно В = dz/z. Отношение А/В = zp(Z, z)dzdt предста-
вляет среднее число пересечений огибающей z на интервале (Z, Z + dz)
при заданном наклоне огибающей z в течение времени dt. Ожидаемое ко-
личество пересечений огибающей уровня Z при наклоне между z и z + dz
за интервал времени [0,Т] вниз составляет:
т
У zp (Z, z)dzdt = zp (Z, z) dzT. (3.40)
о
Отсюда ожидаемое число пересечений огибающей уровня Z с отрицатель-
ным наклоном на интервале [0, Т] равно:
о
Nz = Т J zp(Z,z)dz. (3-41)
Наконец, ожидаемое число пересечений огибающей уровня Z за секунду —
Глава 3. Статистические модели каналов
т. е. скорость пересечения уровня — рассчитывается по формуле:
о
bz = ^= У zp(Z,z)dz. (3.42)
—сю
Обратите внимание, что это общий результат, который применим для
любого случайного процесса.
Совместная плотность вероятностей величины z и ее производной z
для замираний Райса получена в [9], ее можно найти также в [7, гл. 2.1].
Скорость пересечения уровня для замираний Райса находят, подставляя
эту плотность распределения вероятностей в (3.42), что дает:
Lz = у/2тг (K + l)fDpe-K-^+l^2I0 (2ру/К (К + 1)) , (3.43)
где р = Z[ \/Р^. Нетрудно показать, что частота пересечений принима-
емым сигналом порога уо подчиняется той же самой формуле (3.43) при
р = у'Чо/Рг- Для замираний с распределением Рэлея (/С = 0) частота
пересечений уровня упрощается до выражения:
Lz = V2^fDpe~p\ (3.44)
где р = Z/yfPr.
Под средней продолжительностью замирания сигнала понимают сред-
нее время, в течение которого огибающая сигнала находится ниже требу-
емого уровня Z. Этот требуемый уровень часто определяется по величине
сигнала или уровня его мощности, необходимого для получения заданных
качественных показателей, таких, например, как коэффициент ошибок
по битам. Если величина сигнала или уровень его мощности падает ниже
заданного уровня, то говорят о перерыве в системе связи. Пусть вели-
чина ti обозначает продолжительность г-го замирания ниже уровня Z
в течение интервала времени [0,Т], как это показано на рис. 3.10. Тог-
да ti равно продолжительности времени, в течение которого огибающая
сигнала остается ниже Z на ее г-м пересечении. Так как процесс z(t) ста-
ционарный и эргодический, то для достаточно больших значений Т мы
имеем:
p(z(t)<Z) = ~^- (ЗЛ5)
i
Поэтому для достаточно больших Т средняя продолжительность затуха-
ния равна:
1 ~ p(z(t)<Z)
Z TLZ^‘^ Lz
(3.46)
Используя распределение Рэлея для p(z(t) < Z), получаем
3.2. Модели замираний в узкополосных каналах
еР2 - 1
(3'47)
с р = Z/y/Pf. Обратите внимание, что (3.47) — это средняя продолжи-
тельность замирания уровня огибающей сигнала при требуемом значе-
нии Z и среднем уровне огибающей Используя замену переменных,
нетрудно показать, что (3.47) также дает в результате среднюю продол-
жительность замираний уровня мощности сигнала с р = у/Р$/Рг, где
Ро — требуемый уровень мощности, а Рг — средний уровень мощности.
Средняя продолжительность замирания (3.47) уменьшается из-за эффек-
та Доплера, так как канал изменяется быстрее, и поэтому находится
ниже данного уровня замираний более короткий период времени. Сред-
няя продолжительность затухания также обычно повышается с ростом р
при р » 1. Это происходит потому, что сигнал с большей вероятно-
стью будет находиться ниже заданного предела, когда заданный уровень
повышается относительно среднего значения. Среднюю продолжитель-
ность замираний Райса рассчитать труднее; эту информацию можно най-
ти в [7, гл. 1.4].
Средняя продолжительность замирания показывает количество бит
или символов, на которые повлияло глубокое замирание. Для примера
рассмотрим систему без помехоустойчивого кодирования с длительно-
стью бита Т\>. Предположим, что вероятность ошибки высока, если z < Z.
В этом случае, если Tb~iz, то система, скорее всего, будет испытывать
единичные случайные ошибки, когда до и после бит, принятых с ошибкой,
следуют правильно принятые биты (пока для них выполняется условие
z < Z). С другой стороны, если Ть tz, то многие биты в последо-
вательности принимаются при условии z < Z, и вероятны длительные
пакеты ошибок. Наконец, если Тъ tz- то, поскольку в течение времени
прохождения бита замирания сглаживаются в демодуляторе, эти замира-
ния усредняются по величине, и поэтому ими можно пренебречь. Более
подробно это будет исследовано в гл. 8, посвященной кодированию и че-
редованию бит.
Пример 3.3. Рассмотрим систему передачи речи, которая обеспечивает при-
емлемый коэффициент ошибок BER, если принимаемая мощность сигнала боль-
ше или равна половине ее среднего значения. Если коэффициент ошибок BER
выше приемлемого уровня более 120 мс, то телефоны абонентов отключаются.
Определите диапазон значений доплеровской частоты в канале с рэлеевскими
замираниями, при котором средняя продолжительность времени приема абонен-
тами сигнала с неприемлемым качеством речи будет менее t = 60 мс.
152 Глава 3. Статистические модели каналов
Решение. Требуемая величина уровня сигнала на приеме составляет половину
среднего значения, т. е. Pq = 0,5Рг и, соответственно, р = у/03. Нам необходимо:
е0’5 - 1
tz = «J t - 0,060
jDx/ir
и, следовательно, /ц > (е — 1) / (0,060а/2тг) = 6,1 Гц.
3.2.4. Каналы с конечным числом состояний Маркова
Сложный математический аппарат плавных замираний, описанный в пре-
дыдущем разделе, иногда трудно применить для анализа параметров бес-
проводных сетей. Поэтому для таких аналитических расчетов нужны
более простые модели, охватывающие основные свойства каналов с плав-
ными замираниями. Одну из таких моделей представляет канал Марко-
ва с конечным числом состояний — FSMC7. В этой модели замирание
рассматривается как дискретный марковский процесс (цепь Маркова)
со временем дискретизации, равным заданному интервалу Т (обычно это
период следования символов). В частности, набор всех возможных замира-
ний представляется конечным набором состояний канала. В рамках этого
набора канал изменяет свои состояния через каждый интервал времени Т
в соответствии с множеством вероятностей переходов Маркова. Модель
марковского канала с конечным числом состояний (FSMC) применяется
в математических исследованиях и для аппроксимации эксперименталь-
ных данных замираний, включая спутниковые каналы [10], каналы внутри
помещений [11], каналы с рэлеевскими замираниями [12, 13], каналы с за-
мираниями Райса [14] и каналы с замираниями Накагами с параметром тп.
Эта модель также использовалась при проектировании систем и анализе
их эксплуатационных показателей [13, 16]. Модели марковского канала
с конечным числом состояний первого порядка оказались недостаточны-
ми для аналитических расчетов анализа эксплуатационных показателей,
поэтому в основном используются модели более высоких порядков. Мар-
ковский канал с конечным числом состояний обычно используют для мо-
делирования изменений замираний уровня сигнала, хотя были работы,
использующие модель марковского канала для моделирования фазы за-
мираний [17] или каналов с фазовыми шумами [18].
Подробная модель марковского канала с конечным числом состояний
(FSMC) для рэлеевских замираний была разработана в [12]. В этой модели
изменяющееся во времени отношение сигнал - шум у, обусловленное рэле-
евскими замираниями, находится на интервале (И 7 Модель мар-
ковского канала разбивает этот диапазон замираний 0 С у С оо на части
7FSMC — Finite-state Markov channel.
3.3. Модели замираний в широкополосных каналах
таким образом, что j-я область Rj задается в виде Rj = {7: Aj С 7 < Aj+i},
где границы области { Ау} и общее число частей замираний представляют
параметры модели. В этой модели предполагается, что отношение 7 оста-
ется внутри одной и той же зоны в течение всего временного интервала Т
и может переместиться в ту же самую область или смежные области толь-
ко в момент времени Т+1. Таким образом, предполагается, что в течение
интервала времени Т канал находится в состоянии Rj, а в следующий ин-
тервал времени канал может переместиться только в состояния R.j- i- Rj
или -Rj-i-i — это уместное допущение при малых значениях fnT. При этом
допущении вероятность перехода между состояниями, полученная в [12],
имеет вид:
L?+1T LjT d ,
Pj,j+i = ~ 1 = ~~ 1 Pj,j = 1 — Pj,j+1 ~ Pjj-^i (3.48)
77j 77j
где Lj — скорость пересечения уровня при Aj, a trj — статистическое
распределение, соответствующее j-й области:
7Tj = р (7 е Rj) =p(Aj С 7 < A,+i).
3.3. Модели замираний в широкополосных каналах
Если сигнал не узкополосный, то из-за задержек многолучевого распро-
странения мы получаем другой вид искажений. В этом случае короткий
переданный импульс длительностью Т преобразуется в принимаемый сиг-
нал длительностью Т + Тт, где Тт — разброс задержек многолучево-
го распространения. Таким образом, длительность принимаемого сигна-
ла может быть значительно увеличена. Это явление проиллюстрировано
на рис. 3.11, где импульс длительностью Т передается по многолучевому
каналу. Как показано в гл. 5, при линейной модуляции формируется пакет
импульсов, в котором каждый импульс несет в своей амплитуде и/или
фазе информацию, соответствующую информационному биту или сим-
волу8. Если разброс задержек многолучевого распространения Tm Т,
то многолучевые составляющие принимаются, почти накладываясь друг
на друга, как это показано в верхнем правом углу рисунка. Полученная
в результате конструктивная и деструктивная интерференция вызывает
узкополосное замирание импульса, но время распространения импульса
мало, вследствие чего мала интерференция с последующим переданным
импульсом. С другой стороны, если разброс задержек многолучевого рас-
пространения Tm Т, то каждая составляющая многолучевого распро-
странения может быть выделена, как это показано в нижнем правом углу
8Как это показано в § 5.4, линейная модуляция, для повышения эффективности исполь-
зования частотного диапазона, использует обычно неквадратичные формы импульса.
Глава 3. Статистические модели каналов
рисунка. Однако эти многолучевые компоненты интерферируют с после-
дующими переданными импульсами (на рисунке эти импульсы обозначе-
ны пунктиром). Этот эффект называется межсимвольной интерферен-
цией (ISI9).
Импульс 1 Импульс 2
Рис. 3.11. Многолучевое разрешение
Существует несколько методов снижения искажений, обусловленных
задержками многолучевого распространения, включая выравнивание (кор-
рекцию), модуляцию нескольких несущих и расширение спектра сигна-
лов, которые обсуждаются в гл. 11-13. Если Т Тт, то в уменьшении
межсимвольной интерференции нет необходимости, но могут быть внесе-
ны значительные ограничения на скорость передачи данных. Модуляция
на нескольких несущих и расширение спектра сигнала фактически изме-
няют характеристики передаваемого сигнала, главным образом, во из-
бежание межсимвольной интерференции. Однако при этом сигналы все
же испытывают искажения из-за многолучевого распространения, обу-
словленные частотно-селективными замираниями, которые описываются
в подпараграфе 3.3.2.
Различие между моделями замираний в широкополосных и узкополос-
ных каналах заключается в том, что с увеличением полосы частот переда-
ваемого сигнала В до величины, при которой Тт & В1, аппроксимация
и (£ — тп(£)) « u(t) становится не действительной. Поэтому принимаемый
сигнал равен сумме всех копий оригинального, исходного сигнала, в ко-
торой каждая копия задержана на время тп и смещена по фазе на <рп(£)-
Копии сигнала объединяются деструктивно, если их фазы существенно
отличаются, и искажают сигнал, если п (£ — т„) отличается от tz(t).
Так как ширина полосы частот сигнала велика по сравнению с ве-
личиной, обратной разбросу задержек многолучевого распространения,
9ISI — Intersymbol interference.
3.3. Модели замираний в широкополосных каналах 155
то аппроксимация вида (3.11) больше не может быть применена. Однако
если число многолучевых компонентов велико и фаза каждого компонен-
та распределяется равномерно, то принимаемый сигнал все еще будет
составным гауссовым процессом с нулевым средним значением и огиба-
ющей, распределенной по закону Рэлея. Тем не менее, замирания в широ-
кополосных и узкополосных каналах различаются степенью разрешения
различных составляющих многолучевого распространения. Так, разреши-
мость компонентов узкополосных сигналов меньше величины, обратной
ширине полосы частот сигнала, поэтому согласно уравнению (3.6) они
объединяются в приемнике, восстанавливая исходный переданный сигнал
с амплитудой и фазой, представляемыми случайными процессами. Как
показано в § 3.2, эти случайные процессы, в свою очередь, характеризуют-
ся собственной функцией автокорреляции (или спектральной плотностью)
и распределением мгновенных значений. Однако принимаемый широкопо-
лосный сигнал подвержен искажениям, обусловленным разбросом величин
задержек различных компонентов многолучевого распространения, по-
этому полученный сигнал не может больше характеризоваться только
амплитудой и фазой случайных процессов. Таким образом, влияние мно-
голучевого распространения на широкополосные сигналы должно учи-
тывать как задержки многолучевого распространения, так и временные
изменения в канале.
Исходной точкой при описании широкополосных каналов служит им-
пульсная характеристика с (т, t) эквивалентного низкочастотного неста-
ционарного канала. Предположим сначала, что с (т, £) является непрерыв-
ной10 детерминированной функцией т и t. Напомним, что т представляет
импульсный отклик, соответствующий заданной задержке многолучево-
го распространения, a t характеризует временные изменения. К функции
с (т, £) можно применить преобразование Фурье по t в виде:
СЮ
Зс(т,р) = J c(T,t)e~i2vpt dt. (3.49)
Назовем Sc (т, р) детерминированной функцией рассеяния эквивалентно-
го низкочастотного канала с импульсной характеристикой с(т,/). Так
как это преобразование Фурье импульсной характеристики с (т, £) по вре-
менной переменной /, то детерминированная функция рассеяния Sc (т,р),
через частотный параметр р, включает параметры эффекта Доплера в канале.
Вообще, импульсная характеристика нестационарного канала с(т, /),
заданная выражением (3.6), из-за случайных уровней сигнала, фаз и за-
10Характеристики широкополосных каналов в этом разделе можно также распро-
странить на дискретные каналы (дискретные относительно т) заменой интегралов
на суммы и преобразования Фурье на дискретное преобразование Фурье.
Глава 3. Статистические модели каналов
держек случайного числа компонентов многолучевого распространения —
величина случайная, а не детерминированная. В этом случае ее следу-
ет представить на основе статистических параметров или результатов
измерений. Так как число многолучевых компонентов велико, мы мо-
жем воспользоваться центральной предельной теоремой в предположении,
что с(т, /) представляет составной гауссовский процесс и, следователь-
но, его статистические характеристики полностью известны по среднему
значению, автокорреляции и взаимной корреляции его синфазной и ква-
дратурной составляющих. Как и в узкополосном случае, предполагаем,
что фаза каждого многолучевого компонента распределена равномерно.
Поэтому синфазная и квадратурная составляющие с (т, t) представляют
независимые гауссовские процессы с одной и той же функцией автокорре-
ляции, нулевым средним и нулевой взаимной корреляцией. Для синфазной
и квадратурной составляющих сохраняется та же статистика и в случае,
когда канал содержит только небольшое количество лучей — если ампли-
туда каждого луча распределена по закону Рэлея, а фаза распределена
равномерно. Обратите внимание, что эта модель не верна, если у канала
есть доминирующая составляющая на линии прямой видимости (LOS).
Таким образом, статистическая характеристика с (т, /) определяется
функцией автокорреляции, равной:
Ас t,t + Af) = Е [с* (n; f) с (т2; t + Af)]. (3.50)
Большинство существующих каналов стационарны в широком смысле, по-
этому совместная статистика измерений канала, произведенных в два
различных момента времени t и t + АД зависит только от длительности
интервала времени Ai. Для каналов, стационарных в широком смысле
(WSS11), функция автокорреляции при соответствующей полосе частот
пропускания канала h (т, i) = Re {с (т, t) может быть получена [19]
из Ас (ti, т2; t,t + Ait) как12
Ah (ri,T2;t, t + Af) = 0,5Re |ac (n, t2; i, t + At) gJ^/cAt}, .
Допустим, что наша модель канала может быть представлена стационар-
nWSS — Wide-sense stationary.
12Нетрудно показать, что автокорреляционная функция импульсной характеристики
тракта с полосой пропускания канала h (г, t) равна
Е [Л (п, t) h (т2, t + Дt)] =
= 0,5Re (п, тг; t,t + At) ej2’r-fcAt} 0,5Re (ti, тг; t, t + At) eJ2,rf<d2t+At)}
где Ac (ti , T2; t, t + At) = E [c (n; t) с (тг; t + At)]. Однако, если функция с (т, t) стацио-
нарна в широком смысле, то Ас (п, тг;t,t + At) = 0, поэтому Е [Л (п, t) h (т2, t + At)] =
= 0,5Re {Ac (n, T2; t, t + At) c?2^ д ‘.
3.3. Модели замираний в широкополосных каналах
ным в широком смысле процессом WSS, в этом случае автокорреляцион-
ная функция становится независимой от t:
Ас (п, т2; Д£) = Е [с* (ri, 0 с (т2, t + ДО] • (3.51)
Более того, в реальной среде параметры распространения заданной со-
ставляющей многолучевого распространения с задержкой п некоррелиро-
ванны с параметрами многолучевой составляющей при другой задержке
Л 7^ 72, так как две эти составляющие созданы разными отражателями.
Принято говорить, что такой канал имеет некоррелированное рассеяние
(US13). Стационарные в широком смысле каналы с некоррелированным
рассеянием обозначим как каналы WSSUS. Модель канала WSSUS впер-
вые была введена Бело в его революционной работе [19], где он также раз-
работал соотношения двух двумерных преобразований, связанные с этой
автокорреляционной функцией. Эти соотношения обсуждаются в под-
параграфе 3.3.4. Учитывая свойство некоррелированного рассеяния US
в (3.51), получаем
Е [с* (п, /) с (т2, t + Д£)] = Ас (п; Д£) J [п - т2\ = Ас(т; Д£), (3.52)
где Ас(т; Д/) представляет среднюю выходную мощность в канале как
функцию многолучевой задержки т — т\ = т2 при разнице Д/ во времени
наблюдения. Эта функция предполагает, что, когда п т2, то ti и т2
удовлетворяют неравенству |п — т2\ > В-1, так как в противном случае
приемник не сможет различить две эти составляющие. В этом случае две
составляющие моделируются как единый составной многолучевой тракт
с задержкой т » п ~ т2-
Функция рассеяния случайных каналов определяется преобразованием
Фурье Ас(т; Д£) по переменной Д£:
СЮ
Sc(r,p) = I Ac(T,M)erJ^f,MdAt. (3.53)
— сю
Функция рассеяния характеризует среднюю выходную мощность в канале
как функцию многолучевой задержки т и параметра эффекта Доплера р.
Обратите внимание на использование одной и той же записи спектра
Sc (т,р), как для детерминированного рассеяния, так и для функции слу-
чайного рассеяния, потому что функция определяется однозначно вне
зависимости от того, является ли импульсная характеристика канала де-
терминированной или случайной. Типичная функция рассеяния показана
на рис. 3.12.
Наиболее важные характеристики широкополосного канала, включая
его профиль задержек, полосу когерентности, доплеровский спектр мощ-
13US — Uncorrelated scattering.
Глава 3. Статистические модели каналов
ности и время когерентности, выводятся из функции автокорреляции
канала Ас(т;Д£) или функции рассеяния Sc(r, р). Эти характеристики
описываются в следующих разделах.
Относительная
Рис. 3.12.
Функция
рассеяния
3.3.1. Профиль задержек
Профиль задержек энергии сигнала Ас(т), называемый также профилем
напряженности многолучевого распространения, определяется как авто-
корреляция (3.52) при Д/ = 0: Ас(т) = Ас (т, 0). Профиль задержек распро-
странения энергии сигнала представляет собой среднюю мощность при
заданной задержке многолучевого распространения и легко измеряется
на практике. Среднее и среднеквадратическое значения разброса задер-
жек обычно определяются через параметры задержек энергии сигнала
Ас(т) в виде:
OQ
J тАс(т) дт
Гтт = ---, (3-54)
f Ас(т) dr
о
J (т ~ VTm)2 Ас(т) dT
о
сю
f Ас(т) dr
о
(3.55)
Заметьте, что Ас(т) 0 для всех т, поэтому, если определить распреде-
ление вероятностей ртт случайного разброса задержек Тт как
3.3. Модели замираний в широкополосных каналах 159
Рт,Лт) = Л , (3-56)
/ Ас(т) dr
о
то /з/рт и сгтт представляют в этом распределении соответственно сред-
нее и среднеквадратическое значения задержки Тт. Определяя распре-
деление задержек Тт с помощью (3.56) (или, что равносильно, определяя
среднее и среднеквадратическое значения задержек по (3.54) и (3.55) соот-
ветственно) , производят взвешивание задержек различных составляющих
многолучевого распространения по величине их относительной мощно-
сти, так что слабые составляющие многолучевого распространения мень-
ше влияют на разброс задержек, чем сильные. При этом составляющие
многолучевого распространения, энергия которых ниже порога шума, не
будут существенно влиять на эти параметры задержек.
Время задержки Т, при котором автокорреляция Ас(т) « 0 при т Т
может использоваться для приблизительной оценки разброса задержек
в канале, и это значение часто принимается равным меньшей целой части
среднеквадратической величины разброса задержек. Например, предпо-
ложим, что Ас(т) яа 0 для т > Зсгцт. При таком приближении линейный
модулированный сигнал с длительностью периода следования символов Ts
испытывает значительные межсимвольные искажения, если Ts <«С а-рт На-
оборот, если Ts <7тт, система испытывает незначительные межсимволь-
ные искажения. Для расчетов можно допустить, что условие Ts иТт
равносильно условию Ts < сггт/10, и что Ts <Ттт, предполагает Ts >
> 10<ттт. Если длительность символа Ts имеет тот же порядок, что и атт;
то будет наблюдаться некоторая межсимвольная интерференция, кото-
рая, в зависимости от особенностей системы и канала, может существенно
ухудшать или не ухудшать показатели работы. В последующих главах мы
рассмотрим ухудшение качества работы линейно модулированных систем
под воздействием межсимвольной интерференции, а также методы сни-
жения влияния межсимвольной интерференции.
Хотя во многих каналах с большим количеством рассеивателей цтт ~ а-/гп,
точное соотношение между и оду. зависит от вида функции Ас(т). Для
канала без составляющей прямой видимости и с небольшим числом соста-
вляющих многолучевого распространения с приблизительно одинаковыми
большими задержками, &тт- В этом случае большая величина сред-
ней задержки цтт вводит в заблуждение, так как в действительности все
копии передаваемого сигнала приходят приблизительно в одно и то же
время, и демодулятор синхронизируется по этой общей задержке. Обыч-
но допускается, что устройство синхронизации захватывает многолуче-
вую составляющую приблизительно в момент времени, соответствующий
160 Глава 3. Статистические модели каналов
среднему значению задержки, и в этом случае среднеквадратическое зна-
чение разброса задержек характеризует разброс по времени в канале.
Пример 3.4. Профиль задержки энергии распространения часто может быть
аппроксимирован односторонним экспоненциальным распределением:
Ас(т) = ^-еГТ<г’", т 0.
Покажите, что средний разброс задержек (3.54) равен цтт = Тт и найдите
среднеквадратическое значения разброса задержек (3.55).
Решение. Можно без труда показать, что интеграл Ас(т) равен единице. Сред-
нее значение разброса задержек в этом случае составляет:
»тт = [ те~г>Тт dr = Tm,
J- т J
0
а среднеквадратическое значение разброса задержек равно:
Таким образом, для экспоненциально распределенного профиля задержки энер-
гии распространения, среднее и среднеквадратическое значение разброса задер-
жек одинаковы.
Пример 3.5. Рассмотрим широкополосный канал с профилем напряженности
многолучевого распространения, заданным в виде:
. . . _ ( е~Т/О’0000!, 0 т 20 мкс,
с Г ( 0, иначе.
Определите среднее и среднеквадратическое значения разброса задержек в ка-
нале и найдите такую максимальную скорость символов, чтобы линейно модули-
рованный сигнал при передаче по данному каналу не испытывал межсимвольных
помех.
Решение. Среднее значение разброса задержек равно:
20-106
/ те-т/°’0000Чт
цт = ——--------------------= 6,87 мкс.
,т 20-10—6
/ е-^/0.000 01 г/т
о
Среднеквадратическое значение разброса задержек равно:
°тт
20106
j (т - Дтт)2 е_770’00001 dr
—2------------------------------= 5,25 мкс.
голо-6 ’
/ е-г/о,000 01 dT
0
3.3. Модели замираний в широкополосных каналах
Из этого примера видно, что среднее и среднеквадратическое значения раз-
броса задержек приблизительно равны. Во избежание межсимвольной интер-
ференции ISI нам необходимо использовать линейную модуляцию, при которой
длительность символа Ts больше &тт Принимая, что Ts > Ю<ттт, получаем
период следования символов Ts = 52,5 мкс или скорость следования символов
Rs = \/Т\ = 19,04 килосимволов в секунду. В частности, для двоичных видов
модуляции, при которых скорость символов равна скорости передачи данных
(биты в секунду), для передачи речи требуется порядка 32 кбит/с, а для пере-
дачи данных — более высокая скорость порядка 10-100 Мбит/с.
3.3.2. Полоса когерентности
Используя преобразование Фурье импульсной функции с (т; t) по т, можно
охарактеризовать нестационарный канал с многолучевым распростране-
нием в частотной области. Зададим случайный процесс в виде:
ОО
С (/;£) = У с (т; t)e^fr dr. (3.57)
—сю
Так как с (т; t) представляет комплексную гауссовскую случайную величи-
ну во временной области t с нулевым средним значением, то преобразова-
ние Фурье (3.57) представляет сумму14 комплексных гауссовских случай-
ных процессов с нулевым средним значением; откуда следует, что С (J-, t)
также является гауссовским случайным процессом, который полностью
характеризуется функцией автокорреляции. Так как с (т; £) представляет
стационарный в широком смысле процесс WSS, то и его интеграл С (J; t)
также является таковым. Поэтому функция автокорреляции (3.57) опре-
деляется выражением::
Ac (EJa A*) = Е [С* (Л; t) С (/2; t + Af)]. (3.58)
Мы можем упростить Ас (/1, /2; Ai) следующим образом:
У с (т2', t + Ai) е у2'г^2'Г2 Jt2 =
; t + ^t)]ej2vflT1e-j2vf2T2dT1dT2 =
ОО
Ас (т, dr = Ac(Af; Af), (3.59)
где А/ = /2 — /1, а третье выражение следует из свойств стационарности
в широком смысле и некоррелированного рассеяния с(т;£). Следователь-
14Мы можем выразить интеграл как предел суммы дискретных составляющих.
162 Глава 3. Статистические модели каналов
но, автокорреляция С (f; t) в частотной области зависит только от раз-
ницы частот Д/. На практике значения функции Ас(Д/; Д/) могут быть
измерены с помощью передачи по каналу пары синусоид, разнесенных
по частоте на величину Д/, с последующим расчетом функции их взаим-
ной корреляции на приеме в течение временного интервала Д/.
Если функция автокорреляции определена как Ас Af) = Ас (Д/;0),
то из (3.59) следует:
Ас (Д/) = J Ас(г)е^Л/т dr. (3.60)
—сю
Поэтому Ac Af) представляет собой преобразование Фурье функции
профиля задержек энергии. Так как Ac Af) — Е [С* (ft, t) С (f + Д/; £)] —
это функция автокорреляции, то характеристика канала приблизитель-
но независима на интервалах частот порядка Д/, когда Ac Af) ~ 0.
Частота Вс, для которой Ac Af) ~ 0 ПРИ всех > Вс, называется
когерентной полосой пропускания (или полосой когерентности) канала.
Если Ас(т) « 0 при всех т > Т, то при преобразовании Фурье Ас(т)
и Ac Af), A' Af) ~ 0 при А/ > 1/Т. Следовательно, минимальный
разнос по частоте Вс, при котором характеристики канала примерно не-
зависимы, равен Вс ~ 1/Т, где значение Т обычно принимается равным
среднеквадратическому значению величины Ас(т). Более общее при-
ближение имеет вид Вс « к/ат™, где к зависит от формы Ас(т) и точного
определения когерентной полосы пропускания. Например, Ли [20] показал,
что выражение Вс « 0,02/сттт аппроксимирует полосу частот, в которой
величина корреляции превышает 0,5.
В общем, при передаче узкополосного сигнала с полосой пропускания
В <( ВС, замирания по всей полосе пропускания сигнала хорошо корре-
лированны, и поэтому примерно равны. Обычно это называют равномер-
ными замираниями. С другой стороны, если полоса пропускания сигнала
В 3> Вс, то значения сигнала в канале на частотах, удаленных на рассто-
яние больше величины полосы когерентности, приблизительно независи-
мы. Поэтому величина сигнала изменяется внутри полосы пропускания
сигнала в широком диапазоне. В этом случае замирания называются ча-
стотно-избирательными. Если же В « Вс. то поведение канала находится
где-то между равномерными и частотно-избирательными замираниями.
Обратите внимание на то, что при линейной модуляции полоса частот
сигнала В обратно пропорциональна длительности символа Ts, поэтому
при равномерных замираниях Ts ~ 1/В 1/Вс ~ отт, что соответствует
случаю, когда канал испытывает незначительные межсимвольные помехи.
При частотно-избирательных замираниях Ts « 1/В <«С 1/В,. = сгтт, что
соответствует случаю, когда линейно модулированный сигнал испытыва-
3.3. Модели замираний в широкополосных каналах
ет значительные межсимвольные искажения. Форматы широкополосных
сигналов, снижающие межсимвольные искажения, такие как модуляция
на нескольких несущих и расширение спектра, по-прежнему испытывают
частотно-избирательные замирания в своей полосе пропускания, и это
ухудшает их характеристики, что будет обсуждаться в гл. 12 и 13.
Рис. 3.13. Профиль задержек энергии сигнала, среднеквадратическое значение
разброса задержек и когерентная полоса пропускания
На рис. 3.13 показаны профиль задержек энергии сигнала Ас(т) и его
преобразование Фурье Ac (Af). Также на рисунке показаны два сигна-
ла, наложенных на Ac узкополосный сигнал с полосой пропускания
менее Вс и широкополосный сигнал с полосой пропускания, намного боль-
шей Вс. Видно, что функция автокорреляции Ac (Af ) в полосе пропус-
кания узкополосного сигнала однородна, поэтому данный сигнал будет
испытывать равномерные замирания или (что равносильно) незначитель-
ные межсимвольные искажения ISI. В тракте широкополосного сигнала
автокорреляция Ac (Af ) стремится к нулю, что означает, что замирания
будут независимы в различных частях полосы пропускания сигнала. Сле-
довательно, в этом случае замирания будут частотно-избирательными,
а линейно модулированный сигнал, передаваемый по каналу, будет испы-
тывать значительные межсимвольные искажения ISI.
Пример 3.6. В канале внутри помещения атт ~ 50 нс, а во внешней микросо-
те атт ~ 30 мкс. Найдите максимальную скорость передачи символов Rs = 1 /Ts
в этих средах распространения — такую, чтобы линейно модулированный сиг-
нал, передаваемый через них, испытывал незначительные межсимвольные иска-
жения ISI.
Решение. Предположим, что для незначительных межсимвольных искажений
ISI необходимо выполнение условия Ts атт (т. е. Ts Юотт)- Для скорости
следования символов это соответствует Rs = 1/TS 0,1/<ттт. При сгТт ~ 50 нс
это дает Rs 2 Мбит/с, а для <зтт ~ 30 мкс: Rs 3,33 кбит/с. Заметьте, что
внутренние системы в настоящее время обеспечивают скорости до 50 Мбит/с,
а внешние системы — до 2,4 Мбит/с. Чтобы сохранить эти скорости для линейно
модулированных сигналов и избежать серьезных ухудшений качества из-за меж-
символьных помех 1ST, необходимо использовать какой-либо метод подавления
164 Глава 3. Статистические модели каналов
этих помех. Более того, из-за изначально более низких значений разброса задер-
жек, межсимвольные помехи в системах внутри зданий слабее, чем во внешних
средах, что объясняет, почему в системах внутри зданий наблюдается тенденция
к более высоким скоростям передачи данных, чем во внешних системах.
3.3.3. Доплеровский спектр мощности
и время когерентности канала
Временные изменения канала, возникающие из-за передвижения передат-
чика или приемника, вызывают в принимаемом сигнале доплеровское сме-
щение частоты. Этот эффект Доплера можно охарактеризовать с помо-
щью преобразования Фурье функции автокорреляции Ар(Д/; Д£) по Д£:
СЮ
5с(Д/;р)= У (3.61)
— сю
Чтобы охарактеризовать эффект Доплера на одной частоте, примем, что
Д/ равно нулю, а затем определим Sc(p) — Sc (О', р). Легко показать, что:
СЮ
Sc(p) = У Ас (Д«) e~j2vpM d&t, (3.62)
—сю
где Ac (At) — Ac (Af = 0; Д/). Обратите внимание, что Ас (Д£) — функ-
ция автокорреляции, определяющая спад зависимости импульсной харак-
теристики канала во времени. В частности, равенство Ас (Д4 = Т) = 0
означает, что отсчеты импульсной характеристики канала через про-
межутки времени Т некоррелированны, и, следовательно, независимы,
поскольку канал представляет случайный гауссовский процесс. Интер-
вал времени когерентности канала15 Тс определяется множеством зна-
чений Д£, на которых функция автокорреляции Ас (At) не равна нулю.
Поэтому интервал корреляции нестационарного канала приблизительно
равен Тс секунд. Функция Sc(p) называется доплеровским спектром мощ-
ности канала. Так же как и преобразование Фурье функции автокор-
реляции, Sc(p) представляет спектр принимаемого сигнала в функции
параметра р эффекта Доплера. Максимальное значение р, при котором
|5'с(р)| больше нуля, называется доплеровским интервалом частот ка-
нала и обозначается как В у. В соответствии с преобразованием Фурье
между Ас (Д<) и Sc(p) получаем, что Bp sa ^/Тс. Если и передатчик
и отражатели неподвижны, а приемник движется со скоростью и, то до-
плеровский интервал Bd v/7 = /р. Напомним, что в модели замираний
в узкополосном канале отсчеты становятся независимыми через интервал
15В отечественной литературе этот интервал времени принято называть интервалом
корреляции. — Прим, перев.
3.3. Модели замираний в широкополосных каналах
времени Af = 0,4//р, поэтому в общем случае Вр> » к/Тс, где к зависит
от формы Sc{p). Доплеровский спектр мощности Sc{p) и его обратное
преобразование Фурье Ac (Af) проиллюстрированы на рис. 3.14.
Рис. 3.14. Доплеровский
спектр мощности, допле-
ровский частотный интер-
вал и время когерентно-
сти (корреляции)
Пример 3.7. Для канала с доплеровским частотным интервалом Во = 80 Гц
найдите величину разноса во времени, необходимую для отсчетов принимаемого
сигнала, чтобы отсчеты были примерно независимы.
Решение. Интервал времени когерентности канала равен Тс к 1/Во = 1/80,
так что отсчеты, расположенные на 12,5 мс друг от друга приблизительно не-
коррелированные. Поэтому, исходя из гауссовских свойств лежащего в основе
случайного процесса, эти отсчеты являются приблизительно независимыми.
3.3.4. Преобразования автокорреляции
и функции рассеяния
Из выражения (3.61) можно видеть, что функция рассеяния Зс(т; р), опре-
деляемая выражением (3.53), представляет обратное преобразование Фурье
функции Sc(&f',p) по переменной А/. Более того, Sc(r;p) и Ас(А/; Af)
связаны двойным преобразованием Фурье:
СЮ сю
Sc(r;p) = У У Ac(^f;^t)e-j2vp^ej2vT^dbtd&f. (3.63)
— сю —сю
Соотношения между четырьмя функциями Ac(&f', At),Ac(r; Af), Sc(Af', p),
Sc(t;p) показаны на рис. 3.15.
Эмпирические измерения функции рассеяния заданного канала часто
используются для аппроксимации разброса задержек канала, полосы коге-
рентности, разброса доплеровской частоты и временного интервала коге-
рентности (корреляции). Для определения интервала разброса задержек
в канале с функцией эмпирического рассеяния Зс(т. р) рассчитывается
профиль эмпирических задержек энергии Ас(т) с помощью преобразова-
ния Ас(т; Af) = Fp1 [бДт; р)] при Af = 0, на основании которого затем
определяются среднее и среднеквадратическое значения разброса задер-
жек. После этого можно оценить полосу когерентности как Вс «
Подобным образом можно оценить разброс доплеровской частоты Вр как
166 Глава 3. Статистические модели каналов
диапазон значений р, в котором функция 5(0; р) отлична от нуля с вре-
менным интервалом когерентности Тс » 1/Вр.
Рис. 3.15. Взаимосвязь
преобразований Фурье
3.4. Дискретно-временная модель
Часто моделирование импульсной
Рис. 3.16. Модель канала с точечным рас-
сеиванием
характеристики нестационарного
канала слишком сложно для упро-
щенного анализа. В этом случае
можно воспользоваться дискретно-
временным приближением широ-
кополосной многолучевой модели.
Эта дискретно-временная модель,
разработанная Турином в [21], осо-
бенно полезна при изучении систем
с расширенным спектром и при-
емников RAKE (рассматриваемых
в гл. 13). Дискретно-временная мо-
дель основывается на физической
среде распространения сигнала, состоящей из набора изолированных то-
чечных отражателей, как показано на рис. 3.16. В этой модели предпола-
гается, что составляющие многолучевого распространения группируются
в пучки — подканалы. Входящие лучи данного подканала с примерно
равными задержками тп объединяются в один пучок, а входящие кана-
лы, сгруппированные в различные подканалы с задержками тп и тт при
|rn — rm| > 1/B могут быть разрешены, т.е. отличены друг от друга.
Здесь символ В означает ширину полосы пропускания сигнала.
Чтобы включить в модель канала (3.6) фиксированное число подкана-
лов (N + 1), выражение (3.6) преобразуется следующим образом:
N
с (т; <) = ^2 an(i)e“^nW5 (т - r„(f)). (3.64)
п=0
Г1 г2 Гч г4 г5 гь гм
ill I______________I I I_______I.. I I___________I I I-------►
о Т 2Т ЗТ 47 57 6Т МТ Задержка
Рис. 3.17. Дискретно-временная аппроксимация многолучевого распространения
Статистика сигнала на приеме для заданного времени t задается ста-
тистикой {тп}^, {а„}^, {1Рп}о Используя дискретно-временное прибли-
жение, модель можно упростить далее следующим образом. Для фик-
сированного момента t временная ось делится на М равных интерва-
лов продолжительностью Т, так что МТ <ттт, где сттт представляет
среднеквадратическое значение разброса задержек в канале (эти данные
получают экспериментально). Как показано на рис. 3.17, число подка-
налов ограничивается числом столбцов М временных интервалов так,
чтобы каждый подканал находился в одном временном интервале. Ин-
тервал многолучевого разброса в этой дискретной модели равен МТ,
а разрешающий межканальный интервал равен Т. В основе разрешаю-
щей способности лежит ширина полосы передаваемого сигнала: Т » 1/В.
Статистика для n-ного интервала rn (1 С п С М) строится на основе дво-
ичных показателей наличия составляющей многолучевого распростране-
ния в n-ном столбце следующим образом: rn = 1, если в n-ном столбце
есть многолучевой компонент, и гп = 0 в противном случае. Если г,, = 1,
то амплитуда и фаза (ап,вп), соответствующие этой составляющей, под-
чиняются эмпирически определенному распределению. Это распределение
определяется по выборочным средним значениям (ап,дп) Для каждого п
в различных точках среды распространения. Эмпирические распределе-
ния (ап-,6п) и (ат,^т), п m в общем случае могут быть различными;
они могут относиться к одному и тому же семейству замираний, но иметь
различные параметры (например, замирания Райса с различными коэф-
фициентами К) или представлять совершенно различные распределения
замираний (например, замирания Рэлея для n-того столбца и замирания
Накагами для m-ного столбца).
Глава 3. Статистические модели каналов
На этом цикл измерений для статистической модели дискретно-вре-
менной аппроксимации завершается. Последовательность таких профи-
лей изменений сигнала во времени создает модель изменения импульс-
ной характеристики канала — например, импульсной характеристики,
наблюдаемой приемником, движущимся на какой-то ненулевой скорости
по городу. Таким образом, модель должна включать в себя не только
статистику первого порядка (т„, ап, <д„) каждого профиля (соответствен-
но, каждого Г), но также временные и пространственные корреляционные
связи между ними (предполагается, что эти связи обладают марковскими
свойствами). Более подробную информацию об этой модели и полученных
эмпирически распределениях для N и (т„,а„,<д„) можно найти в [21].
3.5. Пространственно-временные модели каналов
Многоэлементные антенны передатчиков и/или приемников становят-
ся обычным явлением в беспроводных системах благодаря своему разно-
образию и достоинствам. Системы с многоэлементными антеннами ну-
ждаются в моделях каналов, которые представляют как пространствен-
ные (угол падения), так и временные характеристики канала. Обычная
модель предполагает, что канал состоит из нескольких рассеивающих
центров, которые создают условия многолучевого распространения [22, 23].
Места нахождения рассеивающих центров относительно приемника опре-
деляют углы падения (АОА16) соответствующих компонентов многолуче-
вого распространения. Такие модели могут быть двумерными или трех-
мерными.
Рассмотрим двумерную многоканальную среду распространения сиг-
нала, в которой приемник или передатчик имеет антенную решетку (АР)
с М элементами. Модель нестационарной импульсной характеристики
(3.6) может быть расширена с тем, чтобы включить углы падения в мо-
дель антенной решетки следующим образом:
w(t)
с ("Б 0 = 52 (^n(i)) (г - Tn(f)), (3.65)
п=0
где <рп(С) соответствует фазовому сдвигу в начале решетки, а а($п(£)) —
вектор характеристики решетки, задаваемый выражением:
а(0п(*)) = (3.66)
где т/>П)г = [xi cos#„(£) + yi sin#„(£)] 2тг/А для координат (a?i, yj относитель-
но начального места нахождения антенны, а — углы падения АОА
1вАОА — Angle of arrival.
лучей многолучевого распространения относительно антенной решетки.
Допустим, что углы падения АОА представляют стационарный процесс
с одинаково распределенными компонентами и обозначим этот случай-
ный угол как в. Пусть А(0) означает среднюю мощность принимаемого
сигнала как функцию угла в. Тогда среднее и среднеквадратическое зна-
чения разброса углов падения выражаются через этот профиль мощности как:
f ЗА (0) de
№ =
J А (0) 00
J (e-^e)2A(e)de
СТ0 =
N
f а (0) de
(3.67)
(3.68)
соответственно. Говорят, что два сигнала, пришедшие под углами, разде-
ленными на величину Х/сгв, примерно некоррелированны. Более подробно
о распределении мощности в зависимости от углов падения для различ-
ных сред распространения (вместе с соответствующими корреляционны-
ми связями элементов антенны) можно прочитать в [23].
Расширение двумерных моделей до трехмерных требует задания воз-
вышения и азимута углов падения в условиях многолучевого распростра-
нения. Различные трехмерные модели таких каналов предложены в [24,
25, 26]. Эти идеи были использованы в [22] для включения пространствен-
но-временных характеристик в единую модель равномерного рассеяния
Джейкеса. Несколько других статей по пространственно-временному мо-
делированию можно найти также в [27].
Задачи
3.1. Рассмотрим двулучевой канал, состоящий из прямого луча и луча, от-
раженного от земли, когда передатчиком служит неподвижная базовая
станция на высоте h, а приемник установлен на подвижной станции (так-
же на высоте h). Передвижная станция начинает движение вблизи базовой
станции и удаляется от нее со скоростью v. Допустим, что ослабление
сигнала в каждом канале происходит по модели потерь в свободном про-
странстве. Определите импульс нестационарного канала на приемнике
при удалении передатчика и приемника друг от друга на расстояние
d — vt, достаточно большое для пути отраженного луча, чтобы можно
было принять примерно равным г + г' ~ d + 2/г2/0.
3.2. Получите формулу для расчета интервала разброса задержек многолуче-
вого распространения Тт в модели двулучевого канала. Найдите упро-
Глава 3. Статистические модели каналов
щенную формулу, когда взаимное удаление передатчика и приемника друг
от друга относительно большое. Рассчитайте Тт для hi = 10 м, hr = 4 м
и d = 100 м.
3.3. Рассмотрим стационарный беспроводной канал внутри помещения, со-
держащий канал прямой видимости LOS с задержкой 23 нс, отраженную
составляющую с задержкой 48 нс и еще одну составляющую с задержкой
67 нс. Найдите разброс задержек, предполагая, что демодулятор синхро-
низируется по составляющей прямой видимости LOS. Повторите вычи-
сления, предполагая, что демодулятор синхронизируется по первой отра-
женной составляющей многолучевого распространения.
3.4. Покажите, что минимальное значение /стп в системе, работающей на /с =
= 1 ГГц с неподвижным передатчиком и приемником, удаленным на более
10 м от передатчика, намного больше 1.
3.5. Докажите, что для двух независимых гауссовских случайных величин
X и Y с нулевым средним значением и дисперсией ст2, величина Z =
= \/X'1 + Y2 имеет распределение Рэлея, и что величина Z2 имеет экспо-
ненциальное распределение.
3.6. Задан канал с замираниями, распределенными по закону Рэлея, и средней
мощностью сигнала 2сг2 = —80 дБм. Какова вероятность перерыва связи
в этом канале при пороговом значении Ро = — 95 дБм? Что можно сказать
о Ро = -90 дБм?
3.7. Предположим, что у нас есть приложение, для которого требуется ве-
роятность нарушения связи, равная 0,01, при пороговой мощности Ро =
= —80 дБм. Какое необходимо значение средней мощности сигнала при
рэлеевских замираниях?
3.8. Задан канал с замираниями Райса с 2ст2 = —80 дБм и требуемой мощ-
ностью Ро = —80 дБм. Найдите вероятность нарушения связи, допуская,
что составляющая по линии прямой видимости LOS имеет среднюю мощ-
ность, равную s2 = —80 дБм.
3.9. Эта задача показывает, что «хвосты» распределения Райса могут суще-
ственно отличаться от его аппроксимации Накагами. Начертите график
функции распределения Райса при К = 1, 5, 10 и соответствующего
распределение Накагами с т = (К + I)2 / (2К + 1). Вообще, в коком слу-
чае — для распределения Райса или его аппроксимации Накагами —
вероятность нарушения связи р (7 < ж)при больших х будет больше?
3.10. С целью повышения качественных показателей сотовых систем, многие
базовые станции могут принимать сигнал, переданный с данного мобиль-
ного устройства и объединять множество сигналов либо методом отбора
самого сильного, либо суммированием всех сигналов (возможно, с каким-
то оптимальным весом). Это обычно повышает отношение сигнал-шум
SNR и снижает влияние эффектов экранирования. Объединение сигналов,
полученных от многих базовых станций, называется макроразнесением,
и в данной задаче мы исследуем преимущества этого метода. Разнесение
будет рассмотрено более детально в гл. 7.
Рассмотрим мобильное устройство сотовой сети, находящееся на оди-
наковом расстоянии от двух базовых станций. Принимаемые сигналы
(в дБ/Вт) от базовой станции задаются в виде:
Prl=W + Zi, P,,2 = W + Z2,
где Zi,2 — случайные величины ЛЦО, ст2)1. При макроразнесении потеря
связи определяется как случай, когда и Ргд, и Рг,2 падают ниже порога Т.
а) Объясните смысл параметров W, Zi,Z2 в выражениях для Pr,i и Рг2.
б) Если величины А и Z2 независимы, покажите, что вероятность потери
связи равна
Pout = [Q (Л/ст)]2 ,
где А = W — Т — границы замирания сигнала в месте расположения
мобильного устройства.
в) Теперь предположим, что величины Z\ и Z2 связаны следующими со-
отношениями:
Zj = аУ1 + &У, Z2 = aY2 + bY,
где У, У1, Уг — независимые случайные величины N (0, ст2), а параме-
тры а и b такие, что а2 + Ь2 — 1. Покажите, что
р _ [ 1 ГЛ) М + бустАТ2 _^/2,
fout — / /—— Qi it I в dy.
J V27T L \ lal(T /J
г) Сравните вероятность потери связи в пунктах б) и в) для частного
случая а = b = 1/-\/2, ст = 8, А = 5 (для этого потребуется численное
интегрирование).
3.11. Целью этой задачи является разработка модели замираний Рэлея для ка-
нала мобильной связи, использующего метод фильтрации гауссовского
процесса, основанной на спектральной плотности мощности синфазной
и квадратурной составляющих, как описано в подпараграфе 3.2.1. В этой
задаче требуется следующее.
а) Разработайте имитационную модель генерации сигнала с амплитудны-
ми замираниями, распределенными во времени по закону Рэлея. Часто-
та дискретизации должна быть как минимум 1000 отсчетов в секунду,
среднее значение огибающей на приеме должно быть равно 1, а модель
должна характеризоваться доплеровской частотой /п. Программный
пакет Matlab — самый простой способ создания такой модели, но дру-
гие средства также подойдут.
б) Дайте описание вашей модели, которое бы ясно показывало, как мо-
дель генерирует огибающую замираний; используйте блок-схему и лю-
бые необходимые соотношения.
1Лг(0, <т2) — обозначение гауссовой (нормальной) случайной величины с нулевым сред-
•_> 2
ним и дисперсией ст .
Глава 3. Статистические модели каналов
в) Запустите вашу имитационную программу.
г) Начертите графики величины сигнала на приеме в дБ в зависимости
от времени при /р = 1, 10 и 100 Гц за 2 с.
3.12. Для канала с замираниями Рзлея при средней мощности Рг = 30 дБ и до-
плеровской частоте fo = 10 Гц рассчитайте среднюю продолжительность
замирания для заданных предельных значений Pq = 0 дБ, Ро = 15 дБ
и Pq = 30 дБ.
3.13. Выведите формулу средней продолжительности времени, когда процесс
с замираниями Рзлея со средней мощностью Рг остается выше заданно-
го значения замирания Pq. Вычислите эту среднюю продолжительность
времени при Рг — 20 дБ, Ро = 25 дБ и /д = 50 Гц.
3.14. Задан канал с замираниями, распределенными по закону Рэлея, со средней
мощностью сигнала Рг = 10 дБ и доплеровской частотой /р = 80 Гц. Тре-
буется применить к каналу модель Маркова с конечным числом состояний
и временным интервалом Т = 10 мс. Состояния Rj соответствуют
Ri = {? ’• — оо 7 < —10 дБ} ,
Яз = {? 0 дБ 7 < 5 дБ} ,
Rs = {7 : Ю дБ 7 7 <15 дБ},
/?7 = {7 : 20 дБ 7 < 30 дБ} ,
#2 = {7 -Ю дБ 7 < 0 дБ} ,
Я4 = {7 : 5 дБ 7 < 10 дБ} ,
R6 = {7 : 15 дБ 7 < 20 дБ} ,
Rs = {7 : 30 дБ 7 00} .
Найдите вероятности перехода между всеми состояниями в этой модели.
3.15. Рассмотрим функцию рассеяния в канале, полученную при передаче по это-
му каналу синусоидального сигнала частотой 900 МГц:
aid(r),
аг<5 (г — 0,022 мкс),
0,
р = 70 Гц,
р = 49,5 Гц,
иначе,
где коэффициенты щ и аг определяются потерями вследствие распро-
странения, экранирования и многолучевых замираний. Ясно, что данная
функция рассеяния соответствует двулучевой модели. Представьте, что
передатчик и приемник, используемые для передачи и приема синусои-
дального сигнала, расположены на высоте 8 м над землей.
а) Найдите расстояние и скорость между передатчиком и приемником.
б) Для расстояния, рассчитанного в пункте а), определите, являются ли
потери на трассе функцией расстояния, пропорциональной d~2 или
Совет: Учтите тот факт, что используется двулучевая модель
канала.
в) Какие замирания испытывает речевой сигнал частотой 30 кГц при
передаче по данному каналу — равномерные или же частотно-избира-
тельные?
3.16. Рассмотрим широкополосный канал с функцией автокорреляции
3.17.
л < _ J sine (W At), 0^10 мкс,
Лс ('т’( 0, иначе,
где W = 100 Гц, a sine (а;) = sin (тга;) / (тга;).
а) Соответствует ли этот канал условиям распространения внутри зда-
ния или же вне его, и почему?
б) Сделайте эскиз графика функции рассеяния для этого канала.
в) Рассчитайте средний и среднеквадратический разброс задержек в ка-
нале, а также интервал доплеровской частоты.
г) Приблизительно в каком диапазоне скоростей передачи данных сиг-
нал, передаваемый в этом канале, будет испытывать частотно-избира-
тельные замирания?
д) Как вы думаете, можно отнести статистику замираний в этом канале
к распределению Рэлея или Райса? Почему?
е) Представьте систему связи с узкополосной двоичной модуляцией. В сис-
теме используется кодирование с исправлением ошибок, позволяющее
исправлять двойные ошибки. Предполагается, что ошибка возникает
всегда, когда принимаемая мощность сигнала ниже среднего значения.
Если мощность сигнала выше или равна среднему значению, то ошиб-
ка не возникает. Какова будет максимальная скорость безошибочной
передачи данных по каналу с замираниями, распределенному по за-
кону Рэлея? Примите, что продолжительность замираний никогда не
превышает среднее значение более чем в два раза.
Пусть функция рассеяния Sc (т, р) не равна нулю на интервалах 0 т
0,1 мс и 0 р 0,1 Гц. Представьте, что мощность функции рассеяния
приблизительно равномерна в пределах диапазона, где она не равна нулю.
а) Чему равен разброс задержек многолучевого распространения и ин-
тервал доплеровской частоты канала?
б) Предположим, вы вводите в этот канал две одинаковые синусоиды,
разделенные во времени на интервал At. Каково минимальное значение
А/, при котором отклик канала на первую синусоиду будет почти
независим от отклика канала на вторую синусоиду?
в) Для двух входных синусоидальных сигналов
ui (t) = sin 2тг ft и u2(t) = sin2Tr/(t + At)
найдите минимальное значение At, при котором отклик канала на сиг-
нал ui(t) будет почти независим от отклика канала на u2(t).
г) Какие замирания (равномерные или частотно-избирательные) будут наб-
людаться в случае обычного речевого канала с полосой пропускания 3 кГц
и в случае канала сотовой связи с полосой пропускания 30 кГц?
174 Глава 3. Статистические модели каналов
Литература
1. Т. S. Rappaport, Wireless Communications - Principles and Practice, 2nd ed.,
Prentice-Hall, Englewood Cliffs, NJ, 2001.
2. D. Parsons, The Mobile Radio Propagation Channel, Wiley, New York, 1994.
3. R. S. Kennedy, Fading Dispersive Communication Channels, Wiley, New York,
1969.
4. R. H. Clarke, «А statistical theory of mobile radio reception», Bell System Tech. J.,
pp. 957 1000, July/August 1968.
5. W.C. Jakes, Jr., Microwave Mobile Communications, Wiley, New York, 1974.
6. M.K. Simon and M.S. Alouini, Digital Communication over Fading Channels:
A Unified Approach to Performance Analysis, Wiley, New York, 2000.
7. G. L. Stuber, Principles of Mobile Communications, 2nd ed., Kluwer, Dordrecht,
2001.
8. M. Patzold, Mobile Fading Channels, Wiley, New York, 2002.
9. S. 0. Rice, «Mathematical analysis of random noise», Bell System Tech. J.,
pp. 282-333, July 1944, and pp. 46-156, January 1945.
10. F. Babich, G. Lombardi, and E. Valentinuzzi, «Variable order Markov modeling
for LEO mobile satellite channels», Elec. Lett., pp. 621-3, April 1999.
11. A. M. Chen and R. R. Rao, «On tractable wireless channel models», Proc. In-
ternal. Sympos. Pers., Indoor, Mobile Radio Commun., pp. 825-30, September
1998.
12. H. S. Wang and N. Moayeri, «Finite-state Markov channel — A useful model for
radio communication channels», IEEE Trans. Veh. Tech., pp. 163-71, February
1995.
13. С. C. Tan and N. C. Beaulieu, «On first-order Markov modeling for the Rayleigh
fading channel», IEEE Trans. Commun., pp. 2032-40, December 2000.
14. C Pimentel and I. F. Blake, «Modeling burst channels using partitioned Fritch-
man’s Markov models», IEEE Trans. Veh. Tech., pp. 885-99, August 1998.
15. Y. L. Guan and L. F. Turner, «Generalised FSMC model for radio channels with
correlated fading», IEE Proc. Commun., pp. 133-7, April 1999.
16. M. Chu and W. Stark, «Effect of mobile velocity on communications in fading
channels», IEEE Trans. Veh. Tech., pp. 202-10, January 2000.
17. C. Komninakis and R. D. Wesel, «Pilot-aided joint data and channel estimation
in flat correlated fading», Proc. IEEE Globecom Conf., pp. 2534-9, November
1999.
18. M. Peleg, S. Shamai (Shitz), and S. Galan, «Iterative decoding for coded non-
coherent MPSK communications overphase-noisyAWGN channels», IEE Proc.
Commun., pp. 87-95, April 2000.
19. P. A. Bello, «Characterization of randomly time-variant linear channels», IEEE
Trans. Commun. Syst., pp. 360-93, December 1963.
20. W. C.Y. Lee, Mobile Cellular Telecommunications Systems, McGraw-Hill, New
York, 1989.
Литература
21. G.L. Turin, «Introduction to spread spectrum antimultipath techniques and
their application to urban digital radio», Proc. IEEE, pp. 328-53, March 1980.
22. Y. Mohasseb and M. P. Fitz, «А 3-D spatio-temporal simulation model for wire-
less channels», IEEE J. Sei. Areas Commun., pp. 1193-1203, August 2002.
23. R. Ertel, P. Cardieri, K.W. Sowerby, T. Rappaport, and J.H. Reed, «Overview
of spatial channel models for antenna array communication systems», IEEE
Pers. Commun. Mag., pp. 10-22, February 1998.
24. T. Aulin, «А modified model for fading signal at the mobile radio channel»,
IEEE Trans. Veh. Tech., pp. 182-202, August 1979.
25. J. D. Parsons and M. D. Turkmani, «Characterization of mobile radio signals:
Model description», Proc. IEE, pt. 1, pp- 549-56, December 1991.
26. J. D. Parsons and M. D. Turkmani, «Characterization of mobile radio signals:
Base station cross-correlation», Proc. IEE, pt. 1, pp. 557-65, December 1991.
27. L. G. Greenstein, J. B. Andersen, H. L. Bertoni, S. Kozono, and D. G. Michelson,
Eds., IEEE J. Sei. Areas Commun., Special Issue on Channel and Propagation
Modeling for Wireless Systems Design, August 2002.
ГЛАВА 4
ПРОПУСКНАЯ
СПОСОБНОСТЬ
БЕСПРОВОДНЫХ
КАНАЛОВ
Растущий спрос на беспроводную связь ставит на повестку дня вопрос
определения границ пропускной способности каналов, лежащих в основе
беспроводных систем. Именно границы пропускной способности опреде-
ляют максимальные скорости передачи данных по беспроводным каналам
с асимптотически малой вероятностью ошибок, при условии отсутствия
ограничений по задержкам или сложности кодера и декодера. Математи-
ческая теория пропускной способности канала связи была впервые раз-
работана Клодом Шенноном в конце 1940-х годов. В основе этой теории
лежит понятие взаимной информации между входом и выходом канала
[1, 2, 3]. В частности, Шеннон определил пропускную способность канала
как максимальную взаимную информацию при всех возможных распре-
делениях сигнала на входе. Важным следствием такого математического
определения стали теорема кодирования Шеннона и обратная ей теорема.
Теорема кодирования доказала, что существует код, позволяющий до-
стигнуть скорости передачи данных, близкой к пропускной способности,
с незначительной вероятностью ошибки. Обратная теорема утверждает,
что если скорость передачи данных выше пропускной способности, то ве-
роятность ошибки будет значительно больше нуля. Идеи Шеннона были
почти революционными в то время: он предсказывал высокие скорости
передачи данных по телефонным каналам и утверждал, что кодирование
может сократить вероятность ошибки без снижения скорости передачи
данных или расширения полосы пропускания. Со временем сложные ме-
тоды модуляции и кодирования подтвердили теорию Шеннона, и сегодня
на телефонных линиях достигаются скорости передачи данных, очень
близкие к емкости Шеннона, с очень низкой вероятностью ошибки. Ис-
пользуемые при этом методы модуляции и кодирования рассматриваются
в гл. 5 и 8 соответственно.
В данной главе будет исследована пропускная способность однополь-
зовательского беспроводного канала, когда передатчик и/или приемник
имеют одну антенну. Емкость однопользовательских систем, в которых
Пропускная способность беспроводных каналов 177
передатчик и приемник имеют несколько антенн, рассматривается в гл. 10,
а емкость многопользовательских систем — в гл. 14. Мы обсудим про-
пускную способность как стационарных, так и нестационарных каналов.
Сначала напомним хорошо известную формулу емкости стационарного
канала с аддитивным белым гауссовским шумом AWGN1, а затем рассмо-
трим пропускную способность нестационарных каналов с амплитудными
замираниями. В отличие от случая AWGN, емкость канала с амплитуд-
ными замираниями не задается одной формулой, так как она зависит от
того, что известно о нестационарном канале в передатчике и/или прием-
нике. Более того, существуют различные определения емкости канала при
различных допущениях относительно наличия информации в канале —
в зависимости о того, характеризует ли емкость канала максимальную
скорость, усредненную по всем состояниям замираний, или же макси-
мальную постоянную скорость, которая может быть достигнута во всех
состояниях замираний (с какой-то вероятностью потерь или без нее).
Вначале рассмотрим пропускную способность канала с амплитудны-
ми замираниями в случае, когда на передаче и приеме известно только
распределение замираний. Емкость канала при таком допущении обычно
трудно определяема и известна только в нескольких особых случаях. За-
тем будет рассмотрена пропускная способность в случаях, когда известен
уровень замираний в канале — только на приеме (по результатам оценки
в приемнике) или как на приеме, так и на передаче (по результатам оцен-
ки в приемнике и через обратную связь передатчика). Мы увидим, что
при наличии информации об амплитуде замираний как на передаче, так
и на приеме, емкость канала достигается за счет того, что передатчик
адаптирует свою мощность, скорость передачи данных и схему кодирова-
ния к изменениям в канале. Оптимальное распределение мощности в этом
случае будет изменяться с течением времени: при благоприятных услови-
ях в канале мощность и скорость передачи данных повышаются, а при
неблагоприятных условиях — понижаются.
Мы также обсудим пропускную способность каналов с частотно-се-
лективными замираниями. Для стационарных частотно-селективных ка-
налов емкость известна и достигается при оптимальном распределении
мощности, которое изменяется не с течением времени, а с частотой. Про-
пускная способность нестационарного канала с частотно-селективными
замираниями в общем случае неизвестна. Однако этот канал может быть
приближенно представлен как совокупность независимых параллельных
каналов с амплитудными замираниями, пропускная способность кото-
рых определяется суммой пропускных способностей каждого канала, при
XAWGN — Additive White Gaussian Noise.
178 Глава 4- Пропускная способность беспроводных каналов
оптимальном распределении мощности среди каналов. Пропускная спо-
собность такого канала известна, а распределение мощности, необходи-
мое для ее достижения, изменяется как во времени, так и по частоте.
В данной главе рассматриваются только дискретные во времени сис-
темы. Большинство систем с непрерывным временем могут быть пре-
образованы в системы с дискретным временем, после чего можно при-
менять те же правила оценки пропускной способности. Однако следует
внимательно выбирать подходящую частоту дискретизации для этого
преобразования, так как временные изменения в канале могут увеличить
частоту дискретизации, необходимую для сохранения емкости канала [4].
4.1. Пропускная способность канала с аддитивным
белым гауссовым шумом — AWGN
Рассмотрим канал с дискретным временем и аддитивным белым шумом
AWGN, если соотношение между входом и выходом канала имеет вид
у [г] = ж [г] + п[г], где x[i] — сигнал на входе канала в момент времени г,
у [г] — соответствующий сигнал на выходе канала, а п[г] — случайный
процесс белого гауссова шума. Пусть полоса пропускания канала равна
В, а мощность принимаемого сигнала — Р. Тогда отношение сигнал-
шум (защищенность) — SNR (signal-to-noise ratio) на приеме, равное от-
ношению мощности сигнала ж [г] и мощности шума п[г], представляет по-
стоянную величину и определяется выражением 7 — P/N0B, где 7ХГ0/2 —
спектральная плотность мощности PSD2 шума. Емкость — пропускная
способность этого канала задается хорошо известной формулой Шеннона [1]:
С = В log2 (1 + 7),
(4-1)
где размерность емкости — количество бит в секунду (бит/с). Согласно
теореме кодирования Шеннона, существует код, позволяющий достичь
скоростей передачи данных, сколь угодно близких к пропускной способ-
ности канала, при сколь угодно малой вероятности ошибок по битам.
Обратная теорема утверждает, что при использовании любого кода при
отношении R > С вероятность ошибки будет значительно больше нуля.
Обе теоремы доказываются с использованием понятия взаимной инфор-
мации между входом и выходом канала. Для дискретного нестационар-
ного канала без памяти со случайным сигналом ж на входе и случайным
сигналом у на выходе, взаимная информация канала определяется как:
7(Х;У)= £ ^,y)logf-^^\
(4-2)
2PSD — Power Spectral Density
4-1. Пропускная способность канала с аддитивным белым шумом 179
где сумма берется по всем возможным парам входных и выходных сигна-
лов х Е X и у Е У, где X и У — входной и выходной алфавиты. Обычно
логарифмическая функция имеет основание 2, и в этом случае взаим-
ная информация выражается в битах в секунду. Взаимная информация
также может быть определена через энтропию у и условную энтропию
х \у на выходе канала как I(X;Y) = Н (У) — H(Y\X), где Н (У) =
= -Е?/6УР(?/)1о8Р(у), а H(Y\X) = - Е Р&, у) logр(у\х). Шеннон
x&X,yeY
доказал, что емкость канала равна максимальной взаимной информации
при всех возможных распределениях сигнала на входе:
С' = тах/(Х;У) =maxJ2p(a:,y)logf-^y^-y (4.3)
рИ рИ \p(x)p(y)J
Для канала с аддитивным белым гауссовым шумом AWGN сумма в (4.3)
становится интегралом по всему непрерывному множеству алфавита, а рас-
пределение на входе, максимизирующее пропускную способность является
гауссовским, что дает пропускную способность канала, заданную урав-
нением (4.1). Для каналов с памятью взаимная информация и емкость
канала определяются относительно входной и выходной последовательно-
стей — хп и уп. Более подробно о емкости канала, взаимной информации,
теореме кодирования и обратной ей теореме можно прочитать в [2, 5, 6].
Доказательства теоремы кодирования и обратной ей теоремы не на-
кладывают ограничений на сложность системы связи или величину за-
держки. Поэтому емкость по Шеннону используется обычно в качестве
верхней границы, ограничивающей скорость передачи, которая может
быть достигнута в реальных системах. В то время, когда Шеннон раз-
рабатывал теорию информации, скорость передачи по стандартным те-
лефонным линиям были порядка 100 бит/с. Тогда считалось, что емкость
Шеннона, предполагавшая передачу данных по тем же телефонным кана-
лам со скоростью около 30 кбит/с, не может служить полезным ограниче-
нием для реальных систем. Однако новые достижения в технике, разра-
ботка новых методов модуляции и кодирования приблизили скорости со-
временных коммерческих модемов к границам, предсказанным Шенноном
в 1940-х годах. На самом деле, в некоторых телефонных каналах модемы
могут даже превышать этот предел в 30 кбит/с. Но это происходит по-
тому, что линии передачи сегодня лучшего качества, чем те, что были во
времена Шеннона, и, соответственно, принимаемая мощность в них выше,
чем та, которая использовалась в его первоначальных расчетах. Сегодня
в радиоканалах с аддитивным белым шумом AWGN применяются турбо-
коды, которые обеспечивают пропускную способность, отличающуюся от
предельного значения Шеннона лишь на доли децибела [7].
В беспроводных каналах обычно имеют место амплитудные или ча-
стотно-селективные замирания. В следующих двух разделах мы рассмо-
180 Глава 4- Пропускная способность беспроводных каналов
трим пропускную способность каналов с амплитудными и частотно-се-
лективными замираниями при различных допущениях относительно того,
что известно о канале.
Пример 4.1. Рассмотрим беспроводный канал, в котором снижение мощно-
сти с расстоянием определяется выражением Pr(d) = Pt (d0/d)3 * при d0 = 10 м.
Пусть канал имеет полосу пропускания В = 30 кГц, а спектральная плотность
мощности аддитивного белого гауссовского шума AWGN равна No/2, где No =
= 10 9 Вт/Гц. Определить пропускную способность этого канала, если переда-
ваемая мощность равна 1 Вт, а расстояние между передатчиком и приемником
составляет 100 м и 1 км.
Решение. Отношение сигнал-шум SNR для принимаемого сигнала составля-
ет у = Pr(d)/N0B = 0,13/(10“9 30 • 103) = 33 = 15 дБ при d = 100 м и 7 =
— 0,013/(10 9 30 • 103) = 0,033 — —15 дБ при d = 1000 м. Соответствующие про-
пускные способности равны: С = В log2(l +7) — 30000 log2(l + 33) = 152,6 кбит/с
при d = 100 м и С = 30000log2(l + 0,033) = 1,4 Кбит/с при d = 1000 м. Обрати-
те внимание на существенное (на 3 порядка) снижение пропускной способности
на больших расстояниях. Это связано с тем, что с увеличением дальности пере-
дачи принимаемая мощность уменьшается.
4.2. Пропускная способность каналов с амплитудными
замираниями
4.2.1. Модель канала и системы
Рассмотрим дискретный канал со стационарным и эргодическим неста-
ционарным усилением у/<Дг], 0 С <?[i] и аддитивным белым шумом AWGN
п[г], показаный на рис. 4.1. Коэффициент передачи канала по мощности
g[?] подчиняется заданному распределению />[<?]; например, при замира-
ниях Рэлея распределение р[д] будет экспоненциальным. Допустим, что
g[i] не зависит от входа канала. Значение коэффициента передачи канала
д[г] может изменяться в каждый момент времени i — либо как случай-
ный процесс с независимыми и одинаково распределенными значениями3,
либо с некоторой корреляцией этих значний во времени. В канале с за-
мираниями в виде блоков значение </[г] постоянно в течение некоторого
времени (длительности блока Т), после чего (/[г] принимает новое неза-
висимое значение, согласно распределению р[д]. Пусть средняя мощность
передаваемого сигнала равна Р, спектральная плотность мощности шу-
ма и [г] равна Wo/2, а полоса пропускания принимаемого сигнала — В.
Тогда мгновенное значение отношения сигнал - шум (защищенности) SNR
на приеме определяется выражением 7(2] = Pg[i]/N0B, 0 С 7(2] < сю, а его
3В англоязычной литературе для обозначения таких случайных процессов применяется
аббревиатура i.i.d — independent and identically distributed. — Прим, перев.
4-2. Пропускная способность каналов с амплитудными замираниями
ожидаемое значение в течение всего времени постоянно: 7 = Pg/N^B',
распределение </[?] определяет распределение -у[г] и наоборот.
Передатчик Канал Приемник
Рис. 4.1. Модель канала и системы с амплитудными замираниями
На рис. 4.1 также показана модель системы, где входное сообщение
w посылается от передатчика к приемнику, который восстанавливает
из полученного сигнала оценку ш переданного сообщения ад. Сообщение
кодируется в кодовое слово х, которое передается по нестационарному
каналу как x[i] в момент времени i. Коэффициент передачи канала <?[?],
называемый также дополнительной информацией канала CSI4, изменяет-
ся во время передачи кодового слова.
Емкость канала зависит от того, что передатчику и приемнику из-
вестно о коэффициенте передачи g[i]. Мы рассмотрим три различных
сценария:
1. Информация о распределении в канале CDI5: распределение г/[г] из-
вестно передатчику и приемнику.
2. Информация CSI в приемнике: значение g[i] в момент времени i из-
вестно приемнику, а распределение g[i] известно как передатчику,
так и приемнику.
3. Информация CSI в передатчике и приемнике: значение g[i] в момент
времени г, а также распределение (/[г] известно как передатчику, так
и приемнику.
Наличие информации CSI в передатчике и приемнике позволяет пере-
датчику адаптировать свою мощность и скорость передачи к коэффици-
енту передачи канала в момент времени г, поэтому данный сценарий обес-
печивает наивысшую пропускную способность. Заметьте, что поскольку
мгновенное значение отношения сигнал-шум SNR 7 [г] равно произведе-
нию (/[г] на постоянную величину P/NqB, то при известной информации
о g[i] (CSI или CDI) такая же информация будет известна и о у[г]. Емкость
нестационарных каналов при допущениях, отличающихся от указанных
трех, обсуждается в [8, 9].
4CSI — Channel Side Information.
5CDI — Channel Distribution linformation.
182 Глава 4- Пропускная способность беспроводных каналов
4.2.2. Известная информация о канальном
распределении
Сначала мы рассмотрим случай, когда распределение коэффициента пе-
редачи канала р[д] или, что эквивалентно, отношение сигнал-шум SNR
р(7) известно и передатчику и приемнику. Для канала с замираниями,
представляющими независимый и одинаково распределенный случайный
процесс, пропускная способность определяется уравнением (4.3). Одна-
ко его решение при таком распределении на входе, которое достигает
пропускной способности (т. е. распределения, при котором достигается
максимум в этом уравнении), может быть достаточно сложным, и за-
висит от характера распределения замираний. Более того, корреляция
замираний создает канал с памятью, и в результате входное распределе-
ние, которое достигает предельной пропускной способности, находится
с помощью оптимизации по входным блокам, что еще больше усложня-
ет поиск решения. Поэтому задача нахождения входного распределения,
достигающего наибольшей пропускной способности, и соответствующей
емкости каналов с замираниями при наличии информации CDI остается
нерешенной для почти всех распределений.
Входное распределение, достигающее пропускной способности, и со-
ответствующая емкость каналов с замираниями при наличии информации
CDI известны для двух представляющих интерес особых случаев — для
каналов с независимыми и одинаково распределенными рэлеевскими за-
мираниями и каналов с конечным числом состояний Маркова. В случае
независимых и одинаково распределенных рэлеевских замираний коэф-
фициент передачи канала имеет экспоненциальное распределение, а его
изменения при каждом очередном использовании канала независимы. Как
показано в [10], оптимальное входное распределение для такого канала —
дискретное с конечным числом материальных точек, одна из которых рас-
полагается в нуле. Это оптимальное распределение и соответствующая
емкость должны находиться численными методами. Отсутствие реше-
ний в аналитическом виде для пропускной способности или оптимального
входного распределения удивляет, так как замирания в данном случае
соответствуют наиболее распространенному распределению и не имеют
корреляционных связей. Для каналов с амплитудными замираниями, кото-
рые не обязательно бывают рэлеевскими или независимыми и одинаково
распределенными, верхняя и нижняя границы емкости определены в [11],
и при высоких значениях отношения сигнал - шум это жесткие ограничения.
В подпараграфе 3.2.4 обсуждалась аппроксимация каналов с рэлеев-
скими замираниями в марковском канале с конечным числом состояний
FSMC. Эта модель приближенно представляет корреляцию замираний
4-2. Пропускная способность каналов с амплитудными замираниями 183
в виде марковского процесса. Хотя марковский характер замираний пред-
полагает, что замирание в данный момент времени зависит только от
замирания в предыдущий момент, оказывается, что для оптимального
декодирования (т. е. достигающего пропускной способности) приемник
должен декодировать вместе с текущим выходным сигналом все про-
шлые выходные сигналы канала. Это значительно усложняет анализ про-
пускной способности. Емкость марковского канала с конечным числом
состояний FSMC в случае независимого и одинаково распределенного про-
цесса на входе определена в [12, 13], а в общем случае — в [14]. Емкость
канала с конечным числом состояний FSMC зависит от предельного рас-
пределения канала, обусловленного всеми предыдущими значениями на
входе и выходе, которые могут быть вычислены рекурсивно. Что касается
канала с независимыми и одинаково распределенными рэлеевскими зами-
раниями, то анализ емкости и получение конечного результата для этой
относительно простой модели замираний представляют достаточно слож-
ную задачу. Это свидетельствует о сложности определения пропускной
способности и понимания связанных с этим аспектов разработки каналов
в тех случаях, когда доступна только информация о распределении CDI.
4.2.3. Наличие дополнительной информации
о канале в приемнике
Теперь рассмотрим случай, когда приемнику известна дополнительная
информация о канале CSI — значение д[г] в момент времени г. Соответ-
ственно, приемнику известно и значение 7[г] в момент времени г. Мы так-
же допускаем, что и передатчику, и приемнику известно распределение
g[i]. В этом случае существует два определения емкости канала, важных
с точки зрения разработки системы: это пропускная способность Шенно-
на, называемая также эргодической пропускной способностью, и пропуск-
ная способность емкости с нарушением связи. Для канала с аддитивным
белым шумом AWGN, пропускная способность Шеннона определяет мак-
симальную скорость, с которой данные могут быть переданы по этому
каналу при асимптотически малой вероятности ошибки. Обратите вни-
мание, что с точки зрения пропускной способности Шеннона скорость
передачи по каналу — величина постоянная: передатчик не может ада-
птировать свою стратегию передачи в соответствии с информацией CSI.
Следовательно, плохие режимы работы канала обычно сокращают про-
пускную способность Шеннона, так как стратегия передачи в этом случае
должна учитывать влияние этих режимов работы. Альтернативное опре-
деление емкости для каналов с замираниями при наличии в приемнике
информации CSI — это пропускная способность с нарушениями связи.
Она определяется как максимальная скорость, с которой можно вести
Глава 4- Пропускная способность беспроводных каналов
передачу по каналу при вероятности нарушения связи, соответствующей
вероятности того, что ошибка декодирования уже не пренебрежимо малая
величина. При определении емкости канала с нарушением связи предпола-
гается, что данные могут быть переданы по каналу с высокой скоростью
и правильно декодированы, за исключением того случая, когда в радио-
тракте имеют место медленные глубокие замирания. Позволив системе
терять какую-то часть данных в случае таких глубоких замираний, мож-
но достигнуть более высокой скорости передачи данных, чем тогда, когда
вся информация должна быть правильно принята вне зависимости от
наличия замираний, как в случае с пропускной способностью Шеннона.
Вероятность нарушения радиосвязи характеризует вероятность потери
данных или, соответственно, глубоких замираний.
Пропускная (эргодическая) способность Шеннона
Пропускная способность Шеннона канала с замираниями при наличии
в приемнике дополнительной информации CSI и ограничном среднем зна-
чении мощности Р может быть определена исходя из результатов, полу-
ченных в [15], как
оо
с = У В log2 (1 + 7) ^7- (4-4)
о
Заметьте, что зта формула представляет математическое ожидание: С
определяется как пропускная способность Шеннона Blog2(l+7) кана-
ла с аддитивным белым шумом AWGN и отношением сигнал-шум 7,
усредненным по распределению 7 — 75(7). Вот почему такую пропуск-
ную способность Шеннона называют также эргодической. Однако следу-
ет осторожно подходить к интерпретации (4.4) как среднего значения.
Было бы неверно рассматривать (4.4) как среднюю пропускную способ-
ность канала, в котором при мгновенном отношении сигнал-шум SNR,
равном 7, обеспечивается пропускная способность В log2 (1 +7). Только
приемник знает мгновенное значение SNR 7[г] и, поэтому, скорость пе-
редачи по каналу постоянна независимо от 7. Следует также отметить,
что для достижения пропускной способности используемый код должен
быть достаточно длинным, так как на принятое кодовое слово оказыва-
ют влияние все возможные состояния замираний. Это может привести
к значительным задержкам.
В соответствии с неравенством Йенсена,
Е [В log2 (1 + 7)] = У В log2 (1 + 7) р(7) dy
Blog2 (1+В[7]) =Blog2(l+7), (4.5)
где 7 — среднее значение отношения сигнал-шум SNR в канале. Таким
4-2. Пропускная способность каналов с амплитудными замираниями 185
образом, можно видеть, что пропускную способность Шеннона для ка-
нала с замираниями при наличии в приемнике информации CSI меньше,
чем емкость Шеннона для канала с аддитивным белым шумом AWGN
при одном и том же среднем значении отношения сигнал-шум. Други-
ми словами, если информация о канале CSI известна только приемнику,
то замирания снижают пропускную способность Шеннона. Более того,
если передатчик не располагает дополнительной информацией CSI, то
при разработке кода следует учитывать статистику корреляции канала,
а сложность максимально правдоподобного декодера будет пропорцио-
нальна времени декорреляции канала. Кроме того, если дополнительная
информация CSI в приемнике не точна, то пропускная способность может
существенно снизиться [16].
Пример 4.2. Рассмотрим канал с амплитудными замираниями, коэффициент
передачи которого \/д[г] представляет независимый и одинаково распределен-
ный случайный процесс с тремя возможными значениями: уТц = 0,05 с вероят-
ностью pi = 0,1, у/д2 = 0,5 с вероятностью р-> = 0,5 и = 1 с вероятностью
Рз = 0,4. Передаваемая мощность равна 10 мВт, спектральная плотность мощ-
ности шума равна Nq/2 при Nq = 10~9 Вт/Гц, а полоса пропускания канала
составляет 30 кГц. Предполагается, что информация о мгновенных значениях
g[i] известна приемнику, но неизвестна передатчику. Необходимо определить
пропускную способность Шеннона для этого канала и сравнить ее с емкостью
канала с аддитивным белым шумом AWGN при одинаковом среднем значении
отношения сигнал-шум SNR.
Решение. Для данного канала существуют три возможных отношения сигнал -
шум SNR на приеме:
71 = Ptgi/N0B = 0,01 • (0,052)/(30000 • ПГ9) = 0,8333 = -0,79 дБ,
72 = Ptgz/NoB = 0,01 • (0,5)2/(30000 • 10“9) = 83,333 = 19,2 дБ,
7з = Ptgz/NoB = 0,01/(30000 • 10“9) = 333,33 = 25 дБ.
Вероятности, соответствующие каждому из этих значений SNR, равны р(71) =
= 0,1, р(уг) = 0,5 и р(уз) = 0,4. Таким образом, емкость Шеннона равна:
G = ^2 Blog2 (1 + 71) р (7г) =
= 30000 (0,1 log2(l,8333) + 0,5log2(84,333) + 0,4log2(334,33)) = 199,26 кбит/с.
Среднее значение отношения сигнал-шум SNR для этого канала равно 7 =
= 0,1(0,8333) + 0,5(83,33) + 0,4(333,33) = 175,08 = 22,43 дБ. Емкость канала с ад-
дитивным белым гауссовым шумом AWGN при данном значении защищенности
SNR равна С = Blog2(l + 175,08) = 223,8 кбит/с. Заметьте, что эта скорость
примерно на 25 кбит/с больше, чем у канала с амплитудными замираниями при
наличии в приемнике информации CSI и таком же среднем значении отношения
сигнал-шум SNR.
186 Глава 4- Пропускная способность беспроводных каналов
Пропускная способность с нарушением радиосвязи
Понятие пропускной способности с нарушением связи применяется для
каналов с медленными изменениями, в которых мгновенное значение от-
ношения сигнал-шум SNR 7 постоянно для большого количества пере-
даваемых сигналов (пакета или интервала передачи), а затем, согласно
распределению замираний, изменяется на новое значение. В этой моде-
ли, если в течение передачи блока данных отношение сигнал- шум SNR
на приеме равно 7, то данные могут передаваться по каналу со скоро-
стью Blog2(l + 7) с незначительной вероятностью ошибки6. Поскольку
передатчику неизвестно значение отношения сигнал-шум 7, он должен
зафиксировать скорость передачи вне зависимости от мгновенных значе-
ний отношения сигнал - шум на приеме.
Пропускная способность с нарушением связи допускает, что при де-
кодировании бит, переданных в течение определенного интервала време-
ни, существует некоторая вероятность неверного декодирования в конце
этого интервала. В частности, передатчик устанавливает минимальное
значение отношения сигнал - шум SNR на приеме 7min и производит коди-
рование для скорости передачи данных С = В log2(l + 7min)- Данные при-
нимаются правильно в том случае, если мгновенное значение отношения
сигнал-шум SNR на приеме больше или равно 7min [17, 18]. Если же зна-
чение SNR на приеме меньше 7min, то биты, полученные в данном интер-
вале передачи, не могут быть декодированы правильно с вероятностью
близкой к 1, и приемник сообщает о нарушении радиосвязи. Таким обра-
зом, вероятность нарушения радиосвязи составляет Fout = р (7 — 7min)-
Так как данные принимаются правильно только на интервалах 1 — POut,
то средняя скорость при правильном приеме на множестве интервалов
передачи равна Cout = (1 — Pout)В log2 (1 + 7min)- Значение 7min выбирает-
ся разработчиками исходя из приемлемой вероятности перерывов связи.
Пропускная способность с нарушением связи обычно характеризуется
с помощью графика зависимости емкости системы от вероятности нару-
шения связи, как это показано на рис. 4.2. На этом рисунке представлена
нормированная емкость С/В = log2 (1 +7min) как функция вероятности
перерыва связи POut = Р (7 < 7min) для канала с рэлеевскими замирани-
ями (7 имеет экспоненциальное распределение) при 7 = 20 дБ. Можно
видеть, что при малой вероятности перерыва связи емкость стремится
к нулю, что связано с требованием правильного декодирования бит, пе-
редаваемых в условиях сильных замираний. С увеличением вероятности
нарушения радиосвязи емкость значительно возрастает. Однако следует
бДопущение постоянного значения замираний при большом количестве передаваемых
сигналов необходимо, так как коды, которые достигают пропускной способности, тре-
буют очень больших длин блоков.
4-2. Пропускная способность каналов с амплитудными замираниями
помнить, что эти высокие значения пропускной способности при больших
вероятностях нарушения связи означают высокую вероятность непра-
вильного приема данных. Среднее значение скорости при правильном
приеме может быть увеличено до максимального значения путем нахо-
ждения такого значения 7mjn (или, соответственно, Pout), ПРИ котором
получается максимальное значение Cout-
4 — -
3.5 (
3 И
2.5 F
2(
1 5^
11
I
0.5^
!
10
Вероятность нарушения радиосвязи
Рис. 4.2. Зависимость нормированной пропускной способности (С/В) от вероят-
ности перерыва связи
Пример 4.3. Рассмотрим тот же самый канал, что и в предыдущем примере,
с полосой пропускания 30 кГц и тремя возможными отношениями сигнал-шум
SNR на приеме: 71 = 0,8333 с p(yi) = 0,1, 72 = 83,33 с р(уг) = 0,5 и 73 = 333,33
с р(7з) = 0,4. Необходимо найти пропускную способность этого канала в зависи-
мости от вероятности нарушения связи, а также среднее значение скорости при
правильном приеме для вероятностей нарушения связи Fout < 0,1, Fout — 0,1 и
Pout = 0,6.
Решение. Для нестационарных каналов с дискретными значениями отношения
сигнал-шум SNR зависимость пропускной способности от вероятности нару-
шения вязи представляет ступенчатую функцию. В частности, при Fout < 0,1
необходимо правильно осуществлять декодирование во всех состояниях канала.
Минимальное отношение сигнал-шум SNR на приеме для Fout в этом диапазоне
соответствует значению самого слабого канала: 7min = 71, а соответствующая
емкость равна С = Blog2(l + 7mjn) = 30000 log2( 1,833) — 26,23 кбит/с. При
0,1 Fout < 0,6 декодирование может быть неправильным только если канал
Глава 4- Пропускная способность беспроводных каналов
находится в самом слабом состоянии. Тогда 7min = 72, а соответствующая ем-
кость канала равна С = Blog2(l + 7m;n) = 300001og2(84,33) = 191,94 кбит/с.
При 0,6 < Fout < 1 декодирование может быть неправильным, если отношение
сигнал-шум на приеме равно 71 или 72. Тогда 7mjn = 73, а соответствующая
емкость канала равна С = Blog2(l + 7m;n) = 30000log2(334,33) = 251,55 кбит/с.
Таким образом, зависимость емкости канала от вероятности нарушения радио-
связи имеет вид: С = 26,23 кбит/с для Fout < 0,1, С = 191,94 кбит/с для
0,1 .Pout < 0,6 и С — 251,55 кбит/с для 0,6 Pout < Т
При Pout < 0,1 данные, передаваемые на скоростях, близких к пропускной
способности С = 26,23 кбит/с, всегда принимаются корректно, так как ка-
нал всегда может поддерживать эту скорость передачи данных. При Fout = 0,1
передача ведется на скоростях, близких к С — 191,94 кбит/с, но мы можем пра-
вильно декодировать эти данные только если отношение сигнал-шум равно 72
или 7з, поэтому скорость при правильном приеме составляет (1 — 0,1)191940 =
= 172,75 кбит/с. При Pout = 0,6 данные передаются на скоростях, близких
к С = 251,55 кбит/с, но мы можем правильно декодировать эти данные только
в случае, если отношение сигнал-шум равно 73, поэтому скорость при пра-
вильном приеме составляет (1 — 0,6) = 125,78 кбит/с. Вероятно, что хорошее
инженерное решение для этого канала позволило бы передавать данные на ско-
рости, близкой к 191,94 кбит/с. В этом случае неправильный прием информации
имел бы место в течение максимум 10 % времени передачи, но скорость была бы
на порядок выше, чем при передаче на скорости, соответствующей самому плохо-
му случаю емкости канала. Однако для некоторых приложений 10 % повторной
передачи — это слишком много, и в таких случаях система разрабатывается
с расчетом на скорость передачи данных в 26,23 кбит/с без повторной переда-
чи. Вопросы разработки систем с учетом приемлемой вероятности повторной
передачи обсуждаются в гл. 14.
4.2.4. Наличие дополнительной информация о канале
в передатчике и приемнике
Если и передатчик, и приемник располагают информацией о канале CSI,
то передатчик может адаптировать свою стратегию передачи в соответ-
ствии с этой информацией, как это показано на рис. 4.3. В данном случае
не говорят о пропускной способности с нарушением связи (когда пере-
датчик посылает биты, которые не могут быть декодированы), так как
передатчик знает состояние канала и поэтому не передает биты, если
они не будут декодироваться правильно. В этом разделе мы выведем про-
пускную способность Шеннона при оптимальной мощности и адаптации
скорости в соответствии с дополнительной информацией CSI. Кроме то-
го, будут введены альтернативные определения емкости и представлены
соответствующие стратегии адаптации мощности и скорости передачи.
4-2. Пропускная способность каналов с амплитудными замираниями
Пропускная способность Шеннона
Рассмотрим пропускную способность Шеннона в случае, когда усиление
мощности в канале <7 [г] в момент времени i известно как передатчику, так
и приемнику. Емкость Шеннона нестационарного канала при наличии до-
полнительной информации о состоянии канала как на передатчике, так
и на приемнике была первоначально исследована Вольфовитцем для сле-
дующей модели. Пусть я[г] — стационарный и эргодический случайный
процесс, представляющий состояние канала, который принимает значе-
ния конечного множества S дискретных каналов без памяти. Пусть Cs —
пропускная способность отдельного канала s Е S, a р(з) — вероятность
того, что канал находится в состоянии з. Тогда емкость этого нестацио-
нарного канала определяется теоремой 4.6.1 из [19]:
C = ^Csp(S). (4.6)
sGS
Передатчик Канал Приемник
мощностью канала
Рис. 4.3. Модель системы при наличии дополнительной информации CSI в пере-
датчике и приемнике
Применим эту формулу к модели системы на рис. 4.3. Мы знаем, что
емкость канала с аддитивным белым гауссовым шумом AWGN при среднем
значении отношения сигнал-шум на приеме 7 равна С7 = Blog2(l +7).
Пусть ^(7) = р(7[г] =7) — распределение отношения сигнал-шум SNR
на приеме. В соответствии с (4.6) емкость канала с замираниями при на-
личии дополнительной информации о канале в передатчике и приемнике
определяется следующим образом:7
оо оо
С = 6^72(7) Фу = В log2 (1 + 7)77(7) Фу. (4.7)
о о
Можно видеть, что без адаптации мощности выражения (4.4) и (4.7) дают
один и тот же результат. Поэтому наличие дополнительной информации
в передатчике повышает пропускную способность канала, только если
мощность будет адаптирована.
7Результат Вольфовитца был получен для конечного множества значений 7, но его
можно расширить до бесконечных множеств [20].
Глава 4- Пропускная способность беспроводных каналов
Предположим, что передаваемая мощность Р(т) изменяется в зависи-
мости от 7 с учетом ограничения среднего значения мощности Р:
ОО
У р- (4-8)
о
С этим дополнительным ограничением мы не можем непосредственно
применить (4.7) для получения емкости. Однако можно ожидать, что
в случае такого ограничения среднего значения мощности емкость канала
будет равна среднему значению емкости согласно (4.7) при оптимальном
распределении мощности во времени. Исходя из этого, емкость канала
с замираниями при ограничении среднего значения мощности (4.8) мож-
но определить следующим образом:
ОО
С = max [ В logo | 14-----------------^7^ | рМ dy. (4.9)
P(7):/P(7)p(7)d7=PJ V Р J
О
Системный кодер
Системный декодер
Рис. 4.4. Многоканальное кодирование и декодирование
В работе [20] доказано, что емкость, определяемая выражением (4.9),
может быть достигнута, и что при любой скорости, превышающей эту
пропускную способность, вероятность ошибки будет значительно больше
нуля. Главная идея этого доказательства — система «временного раз-
деления» с объединенным входом и многоканальным выходом (рис. 4.4).
Сначала выполняется разбиение диапазона замираний на конечный набор
групп {ту : 1 7 j2V}. Для каждого значения ту создается пара кодер —
декодер, в предположении канала с аддитивным белым гауссовым шу-
мом AWGN и отношением сигнал-шум (защищенностью) ту- Среднее
значение мощности на входе Xj кодера ту равно Р(ту), а скорость пе-
редачи данных составляет Rj = Cj, где Cj — емкость стационарного
4-2. Пропускная способность каналов с амплитудными замираниями 191
канала с аддитивным белым гауссовым шумом AWGN при отношении
сигнал-шум на приеме SNR = Р (plj)'ljlP- Эти пары кодер — декодер
соответствуют набору входных и выходных портов, соответствующим
значениям 7?. Когда 7[г] ~ 7у, соответствующая пара портов соединяется
через канал. При передаче кодовые слова, сответсвующие каждому зна-
чению 7j, объединяются (мультиплексируются), а на выходе канала —
демультиплексируются. Это позволяет представить нестационарный ка-
нал в виде набора параллельных стационарных каналов, причем j-й канал
работает только когда 7[г] ~ 7j. Тогда среднее значение скорости в ка-
нале представляет сумму скоростей в каждом из каналов 7?, взвешенную
по параметру р(7у), определяющему долю времени, в течение которого
отношение сигнал - шум SNR в канале равно 7?. Отсюда получается фор-
мула среднего значения емкости (4.9).
Чтобы найти оптимальное распределение мощности Р(7), запишем
функцию Лагранжа:
оо ос
J (р(?)) = У в log2 fl + р(7) dy - А У Р(7)р(т) ^7- (4-10)
о о
Продифференцировав функцию Лагранжа, приравняем производную к нулю:
^(7)) Г/В/1п(2) \7_л1
ар(7) К1+7Л7)/Г/ Р Г
Решая это уравнение относительно Р(у) при условии, что Р(у) > 0, по-
лучаем оптимальное распределение мощности, при котором емкость (4.9)
будет иметь максимальное значение:
р(_7) _ [ I/70-1/?, 7>7о- ,412х
Р (0 ,7 < 7о,
для некоторого «критического» (порогового) значения 70. Если 7(1] ни-
же этой границы, то в i-м временном интервале по каналу не передается
никакой информации, т. е. канал используется в момент времени i толь-
ко при условии, что 7q 7[г] < оо. Подставляя (4.12) в (4.9), получаем
формулу емкости:
ОО
С = [ Blog2(—}p(y)dy. (4.13)
J \7о/
70
Принцип временного мультиплексирования, лежащий в основе страте-
гии кодирования для достижения пропускной способности, показывает,
что пропускная способность (4.13) достигается при переменной скорости
передачи данных, когда скорость, соответствующая мгновенному значе-
нию отношения сигнал-шум 7, равна В log2(7/7o). Поскольку значение 70
постоянно, то при увеличении мгновенного значения отношения сигнал -
Глава 4- Пропускная способность беспроводных каналов
шум SNR скорость передачи данных по каналу при данном значении SNR
также увеличивается. Отметим, что принцип мультиплексирования —
не единственный способ достижения емкости (4.13): она также может
быть достигнута путем адаптации передаваемой мощности и передачи
с фиксированной скоростью [21]. В подпараграфе 4.2.6 мы увидим, что
при одном и том же среднем значении отношения сигнал-шум SNR ем-
кость канала с рэлеевскими замираниями может превышать емкость ка-
нала с аддитивным белым гауссовым шумом AWGN — в отличие от
случая, в котором информация о канале CSI известна только приемни-
ку, когда замирания всегда уменьшают пропускную способность.
Обратите внимание, что принцип оптимального распределения мощ-
ности (4.12) связан с распределением замираний 75(7) только через гранич-
ное значение 70. Это пороговое значение определяют исходя из ограниче-
ний по мощности. Преобразовав ограничение мощности (4.8) и заменив
неравенство равенством (так как использование максимально доступной
мощности всегда будет оптимальным), получаем ограничение мощности
в виде:
оо
j = 1. (4.14)
о
Если подставить в это выражение оптимальное распределение мощности
(4.12), то пороговое значение 70 должно удовлетворять условию:
ОО
[ (— - -^(7) dy = L (4-15)
J \70 7/
70
Очевидно, что это выражение зависит только от распределения р(7)- Зна-
чение 7о нужно находить численно [22], так как решений в общем виде для
типичных непрерывных распределений р(7) не существует.
Поскольку значение 7 изменяется во времени, максимизирующее пра-
вило адаптации мощности (4.12) можно рассматривать как «водоналив-
ной» принцип изменения во времени (рис. 4.5). Кривая на этом рисунке
показывает, какая мощность поступает в канал при мгновенном значении
отношения сигнал-шум SNR 7(f) = 7. «Водоналивная» аналогия заключа-
ется в следующем: линия I/7 схематически изображает дно чаши, а мощ-
ность наполняет эту чашу до постоянного уровня воды 1/70- Количество
мощности, выделяемой при заданном значении 7, равно I/70 — I/7, что
соответствует количеству воды между дном чаши (I/7) и постоянным
уровнем воды (I/70). Смысл этого «водоналивного» процесса — исполь-
зование преимуществ хороших условий канала: когда условия хорошие
(отношение сигнал-шум 7 большое), по каналу передается больше мощ-
ности и поддерживается более высокая скорость передачи данных. Если
4-2. Пропускная способность каналов с амплитудными замираниями
качество канала ухудшается (при малых значениях 7), то по нему переда-
ется меньше мощности, и скорость передачи уменьшается. Если мгновен-
ное значение отношения сигнал-шум падает ниже пороговой величины,
то канал не используется. Адаптивные методы модуляции и кодирования,
следующие этому принципу, предложены в [23, 24] и обсуждаются в гл. 9.
Рис. 4.5. Оптимальное распределение мощности: «водоналивной» принцип
Следует отметить, что подход, основанный на мультиплексировании,
поясняет, что достижение пропускной способности (4.9) применимо к лю-
бому методу адаптации мощности. Поэтому при любом методе адаптации
мощности Р(7) и среднем значении Р пропускная способность, равная:
ОО
с = I в log2 (1 + ^^(7) dy, (4.16)
о
может быть достигнута с как угодно малой вероятностью ошибки. Ко-
нечно, эта емкость не может превышать максимальное значение (4.9),
соответствующее оптимальному распределению мощности. Однако суще-
ствуют сценарии субоптимальной адаптации мощности, полезные свой-
ства которых «перевешивают» максимизацию пропускной способности.
В следующих двух разделах мы обсудим два таких субоптимальных ме-
тода, которые применяются в системах с постоянной скоростью передачи
данных, в отличие от передачи с переменной скоростью, достигающей
пропускной способности (4.9).
Пример 4.4. Рассмотрим тот же самый канал, что и в предыдущем приме-
ре, с полосой пропускания 30 кГц и тремя возможными значениями отношения
сигнал-шум SNR на приеме: 71 = 0,8333 с />(71) = 0,1, 72 = 83,33 с />(72) = 0,5
и 7з = 333,33 с р(7з) = 0,4. Требуется определить эргодическую пропускную спо-
собность этого канала при условии, что и передатчик, и приемник располагают
дополнительной информацией CSI в каждый момент времени.
Глава 4- Пропускная способность беспроводных каналов
Решение. Чтобы применить «водоналивной» принцип оптимального распреде-
ления мощности, необходимо найти пороговое значение 70, удовлетворяющее
выражению (4.15), которое в дисретной форме имеет вид:
(4-17)
Чтобы определить 70, сначала предположим, что используются все состояния
канала 70 (т.е. 70 7 min^J, и посмотрим, будет ли полученное в результате
пороговое значение ниже значения самого слабого канала. Если нет, то мы имеем
несовместимость и должны еще раз произвести расчеты — в предположении,
что, по меньшей мере, одно из состояний канала не используется. Применяя
(4.17) к нашей модели канала, получаем
h ы *
1 = 1 , V = 1 + f °Д + + °’4
70 7г \ 0,8333 83,33 333,33)
= 1,13.
Отсюда имеем: 70 = 1/1,13 = 0,89 > 0,8333 = 71. Полученное значение 70 больше,
чем значение отношения сигнал -шум SNR в самом слабом канале, поэтому дан-
ный результат является противоречивым, так как канал должен использоваться
только тогда, когда его отношение сигнал-шум выше порогового значения.
Следовательно, необходимо повторить вычисления в предположении, что самое
плохое состояние канала не используется. Тогда (4.17) имеет вид;
А Р (7г) АрЫ
°>9 - ! АрЫ /0,5 0,4 \
7о \ 83,33 333,33 /
= 10,0072.
Отсюда находим, что 70 — 0,89. Таким образом, при допущении, что самый
слабый канал с отношением сигнал-шум SNR = 71 не используется, мы получили
совместимый результат для 70: 71 < 70 7 72- При этом емкость канала равна:
C = £Blog2
г=2
(7г \ , s
— Р(7г) =
\7о/
/ 83 33 333 33\
= 30000 (o,51og2 -g-gg- 4“ 0,4 log2 ) = 2000,82 кбит/с.
Сравнивая полученный результат с примером 4.3, можно видеть, что эта ско-
рость только немного выше, чем в случае наличия дополнительной информации
CSI только в приемнике, и она все еще значительно ниже, чем скорость в кана-
ле с аддитивным белым гауссовым шумом AWGN при одном и том же среднем
4-2. Пропускная способность каналов с амплитудными замираниями
значении отношения сигнал - шум SNR. Это связано с тем, что в данном приме-
ре среднее значение отношения сигнал-шум SNR относительно высокое. Но для
каналов с низким отношением SNR емкость при амплитудных замираниях мо-
жет превышать пропускную способность канала с аддитивным белым шумом
AWGN при одном и том же среднем значении SNR, если воспользоваться пре-
имуществами тех редких случаев, когда канал с замираниями находится в очень
хорошем состоянии.
Пропускная способность каналов с инверсией замираний
при отсутствии перерывов связи
Рассмотрим схему субоптимальной адаптации передатчика, когда пере-
датчик использует дополнительную информацию о канале CSI для под-
держания постоянной мощности на приеме, т. е. он инвертирует замира-
ния в канале. В таком случае канал рассматривается как стационарный
канал с кодером и декодером и аддитивным белым гауссовым шумом
AWGN. Такой вид адаптации передаваемой мощности, называемый ин-
версией канала, задается выражением P(pf)/P = <т/7, где ст — постоянное
отношение сигнал-шум SNR на приеме, которое может быть получе-
но при ограничении мощности передачи (4.8). Таким образом, посто-
янное значение ст удовлетворяет условию f (сг/'у) p^d'y = 1, откуда ст =
= 1/£ф/7].
Пропускная способность при инверсии замираний в канале — это про-
сто емкость канала с аддитивным белым шумом AWGN при отношении
сигнал - шум SNR, равном ст:
С = В log2 [1 + ст] = В log2
(4-18)
1 + ^[1/7]
Для достижения такой пропускной способности на передаче использу-
ются кодер и декодер с фиксированной скоростью, разработанные для
каналов с аддитивным белым гауссовым шумом AWGN и отношением
сигнал-шум SNR = ст. Преимущество здесь проявляется в поддержание
фиксированной скорости передачи данных вне зависимости от условий
в канале. По этой причине пропускная способность канала, задаваемая
выражением (4.18), называется пропускной способностью при нулевой ве-
роятности нарушений радиосвязи: скорость передачи данных остается
постоянной при любых условиях, и нет перебоев в работе канала. От-
метим, что на практике существуют методы кодирования, позволяющие
достичь в каналах с аддитивным белым шумом AWGN скоростей пере-
дачи данных, близких к потенциальной пропускной способности канала.
Поэтому можно говорить о том, что пропускная способность при нулевой
вероятности нарушения связи может быть почти достигнута на практике.
В среде с сильными замираниями пропускная способность с нуле-
выми нарушениями связи показывает существенное снижение скорости
Глава 4- Пропускная способность беспроводных каналов
передачи данных по сравнению с пропускной способностью Шеннона.
Так, при рэлеевских замираниях величина Е [I/7] будет бесконечно боль-
шой, и поэтому пропускная способность с нулевыми нарушениями связи,
определяемая выражением (4.18), равна нулю. Метод инверсии канала
широко применяется в системах с расширенным спектром при несогласо-
ванности помех ближней и дальней зоны [25]. Кроме того, данная схема
наиболее проста в реализации, так как использует кодирующее и деко-
дирующее устройства, разработанные для каналов с аддитивным белым
шумом AWGN, независимым от статистики замираний.
Пример 4.5. Рассмотрим тот же самый канал, что и в предыдущем приме-
ре, с полосой пропускания 30 кГц и тремя возможными значениями отношения
сигнал-шум SNR на приеме: 71 = 0,8333 с 79(71) = 0,1, 72 = 83,33 с 75(72) = 0,5
и 7з = 333,33 с р(7з) = 0,4. Требуется определить для этого канала пропускную
способность с нулевыми нарушениями радиосвязи при условии, что информация
о канале CSI известна как передатчику, так и приемнику.
Решение, пропускная способность с нулевыми нарушениями радиосвязи равна
С = В log2 [1 + ст], где ст = 1/Е [1 /7]. Так как
1
.7
Е
0,1 0,5 0,4
0,8333 + 83,33 + 333,33
= 0,1272,
мы имеем: С = 30 0001og2 [1 + 1/0,1272] = 94,43 кбит/с. Обратите внимание, что
это меньше половины пропускной способности по Шеннону при оптимальной
«водоналивной» адаптации.
Пропускная способность канала с усеченной инверсией
и с перерывами связи
Причина, по которой в канале с замираниями пропускная способность при
нулевых перерывах связи может быть значительно меньше пропускной
способности Шеннона, заключается в необходимости поддержания посто-
янной скорости передачи данных во всех состояниях канала (при любых
замираниях). За счет временного прекращения передачи при особенно
сильных замираниях в канале (т. е. при нарушении связи) можно поддер-
живать более высокую постоянную скорость передачи данных в других
состояниях и таким образом значительно увеличить пропускную способ-
ность. Пропускная способность канала с нарушениями связи определяется
как максимальная скорость передачи данных, которая может поддержи-
ваться при всех состояниях канала (за исключением случаев перерывов
радиосвязи), умноженная на вероятность бесперебойной работы. Про-
пускная способность с нарушением радиосвязи достигается с помощью
адаптации мощности методом усеченной инверсии канала, который ком-
пенсирует замирание, только если его глубина выше некоторой пороговой
величины 7о:
(4-19)
-Р(т) = Г <т/7, 7 7о,
Р | О, 7 < То,
где 7о — определяется вероятностью нарушения радиосвязи
-Pout = Р (Т < то) •
Так как канал используется только при выполнении условия т То,
то ограничение мощности (4.8) дает нам: ст = 1/Е70 [I/7], где
ГН
'70
(4.20)
LtJ J т
70
Пропускная способность при заданной вероятности нарушения связи
POut и соответствующем значении порога 70, имеет вид:
С (Рощ) = В log2 (1 +
При максимизации этого выражения по всем возможным значениям 70 по-
лучим максимально достижимую пропускную способность с перерывами
связи:
(4.21)
(4.22)
Эта максимальная пропускная способность с нарушением связи все еще
будет меньше пропускной способности Шеннона (4.13), так как усеченная
инверсия канала представляет субоптимальный метод передачи. Однако
схемы, выполняющие инверсию и усеченную инверсию канала на передаче
и приеме, могут быть проще в реализации или иметь меньшую сложность,
чем «водоналивные» схемы, связанные с пропускной способностью Шен-
нона.
Пример 4.6. Рассмотрим тот же канал, что и в предыдущем примере, с по-
лосой пропускания 30 кГц и тремя возможными значениями отношения сигнал -
шум SNR на приеме: 71 = 0,8333 с p(7i) = 0,1, 72 = 83,33 с />(72) = 0,5 и 73 =
= 333,33 с />(73) = 0,4. Требуется определить для этого канала пропускную спо-
собность с нарушением связи и соответствующие вероятности нарушения связи
для значений порогов, равных 70 = 0,84 и 70 = 83,4. При каком из этих порогов
достигается большая пропускная способность с возможных перерывов связи?
Решение. При 70 = 0,84 мы используем канал, когда отношение сигнал- шум
з
SNR равно 72 или 73, поэтому Е10 [I/7] = ^2 р (yt) = 0,5/83,33 + 0,4/333,33 =
i—2
= 0,0072. При этом пропускная способность с нарушением радиосвязи равна
С = Blog2 (1 + 1/Р70 [l/y]) р (7 > 7о) =
= 30000 log2 (1 + 138,88) • 0,9 = 192,457 кбит/с.
198 Глава 4- Пропускная способность беспроводных каналов
При 7о = 83,34 мы используем канал только когда отношение сигнал-шум SNR
равно 7з, поэтому Е70 [I/7] = р(7з)/?з = 0,4/333,33 = 0,0012. При этом пропуск-
ная способность составит
С = Blog2 (1 + 1/Е70 [I/7]) р (7 > 7о) =
= 30000 log2 (1 + 833,33) • 0,4 = 116,45 кбит/с.
Пропускная способность с нарушением радиосвязи больше в том случае, когда
канал используется при отношениях сигнал-шум SNR, равных 72 и 73. И хо-
тя отношение сигнал-шум 73 значительно больше, чем 79, тот факт, что это
большее значение имеет место только в течение 40 % времени, делает неэффек-
тивным использование канала только в этом наилучшем состоянии.
4.2.5. Пропускная способность канала
с разнесенным приемом
Разнесенный прием — зто хорошо известный метод улучшения эксплуа-
тационных характеристик беспроводной связи, применяемый в каналах
с замираниями. Основное преимущество разнесенного приема состоит
в том, что он уменьшает неустойчивость, возникающую вследствие зами-
раний, так что канал становится более похожим на канал с аддитивным
белым гауссовым шумом AWGN. Более подробно о разнесенном приеме
и его характеристиках будет рассказано в гл. 7. Так как разнесенный
прием уменьшает влияние замираний, то возникает интересный вопрос:
повышает ли он пропускную способность канала с замираниями? Для
расчета пропускной способности при сложении разнесенных сигналов,
прежде всего, необходимо установить распределение отношения сигнал -
шум на приеме />(7) при данном методе сложения. Если это распределение
известно, то при его подстановке в одну из существующих формул емко-
сти будет получена пропускная способность при сложении разнесенных
сигналов. Использование той или иной формулы пропускной способно-
сти зависит от допущений относительно дополнительной информации о
канале; например, при наличии полной информации CSI в передатчике
и приемнике будет использоваться формула (4.13). В [22] рассчитана про-
пускная способность при различных предположениях относительно допол-
нительной информации CSI (при максимальной скорости и разнесении
с избирательным сложением). Было установлено, что, как и ожидалось,
пропускная способность в том случае, когда и передатчик и приемник
располагают информацией о канале CSI, больше пропускной способно-
сти, чем при наличии этой информации только в приемнике, которая,
в свою очередь, больше, чем в канале с инверсией. Эксплуатационная
погрешность этих различных формул уменьшается с увеличением чи-
сла ответвлений антенны. Эта тенденция объясняется тем, что большое
4-2. Пропускная способность каналов с амплитудными замираниями
количество ответвлений антенны делает канал похожим на канал с ад-
дитивным белым шумом AWGN, для которого все формулы пропускной
способности дают приблизительно одинаковые результаты.
В последнее время было проведено много исследований систем с не-
сколькими антеннами как на передаче, так и на приеме. Такой большой
ажиотаж в этой области вызван поразительными результатами в [26,
27, 28], показывающими, что пропускная способность канала с замира-
ниями с множеством входов и выходов (канал MIMO) в М раз больше
пропускной способности канала без многоэлементных антенн. При этом
М = min(Mt, Мг), где Mt — число передающих антенн, а Мг — число
приемных антенн. Мы обсудим пропускную способность систем с много-
элементными антеннами в гл. 10.
4.2.6. Сравнительная оценка пропускной способности
* Пропускная способность (ПС) канала с аддитивным белым шумом AWGN
— ПС Шеннона при наличии информации CSI в передатчике и приемнике (4.13)
ПС Шеннона при наличии информации CSI в приемнике (4.4)
‘ Максимальная ПС с нарушением радиосвязи (4.22)
° ПС с нулевыми нарушениями радиосвязи (4.18)
Рис. 4.6. Пропускная способность канала при логарифмически нормальном рас-
пределении замираний
В этом разделе мы сравним пропускную способность канала в случае
наличия информации CSI как в передатчике, так и в приемнике при
различных методах распределения мощности с пропускной способностью
канала в случае наличия информации CSI только в приемнике. На рис. 4.6,
Глава 4- Пропускная способность беспроводных каналов
4.7 и 4.8 представлены графики зависимости величин пропускной способ-
ности (4.4), (4.13), (4.18) и (4.22) от среднего значения отношения сигнал -
шум SNR на приеме для логарифмически нормального распределения за-
мираний (со стандартным отклонением ст = 8 дБ), рэлеевских замира-
ний и замираний Накагами (с параметром Накагами т = 2). Замира-
ния Накагами с т — 2 примерно соответствуют рэлеевским замираниям
при разнесенном приеме на две антенны. Для сравнния также приведена
пропускная способность канала с аддитивным белым гауссовым шумом
AWGN для того же самого среднего значения мощности. Обратите внима-
ние, что пропускная способность канала с логарифмически нормальным
распределением замираний представлена как функция среднего значе-
ния в дБ отношения сигнал-шум SNR (ц<ш), а не среднего значения
отношения сигнал-шум SNR, выраженного в дБ (101og10 ц): соотноше-
ние между этими значениями, согласно (2.45), имеет вид: 10 log10 /т =
= Р-dB + &%в In (Ю) /20.
Среднее значение отношения сигнал-шум (дБ)
* Пропускная способность (ПС) канала с аддитивным белым шумом AWGN
— ПС Шеннона при наличии информации CSI в передатчике и приемнике (4.13)
ПС Шеннона при наличии информации CSI в приемнике (4.4)
+ Максимальная ПС с нарушением радиосвязи (4.22)
° ПС с нулевыми нарушениями радиосвязи (4.18)
Рис. 4.7. Пропускная способность канала с рэлеевскими замираниями
По результатам сравнения следует отметить следующее. Во-первых,
из графиков видно, что пропускная способность канала с аддитивным бе-
лым шумом AWGN больше, чем у канала с замираниями для всех случаев.
Однако при низких отношениях сигнал-шум SNR канал с аддитивным
4-2. Пропускная способность каналов с амплитудными замираниями
белым шумом AWGN и канал с замираниями при наличии в передатчике
и приемнике информации CSI имеют почти одинаковую пропускную спо-
собность. Фактически, при низких отношениях сигнал-шум (ниже 0 дБ)
пропускная способность канала с замираниями при наличии информации
CSI как в передатчике, так и в приемнике больше, чем пропускная способ-
ность соответствующего канала с аддитивным белым шумом AWGN. Это
объясняется тем, что канал с аддитивным белым шумом AWGN всегда
имеет одно и то же низкое значение отношения сигнал - шум SNR, огра-
ничивая, таким образом, свою пропускную способность. В канале с зами-
раниями при таком же низком среднем значении отношения сигнал - шум
иногда это отношение будет высоким, так как его распределение имеет
бесконечный диапазон. Поэтому если в эти очень редкие моменты с вы-
соким отношением сигнал-шум передача по каналу ведется с большой
мощностью и скоростью, то пропускная способность такого канала бу-
дет больше, чем у канала с аддитивным белым шумом AWGN с тем же
самым низким средним значением отношения сигнал - шум SNR.
Среднее значение отношения сигнал-шум (дБ)
ж Пропускная способность (ПС) канала с аддитивным белым шумом AWGN
— ПС Шеннона при наличии информации CSI в передатчике и приемнике (4.13)
- - ПС Шеннона при наличии информации CSI в приемнике (4.4)
+ Максимальная ПС с нарушением радиосвязи (4.22)
° ПС с нулевыми нарушениями радиосвязи (4.18)
Рис. 4.8. Пропускная способность канала с замираниями Накатами (т = 2)
Глубина замираний характеризуется параметром Накагами т, при
этом для рэлеевских замираний т = 1, а для канала с аддитивным бе-
лым гауссовым шумом AWGN без замираний т = оо. Поэтому, сравнивая
(С202 Глава 4- Пропускная способность беспроводных каналов
рис. 4.7 и 4.8, можно видеть, что при уменьшении глубины замираний
(от рэлеевских замираний к замираниям Накагами с т = 2) разница
пропускной способности при различных методах адаптации также умень-
шается, и соответствующие графики пропускной способности приближа-
ются к графику для канала с аддитивным белым шумом AWGN.
Разница между кривыми пропускной способности при наличии ин-
формации о канале CSI в передатчике и приемнике (4.13) и только в при-
емнике (4.4) незначительна во всех случаях. Поскольку пропускная спо-
собность при наличии информации CSI только в приемнике (4.4) и при
наличии такой информации как в передатчике, так и в приемнике без
адаптации мощности (4.7) одинакова, можно утверждать, что если ско-
рость передачи адаптируется относительно канала, то адаптация мощ-
ности также дает незначительное увеличение пропускной способности.
Это также показывает, что адаптация передатчика приводит к незна-
чительному увеличению пропускной способности по сравнению со слу-
чаем использования дополнительной информации только в приемнике.
В условиях жестких замираний (рэлеевских и с логарифмически нормаль-
ным распределением) максимальная пропускная способность с нарушени-
ем радиосвязи демонстрирует снижение скорости на 1-5 дБ, а пропускная
способность с нулевыми нарушениями радиосвязи дает большую поте-
рю емкости по сравнению с пропускной способностью Шеннона. Однако
в условиях мягких замираний (замирания Накагами с т = 2) значения
пропускной способности Шеннона, пропускной способности с максималь-
ным нарушением связи и пропускной способности с отсутствием пере-
рывов — нулевыми нарушениями радиосвязи находятся в пределах 3 дБ
друг от друга и в пределах 4 дБ от пропускной способности канала с ад-
дитивным белым гауссовым шумом AWGN. С уменьшением замираний
эти различия будут становиться еще меньше (т —» оо для замираний На-
кагами) .
Эти результаты могут рассматриваться как компромисс между про-
пускной способностью и сложностью. Метод адаптации при наличии до-
полнительной информации в передатчике и приемнике требует более слож-
ного передатчика (кроме того, обычно требуется и цепь обратной связи
между приемником и передатчиком для получения дополнительной ин-
формации). Однако декодирующее устройство в приемнике относительно
простое. Неадаптивный метод передачи реализуется относительно про-
сто, но при разработке кода необходимо использовать статистику кор-
реляции канала (часто неизвестную), а сложность декодера пропорци-
ональна времени декорреляции канала. Методы инверсии и усеченной
инверсии канала используют коды, разработанные для каналов с адди-
тивным белым шумом AWGN, и поэтому наиболее просты в реализации,
4-3. Пропускная способность каналов с замираниями 203
но в условиях жестких замираний они несут большие потери пропускной
способности по сравнению с другими методами.
В целом анализ пропускной способности Шеннона не показывает, как
разрабатывать адаптивные или неадаптивные методы для реальных сис-
тем. В [24] были исследованы достижимые скорости при адаптивной мо-
дуляции решетчатым кодом МКАМ. Было установлено, что при объеди-
нении простого решетчатого кода с четырьмя состояниями с адаптив-
ной шестизвездной модуляцией МКАМ достигаются скорости передачи
в пределах 7 дБ пропускной способности Шеннона (4.9) на рис. 4.6 и 4.7.
Появление более сложных кодов еще более приблизило максимальную про-
пускную способность каналов с замираниями и адаптацией передатчика
к пропускной способности Шеннона.
4.3. Пропускная способность каналов
с частотно-селективными замираниями
В этом разделе мы проанализируем пропускную способность Шеннона
для каналов с частотно-селективными замираниями. Сначала будет рас-
смотрена пропускная способность стационарного канала с частотно-се-
лективными замираниями. В этом случае анализ емкости похож на анализ
канала с амплитудными замираниями, но проводится он не во временной
области, а в частотной. Затем мы обсудим пропускную способность не-
стационарных каналов с частотно-селективными замираниями.
4.3.1. Стационарные каналы
Рис. 4.9. Стационарный канал с час- «[;]
тотно-селективными замираниями
Ш]
+
у[|]
Рассмотрим стационарный канал с частотной характеристикой H(J),
как показано на рис. 4.9. Пусть общая передаваемая мощность ограни-
чена величиной Р. Для стационарного канала обычно допускается, что
характеристика известна как передатчику, так и приемнику. (Ем-
кость стационарных каналов при различных допущениях относительно
наличия информации о канале обсуждается в [19, 21]).
Сначала рассмотрим характеристику канала H(J) в случае блоков
замираний, когда частота канала разделяется на подканалы с полосой
частот В, при этом каждый подканал имеет постоянную частотную ха-
рактеристику H(J) = Hj (рис. 4.10). Таким образом, канал с частотно-
селективными замираниями можно рассматривать как совокупность па-
раллельных каналов с аддитивным белым шумом AWGN, при этом от-
ношение сигнал-шум SNR в j-м канале равно \Hj\2 Pj/NqB, где Pj —
мощность, выделенная j-му каналу в этом параллельном наборе, с учетом
ограничения мощности ^jPj Р-
Рис. 4.10. Блоковые ча-
стотно-селективные зами-
рания
Пропускная способность такого параллельного набора каналов опре-
деляется суммой скоростей каждого канала при оптимальном распреде-
лении мощности по всем каналам [5, 6]:
С = У2 в log2 ( 1 +
62 \ N0B
maxPj:^ Pj^P \
(4.23)
Обратите внимание, что это выражение похоже на формулу пропускной
способности при оптимальном распределении мощности в канале с ампли-
тудными замираниями, но изменение мощности и скорости по частоте
носит детерминированный характер, в отличие от вероятностного ха-
рактера изменений во времени. Оптимальное распределение мощности
находят через ту же функцию Лагранжа, что и в случае с амплитудными
замираниями, что обеспечивает распределение мощности по «водоналив-
ному» прнципу:
= Г V70 - 1/7>,
Р I о,
7j 70
7j < 70
(4.24)
при некотором граничном значении 70, где 7? = \Hj\2 P/NqB — отноше-
ние сигнал - шум SNR в j-м канале, при этом предполагается соблюдение
баланса мощности. Это оптимальное распределение мощности показано
на рис. 4.11. Пороговое значение получают подстановкой формулы ада-
птации мощности в ограничение мощности, так что 70 должно удовлетво-
рять условию:
= 1.
(4-25)
з
Рис. 4.11. «Водоналивной»
принцип в канале с частот-
но-селективными блоковы-
ми замираниями
1
/о
1 Л'оД
Yi \^Р
При этом пропускная способность становится равной:
С= £ BlogJ^Y
\7о /
.?:7j77<i
Эта пропускная способность достигается, когда передача ведется по раз-
ным подканалам с различной скоростью и мощностью. Тот же метод
использует и модуляция с несколькими несущими при адаптивной загруз-
ке, что будет более подробно рассмотрено в § 12.3.
В случае непрерывной частотной характеристики канала про-
пускная способность при граничном значении мощности Р определяется
примерно так же, как и в канале с блоковыми замираниями. С помощью
ряда математических преобразований можно показать, что пропускная
способность канала с непрерывной характеристикой имеет вид:
И/)12шЛ
aj.
(4.26)
С = max . ,
P(f)-.fP(P)df^pJ у No
Выражение под знаком интеграла можно рассматривать как возраста-
ющую пропускную способность на данной частоте f по полосе df при
распределении мощности P(J) и коэффициенте передачи канала |Н(/)|2.
Этот результат формально доказывается разложением Карунена — Лоэва
передаточной характеристики канала h(t) для создания эквивалентного
набора независимых параллельных каналов [5, гл. 8.5]. Альтернативное
доказательство [29] основано на представлении общего канала в виде на-
бора параллельных подканалов с использованием дискретного преобразо-
вания Фурье DFT8; такой же метод применяется при дискретной реали-
зации модуляции с несколькими несущими, описанной в разделе 12.4.
8DTF — Discrete Fourier Transform.
(4.27)
Глава 4- Пропускная способность беспроводных каналов
Распределение мощности по частоте P(J), при котором пропускная
способность (4.27) принимает максимальное значение, находят, используя
метод Лагранжа. Получаемое в результате оптимальное распределение
мощности по частоте имеет вид:
P(f) = [ 1/70-1/7Ш, 7(f) >70,
Р 1 0, 7(f) < 7о,
(4.28)
где 7(f) = \H(f)|2 P/Nq. Это дает пропускная способность канала, равная:
С= [ logJ^W
J \ 7о /
/:у(/)>ХО
(4.29)
Пример 4.7. Рассмотрим стационарный канал с частотно-селективными бло-
ковыми замираниями, имеющий три подканала в частотном диапазоне В =1 МГц.
Частотные характеристики каждого подканала равны Hi = 1, = 2 и !Р = 3
соответственно. Ограничение передаваемой мощности Р = 10 мВт, а спектраль-
ная плотность мощности шума равна Nq/2 при No = 10“9 Вт/Гц. Требуется
определить для этого канала пропускную способность Шеннона и оптимальное
распределение мощности, при котором достигается эта пропускная способность.
Решение. Сначала определим для каждого канала уу = \Hj\z P/N0B, получая
71 = 10, 72 = 40 и уз = 90. Пороговое значение уо должно соответствовать
условию (4.25). Допуская, что мощность распределяется по всем подканалам,
получаем:
— = 1 + — = 1,14 => уо = 2,64 < yjVj.
70 Y
Так как пороговое значение у0 меньше всех значений уу, то наше допущение
о том, что мощность распределена по всем подканалам, логично, и мы имеем
корректное пороговое значение. Соответствующая емкость равна:
з
С = У2В1°ё2 (71/7о) =
1=1
= 1000 000 (log2 (10/2,64) + log2 (40/2,64) + log2 (90/2,64)) = 10,93 Мбит/с.
4.3.2. Нестационарные каналы
Нестационарный канал с частотно-селективными замираниями похож
на модель, показанную на рис. 4.9, за исключением того, что H(J) =
= Н (J, г); это означает, что параметры канала изменяются и с частотой
и во времени. Определить пропускную способность нестационарных кана-
лов с частотно-селективными замираниями сложно, даже если мгновенные
значения Н (J, i) в канале точно известны и в передатчике и в приемнике.
4-3. Пропускная способность каналов с замираниями
Эта трудность связана с межсимвольной интерференцией ISI9. В случае
наличия дополнительной информации о канале, как в передатчике, так
и в приемнике оптимальная схема адаптации должна учитывать а) влия-
ние канала на предыдущую последовательность переданных бит и б) как
межсимвольная интерференция, вызванная этими битами, будет влиять
на последующие передаваемые сигналы [30]. Пропускная способность не-
стационарных каналов с частотно-селективными замираниями в общем
виде неизвестна, но существуют ее верхняя и нижняя границы, а также
ограничивающие формулы [30, 31].
Приблизительно оценить пропускную способность нестационарного
канала с частотно-селективными замираниями можно, разделив предста-
вляющий интерес частотный диапазон В на подканалы, соответствующие
когерентному частотному диапазону канала Вс, как показано на рис. 4.12.
Предположим, что каждый из получившихся подканалов является неза-
висимым, нестационарным каналом с амплитудными замираниями, а ха-
рактеристика j-ro подканала равна Н (J,i) = Hj[i\.
Рис. 4.12. Разделение ка-
налов при частотно-селек-
тивных замираниях
Когерентная
При таком допущении мы можем получить пропускную способность
для каждого из этих подканалов с амплитудными замираниями, основы-
ваясь на среднем значении мощности Pj, выделяемой данному подканалу,
с учетом граничного значения общей мощности Р. Так как подканалы
независимы, то полная пропускная способность канала будет равна усред-
ненной по времени и частоте сумме пропускных способностей отдельных
узкополосных каналов с амплитудными замираниями, с учетом ограниче-
ния средней общей мощности:
С= max (4.30)
з J
где Cj (Pj) — пропускная способность подканала с амплитудными зами-
раниями со средним значением мощности Pj и полосой пропускания Вс,
9ISI — intersymbol interference.
208 Глава 4- Пропускная способность беспроводных каналов
задаваемая выражениями (4.13), (4.4), (4.18) или (4.22) для пропускной
способности Шеннона при различных вариантах дополнительной инфор-
мации и методах распределения мощности. Если дополнительной инфор-
мацией о канале располагает только приемник, то Cj (Р^ можно опреде-
лить как пропускную способность с нарушением связи.
Мы сосредоточим внимание на пропускной способности Шеннона в слу-
чае, когда точная информация о канале CSI известна как передатчику,
так и приемнику, поскольку этот случай определяет верхнюю границу
пропускной способности по сравнению с любыми другими вариантами
дополнительной информации или субоптимальными методами распреде-
ления мощности. Мы знаем, что если зафиксировать среднее значение
мощности, приходящейся на подканал, то оптимальная адаптация мощ-
ности будет происходить по «водоналивному» принципу. Можно ожидать,
что оптимальное среднее значение мощности, выделяемой каждому под-
каналу, также будет следовать «водоналивному» принципу, когда лучшим
подканалам выделяется большая средняя мощность. При этом ожидается,
что оптимальное распределение мощности будет двумерным, изменяясь
как во времени, так и по частоте. Найдем это оптимальное двумерное
распределение и соответствующую пропускную способность Шеннона.
Пусть 7у[г] = \Hj[i]\2 P/NqB — мгновенное значение отношения сиг-
нал-шум SNR в j-м подканале в момент времени i в предположении, что
полная мощность Р распределяется во времени и по частоте. Пусть мощ-
ность -Pj(7j) изменяется в зависимости от тДг]. Пропускная способность
Шеннона при наличии информации о канале CSI в передатчике и прием-
нике получается при оптимизации адаптации мощности как по времени
(тДг] = т, так и по частоте (индекс подканала j):
ОО
С= ^шах 52/sclog2fl + ^-^-^-')p(7J)rf7r
РАъ'р'Е f рЛъ)р(ъ)^^ >о '
j о
(4.3!)
Чтобы найти оптимальное распределение мощности Pj (7j), используют
функцию Лагранжа:
ОО
J (Р3 Ы) = 22 / Вс 1о§2 f1 + Р (Bfj -
ОО
- А 22 / (71 )Р (7j) d7r (4.32)
7 о
Заметьте, что выражение (4.32) похоже на функцию Лагранжа (4.10)
для канала с амплитудными замираниями, но в данном случае добавлена
размерность частоты за счет суммирования по всем подканалам. Диф-
ференцируя функцию Лагранжа и приравнивая ее производную к нулю,
можно устранить все составляющие, кроме данного подканала и его от-
ношения сигнал-шум SNR:
dPj Ш
Вс/1н(2)
1 + 7jW/-f7 Р
рЫ = о.
(4.33)
Найдя Pj ('yj), мы получаем тот же самый «водоналивной» принцип,
что и в случае с амплитудными замираниями:
pj (jj)
Р
1/70 - 1/7у,
0,
7? 70,
7J < 70,
(4.34)
где пороговое значение 70 получают из ограничения общей мощности, как
по времени, так и по частоте:
ОО
Е / hi) d-fj = Р. (4.35)
j о
Таким образом, оптимальное распределение мощности (4.34) — это дву-
мерный «водоналивной» процесс с общим пороговым значением 70. При
делении ограничения (4.35) на Р и подстановке в оптимальное распределе-
ние мощности (4.34) мы получаем, что значение 70 должно удовлетворять
условию:
ОО
Е [ f---Vb)^ = l- (4.36)
V-l V70 7>/
J 70
Интересно отметить, что в данном случае значение порогов одинаково
для всех подканалов. Это предполагает, что даже если распределения
замираний или средние значения мощности при замираниях в разных
подканалах различны, все подканалы приостанавливают передачу, когда
мгновенное значение отношения сигнал-шум SNR падает ниже общего
порогового значения 70. Подставляя оптимальное распределение мощно-
сти (4.35) в выражение пропускной способности (4.31), получаем:
ОО
С = Е / 1О§2 d^- (4-37)
J 70
Задачи
4.1. Пропускная способность канала с аддитивным белым шумом AWGN за-
дается выражением: С = В log2 (1 + P/NqB), где Р — мощность принима-
Глава 4- Пропускная способность беспроводных каналов
емого сигнала, В — полоса пропускания сигнала, a No/2 — спектральная
плотность мощности шума. Найдите предельное значение пропускной спо-
собности при бесконечной полосе пропускания В —> оо как функцию от Р.
4.2. Рассмотрим канал с аддитивным белым шумом AWGN с полосой пропус-
кания 50 МГц, мощностью принимаемого сигнала 10 мВт и спектральной
плотностью мощности шума А?)/2, где No = 2 • 10-9 Вт/Гц. Насколько
увеличится пропускная способность при удвоении принимаемой мощно-
сти? Насколько увеличится пропускная способность при удвоении паюсы
пропускания канала?
4.3. Предположим, что два пользователя одновременно ведут передачу по ка-
налу с аддитивным белым гауссовым шумом AWGN на один приемник.
Такая ситуация типична для сотовой системы, где множество абонентов
посылает сигналы на базовую станцию. Пусть принимаемая мощность
для обоих абонентов одинакова и равна 10 мВт, а общий шум на прие-
ме в интересующем нас частотном диапазоне составляет 1 мВт. Полоса
пропускания канала для каждого пользователя составляет 20 МГц.
а) Предположим, что приемник сначала декодирует сигнал первого або-
нента. При этом сигнал второго абонента выступает в качестве шума
(допустим, что у него такая же статистика, как и у канала с аддитив-
ным белым шумом AWGN). Какова пропускная способность канала
первого абонента с этим дополнительным зашумлением?
б) Предположим, что после декодирования сигнала первого абонента де-
кодирующее устройство снова его кодирует и затем вычитает из при-
нятого сигнала. Теперь при декодировании сигнала второго абонента
не будет помех от сигнала первого абонета. Какой будет в этом случае
пропускная способность Шеннона для канала второго абонента?
Примечание: В гл. 14 будет показано, что метод декодирования с последо-
вательным вычитанием декодированных сигналов оптимален для дости-
жения пропускной способности Шеннона в канале коллективного доступа
с независимыми передатчиками, посылающими сигналы на один приемник.
4.4. Рассмотрим канал с амплитудными замираниями с полосой 20 МГц, в ко-
тором при фиксированной передаваемой мощности Р отношение сигнал -
шум SNR на приеме принимает одно из шести значений: 71 = 20 дБ,
72 = 15 дБ, 7з = 10 дБ, 74 = 5 дБ, 75 = 0 дБ и 76 = —5 дБ. Вероят-
ности каждого из этих состояний равны Pi = рв = 0,1, рг — Pi = 0,15,
рз = р5 = 0,25. Предположим, что информацией о канале CSI располагает
только приемник.
а) Найдите пропускную способность Шеннона для этого канала.
б) Начертите график пропускной способности с нарушениями радиосвя-
зи для 0 POut < 1 и найдите максимальное среднее значение скорости
при правильном приеме (макс. Cout)-
4.5. Рассмотрим канал с амплитудными замираниями, в котором при фикси-
рованной передаваемой мощности Р отношение сигнал-шум SNR на при-
4.6.
4.7.
еме принимает одно из четырех значений: 71 = 30 дБ, 72 = 20 дБ,
73 = 10 дБ и 74 = 0 дБ. Вероятности каждого из этих состояний рав-
ны р\ = 0,2, Р2 = 0,3, рз = 0,3 и р,\ = 0,2. Допустим, что и передатчик,
и приемник располагают информацией CSI.
а) Определите оптимальный метод адаптации мощности P[i]/P для этого
канала и соответствующую пропускную способность Шеннона на 1 Гц
(С/В).
б) Определите метод адаптации мощности с инверсией канала и соответ-
ствующую пропускную способность с нулевыми нарушениями радио-
связи на единицу полосы пропускания.
в) Определите метод адаптации мощности с усеченной инверсией канала
и соответствующую пропускную способность с нарушением радио-
связи на единицу полосы пропускания для различных вероятностей
нарушения радиосвязи: FOut = 0,1, POut = 0,25 и для значения Pout
(и соответствующего порогового значеия 70), при котором достигает-
ся максимальная пропускная способность с нарушением радиосвязи.
Рассмотрим сотовую систему, в которой уменьшение мощности с рассто-
янием определяется выражением Pr(d) = Pt (do/d)a, где do = 100 м, а а —
случайная величина. Распределение величины а имеет вид: р (о = 2) = 0,4,
р(а = 2,5) = 0,3, р(а = 3) = 0,2, р(а = 4) = 0,1 Пусть приемник находит-
ся на расстоянии d = 1000 м от передатчика, с ограничением среднего
значения мощности передачи Pt = 100 мВт, а мощность шума приемника
равна 0,1 мВт. Предположим, что и передатчик, и приемник располагают
информацией CSI.
а) Рассчитайте распределение отношения сигнал-шум SNR на приеме.
б) Определите оптимальный метод адаптации мощности для этого ка-
нала и соответствующую пропускную способность Шеннона на 1 Гц
(С/В).
в) Определите пропускную способность с нулевыми нарушениями радио-
связи на единицу полосы пропускания этого канала.
г) Определите максимальную пропускную способность с нарушением ра-
диосвязи на единицу полосы пропускания этого канала.
Рассмотрим канал с рэлеевскими замираниями, в котором и передатчик
и приемник имеют информацию CSI, а распределение отношения сигнал
шум SNR />(7) при замираниях — экспоненциальное со средним значением
7 = 10 дБ. Пусть частотный диапазон канала составляет 10 МГц.
а) Найдите пороговое значение 70 и соответствующее распределение мощ-
ности, при котором в данном канале достигается пропускная способ-
ность Шеннона.
б) Рассчитайте пропускную способность Шеннона для этого канала.
в) Сравните свой ответ в пункте (б) с емкостью канала с аддитивным бе-
лым шумом AWGN и таким же средним значением отношения сигнал -
Глава 4- Пропускная способность беспроводных каналов
шум.
г) Сравните свой ответ в пункте (б) с пропускной способностью Шеннона
в случае, когда значения у[г] известны только приемнику.
д) Сравните свой ответ в пункте (б) с пропускной способностью с нуле-
выми нарушениями радиосвязи и пропускной способностью с наруше-
нием радиосвязи, когда вероятность нарушения радиосвязи составляет
0,05.
е) Повторите пункты (б), (в) и (г) — т.е. определите пропускную спо-
собность Шеннона при наличии дополнительной информации в пере-
датчике и приемнике, в случае канала с аддитивным белым шумом
AWGN при том же среднем значении мощности, а также в случае на-
личия дополнительной информации только в приемнике — для того же
самого распределения замираний, но со средним значением -у = —5 дБ.
Опишите обстоятельства, при которых канал с замираниями имеет бо-
лее высокую пропускную способность, чем канал с аддитивным белым
шумом AWGN при одинаковом среднем значении отношения сигнал-
шум SNR и объясните, почему это происходит.
Рис. 4.13. Канал с помехами для
задачи 4.8
Данная задача иллюстрирует увеличение пропускной способности, кото-
рое может быть получено при оценке помех, а также то, какой ущерб
рабочим характеристикам канала может нанести злонамеренное внесе-
ние умышленных помех. Рассмотрим канал с помехами, изображенный
на рис. 4.13. В этом канале имеется комбинация аддитивного белого шума
AWGN n[fc] и интерференции 7[fc], Мы моделируем 7[fc] как аддитивный
белый шум AWGN. Источник помех включен (переключатель находится
в нижнем положении) с вероятностью 0,25 и выключен (переключатель
находится в верхнем положении) с вероятностью 0,75. Среднее значение
передаваемой мощности равно 10 мВт, спектральная плотность мощно-
сти шума имеет параметр Nq = 10~8 Вт/Гц, полоса пропускания канала
В составляет 10 кГц (мощность шума приемника равна NqB), а мощность
источника помех (во включенном состоянии) равна 9 мВт.
а) Какова пропускная способность Шеннона для этого канала, если ни
передатчик, ни приемник не знают, когда включен источник помех?
б) Какова пропускная способность канала, если и передатчик, и прием-
ник знают, когда включен источник помех?
в) Предположим теперь, что источник помех — это станция внесения
умышленных помех с точным знанием значений х[к] (поэтому источ-
ник помех больше не моделируется как аддитивный белый шум AWGN).
Предположим, что ни передатчик, ни приемник не знают о поведении
станции умышленных помех. Представим также, что станция умыш-
ленных помех всегда включена и имеет среднее значение мощности пе-
редачи 10 мВт. Какой метод будет использовать станция умышленных
помех, чтобы минимизировать отношение сигнал-шум принимаемого
сигнала?
4.9. Рассмотрим злонамеренный источник помех из задачи 4.8. Предположим,
что передатчик прекрасно знает сигнал помехи. В этом случае возможны
два метода передачи: передатчик может игнорировать помеху и исполь-
зовать всю свою мощность для отправки своего сигнала, или он может
использовать какую-то часть своей мощности для погашения источника
помех (т. е. передавать «негатив» сигнала помехи). В первом случае источ-
ник помех будет уменьшать пропускную способность посредством усиле-
ния шума; во втором случае источник помех также уменьшает пропуск-
ную способность, так как передатчик жертвует частью своей мощности
для погашения интерференции. Какой метод обеспечит более высокую
пропускную способность?
Примечание: Существует и третий метод, когда кодирующее устройство
использует структуру помехи в своем процессе кодирования. Этот ме-
тод называется кодированием испорченных документов и используется
для достижения пропускной способности Шеннона в радиовещательных
каналах с многоэлементными антеннами, как описывается в гл. 14.
4.10. Покажите с использованием метода Лагранжа, что оптимальное распре-
деление мощности, при котором достигается максимальная пропускная
способность в стационарном канале с блоковыми замираниями, задается
формулой (4.24).
4.11. Рассмотрим стационарный канал с блоковыми замираниями с частотной
характеристикой
W) =
1,
0,5,
2,
0,25,
0,
fc - 20 МГц f < fc - 10 МГц,
А-10 мгц^/<А,
fc f < fc + 10 МГц,
А+ 10 МГц^/<А + 20 МГц,
другое
для f > 0, а Н (—/) = H(f). При передаваемой мощности 10 мВт и спек-
тральной плотности мощности шума 0,001 мкВт на Герц, найдите опти-
мальное распределение мощности и соответствующую пропускную спо-
собность Шеннона для этого канала.
4.12. Покажите, что оптимальное распределение мощности, при котором до-
стигается максимальная пропускная способность стационарного канала
с частотно-селективными замираниями, задается формулой (4.28).
214 Глава f. Пропускная способность беспроводных каналов
4.13. Рассмотрим канал с частотно-селективными замираниями с полной по-
лосой пропускания 12 МГц и когерентной полосой пропускания Вс =
= 4 МГц. Разделим полную полосу пропускания на три подканала с по-
лосой пропускания Вс и допустим, что каждый подканал представляет
канал с амплитудными рэлеевскими замираниями, при этом замирания
в каждом подканале независимы. Пусть эти подканалы имеют средние
значения усиления Е ^\Hi[i]= 1, Е = 0,5 и Е [|7?з[г]|2] =0,125.
Общая передаваемая мощность равна 30 мВт, а спектральная плотность
мощности шума в приемнике имеет параметр No = 0,001 мкВт/Гц.
а) Найдите для этого канала оптимальное двумерное распределение мощ-
ности по «водоналивному» принципу и соответствующую пропускную
способность Шеннона, допуская, что и передатчик, и приемник знают
мгновенные значения ЛГДг], j = 1,2,3.
б) Сравните пропускную способность, полученную в пункте (а), с той,
которая получается при выделении всем подканалам мощности с оди-
наковым средним значением 10 мВт с последующей «водоналивной»
адаптацией каждого подканала к такому распределению мощности.
Литература
1. С.Е. Shannon, «А mathematical theory of communication», Bell System Tech. J.,
pp. 379 423. 623-56, 1948.
2. C.E. Shannon, «Communications in the presence of noise.» Proc. IRE, pp. 10-
21, 1949.
3. С. E. Shannon and W. Weaver, The Mathematical Theory of Communication,
University of Illinois Press, Urbana, 1949.
4. M. Medard, «The effect upon channel capacity in wireless communications of
perfect and imperfect knowledge of the channel», IEEE Trans. Inform. Theory,
pp. 933-46, May 2000.
5. R. G. Gallager, Information Theory and Reliable Communication, Wiley, New
York, 1968.
6. T. Cover and J. Thomas, Elements of Information Theory, Wiley, New York,
1991.
7. C. Heegard and S. B. Wicker, Turbo Coding, Kluwer, Boston, 1999.
8. I. Csiszar and J. Korner, Information Theory: Coding Theorems for Discrete
Memoryless Channels, Academic Press, New York, 1981.
9. I. Csiszar and P. Narayan, «The capacity of the arbitrarily varying channel»,
IEEE Trans. Inform. Theory, pp. 18-26, January 1991.
10. I. C. Abou-Faycal, M. D. Trott, and S. Shamai, «The capacity of discrete-time
memoryless Rayleigh fading channels», IEEE Trans. Inform. Theory, pp. 1290-
1301, May 2001.
11. A. Lapidoth and S. M. Moser, «Capacity bounds via duality with applications to
multiple-antenna systems on flat-fading channels», IEEE Trans. Inform. Theory,
pp. 2426-67, October 2003.
12. A. J. Goldsmith and P. P. Varaiya, «Capacity, mutual information, and coding
for finite-state Markov channels», IEEE Trans. Inform. Theory, pp. 868-86, May
1996.
13. M. Mushkin and I. Bar-David, «Capacity and coding for the Gilbert-Elliot chan-
nel», IEEE Trans. Inform. Theory, pp. 1277-90, November 1989.
14. T. Holliday, A. Goldsmith, and P. Glynn, «Capacity of finite state Markov chan-
nels with general inputs», Proc. IEEE Internat. Sympos. Inform. Theory, p. 289,
July 2003.
15. R. J. McEliece and W. E. Stark, «Channels with block interference», IEEE Trans.
Inform. Theory, pp. 44-53, January 1984.
16. A. Lapidoth and S. Shamai, «Fading channels: How perfect need ’perfect side
information’ be?» IEEE Trans. Inform. Theory, pp. 1118-34, November 1997.
17. G. J. Foschini, D. Chizhik, M. Gans, C. Papadias, and R. A. Valenzuela, «Analy-
sis and performance of some basic space-time architectures», IEEE J. Sei. Areas
Commun., pp. 303-20, April 2003.
18. W. L. Root and P. P. Varaiya, «Capacity of classes of Gaussian channels», SIAM
J. Appl. Math., pp. 1350-93, November 1968.
19. J. Wolfowitz, Coding Theorems of Information Theory, 2nd ed., Springer-Verlag,
New York, 1964.
20. A. J. Goldsmith and P. P. Varaiya, «Capacity of fading channels with channel
side information» IEEE Trans. Inform. Theory, pp. 1986-92, November 1997.
21. G. Caire and S. Shamai, «On the capacity of some channels with channel state
information», IEEE Trans. Inform. Theory, pp. 2007 -19, September 1999.
22. M.-S. Alouini and A. J. Goldsmith, «Capacity of Rayleigh fading channels un-
der different adaptive transmission and diversity combining techniques», IEEE
Trans. Veh. Tech., pp. 1165-81, July 1999.
23. S.-G. Chua and A. J. Goldsmith, «Variable-rate variable-power MQAM for fad-
ing channels», IEEE Trans. Commun., pp. 1218-30, October 1997.
24. S.-G. Chua and A. J. Goldsmith, «Adaptive coded modulation for fading chan-
nels», IEEE Trans. Commun., pp. 595-602, May 1998.
25. K. S. Gilhousen, I. M. Jacobs, R. Padovani, A. J. Viterbi, L. A. Weaver, Jr., and
С. E. Wheatley III, «On the capacity of a cellular CDMA system», IEEE Trans.
Veh. Tech., pp. 303-12, May 1991.
26. G. J. Foschini, «Layered space-time architecture for wireless communication in
fading environments when using multi-element antennas», Bell System Tech. J.,
pp. 41-59, Autumn 1996.
27. E. Teletar, «Capacity of multi-antenna Gaussian channels», AT&T Bell Labs
Internal Tech. Memo, June 1995.
28. G. J. Foschini and M. Gans, «On limits of wireless communications in a fading
environment when using multiple antennas», Wireless Pers. Commun., pp. 311 —
35, March 1998.
29. W. Hirt and J. L. Massey, «Capacity of the discrete-time Gaussian channel with
intersymbol interference», IEEE Trans. Inform. Theory, pp. 380-8, May 1988.
30. A. Goldsmith and M. Medard, «Capacity of time-varying channels with channel
side information», IEEE Trans. Inform. Theory (to appear).
31. S. Diggavi, «Analysis of multicarrier transmission in time-varying channels»,
Proc. IEEE Internat. Conf. Commun., pp. 1191-5, June 1997.
ГЛАВА 5
ЦИФРОВАЯ
МОДУЛЯЦИЯ
И ДЕМОДУЛЯЦИЯ
Достижения последних десятилетий в области аппаратного обеспечения
и цифровой обработки сигналов сделали цифровые приемопередатчики
намного дешевле, быстрее и экономичней в энергопотреблении анало-
говых приемопередатчиков. Что еще более важно, цифровая модуляция
дает множество других преимуществ по сравнению с аналоговой моду-
ляцией, включая более высокую эффективность использования спектра,
эффективные методы исправления ошибок, стойкость к помехам в ка-
нале, более эффективные методы многостанционного доступа, а также
лучшую безопасность и защиту информации от несанкционированного
доступа. В частности, методы цифровой модуляции высокого уровня, та-
кие как многократная КАМ, обеспечивают гораздо более эффективное
использование спектра, чем это было возможно при аналоговой модуля-
ции. Достижения в кодировании и кодовой модуляции, используемые при
цифровой передаче сигнала, делают этот сигнал гораздо менее воспри-
имчивым к шумам и замираниям, а методы коррекции и использование
нескольких несущих позволяют уменьшить межсимвольную интерферен-
цию. Методы расширения спектра, используемые при цифровой модуля-
ции, позволяют одновременно устранять влияние замираний или объеди-
нять на приеме сигналы многолучевого распространения и противостоять
интерференции, а также принимать сигналы многих. Наконец, при ци-
фровой модуляции намного проще шифровать данные, что обеспечивает
более высокий уровень безопасности и защиты информации от несанкци-
онированного доступа. По этим причинам все создаваемые в настоящее
время или планируемые системы для беспроводных приложений являются
цифровыми.
Цифровая модуляция и демодуляция предполагает передачу инфор-
мации по каналу связи в виде потока бит. Биты — это двоичные симво-
лы, принимающие значения 1 или 0. Эти биты поступают из источника
информации, который может быть как цифровым, так и аналоговым
(в сочетании с аналого-цифровым преобразователем АЦП). Для получе-
ния информационной битовой последовательности информация источни-
Цифровая модуляция и демодуляция 217
ка — как цифрового, так и аналогового с АЦП — может подвергаться
сжатию. Цифровая модуляция преобразует информационные биты в ана-
логовый сигнал для передачи по каналу. При демодуляции производится
восстановление исходной последовательности бит на основе сигнала, полу-
ченного по каналу. При выборе конкретного метода цифровой модуляции
руководствуются следующими основными соображениями:
- высокая скорость передачи данных;
- высокая эффективность использования спектра (минимальное заня-
тие частотного диапазона);
- высокая эффективность в смысле бюджета мощности (минимальная
требуемая мощность передачи);
- устойчивость к помехам в канале (минимальная вероятность ошибок
по битам);
- реализация с помощью маломощных и недорогих устройств.
Часто эти требования бывают противоречивыми, и выбирается тот
метод модуляции, который достигает наилучшего компромисса между
ними.
Существуют две основные категории цифровой модуляции: амплитуд-
ная, а также фазовая и частотная модуляции. Так как частотно-модули-
рованный сигнал обычно имеет постоянную огибающую и генерируется
с использованием нелинейных методов, ее также называют модуляци-
ей с постоянной огибающей или нелинейной модуляцией, а амплитудную
и фазовую модуляцию называют также линейной модуляцией. Линейная
модуляция, как правило, обладает лучшими спектральными характери-
стиками, чем нелинейная модуляция, так как нелинейная обработка ведет
к расширению спектра. Однако при амплитудной и фазовой модуляции
информация содержится в амплитуде или фазе передаваемого сигнала, ко-
торые более восприимчивы к воздействию замираний и интерференции.
Кроме того, методы амплитудной и фазовой модуляции обычно требуют
линейных усилителей, которые являются более дорогостоящими и менее
эффективными с точки зрения мощности, чем нелинейные усилители,
используемые при нелинейной модуляции. Поэтому компромисс между ли-
нейной и нелинейной модуляцией — зто выбор между эффективностью
использования спектра, с одной стороны, и эффективностью по мощ-
ности и устойчивости к ухудшениям канала — с другой. Когда метод
модуляции определен, нужно выбрать размер комбинации (размерность
диаграммы состояний). Методы модуляции с большим числом состояний
обеспечивают более высокие скорости передачи данных при заданной по-
лосе пропускания сигнала, но более восприимчивы к шуму, затуханию
и дефектам аппаратуры. Наконец, в некоторых демодуляторах требует-
Глава 5. Цифровая модуляция и демодуляция
ся опорная фаза, когерентная по отношению к передаваемому сигналу.
Получение этой когерентной фазы может быть труднореализуемым или
значительно повышать сложность приемника. Поэтому методы модуля-
ции, не требующие когерентной опорной фазы в приемнике, более пер-
спективны.
Данная глава начинается с общего обсуждения концепций простран-
ства сигналов. Эти концепции значительно упрощают разработку и ана-
лиз методов модуляции и демодуляции за счет отображения бесконечно-
мерных сигналов в конечномерном векторном пространстве. Затем эти
общие принципы анализа пространства сигналов будут применены для
анализа методов амплитудной и фазовой модуляции, включая амплитуд-
но-импульсную модуляцию АИМ (РАМ1), фазовую манипуляцию ФМН
(PSK2) и квадратурную амплитудную модуляцию КАМ (QAM3). Мы об-
судим формирование комбинаций (созвездий) и методы квадратурного
сдвига для этих видов модуляции, а также дифференциальное кодирова-
ние во избежание необходимости когерентной опорной фазы. Затем будут
описаны методы частотной модуляции и их свойства, включая частот-
ную манипуляцию ЧМН (FSK4), манипуляцию с минимальным сдвигом
(MSK5) и с непрерывной фазой ЧМН-НФ (CPFSK6). Также будут рассмо-
трены когерентное и некогерентное детектирование при данных методах
модуляции. Кроме того, в главе рассматриваются методы формирования
импульсов для улучшения спектральных характеристик модулированного
сигнала, а также вопросы, связанные с восстановлением несущей и син-
хронизацией по символам.
5.1. Анализ пространства сигналов
При цифровой модуляции поток бит конечной длины кодируется в один
из нескольких возможных сигналов для передачи. Очевидно, что при де-
кодировании приемник минимизирует вероятность ошибочного приема,
выбирая из набора возможных передаваемых сигналов тот, который ока-
зывается «ближайшим» к принятому сигналу. Для определения расстояния
между переданным и принятым сигналами необходимо ввести меру (пока-
затель) расстояния между сигналами. Представив сигналы в виде проек-
ций на набор базисных функций, мы получаем однозначное соответствие
'РАМ — Pulse Amplitude Modulation.
2 PSK — Phase-Shift keying.
3QAM — Quadrature Amplitude Modulation.
4 FSK — Frequency-Shift keying.
5MSK — Minimum-Shift keying.
6CPFSK — Continuous-phase FSK.
5.1. Анализ пространства сигналов
между набором передаваемых сигналов и их векторными представления-
ми. Это дает нам возможность анализировать сигналы в конечномерном
векторном пространстве вместо бесконечномерного пространства функ-
ций, используя классические понятия расстояния в векторном простран-
стве. В данном разделе будет показано, как модулированные в цифровом
виде сигналы могут быть представлены векторами в определенном век-
торном пространстве, и как из этого векторного представления можно
получить оптимальные методы демодуляции. В последующих разделах
эти общие принципы будут применены для анализа конкретных методов
модуляции.
m, = {bi
Канал с аддитивным
белым шумом AWGN
Рис. 5.1. Модель системы связи
5.1.1. Модель сигнала и системы
Рассмотрим модель системы связи, представленную на рис. 5.1. Каждые
Т секунд система передает по каналу К = log2 М бит информации со
скоростью R = К/Т бит в секунду. Существуют М = 2К возможных
последовательностей К бит, и можно сказать, что каждая последователь-
ность бит длиной К представляет сообщение rrii = {/ц,..., b^} € М, где
М = {пи,..., тпм} — набор всех подобных сообщений. Вероятность того,
м
что сообщение будет отобрано для передачи, равна pi, а ^2 Pi = 1-
i=i
Предположим, сообщение mi должно быть передано по каналу за вре-
менной интервал [О, Т). Так как канал аналоговый, для передачи по нему
сообщение должно быть преобразовано в аналоговую форму. Поэтому ка-
ждое сообщение m, Е М преобразуется в уникальный аналоговый сигнал
Si(t) eS = {.si (f),... , Сигнал si(f) определен на временном интер-
вале [О, Т) и имеет энергию:
т
ESi = У Si(t)dt, i = (5.1)
О
Так как каждое сообщение представляет собой последовательность
бит, то каждый сигнал Si(t) g S также представляет последовательность
бит, и демодуляция переданного сигнала Sj(£) на приеме предполагает де-
Глава 5. Цифровая модуляция и демодуляция
тектирование переданной последовательности бит. Когда сообщения пе-
редаются последовательно, передаваемый сигнал представляет собой по-
следовательность соответствующих аналоговых сигналов в каждом вре-
менном интервале [кТ, (к + 1) Т): s(t) = ^Si(t - кТ), где Sj(£) — ши-
к
рокополосный или полосовой аналоговый сигнал, соответствующий со-
общению mi, передаваемому в интервале [кТ, (к + 1) Т). Это показано
на рис. 5.2, где изображен передаваемый сигнал s(t) = si(t) + s2(t - Т) +
+si (t — 2Т) + si(t — ЗТ), соответствующий последовательности сообще-
ний mi,m2,mi,mi, а сообщение mi преобразуется в сигнал ьЦГ).
т?
Рис. 5.2. Передаваемый сиг-
нал, соответствующий после-
довательности сообщений
В модели на рис. 5.1 сигнал передается по каналу с аддитивным белым
шумом AWGN, и на приме к переданному сигналу добавляется белый
гауссовский шум n(t) со спектральной плотностью мощности No/2: r(t) =
= s(t) + n(t). При заданном r(t) приемник должен дать лучшую оценку
того, какой сигнал Sj(i) G S передавался в течение каждого интервала
передачи [кТ, (к + 1) Т). Эта лучшая оценка сигнала Sj(£) дает лучшую
оценку сообщения тЦГ) Е М в виде последовательности переданных бит
т = {Si,..., bk} Е М, формируемой на выходе приемника.
При разработке схемы оценки переданного сообщения в приемнике ста-
вится задача сведения к минимуму вероятности ошибочного сообщения
м
Ре = тДтщ отпр)р(тг отпр) (5.2)
г=1
в каждом временном интервале [кТ, {к + 1) Т). При геометрическом пред-
ставлении сигналов {sj(i) : i = оптимальная схема приемни-
ка в канале с аддитивным белым шумом AWGN может быть основана
на критерии минимального расстояния. Напомним, что, как было по-
казано в предыдущих главах, беспроводные каналы, помимо аддитив-
ного белого шума AWGN, обычно имеют нестационарную импульсную
характеристику. Влияние произвольной импульсной характеристики ка-
нала на рабочие характеристики цифровой модуляции будет рассмотрено
в гл. 6, а методы борьбы с ухудшением этих рабочих характеристик —
в гл. 11-13.
5.1. Анализ пространства сигналов
5.1.2. Геометрическое представление сигналов
В основе геометрического представления сигналов лежит понятие бази-
са. В частности, используя процедуру ортогонализации Грама-Шмидта
[1; 2], можно показать, что любой набор М действительных сигналов
S = {siзм(£)} с конечной энергией, определенных на интервале
[0,Т), может быть представлен в виде линейной комбинации N М
действительных ортонормальных базисных функций {<pi(i),..., <рлг(£)}-
Говорят, что эти базисные функции представляют набор S. Следователь-
но, каждый сигнал Sj(£) G S может быть выражен через свои базисные
функции:
N
s;(£) = 5П Sij(pj(£), 0 t < Т, (5.3)
1=1 т
где Sij = У (5.4)
о
— действительный коэффициент, представляющий проекцию сигнала s^(i)
на базисную функцию </?y(t), а
т
j| J’ ’ (5.5)
о
Если сигналы {sj(£)} линейно независимы, то N = М. в противном
случае N < М. Более того, минимальное количество N ортогональных
базисных функций, необходимое для представления любого сигнала Sj(i)
продолжительностью Т с полосой пропускания В, приблизительно рав-
но 2ВТ [3, гл. 5.3]. Поэтому сигнал Sj(t) имеет ортогональную размер-
ность 2ВТ.
Для методов линейной полосовой модуляции базисный набор состоит
из синусоидальной и косинусоидальной функций:
</’1 = COS (27Г^) ’ (5-6)
<^2 (t) = Sin (2л/д). (5.7)
Множитель \J2/T необходим для нормализации, чтобы выполнялось усло-
вие J? <pl(t)dt = 1, i = 1,2. Фактически, с этими базисными функциями
мы получаем только приближение (5.5), так как
т т
У <р?(£) dt = У 0,5 [1 + cos (4л/Д)] dt = 1 + • (5-8)
о о
(Г222 Глава 5. Цифровая модуляция и демодуляция
Числитель во втором элементе (5.8) ограничивается 1, а при fcT 3> 1 зна-
менатель этого элемента очень большой. Поэтому данный элемент может
игнорироваться. Подобным образом имеем:
т т
[ <^i (t) dt = ?~ / 0,5 sin (4тгДТ) dt = « 0, (5.9)
J 1 J ^JC-^
0 0
где при fcT 1 приближение переходит в равенство.
Для базисного набора
<pi(i) = у/2/Т cos (2тг/Д) и <p2(i) = yfijT sin(27rfct)
представление сигнала через базисные функции (5.3) соответствует экви-
валентному низкочастотному представлению сигнала si(f) через его син-
фазную и квадратурную составляющие:
Si(t) = вцcos (2тг/Д) + Si2\J^sin(27vfct) . (5.10)
Обратите внимание, что несущие базисные функции могут иметь исход-
ное фазовое смещение <ро- Базисный набор может также включать в себя
широкополосный фильтр формирования импульсов g(t) для улучшения
спектральных характеристик передаваемого сигнала:
= sng(t) cos (2тг/Д) + si2g(t) sin (2тг/Д). (5.11)
В этом случае форма импульса g(t) должна быть нормирована по ортам
(5.5) базисных функций; т. е. должны выполняться условия:
т
Jg2(t) cos2 (2тг/Д) dt = 1 (5-12)
о
и
т
J g2(t) cos sin (2тг/с£) dt = 0, (5.13)
о
где равенства могут быть приближенными при fcT 3> 1, как в (5.8)
и (5.9). Если полоса пропускания фильтра д(Г) удовлетворяет условию
В /с, то величина g2(t) будет приблизительно постоянной в течение
периода Тс = 1/fc, и условие (5.13) будет приблизительно выполняться,
так как на одном периоде Тс синусоидальная и косинусоидальная функции
ортогональны. Самая простая форма импульса, удовлетворяющая (5.12)
и (5.13) — это прямоугольный импульс g{t) = у/2/Т, 0 t < Т.
Пример 5.1. При двоичной фазовой манипуляции ДФМН (ФМ2) бит со зна-
чением 1 передается сигналом Si (i) = о cos (2тг fct), 0 t < Т, а бит со значением
0 — сигналом s2(0 = — a cos (2тгfct), 0 t Т. Необходимо определить набор
ортонормальных базисных функций и коэффициенты {вц } для этой модуляции.
5.1. Анализ пространства сигналов
Решение. Для сигналов Si(t) и s^t) существует только одна базисная функция:
<p(i) = у/2/Т cos (2тгfct),
где множитель л/2/Т необходим для нормализации. Тогда коэффициенты зада-
ются как Si = а^/Т/2 и «2 = ~Оу/Тjl.
Рис. 5.3. Представление сигнального
пространства
02(0
01(0
Пусть s; = («л,..., Sjyv) G R-^ — вектор коэффициентов {s/j} в базис-
ном представлении сигнала Sj(f). Вектор s, называют точкой созвездия
(диаграммы состояний) сигнала Sj(f). Все точки созвездия {si,...,Sm}
образуют созвездие сигнала (диаграмму состояний). Для заданных ба-
зисных функций {<pi(t),..., (pN[t)} существует однозначное соответствие
между передаваемым сигналом Sj(£) и его точкой созвездия Sj. Так, S{(t)
можно получить из Sj с помощью (5.3), a Si может быть получено из Sj(f)
с помощью (5.4). Следовательно, передаваемый сигнал равным образом
можно охарактеризовать как с помощью Sj(i), так и через Sj. Предста-
вление сигнала Sj(f) с помощью его точки созвездия Sj G RiV называется
представлением в сигнальном пространстве, а векторное пространство,
содержащее созвездие, называется сигнальным пространством. Двумер-
ное сигнальное пространство показано на рис. 5.3, где точка созвездия
s, 6 R2 с г-й осью R2 соответствует базисной функции <рД£), i = 1,2.
Представление в сигнальном пространстве позволяет анализировать бес-
конечномерные функции Si(t) как векторы s, в конечномерном векторном
пространстве R2. Это значительно упрощает анализ эксплуатационных
показателей системы, а также разработку оптимальной схемы приемни-
ка. Для распространенных методов модуляции типа М-кратных ФМН
Глава 5. Цифровая модуляция и демодуляция
и КАМ используется представление в двумерном сигнальном простран-
стве (соответствующем синфазной и квадратурной базисным функциям),
которое будет рассмотрено позднее в данной главе.
Чтобы проанализировать сигнал через его представление в сигналь-
ном пространстве, нам потребуется несколько определений величин, ха-
рактеризующих вектор в векторном пространстве IR/V. Длина вектора
в этом пространстве определяется как
1М = ,Е4- <514)
V=1
Поэтому расстояние между двумя точками созвездия сигнала s, и S& опре-
деляется следующим образом:
||Si - Sfe|| =
(5.15)
где второе равенство получено при записи s2 (£) и Sk (£) через их базисное
представление (5.3) и использовании ортонормальных свойств базисных
функций. Наконец, скалярное произведение (sj(f), Sk(t)) двух действитель-
ных сигналов Sj(f) и Sk(t) на интервале [О, Т] равно
т
(sj(i),sfe(i)) = f Si(t)sk(t)dt. (5.16)
о
Аналогично определяем скалярное произведение для двух точек созвездия:
т
(s„ Sk) = = у Si(f)Sk(t) dt = (Sj(i), sfe(i)), (5.17)
о
где равенство между скалярным произведением векторов и скалярным
произведением соответствующих сигналов следует из базисного предста-
вления сигналов (5.3) и ортонормальных свойств базисных функций (5.5).
Если скалярное произведение сигналов равно нулю, то такие сигналы на-
зывают ортогональными. Поэтому, на основании (5.5), базисные функции
являются ортогональными функциями.
5.1.3. Структура приемника и достаточная статистика
Пусть сигнал на выходе канала имеет вид: r{t) — s,(i) + n(t), 0 < t < Т.
Исследуем структуру приемника, чтобы определить, какая точка созвез-
дия Si (или, соответственно, какое сообщение ггц) передавалась во времен-
ном интервале [О, Т). Такая же процедура проделывается для каждого вре-
менного интервала [кТ, (к + 1)Т). Можно было бы в каждом временном
5.1. Анализ пространства сигналов
интервале преобразовывать принятый сигнал r(t) в вектор, что позволи-
ло бы выполнять оценку переданного сигнала в конечномерном векторном
пространстве. Однако такое преобразование недопустимо с точки зрения
точности оценивания. Рассматриваем приемник, который преобразует
принятый сигнал в вектор без ухудшения его показателей. Рассмотрим
структуру приемника, показанную на рис. 5.4, где
т
Sij = j" (5.18)
о
т
rij = J n(t)<pj(t) dt. (5.19)
о
Рис. 5.4. Структура приемника для демодуляции сигнала в канале с аддитивным
белым шумом AWGN
Мы можем переписать г(£) в виде:
N N
^^ij + nj)<pj{t) + nr{t) = + nr(t), (5.20)
7 = 1 7=1
N
где rj = + nj, a nr(£) = n(t) — 22 означает «остаточный» шум,
7=1
т. е. составляющую шума, ортогональную по отношению к сигнальному
пространству. Если мы можем показать, что оптимальное детектирова-
ние точки созвездия передаваемого сигнала эг при известном принятом
сигнале r(f) производится без учета остаточного шума nr(t), то при-
емник может самостоятельно формировать свою оценку m переданного
сообщения тгц в виде функции г = (п,... ,гм). Другими словами, вектор
г = (п,..., г?у) представляет достаточную статистику r(t) для оптималь-
ного детектирования передаваемых сообщений.
Глава 5. Цифровая модуляция и демодуляция
Рис. 5.5. Проекция принятого сигнала
на полученный вектор г
Интуитивно понятно, что остаточ-
ный шум пг (£) не может помочь в де-
тектировании передаваемого сигна-
ла Sj(i), так как его проекция на сиг-
нальное пространство равна нулю.
Это показано на рис. 5.5, где предпо-
лагается, что передаваемый сигнал
расположен в пространстве, на ба-
зисе (<pi(i), <р2(^))5 в то время как
остаточный шум находится на ба-
зисе функции (рПгЦ), ортогональной
к (i) и Остаточный шум
представлен на рис. 5.5 как пг, при этом nr(i) = пг<рПт(Г). Принимае-
мый сигнал представлен как г + пг, где г = (п,Г2), а г (Г) — nr(t) —
= + T2<p2(i)- Из рисунка ясно, что проецирование г + пг на г не
помешает определить то, какое созвездие Sj было передано, так как пг на-
ходится в пространстве, ортогональном по отношению к пространству,
в котором находится s,. Теперь покажем математически, почему это ин-
туитивное предположение верно.
Сначала исследуем распределение вектора г. Так как n(t) представляет
гауссовский случайный процесс, то если передаваемый сигнал равен Sj(f),
сигнал на выходе канала r(t) = Sj(i) + n(t) также будет гауссовским слу-
чайным процессом, а г = (п,..., г к)- гауссовским случайным вектором.
Вспомним, что rj = Sij + rij. Следовательно, при передаче созвездия Si мы
имеем:
Mrjlsj = Е [rj lsd = E[sij + = sij (5-21)
(так как n(t) имеет нулевое среднее значение) и
— Е ~ Mrjlsj] = Е [йу + rij — Sij= E [zij] . (5.22)
Более того,
т
о
Cov [rjTfclsj] = Е [(rj - nrj)(rk - MrJIsi] = E [п^пк] =
Г т
=Е /
.0
т т
= У У ~d(t-T)<pj(t)<pk(T) dtdr = У (Pj{t)(pk{r) dt = i Q
0 0 0
т т
= У У ’E[n{t)n{T)]cpj(t)tpk{T)dtdT =
о о
N0/2, j = к,
3 ± к,
(5.23)
где последнее равенство следует из ортонормированности базисных функ-
ций. Следовательно, при передаче созвездия si, элементы rj являются
некоррелированными, а также — поскольку речь идет о гауссовском про-
цессе — независимыми. Из этого следует, что Е = Nq/2.
Мы показали, что при передаче созвездия Sj, ту представляет гаус-
совскую случайную величину, не зависящую от ту (k^j), со средним
значением Sij и дисперсией No/2. Следовательно, условное распределение
вектора г имеет вид:
N 1
p(r|Si отпр) = fjp (rjlm,) = — ,
7=1 (тгЛ^о)^2
1 N
2ехр • (5‘24)
° J = 1
Также несложно показать, что Е [г^пг(£)|sj] = 0 для любых 0 t < Т.
Поэтому пока величины ту (обусловленная sj и nr(t) являются гауссов-
скими и некоррелированными, они независимы. Также пока переданный
сигнал независим от шума, не зависит от процесса nr(t).
Теперь обсудим критерии разработки приемника и покажем, что на нее
не влияет отбрасывание nr(i). Задача схемы приемника — свести к ми-
нимуму вероятность ошибки детектирования переданного сообщения тгц
на основе принятого сигнала r(f). Чтобы минимизировать вероятность
ошибки Ре = p(m ± mi\r(t)) = 1 — p(m = mi\r(t)), мы максимизируем
вероятность p(m = m,i\r(t)). Поэтому выходной сигнал приемника m при
принятом сигнале r(i) должен соответствовать тому сообщению mi, при
котором вероятность р (mi отпр|г(£)) максимальна. Так как существу-
ет однозначное соответствие между сообщениями и точками созвездия
сигнала, то это эквивалентно максимизации вероятности р (sj отпр|г(£)).
Помня о том, что r(t) полностью описывается с помощью г = (п,... , гдг)
и nr(t), имеем:
p(si OTnp|r(t)) = p((sn,...,SiN) отпр| (и,...,nv),nr(t)) =
_ p((sn,...,siN) отпр| (ri,...,rN) ,nr(t)) =
p((r1,...,rN),nr(t))
= р((зц,...,зщ) отпр|(г1,...,тЛг))р(пг(£)) =
p(n,...,rAf)p(nr(i))
= p((sn,...,SiN) отпрКп,...,^)), (5.25)
где третье равенство следует из того, что nr(t) не зависит как от (п,..., Гдг),
так и от (six, • • •,, зцу). Этот анализ показывает, что вектор г = (п,..., гдг)
является достаточной статистикой r(t) для детектирования mi — в том
смысле, что при использовании только этой достаточной статистики и отбра-
сывании остаточного шума вероятность ошибки уменьшается до минимума.
Так как вектор г представляет достаточную статистику принимаемого
сигнала г(£), его называют полученным вектором, соответствующим r(t).
Глава 5. Цифровая модуляция и демодуляция
5.1.4. Области решений и критерий
максимального правдоподобия
В предыдущем разделе было показано, что оптимальный приемник сокра-
щает вероятность ошибки до минимума, формируя на выходе детектора
такой сигнал т, при котором вероятность 1 — Ре = р(т отпр|г) макси-
мальна. Другими словами, при заданном полученном векторе г оптималь-
ный приемник отбирает сигналы т = тц, соответствующие созвездию Si,
которое удовлетворяет условию р (sj отпр|г) р (sj отпр|г) для всех j г.
Запишем набор областей решений {Zi,..., Zm}, являющихся подмноже-
ствами сигнального пространства Rw, в виде:
Zi = {г : р (sj отпр|г) > р (sj отпр|г) V; / г} .
(5.26)
Рис. 5.6. Области решений
Ясно, что эти области не перекрываются. Более того, они разделя-
ют сигнальное пространство, если не существует вектора г G R/V, для
которого р (sj отпр|г) = р (sy отпр|г). Если такие точки существуют, то
сигнальное пространство разделяется на области решений произвольным
присваиванием этих точек областям решений Zi или Zj. Когда сигналь-
ное пространство разделено на области решения, оптимальный приемник
формирует на выходе оценку сообщения т = тг для полученного векто-
ра г £ Z{. Таким образом, приемник рассчитывает полученный вектор г
на основе г(£), определяет, какая область решений Zi содержит этот век-
тор г, и формирует на выходе соответствующее сообщение тц Этот
процесс показан на рис. 5.6 для двумерного сигнального пространства
с четырьмя областями решений Zi,..., Z4, соответствующими четырем
5.1. Анализ пространства сигналов
созвездиям si,...,S4. Полученный вектор г лежит в области 2ц, поэто-
му на выходе приемника будет сообщение mi, которое дает наилучшую
оценку для заданного полученного вектора г.
Теперь рассмотрим области решения более подробно. Запишем выра-
жение р (sj отпр|г получ) в сокращенном виде как p(sj|r), a p(sj отпр) —
как p(sj). В соответствии с правилом Байеса получаем:
Чтобы минимизировать вероятность ошибки, примем, что выходной
сигнал приемника соответствует созвездию Sj, для которого вероятность
p(sj|r) максимальна; это значит, что s, должно удовлетворять условию:
arg max - = arg max р (r|s;)p (sj , г = 1,...,М, (5.28)
si p ) si
где второе равенство следует из того факта, что р(г) не является функ-
цией эц В предположении одинаково вероятных сообщений (р (s;) = 1/М),
выходной сигнал приемника т = mi соответствует созвездию Sj, которое
удовлетворяет условию:
arg тахр (г|зД , г = 1,...,М. (5.29)
Запишем функцию правдоподобия для данного приемника в виде:
L(si) = р(г|эД . (5.30)
Для заданного полученного вектора г максимально правдоподобный
приемник формирует на выходе сообщение т = rrii, соответствующее
созвездию Sj, для которого величина L (эД максимальна. Так как логариф-
мическая функция с увеличением аргумента возрастает, то максимизация
функции L (sj) эквивалентна максимизации ее логарифма. Более того,
постоянный множитель (ttNo)~N^2 в (5.24) не влияет на максимизацию
L (si) относительно Sj. Следовательно, максимизация L (эД эквивалентна
максимизации логарифмической функции правдоподобия, определяемой
как I (зД = In [(7r^)-2V/2b(sj)]. Используя (5.24), для Z (вД = р(г|эД,
получаем:
1 N 1
I (si) = (rj — Sij) = — — ||r — SJ| . (5.31)
'Vo 1^0
j=i
Таким образом, логарифмическая функция правдоподобия I (эД зави-
сит только от расстояния между полученным вектором г и точками со-
звездия Sj. Более того, как видно из (5.31), функция I (эД имеет мак-
симальное значение в точке созвездия Sj, самой близкой к полученному
вектору г.
Глава 5. Цифровая модуляция и демодуляция
Принцип реализации максимально правдоподобного приемника пока-
зан на рис. 5.4. Сначала на основе сигнала г(£) рассчитывается вектор г,
а затем определяется ближайшая к вектору г точка созвездия Sj, удовле-
творяющая условию:
N
arg min (г,- — Sj, )2 — arg min ||r — Sj ||2 . (5.32)
Si Si
3=1
Эта точка s, находится в области решений Zj, которая содержит вектор г
и определяется выражением:
Zi = {г : ||г - Si|| < ||r - Sj|| V; = 1,... ,М, j г}, i = (5.33)
Наконец, оценка созвездия Sj преобразуется в оценку сообщения т,
которая поступает на выход приемника. Интуитивно понятно, что такой
результат является удовлетворительным, так как приемник решает, что
переданная точка созвездия находится ближе всех к полученному вектору.
Эта максимально правдоподобная структура приемника проста в приме-
нении, так как критерии решения зависят только от векторных расстоя-
ний. Кроме того, такая структура минимизирует вероятность ошибочно-
го сообщения на выходе приемника в случае, когда переданные сообщения
равновероятны. Однако если сообщения и соответствующие созвездия
сигнала не являются равновероятными, то максимально правдоподобный
приемник не минимизирует вероятность ошибки. В этом случае, чтобы
сократить вероятность ошибки до минимума, области решений Zi долж-
ны быть изменены с тем, чтобы учитывать вероятности сообщений, как
это показано в (5.27).
Рис. 5.7. Структура приемника с согласованным фильтром
На рис. 5.7 представлена альтернативная структура приемника. Эта
структура использует набор фильтров, согласованных с каждой из раз-
5.1. Анализ пространства сигналов
личных базовых функций. Фильтр с импульсной характеристикой ip(t) =
= tp(T — t), 0 t Т называют согласованным фильтром для сигна-
ла <p(i) и, соответственно, схему на рис. 5.7 называют приемником с со-
гласованным фильтром. Можно показать, что если заданный входной
сигнал проходит через фильтр, согласованный с этим сигналом, то отно-
шение сигнал-шум SNR на выходе будет максимальным. Можно также
показать, что выходы дискретного согласованного фильтра (гх,..., гп)
на рис. 5.7 те же самые, что и (и,... ,гп) на рис. 5.4, поэтому приемники,
изображенные на этих рисунках, эквивалентны.
Пример 5.2. Для двоичной фазовой манипуляции ДФМН (ФМ2) найдите
области решений Z\ и Д?, соответствующие созвездиям S] = /1 и S2 ~ —А для
А> 0.
Решение. Сигнальное пространство одномерное, поэтому г = г 6 R. В соответ-
ствии с (5.33) область решений Zx С R определяется так:
Zi = {г : ||г - Л || < ||г - (—А)||} = {г : г > 0} .
Следовательно, Z\ содержит все положительные числа на действительной оси.
Аналогично:
^2 = {г : ||г - (—А)|| < ||г - А||} = {г : г < 0} .
Z2 содержит все отрицательные числа на действительной оси. При г — 0 рассто-
яния до Sj = А и S2 — —А одинаковы, поэтому мы произвольно принимаем, что
г = 0 относится к области решений Z>.
5.1.5. Вероятность ошибки и граница объединения
Теперь проанализируем вероятность ошибки для приемника, работаю-
щего по критерию максимального правдоподобия. Для равновероятных
сообщений р(ггц отпр) = 1/М мы имеем
М 1 м
Ре = (r i zi\mi отпр)р (mi отпр) = — (г £ Zi\mi отпр) =
г=1 г=1
1 Д 1 м г
= 1 м z2p (r G Zi\mi отпр) = 1 - Т7 22 / Р dr =
г=х г=1 z.
1 М f I М Г
= 1~М^ P^r = Si + n^dn = 1~M^ / P^dn- (5-34)
г=1 Zi ^Zi-Si
Интегралы в (5.34) находятся в пределах TV-мерного подмножества Zi С IR/V.
Этот расчет вероятности ошибки проиллюстрирован на рис- 5.8, где точ-
ки созвездия si,... ,s8 равномерно размещены на окружности на мини-
мальном расстоянии dmin друг от друга Вероятность правильного приема
Глава 5. Цифровая модуляция и демодуляция
при условии, что первый символ отправлен — р (г G Zi|mi отпр) соответ-
ствует вероятности р (г = si + n G Zi|si). Поэтому, когда к переданному
созвездию Sy прибавляется шум, то образующийся в результате вектор
г = Si + п остается в области 2ц, показанной штриховкой.
Рис. 5.8 также показывает, что вероятность ошибки инвариантна по от-
ношению к углу вращения или смещению оси созвездия сигнала. В правой
части рисунка показаны вращение фазы 0 и смещение оси Р относительно
созвездия, изображенного слева. При этом s) = s2e70 + Р. Инвариант-
ность к углу вращения объясняется тем, что вектор шума n = (пх,..., пм)
имеет компоненты, которые представляют независимые и одинаково рас-
пределенные случайные величины с нулевым средним значением. Сле-
довательно, фаза 0 в полярном представлении п = |п| е-70 распределена
равномерно, и статистика шума инвариантна к углу вращения фазы. Ин-
вариантность к смещению оси связана с тем, что при смещении созвездия
на некоторую величину Р G ЖЛ"' области решений, определяемые согласно
(5.33), также смещаются на величину Р. Пусть (sj, — точка созвездия
и соответствующая область решений до смещения, a (s', Z') — соответ-
ствующие точка созвездия и область решений после смещения. Нетрудно
показать, что р (г = s2 + n G Zj |sj) = p(r' = s( + n Е Z^s'). Следователь-
но, вероятность ошибки при осевом смещении точек созвездия останется
неизменной.
Рис. 5.8. Интеграл вероятности ошибки и его инвариантность к вращению
и смещению
Хотя (5.34) дает точное решение для вероятности ошибки, мы не мо-
жем получить это решение в аналитическом виде. Поэтому выразим ве-
роятность ошибки, используя объединенную оценку. Это даст нам ана-
5.1. Анализ пространства сигналов
литическое выражение для вероятности ошибки как функции расстояния
между точками созвездия сигнала. Пусть А^ обозначает событие, для
которого ||r — Sfc|| < ||r — Si|| при условии, что точка созвездия выбыла
передана. Если происходит событие Ац^ то созвездие будет декодиро-
вано с ошибкой, так как переданная точка эг не является ближайшей
точкой созвездия к полученному вектору г. Однако событие Ац^ не обяза-
тельно предполагает, что вместо точки sz будет декодирована точка s^,
так как может существовать другая точка созвездия s/, для которой
||r — s/|| < ||г —Sfcll < ||r — Si||. Созвездие декодируется правильно, если
||г — Si || < ||r — Sfe || для всех к i. Поэтому
Ре (mi отпр) = р
/ \
м
Aik
к=1
М
к=1
к^г
(5.35)
где неравенство следует из оценки объединения вероятностей, определен-
ной ниже.
Рис. 5.9. Проекция шума
Рассмотрим вероятность р (А^) более подробно. Мы имеем:
р (Aik) = р ([|sfc - гЦ < ||si - г|| |si отпр) =
= p(||sfe - (Sj + n)|| < ||Si - (Sj + 11)11) =
= p(||n + sj-Sfell < ||n||); (5.36)
т. e. вероятность ошибки равна вероятности того, что шум п ближе к век-
тору Si — Sfc, чем к источнику. Вспомним, что шум имеет нулевое среднее
значение, поэтому он обычно близок к источнику. Эта вероятность не
зависит от всей шумовой составляющей п, а зависит только от проек-
ции п на прямую, соединяющую источник и точку Sj — S&, как показано
на рис. 5.9. Исходя из свойств п, проекция п на эту одномерную пря-
мую представляет одномерную гауссовскую случайную величину п с ну-
левым средним значением и дисперсией Nq/2. Событие Агк происходит,
если п находится ближе к Sj — sk, чем к нулю, т. е. если n > dik/2^ где
dik — ||si — Sfe|| — расстояние между точками созвездия sz и sk. Таким
Глава 5. Цифровая модуляция и демодуляция
образом:
°° 2
p(Aik) =р(п> / —==== ехр ~ dv = Q (-~=\ . (5.37)
\ 2 / J V^No [ TVo J \v27Vo/
Подставляя (5.37) в (5.35), получаем:
kjLi
где Q-функция — Q(z) определяется как вероятность того, что гауссов-
ская случайная величина X со средним значением 0 и дисперсией 1 больше,
чем z:
оо
Q(z) = р(Х > z) = [ —^=е~х2!2dx. (5.39)
J у2тг
Z
Суммируя (5.38) по всем возможным сообщениям, получаем границу объ-
единения:
М 1 М М , , х
ре = ^р(цц)Ре(тг отпр) Q ’ (5’4°)
г=1 г=1 к=1 ' ’
k^i
Обратите внимание, что Q-функция не может быть получена в анали-
тическом виде. Она связана с дополнительной функцией ошибки соотно-
шением:
Q(z) = jerfc . (5.41)
Верхняя граница функции Q(z) может быть представлена выражением:
Q(z) -^=е-г2/2 (5.42)
гу2тг
и будет ограничена при z 0.
Обозначив минимальное расстояние созвездия как c?mjn = min^fe dik,
мы можем упростить (5.40), используя менее жесткую оценку:
(5.43)
Используя (5.42) для представления Q-функции, ограничение можно за-
писать в аналитическом виде:
-----г ехР л л / •
L 4No J
(5.44)
Наконец, Ре иногда приближенно представляют как вероятность ошибки
в созвездии при минимальном расстоянии между его точками dmjn, умно-
5.1. Анализ пространства сигналов
женную на число Mdminсоседних точек, находящихся на этом расстоянии:
(5.45)
\ V 47V0 /
Это приближенное представление вероятности ошибки Ре называют
приближением ближайшего соседа. Когда различные точки созвездия име-
ют разное количество ближайших соседей или различные минимальные
расстояния, граница может быть усреднена по всем точкам созвездия.
Заметьте, что приближение ближайшего соседа всегда будет меньше, чем
«нежесткая» граница (5.43), так как М Mdm.n. Оно будет также немного
меньше, чем граница объединения (5.40), так как приближение ближай-
шего соседа не учитывает ошибки в созвездиях, удаленных на расстояние
больше минимального. Однако при высоких значениях отношения сиг-
нал-шум SNR приближение ближайшего соседа находится достаточно
близко к точной вероятности ошибки символа, так как для больших х и у
при х > у, Q(x) С Q(y) вследствие экспоненциального спада гауссовско-
го распределения в (5.39). Это показывает, что при высоких отношениях
сигнал-шум вероятность неправильной интерпретации точки созвездия
вместо другой точки, не являющейся одной из ближайших к ней соседних
точек, незначительна. Точный вывод формулы (5.45) дается в [4], а так-
же упоминается в [5]. Более того, в [4] показано, что (5.45) учитывает
ухудшение рабочих характеристик вследствие несовершенства приемни-
ка, в том числе медленный дрейф несущей, за счет соответствующей
регулировки постоянных. Привлекательность приближения ближайшего
соседа в том, что оно зависит только от минимального расстояния в сиг-
нальном созвездии и числа ближайших соседей для точек созвездия.
Пример 5.3. Рассмотрим созвездие сигнала в пространстве R2, определя-
емое с помощью точек Si = [А,0], «2 — (0, А), «з = (—А,0), — (0, — А).
Пусть A/yfNo = 4. Необходимо определить для данного созвездия минимальное
расстояние и границу объединения (5.40), «нежесткую» границу (5.43), границу
в аналитическом виде (5.44) и приближение ближайшего соседа (5.45) для веро-
ятности Ре.
Решение. Рассматриваемое созвездие соответствует рис. 5.3 при радиусе окруж-
ности, равном А. При наличии симметрии достаточно определить вероятность
ошибки только для одной из точек созвездия, так как для остальных ситуация
будет аналогичной. Рассмотрим ошибку при передаче точки созвездия Sj. Мини-
мальное расстояние до этой точки созвездия легко рассчитывается по формуле
4,in = di2 = Фз = Фи = ^14 = \/А2 + А2 = л/2А2. Расстояние до других то-
чек созвездия равно фз = Фз — 2А. При наличии симметрии Ре (пц отпр) =
= Ре (mj отпр) для j ф i, поэтому граница объединения упрощается до:
dii А А \ = 2Q(4) + Q(v/32) = 3,1679-КГ5.
7=2
«Нежесткая» граница равна:
Ре 3Q(4) = 9,5014- 10“5,
что примерно в 3 раза мягче, чем граница объединения. Граница в аналитиче-
ском виде равна:
—0,5А2'
= 1,004- КГ4.
М)
„ 3
Ре , — - exp
т. е. отличается от границы объединения примерно на порядок. Наконец, при-
ближение ближайшего соседа дает
Ре « 2Q (4) = 3,1671 • 10“5,
что (как и ожидалось) приблизительно равно границе объединения.
Обратите внимание, что при двоичной модуляции (М = 2) есть толь-
ко один способ совершить ошибку, a Кгп;п представляет расстояние между
двумя точками сигнального созвездия, так что граница (5.43) определя-
ется точно:
(5.46)
РЬ = Q (
Квадрат минимального расстояния Кгп;п в (5.44) и (5.46) обычно про-
порционален отношению сигнал-шум SNR принимаемого сигнала, что
обсуждается в гл. 6. Поэтому при возрастании мощности принимаемого
сигнала вероятность ошибки уменьшается.
Напомним, что Ре — это вероятность ошибочного приема символа
(сообщения): Ре = p(m ггц\ггц отпр), где ттц соответствует сообще-
нию длиной log2 М бит. Однако разработчиков системы обычно больше
интересует не вероятность ошибки символа, а вероятность ошибки в дво-
ичном разряде (или частота ошибок по битам — BER7), так как ошибки
по битам определяют рабочие характеристики сетевых протоколов выс-
ших уровней и сквозной передачи. Поэтому нужно разработать такой
метод преобразования М возможных последовательностей бит в сообще-
ния пц (г = 1,..., М), чтобы ошибка декодирования при выборе смежной
области решений (что является наиболее вероятным способом совершить
ошибку), соответствовала только одной ошибке по битам. При таком пре-
образовании и при допущении, что ошибочное интерпретирование точки
сигнального созвездия вместо другой точки, отличной от ближайшей со-
седней, имеет очень низкую вероятность — мы можем приближенно за-
писать:
(5-47)
log2M’
7BER — Bit Error Rate — коэффициент ошибки.
5.2. Принципы модуляции в ограниченной полосе пропускания
Наиболее распространенный метод преобразования, при котором оши-
бочное интерпретирование точки созвездия вместо одной из ее ближай-
ших соседей приводит к единичной ошибке бита, называется кодирова-
нием Грея. Более подробно этот метод обсуждается в § 5.3. Концепции
сигнального пространства применимы для любой модуляции, где каждый
бит кодируется одним из нескольких возможных аналоговых сигналов,
включая амплитудную, фазовую и частотную модуляции, которые будут
обсуждаться далее.
5.2. Принципы модуляции
в ограниченной полосе пропускания
Основной принцип полосовой цифровой модуляции заключается в кодиро-
вании информационного потока бит сигналом несущей частоты, который
затем передается по каналу связи. Процесс извлечения этого информа-
ционного потока бит из полученного сигнала называется демодуляцией.
Искажения, вносимые каналом в передаваемый сигнал, могут привести
к цифровым ошибкам в процессе демодуляции. Целью модуляции явля-
ется передача бит с высокой скоростью при минимизации вероятности
искажения данных.
Вообще, при модуляции информация может быть закодирована в ам-
плитуде a(t), частоте f(t) или фазе 9(t) сигнала несущей частоты. Поэто-
му модулированный сигнал можно представить в виде:
s(t) = a(t) cos [2тг(/с + + <p0] = a(t) cos (2irfct + + <p0),
(5.48)
где = 2tvf{t)t + 0(t), a <po — сдвиг фазы несущего сигнала Такое
представление объединяет частотную и фазовую модуляции в угловую
модуляцию.
Мы можем переписать правую часть (5.48), используя синфазные и ква-
дратурные составляющие:
s(f) = a(t) cos (<p(i) + <ро) cos (2тгfct) — a(t) sin (<p(i) + <po) sin (2тг/сЦ =
= sr(t) cos (2тгfct) - sQ(t) sin (27Гfct), (5.49)
где si(t) — a(t) cos +<£>o) — синфазная составляющая сигнала s(t),
a SQ{t) — a(t) sin (<p(i) + <po) — его квадратурная составляющая. Мы так-
же можем выразить сигнал s(i) через его эквивалентное низкочастотное
представление:
s(t) = Re |и(Це^27Г^с(}, (5.50)
где u(t) = sj(t) + jsQ^t). Это представление, описанное более подробно
в приложении А, полезно потому, что приемники обычно обрабатывают
синфазные и квадратурные компоненты сигнала отдельно.
238 Глава 5. Цифровая модуляция и демодуляция
5.3. Амплитудная и фазовая модуляция
При амплитудной и фазовой модуляции информационный поток бит ко-
дируется в амплитуде и/или фазе передаваемого сигнала. Это происхо-
дит так: в течение интервала времени Ts, К = log2 М бит кодируются
в амплитуду и/или фазу передаваемого сигнала s(t), 0 t < Ts. Сиг-
нал, переданный за этот период, s(t) = s/(i) cos (2тг/с£) — sq(T) sin (2тг fct)
можно записать в его сигнальном пространстве как s(t) = зц<р1(£) +
+Si2<P‘2(t) с базисными функциями (Pl(t) = g(t) COS (27г/с£ + <ро) И </?2(t) =
= — g(t) sin fct + <ро), где g(t) — формирующий импульс. Чтобы от-
править г-е сообщение в течение интервала времени [кТ,(к + 1)Т] при
<ро = 0, мы принимаем, что si(t) — вцд(Г), a sq(£) = Sizg(t). Это синфаз-
ная и квадратурная составляющие, которые находятся в полосе частот
модулирующего сигнала, а их спектральные характеристики определя-
ются формой импульса д(Г). В частности, их полоса пропускания В равна
ширине полосы частот сигнала д(к), и передаваемый сигнал s(f) пред-
ставляет полосовой сигнал с центральной частотой fc и шириной поло-
сы пропускания 2В. На практике принимают, что В = Kg/Ts, где Кд
зависит от формы импульса: для прямоугольных импульсов Кд = 0,5,
а для импульсов приподнятого косинуса 0,5 Кд 1, что обсуждается
в § 5.5. Поэтому для прямоугольных импульсов ширина полосы частот
сигнала g(t) составляет 0,5/Т5, а ширина полосы сигнала s(t) равна X/Ts.
Созвездие сигнала для амплитудной и фазовой модуляции формируется
на основе точек созвездия {(«ц,^) G R2, г = Эквивалентное
низкочастотное представление s(t) имеет вид:
s(t) = Re ^x(t)e^°e>2vf^ , (5.51)
где x(t) = (sii + jsi2) g(t). Точка созвездия Sj = (зц, s&) называется симво-
лом и соответствует сообщению длиной log2 М бит, а время Ts называется
временем передачи символа. При такой модуляции скорость передачи со-
ставляет К бит за символ или R = log2 M/Ts бит в секунду.
Существуют три основных типа амплитудной и фазовой модуляции:
- амплитудно-импульсная модуляция АИМ — информация содержит-
ся только в амплитуде;
- фазовая манипуляция ФМН — информация содержится только в фазе;
- квадратурная амплитудная модуляция КАМ — информация содер-
жится как в амплитуде, так и в фазе.
Схема цифровой модуляции определяется количеством бит на символ
К = log2 М, созвездием сигнала {sj, г = 1,...,М} и формой импуль-
са дЦ). При выборе формы импульса д{Г) руководствуются необходимо-
5.3. Амплитудная и фазовая модуляция
стью повышения эффективности использования спектра и борьбы с меж-
символьной интерференцией, о чем будет сказано в § 5.5.
Синфазная ветвь
5(Г)
Квадратурная ветвь
Рис. 5.10. Амплитудный и фазовый модулятор
Амплитудная и фазовая модуляция при заданном периоде следования
символов может быть реализована с использованием модулятора, пока-
занного на рис. 5.10. Обратите внимание, что базисные функции на этом
рисунке имеют произвольную фазу <ро, определяемую генератором пере-
датчика. Процесс демодуляции каждого символа происходит в демоду-
ляторе, схема которого изображена на рис. 5.11 и эквивалентна схеме
на рис. 5.7 при <pi(i) = g(t) cos (2тгfct + <р) и </?2(i) = —<?(£) sin (27r/ci + <р).
Обычно приемник включает в себя дополнительную схему восстановле-
ния фазы несущего сигнала, которая согласует фазу несущего сигнала <р
в приемнике с фазой несущего сигнала <ро в передатчике;8 этот процесс
известен как когерентное детектирование. Если — <ро = Д<р 0, то син-
фазная ветвь будет содержать нежелательную составляющую, связанную
с квадратурной ветвью, и наоборот: п = йц cos (Д<р) + sa sin (Д<р) + ni
и Г2 = — Sil sin(A<p) + Sj2 cos (Д<р) + n2, что может привести к значитель-
8 Действительно, задержка распространения по каналу т вносит дополнительную фазо-
вую составляющую —2л/сг. Поэтому при когерентном детектировании фаза несущего
сигнала в приемнике должна быть равна Ф = фо ~ 2л/ст (более подробно об этом гово-
рится в § 5.6).
Глава 5. Цифровая модуляция и демодуляция
ному ухудшению рабочих характеристик. Структура приемника также
предполагает, что через каждые Ts секунд функция взятия отсчетов син-
хронизируется с началом периода следования символа — это называется
восстановлением синхронизации. Синхронизация приемника и восстано-
вление фазы несущего сигнала представляют собой сложные операции, ко-
торые в беспроводных средах могут создавать значительные сложности.
Об этих операциях будет рассказано более подробно в § 5.6. В дальнейшем
обсуждении АИМ, ФМН и КАМ мы предположим идеальное восстановле-
ние несущей частоты и, исходя из этого, установим </? = </?о = 0.
Рис. 5.11. Амплитудный и фазовый демодулятор (когерентный: <р = ро)
5.3.1. Амплитудно-импульсная модуляция — АИМ
Мы начнем с рассмотрения самой простой формы линейной модуляции —
одномерной АИМ, которая не имеет квадратурного компонента (sj2 — 0).
При АИМ вся информация кодируется в амплитуде сигнала Aj. Сигнал,
передаваемый в течение одного периода следования символов, задается
формулой:
sj(i) - Re = АгдЩ cos (2тг/с/), 0 t Ts » 1//с, (5.52)
где Aj = (2г — 1 — М) d, i = 1, 2,..., М. Таким образом, созвездие сигнала
имеет вид {Aj, г = 1,...,2И}, и его параметры определяются расстояни-
ем d. Это расстояние обычно является функцией энергии сигнала. Форма
импульса д(Г) должна удовлетворять условиям (5.12) и (5.13). Минималь-
ное расстояние между точками созвездия равно dmiu — ? | Aj — Aj | = 2d.
Амплитуда передаваемого сигнала принимает М различных значений;
это значит, что за время передачи символа Ts каждый импульс передает
log2 М = К бит.
5.3. Амплитудная и фазовая mi
В каждом периоде следования символа сигнал АИМ, соответствующий
г-му созвездию, имеет энергию:
Т, Ts
Esi = js2(t)dt = У A2g2(t) cos2 (2-nfct)dt = A2, (5.53)
о 0
так как форма импульса должна удовлетворять (5.12)9. Обратите внима-
ние, что для различных сигналов Sj(f), i = 1,..., М энергия неодинакова.
В случае равновозможных символов, средняя энергия равна:
1 М
(5'54)
1=1
Преобразование созвездий обычно выполняется с помощью кодирова-
ния Грея, при котором сообщения, соответствующие соседним значениям
амплитуды сигнала, отличаются одним значением бита, как это показано
на рис. 5.12. При таком методе кодирования, если вследствие шума в про-
цессе детектирования один символ принимается за другой — соседний
(это наиболее вероятный тип ошибки), то в результате получается толь-
ко единичная цифровая ошибка в последовательности из К бит. Можно
также разработать коды Грея для ФМН и квадратных созвездий КАМ,
но не для прямоугольной КАМ.
Рис. 5.12. Кодирование м = 4, К = 2
Грея при АИМ
00 01 11 10
—•-----•------•-----•—
"2d"
М = 8, К = 3
ООО 001 ОН 010 110 111 101 100
--•----9---— •----9— ----•-----•-----•----•-
" 2d "
Пример 5.4. Для импульса прямоугольной формы g(t) = y/T./Tg (0 t < Ts)
найдите среднюю энергию при модуляции АИМ-4.
Решение. Для АИМ-4 значения А/ равны: А, = {—3d, — d. d, 3d}, поэтому средняя
энергия составит:
d2
Es = — (9 + 1 + 1 + 9) = 5d2.
9Вспомним, что с учетом (5.8), выражения (5.12) и, следовательно, (5.53) не являются
точными равенствами, скорее очень хорошими приближениями для fcTs » 1.
На рис. 5.13 показаны области решений Zn i = 1,..., М, соответству-
ющие амплитуде импульса = (2г — 1 — М) d при М = 4 и М = 8.
В общем виде эти области решений для любого М определяются выраже-
нием:
(—оо, Ai + d),
[Aj d, At + d],
[Aj — d, oo),
2 = 1
2 i < M - 1,
i = M.
Рис. 5.13. Обла-
сти решений при
АИМ
Многопороговая схема
Рис. 5.14. Когерентный демодулятор АИМ
Из (5.52) можно видеть, что АИМ имеет только одну базисную функ-
цию <pi(£) = g(t) cos (2тг fct). Поэтому когерентный демодулятор, изобра-
женный на рис. 5.11, в случае АИМ упрощается и имеет структуру, пока-
занную на рис. 5.14: многопороговая схема отображает сигнал г в область
решений Z{ и формирует на выходе соответствующую последователь-
ность бит т = ггц = {51,..., Ьк}.
5.3. Амплитудная и фазовая
5.3.2. Фазовая манипуляция — ФМН
При ФМН вся информация кодируется в фазе модулированного сигна-
ла. Поэтому сигнал, передаваемый за время передачи одного символа Т,,
задается формулой:
Sj(£) = Re = Ag(t) cos
2тг (i — 1)
M
= Ag(t) cos
2тг (i — 1)
M
cos 2тг/Д — Ag(t) sin
2тг (г — 1)
M
sin 2тг fct
(5.55)
2л/Д +
для 0 t Ts. Следовательно, точки созвездия или символы (зц, $12) имеют
вид: 5ц = A cos [2л (г — 1) /М], = Asin [2тг (г — 1) /М] для i = 1,..., М.
Форма импульса g(t) удовлетворяет условиям (5.12) и (5.13), а различ-
ные фазы в точках созвездия сигнала, переносящие биты информации,
обозначаются как ()г = 2л (г — 1) /М [г = 1,2..., М = 2К ). Минимальное
расстояние между точками созвездия равно dmjn = 2А ат(л/М), где А
обычно представляет функцию энергии сигнала. Отметим, что двухпо-
зиционную фазовую манипуляцию часто называют двоичной ФМН —
ДФМН (BPSK10) или ФМ2, а четырехпозиционную фазовую манипуля-
цию называют квадратурной ФМН — КФМН (QPSK11) или ФМ4. При
этом фазовая манипуляция ФМ4 — зто то же самое, что и квадратурная
амплитудная модуляция КАМ при М = 4 (см. подпараграф 5.3.3).
Все возможные передаваемые сигналы Sj(i) имеют одинаковую энергию:
ts
Esi = Js^t)dt = A2. (5.56)
о
Заметьте, что сигнал, для которого в течение времени передачи символа
g(t) = ^2/Ts (прямоугольный импульс) имеет постоянную огибающую,
в отличие от других методов амплитудной модуляции — АИМ и КАМ.
Однако прямоугольные импульсы неэффективны с точки зрения исполь-
зования спектра, а более эффективные формы импульсов при ДФМН со-
здают непостоянную огибающую сигнала. Как и в случае АИМ, преобра-
зование созвездия при ФМН обычно выполняется с помощью кодирования
Грея, при котором сообщения, соответствующие смежным фазам сигна-
ла, отличаются друг от друга значением одного бита (рис. 5.15). При
таком методе кодирования неправильная интерпретация символа вместо
соседнего вызывает только единичную цифровую ошибку.
На рис. 5.16 показаны области решений Zj (г = 1,..., М) при ФМН для
М = 4 и М = 8. Если представить вектор г в полярных координатах:
l0BPSK — Binary Phase-Shift Keying.
11 QPSK — Quadrature Phase-Shift Keying.
г = п + jr2 = ге>в Е R2, то эти области решений для любого М определя-
ются выражением:
Zi = {ге>в : 2л (i - 1,5) /М 0 < 2л (г - 0,5) /Л/}. (5.57)
М = 4, К = 2
Рис. 5.15.
Кодирование
Грея при ФМН
Рис. 5.16. Области
решений при ФМН
Из (5.55) видно, что сигнал ФМН содержит как синфазную, так и ква-
дратурную составляющие, и поэтому когерентный демодулятор имеет
структуру, показанную на рис. 5.11. Для частного случая ДФМН обла-
сти решений, приведенные в примере 5.2, упрощаются до Z\ = (г : г > 0)
и Z? = (г : г 0). Более того, ДФМН имеет только одну базисную функ-
цию <Д1(£) = g(t) cos (2лfct) и, поскольку за время передачи символа Ts пе-
редается только один бит, то в данном случае время передачи бита Ть рав-
но Ts. Поэтому когерентный демодулятор, представленный на рис. 5.11,
при ДФМН упрощается и имеет структуру, показанную на рис. 5.17:
пороговая схема отображает сигнал г на положительную или отрица-
тельную половину действительной прямой, а затем формирует на выходе
соответствующее значение бита. На данном рисунке предполагается, что
сообщение, соответствующее значению бита 1 (mi = 1) преобразуется
в точку созвездия si = А, а сообщение, соответствующее значению би-
та 0 (m2 = 0), преобразуется в точку созвездия S2 = — А.
т — 1
g(Th - t)
Zj : г > О
т = 1 or О
Z2 : г < О
m = О
СО8(2тг/(.Г)
Рис. 5.17. Когерентный демодулятор ДФМН (ФМ2)
5.3.3. Квадратурная амплитудная модуляция — КАМ
При КАМ информационные биты кодируются как в амплитуде, так и в
фазе передаваемого сигнала. Если АИМ и ФМН имеют только одну «сте-
пень свободы» для кодирования информационных бит (амплитуда или
фаза), то КАМ имеет две таких «степени свободы». Поэтому КАМ более
эффективна с точки зрения использования спектра, чем АИМ и ФМН,
за счет того, что позволяет кодировать наибольшее число бит на символ
при заданной средней мощности (энергии).
Передаваемый сигнал КАМ определяется выражением:
Si(t) = Re =
= Ai cos (0j) g(t) cos (2тг/Д) — Ai sin (0j) g(t) sin (2тг/Д), 0 < t < Ts
(5.58)
где форма импульса g(t) удовлетворяет условиям (5.12) и (5.13). Энергия
сигнала зД£) равна:
ESi = J s2i(t) = Al
(5.59)
т. е. такая же, как и при АИМ. Расстояние между любой парой символов
в созвездии сигнала составляет
dij ll®i Sjll у(^il •Sjl) З- (^г2 ^7’2) •
(5.60)
Для квадратных созвездий сигнала, в которых зц и принимают
значения (2г — 1 — L) d при г = 1, 2,..., L, минимальное расстояние между
точками сигнала сокращается до <7rnjn = 2d — такого же, как и при АИМ.
Фактически, КАМ с квадратными созвездиями размером L2 соответству-
ет АИМ с созвездиями размером L для каждой из синфазных и квадра-
турных составляющих сигнала. На рис. 5.18 показаны распространенные
примеры квадратных созвездий — КАМ-4 и КАМ-16. Эти квадратные
Рис. 5.18. Созвездия КАМ-4
и КАМ-16
246 Глава 5. Цифровая модуляция и демодуляция
созвездия имеют М — L2 = 22( точек, которые используются для пере-
дачи 2Z бит на символ или I бит на одно измерение, где I = 0,51og2Af.
Можно показать, что средняя мощность
Pl квадратного созвездия сигнала раз-
мерностью I бит пропорциональна 4(/3,
и, следовательно, средняя мощность при
увеличении размерности на один бит
составит F(+i « 4Р(. Поэтому при ис-
пользовании квадратных созвездий для
увеличения размерности на 1 бит или
дополнительной передачи 2 бит на сим-
вол потребуется приблизительно на 6 дБ
больше мощности при сохранении то-
го же минимального расстояния между
точками созвездия.
Для сигналов КАМ бывает трудно
найти хорошие методы преобразования
созвездий, особенно в случае созвездий
неправильной формы. В частности, для
КАМ сложно разработать код Грея, где все соседние символы отлича-
лись бы только на один бит. На рис. 5.19 показаны области решений
Zi (г = 1,..., М) при КАМ для М = 16. Из (5.58) видно, что КАМ имеет
как синфазную, так и квадратурную составляющие, и поэтому когерент-
ный демодулятор имеет структуру, показанную на рис. 5.11.
5.3.4. Относительная модуляция
При ФМН и КАМ информация переносится в фазе сигнала. Поэтому эти
методы модуляции требуют когерентного детектирования, т.е. фаза
передаваемого несущего сигнала <до должна соответствовать фазе при-
нимаемого несущего сигнала <д. Методы восстановления фазы обычно
требуют использования более сложных и дорогих приемников, а также
восприимчивы к сдвигу фазы несущего сигнала. Более того, получение
когерентной опорной фазы в каналах с быстрыми замираниями может
оказаться сложной задачей. Вопросы, связанные с восстановлением фазы
несущего сигнала, более подробно рассматриваются в § 5.6. Трудности,
возникающие при восстановлении фазы несущей, а также высокая сто-
имость и сложность приемника, побуждают к использованию методов
относительной модуляции, не требующих наличия в приемнике когерент-
ной опорной фазы.
Относительная (или разностная) модуляция входит в более широ-
кий класс методов модуляции с памятью, когда символ, передаваемый за
5.3. Амплитудная и фазовая модуляция
период времени [fcTs, (к + 1) Ts), определяется как битами, соответствую-
щими текущему передаваемому сообщению, так и битами, переданными
в предыдущие периоды. Основной принцип относительной модуляции за-
ключается в использовании предыдущего символа в качестве опорной
фазы для текущего символа, что устраняет необходимость наличия в при-
емнике когерентной опорной фазы. Информационные биты кодируются
как разность фаз между текущим символом и предыдущим символом.
Например, при относительной ФМ2, если символ, переданный за пери-
од времени [(А: — l)Ts,kTs), имеет фазу в(к — 1) = eJ°l для в{ = 0, тг, то
при кодировании передаваемого в течение периода [A:TS, (к + 1)TS) бита
со значением 0 символ будет иметь фазу 0(к) = , а при кодировании
бита со значением 1 — фазу 0(к) = е1(0г+л). Другими словами: бит со
значением 0 кодируется без изменения фазы, а биту со значением 1 соот-
ветствует изменение фазы на л. Подобным образом, при квадратурной
модуляции ФМ4 с относительным кодированием фаза символа на интер-
вале времени [kTs,(k + 1)TS) зависит от текущих информационных бит
в этом интервале и от фазы символа, переданного за предыдущий пери-
од. Фазовые переходы для относительной ФМ4 приведены в табл. 5.1.
Рис. 5.19. Области реше-
ний при КАМ для М = 16
Z5 i
Z6 ;
Пусть символ, переданный на интервале времени [(А: — 1)TS, kTs), име-
ет фазу в(к — 1) = eJ0i. Если информационные биты равны 00, то сим-
вол, передаваемый в интервале [A:TS, (к + 1)TS), также будет иметь фазу
248 Глава 5. Цифровая модуляция и демодуляция
0(к) = ej()t. Это значит, что для кодирования комбинации бит 00 символ
из предыдущего интервала [(А: — l)Tg, kTs) повторяется в следующем ин-
тервале [A:Tg, (к + 1) Ts). Если два информационных бита, которые долж-
ны быть переданы за период времени [kTs,(k + l)Tg), равны 01, то со-
ответствующий символ имеет фазу 0(к) = Для комбинации
информационных бит 10 фаза символа равна 0(к) = е^9'~'п/2\ а для ком-
бинации 11 фаза символа равна в (n) = e-?(0fc+7r\ Можно видеть, что фаза
символа, передаваемого на интервале времени [кТ3, (к + 1) Ts) зависит от
текущих информационных бит в этом интервале и от фазы символа Д
за предыдущий период. Отметим, что такое преобразование последова-
тельностей бит в фазовые переходы гарантирует, что наиболее вероятная
ошибка детектирования — ошибочная интерпретация полученного сим-
вола вместо ближайшего соседнего — приводит лишь к единичной ошибке
бита. Например, если последовательность бит 00 кодируется в к-м сим-
воле, то к-й символ имеет ту же самую фазу, что и (к — 1)-й символ.
Допустим, эта фаза равна 0г. Наиболее вероятная ошибка при детектиро-
вании к-го символа — это интерпретировать его как один из ближайших
соседних символов, которые имеют фазу 0i ± тг/2. При этом декодирова-
ние полученного символа с фазой Д ± тг/2 дало бы нам информационную
последовательность 01 или 10, которая отличалась бы от исходной после-
довательности 00 только на один бит. Если говорить более обобщенно, то
для получения фазовых переходов при относительной ФМН для любых М
можно использовать кодирование Грея. При этом сообщение, в котором
все биты равны 0, не вызывает изменений фазы; сообщению, в котором
один бит равен 1, а остальные — 0, соответствует минимальное изменение
фазы на 2тг/М; сообщению, в котором два бита равны 1, а остальные —
0, соответствует изменение фазы на 4тг/Л4, и так далее. Относитель-
ное кодирование наиболее часто применяется для сигналов ФМН, так
как в данном случае относительное преобразование реализуется сравни-
тельно просто. Относительное кодирование может также использоваться
при КАМ, но с более сложным относительным преобразованием. Фазо-
вая манипуляция ФМН с относительным кодированием обозначается как
ОФМН, а двоичная и квадратурная относительная ФМН — как ОФМ2
(DPSK12) и ОФМ4 (DQPSK13) соответственно.
Пример 5.5. Найдите последовательность символов при передаче последова-
тельности бит 101110 методом 0ФМ2, начиная с к-го интервала передачи, при
условии, что в предыдущем (А — 1)-м интервале был передан символ s(k — 1) =
= Ае>”.
12DPSK - Differential BPSK.
13DQPSK — Differential QPSK.
5.3. Амплитудная и фазовая
Решение. Первому биту, равному 1, соответствует фазовый переход тг, по-
этому s(fc) = А. Следующий бит, равный 0, не вызывает фазового перехода,
и s(k + 1) = А. Затем опять следует бит со значением 1, которому соответ-
ствует фазовый переход тг, поэтому s(k + 1) = AeJ7r и так далее. Полная по-
следовательность символов, соответствующая комбинации 101110, имеет вид:
A, A, Aejv, A, Aejv, Aejn.
Таблица 5.1. Таблица соответствия при 0ФМ4 с кодированием Грея
Последовательность бит Фазовый переход
00 0
01 тг/2
10 -тг/2
11 7Г
На рис. 5.20 представлена схема демодулятора, используемого при от-
носительной модуляции. Пусть на к-м интервале было передано созвездие
s(/r) = Тогда полученный вектор, соответствующий выходам
устройства взятия отсчетов, равен:
г(А:) = Г1(А:) + jr2(k) — Ае^9^^^ + п(к), (5.61)
где n(/c) — белый гауссовский шум в комплексной форме. Следовательно,
в предыдущем периоде к — 1 полученный вектор был равен:
Дк - 1) = гДк - 1) + jr2(k - 1) = + п(к - 1). (5.62)
Разность фаз между г(Аг) и r(k — 1) определяет, какой символ был передан.
Рассмотрим выражение:
r(k)r*(k - 1) = + AeJ^+^n\k - 1) +
+ Ае~^к~^+^п(к) + п(к)п,*(к - 1). (5.63)
При отсутствии шума (n(/c) = п(к — 1) = 0) только первый элемент в (5.63)
будет ненулевым, и этот элемент дает искомую разность фаз. Фазовый
компаратор, показанный на рис. 5.20, выделяет эту разность фаз и фор-
мирует на выходе соответствующий символ.
Относительная модуляция менее чувствительна к случайным смеще-
ниям фазы несущего сигнала. Однако если канал имеет ненулевую до-
плеровскую частоту, то корреляция фаз сигнала на различных интерва-
лах передачи символов может снижаться, что приводит к зашумлению
исходной фазы. Эта потеря корреляции обуславливает не поддающийся
улучшению, устойчивый минимальный уровень ошибок при относитель-
ной модуляции в беспроводных каналах с эффектом Доплера, о чем будет
сказано в гл. 6.
Синфазная ветвь
Т,
Квадратурная ветвь
Рис. 5.20. Демодулятор ОФМН
5.3.5. Формирование созвездий
Прямоугольные и шестиугольные созвездия более эффективны по энер-
гопотреблению, чем квадратные и круглые созвездия, используемые при
КАМ и ФМН соответственно. Такие нестандартные созвездия могут сэко-
номить до 1,3 дБ мощности за счет усложнения схемы созвездия [6]. Опти-
мальной формой созвездия является сфера в N-мерном пространстве; она
должна преобразовываться в последовательность созвездий в двумерном
пространстве, которые может формировать модулятор, изображенный
на рис. 5.10. Основной вывод, полученный в [6], состоит в том, что при не-
кодированной модуляции повышенная сложность сферических созвездий
не стоит сэкономленной за ее счет энергии, так как кодирование может
дать гораздо лучшие эксплуатационные показатели при меньшей скоро-
сти и, соответственно, затратах. Однако если сложный канальный код
уже используется, и с помощью более сложного кода можно получить не-
большое дальнейшее улучшение характеристик, то за счет формы созвез-
дия получается примерно 1 дБ дополнительного усиления. Всестороннее
рассмотрение вопросов формирования созвездий (в том числе созвездий,
позволяющих передавать нецелое число бит на символ) можно найти в [6].
5.3.6. Квадратурный сдвиг
Линейно модулированный сигнал с символом s, = (s,i, будет нахо-
диться в одном из четырех квадрантов сигнального пространства. В ка-
ждом интервале передачи символов kTs переход к новому значению сим-
5.3. Амплитудная и фазовая
вола в другом квадранте может вызвать смещение фазы до 180°, при этом
амплитуда сигнала может перейти через нулевую точку. Эти резкие фа-
зовые переходы и большие колебания амплитуды могут приводить к еще
большим искажениям в нелинейных усилителях и фильтрах. Можно из-
бежать этих внезапных переходов путем сдвига импульса квадратурной
ветви g{t) на половину периода следования символов, как это показано
на рис. 5.21. Такой квадратурный сдвиг делает сигнал менее восприим-
чивым к искажениям, обусловленным переходами при передаче символа.
Рис. 5.21. Модуля-
тор с квадратурным
сдвигом
Синфазная ветвь
Квадратурная ветвь
Фазовая модуляция с квадратурным сдвигом обычно обозначается
как ФМКС (OMPSK14), где «С» означает «сдвиг». Например, квадра-
турную модуляцию ФМ4 с квадратурным сдвигом обозначают аббреви-
атурой ФМ4С (OQPSK15). С точки зрения линейного усиления, ФМ4С
обладает теми же спектральными свойствами, что и ФМ4, но при нели-
нейном усилении ФМ4С обеспечивает более эффективное использование
спектра, так как максимальный переход фазы сигнала составляет 90°,
что соответствует максимальному переходу фазы либо в синфазной, ли-
бо в квадратурной ветви, но не в обеих одновременно. Еще один ме-
тод уменьшения амплитудных колебаний при фазовом смещении на 180°
14OMPSK — MPSK with quadrature offset.
15OQPSK — QPSK with quadrature offset.
Глава 5. Цифровая модуляция и демодуляция
представляет модуляция ФМ4 со сдвигом тг/4 (тг/4-QPSK), используе-
мая в стандарте IS-136 для цифровых сотовых систем [7; 8]. Этот метод
модуляции предусматривает максимальное смещение фазы на 135°, в от-
личие от 90° при ФМ4С и 180° при ФМ4. Следовательно, при нелинейном
усилении ФМ4 со сдвигом тг/4 обладает худшими спектральными ха-
рактеристиками, чем ФМ4С. Однако ФМ4 со сдвигом тг/4 допускает
относительное кодирование, что исключает необходимость в когерентной
опорной фазе, а это является значительным преимуществом. Модуля-
цию ФМ4 со сдвигом тг/4 и относительным кодированием обозначают
как ОФМ4 со сдвигом тг/4 (тг/4-DQPSK). Этот метод модуляции состоит
в следующем: сначала выполняется относительное кодирование информа-
ционных бит методом ОФМ4, что дает одну из четырех точек созвездия
ФМ4. Затем передача каждого следующего символа смещается по фа-
зе на тг/4. Этот периодический фазовый сдвиг дает такой же эффект,
как и временной сдвиг при ФМ4С: амплитудные колебания при перехо-
дах символов уменьшаются, что делает сигнал более устойчивым к шуму
и замираниям.
5.4. Частотная модуляция
При частотной модуляции информация содержится в частоте передава-
емого сигнала. В каждом интервале передачи символа К = log2 М ин-
формационных бит закодированы в частоту передаваемого сигнала s(i),
0 С t < Ts, в результате чего передаваемый сигнал имеет вид s2(f) =
— A cos (2тгfit + <Дг), где i — индекс г-го сообщения, соответствующего
log2 М бит, а — фаза, соответствующая г-й несущей частоте. Пред-
ставление в сигнальном пространстве дает: Sj(f) = ^2 где Зу —
з
= Ад (г — j), a <Pj(t) = cos (2irfjt + щ), при этом базисные функции со-
ответствуют различным несущим частотам, и в каждом временном ин-
тервале передается только одна такая базисная функция. Базисные функ-
ции являются ортогональными при минимальном разносе несущих частот
А/ = min^ \fj - Ц\ = 0,5/Ts для щ = cpj и А/ = 1/TS для tpi <pj.
Поскольку при частотной модуляции информация содержится в изме-
нении частот сигнала, передаваемый сигнал з(£) имеет постоянную огиба-
ющую А. Для такого сигнала можно использовать нелинейные усилители
с высокой эффективностью по мощности, и, следовательно, модулиро-
ванный сигнал будет менее восприимчивым к амплитудным искажениям,
вносимым каналом или аппаратурой. Цена такой устойчивости — более
низкая эффективность использования спектра: для нелинейного метода
модуляции характерна более высокая загруженность частотного диапа-
зона, чем для методов амплитудной и фазовой модуляции, рассмотренных
в § 5.3.
Рис. 5.22. Частот-
ный модулятор
На рис. 5.22 показана структура модулятора, формирующего простей-
ший частотно-модулированный сигнал с заданным периодом следования
символов. Демодуляция символов, принимаемых в каждом периоде, осу-
ществляется с помощью демодулятора, представленного на рис. 5.23.
СО5(2л/МГ +фм)
Рис. 5.23. Частотный демодулятор (когерентный)
Обратите внимание, что J-й несущий сигнал в демодуляторе на рис. 5.23
должен быть согласован по фазе с j-м несущим сигналом в передатчике;
это напоминает требование когерентной опорной фазы при амплитудной
и фазовой модуляции. Альтернативная структура приемника, не требую-
щая когерентной опорной фазы, будет рассмотрена в подпараграфе 5.4.3.
Другая проблема частотной модуляции заключается в том, что различ-
ные несущие частоты, показанные на рис. 5.22, имеют различные фазы
(д7 при г j, поэтому на каждом интервале времени Ts в пере-
даваемом сигнале будет наблюдаться скачок фазы. Такие скачки могут
значительно увеличить частотный диапазон сигнала. Поэтому на прак-
тике используется альтернативный модулятор, формирующий частотно-
модулированный сигнал с непрерывной фазой. Речь об этом пойдет в под-
параграфе 5.4.2.
cos(2tt/2? + Ф1)
Рис. 5.24. Демодулятор двоичной ЧМН
5.4.1. Частотная манипуляция ЧМН и манипуляция
с минимальным сдвигом (MSK)
При ЧМН модулированный сигнал имеет вид:
Sj(i) = A cos [2тг/Д + 27TQ!jA/ci + <ft], 0 С t < Ts, (5.64)
где а, = (2г — 1 — М) для i = 1,2,..., М = 2К. Минимальный разнос
несущих частот при ЧМН составляет 2Afc. ЧМН использует М базис-
ных функций = у/2/Tg cos [2тг/с£ + 2тгщ^.fct + <Дг], i = 1,..., М, где
_____ о ts
у/2/Tg — нормировочный множитель для выполнения условия J (£) = 1.
о
В каждом интервале передачи символа по каналу передается только одна
базисная функция.
Простой способ формирования сигнала ЧМН показан на рис. 5.22, где
М генераторов работают на различных частотах fi = fc + ai&fc, а моду-
лятор в каждом периоде Ts переключается с одного генератора на другой.
Однако при такой реализации модулятора вследствие сдвига фаз между
генераторами наблюдаются скачкообразные фазовые переходы в момен-
ты переключения, которые ведут к нежелательному расширению спек-
тра. (Модулятор ЧМН, поддерживающий непрерывную фазу, описыва-
ется в следующем разделе). Для когерентного детектирования сигналов
ЧМН используется стандартная структура, показанная на рис. 5.23. При
передаче двоичных сигналов эта структура может быть упрощена до схе-
мы, показанной на рис. 5.24: если сигнал на входе решающего устройства
больше нуля, то на его выходе формируется бит, равный 1, если же вход-
ной сигнал меньше нуля, то на выход поступает бит со значением 0.
Особый случай двоичной ЧМН представляет манипуляция с минималь-
ным сдвигом ЧМН-МС (MSK16), при которой <Д1 = <Д2, а разнос частот
составляет 2Д/С = 0,5/Т3. Отметим, что это минимальный разнос частот,
обеспечивающий выполнение условия (sj(i), sj(i)) = 0 в течение време-
ни передачи символа при i j. Так как для демодуляции требуется
ортогональность сигналов, то 2Д/С = 0,5/Ts представляет минимально
возможный разнос частот при ЧМН, и, следовательно ЧМН-МС — это
частотная манипуляция с минимальным частотным диапазоном.
5.4.2. Частотная манипуляция
с непрерывной фазой — ЧМН-НФ
Лучший способ формирования сигнала ЧМН, исключающий скачки фа-
зы — это частотная модуляция одной несущей информационным моду-
лирующим сигналом, как при аналоговой ЧМ. В этом случае модулиро-
ванный сигнал имеет вид:
Sj(i) = A cos
= A cos [2л fct + $(£)],
(5.65)
где u(t) = akg (i — kTs) — АИМ сигнал, модулированный потоком ин-
к
формационных бит, как описано в подпараграфе 5.3.1. Очевидно, что при
этом фаза 0(f) будет непрерывной. Поэтому такую форму ЧМН называют
частотной манипуляцией с непрерывной фазой — ЧМН-НФ (CPFSK17).
В соответствии с правилом Карсона [9], при малых значениях /3 ши-
рина полосы пропускания для сигнала s(i) приблизительно равна:
В., « 2А/ДД + 2Bfl, (5.66)
где Вд — ширина полосы пропускания импульса с формой g(t), исполь-
зуемого в модулирующем АИМ сигнале u(t). Для сравнения, ширина по-
лосы пропускания линейно модулированного сигнала с формой импуль-
leMSK — Minimum-Shift Keying.
17CPFSK — Continuous-Phase FSK.
ca g(t) приблизительно равна Bs ~ ‘2Вд. Поэтому спектр модулированного
сигнала ЧМН-НФ шире, чем спектр линейно модулированного сигнала:
MAfc 0,5М/Та. Неэффективность использования спектра при ЧМН-
НФ по сравнению с линейной модуляцией возрастает с увеличением скоро-
сти передачи данных, в частности, количества бит на символ К = log2 М
и частоты следования символов Rs = \/Ts.
Когерентное детектирование при ЧМН-НФ может выполняться по-
символьно или для последовательности символов. Оптимальным является
детектор, выполняющий оценку всей последовательности, так как каж-
дый символ зависит от ранее переданных символов, и поэтому лучше все-
го детектировать (оценивать) все символы одновременно. Однако такое
детектирование может оказаться нереализуемым из-за высоких требо-
ваний к объему памяти и вычислительным ресурсам, необходимым для
принятия решений на основе последовательностей символов. Детали коге-
рентного детектирования сигналов ЧМН-НФ — как посимвольного, так
и на основе последовательности — можно найти в [10, гл. 5.3].
5.4.3. Некогерентное детектирование при ЧМН
Обеспечение в приемнике когерентной опорной фазы для каждого несуще-
го сигнала ЧМН может оказаться трудновыполнимым и дорогостоящим.
Потребность в когерентной опорной фазе может быть устранена, если
приемник сначала будет определять энергию сигнала на каждой частоте.
При этом, если i-я ветвь будет обладать наибольшей энергией по срав-
нению со всеми остальными, то на выходе приемника появится сообще-
ние тщ. Такой модифицированный приемник показан на рис. 5.25.
Предположим, передаваемый сигнал имеет частоту Д:
s(i) = A cos (2тгД£ + ipf) =
= A cos (tpi) cos (2тгfit) — A sin (<дД sin (2тг Д i), 0 С t < Ts. (5.67)
Фаза (fi представляет фазовый сдвиг между генераторами передатчика
и приемника на частоте fi. Когерентный приемник с несущим сигналом
cos (2тгfit) детектирует только первый член выражения A cos (pi) cos (2лД£),
соответствующий принимаемому сигналу, который может быть близок
к нулю при фазовом сдвиге^ «а ±тг/2. Чтобы обойти эту проблему, при-
емник на рис. 5.25 производит разветвление получаемого сигнала на М
ветвей, соответствующих каждой частоте fj,j = 1,...,М. На каждой
такой несущей частоте fj принимаемый сигнал умножается на некоге-
рентные синфазный и квадратурный несущие сигналы с данной частотой,
интегрируется за период следования символа, дискретизируется, а затем
возводится в квадрат. Для j-й ветви сигнал на выходе квадратора, соот-
ветствующий синфазной составляющей, обозначается как Ад/-\-п}/. а сиг-
нал, соответствующий квадратурной составляющей — как AjQ + njQ, где
величины riji и njQ обусловлены наличием шума п(£) на входе приемника.
Поэтому, если i = j, мы имеем Ац = A2 cos2 (<Дг) и AjQ = A2 sin2 (<#); если
же i j, то Aji = AjQ = 0. При отсутствии шума сигнал на входе решаю-
щего устройства для г-й ветви будет равен A2 cos2 (<д^) + A2 sin2 (<д,) = А2
независимо от <дг, а для всех остальных ветвей входные сигналы рав-
ны нулю. Таким образом, в каждом периоде следования символа реша-
ющее устройство формирует на выходе последовательность бит, соот-
ветствующую частоте fj, если максимальный входной сигнал поступа-
ет на вход решающего устройства из j-й ветви. Можно использовать
и другую подобную схему, в которой каждая ветвь содержит фильтр, со-
гласованный с несущей частотой, детектор огибающей и дискретизатор
[1, гл. 6.8]. Обратите внимание, что некогерентному приемнику, показан-
ному на рис. 5.25, для осуществления дискретизации необходима точная
синхронизация. Вопросы синхронизации рассматриваются в § 5.6.
Синфазная ветвь
sin(2n-/Mf)
Рис. 5.25. Некогерентный демодулятор ЧМН
5.5. Формирование импульсов
При амплитудной и фазовой модуляции ширина полосы пропускания груп-
пового и полосового модулированных сигналов зависит от полосы частот
формирующего импульса д(Т). При прямоугольных импульсах g(t) шири-
ной Ts огибающая модулированного сигнала постоянна. Однако у прямо-
угольного импульса имеются боковые лепестки с высоким уровнем сигна-
ла, что может вносить помехи в соседние каналы. Метод сокращения энер-
гии бокового лепестка относительно прямоугольного импульса называют
формированием импульса. Это формирование следует производить так,
чтобы в принимаемом сигнале не было межсимвольной интерференции
между импульсами. Отметим, что перед дискретизацией принимаемого
сигнала выполняется операция свертки переданного импульса g(t), им-
пульсной характеристики канала с(£) и характеристики согласованного
фильтра д*{—t). Поэтому, чтобы устранить межсимвольную интерферен-
цию до дискретизации, мы должны удостовериться, что в фактически
принятом импульсе p(t) = g(t) *c(t) *g*(—t) нет межсимвольной интерфе-
ренции. Используя модель канала с аддитивным белым шумом AWGN,
допустим, что c(t) = 8(t); тогда p(t) = g(t) * д*(—t) (в гл. 11 будет
рассмотрена межсимвольная интерференция для более общих случаев им-
пульсной характеристики канала c(t)). Чтобы избежать межсимвольной
интерференции между отсчетами принятых импульсов, форма импуль-
са p(t) должна удовлетворять критерию Найквиста, требующему, чтобы
импульс был равен нулю в идеальной точке отсчета предыдущего или
следующего символа:
п(кт} = / Ро =р(0)’ к = 0
P^ls) [0, к 0.
В частотной области это дает:
(5.68)
Критерию Найквиста удовлетворяют следующие формы импульсов.
1. Прямоугольные импульсы: g(t) = y/2/Ts (0 t С Ts), которые дают
реальные импульсы треугольной формы:
р(£) = <
2 + 2t/Ts,
2 - 2t/Ts,
0,
-Ts^t< о,
О С t < Ts,
иначе.
Эта форма импульса позволяет получить сигналы ЧМН с постоян-
ной огибающей, но обладает плохими спектральными характеристи-
ками из-за высокого уровня боковых лепестков.
2. Косинусоидальные импульсы: p(t) = sin7ri/Ts, 0 С t С Ts. Такие им-
пульсы, в основном, используются при относительной частотной
манипуляции ОЧМН, когда квадратурная ветвь модулированного
сигнала смещается во времени на Ts/2. Получается модуляция с по-
стоянкой амплитудой, при этом энергия боковых лепестков на 10 дБ
ниже, чем в случае прямоугольных импульсов.
3. Приподнятые косинусоидальные импульсы: эти импульсы формиру-
ются в частотной области в соответствии с необходимыми спек-
тральными характеристиками. Поэтому импульс p(t) сначала зада-
ется в виде преобразования Фурье:
| Ts, ОС |/| С
И Г]-sin’TZk (f _ J-Л! < i f i < 1±£-
2 [Д ЬШ Д (Д 2TsJj’ 2TS 2TS 1
где /3 — коэффициент сглаживания, определяющий скорость спада
частотной характеристики (см. рис. 5.26). При /3 = 0 мы получаем
прямоугольный импульс. Во временной области выражению P(f)
соответствует импульс p(t\.
p(t) =
simrt/Ts cos (hrt/Ts
Kt/Ts l-4@2t2/T2'
Рис. 5.26. Частотные
(спектральные) харак-
теристики приподнято-
го косинусоидального
импульса (Т = Ts)
Характеристики приподнятого косинусоидального импульса в частот-
ной и временной областях показаны на рис. 5.26 и 5.27 соответствен-
но. «Хвосты» этого импульса во временной области затухают по закону
1/t3 (быстрее, чем для предыдущих форм импульсов), поэтому ошибка
рассинхронизации при дискретизации приводит к серии межсимвольных
помех, которые накладываются друг на дуга. Разновидность приподня-
того косинусоидального импульса представляет корневой косинусоидаль-
ный импульс, который получается при извлечении квадратного корня
Глава 5. Цифровая модуляция и демодуляция
из частотной характеристики приподнятого косинусоидального импуль-
са. Корневой косинусоидальный импульс обладает лучшими спектраль-
ными характеристиками, чем приподнятый косинусоидальный импульс,
но при этом он быстрее затухает во временной области, что значительно
ухудшает рабочие характеристик!! вследствие ошибок при синхрониза-
ции. Так, ошибка рассинхронизации при дискретизации приводит к серии
межсимвольных помех, которые могут накладываться друг на дуга.
Рис. 5.27. Временные характеристики приподнятого косинусоидального
импульса (Т = TS)
Формирование импульса примепяется также при ЧМН с непрерывной
фазой (ЧМН-НФ) для улучшения эффективности использования спектра,
в частности, в АИМ сигнале, который модулируется по частоте для полу-
чения сигнала ЧМН. При ЧМН-НФ чаще всего используется гауссовская
форма импульса, которая задается выражением:
g(t) = З^-Л2/*2, (5.69)
сх
где а — параметр, характеризующей эффективность использования спек-
тра. Спектр импульса g(t), определяющий спектр сигнала ЧМН-НФ, име-
ет вид:
G(f)--=e~a2f2. (5.70)
Параметр а импульса g(t) связан с полосой частот, ограниченной 3 дБ
и обозначаемой Вд, соотношением:
а = 0,5887/В9.
(5-71)
Очевидно, что с увеличением а эффективность использования спектра
повышается.
Если гауссовская форма импульса используется при модуляции с мини-
мальным сдвигом ЧМН-МС, то эту модуляцию обозначают как ГЧМН-МС
(GMSK18). В целом, сигналы ГЧМН-МС обладают высокой эффектив-
ностью по мощности (так как имеют постоянную амплитуду) и высо-
кой эффективностью использования спектра (поскольку гауссовская фор-
ма импульса обладает хорошими спектральными характеристиками при
больших значениях а). По этим причинам модуляция ГЧМН-МС при-
меняется в цифровых системах сотовой связи стандарта GSM. Однако,
будучи хорошим решением для речевой модуляции, метод ГЧМН-МС не
очень подходит для передачи данных. Гауссовская форма импульса не
соответствует критерию Найквиста, что приводит к межсимвольной ин-
терференции, которая возрастает с увеличением а. Поэтому повышение
эффективности использования спектра за счет увеличения а повышает
и уровень межсимвольной интерференции, из-за своих собственных по-
мех, которые создает минимальный пороговый уровень ошибок, который
невозможно улучшить. При передаче речи допустимый коэффициент оши-
бок по битам BER является относительно высоким: F& ~ 10“3; такой
уровень BER может поддерживаться даже при наличии значительной
межсимвольной интерференции. Обычно для расчета допустимого уров-
ня межсимвольной интерференции при передаче речи методом ГЧМН-МС
используют приближенное соотношение: BgTs = 0,5. Однако при передаче
данных коэффициент ошибок по битам BER должен быть намного ниже,
что обуславливает более строгие ограничения для максимального зна-
чения а и соответствующего минимального значения Вд, уменьшая тем
самым эффективность использования спектра ГЧМН-МС. В этом случае
для уменьшения межсимвольной интерференции могут использоваться
такие методы, как выравнивание амплитудно-частотных характеристик,
что обеспечивает допустимый уровень коэффициента ошибок BER без
значительного снижения эффективности использования спектра. Однако
чаще всего для передачи данных с эффективным использованием спектра
используют линейную модуляцию. В частности, в усовершенствованных
системах GSM при передаче данных используется линейная модуляция.
5.6. Символьная синхронизация и восстановление фазы
несущего сигнала
Одними из наиболее сложных задач цифрового демодулятора являются
обеспечение точной символьной синхронизации и получение информации
18GMSK — Gaussian MSK.
262 Глава 5. Цифровая модуляция и демодуляция
о фазе несущего сигнала. Тактовая информация, получаемая при син-
хронизации, необходима для установления границ принимаемого сигнала,
соответствующего конкретному символу. В частности, тактовая инфор-
мация используется для управления дискретизаторами в амплитудных,
фазовых и частотных демодуляторах (см. рис. 5.11 и 5.23). Информация
о фазе несущего сигнала необходима во всех когерентных демодуляторах
как при амплитудной и фазовой, так и при частотной модуляции, о чем
шла речь в § 5.3 и 5.4.
Данный раздел содержит краткий обзор стандартных методов син-
хронизации и восстановления фазы несущего сигнала в каналах с ад-
дитивным белым шумом AWGN. В этом контексте задача символьной
синхронизации и оценивания фазы несущего сигнала относится к более
общей категории задач оценивания параметров сигнала при наличии шу-
ма. Теория оценивания дает теоретическую основу для изучения данной
проблемы и для разработки алгоритма оценивания фазы несущего сигна-
ла и символьной синхронизации методом максимального правдоподобия.
Однако большинство беспроводных каналов, помимо аддитивного бело-
го шума, испытывают влияние нестационарного многолучевого распро-
странения. В таких каналах обеспечить синхронизацию и восстановление
фазы несущей особенно сложно, так как многолучевое распространение
и изменения во времени могут очень затруднить оценку параметров сиг-
нала перед демодуляцией. Более того, немного существует теоретиче-
ских исследований, посвященных методам оценки фазы несущей частоты
и символьной синхронизации в каналах, которые, помимо шума, подвер-
жены нестационарному многолучевому распространению. В большинстве
случаев при анализе параметров систем беспроводной связи предполага-
ется, что приемник синхронизируется по тому многолучевому компонен-
ту, задержка которого равна среднему разбросу задержки19, и затем при
восстановлении тактовой информации и фазы несущего сигнала такой ка-
нал рассматривается как канал с аддитивным белым шумом AWGN. Од-
нако на практике приемник синхронизируется либо по самому сильному
многолучевому компоненту, либо по первому многолучевому компоненту,
превысившему заданный порог мощности. При этом другие многолуче-
вые компоненты будут снижать способность приемника к восстановлению
синхронизации и фазы несущей частоты, особенно в широкополосных сис-
темах типа UWB. В системах с несколькими несущими и с расширенным
спектром при синхронизации и восстановлении несущей следует учиты-
вать ряд дополнительных факторов, речь о которых пойдет в гл. 12 и 13.
Важность синхронизации и оценки фазы несущего сигнала трудно пе-
реоценить: без них беспроводные системы не могли бы функционировать.
10По этой причине разброс задержки обычно характеризуется среднеквадратическим
значением от его среднего значения, о чем более подробно говорилось в гл. 2.
5.6. Символьная синхронизация и восстановление фазы несущего сигнала
Более того, с увеличением скорости передачи данных и усложнением ка-
налов за счет добавления дополнительных «степеней свободы» (например,
многоэлементных антенн) задачи синхронизации и восстановления фа-
зы несущего сигнала, выполняемые приемником, становятся все более
сложными и трудными. Методы синхронизации и восстановления фазы
несущего сигнала разрабатывались и всесторонне анализировались в те-
чение многих лет, и сегодня эти методы продолжают совершенствоваться
при решении проблем, связанных с более высокими скоростями передачи,
новыми системными требованиями и более сложными характеристиками
каналов. В этом разделе дается лишь краткое введение в проблематику
методов синхронизации и восстановления фазы несущего сигнала. Все-
стороннее раскрытие этой темы и анализ характеристик различных ме-
тодов можно найти в [11, 12]; более сжатое рассмотрение темы дается
в [10, гл. 6; 13].
5.6.1. Структура приемника с восстановлением
тактовой частоты И фазы
Квадратурная ветвь
Рис. 5.28. Структура приемника с восстановлением несущего сигнала и тактовой
частоты
На рис. 5.28 показана схема восстановления фазы несущей и тактовой
частоты в амплитудном и фазовом демодуляторе. При ФМ-2 необходима
только синфазная ветвь этого демодулятора. В когерентном частотном
демодуляторе, показанном на рис. 5-23, для каждой отдельной несущей
частоты М необходима своя цепь восстановления фазы несущей; такое
усложнение структуры приемника обуславливает необходимость исполь-
зования некогерентных демодуляторов, о чем говорилось в подпарагра-
ая модуляция и демодуляция
фе 5.4.3. Из рис. 5.28 видно, что цепи восстановления фазы несущей и так-
товой частоты работают непосредственно с принимаемым сигналом до
его демодуляции.
В предположении канала с аддитивным белым шумом AWGN, при-
нимаемый сигнал r(t) представляет сумму передаваемого сигнала s(t)
с задержкой и аддитивного белого шума AWGN n(t): r(t) = s(t - г) + n(t),
где т — случайная задержка распространения. Используя эквивалентное
низкочастотное представление сигнала s(£) = Re {ж(£)е-?¥’°&/2’г^с4}, полу-
чаем:
r(t) = Re {x(t — 7-)e-7¥’e-’2’r^ci| + n(t), (5.72)
где <д = <д0 — 2тгfcr определяется фазой передаваемого несущего сигнала
и задержкой распространения. Оценка величины задержки т необходима
для символьной синхронизации, а оценка фазы <р — для восстановления
фазы несущей. Представим эти два неизвестных параметра в виде векто-
ра ip = (<д, т). Тогда принимаемый сигнал можно записать в виде:
r(t) = s (£; т/>) + n(t).
(5.73)
Оценка параметров должна производиться в течение некоторого ко-
нечного временного интервала Tq Ts, который называют интервалом
наблюдения. Однако на практике оценка параметра, первоначально полу-
ченная для этого интервала, постоянно корректируется с помощью сис-
темы слежения. Предметом нашего рассмотрения будет первоначальная
оценка параметров за временной интервал То- Информацию об отслежи-
вании параметров можно найти в [11, 12].
Существуют два распространенных метода оценивания параметров
сигнала при наличии шума: это критерий максимального правдоподо-
бия, описанный в подпараграфе 5.1.4 при рассмотрении схемы приемника,
и критерий максимальной апостериорной вероятности. При использова-
нии критерия максимального правдоподобия выбирается оценка соот-
ветствующая максимальной вероятности р(г(£)|ч/>) на интервале наблю-
дения То. Критерий максимальной апостериорной вероятности допускает
некоторое распределение вероятности р(ч/>), при этом выбирается оцен-
ка ч/>, соответствующая максимальной вероятности
p(r(i))
на интервале наблюдения То- Предположим, что первоначальная инфор-
мация о величине -ф отсутствует; в этом случае распределение р(ч^) ста-
новится равномерным и, следовательно, оба критерия эквивалентны.
Чтобы охарактеризовать распределение p(r(t)\ip), 0 t < То, пред-
ставим сигнал r(t) на интервале наблюдения, используя набор ортонор-
мальных базисных функций {<дд;(£)}:
г(£) = ^rk<Pk(t)^ < i <Т0.
k=i
Так как n(t') представляет белый шум с нулевым средним значени-
ем и спектральной плотностью мощности Nq/2, распределение вектора
г = (ri,..., гк), обусловленное неизвестным параметром чД, задается фор-
мулой:
( 1 \
= '• еХР
где (согласно базисному разложению)
(rk - sk (i/>))2
(5-74)
rk=J
То
И
sk (чД) = У s(t;i/>ypk(t)dt.
То
На основе этого базисного разложения можно показать, что:
— s (t; ч/>)]2 dt.
(5.75)
fc=i
To
Применив это к выражению (5.74), получаем, что максимизация вероят-
ности р (r|V>) эквивалентна максимизации функции правдоподобия:
Л (гД) = ехр
— s (£; ч/>)]2 dt.
(5.76)
L То J
Максимизация функции правдоподобия (5.76) дает максимально прав-
доподобную оценку фазы несущего сигнала и символьной синхронизации.
Оценивание фазы несущей и символьной синхронизации по критерию мак-
симального правдоподобия можно произвести и раздельно, о чем будет
более подробно сказано в последующих разделах. Методы объединенной
оценки более сложные; подробно о них можно прочитать в [10, гл. 6.4; 11,
гл. 8-9].
5.6.2. Оценка фазы по критерию
максимального правдоподобия
В данном разделе мы получим максимально правдоподобную оценку фазы
при известной тактовой информации. В этом случае функция правдопо-
овая модуляция и демодуляция
добия (5.76) принимает вид:
Л(<д) = ехр
s (£; <д)]2 dt
= ехр
То
То
То
Фазу несущего сигнала оценивают значением ф, при котором функ-
ция правдоподобия максимальна. Заметьте, что первый член выраже-
ния (5.77) не зависит от <д. Более того, будем считать третий интеграл,
характеризующий энергию сигнала s (t; <д) на интервале наблюдения, от-
носительно постоянным по отношению к <д. При таком допущении можно
видеть, что значение ф, максимизирующее (5.77), максимизирует также
и функцию
(5.78)
То
Мы можем непосредственно определить максимизирующее значение ф
для простого случая, когда принятый сигнал представляет смодулиро-
ванную несущую с добавлением шума: r(£) = Л cos (2тг fct + <д)-|-п(£). Тогда
значение ф должно максимизировать функцию:
Л7(<д) = У r(£) cos (2тг fct + <д) dt. (5.79)
То
Дифференцируя функцию Л'(<д) по <д и затем приравнивая ее к нулю,
получаем, что ф удовлетворяет условию:
У r(t) sin (2тг fct + ф) dt = 0. (5.80)
То
Решая (5.80) относительно <р, получаем:
ф = — arctg
f г (i) sin(27rfct) dt
To_____________________
f r(t) cos (2irfct) dt
To
(5.81)
Можно было бы разработать схему для получения (5.81) из принятого
сигнала г(£); однако на практике восстановление фазы несущего сигнала
выполняется с помощью схемы фазовой автоподстройки частоты ФАПЧ,
удовлетворяющей (5.80), как показано на рис. 5.29. Для данной схемы
сигнал на входе интегратора при отсутствии шума задается формулой
e(t) = r(t) sin (2 лfct + <р), а выходной сигнал интегратора равен:
5.6. Символьная синхронизация и восстановление фазы несущего сигнала
z(t) = J r(t) sin (2тгfct + ф) dt,
То
т.е. точно соответствует левой части уравнения (5.80). Поэтому, если
z(t) = 0, то ф представляет максимально правдоподобную оценку фазы <д.
Если z(t) ф 0, то генератор, управляемый напряжением (ГУН), подстра-
ивает оценку фазы ф в зависимости от полярности z(t): при z(f) > 0 ГУН
уменьшает ф для уменьшения z(t), а при z(t) < 0 ГУН увеличивает ф с це-
лью увеличения z(t). На практике интегратор, показанный на рис. 5.29,
замещается фильтром в цепи обратной связи, сигнал на выходе которого
равен 0,5Л sin (ф — <д) « 0,5Л (ф — <д) и определяется низкочастотной со-
ставляющей сигнала на его входе е(£) = A cos fct + <д) sin (2jvfct + <д) =
= 0,5Asin (ф — <д) + 0,5Asin (2тг/с^ + <д + ф). Здесь мы рассматриваем ра-
боту схемы ФАПЧ, допуская, что ф к, ip, так как в противном случае
полярность z(t) может не отражать правильное направление подстройки
фазы, т. е. не обязательно будет выполняться условие sin (<д — <д) ~ ф — <д.
При первоначальной оценке фазы несущего сигнала в цепи ФАПЧ обычно
наблюдается некоторый переходной процесс. Преимущество цепи ФАПЧ
состоит в непрерывной подстройке оценки фазы ф, так что г(£) « 0; это
позволяет корректировать медленные отклонения фазы, обусловленные
дрейфом генератора передатчика или изменением задержки при распро-
странении сигнала. Фактически, схема ФАПЧ является примером конту-
ра обратной связи. Более подробно о цепи ФАПЧ и ее характеристиках
можно прочитать в [10, И].
Рис. 5.29. Цепь фазовой автопод-
стройки для восстановления фазы
несущего сигнала (немодулирован-
ная несущая)
Расчет цепи ФАПЧ выполняется для немодулированной несущей, од-
нако при амплитудной и фазовой модуляции в амплитуду и фазу несущего
сигнала «вложены» информационные биты. При выделении фазы несущей
в таких сигналах применяется два подхода к принятому сигналу потока
данных: последовательность данных либо считается известной, либо рас-
сматривается как случайная с оценкой фазы, усредненной по статистике
^268 Глава 5. Цифровая модуляция и демодуляция
данных. Первый сценарий известен как оценивание параметров с упра-
влением по решению; обычно он имеет место при передаче известной
настроечной последовательности. Второй сценарий называют оценивани-
ем параметров без управления по решению. Данный метод предполагает
максимизацию функции правдоподобия (5.77) с усреднением по статисти-
ке данных. Один из методов с управлением по решению использует для
решения данные после демодуляции (удаления модуляции) из принято-
го сигнала. В результате немодулированная несущая пропускается через
цепь ФАПЧ. Эта базовая схема называется цепью ФАПЧ с решающей
обратной связью, так как данные решений возвращаются обратно в цепь
ФАПЧ для обработки. Структура схемы восстановления фазы несущего
сигнала без управления по решению зависит от базового распределения
данных. При больших созвездиях большинство распределений дают очень
нелинейные функции параметров, подлежащих оценке. В таких случа-
ях часто допускается, что распределение символов в каждом простран-
стве сигнальном подчинено закону Гаусса, что значительно упрощает
структуру схемы восстановления фазы. Существует и альтернативная
схема восстановления фазы без управления по решению: М-кратный сиг-
нал (М = 2 для АИМ и М для Af-кратной ФМН) пропускается через
полосовой фильтр на частоте Mfc, а затем подается на схему ФАПЧ.
Нелинейная операция устраняет эффект амплитудной или фазовой моду-
ляции, благодаря чему цепь ФАПЧ может работать с смодулированным
несущим сигналом на частоте Mfc. Существует и множество других схем
восстановления несущего сигнала — как с управлением по решению, так
и без него; при этом выбор той или иной схемы делается с учетом различ-
ных компромиссов между качеством и сложностью. Более полный анализ
структуры и рабочих характеристик схем восстановления фазы несущего
сигнала можно найти в [10, гл. 6.2.4-6.2.5; 11].
5.6.3. Оценка сигнала тактовой частоты по критерию
максимального правдоподобия
В данном разделе будет получена максимально правдоподобная оценка
задержки т в предположении, что фаза несущего сигнала известна. По-
скольку мы считаем, что фаза <д известна, то восстановление тактового
сигнала не будет оказывать влияния на схему восстановления фазы не-
сущей и связанное с ней преобразование частоты вниз (см. рис. 5.28).
Следовательно, достаточно рассмотреть оценку тактового сигнала для
синфазных или квадратурных составляющих эквивалентных низкочастот-
ных сигналов r(t) и .s(i;r). Обозначим синфазную и квадратурную со-
ставляющие сигнала г (Г) как ri(t) и rQ(t), а синфазную и квадратурную
составляющие сигнала s(t',r) — как з/(£;т) и SQ^t-r). Рассмотрим син-
5.6. Символьная синхронизация и восстановление фазы несущего сигнала
фазную ветвь, так как такты, восстановленные в этой ветви, могут быть
использованы и для квадратурной ветви. Эквивалентный низкочастотный
синфазный сигнал задается формулой:
si(t;r) = ^S!(k)g (t - kTs - -г), (5.82)
к
где g(t) — форма импульса, a s/(A:) — амплитуда синфазной составляю-
щей сообщения, передаваемого в к-м периоде следования символов. Син-
фазный эквивалентный низкочастотный сигнал на приеме имеет вид: г/ (£) =
= si(t; r)+ni(t). Как и при фазовой синхронизации, различают два класса
методов восстановления тактового сигнала: в первом случае последова-
тельность информационных символов на выходе демодулятора считается
известной (оценивание с управлением по решению), во втором случае
предполагается, что эта последовательность неизвестна (оценивание без
управления по решению).
Функция правдоподобия (5.76) при известной фазе <д по форме напо-
минает функцию (5.77) при известной задержке:
Л(т) = ехр —
— si(t; г)]2 dt
Т0
± I - 1-]
То То То
Поскольку при изменении т первый и второй члены выражения (5.83)
существенно не изменяются, оценка задержки т, максимизирующая (5.83),
максимизирует также и функцию
= ехр
То
Тс
где
. (5.83)
\ -r)dt = '^2sI(k)zk(r), (5.84)
к
zk(r) = У r(t)g (t - kTs - r)dt.
To
Дифференцируя функцию (5.84) по т и затем приравнивая ее к нулю,
получаем, что оценка задержки т должна удовлетворять условию:
(5.85)
(5.86)
к
Алгоритм оценивания с управлением по решению согласно (5.86) реа-
лизует схема, показанная на рис. 5.30. Сигнал (5.86) поступает на вход
тактового генератора, управляемого напряжением — ГУН. Если этот
сигнал равен нулю, то оценка задержки т = т. В противном случае так-
товый генератор (т. е. оценка задержки т) подстраивается так, чтобы
входной сигнал стал равным нулю. Такая схема оценивания — еще один
пример контура обратной связи.
Рис. 5.30. Оценивание синхронизации с управлением по решению
Рис. 5.31. Устройство синхронизации с опережающим и запаздывающим строби-
рованием
На рис. 5.31 показана схема оценивания задержки без управления по ре-
шению, известная как устройство синхронизации с опережающим и запаз-
дывающим стробированием. В данной схеме используются два свойства
Ts
автокорреляционной функции g(t), Rg(j) = f g(t)g(t — r)dt — а именно,
о
ее симметриия (Rg(r) = Rg(—r)) и тот факт, что ее максимальное зна-
чение достигается при т = 0. Сигнал на входе дискретизатора в верхней
ветви схемы на рис. 5.31 пропорционален автокорреляционной функции
т„
Rg(r — т + 8) = f g(t — т)д (t — т — 8) dt, а сигнал на входе дискретизато-
о
Ts
ра в нижней ветви — функции Rg (т — т — 8) = f g(t — т)д (t — т + 3) dt.
о
Если т = т, то, поскольку Rg (4) = Rg(—3), сигнал на входе фильтра
в цепи обратной связи будет равен нулю и тактовый генератор, управля-
емый напряжением, будет поддерживать правильную оценку задержки.
Если т > т, то Rg (т — т + <5) < Rg (т — т — 4), и отрицательный сигнал
на входе ГУН вызывает уменьшение оценки т. И наоборот, если т < т,
то Rg (т — т + 4) > Rg (т — т — 8), а положительный сигнал на входе ГУН
вызывает увеличение оценки т.
Более подробную информацию об этой и других схемах оценивания
задержки с управлением по решению и без него, а также об их техниче-
ских компромиссах, можно найти в [10, гл. 6.2.4-6.2.5; 11].
Задачи
5.1. Используя свойства ортонормальных базисных функций, покажите, что,
если сигналам Sj(Z) и sj(t) соответствуют точки созвездия Si и Sj (соот-
ветственно), то
т
l|8i - Sj ||2 = j (Si(f) - Sj(t))2 dt.
о
5.2. Найдите альтернативный набор ортонормальных базисных функций для
пространства сигналов cos (2тг£/Т) и sin (2?rt/T).
5.3. Задан набор М ортогональных сигналов sm(t) для 1 С m < Ми 0 С f <Т.
при этом все сигналы имеют одинаковую энергию Е. Определите новый
набор М сигналов в виде:
1 М
s'm(t) = sm(t) - s‘(*)’ 1 sC М, 0 ? t? Т.
i=l
Покажите, что все М сигналов {.ч'т (Г } имеют одинаковую энергию, равную:
£' = (М — 1)£/М.
Чему равно скалярное произведение любых двух сигналов?
овая модуляция и демодуляция
5.4. Заданы три сигнала {</?i (t), показанные на рис. 5.32.
а) Покажите, что эти сигналы являются ортонормированными.
б) Представьте сигнал x(t) в виде линейной комбинации сигналов (f)}
и найдите коэффициенты, если x(t) задается выражением:
О t < 2,
2 С t < 4.
Рис. 5.33. Формы сигналов к задаче 5.5
5.5. Заданы четыре сигнала, показанные на рис. 5.33.
а) Определите размерность сигналов и набор базисных функций.
б) Используя базисные функции, представьте эти четыре сигнала в виде
векторов.
в) Определите минимальное расстояние между всеми парами векторов.
5.6. Выведите математическое выражение для областей решений сводящих
к минимуму вероятность ошибки, полагая, что сообщения не являются
равновероятными — т.е. при условии, что р(пц) = pi (г = 1, ...,М)
и pi не обязательно равно 1/М. Решите эту задачу для случая модуля-
ции ФМ4, если si = (Ас,0), 82 = (О, Ас), 8з = (—Ас,0), 84 = (О, Ас),
p(si) = p(s3) = 0,2 и p(si) = p(s3) = 0,3.
5.7. Покажите, что остаточная шумовая составляющая nr(t) не зависит от вы-
ходных сигналов коррелятора г, для всех г. Другими словами, покажите,
что E[nr(t)rj] = 0 для всех i. Поскольку величины г, (обусловленная s,)
и nr(t) являются гауссовскими и некоррелированными, они независимы.
5.8. Покажите, что отношение сигнал-шум SNR на выходе будет максималь-
ным, когда заданный входной сигнал проходит через согласованный с ним
фильтр.
5.9. Определите согласованные фильтры д (Т — t), 0 С t Т и найдите
т
У g(t)g (Т - -1) dt
о
для следующих форм сигналов:
а) прямоугольный импульс: g(t) = у/2/Т\
б) импульс вида: g(Z) = sine (^)j
в) гауссовский импульс: g(t) = (\/тг/а)е~7Г * !а .
5.10. Покажите, что приемник, работающий по критерию максимального прав-
доподобия, показанный на рис. 5.4, эквивалентен приемнику с согласован-
ным фильтром на рис. 5.7.
5.11. Рассчитайте границы (5.40), (5.43) и (5.44), а также приближение (5.45)
для несимметричного созвездия сигналов 81 — (Ас,0), 82 = (0, 2АС), з3 =
= (—2Ас,0) и 84 = (0, — Ас), если Ac/\/No = 4.
5.12. Определите входные сигналы для каждой ветви решающего устройства
на рис. 5.11, если фаза несущего сигнала на передаче </?о отличается от
фазы несущего сигнала на приеме на величину Д<р.
5.13. Задано созвездие ФМ4 с минимальным расстоянием = ''/‘2. Какая до-
полнительная энергия понадобится, чтобы передать еще один бит (ФМ-8)
при сохранении того же минимального расстояния (и, соответственно,
с той же вероятностью ошибок по битам)?
5.14. Покажите, что средняя мощность Р[ квадратного созвездия сигналов по I
бит на измерение пропорциональна 4г/3, и что при увеличении размер-
ности на 1 бит и сохранении того же минимального расстояния средняя
мощность равна « 4F(. Найдите Pi для Z = 2 и рассчитайте среднюю
энергию созвездий МФМН (MPSK) и МАИМ (МРАМ) с одним и тем же
количеством бит на символ.
Глава 5. Цифровая модуляция и демодуляция
5.15. Пусть А9? определяет фазовое смещение канала за время передачи сим-
вола Ts для случая относительной ФМН. Какова должна быть величина
Д<р при отсутствии шума, чтобы возникла ошибка детектирования?
5.16. Составьте таблицу соответствия последовательностей бит и фазовых перехо-
дов для относительной ФМ8 с кодированием Грея. Затем определите после-
довательность символов, передаваемых с использованием относительной
ФМ8 с кодированием Грея, для последовательности бит 101110100101110,
начиная с к-го временного интервала, если символ, переданный в (к — 1)-м
интервале, равен s(k — 1) = Ае?*/4.
5.17. Заданы восьмеричные созвездия точек сигнала, показанные на рис. 5.34.
Рис. 5.34. Восьмеричные созвездия точек сигнала к задаче 5.17
а) Ближайшие соседние точки сигнала в созвездии КАМ-8 отдалены друг
от друга на расстояние А. Определите радиусы а и b внутренней и внеш-
ней окружностей.
б) Соседние точки сигнала в созвездии ФМ8 отдалены друг от друга на
расстояние А. Определите радиус окружности г.
в) Определите среднюю передаваемую мощность для обоих созвездий и
сравните полученные результаты. Каково относительное преимуще-
ство по мощности одного созвездия в сравнении с другим? (Предпола-
гается, что все точки сигнала равновероятны).
г) Можно ли задать три информационных бита на каждую точку созвез-
дия сигнала таким образом, чтобы соседние точки отличались друг от
друга только на одну позицию бита?
д) Определите скорость следования символов, если требуемая скорость
передачи бит составляет 90 Мбит/с.
5.18. Модуляцию ФМ4 (QPSK) со сдвигом тг/4 можно представить как сдвиг
двух систем ФМ4 на тг/4 радиан.
а) Изобразите диаграмму сигнального пространства для сигнала ФМ4
со сдвигом тг/4.
б) Используя кодирование Грея, покажите для точек сигнала соответ-
ствующие информационные биты.
в) Определите последовательность символов, передаваемых методом ФМ4
со сдвигом тг/4, для последовательности бит 0100100111100101.
г) Повторите пункт (в) для ОФМ4 со сдвигом тг/4, допуская, что послед-
ний переданный символ в синфазной ветви имел фазу тт, а последний
переданный символ в квадратурной ветви — фазу —Зтг/4.
5.19. Покажите, что минимальный разнос частот ЧМН, при котором сигналы
cos (2тгfjt) и cos (2тгfit) будут ортогональны, равен Д</? = niiriy \ fj — fi\ =
= 0,5/Ts.
5.20. Покажите, что критерий Найквиста для импульсов с нулевой межсим-
вольной интерференцией, задаваемых формулой р (kTs) = роб(к), эквива-
лентен условию (5.68) в частотной области.
5.21. Покажите, что гауссовская форма импульса не удовлетворяет критерию
Найквиста.
Литература
1. S. Haykin, Communication Systems, Wiley, New York, 2002.
2. J. Proakis and M. Salehi, Communication Systems Engineering, Prent ice-Hall,
Englewood Cliffs, NJ, 2002.
3. J.M. Wozencraft and I. M. Jacobs, Principles of Communication Engineering,
Wiley, New York, 1965.
4. M. Fitz, «Further results in the unified analysis of digital communication sys-
tems», IEEE Trans. Commun., pp. 521-32, March 1992.
5. R. Ziemer, «An overview of modulation and coding for wireless communications»,
Proc. IEEE Veh. Tech. Conf., pp. 26-30, April 1996.
6. G. D. Forney, Jr. and L.-F. Wei, «Multidimensional constellations — Part I:
Introduction, figures of merit, and generalized cross constellations», IEEE J.
Sei. Areas Commun., pp. 877-92, August 1989.
7. T. S. Rappaport, Wireless Communications — Principles and Practice, 2nd ed.,
Prentice-Hall, Englewood Cliffs, NJ, 2001.
8. G. L. Stuber, Principles of Mobile Communications, 2nd ed., Kluwer, Dordrecht,
2001.
9. S. Haykin, An Introduction to Analog and Digital Communications, Wiley, New
York, 1989.
10. J. G. Proakis, Digital Communications, 4th ed^ McGraw-Hill, New York, 2001.
11. U. Mengali and A. N. D’Andrea, Synchronization Techniques for Digital Re-
ceivers, Plenum, New York, 1997.
12. H. Meyr, M. Moeneclaey and S. A. Fechtel, Digital Communication Receivers,
vol. 2, Synchronization, Channel Estimation, and Signal Processing, Wiley, New
York, 1997.
13. L. E. Franks, «Carrier and bit synchronization in data communication — A tu-
torial review», IEEE Trans. Commun., pp. 1107-21, August 1980.
ГЛАВА 6
ХАРАКТЕРИСТИКИ
ЦИФРОВОЙ МОДУЛЯЦИИ
В БЕСПРОВОДНЫХ
КАНАЛАХ
Рассмотрим характеристики описанных в предыдущей главе методов ци-
фровой модуляции при их использовании в каналах с аддитивным белым
шумом AWGN и в каналах с амплитудными замираниями. Для нас пред-
ставляют интерес два параметра: вероятность ошибки (символьной или
по битам) и вероятность нарушения, перерывов радиосвязи, т. е. веро-
ятность того, что мгновенное соотношение сигнал-шум упадет ниже
заданного порогового значения. Плавные замирания могут значительно
повысить как среднюю вероятность ошибки бита, так и вероятность на-
рушения связи. Беспроводные каналы могут также испытывать частот-
но-селективные замирания или доплеровский сдвиг. Частотно-селективные
замирания вызывают межсимвольную интерференцию, которая опреде-
ляет непреодолимый минимальный уровень ошибок в сигнале на приеме.
Эффект Доплера приводит к расширению спектра, которое ведет к интер-
ференции в смежных каналах (незначительной при типичных скоростях
передвижения пользователей), а также к неуменыпаемому более порого-
вому уровню ошибок в сигналах с относительной фазовой манипуляцией
(например, ОФМН). Это объясняется тем, что корреляция опорной фазы
предыдущего и фазы последующего символов на интервале времени пере-
дачи символа снижается. В настоящей главе описывается влияние, оказы-
ваемое на характеристики цифровой модуляции шумом, амплитудными
и частотно-селективными замираниями, а также эффектом Доплера.
6.1. Каналы с аддитивным белым шумом AWGN
В данном параграфе мы определим отношение мощностей сигнала и шу-
ма — защищенность SNR и покажем взаимосвязь защищенности с энер-
гией на бит (Еъ) и энергией на символ (Es). Затем, используя эти энер-
гетические параметры, рассмотрим вероятность ошибки в каналах с ад-
дитивным белым шумом AWGN при различных методах модуляции. При
анализе будет использовано понятие пространства сигнала из § 5.1.
6.1. Каналы с аддитивным белым шумом AWGN
6.1.1. Отношение сигнал —шум
и энергия на бит или символ
В каналах с аддитивным белым шумом AWGN к модулированному сигна-
лу s(t) = Re на приеме добавляется шум n(t). Шум п(£) пред-
ставляет гауссовский случайный процесс с нулевым средним значением
и спектральной плотностью мощности Nq/Ч. Таким образом, принимае-
мый сигнал имеет вид: r(£) = s(i) + n(t).
Отношение сигнал - шум (защищенность) SNR на приеме — это от-
ношение мощности принимаемого сигнала Рг к мощности шума в полосе
частот передаваемого сигнала s(t). Принимаемая мощность Рг опреде-
ляется передаваемой мощностью, а также потерями в тракте передачи,
экранированием и замираниями вследствие многолучевого распростра-
нения, о чем шла речь в главах 2 и 3. Мощность шума определяется
полосой частот передаваемого сигнала и спектральными характеристи-
ками n(t). В частности, если полоса частот комплексной огибающей u(t)
сигнала s(t) равна В, то полоса частот передаваемого сигнала s(t) будет
равна ЧВ. Так как шум n(i) имеет постоянную спектральную плотность
мощности AIq/2, то общая мощность шума в полосе частот ЧВ соста-
вит: N — Nq/Ч ЧВ = NqB. Следовательно, отношение сигнал-шум SNR
на приеме равно:
SNR =
Рг
NqB'
В системах с помехами при расчете вероятности ошибки вместо отноше-
ния сигнал-шум SNR часто используют отношение мощности принимае-
мого сигнала к суммарной мощности помех и шума — SINR1. Такое при-
ближение обосновано, если статистика помех приблизительно соответ-
ствует аналогичным показателям гауссовского шума. Отношение SINR
на приеме задается формулой:
SINR =
Рг
NqB + Pj '
где Pi — средняя мощность помех.
Отношение сигнал-шум SNR часто выражают в единицах энергии
сигнала на бит Еь (или на символ, Es):
SNR = Wn = = хДг- (6Л)
NqB 1\013Is NqBIij
где Ts — время передачи символа, а Ть — время передачи бита (для
двоичной модуляции Ts = Ть, a Es = Еь). Если формируются импульсы
с Ts = 1/В (например, приподнятые косинусоидальные импульсы с (3 = 1),
то отношение сигнал-шум SNR будет равно Es/Nq при многоуровневой
1SINR — Signal-to-interference-plus-noise power ratio.
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
передаче сигналов и Еь/Nq при двоичной передаче. Для обычных им-
пульсов время передачи символа составляет Ts = к/В при некоторой
постоянной величине к, и в этом случае к SNR = Es/N0.
Величины 7S = Es/Nq иуь = Еь/Nq иногда называют отношением сиг-
нал-шум на символ и на бит соответственно. В контексте определения
рабочих характеристик нас интересует вероятность ошибок по битам Рь
как функция 7ь. Однако при многоуровневой передаче сигналов (напри-
мер, при многократной АИМ и ФМН) вероятность ошибки бита зависит
как от вероятности символьной ошибки, так и от преобразования бит
в символы. Поэтому обычно рассчитывают вероятность ошибки симво-
ла Ps как функцию 7s на основе концепции сигнального пространства
из § 5.1, а затем получают вероятность ошибки бита Рь как функцию
7ь, используя для этого точное или приближенное преобразование. При-
ближенное преобразование обычно предполагает, что энергия символа
распределяется поровну между всеми битами и что при этом использу-
ется кодирование Грея, поэтому (при разумных отношениях сигнал-шум
SNR) одна символьная ошибка точно соответствует одной ошибке бита.
Эти допущения для многоуровневой передачи сигналов дают нам следу-
ющие приближения:
~ ГД
(6-
и
6.1.2. Вероятность ошибки при ФМ2 и ФМ4
Сначала рассмотрим двоичную фазовую манипуляцию ДФМН (ФМ2) с ко-
герентным детектированием и точным восстановлением несущей часто-
ты и фазы. При двоичной модуляции каждый символ соответствует од-
ному биту, поэтому процент ошибок по битам и ошибок символов один
и тот же. При передаче бита со значением 0 передаваемый сигнал ра-
вен si(i) = Ag(t) cos (2л/Д), а при передаче бита со значением 1 сигнал
имеет вид 52(f) = — Ag(t) cos (2тг/Д), для А > 0. Из (5.46) следует, что
вероятность ошибки равна
Рь = Q (. (6.4)
\VZNoJ
Из подпараграфа 5.3.2 известно, 4To'(fmjn = ||si — 5q|| = ||А — (—А)|| = 2А.
Теперь определим соотношение величины А и энергии на бит. В соответ-
ствии с (5.65) имеем:
6.1. Каналы с аддитивным белым шумом AWGN
Ть Ть Тъ
Еь = Js2(t) dt = J 8^(6) dt = J A2g2(t) cos2 (2тг/с£) dt = A2. (6.5)
ooo
Следовательно, созвездие сигнала для ФМ2 можно выразить через энер-
гию на бит: sq = л/Ё/ и si = — у/Е/,. Отсюда получаем минимальное
расстояние dmjn — 2А = 2д/Ж- Подставляя эти выражения в (6.4), имеем:
(6-6)
Квадратурная фазовая манипуляция КФМН (ФМ4) получается при
двоичной модуляции ФМ2 как синфазной, так и квадратурной составля-
ющих сигнала. При правильном восстановлении фазы и несущей часто-
ты, составляющие принятого сигнала, соответствующие каждой из этих
ветвей, будут ортогональными. Поэтому вероятность ошибки бита в ка-
ждой ветви будет такой же, как и для ФМ2: Рь = Q (^у/2'уь)- Вероятность
ошибки символа равна вероятности того, что в каждой ветви есть ошибка
бита:
Ps = l- [1-Q(72^)]2. (6.7)
Так как энергия символа разделяется между синфазной и квадратур-
ной ветвями, мы имеем 7S = 27^. Подставляя это выражение в (6.7),
получаем:
Ps = l-[l-Q(Vb)]2. (6.8)
Полученная в подпараграфе 5.1.1 граница объединения (5.40) для ве-
роятности Ps при ФМ4 может быть представлена в виде:
Ps 2Q (A/y/N^ + Q (V2A/y/N^ . (6.9)
Учитывая, что 7S = 275 = А2/No, получаем:
Ps 2Q (VTs) + Q ^3Q(y/Ts). (6.10)
В аналитическом виде ограничение (5.44) превращается в
Ps лг— ехР [~°>57«] • (6-11)
Используя тот факт, что минимальное расстояние между точками со-
звездия в (5.45) равно dmjn = д/2А2, получаем приближение ближайшего
Ps « 2Q = 2Q (Тъ) • (6-12)
Обратите внимание, что при кодировании Грея мы можем получить
приближенное значение вероятности ошибки Рь по формуле Рь « Ps/^-,
так как при ФМ4 на один символ приходится два бита.
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
Пример 6.1. Найдите вероятность ошибки бита Рь и вероятность ошибки
символа Ps при ФМ4, если уь = 7 дБ. Сравните точное значение Рь с прибли-
жением Рь ~ Рц/Т, если используется кодирование Грея. Затем рассчитайте Ps,
исходя из приближения ближайшего соседа, при — 2уь и сравните полученные
результаты с точным значением Ps.
Решение. Мы имеем: ^ь = Ю7/10 = 5,012, поэтому
Рь = Q (v^) = Q (УЖб24) = 7,726 IO’4.
Точная вероятность ошибки символа Ps равна
Fs = l- [1 - Q (Л/2^)]2 = 1 - [1 - <2 рЮ,024)]2 = 1,545 • 10~3.
При условии кодирования Грея приближенная вероятность ошибки бита равна
Рь « Ps/2 = 7,723 • 10“4, что достаточно близко к точному значению Рь. При-
ближение ближайшего соседа для Ps дает:
Ps ~ 2Q (Vt?) = 2Q plO,024) = 1,545 • 10"3,
что хорошо совпадает с точным значением Ps.
6.1.3. Вероятность ошибки при ФМН
При М-кратной ФМН созвездие сигнала имеет вид:
зц = Acos[27r(i — 1)/М] и Sj2 = A sin [2л(г — 1)/М]
для А > 0 и i = 1,..., М. Энергия символа составляет Es = А2, поэтому ys =
A2/No. Из (5.57) следует, что для полученного вектора г = reJ°, представленного
в полярных координатах, ошибка происходит в том случае, если передается i-я
точка созвездия сигнала и 0 ^2тг(г — 1 ^0,5)/М, 2тг(г — 1 + 0,5)/Л/). Совместное
распределение г и 0 можно получить через двумерное преобразование шумов nt
и П2 в синфазной и квадратурной ветвях [1, гл. 5.2.7], что дает нам:
Г
Р (г, 0) = —— ехр
TTJVo
(г2 - ZyfEsr cos(0) + Es
(6.13)
Так как вероятность ошибки зависит только от распределения 0, мы можем ис-
ключить зависимость от г путем интегрирования, в результате чего получим:
ОО оо
р(0) = У p(r, 0) dr = sln2W у г ехр
о о
(г - y^cos^))2
2
dz. (6.14)
При наличии симметрии вероятность ошибки одинакова для всех точек созвез-
дия. Поэтому мы можем получить Ps из вероятности ошибки, допуская, что
6-1. Каналы с аддитивным белым шумом AWGN
передается точка созвездия Si = (А, 0):
7Г/М
ps = \- I P(e)de =
~n/M п/М ОО
= 1- / 2^е~7'Sin2(9) /геХр
— к/М О
(z - y2T7cos(0))2l
----------------— dz. (6.15)
При М > 4 решения в аналитическом виде для этого интеграла не существует,
поэтому точное значение Ря должно рассчитываться численно.
Каждая точка в созвездии ФМН имеет две ближайших соседних точки
на расстоянии dmin = 2Asin(7r/lW). Поэтому приближение ближайшего
соседа (5.45) для Ps имеет вид:
Ps « 2Q (V2Asm(Tv/M)/y/N^ = 2Q (^2^ sin(7r/M)} . (6.16)
Это приближение ближайшего соседа может значительно отличаться от
точного значения Ps. Однако такой расчет произвести гораздо легче, чем
численное интегрирование выражения (6.15), необходимое для получения
точного значения Ps. Эту формулу также можно получить при прибли-
жении р(0) в виде:
НА) ~/W^cos(0)e~7sSinM (6.17)
Подстановка этого значения в первую строку выражения (6.15) дает (6.16).
Пример 6.2. Сравните вероятность ошибки бита при ФМ8 и ФМ16, допуская,
что 7(, = 15 дБ, и используя приближение Ря согласно (6.16), а также приближе-
ния (6.3) и (6.2).
Решение. Из приближения (6.2) получаем, что при ФМ8 7S = (log2 8) • IO15/10 =
= 94,87. Подстановка в (6.16) дает:
Ря « 2Q (V189,74sin (тг/8)) = 1,355 • 10“7. (6.18а)
Теперь, используя (6.3), получаем: Рь = Fs/3 = 4,52 • 10-8. Для ФМ16 мы имеем:
7S = (log2 16) • IO15/10 = 126,49. Подстановка в (6.16) дает:
Ps « 2Q (у252,98 sin (тг/16)} = 1,916 • 10~3, (6.186)
а, используя (6.3), получаем: Р/, = Ря/б = 4,79 • 10”4. Заметьте, что при одина-
ковом значении 7,, вероятность ошибки Р/, для ФМ16 намного больше, чем для
ФМ8. Этот результат ожидаем, так как при ФМ16 в заданном созвездии раз-
мещается больше бит на символ, и поэтому при фиксированной энергии на бит
минимальное расстояние между точками созвездия будет меньше.
Вывод вероятности ошибки при ФМН предусматривает, что фаза не-
сущего сигнала точно известна приемнику. При ошибке оценки фазы
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
распределение р(0), используемое для получения Ps, должно включать
в себя распределение чередования фаз, связанного со смещением фазы
несущей. Это распределение обычно зависит от метода оценки фазы несу-
щей и отношения сигнал - шум SNR. Влияние ошибки оценки фазы на ко-
герентную модуляцию изучено в [1, прил. С; 2, гл. 4.3.2; 3; 4]. Эти работы
показывают, что, как и ожидалось, значительное фазовое смещение ве-
дет к неубывающей вероятности ошибки бита. Более того, недвоичная
передача, по сравнению с двоичной ФМН (ФМ2), более восприимчива
к фазовому сдвигу в результате перекрестного взаимодействия между
синфазными и квадратурными составляющими сигнала. Влияние ошиб-
ки оценки фазы может быть особенно сильным при быстрых замирани-
ях, когда фаза в канале очень быстро меняется из-за конструктивной
и деструктивной многолучевой интерференции. Даже при относитель-
ной модуляции изменения фазы в течение интервала передачи символа
и между такими интервалами могут вызвать неубывающие ошибки [5].
Ошибки синхронизации могут ухудшить и другие рабочие характери-
стики; анализ влияния ошибок синхронизации на характеристики ФМН
можно найти в [2, гл. 4.33; 6].
6.1.4. Вероятность ошибки при АИМ и КАМ
При АИМ созвездие сигнала имеет вид: Ai = (2г — 1 — М) d, г = 1, 2,..., М.
Каждая из внутренних точек этого созвездия М — 2 имеет по два ближай-
ших соседа на расстоянии Id. Вероятность ошибки при передаче одной
из этих внутренних точек созвездия — это вероятность того, что шум
превысит d во всех направлениях: Ps (si) — р (|n| > d), г = 2,..., М — 1.
У внешних точек созвездия есть только один ближайший сосед, поэтому
ошибка произойдет, если шум превысит d только в одном направлении:
Ps (si) = р(\п\ > d) = 0,5/? (|n| > d), i = 1, M. Таким образом, вероятность
ошибки составляет:
1 М
Ps= m^Ps =
г=1
М — 2 ^ /мА 2 / /мА 2(М-1) / /мА
М Q Ао J + No ) ~ М Q (^у Ao J ’ ’
Из выражения (5.54) средняя энергия на символ при АИМ равна
i Е Е (2г -1 - M>>2d2 = Um2~ х) d2- (6-2°)
1 г=1 1 г=1
6.1. Каналы с аддитивным белым шумом AWGN
Вероятность Ps можно выразить через среднюю энергию Es следую-
щим образом:
2(М-1) / / 67, \
М 4 [у
(6.21)
Рассмотрим модуляцию КАМ с квадратным созвездием сигнала раз-
мером М = L2. Эту систему можно представить как две системы АИМ
с созвездием сигнала размера L, использующие синфазную и квадратур-
ную составляющие сигнала, каждая из которых обладает половиной энер-
гии исходной системы КАМ. Точки созвездия в синфазной и квадра-
турной ветвях принимают значения Аг = (2г = 1 — L) d, i = 1,2,... , L.
Вероятность ошибки символа для каждой ветви системы КАМ определя-
ется выражением (6.21), при этом М заменяется на L = a 7s равно
средней энергии на символ в созвездии КАМ:
(6.22)
Обратите внимание, что 7s в выражении (6.22) умножается на множи-
тель 3, а не 6, как в (6.21). Это связано с тем, что полная средняя энергия
7s созвездия КАМ 7s разделяется между его синфазной и квадратурной
ветвями. Тогда вероятность ошибки символа для системы КАМ равна:
(6.23)
Приближение ближайшего соседа для вероятности ошибки символа
зависит от того, является ли данная точка созвездия внешней или вну-
тренней. У внутренних точек четыре ближайших соседа, тогда как у внеш-
них точек два или три ближайших соседа; в обоих случаях расстояние
между ближайшими соседями равно 2d. Используя консервативный под-
ход и приняв число ближайших соседей равным 4, мы получим следующее
приближение ближайшего соседа:
(6’24)
Для непрямоугольных созвездий относительно просто показать, что верх-
няя граница вероятности ошибки символа задается следующим образом:
Ps 1-
1-2Q
(6.25)
что идентично выражению (6.24) для квадратных созвездий. Приближе-
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
ние ближайшего соседа для непрямоугольных созвездий равно:
(6-26)
где Mumin — наибольшее число ближайших соседей для любой точки со-
звездия, a dmjn — минимальное расстояние в созвездии.
Пример 6.3. Для КАМ-16 с — 15 дБ (ys = log2 М сравните точную
вероятность ошибки символа (6.23) с:
а) приближением ближайшего соседа (6.24);
б) вероятностью символьной ошибки для ФМ16 при том же значении (по-
лученной в примере 6.2).
Решение. Средняя энергия символа равна = 4 101,5 = 126,49. Тогда точное
значение Ps составит:
(/ ,----\ \ 2
^2^Д /ГП^А =737 ю_;
4 \ V 15 / /
Приближение ближайшего соседа равно:
Ps «4<2
/3 • 126,49
V 15
= 9,82 • 10“7,
что немного больше точного значения вследствие консервативного приближе-
ния, т. е. с запасом, когда каждая точка созвездия имеет по четыре ближайших
соседа. Вероятность ошибки символа при ФМ16 из примера 6.2 равна
Ps » 1,916 - 10 3,
что примерно на четыре порядка больше точного значения Ps при КАМ-16. Боль-
шая вероятность символьной ошибки Ps при ФМН по сравнению с КАМ (при
одинаковых значениях М и -уь) объясняется тем, что при КАМ для кодирования
данных используются как амплитуда, так и фаза, а при ФМН — только фаза.
Поэтому, при заданной величине энергии на символ или бит, КАМ использует
энергию более эффективно, вследствие чего обладает лучшими рабочими харак-
теристиками.
Демодулятор КАМ должен производить оценку амплитуды и фазы
сигнала, чтобы области решения, используемые при детектировании пе-
реданного символа, не смещались по амплитуде или фазе. Анализ сниже-
ния параметров системы вследствие ошибки оценки фазы выполняется
так же, как и в рассмотренном ранее случае ФМН. Исходя из ампли-
туды сигнала в канале, области решения устанавливаются так, чтобы
они соответствовали переданному символу; такая подстройка называется
автоматической регулировкой усиления АРУ. При ошибочной оценке уси-
ления канала, система АРУ неправильно масштабирует принятый сигнал,
6.1. Каналы с аддитивным белым шумом AWGN
что может привести к неправильной демодуляции даже при отсутствии
шума. Однако контрольные сигналы не позволяют точно оценить состо-
яние канала, а ошибка в оценке может привести к цифровым ошибкам.
Более подробные сведения о влиянии ошибок оценки амплитуды и фазы
на характеристики модуляции КАМ можно найти в [7, гл. 10.3; 8].
6.1.5. Вероятность ошибки при ЧМН и ЧМН-НФ
Сначала рассмотрим вероятность ошибки при двоичной ЧМН с коге-
рентным демодулятором (см. рис. 5.24)- Так как демодуляция является
когерентной, мы можем пренебречь лк’бым сдвигом фазы несущей. Пере-
даваемый сигнал определяется выражением:
Sift) = Ау/ЯТь cos , г = 1,2. (6.27)
Следовательно, Еь = А2, а = А2/No- На вход решающего устройства
поступает сигнал:
Z = S1 + П1 S2 — П2- (6.28)
Если z > 0, то на выходе решающего устройства формируется бит со
значением 1, если же z С 0, то формируется бит со значением 0. Пусть
передается сигнал Sj(i); тогда
z|l = А + т — П2- (6.29)
Ошибка происходит в случае, если z = А + щ — П2 0. С другой стороны,
если передается сигнал S2(i), то
z|0 = П1 — А~ П2, (6.30)
и ошибка происходит в случае, когда z = щ — А — П2 > 0. Если П]
и П2 — независимые гауссовские случайные величины с нулевым средним
значением и дисперсией TVq/2, то их разность представляет гауссовскую
случайную величину с нулевым средним значением и дисперсией, равной
сумме дисперсий N0/2 + No/2 = No. Тогда вероятность ошибки при рав-
новероятной передаче бит составит:
Рь = 0,5р (А + Hi — П2 0) + 0,5р (ni — А — П2 > 0) =
= Q (a/v<ZVo) =Q(VTb)- (6.31)
Вывод вероятности символьной ошибки Ps для когерентной ЧМН с М > 2
более сложный и не имеет решения в аналитическом виде [2, выражение
(4.92)]. Вероятность ошибки символа для некогерентной ЧМН получена
в [9, гл. 8.1] и имеет вид:
Ps = У(-1)т+1(М-1)—Ц-ехр . (6.32)
’ \ т /т + 1 т + 1 v 7
т—1 4 '
^286 Глава 6. Характеристики цифровой модуляции в беспроводных каналах
Вероятность ошибки при ЧМН с непрерывной фазой (ЧМН-НФ) за-
висит от того, является ли детектор когерентным или некогерентным,
а также от того, использует ли он посимвольное детектирование или
оценку последовательности. Анализ вероятности ошибки при ЧМН-НФ —
сложный процесс, так как при данной модуляции анализ вероятности
ошибки множества символов требует памяти. Формулы для вероятно-
сти ошибки также могут быть довольно сложными. Подробный вывод
вероятности ошибки для различных структур ЧМН-НФ можно найти
в [1, гл. 5.3]. Как и в случае линейной модуляции, рабочие характеристи-
ки ЧМН ухудшаются при отклонении частоты и ошибках синхронизации.
Детальный анализ влияния таких ошибок на характеристики ЧМН можно
найти в [2, гл. 5.2; 10; И].
6.1.6. Приближенные значения вероятности ошибки
при когерентной модуляции
Многие полученные до настоящего времени выражения, определяющие
приближенные или точные значения вероятности Ps при когерентной мо-
дуляции, имеют вид:
PS(7S) « aMQ , (6.33)
где величины пц и @м зависят от типа приближения и типа модуляции.
В частности, такую форму имеет приближение ближайшего соседа, при
этом ам определяет количество ближайших к созвездию соседей на мини-
мальном расстоянии, а /Зм — константа, характеризующая соотношение
между минимальным расстоянием и средней энергией символа. В табл. 6.1
в общие выражения для Ps при ФМН, КАМ и ЧМН подставлены конкрет-
ные значения аи и @м на основе материала предыдущих параграфов.
Таблица 6.1. Приближенные значения вероятностей ошибок по символам и битам
при когерентной модуляции
Модуляция W) Рь (7ь)
Двоичная ЧМН Pb = Q (VtT)
Двоичная ФМН (ФМ2) Pb = Q (л/27ь)
ФМ-4, КАМ-4 Ps « 2Q (v^7) Ръ « Q (л/27ь)
Л/-кратная АИМ Ps = p, ~ 2(M —1) ,, ( /67Ь log2 M ° ~ M JOg2 M 4 yy M'S-1 )
Af-кратная ФМН Ps ~ 2Q (y/2^sin (^)) рь~ 1О82М<3(\/27Ь1О§2М81П(^))
Прямоугольная ЛФкратная КАМ ps=4Q (у/Ж) p ~ 4 л ( / 37b l°g2 M I ‘ log, \; M-l 1
Непрямоугольная ЛФкратная КАМ Ps = 4Q j^?r) P ~ 4 Г1 1 / 3~f'. log2 M ) logjM1» ly M-l J
6.1. Каналы с аддитивным белым шумом AWGN 287
Технические требования к характеристикам системы обычно осно-
вываются на вероятности ошибок по битам Рь как функции энергии
бита 7ь. Чтобы перейти от Ps к Рь и от к уь, используем приближе-
ния (6.3) и (6.2), предполагающие кодирование Грея и высокий уровень
отношения сигнал-шум. С учетом этих приближений, из (6.33) получаем
простую формулу для вероятности Рь как функции 'уь-
Рь(уъ) = &mQ , (6.34)
где ам = ам/ log2 М и Дад = что соответствует пц и 0м
в (6.33). Это преобразование позволяет получить зависимость Рь от уь
из общего выражения для зависимости Ps от ys (6.33).
6.1.7. Вероятность ошибки
при относительной модуляции
Вероятность ошибки при относительной модуляции зависит от разности
фаз на входе фазового компаратора (см. рис. 5.20). Чтобы определить
переданный символ, фазовый компаратор выделяет фазу сигнала:
r(k)r*(k - 1) = + AeiW^>0)n*(k - 1) +
+ Ае~^-^+^п(к) + n(k)n*(k - 1). (6.35)
Из соображений симметрии при расчете вероятности ошибки можно допу-
стить наличие заданной разности фаз. В предположении нулевой разности
фаз в(к) — в(к — 1) = 0 получаем
r(k)r*(k - 1) = А2 + Aej^+^n\k - 1) +
+ Ае^'(0(/£-1)+^)п(А:) + п(к)п*(к - 1). (6.36)
Введем новые случайные величины
п(к) = n(A:)e“^0(-fc-1)+t/’0) и п(к — 1) = п(к — 1)е”-7^^^+¥’°\
обладающие такой же статистикой, что и величины п(к) и п(к-1). Тогда:
r(k)r*(k — 1) = А2 + А(п*(к — 1) + п(А:)) + п(к)п*(к — 1). (6.37)
Выражение (6.37) содержит три члена: первый член имеет желаемую
нулевую разность фаз; а второй и третий члены вносят шум. При при-
емлемых отношениях сигнал — шум третий член намного меньше второго,
поэтому им можно пренебречь. Разделив оставшиеся члены на А, полу-
чаем:
z = А + Re {п*(к — 1) + п(к)} + Jim {h*(k — 1) + п(к)} . (6.38)
288 Глава 6. Характеристики цифровой модуляции в беспроводных каналах
Введем следующие обозначения: х = Re {г} и у = Im{z}. Тогда фазу z
можно записать в виде:
6z = arctg у/х.
(6.39)
При условии нулевой разности фаз ошибка происходит в случае, если
|R?| к/М. Вероятность p(|0z| > тг/М) определяется так же, как и в
случае когерентной ФМН, за исключением того, что согласно (6.38) мы
имеем два шумовых члена вместо одного, и поэтому мощность шума в два
раза больше, чем при когерентной манипуляции. По этой причине рабочие
характеристики относительной модуляции примерно на 3 дБ хуже, чем
при когерентной модуляции.
В случае относительной ФМН (ОФМН) при принятии решения рас-
сматривается только синфазная ветвь схемы на рис. 5.20, поэтому при
анализе мы учитываем только х = Re {г}. Так, если передается ноль, то
ошибочное решение принимается, когда х = А + Re {n*(k — 1) + n(k)} < 0.
Вероятность такой ошибки можно определить путем нахождения харак-
теристической функции или производящей функции моментов для х, ис-
пользуя обратное преобразование Лапласа для получения распределения х,
а затем интегрируя по области принятия решений х < 0. Эта общая ме-
тодика применима для различных методов модуляции и демодуляции как
в случае аддитивного белого шума AWGN, так и при наличии замираний
[9, гл. 1.1]. Мы воспользуемся данной методикой позднее при расчете сред-
ней вероятности символьной ошибки для линейной модуляции в условиях
замираний — как при наличии, так и при отсутствии разнесения. В случае
ОФМН характеристическую функцию для х получают с использованием
общей квадратичной формы комплексных гауссовских случайных вели-
чин [1, прил. В; 12, прил. В], а получаемая в результате вероятность
ошибки имеет вид:
Pb =
(6.40)
При относительной ФМ4 используется характеристическая функция для г,
полученная в [1, прил. С], которая дает вероятность ошибки бита
b L J L J
где a « 0,765^/ть, b « 1,85^/ть, a Iq(x) — модифицированная функция
Бесселя первого рода и нулевого порядка.
6.2. Альтернативное представление Q-функции
В выражении (6.33) мы видели, что вероятность ошибки символа Ps для
многих методов когерентной модуляции в канале с аддитивным белым
6.2. Альтернативное представление Q-функции
шумом AWGN приближенно выражается через Q-функцию Гаусса. На-
помним, что Q{z) определяется как вероятность того, что гауссовская
случайная величина X с нулевым средним значением и дисперсией, рав-
ной 1, превысит значение z\
ОО
Q(z) = р {X > z} = [ -Le”^/2 dx. (6.42)
J V 2л
z
Работать с Q-функцией непросто, так как аргумент z находится в ниж-
нем пределе подынтегрального выражения, само подынтегральное выра-
жение имеет неопределенную область, а экспоненциальная функция в ин-
теграле не позволяет получить решение в аналитическом виде.
В 1991 г. Крейгом [13] было получено альтернативное представление
Q-функции. Эта альтернативная формула имеет вид
Z > 0.
(6.43)
Такое представление может быть также получено из работы Вайн-
штейна [14] или Паву ла и др. [5]. В этой альтернативной форме подынте-
гральное выражение имеет определенную область, независимую от аргу-
мента функции г, а интеграл представляет гауссову случайную величину
от z. Важность этих свойств будет показана при использовании альтерна-
тивного представления для получения средней вероятности ошибки в ка-
налах с замираниями.
Мотивом Крейга для получения альтернативного представления было
желание упростить расчет вероятности ошибки в каналах с аддитивным
белым шумом AWGN. Так, вероятность ошибки бита при ФМ2 можно
записать в следующей форме:
тг/2
Pb = Q У ехр
о
—dtp.
sin <д]
(6.44)
Подобным образом альтернативное представление может использо-
ваться для получения простой точной формулы вероятности символьной
ошибки Ps при М-кратной ФМН в канале с аддитивным белым шумом
AWGN:
(М—1)тг/М
/ ехр
о
~9Ъ
9
sin <д
(6.45)
(см. [13]), где g = sin2(7r/Af). Обратите внимание, что эта формула не
соответствует общей формуле a^Q : общая формула является
аппроксимацией, тогда как (6.45) дает точное значение. Заметьте также,
Глава б. Характеристики цифровой модуляции в беспроводных каналах
что (6.45) получается интегрированием в конечной области простых три-
гонометрических функций, которые легко рассчитать с использованием
вычислительных программных пакетов или калькулятора.
6.3. Замирания
В каналах с аддитивным белым шумом AWGN вероятность ошибки сим-
вола зависит от отношения сигнал - шум на приеме или, что эквивалентно,
от величины 7S. В среде с замираниями мощность принимаемого сигна-
ла изменяется с расстоянием или временем случайным образом — в ре-
зультате экранирования и/или многолучевого распространения. Поэтому
в канале с замираниями ys является случайной величиной с распределе-
нием р7а(7), и, следовательно, вероятность Ps(7s) также случайна. При
случайном 7S рабочие характеристики системы зависят от скорости сле-
дования замираний. Охарактеризовать случайную величину Ps можно
с помощью трех различных критериев:
- вероятность перерывов радиосвязи POut, определяемая как вероят-
ность того, что 7S станет меньше заданного значения, соответству-
ющего минимальной допустимой вероятности Ps;
- средняя вероятность ошибки Ps, усредненная по распределению 7S;
- комбинация средней вероятности ошибки и вероятности нарушения
радиосвязи, определяемая как средняя вероятность ошибки, которая
может быть достигнута в течение некоторого времени или в неко-
тором пространстве.
Средняя вероятность ошибки символа используется в том случае,
когда интервал когерентности замираний имеет тот же порядок, что
и время передачи символа (Ts w Тс). В этом случае на протяжении одного
интервала времени уровень замирания сигнала остается примерно посто-
янным. Поскольку многие методы кодирования с исправлением ошибок
позволяют восстанавливать информацию при наличии нескольких оши-
бочных бит, а характеристики сквозной передачи данных обычно не очень
серьезно ухудшаются при нескольких одновременных ошибках (так как
ошибочные биты могут быть отброшены или переданы заново), то при
данных условиях средняя вероятность ошибки служит хорошим показа-
телем качества канала.
Однако если замирания сигнала проходят медленно (Т, <С Тс), то глу-
бокое замирание затронет много одновременно передаваемых символов.
Поэтому замирание может привести к большим пакетам ошибок, которые
нельзя исправить при кодировании с приемлемым уровнем сложности.
Такие пакеты ошибок могут серьезно ухудшить характеристики сквоз-
ной передачи. В этом случае нельзя гарантировать приемлемое качество
связи в течение всего времени или, например, на всей территории ячей-
ки (соты), без значительного увеличения мощности передачи. В таких
условиях оценивается вероятность нарушения радиосвязи, т. е. того, что
канал будет непригодным на каком-то временном или пространствен-
ном отрезке. Вероятность нарушения радиосвязи и средняя вероятность
ошибки часто сочетаются, когда канал моделируется комбинацией бы-
стрых и медленных замираний (например, логнормальное экранирование
с быстрыми рэлеевскими замираниями).
Отметим, что если Тс Ts, то замирания усредняются с помощью
согласованного фильтра в демодуляторе. Поэтому при очень быстрых за-
мираниях рабочие характеристики будут такими же, как и в каналах
с аддитивным белым шумом AWGN.
6.3.1. Вероятность перерывов радиосвязи
Вероятность перерывов радиосвязи 70 определяется выражением:
70
Pout = р(ъ < 70) = У P7s(7W, (6.46)
о
где 70 обычно представляет минимальное отношение сигнал-шум, необ-
ходимое для поддержания приемлемого качества. Например, для речевого
сигнала, представленного в цифровом виде, допустим коэффициент оши-
бок по битам Рь = 10“3, поскольку такие ошибки обычно не замечаются
человеческим ухом. Для сигнала ФМ2 в канале с рэлеевскими замира-
ниями величина 7ь < 7 дБ будет считаться нарушением связи, поэтому
принимается, что 70 = 7 дБ.
При рэлеевских замираниях вероятность нарушения связи имеет вид:
70
pout = [ Le^/^dls = i _ е-70/7,_ (6,47)
J 7s
о
Отсюда получаем, что необходимое среднее отношение сигнал-шум ys,
необходимое для заданной вероятности нарушения связи, равно:
- = 7о
Ъ -ln(l-Pout)’
В децибелах это означает, что значение 10 log 7., должно превышать
заданное минимальное значение 10 log 70 на величину
Fd = -10 log [—ln(l - Pout)],
чтобы поддерживать приемлемые качественные показатели в течение бо-
лее 100 • (1 — Pout) процентов времени. Величину Fd обычно называют
запасом на замирание сигнала в дБ.
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
Пример 6.4. Определите значение 77,, необходимое для того, чтобы при мо-
дуляции ФМ2 и медленных рэлеевских замираниях в течение 95 % времени (или
на 95 % территории) поддерживалась вероятность ошибки Р>, (77,) < 10-4.
Решение. При модуляции ФМ2 в канале с аддитивным белым гауссовым шу-
мом AWGN заданное значение коэффициента ошибок по битам достигается при
7г, = 8,5 дБ. Это значит, что при Д, (7^,) = Q (-^/27(,) мы имеем Д, (1О0,85) = 10-4.
Следовательно, 70 = 8,5 дБ. Нам необходимо, чтобы выполнялось условие Fol,t =
= p(ptb < 7о) = 0,05, поэтому
- _ 7о _ 10u’od _
Уь ~ -ln(l-Fout) - -In(1-0,05) “ ’ Д •
(6.49)
6.3.2. Средняя вероятность ошибки
Средняя вероятность ошибки используется для оценки качества переда-
чи, когда Ts « Тс. Поэтому мы можем допустить, что в течение времени
передачи символа величина 7., приблизительно постоянна. Тогда сред-
няя вероятность ошибки рассчитывается интегрированием вероятности
ошибки в канале с аддитивным белым шумом AWGN по распределению
замираний:
ОО
А = У РД7)р7з(7)с?7, (6.50)
о
где РД7) — вероятность ошибки символа в канале с аддитивным белым
гауссовым шумом AWGN с защищенностью (отношением сигнал-шум) 7,
которая может быть аппроксимирована с помощью выражений, приве-
денных в табл. 6.1. Для заданного распределения величины замираний г
(например, распределения Рэлея, Райса, логарифмически нормальное) ве-
роятность p7s (7) рассчитывается заменой переменной:
P~M<h = p(r)dr. (6.51)
Например, при рэлеевских замираниях величина принимаемого сигна-
ла г имеет распределение Рэлея:
p(r) = ^_e-r>2 г 0, (6.52)
(TZ
а мощность сигнала распределена по экспоненциальному закону со сред-
ним значением 2ст2. Отношение сигнал-шум на символ для заданного
значения г равно:
где ст2 = No/2 — спектральная плотность мощности шума в синфазной
и квадратурной ветвях. Дифференцируя обе части этого выражения, по-
лучаем:
rTN
= —z-dr.
Подставляя (6.53) и (6.54) в (6.52), а затем в (6.51), получаем:
p^h) =
9
ап C-^.I^2TS
°2TS
(6.54)
(6.55)
Так как среднее значение отношения сигнал - шум на символ ys равно
a2Ts/a2, мы можем переписать (6.55) в виде:
p7a(j) = ^“е”7/Ъ’ (6-56)
7s
что соответствует экспоненциальному распределению. Для двоичной пе-
редачи сигналов это выражение упрощается к виду:
Р7Ау) = (6.57)
Интегрирование (6.6) по распределению (6.57) дает среднюю вероят-
ность ошибки при ФМ2 и рэлеевских замираниях:
А=Н1 - \/7Е] - А (фМ2)’ <б-58)
где аппроксимация применяется при больших значениях уь- Аналогичное
интегрирование (6.31) по (6.57) дает среднюю вероятность ошибки при
двоичной ЧМН и рэлеевских замираниях:
Рь = - 1 — . / ^Ь_ рь 7- (двоичная ЧМН). (6.59)
2 ( V 2 + 76 J 4 7b
Таким образом, при больших значениях отношения сигнал-шум ха-
рактеристики ФМ2 и двоичной ЧМН сходятся. В случае некогерентной
модуляции, если предположить, что фаза в канале в течение времени
передачи символа относительно постоянна, то вероятность ошибки так-
же может быть получена интегрированием вероятности ошибки в канале
с аддитивным белым гауссовым шумом AWGN по распределению зами-
раний. Для относительной ФМН это дает:
Рь = —-—— as —(относительная ФМН), (6.60)
2(1 +7&) 27b
где аппроксимация также применяется при больших значениях Дь- Обра-
тите внимание, что в пределе при больших значениях 7ь использование
относительной ФМН вместо ФМ2 приводит к потерям мощности при-
мерно на 3 дБ. Потери мощности при относительном детектировании
наблюдались и в канале с аддитивным белым шумом AWGN. На прак-
тике эти потери мощности незначительны, так как относительная ФМН
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
позволяет компенсировать возникающие в канале или приемнике медлен-
ные изменения фазы, которые в данных расчетах не учитывались.
Использовав основное приближение Ps к, &mQ (V/?m7s), можно ап-
проксимировать среднюю вероятность ошибки символа при рэлеевских
замираниях в виде:
х _ / 0,5/?м7з
у 1 + 0,5/3m7s
&М
2/3 мЪ'
ОО
Ps ~ I aMQ
о
(6.61)
где последнее приближение получается в пределе при больших значениях
отношения сигнал-шум.
Рис. 6.1. Средняя веро-
ятность ошибки Рь при
ФМ2 в каналах с рэлеев-
скими замираниями и с
аддитивным белым шу-
мом AWGN
Интересно сравнить вероятности ошибок по битам для различных ме-
тодов модуляции в каналах с аддитивным белым шумом AWGN и с зами-
раниями. При двоичной ФМН, ЧМН и относительной ФМН вероятность
ошибки бита в канале с аддитивным белым шумом AWGN уменьшается
с увеличением по экспоненциальному закону. Однако в каналах с зами-
раниями вероятность ошибки по битам для всех этих методов модуляции
уменьшается с увеличением ут, линейно. Подобная ситуация наблюдает-
ся и при недвоичной модуляции. Поэтому мощность, необходимая для
поддержания заданного значения вероятности ошибки Рь, особенно в слу-
чае малых значений, в каналах с замираниями будет намного выше, чем
в каналах с аддитивным белым шумом AWGN. Например, на рис. 6.1
показаны графики вероятности ошибки при двоичной ФМН (ФМ2) в ка-
налах с аддитивным белым шумом AWGN и с амплитудными рэлеевскими
замираниями. Из рисунка видно, что для поддержания коэффициента
ошибок по битам порядка 10“3 в канале с аддитивным белым шумом
AWGN необходимо, чтобы отношение сигнал-шум составляло примерно
8 дБ, тогда как в канале с замираниями для поддержания такого же ко-
эффициента ошибок требуется отношение сигнал-шум 24 дБ. На рис. 6.2
приведены аналогичные графики вероятности ошибки при ЛГ-кратной
КАМ, построенные на основе приближений (6.24) и (6.61). Таким образом,
чтобы минимизировать передаваемую мощность, необходимо использо-
вать специальные методы для устранения влияния замираний. Некоторые
из этих методов, включая сложение разнесенных сигналов, расширение
спектра и приемники RAKE, будут рассмотрены в последующих главах.
Рис. 6.2. Средняя ве-
роятность ошибки Рь
при Af-к ратной КАМ
в каналах с рэлеевски-
ми замираниями и с
аддитивным белым шу-
мом AWGN
Рэлеевские замирания представляют один из наихудших видов замира-
ний. На рис. 6.3 показана средняя вероятность ошибок по битам при ФМ2
в случае замираний Накагами для различных значений параметра т.
Можно видеть, что с увеличением m влияние замираний уменьшается,
а средняя вероятность ошибки бита приближается к показателям канала
с AWGN.
6.3.3. Расчет средней вероятности ошибки через
производящую функцию моментов
Производящая функция моментов MGF2 представляет полезное средство
анализа характеристик модуляции в каналах с замираниями (как с раз-
2MGF — Moment generating function.
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
несением, так и без него). В данном разделе мы обсудим, как можно
использовать эту функцию для упрощения анализа средней вероятности
символьной ошибки при замираниях. В следующем разделе будет пока-
зано, что функция MGF также значительно упрощает анализ каналов
с замираниями в случае разнесения.
Рис. 6.3. Средняя ве-
роятность ошибки Рь
при ФМ2 Рь в канале
с замираниями Нака-
гами
Производящая функция моментов MGF для неотрицательной случай-
ной величины 7 с распределением р7(7), 7 0 определяется следующим
образом:
(6.62)
ОО
^т(5) = УРу (7)esW
о
Заметьте, что это просто преобразование Лапласа для распределения
р7(7) с аргументом обратного знака: Z[p7(7)] = М7(—з). Поэтому для
большинства интересующих нас распределений замираний функцию MGF
можно рассчитать либо в аналитическом виде — с использованием класси-
ческого преобразования Лапласа, либо методом численного интегрирова-
ния. В частности, для обычных распределений замираний, возникающих
вследствие многолучевого распространения, функция MGF определяется
следующим образом [9, гл. 5.1]:
- Распределение Рэлея:
муАА = (1 - 5ъ)-1
(6.63)
- Распределение Райса с множителем К:
. 1 + К
= 1 + к-^.ехр
Ksys
1 + К - sys
- Распределение Накагами с параметром т:
(6.64)
(6.65)
Уже из названия понятно, что моменты Е [7й] для случайной величины
7 можно получить из функции М7(з):
(6.66)
s=0
В основе расчета средней вероятности ошибки при замираниях че-
рез производящую функцию моментов лежит представление вероятности
ошибки Ps в канале с аддитивным белым шумом AWGN для конкретного
метода модуляции либо в виде экспоненциальной функции 7.,.
Ps = Cl ехр [-c27s] , (6.67)
где ci и С2 — постоянные величины, либо в виде интеграла этой экспо-
ненциальной функции в конечной области:
в
Ps = У С1 ехр [-с2(ж)7в]с?ж, (6.68)
А
где постоянная С2(ж) может зависеть от подынтегрального выражения,
а отношение сигнал-шум 7S не зависит от него (и также не находится
в пределах интегрирования). Эти формулы позволяют выразить среднюю
вероятность ошибки через моментную функцию MGF распределения за-
мираний. Так, если Ps = ci ехр [—C27s], то
ОО
Ps = У Cl ехр [-C27]p7s (7)^7 = C| AA;s (-с2). (6.69)
о
Так как при относительной ФМН в этих формулах используются ко-
эффициенты ci = 1/2 и С2 = 1, можно видеть, что средняя вероятность
ошибки бита для относительной ФМН при замираниях любого типа равна:
Д = |м7Д-1), (6-70)
где Mys (s) — моментная функция MGF распределения замираний. Напри-
мер, используя моментную функцию М7в(з) замираний с распределением
Рэлея (6.63) при s = —1, получаем Д = [2 (1 + 7ь)]-1, что аналогично
полученному ранее выражению (6.60). Если Ps задается в форме интегра-
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
ла (6.68), тогда:
Ps
(6-71)
В данном случае средняя вероятность ошибки символа выражается
одним интегралом функции MGF для распределения замираний, взятым
в конечной области. Обычно можно найти этот интеграл в аналитическом
виде или легко дать его числовую оценку.
Теперь применим метод MGF к конкретным методам модуляции и рас-
пределениям замираний. Ранее нами было получено общее выражение
(6.33) для вероятности Ps при когерентной модуляции в канале с аддитив-
ным белым шумом AWGN, в котором использовалась Q-функция Гаусса.
Введем обозначения а = аи и g = 0,5/Зм и перепишем (6.33) в виде:
А(7.) =«^(\/29ъ), (6-72)
где а и g — постоянные, зависящие от метода модуляции. Изменение
в записи было необходимо для точного выражения вероятности ошибки
через функцию MGF, что мы сейчас и продемонстрируем.
Используя альтернативное представление Q-функции (6.43), получаем:
тг/2
г. a f
Ps = - ехр
о
~97
Фд,
sup (pj
2
(6.73)
что соответствует искомой форме (6.68). Таким образом, средняя веро-
ятность ошибки при замираниях для методов модуляции, при которых
вероятность ошибки в канале AWGN равна Ps = aQ (-^/2<77s), имеет вид:
оо я/2
Ps =
о о
тг/2 Г сю
о Lo
-97
2
sin <д_
ехр
dppls (7)^7 =
-97
. 9
sin <Д_
тг/2
/М7з(—^-)фд, (6.74)
J \Sln <Д/
О
где M7s(s) — функция MGF (6.62) для распределения р7з(7). Напомним,
что в табл. 6.1 вероятность ошибки в канале с аддитивным белым шумом
AWGN для многих представляющих интерес методов модуляции аппрок-
симируется выражением Ps ~ aQ (у/Чд^^. Формула (6.74) дает аппрок-
симацию средней вероятности ошибки для этих методов модуляции в ка-
нале с замираниями. Более того, точная средняя вероятность символьной
ошибки при когерентной ФМН может быть получена в виде, аналогичном
(6.74), с учетом того, что формула Крейга (6.45) для вероятности ошиб-
ки Ps при ФМН в канале AWGN имеет искомую форму (6.68). Поэтому
точная средняя вероятность ошибки при ФМН равна:
(М-1)тг/М
~9Ъ
. 9
Sin (f
difp^1)d1 =
~91s
. 2
sin 99
dtp =
(М-1)тг/М
= - [ M7s(—^-}dp, (6.75)
7Г J \ Sin <Д /
0
где g = sin2(7r/Af) зависит от размера созвездия ФМН. Функции MGF
Mls (s) для распределений Рэлея, Райса и Накагами определяются выра-
жениями (6.63), (6.64) и (6.65) соответственно. Подставляя з = — 3 sin2 99
в эти выражения, получаем следующие уравнения:
- Распределение Рэлея:
мъ f—= Г1+-ЧМ • (б-76)
\ sin2 / \ sin2 /
- Распределение Райса с множителем К:
м f______О = (1 + K)sin2y Г Кдъ
\ sin2 <д7 (1 + К) sin2 + 57s (1 + К) sin2 <д + gys
(6.77)
- Распределение Накагами с параметром т:
= fl +... (6.78)
\ sin <д / \ т sin /
Это простые тригонометрические функции, которые легко интегри-
руются в конечной области по формулам (6.74) или (6.75).
Пример 6.5. Используя моментную функцию MGF, получите выражение для
средней вероятности ошибки при модуляции ФМ2 в канале с замираниями На-
кагами.
Решение. Используем тот факт, что при ФМ2 в канале с аддитивным белым
шумом AWGN вероятность ошибки равна Рь = Qy/^b, следовательно, в (6.72)
а = 1 и д = 1. Производящая функция моментов для замирания Накагами опре-
деляется выражением (6.78). Подставляя это выражение в (6.74) при а = д = 1,
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
получаем:
7ь
т sin2 ip
dip.
Из (6.23) видно, что точная вероятность ошибки символа при КАМ
в канале с аддитивным белым гауссовым шумом AWGN содержит как
Q-функцию, так и ее квадрат. К счастью, альтернативная форма Q2(z)
позволяет нам использовать для модуляции КАМ те же методы, что ис-
пользовались для ФМН. Так, в [15] альтернативное представление Q2(z}
получено в виде:
(6.79)
Заметьте, что это выражение идентично альтернативному предста-
влению Q(z) (6.43), за исключением того, что верхний предел интеграла
равен тг/4, а не тг/2. Поэтому мы можем записать (6.23) с использованием
альтернативного представления Q(z~) и Q2(z) в виде:
97s
. 9
SIH р
-^~-]dip, (6.80)
sin ip /
где g = — 1) определяется размером созвездия Af-кратной КАМ.
Тогда средняя вероятность символьной ошибки при замираниях составит:
оо л72 оо
0 0 0
97
. 9
Sin ip
97
. 2
sin p
4
7Г
P^^dip =
1 -
4
7Г
тг/2
0
—— ] dip —
sin ip /
1 -
—5— dip. (6.81)
sin ip /
о
Таким образом, точную среднюю вероятность ошибки символа мож-
но получить через два интеграла функции MGF для распределения зами-
раний, взятых в конечной области. Обычно можно найти эти интегралы
в аналитическом виде или легко дать их количественную оценку.
Функция MGF может применяться также при некогерентной и отно-
сительной модуляции. Рассмотрим, например, некогерентную ФМН, при
которой вероятность ошибки Ps в канале AWGN определяется выражени-
ем (6.32), представляющим конечную сумму желательной формы (6.67).
Поэтому в случае замираний средняя вероятность символьной ошибки при
некогерентной ФМН имеет вид:
(6.82)
Наконец, для относительной ФМН можно показать [16], что средняя
вероятность ошибки символа равна:
Ps =
тг/2
VS [
2тг J
—7Г/2
ехр [-7s (1 - д/1 - geos#)]
-----------_________________аи,
1 — у 1 — g cos 0
(6.83)
где g = sin2(7r/Af) соответствует искомой форме (6.68). Таким обра-
зом, мы можем выразить среднюю вероятность символьной ошибки через
функцию MGF для распределения замираний:
р _ V9 f Мъ [~
s 2тг J l-y/F^cosfl
—тг/2
(6.84)
Более подробное рассмотрение расчета средней вероятности символь-
ной ошибки через функцию MGF для различных методов модуляции и рас-
пределений замираний можно найти в [9, гл. 8.2].
6.3.4. Комбинация вероятности нарушения связи
со средней вероятностью ошибки
Если для среды распространения с замираниями характерно наложение
быстрых и медленных замираний (например, логнормальное распределе-
302 Глава 6. Характеристики цифровой модуляции в беспроводных каналах
ние экранирования и рэлеевские замирания), то обычно при оценке ка-
чества передачи учитывают как вероятность нарушения радиосвязи, так
и среднюю вероятность ошибки. Нарушение радиосвязи происходит в том
случае, когда медленные замирания падают ниже определенного поро-
гового уровня, а средние качественные показатели при наличии связи
получаются путем усреднения быстрых замираний. Введем следующие
обозначения:
- 7s — среднее отношение сигнал - шум (защищенность) на символ при
фиксированных потерях в тракте и усреднении быстрых замираний
и экранирования;
- — (случайное) отношение сигнал - шум на символ при фиксиро-
ванных потерях в тракте, случайном экранировании и усреднении
быстрых замираний. Усреднение данного параметра по экранирова-
нию дает 7S;
- 7s — случайное отношение сигнал-шум при фиксированных по-
терях в тракте, экранировании и многолучевом распространении.
Усреднение данного параметра только по многолучевому распро-
странению дает у,, а усреднение по многолучевому распростране-
нию и экранированию дает %.
С помощью этих параметров можно определить среднюю вероятность
ошибки Р. с некоторой вероятностью 1 — POut- Нарушение радиосвязи
констатируется в том случае, когда отношение сигнал-шум на символ
на приеме вследствие экранирования и потерь в тракте % падает ниже
заданного порогового значения 7sq. Если нарушения связи нет (% 7«о),
то средняя вероятность ошибки получается усреднением по распределе-
нию быстрых замираний, при среднем значении защищенности:
Я = У Ps{ls)p (7sl7s) ^7s- (6-85)
о
Критерий, используемый для определения порогового значения 7,9, обыч-
но основывается на заданном максимально допустимом значении средней
вероятности ошибки Psq. При этом значение 7sq должно удовлетворять
условию:
ОО
До = У ^s(7s)j’(7sl7so)^7s- (6-86)
о
Ясно, что при 7s > 7so, средняя вероятность ошибки R. будет ниже мак-
симально допустимого значения До-
Пример 6.6. Рассмотрим модуляцию ФМ2 в канале с сочетанием логнор-
мального распределения экранирования (сгфав = 8 дБ) и рэлеевских замираний.
Желаемая максимальная средняя вероятность ошибки составляет Д,о = Ю”4,
для чего необходимо 77,0 = 34 дБ. Определите значение ть, обеспечивающее
До 10-4 с вероятностью 1 — FOut = 0,95.
Решение. Требуется найти уь, т.е. усреднить по быстрым и медленным
замираниям так, чтобы выполнялось условие: р(бь > 7ьо) = 1 — -POut- Для ло-
гнормального распределения экранирования получаем:
/_ Ч/п . 34-фА _ /34-фА _
Р \Уь > 34) — р I 7 I — Q I I — 1 pout. (6.87)
\ &Ф<1В ^Фав / \ &Ф<1В /
При выражении параметров в дБ, (77, — ф,) /<т.фг]в представляет случайную вели-
чину с гауссовским распределением, нулевым средним значением и стандартным
отклонением, равным 1. Поэтому значение ф> находят, подставляя значения FOut
и <Тфлв в (6.87) и используя таблицы Q-функций или программу перестановки.
В результате получаем (34 — %) /8 = —1,6, откуда -% = 46,8 дБ.
6.4. Доплеровское расширение
Одно из следствий доплеровского расширения спектра — неубывающий
уровень ошибок для методов модуляции, использующих относительное де-
тектирование. Это связано с тем, что при относительной модуляции фаза
сигнала, соответствующая одному символу, используется в качестве опор-
ной фазы для следующего символа. Если за время передачи символа фаза
в канале слабо коррелированна, то опорная фаза сильно зашумляется, что
приводит к высокой частоте появления ошибок символов, которая не за-
висит от мощности принимаемого сигнала. Фазовая корреляция между
символами и последующее ухудшение рабочих характеристик являются функ-
циями доплеровской частоты /р = v/X и времени передачи символа Ts.
Первый анализ неубывающего порога ошибки, обусловленного эффек-
том Доплера, был выполнен Бело и Нелином в [17]. В этой работе полу-
чены аналитические выражения для неубывающего порога ошибок, обу-
словленного эффектом Доплера, при некогерентных ФМН и ОФМН для
случая, когда спектральная плотность мощности Доплера имеет гауссов-
ское распределение. Однако эти уравнения не решаются в аналитиче-
ском виде, поэтому приходится применять численную оценку. Выраже-
ния в аналитическом виде для вероятности ошибки бита при ОФМН
в случае быстрых замираний Райса, когда корреляция в канале за вре-
мя передачи бита снижается, можно получить методом производящей
функции моментов MGF; при этом функцию MGF получают на основе
общей квадратичной формы комплексных гауссовских случайных вели-
чин [1, прил. В; 12, прил. В]. Другой подход предполагает использование
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
альтернативных форм Q-функции Маркума [9, гл. 8.2.5]. В результате
средняя вероятность ошибки при ОФМН определяется выражением:
ехр
Куь
1 + К + ф,
(6.88)
где рс — коэффициент корреляции канала за время передачи бита 7&,
К — параметр замираний с распределением Райса, а ф — среднее от-
ношение сигнал-шум на бит. Для рэлеевских замираний (К = 0) это
выражение упрощается до:
- _ 1 /1 +ф,(1 ~рс)\
Ь 2 V 1 + 7b У
Если допустить, что в (6.88) ф> —> оо, то получим неубывающий порог
ошибки, равный:
_ (1 — огЛ е~к
Рпорог = 1--ф------ (ОФМН). (6.90)
Подобный подход используется в [18] для ограничения вероятности
ошибки бита при относительной ФМ4 в случае быстрых замираний Райса:
р < 1 L _ (рсъ/^2)2 \ ех [ (2-^2) Кф/2
\ (ф + 1)2- (pcrh/vy2) Ч (ъ + 1) - (рсъ/^2)] ’
(6-91)
где К — параметр замираний с распределением Райса, рс — коэффи-
циент корреляции канала за время передачи символа Ts, а ф. — среднее
отношение сигнал-шум на символ. Допуская, что ф —> оо, получаем не-
убывающий порог ошибки:
порог —
ехр
(2 - ^2) (К/2)
1 - рс/
(6.92)
(относительная ФМ4).
Как было показано в подпараграфе 3.2.1, корреляция канала А(Дт) за
время т равна обратному преобразованию Фурье спектра мощности До-
плера Sc(f) как функции доплеровской частоты f. Поэтому коэффициент
корреляции равен рс = Ас(Т)/Ас(0) и оценивается за время Т = Ts (для
относительной ФМ4) или Т = Ть (для относительной ФМН). В табл. 6.2
из [19] приведены значения рс для нескольких различных моделей до-
плеровского спектра, где Вр — доплеровское расширение канала. Для
модели равномерного рассеяния (рс = Jo (^фиТь)} и рэлеевских замира-
ний (К = 0) из (6.90) получаем неубывающую ошибку для ОФМН:
Рпорог = 1 ~ J° « 0,5 (7TfDTb)2 , (6.93)
6.4- Доплеровское расширение
где Bp = fp = v/А — максимальное доплеровское расширение в канале.
Обратите внимание, что в этом выражении порог ошибки уменьшается
со скоростью передачи данных R = 1/Х&- В общем случае это верно для
неубывающего порога ошибки вследствие эффекта Доплера при относи-
тельной модуляции, так как канал имеет меньше времени для ослабле-
ния корреляции между передаваемыми символами. Это один из немногих
примеров в цифровой связи, когда рабочие характеристики улучшаются
с увеличением скорости передачи.
Таблица 6.2. Коэффициенты корреляции для различных моделей доплеровского
спектра
Тип Спектр мощности Доплера Sc(f) PC = Дс(Т)Мс(О)
Прямоугольный Po/2Bd, |/| < BD sinc(2BoT)
Гауссовский (РД^Вв)е'^вЪ e-(7rBDT)2
Равномерное рассеяние Р0/кДв1 - |Л < BD Jo (2тгВвТ)
Баттерворта 1-го порядка P0Bd/k (f2 + B2D) е~2кВвТ
Рис. 6.4. Средняя вероятность ошибки Р;, при ОФМН в канале с быстрыми зами-
раниями Райса и равномерным рассеянием
На рис. 6.4 показан график вероятности ошибки при ОФМН (6.88)
в канале с быстрыми замираниями Райса для модели равномерного рас-
сеяния (рс = Л) (2тг/р7{,)) с различными значениями fn'Ti,. Из рисунка
(306 Глава 6. Характеристики цифровой модуляции в беспроводных каналах
видно, что при рэлеевских замираниях с К = 0 порог ошибки устана-
вливается при ф, = 15 дБ, и с увеличением К значение ф, при котором
порог неубывающей ошибки устанавливается, также возрастает. Мы так-
же можем увидеть, что увеличение скорости передачи данных Rb = 1/7/
на один порядок уменьшает порог ошибки примерно на два порядка.
Пример 6.7. Рассмотрим канал с рэлеевскими замираниями и равномерным
рассеянием с максимальным смещением частоты Доплера = 80 Гц. Требу-
ется определить приблизительный диапазон скоростей передачи, при которых
неубывающий порог ошибок при ОФМН будет ниже ПГ'1.
Решение. Мы имеем Рпорог ~ 0,5 (тг/рТ/)2 < 10-4. Решая это неравенство от-
носительно Ть при = 80 Гц, получаем:
V2 • 10-4 5
Т,<^Г8б-=5’63'10 '
что в итоге дает R > 17,77 кбит/с.
С усложнением методов модуляции вывод аналитических выражений
для неубывающего порога ошибок становится все более трудоемким, и в
таких случаях часто прибегают к моделированию. Так, в [20, 21] было
выполнено моделирование неубывающего порога ошибок для модуляции
ОФМ-4 со сдвигом тг/4 и характеристикой фильтра, равной корню ква-
дратному из приподнятого косинуса (поскольку именно эта модуляция
используется в стандарте многостанционного доступа с временным раз-
делением IS-136). В результаты моделирования был получен порог ошибок
между 10-3 и ПГ4. Как и ожидалось, при таком моделировании порог
ошибок увеличивается с увеличением скорости движения транспортно-
го средства, так как при более высоких скоростях движения в канале
наблюдается более значительное ослабление корреляционной связи в те-
чение заданного интервала времени передачи символа.
6.5. Межсимвольная интерференция
Частотно-селективные замирания вызывают межсимвольную интерфе-
ренцию, когда на символ, принимаемый в течение заданного периода вре-
мени, оказывают влияние помехи от других символов, задержанных из-за
многолучевого распространения. Поскольку с увеличением мощности сиг-
нала мощность межсимвольных помех также возрастает, межсимвольная
интерференция определяет неубывающий порог ошибки, не зависящий от
мощности сигнала. Этот порог ошибки сложен для анализа, так как он
зависит от формата модуляции и характеристик межсимвольной интер-
ференции, которые, в свою очередь, зависят от характеристик канала
и последовательности передаваемых символов.
6.5. Межсимвольная интерференция 307^
Первый подробный анализ снижения качества передачи, обусловлен-
ного увеличением вероятности ошибок символов из-за влияния межсим-
вольной интерференции, был выполнен Белло и Нелиным [22]. В данной
работе получены аналитические выражения для неубывающего порога
ошибок при когерентной ЧМН и некогерентной ОФМН в предположении
гауссовского распределения задержек в канале. Для упрощения анали-
за учитывались только помехи от соседних символов. Даже при таком
упрощении получаются сложные выражения, которые для получения коли-
чественной оценки необходимо аппроксимировать. Аналитическая оценка
неубывающего порога ошибки может также основываться на наихудшей
последовательности передаваемых символов или на усреднении всех воз-
можных последовательностей символов [23, гл. 8.2]. Эти выражения также
являются достаточно сложными вследствие их зависимости от характери-
стик канала и последовательности символов. Приближение вероятности
ошибки символа при межсимвольной интерференции можно получить,
рассматривая межсимвольную интерференцию как некоррелированный
белый гауссовский шум [24]. В этом случае отношение сигнал-шум сос-
тавит:
= sjr?' (М4)
где Рг — принимаемая мощность, соответствующая составляющей сиг-
нала на линии прямой видимости, а I — принимаемая мощность, со-
ответствующая межсимвольным помехам. В статическом канале резуль-
тирующая вероятность ошибки символа будет равна Pgfjyg), где Ps —
вероятность символьной ошибки в канале с аддитивным белым шумом
AWGN. Если и составляющая сигнала прямой видимости и межсимволь-
ные помехи испытывают амплитудные замирания, то ys будет случайной
величиной с распределением р(7«), а средняя вероятность ошибки символа
будет равна Ps = f Ps(-ys)p(ys)d'ys. Заметьте, что ys представляет отноше-
ние двух случайных величин — мощности сигнала прямой видимости Рг
и мощности межсимвольных помех I. Поэтому получить результирующее
распределение р(-%) может оказаться сложно, и, как правило, это нельзя
сделать в аналитическом виде.
Неубывающий порог ошибок вследствие межсимвольной интерферен-
ции часто получают путем моделирования, которое позволяет легко учесть
различные модели каналов, форматы модуляции и характеристики по-
следовательности символов [20, 1, 4-6]. Наиболее полное моделирование
для определения несократимого порога ошибки вследствие межсимволь-
ной интерференции было выполнено Чуангом в [25]. В данной работе
были смоделированы сигналы ФМ-2, ОФМ-2, ФМ-4, ФМ-4С и ЧМН-МС
для различных форм импульса и каналов с различными распределения-
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
ми задержек сигнала, включая гауссовое, экспоненциальное, двулучевое
распространение с равными амплитудами и эмпирическое. Результаты,
полученные в [25], показывают, что неубывающий порог ошибки более
чувствителен к среднеквадратическому разбросу задержек в канале, чем
к форме профиля задержек сигнала. Более того, форма импульса может
оказывать значительное влияние на порог ошибки: для импульсов типа
приподнятого косинуса, речь о которых шла в § 5.5, увеличение /3 от О
до 1 может сократить порог ошибки более чем на порядок.
Когерентное детектирование
Модуляция-
Рис. 6.5. Неубывающая ошиб-
ка в зависимости от нормиро-
ванного среднеквадратического
разброса задержки для гауссов-
ского распределения задержек
сигнала (перепечатано с разре-
шения из [25, рис. 9], © 1987
IEEE)
10-2
Один из результатов моделирования Чуанга показан на рис. 6.5. Это
график зависимости коэффициента несократимой ошибки по битам от
нормированного среднеквадратического разброса задержки d = aTm/Ts
при ФМ2, ФМ4, ФМ4С и ЧМН-МС в случае статического канала с гаус-
совским распределением задержек сигнала d = сттт/Т8. Из рисунка вид-
но, что для всех методов модуляции неубывающий порог ошибки может
быть ограничен следующим образом: РпОрог. d? для 0,02 d 0,1.
Результаты другого моделирования [24] дают ту же границу. Эта гра-
ница накладывает строгие ограничения на скорость передачи данных,
даже когда допускается вероятность символьной ошибки порядка 10 2.
Например, среднеквадратический разброс задержки в типичной город-
ской среде приблизительно равен <jpm = 2,5 мкс. Для выполнения условия
< 0,17, необходимо, чтобы скорость передачи данных не превышала
40 кБод, что обычно недостаточно для высокоскоростных приложений.
В сельской местности, где многолучевое распространение не ослабляется
в такой степени, как в городе, &тт ~ 25 мкс, что сокращает максималь-
ную скорость передачи данных до 4 кБод.
Пример 6.8. Используя приближение РпОрог. (PTmITs)2, найдите макси-
мальную скорость передачи данных, которая может быть обеспечена в канале с
разбросом задержки атт = 3 мкс при использовании модуляции ФМ2 или ФМ4,
чтобы вероятность ошибки бита Рь не превышала 10 '3.
Решение. Для ФМ2 мы принимаем РпОрог. (а'тт/'Б,)2, откуда получаем Ть
атт/уРпорог. — 94,87 мкс, что дает скорость передачи данных R = 1/Ть =
= 10,54 кбит/с. Для модуляции ФМ4 тот же расчет дает Ts &тт / \/Рпорог. =
= 94,87 мкс. Так как в данном случае на один символ приходится два бита,
скорость передачи данных составит R = “1ITS = 21,01 кбит/с. Таким образом,
при заданной скорости передачи данных ФМ4 более устойчива к межсимвольной
интерференции, чем ФМ2 за счет того, что время передачи символа при ФМ4
больше. Это справедливо и для более точных, чем в данном примере, порогов
ошибок, указанных на рис. 6.5.
Задачи
6.1. Задана система, в которой данные передаются по каналу со скоростью
100 бит/с.
а) Найдите длительность символа, если для передачи сигналов исполь-
зуются sine импульсы (sinх/ж), а полоса пропускания канала равна
10 кГц.
б) Пусть отношение сигнал-шум на приеме равно 10 дБ. Найдите отно-
шения сигнал-шум на символ и на бит, если используется модуляция
КАМ-4.
в) Найдите отношения сигнал-шум на символ и на бит для КАМ-16
и сравните их с результатами, полученными для КАМ-4.
6.2. Рассмотрим модуляцию ФМ2 в случае, когда априорные вероятности «0»
и «1» неодинаковы: р (sn = 0) = 0,3 и р (sn = 1) = 0,7.
а) Найдите вероятность ошибки бита Рь в канале с аддитивным белым
шумом AWGN, если «1» кодируется как Sj(i) = Acos (2?r/ci), а «0» —
как s2(i) = —A cos (2л/ci) при А > 0. Предполагается, что структура
приемника соответствует рис. 5.17.
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
6.3.
6.4.
б) Предположим, что Вы можете изменить пороговое значение в при-
емнике на рис. 5.17. Найдите такое пороговое значение, при котором
вероятность ошибки будет одинаковой независимо от того, какой бит
передается — т. е. пороговое значение, при котором
р(т = 0|m = l)p(m = 1) = р(т = l|m = Q)p(m = 0).
в) Теперь предположим, что мы изменили модуляцию таким образом, что
si(f) — A cos (2nfct), a s-2(t) = —Bcos (27r/cf). Найдите такие Л > 0
и В > 0, чтобы в приемнике на рис. 5.17 с пороговым значением в нуле
выполнялось условие:
р(т = 0|m = 1)р(т = 1) = р(т = l|m = Q)p(m = 0).
г) Рассчитайте и сравните вероятности ошибки Рь для пунктов (а), (б)
и (в), если Еь/Nq = 10 дБ, а No = 0,1. В какой системе вероятность Рь
сведена к минимуму?
Рассмотрим приемник ФМ2, в демодуляторе которого имеет место сдвиг
фазы относительно передаваемого сигнала, равный <р, поэтому при пе-
редаче сигнала s(f) = ±g(t) cos (2тгfct) несущий сигнал в демодулято-
ре рис. 5.17 равен cos (2irfct + р). Требуется определить пороговый уро-
вень в пороговом устройстве на рис. 5.17, минимизирующий вероятность
ошибки бита, и найти эту минимальную вероятность ошибки.
Рассмотрим демодулятор ФМ2, в котором шум приемника добавляет-
ся после интегрирующего устройства, как показано на рис. 6.6. На вы-
ходе решающего устройства формируется «1», если для входного сиг-
нала х выполняется условие Re{a:} > 0, в противном случае формиру-
ется «0». Предположим, что имеется передатчик гармонических помех
n(f) = l,lej61, при этом р(0 = П7г/3) = 1/6 для п = 0,1,2, 3,4, 5. Какова
вероятность ошибки при принятии решения в решающем устройстве (т. е.
формирования неверного демодулированного бита), если Ас = i/2/Т/ = 1,
а информационные биты, соответствующие «1» (s(f) = Ас cos(2?r/cf)) и «0»
(s(t) = — Ас соз(2тг/с/)) равновероятны.
л(?)
cos(2nyrt)
Рис. 6.6. Демодулятор ФМ2 к задаче 6.4
6.5. Найдите приближенную вероятности ошибки Ps для созвездий сигналов,
изображенных на рис. 6.7.
Рис. 6.7. Созвездия
сигналов к задаче 6.5
V.29
КАМ-5
КАМ-16
КАМ-9
6.6. Изобразите график точной вероятности ошибки символа и приближенной
вероятности из табл. 6.1 для КАМ-16 при 0 7S 30 дБ. Увеличивается
ли или уменьшается ошибка аппроксимации с ростом 7S? Почему?
6.7. Изобразите график вероятности ошибки символа Ps для ФМ4, используя
аппроксимацию из табл. 6.1 и точный результат Крейга для 0 < 7., <
< 30 дБ. Увеличивается или уменьшается ошибка аппроксимации с ро-
стом 7S? Почему?
6.8. В этой задаче мы получим алгебраическое доказательство альтернатив-
ного представления Q-функции (6.43) из ее исходного представления (6.42).
Мы будем работать с дополнительной функцией ошибок (erfc1) для упро-
щения и завершенности преобразований. Функция erfc (ж) традиционно
определяется следующим образом:
erfc (ж)
(6.95)
Альтернативное представление этого выражения, соответствующее аль-
'erfc — complementary error function.
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
тернативному представлению Q-функции (6.43), имеет вид:
тг/2
ег£с(ж) = | у e-x2/sin2(ld9.
о
(6.96)
а) Рассмотрите интеграл
о
-at2
xz + Г
(6.97)
и покажите, что 1х(а) удовлетворяет следующему дифференциальному
уравнению:
х2 Ix (а)
д!х(а) _ 1 /7
да 2 у а
(6.98)
б) Решите дифференциальное уравнение (6.98) и докажите, что
/р-ш ТГ о
= 7/е“ erfc •
“Г t
О
(6.99)
Подсказка: 1х(а) — это функция двух переменных: х и а. Однако так как
все наши манипуляции связаны только с а, при решении дифференциаль-
ного уравнения можно допустить, что х — постоянная величина.
в) Подставляя а = 1 в (6.99) и производя соответствующую замену пере-
менных в левой части (6.99), выведите альтернативное представление
функции erfc:
тг/2
ег£с(ж) = | j" e^^dO.
о
г) Преобразуйте полученное альтернативное представление функции erfc
в альтернативное представление Q-функции.
6.9. Задана система связи, использующая метод ФМ2 при средней мощности
сигнала 100 Вт и мощности шума в приемнике 4 Вт. Оцените с точки
зрения вероятности ошибок, может ли такая система использоваться для
передачи данных? Может ли она использоваться для передачи речи? Как
изменятся Ваши ответы на эти вопросы в случае наличия замираний со
средним отношением сигнал-шум 7ь = 20 дБ?
6.10. Рассмотрите сотовую систему, работающую на частоте 900 МГц со скоро-
стью передачи 64 кбит/с, при наличии замираний вследствие многолуче-
вого распространения. Поясните, какой показатель качества — средняя
вероятность ошибки или вероятность нарушения радиосвязи — больше
подходит (и почему) при скорости абонента 1 миля в час, 10 миль в час
и 100 миль в час.
6.11. Выведите выражение для производящей функции моментов отношения
сигнал-шум при рэлеевских замираниях.
6.12. Эта задача показывает, почему спутниковые системы, которые должны
компенсировать замирания, вызванные экранированием, не получили рас-
пространения (экономически неэффективны). Рассмотрим спутниковую
систему LEO на низкой околоземной орбите, находящейся на расстоянии
500 км от Земли. Предположим, что сигнал соответствует модели потерь
распространения в свободном пространстве без замираний вследствие
многолучевого распространения или экранирования. Передаваемый сиг-
нал имеет несущую частоту 900 МГц, а частотный диапазон составляет
10 кГц. Переносные приемники имеют спектральную плотность мощности
шума 1016 мВт/Гц (полная мощность шума равна NqB). Предположим,
что и на передаче и на приеме используются ненаправленные антенны
(с усилением 0 дБ). Спутник должен обслуживать абонентов на Земле
в пределах круглой ячейки (соты) радиусом 100 км при коэффициенте
ошибок по битам BER, равном 10-6.
а) Для модуляции ОФМН найдите мощность передачи, необходимую, что-
бы обеспечить всем абонентам соты коэффициент BER, равный 1(Г 6.
б) Повторите пункт (а), допуская, что канал также испытывает экра-
нирование с логнормальным законом распределения с <r^dB = 8 дБ,
а абоненты соты должны иметь Рь = 10~6 (для каждого бита) с веро-
ятностью 0,9.
6.13. В данной задаче мы оценим потери мощности при переходе от ФМ2 к мо-
дуляции более высокого уровня — ФМ16.
а) Найдите минимальное расстояние между точками созвездия при мо-
дуляции ФМ16 как функцию энергии сигнала Es.
б) Найдите такие ам и /Зм, чтобы вероятность ошибки символа при
модуляции ФМ16 в канале с аддитивным белым шумом AWGN была
приблизительно равна
Ps ~ aMQ МЪ^
в) Используя выражение, полученное в пункте (б), найдите приближен-
ную среднюю вероятность символьной ошибки при ФМ16 в случае
рэлеевских замираний, выраженную через ys.
г) Преобразуйте выражение для средней вероятности символьной ошиб-
ки при ФМ16 в случае рэлеевских замираний в выражение для средней
вероятности ошибки бита в случае кодирования Грея.
д) Найдите приблизительное значение уь, необходимое для получения ко-
эффициента ошибок по битам BER, равного 10“3, при рэлеевских за-
мираниях для ФМ2 и ФМ16. Какие потери мощности дает переход
314 Глава 6. Характеристики цифровой модуляции в беспроводных каналах
к созвездию сигнала более высокого уровня при данном коэффициенте
BER?
6.14. Получите в аналитическом виде выражение для средней вероятности ошиб-
ки при ОФМН в случае замираний Накагами с параметром т. Рассчи-
тайте эту вероятность для т = 4 и 77, = 10 дБ.
6.15. Распределение Накагами характеризуется параметром т, который мо-
жет изменяться в пределах от т = 0,5 до т = оо. Параметр т определяет
отношение мощности сигнала на линии прямой видимости (LOS) к мощ-
ности многолучевого распространения, так что т = 1 соответствует
рэлеевским замираниям, a m = оо соответствует каналу с аддитивным
белым шумом AWGN без замираний. Значение т = 0,5 соответствует
замираниям, ухудшающим рабочие характеристики системы еще больше,
чем рэлеевские замирания. В данной задаче мы рассмотрим влияние пара-
метра т на характеристики модуляции ФМ2 при замираниях Накагами.
Изобразите график средней ошибки бита Рь при модуляции ФМ2 в случае
замираний Накагами со средним отношением сигнал-шум в пределах от
0 до 20 дБ для параметра т = 1 (рэлеевские замирания), т = 2 и т = 4.
(Для получения средней вероятности ошибки следует использовать метод
производящей функции моментов, описанный в подпараграфе 6.3.3). Как
изменяется средний коэффициент ошибок BER при среднем отношении
сигнал-шум 10 дБ?
6.16. Рассмотрим сотовую систему с логнормальным распределением экрани-
рования в сочетании с рэлеевскими замираниями, в которой использует-
ся модуляция ОФМН. Поставщик услуг поставил условие, что он будет
работать с вероятностью нарушения связи 0,01, т. е. в каждый момент
времени не повезет одному из ста пользователей. При отсутствии нару-
шения связи норма на коэффициент ошибок по битам BER составляет
Рь = 10~3. Пусть спектральная плотность мощности шума равна Nq/2
при No = 10-16 мВт/Гц, частотный диапазон составляет 30 кГц, несу-
щая частота — 900 МГц, распространение сигнала с потерями на трассе
происходит в свободном пространстве с ненаправленными антеннами,
а стандартное отклонение экранирования составляет <x^dB = 6 дБ. Найди-
те максимальный размер соты, при котором обеспечиваются указанные
параметры, если мощность передачи мобильного аппарата ограничена ве-
личиной 100 мВт.
6.17. Рассмотрим сотовую систему с круглыми сотами радиусом 100 м. Распро-
странение сигнала происходит по упрощенной модели потерь на трассе
с параметрами К = 1, do = 1 м и 7 = 3. Допустим, что сигнал ис-
пытывает (в дополнение к потерям на трассе) логнормальное экраниро-
вание с (Тфав = 4, а также рэлеевские замирания. Мощность передачи
на базовой станции равна Pt = 100 мВт, частотный диапазон системы
В = 30 кГц, а спектральная плотность мощности шума равна Aq/2 при
No — 10-14 Вт/Гц. Требуется определить область покрытия соты (долю
территории соты), где абонентам будет обеспечена средняя вероятность
ошибки Рь менее 10-3 при использовании модуляции ФМ2.
а) Учитывая потери распространения, найдите величину мощности на гра-
ницах соты.
б) Найдите минимальную среднюю принимаемую мощность (с учетом по-
терь на трассе и экранирования), при которой, с учетом рэлеевских
замираний, модулированный сигнал ФМ2 в любом месте соты будет
иметь вероятность ошибки Рь < 10'1.
в) Для заданной модели распространения (упрощенные потери на трас-
се, экранирование и рэлеевские замирания) найдите долю территории
соты, где при модуляции ФМ2 вероятность ошибки будет Рь < 10'1.
6.18. В этой задаче мы получим вероятность ошибки бита при ОФМН в усло-
виях быстрых рэлеевских замираний. Из соображений симметрии, веро-
ятность ошибки при передаче бит со значениями 0 и 1 одинакова. Пред-
положим, что за время кТь передается бит со значением 0, поэтому пере-
даваемый в это время символ аналогичен символу, переданному в момент
времени к - 1: s(fc) = s(k — 1). При быстрых замираниях соответству-
ющими принятыми символами будут: r(fc — 1) = gk-is(k — 1) + п(к — 1)
и r(fc) = gks(k — 1) -f-n(fc), где gk-i и gk — коэффициенты усиления канала
с замираниями, соответствующие промежуткам времени (fc — 1)7), и fcT).
а) Покажите, что переменная, подаваемая на вход фазового компаратора
в схеме на рис. 5.20 для получения разности фаз, равна r(fc)r*(fc — 1) =
= 9kg*k-i +gks(k - l)*nfc-i + д^й^Пк + ПкП*^.
Для приемлемых отношений сигнал -шум, последним членом этого вы-
ражения ПкП*).^ можно пренебречь. Таким образом, отбросив послед-
ний член и введя обозначения йк = a'j,... |'»/. и Пк-i = получаем
новую случайную величину z = gkgk-i +gk^k-i + gk-i™k- При условии,
что за время fcT), был передан бит со значением 0, ошибка произойдет
в случае, если х = Re {z} < 0, поэтому необходимо определить рас-
пределение х. Характеристическая функция величины х представляет
двустороннее преобразование Лапласа для распределения х:
Фх(«) = у px(s)e~sxdx = Е .
Эта функция будет иметь полюс pi в левой плоскости и полюс р2 в пра-
вой плоскости, так что ее можно записать следующим образом:
ФХ(5) =_______________
(s-pi) (s -р2)
Полюс pi в левой плоскости соответствует распределению рх (ж) при
ж > 0, а полюс в правой плоскости соответствует распределению рх (ж)
при ж < 0.
б) Используя разложение на простые дроби, покажите, что Ф%(в) можно
записать в виде:
ж / х Р1Р2 1 , Р1Р2 1
Фх(в) —---------------1------------•
Pl - Р2 8 - Р1 р2 - Pl 8 - р2
Глава 6. Характеристики цифровой модуляции в беспроводных каналах
Ошибка имеет место, если х = Re {z} < 0, поэтому здесь нам необ-
ходимо рассмотреть распределение рх(ж) только при х < 0, соответ-
ствующее второму элементу $x(s)-
в) Покажите, что обратное преобразование Лапласа для второго элемен-
та $x(s) выражения из пункта (б) равно:
/ \ Р1Р2 рож п
рх\х) = ------еР2 , х < 0.
Р2 -Р1
г) Используя пункт (в), покажите что Рь = —pi / (рг — Pi) .
В выражении х = Re {z} = Re {pkg^-i + 9кП^_1 + gl^-i^k} коэффици-
енты усиления канала дь, дь-i и шумы nk, fik-i представляют ком-
плексные гауссовские случайные величины. Поэтому полюса pi, Р2 для
рх (х) определяются с использованием общей квадратичной формы ком-
плексных гауссовских случайных величин [1, приложение В; 12, при-
ложение В] следующим образом:
-1 _ 1
P1 ~ No Ь [1 + рс] + 1) И Р2 ~ ДГ0 (7Ь [1 - рс] + 1) ’
где рс — коэффициент корреляции рс канала за время передачи би-
та Ть.
д) Найдите общее выражение для вероятности ошибки Рь при быстрых
рэлеевских замираниях, используя значения pi и рг из выражения для
Рь в пункте (г).
е) Покажите, что для канала с медленными замираниями, которые не
декоррелируют за время передачи бита, выражение для средней веро-
ятности ошибки сводится к виду: Рь = 1/2(1 + ут,) .
6.19. Изобразите график вероятности ошибки бита для ОФМН при быстрых
рэлеевских замираниях, если уь изменяется в пределах от 0 до 60 дБ,
а рс = Jo (‘ZkBdT) при Вг>Т = 0,01, 0,001, и 0,0001. Для каждого значения
В[)Т определите приблизительное значение уь, при котором устанавлива-
ется порог ошибки.
6.20. Найдите неубывающий порог ошибки под влиянием эффекта Доплера
при модуляции ФМ4С и скорости передачи данных 40 кбит/с, если спек-
тральная плотность мощности Доплера имеет гауссовское распределение
с Ве> = 80 Гц и наблюдаются замирания Райса с параметром К = 2.
6.21. Задан беспроводный канал со средним разбросом задержки 10 нс и допле-
ровским расширением 80 Гц. При заданных порогах ошибки вследствие
эффекта Доплера и межсимвольной интерференции, при использовании
модуляции ФМ4С в условиях рэлеевских замираний и равномерного рассе-
яния, определите приблизительный диапазон скоростей передачи данных,
при которых в данном канале можно обеспечить коэффициент ошибок
по битам BER менее 10-4.
Литература 3 17
6.22. Используя пороги ошибок на рис. 6.5, найдите максимальную скорость
передачи данных по каналу с разбросом задержки &тт = 3 мкс (при мо-
дуляции ФМ2, ФМ4 или ЧМН-МС), при которой вероятность ошибки
бита Рь будет меньше 10-3.
Литература
1. J. G. Proakis, Digital Communications, 4th ed., McGraw-Hill, New York, 2001.
2. M.K. Simon, S. M. Hinedi and W.C. Lindsey, Digital Communication Tech-
niques: Signal Design and Detection, Prentice-Hall, Englewood Cliffs, NJ, 1995.
3. S. Rhodes, «Effect of noisy phase reference on coherent detection of offset-QPSK
signals», IEEE Trans. Commun., pp. 1046-55, August 1974.
4. N.R. Sollenberger and J. C.-I. Chuang, «Low-overhead symbol timing and car-
rier recovery for portable TDM A radio systems», IEEE Trans. Commun., pp.
1886-92, October 1990.
5. R. Pawula, S. Rice, and J. Roberts, «Distribution of the phase angle between
two vectors perturbed by Gaussian noise», IEEE Trans. Commun., pp. 1828-41,
August 1982.
6. W. Cowley and L. Sabel, «The performance of two symbol timing recovery
algorithms for PSK demodulators», IEEE Trans. Commun., pp. 2345-55, June
1994.
7. W. T. Webb and L. Hanzo, Modem Quadrature Amplitude Modulation, lEEE/Pen-
tech Press, London, 1994.
8. X. Tang, M.-S. Alouini and A. Goldsmith, «Effect of channel estimation error
on M-QAM BER performance in Rayleigh fading», IEEE Trans. Commun.,
pp. 1856-64, December 1999.
9. M. K. Simon and M.-S. Alouini, Digital Communication over Fading Channels:
A Unified Approach to Performance Analysis, Wiley, New York, 2000.
10. S. Hinedi, M. Simon and D. Raphaeli, «The performance of noncoherent or-
thogonal M-FSK in the presence of timing and frequency errors», IEEE Trans.
Commun., pp. 922-33, February-April 1995.
11. E. Gray ver and B. Daneshrad, «А low-power all-digital FSK receiver for deep
space applications», IEEE Trans. Commun., pp. 911-21, May 2001.
12. M. Schwartz, W.R. Bennett and S. Stein, Communication Systems and Tech-
niques, McGraw- Hill, New York, 1966-1995 by Wiley/IEEE Press].
13. J. Craig, «New, simple and exact result for calculating the probability of er-
ror for two-dimensional signal constellations», Proc. Military Commun. Conf.,
pp. 25.5.1-25.5.5, November 1991.
14. F. S. Weinstein, «Simplified relationships for the probability distribution of the
phase of a sine wave in narrow-band normal noise», IEEE Trans. Inform. Theory,
pp. 658-61, September 1974.
15. M. K. Simon and D. Divsalar, «Some new twists to problems involving the Gaus-
sian probability integral», IEEE Trans. Commun., pp. 200-10, February 1998.
16. R. F. Pawula, «А new formula for MDPSK symbol error probability», IEEE
Commun. Lett., pp. 271-2, October 1998.
8 Глава 6. Характеристики цифровой модуляции в беспроводных каналах
17. Р. A. Bello and B.D. Nelin, «The influence of fading spectrum on the bit error
probabilities of incoherent and differentially coherent matched filter receivers»,
IEEE Trans. Commun. Syst., pp. 160 8, June 1962.
18. P. Y. Kam, «Tight bounds on the bit-error probabilities of 2DPSK and 4DPSK
in nonselective Rician fading», IEEE Trans. Commun., pp. 860 2. July 1998.
19. P. Y. Kam, «Bit error probabilities of MDPSK over the nonselective Rayleigh
fading channel with diversity reception», IEEE Trans. Commun., pp. 220 4,
February 1991.
20. V. Fung, R. S. Rappaport, and B. Thoma, «Bit error simulation for тг/4 DQPSK
mobile radio communication using two-ray and measurement based impulse re-
sponse models», IEEE J. Sei. Areas Commun., pp. 393-405, April 1993.
21. S. Chennakeshu and G. J. Saulnier, «Differential detection of тг/4-shifted-DQPSK
for digital cellular radio», IEEE Trans. Veh. Tech., pp. 46-57, February 1993.
22. P. A. Bello and B.D. Nelin, «The effects of frequency selective fading on the
binary error probabilities of incoherent and differentially coherent matched filter
receivers», IEEE Trans. Commun. Syst., pp. 170-86, June 1963.
23. M.B. Pursley, Introduction to Digital Communications, Prentice-Hall, Engle-
wood Cliffs, NJ, 2005.
24. S. Gurunathan and K. Feher, «Multipath simulation models for mobile radio
channels», Proc. IEEE Veh. Tech. Conf., pp. 131-4, May 1992.
25. J. C.-I. Chuang, «The effects of time delay spread on portable radio communi-
cations channels with digital modulation», IEEE J. Sei. Areas Commun., pp.
879-89, June 1987.
26. C. Liu and K. Feher, «Bit error rate performance of r/4 DQPSK in a frequency
selective fast Rayleigh fading channel», IEEE Trans. Veh. Tech., pp. 558-68,
August 1991.
ГЛАВА 7
РАЗНЕСЕНИЕ
СИГНАЛОВ
НА ПРИЕМЕ
И ПЕРЕДАЧЕ
В гл. 6 было показано, что и замирания беспроводных каналов, распреде-
ленные по закону Рэлея, и экранирование с логарифмически нормальным
распределением требуют больших затрат энергии на поддержание каче-
ственных показателей передачи при различных видах модуляции. Один
из лучших методов уменьшения влияния замираний представляет разне-
сенный прием, когда на приеме объединяются несколько сигналов неза-
висимых каналов с замираниями. Объединение сигналов с разнесенных
точек приема использует то обстоятельство, что в независимых кана-
лах одновременное появление глубоких замираний маловероятно. Поэто-
му идея, лежащая в основе разнесенного приема, и заключается в отправке
одной и той же информации по нескольким трактам передачи с независи-
мыми замираниями. Эти независимые каналы объединяются так, чтобы
в итоге снизить влияние замираний на принимаемый сигнал. Например,
рассмотрим систему с двумя антеннами на передаче или приеме, испы-
тывающими независимые замирания. Если антенны расположены доста-
точно далеко друг от друга, существует очень малая вероятность того,
что они одновременно будут испытывать глубокое замирание. При выбо-
ре антенны с самым сильным сигналом, используя метод так называемого
избирательного, селективного объединения, мы получим сигнал гораздо
лучшего качества, чем при использовании только одной антенны. Эта
глава посвящена рассмотрению общих методов организации разнесения,
которые используются в передатчиках и приемниках. Остальные методы
разнесения, которые имеют потенциальные преимущества по сравнению
с этими схемами по каким-либо показателям, эксплуатационным харак-
теристикам или сложности, рассмотрены в гл. 9.10 [1].
В центре внимания настоящей главы находятся методы разнесения,
снижающие влияние замираний, обусловленных многолучевым распростра-
нением. Такое разнесение называют макроразнесением. Разнесение, на-
правленное на снижение эффектов экранирования зданий и других объек-
тов, называется макроразнесением. Макроразнесение сигналов, в основ-
ном, используется при сложении сигналов, принятых несколькими базо-
выми станциями или точками доступа, для чего необходима координация
этих базовых станций или точек. Такая координация реализуется в соста-
ве сетевых протоколов беспроводных сетей с базовой инфраструктурой.
Поэтому мы отложим рассмотрение вопросов макроразнесения до гл. 15,
где будет рассмотрена структура таких сетей.
7.1. Реализация каналов с независимыми замираниями
Существует много способов организации в беспроводных системах ка-
налов с независимыми замираниями. Одни из них заключаются в ис-
пользовании многоэлементных передающих или приемных антенн, на-
зываемых также антенными решетками, в которых элементы антенны
удалены друг от друга. Такой тип разнесенного приема рассматривает-
ся как пространственное разнесение. Обратите внимание на то, что при
пространственном разнесении приемника каналы с независимыми зами-
раниями организуются без увеличения передаваемой мощности сигнала
или полосы частот. Более того, когерентное объединение разнесенных
сигналов увеличивает отношение мощности сигнала к мощности шума
в приемнике по сравнению с тем отношением, которое было бы получено
при приеме только одной антенной. Это увеличение отношения сигнал-
шум (защищенности), называемое также коэффициентом усиления ан-
тенной решетки, можно также получить пространственным разнесением
при соответствующем взвешивании мощностей, излучаемых антеннами
передатчика пропорционально коэффициентам усиления каналов. Помимо
коэффициента усиления антенной решетки, пространственное разнесение
обеспечивает также коэффициент усиления разнесенного приема, опре-
деляемый по спаду вероятности ошибок, которые возникают при объ-
единении разнесенных сигналов. В последующих разделах описываются
усиление антенных решеток и усиление разнесенного приема при исполь-
зовании конкретных методов разнесения и объединения.
Для получения максимального выигрыша при пространственном раз-
несении приемников или передатчиков обычно требуется такое размеще-
ние антенн, при котором величины замираний в каждой антенне были бы
почти независимы. Например, из уравнения (3.26) видно, что при рабо-
те с всенаправленными передающей и приемной антеннами в обстановке
равномерного рассеяния, минимальный разнос антенн, необходимый для
независимости замираний в каждой антенне, приблизительно равен поло-
вине длины волны (точнее 0,38А). Если на передаче или приеме исполь-
зуются антенны направленного действия (что характерно для базовых
станций с разбиением сот на секторы), то многолучевое распростране-
7.1. Реализация каналов с независимыми замираниями 321
ние ограничено малыми по отношению к линии прямой видимости LOS
углами. Это означает, что для получения точек независимых замираний
необходимо разносить антенны на большее расстояние [2].
Другой метод организации разнесения — использование двух переда-
ющих антенн или двух принимающих антенн с различной поляризацией
(например, вертикально и горизонтально поляризованные волны). Две
переданные волны идут по одному и тому же каналу. Однако, так как
в волнах обеих поляризаций случайные многолучевые отражения влия-
ют на сигнал приблизительно одинаково, то средние значения принимае-
мой мощности, соответствующие каждой поляризации, примерно равны.
Поскольку углы рассеивания волн обеих поляризаций случайны, то ма-
ловероятно, что сигналы, получаемые двумя различно поляризованными
антеннами, одновременно будут находиться в состоянии глубокого зами-
рания. Правда, существует два недостатка поляризационного разнесения
каналов. Во-первых, у вас будет максимум две ветви разнесения сигналов,
соответствующие двум типам поляризации. Во-вторых, при поляриза-
ционном разнесении каналов теряется практически половина мощности
(3 дБ), так как мощность передачи или приема делится между двумя по-
разному поляризованными антеннами.
Направленные антенны обеспечивают угловое (или направленное) раз-
несение каналов, ограничивая ширину диаграммы направленности антен-
ны заданным углом. В пределе, при очень малых углах, только один
из множества лучей попадет в главный лепесток диаграммы направлен-
ности приемной антенны, и поэтому замираний вследствие многолучево-
го распространения не будет. Однако такой метод разнесения сигналов
требует либо достаточного количества направленных антенн для покры-
тия всех возможных направлений приема, либо одной антенны с изме-
няемой диаграммой направленности, которая может подстраиваться под
направления поступления составляющих многолучевого распространения
(предпочтительно — самой сильной из них). Заметьте, что при этом
методе, из-за потери части составляющих многолучевого распростране-
ния, которые выпадают за границы ширины диаграммы направленности
приемной антенны, отношение сигнал-шум SNR может уменьшаться.
Исключение представляет случай, когда коэффициент направленности ан-
тенны достаточно велик для того, чтобы компенсировать эти потери
мощности. Антенные решетки с настраиваемой фазой на каждом эле-
менте антенны называются умными антеннами: такие антенные решет-
ки образуют направленные антенны, которые могут подстраиваться под
угол прихода на антенну самой сильной составляющей многолучевого рас-
пространения [3].
Разнос сигналов по частоте обеспечивается передачей одного и того
же узкополосного сигнала на различных несущих частотах, причем эти
322 Глава 7. Разнесение сигналов на приеме и передаче
несущие частоты разнесены на расстояние, равное полосе когерентно-
сти канала. Для того, чтобы передавать сигнал в нескольких частотных
диапазонах, данный метод требует дополнительных затрат передаваемой
мощности. Методы расширения спектра, речь о которых идет в гл. 13,
иногда представляют как средства, обеспечивающие разнесение сигналов
по частоте, при котором усиление канала варьируется внутри частотного
диапазона передаваемого сигнала. Однако это не равносильно отправке
одного и того же информационного сигнала по каналам с независимыми
замираниями. Как показано в подпараграфе 13.2.4, приемник типа RAKE
принимает сигналы с расширенным спектром и независимыми замирани-
ями в каналах, и поэтому представляет собой разновидность разделения
каналов. Разнесение каналов во времени достигается при передаче одного
и того же сигнала в разные моменты времени, причем интервал времени
больше интервала когерентности канала (обратного доплеровскому рас-
ширению канала). Разнесение сигналов во времени не требует повышения
передаваемой мощности, но при этом снижается скорость передачи дан-
ных, так как на разнесенных временных интервалах повторяются старые,
а не передаются новые данные. Временной разнос каналов можно также
обеспечить с помощью кодирования и чередования, о чем речь пойдет
в гл. 8. Ясно, что временное разнесение каналов не может использовать-
ся для стационарных приложений, так как время когерентности канала
бесконечно, и поэтому замирания сильно коррелированны во времени.
В этой главе особое внимание уделяется пространственному разнесе-
нию каналов как образцу описания систем разнесенного приема и различ-
ных методов объединения, хотя эти методы могут использовать и другие
виды разнесения. Методы объединения будут рассматриваться исходя
из принципа действия антенной решетки. Разнесение передатчиков и при-
емников будет рассматриваться отдельно, так как соответствующие мо-
дели систем и способы объединения имеют существенные различия.
7.2. Разнесение сигналов в приемнике
7.2.1. Модель системы
При разнесенном приеме сигналы с независимыми замираниями, посту-
пающие от нескольких приемных антенн, объединяются в один сигнал,
который подается затем на обычный демодулятор. Это объединение мо-
жет быть выполнено несколькими способами, различающимся по степени
сложности и общим показателям. Как показано на рис. 7.1, большинство
методов объединения линейные: сигнал на выходе устройства объедине-
ния представляет взвешенную сумму М сигналов различных каналов или
ветвей с замираниями. В частности, когда все члены множества сц, за ис-
7.2. Разнесение сигналов в приемнике
ключением одного, равны нулю, то на выход устройства объединения по-
дается только один канал. Если в множестве ai ненулевое значение имеют
более одного члена, то устройство объединения суммирует это множество
каналов, причем всем каналам могут быть присвоены различные взве-
шивающие значения. При объединении сигналов нескольких ветвей, эти
сигналы должны быть сфазированы, т. е. для некоторого действительно-
го значения о^ в ветви i фаза сигнала при перемножении сдвигается
на величину а^ = Для устранения фазового сдвига необходимо ко-
герентное детектирование каждой ветви с тем, чтобы определить фазу Oi
сигнала. Без совмещения по фазе сигналы ветвей не будут когерентно
складываться в устройстве объединения, а на объединенном выходе могут
наблюдаться значительные замирания из-за конструктивного и деструк-
тивного сложения сигналов всех ветвей.
Рис. 7.1. Линейное устрой-
ство объединения
Умножение на коэффициент ai, без существенных различий в пока-
зателях, может быть выполнено перед детектированием или после него.
Объединение обычно проводится после детектирования, так как мощно-
сти и/или фазы сигналов в ветвях необходимы для определения соответ-
ствующих значений о^. При последетекторном суммировании сигналов
многих ветвей в каждой ветви необходим приемник, определяющий фазу
сигнала в этой ветви, а это усложняет конструкцию оборудования и уве-
личивает энергопотребление, особенно при большом числе ветвей.
Основная задача разнесенного приема состоит в когерентном объеди-
нении независимых сигналов из каналов с замираниями таким образом,
чтобы свести к минимуму эффект замираний. Сигнал на выходе устройс-
тва объединения равен исходному передаваемому сигналу з(£), умножен-
ному на случайный комплексный член = E'AG- Этот комплексный
i
член дает случайную величину отношения сигнал-шум на выходе
устройства объединения, причем распределение величины 7s зависит от
количества разносимых каналов, распределения замираний в каждом ка-
нале и метода объединения, о чем будет сказано более подробно.
Усиление антенной решетки приемника с пространственным разнесе-
нием является результатом когерентного сложения многих принимаемых
сигналов. При отсутствии замираний это может привести даже к увеличе-
нию среднего отношения сигнал-шум SNR на приеме. Например, предпо-
ложим, что замирания отсутствуют, поэтому ri = y/Es, где Es — энергия
на символ переданного сигнала. Допустим, что спектральная плотность
мощности шума во всех ветвях равна Nq/2, а форма импульса такова, что
BTS = 1. Тогда во всех ветвях будет одинаковое отношение сигнал-шум
7г = Es/N0. Допустим, что ai = rt/y/No (позднее мы увидим, что эти веса
оптимальны при объединении сигналов с замираниями для достижения
максимума отношения сигнал-шум). Тогда отношение сигнал-шум SNR
на приеме равно:
/ м \ 2
Е airi
\i=l /
=------м----
No Е а}
i=l
Таким образом, при отсутствии замираний и соответствующем взве-
шивании, благодаря когерентному сложению М сигналов, полученных
с различных антенн, происходит ЛТ-кратное увеличение отношения сиг-
нал-шум SNR. Это увеличение отношения сигнал-шум при отсутствии
замираний рассматривается как усиление антенной решетки. Более точ-
но усиление антенной решетки Ад определяется как увеличение среднего
отношения сигнал - шум 77 объединенного сигнала по сравнению со сред-
ним отношением сигнал-шум в ветви 7:
7
Усиление антенной решетки обеспечивают все методы, использую-
щие объединение разнесенных сигналов, но наиболее ярко это усиление
проявляется при суммировании дифференциально-взвешенных сигналов.
Усиление антенной решетки позволяет системе с многоэлементными пе-
редающими или принимающими антеннами получить в канале с зами-
раниями лучшие характеристики, чем у систем без разнесения в канале
с аддитивным белым гауссовым шумом AWGN и тем же средним значени-
7.2. Разнесение сигналов в приемнике 325
ем отношения сигнал-шум SNR. Этот эффект будет виден на графиках
характеристик при дифференциально-взвешенном и линейном суммиро-
вании сигналов равной мощности с большим числом антенн.
При наличии замираний, объединение множества независимых сигна-
лов с замираниями дает более благоприятное распределение 7^, чем это
было бы в случае только с одним каналом. В частности, эксплуатационные
показатели системы с разнесенным приемом (вне зависимости от того, ка-
кая форма разнесения используется — пространственная или какая-либо
иная) Ps и Pout определяются так, как описано в подпараграфах 6.3.1
и 6.3.2:
ОО
А = У Рз(7)р7Е(7) d7, (7-2)
о
где РД7) — вероятность ошибки символа при демодуляции сигнала s(t)
с аддитивным белым гауссовым шумом AWGN с отношением сигнал -
шум SNR, равным 7; и вероятность перерыва связи:
70
Pout = Р (7s < 70) = У ^7 (7.3)
о
при некотором заданном отношении сигнал-шум 70. Наиболее предпо-
чтительное распределение 7s ведет к уменьшению средней вероятности
ошибки Ps и вероятности перерыва Pout вследствие объединения разнесен-
ных каналов, а полученный в результате выигрыш называется коэффици-
ентом усиления за счет разнесения. Для некоторых систем разнесения
каналов средняя вероятность ошибки может быть выражена в форме
Ps = су~м, где с — константа, зависящая от особенностей модуляции
и кодирования, 7 — среднее отношение сигнал-шум на ветвь, а М —
кратность разнесения в системе. Кратность разнесения характеризует
крутизну изменения средней вероятности ошибки как функции среднего
отношения сигнал-шум SNR при разнесении сигналов. (Ниже на рис. 7.3
и 7.6 показаны эти изменения в зависимости от величины М для различ-
ных методов объединения). Напомним, что общее приближение средней
вероятности ошибки при рэлеевских замираниях и отсутствии разнесен-
ного приема (6.61) равно Ps ~ а-м/ (2Дм7)- Это выражение имеет крат-
ность разнесения 1, соответствующую одной приемной антенне. Макси-
мальная кратность разнесения каналов системы из М антенн равна М,
и если кратность разнесения равна М, то говорят, что система достигает
кратности полного разнесения каналов.
В последующих разделах более детально описываются различные методы
объединения и их характеристики. Эти методы предполагают различные
компромиссы между показателями качества и сложностью реализации.
326 Глава 7. Разнесение сигналов на приеме и передаче
7.2.2. Селективное объединение
При селективном объединении разнесенных сигналов (SC1) устройство
объединения подает на выход сигнал из ветви с самым высоким отноше-
нием сигнал-шум SNR rl/Ni. Это эквивалентно выбору ветви с самым
высоким уровнем г2 + М, при условии равенства мощности шумов во всех
ветвях Ni = TV.2 Так как в каждый момент времени используется только
одна ветвь, то при селективном объединении часто требуется только один
приемник, включаемый в активную ветвь антенны. Однако в системах,
ведущих непрерывный одновременный контроль отношения сигнал - шум
во всех ветвях, могут понадобиться отдельные приемники для каждой
ветви антенны. При селективном объединении SC отношение сигнал-шум
на выходе устройства объединения равно максимальному значению, кото-
рое только есть во всех ветвях. Более того, так как используется только
один выход ветви, не требуется одновременного фазирования множества
ветвей. Поэтому данный метод можно применять как при когерентной,
так и при разностной модуляции.
При разнесении сигналов на М ветвей функция распределения отно-
шения сигнал-шум 7s определяется выражением:
м
Ле (7) =РЫ < 7) =р(тах[71,72,...,7м] < ?) = Пр(7г < ?)• (7-4)
г=1
Дифференцируя Р7е(7) по 7, получим плотность распределения 7s,
а вычисляя Р7Е (7) при 7 = 70, найдем вероятность срыва связи. Допустим,
что найдутся М ветвей с некоррелированными рэлеевскими замирания-
ми с амплитудой ri. Тогда отношение сигнал-шум SNR в ?'-й ветви равно
7г = • Определяя среднее значение отношения сигнал-шум в г'-й вет-
ви как 77 = Е [тг], при его экспоненциальном распределении получим:
р(7г) = -е-^/7. (7.5)
7г
Согласно (6.47), вероятность нарушения связи при заданной величине 70
в г-й ветви с рэлеевскими замираниями равна:
Pout(7o) = l-e~7o/7*. (7.6)
Вероятность нарушения связи для избирательного устройства объеди-
нения при заданной величине 70 составит:
м м
Pout (70) = П?(7г < 70) = П t1 - е-7°Лг] • (77)
г=1 г=1
1SC — selection combining.
2На практике значение г2 + Nt измерить проще, чем значение отношения сигнал-шум
SNR, так как формирователь измеряет только общую мощность принимаемого сигнала.
7.2. Разнесение сигналов в приемнике 327
Если среднее значение отношения сигнал-шум SNR для всех ветвей оди-
наковое (7j = 7 для всех г), то выражение упрощается до вида:
Г /-Iм
Pout (70) = Р (7S < 7о) = [1 - е~7о/7] • (7.8)
Дифференцируя (7.8) по 70, получим выражение для плотности распреде-
ления 7s:
М г /-Iм-1 /-
Р7Е(7) = -[1~е-7/7] (7.9)
Из выражения (7.9) следует, что среднее значение отношения сигнал -
шум SNR на выходе устройства объединения при независимых и одина-
ково распределенных рэлеевских замираниях равно:
ОО ОО
7s = У 7Р7Е (7)<^7 = / [1 - е“7/7] е-7/7с?7 = 7^2 (7-Ю)
о о 1=1
Таким образом, рост среднего значения отношения сигнал-шум SNR
и соответствующее усиление антенной решетки увеличиваются с увеличе-
нием М, но не линейно. Самый большой коэффициент усиления достига-
ется при переходе от схемы без разнесения к схеме с разнесением приема
на две ветви. Увеличение количества ветвей разнесения с 2 до 3 дает
меньший коэффициент усиления, чем при переходе от 1 к 2, а в общем
случае при увеличении числа ветвей М антенной решетки выигрыш в еди-
ницах усиления уменьшается. Эта тенденция проиллюстрирована также
на рис. 7.2, где показана зависимость вероятности нарушения связи Pout
от отношения 7/70 при различных значениях М и независимых, одинаково
распределенных рэлеевских замираниях. В данном примере наблюдается
стремительное улучшение уже при объединении двух ветвей: переходя от
М = 1 к М = 2 при условии 1% вероятности нарушения связи, получаем
снижение требуемого отношения сигнал - шум (защищенности) приблизи-
тельно на 12 дБ, а при вероятности нарушения связи в 0,01% требуемая
защищенность снизится приблизительно на 20 дБ. Однако при 0,01% веро-
ятности нарушения связи, переход от схемы разнесения с двумя ветвями
к схеме с тремя ветвями дает дополнительный выигрыш защищенности
только на 7 дБ, а переход от трех ветвей к четырем дает дополнительно
около 4 дБ. Ясно, что экономия в энергопотреблении наиболее значитель-
на при переходе от схемы без разнесения сигналов к разнесению на две
ветви, а по мере увеличения количества ветвей эффект уменьшается. Так-
же следует добавить, что даже при рэлеевских замираниях во всех ветвях,
распределение защищенности (отношения сигнал-шум) на выходе уст-
ройства объединения уже не будет экспоненциальным.
Разнесение сигналов на приеме и передаче
Рис. 7.2. Вероятность нарушения связи при селективном объединении разнесен-
ных сигналов с рэлеевскими замираниями
Пример 7.1. Найдите вероятность нарушения связи в схеме с селективным
объединением сигналов для М = 1 (отсутствие разнесения сигналов), М = 2
и М = 3 при двоичной фазовой манипуляции ДФМН (BPSK), вероятности сбоя
в ветви Рь = 10 :! и рэлеевских замираниях. Среднее значение защищенности
SNR в ветвях принять равным 7 = 15 дБ.
Решение. Сигнал ДФМН (BPSK) имеет вероятность ошибки Рь = 10 при
уь = 7 дБ. Следовательно, мы имеем 70 = 7 дБ. Подставляя 70 = 1О0,7 и 7 = 101,5
в (7.8), получим Fout = 0,1466 при М = 1, FOut = 0,0215 при М = 2 и Fout =
= 0,0031 при М = 3. Видно, что добавление каждой ветви сокращает вероят-
ность нарушения связи почти на порядок.
Средняя вероятность ошибки символа выводится из (7.2) по задан-
ной вероятности ошибки символа для данного вида модуляции при на-
личии аддитивного белого гауссового шума (AWGN) Pslpf) и заданному
распределению защищенности (отношения сигнал-шум SNR) на выходе
устройства объединения р7Е(д)- Для большинства типов распределений
замираний и когерентных видов модуляции эту вероятность нельзя по-
лучить аналитически, и ее оценивают численными методами или с ис-
пользованием аппроксимации. На рис. 7.3 изображен график вероятности
ошибки Рь в зависимости от средней защищенности 77, при независи-
мых одинаково распределенных рэлеевских замираниях, полученный при
численном интегрировании выражения f Q для значений
7.2. Разнесение сигналов в приемнике
р7Е(7), определенных по формуле (7.9). Из рисунка видно, что благодаря
селективному объединению система разнесения каналов при М 8 имеет
вероятность ошибки меньше, чем канал с аддитивным белым гауссовым
шумом (AWGN), при той же защищенности SNR. Это верно и для режи-
ма суммирования дифференциально-взвешенных сигналов, и при линей-
ном суммировании сигналов равной мощности. Для относительных видов
модуляции при независимых и одинаково распределенных рэлеевских за-
мираниях в каждой ветви существуют результаты в аналитическом виде
[1, гл. 9.7; 4, гл. 6.1.]. Например, можно показать, что для относительной
фазовой манипуляции ОФМН (DPSK) при вероятности распределения
Р7Е(7), заданной выражением (7.9), средняя вероятность ошибки символа
равна:
Рис. 7.3. Средняя вероятность ошибки Рь при ДФМН (BPSK) при селективном
объединении разнесенных сигналов с независимыми одинаково распре-
деленными рэлеевскими замираниями
В предыдущих выводах формул мы предполагали, что между сигнала-
ми в ветвях корреляция отсутствует. Если же корреляция не равна нулю,
то наблюдается незначительное снижение эксплуатационных характери-
стик, которое практически пренебрежимо для значений корреляции менее
0,5. Вывод формулы для точного снижения эксплуатационных характе-
ристик вследствие корреляции в ветвях можно найти в [1, гл. 9.7; 2].
7.2.3. Пороговое объединение
В случае непрерывно работающих систем, методы селективного объеди-
нения разнесенных сигналов могут потребовать выделенного приемника
на каждую ветвь для непрерывного отслеживания защищенности SNR
в ветвях. Более простой способ объединения, с последовательным ска-
нированием ветвей и подачей на выход первого сигнала, защищенность
которого будет выше заданного порогового значения 7т, называется по-
роговым объединением и не требует отдельного приемника для каждой
ветви. Как и в случае селективного объединения, при пороговом объеди-
нении не требуется фазирование, поскольку в каждый момент времени
используется выход только одной ветви. Поэтому данный метод можно
использовать как при когерентной, так и при относительной модуляции.
------ Защищенность SNR при SSC
------ Защищенность SNR в 1 ветви
------Защищенность SNR во 2 ветви
Время
Рис. 7.4. Итоговая
защищенность (отно-
шение сигнал-шум
SNR) при объедине-
нии с переключением
и остановкой — SSC
Как только ветвь выбрана, устройство объединения пропускает этот
сигнал на выход в течение всего времени, пока защищенность SNR в этой
ветви остается выше требуемого порогового значения. Если защищен-
ность SNR выбранной ветви падает ниже порогового значения, то устрой-
ство объединения переключается на другую ветвь. Существует несколько
критериев, по которым устройство объединения определяет, на какую
ветвь переключаться [5]. Самый простой способ — это случайное пе-
реключение на другую ветвь. При разнесении сигналов только по двум
ветвям это эквивалентно переключению на другую ветвь, когда защи-
щенность SNR в активной ветви падает ниже значения тр. Такой метод
называется объединением с переключением и остановкой (SSC3). Про-
цесс объединения с переключением и остановкой и соответствующая за-
щищенность (отношение сигнал -шум) SNR показаны на рис. 7.4. Так как
при объединении с переключением и остановкой SSC не выбирается ветвь
3SSC — Switch-and-stay combining.
^тв(7) — у
1.2. Разнесение сигналов в приемнике 33 I
с самым высоким отношением сигнал-шум SNR, то эксплуатационные
показатели системы находятся между вариантом без разнесения сигна-
лов и идеальным избирательным объединением SC.
Обозначим защищенность SNR в г'-й ветви как 7г, а защищенность SNR
на выходе устройства объединения — как 7s. Тогда функция распреде-
ления 7s будет зависеть от порогового уровня 7т и от распределения
защищенности 7т При разнесении каналов по двум ветвям с независи-
мыми и одинаково распределенными статистиками, распределение веро-
ятностей на выходе устройства объединения Р7Е (7) = р 7) можно
выразить через распределение отдельной ветви/7г(7) = p(7i 7), а рас-
пределение защищенности SNR отдельной ветви p7i (7) выразить в виде:
(7т)Р72 (7), 7 < 7т, /7 12х
Р(7Г < 72 < 7) +Л1(7т)Р72(7), 7 7т- '
Для рэлеевских замираний в каждой ветви с равными средними значени-
ями 7j = 7 (г = 1,2) это дает:
fl— е~ут1^ _ р-т/7 -1_ р-(7т+7)/7 -7 < -у-г
(7)Д ! _ 2е-7/, + ' L 7? <7-13»
I -L | О , J Ц .
Вероятность перерыва связи POut Для заданного значения 70 получаем,
вычисляя Р7В(7) при 7 = 70:
fl- е-7т/у _ g—7о/7 -|_ е-(7т+7о)/7, -у0 <
Pout (70) = P7S (70) = I 1 _ 2g—70/7 + е-(7т+7о)/7; ’ 7o 7r’
(7-14)
Параметры системы объединения с переключением и остановкой SSC при
других типах замираний, а также эффекты корреляции замираний изуче-
ны в работах [1, гл. 9.8; 6;7]. В частности, в [1, гл. 9.8] показано, что при
любом распределении замираний система объединения с переключением
и остановкой SSC с оптимизированным пороговым значением ут = 70
имеет такую же вероятность нарушения связи, как и система с избира-
тельным объединением SC.
Пример 7.2. Найдите вероятность нарушения связи при ДФМН (BPSK)
и Рь = 10-3 при объединении сигналов с переключением и остановкой SSC
с двумя ветвями и независимыми одинаково распределенными рэлеевскими за-
мираниями в ветвях для пороговых значений 77- = 5 дБ, 7 дБ и 10 дБ. Принять,
что среднее значение защищенности SNR в ветви равно 7 = 15 дБ. Определи-
те, как изменится вероятность перерыва связи с изменением 7т- Сравните также
вероятность нарушения связи для системы SSC и системы с избирательным объ-
единением SC с аналогичными показателями, а также при отсутствии разнесения
сигналов в примере 7.1.
Глава 7. Разнесение сигналов на приеме и передаче
Решение. Как и в примере 7.1, 70 = 7 дБ. Для 7т = 5 дБ мы имеем 70 > 7т,
потому для вычисления воспользуемся второй строкой выражения (7.14):
Fout = 1 - 2е_10°’7/101’5 + e-(io° s+io° T)/io^ = 0;0654.
При 7т = 7 дБ имеем 70 = 7т, поэтому для вычисления снова используем вторую
строку выражения (7.14):
Fout = 1 - 2е-ioO 7/io-+ е_(10°.Ч10°Ч/10^ = 00215.
Для 7т = Ю дБ имеем 70 < 7т, поэтому используем первую строку выражения
(7-И):
Fout = 1 _ g-io/io1’5 _ e-io°-Vio15 + e-(io+io°-Ч/ю^ = Qj0397_
Видно, что при 7т = 7 дБ вероятность нарушения связи меньше, чем при двух
других значениях. При 7т = 5 дБ пороговое значение слишком низкое, поэто-
му активная ветвь может длительное время находиться ниже заданного порога
7о, прежде чем произойдет переключение; это приводит к большой вероятности
нарушения связи. При 7т = 10 дБ пороговое значение слишком высокое: актив-
ная ветвь часто будет падать ниже порогового значения, из-за чего сумматор
будет переключаться на другую антенну, даже если на этой другой антенне за-
щищенность SNR будет ниже, чем на активной. Этот пример показывает, что
пороговое значение 7т, минимизирующее вероятность FOut, равно 70.
В примере 7.1 селективное объединение SC имеет вероятность Fout = 0,0215.
Следовательно, величина 7т = 7 дБ представляет оптимальное пороговое значе-
ние, при котором метод объединения с переключением и остановкой SSC обла-
дает теми же самыми эксплуатационными характеристиками, что и метод се-
лективного объединения SC. Мы видим также, что характеристики системы
с неоптимизированным пороговым значением могут быть намного хуже, чем
при избирательном объединении SC. Вместе с тем, эксплуатационные показа-
тели объединения с переключением и остановкой SSC при всех трех пороговых
значениях лучше, чем в отсутствие разнесения сигналов, когда Fout = 0,1466
(см. пример 7.1).
Дифференцируя выражение (7.12) по 7, получим распределение 7» Тог-
да средняя вероятность ошибки определяется из выражения (7.2) для вероят-
ности ошибки символа при аддитивном белом гауссовом шуме (AWGN) —
РД7) и распределения вероятностей защищенности SNR на выходе схе-
мы объединения сигналов с переключением и остановкой SSC — Р7Е(т)-
Для большинства типов распределений замираний и видов когерентных
модуляций этот результат нельзя получить в аналитической форме, по-
этому его следует оценить численными методами или с помощью аппрок-
симации. Однако для независимых одинаково распределенных рэлеевских
замираний, дифференцируя выражение (7.13), можно получить:
Г (Т _ е-7г/7)(1 /5,)р-7/7 -у < -№
-,-Л' <7-15)
7.2. Разнесение сигналов в приемнике 333
Как и в случае избирательного приема SC, для большинства видов рас-
пределений замираний и когерентной модуляции, средняя вероятность
ошибки не выражается в аналитическом виде и должна оцениваться чи-
сленными методами. Однако для относительных видов модуляции, при
условии независимых одинаково распределенных рэлеевских замираний
в каждой ветви, все же существуют выражения в аналитическом виде.
В частности, средняя вероятность ошибки символа при ДФМН (DPSK)
имеет следующий вид:
ОО
Pb = l |e-^7E(7)d7 = 2(11+_) (1 - + е-7те-7т/7) . (7Л6)
о
Пример 7.3. Найдите среднюю вероятность ошибки для двоичной фазовой
манипуляции ДФМН (DPSK) в схеме разнесения и объединения сигналов с пе-
реключением и остановкой SSC с двумя ветвями при независимых одинаково
распределенных рэлеевских замираниях в каждой ветви и пороговых значениях
7т = 3 дБ, 7 дБ и 10 дБ. Принять, что средняя защищенность SNR в ветви
7 = 15 дБ. Поясните, каким образом изменится средняя вероятность ошибки
при изменении 7у. Сравните также среднюю вероятность ошибки в условиях
объединения сигналов с переключением и остановкой SSC, в схеме с селектив-
ным объединением с аналогичными показателями и при отсутствии разнесения
сигналов.
Решение. Производя вычисления по (7.16) при 7 = 15 дБ и 7т = 3, 7 и 10 дБ,
получаем (соответственно) Рь = 0,0029, Рь = 0,0023 и Рь = 0,0042. Как и в
предыдущем примере, существует оптимальное пороговое значение, снижаю-
щее до предела среднюю вероятность ошибки. Устанавливая пороговое значение
слишком высоко или слишком низко, мы ухудшаем эксплуатационные харак-
теристики. Из выражения (7.11) получаем, что при избирательном приеме SC
вероятность ошибки равна
Рь = 0,5 (1 + 101’5)-1 - 0,5 (2 + 101’5)-1 = 4,56 • 10 '1,
т. е. примерно на порядок меньше, чем в случае объединения с переключением
и остановкой SSC с оптимальным значением порога. При отсутствии разнесения
каналов получим вероятность ошибки, равную Рь = 0,5 (1 + 101,5) 1 = 0,0153,
что примерно на порядок хуже, чем при объединении сигналов с переключением
и остановкой SSC с двумя ветвями.
7.2.4. Суммирование дифференциально-взвешенных
сигналов
При избирательном объединении SC и объединении с переключением и оста-
новкой SSC сигнал на выходе устройства объединения равен сигналу в од-
ной из ветвей. При суммировании дифференциально-взвешенных сигна-
лов (MRC4) сигнал на выходе равен взвешенной сумме сигналов всех ве-
твей, поэтому все значения ai на рис. 7.1 ненулевые. Сигналы синфазны,
и поэтому ai = aie~iGi, где — фаза входного сигнала г-й ветви. Следова-
ла
тельно, огибающая на выходе устройства объединения равна г = 52
2=1
Полагая, что спектральная плотность шумов PSD всех ветвей одинако-
ва и равна Nq/2, получаем величину полного шума на выходе сумматора
м
Ntot/2, равную Ntoil2 = 52 а^М)/2- Тогда защищенность SNR на выходе
i=l
устройства объединения равна:
м \2
г2
7s /V
1 Vtl
No м
(7-17)
1=1
Задача состоит в выборе таких значений dj, при которых защищенность
7s максимальна. Интуитивно понятно, что ветви с высокой защищенно-
стью SNR должны иметь больший вес, чем ветви с низкой защищенно-
стью, поэтому весовые коэффициенты а2 должны быть пропорциональны
величине защищенности в ветви SNR — г^/Nq. Значения при кото-
рых защищенность на выходе устройства объединения 7s максимальна,
находятся взятием частных производных выражения (7.17) или с исполь-
зованием неравенства Коши-Шварца [2]. Решая уравнения относитель-
но оптимальных весовых коэффициентов, получаем о2 = r2/7Vo5 а ре-
зультирующая защищенность на выходе устройства объединения равна
м м
7s = 52 f^/No = 52 7г- Таким образом, средняя защищенность SNR на вы-
i=i i=i
ходе устройства объединения равна сумме защищенностей SNR всех ве-
твей. Поэтому средняя защищенность SNR на выходе устройства объ-
единения и соответствующий коэффициент усиления антенной решетки
увеличиваются линейно с увеличением количества ветвей разнесения М,
в отличие от избирательного объединения SC, при котором влияние на
среднюю защищенность SNR на выходе устройства объединения (7.10)
с ростом числа ветвей уменьшается. Как и при избирательном объеди-
нении SC, распределение защищенности (отношения сигнал-шум SNR)
на выходе устройства объединения не остается экспоненциальным, даже
если во всех ветвях имеют место замирания с распределением Рэлея.
Для выяснения вида распределения суммарной защищенности 7s возь-
мем произведение производящих функций моментов или характеристи-
ческих функций. Полагая, что средняя защищенность SNR всех ветвей
4MRC — Maximal ratio combining.
7.2. Разнесение сигналов в приемнике 335
с независимыми одинаково распределенными рэлеевскими замираниями
равна 7, получим распределение суммарной защищенности 7S, равное X2
с 2М степенями свободы, математическим ожиданием 7s = Му и диспе-
рсией 2Му:
Соответствующая вероятность нарушения связи для заданного порогово-
го значения 70 определяется выражением:
Pout = Р (7S < 7о) = / Р7е(7)с?7 = 1 - (7.19)
о fc=1 (
На рис. 7.5 представлен график вероятности срыва связи Pout при
объединении дифференциально-взвешенных сигналов в зависимости от
количества ветвей.
Рис. 7.5. Вероятность нарушения связи POut при объединении дифференциально-
взвешенных сигналов с независимыми одинаково распределенными рэле-
евскими замираниями
Среднюю вероятность ошибки символа находят из выражения (7.2),
исходя из вероятности ошибки символа РД7) в канале с аддитивным бе-
лым гауссовым шумом AWGN для данного метода модуляции, а также
из распределения итоговой защищенности 7s — Р7Е(7)- Для двоичной
фазовой манипуляции ДФМН (BPSK) и независимых одинаково распре-
деленных рэлеевских замираний, при распределении суммарной защищен-
(ГзЗб Глава Т. Разнесение сигналов на приеме и передаче
ности р7Е(у) согласно выражению (7.18) можно показать [4, гл. 6.3], что
средняя вероятность ошибки равна:
- 7 / ч Ш-1 + т\ (1 + Г\т
а=у<г(^Х(7М7 = (-г-) Е( т И—) .
q 4 ' т=0 х / \ /
(7.20)
где Г = (1 4- -у). Графики этой вероятности представлены на рис. 7.6.
Сравнивая вероятность нарушения связи при дифференциальном взвеши-
вании сигналов MRC (рис. 7.5) и селективном объединении SC (рис. 7.2)
или же среднюю вероятность ошибки при дифференциальном взвешива-
нии (рис. 7.6) и селективном объединении (рис. 7.3), можно видеть, что
дифференциальное взвешивание MRC обладает значительно лучшими по-
казателями, чем селективное объединение SC. В § 7.4 для вычисления
средней вероятности ошибки при дифференциальном взвешивании сиг-
налов MRC будут использованы методы анализа, основанные на произ-
водящих функциях моментов, которые можно применять к любому типу
модуляции, любому количеству ветвей разнесения и любому распределе-
нию замираний в ветвях.
Рис. 7.6. Средняя вероятность ошибки Рь при объединении дифференциально-
взвешенных сигналов с независимыми одинаково распределенными рэле-
евскими замираниями
Верхнюю границу средней вероятности ошибки можно получить, ис-
пользуя неравенство Чернова Q(x) < е~ж /2 для Q-функции. Напомним,
1.2. Разнесение сигналов в приемнике 337
что для статического коэффициента усиления канала с дифференциаль-
ным взвешиванием сигналов MRC мы можем произвести аппроксимацию
вероятности ошибки следующим образом:
Ps - aMQ < аме~^м^/2 = аме-М^-Р^2. (7.21)
Интегрируя выражение распределения X2 по переменной 7s, получаем:
м
(7.22)
“ 1 + /Зм7г/2
При больших значениях отношения сигнал-шум SNR и в предположении,
что 7i одинаково распределены и = 7, имеем:
Ps ~ • (7-23)
Таким образом, при высоких значениях защищенности SNR порядок
разнесения при дифференциальном взвешивании сигналов MRC равен М
(количеству антенн), и, следовательно, данный метод обеспечивает пол-
ную кратность разнесения каналов.
7.2.5. Линейное объединение сигналов равной
мощности
При объединении дифференциально-взвешенных сигналов необходимо знать
изменяющиеся во времени значения защищенности SNR в каждой вет-
ви, которые бывает трудно измерить. Более простой метод представляет
линейное сложение сигналов (EGC5) с фазированием сигналов в ветвях
и последующим объединением их с равным весом, ац = е~вг. Суммарная
защищенность SNR на выходе устройства объединения в предположении
шумов с одинаковой спектральной плотностью, равной -ZVq/2, составляет:
1 / м \ 2
Ег- ' (724)
\г=1 /
Выражения для плотности и функции распределения вероятностей сум-
марной защищенности 7s не существуют в аналитическом виде. Для не-
зависимых одинаково распределенных рэлеевских замираний, при разне-
сении сигналов по двум ветвям и средней защищенности SNR в ветви,
равной 7, выражение для функции распределения можно получить через
Q-функцию [4, гл. 6.4; 8, гл. 5.6] следующим образом:
Р7е(7) = 1 - - у/^/уе-7/У (1 - 2Q • (7-25)
5EGC — Equal-gain combining.
Глава 7. Разнесение сигналов на приеме и передаче
В результате вероятность нарушения связи составит:
Pout (70) = 1 - е“27й - (1 - 2Q (^2^)) , (7.26)
где 7д = 70/7- Дифференцируя (7.25) по переменной 7, получаем распре-
деление:
(7) = _ 1 /Т) Л - 2Q (7.27)
7 \ V 477 7 V 7 / \ \ V 7 / /
Поставляя это в выражение (7.2) для двоичной ФМН (BPSK), получа-
ем среднюю вероятность ошибки:
В работе [8, гл. 5.7] показано, что эксплуатационные характеристики
системы с линейным сложением EG С очень близки к аналогичным по-
казателям системы с дифференциальным взвешиванием сигналов MRC,
обычно расхождение по мощности составляет менее 1 дБ. Это цена, ко-
торую приходится платить за снижение сложности при использовании
одинаковых коэффициентов усиления. Более подробное сравнение харак-
теристик методов SC, MRC и EGC можно найти в [1, гл. 9].
Пример 7.4. Сравните среднюю вероятность цифровой ошибки для двоич-
ной фазовой манипуляции ДФМН (BPSK) при дифференциально-взвешенном
(MRC) и линейном (EGC) объединении с разнесением сигналов по двум ветвям,
в предположении независимых одинаково распределенных рэлеевских замираний
со средним значением защищенности SNR, равным 10 дБ в каждой ветви.
Решение. В соответствии с (7.20) при дифференциально-взвешенном объедине-
нии MRC получим:
Рь = ( -—^10/Z— j (2 + 00/11) = 1,60 • IO"3.
В соответствии с (7.28) при линейном объединении сигналов EGC получим:
Ръ = 0,5
= 2,07- 10“3.
Таким образом, показатели обоих методов объединения (MRC и EGC) практи-
чески идентичны.
7.3. Разнесение сигналов в передатчике
73. Разнесение сигналов в передатчике
При разнесении сигналов на передаче организуется несколько передаю-
щих антенн, и передаваемая мощность распределяется между этими ан-
теннами. Разнесение сигналов на передаче желательно в системах, в которых
пространственные условия, доступные мощности и возможности обработ-
ки сигналов на передающей стороне превышают возможности приемной
стороны. Очень наглядно это иллюстрируют сотовые системы. Схема
разнесения сигналов на передаче зависит от того, известен ли передатчи-
ку комплексный коэффициент усиления канала. Если этот коэффициент
известен, то система будет похожа на разнесение сигналов на приеме.
Однако при отсутствии этих сведений о коэффициенте усиления при раз-
несении сигналов на передаче необходима комбинация пространственного
и временного разнесения сигналов с помощью метода, получившего на-
звание «Схема Аламоути», и его модификаций. Далее обсуждаются схемы
разнесения сигналов на передаче при различных допущениях о наличии
у передатчика сведений о канале и при условии, что коэффициенты уси-
ления канала известны приемнику.
7.3.1. Информация о канале, известная передатчику
Рассмотрим систему разнесения сигналов на передаче при наличии М
передающих антенн и одной приемной антенны. Предполагается, что ко-
эффициент усиления канала 7‘le:il'>1 для г-й антенны известен передатчику;
в этом случае говорят о наличии в передатчике информации со стороны
канала — CSIT6. Пусть s(t) — передаваемый сигнал с полной энергией
на символ Es. Сигнал умножается на комплексный коэффициент усиле-
ния cti = ар]1'[ (0 at 1), а затем передается через г-ю антенну.
Это комплексное умножение осуществляется с одновременным фазирова-
нием и взвешиванием, соответствующим коэффициентам усиления кана-
ла. Из-за ограничений средней общей энергии Es весовые коэффициенты
м
должны удовлетворять условию 52 = 1- Взвешенные сигналы, передан-
i=i
ные всеми антеннами, складываются «в эфире», в результате чего сигнал
на приеме имеет вид:
м
r(i) = ^2wis(t). (7.29)
г=1
Пусть спектральная плотность мощности шума в приемнике равна Nq/2.
Предположим, что требуется установить такие весовые коэффициен-
ты ветвей, чтобы защищенность SNR на приеме была максимальной. Ис-
eCSIT — Channel Side Information at the Transmitter.
040 Глава 7. Разнесение сигналов на приеме и передаче
пользуя метод, подобный анализу приемника с дифференциальным взве-
шиванием сигналов MRC, можно показать, что весовые коэффициенты аг,
дающие максимальное отношение сигнал-шум SNR, имеют вид:
аг = (7.30)
а результирующая защищенность SNR равна:
„ Л/ м
= = (7-31)
U г=1 г=1
где 7i = r2Es/Ns — защищенность SNR в ветви между г-й передаю-
щей антенной и приемной антенной. Таким образом, можно видеть, что
разнесение сигналов на передаче в случае, когда передатчику известны
коэффициенты усиления канала, подобно разнесению сигналов на приеме
с дифференциальным взвешиванием MRC: защищенность SNR на приеме
равна сумме защищенностей SNR в каждой отдельной ветви. В частно-
сти, если все антенны имеют одинаковый коэффициент усиления Tj = г, то
7s = Mr2Es/N0, т. е. существует коэффициент усиления антенной решет-
ки, равный TW-кратному увеличению защищенности SNR одной антенны,
ведущей передачу на полной мощности. Используя граничное условие Чер-
нова, приведенное в подпараграфе 7-2.4, для статических коэффициентов
усиления получаем:
Ps = aMQ (у/Рмъ) < aMe“^7E/2 = «ме^м(71+-+7м)/2. (7.32)
Интегрируя X2 по 7s, получаем ту же границу, что и в (7.22):
м j
д ^/9- (7’33)
хх 1 + PM7i/2
Z—1
В пределе для больших значений защищенности SNR и в предположе-
нии, что величины одинаково распределены и 7 = 7, получим:
/ о - х -М
~ / РМ7\ .
Ps~aM 1-^-1 • (7.34)
Таким образом, при высоких значениях защищенности SNR порядок
разнесения с дифференциальным взвешиванием MRC на передаче равен М,
и, следовательно, метод дифференциального взвешивания MRC дает мак-
симальный эффект как на передаче, так и на приеме. Анализ методов
линейного (EGC) и избирательного (SC) сложения при наличии у пере-
дающей стороны сведений о канале дает такие же результаты, как и для
разнесения сигналов на приеме.
Сложность организации разнесения сигналов на передаче заключает-
ся в необходимости получения передатчиком информации о фазе канала
1.3. Разнесение сигналов в передатчике 341
и — для селективного (SC) и дифференциального (MRC) методов
о коэффициенте усиления канала. Эти параметры канала могут изме-
ряться на приеме с помощью контрольных частот, а затем пересылаться
обратно в передатчик. Существует и альтернативный вариант: в сото-
вых системах с временным разделением каналов базовая станция может
измерять коэффициент усиления канала и фазу для сигнала, передава-
емого от мобильного устройства к базовой станции. Затем результаты
этих измерений используются при организации передачи к мобильному
устройству, так как при временном разделении прямой и обратный ка-
нал взаимнообратны.
7.3.2. Схема Аламоути — передатчику неизвестна
информация о канале
Рассмотрим такую же модель, что и в подпараграфе 7.3.1, но в предполо-
жении, что на передаче уже нет информации о коэффициентах усиления
канала гщ-70’, т. е. у передатчика отсутствует информация о канале CSIT.
В таком случае неочевидно, каким образом можно получить коэффициент
усиления за счет разнесения. Рассмотрим, например, простую стратегию,
когда для системы, состоящей из двух антенн, мы делим энергию пе-
редачи поровну между этими двумя антеннами. Поэтому передаваемый
сигнал на антенне i будет равен sj(t) = -/0фя(4), где л(£) — передава-
емый сигнал с энергией на символ Es. Допустим, что каждая антенна
имеет комплексный коэффициент усиления гауссового канала hi = г^е-70'
(г = 1,2) с нулевым средним значением и единичной дисперсией. Тогда
сигнал на приеме будет равен
r(t) = + /i2)s(t). (7.35)
Обратите внимание, что /ц + — это сумма двух комплексных гаус-
совых случайных величин, которая и сама является гауссовой величиной
со средним значением, равным сумме средних значений (0) и дисперси-
ей, равной сумме дисперсий (2). Поэтому + Л2) — комплексная
гауссова случайная величина со средним значением 0 и дисперсией 1, и у
принимаемого сигнала будет такое же распределение, как при использова-
нии только одной антенны с полной энергией на символ. Другими словами,
мы не получили никакого выигрыша от использования этих двух антенн,
поэтому нет смысла делить энергию между антеннами по какому-либо
принципу, и бесполезно организовывать когерентное сложение, добива-
ясь фазирования сигналов.
Коэффициент усиления при разнесении на передаче можно получить
и при отсутствии информации о канале, используя соответствующую схе-
му работы антенн. Очень простую и широко распространенную схему
Глава 7. Разнесение сигналов на приеме и передаче
такого разнесения сигналов, объединяющую как пространственное, так
и временное разнесение, разработал Аламоути (Alamouti) [9]. Схема Ала-
моути разработана для цифровой системы связи с разнесением сигналов
на передаче с двумя антеннами. Схема работает в течение двух периодов
передачи символов в предположении, что коэффициент усиления канала
постоянен на этом интервале. В течение первого периода два различных
символа si и S2 (каждый с энергией Es/2) одновременно передаются с ан-
тенн 1 и 2 соответственно. В течение следующего интервала с антенны 1
передается символ — з2, а с антенны 2 — символ каждый опять с энер-
гией Es/2.
Допустим, что комплексный коэффициент усиления канала между ?'-й
передающей антенной и принимающей антенной равен hi = гге^’ (I = 1,2).
Полученный в течение первого периода символ равен yi = hiSi + h^s^ + ni,
а. подученный за второй период символ, равен — — h,\s*z + й-тх) +
где щ (г = 1,2) — выборка аддитивного гауссового белого шума AWGN
в приемнике, соответствующая передаче г-го символа. Предполагается,
что шумовая выборка имеет нулевое среднее значение и мощность N.
Приемник использует эти последовательно принимаемые символы для
формирования вектора у = [t/i yff, определяемого выражением:
hi h2
Ч -Ч
«1
32
П1
. «2
= Ндэ + п,
где s = [si s2]T, n = [ni п2]Т, а
hi
hi
Введем новый вектор z = Н^у. Структура вектора Нд предполагает,
что матрица
Н"НЛ = (|^| + |^|)12 (7.36)
диагональная, и поэтому
2 = [щг2]Г= (|^| + |^|)l2s + n, (7.37)
где й = НдП — комплексный вектор гауссова шума со средним зна-
чением 0 и ковариационной матрицей Е [пп*] = (|/i^| + | й21) МДг • Диа-
гональная природа матрицы z эффективно разъединяет два переданных
символа, так что каждая составляющая z соответствует одному из пере-
данных символов:
Zr = (\^1\ + \ь1\рг+йг, г = 1,2. (7.38)
Поэтому защищенность (отношение сигнал-шум SNR) на приеме соот-
ветствует защищенности SNR Z{, задаваемой выражением:
7-4- Анализ разнесения с помощью производящих функций моментов
(7.39)
7г =
27VO
где коэффициент 2 появляется из того, что символ Sj передается с ис-
пользованием половины всей энергии символа Es. Поэтому защищенность
SNR на приеме равна сумме защищенностей SNR каждой ветви, деленной
на 2. Согласно (7.38), схема Аламоути обеспечивает максимально воз-
можную защищенность системы, ведущей передачу с двумя антеннами,
при кратности разнесения сигналов 2, несмотря на то, что передатчик не
располагает информацией о канале. Однако, согласно (7.39), коэффици-
ент усиления в схеме Аламоути равен 1, тогда как схема суммирования
дифференциально-взвешенных сигналов MRC может достигать усиления
антенной решетки и коэффициента усиления за счет разнесения, рав-
ных 2. Схему Аламоути можно обобщить для М > 2; это обобщение
попадает в категорию схем ортогональных пространственно-временных
блочных кодов [10, гл. 6.3.3; 11, гл. 7.4].
7.4. Анализ разнесения с помощью
производящих функций моментов
В этом параграфе мы воспользуемся производящими функциями момен-
тов MGF, введенными в подпараграфе 6.3.3, что позволит существенно
упростить анализ средней вероятности ошибки при разнесении сигна-
лов. Использование производящей функции MGF при анализе разнесения
сигналов необходимо из-за сложности определения распределения веро-
ятности ошибки Рте (7) ПРИ заданной защищенности SNR 7s на выхо-
де устройства объединения сигналов. Хотя средняя вероятность ошибки
и вероятность перерыва связи при комбинированном разнесении сигналов
задаются простыми формулами (7.2) и (7.3), эти формулы требуют инте-
грирования распределения р7Е(7). Это распределение, при произвольном
количестве ветвей разнесения сигналов и разных распределениях замира-
ний в каждой ветви, независимо от используемого метода объединения,
часто не имеет аналитического выражения. Так, распределение p7s(7)
часто задается в форме интеграла с бесконечными пределами, и тогда
выражения (7.2) и (7.3) становятся двойными интегралами, а это может
оказаться затруднительным для числовой оценки. Даже когда распреде-
ление p7s (7) задано в аналитическом виде, соответствующие интегра-
лы (7.2) и (7.3) могут не давать решения в аналитическом виде, из-за
чего также могут возникнуть затруднения при числовой оценке. В ре-
зультате большого объема проведенной в течение десятилетий работы
были исследованы аппроксимации и числовые методы вычисления инте-
344 Глава 7. Разнесение сигналов на приеме и передаче
гралов, соответствующих средней вероятности ошибки символа для раз-
личных видов модуляции, распределений замираний и методов расчета
(см. [12] и приведенные там ссылки). Выражение средней вероятности
ошибки через производящую функцию моментов MGF для 7>; (вместо
функции распределения) часто устраняет эти трудности интегрирова-
ния. Так, когда разнесенные каналы с замираниями независимы, но не
обязательно одинаково распределены, средняя вероятность ошибки, вы-
числяемая по производящей функции моментов MGF для 7s, обычно пред-
ставляется в аналитическом виде или состоит из единственного интеграла
в ограниченном диапазоне, который легко можно определить численными
методами.
Самый простой случай применения производящих функций моментов
MGF при анализе разнесения сигналов представляет когерентная модуля-
ция в схеме суммирования дифференциально-взвешенных сигналов MRC,
поэтому она рассматривается в первую очередь. Затем обсуждается ис-
пользование производящих функций MGF при анализе средней вероят-
ности ошибки при линейном объединении сигналов EG С и селективном
объединении SC.
7.4.1. Анализ разнесенного приема
при дифференциальном взвешивании MRC
Простота использования метода производящих функций моментов MGF
при анализе объединения сигналов с дифференциальным взвешиванием
MRC объясняется тем, что, как было показано в подпараграфе 7.2.4,
защищенность SNR 7s сумматора представляет сумму защищенностей
SNR 7i всех ветвей:
м
ТЕ = 52 7г- (7-40)
г=1
Как и при анализе средней вероятности ошибки без разнесения кана-
лов (подпараграф 6.3.3), предположим, что вероятность ошибки в канале
с аддитивным белым гауссовым шумом AWGN для интересующей нас мо-
дуляции может быть выражена либо в виде экспоненциальной функции ys,
как в (6.67), либо в виде интеграла с конечной областью, как в (6.68).
Рассмотрим сначала случай, когда вероятность Ps представлена в фор-
ме (6.67). Тогда средняя вероятность ошибки символа при суммировании
дифференциально-взвешенных сигналов MRC равна:
ОО
Ps = У с1ехр[-с27]р7Е(7)б?7. (7.41)
о
Предположим, что величины защищенности SNR в ветвях независимы,
7.4- Анализ разнесения с помощью производящих функций моментов
поэтому их совместное распределение представляет произведение отдель-
ных распределений: р71,.„,7м (71, • •, 7м) = Р71 (71) • • • Ртм (7м)- Используя
этот факт и подставляя в (7.41) 7 = 71 + • • • + 7м, получим
ОО ОО оо
ps = Cl У / • / ехр t-C2 (71 + • • • + 7м)] Р71 (71) • • • Рум (7м) с?71 ... С?7М-
о о о
границам
(7.42)
Теперь, используя представление в виде произведения
м
ехр [-с2 (71 + • • • + 7м)] = fl ехр [-C27J
i=i
м
И Р71 (71) • • 'P-ум (7М) = (7г)
1=1
в (7.42), получаем:
оо оо 00 д/
PS = C1J У • • • / Пехр[-с27г]ръ(7г)фу;. (7.43)
00 о 1=1
границам
Наконец, изменяя в (7.43) порядок интегрирования и умножения, получа-
ем нужную нам конечную формулу:
м 7 м
PS = С! П / ехр [-С27г] Р7г (7г) ^7г = С1 П МЪ (~С^ ' (7‘44)
г=1q г=1
где Af7i(s) — производящая функция моментов MGF для распределения
замираний в г-й ветви разнесения сигналов, определяемая выражениями
(6.63), (6.64) и (6.65) для замираний Рэлея, Райса и Накагами соответ-
ственно. Таким образом, средняя вероятность ошибки символа — это
просто произведение моментных функций MGF, соответствующих за-
щищенности SNR в каждой ветви. Аналогично, когда вероятность Ps
представлена в форме (6.68), мы получаем:
оо В
ps = У У С1 ехр [-с2(т)7]Фср7Е (7)с?7 =
0 оо оо оо В м
= J/"'/(7г)с?7г- (7.45)
О О О А г=1
границам
Опять изменяя последовательность интегрирования и умножения, полу-
чаем нужное окончательное выражение:
В м °? в м
PS = C1 Y[ exp[-c2(o:)7i]p7i (7i) б?7 = сх / Myi (~с2(т))сЬ. (7.46)
A 1=1 0 A 1=1
Таким образом, средняя вероятность ошибки символа равна опреде-
ленному интегралу от произведения моментных функций MGF, соответ-
ствующих защищенности (отношению сигнал-шум) SNR в каждой ветви.
Выражения (7.44) и (7.46) достаточно просты, благодаря чему они при-
меняются для любого количества ветвей разнесения сигналов и любого
типа распределения замираний в каждой ветви (пока защищенности SNR
отдельных ветвей независимы).
Применим теперь эти общие результаты для отдельных видов моду-
ляции и распределений замираний. Сначала рассмотрим относительную
фазовую манипуляцию ОФМН (DPSK), для которой вероятность ошиб-
ки Рь ("Уъ) = Офе-76 в канале с аддитивным белым гауссовым шумом
AWGN представлена в форме (6.67) при сх = 1/2 и с2 = 1. Тогда, со-
гласно (7.44), средняя вероятность цифровой ошибки при ОФМН (DPSK)
и Af-кратном разнесении сигналов с дифференциально-взвешенным сум-
мированием MRC равна:
м
(7.47)
г-1
Заметьте, что эта вероятность уменьшается до значения средней ошибки
бит без разнесения сигналов, определяемой выражением (6.60) при М = 1.
Пример 7.5. Рассчитайте среднюю вероятность ошибки бит для ОФМН
(DPSK) при дифференциально-взвешенном суммировании MRC с тремя ветвями,
предполагая, что замирания в каждой ветви независимы и имеют распределение
Рэлея с 71 =15 дБ и 72 = 73 = 5 дБ. Сравните полученный результат со случаем
отсутствия разнесения сигналов при 7 — 15 дБ.
Решение. Из (6.63) следует, что
(.s) = (1 - .S7d х.
Используя это выражение моментной функции MGF в (7.47) при s = — 1, полу-
чаем:
11 / 1 \2
A = = 8’85’10"
При отсутствии разнесения мы имеем:
2(iTl^ = 1’53-10’2-
I.Jf.. Анализ разнесения с помощью производящих функций моментов
Этот пример показывает, что дополнительные ветви разнесения могут значи-
тельно сократить средний коэффициент ошибок по битам BER, даже если защи-
щенность SNR в этих ветвях невысока.
Пример 7.6. Рассчитайте среднюю вероятность ошибки для модуляции ОФМН
(DPSK) при дифференциально-взвешенном суммировании MRC с тремя ветвя-
ми, допуская наличие в первой ветви замираний Накагами с т = 2 и 71 = 15 дБ;
во второй ветви — замираний Райса сА = Зи72=5 дБ; а в третьей ветви — за-
мираний Накагами ст = 4 и 73 = 5 дБ. Сравните эти результаты с предыдущим
примером.
Решение. Согласно выражениям (6.64) и (6.65), для замираний Накагами имеем
M7i(s) = (1 — s^/i/rri) т, а для замираний Райса
= татр—ехр
1 + Л - S7s
Psys
1 + К - sys
Используя эти моментные функции MGF в выражении (7.47) с s = —1, получаем
р _ 1 ( 1 V 4
ъ + 4 + ю0-5 ехр
-3- ю0’5
4 + IO05
/ х \4
___________ =69- 10-5
\1 + 10°’5/4/ ’ ’
что более чем на порядок ниже средней величины вероятности ошибки при не-
зависимых рэлеевских замираниях с теми же величинами защищенности SNR
в ветвях, полученной в предыдущей задаче. Это показывает, что замирания На-
кагами и Райса представляют более безопасные распределения, чем распределе-
ние Рэлея, особенно когда множество ветвей объединяются с дифференциальным
взвешиванием сигналов MRC. Этот пример иллюстрирует также преимущества
использования моментных функций MGF: расчет средней вероятности ошибки,
когда защищенности SNR в ветвях имеют различные распределения, заключает-
ся в простом перемножении различных функций, заданных в аналитической фор-
ме. Конечное выражение также представлено в аналитическом виде. И наоборот,
расчет распределения суммы случайных величин с различными распределения-
ми предполагает свертку этих распределений, что редко приводит к решению
в аналитическом виде.
Из выражения (6.44) для ОФМН (BPSK) видно, что Pj имеет ту же
самую форму, что и в выражении (6.68) при х = р, q = 1/тг, А = О,
В = тг/2 и сг(ф) = 1/sin2 </?. Поэтому средняя вероятность ошибки бит
при ОФМН (BPSK) с ТИ-кратным разнесением сигналов равна:
Аналогично, если Ps = aQ (y/2gys}, то Ps имеет ту же самую форму, что
и в выражении (6.68) при х = ф, q = 1/тг, А = О, В = л/2 и сг(ф) =
= д/ sin2 р. В результате средняя вероятность ошибки символа при 7И-крат-
ном разнесении каналов имеет вид:
7Г/2 м . х
Ps = / ПМ7, (-Ц-(7-49)
Я J х -*• \ S1H <Л /
О 2=1 4
Если защищенности SNR в ветвях независимы и одинаково распределены,
то это выражение упрощается к виду:
w/2
Ps = - dip, (7.50)
Я J \ \ Sin if)) )
о
где M7i ($) — обычная моментная функция MGF для защищенности SNR
в ветви. Вероятность ошибки символа при М-кратной ФМН (MPSK) в вы-
ражении (6.45) также имеет форму (6.68) и дает среднюю вероятность
ошибки символа, равную:
(М-1)тг/М м
Л = ~ (7.51)
я J • \ sm ip /
о 2=1
где д = 8ш2(я/1И). При независимых одинаково распределенных замира-
ниях это выражение упрощается к виду:
(М — I'Itt/M
о
(7.52)
Пример 7.7. Найдите выражение для средней вероятности ошибки при моду-
ляции ФМН-8 (8-PSK) и суммировании дифференциально-взвешенных сигналов
MRC с двумя ветвями, если замирания в каждой ветви распределены по закону
Рэлея со средней защищенностью SNR 20 дБ.
Решение. Моментная функция MGF для рэлеевского замирания равна M7i (s) =
= (1 — -1. Подставляя это выражение в формулу (7.52) при s —
и 7 = 100, получаем:
7л78 / х 2
я У ^1 + (100 sin2 я/8) / sin2
Это выражение не приводит к решению в аналитическом виде, поэтому его
придется рассчитывать численными методами, что в результате дает значение
Ps = 1,56-10“3.
Подобные методы можно расширить для вывода точной вероятно-
сти ошибки при замираниях для М-кратной КАМ (MQAM), задаваемой
выражением (6.81), с учетом разнесения сигналов с дифференциально-
взвешенным суммированием MRC. Для этого сначала проинтегрируем
выражение (6.80) для вероятности ошибки Ps в канале с аддитивным
белым гауссовым шумом AWGN по распределению 7s, используя альтер-
нативное представление Q и Q2. Так как 7s = 527b а защищенности
SNR независимы, то экспоненциальную функцию и распределение в ре-
зультирующем выражении можно записать в виде произведения. Затем,
как и при выводе формулы для Af-кратной ФМН (MPSK), воспользу-
емся перестановками порядка интегрирования и умножения. Полученное
в итоге выражение для средней вероятности ошибки символа при 7И-крат-
ной КАМ (MQAM) в случае дифференциально-взвешенного суммирова-
ния MRC имеет вид:
Ps = - ( 1-= ) / П ЬР I------) dtp -
ТГ \ VmJ J М 7Ч sin2 pj
О г=1
4 Z х X 2 f м z х
-Л'-тп) ЦМ-Ы^Г' (7'53’
О г=1
Более подробную информацию об использовании моментных функций
MGF для получения средней вероятности ошибки при Af-кратном раз-
несении и дифференциально-взвешенном суммировании MRC для различ-
ных видов модуляции можно найти в [1, гл.9.2].
7.4.2. Анализ разнесения при линейном EGC
и селективном SC сложении сигналов
При анализе линейного EGC и селективного SC сложения сигналов про-
изводящие функции моментов менее полезны, чем при дифференциально-
взвешенном суммировании MRC. Причиной этого является то, что при
дифференциально-взвешенном суммировании MRC 7s = 527b и поэтому
ехр [—C27s] = ПехР["c27i]- Это разложение на множители сразу приво-
дит к простым формулам, в которых вероятность ошибки символа вы-
ражается произведением моментных функций MGF, соответствующих
защищенности SNR в каждой ветви. К сожалению, ни линейное объедине-
ние EGC, ни селективное объединение SC не позволяют применить такое
разложение на множители. Однако, работая с моментными функциями
MGF суммарной защищенности 7s, иногда можно прийти к более про-
стым выражениям, чем при работе непосредственно с распределением
защищенности. Это хорошо показано в [1, гл. 9.3.3.]: точная вероятность
ошибки символа при Af-кратной ФМН (MPSK) и линейном сложении EGC
выводится на основе характеристической функции, соответствующей за-
щищенности SNR в каждой ветви, при этом характеристическая функция
просто равна моментной функции MGF, рассчитанной при s = j^Ttf
(т. е. это преобразование Фурье для распределения вероятностей). Полу-
ченное в результате выражение средней вероятности ошибки приведено
в [1, выражение (9.78)] и равно определенному интегралу суммы, выра-
женной в аналитическом виде, который легко вычисляется численными
методами.
7.4.3. Анализ разнесенного приема при некогерентной
и дифференциальной когерентной модуляции
Подобные методы использования моментных функций MGF при опреде-
лении средней вероятности ошибки символа для некогерентной и диффе-
ренциальной когерентной модуляции с объединением разнесенных сигна-
лов представлены в [1, 13]. Отличие этих методов от случая когерентной
модуляции состоит в том, что они используют Q-функции Маркума, а не
Q-функцию Гаусса, поскольку коэффициент ошибок BER для некогерент-
ной и дифференциальной когерентной модуляций в канале с аддитивным
белым гауссовым шумом AWGN задается с использованием Q-функции
Маркума. Во всем остальном это, по существу, тот же подход, что и в
случае когерентной модуляции. Полученные таким образом выражения
для коэффициента ошибок BER содержат определенный интеграл по ко-
нечной области, который можно легко рассчитать численными методами.
Более подробную информацию об этом можно найти в [1] и [13].
Задачи
7.1. Найдите вероятность нарушения связи при ФМН-4 (QPSK) и вероятности
Ра = 10-3 в канале с рэлеевскими замираниями с селективным объеди-
нением SC для М = 1 (без разнесения сигналов), М = 2 и М = 3.
Предполагается, что защищенность SNR в ветвях имеет значения =
= 10 дБ, 72 = 15 дБ и 7з = 20 дБ.
7.2. Начертите график распределения вероятностей р7Е (7), заданного форму-
лой (7.9) при селективном объединении каналов с защищенностями SNR,
рэлеевских замираниях и разнесением сигналов на М ветвей, допуская,
что М = 1, 2, 4, 8 и 10. Предполагается, что каждая ветвь имеет сред-
нюю защищенность SNR, равную 10 дБ. График должен быть линейным
по обеим осям и должен охватывать значения 7 в диапазоне 0 < 7 < 60.
Поясните, как изменится распределение при увеличении М и почему это
приведет к более низкой вероятности ошибки.
7.3. Выведите формулу (7.11) для средней вероятности цифровой ошибки при
ОФМН (DPSK) и селективном объединении SC в случае независимых оди-
наково распределенных рэлеевских замираний в каждой ветви.
7.4. Получите в общем виде выражение для функции распределения веро-
ятностей защищенности (отношения сигнал-шум) SNR на выходе схе-
мы с двумя ветвями объединения с переключением и остановкой SSC,
если статистики ветвей не независимы и имеют разные распределения.
Покажите, что это распределение приводится к (7.12), если статистики
ветвей независимы и имеют одинаковые распределения. Дайте качествен-
ную оценку вашего выражения при замираниях в ветвях с распределением
Рэлея с различными средними значениями защищенности SNR 71 и 72-
7.5. Выведите формулу (7.16) для средней вероятности ошибки бит при ОФМН
(DPSK) в схеме объединения с переключением и остановкой SSC с незави-
симыми одинаково распределенными рэлеевскими замираниями в ветвях.
7.6. Начертите график средней вероятности ошибки при ОФМН (DPSK) при
разнесении сигналов на приеме с дифференциальным взвешиванием MRC
с числом ветвей М = 2, 3 и 4, полагая, что замирания в ветвях независимы
и распределены по закону Рэлея, а средняя величина защищенности SNR
в ветви изменяется от 0 до 20 дБ.
7.7. Покажите, что весовые коэффициенты «г, максимизирующие суммарную
защищенность 71; при разнесении сигналов на приеме с дифференциаль-
ным взвешиванием MRC, равны а? = r?/7Vo при суммарной спектральной
плотности в каждой ветви, равной No/2. Покажите также, что при этих
весовых коэффициентах защищенность 7s = ^7i-
i
7.8. Эта задача иллюстрирует тот факт, что благодаря коэффициенту усиле-
ния антенной решетки можно получить показатели эффективности объ-
единения за счет разнесения даже при отсутствии замираний. Задан ка-
нал с аддитивным белым гауссовым шумом AWGN при объединении сиг-
налов, разнесенных на N ветвей, и защищенности в каждой ветви, равной
7, = 10 дБ. Вид модуляции — М-кратная КАМ (MQAM) с М = 4. Для
нахождения вероятности ошибки по битам используйте аппроксимацию
Рь = 0,2г,~1ЛА<Л/ где — защищенность SNR на приеме.
а) Найдите вероятность ошибки Рь при N = 1.
б) Найдите такое А", чтобы при дифференциальном взвешивании MRC
вероятность ошибки удовлетворяла неравенству Рь < 10-6.
7.9. Выведите формулу (7.20) для средней вероятности ошибки по битам при
ДФМН (BPSK) с дифференциальным взвешиванием MRC и независимы-
ми рэлеевскими замираниями в ветвях.
7.10. Выведите формулу (7.28) для средней вероятности цифровой ошибки при
ДФМН (BPSK) при линейном сложении EGC и независимых рэлеевских
замираниях в ветвях.
7.11. Сравните среднюю вероятность цифровой ошибки для ДФМН (BPSK)
при отсутствии разнесения сигналов, при селективном объединении SC
с двумя ветвями, объединении с переключением и остановкой SSC с дву-
мя ветвями при защищенности уг = 70, линейном сложении EG С с двумя
Глава 7. Разнесение сигналов на приеме и передаче
ветвями и дифференциальном взвешивании MRC с двумя ветвями. Пред-
полагается наличие в ветвях независимых рэлеевских замираний с оди-
наковыми величинами защищенности SNR, равными 10 и 20 дБ. Как
изменяются относительные показатели с увеличением защищенности SNR
в ветви?
7.12. Начертите график средней вероятности ошибки для ДФМН (BPSK) при
дифференциальном взвешивании MRC и линейном сложении EGC, в пред-
положении разнесения сигналов на две ветви и независимых рэлеевских
замираний в каждой ветви, при средней величине защищенности SNR
в ветви на интервале между 0 и 20 дБ. Чему равен максимальный вы-
игрыш в дБ метода дифференциального взвешивания MRC по сравнению
с линейным сложением EG С?
7.13. Сравните вероятность нарушения связи при ДФМН (BPSK) и вероятно-
сти ошибки Рь = 10-3 для схем с дифференциальным взвешиванием MRC
и линейным объединением EGC. Предполагается, что сигналы разнесены
по двум ветвям с независимыми рэлеевскими замираниями при средней
защищенности SNR в ветвях, равной 7 = 10 дБ.
7.14. Сравните среднюю вероятность ошибки при ДФМН (BPSK) для схем
с дифференциальным взвешиванием MRC и линейным объединением EGC.
Предполагается, что сигналы разнесены по двум ветвям с независимы-
ми рэлеевскими замираниями при средней защищенности SNR в ветвях,
равной 7 = 10 дБ.
7.15. Рассчитайте средний коэффициент ошибок BER для канала с разнесением
сигналов на передаче по схеме Аламоути с двумя ветвями, предполагая,
что средняя защищенность SNR в ветви равна 10 дБ.
7.16. Задано распределение замираний р(7), где J p(-y)e~xid'y = Oflly/y/x. Най-
о
дите среднее значение вероятности ошибки Рь для сигнала ДФМН (BPSK),
если (а) в приемнике используется разнесение сигналов на две ветви с диф-
ференциальным взвешиванием MRC и (б) каждая ветвь имеет среднее
значение защищенности SNR, равное 10 дБ, а замирания независимые
с распределением £>(7).
7.17. Задан канал ДФМН (BPSK) с замираниями и дифференциальным взве-
шиванием MRC сигналов, разнесенных на три ветви. Замирания в ветвях
независимы, средняя величина защищенности SNR на приеме равна 15 дБ.
Рассчитайте среднее значение коэффициента ошибок по битам BER при
рэлеевских замираниях и замираниях Накагами с т = 2.
Подсказка: Использование альтернативного представления Q-функции зна-
чительно упрощает эти расчеты, по крайней мере, для замираний Нака-
гами.
7.18. Начертите график средней вероятности ошибки в зависимости от защи-
щенности SNR в ветви для системы с двумя ветвями при дифференциаль-
ном взвешивании MRC и модуляции ДФМН (BPSK), если первая ветвь
испытывает рэлеевские замирания, а вторая ветвь — замирания Нака-
гами с т = 2. Предположите, что обе ветви имеют одинаковое среднее
значение защищенности SNR. График должен включать среднее значение
защищенности SNR в ветви на интервале от 5 до 20 дБ.
7.19. Начертите график средней вероятности ошибки в зависимости от защи-
щенности SNR в ветви для системы с М ветвями и дифференциальным
взвешиванием MRC при модуляции ФМН-8 (8-PSK) с М = 1, 2, 4, 8. Пред-
полагается, что каждая ветвь испытывает рэлеевские замирания с од-
ним и тем же средним значением защищенности SNR. График должен
включать среднее значение защищенности SNR в ветви на интервале от
5 до 20 дБ.
7.20. Выведите формулу (7.53) для средней вероятности ошибки символа при
М-кратной КАМ (MQAM) при разнесении сигналов и дифференциаль-
ном взвешивании MRC, из вероятности ошибки при аддитивном белом
гауссовом шуме AWGN (6.80), используя альтернативное представление
Q и Q'1 2 3 4 5.
7.21. Сравните среднюю вероятность ошибки символа для двух видов модуля-
ции — ФМН-16 (16-PSK) и КАМ-16 (16-QAM), при дифференциальном
взвешивании MRC с тремя ветвями. Первая ветвь испытывает рэлеевские
замирания, а вторая и третья ветви — замирания Райса при К — 2. В ве-
твях предполагается одинаковое среднее значение защищенности SNR,
равное 10 дБ.
7.22. Начертите график средней вероятности ошибки в зависимости от защи-
щенности SNR в ветви для системы с дифференциальным взвешиванием
MRC с М ветвями и модуляцией КАМ-16 (16-QAM) при М = 1, 2, 4, 8.
Предполагается, что во всех ветвях наблюдаются рэлеевские замирания
с одинаковым средним значением защищенности SNR. График должен
включать среднее значение защищенности SNR в ветви на интервале от
5 до 20 дБ.
Литература
1. М.К. Simon and M.-S. Alouini, Digital communication over Fading Channels:
A Unified Approach to Performance Analysis, Wiley, New York, 2000.
2. W. C. Y. Lee, Mobile Communications Engineering, McGraw-Hill, New York,
1982.
3. J. Winters, «Signal acquisition and tracking with adaptive arrays in the digital
mobile radio system IS-54 with flat fading», IEEE Trans. Veh. Tech., pp. 1740-
51, November 1993.
4. G. L. Stuber, Principles of Mobile Communications, 2nd ed., Kluwer, Dordrecht,
2001.
5. M. Blanco and K. Zdunek, «Performance and optimization of switched diver-
sity systems for the detection of signals with Rayleigh fading», IEEE Trans.
Commun., pp. 1887-95, December 1979.
Глава 7. Разнесение сигналов на приеме и передаче
6. A. Abu-Dayya and N. Beaulieu, «Switched diversity on microcellular Ricean
channels», IEEE Trans. Veh. Tech., pp. 970-6, November 1994.
7. A. Abu-Dayya and N. Beaulieu, «Analysis of switched diversity systems on
generalized-fading channels», IEEE Trans. Commun., pp. 2959-66, November
1994.
8. M. Yacoub, Principles of Mobile Radio Engineering, CRC Press, Boca Raton,
FL, 1993.
9. S. Alamouti, «А simple transmit diversity technique for wireless communica-
tions», IEEE J. Sei. Areas Commun., pp. 1451-8, October 1998.
10. A. Paulraj, R. Nabar and D. Gore, Introduction to Space-Time Wireless Com-
munications, Cambridge University Press, 2003.
11. E. G. Larsson and P. Stoica, Space-Time Block Coding for Wireless Communi-
cations, Cambridge University Press, 2003.
12. M. K. Simon and M.-S. Alouini, «А unified approach to the performance anal-
ysis of digital communications over generalized fading channels», Proc. IEEE,
pp. 1860-77, September 1998.
13. M. K. Simon and M.-S. Alouini, «А unified approach for the probability of error
for noncoherent and differentially coherent modulations over generalized fading
channels», IEEE Trans. Commun., pp. 1625-38, December 1998.
ГЛАВА 8
КОДИРОВАНИЕ
В БЕСПРОВОДНЫХ
КАНАЛАХ
Кодирование позволяет декодеру определить или исправить в приемнике
ошибки, возникшие во время передачи модулированного сигнала по бес-
проводному каналу. Кодирование можно рассматривать как внедрение
точек созвездия сигнала в сигнальное пространство более высокой раз-
мерности, чем это необходимо для передачи. При переходе на более высо-
кую размерность пространства расстояние между точками может увели-
чиваться, что обеспечивает лучшее обнаружение и исправление ошибок.
В этой главе описываются коды, созданные для каналов с аддитивным
белым гауссовым шумом и для каналов с замираниями. Коды, разрабо-
танные для каналов с аддитивным белым гауссовым шумом — AWGN,
обычно плохо работают в каналах с замираниями, так как они не могут
корректировать пакеты ошибок в течение длительных интервалов вре-
мени, которые характерны для глубоких замираний. Коды для каналов
с замираниями основываются, главным образом, на использовании ко-
дов каналов с аддитивным белым гауссовым шумом AWGN в сочетании
с чередованием, но критерии при создании кодов изменяются в сторону
обеспечения разнесенного приема каналов с замираниями. Другие методы
кодирования, призванные бороться со снижением показателей передачи,
обусловленным замираниями, включают в себя коды с неравномерной за-
щитой от ошибок и объединенное кодирование источника и канала.
Сначала дается обзор структур кодов, разработанных как для за-
мираний, так и для каналов с аддитивным гауссовым шумом AWGN,
вместе с их основными параметрами, такими как минимальное расстоя-
ние, эффективность кодирования, расширение полосы частот и кратность
разнесения сигнала. В § 8.2 и 8.3 дается общий обзор схем блочного
и сверточного кодирования для каналов с AWGN. Хотя эти схемы не-
льзя непосредственно применять для каналов с замираниями, коды для
каналов с замираниями и другие коды, используемые в беспроводных сис-
темах (например, расширяющие коды в CDMA) не могут не использовать
в качестве основы эти фундаментальные методы. Также будут описа-
ны каскадные коды и их развитие до турбо-кодов — равно как и коды
356 Глава 8. Кодирование в беспроводных каналах
с контролем по четности низкой плотности LDPC1 для каналов с AWGN.
Эти чрезвычайно мощные коды обладают близкими к предельным пара-
метрами при разумном уровне сложности. Кодированная модуляция была
изобретена в конце 1970-х гг. как метод исправления ошибок на основе
объединения модуляции и кодирования. Мы обсудим основные принци-
пы схем на основе решеток и более общих структур матричных кодовых
видов модуляции вместе с их показателями при аддитивном белом гаус-
совом шуме AWGN.
Проблема создания кодов для каналов с замираниями освещена в § 8.8.
Эти схемы объединяют блочные и сверточные коды, используемые в кана-
лах AWGN, с чередованием, а затем усовершенствуют показатели кодов
AWGN для получения максимального выигрыша от разнесения каналов
при замираниях. Выигрыш от разнесения каналов можно также полу-
чить, объединяя кодирующую модуляцию с чередованием символов или
бит, хотя чередование бит обычно дает больший выигрыш при разнесе-
нии сигналов. Таким образом, объединение кодирования с чередованием
обеспечивает такой же выигрыш от разнесения, как и другие формы раз-
несения каналов, при этом кратность разнесения «встроена» в схему ко-
дирования. Неравномерная защита от ошибок представляет альтернативу
разнесению сигналов в решении проблемы уменьшения влияния замира-
ний. В таких кодах биты имеют приоритеты, при этом биты с высоким
приоритетом кодируются с более сильной защитой от ошибок при глубо-
ких замираниях. Так как расстановка приоритетов бит составляет часть
разработки схемы кодирования источника, то неравномерная защита от
ошибок представляет особый случай объединения кодирования источника
и канала, который также будет рассмотрен.
Кодирование — это очень разносторонняя и глубокая проблема, кото-
рой посвящено много превосходных книг. Данная глава не предполагает
наличия предварительных знаний в области кодирования, и поэтому пред-
ставляет подробное исследование схем кодирования для каналов AWGN,
прежде чем будут рассмотрены схемы для беспроводных систем. Это
углубленное обсуждение можно опустить, так как в § 8.1 и 8.8 дается
краткое освещение проблем кодирования в беспроводных каналах.
8.1. Обзор систем кодирования
Основная причина использования в беспроводных системах кодов с испра-
влением ошибок заключается в необходимости сокращения вероятности
ошибки одиночного бита или ошибки в пакете бит. Вероятностью ошибки
ФОРС — low-density parity-check code.
8.1. Обзор систем кодирования
бита Pj в системе кодирования служит вероятность того, что бит декоди-
рован ошибочно. Вероятность ошибочного блока Ры, называемая также
коэффициентом пакетов с ошибками, характеризуется вероятностью то-
го, что один или более бит в закодированом блоке бит декодированы
ошибочно. Вероятность ошибочного блока полезна для систем передачи
пакетов, в которых биты кодируются и передаются блоками. Сокращение
ошибок, обеспечиваемое данным видом кодирования, обычно характе-
ризуется эффективностью данного кода в канале с аддитивным белым
гауссовым шумом AWGN, а также выигрышем за счет разнесения при
замираниях.
Рис. 8.1. Эффективность ко-
дирования в каналах с адди-
тивным гауссовым белым шу-
мом AWGN
Эффективность кодирования в канале с аддитивным белым гауссо-
вым шумом AWGN определяется количеством энергии, на которое, при
заданных вероятностях Рь или Ры, можно данными методами кодирова-
ния сократить энергию на один бит или увеличить отношение сигнал-
шум (защищенность). График эффективности кодирования при заданной
вероятности Рь показан на рис. 8.1. Из графика видно, что выигрыш Cgi
при Рь = 10 4 меньше выигрыша Св2 при Рь = 10“6, а при Рь = 10~2 вы-
игрыш незначителен. На приктике коды для каналов с высокой защищен-
ностью SNR могут иметь отрицательный коэффициент эффективности
кодирования при низких уровнях защищенности. Излишняя избыточность
кода не обеспечивает удовлетворительной эффективности по показателям
Рь или Ры, так как при низких уровнях защищенности энергии, приходя-
щейся на один бит, недостаточно для ее распространения на множество
358 Глава 8. Кодирование в беспроводных каналах
закодированных бит. Поэтому неожиданные флуктуации защищенности
в канале могут значительно снизить показатели кодирования. Эффек-
тивность кодирования в канале с аддитивным белым гауссовым шумом
AWGN обычно является функцией минимального эвклидового расстояния
кода, которое равно минимальному расстоянию в сигнальном простран-
стве между кодовыми словами или моментами появления ошибок. Поэто-
му коды, разработанные для каналов с AWGN, для обеспечения хороших
показателей максимизируют свое эвклидово расстояние.
Вероятность ошибки при кодировании или без него с увеличением
защищенности SNR от низких до средних значений имеет тенденцию
к стремительному спаду. Такая форма графика имеет место при всех зна-
чениях защищенности SNR для систем без кодированния и многих систем
с кодированием, однако некоторые виды кодов (например, турбо-коды)
при возрастании защищенности SNR проявляют ясно выраженный поро-
говый уровень ошибок. Пороговый уровень ошибок, также показанный
на рис. 8.1, имеет выраженный изгиб при пороговом значении защищен-
ности SNR, которое зависит от вида кода. При значениях защищенности
SNR, находящихся выше этого порогового значения, наклон кривой ве-
роятности ошибки уменьшается, так как в данном режиме появление
ошибок при минимальном кодовом расстоянии доминирует над свойства-
ми кода.
Качественные показатели кодов также оценивают в сравнении с про-
пускной способностью канала. Кривая пропускной способности связана
с защищенностью (отношением сигнал-шум) SNR (Еь/Nq), а пропуск-
ная способность по Шеннону Blog2(l + SNR) равна скорости передачи
данных в системе. При скоростях, приближающихся к пропускной спо-
собности, достигающий уровня пропускной способности код имеет веро-
ятность ошибки, стремящуюся к нулю, как это показано прямой линией
на рис. 8.1. Таким образом, кривая пропускной способности показывает
наилучшие возможные показатели, которых может достичь любой реаль-
ный код.
Для многих кодов возможность исправлять ошибки не проходит бес-
следно. За такое улучшение показателей приходится платить повышением
сложности и — для блочных, сверточных, турбо-кодов и кодов с контро-
лем по четности низкой плотности LDPC — либо снижением скорости
передачи, либо увеличением полосы частот сигнала. Рассмотрим код, в ко-
тором на каждые к некодированных бит приходится п кодированных бит.
Этот код для получения большего расстояния между кодированными сим-
волами прикрепляет А;-мерное подпространство к большему п-мерному
пространству. Однако если скорость передачи данных по каналу зафик-
сирована на значении Rj, то скорость передачи информации для кода,
использующего п кодированных бит на каждые к некодированных бит
равна (к/п)Е,ь; т. е. кодирование уменьшает скорость передачи данных
в к/п раз. Мы можем сохранить скорость передачи информации посто-
янной и повысить эффективность кодирования, уменьшив длительность
бита в к/п раз. Это обычно приводит к расширению полосы частот пе-
редаваемого сигнала в п/к раз. Кодирующая модуляция для получения
выигрыша от кодирования без расширения полосы частот использует со-
вместные схемы кодирования и модуляции, о чем более подробно будет
сказано в § 8.7.
Коды, предназначенные для каналов с аддитивными гауссовым шу-
мом AWGN, обычно плохо работают при замираниях, вызванных пачка-
ми ошибок, не подлежащих исправлению. Однако хорошие качественные
показатели при замираниях может обеспечить объединение кодов для ка-
нала с AWGN и чередования, а также создание оптимальных кодов в усло-
виях разнесения сигналов. Устройство чередования разбрасывает паке-
ты ошибок во времени, так что обеспечивается разнесенный во времени
прием. Это разнесение используется и во внутренней схеме разнесения
данного кода. Действительно, коды данного типа обеспечивают пример-
но такие же показатели, как и при дифференциальном взвешивании на
приеме MRC, с кратностью разнесения сигналов, равной минимальному
расстоянию Хэмминга для данного кода. Расстояние Хэмминга равно
количеству символов, отличающих различные кодовые слова или появле-
ния ошибок. Поэтому схемы кодирования и чередования, разработанные
для каналов с замираниями, максимизируют расстояния Хэмминга в этих
каналах для получения хороших качественных показателей.
8.2. Линейные блочные коды
Линейные блочные коды — это коды с простым принципом действия, ко-
торые, в основном, представляют усовершенствованный вариант кодов,
обнаруживаюших ошибки с одним битом контроля четности. Код с од-
ним битом контроля четности — одна из самых распространенных форм
обнаружения ошибок передачи. При таком кодировании в блоке данных
длительностью п бит используется один специальный бит, указывающий,
является ли количество двоичных единиц в данном блоке четным или не-
четным. При единичной ошибке либо искажается бит контроля четности,
либо количество двоичных единиц в последовательности информацион-
ных бит будет отличаться от количества единиц, использовавшегося при
расчете бита контроля четности. В любом случае этот контрольный бит
не будет соответствовать количеству обнаруженных в последовательно-
сти логических единиц, так что одиночная ошибка будет обнаружена.
360 Глава 8. Кодирование в беспроводных каналах
Линейные блочные коды развивают эту идею за счет использования боль-
шего количества бит контроля четности для обнаружения более одной
ошибки или исправления одной или более ошибок. К сожалению, за спо-
собность линейных блочных кодов (а также сверточных кодов) обнару-
живать или исправлять ошибки приходится платить расширением полосы
частот или снижением скорости передачи данных, что будет рассмотре-
но подробнее. При этом мы ограничимся рассмотрением двоичных кодов,
когда как исходная информация, так и соответствующий код состоят
из бит, принимающих значения 0 или 1.
8.2.1. Двоичные линейные блочные коды
Двоичный блочный код формирует на основе к информационных бит блок,
состоящий из п кодированных бит. Для таких кодов используют обозна-
чение (п, к). Кодированные биты также называются символами кодового
слова. Эти п символов кодового слова могут принимать 2" возможных
значений, соответствующих всем возможным комбинациям п бит. Для
формирования кода из этих 2П возможных значений выбираются 2к ко-
довых слов, при этом каждому информационному блоку из к бит ставит-
ся в соответствие одно из этих 2к кодовых слов. Скорость кода равна
Rc = к/п информационных бит на символ кодового слова. Если предпо-
ложить, что символы кодовых слов передаются по каналу со скоростью
Rs символов в секунду, то скорость передачи информации при использо-
вании блочного кода (п, к) равна Rb = RcRs = (k/n)Rs бит в секунду.
Таким образом, мы видим, что блочное кодирование сокращает скорость
передачи данных по сравнению с некодированной модуляцией на величину
скорости кодирования Rc-
Блочный код называют линейным кодом, если отображение к инфор-
мационных бит в п бит кодовой группы происходит линейно. Для более
подробного описания такого отображения и соответствующих функций
кодирования и декодирования рассмотрим сначала свойства двоичного
n-кратного (n-кортежного) векторного пространства и соответствующих
ему подпространств. Множество всех двоичных n-кортежей Вп предста-
вляет векторное пространство внутри двоичной области, состоящей из
двух элементов: 0 и 1. Все области включают две операции — сложения
и умножения: для бинарной области эти операции соответствуют дво-
ичному сложению (сложение по модулю 2) и стандартному умножению.
Подмножество S множества Вп называется подпространством (субпро-
странством), если оно удовлетворяет следующим условиям.
1. В подмножество S входит вектор, состоящий из одних нулей.
2. Подмножество S является замкнутым в отношении операций сложе-
ния; т. е. если Si € S и Sj € S, то Si + Sj & S.
Блочный код (п, к) линейный, если 2к кодовых слов длиной п образуют
подпространство Вп. Следовательно, если Ci и Cj — два кодовых слова
линейного блочного кода (п, к), то их сумма Ci + Cj должна формировать
другое кодовое слово этого кода.
Пример 8.1. Векторное пространство Вз включает все бинарные кортежи
длиной 3:
В3 = {[ООО], [001], [010], [011], [100], [101], [110], [111]} .
Заметьте, что пространство Вз само по себе представляет подпространство,
так как оно содержит вектор, состоящий из одних нулей, и является замкнутым
при сложении. Определите, какое из следующих подмножеств Вз сформирует
подпространство:
- Ai = {[000], [001], [100], [101]} ;
- Аз = {[000], [100], [110], [111]};
- А3 = {[001], [100], [101]}.
Решение. Можно легко проверить, что подмножество Ai является подпростран-
ством, так как оно содержит вектор, состоящий из одних нулей, а сумма любых
двух кортежей в Ai также входит в Ai. Подмножество Аз не является подпро-
странством, так как не замкнуто при сложении, т.е. ПО + 111 = 001 Аз.
Подмножество Аз не является подпространством, так как не замкнуто при сло-
жении (ПО + 001 = 000 Аз) и не содержит вектор, состоящий из одних нулей.
Очевидно, что чем больше расстояние между кодовыми словами дан-
ного кода, тем меньше вероятность того, что из-за ошибок в канале
переданное кодовое слово будет декодировано неверно. Расстояние Хэм-
минга между двумя кодовыми словами Ci и Cj, обозначаемое как c?(Ci, Cj)
или dij, определяется количеством элементов, на которое они отличаются:
^ = £(сг(/) + с,(/)),
(8.1)
(=1
где Cm(Z) обозначает l-й бит кодового слова Ст. Например, если Cj =
= [00101], a Cj = [10011], то = 3. Вес кодового слова Cj опреде-
ляется количеством бит со значением 1, следовательно, кодовое слово
Ci = [00101] имеет вес 2. Вес данного кодового слова Ci — это про-
сто его расстояние Хэмминга d$i от кодового слова, состоящего из одних
нулей Со = [00... 0], или, что равнозначно, сумма его элементов:
исг) = ]Гс,я.
(8-2)
Так как 04-0 = 1 + 1 = 0, то расстояние Хэмминга между кодовы-
ми словами Ci и Cj равно весу слова Ci + Cj. Например, если Cj =
= [00101] и Cj = [10011], как было задано ранее, то w(Cj) = 2, w(Cj) = 3,
362 Глава 8. Кодирование в беспроводных каналах
a dij = ш (Сг- + Су) = ш ([10110]) = З.Так как расстояние Хэмминга между
двумя любыми кодовыми словами равно весу их суммы, а эта сумма также
является кодовым словом, мы можем определить минимальное расстояние
между всеми кодовыми словами данного кода, просто найдя минималь-
ное расстояние между ненулевым кодовым словом и полностью нулевым
кодовым словом Со- Таким образом, минимальное расстояние кода равно:
Фиш = mindoi- (8.3)
i,i#0
В подпараграфе 8.2.6 мы увидим, что минимальное расстояние линейного
блочного кода является критическим параметром при определении его
вероятности ошибки.
8.2.2. Порождающая матрица
Порождающая матрица дает компактное представление того, как на осно-
ве информационных бит формируются кодовые слова линейного блочного
кода. При разработке линейных блочных кодов ставится задача нахожде-
ния таких порождающих матриц, чтобы соответствующие им коды были
просты при кодировании и декодировании и при этом обладали мощны-
ми способностями обнаружения и исправления ошибок. Рассмотрим код
(п, к) с к информационными битами, обозначаемыми как
Uy — [пд,..., Ujfc],
которые кодируются в кодовое слово:
Cj — [сц, • • • сщ] •
Операцию кодирования можно представить как набор п уравнений:
Cij = ицдгу + ui2g2j \~Uik9kj, j = (8.4)
гДе 9ij — двоичное число (0 или 1), при этом используется двоичное
(стандартное) умножение. Эти п уравнений можно записать в матрич-
ной форме:
Су = UiG, (8.5)
где G — порождающая матрица кода, имеющая размерность к х п:
911 912 9in
G = 921 922 ' 92n (8.6)
_ 9kl 9k2 9kn
Обозначив Z-ю строку матрицы G как g; = [gn, gin], можно записать
любое кодовое слово Су в виде линейных комбинаций этих векторов-строк
следующим образом:
Су — Hyigl + Uj2g2 + . . . + Uik^k-
(8-7)
Так как линейный блочный код (п, к) представляет подпространство
размерностью к в большем n-мерном пространстве, то к векторов-строк
матрицы G должны быть линейно независимы, чтобы охватить /с-мерное
подпространство, соответствующее 2fc кодовых слов. Поэтому матрица G
имеет ранг к. Так как множество базисных векторов для этого подпро-
странства не однозначно, то порождающая матрица также не опеределена
однозначно.
Систематический линейный блочный код описывается порождающей
матрицей следующей формы:
1 О
О 1
о о
G = [Ц|Р] =
о Рп Р12 РЦп-к)
О Р21 Р22 • ' ' Р2(п—к)
1 Рк1 Рк2 ' ’ ’ Рк(п—fc)
(8-8)
где I/j — единичная матрица размерностью к х к, а Р — матрица размер-
ностью к х (п — /с), определяющая избыточные биты, или биты четности,
используемые для исправления или обнаружения ошибок. Кодовое слово
на выходе систематического кодирующего устройства имеет вид:
Сг = UjG = иг [Ifc|P] = [иц,...,uik,pi,... ,Р(п-к)] , (8-9)
где первые к бит кодового слова — это исходные информационные биты,
а последние (п—к) бит — биты четности, полученные из информационных
бит следующим образом:
Pj = UiiPij + • • • + UikPkj, j = l,...,n — k. (8.10)
Обратите внимание, что любая порождающая матрица линейного блочно-
го кода (п, /с) может быть сокращена путем операций со строками и пере-
становок столбцов до порождающей матрицы систематической формы.
Пример 8.2. Систематические линейные блочные коды обычно реализуют-
ся с использованием п — к сумматоров по модулю 2, соединенных в соответ-
ствующие каскады в регистре сдвига. Полученные в результате биты четности
добавляются после информационных бит, формируя кодовое слово. Найдите со-
ответствующую реализацию для создания двоичного кода (7,4) с порождающей
матрицей:
Г 1 0 0 0 1 1
0 10 0 10
001000
0 0 0 1 0 1
о
1
1
о
(8.11)
364 Глава 8. Кодирование в беспроводных каналах
Решение. Матрица G уже находится в систематической форме:
1 1 О
1 0 1
О 0 1
О 1 О
(8.12)
Пусть Рц определяет Ij-vt элемент матрицы Р. Согласно (8.10), первый бит чет-
ности В КОДОВОМ слове равен р4 = НцРц + «12^21 + U13T31 + «О-Ри = Wji + Uj2-
Аналогично определяем второй бит четности рг = «и-Ры + Щ2Р22 + Щ3Р32 +
+ui4P42 = Щ1 +ui4 и третий бит четности р3 = ui4 Р13 +ui2P23 + ui3P33 + ui4P43 =
= Ui2 + Ui3. Реализация сдвигового регистра для создания этих бит четности по-
казана на рис. 8.2. На выходе формируется кодовое слово [ицЩ2Щ3и14р4р2р3],
при этом для вывода систематических бит (J = 1,.. .4) переключатель уста-
навливается в нижнее положение, а для вывода бит четности pj (j = 1,2,3) —
в верхнее положение.
Рис. 8.2. Реализация
двоичного кода (7,4)
8.2.3. Матрица контроля четности
и синдромный контроль
При декодировании линейных блочных кодов с порождающей матрицей
G используется матрица контроля четности. Матрица контроля четно-
сти Н, соответствующая порождающей матрице G = [1&|Р], имеет вид:
Н = [Pr|l„_fc] . (8.13)
Можно легко проверить, что GHr = Ok,n-k, где обозначает матри-
цу размерностью к х (п — к), состоящую только из нулей. Вспомним, что
кодовое слово Cj получается умножением последовательности информа-
ционных бит Uj на порождающую матрицу G: Cj = U?G. Таким образом,
С;НГ = игСНг = 0п_к (8.14)
для любой входной последовательности U$, где 0n-k обозначает вектор-
строку длиной п — к, состоящий из одних нулей. Поэтому умножение лю-
бого верного кодового слова на матрицу контроля четности дает вектор,
состоящий из одних нулей. Это свойство позволяет определить, является
ли полученный вектор верным или искаженным кодовым словом. В основе
такой проверки лежит понятие синдромного контроля, которое мы сейчас
и рассмотрим.
Пусть R — принятое кодовое слово в случае, если передавалось кодо-
вое слово С. При отсутствии ошибок в канале R = С. Однако если при
передаче сигнал был искажен, то один или более символов кодового сло-
ва R будут отличаться от соответствующих символов кодового слова С.
Исходя из этого, запишем принятое кодовое слово в виде:
R = С + е, (8.15)
где е = [ei, 62,..., еп] — ошибочная комбинация, показывающая, какие
именно символы кодового слова были искажены каналом. Синдром R
определяется выражением:
S = RHT. (8.16)
Если R представляет верное кодовое слово (т. е. R = С, для некото-
рого г), то, в соответствии с (8.14), S = CjHT = 0п -k- Таким образом,
синдром равен вектору, состоящему из одних нулей, если переданное ко-
довое слово не является искаженным, или искажено таким образом, что
принятое кодовое слово является верным для данного кода, но отличается
от переданного кодового слова. Если принятое кодовое слово R содержит
обнаружимые ошибки, то S On_fe. Если принятое кодовое слово содер-
жит исправимые ошибки, то синдром устанавливает ошибочные кодовые
комбинации, искажающие переданное кодовое слово, и эти ошибки затем
могут быть исправлены. Обратите внимание, что синдром зависит только
от ошибочной кодовой комбинации е и не зависит от переданного кодо-
вого слова С, так как:
S = RHT = (С + е) Нг = СНГ + еНг = 0п.к + еНг. (8.17)
Поскольку S = еН7 соответствует п — к уравнений с п неизвест-
ными, то существуют 2к возможных ошибочных кодовых комбинаций,
которые могут давать этот синдром S. Но так как вероятность ошиб-
ки обычно мала и независима для каждого бита, наиболее вероятной
ошибочной кодовой комбинацией будет комбинация с минимальным ве-
сом, которая соответствует наименьшему количеству ошибок, вносимых
каналом. Поэтому, если ошибочная кодовая комбинация ё представляет
наиболее вероятную ошибку, соответствующую данному синдрому S, то
переданное кодовое слово обычно декодируется как
C = R + e = C + e + e. (8.18)
Если имеет место наиболее вероятная ошибочная комбинация, то ё = е
и С = С, т. е. искаженное кодовое слово декодируется правильно. Процесс
Глава 8. Кодирование в беспроводных каналах
декодирования и соответствующая вероятность ошибки будут рассмотре-
ны в подпараграфе 8.2.6.
Пусть Сш обозначает кодовое слово кода (n, к) с минимальным ве-
сом (исключая кодовое слово, состоящее из одних нулей). Тогда СШН7 =
= 0п-к — это просто сумма с/т;Г1 столбцов матрицы Н7, так как dmjn
равно количеству бит со значением 1 (весу) в кодовом слове с минималь-
ным весом. Ранг матрицы Н7 не превышает п — к, откуда следует, что
минимальное расстояние блочного кода (п, к) имеет верхнюю границу,
равную:
^min п к + 1,
(8.19)
которая называется границей Синглтона.
8.2.4. Циклические коды
Циклические коды представляют подкласс линейных блочных кодов, в ко-
тором все кодовые слова данного кода являются циклическими сдвига-
ми по отношению друг к другу. Так, если задано кодовое слово С =
= [co,ci,... ,сп_1], то циклический сдвиг на 1, обозначаемый как (У1) =
= [cn-i,co, • •. ,сп-2], также будет кодовым словом. В общем виде, любой
циклический сдвиг = [сп_^, cn-i_|_i,..., сп_^_1] также будет кодовым
словом. Циклическая природа этих кодов обладает удачной структурой,
обеспечивающей функции кодирования и декодирования на гораздо более
низком уровне сложности, чем перемножение матриц при кодировании
и декодировании линейных блочных кодов общего вида. Поэтому боль-
шинство линейных блочных кодов, используемых на практике, являются
циклическими кодами.
Для формирования циклических кодов вместо порождающей матрицы
используется порождающий многочлен (образующий полином). Образу-
ющий полином д(Х) для циклического кода (п, к) имеет степень п — к
и форму:
д(Х) = до + giX + + gn~kXn~k, (8.20)
где gi — двоичное число (0 или 1), а до = дп~к = 1- Последовательность
информационных бит длиной к [г*о,..., Uk-1] также записывается в форме
многочлена — информационного полинома:
и(Х) = ио + и±Х + • • • + u^.iXk Ч (8.21)
Кодовое слово, соответствующее данной последовательности к информа-
ционных бит, образуется умножением коэффициентов образующего и ин-
формационного полиномов; поэтому кодовое слово С = [со,..., cn_i] име-
ет вид:
с(Х) = и(Х)д(Х) = со + С1Х + • • + c^-iX71”1. (8.22)
Кодовое слово, заданное в виде многочлена с(Х), представляет ис-
тинное кодовое слово циклического кода с образующим полиномом д(Х)
только в том случае, если с(Х) делится на д(Х) без остатка (ни один член
многочлена не остается в остатке), т.е. если
(8-23)
для многочлена д(Х), степень которого меньше к.
Пример 8.3. Рассмотрим циклический код (7,4) с образующим полиномом
д(Х) = 1 + X2 + X3. Определите, являются ли кодовые слова, задаваемые много-
членами ci (X) = 1 + X2 + X5 + X6 и с2 (X) = 1 + X2 + X3 + X5 + Xе истинными
кодовыми словами для этого образующего полинома.
Решение. Деление двоичных многочленов похоже на деление стандартных мно-
гочленов, за исключением того, что при двоичном сложении вычитание подобно
сложению. Деля щ (X) — 1 + X2 + X5 + X6 на д(Х) = 1 + X2 + X3, имеем:
Х3+ 1
X2+Х2+1| Х6+Х5+Х2+ 1
х6+х5+х3
Х3+Х2+1
Х3+Х2+1
Так как кодовое слово с(Х) делится на д(Х) без остатка, оно является истинным
кодовым словом. Действительно, мы имеем сДХ) — (1 + X3) р(Х) = «(Х)р(Х),
и поэтому последовательность информационных бит, соответствующая ci(X),
равна U = [1001], что соответствует коэффициентам информационного полино-
ма и (X) = 1+Х3.
Деля с2(Х) = 1 + X2 + X2 + X5 + Xе на д(Х) = 1 + X2 + X2, получаем:
Х3+ 1
X3+Х2+1| х6+х5+х3+х2+1
х6+х5+х3
Х2+1.
В данном случае мы видим, что при делении есть остаток X2 +1. Поэтому с2(Х)
не представляет истинное кодовое слово для данного образующего полинома.
Напомним, что у систематических линейных блочных кодов первые
к символов кодового слова — это информационные биты, а оставшиеся
символы представляют биты четности. Циклический код можно предста-
вить в систематической форме, если сначала умножить информационный
полином и(Х) на Хп~к, что даст:
Xn~ku(X) = u0Xn~k + UlXn~k+1 + • • • + Ufc-iX”-1. (8.24)
Глава 8. Кодирование в беспроводных каналах
В результате биты сообщения смещаются на к крайних правых пози-
ций в многочлене кодового слова. Если затем разделить выражение (8.24)
на д(Х), мы получим:
хп~ки(х) = Р(Х)
д(Х) 9( > + д(ХУ (’ }
где q(X) — многочлен, степень которого не превышает к — 1, а р(Х) —
многочлен остатка степени не более п — к — 1. Умножая (8.25) на д(Х),
получим:
Хпки(Х) = q(X)g(X) + р(Х). (8.26)
Добавление р(Х) к обеим сторонам выражения дает:
р(Х) + Хп~ки(Х) = q(X)g(X). (8.27)
Это означает, что выражение р(Х) + Хп~ки(Х) представляет истинное
кодовое слово, так как делится на д(Х) без остатка. Кодовое слово за-
дается п коэффициентами многочлена кодового слова р(Х') + Хп~ки(Х).
Мы можем записать многочлен р(Х) (степени п — к — 1) в виде:
р(Х) =Ро+Р1Х + + pn-k^X^-1. (8.28)
Объединяя выражения (8.24) и (8.28), получаем:
р(Х) + Хп~ки(Х) =
= Ро +Р1Х + • • • +pn_fc_1Xn-fc’1 + и0Хп~к + UlXn~k+l + + ик\Хп].
(8.29)
Таким образом, в кодовом слове, соответствующем этому многочлену,
первые к бит представляют информационные биты [но,..., ик], а послед-
ние п — к бит — биты четности, [ро, • • • ,Pn-fc-i], как этого требует систе-
матическая форма.
Заметьте, что многочлен систематического кодового слова форми-
руется в три этапа: сначала производится умножение информационного
полинома и(Х) на Хп~к-, затем — деление Хп~ки(Х) на д(Х) для получе-
ния многочлена остатка р(Х) (вместе с фактор-многочленом q(X). кото-
рый не используется); и, наконец, для получения выражения (8.29) р(Х')
складывается с Хп~ки(Х). Умножение многочленов реализуется просто,
а деление многочленов можно легко реализовать, используя сдвиговый
регистр с обратной связью [1, гл. 8.1; 2, гл. 6.7]. Поэтому формирование
кодового слова систематических циклических кодов имеет низкую стои-
мость и низкий уровень сложности.
Рассмотрим, как оцениваются ошибки в канале при использовании
циклических кодов. Многочлен кодового слова, соответствующий пере-
данному кодовому слову, имеет вид:
с(Х) = и(Х)д(Х). (8.30)
Принятое кодовое слово также можно записать в форме многочлена сле-
дующим образом:
г(Х) = с(Х) + е(Х) = и(Х)д(Х) + е(Х), (8.31)
где е(Х) — многочлен ошибки с коэффициентами, равными 1, там, где
происходит ошибка. Например, если переданное кодовое слово равно С =
= [1011001], а полученное кодовое слово равно R = [1111000], то е(Х) =
= X + Хп~1. Синдромный полином з(Х) для полученного кодового слова
определяется как остаток от деления г(Х) на д(Х), так что s(X) имеет
степень п — к — 1. Но в соответствии с (8.31) синдромный полином s(X)
является эквивалентом многочлена ошибки е(Х) по модулю д(Х). Более
того, мы получаем синдром через схему деления, похожую на ту, которая
используется при формировании кода. Как уже говорилось ранее, схе-
ма деления обычно реализуется с использованием сдвиговых регистров
с обратной связью, что обеспечивает низкую стоимость и простоту реа-
лизации.
8.2.5. Декодирование с жестким решением
Вероятность ошибки для линейных блочных кодов зависит от того, какое
решение использует декодер — мягкое или жесткое. При декодировании
с жестким решением (HDD2) каждый кодированный бит демодулиру-
ется как 0 или 1, т. е. демодулятор определяет каждый кодированный
бит (символ) отдельно. Например, при ДФМН (BPSK) принятый символ
определяется как «1», если он ближе к значению \/Ж5 и как «0», если он
ближе к значению — у/Ёь. Такая форма детектирования удаляет информа-
цию, которая может быть использована декодером канала. Например, при
ДФМН декодер канала, для принятия лучшего решения относительно пе-
реданного кодового слова, может учитывать расстояние от принимаемого
бита до у/Ёь и — у/Ёь. При декодировании с мягким решением эти рассто-
яния используются в процессе декодирования. Декодирование линейных
блочных кодов с мягким решением чаще используется в беспроводных
системах, чем декодирование с жестким решением, и речь о нем пойдет
в подпараграфе 8.2.7.
Декодирование с жестким решением использует декодирование по ми-
нимальному расстоянию, основанное на расстоянии Хэмминга. При де-
кодировании по минимальному расстоянию п бит, соответствующих ко-
довому слову, сначала демодулируются как «0» или «1», а затем сигнал
с выхода демодулятора поступает в декодер. Декодер сравнивает это ко-
довое слово с 2к возможными кодовыми словами, составляющими код,
и принимает решение в пользу того кодового слова, которое находится
2HDD — Hard decision Decoding.
Глава 8. Кодирование в беспроводных каналах
ближе всех к кодовому слову в смысле расстояния Хэмминга (т. е. отли-
чается наименьшим количеством бит). С точки зрения математики, для
получения кодового слова R декодер использует формулу:
pickCj s.t. d(Cj-R) d(CjR) Vj j. (8.32)
При наличии более одного кодового слова с одним и тем же минимальным
расстоянием до слова R, декодер произвольно выбирает одно из них.
Рис. 8.3. Декодирование
в кодовом пространстве
по методу максимально-
го правдоподобия
При декодировании по методу максимального правдоподобия выбира-
ется кодовое слово, обладающее наибольшей вероятностью в том смысле,
что именно оно воспроизводит принятое кодовое слово. Другими словами,
при условии получения кодового слова R, декодер, работающий по прин-
ципу максимального правдоподобия, выбирает кодовое слово С?, равное:
Cj = arg maxp (R|Cj), i — 0,..., 2k — 1. (8.33)
i
Так как в канале с аддитивным белым гауссовым шумом AWGN наи-
более вероятен случай с минимальным количеством ошибок, необходимых
для воспроизводства принятого кодового слова, то критерии минималь-
ного расстояния (8.32) и критерии максимального правдоподобия (8.33)
эквивалентны. После определения максимально правдоподобного кодово-
го слова Cj его декодируют, получая к бит, формирующих это кодовое
СЛОВО Cj.
8.2. Линейные блочные коды 371
Так как детектирование кодового слова по методу максимального
правдоподобия основывается на расстоянии, определяемом метрически,
то лучшим образом продемонстрировать этот процесс можно в кодо-
вом пространстве, как это показано на рис. 8.3. Минимальное расстоя-
ние Хэмминга между кодовыми словами, показанное на рисунке черными
точками, равно cZmin- Каждое кодовое слово находится в центре сферы ра-
диусом t = |_0,5<iminJ, где krj обозначает наибольшее целое число, меньшее
или равное х. Заштрихованные точки представляют принятые последова-
тельности, в которых один или более бит отличаются от бит в переданном ко-
довом слове. Рисунок иллюстрирует расстояние Хэмминга между Ci и С%.
Декодирование по минимальному расстоянию может использоваться
как для обнаружения, так и для исправления ошибок. При обнаружении
ошибок в блоке данных эта информация либо теряется, либо передается
повторно. Исправление ошибок позволяет устранить нарушение целостно-
сти принимаемых данных. Исправление ошибок по методу минимального
расстояния обеспечивает правильное декодирование полученного кодово-
го слова, находящегося в пределах расстояния Хэмминга t от переданного
кодового слова. Поэтому декодер может исправить до t ошибок, как это
можно видеть на рис. 8.3: так как полученные кодовые слова, соответ-
ствующие t или меньшему количеству ошибок, будут находиться в пре-
делах сферы, начерченной вокруг правильного кодового слова, оно будет
декодировано по методу минимального расстояния верно. Из рис. 8.3 вид-
но, что декодер может определить все ошибочные кодовые комбинации
при dm-m — 1 ошибок. Так, для кода (п, к) декодер может определить
2п — 2к возможных ошибочных кодовых комбинаций. Это объясняется
тем, что существуют 2к — 1 необнаруживаемых ошибок, соответствую-
щих тем случаям, когда искаженное кодовое слово точно равно кодовому
слову из набора 2к возможных кодовых слов, не эквивалентному пере-
данному кодовому слову. Так как всего существуют 2п — 1 возможных
ошибочных кодовых комбинаций, это дает нам 2п — 2к обнаруживаемых
ошибочных кодовых комбинаций. Заметьте, что в данном случае речь не
идет о декодировании с жестким решением, так как мы не исправляем
ошибки, а только обнаруживаем их.
Пример 8.4. Код (5,2) имеет кодовые слова Со = [00000], Ci = [01011],
Сг = [10101] и Сз — [11110]. Предположим, что передается кодовое слово, со-
стоящее из одних нулей Со. Найдите набор ошибочных кодовых комбинаций,
соответствующий необнаруживаемым ошибкам при передаче этого кодового слова.
Решение. Необнаруживаемые ошибочные кодовые комбинации соответствуют
трем ненулевым кодовым словам. Таким образом, ei = [01011], ег = [10101]
и ез = [11110] представляют ошибочные кодовые комбинации, которые не обна-
руживаются, так как прибавление любой из них к Со дает в результате верное
кодовое слово.
Глава 8. Кодирование в беспроводных каналах
8.2.6. Вероятность ошибки при декодировании
с жестким решением в канале с аддитивным
белым шумом AWGN
Вероятность ошибки кодового слова Ре определяется как вероятность
того, что переданное кодовое слово будет декодировано ошибочно. При
декодировании с жестким решением полученное кодовое слово может быть
декодировано ошибочно, если оно содержит более t ошибок (однако ошиб-
ки не произойдет, если нет альтернативного кодового слова, более близко-
го к полученному кодовому слову, чем переданное кодовое слово). Верхняя
граница вероятности ошибки в данном случае ограничена вероятностью
того, что произойдет t ошибок. Так как в канале с аддитивным белым
гауссовым шумом AWGN ошибки в кодовом слове происходят независимо,
то данная вероятность задается формулой:
Ai
(8.34)
где р — вероятность ошибки бита при передаче кодового слова. Таким
образом, р соответствует вероятности ошибки для некодированной мо-
дуляции при заданной энергии на символ кодового слова, как это было
рассмотрено в гл. 6 для каналов AWGN. Например, если символы кодово-
го слова передаются с помощью когерентной модуляции ДФМН (BPSK),
то вероятность ошибки равна р = Q (^/2Ec/Nq^ , где Ес представляет
количество энергии на один символ кодового слова, а No/2 — спектраль-
ная плотность мощности шума. Так как на один символ кодового слова
приходится k/п информационных бит, то соотношение между энергией
на бит и энергией на символ составляет Ес = кЕ^/п. Поэтому мощные
блочные коды с большим числом бит четности (с малым к/п) сокращают
энергию канала, приходящуюся на один символ, и, следовательно, увели-
чивают вероятность ошибки в процессе демодуляции символов кодового
слова. Однако возможности этих кодов по исправлению ошибок обычно
полностью компенсируют такое сокращение энергии, особенно при высо-
ких значениях защищенности SNR. При низких значениях защищенности
SNR этого может не произойти, в таком случае проявится отрицательная
эффективность схемы кодирования — она будет иметь более высокую ве-
роятность ошибки, чем некодированная модуляция. Граница (8.34) имеет
место с одинаковой долей вероятности, когда декодер исправляет точно t
или меньшее количество ошибок в кодовом слове и не может исправить
более t ошибок в кодовом слове. Код с таким свойством называется со-
вершенным кодом.
При высоких значениях защищенности SNR наиболее вероятный спо-
соб допустить ошибку в кодовом слове — это ошибочно принять за нуж-
8.2. Линейные блочные коды 373
ное кодовое слово одно из ближайших соседних слов. Ошибки «ближайших
соседей» дают верхнюю и нижнюю границы вероятности ошибки. Нижняя
граница представляет вероятность того, что кодовое слово будет принято
за его ближайшего соседа на расстоянии c/rnjn:
^rniri /7 \
Ре^ 52 ( minV(l-p)dmin-< (8.35)
j=t+i \ 3 /
Верхняя объединенная граница допускает, что все другие 2k — 1 кодовых
слов находятся на расстоянии <Zrr,in от переданного кодового слова. Поэто-
му объединенная граница — это просто произведение 2fc — 1 и вероятности
(8.35) того, что данное кодовое слово будет ошибочно принято за своего
ближайшего соседа на расстоянии dmjn:
4nin z , \
Ре (2к - 1) 52 ( minp(i -p)dmin~J. (8.36)
j=t+i \ 3 /
Если число кодовых слов больше или если величина защищенности SNR
низкая, то обе эти границы достаточно размыты.
Более точную верхнюю границу можно получить, применения для рас-
чета вероятности ошибки в кодовом слове границу Чернова Р (X х)
е~х /2, где X — гауссовская случайная величина с нулевым средним
значением и единичной дисперсией. Использовуя эту формулу, можно
показать [3, гл. 5.2], что верхняя граница вероятности декодирования
кодового слова, содержащего одни нули, в виде J-ro кодового слова с ве-
сом Wj рассчитывается по формуле:
Р(^К[4р(1-р)]^/2. (8.37)
Так как вероятность ошибки декодирования ограничена сверху ве-
роятностью того, что кодовое слово, состоящее из одних нулей, будет
ошибочно принято за любое другое, мы получаем ограничение сверху
в виде:
2*-i
Е[4Н1-Р)Г/2- (8.38)
>=1
Для этой границы необходимо знать распределение весов всех
кодовых слов данного кода (отличных от кодового слова, состоящего
из одних нулей и соответствующего j = 0). Более простая, но слегка
размытая верхняя граница получается из (8.38) при использовании c/mjn
вместо индивидуальных весов кодовых слов. Это упрощение дает границу в виде:
Ре (2к - 1) [4р(1 - p)]d—'2 . (8.39)
Заметьте, что вероятность ошибки в кодовом слове Ре зависит от ве-
Глава 8. Кодирование в беспроводных каналах
роятности р. которая является функцией эвклидового расстояния между
точками модуляции, соответствующими символам переданного кодово-
го слова. Действительно, лучшие коды для каналов с аддитивным белым
шумом AWGN не должны основываться на расстоянии Хэмминга: в их
основе должна лежать максимизация эвклидова расстояния между ко-
довыми словами после модуляции. Однако в таком случае необходимо,
чтобы код канала разрабатывался вместе с модуляцией. Это основопо-
лагающее положение кодированной модуляции, речь о которой пойдет
в § 8.7. Тем не менее, расстояние Хэмминга обеспечивает лучшие по-
казатели кодирования при замираниях, когда кодирование объединяется
с чередованием, о чем будет сказано в § 8.8.
В общем случае, вероятность ошибки после декодирования принятого
кодового слова зависит от особенностей конкретного кода и декодера
и, в частности, от того, каким образом биты отображаются в кодовых
словах, т.е. от процедуры отображения бит при недвоичной модуляции.
Эта вероятность ошибки бита часто аппроксимируется выражением:
p>(l-p)n-j (8.40)
Согласно \2, гл. 6.5] при t = 1 это выражение может быть упрощено [2]
до Рь &р-р(1 -р)71-1.
Пример 8.5. Рассмотрим линейный блочный код (24, 12) с минимальным
расстоянием = 8 (пример такого кода — расширенный код Голея, речь
о котором пойдет в подпараграфе 8.2.8). Найдите вероятность Ре, используя
нежесткую границу (8.39) и полагая, что символы кодового слова передаются
по каналу с использованием модуляции ДФМН (BPSK) при отношении Eb/N0 =
= 10 дБ. Также найдите вероятность Рь для этого кода, используя аппроксима-
цию Рь = Ре/к, и сравните с вероятностью ошибки бита при некодированной
модуляции.
Решение. Для Еь/Nq = 10 дБ мы имеем Ec/Nq = Ц10 = 5. Поэтому р =
= Q (д/1б) — 7,82 • 10-4. Подставляя это значение в (8.39) при к — 12 и rfmin — 8,
получаем Ре 3,92 • 10-7. Используя аппроксимацию вероятности ошибки Рь,
получаем Рь ~ (l/fc)Fe = 3,27 • 10-8. Для некодированной модуляции Рь =
= Q (^/ZEb/No') = Q (а/20) = 3,87 • 10 ‘6. Следовательно, данный код позволяет
получить выигрыш на два порядка. Обратите внимание, что нежесткая граница
может на несколько порядков отличаться от действительной величины вероятно-
сти ошибки, поэтому данные расчеты могут в значительной мере преуменьшить
эффективность этого кода.
8.2. Линейные блочные коды
8.2.7. Вероятность ошибки при декодировании
с мягким решением в канале с аддитивным
белым шумом AWGN
Метод жесткого принятия решения HDD, описанный в предыдущем раз-
деле, отбрасывает информацию, которая могла бы сократить вероятность
ошибки в кодовом слове. Например, при ДФМН (BPSK) созвездие пе-
реданного сигнала равно ±у/Ёь, и принятый символ после согласован-
ной фильтрации декодируется как «1», если он находится ближе к у/Ё^,
и как «О», если он находится ближе к —у/Ё^. Расстояние от полученного
символа до у/Ёь и — у/Ёь при таком декодировании не используется, хо-
тя эта информация позволила бы принять лучшее решение относительно
переданного слова. Если эти расстояния используются в декодере канала,
то такой процесс называется декодированием с мягким решением (SDD3).
При этом демодулятор вместо жесткого решения о том, какой бит был
передан («О» или «1»), принимает мягкое решение с учетом расстояния
между полученным символом и символом, соответствующим передаче би-
та со значением «О» или «1». Ниже изложены основные положения мягкого
принятия решения SDD при модуляции ДФМН (BPSK); эти идеи легко
распространить и на модуляции более высокого уровня.
Рассмотрим кодовое слово, переданное по каналу с использованием
модуляции ДФМН (BPSK). Как и в случае декодирования с жеским ре-
шением HDD, энергия на символ кодового слова равна Ес = (к/п)Еь- Если
j-й символ кодового слова равен «1», то он будет принят как rj = y/E^+rtj,
а если это «О» — то как rj = — у/Ё^ + rij, где rij — реализация бело-
го гаусового шума AWGN с нулевым средним значением и дисперсией
No/2 в приемнике. При мягком принятии решения SDD относительно
принятого кодового слова R = [гi,..., гп\, декодер формирует корреля-
ционный показатель С (R, СД для каждого кодового слова данного кода
Ci (i = 0,...,2к - 1), а затем выбирает кодовое слово Ci с наивысшим
корреляционным показателем. Корреляционный показатель определяет-
ся выражением:
п
C(R, СД = J2(c0-l)rj, (8.41)
>=i
где Cij означает j-й кодированный бит в кодовом слове Сг. Если = 1,
то 2cij — 1 = 1, а если с^= 0, то 2с^ — 1 = —1. Поэтому символ при-
нятого кодового слова взвешивается по полярности соответствующего
символа в кодовом слове, для которого рассчитывается корреляционный
показатель. Следовательно, С (R, СД будет больше, когда большинство
3SDD — Soft Decision Decoding.
376 Глава 8. Кодирование в беспроводных каналах
принятых символов будут иметь большую величину и ту же полярность,
что и соответствующие символы слова Cj. Если большинство полученных
символов будут иметь маленькую величину и ту же полярность, что и со-
ответствующие символы кодового слова Cj, то значение С (R, Cj) будет
меньше. Если же полярность большинства полученных символов отли-
чается от полярности соответствующих символов слова Cj, то обычно
значение C(R, Cj) бывает отрицательным. В частности, при очень высо-
ких значениях защищенности SNR, если передается кодовое слово Cj, то
С (R, Ci) ~ пу/Ё~с, в то время как С (R, Ci) < пу/Ё^ для j ф i.
Для канала с аддитивным белым гауссовым шумом AWGN вероят-
ность ошибки в кодовом слове является аналогичной для любого кодо-
вого слова линейного кода. Анализ ошибок обычно наиболее прост, если
допускается передача кодового слова, состоящего из одних нулей. По-
этому предположим, что передано кодовое слово Со, состоящее из одних
нулей, а соответствующее принятое кодовое слово равно R. Для правиль-
ного декодирования слова R мы должны иметь C(R, Со) > C(R, Cj),
i = 1,..., 2fc — 1. Пусть Wj обозначает вес Хэмминга г-го кодового слова Cj,
равный количеству единиц «1» в Cj. Тогда, в зависимости от переданного
кодового слова Cj, из этого следует, что величина C(R, Cj) распределе-
на по закону Гаусса со средним значением у/Ё^п (1 — 2cdj/n) и дисперсией
nN®/1!. Обратите внимание, что корреляционные показатели не незави-
симы, так как все они являются функциями R. Можно показать, что
вероятность Pe(Cj) = p(C(R, Со)) < С (R, Cj) равна вероятности того,
что случайная величина, распределенная по закону Гаусса с дисперсией
2cdjAo, будет меньше, чем — 2сОгу/Ё^. Поэтому
Pe(Ci) = = Q (y/2ojnbRc) . (8.42)
\v2wj7Vo/ ' '
Тогда, при условии объединенной границы, вероятность ошибки будет ог-
раничена сверху суммой парных вероятностей ошибки для каждого слова Cj:
2*-1 2*-1
Ре Pe(Cj) = ' Q ^у/2шi^hRc^ (8.43)
1=1 1=1
Для расчетов по (8.43) требуется распределение весов Wj (г = 1,..., 2к — 1)
данного кода. Это ограничение можно упростить, если иметь в виду, что
Щ dmin, тогда:
Ре < (2k - 1) Q (^276Pcdmin) . (8.44)
Граница Чернова для Q-функции равна Q(2y/x) < е~х. Подставляя это
неравенство в выражение (8.43), получаем:
Ре < (2fc - l') e^bRc^min < 2^ e~7bRc ^min — g-7b^e ^min +fcln2. (8.45)
8.2. Линейные блочные коды 377
Сравнивая эту границу с аналогичной границей для некодированной мо-
дуляции ДФМН (BPSK), равной
Pb = Q (8.46)
мы получаем эффективность кодирования в дБ, приблизительно равную:
Gc = 101g [(^bRcdmin - fc In 2) /7ь] = 101g [Rcdmin - (fc In 2) /7^]. (8.47)
Обратите внимание, что эффективность кодирования зависит от ско-
рости передачи кода и защищенности SNR в канале. В частности, эф-
фективность кодирования уменьшается при снижении 75, и становится
отрицательной при достаточно низких значениях SNR. В целом, показа-
тели мягкого принятия решений SDD примерно на 2-3 дБ лучше, чем при
декодировании с жестким решением HDD [1, гл. 8.1].
Пример 8.6. Найдите примерный выигрыш при кодировании с мягким при-
нятием решения SDD по сравнению с некодированной модуляцией для рассмо-
тренного в примере 8.5 кода (24,12) с rfmjn = 8 при защищенности % = 10 дБ.
Решение. Подставляя уу, = 10 дБ, Rc = 12/24, с/т,п = 8 и к = 12 в (8.47), полу-
чаем Gc = 5 дБ. Этот заметный выигрыш от кодирования — прямой результат
большой величины минимального кодового расстояния.
8.2.8. Примеры распространенных
линейных блочных кодов
Теперь мы опишем несколько распространенных линейных блочных ко-
дов. Более подробную информацию об этом можно найти в [1-4]. Наибо-
лее распространенным блочным кодом является код Хэмминга, параме-
тры которого задаются целым числом т 2. Для кода Хэмминга (n, fc)
п = 2т — 1 и k = 2т — т — 1; таким образом, код вводит п — к = т избы-
точных бит. Минимальное расстояние всех кодов Хэмминга составляет
^min = 3, поэтому в каждом символе кодового слова длиной п = 2т — 1
может быть исправлена однократная ошибка (t = 1). Хотя коды Хэм-
минга не очень мощные, они представляют совершенные коды, и поэтому
имеют вероятность ошибки, точно определяемую правой частью выраже-
ния (8.34).
Код Голея и расширенный код Голея представляют еще один класс
канальных кодов с хорошими эксплуатационными показателями. Код Го-
лея — это линейный код (23,12) с с/т,п = 7 и t = 3. Расширенный код
Голея получается при добавлении к коду Голея одиночного бита четности,
в результате чего формируется блочный код (24,12) с с?т;п = 8 и t = 3.
Дополнительный бит четности не изменяет возможностей исправления
ошибок (так как t остается прежним), но значительно упрощает реализа-
цию кода, так как скорость информационных бит точно равна половине
Глава 8. Кодирование в беспроводных каналах
скорости закодированных бит. Поэтому как некодированные, так и ко-
дированные потоки бит могут формироваться одним и тем же тактовым
генератором, при этом для некодированных бит такты используются че-
рез раз. Эти коды обладают более высоким c£min и, следовательно, лучшей,
по сравнению с кодами Хэмминга, исправляющей способностью, но это
достигается за счет более сложного процесса декодирования и более низ-
кой скорости кода Rc = k/n. Более низкая скорость кода означает, что
данный код обеспечивает более низкую скорость передачи данных или
ему необходима дополнительная полоса частот.
Еще один мощный класс блочных кодов представляют коды Б оу за -
Чоудхури -Хоквенгема, или коды БХЧ (ВСН4). Это циклические коды,
и на высоких скоростях они обычно превосходят все остальные блоч-
ные коды с одними и теми же значениями п и к при средних и высоких
значениях защищенности SNR. Этот класс кодов обеспечивает большой
выбор длин блоков, скоростей кода и возможностей исправления ошибок.
В частности, наиболее распространенные коды БХЧ имеют n = 2т — 1
для любого целого числа т 3.
Вероятность ошибки Рь для некоторых кодов БХЧ при декодировании
с жестким решением и когерентной модуляцией ДФМН (BPSK) показана
на рис. 8.4 При построении графика использована аппроксимация (8.40),
откуда для когерентной ДФМН (BPSK) мы имеем:
Р = Q = Q (8.48)
Как видно из рисунка, код БХЧ (127,36) при низких значениях защищен-
ности SNR дает отрицательный эффект. Это не редкость для мощных
канальных кодов из-за их пониженной энергии на символ, о чем уже го-
ворилось в подпараграфе 8.2.6.
8.2.9. Недвоичные блочные коды: код Рида —Соломона
Недвоичный блочный код обладает такими же свойствами, как и двоич-
ный код: на основе К информационных символов он формирует кодовые
слова длиной N. Однако N символов каждого кодового слова выбираются
из недвоичного алфавита с q > 2. Поэтому символы кодового слова могут
принимать любое значение в интервале {0,1,... ,q — 1}. Обычно q = 2k,
чтобы к бит могли быть отображены в одном символе.
Наиболее распространенным недвоичным блочным кодом является код
Рида - Соломона (RS5), используемый в различных приложениях — от за-
писи на магнитные носители до протокола цифровой пакетной передачи
4ВСН — Bose-Chadhuri-Hocquenghem code.
sRS — Reed Solomon code.
8.2. Линейные блочные коды
данных по сети сотовой связи (CDPD6). Коды Рида - Соломона имеют па-
раметры N = q — 1 = 2fc — 1 и К = 1,2,..., N — 1. Значение К определяет
возможности данного кода по исправлению ошибок. Код RS может испра-
влять до t = 0,5 [TV — К\ ошибок символа кодового слова. В недвоичных
кодах минимальное расстояние между кодовыми словами определяется
как количество символов кодового слова, которыми кодовые слова отли-
чаются друг от друга. Коды Рида - Соломона достигают минимального
расстояния с/min = N—К+1, что является самым большим возможным ми-
нимальным расстоянием между кодовыми словами для любого линейного
кода при одинаковым сигнале на входе кодирующего устройства и оди-
наковой длине блоков на выходе. Коды Рида - Соломона часто укорачива-
ются, чтобы удовлетворить требованиям данной системы [4, гл. 5.10].
Рис. 8.4. Вероятность ошибки р, Для различных кодов
Так как недвоичные коды — и, в частности, коды RS — формируют
символы, соответствующие 2к битам, их иногда используют совсестно
с многоуровневой М-кратной модуляцией, при этом М = 2к. В частно-
сти, при модуляции уровня 2к каждый символ кодового слова передается
по каналу как одна из 2к возможных точек созвездия. Если вероятность
ошибки, соответствующая данной модуляции (вероятность того, что по-
6CDPD — Cellular Digital Packet Data.
Глава 8. Кодирование в беспроводных каналах
лученная точка созвездия будет ошибочно принята за другую переданную
точку) равна Рм, то вероятность ошибки в кодовом слове при использо-
вании недвоичного кода имеет верхнюю границу, равную:
Ре^ £ (8.49)
j=t+i '
что похоже на формулу (8.34) для двоичного кода. Тогда мы можем ап-
проксимировать вероятность ошибки информационного символа в виде:
1 N / дг\
Е Д (8-50)
j=t+l /
8.3. Сверточные коды
Кодовое слово длиной п
Ступень 1
Ступень 2
Ступень К
Рис. 8.5. Сверточный кодер
Сверточный код формирует кодированные символы, пропуская инфор-
мационные биты через линейный сдвиговый регистр с конечным числом
состояний, как показано на рис. 8.5. Сдвиговый регистр состоит из К
ступеней по к бит на ступень. Существуют п операторов двоичного сло-
жения с входными сигналами, которые берутся со всех К ступеней: эти
операторы создают кодовое слово длиной п для каждой входной после-
довательности длиной к бит. При этом на каждой ступени сдвигового
регистра двоичные входные данные сдвигаются на к бит за один раз,
и каждый из этих сдвигов создает кодовую последовательность длиной п.
Скорость передачи кода равна Rc = к/п. Максимальное количество сим-
волов на выходе, на которые может оказать влияние данный входной бит
при использовании сверточного кода, называется длиной кодового огра-
8.3. Сверточные коды 381
ничения. Из рис. 8.5 видно, что кодовое слово длиной п зависит от кК
входных бит — в отличие от блочного кода, который зависит только от к
входных бит. Поэтому длина кодового ограничения для сверточного коде-
ра составляет кК бит или, что эквивалентно, К байт по к бит. Считается,
что сверточные коды обладают памятью, так как текущее кодовое слово
зависит от большего числа входных бит (кК), чем то количество бит (к),
которое поступает на вход кодера, чтобы сформировать данное кодовое
слово. Обратите внимание, что обычно число бит на ступень в сверточном
кодере может быть неодинаковым.
8.3.1. Характеристика кода: решетчатая диаграмма
Если кодовое слово длиной п создается с помощью сверточного кодиру-
ющего устройства (см. рис. 8.5), то оно зависит как от к бит на входе
первой ступени регистра сдвига, так и от состояния кодера, т. е. от содер-
жимого других К—1 ступеней сдвигового регистра. Чтобы охарактеризо-
вать этот сверточный код, мы должны описать процесс формирования ко-
дового слова, который зависит как от к входных бит, так и от состояния
кодера, имеющего возможных значений. Существует множество
способов описания сверточных кодов, включая древовидную диаграмму,
диаграмму состояний и решетчатую диаграмму [1, гл. 8.2]. Древовидная
диаграмма представляет кодирующее устройство в форме дерева, каждая
ветвь которого соответствует одному состоянию кодирующего устройс-
тва и соответствующему выходному сигналу кодера. Диаграмма состоя-
ний — это графическое изображение различных состояний кодирующего
устройства с возможными переходами между ними и соответствующи-
ми выходными сигналами. Решетчатая диаграмма использует тот факт,
что древовидное представление кода будет повторяться, как только ко-
личество ступеней превысит длину кодового ограничения. Решетчатая
диаграмма упрощает древовидное представление, объединяя узловые точ-
ки дерева, соответствующие одинаковым состояниям кодера. В данном
разделе основное внимание уделяется решетчатому представлению свер-
точного кода, как наиболее распространенному. Детали представления
кода в виде решетчатой диаграммы лучше всего показать на примере.
Рассмотрим сверточный кодер, представленный на рис. 8.6, с параме-
трами тг = 3,А: = 1иХ = З.В этом кодирующем устройстве используется
трехступенчатый регистр сдвига, в котором за один такт смещается
один бит. Обозначим бит на ступени i сдвигового регистра в заданный
момент времени t как Si. Три ступени регистра сдвига используются
для формирования кодового слова длиной 3: С1С2С3. Из рисунка вид-
но, что С| = S|, С-2 = 5'i + S2 + S3, а Сз = Si + S3. Последовательность
бит U, смещенных в кодирующем устройстве, генерирует последователь-
Глава 8. Кодирование в беспроводных каналах
ность кодовых символов С. Обратите внимание, что кодовые символы,
соответствующие С± — это просто исходные информационные биты.
Как и в случае с блочными кодами, если один из кодированных симво-
лов в сверточном коде соответствует исходным информационным битам,
то говорят, что этот код систематический. Определим состояние кодера
как S — S2S3 (т. е. содержимое последних двух ступеней кодирующего
устройства), что дает 22 = 4 возможных значения для этого состояния
кодирующего устройства. Чтобы охарактеризовать кодер, мы должны
показать, каким будет сигнал на его выходе для каждого входного бита
и каждого возможного состояния кодера, а также то, как новый входной
бит изменяет состояние кодера для следующего входного бита.
Ступень 1 Ступень 2 Ступень 3
Рис. 8.6. Пример сверточ-
ного кодера (п = 3, k = 1,
К = 3)
Решетчатая диаграмма для этого кода представлена на рис. 8.7. Сплош-
ными линиями на рисунке показаны изменения состояний кодера, когда
на вход его первой ступени поступает бит со значением «О», а пунктирны-
ми линиями — изменения состояний, соответствующие появлению бита со
значением «1». Например, если при начальном состоянии S' = 00 на сту-
пень 1 поступает бит «0», то после переключений сдвигового регистра
состояние кодера останется тем же: S = 00 (так как «0» со ступени 1
переходит на ступень 2, а «0» со ступени 2 переходит на ступень 3, что
дает новое состояние S = S2S3 = 00). С другой стороны, если на сту-
пень 1 поступает бит «1», то после переключений сдвигового регистра
новое состояние будет равно S = 10 (так как 1 со ступени 1 переходит
на ступень 2, а 0 со ступени 2 переходит на ступень 3, что дает новое со-
стояние S = S2S3 — 10). На рисунке рядом с линиями переходов состояний
записаны сигналы на выходе кодера для данного состояния S и входного
сигнала S±. Эти выходные сигналы формируются кодером в результате
8.3. Сверточные коды
операций сложения бит S'i,Sl2 и S3 на каждой ступени. Например, при
S = 00 и Si = 1 на выходе кодирующего устройства будет комбинация
CiC2C3, где Сг = Si = 1, С2 = Si + S2 + S3 = 1 и С3 = Si + S3 = 1.
На рис. 8.7 этот выходной сигнал 111 записан возле пунктирной линии,
показывающей переход из состояния S' = 00 в состояние S = 10. Обрати-
те внимание, что при Si — 0 и S = 00 выходной сигнал кодера всегда
представляет кодовое слово, состоящее из одних нулей — вне зависи-
мости от операций сложения, формирующих кодовое слово С1С2С3, так
как суммирование любого количества нулей всегда дает в результате
ноль. Часть решетки между моментами времени и называется i-
й ветвью решетки. На рис. 8.7 показано, что первоначальное состояние
в момент времени to представлено одними нулями. В момент времени
t3 решетка достигает устойчивого состояния, определяемого как точка,
в которой из любого из двух предшествующих состояний могут быть по-
лучены все состояния. После достижения этого устойчивого состояния,
решетка повторяется через каждый интервал времени. Заметьте также,
что в устойчивом состоянии каждое состояние переходит в одно из двух
возможных новых состояний. В общем случае, решетчатые структуры,
начиная от полностью нулевого состояния в момент времени £q, достига-
ют устойчивого состояния к моменту tj{.
S = S2S3
-------- S| = о
........Si - 1
Рис. 8.7. Решетчатая диаграмма
Для общих значений к и К решетчатая диаграмма будет иметь 2я-1
состояний, при этом каждое состояние имеет 2k путей (маршрутов),
Глава 8. Кодирование в беспроводных каналах
направленных к каждой узловой точке и 2fc маршрутов, исходящих из ка-
ждой узловой точки. Поэтому количество путей в решетке растет по экс-
поненциальному закону с ростом k, К и длины маршрута.
Пример 8.7. Рассмотрим сверточный код, представленный решеткой на рис. 8.7.
При начальном состоянии S = S2S3 = 01 найдите последовательность состояний
S и сигнал на выходе кодера С для входной последовательности бит U = 011.
Решение. Первое появление состояния S = 01 в решетке соответствует моменту
времени 1г • Из рисунка видно, что если в этот момент поступает информацион-
ный бит Si = 0, то, двигаясь по сплошной линии решетки от S = 01 в момент 1г
к S = 00 в момент /3, мы получим выходной сигнал, равный С = 011. В момент
времени Г, при поступлении информационного бита Si = 1 мы идем, начиная
с состояния S = 00, по пунктирной линии решетки к S = 10 в момент t^, и соот-
ветствующий выходной сигнал будет равен С = 111. Наконец, в момент времени
Г при поступлении информационного бита Si = 1 мы идем, начиная с состояния
S = 10, по пунктирной линии к S = 11 в момент t$, и соответствующий сигнал
на выходе кодера равен С = 101.
8.3.2. Декодирование методом
максимального правдоподобия
Сверточный код, сформированный с помощью регистра сдвига с конеч-
ным числом состояний, представляет конечный автомат. Поэтому в от-
личие от блочного кода (n, к) — когда детектирование методом макси-
мального правдоподобия требует нахождения кодового слова длиной п,
ближайшего к принятому кодовому слову длиной п — декодирование
сверточного кода методом максимального правдоподобия предполагает
нахождение наиболее правдоподобной последовательности кодированных
символов С при условии приема некоторой последовательности символов R.
Для принятой последовательности R декодер принимает решение о том,
что была передана последовательность кодированных символов С*, если
p(R|C*) ^p(R|C) VC. (8.51)
Так как каждая возможная последовательность С соответствует одно-
му пути в решетчатой диаграмме кода, то декодирование по максимуму
правдоподобия соответствует нахождению максимально правдоподобно-
го пути в решетчатой диаграмме. В случае канала с аддитивным белым
гауссовым шумом AWGN, шум оказывает влияние на каждый кодирован-
ный символ в отдельности, независимо. Поэтому для сверточного кода со
скоростью 1/п мы можем выразить вероятность (8.51) для пути с длиной
L как условную вероятность:
L—1 L—1 п
p(R|C) = = П (8-52)
г=0 г=0 j=l
8.3. Сверточные коды 385
где Ci — часть кодовой последовательности С, соответствующая г-й
ветви решетки, Ri — часть принятой кодовой последовательности R,
соответствующая г-й ветви решетки, Сг] — j-й кодированный символ,
соответствующий Ci, a Rij — j-й принятый кодированный символ, соот-
ветствующий Ri- Логарифмическая функция правдоподобия определяет-
ся как логарифм p(R|C) в виде:
L—1 L —1 п
logp(R|C) = logp (RilG) = 5252^(^1^). (8.53)
г=0 i=0 j—1
Величина
п
= 52logp №с\сс) (8.54)
J=1
называется метрикой ветви, так как она представляет составляющую
(8.53), соответствующую г-й ветви решетки. Последовательность или путь,
максимизирующие функцию правдоподобия, также максимизируют лога-
рифм функции правдоподобия, так как логарифмическая функция моно-
тонна. Однако при проведении расчетов декодера более удобно использо-
вать логарифмическую функцию правдоподобия, так как в этом случае
вместо умножения выполняется суммирование. Логарифмическую функ-
цию правдоподобия, соответствующую данному пути в решетке, называ-
ют также метрикой пути, и согласно (8.53) она равна сумме мер ветвей
всех ветвей данного пути. Путь в решетке с максимальной метрикой пути
соответствует максимально правдоподобному пути.
Декодер может использовать жесткое или мягкое решения логарифма
logp (Rij\Cij) для определения меры правдоподобия величины logp (Rij\Cij).
При декодирования с жестким решением R^ декодируется как «1» или
«О». Вероятность ошибки декодирования с жестким решением зависит от
модуляции и обозначается как р. Если последовательности R и С имеют
по N символов и отличаются в d позициях (т. е. их расстояние Хэмминга
равно d), то
p(R|C)=/(l-p)^d
И
1 — V
logp(R|C) = — dlog---+7Vlog(l— р). (8.55)
Так как р < 0,5, то логарифм вероятности (8.55) максимизируется
при минимизации d. Поэтому кодовая последовательность С с минималь-
ным расстоянием Хэмминга относительно принятой последовательности
R соответствует максимально правдоподобной последовательности.
При декодировании с мягким алгоритмом решения о значении при-
нимаемых символов (Rij) принимаются непосредственно в декодере, а не
Глава 8. Кодирование в беспроводных каналах
в решающем устройстве с разбиением на 1 или 0. Например, если симво-
лы Cij передаются с помощью ДФМН (BPSK) по каналу с аддитивным
белым шумом AWGN при условии, что «1» соответствует \[ЁС, а «0» со-
ответствует —\ДЁс, то
Rij = у/Ёс (2Cij - 1) + nv-, (8.56)
где Ес = kEf,/п — энергия, приходящаяся на кодированный символ, а —
гауссов шум с нулевым средним значением и дисперсией ст2 = O,57Vq- По-
этому
Р \С„) = ехр [ (8 57)
у2тгсг
Максимизация этой функции правдоподобия эквивалента выбору симво-
ла С^, ближайшего в смысле эвклидова расстояния к символу Rij. При
отыскании последовательности С, которая максимизирует логарифм функ-
ции максимального правдоподобия (8.53), любые элементы, общие для
двух различных последовательностей Ci и Сг, могут быть отброшены,
так как при суммировании они вносят одну и ту же величину. Подоб-
ным образом мы можем оценить все элементы в (8.53) без изменения
максимизирующей последовательности. Поэтому, пренебрегая расчетны-
ми множителями и элементами (8.57), общими для любых Cij, мы можем
п
заменить logp (Rij\Cij) в (8.53) на эквивалентную метрику ветви:
J-1
п
щ = 52^(26^-1) (8-58)
1=1
и получить тот же самый максимально правдоподобный результат.
Теперь проиллюстрируем расчет метрики пути при жестком и мяг-
ком способах принятия решения для сверточного кода, представленного
на рис. 8.6, с решетчатой диаграммой на рис. 8.7. Для простоты допустим
только два возможных пути в решетке и рассчитаем их соответству-
ющие вероятности для заданной принятой последовательности R. Начнем
с момента времени t0, соответствующего полностью нулевому состоя-
нию. Вначале мы рассмотрим путь, состоящий из одних нулей, который
соответствует полностью нулевой входной последовательности. Второй
рассматриваемый нами путь начинается с состояния S' = 00 в момент
времени to и переходит в состояние S' = 10 в момент времени ti, затем
в состояние S' = 01 в момент времени С и, наконец, в состояние S' = 00
в момент времени to, где этот путь сливается с первым — полностью нуле-
вым путем. Так как при t < to и t to пути и, следовательно, метрики их
ветвей идентичны, то максимально правдоподобным будет тот путь, при
котором сумма метрик отличающихся ветвей будет меньшей. Из рис. 8.7
8.3. Сверточные коды
видно, что путь, состоящий из одних нулей, создает кодированную после-
довательность Со = 000000000 по первым трем ветвям в решетке. Второй
путь создает по первым трем ветвям в решетке кодированную последо-
вательность Ci = 111010011.
Сначала рассмотрим декодирование с жестким решением при вероят-
ности ошибки р. Допустим, что полученная последовательность по этим
трем ветвям равна R = 100110111. Обратите внимание, что расстоя-
ние Хэмминга между R и Со равно 6, тогда как расстояние Хэмминга
между R и Ci равно 4. Поэтому, как уже обсуждалось ранее, наибо-
лее правдоподобный путь соответствует последовательности Сх, которая
имеет минимальное расстояние Хэмминга до R. Метрика пути, состоя-
щего из одних нулей, равна:
2 з
Мо = ЕЕ logP (Rij\Cij) = 61ogp + 31og(l -р), (8.59)
i-0 j=l
тогда как метрика другого пути равна:
2 3
Mi = ^2^21ogP(T?ij|C0) = 41ogp + 51og(l -p). (8.60)
i=0 j=l
Принимая p << 1, что чаще всего и встречается, получаем Mq ~ 61ogp
и Mi ~ 41ogp. Так как logp < 1, это подтверждает, что второй путь
имеет большую метрику, чем первый.
Теперь рассмотрим декодирование с мягким решением за время от io
до t$. Допустим, что полученная последовательность (до демодуляции) на
этих трех ветвях для Ес = 1 равна R = (0,8; —0,35; —0,15; 1,35; 1,22; —0,62;
0,87; 1,08; 0,91). Метрика пути, состоящего из одних нулей, равна:
2 2 3 2 3
М) = = 52 Rij ftCij — 1) = 52 52 ~Rij = —5,11,
i=0 i=0 j=l i=0 j=l
а метрика второго пути равна:
2 3
Mi = 5252^(2^-1) = 1,91.
г=0 j=l
Следовательно, второй путь обладает более высокой метрикой, чем пер-
вый. Чтобы определить, является ли второй путь максимально правдо-
подобным, мы должны сравнить его метрику с метриками всех других
путей в решетке.
Трудность декодирования по максимуму правдоподобия заключается
в том, что сложность расчета логарифма функции правдоподобия (8.53)
растет по экспоненциальному закону с увеличением памяти кода, а эти
расчеты должны быть выполнены для каждого возможного пути в решет-
ке. Алгоритм Витерби, речь о котором пойдет в следующем разделе, со-
388 Глава 8. Кодирование в беспроводных каналах
кращает сложность декодирования по максимуму правдоподобия за счет
использования преимуществ структуры расчета метрики пути.
8.3.3. Алгоритм Витерби
Максимально правдоподобный путь
Рис. 8.8. Частные метрики максимально правдоподобного пути
Алгоритм Витерби, предложенный Витерби в 1967 г. [5], упрощает деко-
дирование по максимуму правдоподобия благодаря системному удалению
из рассмотрения таких путей, которые заведомо не могут достичь само-
го высокого значения метрики пути. Основное исходное условие данного
алгоритма заключается в раздельном просмотре метрик всех путей, вхо-
дящих в данную узловую точку решетки (узловую точку N). Так как
возможные пути в решетке, выходящие из узловой точки N, те же, что
и входящие тракты, то полный путь с наибольшей метрикой (рангом),
который проходит через узел N, должен совпадать с путем, обладающим
наибольшей отдельной (частной) метрикой при входе в узловую точку N.
Это показано на рис. 8.8, где путь 1, путь 2 и путь 3 входят в узловую
п—1
точку N (на глубине решетки п) с частными метриками Pl = Blk
k=o
(Z = 1,2,3). Допустим, что Р1 — самая большая из этих частных ме-
трик путей. Полный путь с наибольшей метрикой после узловой точки N
имеет метрики ветвей {В/.}. Максимально правдоподобный путь, начина-
ющийся в узловой точке N (т. е. путь, начинающийся в узловой точке N,
ОО
с самой большой метрикой пути) имеет частную метрику, равную Bk-
k=n
Полная метрика для 1-го пути (Z = 1,2,3) до узловой точки N и макси-
мально правдоподобный путь после узловой точки N равны Р1 + £Вк
к=п
(Z = 1,2,3), и поэтому путь с максимальной частной метрикой Р1 до уз-
ловой точки N (в данном примере это путь 1) должен соответствовать
маршруту с наибольшей метрикой пути, проходящему через узел N.
Рис. 8.9. Общий ствол для всех ц
выбранных путей в решетке
tk+1
tk+2
tk+3
Общий ствол
Алгоритм Витерби использует преимущества данной структуры, от-
брасывая все пути, которые входят в данный узел, за исключением пути
с наибольшей частной метрикой. Путь, который не был отброшен, назы-
вается выбранным или «выжившим» путем. Так, в примере на рис. 8.8.
путь 1 — «выживший» до узловой точки N, а 2 и 3 пути исключаются
из дальнейшего рассмотрения. Таким образом, на каждом шаге в решетке
есть выбор из 2я-1 путей, по одному для каждого возможного состояния
кодера. На данной ступени решетки ветвь не может быть декодирована
до тех пор, пока все выбранные пути на последующей ступени решетки не
совместятся с этой ветвью (см. рис. 8.9, где показаны выбранные пути для
момента времени С+з). Из рисунка видно, что для всех этих «выживших»
путей можно проследить их происхождение до общего ствола на интер-
вале времени от tk до t^+i. В этой точке декодер может выдать символ
кодового слова Ci, соответствующий данной ветви решетки. Обратите
внимание, что не существует фиксированной задержки декодирования,
связанной с тем, насколько далеко назад в решетку уходит общий ствол
для данного набора выбранных путей, так как эта задержка зависит от к,
А и от специфических свойств кода- Во избежание случайной задержки
декодирования, алгоритм Витерби специально был модифицирован таким
образом, что на данной ступени решетки решение о возвращении к наи-
более правдоподобной ветви п на ступень назад принимается на основе
390 Глава 8. Кодирование в беспроводных каналах
частных метрик путей, входящих в эту точку. Хотя эта модификация
не дает точного декодирования по максимуму правдоподобия, для до-
статочно большого числа п (обычно при n 5К) это служит хорошей
аппроксимацией.
Алгоритм Витерби должен отслеживать ~выбранных путей и со-
ответствующих им метрик. На каждой ступени для определения «выжив-
шего» пути необходимо рассчитать для каждой узловой точки 2fc метрик,
соответствующих 2fc путям, входящим в эту узловую точку. Поэтому для
данного алгоритма количество расчетов при декодировании и требования
к памяти возрастают с ростом к и К по экспоненциальному закону. Это
означает, что практическое использование сверточных кодов ограничено
относительно малыми значениями к и К.
8.3.4. Свойства расстояния
Как и в случае блочных кодов, способность сверточных кодов к испра-
влению ошибок зависит от кодового расстояния между последовательно-
стями кодовых слов. Так как сверточные коды линейные, то минималь-
ное расстояние между всеми последовательностями кодовых слов можно
найти, определив минимальное расстояние от любой последовательности
до последовательности, состоящей из одних нулей, или, что эквивалент-
но, выбрав в решетке путь, находящийся на минимальном расстоянии
от полностью нулевого пути. Ясно, что путь в решетке, находящийся
на минимальном расстоянии от полностью нулевого пути, будет откло-
няться или сливаться с этим нулевым путем, так что два пути совпадут,
за исключением некоторого количества ветвей решетки. Для нахожде-
ния этого пути с минимальным расстоянием мы должны рассмотреть
все пути, отклоняющиеся от полностью нулевого пути, а затем возвра-
щающиеся в это состояние. В качестве примера на рис. 8.10 изображены
все пути, показанные на рис. 8.7 для интервала времени от to до is, от-
клоняющиеся и затем сливающиеся с полностью нулевым состоянием.
Обратите внимание, что путь 2 идентичен пути 1 — просто сдвинут во
времени — и поэтому не рассматривается как отдельный путь. Заметьте
также, что можно было бы отслеживать и больший временной интервал,
но в этом случае некоторые отклоняющиеся и повторно сливающиеся пу-
ти будут проходить через одни и те же ветви (но со сдвигом во времени),
повторяя один из уже существующих путей с добавлением нескольких до-
полнительных ветвей, и поэтому будут иметь большие значения метрики.
В частности, мы видим, что путь 4 проходит по ветвям решетки 00-10-01-
10-01-00, тогда как путь 1 проходит по ветвям 00-10-01-00. Так как путь
4 проходит по тем же ветвям, что и путь 1, во время своего первого,
второго и последнего перехода, а также имеет дополнительные перехо-
8.3. Сверточные коды
ды, то его метрика будет не меньше, чем метрика пути 1. Поэтому нам
не надо рассматривать больший временной интервал для нахождения пу-
ти с минимальным расстоянием. Для каждого пути на рис. 8.10 указано
расстояние Хэмминга от кодового слова, соответствующего данной вет-
ви, до кодового слова из одних нулей, находящегося на соответствующей
ветви нулевого пути. Суммируя расстояния Хэмминга всех ветвей каждо-
го пути, мы получаем, что расстояние Хэмминга для пути 1 равно 6, а для
путей 3 и 4 — равно 8. Напомним, что пунктирные линии соответствуют
входному биту со значением «1», а сплошные линии — входному биту со
значением «0». Таким образом, мы видим, что путь 1 соответствует вводу
в течение интервала времени to-t$ цифровой последовательности 10000,
путь 3 соответствует вводу цифровой последовательности 11000, а путь
4 — вводу цифровой последовательности 10100. Поэтому, в результате 1
путь дает 1 ошибочный бит относительно последовательности, состоящей
из одних нулей, а 3 и 4 пути дают по 2 ошибки.
Рис. 8.10. Расстояния до пути, состоящего из одних нулей. Путь 1 и 2: 00-10-01-00;
путь 3: 00-10-11-01-00; путь 4: 00-10-01-10-01-00
Минимальное свободное расстояние (минимальный просвет) сверточ-
ного кода df. которое иногда называют просто просветом, определяют
как минимальное расстояние Хэмминга от всех путей в решетке до пути,
состоящего из одних нулей, которое в данном примере равно 6. Воз-
можность исправления ошибок для данного кода определяется таким же
образом, как и в блочных кодах, но с заменой c/rnjn на df, так что код
может исправлять t ошибок канала при t = L0,5d/J.
8.3.5. Диаграммы состояния и передаточные функции
Передаточная функция сверточного кода используется для характери-
стики пути, отклоняющегося и снова сливающегося с путем, состоящим
Глава 8. Кодирование в беспроводных каналах
из одних нулей, а также для получения границ вероятности ошибки. Пере-
даточная функция получается из диаграммы состояний кода, представля-
ющей возможные переходы от полностью нулевого состояния до того же
полностью нулевого состояния. Диаграмма состояний кода, представлен-
ного на рис. 8.7, показана на рис. 8.11, где полностью нулевое состояние
а = 00 присвоено также второму узлу (е), чтобы наглядно представить
все пути, начинающиеся и заканчивающиеся в этом состоянии. Переходы
между состояниями при подаче на вход бита со значением «0» показаны
сплошными линиями, а переходы при подаче на вход бита со значением
«1» — пунктирными линиями. Ветви диаграммы состояний обозначены
как D° = 1, D1, D2 или D3, где показатель степени D соответствует
расстоянию Хэмминга между данным кодовым словом (которое показа-
но для каждой ветви перехода) и кодовым словом с полностью нулевого
пути, состоящим из одних нулей. Петлей в узле а можно пренебречь, так
как она не влияет на расстояния кода.
100
Рис. 8.11. Диаграмма состояний
В данной диаграмме каждое состояние может быть представлено урав-
нением состояний. Для примера, приведенного на рис. 8.11, мы получим
уравнения для четырех состояний:
Хс = D3Xa+DXb, Xb = DXc+DXd, Xd = D2Xc+D2Xd, Xe=D1Xb,
(8.61)
где Xa,..., Xe — условные переменные, характеризующие отдельные пу-
ти. Передаточная функция кода, описывающая пути от состояния а до со-
стояния е, определяется как T(D) = Хе/Ха. При решении уравнения
состояний кода, для чего можно использовать стандартные методы, на-
пример, формулу Мейсона, мы получаем передаточную функцию следую-
8.3. Сверточные коды
щего вида:
ОО
Т(£>) = adDd, (8.62)
d=df
где ad — количество путей с расстоянием Хэмминга d до пути, состояще-
го из одних нулей. Как уже говорилось ранее, минимальное расстояние
Хэмминга до пути, состоящего из одних нулей, равно df, а передаточная
функция T(D) показывает, что существуют adf путей с этим минималь-
ным расстоянием. Для примера на рис. 8.11 решение уравнения состояний
(8.61) дает передаточную функцию:
пб
Т(Р) =--------2 = D6 + 2D8 + 4D10 + . (8.63)
1 2D
Из этой передаточной функции видно, что существует один путь с ми-
нимальным расстоянием df = 6 и два пути с расстоянием Хэмминга 8,
что согласуется с рис. 8.10. Передаточная функция представляет удобную
форму перечисления количества и соответствующих расстояний Хэммин-
га для всех путей данного кода, которые отклоняются, а затем сходятся
к пути, состоящему из одних нулей.
Для описания количества путей в решетке и расстояний Хэмминга
до пути, состоящего из одних нулей, достаточно передаточной функции,
однако для расчета вероятности ошибки бита необходима более подроб-
ная характеристика сверточного кода. Чтобы получить эту дополнитель-
ную характеристику, в передаточную функцию вводят два дополнитель-
ных параметра — N и J. Коэффициент N вводится во все переходные
ветви, соответствующие входному биту со значением «1» (пунктирные ли-
нии на рис. 8.11). Коэффициент J вводится в каждую ветвь диаграммы
состояний таким образом, чтобы показатель степени при J в выражении
передаточной функции был равен количеству ветвей в любом заданном
пути от узла а до узла е. Расширенная диаграмма состояний, соответ-
ствующая решетке рис. 8.7, показана на рис. 8.12.
Расширенная диаграмма состояний также может быть представлена
в виде уравнения состояний. Например, для рис. 8.12 мы имеем:
Хс = JND3Xa + JNDXb, Хь = JDXC + JDXd,
Xd = JND2XC + JND2Xd, Xe = JD2Xb.
По аналогии с предыдущим определением передаточной функции, пере-
даточная функция для этой расширенной диаграммы состояний равна
T(D,N, J) = Хе/Ха, что для данного примера дает:
J3ND6
= J3NDe + J4N2D8 + J3N2D8 + J3N3DW + . (8.65)
Глава 8. Кодирование в беспроводных каналах
Коэффициент J очень важен, если нас интересует передача последова-
тельностей конечной длины; при передаче последовательностей с беско-
нечной длиной обычно принимают, что J = 1, что дает передаточную
функцию в виде:
T(D,N) =T(D,N, J = 1). (8.66)
JND2
Рис. 8.12. Расширенная диаграмма состояний
Расширенная передаточная функция дает нам больше информации об
отклонении и последующем слиянии путей, чем просто их расстояние Хэм-
минга. Например, длина минимального пути с расстоянием Хэмминга 6
равна 3 и дает в результате одиночную ошибку (показатель степени при
N равен единице). Один путь с расстоянием Хэмминга 8 и длиной 4 дает
две ошибки и другой путь с расстоянием Хэмминга 8 и длиной 5 дает две
ошибки, что согласуется с рис. 8.10. Расширенная передаточная функ-
ция представляет удобную форму записи расстояний Хэмминга, длины
и количества ошибок для каждого пути, который отклоняется и вновь
сходится с путем, полностью состоящим из нулей. В следующем разде-
ле мы покажем, что такое представление полезно и при характеристике
вероятности ошибки сверточных кодов.
8.3.6. Вероятность ошибки сверточных кодов
Так как сверточные коды — это линейные коды, то вероятность ошибки
для них можно получить, допустив, что передается последовательность,
состоящая из одних нулей, и определив вероятность того, что декодер
примет решение в пользу другой последовательности. Мы рассмотрим
вероятность ошибки декодирования как с жестким, так и с мягким ре-
шением. В беспроводных системах чаще используются системы декоди-
рования с мягким решением благодаря их отличным эксплуатационным
показателям.
8.3. Сверточные коды
Рассмотрим сначала декодирование с мягким решением. Нас интере-
сует, чему равна вероятность того, что при передаче последовательности,
состоящей из одних нулей, на приеме декодируется другая последова-
тельность. Если закодированные символы с выхода сверточного кодера
передаются по каналу с аддитивным белым гауссовым шумом AWGN ме-
тодом когерентной модуляции ДФМН (BPSK) с энергией Ес = RcEb, то
можно показать [1], что при передаче последовательности из одних нулей
вероятность того, что эта последовательность будет ошибочно принята
за другую последовательность с расстоянием Хэмминга d, составляет:
W) = Q = Q (V^bRcd) (8.67)
Эту вероятность называют парной вероятностью ошибки, так как она
соответствует сравнению двух путей, отличающихся друг от друга на d
бит. Передаточная функция перечисляет все пути, отклоняющиеся и за-
тем сходящиеся к пути, состоящему из одних нулей. Поэтому для по-
лучения объединенной границы можем ограничить сверху вероятность
ошибочной замены пути, состоящего из одних нулей, на другой путь вну-
три решетки, в виде:
Ре adQ p27bJRcC?) , (8.68)
d=df
где ad обозначает число путей с расстоянием d до пути, состоящего из од-
них нулей. Эту границу можно выразить через передаточную функцию,
если мы воспользуемся верхней границей Чернова для Q-функции, что
дает:
Q ^7bRcd) e~^d.
Применив это к выражению (8.68), мы получаем верхнюю границу в виде:
Эта верхняя граница отражает вероятность ошибочной замены одной
последовательности на другую, но она не дает нам более важной характе-
ристики — вероятности ошибки бита. Мы знаем, что показатель степени
коэффициента N в выражении передаточной функции T(D,N) показы-
вает количество ошибок в информационных битах при выборе неверного
пути в решетке. Функцию T(D,N) можно представить в виде:
T(D,N) = adDdNPd\ (8.70)
d=df
где f (d) обозначает количество ошибок по битам, соответствующих пути с
расстоянием d до пути, состоящего из одних нулей. Тогда при k = 1 мы мо-
Глава 8. Кодирование в беспроводных каналах
жем определить верхнюю границу вероятности ошибки бита как [1, гл. 8.2]:
ОО
Рь 52 adf(d)Q (y/Z'ybRcd) , (8.71)
d=df
что отличается от выражения (8.68) только взвешивающим коэффици-
ентом f(d), соответствующим числу ошибок по битам на каждом невер-
ном пути. Если Q-функция ограничена сверху неравенством Чернова, как
в предыдущем примере, то мы получим следующую верхнюю границу:
_dT(D,N)
b dN
(8.72)
N=\,D=e—<bRc
Если k > 1, то для получения Рь нужно разделить (8.71) или (8.72) на к.
Все эти границы предполагают использование когерентной модуляции
ДФМН (BPSK) (или когерентной ФМН-4 (QPSK), которая эквивалентна
передаче двух независимых сигналов ДФМН). Для других видов моду-
ляции парная вероятность ошибки P^d) должна рассчитываться заново,
исходя из вероятности ошибки, характерной для данного вида модуляции.
Теперь рассмотрим декодирование с жестким решением. Вероятность
выбора неправильного пути на расстоянии d от пути, состоящего из одних
нулей, для нечетного d задается в виде:
d /ЯХ
Р^= Ё (, )/(i-p)(d~fe),
z—' \k)
fc=0,5(d+l) v '
(8.73)
где p — вероятность ошибки в канале. Это следствие того, что неверный
путь выбирается только в том случае, если декодированный путь будет
ближе к неверному пути, чем к пути, состоящему из одних нулей — по-
этому декодер совершает, по меньшей мере 0,5(d + 1) ошибок. Если d —
четное число, то неверный путь выбирается в том случае, когда деко-
дер совершает более чем 0,5 с/ ошибок, а если количество ошибок точно
равно 0,5с/, то декодер делает случайный выбор. Мы можем ограничить
вероятность парной ошибки как:
P2(t/) < [4р(1-p)]d/2. (8.74)
Теперь, следуя тому же подходу, что и при декодировании с мягким ре-
шением, мы получаем границу вероятности ошибки, равную:
ОО
Ре< 52 «d[4p(l-p)]d/2 <T(D)
d=df
d=df
(8.75)
(8.76)
N=l, D=y/4p(l-p)
8-4- Каскадные коды
8.4. Каскадные коды
Каскадный код, как показано на рис. 8.13, использует два уровня кодиро-
вания: внутренний код и внешний код. Внутренний код обычно устраняет
большинство ошибок, вносимых каналом, а внешний код (как правило,
менее мощный) продолжает снижать вероятность ошибки, которая для
принятых кодированных бит уже относительно низкая (поскольку боль-
шинство ошибок исправляются внутренним кодом). В частности, кас-
кадные коды могут быть эффективны при исправлении пакетов ошибок,
которые распространены в беспроводных каналах при глубоких замира-
ниях. Кроме того, при низких значениях защищенности SNR декодирова-
ние сверточных кодов по методу Витерби имеет тенденцию к созданию
пакетов ошибок. Для компенсации этих пакетов ошибок внутренний кас-
кадный код часто объединяют с внешним кодом Рида - Соломона, так как
коды Рида - Соломона обладают хорошей способностью к исправлению
пакетов ошибок. Кроме того, в каскадных кодах внутренний и внеш-
ний коды часто разделяются устройством чередования, чтобы разрушить
пакеты ошибок. Схемы устройств чередования для различных методов
кодирования описаны в § 8.8.
Рис. 8.13. Каскадное коди-
рование
Каскадные коды обычно обеспечивают очень низкий уровень вероят-
ности ошибки при меньшей сложности, чем у одного кода с теми же пока-
зателями вероятности ошибки. Декодирование каскадных кодов обычно
выполняется в два приема, как показано на рисунке: сначала декодируется
внутренний код, а затем отдельно декодированию подвергается внеш-
ний код. Это субоптимальный метод, так как в действительности оба
кода работают в тандеме для сокращения вероятности ошибки. Одна-
ко декодер максимального правдоподобия для каскадного кода, который
Глава 8. Кодирование в беспроводных каналах
осуществляет объединенное декодирование, чрезвычайно сложен. В се-
редине 1990-х годов было установлено, что декодер каскадных кодов,
близкий к оптимальному, можно получить на основе итеративного де-
кодирования. Это составляет основную предпосылку появления турбо-
кодов, речь о которых пойдет в следующем разделе.
8.5. Турбо-коды
Турбо-коды, предложенные в 1993 г. в знаменитой работе Берроу, Гла-
вье и Тхитимайшима ([6], см. также [7]), представляют мощные коды,
которые в каналах с аддитивным белым гауссовым шумом AWGN могут
обеспечить пропускную способность, только на доли децибела отличаю-
щуюся от граничной пропускной способности по Шеннону. Турбо-коды
и более общее семейство кодов на основе графов с итеративным алгорит-
мом декодирования [8, 9] были тщательно изучены, хотя некоторые их
характеристики еще недостаточно поняты. Основные идеи разработки
кодов на основе графов были высказаны Галлагером еще в начале 1960-х
годов; но в то время эти методы кодирования считались непрактичными
и, как правило, не рассматривались исследователями в данной области.
Поворотная работа 1993 года по турбо-кодам [6] предоставила более чем
достаточно мотиваций для пересмотра работы Галлагера и других авто-
ров по итеративным методам декодирования на основе графов.
Как впервые было описано Берроу и др., турбо-коды состоят из двух
основных частей: параллельно соединенной схемы кодирования и ите-
ративного, турбо-декодирования [6, 11]. Типичная схема параллельного
кодирующего устройства показана на рис. 8.14. Она состоит из двух па-
раллельно соединенных кодеров, отделенных друг от друга устройством
чередования. В канал поступают информационные биты т вместе с би-
тами четности Х± и сформированными каждым из кодеров в соот-
ветствии с входным потоком бит т. Так как информационные биты т
передаются как часть кодового слова, такой код называют систематиче-
ским турбо-кодом. В основу параллельного объединенного кодирования
положены рекурсивные свойства кодеров и влияние на информационный
поток устройства чередования. Устройство чередования также играет
значительную роль в снижении порогов ошибок [11], которые обычно об-
наруживают турбо-коды.
Итеративное или «турбо»- декодирование использует структуру раз-
дельного декодирования турбо-кода, когда каждому кодеру соответству-
ет свой декодер. Более конкретно, каждый декодер производит декодиро-
вание с мягким решением по входу и выходу, как это показано на рис. 8.15
на примере кодера с рис. 8.14. На этом рисунке первый декодер принимает
мягкое решение в форме вероятностной меры p(mi) для переданного по-
тока информационных бит, исходя из принятого кодового слова (т,Лд).
Рис. 8.15.
Турбо-декодер
Рис. 8.14. Параллельно соединенный турбо-кодер
Вероятностная мера определяется на основе максимальной апостери-
орной вероятности (МАР7) или алгоритма Витерби с мягким решени-
ем по выходу (SOVA8), повышающего надежность алгоритма Витерби
с жестким принятием решения [4, гл. 12.5]. Эта информация о вероят-
ности поступает на декодер 2, который определяет свою собственную
вероятностную меру р(т2) на основе принятого кодового слова (т,
7МАР — Maximum a posteriori probability.
8SOVA — Soft output Viterbi algorithm.
Глава 8. Кодирование в беспроводных каналах
и вероятностной меры Затем эта вероятностная мера поступа-
ет на вход декодера 1, который, используя эту информацию и исходное
принятое кодовое слово, перепроверяет собственную вероятностную меру
p(mi). Декодер 1 посылает новую информацию о достоверности декоде-
ру 2, который проверяет свои оценки, используя эту новую информацию.
Таким образом, турбо-декодирование осуществляется итеративным спо-
собом, когда два декодера поочередно обновляют свои вероятностные
меры. В идеале, декодеры в конечном итоге должны согласовать свои
вероятностные меры, что дает жесткое решение т = т± = т?- Однако
условие прекращения турбо-декодирования не имеет четкого определе-
ния — отчасти потому, что существует много случаев, когда алгоритм
турбо-декодирования не сходится: декодеры не могут прийти к согласию
в отношении значения т. Было предложено несколько методов для опре-
деления сходимости (если таковая случается), включая оценку дисперсии
бит [7] и методы нейронных сетей [12].
Eb/N0, дБ
Рис. 8.16. Показатели тур-
бо-кода (скорость = 1/2, К =
— 5 отдельных кодов с чере-
дованием глубиной 216)
На рис. 8.16 представлены результаты моделирования показателей тур-
бо-кодов при различном числе итераций декодера для кода, состояще-
го из двух сверточных кодов со скоростью 1/2 с ограниченной длиной
К = 5, разделенных устройством чередования глубиной d — 216 = 65 536.
Декодирование сходится после приблизительно восемнадцати итераций.
Эти графики иллюстрируют несколько важных аспектов турбо-кодов. Во-
первых, обратите внимание на их исключительные характеристики: веро-
ятность ошибки равна 10-6 при Еь/Nq менее чем в 1 дБ. Действительно,
оригинальный турбо-код, предложенный в [6], обеспечивал пропускную
способность в пределах 0,5 дБ от граничного значения Шеннона при веро-
ятности ошибки Рь = 105. Интуитивно объяснить замечательные пока-
затели турбо-кодов можно тем, что сложность их структуры кодирования
напоминает коды, достигающие пропускной способности по Шеннону.
Итеративный принцип работы двух турбо-декодеров позволяет декодиро-
вать турбо-коды без чрезмерной сложности. Однако обратите внимание,
что турбо-коды имеют минимальный уровень порога ошибок: на рис. 8.16
этот минимальный уровень составляет 10-6. Порог ошибок создает про-
блемы в системах, где необходим чрезвычайно низкий уровень ошибок.
Было исследовано несколько механизмов снижения минимального поро-
га ошибок, включая цифровое чередование и увеличение длины кодового
ограничения для отдельных кодов.
Альтернативой параллельному каскадному кодированию служит по-
следовательное каскадное кодирование [13]. При таком методе кодиро-
вания одна составляющая кода используется в качестве внешнего ко-
да, а затем выход этого первого кодера чередуется и подается на вто-
рой кодер. На выходе второго кодера формируются кодированные би-
ты. При декодировании используется итеративное декодирование между
внешним и внутренним кодами. Существует множество работ, посвящен-
ных сравнению эксплуатационных показателей последовательных и па-
раллельных каскадных кодов (см., например, 13-15]). Хотя оба метода
работают очень хорошо с равной задержкой и одинаковым уровнем слож-
ности, в некоторых случаях последовательное каскадное кодирование ока-
зывается лучше при низких коэффициентах ошибок, а также может обес-
печить более низкий минимальный пороговый уровень ошибок.
8.6. Коды с проверкой на четность низкой плотности
Коды с проверкой на четность низкой плотности (LDPC9) в своем пер-
воначальном виде были предложены Галлагером [10]. Однако эти коды
оставались невостребованными вплоть до появления турбо-кодов, кото-
рые заново использовали некоторые их идеи. После поворотной статьи [6]
1993 года, посвященной турбо-кодам, коды LDPC были представлены
Мэккеем и Нилом в [16] и Вайбергом [17]. Вскоре было признано, что
эти новые схемы кодирования, по сути, повторяют оригинальные идеи
Галлагера, и впоследствии много работ было посвящено нахождению огра-
ничений пропускной способности, схемам кодирующего и декодирующего
устройств, а также практическому использованию кодов LDPC в различ-
ных каналах.
0LDPC — Low-density parity-check codes.
402 Глава 8. Кодирование в беспроводных каналах
Коды с проверкой на четность низкой плотности представляют собой
линейные блочные коды с особой структурой матрицы контроля четно-
сти Н, определение которой было дано в подпараграфе 8.2.3. В частности,
регулярный двоичный код (dv,dc) LDPC имеет матрицу контроля четно-
сти Н с dv единиц в каждом столбце и dc единиц в каждой строке, при
этом параметры dv и dc выбираются при разработке кодового слова и име-
ют малые значения по сравнению с длиной кодового слова. Так как доля
ненулевых элементов в матрице контроля четности Н для данного кода
мала, то говорят, что эта матрица имеет низкую плотность — отсюда
и название: коды с проверкой на четность низкой плотности.
При большой длине кодового слова коды LDPC достигают показа-
телей, близких к пределу Шеннона, а в некоторых случаях превосходят
показатели параллельных или последовательных каскадных кодов [18].
Принципиальное практическое различие между турбо-кодами и кодами
LDPC заключается в том, что турбо-коды имеют тенденцию к низкой
сложности кодирования (линейно по длине блока), но высокой сложности
декодирования (вследствие их итеративной природы и схемы прохожде-
ния сообщения). Коды LDPC, наоборот, имеют тенденцию к относитель-
но высокой сложности кодирования, но низкую сложность декодирования.
В частности, как и у турбо-кодов, процесс декодирования кодов LDPC
использует итеративные методы, связанные с идеями Перла, которые
широко применяются специалистами по системам искусственного интел-
лекта (см. [19]). Однако принципы декодирования кодов LDPC могут
быть проще, чем при турбо-декодировании [19, 20]. Кроме того, такое
декодирование может выполняться параллельно и может быть аппрок-
симировано с помощью очень простых декодеров [21], хотя это также
возможно и для турбо-декодирования. И, наконец, алгоритм декодиро-
вания кодов LDPC позволяет определить, когда было принято верное
кодовое слово, что не всегда возможно в случае с турбо-кодами. Ком-
промисс между турбо- и LDPC кодами составляет предмет интенсивных
исследований, и много вопросов, касающихся их показателей, еще оста-
ются открытыми.
Дополнительные исследования в области кодов LDPC посвящены опре-
делению пределов пропускной способности для этих кодов [21], нахожде-
нию эффективных методов разработки кодов [22] и эффективных алго-
ритмов кодирования и декодирования [21, 23], расширению схем коди-
рования за счет нерегулярных и недвоичных кодов LDPC [24], а также
кодовой модуляции [25].
8.7. Кодовая модуляция
Хотя Шеннон и доказал в конце 1940-х годов теорему о пропускной спо-
собности каналов с аддитивным белым гауссовым шумом AWGN, до кон-
ца 1990-х невозможно было получить скорости, достигающие предела Шен-
нона — впервые это удалось сделать для каналов AWGN с двоичной
модуляцией при использовании турбо-кодов. Теорема Шеннона предска-
зала возможность одновременного сокращения энергии и полосы частот
с помощью кодирования. Однако, как было показано в § 8.1, традиционные
схемы исправления ошибок при кодировании (т. е. блочные, сверточные
и турбо-коды) обеспечивают эффективность кодирования за счет увели-
ченния полосы частот и сокращения скорости передачи.
Прорыв в спектральной эффективности кодирования произошел, ко-
гда Унгербоек [26] ввел метод кодовой модуляции для совместной опти-
мизации канального кодирования и модуляции. Эта двойная оптимизация
обеспечивает значительное повышение эффективности кодирования без
расширения полосы частот. Кодовая решетчатая модуляция Унгербоека,
использующая многоуровневую фазовую модуляцию сигнала и простое
сверточное кодирование с разбиением множества, выдерживает сравне-
ние с последующими достижениями в области кодовой модуляции (смеж-
но-групповыми и решетчатыми кодами), а также с более сложными ма-
тричными кодами [27]. Сейчас мы сформулируем основные принципы
этого метода кодирования. Полное освещение матричных, решетчатых
и смежно-групповых кодов можно найти в [26-28].
Основная схема матричного и решетчатого кодирования — или, еще
более обобщенно, схема смежно-группового кодирования любого типа —
показана на рис. 8.17. Существуют пять элементов, необходимых для со-
здания кодовой модуляции такого рода:
1) двоичный кодер Е (блочный или сверточный), оперирующий с к
некодированными информационными битами для создания к + г ко-
дированных бит;
2) селектор подмножеств (смежных групп), использующий кодирован-
ные биты для выбора одного из 2к+г подмножеств, на которые раз-
бивается N-мерное сигнальное созвездие;
3) селектор точек сигнала, использующий п — к дополнительных неко-
дированных бит для выбора одной из 2п~к точек сигнала в выбран-
ном подмножестве;
4) карта созвездия (диаграмма состояний), отображающая выбранную
точку Af-мерного пространства в последовательность из N/2 точек
в двумерном пространстве;
Глава 8. Кодирование в беспроводных каналах
5) модулятор многоуровневый КАМ — МКАМ (MQAM) (или другой
многоуровневый модулятор).
точек сигнала точек сигнала
Рис. 8.17. Общая схема кодирования
Два первых элемента определяют способ канального кодирования, а
оставшиеся элементы осуществляют модуляцию. Приемник же, по сущест-
ву, меняет местами этапы модуляции и кодирования. После демодуляции
МКАМ (MQAM) и обратного отображения созвездия из 2/N состояний,
декодирование, по сути, происходит в два шага: сначала определяются
точки внутри каждого подмножества, ближайшие к полученной точке
сигнала; затем рассчитывается максимально правдоподобная последова-
тельность подмножества. Если кодирующее устройство Е представляет
сверточный кодер, то данная схема называется модуляцией с решетча-
тым кодом (кодово-матричной модуляцией); при использовании блочного
кодирующего устройства Е схема называется структурно-кодовой мо-
дуляцией (или решетчатой кодовой модуляцией.) Эти схемы называют
также матричными или решетчатыми кодами.
Шаги 1-5, по сути, отделяют эффективность кодирования канала от
выигрыша, обусловленного формированием сигнала в процессе модуля-
ции. Так, свойства кодового расстояния — и, следовательно, эффектив-
ность кодирования канала, — определяются свойствами кодирующего
устройства (Е) и разбиением на подмножества, которые, по существу, не
связаны с формированием сигнала. Ниже мы обсудим эффективность ко-
дирования канала более подробно. Оптимальная форма созвездия сигнала
дополнительно обеспечивает до 1,53 дБ выигрыша за счет формирова-
ния сигнала (для асимптотически большого АГ), независимо от схемы
кодирования канала10. Однако улучшение показателей за счет выигрыша
10Квадратное созвездие дает 0 дБ выигрыша при формировании сигнала, а круговое
созвездие, представляющее геометрическую фигуру с наименьшей средней энергией
при заданной площади, дает максимальный выигрыш формирования при заданном N [27].
8.7. Кодовая модуляция
при формировании сигнала компенсируется сложностью карты созвездия,
которая растет по экспоненциальному закону с ростом N. Размер пере-
даваемого созвездия определяется средним ограничением мощности и не
влияет на выигрыш формирования или кодирования.
Эффективность канального кодирования достигается за счет правиль-
ного выбора последовательностей среди всех возможных последователь-
ностей точек сигнала. Если рассматривать последовательность N входных
бит как точку в TV-мерном пространстве (пространстве последовательно-
стей), то этот выбор должен гарантировать определенное минимальное
расстояние dmin в пространстве последовательностей между возможны-
ми входными последовательностями. Ошибки обычно случаются, когда
последовательность ошибочно принимается за ближайшего соседа, а в ка-
налах с аддитивным белым гауссовым шумом AWGN вероятность ошибки
представляет убывающую функцию от с^;п. Поэтому мы можем умень-
шить коэффициент ошибок BER, увеличивая расстояние между всеми
точками в пространстве последовательностей на постоянную величину
(«расширяя» пространство). Однако в итоге это даст пропорциональное
увеличение мощности, поэтому выигрыша при кодировании не будет. По-
этому при канальном кодировании выигрыш по мощности равен квадрату
минимального расстояния между выбранными точками последовательно-
сти (точки последовательности, полученные при кодировании), умножен-
ному на плотность отобранных точек последовательности. Если обозна-
чить минимальное расстояние и плотность всех точек в пространстве
последовательностей как do и До соответственно, а минимальное расстоя-
ние и плотность точек в пространстве последовательностей, отобранных
при кодировании, — как drnin и Д соответственно, то выбор последова-
тельности по максимуму правдоподобия дает величину эффективности
канального кодирования, равную:
/л2 . \ / д \
(8-77)
Второй элемент в правой части этого выражения называется коэффи-
циентом расширения созвездия и равен 2Г (на N измерений) при избы-
точности кодирующего устройства Е, равной г бит [27].
Некоторая доля номинальной эффективности кодирования (8.77) теря-
ется вследствие отобранных последовательностей, имеющих более одного
ближайшего соседа в пространстве последовательностей, что повыша-
ет возможность неправильного детектирования последовательности. Эти
потери в эффективности кодирования характеризуются коэффициентом
ошибки, который протабулирован для большинства решетчатых и ма-
тричных кодовых модуляций в [27]. В целом, коэффициент ошибки больше
Глава 8. Кодирование в беспроводных каналах
для решетчатых кодов, чем для матричных кодов с сопоставимыми зна-
чениями Gc.
Кодирование канала выполняется с использованием разбиения решет-
ки на подмножества. Решетка представляет дискретный набор векторов
в реальном эвклидовом TV-мерном пространстве, формирующем группу
при обыкновенном векторном сложении так, что сумма или разность лю-
бых двух векторов в решетке также будет находиться в этой решетке.
Подрешетка представляет подструктуру решетки, которая сама по се-
бе также является решеткой. При некодированной модуляции МКАМ
(MQAM) пространство последовательностей — это просто Af-мерный
куб11, поэтому минимальное расстояние между точками не отличается от
аналогичного расстояния для двумерного случая. При ограничении вход-
ных последовательностей условием, что они должны быть расположены на
решетке в Af-мерном пространстве, которое является более плотным, чем
Af-мерный куб, мы можем увеличить расстояние с/„ш1 при поддержании
той же плотности (или, что равнозначно, той же самой средней мощности)
в созвездии передаваемого сигнала; следовательно, никакого расшире-
ния созвездия не происходит. Af-мерный куб является решеткой, но для
любого N > 1 существуют более плотные решетки в Af-мерном простран-
стве. Нахождение наиболее плотной решетки в Af-мерном пространстве
представляет хорошо известную математическую задачу, которая была
решена для всех N, при которых реализация декодера не слишком слож-
на.12 Когда известна самая плотная решетка, можно провести разбиение
решетки на подмножества (или смежные группы), используя преобразо-
вание любой подрешетки. Выбор подрешетки будет определять порядок
разбиения, т. е. количество подмножеств, из которых селектор подмно-
жеств на рис. 8.17 должен сделать выбор. Затем информационные биты
пересылаются двумя путями: через последовательность смежных групп
(подмножеств), из которых отобраны точки созвездия, и через точки,
отобранные внутри каждой смежной группы. Плотность решетки опре-
деляет расстояние между точками внутри смежной группы, тогда как
расстояние между последовательностями подмножества в значительной
мере определяется свойствами двоичного кода, используемого кодером Е,
и его избыточностью г. Если обозначить минимальное расстояние между
точками внутри подмножества как dp, а минимальное расстояние между
последовательностями подмножества — как ds. то минимальное расстоя-
ние кода составит drnin = min(dp, ds). Эффективность кодирования в этом
11 Декартово произведение двумерных прямоугольных решеток в точках с целыми не-
четными значениями.
12Сложность реализации декодера по максимуму правдоподобия с алгоритмом Витерби
приблизительно пропорциональна N.
8.7. Кодовая модуляция
случае равна:
Gc = 2-2^d2min, (8.78)
где 2-2г/ЛГ — коэффициент расширения созвездия (в двух измерениях) за
счет г дополнительных бит, введенных кодером двоичного канала.
Возвращаясь к рис. 8.17, предположим, что необходимо передать т =
= п + г бит на измерение, т. е. последовательность длиной N переносит
mN бит. Если мы воспользуемся самой плотной решеткой в TV-мерном
пространстве, лежащей внутри TV-мерной сферы, причем радиус сферы
достаточно большой, чтобы включить в себя 2т точек, то получим пол-
ную величину выигрыша при кодировании, объединяющую эффектив-
ность кодирования (образующуюся за счет плотности решетки и свойств
кодирующего устройства) и эффективность формирования TV-мерной сфе-
ры вокруг TV-мерного прямоугольника. Ясно, что эффективность коди-
рования отделена от эффективности формирования сигнала. Увеличение
мощности сигнала позволит нам использовать большую TV-мерную сферу
и, следовательно, передавать больше некодированных бит. Можно сфор-
мировать N-мерную решетку с максимальной плотностью при N = 4,
8, 16 и 24, используя простое деление двумерной прямоугольной решет-
ки в сочетании со стандартным блочным или сверточным кодированием.
Детали таких схем кодирования и соответствующие алгоритмы декоди-
рования можно найти в [28] как для решетчатых, так и для матричных
кодов. Для данных схем эффективность кодирования при использовании
решетчатых кодов составляет приблизительно 1,5, 3, 4,5 и 6 дБ для N = 4,
8, 16 и 24 соответственно. Матричные коды обеспечивают более высокие
значения эффективности кодирования при соизмеримой сложности.
В завершение этого параграфа рассмотрим пример кодовой модуля-
ции: N = 8, а выигрыш при использовании решетчатого кода, предло-
женного в [28], равен 3 дБ. Сначала двумерное созвездие сигнала делится
на четыре подмножества, как это показано на рис. 8.18, где подмножества
представлены точками Ao, А±, Bq и В±. Например, при КАМ-16 (16-QAM)
созвездие имело бы четыре подмножества, каждое из которых состояло
бы из четырех точек созвездия. Обратите внимание, что расстояние меж-
ду точками в каждом подмножестве в два раза больше расстояния между
точками в (некодированном) созвездии. На основании этого разбиения
мы формируем 8-мерную решетку, беря все последовательности четырех
точек, если (i) все точки являются либо A-точками, либо В-точками, и (ii)
внутри последовательности, состоящей из четырех точек, нижние индек-
сы точек соответствуют контролю четности и + «2 + *з + й = 0 (так что
нижние индексы последовательности должны быть кодовыми словами ко-
да (4,3) с контролем четности и минимальным расстоянием Хэмминга,
равным 2). Таким образом, подмножество решетки образуют три ин-
Глава 8. Кодирование в беспроводных каналах
формационных бита и один бит проверки четности. В результате такого
разбиения на подмножества, квадрат минимального расстояния увеличи-
вается в четыре раза по сравнению с некодированным созвездием сигнала,
что дает выигрыш в 6 дБ. Однако дополнительный бит контроля четно-
сти расширяет созвездие на 1/2 бита на измерение, что, в соответствии
с подпараграфом 5.3.3, требует дополнительного увеличения мощности
на коэффициент, равный 40,5 = 2, или 3 дБ. Поэтому эффективность
кодирования составит 6 — 3 = 3 дБ. Оставшиеся информационные би-
ты используются для выбора точки внутри выбранного подмножества
и поэтому при скорости передачи данных, равной т бит на символ, ка-
ждое подмножество четырехмерной решетки должно иметь 2"'1 точек.13
Например, для созвездия КАМ-16 каждое подмножество четырехмерной
решетки должно иметь 2"1-1 = 4 точки, так что скорость передачи дан-
ных составляет 3 информационных бита на символ.
Рис. 8.18. Разбиение на подмноже-
ства для получения 8-мерной решетки
AQ Bq Aq Bq Aq Bq Aq Bq Aq Bq
ЕЦ A^ B. A^ В. А1 В.j A^ B^ A1
AQ Bq Aq Bq Aq Bq Aq Bq Aq Bq
B1 A1 B1 A1 B1 A1 B1 A1 B1 A1
A0 B0 Ло Bo Ao Bo Ao Bo Ao Bo
B1 A1 B1 A1 B1 A1 B1 A1 B1 A1
Ao Bo Bo Ao Bo Ao Bo Ao Bo
B1 A1 B1 A1 B1 A1 B1 A1 B1 A1
Ao Bo Ao Bo Ao Bo Ao Bo Ao Bo
Кодовая модуляция, использующая турбо-коды, также рассмотрена
в работах [29-31]. Там показано, что при недвоичной передаче сигна-
лов матричная модуляция с использованием турбо-кодов может подойти
очень близко к пределу Шеннона.
13Это дает т — 1 бит на символ, при этом дополнительный бит на символ связан с ка-
нальным кодированием.
8.8. Кодирование и чередование в каналах с замираниями 409
8.8. Кодирование и чередование в каналах с замираниями
Для обеспечения хороших рабочих показателей в каналах с аддитивным
белым гауссовым шумом AWGN были разработаны блочные и сверточные
коды, а также кодовая модуляция. В каналах с замираниями ошибки при
демодуляции имеют тенденцию происходить пакетами, соответствующи-
ми периодам времени, когда канал находится в состоянии глубокого зами-
рания. Большинство кодов, созданных для каналов с аддитивным белым
гауссовым шумом AWGN, не могут исправлять длинные пакеты ошибок,
появляющиеся в каналах с замираниями. Следовательно, при замираниях
коды для каналов с AWGN могут иметь даже худшие показатели, чем
система без кодирования.
С целью улучшения эксплуатационных показателей, в каналах с зами-
раниями кодирование обычно объединяется с чередованием, что снижает
вероятность появления пакетов ошибок. Основным исходным условием
кодирования с чередованием служит рассредоточение пакета ошибок, вы-
званных глубокими замираниями, на множество кодовых слов, так чтобы
каждое принятое кодовое слово одновременно содержало, по крайней ме-
ре, несколько ошибочных символов, которые можно было бы исправить.
Рассредоточение пакетов ошибок реализуется с помощью устройства че-
редования, а исправление ошибок выполняется кодом. Размер устройства
чередования должен быть достаточно большим, так как замирания неза-
висимы в течение всего кодового слова. Каналы с медленными замирани-
ями требуют больших устройств чередования, что, в свою очередь, может
привести к большим задержкам.
Кодирование с чередованием представляет форму разнесенного прие-
ма, и эксплуатационные показатели данного метода часто характеризуют
кратностью разнесения сигнала и соответствующей вероятностью ошиб-
ки. Кратность разнесения сигнала обычно является функцией минималь-
ного расстояния Хэмминга. Поэтому схемы кодирования с чередованием
в каналах с замираниями должны быть, в первую очередь, направлены
на максимизацию кратности разнесения кодированных сигналов, а не
таких параметров, как, например, эвклидово расстояние, которые слу-
жат критериями качества в каналах с аддитивным белым шумом AWGN.
В последующих разделах мы более подробно рассмотрим кодирование
с чередованием для случаев блочных, сверточных кодов и кодовой моду-
ляции. Мы допускаем, что приемник обладает информацией о замираниях
в канале, что очень упрощает как анализ, так и схему декодера. Оценки
канала с замираниями получают, в основном, при передаче контрольных
сигналов [32, 33]. Детектирование кодированных сигналов при замира-
ниях по методу максимального правдоподобия без информации об этом
410 Глава 8. Кодирование в беспроводных каналах
канале требует очень трудоемких вычислений [34], и поэтому обычно
требуется аппроксимация либо алгоритма декодирования по максимуму
правдоподобия, либо канала [34-39]. Обратите внимание, что турбо-коды,
созданные для каналов с аддитивным белым шумом AWGN и описанные
в § 8.5, имеют устройство чередования, включенное в схему кодирования.
Однако анализ схем чередования в каналах с AWGN отличается от ана-
лиза для каналов с замираниями. Обсуждение схем чередования и анализ
их показателей для турбо-кодов в каналах с замираниями можно най-
ти в [40, гл. 8; 41, 42]. Коды низкой плотности с проверкой на четность
также могут поддерживать схемы разнесенного приема для борьбы с за-
мираниями, при этом их эксплуатационные характеристики будут похожи
на аналогичные показатели турбо-кодов, оптимизированных для разне-
сенного приема при замираниях [43].
8.8.1. Блочное кодирование с чередованием
Для рассеивания пакетов ошибок блочные коды обычно объединяют с че-
редованием блоков. Устройство чередования блоков представляет собой
решетку из d строк и п столбцов, как это показано на рис. 8.19. В устрой-
ствах чередования блоков для блочных (тг, k) кодов, кодовые слова счи-
тываются построчно, так что каждая строка содержит кодовое слово
с параметрами (n, fc). В модуляторе содержимое устройства чередования
считывается по столбцам для последующей передачи по каналу. Во вре-
мя передачи символы одного и того же кодового слова разносятся друг
от друга на d — 1 других символов, при этом символы одного и того
же кодового слова будут испытывать приблизительно независимые зами-
рания, если их разделение во времени превышает время когерентности
канала — т. е., если dTs > Тс « 1/Вр, где Ts —длительность символа
кодового слова, Тс — время когерентности канала, а Вр — доплеров-
ское расширение канала. Устройство чередования называется глубоким,
если выполняется условие dTs > Тс. Устройство устранения чередования
(устройство обратного чередования) — это решетка, идентичная переме-
жителю. Это устройство считывает биты из демодулятора по столбцам,
так что каждый ряд будет содержать кодовое слово (биты которого мо-
гут быть искажены каналом). Сигнал с выхода устройства устранения
чередования считывается в декодере построчно, по одному кодовому сло-
ву за один раз.
Рис. 8.19 иллюстрирует способность кодирования с чередованием ис-
правлять пакеты ошибок. Допустим, что наша схема кодирования пред-
ставляет двоичный блочный код (n, к) с исправляющей способностью t = 2.
Если кодовое слово передается по каналу с одним пакетом ошибок, со-
стоящим из трех символов, то три из четырех символов кодового слова
8.8. Кодирование и чередование в каналах с замираниями
будут получены с ошибкой. Так как код может исправить только две
или меньше ошибок, кодовое слово будет декодировано ошибочно. Од-
нако если кодовое слово пропустить через устройство чередования, то,
как показано на рис. 8.19, пакет ошибок, состоящий из трех символов,
будет разбит на три отдельных кодовых слова. Так как ошибка в одном
символе может быть легко исправлена кодом (n, k) с t = 2, то исходные
информационные биты могут быть декодированы без ошибки. Сверточ-
ные устройства чередования, в принципе, похожи на блочные устройства
чередования и лучше подходят для сверточных кодов, о чем речь пойдет
в подпараграфе 8.8.2.
Рис. 8.19. Работа прямого и обратного устройств чередования блоков
Анализ эксплуатационных показателей кодирования с чередованием
предполагает нахождение парной вероятности ошибки или применение
либо границы Чернова, либо объединной границы. Подробности такого
анализа можно найти в [1, гл. 14.6]. Объединенная граница обеспечива-
ет простую аппроксимацию эксплуатационных показателей. Допустим,
что в канале с рэлеевскими замираниями используется глубокое передо-
Глава 8. Кодирование в беспроводных каналах
вание, так что каждый кодированный символ замирает независимо. Тогда
граница объединения для блочного кода (п, к) при декодировании с мяг-
ким решением и некогерентной модуляции ЧМН (FSK) дает вероятность
ошибки в кодовом слове, равную:
Ре < (2к - 1) [4р( 1 - p)]d™ , (8.79)
где cimin — минимальное расстояние Хэмминга кодового слова, а
1
Р 2 + Rcyb'
(8.80)
Подобным образом, для каналов с медленными замираниями, в кото-
рых можно получить когерентную опорную фазу, объединенная граница
вероятности ошибки в кодовом слове блочного кода (п, к) при декодиро-
вании с мягким принятием решения и модуляции ДФМН (BPSK) дает:
_ 1 \ / 1 \ ^min
, • (8-81)
^min / \4.RC7(>/
Обратите внимание, что и (8.79), и (8.81) похожи на формулу вероятно-
сти ошибки разнесенного приема при объединении с дифференциальным
взвешиванием MRC (7.23), где с?т1П определяет порядок разнесения. По-
хожие формулы применяются и для жесткого декодирования, при этом
кратность разнесения сигнала уменьшается в 2 раза по сравнению с де-
кодированием с мягким решением. Таким образом, схемы блочного ко-
дирования с чередованием, предназначенные для каналов с замираниями,
оптимизируют свои показатели, максимизируя расстояние Хэмминга для
данного кода.
Кодирование с чередованием представляет субоптимальный метод ко-
дирования, так как корреляция замираний, влияющая на последующие
биты, содержит информацию о канале, которая могла бы быть исполь-
зована в схеме декодирования по максимуму правдоподобия. При отбра-
сывании этой информации свойственная каналу пропускная способность
уменьшается [44]. Однако, несмотря на это, кодирование с чередовани-
ем, использующее коды, разработанные для каналов AWGN, представля-
ет распространенный метод кодирования в каналах с замираниями, так
как сложность реализации декодирования коррелированных кодирован-
ных символов по максимуму правдоподобия оказывается чрезмерно вы-
сокой.
Пример 8.8. Рассмотрим канал с рэлеевскими замираниями и доплеровской
частотой Bd = 80 Гц. Система использует код Хэмминга (5,2) с чередовани-
ем для компенсации замираний. Символы кодового слова передаются по каналу
со скоростью 30 кбит/с. Найдите глубину чередования, необходимую для полу-
чения независимых замираний каждого символа. Какой самый длинный пакет
8.8. Кодирование и чередование в каналах с замираниями
ошибок в кодовом слове может быть исправлен и чему равна общая задержка
в устройстве чередования для данной глубины?
Решение. Код Хэмминга (5,2) имеет минимальное расстоние 3, поэтому он мо-
жет исправлять t = [0,5 • 3J = 1 ошибку в символе кодового слова. Символы
кодового слова передаются по каналу со скоростью Rs — 30 кбит/с, поэто-
му время передачи символа равно Ts — ~\./Rs — 3,3 • 10-5. Предположим, что
время когерентности для данного канала составляет Тс = ^/Bd = 0,0125 с.
Биты в усройстве чередования разносятся на интервал dTs, поэтому для не-
зависимости замираний каждого символа кодового слова необходимо, чтобы
выполнялось условие dTs Тс. Решая это неравенство относительно d, получа-
ем d Tc/Ts — 375. Так как устройство чередования рассеивает пакет ошибок
на глубину d, то после устранения чередования пакет из d ошибок символов
в перемежающихся кодовых словах даст только одну ошибку символа на каждое
кодовое слово, которая может быть исправлена. Таким образом, допустимым для
данной системы будет пакет ошибок из 375 символов. Однако все строки уст-
ройства чередования должны быть заполнены до того, как будет производиться
считывание по столбцам, поэтому полная задержка в устройстве чередования
составляет ndTs = 5 • 375 3,3 • 10 5 = 62,5 мс. Такая задержка может ухуд-
шить качественные показатели системы передачи речевых сообщений. Поэтому
понятно, что ценой, которую приходится платить за исправление длинных паке-
тов ошибок при кодировании с чередованием, будет значительная задержка.
8.8.2. Сверточное кодирование с чередованием
Как и в случае с блочными кодами, сверточные коды в каналах с замира-
ниями снижают свои эксплуатационные показатели, так как эти коды не
предназначены для исправления пакетов ошибок. Поэтому для рассеива-
ния пакетов ошибок принято использовать устройство чередования. При
блочном кодировании это устройство разбрасывает ошибки по различ-
ным кодовым словам. Так как в сверточных кодах нет подобного понятия
кодового слова, то схема чередования для уменьшения влияния пакетов
ошибок будет несколько отличаться. Устройство чередования, которое
обычно используется со сверточными кодами, называется сверточным
устройством чередования. Это устройство обеспечивает рассеивание па-
кетов ошибок, и при этом хорошо приспособлено к последовательному
характеру формирования сверточных кодов [45, 46].
На рис. 8.20 показана структурная схема сверточного устройства че-
редования. Сигналы с выхода кодера мультиплексируются во времени
в буферы. Объем буфера может быть равен от нуля до N — 1. Подобным
образом входные сигналы из этих буферов мультиплексируются в канал.
В декодере выполняется обратная операция. Таким образом, задержка
в устройстве чередования при передаче выходного сигнала кодера по ка-
налу постепенно увеличивается, а в приемнике эта задержка уменьшается
в обратном порядке. Устройство чередования принимает последователь-
Глава 8. Кодирование в беспроводных каналах
ные символы с выхода кодера и при передаче в канал разделяет их дру-
гими N — 1 символами, в результате чего пакеты ошибок распадаются.
Заметьте, что сверточный кодер может использоваться и с блочными
кодами, но чаще всего он используется со сверточными кодами. Объем
памяти, необходимый для сверточного устройства чередования, соста-
вляет O,57V(N — 1), а задержка равна N(N — 1)Т, [2, гл. 8.2.2], где Ts —
время передачи кодированного символа по каналу.
-1112|...|w- 1F
Рис. 8.20. Сверточное кодирование с чередованием
Анализ вероятности ошибки при сверточном кодировании с чередо-
ванием дан в [1, гл. 14.6] при допущениях, сходных с теми, которые мы
использовали при анализе блочного кодирования в каналах с замирания-
ми. Граница Чернова снова дает вероятность ошибки при декодировании
с мягким решением, при этом кратность разнесения сигнала основывает-
ся на минимальном свободном расстоянии кода. Декодирование с жестким
решением сокращает кратность разнесения в 2 раза.
Пример 8.9. Рассмотрим канал с временем когерентности Тс = 12,5 мс и ско-
ростью передачи кодированных бит Rs = 100 килосимволов в секунду. Найдите
среднюю задержку в сверточном устройстве чередования, при которой замира-
ния последовательных кодированных бит будут независимыми.
Решение. В сверточном устройстве чередования каждый последующий кодиро-
ванный бит разносится от предыдущего на интервал NTS и для независимости
замираний необходимо, чтобы выполнялось условие NTS Тс, где Ts = ^-/Rs-
Поэтому мы получаем: N Tc/Ts = 0,0125/0,00001 — 1250. Обратите внимание,
что это то же самое, что и глубина блочного устройства чередования, необхо-
димая для независимости замираний всех кодированных бит. Полная задержка
составляет N (N — 1) Ts = 15 с. Это довольно высокая задержка как для речевого
сигнала, так и передаче данных.
8.8.3. Кодовая модуляция с чередованием
символов / бит
Как и в случае с блочными и сверточными кодами, кодовая модуляция,
разработанная для канала с аддитивным белым гауссовым шумом AWGN,
плохо работает при замираниях. Поэтому в каналах с замираниями ис-
8.9. Коды с неравномерной защитой от ошибок 415
пользуется кодовая модуляция с чередованием. Однако, в отличие от блоч-
ных и сверточных кодов, при кодовой модуляции возможны два варианта
чередования. Первый вариант — это чередование бит с последующим
отображением их в модулированных символах. Это называется кодовой
модуляцией с чередованием бит (BICM14). И наоборот, модуляция и коди-
рование могут выполняться вместе, как при кодовой модуляции в каналах
с аддитивным белым шумом AWGN, а полученные в результате символы
чередуются перед передачей. Такой метод называется кодовой модуляци-
ей с чередованием символов (SICM15).
На первый взгляд, кодовая модуляция с чередованием символов кажет-
ся наилучшим подходом, так как она сохраняет совместое кодирование
и модуляцию — основное условие при разработке схем кодовой моду-
ляции. Однако при замираниях следует использовать другой критерий
разработки схем кодовой модуляции, так как качественные показатели
кода при замираниях зависят от разнесенного приема и поэтому харак-
теризуются не эвклидовым расстоянием, а расстоянием Хэмминга. Перво-
начально работы в области кодовой модуляции в каналах с замираниями
велись в направлении максимизации кратности разнесения при чередо-
вании символов SICM. Однако получить критерии разработки хорошей
схемы было очень сложно, и в результате эксплуатационные показатели
таких кодов оказались совсем неутешительными [47-49].
Настоящим прорывом в деле создания схемы кодовой модуляции для
каналов с замираниями стала разработка кодовой модуляции с чередова-
нием бит — BICM [50, 51]. При использовании метода BICM кратность
разнесения равна наименьшему числу отдельных бит (а не символов кана-
ла) в случае любой ошибки. Это достигается путем побитового чередова-
ния на выходе кодера перед отображением символов, с соответствующими
оценками бит для мягкого принятия решения — как на входе декодера
Витерби. Хотя это и нарушает принцип объединения кодирования и моду-
ляции, зато обеспечивает гораздо лучшие эксплуатационные показатели,
чем метод чередования символов SICM. Более того, уже существуют ана-
литические средства для оценки качественных показателей систем BICM,
а также рекомендации по разработке схем с хорошими рабочими харак-
теристиками [50]. В настоящее время BICM является преобладающим
методом кодовой модуляции в каналах с замираниями.
8.9. Коды с неравномерной защитой от ошибок
Если не все биты, передаваемые по каналу, имеют одинаковый приоритет
или равные требования к вероятности ошибки, то можно воспользовать-
14В1СМ — Bit-interleaved coded modulation.
15 SICM — Symbol-interleaved coded modulation.
416 Глава 8. Кодирование в беспроводных каналах
ся переменной исправляющей способностью или неравномерной защитой
от ошибок — UEP16. Такой сценарий используется, например, в системах
передачи данных и речи с учетом того, что речь обычно более терпи-
ма к ошибкам, чем передача данных. Данные, полученные с ошибками,
должны быть переданы повторно, поэтому обычно требуется вероятность
ошибки Рь < 106, тогда как для хорошего качества речи достаточно ве-
роятности ошибки порядка Рь < 10-3. Также данный сценарий имеет
место при определенных типах сжатия. Например, при сжатии изобра-
жения требуются биты, соответствующие воспроизведению изображения
с низким разрешением, тогда как биты с высоким разрешением просто
улучшают изображение. При кодировании каналов с переменной испра-
вляющей способностью, в номинальных условиях работы канала все биты
принимаются безошибочно с высокой степенью вероятности. Однако если
канал находится в состоянии глубокого замирания, то только биты с вы-
соким приоритетом или не требующие высокой вероятности ошибки Рь
будут приняты безошибочно с высокой степенью вероятности.
Практическая реализация кода UEP впервые была проработана Имаи
и Хиракавой [52]. Затем рассматривались возможности применения дво-
ичных кодов UEP при совместном кодировании речи и канала [53], а так-
же совместном кодировании изображения и канала [54]. В этих схемах
применяются традиционные (блочный или сверточный) коды с испра-
влением ошибок, поэтому эффективность кодирования прямо пропорци-
ональна расширению полосы частот. Впоследствии были предложены два
способа эффективного использования полосы частот для кодов с неравно-
мерной защитой UEP: кодовая модуляция с временным разделением эф-
фективной полосы частот [55] и методы кодовой модуляции, применяемые
как для однородных, так и для неоднородных созвездий сигналов [56, 57].
Все эти многоуровневые коды могут работать либо в каналах с адди-
тивным белым гауссовым шумом AWGN, либо в каналах с замираниями.
Далее представлен краткий обзор методов неравномерного кодирования
UEP; особое внимание мы уделим принципам, лежащим в основе много-
уровневого кодирования и многоступенчатого декодирования, а также
более сложным схемам, обеспечивающим эффективное использование по-
лосы частот.
Общая структурная схема многоуровневого кодера представлена на
рис. 8.21. Сначала кодер источника делит информационную последова-
тельность на М параллельных цифровых потоков с уменьшающимся при-
оритетом. Канальный кодер использует М различных двоичных кодов
с исправлением ошибок C*i,..., См с уменьшающимися расстояниями меж-
ду кодовыми словами. Цифровой поток с г-м приоритетом поступает в г-е
16UEP — Unequal error protection.
8.9. Коды с неравномерной защитой от ошибок
кодирующее устройство, которое формирует кодированные биты Sj. Ес-
ли 2Л/ точек в созвездии сигнала пронумерованы от 0 до 2м — 1, то
селектор точек выбирает точку созвездия s, соответствующую условию:
м
s = J2s1.2i-1. (8.82)
i=i
Например, если М = 3, а созвездие сигнала соответствует ФМН-8 (8-PSK),
то выбранная точка сигнала будет иметь фазу 2тгз/8.
Рис. 8.21. Многоуровневый кодер
При оптимальном декодировании многоуровневого кода декодер ра-
ботает по методу максимального правдоподобия и определяет входную
последовательность, максимизирующую вероятность принятой последо-
вательности. Поэтому такой декодер должен одновременно декодировать
кодовые последовательности {si},...,{sTO}. Это может сильно усложнить
схему, даже если отдельные коды в многоуровневом коде будут иметь низ-
кую степень сложности. Например, если отдельные коды представлены
сверточными кодами с числом состояний 2Mi, i = 1,..., М. то количество
состояний в оптимальном декодере будет равно 2мН Из-за слож-
ности оптимального декодирования в большинстве случаев используется
субоптимальный метод многоступенчатого декодирования, предложен-
ный в [52]. Многоступенчатое декодирование состоит в последовательном
декодировании отдельных (компонентных) кодов. Сначала декодируется
наиболее мощный код Ci, затем Сг и т. д. После оценки (декодирования)
кодовой последовательности, соответствующей кодеру Cj, эта последова-
тельность считается верной при принятии решений для кодовых последо-
вательностей с более низким приоритетом.
Для достижения заданной эффективности кодирования, двоичным ко-
дерам такого многоуровневого кода требуются избыточные биты, поэто-
Глава 8. Кодирование в беспроводных каналах
му с точки зрения полосы частот они неэффективны. Альтернативный
подход, предложенный в работе [56], использует временное мультиплек-
сирование сигналов с кодовой модуляцией, описанных в § 8.7. При таком
подходе для каждого класса приоритетности входных данных исполь-
зуются различные виды матричной или решетчатой кодовой модуляции
с различными значениями эффективности кодирования. Созвездия пере-
даваемых сигналов для каждого кодера могут различаться по размеру
(количеству сигнальных точек), но средняя мощность каждого созвез-
дия одна и та же. Затем сигнальные точки с выходов отдельных кодеров
мультиплексируются во времени для передачи по каналу, как это пока-
зано на рис. 8.22 для двух цифровых потоков с разными приоритетами.
Пусть на данном рисунке Ri обозначает скорость следования бит для ко-
дера Ci при i = 1,2. Если период времени, в течение которого передается
код с высокой приоритетностью Сд, равен 1\, а период, в течение которо-
го передается код равен Tj, то общая скорость потока бит составит
(RiTi + R2T2) / (Ti + Т2), причем на биты с высоким приоритетом прихо-
дится часть этой общей скорости, равная RCRJ (R1T1 + R2T2).
Кодированные
Рис. 8.22. Приемопередатчик кодовой модуляции с временным мультиплексиро-
ванием
Метод кодирования с временным разделением (мультиплексировани-
ем) дает более высокую эффективность, если карты созвездий S± и S2
на рис. 8.22 формируются совместно. Такая модифицированная схема по-
казана на рис. 8.23 для двух кодирующих устройств. Ее расширение до М
кодеров проводится непосредственно добавлением элементов схемы. На-
помним, что при решетчатой и матричной кодовой модуляции биты ко-
8.10. Совместное кодирование источника и канала
дируются для выбора подмножества решетки, а некодированные биты
выбирают точку созвездия внутри подмножества. Свойства двоичного
кодера сокращают вероятность ошибки Рь только для кодированных бит;
вероятность Рь для некодированных бит определяется разносом точек
созвездия сигнала. Мы можем легко модифицировать эту схему для полу-
чения двух уровней эффективности кодирования, когда биты с высоким
приоритетом кодируются более основательно и используются для выбо-
ра подмножества разделенного созвездия, тогда как биты с более низким
уровнем приоритета остаются некодированными (или кодируются незна-
чительно) и используются для выбора точки созвездия сигнала.
Кодированные
Рис. 8.23. Совместная оптимизация созвездия сигнала
8.10. Совместное кодирование источника и канала
Основной принцип неравномерных кодов UEP состоит в том, что ве-
роятности ошибки, обеспечиваемые канальным кодом, должны соответ-
ствовать приоритетности передаваемых бит или заданным требовани-
ям к вероятности Рь- Часто эти биты поступают с выхода устройства
сжатия, работающего с источником исходных данных. Поэтому неравно-
мерное кодирование UEP может рассматриваться как схема объединения
сжатия (называемого также кодированием источника) и канального ко-
дирования. Хотя Шеннон показал, что в канале с аддитивным белым
гауссовым шумом AWGN коды источника и канала могут разрабаты-
ваться отдельно без потерь в оптимальности решения [58], этот результат
420 Глава 8. Кодирование в беспроводных каналах
верен только для неограниченного кодового пространства источника, не-
ограниченной длины блоков канального кода и неограниченной сложности
реализации и задержки. Поэтому была проделана большая работа по изу-
чению преимуществ совместного кодирования источника и канала при
более реальных системных предположениях.
Работы в области совместного кодирования источника и канала под-
разделяются на несколько обширных категорий: кодирование канала с опти-
мизированным источником, кодирование источника с оптимизированным
каналом и итеративные алгоритмы, объединяющие эти две схемы коди-
рования. При кодировании канала с оптимизированным источником код
источника разрабатывается для канала без шумов. Тогда код канала под-
бирается для этого кода источника таким образом, чтобы минимизиро-
вать искажения в данном канале, обусловленные повреждением различных
передаваемых бит. Примером такого метода может служить кодирование
канала с неравномерной защитой от ошибок, когда вероятность ошиб-
ки Рь для отдельных канальных кодов подбирается под приоритетность
бита, связанную с кодом источника. Кодирование канала с оптимизи-
рованным источником применено в [54, 59, 60] для сжатия изображения
при сверточном кодировании канала и при использовании совместимых
по скорости пунктирных сверточных канальных кодов (RCPC17). Все-
сторонний анализ подбора кодов RCPC или модуляции МКАМ (MQAM),
подходящих к поддиапазону и линейному кодированию речевого сигнала
с предсказанием — как в канале с аддитивным белым гауссовым шумом
AWGN, так и в канале с рэлеевскими замираниями — можно найти в [61].
При модуляции с оптимизированным источником код источника разра-
батывается для канала без шумов, а модуляция оптимизируется с целью
минимизации сквозных искажений. Пример такого подхода дан в [62],
где сжатие с помощью векторного квантователя (VQ18) сопровождает-
ся модуляцией на нескольких несущих, и эта модуляция обеспечивает
различным битам источника неравномерную защиту от ошибок за счет
присвоения каждой поднесущей разной мощности.
Кодирование источника с оптимизированным каналом представляет
другой подход к объединению кодирования источника и канала. В этом
случае код источника оптимизируется на основании вероятности ошиб-
ки, обусловленной канальным кодом, который разрабатывается независи-
мо от источника. Примерами реализации такого подхода могут служить
векторный квантователь оптимизированного канала (COVQ19) и его ска-
лярный вариант [63, 64]. Кодирование и модуляция канала с оптимизи-
17RCPC — Rate-compatible punctured convolutional.
18VQ — vector quantizer.
10COVQ — channel-optimized vector quantizer.
рованным источником могут объединяться с кодированием источника
с оптимизированным каналом с помощью итеративной схемы. Такой под-
ход используется в объединенной схеме COVQ и модуляции с несколь-
кими несущими [65] и в объединенной схеме COVQ и канальных кодов
RCPC [66]. В [67, 68] предложено объединение матричной кодовой моду-
ляции и матричного квантования — стратегия кодирования источника,
в основе которой лежат базовые положения матричной кодовой модуля-
ции. Все эти работы по объединению схем кодирования источника и ка-
нала показывают, что совместная разработка кодов источника и канала
дает значительные преимущества в эксплуатационных показателях. Бо-
лее того, многие сложные схемы кодирования канала, такие как турбо-
и LDPC коды, еще не были объединены с кодами источника для совмест-
ной оптимизации. Поэтому в обширной области, касающейся объединения
кодирования источника и канала, необходимо проделать большую работу
для оптимизации эксплуатационных показателей различных приложений.
Задачи
8.1. Задан линейный блочный код (3,1), где каждое кодовое слово состоит
из трех информационных бит и одного бита четности.
а) Найдите все кодовые слова этого кода.
б) Найдите минимальное кодовое расстояние.
8.2. Задан код (7, 4) с порождающей матрицей
’0101100’
10 10 10 0
0110010
1 1 0 0 0 0 1
а) Найдите все кодовые слова этого кода.
б) Чему равно минимальное кодовое расстояние?
в) Найдите матрицу контроля четности для данного кода.
г) Найдите синдром для полученного вектора R = [1101011].
д) Допуская последовательность информационных бит, состоящую из од-
них нулей, найдите все конфигурации ошибок с минимальным весом
е, дающие в результате действительное кодовое слово, отличное от
кодового слова, состоящего из одних нулей.
е) Используя операции со строками и столбцами, приведите матрицу G
к систематической форме и найдите соответствующую ей матрицу
контроля четности. Сделайте набросок схемы сдвигового регистра для
этого систематического кода.
Глава 8. Кодирование в беспроводных каналах
8.3. Все коды Хэмминга имеют минимальное расстояние 3. Каковы возмож-
ности кода Хэмминга по исправлению и обнаружению ошибок?
8.4. Код Хэмминга (15,11) имеет образующий полином д(Х) = 1 + X + Xi.
Определите, являются ли кодовые слова, описанные многочленами (X) =
= 1 4- X 4- X3 + X7 и сг(Х) = 14- X3 4- X5 4- X6, действительными
кодовыми словами для этого образующего полинома. Найдите также си-
стематическую форму этого полинома р(Х) 4- Хп~ки(Х), позволяющую
формировать кодовые слова в систематической форме.
8.5. Циклический код Хэмминга (7,4) имеет образующий полином д(Х) = 14-
4-Х24-Х3.
а) Найдите порождающую матрицу для этого кода в систематической
форме.
б) Найдите матрицу контроля четности для этого кода.
в) Предположим, что по каналу передается кодовое слово С = [1011010],
а соответствующее принятое кодовое слово равно С — [1010011]. Най-
дите синдромный многочлен, соответствующий данному принятому
кодовому слову.
г) Найдите все возможные принятые кодовые слова, для которых при
передаче кодового слова С = [1011010] синдромный многочлен будет
нулевым.
8.6. Распределение весов для кода Хэмминга с длиной блока п задается фор-
мулой:
ЛЦж) = [(1 4- х)п + п (1 4- т)0'5' "1’ (1 - щ)°’5(г1+1)] ,
г=0
где Ni — количество кодовых слов с весом г.
а) Используя эту формулу, найдите распределение весов для кода Хэм-
минга (7,4).
б) Используя распределение весов из пункта (а), найдите верхнюю объ-
единенную границу, основанную на распределении весов (8.38) для
кода Хэмминга (7,4), в предположении модуляции кодированных бит
методом ДФМН (BPSK) при защищенности SNR, равной 10 дБ. Срав-
ните этот результат с вероятностью ошибки, полученной с использо-
ванием нежесткой границы (8.39) для того же метода модуляции.
8.7. Найдите верхнюю объединенную границу вероятности ошибки в кодо-
вом слове для кода Хэмминга с т = 7. Допустим, что кодированные биты
передаются по каналу с аддитивным белым гауссовым шумом AWGN с ис-
пользованием модуляции ФМН-8 (8-PSK) с защищенностью SNR, равной
10 дБ. Рассчитайте вероятность ошибки бита для данного кода, допуская,
что ошибка в кодовом слове соответствует одной ошибке бита, и сравните
полученный результат с вероятностью ошибки бита при некодированной
модуляции.
8.8. Постройте график зависимости вероятности ошибки Рь от у,, для линей-
ного блочного кода (24,12) с r/min = 8 при 0 С Eb/N0 С 20 дБ, используя
объединенную границу вероятности ошибки в кодовом слове. Допустим,
что кодированные биты передаются по каналу с использованием модуля-
ции ФМН-4 (QPSK). При каких значениях Eb/N0 эффективность коди-
рования будет отрицательной?
8.9. Используя формулу (8.47), найдите приблизительную эффективность ко-
дирования для кода Хэмминга (7,4) при декодировании с мягким реше-
нием по сравнению с некодированной модуляцией, если уь = 15 дБ.
8.10. Постройте график вероятности ошибки в кодовом слове для кода (24,12)
с rfmin = 8 при 0 10 дБ для случаев декодирования с жестким
и мягким решением, используя объединенную границу (8.36) для жест-
кого декодирования и аппроксимацию (8.44) для мягкого декодирования.
Как будет отличаться эффективность кодирования для этих двух мето-
дов декодирования при высоких значениях защищенности SNR?
8.11. Вычислите верхнюю и нижнюю границы вероятности ошибки в кодо-
вом слове — (8.35) и (8.36) соответственно, для расширенного кода Го-
лея с декодированием по жесткому алгоритму, если используется канал
с аддитивным белым шумом AWGN и модуляцией ДФМН (BPSK), при
защищенности SNR, равной 10 дБ.
8.12. Рассмотрим код Рида-Соломона с параметрами к = 3 и К = 4, исполь-
зуемый в сочетании с модуляцией ФМН-8 (8-PSK). Найдите количество
ошибок, которые могут быть исправлены этим кодом, и его минимальное
расстояние. Найдите также вероятность ошибки бита, допуская, что ко-
дированные символы передаются по каналу с помощью ФМН-8 (8-PSK)
и имеют вероятность ошибки символа, равную 1Q 3.
8.13. Для решетки на рис. 8.7 определите последовательность состояний и сиг-
нал на выходе кодера для первоначального состояния S = 00 и последо-
вательности информационных бит U = [0110101101].
8.14. Рассмотрите сверточный код, сформированный кодером на рис. 8.24.
а) Изобразите решетчатую диаграмму кода.
б) Для полученной последовательности R = [001010001] найдите метрику
пути, состоящего из одних нудей, если вероятность ошибки символа
равна р = 10-3.
в) Найдите один путь, находящийся на минимальном расстоянии Хэм-
минга от пути, состоящего из одних нулей, и рассчитайте его метрику
для тех же Кир, что и в пункте (б).
8.15. Эта задача посвящена сверточному кодеру, представленному на рис. 8.24.
а) Начертите диаграмму состояний для этого сверточного кодера.
б) Определите его передаточную функцию Т (D,N,J).
в) Определите минимальное расстояние от путей в решетке до пути, со-
стоящего из одних нулей.
Глава 8. Кодирование в беспроводных каналах
г) Рассчитайте верхнюю границу вероятности ошибки бита (8.72) для
этого кода, если используется декодирование с мягким решением и
ДФМН (BPSK), а 7г, = 10 дБ.
д) Рассчитайте верхнюю границу вероятности ошибки бита (8.76) для
этого кода, если используется декодирование с жестким решением и
ДФМН (BPSK), а 7(, = 10 дБ. Какой выигрыш дает мягкое декодиро-
вание по сравнению с жестким?
Ступень 1 Ступень 2 Ступень 3
Рис. 8.24. Сверточный ко-
дер для задач 8.14 и 8.15
8.16. Задано созвездие сигнала КАМ-16 (16-QAM) с решетчатым кодировани-
ем по схеме, представленной на рис. 8.25. Предположим, что разбиение
множества сигналов КАМ-16 соответствует показанному на рис. 8.18.
а) Предполагая, что параллельные переходы — т. е. перемещения внутри
подмножества — доминируют в оценке вероятности ошибки, опреде-
лите выигрыш от кодирования этим решетчатым кодом по сравнению
с некодированной ФМН-8 (8-PSK), при условии, что расстояние <70 для
КАМ-16 равно 0,623, а для ФМН-8 — 0,765.
б) Начертите решетку для сверточного кодера и установите подмноже-
ства переходов решетки в соответствии со следующими эвристиче-
скими правилами Унгербоека: (i) если в течение одного интервала
модуляции должны быть закодированы к бит, то решетка должна по-
зволять 2к возможных переходов от одного состояния к следующему;
(ii) между парами состояний может происходить более одного пере-
хода; (iii) все сигналы должны иметь одинаковую частоту, а также
хорошие показатели регулярности и симметрии; (iv) переходы из од-
ного и того же состояния соответствуют сигналам из подмножества
А или В, но не из обоих сразу; (v) переходы в одно и то же состояние
соответствуют сигналам из подмножества А или В, но не из обоих
сразу и (vi) параллельные переходы задаются только из одного под-
множества.
в) Каково минимальное расстояние появления ошибки внутри решетки
относительно пути, образованного цифровым потоком, состоящим из
одних нулей?
г) Если допустить, что ваш ответ в пункте (в) представляет минималь-
ное расстояние появления ошибки в решетке, то каким будет rfmjn для
данного кода?
Решетчатый кодер
Ь3(«)
Задержка Задержка
Ь3(л - 1)
Ь3(л - 2)
Сверточный кодер
с 2
Рис. 8.25. Решетчатый кодер КАМ-16 (16-QAM) для задачи 8.16
8.17. Задан канал с временем когерентности Тс — 10 мс и скоростью сле-
дования кодированных бит Rs = 50 килосимволов в секунду. Найдите
среднюю задержку такого сверточного устройства чередования, которое
обеспечивает независимость замираний между последовательными коди-
рованными битами. Определите также требования к памяти для этой
системы.
8.18. Определите верхнюю границу вероятности ошибки по битам Pt, для кода
Голея (23,12) в канале с рэлеевскими замираниями при глубине чередо-
вания (dTs Тс), модуляции ДФМН (BPSK), алгоритме декодирования
с мягким принятием решения и средней величине защищенности Ec/Nq =
= 15 дБ. Сравните полученное значение с вероятностью ошибки Рь для
некодированной последовательности при рэлеевских замираниях.
8.19. Задан канал с рэлеевскими замираниями, модуляцией ДФМН (BPSK),
средней защищенностью SNR, равной 10 дБ, и доплеровской частотой
Глава 8. Кодирование в беспроводных каналах
80 Гц. Скорость передачи данных по каналу составляет 30 кбит/с. Допу-
стите, что ошибки бит происходят в канале при Рь(т) 10~2. Разрабо-
тайте устройство чередования и соответствующий блочный код (п,к),
который исправляет практически все цифровые ошибки, при этом за-
держка в устройстве чередования должна быть менее 50 мс. Ваша схема
должна определять размеры устройства чередования, а также тип блоч-
ного кода и значения п и к.
8.20. Задано многоуровневое кодирующее устройство, подобное показанному
на рис. 8.21, в котором информационные биты имеют три различных
уровня защиты от ошибок (М = 3), а выходные сигналы трех кодеров
модулируются с использованием модуляции ФМН-8 (8-PSK) при защи-
щенности SNR, равной 10 дБ. Предположим, что код Ci, соответствую-
щий г-му цифровому потоку bt, является кодом Хэмминга с параметром
mi, где mi = 2, тег = 3 ит3 = 4.
а) Найдите вероятность ошибки для каждого кода Хэмминга С/, учиты-
вая, что он декодируется отдельно с использованием алгоритма жест-
кого принятия решения HDD.
б) Если время модуляции символа при ФМН-8 (8-PSK) Ts = 10 мкс, то
какова скорость передачи данных для каждого из этих трех цифровых
потоков?
в) Какие параметры должен иметь декодер с решением по максимуму
правдоподобия для данного неравномерного кода UEP?
8.21. Разработайте двухуровневый неравномерный код UEP, используя коды
Хэмминга или Голея, для канала с защищенностью SNR, равной 10 дБ,
чтобы код UEP имел вероятность ошибки Рь = 10~'3 для бит с низкой
приоритетностью и Рь = 10-6 для бит с высоким приоритетом.
Литература
1. J.G. Proakis, Digital Communications, 4th ed., McGraw-Hill, New York, 2001.
2. B. Sklar, Digital Communications — Fundamentals and Applications, Prentice-
Hall, Englewood Cliffs, NJ, 1988.
3. D. G. Wilson, Digital Modulation and Coding, Prentice-Hall. Englewood Cliffs,
NJ, 1996.
4. S. Lin and J.D.J. Costello, Error Control Coding, 2nd ed., Prentice-Hall, En-
glewood Cliffs, NJ, 2004.
5. A. J. Viterbi, «Error bounds for convolutional codes and asymptotically opti-
mum decoding algorithm», IEEE Trans. Inform. Theory, pp. 260-9, April 1967.
6. C. Berrou, A. Glavieux and P. Thitimajshima, «Near Shannon limit error-
correcting coding and decoding: Turbo-codes», Proc. IEEE Internal. Conf. Com-
mun., pp. 54-8, May 1993.
7. C. Berrou and A. Glavieux, «Near optimum error correcting coding and decod-
ing: Turbo-codes», IEEE Trans. Commun., pp. 1261-71, October 1996.
8. IEEE Trans. Inform. Theory, Special Issue on Codes and Graphs and Iterative
Algorithms, February 2001.
9. S. B. Wicker and S. Kim, Codes, Graphs, and Iterative Decoding, Kluwer, Boston,
2002.
10. R. G. Gallager, «Low-density parity-check codes», IRE Trans. Inform. Theory,
pp. 21-8, January 1962.
11. C. Heegard and S.B. Wicker, Turbo Coding, Kluwer, Boston, 1999.
12. M. E. Buckley and S. B. Wicker, «The design and performance of a neural net-
work for predicting decoder error in turbo-coded ARQ protocols», IEEE Trans.
Commun., pp. 566-76, April 2000.
13. S. Benedetto, D. Divsalar, G. Montorsi and F. Pollara, «Serial concatenation of
interleaved codes: Performance analysis, design and iterative decoding», IEEE
Trans. Inform. Theory, pp. 909-26, May 1998.
14. H. Jun and R. J. McEliece, «Coding theorems for turbo code ensembles», IEEE
Trans. Inform. Theory, pp. 1451-61, June 2002.
15. I. Sasan and S. Shamai, «Improved upper bounds on the ML decoding error
probability of parallel and serial concatenated turbo codes via their ensemble
distance spectrum», IEEE Trans. Inform. Theory, pp. 24-47, January 2000.
16. D. J. C. MacKay and R. M. Neal, «Near Shannon limit performance of low den-
sity parity check codes», Elec. Lett., p. 1645, August 1996.
17. N. Wiberg, N.-A. Loeliger and R. Kotter, «Codes and iterative decoding on
general graphs», Euro. Trans. Telecommun., pp. 513-25, June 1995.
18. T. Richardson, A. Shokrollahi and R. Urbanke, «Design of capacity-approaching
irregular low-density parity-check codes», IEEE Trans. Inform. Theory, pp. 619-
37, February 2001.
19. R. McEliece, D. J. C. MacKay and J.-F. Cheng, «Turbo decoding as an instance
of Pearl’s ‘belief propagation’ algorithm», IEEE J. Sei. Areas Commun., pp.
140-52, February 1998.
20. F. R. Kschischang and D. Frey, «Iterative decoding of compound codes by proba-
bility propagation in graphical models», IEEE J. Sei. Areas Commun., pp. 219-
30, February 1998.
21. T. Richardson and R. Urbanke, «The capacity of low-density parity-check codes
under message passing decoding», IEEE Trans. Inform. Theory, pp. 599-618,
February 2001.
22. S.-Y. Chung, G.D. Forney, T. Richardson and R. Urbanke, «On the design of
low-density parity-check codes within 0.0045 dB of the Shannon limit», IEEE
Commun. Lett., pp. 58-60, February 2001.
23. M. Fossorier, «Iterative reliability-based decoding of low-density parity check
codes», IEEE J. Sei. Areas Commun., pp. 908-17, May 2001.
24. M. C. Davey and D. MacKay, «Low density parity-check codes over GF(q)»,
IEEE Commun. Lett., pp. 165-7, June 1998.
25. J. Hou, P. Siegel, L. Milstein and H. D. Pfister. «Capacity-approaching band-
width efficient coded modulation schemes based on low-density parity-check
codes», IEEE Trans. Inform. Theory, pp. 2141-55, September 2003.
26. G. Ungerboeck, «Channel coding with multi-level/phase signals», IEEE Trans.
Inform. Theory, pp. 55-67, January 1982.
Глава 8. Кодирование в беспроводных каналах
27. G. D. Forney, «Coset codes, I: Introduction and geometrical classification and II:
Binary lattices and related codes», IEEE Trans. Inform. Theory, pp. 1123-87,
September 1988.
28. G. D. Forney, Jr., R. G. Gallager, G. R. Lang, F. M. Longstaff and S. U. Quereshi,
«Efficient modulation for band-limited channels», IEEE J. Sei. Areas Commun.,
pp. 632-47, September 1984.
29. S. Benedetto, D. Divsalar, G. Montorsi and F. Pollara, «Parallel concatenated
trellis coded modulation», Proc. IEEE Internat. Conf Commun., pp. 974-8, June
1996.
30. C. Fragouli and R. D. Wesel, «Turbo-encoder design for symbol-interleaved par-
allel concatenated trellis-coded modulation», IEEE Trans. Commun., pp. 425-
35, March 2001.
31. P. Robertson and T. Worz, «Bandwidth-efficient turbo trellis-coded modulation
using punctured component codes», IEEE J. Sei. Areas Commun., pp. 206-18,
February 1998.
32. G.T. Irvine and P. J. Mclane, «Symbol-aided plus decision-directed reception
for PSK TCM modulation on shadowed mobile satellite fading channels», IEEE
J. Sei. Areas Commun., pp 1289-99, October 1992.
33. D. Subasinghe-Dias and K. Feher, «А coded 16-QAM scheme for fast fading
mobile radio channels», IEEE Trans. Commun., pp. 1906-16, February—April
1995.
34. P. Y. Kam and H. M. Ching, «Sequence estimation over the slow nonselective
Rayleigh fading channel with diversity reception and its application to Viterbi
decoding», IEEE J. Sei. Areas Commun., pp. 562-70, April 1992.
35. D. Makrakis, P. T. Mathiopoulos and D.P. Bouras, «Optimal decoding of coded
PSK and QAM signals in correlated fast fading channels and AWGN — A com-
bined envelope, multiple differential and coherent detection approach», IEEE
Trans. Commun., pp. 63-75, January 1994.
36. M. J. Gertsman and J. H. Lodge. «Symbol-by-symbol MAP demodulation of
CPM and PSK signals on Rayleigh flat-fading channels», IEEE Trans. Com-
mun., pp. 788-99, July 1997.
37. H. Kong and E. Shwedyk, «Sequence detection and channel state estimation
over finite state Markov channels», IEEE Trans. Veh. Tech., pp. 833-9, May
1999.
38. G. M. Vitetta and D. P. Taylor. «Maximum-likelihood decoding of uncoded and
coded PSK signal sequences transmitted over Rayleigh flat-fading channels»,
IEEE Trans. Coinmun., pp. 2750-8, November 1995.
39. L. Li and A. J. Goldsmith, «Low-complexity maximum-likelihood detection of
coded signals sent over finite-state Markov channels», IEEE Trans. Commun.,
pp. 524-31, April 2002.
40. B. Vucetic and J. Yuan, Turbo Codes: Principles and Applications, Kluwer,
Dordrecht, 2000.
41. E. K. Hall and S.G. Wilson, «Design and analysis of turbo codes on Rayleigh
fading channels», IEEE J. Sei. Areas Commun., pp. 160-74, February 1998.
42. C. Komninakis and R. D. Wesel, «Joint iterative channel estimation and decod-
ing in flat correlated Rayleigh fading», IEEE J. Sei. Areas Commun., pp. 1706-
17, September 2001.
43. J. Hou, P. H. Siegel and L.B. Milstein, «Performance analysis and code opti-
mization of low-density parity-check codes on Rayleigh fading channels», IEEE
J. Sei. Areas Commun., pp. 924-34, May 2001.
44. A. J. Goldsmith and P. P. Varaiya, «Capacity, mutual information and coding for
finite-state Markov channels», IEEE Trans. Inform. Theory, pp. 868-86, May
1996.
45. G. D. Forney, «Burst error correcting codes for the classic bursty channel», IEEE
Trans. Commun. Tech., pp. 772-81, October 1971.
46. J. L. Ramsey, «Realization of optimum interleavers», IEEE Trans. Inform. The-
ory, pp. 338-45, 1970.
47. C.-E. W. Sundberg and N. Seshadri, «Coded modulation for fading channels —
An overview», Euro. Trans. Telecommun., pp. 309-24, May/June 1993.
48. L.-F. Wei, «Coded M-DPSK with built-in time diversity for fading channels»,
IEEE Trans. Inform. Theory, pp. 1820-39, November 1993.
49. S.H. Jamali and T. Le-Ngoc, Coded-Modulation Techniques for Fading Chan-
nels, Kluwer, New York, 1994.
50. G. Caire, G. Taricco and E. Biglieri, «Bit-interleaved coded modulation», IEEE
Trans. Inform. Theory, pp. 927-46, May 1998.
51. E. Zehavi, «8-PSK trellis codes for a Rayleigh channel», IEEE Trans. Commun.,
pp. 873-84, May 1992.
52. H. Imai and S. Hirakawa, «А new multilevel coding method using error correcting
codes», IEEE Trans. Inform. Theory, pp. 371-7, May 1977.
53. R. V. Cox, J. Hagenauer, N. Seshadri and C.-E. W. Sundberg, «Variable rate
sub-band speech coding and matched convolutional channel coding for mobile
radio channels», IEEE Trans. Signal Proc., pp. 1717-31, August 1991.
54. J. W. Modestino and D. G. Daut, «Combined source-channel coding of images»,
IEEE Trans. Commun., pp. 1644-59, November 1979.
55. A. R. Calderbank and N. Seshadri, «Multilevel codes for unequal error protec-
tion», IEEE Trans. Inform. Theory, pp. 1234-48, July 1993.
56. L.-F. Wei, «Coded modulation with unequal error protection», IEEE Trans.
Commun., pp. 1439-49, October 1993.
57. N. Seshadri and C.-E. W. Sundberg, «Multilevel trellis coded modulations for
the Rayleigh fading channel», IEEE Trans. Commun., pp. 1300-10, September
1993.
58. С. E. Shannon, «Coding theorems for a discrete source with a fidelity criterion»,
IRE National Convention Record, part 4, pp. 142-63, 1959.
59. N. Tanabe and N. Farvardin, «Subband image coding using entropy-coded quan-
tization over noisy channels», IEEE J. Sei. Areas Commun., pp. 926-43, June
1992.
60. H. Jafarkhani, P. Ligdas and N. Farvardin, «Adaptive rate allocation in a joint
source/channel coding framework for wireless channels», Proc. IEEE Veh. Tech.
Conf, pp. 492-6, April 1996.
61. W.C. Wong, R. Steele and C.-E.W. Sundberg, Source-Matched Mobile Com-
munications, Pen-tech and IEEE Press, London and New York, 1995.
62. K.-P. Ho and J. M. Kahn, «Transmission of analog signals using multicarrier
modulation: A combined source-channel coding approach», IEEE Trans. Com-
mun., pp. 1432-43, November 1996.
430 Глава 8. Кодирование в беспроводных каналах
63. N. Farvardin and V. Vaishampayan, «On the performance and complexity of
channel-optimized vector quantizers», IEEE Trans. Infortn. Theory, pp. 155-
60, January 1991.
64. N. Farvardin and V. Vaishampayan, «Optimal quantizer design for noisy chan-
nels: An approach to combined source-channel coding», IEEE Trans. Inform.
Theory, pp. 827-38, November 1987.
65. K.-P. Ho and J.M. Kahn, «Combined source-channel coding using channel-
optimized quantizer and multicarrier modulation», Proc. IEEE Internat. Conf.
Commun., pp. 1323-7, June 1996.
66. A. J. Goldsmith and M. Effros, «Joint design of fixed-rate source codes and
multiresolution channel codes», IEEE Trans. Commun., pp. 1301-12. October
1998.
67. E. Ayanoglu and R. M. Gray, «The design of joint source and channel trellis
waveform coders», IEEE Trans. Inform. Theory, pp. 855-65, November 1987.
68. T.R. Fischer and M.W. Marcellin, «Joint trellis coded quantization/modu-
lation», IEEE Trans. Commun., pp. 172-6, February 1991.
ГЛАВА 9
АДАПТИВНАЯ
МОДУЛЯЦИЯ
И КОДИРОВАНИЕ
Адаптивная модуляция и кодирование обеспечивают устойчивую и эф-
фективную передачу по нестационарным каналам. Основную предпосыл-
ку достижения этого эффекта составляет приблизительная оценка канала
приемником и сообщение результатов этой оценки обратно передатчи-
ку, так что схема передачи может быть адаптирована к характеристи-
кам канала. При использовании методов модуляции и кодирования, не
адаптирующихся к условиям замираний, для поддержания приемлемых
эксплуатационных показателей работы в условиях плохого качества ка-
нала нужен постоянный энергетический запас. Поэтому для эффективной
работы таких систем необходимо, чтобы они разрабатывались для наи-
худших условий канала. Так как рэлеевские замирания могут вызвать
потери мощности сигнала до 30 дБ, то разработка систем для наихудших
условий канала может выразиться в очень неэффективном использовании
канала. Адаптация к замираниям канала за счет установки благоприят-
ных параметров канала при передаче на более высоких скоростях или
с меньшей мощностью, а также сокращения скорости передачи или уве-
личения мощности при ухудшении состоянии канала, способна увеличить
среднюю пропускную способность канала, уменьшить необходимую мощ-
ность передачи или уменьшить среднюю вероятность ошибок. В подпа-
раграфе 4.2.4 получена универсальная схема адаптивной передачи, позво-
ляющая достичь пропускной способности Шеннона в канале с плавными
замираниями. В этой главе описываются практические схемы адаптивной
модуляции и кодирования, призванные достичь максимальной средней
эффективности использования спектра при заданной средней или мгно-
венной вероятности ошибок. Те же самые исходные условия могут быть
применены и к каналам MIMO, каналам с частотно-селективными зами-
раниями с выравниванием амплитудно-частотной характеристики, систе-
мам ОЧРК (OFDM) или МДКР (CDMA), а также к сотовым системам.
Применение адаптивных технологий к этим системам будет описано в по-
следующих главах.
Адаптивная передача была впервые предложена в конце шестидеся-
тых — начале семидесятых годов прошлого века [1, 2]. Правда, интерес
432 Глава 9. Адаптивная модуляция и кодирование
к этим технологиям оказался кратковременным — может быть, вслед-
ствие технических ограничений, недостатка хороших методов оценки ка-
нала и/или систем, пригодных для радиосвязи «точка-точка» без обрат-
ной связи с передатчиком. Как только методы, развивающие эти идеи,
стали менее ограниченными в реализации, интерес к методам адаптивной
модуляции вновь проявился в беспроводных системах третьего поколения
3G [3-12]. В результате многие беспроводные системы, включая GSM и со-
товые системы МДКР (CDMA), а также беспроводные ЛВС, используют
методы адаптивной передачи [13-16].
На практике существует несколько ограничений, определяющих усло-
вия, при которых должна использоваться адаптивная модуляции. Ада-
птивная модуляция требует цепи обратной связи между передатчиком
и приемником, что для некоторых систем невыполнимо. Более того, если
канал меняется быстрее интервала времени, за который может быть дана
и отправлена обратно на передатчик его достоверная оценка, адаптивные
технологии будут работать плохо. Во многих каналах беспроводных сис-
тем замирания происходят в различном временном масштабе; в качестве
примеров можно привести замирания многолучевого распространения,
которые могут меняться очень быстро, и влияние экранирования, кото-
рое проявляется медленно. Часто можно отследить и адаптировать только
медленные колебания, в этом случае, реагируя на эффекты многолучевого
распространения, необходимо уменьшить величину замираний. Техниче-
ские ограничения могут определять и частоту изменения скорости и/или
мощности передатчика, а это может ограничивать эффективность ис-
пользования возможностей адаптивной модуляции. Наконец, адаптивная
модуляция обычно изменяет скорость передачи в соответствии с услови-
ями канала. Мы увидим, что при ограничении средней мощности средняя
эффективность использования спектра при адаптивной модуляции мак-
симизируется за счет установки низкой или нулевой скорости передачи
при плохих условиях в канале. Однако при такой схеме качество рабо-
ты приложений с фиксированной скоростью (таких как речь или видео),
имеющих жесткие ограничения по задержке, может значительно ухуд-
шиться. Поэтому в приложениях с ограниченной задержкой адаптивная
модуляция должна быть оптимизирована так, чтобы свести к миниму-
му вероятность нарушения связи при фиксированной скорости передачи
данных [17].
9.1. Система с адаптивной передачей
В этом разделе будет рассмотрена система с адаптивной передачей. Рас-
сматриваемая модель аналогична модели из подпараграфа 4.2.1, использу-
9.1. Система с адаптивной передачей 433
емой для определения пропускной способности каналов с амплитудными
замираниями. Предполагается линейная модуляция с адаптацией на мно-
жестве скоростей следования символов Rs = 1/TS. Допустим также, что
модуляция использует идеальные импульсы Найквиста (sine [f/T,]), а по-
лоса частот сигнала равна В = 1/TS. Смоделируем канал с амплитудными
замираниями как канал дискретного времени, в котором каждый ин-
тервал использования канала соответствует длительности одного симво-
ла Ts. Стационарный эргодический канал имеет передаточный коэффици-
ент у/g[i] с распределением р(д), который зависит от времени1. В канале
действует аддитивный белый гауссовский шум AWGN п[г] со спектраль-
ной плотностью Nq/2. Пусть Р — средняя мощность передачи сигнала,
В — 1/TS — полоса частот принимаемого сигнала, а д — средний ко-
эффициент усиления канала. Тогда мгновенное отношение принимаемой
мощности сигнала к шуму (защищенность) SNR равно у[г] = Pg[i]/NoB,
О у[г] < оо, а его ожидаемое значение в течение всего времени равно
7 = Pg/NqB. Так как <?[г] является стационарным, распределение у[г] не
зависит от г, и мы обозначаем это распределение как 72(7).
При адаптивной передаче проводится оценка коэффициента усиления
или защищенности SNR на приеме в момент времени г, а затем адаптиру-
ются параметры модуляции и кодирования. В общем случае параметрами
адаптации являются: скорость передачи данных Д[г], мощность передачи
Р[г] и параметры кодирования С [г]. При многоуровневой М-кратной мо-
дуляции скорость передачи данных равна R[i] = log2 M[i]/Ts — В log2 M[i\
бит/с. Эффективность использования спектра при М- крат ной модуляции
составляет R\i\/B = log2 М[г] бит/с/Гц. Введем оценку защищенности
SNR -у[г] = Рд\г\/^В, которая основывается на оценке коэффициента
передачи по мощности <?[?]. Предположим, что мощность передачи ада-
птирована по оценке защищенности -у[г]. Обозначим эту адаптированную
мощность на передаче в момент времени i как Р(7[г]) = ^[г], и тогда
принятая в момент времени i мощность равна 7Й-Р (7[(|) /Р- Подобным
образом можно адаптировать скорость передачи данных при модуляции
Д(7[г']) = Я[г] и/или параметры кодирования С (7(2]) = С*[г] по оценке 7[г].
Если контекст ясен, то временную ссылку i в выражениях для 7, Р(7),
Д(7) и С*(7) можно опустить.
Модель системы показана на рис. 9.1. Предполагается, что оценка g[i]
коэффициента усиления мощности канала </[?'] в момент времени i доступ-
на для приемника после оценки временной задержки ie, и что эта самая
задержка доступна для передатчика после объединенной оценки и за-
1 Зависимость от времени означает нестационарность канала, что указывает на проти-
воречие в условиях. — Прим, перев.
a 9. Адаптивная модуляция и кодирование
держки в. цепи обратной связи id = ie + if. Наличие в передатчике этой
информации’о канале позволяет адаптировать схему передачи к изме-
нениям в канале. Стратегия адаптации может учитывать оценку ошибки
и задержки в g [г — ц/] или трактовать g [г — id] как истинный коэффициент
передачи: эти задачи будут рассмотрены более подробно в подпараграфе
9.3.7. Предполагается, что канал обратной связи не вносит никаких оши-
бок, что представляется разумным при использовании в цепи обратной
связи мощных кодов с обнаружением и исправлением ошибок и повтор-
ной передачи данных.
Демодуляция
Канал обратной связи
Рис. 9.1. Модель системы
Скорость изменений канала будет определять, насколько часто пе-
редатчику придется адаптировать свои параметры, и это также будет
влиять на оценку ошибки «/[г]. Если коэффициент передачи канала со-
держит составляющие быстрых и медленных замираний, то передача мо-
жет адаптироваться по обоим параметрам при условии, что коэффициент
передачи изменяется достаточно медленно, или же она будет ада-
птироваться только к медленным замираниям. Так, если коэффициент
передачи <у|г] соответствует экранированию и замиранию при многолуче-
вом распространении, то на низких скоростях передачи экранирование
практически постоянно, а многолучевые замирания проходят достаточ-
но медленно, поэтому состояние канала может быть оценено и передано
обратно передатчику с оценкой ошибки и задержки, которые незначи-
тельно ухудшают эксплуатационные показатели. При высоких скоростях
передачи система уже не успевает эффективно производить оценку па-
раметров многолучевых замираний и передавать их по каналу обратной
связи, чтобы адаптироваться к таким замираниям. В этом случае ада-
птивная передача реагирует только на колебания экранирования, а ве-
роятность ошибки модуляции должна быть усреднена по распределению
быстрых замираний. Адаптивные методы, используемые при сочетании
быстрых и медленных замираний, представлены в § 9.5.
9.2. Методы адаптации
Существует множество параметров, которые могут изменяться в пере-
датчике в соответствии с коэффициентом передачи канала у. В этом
разделе мы обсудим методы адаптации, при которых изменяются наибо-
лее распространенные параметры: скорость передачи данных, мощность,
параметры кодирования, вероятность ошибки, а также сочетания этих
методов адаптации.
9.2.1. Методы адаптации,
основанные на изменении скорости передачи
При модуляции с переменной скоростью скорость передачи данных R [7]
изменяется в соответствии с коэффициентом передачи канала 7. Это мож-
но выполнить, либо фиксируя скорость передачи символов Rs = 1 /Ts при
модуляции и используя несколько схем модуляции или размеров созвез-
дий, либо фиксируя вид модуляции (например, ДФМН (BPSK)) и изменяя
скорость передачи символов. Изменение скорости передачи символов до-
статочно трудно реализовать на практике, так как изменение полосы
частот сигнала непрактично и осложняет разделение полосы частот. Нао-
борот, изменение размера созвездия или типа модуляции с фиксированной
скоростью передачи символов достаточно просто в реализации, и эти
методы используются в существующих системах. В частности, системы
GSM и IS-136 EDGE, а также стандарт IEEE 802.11а беспроводных ЛВС
изменяют виды модуляции и кодирование в соответствии с качеством
канала [15]. Обычно параметры модуляции, определяющие скорость пе-
редачи, фиксируются для блока или цикла символов, при этом размер
цикла является параметром схемы. Циклы могут также включать в се-
бя контрольные символы для оценки канала и различную управляющую
информацию.
Если используется дискретный набор видов модуляции или размеров
созвездий, то каждое значение коэффициента передачи 7 должно соот-
ветствовать одной из возможных схем модуляции. Это часто делается
для поддержания вероятности ошибки в каждой схеме ниже заданного
значения. Эти идеи продемонстрированы в следующем примере, а также
в последующих разделах, для конкретных видов адаптивной модуляции.
Пример 9.1. Рассчитывая получить вероятность ошибки Рь приблизительно
равной 10“3, рассмотрим систему адаптивной модуляции, использующую ФМН-4
Глава 9. Адаптивная модуляция и кодирование
(QPSK) и ФМН-8 (8-PSK). Если требуемое значение Рь не может быть обеспе-
чено ни одной из этих схем, то передача данных не ведется. Найдите область
значений коэффициента передачи 7, соответствующую трем возможным схемам
передачи (отсутствие передачи, ФМН-4 и ФМН-8), а также определите среднюю
эффективность использования спектра для такой системы в условиях рэлеевских
замираний с 7 = 20 дБ.
Решение. Прежде всего, обратите внимание, что для ФМН-4 и для ФМН-8
защищенность SNR равна 7 = 7S. Из § 6.1 имеем Pb « Q (^/7) для ФМН-4 и Рь «
» 0,666Q (v^sin (тг/8)) для ФМН-8. Так как ФМН-8 при 7 > 14,79 дБ дает
Рь < 10“3, то при 7 > 14,79 дБ адаптивная схема использует модуляцию ФМН-8.
Так как ФМН-4 при 7 > 10,35 дБ дает Рь < 10“3, то схема адаптации использует
ФМН-4 при 14,79 7 > 10,35 дБ. Канал не используется при 7 С 10,35 дБ.
Определим среднюю скорость передачи, проанализировав, как часто исполь-
зуется каждая из различных схем передачи. Так как ФМН-8 используется при
7 > 14,79 дБ = 30,1, то при рэлеевских замираниях с 7 = 20 дБ и эффективно-
сти использования спектра ФМН-8, равной R [7] /В = log2 8 = 3 бит/с/Гц, доля
времени передачи по схеме ФМН-8 составляет Ps = J 7/100с?7 = 0,74. Мо-
30,1 '**>»
дуляция ФМН-4 используется при 10,35 < 7 С 14,79 дБ, где 10,35 дБ = 10,85
в абсолютных единицах. Поэтому эффективности использования спектра, равной
30,1
R [7] = log2 4 = 2 бит/с/Гц, соответствует доля времени Р4 = J -7/100с?7 =
10,85
= 0,157. В течение оставшейся части времени (0,103) передача не осуществляет-
ся. Таким образом, средняя эффективность использования спектра составляет
0,74 • 3 + 0,157 • 2 + 0,103 0 = 2,534 бит/с/Гц.
Заметим, что при 7 С 10,35 дБ предпочтительней вместо приостановки
передачи, ведущей к вероятности нарушения связи, примерно равной 0,1, ли-
бо использовать только одно измерение сигнала (т. е. могла бы использоваться
ДФМН), либо добавить к ФМН-4 кодирование с исправлением ошибок, чтобы
достичь требуемой вероятности Рь- При применении блочных или сверточных
кодов эффективность использования спектра при 7 С 10,35 дБ была бы менее
2 бит/с/Гц, но больше нулевой эффективности, соответствующей отсутствию
передачи. Эти методы переменного кодирования описаны в подпараграфе 9.2.4.
9.2.2. Методы адаптации,
основанные на изменении мощности
Простая адаптация передаваемой мощности используется в основном
для компенсации изменений защищенности SNR при замираниях. Ее цель
заключается в поддержке фиксированного уровня вероятности ошибки
бита или, что равнозначно, постоянного отношения сигнал-шум (защи-
щенности) SNR на приеме. Таким образом, при адаптации мощности
замирания в канале преобразуются таким образом, что в модуляторе и де-
модуляторе канал предстает как канал с аддитивным белым гауссовым
9.2. Методы адаптации
шумом AWGN.2 Адаптация мощности при инверсии канала задается фор-
мулой
(«)
где ст — постоянное значение защищенности SNR на приеме. Среднее
ограничение мощности Р предполагает, что:
У = У %(7)^7 = L (9-2)
Рассчитывая (9.2) для ст, получаем, что ст = 1/Е[1/'у], поэтому ст опреде-
ляется распределением />(7), которое, в свою очередь, через 7 зависит от
средней мощности передачи Р. Следовательно, если значение ст, необхо-
димое для достижения требуемого коэффициента ошибок при заданной
средней мощности Р, больше 1/Е [I/7], то эта цель недостижима. Обра-
тите внимание, что для рэлеевских замираний, при которых величина 7
распределена экспоненциально, Е [I/7] = оо, и поэтому, используя инвер-
сию канала, нельзя достичь требуемого значения вероятностшГлпибки Pj.
Замирание можно также инвертировать только при значениях выше
заданной границы 70, и тогда происходит адаптация мощности с усе-
ченной инверсией канала. В этом случае адаптация мощности задается
выражением:
Р(7) _ f <7/7, 7 > 7о, , .
Р t 0, 7 < 7о. 1 }
Граничная величина 70 может основываться на требуемой вероятно-
сти перерыва связи Pout = Р (7 < 7о) или на требуемой величине коэф-
фициента ошибок BER, превышающего заданную границу, которая опре-
деляется с помощью этого коэффициента ошибок BER и 72(7). Так как
канал используется только тогда, когда 7 70, то при условии средней
мощности Р мы получим ст = i/E7o [V7], где:
Е7о | = [ -Р(7)^7- (9-4)
L7J J 1
70
Пример 9.2. Найдите адаптацию мощности для модуляции ДФМН (BPSK),
поддерживающую фиксированное значение вероятности р, = 10“3 при отсут-
ствии перебоев связи и при рэлеевских замираниях в канале с 7 = 10 дБ. Опре-
делите также результирующую вероятность нарушения связи.
Решение. Используется адаптация мощности с усеченной инверсией канала,
поэтому нам необходимо найти только ст и 70. Для ДФМН с постоянной за-
щищенностью SNR и ст = 4,77 получаем Рь = Q (\/2ст) = 10-3. Подставляя
2Инверсия и усеченная инверсия канала были рассмотрены в подпараграфе 4.2.4 в кон-
тексте пропускной способности каналов с замираниями.
a 9. Адаптивная модуляция и кодирование
а = 1/Е7о [I/7] и решая это уравнение относительно 70 в численном виде, по-
лучаем 7о = 0,7423. Таким образом, Poat = 72(7 < 70) = 1 — е-7°/10 = 0,379.
Следовательно, при требуемой вероятности Рь = 10“3 в данном, относительно
плохом канале, существует высокая вероятность нарушения связи.
9.2.3. Различная вероятность ошибки
При условии ограничения среднего значения коэффициента ошибки BER
величиной Рь, можно адаптировать также мгновенное значение коэффи-
циента ошибки. В подпараграфе 6.3.2 мы видели, что в каналах с замира-
ниями мгновенная вероятность ошибки колеблется так же, как колеблется
значение защищенности SNR 7 на приеме, и в результате среднее значе-
ние BER составляет Pb = J Это не считается адаптивным
методом, так как передатчик не адаптируется к величине 7. Поэтому при
адаптивной модуляции вероятность ошибки обычно адаптируется вместе
с какой-либо иной формой адаптации, например, при адаптации разме-
ра созвездия или типа модуляции. Адаптация, основанная на изменении
скорости передачи данных и вероятности ошибки с целью сокращения пе-
редаваемой энергии, первоначально была предложена Хэйесом в [1], где
была получена экономия мощности в 4 дБ при требуемой средней веро-
ятности ошибки бита, равной 10“4.
9.2.4. Методы переменного кодирования
При адаптивном кодировании для получения разных значений эффектив-
ности кодирования передаваемых бит используются различные канальные
коды. Например, при небольших значениях защищенности 7 может быть
использован код с сильной исправляющей способностью, а когда 7 име-
ет большую величину, можно использовать слабый код или передачу без
кодирования. Адаптивное кодирование может быть реализовано методом
объединения, мультиплексирования кодов с различными исправляющими
способностями.
Однако при таком подходе требуется, чтобы канал оставался пример-
но постоянным в течение передачи всего блока или чтобы длина кода
была ограничена [7]. В таких каналах с медленно изменяющимися пара-
метрами адаптивное кодирование может быть очень полезным, особенно
если вид модуляции должен оставаться фиксированым, что может быть
обусловлено сложностью или ограничениями на отношение пиковой вели-
чины мощности к среднему значению (пик-фактор).
Альтернативой кодированию с объединением — мультиплексирова-
нием могут служить совместимые по скорости пунктирные сверточные
коды — RCPC3 [18]. Это семейство сверточных кодов с различными от-
3RCPC — Rate-compatible punctured codes.
9.2. Методы адаптации 439
ношениями Rc = к/п. Основным исходным условием для кодов RCPC
является наличие отдельного кодирующего устройства и декодера, испра-
вляющая способность которого может изменяться при отсутствии досто-
верных кодированных бит (пунктирование кода). Более того, коды RCPC
имеют ограничение по совместимости скоростей, так как кодированные
биты высокоскоростных (более слабых) кодов используются также всеми
кодами с меньшей скоростью (т. е. более сильными). Поэтому для увели-
чения исправляющей способности кода и достижения требуемого уровня
исправления ошибок, кодированные биты самого слабого кода передаются
вместе с дополнительными кодированными битами. Совместимость ско-
ростей упрощает процесс адаптации к защите от ошибок, так как для всех
кодов семейства RCPC используются одни и те же кодеры и декодеры,
с пунктированием на передатчике для достижения желаемого уровня ис-
правления ошибок. Декодирование осуществляется по алгоритму Витер-
би, принцип действия которого основан на решетках, соответствующих
самой маленькой скорости кода, с пунктированием, встроенным в метри-
ки ветвей. Пунктирование представляет очень эффективный и мощный
способ адаптивного кодирования и лежит в основе адаптивного кодиро-
вания передачи данных в протоколах EDGE GSM и IS-136 [13].
Адаптивное кодирование может быть реализовано методами мульти-
плексирования или пунктирования для фиксированного вида модуляции
или в сочетании с адаптивной модуляцией. Если вид модуляция зафик-
сирован, то адаптивное кодирование часто является единственным прак-
тическим механизмом реагирования на изменения в канале [6, 7]. В этой
главе основное внимание уделяется системам, где возможна адаптивная
модуляция, поэтому адаптивное кодирование само по себе далее обсу-
ждаться не будет.
9.2.5. Гибридные методы
Гибридные методы могут адаптировать большинство параметров систе-
мы передачи, включая скорость, мощность, метод кодирования и мгно-
венную вероятность ошибки. В этом случае, для выполнения заданных
требований к эксплуатационным показателям системы, используется со-
вместная оптимизация различных методов. Адаптация скорости часто
объединяется с адаптацией передаваемой мощности для максимально-
го увеличения эффективности использования спектра, и в последующих
разделах мы применим эту совместную оптимизацию к различным ви-
дам модуляции. Адаптивная модуляция и кодирование в настоящее вре-
мя используются как в сотовых системах, так и в беспроводных ЛВС,
а результатам их исследования посвящен обширный список специальной
литературы [13, 15].
a 9. Адаптивная модуляция и кодирование
9.3. МКАМ с переменной скоростью и переменной
мощностью
В предыдущем разделе мы обсудили общие подходы к адаптивной мо-
дуляции и кодированию. В данном разделе будет рассмотрена особая
форма адаптивной модуляции, когда, для достижения максимальной эф-
фективности использования спектра при заданной мгновенной вероятно-
сти ошибки Рь, изменяются скорость и мощность многоуровневой КАМ —
МКАМ (MQAM). Мы изучаем эту форму адаптивной модуляции пото-
му, что она дает понимание преимуществ адаптивной модуляции и, более
того, потому что одна и та же схема адаптации мощности и скорости по-
зволяет достичь максимальной пропускной способности и также оптими-
зировать адаптивную схему МКАМ. Мы покажем, что при плавных зами-
раниях существует постоянный разрыв в мощности между спектральной
эффективностью данного адаптивного метода МКАМ и пропускной спо-
собностью, и этот разрыв можно частично закрыть с помощью кодовой
модуляции, использующей матричный или решетчатый код, наложенный
на адаптивную модуляцию.
Рассмотрим семейство сигнальных созвездий МКАМ с фиксирован-
ным временем передачи символа Ts, где М обозначает количество точек
в каждом созвездии сигнала. Исходя из идеальной формы импульса Най-
квиста, предположим, что Ts = 1/В. Пусть величины Р, Nq, 7 = Pg/N^B
и 7 — P/NqB будут такими же, как и в используемой нами модели систе-
мы. Тогда среднее значение Es/Nq равно средней защищенности SNR:
Д _ pts
Ао “ W ~
Эффективность использования спектра при фиксированной величине М
равна R/B = log2 М бит на символ. Эта эффективность обычно характе-
ризуется средней мощностью передачи Р и коэффициентом ошибок BER
для данного вида модуляции.
(9-5)
9.3.1. Граничные значения вероятности ошибок
В [19] коэффициент ошибок BER для канала с аддитивным белым гауссо-
вым шумом AWGN и модуляцией МКАМ при детектировании с идеальной
когерентной фазой и помехозащищенностью SNR 7 ограничен сверху сле-
дующей величиной:
Рь 2е^1’57/(М^1). (9.6)
Строгая граница, хорошо действующая в пределах 1 дБ для М 4 и 0
7 30 дБ, имеет вид:
Рь 0,2е-1’57/(м-1). (9.7)
Обратите внимание, что эти выражения являются только ограниче-
ниями, поэтому они не соответствуют выражениям вероятности ошибки
(табл. 6.1). Мы используем эти ограничения потому, что их легко инвер-
тировать, и таким образом, как мы вскоре увидим, можно получить М
как функцию заданной вероятности Рь и стратегии адаптации мощности.
Схемы адаптивной модуляции также могут основываться на выражениях
коэффициента ошибки BER, не подлежащих инверсии, или на результа-
тах моделирования коэффициента ошибки BER с числовой инверсией,
используемой для получения размера созвездия и защищенности SNR, со-
ответствующей заданной величине BER.
В канале с замираниями при неадаптированной передаче (с постоян-
ными мощностью и скоростью передачи) среднее значение коэффициента
ошибок BER получают, интегрируя величину BER в канале с аддитивным
белым гауссовым шумом AWGN по распределению замираний По-
этому для нахождения максимальной скорости передачи, которая может
быть достигнута при данном среднем значении коэффициента ошибок
BER и данной средней защищенности SNR, мы используем выражение
для среднего коэффициента ошибок BER. Подобным образом, если ско-
рость передачи данных и среднее значение коэффициента ошибок BER
заданы, то, как это показано в следующем примере, для этих параметров
мы можем найти требуемое среднее значение защищенности SNR.
Пример 9.3. Найдите среднее значение защищенности SNR, необходимой
для получения среднего коэффициента ошибок BER, равного Рь = 10 3, при
неадаптивной модуляции ДФМН (BPSK) в канале с рэлеевскими замираниями.
Какова эффективность использования спектра в такой схеме?
Решение. Из подпараграфа 6.3.2 известно, что ДФМН при рэлеевских зами-
раниях имеет вероятность Рь « 1/4у. Поэтому без адаптации передатчика для
нужного нам среднего значения коэффициента ошибок BER необходимо среднее
значение защищенности у = 1/4Рь = 250 = 24 дБ. Эффективность использова-
ния спектра составляет R/В = log2 2 = 1 бит/с/Гц. Мы увидим, что адаптивная
модуляция обеспечивает намного большую эффективность использования спек-
тра при той же самой защищенности SNR и заданном коэффициенте ошибок BER.
9.3.2. Схемы с адаптацией скорости и мощности
Теперь рассмотрим адаптацию мощности передачи Р(д) по величине у
при условии ограничения средней мощности величиной Р и мгновенного
значения коэффициента ошибок BER Рь(у) = Рь- Тогда защищенность
SNR на приеме равна уР(у)/Р, а граничная величина Рь для каждого зна-
чения у, при использовании жесткого ограничения (9.7), становится равной:
Рь(у) 0,2 ехр . (9.8)
Для достижения заданной вероятности Рь регулируются значения М
и Р(7). Преобразовывая (9.8), для заданной вероятности Рь получаем сле-
дующий максимальный размер созвездия:
Лт)
р ’
(9.9)
где
(9.10)
К = ^-
ln(5Pb)
Максимизируем эффективность использования спектра, увеличивая
до максимума выражение:
Е [log2 М(7)] = У log2 (1 + ^7^7^ р(7)^7
о
при условии ограниченной мощности
(9-И)
(9-12)
(9.13)
У ^(?)р(7)^7 = Р-
о
Стратегия адаптации мощности, максимизирующая (9.11), имеет ту
же форму, что и стратегия оптимальной адаптации мощности (4.12), до-
стигающая максимальной пропускной способности:
Р(1) = ( 1/70 - 1/7^, 7 > 7оЖ
Р 1 0, 7 < щ/К,
где 7о/А” — оптимальная глубина отсечки замираний, ниже которой ка-
нал не используется, для значений К, заданных (9.10). Если мы определим
7к = 'уо/К и умножим обе стороны выражения (9.13) на К, то получим:
КР^) = ( 1/7к “ 1/7, 7 7/<
Р [ 0, 7 < 7к,
где 7к — глубина отсечки замираний, ниже которой канал не использу-
ется. Эта глубина отсечки должна удовлетворять ограничению по мощ-
ности (9.12):
(9-14)
(9.15)
УК
При подстановке (9.13) или (9.14) в (9.9) получаем, что мгновенная
скорость равна:
log2M(y) = log2 (—
\7К
а соответствующая средняя эффективность использования спектра (9.11)
(9.16)
равна:
оо
Ъ = [ 1о§2 (9-17)
-О J \7К /
7к
Сравнивая адаптацию мощности (4.12) и среднюю эффективность ис-
пользования спектра (4.13), соответствующие пропускной способности
Шеннона в канале с замираниями, с оптимальной адаптацией мощно-
сти (9.13) и средней эффективностью использования спектра (9.17) при
адаптивной МКАМ, можно видеть, что механизмы адаптации мощно-
сти и скорости в обоих случаях одинаковы и дают одинаковую эффек-
тивность использования спектра — с потерями эффективной мощности
на величину К в случае МКАМ по сравнению со схемой повышения ем-
кости. Более того, эти потери мощности не зависят от вида распределе-
ния замираний. Поэтому, если емкость канала с замираниями составляет
R бит/с/Гц при средней защищенности SNR 7, то для достижения той
же самой скорости при некодированной адаптивной МКАМ необходима
величина защищенности SNR, равня 7/К. Точно так же К представляет
максимально возможную эффективность кодирования с переменной ско-
ростью и мощностью для МКАМ. Далее в разделе 9.3.8 будет рассмотрено
наложение на адаптивную МКАМ матричного или решетчатого кода для
получения определенного выигрыша от кодирования.
На рис. 9.2 и 9.3 соответственно изображены графики средней эф-
фективности использования спектра (9.17) для адаптивной МКАМ при
заданных значениях вероятности Рь, равных 10-3 и 10“6, логнормаль-
ном распределении экранирования и рэлеевском распределении замира-
ний. Для сравнения на этих рисунках показан также график пропускной
способности. Обратите внимание, что разрыв между эффективностью
использования спектра при МКАМ с изменяющимися скоростью и мощ-
ностью и пропускной способностью равен постоянной К, которая в соот-
ветствии с (9.10) является простой функцией коэффициента ошибок BER.
9.3.3. Инверсия в канале с фиксированной скоростью
Адаптацию мощности с инверсией канала можно также применять для
поддержания фиксированного значения защищенности SNR на приеме.
В этом случае передача с модуляцией МКАМ ведется на одной фиксиро-
ванной скорости, при которой достигается заданная вероятность ошиб-
ки Рь. Размер созвездия М, соответствующий заданной вероятности Рь,
получают подстановкой формулы адаптации мощности в канале с инвер-
сией F(7)/F = ст/7 (9.2) в (9.9) при ст = Е[1/7]. Так как полученная
в результате эффективность равна R/B = М, то эффективность исполь-
a 9. Адаптивная модуляция и кодирование
зования спектра при адаптации мощности в канале с инверсией составит:
Я, (1+ ~1,5
В °g2V 1п(5Рь)Е[1/7]Л
(9.18)
Эта эффективность использования спектра основывается на жесткой гра-
нице (9.7); если же М = R/B < 4, то должна использоваться нежесткая
граница (9.6), и в этом случае в (9.18) 1п(5Рь) заменяется на 1п(0,5Рь).
Рис. 9.2. Средняя эффективность использования спектра при логнормальном рас-
пределении экранирования = 8 дБ)
Усеченная инверсия канала используется только при условии, что 7 > 7о-
Поэтому эффективность использования спектра при усеченной инверсии
канала получают подстановкой в (9.9) выражения Р(7)/Р = <т/7 (7 > 7о)
и умножением на вероятность того, что 7 > 7о- Максимальное значение
получается при оптимизации по уровню отсечки 7о:
R ( —15 \
- = n^lOg2 [1/?]ф(7 > 7„). (9.19)
Эффективность использования спектра при адаптивной МКАМ (при
оптимальной «водоналивной» стратегии и адаптации мощности с усечен-
ной инверсией канала) в канале с рэлеевскими замираниями и заданным
коэффициентом ошибок BER, равным 10“3, показана на рис. 9.4 вместе
с пропускной способностью для тех же двух стратегий адаптации. Как
это ни удивительно, мы видим, что усеченная инверсия канала с переда-
чей на фиксированной скорости обеспечивает практически ту же самую
9.3. МКАМ с переменной скоростью и переменной мощностью
эффективность использования спектра, что и оптимальная МКАМ с изме-
няющейся скоростью и изменяющейся мощностью. Это наводит на мысль,
что усеченная инверсия канала на практике предпочтительней, так как
она достигает практически той же самой эффективности спектра, что
и передача с изменяющимися скоростью и мощностью, но не требует от
нас изменения скорости.
Рис. 9.3. Средняя эф-
фективность использо-
вания спектра при рэ-
леевских замираниях
Рис. 9.4. Эффективность
использования спектра при
различных стратегиях ада-
птации мощности (замира-
ния с рэлеевским распреде-
лением)
Помехозащищенность, дБ
a 9. Адаптивная модуляция и кодирование
Однако это предполагает, что нет ограничений на размер созвездия.
В частности, выражения для эффективности использования спектра (9.17),
(9.18) и (9.19) предполагают, что М может быть любым действительным
числом, и что мощность и скорость постоянно могут изменяться в зависи-
мости от у. Хотя МКАМ для нецелых значений М возможна, ее сложность
будет достаточно высока [20]. Более того, на практике сложно постоян-
но адаптировать мощность передачи и размер созвездия в соответствии
с замираниями в канале, в частности, в условиях быстрых замираний.
Поэтому при дальнейшем рассмотрении мы ограничим размер созвездия
небольшим количеством значений. Это явно повредит эффективности ис-
пользования спектра, хотя (как это показано в следующем разделе) и не
очень сильно.
9.3.4. Адаптация при дискретной скорости
Рассмотрим ту же модель, что и в предыдущем разделе, но ограничим
линейную МКАМ по величине созвездия. Так, возьмем набор квадратных
созвездий с размерами Mq = 0, Mi = 2 и Mj = j = 2,..., N — 1
для некоторого N. При М > 2 мы предполагаем квадратные созвез-
дия, так как их проще реализовать, чем прямоугольные [21]. Сначала мы
проанализируем влияние этого ограничения на эффективность использо-
вания спектра при оптимальной стратегии адаптации. Затем определим
эффект, оказываемый на стратегии с инверсией канала.
Рассмотрим схему передачи сигнала МКАМ с изменяющимися ско-
ростью и мощностью для заданных ограниченных созвездий. В каждом
интервале следования символа будет передаваться один символ из задан-
ного набора созвездий {Mj : j = 0,1,..., N — 1}; выбор созвездия зависит
от уровня замираний у в каждом периоде передачи символа. Выбор со-
звездия Мо соответствует отсутствию передачи. Для каждого значения у
мы должны решить, какое созвездие необходимо передать и какова долж-
на быть мощность передачи. Скорость, на которой передатчик должен
изменить свое созвездие и мощность, будет проанализирована ниже. Так
как адаптация мощности при дискретном размере созвездий проводит-
ся непрерывно, такой режим называют схемой адаптации с непрерывной
мощностью и дискретной скоростью.
Размер созвездия для каждого значения у определяется по уровням
дискретной области замираний в канале. В частности, область значений
7 разделяется на N зон замираний Rj = [7^-1,7Д, j = 0,..., N — 1, где
7-1 = 0, а 7дг_1 = оо. Мы передаем созвездие Mj, когда 7 G Rj. Поэтому
эффективность использования спектра при 7 G Rj равна log2 Mj бит/с/Гц
для всех j > 0.
Схема адаптивной МКАМ требует, чтобы были определены грани-
цы каждой зоны Rj. Хотя эти границы могут быть оптимизированы
для максимального увеличения эффективности использования спектра,
как это показано в подпараграфе 9.4.2, но оптимальные границы не-
льзя найти в аналитическом виде, и их получение требует всесторонних
исследований. Поэтому для определения границ мы будем пользоваться
субоптимальным (частично оптимальным) методом. Такие субоптималь-
ные границы найти намного проще, чем оптимальные, и они имеют прак-
тически те же самые показатели. Введем выражение:
М(7) = (9.20)
где 7^ >0 — параметр, который позднее будет оптимизирован для мак-
симального увеличения эффективности использования спектра. Обратите
внимание, что при = у к подстановка (9.13) в (9.9) дает (9.20). Поэто-
му соответствующий выбор 7^- в (9.20) определяет оптимальный размер
созвездия для каждого значения 7 при отсутствии ограничений созвездия.
Допустим теперь, что 7^ — фиксированная величина, и определим,
что = оо. Для определения размера созвездия Mj (j = 0,..., N — 1)
для заданной защищенности SNR 7, сначала необходимо рассчитать М(7)
по (9.20). Затем находят такое значение j, чтобы выполнялось условие
Mj М{у) < Mj+i, и выделяют созвездие Mj для данного значения 7.
Таким образом, при фиксированном значении 7 передается наибольшее
созвездие из нашего набора {Mj : j = 0,..., N — 1}, которое меньше М(7).
Например, если уровень замираний соответствует условию 2 7/7к < 4,
то используется модуляция ДФМН (BPSK). Границы области, отличаю-
щиеся от значений 7_i = 0 и 7jv-i = сю, располагаются на уровнях 7? =
= 7^Mj+i, j = 0,..., N — 2. Ясно, что увеличение количества дискретных
созвездий сигнала N дает лучшую аппроксимацию непрерывной адапта-
ции (9.9), обеспечивая лучшую эффективность использования спектра.
Когда зоны и связанные с ними созвездия зафиксированы, необходи-
мо найти стратегию адаптации мощности, удовлетворяющую требовани-
ям к коэффициенту ошибок BER и ограничениям по мощности. Исходя
из (9.9), мы можем поддерживать фиксированное значение коэффициен-
та ошибок BER для созвездия Mj > 0, используя стратегию адаптации
мощности:
W = ( -1) (1/7К), Mj < Mj+i,
Р [ О, Mj=0 ’
для 7 6 Rj. так как эта стратегия для созвездия Mj дает фиксированное
отношение Es/Nq на приеме:
ЕЩ) = 7Щ7) = Л7-1
No Р К ' '
По определению параметра К, модуляция МКАМ с размером созвездия
448 Глава 9. Адаптивная модуляция и кодирование
Mj и отношением Es/Nq (9.22) дает в результате требуемое значение ве-
роятности ошибки Pt,. В табл. 9.1 в обобщенном виде приведены размеры
созвездий и стратегии адаптации мощности в зависимости от 7 и 7^- для
пяти зон замираний.
Таблица 9.1. Адаптация скорости и мощности для пяти зон
Зона (J) Область значений 7 Mj S>(y)/S
0 0 у/Ук < 2 0 0
1 2 у/ук < 4 2 1/Ку
2 4 У/Ук < 16 4 З/Ку
3 16 у/ук < 64 16 15/АГу
4 64 7 у/ук < оо 64 63/Ку
8
Непрерывные мощность и скорость
-ОтНепрерывная мощность, дискретная скорость (6 зон)
СП
7 -
е- 2
25
5
10 15 20
Средняя защищенность SNR, дБ
Рис. 9.5. Эффективность использования спектра при логнормальном распределе-
нии экранирования (уст,/, = 8 дБ) и дискретной скорости
Эффективность использования спектра при такой стратегии с дис-
кретной скоростью просто равна сумме скоростей передачи, соответству-
ющих каждой зоне, умноженной на вероятность того, что 7 попадает
9.3. МКАМ с переменной скоростью и переменной мощностью
в данную зону:
В 7V-1 / \
-Б = Е l°g2 [Mj)p (Mj^< MJ+X . (9.23)
" j=i \ /
Так как Mj — функция от 7^-, то мы можем максимизировать (9.23)
по переменной 7^, подчиняющейся ограничению по мощности:
Лг_1 7кМ?+1
Е / = 1, (9.24)
7=1 -ГКМ
где Pjipf^/P определяется согласно (9.21). Для оптимального 7^- нет реше-
ния в аналитическом виде: в дальнейших расчетах оно находится с при-
менением численных методов.
На рис. 9.5 и 9.6 показан максимум выражения (9.23) в зависимости от
количества зон замираний N при логнормальном распределении экрани-
рования и рэлеевских замираниях, соответственно. Коэффициент ошибок
BER принят равным 10-3 для обоих графиков. Из рис. 9.5 видно, что
при ограничении нашей стратегии адаптации только шестью зонами за-
мирания [Mj = 0,2,4,16,64,256) эффективность использования спектра
находится в пределах 1 дБ эффективности, полученной при адаптации
с непрерывной скоростью (9.17) в условиях логнормального экранирова-
ния. Похожий результат наблюдается и для рэлеевского замирания с ис-
пользованием пяти зон [Mj = 0,2,4,16,64).
Рассмотренную стратегию с дискретной скоростью можно упростить
еще больше, используя для каждого созвездия Mj постоянную мощность
передачи. В этом случае каждой зоне замираний соответствуют одно со-
звездие сигнала и одна мощность передачи. Такая стратегия называется
адаптивной МКАМ с дискретной мощностью и дискретной скоростью.
Так как мощность передачи и размер созвездия в пределах зоны имеют
фиксированные значения, то коэффициент ошибок BER в каждой зоне бу-
дет изменяться в зависимости от 7. Поэтому границы зоны и мощность
передачи должны быть установлены так, чтобы достичь требуемого сред-
него значения BER.
Ограничение допустимого числа созвездий сигнала повлияет и на при-
менение стратегий полной и усеченной инверсии канала. Так, предполо-
жим, что в соответствии со стратегией инверсии канала созвездие долж-
но быть выбрано из фиксированного набора возможных созвездий М =
{Mq = 0,..., Mpf-i}. При полной инверсии канала эффективность ис-
пользования спектра с этим ограничением имеет вид:
В ( — 1 5 \
В-^[(1 + 1п(5Д)Е[1/71)]м'
Глава 9. Адаптивная модуляция и кодирование
где |_xj м обозначает наибольшее число из набора М, которое меньше или
равно х. Эффективность использования спектра при данной стратегии
будет ограничена значениями log2 М (М 6 М) с дискретными перехода-
ми на значения у, при которых эффективность использования спектра
без ограничения созвездия (9.18) равна log2 М. При усеченной инверсии
канала эффективность использования спектра равна:
Я
В
= maxlog2
70
-1,5
1п(5Рь)Е70[1/у]
(9.26)
J м
Рис. 9.6. Эффективность использования спектра при рэлеевских замираниях
и дискретной скорости
На рис. 9.7 и 9.8 показано влияние ограничения созвездия на адаптив-
ную модуляцию МКАМ при различных стратегиях адаптации мощности.
Когда созвездие ограничено, мы допускаем шесть зон замираний, поэтому
М = {Мо = 0, 2,4,... , 256}. Было принято, что мощность, соответству-
ющая каждой зоне замираний при стратегии с дискретной мощностью
и дискретной скоростью, имеет средний коэффициент ошибок BER, рав-
ный мгновенному значению коэффициента ошибок BER при адаптивной
9.3. МКАМ с переменной скоростью и переменной мощностью
стратегии с дискретной скоростью и непрерывной мощностью. Из этих
рисунков видно, что МКАМ с изменяющейся скоростью и малым на-
бором созвездий при ограничении мощности каждого созвездия только
одним значением ухудшает эффективность использования спектра при-
мерно на 1-2 дБ по сравнению с адаптацией с постоянной мощностью.
Для сравнения представлен также график максимальной эффективности
(9.17) при адаптации с непрерывными мощностью и скоростью. Все стра-
тегии с дискретной скоростью имеют показатели, которые находятся
в пределах 3 дБ от этого теоретического максимума.
Средняя защищенность SNR, дБ
Рис. 9.7. Эффективность при логнормальном экранировании (оу, — 8 дБ)
На этих рисунках также показана эффективность использования спек-
тра при передаче с фиксированной скоростью и усеченной инверсией ка-
нала (9.26). Эффективность такой схемы очень близка к эффективности
стратегии с дискретной мощностью и дискретной скоростью. Однако
для достижения этой высокой эффективности оптимальное значение 70
должно быть довольно большим, при соответствующей вероятности пе-
рерыва связи Pout = р(7 С 7о) в интервале от 0,1 до 0,6. Поэтому данная
стратегия похожа на пакетную радиосвязь с пакетами данных, передава-
емыми на высоких скоростях при благоприятных условиях в канале. Для
логнормального закона экранирования на рисунке также показана эффек-
тивность полной инверсии канала (9.25); при рэлеевских замираниях эта
эффективность равна нулю. Кроме того, приведен график эффективно-
сти использования спектра при неадаптивной передаче, когда и скорость
452 Глава 9. Адаптивная модуляция и кодирование
передачи, и мощность постоянны. Как уже говорилось в подпараграфе
9.3.1, среднее значение коэффициента ошибок BER в этом случае получа-
ется при усреднении вероятности ошибки (9.31) по распределению замира-
ний р(7). Эффективность использования спектра определяется по значе-
нию М, которое при заданной величине 7 обеспечивает среднее значение
коэффициента ошибок BER, равное 10”3, как это показано в примере 9.3.
Очевидно, что из-за своей простоты неадаптивная передача сильно про-
игрывает в эффективности использования спектра. Однако если канал
быстро изменяется и его нельзя точно оценить, неадаптивная передача
может оказаться лучшим решением. Похожие кривые можно получить для
заданного коэффициента ошибок BER, равного 10”6, с приблизительно
таким же ухудшением эффективности использования спектра по сравне-
нию с BER, равным 10”3, как было показано на рис. 9.2 и 9.3.
Рис. 9.8. Эффективность при рэлеевских замираниях
9.3.5. Средняя продолжительность зоны замираний
Выбор количества зон замираний при использовании адаптивной страте-
гии будет зависеть от того, насколько быстро изменяется канал, а также
от ограничений технического характера, которые определяют, сколько
созвездий сигнала можно организовать в передатчике и на какой скоро-
9.3. МКАМ с переменной скоростью и переменной мощностью 453
сти передатчик может изменять свое созвездие и мощность. Результаты
оценки канала с использованием обратной связи вместе с ограничениями
технического характера могут создать условия, при которых созвездие
будет оставаться постоянным на протяжении десятков или даже сотен
символов. Кроме того, требования к линейности усилителя мощности
и ограничения внеполосного излучения могут ограничить скорость, на ко-
торой происходит адаптация мощности. Углубленное обсуждение и ре-
комендации по использованию технических средств можно найти в [22].
Так как нас интересует компромисс между количеством зон и адаптацией
по мощности и созвездию, то необходимо оценить, как долго отношение
сигнал-шум SNR 7 находится внутри определенной зоны замираний Rj.
Итак, рассмотрим продолжительность времени, в течение которого за-
щищенность SNR остается внутри данной зоны замираний.
Пусть Tj обозначает среднюю длительность времени, в течение кото-
рого 7 остается внутри J-й зоны замираний. Пусть Aj = ^^Mj для опре-
деленных ранее величин 7^- и Mj. Тогда j-я зона замираний определяется,
как {7 : 7 < Aj+i}. Время Tj называется средней продолжительно-
стью j-й зоны замираний — AFRD4. Этот параметр похож на сред-
нюю продолжительность замираний AFD5 (см. подпараграф 3.2.3), за
исключением того, что AFD характеризует среднее время, в течение ко-
торого 7 остается ниже определенного уровня, а в данном случае нас
интересует среднее время, когда 7 остается между двумя уровнями. Для
зоны в худшем случае (j = 0) эти два параметра совпадают.
Для определения точного значения fj необходим сложный вывод ана-
литического выражения, основанный на совместной плотности распреде-
ления р (7,7), и эта задача пока не решена. Однако можно получить хоро-
шую аппроксимацию, используя марковскую модель с конечным числом
состояний, описанную в подпараграфе 3.2.4. В данной модели замирание
аппроксимируется как марковский процесс дискретного времени Т, рав-
ного обычно длительности символа. При этом допускается, что значение
защищенности при замираниях 7 остается внутри одной зоны в течение
периода символа и что из данной зоны процесс может перейти только
в ту же или смежную зону. Обратите внимание, что эта аппроксимация
может дать большие значения продолжительности глубоких замираний,
чем более точные модели [23]. Вероятности перехода между зонами при
таком допущении задаются в виде:
L Т L Т
~ , Pj,j-i = ~ 5 Pj,j = 1 — Pj,jM ~ Pj,j-i, (9.27)
7TJ TTj
4AFRD — Average fade region duration.
5 AFD — Average fade duration.
(^454 Глава 9. Адаптивная модуляция и кодирование
где Lj — скорость пересечения уровней при Aj , a ть,- — устойчивое рас-
пределение, соответствующее j-й зоне: ть, = p(Aj С 7 < Aj+i). Так как
время, в течение которого марковский процесс остается в данном состо-
янии, распределяется геометрически [24, гл. 2.3], fj равно:
Pj,j+i + -^7+1 + Lj
Таким образом, значение fj является простой функцией скорости пе-
ресечения уровней и распределения замираний. Скорость пересечения уров-
ней при рэлеевских замираниях известна [25, гл. 1.3.4], но ее нельзя полу-
чить для логнормального закона распределения экранирования, так как
совместное распределение р (7,7) для этого типа замираний неизвестно.
При рэлеевских замираниях скорость пересечения уровней задается
формулой (3.44) как:
Tj = (9.29)
где /р = v/X — доплеровская частота. Подставляя (9.29) в (9.28), мы
легко можем увидеть, что значение fj обратно пропорционально допле-
ровской частоте. Более того, лу и Aj не зависят от fij. и поэтому, если
мы рассчитываем fj для заданной доплеровской частоты /о, мы можем
рассчитать и значение Tj, соответствующее другой доплеровской часто-
те fD:
Ь = (9.30)
JD
В табл. 9.2 приведены значения fj, соответствующие пяти зонам (Mj =
= 0, 2,4,16,64) при рэлеевских замираниях6 для /о = 100 Гц и двум уров-
ням средней защищенности: 7 = 10 дБ (7^. = 1,22) и 7 = 20 дБ (7^ =
= 1,685). Среднюю продолжительность AFRD для других доплеровских
частот можно легко определить, используя табличные значения и выра-
жение (9.30). Эта таблица показывает, что даже при высоких скоростях
порядка 100 килосимволов в секунду стратегия с дискретной скоростью
и дискретной мощностью будет поддерживать то же самое созвездие
и мощность передачи в течение десятков — сотен символов.
Пример 9.4. Найдите значения средней продолжительности зон замираний
AFRD для канала с рэлеевскими замираниями при 7 = 10 дБ, Mj = 0,2,4,16, 64,64
и /р = 50 Гц.
Решение. Сначала обратим внимание на то, что все параметры аналогичны тем,
что использовались для расчета в табл. 9.2, за исключением того, что доплеров-
6Применимость марковской модели с конечным числом состояний для каналов с рэле-
евскими замираниями была исследована в [26].
9.3. МКАМ с переменной скоростью и переменной мощностью
скал частота fp — 50 Гц равна половине доплеровской частоты fp = 100 Гц,
которая была использована для расчета табличных значений. Поэтому из выра-
жения (9.30) мы получаем значения AFRD с этим новым значением доплеровской
частоты путем умножения каждого значения в таблице на fol 3d = 2.
Таблица 9.2. Средняя продолжительность зон замираний Tj для /р = 100 Гц
Зона (J) у = 10 дБ 7 = 20 дБ
0 2,23 мс 0,737 мс
1 0,83 мс 0,301 мс
2 3,00 мс 1,06 мс
3 2,83 мс 2,28 мс
4 1,43 мс 3,84мс
При экранировании с замираниями мы можем получить грубую ап-
проксимацию fj, основанную на функции автокорреляции экранирования
(2.50): А(<5) = <ЕфдБе~^Хс, где = цт для скорости мобильного устройства
у. Так, например, мы можем аппроксимировать значения AFRD для всех
зон как fj ~ 0,1Хс/и, так как в этом случае корреляция между уровня-
ми замираний, разделенными во времени на величину fj ~ 0,lXc/v, будет
равна 0,9. Поэтому вероятно, что для небольшого количества зон зна-
чение 7 будет оставаться внутри одной и той же зоны в течение этого
периода времени.
9.3.6. Точная вероятность цифровой ошибки
в сравнении с приближенной
Стратегии адаптации, описанные в предыдущих разделах, основываются
на верхних оценках коэффициента ошибок BER из подпараграфа 9.3.1.
Так как это оценки сверху, то они дают значения коэффициента оши-
бок BER ниже требуемой величины. Представляет интерес оценка того,
насколько коэффициент ошибок BER, полученный с помощью рассмо-
тренных стратегий, отличается от требуемой величины BER. Более точ-
ное значение BER может быть получено с помощью моделирования или
использования лучшей аппроксимации коэффициента ошибок BER, чем
верхняя граница. Из табл. 6.1 видно, что коэффициент ошибок BER для
МКАМ с кодом Грея при высоких значениях защищенности SNR хорошо
аппроксимируется следующим образом:
4 / / fry А
п) (М1)
Более того, для стратегии адаптации с непрерывной мощностью и дис-
кретной скоростью передачи, отношение 7 = Es/Nq для j-vo созвездия
сигнала равно:
Es (j) = M3-l
No К
(9.32)
Поэтому мы можем получить более точное аналитическое выражение для
среднего значения коэффициента ошибок BER для рассматриваемых стра-
тегий адаптации путем усреднения BER (9.31) для каждого созвездия
сигнала следующим образом:
ЛГ-1 z ,______Ч 7кЧ+1
f P(7)dj
Р = 7=1
Ь ДГ-1 Tkmj+i
Е bgsMj f p(y)dy
>=1 7kMJ
(9.33)
при Мм = оо.
Рис. 9.9. Коэффици-
ент ошибок BER при
логнормальном распре-
делении экранирования
(шесть зон)
На рис. 9.9 и 9.10 представлены графики аналитического выражения
(9.33) и результаты моделирования коэффициента ошибок BER при из-
менении скорости и мощности, модуляции МКАМ и требуемом значении
BER, равном 10“3, соответственно для логнормального распределения
экранирования и рэлеевских замираний. Моделированное значение BER
немного лучше, чем вычисленное по формуле (9.33), так как это уравнение
основывается на границе ближайшего соседа для максимального количе-
ства ближайших соседей. Как модель коэффициента ошибок BER, так
и его аналитическая форма меньше, чем заданное значение BER, равное
10-3, при 7 > 10 дБ. Выражение (9.7) неприемлемо для ДФМН (BPSK),
9.3. МКАМ с переменной скоростью и переменной мощностью
поэтому нам придется воспользоваться нежесткой границей (9.6). Так как
при низких значениях защищенности SNR стратегия адаптация часто ис-
пользует созвездия ДФМН (BPSK), вероятность ошибки Рь будет больше
расчетного значения, полученного из строгой границы (9.7). То, что моде-
лированное значение BER меньше требуемой величины при высоких зна-
чениях SNR, означает, что аналитические расчеты на рис. 9.5 и 9.6 дают
пессимистическую картину; можно достичь несколько большей эффек-
тивности, поддерживая заданную вероятность ошибки Рь, равную 10~3.
Рис. 9.10. Коэффициент
ошибок BER при рэле-
евском распределении за-
мираний (пять зон)
9.3.7. Ошибка оценивания и задержка
В этом разделе мы рассмотрим влияние ошибки оценивания и задерж-
ки, если ошибка оценивания равна е = 7/7 1, а задержка равна Д =
= if + ie 0. Сначала рассмотрим ошибку оценивания. Предположим,
что передатчик адаптирует мощность и скорость по заданному коэффи-
циенту ошибок BER Рь, основываясь на оценке канала 7 вместо верного
значения 7. В соответствии с (9.8), коэффициент ошибок BER в таком
случае ограничивается величиной:
РЬ (7,7) ^0,2 ехр = 0,2[5Рь]1/£ , (9.34)
где правая сторона уравнения получена подстановкой стратегий опти-
мальной скорости (9.9) и мощности (9.13). При е = 1 выражение (9.34)
сводится к заданному значению Рь- Если е 1, то при г > 1 коэффициент
ошибок BER превысит заданное значение, а при е < 1 BER уменьшится.
Глава 9. Адаптивная модуляция и кодирование
Влияние ошибки оценивания на коэффициент ошибок BER выражает-
ся в виде:
Pb^l I 0,2[5Рь]7/^(7,7)^7 = У 0,2[5Рь]1/£ p(e)de. (9.35)
О ук О
Распределение р(с) представляет функцию совместного распределе-
ния р(7,7), которое, в свою очередь, зависит от метода оценки канала.
В [27] было показано, что если канал оценивается с использованием кон-
трольных символов, то совместное распределение огибающей сигнала и ее
оценки представляет двумерное рэлеевское распределение. Такое совмест-
ное распределение было использовано в [27] для получения вероятности
ошибки при неадаптивной модуляции с ошибками в оценке канала. Этот
анализ можно расширить на адаптивную модуляцию, используя похожую
Рис. 9.11. Влияние ошибки оценивания на коэффициент ошибок — (BER)
Если ошибка оценивания остается внутри некоторого ограниченного
интервала, то мы можем ограничить ее влияние, используя выражение
(9.34). На рис. 9.11 показано, как увеличивается коэффициент ошибок
BER с ростом е. Из рисунка видно, что для заданной величины коэффици-
ента ошибок BER, равной 10”3, ошибка оценивания должна быть менее
1 дБ, а для коэффициента BER, равного 1()6, она должна быть менее
0,5 дБ. Эти значения дают пессимистическую оценку, так как они до-
пускают постоянное значение ошибки оценивания. Но даже в этом случае
9.3. МКАМ с переменной скоростью и переменной мощностью
ошибка оценивания может быть выдержана в данных пределах за счет ис-
пользования описанных в [28] методов оценки с контрольными символами,
и при соответствующем выборе параметров. Если канал недооценивается
(е < 1), то коэффициент ошибок BER уменьшается, при этом будут еще
и потери в использовании спектра, так как среднее значение оценки кана-
ла 7 будет отличаться от верного среднего значения 7. Характеристика
влияния такой ошибки оценивания средней мощности дается в [29].
Теперь предположим, что канал оценивается правильно (е = 1), но за-
держка этой оценки id и путь обратной связи не равны нулю. Поэтому для
подстройки своей мощности и скорости в момент времени i передатчик
будет использовать устаревший вариант оценки канала 7Н = 7 [г — zd]-
В работе [30] было показано, что при условии устаревших оценок канала
принимаемый сигнал подчиняется распределению Райса, а вероятность
ошибки можно рассчитать, используя усреднение по распределению оце-
нок. Более того, в [30] предложены схемы адаптивного кодирования для
уменьшения воздействия задержки оценки на эксплуатационные пока-
затели адаптивной модуляции. Альтернативным вариантом уменьшения
этого воздействия может быть прогнозирование состояния канала [31].
Увеличение коэффициента ошибок BER из-за задержки оценивания
канала можно определить так же, как в (9.34). Для точной величины за-
щищенности SNR 7(2] и ее задержанного значения 7 [г — г</] имеем:
Рь (7Й, 7 - «</]) < 0,2 ехр
—1,57[г] P(y[i-id])
_М (7 [г - 2d]) - 1 Р
= 0,2 [5Pfco]7K/7['> Zrf].
(9.36)
Пусть £ [г, id] = 7Й/7^ ~ *</]• Так как случайный процесс 7[г] стацио-
нарный и эргодический, то распределение £ [2, г</] при условии 7(2] зависит
только от id и значения 7 = 7(2]. Обозначаем это распределение как
Pid (СЬО- Среднее значение коэффициента ошибок BER получается инте-
грированием по £ и 7. В частности, в [32] показано, что:
Рь Ы
0,2 [5РЬо]^ Pid
(9.37)
где •ук — уровень отсечки при оптимальной стратегии, а 72(7) — распре-
деление замираний. Распределение Pid (^7) будет зависеть от функции ав-
токорреляции процесса замираний. Распределение вероятностей pid (£[7)
при замираниях Накагами (частный случай которых представляют рэле-
евские замирания) в аналитическом виде получено в [32]. Подставляя это
распределение в (9.37), мы получим среднее значение коэффициента оши-
бок BER при рэлеевских замираниях как функцию параметра задерж-
a 9. Адаптивная модуляция и кодирование
ки id- На рис. 9.12 показан график зависимости величины (9.37) от норми-
рованной задержки во времени id.fr)- Как видно из этого рисунка, чтобы
удержать коэффициент ошибок BER вблизи заданного значения, общая
задержка оценивания и задержка в цепи обратной связи должны нахо-
диться в пределах 0,001//р.
Рис. 9.12. Влияние нор-
мированной задержки оце-
нивания 1'irifn) на коэффи-
циент ошибок Кош (BER)
9.3.8. Адаптивная кодовая модуляция
При адаптивной модуляции можно получить дополнительный выигрыш
за счет кодирования, наложив на адаптивную модуляцию матричные или
решетчатые коды. В частности, используя присущее кодовой модуляции
разбиение на подмножества, матричные (или решетчатые) коды, разра-
ботанные для каналов с аддитивным белым гауссовым шумом AWGN,
можно наложить непосредственно на адаптивную модуляцию примерно
с таким же выигрышем от кодирования. Основная идея адаптивной ко-
довой модуляции заключается в использовании характерной для кодовой
модуляции возможности разделения схем формирования кода и созвездия,
как об этом говорилось в § 8.7.
Кодовая модуляция представляет естественную схему кодирования при
использовании многоуровневой МКАМ с изменяющимися скоростью и мощ-
ностью, так как выигрыш от кодирования в канале, по существу, не
зависит от модуляции. Поэтому мы можем настроить мощность и ско-
рость (количество уровней или точек сигнала) в передаваемом созвездии
в соответствии с мгновенным значением защищенности SNR без влияния
9.3. МКАМ с переменной скоростью и переменной мощностью
на эффективность канального кодирования. Рассмотрим этот вопрос бо-
лее подробно.
nf?.)-к бит Одна из/И (у)
точек созвездия
Рис. 9.13. Схема адаптивной кодовой модуляции
Схема кодовой модуляции представлена на рис. 9.13. Схема формиро-
вания смежно-группового кода аналогична той, какая была бы для кана-
ла с аддитивным белым шумом AWGN; поэтому решетчатая структура
и стандартное кодирующее устройство соответствуют схемам матрич-
ной или решетчатой кодовой модуляции, представленным в § 8.7. Пусть
Gc обозначает выигрыш от кодирования при кодовой модуляции соглас-
но (8.78). Модуляция происходит следующим образом. Созвездие сигнала
представлено квадратной решеткой с настраиваемым количеством точек
созвездия М. Размер созвездия сигнала МКАМ, из которого выбирается
точка сигнала, определяется мощностью передачи, которая настраивает-
ся в соответствии с мгновенным значением SNR и требуемым коэффи-
циентом ошибок BER, как в случае отсутствия кодирования, описанном
в подпараграфе 9.3.2.
Если коэффициент ошибок BER, аппроксимируемый выражением (9.7),
подстраивается на получение требуемой эффективности кодирования, то
для заданного значения защищенности SNR = 7 имеем:
Рь « (9.38)
где М — размер созвездия передаваемого сигнала. Как и при отсутствии
кодирования, использование строгой границы (9.7) позволяет нам настро-
ить количество точек созвездия М и мощность сигнала в соответствии
с мгновенным значением защищенности SNR для поддержания фиксиро-
ванного значения коэффициента ошибок BER:
....-~-^¥
1/7о - У/чКс, -у 'уь/Кс,
0, 7 < 7о/Кс,
462 Глава 9. Адаптивная модуляция и кодирование
Количество некодированных бит, необходимых для выбора точки в смеж-
ной группе, равно:
п(7) - 2k/N = log2 М(7) - 2 (k + г) /N.
Поскольку данное значение со временем изменяется, то эти некодирован-
ные биты должны выстраиваться в порядке очередности, как это пред-
ставлено на рис. 9.13.
Скорость передачи бит равна log2 Af(7), а скорость передачи данных
равна log2 М(7) — 2г/Л1. Поэтому мы максимизируем скорость переда-
чи данных, максимально увеличивая Е [log2 М] при ограниченной средней
мощности. Такая максимизация дает оптимальную стратегию адаптации
мощности для данной схемы модуляции:
Лт)
р
где уКс = 7о/Кс — глубина отсечки замирания при Кс = KGC, где К
определяется согласно (9.10). Это то же самое, что оптимальная стра-
тегия для случая с отсутствием кодирования (9.13), только К заменяет-
ся на Кс. Таким образом, кодовая модуляция увеличивает эффективную
передаваемую мощность на Gc по сравнению с некодированной МКАМ
с переменными скоростью и мощностью. Адаптивная скорость передачи
данных получается путем подстановки (9.40) в (9.39), что дает:
\7-Kc /
В результате эффективность использования спектра составит:
5 = [ 1оё2 P(7)dj- (9.42)
Р J \7^с/
УКС
Если при расчете выигрыша от кодирования Gc не учтен коэффициент
расширения созвездия, то для получения скорости передачи данных необ-
ходимо вычесть из (9.42) величину 2r/N. Более подробную информацию
об этой схеме адаптивной кодовой модуляции можно найти в [33] вме-
сте с графиками эффективности использования спектра при адаптивной
модуляции с решетчатым кодированием различной степени сложности.
Эти результаты показывают, что адаптивная модуляция с решетчатым
кодированием при приемлемой сложности позволяет достичь пропуск-
ной способности в пределах 5 дБ от пропускной способности Шеннона,
а выигрыш от кодирования при наложении данного решетчатого кода
на некодированную адаптивную модуляцию будет примерно таким же,
как и при решетчатом кодировании в канале с аддитивным белым шу-
мом AWGN.
9.4. Основные виды многоуровневой модуляции
9.4. Основные виды многоуровневой модуляции
Методы с переменной скоростью и мощностью, уже описанные для МКАМ,
могут использоваться и для других видов многоуровневой модуляции.
Для любой модуляции исходное условие остается прежним: мощность пе-
редачи и размер созвездия адаптируются для поддержания заданного
фиксированного мгновенного значения коэффициента ошибок BER для
каждого символа при максимальном увеличении средней скорости пере-
дачи данных. В этом разделе мы рассмотрим оптимальную адаптацию
скорости и мощности для основных видов многоуровневой модуляции —
как с непрерывной, так и с дискретной скоростью.
9.4.1. Адаптация с непрерывной скоростью
Сначала рассмотрим случай, когда и скорость, и мощность могут ада-
птироваться непрерывно. Нам нужно найти оптимальную стратегию
адаптации мощности и скорости к^у) = log2Af(7) для многоуров-
невой модуляции, максимизирующую среднюю скорость передачи данных
Е [к(7)] со средним значением мощности Р при соблюдении заданного зна-
чения коэффициента ошибок BER. Такая оптимизация упрощается, если
точную или приблизительную вероятность ошибки бита для данного вида
модуляции можно записать в виде:
Pb(-y) ~ С1 ехр
-С27 (РЩР)
2c3fc(T - С4
(9.43)
где ci, С2 и сз — положительные постоянные, а С4 — вещественная посто-
янная. Например, для коэффициента ошибок BER при МКАМ, задавае-
мого неравенствами (9.6) и (9.7), <7 = 2 или 0,2, С2 = 1,5, С3 = 1, а С4 = 1.
Для большинства видов многоуровневой модуляции вероятность ошибки
бита может быть аппроксимирована по этой форме с соответствующим
вычерчиванием кривой по точкам.
Преимущество выражения (9.43) заключается в том, что, когда веро-
ятность РД7) представлена в такой форме, ее можно преобразовать для
выражения скорости £(7) как функции адаптации мощности Р(7) и за-
данного коэффициента ошибок BER Рь следующим образом:
А: (7) = log2M(7) = <
a u L, _ _ С27_________
сз 10ё2 р т(Рь/С1) Р J ,
0,
Р(7) Д 0, к(-у) 0,
иначе.
(9.44)
Для получения адаптации мощности и скорости, максимизирующей эф-
фективность использования спектра Е [к(7)], задаем лагранжиан:
j = У ^(7)р(?)^7 + Л
о
У р^Ы'уУ'у - р .
.0
(9.45)
ная модуляция и кодирование
(9.46)
Стратегия оптимальной адаптации максимизирует этот лагранжиан с нео-
трицательными значениями скорости и мощности таким образом, чтобы
он удовлетворял условию:
= 0, Р(7) > 0, А:(7) > 0.
Решая (9.46) относительно Р(7) с учетом того, что к(-у) определяется вы-
ражением (9.44), получаем оптимальную стратегию адаптации мощности:
Р(7) f -1/с3(1п2)АР-I/7K, Р(7) > 0, к(у) > 0,
Р [ 0, другое,
где
(9.47)
К =-------------.
С4 1П(Р6/С1)
Выражение адаптации мощности (9.47) может быть записано в упрощен-
ном виде:
(9.48)
р(?) = f - i/МС р(7) > °, Ш) > °,
Р [0, другое.
Константа ц в (9.49) определяется из граничного значения средней мощ-
ности (9.12).
Хотя аналитическое выражение для оптимальной адаптации мощно-
сти (9.49) кажется простым, его поведение сильно зависит от значений С4
в аппроксимации Р(, (9.43). Для выражения (9.43) и модуляции МКАМ,
заданной аппроксимациями (9.6) или (9.7), функция адаптации мощности
задается «водоналивной» формулой (9.13). Однако «водоналивной» прин-
цип при кодировании не оптимален во всех случаях, и это мы сейчас
продемонстрируем.
Исходя из (6.16), при кодировании Грея коэффициент ошибок BER при
М-кратной ФМН (MPSK) строго аппроксимируется в виде:
2
Ь ~ log2 М
Однако формула (9.50) не так удобна, как выражение (9.43) В частности,
непросто преобразовать в явном виде (^-функцию для получения опти-
мальной адаптации скорости и мощности при заданном коэффициенте
ошибок BER. Поэтому рассмотрим следующие три границы вероятности
ошибки Рь при МФМН (MPSK), которые верны при ^(7) > 2.
-67 (Р(7)/Р)~ .
(9.49)
(9.50)
Граница 1:
Рь(7) ай 0,05 ехр
21’- 1
(9.51)
Граница 2:
Рь(?) ~ 0,2 ехр
-77 (Р(7)/Р)
2i,9fc(?) _i_ j
(9.52)
9-4- Основные виды многоуровневой модуляции
Граница 3:
Рь(т) ~ 0,25 ехр
-87 (Р(?)/Р)
21,94^(7)
(9.53)
Эти границы представлены на рис. 9.14 вместе со строгой аппроксима-
цией (9.50). Мы видим, что все границы хорошо аппроксимируют точное
значение коэффициента ошибок BER, задаваемое выражением (6.45), осо-
бенно при больших значениях защищенности SNR.
ю
10
ю1
10’
10’
10
10
10
10
сг
ш
СО
— Строгая аппроксимация (9.50)
о Точно (6.45)
Граница 1 (9.51)
Граница 2 (9.52 )
- Граница 3 (9.53)____
\ФМН-
\ФМН-3
•
30
35
10
5
15 20 25
Защищенность, дБ
10’
0
40
Рис. 9.14. Границы коэффициента ошибок BER при МФМН (MPSK)
В первой границе (9.51) щ = 0,05, с? = 6, сз = 1,9, а С4 = 1. Поэто-
му в (9.49) величина К = —С2/(С4 In (Рь/щ)) будет положительной, пока
требуемое значение меньше 0,05, что составляет наше предположение.
Таким образом, значение ц должно быть положительным, чтобы адапта-
ция мощности Р(у)/Р = ц — 1 /'уК была положительной в районе значения
отсечки SNR уо- Более того, при положительном значении К, fc(-y) 0 для
любого Р(у) 0. Поэтому при положительных значениях р и А:(у) фор-
мулу (9.49) можно записать в виде:
р(?) = f W# - У/7К, р(7) > °, zq w
Р [ 0, другое, ' ’ '
где уо 0 — глубина отсечки замирания, ниже которой сигнал не пе-
редается. Подобно ц, это значение отсечки определяется ограничением
средней мощности (9.12). Адаптация мощности (9.54) представляет та-
Глава 9. Адаптивная модуляция и кодирование
кой же водоналивной процесс, как и при адаптивной МКАМ (9.13), что
обусловлено сходством границ вероятности ошибки Рь (9.7) и (9.6) для
МКАМ и границы (9.51) для МФМН (MPSK). Соответствующая опти-
мальная адаптация скорости, полученная подстановкой (9.54) в (9.44),
равна:
k(7) =( 1-62(7/70), 7J>70, (
[0, другое,
т. е. имеет ту же форму, что и адаптация скорости при адаптивной МКАМ
(9.16).
Теперь рассмотрим вторую границу (9.52). Здесь щ = 0,2, С2 — 7,
сз = 1,9, а С4 = —1. Поэтому величина К = — с^/ (04 In (Рь/ci)) будет
отрицательной при требуемых значениях Рь < 0,2, что составляет наше
предположение. Из формулы (9.44) видно, что при отрицательном К мы
должны иметь в (9.49) // > 0, чтобы получить А:(у) > 0. Тогда оптималь-
ная адаптация мощности, при которой Р(у) ^0 и 0, имеет вид:
р(?) = J °’ (9 56)
Р 1 0, другое. '
Из (9.44) находим оптимальную адаптацию скорости:
ад=( (^з) 1062(7/70), 7> 70, (9.57)
( 0, другое.
где 7о = — глубина отсечки замирания, ниже которой канал не
используется. Обратите внимание, что для первой границы (9.52) глуби-
ну отсечки замираний определяет положительное ограничение мощности
(Р(у) > 0), а для второй границы (9.52) — положительное ограничение
скорости (/г(у) > 0). Мы можем выразить (9.56) через уо:
Р(?) _ Г 1/?о (~К) + 1/у (-К), 7 >7о, .
Р (0, другое. ' ' '
Эта адаптация мощности представляет обратный водоналивной про-
цесс: поскольку К — отрицательная величина, при повышении защищен-
ности SNR выше оптимизированного значения глубины отсечки 70 в кана-
ле используется меньше мощности. Как обычно, значение 70 выбирается
исходя из ограничения средней мощности (9.12).
Наконец, для третьей границы (9.53), ci = 0,25, С2 = 8, С3 = 1,94, а
С4 = 0. Потому К = —С2/(с4 In (Рь/ci)) = сю при требуемых значениях
Рь < 0,25, что является нашим допущением. Из (9.49) находим оптималь-
ную адаптацию мощности:
Р(?) = Г 0, Р(у) > 0,
Р (0, другое. 1 '
Это передача мощности по принципу «включено — выключено», когда
94- Основные виды многоуровневой модуляции
мощность имеет либо нулевое, либо постоянное ненулевое значение. В со-
ответствии с (9.44), оптимальная адаптация скорости при такой
адаптации мощности имеет вид:
= ( (l/«)l»g2(7/70), 7 >70, (9 60)
( о, другое,
где 7о = — ln(P(,/ci) /с2Ц — глубина отсечки замирания, ниже которой
канал не используется. Как и для предыдущей границы, это положитель-
ное ограничение скорости, определяющее глубину отсечки замирания 70.
Оптимальная адаптация мощности как функция 70 имеет вид:
р(_7) [ Kq/w, 7^70, , .
P [0, другое, ' ' '
где Kq = — In (Рь/щ) /с-2- Значение 70 определяется ограничением средней
мощности и должно удовлетворять условию:
ОО
— [ P^d-y = 1. (9.62)
7о J
70
Рис. 9.15. Адаптация мощности для границ коэффициента ошибок BER при
модуляции МФМН (MPSK) (рэлеевский тип замираний, Ръ = 1О'а,
7 = 30 дБ)
Глава 9. Адаптивная модуляция и кодирование
Таким образом, для всех трех аппроксимаций вероятности ошибки Рь
при МФМН (MPSK) схемы оптимальной адаптации скорости (9.55), (9.57)
и (9.60) имеют одну и ту же форму, в то время как схемы оптималь-
ной адаптации мощности (9.54), (9.58) и (9.61) имеют различные фор-
мы. На рис. 9.15 представлены оптимальные схемы адаптации мощности
(9.54), (9.58) и (9.61) для рэлеевских замираний при заданном коэффици-
енте ошибок BER = 10s и 7 = 30 дБ. На этом рисунке ясно прослежи-
ваются водоналивной процесс, обратный водоналивной процесс и режим
«включено — выключено» при работе различных схем. Обратите внима-
ние, что значение отсечки 70 для всех этих схем примерно одинаково.
Также из рисунка видно, что если при низких значениях защищенности
SNR схемы адаптации мощности различаются, то при высоких значениях
SNR они практически совпадают. А именно, мы видим, что для 7 < 10 дБ
все графики быстро сходятся к одному постоянному значению. График
функции распределения 7 10 дБ, также приведенный на рис. 9.15, пока-
зывает, что вероятность того, что 7 будет менее 10, равна 0,01. Поэтому,
хотя оптимальная адаптация мощности, соответствующая низким зна-
чениям SNR, сильно отличается для различных методов, это оказывает
незначительное воздействие на эффективность использования спектра,
так как вероятность столь низких значений защищенности SNR доволь-
но мала.
9.4.2. Адаптация с дискретной скоростью
Рассмотрим заданное дискретное множество созвездий М = {Mq, ..., Mn-i },
где Mq = 0 соответствует состоянию отсутствия передачи информации.
Скорость, соответствующая каждому из этих созвездий, равна kj = log2 Mj
(j = 0,..., N — 1), где ко — 0. Каждая скорость kj (j > 0) соответ-
ствует определенной зоне замираний со значениями 7 Rj = {7j_i,7j},
j = 0, ...,N — 1 при 7-i = 0 и 7дг-1 = сю. Оптимизация границ 7,-
(j = 0,..., N — 2) является частью стратегии адаптации. При 7 < 70
канал не используется. Опять предположим, что вероятность Рь аппрок-
симируется с использованием общей формулы (9.43). Тогда адаптация
мощности, поддерживающая заданный коэффициент ошибок BER выше
значения отсечки 70, имеет вид:
^(7) Р где = 71-1 ^7 <73- (9.63)
= _ln(^/C1) (2Сз^ - с4) • (9.64)
Границы зон 7о,..., 7дг-2, максимизирующие эффективность использова-
94. Основные виды многоуровневой модуляции
ния спектра, определяются с использованием уравнения Лагранжа:
ДГ-1 4
7(7о,71,--.,7лг-2) = 52 / p^dy + X
7 = 1 7j-l
N—l 7 l О \
52 / —^p(7)d7 - 1 .
7 = 1 J '
3 7J-1
(9.65)
Границы зон оптимальных скоростей определяют, решая относительно 7j
следующее уравнение:
^=0
д4з ’
0 j sC N - 2.
Это дает:
h (Ац)
70 = ~кГр
h(kj+1)-h(k3) l<i<N — 2
Р ~ Ь. , _ Ь. Р' 1 5% « Z,
Kj + l Kj
где параметр р определяется по ограничению средней мощности
3 к ы. \
52 / —~p^d^ = L
7 = 1 ’
(9.66)
(9.67)
(9.68)
(9.69)
9.4.3. Среднее заданное значение
коэффициента ошибок BER
Теперь смягчим наши предположения в отношении того, что требуемое
значение вероятности ошибки Рь должно выполняться для каждого пе-
редаваемого символа, заменяя это требованием того, чтобы среднее зна-
чение вероятности Рь просто было ниже некоторого заданного среднего
значения Рь. В этом случае в дополнение к адаптации по скорости и мощ-
ности мы можем также адаптировать мгновенное значение Pbipf) при
условии ограничения среднего значения Рь- Это дает адаптации допол-
нительную степень свободы, которая может привести к более высокой
эффективности использования спектра. Определим среднюю вероятность
ошибки для адаптивной модуляции как:
р Е[количество ошибочных битов за передачу]
Е[количество битов за передачу]
Если скорость следования бит к^у) адаптируется постоянно, то
f Pb(j)k(y)p(y)dy
Рь = , (9-71)
/ А:(7)р(7)с/7
о
a 9. Адаптивная модуляция и кодирование
а если /с('у) принимает значения в дискретном множестве, то
TV—1 7j
Е kj J ^b(7)p(7)dy
---------• <9-72)
Е kj f P(7)d7
j=i '/j-i
Найдем оптимальную адаптацию непрерывной скорости, мощности
и коэффициента ошибок BER, максимизирующую эффективность исполь-
зования спектра Е [fc(7)] при условии ограничения средней мощности Р
и средней величины коэффициента ошибок BER (9.71). Как и в случае
с ограничением мгновенного значения коэффициента ошибок BER, это
представляет стандартную задачу оптимизации, которую мы решаем, ис-
пользуя метод Лагранжа. Теперь нам необходимо два лагранжиана для
двух ограничений: по средней мощности и среднему значению коэффици-
ента ошибок BER. Уравнение Лагранжа имеет вид:
J (fc(7),P(7)) = У &(7)p(7)d7+
~ ОС 0 ОО
У -Рь(7Ж7М7И7 - Pb У &(7)p(7)d7 + А2
.о о
У P(7M7)d7 ~ Р
(9.73)
Оптимальная адаптация скорости и мощности должна удовлетворять усло-
вию:
+ Ai
Lo
dJ
дк(7)
_УР = о,
аг<7) ’
при дополнительном ограничении, что значения /г(7) и Р(7) неотрица-
тельны при всех 7.
Допустим, что Рь аппроксимируется с использованием основной фор-
мулы (9.43). Зададим:
(9.74)
f (fc(7)) = 2C3fcW - c4. (9.75)
Теперь, используя (9.43) и (9.74), получаем, что адаптация мощности
и коэффициента ошибок BER, максимизирующая эффективность исполь-
зования спектра, удовлетворяют условию:
f (fc(?)) л so Р _ 11 _ о
дк^) z ' дк(у) ' ' '
для неотрицательных значений к (-у) и
= Л2РЛЦ7»
А1С27А:(7)
(РЩ
Р
= max
(9.76)
(9.77)
94- Основные виды многоуровневой модуляции
Более того, из формул (9.43), (9.76) и (9.77) следует, что оптимальная
адаптация скорости к(уу) представляет либо нулевое, либо неотрицатель-
ное решение уравнения:
Л1А ~ 1______/(fc(?)) = 1 I ГAiCiC27fc(7) 1
Ы^АЪ) 7С2 М(кШ\- }
Значения к(уу) и лагранжианы Ai и А2 определяются методом числового
поиска — так, чтобы они удовлетворяли ограничениям средней мощности
Р и среднего значения коэффициента ошибок BER (9.71).
При дискретных значениях скорости ее величина изменяется в пре-
делах фиксированного набора &о,...,/гдг-i, где ко соответствует отсут-
ствию передачи данных. Необходимо определить такие границы зон jq ,...,
7лг_2, чтобы скорости kj соответствовала зона [7j-i,7j], если 7-1 = О,
а 7дг-1 = сю. При таком распределении скоростей требуется максимизи-
ровать эффективность использования спектра за счет оптимальной ада-
птации скорости, мощности и коэффициента ошибок BER при условии
ограничения средней мощности и коэффициента ошибок BER. Так как
множество возможных скоростей и соответствующие им зоны скоростей
фиксированы, то оптимальная адаптация скорости соответствует нахо-
ждению оптимальных границ зон скоростей 7^, j = 0,..., N — 2. Лангран-
жиан для этой ограниченной задачи оптимизации имеет вид:
лг-1 у
•/(7о,7ь ,7n-2,E(7)) ='^kj / р(7)с?7 +
Оптимальная адаптация мощности определяется при решении относи-
тельно Р(7) следующего уравнения:
= 0. (9.80)
Подобным образом, решая систему уравнений относительно 7j, рас-
считываются оптимальные границы зон скоростей:
О т
— = 0. О j N - 2. (9.81)
Из выражения (9.80) следует, что оптимальная адаптация мощности и ко-
эффициента ошибок BER должна удовлетворять условию:
дРьЬ) = —А2
ар(7) ^Д1’
7>-1 7 < 7г
(9.82)
Глава 9. Адаптивная модуляция и кодирование
Подстановка (9.43) в (9.82) дает:
^(7) = 7>-1 < 7 7 77, (9.83)
7Kj
где Л = FA2/C2A1. Эта форма адаптация/козффициента ошибок BER
похожа на водоналивную адаптацию мощности: мгновенное значение ко-
эффициента ошибок BER уменьшается при улучшении качества канала.
Теперь, приравнивая коэффициент ошибок BER (9.43) к (9.83) и решая
это уравнение относительно Р(7), получаем:
p(7) = pj(7), 7j-i^7^7j, (9-84)
где
ад=1птм1 ты, (9.85)
Р L с^7^3 J ~7С2
а Р(7) = 0 при 7 < 7о- Из (9.85) видно, что на границах 7? функция Р(7)
имеет разрывы.
Теперь рассмотрим оптимальные границы зон 70,..., 7/V .ц- Решая урав-
нение (9.81) относительно Рь ('Yj), получаем:
Рь (77) = А - Г - ’ 0О'<ЛГ-2, (9.86)
Ai Ai —
где ко = 0, а Ро(7) = 0. К сожалению, данная система уравнений может
оказаться сложной для расчета оптимальных граничных точек {7?}. Но
если предположить, что функция Р(7) непрерывна в граничных точках,
то (9.86) преобразуется к виду:
РьШ = Ръ~^, 0^j^N~2, (9.87)
для лангранжиана Ар При таком допущении мы можем определить субоп-
тимальные границы зон скоростей:
77-1 = 1 j < N - 1, (9.88)
Ку
для некоторого постоянного значения р. Постоянные Ai и р находят чи-
словыми методами — так, чтобы выполнялись ограничение по средней
мощности:
АГ-1 Р С 1
Е J -—-P(7)d7 = l (9.89)
и ограничение по коэффициенту ошибок BER (9.72). Обратите внимание,
что границы (9.88) субоптимальны, так как функция Р(7) на границах
зоны не обязательно непрерывна, поэтому данные границы дают субопти-
мальную эффективность использования спектра.
94- Основные виды многоуровневой модуляции
Рис. 9.16. Эффективность использования спектра при адаптации с различными
ограничениями
На рис. 9.16 изображен график эффективности использования спек-
тра при адаптивной МКАМ с непрерывной и дискретной адаптацией
скорости, при заданных средних и мгновенных значениях коэффициентов
ошибок BER в каналах с рэлеевскими замираниями. Стратегии адаптации
основываются на аппроксимации коэффициента ошибок BER (9.7) при за-
данном значении BER, равном 10-3 или 10-7. Для случаев с дискретной
скоростью мы допускаем, что доступны шесть различных созвездий сиг-
нала МКАМ (семь зон замираний) при М = {0,4,16,64,256,1024,4096}.
Из рисунка видно, что эффективность использования спектра для всех
четырех стратегий при одинаковых мгновенных или средних значениях
коэффициентов ошибок BER очень похожа. При адаптации с дискретной
скоростью эффективность использования спектра при заданном мгно-
венном значении коэффициента ошибок BER немного выше, чем в слу-
чае среднего значения коэффициента ошибок BER, хотя этот последний
случай ограничен. Это происходит потому, что при заданном среднем
значении BER эффективность рассчитывается с использованием субопти-
мальных границ зон скоростей, что приводит к небольшому снижению
эффективности.
Глава 9. Адаптивная модуляция и кодирование
9.5. Адаптивные методы при сочетании быстрых
и медленных замираний
В этом разделе мы рассмотрим адаптивные методы, используемые в кана-
лах с составными замираниями, содержащих как быстрые, так и медлен-
ные замирания (экранирование). Предполагается, что быстрые замирания
изменяются слишком быстро, вследствие чего невозможно провести точ-
ные измерения и осуществить обратную связь с передатчиком, поэтому
передатчик адаптируется только к медленным замираниям. Мгновенное
значение помехозащищенности SNR 7 имеет распределение р (7I7), где
7 — кратковременное усреднение быстрых замираний. Это краткосроч-
ное усреднение медленно изменяется вследствие экранирования и имеет
распределение р (7), а среднее значение SNR по этому распределению
равно 7. Передатчик адаптируется только к медленным замираниям 7,
поэтому его скорость k (7) и мощность Р (7) являются функциями 7-
Адаптация мощности при условии долгосрочного среднего ограничения
мощности как для быстрых, так и для медленных замираний, имеет вид:
У = Р. (9.90)
о
Как и ранее, мы аппроксимируем мгновенную вероятность ошибки
бита с помощью основной формулы (9.43). Так как мощность и скорость
являются функциями 7, условный коэффициент ошибок BER, зависящий
от 7, равен:
-С27-Р (7) /Р
Рь (7I7) ~ С1 ехР
(9.91)
2c3fc(7) _ С4
Так как передатчик не адаптируется к быстрым замираниям 7, то мы
не можем требовать поддержания заданного мгновенного значения ко-
эффициента ошибок BER. Однако передатчик адаптируется к экраниро-
ванию, и поэтому мы можем потребовать соблюдения заданной средней
вероятности ошибки, усредненной по быстрым замираниям при фикси-
рованном значении экранирования. Это кратковременное усреднение для
заданного 7 находится усреднением Р^ (7I7) по распределению быстрых
замираний р (7I7):
Р> = / РЬ ^7’7^ N7) dy'
о
Используя выражения (9.91) и (9.92) в предположении рэлеевского рас-
пределения быстрых замираний, получаем:
Р /-Х 1 [ [-С27р(7) /Р А
Рь (71 = т / С1 ехР -------
о
2c3fc(?) _ С4
— — dy
7J
_____С1
1,5уР(7)/Р , I
2сз^(7)_С4
(9.92)
(9.93)
9.5. Адаптивные методы при сочетании быстрых и медленных замираний
Например, для модуляции МКАМ со строгой границей коэффициента
ошибок BER (9.7) выражение (9.93) приобретает вид:
0 2
ръ (~\ =-----. (9.94)
6 ’’ ^РЩР ,
2*(т) —1 ' 1
Теперь мы можем преобразовать (9.93) для получения адаптивной ско-
рости к (7) как функции требуемого среднего коэффициента ошибок BER
Рь и адаптации мощности Р (7):
к (7) = - bg2 (с4 Т , (9.95)
Сз \ Р J
где
зависит только от требуемого среднего значения BER и уменьшается
с уменьшением этой величины. Мы максимизируем эффективность исполь-
зования спектра, максимально увеличивая математическое ожидание:
Е[/с(7)] == / —log2 6'1 + ^^^^(7) ^7 (9-97)
J Сз \ Р J
о
при условии ограниченной средней мощности (9.90).
Допустим, что с4 > 0. Тогда эта максимизация и ограничение мощ-
ности имеют точно такую же форму, как и (9-П), только замирания 7
заменяются на медленные замирания 7. Поэтому оптимальная адаптация
мощности будет иметь ту же водоналивную форму, что и (9.13), и зада-
ется в виде:
р(7) _ Г 1/70 - cihK, 7 > С470/К, д8)
Р \ 0, 7 < с47о/к, 1
где канал не используется, если 7 < с^о/К. Значение 70 определяется
путем усреднения ограничения мощности. Подстановка выражения (9.98)
в (9.95) дает адаптацию скорости:
A;(7) = -log2f^Y (9.99)
сз \ 7о /
а соответствующая средняя эффективность использования спектра имеет вид:
( log2 (^\p(^)dp (9.100)
В J \ 7о /
сдгуо/К
Таким образом, мы видим, что при комбинированных замираниях в канале,
когда скорость и мощность адаптируются только к медленным замирани-
ям и при условии, что в (9.43) с4 > 0, водоналивной процесс, построенный
по медленным замираниям, представляет оптимальную адаптацию мощ-
Глава 9. Адаптивная модуляция и кодирование
ности, максимизирующую эффективность использования спектра при за-
данном значении среднего коэффициента ошибок BER.
При выводе предполагалось, что быстрые замирания имеют рэлеев-
ское распределение; однако можно показать [34], что если в (9.43) С4 > О,
то оптимальная адаптация мощности и скорости при любом распределе-
нии быстрых замираний имеет тот же вид. Поскольку мы предполагали,
что в (9.43) С4 > 0, то ограничение положительными значениями устана-
вливает значение отсечки, ниже которого канал не используется. Как мы
видели в подпараграфе 9.4.1, при су 0 значение отсечки устанавливает-
ся положительным ограничением по скорости, а оптимальная адаптация
мощности приобретает характер обратного водоналивного процесса при
С4 < 0 и процесса «включено - выключено» при С4 = 0.
Задачи
9.1. Найдите среднее значение защищенности SNR, необходимое для достиже-
ния среднего коэффициента ошибок BER, равного Д = 10-3 для модуля-
ции ФМН-8 (8-PSK) при рэлеевских замираниях. Какова эффективность
использования спектра для этой схемы, если длительность символа равна
Ts = 1/В?
9.2. Рассмотрите метод усеченной инверсии канала с изменяющейся скоро-
стью при рэлеевских замираниях со средним значением SNR, равным
20 дБ. Какое значение а соответствует вероятности нарушения связи 0,1?
Найдите максимальный размер созвездия МКАМ, который может быть
передан при этой стратегии таким образом, чтобы вероятность беспере-
бойной связи была равна Рь « 10“3.
9.3. Найдите адаптацию мощности для модуляции ФМН-4 (QPSK), поддер-
живающей фиксированное значение вероятности ошибки Р>, = 10-3 при
наличии связи в канале с рэлеевскими замираниями при у = 20 дБ. Какова
вероятность нарушения связи в этой системе?
9.4. Рассмотрим схему модуляции МКАМ с изменяющейся скоростью, если
используются только два созвездия: М = 4 и М = 16. Пусть требуемое
значение вероятности ошибки Рь приблизительно равно 10-3. Если это
значение не может быть получено, информация не передается.
а) Используя границу коэффициента ошибок BER (9.7), найдите обла-
сти значений у, соответствующие трем возможным схемам передачи
(отсутствие передачи, КАМ-4 (4-QAM) и КАМ-16 (16- QAM)), при ко-
торых достигается требуемое значение BER. Каково значение отсечки
Уо, ниже которого канал не используется?
б) Допуская рэлеевские замирания с у = 20 дБ, найдите среднюю ско-
рость передачи данных в схеме с изменяющейся скоростью.
в) Предположите, что вместо приостановки передачи ниже значения у0,
при значениях 0 у 7о передается сигнал ДФМН (BPSK). Исполь-
зуя нежесткую границу (9.6), найдите среднюю вероятность ошибки
для этого сигнала ДФМН (BPSK).
9.5. Рассмотрим схему адаптивной модуляции и кодирования, использующую
три метода модуляции: ДФМН (BPSK), ФМН-4 (QPSK) и ФМН-8 (8-PSK),
вместе с тремя блочными кодами со скоростями 1/2, 1/3 и 1/4. Допустим,
что первый код обеспечивает для каждого типа модуляции выигрыш при-
близительно в 3 дБ, второй код — 4 дБ, а третий код — 5 дБ. Для каждого
возможного значения защищенности SNR в диапазоне 0 7 оо найдите
комбинацию кодирования и модуляции, обеспечивающую максимальную
скорость передачи данных при требуемом значении коэффициента оши-
бок BER, равном 10-3 (в своих расчетах Вы можете воспользоваться
любой приемлемой аппроксимацией коэффициента ошибок BER при моду-
ляции, повышая защищенность SNR за счет выигрыша от кодирования).
Найдите среднюю скорость передачи данных в этой системе для кана-
ла с рэлеевскими замираниями при средней защищенности SNR, равной
20 дБ, допуская, что передача не осуществляется, если ни одна комби-
нация модуляции и кодирования не обеспечивает необходимого значения
коэффициента ошибок BER.
9.6. Покажите, что эффективность использования спектра, задаваемая вы-
ражением (9.11) с ограничением мощности (9.12) достигает максимума
при водоналивной адаптации мощности (9.13). Выполните это с помо-
щью уравнения Лагранжа, с его дифференцированием и решением для
максимизации адаптации мощности. Покажите также, что при такой ада-
птации мощности адаптация скорости задается выражением (9.16).
9.7. В данной задаче сравнивается эффективность использования спектра для
неадаптивных и адаптивных методов.
а) Используя строгую границу для модуляции МКАМ, определяемую вы-
ражением (9.7), найдите выражение для средней вероятности ошибки
бита при рэлеевских замираниях как функции М и 7.
б) На основе выражения, полученного в пункте (а), найдите максималь-
ный размер созвездия, которое может быть передано по каналу с рэле-
евскими замираниями с заданным средним значением коэффициента
ошибок BER, равным 10 3, если 7 = 20 дБ.
в) Сравните эффективность использования спектра в пункте (б) с эффек-
тивностью, которую при тех же параметрах обеспечивает адаптивная
модуляция, показанная на рис. 9.3. Каково отличие между адаптивны-
ми и неадаптивными методами с точки зрения эффективности исполь-
зования спектра?
9.8. Задан канал с рэлеевскими замираниями и средним значением помехоза-
щищенности SNR, равным 20 дБ. Предполагается, что допустимое значе-
ние коэффициента ошибок BER равно 10 4.
а) Найдите оптимальную адаптацию скорости и мощности для МКАМ
с переменной скоростью и переменной мощностью, а также значение
отсечки 70/.К, ниже которого канал не используется.
Глава 9. Адаптивная модуляция и кодирование
б) Найдите среднюю эффективность использования спектра для адаптив-
ной схемы, полученной в пункте (а).
в) Сравните Ваш ответ в пункте (б) с эффективностью использования
спектра при усеченной инверсии канала, если для максимизации этой
эффективности выбирается параметр 70 •
9.9. Задан дискретный нестационарный канал с аддитивным белым гауссо-
вым шумом AWGN, имеющий четыре состояния. При фиксированной мощ-
ности передачи Р, значения помехозащищенности SNR на приеме, соот-
ветствующие каждому состоянию канала, равны 71 = 5 дБ, 72 = 10 дБ,
7з = 15 дБ и 74 = 20 дБ. Вероятности состояний канала равны: p(7i) =
= 0,4, а р(7г) = р(7з) = р(?4) = 0,2. Предполагается, что требуемая вели-
чина коэффициента ошибок BER равна 10“3.
а) Найдите оптимальную адаптацию мощности и скорости при адаптив-
ной МКАМ с непрерывной скоростью для этого канала.
б) Найдите среднюю эффективность использования спектра при такой
оптимальной адаптации.
в) Определите стратегию управления мощностью при усеченной инвер-
сии канала и максимальную скорость передачи данных, которая может
обеспечиваться такой стратегией.
9.10. Задан канал с рэлеевскими замираниями, средним значением помехоза-
щищенности SNR на приеме, равным 20 дБ, и требуемым коэффициентом
ошибок BER = 10-3. Найдите эффективность использования спектра для
этого канала, если используется усеченная инверсия канала, а созвездие
ограничено размерами 0, 2, 4, 16, 64 или 256.
9.11. Задан канал с рэлеевскими замираниями, средним значением помехоза-
щищенности SNR на приеме, равным 20 дБ, доплеровской частотой 80 Гц
и требуемым значением коэффициента ошибок BER = 10“3.
а) Предположите, что в данном канале используется модуляция МКАМ
с созвездиями, ограниченными размерами 0, 2, 4, 16 или 64. При 7^- = 0,1
найдите зоны замираний R.,. соответствующие каждому из этих со-
звездий. Найдите также среднюю эффективность использования спек-
тра для этой ограниченной схемы адаптивной модуляции и среднее
время, затрачиваемое в каждой зоне Rj. Если скорость символа со-
ставляет Ts — В~1, то сколько приблизительно символов каждого со-
звездия будут переданы до того, как потребуется изменение размера
созвездия?
б) Найдите точное значение коэффициента ошибок BER для вашей ада-
птивной схемы, используя (9.33). Как это значение отличается от за-
данного коэффициента ошибок BER?
9.12. Задан канал с рэлеевскими замираниями, средним значением помехоза-
щищенности SNR на приеме, равным 20 дБ, шириной полосы 30 кГц,
доплеровской частотой 80 Гц и требуемым значением коэффициента оши-
бок BER, равным 10“3.
а) Предполагается, что ошибка оценивания е = 7/7 в системе МКАМ
с изменяющимися скоростью и мощностью при заданном коэффици-
енте ошибок BER = 10-3 распределена равномерно между 0,5 и 1,5.
Найдите среднюю вероятность ошибки для этой системы.
б) Найдите выражение для средней вероятности ошибки в системе МКАМ
с изменяющимися скоростью и мощностью, в которой оценка помехоза-
щищенности SNR 7, доступная в передатчике, одновременно является
и задержанной, и зашумленной 7: = 7(f — т) + 7Е(£). Какое совмест-
ное распределение необходимо для расчета такого усреднения?
9.13. Рассмотрим адаптивную систему МКАМ с решетчатым кодом и выигры-
шем от кодирования, равным 3 дБ. Предполагается канал с рэлеевскими
замираниями и средним значением помехозащищенности SNR, равным
20 дБ. Найдите оптимальную стратегию адаптации мощности и скорости
для этой системы и соответствующую среднюю эффективность исполь-
зования спектра. Допустимый коэффициент ошибок BER равен 10~3.
9.14. В гл. 6 граница вероятности ошибки р, для непрямоугольной МКАМ была
задана следующим образом:
37
(М-1)
Найдите значения щ, С2, С3 и а в общей формуле коэффициента оши-
бок BER (9.43) для аппроксимации этой границы при М = 8. Допустим
любой метод аппроксимации графика. Начертите график коэффициентов
ошибок BER, рассчитанных по обеим формулам, для 0 7 30 дБ.
9.15. Покажите, что средняя эффективность использования спектра Е [£(7)]
при fc(7), задаваемом формулой (9.44), и ограничении по мощности Р,
максимизируется при адаптации мощности согласно (9.47).
9.16. В эой задаче исследуется оптимальная адаптивная модуляция при МФМН
(MPSK), для трех границ коэффициента ошибок BER (9.51), (9.52) и (9.53).
Предполагается канал с рэлеевскими замираниями (величина 7 распреде-
ляется по экспоненциальному закону при 7= 30 дБ) и заданным значением
коэффициента ошибок BER Рь = 10-7.
а) Глубина отсечки замирания 70 должна удовлетворять условию:
FbWlog2MQ(
Г ( 1 1 \
/--------ГР 1
J \7о 7Л J
70/К
для К, задаваемого формулой (9.48). Найдите значение отсечки 70,
соответствующее адаптации мощности для каждой из трех рассма-
триваемых границ.
б) Начертите графики Р(7)/Р и для 1, 2 и 3 границ в диапазоне
значений 7 от 0 до 30 дБ. Определите также, основывается ли зна-
Глава 9. Адаптивная модуляция и кодирование
чение отсечки, ниже которой канал не работает, на положительных
значениях мощности или скорости.
в) Как отличается адаптация мощности для разных границ при низких
значениях помехозащищенности SNR? Что произойдет при высоких
значениях помехозащищенности SNR?
9.17. Покажите, что при адаптации с дискретной скоростью для основных
видов многоуровневой модуляции адаптация мощности, поддерживаю-
щая требуемое мгновенное значение коэффициента ошибок BER, задается
формулой (9.63). Покажите также, что границы зон, максимизирующие
эффективность использования спектра (полученные с использованием ла-
гранжиана (9.65)), задаются формулами (9.67) и (9.68).
9.18. Покажите, что для многоуровневой модуляции со средним заданным зна-
чением коэффициента ошибок BER лагранжиан (9.80) означает, что опти-
мальная адаптация мощности и коэффициента ошибок BER должна соот-
ветствовать формуле (9.83). Затем покажите, как (9.82) приводит к ада-
птации коэффициента ошибок BER (9.83), которая, в свою очередь, ведет
к адаптации мощности согласно (9.84) и (9.85). Наконец, используя (9.81),
покажите, что оптимальные границы зон скоростей должны удовлетво-
рять выражению (9.86).
9.19. Рассмотрим адаптивную многоуровневую модуляцию МФМН (MPSK),
если созвездие ограничено состоянием отсутствия передачи или М =
= 2, 4, 8, 16. Предполагается, что вероятность ошибки аппроксимируется
формулой (9.51). Определите выражение и начертите график оптималь-
ной адаптации с дискретной скоростью и непрерывной мощностью при
0 < 7 < 30 дБ в предположении канала с рэлеевскими замираниями с 7 =
= 20 дБ и требуемым значением Р/,, равным 10-4. Чему будет равна сред-
няя эффективность использования спектра?
9.20. Рассмотрим ту же самую адаптивную МФМН (MPSK) с дискретной ско-
ростью, что и в предыдущей задаче, за исключением того, что теперь
вместо мгновенного значения вероятности задано ее среднее значение,
равное 10-4. Найдите оптимальную адаптацию с дискретной скоростью
и непрерывной мощностью для рэлеевского канала с замираниями при
7 = 20 дБ и соответствующую среднюю эффективность использования
спектра.
9.21. Рассмотрим составной канал с быстрыми рэлеевскими замираниями и мед-
ленным логнормальным экранированием со средним значением помехоза-
щищенности SNR = 20 дБ (усредненным как по быстрым, так и по
медленным замираниям) и 07. = 8 дБ. В канале используется адаптивная
модуляция МФМН (MPSK), адаптирующаяся только к экранированию,
с заданным средним значением коэффициента ошибок BER, равным 10-3.
Используя аппроксимацию коэффициента ошибок BER (9.51), найдите
стратегию оптимальной адаптации мощности и скорости как функцию
медленных замираний 7, максимизирующую среднюю эффективность ис-
пользования спектра при соблюдении средней величины коэффициента
ошибок BER. Определите также среднюю эффективность использования
спектра, получаемую в результате этой стратегии.
9.22. В разделе 9.5 определены стратегии оптимальной адаптации скорости
и мощности для максимизации средней эффективности использования
спектра при условии соблюдения заданного среднего значения коэффи-
циента ошибок BER при рэлеевских замираниях и экранировании. Вывод
формулы допускал общую границу (9.43) при С4 >0. Для того же комби-
нированного канала найдите стратегии оптимальной адаптации скорости
и мощности, максимизирующие среднюю эффективность использования
спектра при соблюдении заданного среднего значения коэффициента оши-
бок BER в предположении, что С4 < 0.
Подсказка: Вывод формулы похож на вариант адаптации с непрерывной
скоростью, использующей вторую границу для МФМН (MPSK) и дающей
такой же механизм управления мощностью с инверсией канала.
9.23. Как и в предыдущей задаче, мы снова рассмотрим стратегии адаптации
скорости и мощности для максимизации эффективности использования
спектра при условии соблюдения заданного среднего значения коэффици-
ента ошибок BER при рэлеевских замираниях и экранировании. В данной
задаче предполагается соблюдение условия (9.43) при щ = 0. Для со-
ставного канала найдите стратегии оптимальной адаптации скорости
и мощности, максимизирующие среднюю эффективность использования
спектра при условии соблюдения заданного среднего значения коэффици-
ента ошибок BER, если С4 — 0. Подсказка:ъыъод формулы похож на слу-
чай из раздела 9.4.1 для третьей границы МФМН (MPSK), такой же
механизм управления мощностью в канале по принципу «включено - вы-
ключено» .
Литература
1. J.F. Hayes, «Adaptive feedback communications», IEEE Trans. Commun. Tech.,
pp. 29-34, February 1968.
2. J.K. Cavers, «Variable-rate transmission for Rayleigh fading channels», IEEE
Trans. Commun., pp. 15-22, February 1972.
3. S. Otsuki, S. Sampei and N. Morinaga, «Square-QAM adaptive modulation/TDMА/
TDD systems using modulation level estimation with Walsh function», Elec.
Lett. pp. 169-71, February 1995.
4. W. T. Webb and R. Steele, «Variable rate QAM for mobile radio», IEEE Trans.
Commun., pp. 2223-30, July 1995.
5. Y. Kamio, S. Sampei, H. Sasaoka and N. Morinaga, «Performance of modulation-
level-controlled adaptive-modulation under limited transmission delay time for
land mobile communications», Proc. IEEE Veh. Tech. Conf., pp. 221-5, July
1995.
6. B. Vucetic, «An adaptive coding scheme for time-varying channels», IEEE Trans.
Commun., pp. 653-63, May 1991.
482 Глава 9. Адаптивная модуляция и кодирование
7. М. Rice and S. В. Wicker, «Adaptive error control for slowly varying channels»,
IEEE Trans. Commun., pp. 917 26, February-April 1994.
8. S. M. Alamouti and S. Kallel, «Adaptive trellis-coded multiple-phased-shift key-
ing for Rayleigh fading channels», IEEE Trans. Commun., pp. 2305-14, June
1994.
9. T. Ue, S. Sampei and N. Morinaga, «Symbol rate and modulation level controlled
adaptive modulation/TDMA/TDD for personal communication systems», Proc.
IEEE Veh. Tech. Conf., pp. 306-10, July 1995.
10. H. Matsuoka, S. Sampei. N. Morinaga and Y. Kamio, «Symbol rate and modu-
lation level controlled adaptive modulation/TDMA/TDD for personal commu-
nication systems», Proc. IEEE Veh. Tech. Conf., pp. 487-91, April 1996.
11. S. Sampei, N. Morinaga and Y. Kamio, «Adaptive modulation/TDMA with a
BDDFE for 2 Mbit/s multi-media wireless communication systems». Proc. IEEE
Veh. Tech. Conf., pp. 311-15, July 1995.
12. S.T. Chung and A. J. Goldsmith, «Degrees of freedom in adaptive modulation:
A unified view». IEEE Trans. Commun., pp. 1561-71, September 2001.
13. A. Furuskar, S. Mazur, F. Muller and H. Olofsson, «EDGE: Enhanced data rates
for GSM and TDMA/136 evolution». IEEE Wireless Commun. Mag., pp. 56-66,
June 1999.
14. A. Ghosh, L. Jalloul, B. Love, M. Cudak and B. Classon, «Air-interface for
IXTREME/lxEVDV», Proc. IEEE Veh. Tech. Conf., pp. 2474-8, May 2001.
15. S. Nanda, K. Balachandran and S. Kumar, «Adaptation techniques in wireless
packet data services», IEEE Comnwn. Mag., pp. 54-64, January 2000.
16. H. Sari, «Trends and challenges in broadband wireless access», Proc. Sympos.
Commun. Veh. Tech., pp. 210-14, October 2000.
17. K.M. Kamath and D. L. Goeckel, «Adaptive-modulation schemes for minimum
outage probability in wireless systems», IEEE Trans. Commun., pp. 1632 S.
October 2004.
18. J. Hagenauer, «Rate-compatible punctured convolutional codes (RCPC codes)
and their applications», IEEE Trans. Commun., pp. 389-400, April 1988.
19. G. J. Foschini and J. Saiz, «Digital communications over fading radio channels»,
Bell System Tech. J., pp. 429-56, February 1983.
20. G. D. Forney, Jr., R. G. Gallager, G. R. Lang, F. M. Longstaff and S. U. Quereshi,
«Efficient modulation for band-limited channels», IEEE J. Sei. Areas Commun.,
pp. 632-47, September 1984.
21. J.G. Proakis, Digital Communications, 4th ed., McGraw-Hill, New York, 2001.
22. M. Filip and E. Vilar, «Implementation of adaptive modulation as a fade coun-
termeasure». Inter nat. J. Sat. Commun., pp. 181-91, 1994.
23. С. C. Tan and N. C. Beaulieu, «On first-order Markov modeling for the Rayleigh
fading channel», IEEE Trans. Commun., pp. 2032-40, December 2000.
24. L. Kleinrock, Queueing Systems, vol. I: Theory. Wiley, New York, 1975.
25. W.C. Jakes, Jr., Microwave Mobile Communications, Wiley, New York, 1974.
26. H. S. Wang and P.-C. Chang, «On verifying the first-order Markov assumption
for a Rayleigh fading channel model», IEEE Trans. Veh. Tech., pp. 353-7, May
1996.
27. X. Tang, M.-S. Alouini. and A. Goldsmith, «Effect of channel estimation error
on M-QAM BER performance in Rayleigh fading», IEEE Trans. Commun.,
pp. 1856-64, December 1999.
Литература
483)
28. J.K. Cavers, «Ап analysis of pilot symbol assisted modulation for Rayleigh
fading channels», IEEE Trans. Veh. Tech., pp. 686-93, November 1991.
29. A. J. Goldsmith and L.J. Greenstein, «Effect of average power estimation er-
ror on adaptive MQAM modulation», Proc. IEEE Internal. Conf. Commun.,
pp. 1105-9, June 1997.
30. D. L. Goeckel, «Adaptive coding for time-varying channels using outdated fading
estimates», IEEE Trans. Commun., pp. 844-55, June 1999.
31. A. Duel-Hallen, S. Hu and H. Hallen, «Long-range prediction of fading signals»,
IEEE Signal Proc. Mag., pp. 62-75. May 2000.
32. M.-S. Alouini and A. J. Goldsmith, «Adaptive modulation over Nakagami fading
channels», Kluwer J. Wireless Pers. Commun., pp. 119-43, May 2000.
33. S.-G. Chua and A. J. Goldsmith, «Adaptive coded modulation for fading chan-
nels», IEEE Trans. Commun., pp. 595-602. May 1998.
34. S. Vishwanath, S. A. Jafar and A. J. Goldsmith, «Adaptive resource allocation
in composite fading environments», Proc. IEEE Globecom Conf., pp. 1312-16,
November 2001.
ГЛАВА IО
МНОГОЭЛЕМЕНТНЫЕ АНТЕННЫ
И ПРОСТРАНСТВЕННО-ВРЕМЕННЫЕ
МЕТОДЫ ПЕРЕДАЧИ
В этой главе рассматриваются системы с многоэлементными антеннами
на передаче и приеме, которые обычно называют системами со многими
входами и выходами — MIMO1. Многозлементные антенны могут повы-
сить скорость передачи за счет мультиплексирования или улучшить экс-
плуатационные показатели системы за счет разнесения. В гл. 7 уже гово-
рилось о разнесении на приеме и передаче. В системах MIMO для разнесе-
ния могут использоваться как передающие, так и приемные антенны. При
мультиплексировании для организации независимых путей прохождения
сигнала, которые могут использоваться для передачи независимых дан-
ных, применяется структура матрицы усиления канала. Повышенный ин-
терес к системам MIMO впервые возник благодаря новаторским работам
Винтерса [1], Фошини [2], Фошини и Ганса [3] и Телатара [4, 5], которые
прогнозировали высокую эффективность использования спектра в бес-
проводных системах с передающими и приемными многоэлементными
антеннами. Чтобы получить этот выигрыш в использовании спектра, час-
то необходима точная информация о канале на приеме, а иногда также
и на передаче. В дополнение к выигрышу в эффективности использования
спектра с помощью методов «умных антенн» можно снизить межсимволь-
ные помехи ISI и помехи, создаваемые другими пользователями. Платой
за улучшение эксплуатационных показателей при использовании систем
MIMO являются дополнительные расходы на установку многоэлемент-
ных антенн, требования к пространству и схеме распределения мощности
для этих дополнительных антенн (особенно в маленьких портативных
устройствах), а также увеличение сложности из-за необходимости мно-
гомерной обработки сигнала. В этой главе рассматриваются различные
сферы применения многоэлементных антенн и выясняются преимущества
их показателей. При изложении материала использовано несколько ключе-
вых результатов из теории матриц (краткий обзор этих результатов дан
в приложении В).
хМ1М0 — multiinput multioutput (system).
10.1. Модель узкополосного канала MIMO
В этом разделе мы рассмотрим узкополосный канал MIMO. Узкополосная
система связи «точка-точка» с Mt передающих и Мг приемных антенн
показана на рис. 10.1. Эта система может быть представлена моделью
дискретного времени в виде:
или просто как у = Нх + п. Здесь х — Мгмерный передаваемый символ,
п — М,-мерный вектор шума, а Н — матрица коэффициентов передачи
каналов h!} размерностью Mt х Мг, содержащая коэффициенты переда-
чи от передающей антенны j до приемной антенны i. Предполагаются
канал с полосой частот, равной В, и гауссов шум с нулевым средним зна-
чением и матрицей ковариации о2!^, где обычно ст2 = Е И] = N0/2,
что соответствует спектральной плотности мощности шума в канале.
Для простоты, при ограничении мощности на передаче величиной Р,
2
применим .эквивалентную модель с мощностью шума ст , принятой за
единицу, и передаваемой мощностью F/ст2 = р, где р можно интерпрети-
ровать как среднее значение помехозащищенности (отношение сигнал-
шум) SNR на приемной антенне при единичном передаточном коэффи-
циенте канала. Это ограничение мощности подразумевает, что входящие
символы удовлетворяют условию:
(10.1)
г=1
или (эквивалентно), что Tr(Rx) = р, где Tr(Rx) — сумма элементов глав-
ной диагонали входной матрицы ковариации Rx = Е[ххя].
Рис. 10.1. Системы
МШО
a 10. Многоэлементные антенны и методы передачи
Можно сделать различные допущения относительно наличия в пере-
датчике и приемнике информации о матрице передаточных коэффици-
ентов канала Н, которую называют дополнительной информацией о ка-
нале в передатчике (CSIT2) и дополнительной информацией о канале
в приемнике (CSIR3) соответственно. Для статичных каналов обычно
допускается наличие информации CSIR, так как можно гораздо проще
получить коэффициенты передачи канала, отправляя для оценки канала
контрольную последовательность. Более подробную информацию о ме-
тодах оценки каналов MIMO можно найти в [6, гл. 3.9]. Если досту-
пен канал обратной связи, то информацию CSIR с приемника можно
отправить обратно в передатчик для формирования информации CSIT.
Информацию CSIT также можно получить в двунаправленных системах
без канала обратной связи, используя взаимообратные свойства распро-
странения радиоволн. Если информации о канале нет ни в передатчике,
ни в приемнике, то приходится допускать некоторое распределение ко-
эффициентов передачи в матрице. Наиболее распространенную модель
такого распределения представляет модель двумерного белого шума с ну-
левым средним (ZMSW4), когда элементы матрицы Н рассматриваются
как независимые и одинаково распределенные гауссовские комплексные
случайные величины с нулевом средним значением, единичной дисперсией
и круговой симметрией5. Если не оговорено иное, мы предполагаем имен-
но эту модель. Альтернативная модель рассматривает элементы матрицы
как комплексные гауссовские случайные величины с круговой симметри-
ей и ненулевым средним значением или с матрицей ковариации, не равной
единичной матрице. В общем, различные допущения относительно нали-
чия дополнительной информации CSI и вида распределения элементов
матрицы Н обуславливают различную пропускную способность канала
и различные подходы к пространственно-временной передаче сигналов.
Для оптимального декодирования сигнала на приеме необходимо ис-
пользовать при демодуляции алгоритм максимального правдоподобия.
Если символы, модулированные для каждой из М± передающих антенн,
2 CSIT — Channel side information at the transmitter.
3CSIR — Channel side information at the receiver.
4ZMSW — Zero-mean spatially white model.
комплексный случайный вектор x имеет круговую симметрию, если для любого
0 е [0, 2тг] распределение х будет таким же, как распределение ejex. Поэтому действи-
тельная и мнимая части х независимы и одинаково распределены. Для х с круговой
симметрией при 0 = тг подразумевается, что Е[х] = 0. Подобным образом, при 0 = тг/2
подразумевается, что Е[ххт] = 0, что, по определению, означает, что х является соб-
ственным случайным вектором. Для комплексного случайного вектора х также верно
и обратное: если х является собственным вектором с нулевым средним, то он имеет
круговую симметрию.
выбраны из алфавита размером |Х|, то тогда — из-за перекрестных свя-
зей между переданными символами на приемных антеннах — для демо-
дуляции по алгоритму максимального правдоподобия необходим полный
перебор всех |Х\Mt возможных векторов для Mt символов на входе. В об-
щем случае, если передатчику не известна матрица Н, то уменьшить
сложность декодирования невозможно.
Эта сложность декодирования обычно слишком велика даже при ма-
лом числе передающих антенн. Однако если передатчик располагает ин-
формацией о канале, то, как будет показано в следующем разделе, слож-
ность декодирования значительно уменьшается.
10.2. Параллельное разложение канала MIMO
В гл. 7 показано, что многоэлементные антенны на передаче или приеме
могут использоваться для повышения эффективности разнесения. Если
многоэлементные антенны используются и на передаче и на приеме, то
существует иной механизм повышения эксплуатационных показателей,
называемый выигрышем от мультиплексирования. Выигрыш от мульти-
плексирования в системах MIMO достигается за счет того, что канал
MIMO может быть разбит на R независимых параллельных каналов. При
мультиплексировании независимых данных по этим независимым кана-
лам мы получаем jR-кратное повышение скорости передачи по сравне-
нию с системой, имеющей только одну антенну на передаче и приеме.
Это увеличение скорости передачи называется эффективностью (или вы-
игрышем) от мультиплексирования. В данном разделе мы опишем, как
в системе MIMO получить независимые каналы.
Рассмотрим канал MIMO с передаточной матрицей канала Н раз-
мерностью Мг х Mt, информация о которой есть как у передатчика, так
и у приемника. Пусть Rh обозначает ранг матрицы Н. Согласно при-
ложению С, для любой матрицы Н мы можем получить ее разложение
по сингулярным числам (SDV6):
Н = WSVH, (10.2)
где матрицы U размерностью Мг х Мг и V размерностью Mt х Mt — уни-
тарные матрицы7, aS — диагональная матрица сингулярных чисел {ч,}
матрицы Н, имеющая размерность MrxMt. Сингулярные числа обладают
таким свойством, что <тг = y/Xi, где Aj — i-e наибольшее собственное зна-
чение матрицы НН77, а ранги 7?н этих сингулярных чисел не равны нулю.
Так как (ранг матрицы Н) не может превышать количества столбцов
6SDV — singular value decomposition.
7Унитарность U и V подразумевает, что UHU = IMr и VHV = 1мг
и строк в Н, то 7?н Мг). Если матрица Н полноранговая, что
соответствует сильно рассеивающей среде, то /?н = В дру-
гих средах матрица Н может иметь низкий ранг: для канала с высокой
корреляцией передаточных коэффициентов матрицы Н ранг может быть
равен 1.
Параллельное разложение канала достигается за счет выполнения пре-
образований на входе и выходе канала х и у — предварительного коди-
рования на передаче и формирования (исправления) сигнала на приеме.
При предварительном кодировании на входы антенн подается сигнал х,
формируемый в результате линейного преобразования входного векто-
ра х в виде х = Vx. При формировании (исправлении) сигнала на приеме
производится подобная операция — умножение сигнала на выходе канала
у на ия, как это показано на рис. 10.2.
у
Рис. 10.2. Предварительное кодирование на передаче и исправление на приеме
Предварительное кодирование на передаче и исправление на приеме
преобразуют канал MIMO в /?н параллельных каналов с одним входом
и одним выходом (SISO8) — с входом х и выходом у, так как разложение
по сингулярным числам SVD дает:
у = UH(Hx + и) = UH(USVHx + п) = ин(и£УяУХ + п) =
= UHUSVHVx + ияп = Sx + п,
где п = ияп, a S — матрица сингулярных чисел матрицы Н, в ко-
торой все элементы, кроме элементов ст, на г-й диагонали, равны нулю.
Обратите внимание, что умножение на единичную матрицу не изменя-
ет распределения шума — поэтому пип распределены одинаково. Таким
образом, предварительное кодирование на передаче и исправление на при-
еме преобразуют канал MIMO в /?н независимых параллельных каналов,
где z-й канал имеет вход £$, выход у,, шум п, и коэффициент переда-
чи <Tj. Отметим, что коэффициенты ст, связаны между собой, так как все
они — функции передаточной матрицы Н, но поскольку образующиеся
в результате параллельные каналы не мешают друг другу, можно ска-
зать, что эти передаточные коэффициенты независимы и связаны только
общим ограничением по мощности. Такое параллельное разбиение пока-
8SISO — single-input single-output (channel).
10.2. Параллельное разложение канала MIMO
зано на рис. 10.3. Поскольку параллельные каналы не мешают друг другу,
то сложность реализации оптимальной демодуляции по методу макси-
мального правдоподобия линейно зависит от Rn — числа независимых
каналов, подлежащих демодуляции. Более того, при передаче независи-
мых данных по параллельным каналам, канал MIMO может в Rh раз
повысить скорость передачи данных по сравнению с системой с только
одной передающей и одной приемной антеннами, обеспечивая выигрыш
от мультиплексирования — Rh- Однако обратите внимание, что характе-
ристики каждого канала будут зависеть от его собственного передаточ-
ного коэффициента стг. В следующем разделе будет дана более подробная
характеристика эффективности мультиплексирования, соответствующая
пропускной способности канала MIMO по Шеннону.
Рис. 10.3. Параллель-
ное разложение канала
MIMO
Пример 10.1. Найдите эквивалентную модель параллельных каналов для ка-
нала MIMO с передаточной матрицей:
' 0,1 0,3 0,7
н = 0,5 0,4 ОД
0,2 0,6 0,8
(10.3)
Решение. Разложение по сингулярным числам матрицы Н = USVH дает:
-0,555 0,3764 -0,7418 ' 1,3333 0 0
Н = -0,3338 -0,9176 -0,2158 0 0,5129 0 X
-0,7619 0,1278 0,6349 0 0 0,0965
-0,2811 -0,7713 -0,5710 '
X -0,5679 -0,3459 0,7469 . (10.4)
-0,7736 0,5342 -0,3408
Есть три ненулевых сингулярных значения, поэтому /?н = 3, что приводит
к трем параллельным каналам с соответствующими коэффициентами передачи
<71 = 1,3333, <72 = 0,5129 и <73 = 0,0965. Обратите внимание, что каналы имеют
снижающийся коэффициент передачи, который в третьем канале очень мал. Сле-
довательно, этот последний канал будет или иметь очень высокую вероятность
ошибки или низкую пропускную способность.
10.3. Пропускная способность канала MIMO
Данный раздел посвящен исследованию пропускной способности Шенно-
на каналов MIMO, т. е. максимальной скорости передачи данных, кото-
рая может поддерживаться в канале с произвольно малой вероятностью
ошибок. Пропускная способность с нарушениями связи определяет мак-
симальную скорость, с которой можно вести передачу по каналу при неко-
торой ненулевой вероятности нарушения связи. Пропускная способность
канала зависит от того, какой информацией о передаточной матрице
канала или ее распределении располагает передатчик и/или приемник.
Сначала будет рассмотрена пропускная способность статического кана-
ла при различных допущениях относительно информации о канале, что
сформирует основу для последующего раздела, касающегося пропускной
способности каналов с замираниями.
10.3.1. Статичные каналы
Пропускная способность канала MIMO представляет расширение фор-
мулы взаимной информации канала с одним входом и одним выходом
(SISO), задаваемой уравнением (4.3), для матрицы канала. Для статичных
каналов можно довольно просто получить хорошую оценку матрицы Н
в приемнике, поэтому в данном разделе предполагается наличие в при-
емнике информации о канале — CSIR. При таком допущении пропускная
способность определяется как взаимная информация между входным век-
тором канала х и выходным вектором у:
С = шахДХ; Y) = тах[Я(У) - Я(У|Х)], (10.5)
р(х) р(х)
где H(Y) и #(Y|X) — энтропия у и у|х, как определено в § 4.19. Из опре-
деления энтропии следует, что условная энтропия H(YjX) равна энтро-
пии шума: Jf(Y|X) = Н(п). Так как шум п имеет фиксированную энтро-
пию, не зависящую от входа канала, максимизация взаимной информации
эквивалентна максимизации энтропии у.
9Энтропия была определена в § 4.1 для скалярных случайных величин, и это определение
полностью подходит для случайных векторов.
10.3. Пропускная способность канала
При заданной матрице ковариации Rx входного вектора х, матри-
ца ковариации на выходе Ry, соответствующая выходу у канала MIMO,
определяется выражением:
Ry = E[yy"]=HRxH" + lMr. (10.6)
Оказывается, что для всех случайных векторов с данной матрицей ко-
вариации Ry энтропия у максимальна тогда, когда у представляет ком-
плексный случайный гауссовский вектор с нулевым средним и круговой
симметрией (ZMCSCG10) [5]. Но вектор у на выходе обладает свойства-
ми ZMCSCG, только если этими свойствами обладает входной вектор
х и, следовательно, это оптимальное распределение для х в (10.5) при
условии ограничения мощности Tr(Rx) = р. Поэтому мы имеем Jf(Y) =
= В log2 detf^eRy] и Н(п) = В log2 Йе1[тгс1д/-Г], что дает взаимную инфор-
мацию в виде:
I(X; Y) = В log2 det [lMr + HRxHh] . (10.7)
Эта формула была выведена в [3, 5] для взаимной информации в систе-
ме, состоящей из многих антенн, а также появилась в первых работах,
посвященных системам MIMO [7, 8] и матричных моделях каналов с меж-
символьной интерференцией ISI [9, 10].
Пропускная способность канала MIMO достигается при максимиза-
ции взаимной информации (10.7) по всем входным матрицам ковариа-
ции Rx, удовлетворяющим условию ограничения мощности:
С = max Вlog2det [Im + HRXHH1 . (10.8)
RX:T>(Rx)=p L J
где det [А] обозначает детерминант матрицы А. Ясно, что оптимизация
относительно Rx будет зависеть от того, располагает ли передатчик ин-
формацией о матрице Н. Рассмотрим эту оптимизацию при различных
допущениях относительно наличия дополнительной информации о канале
CSI у передатчика.
Передатчик располагает информацией о канале:
«водоналивной» принцип
Разложение канала MIMO, описанное в § 10.2, позволяет получить про-
стую характеристику пропускной способности канала MIMO для фикси-
рованной матрицы канала Н, известной передатчику и приемнику. В част-
ности, пропускная способность равна сумме пропускных способностей
каждого из независимых параллельных каналов с мощностью передачи,
оптимально распределенной между этими каналами. Эта оптимизация
распределения мощности канала по независимым каналам получается в ре-
10ZMCSCG — zero-mean, circularly symmetric complex Gaussian.
Глава 10. Многоэлементные антенны и методы передачи
зультате оптимизации входной матрицы ковариации, максимизирующей
формулу пропускной способности (10.8). Подставляя матрицу сингуляр-
ных чисел SVD (10.2) в (10.8) и используя свойства единичных матриц, мы
получаем пропускную способность системы MIMO для случая, когда и пе-
редатчик и приемник располагают информацией о канале (CSIT и CSIR)
в виде:
С= max VBlog2(l + ^), (10.9)
где /?н — количество ненулевых сингулярных значений <т? в матрице Н.
Так как канал MIMO разбивается на /?н параллельных каналов, мы гово-
рим, что он имеет /?н степеней свободы. Так как р = Р/о2, пропускную
способность (10.9) можно также выразить через распределение мощности
Pi для /-го параллельного канала:
/ 2 р \ «н / р \
С = max В log2 (1-1—) = max В log2 ( 1 -|—— ),
\ °2 ) \ Р J
(10.10)
где уг = (7^Р/о'2 — помехозащищенность SNR, соответствующая /-му ка-
налу при полной мощности. Это выражение показывает, что при высоких
значениях защищенности SNR емкость канала повышается линейно с уве-
личением числа степеней свободы канала. И наоборот, при низких зна-
чениях SNR вся мощность будет выделена параллельному каналу с боль-
шей величиной помехозащищенности SNR (или, что равнозначно, с самым
большим значением <т?). Формула пропускной способности (10.10) похожа
на случаи с плавными замираниями (4.9) или частотно-селективными за-
мираниями (4.23). Расчеты по оптимизации приводят к «водоналивному»
принципу распределения мощности в канале MIMO:
Р
1/70 - 1/7г,
0,
7г 70,
7г < 70,
(10.11)
при некотором значении отсечки уо- Это дает пропускную способность,
равную:
С= £ Blog( — .
\7о/
г:74>70
(10.12)
Пример 10.2. Найдите пропускную способность и оптимальное распределе-
ние мощности для канала MIMO, заданного в примере 10.1, если р = F/п2 =
= 10 дБ и В = 1 Гц.
Решение. Из примера 10.1 известно, что сингулярные значения канала соста-
вляют <71 = 1,3333, П2 = 0,5129 и <7.з = 0,0965. Так как уг = 10<7?, получаем, что
У1 = 17,7769, у2 = 2,6307 и у3 = 0,0931. Допуская, что мощность распределена
по всем трем параллельным каналам, из ограничения по мощности получаем:
з
ч _3 1
— = 1 + V — = 12,1749.
7о "Ч 7i
Решая это выражение для уо, получаем у0 = 0,2685, что нелогично, так как
уз = 0,0931 < уо = 0,2685. Поэтому третьему каналу никакой мощности не
выделяется. Тогда ограничение по мощности дает:
2
2 .2. 1
— = 1 + V — = 1,4364.
7o 7i
В этом случае расчеты дают уо = 1/392 < уг, т.е. верное значение отсечки.
Тогда Pi/P = 1/1,392 — 1/уц поэтому Р\/Р = 0,662, а Р^/Р = 0,338. Пропускная
способность равна С = log2 (yi/yo) + log2 (72/70) = 4,59.
Пропускная способность при наличии точной информации CSIT и CSIR
на передаче и приеме может быть распространена также на каналы с од-
ной передающей и несколькими приемными антеннами (системы с одним
входом и многими выходами — SIMO11) или с несколькими передающи-
ми антеннами и одной приемной антенной (системы с многими входами
и одним выходом — MISO12). В таких каналах можно получить выигрыш
за счет разнесения и использования многоэлементных антенн, но не за
счет мультиплексирования. Если и передатчик и приемник располагают
информацией о канале, то пропускная способность будет равна пропуск-
ной способности одноканальной системы SISO с сигналом, переданным
или полученным через многоэлементную антенну с когерентным объеди-
нением, максимизирующим помехозащищенность SNR в канале, как при
приеме с дифференциальным взвешиванием (MRC). Это дает пропускную
способность С = В log2 (1 + р ||h||2), где канальная матрица Н сводит-
ся к передаточному вектору h канала, оптимальный вес вектора равен
c = hH/||h||, ap = F/cr2.
Передатчик не располагает информацией о канале:
равномерное распределение мощности
Представим теперь, что приемник располагает информацией о канале,
а передатчик — нет. Без наличия информации о канале передатчик не мо-
жет оптимизировать распределение своей мощности или входную струк-
туру ковариации антенн. Если распределение канальной матрицы Н со-
ответствует модели двумерного белого шума с нулевым средним значени-
ем — ZMSW, то смещения среднего значения или ковариации матрицы Н
^IMO — Single-input multiple-output.
12MISO — Multiple-input single-output.
494 Глава 10. Многоэлементные антенны и методы передачи
не происходит. Поэтому интуитивно кажется, что наилучшей стратеги-
ей было бы выделить каждой передающей антенне одинаковую мощность,
что в результате даст входную матрицу ковариации, равную масштабиро-
ванной единичной матрице: Rx = (р/М^Т^,. В работе [4] показано, что
при таких допущениях эта входная матрица ковариации действительно
максимизирует взаимную информацию канала. Для системы, состоящей
из Mt передающих и Мг приемных антенн, это дает выражение взаимной
информации в виде:
Используя сингулярные числа SVD матрицы Н, мы можем выразить это
как:
ЛХ!У) = (1 + -S-
Л_1 \
(10.13)
где = <т2р = cr2F/<72.
Взаимная информация канала MIMO (10.13) зависит от особенностей
реализации матрицы Н, в частности, от ее сингулярных значений {ст,}.
Средняя взаимная информация случайной матрицы Н, усредненная по рас-
пределению матрицы, зависит от распределения вероятностей сингуляр-
ных значений матрицы Н [5, 11, 12]. В каналах с замираниями передатчик
может вести передачу на скорости, равной этой средней взаимной инфор-
мации, и обеспечивать правильный прием информации, о чем пойдет речь
в следующем разделе. Но в статичном канале, если передатчик не знает
особенностей реализации канала (или, говоря точнее, не знает средней
взаимной информации канала), то он не знает, на какой скорости можно
вести передачу, чтобы информация была принята правильно. В этом слу-
чае подходящим определением пропускной способности будет пропускная
способность с нарушением связи. Передатчик фиксирует скорость пере-
дачи R, а вероятность нарушения связи, соответствующая скорости R,
равна вероятности того, что переданные данные не будут приняты пра-
вильно или, что равнозначно, вероятности того, что взаимная информа-
ция канала Н меньше, чем R. Эта вероятность определяется выражением:
Pout = Р ( Н : В log2 det IMr + т^-ННн
(10.14)
Данная вероятность определяется распределением собственных значений
ННЯ. эти собственные значения равны квадратам сингулярных значе-
ний матрицы Н. Распределение сингулярных значений матриц хорошо
изучено и известно для обычных матриц каналов MIMO [12, разд. 2.1].
При увеличении числа передающих и приемных антенн теория слу-
10.3. Пропускная способность канала MIMO 495
чайных матриц попадает под условия центральной предельной теоремы
для распределения сингулярных значений Н [13], что дает постоянную
взаимную информацию для всех реализаций канала. Это положение бы-
ло использовано при выводе выражения пропускной способности канала
MIMO с некоррелированными замираниями в [14-17] и с коррелирован-
ными замираниями в [18-20]. В качестве примера этого предельного рас-
пределения отметим, что для фиксированного значения Мг при условии
модели ZMSW закон больших чисел подразумевает, что:
lim -^ННн = 1Мг. (10.15)
Подставляя это выражение в (10.13), получим, что взаимная информация
при больших значениях Mt асимптотически сходится к постоянной вели-
чине, равной С = MrBlog2 (1 + />)• Для М = mm(Mt, Мг) это означает,
что с увеличением М пропускная способность канала MIMO при отсут-
ствии информации у передатчика CSIT приближается к С = MB log2 (1 + р)
и, следовательно, с ростом М линейно возрастает. Более того, этот асим-
птотический линейный рост пропускной способности с ростом М наблю-
дается даже при малом числе антенн [20]. Подобным образом, с увеличе-
нием помехозащищенности SNR пропускная способность также линейно
возрастает с ростом М = min(Mj,Mr) для любых Mt и Мг [2]. Так
как канал MIMO, соответствующий модели ZMSW, имеет число степе-
ней свободы = М = min (Mj, .Mr), мы видим, что для этого канала
при отсутствии информации CSIT при высоких значениях защищенности
SNR или большом числе антенн пропускная способность увеличивается
линейно в зависимости от количества степеней свободы в канале. Эти ре-
зультаты стали основной причиной широкого распространения методов
MIMO: даже если у передатчика нет информации о канале, пропускная
способность каналов MIMO с двумерным белым шумом ZMSW все же
линейно растет при минимальном числе передающих и принимающих ан-
тенн — в течение всего времени, пока в приемнике может быть получена
точная оценка канала. Поэтому каналы MIMO могут обеспечивать вы-
сокие скорости передачи данных без увеличения мощности сигнала или
расширения полосы частот. Однако обратите внимание на то, что пере-
дающие антенны не создают преимуществ при очень низких значениях
защищенности SNR: в таком режиме пропускная способность определя-
ется только числом приемных антенн, независимо от числа передающих
антенн. Это объясняется тем, что при низких значениях SNR система
MIMO стремится всего лишь накапливать энергию, а не использовать
все доступные степени свободы. Таким образом, в канале MIMO с дву-
мерным белым шумом ZMSW энергия может быть распределена по всем
передающим антеннам или сконцентрирована в одной (или нескольких)
из этих антенн для достижения пропускной способности [4]. С увеличени-
Глава 10. Многоэлементные антенны и методы передачи
ем помехозащищенности SNR мощность перестает быть ограничивающим
фактором, и пропускная способность ограничивается только степенями
свободы в канале.
Хотя отсутствие дополнительной информации у передатчика CSIT
и не влияет на увеличение пропускной способности в зависимости от М,
по крайней мере при большом числе антенн, это все же затрудняет де-
модуляцию. В частности, при отсутствии дополнительной информации
CSIT система не может преобразовать канал MIMO в каналы SISO без
взаимных помех. Напомним, что сложность декодирования возрастает
экспоненциально с ростом числа независимых символов, передаваемых
через многоэлементную передающую антенну, а это число равно рангу
входной ковариационной матрицы.
Наш анализ при наличии точной информации о канале на приеме и в
отсутствие ее на передаче допускает, что передаточная матрица кана-
ла имеет распределение ZMSW; т.е. она имеет нулевое среднее значение
и матрицу ковариации, равную единичной матрице. Если канал имеет не-
нулевое среднее или не единичную матрицу ковариации, то в канале есть
пространственные отклонения, которые следует использовать при выборе
оптимальной стратегии передачи, поскольку равномерное распределение
мощности по антеннам уже не будет оптимальным [21-23]. Результаты,
полученные в [21, 24] показывают, что если канал имеет доминирующее
направление по среднему значению или ковариации, то для повышения
пропускной способности канала может быть использовано формирование
диаграммы направленности антенны (описанное в § 10.4). Это удачный
вариант, учитывая простоту формирования диаграммы направленности.
10.3.2. Каналы с замираниями
Представим теперь, что матрица передаточных коэффициентов канала
подвержена равномерным замираниям, так что коэффициенты переда-
чи hij изменяются во времени. Как и в случае статичного канала, про-
пускная способность зависит от того, что известно о матрице канала на
передаче и приеме. При наличии точной информации у приемника (CSIR)
и передатчика (CSIT) передатчик может адаптироваться к замираниям
канала, и его пропускная способность равна средней величине по всем
реализациям матрицы канала с оптимальным распределением мощности.
При наличии информации у приемника и ее отсутствии у передатчика
для оценки пропускной способности канала используются эргодическая
пропускная способность и пропускная способность с нарушением связи.
Более подробно эти характеристики описаны в последующих разделах.
10.3. Пропускная способность канала
Передатчик располагает информацией о канале:
«водоналивной» принцип
При наличии точной информации о канале у приемника (CSIR) и пере-
датчика (CSIT), передатчик оптимизирует свою стратегию передачи для
каждой реализации канала с замираниями, как и в случае статического
канала. При этом пропускная способность просто равна средней пропуск-
ной способности всех реализаций канала, задаваемой выражением (10.8),
при оптимальном распределении мощности. Такая средняя пропускная
способность называется эргодической пропускной способностью канала.
Существуют две возможности для распределения мощности при эргодиче-
ской пропускной способности. Кратковременное ограничение мощности
допускает, что мощность, соответствующая каждой реализации канала,
должна равняться средней мощности Р. В таком случае эргодическая про-
пускная способность становится равной:
С = Ен max В log2 det + НК,ХНЯ1 =
Rx:Tr(Rx)=p
= Ен
max _52B1°g2 fl +, (10.16)
где 7i = <t?F/(72. Менее строгим ограничением является долговременное
ограничение мощности, когда можно использовать различные мощности
FH Для различных условий канала Н при условии ограничения средней
мощности по всем реализациям канала: Eh[Fh] Р- Эргодическая про-
пускная способность при таком допущении задается выражением:
С = max Ен max В log2 det 1ад. + —
Рн:Ен[Рн]=Р |_Rx:Tr(Rx)=PH 1 <
max Ен
Рн:Ен[Рн]^Р
при защищенности у, = <t2Fh/<t2. Кратковременное ограничение мощно-
сти обуславливает «водоналивной» принцип пространственного разделе-
ния, тогда как долговременное ограничение мощности предусматривает
«водоналивной» принцип в двух измерениях: и в пространстве, и во вре-
мени; это похоже на частотно-временной «водоналивной» процесс, соот-
ветствующий пропускной способности нестационарного канала с частот-
но-селективными замираниями. Заключенные в скобки члены во вторых
строках выражений (10.16) и (10.17) являются функциями сингулярных
значений {стг} матрицы Н. Поэтому математическое ожидание Н в дан-
ных выражениях будет основываться на распределении этих сингулярных
498 Глава 10. Многозлементные антенны и методы передачи
значений. Это распределение для матрицы Н с каналами ZMSW, а также
для других типов матриц можно найти в [12, разд. 2.1].
Передатчик не располагает информацией о канале:
эргодическая пропускная способность
и пропускная способность с нарушением связи
Теперь рассмотрим нестационарный канал со случайной матрицей Н, ин-
формация о которой есть у приемника, но отсутствует у передатчика.
В передатчике предполагается, что матрица Н имеет распределение дву-
мерного белого шума ZMSW. Два подходящих определения пропускной
способности в этом случае — это эргодическая пропускная способность
и пропускная способность с нарушением связи. Эргодическая пропускная
способность определяет максимальную скорость, усредненную по всем
реализациям канала, которая может быть достигнута в канале при ис-
пользовании стратегии передачи, основанной только на распределении
матрицы Н. Это приводит к задаче оптимизации передатчика - на-
хождению оптимальной входной матрицы ковариации для максимизации
эргодической пропускной способности при условии ограничения мощно-
сти передачи. С математической точки зрения, это задача нахождения
оптимального значения Rx, максимизирующего выражение:
С = max Ен В log? det 1м. + HRxHH
Rx:Tr(Rx)=p L L
(10.18)
где математическое ожидание определяется по распределению матрицы
канала Н, которая для модели двумерного белого шума ZMSW предста-
влена независимыми и одинаково распределенными величинами с нулевым
средним, круговой симметрией и единичной дисперсией.
Как и в случае статичных каналов, оптимальная входная матрица ко-
вариации, максимизирующая эргодическую пропускную способность для
модели двумерного белого шума ZMSW, представляется масштабирован-
ной единичной матрицей Rx = (р/М()1м4; т. е. передаваемая мощность
делится поровну между всеми передающими антеннами, а независимые
символы передаются через разные антенны. Поэтому эргодическая про-
пускная способность определяется выражением:
(10.19)
где, как и при наличии информации у передатчика (CSIT), математиче-
ское ожидание матрицы Н основывается на распределении ее сингуляр-
ных значений. Пропускная способность статичного канала при больших
значениях М растет с ростом М = m'mlMf , Мг ). так что это будет вер-
но и для эргодической пропускной способности, поскольку она просто
усредняет пропускную способность статичного канала. Выражения для
10.3. Пропускная способность канала
постоянного увеличения скорости можно найти в [4, 25]. Если канал не
соответствует модели двумерного белого шума ZMSW, то пропускная
способность зависит от распределения сингулярных значений случайной
матрицы канала. Свойства этих распределений и эргодическая пропуск-
ная способность, получающаяся при этой более общей постановке задачи,
изучены в [11].
Рис. 10.4. Эргодичес-
кая пропускная способ-
ность канала MIMO 4x4
На рис. 10.4 показана эргодическая пропускная способность системы
MIMO 4 х 4 с независимыми комплексными гауссовыми передаточны-
ми коэффициентами канала. Графики пропускной способности приведены
для случаев наличия дополнительной информации о канале CSI на пере-
даче и приеме и только на приеме. Между этими двумя графиками есть
небольшое различие, которое уменьшается с ростом помехозащищенно-
сти SNR, как и в случае одиночного канала SISO. Сравнивая пропускную
способность этого канала с пропускной способностью канала SISO с за-
мираниями, изображенной на рис. 4.7, можно видеть, что эргодическая
пропускная способность канала MIMO в четыре раза больше эргоди-
ческой пропускной способности канала SISO, как это и ожидалось при
min (Mj, Mr) = 4.
Если передаточная матрица канала не известна передатчику, а ее
элементы представляют комплексные гауссовские, но не независимые ве-
личины, то для увеличения пропускной способности на передаче можно
использовать среднее значение матрицы канала или матрицу ковариации.
Основная идея заключается в распределении мощности в соответствии
500 Глава 10. Многоэлементные антенны и методы передачи
со средним значением или ковариацией. Эту модель канала иногда на-
зывают обратной связью по среднему или ковариации. Данная модель
предполагает наличие у приемника точной информации о канале CSI,
а влияние коррелированных замираний зависит от того, какая инфор-
мация есть у передатчика. Если у передатчика есть информация только
о состоянии канала или там нет информации ни о состоянии канала,
ни о структуре корреляции, то корреляция антенн снижает пропускную
способность по сравнению со случаем независимых одинаково распреде-
ленных замираний. Однако, если передатчику известна структура корре-
ляции, то при Mr = 1 пропускная способность повышается относительно
случая с независимыми одинаково распределенными замираниями. По-
дробности о пропускной способности при этих различных условиях можно
найти в [21, 24, 26].
Пропускная способность с нарушением связи определяется так же,
как это было сделано для статичных каналов в подпараграфе 10.3.1, но
в данном случае этот метод применяется к медленно изменяющемуся ка-
налу, когда передаточная матрица канала Н постоянна в течение отно-
сительно длительного времени передачи, а затем изменяется на новое
значение. Как и в случае статического канала, реализация канала и соот-
ветствующая пропускная способность не известны на передаче, и поэто-
му передатчик, чтобы отправить информацию по этому каналу, должен
фиксировать свою скорость. При любой выбранной скорости R будет су-
ществовать вероятность нарушения связи, т. е. вероятность того, что
переданная информация не будет принята правильно. Вероятность на-
рушения связи определяется так же, как и для статического канала —
согласно формуле (10.14). Иногда пропускную способность с нарушением
связи можно улучшить, не распределяя мощность на одну или более пере-
дающих антенн, особенно в случае, когда вероятность нарушения связи
высока [4]. Это объясняется тем, что пропускная способность с нарушени-
ем связи зависит от «хвоста» распределения вероятностей. При меньшем
количестве антенн происходит меньшее усреднение, и разброс хвоста уве-
личивается.
На рис. 10.5 показана пропускная способность с нарушением связи для
системы MIMO 4 х 4 с независимыми комплексными гауссовыми пере-
даточными коэффициентами канала при 1 % и 10 % нарушении связи.
Мы видим, что различие в пропускной способности для этих двух веро-
ятностей нарушения связи увеличивается с ростом помехозащищенности
SNR, что поясняют кривые распределений пропускной способности, при-
веденные на рис. 10.6. Эти кривые показывают, что при низких значени-
ях защищенности SNR распределение очень крутое, так что пропускная
способность с нарушением связи в 1 % очень близка к пропускной способ-
10.3. Пропускная способность канала
ности с нарушением связи в 10 %. При высоких значениях SNR кривые
становятся менее крутыми, что ведет к большему различию пропускной
способности при различных вероятностях нарушения связи.
Рис. 10.5. Пропуск-
ная способность с на-
рушением связи для
канала MIMO 4x4
Рис. 10.6. Распреде-
ление вероятности на-
рушения связи для ка-
нала MIMO 4x4
Отсутствие информации о канале CSI
и у передатчика, и у приемника
502 Глава 10. Многоэлементные антенны и методы передачи
Когда ни на передаче, ни на приеме нет информации о канале CSI, то ли-
нейная зависимость роста пропускной способности от числа передающих
и приемных антенн исчезает, а в некоторых случаях добавление допол-
нительных антенн дает только незначительное увеличение пропускной
способности. Более того, пропускная способность канала приобретает
сильную зависимость от модели канала, положенной в основу анализа, что
осложняет нахождение общих закономерностей роста пропускной способ-
ности. Для канала с независимыми одинаково распределенными блочными
замираниями и двумерным белым шумом ZMSW показано [27], что увели-
чение числа передающих антенн больше, чем на длину блока, не увеличи-
вает пропускную способность. Поэтому увеличения скорости передачи по-
сле достижения определенного количества передающих антенн также не
происходит. Однако если замирания коррелированны, то дополнительные
передающие антенны все же увеличивают пропускную способность [28].
Результаты, представленные в [27], были продолжены в [29] с целью по-
дробного описания пропускной способности и стратегии ее достижения
при передаче в каналах с независимыми одинаково распределенными блоч-
ными замираниями при высоких значениях помехозащищенности SNR.
В работе [29] было показано, что в каналах с независимыми одинаково
распределенными блочными замираниями пропускная способность растет
линейно с увеличением степеней свободы канала.
Пропускная способность для более общих моделей каналов с замирани-
ями при отсутствии информации о канале CSI в передатчике и приемнике
была исследована в [30-32]. В этих работах показано, что при определении
пропускной способности каналов с медленно изменяющимися плавными
замираниями в отсутствие информации о канале на передаче CSIT и на
приеме CSIR выделяются три отдельные зоны. При низких значениях за-
щищенности SNR пропускная способность ограничена шумом и растет
линейно с ростом степеней свободы канала. От средних до высоких зна-
чений защищенности SNR пропускная способность ограничена ошибкой
оценки, и ее рост также имеет линейную зависимость от числа степе-
ней свободы канала. При очень высоких значениях SNR степени свободы
перестают оказывать влияние, и пропускная способность растет в зави-
симости от помехозащищенности SNR пропорционально удвоенному лога-
рифму. Другими словами, в медленно изменяющихся каналах, в которых
отсутствует информация CSI на передаче и приеме, при очень высоких
значениях защищенности SNR мультиплексирование не дает выигрыша,
кратного числу антенн.
104- Выигрыш от разнесения в системах MIMO
10.4. Выигрыш от разнесения в системах MIMO:
формирование диаграммы направленности антенны
Антенные системы передатчика и приемника могут оцениваться не по вы-
игрышу пропускной способности, а по полученному выигрышу от раз-
несения антенн и коэффициента усиления антенной решетки (как это
было определено в § 7.1). При такой постановке задачи один и тот же
символ, перемноженный на взвешивающий комплексный коэффициент, пе-
редается через каждую передающую антенну, так что входная матрица
ковариации имеет единичный ранг. Эту схему называют формированием
диаграммы направленности антенн MIMO13. Диаграмма направленности
формируется в соответствии с матрицами предварительного кодирова-
ния и исправления (подробнее об этом см. § 10.2), которые представляют
просто векторы-столбцы: V = v и U = и, как показано на рис. 10.7.
Из рисунка видно, что передаваемый символ х посылается через i-ю ан-
тенну с весом Vi. На приемной стороне сигнал, полученный на г-й антенне,
умножается на взвешивающий коэффициент и*. Как на передаче, так
и на приеме взвешивающие векторы нормированы таким образом, что
||и|| = ||v|| = 1. В результате принятый сигнал имеет вид:
у = uHHvx + uHn, (10.20)
где, если n = (ni,..., пмг) состоит из независимых одинаково распреде-
ленных элементов, то статистика ияп такая же, как и статистика для
любого из этих элементов.
Рис. 10.7. Канал MIMO с формированием диаграммы направленности антенн
13К сожалению, формирование диаграммы направленности используется также в кон-
тексте «умных антенн» в § 10.8 для описания настройки диаграмм направленности
передающей и приемной антенн в заданном направлении.
антенны и методы передачи
Формирование диаграммы направленности обеспечивает выигрыш от
разнесения и антенной системы благодаря когерентному объединению
многолучевого сигнала. Предполагается наличие у приемника информа-
ции о канале, так как это необходимо для когерентного объединения.
Выигрыш показателей в этом случае зависит от наличия информации
о канале у передатчика. Если матрица канала Н известна, то отношение
сигнал-шум SNR на приеме оптимизируется за счет выбора векторов
и и v в качестве левого и правого корневых сингулярных векторов ма-
трицы канала Н. Поэтому для = сттах максимальными сингулярными
значениями Н, и и v будут, соответственно, первые столбцы матриц U
и V. Можно показать, что помехозащищенность SNR на приеме равна
у = ^тахР, гДе ^тах — наибольшее сингулярное значение матрицы Н
[6, 33]. В итоге пропускная способность равна С = В log2 (1 +
что соответствует пропускной способности одноканальной системы SISO
с коэффициентом передачи мощности в канале, равным ст]2,.,,. Для матри-
цы Н с двумерным белым шумом ZMSW можно показать [6, гл. 5.4.4], что
коэффициент усиления антенной решетки при формировании диаграммы
направленности находится между значениями max (1Иг, Мг) и MtMr, а вы-
игрыш за счет разнесения равен MtMr.
Если у передатчика нет информации о канале, то при Mt = 2 для по-
лучения коэффициента усиления антенной системы Мг и максимального
выигрыша от разнесения 2МГ можно использовать схему Аламоути, опи-
санную в подпараграфе 7.3.2 [6, гл. 5.4.3]. При Mt > 2 общий выигрыш от
разнесения можно также получить, используя пространственно-времен-
ные блочные коды, о чем говорится в подпараграфе 10.6.3. Хотя форми-
рование диаграммы направленности дает меньшую пропускную способ-
ность по сравнению с методом предварительного кодирования на переда-
че и исправления на приеме, сложность демодуляции при формировании
диаграммы направленности имеет меньший порядок — |%| вместо |%|/|>н.
Еще более простой метод представляет разнесение с дифференциальным
взвешиванием MRC на передаче или на приеме с выбором антенны на дру-
гом конце: этот способ проанализирован в [34].
Пример 10.3. Рассмотрим канал MIMO с матрицей передаточных коэффи-
циентов:
Н =
0,7 0,9 0,8
0,3 0,8 0,2
0,1 0,3 0,9
Определим пропускную способность этого канала при формировании диаграм-
мы направленности, при условии наличия информации о канале у передатчика
и приемника, если В = 100 кГц, а р = 10 дБ.
10.5. Компромиссы между разнесенным приемом и мультиплексированием
Решение. Наибольшее сингулярное значение матрицы Н равно <ттах = л/Атах,
где Атах — максимальное собственное значение матрицы
ННн
1,94
1,09
1,06
1,09
0,77
0,45
1,06
0,45
0,91
Наибольшее собственное значение этой матрицы равно Атах = 3,17. Поэтому
С = В log2 (1 + Amaxp) = 105 log2 (1 + 31,7) = 503 кбит/с.
10.5. Компромиссы между разнесенным приемом
и мультиплексированием
В предыдущих разделах предлагается два механизма использования мно-
гоэлементных антенн для улучшения качественных показателей беспро-
водных систем. Один способ состоит в повышении пропускной способ-
ности за счет разбиения канала MIMO на параллельные каналы и муль-
типлексирования различных информационных потоков в этих каналах.
Такое увеличение пропускной способности называют также выигрышем
за счет мультиплексирования. Однако помехозащищенность SNR, соот-
ветствующая каждому из этих каналов, зависит от сингулярных значений
канальной матрицы. Это учитывается при анализе пропускной способ-
ности, когда в соответствующих каналах устанавливают относительно
низкие значения скорости. Однако на практике стратегии передачи по та-
ким каналам обычно имеют плохие эксплуатационные показатели, если
не используются мощные методы кодирования канала. В качестве аль-
тернативного метода может применяться формирование диаграммы на-
правленности, когда передаточные коэффициенты каналов объединяют-
ся когерентно для получения очень устойчивого канала с высоким вы-
игрышем от разнесения. При этом не обязательно использовать антенны
только для мультиплексирования или разнесения. Некоторые простран-
ственно-временные степени свободы могут использоваться для получения
выигрыша от разнесения, а оставшиеся степени свободы — для мульти-
плексирования. Отсюда возникает основной вопрос разработки систем
MIMO: использовать антенны для получения выигрыша от разнесения
или от мультиплексирования, или для того и другого?
Проблема компромисса между разнесенным приемом и мультиплекси-
рованием или, более обобщенно, компромисса между скоростью передачи
данных, вероятностью ошибок и сложностью систем MIMO, была всесто-
ронне изучена в литературе — как теоретически, так и в рамках создания
практических схем пространственно-временных кодов [35-38]. В этих ра-
ботах основное внимание уделено каналам с блочными замираниями при
антенны и методы передачи
наличии информации о канале CSI только у приемника, так как если
информация о канале есть и у передатчика, и у приемника, то компро-
мисс достигается относительно просто. Сначала антенны группируются
для получения выигрыша от разнесения, а затем получается выигрыш от
мультиплексирования, соответствующий этим новым каналам с понижен-
ной размерностью, обусловленной группированием. Для модели канала
с блочными замираниями при наличии информации о канале CSI толь-
ко у приемника и увеличении длины блока до асимптотически больших
значений, можно при приемлемом уровне сложности получить полный
выигрыш (в смысле пропускной способности с нарушением связи) одно-
временно от разнесения и мультиплексирования, используя диагональное
кодирование антенн [2, 39, 40]. Примером такого способа кодирования
может служить система D-BLAST, описанная в подпараграфе 10.6.4. Для
блоков конечной длины невозможно одновременно достичь полного вы-
игрыша и от разнесения и от мультиплексирования, поэтому имеет ме-
сто компромисс между этими показателями. Для каналов с блочными
замираниями при асимптотически высоких значениях защищенности SNR
простая характеристика такого компромисса дается в [38]. При анализе
считается, что схема передачи достигает выигрыша от мультиплексиро-
вания г и от разнесения d, если скорость передачи данных R в бит/с
на 1 Гц, и вероятность ошибки Ре, заданные как функции помехозащи-
щенности SNR, удовлетворяют условиям:
R(SNR)
11Щ :— „„
SNR—юо log2 SNR
(10.21)
log Fe (SNR)
SNR—>oo log2 SNR
(10.22)
где логарифм в (10.22) может иметь любое основание14. Для каждого
значения г оптимальное значение выигрыша donm(r) представляет мак-
симальный выигрыш от разнесения, которого можно достичь при любой
схеме. В работе [38] показано, что, если длина блока замираний Т
Mt + Мг — 1, то:
donmtr) = (Mt - г) (Мг - г), 0 С г С шш(ЛД, ЛД). (10.23)
График функции (10.23) изображен на рис. 10.8. Из рисунка видно, что
(i) если использовать все передающие и приемные антенны для разнесе-
ния, то мы получаем полный выигрыш от разнесения — MtMr, и (ii) мы
можем использовать некоторые из этих антенн для увеличения скорости
передачи за счет выигрыша от разнесения.
14Основание логарифма сокращается, так как выражение (10.22) представляет отно-
шение двух логарифмов с одинаковым основанием.
10.6. Пространственно-временная модуляция и кодирование
Рис. 10.8. Компромисс меж-
ду разнесением и мультиплек-
сированием при блочных за-
мираниях и высоких значени-
ях защищенности SNR
Выигрыш от мультиплексирования г = fl/log(SNR)
Также возможно адаптировать выигрыши от разнесения и мульти-
плексирования к условиям канала. Так, например, при плохих состояниях
канала можно использовать большее количество антенн для получения вы-
игрыша от разнесения, тогда как при хороших состояниях можно исполь-
зовать больше антенн для мультиплексирования. Адаптивные методы,
изменяющие схему использования антенн для достижения компромисса
между разнесением и мультиплексированием исходя из условий канала,
были исследованы в [41—43].
Пример 10.4. Пусть параметры мультиплексирования и разнесения г и d
определяются соотношениями (10.21) и (10.22). Предположим, что г и d при-
близительно соответствуют компромиссу между разнесением и мультиплекси-
рованием donm(r) = (Mt — г) (Мг — г) при любом большом конечном значении
помехозащищенности SNR. Какой максимальный выигрыш от разнесения может
быть достигнут в системе MIMO с параметрами Mt = Мг — 8 при помехозащи-
щенности SNR, равной 15 дБ, если скорость передачи данных должна быть равна
R = 15 бит/с на Гц?
Решение. При SNR = 15 дБ для получения R = 15 бит/с нам необходимо выпол-
нить условие rlog2 (101,5) = 15, что дает г — 3,01. Следовательно, три антенны
будут использоваться для мультиплексирования, а оставшиеся пять — для разне-
сенного приема. Максимальный выигрыш от разнесения в этом случае составит
donm(r) = (Mt - г) (Мг - г) = (8 - 3) (8 - 3) = 25.
10.6. Пространственно-временная модуляция
и кодирование
Так как вход и выход канала MIMO связаны соотношением у = Нх + п,
то символ, передаваемый по каналу в каждом временном интервале, будет
скорее вектором, чем скалярной величиной, как при традиционной моду-
ляции в канале SISO. Более того, когда сигнал распределяется в простран-
стве (несколько антенн) и во времени (несколько временных интервалов),
то такую схему обычно называют пространственно-временным кодом.
Глава 10. Многоэлементные антенны и методы передачи
Большинство пространственно-временных кодов, включая все коды,
речь о которых пойдет в данном разделе, разработаны для квазистати-
ческих каналов, когда канал неизменен в течение блока из Т символьных
интервалов, в предположении, что у передатчика нет информации о ка-
нале. При такой модели вход и выход канала представляются матрицами
с размерностью, соответствующей пространству (антеннам) и времени.
Пусть X = [xi,..., хг] — входная матрица канала размерностью Mt х Т
с г-м столбцом Xj, равным входному вектору канала на г-м интервале пере-
дачи, Y = [у 1,..., ут] — выходная матрица канала размерностью Mr х Т
с г-м столбцом у^, равным выходному вектору канала на г-м интервале
передачи, a N = [щ,..., п-/-] — матрица шума размерностью Мг хТ с г-м
столбцом пг, равным вектору шума приемника на г-м интервале передачи.
При таком матричном представлении соотношение между входом и вы-
ходом канала в течение всех Т блоков имеет вид:
Y = НХ + N. (10.24)
10.6.1. Детектирование по максимуму правдоподобия
и вероятность парной ошибки
Предположим, что используется пространственно-временной код, и при-
емник располагает информацией о канальной матрице Н. Используя ме-
тоды, подобные тем, что применялись для скалярных величин (гл. 5)
и векторов (гл. 8), можно показать, что при заданной принятой матри-
це Y детектирование по максимуму правдоподобия дает максимально
правдоподобную оценку переданной матрицы X, удовлетворяющую условию:
т
X = arg min ||Y - НХ||р = arg min V ||yj - Нхг||2, (10.25)
XexMfxr XExMtxT^
где || A||yp обозначает норму Фробениуса15 матрицы А, а минимизация про-
изводится по всем возможным пространственно-временным входным ма-
трицам Вероятность парной ошибки при ошибочном замещении
переданной матрицы X другой матрицей X, определяемая как р (х —> Х^,
зависит только от расстояния между этими двумя матрицами после пе-
9
редачи по каналу с мощностью шума а , т.е.:
(10.26)
Обозначим разницу матриц X и X как Dx = X — X. Применяя нера-
венство Чернова к выражению (10.26), получим:
15Норма Фробениуса матрицы — это квадратный корень из суммы квадратов ее эле-
ментов.
10.6. Пространственно-временная модуляция и кодирование
р (X X ) < ехр
ПНРхН^
4<т2
(10.27)
(10.28)
Пусть hj обозначает ?'-й ряд матрицы Н, i = 1,..., Мг. Тогда:
м
||HDx|||, = £h2DxD^hf.
i=i
Введем обозначение Н = vec(HT)T, где vec (А) определяется как век-
тор, образующийся при расположении столбцов матрицы А друг над дру-
гом16. Таким образом, И.Т — вектор длиной MrMt. Определим также
Рх = ^мг ® Dx, где ® — знак произведения Кронекера. Используя эти
определения, имеем:
||HDx||t? = \[НПх\\2р. (10.29)
Подставляя (10.29) в (10.27) и усредняя по всем возможным реализа-
циям канала, получаем:
~Е \d%HhHDx\
(10.30)
Предположим, что канальная матрица Н — случайная матрица со
свойствами двумерного белого шума, элементы которой представляют не-
зависимые и одинаково распределенные комплексные гауссовские случай-
ные величины с нулевыми средними значениями и единичной дисперсией.
Тогда, определяя математическое ожидание в (10.30), получаем:
/ । \ мг
У \ 7 у det + 0,25рД]
где Д = (l/F)DxDg. Это упрощается до
Яд
(10.31)
м,
1
(10.32)
V + 0,257Afc(A)
где у — Р/сг2 = р — защищенность SNR на входной символ, a Afc(A) —
k-e ненулевое собственное значение матрицы Д, k = 1,..., /?д, где /?д —
ранг матрицы Д. При высоких значениях помехозащищенности SNR
(т. е. для 7» 1) выражение упрощается к виду:
/р х -мг
р (х -> хК П АЦД) х (0,257)-ДдМ’
(10.33)
\fc=i /
Это уравнение позволяет сформулировать основные критерии, используе-
мые при разработке пространственно-временных кодов, которые описаны
в следующем подпараграфе.
16Так, для матрицы А = [ai,..., алг] размерностью М х N, где а, — вектор длиной М,
имеем: vec (А) = [af,... , — вектор длиной MN.
510 Глава 10. Многоэлементные антенны и методы передачи
10.6.2. Критерии ранга и определителя
Формула вероятности парной ошибки (10.33) показывает, что вероят-
ность ошибки понижается пропорционально у-*7, где d = R&Mr. Сле-
довательно, R&Mr представляет выигрыш от разнесения для простран-
ственно-временного кода. Максимальный выигрыш, возможный при ко-
герентном объединении Mt передающих и Мг приемных антенн, равен
MtMr. Поэтому для получения максимального выигрыша от разнесения
необходимо разрабатывать пространственно-временной код таким обра-
зом, чтобы разностная матрица между любыми двумя кодовыми словами
Д размерностью Mt х Mt имела полный ранг, равный Mt. Этот критерий
называется критерием ранга.
Эффективность кодирования, соответствующая вероятности парной
/р \Мг
ошибки (10.33), определяется величиной I Afc(A) I . Следовательно,
\fc=1 /
высокая эффективность кодирования достигается при максимизации ми-
нимума определителя Д по всем парам входных матриц X и X. Этот
критерий называется критерием определителя.
Критерии ранга и определителя впервые были предложены в [36, 44, 45].
Эти критерии основываются на вероятности парной ошибки для различ-
ных матриц передачи сигналов — в отличие от традиционных кодов,
работающих в двоичной области. Поэтому часто для нахождения хоро-
ших кодов необходимы компьютерные исследования [46, 47]. В работе [48]
предложен общий критерий ранга в двоичном виде, представляющий хо-
роший инструмент для разработки пространственно-временных кодов.
10.6.3. Пространственно-временные решетчатые
и блочные коды
Критерии ранга и определителя в основном применяются при разработ-
ке пространственно-временных решетчатых кодов — STTC17, предста-
вляющих расширение сверточных решетчатых кодов в системах MIMO
[6, 45]. Эти коды описываются моделью решетки и декодируются методом
оценки последовательности по максимуму правдоподобия с использова-
нием алгоритма Витерби. Коды STTC могут обеспечить отличный вы-
игрыш от разнесения и кодирования, но сложность декодирования растет
по экспоненциальному закону с ростом кратности разнесения и скорости
передачи [49]. Альтернативный вариант пространственно-временного ко-
дирования представляют пространственно-временные блочные коды —
STBC18, которые также могут давать прекрасный эффект от разнесения
17STTC — Space-time trellis codes.
I8STBC — Space-time block codes.
10.6. Пространственно-временная модуляция и кодирование
при линейно возрастающей сложности приемника. Интерес к кодам STBC
возник после создания кода Аламоути, описанного в подпараграфе 7.3.2,
который обеспечивает полный эффект от разнесения при линейном росте
сложности обработки сигналов в приемнике в системе с двумя передаю-
щими антеннами. В работе [50] эта схема была обобщена для кода STBC,
обеспечивающего полный эффект от разнесения при произвольном чи-
сле передающих антенн. Однако, так как эти коды обеспечивают рост
эффекта разнесения, они не обеспечивают эффективности кодирования,
и поэтому имеют худшие эксплуатационные показатели по сравнению
с кодами STTC, обеспечивающими выигрыш как от разнесения сигнала,
так и кодирования. Дополнительный выигрыш от кодирования для кодов
STTC и STBC может быть получен при последовательном или параллель-
ном объединении этих кодов с внешним кодом канала и формировании
турбо-кода [51-53]. Линейный рост сложности схем кодирования STBC,
приведенных в [50], объясняется тем, что эти коды ортогональны по ка-
ждому измерению матрицы кода. Подобный подход использован в [54]
для разработки схем унитарной пространственно-временной модуляции
для каналов с блочными замираниями при отсутствии информации о ка-
нале CSI и у передатчика, и у приемника. Более подробные выкладки
по пространственно-временному кодированию можно найти в работах
[6, 49, 55, 56] и в их ссылках.
10.6.4. Пространственное мультиплексирование
и архитектуры BLAST
Основная идея пространственного мультиплексирования заключается в
передаче Mf независимых символов за один символьный период с исполь-
зованием пространственных и временных степеней свободы. Для достиже-
ния эффекта от разнесения поток кодированных бит должен передаваться
через все Mt передающих антенн. Это можно реализовать с помощью
последовательного кодирования, как показано на рис. 10.9. Поток бит
кодируется во времени в течение длины канального блока Т, при этом
формируются кодовые слова [ид,..., ту]. Кодовое слово чередуется и ото-
бражается в точки созвездия, а затем распределяется по нескольким ан-
теннам. Первые Mt символов передаются Mt антеннами в течение первого
интервала передачи символа, следующие Mf символов — в течение следу-
ющего временного интервала, и так продолжается до тех пор, пока не
будет передано все кодовое слово. Обозначим символ, переданный fc-й ан-
тенной в течение г-го временного интервала, как ajfcfi]. Если кодовое слово
достаточно длинное, то оно передается всеми Mt передающими антенна-
ми и принимается всеми Мг приемными антеннами, что дает в результате
полный эффект от разнесения. Однако для достижения такого эффекта
антенны и методы передачи
длина кодового слова Тдолжна быть равна MtMr, а сложность декодиро-
вания возрастает с увеличением длины кодового слова по экспоненциаль-
ному закону. Этот высокий уровень сложности делает последовательное
кодирование непрактичным.
Рис. 10.9. Пространственное мультиплексирование с последовательным кодиро-
ванием
Рис. 10.10. Пространственное мультиплексирование с параллельным кодировани-
ем: V-BLAST
Более простой метод пространственного мультиплексирования пред-
ставляет параллельное кодирование, изображенное на рис. 10.10. Данный
метод впервые был предложен «Белл лэбораториз» в качестве одной из
структур каналов MIMO серии BLAST19 [2]. При параллельном кодиро-
вании информационный поток разделяется на Mt независимых потоков.
Каждый из полученных потоков пропускается через временное кодирую-
щее одноканальное устройство (SISO) с длиной блока Т, чередуется, ото-
бражается в точки созвездия сигнала и передается через соответствую-
щую ему передающую антенну. В частности, k-е кодирующее устройство
SISO формирует кодовое слово {ж^[?], i = 1,..., Т}, которое последова-
тельно передается через к-ю антенну. Этот процесс можно рассматривать
19BLAST — Bell Labs Layered Space Time.
10.6. Пространственно-временная модуляция и кодирование
как кодирование последовательных данных в вертикальный вектор, и по-
этому его также называют вертикальным кодированием или V-BLAST
[57]. Вертикальное кодирование может обеспечить кратность разнесения
не более Мг. так как каждый кодированный символ передается с одной
антенны и принимается Мг антеннами. Такая система имеет невысокую
сложность кодирования, линейно возрастающую с числом антенн. Однако
для оптимального декодирования необходимо объединенное детектирова-
ние кодовых слов от каждой передающей антенны, так как все переданные
символы принимаются всеми приемными антеннами. В работе [58] пока-
зано, что сложность приемника может быть значительно снижена за счет
подавления искаженных символов, как показано на рис. 10.11. Это по-
давление, использующее синхронность символов, передаваемых с каждой
антенны, происходит по следующему алгоритму. Сначала Mt передан-
ных символов упорядочиваются по величине помехозащищенности SNR
на приеме. Производится оценка полученного символа с наивысшим уров-
нем SNR, тогда как все другие символы обрабатываются как шум. Затем
этот оцененный символ вычитается, а символ со следующим высшим уров-
нем SNR оценивается, при этом оставшиеся символы обрабатываются как
шум. Этот процесс продолжается до тех пор, пока все Mt переданных сим-
волов не будут оценены. После подавления символов, создающих помехи,
закодированный поток, соответствующий каждой передающей антенне,
может быть декодирован отдельно, и в результате сложность приемника
линейно возрастает с увеличением числа передающих антенн. Фактиче-
ски, при такой структуре нет необходимости в кодировании. В работе [57]
сообщается об использовании некодированных сигналов V-BLAST на ско-
ростях передачи 20-40 бит/с на Гц с приемлемым коэффициентом ошибок.
Рис. 10.11. Приемник V-BLAST с линейно возрастающей сложностью
Простота параллельного кодирования и преимущества разнесения с по-
следовательным кодированием могут быть объединены при использова-
антенны и методы передачи
нии этих двух методов в комбинации, получившей название диагонального
кодирования или D-BLAST [2] (рис. 10.12). При использовании D-BLAST
информационный поток сначала кодируется параллельно. Однако вместо
передачи каждого кодового слова через одну антенну символы кодового
слова распределяются по всем антеннам, так что кодовое слово передается
всеми Mt антеннами.
Рис. 10.13. Рас-
пределение потока
Рис. 10.12. Диагональное кодирование с распределением потока
Время
Операция распределения потока показана на рис. 10.13. Допустим, что
i-e кодирующее устройство формирует кодовое слово Xj = [sj[l],..., пДТ]].
Распределительное устройство направляет все символы потока на разные
антенны, так что символ ж»[1] поступает на антенну 1 на г-м интерва-
ле передачи символа, символ Xi[2] поступает на антенну 2 на интервале
i + 1, и так далее. Если длина блока кода Т превышает Afj, то цикл снова
начинается на первой антенне. В результате кодовое слово распределяет-
ся по всем пространственным координатам. Схемы передачи, основанные
на методе диагонального кодирования D-BLAST, могут достигать полной
эффективности от разнесения, равной MtMr, если временное кодирование
с распределением потока достигает пропускной способности (гауссовы
10.7. Каналы MIMO с частотно-селективными замираниями
кодовые слова с бесконечной длиной блока Т) [6, гл. 6.3.5]. Более того, сис-
тема D-BLAST может достигать максимальной пропускной способности
с нарушением связи, если пренебречь неиспользованными пространствен-
но-временными координатами вдоль диагоналей [6, гл. 12.4.1]. Сложность
приемника линейно возрастает с ростом числа передающих антенн, по-
скольку приемник декодирует каждый диагональный код отдельно. Од-
нако эта простота обходится дорого, так как потери эффективности из-
за неиспользованных пространственно-временных координат (рис. 10.13)
при неправильно выбранном размере блока данных могут быть достаточ-
но большими.
10.7. Каналы MIMO с частотно-селективными
замираниями
Если полоса частот канала MIMO велика относительно разброса задер-
жек многолучевого распространения, то такой канал испытывает влия-
ние межсимвольной интерференции, подобное влиянию в одноканальной
системе SISO. Существует два подхода к нейтрализации межсимвольной
интерференции ISI в каналах MIMO. Для смягчения влияния межсим-
вольной интерференции может быть использовано выравнивание. Однако
выравнивание каналов MIMO достаточно сложное, так как канал необ-
ходимо выровнять и в пространстве, и во времени. Более того, когда
выравниватель используется в сочетании с пространственно-временным
кодированием, нелинейная и некаузальная природа таких кодов еще более
усложняет разработку систем коррекции. В некоторых случаях структура
кода позволяет свести задачу выравнивания в системе MIMO к зада-
че выравнивания в одноканальной системе SIS О и применить хорошо
зарекомендовавшие себя схемы выравнивания, разработанные для одно-
канальных систем [59, 60, 61].
Альтернативу выравниванию при частотно-селективных замирани-
ях представляет многочастотная модуляция или ортогональное частот-
ное мультиплексирование — ортогональное частотное разделение ка-
налов ОЧРК20. Методы ОЧРК (OFDM) для каналов SISO описываются
в 12 главе: в их основе лежит преобразование широкополосного канала
в множество узкополосных подканалов, испытывающих только плавные
замирания. Применение ОЧРК в каналах MIMO дает в результате па-
раллельное множество узкополосных каналов, а методы пространственно-
временной модуляции и кодирования, только что описанные для одно-
20 Соответствует англоязычному — OFDM (orthogonal frequency division multiplex-
ing). — Прим, перев.
антенны и методы передачи
го канала MIMO, применяются к множеству этих параллельных каналов.
В каналах MIMO с частотно-селективными замираниями используется
разнесение сигнала в пространстве, во времени и по частоте, так что
в идеале все эти три измерения должно быть полностью задействованы
в схеме передачи сигнала.
10.8. Умные антенны
Мы видели, что многоэлементные антенные системы на передаче и/или
приеме могут обеспечить выигрыш от разнесения, а также повысить
скорость передачи при пространственно-временной обработке сигнала.
В качестве альтернативы, для повышения коэффициента усиления напра-
вленных антенн передающей или приемной систем могут использоваться
методы секторизации или фазированные антенные решетки. Такая на-
правленность антенн может увеличивать зону распространения сигнала,
сократить разброс задержек (межсимвольную интерференцию), сгладить
замирания и ограничить взаимные влияния между пользователями. Обыч-
но помехи поступают на приемник с различных направлений. Поэтому
направленные антенны могут сводить эти влияния до нуля или ослаблять
помехи, поступающие с разных направлений, увеличивая тем самым про-
пускную способность системы. Отраженные многолучевые составляющие
передаваемого сигнала также поступают на приемник с различных на-
правлений и могут быть ослаблены, что уменьшает межсимвольную ин-
терференцию ISI и плавные замирания. Преимущества направленности,
которые могут быть получены в многоэлементных антенных системах,
необходимо сравнивать с потенциальным выигрышем от разнесенного
приема или мультиплексирования, что обуславливает необходимость по-
иска компромисса между направленностью, мультиплексированием и раз-
несением сигнала. Что лучше: использовать многоэлементные антенны
для увеличения скорости передачи данных за счет мультиплексирования,
повысить устойчивость к замираниям, используя разнесенный прием, или
снизить межсимвольную интерференцию ISI и влияние помех за счет на-
правленности антенн? Это комплексное решение, зависящее от схемы всей
системы в целом.
Наиболее распространенные типы направленных антенн представля-
ют секторные и фазированные (направленные) антенные решетки. Диа-
граммы направленности для этих антенн — вместе с диаграммами не-
направленных антенн — показаны на рис. 10.14. Секторные антенны
разработаны для обеспечения высокого коэффициента усиления в широ-
ком диапазоне углов приема сигнала. Секторизация обычно используется
на базовых станциях сотовых систем для снижения взаимных влияний.
10.8. Умные антенны
Если в разных секторах используется один и тот же частотный диапазон
или временной интервал, то при хорошем разбиении на сектора взаимные
помехи возникают только между пользователями, находящимися внутри
одного сектора, за счет чего средняя величина взаимных влияний сокра-
щается на число, равное количеству секторов. Например, на рис. 10.14
показана секторная антенна с шириной пучка 120°. Базовая станция мо-
жет разделить свою зону в 360° на три сектора, которые будут покрывать
три секторные антенны с шириной пучка по 120°; в этом случае взаимные
влияния в каждом секторе сокращаются в три раза по сравнению с ис-
пользованием ненаправленной антенны базовой станции. Цена, которую
приходится платить за сокращение взаимных помех в сотовых системах
за счет секторизации, заключается в необходимости переадресации вы-
зова между секторами.
Рис. 10.14. Диаграммы направленности всенаправленных, секторных и напра-
вленных антенн
Направленные антенны обычно используют антенные решетки в соче-
тании с методами фазирования для создания коэффициента направленно-
го действия, который трудно контролировать при достаточно большом
количестве элементов антенны. Методы фазированных антенных реше-
ток основаны на подстройке фазы каждого элемента антенны в решетке,
что изменяет положения углов главных лепестков диаграммы направлен-
ности антенны (углы с большим коэффициентом усиления) и нулей (углы
с малым коэффициентом усиления). Для антенной решетки из N антенн
можно сформировать N нулей, что значительно сокращает мощность,
получаемую от N отдельных источников помех. Если имеется < N
источников помех, то Nj источников помех можно вывести на ноль, ис-
пользуя в фазированной решетке Nj антенн, а оставшиеся N—Ni антенны
можно использовать для усиления эффекта от разнесения. Обратите вни-
мание, что направленные антенны должны располагать информацией об
угловых координатах мест нахождения источников полезных и мешающих
сигналов для обеспечения в соответствующих направлениях высоких или
низких коэффициентов усиления антенн. В мобильных системах с высокой
абонентской плотностью и мобильностью слежение за местонахождением
Глава 10. Многоэлементные антенны и методы передачи
абонентов может быть очень затруднительным, поэтому базовые станции
сотовых систем используют секторные, а не направленные антенны.
Сложность обработки сигналов в антенных решетках и затраты, не-
обходимые для их реализации, делают использование умных антенн в не-
больших, легких, маломощных переносных устройствах нереальным в бли-
жайшем будущем. Однако базовые станции и точки доступа во многих
случаях уже используют антенные решетки. Более подробно о техноло-
гии, лежащей в основе умных антенн, и их использовании в беспроводных
системах можно прочитать в [62].
Задачи
10.1 . При анализе каналов MIMO широко используются матричные тождества.
Докажите следующие матричные тождества.
а) Для заданной матрицы А размерностьюMxN покажите, что матрица
ААЯ является эрмитовой. Что это значит в собственном разбиении
ААЯ?
б) Покажите, что матрица А.А.Н является положительно полуопределен-
ной.
в) Покажите, что 1д/ + ААЯ — эрмитова положительно определенная
матрица.
г) Покажите, что det[Ijw + ААЯ] = det[(^ + АЯА].
10.2 . Выполните разложение следующей матрицы по сингулярным числам (SVD);
0,7
ОД
0,3
Н =
0,6 0,2
0,5 0,9
0,6 0,9
10.3 . Найдите матрицу канала Н размерностью 3 х 3 с двумя ненулевыми син-
гулярными значениями.
10.4 . Рассмотрите каналы MIMO 4x4, заданные ниже. Чему равен максималь-
ный выигрыш от мультиплексирования для каждого канала, т. е., сколько
независимых потоков скалярных данных могут поддерживаться с боль-
шой степенью надежности?
Hi = '11-1 1 11-1-1 1111 11 1-1 , Н2 = 1 1 1 -1 11-11 1-111 1 -1 -1 -1
10.5 . Пропускная способность статичного канала MIMO с информацией о канале
CSI только у приемника задается выражением С = В log2 (1 + ст? p/Mt'j.
Покажите, что если сумма сингулярных значений ограничена, то это
выражение будет иметь максимальное значение в случае, если все син-
гулярные числа 7?н равны.
10.6 . Задана система MIMO со следующей матрицей канала:
0,1 0,3 0,4 '
н = 0,3 0,2 0,2 =
0,1 0,3 0,7
-0,5196 -0,0252 -0,8541 0,9719 0 0
— -0,3460 -0,9077 0,2372 0 0,2619 0 X
-0,7812 0,4188 0,4629 0 0 0,0825 _
г — 0,2406 -0,4727 -0,8477 н
X — 0,8894 -0,2423 0,3876
— 0,3886 -0,8472 0,3621
Обратите внимание, что матрица Н записана в виде разложения по син-
гулярным числам (SVD) Н = USVH.
а) Проверьте, действительно ли Н = USVH. Вы увидите, что матрицы
U, S и Vя не имеют достаточно большой точности, так что USVH
только приблизительно равно матрице Н. Это показывает чувстви-
тельность сингулярных чисел SVD — в частности, матрицы S —
к маленьким ошибкам при оценке матрицы канала Н.
б) Основываясь на разложении по сингулярным числам матрицы Н =
= USVH, найдите эквивалентную систему MIMO, состоящую из трех
независимых каналов. Найдите матрицы предварительного кодирова-
ния на передаче и формирования (исправления) на приеме, необходи-
мые для преобразования исходной системы в эквивалентную систему.
в) Найдите оптимальное распределение мощности Pi (г = 1,2,3) по трем
каналам, найденным в пункте (б), и соответствующую полную про-
пускную способность эквивалентной системы, если Р/<т2 = 20 дБ,
а частотный диапазон системы В = 100 кГц.
г) Сравните пропускную способность, полученную в пункте (в), с про-
пускной способностью в случае, когда передатчик не располагает ин-
формацией о канале и поэтому всем антеннам выделяется равная мощ-
ность.
10.7 . Воспользовавшись свойствами разложения по сингулярным числам SVD,
покажите, что в канале MIMO, информация о котором есть как у пере-
датчика, так и у приемника, основное выражение для пропускной способ-
ности в виде:
С = max В log2 det + HRxHh1
Rx:Tr(Rx)=p
сокращается к виду
520 Глава 10. Многоэлементные антенны и методы передачи
С = max V в 1о§2 (1 + °2iPi)
Pi'-Z^Pi^P
i г
при сингулярных значениях {ст*} и помехозащищенности SNR, равной р.
10.8 . Для каналов MIMO 4x4, заданных ниже, найдите пропускную способ-
ность, полагая, что и у передатчика, и у приемника есть информация о
канале, помехозащищенность SNR р = 10 дБ, а полоса частот В = 10 МГц:
Hi = '11-1 1 11-1-1 1111 11 1-1 , Н2 = ' 1 1 1-1 11-11 1-111 1 -1 -1 -1
10.9 . Задана система MIMO, соответствующая модели ZMCSCG (комплексный
случайный гауссовский вектор с нулевым средним и круговой симметри-
ей), с матрицей канала Н при числе передающих и приемных антенн
Mt = Mr = М. Используя закон больших чисел, покажите, что
lim
М—*оо
—ННн
= IjVf.
Затем, используя это выражение, покажите, что
В log2 det [lM + -g:HHH] = MB log2 (1 + p).
10.10 . Постройте графики эргодической пропускной способности для канала
MIMO со свойствами ZMCSCG при помехозащищенности SNR 0 р
С 30 дБ и В = 1 МГц для следующих размерностей канала MIMO:
a) Mt = Мг = 1; б) Mt =2, Mr = 1; в) Mt = Mr = 2; г) Mt =2, Mr =3;
д) Mt = Mr = 3.
Убедитесь, что при высоких значениях защищенности SNR пропускная
способность возрастает линейно с ростом М = min (Mt, Mr).
10.11 . Постройте графики пропускной способности с нарушением связи при В =
= 1 МГц и вероятности нарушения связи Fout = 0,01 для канала MIMO со
свойствами ZMCSCG при помехозащищенности SNR 0 С р 30 дБ для
следующих размерностей канала MIMO:
a) Mt = Мг = 1; б) Mt = 2, Mr = 1; в) Mt = Mr = 2; г) Mt = 2, Mr =3;
д) Mt = Mr = 3.
Удостоверьтесь, что при высоких значениях помехозащищенности SNR
пропускная способность возрастает линейно с ростом М = min (Mt,Mr).
10.12 . Покажите, что если вектор шума n = (zzi,...,n.?rfr j имеет независимые
одинаково распределенные составляющие, то при ||и|| =1 статистика uHn
будет такой же, как и статистика для любого из этих элементов. •
10.13 . Рассмотрите систему MIMO в случае, когда матрица передаточных ко-
эффициентов канала Н известна и передатчику, и приемнику. Покажите,
что если для разнесения используются передающие и приемные антен-
ны, то оптимальные веса на передатчике и приемнике приведут к защи-
щенности SNR, равной у = Атахр, где Атах — наибольшее собственное
значение ННЯ.
10.14 . Задан канал с передаточной матрицей:
0,1 0,5 0,9 '
н = 0,3 0,2 0,6
0,1 0,3 0,7
При р = 10 дБ найдите отношение сигнал-шум на выходе SNR при ис-
пользовании формирования диаграммы направленности в каналах с равны-
ми весами для каждой передающей антенны и оптимальным взвешиванием
в приемнике. Сравните полученный результат с величиной защищенно-
сти SNR при формировании диаграммы направленности с оптимальным
взвешиванием на передаче и на приеме.
10.15 . Рассмотрите систему MIMO 8 х 4 в предположении схемы кодирования,
которая может достичь компромисса между скоростью и разнесением
d(r) = (Mt — г) (Мг — г).
а) Найдите максимальную скорость мультиплексирования для этого ка-
нала при требуемой вероятности ошибки Ре = р d 10 3, если р =
= 10 дБ.
б) Для значения г, полученного в пункте (а), определите вероятность Ре.
10.16 . Найдите пропускную способность канала SIMO с вектором передаточных
коэффициентов канала h = [0,1 0,4 0,75 0,9] при оптимальном взвешивании
на приеме, если р = 10 дБ и В = 10 МГц.
10.17 . Задана система MIMO с передаточной матрицей канала Н размерностью
2x2:
Г 0,3 0,5 '
[ 0,7 0,2 ’
Предполагается, что информация о матрице канала Н известна как передат-
чику, так и приемнику, полная мощность передачи на двух передающих антеннах
составляет Р = 10 мВт, на каждой принимающей антенне существует адди-
тивный белый шум AWGN с Nq = 10 9 Вт/Гц, а полоса частот канала равна
В = 100 кГц.
а) Найдите разложение по сингулярным числам SVD для матрицы Н.
б) Найдите пропускную способность этого канала.
в) Предположим, что для преобразования этого канала в два независи-
мых параллельных канала с ограничением по полной мощности Р ис-
пользуется предварительное кодирование на передаче и формирование
(исправление) в приемнике. Найдите максимальную скорость передачи
522 Глава 10. Многоэлементные антенны и методы передачи
данных в этих параллельных каналах, полагая, что в каждом канале
используется модуляция МКАМ (MQAM) с оптимальной адаптацией
мощности при условии ограничения по мощности Р. Требуемое значе-
ние коэффициента ошибок BER в каждом канале равно 10’, и этот
коэффициент ограничен соотношением Рь ОДе-1,57/^"1). Примите,
что размер созвездия МКАМ (MQAM) не ограничен.
г) Предположите теперь, что все антенны передатчика и приемника ис-
пользуются для разнесенного приема (с оптимальным взвешиванием
на передаче и приеме) с целью максимального увеличения защищен-
ности SNR на выходе устройства объединения. Найдите значение за-
щищенности SNR на выходе устройства объединения, а также коэф-
фициент ошибок BER для модулированного сигнала ДФМН (BPSK),
переданного через эту систему с разнесением. Сравните скорость пе-
редачи данных и коэффициент ошибок при передаче этого сигнала
ДФМН с разнесением (при В = I /Ть) со скоростью и с коэффициен-
том ошибок из пункта (в).
д) Оцените возможные компромиссы между разнесением и мультиплек-
сированием для систем из пунктов (в) и (г).
10.18 . Задан канал MIMO М х М, обладающий свойствами ZMCSCG.
а) Постройте график эргодической пропускной способности этого кана-
ла для М = 1 и М = 4 при 0 А р 20 дБ и В = 1 МГц, допуская, что
и передатчик, и приемник имеют информацию о канале CSI.
б) Повторите пункт (а), полагая, что информацию о канале CSI имеет
только приемник.
10.19 . Найдите пропускную способность с нарушением связи для канала MIMO
4 х 4 со свойствами ZMCSCG при 10 % нарушении связи для р — 10 дБ
и В = 1 МГц.
10.20 . Постройте график функции распределения пропускной способности кана-
ла MIMO М х М при р = 10 дБ, В = 1 МГц и отсутствии у передатчика
информации о канале для М = 4, 6, 8. Что произойдет с увеличением М?
Как это скажется на практической разработке такой системы?
Литература
1. J. Winters, «On the capacity of radio communication systems with diversity in
a Rayleigh fading environment», IEEE J. Sei. Areas Commun., pp. 871-8, June
1987.
2. G. J. Foschini. «Layered space-time architecture for wireless communication in
fading environments when using multi-element antennas», Bell System Tech. 1,
pp. 41-59, Autumn 1996.
3. G. J. Foschini and M. Gans, «On limits of wireless communications in a fading
environment when using multiple antennas», Wireless Pers. Commun., pp. 311—
35, March 1998.
4. E. Telatar, «Capacity of multi-antenna Gaussian channels», AT&T Bell Labs
Internal Tech. Memo, June 1995.
5. E. Telatar, «Capacity of multi-antenna Gaussian channels», Euro. Trans. Telecom-
mun., pp. 585-96, November 1999.
6. A. Paulraj, R. Nabar and D. Gore, Introduction to Space-Time Wireless Com-
munications, Cambridge University Press, 2003.
7. L.H. Brandenburg and A. D. Wyner, «Capacity of the Gaussian channel with
memory: The multivariate case», Bell System Tech. J., pp. 745-78, May/June
1974.
8. J. Saiz and A. D. Wyner, «On data transmission over cross coupled multi-input,
multi-output linear channels with applications to mobile radio», AT&T Bell
Labs Internal Tech. Memo, 1990.
9. B. Tsybakov, «The capacity of a memoryless Gaussian vector channel», Prob.
Inform. Trans., 1(1), pp. 18-29, 1965.
10. J.L. Holsinger, «Digital communication over fixed time-continuous channels
with memory, with special application to telephone channels», MIT Res. Lab
Elec. Tech. Rep. 430, 1964.
11. H. Shin and J.H. Lee, «Capacity of multiple-antenna fading channels: Spatial
fading correlation, double scattering and keyhole», IEEE Trans. Inform. Theory,
pp. 2636-47, October 2003.
12. A. M. Tulino and S. Verdii, «Random matrix theory and wireless communica-
tions», Found. Trends Cominun. Inform. Theory, 1(1), pp. 1-182, 2004.
13. V. L. Girko, «А refinement of the central limit theorem for random determi-
nants», Theory Probab. Appi., 42(1), pp. 121-9, 1998.
14. A. Grant, «Rayleigh fading multiple-antenna channels», J. Appl. Signal Proc.,
Special Issue on Space-Time Coding (Part I), pp. 3 16-29, March 2002.
15. P. J. Smith and M. Shafi, «On a Gaussian approximation to the capacity of
wireless MIMO systems», Proc. IEEE Intermiaf. Conf. Commun., pp. 406-10,
April 2002.
16. S. Verdu and S. Shamai (Shitz), «Spectral efficiency of CDMA with random
spreading», IEEE Trans. Inform. Theory, pp. 622-40, March 1999.
17. Z. Wang and G. B. Giannakis, «Outage mutual information of space-time MIMO
channels», Proc. Allerton Conf. Commun., Control, Comput., pp. 885-94, Oc-
tober 2002.
18. C.-N. Chuah, D.N. C. Tse, J.M. Kahn and R. A. Valenzuela, «Capacity scal-
ing in MIMO wireless systems under correlated fading», IEEE Trans. Inform.
Theory, pp. 637-50, March 2002.
19. A. Lozano, A. M. Tulino and S. Verdu, «Multiple-antenna capacity in the low-
power regime», IEEE Trans. Inform. Theory, pp. 2527-44, October 2003.
20. A. L. Moustakas. S. H. Simon and A. M. Sengupta, «MIMO capacity through
correlated channels in the presence of correlated interferers and noise: A (not
so) large N analysis», IEEE Trans. Inform. Theory, pp. 2545-61, October 2003.
21. S. A. Jafar and A. J. Goldsmith. «Transmitter optimization and optimality of
beamforming for multiple antenna systems», IEEE Trans. Wireless Commun.,
pp. 1165-75, July 2004.
22. A. Narula, M. Lopez, M. Trott and G. Wornell, «Efficient use of side information
in multiple-antenna data transmission over fading channels», IEEE J. Sei. Areas
Commun., pp. 1423-36, October 1998.
524 Глава 10. Многоэлементные антенны и методы передачи
23. Е. Visotsky and U. Madhow, «Space-time transmit precoding with imperfect
feedback», Proc. IEEE Intemat. Sympos. Inform. Theory, pp. 357-66, June
2000.
24. E. Jorswieck and H. Boche, «Channel capacity and capacity-range of beamform-
ing in MIMO wireless systems under correlated fading with covariance feedback»,
IEEE Trans. Wireless Commun., pp. 1543-53, September 2004.
25. B. Hochwald and V. Tarokh. «Multiple-antenna channel hardening and its im-
plications for rate feedback and scheduling», IEEE Trans. Inform. Theory, pp.
1893-1909, September 2004.
26. A. J. Goldsmith, S. A. Jafar, N. Jindal and S. Vishwanath, «Capacity limits of
MIMO channels», IEEE J. Sei. Areas Commun., pp. 684-701, June 2003.
27. T. Marzetta and B. Hochwald, «Capacity of a mobile multiple-antenna commu-
nication link in Rayleigh flat fading», IEEE Trans. Inform. Theory, pp. 139-57,
January 1999.
28. S. A. Jafar and A. J. Goldsmith, «Multiple-antenna capacity in correlated Rayleigh
fading with channel covariance information», IEEE Trans. Wireless Commun.,
pp. 990-7, May 2005.
29. L. Zheng and D. N. Tse. «Communication on the Grassmann manifold: A ge-
ometric approach to the non-coherent multi-antenna channel», IEEE Trans.
Inform. Theory, pp. 359-83, February 2002.
30. R. Etkin and D. Tse, «Degrees of freedom in underspread MIMO fading chan-
nels», Proc. IEEE Internal. Sympos. Inform. Theory, p. 323, July 2003.
31. A. Lapidoth and S. Moser, «On the fading number of multi-antenna systems
over flat fading channels with memory and incomplete side information», Proc.
IEEE Internal Sympos. Inform. Theory, p. 478, July 2002.
32. T. Koch and A. Lapidoth, «The fading number and degrees of freedom in non-
coherent MIMO fading channels: A peace pipe», Proc. IEEE Intemat. Sympos.
Inform. Theory, September 2005.
33. G.B. Giannakis, Y. Hua, P. Stoica and L. Tong, Signal Processing Advances in
Wireless and Mobile Communications: Trends in Single- and Multi-user Sys-
tems, Prentice-Hall, New York, 2001.
34. A. Molisch, M. Win and J.H. Winters, «Reduced-complexity transmit/receive-
diversity systems», IEEE Trans. Signal Proc., pp. 2729-38, November 2003.
35. H. Gamal, G. Caire and M. Damon, «Lattice coding and decoding achieve the
optimal diversity- multiplexing trade-off of MIMO channels», IEEE Trans. In-
form. Theory, pp. 968-85, June 2004.
36. V. Tarokh, N. Seshadri and A. Calderbank, «Space-time codes for high data rate
wireless communication: Performance criterion and code construction», IEEE
Trans. Inform. Theory, pp. 744-65, March 1998.
37. H. Yao and G. Wornell, «Structured space-time block codes with optimal diver-
sity-multiplexing tradeoff and minimum delay», Proc. IEEE Globecom Conf,
pp. 1941-5, December 2003.
38. L. Zheng and D. N. Tse, «Diversity and multiplexing: A fundamental trade-off
in multiple antenna channels», IEEE Trans. Inform. Theory, pp. 1073-96, May
2003.
39. M. O. Damen, H. El. Gamal and N. C. Beaulieu, «Linear threaded algebraic
space-time constellations», IEEE Trans. Inform. Theory, pp. 2372-88, October
2003.
Литература
40. Н. El Gamal and M. 0. Damen, «Universal space-time coding», IEEE Trans.
Inform. Theory, pp. 1097-1119, May 2003.
41. R. W. Heath, Jr. and A. J. Paulraj, «Switching between multiplexing and diver-
sity based on constellation distance», Proc. Allerton Conf. Commun., Control,
Comput., pp. 212-21, October 2000.
42. R. W. Heath, Jr. and D. J. Love, «Multi-mode antenna selection for spatial mul-
tiplexing with linear receivers», IEEE Trans. Signal Proc, (to appear).
43. V. Jungnickel, T. Haustein, V. Pohl and C. Von Helmolt, «Link adaptation in
a multi-antenna system», Proc. IEEE Veh. Tech. Conf, pp. 862-6, April 2003.
44. J.-C. Guey, M. P. Fitz, M. Bell and W.-Y. Kuo, «Signal design for transmitter
diversity wireless communication systems over Rayleigh fading channels», IEEE
Trans. Commun., pp. 527-37, April 1999.
45. V. Tarokh, A. Naguib, N. Seshadri and A. Calderbank, «Space-time codes for
high data rate wireless communication: Performance criteria in the presence of
channel estimation errors, mobility, and multiple paths», IEEE Trans. Com-
mun., pp. 199-207, February 1999.
46. S. Baro, G. Bauch and A. Hansman, «Improved codes for space-time trellis coded
modulation», IEEE Commun. Lett., pp. 20-2, Januaiy 2000.
47. J. Grimm, M. Fitz and J. Korgmeier, «Further results in space-time coding for
Rayleigh fading», Proc. Allerton Conf. Commun., Control, Comput., pp. 391-
400, September 1998.
48. H. Gamal and A. Hammons, «On the design of algebraic space-time codes for
MIMO block-fading channels», IEEE Trans. Inform. Theory, pp. 151-63, Jan-
uary 2003.
49. A. Naguib, N. Seshadri and A. Calderbank, «Increasing data rate over wireless
channels», IEEE Signal Proc. Mag., pp. 76-92, May 2000.
50. V. Tarokh, H. Jafarkhani and A. Calderbank, «Space-time block codes from
orthogonal designs», IEEE Trans. Inform. Theory, pp. 145 6-67, July 1999.
51. V. Gulati and K. R. Narayanan, «Concatenated codes for fading channels based
on recursive space-time trellis codes», IEEE Trans. Wireless Commun., pp. 118—
28, January 2003.
52. Y. Liu, M.P. Fitz and O.Y. Takeshita, «Full-rate space-time codes», IEEE J.
Sei. Areas Commun., pp. 969-80, May 2001.
53. K.R. Narayanan, «Turbo decoding of concatenated space-time codes», Proc.
Allerton Conf. Commun., Control, Comput., pp. 217-26, September 1999.
54. B. Hochwald and T. Marzetta, «Unitary space-time modulation for multiple-
antenna communi cations in Rayleigh flat fading», IEEE Trans. Inform. Theory,
pp. 543-64, March 2000.
55. D. Gesbert, M. Shafi, D.-S. Shiu, P. Smith and A. Naguib, «From theory to
practice: An overview of MIMO space-time coded wireless systems», IEEEJ.
Sei. Areas Commun., pp. 281-302, April 2003.
56. E. G. Larsson and P. Stoica, Space-Time Block Coding for Wireless Communi-
cations, Cambridge University Press, 2003.
57. P. Wolniansky, G. Foschini, G. Golden, and R. Valenzuela, «V-blast: An architec-
ture for realizing very high data rates over the rich-scattering wireless channel»,
Proc. URSI Internal. Sympos. Signal Syst. Elec., pp. 295-300, October 1998.
Глава 10. Многоэлементные антенны и методы передачи
58. G. Foschini, G. Golden, R. Valenzuela and P. Wolniansky, «Simplified process-
ing for high spectral efficiency wireless communication employing multi-element
arrays», IEEE J. Sei. Areas Commun., pp. 1841-52, November 1999.
59. G. Bauch and A. Naguib, «Map equalization of space-time coded signals over
frequency selective channels», Proc. IEEE Wireless Commun. Network Conf.,
pp. 261-5, September 1999.
60. C. Fragouli, N. Al-Dhahir and S. Diggavi, «Pre-filtered space-time M-BCJR
equalizer for frequency selective channels», IEEE Trans. Commun., pp. 742-53,
May 2002.
61. A. Naguib, «Equalization of transmit diversity space-time coded signals», Proc.
IEEE Globecom Conf, pp. 1077-82, December 2000.
62. J. Winters, «Smart antennas for wireless systems», IEEE Pers. Commun. Mag.,
pp. 23-7, February 1998.
ГЛАВА I I
ВЫРАВНИВАНИЕ —
КОРРЕКЦИЯ
КАНАЛОВ
В гл. 6 показано, что разброс задержек вызывает межсимвольные поме-
хи — ISI, которые, если время модуляции символа будет того же порядка,
что и разброс задержек в канале, могут привести к уровню ошибок,
снизить который невозможно. Обработка сигнала представляет мощный
механизм противодействия межсимвольным помехам ISI. В широком смы-
сле, выравниванием называют любой метод обработки сигнала на приеме
для смягчения проблемы межсимвольных влияний, вызванных разбро-
сом задержек. Обработку сигнала можно также провести в передатчике
с тем, чтобы сделать сигнал менее восприимчивым к разбросу задержек.
К методам обработки сигнала на передаче относятся расширение спек-
тра сигнала и модуляция на нескольких несущих. В этой главе основное
внимание уделяется выравниванию; модуляция на нескольких несущих
и расширение спектра рассматриваются соответственно в гл. 12 и 13.
Уменьшение межсимвольных помех ISI необходимо, когда время мо-
дуляции символа Ts представляет величину того же порядка, что и сред-
неквадратическое значение разброса задержек в канале <ттт- Например,
беспроводные телефоны обычно используются внутри помещений, где
разброс задержек небольшой. Кроме того, поскольку передача речи в ка-
нале производится с относительно низкой скоростью, то в выравнивании
амплитудно-частотной характеристики беспроводных телефонов обыч-
но нет необходимости. Однако стандарт цифровой сотовой связи IS-136
предполагает работу вне помещений, когда атт ~ Ts, поэтому выравни-
вание представляет один из предметов рассмотрения данного стандарта.
Приложения с высокой скоростью передачи данных более чувствительны
к разбросу задержки и обычно нуждаются в высококачественных коррек-
тирующих устройствах или других средствах снижения межсимвольных
помех ISI. В сущности, снижение влияния разброса задержек предста-
вляет одну из наиболее трудноразрешимых проблем высокоскоростных
беспроводных систем.
Схемы коррекции обычно должны балансировать между уменьшением
межсимвольных помех ISI и увеличением шума, так как через корректор
Глава 11. Выравнивание — коррекция каналов
проходят и сигнал и шум, а это может увеличить уровень шума. Не-
линейные корректоры увеличивают уровень шума намного меньше, чем
линейные выравниватели, но при этом они обычно сложнее в реализации,
о чем подробнее будет сказано ниже. Более того, для уменьшения воздей-
ствия межсимвольных помех ISI корректору нужна оценка импульсной
или частотной характеристики канала. Так как беспроводный канал из-
меняется во времени, то корректор должен распознавать частотную или
импульсную характеристику канала (настройка), а затем с изменением
канала обновлять эту оценку (отслеживание). Процесс настройки кор-
ректора и отслеживания часто называют адаптивным выравниванием,
так как корректор адаптируется к изменяющемуся каналу. Если канал
изменяется быстро, то настройка и отслеживание могут представлять
достаточно сложный процесс. В данной главе обсуждаются различные
проблемы, связанные с разработкой выравнивателей, включая вопросы
баланса между снижением межсимвольных помех ISI и увеличением шу-
ма, схемы и свойства линейной и нелинейной коррекции, а также процесс
настройки и слежения.
Корректор может работать в исходной части диапазона частот моду-
лирующего сигнала или в рабочей части трактов на несущей или проме-
жуточной частоте. Большинство корректоров обеспечивают цифровую
обработку после аналого-цифрового преобразования, так как такие вы-
равниватели небольшие, недорогие, легко настраиваются и очень эконо-
мичны в отношении потребляемой мощности. В данной главе основное
внимание будет уделено реализации цифровых корректоров, хотя в следу-
ющем разделе для простоты увеличение шума иллюстрируется на примере
использования аналогового фильтра.
I I. I. Повышение корректором шума
Задача выравнивания заключается в уменьшении влияния межсимволь-
ных помех ISI. Однако решение этой задачи должно быть уравновешено
таким образом, чтобы в процессе устранения межсимвольных помех ISI
в принимаемом сигнале не повышалась мощность шума. Простой анало-
говый выравниватель, показанный на рис. 11.1, иллюстрирует просчеты
при устранении ISI без учета эффекта шума. Рассмотрим сигнал s(t),
прошедший через канал с частотной характеристикой H(f ). Во входном
каскаде приемника к сигналу добавляется белый гауссов шум п(Г), и, та-
ким образом, сигнал на входе приемника равен У(/) = + N(J),
где — белый шум со спектральной плотностью Nq/2. Если полоса
частот сигнала s(t) равна В, то мощность шума внутри интересующе-
го нас диапазона равна NqB. Предположим, что нам нужно выровнять
11.1. Повышение корректором шума
принимаемый сигнал так, чтобы полностью удалить вносимые каналом
межсимвольные помехи ISI. Это просто сделать, вводя в тракт приемника
аналоговой выравниватель с передаточной характеристикой, равной:
Яе9(/) = 1/Я(/). (11.1)
Принятый сигнал Y(/) после прохождения через выравниватель стано-
вится равным:
[5(/)Я(/) + Я(/)] Яе<7(/) = ЭД +
где N'(f') — цветной гауссов шум со спектральной плотностью мощно-
сти O,51Vo/ |Я(/)|2. Таким образом, межсимвольные помехи ISI полностью
удалены из переданного сигнала S(J).
n(t)
Рис. 11.1. Иллюстрация увеличения шума при аналоговой коррекции
Однако, если передаточная характеристика имеет нулевое зна-
чение на некоторой частоте (Н (/о) — 0 для некоторого/g) в пределах ча-
стотного диапазона s(t), то тогда мощность шума N'(f') становится бес-
конечно большой. Но даже при отсутствии нулей, если некоторые частоты
передаточной функции H(J) вносят большое затухание, то корректор
с характеристикой Heq(J) = 1/Я(/) будет существенно увеличивать мощ-
ность шума на этих частотах. В этом случае, даже при устранении эффек-
та межсимвольных влияний ISI, сбалансированная система будет плохо
работать из-за сильно пониженной защищенности SNR. Поэтому зада-
ча выравнивания заключается в нахождении баланса между снижением
межсимвольных помех ISI и максимизацией помехозащищенности SNR
сигнала после выравнивания. Обычно линейные цифровые корректоры
работают, инвертируя аппроксимированную частотную характеристику
канала, и поэтому вносят наибольший уровень шумов. Нелинейные филь-
тры не инвертируют частотную характеристику канала, поэтому они
вносят значительно меньше шумов. В следующем разделе мы дадим обзор
различных типов линейных и нелинейных выравнивателей, их структур
и алгоритмов, используемых для обновления коэффициентов при настрой-
ке и отслеживании.
Пример 11.1. Рассмотрим канал с импульсной характеристикой H(f) =
1/\/Ш ПРИ 1/1 < В, где В — ширина полосы частот канала. Если спектраль-
авнивание — коррекция каналов
ная плотность шума PSD равна Nq/2, то какова будет мощность шума в полосе
частот канала В = 30 кГц с корректором, инвертирующим импульсную харак-
теристику канала, и без него?
Решение. Без выравнивания канала мощность шума равна NqB = 3iV0 • 104.
После выравнивания спектральная плотность шума становится равной
0,5JVo |Не9(/)|* 2 = 0,5Л?о/ |Н(/)|2 = 0,5 |/| No
при |/| < В. Таким образом, мощность шума составляет
в
0,5No У \f\df = 0,5JVoB2 = 4,5JV0 • Ю8,
-в
т. е. возрастает более чем на четыре порядка!
I 1.2. Типы выравнивателей
Методы выравнивания подразделяются на две большие категории: ли-
нейную и нелинейную. Линейные методы обычно самые простые в ре-
ализации и понимании идеи. Однако методы линейного выравнивания,
в отличие от нелинейных, обычно приводят к существенному увеличению
шума и поэтому не используются в большинстве беспроводных приложе-
ний. Среди методов нелинейного выравнивания наиболее распространен
метод выравнивания с решающей обратной связью (DFE1), так как он до-
вольно прост в реализации и имеет хорошие показатели. Однако в каналах
с низкой величиной помехозащищенности SNR корректоры с решающей
обратной связью DFE способствуют размножению ошибок при декодиро-
вании бит, что снижает их эксплуатационные показатели. Оптимальный
метод выравнивания представляет оценка максимального правдоподобия
последовательности — MLSE2. К сожалению, сложность реализации это-
го метода возрастает экспоненциально в зависимости от длительности
разброса задержек, поэтому он непрактичен для большинства предста-
вляющих интерес каналов. Однако показатели MLSE часто используются
в качестве верхней границы характеристик других методов выравнива-
ния. На рис. 11.2 представлены различные типы корректоров, их струк-
туры и алгоритмы обновления коэффициентов.
Корректоры могут быть посимвольными (SBS3 4) или с оценкой после-
довательности (SE4). Выравниватели посимвольного типа SBS устраняют
XDFE — Decision-feedback equalization.
2MLSE — Maximum likelihood sequence estimation.
3SBS — Symbol-by-symbol.
4SE — Sequence estimator.
11.2. Типы выравнивателей
межсимвольные помехи ISI из каждого символа, а затем каждый символ
отдельно детектируется. Все линейные корректоры, а также корректоры
с решающей обратной связью DFE, представленные на рис. 11.2, явля-
ются корректорами посимвольного типа SBS. Корректоры с оценкой
noc.nedo«<i,Trte.nt>Hocmu детектируют всю последовательность символов, по-
этому влияние межсимвольных помех ISI составляет часть самого процес-
са оценивания. Оптимальную форму детектирования последовательности
представляет оценка максимального правдоподобия последовательности
MLSE, но она чрезвычайно сложна.
Корректоры (выравниватели)
Типы
Структуры
Нелинейные
DFE MLSE
Поперечные Решетчатые
Поперечные
с оценкой
Поперечные Решетчатые канала
Минимальной
среднеквадратичной
Алгоритмы
обновления
коэффициентов
ответвлений
ошибки
(СКО)
Наименьших
квадратов
Быстрый RLS
Квадратный
корень LS
Минимальной
среднеквадратичной
ошибки
(СКО)
Наименьших
квадратов
Быстрый RLS
w Минимальной
сс среднеквадратичной
’5 ошибки
х (СКО)
g Наименьших
Л квадратов
ш Быстрый RLS
Квадратный
корень LS
Квадратный
корень LS
Рис. 11.2. Типы корректоров, их структур и алгоритмов
Линейные и нелинейные фильтры обычно конструируются с исполь-
зованием поперечной или решетчатой структур. Поперечная структура
представляет собой фильтр с N — 1 элементами задержки и N ответвле-
ниями, в котором используются перестраиваемые комплексные взвешива-
ющие коэффициенты. Решетчатые фильтры используют более сложную
all. Выравнивание — коррекция каналов
рекурсивную структуру [1]. За счет более высокой сложности (по срав-
нению с поперечными структурами), решетчатые структуры часто обла-
дают лучшей вычислительной устойчивостью и сходимостью, а также
большей гибкостью при изменении своей длины [2]. В настоящей главе
основное внимание уделяется поперечным структурам. Подробную ин-
формацию о решетчатых структурах и их эксплуатационных показателях
в сравнении с поперечными структурами можно найти в [1-4].
В дополнение к классификации по типам и структурам, адаптивные
выравниватели классифицируют по алгоритмам обновления коэффициен-
тов ответвлений фильтра в процессе настройки (тренировки) и слежения.
В последнее время с этой целью было разработано множество алгоритмов.
В основном они представляют собой компромиссы между сложностью,
скоростью сходимости и вычислительной устойчивостью.
В оставшейся части настоящей главы — после обсуждения условий пе-
редачи без межсимвольных искажений ISI — более детально рассматрива-
ются различные типы корректоров, их структуры и алгоритмы обновле-
ния. Наш анализ выравнивания основывается на эквивалентном низкоча-
стотном представлении полосы пропускания, описанном в приложении А.
I 1.3. Сжатый спектр и условия передачи без
межсимвольных искажений ISI
Канал
с межсимвольными
помехами ISI
Рис. 11.3. Передающая и приемная части системы передачи (эквивалентное низ-
кочастотное представление)
Обычно корректоры реализуются в цифровом виде. На рис. 11.3 предста-
влена эквивалентная низкочастотная блок-схема передающей и приемной
11.3. Сжатый спектр и условия передачи без межсимвольных искажений
частей системы с цифровым выравнивателем. Входной символ dk прохо-
дит через фильтр формирования импульса g(t), а затем передается через
канал с межсимвольными искажениями ISI и эквивалентной низкочастот-
ной импульсной характеристикой c(t). Импульсная характеристика со-
ставного канала определяется в виде h(t) = g(t) * c(t), а эквивалентный
низкочастотный передаваемый сигнал в таком случае задается выраже-
нием d(t) * g(t) * c(t) для последовательности информационных символов
d(t) = ^2 dk& (t — kTs). Как описано в § 5.5, форма импульса g(t) улучшает
k
спектральные характеристики передаваемого сигнала. Эта форма им-
пульса определяется разработчиком системы, тогда как канал с(1) опре-
деляется природой и находится вне сферы его влияния.
Во входном каскаде приемника к полученному сигналу добавляется
эквивалентный белый низкочастотный гауссов шум n(t) со спектраль-
ной плотностью Nq, что в результате дает сигнал Этот сигнал
пропускается через аналоговый согласованный фильтр </*, (—i) для полу-
чения эквивалентного низкочастотного выходного сигнала y(t'), который
затем с помощью аналого-цифрового преобразователя АЦП преобразу-
ется в цифровую форму. Назначение согласованного фильтра состоит
в максимизации помехозащищенности SNR сигнала перед дискретизацией
и последующей обработкой5. Как было показано в § 5.1, в канале с адди-
тивным белым гауссовым шумом AWGN помехозащищенность SNR при-
нимаемого сигнала максимизируется до дискретизации с использованием
фильтра, согласованного с формой импульса. Из этого следует, что в сис-
теме, изображенной на рис. 11.3, защищенность SNR до дискретизации
максимизируется за счет пропускания ш(/) через согласованный фильтр
с характеристикой h(t), так что в идеале мы бы получили gm(f) = h(t).
Однако, поскольку импульсная характеристика канала сЦ) изменяется во
времени, а настройка аналоговых фильтров достаточно сложна, то обыч-
но достичь условия gm(t) = h(t) невозможно. Поэтому часть искусства
разработки корректора состоит в выборе такого формирователя импуль-
са gm(t), который давал бы хорошие параметры. Часто характеристика
gm(t) согласовывается с формой импульса g(t). которая будет оптималь-
ной при с(Ц = но такая схема явно субоптимальна при с(Ц ё(С). Не-
согласованность gm(t) и h(t) может привести к значительному ухудшению
эксплуатационных показателей, а также сделать приемник чрезвычай-
но чувствительным к ошибкам синхронизации. Эти проблемы в какой-то
мере уменьшаются за счет дискретизации у(Ц со скоростью, намного пре-
5Хотя согласованный фильтр более эффективен в цифровом виде, аналоговая ре-
ализация перед дискретизацией предусматривает меньший динамический диапазон
устройства дискретизации, что значительно снижает затраты.
Глава 11. Выравнивание — коррекция каналов
вышающей скорость символа, и создания корректора для этого сигнала
с повышенной частотой дискретизации. Этот процесс называется дробно-
интервальной коррекцией [4, гл. 10.2.4].
На выходе корректора формируется оценка переданного символа. За-
тем эта оценка подается на решающее устройство, которое, округляя
данные корректора, выдает на выход символы из алфавита возможных
передаваемых символов. Во время настройки сигнал с выхода коррек-
тора обрабатывается с помощью алгоритма обновления коэффициентов
ответвлений, так что выход корректора хорошо согласуется с известной
настроечной последовательностью. В режиме слежения ошибка округле-
ния, обусловленная выбором символа, используется для подстройки коэф-
фициентов корректора.
Введем импульсную характеристику эквивалентного составного низ-
кочастотного тракта f(t), включающую импульсные характеристики фор-
мирователя импульсов передатчика, канала и согласованного фильтра:
f (t) — g(t) * c(t) * g^ (—t). (11.2)
Тогда сигнал на выходе согласованного фильтра равен:
y(t) = d(t) * f(t) + ng(t) = ^dkf (t - kT,) + ng(t), (11.3)
где ng(t) = n(f) * yj^(—t) — эквивалентный низкочастотный шум на входе
фильтра, a Ts — длительность символа. Если обозначить отсчеты f(k)
через каждые Ts секунд как f[n] = f (nTs), то дискретизация y(t) через
каждые Ts секунд даст дискретный сигнал у[п] = у (nTs) в виде:
СЮ СЮ
у[п] = У? dkf (пТ, - kTs) + ng (nTs) = 5? dkf [n - k] + i/[n] =
fc= — oo fc=—oo
= dnf[O\ + ^dkf [n - k] +v[n\, (11.4)
где первый член представляет полезный информационный бит, второй
член — межсимвольные помехи ISI, а третий член — дискретизированный
шум. В соответствии с (11.4), межсимвольных помех ISI нет в том случае,
если f[n — к] = 0 при к п, т.е. f[k] = J[fc]/[0]. Тогда выражение (11.4)
упрощается к виду y[n] = dn/[0] + и[п].
Теперь покажем, что условие передачи без межсимвольных помех f[k] =
= <^[А:]/[0] удовлетворяется тогда и только тогда, если:
(7? \
(ц-5)
-*-s /
Функция Es(/) — периодическая с периодом 1/TS, часто называется свер-
нутым спектром. Если 7s(/) = /[0], то говорят, что свернутый спектр
равномерный.
11.3. Сжатый спектр и условия передачи без межсимвольных искажений
Чтобы показать равенство между передачей без межсимвольных по-
мех ISI и равномерным свернутым спектром, начнем с того, что
e№fkTs
0,5(2n+l)/Ts
[ F(J)ej27vfkTsdf =
0,5/Ts
П~ °°0,5(2n—1)/TS
ej2ir(f' +n/Ta)kTajy/ _
п=—оо
0,5/Ts
0,5/Ts
df. (П.6)
-0,5/Т,
_п=—оо
Уравнение (11-6) подразумевает, что функция Ts(/) представляется ря-
дом Фурье вида:
s k
Сначала покажем, что равномерный свернутый спектр подразумевает,
что f[k] = J[fc]/[0]. Допустим, что (П-5) верно. Тогда подстановка (11.5)
в (И.6) дает:
• 5/Тз
f[k] = Ts [ e^fkT^f[Q]df=S^f[0] = 6[k]f[Ql (11.7)
—0,5/Ts
что и требовалось доказать. Теперь покажем, что f[k] = £[fc]/[0] подра-
зумевает свертку равномерного спектра. В соответствии с (11.6) и опре-
делением Fs(/), имеем:
0,5/Ts
f[k]=Ts I F^f)e^^df. (11.8)
-0,5/Ts
Таким образом, f[k] представляет обратное преобразование Фурье функ-
ции Fs(/)6. Поэтому, если f[k] = £[fc]/[0], то F%(f) = /[0].
Пример 11.2. Рассмотрим составной канал с эквивалентной низкочастот-
ной импульсной характеристикой f(t) = sinc(i/Ts). Найдите свернутый спектр
и определите, содержит ли этот канал межсимвольные помехи ISI.
Решение. Преобразование Фурье функции f(t) равно:
F(t) = Tsrect (fTs) = <
0,5Ts\
0,
|/l < 0,5/Ts,
|/l = 0,5/Ts,
l/l > 0,5/Ts.
6Это также следует из представления Fs(f) рядом Фурье.
all. Выравнивание — коррекция каналов
Отсюда:
следовательно, свернутый спектр равномерный, и межсимвольные помехи ISI от-
сутствуют. Это видно также из того, что:
f(nTs) = sine
= sinc(n)
1,
О,
п = О
п ± 0.
Поэтому f[k] = <5[fc] — эквивалентное условие для равномерного свернутого спек-
тра и нулевых межсимвольных помех ISI.
I 1.4. Линейные корректоры
Если спектр неравномерный, то для сокращения влияния межсим-
вольных помех ISI можно воспользоваться выравнивателем с передаточ-
ной характеристикой Heq(z), приведенной на рис. 11.3. В данном разделе
предполагается использование линейного корректора с поперечным филь-
тром, имеющим 2L + 1 = N ответвлений:
L
Heq(z) = 52 WiZ~1' (П.9)
i=—L
Длина корректора N обычно определяется его назначением, так как боль-
шое N влечет за собой большую сложность и величину задержки. Обыч-
ные линейные фильтры имеют сщ = 0 при i < 0. Для заданного размера
корректора N, технические требования к корректору должны определять
(i) весовые коэффициенты ответвления для заданной частот-
ной характеристики канала и (ii) алгоритм обновления этих весовых
коэффициентов при изменениях в канале. Напомним, что в беспроводных
системах показателем качества служит вероятность ошибки (или веро-
ятность нарушения связи), поэтому оптимальными для данного канала
будут такие коэффициенты фильтра, которые сводят к минимуму ве-
роятность ошибки. К сожалению, оптимизировать {шД с учетом этого
критерия чрезвычайно сложно. Так как мы не можем непосредственно
оптимизировать нужные нам показатели качества, то необходимо вме-
сто этого использовать косвенную оптимизацию, которая уравновешива-
ет снижение межсимвольных помех ISI и увеличение шума, как пояснялось
ранее на примере простого аналогового корректора. Мы рассмотрим два
линейных корректора: один — с обнулением коэффициентов (ZF7), а вто-
рой — с минимальной среднеквадратичной ошибкой (MMSE8). Первый
7ZF — Zero-forcing.
8MMSE — Minimum mean-square error.
11.4- Линейные корректоры
из них подавляет все межсимвольные помехи ISI, но может привести
к значительному увеличению шумов. Решетчатые методы сводят к мини-
муму ожидаемую среднеквадратичную ошибку между переданным сим-
волом и символом, детектируемым на выходе корректора, обеспечивая,
таким образом, лучший баланс между снижением межсимвольных помех
ISI и возрастанием шума. Благодаря этому корректоры MMSE имеют
лучшие показатели по коэффициенту ошибок BER, чем корректоры, ис-
пользующие алгоритм ZF.
11.4.1. Фильтры с обращением в нуль
незначащих коэффициентов (ZF)
Исходя из выражения (11.4), отсчеты {уп} на входе корректора могут
быть представлены на основе дискретной импульсной характеристики
эквивалентного низкочастотного составного канала f(t) = h(t) *
в виде:
K(z) = D(z)F(z) + Ng(z), (11.10)
где Ng(z) — ^-преобразование отсчетов шума на выходе согласованного
фильтра, равное 0^(1/z*), а
F(z) = H(z)G*m = ^f(nTs)z~n. (11.11)
' ' п
Корректор с обращением коэффициентов в нуль устраняет все межсим-
вольные помехи ISI, введенные составной характеристикой f(t). Из выра-
жения (11.10) видно, что соответствующий корректор имеет характери-
стику:
HzfW = (11-12)
Это дискретно-временной низкочастотный корректор, эквивалентный опи-
санному ранее аналоговому выравнивателю (11.1), и он обладает теми же
свойствами увеличения уровня шума. Спектр мощности отсчетов шума
на выходе корректора N(z) имеет вид:
W) = М |G^ (1/г*)|2 |#ZF(< = 7V°I^^)-1-2 =
M|G^(1M)|2 N0
|Я(г)|2|С^(1М)|2 |Я(г)|2‘
Из выражения (11.13) мы видим, что, если передаточная характеристи-
ка канала H(z) резко затухает на какой-то частоте в пределах интере-
сующего нас диапазона (а это обычное явление в каналах с частотно-
селективным замираниями), то мощность шума значительно возрастет.
Это обусловило необходимость разработки корректора, обеспечивающе-
CgJ> Глава 11. Выравнивание — коррекция каналов
го оптимальное соотношение между снижением межсимвольных помех ISI
и увеличением шума. Примером выравнивателей такого типа может слу-
жить корректор MMSE, который описывается в следующем разделе.
Реализация корректора с обнулением коэффициентов ZF с характери-
стикой Hzf(z) = 1/F(z) в виде фильтра с конечной импульсной характе-
ристикой КИХ (FIR9) может оказаться невозможной. В частности, не все-
гда можно найти такое конечное множество коэффициентов ... ,
чтобы выполнялось условие:
W-LzL -I----hW£2-L = -^—. (11-14)
Г(г)
В таком случае мы находим множество коэффициентов {с^}, наилучшим
образом аппроксимирующее выравниватель с обращением коэффициен-
тов в нуль. Обратите внимание, что это не приводит прямо к цели, так как
аппроксимация должна быть действительной для всех значений z. Суще-
ствует много способов такой аппроксимации. Один из методов заключа-
ется в представлении корректора с характеристикой H/].(z) фильтром
с бесконечной импульсной характеристикой БИХ (IIR10) вида 1/F(z) =
оо
= Ci-2-2, после чего устанавливается Можно показать, что
i=—оо
при z = это сводит к минимуму выражение:
И наоборот, можно установить весовые коэффициенты ответвлений для
минимизации максимальных общих искажений (наихудший случай меж-
символьных искажений ISI). Нахождение весов ответвлений для снижения
до минимума максимальных общих искажений представляет задачу вы-
пуклой оптимизации, которая может быть решена с помощью стандарт-
ных методов, например, методом скорейшего спуска [4].
Пример 11.3. Рассмотрим канал с импульсной характеристикой
- J t О,
( 0, t < 0.
Найдите для этого канала характеристику корректора типа ZF с двумя отве-
твлениями.
Решение. Мы имеем:
h(t) = 1 + е~Т^Т6 [п - 1] + е~2Т°/тд [п — 2] + - .
9FIR — Finite-impulse response.
10IIR — Infinite-impulse response.
11.4- Линейные корректоры 539
Поэтому
Н(г) = 1 + е-Та/тг-1 + e~2T^Tz~2 + e~3T^rz~3 -|-=
Таким образом, Heq(z) = \/H(z} = 1 — e~T,dTz x. Исходя из этого, корректор
ZF с двумя ответвлениями имеет весовые коэффициенты ответвлений wq = 1
и wi = е~Та1Т.
11.4.2. Корректоры с минимальной
среднеквадратичной ошибкой (MMSE)
Цель разработки схем выравнивания с MMSE заключается в минимиза-
ции среднеквадратичной ошибки СКО (MSE)11 между переданным симво-
лом dk и его оценкой dk на выходе корректора. Другими словами, значения
коэффициентов {a?i} выбираются так, чтобы снизить до минимума сред-
нее значение квадратов разностей между переданным символом dk и его
г Л I2
оценкой dk Е 4 4 . Так как выравниватель с минимальной сред-
неквадратичной ошибкой MMSE линейный, то сигнал на его выходе dk
равен линейной комбинации отсчетов на входе у[к]:
L
dk = ичу[к-г\. (11.15)
i=~L
По существу, процедура нахождения оптимальных коэффициентов филь-
тра {ш,} сводится к стандартной задаче линейного оценивания. Действи-
тельно, если шум на входе выравнивателя — белый, то это представляет
стандартную задачу линейной фильтрации Вайнера. Однако из-за согла-
сованной фильтрации д*п (—Ц на входе приемника шум на входе выравни-
вателя не белый, а имеет «окрашенный» спектр мощности No\Gm (1/z*) |2.
Поэтому, чтобы применить известные методы оптимального линейного
оценивания, передаточную функцию корректора Heq(z) разделяют на две
составляющие: это составляющая, «отбеливающая» шум 1/С^ (l/z*), и со-
ставляющая подавления межсимвольных помех ISI — Heq(z) (рис. 11.4).
Назначение отбеливающего фильтра (о чем говорит уже само его
название) состоит в отбеливании «окрашенного» шума, чтобы составляю-
щая шума на выходе этого фильтра имела равномерный спектр мощности.
Так как на входе фильтра шум имеет спектр мощности No\G^ (1/z*) |2,
то соответствующая передаточная характеристика отбеливающего филь-
тра равна 1/GJn (1/z*). Тогда спектр шума на выходе из отбеливающего
nMSE — Mean-square error.
— коррекция каналов
фильтра равен No\Gm {\/z*} |2/(1/г*)|2 = Nq. Обратите внимание,
что фильтр с характеристикой l/G^ (1/z*) — это не единственный вари-
ант отбеливания шума, можно выбрать и другой отбеливающий фильтр
с более подходящими характеристиками (например, стабильностью). Сна-
чала может показаться странным введение во входной каскад приемника
согласованного фильтра g^(—t) только для того, чтобы подавить его
эффект в выравнивателе. Вспомним, однако, что согласованный фильтр
предназначен для максимального увеличения помехозащищенности SNR
сигнала перед дискретизацией. Устраняя действие согласованного филь-
тра за счет отбеливания шума после дискретизации, мы просто упрощаем
разработку фильтра с характеристикой Heq(z), минимизирующей СКО.
Действительно, если фильтр, отбеливающий шум, не дает оптимальных
показателей, то его влияние будет устранено при разработке фильтра
Heq(z), как это будет показано для корректоров MMSE с БИХ.
Рис. 11.4. Выравниватель с минимальной среднеквадратичной ошибкой MMSE
с отбеливающим шум фильтром
Предположим, что фильтр Heq(z) с сигналом vn на входе — это линей-
ный фильтр с N = 2L + 1 ответвлениями:
L
Heq(z) = 57 wiz~'- (11.16)
i=—L
Нам необходимо получить такие коэффициенты фильтра {сщ}, которые
Г ' 12
снизят до минимума математическое ожидание Е сД — сД . Это та же
задача, которую выполняет и весь фильтр с характеристикой Heq(z) —
мы просто добавили отбеливающий фильтр для упрощения расчета этих
коэффициентов. Определим vT = (и [k + L], v [к + L - 1],..., v [к - £]) =
11.4- Линейные корректоры
= (vfc+L, Vk+L-1, • • •, Vk-ь) как вектор-строку на входе корректора Heq(z),
используемый для получения на выходе корректора значений dk, a w7 =
= (w-L,. • •, wl) — как вектор-строку коэффициентов фильтра. Тогда:
dk = wTv = v7w. (П.17)
Таким образом, необходимо свести к минимуму среднеквадратическую
ошибку:
J = E[dfc - dk]2 = E[wTvvHw* - 2Re{vHw*dfc} + |4|2]- (П-18)
Введем обозначения Mv = E [w77] и vd — E [v77^]. Mv — это эр-
митова матрица размерностью N х N, a vd — вектор-строка длиной N.
Примем, что Е |сД|2 = 1. Тогда среднеквадратичная ошибка J равна:
J = wTMvw* - 2Re {vdw*} + 1. (11.19)
Приняв, что градиент VWJ = 0 и решая это выражение относитель-
но w, можно получить оптимальный вектор ответвлений w. Согласно
(11.19), градиент задается формулой:
VWJ= =2wTMv-2vd. (11.20)
\OW-L OWL)
Приравнивая его к нулю, получаем wTMv = vd или, что равносильно,
получаем оптимальные веса ответвлений в виде:
wopt = (11.21)
Обратите внимание, что решение относительно ~wopt требует обра-
щения матрицы входного вектора фильтра. Сложность этих расчетов
достаточно высока — обычно число операций имеет порядок от №
до №. При подстановке этих оптимальных весов ответвлений, мы по-
лучаем минимальную среднеквадратичную ошибку:
Jmin = 1 - VdM^V^. (11.22)
Для бесконечно длинного корректора векторы имеют вид:
V (^п+оо, • • • , Um • Vn — oo) И (^ —ОО, • • • , • • • 1 шос) •
Тогда выражение w7Mv = vd можно записать как [5, гл. 7.4]:
ОО
52 Wi (f + N°S [•? “ = 9т [№] , - ОО С j ОО. (11.23)
Z —— ОС
Выполнив г-преобразование и учитывая, что Heq(z) представляет г-пре-
образование коэффициентов фильтра w, получим:
№№) (Г(г) + №) = G*m (1/z*). (11.24)
Решая это уравнение относительно Heq(z), получим:
Глава 11. Выравнивание — коррекция каналов
Heq(z) =
F(z) + No ’
(11.25)
Так как корректор MMSE включает отбеливающий фильтр с характери-
стикой 1/G^ (1/z*) и элемент подавления межсимвольных помех ISI с ха-
рактеристикой Heq(z'), то, характеристика всего выравнивателя MMSE
(если он не ограничивается конечной длиной) имеет вид:
Heq(z) = 1
^(l/z*) F(z) + No'
(11.26)
В полученном результате стоит обратить внимание на три момента.
Прежде всего, идеальный выравниватель MMSE с бесконечной длиной
компенсирует влияние отбеливающего фильтра. Во-вторых, этот коррек-
тор с бесконечной длиной идентичен фильтру с обнулением незначащих
коэффициентов ZF, за исключением члена, представляющего шум No, по-
этому при отсутствии шума оба фильтра эквивалентны. Наконец, схема
идеального фильтра ясно показывает равновесие между преобразованием
канала и повышением шума: если Е(л) сильно подавляется на некоторых
частотах, то член шума No в знаменателе предотвращает существенный
рост шума корректора. К тому же на частотах, где спектральная плот-
ность мощности шума Nq мала по сравнению с передаточной функцией
составного канала Е(л), выравниватель эффективно преобразует Е(л).
Для фильтра (11.26) можно показать [5, гл. 7.4.1], что минимальное
значение СКО (11.22) можно выразить через свернутый спектр F^f):
0,5/Ts
f kuwnN' <lb27)
-0,5/T,
В этом выражении для среднеквадратичной ошибки выравнивателя MMSE
есть несколько интересных особенностей. Во-первых, можно показать,
что, как и ожидалось, 0 С Лпш = Е С 1. Кроме того, при
отсутствии шума (Nq = 0), Jmjn = 0, пока F%(f) 0 в пределах инте-
ресующей нас полосы частот. Также, как и ожидалось, Jmjn = 1, если
Nq = оо.
Пример 11.4. Найдите Jmin, если свернутый спектр F^(f) асимптотически
равномерный (Ец(/) = /[0]) при высоких и низких значениях помехозащищенно-
сти SNR.
Решение. Если Fe(J) = /[0] = /о, то
-0,5/Т.
11.5. Максимально правдоподобная оценка последовательности
При высоких значениях защищенности SNR /о » 0, и поэтому Jmin » No/fo =
= Nq/Es, где Es/Nq — защищенность SNR на один символ. При низких значе-
ниях SNR No f, и поэтому Jmin = No/ (No + /о) ~ No/No = 1.
11.5. Максимально правдоподобная оценка
последовательности
Оценка последовательности по критерию максимума правдоподобия об-
ходит проблему увеличения шума, так как она не использует выравнива-
ющий фильтр: вместо этого оценивается последовательность переданных
символов. Структура корректора типа MLSE аналогична схеме, показан-
ной на рис. 11.3, за исключением того, что выравниватель Heq(z) и реша-
ющее устройство заменены алгоритмом MLSE. Для заданной составной
характеристики фильтра, формирующего импульсы, и канала h(t), алго-
ритм MLSE отбирает входную последовательность {сД}, которая макси-
мально правдоподобно соответствует принятому сигналу w(i). Рассмо-
трим этот алгоритм более подробно.
Используя процедуру ортонормирования Грамма-Шмидта, мы можем
выразить w(t) на временном интервале [О, L7's] в виде:
N
w(t) = ^wn(pn(t), (11.28)
n=l
где {<^n(i)} — полная система функций в ортонормированном базисе. Ко-
личество N функций в этом наборе зависит от памяти канала, так как
w(t) на [О, LTS] зависит от do,..., d^. Это разложение дает нам:
N L
wn — dkhnk Ч" vn — dkhnk + vn, (11.29)
fc=—оо k=o
где
LTS
hnk= У h{t-kTs)^t)dt (11.30)
о
и
LTS
Vn= У n^ip^dt. (11.31)
о
vn — это комплексные гауссовские случайные величины с нулевым сред-
ним значением и ковариацией 0,5Е [г = Nq6 [п — т]. Поэтому w'"v =
= (гщ,..., шдг) имеет многомерное гауссово распределение:
N
Р (wN\dL,h{t)^ = fj
n=l
1
~КГехР
7rlVo
(11.32)
544 Глава 11. Выравнивание — коррекция каналов
Корректор MLSE декодирует заданный принимаемый сигнал w(t) или,
что эквивалентно, wN, как последовательность символов dL, которая мак-
симизирует функцию правдоподобия р (wAr|dL, h(t\) (или логарифм этой
функции). Таким образом, на выходе корректора MLSE формируется по-
следовательность:
N
2”
= argmax |logp (wA|dL,/i(£)J| = argmax — У^
N N
= arg max
wn - dkhniz
к
n \
wn^2dkhnk + wn^2 dkdnk
n=l n=l \ fc fc
N / \ / \ “I
/ j u'm"'nm I
m /
N
n=l \ к
N
= arg max 2Re d*k 52 Wnhnk
к n=l
Обратите внимание, что
N °?
^2wnh^k = / w(7
n=l d
' j / j / j "'пк""пт
fc m n=l
. (11.33)
(11.34)
N
hnkh nm
n=l
(11.35)
Объединяя (11.33), (11.34) и (11.35), получим:
(11.36)
Из этого уравнения видно, что сигнал на выходе корректора MLSE зави-
сит только от отсчетов на выходе {у [А;]} и параметров канала и[п — к] =
= u(nTs — kTs), где и (Г) = h(t) * h*(—t). Так как вывод формулы для кор-
ректора MLSE основан только на сигнале с выхода канала w(t) (до согла-
сованной фильтрации), то этот вывод подразумевает, что согласованный
фильтр приемника на рис. 11.3 с характеристикой g,n(t) = h(t) оптимален
при детектировании по алгоритму MLSE (обычно согласованный фильтр
оптимален при детектировании сигналов в канале с аддитивным белым
гауссовым шумом AWGN, но данный вывод показывает, что если исполь-
зуется алгоритм MLSE, то он также оптимален и при детектировании
сигналов с межсимвольными помехами ISI).
Для упрощения можно воспользоваться алгоритмом Витерби [4-7].
Однако сложность данного метода выравнивания возрастает по экспонен-
11.6. Выравнивание с решающей обратной связью
циальному закону в зависимости от разброса задержек в канале. Метод
нелинейного выравнивания со значительно меньшей сложностью предста-
вляет выравнивание с решающей обратной связью.
11.6. Выравнивание с решающей обратной связью
Выравниватель с решающей обратной связью (DFE12) содержит фильтр
в цепи прямого прохождения W(z), на вход которого поступает принима-
емая последовательность (как в линейном выравнивателе); за ним следует
фильтр цепи обратной связи, на вход которого подается принятая ранее
последовательность V(z). Структура корректора с решающей обратной
связью DFE показана на рис. 11.5. В сущности, корректор с решающей
обратной связью DFE определяет долю межсимвольных помех ISI в де-
тектированных символах (dk), пропуская их через фильтр цепи обратной
связи, и, образуя свертку с фильтром прямой цепи W(z), получает аппрок-
симацию составного канала F(z). Остаточные межсимвольные помехи ISI
вычитаются из входящих символов. Так как фильтр обратной связи V(z)
на рис. 11.5 находится в цепи обратной связи, то он должен быть строго
каузальным, иначе система будет нестабильной. Фильтр обратной связи
корректора DFE не создает эффекта усиления шума, так как он оценивает
частотную характеристику канала, а не создает его обратную характери-
стику (инвертирует). В каналах с глубокими нулями спектра корректоры
DFE обычно работают намного лучше, чем линейные фильтры.
у(1)
Рис. 11.5. Структура корректора с решающей обратной связью
В предположении, что W(z) имеет IVi + 1 ответвлений, а V(z) —
ответвлений, можно записать сигнал на выходе корректора DFE в виде:
О №
dk = Wiy [к - г] - vidk-i-
i=—Ni г=1
i2DFE — Decision-feedback equalization.
Глава 11. Выравнивание — коррекция каналов
Типичными критериями при выборе коэффициентов передаточных функ-
ций W(z) и V(z) обычно служат либо метод обнуления незначащих коэф-
фициентов — ZF (подавление всех межсимвольных помех ISI), либо метод
минимизации СКО — MMSE (сведение к минимуму математического
ожидания СКО между сигналом на выходе корректора DFE и исход-
ным символом на входе). Допустим, что согласованный фильтр приемника
идеально согласован с каналом: gm(t) = h(t). При таком предположении
для отыскания передаточной функции причинного (каузального) филь-
тра V(z) нам необходима спектральная факторизация H(z)G^l (1/z*) =
= H(z)H* (1/z*) [4, гл. 10.1.2]. В частности, член H(z)H* (1/z*) разлагает-
ся на множители для нахождения такого причинного (каузального) филь-
тра B(z), у которого H(z)H* (1/z*) = B(z)B* (1/z*) = А2В1(г)В^ (1/z*),
где Bi (г) нормализуется для получения старшего коэффициента, равно-
го 1. При таком разложении на множители, если функции W (z) и V(z)
имеют бесконечную длительность, то, как это показано у Прайса в [8],
оптимальные характеристики прямого фильтра и фильтра обратной свя-
зи корректора DFE с обнулением незначащих коэффициентов (соответ-
ственно) равны: W(z) = 1/А2В^ (1/z*) и V(z) = 1 — ВДг).
При использовании критерия среднеквадратичной ошибки MMSE, не-
Г - I2
обходимо свести к минимуму Е сД — сД . Пусть Ьп = Ь[п] обозначает
обратное z—преобразование функции B(z) при только что описанном
условии спектральной факторизации H(z)H* (1/z*) = B(z)B* (l/z*). Тог-
да при сведении к минимуму СКО коэффициенты фильтра в цепи прямо-
го прохождения должны соответствовать следующей системе линейных
уравнений:
о
<Пг“>г = Ь*_ь
i=-Ni
0
где qn — ^2 b*bj+i-i + Nq6 [I — i] при i = —7Vi,...,0 [4, гл. 10.3.1]. Ko-
j=-l
эффициенты фильтра цепи обратной связи в таком случае определяются
по коэффициентам фильтра прямой цепи следующим образом:
о
Vk = - 5? Wibk-i.
i=-Ni
Эти коэффициенты полностью подавляют межсимвольные помехи ISI в том
случае, если нет ошибок решения — т.е. когда dk = dk- Зальц в своей
работе [9] показал, что минимальное значение СКО в итоге равно:
'min = ехр
0,5/Ts
г, / i°L "к
J UsU) + -vo J
-0,5/Ts
11.7. Другие методы выравнивания канала
В общем, среднеквадратичная ошибка в корректорах с решающей обрат-
ной связью DFE намного ниже, чем в линейных корректорах, при условии,
что влияние ошибок обратной связи игнорируется.
В выравнивателях типа DFE возможны ошибки обратной связи, когда
dp Д dk, т. е. межсимвольные помехи ISI, вычитаемые в цепи обратной
связи, не совпадают с истинными значениями помех ISI, соответству-
ющими d/;- Такие ошибки ведут к дальнейшему распространению оши-
бок. Более того, невозможно остановить это распространение ошибок за
счет кодирования канала, так как канал с обратной связью обрабатывает
полученные символы до декодирования. Это связано с тем, что меж-
символьные помехи ISI необходимо сразу же вычесть, что не допускает
никакой задержки декодирования. Поэтому распространение ошибок се-
рьезно снижает эксплуатационные показатели каналов с низким уровнем
помехозащищенности SNR. Эту проблему можно решать за счет введения
в канал обратной связи некоторой задержки для учета результатов деко-
дирования канала [10] или с помощью турбо-выравнивания канала, о чем
пойдет речь в следующем разделе. Систематизированный анализ коррек-
торов DFE с использованием кодирования можно найти в [11, 12]. Более
того, структура корректоров DFE может быть обобщена и распростра-
нена на многомерные каналы MIMO [13].
I 1.7. Другие методы выравнивания канала
Хотя корректоры с оценкой последовательности по критерию максимума
правдоподобия MLSE представляют оптимальную форму выравнивания
канала, но ее сложность препятствует широкому использованию. Была
проделана большая работа по снижению сложности корректоров MLSE
[4, гл. 10.4]. Большинство методов либо сокращают количество «выжив-
ших» последовательностей в алгоритме Витерби, либо сокращают коли-
чество символов, пораженных межсимвольными помехами ISI, за счет
предварительной обработки или решающей обратной связи в детекто-
ре Витерби. Такие корректоры MLSE пониженной сложности дают луч-
ший (по сравнению с методами посимвольного выравнивания) компро-
мисс между эксплуатационными показателями и сложностью, и при зна-
чительно меньшей сложности обеспечивают характеристики, близкие к
оптимальным значениям корректоров MLSE.
Принципы турбо-декодирования, представленные в § 8.5, также могут
быть использованы при разработке корректоров [14, 15]. Получающая-
ся в результате схема называется турбо-корректором. Турбо-корректор
для определения переданного символа проводит последовательные при-
авнивание — коррекция каналов
ближения между максимальным апостериорным корректором (МАР13)
и декодером. Корректор МАР рассчитывает апостериорную вероятность
АРР14 передаваемого символа исходя из предыдущих символов на выхо-
де канала. Декодер рассчитывает логарифмический коэффициент прав-
доподобия — LLR15 для передаваемого символа исходя из предыдущих
символов на выходе канала. Апостериорная вероятность АРР и лога-
рифмический коэффициент правдоподобия LLR представляют корректи-
рующую информацию, которой обмениваются корректор и декодер при
турбо-итерации. После некоторого количества итераций турбо-коррек-
тор формирует свою оценку переданного символа.
Если у передатчика есть информация о канале, то он может осуще-
ствить предварительное выравнивание16 передаваемых символов, пропус-
кая их через фильтр с характеристикой, обратной частотной характе-
ристике канала. Так как в этом случае инверсия канала осуществляется
на передаче, а не на приеме, то возрастания шума не происходит. В неста-
ционарном канале сложно производить предварительное выравнивание,
так как на передатчике должна быть точная оценка канала, но такой под-
ход используется на практике в относительно статичных беспроводных
каналах. Еще одну проблему составляет то, что инверсия канала часто
увеличивает динамический диапазон передаваемого сигнала, что может
привести к искажениям или снижению эффективности работы усилителя.
Эта проблема решается с помощью метода предварительного кодирова-
ния Томлинсона - Харашимы [16, 17].
I 1.8. Адаптивные фильтры: настройка и слежение
Все схемы выравнивателей, описанные до сих пор, разработаны в пред-
положении известного значения составной импульсной характеристики
/г(£) = g(t) * c(t). Так как импульсная характеристика канала с{б) обычно
неизвестна при разработке приемника, то выравниватель должен быть
настраиваемым, т.е. настраиваться на различные значения c(t). Более
того, так как в беспроводных каналах значение c(t) = с (т, t) будет из-
меняться во времени, система должна периодически производить оценку
канала c(t) и соответствующим образом обновлять коэффициенты вы-
равнивателя. Этот процесс называется настройкой (обучением) выравни-
вателя или адаптивным выравниванием канала [18, 19]. Выравниватель
может использовать для настройки коэффициентов детектированную ин-
13МАР — Maximum a posteriori.
14АРР — A posteriori probability.
15LLR — Log likelihood ratio.
16Иногда говорят — предыскажения. — Прим, персе.
11.8. Адаптивные фильтры: настройка и слежение 549
формацию, этот процесс известен под названием следящего приема. Од-
нако существуют и выравниватели, действующие «вслепую», которые не
настраиваются и получают информацию о канале только после детекти-
рования данных [20 23].
При настройке обновление коэффициентов выравнивателя в момент
времени к происходит на основе известной обучающей последовательно-
сти [dk-м, , dk], передаваемой по каналу. Длина обучающей последова-
тельности М + 1 зависит от количества подстраиваемых коэффициентов
корректора и скорости сходимости алгоритма настройки. Примечатель-
но, что выравниватель должен проходить повторную настройку каждый
раз, когда канал декоррелирует — т. е. по крайней мере каждые Тс се-
кунд, где Тс — время когерентности канала. Поэтому, если алгоритм
настройки медленный по сравнению с временем когерентности канала,
то канал может измениться до того, как выравниватель получит о нем
информацию. Так, если (М + 1) Ts > Тс, то состояния канала станут не-
коррелированными до того, как завершится настройка фильтра. В этом
случае выравнивание канала не может служить эффективным средством
противодействия межсимвольным помехам ISI, и нужны какие-то дру-
гие методы (например, модуляция на нескольких несущих или МДКР
(CDMA)).
Пусть {с?А:} — биты на выходе выравнивателя при передаче обуча-
ющей последовательности {сД}. Нам необходимо обновить N коэффи-
циентов выравнивателя в момент времени к + 1 на основе обучающей
последовательности, полученной к моменту времени к. Обозначим обно-
вленные коэффициенты как {w_l (к + 1),..., wl {к + 1)}. Воспользуемся
алгоритмом минимальной среднеквадратичной ошибки MMSE в качестве
критерия обновления коэффициентов, т. е. выберем такие коэффициенты
{w-l (к + 1),..., wl (к + 1)}, которые сводят к минимуму СКО между ве-
L
личинами dk и dk- Вспомним, что dk = 22 wi (к + 1) Ук—i, где Ук = у[&] —
i=-L
сигнал на выходе устройства дискретизации (рис. 11.3) в момент време-
ни к при известной обучающей последовательности на входе. Значения
{w-l (к + 1),..., wl (к + 1)}, минимизирующие СКО, определяются с по-
мощью фильтра Вайнера [4, 5]. В частности,
w (к + 1) = {w-l (к + 1),..., wl (к + 1)} = R-1p, (11.37)
где р = dk [yk+L Ук-ь]Т и
|У/с+ь|2 yk+lA/k+L-l Ук+Ll/k—L
Ук+Ь-1Ук+Ь |У*+Ь-1 I2 ••• Vk+L-lVk-L
R —
. Ук-ЬУк+Ь= ••• \ук-ь\2
(11.38)
550 Глава 11. Выравнивание — коррекция каналов
Обратите внимание, что нахождение оптимальных обновленных значе-
ний коэффициентов (весов) ответвлений в этом случае требует обращения
матрицы, для чего необходимо осуществить от 7V2 до № операций умно-
жения при каждой итерации (за время передачи каждого символа Ts).
В обмен на сложность, данный алгоритм обеспечивает очень быструю
сходимость; обычно при числе весов ответвлений фильтра, равном N, он
сходится примерно за N интервалов времени передачи символа.
Если сложность реализации составляет проблему, то большое число
операций умножения, необходимое для настройки корректора MMSE, мо-
жет оказаться недопустимым. Более простое решение дает алгоритм наи-
меньшего среднеквадратичного отклонения СКО — LMS17 [4, гл. 11.1.2].
В этом алгоритме вектор весов ответвлений w(A: + l) обновляется линейно
следующим образом:
w(fc + 1) = -w(k) + Aefc [y*k+L ... yk_L] , (11.39)
где efc = dk — dk — ошибка между последовательностью принятых бит
и битами обучающей последовательности, а А — размер шага алго-
ритма. Выбор шага А определяет скорость сходимости и устойчивость
алгоритма. При малых значениях А сходимость очень медленная; для
получения правильных коэффициентов фильтра алгоритму требуется на-
много больше, чем N бит. Однако если выбрать большое значение шага А,
то алгоритм может стать неустойчивым, по сути пропускающим необхо-
димые веса ответвлений при каждой итерации. Поэтому для обеспечения
хороших эксплуатационных показателей алгоритма LMS шаг А обычно
выбирают малым, и сходимость при этом медленная. Однако алгоритм
LMS имеет намного меньшую сложность по сравнению с алгоритмом
MMSE, так как для обновления коэффициентов ответвлений требует-
ся всего около 2N + 1 операций умножения на одну итерацию. Поэто-
му сложность линейно возрастает с количеством весовых коэффициентов
ответвлений. Другие алгоритмы — такие как алгоритмы корня наимень-
ших квадратов (RLS18), квадратного корня из наименьших квадратов19
и быстрый алгоритм Калмана — представляют различные компромиссы
между сложностью и эксплуатационными показателями, лежащие между
двумя противоположностями — алгоритмом LMS (медленная сходимость
и низкая сложность) и алгоритмом MMSE (быстрая сходимость и высокая
сложность). Описания других алгоритмов даны в [4, гл. 11]. В табл. 11.1
приведены количество требуемых операций умножения и относительная
скорость сходимости алгоритмов.
17LMS — Least mean square.
18RLS — Root least squares.
19Square-root least squares.
11.8. Адаптивные фильтры: настройка и слежение
Таблица 11.1. Характеристики настройки фильтра и слежения
Алгоритм Число операций умножения за время передачи символа Тц Сложность Время сходимости настройки Слежение
LMS 2N + 1 Низкая Медленное (> 1(WS) Плохое
MMSE N2 до № Очень высокая Быстрое NTA Хорошее
RLS 2,б№ + 4,5N Высокая Быстрое (~ NTA Хорошее
Быстрый алгоритм Калмана с решающей обратной связью DEE 2(W + 5 Довольно низкая Быстрое (~ NTA Хорошее
Алгоритм квадратного корня LS с решающей обратной связью DFE 1,5№ + 6,5.V Высокая Быстрое (~ NTS) Хорошее
Примечательно, что символы dk с выхода фильтра обычно пропус-
каются через пороговый детектор для округления до ближайшей точки
созвездия. Получающаяся в результате ошибка округления может быть
использована для настройки коэффициентов фильтра во время передачи
информации, этот процесс называется слежением. В основе слежения ле-
жат два исходных условия: (i) если ошибка округления не равна нулю,
то фильтр не прошел настройку в полной мере; и (ii) ошибка округ-
ления может быть использована для подстройки корректора по оценке
канала. Процедура слежения состоит в следующем. Биты на выходе вы-
равнивателя dk и биты на выходе порогового детектора ^используются
для настройки оценки характеристики эквивалентного низкочастотно-
го составного канала F(z). С использованием описанных ранее приемов
MMSE, подбираются такие коэффициенты F(z), которые сводят к мини-
муму СКО между dk и dk- Затем обновленная версия F(z) используется
для выравнивания составного канала и соответствующего обновления ко-
эффициентов корректора. Более подробную информацию об этом можно
найти в [4, 5]. Характеристики настройки и слежения для различных алго-
ритмов в зависимости от количества ответвлений N сведены в табл. 11.1.
Примечательно, что быстрый алгоритм Калмана и квадратный корень
наименьших квадратов могут быть неустойчивыми по показателям сходи-
мости и слежения. Это цена, которую приходится платить за их быструю
сходимость и относительно низкий уровень сложности.
552 Глава 11. Выравнивание — коррекция каналов
Пример 11.5. Рассмотрим фильтр с 5 ответвлениями, который должен на-
страиваться каждые 0,57?, где Тс — время когерентности канала. Допустим,
что как при передаче данных, так и в качестве обучающей последовательности
используется сигнал ДФМН (BPSK) (Ts = Ть) со скоростью 1 Мбит/с. Сравните
длительность обучающей последовательности, необходимую при использовании
алгоритма LMS и быстрого алгоритма Калмана с. решающей обратной связью
DFE. На какую величину необходимо сократить скорость передачи данных при
доплеровской частоте 80 Гц, чтобы обеспечить периодическую настройку ка-
ждого из этих фильтров? Сколько операций потребуется для настройки каждого
из этих фильтров?
Решение. Фильтры должны настраиваться каждые 0,57/ = 0,5/В^ = 0,5/80 =
= 6,25 мс. При скорости передачи данных Rb = 1/Ть = 1 Мбит/с из табл. 11.1
находим, что для сходимости настройки алгоритму LMS необходимо 10А7), =
= 50 • 10~6 секунд, а быстрому алгоритму Калмана с DFE необходимо NTb =
= 50-10-5 секунд. Если настройка проводится каждые 6,25 мс, то доля времени,
которую использует алгоритм LMS для настройки, составит 5010“6/6,25 10-3 =
= 0,008. Поэтому эффективная скорость передачи данных становится равной
(1 — 0,008)77* = 0,992 Мбит/с. Доля времени, используемая быстрым алгоритмом
Калмана с DFE для настройки, составляет 50-10“5/6,25 -10-3 = 0,0008, что дает
эффективную скорость передачи данных, равную (1 — 0,0008)/?* = 0,9992 Мбит/с.
Алгоритму LMS необходимо приблизительно (2А + 1) • 10А = 550 операций
на один период настройки, тогда как быстрому алгоритму Калмана с DFE
необходимо (20А + 5) • N = 525 операций. При сегодняшних вычислительных
технологиях, это не представляет существенного различия в отношении требо-
ваний к центральному процессору.
Задачи
11.1. Разработайте аналоговый эквивалентный низкочастотный фильтр He(J)
для полного подавления межсимвольных помех ISI, вносимых каналом
с эквивалентной низкочастотной импульсной характеристикой H(f) = 1//.
Допустим, что передаваемый сигнал имеет диапазон частот 100 кГц. По-
лагая, что канал с эквивалентным низкочастотным аддитивным белым
гауссовым шумом AWGN имеет спектральную плотность Aq, найдите
мощность шума на выходе вашего фильтра в пределах полосы частот
в 100 кГц. Улучшит ли этот фильтр рабочие характеристики системы?
11.2. В данной задаче исследуются межсимвольные помехи ISI и шум, который
вносится при выравнивании канала с помощью корректора с обнулением
коэффициентов (ZF). Заданы два многолучевых канала: первый канал
имеет импульсную характеристику
h^ = {
0 О Т,
иное.
Импульсная характеристика второго канала равна:
а) Считается, что передаваемый сигнал s(i) представлен бесконечной по-
следовательностью импульсов с амплитудой А и периодом Tj, = Тт/2;
т.е. s(t) = 52 Ад (t — пТь). Рассчитайте среднюю мощность помех
п— — оо
ISI за время следования бита Г*.
б) Пусть Тт = 10 мкс. Предположим, что по каналу с импульсной харак-
теристикой передается сигнал ДФМН (BPSK). Найдите макси-
мальную скорость, с которой может осуществляться передача по кана-
лу с нулевыми межсимвольными влияниями ISI при модуляции ДФМН
(BPSK) с прямоугольной формой импульса и шириной импульса
Т = 1 мкс. Как изменится этот результат, если полоса частот сигнала
будет ограничена частотой 100 кГц?
11.3. Задан канал с эквивалентной низкочастотной импульсной характеристикой
Л(*) = | °’
(0, иное,
где г = 6 мкс. Спектральная плотность шума в канале с эквивалентным
низкочастотным аддитивным шумом AWGN равна Aq-
а) Найдите для этого канала частотную характеристику эквивалентно-
го низкочастотного аналогового линейного корректора с обнулением
коэффициентов ZF. Предположите, что в схеме отсутствуют согласо-
ванный фильтр или формирователь импульсов.
б) Представьте, что по данному каналу передается сигнал с полосой 30 кГц,
частотная характеристика которого соответствует прямоугольной фор-
ме импульса. Каково значение защищенности SNR с корректором и беэ
него в диапазоне частот передаваемого сигнала?
Подсказка: Вспомните, что случайный стационарный процесс со спек-
тральной плотностью P(f) имеет полную мощность J P(j) df и поэто-
му, если этот процесс пропустить через фильтр G(f), то на выходе
спектральная плотность мощности будет составлять P(/)|G(/)|2.
в) Аппроксимируйте эквивалентный низкочастотный корректор MMSE
для этого канала, используя трансверсальный (поперечный) фильтр
с дискретным временем с тремя ответвлениями. Воспользуйтесь лю-
бым известным вам методом аппроксимации временной характеристи-
ки корректора MMSE.
11.4. Рассмотрите выравниватель с обнулением коэффициентов ZF и КИХ,
имеющий два ответвления с весом W; = Cj, где {сД — обратное z-npe-
образование 1/F(z). Покажите, что выбор весов ответвлений при z =
сводит к минимуму выражение:
j-^j-(w0 + W12 1 + + wNz N)
11.5. Задана система связи, где модулированный сигнал s(t) имеет мощность
10 мВт, несущую частоту fc и полосу пропускания частот Bs = 40 МГц.
554 Глава 11. Выравнивание — коррекция каналов
Сигнал s(t) проходит через канал с частотно-селективными замираниями
с симметричной частотной характеристикой H(f) = H(—f), где:
1,
0,5,
2,
0,25,
0,
fc -20 МГц^/</с-10 МГц,
/с-10 МГц </с,
fc < f < fc + 10 МГц,
fc + 10 МГц^/<Л + 20 МГц,
иначе.
Принимаемый сигнал равен y(t) = s(t) * h(t) + n(t), где n(t) — адди-
тивный белый гауссов шум AWGN со спектральной плотностью No/2 —
= 1СГ12 Вт/Гц.
а) Допустим, что сигнал у(€) пропускается через (полосовой) фильтр ZF
непрерывного времени. Найдите частотную характеристику Ле(/(/)
этого фильтра в пределах интересующего нас диапазона частот (/с ±
±20 МГц).
б) Для фильтра из пункта (а) найдите защищенность SNR на выходе
фильтра.
в) Пусть длительность символа s(t) равна Ts = 0,5/Bs, а ограничения
на размер созвездия отсутствуют. Найдите максимальную скорость,
с которой можно осуществлять передачу по каналу с корректором ZF
из пункта (а) так, чтобы вероятность ошибки составляла Рь < 10 ‘3.
11.6. Задан канал с межсимвольными помехами ISI. Принимаемый сигнал после
прохождения по этому каналу имеет вид:
где Xj = ±1, a f(t) — импульсная характеристика составного канала,
состоящего из формирующего импульс фильтра, эквивалентного низко-
частотного канала и согласованного фильтра приемника. Допустим, что
f(t) = sin (7ri/T) / (7rt/T), что удовлетворяет критерию Найквиста для
нулевых межсимвольных помех ISI. Существуют две трудности, связан-
ные с такой формой импульса: во-первых, у нее прямоугольный спектр,
который сложно реализовать на практике. Во-вторых, хвосты импуль-
са затухают пропорционально 1/t, поэтому временные ошибки приводят
к последовательности отсчетов с межсимвольными помехами ISI, кото-
рая не сходится. Для пунктов (б) и (в) этой задачи мы делаем допущение,
что f(t) = 0 при |i| > NT, где N — положительное целое число. Это до-
пущение не является строго верным, так как оно предполагает, что f(t)
ограничено по времени и полосе частот. Однако это приемлемая на прак-
тике аппроксимация.
а) Покажите, что свернутый спектр f(t) равномерный.
б) Представьте, что (из-за временной ошибки) отсчеты сигнала берутся
в моменты времени t = kT + io, где io < Т. Рассчитайте характе-
ристику yk = у(кТ + io) и разделите свой ответ на полезную часть
и межсимвольные помехи ISI.
в) Представьте, что полярности Xi таковы, что каждый член в выраже-
нии межсимвольных помех ISI положительный (худший случай ISI).
При таком предположении покажите, что член ISI в пункте (б) равен
О / J. \
тст (“М V п
~/П(т J^n2-i2/T2’
\ 7 „=1 О/
а, значит, величина помех ISI —> оо при N —> оо.
11.7. Пусть g(t) — sinc(i/T's), |i| < Ts. Найдите согласованный фильтр gm(t)
для g(t). Найдите для этой системы отбеливающий фильтр 1/G^ (1/г*),
который нужно использовать в корректоре MMSE для отбеливания шума.
11.8. Покажите, что минимальное значение СКО (11.22) для корректора MMSE
с НИХ можно выразить через свернутый спектр Fg(/) в виде:
0,5/Т
J —Т [
-о,5/т
No
Fs(f) + N0
11.9. Покажите, что градиент весовых коэффициентов ответвлений корректо-
ра MMSE определяется выражением:
VWJ = . •., ) = 2wTMv - 2vd.
\OWo OWNj
Приравняйте это выражение нулю и рассчитайте оптимальные веса от-
ветвлений для получения
wOpt = (M^)-1vf.
11.10. Покажите, что CKO Jmin для корректора MSE с НИХ, задаваемая выра-
жением (11.27), удовлетворяет неравенству 0 С Jmjn 1.
11.11. Сравните значения минимальной CKO Jmin при выравнивании методами
MMSE и ZF, для эквивалентной модели канала с тремя ответвлениями
и дискретным временем C(z) = 1 + 0,5г-1 + 0,3г-2.
11.12. Эта задача иллюстрирует (i) увеличение шума корректорами с обнуле-
нием коэффициентов ZF и (ii) каким образом можно снизить этот рост
шума за счет использования корректоров MMSE с минимальной СКО.
Задан канал с частотно-селективными замираниями с эквивалентной низ-
кочастотной характеристикой
1,
Я(/) =
1/2,
1/3,
1/4,
1/5,
0,
0 ^ |/| < 10 кГц,
10 кГц |/| < 20 кГц,
20 кГц |/| < 30 кГц,
30 кГц |/| < 40 кГц,
40 кГц |/| < 50 кГц,
иное.
коррекция каналов
Частотная характеристика симметрична на положительных и отрица-
тельных частотах. Предполагается канал AWGN с эквивалентным низ-
кочастотным шумом с удельной спектральной плотностью Aq = 10 !).
а) Найдите аналоговый фильтр с обнулением незначащих коэффициентов
ZF, который полностью устраняет межсимвольную интерференцию
ISI, внесенную каналом H(j).
б) Найдите полную мощность шума на выходе фильтра, определенного
в пункте (а).
в) Представьте, что корректор MMSE реализован в аналоговой форме
с передаточной функцией Heq(J) = + а). Найдите полную
мощность шума на выходе этого фильтра при действии на входе адди-
тивного белого гауссового шума AWGN со спектральной плотностью
Aq для а = 0,5 и а = 1.
г) Качественно опишите влияния на сигнал, который передается по кана-
лу H(f), а затем пропускается через корректор MMSE с передаточной
характеристикой Heq(f) = 1/(Л(/) + а) при а > 0 . Какие особенно-
сти необходимо учесть при выборе а?
д) Что произойдет с полной мощностью шума в корректоре MMSE из пунк-
та (в) при а —> оо? Какие отрицательные моменты будут в данной
схеме фильтра, если допустить, что а оо?
е) Предположим, что схема фильтра из пункта (в) используется в системе
со скоростью передачи данных 100 кбит/с и что потребности коррек-
тора в подстройке удовлетворяются обучающей последовательностью
из 1000 бит. Чему равен максимальный сдвиг Доплера, при котором
коэффициенты фильтра будут сходиться до того, как канал станет
некоррелированным?
11.13. Почему для корректора, отслеживающего канал во время передачи дан-
ных, все же нужно периодическое обучение (настройка)? Назовите два
преимущества отслеживания.
11.14. Задан фильтр с 4 ответвлениями, который каждые 0,57/ должен под-
вергаться повторной настройке, где Тс — время когерентности канала.
Цифровой сигнальный процессор может производить 10 миллионов пе-
ремножений в секунду. Скорость сходимости алгоритма LMS с решаю-
щей обратной связью DFE составляет 1000 итераций (периодов символа),
а алгоритма RLS — 50 итераций. Чему равна максимальная скорость
передачи данных для этих корректоров при модуляции ДФМН (BPSK)
и разбросе доплеровских частот Bd = 100 Гц? При Bd = 1000 Гц?
Предполагается, что скорости передачи обучающих и информационных
последовательностей равны.
11.15. В этой задаче попытаемся найти процедуру обновления оценки канала
в процессе слежения. Найдите формулу для обновления коэффициентов
канала с передаточной функцией Н(я), основанную на минимизации СКО
между dk и dk.
Ть
2Tb
Рис. 11.6. Сигнал UWB для задачи 11.16.
11.16. Системы сверхширокополосной радиосвязи UWB1 распространяют ин-
формационный сигнал и соответствующую ему мощность в очень широ-
ком диапазоне частот, так что мощность сигнала на 1 Гц мала (обычно
ниже минимального значения шума). Поэтому эти системы сосуществу-
ют с другими системами, не вызывая в них сильных помех. Рассмотри-
те систему UWB с модуляцией ДФМН (BPSK). Информационные биты
модулируются с помощью прямоугольного импульса g(t), при этом g(t)
имеет очень малую длительность Т по сравнению с длительностью би-
та Ть. В этой задаче мы допускаем, что Т — 10-9. Поэтому сигнал UWB
с модуляцией ДФМН (BPSK) будет иметь форму s(i) = ^dng (t — пТь),
где dn принимает значения ±1, а Ть Т — длительность бита. Набросок
сигнала s(i) с информационной последовательностью чередующихся бит
«1» и «О» приведен на рис. 11.6.
а) Чему приблизительно равна ширина полосы частот сигнала s(t), если
Ть = 10-5?
б) Одной из выгодных особенностей UWB является то, что сигналы не
испытывают плавных замираний в обычных каналах. Рассмотрим пе-
редачу единичного бита s(t) = dijg(t'). Представьте, что .$(/) передается по
каналу, соответствующему двулучевой модели h(t) = + «ц6(t — т).
Сделайте набросок сигнала на выходе канала при т С Т ит^>Т. Ка-
кой из этих двух набросков более правдоподобно представляет сигнал
на выходе реального беспроводного канала? Почему это подразумева-
ет, что каналы UWB обычно не испытывают плавных замираний?
в) Рассмотрим канал с многолучевым распространением задержки Тт =
= 20 мкс. Какова будет точная максимальная скорость сигнала на
рис. 11.6, с которой можно осуществлять передачу по этому каналу
при отсутствии межсимвольных помех ISI? Является ли полоса частот
s(t) на рисунке меньшей, чем полоса когерентности канала при этой
скорости передачи данных?
г) Пусть импульсная характеристика составного канала, включающего
передатчик, канал и согласованный фильтр, для данной системы UWB
равна F(z) = ag-bc^z-1 +a2z-2. Найдите цифровой корректор с двумя
ответвлениями Heq(z) = wg + u'\z~ x, аппроксимирующий корректор
XUWB — Ultrawideband.
558 Глава 11. Выравнивание — коррекция каналов
с обнулением коэффициентов ZF с БИХ для данной характеристики
F(z). Подойдет любая удобная аппроксимация, которую вы можете
обосновать.
д) Предположим, что схема фильтра из пункта (г) используется в системе
со скоростью передачи данных 100 кбит/с и что потребности коррек-
тора в подстройке удовлетворяются обучающей последовательностью
из 1000 бит. Чему равен максимальный сдвиг Доплера, при котором
коэффициенты фильтра будут сходиться до того, как канал станет
некоррелированным?
Литература
1. Е. Н. Satorius and S. Т. Alexander, «Channel equalization using adaptive lattice
algorithms», IEEE Trans. Commun., pp. 899-905, June 1979.
2. F. Ling and J. Proakis, «Adaptive lattice decision feedback equalizers — Their
performance and application to time-variant multipath channels», IEEE Trans.
Commun., pp. 348-56, April 1985.
3. J. Cioffi and T. Kailath, «Fast, recursive-least-squares transversal filters for
adaptive filtering», IEEE Trans. Signal Proc., pp. 304-37, April 1984.
4. J. G. Proakis, Digital Communications, 4th ed., McGraw-Hill, New York, 2001.
5. G. L. Stuber, Principles of Mobile Communications, 2nd ed., Kluwer, Dordrecht,
2001.
6. G. D. Forney, Jr., «Maximum-likelihood sequence estimation of digital sequences
in the presence of intersymbol interference», IEEE Trans. Inform. Theory, pp.
363-78, May 1972.
7. B. Sklar, «How I learned to love the trellis», IEEE Signal Proc. Mag., pp. 87-102,
May 2003.
8. R. Price, «Nonlinearly feedback-equalized PAM vs. capacity», Proc. IEEE In-
ternat. Conf. Commun., pp. 22.12-22.17, June 1972.
9. J. Saiz, «Optimum mean-square decision feedback equalization», Bell System
Tech. J., pp. 1341-73, October 1973.
10. M.V. Eyuboglu, «Detection of coded modulation signals on linear, severely
distorted channels using decision-feedback noise prediction with interleaving»,
IEEE Trans. Commun., pp. 401-9, April 1988.
11. J.M. Cioffi, G.P. Dudevoir, V. Eyuboglu and G.D. Forney, Jr., «MMSE decision-
feedback equalizers and coding. Part I: Equalization results», IEEE Trans. Com-
mun., pp. 2582-94, October 1995.
12. J.M. Cioffi, G.P. Dudevoir, V. Eyuboglu, and G.D. Forney, Jr., «MMSE de-
cision-feedback equalizers and coding. Part II: Coding results», IEEE Trans.
Commun., pp. 2595-2604, October 1995.
13. J.M. Cioffi and G.D. Forney, Jr., «Generalized decision-feedback equalization
for packet transmission with 1ST and Gaussian noise», in A. Paulraj, V. Roy-
chowdhury, and C. Schaper (Eds.), Communication, Computation, Control, and
Signal Processing, pp. 79-127, Kiuwer, Boston, 1997.
14. C. Douillard, М. Jezequel, С. Berrou, A. Picart, Р. Didier and A. Glavieux, «It-
erative correction of intersymbol interference: Turbo equalization», Euro. Trans.
Telecommun., pp. 507-11, September/October 1995.
15. M. Tuchler, R. Koetter and A. C. Singer, «Turbo equalization: Principles and
new results», IEEE Trans. Commun., pp. 754-67, May 2002.
16. M. Tomlinson, «А new automatic equalizer emptying modulo arithmetic», Elec.
Lett., 7, pp. 138-9, 1971.
17. H. Harashima and H. Miyakawa, «Matched-transmission techniques for chan-
nels with intersymbol interference», IEEE Trans. Commun., pp. 774-80, August
1972.
18. J.G. Proakis, «Adaptive equalization for TDMA digital mobile radio», IEEE
Trans. Veh. Tech., pp. 333-41, May 1991.
19. S. U. Qureshi, «Adaptive equalization», Proc. IEEE, pp. 1349-87, September
1985.
20. A. Benveniste and M. Goursat, «Blind equalizers», IEEE Trans. Commun.,
pp. 871-83, August 1984.
21. C. R. Johnson Jr., «Admissibility in blind adaptive channel equalization», IEEE
Control Syst. Mag., pp. 3-15, January 1991.
22. R. Johnson, P. Schniter, T.J. Endres, J.D. Behm, D.R. Brown and R. A.
Casas, «Blind equalization using the constant modulus criterion: A review»,
Proc. IEEE, pp. 1927-50, October 1998.
23. L. Tong, G. Zu and T. Kailath, «Blind identification and equalization based on
second-order statistics: A time domain approach», IEEE Trans. Inform. Theory,
pp. 340-9, March 1994.
ГЛАВА 12
МОДУЛЯЦИЯ
НА НЕСКОЛЬКИХ
НЕСУЩИХ
Основная идея, лежащая в основе модуляции на нескольких несущих —
это разделение предаваемого потока бит на множество различных подпо-
токов и отправка их по различным подканалам. Обычно при идеальных
условиях распространения подканалы являются ортогональными. Ско-
рость передачи в каждом из этих подканалов намного меньше общей
скорости передачи, а соответствующая полоса пропускания подканала
намного меньше общей полосы пропускания системы. Количество подпо-
токов выбирается так, чтобы полоса пропускания каждого канала была
меньше полосы когерентности канала, поэтому все подканалы испытыва-
ют относительно равномерные, плавные замирания. Следовательно, меж-
символьная интерференция в каждом подканале мала. Подканалы при
модуляции на нескольких несущих могут не быть смежными, поэтому для
высокоскоростной передачи на нескольких несущих не требуется большой
непрерывный частотный диапазон. Более того, модуляция на нескольких
несущих эффективно реализуется в цифровом виде. Этот дискретный ме-
тод, называемый мультиплексированием с ортогональным частотным
разделением (ортогональным ЧРК или ОЧРК — OFDM1), позволяет пол-
ностью устранить межсимвольную интерференцию за счет использования
циклического префикса.
В настоящее время модуляция на нескольких несущих используется во
многих беспроводных системах. Однако этот метод не новый: впервые он
был использован в военных высокочастотных радиоприемниках в конце
50-х — начале 60-х годов прошлого столетия. Начиная с 90-х годов [1],
модуляция на нескольких несущих стала использоваться во множестве
различных проводных и беспроводных приложений, включая цифровое
радио- и телевещание в Европе [2], цифровые абонентские линии DSL2
с использованием дискретных многочастотных сигналов [3-5] и самое
последнее поколение беспроводных локальных сетей [5-7]. Существует
'OFDM — orthogonal frequency division multiplexing.
2DSL — digital subscriber line.
Модуляция на нескольких несущих
также множество новых перспективных приложений модуляции на не-
скольких несущих, среди которых широкополосные услуги стационарной
беспроводной связи [8, 9], мобильная беспроводная широкополосная систе-
ма, известная как FLASH-OFDM [10] и даже радиовещание в ультраши-
роком диапазоне (многополосное ортогональное ЧРК представляет од-
но из конкурирующих решений для работы в ультрашироком диапазоне
по стандарту IEEE 802.15). Кроме того, рассматривается возможность
использования модуляции на нескольких несущих для организации радио
интерфейса в системах сотовой связи следующего поколения [11, 12].
Модуляция на нескольких несущих может быть реализована различ-
ными методами, например, с использованием векторного кодирования
[13, 14] и ортогонального ЧРК [13, 15], о чем будет сказано в данной гла-
ве. Эти методы имеют некоторые отличия, но все они основаны на одном
и том же принципе — разбиении широкополосного канала на множество
параллельных узкополосных каналов посредством ортогонального разде-
ления канала.
Существуют разногласия относительно того, какой метод модуляции
(на нескольких несущих или на одной несущей) лучше использовать в ка-
налах с межсимвольной интерференцией и разбросом задержки того же
порядка, что и время передачи символа. В работе [2] утверждается, что
для некоторых мобильных радио приложений модуляция на одной несу-
щей с коррекцией имеет примерно такие же характеристики, как и моду-
ляция на нескольких несущих с канальным кодированием, чередованием
в частотной области и взвешенным декодированием по критерию мак-
симального правдоподобия. Адаптивная нагрузка в [2] не учитывалась,
хотя она может значительно улучшить работу на нескольких несущих [16].
В то же время, при модуляции на нескольких несущих возникает ряд про-
блем, ухудшающих ее рабочие характеристики. Наиболее значительные
проблемы — это сдвиг частоты и фазовое дрожание (джиттер), сни-
жающие ортогональность подканалов. Кроме того, отношение пикового
значения мощности к среднему в таких системах значительно выше, чем
аналогичные показатели в системах с одной несущей частотой, что пред-
ставляет серьезную проблему при использовании нелинейных усилителей.
Сравнительный анализ систем передачи с несколькими или одной несущей
частотой с учетом этих трудностей рассмотрены в [17].
Несмотря на перечисленные проблемы, методы модуляции на несколь-
ких несущих получили распространение в высокоскоростных беспровод-
ных системах с разбросом задержки от умеренного до высокого, так как
эти методы обладают заметными преимуществами по сравнению с вырав-
ниванием во временной области. В частности, в высокоскоростной сис-
теме корректор с хорошими рабочими характеристиками обычно должен
иметь большое количество ответвлений. Такие корректоры представляют
достаточно сложные устройства. Более того, в быстро меняющемся кана-
ле сложно обеспечить поддержание точных весовых коэффициентов для
большого количества ответвлений корректора. По этим причинам боль-
шинство новых высокоскоростных беспроводных систем используют для
компенсации межсимвольной интерференции не коррекцию, а модуляцию
на нескольких несущих или расширение спектра.
12.1. Передача информации
с использованием нескольких несущих
Простейшая форма модуляции на нескольких несущих предполагает раз-
деление потока данных на множество подпотоков, передаваемых по раз-
личным ортогональным подканалам с различными поднесущими часто-
тами. Количество подпотоков выбирается так, чтобы время передачи
символа в каждом подпотоке было намного больше, чем разброс задерж-
ки в канале или, что равнозначно, чтобы полоса пропускания подпотока
была меньше, чем полоса когерентности канала. За счет этого подпотоки
не испытывают значительной межсимвольной интерференции.
Рассмотрим систему линейной модуляции со скоростью передачи дан-
ных R и полосой пропускания В. Предположим, что полоса когерентности
канала находится в пределах Вс < В, поэтому сигнал испытывает частот-
но-селективные замирания. Основной принцип модуляции на нескольких
несущих заключается в разбиении этой широкополосной системы на N
параллельных подсистем с линейной модуляцией, каждая из которых име-
ет полосу пропускания Bn — В/N и скорость передачи Rn ~ R/N.
При достаточно больших значениях N полоса пропускания подканала
Bn = В/N <С Вс, что обеспечивает относительно равномерные зами-
рания в каждом подканале. Это можно увидеть и во временной области:
время передачи символа модулированного сигнала Tn в каждом подка-
нале пропорционально ширине полосы подканала 1/Bn- Следовательно,
если Bn <С Вс, то Tn ~ 1/Bn ^-/Вс as Тт, где Тт обозначает разброс
задержки в канале. Поэтому при достаточно больших значениях N время
передачи символа намного больше, чем разброс задержки, и влияние меж-
символьной интерференции на каждый подканал будет незначительным.
На рис. 12.1 изображен передатчик с несколькими несущими3. Поток
бит разбивается на N подпотоков с помощью преобразователя после-
3На практике комплексный символ зг имеет действительную часть, передаваемую
по синфазной сигнальной ветви, и мнимую часть, передаваемую по квадратурной вет-
ви. Здесь для простоты описания передачи на нескольких несущих рассматривается
передача комплексного символа только по синфазной ветви.
12.1. Передача информации с использованием нескольких несущих
5»а
довательного кода в параллельный. М-й подпоток линейно модулирует
(обычно методом КАМ или ФМН) поднесущую частоту /и и занимает
полосу частот В^. В случае когерентной демодуляции поднесущих, при
анализе можно пренебречь фазой поднесущей. Предполагая, что в каче-
стве g(t) используются импульсы приподнятого косинуса, получаем время
передачи символа в каждом подпотоке = (1 + /3)Вы, где /3 — коэф-
фициент спада импульса. Модулированные сигналы из всех подканалов
суммируются, формируя передаваемый сигнал в виде:
дг-1
s(0 = ZL Si9^ cos(27r/^ + (12.1)
г=0
где si — комплексный символ, соответствующий г-й поднесущей, а —
фазовый сдвиг z-й поднесущей.
Рис. 12.1. Передатчик с несколькими несущими
Для непересекающихся подканалов принимаем, что /г = /о +
i = 0,... ,N — 1. В этом случае подпотоки занимают ортогональные под-
каналы с полосой пропускания В^, что дает общую полосу пропуска-
ния NBn = В и скорость передачи NRn ~ R. Таким образом, данная
форма модуляции на нескольких несущих не меняет скорость передачи
данных или ширину полосы сигнала по сравнению с исходной системой,
564 Глава 12. Модуляция на нескольких несущих
но зато почти полностью устраняет межсимвольную интерференцию при
«С Вс.
Приемник, используемый при данном методе модуляции на несколь-
ких несущих, показан на рис. 12.2. Каждый подпоток пропускается через
узкополосный фильтр (для удаления других подпотоков), демодулируется
и объединяется с помощью преобразователя параллельного кода в после-
довательный с другими подпотоками, формируя исходный информацион-
ный поток. Заметьте, что z-й подканал подпадает под влияние амплитуд-
ных замираний, соответствующих передаточному коэффициенту этого
канала
cos(2nfN-\t)
Рис. 12.2. Приемник с несколькими несущими
Хотя описанная выше разновидность модуляции на нескольких несу-
щих проста для понимания, у нее есть несколько существенных недостат-
ков. Во-первых, при применении такого метода на практике подканалы
будут занимать более широкую полосу частот, чем при формировании
идеальных импульсов приподнятого косинуса, так как форма импульса
должна быть ограничена во времени. Обозначим дополнительную полосу
частот, необходимую в связи с ограничением импульсов данной формы во
времени, как e/Tn- Тогда подканалы должны быть разнесены на рассто-
яние (1 + /3 + e)/Tn, а поскольку система имеет N подканалов, то расход
полосы частот на временное ограничение составит eN/Tn- По существу,
общая полоса пропускания, требуемая для непересекающихся подканалов,
равна:
= «ц-НМ
Т:: ' ’
12-1. Передача информации с использованием нескольких несущих 565
Следовательно, данная форма модуляции на нескольких несущих может
быть неэффективной с точки зрения использования спектра. Кроме того,
необходимы близкие к идеальным (и, следовательно, дорогие) фильтры
нижних частот для поддержания ортогональности поднесущих в при-
емнике. И, возможно, самое главное — для этой схемы необходимо N
независимых модуляторов и демодуляторов, что ведет к значительным
затратам в плане стоимости, размера и потребления мощности. В следу-
ющем разделе будет рассмотрен метод модуляции, позволяющий подне-
сущим пересекаться, устраняя, таким образом, потребность в жесткой
фильтрации. В § 12.4 будет представлена дискретная реализация моду-
ляции на нескольких несущих, устраняющая необходимость в нескольких
модуляторах и демодуляторах.
Пример 12.1. Рассмотрим систему с несколькими несущими, с общей ши-
риной полосы пропускания 1 МГц. Представим, что система работает в городе,
с разбросом задержки канала Тт = 20 мкс. Сколько необходимо подканалов для
получения приблизительно равных амплитудных замираний в каждом подкана-
ле?
Решение. Полоса когерентности канала равна Вс = 1 /Тт = 1 /0,000 02 = 50 кГц.
Для обеспечения равномерного затухания в каждом подканале должно выпол-
няться условие: Bn = B/N = 0,1Вс Вс. Следовательно, N = B/G,1BC =
= 1000000/5000 = 200, т.е. для обеспечения равномерных замираний в каждом
подканале необходимо 200 подканалов. В случае дискретной реализации модуля-
ции на нескольких несущих с использованием прямого и обратного дискретных
преобразований Фурье (ДПФ и ОДПФ) число N должно быть равно степени
числа 2, т. е. в данном случае N = 256.
Пример 12.2. Рассмотрим систему с несколькими несущими при 7/у = 0,2 мс.
В данном случае Tn Тт, где Тт — разброс задержки в канале, поэтому
межсимвольная интерференция в каждом подканале минимальна. Пусть число
подканалов N = 128. Какова общая полоса пропускания системы, если исполь-
зуются ограниченные во времени импульсы приподнятого косинуса с Д — 1,
а дополнительная полоса частот (обусловленная ограничением во времени), ко-
торая требуется для обеспечения минимальной выходной мощности за пределами
полосы пропускания, составляет е = 0,1?
Решение. В соответствии с (12.2), имеем:
В = ЩЦД + Й = 128(1 + 14-0,1) =
TN 0,0002
В следующем подпараграфе мы увидим, что требования к полосе частот для
данной системы могут быть значительно снижены за счет перекрывающихся
подканалов.
566 Глава 12. Модуляция на нескольких несущих
12.2. Модуляция на нескольких несущих
с перекрывающимися подканалами
Эффективность использования спектра при модуляции на нескольких не-
сущих можно повысить за счет использования перекрывающихся подкана-
лов. Поднесущие должны оставаться ортогональными, чтобы демодуля-
тор в приемнике мог их выделить. Поднесущие {cos(2tt(/q + i/T^t + (pi),
i = 0,1,2,...} формируют множество (приблизительно) ортогональных
базисных функций на интервале [0, Ту] для любого множества фазовых
сдвигов поднесущих }, так как
Аппроксимация обусловлена тем, что при /о7у 1 интеграл в третьей
строке формулы (12.3) приблизительно равен нулю. Более того, несложно
показать, что ни одно множество поднесущих с меньшим разносом частот
не сформирует ортогональное множество на интервале [0, Ту] для произ-
вольных значений фазового сдвига. Это означает, что минимальный раз-
нос частот, необходимый для того, чтобы поднесущие оставались ортого-
нальными в течение интервала передачи символа [0, Ту], составляет 1/Ту.
Так как несущие являются ортогональными, то, в соответствии с § 5.1,
множество функций {g(t) cos(2tt(/o + г/Ту)< + </9j), i = 0,1,..., N — 1} так-
же формирует множество (приблизительно) ортонормальных базисных
функций для соответствующих форм импульса модулирующего сигнала
g(t): обычно в качестве формы импульса выбирают семейство импуль-
сов приподнятого косинуса. При использовании этого ортонормального
базисного множества, даже если подканалы перекрывают друг друга, мо-
дулированный сигнал, передаваемый в каждом подканале, может быть
выделен в приемнике, как будет показано ниже.
Рассмотрим систему с несколькими несущими, в которой каждый под-
канал модулируется с использованием импульсов приподнятого косинуса
12.2. Модуляция на нескольких несущих с перекрывающимися
с коэффициентом спада /3. Полоса пропускания каждого подканала рав-
на Bn = (1 + /3)/Т]у. При этом частота г-й поднесущей для некоторого
значения /о определяется выражением (/о + i/Tx), г = 0,1,...,7V — 1, так
что поднесущие разнесены на l/Ту. Однако при /3 > 0 полоса пропус-
кания каждого подканала Bn = (1 + {3}/Tn > 1/7дг, поэтому подканалы
перекрывают друг друга. Избыточная полоса частот из-за ограничений
во времени расширяет полосу частот подканала на величину e/Tn- Од-
нако параметры /3 и е не влияют па общую полосу пропускания систе-
мы, получающуюся при наложении подканалов, за исключением первого
и последнего подканалов, как это показано на рис. 12.3. Общая полоса
пропускания системы с перекрывающимися подканалами равна:
ТУ + /3 + е ~ JV
Tn Tn’
(12.4)
где аппроксимация имеет место при больших значениях 7V. Таким обра-
зом, при больших N влиянием параметров /3 и е на общую полосу пропус-
кания системы можно пренебречь, в отличие от требуемой полосы частот
В = 1V(1 + (3 + e)/Tn в случае, когда подканалы не перекрывают друг
Рис. 12.3. Модуляция на нескольких несущих с перекрывающимися подканалами
Пример 12.3. Сравним требуемую полосу пропускания системы с несколь-
кими несущими с перекрывающимися и неперекрывающимися подканалами, ис-
пользуя те же параметры, что и в примере 12.2.
Решение. В предыдущем примере Ту = 0,2 мс, N = 128, {3 = 1 и е = 0,1.
В случае перекрывающихся подканалов в соответствии с (12.4) имеем:
N + (3 + е 128 + 1 + 0,1 . .
В =----—--- = -----------= 645,5 кГц « N 1 n = 640 к! ц.
TN 0,0002 ’ 7
В предыдущем примере с неперекрывающимися подканалами требовалась полоса
пропускания 1,344 МГц, что почти в два раза больше требуемой полосы частот
при наложении подканалов.
Очевидно, что для выделения перекрывающих друг друга поднесущих
необходима структура приемника, отличная от показанной на рис. 12.2.
Глава 12. Модуляция на нескольких несущих
Перекрывающиеся подканалы демодулируются с помощью приемника, струк-
тура которого показана на рис. 12.4. В этом приемнике каждый сим-
вол демодулируется без помех от перекрывающихся подканалов. Если
пренебречь влиянием канала h(t) и шума п(£), то для принимаемого сигна-
ла s(£), задаваемого формулой (12.1), сигнал на входе каждого обратного
преобразователя символов (см. рис. 12.4) имеет вид:
N-1
Г = / (^2 COS(2M'/ + PjYfgtt) cos(27r.M + Pi)dt =
о J=°
N—l
= 52 W cos(27r(/o + cos(27r(/o + -?-)t + ^i)dt =
n J In In
j=° о
ДГ-1
= J2s/(j-z)= (12.5)
j=o
= sz, (12.6)
где (12.5) следует из того обстоятельства, что функции {g(t) cos(2iv fjt + у?7) }
формируют множество ортонормальных базисных функций на интерва-
ле [0,7дг].
Рис. 12.4. Приемник с несколькими несущими в случае перекрывающихся подка-
налов
Если учесть влияние канала и шума, то символ в i-м подканале взве-
шивается передаточным коэффициентом канала од = H(fi) и искажается
шумовой выборкой, так что щ = aiSi + щ, где щ — аддитивный бе-
лый шум с мощностью NoBn. Такая система модуляции на нескольких
несущих использует полосу частот намного эффективнее, чем системы
12.3. Ослабление замираний поднесущей
с неперекрывающимися подканалами. Однако, поскольку поднесущие пе-
рекрывают друг друга, их ортогональность нарушается из-за временных
и частотных сдвигов. Даже будучи относительно малыми, эти воздей-
ствия могут значительно ухудшить характеристики системы из-за того,
что подканалы будут испытывать взаимные помехи. Более подробно это
будет рассмотрено в подпараграфе 12.5.4.
12.3. Ослабление замираний поднесущей
Преимущество модуляции на нескольких несущих заключается в том, что
каждый подканал является относительно узкополосным, и это уменьшает
влияние разброса задержки. Однако подканалы испытывают амплитуд-
ные замирания, что может стать причиной высокой частоты появления
ошибок в некоторых подканалах. Так, если мощность передачи на г-й под-
несущей равна Pi, а коэффициент передачи канала с замираниями на этой
поднесущей равен с^, то отношение мощностей сигнала и шума на приеме
составит 7j = a^Pi/NoB^, где В к — полоса частот каждого подканала.
При малых значениях о?г отношение сигнал - шум на приеме в г’-м подкана-
ле будет низким, что может привести к высокому коэффициенту ошибок
по битам в данном подканале. Более того, в беспроводных каналах значе-
ние ai изменяется во времени в соответствии с заданным распределением
замираний, что приводит к таким же ухудшениям качественных показа-
телей, как и при амплитудных замираниях в системах с одной несущей,
рассмотренных в гл. б. Поскольку амплитудные замирания могут серьез-
но ухудшить характеристики каждого подканала, очень важно компенси-
ровать эти замирания. Для этого существует несколько методов, включая
кодирование с чередованием по времени и частоте, коррекцию частоты,
предварительное кодирование и адаптивную нагрузку, речь о которых
пойдет в следующих разделах. Наиболее распространенным методом явля-
ется кодирование с чередованием, принятое в европейских стандартах
цифрового радио- и телевещания [2; 18]. Более того, в быстро меняющих-
ся каналах бывает очень сложно произвести в приемнике оценку канала
и переслать эту информацию обратно в передатчик. При отсутствии в пе-
редатчике информации о канале реализовать методы предварительного
кодирования и адаптивной нагрузки невозможно, и поэтому единствен-
ным эффективным методом ослабления замираний остается кодирование
с чередованием.
570 Глава 12. Модуляция на нескольких несущих
12.3.1. Кодирование с чередованием
по времени и частоте
В основе метода кодирования с чередованием по времени и частоте лежит
идея кодирования информационных бит в кодовые слова с чередованием
получившихся кодированных бит по времени и частоте, и передача коди-
рованных бит по различным подканалам — так, чтобы все кодированные
биты, относящиеся к одному кодовому слову, испытывали независимые
замирания [19]. Если большинство каналов имеет высокое отношение сиг-
нал-шум, то большая часть бит кодового слова будет принята верно,
а ошибки, произошедшие в нескольких плохих подканалах, могут быть
исправлены. Чтобы обеспечить исправление ошибок, при распределении
подканалов обычно используется частотное разнесение, свойственное сис-
темам с несколькими несущими.
Эта методика хорошо работает только при значительном частотном
разнесении по всей полосе пропускания системы. Если полоса когерентно-
сти канала велика, то замирания в подканалах будут сильно коррелиро-
ванными, что значительно снизит преимущества кодирования. Большин-
ство схем кодирования предполагают наличие в декодере информации
о канале. Оценку состояния канала обычно получают с помощью двумер-
ной передачи контрольных символов как во временной, так и в частотной
области [20].
Следует отметить, что кодирование с частотно-временным чередова-
нием использует то обстоятельство, что на всех поднесущих передается
информация одного и того же пользователя, которую можно обрабаты-
вать совместно. Другие способы ослабления замираний, речь о которых
пойдет в следующих разделах — это, по существу, методы компенсации
амплитудных замираний, одинаково применимые как к системам с не-
сколькими несущими, так и к узкополосным системам с одной несущей,
испытывающим амплитудные замирания.
12.3.2. Коррекция частоты
При коррекции частоты амплитудные замирания в i-м подканале,
по существу, инвертируются в приемнике [2]. Для этого принятый сиг-
нал умножается на l/oj, что дает результирующую мощность сигнала
а^Р^/а^ = Р. Это устраняет влияние амплитудных замираний на сигнал,
но в то же время увеличивает мощность шума. Входной шумовой сигнал
также умножается на 1/сц, так что мощность шума становится равной
NqBк/а?, и результирующее отношение сигнал-шум в i-м подканале по-
сле коррекции частоты остается таким же, каким было до коррекции.
Следовательно, выравнивание частот на самом деле не устраняет ухуд-
12.3. Ослабление замираний п<
шение рабочих характеристик, связанное с амплитудными замираниями
поднесущих.
12.3.3. Предварительное кодирование
В основе предварительного кодирования лежит та же идея, что и в основе
коррекции частот, за исключением того, что замирания инвертируются
не в приемнике, а в передатчике [21]. Для реализации данного метода
необходимо, чтобы передатчик располагал информацией о передаточных
коэффициентах канала с замираниями в подканалах а, (г = 0,..., N — 1),
которая должна быть получена посредством оценки [22]. В этом случае,
если желаемая мощность сигнала г-го подканала на приеме равна Pi,
а канал вносит затухание пропорционально передаточному коэффициенту
канала , то при предварительном кодировании мощность, передаваемая
в г-й подканал, составит Pi/а?. Сигнал в подканале ослабляется ампли-
тудными замираниями пропорционально передаточному коэффициенту
ai, поэтому мощность принимаемого сигнала будет равна Р^аЦа? = Pi,
как и требуется. Примечательно, что инверсия канала происходит не
в приемнике, а в передатчике, поэтому мощность шума остается рав-
ной NoBjy. Предварительное кодирование достаточно широко распро-
странено в беспроводных системах с несколькими несущими, таких как
высокоскоростные цифровые абонентские линии HDSL4. При использова-
нии предварительного кодирования в беспроводных системах возникают
две проблемы. Во-первых, предварительное кодирование — это, по суще-
ству, инверсия канала, а из подпараграфа 6.3.5 мы знаем, что инверсия
в каналах с замираниями неэффективна с точки зрения мощности. Так,
для инверсии канала с рэлеевскими замираниями необходима бесконечная
мощность. Другая проблема предварительного кодирования заключается
в том, что передатчику необходимы точные оценки состояния канала,
а это трудно осуществить в канале с быстрыми замираниями.
12.3.4. Адаптивная нагрузка
Адаптивная нагрузка основывается на методе адаптивной модуляции,
описанном в гл. 9. Как правило, адаптивный метод используют в медленно
изменяющихся каналах, таких как цифровые абонентские линии [16], где
можно довольно просто получить оценку канала в передатчике. Основ-
ная идея заключается в изменении скорости передачи и мощности в ка-
ждом подканале в зависимости от коэффициента усиления данного под-
канала. Как и в случае предварительного кодирования, для этого пе-
редатчик должен располагать информацией о замираниях в подканале
4HDSL — High-bit-rate Digital Subscriber Line.
Глава 12. Модуляция на нескольких несущих
{ai, i = 0,..., N — 1}. При адаптивной нагрузке мощность и скорость пе-
редачи в каждом подканале адаптируются так, чтобы получить макси-
мальную общую скорость передачи для всей системы в целом. При этом
используется адаптивная модуляция, например, КАМ с изменяющейся
скоростью и изменяющейся мощностью.
Прежде чем рассматривать адаптивную модуляцию, рассмотрим про-
пускную способность системы с несколькими несущими, имеющей N не-
зависимых подканалов с полосой пропускания By и коэффициентом уси-
ления подканала {ai, i = О, ...,N — 1}. Если общая мощность системы
ограничена величиной Р, то пропускная способность равна5:
;vi / 1р. \
С = max V Bwlog2 ( 1 + 1 ) . (12.7)
Pi-.^Pi=P^ \ NqBnJ
Распределение мощности Pi, максимизирующее это выражение, предста-
вляет «водоналивной» процесс в частотной области, определяемый для
некоторого порогового значения ус, выражением (4.24):
Л
р
i-hc - yhr
о,
7г 7с
7г < 7с,
(12-8)
где 7j = а?Р/NoBn. Пороговое значение получается путем подстанов-
ки формулы адаптации мощности в формулу ограничения по мощности.
Тогда пропускную способность можно записать в виде:
С= V ByylogafM (12.9)
• Уве,/
Если использовать в подканалах описанный в разделе 9.3.2 метод моду-
ляции КАМ с изменяющейся скоростью и изменяющейся мощностью, то
общая скорость передачи составит:
7V-1 z
В = В^ log2 ( 1 +
г=0 '
K^jPjX
р / ’
(12.10)
где К = —1,5/1п(5Рь), а Рь — желаемое значение коэффициента ошибок
по битам в каждом подканале. Оптимизируя это выражение относитель-
5Как уже говорилось в подпараграфе 4.3.1, это суммирование дает точную пропуск-
ную способность в случае, если коэффициенты at независимы. Однако для того, чтобы
ai были независимыми, подканалы должны быть разнесены на полосу когерентно-
сти канала, что означало бы, что подканалы больше не подвержены амплитудным
замираниям. Так как подканалы создаются в предположении амплитудных замираний,
то коэффициенты усиления подканалов {at, i = 1,...,1V} будут коррелированны-
ми. В этом случае пропускная способность, получаемая путем сложения пропускных
способностей всех подканалов, представляет верхнюю границу истинной пропускной
способности. Мы примем данную границу как значение действительной пропускной
способности, так как на практике эта граница достаточно жесткая.
12.4- Дискретная реализация модуляции на нескольких несущих
но Pi, получаем оптимальное распределение мощности
Хрг _ J 1/7ЛГ - Ifri, Г191П
Р t 0, 7г < 7К, ( }
и соответствующую скорость передачи данных
R= 57vlog2f—) (12.12)
Й7»^7К \7К/
где — предельная глубина замираний, определяемая ограничением
по мощности Р и величиной К.
12.4. Дискретная реализация модуляции
на нескольких несущих
Хотя модуляция на нескольких несущих была предложена еще в 1950-х гг.,
ее требования, касающиеся отдельных модуляторов и демодуляторов для
каждого подканала, были слишком сложными для реализации в большин-
стве систем того времени. Однако двадцать лет спустя появление простых
и дешевых элементов, реализующих дискретное преобразование Фурье
(ДПФ6) и обратное ДПФ (ОДПФ7) — в сочетании с пониманием того,
что модуляцию на нескольких несущих можно реализовать с помощью
этих алгоритмов — послужило толчком для ее широкого использования.
В данном разделе, после первоначального обзора основных свойств ДПФ,
будет рассмотрена система с ортогональным ЧРК, реализующая модуля-
цию на нескольких несущих с использованием ДПФ и ОДПФ.
12.4.1. ДПФ и его свойства
Рассмотрим последовательность дискретного времени a?[n], O^n^lV — 1.
TV-точечное дискретное преобразование Фурье для последовательности
ж[п] определяется выражением [23]:
N-1
ДПФ {т[п]} = Х[г] = —= x[n]e~^vmlN, 0 i N - 1. (12.13)
VN п=0
ДПФ представляет дискретный эквивалент непрерывного во времени пре-
образования Фурье, так как Х[г] характеризует частотный состав вре-
менных отсчетов ж[п] исходного сигнала x(t). Как непрерывное, так и дис-
кретное преобразования Фурье основываются на том, что комплексные
6В англоязычной литературе используется термин DFT — Discrete Fourier Transform. —
Прим, перев.
7В англоязычной литературе используется термин IDFT — Inverse Discrete Fourier
Transform. — Прим, перев.
показательные функции представляют собой собственные функции лю-
бой линейной системы. Последовательность ж[п] можно восстановить из ее
ДПФ, используя обратное ДПФ — ОДПФ:
7V-1
ОДПФ {%[?]} = ф] = -у= 22 ^Hej2™/7V, 0 п N - 1. (12.14)
г=0
ДПФ и ОДПФ обычно реализуются с помощью аппаратного обеспечения,
использующего быстрое преобразование Фурье (БПФ8) и обратное БПФ
(ОБПФ9).
Когда входной поток данных передается по линейному стаци-
онарному каналу с дискретным временем, выходной сигнал у[п] будет
представлять дискретную свертку входного сигнала и импульсной харак-
теристики канала /г[п]:
ф] = ф] * ф] = ф) * h[n] — y^h[k]x[n — (12.15)
к
TV-точечная круговая свертка ж[п] и h[n] имеет вид:
ф] = ф] ® h[n] = ф] ® ф] = 22 Ф]ф - к]м, (12.16)
к
где [п — к]м означает разность [n — к] по модулю N. Другими словами,
х[п — к]м — это периодическая версия х\п — к] с периодом N. Неслож-
но проверить, что функция у[п], задаваемая формулой (12.16), также
является периодической с периодом N. Из определения ДПФ следует,
что круговой (циклической) свертке во временной области соответствует
умножение в частотной области:
ДПФ {ф] = ф] ® ф]} = Х[г]Я[г], 0 i N — 1, (12.17)
где H[i] — TV-точечное представление {/i[n]}. Примечательно, что если
последовательность {/ф]} имеет длину к < N, то ее дополняют N — к ну-
лями, чтобы получить длину N для TV-точечного ДПФ. В соответствии
с (12.17), если канал и входной сигнал подвергаются круговой свертке,
то, пока приемник располагает информацией о характеристике /г[п], ис-
ходную информационную последовательность ж[п] можно восстановить,
выполнив ОДПФ для Y[i\/H\i\, 0 T TV — 1. К сожалению, сигнал на вы-
ходе канала представляет собой не круговую, а линейную свертку. Однако
линейная свертка входного сигнала и импульсной характеристики кана-
ла может быть преобразована в круговую за счет добавления на входе
специального префикса, называемого циклическим префиксом, речь о ко-
тором пойдет в следующем разделе.
8В англоязычной литературе используется термин FFT — Fast Fourier Transform. —
Прим, перев.
9В англоязычной литературе используется термин IFFT — Inverse Fast Fourier Trans-
form. — Прим, перев.
12.4- Дискретная реализация модуляции на нескольких несущих
12.4.2. Циклический префикс
Рассмотрим последовательность на входе канала = ж[0],..., x[N — 1]
длиной N и канал с дискретным временем, имеющий конечную импульс-
ную характеристику (КИХ10) /г[п] = /г[0],..., h[p] длиной р + 1 = Tm/Ts,
где Тт — разброс задержки в канале, a Ts — период взятия отсчетов дис-
кретной последовательности. Циклический префикс для х[п] определяется
как — ц],..., x[N — 1]}: он содержит последние р значений последо-
вательности ж[п]. К началу каждой входной последовательности длиной
N добавляются последние р отсчетов. Это дает нам новую последова-
тельность ж[п], — р п N — 1 длиной N + р, где х[—р],..., x[N — 1] =
= x[N — р],..., x[N — 1],ж[0],..., x[N — 1], как показано на рис. 12.5. За-
метьте, что, в соответствии с таким определением, ж[п] = ж[п]уу для — р
п N — 1; это означает, что х[п — к] = х[п — к]к для — р п — к N — 1.
Исходная последовательность длиной N
Циклический префикс
x|/V д],х[М /. Ч lj, -1] x[0],x[lJ, x[N-i., - 1] х[ЛГ-д],х[ЛГ-д + 1] xfN-1]
Вставка последних символов в начало
Рис. 12.5. Циклический префикс длиной р
Пусть х[п\ — сигнал на входе дискретного канала с импульсной ха-
рактеристикой /г[п]. Тогда сигнал на выходе канала у[п\, 0 п N — 1
равен:
д
у[п] = ж[п] * /г[п] = ^2 — к] =
к=0
и
= У2 Я[А:]ж[п — к]х = х[п] ® h[n], (12.18)
к=о
где третье уравнение следует из того, что при 0 к //, х\п — к] =
= х[п — к]]у для 0 п N — 1. Поэтому, при добавлении к входно-
му сигналу циклического префикса, его линейная свертка с импульсной
характеристикой канала у[п] при О п N — 1 становится круговой
сверткой. Выполнив ДПФ для сигнала на выходе канала при отсутствии
шума, получаем:
Г[г]=ДПФ{|/[п]=1[п]®/1[п]} = Х[г]Я[г], 0 i N - 1, (12.19)
10В англоязычной литературе применяется термин FIR — Finite Impulse Response. —
Прим, перев.
Глава 12. Модуляция на нескольких несущих
а входная последовательность т[п], 0 п N—1 может быть восстановле-
на из выходного сигнала у[п], 0 п TV—1 при известной характеристике
h[n] следующим образом:
ф] = ОДПФ { = ОДПФ (12.20)
Обратите внимание, что последовательность у[п], — р п N — 1 име-
ет длину N + ц, но при этом в соответствии с (12.20) первые // отсчетов
у[—р],... ,у[— 1] не нужны для восстановления входной последовательно-
сти т[п], 0 п N — 1 благодаря избыточности, связанной с циклическим
префиксом. Более того, если входная последовательность т[п] делится
на блоки данных размером IV, к каждому из которых добавляется цикли-
ческий префикс для получения ж[п], то первые р отсчетов у[п] = /г[п] * ж[п]
каждого блока искажаются вследствие межсимвольной интерференции
с последними р отсчетами ж[п] из предыдущего блока, как это показано
на рис. 12.6. Циклический префикс устраняет влияние межсимвольной ин-
терференции между блоками данных, так как первые р отсчетов выходно-
го сигнала, подверженные воздействию межсимвольной интерференции,
могут быть отброшены без каких-либо потерь исходной информации. При
непрерывном времени это равнозначно использованию защитной полосы
длительностью Тт (разброс задержки в канале) после каждого блока из N
символов длительностью NTS для устранения межсимвольной интерфе-
ренции между этими блоками.
Циклический
префикс
Блок Циклический Блок
данных префикс данных
Циклический Блок
префикс данных
интерференция
Рис. 12.6. Межсимвольная интерференция между блоками данных на выходе
канала
Но преимущества добавления циклического префикса имеют свою цену.
При добавлении р символов к блокам данных на входе создается избыточ-
ность р/N, и в итоге скорость передачи данных уменьшается на N/(p + N).
Мощность передачи, связанная с пересылкой циклического префикса, так-
же тратится впустую, так как этот префикс состоит из избыточной ин-
формации. Из рис. 12.6 ясно, что межсимвольную интерференцию между
блоками данных устраняет любой префикс длиной р, добавляемый к вход-
ным блокам размером N — при условии, что первые р отсчетов блока
отбрасываются. В частности, префикс может состоять только из нулевых
12-4- Дискретная реализация модуляции на нескольких несущих
символов, и тогда на передачу префикса не расходуется никакой мощно-
сти, хотя скорость передачи данных все же сокращается на + N).
Плюсы и минусы циклического префикса по сравнению с таким полно-
стью нулевым префиксом, представляющим форму векторного кодирова-
ния, описаны в подпараграфе 12.4.5.
Предшествующий анализ поясняет мотивы разработки метода ортого-
нального ЧРК — ОЧРК. При ортогональном ЧРК входящая информация
делится на блоки размером IV, каждый из которых называется симво-
лом ОЧРК. К каждому символу добавляется циклический префикс для
получения круговой свертки входного сигнала и импульсной характери-
стики канала. В приемнике отсчеты выходного сигнала, подверженные
воздействию межсимвольной интерференции между символами ОЧРК,
удаляются. ДПФ оставшихся отсчетов используются для восстановления
исходной входной последовательности. Детали разработки такой системы
ОЧРК будут рассмотрены в следующем разделе.
Пример 12.4. Рассмотрим систему ОЧРК с общей полосой пропускания
В = 1 МГц при допущении /3 = е = 0. Система с одной несущей имела бы
время передачи символа Ts = 1/В = 1 мкс. Максимальный разброс задержки
в канале составляет Тт = 5 мкс. Ясно, что при Ts = 1 мкс и Тт = 5 мкс бу-
дет сильная межсимвольная интерференция. Пусть в каждом подканале данной
системы используется модуляция КАМ. Чтобы сохранить низкий уровень из-
быточности и устранить межсимвольную интерференцию, система использует
N = 128 поднесущих. Поэтому Тдг = NTS = 128 мкс. Для поддержания низкого
уровня межсимвольной интерференции между символами ОЧРК, устанавлива-
ется длина циклического префикса, равная у = 8 > Tm/Ts. Для этих параметров
нужно определить полосу пропускания подканала, общее время передачи для
каждого символа ортогонального ЧРК, избыточность за счет циклического пре-
фикса и скорость передачи в системе, если М = 16.
Решение. Полоса пропускания подканала равна Bn = 1/Tn = 7,812 кГц, по-
этому В^ ^Вс= 1/Тт = 200 кГц, что обеспечивает незначительную межсим-
вольную интерференцию. Общее время передачи для каждого символа ОЧРК
составляет Т = Tn + yTs = 128 + 8 = 136 мкс. Избыточность за счет цикличе-
ского префикса равна 8/128, что составляет 6,25 %. Каждые Т секунд система
передает на одной поднесущей log2 16 = 4 бита, поэтому скорость передачи дан-
ных равна 128 • 4/136 • 10-6 = 3,76 Мбит/с, что несколько меньше, чем 4В, как
результат избыточности циклического префикса.
12.4.3. Мультиплексирование с ортогональным
частотным разделением каналов —
ортогональное ЧРК—ОЧРК
Схема модуляции на нескольких несущих с использованием ОЧРК пред-
ставлена на рис. 12.7. Входной поток данных модулируется с помощью мо-
578 Глава 12. Модуляция на нескольких несущих
дулятора КАМ, в результате чего получается комплексный поток симво-
лов Х[0], Х[1],..., Х[А1 — 1]. Этот поток символов пропускается через пре-
образователь последовательного кода в параллельный, на выходе которо-
го формируется набор N параллельных символов КАМ Х[0],..., XfA' — 1],
соответствующих символам, передаваемым на каждой поднесущей. Та-
ким образом, N символов на выходе преобразователя последовательного
кода в параллельный, представляют дискретные частотные составляющие
выходного сигнала модулятора s(t). Чтобы сформировать сигнал s(t),
частотные составляющие преобразуются во временные отсчеты взятием
обратного ДПФ для этих N символов, что эффективно реализуется с по-
мощью алгоритма ОБПФ. ОБПФ дает символ ОЧРК, представляющий
последовательность ж[п] = х[0],..., x[N — 1] длиной N, где:
7V-1
ф] = 52 X[i]ej27rnitN, 0 п N - 1. (12.21)
V j_Q
Приемник
Рис. 12.7. Реализация ортогонального ЧРК-ОЧРК с помощью алгоритмов
ОБПФ/БПФ
Эта последовательность соответствует отсчетам сигнала с нескольки-
ми несущими: такой сигнал состоит из линейно модулированных подка-
налов, и правая часть выражения (12.21) соответствует отсчетам суммы
символов КАМ Х[г], каждый из которых модулирует несущую e^lt!TN,
12.4- Дискретная реализация модуляции на нескольких несущих 579
г = 0,..., N — 1. Затем к символу ОЧРК добавляется циклический пре-
фикс, а полученные в результате временные отсчеты i[n] = х[—
x[N — 1] = — ц],..., ж[0],..., x[N — 1] упорядочиваются преобразо-
вателем параллельного кода в последовательный и пропускаются через
цифро-аналоговый преобразователь, формируя сигнал ОЧРК ж[<], кото-
рый затем преобразуется с повышением до частоты /о-
Передаваемый сигнал фильтруется импульсной характеристикой ка-
нала и искажается под действием аддитивного шума, что в результате
дает принимаемый сигнал r(t). Этот сигнал понижением частоты пре-
образуется в полосу частот исходного сигнала и фильтруется для уда-
ления высокочастотных составляющих. Аналого-цифровой преобразова-
тель берет отсчеты полученного сигнала для образования
у[п] = ж[п] * /i[n] + v[n], —ц п N — 1,
где /г[п] — дискретный эквивалент низкочастотной импульсной характе-
ристики канала. Затем удаляется префикс у[п], состоящий из первых ц
отсчетов. В результате остается N временных отсчетов, ДПФ которых
при отсутствии шума равно У [г] = /?[г]Х[г]. Эти временные отсчеты пре-
образуются с помощью преобразователя последовательного кода в парал-
лельный и пропускаются через блок БПФ. В результате получаются мас-
штабируемые варианты исходных символов /?[г]Х[г], где H[i] = Н [Д] —
коэффициент усиления канала с амплитудными замираниями, соответ-
ствующий г-му подканалу. Сигнал с выхода блока БПФ преобразуется
из параллельного кода в последовательный и пропускается через демоду-
лятор КАМ для восстановления исходной информации.
Система с ОЧРК разделяет широкополосный канал на множество уз-
кополосных ортогональных подканалов — так, что различные символы
КАМ передаются по разным подканалам. Для такого разложения не нуж-
но располагать информацией о передаточных коэффициентах канала J? [г],
i = 0,..., N — 1 — аналогично тому, как непрерывный во времени ка-
нал с частотной характеристикой -Щ/] можно разложить на ортогональ-
ные подканалы без наличия информации об /?[/], разделив общую полосу
пропускания сигнала на неперекрывающиеся поддиапазоны. Демодуля-
тор может использовать коэффициенты усиления канала для восстано-
вления исходных символов КАМ путем сокращения этих коэффициентов
усиления: Х[г] = Этот процесс называется коррекцией часто-
ты. Однако, как уже говорилось в подпараграфе 12.3.2, при ортогональ-
ном ЧРК в каналах с непрерывным временем коррекция частоты ведет
к увеличению шума, так как шум в г-м подканале также умножается
на 1/Н[г]. Следовательно, несмотря на то, что коррекция устраняет вли-
яние амплитудных замираний на X [г], отношение сигнал - шум на приеме
остается неизменным. Как уже отмечалось в § 12.3, для уменьшения воз-
Глава 12. Модуляция на нескольких несущих
действия амплитудных замираний на поднесущие предпочтительнее ис-
пользовать методы предварительного кодирования, адаптивной нагрузки
и кодирования подканалов. Альтернативой циклического префикса может
быть использование префикса, полностью состоящего из нулевых симво-
лов. В этом случае символу ортогонального ЧРК, содержащему поток
данных ж[п], 0 п < N — 1, предшествует ц нулевых отсчетов, как по-
казано на рис. 12.8. В приемнике «хвост» межсимвольной интерференции,
образующийся в конце данного символа, вставляется обратно в начало
символа, что воссоздает эффект циклического префикса, поэтому осталь-
ная часть системы ОЧРК работает в обычном режиме. Этот нулевой
префикс сокращает мощность передачи по сравнению с передачей цикли-
ческого префикса на N/(ц + AQ, так как при передаче нулевого префикса
мощность не расходуется. Однако шум от принятого «хвоста» опять доба-
вляется к началу символа, что увеличивает мощность шума на (N + у.)/N.
Поэтому различие отношений сигнал-шум при использовании этих двух
префиксов незначительно.
копируется в начало символа
Рис. 12.8. Создание циклического канала с полностью нулевым префиксом
12.4.4. Матричное представление ОЧРК
Альтернативный анализ ОЧРК основывается на матричном представле-
нии системы. Рассмотрим дискретный эквивалентный низкочастотный
канал с конечной импульсной характеристикой /г[п], 0 п /т, входным
сигналом ж[п], шумом v[n] и выходным сигналом y[n] = х[п\ * h[n] + v[n].
Обозначим п-е элементы этих последовательностей как hn = h[n], хп — i[n],
vn = v[n] и yn = у[п]. Используя эти условные обозначения, запишем по-
следовательность на выходе канала в матричной форме:
TyV-l
Un-1 Un-2 Уо = О О ••• • • • 7 : ’ а. а 1 о -е а .’ ~е : : .-’о ~е ~е •” : и? О •••О । 1 Хо Х-1 + VN-1 VN-2
(12.22)
12-4- Дискретная реализация модуляции на нескольких несущих
или в более компактном виде:
у = Нх + к
(12.23)
Принятые символы у_15..., отбрасываются, так как они испыты-
вают влияние межсимвольной интерференции в предыдущем блоке дан-
ных и не нужны для восстановления входного сигнала. Последние у симво-
лов последовательности соответствуют циклическому префиксу .т_| =
= aryv-i, :е ..2 = ждг-2, ..., х-ц = xn-v Исходя из этого, можно показать,
что матричное представление (12.22) эквивалентно выражению:
UN-1 PN-2 — ho 0 0 hi ho 0 hy, hfj,-i 0 hy h^—i 0 0 h^ a: tv-1 XN-2 + VN-1 VN-2
h-2 h?> hu-2 ho hi ar0
уо которое М0Ж1 hi h2 h^-i 0 io записать более компактно в у = Нх + к ho виде: (12.2 (12.2 4) 5)
Эта эквивалентная модель показывает, что добавление циклического пре-
фикса позволяет представить канал в виде циркулянтной сверточной ма-
трицы Н, составленной из представляющих интерес N отсчетов. Матрица
Н является нормальной (НЯН = ННЯ), поэтому она допускает разложе-
ние по собственным значениям:
Н = МЛМЯ, (12.26)
где Л — диагональная матрица собственных значений Н, а М — унитар-
ная матрица, столбцы которой образуют собственные векторы матри-
цы Н.
Несложно показать, что операция ДПФ для последовательности ж[п]
может быть представлена перемножением матриц:
X = Qx,
где X = (Х[0],..., X[1V — 1])т, х = (т[0],..., x[N — 1])т, a Q— матрица
размерностью NxN, задаваемая выражением:
’ 1 1 1 1
1 1 WN W2N •
Q = -T=
y/N . 1 vv N
(12.27)
Глава 12. Модуляция на нескольких несущих
где Wn = е i2nlN. Так как
Q1 = Q" (12.28)
то аналогичным образом можно представить и операцию ОДПФ:
x = Q1X = QffX. (12.29)
Пусть v — собственный вектор матрицы Н с собственным значени-
ем Л. Тогда
Av = Hv.
Столбцы унитарной матрицы М представляют собственные векторы ма-
трицы Н; т. е. Агтг = Нт, для г = 0,1,... IV — 1, где тг обозначает
г-й столбец матрицы М. Можно также показать методом индукции, что
столбцы матрицы ДПФ представляют собственные векторы матрицы
Н, а это означает, что Q = Мн, a QH = М. Таким образом,
Y = Qy = Q[Hx + р] = Q[HQ^X + и] = QfMAM^C^X + v] = (12.30)
= QMAM^Q^X + Qi/ = МЯМЛМЯМХ + Qp = АХ + i/Q. (12.31)
Поскольку матрица Q является унитарной, pq = Qp имеет ту же матрицу
автокорреляции шума, что и v и, следовательно, в общем случае это будет
белый гауссовский шум с неизмененной мощностью. Таким образом, ана-
лиз в матричной форме также показывает, что ортогональное ЧРК, за
счет добавления циклического префикса и использования ОДПФ/ДПФ,
разлагает канал с межсимвольной интерференцией на N ортогональных
подканалов, и для этого разложения не требуется информация о матрице
канала Н.
Матричное представление полезно также при анализе систем ортого-
нального ЧРК с многоэлементными антеннами [24]. Как уже говорилось
в гл. 10, канал системы со многими входами и выходами MIMO обычно
представляется матрицей размерностью Mr х Mt, где Mt — количество
передающих антенн, а Мг — количество приемных антенн. Поэтому ка-
нал системы MIMO с ортогональным ЧРК, имеющей N подканалов, ЛД
передающих антенн, Мг приемных антенн и конечную импульсную ха-
рактеристику протяженностью ц, может быть представлен в виде:
у = Нх + р, (12.32)
где у — вектор размерностью MrN х 1, соответствующий N отсчетам вы-
ходного сигнала для каждой из Мг антенн; Н — матрица размерностью
NMr х (IV + n)Mt, соответствующая N коэффициентам усиления подкана-
лов с амплитудными замираниями для каждой пары передающей и прием-
ной антенн; х — вектор размерностью Mt(N + ц) х 1, соответствующий
N отсчетам входного сигнала с добавленным циклическим префиксом
длиной /г для каждой из Mt передающих антенн, а и — вектор шума в ка-
12.4- Дискретная реализация модуляции на нескольких несущих
нале размерностью MrN х 1. Матрица имеет ту же форму, что и в случае
ортогонального ЧРК без многоэлементных антенн, поэтому при анализе
можно использовать такую же схему: в системе MIMO с ОЧРК межсим-
вольная интерференция удаляется за счет разбиения широкополосного
канала на множество узкополосных подканалов. Каждый подканал ис-
пытывает амплитудные замирания, и поэтому его можно рассматривать
как канал MIMO с замираниями. Пропускную способность этого кана-
ла получают, применяя метод матричного анализа стандартного канала
MIMO к расширенному каналу MIMO с ОЧРК [25]. При дискретной ре-
ализации системы входной сигнал каждой передающей антенны разбива-
ется на блоки размером N с циклическим префиксом, добавляемым для
преобразования линейной свертки в циклическую и устранения межсим-
вольной интерференции между блоками. Более подробную информацию
об этом можно найти в [26].
12.4.5. Векторное кодирование
При ортогональном ЧРК циркулянтная матрица канала Н размерностью
N х N разлагается на собственные значения и собственные векторы.
Похожий метод представляет и векторное кодирование11, при котором
к исходной матрице канала Н размерностью N х (IV + р) из (12.23) при-
меняется разложение по сингулярным числам, подходящее для матрицы
любой размерности. При разложении по сингулярным, особым числам12
нет необходимости в циклическом префиксе для того, чтобы обеспечить
ортогональность подканалов. Поэтому с точки зрения энергопотребления
векторное кодирование более эффективно, чем ОЧРК. Однако данный
метод более сложен, а для разложения необходима информация об им-
пульсной характеристике канала — в отличие от ОЧРК, при котором
наличие информации о канале не требуется.
В соответствии с приложением В, разложение по сингулярным числам
матрицы Н можно записать в виде:
н = USV/J,
(12.33)
где U — унитарная матрица размерностью N х N, V — унитарная матри-
ца размерностью (IV + д) х (N + д), а Е — матрица с г-м диагональным
элементом о,, равным г-му сингулярному числу матрицы Нис нулями во
всех остальных случаях. Сингулярные числа матрицы Н связаны с соб-
ственными значениями матрицы ННЯ соотношением <хг = y/Xi, где Xi —
ПВ англоязычной литературе применяется аббревиатура VC — Vector Codind. — Прим,
перев.
12В англоязычной литературе применяется аббревиатура SVD — Singular Value Decom-
position. — Прим, перев.
i-e собственное значение матрицы ННЯ. Так как Н представляет блочно-
диагональную сверточную матрицу, ее ранг равен N, и поэтому О
для всех i = 1,..., N.
При векторном кодировании, как и при ортогональном ЧРК, входя-
щие символы данных группируются в векторы по N символов. Пусть
Xi, i — 0,... ,7V — 1 обозначает символ, передаваемый по г-му подкана-
лу, а X = (Xq, ..., Xyv-i, Хп,..., — вектор из этих символов
и ц символов Хп,..., Xyv+^-1 (обычно нулей), добавляемых в конце. Сим-
вол данных Xi умножается на г-й столбец матрицы V, формируя вектор,
а затем эти векторы складываются друг с другом. В приемнике получен-
ный вектор у умножается на каждую строку матрицы UH для получения
N выходных символов Yi, i = 0,1,... TV — 1. Этот процесс представлен
на рис. 12.9, где умножение на V и UH выполняет функцию, подобную
предварительному кодированию и формированию импульса в приемнике
в системах MIMO.
Рис. 12.9. Векторное кодирование
Математически можно показать, что после фильтрации передаваемый
и полученный векторы имеют вид:
х — VX
и
Y = ияу. (12.34)
В результате с помощью простой линейной алгебры получаем, что после
фильтрации полученный вектор Y не подвержен межсимвольной интер-
ференции, так как:
Y = UHy = Uh(Hx+p) = ия(иЕУя)УХ+ияр = 2Х+ияр. (12.35)
12-4- Дискретная реализация модуляции на нескольких несущих
Таким образом, каждый элемент вектора X эффективно проходит
через скалярный канал без межсимвольной интерференции, при этом ска-
лярный коэффициент усиления подканала i представляет г-е сингулярное
число матрицы Н. Кроме того, новый вектор шума й = имеет ту
же дисперсию шума, так как U — унитарная матрица. Поэтому резуль-
тирующий полученный вектор равен:
(12.36)
Вектор X, образующийся при добавлении ц дополнительных символов
к каждому блоку N информационных символов, называют векторным
кодовым словом. Из (12.35) и структуры матрицы S можно видеть, что
при разложении по сингулярным числам, в отличие от ортогонального
ЧРК, дополнительные символы не должны принимать какие-то опреде-
ленные значения; это не должен быть ни циклический префикс, ни вновь
добавляемый «хвост», потому что все эти символы — нули. На практике
специальные символы устанавливаются в «О» для сохранения мощности
передачи, формируя защитную полосу или нулевой префикс между сим-
волами векторного кодового слова, как показано на рис. 12.10.
Символ векторного Защитный Символ векторного Защитный Символ векторного
кодового слова интервал кодового слова интервал кодового слова
Рис. 12.10. Защитный интервал (нулевой префикс) при векторном кодировании
В теории информации и оценивания доказано, что векторное кодиро-
вание обеспечивает оптимальное разделение TV-мерного канала Н [13, гл. 4].
Поэтому пропускная способность любой другой схемы разделения ка-
налов будет ограничена сверху показателями векторного кодирования.
Несмотря на теоретическую оптимальность и возможность формирова-
ния каналов без межсимвольной интерференции с относительно малой
избыточностью и без потерь передаваемой мощности, реализация вектор-
ного кодирования на практике сопряжена с рядом проблем. Рассмотрим
две наиболее важные из них.
1. Сложность. При векторном кодировании, как и в случае простой
многоканальной модуляции, сложность быстро возрастает с увели-
чением количества поднесущих N. Как видно из рис. 12.9, для ре-
ализации векторного кодирования необходимы N операций предва-
рительного кодирования на передаче и N формирующих фильтров
Глава 12. Модуляция на нескольких несущих
на приеме. Более того, сложность разложения по сингулярным чи-
слам матрицы Н размерностью N х (JV + ц) при увеличении N стре-
мительно возрастает.
2. Разложение по сингулярным числам и наличие информации о канале.
Для ортогонального разделения канала необходимо получить разло-
жение матрицы канала Н по сингулярным числам. Для этого пере-
датчику должна быть известна матрица фильтра предварительного
кодирования. Это значит, что каждый раз, когда канал изменяет-
ся, необходимо получить новое разложение по сингулярным числам
и переслать эти результаты в передатчик. Как правило, сложность
разложения по сингулярным числам и задержка, возникающая при
отправке информации о канале обратно в передатчик, оказываются
слишком высокими для беспроводных систем. При ОЧРК разделе-
ние канала производится без наличия информации о нем, и поэтому
данный метод лучше всего подходит для дискретной модуляции
на нескольких несущих в беспроводных приложениях.
Пример 12.5. Рассмотрим простой дискретный канал с двумя ответвлениями
(т.е. р = 1), определяемый выражением:
Я(г) = 1 + 0,9г-1.
Так как р+1 = Tm/Ts = 2, то при N = 8 мы имеем: Вд; « 1/(NTS) Вс « 1/Тт.
Требуется получить матричное представление системы (12.23) и сингулярные
числа матрицы Н для данного канала.
Решение. Представление (12.23) для H(z) = 1 + 0,9z~' и N = 8 имеет вид:
(12.37)
Сингулярные числа матрицы Н в (12.37) можно найти с помощью стандартного
компьютерного пакета (например, Matlab):
S = diag[l ,87,1,78,1,65,1,46,1,22,0,95,0,66,0,34].
Матрицы предварительного кодирования и формирования (U и V) также лег-
ко находятся. При известных U, V и S данная система связи не подвержена
межсимвольной интерференции, при этом символы Xq, Xi,. .., А’д'| умножают-
ся на соответствующие сингулярные числа, как в (12.36).
12.5. Проблемы систем с несколькими несущими
12.5. Проблемы систем с несколькими несущими
12.5.1. Отношение пиковой и средней мощностей
Отношение пиковой и средней мощностей PAR13 служит важной характе-
ристикой системы связи. Низкое отношение PAR обеспечивает эффектив-
ную работу усилителя передаваемой мощности, тогда как при высоком
PAR линейное усиление передаваемого сигнала сопряжено с большими по-
терями мощности. Это можно видеть на рис. 12.11, где показана типичная
характеристика усилителя мощности. Чтобы избежать искажений сигна-
ла, обычно требуется работа в линейной области этой характеристики,
поэтому пиковое значение должно находиться в этой области. Желатель-
но, чтобы среднее и пиковое значения мощности находились как можно
ближе друг к другу, и усилитель мощности мог работать с максимальной
эффективностью. Кроме того, при высоком отношении пиковой и сред-
ней мощностей необходима высокая разрешающая способность аналого-
цифрового преобразователя в приемнике, так как при больших значениях
PAR динамический диапазон сигнала значительно расширяется. Аналого-
цифровое преобразование с высокой разрешающей способностью услож-
няет реализацию входного каскада приемника и увеличивает расход мощ-
ности в нем.
Рис. 12.11. Типичная ха-
рактеристика усилителя
мощности
Отношение пиковой и средней мощностей для непрерывного во време-
ни сигнала имеет вид:
д maxt |ac(f)|2
“ Е>(012]
13PAR — Peak-to-average power ratio.
(12.38)
а для дискретного сигнала —
PAR =
maxn |or[n]|2
Е4Ж12]
(12.39)
Для любого сигнала с постоянной амплитудой (например, прямоуголь-
ного колебания — меандра) отношение пиковой и средней мощностей
PAR = 0 дБ. Для гармонического сигнала PAR = 3 дБ, так как
max[sin2(27r^/T)] = 1, и
Е
откуда PAR = 1/0,5 = 2.
В принципе, отношение пиковой и средней мощностей необходимо оце-
нивать по формуле для непрерывного во времени сигнала (12.38), так
как на вход усилителя поступает аналоговый сигнал. Однако отношение
(12.38) чувствительно к форме импульса g(t), используемого при модуля-
ции, и это не позволяет получить простые аналитические выражения [27].
Здесь для примера будет рассмотрено отношение PAR для дискретного
сигнала, поскольку оно определяется проще. Однако при интерпретации
этих результатов нужна осторожность, так как без учета формы импуль-
са g(t') они могут быть довольно неточными.
Рассмотрим отсчеты во временной области, полученные в результате
ОБПФ:
N-1
ф] = X[^in<N, - 1. (12.40)
vN i=0
При больших значениях N можно применить центральную предельную
теорему, а ж[п] представляют комплексные гауссовские случайные вели-
чины с нулевым средним значением, так как действительная и мнимая ча-
сти суммируются. При достаточно большом числе поднесущих (N 64),
гауссовское приближение для выходных сигналов ОБПФ обычно бывает
довольно точным. Для комплексных гауссовских случайных величин ж[п]
огибающая сигнала с ортогональным ЧРК имеет рэлеевское распределе-
ние с дисперсией <т2, при этом фаза сигнала постоянна. Так как рэлеевское
распределение задается на бесконечном множестве, то максимальное зна-
чение сигнала может превысить любое заданное значение с ненулевой
вероятностью. Можно показать [28], что вероятность того, что отноше-
ние пиковой и средней мощностей (12.39) превысит пороговое значение
Ро = /о2, равна:
p(PAR Ро) = 1 - (1 - e-Pn)N. (12.41)
Теперь посмотрим, как возрастает отношение PAR в зависимости от
количества поднесущих. Рассмотрим N независимых и одинаково распре-
12.5. Проблемы систем с несколькими несущими
деленных гауссовских случайных величин хп(0 п N — 1) с нулевым
средним значением и единичной мощностью. Тогда средняя мощность сиг-
нала Еи[|ж[п]|2] равна:
Е
1 I 12
-/=|жо + Х1 н-----+ Ждг_1|
= — Е|ж0 + Н------ь xN-! I2 =
Е|а?д| + Е|ж2| + ... + Е|ж^1|
N
(12.42)
Максимальным это значение будет тогда, когда все Xi складываются ко-
герентно. В этом случае:
2
max
1 ) |2
-7= ж0 + Ж1 + ... + ждг-1
VN
= N.
(12.43)
Следовательно, максимальное отношение пиковой и средней мощностей
PAR для N поднесущих равно N. На практике полностью когерентное
сложение всех N символов маловероятно, и поэтому наблюдаемое значение
PAR обычно меньше N — как правило, на много децибел. Тем не менее,
с ростом числа поднесущих PAR возрастает почти линейно. Поэтому, хо-
тя для компенсации избыточности, связанной с циклическим префиксом,
желательно иметь как можно большее число поднесущих N, платой за это
становится большое отношение пиковой и средней мощностей PAR.
Существует несколько способов сокращения или поддержания отно-
шения PAR сигналов с ортогональным ЧРК, включая отсечение сигнала
выше некоторого порогового значения, подавление пиков дополнитель-
ным сигналом, учет нелинейных искажений в усилителе мощности (и его
коррекция), а также специальные методы кодирования [29]. Удачный об-
зор некоторых из этих методов можно найти в [30].
12.5.2. Частотный и временной сдвиг
Мы видели, что при модуляции ОЧРК информационные символы Xi коди-
руются в ортогональные подканалы, при этом ортогональность обеспечи-
вается разделением поднесущих на величину А/ = 1/Тдг. Подканалы мо-
гут пересекаться в частотной области, как это показано на рис. 12.12 для
прямоугольных импульсов (функции в частотной области). На прак-
тике разнос частот неидеален, и поэтому интервал А/ не точно равен 1 /Т^
Обычно это обусловлено несогласованными генераторами, доплеровскими
сдвигами частоты или ошибками временной синхронизации. Например,
если точность генератора несущей частоты составляет одну миллионную
долю, то сдвиг частоты будет равен АД « Д(0,1 • 10~6). Если Д = 5 ГГц
(несущая частота систем WLAN стандарта 802.11а), то сдвиг частоты
АД = 500 Гц нарушит ортогональность подканалов, так как теперь от-
счеты БПФ на приеме будут содержать помехи от соседних подканалов.
Далее мы проанализируем эти помехи между несущими (ICI14) более по-
дробно.
Рис. 12.12. Наложение поднесущих в системе ОЧРК для прямоугольных импуль-
сов с /о = 10 Гц и Д/ = 1 Гц
Сигнал, соответствующий поднесущей i в случае прямоугольных им-
пульсов (при подавлении информационного символа и несущей частоты)
можно представить в простой форме:
Xi(t) = e32vitlTN. (12.44)
Мешающий сигнал из другого подканала можно записать в виде:
= e32<i+m^TN. (12.45)
Если сигнал демодулируется с частотным сдвигом, равным 5/Т^, то
эта помеха составит:
= e^+m+6)t/TN . (12,4б)
Помеха ICI между сигналами подканалов xi и Xi+m — это просто их ска-
лярное произведение:
tn
Г Тк(1 - e-J2’r(<5+"«)')
Im = J Xi(t)x*+m(t)dt = + . (12.47)
0
14ICI — Intercarrier interference.
12.6. Стандарт локальных беспроводных сетей IEEE 802.11а
Можно видеть, что в (12.47), как и ожидалось, б = 0 => 1т — 0. Тогда
полная мощность помех ICI на поднесущей i равна:
1С1г = 22|1то|2«Со(ВД2, (12.48)
m^i
где Со — некоторая постоянная величина. На примере этой простой ап-
проксимации можно увидеть насколько важных тенденций. Во-первых,
с увеличением Ты поднесущие становятся более узкими и, следовательно,
ближе расположены друг к другу, что вызывает большие помехи между
несущими — ICI. Во-вторых, помехи ICI предсказуемо возрастают с ро-
стом частотного сдвига S, и этот рост является примерно квадратичным.
Еще одно интересное наблюдение состоит в том, что выражение (12.48)
не кажется напрямую связанным с числом N. Но при больших значениях
N величина Ты обычно тоже увеличивается, что затем вызывает сбли-
жение поднесущих. Вместе с увеличением отношения пиковой и средней
мощностей PAR с ростом N, возрастание помех ICI является еще одной
причиной поддерживания числа поднесущих Ана минимально возможном
уровне, для снижения избыточности. Для дальнейшего сокращения помех
между несущими ICI при заданном значении N можно также воспользо-
ваться непрямоугольными окнами [31, 32].
Результаты воздействия временного сдвига обычно меньше, чем при
частотном сдвиге [5, гл. 5], пока в приемнике используется полный символ
ортогонального ЧРК из N отсчетов без искажений от предыдущих или
последующих символов (это обеспечивается за счет использования цикли-
ческого префикса длиной ц атт/Т8, где с?тт — среднеквадратический
разброс задержек в канале). Можно показать, что мощность помехи ICI
на поднесущей i вследствие временного сдвига т в приемнике может быть
аппроксимирована выражением 2(r/7)v)2. Так как обычно т С Ты, то
этим эффектом можно пренебречь.
12.6. Рассмотрение конкретного случая: стандарт
локальных беспроводных сетей IEEE 802.1 la
Беспроводные локальные сети стандарта IEEE 802.11а занимают полосу
частот шириной 300 МГц в нелицензируемом диапазоне 5 ГГц и исполь-
зуют принцип ортогонального ЧРК [6]. Стандарт IEEE 802.11g практи-
чески идентичен стандарту 802.11а на канальном уровне, но работает
в меньшем и более загруженном нелицензируемом диапазоне 2,4 ГГц —
ISM [7]. В данном разделе мы рассмотрим свойства такой системы с ор-
тогональным ЧРК и обсудим некоторые вопросы, связанные с ее разра-
боткой.
В системах стандарта 802.11а генерируется N = 64 поднесущих, хо-
тя в действительности для передачи информации используются только
48 из них. 12 из оставшихся поднесущих обнуляются для уменьшения по-
мех от соседних каналов, а 4 используются в качестве пилотных символов
для оценки состояния канала. Циклический префикс состоит из д = 16
отсчетов, т. е. общее число отсчетов, соответствующее каждому символу
ортогонального ЧРК, включая информационные отсчеты и циклический
префикс, равно 80. Кодированные биты объединяются в пакеты, а пере-
датчик периодически получает от приемника информацию о коэффици-
енте пакетных ошибок, которую он использует при выборе подходящего
кода с исправлением ошибок и метода модуляции. В каждый момент вре-
мени для всех поднесущих необходимо использовать одни и те же код
и модуляцию. Код с исправлением ошибок представляет сверточный код
с одним из трех возможных коэффициентов кодирования: г = 1/2, 2/3
или 3/4. В подканалах могут использоваться такие методы модуляции,
как ФМ2, ФМ4, КАМ-16 или КАМ-64.
Общая полоса пропускания системы шириной 300 МГц делится на ка-
налы по 20 МГц, которые могут предоставляться разным пользователям.
Так как полоса пропускания канала В (и частота взятия отсчетов 1/TS)
составляет 20 МГц, а всего имеется 64 несущих, равномерно разнесенных
в этой полосе, то полоса пропускания поднесущей равна:
Bn =
20 МГц
64
= 312,5 кГц.
Так как ц = 16, a 1/TS = 20 МГц, то максимальный разброс задержек,
при котором устраняется межсимвольная интерференция, составляет:
16
Тт < u,Ts = —„ = 0,8 мкс,
20 МГц
что соответствует разбросу задержек внутри помещения. С учетом сим-
вола ортогонального ЧРК и циклического префикса, в течение времени
передачи символа ортогонального ЧРК передается 80 = 64 + 16 отсче-
тов, поэтому время передачи символа, приходящееся на каждый подканал,
равно:
80
TN = 80Ts = 2Q 1Q6 =4 мкс.
Скорость передачи данных в одном подканале составляет log2 M/Tn- Сле-
довательно, минимальная скорость передачи данных для этой системы —
при использовании модуляции ФМ2 (1 бит на символ), кода с коэффици-
ентом г = 1/2, и с учетом того, что только 48 поднесущих действительно
переносят полезную информацию — равна:
Задачи
1/2 бит 1 кодирован, бит
-Rmin = 48 поднесущих • ------------------------------- х
1 кодирован, бит символ поднесущей
1 символ поднесущей „, ,
х-------4 10-6 с = 6 М6ИТ/С' (12’49)
Максимальная скорость, с которой может вестись передача, составляет:
6 кодирован, бит
символ поднесущей
„ 3/4 бит
«max = 48 поднесущих -------------—
1 кодирован, бит
1 символ поднесущей ~
х ------4 10-б с = 54 мбит/с. (12.50)
Естественно, возможен широкий спектр различных скоростей передачи
данных, находящихся между этими двумя предельными значениями.
Пример 12.6. Найдите скорость передачи данных для системы стандарта
802.11а, если используется модуляция КАМ-16, а коэффициент кодирования со-
ставляет 2/3.
Решение. При модуляции КАМ-16 каждая поднесущая передает log2(16) = 4
кодированных бита на символ поднесущей, а всего для передачи информации
используется 48 поднесущих. При коэффициенте кодирования 2/3 каждый ко-
дированный бит передает 2/3 информационного бита за Т\ секунд. Поэтому
скорость передачи данных составит:
.о 2/3 бит
Rmax = 48 поднесущих -------------—
1 кодирован, бит
4 кодирован, бит
символ поднесущей
1 символ поднесущей
х --------—-— ------= 32 Мбит/с.
410“6 с
(12.51)
Задачи
12.1. Покажите, что минимальный разнос поднесущих {cos(27tjAft + j —
= 1,2,...} Д/, необходимый для формирования множества ортонормаль-
ных базисных функций на интервале [0, Тдг], равен Д/ = 1/Ту для любой
начальной фазы Покажите, что если = 0 для всех j, то этот разнос
несущих можно сократить в два раза.
12.2. Задана система ОЧРК, работающая в канале с полосой когерентности
Вс = 10 кГц.
а) Найдите время передачи символа подканала Тдг = 1/Bn — 10Тт, до-
пуская, что Tm = 1 /Вс- Это должно обеспечить равномерное затухание
в подканалах.
б) Пусть система имеет N = 128 подканалов. Если используются импуль-
сы приподнятого косинуса с /3 = 1,5, а необходимый дополнительный
Глава 12. Модуляция на нескольких несущих
частотный диапазон в связи с ограничением во времени для обеспече-
ния минимальной мощности за пределами полосы пропускания сигнала
равен е = 0,1, то чему будет равна общая полоса пропускания системы?
в) Найдите общую полосу пропускания, необходимую для системы, ис-
пользующей пересекающиеся несущие, разнесенные на 1/Тдг, и срав-
ните с результатом, полученным в пункте (б).
12.3. Исходя из определения ДПФ, покажите, что круговая свертка последова-
тельностей, дискретных во времени, приводит к умножению их ДПФ.
12.4. Рассмотрим информационный сигнал с полосой частот 0,5 МГц и скоро-
стью передачи данных 0,5 Мбит/с. Сигнал передается по беспроводному
каналу с разбросом задержки, равным 10 мкс.
а) Если для ослабления межсимвольной интерференции используется мо-
дуляция на нескольких несущих с непересекающимися подканалами,
то сколько примерно поднесущих будет необходимо? Чему равны ско-
рость передачи данных и время передачи символа на каждой поднесу-
щей? (Нам не нужно полностью устранять межсимвольную интерфе-
ренцию; для ее ослабления достаточно выполнения условия Ts — Тт).
Для решения оставшихся пунктов задачи будем считать, что среднее
отношение сигнал-шум SNR на приеме (ys) на п-й поднесущей рав-
но 1000/п (линейных единиц), и что каждая поднесущая испытывает
амплитудные рэлеевские замирания (так что межсимвольная интерфе-
ренция полностью устраняется).
б) Пусть на всех поднесущих используется модуляция ФМ2. Если на всех
поднесущих используется код с повторениями (т. е. на всех поднесущих
передается копия каждого бита), то каким будет коэффициент оши-
бок по битам BER после мажоритарного декодирования? Чему равна
скорость передачи данных в системе?
в) Представьте, что вы используете адаптивную нагрузку (т. е. различ-
ные созвездия на каждой поднесущей), так что среднее значение ко-
эффициента ошибок BER на каждой поднесущей не превышает 10-3
(это усредненное значение по распределению замираний; не считай-
те, что передатчик и приемник адаптируют мощность или скорость
к мгновенным значениям замираний). Найдите созвездие М-кратной
КАМ, которое может быть передано на каждой поднесущей при обес-
печении этого среднего значения BER. Чему равна общая скорость
передачи данных в системе с адаптивной нагрузкой?
12.5. Рассмотрим схему модуляции на нескольких несущих с тремя непересе-
кающимися подканалами, разнесенными на 200 кГц друг от друга (от
несущей до несущей), при этом ширина полосы пропускания подканала
равна 100 кГц.
а) При каких значениях полосы когерентности канала подканалы данной
схемы с несколькими несущими будут испытывать амплитудные за-
мирания практически без межсимвольной интерференции? Для каких
Задачи
из этих значений замирания поднесущих будут независимыми? Если
поднесущие испытывают коррелированные замирания, какое это бу-
дет оказывать воздействие на кодирование в подканалах?
б) Пусть общая мощность передачи Р = 300 мВт, а мощность шума
в каждом подканале равна 1 мВт. При передаче по всем подкана-
лам одинаковой мощности, равной 100 мВт, отношения сигнал-шум
SNR на приеме в каждом подканале равны 71 — 11 дБ, 72 = 14 дБ
и 7з = 18 дБ. Допустим, что подканалы не испытывают замираний,
поэтому значения SNR постоянны. Для заданных значений SNR найди-
те максимальный размер созвездия сигнала Л7-кратной КАМ, который
может быть передан по каждому подканалу при обеспечении коэффи-
циента ошибок по битам BER, равного 10-3. При расчете примите,
что созвездие МКАМ ограничивается степенью числа 2 и используйте
границу: BER 0,2е-1,57^М-1\ Найдите соответствующую общую
скорость передачи сигнала с несколькими несущими, если скорость
символов в каждом подканале Ts — 1/В, где В — ширина полосы про-
пускания подканала.
в) При заданных в пункте (б) отношениях сигнал - шум SNR в подканалах
предположим, что нам нужно использовать предварительное кодиро-
вание (для выравнивания отношения сигнал-шум SNR в каждом под-
канале) , а затем передать одно и то же созвездие сигнала по каждому
подканалу. Каким должен быть размер созвездия сигнала, чтобы обес-
печить ту же скорость передачи, что и в пункте (б)? Какая мощность
должна передаваться в каждом подканале для достижения требуемых
значений SNR при использовании этого созвездия и коэффициенте
ошибок BER, равном 10~3? Насколько необходимо увеличить общую
мощность передачи по сравнению с мощностью 300 мВт в пункте (б)?
12.6. Задан канал с импульсной характеристикой:
h(t) = oo^(i) + - Т\) + cK2<5(i - Т2).
Пусть Ti = 10 мкс, а Т> =20 мкс. Требуется создать для этого кана-
ла систему с несколькими несущими и полосой пропускания подканала
Вдг = Вс/2. Если используются импульсы приподнятого косинуса с /3 = 1,
и поднесущие разнесены на минимальный интервал, необходимый для со-
хранения их ортогональности, то каков будет общий частотный диапазон,
занимаемый системой с восемью поднесущими? Считая, что отношение
сигнал-шум SNR в каждом подканале постоянно и равно 20 дБ, найдите
максимальный размер созвездия Л7-кратной КАМ, которое может быть
передано по каждому подканалу с коэффициентом ошибок BER, равным
10~3. Учтите также, что значение М ограничено степенью числа 2. Най-
дите соответствующую общую скорость передачи данных в системе.
12.7. Покажите эквивалентность матричных представлений (12.22) и (12.24)
системы с ортогональным ЧРК в случае, когда циклический префикс при-
соединяется к каждому символу ОЧРК.
Глава 12. Модуляция на нескольких несущих
12.8. Покажите, что операция ДПФ для последовательности х[п] может быть
представлена перемножением матриц Х[г] = Qa:[n], где:
' 1 1 1 1
1 1 wN ТУ2 . . <-1
Q Vn . 1 w2^ . . НГ1)2. (12.52)
для ИАу =
12.9. Эта задача показывает, что строки матрицы ДПФ Q представляют соб-
ственные векторы Н.
а) Покажите, что первая строка матрицы Q является собственным век-
м
тором матрицы Н с собственным значением Aq = hi.
i=0
б) Покажите, что вторая строка матрицы Q является собственным век-
м
тором матрицы Н с собственным значением Ai = hiWfa.
i=0
в) Докажите методом индукции, что подобные соотношения выдержива-
ются для всех строк матрицы Q.
12.10. Покажите, что добавление к символу ОЧРК префикса, состоящего из од-
них нулей, и последующее добавление его в конец принятой последова-
тельности, как показано на рис. 12.8, дает ту же самую принятую после-
довательность, что и в случае циклического префикса.
12.11. Задан дискретный канал с конечной импульсной характеристикой й[п] =
= 0,7 + 0,5<5[гг — 1] + 0,3J[n — 3]. Рассмотрим систему ортогонального ЧРК
с N = 8 подканалами.
а) Найдите матрицу Н, соответствующую матричному представлению
у — Нх + v, заданному формулой (12.23).
б) Найдите циркулянтную сверточную матрицу Н, соответствующую ма-
тричному представлению (12.25), а также ее разложение по собствен-
ным значениям Н = МАМ".
в) Чему равны коэффициенты усиления канала с амплитудными замира-
ниями для каждого подканала в представлении, полученном в пунк-
те (б)?
12.12. Задан дискретный канал с пятью ответвлениями:
H(z) = 1 + 0,6г-1 + 0,7г-2 + 0,3г-3 + 0,2г-4.
Допустим, что эта модель характеризует максимальный разброс задер-
жек в канале, при этом в канале используется система векторного коди-
рования с N = 256 несущими.
а) Какое значение /i необходимо для префикса, чтобы устранить меж-
символьную интерференцию между векторными кодовыми словами?
Каковы потери, связанные с данным значением /i?
б) Найдите матричное представление системы (12.23) и сингулярные зна-
чения соответствующей канальной матрицы Н.
в) Найдите матрицы предварительного кодирования на передаче и фор-
мирования на приеме — V и UH, необходимые для обеспечения орто-
гональности подканалов.
12.13. Найдите отношение пиковой и средней мощностей PAR для импульсов
приподнятого косинуса с /3 = О, 0,5 и 1. Какая форма импульса имеет
наименьшее значение PAR? Насколько эта форма импульса чувствитель-
на к временным сдвигам?
12.14. Найдите постоянную Со в формуле (12.48), определяющей помехи между
несущими.
12.15. Представьте, что, благодаря применению методов «оценки вслепую», че-
тыре подканала системы стандарта 802.11а, предназначенные для пилот-
ной оценки канала, могли бы использоваться для передачи информации.
Какой максимальной и минимальной скорости передачи данных можно
было бы достичь с учетом этих дополнительных подканалов, если исполь-
зуются те же методы модуляции и форматы кодирования?
12.16. Найдите скорость передачи данных в системе стандарта 802.11а при усло-
вии, что половина из доступных 48 подканалов использует ФМ2 и коди-
рование с коэффициентом 1/2, а остальные используют КАМ-64 и коди-
рование с коэффициентом 3/4.
Литература
1. J. Bingham, «Multicarrier modulation for data transmission: An idea whose
time has come», IEEE Commun. Mag., pp. 5-14, May 1990.
2. H. Sari, G. Karam and I. Jeanclaude, «Transmission techniques for digital ter-
restrial TV broadcasting», IEEE Commun. Mag., pp. 100-9, February 1995.
3. J.S. Chow, J.C. Tu and J.M. Cioffi, «А discrete multitone transceiver system
for HDSL applications», IEEE J. Sei. Areas Commun., pp. 895-908, August
1991.
4. J.M. Cioffi, «А multicarrier primer», Stanford University/Amati T1E1 contri-
bution, I1E1.4/91- 157, November 1991.
5. A. R. S. Bahai, B. R. Saltzberg and M. Ergen, Multi-Carrier Digital Communi-
cations — Theory and Applications of OFDM, 2nd ed., Springer-Verlag, New
York, 2004.
6. IEEE 802.11a-1999: High-Speed Physical Layer in the 5 GHz Band, 1999.
7. IEEE 802.11g-2003: Further Higher-Speed Physical Layer Extension in the 2.J
GHz Band, 2003.
Глава 12. Модуляция на нескольких несущих
8. IEEE 802.16а-2001: IEEE Recommended Practice for Local and Metropolitan
Area Networks, 2001.
9. C. Eklund, R. B. Marks, K.L. Stanwood and S. Wang, «IEEE Standard 802.16:
A technical overview of the WirelessMAN 326 air interface for broadband wire-
less access», IEEE Commun. Mag., pp. 98-107, June 2002.
10. M. Corson, R. Laroia, A. O’Neill, V. Park and G. Tsirtsis, «А new paradigm
for IP-based cellular networks», IT Professional, pp. 20-9, November/December
2001.
11. W. Lu, «4G mobile research in Asia», IEEE Commun. Mag., pp. 104-6, March
2003.
12. T. S. Rappaport, A. Annamalai, R. M. Buehrer and W. H. Tranter, «Wireless
communications: Past events and a future perspective», IEEE Commun. Mag.,
pp. 148-61, May 2002.
13. J.M. Cioffi. Digital Communications, chap. 4: Multichannel Modulation, un-
published course notes, available at (http:stanford.edu/class/ee379c/).
14. S. Kasturia, J. Aslanis and J. Cioffi, «Vector coding for partial response chan-
nels», IEEE Trans. Inform. Theory, pp. 741-62, July 1990.
15. L. J. Cimini, «Analysis and simulation of a digital mobile channel using orthogo-
nal frequency division multiplexing», IEEE Trans. Inform. Theory, pp. 665-75,
July 1985.
16. P.S. Chow, J.M. Cioffi and John A. C. Bingham, «А practical discrete multi-
tone transceiver loading algorithm for data transmission over spectrally shaped
channels», IEEE Trans. Commun., pp. 773-5, February—April 1995.
17. Z. Wang, X. Ma and G.B. Giannakis, «OFDM or single-carrier block transmis-
sions?», IEEE Trans. Commun., pp. 380-94, March 2004.
18. R. K. Jurgen, «Broadcasting with digital audio», IEEE Spectrum, pp. 52-9,
March 1996.
19. S. Kaider, «Performance of multi-carrier CDM and COFDM in fading channels»,
Proc. IEEE Globecom Conf., pp. 847-51, December 1999.
20. P. Hoeher, S. Kaiser and P. Robertson, «Two-dimensional pilot-symbol-aided
channel estimation by Wiener filtering», Proc. IEEE Internet. Conf. Acous.,
Speech, Signal Proc., pp. 1845-8, April 1997.
21. A. Scaglione, G.B. Giannakis and S. Barbarossa, «Redundant filterbank pre-
coders and equalizers. I: Unification and optimal designs», IEEE Trans. Signal
Proc., pp. 1988-2006, July 1999.
22. A. Scaglione, G. B. Giannakis and S. Barbarossa, «Redundant filterbank pre-
coders and equalizers. II: Blind channel estimation, synchronization, and direct
equalization», IEEE Trans. Signal Proc., pp. 2007-22, July 1999.
23. A. V. Oppenheim, R. W. Schafer and J.R. Buck, Discrete-Time Signal Process-
ing, 2nd ed., Prentice-Hall, Englewood Cliffs, NJ, 1999.
24. H. Sampath, S. Talwar, J. Tellado, V. Erceg and A. Paulraj, «А fourth-generation
MIMO-OFDM broadband wireless system: Design, performance and field trial
results», IEEE Commun. Mag., pp. 143-9, September 2002.
25. L. H. Brandenburg and A. D. Wyner, «Capacity of the Gaussian channel with
memory: The multivariate case», Bell System Tech. J., pp. 745-78, May/June
1974.
26. G.L. Stuber, J.R. Barry, S. W. McLaughlin, Y. Li, M.A. Ingram and T. G.
Pratt, «Broadband MIMO-OFDM wireless communications», Proc. IEEE, pp.
271-94, February 2004.
27. H. Ochiai and H. Imai, «On the distribution of the peak-to-average power ratio
in OFDM signals», IEEE Trans. Commun., pp. 282-9, February 2001.
28. D.J.G. Mestdagh and P. M.P. Spruyt, «А method to reduce the probability
of clipping in DMT-based transceivers», IEEE Trans. Commun., pp. 1234-8,
October 1996.
29. K. G. Paterson and V. Tarokh, «On the existence and construction of good
codes with low peak-to-average power ratios», IEEE Trans. Inform. Theory, pp.
1974-87, September 2000.
30. J. Tellado, Multicarrier Modulation with Low PAR: Applications to DSL and
Wireless, Kluwer, Boston, 2000.
31. C. Muschallik, «Improving an OFDM reception using an adaptive Nyquist win-
dowing», IEEE Trans. Consumer Elec., pp. 259-69, August 1996.
32. A. Redfern, «Receiver window design for multicarrier communication systems»,
IEEE J. Sei. Areas Commun., pp. 1029-36, June 2002.
ГЛАВА 13
ШИРОКОПОЛОСНЫЕ
СИСТЕМЫ
ПЕРЕДАЧИ
Хотя в беспроводных системах частотный диапазон представляет ценный
ресурс, увеличение полосы частот передаваемого сигнала иногда может
улучшить характеристики системы. Широкополосная передача (расшире-
ние спектра) — это метод передачи с увеличением полосы частот сигнала
выше необходимого минимума. Для этого существует много причин. Ши-
рокий спектр помогает спрятать сигнал ниже шумового порога, затруд-
няя его обнаружение. Широкий спектр помогает также избежать сниже-
ния характеристик передачи под воздействием межсимвольных и узкопо-
лосных помех. В сочетании с приемником RAKE широкий диапазон может
обеспечить когерентное объединение различных составляющих многолу-
чевого распространения. Кроме того, широкополосная система позволя-
ет множеству пользователей использовать одну полосу частот, так как
сигналы с расширенным спектром могут накладываться друг на друга
и демодулироваться с минимальными помехами между ними. Наконец,
широкая полоса сигналов с расширенным спектром полезна при локации
(определении местоположения) и вхождении в синхронизм.
Изначально, благодаря своей способности ведения скрытой передачи
сигнала ниже уровня шумов, устойчивости к помехам и узкополосному по-
давлению, а также низкой вероятности обнаружения и перехвата, широ-
кополосные системы получили широкое распространение в сфере военных
приложений. В коммерческих приложениях устойчивость к узкополосным
помехам обусловила применение широкополосной передачи в беспровод-
ных телефонах. Способность к подавлению межсимвольных помех ISI и к
распределению полосы частот — это свойства, необходимые для сото-
вых систем и беспроводных ЛВС. В результате передача с расширением
спектра составила основу сотовых систем второго и третьего поколений,
а также беспроводных ЛВС второго поколения.
13.1. Принципы широкополосной передачи
Передача с расширенным спектром представляет собой метод модуляции,
который применяется к цифровым модулированным сигналам для увели-
13.1. Принципы широкополосной п<
чения их полосы частот до значений, намного превышающих минимум,
необходимый для передачи информационных бит. Существует много ме-
тодов увеличения используемого диапазона частот сверх необходимого
минимума — например, кодирование и частотная модуляция. Однако эти
методы не попадают в категорию расширения спектра. Сигнал можно
отнести к модулированным сигналам с расширенным спектром, если вы-
полняются следующие три условия [1].
- Сигнал занимает гораздо больший частотный диапазон, чем это не-
обходимо для передачи информационного сигнала.
- Модуляция сигналов с расширенным спектром осуществляется с ис-
пользованием расширяющего кода, который не зависит от переда-
ваемых данных.
- Сжатие спектра в приемнике осуществляется с помощью корреляции
полученного сигнала с синхронизированной копией расширяющего
кода.
Для уточнения этих понятий вернемся к представлению сигнального
пространства из § 5.1 и рассмотрим размещение информационного сиг-
нала с полосой частот В в гораздо большей, чем это необходимо, полосе
частот передаваемого сигнала Bs. В соответствии с формулой (5.3), мно-
жество линейно независимых сигналов Si(t), i = 1,..., М с полосой частот
В и длительностью Т можно представить, используя базисные функции:
N
si(t) = 0 Д £ <Т, (13.1)
1=1
где базисные функции <рД£) ортогональны и охватывают ./V-мерное про-
странство. Каждые Т секунд передается один из этих сигналов и пе-
реносит log2 Л7/Т бит в секунду. Как говорилось в подпараграфе 5.1.2,
минимальное количество базисных функций, необходимое для представле-
ния этих сигналов, приблизительно равно 2ВТ. Так как сигналы {si(t)}^Lr
линейно независимы, то это предполагает, что М « 2ВТ. Для вставки
этих сигналов в пространство более высокой размерности, мы выбира-
ем N ~^> М. Приемник использует структуру с М ветвями, в которой
г-я ветвь статистически связана — коррелированна с принятым сигна-
лом si (£). На выходе приемника будут формироваться сигналы, которые
в большей степени коррелированны с соответствующей ветвью.
Предположим, мы формируем сигналы зД£) с использованием случай-
ных последовательностей, так что последовательность коэффициентов
Sij выбирается на основе генерирования случайной последовательности,
в которой каждый коэффициент имеет нулевое среднее значение и дис-
персию Es/N. Поэтому сигналы s^(i) будут иметь равномерное распреде-
ление энергии в сигнальном пространстве размерностью N. Рассмотрим
случайные или преднамеренные помехи в этом сигнальном пространстве.
Мешающий сигнал можно представить в виде:
= (13.2)
7=1
с общей энергий на интервале [О, Т], равной:
Г
l\t)dt = ^ = Ej. (13.3)
о 1=1
Предположим, передается сигнал зД£). Если пренебречь шумами, то при-
нятый сигнал будет равен сумме переданного сигнала и помехи:
x{t) = + I{t). (13.4)
Тогда сигнал на выходе коррелятора г-й ветви приемника определяется
выражением:
т
N
(13.5)
(13.6)
о
где первый член представляет сигнал, а второй — помеху. Можно пока-
зать [1], что соотношение мощностей сигнала и помехи SIR — помехо-
защищенность этого сигнала составляет:
SIR
Ej М
Этот результат не зависит от распределения энергии помехи в TV-мер-
ном сигнальном пространстве. Другими словами, при распространении
мощности помехи в TV-мерном пространстве, превышающем требуемое
для передачи сигнала число М-мерное пространство, помехозащищенность
SIR увеличивается в G = N/М раз, а величину G называют выигрышем от
обработки или коэффициентом расширения спектра. На практике систе-
мы с расширенным спектром имеют коэффициенты расширения порядка
10 1 000. Так как N « 2BST, а М т 2ВТ, то коэффициент расширения ра-
вен отношению полосы частот сигнала с расширенным спектром к полосе
частот информационного сигнала: G & Bs/B. Коэффициент расширения
спектра сигнала часто определяется как соотношение полосы частот или
чего-то подобного, но подразумевается при этом улучшение эксплуата-
ционных показателей системы с расширенным спектром относительно
системы с нерасширенным спектром при наличии помех [2, гл. 2.1]. Отме-
тим, что блочное и сверточное кодирование также представляют средства
улучшения характеристик передачи при наличии шума или помех за счет
увеличения полосы частот сигнала. Интересный компромисс возникает
13.1. Принципы широкополосной п>
в отношении того, что выгоднее использовать для конкретной заданной
полосы частот — кодирование или расширенный спектр. Ответ зависит
от особенностей системы [3].
Расширение спектра сигналов обычно осуществляется в одной из двух
форм: прямой последовательностью DS1 или скачкообразной перестрой-
кой частоты FH2. При расширении спектра модуляцией прямой последо-
вательностью (DSSS3) модулированный информационный сигнал s(t) пе-
ремножается с широкополосным расширяющим сигналом или кодом sc(£),
где sc(t) в течение интервала времени Тс имеет постоянное значение,
равное 1 или —1. Биты расширяющего кода обычно называют чипами,
Тс — длительностью чипа, а 1/Тс — скоростью следования чипов. По-
лоса частот Bs « 1/Тс сигнала sc(t) приблизительно в Bs/B ~ Ts/Tc
раз больше полосы частот В модулированного сигнала s(t), а количество
чипов на бит Ts/Tc — это целое число, приблизительно равное коэффи-
циенту расширения спектра G данной системы. Умножение модулирован-
ного сигнала на расширяющий сигнал дает свертку этих двух сигналов
в частотной области. Поэтому передаваемый сигнал з(£)зс(£) имеет ча-
стотную характеристику S(f) * Sc(f) с полосой частот, равной примерно
Вс + В. Перемножение расширяющего сигнала sc(t) с модулированным
информационным сигналом s(t) в течение времени передачи символа Ts
показано на рис. 13.1
Для канала с аддитивным белым гауссовым шумом AWGN принятый
расширенный сигнал равен s(t)sc(t) 4-п(£), где n(t) — шум в канале. Если
приемник умножает этот сигнал на синхронизированную копию расши-
ряющего сигнала, то произведение равно s(£)s2(£) + n(t)sc(t). Так как
sc(t) = ±1, то s2(£) = 1. Более того, n'(t) = n(t)sc(t) имеет приблизитель-
но ту же статистику белого гауссового сигнала, что и n(i), если сигнал
sc(t) имеет нулевое среднее значение и достаточно широкополосный (т.е.
если его автокорреляционная функция близка к дельта-функции). Сигнал
на приеме равен s(£)s2(£) +n(t)sc(t) = s(t)+n'(t) и, таким образом, расши-
рение и сжатие не оказывают влияния на сигнал, передаваемый по каналу
с аддитивным белым шумом AWGN. Однако расширение и сжатие дают
огромные преимущества, когда канал вносит узкополосные помехи или
межсимвольные искажения — ISI.
Рассмотрим влияние узкополосных помех и особенности многолучево-
го подавления в частотной области при передаче сигналов со спектром,
расширенным методом прямой последовательности DSSS: более подроб-
но речь об этом пойдет в следующих разделах. Сначала мы остановимся
’DS — Direct sequence.
2FH — Frequency hopping.
3DSSS — Direct-sequence spread-spectrum.
Глава 13. Широкополосные системы передачи
на подавлении узкополосных помех (рис. 13.2). Если пренебречь шумом,
то можно видеть, что на входе приемника присутствуют расширенный
модулированный сигнал S(f) *Sc(f } и узкополосная помеха 1(f)- Сжатие
в приемнике восстанавливает информационный сигнал Однако сиг-
нал помехи I(t) перемножается с расширяющим сигналом sc(£), и в частот-
ной области образуется их свертка I(f)*Sc(f). Поэтому сжатие на приеме
создает эффект распределения энергии помехи по полосе частот расши-
ряющего кода. Демодуляция модулированного сигнала s(t) эффективно
выполняет функцию низкочастотного фильтра, удаляя большую часть
энергии расширенной помехи, что сокращает ее мощность пропорцио-
нально коэффициенту расширения спектра сигнала G ~ Bs/B.
Модулированный исходный сигнал x(t)
Рис. 13.1. Перемножение расши-
ряющего сигнала
Расширяющий сигнал sc(t)
Передаваемый сигнал s(t)s (t)
we»
$(/)
Модулированный
сигнал
/(/)
[ I $(/) * 5f(/)
Вход приемника
Рис. 13.2. Подавление узкополосных помех в сигнале с модуляцией прямой после-
довательностью DSSS
13.1. Принципы широкополосной
На рис. 13.3 показано подавление межсимвольных помех ISI, в основе
которого лежат те же принципы. Представим, что расширенный сиг-
нал s(t)sc(t) передается через двулучевой канал с импульсной характе-
ристикой h(t) = a6(t) + — т). Тогда, при передаточной характери-
стике канала H(f) = а + /3e_j2’r^T, сигнал на входе приемника при от-
сутствии шума будет равен H(f)[S(f) * Sc(f)] в частотной области или
[s(£)sc(£) * h(t)] = as(t)sc(t) + /3s(t — r)sc(t — т) во временной области. До-
пустим, что в процессе сжатия сигнала в приемнике сигнал перемножает-
ся на копию сигнала sc(t), синхронизированную по первому из двух лучей
данной модели. Это выражается во временной области как +
+/3s(t — r)sc(t — r)sc(£). Так как вторая составляющая распространения
fis'(t) = (3s{t — rjscft — T)sc(t) включает в себя произведение несинхрони-
зированных копий sc(t), то она остается распределенной в полосе частот
расширяющего кода, и процесс демодуляции устраняет большую часть ее
энергии.
S(J)
Модулированный
сигнал
Вход приемника
Рис. 13.3. Подавление межсимвольных помех ISI в сигнале, модулированном пря-
мой последовательностью DSSS
Сжатый сигнал
Рис. 13.4. Скачкообраз-
ная перестройка частоты
В(.
Если говорить более точно, то, как описано в § 13.2, процесс демо-
дуляции эффективно подавляет многолучевые составляющие, используя
автокорреляцию расширяющего кода рс(т) при задержке т. При т > Тс эта
автокорреляция может быть довольно мала — порядка 1/G ~ Tc/Ts, что
обеспечивает значительное снижение межсимвольных помех ISI, когда
606 Глава 13. Широкополосные системы передачи
модулированный сигнал распределен в широкой полосе частот. Так как
в системе с расширенным спектром автокорреляция расширяющего кода
определяет подавление межсимвольных помех ISI, то важно использовать
расширяющие коды с хорошими автокорреляционными свойствами, о чем
пойдет речь в следующем разделе.
В основе расширения спектра методом скачкообразной перестрой-
ки частоты (FHSS4) лежит скачкообразное изменение несущей частоты
информационного сигнала в широком диапазоне частот. Скачкообразная
перестройка частоты модулированного сигнала производится в соответ-
ствии со значением расширяющего кода sc{t)5. Этот процесс показан
на рис. 13.4. Время следования чипа Тс расширяющего сигнала sc(£) опре-
деляет время между скачками — т. е. длительность временного интерва-
ла, в течение которого модулированный информационный сигнал груп-
пируется вокруг заданной несущей частоты /г- до того, как перескочит
на новую несущую частоту. Время между скачками может превышать
время передачи символа: Тс = kTs, где к — некоторое целое число, и в этом
случае говорят о медленной смене частоты — SFH.6 Если же несущая ча-
стота изменяется многократно на протяжении одного символа: Тс = Ts/k,
где к — целое число, то это называют быстрой сменой частоты —
FFH7. При FFH разнос по частоте производится для каждого символа,
что защищает каждый символ от узкополосных помех и нулей в спек-
тре передаточной функции канала, вызванных частотно-селективными
замираниями. Полоса частот системы FH приблизительно равна NB, где
N — количество несущих частот, доступных для перестройки) аВ- час-
тотный диапазон информационного сигнала. Сигнал генерируется с ис-
пользованием частотного синтезатора, который устанавливает несущую
частоту модулирующего сигнала по последовательности чипов, обычно
с использованием какой-то формы частотной модуляции ЧМ (FM), на-
пример, CPFSK8. В приемнике сигнал демодулируется с использованием
похожего частотного синтезатора, синхронизированного с последователь-
ностью чипов sc(t) и формирующего из этой последовательности чипов
4 FHSS — Frequency-hopping spread spectrum.
5Идея скачкообразной перестройки частоты была разработана во время Второй ми-
ровой войны кинозвездой Хеди Ламарром и композитором Джорджем Антхейлом.
Их патент на изобретение «секретной системы связи» предлагал использовать по-
следовательность звуков — чипов, проигрываемую пианистом по списку струн, для
организации скачков между 88 частотами. Схема задумывалась для того, чтобы ослож-
нить процесс обнаружения или электронное подавление радиоуправляемых торпед.
6SFH — Slow frequency hopping.
7FFH — Fast frequency hopping.
8CPFSK (Continuous-phase frequency-shift keying) — частотная манипуляция без разры-
ва фазы. — Прим, перев.
13.1. Принципы широкополосной
последовательность несущих частот для обратного преобразования. Как
и модуляция прямой последовательностью DS, метод частотного скачка
FH не подвержен влиянию аддитивного белого гауссового шума AWGN
в канале. Однако этот метод уменьшает влияние узкополосных помех
и многолучевого распространения.
Рассмотрим узкополосную помеху в полосе частот В на несущей час-
тоте fi, используемой в системе с частотными скачками FH. Источник
помех и сигнал FH занимают один и тот же частотный диапазон толь-
ко в том случае, если несущая частота fi генерируется по последова-
тельности скачков. Если в последовательности скачков каждой несущей
частоте выделен одинаковый временной интервал, то помеха действует
только в течение промежутка времени, равного 1/N, и, следовательно,
мощность помехи сокращается примерно в N раз. Однако механизм сни-
жения помех в системах модуляции со скачками частоты FH и прямой
последовательностью DS различен. В частности, при модуляции прямой
последовательностью DS снижение мощности помех имеет место все вре-
мя, а для модуляции со скачками частоты FH характерно наличие полной
мощности помехи в течение определенного интервала времени. В сис-
темах с быстрой сменой частоты FFH помеха влияет только в течение
времени действия символа, поэтому кодирование может и не понадобить-
ся для компенсации этой помехи. В системах с медленной сменой час-
тоты SFH помеха действует в течение нескольких символов, поэтому,
чтобы избежать одновременного появления нескольких ошибок в одном
слове, обычно требуется использовать кодирование с чередованием. Скач-
кообразная перестройка частот обычно используется в военных системах,
где предполагается присутствие источников помех, намеренно направлен-
ных на подавление связи.
Теперь исследуем влияние многолучевого распространения на систему
с перестройкой частоты FH. Для упрощения мы рассмотрим двулуче-
вой канал, который вносит составляющую с задержкой т. Представим,
что приемник синхронизируется по последовательности скачков, соответ-
ствующей траектории сигнала в пределах прямой видимости. Затем сиг-
нал канала прямой видимости LOS подвергается демодуляции на нужной
несущей частоте. Однако второй луч приходит в приемник с задержкой т.
Если т > Тс, то когда второй луч с частотой Д поступает на прием-
ник, приемник перестраивается на новую несущую частоту fj fi для
дальнейшего преобразования вниз. Так как в этом случае второй луч при-
ходит с частотой, отличающейся от частоты демодулируемого сигнала,
пришедшего по линии прямой видимости LOS, то его влиянием на демо-
дулируемый сигнал можно пренебречь. Поэтому при т > Тс демодулиро-
ванный сигнал не испытывает ни амплитудных, ни частотно-селективных
(бое
Глава 13. Широкополосные системы передачи
замираний. Если т < Тс, то влияние составляющих многолучевого распро-
странения зависит от полосы частот В модулированного сигнала, а также
от скорости скачков. Сначала рассмотрим систему с быстрыми скачками
FFH, в которой Тс <^TS. Так как предполагается, что т < Тс, то, следова-
тельно, т < Тс Ts. Поскольку при многолучевом распространении все
лучи прибывают в течение времени длительности символа, многолуче-
вое распространение обуславливает комплексный коэффициент передачи
канала, и сигнал испытывает амплитудные замирания. Теперь рассмо-
трим систему с медленными скачками SFH, в которой Тс Ts. Так как
предполагается, что т < Тс, то все составляющие многолучевого распро-
странения прибудут в течение времени, пока сигнал находится на одной
и той же несущей частоте, поэтому влияние многолучевого распростра-
нения будет таким же, как и при отсутствии частотных скачков: при
В < 1/т сигнал испытывает амплитудные замирания, а при В > 1/т —
частотно-селективные замирания. Так как передаточная характеристика
эквивалентного низкочастотного канала представляет функцию несущей
частоты и поэтому изменяется всякий раз, когда несущая перескакивает
на новую частоту, то передаточная характеристика канала с замирани-
ями также медленно изменяется во времени. В итоге, при т > Тс скачки
частоты удаляют влияние многолучевого распространения на процесс де-
модуляции составляющей прямой видимости LOS. При т < Тс система
с быстрыми скачками FFH испытывает амплитудные замирания, а сис-
тема с медленными скачками SFH испытывает медленно изменяющиеся
амплитудные замирания при В < 1/т и медленно изменяющиеся частотно-
селективные замирания при В > 1/т. Анализ показателей таких систем
при нестационарных амплитудных или частотно-селективных замирани-
ях проводится по тем же правилам, что и для систем без скачков (см. § б.З
и 6.5 соответственно).
Помимо способности подавлять помехи и межсимвольную интерфе-
ренцию ISI, модуляция прямой последовательностью DSSS и метод ча-
стотного скачка FHSS обеспечивают механизм параллельного доступа,
позволяя множеству пользователей одновременно использовать расши-
ренный спектр с минимальными взаимными помехами. В таких многока-
нальных системах взаимные влияния между пользователями определяют-
ся взаимной корреляцией используемых расширяющих кодов. Схемы рас-
ширяющих кодов обычно обладают либо хорошими автокорреляционными
свойствами для уменьшения межсимвольных помех ISI, либо хорошими
свойствами взаимной корреляции для уменьшения взаимных влияний не-
скольких пользователей. Однако обычно существует компромисс между
оптимизацией этих двух свойств. Поэтому наилучший вариант схемы ко-
дирования зависит от количества пользователей в системе и серьезно-
сти ошибок, обусловленных многолучевым распространением и интер-
13.2. Метод расширения спектра прямой последовательностью — DSSS
ференцией. Компромиссы между скачкообразной перестройкой частоты
и методом прямой последовательности в системах, предназначенных для
многих пользователей, описаны в § 13.5. Скачкообразная перестройка
частоты также используется в сотовых системах для усреднения помех
других ячеек.
Пример 13.1. Рассмотрим систему с медленными скачками частоты SFH
с периодом следования скачков Тс = 10 мкс с и длительностью символа Ts =
= 1 мкс. Если сигнал FH передается по многолучевому каналу, при каком при-
мерно уровне разброса задержек многолучевого распространения принятый сжа-
тый сигнал будет испытывать частотно-селективные замирания?
Решение. Исходя из приведенного выше анализа двулучевой модели, сигнал
испытывает замирания — амплитудные или частотно-селективные — только
тогда, когда разброс задержек составляет т < Тс = 10 мкс. Более того, для
частотно-селективных замираний необходимо, чтобы В « 1/TS = Ю6 > 1/т; т.е.
т > 10 е = 1 мкс. Таким образом, при разбросе задержек в пределах от 1 мкс
до 10 мкс, сжатый сигнал будет испытывать частотно-селективные замирания.
13.2. Метод расширения спектра прямой
последовательностью — DSsS
13.2.1. Модель системы DSSS
Передающая и приемная части системы передачи с расширением9 спек-
тра прямой последовательностью показаны на рис. 13.5. Перемножение
9Система, осуществляющая расширение и сжатие в полосе пропускания модулирован-
ного сигнала, работает следующим образом. Передатчик состоит из стандартного
узкополосного модулятора, генерирующего модулированный сигнал в заданной по-
лосе пропускания, после чего производится расширение спектра сигнала. Приемник
выполняет процедуру обратного преобразования — сжатия спектра и стандартного
обратного преобразования в обычном узкополосном демодуляторе. Этот порядок опе-
раций позволяет создать систему с расширенным спектром, непосредственно используя
существующие узкополосные модуляторы и демодуляторы, а операции по восстано-
влению фазы несущей не попадают под расширение. Однако современные системы
с расширением спектра производят обработку сигналов в цифровом виде везде, где
это только возможно. Поэтому системы с расширенным спектром обычно модулиру-
ют информационные символы и умножают их на расширяющие коды в полосе частот
узкополосной передачи, используя методы цифровой обработки сигнала, за которой
следуют цифро-аналоговое преобразование и повышающее преобразование на несущей
частоте в аналоговом виде. В этом случае все функции, предшествующие перемно-
жению на несущую (рис. 13.5), выполняются в цифровом виде, а цифро-аналоговое
преобразование следует после умножения на sc(t). Однако для такой системы слож-
нее разработать схему выделения несущей частоты, так как она должна работать
с расширенным сигналом. В частности, любая нелинейная операция (т. е. формирова-
ние прямоугольных импульсов), используемая для удаления влияния информационной
или расширяющей последовательности при восстановлении фазы несущей, может быть
серьезно повреждена шумом, создаваемым расширенным сигналом.
Глава 13. Широкополосные системы передачи
на sc(t) и несущую соб(2лfct) может быть выполнено и в противоположном
порядке: обратное преобразование частоты вниз перед сжатием сигна-
ла позволяет в цифровом виде выполнить синхронизацию кода и сжа-
тие, но зато усложняет отслеживание фазы несущего колебания, так как
это отслеживание должно проводиться по широкополосному расширен-
ному сигналу. Для упрощения приемник показан только для синфазной
составляющей сигнала; подобная же структура используется и для ква-
дратурной составляющей. Сначала информационные символы з/ линейно
модулируются для передачи в исходной, основной полосе частот: x(t) =
= ^sig(t — ITS), где g(t) — формирующий импульс модулятора, Ts —
I
длительность символа, а з/ — символ, переданный в течение /-го периода
передачи символа. Линейная модуляция используется потому, что моду-
ляция прямой последовательностью DSSS представляет форму фазовой
модуляции и, следовательно, лучше всего работает в сочетании с ли-
нейно модулированным сигналом данных. Затем модулированный сигнал
умножается на расширяющий код зс(£) с периодом следования чипов Тс,
после чего он переносится вверх по частоте умножением на несущую
cos(2лfct). Широкополосный сигнал проходит через канал /г(/), который
также вносит узкополосные помехи I(t) и аддитивный белый гауссов
шум n(t) с нулевым средним и спектральной плотностью мощности, рав-
ной Ng/2.
Передатчик Приемник
Рис. 13.5. Модель системы с модуляцией прямой последовательностью — DSSS
Допустим, что канал имеет несколько многолучевых составляющих:
h(t) = ao6(t — то) + «15(2 — л) + • • •. Сигнал на приеме сначала перено-
сится по частоте вниз в основную полосу частот, в предположении полно-
го восстановления несущей, так чтобы несущая частота cos(2лfct + у?)
в приемнике имела фазу у?, согласованную с фазой несущей входного
сигнала (т. е., если h(t) = то </> = 0). Обычно предполагается, что
цепь восстановления несущей частоты синхронизируется с составляющей
13.2. Метод расширения спектра прямой последовательностью
несущего сигнала, которая проходит по линии прямой видимости LOS
(или сигнала с минимальной задержкой). В этом случае устройство син-
хронизации использует сигнал z(t). получаемый в основной полосе частот,
для выравнивания задержки т генератора расширяющего кода в прием-
нике по задержке 79 одной из составляющих многолучевого распростра-
нения. В этом случае генератор расширяющего кода подает на выход код
sc(t — т), где т = Tj, если синхронизатор идеально согласован с задержкой
г-й составляющей многолучевого сигнала. В идеале синхронизатор захва-
тывает и отслеживает составляющую многолучевого сигнала, большую
по величине. Однако на практике для этого необходима сложная проце-
дура поиска, поэтому вместо этого синхронизатор обычно захватывает
первую найденную составляющую выше данного порогового значения.
Эта процедура синхронизации может быть довольно сложной, особенно
для каналов с ощутимыми помехами или межсимвольной интерференцией
ISI, а схема синхронизации может составлять значительную часть любого
приемника с расширенным спектром. Более подробно речь о синхрониза-
ции пойдет в подпараграфе 13.2.3.
Обратное преобразование — сжатие составляющей с задержкой т про-
изводится при умножении на расширяющий код sc(t — т). Другие соста-
вляющие многолучевого распространения не подвергаются сжатию, и боль-
шая часть их энергии удаляется, о чем уже было упомянуто. После сжатия
сигнал основной полосы частот х(£) пропускается через согласованный
фильтр и решающее устройство. Таким образом, демодуляция в приемни-
ке сигнала с расширением спектра прямой последовательностью состоит
из трех стадий: преобразования вниз по частоте, сжатия — обратного
преобразования и демодуляции сигнала основной полосы частот. Этот
демодулятор называют еще одноканальным детектором с согласованным
фильтром DSSS. Теперь более подробно рассмотрим три этапа детекти-
рования.
Для упрощения предположим, что при модуляции используются пря-
моугольные импульсы (</(£) = у/2/Тя, 0 С t Ts). В этом случае со-
гласованный фильтр для получения оценки переданного символа,
просто умножает x(t) на и интегрирует ее от нуля до Ts. Так
как предполагается идеальное восстановление несущей, то сдвиг фазы ср
несущей в приемнике согласован со смещением входного сигнала. Мы
предполагаем также идеальную синхронизацию в приемнике. Подавление
многолучевого распространения и помех происходит в процессе демоду-
ляции информации. В частности, сигнал на входе согласованного фильтра
задается формулой:
т(£) = [[x(t)sc(t) cos(2tt/cZ)] *h(t)jsc(t — т) cos(2tt/cZ + <р) +
+ n^Scit - т) cos(27r/ci + 97)+
+I(t)sc(t — т) cos(2ttfct + (fi).
(13-7)
Без многолучевого распространения при т = 0 и hff) = <$(/), р = О,
синхронизация в приемнике протекает идеально. Тогда процесс расши-
рения/сжатия не оказывает влияния на сигнал x(t) в основной полосе
частот. В частности, расширяющий код имеет амплитуду ±1, поэтому
его произведение sc(t) с синхронной копией дает в результате s2(t) = 1
для всех t. Тогда в отсутствии помех и многолучевого распространения
(т. е. при h(t) = и I(£) = 0) сигнал на входе согласованного фильтра,
с учетом з)?(£) = 1, имеет вид:
x(t) = x(t)s2(t) cos2(27t/,4) + n(t)sc(t) cos(2^/cZ) =
= x(t) cos2(27r/c£) + n(i)sc(i) cos(27rfci). (13.8)
Если сигнал sc(t) достаточно широкополосный, то n(Z)sc(Z) имеет при-
мерно ту же самую статистику, что и шум n(Z): это случайный процесс
типа белого гауссового шума AWGN с нулевым средним значением и спек-
тральной плотностью Nq/2. Поэтому сигнал на выходе согласованного
фильтра на интервале времени символа (g(t) = y/2/Ts, 0 t Ts) будет
равен:
ts
s(t) — J x(t) * g*(—t)dt =
о
Ts Te
= cos2(2nfct)dt + У n(t)sc(t) cos^fct)dt =
0 _ 0
Ts __ Ts
= УУ Si cos2(2Trfct)dt+ У n(t)sc(t) cos(2tt fct)dt « st + nt, (13.9)
о о
где si и ni соответствуют информационному и шумовому сигналам на вы-
ходе стандартного демодулятора без расширения или сжатия и предпо-
лагается, что fc 3> 1/TS.
Теперь рассмотрим помеху I(t) на несущей частоте /с. Помеху некото-
рого исходного узкополосного сигнала I'(t) можно смоделировать в виде
I(£) = I'(t) cos(27r/c£). Опять предположим, что h(t) = 6(t). Умножение
на расширяющий сигнал, полностью синхронизированный с входным сиг-
налом, дает
xft) = x(t) со82(2тг/ct) + n(t)sc(t) cos(2ttfct) +
+ Г(t)scft) cos2(2лfct), (13.10)
где n(i)sc(Z) —гауссовский процесс AWGN с нулевым средним значением.
13.2. Метод расширения спектра прямой последовательностью —
В этом случае сигнал на выходе задается как:
Ts ___ Ts
= Y j sis^t) cos2(2Kfct)dt + У Y У n(t)sc(t) cos(2tt/ct)dt+
О о
___ Ts
+ У I'(t)sc(t) cos2(27vfct)dt « st + ni + II, (13.11)
о
где si и п/ соответствуют информационному и шумовому сигналам на вы-
ходе со стандартного демодулятора без расширения или сжатия, и где
допускается приближение fc 1 /Ts. Подавление узкополосной помехи
можно наблюдать, рассматривая последний член формулы (13.11). В част-
ности, расширенная помеха I'(t)sc(t) представляет широкополосный сиг-
нал с диапазоном частот, примерно равным 1/TC С 1/TS, за счет чего
большая часть мощности помех подавляется.
Теперь рассмотрим подавление межсимвольных помех ISI. Представим
многолучевой канал с одной задержанной составляющей: h(t) = ао<5(£) +
+ai6(t — п). Для упрощения предположим, что Ti = kTs, т. е. кратно це-
лому числу длительности символа. Представим, что первая многолучевая
составляющая сильнее второй, «о > од, и что приемник синхронизиру-
ется по первой составляющей (у? = 0 и т = 0 на рис. 13.5). Тогда при
отсутствии узкополосных помех (/(£) = 0) после сжатия мы имеем:
x(t) = Qo^(/)Sc(O cOS2(27t/cZ) +
+ Ot]X(t - T\)sc(t - л) cos(27Tfc(t - Ti^Scif) cos(2tt/c£) +
+ n(Z)sc(Z) cos(2^/cZ). (13.12)
Так как n = kTs, то межсимвольная помеха ISI просто соответству-
ет передаче сигнала (Z — А:)-того символа, т. е. x(t — гД = x(t — kTs) =
— si-kg(t — (I — k)Ts). Выходной сигнал демодулятора во время передачи
l-го символа в этом случае имеет вид:
те
Si = У У a0sicos2(2Trfct)dt+
о
ts
+ У У aiSi-ksc(f)sc(t - Ti) cos(27T fct) cos(2tt/c(£ - тх))Л+
о
__Ts
+ Уп(^)5с(^)со8(2л/Д)Л « (13.13)
о
~ aosi + o^si-k со8(2л/сТ1)рс(т1) + щ. (13.14)
Здесь, как и в случае с подавлением помех, si и п/ соответствуют инфор-
мационному символу и шумовому сигналу на выходе стандартного демо-
дулятора без расширения или сжатия, в предположении, что /с \/Ts.
Средний член a^si-k cos(27r/cTi)pc(ri) получается в результате следующе-
го интегрирования:
т3
Y У sc(t)sc(t - Ti)cos(27r/Cz) cos(2ttfc(t - Ti))dt =
0
Ts
= У У sc(t)sc(t - Ti)(cos(27r/CT1) + cos(4лfct - 2лfcTifidt «
0
Ts
к. со8(2л/сТ1)У У sc(t)sc(t - r^dt = cos(27r/cTi)pc(M - Ti), (13.15)
0
где приближение основывается на fc 1 /Ts, а величина
ts
pc(t, Z - n) = У У sc(t)sc(t - i\)dt (13.16)
о
называется автокорреляционной функцией расширяющего кода в момент
времени t и при задержке п в течение времени передачи символа10. В обоб-
щенном виде автокорреляция расширяющего кода за время t (в предпо-
ложении, что она кратна длительности Тс) и при задержке т за период
[О, Т] определяется как:
Т NT
pc(t, t-т) = / sc(i)sc(f - r)dt = У2 sc(nTc)sc(nTc - г), (13.17)
TJ0 Nt^
где Nt = Т/Тс — количество чипов за время Т, и где второе уравнение
следует из того, что величина sc(t) постоянна в течение времени следова-
ния чипа Тс. Можно показать, что pc(t,t — т) — симметричная функция
10Обратите внимание, что если п не кратно длительности символа, то средний член
в выражении (13.14) становится более сложным. В частности, если допустить, что
g(t) = y/2/Ts, при и = (fc + к)Та и 0 < к < 1, то x(t — п) = ^/‘2/Tssi-k~i для 0 С t кТа
и x(t — л) = для kTs t Тя. Поэтому средний член выражения (13.14)
принимает вид
kTs т„
aisi-k-г со8(2тг/сп)^- / sc(t)sc(t - n)dt + aisi-k со8(2л/сп)^- f sc(t)sc(t - n)dt,
0 kT,
где каждый член является функцией автокорреляции расширяющего кода, взятой за
время длительности символа.
13.2. Метод расширения спектра прямой последовательностью —
с максимальным значением при т — 0. Более того, если зс(£) — перио-
дическое выражение с периодом Т, то автокорреляция зависит только от
временной разницы расширяющих кодов; т. е.
т
У Sc(t - T0)sc(t - Ti)dt = рс(т! - То), (13.18)
о
поэтому pc(t, t — т) = рс(т) в выражении (13.17) зависит только от т.
В соответствии с выражением (13.15), если Т = Ts и рс(т) = <5(т),
то процесс сжатия удаляет все межсимвольные помехи ISI. К сожале-
нию, невозможно использовать расширяющие коды конечной длины с ав-
токорреляционной функцией вида дельта-функции. Поэтому пришлось
проделать большую работу по созданию расширяющих кодов с автокор-
реляционной функцией, которая бы на интервале времени длительности
символа приближалась к дельта-функции. В следующем разделе мы рас-
смотрим расширяющие коды с подавлением межсимвольных помех ISI,
включая максимальные линейные коды с прекрасными автокорреляцион-
ными свойствами, уменьшающие влияние межсимвольных помех ISI.
13.2.2. Расширяющие коды для подавления
межсимвольных помех ISI: случайные,
псевдослучайные и т-последовательности
Последовательность
Рис. 13.6. Генерирование расширяющих кодов
При формировании последовательности «1» и «0» двоичного кода Ь, при-
меняемого для расширения спектра, часто используют регистры сдвига
с цепями логической обратной связи. Как показано на рис. 13.6, двоичная
последовательность, называемая также последовательностью чипов, с ам-
плитудой 1 для битов «1» и амплитудой —1 для битов «0», используется для
амплитудной модуляции последовательности прямоугольных импульсов
длительностью Тс. Полученный в результате сигнал sc(t) с расширенным
спектром представляет в частотной области sinc-функцию, полученную
преобразованием Фурье квадратного импульса. Сигнал на выходе реги-
616 Глава 13. Широкополосные системы передачи
стра сдвига, состоящего из п каскадов, имеет максимальный период 2й — 1.
Во избежание выброса спектра на постоянном токе или смещения шума
при сжатии, расширяющий код sc(t) не должен содержать постоянной со-
ставляющей, для чего необходимо, чтобы цифровая последовательность b
имела приблизительно одинаковое количество «1» и «О». Желательно так-
же, чтобы число последовательных «1» или «О», называемых серией, было
небольшим. Серии нежелательны потому, что при наличии серии из к
последовательных «1» или «О» информационный сигнал в течение време-
ни кТс просто умножается на константу, а это сокращает расширение
полосы частот и, следовательно, его преимущества примерно в к раз.
В идеале значения чипов изменяются примерно на каждом интервале сле-
дования чипа, что ведет к максимальному расширению спектра. Исходя
из формулы (13.15), для максимального снижения влияния межсимволь-
ных помех ISI необходимы расширяющие коды с корреляционной функ-
цией рс(т) » <5(т).
Пример 13.2. Найдите ширину полосы частот сигнала с расширяющим кодом
sc(f) при периоде следования чипов Тс = 1 мкс.
Решение. Расширенный сигнал sc(t) состоит из последовательности прямоуголь-
ных импульсов с единичной амплитудой ±1 продолжительностью Тс. Преобра-
зование Фурье квадратных импульсов с единичной амплитудой равно S(f) =
= Tcsinc(fTc) с полосой частот главного лепестка, равной l/Tc. Следовательно,
ширина основного спектра до первого нуля полосы частот, определяемая как
минимальная частота, на которой S(f) = 0, равна 1/Тс.
Хотя последовательность чипов при модуляции DSSS должна генери-
роваться детерминировано, для разработки детерминированных после-
довательностей полезно понимать свойства случайных последовательно-
стей. Случайная двоичная последовательность чипов состоит из независи-
мых битов, принимающих с равной вероятностью 0,5 значения «1» или «0».
Следовательно, можно сформировать случайную последовательность дли-
ной N, если, например, подбросить симметричную монету N раз. Каждый
раз, когда выпадает «орел», ставится значение бита, равное «1», а когда
«решка» — «0». Случайные последовательности с асимптотически большой
длиной N обладают свойствами, которыми должны обладать расширяю-
щие коды [4]. В частности, такие последовательности будут иметь равное
количество «1» и «0», что называется сбалансированностью кода. Более
того, длина серии в таких последовательностях в основном мала. В част-
ности, для асимптотически больших последовательностей половина всех
серий имеют длину 1, четверть — длину 2, и так далее, т. е. для конечно-
го значения г длину г имеют 1/2г серий. Такое распределение длин серий
называется серийностью кода. Случайные последовательности обладают
также следующим свойством: если они сдвигаются на какое-то число эле-
13.2. Метод расширения спектра прямой последовательностью — DSSS 61^7
ментов, то в полученной последовательности половина элементов будет
полностью идентична элементам оригинальной последовательности, а по-
ловина элементов будет отличаться от оригинальной последовательности.
Это называется свойством сдвига. Согласно Голомбу [4], сбалансирован-
ная детерминированная последовательность, со свойствами серийности
и сдвига как у асимптотически очень большой последовательности, от-
носится к псевдослучайным последовательностям. Так как эти три свой-
ства часто представляются самыми важными при анализе системы, то
анализ модуляции прямой последовательностью DSSS часто проводится
с использованием случайных, а не детерминированных расширяющих по-
следовательностей, благодаря их аналитическим свойствам [5, гл. 2.2].
Среди всех линейных кодов расширяющие коды, образованные из по-
следовательностей максимальной длины, обладают многими ценными ка-
чествами. Последовательности максимальной длины представляют тип
циклического кода (см. подпараграф 8.2.4). Следовательно, они генери-
руются и характеризуются порождающим многочленом, а их свойства
можно вывести с помощью теории алгебраического кодирования [2, гл.
3.3; 5, гл. 2.2]. Эти последовательности имеют максимальный период,
равный N = 2" — 1, который определяется регистром сдвига длиной
п, поэтому последовательность повторяется каждые NTC секунд. Более
того, так как последовательности представляют циклические коды, то
любой временной сдвиг последовательности длиной т создает опять по-
следовательность той же длины — т-последовательность. Эти последо-
вательности обладают также следующим свойством: сложение по модулю
2 m-последовательности и ее временного сдвига дает в результате другую
последовательность длиной т, соответствующую другому временному
сдвигу исходной последовательности. Это свойство называется свойством
сдвига и сложения m-последовательностей. Такие т-последовательности
обладают примерно одним и тем же количеством «О» и «1» за период: чис-
ло «О» равно 2"-1 — 1, а число «1» равно 2"-1. Поэтому расширяющие коды,
образованные из m-последовательностей, называемые максимальными ли-
нейными кодами, имеют очень маленькую постоянную составляющую.
Более того, максимальные линейные коды имеют примерно то же свой-
ство серийности, что и случайные двоичные последовательности; то есть
количество серий длиной г в последовательности с длиной п равно 1/2г
для г < п и 1/2г-1 для г = п. Наконец, сбалансированность и свой-
ства сдвига и сложения m-последовательностей могут быть использованы
для того, чтобы показать, что m-последовательности имеют такое же
свойство сдвига, что и случайные двоичные последовательности. Следо-
вательно, так как m-последовательности сбалансированы, а их свойства
серийности и сдвига такие же как у случайных последовательностей, то
Глава 13. Широкополосные системы передачи
они принадлежат к классу псевдослучайных последовательностей ПСП11
[5, гл.2.2].
Рис. 13.7. Функция
автокорреляции ли-
нейного кода макси-
мальной длины (N =
= Т/Тс)
Коэффициент автокорреляции рс(т) максимального линейного расши-
ряющего кода, взятый за полный период Т = NTC, показанный на рис. 13.7
при |т| < (N — 1)ТС, определяется выражением:
^4‘w.(1 + 1/WTc' К
Более того, так как период расширяющего кода равен Т = NTC, то,
как показано на рис. 13.8, его функция автокорреляции также периоди-
ческая, с тем же периодом. Поэтому, если т не находится в переделах
длительности чипа kNTc, то для любого целого числа к, рс(т) = —1/N =
= —1/(2" — 1). Если будет выбрано довольно большое значение п, то влия-
ние многолучевых составляющих, связанных с задержками, которые нахо-
дятся за пределами длительности чипа kNTc, может быть в значительной
мере подавлено. Для задержек т, в течение времени следования чипа kNTc.
затухание определяется автокорреляционной функцией рс(т\ и линейно
возрастает при приближении т к kNTc. Спектр мощности sc(t) находит-
ся с помощью преобразования Фурье автокорреляционной функции рс(т),
что в результате дает
тп~—оо
Так как функция рс(т) периодическая, то PSc(f) — дискретная функция
с отсчетами, взятыми через каждые 1/Т = 1/NTC Гц.
11 Англоязычная аббревиатура — PN (pseudorandom). — Прим, персе.
13.2. Метод расширения спектра прямой последовательностью —
Рис. 13.8. Функция автокорреляции с периодом Т = NT,.
Периодический характер функции автокорреляции рс(т) осложняет
подавление межсимвольных помех ISI. В частности, из формулы (13.16)
следует, что демодулятор информационного сигнала в системе с расши-
ренным спектром подавляет межсимвольные помехи ISI, используя свой-
ства функции автокорреляции рс(т) на интервале времени действия сим-
вола Ts. Поэтому, если код содержит N = Ts/Tc чипов на символ, то
демодулятор вычисляет функцию автокорреляции рс(т), заданную выра-
жением (13.19), за полный период Ts = NTC. Иногда выбор N = Ts/Tc
рассматривается как короткий расширяющий код, так как при Т = Ts
автокорреляция периодически повторяется на каждом символе, как это
показано на рис. 13.8. Однако в коротких кодах обнаруживаются значи-
тельные межсимвольные помехи ISI, обусловленные задержкой составля-
ющих многолучевого распространения, равной примерно целому числу
длительностей символа, в особенности, на нескольких первых символах
после нужного. Если период кода расширить до N Ts/Tr. то только
составляющие многолучевого распространения с очень большими задерж-
ками не могут быть полностью подавлены, а эти составляющие, из-за
потерь в тракте передачи, обычно все равно маломощные. Код, удовле-
творяющий условию N Ts/Tc иногда называется длинной расширяющей
последовательностью. Функция автокорреляции (13.17) длинной расширя-
ющей последовательности на выходе демодулятора берется за неполный
период Т = Ts С NTC вместо полного периода NTC. Функция авто-
корреляции максимального линейного кода за неполный период уже не
может быть охарактеризована формулой (13.19), так как составляющие
многолучевого распространения, задержанные на время больше длитель-
ности чипа, более не ослабляются пропорционально — 1/N. Более того,
функция автокорреляции за неполный период очень плохо поддается ана-
литическому описанию, так как она зависит от исходной точки в по-
следовательности, с которой отсчитывается частичная автокорреляция.
При усреднении по всем исходным точкам можно показать, что ослабле-
620 Глава 13. Широкополосные системы передачи
ние межсимвольных помех ISI, связанное с частичной автокорреляцией,
при грубом приближении пропорционально 1/G, где G — коэффициент
расширения спектра сигнала, a G » Ts/Тс — количество чипов на символ
[6, гл. 9.2].
Хотя максимальные линейные коды обладают великолепными харак-
теристиками для подавления ISI, у них есть также определенные свойства,
которые, при использовании в режиме поддержки многих пользовате-
лей в расширенном спектре, делают их неоптимальными. В частности,
имеется меньшее количество максимальных линейных кодов с данной дли-
ной N, чем в других кодах, что ограничивает количество пользователей,
способных разделить полный частотный диапазон многопользователь-
ской системы DSSS, основанной на максимальных линейных кодах. Более
того, максимальные линейные коды, в общем, имеют относительно пло-
хие взаимно-корреляционные свойства, по крайней мере, для некоторых
множеств кодов. В частности, нормированная взаимная корреляция ко-
да может быть достаточно высокой, вплоть до 0,37 [6, гл.9.2]. Поэтому,
в системах с расширенным спектром и множеством пользователей исполь-
зуются коды Голда (Gold), Касами (Kasami) или Уолша (Walsh) вместо
максимальных линейных кодов, так как они обладают лучшими свойства-
ми взаимной корреляции. Однако, для подавления межсимвольных помех
ISI, эти коды могут оказаться менее эффективными, чем максимальные
линейные коды. Более подробно об этих и других типах расширяющих
кодов речь пойдет в подпараграфе 13.4.1.
Пример 13.3. Рассмотрим систему с расширенным спектром, использующую
максимальные линейные коды с периодом Т = Ts и N = 100 чипов на символ. До-
пустим, что синхронизатор имеет смещение, вызванное задержкой, равное 0,5Тс
относительно составляющей прямой видимости LOS, по которому осуществляет-
ся синхронизация. На сколько сократится мощность этой составляющей сигнала
за счет данного временного смещения?
Решение. Для т = 0,5Тс и N = 100 коэффициент автокорреляции рс(т), опреде-
ляемый формулой (13.19), равен:
1 |r|(i+W) = , _ ОД(1.+ 1/100) =, _ 015(1101) = 01495
L С -L с
Так как составляющая сигнала умножается на рс(т), то ее мощность снижается
на р|(т) = 0,4952 = 0,245 = —6,11 дБ. Это существенное снижение мощности,
показывающее важность обеспечения высокоточной синхронизации, о чем речь
пойдет в следующем разделе.
13.2.3. Синхронизация
Теперь рассмотрим работу устройства синхронизации, показанного на
рис. 13.5. Эта работа отделена от процесса восстановления фазы несущей,
13.2. Метод расширения спектра прямой последовательностью —
поэтому предположим, что несущая частота в демодуляторе когерентна
по фазе с принятой несущей. Устройство синхронизации должно выров-
нять — согласовать тактовый сигнал генератора расширяющего кода
в приемнике с расширяющим кодом одной из составляющих многолучево-
го сигнала, поступающих по каналу. Наиболее распространенный метод
синхронизации использует цепь управления с обратной связью, как это
показано на рис. 13.9. В основе работы цепи обратной связи лежит на-
стройка задержки г генератора расширяющего кода до тех пор, пока
функция щ(т) не достигнет своего максимального значения. В этой точке,
при идеальных условиях, расширяющий код синхронизируется по входно-
му сигналу, что мы сейчас и проиллюстрируем.
Рассмотрим канал с импульсной характеристикой h(t) = 6(t — то), ко-
торый вводит задержку tq. Если пренебречь шумом, то сигнал на входе
синхронизатора (рис. 13.5) равен
z(t) = x(t - To)sc(t - То) cos(2?rfc(t - To)) cos(2?rfct + </?),
где у? — фаза в цепи восстановления несущей частоты приемника. Предпола-
гая идеальное восстановление несущей для cos(2tt/c(Z — то)) = cos(2лfct + у?)
получим z(t) = x(t — To)sc(t — то) cos2(2ttfct + у?). Контур обратной связи
достигает синхронизма при т = то- Сначала предположим, что x(t) —
модулированный сигнал ДФМН (BPSK) с прямоугольной формой им-
пульса (з/ = ±у/Еь, а величина x(t) = постоянна в течение
0,5Г
622 Глава 13. Широкополосные системы передачи
длительности 7},), и что расширяющие коды представлены максималь-
ными линейными кодами. Затем распространим полученные результаты
на более широкий класс расширяющих кодов и модуляций. Предположим,
что расширяющие коды имеют период Т — NTC — Т^, тогда их функция
автокорреляции на одном периоде задается формулой (13.19) и показана
на рис. 13.7. Затем, в соответствии с (13.18), полагая А = ^/2/7),, получим:
т
w(t) = у sisc(t - r0)sc(t - т) со82(2л fct + (p)dt «
о
т
sc(t - T0)sc(t - r)dt = Q,5Xsipc(r - To). (13.21)
0
Так как рс{т - то) достигает своего максимума при г - т0 = О, a si =
= то цепь обратной связи будет подстраивать т таким образом,
чтобы повышалась величина |ш(т)|. В частности, предположим, что |т - т0| >
> Тс. Тогда, в соответствии с (13,19), рс(т — то) = — 1/N, а устройство
синхронизации работает вне треугольной области функции автокорреля-
ции, изображенной на рис. 13.7. Цепь обратной связи в этом случае будет
подстраивать т, обычно в сторону приближения к Тс до тех пор, пока
|ш(т)| не превысит —1/N. Этот рост происходит в том случае, когда т
удовлетворяет условию |т — тр | <ТС. В этой точке синхронизатор входит
в режим синхронизма с точностью до длительности чипа, что иногда
называется грубой синхронизацией или вхождением в синхронизм. Обыч-
но в канале есть много составляющих многолучевого распространения,
в этом случае грубая синхронизация будет производиться по первой об-
наруженной составляющей с мощностью выше заданного порога.
Альтернативой контуру управления обратной связью служит система
параллельного поиска вхождения в синхронизм. В этой системе имеется
несколько ветвей, рассчитывающих величину корреляции принимаемого
сигнала в зависимости от задержанной копии расширяющего кода, а вет-
ви имеют различные задержки, кратные длительности чипа. Синхрониза-
тор захватывает ветвь с максимальным сигналом на выходе коррелятора.
Подобная структура используется в приемнике RAKE, речь о котором
пойдет в следующем разделе, при когерентном объединении составля-
ющих многолучевого распространения с различными задержками. При
обоих способах синхронизации, для сокращения времени вхождения в син-
хронизм, грубая синхронизация часто использует короткие коды с малым
периодом Т. Если используются длинные коды, то время вхождения в син-
хронизм может быть уменьшено за счет интегрирования в цепи обратной
связи за полный период кода. В этом случае, пока частичная автокорреля-
13.2. Метод расширения спектра прямой последовательностью —
ция мала при задержках, превышающих длительность чипа, и находится
выше заданного порога при задержках, не превышающих длительность
чипа, цепь вхождения в синхронизм может произвести сравнение частич-
ной автокорреляции с пороговым значением и определить, имела ли место
грубая синхронизация или нет. Для тонкой подстройки, которая следует
после захвата, для обеспечения более точной синхронизации обычно ис-
пользуются длинные коды.
Как только произошел захват, цепь управления обратной связью про-
изводит небольшую подстройку величины т для ее точной установки под
оценку задержки, так чтобы т » tq. Это называется точной синхрони-
зацией или отслеживанием. Допустим, что при грубой синхронизации
мы получили т — то = Тс. Из рис. 13.7 следует, что устройство синхро-
низации работает на правой границе треугольной функции корреляции.
При дальнейшем уменьшении г, разность т — tq уменьшается, стремясь
к нулю, а устройство синхронизации «идет в обратном направлении» к пи-
ку автокорреляции в точке т — то = 0. Как только максимум достигнут,
устройство синхронизации фиксирует задержку то. Из-за нестационарной
природы канала, а также помех, многолучевого распространения и шу-
ма необходимо постоянно производить подстройку т для оптимизации
синхронизации при этих динамичных условиях обработки сигнала. От-
слеживание сигналов с расширенным спектром часто использует метод
восстановления тактовой частоты, речь о котором шла в подпарагра-
фе 5.6.3 для узкополосных систем.
Процессы вхождения в синхронизм и отслеживания расширяющих ко-
дов общего вида очень похожи. Так как все периодические расширяющие
коды имеют функции автокорреляции с пиковым значением в нуле, то
процессы грубой и тонкой синхронизации будут настраивать свои оцен-
ки величины задержки, пытаясь максимально увеличить автокорреляцию
сигнала на выходе интегратора. Показатели синхронизации в большой
степени зависят от формы функции автокорреляции. Средства вычисле-
ния точной автокорреляции выполняют точную подстройку синхронизма.
Шум, замирания, помехи и межсимвольная интерференция ISI усложняют
процессы грубой и точной синхронизации, так как под воздействием этих
факторов сигнал на выходе интегратора (рис. 13.9) искажается.
Если сигнал s(t) не двоичный и/или длительность его символа меньше,
чем период последовательности, то сигнал на выходе интегратора будет
зависеть от соотношения длительности символа (символов) и времени ин-
теграции. Это такая же ситуация, как и при восстановлении несущей
и синхронизации узкополосных систем с неизвестными данными, речь о
которых шла в § 5.6, те же методы применимы и в данном случае. Обра-
тите внимание, что при анализе мы пренебрегли восстановлением фазы
624 Глава 13. Широкополосные системы передачи
несущей, допуская, что в приемнике есть схема восстановления, обес-
печивающая получение когерентной фазы принимаемого сигнала. Мето-
ды восстановления несущей обсуждались в § 5.6, но для систем с рас-
ширенным спектром эти методы необходимо модернизировать, так как
расширяющие коды оказывают воздействие на процесс восстановления
несущей [7]. Синхронизация представляет проблемный аспект проектиро-
вания широкополосных систем, особенно в нестационарной беспроводной
среде. Большая работа была проделана по анализу и разработке методов
синхронизации систем с расширенным спектром. Детали основных мето-
дов и данные об их показателях можно найти в работах [2, гл. 4- 5: 8, гл. 6;
9, гл. 4: 1-2; 10, гл. 12.5].
13.2.4. Приемники RAKE
На рис. 13.5 изображен приемник сигналов с расширенным спектром, ко-
торый синхронизируется по одной из многолучевых составляющих при-
нимаемого сигнала. Составляющая, по которой производится синхрони-
зация, обычно представляет первую составляющую, вошедшую в синхро-
низм во время проведения грубой синхронизации, значение которой выше
данного порогового уровня. Это не обязательно самая сильная многолуче-
вая составляющая; более того, в результате все остальные многолучевые
составляющие будут теперь рассматриваться как помехи. В более слож-
ном приемнике может быть несколько ветвей, каждая из которых син-
хронизируется по разным составляющим многолучевого сигнала. Такая
структура называется приемником RAKE,12 и обычно предполагает на-
личие в каждой ветви задержки, равной целому кратному значению дли-
тельности чипа, для составляющих многолучевого сигнала. Таким обра-
зом, как показано на рис. 13.10, разница в задержке между ветвями рав-
на Тс. Обратите внимание, что сдвиг фазы несущего сигнала каждой
составляющей многолучевого распространения зависит от ее задержки:
это смещение определяется когерентным демодулятором каждой ветви.
В приемнике другого типа, перед умножением на расширяющий код, каж-
дая ветвь может быть преобразована по частоте вниз в исходную полосу
частот. В этом случае каждая ветвь выделяет фазу несущего сигнала
перед понижающим преобразованием. По существу, RAKE представляет
12 Название RAKE берет начало с представления о том, что приемник с нескольки-
ми ветвями похож на садовые грабли (англ, rake — «грабли»), а работа каждой его
ветви похожа на сгребание энергии составляющих многолучевого распространения.
Приемник RAKE был изобретен в 50-е годы прошлого столетия для работы в условиях
многолучевого рассеяния в ионосфере сигналов высокочастотной межконтинентальной
связи с расширенным спектром. Название придумали его изобретатели — Пол Грин
и Боб Прайс.
13.2. Метод расширения спектра прямой последовательностью —
еще одну форму объединения разнесенного сигнала, поскольку расши-
ряющий код приводит к разнесению трактов передаваемого сигнала и,
таким образом, независимые составляющие многолучевого сигнала, кото-
рые разделены на интервал времени, превышающий длительность чипа,
могут быть различены — приняты раздельно. При этом может исполь-
зоваться любой метод объединения, речь о которых шла в гл. 7, хотя
на практике наиболее часто используется разнесение сигналов на приеме
с дифференциальным взвешиванием — MRC.
Рис. 13.10.
Приемник
RAKE
sc(t — JTC)
Для изучения поведения приемников RAKE рассмотрим модель кана-
J
ла с импульсной характеристикой h(f) = ]>2 ctjd(t — jTc), где aj — ко-
J=°
эффициент передачи j-й. составляющей многолучевого распространения.
Эта модель, описанная в § 3.4, может аппроксимировать широкий спектр
условий многолучевого распространения, согласовывая статистики ком-
плексных коэффициентов передачи с коэффициентами соответствующего
окружения. Экспериментальная статистика коэффициентов aj беспро-
водных каналов описана в [11]. В соответствии с этой моделью каждая
ветвь приемника RAKE, изображенного на рис. 13.10, синхронизируется
по различным многолучевым составляющим и когерентно демодулирует
Глава 13. Широкополосные системы передачи
свой сигнал. Большее значение J подразумевает более высокую сложность
приемника, но также и увеличение порядка разнесения. Тогда, исходя
из формул (13.14) и (13.15), сигнал на выходе г-й ветви демодулятора
равен:
J-1
s\ = aiSi + ajpc(iTc - jTc)sij + п], (13.22)
>=i
i/j
где si — символ, переданный на интервале [ITS, (Z + 1 )TS] (т. e. символ, пе-
реданный по линии прямой видимости — LOS); sij — символ, переданный
на интервале [ITS — jTc, (/ + 1 )TS — jTc], сдвиг и период следования симво-
лов считаются постоянными; и nj — выборка шума в г-й ветви демодулято-
ра. Если значение sij не постоянно на интервале [ITS — jTc, (Z + 1)TS — jTc\,
то составляющая межсимвольных помех ISI в (13.22) будет иметь более
сложный вид и включает частичную автокорреляцию. Однако во всех
случаях составляющая межсимвольных помех ISI сокращается за счет ав-
токорреляции приблизительно на рс((г — j)Tc). Устройство объединения
с разнесением когерентно складывает сигналы с выходов демодуляторов.
В частности, при селективном объединении на выход устройства объеди-
нения подается выходной сигнал ветви s] с самым большим передаточ-
ным коэффициентом в канале аг. При линейном сложении все выходные
сигналы демодулятора объединяются с равным весом, а при объедине-
нии с дифференциальным взвешиванием выходные сигналы демодулятора
объединяются с весом, равным отношению сигнал - помеха SNR, или SINR
(signal-to interference-plus-noise power ratio — отношение сигнал-поме-
ха плюс мощность шума) в ветви, — если учитываются межсимвольные
помехи ISI. Если рс(т) и 0 при |т| > Тс, то можно пренебречь составля-
ющей межсимвольной помехи ISI каждой ветви, а показатели приемника
RAKE с J ветвями будут идентичны любому другому методу разнесен-
ного приема с J ветвями. Всестороннее исследование эксплуатационных
показателей RAKE для моделей каналов, полученных экспериментально,
было проделано Турином [11].
Расширение спектра — это не единственное средство, используемое
для разнесения, так как для него необходима значительно более широкая
полоса частот, чем при других методах разнесения. Однако если передача
сигналов с расширением спектра выбирается из-за других своих преиму-
ществ — таких как большое количество пользователей или возможность
устранения помех, то RAKE обеспечивает простой механизм для получе-
ния преимуществ от разнесенного приема.
13.3. Расширение спектра скачкообразной перестройкой частоты 627
13.3. Расширение спектра методом скачкообразной
перестройки частоты (FHSS)
Передающая и приемная части системы передачи с расширением спектра
методом скачкообразной перестройки частоты показаны на рис. 13.5.
На синтезатор частот подается расширяющий код для генерирования сигна-
ла со скачкообразным изменением несущей частоты eft) — cos(2tt fit +
который затем подается на модулятор для преобразования модулирован-
ного сигнала вверх и передачи на данной несущей частоте. Модулятор
может быть когерентным, некогерентным или дифференциально-коге-
рентным, хотя когерентная модуляция не является настолько распростра-
ненным явлением, как некогерентная модуляция, вследствие сложности
поддержания характеристики фазы несущей во время скачков несущей
в широкой полосе частот [9, часть 2.2]. В приемнике для синхронизации
местного генератора расширяющей последовательности с входным сиг-
налом используется синхронизатор. Как только синхронизм достигнут,
расширяющий код подается на синтезатор частоты для генерирования
последовательности скачков частот, а затем сигнал подается на демо-
дулятор для преобразования вниз по частоте. Для некогерентного или
дифференциально когерентного модулятора не нужно синхронизировать
фазу несущей частоты, генерируемой в приемнике, с фазой несущей час-
тоты передатчика.
Как и при модуляции прямой последовательностью — DSSS, проце-
дура синхронизации в системах с модуляцией скачками частоты — FH
проводится обычно в два этапа. Сначала выполняется грубая синхрониза-
ция — согласование скачков последовательности в приемнике со скачками
принимаемого сигнала с FH в пределах длительности скачка Тс. Процесс
похож на грубую синхронизацию в методе с DSSS: принятый сигнал с FH
с шумом перемножается с последовательностью скачков местного гене-
ратора и, вычисляя энергию этих произведений, получают оценку корре-
ляционной зависимости. Если эта энергия превышает заданное пороговое
значение, то грубый захват произошел; в противном случае принимаемый
сигнал FH смещается во времени на Тс, и процесс повторяется. Грубое
вхождение в синхронизм может быть также выполнено при параллельном
использовании нескольких последовательностей скачков, каждая из ко-
торых сдвигается во времени на число, кратное Тс. Как только произо-
шло вхождение в состояние грубого синхронизма, начинается непрерыв-
ная подстройка точного синхронизма скачков частоты для обеспечения
максимального значения корреляции между последовательностью скач-
ков приемника и принимаемым сигналом. Более подробную информацию
о синхронизации методом частотного скачка FH и анализе показателей
системы при ошибках синхронизации можно найти в [9, гл. 4].
Глава 13. Широкополосные системы передачи
Влияние многолучевого распространения на системы с частотным скач-
ком FH было рассмотрено в § 13.1. Там показано, что системы FH не
испытывают замираний в том случае, если многолучевые составляющие
имеют задержку, превышающую интервал времени между скачками час-
тоты, так как во время скачка поступает только одна составляющая
сигнала без замираний. Если все же условия многолучевого распростра-
нения вызывают амплитудные или частотно-селективные замирания, то
анализ эксплуатационных показателей проводится так же, как в системе
с медленно изменяющимися параметрами без скачков частоты. Однако
влияние узкополосных помех на системы с FH, которое характеризуется
вероятностью ошибки символа, более сложно определить. Действительно,
эта вероятность ошибки зависит от структуры мешающего сигнала и его
влияния на применяемый вид модуляции, что сейчас и будет рассмотрено.
Ограничимся рассмотрением вероятности ошибки символа в систе-
ме без кодирования с медленными скачками частоты SFH, в которой
помеха, если она присутствует, постоянна в течение времени передачи
символа. Анализ при быстрых скачках частоты сложнее, так как помеха
изменяется в течение времени передачи символа, поэтому описание ста-
тистических свойств помехи и оценка ее влияния на вероятность ошибки
символа усложняется. Поэтому рассмотрим систему с медленными скач-
ками SFH и М выходами N частотных полос, с узкополосными помехами.
Полагая, что сигнал равномерно проскакивает всю полосу частот, ве-
роятность некоторой частоты, которая находится в той же полосе, что
и источник помех, равна М/N. Вероятность ошибки символа выводится
приведением помехи к заданному периоду следования символов:
Ps = р(ошибка символа|нет помехи)р(нет помехи) +
+ р(ошибка символа|есть помеха)р(есть помеха) —
N -М
N
р(ошибка символа|нет помехи) +
+ — р(ошибка символа|есть помеха).
(13.23)
В отсутствие помех вероятность ошибки символа просто равна ве-
роятности ошибки символа модулированного информационного сигнала,
переданного по каналу с аддитивным белым шумом AWGN и защищенно-
стью — SNR на приеме, равной 7S, эту вероятность обозначим P&WGN.
Отметим, что значение защищенности SNR на приеме приведено ко
входу демодулятора в отсутствие помех, поэтому многолучевые соста-
вляющие, удаленные в процессе сжатия, не оказывают влияния на это
значение SNR. Однако на защищенность будут оказывать влияние пе-
редаточные коэффициенты канала на несущих частотах составляющих
13.3. Расширение спектра скачкообразной перестройкой частоты 629
многолучевого сигнала, не удаленных при сжатии сигнала. Для боль-
шинства видов когерентных модуляций p^WGN « где ко-
эффициенты сим и /Зм зависят от типа модуляции, о чем говорилось
в подпараграфе 6.1.6. Выражения вероятности p^WGN в канале AWGN
для некогерентной или разностной когерентной модуляции обычно слож-
нее [12, гл.1.1]. При заданном p^WGN остается только охарактеризовать
вероятность ошибки при наличии помех, р (ошибка символа | есть помеха),
чтобы определить Ps в (13.23). Если мы обозначим эту вероятность как
PgNT, то выражение (13.23) принимает следующий вид:
Р. = ’^Р.^ + ^Р"Т- ИЗ-24)
Теперь рассмотрим вероятность ошибки при наличии помех PgNT бо-
лее подробно. Эта вероятность зависит от параметров помехи. Рассмо-
трим сначала узкополосный источник помех с такой же статистикой, как
у аддитивного белого шума AWGN в пределах полосы частот модули-
рованного сигнала. Источник помех с такими характеристиками иногда
рассматривается как источник шума, ограниченный по полосе частот.
Для такого типа источников помех вероятность PgNT находится при рас-
смотрении помехи как дополнительной составляющей аддитивного шума
AWGN с мощностью Nj внутри полосы частот модулированного сигнала.
Полная мощность шума в этом случае равна NqB + Nj, и тогда отношение
SINR при наличии такой помехи принимает вид:
INT = N0B
,s N0B + Nj ’
что дает
p/TVT = pAWGN^INTy (13,25)
Допустим теперь, что помеха в точности равна сигналу скачкообраз-
ной несущей частоты с некоторым смещением фазы. Тогда выходной
сигнал демодулятора з/ на рис. 13.11 определяется как:
si = api + nt + Ii, (13.26)
где сц — передаточный коэффициент канала, соответствующий приня-
тому сигналу после сжатия, щ — отсчет шума AWGN, a Ii = y/le^1 —
составляющая помехи с фазовым сдвигом у?/. Отметим, что, так как это
широкополосный канал, то замирания имеют частотно-селективный ха-
рактер, и, следовательно, (i) передаточный коэффициент канала а/ за-
висит от несущей частоты, и (ii) некоторые скачки могут иметь очень
низкую величину передаточного коэффициента канала. Влияние соста-
вляющей дополнительных помех Ii зависит от типа модуляции. Например,
при когерентной многоуровневой фазовой манипуляции МФМН (MPSK)
Глава 13. Широкополосные системы передачи
и предположении Zs/ = 0 вероятность ошибки символа равна:
Ps = 1 - p(.\Aaisi + ni + Ii) тг/М.
(13.27)
Передатчик Приемник
Рис. 13.11. Модель системы с расширением спектра методом частотного скачка
FHSS
Вообще, для вычисления вероятности Ps, будь то когерентная или
некогерентная модуляция, необходимо найти распределение случайной
фазы Z(n/ + Ii). Это распределение и полученное в результате значение Ps
определены в [9, части 2-3] для некогерентной, когерентной и разностной,
относительной когерентной модуляций при различных моделях помех.
Кодирование или кодирование с чередованием часто используются в сис-
темах со скачками частоты FH для компенсации частотно-селективных
замираний, а также при узкополосных помехах или помехах преднамерен-
ного подавления. Анализ кодированных систем с помехами можно найти
в [9, часть 2:2].
13.4. Многопользовательские многоканальные системы
с модуляцией прямой последовательностью DSSS
Система широкополосной передачи также может использоваться в ка-
честве механизма, с помощью которого несколько пользователей могут
использовать один и тот же диапазон частот. Использование свойств
расширяющего кода для поддержания работы многих пользователей вну-
три одного и того же расширенного диапазона частот называется так-
же многостанционным доступом с использованием сигналов с расши-
ренным спектром — SSMA (spread-spectrum multiple access), который
представляет частный случай многостанционного доступа с кодовым раз-
13.4- Многопользовательские многоканальные системы 63 I
делением каналов — CDMA. В многоканальной широкополосной системе
каждому пользователю для модуляции данных выделяется уникальный
расширяющий код или уникальная последовательность скачков частоты.
Переданные сигналы всех пользователей совпадают во времени и частоте.
Кодовые расширяющие последовательности или последовательности скач-
ков могут быть ортогональными, и в этом случае, при условии идеального
распространения сигнала, пользователи не создают помех друг другу,
или последовательности могут быть неортогональными, — тогда между
пользователями возникают взаимные влияния — перекрестные помехи.
Но эти влияния ослабляются свойствами расширяющего кода. Поскольку
использование расширенного спектра для одного пользователя неэффек-
тивно, так как используется полоса частот больше, чем это минимально
необходимо для передачи информационного сигнала, то используются
многопользовательские системы с расширенным спектром для органи-
зации связи многих пользователей в заданном диапазоне частот. Число
пользователей может быть равно или больше, чем при других способах
разделения каналов, как, например, временное или частотное разделе-
ние. Однако если механизмы расширения неортогональны — или потому,
что так разработаны, или из-за искажений в канале, — то пользователи
будут создавать помехи друг другу. Если между пользователями воз-
никают слишком большие взаимные помехи, то показатели всех пользо-
вателей системы ухудшаются. Сравнение эффективности использования
спектра для различных методов разделения спектра в многопользователь-
ских и сотовых системах будет дано в гл. 14 и 15.
Показатели многоканальных систем с расширением спектра также за-
висят от того, какое это направление канала: нисходящее (один передат-
чик работает с несколькими приемниками) или восходящее13 (много пере-
датчиков работают на один приемник). Эти модели каналов изображены
на рис. 13.12: нисходящее направление также называют вещательным или
прямым каналом, а восходящее направление — каналом многостанци-
онного доступа или обратным каналом. Различия в показателях DSSS
в нисходящем и восходящем каналах происходят из-за того, что для нис-
ходящего направления все переданные сигналы обычно синхронны, так
как они идут с одного передатчика. Более того, и нужный и мешающие
сигналы проходят через один и тот же канал, пока не достигнут данного
приемника. И наоборот, пользователи восходящего направления канала
обычно асинхронны, так как они работают от передатчиков, располо-
женных на различных расстояниях, а переданные сигналы пользователей
13Обычно подразумевается, что восходящий канал — это исходивши канал от абонента
к станции (базовой, к АТС и т.д.), а нисходящий — в противоположном, входящем
направлении, с точки зрения абонента. — Прим, перев.
Глава 13. Широкополосные системы передачи
проходят по различным каналам, прежде чем они достигнут приемника.
В данном разделе анализируются свойства нисходящего и восходящего ка-
налов многопользовательской системы DSSS. В § 13.5 рассматриваются
свойства многопользовательских систем с частотными скачками FHSS.
Нисходящий канал Восходящий канал
Рис. 13.12. Нисходящий канал и восхо-
дящий канал
13.4.1. Расширяющие коды
в многопользовательской DSSS
В многопользовательской — многоканальной системе с DSSS каждому
пользователю выделяется уникальная расширяющая кодовая последова-
тельность sCi(Z). Как сказано в подпараграфе 13.2.2, функция автокорре-
ляции расширяющей последовательности определяет ее способность по-
давлять эффекты многолучевого распространения. Взаимная корреляция
различных последовательностей определяет степень взаимных влияний
между пользователями, сигналы которых модулируются этими кодовыми
последовательностями. Сигналы асинхронных пользователей поступают
на приемник с произвольной относительной задержкой т, и взаимная кор-
реляция кодов, выделенных пользователю i и пользователю j на интервале
времени одного символа с этой задержкой, выражается в виде:
D N
т) = [ sCi(f)sCj(t - r)dt = j-^sCi(nTc)sCj(nTc - г), (13.28)
где N — число чипов на один символ. Как и при автокорреляции, ес-
ли sCi(t) и sCj(t) периодические с периодом Ts, то взаимная корреляция
зависит только от разницы во времени т, поэтому t — т) = pij(r).
Сигналы синхронных пользователей поступают на приемник выровнен-
ными во времени, поэтому т = 0, а взаимная корреляция принимает вид:
Г
о
1 "
-£ясДпТс)ясДпТс). (13.29)
п=1
13.4- Многопользовательские многоканальные системы 633
В идеале из-за того, что взаимные помехи между пользователями опре-
деляются величиной взаимной корреляции расширяющих последователь-
ностей, то при i / j было бы желательно равенство Pij(r) = 0 для всех зна-
чений сдвигов т асинхронных пользователей, и = 0 для синхронных
пользователей. Это бы устранило взаимные влияния между пользователя-
ми. Множество расширяющих кодов с таким свойством взаимной корре-
ляции образует ортогональное множество кодовых последовательностей,
а множество расширяющих кодовых последовательностей, которое не удо-
влетворяет этому условию, образует неортогональное множество. Для
асинхронных пользователей невозможно получить ортогональные коды.
Для синхронных пользователей существует только ограниченное коли-
чество расширяющих кодов, которые ортогональны только в пределах
данной полосы частот. Поэтому требования ортогональности ограничи-
вают количество различных расширяющих кодов и соответствующее ко-
личество независимых каналов или пользователей в синхронной системе
с DSSS. Ниже описываются типичные последовательности чипов и соот-
ветствующие им расширяющие коды, используемые в многопользователь-
ских системах с модуляцией прямой последовательностью — DSSS.
Коды Голда
У кодов Голда (Gold) свойства автокорреляции хуже, чем у кодов с макси-
мальной длиной, но при соответствующей разработке схемы коды Голда
обладают лучшими свойствами взаимной корреляции. Последовательно-
сти чипов кодов Голда создаются при двоичном сложении двух т-после-
довательностей, каждая длиной N = 2" — 1, и они сохраняют свойства этих
двух последовательностей — сбалансированности, длины серии — серий-
ности, сдвига и, следовательно, представляют псевдослучайные последо-
вательности. Коды Голда используют преимущества того факта, что по-
следовательность, полученная при сложении по модулю 2 двух отдельных
т-последовательностей с временными сдвигами л и тг, будет единствен-
ной для любого выбранного значения л или т^- Следовательно, можно со-
здать очень большое количество уникальных последовательностей Голда,
благодаря чему возможно организовать в многопользовательской систе-
ме очень большое количество каналов. Однако, если при создании кода
Голда m-последовательности, которые складываются по модулю 2, выби-
раются случайно, то взаимная корреляция полученного в результате кода
может быть довольно плохой. Поэтому коды Голда генерируются сло-
жением по модулю 2 последовательностей чипов, составленных из пред-
почтительных пар m-последовательностей. Эти предпочтительные пары
отбираются для получения хороших свойств взаимной корреляции в ге-
нерируемом коде Голда. Однако автокорреляционные свойства предпо-
чтительных пар m-последовательностей отличаются от свойств обычных
Глава 13. Широкополосные системы передачи
m-последовательностей. Метод отбора предпочтительных пар с ограни-
ченными функциями взаимной корреляции и автокорреляции в создавае-
мом коде Голда, был представлен Голдом в работе [13], его также можно
найти в [6, гл. 9.2; 8, прил. 7; 14]. Предпочтительные последовательности
отбираются таким образом, чтобы коды Голда имели трехзначную вза-
имную корреляцию в течение периода последовательности со значениями:
f -W,
РгДт) = { (13.30)
I (Дп) - 2)/У,
где
,, . ( 2("+1)/2 +1, при нечетном п,
Цп) = 1 , (13.31)
( 2^ + 'I + 1, при четном п.
Автокорреляционная функция берется по тем же трем значениям.
Коды Кассами
Последовательности Кассами (Kasami) обладают свойствами, подобными
свойствам предпочтительных последовательностей, используемых при со-
здании кодов Голда, и они также образуются из т-последовательностей.
Однако коды Касами обладают лучшими свойствами взаимной корре-
ляции, чем коды Голда. Существуют два различных множества после-
довательностей Касами — большое множество и малое множество. Для
генерирования малого множества начинают с m-последовательности а
длиной N = 2" — 1 для четного п и формируют новую более короткую
последовательность а1, делая выборки через каждые 2"/2 + 1 элементов по-
следовательности а. Полученная в результате последовательность а' будет
иметь период 2"/2 — 1. Затем создается малое множество последователь-
ностей Кассами взятием суммы по модулю 2 элементов последовательно-
сти а по всем циклическим сдвигам последовательности а'. Существуют
2й/2 — 2 циклических сдвига и — включая в это множество также ис-
ходную последовательность а и mod2(a + а'), — мы получаем множество
2"/2 двоичных последовательностей с длиной 2" — 1. Как и в кодах Гол-
да, автокорреляция и взаимная корреляция расширяющих кодов Касами,
полученных из последовательностей Касами за период кода, являются
трехзначными и принимают значения:
Pij(r) = S -s(n)/N, (13.32)
I (S(n) - 2)/N,
где s(n) = 2"/2 + 1. Так как |s(n)| < |i(n)|, то коды Касами обладают
лучшими свойствами взаимной и автокорреляции, чем коды Голда. Дей-
ствительно, коды Касами достигают нижнего предела Уолша взаимной
13-4- Многопользовательские многоканальные системы 635
и автокорреляции для любого множества последовательностей 2"/2 дли-
ной 2" — 1, и поэтому они оптимальны (в смысле минимизации взаимной
и автокорреляции) для любого такого кода [9, часть 1: 5; 14].
Большое множество последовательностей Касами формируется таким
же способом. Оно обладает большим количеством последовательностей,
чем меньшее множество, и поэтому может поддерживать в многоканаль-
ной системе большее число пользователей, но свойства автокорреляции
и взаимной корреляции расширяющих кодов, сформированных из этого
большего множества хуже, чем у последовательностей меньшего множе-
ства. Для получения большого множества мы берем т-последователь-
ность а длиной N = 2" — 1 для четного п и формируем две новые после-
довательности а' и а", выбирая их из исходной последовательности через
каждые 2"/2 + 1 элементов для а1 и каждые 2("+2)/2 + 1 элементов для а".
После этого множество формируется сложением последовательностей а,
а' и а" при всех циклических сдвигах а'и а”. Количество таких последова-
тельностей равно 23"/2, если п кратно 4, и 23"/2 + 2"/2, если гпобДп) = 2.
Функции автокорреляции и взаимной корреляции расширяющих кодов,
созданных из этого множества, могут принять одно из пяти значений:
f -1/2V,
РаИ = { (-1±2"/2)/ЛГ, (13.33)
[ (-1 ± (2n/2 + 1)/7V.
Так как эти значения превышают значения кодов, создаваемых в малом
множестве Касами, то можно видеть, что коды большого множества Ка-
сами имеют худшие свойства автокорреляции и взаимной корреляции, чем
коды малого множества Касами.
Пример 13.4. Найдите количество последовательностей и худшее значение
взаимной корреляции за период кода для расширяющих кодов, созданных из ма-
лой и большой последовательностей Касами с п = 10.
Решение. Для малого множества существуют 2П/2 — 25 = 32 последовательно-
сти. В соответствии с формулой (13.32) наибольшее значение взаимной корреля-
ции соответствующего кода Касами равно
1[2"/2 + 1] = + Ч = °’032-
Для большого множества, шосЦДО) = 2, поэтому существуют 23п/2 + 2”/2 —
= 215 + 210 = 33792 члена последовательности, что на три порядка больше, чем
в малом множестве. Поэтому наибольшая величина взаимной корреляции расши-
ряющего кода равна
^[2^2 + 2] = ^-1[25 + 2] = 0,033.
системы передачи
Таким образом, существует некоторое увеличение взаимной корреляции — цена,
которую приходится платить за значительное увеличение количества кодов.
Коды Уолша-Адамара
Коды Уолша - Адамара длиной N — Ts/Tc, синхронизированные во вре-
мени, ортогональны на интервале символа, поэтому взаимная корреля-
ция любых таких двух кодов равна нулю. Следовательно, синхронизиро-
ванные пользователи, использующие при модуляции последовательности
Уолша-Адамара, могут разделяться в приемнике без взаимных помех,
пока в канале не нарушится ортогональность кодов. При многолучевом
распространении составляющие, пришедшие с задержкой, не синхронны
с каналом прямой видимости LOS, и поэтому многолучевые составляю-
щие различных пользователей вызывают взаимные помехи между ними.
Потеря ортогональности может быть оценена коэффициентом ортого-
нальности [15]. В нисходящем направлении передачи каналы пользова-
телей можно синхронизировать, так как все сигналы поступают от одно-
го передатчика. В каналах восходящего направления синхронизировать
пользователей намного сложнее, так как они территориально разнесены.
Поэтому коды Уолша-Адамара редко используются в восходящих кана-
лах с DSSS. Последовательности Уолша - Адамара длиной N получают
из строк матрицы Адамара Нуу размером N х N. Матрица Адамара при
N = 2 имеет вид:
Большие матрицы Адамара получаются с использованием Н2 и рекурсии:
H2W =
Нуу Нуу
_ Нуу Н\
Каждая строка в матрице Нуу обозначает отдельную последовательность
чипов, поэтому количество расширяющих последовательностей в коде Уол-
ша-Адамара равно N. Следовательно, система DSSS с кодами Уолша-
Адамара может поддерживать не более N = TS/TC пользователей. Так как
при модуляции прямой последовательностью DSSS используется полоса
частот, примерно в N раз большая информационного сигнала, то можно
было бы организовать примерно такое же количество независимых кана-
лов, разделяя всю полосу частот системы на N непересекающихся каналов
(частотное разделение). Подобным образом можно организовать такое
же количество каналов с помощью временного разделения на N ортого-
нальных временных интервалов (временное разделение), когда каждый
пользователь в течение своего временного интервала занимает всю по-
лосу частот системы. Таким образом, все многопользовательские, много-
134- Многопользовательские многоканальные системы
канальные технологии, которые организовывают ортогональные каналы
так, чтобы исключить между ними взаимные влияния, будут обеспечи-
вать связью примерно одинаковое количество каналов.
Эксплуатационные характеристики многопользовательской системы
DSSS зависят от свойств расширяющего кода, а также от канала, по ко-
торому система работает. В следующем разделе рассматриваются эксплу-
атационные характеристики многопользовательской системы DSSS в нис-
ходящем направлении канала связи, а эксплуатационные характеристики
восходящего канала обсуждаются в подпараграфе 13.4.3.
13.4.2. Нисходящие каналы
Рис. 13.13. Передат-
чик канала нисходяще-
го направления
На рис. 13.13 представлен передатчик нисходящих каналов связи, а на
рис. 13.14 показаны канал и приемник. Остановимся на анализе синфаз-
ной составляющей сигнала; похожий анализ применяется и для квадра-
турной составляющей. В нисходящем канале сигналы всех пользовате-
лей обычно посылаются передатчиком (базовой станцией) одновремен-
но, а каждый приемник должен демодулировать свой сигнал. Поэтому
можно допустить, что все сигналы синхронны, а это позволяет нам ис-
пользовать ортогональные расширяющие коды, такие как коды Уолша-
Адамара. Однако использование ортогональных кодов ограничивает ко-
личество пользователей, которое можно разместить в нисходящем канале,
поэтому такие коды используются не всегда.
Рассмотрим систему с числом абонентов, равным К, в которой пе-
редатчик посылает сигналы К независимым пользователям. Исходный
модулированный сигнал k-ro пользователя равен:
ы*) = - ад (13-34)
i
где g(t) = у/2/Tg — форма импульса (предполагается прямоугольной),
Ts — длительность символа, a ski — символ к-го пользователя на времен-
ном интервале символа I. Передатчик состоит из К ветвей, где к-я ветвь
умножает сигнал к-го пользователя xk(t) на расширяющий код sCk(t). Вет-
ви суммируются, в результате чего получается многопользовательский -
многоканальный сигнал в основной полосе частот:
к к
= ^xk(t)sCk(t) = 22
fc=i fc=i
Рис. 13.14. Приемник и канал нисходящего направления
Этот многопользовательский сигнал перемножается с несущим сигна-
лом для переноса сигнала s(t) в полосу частот, в которой он и передается
по радиоканалу.
Сигнал, принятый пользователем к, сначала проходит через его ка-
нал с импульсной характеристикой hk(t) и аддитивным белым шумом
AWGN. Таким образом, принимаемый сигнал в приемнике к-го пользо-
вателя равен s(t) * hk(t) + nk(t). Этот сигнал преобразуется по частоте
вниз. Предполагается, что несущая частота восстановлена идеально и что
фаза ipk несущей в приемнике к-го пользователя полностью согласуется
с несущей входного сигнала. Поэтому мы можем принять задержку к-го
пользователя в канале прямой видимости LOS (минимальную задержку)
и соответствующий фазовый сдвиг равными нулю. После преобразования
сигнала по частоте вниз он умножается на расширяющий код к-го пользе-
134-
Многопользовательские многоканальные системы
вателя sCk(t), при этом предполагается, что он полностью синхронизиро-
ван с расширяющим кодом k-vo пользователя принятого сигнала14. Затем
с помощью согласованного фильтра сигнал демодулируется в основную
полосу частот (т. е. он умножается на и интегрируется за время
символа). Для получения оценки переданного пользователем k-ro сим-
вола на каждом интервале Ts берется отсчет на выходе демодулятора.
Сравнивая рис. 13.5 и 13.14, можно видеть, что приемник k-vo пользо-
вателя идентичен детектору согласованного фильтра в одноканальной
системе DSSS с одним пользователем. Поэтому при отсутствии помех дру-
гих пользователей канал к-ro пользователя имеет такие же показатели,
как и одноканальная система DSSS. Однако если учитывать взаимные
влияния, то сигнал на выходе демодулятора будет включать в себя соста-
вляющие, соответствующие сигналу к-го пользователя, помехи сигналов
других пользователей и шум. В частности, выходной сигнал демодулято-
ра к-го пользователя за l-е время символа, выражается в виде:
8к
[s(i) * hk(t) + nk(t)]sCk (f) cos(2?rfct)dt =
[z(t) * hkp(f)]sCk(t) cos2(2^/c/)t// +
nk(t)sCk (t) cos(2?rfct)dt
sCk(t) cos2(27r/c£)t/£ +
nk(t)sCk (f) cos(2лfct)dt
Ts
= I. I [sklSck (t) * hkP(t)]sCk (£) cos2(2Tvfct)dt+
o
14 Этот процесс синхронизации еще сложнее, чем при одном пользователе, так как
в данной ситуации он должен осуществляться в присутствии многих расширенных
сигналов. На практике, некоторые наборы расширяющих кодов получены смещением
одного расширяющего кода на некоторый интервал времени. В таких системах должен
быть управляющий канал для информирования приемника, какой временной сдвиг со-
ответствует нужному сигналу. Более подробную информацию по синхронизации таких
систем можно найти в [8, гл.6].
640 Глава 13. Широкополосные системы передачи
sCk(t) cos2(2Trfct)dt+
nk(t)sCk(t) cos(2tt/ct)dt, (13.36)
где h^p(t) — синфазная составляющая эквивалентного низкочастотного
фильтра для hk(t), ski — восстанавливаемый символ k-го пользователя,
переданный за время l-го символа, a Sji — символ j-ro пользователя пере-
данный на том же интервале, который оказывает мешающее воздействие.
Обратите внимание, что формула (13.36) состоит из трех отдельных чле-
нов. Первый член соответствует принятому сигналу только к-го пользова-
теля, второй член соответствует помехам других пользователей системы,
а последний член — выборка аддитивного шума AWGN, которая обозна-
чена пк. Первый член и выборка шума описываются как при анализе,
приведенном в § 13.2 для систем с одним пользователем. Второй член за-
висит от свойств канала h^p(t) и расширяющего кода, что и будет сейчас
показано.
При изучении параметров помех в многопользовательских — многока-
нальных системах сначала допустим, что канал к-го пользователя имеет
действительный коэффициент передачи ак и задержку, принятую равной
нулю, /ifc(i) = afc<5(i). Тогда выражение (13.36) принимает вид:
тв
sk = — akskis2Ck(t) cos2(2ivfct)dt+
+ y aksjiscj №ck (i) cos2 (2iv fct)dt + nk
a-kSki + Qfc Sjipjk(O) + nk, (13.37)
j=i
j^k
где Pjfc(O) — взаимная корреляция между сигналами sCk(t) и sCj (i) при
нулевом временном сдвиге, так как принимается, что пользователи син-
хронные15. Определим помеху всех остальных пользователей системы,
15Если бы эти пользователи были несинхронными, что нетипично для нисходящего ка-
нала, то взаимная корреляция р1к (0)в выражении (13.37) была бы заменена на ри (rjk),
где rjk — относительная задержка между сигналами, полученными от пользователей
}и к. При этом предполагается, что Sji постоянно в течение времени интегрирования;
в противном случае мешающая составляющая зависит от различных значений символа
в течение времени интегрирования.
13.4- Многопользовательские многоканальные системы 641
действующую на выходе демодулятора на сигнал k-ro пользователя в виде:
к
Ikl = % SjiPjkity- (13.38)
j=i
j/k
Из формулы (13.37) следует, что символ k-ro пользователя Ski ослабляет-
ся передаточным коэффициентом канала, но на него не оказывают влия-
ния расширение и сжатие, точно так же, как и в случае с одним пользова-
телем. Выборка шума nk тоже такая же, как и в системе без расширения
спектра с одним пользователем. Помехи, создаваемые другими пользова-
телями системы, ослабляются передаточным коэффициентом канала ak
к-ro пользователя и коэффициентом взаимной корреляции кодов pjfc(O).
Для ортогональных кодов (т. е. Уолша - Адамара) коэффициент взаимной
корреляции pjfc(O) = 0, поэтому между пользователями нет взаимного вли-
яния. Коэффициент взаимной корреляции неортогональных кодов руДО)
зависит от свойств кодов, которые используют абоненты j и к. У кодов
Голда, например, коэффициент /тц(0) может принять одно из трех воз-
можных значений. Обратите внимание, что и сигнал к-ro пользователя,
и помеха ослабляются одним и тем же передаточным коэффициентом ка-
нала ak, так как и сигнал, и помеха проходят от передатчика к приемнику
по одному и тому же каналу. Как будет показано в следующем разделе
для систем с DSSS, это не свойственно каналам восходящего направления.
Если помеха взаимных влияний в многопользовательской системе име-
ет приблизительно гауссову статистику, то мы можем рассматривать ее
как дополнительный элемент шума и определять эксплуатационные пока-
затели системы, основываясь на отношении сигнал — помеха плюс шум
SINR каждого пользователя. Однако гауссова аппроксимация часто бы-
вает неточной, даже при большом числе источников помех [16]. Более
того, при замираниях составляющие взаимных помех коррелируют, так
как все они испытывают одни и те же замирания ak- Поэтому мешаю-
щие сигналы других пользователей в условиях замираний только условно
можно аппроксимировать как гауссову помеху. Условная гауссова аппрок-
симация становится оправданной при большом числе источников помех,
так как в силу центральной предельной теоремы сумма большого числа
случайных переменных стремится к гауссовой случайной переменной16.
Помехозащищенность SINR на выходе демодулятора сигнала к-ro поль-
зователя определяется как отношение его мощности к средней мощности
помех всех других пользователей и мощности шума. Эксплуатационные
показатели к-ro пользователя в этом случае анализируются, исходя из ко-
16 г—х и
Это верно даже тогда, когда случайные переменные до декорреляции зависимы и име-
ют различные распределения.
642 Глава 13. Широкополосные системы передачи
эффициента ошибок в канале с аддитивным белым шумом AWGN при
заданном отношении сигнал - шум SNR, используемом вместо отношения
SINR для этого пользователя. Более того, если в системе мощность помех
намного больше мощности шума, то шумом можно пренебречь и прово-
дить анализ в канале AWGN, основываясь на отношении сигнал - помеха
(SIR — signal-to-interference ratio) вместо отношения сигнал-шум SNR.
Отношение SIR к-го пользователя определяется как отношение мощно-
сти сигнала к-го пользователя к средней мощности мешающих сигналов.
Многопользовательские системы с расширенным спектром, в которых
при анализе эксплуатационных показателей можно пренебречь шумом,
называются системами, ограниченными помехами, так как при анали-
зе эксплуатационных показателей такой системы шумом по сравнению
с помехами можно пренебречь. Как для отношения SINR, так и для SIR,
определение средней мощности помех зависит от специфики расширяю-
щих последовательностей и передачи символов пользователей, создающих
эти помехи, что при анализе может создать очень большие трудности.
В качестве альтернативы, средняя мощность помех часто рассчитывает-
ся в предположении случайных расширяющих последовательностей. При
таком допущении можно показать, что отношение SIR в системе с К
синхронными пользователями, использующей N чипов на символ, выра-
жается в виде [17, гл. 2.3]:
N G
где G « N — коэффициент расширения спектра сигнала системы. Обра-
тите внимание, что он согласуется с выражением (13.6) отношения SIR
для произвольной помехи случайной природы. Если принять в расчет
шум, то отношение SINR можно получить из выражения (13.39), доба-
вляя отношение энергии символа Es сигнала к величине шума:
SINR = № + \ (13.40)
Теперь рассмотрим более общий случай канала с передаточной ха-
м-1
рактеристикой /ifc(t) = £2 otkmfiit — Tfcm). Предположим, что т = 0 со-
т=0
ответствует лучу сигнала прямой видимости LOS, так что при условии
идеального восстановления несущей мы можем нормировать задержку т^о
и соответствующий фазовый сдвиг, приравняв их нулю. Выходной сиг-
нал демодулятора опять будет содержать три члена: первый — это сигнал
к-го абонента, второй член соответствует помехам других пользователей,
а последний — отсчетам аддитивного шума AWGN, на которые канал не
влияет. Составляющая сигнала к-го пользователя анализируется точно
так же, как и в § 13.2 для многолучевых каналов: составляющие сиг-
134-
Многопользовательские многоканальные системы
нала с задержкой ослабляются благодаря коэффициенту автокорреляции
расширяющего кода k-ro пользователя. Анализ помех других пользовате-
лей — на этот раз задача более сложная. В частности, в предположении,
что демодулятор синхронизирован по составляющей прямой видимости
LOS к-го пользователя, сигнал на выходе демодулятора, соответствую-
щий помехе, создаваемой другими пользователями системы, имеет вид:
2 Tf К М~1
Ikl = / 5 5 akmsj(l—lkm)sc3~ Tkm) cOs(2tVfc{t — Ткт)) X
S о j=l m=0
К M-l
x sCk(t) cos(27Tfct)dt ~ 52 52 akmsj^lkm) cos(27TfcTkm)pjk(Tkm), (13.41)
j=l m=0
где Sj(l — lkm) — символ j-vo пользователя за (ITS — ткт) — длитель-
ность символа, которую для упрощения принимаем неизменной. Сравни-
вая выражения (13.38) и (13.41), можно видеть, что многолучевой канал
воздействует на помехи, создаваемые пользователями, двумя способами.
Во-первых, существует больше составляющих помех: если раньше было
К — 1, то теперь мы имеем (К — 1)ЛТ; так что каждый пользователь,
создающий помехи, привносит свою часть помехи М, по одной на каж-
дый луч многолучевого сигнала. Кроме того, взаимная корреляция ко-
дов больше не сходится при задержке т = 0, даже когда пользователи
синхронизированы. Другими словами, многолучевое распространение на-
рушает синхронность канала. Это существенно, так как ортогональные
коды, такие как коды Уолша-Адамара, обычно имеют нулевую взаимную
корреляцию только при нулевой задержке. Поэтому если многопользова-
тельская система Уолша-Адамара действует в многолучевом канале, то
пользователи будут создавать взаимные помехи. Для снижения этих по-
мех можно использовать выравнивание расширяющих кодов.
Пример 13.5. Рассмотрим нисходящий канал DSSS с расширением полосы
частот N = Bs/B = 100. Допустим, что система ограничена помехой (т.е. шу-
мом можно пренебречь) и что во всех каналах пользователей отсутствуют эф-
фекты многолучевого распространения. Найдите число абонентов, которое мо-
жет работать в системе с модуляцией ДФМН (BPSK), так чтобы коэффициент
ошибок BER каждого пользователя был менее 10-3.
Решение. Для ДФМН (BPSK) имеем Ръ = Q(y/2"fb), а при yt, = 6,79 вероятность
ошибки равна Рь = 10-3. Так как система ограниченна помехой, то примем
значение SIR равным величине SNR Уь = 6,79 дБ и выполним расчет количества
пользователей К:
SIR = = 10°’679 = 4,775.
Глава 13. Широкополосные системы передачи
Преобразовывая относительно К, получим К 1 + 100/4,77 = 21,96. Так как
К должно быть целым числом и нам необходимо Рь С 10“3, то, следовательно,
21,96 необходимо округлить до 21 пользователя — хотя обычно разработчик
создал бы систему для поддержания 22 пользователей с небольшой недостачей
по коэффициенту ошибок BER.
13.4.3. Каналы восходящего направления
Теперь рассмотрим каналы восходящего направления в системе DSSS.
В многоканальной системе DSSS свойства расширяющего кода исполь-
зуются для разделения сигналов, полученных от разных пользователей.
Основное отличие восходящего канала в системе DSSS по сравнению с нис-
ходящим каналом заключается в том, что в нисходящем направлении
сигнал fc-ro пользователя и мешающие сигналы других пользователей
проходят через один и тот же канал от передатчика к приемнику k-ro
пользователя. В восходящем направлении сигналы, полученные приемни-
ком от каждого пользователя, идут по различным путям. Это вызывает
эффект «близкий-дальний», когда абоненты, которые находятся близ-
ко к приемнику восходящего канала, могут создавать сильные помехи
сигналам пользователей, которые находятся на большом расстоянии от
приемника, о чем более подробно будет сказано ниже.
Рис. 13.15. Каналы восходящего направления в системе DSSS
Передатчик и канал каждого отдельного пользователя в восходящем
канале при К пользователях изображены на рис. 13.15. Как и в нисхо-
дящем канале, остановимся на анализе синфазного сигнала. Передатчи-
ки обычно не синхронизированы, так как они находятся в разных ме-
13-4- Многопользовательские многоканальные системы
стах. Вообще, асинхронный восходящий канал анализировать сложнее,
чем синхронный восходящий канал, и он имеет худшие эксплуатацион-
ные показатели. Из рис. 13.15 видно, что А:-й пользователь формирует
модулированный сигнал xk(t) в основной полосе частот. Как и в модели
нисходящего канала, предположим, что импульсы xk(t) имеют прямо-
угольную форму. Этот сигнал rcfc(i) k-ro пользователя перемножается
со своим расширяющим кодом sCk (£), а затем преобразуется на несущей
частоте вверх, формируя передаваемый сигнал Sfc(Z) fc-ro пользователя.
Обратите внимание, что сигналы несущей частоты каждого пользовате-
ля имеют различные фазовые сдвиги. Этот сигнал посылается по каналу
fc-ro пользователя с импульсной характеристикой hk(t). После прохожде-
ния через соответствующие каналы все сигналы пользователей вместе
с аддитивным шумом AWGN n(t) суммируются во входных каскадах при-
емника.
Рис. 13.16. Приемник
каналов восходящего на-
правления
В этом случае принятый сигнал восходящего направления равен:
г(г) =
к
У2 (xk(t)sCk (£) cos(2?rfct + * hk(t)
_fc=i
+ n(Z).
(13.42)
Приемник состоит из К ветвей, соответствующих К принимаемым
сигналам, как это показано на рис. 13.16. Предполагается, что (i) луч ка-
нала прямой видимости LOS k-ro пользователя вносит задержку гк и что
Глава 13. Широкополосные системы передачи
(ii) фазовый сдвиг, образованный этой задержкой и сдвиг фазы несущей
частоты передатчика tpk согласованы с фазовым сдвигом вносимым
цепью восстановления несущей в k-й ветви приемника. Для синхронных
пользователей все эти задержки равны. Сигнал fc-й ветви преобразует-
ся вниз по частоте в основную полосу частот, а затем перемножается
с сигналом расширяющего кода fc-ro пользователя, синхронизированного
по задержке с входящим сигналом fc-ro пользователя. Затем уже сжа-
тый сигнал пропускается через согласованный фильтр и дискретизиру-
ется для получения оценки каждого переданного символа пользователя
на временном интервале символа I. Сравнивая рис. 13.5 и 13.16, мы ви-
дим, что k-я ветвь приемника восходящего канала идентична детектору
согласованного фильтра СФ в одноканальной системе с DSSS. Поэтому
приемник восходящего канала состоит из ряда детекторов с СФ для всех
К пользователей, и при отсутствии помех других пользователей канал
к-го абонента имеет такие же характеристики, как и в системе с од-
ним пользователем. При учете помех других абонентов сигнал на выходе
демодулятора к-й ветви приемника на интервале времени символа I вы-
ражается как:
x cos(2ttfct + (p'j)dt + rifc =
sCk(t-rk)cos(27rfct + <Pk)x
ts J
sCk(t - rfc)x
Ts K
x cos2(2^fct + (p’k)dt +Y У 52
о -7=1
x cos(27r/c£ + cos(27r/c£ + ptydt + n^, (13.43)
где rifc — выборка аддитивного шума AWGN, h^p(t) — синфазная соста-
вляющая эквивалентного низкочастотного фильтра с hj(t}, j = 1,..., К
с задержкой, принятой за нуль для луча прямой видимости LOS; a sijk —
символ, переданный по каналу j-ro пользователя во время
[ITS - Tj + Tfc, (Z + 1)TS - Tj + Tfc],
которое предполагается постоянным. Если этот символ на этом интервале
принимает различные значения, т. е. если он изменяет значения на ин-
тервале ITS, то член выражения, соответствующий межсимвольной ин-
терференции ISI, сложнее и вносит частичную взаимную корреляцию,
но ослабление помехи ISI остается примерно таким же. Обратите внима-
ние, что выражение (13.43) состоит из трех отдельных членов. Первый —
134-
Многопользовательские многоканальные системы
соответствует сигналу, полученному только от k-ro пользователя, а по-
следний член — выборке аддитивного шума AWGN; эти два члена такие
же, как и для системы с одним пользователем. Второй член представля-
ет помеху, создаваемую другими пользователями в системе, а помеха,
вызываемая j-м пользователем в отношении fc-ro пользователя (j к)
зависит от эквивалентного низкочастотного канала j-ro пользователя
/грр(£) и свойств расширяющего кода, что сейчас и продемонстрируем.
Допустим, что канал любого пользователя имеет только один переда-
точный коэффициент otj и одну задержку Tj, так что hjP(t) = aj6(t — Tj).
Тогда выходной сигнал демодулятора к-тк ветви на интервале времени
символа I равен:
Sk = OikSki + hl + щ, (13.44)
где первый и третий члены такие же, как и в системе с одним пользо-
вателем в предположении, что расширяющий код в приемнике идеально
синхронизирован по задержке гд,. Теперь рассмотрим член, представля-
ющий мешающие сигналы в системе hl- Подставляя /грр(£) = aj5(t — Tj)
в формулу (13.43), получим:
Sck (t ~ Тк)х
0
1=1
J
x cos(2?rfct + у?д.) cos(2ttfct + ifydt =
Sck(t - Tfc)[cos(A</?fcj) +
о
к
+cos(4:Trfct+(fi'k+(fi'j)]dt » ^T^otj cos
j=i
Ts
У sC](t - Tj)sCk(t-Tk)dt
о
^2 aj cos(^kj)sijkpjk(Tj - тк), (13.45)
j-i
где ^-4>kj — <p'k — <p'j, а аппроксимация основана на условии fc Э> k/Ts.
Из формулы (13.45) следует, что, как и в нисходящем направлении ка-
нала, мешающие сигналы других пользователей в восходящем направле-
нии канала ослабляются за счет расширяющих кодов. Так как обычно
т? 4 тк, то пользователи асинхронны. Следовательно, ортогональные ко-
ды, требующие синхронного приема (например, коды Уолша-Адамара)
в восходящих каналах обычно не используются. Другим важным аспектом
восходящего канала является то, что символ к-ro пользователя и помехи
Глава 13. Широкополосные системы передачи
других пользователей ослабляются различными передаточными коэффи-
циентами каналов. В частности, сигнал fc-ro пользователя ослабляется
коэффициентом сц-, а помеха, исходящая от ,)-го пользователя, ослабляет-
ся aj. Если aj ak, то помехи могут значительно ухудшить показатели
канала, даже если они и ослаблены за счет взаимной корреляции расши-
ряющих кодов.
Теперь рассмотрим восходящие каналы, ограниченные помехой. Пред-
ставим сначала, что мощность всех пользователей на приеме равна. Тогда
среднее отношение SINR для асинхронных пользователей в заданном ка-
нале — в предположении, что расширяющие коды случайные, содержат
N чипов на символ и имеют случайные начальные моменты и случайные
фазы несущих — выражается [18] в виде:
SINR = (~ +
\ES
(13.46)
Для систем, ограниченных помехой, шумовой составляющей пренебрега-
ют, а отношение сигнал - помеха SIR приобретает вид:
<13-47’
где G ~ N — коэффициент расширения спектра сигнала. Выражения
SINR (13.46) и SIR (13.47) относятся к типичным гауссовым приближе-
ниям. Нужно быть осторожными при использовании этих приближенных
выражений для различных систем, так как отношения SIR и SINR в кон-
кретной системе в большой степени зависят от свойств расширяющих ко-
дов, предположений относительно синхронизации, фазы и других харак-
теристик системы. Для повышения точности гауссовой аппроксимации
при ее использовании в реальных системах были разработаны различные
ее модификации, но эти модификации, как правило, сложнее в работе и не
дают существенного увеличения точности в сравнении с обычной гауссо-
вой аппроксимацией [6, гл. 9.6]. Выражение (13.47) можно модифициро-
вать для аппроксимации отношения SIR при использовании неслучайных
расширяющих кодов следующим образом:
STR = 32V ~ 3g
С(К~1) ~£(К-1У
(13.48)
где £ — постоянная, характеризующая взаимную корреляцию кода, ко-
торая зависит от свойств расширяющей последовательности и других
предположений относительно системы. При стандартном гауссовом при-
ближении используется значение £ = 1, тогда как у псевдослучайных
последовательностей £ = 2 [19] или £ = 3 [20], в зависимости от типа
системы.
13.4- Многопользовательские многоканальные системы 649
Предположим теперь, что все К — 1 источников помех имеют пере-
даточный коэффициент канала а а^. Тогда защищенность SIR k-vo
пользователя выражается в виде:
СТО/, A ak^N al3G 2G ,1ОЛП.
SRW а2^К-1) * аЩК -1) (tf-i)’ ( 3’49)
поэтому из-за различных передаточных коэффициентов восходящих ка-
налов k-й пользователь получает дополнительный коэффициент потерь
ajja1. Это явление называется эффектом «близкий-дальний», так как
у пользователей, находящихся далеко от приемника восходящего кана-
ла, в общем, уровень сигнала на приеме будет меньше, чем у мешающих
сигналов источников, которые находятся ближе. При замираниях коэф-
фициенты ад, имеют случайные значения, что обычно снижает взаимную
корреляцию кодов и, следовательно, увеличивает среднее значение по-
мехозащищенности SIR. Эффект замираний можно смягчить, подбирая
значения £ в выражении (13.48) с учетом среднего значения взаимной
корреляции в модели с замираниями. Значение £ в этом случае зависит
от свойств расширяющего кода, свойств системы и характеристик зами-
раний [21].
Для каналов многолучевого распространения эквивалентная переда-
м
точная функция ЬФр(Р) = £2 ajm6(t — Tjm). Подставляя это выражение
т=1
в формулу (13.45), получаем выражение помех других пользователей в к-й
ветви в следующем виде:
к м
hi -ЕЕ COs[&<Pjkm)sijmPjk(Tjm Tfc), (13.50)
j=l т=1
'J^k
где предполагается, что к-я ветвь синхронизирована по задержке т^, по-
этому представляет относительное фазовое смещение, a sijm —
символ, переданный j-м пользователем за время
[ITS - тк + (I + 1)TS — Tfc +
которое считается постоянным. Эта помеха также влияет на эффект
«близкий - дальний», так как любая из многолучевых составляющих с боль-
шим передаточным коэффициентом относительно сигнала к-го пользова-
теля будет ослаблять защищенность SIR.
Решение проблемы «близкий - дальний» в восходящих каналах систем
с модуляцией прямой последовательностью DSSS заключается в регу-
лировании мощности, основанном на принципе инверсии канала, когда
к-й пользователь передает сигнал с такой мощностью чтобы мощ-
ность принимаемого им сигнала была равна Р вне зависимости от потерь
650 Глава 13. Широкополосные системы передачи
в тракте передачи. Это приведет к величине помехозащищенности SIR
каждого пользователя (13.48). Недостаток такой формы управления мощ-
ностью заключается в том, что при инверсии канала может понадобиться
очень большая мощность передачи в некоторых каналах с замираниями
(например, при рэлеевских замираниях нужна очень большая мощность).
Более того, инверсия канала может создать значительные помехи другим
системам или пользователям, работающим на той же частоте. В част-
ности, инверсия канала может значительно увеличить взаимные помехи
между ячейками сотовой системы. Несмотря на эти проблемы, инверсия
канала используется для связи на участке «мобильное устройство — базо-
вая станция» в стандарте сотовых систем IS-95, хотя инверсия не может
превысить установленное ограничение на максимальную мощность передачи.
Пример 13.6. Рассмотрим восходящий канал системы DSSS с коэффициен-
том расширения спектра G = Bs/B = 100. Допустим, что система ограничена
помехой и в каналах всех пользователей отсутствуют эффекты многолучевого
распространения. Представим, что мощность сигнала абонента к на приеме на
6 дБ меньше, чем у других пользователей. Найдите количество абонентов, ко-
торое может быть организовано в системе с модуляцией ДФМН (BPSK) при
условии, что коэффициент ошибок BER любого пользователя менее 10-3. Вычи-
сления проведите для случайных кодов при стандартном гауссовом приближении
при £ = 1, и для кодов псевдослучайных последовательностей с £ = 3.
Решение. Как и в предыдущем примере, нам при вероятности ошибки р, = 10~3
необходима помехозащищенность SIR =- 7ь = 6,79 дБ = 4,775. Опять установим
значение SIR равным отношению SNR уъ = 4,775 и, решая относительно К,
найдем максимальное количество пользователей, которое может поддерживать
система. Так как это асинхронная система с aj./a2 = 0,251 (—6 дБ), то получим:
a2k3N 0,251 • 300 75,3
“оЧ(К-1)^ £(К — Г) ~ ’7 '
Решая относительно К при £ = 1, получим К 1 + 75,3/4,77^ — 16,78, и А 6,26
при £ = 3, так что система может обеспечить поддержку от 6 до 16 поль-
зователей — при коэффициенте 3 — это меньше, чем в предыдущем примере
для нисходящего канала, что обусловлено асинхронностью восходящего канала
и наличием эффекта «ближнего-дальнего». Этот пример демонстрирует также
чувствительность вычислений пропускной способности системы к предположе-
ниям относительно свойств расширяющих кодов с коэффициентами £. Так как
отношение SIR пропорционально 1/(^А'), то количество пользователей, которое
система может поддерживать, при данной помехозащищенности SIR пропорци-
ональна 1/£.
13.4.4. Многоканальное детектирование
Мешающие сигналы в системах многостанционного доступа с расширен-
ным спектром — SSMA не следует рассматривать как шум. Если рас-
13.4- Многопользовательские многоканальные системы 651
ширяющий код мешающего сигнала известен, то эту информацию можно
использовать для снижения помех многостанционного доступа — MAI
(multiple access interference). В частности, если все пользователи детек-
тируются одновременно, то взаимные помехи — интерференцию меж-
ду пользователями можно вычесть, что или улучшит эксплуатационные
показатели или, при заданных эксплуатационных показателях, позволит
повысить число абонентов, использующих канал. Более того, если сигна-
лы всех абонентов детектируются одновременно, то при детектировании
эффект «ближний — дальний» может помочь, так как сигналы пользова-
телей с сильным затуханием в канале детектируются проще (при последо-
вательном подавлении), чем если бы все пользователи имели одинаковые
передаточные коэффициенты. Приемник сигналов с модуляцией DSSS,
который использует при детектировании структуру взаимных помех, на-
зывается многопользовательским детектором — MUD (multi-user detec-
tor). В нисходящих каналах многопользовательские детекторы не получи-
ли широкого распространения по нескольким причинам. Во-первых, нис-
ходящие каналы обычно синхронные, поэтому они могут устранять все
взаимные влияния за счет использования ортогональных кодов до тех пор,
пока в канале не нарушится ортогональность кода. Более того, приемник
в нисходящем канале k-ro пользователя обычно ограничен по мощности
и/или сложности, что усложняет реализацию приемников MUD. Наконец,
приемник восходящего направления канала должен детектировать сигна-
лы всех пользователей в любом случае, так что любой приемник в вос-
ходящем канале, по определению, — многопользовательский детектор,
хотя и не обязательно хороший. Напротив, приемник k-ro пользовате-
ля в нисходящем канале должен детектировать сигнал, соответствующий
только fc-му пользователю. По этим причинам разработка приемников
MUD ориентирована, в основном, на восходящие каналы систем с DSSS,
что и составляет предмет настоящего раздела.
Многопользовательское, многоканальное детектирование впервые бы-
ло предложено Берду (Verdu) [22; 23], при разработке оптимального груп-
пового детектора для асинхронных восходящих каналов с DSSS. При со-
здании схемы группового детектирования предполагался канал с адди-
тивным белым гауссовым шумом AWGN с различными передаточными
коэффициентами у всех пользователей. Оптимальный детектор такого
канала отбирает последовательности символов, соответствующие всем К
пользователям, минимизируя среднеквадратическую ошибку между при-
нятым сигналом и сигналом, который мог бы быть сформирован этими
последовательностями. Так как канал асинхронный, то для оптимального
детектирования за любой один период символа должен быть обработан
весь принятый сигнал. Это объясняется тем, что символы других пользе-
вателей не согласованы во времени, поэтому должны рассматриваться все
символы, совпадающие в данный интересующий нас интервал времени.
При применении этого же принципа к совпадающим символам, видно, что
на любом конечном интервале невозможно обработать сигнал и при этом
сохранить оптимальность. Оптимальный многопользовательский прием-
ник MUD для асинхронного случая был представлен в [23] и состоял
из линейки К согласованных фильтров индивидуальных абонентов и бло-
ка последующей обработки последовательности по алгоритму Витерби.
Алгоритм Витерби имеет 2/г-1 состояний. Сложность реализации при
двоичной модуляции возрастает пропорционально 2К.
Для синхронных пользователей оптимальное детектирование стано-
вится проще: при оптимальном групповом детектировании необходимо
рассматривать интервал только одного символа и не требуется детекти-
рование последовательности. В частности, сложность такого детектора
возрастает пропорционально 2К/К, в отличие от значения 2К, которое со-
ответствует детектированию последовательности. Рассмотрим синхрон-
ный восходящий канал с двоичной модуляцией, двумя пользователями
и передаточным коэффициентом ак в канале к. Эквивалентный низкоча-
стотный принимаемый сигнал на интервале времени одного бита равен:
r(t) = Qi6isC1(Z) + a^Sc^t) + n(Z), (13.51)
где bk — бит, переданный А:-м пользователем за время данного бита.
Оптимальный (максимально правдоподобный) детектор формирует па-
ру значений Ь* = (6), Ь*2). удовлетворяющую условию:
arg min
(bl,&2)
Ts
[r(i) - aiMci(i) - a2b2sc2(t)]2dt
о
(13.52)
где <r2 — мощность шума. Это эквивалентно нахождению (b^. Ь2) для мак-
симизации функции стоимости:
А(51, Ь2) = + a2b2r2 - ara2brb2pi2, (13.53)
где
Ть
rk = У r(t)sckdt (13.54)
о
И
Ть
Pjk ~~ j sckscjdt. (13.55)
о
Этот результат несложно распространить на К синхронных пользо-
вателей. Здесь мы можем выразить г = (и,... ,гк)т в форме матрицы
13-4- Многопользовательские многоканальные системы
как:
г = RAb + п (13.56)
[24], где b = (61,..., Ьк)Т — бит-вектор, соответствующий К пользова-
телям на интервале времени данного бита, А — диагональная матрица
К х К передаточных коэффициентов аь, a R — взаимно-корреляцион-
ная матрица К х К расширяющих кодов. Оптимальная последователь-
ность бит Ь* находится при выборе последовательности, максимизирую-
щей функцию стоимости:
Z(b) = 2bTAr - bTARAb. (13.57)
К сожалению, сложность вычислений (так же, как для асинхронного слу-
чая) при максимизации выражения (13.57) для К пользователей возра-
стает пропорционально 2К, в предположении использования при оптими-
зации дерева поиска. Кроме высокой сложности, оптимальный детектор
имеет недостаток — ему необходима информация о величинах ak.
Сложность приемника MUD можно уменьшить, пожертвовав опти-
мальностью. Было разработано множество субоптимальных вариантов
приемников MUD с различными компромиссами между эксплуатацион-
ными показателями, сложностью и требованиями к информации о канале.
Субоптимальные приемники MUD распадаются на две широкие катего-
рии: линейные и нелинейные. Линейные приемники MUD применяют ли-
нейный оператор или фильтр в блоке согласованных фильтров (рис. 13.16).
Сложность реализации этих детекторов линейно возрастает с ростом чи-
сла пользователей, что дает выигрыш по сравнению со сложностью ре-
ализации оптимального детектора. Наиболее распространенный тип ли-
нейного приемника MUD представляют декоррелирующий детектор [25]
и детектор минимальной среднеквадратичной ошибки — MMSE (mini-
mum mean-square detector). Декоррелирующий детектор просто инверти-
рует взаимно-корреляционную матрицу R, что в результате дает:
b* = R r = R-1[RAb + n] = Ab + R-1n. (13.58)
Инверсия существует для большинства интересующих нас случаев.
В результате при отсутствии шума последовательность бит равна ис-
ходной последовательности, пропорционально измененной передаточны-
ми коэффициентами канала. В дополнение к своей простоте такой детек-
тор обладает и другими привлекательными свойствами: он полностью
устраняет мешающий эффект многостанционного доступа — MAI, и ему
не нужна информация о передаточных коэффициентах канала. Однако
декоррелирующий детектор может привести к возрастанию шума, так
как вектор шума умножается на обратную матрицу. Поэтому декоррели-
рующий приемник MUD чем-то похож на выравнивание с отбрасыванием
Глава 13. Широкополосные системы передачи
незначащих коэффициентов, о котором речь шла в подпараграфе 11.4.1:
можно полностью устранить мешающий эффект MAI за счет увеличения
шума.
Детектор с минимальной СКО — МСКО (MMSE) находит такую ма-
трицу D, которая при перемножении с сигналами на выходе линейки
фильтров минимизирует ожидаемое значение СКО между D и переданной
последовательностью бит Ь. Другими словами, матрица D удовлетворяет
условиям:
argminE[(b - Dr)T(b - Dr)]. (13.59)
Оптимизация D задается [17; 24; 26] в виде:
D = (R + 0,5^1)-1- (13.60)
Обратите внимание, что при отсутствии шума детектор МСКО (MMSE)
точно такой же, как и декоррелирующий детектор. Однако он обладает
лучшими эксплуатационными показателями при низких значениях защи-
щенности SNR, так как уравновешивает подавление мешающего эффекта
многостанционного доступа MAI и возрастание шума. Это похоже на схе-
му выравнивателя МСКО (MMSE) для каналов с межсимвольными поме-
хами — ISI, описанную в подпараграфе 11.4.2.
Нелинейные приемники MUD могут обладать значительно лучшими
эксплуатационными характеристиками, чем линейные детекторы — хотя
не обязательно во всех случаях, особенно при незначительном кодиро-
вании или вообще при его отсутствии [27]. Наиболее распространенные
нелинейные методы приема MUD представляют многоступенчатое де-
тектирование, детектирование с решающей обратной связью и последо-
вательное подавление помех. В многоступенчатом детекторе каждая
ступень состоит из линейки сверточных согласованных фильтров. JV-ная
ступень детектора использует решения (п — 1)-й ветви для подавления
мешающего эффекта многостанционного доступа MAI на входе. Много-
ступенчатый детектор может использоваться как в синхронных [28], так
и в асинхронных [29] системах. Детектор с решающей обратной связью
основывается на том же самом исходном положении, что и выравниватель
с решающей обратной связью. Он состоит из фильтров в цепях прямой
и обратной связи, где фильтр прямой связи представляет разложение
Холецкого корреляционной матрицы R. Приемники MUD с решающей
обратной связью можно использовать как в синхронных [30], так и в
асинхронных [31] системах. Для этих детекторов необходима информа-
ция о передаточных коэффициентах канала, и они также подвержены
размножению ошибок, когда ошибки принятия решения передаются назад
через фильтр обратной связи. При подавлении помех выполняется оцен-
ка сигналов одного или более пользователей, а затем помехи взаимного
13.4- Многопользовательские многоканальные системы 655
влияния MAI, вызванные другими пользователями, вычитаются [32]. По-
давление помех может выполняться параллельно, когда все пользователи
детектируются одновременно, а затем помехи удаляются [33; 34], или по-
следовательно, когда сигналы пользователей детектируются по одному за
единицу времени, а затем помехи вычитаются из сигналов пользователей,
которые еще должны быть детектированы [35]. Параллельное подавление
имеет низкую задержку и более устойчиво к ошибкам решения. Одна-
ко его эксплуатационные показатели страдают из-за эффекта «близкий-
дальний», когда у одних пользователей величина принимаемой мощности
намного меньше, чем у других. При таком неравномерном распределении
мощности показатели последовательного подавления помех могут превос-
ходить показатели схемы параллельного подавления [24]. Действительно,
последовательное подавление теоретически достигает пропускной спо-
собности Шеннона для восходящего канала, о чем речь пойдет в гл. 14,
а на практике приближается к пропускной способности Шеннона [36].
Последовательное подавление помех подвержено распространению оши-
бок, которое может значительно понизить эксплуатационные показатели,
но это ухудшение может быть частично компенсировано за счет регули-
рования мощности [37].
Подробное рассмотрение различных типов приемников MUD и их экс-
плуатационных показателей дано в [17], а краткое — в учебных пособиях
[24; 32]. Совместное выравнивание и многопользовательское детектирова-
ние MUD рассмотрено в [38]. Многопользовательское детектирование для
многоскоростной системы МДКР (CDMA), когда у разных пользователей
разные скорости передачи информации, проанализировано в [39]. «Сле-
пые», пространственно-временные и турбо многопользовательские детек-
торы разработаны в [40]. Эффективность использования спектра различ-
ными методами детектирования проанализирована в [27].
13.4.5. Многочастотная МДКР (CDMA) — MC-CDMA
Многочастотная система МДКР (CDMA) — MC-CDMA (multicarrier
CDMA) — это метод, объединяющий преимущества ортогонального ча-
стотного разделения OFDM и CDMA. Метод очень эффективен как при
борьбе с межсимвольными помехами ISI, так и в качестве механизма, по-
зволяющего многим пользователям использовать один и тот же канал.
Блок-схема оборудования для организации канала одного пользователя
в многочастотной системе CDMA показана на рис. 13.17. Информацион-
ный символ si посылается через все N подканалов. В г-м подканале символ
si умножается на i-й чип Cj расширяющей последовательности sc(t), где
а = ±1. Этот процесс похож на обычный метод расширения спектра, за
исключением того, что умножение на расширяющую последовательность
Глава 13. Широкополосные системы передачи
выполняется в частотной области, а не во временной. Затем поток данных
с расширенной полосой частот (s/Ci, s/C2,..., з/СдД модулируется обычным
образом на нескольких несущих: параллельная последовательность под-
вергается обратному быстрому преобразованию Фурье ОБПФ (IFFT —
inverse fast Fourier transform), проходит через преобразователь параллель-
ного кода в последовательный. После чего, для создания модулированного
сигнала s(i), проводится цифро-аналоговое преобразование. Спектр S(f)
показан на рис. 13.17 для несущих частот подканалов (Д,..., /л?)-
Рис. 13.17. Одноканальная многочастотная система CDMA — MC-CDMA
Допустим, что сигнал MC-CDMA передается по каналу с частотно-се-
лективными замираниями и постоянным передаточным коэффициентом
аг в i-м подканале с шумами AWGN n(t). Приемник проводит операции,
13.4- Многопользовательские многоканальные системы
обратные операциям, проводимым на передаче — пропускание получен-
ного сигнала через аналого-цифровой преобразователь, преобразователь
последовательного кода в параллельный, и схему быстрого преобразо-
вания Фурье FFT — для восстановления символа, переданного по г-му
подканалу. Символ подканала, полученный в г-м подканале, умножает-
ся на г-й чип сг и взвешивающий коэффициент /%. Затем, для получения
окончательной оценки з/, эти составляющие суммируются.
Рис. 13.18. Двухканальная многочастотная система CDMA — MC-CDMA
В многочастотной системе MC-CDMA, как это показано на рис. 13.17,
каждый пользователь к модулирует свой сигнал расширяющим кодом
sCfc(Z). Таким образом, для системы, предназначенной для двух пользова-
телей, абонент 1 будет пользоваться расширяющим кодом sC1 (£) с чипами
(с(,..., с]у), в результате чего получается передаваемый сигнал 3[(/). а або-
нент 2 будет пользоваться расширяющим кодом зС2 (/) с чипами (с(,..., с^),
в результате чего получится передаваемый сигнал S2(t). Если пользова-
тели осуществляют передачу одновременно, то их сигналы складываются
«в эфире», как это показано на рис. 13.18, где з| (соответственно зр) —
символ, соответствующий пользователю 1 (соответственно, пользователю
2) за время передачи символа I. В этой системе взаимные влияния между
пользователями снижаются благодаря взаимной корреляции расширяю-
щих кодов, как и при обычном расширении спектра с одной несущей.
Однако каждый пользователь извлекает преимущества от разнесения час-
тоты при расширении его сигнала по подканалам с независимыми замира-
ниями. Это обычно приводит к лучшим эксплуатационным показателям,
чем при обычном расширении спектра.
системы передачи
13.5. Многопользовательская — многоканальная система
с расширением спектра методом частотного скачка
FHSS
В многопользовательских, многоканальных системах с расширением спек-
тра методом частотного скачка — FHSS каждому пользователю выделя-
ется уникальная расширяющая последовательность зСг (/) для генерирова-
ния сигнала со скачкообразным изменением частоты. Если расширяющие
последовательности ортогональны, а пользователи синхронизированы во
времени, то разные пользователи никогда не конфликтуют, а эксплуа-
тационные показатели каждого пользователя такие же, как и в системе
с частотным скачком FH для одного пользователя. Однако если поль-
зователи асинхронны или если используются неортогональные коды, то
многие пользователи будут конфликтовать друг с другом, одновременно
занимая данный канал. Символы, переданные в течение этого времени,
вероятно, будут приняты ошибочно, поэтому многоканальные системы
с частотным скачком FHSS для компенсации взаимных помех обычно ис-
пользуют коды с исправлением ошибок.
Многоканальные системы FHSS, обозначаемые также как FH-CDMA
или FH-SSMA, главным образом используются в восходящих каналах.
Этот способ доступа предпочтителен в военных приложениях благодаря
защищенности от преднамеренного подавления, низкой вероятности пере-
хвата и характеристикам детектирования систем с частотным скачком
FH. Использование многостанционного доступа с кодовым разделением
и частотным скачком — FH-CDMA рассматривалось также для примене-
ния в цифровых сотовых системах второго поколения [2, гл. 9.4], но не бы-
ло принято. Достоинства и недостатки использования систем многостан-
ционного доступа со скачкообразной перестройкой частоты и модуляцией
прямой последовательностью рассматриваются в [8, гл. 11; 41; 42]. Дей-
ствительно, большинство исследований показали, что метод FH-CDMA
уступает DS-CDMA как средство многоканального доступа по числу поль-
зователей, которые могут использовать систему одновременно, по край-
ней мере, при асинхронной работе. Кроме того, системы с частотным
скачком FH-CDMA обычно вызывают помехи на гораздо большем рас-
стоянии, чем системы DS-CDMA, так как помеха при расширении по-
лосы частот не уменьшается [8, гл. 11]. Основное преимущество метода
частотного скачка FH по сравнению с методом модуляции прямой после-
довательностью DS заключается в его устойчивости к эффекту «близкий-
дальний»: данный метод избегает влияния помех за счет скачков частоты,
а не заглушает их, используя коэффициенты расширения спектра сигна-
ла, что не допускает ухудшения эксплуатационных показателей, обусло-
вленного сильными источниками помех. Для использования преимуществ
обеих систем применяются комбинированные, гибридные технологии, ис-
пользующие скачки частоты FH вместе с другими методами параллельно-
го доступа. Например, стандарт цифровой сотовой связи GSM использует
комбинацию временного разделения и медленной скачкообразной пере-
стройки частоты, где скачки частоты используются главным образом для
усреднения помех от других ячеек. Метод FH-CDMA также использует-
ся в системе Bluetooth. Система Bluetooth работает в нелицензируемой
полосе частот 2,4 ГГц, а метод частотного скачка FH был выбран из-
за того, что его можно использовать вместе с некогерентной частотной
манипуляцией ЧМН (FSK), недорогой и энергетически эффективной тех-
нологией.
Задачи
13.1.
В этой задаче выведите соотношение (13.6) помехозащищенности SIR для
сигнала, расширенного случайной последовательностью, с помехой. Сиг-
нал на выходе коррелятора i-й ветви приемника выражается формулой
(13.5):
а) Покажите, что условное математическое ожидание x-t. соответствую-
щее переданному сигналу s,(t), равно E[a?j|s,(t)] = Es.
б) В предположении равновероятной передачи символов сигнала (p(s;(t)) =
= 1/М), покажите, что Е[жг] = Es/M.
в) Покажите, что Уаг[тг|st-(t)] = EsEj/N.
г) Покажите, что (снова при равновероятной передаче) Уаг[т^] = .
д) Отношение сигнал - помеха SIR выражается в виде:
. БЫ2
УагН
Покажите, что
SIR =
Еу М
13.2. Сделайте эскиз передаваемого сигнала s(t)sc(t), модулированного прямой
последовательностью DSSS на интервале времени двух бит [0,27),], пола-
гая, что s(t) модулирован ДФМН (BPSK) на несущей частоте 100 МГц,
a Ts = 1 мкс. Представьте, что первый информационный бит — единица
«1», а второй — «0». Представьте также, что на каждый бит выделено 10
чипов, и что эти чипы чередуются между ±1, с первым чипом, равным +1.
Глава 13. Широкополосные системы передачи
13.3. Рассмотрите систему с частотными скачками FH, работающую по двулу-
чевому каналу, в котором задержка в отраженном канале относительно
времени прохождения луча прямой видимости LOS равна т = 10 мкс.
Представьте, что приемник синхронизирован по скачкам частоты луча
прямой видимости LOS.
а) При каких скоростях скачков система не будет испытывать замираний?
б) Представьте систему с быстрыми скачками FFH и временем скачка
Тс — 50 мкс и длительностью символа Ts = 0,5 мс. Будет ли эта систе-
ма нечувствительна к замираниям, или же чувствительна к плавным
замираниям или частотно-селективным замираниям?
в) Представьте систему с медленными скачками SFH и временем скачка
Тс = 50 мкс и длительностью символа Ts = 0,5 мкс. Будет ли эта сис-
тема нечувствительна к замираниям, или же чувствительна к плавным
замираниям или частотно-селективным замираниям?
13.4. В этой задаче исследуется статистика шума в приемнике DSSS после его
умножения на расширяющую последовательность. Пусть n(f) — шум (слу-
чайный процесс) с функцией автокорреляции рп(г), a sc(t) — случайная
расширяющая последовательность, независимая от шума n(t), с нулевым
средним значением, автокорреляцией рс(т). Пусть n'(t) = n(t)sc(t').
а) Найдите автокорреляционную функцию и спектральную плотность мощ-
ности n'(t).
б) Покажите, что если рс(т) — <5(т), то n'(t) имеет нулевое среднее значе-
ние и функцию автокорреляции рп(т) — т. е. имеет ту же статистику,
что и 'nit). поэтому на статистику шума n(i) не оказывает влияние его
умножение на sc(t).
в) Найдите автокорреляционную функцию рп'(т) сигнала если n(t)
представляет аддитивный белый шум AWGN с нулевым средним зна-
чением, a sc(t) — максимальный линейный код с автокорреляцион-
ной функцией (13.19). Что произойдет с функцией рП'(т) (13.19) при
IV оо?
13.5. Покажите, что для любого реального периодического расширяющего кода
sc(t) его автокорреляционная функция рс(т) на одном периоде симметрич-
на относительно т и достигает своего максимального значения при т = 0.
13.6. Покажите, что если sc(t) — периодическая последовательность с периодом
Т, то ее автокорреляционная функция для смещенных во времени вариан-
тов расширяющего кода зависит только от разницы временных сдвигов:
т
У Sc{t - r0)sc(t - i\)dt = Pctb - To)-
о
13.7. Покажите, что для любой периодической расширяющей последовательно-
сти sc(t) с периодом Т ее функция автокорреляции pc(t) периодическая
с тем же периодом.
13.8. Покажите, что спектральная плотность мощности sc(t) для максималь-
ного линейного расширяющего кода с периодом NTC = Ts определяется
формулой:
п /W + 1 . 2(т\ t т\
т= —оо 4 7
Также начертите график этого спектра при N = 100 и Ts = 1 мкс в ча-
стотном диапазоне —10/7^ С f С 10/Ts
13.9. Покажите, что m-последовательности, а также случайные двоичные рас-
ширяющие последовательности обладают свойствами сбалансированно-
сти, серийности и смещения.
13.10. Представим, что немодулированная несущая s(t) расширена максималь-
ным линейным кодом sc(t) с периодом Т, а затем передается по каналу
с импульсной характеристикой h(t) = а05(7 — т0) + — п). Соответ-
ствующий сигнал r(t) на приеме подается на схему синхронизации, пока-
занную на рис. 13.9. Найдите выражение сигнала w(r) на выходе интегра-
тора как функцию от т. Какая из этих двух составляющих многолучевого
распространения захватит цепь управления при грубом вхождении в син-
хронизм и почему?
13.11. Найдите вероятность нарушения связи при Рь = 10“6 для приемника
RAKE с тремя ветвями при модуляции ДФМН (DPSK) с независимы-
ми рэлеевскими замираниями в каждой ветви и отношением сигнал —
шум в каждой ветви (до сжатия) SNR на бит, равном 10 дБ. Величи-
ну автокорреляции последовательности принять равной автокорреляции
максимального линейного кода с К = N = 2” — 1 = 15. Представьте так-
же, что сигнал в первой ветви полностью согласован, а во второй ветви —
смещен на Тс/А, в третьей ветви смещен на Тс/3. В расчетах отношения
SNR примите условия разнесенного приема с селективным объединени-
ем. Помехами других составляющих многолучевого распространения при
расчете SNR можно пренебречь.
13.12. Рассмотрите сигнал с расширенным спектром, передаваемый по кана-
лу с составляющей прямой видимости LOS и еще одной составляющей
двулучевого распространения, где задержка второго луча относительно
луча прямой видимости LOS больше длительности чипа Тс. Рассмотрите
приемник RAKE с двумя ветвями, где одна ветвь соответствует соста-
вляющей прямой видимости LOS, а другая — второму лучу. Представьте
также, что при полной синхронизации в обеих ветвях составляющая вход-
ного сигнала в каждой ветви (после сжатия) имеет мощность, которая
равномерно распределена между 6 и 12 мВт. Полная мощность шума в дан-
ном частотном диапазоне сжатого сигнала составляет 1 мВт. Представь-
те, тем не менее, что только первая ветвь полностью синхронизируется,
а вторая ветвь имеет временной сдвиг, равный 7)1/2,366. Величина авто-
корреляция тогда равна автокорреляции максимального линейного кода
при N 1. Две ветви RAKE объединяются с дифференциальным взве-
шиванием при наличии информации о временном сдвиге.
системы передачи
а) Каково среднее значение защищенности SNR на выходе устройства
объединения?
б) Каково распределение SNR на выходе устройства объединения?
в) Какова вероятность перерыва связи при модуляции ДФМН (DPSK) с
коэффициентом ошибок BER, равным 10~4?
13.13. Эта задача иллюстрирует преимущества приемников RAKE и оптималь-
ный выбор составляющих многолучевого распространения при их объеди-
нении в приемнике ограниченной сложности. Рассмотрите многолучевой
канал с импульсной характеристикой
/i(i) = a08(t) + - n) + a26(t - тг).
ai — коэффициенты рэлеевских замираний, но их ожидаемая мощность
варьируется (из-за экранирования) таким образом, что E[oq] равно 5
с вероятностью 0,5 и 10 с вероятностью 0,5; Е[а3] равно 0 с вероят-
ностью 0,5 и 20 с вероятностью 0,5; Efa^] равно 5 с вероятностью 0,75
и 10 с вероятностью 0,25 (все единицы заданы в абсолютных величинах).
Мощность передачи и мощность шума такие, что приемник расширен-
ного спектра, синхронизированный по г-й составляющей, при отсутствии
других многолучевых составляющих, будет иметь помехозащищенность
SNR, равную а?.
а) Предполагая использование максимальных линейных кодов с длитель-
ность бита Ть и приемника расширенного спектра, синхронизирован-
ного по составляющей сигнала прямой видимости LOS (с нулевой за-
держкой и коэффициентом усиления Оо), найдите значения ту и т2
(0 С Ti С т"2 < Ть), при которых соответствующие им многолучевые
составляющие будут ослабляться пропорционально — 1/N, где N — ко-
личество чипов на бит.
Для оставшейся части этой задачи допустите расширяющие коды с ав-
токорреляционной функцией, равной дельта-функции.
б) Какова вероятность перерыва связи при модуляции ДФМН (DPSK)
и мгновенной вероятности ошибки бита Рь = 10~3 в приемнике с одной
ветвью, синхронизированном по лучу прямой видимости LOS?
в) Какова вероятность перерыва связи при модуляции ДФМН (DPSK)
и мгновенной вероятности ошибки бита Рь = 10 '! в приемнике RAKE
с тремя ветвями, где каждая ветвь синхронизирована по одной соста-
вляющей многолучевого распространения и используется селективное
объединение SC каналов.
г) Представьте, что сложность приемника RAKE можно ограничить толь-
ко двумя ветвями и селективным объединением SC. Найдите, какую
из двух многолучевых составляющих следует захватить RAKE, чтобы
минимизировать вероятность нарушения связи при модуляции ДФМН
(DPSK) и вероятности Рь = 10“3, а затем найдите эту минимальную
вероятность нарушения связи.
13.14. В этой задаче исследуются эксплуатационные показатели приемника RAKE
со случайными задержками составляющих многолучевого распростране-
ния. Рассмотрите расширяющий код прямой последовательности DS с дли-
тельностью чипа Тс и функцией автокорреляции:
РсЩ = { о’
-Тс/2 < t < Тс/2,
иначе.
Представьте, что при модуляции сигнала ДФМН (DPSK) с длительно-
стью бита Ть = ЮТ) используется этот расширяющий код. Расширенный
сигнал передается по многолучевому каналу. Условия распространения
в канале удовлетворяют дискретно-временной модели задержки с отво-
дами, описанной в § 3.4, с разделением отводов на Тс и полным многолу-
чевым расширением Тт = 5ТС. Поэтому модель имеет пять многолучевых
секций, где г-я секция содержит максимум одну составляющую с задерж-
кой (г—0,5)Тс. Распределение составляющих многолучевого распростране-
ния в каждой секции не зависит от составляющих всех остальных секций.
Вероятность обнаружения составляющей в секции г равна 0,75 и, при усло-
вии наличия многолучевой составляющей в секции г, ее величина после
сжатия удовлетворяет распределению Рэлея со средним значением защи-
щенности SNR на бит, равным Si = 20/г при г = 1, 2, ..., 5 (абсолютные
значения). Поэтому средняя мощность уменьшается с расстоянием, кото-
рое прошла составляющая.
На приемном конце находится приемник RAKE с пятью ветвями и селек-
тивным объединением SC, в котором каждая ветвь синхронизирована по одной
из многолучевых составляющих. Принимая требуемое значение коэффициента
ошибок BER равным 10“3, рассчитайте вероятность нарушения связи на выходе
приемника RAKE. Сравните ответ с вероятностью нарушения связи для того
же коэффициента ошибок, если в каждой секции есть (с вероятностью 1) много-
лучевая составляющая, и если каждая многолучевая составляющая после сжатия
имеет среднее значение SNR на бит, равное Si = 20 (в абсолютных величинах).
13.15. Сигналы со спектром, расширенным прямой последовательностью, часто
используются для измерений в канале, так как широкополосный сигнал
с расширенным спектром имеет хорошее разрешение отдельных составля-
ющих многолучевого распространения. Измерения в канале с расширен-
ным спектром называются также зондированием канала, оно проводится
с использованием приемника с несколькими ветвями, синхронизирован-
ными по различным задержкам чипов. В частности, немодулированная
расширяющая последовательность sc(£) посылается через канал hit), как
это показано на рис. 13.19. Приемник имеет N + 1 ветвей, синхронизиро-
ванных по различным задержкам чипов. Выход Si i-h ветви аппроксими-
рует передаточный коэффициент канала, соответствующий этой задерж-
ке, так что приближенная модель канала, полученная при зондировании
по схеме, показанной на рисунке, имеет вид: h(t) = Sid(t — гТс).
i=0
Допустим, что функция автокорреляции сигнала sc(t) равна
Рс{т) = ¥b lSc(t)Sc(t " T)dt = { о, |Т|/Тс
о
Рис. 13.19. Устройство зондирования канала для задачи 13.15
N
а) Покажите, что если h(t) = 52 ai$(t ~ 1ТС), то в отсутствие шума (n(t) = 0)
г=0
устройство зондирования канала на рис. 13.19 будет иметь на выходе
Pt = ог для всех г.
б) Если пренебречь шумом при h(t) = а6(Р) + b6(t — 1,275) + c6(t — ?>.5Т(.').
то какую аппроксимацию /г(7) можно получить с помощью устройства
зондирования канала?
в) Теперь представьте, что устройство зондирования канала получает
полную оценку канала й(£) = h(t) = + (3i6(t — Тс) + /32<5(£ — 21с),
где все Д — независимые переменные каналов с рэлеевскими зами-
раниями. Рассмотрите приемник RAKE с тремя ветвями, когда г-я
ветвь полностью синхронизируется по г-й многолучевой составляю-
щей /г(£) и со средним значением SNR на бит в каждой ветви (после
сжатия), равным 10 дБ. Найдите вероятность срыва связи jPout при
модуляции ДФМН (DPSK) и заданной величине коэффициента оши-
бок BER, равной 10-3 при объединении сигналов в приемнике RAKE
с дифференциальным взвешиванием MRC. Выполните эти же расчеты
при селективном объединении в RAKE.
13.16. Найдите значения автокорреляции и взаимной корреляции кодов Голда,
кодов Касами малого и большого множества при п = 8. Также найди-
те количество таких кодов Касами как для малого, так и для большого
множества.
13.17. Найдите матрицу Адамара при N = 4 и покажите, что расширяющие
коды, созданные строками этой матрицы, ортогональны для синхронных
пользователей (т.е. покажите, что Ру(0) = 0, V? 7^ j). Найдите также
взаимную корреляцию между всеми парами пользователей, допуская вре-
менной сдвиг между пользователями, равный Тс/‘2, т. е. для всех пар кодов
найдите:
13.18. Рассмотрите асинхронный канал многостанционного доступа в системе
с DSSS и расширением полосы частот в N = Bs/B — 100 раз при числе
пользователей К = 40. Представьте, что система ограничена помехой
и во всех каналах отсутствуют эффекты многолучевого распростране-
ния. Найдите вероятность ошибки в канале пользователя к при модуляции
ДФМН (DPSK), допуская, что последовательности случайные при обыч-
ном гауссовом приближении и полагая, что сигнал этого пользователя
находится в глубоком замирании, с мощностью на приеме на 6 дБ мень-
ше, чем у остальных пользователей. Изменилось ли бы что-нибудь, если
бы пользователей можно было синхронизировать?
13.19. Покажите, что вектор г = (п,..., гк)т при rk, заданных (13.54), можно
выразить матричным уравнением (13.56). Какова статистика п в этом
выражении?
13.20. Покажите что детектирование по методу максимального правдоподобия
при К пользователях в синхронном приемнике многостанционного досту-
па выбирает вектор b для максимизации функции стоимости, заданной
выражением (13.57).
13.21. В данной задаче иллюстрируется использование множества расширяю-
щих кодов в одноканальных системах CDMA для адаптивной модуляции
или для получения выигрыша от разнесения. Коэффициент ошибок BER
пользователя к системы DS-CDMA с числом К абонентов, в которой каж-
дый абонент передает свой сигнал ДФМН (DPSK) со скоростью R бит/с,
Глава 13. Широкополосные системы передачи
модулированный собственной последовательностью битов, определяется
выражением:
BERfc = Q
2A-(?fe) ' 7*
(13.61)
где N — коэффициент расширения спектра сигнала, 7, — коэффици-
ент передачи мощности канала г-го пользователя, a Pii^i) — мощность
г-го пользователя на передаче, при коэффициенте передачи в его кана-
ле равном 7j. Обратите внимание, что мощность шума была приведена
к единице, и что приемник демодулирует каждую расширяющую после-
довательность, рассматривая другие последовательности как шум (со-
гласованная фильтрация). Система имеет единственного пользователя,
который может одновременно передавать до двух расширяющих последо-
вательностей, модулируя каждый независимый цифровой сигнал ДФМН
(DPSK) со скоростью R бит/с.
а) Предполагается, что замирание в канале пользователя равно 7, и что
он равномерно разделяет всю свою передаваемую мощность P("f) меж-
ду последовательностями. Обратите внимание, что пользователь име-
ет три варианта: он может ничего не передавать, передавать один
сигнал ДФМН (DPSK), модулированный расширяющей последователь-
ностью, или передавать обе расширяющие последовательности с неза-
висимыми битами, модулированные ДФМН (DPSK). Используя выра-
жение коэффициента ошибок BER для многопользовательского случая
(13.61), объясните, почему коэффициент BER для многоскоростной
системы DS-CDMA с одним пользователем выражается формулой:
BER = Q (^2Р(7)7) , (13.62)
если пользователь передает только одну расширяющую последователь-
ность, и формулой:
ВЕК=«(\ОЖд)’ (1МЗ>
если он передает обе расширяющие последовательности. Чему равны
скорости, достигаемые в обоих случаях?
б) Представьте, что и у передатчика, и у приемника есть полная инфор-
мация о канале, и допустите, что 7 имеет распределение />(7). Необ-
ходимо разработать стратегию адаптации скорости и мощности для
этого канала. Поскольку кодирование с исправлением ошибок не ис-
пользуется, то пользователю необходимо поддерживать свой коэффи-
циент ошибок BER ниже порогового значения Рь° для всех передавае-
мых битов. Среднее значение передаваемой мощности предполагается
Литература 667
равным единице: J P{'y)p(.'i)d'y = 1. Мы имеем конечное дискретное
о
множество возможных скоростей и поэтому, как и для узкополосной
адаптивной модуляции, оптимальная политика адаптации скорости за-
ключается в отсутствии передачи (отправке нулевой информации),
когда 7 находится ниже значения отсечки 70, и передаче одного ин-
формационного потока, когда 70 С 7 < 71, и обоих информационных
потоков, когда 7 > 71. Найдите стратегию адаптации мощности, кото-
рая точно достигает заданного значения BER Р® при этой стратегии
адаптации скорости как функцию пороговых значений 70И 71.
в) При условии реализации стратегии адаптации скорости и мощности,
полученной в (б), используйте оптимизацию Лагранжа для нахождения
7о и 71 как функции Лагранжа Л.
13.22. Представьте, что Вы работаете в компании, которая хочет создать сото-
вую систему нового поколения для высокоскоростной передачи речевых
сообщений и данных. Федеральная комиссия США (FCC) выделила для
этой системы полосу 100 МГц, под любой стандарт, принятый различ-
ными производителями. Вам поручили создание системы и проведение
согласований в органах стандартизации. Вам необходимо как можно по-
дробнее описать Вашу схему, уделяя особое внимание тому, как она будет
бороться с влиянием замираний и межсимвольными помехами ISI, а так-
же ее пропускной способности при передаче данных и речи. Приготовьте
также аргументацию, объясняющую, почему Ваша разработка лучше кон-
курирующих стратегий.
Литература
1. R. Pickholtz, D. Schilling, and L. Milstein, «Theory of spread-spectrum com-
munications — A tutorial», IEEE Trans. Commun., pp. 855-84, May 1982.
2. R. L. Peterson, R. E. Ziemer and D.E. Borth, Introduction to Spread Spectrum
Communications, Prentice-Hall, Englewood Cliffs, NJ, 1995.
3. V. V. Veeravalli and A. Mantravadi. «The coding—spreading trade-off in CDMA
systems», IEEE J. Sei. Areas Commun., pp. 396-408, February 2002.
4. S. W. Golomb, Shjft Register Sequences, Holden-Day, San Francisco, 1967.
5. A. J. Viterbi, CDMA Principles of Spread Spectrum Communications, Addison-
Wesley, Reading, MA, 1995.
6. G. L. Stuber, Principles of Mobile Communications, 2nd ed., Kluwer, Dordrecht,
2001.
7. О. C. Mauss, F. Classen and H. Meyr, «Carrier frequency recovery for a fully
digital direct- sequence spread-spectrum receiver: A comparison», Proc. IEEE
Veh. Tech. Conf., pp. 392-5, May 1993.
8. R. C. Dixon, Spread Spectrum Systems with Commercial Applications, 3rd ed.,
Wiley, New York, 1994.
9. M. K. Simon, J. K. Omura, R. A. Scholtz and B.K. Levitt, Spread Spectrum
Communications Handbook, McGraw-Hill, New York, 1994.
668 Глава 13. Широкополосные системы передачи
10. В. Sklar, Digital Communications — Fundamentals and Applications, Prentice-
Hall, Englewood Cliffs, NJ. 1988.
11. G.L. Turin. «Introduction to spread spectrum antimultipath techniques and
their application to urban digital radio», Proc. IEEE, pp. 328-53, March 1980.
12. M. K. Simon and M.-S. Alouini, Digital Communication over Fading Channels:
A Unified Approach to Pe Analysis, Wiley. New York, 2000.
13. R. Gold, «Optimum binary sequences for spread-spectrum multiplexing», IEEE
Trans. Inform. Theory, pp. 619-21, October 1967.
14. E. H. Dinan and B. Jabbari, «Spreading codes for direct sequence CDMA and
wideband CDMA cellular networks», IEEE Commun. Mag., pp. 48-54, Septem-
ber 1998.
15. N.B. Mehta, L. J. Greenstein, T. M. Willis and Z. Kostic, «Analysis and results
for the orthog onality factor in WCDMA downlinks», IEEE Trans. Wireless
Commun., pp. 1138-49. November 2003.
16. S. Verdu, «Demodulation in the presence of multiuser interference: Progress
and misconcep tions», in D. Docampo. A. Figueiras. and F. Perez-Gonzalez,
Eds. Intelligent Methods in Signal Processing and Communications, pp. 15-46,
Birkhauser, Boston, 1997.
17. S. Verdu, Multiuser Detection, Cambridge University Press, 1998.
18. M. Pursley, «Performance evaluation for phase-coded spread-spectrum multiple-
access communication — Part I: System analysis», IEEE Trans. Commun.,
pp. 795-9, August 1977.
19. R. Pickholtz, L. Milstein and D. Schilling, «Spread spectrum for mobile com-
munications», IEEE Trans. Veh. Tech., pp. 313-22, May 1991.
20. K.S. Gilhousen, I. M. Jacobs, R. Padovani, A. J. Viterbi, L. A. Weaver, Jr. and
С. E. Wheatley III. «On the capacity of a cellular CDMA system», IEEE Trans.
Veh. Tech., pp. 303-12, May 1991.
21. H. Xiang, «Binary code-division multiple-access systems operating in multipath
fading, noisy channels», IEEE Trans. Commun., pp. 775-84, August 1985.
22. S. Verdu. «Optimum multiuser signal detection», Ph.D. thesis, University of
Illinois, Urbana-Champaign. August 1984.
23. S. Verdu, «Minimum probability of error for asynchronous Gaussian multiple-
access channels», IEEE Trans. Inform. Theory, pp. 85-96, January 1986.
24. A. Duel-Hallen, J. Holtzman and Z. Zvonar, «Multiuser detection for CDMA
systems», IEEE Pers. Commun. Mag., pp. 46-58. April 1995.
25. R. Lupas and S. Verdu, «Linear multiuser detectors for synchronous code-
division multiple-access channels», IEEE Trans. Inform. Theory, pp. 123-36,
January 1989.
26. M. L. Honig and H.V. Poor, «Adaptive interference suppression», in Wireless
Communications: Signal Processing Perspectives, ch. 2, Prentice-Hall, Engle-
wood Cliffs, NJ, 1998.
27. S. Verdu and S. Shamai (Shitz), «Spectral efficiency of CDMA with random
spreading», IEEE Trans. Inform. Theory, pp. 622-40, March 1999.
28. M. K. Varanasi and B. Aazhang, «Near-optimum detection in synchronous code
division multiple-access communications», IEEE Trans. Commun., pp. 725-36,
May 1991.
29. M.K. Varanasi and В. Aazhang, «Multistage detection in asynchronous code
division multiple- access communications», IEEE Trans. Commun., pp. 509-19,
April 1990.
30. A. Duel-Hallen, «Decorrelating decision-feedback multiuser detector for syn-
chronous CDMA», IEEE Trans. Commun., pp. 285-90, February 1993.
31. A. Duel-Hallen, «А family of multiuser decision-feedback detectors for asyn-
chronous code-division multiple-access channels.», IEEE Trans. Commun., pp.
421-34, February—April 1995.
32. J. G. Andrews. «Interference cancellation for cellular systems: A contemporary
overview», IEEE Wireless Commun. Mag., pp. 19-29, April 2005.
33. D. Divsalar, M. K. Simon and D. Raphaeli, «Improved parallel interference can-
cellation for CDMA», IEEE Trans. Commun., pp. 258-68, February 1998.
34. Y. C. Yoon, R. Kohno and H. Imai. «А spread-spectrum multiaccess system with
cochannel interference cancellation for multipath fading channels», IEEE J. Sei.
Areas Commun., pp. 1067-75, September 1993.
35. P. Patel and J. Holtzman, «Analysis of a simple successive interference can-
cellation scheme in a DS/CDMA system», IEEE J. Sei. Areas Commun., pp.
796-807, June 1994.
36. A. J. Viterbi, «Very low rate convolutional codes for maximum theoretical per-
formance of spread spectrum multiple-access channels», IEEE J. Sei. Areas
Commun., pp. 641-9, May 1990.
37. J. G. Andrews and Т.Н. Meng, «Optimum power control for successive inter-
ference cancellation with imperfect channel estimation», IEEE Trans. Wireless
Commun., pp. 375-83, March 2003.
38. X. Wang and H. V. Poor, «Blind equalization and multiuser detection in disper-
sive CDMA channels», IEEE Trans. Commun., pp. 91-103, January 1998.
39. U. Mitra, «Comparison of maximum-likelihood-based detection for two multirate
access schemes for CDMA signals», IEEE Trans. Commun., pp. 64-77, January
1999.
40. X. Wang and H.V. Poor, Wireless Communication Systems: Advanced Tech-
niques for Signal Reception, Prentice-Hall, Englewood Cliffs, NJ, 2004.
41. R. Kohno, R. Meidan and L.B. Milstein, «Spread spectrum access methods for
wireless com munications», IEEE Commun. Mag., pp. 58-67, January 1995.
42. H. El Gamal and E. Geraniotis, «Comparing the capacities of FH/SSMA and
DS/CDMA networks», Proc. Internat. Svmpos. Pers., Indoor, Mobile Radio
Commun., pp. 769-73, September 1998.
ГЛАВА 14
МНОГОПОЛЬЗОВАТЕЛЬСКИЕ
МНОГОКАНАЛЬНЫЕ
СИСТЕМЫ
В многоканальных системах имеющиеся ресурсы приходится делить меж-
ду многими пользователями. Эта глава посвящена методам распределе-
ния ресурсов между пользователями и исследует основные ограничения
пропускной способности многопользовательских систем. Из подпарагра-
фа 5.1.2 мы знаем, что сигналы с полосой частот В и длительностью
Т занимают сигнальное пространство размером 2ВТ. Чтобы многока-
нальная система могла обслуживать некоторое число пользователей, про-
странственные измерения сигналов1 — ресурсы этой системы — должны
быть распределены между различными пользователями2. Распределение
между пользователями пространственных измерений сигнала называет-
ся доступ!многостанционный3. В различных групповых каналах мето-
ды многостанционного доступа работают по-разному. Мы рассмотрим
использование этих методов в каналах двух основных типов — нисхо-
дящих и восходящих каналах. Так как сигнальное пространство может
быть распределено между различными пользователями бесконечным ко-
личеством разных способов, то пропускная способность группового кана-
ла характеризуется не одним числом, а скорее областью скоростей. Эта
область определяет скорости всех пользователей, которых канал может
поддерживать одновременно с произвольно малой вероятностью ошибки.
Мы рассмотрим области пропускной способности групповых каналов как
в нисходящем, так и в восходящем направлениях. Также будут рассмо-
трены методы случайного доступа, при помощи которых пространствен-
ные измерения передачи сигнала распределяются только среди активных
1Еще говорят — степени свободы системы. — Прим, перев.
2Распределение сигнального пространства при многостанционном или случайном до-
ступе проводится на уровне «управления доступом к среде» согласно сетевой модели
взаимодействия открытых систем (OSI — Open Systems Interconnect) [1, гл. 1.3].
3Пространственные измерения сигнала или его степени свободы, выделенные раз-
личным пользователям, могут не быть ортогональными. Примерами могут служить
многопользовательские системы с расширенным спектром, использующие неортого-
нальные расширяющие коды, или методы кодирования с наложением, речь о которых
пойдет в § 14.5.
14.1. Групповые (многопользовательские) каналы радиодоступа
пользователей, а также регулирование мощности, позволяющее абонен-
там поддерживать уровень помехозащищенности SINR, необходимый для
обеспечения требуемых характеристик. Речь пойдет также о преимуще-
ствах многопользовательского — многостанционного разнесения, исполь-
зующего нестационарный характер каналов пользователей. В заключение
мы рассмотрим показатели эффективности и методы передачи сигналов
в многоканальных системах с многоэлементными антеннами.
14.1. Групповые (многопользовательские) каналы
радиодоступа: восходящий и нисходящий каналы
«Множественным» или групповым каналом называют любой канал, ко-
торый совместно используется многими пользователями. Различают два
направления групповых каналов — восходящее и нисходящее (рис. 14.1).
Нисходящий канал, который также называют радиовещательным или пря-
мым каналом, содержит один передатчик, ведущий передачу на несколько
приемников. Поскольку сигналы передаются всем пользователям одно-
аг
временно, то сигнал передатчика нисходящего канала s(t) =
k=i
с общей мощностью Р и полосой частот В, равен сумме сигналов, переда-
ваемых всем К пользователям. Таким образом, все пространство сигнала
передатчика и его мощность должны быть разделены между различными
пользователями. Синхронизация различных пользователей в нисходящем
канале осуществляется относительно просто, так как все сигналы исхо-
дят от одного передатчика, хотя многолучевое распространение в канале
может нарушить эту синхронизацию. Еще одной важной характеристи-
кой нисходящего канала является то, что и сигнал, и помехи искажаются
одним и тем же каналом. Так, по каналу к-го абонента с характеристи-
кой hk(t) проходят сигнал к-го абонента Sfc(t) и все помехи4 sj(f), j ф к,
которые затем поступают на приемник к-го абонента. В этом основное
различие между восходящим и нисходящим каналами, так как в вос-
ходящих направлениях канала сигналы разных абонентов искажаются
различным образом. Примеры беспроводных нисходящих каналов — это
все радио- и телевещание, линии связи от спутника к множеству наземных
станций и каналы передачи от базовой станции к мобильным терминалам
в сотовых системах.
Восходящий канал, называемый также каналом многостанционного
43десь под помехами понимаются мешающие воздействия сигналов других абонен-
тов. — Прим, перев.
Глава Ц. Многопользовательские многоканальные системы
доступа5 или обратным каналом, имеет множество передатчиков, посы-
лающих сигналы на один приемник, при этом каждый сигнал должен
находиться в пределах общей полосы пропускания системы В. Однако
в отличие от нисходящего канала в восходящем канале каждый пользова-
тель имеет индивидуальное значение мощности для соответствующего
передаваемого сигнала Sk(t). Кроме того, так как сигналы посылаются
различными передатчиками, то, при необходимости их синхронизации,
требуется согласование этих передатчиков. На рис. 14.1 видно, что сиг-
налы от разных абонентов в восходящем направлении проходят через
различные каналы, так что даже если переданные мощности оди-
наковы, то мощности сигналов различных абонентов на приеме будут
отличаться, если коэффициенты усиления соответствующих каналов раз-
личны. Примерами восходящих беспроводных каналов служат встроен-
ные в портативные компьютеры карты взаимодействия с беспроводной
ЛВС6, ведущие передачу на точки доступа к беспроводной ЛВС, линии
связи от наземных станций к спутнику и каналы передачи от мобильных
терминалов на базовую станцию в сотовых системах.
^Абонент 3
Нисходящий канал
Рис. 14.1. Нисходящий и восходящий каналы
S1W
Восходящий канал
Большинство систем связи являются двунаправленными и, следова-
тельно, имеют как восходящие, так и нисходящие каналы. Радиоприемо-
передатчики, посылающие информацию пользователям по нисходящему
каналу и получающие информацию от этих пользователей по восходяще-
6 Отметим, что методы многостанционного доступа должны использоваться в груп-
повых каналах доступа обоих типов — т. е. как в восходящих, так и в нисходящих
каналах.
6 ЛВС — Локальная вычислительная сеть (английский вариант — LAN). — Прим, перев.
Ц.2. Многостанционный доступ
му каналу, часто называют точками доступа или базовыми станциями.
Обычно в радиосвязи невозможно принимать и передавать информацию
в одной и той же полосе частот из-за возникающих помех. Поэтому дву-
направленные системы должны разделять восходящие и нисходящие ка-
налы, используя ортогональные пространственные измерения (степени
свободы) сигнала, обычно во временной и частотной областях. Такое
разделение называется дуплексным режимом. Так, при дуплексном ре-
7
жиме с временным разделением каждому пользователю выделяются ор-
тогональные — непересекающиеся временные интервалы для получения
информации из точки доступа и передачи в точку доступа. Дуплексный
режим с частотным разделением направлений предполагает выделение
отдельных — непересекающихся полос частот для передачи информации
в точку доступа и приема информации из этой точки. Преимущество
временного разделения направлений передачи состоит в том, что двуна-
правленные каналы обычно имеют симметричные коэффициенты переда-
чи, поэтому измерения параметров канала, сделанные в одном направле-
нии, могут использоваться для оценки канала в другом направлении. При
частотном разделении направлений передачи это не всегда верно из-за
частотно-селективных замираний: если разнос частот, выделенных для
каждого направления, больше полосы когерентности сигналов, соответ-
ствующей условиям многолучевого распространения в каналах, то эти
каналы будут испытывать независимые замирания.
14.2. Многостанционный доступ
Эффективное распределение сигнального пространства между пользова-
телями составляет ключевое положение разработки восходящих и нисхо-
дящих направлений каналов, поскольку диапазон частот обычно очень
ограничен и/или дорог. Распределение выделенных каналов между поль-
зователями часто называют многостанционным доступом7 8. Приложения,
ориентированные на соединения и с ограничениями по задержке, такие
как передача речи или видео, обычно требуют выделенных каналов для
обеспечения хороших показателей непрерывности передачи. Выделенные
каналы получают из сигнального пространства системы, используя ме-
тоды разделения на каналы, временное, частотное и кодовое разделение,
7Дуплексный режим подразумевает выделение независимых направлений передачи
и приема (исходящего и входящего или, в данном случае, восходящего и нисходяще-
го). — Прим, перев.
8Восходящий канал также называют каналом многостанционного доступа, однако ме-
тоды многостанционного доступа нужны как для восходящего, так и для нисходящего
канала.
Глава 14- Многопользовательские многоканальные системы
или комбинации этих методов. При распределении сигнального простран-
ства между пользователями с пакетным трафиком обычно используется
та или иная форма случайного распределения каналов, не гарантирующая
доступа к каналу. Совместное использование полосы частот по принципу
случайного распределения каналов называется случайным многостанци-
онным доступом или просто случайным доступом, о нем речь пойдет
в § 14.3. Вообще, решение о том, какой доступ использовать — многостан-
ционный или случайный, и какой именно метод многостанционного или
случайного доступа следует применить, принимается с учетом приложе-
ний данной системы, характеристик абонентского трафика, требований
к эксплуатационным показателям, а также характеристик канала и дру-
гих систем, вносящих помехи и работающих в той же полосе частот.
Методы многостанционного доступа разделяют все пространствен-
ные измерения сигналов (общее число степеней свободы) на каналы, а за-
тем распределяют эти каналы между различными пользователями. Наи-
более распространены методы разделения сигнального пространства во
временных, частотных и и/или кодовых координатах. При этом каналы
различных пользователей формируются с помощью ортогонального или
неортогонального разделения в соответствующих пространственных ко-
ординатах: многостанционный доступ с временным разделением МДВР
(TDMA — Time-division multiple access) и многостанционный доступ с ча-
стотным разделением МДЧР (FDMA — Frequency-division multiple ac-
cess) относятся к ортогональным методам разделения каналов, в то время
как многостанционный доступ с кодовым разделением МДКР (CDMA —
Code-division multiple access) может быть как ортогональным, так и не-
ортогональным — в зависимости от схемы кодирования. Направленные
антенны, часто реализуемые на основе антенных решеток, добавляют
дополнительное угловое пространственное измерение (степень свободы),
которое также может использоваться для разделения сигнального про-
странства на каналы; этот метод называют многостанционным доступом
с пространственным разделением МДПР (SDMA — Space-division multiple
access). Качественные показатели различных методов многостанционного
доступа зависят от того, в каком канале они применяются (восходящем
или нисходящем), а также от их специфических характеристик. Мето-
ды МДВР, МДЧР и ортогонального МДКР эквивалентны в том смысле,
что они ортогонально разделяют пространственные измерения сигнала
и, следовательно, формируют одинаковое количество ортогональных ка-
налов. Так, в сигнальном пространстве с размером 2ВТ можно создать
N ортогональных каналов с размером 2ВТ/N вне зависимости от ме-
тода разделения на каналы. В результате все методы многостанционно-
го доступа, разделяющие сигнальное пространство ортогонально, имеют
Ц-2. Многостанционный доступ
одинаковую пропускную способность, когда они применяются в каналах
с аддитивным белым гауссовым шумом AWGN, о чем говорится в § 14.5
и 14.6. Однако факторы, снижающие качественные показатели канала,
такие как амплитудные и частотно-селективные замирания, по-разному
влияют на эти методы, что приводит к различным значениям пропускной
способности и различным эксплуатационным показателям стандартных
беспроводных каналов.
14.2.1. Многостанционный доступ с частотным
разделением — МДЧР (FDMA)
Рис. 14.2. Многостан-
ционный доступ с ча-
стотным разделением
При МДЧР сигнальное пространство делится по частотной оси на не-
пересекающиеся каналы, и каждому пользователю выделяется отдель-
ный частотный интервал (рис. 14.2). Между каналами часто оставляются
защитные полосы с учетом неидеальных характеристик фильтров, воз-
можности подавления межканальных помех и расширения спектра вслед-
ствие эффекта Доплера. Если каналы достаточно узкополосные, то от-
дельные каналы не будут испытывать частотно-селективных замираний
даже в том случае, если общий частотный диапазон системы большой.
Передача ведется непрерывно во времени, что может осложнить реализа-
цию дополнительных функций, таких как, например, оценивание канала,
поскольку эти функции должны выполняться одновременно и в том же
частотном диапазоне, в котором передается информация. Кроме того,
при МДЧР необходимо использовать радиоустройства с быстрой пере-
стройкой частоты, способные настраиваться на разные несущие частоты,
соответствующие различным каналам. При использовании МДЧР слож-
но выделить одному и тому же пользователю много каналов, так как для
676 Глава Ц. Многопользовательские многоканальные системы
этого необходимо, чтобы радиоустройства одновременно демодулировали
сигналы, полученные по нескольким частотным каналам. Даже при этих
условиях, метод МДЧР остается наиболее распространенным вариантом
многостанционного доступа в аналоговых системах связи с непрерывной
передачей и лежит в основе стандартов аналоговой сотовой телефонии
AMPS и TACS [2, гл. 11.1]. Многостанционный доступ в системах ортого-
нального ЧРК — ОЧРК (OFDM), обозначаемый как ОМДЧР (OFDMА),
реализует МДЧР посредством выделения различным пользователям от-
дельных поднесущих.
Пример 14.1. В аналоговых системах первого поколения для каналов восходя-
щих направлений была выделена групповая полоса частот шириной В = 25 МГц,
а для каналов нисходящих направлений — другая полоса тоже шириной В = 25 МГц.
В каждом регионе эта выделенная полоса разделялась между двумя операторами,
так что каждый оператор имел по 12,5 МГц как для восходящих, так и для нисхо-
дящих каналов. Каждому абоненту для передачи аналогового речевого сигнала
выделялся частотный диапазон Вс = 30 кГц, что соответствует модулированно-
го сигналу ЧМ полосой частот 24 кГц и защитным полосам по 3 кГц с каждой
стороны. Групповые полосы частот восходящих и нисходящих направлений для
уменьшения помех от смежных систем также ограничивались защитными поло-
сами шириной Вд — 10 кГц с каждой стороны. Найдите общее число абонентов,
которым можно предоставить услуги по аналоговой передаче речи, если общий
частотный диапазон, выделенный для восходящих и нисходящих каналов, со-
ставляет 25 МГц. Рассмотрите также более эффективную цифровую систему
с модуляцией высокого уровня (при которой для цифровой передачи речи по-
надобятся каналы с шириной полосы всего 10 кГц) и более высоким уровнем
фильтрации (когда ширина защитных полос на границах диапазона составит
всего 5 кГц). Сколько абонентов сможет поддерживать в том же самом частот-
ном диапазоне шириной 25 МГц эта более эффективная цифровая система?
Решение. Как для восходящего, так и для нисходящего канала защитные полосы
на каждой стороне означают, что для N абонентов необходим полный частотный
диапазон шириной NBC + 2Вд. Поэтому общее количество абонентов, которых
можно обслужить, имея для восходящих и нисходящих каналов частотные диа-
пазоны шириной В — 25 кГц, равно:
_ В — 2ВЙ _ 25 • 106 — 2 10 • 103 _
в ОА 103
30 • 103
или по 416 абонентов на оператора. Действительно, аналоговые системы первого
поколения могли поддерживать 832 абонента в каждой соте. Цифровая система
может обслужить в каждой соте
я = 1оа = 2499
Ве
10 • 103
абонентов, что в три раза больше, чем в аналоговой системе. Такое увеличение
стало возможным, в основном, благодаря экономии частотного диапазона при
Ц-2. Многостанционный доступ
использовании высокоуровневой цифровой модуляции, которая позволяет раз-
местить речевой сигнал в одной трети частотного диапазона, необходимого для
аналогового речевого сигнала.
14.2.2. Многостанционный доступ с временным
разделением — МДВР (TDMA)
При МДВР сигнальное пространство делится по временной оси на непе-
ресекающиеся каналы, и каждому пользователю выделяется отдельный
циклически повторяющийся временной интервал (рис. 14.3). Эти кана-
лы МДВР занимают весь частотный диапазон системы (как правило,
широкополосный), поэтому возникает необходимость в подавлении меж-
символьных помех ISI. Циклически повторяющиеся временные интерва-
лы предполагают, что для каждого абонента передача не непрерывна.
Следовательно, необходимы методы цифровой передачи, обеспечивающие
буферизацию данных. Тот факт, что передача не является непрерывной,
упрощает реализацию дополнительных функций, таких как оценивание
канала, которые могут выполняться в течение временных интервалов,
занятых другими пользователями. Еще одно преимущество многостан-
ционного доступа с временным разделением состоит в том, что данный
метод позволяет предоставить одному пользователю много каналов, про-
сто выделив ему несколько временных интервалов.
Рис. 14.3. Многостанционный доступ с временным разделением
Основная трудность при реализации метода МДВР, по крайней мере,
в восходящем канале, заключается в необходимости синхронизации раз-
личных пользователей. В нисходящем же канале все сигналы исходят от
одного передатчика и поступают к любому приемнику по одному и тому
678 Глава Ц. Многопользовательские многоканальные системы
же каналу. Следовательно, если сигналы различных абонентов переда-
ются по каналу с плавными замираниями в ортогональных временных
интервалах, то эта ортогональность сохранится и в принятом сигнале.
Однако в восходящем канале сигналы различных пользователей переда-
ются по различным каналам с разными задержками. Для поддержания
ортогональности временных интервалов в принятых сигналах различ-
ные передатчики восходящего канала должны синхронизироваться таким
образом, чтобы после передачи по соответствующим каналам принятые
сигналы были ортогональными во времени. Такая синхронизация обычно
координируется базовой станцией или точкой доступа и может привести
к значительной избыточности. Многолучевое распространение также мо-
жет нарушать ортогональность временного разделения в восходящих и в
нисходящих каналах, когда задержки многолучевого распространения со-
ставляют значительную часть временного интервала. Поэтому в системах
с МДВР между каналами часто оставляют защитные полосы для ком-
пенсации ошибок синхронизации и многолучевого распространения. Еще
одна сложность реализации МДВР состоит в том, что при циклически по-
вторяющихся временных интервалах характеристики канала изменяются
в каждом цикле. Поэтому для выполнения функций приемника, требу-
ющих оценки параметров канала, таких как выравнивание, приходится
производить повторную оценку канала в каждом цикле. Если передача
ведется непрерывно, то состояние канала можно отслеживать, что более
эффективно. Многостанционный доступ с временным разделением ис-
пользуется в стандартах цифровой сотовой телефонии GSM, PDC и IS-136
[2, гл. 11].
Пример 14.2. Первоначальный вариант системы GSM предусматривает ис-
пользование в восходящем и нисходящем направлениях частотных диапазонов
по 25 МГц, как это делалось в системах AMPS. Этот частотный диапазон разде-
ляется на 125 каналов МДВР по 200 кГц каждый. Каждый канал МДВР состоит
из восьми временных интервалов, выделяемых абонентам. Восемь временных
интервалов вместе с преамбулой и замыкающими битами формируют цикл, по-
вторяющийся во времени. Найдите общее число абонентов, которых может под-
держивать система GSM, и частотный диапазон сигнала для каждого абонента.
Если среднеквадратический разброс задержки в канале равен 10 мкс, нуждается
ли такая система в подавлении межсимвольных помех?
Решение. Так как мы имеем по восемь абонентов на канал и 125 каналов, то
общее количество абонентов, которых может поддерживать данная система, рав-
но 125 • 8 = 1000 абонентов. Частотный диапазон каждого канала МДВР равен
25 • 106/125 = 200 кГц. Разброс задержки, равный 10 мкс, соответствует полосе
когерентности канала Вс « 100 кГц, что меньше частотного диапазона канала
МДЧР, равного 200 кГц. Следовательно, требуется подавление межсимвольных
помех ISI. Технические условия систем GSM предусматривают выравниватель
1^.2. Многостанционный доступ
для компенсации межсимвольных помех ISI, но разработчику предоставляется
свобода выбора типа выравнивателя.
14.2.3. Многостанционный доступ с кодовым
разделением — МДКР (CDMA)
При МДКР (CDMA) информационные сигналы различных абонентов мо-
дулируются с помощью ортогональных или неортогональных расширяю-
щих кодов. Полученные в результате расширенные сигналы одновремен-
но занимают одно и то же время и одну полосу частот, как это пока-
зано на рис. 14.4. Приемник использует структуру расширяющих кодов
для разделения сигналов различных абонентов. Наиболее распространен-
ная форма МДКР (CDMA) — это системы многостанционного доступа
с расширением спектра, которое реализуется либо методом прямой по-
следовательности, либо скачкообразной перестройкой частоты. Описание
и анализ этих методов даны в § 13.4 и 13.5.
Рис. 14.4. Многостан-
ционный доступ с кодо-
вым разделением
В нисходящих каналах обычно используются ортогональные расши-
ряющие коды, такие как коды Уолша - Адамара, однако эта ортогональ-
ность может быть нарушена многолучевым распространением. В вос-
ходящих каналах обычно используются неортогональные коды — из-за
сложности синхронизации абонентов и поддержания ортогональности ко-
да в восходящих каналах с многолучевым распространением [3]. Одно
из важных преимуществ неортогонального МДКР в восходящих кана-
лах заключается в том, что данный метод требует лишь незначительного
динамического согласования пользователей по частоте или времени, так
680 Глава Ц. Многопользовательские многоканальные системы
как пользователи могут быть разделены только за счет свойств кода.
При МДВР и МДЧР из-за того, что пространственные измерения сигнала
разделяются ортогонально, существует жесткое ограничение количества
получаемых ортогональных каналов. Это верно и для МДКР с ортого-
нальными кодами, но при использовании неортогональных кодов жестких
ограничений количества полученных каналов не существует.
Однако неортогональные коды приводят к взаимным помехам между
абонентами, и чем больше абонентов одновременно используют частот-
ный диапазон системы с помощью неортогональных кодов, тем выше
будет уровень помех, что ухудшает качественные показатели системы для
всех пользователей. Кроме того, схема неортогонального МДКР (CDMA)
требует регулирования мощности в восходящем канале для компенса-
ции эффекта «близкий-дальний». Эффект «близкий - дальний» появляется
в восходящем канале потому, что передаточные коэффициенты каналов
между передатчиком пользователя и приемником (базовой станцией) раз-
личны для каждого пользователя. Представим, например, что один або-
нент находится очень близко к своей базовой станции или точке доступа,
в то время как другой удален на значительное расстояние. Если оба
абонента ведут передачу на одном и том же уровне мощности, то поме-
хи, создаваемые сигналом первого (ближнего) абонента, будут заглушать
сигнал второго (дальнего). Поэтому, для приема сигналов всех абонентов
примерно с одинаковой мощностью используется регулирование мощно-
сти. Такой способ регулирования мощности, в сущности, преобразует
величину затухания и/или замирания в канале в усиление передатчика
и стимулирует каждый источник помех расходовать равное количество
мощности, тем самым сглаживая эффект «близкий-дальний». Системы
многостанционного доступа с кодовым разделением с неортогональны-
ми расширяющими кодами также могут использовать для подавления
помех между абонентами многопользовательское (групповое) детектиро-
вание — MUD (Multiuser detection). Такое детектирование существенно
улучшает эксплуатационные показатели при идеальном регулировании
мощности, и оно работает еще лучше, если регулирование мощности опти-
мизируется совместно с методом MUD [4]. В § 14.5 и 14.6 мы увидим, что
МДКР с групповым детектированием достигает пропускной способности
Шеннона как в восходящем, так и в нисходящем каналах, хотя стратегии
передачи и приема, достигающие пропускной способности, для этих ка-
налов существенно отличаются. И наконец, при МДКР (CDMA) можно
легко выделить много каналов одному пользователю, предоставив этому
пользователю множество кодов. Многостанционный доступ с кодовым
разделением используется в стандартах цифровой сотовой связи IS-95,
при этом в нисходящем канале предусмотрено использование ортогональ-
ных расширяющих кодов, а в восходящем — комбинации ортогональных
14-2. Много станционный доступ
и неортогональных кодов [2, гл. 11.4]. МДКР (CDMA) также используется
в стандартах цифровой сотовой связи W-CDMA и CDMA2000 [5, гл. 10.5].
Пример 14.3. Отношение мощностей сигнала и помехи SIR (SIR — Signal-
to-interference power ratio) в восходящем канале МДКР (CDMA) с неортого-
нальными кодами в предположении типичного гауссового приближения задается
формулой (13.47);
3G
SIR =
где К — количество абонентов, a G & 128 — соотношение расширенной по-
лосы частот и исходной полосы частот сигнала. В системах стандарта IS-95
восходящему каналу выделяется полоса частот шириной 1,25 МГц. Поэтому по-
лоса частот информационного сигнала перед расширением составляет Bs «
~ 1,25 • 106/128 = 9,765 кГц. Если пренебречь шумом, то сколько абонентов
может поддерживать восходящий канал МДКР (CDMA) при требуемом отно-
шении SIR в канале, равном 10 дБ? Сколько абонентов могла бы поддерживать
система МДЧР в пределах того же частотного диапазона?
Решение. Для определения количества абонентов, которое может поддерживать
система, преобразуем выражение для SIR и получаем:
К^ + 1 = ^ + 1 = 39,4.
о1гъ 1U
Поскольку К должно быть целым числом, система может поддерживать 39 або-
нентов. Для системы МДЧР получаем:
1.25 • 106
9,765 • Ю3 8’
т.е. в частотном диапазоне шириной 1,25 МГц система может поддерживать
128 каналов по 9,765 кГц каждый. Полученный результат означает, что МДЧР
в три раза эффективнее неортогонального МДКР при условии типичного гаус-
сова приближения для взаимной корреляции кодов (МДЧР оказывается еще эф-
фективнее при других допущениях относительно взаимной корреляции кодов).
Но в действительности системы IS-95 обычно поддерживают 64 абонента в вос-
ходящем и нисходящем каналах. Это достигается за счет переменной скорости
сжатия речи в зависимости от помех и качества канала и с учетом того, что по-
мехи присутствуют не всегда (фактора активности речи). В пределах одной соты
система МДКР (CDMA) оказывается менее эффективной, чем МДЧР, но в сото-
вых системах реализуется повторное использование каналов, которое при МДКР
(CDMA) можно осуществить более эффективно, чем в случае МДЧР (см. § 15.2).
14.2.4. Многостанционный доступ
с пространственным разделением —
МДПР (SDMA)
Многостанционный доступ с пространственным разделением использу-
ет направление (угол) в качестве пространственного измерения (степе-
ни свободы) в сигнальном пространстве, которое может быть разделено
Глава 1^. Многопользовательские многоканальные системы
на каналы и распределено между различными пользователями. Обычно
это реализуется с помощью многоэлементных антенн (рис. 14.5). Ортого-
нальные каналы образуются только в том случае, если угловое разнесение
между абонентами превышает угловое разрешение направленной антен-
ны. Если направленность достигается с помощью антенной решетки, то
для точного углового разрешения необходима большая решетка, что мо-
жет оказаться непрактичным для базовой станции или точки доступа
и, естественно, невыполнимо для маленьких терминалов пользователей.
На практике МДПР (SDMA) часто реализуется с использованием сектор-
ных антенных решеток, речь о которых шла в § 10.8. В этих решетках
угловой диапазон в 360° подразделяется на N секторов. При этом обеспе-
чиваются высокий коэффициент направленного действия в каждом сек-
торе и незначительные помехи между секторами. Для распределения ка-
налов между абонентами внутри сектора используется МДВР или МДЧР.
При работе с мобильными абонентами схема МДПР (SDMA) должна ада-
птироваться к изменению углов, под которыми ведется обмен сигналами
с абонентами, а если направленность достигается с помощью секторных
антенн, то должна быть предусмотрена передача обслуживания из секто-
ра в сектор при перемещении по ним абонента.
Рис. 14.5. Многостанци-
онный доступ с простран-
ственным разделением
14.2.5. Гибридные методы
Многие системы используют комбинацию различных схем многостанци-
онного доступа. Для улучшения свойств частотного разнесения каналов
скачкообразная перестройка частоты может быть объединена с ОМЧРК
(OFDMА) [6]. Расширение спектра методом прямой последовательности
(DSSS) можно объединить с МДЧР для разбиения частотного диапазона
Ц.З. Случайный доступ 683
системы на поддиапазоны; при этом различным пользователям выделя-
ются разные поддиапазоны, после чего производится расширение спек-
тра сигнала пользователя в пределах его поддиапазона. Внутри поддиа-
пазона коэффициент расширения спектра сигнала меньше, чем мог бы
быть для всего частотного диапазона системы, поэтому ослабление помех
и межсимвольной интерференции ISI будет меньшим. Однако это ухуд-
шение эксплуатационных показателей компенсируется тем, что данный
гибридный метод не требует, чтобы спектры поддиапазонов были смеж-
ными, а также обеспечивает большую гибкость, используя для расшире-
ния сигналов пользователя поддиапазоны различного размера в зависимо-
сти от конкретных требований. Еще один гибридный метод объединяет
DS-CDMA с FH-CDMA таким образом, что несущая частота расширен-
ного сигнала скачкообразно перестраивается в доступной полосе частот.
Это уменьшает эффект «близкий-далекий», так как пользователи, созда-
ющие помехи, меняются при каждом скачке. В качестве альтернативы,
можно объединить методы МДВР и частотного скачка FH таким обра-
зом, чтобы канал с глубокими замираниями или помехами использовал-
ся только на периодических интервалах между скачками частоты, что
позволяет уменьшить влияние замираний и помех за счет кодирования
с исправлением ошибок. Эта идея используется в стандарте GSM, объеди-
няющем метод частотного скачка FH со схемой МДВР для сокращения
влияния источников сильных помех, находящихся в других сотах.
Ведется много дискуссий и споров на тему сравнительного анализа ка-
чественных показателей различных методов многостанционного доступа
для настоящих и будущих беспроводных систем (см., например, [6-12]).
Сделать анализ и общие выводы можно для простых систем и моделей
канала, но для сложных многопользовательских систем с учетом цело-
го спектра типичных условий функционирования сложно прийти к од-
нозначному ответу относительно наилучшего метода. Более того, для
проведения сравнительного анализа или имитационного моделирования
приходится упрощать исходные предположения, и это может оказать вли-
яние на результаты в пользу той или иной конкретной схемы. Как и для
большинства вопросов, связанных с техническими разработками, выбор
определенного метода многостанционного доступа будет определяться
требованиями к системе и ее характеристикам, а также ограничениями
по стоимости и сложности.
14.3. Случайный доступ
Методы многостанционного доступа предназначены главным образом для
приложений с непрерывной передачей, таких как передача речи и видео,
684 Глава 1J. Многопользовательские многоканальные системы
когда выделенный канал способствует получению хороших качественных
показателей. Однако большинство приложений, связанных с передачей
данных, не требует непрерывной передачи; информационные потоки ге-
нерируются в случайные моменты времени, поэтому использование вы-
деленных каналов может оказаться чрезвычайно неэффективным. Более
того, большинство систем имеют гораздо больше пользователей в целом
(активных и бездействующих), чем можно обслужить одновременно, так
что в любое заданное время каналы могут выделяться только тем пользо-
вателям, которые в них нуждаются. В таких системах для эффективного
распределения каналов между активными пользователями используются
стратегии случайного доступа.
Все методы случайного доступа основываются на исходном условии
пакетированной информации или пакетной радиосвязи. При пакетной ра-
диосвязи данные пользователя группируются в пакеты по N бит, кото-
рые могут включать биты для обнаружения/исправления ошибок и биты
управления. После формирования пакета он передается по каналу. При
неизменной скорости передачи данных по каналу, равной R бит/с, вре-
мя передачи пакета составит т = N/R. Предполагается, что скорость
передачи R занимает всю полосу частот сигнала, и что все пользовате-
ли передают свои пакеты в этой полосе без дополнительной информации,
необходимой для разделения одновременно передаваемых пакетов. Следо-
вательно, если пакеты разных пользователей совпадают во времени, то
происходит коллизия (столкновение пакетов), и в этом случае оба пакета
могут быть декодированы неверно. Пакеты могут декодироваться с ошиб-
кой и в результате воздействия шума или других повреждений канала.
Вероятность обнаружения ошибки в пакете называется коэффициентом
пакетов с ошибками. Анализ методов случайного доступа обычно допус-
кает, что пакеты, совместно генерируемые пользователями, образуют
пуассоновский поток с интенсивностью Л пакетов за единицу времени;
т. е. А представляет среднее количество пакетов, поступающих за вре-
менной интервал [0, t], деленное на t. Соответственно, XN — это среднее
количество бит, генерируемых в течение любого временного интервала
[ОД], деленное на t. Для пуассоновского процесса вероятность того, что
количество пакетов, поступающих за период времени [0, t\, обозначаемое
как X(i), будет равно некоторому целому числу к, задается формулой:
Р(Х(() = Ц = ^е~и. (14.1)
Пуассоновский процесс не обладает памятью, поэтому количество паке-
тов, поступивших в течение какого-то заданного периода времени, не
влияет на распределение поступивших пакетов в любой другой период
времени. Обратите внимание, что пуассоновская модель подходит не для
Ц-З. Случайный доступ 685
всех типов пользовательского трафика — особенно это касается Интер-
нета, где пульсирующий трафик приводит к корреляции моментов при-
бытия пакетов [13].
Информационная нагрузка канала при условии, что пакеты поступают
согласно пуассоновской модели со скоростью А и длительностью переда-
чи пакета т, определяется как L = Хт. Если скорость передачи данных
по каналу равна Rp пакетов в секунду, то г = \/Rp = N/R, где R —
скорость передачи данных по каналу в битах в секунду. Заметьте, что L
является безразмерной величиной: это соотношение скорости поступления
пакетов, деленное на скорость пакета, с которой он может быть передан
по каналу, имеющему скорость передачи данных R. Мы допускаем, что
сталкивающиеся пакеты всегда декодируются с ошибкой. Таким образом,
если L > 1, то в среднем в течение заданного периода времени в систему
поступит больше пакетов (или бит), чем может быть передано за этот
период, поэтому системы с L > 1 будут нестабильными. Если передатчик
информируется приемником о пакетах, принятых с ошибкой, и передает
эти пакеты повторно, то скорость поступления пакетов А и соответству-
ющая нагрузка L = Хт рассчитываются с учетом как новых пакетов, так
и пакетов, требующих повторной передачи. В этом случае L называют
полной поступающей нагрузкой.
Качественные показатели методов случайного доступа обычно харак-
теризуются пропускной способностью системы Т. Пропускная способ-
ность — это безразмерная величина, определяемая отношением средней
скорости успешно переданных пакетов к скорости передачи пакетов по ка-
налу Rp. Следовательно, пропускная способность равна поступающей на-
грузке, умноженной на вероятность успешного приема пакетов: Т = Lp
(успешного приема). Вероятность успешного приема пакетов р зависит от
используемого протокола случайного доступа, а также от характеристик
канала, которые могут вызвать пакетные ошибки в отсутствие коллизий.
Поэтому Т L. Итак, поскольку система с L > 1 является нестабиль-
ной, то для стабильных систем характерно соотношение Т L 1.
Обратите внимание, что пропускная способность не зависит от скоро-
сти передачи данных по каналу R, так как нагрузка и соответствующая
пропускная способность нормируются относительно этой скорости. Это
позволяет при разработке сравнивать между собой различные протоко-
лы случайного доступа и емкости каналов. При пакетной радиосвязи со
скоростью передачи данных R бит/с, эффективная скорость передачи
данных в системе составляет RT, так как Т определяет долю пакетов или
бит, успешно переданных со скоростью R. Задача случайного доступа
состоит в предельном увеличении значения Т для полного использова-
ния скоростей имеющихся каналов. Обратите внимание, что при некото-
686 Глава IJ. Многопользовательские многоканальные системы
рых обстоятельствах перекрывающиеся пакеты не вызывают коллизий.
В частности, короткие временные интервалы наложений пакетов, различ-
ные коэффициенты передачи в каналах, по которым поступили пакеты
и/или кодирование с исправлением ошибок могут обеспечить успешный
прием одного или нескольких пакетов даже при наличии столкновения.
Это состояние называется занятием канала [14, гл. 4.3].
Методы случайного доступа были впервые предложены Абрамсоном
для протокола ALOHA [15], в котором данные объединяются в пакеты,
и пользователи посылают пакеты каждый раз, когда у них есть информа-
ция, подлежащая передаче. Протокол ALOHA чрезвычайно неэффективен
из-за коллизий между пользователями, обуславливающих очень низкую
пропускную способность. Пропускная способность может быть удвоена
за счет разделения интервала времени на такты и синхронизации поль-
зователей, но и в этом случае из-за коллизий пропускная способность
будет относительно низкой. Модификации протокола ALOHA во избежа-
ние коллизий и, следовательно, для повышения пропускной способности,
предусматривают контроль несущей, обнаружение коллизий и предотвра-
щение коллизий. Чтобы избежать коллизий, можно составить длинные
пачки пакетов, но обычно это ведет к дополнительной избыточности.
В этом разделе мы опишем различные методы случайного доступа, их экс-
плуатационные показатели и компромиссы при их разработке.
14.3.1. Простой алгоритм ALOHA
При использовании простого (не синхронизированного) алгоритма ALOHA
пользователи передают свои пакеты сразу же после их формирования. Ес-
ли пренебречь временем занятия канала, то предполагается, что пакеты,
совпадающие во времени, принимаются с ошибкой и подлежат повтор-
ной передаче. Если допустить также, что несовпадающие пакеты при-
нимаются успешно (т.е. в канале отсутствуют искажения или шум), то
пропускная способность будет равна поступающей нагрузке, умножен-
ной на вероятность отсутствия коллизий: Т = Lp (отсутствия коллизий).
Пусть некоторый пользователь передает пакет длительностью т в тече-
ние времени [0, т]. Тогда, если любой другой пользователь сформирует
пакет в течение времени [—т, т], то его пакет (длительностью т) будет
пересекаться с переданным пакетом, вызывая коллизию. Следователь-
но, вероятность отсутствия коллизий будет равна вероятности того, что
в течение времени [—т, г] не будет генерироваться ни один пакет. Эта
вероятность определяется формулой (14.1) при t = 2т:
p(X(t) = 0) = е“2Ат = e~2L, (14.2)
с соответствующей пропускной способностью
Т = Le~2L. (14.3)
ц.з.
Эта пропускная способность представлена на рис. 14.6. Из рисунка
видно, что пропускная способность увеличивается с ростом поступающей
нагрузки до максимального значения (около 0,18) при L = 0,5, а после
достижения этой точки начинает уменьшаться. Другими словами, ско-
рость передачи данных составляет только 18 % от той скорости, которая
была бы в системе с одним пользователем, ведущим передачу постоян-
но. Такая особенность пропускной способности объясняется тем, что при
малых значениях L существует много «свободных» периодов, когда ни
один пользователь не ведет передачу сообщений, поэтому пропускная спо-
собность мала. С увеличением L канал используется в большей степени,
но в этом случае начинают происходить коллизии. При L = 0,5 достигает-
ся оптимальный баланс между пользователями, создающими достаточное
количество пакетов для использования канала с приемлемой эффективно-
стью, а коллизии при генерировании этих пакетов случаются не часто.
При L свыше 0,5 коллизии происходят все чаще, что снижает пропускную
способность ниже ее максимального уровня; когда значение L становится
очень большим, большинство пакетов испытывают столкновения, а про-
пускная способность приближается к нулю.
Рис. 14.6. Пропускная способность при использовании алгоритмов ALOHA —
простого и синхронизированного
Одна из причин неэффективности простого алгоритма ALOHA за-
ключается в том, что пользователи могут начать передачу своих пакетов
A88 Глава 14- Многопользовательские многоканальные системы
в любое время, а любое частичное наложение двух или более пакетов на-
рушает успешный прием всех пакетов. При синхронизации пользователей,
когда передача всех пакетов выравнивается во времени, можно избежать
частичного наложения передаваемых пакетов. Это стало основной пред-
посылкой для разработки синхронизированного алгоритма ALOHA.
14.3.2. Синхронизированный алгоритм ALOHA
Синхронизированный алгоритм ALOHA предусматривает разбиение вре-
мени на интервалы длительностью т, причем пользователи могут начать
передачу своих пакетов только в начале временного интервала, следую-
щего после формирования пакета. Поэтому частичное наложение пере-
данных пакетов отсутствует, что увеличивает пропускную способность.
Пакет, переданный за период времени [0, т], принимается успешно, если
в течение этого периода не велась передача других пакетов. Эту вероят-
ность можно получить из формулы (14.1) при t = т: р(Х(Г) = 0) = e-L,
с соответствующей пропускной способностью
Т = Le~L. (14.4)
Эта пропускная способность также показана на рис. 14.6, где мы ви-
дим, что с ростом поступающей нагрузки пропускная способность уве-
личивается до максимального значения, примерно равного Т = 0,37 при
L = 1, после чего уменьшается. Таким образом, синхронизированный ал-
горитм ALOHA обеспечивает в два раза большую пропускную способ-
ность по сравнению с простым алгоритмом ALOHA, и достигает мак-
симального значения при большей поступающей нагрузке. Хотя данный
метод дает заметное улучшение по сравнению с простым алгоритмом
ALOHA, эффективная скорость передачи данных все еще составляет ме-
нее 40 % от максимальной физической скорости передачи. Это слишком
большая расточительность для ограниченного частотного диапазона бес-
проводной связи, поэтому для повышения эффективности требуются бо-
лее сложные методы.
Следует отметить, что синхронизированный алгоритм ALOHA тре-
бует синхронизации всех узлов сети, что может привести к значительной
избыточности. Даже в синхронизированной системе случаются коллизии
всякий раз, когда два или более пользователей пытаются вести передачу
в одном и том же временном интервале. Применение кодирования с за-
щитой от ошибок может обеспечить правильное детектирование пакета
даже после столкновения, но если исправляющей способности окажется
недостаточно, то пакет придется передавать повторно. Вопросы разра-
ботки систем с оптимальным балансом между исправлением ошибок и по-
вторной передачей рассматриваются в [16].
Ц.з. Случайный доступ 689
Пример 14.4. Задана синхронизированная система ALOHA со скоростью пе-
редачи R = 10 Мбит/с. Пусть пакеты состоят из 1000 бит. При какой скорости
поступления пакетов А система достигнет максимальной пропускной способно-
сти, и какова эффективная скорость передачи данных, соответствующая этой
пропускной способности?
Решение. Пропускная способность Т достигает максимального значения при
L = Ат — 1, где А — скорость поступления пакетов, ат — длительность па-
кета. Для скорости передачи 10 Мбит/с и при 1000 бит в одном пакете т =
= 1000/106 = 0,1 мс. Следовательно, пропускная способность будет максималь-
ной при А = 1/0,0001 = 104 пакетов с секунду. Пропускная способность при
L = 1 составляет Т = 0,37, поэтому эффективная скорость передачи данных
равна TR = 3,7 Мбит/с. Таким образом, скорость передачи данных сокращает-
ся примерно в три раза (по сравнению с непрерывной передачей данных) из-за
случайного характера поступления пакетов и соответствующих коллизий.
14.3.3. Многостанционный доступ с контролем
несущей — CSMA
Количество коллизий можно уменьшить, применяя многостанционный до-
ступ с контролем несущей (CSMA) — CSMA (Carrier-sense multiple ac-
cess), при котором пользователи проверяют состояние канала и задержи-
вают передачу, если обнаруживают, что другой пользователь уже ведет
передачу. Для эффективной работы, время опроса и задержки распро-
странения в системе должны быть малыми [17, гл. 4.19]. После обнару-
жения занятого канала, пользователь обычно ждет начала передачи в те-
чение какого-то случайного периода времени. Эта случайная отсрочка
предотвращает одновременное ведение передачи несколькими пользова-
телями до тех пор, пока канал не освободится. Многостанционный доступ
с контролем несущей работает только тогда, когда каждый пользова-
тель может распознавать передачу информации другими пользователями,
а задержки распространения малы. Этими характеристиками обладают
проводные локальные сети ЛВС (LAN), поэтому метод CSMA использу-
ется в протоколе Ethernet. Однако природа беспроводного канала может
помешать каждому конкретному пользователю распознать сигналы, пе-
редаваемые другими пользователями. Это приводит к проблеме скрытого
терминала (рис. 14.7), когда каждый узел может «слышать» своего непо-
средственного соседа, но не другие узлы сети. На рисунке и узел 3, и узел 5
хотят передать информацию на узел 4. Представим, что узел 5 начинает
свою передачу. Так как узел 3 расположен слишком далеко, чтобы рас-
познать этот сеанс передачи, то он предполагает, что канал свободен
и начинает свою передачу, что приводит к коллизии с сигналом узла 5.
Узел 3 считается «скрытым» от узла 5, так как он не может распознать
сигнал, передаваемый с 5 узла.
690 Глава Ц. Многопользовательские многоканальные системы
Рис. 14.7. Скрытые и открытые терминалы
Т Скрытый
терминал
3
Алгоритм ALOHA с CSMA также может привести к неэффективному
использованию канала из-за проблемы открытого терминала (см. рис. 14.7).
Допустим, что открытый терминал на этом рисунке — узел 2 — тоже хо-
чет передать пакет узлу 1 в то же самое время, когда узел 3 передает
информацию узлу 4. Оценивая канал, узел 2 распознает передачу с узла 3
и предполагает, что канал занят, даже если узел 3 не создает помех уз-
лу 1 при приеме сигнала с узла 2. Поэтому узел 2 не будет вести передачу
на узел 1 даже в том случае, когда не произошло бы никаких коллизий.
Открытые терминалы встречаются только в многозвенных сетях, поэто-
му мы отложим их рассмотрение до гл. 16.
В беспроводных сетях часто удается избежать коллизий, вызванных
скрытыми терминалами, с помощью четырехшагового подтверждения уста-
новления связи перед началом передачи [18, 19]. Это происходит следую-
щим образом. Узел, который собирается отправить пакет данных, снача-
ла ждет, пока канал станет доступным, а затем передает короткий пакет
RTS9 — «запрос на передачу». Потенциальный приемник, в предположе-
нии, что он обнаружил доступный канал, сразу же отправляет ответный
пакет CTS10 — «готов к приему», который разрешает первому узлу ве-
сти передачу, а также информирует соседние скрытые узлы (т. е. узлы,
находящиеся вне зоны связи передатчика, но в зоне доступа приемни-
ка), что они не должны передавать свои пакеты в течение времени, пока
будет идти передача. Узлы, которые «подслушают» пакеты RTS и CST,
будут воздерживаться от передачи в течение ожидаемой длительности
пакета. Узел может отправить пакет RTS только в том случае, если он
распознает свободный канал и не был остановлен другим контрольным
пакетом. Узел отправит пакет CST только в том случае, если он не был
остановлен другим контрольным пакетом. Подтверждение установления
9RTS — Request to send.
10 CTS — Clear to send.
Ц.З. Случайный доступ 691
связи RTS/CTS обычно сопровождается случайной отсрочкой передачи
во избежание передачи со всех узлов в тот момент, когда канал освобо-
дится. В некоторых реализациях [19, 20], включая стандарт беспроводных
локальных сетей WLAN 802.11 [5, гл. 14.3], приемник отправляет передат-
чику пакет АСК11 — «подтверждение приема», для проверки правильного
приема пакета, после чего канал снова становится доступным.
Еще один метод, решающий проблему скрытых терминалов — это пе-
редача с сигналом занятости. При такой стратегии пользователи сначала
проверяют, занят ли канал передачи, принимая сигнал «занято» по отдель-
ному каналу управления [1, гл. 4.6]. На самом деле, это не традиционный
тональный сигнал «занято»; просто по каналу управления в специально
выделенном поле передается бит. Такая схема хорошо подходит для пре-
дотвращения коллизий в случае, когда пользователи по всей сети могут
«слышать» централизованный контроллер. В плоской сети без централизо-
ванного управления используются более сложные показатели для обеспе-
чения того, чтобы любой потенциальный источник помех в одном канале
мог принимать сигнал «занято» из другого канала [21, 22]. Можно также
использовать гибридные методы, сочетающие подтверждение установле-
ния связи, передачу с сигналом занятости и регулирование мощности [22].
Количество коллизий можно уменьшить и при комбинировании метода
DSSS с алгоритмом ALOHA. В такой схеме каждый пользователь модули-
рует свой сигнал с помощью одного и того же расширяющего кода, но если
интервал между сигналами, передаваемыми данным пользователем, пре-
вышает время прохождения чипа, то помехи из-за коллизий сокращаются
за счет автокорреляции кода [23].
14.3.4. Планирование
Протоколы случайного доступа хорошо работают с пульсирующим тра-
фиком — в условиях, когда пользователей намного больше, чем доступных
каналов, но эти пользователи редко ведут передачу. Если пользователи
передают длинные цепочки пакетов или непрерывные потоки данных, то
случайный доступ работает плохо, так как большинство передач заканчи-
вается коллизиями. При таком сценарии эксплуатационные характеристи-
ки можно улучшить за счет систематизированного распределения каналов
между пользователями с установлением очередности обслуживания - —
планированием. Планирование доступа предусматривает разбиение до-
ступного частотного диапазона на множество каналов с временным, ча-
стотным или кодовым разделением. Каждый узел связи распределяет свои
сигналы по различным каналам таким образом, чтобы избежать конфлик-
11 АСК — Acknowledgment.
692 Глава Ц. Многопользовательские многоканальные системы
тов с соседними узлами, обеспечивая наиболее эффективное использова-
ние доступных пространственных измерений сигнала.
Даже при использовании протокола доступа с планированием пере-
дачи остается необходимость в какой-либо форме алгоритма ALOHA,
поскольку, по определению случайного доступа, на стадии запуска ис-
пользовать заранее установленный механизм установления очередностью
обслуживания невозможно. Алгоритм ALOHA обеспечивает первоначаль-
ный контакт и устанавливает некоторую форму планирования доступа,
что позволяет передать относительно большой объем данных. Системати-
зированный подход к данному вопросу, сочетающий преимущества слу-
чайного доступа пульсирующего трафика и планирования очередности
обслуживания непрерывной информации, обеспечивает многостанцион-
ный доступ с резервированием пакетов — РИМА12 [24]. Этот метод пре-
дусматривает синхронизацию как пользователей с непрерывным, так и с
пульсирующим трафиком (т. е. при передаче речи и данных). При случай-
ном доступе за получение конкретного временного интервала сопернича-
ет множество пользователей. Успешная передача одним из пользователей
в течение определенного временного интервала резервирует этот вре-
менной интервал для всех последующих передач данного пользователя.
Если пользователь ведет непрерывную или длительную передачу, то по-
сле успешного захвата канала он имеет выделенный канал для передачи
всех своих оставшихся сообщений (в предположении, что последующие
сообщения не искажаются каналом; такие искажения вынуждают поль-
зователей оставлять свои временные интервалы, и затем им приходится
повторно бороться за какой-то незарезервированный интервал, что мо-
жет привести к значительным задержкам и отбрасыванию пакета [25]).
Если данному пользователю не нужно больше передавать пакеты, его
временной интервал возвращается в группу доступных интервалов, ко-
торые пользователи пытаются получить с помощью случайного доступа.
Следовательно, преимущества протокола случайного доступа получают
как пользователи, ведущие кратковременную передачу данных, которым
выделяются неиспользуемые временные интервалы, так и пользователи
с непрерывной передачей, которые после успешного захвата исходного
временного интервала могут вести упорядоченную периодическую пере-
дачу. Подобный метод, использующий сочетание резервирования и алго-
ритма ALOHA, описан в [26].
14.4. Регулирование мощности
Регулирование мощности осуществляется в системах, в которых поль-
зователи оказывают мешающее влияние друг для друга. Задача регули-
12PRMA — Packet-reservation multiple access.
14-4- Регулирование мощности
рования мощности состоит в настройке мощности передачи всех пользо-
вателей таким образом, чтобы отношение сигнал-помеха SINR в канале
каждого пользователя удовлетворяло заданному порогу, необходимому
для обеспечения приемлемых качественных показателей. При этом поро-
говое значение может быть различным для разных пользователей, в за-
висимости от требуемого качества передачи. В нисходящих каналах эта
задача решается просто, так как пользователи и источники помех име-
ют одинаковые коэффициенты передачи канала. В восходящих каналах
ситуация сложнее — передаточные коэффициенты могут различаться.
Важные результаты в области управления мощностью в сотовых систе-
мах и специализированных сетях были получены в [27-29]. Управление
мощностью в восходящем направлении каналов представляет особый слу-
чай, в котором можно использовать эти результаты. В модели восходяще-
го канала к-т4 передатчик имеет фиксированный коэффициент усиления
мощности канала дк в направлении к приемнику. Качество каждого со-
единения определяется отношением сигнал — помеха плюс шум SINR на
соответствующем приемнике. Для восходящего канала с К пользователя-
ми, создающими друг другу помехи, запишем отношение сигнал - помеха
SINR для к-го пользователя в виде:
(14-5)
где Рк — мощность к-ro передатчика, п — мощность шума в приемнике,
ар — ослабление помех при обработке сигнала. Например, в восходя-
щем канале МДКР (CDMA) мощность помех сокращается при обработке
сигнала, поэтому р ~ 1/G, где G — коэффициент расширения спектра
сигнала, тогда как при МДВР р = 1.
Допустим, что минимальные требования к помехозащищенности SINR
для каждого соединения задаются в виде: > 0. Это ограничение можно
представить в форме матрицы с покомпонентными неравенствами:
(I — F)P > и при Р > 0,
(14-6)
где Р = (Pi, Р2,..., Рк)Г — вектор значений мощности передатчика,
п?Г пу*
f/1 ’ f/2
9к
(14.7)
— вектор мощности шума, пропорционально измененный по ограничени-
ям отношения сигнал - помеха SINR и коэффициентам передачи каналов,
a F — матрица с элементами вида
_ f 0, к = j,
'3 \^k9jp/9k,
(14.8)
для к, j = 1, 2,..., К.
Глава Ц- Многопользовательские многоканальные системы
Матрица F содержит неотрицательные элементы и неразложима. Пусть
Pf — собственное значение Перрона-Фробениуса для матрицы F. Это
максимальное по модулю собственное значение матрицы F, которое для
неразложимой матрицы F будет простым, действительным и положи-
тельным. Более того, в соответствии с теоремой Перрона-Фробениуса
и теорией стандартных матриц [30], следующие утверждения эквивалентны:
1. pp < 1.
2. Существует такой вектор Р > 0 (т. е. Рь > 0 для всех А:), при кото-
ром (I — F)P и.
3. Матрица (I — F)-1 существует и является покомпонентно положи-
тельной.
Более того, если выполняется какое-то из этих условий, то Р* = (I—F)-1u
представляет оптимальное решение Парето для (14.6). Это значит, что
если Р является любым другим решением выражения (14.6), то Р Р*
покомпонентно. Следовательно, если требования к помехозащищенности
SINR для всех пользователей можно выполнить одновременно, то лучшим
распределением мощности будет Р*, при котором мощность передачи
пользователей минимизируется. В работе [28] рассмотрен алгоритм ре-
гулирования мощности, который сходится к Р* при pp < 1, и стремится
к бесконечности в противном случае. Этот итеративный алгоритм Фо-
шини - Мильяника задается формулой:
Р(г + 1) = FP(z)+u (14.9)
для г = 1,2,3,.... Более того, этот алгоритм можно упростить для ка-
ждого пользователя следующим образом. Пусть
Ш1) = 4^(’) (14.10)
7fcW
для каждого соединения к 6 {1,2,..., IV}. Следовательно, каждый пе-
редатчик увеличивает свою мощность, когда его помехозащищенность
SINR становится ниже требуемого значения, и уменьшает мощность, если
помехозащищенность SINR превосходит требуемое значение. Измерения
отношения сигнал — помеха плюс шум SINR (или его функции, например,
коэффициента ошибок BER) обычно выполняются на базовой станции или
в точках доступа, после чего каждому передатчику может быть направле-
на простая команда относительно регулирования передаваемой мощности
«вверх» или «вниз» на следующей итерации. Можно легко показать, что
выражения (14.9) и (14.10) линейно эквивалентны и, следовательно, алго-
ритм регулирования мощности в варианте для одного пользователя также
сходится к Р*. На рис. 14.8 показана область допустимых значений векто-
ров мощности, обеспечивающих требуемые значения отношения сигнал —
14-4- Регулирование мощности
помеха плюс шум SINR для системы, состоящей из двух пользователей,
а также итеративный алгоритм, сходящийся к минимальному вектору
мощности в этой зоне. Из рисунка видно, что область допустимых значе-
ний включает все пары мощностей Р = (Pi, TV), при которых достигается
заданная пара пороговых значений помехозащищенности SINR, и поэто-
му оптимальная пара Р* представляет минимальный вектор мощности
в данной двумерной области.
Рис. 14.8. Итеративный />2
алгоритм Фошини - Ми-
льяника
Р,
Алгоритм регулирования мощности Фошини Мильяника можно так-
же объединить с управлением доступом [31]. При такой комбинации до-
ступ в систему определяется тем, не приведет ли подключение нового
пользователя к падению помехозащищенности SINR других пользовате-
лей ниже пороговых значений. Когда новый пользователь запрашивает
доступ в систему, базовая станция или точка доступа определяет, суще-
ствует ли такое множество значений мощности передачи, при котором
можно дать доступ этому пользователю без падения помехозащищенно-
сти SINR существующих пользователей ниже установленного для них по-
рога. Если новый пользователь не может получить доступ к системе
без нарушения требований к помехозащищенности SINR существующих
пользователей, то доступ запрещается. Если новый пользователь может
быть допущен в систему, то алгоритм управления его мощностью и такой
же алгоритм для существующих пользователей настраиваются на вектор
мощности из области допустимых значений, при котором помехозащи-
щенность всех пользователей (нового и существующих) будет соответ-
ствовать требуемым значениям.
Глава Ц- Многопользовательские многоканальные системы
В работе [32] была предложена и проанализирована стратегия регули-
рования мощности при многостанционном доступе, учитывающая огра-
ничения задержки. Эта стратегия оптимизирует мощность передачи в со-
ответствии с условиями канала и ограничениями по задержке методами
динамического программирования. Оптимальная стратегия определяет
три режима: очень низкая мощность передачи, когда сигнал в канале
слабый, а допустимая задержка большая; более высокая мощность пере-
дачи, когда канал и задержка находятся в среднем состоянии; и очень
высокая мощность передачи, когда ограничение задержки очень стро-
гое. Эта стратегия дает значительную экономию мощности по сравнению
с постоянной мощностью передачи, обеспечивая при этом выполнение
требований по задержке трафика.
14.5. Пропускная способность
нисходящего (вещательного) канала
Если множество пользователей совместно используют один и тот же ка-
нал, то пропускную способность канала уже нельзя охарактеризовать
одним значением. В пределе, если все сигнальное пространство в канале
занимает только один пользователь, то весь диапазон значений, кото-
рые может принимать пропускная способность, сокращается до одной
величины, речь о которой шла в гл. 4. Однако, поскольку существует
бесконечное число способов разделения канала между множеством пользо-
вателей, то пропускная способность группового канала характеризуется
областью или диапазоном скоростей. Каждая точка этой области пред-
ставляет векторы возможных скоростей, которые одновременно могут ис-
пользовать все пользователи при произвольно малой вероятности ошибки.
Объединение векторов всех возможных скоростей для различных страте-
гий групповой передачи называется областью, объемом или диапазоном
пропускной способности или емкости многоканальной — многопользо-
вательской системы. Пропускные способности восходящих и нисходящих
направлений каналов отличаются из-за принципиальных отличий в мо-
делях этих каналов. Однако тот факт, что нисходящие и восходящие
направления каналов кажутся зеркальными отображениями, наталкива-
ет на мысль, что между свойствами их пропускных способностей может
существовать какая-то связь. Действительно, между этими направлени-
ями каналов существует дуализм, обратимость, позволяющая получить
значения пропускной способности одного направления, используя анализ
пропускной способности другого направления канала. Заметьте, что при
анализе пропускной способности нисходящий канал обычно называют ве-
Ц.5. Пропускная способность нисходящего (вещательного) канала
щательным каналом (ВС13), а восходящий канал — групповым каналом
доступа (МАС14), и мы также воспользуемся этой терминологией в нашем
обсуждении пропускной способности. В этом разделе рассматривается
диапазон пропускной способности вещательных каналов ВС, § 14.6 бу-
дет посвящен пропускной способности групповых каналов доступа МАС,
а в § 14.7 рассматривается обратимость этих двух направлений каналов
и то, как можно использовать эту обратимость для расчета пропускной
способности.
После описания модели вещательного канала с аддитивным белым
гауссовым шумом AWGN, определяется диапазон скоростей в этом канале
при временном разделении (TD15), частотном разделении (FD16) и ко-
довом разделении(СО17) с наложением и последовательным подавлением
помех. Затем будут определены диапазоны скоростей при использовании
метода DSSS для ортогональных и неортогональных кодов. Также будут
рассмотрены вещательные каналы ВС и их пропускная способность при
наличии замираний.
Будет показано, что максимальная пропускная способность дости-
гается при суперпозиции кодового разделения CD и подавления помех.
Кроме того, метод DSSS с последовательным подавлением помех при-
водит к потерям мощности (по сравнению с наложенным кодировани-
ем), которые возрастают с ростом коэффициента расширения. Наконец,
расширение спектра с ортогональным кодовым разделением CD позво-
ляет достигнуть множества значений пропускной способности, соответ-
ствующего по объему пропускной способности методов с временным или
частотным разделением, а расширение спектра с неортогональным ко-
дированием при отсутствии подавления помех представляет наихудший
вариант среди методов расширения спектра. Объем пропускной способ-
ности при замираниях зависит от наличия у передатчика и приемника
информации о замираниях в канале, как и в случае пропускной способно-
сти канала с замираниями с одним пользователем.
14.5.1. Модель канала
Рассмотрим канал вещательного типа, в котором один передатчик посы-
лает по разным приемникам различные потоки данных, называемые так-
13ВС — Broadcast.
14МАС — multiple access channel. Аббревиатура МАС также используется для обозна-
чения уровня управления доступом к среде передачи [данных] в сетях (medium access
control) [1, гл. 1.2].
15TD — Time division.
16FD — Frequency division.
17CD — Code division.
^698 Глава Ц. Многопользовательские многоканальные системы
же независимой информацией или данными. Такая модель неприменима
для обычного радио- или телевещательного канала, где всеми пользовате-
лями принимается один и тот же поток данных, также обычно называе-
мый информацией или данными. Однако полученные результаты расчета
пропускной способности можно легко распространить и на эти данные,
о чем будет сказано в подпараграфе 14.5.3. Диапазон пропускной спо-
собности вещательного канала характеризуют скорости, на которых ин-
формация может быть одновременно доставлена различным приемникам.
Мы сосредоточим свое внимание, главным образом, на объеме пропуск-
ной способности вещательного канала с двумя пользователями, так как
основные свойства и относительные эксплуатационные характеристики
различных методов разделения спектра одинаковы для любого конечного
числа пользователей [33].
Канал вещания ВС с двумя пользователями состоит из одного пере-
датчика и двух удаленных приемников, получающих данные на скоро-
сти 7?^, к = 1,2. Коэффициент передачи по мощности в канале между
передатчиком и к-м приемником равен д^, к = 1, 2, а в каждом приемнике
существует аддитивный белый гауссов шум AWGN со спектральной плот-
ностью мощности Nq/2. Обозначим эффективное значение шума в к-м
канале как щ- — N^/gk, к = 1,2 и произвольно примем, что ni С пз;
т. е. предположим, что канал к приемнику первого пользователя имеет
больший коэффициент передачи по мощности, чем канал второго поль-
зователя. Включение коэффициентов передачи каналов в спектральную
плотность мощности шума не изменяет помехозащищенность SINR для
каждого пользователя, так как сигнал и помеха в каналах всех пользова-
телей ослабляются с одним и тем же коэффициентом передачи. Следова-
тельно, пропускная способность вещательного канала с коэффициентами
передачи {д^} такая же, как и пропускная способность, рассчитанная
на основе эффективных значений шума {п^} [34]. Тот факт, что коэффи-
циенты передачи каналов (или, что равнозначно, эффективные значения
шума в канале пользователей) могут быть упорядочены, сводит рассма-
триваемую модель к модели вырожденного вещательного канала, для ко-
торого известна общая формула пропускной способности [35, гл. 14.6].
Мы будем обозначать полную среднюю мощность передатчика и полосу
частот как Р и В соответственно.
Если передатчик выделяет всю мощность и полосу частот одному
пользователю, то очевидно, что другой пользователь получит нулевую
скорость. Следовательно, множество значений скоростей (7?i, 7?з) , кото-
рые могут быть достигнуты одновременно, включает в себя пары (Ст,0)
и (0, Съ) , где пропускная способность одного пользователя в битах в се-
кунду в канала с аддитивным белым гауссовым шумом AWGN, опреде-
Ц.5. Пропускная способность нисходящего (вещательного) канала
ленна в § 4.1, и равна:
(14.11)
Ck = Blog2 fl + А; = 1,2.
\ J
Эти две точки ограничивают область пропускной способности канала
вещания ВС. Теперь мы рассмотрим пары скоростей внутри этой обла-
сти, которые достигаются при более объективном распределении ресур-
сов системы.
14.5.2. Пропускная способность канала с аддитивным
белым шумом AWGN
В данном разделе мы рассчитаем множество векторов достижимых ско-
ростей для вещательного канала с аддитивным белым гауссовым шумом
AWGN при временном разделении TD, частотном разделении FD, а так-
же при использовании оптимального метода, включающего кодирование,
при котором достигается максимум пропускной способности. При вре-
менном разделении мощность передачи Р и полоса частот В выделяются
1-му пользователю в течение интервала времени т, составляющего только
часть всего времени передачи, а оставшееся время передачи выделяется
2-му пользователю. Такая схема временного разделения — TD соответ-
ствует прямой линии между точками Ci и Р, соответствующей парам
скоростей:
Ctd = II | Ri = тВ log2 (14-------— ) ,
\ \ щВ/
{т:0^т^1} \ (14.12)
Т?2 = (1 - т)В log2 fl + \ ] .
\ П2±> ) у
Эта область достижимых скоростей при временном разделении TD при
равной мощности показана на рис. 14.10 и 14.11, где величины п\В и п?В
отличаются на 2 дБ и 20 дБ соответственно. Эта разность в дБ показыва-
ет отличие между коэффициентами передачи каналов двух пользователей,
и представляет ключевой параметр при сравнении скоростей, достигае-
мых при различных методах разделения спектра, о чем более подробно
будет сказано ниже.
Изменяя также мощность передачи сигнала каждого пользователя при
ограниченной общей средней мощности Р, можно получить большее мно-
жество скоростей. Пусть Pi и Р^ обозначают мощность, выделяемую поль-
зователям 1 и 2 соответственно в течение предоставленных им временных
интервалов. Тогда наличие ограничения по средней мощности можно за-
писать в виде: rPi 4- (1 — т)Р2 = Р. Область достижимых скоростей при
ftoo Глава 14- Многопользовательские многоканальные системы
временном разделении TD с переменной мощностью VP18 определяется
выражением:
(/ р \
Ri = тВ log2 I 1 4-I ,
\ niB j
TFi+(i-r)F2=.P} /
, Р?
Т?2 = (1 - т)В\о%2 1 4----
При частотном разделении передатчик выделяет k-му пользователю
мощность Pk из своей общей мощности Р и использует полосу В^ из всей
своей полосы частот В. Ограничения по мощности и частотному диапазо-
ну требуют, чтобы выполнялись соотношения Pi 4- Р2 — Р и Bi 4- В2 — В.
Поэтому множество достижимых скоростей при частотном разделении
с фиксированными полосами частот (В\,В2) равно:
Cffd = |1 (Ri = Bi log2 (1 4--
\ \ niBi
{Pi,Рг- 4 \ 1 1
Fi+F2=F}
( Р2
= В2 log2 1 4------—
\ П2/?2
(14.14)
Исследователи Бергмане и Кавер в своей работе [33] показали, что
если ni строго меньше, чем п2, то при любом фиксированном распреде-
лении полос частот (Bi,B2) существует такое распределение мощностей
{Р1,Р2 : Pi 4- Р2 = Р}, что соответствующие им пары скоростей пре-
вышают прямую линию, соответствующую линии, полученной при вре-
менном разделении TD с равной мощностью (14.12). Это можно видеть
на рис. 14.10 и 14.11, где показаны области скоростей при фиксирован-
ном разделении полос частот для двух различных диапазонов частот.
На рис. 14.10 каналы пользователей имеют почти одинаковые коэффици-
енты передачи, указанное преимущество в превышение скорости не так
заметно, но зато оно более наглядно проявляется на рис. 14.11, где раз-
ность между коэффициентами передачи составляет 20 дБ.
Диапазон скоростей, которые достигаются при частотном разделении
FD, находят объединением диапазонов достижимых скоростей при ча-
стотном разделении FD с фиксированными полосами частот (14.14) для
всех возможных вариантов разделения частотного диапазона:
Сгв = II (ri = Bi log2 f 1 4------------,R2 — B2 log2 (14----------5-) ) •
\ \ 71]-Di j \ n2t>2 ) )
{Pl,P2,Bi,B2-. v \ 1 / \ //
Bi+B2=B}
(14.15)
18VP — Variable power.
Ц.5. Пропускная способность нисходящего (вещательного) канала
Как показано в [33], эта область достигаемых скоростей превышает область
скоростей при временном разделении TD с равной мощностью (14.12). На
рис. 14.10 и 14.11 это превышение показано замыканием областей с фик-
сированным частотным разделением FD — хотя на рис. 14.10 это слож-
но увидеть, так как пользователи имеют почти одинаковые отношения
сигнал-шум на приеме. Действительно, при ni = «2 выражение (14.15)
упрощается до (14.12) [33]. Следовательно, оптимальное распределение
мощности и/или частоты будет полезней в том случае, когда каналы поль-
зователей существенно отличаются по качеству.
Обратите внимание, что область достигаемых скоростей при времен-
ном разделении TD с неравномерным распределением мощности, задавае-
мая выражением (14.13), совпадет с областью достижимых скоростей при
частотном разделении FD (14.15). Это видно, если в (14.13) принять, что
Bi = TiB и тг , = TjPj, где ri = т, а Т2 = 1 — т. Тогда ограничение мощно-
сти приобретает вид: 7Г1 + 7Г2 = Р. Подставляя это в выражение (14.13),
получаем:
Ctd,vp = |1 ( Ri = Bi log2 ( Н-----) , Т?2 = #2 log2 f П----) ) •
г \ \ «1^1/ \ п2В2] J
{7Г1,7Г2:
7Г1+тГ2 = Р}
(14.16)
Сравнивая полученное выражение с формулой (14.14), мы видим, что при
соответствующем выборе и любая точка в области достигаемых
скоростей при частотном разделении FD может быть получена и при вре-
менном разделении TD с изменяемой мощностью.
Наложенное кодирование с последовательным подавлением помех —
это метод кодирования с различной разрешающей способностью, при ко-
тором пользователь с более высоким передаточным коэффициентом мо-
жет различать созвездия принимаемых сигналов с более высокой разре-
шающей способностью, чем пользователь, у которого канал с низким,
плохим коэффициентом передач [33; 35, гл. 14.6]. Примером созвездия,
сформированного с помощью кода с двухуровневым наложением, может
служить созвездие КАМ-32 (32-QAM) со встроенной модуляцией ФМН-4
(4-PSK) из [36], показанное на рис. 14.9. В этом примере передаваемая
точка созвездия представляет одну из точек сигнала КАМ-32, выбран-
ную следующим образом. Поток данных, предназначенный для пользо-
вателя с худшей помехозащищенностью SNR (в нашей модели это 2-й
пользователь, так как n2 > ni), доставляет 2 бита для выбора одной
из наложенных точек ФМН-4. Поток данных, предназначенный для поль-
зователя с лучшей помехозащищенностью SNR, доставляет 3 бита для
выбора одной из восьми точек созвездия, окружающих выбранную нало-
женную точку. После осуществления передачи по каналу, пользователь
Глава Многопользовательские многоканальные системы
с лучшей помехозащищенностью SNR может легко определить квадрант,
в котором находится точка созвездия. Следовательно, пользователь эф-
фективно вычитает эту наложенную точку ФМН-4. Однако пользователь
с худшей помехозащищенностью SNR не различает точки КАМ-32, на-
ходящиеся вокруг своих наложенных точек ФМН-4. Следовательно, этот
пользователь воспринимает модуляцию КАМ-32, наложенную на модуля-
цию ФМН-4, как шум, и может декодировать только ФМН-4. Эти идеи
можно легко распространить и на многоканальные системы с более слож-
ными созвездиями сигналов. Так как кодирование с наложением обеспе-
чивает групповые скорости посредством расширения созвездия сигнала,
то расширение частотного диапазона в этом случае не требуется.
Область пропускной способности для двух пользователей при нало-
женном кодировании и с последовательным подавлением помех, была по-
лучена в [33] в виде множества пар скоростей:
Свс= и
{Р1,Р2: 4 \ 1 / \ 1//
Р1+Р2=Р}
(14.17)
Рис. 14.9. Модуляция КАМ-32 (32-QAM) со
встроенной модуляцией ФМН-4
(4-PSK)
• © • • @ •
• • • • • •
• КАМ-32
0 Наложенная точка ФМН-4
Интуитивно формула (14.17) объясняется так же, как и пример на
рис. 14.9. Так как ni < пг, 1-й пользователь правильно принимает всю
информацию, переданную 2-му пользователю. Поэтому 1-й пользователь
может декодировать и вычесть сообщение 2-го пользователя, а затем
декодировать свое собственное сообщение. Второй пользователь не мо-
жет декодировать сообщение, предназначенное для 1-го пользователя, так
как обладает худшей помехозащищенностью SNR. Следовательно, сооб-
щение 1-го пользователя с мощностью Pi вносит в сообщение, принятое
Ц.5. Пропускная способность нисходящего (вещательного) канала
2-м пользователем, дополнительный шум. Это сообщение можно рассма-
тривать как дополнительный элемент аддитивного белого гауссова шума
AWGN, так как распределения сигналов каждого пользователя, обеспечи-
вающие пропускную способность, являются гауссовскими [33; 35, гл. 14.1].
Тот же принцип используется и при последовательном подавлении помех
методом, описанным для DSSS в подпараграфе 13.4.4. Однако, хотя по-
следовательное подавление помех и достигает объема пропускной способ-
ности (14.17), на практике это не всегда оказывается лучшим вариантом.
Анализ емкости предполагает полное декодирование сигнала и оценку ка-
нала, тогда как в реальных системах при декодировании и оценке канала
могут возникать ошибки. Это приводит к ошибкам решающей обрат-
ной связи в схеме последовательного подавления помех. Поэтому методы
детектирования группового сигнала, которым не свойственны ошибки
данного типа, на практике работают лучше, чем последовательное по-
давление.
В [37] показано, что область пропускной способности (14.17) при п\ < П2,
превышает значения, достигаемые при использовании временного или
частотного разделения. Более того, в [37] также показано, что это мак-
симально достижимое множество пар скоростей при любом виде коди-
рования и разделения спектра и, следовательно, формула (14.17) опреде-
ляет область пропускной способности канала вещания ВС; отсюда и за-
пись С вс- Однако если все пользователи имеют одинаковую помехозащи-
щенность SNR, то эта область сокращается до линии, соответствующей
временному разделению TD с равной мощностью (14.12). Поэтому при
ni = «2 все методы разделения спектра дают одинаковую область скоростей.
Идеи кодирования с наложением созвездий можно легко распростра-
нить и на системы с К пользователями при К > 2. Рассмотрим канал
вещания ВС с К пользователями, каждый из которых имеет коэффици-
ент передачи канала дь- Сначала мы упорядочим пользователей по эф-
фективным значениям шума тг^ = N^/g^. Исходя из этого, кодирование
с наложением будет иметь К уровней, причем самый низкий уровень мо-
жет детектировать пользователь с наибольшим эффективным значением
шума (с худшей помехозащищенностью SNR), следующий уровень может
детектировать пользователь со следующим по величине эффективным
значением шума, и так далее. Каждый пользователь может устранить
влияние точек созвездия, которые соответствуют другим пользователям,
обладающим более шумными каналами, но точки созвездия, предназна-
ченные для пользователей с лучшими каналами, создают дополнительный
шум. При ограничении общей мощности, равном Р, расширение выраже-
ния (14.17) для случая многих пользователей дает:
Глава 14- Многопользовательские многоканальные системы
>, (14.18)
= В log2 1 +
С вс = U S (Л1, • • , Rk) : Rk =
{Pk^=lPk=P}
___________________________________________Pk___________
ПкВ + E^=l Rj1 lnk > rij]
где 1[-] обозначает индикатрису.
Максимальная пропускная способность суммы скоростей (SR19) кана-
ла вещательного типа ВС определяется как максимальная сумма скоро-
стей, взятая по всем векторам скорости области пропускной способности:
к
Cbcsr = max (14.19)
(Ri,...,RK)eCBc
Другими словами — это число, определяющее максимальную пропуск-
ную способность системы (независимо от способа распределения скоро-
стей между пользователями). Поэтому анализ данного параметра намно-
го проще, чем анализ объема пропускной способности К-мерной области,
и часто такой анализ приводит к важным выводам. Так, с помощью выра-
жения (14.18) можно показать, что в вещательном канале с аддитивным
белым гауссовым шумом AWGN максимальная пропускная способность
суммы скоростей достигается при выделении всей мощности Р пользо-
вателю с наивысшим коэффициентом передачи канала или, что равно-
значно, с наименьшим эффективным значением шума. Введя обозначения
nniiri — minn/c и gmax = maxg^, получаем, что максимальная пропускная
к к
способность суммы скоростей Cbcsr вещательного канала с аддитивным
белым гауссовым шумом AWGN с К пользователями равна:
/ р \ fa Р\
Cbcsr = Blog2 1 +-------- = Blog2 1 + . (14.20)
Таким образом, значение суммы скоростей представляет одну из гра-
ничных точек (14.11) области пропускной способности. Это верно как при
кодировании с наложением, так и при временном и частотном разделении,
поскольку все ресурсы предоставляются одному пользователю.
Пример 14.5. Рассмотрим канал вещания ВС с аддитивным белым гауссовым
шумом AWGN при полной мощности передачи Р = 10 мВт, n, = 10-9 Вт/Гц,
п% = 10-8 Вт/Гц и В = 100 кГц. Пусть 1-му пользователю необходима скорость
передачи данных 300 кбит/с. Найдите скорость, которая может быть предоста-
влена 2-му пользователю при временном разделении TD с равной мощностью,
частотном разделении FD с равными диапазонами и наложеным кодированием.
19SR — Sum-rate.
1^.5. Пропускная способность нисходящего (вещательного) канала
Решение. При временном разделении TD с равной мощностью 1-й пользователь
имеет скорость R.\ — тВ log2 (1 + Р/п^В} = (6,658 • Ю5) т бит/с. Присваивая
Ri нужное значение Ri = (6,658 • 105) т = 3 • 105 бит/с и решая уравнение
относительно т, получаем т = 3 • 105/б,644 • 105 = 0,451. В этом случае 2-й
пользователь получает скорость, равную R% = (1 — т) В log2 (1 + Р/п^В') = 1,89 •
105 бит/с. При частотном разделении с равными диапазонами нам необходима
скорость Ri = 0,5В log2 (1 + Pi/0,5niB) = 3 • 105 бит/с. Решая уравнение Pi =
= 0,5riiB (2Л1Л°’5В) — 1), получаем Pi = 3,15 мВт. Тогда Рг = Р —Pi = 6,85 мВт,
а Яг = 0,5В log2 (1 + Рг/0,5пгВ) = 1,94 • 105 бит/с. Наконец, при кодировании
с наложением мы имеем 7?i = Вlog2 (1 + Pi/niB) = 3 • 105. Решая уравнение
Pi = П1В (2Л1/В — 1), получаем Pi = 0,7 мВт. Тогда
Яг = В log (14—| = 2,69 • 105 бит/с.
\ n2B + Pi)
Кодирование с наложением, как и ожидалось, превосходит как временное, так
и частотное разделение, хотя характеристики этих методов были бы ближе к ха-
рактеристикам кодирования с наложением, если бы мы оптимизировали рас-
пределение мощности при временном разделении или распределение частотного
диапазона при частотном разделении.
Пример 14.6. Найдите максимальную пропускную способность суммы ско-
ростей для системы из предыдущего примера.
Решение. Согласно исходным данным, В = 10 мВт, n, = 10-9 Вт/Гц, п2 =
= 1СГ8 Вт/Гц и В = 100 кГц. Минимальным шумом обладает канал 1-го пользо-
вателя: = 10-9. Поэтому Cbcsr = В log2 (1 + P/nminB) = 6,644 • 105 бит/с.
Сумма скоростей достигается методами временного разделения TD, частотного
разделения FD или кодирования с наложением, которые в данном случае экви-
валентны, так как все ресурсы предоставляются 1-му пользователю.
Кодовое разделение пользователей может также осуществляться мето-
дом расширения спектра прямой последовательностью DSSS, описанным
в § 13.4. В таких системах модулированный сигнал данных каждого поль-
зователя модулируется с помощью уникального расширяющего кода, уве-
личивающего частотный диапазон передаваемого сигнала примерно в G
раз, где G — коэффициент расширения спектра для данного расширяю-
щего кода. Для ортогональных расширяющих кодов взаимная корреляция
между соответствующими кодами равна нулю, и поэтому для форми-
рования N ортогональных кодов необходим коэффициент расширения
спектра, равный N. При ограничении полного частотного диапазона ве-
личиной В, частотный диапазон, выделяемый каждому пользователю,
для таких расширяющих кодов ограничивается величиной В/N. Таким
образом, область достижимых скоростей для двух пользователей при ис-
пользовании ортогональных кодов (ОС — orthogonal codes) равна:
706 Глава 14- Многопользовательские многоканальные системы
^DS,OC = тз /
= JJ = + 2M1 + dh))'
Р1+Р2=Р}
(14.21)
Сравнивая выражения (14.21) и (14.14), можно видеть, что метод DSSS
с ортогональным кодированием имеет ту же область пропускной способ-
ности, что и фиксированное частотное разделение с равномерно распреде-
ленным частотным диапазоном (Bi = В2 = В/2). В соответствии с выра-
жением (14.16), временное разделение с неравномерным распределением
мощности также может достигать всех точек этой области скоростей.
Поэтому метод DSSS с ортогональными (например, Уолша-Адамара)
кодами достигает значений суммарных скоростей, равных достигаемым
при временном и частотном разделении. Для достижения этих же значе-
ний нужны более совершенные коды или другие методы.
Теперь рассмотрим метод DSSS с неортогональными расширяющи-
ми кодами. Как уже говорилось в подпараграфе 13.4.2, в этих системах
помехи между пользователями ослабляются за счет взаимной корреля-
ции последовательностей. Поэтому, если помехи рассматриваются как
шум, то их составляющая в отношении SIR сокращается на величину
квадрата взаимной корреляции последовательностей. Следуя выражению
(13.6), допустим, что расширяющие коды с коэффициентом расширения G
сокращают мощность помех в 1/G раз. Это удовлетворительная аппрокси-
мация для случайных расширяющих последовательностей, хотя (как уже
говорилось в подпараграфе 13.4.1) точное значение снижения мощности
помех зависит от природы расширяющих кодов и других предположений
[38, 39]. Так как полоса частот сигнала увеличивается в G раз, то суммар-
ная скорость двух пользователей вещательного канала ВС, достигаемая
при использовании метода DSSS с неортогональными кодами и последо-
вательным подавлением помех равна:
C'ds.ncjc
U 6?1 G log2 (
{Р1,Р2: \ \ 1 / /
Р1+Р2=Р} .
В ( Р2 \ \
Д2 = G log2 V + n^B/G + Pr/G) )
(14.22)
За счет выпуклости вверх логарифмической функции20, при G > 1
область скоростей (14.22) меньше диапазона скоростей (14.17), получае-
20Имеется в виду, что функция выпукла вверх, то есть на интервале (0,оо] расположена
ниже всякой касательной, проведенной в любой точке. — Прим, перев.
Ц.5. Пропускная способность нисходящего (вещательного) канала
мой при использовании наложенного кодирования, и с увеличением зна-
чений G этот эффект усиливается. Поэтому при использовании метода
DSSS с неортогональным кодированием для максимального увеличения
емкости следует минимизировать коэффициент расширения спектра.
При неортогональном кодировании без подавления помех приемник
рассматривает все сигналы, предназначенные другим пользователям, как
шум, в результате чего достигается диапазон скоростей:
(В / Р\ \
R1 = G log2 V + nrB/G + P^/G J ’
Р1'+Р2=Р} , \
В Рь \ \
R‘2=G log2 V + nzB/G + PjGj J ’ (14’23)
За счет выпуклости логарифмической функции, эта область скоростей
будет максимальной при G — 1, а с ростом G она уменьшается. Более
того, радиус кривизны графика (14.23) равен:
_ — R2R1
Х~ (7?2 + 7?2)3/2 ’
где Ri и Ri обозначают (соответственно) первую и вторую производные
от Ri по а при Р± = аР и Р2 = (1 — а) Р- Для G = 1, х 0. Поэто-
му область скоростей при неортогональном кодировании без подавления
помех (14.23) ограничивается выпуклой функцией с конечными точками
Ci и (72, как это показано на рис. 14.10 и 14.11. Следовательно, область
достижимых скоростей при DSSS с неортогональным кодированием без
подавления помех будет лежать ниже областей, достигаемых при вре-
менном и частотном разделении и ограниченных выпуклыми функциями
с теми же конечными точками.
На рис. 14.10 и 14.11 показаны области достигаемых скоростей при
временном разделении и равной мощности (14.12), частотном разделении
(14.14), методах DSSS с ортогональными кодами (14.21) и DSSS с неор-
тогональными кодами с подавлением помех (14.17) и без их подавления
(14.23) для случаев, когда помехозащищенность двух пользователей SNR
отличается на 3 дБ и 20 дБ соответственно. При расчете по формуле
(14.23) принято, что (7 = 1. При более высоких значениях коэффициента
расширения спектра, метод расширения спектра прямой последователь-
ностью даст меньший диапазон скоростей.
14.5.3 . Общие данные
Во многих применениях каналов вещательного типа всем пользователям
системы одновременно посылаются общие данные. Например, теле- и ра-
Глава 1^. Многопользовательские многоканальные системы
диостанции передают одну и ту же информацию всем пользователям,
а в беспроводных приложениях Интернета многие пользователи могут
захотеть скачать одни и те же сведения о курсах акций или результатах
спортивных игр.
- - Кодовое разделение с подавлением помех
— Кодовое разделение без подавления помех
.... Ортогональное кодовое разделение или частотное разделение с В, = В2 = 0,5 В
- - Фиксированное частотное разделение с В, = 0,25 В и В2 = 0,75 В
Фиксированное частотное разделение сВА= 0,75 В и В2 = 0,25 В
— Временное разделение при равной мощности
Рис. 14.10. Диапазон пропускной способности двух пользователей с разницей по-
мехозащищенности SNR в 3 дБ
Природа наложенного кодирования допускает непосредственное ис-
пользование оптимальных методов вещания для передачи общих данных
в объеме вещательного канала. В частности, при использовании веща-
тельного канала ВС для двух пользователей с наложенным кодированием,
пользователь с лучшим передаточным коэффициентом канала вместе со
своей собственной информацией всегда получает информацию, предна-
значенную для пользователя с худшим коэффициентом. Поскольку общие
данные должны передаваться обоим пользователям, то их можно деко-
дировать как независимые данные, предназначенные для пользователя
с худшей помехозащищенностью SNR. Пользователь с лучшей защищен-
ностью SNR также получит эти данные, то есть данные дойдут до обоих
польз ов ателей.
Ц-5. Пропускная способность нисходящего (вещательного) канала
При такой стратегии передачи, если пара скоростей (7?i, R2) находит-
ся в диапазоне пропускной способности канала вещания ВС двух пользо-
вателей с независимыми данными, определяемом выражением (14.17), то
при любом Rq Т?2 можно получить тройку скоростей общих и незави-
симых данных (7?о,7?1,7?2 — Ro)- В последнем выражении Ro — скорость
передачи общих данных, 7?i — скорость передачи независимых данных
первого пользователя, а Т?2 ~ Ro — скорость передачи независимых дан-
ных второго пользователя. С точки зрения математики это дает трех-
мерный объем пропускной способности:
Свс= (J ftfo^Blog2(l + --^—L7?1 = Blog2fl + ^
{Р?>2: \ \ n2B + Pj V ^В
р1+р2=р}
( Ру \
R2 = В log2 1 + ——-— - Ro
\ п2В + Pi)
(14.25)
- - Кодовое разделение с подавлением помех
— Кодовое разделение без подавления помех
Ортогональное кодовое разделение или частотное разделение с В1 = В2 = 0,5 В
- - Фиксированное частотное разделение с В, = 0,9 В и В, = 0,1 В
Фиксированное частотное разделение с В, = 0,75 В и В2 = 0,25 В
— Временное разделение при равной мощности
Рис. 14.11. Диапазон пропускной способности двух пользователей с разницей по-
мехозащищенности SNR в 20 дБ
710 Глава 1Многопользовательские многоканальные системы
Пример 14.7. В примере 14.5 мы видели, что для канала вещания с пол-
ной мощностью передачи Р = 10 мВт, п, = 10-9 Вт/Гц, «2 = 10~8 Вт/Гц
и В = 100 кГц пара скоростей (Bi,J?2) = (3 • 105,2,69 • 105) находится на гра-
нице зоны емкости. Представим, что пользователь 1 хочет получить скорость
передачи независимых данных 300 кбит/с и что в этой системе необходима ско-
рость передачи общих данных 100 кбит/с. С какой скоростью пользователь 2
получает независимые данные?
Решение. Чтобы получить скорость Ri = 300 кбит/с, нам необходима такая
же мощность Pi = 0,7 мВт, как и в примере 14.5. Скорость передачи общих
данных Ro = 105 < 2,69 • 105, так как из (14.25) следует, что скорость передачи
независимых данных 2-го пользователя просто равнаЯ2 —Ро = 2,6910s — 110s =
= 1,69 • 105 бит/с.
14.5.4 . Пропускная способность при замираниях
Теперь мы рассмотрим диапазон пропускной способности канала вещания
ВС с замираниями в случае, когда каналы пользователей имеют независи-
мые случайные коэффициенты передачи, изменяющиеся во времени. Как
было показано в § 4.2 для каналов с одним пользователем, емкость ве-
щательных каналов с замираниями зависит от того, какой информацией
о канале располагают передатчик и приемник. Однако емкость вещатель-
ных каналов ВС определена только для вырожденной модели каналов ВС,
а эта модель предполагает, что коэффициенты передачи канала известны
как передатчику, так и приемнику. Более того, при отсутствии информа-
ции о канале в передатчике нельзя использовать наложенное кодирование,
так как если передатчику не известны относительные передаточные ко-
эффициенты канала, то он не знает, какой пользователь может принять
точку созвездия с возможностью грубой оценки, а какой — с возможно-
стью точной оценки. Поэтому мы будем рассматривать каналы вещания
ВС с замираниями только при наличии в передатчике и всех приемниках
точной информации CSI о мгновенных коэффициентах передачи канала.
Допустим также, что канал замирает медленно, так что для заданного
состояния замираний стратегия кодирования, достигающая любой точки
области пропускной способности для статичного канала ВС в этом же
состоянии, имеет достаточно времени для того, чтобы приблизить веро-
ятность ошибки к нулю до того, как изменится коэффициент передачи
21
канала . 21
21 Говоря точнее, стратегия кодирования, достигающая точки области пропускной спо-
собности вещательного канала ВС с аддитивным белым гауссовым шумом AWGN,
использует блочный код, и вероятность ошибки для этого кода стремится к нулю
при увеличении длины блока. Наше допущение медленных замираний предполагает,
что коэффициенты передачи канала остаются неизменными достаточно долго, чтобы
блочный код, соответствующий этим коэффициентам передачи, смог приблизить эту
вероятность ошибки к нулю.
1^.5. Пропускная способность нисходящего (вещательного) канала
Как и в случае канала с замираниями для одного пользователя, су-
ществует два определения пропускной способности многопользователь-
ских (групповых) каналов с замираниями при наличии полной инфор-
мации о канале CSI: эргодическая пропускная способность (Шеннона)
и пропускная способность с нарушением связи. Диапазон эргодической
пропускной способности многопользовательского канала с замираниями
характеризует векторы достигаемых скоростей, усредненные по всем со-
стояниям замираний [34, 40], тогда как область пропускной способности
с нарушением связи определяет набор векторов фиксированных скоро-
стей, которые могут поддерживаться во всех состояниях замираний при
заданной вероятности нарушения связи [41-43]. Пропускная способность
с нулевым нарушением связи — это емкость с нарушением связи при
нулевой вероятности нарушения связи [41], то есть множество векторов
фиксированных скоростей, которые могут поддерживаться во всех состо-
яниях замираний. Диапазон эргодической пропускной способности, как
и в случае одного пользователя, определяет векторы скоростей переда-
чи данных, которые могут поддерживаться в течение всего времени без
каких-либо ограничений по задержке. Следовательно, при некоторых со-
стояниях замираний скорость передачи данных может быть малой или
нулевой, что может оказаться проблематичным для приложений с ограни-
чением задержки, таких как передача речи или видео. Диапазон пропуск-
ной способности с нарушением связи, как и в случае одного пользователя,
устанавливает вектор фиксированных скоростей для всех состояний за-
мираний без нарушения связи, что, очевидно, дает более удачную оценку
пропускной способности для приложений с ограничением задержки. Од-
нако требование к поддержанию фиксированной скорости даже при очень
глубоких замираниях может значительно уменьшить диапазон пропуск-
ной способности с нарушением связи по сравнению с областью эргоди-
ческой пропускной способности. Действительно, если все пользователи
испытывают рэлеевские замирания, 4о область пропускной способности
с нулевым нарушением связи будет нулевой для всех пользователей.
Рассмотрим канал вещания ВС с аддитивным белым гауссовым шу-
мом AWGN и замираниями в случае, когда единственный передатчик
передает независимые данные К пользователям в частотном диапазоне В
со средней мощностью передачи Р. Передатчик и все приемники имеют
по одной антенне. Нестационарный коэффициент передачи канала k-ro
пользователя на интервале времени i равен [г]. Каждый приемник име-
ет аддитивный белый гауссов шум AWGN со спектральной плотностью
мощности, равной Nq/2. Эффективное значение нестационарного шума
к-го пользователя определяется выражением22 пДг] = No/gk[i]. Эффек-
220братите внимание, что вектор шума представляет мгновенную мощность шума, а не
мгновенный отсчет шума.
(7J 2 Глава 1^- Многопользовательские многоканальные системы
тивный вектор шума на интервале времени г равен:
п[г] = (щ[г],...,пкН). (14.26)
Эту величину называют также состоянием замираний на интервале
времени г, так как она характеризует передаточные коэффициенты ка-
нала для каждого пользователя на данном временном интервале. Мы
будем обозначать k-й элемент этого вектора как п&[г] или просто пд,,
если привязка к временному интервалу понятна из контекста. Как и в
случае статического канала, емкость вещательного канала ВС с зами-
раниями можно рассчитать, основываясь на его нестационарных коэф-
фициентах передачи или векторе нестационарного шума. Диапазон эрго-
дической пропускной способности канала вещания ВС определяется как
множество всех средних скоростей, достигаемых в канале с замираниями
при произвольно малой вероятности ошибки, с усреднением по всем со-
стояниям замираний. В работе [34] для нахождения области эргодической
пропускной способности и схемы оптимального распределения мощности
для канала вещания ВС с замираниями этот канал представляется в виде
множества параллельных статических вещательных каналов ВС, по од-
ному на каждое возможное состояние замираний: n = (No/gi, , No/g^)-
В каждом состоянии замираний канал можно рассматривать как статиче-
ский вещательный канал с аддитивным белым гауссовым шумом AWGN,
к которому можно применить временное, частотное или кодовое разделение.
Так как вектор п[г] известен передатчику и всем приемникам, то пере-
датчик может использовать наложенное кодирование, зная эффективные
текущие значения шума. Каждый приемник может проводить последова-
тельное декодирование, при котором сигналы пользователей с большим
эффективным значением шума декодируются и вычитаются до начала
декодирования нужного (полезного) сигнала. Более того, мощность, пе-
редаваемая каждому пользователю — Pj(n), является функцией текущего
состояния замираний. Так как схема передачи основывается на наложен-
ном кодировании, то остается только определить оптимальное распреде-
ление мощности во времени и между пользователями.
Стратегия распределения мощности Р определяется как функция, ко-
торая каждому пользователю при всех возможных состояниях замираний
п ставит в соответствие величину передаваемой мощности РЦп). Пусть
Рве обозначает множество всех стратегий распределения мощности, удо-
влетворяющих ограничению средней мощности Р:
Рве = < Р Еп
Р >
(14.27)
I Lfe=i J )
Из выражения (14.18), область пропускной способности при неизменном
1^.5. Пропускная способность нисходящего (вещательного) канала
состоянии замираний п и распределении мощности
P(n) = {Pfc(n) •. к = . ,К}
определяется как:
Свс(Р(п)) = (Л1(Р(п),...,Лк(Р(п)) :
к
7?fc(P(n)) = BlogJl +--------------------------] L (14.28)
' nkB + £ P/(n)l[nfc > '
1=1
Пусть Свс (P) обозначает множество скоростей, которые достигаются
при усреднении по всем состояниям замираний и стратегии распределения
мощности Р:
Свс(Р) = {(Л1, • • •,RK} Rk < En[7?fc(P(n))]},
где Rk (Р(п)) определяется выражением (14.28). Согласно [34], диапазон
эргодической пропускной способности вещательного канала ВС с полной
информацией о канале CSI и ограничением мощности Р равен
Свс(Р)= (J Свс(Р)- (14-29)
Далее в работе [34] показано, что область пропускной способности
Свс (Р) выпукла, а схема оптимального распределения мощности пред-
ставляет расширенный вариант водоналивного процесса с К различных
уровней для системы, имеющей К пользователей.
Мы можем также определить векторы скоростей, достигаемых при
временном или частотном разделении, хотя очевидно, что они будут на-
ходиться внутри области эргодической пропускной способности, так как
наложенное кодирование превосходит оба этих метода при любом состо-
янии замираний. Оптимальная форма временного разделения TD ада-
птирует мощность, выделяемую каждому пользователю, к текущему со-
стоянию замираний. Подобным образом, оптимальная форма частотного
разделения FD адаптирует к текущему состоянию замираний выделяемые
каждому пользователю частотный диапазон и мощность. Как было пока-
зано в подпараграфе 14.5.2, для любого состояния замираний изменение
мощности при временном разделении дает те же скорости, что и из-
менение частотного диапазона и мощности при частотном разделении.
Поэтому при использовании этих двух методов скорости, достигаемые
при усредненнии по всем состояниям замираний, будут одинаковыми.
Рассмотрим область скоростей при частотном разделении FD, если ис-
пользуется стратегия распределения мощности V G рве, при которой
состоянию замираний п соответствует мощность k-ro пользователя, рав-
Глава Ц. Многопользовательские многоканальные системы.
нал Pfc(n). В соответствии с (14.27), стратегия распределения мощности
Р G Рве удовлетворяет ограничению средней мощности. Предположим
также, что используется стратегия распределения частотного диапазона
В, когда в состоянии замираний п k-му пользователю выделяется час-
тотный диапазон В^(п). Пусть Q обозначает множество всех стратегий
распределения частотного диапазона, удовлетворяющих ограничению ча-
стотного диапазона системы:
В Vn
Множество скоростей, достигаемых при частотном разделении FD с ис-
пользованием стратегий V и В равно:
CFD(P,B) = {(7?1,...,Р;<) :JRfc^En[7?fc(P(n),B)]}, (14.30)
где
7?fc(P(n),B) = Bfc(n)log2 fl + . (14.31)
\ nkBk (п) у
Тогда множество всех скоростей, достигаемых при частотном разделе-
нии, наличии полной информации о канале CSI, ограничении мощности
величиной Р и ограничении частотного диапазона величиной В составит:
CFD(P,B)= U CFD(P,B). (14.32)
-р&Гвс, в&д
Сумма скоростей для вещательного канала ВС с замираниями опре-
деляется как максимальная сумма достигаемых скоростей, максимизиро-
ванная по всем векторам скорости в области эргодической пропускной
способности канала. Так как в вещательном канале с аддитивным белым
гауссовым шумом AWGN максимум суммы скоростей достигается при пе-
редаче только одному пользователю, обладающему наилучшим каналом,
то при замираниях сумма скоростей будет максимальной, если вести пере-
дачу только пользователю, обладающему лучшим каналом при заданном
состоянии замираний. Очевидно, что в этом случае кодовое разделение
CD с наложением, временное разделение TD и частотное разделение FD
эквивалентны, так как в каждом состоянии замираний все ресурсы вы-
деляются одному пользователю. Максимальную сумму скоростей и опти-
мальное распределение мощности во времени можно получить, используя
модель эквивалентного канала одного пользователя с замираниями и не-
стационарным эффективным шумом п [г] = min тц, [г] при ограничении
k
средней мощности величиной Р. Из подпараграфа 4.2.4 известно, что
оптимальное выделение мощности пользователю с наилучшим каналом
на интервале времени i представляет водоналивной процесс во времени,
при этом значение отсечки определяется из распределения minn^H-
Ц.5. Пропускная способность нисходящего (вещательного) канала
В [34] рассчитаны эргодическая пропускная способность и области
достигаемых скоростей для каналов вещания с замираниями при кодо-
вом, временном и частотном разделении для различных распределений
замираний, а также оптимальные адаптивные стратегии распределения
ресурсов, достигающие границ этих областей. Эти стратегии адаптив-
ной передачи используют разнесение каналов многих пользователей, при
котором большая часть ресурсов (мощности, частотных диапазонов, вре-
менных интервалов) распределяется среди пользователей, обладающих
лучшими каналами при заданном состоянии замираний. Так, максимум
суммы скоростей достигается, когда в каждом состоянии замираний все
ресурсы предоставляются пользователю с лучшим каналом. Более подроб-
но о многопользовательском разнесении каналов будет рассказано в § 14.8.
Диапазон пропускной способности вещательного канала ВС с нулевой
вероятностью нарушения связи определяет множество скоростей, кото-
рые могут быть достигнуты одновременно всеми пользователями при
всех состояниях замираний, с учетом ограничения средней мощности.
Это расширение понятия пропускной способности с нулевой вероятно-
стью нарушения связи в каналах с одним пользователем, определенного
в разделе 4.2.4, на случай со многими пользователями. В соответствии
с [42], мощность, необходимая для обеспечения вектора скоростей R =
= (7?i, • • •, Rk) в состоянии замираний п равна:
7<-1
Pmin(R, n) = [2(^+1й-(»/в)(2й’(^/в - l)nw(fe)p] +
k=l
+ (2^(К)/В _ 1)п<кув, (14.33)
где л (•) — такая перестановка, что:
П7г(1) < птг(2) < • • • < Птг(ку
Следовательно, область пропускной способности с нулевым нарушением
связи представляет объединение всех векторов скоростей, удовлетворяю-
щих ограничению по средней мощности:
Свс(Р)= U н=(Л1,Л2,...,Лк). (14.34)
{R:E„[Fmin(R,n)]^P}
Граница области пропускной способности с нулевым нарушением связи
представляет множество всех векторов скорости R, для которых величи-
ны мощности ограничены одинаковыми значениями. Для вещательного
канала с двумя пользователями и аддитивным белым гауссовым шумом
AWGN с нестационарной составляющей и значениями мощности ni и П2,
эта граница упрощается до множества всех пар скоростей (T?i,T?2), Удо-
влетворяющих следующему уравнению [42]:
Глава Ц. Многопользовательские многоканальные системы
р = < п2) х
х [E[niB|ni < п2]2Й2/в(2Й1/в - 1) +Е[п2В|щ < п2](2Й2/в - 1)] +
+ p(ni > п2) х
х [е[п2В|п1 > п2]2Й1/в(2Й2/в - 1) + E[niB|m > п2](2Д1/в - 1)] .
Граница определяется только величинами E[niB|ni < n2], E[n2B|«i < п2],
Е [niB|ni > п2] и Е [n2B|ni п2]. Это следует из того, что мощность,
необходимая для достижения вектора скорости, представляет линейную
функцию уровней шума в каждом состоянии, как это видно в выражении
(14.33). Область пропускной способности с нулевым нарушением связи
зависит от условных (а не безусловных) математических ожиданий шу-
мов, так как каждому упорядочению значений шумов соответствует свое
выражение требуемой мощности в каждом состоянии, как можно видеть
из выражения (14.33).
Область пропускной способности с нарушением связи для вещательно-
го канала ВС определяется так же, как и область с нулевым нарушением
связи, за исключением того, что пользователи могут иметь некоторую
ненулевую вероятность нарушения связи и приостанавливать передачу
в определенных состояниях. Это обеспечивает системе дополнительную
гибкость, так как в жестких условиях замираний поддержание фиксиро-
ванной скорости во всех состояниях замираний может привести к большо-
му расходу мощности. В частности, в подпараграфе 4.2.4 было показано,
что для канала с замираниями с одним пользователем поддержание неко-
торой ненулевой скорости при рэлеевских замираниях требует бесконеч-
ной величины мощности. Если допустить состояния нарушения связи, то
можно использовать мощность, соответствующую этим состояниям, для
поддержания более высоких скоростей в состояниях без нарушения связи.
Получить диапазон пропускной способности с нарушением связи сложнее,
чем диапазон пропускной способности с нулевым нарушением связи, так
как в заданном состоянии замираний стратегия передачи должна опреде-
лить, какие пользователи окажутся в состоянии нарушения связи. Когда
пользователи с нарушением связи определены, мощность, необходимая
для поддержания работы оставшихся пользователей, задается выраже-
нием (14.33) для вектора скоростей К' К пользователей, которые не
находятся в состоянии нарушения связи. В [42] показано, что это решение
необходимо принимать на основе пороговой стратегии, а соответствую-
щая область пропускной способности с нарушением связи рассчитывается
в неявном виде с использованием пороговой стратегии и распределения
мощности пользователей без нарушения связи согласно (14.33).
Ц.5. Пропускная способность нисходящего (вещательного) канала
Можно также объединить понятия эргодической пропускной способ-
ности и пропускной способности с нарушением связи. Такое объединение
дает область пропускной способности с минимальной скоростью [44]. Век-
тор скоростей в этой области характеризует множество всех поддержива-
емых векторов средних скоростей, усредненных по всем состояниям зами-
раний, при условии некоторого вектора минимальных скоростей, которые
должны поддерживаться во всех состояниях (возможно, при некоторой
вероятности нарушения связи). Пропускная способность с минимальной
скоростью полезна для систем, передающих различные данные — с на-
личием и отсутствием ограничений по задержке. Минимальные скорости
определяют скорости передачи данных, доступные для данных с ограни-
чениями по задержке, которые должны передаваться во всех состояни-
ях замираний, тогда как скорости выше этого минимума доступны для
передачи данных без ограничений по задержке, поскольку очень зави-
сят от текущего состояния замираний. Область пропускной способности
с минимальной скоростью (при нулевой вероятности нарушения связи)
находится между областью с нулевым нарушением связи и областью эрго-
дической пропускной способностью: для минимальных скоростей, равных
нулю, она совпадает с областью эргодической пропускной способности,
а для минимальных скоростей, находящихся на границе области пропуск-
ной способности с нулевым нарушением связи, не может превысить эти
граничные точки. Это показано на рис. 14.12, где изображены графики
областей пропускной способности — эргодической, с нулевым наруше-
нием связи и минимальной скоростью — для канала вещания ВС с за-
мираниями Райса. Из этого рисунка видно, что область эргодической
пропускной способности будет наибольшей, так как она адаптируется
к различным состояниям канала для максимального увеличения средней
скорости (усредненной по всем состояниям замираний). Область пропуск-
ной способности с нулевым нарушением связи — наименьшая, так как
она соответствует принудительному поддержанию фиксированной скоро-
сти во всех состояниях, для чего необходимы большие затраты мощности
в случае сильных замираний. Область пропускной способности с мини-
мальной скоростью находится между двумя другими областями и зави-
сит от требований к минимальной скорости. Когда вектор минимальных
скоростей, которые должны поддерживаться во всех состояниях замира-
ний, увеличивается, то область пропускной способности с минимальной
скоростью приближается к области пропускной способности с нулевым
нарушением связи, а если вектор минимальных скоростей уменьшается,
то область пропускной способности с минимальной скоростью приближа-
ется к области эргодической пропускной способности.
Глава 14- Многопользовательские многоканальные системы
Рис. 14.12. Области пропускной способности канала вещания ВС — эргоди-
ческая, с нулевым нарушением связи и минимальной скоростью
(замирания Райса с параметром К = 1 и средней защищенностью
SNR = 10 дБ)
14.5.5 . Пропускная способность
многоэлементных антенн
Теперь исследуем диапазон пропускной способности канала вещания ВС
с многоэлементными антеннами. В § 10.3 показано, что системы со многи-
ми входами и (многими) выходами — MIMO (multiple-input multiple-out)
могут обеспечить большое увеличение емкости систем с одним пользова-
телем. Это же верно для многопользовательских систем: действительно,
много пользователей может использовать множество пространственных
измерений даже более эффективно, чем один пользователь.
Рассмотрим канал вещания ВС с К пользователями, где передатчик
имеет Mt антенн, а каждый приемник имеет Мг антенн. Матрица канала
Ид, размером Mr х Mt характеризует передаточные коэффициенты канала
между всеми антеннами на передаче и антеннами k-ro приемника. Тогда
сигнал, принимаемый к-м пользователем, равен
yfc = Hfcx + nfc, (14.35)
где х — сигнал на входе передающих антенн, а его ковариационную
матрицу обозначим как Qx = Е [ххя]. Для упрощения примем полосу
1J.5. Пропускная способность нисходящего (вещательного) канала 719
частот равной единице23, В = 1 Гц, и предположим, что вектор шу-
ма п/~ — комплексная гауссовская переменная с круговой симметрией
и nk ~ 7V(0,I).
Если на передатчике установлено более одной антенны, Mt > 1, то ка-
налы вещания ВС уже не могут быть упорядочены. Другими словами,
приемники, в общем случае, не могут быть упорядочены по уровням ка-
чества их каналов, так как у каналов между приемниками и антеннами
передатчика различные передаточные коэффициенты. Диапазон пропуск-
ной способности радиовещательных каналов общего вида неизвестен. Тем
не менее, оценка достижимого диапазона пропускной способности это-
го канала была предложена в [46, 47], которая, как позже было показа-
но в [48], равна максимальной пропускной способности диапазона. Эта
область основывается на понятии кодирования «грязных» — погашенных
страниц документов — DPC (dirty paper coding) [49]. Основные поло-
жения метода DPC заключаются в следующем. Если передатчик (но не
приемник) имеет полную, не казуальную информацию о помехе данного
пользователя, то емкость канала будет такой же, как если бы там не бы-
ло помех или, что равнозначно, если бы у приемника была информация
о помехе и он мог бы ее вычесть. Кодирование «грязных» документов
представляет метод, позволяющий «предварительно вычитать» на пере-
даче неказуально известную помеху, но таким образом, чтобы мощность
передачи не увеличивалась. Более практичный (и более общий) метод ре-
ализации этого предварительного вычитания описан в [50].
В вещательном канале MIMO на передаче метод DPC можно исполь-
зовать при выборе кодовых слов для различных пользователей. Сначала
передатчик подбирает кодовое слово Xi для пользователя 1. Затем пере-
датчик выбирает кодовое слово Х2 для пользователя 2 с полной информа-
цией о кодовом слове, выделенном пользователю 1. Следовательно, кодо-
вое слово пользователя 1 может быть предварительно вычтено так, чтобы
пользователь 2 не воспринимал кодовое слово, предназначенное пользова-
телю 1, как помеху. Подобным образом кодовое слово хз для пользова-
теля 3 выбирается так, чтобы пользователь 3 не воспринимал сигналы,
выделенные пользователям 1 и 2, как помехи. Этот процесс продолжается
для всех К пользователей. Ясно, что упорядочение пользователей имеет
значение в такой процедуре и должно быть оптимизировано при расчете
емкости. Пусть л (•) обозначает перестановку показателей пользователей,
a Q = [Qi,..., Q/<] — множество положительных полуопределенных ко-
23 В выражении емкости каналов MIMO с единичным частотным диапазоном для
действительных (одномерных) каналов перед функцией логарифма добавляется коэф-
фициент 0,5, а для комплексных (двумерных) каналов такой коэффициент отсутствует
[45, гл.3.1].
Глава 14- Многопользовательские многоканальные системы
вариационных матриц с Tr [Qi + . • • + Qt<] С Р. При DPC, если сначала
кодируется пользователь тг(1), за которым идет пользователь л(2) и так
далее, то достигается следующий вектор скорости:
Q) (-^7Г(1) 5 ‘ ’ • 1 '
Ъг(к) = log2
det i + f £2 Q?r(j)) ^(fc)
det \j>^ /
к — (14.36)
Область пропускной способности С в этом случае будет выпуклой обо-
лочкой объединения всех таких векторов скорости по всем перестановкам
и всем возможным положительным полуопределенным ковариационным
матрицам, удовлетворяющим ограничению средней мощности:
Свс (Л Н) = Со I |J R(7t, Q) , (14.37)
\yr,Q /
где R (л, Q) задается формулой (14.36). Переданный сигнал х = Xi + • • + хд-
и ковариационные матрицы входящего сигнала будут иметь форму =
= Е [*k*k] Метод DPC подразумевает, что векторы xi,..., х/< — неко-
реллированные, и поэтому Tr [Qi + ... + Q/<] С Р.
Важная особенность, на которую следует обратить внимание, рассма-
тривая уравнения скоростей (14.36), заключается в том, что эти урав-
нения не представляют ни вогнутую, ни выпуклую функции ковариаци-
онных матриц. Это осложняет нахождение области пропускной способно-
сти, так как должно быть исследовано полное пространство ковариацион-
ных матриц, попадающее под ограничение мощности [46; 47]. Однако, как
будет показано в § 14.7, существует дуализм между вещательными кана-
лами ВС с MIMO и каналами доступа — МАС с MIMO, который можно
использовать и значительно упростить вычисления. На рис. 14.13 изобра-
жена область пропускной способности канала с двумя пользователями,
рассчитанная с использованием принципа дуализма — обратимости кана-
лов при Mt = 2 и Mr = 1. Эта область определяется внешними границами,
а каждая линия внутри этих границ соответствует области пропускной
способности отдельного канала доступа МАС с MIMO, сумма мощностей
которого равна мощности двойственного канала вещания ВС с MIMO.
Объединение областей этих каналов МАС дает границы области двой-
ственного канала ВС с MIMO, о чем будет сказано в § 14.7.
Ц.6. Пропускная способность канала восходящего направления
Рис. 14.13. Область пропускной способности канала вещательного типа ВС
с MIMO при Hi = [1 0,5], Н2 = [0,5 1] и Р = 10
14.6. Пропускная способность канала восходящего
направления (многостанционный доступ)
14.6.1. Пропускная способность канала с аддитивным
белым гауссовым шумом AWGN
Канал многостанционного доступа МАС состоит из К передатчиков,
каждый из которых ведет передачу с мощностью Pk по каналу с пере-
даточным коэффициентом д^. Предположим, что все передатчики и при-
емник имеют по одной антенне. Полученный сигнал подвержен шумам
AWGN со спектральной плотностью PSD, равной Nq/2. Область про-
пускной способности канала МАС с двумя пользователями представляет
замкнутую выпуклую оболочку векторов (7?i, R2), удовлетворяющих сле-
дующим условиям [35, гл. 14.1]:
Rk <Blog2 fl + ^Y к = 1,2, (14.38)
Ri + R2 < Blog2 fl + (14.39)
\ -No-O /
Первое ограничение (14.38) — это просто емкость, соответствующая ка-
ждому отдельному каналу. Второе ограничение (14.39) показывает, что
722 Глава Ц. Многопользовательские многоканальные системы
сумма скоростей всех пользователей не может превышать емкость «супер-
пользователя» с мощностью на приеме, равной сумме мощностей, прини-
маемых от всех пользователей. При К пользователях область становится
равной:
СмАС =
= <№,..., Rk) :^Rk В log2 f 1 +
c -f1’ 2’ • • • ’ О •
kes
(14.40)
Таким образом, область, описываемая формулой (14.40), показывает,
что сумма скоростей для любого подмножества К пользователей не мо-
жет превышать емкости привилегированного «суперпользователя» с мощ-
ностью на приеме, равной сумме мощностей, соответствующих данному
подмножеству пользователей.
Суммарная скорость каналов доступа МАС равна максимальной сум-
к
ме скоростей ^2 Rk, где максимальное значение берется по всем векторам
fc=l
скорости (7?i,... ,7?fc) в области пропускной способности МАС. Как и в
случае канала вещания ВС, суммарная скорость канала доступа МАС ха-
рактеризует максимальную пропускную способность системы вне зависи-
мости от равнодоступности, и оценить ее проще, чем К-мерный диапазон
пропускной способности. Из формулы (14.40) можно видеть, что суммар-
ная скорость канала доступа МАС с аддитивным белым гауссовым шумом
AWGN достигает максимума, когда передатчики всех пользователей ве-
дут передачу с максимальной мощностью, что дает:
Cmacsr = В log2
к \
£ 9кРк
к=1
N0B
/
(14.41)
Этот результат подразумевает, что каждый пользователь в канале до-
ступа МАС имеет ограниченную собственную мощность, не расходуя
напрасно мощность системы. И наоборот, максимальная сумма скоростей
вещательного канала ВС с шумами AWGN (14.20) достигается при пере-
даче только одному пользователю с лучшим каналом. Но поскольку все
пользователи совместно используют ресурсы мощности, в этом случае не
происходит пустой траты энергии.
Область пропускной способности канала доступа МАС при двух поль-
зователях показана на рис. 14.14, где Ck и С^. задаются формулами:
Cfc = Blog2 fl + ^Y к = 1,2; (14.42)
Ц.6. Пропускная способность канала восхо
Cf = Blog2(l+ ), (14.43)
\ -iVo-D + ^2 ^2 /
c; = 51og2fl + - У (14.44)
\ TVo-o+31^1/
Точка (Ci,0) — это вектор скорости, получаемый, когда 1-й пере-
датчик отправляет данные на максимальной скорости, а 2-й передат-
чик «молчит»; обратная ситуация соответствует вектору скорости (О, С2).
Угловые точки (С^С^) и (С^Сг) достигаются при последовательном
подавлении помех, описанном выше для наложенного кодирования. Допу-
стим, что первый пользователь передает данные с максимальной скоро-
стью Ci. В этом случае его сигнал проявляется у 2-го пользователя в виде
шума, поэтому 2-й пользователь может передавать информацию на скоро-
сти С*2, и она может быть декодирована в приемнике с произвольно малой
вероятностью ошибки. Когда приемник затем вычитает сообщение 2-го
пользователя из полученного сигнала, то оставшаяся составляющая сооб-
щения является всего лишь сообщением 1-го пользователя, поврежденным
шумом, так что можно достичь скорости Ci с произвольно малой вероят-
ностью ошибки. Следовательно, (Ci,С$) — вектор достижимой скорости.
Схожие аргументы, только с переменой ролей пользователей, дают точ-
ку в области скоростей (С^С^). Совместное использование этих двух
стратегий с разделением во времени дает любую точку на прямой линии,
соединяющей (Cq,^) и Эта линия временного разделения мо-
жет быть также получена с помощью метода, называемого разделением
скоростей, когда данный пользователь разделяет свой информационный
поток на множество малых потоков и кодирует эти подпотоки таким
образом, как если бы они исходили от различных виртуальных пользо-
вателей [51]. Обратите внимание, что в канале вещания ВС пользователь
с лучшей защищенностью SNR всегда должен декодироваться последним,
тогда как в канале доступа МАС декодирование можно производить в любом
порядке. В этом состоит принципиальное отличие между этими двумя каналами.
Стратегия временного разделения между двумя передатчиками, рабо-
тающими на максимальных скоростях, выраженных (14.42), дает некий
вектор скорости на прямой линии, соединяющей Ci и С2- При частотном
разделении скорости зависят от части всей полосы частот, выделенной
каждому передатчику. Обозначая Bi и полосы частот, выделенные
каждому пользователю, получаем выражение области достижимой ско-
рости, изображенной на рис. 14.14, в виде:
Cfd = |J f-Ri = Bi log2 fl + 1 Y B2 = B2log2 fl +
rn D \ \ -W0B1/ \ 1VOB2//
B1+B2=B}
(14.45)
724 Глава 1^. Многопользовательские многоканальные системы
Ясно, что эта область превосходит область, достигаемую при времен-
ном разделении TD, так как подстановка в (14.45) значений В\ = тВ
и В^ — (1 — т) В дает 7?i > т(\ и Я2 > (1 — т) . Можно показать [35,
гл. 14.3], что эта кривая соприкасается с границами зоны в одной точке:
эта точка соответствует вектору скорости, максимально увеличивающе-
му сумму скоростей 7?i + Л2. Для достижения этих значений скоростей
полосы частот В\ и В% должны быть пропорциональны соответствующим
принимаемым мощностям и f/2p2-
Кодирование с временным Рис. 14.14. Зона емкости ка-
Как и в случае с каналом вещания, FD с помощью эффективного ис-
пользования мощности передачи можно получить ту же самую область
достижимых скоростей как при временном TD, так и при частотном раз-
делении. Если использовать ограничения Pi и Р2 как условия средней
мощности, то из этого следует, что, так как пользователь к использу-
ет канал только в течение части времени Tk, то его средняя мощность за
это время может быть увеличена на Р^/т^. Зона скорости, достигаемая
при временном разделении TD с переменной мощностью в этом случае
выражается в виде:
Ctd,vp = II | Ri = TiBlog2 ( 1 + J?1 1 ) ,
{Т1,Т2:Т1-|-Т2=1} \
P2 = r2mog2(l + -^V) ), (14.46)
а подстановка Ву: = в формулу (14.46) дает тот же самый диапазон
скоростей, как и (14.45).
Ц.6. Пропускная способность канала восхо
Можно также использовать наложенные коды без последовательно-
го декодирования. При таком подходе каждое сообщение передатчика
действует как шум на другие сообщения. Следовательно, в этом случае
максимальная достижимая скорость не может превышать явно
доминирующую при частотном FD и временном разделении TD для неко-
торой полосы частот или временного распределения — в частности, при
распределении, которое перекрывает границы зоны емкости.
Пример 14.8. Рассмотрим канал доступа МАС при шумах AWGN, мощно-
стями на передаче обоих пользователей Рг = Р2 = 100 мВт и с передаточными
коэффициентами канала пользователя 1 = 0,08 и пользователя 2 — д2 = 0,001.
Допустим, что шум приемника имеет спектральную плотность No = 10-9 Вт/Гц,
а частотный диапазон системы равен В = 100 кГц. Найдите угловые точки зоны
емкости канала доступа МАС. Найдите также скорость, которую может достичь
пользователь 1, если для пользователя 2 необходима скорость R2 = 100 кбит/с
и R2 = 50 кбит/с.
Решение. Из формул (14.42)-(14.44) получим:
Сх =Blog2 + =6,34-IO5,
C2 = Blog2 fl + ^Vi-io5,
= В log2 f 1 + — = 5,36 • 105,
\ NqB + (72-Г2 /
C2* = в log2 f 1 + --Д^2 -Л = 1,77 • 103.
2 62 < NoB + giPj
Максимальная скорость пользователя 2 составляет 100 кбит/с. Поэтому, если
ему необходима скорость R2 = 100 кбит/с, то это значение скорости связано
с угловой точкой зоны емкости (С^,С2) и, следовательно, пользователь 1 мо-
жет достичь скорости Ri = С* = 536 кбит/с . Если пользователю 2 необходимо
только R2 = 50 кбит/с, то точка скорости будет лежать в части зоны емкости
с временным разделением TD. В частности, временное разделение между угло-
выми точками (Ci,C2) и (С2,СХ*) дает в результате, что при любом значении т
на интервале 0 т 1, точка скорости (Ri,R2) = r(Ci,C'2) + (1 — г) (С^,С2).
Значение временного деления т в этом случае дает R2 = 50 кбит/м, что удовле-
творяет соотношению тС2 + (1 — т) С2 = R2. Решая относительно т, получаем
т — (R2 — С2) / (С2 — С2) = 0,51, что составляет примерно половину расстояния
между двумя угловыми точками. В этом случае пользователь 1 может достичь
скорости = rCi + (1 — т) = 5,86 • 105. Этот пример показывает огромное
влияние эффекта «близкий-дальний» в каналах доступа МАС. Даже если оба
пользователя имеют одинаковую мощность передачи, передаточный коэффици-
ент канала пользователя 2 намного меньше, чем передаточный коэффициент
канала пользователя 1. Следовательно, пользователь 2 может достичь, самое
большее, скорости 100 кбит/с, тогда как пользователь 1 может достигать ско-
рости в пределах от 536 до 634 кбит/с. Более того, из-за слабого передаточного
Глава Ц. Многопользовательские многоканальные системы
коэффициента канала, помехи, создаваемые пользователем 2, оказывает неболь-
шое воздействие на 1 пользователя: скорость передачи данных пользователя 1
без помех равна Ci = 634 кбит/с и = 536 кбит/с при наличии помех. Однако
помехи, создаваемые пользователем 1, строго ограничивают скорость передачи
данных пользователем 2, снижая ее почти на два порядка с С-> = 100 кбит/с
до С? = 1,77 кбит/с.
14.6.2. Емкость канала при замираниях
Теперь мы рассмотрим емкость канала многостанционного доступа в ка-
налах с аддитивным белым гауссовым шумом AWGN при замираниях,
когда передаточные коэффициенты канала всех пользователей изменяют-
ся во времени. Допустим, что все передатчики и приемник имеют по одной
антенне, и что плотность аддитивных шумов AWGN на входе приемника
равна Nq/2. Каждый пользователь имеет собственное значение мощно-
сти /Д, к = 1,...,К. Нестационарный передаточный коэффициент ка-
нала пользователя к на интервале времени i равен gk[i] и независим от
замираний в каналах других пользователей. Состояние передаточных ко-
эффициентов при замираниях на интервале времени г определим, как
g[i] = при этом привязку к временному интервалу мож-
но опустить, если она понятна из контекста. Предполагается наличие
полной информации CSI о состоянии замираний у передатчика и приемни-
ка, вариант при наличии информации CSI только на приеме рассмотрен
в [52, гл. 6.3]. Так же как и в случае с каналом вещания и каналом од-
ного пользователя, канал доступа МАС с замираниями также имеет два
определения пропускной способности: эргодический диапазон пропускной
способности, который характеризуется векторами достижимых скоро-
стей, усредненных по всех состояниям замираний, и диапазон пропускной
способности емкости с нарушениями связи, которая характеризуется век-
тором максимальных скоростей, который может поддерживаться во всех
состояниях с некоторой ненулевой вероятностью нарушения связи.
Сначала рассмотрим область эргодической емкости, полученную в [40].
Определим стратегию мощности Р как функцию, отображающую состо-
яние замираний g = (gi, ,дк) для множества значений мощности Pj (g),
P2(g), • • •, по одной для каждого пользователя. Пусть Fmac обо-
значает множество всех стратегий мощности, удовлетворяющих ограни-
чению по средней мощности на каждого пользователя Д:
РмАС — {P:Eg[Pfc(g)]^Pfc, к = 1,...,К}.
Диапазон емкостей каналов доступа МАС, предполагает постоянные со-
стояния замираний g с распределением мощности Pi(g),..., P/<(g), кото-
рое имеет вид:
Ц-6. Пропускная способность канала восходящего направления
CMAcCPl(g), • • ,Ffc(g)) =
= < (7?i,..., RK) :^Rk В log2
fees
ЕэЛ(?)\
(14.47)
Множество значений достигаемых скоростей, усредненных по всем со-
стояниям замираний при стратегии мощности Р задается с помощью
Смас (V) как:
Смас(Р) = <j Rk)-Y,R^<
kes
/ E 9kPk(s)
в'°ь |l+Ee
VS C {1,2,... ,K} >. (14.48)
Eg
В этом случае зона эргодической пропускной способности будет равна
сумме всех стратегий мощности, которые удовлетворяют ограничениям
на значения индивидуальной мощности пользователя:
Смас(А,...,Рк)= U Смас(Р). (14.49)
Т’е^млс
Согласно выражениям (14.41), (14.48) и (14.49) суммарная скорость
каналов доступа МАС при замираниях сводится к виду:
Cmacsr = max Eg
Ре^мАс
Blog2 1 +
Е 9kPk(g)
fe=l_____
N0B
(14.50)
Максимизация выражения (14.50) проводится с помощью метода Ла-
гранжа и показывает, что оптимальная стратегия передачи, направленная
на достижение суммарной скорости, позволяет только одному пользова-
телю вести передачу при любом состоянии замираний [53]. При такой
оптимальной стратегии пользователь, ведущий передачу в данном со-
стоянии замираний g , является единственным, кто обладает наиболь-
шим взвешенным передаточным коэффициентом канала gk /Xk, где —
множитель Лагранжа, соответствующий ограниченной средней мощно-
сти k-ro пользователя. Этот множитель Лагранжа представляет собой
функциию ограниченной средней мощности пользователя и распределения
замираний. При наличии симметрии, если все пользователи имеют одина-
ковое распределение замираний и такое же ограничение величины средней
728 Глава 1^. Многопользовательские многоканальные системы
мощности, то все пользователи будут иметь одно и то же значение А^,
а также оптимальную стратегию, позволяющую только одному пользова-
телю с лучшим каналом вести передачу при замирании g. Как только
будет определено, какой пользователь должен будет вести передачу в дан-
ном состоянии, то мощность, которую пользователь должен выделить
для этого состояния, определяется во времени с помощью водоналивно-
го процесса. Интуиция, по которой даются разрешения вести передачу
в данное время только одному пользователю, держится на следующем.
Так как пользователи могут адаптировать свои мощности во времени,
системные ресурсы используются лучшим образом при распределении
их пользователю с лучшим каналом и разрешением этому пользовате-
лю вести передачу с мощностью, соответствующей качеству его канала.
Но если пользователи имеют неодинаковую среднюю мощность на приеме,
эта стратегия становится не оптимальной: пользователи с низким сред-
ним значением помехозащищенности SNR на приеме будут редко вести
передачу, поэтому их индивидуальные ресурсы мощности будут исполь-
зованы не полностью.
Диапазон емкости каналов доступа МАС с нулевой вероятностью на-
рушения связи, выведенный в [41], определяет набор скоростей, которые
можно достичь одновременно всеми пользователями при любых состояни-
ях замираний и выполнении ограничений по средней мощности каждым
пользователем. Из формулы (14.40) выводится стратегия распределения
мощности Р. При условии отображения состояний замираний в страте-
гию распределения мощностей между пользователями диапазон емкости
каналов доступа МАС в состоянии g имеет вид:
Е 9kPk(s)\
1 . fees I
Жв j
VS С {1,2,...,К} j-. (14.51)
Тогда, при стратегии Р, множество скоростей, которые можно поддер-
живать во всех состояниях замирания g, равно:
^ас(^)=АСмас(Р). (14.52)
g
Зона емкости с нулевым нарушением связи в этом случае является
суммой СмАс(Р) по всем стратегиям мощности Р Е РмАС, удовлетво-
ряющим ограничениями мощности пользователя. Поэтому зона емкости
МАС с нулевой вероятностью нарушения связи выражается в виде:
флс(Р1,...,Р^)= J Р|Смлс(Р). (14.53)
ГеГмас g
СмАс(Т’) = * (Л1, • • • , Rk) ^jRk Plog2
kes
Ц.6. Пропускная способность канала восходящего направления
Диапазон пропускной способности канала доступа МАС с нарушением
связи похож на диапазон пропускной способности с нулевой вероятно-
стью нарушением связи, за исключением того, что пользователи могут
задерживать передачу в некоторых состояниях нарушений связи, при
данной ненулевой вероятности нарушения связи. Как и в случае кана-
ла вещательного типа ВС, зона пропускной способности канала МАС
с нарушением связи сложнее в выводе, чем диапазон пропускной спо-
собности при нулевой вероятности нарушения связи, так как при любом
состоянии замираний стратегия передачи должна определять, каких поль-
зователей перевести в состояние перерыва связи, определить порядок
декодирования пользователей без перерыва связи и мощность, с кото-
рой эти пользователи без нарушения связи должны вести свою передачу.
Область пропускной способности каналов МАС с нарушением связи по-
лучена в [43] в неявном виде — исходя из того, может ли данный вектор
скорости R существовать при всех состояниях замираний, при заданной
вероятности нарушения связи для каждого пользователя и при соблю-
дении ограничений в отношении мощности всеми пользователями. Для
определения диапазона минимальной скорости МАС можно также объ-
единить эргодическую емкость и емкость с нарушением связи. Как и в
случае вещательного канала ВС, этот диапазон характеризуется набором
векторов средних скоростей (усредненных по всем состояниям замира-
ний), которые можно поддерживать при заданном векторе минимальных
скоростей. Этот вектор минимальных скоростей должен поддерживать-
ся при всех состояниях замираний с некоторой вероятностью нарушения
связи (возможно, нулевой). Пропускная способность с минимальной ско-
ростью в канале доступа МАС с замираниями получена в работе [54]
с использованием в отношении каналов ВС и МАС принципа двойствен-
ности. Этот принцип двойственности описан в следующем подпараграфе.
14.6.3. Емкость каналов
с многоэлементными антеннами
Теперь рассмотрим каналы МАС с многоэлементными антеннами. Как
и в модели MIMO канала ВС, примем полосу частот равной единице,
В = 1 Гц, и предположим, что вектор шума п — комплексная гауссова
переменная с круговой симметрией и п ~ АГ(О, I). Пусть матрица кана-
ла Hfe размером Mr х Mt характеризует передаточные коэффициенты
канала МАС с MIMO между каждой антенной k-ro передатчика и ка-
ждой антенной приемника. Определим матрицу Н = [Hi,..., Нк]. Тогда
диапазон емкости гауссовского канала МАС с MIMO, где пользователю к
соответствует матрица Нд, передаточных коэффициентов, а мощность
задается [55 -57] в виде:
730 Глава Ц. Многопользовательские многоканальные системы
Смас((А, • • • ,Рк); Н) =
Г
= |J J : J274^1og2det I + ^HfcQfcH^
{Vfc Qfc^O, kES . kES
Tr(Qfc)^Pfc}
VSC {1,...,K}V. (14.54)
Этот диапазон достигается следующим образом. Пользователь к передает
гауссовский случайный вектор с нулевым средним значением X/, с про-
странственной ковариационной матрицей Qfc = E[xfcxfl. Каждое мно-
жество ковариационных матриц (Qi,..., Qt<) соответствует К-мерному
многограннику (т. е. {(7?i,..., Rk) : Ц) P-k log2det[I+
kES kES
\/S C {1,...,K}}), а диапазон пропускной способности равен сумме (по
всем ковариационным матрицам, удовлетворяющим ограничениям мощ-
ности) всех таких многогранников. Угловые точки этого многогранника
можно получить с помощью успешного декодирования: сигналы пользова-
теля успешно декодируются и вычитаются из принятого сигнала. Обра-
тите внимание, что диапазон емкости (14.54) имеет несколько сходств
со своим двойником с единственной антенной: она определяется, основы-
ваясь на сумме скоростей, связанной с подмножеством пользователей,
а угловые точки диапазона получаются благодаря использованию после-
довательного декодирования.
Для случая с двумя пользователями каждое множество ковариацион-
ных матриц соответствует многограннику, похожему по форме на зону
емкости МАС с одной антенной. Например, угловая точка, где Ri =
log2 det[I + и
R2 = log2 det[I + HjQiHf + H2Q2Hf] - 7?i =
= log2 det[I + (I + HiQiHf )-1H2Q2Hf]
соответствует декодированию сначала пользователя 2 (т. е. при наличии
помех от пользователя 1) и затем только декодированию пользователя 1
(помехи от пользователя 2 отсутствуют).
14.7. Двойственность восходящего и нисходящего
направлений канала связи
Каналы нисходящего и восходящего направлений, изображенные на рис. 14.1,
кажутся почти похожими: нисходящее направление канала почти такое
ЦЛ. Двойственность направлений канала связи
же, как восходящее, но с обратным направлением стрелок. Однако между
этими двумя моделями канала существует три принципиальных отличия.
Во-первых, в нисходящем направлении каждый приемник создает допол-
нительную шумовую составляющую, тогда как в восходящем направлении
присутствует только одна дополнительная шумовая составляющая (по-
скольку имеется только один приемник). Второе принципиальное отличие
заключается в том, что в нисходящей линии мощность передатчика огра-
ничена одним значением, а в восходящем направлении есть различные
значения мощности, соответствующие каждому пользователю. Наконец,
в нисходящем направлении и сигнал, и помеха, соответствующие каждому
пользователю, проходят через один и тот же канал, тогда как в восхо-
дящем направлении эти сигналы проходят через различные каналы, что
приводит к появлению эффекта «близкий-далекий». Несмотря на всесто-
роннее изучение каналов нисходящего и восходящего направлений в от-
дельности, не было предпринято попыток по выяснению связей между
этими двумя моделями или по использованию этих связей при анализе
и разработке систем. В этом разделе мы опишем двойственные отноше-
ния между этими двумя каналами, и покажем, как можно использовать
эти отношения для анализа пропускной способности и при разработке
стратегий использования нисходящих и восходящих направлений каналов
связи.
Говорят, что нисходящий и восходящий каналы для К абонентов, как,
например, на рис. 14.1 при К = 3, двойственны по отношению друг к дру-
гу, если выполняются все три перечисленных ниже условия.
1. Импульсные характеристики каналов Ад, (f), k = 1,..., К в нисходя-
щем направлении такие же, как и в восходящем направлении для
всех к. Для каналов с аддитивным белым гауссовым шумом AWGN
или с замираниями это подразумевает, что двунаправленные кана-
лы имеют одинаковый передаточный коэффициент канала в каждом
направлении.
2. Все каналы в нисходящем направлении имеют одинаковую стати-
стику шума, и эта статистика такая же, как и статистика шума
в восходящем направлении.
3. Мощность Р в нисходящем направлении равна сумме мощностей от-
дельных каналов Р^, к = 1,..., К в восходящем направлении.
Несмотря на сходства между вещательным каналом в нисходящем на-
правлении ВС и каналами абонентского доступа МАС, диапазон их про-
пускной способности достаточно отличается. В частности, емкость ве-
щательного канала ВС с аддитивным белым гауссовым шумом AWGN
и двумя пользователями (соответствующая наибольшей области скоро-
732 Глава Ц. Многопользовательские многоканальные системы
стей на рис. 14.10) явно отличается от емкости восходящих каналов МАС
с аддитивным белым гауссовым шумом AWGN и двумя пользователями
(показанной на рис. 14.14). Зоны пропускной способности двойственных
каналов МАС и ВС также сильно отличаются при замираниях для лю-
бого вида емкости канала с замираниями: эргодической, с нарушением
связи или минимальной скорости. Однако, несмотря на их различные фор-
мы, области пропускной способности двойственных каналов достигаются
при использовании стратегии наложенного кодирования, а оптимальные
декодеры для двойственных каналов используют последовательное деко-
дирование и подавление помех.
Дуальность — отношения двойственности между двумя каналами осно-
вывается на использовании сходства стратегий их кодирования и деко-
дирования, в то время как их соотношение отличается (i) суммирова-
нием мощности отдельных пользователей в каналах доступа МАС для
получения мощности, равной мощности вещательного канала ВС и (ii)
масштабированием передаточных коэффициентов канала ВС для пода-
вления эффекта «близкий далекий»в каналах МАС. Такая модель взаи-
мосвязи была разработана в [54], и использовалась для иллюстрации того,
что область пропускной способности и стратегия оптимальной передачи
как для ВС, так и для МАС могут быть получены исходя из области
пропускной способности и стратегии оптимальной передачи двойствен-
ного канала. В частности, в [54] было показано, что диапазон пропускной
способности вещательного канала ВС с аддитивным белым гауссовым
шумом AWGN, мощностью Р и передаточными коэффициентами канала
g = (<?1,... ,дк) равен диапазону пропускной способности двойственного
канала МАС с аддитивным белым гауссовым шумом AWGN и теми же пе-
редаточными коэффициентами канала, если канал доступа МАС ограни-
к
чен суммарной мощностью £ Р вместо отдельных значений мощно-
fc=i
сти (Pi,..., Д,). Ограничение суммарной мощности в групповых каналах
доступа МАС подразумевает, что передатчики МАС выбирают величи-
ну своей мощности из одного общего источника с величиной мощности,
равной суммарной мощности Р, и что эта мощность распределяется меж-
ду отдельными передатчиками МАС таким образом, чтобы выполнялось
к
неравенство ^2 Рь Р. С точки зрения математики, емкость канала ве-
ьч
щания ВС можно получить объединением емкостей двойственного канала
МАС с общим ограничением по суммарной мощности [54]:
Свс(Дё) = U СЫАДР1,...,Рк-,ё). (14.55)
{(Л,--Л);
Е^1П=р}
Здесь Свс(-Р, g) — область пропускной способности канала вещания ВС
с аддитивным белым гауссовым шумом AWGN, ограничением суммарной
мощности Р и передаточными коэффициентами канала g = (<?i,... ,дк),
определяемая выражением (14.18) при = N^/gb, а Смас (-F1, • •, Рк\ g) —
диапазон пропускной способности канала восходящего направления (МАС)
с аддитивным белым гауссовым шумом AWGN, индивидуальными огра-
ничениями по мощности Fi,..., Рк и передаточными коэффициентами
канала g = (<71,..., дк), согласно формуле (14.40). Эта взаимосвязь пока-
зана на рис. 14.15 для двух пользователей, из которого видно, что область
пропускной способности канала вещания ВС формируется объединением
емкостей отдельных каналов МАС при распределении мощности различ-
ных передатчиков МАС таким образом, что их суммарная мощность рав-
на общей мощности Р двойственного вещательного канала ВС.
Рис. 14.15. Объем пропуск-
ной способности нисходяще-
го направления канала (ВС)
с аддитивным белым гауссо-
вым шумом AWGN, предста-
вленный в виде суммы диа-
пазонов пропускной способ-
ности двойственного кана-
ла восходящего направления
(МАС)
Помимо соотношения диапазонов пропускной способности (14.55), в [54]
показано, что оптимальное распределение мощности канала вещания ВС
для любой точки на границе его зоны пропускной способности можно
получить из распределения суммарной мощности двойственного канала
доступа МАС, проходящего через эту точку. Более того, порядок де-
кодирования канала ВС в этой точке пересечения будет обратным по-
рядку декодирования двойственного канала МАС. Поэтому стратегии
оптимального кодирования и декодирования для канала вещания ВС мож-
но получить из оптимальных стратегий, используемых в двойственных
каналах доступа МАС. Эта связь между оптимальными стратегиями для
нисходящих и восходящих направлений каналов может найти интересное
применение в практических разработках.
734 Глава Ц. Многопользовательские многоканальные системы
Двойственность также подразумевает, что область пропускной спо-
собности канала доступа МАС можно получить из области пропускной
способности двойственного канала вещания ВС. Эта взаимосвязь основы-
вается на понятии масштабирования канала. Из формулы (14.40) можно
легко увидеть, что пропускная способность канала доступа МАС с адди-
тивным белым гауссовым шумом AWGN не изменится, если передаточ-
ный коэффициент канала k-ro пользователя дь масштабировать по пе-
редаточному коэффициенту мощности а — при условии, что мощность
этого канала Р/- также масштабируется пропорционально 1/а. Однако
двойственный канал вещания ВС основательно изменяется при масшта-
бировании канала, так как порядок кодирования и декодирования при
наложении кодов в канале ВС определяется порядком передаточных коэф-
фициентов канала. Поэтому объем пропускной способности вещательного
канала ВС при различном масштабировании будет различным. В [54] по-
казано, что объем пропускной способности канала доступа МАС можно
получить, находя пересечения канала ВС со всеми возможными значени-
ям передаточных коэффициентов канала в канале к-ro пользователя.
С точки зрения математики, мы получаем объем пропускной способности
канала МАС из емкости двойственного ему канала ВС в виде:
/ р \
Cmac(Pi,---iPk',s) = Р| £вс I -Р = g — («lgi> • • , &к9к i ,
(ai,...,afc)>0 \ fc=l /
(14.56)
где Cmac (Pi, , Pk', g) и Свс (P, g) определяются так же, как и в (14.55).
Рис. 14.16 иллюстрирует эту взаимосвязь для двух пользователей с ко-
эффициентами передачи g = (^1,^2)- Из рисунка видно, что объем про-
пускной способности канала МАС формируется пересечением областей
пропускной способности канала ВС при различных значениях передаточ-
ных коэффициентов канала а, применительно к пользователю I24. При
а —* 0 передаточный коэффициент канала пользователя 1 стремится
к нулю, но полная мощность Р — Pi/а + Рг стремится к бесконечности.
Так как коэффициент передачи канала второго пользователя не меняется,
то этот канал использует преимущества увеличения мощности, и его ско-
рость асимптотически возрастает с ростом а. При а —» оо происходит
обратный процесс: передаточный коэффициент первого канала растет,
а полная мощность Р = Pi/ос + Рг Рг, поэтому первый пользователь
за счет увеличения своего передаточного коэффициента достигает асим-
птотически большой скорости при использовании любой части полной
24 Достаточно получить пересечение при масштабировании только для К — 1 пользо-
вателей, так как масштабирование (од,... , арс-1, Пк) эквивалентно масштабированию
(оп/ак,..., ак-i/otK, 1).
Ц.7. Двойственность направлений канала связи
мощности Р. Все значения а между нулем и бесконечностью отобра-
жают различные градации емкости канала вещания ВС, сечения кото-
рых формируют область пропускной способности каналов доступа МАС.
В частности, когда а = то передаточные коэффициенты обоих
пользователей в масштабированном канале ВС будут одинаковыми, а это
создает сегмент временного разделения пропускной способности кана-
лов МАС. Оптимальный порядок декодирования канала доступа МАС
для заданной точки в области его пропускной способности также мож-
но получить исходя из масштабирования двойственного канала вещания
ВС, область пропускной способности которого в этой точке пересекается
с областью пропускной способности канала МАС.
Рис. 14.16. Объем пропуск-
ной способности восходящего
направления канала (МАС) с ад-
дитивным белым гауссовым
шумом AWGN, представлен-
ный сечением диапазонов про-
пускной способности двойствен-
ного канала нисходящего нап-
равления (ВС)
Эти отношения двойственности получили в работе [54] дальнейшее
развитие для многих других важных моделей каналов. В частности, двой-
ственность применятся для каналов доступа МАС и вещательных каналов
ВС с плавными замираниями, так что объемы эргодической емкости,
емкости с нарушением связи и минимальной скоростью (вместе со стра-
тегиями оптимального кодирования и декодирования) для одного канала
можно получить исходя из стратегий и объемов пропускной способности
двойственного канала. Двойственность каналов МАС и ВС сохраняется
и в каналах с одновременными и частотно-избирательными замираниями,
что определяет связь между областями пропускной способности каналов
МАС и ВС с частотно-избирательными замираниями [58, 59]. Еще од-
но важное применение двойственности представляют каналы МАС и ВС
с многоэлементными антеннами MIMO [48, 60, 61]. В [60] понятие двой-
ственности между каналами ВС и МАС было распространено на системы
736 Глава Ц. Многопользовательские многоканальные системы
MIMO. Так, было показано, что объем пропускной способности вещатель-
ного канала ВС с антеннами MIMO, при ограничении мощности величи-
ной Р и передаточной матрице коэффициентов канала Н определяется
объединением диапазонов пропускной способности двойственного кана-
ла МАС с передаточной матрицей коэффициентов канала Ня, где сумма
берется по всем индивидуальным значениям мощности, суммирование ко-
торых дает Р. С точки зрения математики имеем:
Свс(Р,Н)= U Смлс((Р1,...,тня),
E*i Pk=P
где Свс (Р, Н) определяется формулой (14.37), а Смас ((Pi, • • •, Рк); Ня) —
формулой (14.54). Эту двойственность иллюстрирует рис. 14.13, где об-
ласть пропускной способности канала вещания ВС с антеннами MIMO
определяется внешней границей рисунка. Зоны внутри этой границы пред-
ставляют емкости каналов МАС с антеннами MIMO при различных значе-
ниях мощности отдельных пользователей, дающих в сумме полную мощ-
ность канала ВС, равную Р. Напомним, что непосредственно рассчитать
емкость канала ВС с антеннами MIMO чрезвычайно сложно, так как сре-
ди ковариационных матриц, подлежащих оптимизации, нет ни выпуклых,
ни вогнутых матриц. И наоборот, оптимальный канал МАС с антеннами
MIMO рассчитывается просто — с помощью стандартной выпуклой опти-
мизации [62]. Более того, двойственность касается не только двух обла-
стей пропускной способности; она также может быть использована для
получения стратегии оптимальной передачи в некоторой точке диапазона
пропускной способности канала ВС с антеннами MIMO преобразованием
оптимальной стратегии двойственного канала МАС с антеннами MIMO,
достигающей той же самой точки. Поэтому в каналах MIMO двойствен-
ность можно использовать для упрощения расчетов объемов пропускной
способности, а также для упрощения нахождения соответствующей стра-
тегии оптимальной передачи.
14.8. Разнесение каналов многих пользователей
Разнесение каналов в системе со многими пользователями использует
преимущества того обстоятельства, что если замирания в каналах поль-
зователей происходят независимо, то в любой заданный момент времени
у одних пользователей будут каналы с лучшими характеристиками, чем
у других. Передавая информацию только тем пользователям, у которых
каналы какое-то время имеют лучшие характеристики, и распределяя
ресурсы системы между пользователями, которые могут использовать
Ц.8. Разнесение каналов многих пользователей 737
эти ресурсы лучшим образом, можно повысить емкость системы и/или
ее эксплуатационные показатели. Разнесение каналов многих пользова-
телей впервые было исследовано в работе [53] как средство увеличения
пропускной способности и сокращения вероятности ошибки в каналах
восходящего направления, но те же самые идеи можно использовать и для
каналов нисходящего направления. Идея разнесения каналов многих поль-
зователей расширяет концепцию разнесения в одноканальных системах,
описанную в гл. 7. В одноканальных системах с разнесением каналов
сквозное соединение состоит из множества независимых каналов, сигналы
которых можно объединить для улучшения эксплуатационных характе-
ристик. При разнесении каналов в системе со многими пользователями
все множество каналов принадлежит различным пользователям, и обычно
система избирательно использует разнесение каналов, выбирая пользова-
телей, у которых канал имеет лучшие параметры при данном состоянии
замираний. Эффективность от разнесения каналов многих пользователей
зависит от различий параметров каналов между пользователями, и по-
этому чем больше динамический диапазон замираний, тем выше эффек-
тивность от разнесения каналов в системе со многими пользователями.
Кроме того, как и при любом методе разнесения, эксплуатационные ха-
рактеристики улучшаются с увеличением числа независимых каналов.
Поэтому разнесение каналов многих пользователей наиболее эффектив-
но в системах с большим числом пользователей.
В § 14.5 показано, что полная пропускная способность (суммарная ско-
рость) нисходящего направления канала с замираниями достигает максиму-
ма при выделении всей полосы частот системы пользователю, у которого
канал имеет лучшие характеристиками при данном состоянии замираний.
Как описано в § 14.6, подобный результат получается и для восходя-
щего направления канала с замираниями, если каналы всех пользовате-
лей имеют одинаковое распределение замираний и одинаковую среднюю
мощность. Если статистические показатели замираний в каналах поль-
зователей различны или средняя мощность имеет различные значения,
то при любом заданном состоянии канал выделяется абоненту с лучшим
взвешенным передаточным коэффициентом канала, при этом вес зави-
сит от затухания в канале пользователя в данном состоянии, статистики
замираний и значения средней мощности. Идея планирования передачи
с учетом состояний каналов называется планированием по ситуации. Чи-
словые результаты, приведенные в [34, 35], показывают, что планирование
по ситуации в сочетании с регулированием мощности может значительно
увеличить пропускную способность каналов, измеряемую суммой скоро-
стей — как в нисходящем, так и в восходящем направлениях.
Планирование по ситуации может также улучшить показатели ко-
эффициента ошибок BER [53]. Пусть 'Т’&Н ПРИ & = !,, К обозначает
738 Глава Ц. Многопользовательские многоканальные системы
защищенность (отношение сигнал-шум) SNR в каналах пользователей
на интервале времени i. Если передача ведется только к пользователю,
имеющему наибольшее значение защищенности SNR, то защищенность
SNR всей системы на интервале i будет равна. 7 [г] = maxfc7fc[z]. В [63] по-
казано, что при независимых и одинакового распределенных рэлеевских
замираниях и асимптотически больших значениях К это максимальное
значение защищенности SNR примерно в In К раз больше защищенности
SNR любого из пользователей. Таким образом, выигрыш от разнесения
каналов многих пользователей, выраженный через защищенность SNR,
равен In К. Более того, если Ps(7) обозначает вероятность ошибки симво-
ла у пользователя с лучшим передаточным коэффициентом канала на ин-
тервале времени г, то для Ps(7) эффективность разнесения каналов будет
такой же, как и при селективном объединении в одноканальной системе
(об этом говорилось в подпараграфе 7.2.2) по сравнению с вероятностью
ошибки у любого из пользователей. При увеличении числа пользователей
в системе вероятность ошибки приближается к показателям канала с ад-
дитивным белым шумом AWGN без замираний, аналогично увеличению
количества ветвей при селективном объединении разнесенных каналов од-
ного пользователя.
Планирование передачи, ориентированное на пользователей с лучшим
каналом, создает в беспроводных системах две проблемы: равнодоступ-
ность и задержку. Если уровни замираний в каналах абонентов изменя-
ются очень медленно, то один абонент будет занимать систему в течение
длительного периода времени. Время между использованиями канала лю-
бым из абонентов может стать достаточно длительным, а такая задержка
может быть неприемлема для данного приложения. Кроме того, пользо-
ватели с плохими средними значениями защищенности SNR будут редко
получать каналы с лучшими показателями и, таким образом, редко до-
пускаться к ведению передачи в сети, что приводит к неравномерной
доступности к ресурсам системы. Решение проблем равнодоступности
и задержки в нисходящем направлении канала, называемое пропорцио-
нальным справедливым планированием, было предложено в [63]. Пред-
ставим, что на интервале времени i каждый из К абонентов системы
в нисходящем направлении может поддерживать скорость если ему
выделяются полная мощность и весь частотный диапазон системы. Пусть
Tfc[«] обозначает среднюю пропускную способность k-ro пользователя на i-
том интервале времени, усредненную с использованием низкочастотного
фильтра, экспоненциально взвешенного по параметру ic , который пред-
ставляет параметр схемы планирования. На г-том временном интервале
схема планирования будет вести передачу пользователю, имеющему наи-
большее соотношение 7?fc[z]/Tfc[i], Если на интервале времени i все поль-
зователи имеют примерно одинаковую среднюю пропускную способность
Ц.8. Разнесение каналов многих пользователей 739
Tfc[z] = T[i], то данная схема планирования будет отдавать предпочте-
ние пользователю, имеющему лучший канал. Представим, однако, что
канал одного из пользователей (пользователь j) имеет низкую пропуск-
ную способность, так что ТДг] Tk[i] при j к. Тогда на интервале
времени i пользователь j, вероятно, будет иметь высокое соотношение
что послужит положительным моментом при распределении
ресурсов на г-том интервале. Если на интервале времени i пользователь
к* имеет наивысшее соотношение Rk [г]/Т'ь [г], то пропускная способность
для следующего временного интервала корректируется следующим образом:
Т',Г?’_|_Ь1 — f (1 — 1Лс)^А:й + (lAc)-RfcHj к = к*, . .
| (1 _ 1/!с)71И, к к., <14'57'
При такой схеме планирования пользователи с лучшими каналами ис-
пользуют ресурсы системы, когда пропускная способность распределя-
ется между пользователями корректно. Однако если пропускная способ-
ность канала одного из пользователей низкая, то этому пользователю
будут выделяться ресурсы в увеличенном объеме до тех пор, пока его
пропускная способность не будет приемлемо сбалансирована с другими
пользователями. Ясно, что при такой схеме пропускная способность бу-
дет ниже, чем при выделении всех ресурсов сети пользователю, имеющему
лучший канал (что максимально увеличивает пропускную способность),
а дефицит пропускной способности будет увеличиваться, поскольку поль-
зователи имеют несопоставимые средние характеристики каналов. За-
держка при такой схеме планирования регулируется с помощью взвеши-
вающего параметра ic. С увеличением этого параметра задержка также
увеличивается, но пропускная способность системы возрастает, так как
схема планирования имеет большую гибкость в распределении ресурсов
между пользователями. Когда параметр ic стремится к бесконечности,
то схема пропорционально справедливого планирования просто сокраща-
ет распределение ресурсов системы между пользователями, имеющими
наилучший канала, допуская при этом, что все пользователи имеют оди-
наковое среднее значение защищенности SNR. Пропорционально справед-
ливый алгоритм планирования использован в стандарте передачи пакет-
ных данных в сотовых системах CDMA 2000 [64]; его показатели для
таких систем исследованы в работе [65]. Альтернативные методы, объ-
единяющие управление доступностью и ограничения по задержке с пла-
нированием по ситуации, разработаны в [66, 67]. При этом учтены их
эксплуатационные показатели при реальных ограничениях, таких как не-
совершенные оценки канала.
^740 Глава 14- Многопользовательские многоканальные системы
14.9. Многопользовательские системы MIMO
Многопользовательские системы с многоэлементными антеннами на пе-
редаче и/или приеме называются многопользовательскими (многоканаль-
ными) системами MIMO. Такие многоэлементные антенны могут значи-
тельно улучшить эксплуатационные показатели по многим параметрам.
Антенны могут обеспечить выигрыш от разнесения каналов и улучшить
показатели коэффициента ошибок BER. Объем пропускной способности
многопользовательского канала увеличивается за счет совокупности пе-
редающих и принимающих антенн, обеспечивающих выигрыш от муль-
типлексирования. Наконец, многоэлементные антенны могут обеспечить
выигрыш от разнесения каналов для пространственно удаленных пользо-
вателей, что снижает помехи. Обычно существуют компромиссы между
этими тремя типами повышения эффективности эксплуатационных пока-
зателей в многопользовательских системах MIMO [68].
Выигрыш от мультиплексирования в многопользовательской систе-
ме MIMO характеризует увеличение объемов пропускной способности
каналов восходящего и нисходящего направлений за счет добавления мно-
гоэлементных антенн. Объемы пропускной способности каналов много-
пользовательских систем MIMO были тщательно изучены. Интерес к ним
обусловлен большим выигрышем в емкости в сравнении с системами для
одного пользователя. Для каналов с аддитивным белым гауссовым шу-
мом AWGN емкость каналов восходящего и нисходящего направлений
с антеннами MIMO описана в подпараграфах 14.6.3 и 14.5.5 соответствен-
но. Эти результаты можно расширить для определения емкости систем
MIMO при замираниях и наличии полной информации о канале CSI у всех
передатчиков и приемников. Результаты расчета пропускной способно-
сти и нерешенные проблемы, касающиеся многопользовательских каналов
систем MIMO с замираниями при других предположениях относительно
наличия информации CSI, описаны в [69].
В § 10.4 описывалось формирование диаграммы направленности как
средство достижения полного эффекта от разнесения каналов в системах
с одним пользователем за счет некоторой потери емкости. В многополь-
зовательских системах потери емкости при формировании диаграммы
направленности будут меньшими из-за эффекта разнесения каналов меж-
ду многими пользователями, и фактически формирование диаграммы
направленности позволяет достичь емкости, равной максимальной сумме
скоростей каналов нисходящего направления системы MIMO при асим-
птотически большом количестве пользователей [70, 71].
Разнесение каналов между несколькими пользователями основано на
том, что в многопользовательских системах качество каналов разных
Ц.9. Многопользовательские системы MIMO
пользователей различно, поэтому эксплуатационные показатели можно
улучшить, распределяя ресурсы системы в любое заданное время между
пользователями, имеющими лучший канал. Схемы, использующие раз-
несение каналов между многими пользователями, описаны в § 14.8 для
многопользовательских систем с одной антенной.
В системах с антеннами MIMO преимущества разнесения каналов меж-
ду многими пользователями удваиваются. Во-первых, разнесение каналов
между многими пользователями в системах MIMO улучшает качество
канала, так как только пользователи, имеющие лучшие каналы, исполь-
зуют системные ресурсы. Кроме того, разнесение каналов в системах
MIMO обеспечивает избыточное число направлений с хорошими пере-
даточными коэффициентами, так что пользователи, которым в данном
состоянии выделены ресурсы, имеют не только хорошее качество канала,
но также хорошее пространственное разделение, за счет чего ограничи-
ваются взаимные влияния между ними. Эта двойная польза от разнесе-
ния каналов позволяет относительно простым, субоптимальным методам
передачи и приема при увеличении числа пользователей достичь пока-
зателей, близких к оптимальным [70, 71]. Это обстоятельство устраняет
также необходимость использования многоэлементных приемных антенн
в нисходящих каналах и многоэлементных передающих антенн в восходя-
щем направлении для получения существенного выигрыша в емкости, что
снижает сложность и энергопотребление мобильных терминалов. В част-
ности, выигрыш в суммарной скорости канала вещания ВС в системе
MIMO увеличивается примерно линейно при минимальном количестве
передающих антенн и общем количестве приемных антенн равном чи-
слу пользователей [73]. Поэтому, при фиксированном числе передающих
антенн базовой станции и большом числе абонентов, использование мно-
гоэлементных антенн на терминалах пользователей не дает выигрыша
в емкости. Подобным образом, выигрыш в суммарной скорости кана-
лов доступа МАС в системе MIMO увеличивается примерно линейно при
минимальном количестве приемных антенн и общем числе передающих
антенн равном числу всех пользователей. Таким образом, в системе со
многими пользователями и большим числом приемных антенн на базовой
станции добавление передающих антенн на терминалах пользователей не
увеличит емкость. Заметьте, что эффект от разнесения каналов между
многими пользователями возрастает с увеличением динамического диа-
пазона и скорости замираний в канале. При контролируемом управле-
нии величиной и фазой излучения многоэлементных передающих антенн,
скорость и динамический диапазон замираний могут быть увеличены,
что ведет к более высокой эффективности от разнесения каналов мно-
гих пользователей. Этот метод называется формированием диаграммы
направленности по ситуации и описан в [63].
Глава Ц. Многопользовательские многоканальные системы
В [74 76] были разработаны пространственно-временные методы мо-
дуляции и кодирования для многопользовательских систем с антенна-
ми MIMO. Цель этих методов состоит в максимальном использовании
присущих системам MIMO компромиссов между разнесением каналов,
мультиплексированием и направленностью антенн. Методы многополь-
зовательского детектирования также можно распространить на каналы
MIMO, обеспечив тем самым значительный выигрыш в эксплуатацион-
ных показателях [77—79]. В широкополосных каналах многопользователь-
ские системы MIMO должны работать в условиях частотно-избиратель-
ных замираний [76, 80, 81]. Современные методы передачи для этих ши-
рокополосных каналов обещают еще более значительный выигрыш в по-
казателях по сравнению с узкополосными каналами, так как частотно-
избирательные замирания обеспечивают еще одну форму разнесения ка-
налов. Однако при низких значениях защищенности SNR многоэлемент-
ные антенны, в основном, используются для сбора энергии. Актуальную
проблему для многопользовательских систем MIMO представляет разра-
ботка методов передачи сигнала приемлемой сложности, которые обес-
печат обещанный выигрыш эксплуатационных показателей в реальной
рабочей обстановке.
Задачи
14.1. Рассмотрите систему МДЧР (FDMA) для пользователей мультимедий-
ной информации. Формат модуляции требует выделения каждому поль-
зователю полосы 10 МГц, а для максимального подавления внеполосных
каждой стороны выделенного спектра должны быть защитные полосы
шириной по 1 МГц. Какая полоса частот необходима данной системе для
организации одновременного обслуживания 100 пользователей?
14.2. Система GSM располагает полосой частот 25 МГц, выделенной для вос-
ходящего и нисходящего направлений и разделенной на 125 каналов с вре-
менным разделением — ВРК (TDMA). В каждом канале по 8 временных
интервалов пользователей. Цикл GSM состоит из 8 временных интерва-
лов, перед которыми находится группа бит заголовка — преамбулы, а по-
сле них — группа бит окончания. Каждый временной интервал состоит
из 3 стартовых бит в начале, за которыми следует пакет из 58 информа-
ционных бит, затем 26 бит для настройки корректора, потом еще один
пакет из 58 бит и 3 стоповых бита, а затем защитный такт, состоящий
из 8,25 информационных бит. Скорость передачи равна 270,833 кбит/с.
а) Изобразите структуру цикла GSM и временной интервал, входящий
в цикл.
б) Найдите долю информационных бит внутри временного интервала,
а также скорость передачи информации пользователя.
14.3.
14.4.
в) Найдите длительность цикла и задержку между временными интерва-
лами, предназначенными для данного пользователя в цикле, игнорируя
при этом продолжительность преамбулы и бит окончания.
г) Чему равна максимальная задержка распространения в канале, при
которой защитная полоса и стоповые биты могут предотвратить на-
ложение временных интервалов?
Рассмотрите систему CDMA с модуляцией прямой последовательностью
DS, занимающую полосу частот 10 МГц. Предполагается, что система
ограничена помехой, коэффициент расширения спектра равен G = 100,
а взаимная корреляция кода равна 1 /G.
а) Для канала доступа МАС найдите формулу помехозащищенности сиг-
нала на приеме SIR как функции G и определите количество поль-
зователей К. Предполагается, что все пользователи ведут передачу
с одинаковой мощностью при наличии идеальной системы управления
мощностью, так что у всех пользователей мощность на приеме одина-
кова.
б) Используя формулу помехозащищенности SIR, полученную в пункте
(а), определите максимальное число пользователей К, которых можно
обслужить в системе с модуляцией ДФМН (BPSK) при коэффициен-
те ошибок BER, равном 10-3. При вычислении коэффициента оши-
бок BER помеху можно рассматривать как аддитивный белый гауссов
шум — AWGN. Как это соотносится с максимальным количеством
пользователей К, которых может обслужить система с МДЧР (FD-
МА) в том же общем диапазоне частот и при той же полосе частот
информационного сигнала?
в) Модифицируйте вашу формулу помехозащищенности SIR из пункта
(а), включив в нее коэффициент активности речи, определяемый как
процент времени, в течение которого пользователи ведут беседу, по-
этому помеха умножается на этот коэффициент. Найдите также такой
коэффициент активности речи, при котором система МДКР (CDMA)
поддерживала бы то же количество пользователей, что и система МДЧР
(FDMA). Будет ли это значение приемлемым для реальной активности
речи?
Рассмотрите систему CDMA с расширением спектра методом частотно-
го скачка FH, использующую фазовую манипуляцию ФМН (FSK) и те же
коэффициент расширения спектра и информационный диапазон частот,
что и система CDMA с модуляцией прямой последовательностью DS из за-
дачи 14.3. Следовательно, в системе имеется G = 100 частотных полос,
каждая шириной 100 кГц. Скачки частоты случайные и равномерно рас-
пределены, то есть вероятность того, что данный пользователь занимает
данную полосу частот во время какого-то скачка равна 0,01. Как и в зада-
че 14.3, шумом можно пренебречь, так что вероятность ошибки во время
отдельного скачка равна нулю при условии, что только один пользова-
тель занимает этот скачок. Предполагается также идеальное управление
Глава Ц. Многопользовательские многоканальные системы
мощностью, так что принимаемая мощность для всех пользователей оди-
накова.
а) Получите выражение для вероятности ошибки бита, когда т пользо-
вателей занимают одну и ту же полосу частот.
б) Допустите, что в данное время в системе работают все К ее поль-
зователей. Какова вероятность того, что во время какого-то скачка
на одной и той же частоте будет более одного пользователя?
в) Получите выражение для средней вероятности ошибки бита как функ-
ции К — общего количества пользователей в системе.
14.5. Рассчитайте максимальную пропускную способность Т для систем слу-
чайного доступа, использующих простой и синхронизированный алгорит-
мы ALOHA, а также нагрузку L, при которой пропускная способность
достигает максимального значения в обоих случаях.
14.6. Задана система с простым алгоритмом ALOHA и скоростью передачи
R = 10 Мбит/с. Рассчитайте нагрузку L и пропускную способность Т
для этой системы, предполагая пакеты длиной 1000 бит и интенсивность
пуассоновского потока, равную А = 103 пакетов в секунду. Рассчитай-
те также эффективную скорость передачи данных (скорость успешно
принятых бит). Какое еще значение нагрузки L дает точно такую же
пропускную способность?
14.7. Задан канал восходящего направления с тремя пользователями. Переда-
точные коэффициенты между k-м пользователем и приемником (fc = 1,
2,3) равны </! = 1, </2 = 3 и </з = 5 Предполагается, что всем трем поль-
зователям необходима помехозащищенность SINR, равная 10 дБ. Шум
приемника п = 1.
а) Покажите, что векторное уравнение (I — F)P и, задаваемое форму-
лой (14.6), эквивалентно ограничениям по помехозащищенности SINR
каждого пользователя.
б) Определите, существует ли для данной системы такой реальный век-
тор мощности, чтобы для всех пользователей выполнялись требуемые
ограничения по помехозащищенности SINR и, если он существует, най-
дите этот вектор оптимальной мощности Р*, чтобы нужные значения
SINR достигались при минимальной мощности передачи. Предполага-
ется, что р = 0,1.
14.8. Найдите область пропускной способности канала вещания с двумя поль-
зователями и наложенным кодированием, если мощность передачи Р =
= 10 мВт, В = 100 кГц, a No = 10-9 Вт/Гц.
14.9. Покажите, что максимальная сумма скоростей в вещательном канале ВС
с аддитивным белым гауссовым шумом AWGN достигается при выделе-
нии всей мощности пользователю с наивысшим передаточным коэффици-
ентом канала.
14.10. Выведите формулу оптимального распределения мощности в вещатель-
ном канале с замираниями, максимизирующего сумму скоростей.
14.11. Найдите максимальную сумму скоростей в канале вещания ВС с замира-
ниями при двух пользователях, если замирания в каналах каждого пользо-
вателя протекают независимо. Допустите, что для каждого пользователя
(i) мощность на приеме равна 10 мВт и (ii) эффективная мощность шума
равна 1 мВт с вероятностью 0,5 или 5 мВт с вероятностью 0,5.
14.12. Найдите максимальную сумму скоростей в канале вещания ВС с замира-
ниями при двух пользователях, каждый из которых испытывает рэлеев-
ские замирания. Примите, что для каждого пользователя средняя мощ-
ность на приеме равна Р = 10 мВт, частотный диапазон В — 100 кГц
и Nq = 10~9 Вт/Гц.
14.13. Рассмотрите множество скоростей, которые могут быть получены в кана-
ле вещательного типа ВС с замираниями при частотном разделении. Для
любого вектора скорости Срр>(Р,В) при заданной стратегии мощности Р
и стратегии распределения частотного диапазона В, согласно выражению
(14.30), найдите временной интервал и стратегию распределения мощно-
сти, которые дают такой же вектор скорости.
14.14. Задан нестационарный канал вещания с общей полосой частот, равной
В = 100 кГц. Эффективное значение шума 1-го пользователя равно ni =
= 10-5 Вт/Гц с вероятностью 3/4 или Пх = 2 • 10-5 Вт/Гц с вероятно-
стью 1/4. Эффективное значение шума 2-го пользователя с вероятностью
1/2 принимает значения П2 = 10~5 Вт/Гц или = 2 • 10-5 Вт/Гц. Эти
значения шума независимы друг от друга во времени. Полная мощность
на передаче равна Р = 10 Вт.
а) Чему равно множество всех возможных совместных значений плотно-
стей шумов и соответствующих вероятностей?
б) Найдите оптимальное распределение мощности между двумя пользо-
вателями и соответствующую область скоростей с изменяющейся во
времени (нестационарной) пропускной способностью, используя вре-
менное разделение. Предполагается, что (i) пользователь к получает
фиксированный временной интервал на все время (где ту + т? = 1)
и фиксированную среднюю мощность Р в течение всего времени, и (ii)
что каждый пользователь может изменять свою мощность внутри сво-
его собственного временного интервала, при условии выполнения огра-
ничения по средней мощности Р. Найдите точку, выходящую за пре-
делы этой области скоростей, допуская, что мощность распределяется
неравномерно.
в) Теперь предположим фиксированное частотное разделение, при кото-
ром частотный диапазон равномерно распределен между двумя поль-
зователями: Bi — В% = В/2. Допустим также, что каждому поль-
зователю, в пределах соответствующего ему частотного диапазона,
выделяется половина мощности (Fi = Р2 = Р/2) и что можно варьиро-
вать мощность во времени при условии, что средняя мощность будет
ограничена величиной Р/2. Какое максимальное значение скорости мо-
жет быть достигнуто? Найдите точку, выходящую за пределы этой
746 Глава Ц. Многопользовательские многоканальные системы
области скоростей, допуская, что мощность и/или полосы частот мож-
но разделить неравномерно.
г) Находится ли точка со скоростями (7?i = 100 000, R? = 100 000) в обла-
сти пропускной способности с нулевой вероятностью нарушения связи
в данном канале?
14.15. Покажите, что диапазон пропускной способности канала доступа МАС
с аддитивным белым гауссовым шумом AWGN при К пользователях не
изменится, если передаточный коэффициент канала fc-ro пользователя
gk масштабируется с коэффициентом а в течение всего времени, пока
мощность передачи fc-ro пользователя также масштабируется с коэф-
фициентом 1/а.
14.16. Рассмотрите канал многостанционного доступа, разделенный между дву-
мя пользователями. Полный частотный диапазон системы равен В =
= 100 кГц. Мощность передачи 1-го пользователя равна Р\ = 3 мВт, а пе-
редаваемая мощность 2-го пользователя равна Р> = 1 мВт. Плотность
шума приемника составляет 0,001 мкВт/Гц. Потерями в тракте или эф-
фектами экранирования можно пренебречь.
а) Представьте, что 1-му пользователю необходима скорость передачи
данных 300 кбит/с для просмотра видео. Какова максимальная ско-
рость, которая может быть выделена для 2-го пользователя при вре-
менном разделении каналов? При использовании наложенного кодиро-
вании с последовательным подавлением помех?
б) Рассчитайте пару скоростей JR2), при которых область скоростей
при частотном разделении пересекается с областью скоростей, до-
стигаемых при кодовом разделении с последовательным подавлением
помех (полагая G = 1).
в) Рассчитайте такую пару скоростей (7?i, Д2), чтобы R\ = R% (т. е. что-
бы два пользователя получали одинаковую скорость) при временном
разделении и кодовом разделении с последовательным подавлением по-
мех и без него при коэффициенте расширения спектра G — 10.
Примечание-, для вычисления этой области при G > 1 для канала досту-
па МАС следует использовать такой же подход, какой применялся при
определении диапазона пропускной способности канала вещания ВС при
G> 1.
14.17. Покажите, что максимальная сумма скоростей в канале доступа МАС
с аддитивным белым гауссовым шумом AWGN достигается в случае, ко-
гда все пользователи ведут передачу с полной мощностью.
14.18. Для канала доступа МАС с замираниями при двух пользователях выве-
дите оптимальную стратегию адаптации мощности, достигающую мак-
симальной суммы скоростей.
14.19. Найдите максимальную сумму скоростей в канале МАС с двумя пользова-
телями и независимыми замираниями. Предполагается, что для каждого
пользователя (i) значение мощности на приеме равно 10 мВт, a (п) эф-
фективная мощность шума с вероятностью 0,5 равна 1 или 5 мВт.
14.20. Рассмотрите нисходящее направление канала шириной 100 кГц с зами-
раниями при трех пользователях. Представьте, что у всех трех поль-
зователей одинаковая статистика замираний, так что их защищенность
SNR на приеме при использовании всей мощности и всего диапазона час-
тот равна 5 дБ с вероятностью 1/3, 10 дБ с вероятностью 1/3 и 20 дБ
с вероятностью 1/3. Предполагается, что это система дискретного време-
ни с независимыми одинаково распределенными замираниями на каждом
временном интервале.
а) Найдите максимальную пропускную способность этой системы, если
(в каждый момент времени) полная мощность и частотный диапазон
выделяются пользователю, имеющему лучший канал.
б) Смоделируйте пропускную способность, полученную с использованием
алгоритма пропорционального справедливого планирования для значе-
ний ic, равных 1, 5 и 10.
Литература
1. D. Bertsekas and R. Gallager, Data Networks, 2nd ed., Prentice-Hall, Englewood
Cliffs, NJ. 1992.
2. T. S. Rappaport, Wireless Communications — Principles and Practice, 2nd ed.,
Prentice-Hall, Englewood Cliffs, NJ, 2001.
3. G. Leus, S. Zhou and G.B. Giannakis, «Orthogonal multiple access over time-
and frequency selective channels», IEEE Trans. Inform. Theory, pp. 1942-50,
August 2003.
4. S. Verdu, «Demodulation in the presence of multiuser interference: Progress
and misconceptions», in D. Docampo, A. Figueiras and F. Perez-Gonzalez,
Eds., Intelligent Methods in Signal Processing and Communications, pp. 15-
46, Birkhauser, Boston, 1997.
5. W. Stallings, Wireless Communications and Networks, 2nd ed.. Prentice-Hall,
Englewood Cliffs, NJ, 2005.
6. B. Gundmundson, J. Skold and J.K. Ugland, «А comparison of CDMA and
TDMA systems», Proc. IEEE Veh. Tech. Conf., pp. 732-5, May 1992.
7. M. Gudmundson, «Generalized frequency hopping in mobile radio systems»,
Proc. IEEE Veh. Tech. Conf., pp. 788-91. May 1993.
8. K.S. Gilhousen, I. M. Jacobs, R. Padovani, A. J. Viterbi, L. A. Weaver, Jr and
C.E. Wheatley III, «On the capacity of a cellular CDMA system», IEEE Veh.
Tech. Conf., pp. 303-12, May 1991.
9. P. Jung, P. W. Baier and A. Steil, «Advantages of CDMA and spread spectrum
techniques over FDMA and TDMA in cellular mobile radio applications», IEEE
Veh. Tech. Conf., pp. 357-64, August 1993.
748 Глава Ц. Многопользовательские многоканальные системы
10. J. Chuang and N. Sollenberger, «Beyond 3G: Wideband wireless data access
based on OFDM and dynamic packet assignment», IEEE Commun. Mag., pp. 78-
87, July 2000.
11. K.R. Santhi, V. K. Srivastava, G. SenthilKumaran and A. Butare, «Goals of
true broadband’s wireless next wave (4G-5G)», Proc. IEEE Veh. Tech. Conf.,
pp. 2317-21, October 2003.
12. M. Frodigh. S. Parkvall, C. Roobol, P. Johansson and P. Larsson, «Future-
generation wireless networks», IEEE Wireless Commun. Mag., pp. 10-17, Oc-
tober 2001.
13. E. Anderlind and J. Zander, «А traffic model for non-real-time data users in a
wireless radio network», IEEE Commun. Lett., pp. 37-9, March 1997.
14. K. Pahlavan and P. Krishnamurthy, Principles of Wireless Networks: A Unified
Approach, Prentice-Hall, Englewood Cliffs, NJ, 2002.
15. N. Abramson, «The ALOHA system — Another alternative for computer com-
munications», Proc. Amer. Federation Inform. Proc. Soc. Fall Joint Comput.
Conf., pp. 281-5. November 1970.
16. A. Chockalingam and M. Zorzi, «Energy consumption performance of a class of
access protocols for mobile data networks», Proc. IEEE Veh. Tech. Conf., pp.
820-4, May 1998.
17. S. Haykin and M. Moher, Modem Wireless Communications, Prentice-Hall, En-
glewood Cliffs, NJ, 2005.
18. P. Karn, «МАСА: A new channel access method for packet radio», Proc. Comput.
Network Conf., pp. 134-40, September 1990.
19. V. Bharghavan. A. Demers, S. Shenkar and L. Zhang, «MACAW: A media access
protocol for wireless LANs», Proc. ACM SIGCOMM, vol. 1, pp. 212-25, August
1994.
20. IEEE Standard for Wireless LAN Medium Access Control (MAC) and Physical
Layer (PHY) Specifications, IEEE Standard 802.11, 1997.
21. Z. J. Haas, J. Deng and S. Tabrizi, «Collision-free medium access control scheme
for ad hoc networks, Proc. Military Commun. Conf., pp. 276-80, 1999.
22. S.-L. Wu, Y.-C. Tseng and J.-P. Sheu, «Intelligent medium access for mobile ad
hoc networks with busy tones and power control», IEEE J. Sei. Areas Commun.,
pp. 1647-57, September 2000.
23. N. Abramson, «Wide-band random-access for the last mile», IEEE Pers. Com-
mun. Mag., pp. 29-33, December 1996.
24. D. J. Goodman, R. A. Valenzuela, K.T. Gayliard and B. Ramamurthi, «Pack-
et reservation multiple access for local wireless communications», IEEE Trans.
Commun., pp. 885-90, August 1989.
25. N.B. Mehta and A. J. Goldsmith, «Effect of fixed and interference-induced
packet error probability on PRMA», Proc. IEEE Internal. Conf. Commun.,
pp. 362-6, June 2000.
26. P. Agrawal, «Energy efficient protocols for wireless systems», Proc. Internal.
Sympos. Pers., Indoor, Mobile Radio Commun., pp. 564-9, September 1998.
27. J. Zander, «Performance of optimum transmitter power control in cellular radio
systems», IEEE Veh. Tech. Conf, pp. 57-62, February 1992.
28. G. J. Foschini and Z. Miljanic, «А simple distributed autonomous power control
algorithm and its convergence», IEEE Veh. Tech. Conf, pp. 641-6, November
1993.
29. S.A. Grandhi, R. Vijayan and D.J. Goodman, «Distributed power control in
cellular radio systems», IEEE Trans. Commun., pp. 226-8, February—April
1994.
30. E. Seneta, Nonnegative Matrices and Markov Chains, Springer-Verlag, New
York, 1981.
31. N. Bambos, S. C. Chen and G.J. Pottie, «Channel access algorithms with ac-
tive link protection for wireless communication networks with power control»,
IEEE/А CM Trans. Network., pp. 583-97, October 2000.
32. S. Kandukuri and N. Bambos, «Power controlled multiple access (PCMA) in
wireless communication networks», Proc. IEEE Infocom Conf., pp. 386-95, March
2000.
33. P. P. Bergmans and T.M. Cover, «Cooperative broadcasting», IEEE Trans. In-
form. Theory, pp. 3 17-24, May 1974.
34. L. Li and A. J. Goldsmith, «Capacity and optimal resource allocation for fading
broadcast channels — Part I: Ergodic capacity», IEEE Trans. Inform. Theory,
pp. 1083-1102, March 2001.
35. T. Cover and J. Thomas, Elements of Information Theory, Wiley, New York,
1991.
36. L.-F. Wei, «Coded modulation with unequal error protection», IEEE Trans.
Commun., pp. 1439-49, October 1993.
37. P. P. Bergmans, «А simple converse for broadcast channels with additive white
Gaussian noise», IEEE Trans. Inform. Theory, pp. 279-80, March 1974.
38. R. Pickholtz, L. Milstein and D. Schilling, «Spread spectrum for mobile com-
munications», IEEE Veh. Tech. Conf, pp. 313-22, May 1991.
39. S. Verdu, Multiuser Detection, Cambridge University Press, 1998.
40. D. Tse and S. Hanly, «Multiaccess fading channels — Part I: Polymatroid
structure, optimal resource allocation and throughput capacities», IEEE Trans.
Inform. Theory, pp. 2796-2815, November 1998.
41. S. Hanly and D. Tse, «Multiaccess fading channels — Part II: Delay-limited
capacities», IEEE Trans. Inform. Theory, pp. 2816-31, November 1998.
42. L. Li and A. J. Goldsmith, «Capacity and optimal resource allocation for fading
broadcast channels — Part II: Outage capacity», IEEE Trans. Inform. Theory,
pp. 1103-27, March 2001.
43. L. Li, N. Jindal and A. J. Goldsmith, «Outage capacities and optimal power
allocation for fading multiple access channels», IEEE Trans. Inform. Theory,
pp. 1326-47, April 2005.
44. N. Jindal and A. J. Goldsmith, «Capacity and optimal power allocation for fad-
ing broadcast channels with minimum rates», IEEE Trans. Inform. Theory, pp.
2895-2909, November 2003.
45. E. Larsson and P. Stoica, Space-Time Block Coding for Wireless Communica-
tions, Cambridge University Press, 2003.
46. G. Caire and S. Shamai, «On the achievable throughput of a multiantenna Gaus-
sian broadcast channel», IEEE Trans. Inform. Theory, pp. 169 1-1706, July
2003.
47. W. Yu and J. M. Cioffi, «Trellis precoding for the broadcast channel», Proc.
IEEE Globecomn Conf., pp. 1344-8, November 2001.
Глава Ц. Многопользовательские многоканальные системы
48. Н. Weingarten, Y. Steinberg and S. Shamai, «The capacity region of the Gaus-
sian MIMO broad cast channel», Proc. IEEE Internat. Sympos. Inform. Theory,
p. 174, June 2004.
49. M. Costa, «Writing on dirty paper», IEEE Trans. Inform. Theory, pp. 439-41,
May 1983.
50. U. Erez, S. Shamai and R. Zamir, «Capacity and lattice strategies for cancelling
known interference», Proc. Internat. Sympos. Inform. Theory Appl., pp. 681-4,
November 2000.
51. B. Rimoldi and R. Urbanke, «А rate-splitting approach to the Gaussian multiple-
access channel», IEEE Trans. Inform. Theory, pp. 364-75, March 1996.
52. D. Tse and P. Viswanath, Foundations of Wireless Communications, Cambridge
University Press, 2005.
53. R. Knopp and P. Humblet, «Information capacity and power control in single-cell
multiuser communications», Proc. IEEE Internat. Conf. Commun., pp. 331-5,
June 1995.
54. N. Jindal, S. Vishwanath and A. J. Goldsmith, «On the duality of Gaussian
multiple-access and broadcast channels», IEEE Trans. Inform. Theory, pp. 768-
83, May 2004.
55. S. Verdu, «Multiple-access channels with memory with and without frame syn-
chronism», IEEE Trans. Inform. Theory, pp. 605-19, May 1989.
56. E. Telatar, «Capacity of multi-antenna Gaussian channels», Euro. Trans. Tele-
commun., pp. 585-96, November 1999.
57. W. Yu, W. Rhee, S. Boyd and J. Cioffi, «Iterative water-filling for vector multiple
access channels», IEEE Trans. Inform. Theory, pp. 145-52. January 2004.
58. R. Cheng and S. Verdu, «Gaussian multiaccess channels with ISI: Capacity
region and multiuser water-filling», IEEE Trans. Inform. Theory, pp. 773-85.
May 1993.
59. A. J. Goldsmith and M. Effros, «The capacity region of broadcast channels with
intersymbol interference and colored Gaussian noise», IEEE Trans. Inform. The-
ory, pp. 219-40, January 2001.
60. S. Vishwanath, N. Jindal and A. J. Goldsmith, «Duality, achievable rates and
sum-rate capacity of Gaussian MIMO broadcast channels», IEEE Trans. Inform.
Theory, pp. 2658-68, October 2003.
61. P. Viswanath and D. N. C. Tse, «Sum capacity of the vector Gaussian broadcast
channel and uplink-downlink duality», IEEE Trans. Inform. Theory, pp. 1912-
21, August 2003.
62. N. Jindal, W. Rhee. S. Vishwanath, S. A. Jafar and A. J. Goldsmith, «Sum
power iterative water-filling for multi-antenna Gaussian broadcast channels»,
IEEE Trans. Inform. Theory, pp. 1570-9, April 2005.
63. P.Vishwanath, D.N. C. Tse and R. Laroia, «Opportunistic beamforming using
dumb antennas», IEEE Trans. Inform. Theory, pp. 1277-94, June 2002.
64. TIA/EIA IS-856, «CDMA 2000: High rate packet data air interface specifica-
tion», November 2000.
65. A. Jalali, R. Padovani and R. Pankaj, «Data throughput of CDMA-HDR a high
efficiency—high data rate personal communication wireless system», Proc. IEEE
Veh. Tech. Conf, pp. 1854-8, May 2000.
66. M. Andrews, К. Kumaran, К. Ramanan, A. Stolyar and P. Whiting, «Providing
quality of service over a shared wireless link», IEEE Commun. Mag., pp. 150-4,
February 2001.
67. X. Liu, E. K.P. Chong and N.B. Shroff, «Opportunistic transmission schedul-
ing with resource-sharing constraints in wireless networks», IEEE J. Sei. Areas
Commun., pp. 2053-64, October 2001.
68. D. N. C. Tse, P. Viswanath and L. Zheng, «Diversity—multiplexing trade-off in
multiple-access channels», IEEE Trans. Inform. Theory, pp. 1859-74, September
2004.
69. A. J. Goldsmith, S.A. Jafar, N. Jindal and S. Vishwanath, «Capacity limits of
MIMO channels», IEEE J. Sei. Areas Commun., pp. 684-701, June 2003.
70. M. Sharif and B. Hassibi. «Scaling laws of sum rate using time-sharing, DPC
and beamforming for MIMO broadcast channels», Proc. IEEE Internal. Sympos.
Inform. Theory, p. 175, June 2004.
71. T. Yoo and A. J. Goldsmith, «Optimality of zero-forcing beamforming with mul-
tiuser diversity», Proc. IEEE Internal. Conf. Commun., May 2005.
72. J. Heath, R. W. M. Airy and A. Paulraj, «Multiuser diversity for MIMO wireless
systems with linear receivers», Proc. Asilomar Conf. Signals, Syst., Comput.,
pp. 1194-9, November 2001.
73. N. Jindal and A. Goldsmith, «DPC vs. TDM A for MIMO broadcast channels»,
IEEE Trans. Inform. Theory, pp. 1783-94, May 2005.
74. N. Al-Dhahir, C. Fragouli, A. Stamoulis, W. Younis and R. Calderbank, «Space-
time processing for broadband wireless access», IEEE Commun. Mag., pp. 136-
42, September 2002.
75. M. Brehler and M. K. Varanasi, «Optimum receivers and low-dimensional spread-
ed modulation for multiuser space-time communications», IEEE Trans. Inform.
Theory, pp. 901-18, April 2003.
76. S. N. Diggavi, N. Al-Dhahir and A. R. Calderbank, «Multiuser joint equaliza-
tion and decoding of space-time codes», Proc. IEEE Internal. Conf. Commun.,
pp. 2643-7, May 2003.
77. H. Dai and H. V. Poor. «Iterative space-time processing for multiuser detec-
tion in multipath CDMA channels», IEEE Trans. Signal Proc., pp. 2116-27,
September 2002.
78. S. N. Diggavi, N. Al-Dhahir and A. R. Calderbank, «On interference cancellation
and high-rate space-time codes», Proc. IEEE Internal. Sympos. Inform. Theory,
p. 238, June 2003.
79. S. J. Grant and J. K. Cavers, «System-wide capacity increase for narrowband
cellular systems through multiuser detection and base station diversity arrays»,
IEEE Trans. Wireless Commun., pp. 2072-82, November 2004.
80. Z. Liu and G. B. Giannakis, «Space-time block-coded multiple access through
frequency- selective fading channels», IEEE Trans. Commun., pp. 1033-44, June
2001.
81. K.-K. Wong, R. D. Murch and K.B. Letaief, «Performance enhancement of
multiuser MIMO wireless communication systems», IEEE Trans. Commun.,
pp. 1960-70, December 2002.
ГЛАВА 15
СОТОВЫЕ СИСТЕМЫ
И БЕСПРОВОДНЫЕ СЕТИ
С БАЗОВОЙ ИНФРАСТРУКТУРОЙ
Инфрастуктура беспроводных сетей включает расположенные на опреде-
ленной территории базовые станции, называемые также точками досту-
па. Эти базовые станции предоставляют мобильным телефонам доступ
к опорной проводной сети. Базовые станции выполняют также функции
управления сетью и часто, для достижения согласованного управления,
базовые станции связываются между собой. Такая инфраструктура про-
тивоположна специальным беспроводным сетям, описанным в гл. 16, ко-
торые не имеют опорной инфрастуктуры. Примеры беспроводных сетей
с базовой инфраструктурой включают сотовые системы, беспроводные
локальные вычислительные сети и пейджинговые системы. Координа-
ция базовых станций в сетях с базовой инфраструктурой обеспечивает
централизованное управление механизмом планирования передачи, дина-
мическое распределение ресурсов, регулирование мощности и передачу
обслуживания. Это позволяет эффективно использовать сетевые ресурсы
для удовлетворения характеристик требованиям отдельных пользовате-
лей. Кроме того, большинство сетей с такой инфрастуктурой разработа-
ны таким образом, что мобильные телефоны ведут передачу непосред-
ственно на базовую станцию, без прохождения через промежуточные уз-
лы беспроводной связи. Однако иногда создавать инфрастуктуру дорого,
просто невыполнимо или непрактично. В этом случае специализирован-
ные беспроводные сети предоставляют лучшее решение несмотря на то,
что их характеристики обычно хуже.
Сотовые системы представляют тип сетей с базовой инфраструкту-
рой, что обеспечивает эффективное повторное использование спектра
в разнесенных в пространстве областях. В данной главе основное вни-
мание сосредоточено на разработке и анализе сотовой системы связи,
хотя многие из рассматриваемых принципов применимы к любой сети
с базовой инфраструктурой. Сначала представлены основные принципы
разработки сотовых систем и повторного использования каналов. Затем
обсуждаются вопросы емкости системы в связи с методами снижения
помех для повышения этой емкости. Мы также поясним преимущества
динамического распределения ресурсов сети. Глава завершается анали-
зом фундаментальных ограничений скорости сотовых систем в терминах
пропускной способности Шеннона и эффективности использования спектра.
15.1. Основы сотовых систем
В основе построения сотовых систем лежит естественное снижение мощ-
ности с увеличением расстояния распространения сигнала, что дает воз-
можность повторно использовать те же самые каналы в пространственно
разнесенных местах. В сотовых системах заданная область пространства
(например, город), разделяется на неперекрывающиеся соты, показан-
ные на рис. 15.1. Каналообразование системы строится на использова-
нии одного из ортогональных или неортогональных методов разделения
пространства сигналов, рассмотренных в § 14.2. Мы сосредоточим вни-
мание, в основном, на ортогональных методах МДЧР (FDMA) и МДВР
(TDMA) и неортогональном методе МДКР (CDMA). Каждому каналу,
полученному в пространстве сигналов, ставится в соответствие собствен-
ный уникальный канальный набор Сп. Как показано на рис. 15.1, каждой
соте выделен свой набор каналов, и этот набор может повторно использо-
ваться в определенном месте пространства. Это называется повторным
использованием частот или каналов. Соты, которым выделены одина-
ковые наборы каналов, называются соканальными или совмещенными.
Следует достаточно далеко разносить их в пространстве, чтобы помехи
совмещенных каналов не снижали качества сигналов ниже допустимого
уровня. Требуемая величина расстояния разнесения зависит от метода
754 Глава 15. Сотовые системы и сети с базовой инфраструктурой
каналообразования, параметров распространения сигналов и требуемых
показателей качества для конкретного пользователя.
В системе сотовой связи, показанной на рис. 15.1, базовые станции
размещены вблизи центров сот. При идеальных условиях распростране-
ния, мобильные телефоны в пределах заданной соты связываются с ба-
зовой станцией этой соты, хотя на практике выбор основывается на от-
ношении SINR между мобильной и базовой станциями. При перемещении
мобильной станции из одной соты в другую, исходная сота должна пере-
дать обслуживание ее вызова новой соте. Канал от базовой станции к мо-
бильной станции называется нисходящим каналом, а канал от мобильной
станции к базовой — восходящим каналом. Все базовые станции данного
региона связаны с коммутационной станцией, обслуживающей мобильные
телефоны и действующей как центральный пункт управления — контрол-
лер. Коммутационная станция координирует идентификацию абонентов,
выделение каналов и передачу обслуживания между базовыми станциями.
Передача обслуживания инициируется при снижении качества передачи
между мобильной станцией и данной базовой станцией ниже заданного
порога. Это может происходить при перемещении мобильной станции
из соты в соту, а также может быть вызвано замираниями или экра-
нированием в соте. Если соседние базовые станции не имеют каналов
приемлемого качества и попытки передачи обслуживания безуспешны,
то соединение прерывается.
Сотовые системы должны допускать использование различных мето-
дов доступа в восходящем и нисходящем направлениях. Основные методы
доступа, используемые в сотовых системах — это частотное, временное,
ортогональное и неортогональное кодовое разделение, а также их комби-
нации. Эти методы объединяются также с методами многостанционного
доступа с пространственным разделением. Проектирование восходящих
и нисходящих каналов для одной соты описано в § 14.2, и многие из этих
методов анализа и принципов проектирования, при соответствующей мо-
дификации, учитывающей особенности повторного использования, под-
ходят к сотовым системам. Компромиссы, обусловленные различными
методами доступа, различны для сотовой системы и одной соты, так как
каждый метод должен учитывать помехи за пределами собственной со-
ты, известные также как межсотовые помехи или помехи совмещенного
канала. Кроме этого, системам с неортогональным разделением каналов
присущи помехи внутри соты, называемые внутрисотовыми помехами.
Эти внутрисотовые помехи имеют тенденцию к увеличению и в системах
с ортогональными методами разделения при многолучевом распростране-
нии, сбоях синхронизации и других встречающихся на практике явлениях,
нарушающих ортогональность сигналов.
Хотя системы МДКР (CDMA) с неортогональными кодами, по опре-
делению, подвержены как межсотовым, так и внутрисотовым помехам,
эти помехи могут быть значительно снижены с помощью взаимной кор-
реляции кодов. В противоположность им, методы ортогонального мно-
гостанционного доступа при идеальных условиях работы не подвержены
внутрисотовым помехам. Однако их межсотовые помехи не снижаются
при обработке как это происходит в системах с расширением спектра.
Количественно влияние внутрисотовой и межсотовой помех на данного
пользователя выражается отношением мощности его сигнала к помехе
плюс шум, в виде:
SINR =
Рг
N0B + Р/ ’
(15-1)
где Рг — мощность принимаемого сигнала, Pi — мощность внутри- и меж-
сотовой помех на приеме. В системе МДКР (CDMA) мощность Pi пред-
ставляет мощность помехи после компрессии сигнала расширенным спек-
тром. Обычно величина ошибок по битам в мобильной связи рассчитыва-
ется по отношению сигнал - помеха плюс шум SINR, а не по отношению
сигнал-шум SNR, хотя это приближение недостаточно точно, если ста-
тистика случайной помехи не соответствует гауссовому распределению.
Большая величина помех снижает отношение сигнал - помеха плюс шум
SINR и увеличивает число ошибок у абонента. Если соты с одинаковыми
частотами разнести в пространстве на достаточно большое расстояние,
то помехи между сотами можно поддерживать на очень низком уровне.
Однако число абонентов, которое может обслуживать система, будет мак-
симальным как раз при как можно более частом повторном использовании
частот. Поэтому в лучших проектах сотовых систем абонентов, исполь-
зующих одни и те же каналы в сотах, размещают на расстояниях, при
которых уровень межсотовых помех только ниже допустимого уровня,
необходимого для заданной скорости передачи и заданного коэффициен-
та ошибок по битам. В хороших проектах сотовых систем величина помех,
как правило, только ограничена, а это означает, что величина помех зна-
чительно больше величины шумов. Поэтому обычно при исследовании
таких систем шумами пренебрегают. В этом случае, отношение сигнал -
помеха плюс шум SINR сводят к отношению мощности сигнала к помехе
SIR = Pr/Pi. Поскольку в системах с ограниченной помехой коэффициент
ошибок пользователя BER определяется по отношению сигнал - помеха
SIR, то число абонентов, которое может быть обслужено, ограничивается
помехами, создаваемыми другими абонентами. Методы снижения помех,
такие как многоэлементные антенны и многопользовательское детекти-
рование, повышают отношение SIR и, следовательно, увеличивают число
пользователей, которое может быть размещено в соте при заданной ве-
Глава 15. Сотовые системы и сети с базовой инфраструктурой
личине коэффициента ошибок BER. Отметим, что требуемые значения
коэффициента ошибок BER и отношения сигнал - помеха SIR достаточно
хорошо известны и для аналоговых приложений, таких как, например, пе-
редача речи. Для передачи данных планирование системы сложнее из-за
взрывообразного характера передаваемой нагрузки.
Большая
Рис. 15.2. Увеличение емкости соты
при сжатии ее размеров
Следующий важный элемент проек-
тирования — это выбор размера соты.
Мы можем увеличивать число поль-
зователей в ячейке данной системы,
сжимая размер соты до тех пор, по-
ка все параметры системы не уста-
новятся так, что отношение сигнал-
помеха плюс шум SINR будет одина-
ковым для всех пользователей. Сопо-
ставление большой и малой сот пока-
зано на рис. 15.2. Предположим, что
большая сота на этом рисунке пред-
ставляет одну соту сотовой системы,
в которой в каждой соте размещено
К абонентов. Если размер соты сжат
(обычно из-за снижения мощности пе-
редачи) до размеров малой соты, как
показано на рис. 15.2, и если все пара-
метры системы (включая потери распространения) такие, что отношение
сигнал - помеха плюс шум SINR в малых сотах такое же, как в исходной
большой соте, то эта малая сота также может разместить К абонен-
тов. Так как на рисунке в большой ячейке помещается 19 малых сот,
то новая система с малыми сотами может разместить 19JC абонентов
в зоне прежней большой соты, с 19-кратным увеличением пропускной спо-
собности. Однако обычно при сжатии соты параметры распространения
изменяются так, что характеристики системы не совершенны. Кроме то-
го, с уменьшением размеров соты возрастает число переключений для
передачи обслуживания, при которых возрастает вероятность разъеди-
нений а процент неудачных попыток передачи обслуживания остается
тем же. Малые соты повышают также нагрузку на магистральную сеть,
а большое число сот на единицу площади означает и большое число ба-
зовых станций, что повышает стоимость системы. Поэтому хотя малые
соты обычно повышают емкость системы, но у них есть свои недостатки.
Компромисс заключается во вставке малых сот в «горячих точках« боль-
ших сот, испытывающих перегрузку трафика для того, чтобы повысить
их пропускную способность [1, глава 3.7].
Сота, показанная на рис. 15.1, имеет форму шестиугольника. Фор-
ма представления соты в виде шестиугольной ячейки позволяет разме-
щать соты друг возле друга без перекрытий и просветов и покрывать,
таким образом, все географическое пространство. Соты также могут
быть представлены в форме прямоугольников, квадратов, ромбов и тре-
угольников. Эти правильные формы ячеек используют для приближен-
ного представления линий постоянной принимаемой мощности вокруг
базовой станции. Если для представления распространения сигнала ис-
пользуется модель свободного пространства или упрощенная модель по-
терь в тракте, когда принимаемая мощность постоянна по окружности,
очерченной вокруг базовой станции, то шестиугольник представляет под-
ходящую аппроксимацию этой окружности. Шестиугольник обычно ис-
пользуется для аппроксимации формы сот телефонных сотовых сетей
первого поколения, у которых базовые станции располагались на кры-
шах зданий и обеспечивали покрытие в несколько квадратных киломе-
тров. Современные системы имеют малые соты с базовыми станциями,
расположенными близко к земле. Для таких систем ромб дает лучшую ап-
проксимацию областей постоянной мощности, характерных, в частности,
для городских улиц [2, 3]. Очень малые соты и соты внутри помещений
в большой степени зависят от условий распространения, что затрудняет
использование сотовой формы представления для аппроксимации контура
постоянной мощности излучения [4].
15.2. Повторное использование каналов
Повторное использование каналов представляет ключевой элемент про-
ектирования сотовых систем, так как оно определяет величину помех,
которые будут испытывать различные абоненты и тем самым устанавли-
вает ограничения на характеристики и емкость системы. Соображения
по повторному использованию каналов различны при каналообразова-
нии с ортогональным многостанционным доступом (например, МДВР
(TDMA), МДЧР (FDMA) и ортогональный МДКР (CDMA)) и при ис-
пользовании неортогональных способов каналообразования (неортогональ-
ный или гибридный ортогонально-неортогональный доступ CDMA). На прак-
тике, при нормальных условиях распространения ортогональные методы
не создают межсотовые помехи. Однако соты с МДВР (TDMA) и МДЧР
(FDMA), использующие одинаковые наборы каналов, разносятся на не-
сколько сот, так как соканальные помехи расположенных рядом сот могут
быть очень большими. В противоположность им, неортогональные мето-
ды каналообразования подвержены влиянию и внутри- и межсотовых по-
мех. Однако эти помехи можно ослабить, используя взаимную корреляцию
758 Глава 15. Сотовые системы и сети с базовой инфраструктурой
расширяющих кодов, и это позволяет повторно использовать одни и те же
наборы каналов во всех сотах. В системе МДКР (CDMA) с ортогональ-
ными кодами (обычно в нисходящем направлении) те же коды повторно
используются во многих сотах благодаря тому, что передача кодов не син-
хронизирована между базовыми станциями. Поэтому те же самые коды
разных базовых станций поступают на мобильную станцию с временным
сдвигом, а итоговая межсотовая помеха ослабляется за счет автокорре-
ляции, вычисляемой по этому временному сдвигу. Эта автокорреляция
может еще оставаться достаточно большой. Также может использоваться
гибридный метод, при котором уникальный для каждой соты неортого-
нальный код модулируется (накладывается) поверх ортогональных кодов,
используемых в данной соте. Этот неортогональный код при обработке
существенно снижает межсотовые помехи. Такой гибридный подход ис-
пользуется в широкополосной сотовой системе W-CDMA [5]. В настоящей
главе предполагается, что в системах МДКР (CDMA) во всех сотах ис-
пользуются одинаковые коды, как это обычно имеет место на практике.
Таким образом, расстояние повторного использования едино и в системе
МДКР (CDMA) нет необходимости заниматься оптимизацией повторно-
го использования каналов.
Обсудим основные исходные принципы, лежащие в основе повторно-
го использования каналов: кластеризацию, группирование сот и выделе-
ние, распределение каналов. В системе с ограничением по помехам ко-
эффициент ошибок BER для каждого пользователя определяется по его
отношению сигнал - помеха SIR, т. е. по отношению мощности принима-
емого сигнала в данной соте к мощности внутрисотовой и межсотовой
помехи. Мощность принимаемого полезного сигнала, а также внутрисото-
вая и межсотовая помехи определяются характеристиками канала между
полезным или мешающим передатчиком и данным приемником. Сред-
няя величина отношения сигнал - помеха SIR обычно вычисляется только
на основе потерь в тракте при среднем значении затухания рассеивания,
введенного в модели потерь тракта для сигнала и помехи. Затем принима-
ются во внимание случайные изменения рассеивания и плавные замирания
уже как статистические колебания потерь в тракте.
Так как потери в тракте зависят от расстояния прохождения сигнала,
то расстояние между сотами повторного использования D, использующи-
ми одни и те же каналы, представляет важный параметр при определении
средней мощности межсотовых помех. Расстояние повторного использо-
вания определяется как расстояние между центрами сот, использующих
те же наборы каналов. Оно зависит от формы и размера сот, а также
от числа промежуточных сот между двумя сотами с одинаковыми пла-
нами частот. Задавая требуемую среднюю величину отношения сигнал -
помеха плюс шум SINR для конкретного уровня качества, мы можем най-
ти минимальное расстояние повторного использования, соответствующее
заданным характеристикам. В данном разделе основное внимание уделе-
но планированию сотовых систем на основе требований к минимальному
расстоянию повторного использования.
На рис. 15.3 иллюстрируется расстояние повторного использования
для заданной последовательности повторного использования каналов при
шестиугольной и ромбовидной форме сот. Соты, использующие одинако-
вые частотные планы каналов Сп, обозначены на рисунке одинаковыми
индексами. Эта последовательность повторного использования каналов
для обеих форм сот основывается на идее объединения сот в кластеры, бо-
лее подробно рассмотренной ниже. Расстояние повторного использования
D между этими сотами равно минимальному расстоянию между точками
в центре сот, использующих набор каналов Сп. На рисунке также показан
радиус соты R. Для шестиугольной соты ее радиус R определяется как
расстояние от центра соты до вершины шестиугольника. Радиус R ром-
бовидной соты равен расстоянию от центра соты до середины стороны.
Для ромбовидных сот расстояние повторного использования D может
быть вычислено непосредственно по числу промежуточных сот Nj меж-
ду соканальными ячейками и радиусу соты R. В частности, расстояние
через соту равно 2R. Расстояние от центра соты до ее границы равно R,
а расстояние через Nj сот между двумя соканальными ячейками равно
2RNR Таким образом, D = R + 2RNj + R = 2R(Nj + 1).
Рис. 15.3. Расстояние повторного использования для заданной последовательно-
сти шестиугольных и ромбовидных сот
Расстояние повторного использования шестиугольных сот сложнее в вы-
числениях, так как между двумя соканальными сотами может быть не-
760 Глава 15. Сотовые системы и сети с базовой инфраструктурой
целое число сот. В левой части рис. 15.3 показано использование набора
каналов Сп в центральной соте. Если этот же набор повторно исполь-
зуется в заштрихованной соте, то между ними будет как раз две соты,
и расстояние повторного использования легко вычислить. Но если набор
каналов Сп используется в соте, смежной заштрихованной соте, как это
показано на рисунке, то здесь уже нет целого числа сот, разделяющих эти
соканальные ячейки, что усложняет процедуру вычисления. Распределе-
ние каналов, показанное на рис. 15.3, нуждается в образовании кластера
сот, о чем будет более детально сказано ниже.
Рис. 15.4. Оси для опре-
Ось и
деления расстояния повтор-
ного использования шес-
тиугольной соты
Процедура распределения каналов в шестиугольных сотах заключает-
ся в следующем. Рассмотрим диаграмму сот, показанную на рис. 15.4, где
R по-прежнему обозначает радиус шестиугольной соты. Пометим место
каждой соты парой координат (г, j). Предположим, что сота А находит-
ся в центре с исходным обозначением (0,0), тогда положение соты (г, j)
относительно соты А определяется перемещением на i сот по оси и, и пе-
ремещением на j сот по оси ц, повернутой против часовой стрелки на 60°.
Например, сота G расположена в точке (0,1), сота S — в точке (1,1), сота
Р — в точке (—2, 2), а сота М — в точке (—1, —1). Нетрудно показать, что
расстояние меду центрами смежных сот равно х/37?, а расстояние меж-
ду центрами соты с координатами (i,j) и соты А с координатами (0,0)
имеет следующий вид:
D = V3Ry/i2 + j2 + ij. (15.2)
Пример 15.1. Определим расстояние повторного использования D как функ-
цию радиуса соты R для последовательности повторного использования, пока-
занной на рис. 15.3, при шестиугольной и ромбовидной форме сот.
Решение. Для ромбовидных сот число промежуточных сот составляет Nj — 1,
откуда D = 2R(Ni + 1) — 47?. Для шестиугольных сот, показанных на рис. 15.3,
последовательность повторного использования включает сдвиг на две соты по оси
и и на одну соту по оси v. Таким образом, D = х/37?х/22 + I2 + 2 = 4,587?.
Рис. 15.5. Кластеры ромбовидных сот
Глава 15. Сотовые системы и сети с базовой инфраструктурой
При заданном минимальном допустимом расстоянии повторного ис-
пользования .Dmin, необходимо поддерживать это расстояние во всей со-
товой структуре, обеспечивая при этом как можно более частое повтор-
ное использование каналов. Это приводит к разнесенным в пространстве
повторяющимся группам сот — кластерам с повторяющимися распре-
делениями каналов. Каждой соте в кластере выделен свой собственный
уникальный набор каналов, не используемый никакой другой сотой дан-
ного кластера. Для возможности пространственного повторения кластер
должен иметь мозаичное, ячеистое представление. При ромбовидных со-
тах сотовый кластер образует еще один ромб из К сот по каждой стороне,
как это показано на рис. 15.5 для К = 4. Набор каналов, выделенный для
n-й соты в кластере, обозначается как Сп (n = 1,..., N), где N — число
неповторяющихся наборов каналов, а последовательность распределения
каналов повторяется в каждом кластере. Это должно гарантировать, что
соты, использующие одни и те же каналы, разнесены на расстояние, до-
пускающее повторное использование, как минимум равное D = 2KR. Чис-
ло сот в кластере, равное N = К2, называется также коэффициентом по-
вторного использования: так как D = 2KR, то получим N = 0,25(79/R)2.
Если число каналов в соте обозначить как Nc (т. е. число каналов в Сп),
а общее число каналов — как Nt, то N = Nr/Nc. Малая величина N озна-
чает высокую эффективность повторного использования каналов (каналы
в данной области с фиксированными размерами и формой сот использу-
ются чаще). Однако малая величина N означает также малое расстояние
повторного использования, так как D = 2KR = 2^/NR, а это может при-
вести к значительным межсотовым помехам.
Формирование кластера из шестиугольных сот носит итеративный ха-
рактер. Сначала общая полоса частот разбивается на N наборов каналов
Ci,, Cn, где N — размер кластера. Присвоим первый набор каналов Ci
некоторой произвольно выбранной соте. От этой соты сместимся на i сот
цепочки шестиугольников в любом направлении. Повернем на 60° и сме-
стимся на j сот цепочки шестиугольников в этом новом направлении.
Выделим для этой у-й соты набор каналов C*i. Возвращаясь назад к ис-
ходной соте, повторяем этот процесс для другого направления до тех
пор, пока не закроем все направления от начальной соты. Данный про-
цесс показан на рис. 15.6 для i = 3 и j = 2. Для выделения наборов С\
по всей области повторим итеративный процесс, начиная с любой соты
с уже выделенным при предыдущей итерации набором С\ до тех пор, по-
ка уже нельзя будет присвоить этот набор новой соте, двигаясь из любой
соты с уже присвоенным набором . Затем выбирается новая сота, ко-
торой еще не был присвоен канальный набор, ей присваивается набор С?,
и для этого нового канального набора выполняется такой же итератив-
15.3. Емкость соты и отношение сигнал-помеха 763
ный процесс. Этот процесс повторяется до тех пор, пока всем сотам не
будет присвоен собственный единственный, уникальный набор. В итоге
получаем кластер сот, показанный на рис. 15.7. Расстояние повторного
использования между двумя сотами с одинаковыми наборами каналов
равно D = \/37?у/г2 + j2 + ij. Можно приблизительно определить размер
кластера через отношение площади кластера к площади соты. В част-
ности, площадь шестиугольной соты равна Асец = 3y/3R2/2, а площадь
кластера шестиугольных сот равна Aciuster = \/3D2/2. Следовательно,
число сот в кластере равно:
N = Acluster = V3D2/2 = 1 2 = 1 (3R2^+j2 + ij\ = ,2 .2 •
Acell j3R2/2 3 \r) 3 \ R2 ) 1 3 l3'
Как и при ромбовидных сотах, малая величина N означает более вы-
сокую эффективность повторного использования каналов, но и меньшее
расстояние повторного использования D = Ry/3N, что увеличивает по-
мехи между сотами.
Рис. 15.6. Распределение
каналов в шестиугольных
сотах
15.3. Емкость соты и отношение сигнал-помеха
В данном параграфе приведен расчет отношения сигнал - помеха SIR
абонента сотовой системы и числа абонентов в соте, которое может быть
обеспечено при этой заданной величине отношения сигнал - помеха SIR.
764 Глава 15. Сотовые системы и сети с базовой инфраструктурой
Рис. 15.7. Кластеры шестиугольных сот
Пренебрежем влиянием шумов на параметры системы, предполагая,
что помехи в системе ограничены, хотя расчет может быть легко расши-
рен для учета шумов. Отношение сигнал - помеха SIR в сотовой системе
зависит от многих факторов, включая расположение соты, размер, рас-
стояние повторного использования и распространение радиоволн. Мы пред-
полагаем, что используется упрощенная модель потерь в тракте (2.39)
с опорным расстоянием do = 1 метр, так что Pr = PtLd-'7, где L —
постоянная, равная средним потерям в тракте при расстоянии d = do,
а 7 — показатель степени затухания. Так как величина L одинакова как
для сигнала, так и для помехи, то она сокращается в выражении для
отношения мощностей сигнала и помехи SIR. Поэтому в последующем
анализе примем L — 1. Показатель степени затухания распространения
сигнала внутри соты обозначим как 7/, а показатель степени затуха-
ния при распространении сигнала внешней соты (межсотовой помехи) —
как 7о- Эти показатели трактов могут отличаться друг от друга в за-
висимости от условий распространения и размеров соты [6]. Используя
упрощенную модель затухания в тракте, получим выражения для отноше-
ния сигнал - помеха SIR для ортогональных и неортогональных методов
15.3. Емкость соты и отношение сигнал-помеха 765
доступа. Затем для каждой модели определим емкость, т. е. максимальное
число пользователей в соте, которое система еще может обеспечивать, не
превышая заданную величину отношения сигнал - помеха SIR.
Отношение сигнал - помеха SIR используется обычно для вычисления
коэффициента ошибок по битам BER полезного сигнала. В частности, если
помеха аппроксимируется аддитивным белым гауссовым шумом (AWGN),
то может быть использована формула зависимости коэффициента оши-
бок BER от отношения сигнал-шум SNR. Например, из выражения (6.6),
представленного для двоичной фазовой манипуляции ФМН (BPSK) при
отсутствии замираний, получим Рь = Qy/2 SIR, а из (6.58) получим вы-
ражение для случая, при котором полезный сигнал подвержен релеевским
замираниям: Рь ~ 0,25/SIR для больших значений отношения сигнал-
помеха SIR. Хотя мы получили это выражение, используя для отноше-
ния сигнал - помеха SIR упрощенную модель потерь в тракте, для более
точной аппроксимации можно использовать более сложную модель по-
терь. Однако при этом в модели допускается ряд неточностей, которые
не так-то просто установить. На практике модель гауссовской помехи
служит достаточно точным приближением для большого числа помех,
например, в случае МДКР (CDMA), но не точна для небольшого числа
помех в системах МДВР (TDMA) и МДЧР (FDMA). Более того, при вы-
числении параметров замираний пренебрегают тем фактом, что помехи
также подвержены замираниям, что приводит к необходимости рассмо-
трения отношения сигнал - помеха SIR в виде отношения двух случайных
переменных. Это отношение имеет сложное распределение и не аппрокси-
мируется хорошо ни распределением Релея, ни каким-либо другим распре-
делением замираний общего вида [7]. Сложность моделирования среднего
значения отношения SIR, а также его распределения для точных моделей
потерь в тракте, экранирования и замираний при многолучевом распро-
странении может стать трудноразрешимой. Поэтому часто распределение
отношения сигнал - помеха SIR получают методами машинного моделиро-
вания [6].
15.3.1. Ортогональные системы МДВР (TDMA)
и МДЧР (FDMA)
В данном подпараграфе мы вычислим отношение SIR и абонентскую ем-
кость для сотовых систем, использующих ортогональные методы много-
станционного доступа. В таких системах отсутствуют внутрисотовые по-
мехи и, следовательно, отношение сигнал - помеха SIR определяется мощ-
ностью принимаемого сигнала и мощностью помехи с канальной соты.
При использовании упрощенной модели потерь в тракте, мощность при-
нимаемого сигнала на расстоянии d от базовой станции в восходящем
Глава 15. Сотовые системы и сети с базовой инфраструктурой
и нисходящем направлениях равна Рг = P/d Средняя мощность поме-
хи от других сот находится в зависимости от числа влияющих внешних
сот. Для упрощения пренебрежем помехами, которые находятся за пер-
вым кольцом М влияющих сот. Это приближение достаточно точно, если
показатель потерь в тракте 70 относительно большой, а последующие
мешающие кольца, по сравнению с первым кольцом, имеют значительно
большие потери в тракте.
Предположим, что все передатчики излучают одинаковую мощность Pt.
Влияние регулирования мощности обсуждается в подпараграфе 15.5.3.
Предположим также, что пользователь находится на расстоянии d < R
и что М — общее число помех на расстоянии di, i = 1,... ,М от прием-
ника, подверженного помехам, который находится на мобильной станции
в нисходящем канале и на базовой станции в восходящем канале. Итоговое
отношение сигнала к помехе равно:
SIR=----------• (15.3)
Е d~70
i=i
Данная величина отношения сигнал - помеха SIR представляет отноше-
ние двух случайных переменных, распределение которых может быть
достаточно сложным. Однако статистика помех в знаменателе характе-
ризуется несколькими моделями распространения, и если помехи имеют
логарифмически нормальное распределение, то их сумма также имеет ло-
гарифмически нормальное распределение [8, гл. 3]. Заметим, что вообще
среднее значение отношения сигнал - помеха SIR в восходящем и нисхо-
дящем каналах приближенно может быть одинаковым. Но отношение SIR
в восходящем канале, в котором все мешающие станции могут находиться
на границе соты, т. е. максимально близко к базовой станции, на которую
они влияют, обычно представляет худший случай и имеет меньшее значе-
ние, чем у нисходящих каналов, помеха в которые приходит от базовых
станций в середине соты.
Выражение для отношения сигнал - помеха SIR может быть упрощено,
если мы предположим, что мобильная станция находится на границе своей
соты, d = R и все источники помех находятся на расстоянии повторно-
го использования D от приемника, подверженного влиянию. При таких
предположениях выражение для отношения сигнал - помеха SIR упроща-
ется и сводится к виду:
SIR= -----,
МБ-'Уо
а если 7/ = 7о = 7, то оно упрощается далее к:
1 (DV*
sir=m Ё ’
(15-4)
(15.5)
15.3. Емкость соты и отношение сигнал-помеха
Поскольку для большинства форм сот отношение D/R есть функция
от коэффициента повторного использования N, то отношение SIR можно
выразить через N. В частности, из рис. 15.5 для ромбовидных сот имеем:
М = 8 и D/R = y/4N\ Подставляя последнее выражение в (15.5), полу-
чаем SIR = 0,125(41V)7/2. Из рис. 15.7 для шестиугольной соты получим
М — 6 и D/R = х/ЗДГ, что дает отношение SIR = 0,167(31V)7/2. Оба этих
значения SIR можно выразить как:
SIR = ai(a2iV)7/2, (15.6)
где для ромбовидной соты ai = 0,125 и a2 = 4, а для шестиугольной со-
ты ai = 0,167 и а2 = 3. Эта формула дает упрощенную аппроксимацию
выражения для коэффициента повторного использования, необходимого
для получения требуемых параметров. В частности, задавая значение от-
ношения сигнал - помеха SIR, необходимого для получения заданного ко-
эффициента ошибок BER, как SIRq, мы можем преобразовать выражение
(15.6) в выражение для минимального коэффициента повторного исполь-
зования, которое получается при заданном значении отношения SIRq:
N >
1
а2
SIRq \ 2/7
ai )
(15-7)
Соответствующее минимальное расстояние повторного использова-
ния D (для заданной формы соты) вычисляется по коэффициенту повтор-
ного использования N и радиусу соты R. Для показателя потерь в тракте
7 = 2 выражение (15.7) упрощается до N SIRo/aia2. При наличии за-
мираний сигнала анализ усложняется, но мы все еще можем получить
коэффициент минимального использования, выраженный через отноше-
ние SIR, заданное для некоторого значения вероятности потерь [9].
Абонентская емкость Си определяется как общее число активных
пользователей в соте, которое еще может поддерживаться системой при
соблюдении заданной величины отношения SIR у всех пользователей. Для
выполнения данного требования в ортогональной системе, коэффициент
повторного использования N должен удовлетворять выражению (15.7).
Тогда, при Си = Nc, где Nc — число каналов, выделенных заданной соте
при предполагаемом коэффициенте повторного использования N. Общее
число ортогональных каналов с полосой Bs, которое может быть орга-
низовано в диапазоне частот системы В, равно Nt = B/Bs. Поскольку
в ортогональных системах коэффициент повторного использования N
удовлетворяет условию N = Nt/Nc, то это подразумевает, что:
NT _ В _ G
~N ~ NRTs ~ N’
(15.8)
где G = B/Bs — отношение общей полосы частот системы к полосе
частот, необходимой для одного пользователя, а N равно минимально-
Глава 15. Сотовые системы и сети с базовой инфраструктурой
му целому числу, удовлетворяющему неравенству (15.7).
Пример 15.2. Рассмотрим сотовую систему связи с временным разделени-
ем МДВР (TDMA), шестиугольными сотами и показателем затухания в тракте
7 = 2 для всех сигналов, распространяющихся в системе. Найти минимальный
коэффициент повторного использования N, необходимый для заданного отноше-
ния SIR, равного 10 дБ, и соответствующую емкость системы в предположении,
что общая полоса частот системы равна 20 МГц, а полоса частот одного канала
равна 100 кГц.
Решение. Используем выражение (15.7) для определения коэффициента повтор-
ного использования при щ = 0,167 и а-} = 3:
SIRp
aia2
10
0,5
= 20.
Определив G = B/Bs = 20 • 106/100 • 103 = 200, получим Си = G/N = 200/20 =
= 10 абонентов, т. е. в соте может быть 10 абонентов. Обычно 7 > 2, что мы
и рассмотрим в следующем примере.
Пример 15.3. Рассмотрим сотовую систему связи с временным разделением
МДВР (TDMA) с ФМН (BPSK), ромбовидными сотами и показателем затухания
в тракте 7 = 4 для всех сигналов, распространяющихся в системе. Примем, что
замирания принимаемого сигнала подчинены закону Релея. В предположении
системы, ограниченной по помехе, найти минимальный коэффициент повторного
использования N, необходимый для заданных параметров системы. Определить
соответствующую емкость системы, если общая полоса частот системы равна
20 МГц, а полоса частот одного канала равна 100 кГц.
Решение. Рассматривая помеху в виде гауссового шума, при распределении за-
мираний по закону Релея получим Рь к 0,25/SIRq для отношения SIRq, равного
среднему значению SIR. Значение SIR, удовлетворяющее требуемой величине Д,
равно SIRq = 0,25/10~3 = 250, что соответствует примерно 24 дБ. Подставляя
в (15.7) значения SIRq = 250, a, = 0,125, a2 = 4 и 7 = 4, получим:
1 рРТГ
4 у 0,125
10
0,5
= 11,18.
Следовательно, коэффициент повторного использования, удовлетворяющий тре-
бованиям системы, равен N = 12. Емкость системы при G = B/Bs = 20 х
х 106/100 103 = 200 равна Си = G/N = 200/12 = 16 абонентов на соту. Отметим,
что предположение о гауссовом распределении помехи есть только определенное
приближение, которое, согласно центральной предельной теореме, становится
точнее, когда число источников увеличивается1.
1 Следует добавить, что при этом вклад каждого источника должен быть пренебрежимо
мал по сравнению С мощностью (дисперсией) суммарной помехи. — Прим, перев.
15.3. Емкость соты и отношение сигнал-помеха
15.3.2. Неортогональные системы МДКР (CDMA)
В неортогональных системах коды (т. е. каналы) обычно используются во
всех сотах так, что коэффициент повторного использования равен N = 1.
Поскольку эти системы подвержены как внутрисотовым, так и межсо-
товым помехам, то емкость соты определяется по максимальному числу
пользователей в соте, которое может быть получено при заданном от-
ношении SIR. Пренебрежем межсотовыми помехами за первым внешним
слоем мешающих сот, т. е. сот, несмежных с интересующей нас сотой.
Предположим также, что все сигналы соответствуют упрощенной моде-
ли потерь в тракте с равными показателями потерь. Такое предположение
обычно оправдано для помех от смежных сот, но, в конечном счете, это
зависит от условий распространения сигналов.
Пусть Nc = Nr = Си обозначает число каналов в соте. В системе
МДКР (CDMA) емкость соты ограничена обычно числом восходящих
линий из-за присущих им проблем «близкий - дальний» и асинхронности
кодов. Мощность принимаемого сигнала в восходящем канале, при ис-
пользовании упрощенной модели потерь в тракте, равна Pr = Ptd~^, где
d — расстояние между мобильной и базовой станциями. Наблюдается
Nc — 1 асинхронных внутрисотовых мешающих сигналов и MNC асин-
хронных межсотовых мешающих сигналов, передаваемых от мобильных
станций в М смежных сотах. Пусть di (i—1,..., Nc — 1) обозначает рассто-
яние от г-й мобильной станции внутри соты, создающей помехи на входе
приемника в восходящем канале, а Д — передаваемую мощность этой мо-
бильной станции. Пусть dj (j — 1,..., MNC) обозначает расстояние от j-й
мобильной станции, создающий межсотовую помеху на входе приемника
в восходящем канале, a Pj — передаваемую мощность этой мобильной
станции. Согласно подпараграфу 13.4.3, все помехи снижаются за счет
взаимной корреляции расширяющих кодов в £/3G раз, где G — выигрыш
от обработки (коэффициент расширения спектра), а £ — параметр рас-
ширяющего кода, 1 С £ Д 3. Суммарная мощность внутри- и межсотовой
помех может быть выражена в виде:
. /Nc-1 MNC \
I = Е рлг + Е pidr' • <15•»)
у 1=1 1=1 /
что дает отношение:
Р.(Р~
SIR =----(15.10)
/ Nc — 1 MNC \
sb Е P.d^ + Е W
\ «=1 }
Так как все расстояния в выражении (15.10) различны, то это вы-
(770
Глава 15. Сотовые системы и сети с базовой инфраструктурой
ражение не может быть упрощено без дополнительных предположений.
Допустим поэтому, что система регулирования мощности в соте идеаль-
ная, и мощности полезного и мешающего сигналов на входе приемника
равны: Pr = Ptd~'y = Pidi 7 для всех i. Кроме того, обозначим отноше-
ние средней мощности помех всех внешних сот к мощности помех внутри
соты с системой регулирования мощности на входе приемника как:
Ivl 1\с
Е
j=i
(Nc-l)Pr-
(15.11)
Используя эти приближения, получим следующую формулу отношения
SIR, которая обычно используется для расчета отношения SIR в восходя-
щих каналах систем МДКР (CDMA) с регулированием мощности [10, 11]:
SIR =
1
^(JVC-1)(1 + A)’
(15.12)
При данных предположениях, для любого заданного отношения SIRq,
мы можем определить емкость соты Си — Nc, приравнивая (5.12) к тре-
буемому значению SIR и решая уравнение относительно Си:
Си — 1 Н—т----------•
3£j(l + A)SIRo
(15.13)
Сигналы речи, в силу их статистической природы, не активны по-
стоянно [12]. Активная составляющая речи абонента во времени, дей-
ствительно использующая канал, называется коэффициентом активности
речи и обозначается буквой а, причем 0 < а 1. Если передатчик вы-
ключается в периоды неактивности, то в системе МДКР (CDMA) помеха,
соответствующая знаменателю в (15.13), умножается на а. При этом воз-
растает отношение сигнал - помеха SIR и, следовательно, абонентская
емкость.
Пример 15.4. Рассмотрим сотовую систему МДКР (CDMA) с идеальной
системой регулирования мощности в соте. Примем, что требуемое значение SIRq
равноЮ дБ, выигрыш от обработки равен Си = 200, параметр расширяющего
кода £ = 2, а средняя мощность помех источников внутри соты и вне соты
одинакова (Л = 1). Определите абонентскую емкость такой системы.
Решение. Из уравнения (15.13) находим:
Си — 1 +
б5о(1 + 1)Ю
таким образом, в соте может быть обслужено 16 абонентов.
Поскольку формулы (15.13) и (15.8) дают простые выражения або-
нентской емкости, то интересно сравнить количество каналов в соте при
МДКР (CDMA) и МДВР (TDMA), которое получается при заданной
величине SIR. Это было сделано в примерах 15.2 и 15.4, где при рав-
ных величинах SIR и других параметрах для системы МДВР (TDMA)
получено 10 каналов, а для МДКР (CDMA) — 16. Однако, эти выра-
жения емкости чрезвычайно чувствительны к модели системы и при-
нятым предположениям. Увеличение А с 1 до 2 в примере 15.4 снижает
емкость системы МДКР (CDMA) Си с 16 до 11 каналов, а изменение по-
казателя потерь в тракте примера 15.2 для системы МДВР (TDMA) —
7 с 7 = 2 на 7 = 3 изменяет коэффициент повторного использования
N с 20 на 6, что, в свою очередь, изменяет абонентскую емкость с 10
на 33 канала. Системы многостанционного доступа с кодовым разделе-
нием могут чередовать расширение и кодирование, что дает большую
эффективность кодирования сигналов и более низкое требуемое значение
SIR за счет некоторого выигрыша на обработку [13]. В системе доступа
МДВР (TDMA) труднее достичь высокой эффективности кодирования,
поскольку ее нельзя «обменять» на коэффициент расширения. В системе
МДКР (CDMA) не была принята во внимание активность речи, что при-
вело бы к повышению абонентской емкости. Кроме того, выражение для
емкости системы МДКР (CDMA) выведено в предположении совершен-
ной системы регулирования мощности, в то время как в системе МДВР
(TDMA) не предполагается никакой системы регулирования мощности.
Эффекты экранирования и замирания также не принимались во внима-
ние, хотя замирания приводят к большим потерям мощности в системах
МДКР (CDMA) (из-за инверсии регулировки мощности каналов), а также
влияют на мощность межсотовых помех как в системах МДВР (TDMA),
так и в системах МДКР (CDMA). Все эти факторы и компромиссы су-
щественно усложняют анализ, делая его сложным при разработке общих
решений о преимуществе одного метода над другим в отношении або-
нентской емкости. Анализ абонентской емкости методов МДВР (TDMA)
и МДКР (CDMA) при различных допущениях и моделях работы системы
можно найти в [11, 14-16].
15.4. Методы снижения помех
Поскольку сотовые системы идеально ограничены по помехам, то любые
методы, снижающие помехи, повышают отношение сигнал - помеха SIR
и абонентскую емкость. В данном разделе описываются методы сниже-
ния помех в сотовых системах., включая секторизацию, управляемые ан-
тенны, усреднение помех, многопользовательское детектирование и пред-
варительную компенсацию помех.
Глава 15. Сотовые системы и сети с базовой инфраструктурой
Секторизация представляет распространенный метод снижения по-
мех. При секторизации используются направленные антенны для разделе-
ния излучения всенаправленной на 360° антенны базовой станции на N сек-
торов, как показано на рис. 15.8 при N = 8. Как обозначено на рисунке,
внутри- и межсотовая помехи поступают на данную мобильную стан-
цию в основном в пределах ее сектора. Поэтому секторизация снижает
мощность помех грубо на коэффициент N при полной загрузке системы
(относительно помех в каждом секторе). При перемещении мобильной
станции по соте необходимо переключение обслуживания между сектора-
ми, что повышает расходы и вероятность потерь вызовов. Секторизация
представляет собой обычный прием построения сотовых систем, с типич-
ным значением N = 3.
Рис. 15.8. Секторизация круг-
лой соты при N = 8
Управляемые, интеллектуальные антенны (смарт-антенны) обычно
содержат антенные решетки в сочетании с обработкой сигналов во време-
ни и пространстве. Управляемые антенны могут формировать узкие лучи,
которые обеспечивают высокий коэффициент усиления нужных сигналов
пользователей, и/или могут создавать пространственный нуль в напра-
влении мешающих сигналов [17]. Кроме того, антенные решетки могут
использоваться для выигрыша за счет мультиплексирования, что позво-
ляет вести передачу данных с более высокой скоростью или вести прием
на разнесенные антенны, что повышает надежность работы. Эти осново-
полагающие составляющие компромиссов описываются в § 14.9. Исполь-
15.4- Методы снижения помех
зование многоэлементных антенн для снижения помех за счет достоинств
других характеристик отражает компромиссы, связанные с разработкой
сотовых систем.
Межсотовая помеха в восходящем канале часто доминирует из-за од-
ного или двух мобильных абонентов, находящихся около границы соты,
ближайшей к базовой станции, обслуживающей нужного абонента. В сис-
темах МДВР (TDMA) и МДЧР (FDMA) влияние этой помехи худше-
го случая может быть ослаблено с помощью наложения скачкообразной
перестройки частоты FH (frequency hopping) поверх каналообразующей
системы МДВР (TDMA) или МДЧР (FDMA). При покрытии с частотны-
ми скачками FH, все мобильные станции изменяют свои несущие часто-
ты в соответствии с уникальной последовательностью. Поскольку после-
довательность скачков помех худшего случая отличается от последова-
тельности заданного абонента, то эти помехи могут вызвать наложение
межсотовых помех на рассматриваемый сигнал только тогда, когда две
последовательности скачков совпадут и во времени и по частоте, что ма-
ловероятно. Таким образом, наложение частотных скачков FH создает
эффект усреднения помех, когда межсотовые влияния любой заданной
соты усредняются относительно всех источников помех. Это значитель-
но снижает влияние помех мобильных станций на границах соты. Из этих
соображений, наложенный частотный скачок FH используется в сотовых
системах GSM.
Многопользовательское детектирование представляет еще один ме-
тод снижения помех [18]. Многопользовательские детекторы совместно
обрабатывают нужный сигнал и некоторые или все помехи, так что после
детектирования помехи могут быть уменьшены или вообще подавлены.
Различные методы многопользовательского детектирования имеют дело
с компромиссом между характеристиками системы и сложностью реали-
зации, в особенности при большом числе мешающих источников. Методы
многопользовательского детектирования в восходящих каналах односо-
товых систем МДКР (CDMA) описаны в § 13.4. Но эти методы можно
также применить и к межсотовым мешающим сигналам как на базовой
станции [19], если сложность обработки ниже ограничивающих условий,
так и в мобильном телефоне — для подавления нескольких доминирую-
щих помех [20].
Предварителъная компенсация помех использует тот факт, что в нис-
ходящем канале базовая станция располагает сведениями о (i) помехах
между пользователями в собственной соте и (ii) помехе, которую она со-
здает своей передачей на мобильные станции других сот. Эти сведения
могут быть использованы на базовой станции для предварительного вы-
читания помех пользователей [21-23]. Предварительное вычитание помех
Глава 15. Сотовые системы и сети с базовой инфраструктурой
на базовой станции имеет свои корни в стратегии повышения емкости
в нисходящих линиях, использующей для предварительного вычитания
помех методы кодирования грязных документов («кодирования испор-
ченных бланков») (dirty paper coding) (см. подпараграф 14.5.5), разрабо-
танные Коста (Costa) [24]. Численные результаты в [21-23] показывают,
что, при большом числе антенн на базовой станции, предварительная
компенсация помех может давать увеличение емкости сотовой системы
вплоть до порядка. Но для предварительного вычитания помех требуется
индикация состояния канала CSI (channel status indicator) на передаче,
в отличие от многопользовательского детектирования, где такая индика-
ция не нужна.
15.5. Динамическое распределение ресурсов
Сотовые системы демонстрируют значительную динамику численности
пользователей в любой заданной соте, а также изменение прироста кана-
лов во времени. Кроме того, прикладные аспекты использования сотовых
сетей также имеют тенденцию к расширению за границы использования
только телефонии к мультимедийным услугам. Абонента уже не удо-
влетворяет единая скорость передачи. Поэтому, для возможности предо-
ставления разнообразных услуг, выделение абонентам ресурсов должно
становиться более гибким. Динамическое распределение ресурсов кана-
лов в системе, скоростей передачи и уровней мощности создает возмож-
ность динамичного удовлетворения запросов пользователей и изменения
текущих параметров системы. Много работы посвящено исследованию
динамики распределения ресурсов сотовых систем. В настоящем разделе
мы подытожим некоторые основные методы, включая планирование, ди-
намическое распределение каналов и регулирование мощности. Сделаны
ссылки на литературу, хотя это лишь небольшая выборка из огромного
массива литературы по данной теме.
15.5.1. Планирование
Основная задача планирования состоит в динамическом распределении
ресурсов мобильных абонентов в соответствии с их требованиями к ско-
рости передачи данных и ограничениями по задержке. Согласование этих
требований называется также поддержкой качества обслуживания QoS
(Quality of service). Планирование должно быть не только эффективным
в выделении ресурсов, но и объективным. Обычно приходится искать
компромисс между этими двумя задачами, поскольку, как обсуждалось
в § 14.8, наиболее эффективное распределение ресурсов дает метод мно-
15.5. Динамическое распределение ресурсов 775
гопользовательского разнесения, когда ресурсы выделяются абоненту,
имеющему лучший канал.
Однако это предполагает, что абоненты, использующие лучшие кана-
лы, могут полностью задействовать эти ресурсы, которые, впрочем, мо-
гут оказаться некстати для данного приложения и не требовать высокой
скорости передачи. Кроме того, это может быть нечестно по отношению
к абонентам, использующим второстепенные каналы.
Процедура планирования исследовалась как для восходящих, так и для
нисходящих каналов сотовых систем с МДКР (CDMA) и МДВР (TDMA).
Отметим, что многие сотовые системы МДКР (CDMA) используют для
передачи данных по нисходящим каналам разновидность МДВР (TDMA) —
так называемую высокоскоростную передачу данных HDR (High Data
Rate) [1, гл. 2.2] и, следовательно, планирование таких систем МДКР
(CDMA) основывается на каналообразовании МДВР (TDMA). В [25] срав-
ниваются три различные схемы планирования — циклическая, равных
задержек и относительной равнодоступности — для нисходящих каналов
МДВР (TDMA), совместимых с системами HDR. Планирование нисходя-
щих линий МДВР (TDMA), использующих многопользовательское разне-
сение, исследовано в [26]. Задачи планирования нисходящих линий МДКР
(CDMA), включая адаптацию скорости, равнодоступность и срок окон-
чательного удержания, исследованы в [27-29]. Восходящие линии систем
МДКР (CDMA) были исследованы в [30, 31] в предположении однополь-
зовательского обнаружения с согласованным фильтром, а усовершенство-
ванный вариант с использованием многопользовательского детектирова-
ния проанализирован в [32]. Как показано в [30, 31], системы со многими
входами и выходами MIMO (multiinput multioutput (system)) предоста-
вляют другую степень свободы в планировании ресурсов системы. Как
показано в [35], при соответствующем планировании могут обслуживать-
ся также многие классы пользователей.
15.5.2. Динамическое распределение каналов
Динамическое распределение каналов DCA (Dynamic Channel Assignment)
разделяется на два класса: динамическое распределение каналов в со-
те (внутрисотовое DCA) и, для систем с ортогональным каналообра-
зованием, динамическое распределение каналов между сотами (межсото-
вое DC А). Обычно межсотовое DC А не используется в системах МДКР
(CDMA), потому что каналы таких систем повторно используются во всех
сотах. Основная идея межсотового DCA заключается в создании доступа
ко всем каналам во всех сотах так, чтобы не образовывались неизменные
последовательности повторного использования каналов. Каждый канал
может быть использован в каждой соте, пока отношение сигнал — помеха
системы и сети с базовой инфраструктурой
SIR соответствует требованиям каждого пользователя. Поэтому каналы
выделяются по требованиям пользователей, и когда вызов завершает-
ся, канал возвращается в фонд каналов, доступных для использования.
Установлено, что межсотовое динамическое распределение каналов DCA
превосходит фиксированное повторное использование каналов с коэффи-
циентом 2 и более, даже при относительно простых алгоритмах [36, 37].
С точки зрения математики, межсотовое динамическое распределение
каналов DCA представляет комбинационную задачу оптимизации, в кото-
рой ограничение по повторному использованию каналов формулируется
по требованиям к отношению сигнал - помеха SIR.
Наиболее динамичные схемы распределения каналов предполагают,
что все параметры системы фиксированы, за исключением входящих и ис-
ходящих вызовов [38-40], при этом ограничения на повторное использо-
вание каналов определяются исходя из неизменного во времени графа
связности. Задача распределения каналов в такой постановке сводится,
в общем виде, к задаче о раскраске вершин и, следовательно, относится
к NP-трудным задачам2[41]. Снижения сложности достигают при исполь-
зовании нейронной сети [42] или усовершенствованного, «закаленного»
алгоритма моделирования [43]. Однако эти методы недостаточно хоро-
шо сходятся. Лучшую эффективность динамического распределения DCA
между сотами получают при условиях неполной загрузки [38]. Как толь-
ко трафик становится напряженней, динамическое распределение каналов
DCA между сотами начинает страдать от субоптимального распределе-
ния, которое усложняет перераспределение ресурсов в условиях напряжен-
ной нагрузки. На характеристики межсотового динамического распре-
деления каналов DCA влияет также мобильность абонентов, поскольку
она вызывает более частые переключения и, соответственно, увеличение
доли потерянных вызовов [44]. В конечном итоге, сложность межсотово-
го динамического распределения каналов DCA, в частности, в системах
с малыми сотами и внезапно изменяющимися условиями распространения
и требованиями пользователей, ограничивают применение таких методов
на практике.
Внутрисотовое DCA решает вопросы динамического выделения не-
скольких каналов в одной соте конкретному пользователю. В системах
с временным разделением каналов МДВР (TDMA) зто реализовано вы-
делением временных интервалов, а в системах с кодовым разделением
МДКР (CDMA) — с использованием умножающих и/или расширяющих ко-
дов. Выделение пользователям кратных каналов в системах МДВР (TDMA)
2МР-трудный — класс комбинаторных задач с нелинейной полиномиальной оценкой
числа итераций. — Прим, перев.
15.5. Динамическое распределение ресурсов 777
или ортогональных системах МДКР (CDMA) относительно прямолиней-
но и не изменяет природу выделения каналов. Динамическое выделение
временных интервалов использовано в [45, 46] для удовлетворения требо-
ваний телефонных абонентов и уменьшения задержек при передаче дан-
ных. В противоположность этому, внутрисотовое динамическое распре-
деления каналов DCA в неортогональной системе МДКР (CDMA) с помо-
щью кратного кодирования или переменного расширения, приводит к не-
которому ухудшению параметров используемых каналов. Так, пользова-
тели, которым выделяются умножающие коды в неортогональной системе
МДКР (CDMA), сталкиваются с собственными помехами, когда одиноч-
ный пользователь использует согласованную фильтрацию в собственном
канале. Хотя это не хуже, чем при выделении различных кодов разным
пользователям, но, несомненно, субоптимально в случае, когда одному
абоненту выделяются умножающие коды. В системах МДКР (CDMA)
с переменным расширением, при низком коэффициенте расширения обес-
печивается высокая скорость передачи данных, поскольку для передачи
данных доступна большая часть общей полосы передачи, предоставленная
для расширения. Но снижение коэффициента расширения делает сигнал
более чувствительным к помехам, создаваемым другими пользователя-
ми. Внутрисотовое динамическое распределение каналов DCA проана-
лизировано в [47, 48], а методы многократного кодирования — в [49].
Сравнение систем МДКР (CDMA) с многократным кодированием и DCA
с переменным расширением проведено в [50], где показано, что (i) при со-
гласованной фильтрации оба метода эквивалентны, но (ii) многократное
кодирование предпочтительней для большинства современных методов
обработки.
15.5.3. Регулирование мощности
Регулирование мощности представляет важнейший аспект разработки
беспроводных систем. Как видно из предыдущих глав, «водоналивная»
(water-filling) адаптация мощности максимизирует емкость систем оди-
ночных пользователей с адаптивной скоростью передачи и многополь-
зовательских систем при замираниях. Управление мощностью с инвер-
сией каналов поддерживает фиксированное отношение сигнал-шум SNR
на приеме в однопользовательских каналах с замираниями, а также устра-
няет эффект «ближний - дальний» в восходящих каналах МДКР (CDMA).
Однако, как будет показано ниже, в сотовых системах это направление
регулирования мощности по-разному влияет на межсотовые помехи.
Управление мощностью в нисходящих линиях меньше влияет на межсо-
товые помехи, чем в восходящих линиях, так как передача по нисходящим
каналам ведется из центра соты, а по восходящим каналам передача мо-
778 Глава 15. Сотовые системы и сети с базовой инфраструктурой
жет вестись от границ соты, под влиянием помех соседних сот. Поэтому
сосредоточимся на влиянии регулирования мощности в восходящих лини-
ях. Рассмотрим две соты, показанные на рис. 15.9. Предположим, что обе
мобильные станции В± и В? в соте В излучают одинаковую мощность.
Тогда помеха, создаваемая мобильной станцией В\ на базовой станции
соты А будет относительно большой, так как эта мобильная станция
находится вблизи границы соты А. Помеха от станции В2, в общем слу-
чае, будет намного слабее из-за большего расстояния распространения
сигнала. При использовании «водоналивной* адаптации мощности стан-
ция Bi, которая находится дальше от базовой станции, как правило, будет
передавать на базовую станцию сигнал с мощностью, меньшей, чем стан-
ция В2, так как В\ обычно имеет меньшее усиление в канале к базовой
станции соты В, чем В2. Это создает положительный эффект снижения
межсотовой помехи в соте А. Другими словами, «водоналивная* (water-
filling) адаптация мощности снижает межсотовые помехи от мобильных
станций, которые находятся вблизи границ соты и представляют основ-
ные источники межсотовых помех. Подобный эффект имеет место и при
многопользовательском разнесении, поскольку абоненты ведут передачу,
только если располагают высоким усилением в канале к базовой станции,
что обычно бывает, когда они находятся ближе к центру своей соты. На-
оборот, при инверсии канала мобильная станция на границе соты будет
передавать большую мощность с тем, чтобы поддерживать принимае-
мую мощность на базовой станции равной мощности, которая передается
мобильной станцией, находящейся вблизи центра соты. Это повышает
влияние межсотовой помехи от мобильных станций, находящихся на гра-
нице соты.
Рис. 15.9. Влияние регу-
лировки мощности на по-
мехи между сотами
Рассмотренный в § 14.4 алгоритм регулирования мощности для под-
держания заданного отношения SINR у всех пользователей в одной соте
может быть расширен также на множество сот. Предположим, что име-
ется К абонентов с требуемым отношением SINR для k-го абонента,
равным 7^. Возьмем восходящий канал, где отношение SIR к-го абонента
15.5. Динамическое распределение ресурсов
задано в виде:
7fc = —р , k,je{l,...,K}, (15.14)
nk + р 2^ gkjPj
где gk — усиление мощности в канале от абонента к к его базовой стан-
ции, gkj >0 — усиление мощности в канале от j-ro влияющего (между
сотами или внутри соты) передатчика на базовую станцию абонента к,
Pk — мощность, передаваемая к-м абонентом, Pj — мощность мешаю-
щего j-ro передатчика, пд, — мощность шума на базовой станции к-го
абонента, р — коэффициент снижения помехи за счет обработки сиг-
нала (т. е. р к, 1/G при МДКР (CDMA) и р = 1 при МДВР (TDMA)).
Подобно случаю регулирования мощности в восходящем канале, ограни-
чение по отношению SIR может быть представлено в матричной форме
как (I — F)P > и при Р > О, где Р = (Pi, Рг,..., Рк)Т — вектор-столбец
передаваемой мощности каждого абонента, а
(15.15)
\ gi g2 дк /
представляет вектор мощности шумов, отнесенный к ограничениям SIR
и усилению канала. Неразложимая матрица с неотрицательными элемен-
тами F задается в виде:
при k,j е {1, 2,..., К}. Как и при регулировании мощности в восходящем
канале одной соты (см. § 14.4), в [51, 52, 53] показано, что если собственное
значение Перрона-Фробениуса (максимум модуля) F меньше единицы,
то существует вектор Р > 0 (т. е. Pk > 0 для всех к), который удо-
влетворяет требованиям всех пользователей во всех сотах к отношению
SIR и при Р* = (I - F)-1u дает оптимальное решение Парето. Следо-
вательно, Р* отвечает требованиям к отношению SIR при минимальной
передаваемой мощности пользователей. Более того, итеративный алго-
ритм регулирования распределения мощности
*
Pk(i + 1) = -^Pk(i) (15.17)
7fcW
приближается к оптимальному решению. Это простой алгоритм регу-
лирования мощности, так как для его реализации необходимо только
наличие на каждом передатчике информации об отношении сигнал - поме-
ха SIR. Каждый передатчик увеличивает мощность, когда его отношение
SIR становится меньше заданного значения и снижает мощность, если
отношение SIR превышает норму. Однако важно отметить, что существо-
вание допустимого вектора регулирования мощности, удовлетворяющего
Глава 15. Сотовые системы и сети с базовой инфраструктурой
всем требованиям к отношению SIR, в сотовой системе менее вероятно,
чем в восходящей линии одиночной соты, из-за большего числа помех,
влияющих на отношение SIR, а также из-за того, что диапазон усиле-
ния в канале будет больше, чем в одиночной соте. Когда допустимого
распределения мощности не существует, алгоритм распределения пре-
дусматривает режим, при котором все абоненты работают на передачу
с максимальной мощностью с тем, чтобы компенсировать недостающую
часть в требуемом соотношении SIR.
Часто регулирование мощности объединяют с планированием и меж-
сотовым или внутрисотовым динамическим распределением каналов DCA.
Межсотовое динамическое распределение каналов DCA и регулирование
мощности проанализированы в [54, 55], а в [56] эти методы распростра-
нены на системы MIMO. Регулирование мощности в сочетании с внут-
рисотовым динамическим распределением каналов DCA, использующим
многопользовательское разнесение, исследовалось в [59, 60]. Сравнение
регулирования мощности, совмещенного с умножающими кодами или пе-
ременным расширяющим кодированием в системах МДКР (CDMA), да-
но в [61].
15.6. Основополагающие ограничения скорости
15.6.1. Пропускная способность Шеннона
в сотовых сетях
В теории информации было получено мало результатов для пропускной
способности сотовых сетей на основе соотношений Шеннона — из-за труд-
ностей учета повторного использования каналов и суммарных помех при
анализе основных соотношений пропускной способности. Хотя пропуск-
ная способность восходящей и нисходящей линий изолированной соты
известна, как показано в § 14.5 и 15.6, немного найдется работ, распро-
страняющих эти результаты на совокупность сот. Характеристики про-
пускной способности были установлены для некоторых случаев, но про-
пускная способность и стратегические вопросы оптимальной передачи
и приема, при самых общих предположениях относительно моделей кана-
лов, взаимодействия базовых станций, характеристик помех и индикации
состояний CSI приемопередатчика в большинстве своем остаются нере-
шенными.
Один из способов проанализировать пропускную способность сото-
вой системы заключается в предположении о том, что базовые станции
полностью взаимодействуют для одновременного кодирования и декоди-
рования всех сигналов. В таком случае понятие сот не вводится в анализ
пропускной способности. В предположении полного взаимодействия ба-
зовых станций, множество базовых станций может быть рассмотрено
как одна базовая станция с множеством географически разнесенных ан-
тенн. Передача от базовой станции с множеством антенн к мобильным
станциям может рассматриваться как нисходящий канал системы MIMO
(канал радиовещания), а передача от мобильных станций к базовой стан-
ции с множеством разнесенных антенн — как восходящий канал системы
MIMO (множественный, групповой канал доступа). Области значений
пропускной способности Шеннона для обоих этих случаев известны, как
это показано в § 14.9, для некоторых моделей каналов и предположений
об информации в канале.
Пропускная способность восходящего канала сотовых систем в пред-
положении полного взаимодействия базовых станций впервые была ис-
следована в [62], с последующим, более всесторонним, изучением в [63].
В обеих работах распространение сигналов между мобильными и базовой
станциями исследовалось с использованием модели канала С гауссовыми
аддитивными шумами (AWGN), при усилении канала внутри соты, рав-
ном единице, и усилении между сотами а(0 С а 1). Модель Винера в [63]
рассматривает одно- и двухмерные пространства сот, и для обоих случа-
ев получается выражение пропускной способности, отнесенной к одному
абоненту и определенной как максимально возможная скорость, которой
все абоненты могут достичь одновременно, в виде:
\ В Л , КР<Д + 2аcos(2tt0))2\
С(«) = J log2 (1 +------------, (15.18)
О
где В — общая полоса пропускания системы, Nq/2 — спектральная плот-
ность мощности шума, К — число мобильных станций в соте, а Р —
мощность передачи, усредненная по всем мобильным станциям. В [62]
и [63] показано также, что пропускная способность восходящей линии
достигается при использовании методов ортогонального многостанци-
онного доступа (например, МДВР (TDMA)) во всех сотах с последую-
щим повторным использованием этих ортогональных каналов в других
сотах, хотя это необязательно однозначно оптимально. Поведение С (а)
как функции ослабления помехи между сотами а зависит от отношения
сигнал-шум SNR в системе. При высоком отношении SNR пропускная
способность системы, отнесенная к одному абоненту — С*(а) обычно
возрастает с увеличением а, поскольку наличие высокой помехи между
сотами способствует декодированию и последующему вычитанию помех
из полезного сигнала. Однако при малых отношениях сигнал-шум SNR
пропускная способность С*(а) сначала понижается с а, а затем возрастает.
Это происходит потому, что слабые помехи между сотами не могут быть
782 Глава 15. Сотовые системы и сети с базовой инфраструктурой
надежно декодированы и отделены и, таким образом, снижают пропуск-
ную способность. При увеличении усиления канала при наличии помех
одновременное декодирование позволяет лучше декодировать и удалять
эти помехи, повышая пропускную способность.
Другой метод анализа пропускной способности не предполагает вза-
имодействия базовых станций, так что приемники в каждой соте обра-
батывают сигналы от других сот как помехи. Такой подход отражает
реальный процесс проектирования сотовых систем на практике. К сожа-
лению, пропускная способность канала с помехами по Шеннону предста-
вляет давнюю проблему теории информации [64, 65], решенную только
для особого случая сильных помех [66]. При помехе типа гауссового шума
пропускная способность восходящего и нисходящего каналов может быть
определена с использованием результатов анализа одиночной соты, при-
веденного в § 14.5 и 14.6. Предположение о гауссовом характере может
рассматриваться как вариант помехи «худшего случая«, поскольку не ис-
пользуются никакие известные структуры помех, которые могут помочь
при декодировании полезного сигнала и тем самым повысить пропускную
способность. Оценка пропускной способности сотовой системы с замира-
ниями, основанная на обработке помехи в виде гауссового шума, была
получена в [67] для одномерной и двухмерной сотовых сетей. Это выра-
жение пропускной способности показывает, что если, при наличии или от-
сутствии замираний, помеха между сотами пренебрежимо мала, то метод
ортогонального многостанционного доступа, например, МДВР (TDMA)
оптимален в соте. Это обобщение охватывает также случай обратного ре-
гулирования мощности, используемого в соте. Кроме того, в некоторых
случаях можно повысить пропускную способность за счет ограничения
или отказа от повторного использования каналов в разных сотах. Так-
же можно оценить эффект повышения пропускной способности для этой
модели при частичной совместной обработке сигналов базовыми станци-
ями [68].
Приведенные здесь результаты дают некоторое понимание пропуск-
ной способности и оптимальных стратегий передачи в восходящих линиях
сотовых систем. К сожалению, пока такие данные отсутствуют для нисхо-
дящего канала при любых предположениях относительно моделей канала
или взаимодействия базовых станций. Хотя пропускная способность вос-
ходящих линий была узким местом сотовых систем с двунаправленным
телефонным трафиком, нисходящая линия становится в высшей степени
критичной при мультимедийной нагрузке. Поэтому для разработки бу-
дущих сотовых систем следует лучше понимать ограничения пропускной
способности и сущность нисходящих сотовых каналов.
15.6. Основополагающие ограничения скорости
15.6.2. Эффективность использования
спектральной области
Диапазон пропускной способности Шеннона сотовых систем, описанных
в подпараграфе 15.6.1, дает набор максимально достижимых скоростей
в нисходящих или восходящих каналах соты. Когда диапазон пропускной
способности вычисляется на основе понятия совместной обработки на ба-
зовых станциях, то фактически система рассматривается как только одна
сота с базовой станцией с множеством разнесенных антенн. Однако когда
пропускная способность вычисляется на основе обработки помехи между
сотами в виде гауссового шума, диапазон пропускной способности вос-
ходящей и нисходящей линий становится в высшей степени зависимым
от структуры сотовой системы, в частности, от размера соты и расстоя-
ния повторного использования. Эффективность спектральной области
ASE (Area Spectral Efficiency) — это характеристика пропускной способ-
ности, позволяющая оптимизировать сотовую структуру (и конкретно
расстояние повторного использования) относительно фундаментальных
ограничений.
Напомним, что для ортогональных и неортогональных методов кана-
лообразования расстояние повторного использования D сотовой системы
определяется как расстояние между центрами двух сот, использующие те
же самые каналы. Поскольку эти каналы используются на расстоянии D,
то площадь покрытия каждого канала приближенно равна площади кру-
га с радиусом 0,579, которая равна А = тг(0,579)2. Чем больше расстоя-
ние повторного использования, тем меньше эффективность повторного
использования. Однако снижение расстояния повторного использования
повышает помехи между сотами, таким образом снижая емкость каждой
соты, если помеха обрабатывается как шум. Эффективность использо-
вания спектра ASE повышается за счет компромисса с эффективностью
использования ресурсов и пропускной способностью соты.
Рассмотрим сотовую систему с К пользователями в соте, расстоя-
нием повторного использования D и используемой суммарной полосой
частот В. Пусть С = (-Hi, R%,..., 2?к) обозначает пропускную способ-
ность нисходящих или восходящих каналов региона, а помехи, поступа-
ющие в данную соту от других сот, обрабатываются как гауссов шум.
Соответствующая суммарная скорость, называемая также пропускной
способностью, задается в виде:
к
Csr = шах Rk, бит/с. (15.19)
(ru...,rk)eC
Область С и соответствующая суммарная скорость передачи Csr мо-
жет быть получена для любого способа каналообразования в соте. Яс-
Глава 15. Сотовые системы и сети с базовой инфраструктурой
но, что значения емкости убывает при возрастании уровня помех между
сотами. Кроме того, поскольку уровень помех между сотами убывает
с увеличением расстояния повторного использования, то область значе-
ний пропускной способности увеличивается с увеличением расстояния
повторного использования.
Эффективность использования спектра ASE соты определяется как
пропускная способность единицы площади на Герц, которая обеспечи-
вается ресурсами соты. В частности, используя описанную только что
суммарную скорость, величину ASE можно представить как:
Ае = бит/с/Г«/м2- (15.20)
Используя результаты [67] для емкости, достигаемой в соте с системой
ортогонального каналообразования, сосредоточим внимание на расчете
эффективности использования спектра ASE в системе МДВР (TDMA).
Если мы также предположим, что система ограничена по помехам, и шу-
мом можно пренебречь, то скорость передачи данных абонента Rk в соте
представляет функцию отношения мощности сигнала к мощности поме-
хи = Pk/Ik, k = Если 7fc — величина постоянная, то Rk =
= TkB log(l+7fc), где Tfc — доля времени, выделенная к-му абоненту. Обыч-
но 7fc — величина переменная, поэтому мощность сигнала к-го абонента
и мощность помехи изменяются при изменении условий распространения
и месторасположения абонента. Если 7^ изменяется во времени, то вели-
чина пропускной способности выводится из оптимальных ресурсов, вы-
деляемых абонентам во времени, как это описано в подпараграфах 14.5.4
и 14.6.2.
В качестве простого примера рассмотрим восходящий канал системы
МДВР (TDMA) с аддитивным гауссовым шумом AWGN в шестиугольной
соте с радиусом R. Предположим, что всем абонентам в соте выделяются
равные интервалы времени тд, = 1/К, и что все абоненты имеют на пере-
даче одинаковую мощность Р. Пренебрежем влиянием помех сот, которые
находятся за первым слоем мешающих сот, рассматривая, таким образом,
только шесть межсотовых помех. Выберем пессимистическую модель,
в которой (i) все пользователи рассматриваемой соты находятся на ее гра-
нице и (ii) все межсотовые помехи находятся на границах влияющих сот,
ближайших к рассматриваемой соте. Потери в тракте характеризуются
упрощенной моделью: Рг = Ftd-2 внутри соты и Pr = Pfd^ между сота-
ми, где 2 7 4. Принимаемый сигнал к-го абонента равен Pk = PR~2,
а мощность помехи равна Д = 6F(D — Д)“7. Максимальная достижимая
15.6. Основополагающие ограничения скорости 785
скорость k-ro абонента соты составляет:
„ В, / (D-RV\ * .
Rk = % log2 ~ 6Д2 ~ J , бит/с,
а эффективность использования спектра ASE равна:
(15.21)
л = k=i_________
е 7г(0,5£>)2
log2(l + (£> - Д)7/6Д2)
7r(0,5D)2
бит/с/Гц/м2.
(15.22)
График зависимости Ае от D при 7 = 4 и 7 = 2 показан на рис. 15.10,
в соте с нормированным радиусом Д = 1. Из этих графиков можно видеть,
что, как и ожидалось, если затухание помехи между сотами падает более
медленно, то эффективность использования полосы частот ASE снижает-
ся. Однако есть нечто удивительное в том, что оптимальное расстояние
повторного использования также убывает.
Рис. 15.10. Эффективность
использования спектра ASE
в восходящем канале с гаус-
совым аддитивным шумом
AWGN при 7 = 2 и 7 = 4
Предположим теперь, что помехи на границах соты отсутствуют. Если
все помехи находятся на расстоянии D — Д/2 от базовой станции рассма-
триваемого абонента, то эффективность использования полосы частот
ASE становится равной:
_ log2 (1 + (D — Д/2)7/6Д2)
е 7г(0,5Д)2
График ASE для этого случая показан на рис. 15.11 при 7 = 4, вместе
с графиком для случая, когда источники помех находятся на границах
своих сот. Как и ожидалось, величина ASE больше в случае, если источ-
ники помех располагаются ближе к центрам своих сот, чем тогда, когда
Глава 15. Сотовые системы и сети с базовой инфраструктурой
они находятся вблизи рассматриваемой соты, а оптимальное расстояние
повторного использования — меньше.
В [69] проанализирована эффективность использования спектра для
восходящих линий сотовых систем с ортогональным способом канало-
образования в предположении переменной скорости передачи, а также
для наилучшего случая, наихудшего случая и усредненных условий меж-
сотовых помех. Влияние различных моделей замираний, размеров соты
и нагрузки системы также было исследовано. Результаты показали, что
оптимальный коэффициент повторного использования равен единице для
случаев наилучших и усредненных условий. Это значит, что каналы сле-
дует повторно использовать в каждой соте, даже несмотря на отсутствие
снижения помех при расширении. Кроме того, эффективность использо-
вания спектра ASE снижается по экспоненциальному закону полинома
четвертой степени в зависимости от радиуса соты, откуда следует, что
емкость возрастает при уменьшении размера соты. Подобная постанов-
ка задачи была использована в [70] для характеристики эффективности
использования спектра ASE нисходящих линий сотовых систем.
Рис. 15.11. Эффективность
использования спектра ASE
при помехах на расстоянии
D — R/2 и расстоянии D
(7 = 4)
Задачи
15.1. Рассмотрим город площадью в 10 км2. Разработанная система макросот
разделяет город на квадратные соты по 1 км2. В каждой соте может
находиться до 100 абонентов. Найти общее число пользователей, кото-
рое может быть размещено в системе и длительность времени, которое
15.2.
15.3.
15.4.
15.5.
15.6.
требуется мобильному абоненту для проезда соты (примерно равное вре-
мени, необходимому для переключения), если он двигается со скоростью
30 км/ч. Если уменьшить соту до 100 м2 и все в системе изменить так,
чтобы в этой малой соте по-прежнему могло находиться 100 абонентов, то
сколько всего абонентов может быль размещено в системе и какое время
требуется для проезда соты?
Показать, что при правилах распределения каналов в шестиугольной со-
те, описанных в § 15.2, расстояние повторного использования равно D =
= V3Ry/i2 +j2 + ij.
Рассмотреть сотовую систему с ромбовидными сотами радиусом R =
= 100 м. Принять, что для поддержания требуемого отношения сигнал-
помеха SIR минимальное расстояние между центрами сот с одинаковыми
частотами должно быть равно D = 600 м.
а) Найти требуемый коэффициент повторного использования N и общее
число абонентов в кластере.
б) Найти число каналов, которое может быть выделено каждой соте, если
общее число каналов в системе равно 450.
в) Сделать эскиз двух соседних кластеров сот и показать распределение
каналов в этих двух кластерах при заданном расстоянии повторного
использования.
Рассмотреть сотовую систему с шестиугольными сотами радиусом R =
= 1 км. Принять, что для поддержания требуемого отношения сигнал-
помеха SIR минимальное расстояние между центрами сот с одинаковыми
частотами должно быть равно D = 6 км.
а) найти требуемый коэффициент повторного использования N и общее
число абонентов в кластере;
б) найти число каналов, которое может быть выделено каждой соте, если
общее число каналов в системе равно 1200;
в) сделать эскиз двух соседних кластеров сот и показать распределение
каналов в этих двух кластерах при заданном расстоянии повторного
использования.
Вычислить отношение сигнал-помеха SIR для сотовой системы с МДВР
(TDMA) и ромбовидными сотами, если радиусы сот равны R = 10 м,
а расстояние повторного использования D = 60 м. Принять, что показа-
тель потерь в тракте внутри соты равен -yi = 2, а показатель потерь для
помехи между сотами 70 = 4. Сравните отношение сигнал - помеха SIR
при 7 = 7/ = 7о = 4 и при 7 = 7/ = 70 = 2. Поясните отношение порядков
SIR в каждом случае.
Определите расстояние повторного использования и абонентскую емкость
системы с МДВР (TDMA) и шестиугольными сотами при показателе
потерь всех сигналов в системе, равном 7 = 2 и модуляции вида ФМН
(BPSK). Принять модель канала с гауссовым аддитивным шумом (AWGN)
788 Глава 15. Сотовые системы и сети с базовой инфраструктурой
с вероятностью Рь = 10 6, общей шириной полосы частот системы В =
= 50 МГц и требуемой полосой частот для каждого абонента 100 кГц.
15.7. Рассмотреть систему МДКР (CDMA) с совершенной системой регули-
рования мощности, выигрышем от обработки G = 100, расширяющими
кодами с £ = 1 и отношением Л = 1,5. При модуляции вида ФМН (BPSK),
требуемой вероятности Рь = 10“6 и модели канала с гауссовым аддитив-
ным шумом (AWGN) найти абонентскую емкость системы без разделения
на секторы и при N = 3 секторах.
15.8. В данной задаче рассматривается влияние коэффициента активности ре-
чи, создающего случайную суммарную помеху. Рассмотреть систему МДКР
(CDMA) с отношением
Ne-l ’
Е xt + м
г—1
где G — выигрыш от обработки в системе, х* — помеха внутри соты
с распределением по закону Бернулли с вероятностью а = = 1), рав-
ной коэффициенту активности речи, а величина N характеризует помеху
между сотами и предполагается подчиненной закону распределения веро-
ятностей Гаусса со средним 0,247Лгс и дисперсией 0,0787Vc. Вероятность
простоя определяется как вероятность, при которой отношение сигнал-
помеха SIR ниже некоторого заданного значения SIRq:
Fout = p(SIR < SIRo).
а) Показать, что
FOut = pf E
б) Найти аналитическое выражение для Fout.
в) Используя аналитическое выражение, полученное в п. (б), вычислить
вероятность простоя системы при числе абонентов Nc = 45, а = 0,5
и заданном отношении SIRq, равном 5 (7 дБ). Предположить, что вы-
игрыш G — 150.
г) Принять, что Nc — достаточно большая величина для того, чтобы слу-
Nc-l
чайную переменную )Г х, можно было аппроксимировать гауссовой
о 8=1
случайной величиной. При таком приближении, найти распределение
Nc-1
Е Xi + N как функцию Nc, а также аналитическое выражение для
г=1
вероятности простоя, основанное на этом приближении.
д) Вычислить вероятность простоя, используя аппроксимацию при Nc —
— 35, а = 0,5, G = 150 и заданном отношении SIRq, равном 5 (7 дБ).
Сравнить с результатом, полученным в пункте (г).
15.9. Принять, что в сотовой системе К абонентов и в нисходящей линии мини-
мальное отношение SIR у абонентов задано в виде А),..., ^*к. Запишите
условия, при которых существует вектор регулирования, удовлетворяю-
щий этим условиям.
15.10. Постройте график зависимости эффективности использования спектра
ASE от расстояния повторного использования D(Q D 10) в восходя-
щих каналах системы МДВР (TDMA) при шестиугольных сотах с радиу-
сом R = 1, в предположении, что все абоненты расположены на границах
соты. Вычисления должны основываться на потерях в тракте при 7 = 2
и помехах только от первого кольца мешающих сот, когда помехи имеют
вероятность 1/5 для одного из следующих пяти местоположений: на гра-
нице соты, ближайшей к рассматриваемой соте; посередине между базо-
вой станцией и границей данной ближайшей соты; в центре соты; на гра-
нице соты, самой дальней от рассматриваемой соты; посередине между
базовой станцией и границей этой самой дальней соты. Постройте так-
же график эффективности использования спектра ASE и оптимального
расстояния повторного использования для случая, когда с вероятностью,
равной 1, источники помех находятся на границе: (а) ближайшей или (б)
самой удаленной соты. Сравните различия на этих графиках.
15.11. Рассмотрите одномерную сотовую систему, развернутую вдоль автостра-
ды. Система располагает квадратными сотами протяженностью 27? = 2
км, показанными на рис. 15.12. В центре внимания данной задачи на-
ходится передача по нисходящей линии от базовой станции к мобильной
станции. Предполагается, что каждая сота имеет по две мобильных стан-
ции, размещенных, как показано на рисунке, так, что мобильные станции
в каждой соте находятся в точно таком же положении относительно своих
базовых станций. Предполагается, что суммарная излучаемая мощность
каждой базовой станции равна Pi = 5 Вт и поровну распределена меж-
ду двумя абонентами в своей соте. Общая полоса частот системы равна
100 кГц, а спектральная плотность мощности шума на входе каждого
приемника равна 10-16 Вт/Гц. Условия распространения удовлетворяют
модели Pr = PtK(dQ/d)3, где dg = 1 м и К = 100. Все помехи обраба-
тываются как гауссов аддитивный шум AWGN, а источниками помех,
находящимися за первым кольцом мешающих сот, можно пренебречь.
В системе используется частотное разделение каналов, а полоса частот,
выделенная для каждой базовой станции, поровну разделена между двумя
абонентами соты.
790 Глава 15. Сотовые системы и сети с базовой инфраструктурой
R = 1 км
Рис. 15.12. Одномерная сотовая система с квадратными сотами (к задаче 15.11)
а) Какая ширина полосы частот выделена каждому пользователю при
расстоянии повторного использования D = 2 (частоты повторяются
в каждой второй соте)?
б) Вычислите минимальное расстояние повторного использования D, не-
обходимое для обеспечения коэффициента ошибок по битам BER, рав-
ного 10“3, при фазовой манипуляции ФМН (BPSK) и быстрых зами-
раниях, распределенных по закону Релея.
в) Пренебрегая замираниями и экранированием и используя формулу пропуск-
ной способности Шеннона для скорости абонента, определите площадь
эффективного использования спектра каждой соты при частотном раз-
делении каналов, когда частоты повторно используются в каждой вто-
рой соте (Р = 2).
15.12. В данной задаче исследуется абонентская пропускная способность восхо-
дящих каналов сотовых систем с различными параметрами. Принять, что
восходящий канал сотовой системы находится в общей полосе системы,
равной В = 100 кГц. Принять, что в каждой соте спектральная плот-
ность шумов Nq/1! на входе приемника каждой базовой станции равна
Nq = 10~9 Вт/Гц и что все мобильные станции имеют равную передава-
емую мощность Р.
а) Постройте график абонентской емкости восходящей линии по выра-
жению (15.18) при числе абонентов К = 10, передаваемой мощности
Р = 10 мВт на абонента иО^а^ 1. Поясните форму кривой относи-
тельно а.
б) При а = 0,5 и Р = 10 мВт, постройте график абонентской емкости
для 1 К 30. Поясните форму кривой относительно К.
в) При а = 0,5 и числе абонентов К = 10, постройте график абонентской
емкости для 0 С Р 100 мВт. Поясните форму кривой относитель-
но Р.
Литература
1. T.S. Rappaport, Wireless Communications — Principles and Practice, 2nd ed.,
Prentice-Hall, Englewood Cliffs, NJ, 2001.
2. V. Erceg, A. J. Rustako and R. S. Roman, «Diffraction around corners and its
effects on the microcell coverage area in urban and suburban environments at
900 MHz, 2 GHz and 4 GHz», IEEE Trans. Veh. Tech., pp. 762-6. August 1994.
3. A. J. Goldsmith and L. J. Greenstein, «А measurement-based model for pre-
dicting coverage areas of urban microcells», IEEE J. Sei. Areas Commun.,
pp. 1013-23, September 1993.
4. S. Dehghan and R. Steele, «Small cell city», IEEE Commun. Mag., pp. 52-9,
August 1997.
5. H. Holma and A. Toskala, WCDMA for UMTS Radio Access for Third Gener-
ation Mobile Communications, 3rd ed., Wiley, New York, 2004.
6. M. V. Clark. V. Erceg and L. J. Greenstein, «Reuse efficiency in urban micro-
cellular networks», IEEE Trans. Veh. Tech., pp. 279-88, May 1997.
7. M.K. Simon, Probability Distributions Involving Gaussian Random Variables,
Kluwer, Dordrecht, 2002.
8. G. L. Stuber, Principles of Mobile Communications, 2nd ed., Kluwer, Dordrecht,
2001.
9. R. Prasad and A, Kegel, «Effects of Rician faded and log-normal shadowed
signals on spectrum efficiency in microcellular radio», IEEE Trans. Veh. Tech.,
pp. 274-81, August 1993.
10. R. Kohno, R. Meidan and L.B. Milstein, «Spread spectrum access methods for
wireless communications», IEEE Commun. Mag., pp. 58-67, January 1995.
11. K.S. Gilhousen, 1. M. Jacobs, R. Padovani, A. J. Viterbi, L. A. Weaver, Jr. and
С. E. Wheatley III, «On the capacity of a cellular CDMA system», IEEE Trans.
Veh. Tech., pp. 303-12, May 1991.
12. P. T. Brady, «А statistical analysis of on-off patterns in 16 conversations», Bell
System Tech. J., pp. 73-91, January 1968.
13. V. V. Veeravalli and A. Mantravadi, «The coding—spreading trade-off in CDMA
systems», IEEE J. Sei. Areas Commun., pp. 396-408, February 2002.
14. P. Jung, P. W. Baier and A. Steil, «Advantages of CDMA and spread spectrum
techniques over FDMA and TDMA in cellular mobile radio applications», IEEE
Trans. Veh. Tech., pp. 357-64. August 1993.
15. T.S. Rappaport and L.B. Milstein, «Effects of radio propagation path loss on
DS-CDMA cellular frequency reuse efficiency for the reverse channel», IEEE
Trans. Veh. Tech., pp. 231-42, August 1992.
16. B. Gundmundson, J. Skold and J.K. Ugland, «А comparison of CDMA and
TDMA systems», Proc. IEEE Veh. Tech. Conf, pp. 732-5, May 1992.
17. J. Winters, «Smart antennas for wireless systems», IEEE Pers. Commun. Mag.,
pp. 23-7, February 1998.
18. S. Verdu, Multiuser Detection, Cambridge University Press. 1998.
19. B.M. Zaidel, S. Shamai. and S. Verdu. «Multicell uplink spectral efficiency
of coded DS-CDMA with random signatures», IEEE J. Sd. Areas Commun.,
pp. 1556-69, August 2001.
20. J.G. Andrews, «Interference cancellation for cellular systems: A contemporary
overview», IEEE Wireless Commun. Mag., pp. 19-29, April 2005.
(792
Глава 15. Сотовые системы и сети с базовой инфраструктурой
21. S. Shamai and В.М. Zaidel, «Enhancing the cellular downlink capacity via co-
processing at the transmitting end», IEEE Veh. Tech. Conf., pp. 1745-9, May
2001.
22. H. Viswanathan, S. Venkatesan and H. Huang, «Downlink capacity evaluation
of cellular networks with known-interference cancellation», IEEE J. Sei. Areas
Commun., pp. 802-11, June 2003.
23. S.A. Jafar, G. J. Foschini and A. J. Goldsmith, «PhantomNet: Exploring opti-
mal multicellular multiple antenna systems», J. Appl. Signal Proc. (EURASIP),
pp. 591-605, May 2004.
24. M. Costa. «Writing on dirty paper», IEEE Trans. Inform. Theory, pp. 439-41,
May 1983.
25. E. I-I. Choi, W. Choi and J. Andrew Throughput of the lx EV-DO system with
various sched uling algorithms», Proc. Internat. Sympos. Spread Spec. Tech.
Appl., pp. 359-63, August 2004.
26. D. Wu and R. Negi, «Downlink scheduling in a cellular network for quality-of-
service assurance», IEEE Trans. Veh. Tech., pp. 1547-57, September 2004.
27. L. Xu, X. Shen and J. W. Mark, «Dynamic fair scheduling with QoS constraints
in multimedia wideband CDMA cellular networks», IEEE Trans. Wireless Com-
mmun., pp. 60-73. January 2004.
28. X. Qiu, L. Chang, Z. Kostic, T.M. Willis, N. Mehta, L. G. Greenstein, K.
Chawla, J.F. Whitehead and J. Chuang, «Some performance results for the
downlink shared channel in WCDMA», Proc. IEEE Internat. Conf. Commun.,
pp. 376-80, April 2002.
29. A. C. Varsou and H. V. Poor, «HOLPRO: A new rate scheduling algorithm for
the downlink of CDMA networks», Proc. IEEE Veh. Tech. Conf., pp. 948-54,
September 2000.
30. E. Villier, P. Legg and S. Barrett, «Packet data transmissions in a W-CDMA
network — Exam pies of uplink scheduling and performance», Proc.. IEEE Veli.
Tech. Conf, pp. 2449-53, May 2000.
31. L. Qian and K. Kumaran, «Uplink scheduling in CDMA packet-data systems»,
Proc. IEEE Infocom Conf., pp. 292-300. March 2003.
32. L. Qian and K. Kumaran, «Scheduling on uplink of CDMA packet data net-
work with successive interference cancellation», Proc. IEEE Wireless Commun.
Network Conf, pp. 1645-50, March 2003.
33. H. Boche and M. Wiczanowski, «Queueing theoretic optimal scheduling for
multiple input multiple output multiple access channel», Proc. IEEE Internat.
Sympos. Signal Proc. Inform. Tech., pp. 576-9, December 2003.
34. K.-N. Lau,« Analytical framework for multiuser uplink MIMO space-time schedul-
ing design with convex utility functions», IEEE Trans. Wireless Commun.,
pp. 1832-43, September 2004.
35. L. F. Chang, X. Qiu, K. Chawla and C. Jian, «Providing differentiated services
in EGPRS through radio resource management», Proc. IEEE Internat. Conf.
Commun., pp. 2296-2301. June 2001.
36. I. Katzela and M. Naghshineh. «Channel assignment schemes for cellular mobile
telecommunication systems — A comprehensive survey», IEEE Pers. Commun.
Mag., pp. 10-31, June 1996.
37. D. C. Cox, «Wireless network access for personal communications», IEEE Com-
mun. Mag., pp. 96 115, December 1992.
38. R. J. McEliece and K. N. Sivarajan, «Performance limits for channelized cellular
telephone systems», IEEE Trans. Inform. Theory, pp. 21-4, January 1994.
39. D. Everitt and D. Manfield, «Performance analysis of cellular mobile communica-
tion systems with dynamic channel assignment», IEEE J. Sei. Areas Commun.,
pp. 1172-81, October 1989.
40. J. Zander and H. Eriksson. «Asymptotic bounds on the performance of a class
of dynamic channel assignment algorithms», IEEE J. Sei. Areas Commun.,
pp. 926-33, August 1993.
41. M. R. Garey and D. S. Johnson, Computers and Intractability: A Guide to the
Theory of NP Completeness, Freeman, New York, 1979.
42. D. Kunz, «Channel assignment for cellular radio using neural networks», IEEE
Trans. Veh. Tech., pp. 188-93, February 1991.
43. R. Mathar and J. Mattfeldt, «Channel assignment in cellular radio networks»,
IEEE Trans. Veh. Tech., pp. 647-56, November 1993.
44. A. Lozano and D. C. Cox, «Distributed dynamic channel assignment in TDMA
mobile communication systems», IEEE Trans. Veh. Tech., pp. 1397-1406, Novem-
ber 2002.
45. L. Chen, U. Yoshida, H. Murata and S. Hirose, «Dynamic timeslot allocation
algorithms suitable for asymmetric traffic in multimedia TDMA/TDD cellular
radio», Proc. IEEE Veh. Tech. Conf., pp. 1424-8, May 1998.
46. Y. Hara, T. Nabetani and S. Hara, «Performance evaluation of cellular SDMA/
TDMA systems with variable bit rate multimedia traffic», Proc. IEEE Veh.
Tech. Conf, pp. 1731-4, October 2001.
47. A. C. Kam, T. Minn and K.-Y. Siu, «Supporting rate guarantee and fair access
for bursty data traffic in W-CDMA», IEEE .1. Se!. Areas Commun., pp. 2121-30,
November 2001.
48. U. C. Kozat, I. Koutsopoulos and L. Tassiulas, «Dynamic code assignment and
spreading gain adaptation in synchronous CDMA wireless networks», Proc. In-
ternal. Sympos. Spread Spec. Tech. Appl., pp. 593-7, November 2002.
49. D. Ayyagari and A. Ephremides, «Cellular multicode CDMA capacity for in-
tegrated (voice and data) services», IEEE J. Sei. Areas Commun., pp. 928-38.
May 1999.
50. E. Biglieri, G. Caire and G. Taricco, «CDMA system design through asymptotic
analysis», IEEE Trans. Commun., pp. 1882-96, November 2000.
51. J. Zander, «Performance of optimum transmitter power control in cellular radio
systems», IEEE Trans. Veh. Tech., pp. 57-62, February 1992.
52. G. J. Foschini and Z. Miljanic, «А simple distributed autonomous power control
algorithm and its convergence», IEEE Trans. Veh. Tech., pp. 641-6, November
1993.
53. S. A. Grandhi, R. Vijayan and D.J. Goodman. «Distributed power control in
cellular radio systems», IEEE Trans. Commun., pp. 226-8. February-April 1994.
54. S. A. Grandhi, R. D. Yates and D. J. Goodman, «Resource allocation for cellular
radio systems», IEEE Trans. Veh. Tech., pp. 581-7. August 1997.
55. A. Lozano and D. C. Cox, «Integrated dynamic channel assignment and power
control in TDMA mobile wireless communication systems», IEEE J. Sei. Areas
Commun., pp. 2031-40, November 1999.
Глава 15. Сотовые системы и сети с базовой инфраструктурой
56. R. Veronesi, V. Tralli, J. Zander and М. Zorzi, «Distributed dynamic resource
allocation with power shaping for multicell SDMA packet access networks»,
Proc. IEEE Wireless Commun. Network Conf., pp. 25 15-20. March 2004.
57. F. Berggren, S.-L. Kim, R. Jantti and J. Zander, «Joint power control and intra-
cell scheduling of DS-CDMA nonreal time data», IEEE J. Sei. Areas Commun.,
pp. 1860-70, October 2001.
58. H. C. Akin and К. M. Wasserman, «Resource allocation and scheduling in uplink
for multimedia CDMA wireless systems», lEEE/Sarnoff Sympos. Adv. Wired
Wireless Commun., pp. 185-8, April 2004.
59. T. H. Hu and M. M. K. Liu, «А new power control function for multirate DS-CDMA
systems», IEEE Trans. Commun. pp. 896-904, June 1999.
60. S.-J. Oh, D. Zhang and K.M. Wasserman, «Optimal resource allocation in mul-
tiservice CDMA networks», IEEE Trans. Wireless Commun., pp. 811-21, July
2003.
61. D. Ayyagari and A. Ephremides, «Optimal admission control in cellular
DS-CDMA systems with multimedia traffic», IEEE Trans. Wireless Commun.,
pp. 195-202, January 2003.
62. S. V. Hanly and P. Whiting, «Information theory and the design of multi-receiver
networks», Proc. Internal. Sympos. Spread Spec. Tech. Appl., pp. 103-6, Novem-
ber 1992.
63. A. Wyner, «Shannon-theoretic approach to a Gaussian cellular», IEEE Trans.
Inform. Theory, pp. 1713-27, November 1994.
64. T. Cover and J. Thomas, Elements of Information Theory, Wiley, New York,
1991.
65. E. C. van der Meulen, «Some reflections on the interference channel», in R. E.
Blahut, D. J. Costello and T. Mittelholzer, Eds., Communications and Cryptog-
raphy: Two Sides of One Tapestry, pp. 409-21, Kluwer, Boston, 1994.
66. M. H. M. Costa and A. A. El Gamal. «The capacity region of the discrete mem-
oryless interference channel with strong interference», IEEE Trans. Inform.
Theory, pp. 710-11. September 1987.
67. S. Shamai and A. D. Wyner, «Information-theoretic considerations for sym-
metric, cellular, multiple-access fading channels: Part I», IEEE Trans. Inform.
Theory, pp. 1877-94, November 1997.
68. S. Shamai and A. D. Wyner. «Information-theoretic considerations for symmet-
ric, cellular, multiple-access fading channels: Part II», IEEE Trans. Inform.
Theory, pp. 1895-1911, November 1997.
69. M.-S. Alouini and A. J. Goldsmith, «Area spectral efficiency of cellular mobile
radio systems», IEEE Trans. Veh. Tech., pp. 1047-66, July 1999.
70. M. F. Tariz and A. Nix, «Area spectral efficiency of a channel adaptive cellular
mobile radio system in a correlated shadowed environment», Proc. IEEE Veh.
Tech. Conf, pp. 1075-9, May 1998.
ГЛАВА 16
СПЕЦИАЛИЗИРОВАННЫЕ
БЕСПРОВОДНЫЕ
СЕТИ
Как показано на рис. 16.1, беспроводные специализированные сети — это
совокупность беспроводных мобильных узлов, автоматически объединя-
ющихся в сети без поддержки какой-либо заранее установленной инфра-
структуры. Без собственной инфраструктуры мобильные станции сами
обеспечивают необходимое управление и решают задачи организации се-
ти, обычно с помощью распределенных алгоритмов управления. Марш-
рутизация с переприемом информации, посредством которой промежу-
точные узлы транслируют пакеты в направлении оконечного пункта их
назначения, может повысить пропускную способность и эффективность
энергопотребления сети. В словаре Вебстера (Merriam-Webster) приведены
два соответствующих определения специализированных сетей: «организу-
ются и используются для определенных или срочных задач» и «формиру-
ются из всего непосредственно доступного в данный момент». Специали-
зированные беспроводные сети имеют также и другие привлекательные
свойства. Они устраняют расходы на монтаж и обслуживание сетевой
инфраструктуры. Беспроводные специализированные сети могут быстро
развертываться и гибко перестраивать свою структуру. Благодаря сво-
ей распределенной структуре, избыточности узлов и отсутствию един-
ственных точек полного отказа беспроводные специализированные сети
обладают высокой живучестью. Эти свойства особенно важны для воен-
ных приложений, и множество фундаментальных исследований в области
беспроводных специализированных сетей было проведено при поддерж-
ке Управления перспективных исследований и разработок министерства
обороны и военно-морских сил США DARPA (Defense Advance Research
Project Agency) [1—6]. В этих ранних исследованиях были определены и изу-
чены основные принципы проектирования специализированных беспро-
водных сетей. Однако несмотря на значительный прогресс в течение
последних нескольких десятилетий беспроводных коммуникаций вообще
и беспроводных сетей с произвольной структурой в частности, опти-
мальное проектирование, эксплуатационные характеристики и основные
возможности этих сетей остаются недостаточно понятными, по крайней
мере, в сравнении с другими примерами беспроводных сетей.
Глава 16. Специализированные беспроводные сети
Рис. 16.1. Специализи-
рованная беспроводная
сеть
Эта глава начинается с обзора основных приложений специализирован-
ных беспроводных сетей, поскольку именно приложения диктуют многие
технические требования к разработке сетей. Далее описываются основные
принципы проектирования и задачи этих сетей. Затем описывается кон-
цепция иерархического представления протоколов, а также взаимодей-
ствие этих иерархических уровней и преимущества перекрестно-уровне-
вого проектирования. Очерчиваются также пределы основных возможностей
и законы масштабирования этих сетей. Глава завершается рассмотрени-
ем задач индивидуального проектирования, свойственным ограниченным
по мощности беспроводным сетям произвольной структуры.
16.1. Приложения
Данный раздел описывает некоторые из наиболее распространенных при-
ложений беспроводных сетей произвольной структуры. Свойство самоор-
ганизации и отсутствие инфраструктуры, присущие этим сетям, делают
их очень привлекательными, даже, если это приводит к существенному
16.1. Приложения 797
ухудшению эксплуатационных характеристик. Отсутствие инфраструк-
туры весьма желательно для недорогих коммерческих систем, поскольку
в этом случае не требуется значительных капиталовложений для органи-
зации и эксплуатации сети, и затраты на развитие впоследствии могут
стать соизмеримыми с эффективностью сети. Отсутствие инфраструк-
туры также чрезвычайно желательно для военных систем, в которых при
возникновении необходимости, сети связи должны быстро перестраивать-
ся, зачастую в удаленных регионах. К другим преимуществам специа-
лизированных беспроводных сетей относятся простота реконфигурации
сети и снижение расходов на обслуживание. Однако, эти преимущества
должны уравновешиваться некоторыми потерями качества работы, свя-
занными с присущими этим сетям маршрутизацией с переприемом ин-
формации и распределенным управлением.
Мы сосредоточим внимание на следующих приложениях: сети переда-
чи данных, домашние сети (сети зданий), сети оборудования, сети датчи-
ков и системы с распределенным управлением. Этот перечень ни в коем
случае не полон, действительно, успех беспроводных сетей с произволь-
ной структурой настолько зависит от гибкости их исполнения, что этот
успех неслучаен.
В этом и состоит дилемма этих сетей. Если сеть рассчитывается на мак-
симальную гибкость для поддержки множества приложений (т. е. сеть «на
все случаи»), то будет трудно приспосабливать ее к требованиям различ-
ных приложений. Это, вероятно, приведет к низкому качеству работы
некоторых приложений, особенно приложений, требующих высокой ско-
рости передачи или имеющих жесткие ограничения по задержке. С дру-
гой стороны, если сеть оптимизируется для специфических приложений,
то проектировщики должны заранее предвидеть риски, связанные с эти-
ми приложениями «приманками». В идеальном случае, беспроводная сеть
с произвольной структурой должна быть достаточно гибкой для поддерж-
ки множества различных приложений при адаптации к приложениям ее
эксплуатационных характеристик в процессе работы в любое заданное
время. Адаптивное межуровневое проектирование может обеспечить эту
гибкость вместе с возможностью использования протокольной структуры
с различными ограничениями на узлах.
16.1.1. Сети передачи данных
Беспроводные специализированные сети для передачи данных прежде все-
го поддерживают обмен данными между компьютерами, карманными
компьютерами, персональными цифровыми секретарями и другими ин-
формационными устройствами. В зависимости от зоны охвата, эти сети
данных, как правило, разделяются на три категории: локальные сети
798 Глава 16. Специализированные беспроводные сети
(LAN), сети больших городов (MAN) и глобальные сети (WAN1). Осно-
ванные на базовой инфраструктуре беспроводные локальные сети уже
достаточно широко распространенны и обеспечивают хорошее качество
работы при низких расходах. Однако специализированные беспроводные
сети данных с произвольной структурой имеют некоторые преимуще-
ства по сравнению с сетями, основанными на базовой инфраструктуре.
Во-первых, при маршрутизации с переприемом информации необходима
только одна точка доступа для подключения рассредоточенных в зоне уз-
лов к магистральной проводной инфраструктуре, что снижает затраты
и требования к инсталляции. Кроме того, иногда может быть неэффек-
тивным подключение узлов через точку доступа или базовую станцию.
Например, соседние персональные цифровые секретари могут обмени-
ваться информацией скорее напрямую, чем через промежуточный узел.
Из-за более широкой области покрытия беспроводные городские се-
ти обычно требуют маршрутизации с переприемом информации, часто
с использованием множества ретрансляционных участков. Сложной зада-
чей в этих сетях является обеспечение высокоскоростной передачи дан-
ных экономически эффективно и с использованием множества ретранс-
ляционных участков, качество каналов которых различно и переменно во
времени. Отсутствие централизованного управления сетью и возможная
высокая подвижность пользователей усложняет эту задачу. При реализа-
ции военных программ, как например, GLOMO (Global Mobile Informa-
tion Systems) — глобальные мобильные системы Управления перспектив-
ных исследований и разработок министерства обороны США — DARPA,
на построение высокоскоростных беспроводных городских сетей, поддер-
живающих мультимедийные приложения, вложено много времени и де-
нежных средств с сомнительным успехом [7, 8]. Беспроводные городские
сети произвольной структуры проникли также и в коммерческий сектор,
компания Metricom — лучший этому пример. Хотя Metricom обеспечил
достаточно высокие скорости передачи для нескольких основных город-
ских зон, значительные расходы не возместились, и, в конечном счете,
компания обанкротилась.
Беспроводные глобальные сети необходимы для тех применений, при
которых слишком дорого или невозможно развернуть сетевую инфра-
структуру, чтобы охватить большие области. Например, сети датчиков
(сенсорные сети) могут забрасываться в удаленные области, где не мо-
жет быть образована сетевая инфраструктура. Кроме того, сети, кото-
рые должны быстро строиться и разбираться (например, для военных
Ш советской и русской технической литературе и нормативных документах понятию
WAN (Wide Area Network) соответствуют понятия зоновой (внутриобластной или кра-
евой) сети, фрагменты магистральной сети и сетей мегаполисов. — Прим, перев.
приложений или аварийного реагирования), невозможны без принципов
произвольной структуры.
16.1.2. Сети зданий
Сети зданий предусмотрены для передачи информации между персо-
нальными компьютерами, портативными компьютерами, персональными
цифровыми секретарями, беспроводными телефонами, интеллектуальны-
ми приборами, системами охраны и наблюдения, абонентским электрон-
ным оборудованием и развлекательными системами внутри и вблизи зда-
ний. Такие сети дают возможность создать интеллектуальные помещения,
ощущающие присутствие и перемещения людей и регулирующие освеще-
ние и отопление соответственно, а также «разумный дом», оснащенный
сетевыми датчиками и компьютерами, облегчающими проживание по-
жилым и немощным людям. Домашние сети охватывают также системы
видео- и сенсорного наблюдения со встроенными вычислительными сред-
ствами для координации и интерпретирования данных и оповещения вла-
дельца дома и соответствующего полицейского или пожарного отделения
о необычных комбинациях; интеллектуальные приборы, согласованные
друг с другом и с сетью Интернет для дистанционного управления, мо-
дернизации программного обеспечения и планового обслуживания; и раз-
влекательные системы, предоставляющие доступ к видеомагнитофону,
телевизионной приставке или персональному компьютеру из любой те-
левизионной или стереосистемы в доме [10-13].
Имеется несколько проблем в проектировании таких сетей. Одна из наи-
больших проблем заключается в необходимости удовлетворять изменя-
ющиеся требования к качеству услуг QoS для различных приложений
домашних сетей. Качество услуг в данном контексте относится к требо-
ваниям конкретного приложения — обычно к скорости передачи данных
и ограничениям задержки, которые могут быть достаточно жесткими для
домашних развлекательных систем. Другие основные проблемы — это
стоимость и необходимость стандартизации, поскольку все устройства,
которые станут поддерживаться домашней сетью данного типа, должны
соответствовать одному стандарту организации сети. Следует отметить,
что различные устройства, имеющие доступ к домашней сети, имеют
очень разные ограничения по мощности: некоторые будут иметь фик-
сированный источник электропитания без ограничений эффективности,
в то время как другие будут иметь ограниченное электропитание от
батареи, возможно, не подзаряжаемой. Поэтому, одна из крупных про-
блем проектирования домашних сетей состоит в том, чтобы уравновесить
электропитание в устройствах без ограничения по установлению связи
и организации сети таким образом, чтобы все узлы могли отвечать тре-
800 Глава 16. Специализированные беспроводные сети
бованиям организации сети независимо от своих ограничений по электро-
питанию.
16.1.3. Сети устройств
Сети устройств поддерживают беспроводные соединения между устрой-
ствами (приборами) на коротких расстояниях. Такие сети предназначены,
прежде всего, для замены неудобных кабельных соединений беспроводны-
ми соединениями. Таким образом, устраняется необходимость в кабелях
и соответствующих соединителях между сотовыми телефонами, моде-
мами, наушниками, персональными цифровыми секретарями, компью-
терами, принтерами, проекторами, точками доступа к сети и другими
подобными устройствами. Основными техническими средствами таких
сетей являются недорогие и маломощные радиостанции с возможностью
подключения к сети — устройства типа Bluetooth [14, 15], ZigBee [16]
и сверхширокополосные устройства UWB (ultrawideband). Радиостанции
встраиваются в промышленные электронные устройства для того, чтобы
эти устройства можно было включить в сеть. Среди распространенных
приложений можно назвать беспроводные версии стыков USB и RS232,
карты PCMCIA, компьютерные приставки к телевизорам и наушники для
мобильных телефонов.
16.1.4. Сети датчиков
Беспроводная сеть датчиков состоит из малых узлов с возможностя-
ми восприятия, вычисления и подключения к беспроводной сети, и, та-
ким образом, представляют собой пример сходимости этих трех важ-
ных технологий. Сети датчиков имеют огромный потенциал для обычных
пользователей и военных приложений. Военные приложения нуждаются
в датчиках и других интеллектуальных комплектующих, которые мож-
но было бы разместить близко к обследуемым объектам. Потенциальная
угроза этим механизмам достаточно велика, поэтому соответствующие
технологии должны использовать высокую избыточность (или стойкость)
и как можно меньше требовать вмешательства человека. Очевидные ре-
шения при таких ограничениях находятся в огромной области пассивного
электромагнетизма, оптики, химии и биологических датчиков. Эти ре-
шения могут использоваться для обнаружения и сопровождения целей,
а также служат для оперативного обнаружения различного рода атак.
Такие сети могут также поддерживать движение мобильных беспилот-
ных роботов. Например, сети оптических датчиков могут поддерживать
сетевую навигацию, провождение аппаратов через препятствия во время
сопровождения их на позицию для защиты или атаки. Рассмотрение во-
просов разработки некоторых промышленных проектов показывает их
16.1. Приложения 801
схожесть с военными приложениями. В частности, сеть датчиков мо-
жет быть развернута и использована для дистанционного считывания
на атомных электростанциях, шахтах и в других областях промышлен-
ности.
Примерами сетей датчиков для бытовых применений служат счет-
чики электроэнергии, газа и воды, которые могут снимать показания
дистанционно через беспроводные сети. Широкое использование простых
измерительных устройств в доме позволит контролировать работу быто-
вых приборов, таких как кондиционеры и водонагреватели, являющих-
ся значительными потребителями энергии и газа. Простое дополнение
к электрической розетке может служить измерительным и извещающим
устройством для индивидуальных приложений. Представьте себе, что поль-
зователь сможет получать различную информацию об энергопотреблении
в доме от одного устройства — домашнего компьютера. Использование
и содержание программ телевизора также может отслеживаться и упра-
вляться подобным способом. Еще одно важное бытовое приложение — это
индикаторы дыма, которое могут не только контролировать различные
части дома, но и сообщать о распространении огня. Такая информация
(вместе с планом дома) может быть передана местным пожарным перед
их отправкой на место события. Подобный порядок может быть использо-
ван для обнаружения возникновения и распространения утечки газа или
других токсичных испарений.
Сети датчиков располагают огромным потенциалом использования
на местах больших катастроф. Рассмотрим, например, использование ди-
станционных датчиков в спасательных операциях, проводимых после раз-
рушения здания. Сети датчиков могут быть стремительно развернуты
на месте аварии и использоваться для слежения за температурой, со-
держанием природного газа и токсических веществ. Акустические дат-
чики и методы определения местоположения могут быть использованы
для обнаружения и локализации оставшихся в живых. Возможно также
предотвращение таких трагедий с использованием матрицы датчиков.
Разрушения мостов, пешеходных мостиков и балконов, например, мож-
но предсказать заранее с помощью датчиков напряжения и движения,
изначально встроенных в их структуру. Такие датчики должны быть
прочными и автоматически конфигурируемыми и обладать длительным
сроком службы, соизмеримым со сроками службы основных структур.
Большинство датчиков должно быть установлено с неподзаряжаемы-
ми батарейками. Проблема срока службы батарей в таких датчиках может
быть решена за счет использования сверхмалых энергопоглощающих ра-
диодатчиков. Исследования в этой области обещают создание радиодат-
чиков размером менее одного кубического сантиметра, весом менее 100 г
802 Глава 16. Специализированные беспроводные сети
и энергопотреблением менее 100 мВт [18]. Такой низкий уровень потре-
бления мощности позволяет датчикам выделять достаточное количество
энергии из окружающего пространства с использованием знергопоглоща-
ющих технологий, и обеспечить бесконечно долгую работу. Такие радио-
датчики открывают новые направления для их использования в зданиях,
домах и даже в теле человека.
16.1.5. Распределенные системы управления
Специализированные беспроводные сети позволяют также организовы-
вать распределенные управляющие системы на удаленных сооружениях,
где датчики и исполнительные механизмы связаны между собой радио-
каналами. Такие сети позволяют координировать работу мобильных не-
обслуживаемых блоков и в будущем существенно снизят затраты на об-
служивание и реконфигурацию по сравнению с системами управления
с проводными линиями связи. Специализированные беспроводные сети
могут использоваться для координации управления потоками транспорт-
ных средств в автоматизированных системах автомагистралей, дистан-
ционного управления в производстве и других промышленных процессах,
и управления беспилотными летательными аппаратами в военных целях.
Современные разработки распределенных систем управления распо-
лагают прекрасными характеристиками, а также стойкостью к параме-
трам режимов неопределенности. Однако эти разработки основаны на
характеристиках замкнутых систем, предполагающих централизованную
структуру управления, систему тактовой синхронизации и фиксирован-
ную, неизменную топологию. Таким образом, эти системы требуют, что-
бы сигналы датчиков и исполнительных устройств поступали к устрой-
ству управления с малой, фиксированной задержкой. Специализированные
беспроводные сети не могут предоставить никаких гарантированных ха-
рактеристик в смысле скорости передачи данных, задержки или пара-
метров потерь — задержка обычно представляет случайную величину,
пакеты могут быть утеряны. К сожалению, большинство распределен-
ных управляющих устройств неустойчивы к такого рода ошибкам связи,
и последствия небольших случайных задержек могут быть катастрофиче-
скими [19, 20]. Поэтому распределенные управляющие устройства следует
перепроектировать в смысле стойкости к случайным задержкам и поте-
рям пакетов, присущих беспроводным сетям [21]. В идеале, для получения
наилучших конечных характеристик, специализированные беспроводные
сети нужно разрабатывать совместно с устройствами управления.
16.2. Принципы разработки и трудности
803)
16.2. Принципы разработки и трудности
Самый принципиальный, основополагающий аспект беспроводных специ-
ализированных сетей заключается в отсутствии в них инфраструктуры,
и большинство принципов разработки и трудностей вытекают из этой
особенности. Отсутствие инфраструктуры, свойственное специализиро-
ванным беспроводным сетям, хорошо иллюстрируется при сопоставлении
с наиболее распространенными беспроводными сетями — сотовыми си-
стемами и беспроводными локальными вычислительными сетями ЛВС.
Географические зоны использования сотовых систем разделены на ячей-
ки — соты, и мобильные телефоны в соте связываются с базовой стан-
цией в центре соты, которая связывается с опорной проводной сетью.
Таким образом, между мобильными телефонами отсутствует прямая, не-
посредственная связь. Все соединения проходят через базовую станцию
с использованием однозвенной маршрутизации — через один пролет. Ба-
зовые станции и опорная проводная сеть выполняют все сетевые функ-
ции, включая аутентификацию, маршрутизацию вызовов и передачу об-
служивания. Большинство беспроводных ЛВС имеет подобную центра-
лизованную однопролетную архитектуру: мобильные узлы связываются
непосредственно с точкой централизованного доступа, которая имеет ши-
рокополосный доступ к сети Интернет и выполняет все функции сети
по организации работы и управлению мобильными станциями2. В отличие
от ЛВС, специализированные беспроводные сети используют одноранго-
вые, прямые связи, функции по организации работы сети и управление
ею распределены по всем узлам сети, и маршрут может использовать про-
межуточные узлы в качестве ретрансляторов.
Специализированные беспроводные сети могут постоянно или дина-
мично формировать инфраструктуру или иерархию узлов. Например, мно-
гие специализированные беспроводные сети для повышения надежности
масштабируемости и емкости, формируют из подмножества узлов се-
ти опорную, магистральную структуру [22]. Если узлы этого опорного
подмножества выходят из сети, то эта магистраль может реконфигури-
роваться. Подобным образом, некоторые узлы могут быть выбраны для
работы в качестве базовых станций, обслуживающих соседние узлы [14].
Следовательно, специализированные беспроводные сети, для улучшения
своих свойств, могут преобразовывать свои структуры, но такие структу-
ры не представляют фундаментальное, неотъемлемое свойство этих сетей.
Отсутствие канонической структуры типично для проводных сетей.
Действительно, большинство местных, городских сетей и географически
2Стандарт 802.11 беспроводной ЛВС включает требования к пропускной способности
специализированных сетей, но эта часть стандарта редко используется на практике.
804 Глава 16. Специализированные беспроводные сети
распределенные, глобальные сети, включая Интернет, имеют структуру
специализированных беспроводных сетей. Однако природа радиопереда-
чи в радиоканалах вносит в специализированные беспроводные сети свой-
ства, которые отсутствуют в их проводных аналогах. В частности, ни
один узел не может передавать сигнал непосредственно любому другому
узлу с достаточным уровнем мощности.
При фиксированной передаваемой мощности отношение мощности сиг-
нала в линии к мощности помех плюс шум SINR между двумя обме-
нивающимися узлами обычно убывает, когда расстояние между узлами
возрастает, и зависит также от условий распространения сигнала и уров-
ня помех в окружающей среде. Кроме того, из-за наличия замираний
сигнала и помех, отношение SINR в канале изменяется во времени слу-
чайным образом.
Отношение SINR в канале определяет характеристики данного ка-
нала — скорость передачи данных и вероятность пакетов ошибок или
коэффициент ошибок по битам BER, которые могут быть обеспечены
в канале. Каналы с очень низким отношением SINR, из-за чрезвычай-
но низких характеристик, обычно не используются, что приводит толь-
ко к частичному использованию возможных связей всех станций сети,
как это показано на рис. 16.1. Однако существуют различные решения
по обеспечению связности, если станции сети могут адаптировать свои
отношения сигнал - помеха SINR с помощью адаптивных методов моду-
ляции или изменить мощность, используя систему регулирования мощ-
ности. Различные значения отношения SINR в разных каналах показаны
на рис. 16.1 линиями разной ширины. Поэтому, теоретически, каждый
узел сети может передавать данные прямо на любой другой узел. Однако
это может быть невыполнимо, если узлы разнесены на большие рассто-
яния или подвержены большим помехам других линий. Связность сети
изменяется также, когда станции входят в сеть или покидают ее, и тогда
связность может контролироваться с помощью адаптации передаваемой
мощности уже существующих станций сети при появлении новых стан-
ций [23].
Гибкость связей сети представляет собой результат варьирования та-
кими параметрами каналов, как передаваемая мощность и скорость пе-
редачи, и имеет большое значение для маршрутизации. Узлы могут по-
сылать пакеты непосредственно на конечную станцию через один пролет
до тех пор, пока отношение SINR в канале выше минимального порога.
Но это отношение SINR при одном пролете (однозвенной маршрутизации)
может быть недостаточным, и, кроме того, такой метод соединения мо-
жет создавать чрезмерные помехи на соседних станциях. В большинстве
специализированных беспроводных сетей пакеты передаются от источ-
16.2. Принципы разработки и трудности 805
ника к адресату через промежуточные приемопередающие станции —
ретрансляторы. Поскольку потери в тракте вызывают падение принима-
емой мощности в экспоненциальной зависимости от расстояния, то про-
межуточные ретрансляторы могут значительно снизить общую переда-
ваемую мощность системы (суммарную передаваемую мощность источ-
ника и всех ретрансляторов), необходимую для сквозной передачи пакета
из конца в конец. Многопролетная линия, использующая промежуточные
приемопередающие станции, представляет ключевое свойство специали-
зированных беспроводных сетей — оно позволяет связывать между собой
географически разнесенные узлы и способствует развитию сети и децен-
трализации управления сетью. Однако в многопролетных беспроводных
каналах, по сравнению с однопролетными беспроводными каналами, ха-
рактерными для сотовых систем и беспроводных ЛВС, возникает множе-
ство проблем с поддержанием высокой скорости передачи данных и малой
величины задержки. Это одна из основных трудностей при использовании
специализированных беспроводных сетей для ряда приложений, напри-
мер, при передаче видео, когда требуются высокая скорость передачи
и низкая величина задержки.
От специализированных беспроводных сетей с большим числом узлов
требуется возможность развития, масштабируемость. Ключ к решению
проблемы масштабируемости — это использование алгоритмов управле-
ния распределенной сетью, которые подстраивают локальные параметры
под местные условия. При отказе от использования централизованного
сбора информации и управления ресурсами, протоколы могут изменяться
с ростом сети, поскольку они используют только локальную информа-
цию. Работы над масштабируемостью протоколов в специализированных
беспроводных сетях сосредоточены главным образом на самоорганиза-
ции [14, 25], распределенной маршрутизации [26], поддержании мобиль-
ности [22] и безопасности [27]. Отметим, что распределенные протоколы
часто потребляют изрядное количество энергии при локальной обработке
и коммутации сообщений, в деталях это проанализировано для протоко-
лов безопасности в [28]. Таким образом, интересуемый компромисс воз-
никает относительно того, сколько следует организовывать локальных
мест обработки вместо передачи информации в пункт централизованной
обработки. Этот компромисс проявляется, в частности, в сетях датчиков,
где данные расположенных близко друг к другу узлов коррелированны и,
кроме того, скоординированы при маршрутизации данных в сети. Боль-
шинство экспериментальных работ по масштабируемости специализиро-
ванных беспроводных сетей сосредоточены на относительно небольших
сетях, менее сотни узлов. Большинство применений специализированных
беспроводных сетей, особенно сети датчиков, могут иметь от несколь-
ких сотен до нескольких тысяч узлов и даже более. Способность суще-
Глава 16. Специализированные беспроводные сети
ствующих протоколов беспроводных сетей подстроиться под сети таких
больших размеров остается неясной.
Ограничения по энергопотреблению представляют еще одну большую
проблему разработки специализированных беспроводных сетей [29]. Эти
ограничения возникают в узлах беспроводных сетей, например, датчи-
ках, питающихся от батареек, которые не могут подзаряжаться. Строгие
ограничения по питанию существенно влияют на условия разработки се-
ти. Во-первых, уже больше не существует понятия скорости передачи
данных, поскольку только конечное число бит может быть передано ка-
ждым узлом, прежде чем батарея полностью разрядится. Существует
также компромисс между длительностью бита и потреблением энергии —
более медленная передача бита сохраняет передаваемую энергию, но мо-
жет повысить потери энергии в электрической цепи [30]. Резервный ре-
жим может потреблять значительное количество энергии, поэтому для
сохранения энергии следует использовать «спящий» — дежурный режим
(режим ожидания), но при этом переход узлов в дежурный режим может
усложнить управление и маршрутизацию сети. По существу, ограничения
по энергопотреблению влияют почти на все протоколы сети подобным
образом, и поэтому ограничения по энергопотреблению должны быть
оптимизированы во всех аспектах проектируемой сети.
16.3. Уровни протоколов
Уровни протоколов представляют обычную абстракцию при проектиро-
вании сети. Разбиение на слои дает возможность модульного проектиро-
вания сетевых протоколов, что способствует их стандартизации и реа-
лизации. К сожалению, уровневая система понятий плохо работает в спе-
циализированных беспроводных сетях, где при разработке протоколов
возникает множество взаимосвязанных проблем. В настоящем разделе
представлены уровни протоколов так, как они используются в специа-
лизированных беспроводных сетях, а также взаимодействия между уров-
нями протоколов, которые оправдывают необходимость разработки меж-
уровневых связей.
Международный стандарт МОС3, называемый моделью взаимодей-
ствия открытых систем ВОС4, был разработан в качестве системы взгля-
дов, разделяющей сеть передачи данных на слои. Модель ВОС (OSI)
3МОС (Международная организация по стандартизации), в англоязычных сокращени-
ях ISO (International Organization for Standardization). — Прим, перев.
4BOC — стандарт, часто употребляется англоязычная аббревиатура OSI (open system
interconnection). — Прим, перев.
разделяет требуемые функции сети на семь слоев: прикладной слой, пред-
ставительский (уровень представления данных), сеансовый слой, транс-
портный слой, сетевой слой, канальный слой (уровень управления кана-
лом) и физический слой. Каждый уровень ответственен за отдельный
набор задач на заданном интерфейсе между
слоями для обмена управляющей информацией
и данными. В основе модели ВОС (OSI) лежит
предпосылка о том, что протоколы, разрабо-
танные на любом уровне, могут быть объеди-
нены с протоколами, разработанными на дру-
гом уровне без рассмотрения деталей реализа-
ции этих протоколов. Например, на приклад-
ном уровне нет необходимости рассматривать,
как данные проходят по сети, или какой вид
модуляции или кодирования использован в том
или ином канале. Набор протоколов определен-
ного слоя называется стеком протоколов сети.
Детали модели ВОС (OSI) и функции протоко-
лов каждого слоя приведены в [31, гл. 1.3].
Интернет внес в уровневую модель реальное
содержание, используя протокол управления
передачей TCP (Transmission Control Protocol)
на транспортном уровне и протокол Интер-
нет IP (Internet Protocol) для маршрутизации
на сетевом уровне. Поэтому большинство сетей
с моделью уровней ВОС (OSI) были замеще-
ны пятиуровневой моделью, называемой также
моделью TCP/IP, которая определена по основ-
ным функциям протоколов TCP и IP. Пять
уровней существуют на прикладном уровне,
транспортном, сетевом, доступа и физическом
уровнях. Эти слои показаны на рис. 16.2, и ря-
дом с ними перечислены основные функции
специализированных беспроводных сетей. Эти
функции более детально будут описаны ниже.
Отметим, что регулирование мощности зани-
мает два слоя — физический и слой доступа,
Рис. 16.2. Пятиуровневая
модель разработки сетевых
протоколов (MIMO — mul-
tiinput multioutput system —
системы co многими входами
и выходами)
а также используется при выделении ресурсов на сетевом уровне [32]. Та-
ким образом, как будет описано ниже, регулирование мощности занимает
несколько слоев стека протоколов. Большая часть специализированных
беспроводных сетей, в силу больших отличий маршрутизации в беспро-
808 Глава 16. Специализированные беспроводные сети
водных сетях и сетях Интернет, разработаны без использования маршру-
тизации Интернет протокола — IP. Более того, адресация и организация
подсетей IP не очень хорошо подходит специализированным беспровод-
ным сетям. Транспортный протокол также не обязательно использует
протокол TCP. Тем не менее, пятиуровневая модель представляет обыч-
ную абстракцию для модульной разработки протоколов разных уровней
беспроводных сетей.
Уровневый принцип разработки протоколов достаточно хорошо рабо-
тает в проводных сетях, подобных Интернет, в которых скорость пере-
дачи данных обусловлена физическим слоем и может достигать Гигабит
в секунду, а пакеты теряются редко. Однако даже при этих условиях
разбиение на слои создает трудности поддержки высокоскоростных при-
ложений с жесткими ограничениями к задержке, таких, как видео и даже
речь. Беспроводные сети могут иметь очень низкую скорость переда-
чи данных на физическом уровне и очень высокую вероятность ошибок
пакетов или бит. При таком положении, разделение протокола на слои
может дать потрясающую вспышку потерь производительности систе-
мы и, кроме того, может препятствовать взаимодействию между слоями
протоколов для обеспечения лучших характеристик сети. Межуровне-
вое проектирование рассматривает множество уровней стека протоколов
в совокупности, в понятиях совместной разработки или обмена инфор-
мацией между слоями. Межуровневое проектирование может продемон-
стрировать потрясающие преимущества по сравнению со строгой уров-
невой системой. Далее будут описаны уровни пятиуровневой модели и их
функции в беспроводных сетях. Затем обсуждаются основные принципы
межуровневого проектирования и достоинства характеристик, получае-
мых при таком подходе, по сравнению со строгим разделением на слои.
16.3.1. Разработка физического слоя
Физический слой имеет дело, в первую очередь, с передачей бит по бес-
проводной линии от одного пункта к другому, поэтому его также называ-
ют канальным слоем. В гл. 5-13 всесторонне рассмотрены компромиссы
и проблемы, которые возникают при разработке средств физического
уровня, включая модуляцию, кодирование, разнесение, адаптивные ме-
тоды, системы со многими входами и выходами MIMO, выравнивание,
многочастотную модуляцию и расширение спектра. Однако разработка
компромиссных решений для каналов, которые входят составной частью
в специализированные беспроводные сети, оказывают влияние на слои
протоколов выше физического уровня. Фактически, некоторые аспекты
разработки физического слоя специализированных беспроводных сетей
никаким образом не оказывают влияния на протоколы, связанные с выс-
шими слоями. Далее мы приведем некоторые примеры разработки физи-
ческого слоя с учетом коэффициента ошибок в пакетах, многоэлементных
антенн и регулирования мощности.
В большинстве специализированных беспроводных сетей, как уже опи-
сано в § 14.3, при передаче биты объединяются в пакеты. При разработке
решений физического слоя, наряду с параметрами каналов и помех, вы-
бираются и параметры, определяющие частоту ошибок в пакетах PER
(Packet Error Rate). Множество протоколов уровня доступа ретрансли-
руют пакеты, принятые с ошибками, таким образом, коэффициент оши-
бок PER, предусмотренный при разработке физического уровня, влияет
на требования к ретрансляции в слое доступа. Как описано в § 10.8, подоб-
ным образом многоэлементная антенна позволяет повысить возможности
компромисса между мультиплексированием — разносом — направлен-
ностью. Антенна может использоваться для повышения скорости пере-
дачи данных в линии, обеспечить разнос при замираниях так, чтобы
снизить среднее значение коэффициента ошибок BER, или использовать
направленность антенны для снижения замираний и мешающего влияния
посторонних сигналов. Выигрыш от разноса позволяет снизить коэффи-
циент ошибочных пакетов PER и уменьшить число повторных передач.
Мультиплексирование повышает скорость передачи в линии, что снижа-
ет задержки и вероятность перегрузки линии и позволяет использовать
эти достоинства при организации многопролетной радиолинии. Напра-
вленность снижает помехи на другие линии, улучшая их характеристи-
ки. Следовательно, наилучшее использование многоэлементной антенны
в специализированных беспроводных сетях совершенно очевидно улучша-
ет свойства физического уровня, а на самом деле, одновременно влияет
на физический слой и слои доступа, сетевой и транспортный.
Мощность, излучаемая узлом на физическом уровне, также оказы-
вает широкое воздействие на многие слои стека протоколов. Повыше-
ние передаваемой мощности на физическом уровне снижает коэффициент
ошибочных пакетов PER, влияя таким образом на число ретрансляций,
необходимых на уровне доступа. Фактически два любых узла в сети
могут связываться друг с другом непосредственно при достаточно вы-
соком уровне передачи мощности, так чтобы можно было установить
соединение. Однако высокая мощность передачи одного узла сети может
существенно повысить уровень помех на других узлах и, следователь-
но, ухудшить их характеристики и, возможно, даже прервать соединения
на некоторых линиях. В частности, характеристики линий в специализи-
рованных беспроводных сетях рассчитываются и зависят от отношения
сигнала к помехам и шумам — SINR и, таким образом, уровень переда-
ваемой мощности всех узлов оказывает воздействие на характеристики
810 Глава 16. Специализированные беспроводные сети
всех линий в сети. Вообще говоря, передаваемая мощность данного уз-
ла в совокупности с адаптивной модуляцией и кодированием определяет
его ближайшее окружение, включающее узлы, с которыми может быть
установлена связь через один пролет. Это, в свою очередь, определяет
содержание, с которым будут работать протоколы уровня доступа, марш-
рутизации и другие протоколы более высокого уровня. Поэтому уровень
предаваемой мощности всех узлов сети следует оптимизировать относи-
тельно всех слоев, на которые он оказывает влияние. По существу, это
главный аргумент в пользу проведения разработки с учетом взаимного
влияния слоев.
16.3.2. Разработка уровня доступа
Уровень доступа управляет тем, как разные пользователи совместно исполь-
зуют общий диапазон частот, и обеспечивает уверенный прием пакетов,
передаваемых в этом общем диапазоне. Распределение пространства сиг-
налов между различными пользователями реализуется или посредством
многостанционного доступа или случайного доступа. Детальное обсу-
ждение этих методов можно найти в § 14.2 и 14.3. Многостанционный
или коллективный доступ разделяет пространство сигналов на отдель-
ные каналы, используя ортогональные и неортогональные методы канало-
образования. Наиболее распространенные из этих методов — это МДВР
(TDMA), МДЧР (FDMA) и МДКР (CDMA). Слой доступа должен так же
обеспечить управление функциями выделения каналов пользователям или
отказа в выделении канала, если они не могут быть введены в систему.
При случайном доступе каналы выделяются активным пользователям ди-
намично, и в многопролетной сети этот протокол должен соревноваться
со скрытыми и открытыми оконечными станциями. Наиболее распростра-
ненный метод случайного доступа представляют разные формы системы
ALOHA, коллективный доступ с опросом несущей CSMA (carrier-sense
multiple access) и планирование (см. § 14.3). Эти методы случайного досту-
па объединяют в своих протоколах процедуры предоставления доступа
и отказ в доступе.
Как было обсуждено в предыдущем разделе, передаваемая мощность
одного узла влияет на все остальные узлы. Поэтому, регулирование мощ-
ности всех узлов сети составляет часть функций слоя доступа. Основ-
ную роль в управлении мощностью играет гарантия того, что требуе-
мое отношение SINR может соответствовать норме во всех линиях сети.
Как детально показано ниже, часто это невыполнимо. Алгоритмы регу-
лирования мощности при много станционном доступе в сотовых сетях,
основанные на соблюдении заданного значения отношения SINR, описа-
16.3. Уровни протоколов 811
ны в § 14.4 и подпараграфе 15.5.3, соответственно. Эти алгоритмы могут
быть распространены на специализированные беспроводные сети следу-
ющим образом. Рассмотрим специализированную беспроводную сеть с К
узлами и N линиями между разными парами передатчиков и приемни-
ков этих узлов5. Отношение мощности сигнала к помехе и шуму SINR к-й
линии будет равно:
= k,je{l,...,K}, (16.1)
4” Р / , 9kjPj
где gkj >0 — усиление мощности в канале между передатчиком j-й ли-
нии к приемнику fc-й линии, — мощность передатчика fc-й линии, —
мощность шумов на входе приемника fc-й линии, р — коэффициент сниже-
ния помехи за счет обработки сигнала (т. е. р ~ 1/G при МДКР (CDMA)
и р = 1 при МДВР (TDMA)). Предположим, что для fc-й линии требу-
ется отношение SINR, равное 7^, определенное, например, по связности
и требуемой скорости передачи в линии. Тогда, ограничения по отноше-
нию SINR для всех линий может быть представлено в матричной форме
в виде (I — F)P и при Р > 0, где Р = (Pi, Р?,..., Pn)T — вектор-
столбец передаваемой мощности в N линиях, а
и= (16.2)
\ 511 522 9nn J
представляет вектор мощности шумов, отнесенный к ограничениям SINR
и усилению канала, F — матрица в виде:
Fti = { уЬчр/яы,, (1Ы)
при k, j G {1, 2,..., N}. Как и в задачах регулирования мощности в восхо-
дящем канале доступа и в соте, описанных в § 14.4 и подпараграфе 15.5.5,
если собственное значение Перрона-Фробениуса (максимум модуля) F
меньше единицы, то существует вектор Р > 0 (т. е. Р& > 0 для всех к), ко-
торый удовлетворяет требованиям всех линий в отношении SINR, то Р* =
= (I —F)-1U дает оптимальное решение Парето [33, 34, 35]. Следовательно,
Р* отвечает требованиям в отношении SINR при минимальной передава-
емой мощности по всем линиям. Более того, можно показать[34, 35], что
распределенный итеративный алгоритм регулирования мощности, когда
передатчик к-й линии подстраивает свою передаваемую мощность в мо-
мент i + 1 как:
5Как отмечалось ранее, все узлы могут связываться со всеми другими узлами так, что
в сети с К узлами всего может быть К(К — 1) линий. Тем не менее, предположим, что
здесь используется только N К {К — 1) линий и мы можем рассматривать отношение
SINR только для этих N линий.
Глава 16. Специализированные беспроводные сети
Pk(i + l) = ^Lpk^ (16.4)
приближается к оптимальному решению при Р*. Это простой алгоритм
регулирования мощности в специализированных беспроводных сетях, по-
скольку для передачи по fc-й линии он нуждается только в информации
об отношении сигнал — помеха SINR в этой fc-й линии. Тогда, если отно-
шение SINR ниже заданной величины, то передатчик увеличивает свою
мощность, а если отношение SINR выше заданной величины, то передат-
чик уменьшает свою мощность на передаче. Примечательно то, что такой
простой алгоритм распределения мощности сходится к полной системе
оптимального регулирования мощности. Однако, если усиления в канале
не постоянны, то со временем величина отношения SINR может с боль-
шой вероятностью не соответствовать норме, а разработка алгоритма
управления распределением мощности, соответствующего всем желатель-
ным требованиям, представляется задачей значительно большей слож-
ности [36]. В частности, алгоритм, представленный выражением (16.4),
при изменении усилений в канале во времени может демонстрировать
длительные флуктуации отношения SINR в канале. Важнее, хотя часто
невыполнимо, выполнять ограничения по отношению SINR одновременно
на всех узлах сети, даже когда усиления линий статичны из-за большого
количества помех и широкого динамического диапазона изменения уси-
ления в каналах при наличии всех сигналов в сети. Когда ограничения
по отношению SINR не могут быть приведены в норму, то механизм рас-
пределенного регулирования передаваемой мощности переходит к такой
форме управления, при которой все станции сети работают с максималь-
ной передаваемой мощностью, оставаясь по-прежнему вне нормы по вели-
чине SINR. Это очевидно нежелательный режим работы, в особенности
при ограничениях по энергопотреблению узлов.
В работе [37] алгоритм управления распределением мощности при усло-
вии статических усилений в каналах расширен на систему, предусматри-
вающую распределенный контроль по допуску в сеть. Контроль по допус-
ку обеспечивает защиту существующих линий с заданными отношениями
SINR при появлении в системе нового пользователя. В этой схеме ак-
тивные линии имеют несколько большую установленную величину SINR,
чем это необходимо. Запас используется так, что когда новый пользо-
ватель пытается войти в систему с низким уровнем передачи, то это не
приведет к падению отношения SINR ниже заданного минимума в актив-
ных линиях. Новый пользователь постепенно повышает свою мощность
и проверяет, получил ли он в результате значение SINR, более близкое
к требуемой величине. Если новый пользователь может быть помещен
16.3. Уровни протоколов
в систему без нарушения значений SINR уже существующих линий, то
алгоритм распределения при таком постепенном повышении мощности,
в конечном итоге, будет сходиться к новому значению вектора Р*, удовле-
творяющему ограничениям по SINR в новой и уже существующих линиях.
Однако, если пользователь не может быть введен в систему, то постепен-
ное повышение мощности не подходит для получения нужного отношения
SINR, и он, в конечном счете, будет вынужден покинуть систему. Отме-
тим, что критерий отказа в доступе в систему труден для оптимизации
алгоритма распределенного управления каналов с изменяющимися во вре-
мени параметрами [36]. Алгоритм управления мощностью может быть так
же модифицирован для учета ограничений по времени задержки [23, 40].
Однако ограничения по времени задержки связанны с прохождением па-
кета через многопролетную линию, и регулирование мощности должно
быть согласовано с протоколом сетевого уровня для соблюдения ограни-
чений по задержке по всему маршруту из конца в конец.
Уровень доступа ответственен так же за повторную передачу паке-
тов, принятых по беспроводной линии с ошибками. Этот алгоритм часто
называют протоколом автоматического запроса повторенной передачи
ARQ (Automatic Repetition Repeat/Query Request). Конкретно, пакеты
передачи данных обычно имеют коды обнаружения ошибок, используемые
в приемнике, для определения в пакете одного или более искаженных бит,
которые не могут быть исправлены. Приемник обычно отбрасывает такие
искаженные пакеты и сообщает передатчику по каналу обратной связи,
что данный пакет должен быть повторно передан. Однако перед отбра-
ковкой пакета он запоминается на уровне доступа и затем используется
для повышения избыточности, за счет объединения поврежденного и по-
вторно переданного пакетов и повышения вероятности принятия верного
пакета. С другой стороны, прежде чем повторно переданный и началь-
ный пакет полностью совпадут, передатчик может послать некоторые
дополнительно закодированные биты для возможности использования бо-
лее сильного метода исправления ошибок в приемнике для исправления
ошибок в первом принятом пакете. Этот метод называется приращени-
ем избыточности, поскольку передатчику нужно только передать доста-
точное количество избыточных бит для исправления поврежденных бит
в изначально переданном пакете. Методы избыточности и приращение
избыточности существенно повышают пропускную способность канала
по сравнению с простым методом избыточности [41].
16.3.3. Разработка сетевого уровня
Сетевой уровень ответственен за установление и поддержание в сети
сквозных соединений. Это требует обычно, чтобы сеть была полностью
814 Глава 16. Специализированные беспроводные сети
связана, когда каждый узел сети может связываться с каждым другим
узлом, хотя эти соединения могут иметь несколько пролетов и быть орга-
низованы через промежуточные узлы6. Основная функция сетевого слоя
в специализированных беспроводных сетях заключается в нахождении
ближайшего окружения, маршрутизации и динамическом распределении
ресурсов. Нахождение ближайшего окружения представляет собой про-
цесс, при котором узел отыскивает своего соседа при первом входе в сеть.
Маршрутизация — вторая ключевая функция сетевого слоя. Это процесс
определения пути, по которому пакеты должны следовать по сети от их
источника до пункта назначения. Маршрутизация через промежуточные
узлы обычно производится с помощью ретрансляции, хотя могут быть
применены и другие методы, которые лучше используют коллективную
избыточность. Динамическое распределение ресурсов показывает, как та-
кие ресурсы сети как мощность и полоса частот следует распределять
в сети, хотя распределение ресурсов вообще происходит на многих уров-
нях стека протоколов и нуждается поэтому в процедуре проектирования,
учитывающей взаимное влияние слоев.
Нахождение ближайшего окружения и управление топологией
Нахождение ближайшего окружения представляет собой первый шаг в со-
здании сети со случайным распределением узлов. С точки зрения отдельно
взятого узла, это процесс нахождения числа и идентификации узлов в се-
ти, с которыми могут быть установлены прямые связи, при заданном
максимальном уровне мощности и минимальных требованиях к параме-
трам каналов (обычно это скорость передачи данных и связанный с ней
коэффициент ошибок по битам BER). Ясно, что чем выше допустимая
мощность, тем с большим числом узлов можно связаться непосредствен-
но. Заметьте, что различные схемы адресации в протоколах разных слоев
могут усложнять задачу нахождения ближайшего окружения, которая
должна решаться с учетом этих различий.
Обычно нахождение ближайшего окружения начинается с проверки
соседних узлов с начальным уровнем передаваемой мощности. Если эта
мощность недостаточна для установления соединения при числе соседей
N 1, то передаваемая мощность повышается, и попытка повторяет-
ся. Этот процесс продолжается, пока не будет установлено N соединений
или пока не будет достигнута максимальная мощность Fmax. Параметр N
устанавливается на основании сетевых требований к минимальной связ-
ности, а максимальная мощность РтАХ — на основании ограничений, уста-
новленных для каждого узла, и проекта сети. Если N и/или Fmax малы,
6Это определение отличается от принятого в теории графов, где в полносвязном графе
каждый узел имеет ребро (соединение) с каждым другим узлом.
16.3. Уровни протоколов 815
то сеть может формироваться несвязанным способом, с малыми кла-
стерами узлов, которые связаны между собой, но не могут соединяться
с соседними кластерами. Такая ситуация иллюстрируется на рис. 16.3,
где пунктирные окружности вокруг узлов в центре обозначают окрест-
ность, в которой может быть установлено соединение с другими узлами.
Если N и Ртах большие, то, несмотря на то, что сеть обычно полносвяз-
ная, многие узлы передают более высокую мощность, чем необходимо для
связи со всеми другими узлами, что может привести к растрачиванию
энергии и увеличению помех. Раз сеть полносвязная, то для достижения
требуемых значений SINR при минимальной передаваемой мощности мо-
жет быть применен более сложный алгоритм управления распределением
мощности, подобный (16.4). С другой стороны, регулирование мощности
может быть использовано для образования нужной топологии [8].
Рис. 16.3. Несвязанная
сеть
Точное число соседних узлов, необходимое каждому узлу для орга-
низации полносвязной сети, зависит от стройности конфигурации сети
и характеристик каналов. Но обычно это число порядка шести — восьми,
для стационарных случайным образом расставленных узлов с каналами,
которые характеризуются только потерями в тракте [2, 31]. Число узлов,
необходимое для полной связности при более общих предположениях, про-
анализировано в [42-44]. Когда мобильность узлов возрастает, то каналы
из-за замираний испытывают обычно значительные колебания усиления.
Эти изменения могут создавать трудности для сохранения полносвязной
структуры сети в течение всего времени без повышения всеми узлами
передаваемой мощности, для компенсации быстрых замираний. Если пе-
редаваемые данные терпимы к задержкам, то замирание может факти-
чески улучшить связность, потому что при этом в сети используется
Глава 16. Специализированные беспроводные сети
разнесение [45]. При снижении плотности сети ее связность, как правило,
уменьшается [43, 46-48]. Связность также сильно влияет на возможности
адаптации на физическом уровне таких параметров как скорость переда-
чи, мощность и кодирование, поскольку связь возможна в каналах даже
при низких отношениях SINR, если эти параметры можно подстраивать.
Маршрутизация
Протокол маршрутизации в специализированных беспроводных сетях под-
вержен значительным проблемам, в особенности в случае мобильных уз-
лов, когда маршрут должен динамично перестраиваться из-за быстрых
изменений связности. Для специализированных беспроводных сетей сде-
лано много глубоких и обширных работ, охватывающих несколько де-
сятков протоколов маршрутизации, но которые трудно классифициро-
вать простым методом. Мы сосредоточимся на трех основных категориях
протоколов маршрутизации: лавинном, проактивном (централизованный,
управляемый источником или распределенный) и реактивном [49, гл. 49].
При лавинной маршрутизации, пакет транслируется по радио ко всем
узлам принимаемого диапазона в режим радиовещания. Эти узлы, в свою
очередь так же транслируют пакеты, и передача продолжается так до тех
пор, пока пакет достигнет конечного пункта назначения. Лавинный про-
токол соединения имеет то достоинство, что он в высшей степени устойчив
к изменениям топологий сети и то, что ему нужен небольшой маршрут-
ный заголовок. Фактически, в очень подвижных сетях лавинообразный
принцип может быть единственно возможной стратегией. Очевидный не-
достаток заключается в том, что создается множество копий, блужда-
ющих по сети, в расходовании полосы частот и энергоресурсов батарей
узлов. Эти недостатки делают лавинную маршрутизацию непрактичной
для всех, кроме очень малых сетей.
Централизованный протокол маршрутизации представляет филосо-
фию, противоположную лавинообразной стратегии. При таком подходе,
информация о наличии каналов и топологии сети определяется по каждо-
му узлу и передается в центр, в котором для всех узлов сети рассчитыва-
ются таблицы маршрутизации. Затем эти таблицы передаются на узлы.
Критерии, используемые при расчете оптимальных соединений, зависят
от предмета оптимизации. Обычно при оптимизации трасс — маршрутов
объектами служат минимальное время распространения сигнала, мини-
мальное число пролетов (ретрансляций) и минимум перегрузки сети [50].
Вообще, эти объекты находятся в зависимости от стоимости каждого
пролета по трассе. Минимальная стоимость маршрута между источни-
ком и пунктом назначения вычисляется затем с помощью классических
методов оптимизации, например, алгоритмов Форда — Веллмана (Bell-
16.3. Уровни протоколов 817
man — Ford) или Диджикстра (Dijkstra), см. [51]. Несмотря на то, что
централизованное вычисление трасс дает более эффективные маршруты
в терминах теории оптимизации, оно не может адаптироваться к бы-
стрым изменениям параметров каналов или топологии сети. Поэтому оно
нуждается в большом заголовке для периодического сбора информации от
узлов сети и последующего распространения по сети информации по трас-
сировке. Как и лавинный метод, централизованный метод используется
только в очень малых сетях.
Маршрутизация, управляемая от исходного узла — «ведомая источ-
ником», представляет вариант централизованной стратегии, при которой
каждый узел получает информацию о соединениях по всей сети, которую
он потом использует для расчета лучшей трассы от узла до требуемо-
го пункта назначения. При маршрутизации, управляемой источником,
следует периодически собирать информацию о связях в сети, для кото-
рой отводится большой заголовок. Оба типа маршрутизации, и центра-
лизованный и ведомый источником могут объединяться в иерархические
структуры маршрутизации, при которых каждый узел сети группирует-
ся в иерархические группы — кластеры, а маршрутизация выполняется
затем на каждом иерархическом уровне по кластерам.
Распределенный способ вычисления маршрутов представляет наибо-
лее распространенную процедуру, используемую в специализированных
беспроводных сетях. В этом типе протокола, узлы посылают информацию
о своих связях соседним узлам, а затем по этой локальной информа-
ции, рассчитывается маршрут. В частности, по этой информации уз-
лы определяют следующий пролет и маршрут пакетов. У этого метода
есть ряд достоинств и недостатков. Первое достоинство — это мини-
мальный заголовок для обмена информацией с соседними узлами. Кроме
того, эта стратегия быстро адаптируется к изменениям в каналах и со-
единениях. Недостаток данного метода заключается в том, что общий
соединительный тракт, составленный по локальной информации, предста-
вляет обычно субоптимальное решение. Второй недостаток заключатся
в возникновении петель — таких маршрутов, в которых пакеты ходят
по кругу между теми же промежуточными узлами, не поступая в конеч-
ный пункт назначения, что представляет обычное явление при распре-
деленном способе вычисления маршрутов. Возникновения петель можно
избежать при использовании протокола, называемого вектором последо-
вательного назначения интервалов DSDV (Destination Sequenced Distance
Vector), который объединяет последовательные номера в виде частей та-
блиц маршрута [52].
Оба, и централизованный и распределенный, децентрализованный ме-
тоды маршрутизации нуждаются в фиксированных маршрутных табли-
818 Глава 16. Специализированные беспроводные сети
цах, оптимизируемых по заданным критериям. Оптимизация маршрута,
по минимальному числу пролетов называется маршрутизацией по вектору
перемещения (distance vector routing), а когда маршрут оптимизируется
относительно более общей функции стоимости каждого пролета, называ-
ется маршрутизацией по состоянию линий (link state routing). Так как
сеть динамична, то таблицы маршрутизации, полученные при централи-
зованном и децентрализованном способе оптимизации маршрутов, следу-
ет периодически обновлять. Альтернативный способ получения маршру-
тов (по требованию) заключается в том, что маршрут создается только
при инициализации исходящего узла, которому нужно передать трафик
в пункт назначения. Это устраняет необходимость в использовании за-
головков для поддержки таблиц маршрутизации, которые в настоящее
время не используются. При таком подходе исходящий узел иницииру-
ет процесс развития маршрута только при наличии данных для переда-
чи. Этот процесс определяет наличие одного или нескольких маршрутов
к пункту назначения. Маршрут или маршруты обслуживаются до тех
пор, пока источник не исчерпает данные, предназначенные заданному
пункту. Преимущество реактивной маршрутизации заключается в эф-
фективности построения всего маршрута, который может быть построен
с относительно небольшим заголовком, поскольку нет необходимости об-
служивать соединение все время. Недостаток заключается в том, что
реактивная маршрутизация может вносить значительную начальную за-
держку, поскольку процесс построения маршрута инициируется, когда
данные уже готовы для передачи, передача этих данных еще не может
начаться, пока продолжается процесс составления маршрута. Протокол
самого распространенного вида маршрутизации по запросу представлен
специализированной маршрутизацией по запросу с вектором перемеще-
ния AOVD (Ad hoc On-demand Distance Vector) и динамической марш-
рутизацией источника DSP (Dynamic Source Routing) [54]. Реактивная
и проактивная маршрутизации объединяются в комбинированные мето-
ды, названные протоколами зоновой маршрутизации ZRP (Zone Routing
Protocol), которые снижают время задержки при реактивной маршрути-
зации, а так же уменьшают размеры заголовка, свойственные проактив-
ным методам [55].
Подвижность оказывает огромное влияние на протоколы маршрути-
зации, поскольку она может вызывать установление уже несуществующих
маршрутов. Высокий уровень подвижности особенно сильно снижает па-
раметры проактивной маршрутизации, поскольку маршрутные таблицы
быстро устаревают, требуют чудовищных размеров заголовков для под-
держания необходимого обмена данными. Лавинообразная маршрутиза-
ция эффективна при обслуживании соединений при высокой подвижно-
сти, но с точки зрения эффективности сети имеет огромную стоимость.
Модификация лавинообразной маршрутизации называется многолучевой
маршрутизацией, которая может быть достаточно эффективной без доба-
вления большого заголовка. При многолучевой маршрутизации передача
пакета дублируется только по нескольким направлениям между источни-
ком и пунктом назначения. Поскольку маловероятно, что дублированные
пакеты потеряются или надолго задержатся по всем трактам одновре-
менно, то существует высокая вероятность получения пакета в конечном
пункте назначения при минимальном времени задержки хотя бы по одно-
му тракту [56]. Этот метод показывает хорошие свойства при динамиче-
ски изменяющейся топологии.
Проколы маршрутизации основываются на топологии сети — пакеты
могут передаваться только по каналам между двумя узлами с соответ-
ствующим качеством. Однако, как показано выше, определение связно-
сти между двумя узлами в некоторой степени эластично, она зависит от
отношения SINR в линии, а также от проработки физического слоя, ко-
торый определяет величину отношения сигнала к помехе и шумам SINR,
необходимую для надежной передачи по линии. Слой доступа также игра-
ет роль в оценке связности, поскольку устанавливает величину помехи
между линиями. Таким образом, имеет место существенное взаимодей-
ствие между физическим слоем, слоем доступа и сетевым слоем [57]. Это
взаимодействие было исследовано в [38], где показано, что если объеди-
нить систему коллективного доступа CSMA с методом предотвращения
коллизий в протоколе маршрутизации, использующим линии с низким от-
ношением SINR, то пропускная способность сети значительно снизится.
Другой интересный результат, полученный в [38], заключается в том,
что обслуживание одного маршрута между любой парой узлов «отпра-
витель получатель» является субоптимальным, в понятиях суммарной
пропускной способности сети. Мультиплексирование нескольких маршру-
тов, связанных с любой заданной парой узлов отправитель - получатель
предоставляет возможность изменения помехи, которую эта пара вызы-
вает в сквозном соединении, и этот разнос может быль использован для
повышения пропускной способности сети.
Алгоритм маршрутизации может быть также оптимизирован под тре-
бования протоколов верхнего уровня, в частности, под требования при-
кладного слоя к величине задержки и скорости передачи. Такие алгорит-
мы относят к протоколам маршрутизации по показателям качества QoS.
Назначение маршрутизации по показателям QoS — найти в сети марш-
руты, удовлетворяющие требованиям данного приложения к сквозной за-
держке и скорости передачи. Примеры маршрутизации по показателям
QoS и ее характеристик приведены в [58-60].
820 Глава 16. Специализированные беспроводные сети
Большинство протоколов маршрутизации используют на каждом про-
межуточном узле стратегию декодирования с последующей отправкой,
когда принимаемые пакеты декодируются, а ошибки исправляются. При
обнаружении ошибок, которые нельзя исправить, запрашивается повтор-
ная передача. В качестве альтернативы используется стратегия усиле-
ния с последующей отправкой, когда промежуточный узел просто транс-
лирует принятый пакет, не пытаясь устранять ошибки или обнаружи-
вать поврежденные пакеты. Это упрощает разработку промежуточных
узлов, уменьшает их потребляемую мощность и величину задержек. Од-
нако в беспроводном окружении такая стратегия не оправдывает себя,
поскольку беспроводные каналы ненадежны и часто вносят ошибки, ко-
торые накапливаются на каждом транзитном участке маршрута. Альтер-
нативой двум упомянутым стратегиям может быть согласованное разне-
сение, когда для передачи пакетов используется пространственное разне-
сение пользователей [61, 62]. Эта идея была впервые предложена в [63, 64],
где различные передатчики взаимодействуют, повторяя обнаруженные
символы друг друга и формируя, таким образом, код с повторениями
и пространственным разнесением. Эти идеи послужили основой для раз-
работки более сложных методов согласованного кодирования [65], а также
других форм согласованного разнесения [66]. Кроме того, существует
сетевое кодирование, при котором данные, принятые по различным марш-
рутам, объединяются с целью повышения пропускной способности сети
[67-69]. Хотя сетевое кодирование применяется, в основном, при органи-
зации вещания в проводных сетях, оно также может использоваться и в
беспроводном окружении [70].
Распределение ресурсов и управление потоками
Протокол маршрутизации определяет маршрут, по которому должен сле-
довать пакет от источника к пункту назначения. Если маршрут оптими-
зируется по критерию минимальной перегрузки или задержки, то процесс
маршрутизации взаимосвязан с управлением потоком, которое обычно
происходит на транспортном уровне. Если при маршрутизации в опре-
деленный канал направляется слишком много данных, то в этом канале
возникает перегрузка, и алгоритм маршрутизации должен найти другой
путь, чтобы освободить данный канал. Кроме того, задержка в канале
представляет функцию скорости передачи данных или пропускной спо-
собности: чем выше пропускная способность, тем больше данных может
пройти по каналу с минимальной задержкой. Поскольку пропускная спо-
собность канала определяется выделенными ему ресурсами (в частности,
передаваемой мощностью и полосой пропускания), можно видеть, что
процессы маршрутизации, распределения ресурсов и управления потока-
ми взаимосвязаны.
(16.5)
(16.6)
Классическая формула задержки в канале между узлами i и j, если
пренебречь задержками на обработку и распространение, имеет вид:
Г).. =А?
V Г - f-
J г j
[31, раздел 5.4], где Д? — поток данных, передаваемых по каналу, а Сц —
пропускная способность канала (т. е. максимальный поток данных, кото-
рый может быть передан по данному каналу). Эта формула была получена
в теории массового обслуживания и хорошо работает на практике, так
как чем ближе поток данных к максимальной скорости передачи по дан-
ному каналу, тем больше вероятность возникновения в этом канале пере-
грузки или задержки. Еще одна величина, определяемая для канала между
узлами г тл. j — это коэффициент использования канала:
г).. _ Al
7 A? —
Как показано в [31, раздел 5.4], свойства этой величины сопоставимы
со свойствами задержки (16.5). Это квазивыпуклая функция7 потока дан-
ных и пропускной способности, позволяющая эффективно использовать
методы выпуклой оптимизации при проведении расчетов для маршрути-
зации. Если по каналам сети передается фиксированный поток данных,
то алгоритм маршрутизации позволяет рассчитать для каждого канала
величину затрат на один транзитный участок, используя понятия за-
держки (16.5) или коэффициента использования канала (16.6) и на основе
полученных результатов определить в сети маршрут с минимальными
затратами. Отличие между задержкой и использованием канала состо-
ит в том, что при приближении скорости потока данных к пропускной
способности канала задержка асимптотически растет, а коэффициент ис-
пользования канала стремится к единице. Поэтому в случае, когда поток
данных передается по каналу, работающему на пределе своей пропускной
способности, формула задержки (16.5) даст намного большие затраты,
чем формула коэффициента использования канала (16.6). После определе-
ния нового маршрута потоки данных в каналах перенаправляются в со-
ответствии с этим маршрутом. В большинстве случаев эти изменения
невелики, поскольку вклад каждого узла в общий трафик незначителен,
однако в малых и средних сетях некоторые приложения, такие как видео,
могут стать причиной значительных перегрузок.
Выражения (16.5) и (16.6) получены в предположении фиксирован-
ной пропускной способности Cij. Однако пропускная способность зависит
от отношения сигнал — помеха плюс шум SINR в канале, а также от
7 Функция называется квазивыпуклой, если область ее значений ниже заданного порога,
будет выпуклой.
822 Глава 16. Специализированные беспроводные сети
выделенной данному каналу полосы частот. Динамическое выделение пе-
регруженным каналам сетевых ресурсов, таких как мощность и полоса
пропускания, позволяет увеличить пропускную способность этих кана-
лов и уменьшить задержки. Но при этом ресурсы отбираются у других
каналов, что уменьшает их пропускную способность. Такие изменения
пропускной способности каналов, в свою очередь приведут к изменению
характеристик канала, используемых при расчете оптимальных маршру-
тов и, в конце концов, повлияют на общие характеристики сети. Поэтому
на характеристики сети одновременно влияют процессы маршрутизации,
управления потоками и распределения ресурсов.
Совместная оптимизация управления потоками, маршрутизации и рас-
пределения ресурсов может рассматриваться как задача выпуклой опти-
мизации по переменным, связанным с потоком данных и системой связи,
в предположении, что затраты и пропускная способность представляют
выпуклые (или квазивыпуклые) функции. Для решения данной задачи
оптимизации можно применить методы выпуклой оптимизации по вну-
тренней точке. Такой подход проанализирован в [71—73] для беспроводных
сетей МДВР (TDMA) и МДКР (CDMA) с точки зрения минимизации
мощности, максимизации коэффициента использования канала или мак-
симизации протекания потока данных при совмещении процессов марш-
рутизации и распределения ресурсов. Подобные идеи по поводу исполь-
зования итеративной оптимизации содержатся также в [74]. При такой
постановке задачи максимальная пропускная способность может приве-
сти к очень несправедливому распределению ресурсов системы [75], хотя
условия задачи можно изменить так, чтобы обеспечить равноправие при-
нудительно [76].
16.3.4. Разработка транспортного уровня
Транспортный уровень обеспечивает в сквозном режиме функции устра-
нения ошибок, повторной передачи, переупорядочивания пакетов и упра-
вления потоками. Хотя отдельные каналы также выполняют функции
обнаружения ошибок и повторной передачи, но эти механизмы недоста-
точно надежны (не защищены от неправильного использования). Транс-
портный уровень обеспечивает дополнительную степень защиты, отсле-
живая поврежденные или потерянные пакеты на маршруте между око-
нечными пунктами и запрашивая у узла-источника повторную передачу
этих пакетов. Кроме того, из-за многолучевой маршрутизации, задержек
и перегрузки, а также из-за потери и повторной передачи пакетов, паке-
ты могут поступать не по порядку. Пакеты, передаваемые по сквозному
маршруту, прежде чем они попадут на прикладной уровень, упорядочи-
ваются на транспортном уровне.
Транспортный уровень выполняет также управление потоками в сети,
направляя пакеты с прикладного уровня по различным маршрутам. Про-
токол управления передачей на транспортном уровне TCP (Transmission
Control Protocol) плохо работает в беспроводных сетях, поскольку пред-
полагает, что все потерянные пакеты теряются из-за перегрузок, и запус-
кает процедуру управления перегрузками. В проводных сетях перегрузки
являются основной причиной потери пакетов, и протокол TCP работает
там хорошо — именно поэтому он используется на транспортном уровне
сети Интернет. Однако в беспроводных сетях пакеты, в основном, теря-
ются из-за повреждений в каналах и мобильности узлов. В этом случае
процедура управления перегрузками может оказаться крайне неэффек-
тивной [49, раздел 11.5]. Поэтому были предприняты некоторые меры
по усовершенствованию возможностей протокола TCP для беспроводных
сетей: разработаны механизмы, обеспечивающие на транспортном уровне
обратную связь для уведомления о повреждениях в канале.
Вообще, управление потоками в беспроводных сетях тесно взаимосвя-
зано с распределением ресурсов и маршрутизацией, как уже отмечалось
в подпараграфе 16.3.3. В беспроводных сетях эта взаимозависимость на-
много больше, чем в проводных сетях. Так, проводные сети имеют каналы
с фиксированной пропускной способностью, в то время как пропускная
способность беспроводного канала зависит от помех между каналами.
Нагрузка, передаваемая по одному каналу, может создавать помехи для
других каналов, влияя на их пропускную способность и задержки. Такая
взаимосвязь усложняет разделение функций управления потоками, рас-
пределения ресурсов и маршрутизации между сетевым и транспортным
уровнями и создает предпосылки для межуровневого проектирования,
объединяющего оба этих уровня.
16.3.5. Разработка прикладного уровня
Прикладной уровень формирует данные для передачи по сети и обраба-
тывает соответствующие данные, принимаемые из сети. На этом уровне
осуществляется сжатие данных, поступающих от приложений, а также
исправление и маскирование ошибок. Для приложений, связанных с пе-
редачей данных, сжатие информации должно выполняться без потерь,
но в случае передачи видео, речи или изображений восстановление ис-
ходного сигнала может допускать некоторые потери. Чем выше уровень
сжатия, тем меньшую скорость передачи данных должна обеспечить сеть.
Однако сильно сжатые данные более чувствительны к ошибкам, так как
большинство избыточных элементов устраняется. При передаче данных
потери недопустимы, и поэтому пакеты, поврежденные или потерянные
при сквозной передаче, должны передаваться повторно, что может со-
824 Глава 16. Специализированные беспроводные сети
здать существенные задержки. При передаче речи, видео и изображений
потери допускаются, поэтому применение таких методов как маскиров-
ка ошибок или адаптивное воспроизведение, позволяет ослабить влияние
этих ошибок на качество восприятия информации пользователем на при-
емном конце [77, 78]. Таким образом, на прикладном уровне приходится
искать компромисс между скоростью передачи и надежностью (живуче-
стью) сети: более высокие скорости требуют дополнительных сетевых
ресурсов, но при этом делают передачу данных более надежной в смысле
качества функционирования сети.
Прикладной уровень может также обеспечивать разновидность разне-
сения — кодирование по множеству признаков MDC (multiple description
coding) [79, 80], т. е. такую форму сжатия, при которой генерируется мно-
жество признаков данных. Исходные данные могут быть восстановлены
с некоторыми потерями по любому из этих признаков, и чем больше та-
ких признаков будет доступно, тем лучше восстановятся данные. Если
по сети передается множество признаков исходных данных, то некото-
рые из этих признаков могут быть потеряны, задержаны или повреждены
без значительного ухудшения общих характеристик. Таким образом, ме-
тод MDC обеспечивает разнесение ненадежных сетевых характеристик
на прикладном уровне. Кроме того, метод MDC можно объединить с мно-
голучевой маршрутизацией, чтобы обеспечить разнесение по уровням как
самих признаков, так и маршрутов, по которым эти признаки переда-
ются [81]. Проблема здесь состоит в том, что при заданной скорости
передачи метод MDC создает больше искажений, чем методы сжатия,
не поддерживающие протокол кодирования по множеству признаков. Эту
ситуацию можно представить как выбор между качеством передачи и раз-
несением: приходится пожертвовать некоторым уровнем качества, чтобы
обеспечить живучесть сети.
Многим приложениям для качественной работы требуется гаранти-
рованная величина скорости передачи из конца в конец и задержки, что
обычно обозначается термином «качество обслуживания QoS». Сегодняш-
ний Интернет, даже при своей высокой скорости и наличии качественных
проводных каналов связи, не может обеспечить приложениям гаранти-
рованное качество обслуживания, т. е. необходимые величины скорости
передачи и задержек. В случае специализированных беспроводных сетей
с их низкой пропускной способностью, подверженными ошибками неста-
ционарными каналами, мобильными абонентами и динамической тополо-
гией говорить о выполнении таких требований к качеству обслуживания
просто нереально. Поэтому приложения специализированных беспровод-
ных сетей должны адаптироваться к тем изменяющимся во времени па-
раметрам качества QoS, которые обеспечивает сеть. Хотя адаптивность
на физическом уровне, уровне доступа и сетевом уровне (как описано
в предыдущих разделах) обеспечит приложению максимально возможное
качество обслуживания QoS, это качество будет изменяться во времени
в зависимости от состояния каналов, топологии сети и изменения по-
требностей пользователей. Поэтому приложения должны адаптироваться
к предоставляемому сетью качеству QoS. Возможны также варианты, ко-
гда абонентам с высшим приоритетом предоставляется лучшее качество
обслуживания QoS за счет снижения качества обслуживания для менее
важных абонентов.
Простым примером может служить случай, когда сеть предоставля-
ет приложению «кривую компромиссов» между скоростью и задержками,
исходя из возможностей протоколов нижних уровней [82]. Прикладной
уровень должен принять решение, в какой точке этой кривой нужно работать.
Некоторые приложения допускают значительные задержки, но скорость
при этом не должна понижаться. Это относится, например, к передаче
данных, когда общая скорость передачи должна быть высокой, но до-
пускаются некоторые задержки. Другие приложения (например, системы
распределенного управления) могут быть очень чувствительны к задерж-
кам, но допускают снижение скорости (например, путем более грубого
квантования информации датчиков). Приложения, допускающие потери,
такие как передача речи или видео, могут «обменять» некоторую долю
устойчивости к ошибкам на более высокую скорость. Энергетические
ограничения ставят другие проблемы: нужно искать компромисс между
качеством функционирования сети и сроком службы. Поэтому «кривые
компромиссов», используемые при планировании сети, обычно бывают
многомерными и учитывают скорость, задержки, живучесть и срок служ-
бы. Эти условия также могут изменяться во времени — при изменении
числа пользователей и сетевого окружения.
16.4. Межуровневое проектирование
Децентрализованное управление, отсутствие магистральной инфраструк-
туры и особенности беспроводных каналов усложняют поддержку специа-
лизированными беспроводными сетями некоторых приложений, особенно
при наличии высоких требований к скорости передачи и жестких огра-
ничений по задержкам. Уровневый подход, когда каждый уровень стека
протоколов не обращает внимания на структуру и функционирование
других уровней, в целом плохо подходит для разработки беспроводных
(и проводных) сетей, особенно в случае жестких требований к качеству
функционирования сети. Разбиение на уровни мешает реализовать пре-
имущества совместной оптимизации, описанные в предыдущих разделах.
826 Глава 16. Специализированные беспроводные сети
Кроме того, хорошо отработанные протоколы для отдельных уровней
часто плохо взаимодействуют с другими уровнями, что может существен-
но ухудшить характеристики сквозной передачи данных и сделать сеть
крайне неустойчивой к динамическому поведению и помехам. Поэтому
в специализированных беспроводных сетях жесткие требования к ха-
рактеристикам передачи можно удовлетворить только с помощью меж-
уровневого проектирования. При создании такой структуры необходимо
охарактеризовать, использовать и совместно оптимизировать взаимосвя-
зи между уровнями. При этом следует четко определить информационный
обмен между уровнями, адаптируемость к этой информации на каждом
уровне и встроенные в каждый уровень механизмы разнесения для обес-
печения живучести.
Хотя технические решения совмещенного уровня можно применить
как к беспроводным, так и к проводным сетям, но именно специализи-
рованные беспроводные сети, благодаря характеристикам беспроводных
каналов, создают уникальные предпосылки и возможности для реали-
зации такого подхода. Существование между узлами канала, который
может как использоваться для связи между ними, так и создавать поме-
хи, можно контролировать с помощью адаптивного протокола, применяя,
например, адаптивную модуляцию и кодирование, адаптивную обработку
сигналов в пространственной, временной или частотной областях, а так-
же адаптивный контроль мощности. Так как протоколы высших уровней
(доступа и маршрутизации) зависят от возможностей соединения базовых
узлов и уровня помех, то адаптивность на физическом уровне позволит
протоколам высшего уровня достичь лучших характеристик функцио-
нирования сети. В то же время некоторые каналы могут испытывать
сильные перегрузки или замирания. Протоколы высших уровней могут
блокировать такие каналы с использованием адаптивной маршрутиза-
ции, что позволит минимизировать задержки и нехватку ресурсов, воз-
никающие из-за плохих каналов. На самом высоком уровне информация
о пропускной способности и задержках на сквозных маршрутах может
использоваться для изменения коэффициента сжатия данных, поступаю-
щих от приложений, или для отправки данных по различным маршрутам
с применением метода MDC. Таким образом, протоколы высших уровней
могут адаптироваться к состоянию нижних уровней.
Адаптация на каждом уровне стека протоколов должна компенсиро-
вать изменения, происходящие на данном уровне с течением времени.
Так, изменения отношения сигнал — помеха плюс шум SINR в канале
происходят очень быстро: при быстрых замираниях речь идет о микро-
секундах. Изменения топологии сети более медленные (порядка несколь-
ких секунд), а изменения абонентского трафика занимают десятки или
сотни секунд, в зависимости от приложения. Различные временные мас-
штабы сетевых изменений предполагают, что каждый уровень должен,
в первую очередь, попытаться сам компенсировать такие изменения. Ес-
ли такая местная адаптация окажется неэффективной, то информация
об этом должна быть передана на высшие уровни для более широкого
охвата проблемы. Предположим, например, что некоторый канал имеет
низкое отношение SINR при сквозной передаче. К тому времени, пока
эта информация будет передана на высший уровень стека протоколов
(т. е. на сетевой уровень для изменения маршрута или на прикладной уро-
вень для уменьшения коэффициента сжатия), величина отношения SINR,
скорее всего, уже изменится. Поэтому имеет смысл, чтобы каждый прото-
кольный уровень адаптировался к изменениям, происходящим на данном
уровне. Если такая адаптация не сможет эффективно компенсировать
ухудшения качества на местном уровне, то характеристики следующе-
го уровня стека протоколов существенно ухудшатся. Поэтому адаптация
на следующем уровне должна исправить или хотя бы ослабить ту пробле-
му, которую не удалось урегулировать на местном уровне.
Вернемся к тому же примеру — уменьшению отношения SINR в ка-
нале. Это отношение может быть достаточно точно и быстро измерено
на физическом уровне. Поэтому протокол физического уровня может отре-
агировать на снижение отношения SINR, увеличив передаваемую мощ-
ность или повысив уровень исправляющей способности кода. Это позво-
ляет решать возникающие проблемы организации соединений в сети, на-
пример, проблему замираний вследствие многолучевого распространения.
Однако если проблема в канале обусловлена причиной, которую трудно
устранить на физическом уровне, например, когда мобильный телефон
находится в тоннеле, то лучше, если высший уровень стека сетевых про-
токолов отреагирует на это, скажем, задержкой передачи пакетов до того
момента, пока телефон не покинет туннель. Высокая мобильность узлов
также приводит к стремительным изменениям характеристик каналов
и топологии сети. Информирование сетевого уровня о высокой мобильно-
сти узлов может привести к изменению плана маршрутизации — переходу
из однонаправленного режима в режим вещания в направлении интере-
сующего абонента. В конечном счете, если сеть не может предоставить
приложению требуемый уровень качества обслуживания QoS, то приложе-
ние должно адаптироваться к этому доступному качеству QoS, в против-
ном случае качество функционирования данного приложения пострадает.
Именно такой интегрированный подход к вопросам адаптации сети, опре-
деляющий, как каждый уровень стека протоколов должен реагировать
на изменения своих параметров, чтобы адаптироваться к требованиям
высших уровней, лежит в основе адаптивной разработки межуровневых
протоколов.
828 Глава 16. Специализированные беспроводные сети
Еще один механизм, который можно использовать при межуровне-
вом проектировании — это разнесение. Обычно разнесение применяется
для повышения устойчивости сети к замираниям на физическом уров-
не. Однако основная идея разнесения может быть распространена на все
уровни стека сетевых протоколов. Так, метод совместного разнесения
обеспечивает разнесение на уровне доступа используя для передачи па-
кета множество пространственно разнесенных узлов. Это обеспечивает
защиту от повреждений пакетов в каком-либо одном канале. Разнесение
на сетевом уровне реализуется при многолучевой маршрутизации, когда
для передачи по сети одного пакета используются различные маршруты.
При этом на сетевом уровне приходится искать компромисс между разне-
сением и пропускной способностью, подобно тому, как это было описано
для систем MIMO на физическом уровне (см. § 10.5). Пакет, передаваемый
по различным маршрутам, вряд ли будет потерян или существенно задер-
жан одновременно на всех маршрутах. Поэтому разнесение на сетевом
уровне уменьшает вероятность отбрасывания пакета и среднюю величину
задержки. Однако такой пакет использует сетевые ресурсы, которые мог-
ли бы быть использованы для передачи других пакетов, что уменьшает
общую пропускную способность сети. Разнесение на прикладном уровне
связано с использованием для данных, поступающих от приложений, ме-
тода кодирования по множеству признаков MDC: если будет принят хотя
бы один из этих признаков, данные источника могут быть восстановле-
ны (хотя и с большими искажениями, чем при восстановлении на основе
всех признаков). Разнесение на всех уровнях стека протоколов, особен-
но в сочетании с адаптивным межуровневым проектированием, может
гарантировать надежность и хорошие рабочие характеристики специа-
лизированных беспроводных сетей, несмотря на присущие им проблемы.
Вопросы межуровневого проектирования для нескольких протоколь-
ных уровней, лежащих ниже прикладного, рассматривались в предыду-
щих разделах. Межуровневое проектирование для всех уровней, включая
прикладной, представляет сложную задачу, требующую междисципли-
нарной экспертной оценки, и на данный момент в этом направлении сдела-
но немного. Более того, при межуровневом проектировании существуют
потенциальные «ловушки», такие как повышение сложности и уменьшение
гибкости архитектуры сети [83]. Но даже при этих условиях потенциаль-
ный выигрыш в рабочих характеристиках представляется значительным,
как это показано в [84-86] на примере межуровневого проектирования для
передачи видео и изображений в специальных беспроводных сетях.
Межуровневое проектирование особенно важно для сетей с энерге-
тическими ограничениями, в которых каждый узел располагает ограни-
ченным объемом энергии, который нужно оптимизировать между всеми
уровнями стека протоколов. Энергетические ограничения создают уни-
кальные предпосылки и возможности для использования межуровневого
проектирования. Некоторые из этих аспектов будут рассмотрены в под-
параграфе 16.6.4.
16.5. Предельная пропускная способность сети
Определение основополагающих пределов пропускной способности специ-
ализированных беспроводных сетей, т. е. набора максимальных скоростей
передачи, возможных между всеми узлами, представляет сложную задачу
теории информации. В сети из К узлов каждый узел может соединяться
с К — 1 других узлов, и поэтому область значений пропускной способ-
ности имеет размерность К (К — 1) при передаче между узлами незави-
симых сообщений. Область значений пропускной способности при пере-
даче как независимых, так и общих (многоадресных) сообщений будет
намного больше. Даже при малом числе узлов задача определения про-
пускной способности каналов простой конфигурации (таких как обычная
ретрансляция и канал с помехами) в специализированных беспроводных
сетях остается нерешенной [87]. Хотя суммы скоростей между любы-
ми двумя непересекающимися множествами сетевых узлов могут быть
ограничены сверху соответствующей величиной взаимной информации
[87, теорема 14.10.1], упрощение этой формулы для получения удобного
выражения пропускной способности специализированной сети предста-
вляет очень сложную задачу.
Хотя задача определения общей пропускной способности представля-
ется трудноразрешимой, интуитивно ее можно решить, сосредоточив-
шись на более узких вопросах. Поворотным моментом стал результат
Гупта (Gupta) и Кумар (Kumar) [88], которые получили законы подобия
для пропускной способности сети, если число узлов в сети К асимптоти-
чески возрастает до больших значений. Авторы установили, что пропуск-
ная способность каждого сетевого узла, выраженная в битах на секунду,
с уменьшением К уменьшается от А./у/К log К до 1/д/К- Другими слова-
ми, скорость в сети из расчета на один узел стремится к нулю, хотя общая
пропускная способность сети (равная скорости из расчета на один узел,
умноженной на К) возрастает от л/K/log К до у/К. Этот интересный
результат свидетельствует о том, что в крупных специализированных
беспроводных сетях, даже при оптимальной маршрутизации и планирова-
нии, скорость передачи из расчета на один узел будет стремиться к нулю.
Причина этого в том, что промежуточные узлы тратят много своих ре-
сурсов на пересылку пакетов для других узлов, и у них остается мало
ресурсов для отправки собственных данных. Такой результат, до неко-
830 Глава 16. Специализированные беспроводные сети
торой степени, пессимистичен: он получен в предположении, что узлы
выбирают пункт назначения случайным образом, тогда как во многих се-
тях соединения между узлами, устанавливаются, в основном, на местном
уровне. Эти результаты получили дальнейшее развитие в [89], где показа-
но, что если мобильные узлы могут передавать информацию, физически
доставляя ее ближе к пункту назначения, то подвижность узла реально
повышает скорость передачи из расчета на узел до некоторой посто-
янной величины. Таким образом, мобильность увеличивает пропускную
способность сети. Это объясняется тем, что мобильность вносит в сеть
изменения, которые могут быть использованы для предоставления або-
нентам более высоких скоростей. Однако при этом могут наблюдаться
значительные задержки. Компромисс между пропускной способностью
и задержками в асимптотически больших фиксированных и мобильных
сетях проанализирован в [90, 91]. В [43, 92] подобный подход применен
к сетям конечного размера и сетям с ретрансляцией.
Альтернативный подход к законам подобия заключается в расчете
реально достижимых скоростей на основе частично оптимальных страте-
гий передачи. Такой подход применен в [45] для определения достижимых
скоростей на основе стратегии временного разделения с использованием
матриц всех возможных скоростей. Матрицы скоростей описывают набор
скоростей, которые могут одновременно поддерживаться всеми парами
источников и пунктов назначения в любой момент времени. Применив
к матрицам скоростей выпуклую комбинацию на различных временных
интервалах, можно получить все достижимые скорости между парами ис-
точников и пунктов назначения при использовании стратегии временного
разделения. Матрица скоростей определяется узлами, ведущими переда-
чу в данный момент времени, результирующим отношением SINR по всем
каналам, а также стратегией передачи. Чем совершеннее стратегия пере-
дачи, тем выше будут скорости передачи в данной матрице, и тем больше
матриц будет доступно для использования по схеме с временным разделе-
нием. Некоторые стратегии, рассмотренные в [45], предполагают переда-
чу с переменной скоростью, однозвенную или многозвенную маршрути-
зацию, контроль мощности и последовательное подавление помех. Кроме
того, может учитываться влияние мобильности и замираний. На рис. 16.4
показан двумерный срез области значений скоростей передачи в сети
из пяти узлов, распределенных по случайному закону на квадратной тер-
ритории. Предполагается, что распространение сигналов между узлами
соответствует упрощенной модели потерь в тракте с показателем степени
затухания 7 = 4. Этот двумерный срез 20-мерной области значений скоро-
сти передачи показывает реально достижимые скорости передачи между
двумя парами узлов (от узла 1 к узлу 2 и от узла 3 к узлу 4), при условии,
16.5. Предельная пропускная способность сети
что все другие узлы сети могут использоваться для содействия передаче
трафика между указанными узлами, но при этом не генерируют никаких
собственных данных. На рисунке предполагается использование передачи
с переменной скоростью на основе отношений SINR в каналах, и область
значений достижимых скоростей показана в предположении однозвен-
ной или многозвенной передачи, пространственного разнесения, контроля
мощности и последовательного подавления помех. Значительное увели-
чение пропускной способности наблюдается при введении многозвенной
маршрутизации, пространственного разнесения и последовательного по-
давления помех. Контроль мощности не дает существенного результата,
так как адаптивная модуляция уже используется, и дополнительное вве-
дение контроля мощности не приводит к существенным изменениям —
по крайней мере, для данной сетевой конфигурации.
Рис. 16.4. Срез области значений пропускной способности для сети из пяти узлов
на плоскости при Rij = 0, где {ij} / {12}, {34} и i ф j: а) — однозвен-
ная маршрутизация при отсутствии пространственного разнесения;
б) — многозвенная маршрутизация при отсутствии пространственно-
го разнесения; s) — многозвенная маршрутизация с пространственным
разнесением; г) — то же, что (s) плюс двухуровневый контроль мощ-
ности; д) — то же, что (в) плюс последовательное подавление помех
Области значений пропускной способности при различных формах
согласованного разнесения проанализированы в [93-97]. Поскольку об-
щее выражение для пропускной способности специализированных бес-
проводных сетей неизвестно, обычно для оценки пропускной способности
при согласованном разнесении используют нижние границы, основанные
Глава 16. Специализированные беспроводные сети
на области значений реально достижимой скорости, и верхние границы,
основанные на предельной величине взаимной информации для суммы
скоростей. Результаты показывают, что согласованное разнесение может
обеспечить существенное повышение пропускной способности, но преиму-
щества передатчиков и/или приемников с согласованным разнесением,
как и использование наиболее перспективных методов согласования, силь-
но зависит от топологии сети и наличия информации в каналах.
16.6. Сети с ограничениями по энергопотреблению
Многие узлы специализированных беспроводных сетей питаются от акку-
муляторных батарей с ограниченным сроком службы. Поэтому при раз-
работке таких сетей важно учитывать влияние ограничений по энергопо-
треблению. Устройства с аккумуляторными батареями должны сохранять
энергию, чтобы максимально увеличить период между перезарядками.
Кроме того, многие интересные приложения используют устройства, пе-
резарядка которых невозможна — например, датчики, которые встраива-
ются в стены или забрасываются в удаленный район. Такие радиостанции
должны в течение многих лет работать только от аккумуляторной бата-
реи и/или получать энергию из окружающей среды. Исследовательские
проекты ц-AMPs и Picoradio созданы с целью разработки радиостанций
для таких приложений, которые смогут работать с потребляемой мощно-
стью менее 100 мВт и использовать для продления своего срока службы
заимствованную энергию [18, 98, 99].
Ограничения по энергопотреблению оказывают влияние на работу ап-
паратных средств, передаваемую мощность и обработку сигналов в про-
цессе функционирования узла. Требуемая величина передаваемой энергии
на бит для заданного коэффициента ошибок BER в канале с шумами
минимизируется путем расширения энергии сигнала на весь доступный
интервал времени и частотный диапазон [100]. Однако мощность пере-
даваемого сигнала — это не единственный фактор, влияющий на по-
требляемую мощность. При обработке сигналов, связанной с передачей
и приемом пакетов, и даже при работе аппаратных средств в режиме
ожидания также потребляется некоторая мощность [24, 101, 102]. Это
обуславливает интересные энергетические компромиссы между прото-
кольными уровнями. На физическом уровне многие методы передачи,
позволяющие уменьшить передаваемую мощность, требуют значитель-
ного объема работ по обработке сигналов. Общепринято, что для такой
обработки требуется мало энергии, а с появлением новых технологий и бо-
лее совершенных аппаратных средств ее потребуется еще меньше [24, 103].
Однако результаты, полученные в [101, 102], свидетельствуют, что эти
затраты энергии все еще существенны. Отсюда следует, что системы
с ограничениями по энергопотреблению должны не только внедрять энер-
госберегающие методы обработки с целью минимизации потребляемой
мощности на всех уровнях стека протоколов, но также минимизировать
передачу по сети управляющих сообщений, на которые расходуется зна-
чительная часть энергии передатчика и приемника. Подобным образом
следует оптимизировать и работу узлов в режиме ожидания, поскольку
такие режимы, хотя и позволяют сохранить энергию, но при этом мо-
гут обусловить затраты энергии на других протокольных уровнях из-за
сложностей доступа и маршрутизации. Разработку аппаратных средств
и операционной системы узла также можно оптимизировать с точки зре-
ния сохранения энергии; методы такой оптимизации описаны в [101, 104].
Фактически, энергетические ограничения влияют на все уровни стека
протоколов, поэтому еще более важной задачей становится межуровне-
вое проектирование, особенно если сеть с ограничениями по энергопо-
треблению должна соответствовать определенным требованиям качества
[23, 105-107]. В данном разделе рассмотрено несколько основных аспектов
разработки специализированных беспроводных сетей с ограничениями
по энергопотреблению.
16.6.1. Модуляция и кодирование
Как правило, методы модуляции и кодирования выбираются на основе
компромисса между требуемой передаваемой мощностью, скоростью пе-
редачи, коэффициентом ошибок BER и сложностью. Однако мощность,
расходуемая в схемах аналоговой и цифровой обработки сигналов, может
оказаться сравнимой с требуемым уровнем передаваемой мощности для
приложений ближней связи. В таких случаях выбор технических решений
должен делаться исходя из общего энергопотребления, включая затраты
энергии как на передачу, так и на обработку сигналов. Моделирование
энергопотребления в системе представляет достаточно сложную зада-
чу, а его результаты сильно зависят от типа используемых аппаратных
средств [108], что затрудняет получение широких обобщений относитель-
но компромиссов между затратами энергии на передачу и обработку.
Однако такие компромиссы, конечно, существуют, особенно для прило-
жений ближней связи, где передаваемая энергия может быть достаточно
низкой.
Энергопотребление системы возрастает с увеличением времени пере-
дачи, поэтому минимизация времени передачи с последующим переводом
узлов в режим ожидания может обеспечить значительную экономию энер-
гии. Эти вопросы были изучены в [98], где показано, что для некото-
рых приложений ближней связи использование М-пой модуляции позво-
834 Глава 16. Специализированные беспроводные сети
лит сэкономить энергию (по сравнению с двоичной модуляцией) за счет
уменьшения времени передачи и отключения большинства элементов сис-
темы по окончании передачи. Такой подход проанализирован на приме-
ре модуляции КАМ-М (MQAM) в [109], где предложены оптимальные
стратегии минимизации общего энергопотребления. Эти идеи получили
дальнейшее развитие в [30] при совместной оптимизации ширины полосы
частот модуляции, времени передачи и размера созвездия при модуля-
ции КАМ-М (MQAM) и ЧМН-М (MFSK) для случаев канала типа AWGN
и канала с рэлеевскими замираниями. Эти результаты свидетельству-
ют о том, что энергопотребление можно существенно понизить за счет
оптимизации времени передачи относительно расстояния. При передаче
на большие расстояния доминирует передаваемая мощность, поэтому луч-
ше использовать меньшие созвездия с большим временем передачи, а при
передаче на малые расстояния следует поступать наоборот. В результа-
те, при малых расстояниях передачи модуляция КАМ-М (MQAM) ока-
залась несколько более эффективной с точки зрения энергопотребления,
чем ЧМН-М (MFSK), поскольку обеспечивает меньшее время передачи,
в то время как на длинных расстояниях лучше использовать модуляцию
ЧМН-М (MFSK) из-за отличных энергетических характеристик нелиней-
ных усилителей.
Ограничения по энергопотреблению влияют и на выбор метода ко-
дирования. Обычно кодирование уменьшает требуемую величину пере-
даваемой энергии на бит при заданном коэффициенте BER. Однако это
влечет за собой затраты энергии на обработку сигнала в кодере и де-
кодере. Более того, некоторые схемы кодирования (например, блочные
и сверточные коды) кодируют биты кодовой комбинацией, которая по-
лучается более длинной, чем исходная последовательность бит; иногда
зто называют расширением полосы частот. Хотя общие затраты энергии
на передачу кодовой комбинации с обеспечением заданного значения BER
могут оказаться ниже, чем при передаче некодированных бит, но переда-
ча кодовой комбинации занимает больше времени, что связано с дополни-
тельным энергопотреблением. При совместном использовании модуляции
и методов кодирования, таких как решетчатое кодирование, не требует-
ся расширения полосы частот, что позволяет избежать дополнительных
затрат энергии. Однако чтобы сэкономить энергию в масштабах всей
сети, нужно принимать во внимание и ту энергию, которая расходует-
ся при обработке сигналов в кодере и декодере. Влияние ограничений
по энергопотреблению на кодирование в сочетании с модуляцией КАМ-М
(MQAM) и ЧМН-М (MFSK) исследовано в [30]. Полученные результа-
ты показали, что сочетание модуляции КАМ-М (MQAM) с решетчатым
кодированием обеспечивает экономию энергии на почти всех представля-
16.6. Сети с ограничениями по энергопотреблению 835
ющих интерес расстояниях передачи (более 1 метра для рассматриваемых
аппаратных средств). Методы кодирования в сочетании с модуляцией
ЧМН-М (MFSK) обычно не обеспечивают эффективного использования
полосы частот, поэтому при использовании ЧМН-М (MFSK) кодирова-
ние полезно только при средней дальности передачи (более 30 метров для
рассматриваемых аппаратных средств).
16.6.2. Системы MIMO и MIMO с взаимодействием
Системы с использованием многих входов и выходов могут существен-
но повысить рабочие характеристики беспроводных систем, при этом
выигрыш получается за счет мультиплексирования или разнесения. При
заданной величине передаваемой энергии на бит, мультиплексирование
обеспечивает более высокую скорость передачи, а разнесение — более
низкий коэффициент ошибок BER при замираниях. Однако системы MIMO
создают значительно большее энергопотребление, чем их аналоги с одной
антенной, так как для тракта каждой антенны требуется отдельная цепь,
а обработка сигналов в системе MIMO может быть очень сложной. Поэто-
му неясно, как скажется применение MIMO на характеристиках системы
при наличии ограничений по энергопотреблению. Этот вопрос исследу-
ется в [110], где показано, что система MIMO обеспечивает экономию
энергии по сравнению с одноантенной системой для большинства пред-
ставляющих интерес расстояний передачи, если размер созвездия опти-
мизирован по отношению к дальности передачи. Причина этого в том,
что система MIMO может обеспечить более высокую скорость переда-
чи при заданной величине энергии на бит, поэтому она передает биты
быстрее и затем может отключаться для сохранения энергии.
Многие сети с ограничениями по энергопотреблению состоят из очень
маленьких узлов, которые не могут работать с несколькими антеннами.
В этом случае узлы, расположенные близко друг к другу, могут обме-
ниваться информацией, формируя передатчик с несколькими антеннами,
а узлы, находящиеся рядом друг с другом на приемном конце, могут вза-
имодействовать как приемник с несколькими антеннами (см. рис. 16.5).
Пока расстояние между взаимодействующими узлами будет оставаться
небольшим, энергия, затрачиваемая на обмен информацией между ни-
ми, будет малой по сравнению с энергией, сэкономленной во всей системе
MIMO. Энергетическая оценка системы MIMO с взаимодействием бы-
ла сделана в [110], где показано, что такое взаимодействие обеспечивает
экономию энергии, когда расстояние между кластерами узлов на приеме
и передаче в 10-20 раз превышает расстояние между взаимодействующи-
ми узлами. При уменьшении разницы между разнесением взаимодейству-
ющих узлов и дальностью передачи, затраты энергии на обмен инфор-
836 Глава 16. Специализированные беспроводные сети
мацией внутри кластеров превысят экономию от такого взаимодействия.
Системы MIMO с взаимодействием представляют разновидность согла-
сованного разнесения. Другие формы такого разнесения, рассмотренные
в подпараграфе 16.3.3, могут обеспечить такую же экономию энергии,
как и системы MIMO с взаимодействием, или даже превысить ее, в зави-
симости от топологии сети.
Рис. 16.5. Система MIMO с вза-
имодействием
16.6.3. Доступ, маршрутизация и режим ожидания
При использовании схем произвольного доступа можно повысить энерго-
сбережение за счет (i) минимизации конфликтов и вызванных ими повтор-
ных передач и (ii) оптимизации передаваемой мощности до минимального
уровня, необходимого для успешной передачи. Один из способов умень-
шения числа конфликтов состоит в повышении защиты от ошибок, когда
конфликты становятся более частыми [111]. Альтернативный вариант —
это адаптивная минимизация мощности с использованием проб в рамках
протокола случайного доступа; было показано, что такой метод суще-
ственно повышает энергосбережение [111, 38]. Еще один метод энерго-
сберегающего доступа предполагает постановку задачи распределенного
доступа с использованием теоретико-игрового подхода, когда затраты
энергии и задержки рассматриваются как объекты игры [112]. Оцен-
ка нескольких различных подходов к энергосберегающему доступу дана
в [113]. Однако наиболее выигрышный вариант так и не выявлен, потому
что характеристики каждого протокола сильно зависят от характеристик
канала. Ограничения по задержкам и равнодоступности также необходи-
мо учитывать при постановке задачи энергосберегающего доступа, что
сделано в [114]. Многие методы используют для предотвращения конфлик-
тов разновидность системы МДВР (TDMA), хотя организация доступа
с каналообразованием при распределенном управлении может привести
к значительным задержкам.
Если пользователь передает длинную последовательность пакетов или
непрерывный поток данных, то произвольный доступ работает плохо,
и большинство передач приводят к коллизиям. Поэтому каналы должны
выделяться пользователям на более систематической основе — в соответ-
ствии с планом передачи. Ограничения по энергопотреблению добавляют
еще один аспект к задаче оптимизации планирования. В [100] показа-
но, что энергия, требуемая для передачи одного бита, минимизируется
при его передаче во всей доступной полосе частот и во всем времен-
ном интервале. Однако если доступ к каналу хотят получить несколько
пользователей, временные и частотные ресурсы системы должны быть
разделены между ними. Позднее были исследованы алгоритмы оптималь-
ного планирования с целью минимизации передаваемой энергии при со-
вместном использовании одного канала несколькими абонентами [115].
В этой работе оптимизация планирования предполагает минимизацию
энергии, требуемой для каждого пользователя, в зависимости от огра-
ничений по предельному сроку передачи и задержкам. В основе мини-
мизации энергии лежит изменение времени передачи пакета (и, соот-
ветственно, потребляемой энергии) в разумных пределах с тем, чтобы
удовлетворить требования к задержке данных. Было показано, что такая
схема обеспечивает значительно большее энергосбережение, чем детер-
минированная схема планирования с постоянным ограничением на время
доставки.
Сети с энергетическими ограничениями нуждаются также в прото-
колах маршрутизации, чтобы оптимизировать маршруты с точки зре-
ния энергопотребления. Если степень энергопотребления распределена
по всем узлам неравномерно, то некоторые узлы могут выйти из строя
раньше других, нарушив целостность сети. Маршрутизацию можно опти-
мизировать за счет минимизации энергопотребления между оконечными
пунктами, используя стандартную процедуру оптимизации, описанную
в § 16.3; при этом за стоимость транзитного участка принимается рас-
ходуемая на нем энергия (вместо перегрузки или задержки) [116]. Суще-
ствует и другой метод, когда маршруты рассчитываются исходя из ха-
рактеристик аккумуляторных батарей на каждом узле. Примером мо-
жет служить задача максимизации минимального срока службы батарей
на всех узлах сети [116, 117]. В [116] с помощью моделирования иссле-
дованы различные функции стоимости, используемые для оптимизации
маршрутов в сетях с ограничениями по энергопотреблению; сравнение
показало, что все они приблизительно эквивалентны. Функция стоимости
может быть расширена, если, кроме энергии, учесть также традиционные
характеристики задержки. [118]. Этот метод позволяет оптимизировать
маршрутизацию в отношении задержки и потребления энергии, исполь-
Глава 16. Специализированные беспроводные сети
зуя различный вес их вкладов в общую функцию стоимости. Необходимо
заметить, что вычисление и составление таблиц маршрутов может потре-
бовать значительных средств. Этого можно избежать, проводя трафик
по географическому принципу, т. е. в генеральном направлении места его
назначения, что требует немного предварительных вычислений [ПО].
Узлы с ограничением по потребляемой мощности расходуют энергию
даже в дежурном режиме, когда они только пассивно присутствуют на се-
ти при минимальном обмене данными для поддержания их сетевого ста-
туса. В поисковых (пейджинговых) системах эта проблема была решена
несколько десятков лет назад за счет планирования «спящих» периодов
пейджеров. Основная идея заключается в том, что каждый пейджер ну-
ждается в прослушивании передачи только в течение определенного ко-
роткого периода времени. Данное решение просто реализовать при на-
личии центрального управляющего устройства, но в рамках управления,
распределенного по сети, реализация такой стратегии менее очевидна.
«Спящие» решения должны учитывать связность сети, откуда следует,
что эти решения локальные, но не автономные. Механизм поддержки та-
кого решения может основываться на методе нахождения соседних узлов,
в сочетании с некоторыми средствами упорядочивания решений в опреде-
ленной окрестности. В заданной области удобная возможность «вздрем-
нуть» должна циркулировать по узлам, гарантируя, что связность сети
не потеряется из-за совпадения периодов сна нескольких узлов.
16.6.4. Межуровневое проектирование в условиях
ограниченного энергоснабжения
Особенности параметров сетей с ограничениями по энергопотреблению
делают их первыми кандидатами на межуровневое проектирование. Если
батареи узла не могут перезаряжаться, то каждый узел может передать
только конечное число бит, прежде чем батарея полностью разрядится.
Спустя это время узел не может больше выполнять функции по своему
предназначению (например, считывание) или участвовать в работе сети
при маршрутизации. Поэтому энергия должна расходоваться очень рас-
судительно на всех уровнях стека протоколов с тем, чтобы продлить срок
жизни сети и выполнение ее требований.
Энергопотребление на всех уровнях стека протоколов обычно обу-
славливает необходимость компромиссов между энергопотреблением, за-
держками и пропускной способностью [120]. Однако на каждом конкрет-
ном уровне оптимальная рабочая точка на этой «кривой компромиссов»
должна выбираться с учетом интересов высших уровней. Например, если
узел передает данные медленно, то он экономит энергию передачи, но это
усложняет доступ к сети других узлов и увеличивает сквозную задержку.
16.6. Сети с ограничениями по энергопотреблению 839
Протокол маршрутизации может использовать для энергосберегающей
маршрутизации узел, расположенный в центре сети, но это увеличит пере-
грузки и задержки на данном маршруте, а энергия батареи данного узла
быстро израсходуется, что приведет к его выбыванию из сети. В конечном
счете, компромиссы между энергией, задержкой, пропускной способно-
стью и сроком службы узла/сети должны быть оптимизированы исходя
из требований конкретного приложения. При спасательных работах в ава-
рийных ситуациях информация с места событий должна поступать очень
быстро, хотя обычно сеть, поддерживающая обмен информацией, нужна
только последние несколько часов или дней. В противоположность этому,
сеть датчиков, встроенных в бетонные конструкции моста для измерения
нагрузки и растяжения, должна работать в течение десятилетий, хотя ин-
формацию нужно собирать за каждый день или неделю.
16.6.5. Пропускная способность на единицу энергии
Если передаваемая энергия ограничена, то невозможно передать любое
конечное число бит с асимптотически малой вероятностью ошибки. На ин-
туитивном уровне это легко понять, рассмотрев передачу одного бита.
Единственный способ убедиться в том, что два разных значения в про-
странстве сигналов (представляющих два возможных значения бита) мо-
гут быть декодированы с произвольно малой ошибкой — это разнести
их как можно дальше друг от друга, что требует как можно большей
энергии. Поскольку как угодно малая вероятность ошибки при наличии
жестких ограничений по энергопотреблению невозможна, для узлов с та-
кими ограничениями применяется другое определение надежной связи.
Определение емкости при надежной связи при условии ограниченной
энергии было предложено в [121] (см. также [100]) в виде максимального
числа бит на единицу энергии, которое может быть передано так, чтобы
вероятность ошибки стремилась к нулю при увеличении энергии. Этот но-
вый подход к оценке емкости на единицу энергии нуждается в сведениях
об энергии и длине блока, асимптотически возрастающих для бесконеч-
но малой вероятности ошибки. Поэтому, конечное значение передаваемой
в системе энергии при емкости на единицу энергии не имеет бесконечно
малое значение вероятности ошибки. Понимание этого определения для
каналов с аддитивным гауссовым шумом AWGN приходит при оценке
минимальной энергии на бит, необходимой для обеспечения передачи нор-
мированной емкости по Шеннону Св = С/В, бит/с/Гц [100]. В частности,
принимаемая энергия на бит равна отношению принимаемой мощности
к скорости передачи данных: Еь — Р/R = Р/С для передачи на скоро-
сти, стремящейся к емкости по Шеннону С. Используя формулу Шеннона
для выражения емкости канала при аддитивном гауссовом шуме AWGN,
Глава 16. Специализированные беспроводные сети
получим:
с = Blog2 0 + ^в) = Blog2 + шО
(16.7)
Преобразование (16.7) относительно количества энергии на бит, требуе-
мой для передачи на скорости, стремящейся к нормированной величине
пропускной способности Св = С/В дает:
Еь„ - 2Св ~ 1
No Св
(16.8)
При увеличении полосы частот канала В, величина Св стремится к ну-
лю, давая выражение минимума энергии на бит при условии широкой
полосы:
/ тг \ _1
-А = lim ------------= 1н2 =-1,59, дБ. (16.9)
Как показано в [100], сигналы типа «включено - выключено», подобно
фазоимпульсной модуляции ФИМ, достигают минимума энергии на бит
при аддитивном гауссовом шуме AWGN. Более того, результаты в [122, 123]
показали, что минимум энергии на бит для надежной связи при плавных
замираниях так же выражается (16.9), даже в случае, когда замирания
неизвестны приемнику. Эти результаты показали следующее: (i) в преде-
ле при бесконечной полосе частот, минимум энергии на бит не зависит
от замираний или возможностей приема; (ii) сигнал вида «включено - вы-
ключено» находится вблизи минимума энергии при связи.
Многие ограниченные по энергии беспроводные сети имеют большую,
но конечную полосу частот и результаты, полученные для предельно-
го случая неограниченной полосы частот, могут ввести в заблуждение
при разработке таких систем, [123, 124]. В частности, полоса частот, не-
обходимая для работы при энергии на бит, близкой к минимуму (16.9),
очень чувствительна к распределению замираний и к тому, что известно
о замираниях на приеме. Если замирания известны на приеме, то коге-
рентная четырехкратная фазовая манипуляция ФМН-4 (QPSK) предста-
вляет оптимальную схему сигнала с отчетливо субоптимальным сигналом
«включено - выключено», но асимптотическая форма сигнала «включено -
выключено» — оптимальна без предварительных знаний на приеме.
Емкость на единицу энергии для каналов с одним пользователем мо-
жет быть распространена на каналы радиовещательного типа и каналы
многостанционного, коллективного доступа [121, 126, 125]. Эти результа-
ты показывают, что при ограниченной полосе частот система с много-
станционным доступом и временным разделением каналов МДВР (TDMA)
оптимальна для обоих типов каналов, потому что она обеспечивает ми-
нимум энергии на бит, необходимой для надежной связи. Однако в [126]
показано, что при большой, но конечной полосе частот, совмещенная стра-
тегия МДКР (CDMA) с многопользовательским детектированием обес-
печивает надежную связь при той же величине энергии на бит и при
меньшей полосе частот, чем при МДВР (TDMA).
Задачи
16.1. Рассмотреть сигнал, который следует передать на 1 км. Предположим,
что потери в тракте подчиняются упрощенной модели Pr = Pfd ^.
а) Найти требуемую мощность на передаче Pt — такую, чтобы принима-
емая мощность была равна 10 мВт, при 7 = 2 и 7 = 4.
б) В предположении, что промежуточный узел (ретранслятор) находится
посередине между передающей и приемной станциями при многопро-
летной маршрутизации, при 7 = 2 и 7 = 4, когда передатчик и ре-
транслятор работают с одинаковой мощностью Pt, определить, какой
должна быть величина Pt, чтобы сигнал на входе приемника промежу-
точного узла был равен 10 мВт и сигнал на входе приемника оконечной
станции назначения, получаемый от промежуточной станции, был ра-
вен 10 мВт.
в) Вывести общую формулу суммарной мощности в сети с числом при-
емопередающих станций, равным N, равномерно разнесенных меж-
ду передатчиком и приемником так, что каждый приемопередатчик
и приемник принимал бы мощность 10 мВт.
16.2. Рассмотреть специализированную беспроводную сеть с тремя пользова-
телями. Абоненты 1 и 2 требуют на приеме отношения SINR, равного
7 дБ, а третий абонент требует SINR — 10 дБ. Предположить, что все
абоненты имеют равную мощность шумов щ = 1 и что выигрыш от обра-
ботки сигнала для снижения помехи отсутствует (р = 1). Предположить,
что матрица усилений (индексы соответствуют номерам абонентов) равна:
G =
1 0,06 0,04
0,09 0,9 0,126
0,064 0,024 0,8
а) Доказать, что уравнение (I — F)P и эквивалентно ограничению
по отношению SINR для каждого пользователя.
б) Показать, что для этой системы существует вектор мощности, при
котором все пользователи достигают нужного отношения SINR.
в) Найти оптимальный вектор Р*, при котором все пользователи дости-
гают нужного отношения SINR.
16.3. Данная задача использует условия предыдущей задачи. Предположим, что
каждый пользователь начинает работу с мощности 50, так, что началь-
ный вектор мощности Р(0) = (РДО), -Рг(О), -Рз(О)) = (50,50, 50). Используя
Глава 16. Специализированные беспроводные сети
рекуррентную формулу (16.4) для каждого абонента, изобразить график
Pi(k) для каждого пользователя (г = 1,2,3) в диапазоне к =
где N — достаточно большая величина для того, чтобы вектор P(N) на-
ходился близко к своему оптимальному значению Р*. Изобразить также
график отношения SINR для каждого пользователя при к = 1,..., N.
16.4. Рассмотреть бесконечную сетку узлов, размещенных через каждые 10 мет-
ров вдоль прямой линии. Использовать упрощенную модель потерь в трак-
те Pr = Ptd~y и принять, что для установления связи принимаемая мощ-
ность Рг должна быть по меньшей мере равна 10 мВт.
а) При 7 = 2 найти такое значение Ртах, при котором каждый узел имеет
окрестность из двух узлов: N = 2. Что случится, если узлы имеют
максимальную мощность ниже этого значения Ртах?
б) Найти Ртах при 7 = 2 и N = 4.
в) Найти Ртах при 7 = 4 и N = 4.
16.5. Рассмотреть географический регион площадью 100 м2. Предположить,
что N узлов равномерно распределены по этому региону и что каждый
узел передает мощность, достаточную для установления связи с любым
другим узлом на расстоянии R метров. Рассчитайте среднее число узлов
E(2V) в функции величины радиуса R, 1 С R С 20, необходимого для
того, чтобы сеть была полностью связана. Среднее значение E(IV) следу-
ет рассчитать на основании выборки объемом в 100 отсчетов случайно
размещенных по региону узлов.
16.6. Рассмотреть сеть с многолучевой маршрутизацией так, что каждый па-
кет посылается по N независимым маршрутам от источника до получате-
ля. Предположить, что задержка d экспоненциально распределена вдоль
каждого маршрута со средним значением D: p(d) = е /D. d > 0.
Найти вероятность того, что все N копий пакетов поступят на узел назна-
чения с задержкой, превышающей D в функции N, и сделать оценки при
N = 1 и N = 5. Определить также, как влияет многолучевая маршрути-
зация на пропускную способность в функции от N. Качественно опишите
компромисс между пропускной способностью системы и задержкой при
многолучевой маршрутизации.
16.7. Показать, что (16.6) выпукла и по /у и по С1Г
16.8. Предположить, что пропускная способность канала С = 10 Мбит/с. Изо-
бразить график, заданный выражением (16.5) и (16.6) для потока данных,
изменяющегося от 0 до 10 Мбит/с: 0 С /у < 10 Мбит/с.
16.9. В данной задаче рассматриваются различия между мерами задержки (16.5)
и (16.6). Пусть А — коэффициент в (16.5) и (16.6).
а) Найти А в функции fij/С^.
б) Используя тот факт, что поток /у должен быть меньше Су, найти
диапазон значений, принимаемый величиной А.
в) Найти такое значение ftj/С^. при котором А > 10, т. е. величина
задержки, рассчитанная по формуле (16.5), превосходит значение, рас-
считанное по формуле (16.6), на порядок.
г) Рассмотреть проект сети, когда стоимость маршрута основывается
на мере (16.5) или (16.6). При каких значениях каналы будут более
перегружены и почему?
16.10. Данная задача показывает выигрыш (на примере межуровневого про-
ектирования) от учета взаимодействия между сетевым и прикладным
слоями. Для передачи приложений подобных видео прикладной слой будет
пытаться использовать высокоскоростное кодирование для улучшения ка-
чества. Теперь рассмотрим приложение в реальном времени. Заданная
величина емкости выделена на сетевом уровне, если скорость передачи
превышает ее, то наступит перегрузка канала, это повлечет задержку па-
кетов и, следовательно, многие пакеты не поступят на декодер вовремя,
что, в свою очередь, снизит качество. Таким образом, мы видим основа-
ния для компромисса. Простая модель распределения, учитывающая оба
эти параметра, может быть представлена в виде:
Dist(fi) = Do + + K<Cic<-R'T/L. (16.10)
Г1 rto
Первые два члена соответствуют искажениям на прикладном уровне при
кодировании источника, а последний член соответствует искажениям,
возникающим из-за задержки пакетов. Пусть Do = 0,38, Ro = 18,3 кбит/с,
в = 2537, масштабный коэффициент к = 1, эффективная длина пакета
L = 3040 бит, предельная величина времени воспроизведения Т = 350 мс.
Емкость С и скорость передачи R описаны ниже.
а) Если емкость С принимает значения 45 кбит/с, 24 кбит/с и 60 кбит/с
с вероятностью 0,5; 0,25 и 0,25 соответственно, то требуется найти
оптимальную скорость R, которая минимизирует среднюю величину
искажений Dist(fi). Предположить полное взаимодействие между при-
кладным и сетевым слоями — прикладной слой всегда знает мгновен-
ную емкость С сетевого слоя.
б) Теперь рассмотрим случай, когда между слоями отсутствует взаимо-
действие и оптимизация, а кодирование на прикладном слое все время
производится с постоянной скоростью R = 22 кбит/с. Найти среднюю
величину искажений Dist(7?) при том же распределении емкости, ко-
торое задано в пункте (а).
в) Сравнить части (а) и (б) и определить процент увеличения искажений
при отсутствии взаимодействия для оптимизации между слоями.
16.11. Показать, что отношение Еь/No в функции от Св — С/В, заданной вы-
ражением (16.8), возрастает с С при фиксированной В и убывает с В при
фиксированном значении С. Показать так же, что:
lim
С'в—о
844 Глава 16. Специализированные беспроводные сети
Литература
1. R. Е. Kahn, S. A. Gronemeyer, J. Burchflel and R. C. Kunzelman, «Advances in
packet radio technology», Proc. IEEE, pp. 1468-96, November 1978.
2. L. Kleinrock and J. Silvester, «Optimum transmission radii for packet radio
networks or why six is a magic number», Proc. IEEE Natl. Telecomm. Conf.,
pp. 4.3.1-4.3.5, December 1978.
3. A. Ephremides, J. E. Wieselthier and D. J. Baker, «А design concept for reliable
mobile radio networks with frequency hopping signaling», Proc. IEEE, pp. 56-
73, January 1987.
4. J. Jubin and J. D. Tornow, «The DARPA packet radio network protocols», Proc.
IEEE, pp. 21-32, January 1987.
5. M.B. Pursley, «The role of spread spectrum in packet radio networks», Proc.
IEEE, pp. 116-34, January 1987.
6. F. A. Tobagi. «Modeling and performance analysis of multihop packet radio
networks», Proc. IEEE, pp. 135-55, January i987.
7. B. Leiner, R. Ruther and A. Sastry, «Goals and challenges of the DARPA Glomo
program (global mobile information systems)», IEEE Pers. Commun. Mag., pp.
34-43, December 1996.
8. R. Ramanathan and R. Rosales-Hain, «Topology control of multihop wireless
networks using transmit power adjustment», Proc. IEEE Infocont Conf., pp. 404-
13, March 2000.
9. M. Ritter, R. Friday and M. Cunningham. «The architecture of Metricom’s
microcellular data network and details of its implementation as the 2nd and 3rd
generation ricochet wide-area mobile data service», Proc. IEEE Emerg. Technol.
Sympos. Broadband Commun., pp. 143-52, September 2001.
10. M.N. Huhns, «Networking embedded agents», IEEE Internet Compur., pp. 91-
3, January-February 1999.
11. W. W. Gibbs «As we may live», Scientific American, pp. 36, 40, November 2000.
12. K. J. Negus, A. P. Stephens and J. Lansford, «HomeRF: Wireless networking for
the connected home», IEEE Pers. Commun. Mag., pp. 20-7, February 2000.
13. A. Schmidt, «How to build smart appliances», IEEE Pers. Commun. Mag.,
pp. 66-71. August 2001.
14. J. Haartsen, «The Bluetooth radio system», IEEE Pers. Commun. Mag., pp. 28-
36, February 2000.
15. J. Haartsen and S. Mattisson. «Bluetooth: A new low-power radio interface
providing short-range connectivity», Proc. IEEE, pp. 1651-61, October 2000.
16. I. Poole, «What exactly is ... ZigBee?» IEEE Commun. Eng., pp.44-5, Au-
gust/September 2004.
17. T. Mitchell, «Broad is the way (ultra-wideband technology)», IEE Review pp. 35-
9, January 2001.
18. J. Rabaey, J. Ammer, J. L. da Silva, Jr. and D. Roundy. «PicoRadio supports
ad hoc ultra-low power wireless networking», IEEE Computer, pp. 42-8. July
2000.
19. J. Nilsson, В. Bernhardsson and B. Wittenmark, «Stochastic analysis and con-
trol of real-time systems with random time delays», Automatica, pp. 57-64.
January 1998.
20. X. Liu, S. S. Mahal, A. Goldsmith and J. K. Hedrick. «Effects of communication
delay on string stability in vehicle platoons», Proc. IEEE Inremat. Conf Intell.
Transp. Sysr., pp. 625-30, August 2001.
21. S. R. Graham, G. Baliga and P. R. Kumar. «Issues in the convergence of control
with communication and computing: Proliferation, architecture, design, services
and middleware», Proc. IEEE Conf. Decision Control, pp. 1466-71, December
2004.
22. S. Basagni, D. Turgut and S. K. Das, «Mobility-adaptive protocols for managing
large ad hoc networks», Proc. IEEE Internal Conf. Commun., pp. 1539-43.
June 2001.
23. N. Bambos, «Toward power-sensitive network architectures in wireless commu-
nications: Concepts, issues and design aspects», IEEE Pers. Commun. Mag.,
pp. 50-9, June 1998.
24. K. Sohrabi, J. Gao, V. Ailawadhi and G. Pottie. «Protocols for self-organization
of a wireless sensor network», IEEE Pers. Commun. Mag., pp. 16-27, October
2000.
25. L. Subramanian and R. H. Katz, «An architecture for building self-configurable
systems», Proc. Mobile Ad Hoc Network Comput. Workshop, pp. 63-73, August
2000.
26. R. Jam, A. Pun and R. Sengupta, «Geographical routing using partial infor-
mation for wireless ad hoc networks», IEEE Pers. Commun. Mag., pp. 48-57.
February 2001.
27. L. Zhou and Z. J. Haas, «Securing ad hoc networks», IEEE Network, pp. 24-30.
November/December 1999.
28. R. Karri and P. Mishra, «Modeling energy efficient secure wireless networks
using network simulation», Proc. IEEE Internat. Conf. Commun., pp. 61-5,
May 2003.
29. IEEE Wireless Conirnun. Mag., Special Issue on Energy Aware Ad Hoc Wireless
Networks (A. J. Goldsmith and S.B. Wicker. Eds.). August 2002.
30. S. Cui. A. J. Goldsmith and A. Bahai, «Energy-constrained modulation opti-
mization», IEEE Trans. Wireless Commun., September 2005.
31. D. Bertsekas and R. Gallager. Data Networks, 2nd ed., Prentice-Hall, Englewood
Cliffs. NJ. 1992.
32. V. Kawadia and P. R. Kumar, «Principles and protocols for power control in
wireless ad hoc net works», IEEE J. Sei. Areas Commun., pp. 76-88, January
2005.
33. J. Zander, «Performance of optimum transmitter power control in cellular radio
systems», IEEE Trans. Veh. Tech., pp. 57-62, February 1992.
34. S. A. Grandhi, R. Vijayan. and D. J. Goodman. «Distributed power control in
cellular radio sys terns», IEEE Trans. Commun., pp. 226-8, February—April
1994.
35. G. J. Foschini and Z. Miljanic, «А simple distributed autonomous power control
algorithm and its convergence», IEEE Trans. Veh. Tech., pp. 641-6, November
1993.
846 Глава 16. Специализированные беспроводные сети
36. Т. Holliday, N. Bambos. A. J. Goldsmith and Р. Glynn, «Distributed power
control for time varying wireless networks: Optimality and convergence», Proc.
Allerton Conf. Commun., Control, Comput., pp. 1024-33, October 2003.
37. N. Bambos, G. Pottie and S. Chen, «Channel access algorithms with active link
protection for wireless communications networks with power control», IEEE/ACM
Trans. Network., pp. 583- 97, October 2000.
38. S. Toumpis and A. J. Goldsmith. «Performance, optimization and cross-layer
design of media access protocols for wireless ad hoc networks», Proc. IEEE
Internal. Conf. Commun., pp. 2234- 40, May 2003.
39. T. ElBatt and A. Ephremides. «Joint scheduling and power control for wireless
ad hoc networks», IEEE Trans. Wireless Commun., pp. 74-85, January 2004.
40. S. Kandukuri and N. Bambos, «Power controlled multiple access (PCMA) in
wireless communication networks», Proc. IEEE Infocom Conf., pp. 386-95, March
2000.
41. S. Kallel, «Analysis of memory and incremental redundancy ARQ schemes over a
nonstationary channel», IEEE Trans. Commun., pp. 1474-80. September 1992.
42. V. Rodoplu and T. H. Meng, «Minimum energy mobile wireless networks», IEEE
J. Sei. Areas Commun., pp. 1333 44, August 1999.
43. P. Gupta and P. R. Kumar, «Towards an information theory of large networks:
An achievable rate region», IEEE Trans. Inform. Theory, pp. 1877-94, August
2003.
44. F. Xue and P. R. Kumar, «The number of neighbors needed for connectivity of
wireless networks», Wireless Networks, pp. 169-81, March 2004.
45. S. Toumpis and A. Goldsmith, «Capacity regions for ad hoc networks», IEEE
Trans. Wireless Commun., pp. 736-48, July 2003.
46. O. Dousse, P. Thiran. and M. Hasler, «Connectivity in ad-hoc and hybrid net-
works», Proc. IEEE Infocom Conf, pp. 1079-88, June 2002.
47. B. Krishnamachari, S. B. Wicker and R. Bejar. «Phase transition phenomena in
wireless ad hoc networks», Proc. IEEE Globecoin Conf., pp. 2921-5, November
2001.
48. M. Penrose, Random Geometric Graphs, Oxford University Press, 2004.
49. С -K. Toh, Ad Hoc Mobile Wireless Networks: Protocols and Systems, Prentice-
Hall, Englewood Cliffs, NJ, 2002.
50. S.-J. Lee and M. Gerla, «Dynamic load-aware routing in ad hoc networks», Proc.
IEEE Intern at. Conf. Commun., pp. 3206-10, June 2001.
51. L. L. Peterson and B.S. Davie, Computer Networks — A Systems Approach,
2nd ed., Morgan-Kaufman, San Mateo. CA, 2000.
52. С. P. P. Bhagwat, «Highly dynamic destination-sequenced distance vector rout-
ing (DSDV) for mobile computers», Proc. ACM SIGCOMM, pp. 234-44, Septem-
ber 1994.
53. C.E. Perkins and E.M. Royer. «Ad hoc on-demand distance vector routing»,
Proc. IEEE Workshop Mobile Comput. Syst. Appl., pp. 90-100, February 1999.
54. D. B. Johnson and D. A. Maltz. «Dynamic source routing in ad hoc wireless
networks», in T. Imielinsky and H. Korth, Eds., Mobile Computing, Kluwer,
Dordrecht. 1996.
55. M.R. Pearlman, Z. J. Haas and S. I. Mir, «Using routing zones to support
route maintenance in ad hoc networks», Proc. IEEE Wireless Commun. Net-
work Conf., pp. 1280-4, September 2000.
56. A. Tsirigos and Z. J. Haas, «Multipath routing in the presence of frequent topo-
logical changes», IEEE Commun. Mag., pp. 132 8, November 2001.
57. D. Ayyagari, A. Michail and A. Ephremides, «А unified approach to scheduling,
access control and routing for ad-hoc wireless networks», Proc. IEEE Veh. Tech.
Conf., pp. 380-4, May 2000.
58. S. Chen and K. Nahrstedt. «Distributed quality-of-service routing in ad hoc
networks», IEEE J. Sei. Areas Commun., pp. 1488-1505. August 1999.
59. C. R. Lin and J.-S. Liu, «QoS routing in ad hoc wireless networks», IEEE J. Sei.
Areas Commun., pp. 1426-38, August 1999.
60. M. Mirhakkak, N. Schult and D. Thomson, «Dynamic bandwidth management
and adaptive applications for a variable bandwidth wireless environment», IEEE
J. Sei. Areas Commun., pp. 1984-97, October 2001.
61. A. Nosratinia, T.E. Hunter and A. Hedayat, «Cooperative communication in
wireless networks», IEEE Commun. Mag., pp. 74-80, October 2004.
62. S. Cui and A. J. Goldsmith. «Energy efficient routing using cooperative MIMO
techniques», Proc. IEEE Internat. Comnf. Acous., Speech, Signal Proc., pp. 805-
8, March 2005.
63. A. Sendonaris, E. Erkip and B. Aazhang, «User cooperation diversity. Part I:
System description», IEEE Trans. Commnun., pp. 1927-38. November 2003.
64. A. Sendonaris, E. Erkip and B. Aazhang, «User cooperation diversity. Part
IL Implementation aspects and performance analysis», IEEE Trans. Commun.,
pp. 1939-48. November 2003.
65. M. Janani, A. Hedayat. T. E. Hunter and A. Nosratinia, «Coded cooperation
in wireless communications: Space-time transmission and iterative decoding»,
IEEE Trans. Signal Proc., pp. 362-71, February 2004.
66. J. N. Laneman, D. N. C. Tse and G. W. Wornell, «Cooperative diversity in wire-
less networks: Efficient protocols and outage behavior», IEEE Trans. Inform.
Theory, pp. 3062-80, December 2004.
67. R. Ahiswede, N. Cai, S.-Y. R. Li and R. W. Yeung, «Network information flow»,
IEEE Trans. Inform. Theory, pp. 1204-16. July 2000.
68. R. Koetter and M. Medard, «An algebraic approach to network coding», IEEE/
ACM Trans. Network., pp. 782-95, October 2003.
69. S.-Y. R. Li, R. W. Yeung and N. Cai, «Linear network coding», IEEE Trans.
Inform. Theory, pp. 371-81, February 2003.
70. N. Cai and R. W. Yeung, «Network error correction», Proc. IEEE Inform. Theory
Workshop, p. 101. June 2003.
71. R. L. Cruz and A. V. Santhanam, «Optimal routing, link scheduling and power
control in multi- hop wireless networks», Proc. IEEE Infocom. Conf., pp. 702-11,
April 2003.
72. M. Johansson, L. Xiao and S. P. Boyd, «Simultaneous routing and power alloca-
tion in CDMA wireless data networks», Proc. IEEE Internat. Conf. Commun.,
pp. 51-5, May 2003.
73. L. Xiao. M. Johansson and S. P. Boyd. «Optimal routing, link scheduling and
power control in multihop wireless networks», IEEE Trans. Commun., pp. 1136—
44, July 2004.
74. Y. Wu. P. A. Chou, Q. Zhang, K. Jam, W. Zhu. and S.-Y. Kung. «Network
planning in wireless ad hoc networks: A cross-layer approach», IEEE J. Sei.
Areas Commun., pp. 136-50, January 2005.
848 Глава 16. Специализированные беспроводные сети
75. В. Radunovie and J. Y. Boudec, «Rate performance objectives of multihop wire-
less networks», IEEE Trans. Mobile Comput., pp. 334-49, October-December
2004.
76. D. Julian, M. Chiang, D. O’Neill and S. Boyd, «QoS and fairness constrained
convex optimization of resource allocation for wireless cellular and ad hoc net-
works», Proc. IEEE Infocom Conf., pp. 477-86. June 2002.
77. Y. Wang and Q.-F. Zhu, «Error control and concealment for video communica-
tion: A review», Proc. IEEE, pp. 974-97, May 1998.
78. E. Steinbach, N. Farber and B. Girod. «Adaptive playout for low latency video
streaming», Proc. IEEE Intemat. Conf. Image Proc., pp. 962-5, October 2001.
79. D. G. Sachs, R. Anand and K. Rarnchandran, «Wireless image transmission us-
ing multiple-description based concatenated codes», Proc. IEEE Data Compress.
Conf., p. 569, March 2000.
80. S. D. Servetto, K. Rarnchandran, V. A. Vaisharnpayan and K. Nahrstedt, «Mul-
tiple description wavelet based image coding», IEEE Trans. Image Proc., pp. 813-
26, May 2000.
81. M. Alasti, K. Sayrafian-Pour, A. Ephremides and N. Farvardin, «Multiple de-
scription coding in networks with congestion problem», IEEE Trans. Inform.
Theory, pp. 891-902, March 2001.
82. T. Holliday and A. Goldsmith, «Joint source and channel coding for MIMO
systems: Is it better to be robust or quick», Proc. Joint Workshop Commun.
Cod., p. 24, October 2004.
83. V. Kawadia and P. R. Kumar, «А cautionary perspective on cross-layer design»,
IEEE Wireless Commun. Mag., pp. 3-11, February 2005.
84. W. Kumwilaisak, Y. T. Hou, Q. Zhang. W. Zhu, C.-C. J. Kuo and Y.-Q. Zhang,
«А cross-layer quality-of-service mapping architecture for video delivery in wire-
less networks», IEEE J. Sei. Areas Commun., pp. 1685-98, December 2003.
85. T. Yoo, E. Setton, X. Zhu, A. Goldsmith and B. Girod, «Cross-layer design for
video streaming over wireless ad hoc networks», Proc. IEEE Intemat. Workshop
Multi. Signal Proc., pp. 99-102, September 2004.
86. W. Yu, K. J. R. Liu and Z. Safar, «Scalable cross-layer rate allocation for image
transmission over heterogeneous wireless networks», Proc. IEEE Intemat. Conf.
Acous., Speech, Signal Proc., pp. 4.593-4.596. May 2004.
87. T. Cover and J. Thomas, Elements of Information Theory, Wiley, New York,
1991.
88. P. Gupta and P. R. Kumar, «The capacity of wireless networks», IEEE Trans.
Inform. Theory, pp. 388-404, March 2000.
89. M. Grossglauser and D. N. C. Tse, «Mobility increases the capacity of ad-hoc
wireless networks», IEEE/АСМ Trans. Network., pp. 1877-94, August 2002.
90. A. El Gamal, J. Mammen, B. Prabhakar and D. Shah, «Throughput—delay
trade-off in wireless networks», Proc. IEEE Infocom Conf., pp. 464-75, March
2004.
91. S. Toumpis. «Large wireless networks under fading, mobility and delay con-
straints», Proc. IEEE Infocom Conf, pp. 609-19, March 2004.
92. M. Gastpar and M. Vetterli, «On the capacity of wireless networks: The relay
case», Proc. IEEE Infocom Conf., pp. 1577-86, June 2002.
93. A. Host-Madsen, «А new achievable rate for cooperative diversity based on gen-
eralized writing on dirty paper», Proc. IEEE Internat. Sympos. Inform. Theory,
p. 317, June 2003.
94. A. Host-Madsen, «On the achievable rate for receiver cooperation in ad-hoc
networks», Proc. IEEE Internat. Sympos. Inform. Theory, p. 272, June 2004.
95. M. A. Khojastepour, A. Sabharwal and B. Aazhang, «Improved achievable rates
for user co operation and relay channels», Proc. IEEE Internat. Sympos. Inform.
Theory, p. 4, June 2004.
96. N. Jindal, U. Mitra, and A. Goldsmith. «Capacity of ad-hoc networks with node
cooperation», Proc. IEEE Internat. Sympos. Inform. Theory, p. 271, June 2004.
97. C.T.K. Ng and A. J. Goldsmith, «Transmitter cooperation in ad-hoc wireless
networks: Does dirty-paper coding beat relaying?» IEEE Inform. Theory Work-
shop, pp. 277-82. October 2004.
98. A. Chandrakasan, R. Amirtharajah, S. Cho. J. Goodman, G. Konduri, J. Kulik,
W. Rabiner and A. Y. Wang, «Design considerations for distributed microsensor
systems», Proc. IEEE Custom Integrated Circuits Conf., pp. 279-86, May 1999.
99. J. Rabaey, J. Ammer, J.L. da Silva. Jr. and D. Patel. «PicoRadio: Ad-hoc wire-
less networking of ubiquitous low-energy sensor/monitor nodes», IEEE Comput.
Soc. Workshop on VLSI, pp. 9-12, April 2000.
100. S. Verdu, «On channel capacity per unit cost», IEEE Trans. Inform. Theory,
pp. 1019-30. September 1990.
101. P. Agrawal, «Energy efficient protocols for wireless systems», Proc. Internat.
Sympos. Pers., Indoor, Mobile Radio Commun., pp. 564-9, September 1998.
102. W. R. Heinzelman. A. Sinha and A.P. Chandrakasan, «Energy-scalable algo-
rithms and protocols for wireless microsensor networks», Proc. IEEE Internat.
Conf Acous., Speech, Signal Proc., pp. 3722-5, June 2000.
103. J. M. Kahn, R. H. Katz and K. S. Pister, «Emerging challenges: Mobile network-
ing for Smart Dust», J. Cominun. Networks, pp. 188-96, August 2000.
104. A. Chandrakasan and R. W. Brodersen, Low Power Digital CMOS Design,
Kluwer, Norwell, MA, 1995.
105. A. Ephremides, «Energy concerns in wireless networks», IEEE Wireless Com-
mun. Mag., pp. 48-59. August 2002.
106. A. J. Goldsmith and S. B. Wicker, «Design challenges for energy-constrained ad
hoc wireless networks», IEEE Wireless Commun. Mag., pp. 8-27, August 2002.
107. W. Stark, H. Wang. A. Worthen, S. Lafortune and D. Teneketzis, «Low-energy
wireless communication network design», IEEE Wireless Commun. Mag., pp. 60-
72. August 2002.
108. E. Shih. P. Bahl and M. Sinclair. «Wake on wireless: An event driven ener-
gy saving strategy for battery operated devices», Proc. Internat. Conf. Mobile
Comput. Network, pp. 160-71, September 2002.
109. C. Schurgers and M. B. Srivastava, «Energy efficient wireless scheduling: Adap-
tive loading in time», Proc. IEEE Wireless Commun. Network Conf., pp. 706-11,
March 2002.
110. S. Cui, A. J. Goldsmith and A. Bahai, «Energy-efficiency of MIMO and coop-
erative MIMO in sensor networks», IEEE J. Sei. Areas Commun., pp. 1089-98,
August 2004.
850 Глава 16. Специализированные беспроводные сети
111. М. Zorzi and R. R. Rao, «Energy-constrained error control for wireless channels»,
IEEE Pers. Commun. Mag., pp. 27-33, December 1997.
112. A. B. MacKenzie and S. B. Wicker, «Selfish users in ALOHA: A game-theoretic
approach», Proc. IEEE Veh. Tech. Conf., pp. 1354-7, October 2001.
113. A. Chockalingarn and M. Zorzi, «Energy efficiency of media access protocols for
mobile data networks», IEEE Trans. Commun., pp. 1418-21, November 1998.
114. J.-H. Youn and B. Bose, «An energy conserving medium access control protocol
for multihop packet radio networks», IEEE Internal. Conf. Comput. Commun.
Network, pp. 470-S. October 2001.
115. E. Uysal-Biyikoglu, B. Prabhakar and A. El Gamal, «Energy-efficient packet
transmission over a wireless link», IEEE/АСМ Trans. Network., pp. 487-99,
August 2002.
116. C.-K. Toh, «Maximum battery life routing to support ubiquitous mobile com-
puting in wireless ad hoc networks», IEEE Commun. Mag., pp. 138-47, June
2001.
117. J.H. Chang and L. Tassiulas, «Energy conserving routing in wireless ad-hoc
networks», Proc. IEEE Infocom Conf., pp. 609-19. August 2000.
118. M. A. Youssef, M. F. Younis and K.A. Arisha, «А constrained shortest-path
energy-aware rout ing algorithm for wireless sensor networks», Proc. IEEE Wire-
less Commun. Network Conf., pp. 794-9, March 2002.
119. M. Zorzi and R. R. Rao, «Geographic random forwarding (GeRaF) for ad hoc
and sensor net works: Energy and latency performance», IEEE Trans. Mobile
Comput., pp. 349-65, October— December 2003.
120. S. Cui, R. Madan, A. J. Goldsmith and S. Lail, «Joint routing. MAC. and link
layer optimization in sensor networks with energy constraints», Proc. IEEE In-
ternal. Conf. Commun., May 2005.
121. R. G. Gallager, «Energy limited channels: Coding, multiaccess and spread spec-
trum», Proc. Inform. Syst. Scl. Conf., p. 372, March 1988. (See also Technical
Report LIDS-P-1714, MIT, November 1987.)
122. R. S. Kennedy, Fading Dispersive Communication Channels, Wiley, New York,
1969.
123. S. Verdu, «Spectral efficiency in the wideband regime», IEEE Trans. Inform.
Theory, pp. 1319- 43, June 2002.
124. S. Verdru. «Recent results on the capacity of wideband channels in the low-power
regime», IEEE Wireless Commun. Mag., pp. 40-5, August 2002.
125. A. Lapidotv, I. E. Telatar. and R. Urbanke, «On wide-band broadcast channels»,
IEEE Trans. Inform. Theory, pp. 3250-8, December 2003.
126. G. Caire, D. Tuninetti and S. Verdii, «Suboptimality of TDMA in the low-power
regime», IEEE Trans. Inform. Theory, pp. 608-20. April 2004.
ПРИЛОЖЕНИЕ А
ПРЕДСТАВЛЕНИЕ
ПОЛОСОВЫХ
СИГНАЛОВ
И КАНАЛОВ
Многие сигналы в системах связи представляют собой действительные
сигналы с ограниченной полосой частот (или полосовые сигналы), ампли-
тудно-частотная характеристика которых занимает узкую полосу час-
тот 2В с центром на несущей частоте /с, при этом 2В <. /с, как показано
на рис. А.1. Поскольку полосовые сигналы — это действительные сиг-
налы, их частотная характеристика обладает сопряженной симметрией,
т.е. для полосового сигнала s(t) справедливы равенства |5(/)| = |S'(—/)|
и ZS(f) = —ZS(—f). Однако полосовые сигналы не обязательно симме-
тричны в полосе частот относительно несущей частоты fc: это значит,
что для некоторых частот f в диапазоне 0 < f В мы можем иметь:
\S(fc + /)| + \S{h ~ f)\ или Z5(/c + /) ^ -ZS(/C - /). На рисунке проил-
люстрирована эта асимметрия |5(/)| относительно fc (т.е. \S(fc + /)|
/ \S(fc~ /)| для некоторых f < В). Полосовые сигналы образуются
в результате модуляции несущего сигнала модулирующим, исходным сиг-
налом или в результате фильтрации детерминированного или случайно-
го сигнала полосовым фильтром. Ширина полосы частот 2В полосового
сигнала приближенно соответствует диапазону частот с центральной ча-
стотой /с, в котором сигнал имеет значительную амплитуду. Полосовые
сигналы обычно используются при моделировании передаваемых и при-
нимаемых сигналов систем связи. Это действительные сигналы, так как
цепь передатчика может генерировать только действительные синусои-
ды (а не сложные экспоненциальные функции), а канал просто вносит
изменения по амплитуде и фазе на каждой частоте действительного пе-
редаваемого сигнала.
Вначале представим полосовой сигнал s(i) на несущей частоте /с в сле-
дующем виде:
s(t) = si(t) cos(2ttfct) - sQ(t) sin(27r/ci),
(A.l)
где sift) и sq(£) — действительные низкочастотные сигналы (модулиру-
ющие сигналы) с полосой В fc. Это общая форма представления как
852 Приложение А. Представление полосовых сигналов и каналов
полосовых, так и шумовых сигналов. Такое представление обычно исполь-
зуется для описания методов модуляции типа MPSK1 и MQAM2 *. При этом
sj(t) называют синфазной составляющей сигнала s(t), a sq(/)- его квадра-
турной составляющей. Введем комплексный сигнал u(t) = S[(t) +
где S[(t) = Re{u(f)}, a sqft) = Im{u(f)}. Таким образом, u(f) представляет
комплексный низкочастотный сигнал с полосой В. Тогда
s(t) = Re{u(/)} cos(27r/c£) — Im{w(f)} sin(2^/cf) = Re{u(f)e-?2’r^ct}. (A.2)
Правую часть этого выражения называют комплексным низкочастотным
представлением полосового сигнала s(t), а исходный, модулирующий сиг-
нал u(t) — эквивалентным низкочастотным сигналом для сигнала s(i)
или его комплексной огибающей. Заметьте, что U(f) обладает парной
(сопряженной) симметрией относительно / = 0, только если сигнал u(i)
действительный (т. е. если SQ^t) = 0).
|5(/)|
2В « fe
-В
Рис. А.1. Полосовой сигнал S(f)
Используя свойства преобразования Фурье, можно показать, что
S(f) = 0,5[П(/ - /с) + П*(-/ - /с)]. (А.З)
Поскольку сигнал s(t) действительный, S(f) обладает сопряженной сим-
метрией относительно f = 0. Но при этом низкочастотные сигналы U(f)
и U*(f) не обязательно обладают тем же свойством, что ведет к асим-
метрии сигнала S(f) в полосе частот 2В относительно несущей часто-
ты /с, как показано на рис. А.1. Действительно, в этой полосе частот
S(J) обладает сопряженной симметрией относительно несущей частоты,
только если u(i) = Sj(^), т. е. если сигнал u(f) не имеет квадратурной со-
ставляющей. Кратко рассмотрим, как эта асимметрия влияет на отклик
полосовых каналов на полосовые сигналы.
Эквивалентный низкочастотный сигнал можно представить в виде:
(А.4)
с огибающей
а(£) = + sqW
(А.5)
'Многоуровневая фазовая манипуляция — МФМН (MPSK). — Прим, перев.
2Многоуровневая квадратурная амплитудная манипуляция — МКАМ (MQAM). —
Прим, перев.
и фазой
¥>(*) = arctg (A-6)
\ S/W /
Используя эту форму представления, получим:
s(t) = = a(t) cos(2^/cf + <^(f)). (A.7)
Рассмотрим действительную импульсную характеристику канала h(t), ис-
пользуя преобразование Фурье H(f). Если характеристика h(t) действи-
тельная, то = H(f). В системах связи, в основном, представля-
ет интерес частотная характеристика канала H(f) для частот |/ — /с| < В,
так как только эти частотные составляющие H(f) влияют на принимае-
мый сигнал в рабочей полосе частот. Понятие полосового канала подобно
понятию полосового сигнала: такой канал имеет действительную импульс-
ную характеристику h(t) и частотную характеристику с центром
на несущей частоте fc и полосой 2В /с. Чтобы выразить частотную
характеристику H(f) с центром на несущей частоте /с, введем модель
эквивалентного низкочастотного канала (по аналогии с моделью эквива-
лентного низкочастотного сигнала). Так как импульсная характеристика
h(t), соответствующая частотной характеристике H(f) — это полосовой
сигнал, ее можно представить с использованием эквивалентной низкоча-
стотной модели:
h(t) = 2Re{/i;(i)e^/ct}, (А.8)
где дополнительный коэффициент 2 введен для того, чтобы избежать по-
стоянных множителей в форме представления согласно (А.9). Функ-
цию hi(t) называют импульсной характеристикой эквивалентного низко-
частотного канала для характеристики H(f). С учетом (А.2) и (А.З),
выражение (А.8) можно представить в виде:
Н(/) = Я;(/ - Л) + ЯГ(-/ - Л), (А.9)
т. е. частотная характеристика Я(/) представляется двумя составляющи-
ми: Hi(f) со сдвигом вверх от /с и со сдвигом вниз от fc. Отметим,
что если Я(/) обладает сопряженной симметрией относительно несущей
частоты fc в полосе частот 2Я, то функция hi(t) будет действительной,
а ее частотная характеристика Hi(f) будет обладать сопряженной симме-
трией относительно нуля. Однако во многих беспроводных каналах (на-
пример, в каналах с частотно-избирательными замираниями) частотная
характеристика H(f) не обладает свойством сопряженной симметрии от-
носительно /с, и в этом случае hi(t) представляет комплексную функцию
с синфазной составляющей Нц= Re{/i;(£)} и квадратурной составляю-
щей = Im{/i;(f)}. Отметим, что если функция Л/(£) комплексная, то
ее частотная характеристика Hi(f) не обладает сопряженной симметрией
относительно нуля.
854 Приложение А. Представление полосовых сигналов и каналов
Используя модель эквивалентного низкочастотного сигнала и канала,
проанализируем выходной сигнал полосового канала, на вход которого
поступает полосовой сигнал. Обозначим этот входной сигнал как s(Z),
а эквивалентный низкочастотный сигнал — как u(t). Импульсную харак-
теристику полосового канала обозначим как а импульсную характе-
ристику эквивалентного низкочастотного канала — как hi(t). Передава-
емый сигнал s(t) и импульсная характеристика канала h(t) — действи-
тельные функции, поэтому сигнал на выходе канала г(£) = s(t) *h(t) тоже
будет действительным, с частотной характеристикой R(f) = H(f)S(f).
Поскольку S(J) представляет полосовой сигнал, то и R(J) также будет
полосовым сигналом. Итак, получаем комплексное низкочастотное пред-
ставление выходного сигнала:
r(t) = Re{r(f)e-?2’r^ct}. (А.10)
Теперь оценим взаимосвязь между эквивалентными низкочастотными
сигналами — сигналом на входе канала «(/), импульсной характеристикой
канала h(t) и сигналом на выходе канала r(t). Частотную характеристику
выходного сигнала можно представить в виде:
R(J) = #(/W) = 0,5[ЯД/ - /с) + ЯД-/ - /с)] х
х И/ ~fc) + U*(-f -/с)]. (А.11)
Для полосовых сигналов и каналов, у которых ширина полосы В для
u(t) и hi(t) намного меньше несущей частоты fc, имеем:
ЯД/-/с)Я*(-/-/с) = 0
И
Ht(-f-fc)U(f-fc)=O.
Таким образом,
R(f) = 0,5[ЯД/ - fc)U(j - fc) + Hf {-f - fc)U\-f - fc)]. (A.12)
С учетом (A.2) и (А.З) выражение (A. 10) можно представить в виде:
R(J) = 0,5[У(/ - fc) + V*(-f - fc)]. (A.13)
Приравняв составляющие на положительной и отрицательной часто-
тах в (А. 12) и (А. 13), получаем:
V(J ~ fc) = Hi(j- fc)U{f - fc) (A.14)
И
v*(-f - fc) = - fc)U*(-f - fc) (A.15)
или, соответственно
V(f)=Hl(f)U(f). (A.16)
Представление полосовых сигналов и каналов
Применив обратное преобразование Фурье, получим:
v(t) = u(t) * hi(/). (А.17)
Таким образом, мы можем получить эквивалентный низкочастотный
сигнал v(t) для принимаемого сигнала r(t), применив операцию свертки
hi(t) и u(t). Для принимаемого сигнала имеем:
r(t) = Re{(iz(f) * /i/(/))e-?2’r^ct}. (А.18)
Заметьте, что функция V(j) = обладает сопряженной симме-
трией относительно f = 0, если только такой симметрией обладают обе
функции U(f) и Hi(f). Другими словами, эквивалентный низкочастот-
ный сигнал в общем случае будет комплексным, с ненулевыми синфазной
и квадратурной составляющими, если или u(t) или ЛД/) — комплексные
функции. Более того, если сигнал u(t) = $i(t) действительный (без ква-
дратурной составляющей), а импульсная характеристика канала hi(t) =
комплексная (как, например, при частотно-избирательных
замираниях), то эквивалентный сигнал
v(t) = si(t) * + jhi,Q(t)) = sj(z) * hij(t) + 3sl(t) * (A.19)
представляет комплексную функцию, поэтому принимаемый сигнал будет
иметь как синфазную, так и квадратурную составляющие. В более общем
случае, когда u(t) = si(t) + a hi(t) = + jh^Q^t), имеем:
u(f) = [s/(f) + jsQ(t)]*[hij(t) + jhi!Q(t)] = [s!(t) - sQ(t) *hi,Q(t)] +
+ * hi’Qtt) + sQ(f) * hij(t)]. (A.20)
Следовательно, синфазная составляющая сигнала v(t) зависит как от син-
фазной, так и от квадратурной составляющих сигнала uft); то же спра-
ведливо и для квадратурной составляющей v(t'). Это вызывает проблемы
при приеме сигналов, так как синфазная и квадратурная составляющие
модулированного сигнала создают взаимные помехи в демодуляторе.
Основное назначение эквивалентной низкочастотной формы предста-
вления сигналов — анализ систем связи с ограниченной полосой частот,
при котором используются эквивалентные низкочастотные модели пере-
даваемого сигнала, импульсной характеристики и принимаемого сигнала.
Это позволяет исключить из рассмотрения составляющие на несущей час-
тоте и, в частности, избежать зависимости такого анализа от несущей
частоты fc.
ПРИЛОЖЕНИЕ Б
ТЕОРИЯ
ВЕРОЯТНОСТЕЙ,
СЛУЧАЙНЫЕ ВЕЛИЧИНЫ
И СЛУЧАЙНЫЕ ПРОЦЕССЫ
Данное приложение содержит краткий обзор основных положений теории
вероятностей, случайных величин и случайных процессов, используемых
в этой книге. Более подробное изложение этих сложных и глубоких во-
просов, а также доказательства свойств, сформулированных в данном
приложении, можно найти в [1-8].
Б. I. Теория вероятностей
Теория вероятностей дает математическую характеристику случайным
событиям. Такие события описываются в исходном вероятностном про-
странстве (Q, £,р(-)). Вероятностное пространство состоит из простран-
ства выборок Q, включающего возможные результаты случайных собы-
тий; множество случайных событий е, при этом каждое множество со-
бытий А Е £ представляет подмножество О; и вероятностной меры р(-),
определенной для этих подмножеств. Следовательно, е — это множество
множеств, и вероятностная мера р(А) определяется для каждого множе-
ства А Е £. Вероятностное пространство предполагает, что множество
е представляет собой <т-поле. Интуитивно можно сказать, что множе-
ство множеств е представляет <т-поле, если содержит все пересечения,
объединения и дополнения своих элементов1. Говоря точнее, е будет сг-по-
лем, если: множество всех возможных результатов Q представляет одно
из множеств е; множество А 6 е предполагает, что Ас 6 е; и для любых
ОО
множеств Ai, Аг,... при Ai Е £ мы имеем [J Aj 6 е. Множество е должно
г—1
быть сг-полем для того, чтобы можно было определить вероятность пе-
ресечений и объединение случайных событий. Необходимо также, чтобы
1 Обозначение АЛВ — означает пересечение А и В, т. е. все элементы обоих множеств —
А и В. Объединение А и В, обозначаемое как A U В, — это множество всех элементов
в А или В. Дополнение множества А С Д обозначаемое как Ас, определяется как все
элементы в Q, не принадлежащие множеству А.
Б.2. Случайные величины
вероятностная мера, используемая в вероятностном пространстве, обла-
дала следующими тремя фундаментальными свойствами.
1. p(Q) = 1.
2.0^ р(А) 1 для любого события А Е г.
3. Если множества А и В взаимно исключающие (т. е. их пересечение
равно нулю), то р(А U В) = р(А) + р(В).
В данном разделе мы будем рассматривать только множества в г, так
как вероятностная мера определяется только для этих множеств.
Некоторые важные характеристики вероятностной меры р(-) могут быть
получены исходя из ее фундаментальных свойств. Так, р(Ас) = 1 — р(А).
Рассмотрим множества Ai,..., Ап при условии, что А{ и Aj (г / j) непе-
ресекающиеся: Ai Cl Aj = 0. Тогда, если Ai U А2 U ... U Ап = О, получаем:
п
^2 р(А) = 1- Множество {Ai,..., Ап] с такими свойствами называют раз-
г=1
биением J2. Для двух непересекающихся множеств Aj и Aj р(Аг U Aj) =
= р(Л) +p(Aj) -p(Ai Я Aj). Это приводит к пределу объединения, озна-
чающему, что для любых множеств Ai,..., Ап
p(AluA2U...UAn')^^p(Ai'). (Б.1)
г=1
Появление одного случайного события может влиять на вероятность
другого случайного события, так как наблюдение за одним случайным со-
бытием показывает, какие подмножества в е могли оказать влияние на за-
регистрированный результат. Чтобы описать этот эффект, вводят услов-
ную вероятность события В, зависящую от появления события А следу-
ющим образом: р(В|А) = р(А П В)/р(А) в предположении, что р(А) / 0.
Отсюда имеем:
р(А П В) = р(А\В)р(В) = p(B\A)p(A). (Б.2)
По существу, условная вероятность р(В|А) = р(АОВ)/р(А) нормирует
вероятность события В относительно результатов события А, поскольку
известно, что событие А произошло. Из (Б.2) получаем формулу Бейеса:
р(в|Л) = (Б-3)
Независимость событий определяется вероятностной мерой р(-). Так,
события А и В независимы, если р(А П В) = р(А)р(В). Это означает, что
р(В|А) =р(В), ар(А|В) = р(А).
Б.2. Случайные величины
Случайные величины задаются в базисном вероятностном пространстве
(Q, s,p(-)). Случайная величина X — это функция отображения из про-
Приложение Б. Теория вероятностей, случайные процессы
странства выборок Q в подмножество действительного числового ряда.
Если случайная величина X принимает дискретные значения действи-
тельного числового ряда, то ее называют дискретной, а если она принима-
ет непрерывные значения — непрерывной случайной величиной. Функция
распределения (интегральная функция распределения) случайной величи-
ны X определяется как Р%(ж) = р(Х ж) для некоторых х G R. Функцию
распределения получают из базисного вероятностного пространства как
р(Х х) — р(Х-1(—оо, ж)), где Х-1(-) — функция обратного отобра-
жения действительного ряда чисел в подмножество Q: ос. ж) =
= {cu G Q : X(си) С х}. Свойства функции распределения вытекают из свойств
вероятностной меры. В частности, функция распределения удовлетворяет
условию 0 С Рх(х) = р(Х '(—ос, ж)) 1. Кроме того, функция распре-
деления неубывающая: Рх(жх) С Px(xz) при жх Ж2- Это доказывает-
ся следующим образом: Р%(жг) = р(Х-1(—оо, Ж2)) = р(Х-1 (—оо, жх)) +
+р(Х_1(жх,ж2)) р(Х-1(-оо,Ж1)) = Рх(Ж1).
Плотность распределения вероятности случайной величины X опреде-
ляется как производная функции распределения: рх (ж) - ^рх(ж). Для
непрерывной случайной величины X плотность вероятности рх (ж) опре-
деляется по всей области действительных чисел; для дискретной слу-
чайной величины X рх(х) представляет совокупность дельта-функций
возможных значений X. Плотность распределения, называемая также рас-
пределением вероятностей или просто распределением случайной величи-
ны X, определяет вероятность того, что X находится в заданном диапа-
зоне значений:
'•2
р(жх < X ж2) = р(Х ж2) -р(Х Ж1) = Рх(ж2) - Рх(жх) = Уpx(x)dx.
XI
(Б.4)
Так как Ру(оо) = 1, а Р%(—оо) = 0, то интеграл плотности распределения
равен 1:
У px(x)dx = 1. (Б.5)
Отметим, что нижний индекс X в обозначениях плотности распределения
и функции распределения часто опускается, когда из контекста ясно, что
эти функции характеризуют распределение случайной величины X. В та-
ких случаях плотность распределения обозначают как р(ж), а функцию
распределения — как Р(ж).
Математическое ожидание (или среднее значение) случайной величи-
ны X определяется как
цх = Е[Х] = f xpx(x)dx. (Б.6)
Б.2. Случайные величины
Оператор математического ожидания Е(-) линейный и может применять-
ся также к функциям случайных величин. В частности, среднее значение
функции X задается как
ЕЬРО] = У g(x)px(x)dx. (Б.7)
—ОО
Особый интерес представляет функция момента n-го порядка случай-
ной величины X:
Е[ХП] = У xnpx(x)dx. (Б.8)
— ОО
Дисперсия случайной величины X определяется через ее первый и вто-
рой моменты:
Var[X] = 4 Е[(Х - цх)2] = Е[Х2] - р,2х. (Б.9)
Дисперсия характеризует среднеквадратическое отклонение случайной
величины X от ее математического ожидания рх- Стандартное отклоне-
ние случайной величины X, <?х — это квадратный корень из ее дисперсии.
Исходя из линейности оператора математического ожидания, легко пока-
зать, что для любой постоянной величины с: Е[сХ] = сЕ[Х], VarfcX] —
= c2Var[X], Е[Х Тс] — Е[Х] Теи Var[X Тс] = Var[X]. Таким образом, при
делении случайной величины на некоторую постоянную величину ее мате-
матическое ожидание делится на ту же постоянную, а дисперсия — на ту
же постоянную величину в квадрате. Добавление постоянной к случайной
величине сдвигает ее математическое ожидание на ту же постоянную,
но не влияет на дисперсию.
Распределение случайной величины X можно получить из ее характе-
ристической функции, определяемой как
^х(г/)^ЕИх]= J px(x)e^xdx. (Б.10)
— ОО
Из (Б.10) можно видеть, что характеристическая функция рх(у) слу-
чайной величины X представляет обратное преобразование Фурье рас-
пределения рх{х), выраженное через р/(2тг). Таким образом, плотность
распределения рх (ж) можно получить из рх (^) следующим образом:
ОО
Рх(х) = [ px^e~3l'xdx. (Б.П)
2% J
—ОО
Это существенно при нахождении распределений сумм случайных вели-
чин. Момент n-го порядка случайной величины X может быть получен
Приложение Б. Теория вероятностей, случайные процессы
из у>х(у) следующим образом:
Е[Х"] =
dvn
v=0
Производящая функция моментов (MGF — Moment Generating Func-
tion) случайной величины X, определяемая как — E[e"x], напоми-
нает характеристическую функцию, но может отклоняться от нее при тех
же значениях v. Если производящая функция моментов конечна при зна-
чениях и, близких к нулю, то момент n-го порядка случайной величины
X имеет вид:
Е[ХП] =
dfn
v=Q
Пусть X — случайная величина, а д(х) — некоторая функция, опре-
деленная в области действительных чисел. Введем еще одну случайную
величину Y = д(Х'). Тогда Ру (у) = J px(x)dx. Для монотонно возра-
х:д(х)^у
стающей и однозначной функции д это означает: Ру (у) = J px(x)dx.
Для монотонно убывающей и однозначной функции д имеем: Ру (у) =
= J Pxfx'fdx.
9~Чу)
Теперь рассмотрим совместные случайные величины. Для определения
совместного распределения двух случайных величин необходимо, чтобы
они были заданы в одном и том же базисном вероятностном простран-
стве. Пусть X и Y — случайные величины, заданные в одном вероят-
ностном пространстве (Q, е,р(-)). Их совместная функция распределения
определяется, как Рху(т,у) = р(Х x,Y у). Совместная плотность
распределения представляет производную этой совместной функции рас-
пределения: , d2Pxv(x,y) юг(1’!')= dxdy (БЛ2)
Следовательно, х у PxY(x,y)= У У pxY(y,w)dvdw. (Б.13) —оо —оо
Для совместных случайных величин X и У, можно получить распределе-
ние случайной величины X, проинтегрировав совместное распределение по У:
Рх(ж) = / pxv(x,y)dy. (Б.14)
Б.2. Случайные величины
Аналогично:
оо
PY(y) = У PxY(x,y)dx. (Б.15)
Полученные таким способом распределения рх(х) пру(у) иногда на-
зывают частными распределениями — по отношению к совместному рас-
пределению рху(ж,у). Отметим, что совместное распределение должно
сходиться к единице:
ОО оо
У У Pxv(x,y)dxdy = 1. (Б.16)
Определения совместной функции распределения и совместной плот-
ности распределения двух случайных величин могут быть прямо распро-
странены на любое конечное число случайных величин.
Как и для случайных событий, наблюдение за значениями одной слу-
чайной величины может влиять на вероятность другой случайной ве-
личины. Условное распределение случайной величины Y при заданном
значении X = х случайной величины X определяется как: ру(у\Х = х) =
= рху(х,у)/рх(х). Это означает, что рху(х,у) = ру(у\Х = х)рх(х). Не-
зависимость двух случайных величин X и Y определяется их совместным
распределением. Так, случайные величины X и Y независимы, если их
совместное распределение р%у(т,у) разлагается на отдельные распреде-
ления для X и Y: рху(х,у) — рх(х)ру(у)- Для независимых случайных
величин легко показать, что Е[/(Л’)<?(У)] = Е[/(Х)]Е[<?(У)] для любых
функций /(ж) и д(у).
Для случайных величин X и У с совместной плотностью распределения
Pxy(x, у) можно определить смешанный момент ij-vo порядка:
EfX’y7] = У У x^pxY(x,y)dxdy. (Б.17)
—оо —оо
Корреляция случайных величин X и У определяется как Е[ХУ], а их
ковариация — как Соу[ХУ] = Е[(Х — px)(Y — Цу)] = Е[ХУ] — ц%цу.
Следует отметить, что если одна из случайных величин (X или У) име-
ет нулевое среднее значение, то значения ковариации и корреляции бу-
дут одинаковыми. Коэффициент корреляции случайных величин X и У
определяется через их ковариацию и стандартные отклонения как р =
= Соу[.ХУ]/(о’а'О’у)- Говорят, что случайные величины X и У некорре-
лированы, если их ковариация равна нулю или, что эквивалентно, если
равен нулю коэффициент корреляции. Отметим, что некоррелированные
случайные величины (например, величины X и У, для которых Соу[ХУ] =
= Е[ХУ] — yxPY = 0) будут иметь ненулевую корреляцию (Е[ХУ] / 0),
862 Приложение Б. Теория вероятностей, случайные процессы
если их средние значения не равны нулю. Для случайных величин Хц,..., Хп
вводится понятие ковариационной матрицы S размерностью п х n, ij-тк
элемент которой равен Е^ = Cov[XjXj]. В частности, г-й диагональный
элемент этой матрицы представляет дисперсию Ху Ец = Var[Xj.
Рассмотрим две независимых случайных величины X и Y. Введем
новую случайную величину Z = X + Y в вероятностном пространстве
(Q, е,р(-)). Можно показать прямо (или с использованием характеристи-
ческих функций), что распределение случайной величины Z представляет
свертку распределений X и Y: pz(z) = Рх(х) *ру(у)- Аналогично получа-
ем: <pz(p) = Используя это распределение, можно показать,
что E[Z] = Е[Х] + Е[У], a Var[Z] = Var[X] + ¥аг[У]. Таким образом,
математическое ожидание суммы независимых случайных величин равно сум-
ме их математических ожиданий, а дисперсия суммы равна сумме дисперсий.
При анализе систем связи часто применяется гауссово распределение.
Гауссово распределение случайной величины X определяется через ее ма-
тематическое ожидание и дисперсию сг^- следующим образом:
рХ(х) = ---е-[(^-^)2/(2^)]_
V 2тгох
(Б.18)
Гауссово распределение, известное также как нормальное, обознача-
ется как 1У(ц%, сГ(-). Отметим, что «хвост» этого распределения (т. е. зна-
чения рх{х) при удалении х от математического ожидания ух) убывает
по экспоненциальному закону. Функция распределения Рх(х) = р(Х < ж)
не существует для гауссова распределения в аналитическом виде. Она
выражается через гауссовы Q-функции:
Рх(х) =р(Х <ж) = I Q , (Б.19)
\ Ох )
где гауссовская Q-функция, определяемая как
Q(t) 7-^—e^dy, (Б.20)
J V 2?Г
х
представляет вероятность того, что гауссовская случайная величина X
с математическим ожиданием 0 и дисперсией 1 превышает х\ Q(x) —
= р(Х х) для X ~ 7V(0,l). Гауссовская Q-функция связана с допол-
нительной функцией ошибки соотношением: Q(t) = 0,5erfc(x/-\/2). Эти
функции обычно рассчитываются с использованием стандартных ком-
пьютерных математических пакетов.
Пусть X = (Xi,..., Хп) — вектор совместно нормальных случайных
величин. Их совместное распределение имеет вид:
Px1„..,xn(xi,...,xn) = —==£=== ехр[-0,5 (х - цх)Г^'Г(х - цх)],
у/ (2тг)п det|S]
(Б.21)
Б.2. Случайные величины 863
где рх = Е[Х]Г = (E[Xi],..., E[Xn])T — математическое ожидание X,
aS — ковариационная матрица X размерностью п х п = CovfXjXj]).
Из (Б.21) можно получить, что для совместно нормальных случайных
величин X и У при Соу[ХУ] — 0 Рху(т,у) = рх(ж)ру(у). Другими сло-
вами, некоррелированные гауссовские случайные величины независимы.
Комплексная гауссовская случайная величина имеет вид Z = X + jY,
где X и У — совместно нормальные действительные случайные величи-
ны. Распределение случайной величины Z можно получить из совмест-
ного распределения величин X и У согласно (Б.21) для вектора (X, У).
Аналогично, комплексный гауссовский случайный вектор имеет вид Z =
= (Z!,...,ZN) = (Хх + 3Yl,...,XN+jYN), где Xb ..., Х„, Уь ..., YN -
совместно нормальные действительные случайные величины. Распределе-
ние Z получают из совместного распределения этих случайных величин
по (Б.21) для вектора (Xi,..., Хдг, У1,..., Уу).
Основная причина широкого использования гауссовского распреде-
ления в моделях систем связи — это центральная предельная теорема,
устанавливающая предельное распределение суммы большого числа не-
зависимых случайных величин с одинаковыми распределениями. Рассмо-
трим Х{ — совокупность независимых и одинаково распределенных слу-
п
чайных величин. Пусть Yn = Xi, a Zn = (Yn — /zyn)/ауп Согласно
i=l
центральной предельной теореме, распределение Zn при условии, что п
стремится к бесконечности, сходится к гауссовскому распределению с ну-
левым математическим ожиданием и дисперсией, равной 1: lim (•/.') =
= Х(0,1). Следовательно, любая случайная величина, представляющая сум-
му большого числа независимых одинаково распределенных случайных
компонентов, имеет распределение, которое приближенно можно считать
гауссовским. Например, шум в радиоприемнике обычно содержит пара-
зитные сигналы, генерируемые различными частями оборудования, и при
большом количестве независимых одинаково распределенных компонен-
тов этот шум точно моделируется гауссовским распределением.
В системах связи распространены еще два распределения — равномер-
ное и биномиальное. Для равномерно распределенной случайной величи-
ны X плотность распределения равна рх (ж) = 1 / (Ь — а) для х на интервале
[а, Ь\, и нулю за пределами этого интервала. Случайная фаза 0 обычно
моделируется равномерным распределением на интервале [0, 2тг], что обо-
значается как ц[0,2тг]. Биномиальное распределение обычно применяется
при анализе кодирования. Пусть ХДг = 1,... ,п) — дискретные случай-
ные величины, принимающие одно из двух возможных значений — 0 или 1.
Предположим, что эти величины независимы и одинаково распределены,
при этом p(Xj = 1) = р, a р(Х, = 0) = 1 — р. Такие Xj называют случай-
Приложение Б. Теория вероятностей, случайные процессы
п
ными величинами Бернулли. Пусть Y = ^2 А,. Тогда Y — дискретная
2=1
случайная величина, принимающая значения целых чисел к = 0,1,2,....
Распределение величины Y представляет биномиальное распределение:
p(Y = k) = (Б.22)
\ гъ /
где
А п!
к) /с!(п — /с)!
(Б.23)
Б.З. Случайные процессы
Случайный процесс X(/) задается в вероятностном пространстве (Q, е,р(-)).
Это функция отображения из пространства выборок Q в множество дей-
ствительных функций ...}, где каждая функция xt(t) пред-
ставляет возможную реализацию процесса X(t). Выборки X(t) в момен-
ты времени to,ti,..., tn — это совокупность случайных величин, задан-
ных в базисном вероятностном пространстве. Следовательно, совместная
функция распределения отсчетов в моменты времени to, t\,..., tn имеет вид:
рх(ео)Х(41),...,х(*„)(жо,- • • ,хп) = p(X(t0) ^x0,X(ti) хп).
Случайный процесс X(t) полностью характеризуется своей совместной
функцией распределения Px(to)X(ti),...,x(tn)(xo, • • •,хп) для всех возможных
множеств моментов взятия отсчетов {to, t\,..., tn{.
Случайный процесс X(t) называют стационарным2, если для всех Т,
всех п и всех множеств моментов взятия отсчетов {to, ti,..., tn} выпол-
няется условие:
p(X(t0) ж0,Х(<1) я?1,... ,X(tn) хп) =
= + Т) х0, X{h + Т) xi,..., X(tn + Т) si хп).
Интуитивно можно сказать, что случайный процесс стационарный, ес-
ли сдвиги во времени не влияют на его вероятность. Стационарность про-
цесса часто трудно доказать, так как это требует проверки совместных
функций распределения всех возможных множеств отсчетов для всех воз-
можных временных сдвигов. Стационарность случайного процесса часто
выводится из стационарности источника, генерирующего данный процесс.
Математическое ожидание случайного процесса обозначается как Е[Х(t)].
Поскольку математическое ожидание стационарного случайного процес-
са не зависит от сдвигов во времени, оно должно быть постоянной вели-
чиной: Е[Х(/)] = E[X(f — t)] = Е[Х(0)] — рх- Автокорреляция случайного
2Стационарный в узком смысле. — Прим, перев.
процесса определяется как Ax(t, t+r) = E[X(f)X(f+r)]. Автокорреляцию
процесса X(t) также называют его вторым моментом. Поскольку авто-
корреляция стационарного процесса не зависит от сдвигов во времени,
имеем: Ax(t, t + т) = E[X(f — t)X(t + т — t)] = E[X(0)X(r)] = А%(т). Сле-
довательно, для стационарных процессов автокорреляция зависит только
от разности во времени т между отсчетами X(t) и X(t + т) и не зави-
сит от абсолютного времени t. Автокорреляция процесса определяет меру
корреляции между отсчетами процесса, взятыми в различные моменты
времени.
Случайные процессы X(t) и У (f), заданные в одном базисном вероят-
ностном пространстве, имеют совместную функцию распределения:
,X(tn)y(t'0),...,y(t^) (ж0, • • • , Хп, Уо, • • • , Ут) =
= р(Х(£0) х0,..., X(tn) хп, Y(i'o) у0,..., У (t'm) ут) (Б.24)
для всех возможных множеств моментов взятия отсчетов {to,, tn} и {/q,
... Два случайных процесса X(t) и У(/) считаются независимыми,
если для всех множеств выполняется условие:
Px(to),...,x(tn)Y(t'o),...,Y(t’m)^x(to) ^x0,...,X(tn) хп,
Y{t’o) Оо, • • , У (t'm) Ут) = PX(t0),... ,Х(М (Х (t0) ^X0,...,X(tn) ^Хп) X
х -fy(t^),...,y(t^) (Y(t0) уо, , Y(tm) ут. (Б.25)
Взаимная корреляция между двумя случайными процессами X (t) и У (t)
определяется как: Axy(t, t+r) = Е[Х(t)Y(<+т)]. Два случайных процесса
некоррелированы, если Е[Х(£)У(£ + т)] = Е[Х(£)]Е[У(t + т)] для всех t
и т. Как и в случае автокорреляции, если оба случайных процесса X(t)
и Y(t) стационарны, то взаимная корреляция будет зависеть только от:
Axy(t, t + r) = E[X(f - t)Y(t + r-t)] = Е[Х(0)У (r)J AXy (r).
При анализе случайных процессов в большинстве случаев ограничи-
ваются рассмотрением только первого и второго моментов. Поэтому ис-
пользуется понятие стационарности в широком смысле, которая опреде-
ляется только первыми двумя моментами и может быть легко подтвер-
ждена. Случайный процесс называется стационарным в широком смысле,
если его математическое ожидание представляет постоянную величину
Е[Х(/)] = ух, а автокорреляция зависит только от временного интервала
между отсчетами: Ax(t,t + т) = E[X(t)X(f + т)] = А%(т). Стационарный
процесс всегда будет стационарным в широком смысле, но не наоборот.
Для процессов, стационарных в широком смысле, автокорреляция пред-
ставляет симметричную функцию т, так как А%(т) = E[X(f)X(/ + т)] =
= Е[Х(/ + т)Х(/)] = Ах(—т). Более того, можно показать, что Ах(т)
Приложение Б. Теория вероятностей, случайные процессы
принимает максимальное значение при т = 0, т.е. |A%(r)| С -Ах(О) =
= Е[.№(£)]. Как и в случае стационарных процессов, если два процесса
X{t) и стационарны в широком смысле, то их взаимная корреляция
не зависит от сдвигов во времени и определяется только величиной вре-
менных интервалов процессов: А%у(/, £ + т) = Е[Х(0)У(т)] = А%у(т).
Спектральная плотность мощности случайного процесса, стационар-
ного в широком смысле, определяется преобразованием Фурье, взятым
от ее автокорреляционной функции по т:
ОС'
Sx(f)= f Ах(т)е~^тат. (Б.26)
Автокорреляция может быть получена из спектральной плотности мощ-
ности обратным преобразованием:
Ах{т)= I Sx(f)e^Tdf. (Б.27)
—оо
Спектральная плотность мощности получила свое название благодаря то-
му факту, что интеграл от этой величины представляет ожидаемое зна-
чение мощности случайного процесса X{t)\
ОО
E[X2(/)] = Ax(0)= j Sx(J)df, (Б.28)
что вытекает из (Б.27). Аналогично, из (Б.26) получаем, что 5%(0) =
ОО
= f Ax(r)dr. Поскольку функция Ах(т) действительная и симметрич-
ная, из (Б.26) следует, что функция Sx(f) тоже симметрична, т. е. Sx(f) =
= Sx(—f). Случайный процесс, стационарный в широком смысле, с нуле-
вым математическим ожиданием и спектральной плотностью мощности,
постоянной на всех частотах, называется белым шумом. Следовательно,
для такого случайного процесса X(t) имеем: Е[Х(£)] = 0, a Sx(f) = Nq/2,
где Nq — некоторая постоянная величина, которую обычно называют
односторонней спектральной плотностью мощности белого шума. С помо-
щью обратного преобразования Фурье получаем автокорреляцию белого
шума: Ах(т) = (Nq/2)5(t\ В некотором смысле белый шум можно счи-
тать наиболее случайным из всех возможных шумовых процессов, так как
он непрерывно декоррелируется.
Случайные процессы часто фильтруются или модулируются, и если
процесс стационарен в широком смысле, то влияние этих операций можно
охарактеризовать достаточно просто. Так, если стационарный в широком
смысле случайный процесс со спектральной плотностью мощности Sx(f)
проходит через линейный неизменяющийся во времени фильтр с частот-
Б.З. Случайные процессы 867
ной характеристикой H(f), то случайный процесс на выходе фильтра
также будет стационарным в широком смысле, со спектральной плот-
ностью мощности \H(f)\2Sx(f)- Если стационарный в широком смысле
случайный процесс X(t) со спектральной плотностью мощности Sx(f)
умножается на несущее колебание cos(2?rfct + 0) с фазой 0 ~ W[0,2л],
то в результате получается стационарный в широком смысле случай-
ный процесс X(t) cos(2ivfct + 0) со спектральной плотностью мощности
0,25[5х(/-/с) + 5х(/ + /с)].
При пропускании гауссовского белого шума с нулевым математиче-
ским ожиданием и спектральной плотностью мощности Nq/2 через иде-
альный полосовой фильтр с центральной частотой /с и полосой 2В, можно
получить узкополосный шумовой процесс n(t). Этот узкополосный про-
цесс можно записать с использованием комплексной формы представле-
ния низкочастотного сигнала как n(t) = где = nj(t) +
+jnQ(t) — комплексный низкочастотный гауссовский процесс, a nj(t) и
— действительные низкочастотные гауссовские процессы. Можно
показать, что процессы и независимы, каждый из них имеет
нулевое математическое ожидание и спектральную плотность мощности
Nq (т. е. их спектральная плотность мощности в два раза больше, чем
у исходного шумового процесса).
Стационарность3 и стационарность в широком смысле — это свойства
вероятностного пространства, в котором задается случайный процесс.
Также часто представляют интерес усредненные во времени характери-
стики случайных процессов, которые можно охарактеризовать различны-
ми категориями понятия эргодичности. Случайный процесс X (£) называ-
ют эргодическим по математическому ожиданию, если его усредненное
во времени математическое ожидание, определяемое как
т
= 2? / (Б-29)
-т
постоянно для всех возможных реализаций Х(€). Другими словами, про-
цесс X(f) будет эргодическим по математическому ожиданию, если пре-
т
дел lim J Xi(t}dt равен одной и той же постоянной величине р/у для
Т—j-
всех возможных реализаций случайного процесса X(i). Аналогично,
случайный процесс X (/) называют эргодическим по моменту /г-го поряд-
ка, если усредненное во времени значение момента n-го порядка
т
lim -L [ Xn(t)dt (Б.ЗО)
-Т
3Имеется в виду стационарность в узком смысле. — Прим, перев.
Приложение Б. Теория вероятностей, случайные процессы
постоянно для всех возможных реализаций X(t). Также можно определить
эргодичность процесса X(f) по отношению к усредненному во времени
значению автокорреляции:
т
А^(т)= Пт [ X(t)X(t + r)dt.
1 —►ос J
-Т
(Б.31)
Случайный процесс X (/) называют эргодическим по автокорреляции,
т
если lim X f Xi(t)xi(t + r)dt имеет одно и то же значение А^(т) для
Т—><Х> _ср
всех возможных реализаций Xi(t) процесса X(t). Эргодичность автокор-
реляции высших порядков предполагает, что усредненная во времени ав-
токорреляция nm-го порядка
т
(Б.32)
А^(п,т,т) = lim — /
1 -^00 £1 J
-т
постоянна для всех возможных реализаций X(t). Если условия эргодично-
сти выполняются для моментов и функций автокорреляции всех порядков,
то такой процесс называется эргодическим. Эргодичность означает, что
средние значения момента n-го порядка и автокорреляции ij-ro порядка,
усредненные по всему интервалу времени, постоянны при любых п, i и j.
Это значит, что вероятность эргодического процесса не зависит от сдви-
гов во времени, и, следовательно, процесс является стационарным. Дру-
гими словами, эргодический процесс должен быть стационарным. Однако
стационарный процесс может быть как эргодическим, так и неэргодиче-
ским. Исходя из стационарности эргодического процесса, имеем:
т
№ = Е[М‘Х“] = Е lim Б [
1 —*ОО £1 J
-Т
2т/Е1ВД1Л =
~тт
= Ит 7БТ / l*xdt = vx-
1 —>00 J
-т
Таким образом, усреднение во времени случайного процесса Х(Т)
его вероятностному среднему. Аналогично имеем:
(Б.ЗЗ)
равно
А^
т
/ X(t)X(t + T)dt
°° -т Т
т
2? / В[М W + г)]<« = Tlim i /
-т -т
(Б.34)
Б.4- Гауссовские процессы
т. е. усредненная во времени автокорреляция случайного процесса X (t)
равна его вероятностной автокорреляции.
Б.4. Гауссовские процессы
При моделировании шумовых процессов в системах связи обычно исполь-
зуется модель гауссовского процесса. Случайный процесс X(t) называют
гауссовским, если для всех значений Т и всех функций g(t) случайная
величина
т
Хд = У g(t)X(t)dt (Б.35)
о
имеет гауссовское (нормальное) распределение. При детектировании сиг-
нала в приемнике обычно используется интегрирующее устройство, по-
этому данное определение означает, что если канал создает на входе
приемника гауссовский шум, то распределение случайной величины, со-
ответствующей шуму на выходе интегратора, будет нормальным. Мате-
матическое ожидание случайной величины Хд определяется выражением:
т
Е[Хр] = У g(t)E[X(t)]dt, (Б.36)
о
а дисперсия — выражением
т т
Var[Xs] = 11 g(t)g(S)E[X(t)X(S)dtds - (ЕВД2. (Б.37)
о о
Если процесс X(t) стационарный в широком смысле, эти формулы
упрощаются:
т
Е[Х3] = У g(t)gxdt, (Б.38)
о
т т
Var[Xs] = У У g(t)g(s)Rx(s -t)dtds - (E[XS])2. (Б.39)
о о
Ряд важных свойств гауссовского случайного процесса следует из его
определения. Так, если на входе линейного неизменяющегося во времени
фильтра мы имеем гауссовский случайный процесс, то на выходе фильтра
также будет гауссовский процесс. Более того, можно ожидать, что отсче-
ты гауссовского случайного процесса будут в совокупности нормальными
случайными величинами, что следует из определения, если подставить
g(t) = 8(t — Г) в (Б.35). Это отсчеты гауссовских случайных величин,
870 Приложение Б. Теория вероятностей, случайные процессы
поэтому если они некоррелированы, то и независимы. Для гауссовских
процессов, стационарных в широком смысле, распределение Хд в (Б.35)
зависит только от математического ожидания и автокорреляции про-
цесса Х(Т). Напомним, что случайный процесс полностью определяется
совместной вероятностью его отсчетов для всех возможных множеств
моментов взятия отсчетов. Для гауссовского процесса эти отсчеты будут
совместно нормальными, а их совместное распределение определяется ма-
тематическим ожиданием и автокорреляцией процесса. Итак, поскольку
вероятность гауссовского процесса полностью определяется его матема-
тическим ожиданием и автокорреляцией, то стационарный в широком
смысле гауссовский процесс будет также и стационарным. Аналогично,
если гауссовский процесс обладает свойствами эргодичности по матема-
тическому ожиданию и автокорреляции, то он является эргодическим.
Литература
1. W. Feller, An Introduction to Probability Theory and Its Applications, vols.
I and II, Wiley, New York, 1968 and 1971.
2. R. M. Gray and L. D. Davisson, Random Processes. A Mathematical Approach
for Engineers, Prentice-Hall, Englewood Cliffs, NJ, 1986.
3. W. B. Davenport, Jr., and W. L. Root, An Introduction to the Theory of Ran-
dom Signals and Noise, McGraw-Hill, New York, 1987.
4. A. Leon-Garcia, Probability and Random Processes for Electrical Engineering,
2nd ed., Addison- Wesley, Reading, MA, 1994.
5. P. Billingsley, Probability and Measure, 3rd ed., Wiley, New York, 1995.
6. R. G. Gallager, Discrete Stochastic Processes, Kiuwer, Dordrecht, 1996.
7. H. Stark and J. W. Woods, Probability and Random Processes with Applications
to Signal Pro cessing, 3rd ed., Prentice-Hall, Englewood Cliffs, NJ, 2001.
8. A. Papoulis and S. U. Pillai, Probability, Random Variables and Stochastic
Processes, McGraw Hill, New York, 2002.
ПРИЛОЖЕНИЕ В
МАТРИЦЫ: ОПРЕДЕЛЕНИЯ,
ОПЕРАЦИИ И СВОЙСТВА
В данном приложении кратко изложены определения, операции и свой-
ства матриц, используемые в этой книге. Более детальное рассмотрение
матриц, а также доказательства свойств, сформулированных в данном
приложении, можно найти в [1-4].
В. I. Матрицы и векторы
Матрица А размерностью N х М представляет прямоугольную таблицу
значений из N строк и М столбцов, записываемую в виде:
ан
«1М
А =
(B.l)
адп
адм
ij-тк элемент (или позиция) матрицы А (т. е. элемент, находящийся в г-й
строке и j-м столбце) обозначается как Ац. В (В.1) Ац = щу. Элементы
матрицы также называют скалярами, чтобы подчеркнуть, что это одно-
мерные числа. При N = М матрица размерностью N х М называется
квадратной, при N > М — «худой», а при N < М — «толстой».
Диагональные элементы матрицы — это элементы, расположенные
вдоль диагональной линии, начинающейся в левом верхнем углу матрицы
(т. е. элементы А,у при i = j). Сумма диагональных элементов квадратной
матрицы размерностью NxN называется ее рангом: Тг[А] = 22 Ква-
дратная матрица называется диагональной, если все ее недиагональные
элементы равны нулю: А,у = 0, j i. Диагональную матрицу с диагональ-
ными элементами щ,..., адг обозначают как diagfai,..., а к]. Единичной
матрицей 1дг размерностью NxN называют диагональную матрицу, у ко-
торой 1ц = 1 при i — 1,..., N; т. е. 1дг = diagfl,..., 1]. Нижний индекс N
в обозначении 1дг опускается, если размерность матрицы ясна из кон-
текста (например, из требований к заданному оператору, такому как
перемножение матриц).
Квадратная матрица А называется треугольной сверху, если все ее
элементы, находящиеся ниже диагонали, равны нулю (т. е. Ац = 0, i > у).
&
Приложение В. Матрицы: определения, операции и свойства
Если все элементы квадратной матрицы, лежащие выше диагонали, равны
нулю (т. е., Aij = 0, i < J), то ее называют треугольной снизу. Диагональ-
ная матрица будет треугольной как сверху, так и снизу.
Матрица может формироваться из элементов, которые и сами явля-
ются матрицами, если их размерности совместимы. Так, из матрицы В
размерностью N х М\ и матрицы С размерностью N х можно по-
лучить матрицу А = [ВС] размерностью N х (Mi + Л/у): г-й ряд этой
матрицы имеет вид [Ай ... Ai(M1+M2)] = [Вп ... ВШ1Сц ... Сш2]. Матри-
ца А, сформированная таким образом, обозначается как А = [В|С]. Если
мы также имеем матрицу D размерностью К х Li и матрицу Е размер-
ностью К х 1>2, то, если М\ + — L-[ + L2, можно получить матрицу
размерностью (N + К) х (Mi + М2):
А = [ D Е ] ' (В’2)
Матрицы В, С, D и Е называются подматрицами матрицы А. Матри-
ца может содержать любое число подматриц при условии совместимости
размерностей. Подматрица А' матрицы А может быть также получена
удалением некоторых строк и/или столбцов матрицы А.
Матрица, имеющая только один столбец (т. е. при М = 1) называется
вектор-столбцом или просто вектором. Число строк вектора называется
его размерностью. Например, TV-мерный вектор х задается как
х =
(В-3)
г-й элемент вектора х записывается как хг. TV-мерный вектор, все эле-
менты которого равны 1, называется единичным вектором и обознача-
ется как 1дг. TV-мерный вектор, у которого один элемент равен едини-
це, а остальные равны нулю, называется единичным вектором. Так, для
г-мерного единичного вектора ег имеем: е- = 1 и е’ = 0 при j / г. Ма-
трицу, имеющую только одну строку (т.е. при N = 1) называют вектор-
строкой. Размерность такого вектора определяется число столбцов, по-
этому ТИ-мерный вектор-строка х задается как х = ... хм], а его г-й
элемент — как хг = тг. Евклидова норма TV-мерного вектор-строки или
вектор-столбца, называемая также просто нормой, определяется как
(В-4)
В.2. Операции с матрицами и векторами
Если матрица А имеет размерность N х М, то транспонированная мат-
рица, обозначаемая как Ат, будет иметь размерность М х N, при этом
Ат = А
ац
адч
адч
CZ7VM
(В.5)
Другими словами, транспонированная матрица Ат получается при та-
ком перемещении строк и столбцов матрицы А, когда г-я строка А стано-
вится г-м столбцом Ат. Транспонирование вектор-строки х = [xi.. ,хдг]
дает вектор с такими же элементами:
Х1
Тдг
Хт = [xi . . . Хд^
(В.6)
Поэтому часто вектор-столбец х с элементами Xj записывается как х =
= [xi... хдг]т. Аналогично, при транспонировании A-мерного вектора х
с элементами Xj получим вектор-строку [xi... хдг]. Отметим, что для век-
тор-строки или вектор-столбца х выполняется условие: (хт)т = х.
Комплексно сопряженная матрица А* для матрицы А получается из
комплексно сопряженных значений каждого элемента матрицы А:
А*
ац
адц
аш
(В.7)
*
aNM .
Эрмитова матрица матрицы А, обозначаемая как Ая, получается при
транспонировании сопряженной матрицы: Ан = (А*)т. Если применить
оператор Эрмита дважды, то получим исходную матрицу: (Ан)н = А,
так как эрмитовой матрицей для Ан будет А. Квадратная матрица А бу-
дет эрмитовой матрицей, если обладает эрмитовостью так как: А = Ан.
Квадратная матрица А называется нормальной, если АнА = ААН. Эр-
митова матрица является нормальной, так как Ан = А означает, что
АнА — ААН. Комплексно сопряженный оператор и оператор Эрмита
могут также применяться к вектор-строкам или вектор-столбцам. Так,
комплексно сопряженный вектор для вектор-строки или вектор-столб-
ца х, обозначаемый как х*, получается из комплексно сопряженных зна-
чений каждого элемента вектора х. Эрмитовость вектора х, обознача-
ется как хя, получается при транспонировании сопряженного вектора:
Xя = (х*)т.
Приложение В. Матрицы: определения, операции и свойства
Сложение двух матриц размерностью N х М дает новую матрицу раз-
мерностью N х М, при этом сложение выполняется поэлементно. Другими
словами, при сложении матриц А и В размерностью NxM получается ма-
трица С = А + В размерностью N х М, ij-n элемент которой равен Cij —
= Aij + Вгу. Поскольку сложение матриц выполняется поэлементно, на не-
го распространяются переместительное и сочетательное свойства сложе-
ния: А + В = В + Аи (А + В) + С = А + (В + С). Транспонирование суммы
матриц соответствует сложению отдельных транспонированных матриц:
(А + В)т = АТ + ВТ . Вычитание матриц происходит аналогично: из двух
матриц А и В размерностью NxM получается матрица С = А В раз-
мерностью NxM, ij-n. элемент которой равен Сц = Ац— В^. Два вектор-
строки или вектор-столбца одинаковой размерности могут складывать-
ся по правилу сложения матриц, поскольку такие векторы представляют
частные случаи матриц. Например, к TV-мерному вектор-столбцу х мож-
но прибавить другой вектор-столбец у той же размерности; в результате
получится новый TV-мерный вектор-столбец z = х + у, г-й элемент ко-
торого равен Zj = хг + у7. Аналогично, сумма двух вектор-строк х и у
размерностью TV представляет TV-мерный вектор-строку z = х + у с г-м
элементом Zj = Xj + yj. Однако вектор-строку размерностью N > 1 нельзя
сложить с вектор-столбцом размерностью TV, так как эти векторы пред-
ставляют матрицы разного размера (1 х TV для вектор-строки и TV х 1
для вектор-столбца). Линейная комбинация вектор-столбцов х и у раз-
мерностью N дает новый TV-мерный вектор-столбец z = сх + dy с г-м
элементом z$ = схг + dy,. где end — произвольные скалярные величины.
Аналогично, линейная комбинация вектор-строк х и у размерностью N
даст TV-мерный вектор-строку z = сх + dy с г-м элементом z^ = сх,- + dyi,
для произвольных скалярных величин end.
Матрицу можно умножить на скалярную величину, при этом на дан-
ную величину умножается каждый элемент матрицы. Так, при умножении
матрицы А на скалярную величину к получаем матрицу А:
ап • а1М ка^ ка-[м
кА = к — (В.8)
_ . ONM ka^i кахм
При умножении вектор-строки х на скалярную величину к получаем
/сх = [/cxi... fcxjv], а при умножении вектор-столбца х на скалярную ве-
личину к имеем: /сх = [/cxi... /cxyv]T.
Две матрицы можно перемножить между собой, если их размерности
совместимы. Так, матрицы А и В можно перемножить, если число столб-
цов матрицы А равно числу строк матрицы В. Если матрица А имеет
размерность N х М. а матрица В — размерность М х L, то их произ-
ведение С = АВ будет представлять матрицу размерностью N х L, ij-n
В.2. Операции с матрицами и векторами 875)
М
элемент которой равен Сц = Е Умножение матриц в общем слу-
fc=i
чае не обладает переместительным свойством (т.е. обычно АВ ВА).
Фактически, если матрица А имеет размерность N х М, а матрица В —
размерность М х L, то произведение ВА существует только при усло-
вии, если L = N. В этом случае В А представляет матрицу размерностью
М х М, и ее размер может отличаться от матрицы АВ размерностью
N х L. Даже если М = L — N, так что матрицы АВ и ВА имеют
одинаковый размер, они могут быть не равны. Если А — квадратная
матрица, то ее можно умножать саму на себя. Например: А2 = АА. Ана-
логично получаем произведение к копий матрицы А в виде: Afc = А ... А.
Отсюда следует, что AfcAz = Ak+l. Умножение любой матрицы на единич-
ную матрицу соответствующего размера дает ту же самую матрицу; т. е.
для матрицы А размерностью N х М имеем: 1дгА = А1уц = А. Транс-
понирование произведения матриц соответствует произведению транс-
понированных отдельных матриц в обратном порядке: (АВ)Г = ВГАГ.
Произведение матрицы А размерностью N х М и ее эрмитовой матри-
цы Ая размерностью М х N представляет квадратную матрицу. При
этом ААЯ будет квадратной матрицей размерностью N х N, а АнА —
квадратной матрицей размерностью М х М. Фробениусова норма ма-
трицы А, обозначаемая как ||А||/г, определяется выражением ||А||р =
I-------- I N М
= л/Тг[ААя] = у/Тг[А"А] = ,/Е Е |Ау|2. Умножение матриц облада-
V
ет сочетательным свойством, так как (АВ)С = А(ВС) при условии, что
размерности матриц подходят для умножения (поэтому круглые скобки
обычно опускаются). Умножение матриц обладает также распределитель-
ным свойством: А(В + С) = АВ + АС и (А + В)С = АС + ВС.
М-мерный вектор можно перемножить с матрицей, имеющей М столб-
цов. Так, если А — матрица размерностью N х М, ах — ТИ-мерный
вектор (т.е. матрица размерностью М х 1), то их произведение будет
представлять TV-мерный вектор у = Ах, г-й элемент которого равен
м
Уг = Е AjfcXfc. Отметим, что матрица должна умножаться на вектор сле-
fc=i
ва, так как размерности не соответствуют произведению хА. Однако если
х — TV-мерный вектор-строка, то его размерность позволяет умножение
хА на матрицу А размерностьюNxM, и в результате получается ТИ-мер-
N
ный вектор-строка у = хА с г-м элементом уг = Е ~x-k&-ki- Умножение
fc=i
TV-мерного вектор-строки х на TV-мерный вектор у дает скалярную вели-
N
чину: z = ху = Е хгУь Напомним, что при транспонировании TV-мерного
i=i
Приложение В. Матрицы: определения, операции и свойства
вектора получается /V-мерный вектор-строка. Скалярное произведение
N
двух TV-мерных векторов х и у имеет вид: (х, у) == хту = 22 хгУг-
г=1
Подмножество строк матрицы А образует линейно независимое мно-
жество, если любая из этих строк не является линейной комбинацией
других строк данного подмножества. Аналогично, подмножество столб-
цов матрицы А образует линейно независимое множество, если любой
из столбцов не является линейной комбинацией других столбцов этого
подмножества. Ранг R,\ матрицы А — это число строк в самом боль-
шом подмножестве линейно независимых строк матрицы А, которое, как
можно показать, равно числу столбцов в наибольшем подмножестве ли-
нейно независимых столбцов матрицы А. Это означает, что ранг матри-
цы размерностью N х М не может превышать min[7V, М]. Матрица А
размерностью N х М называется полноранговой, если R& = min[7V,М].
Определитель матрицы А размерностью 2x2 имеет вид: det [А] =
= АцАгг — А21А12. Для матрицы А размерностью N х N при N > 2
определитель находится по рекуррентной формуле:
N
det[A] = A-ijCij (В.9)
г=1
для любых j’ (1 С jN), где сгу — алгебраическое дополнение (кофак-
тор), соответствующее элементу матрицы А^ и определяемое как
сц = (—l)i+j det[A'], (В.10)
где А' — подматрица матрицы А, полученная при удалении ?-й строки
и j-ro столбца матрицы А.
Если для квадратной матрицы А размерностью N х N существует
другая матрица В размерностью N х N, так что ВА = 1дг, то гово-
рят, что матрица А обратимая или невырожденная. При этом матрицу В
называют обратной матрицей матрицы А, что обозначается как А-1. Та-
ким образом, А-1 А = 1дг. Кроме того, для определенной таким образом
матрицы А-1 можно записать: АА~1 = 1дг. Только квадратные матрицы
могут быть обратимыми, а обратная матрица имеет такой же размер,
как и исходная матрица. Квадратная обратимая матрица U называется
унитарной, если иия = I, откуда следует, что IIя = U 1 и ияи — I.
Не каждая квадратная матрица обратима. Если матрица необратима, ее
называют вырожденной. Обратной матрицей обратной матрицы будет ис-
ходная матрица: (А'1)-1 = А. Обратной матрицей произведения матриц
будет произведение обратных матриц в обратном порядке: (АВ)-1 =
= В ХА 2 Обратная матрица А:-й степени имеет вид: А к — (A 1)fc.
Для диагональной матрицы D = diagfdi,..., dw] с элементами di / О
(г = 1,..., А) обратная матрица существует и задается соотношением:
В.З. Разложение матриц
D 1 = diag[l/c?i,... ,1/cIn]. Для матрицы А размерностью 2 х 2 с элемен-
тами dij обратная матрица существует, если det[A] 0, и имеет вид:
А~1 =
ап
«21
«12 __ 1 «22
022 J det [А] [ -021
—012
ОЦ
(В.11)
Существуют более сложные формулы определения обратных матриц
для обратимых матриц размерностью NxN при N > 2. Однако для
определения обратных матриц, как правило, применяются компьютерные
математические пакеты.
Обратные матрицы обычно используются при решении систем ли-
нейных уравнений. Рассмотрим, например, систему линейных уравнений,
выраженную в матричной форме:
у = Ах. (В.12)
Если матрица А обратима, то существует единственный вектор х = А-1у,
который удовлетворяет данной системе уравнений.
В.З. Разложение матриц
Пусть задана квадратная матрица А. Скалярная величина Л, для которой
существует такой ненулевой вектор х, что Ах = Ах, называется собствен-
ным значением матрицы А. Вектор х называется собственным вектором
матрицы А, соответствующим данному значению А. Собственными зна-
чениями матрицы А будут все значения А, удовлетворяющие характери-
стическому уравнению этой матрицы, которое имеет вид: det[A — AI] = 0.
Многочлен det [А — AI] называется характеристическим многочленом ма-
трицы А, а собственные значения матрицы А являются корнями ее ха-
рактеристического многочлена. Характеристический многочлен матри-
цы размерностью NxN имеет N единственных корней и,..., гдг (п / ту),
если его можно записать в виде det[A — AI] = (—1)W(A — и)... (А — гдг).
Если характеристический многочлен содержит член (А — к > 1, то
говорят, что корень имеет кратность к. Например, если det[A — AI] —
= —(А — п)2(А — гг)3, то корень и имеет кратность 2, а корень г? —
кратность 3. Матрица размерностью NxN имеет N собственных значе-
ний Ai,..., Адг, хотя не все из них будут единственными, если какие-либо
иэ корней характеристического многочлена имеют кратность больше 1.
Можно показать, что определитель матрицы равен произведению всех ее
собственных значений (т. е. собственное значение с кратностью к дает
в произведении член г^).
Собственные значения эрмитовой матрицы всегда действительные,
хотя собственные векторы могут быть комплексными. Кроме того, нор-
мальную матрицу размерностью NxN можно представить в виде:
А = UAUH, (В.13)
Приложение В. Матрицы: определения, операции и свойства
где U — унитарная матрица, столбцы которой представляют собствен-
ные векторы матрицы А, а Л = diagfAi,..., Xr, 0,..., 0] — диагональная
матрица размерностью N х N, первые К диагональных элементов ко-
торой представляют ненулевые собственные значения матрицы А. Если
А — эрмитова матрица, то Л в (В. 13) содержит только действительные
элементы. Матрицу А называют положительно-определенной, если для
всех ненулевых векторов х выполняется условие: хйАх > 0. Эрмитова ма-
трица будет определенно-положительной, только если все ее собственные
значения положительные. Аналогично, матрицу А называют неотрица-
тельно определенной, если для всех ненулевых векторов х выполняется
условие: хяАх 0. Эрмитова матрица будет неотрицательно определен-
ной, только если все ее собственные значения неотрицательные.
Пусть А — матрица размерностью N х М с рангом 7?д. Тогда суще-
ствуют матрица S размерностью N х М и две унитарные матрицы U и V
размерностями N х N и М х М соответственно, для которых справедливо
равенство:
A^UEV". (В.14)
Столбцы матрицы V называют правыми сингулярными векторами
матрицы А, а столбцы матрицы U — левыми сингулярными вектора-
ми матрицы А. Матрица S имеет особенность: все ее недиагональные
элементы равны нулю, т. е.
<71 • • 0
при N М и
0
0
(В.16)
при N < М, где <ji = у/Xi, a А,
i-e собственное значение ААЯ. Зна-
чения а, называются сингулярными значениями матрицы А, а ранги
этих сингулярных величин ненулевые, где 7?д — ранг матрицы А. Разло-
жение (В. 14) называется разложением матрицы А на сингулярные значе-
ния (SVD — singular value decomposition). Сингулярные значения матри-
цы всегда неотрицательные.
Рассмотрим матрицу А размерностью N х М и обозначим ее г-й стол-
бец как Аг. Представив каждый столбец как подматрицу, запишем: А =
= [Ai Аз ... Aw]. Векторизация матрицы А, обозначаемая как vec(A) —
это (7VM[-мерный вектор, полученный при наложении столбцов Aj (i =
= 1,..., М) матрицы А друг на друга:
vec(A) =
= [АцА21 ... АлчАп • Адг2 • Aim • Anm]'
(В-17)
Пусть А — матрица размерностью N х М, а В — матрица размерностью
L х К. Произведение Кронекера для матриц А и В, обозначаемое как
А ® В, представляет матрицу размерностью NL х МК:
АцВ • • • АШВ
А 0 В =
(В.18)
АдцВ ... AjvmB
Литература
1. В. Nobel and J.W. Daniel, Applied Linear Algebra, Prentice-Hall. Englewood
Cliffs, NJ, 1977.
2. G. Strang, LinearAlgebra and ItsApplications, 2nd ed., Academic Press. New
York, 1980.
3. R. A. Horn and C. R. Johnson, Matrix Analysis, Cambridge University Press.
1985.
4. R. A. Horn and C. R. Johnson, Topics in Matrix Analysis, Cambridge University
Press, 1991.
ПРИЛОЖЕНИЕ Г
ОБЗОР СТАНДАРТОВ
БЕСПРОВОДНОЙ СВЯЗИ
Ниже приведен краткий обзор технических деталей, относящихся к двум
наиболее распространенным на сегодняшний день системам беспровод-
ной связи — сотовой телефонии и беспроводным локальным сетям. Также
рассмотрены технические требования трех стандартов беспроводных се-
тей ближней связи (с малым радиусом действия), разработанных для
поддержки разнообразных приложений. Более детальное описание стан-
дартов беспроводной связи можно найти в [1-6].
Г. I. Стандарты сотовой телефонии
Г. 1.1. Аналоговые системы первого поколения
Данный подпараграф посвящен обзору стандартов сотовой телефонии.
Вначале рассмотрим стандарты аналоговой сотовой телефонии первого
поколения (1G), основные характеристики которых сведены в табл. Г.1.
Системы, построенные по этим стандартам, получили широкое распро-
странение в 1980-е годы. И хотя большинство из них уже уступили место
цифровым системам сотовой связи, в мире остается много мест, где та-
кие аналоговые системы еще работают. Наибольшую известность получил
разработанный Bell Labs в 1970-е годы стандарт усовершенствованной
мобильной телефонной связи AMPS (Advanced Mobile Phone Service), пер-
вое коммерческое использование которого относится к 1983 г. После того
как этот стандарт был внедрен в США, его приняли и многие другие
страны. Система AMPS имеет узкополосную версию N-AMPS (narrow-
band AMPS), в которой речевые каналы занимают одну треть частотного
диапазона стандартной системы AMPS. В Японии первая коммерческая
система сотовой телефонии была развернута в 1979 г. и работала по стан-
дарту NTT (MCS-L1). Эта система была основана на AMPS, но работала
на более высокой частоте, а полоса частот речевых каналов была немного
уже. В Европе также появилась система, аналогичная AMPS — система
связи общего доступа TAGS (Total Access Communication System), которая
работала на более высокой частоте и имела более узкую полосу каналов
по сравнению с AMPS. Эта система получила распространение в Велико-
британии и других европейских странах, а также за пределами Европы.
Г.1. Стандарты сотовой телефонии
Таблица Г.1. Стандарты аналоговой сотовой телефонии первого поколения
Параметр AMPS TACS NMT (450/900) NTT С-450 RC2000
Частоты в восходящем направлении (МГц) 824 849 890-915 453-458/ 890-915 925-940“ 450- 455,74 414,8- 418ь
Частоты в нисходящем направлении (МГц) 869-894 935-960 463-468/ 935-960 870-885 460- 465,74 424,8-428
Вид модуляции ЧМ (FM) ЧМ (FM) ЧМ (FM) ЧМ (FM) ЧМ (FM) ЧМ (FM)
Разнос каналов (кГц) 30 25 25/12,5 25 10 12,5
Число каналов 832 1000 180/1999 600 573 256
Метод многостан- ционного доступа МДЧР (FDMA) МДЧР (FDMA) МДЧР (FDMA) МДЧР (FDMA) МДЧР (FDMA) МДЧР (FDMA)
“Системы стандарта NTT также работали в некоторых других частотных диапазонах в районе 900 МГц. ь Системы стандарта RC2000 также работали в некоторых других частотных диапазонах в районе 200 МГц.
В Великобритании частотный диапазон системы TACS был расши-
рен с целью увеличения числа каналов, и эта версия получила название
ETACS. Другая версия системы TACS, известная как JTACS, была реали-
зована в городских районах Японии в 1989 г., чтобы обеспечить большую
пропускную способность по сравнению с системой NTT. В системе JTACS
рабочая частота была несколько выше, чем у систем TACS и ETACS,
а в ее узкополосной версии (известной как NTACS) частотный диапазон
речевых каналов занимал только половину диапазона стандартной систе-
мы JTACS. Помимо системы TACS, в европейских странах существовали
различные несовместимые друг с другом стандарты аналоговых сото-
вых систем с разными рабочими частотами, среди которых стандарт
мобильной телефонии NMT (Nordic Mobile Telephone) в Скандинавских
странах, стандарт Radiocom 2000 (RC2000) во Франции, а также стандарт
С-450 в Германии и Португалии. Несовместимость стандартов сделала
невозможным использование одного аналогового телефона в различных
европейских странах, что обусловило необходимость введения единого
стандарта сотовой связи и планов распределения частот в масштабах всей
Европы.
Приложение Г. Обзор стандартов беспроводной связи
Г.1.2. Цифровые системы второго поколения
Далее рассмотрим стандарты цифровой сотовой связи второго поколения
(2G), основные характеристики которых сведены в табл. Г.2. Эти систе-
мы были введены в эксплуатацию, в основном, в начале 1990-х годов.
Таблица Г.2. Стандарты цифровой сотовой телефонии второго поколения
Параметр GSM IS-136 IS-95 (cdmaOne) PDC
Частоты в восходящем направлении (МГц) 890-915 824-849 824-849 940-956, 1429-1453
Частоты в нисходящем направлении (МГц) 935-960 869-894 869-894 810-826, 1477-1501
Разнос несущих частот (кГц) 200 30 1250 25
Число каналов 1000 832“ ~ 2500 1600“
Модуляция GMSK тг/4-D-QPSK BPSK/QPSK тг/4-D-QPSK
Скорость сжатой речи (кбит/с) 13 7,95 1,2- 9,6 (переменная) 6,7
Скорость данных в канале (кбит/с) 270,833 48,6 (1,2288 Мчип/с) 42
Коэффициент кодирования данных 1/2 1/2 1/2 (DL), 1/3 (UL) 1/2
Подавление межсимвольной интерферен- ции /разнесение Корректор Корректор RAKE, SHO Корректор
Метод многостанционного доступа МДВР (TDMA)/ SFH МДВР (TDMA) МДКР (CDMA) МДВР (TDMA)
“Три абонента на канал
Поскольку аналоговые системы первого поколения были несовмести-
мы, в 1982 г. была создана специальная рабочая группа по мобильной
связи — GSM (Groupe Special Mobile), задачей которой стала разработка
единого стандарта цифровой связи для всей Европы. Чтобы облегчить ор-
ганизацию роуминга между странами, для работы системы GSM в Европе
был выделен диапазон частот системы TACS в полосе 900 МГц. В 1989 г.
работа над техническими требованиями GSM была завершена, и в 1991 г.
система была введена в эксплуатацию, хотя ее использование остава-
лось ограниченным до 1992 г. Стандарт GSM использует многостанци-
онный доступ с временным разделением МДВР (TDMA) в сочетании
с незначительным сдвигом частот частоты для борьбы с помехами между
Г.1. Стандарты сотовой телефонии 883
сотами. Для обнаружения и исправления ошибок применяются сверточ-
ное кодирование и коды с контролем по четности чередованием. Также
этот стандарт предусматривает корректирующую цепь для компенсации
частотно-избирательных замираний. На сегодня стандарт GSM использу-
ют около 66 % всех мобильных телефонов мира; более 470 операторов GSM
в 172 странах обслуживают больше миллиона абонентов. Когда стан-
дарт GSM стал глобальным, значение этой аббревиатуры было изменено
на «глобальная система мобильной связи» (Global System for Mobile Com-
munications).
Хотя первый «прыжок» в развитии цифровых систем второго поко-
ления был сделан в Европе, США тоже не отставали. В 1992 г. была
завершена работа над стандартом цифровой сотовой связи IS-54, а его
коммерческое использование началось в 1994 г. Этот стандарт использует
тот же разнос частот (30 кГц), что и система AMPS, чтобы облегчить мо-
бильным операторам переход от аналоговых методов к цифровым. Метод
многостанционного доступа с временным разделением МДВР (TDMA)
позволил улучшить (по сравнению с аналоговым методом МДЧР) харак-
теристики передачи обслуживания и управляющей сигнализации. Позднее
стандарт IS-54 (называемый также Североамериканским стандартом ци-
фровой связи) был усовершенствован, и эти усовершенствования стали
основой для новой версии стандарта — IS-136. Как и GSM, стандарт
IS-136 предусматривает использование кодов с контролем по четности,
сверточных кодов, чередования и корректоров.
В начале 1990-х годов компанией Qualcomm был предложен альтер-
нативный стандарт для систем второго поколения, основанный на тех-
нологии CDMA (МДКР — многостанционный доступ с кодовым разде-
лением). Работа над этим стандартом, известным как IS-95 или IS-95a,
была завершена в 1993 г., а в 1995 г. появилась его первая коммерческая
реализация — система cdmaOne. Как и IS-136, стандарт IS-95 совместим
с AMPS, так что две системы могут сосуществовать в одном и том же
частотном диапазоне. В системе CDMA все абоненты «накладываются»
друг на друга с помощью расширяющих кодов, которые позволяют раз-
делить сигналы разных абонентов в приемнике. Таким образом, скорость
передачи данных в канале относится не только к одному абоненту, как это
было в системах МДВР (TDMA). Скорость чипов1 в канале составляет
1,2288 Мчип/с при общем коэффициенте расширения 128 как в восходя-
щем, так и в нисходящем направлениях. Стандарт IS-95 предусматривает
в нисходящем (DL — downlink) и восходящем (UL — uplink) каналах раз-
ные механизмы расширения, но в обоих случаях для этого используется
сочетание модуляции с расширением спектра и кодирования. В нисходя-
1 Чип — бит несущей, расширяющей последовательности, намного меньше бита моду-
лирующей последовательности исходного сигнала. — Прим, перев.
^884 Приложение Г. Обзор стандартов беспроводной связи
щем канале данные сначала кодируются сверточным кодом с коэффици-
ентом 1/2 и чередуются, а затем модулируются одной из 64 ортогональ-
ных расширяющих последовательностей (функций Уолша). После этого
на функцию Уолша накладывается синхронизированная скремблирующая
последовательность (уникальная для каждой соты), чтобы уменьшить
помехи между сотами. Скремблирование требует синхронизации между
базовыми станциями. Для расширения в восходящем канале используется
сочетание сверточного кода с коэффициентом 1/3 и чередованием, мо-
дуляции ортогональной функцией Уолша и модуляции неортогональным
кодом сигналов данного абонента и базовой станции. Стандарт IS-95 обес-
печивает обнаружение ошибок с помощью кода с контролем по четности,
а также контроль мощности в обратном канале во избежание проблемы
«ближнего и дальнего»2. Чтобы обеспечить разнесение и компенсировать
межсимвольную интерференцию, предусматривается использование при-
емника RAKE с тремя ветвями. Кроме того, стандартом предусмотрен
метод разнесения базовых станций, называемый мягкой передачей обслу-
живания SHO (soft handoff). В процессе такой передачи обслуживания
мобильный аппарат поддерживает соединение как с новой, так и со ста-
рой базовыми станциями и объединяет их сигналы. Сотовые системы
на основе CDMA имеют ряд преимуществ по сравнению с системами
МДВР (TDMA): это отсутствие необходимости в частотном планиро-
вании, возможности мягкой передачи обслуживания, возможность повы-
шения пропускной способности за счет использования активности речи
и отсутствие жестких ограничений на число обслуживаемых системой
абонентов. В начале 1990-х годов широко обсуждались и сравнивались
возможности стандартов IS-136 и IS-95. При этом утверждалось, что сис-
тема IS-95 может обеспечить в 20 раз большую пропускную способность,
чем система AMPS, в то время как система IS-136 — только в 3 раза.
В конце концов, обе системы начали давать примерно одинаковое увели-
чение пропускной способности по сравнению с AMPS.
Японский стандарт цифровой сотовой связи второго поколения, из-
вестный как стандарт персональной цифровой сотовой связи PDC (Per-
sonal Digital Cellular) был разработан в 1991 г. и реализован в 1994 г. Он
похож на стандарт IS-136, но использует разнос речевых каналов 25 кГц
для совместимости с японскими аналоговыми системами. Система PDC
работает в двух частотных диапазонах: 800-900 МГц и 1400 МГц. Каж-
дый канал обслуживает трех абонентов, а при большем коэффициенте
сжатия один канал может обслуживать шесть абонентов.
2Имеется в виду выравнивание на базовой станции уровня мощности сигналов абонен-
тов, находящихся «близко» и «далеко» от нее. — Прим, перев.
Г.1. Стандарты сотовой телефонии 885
Г.1.3. Эволюция систем второго поколения
В конце 1990-х годов системы второго поколения развивались в двух на-
правлениях: системы сотовой связи переходили на более высокие частоты
благодаря тому, что в Европе и США для них была выделена более широ-
кая полоса частот, и, кроме того, дорабатывались для поддержки, помимо
передачи речи, также услуг передачи данных. В 1994 г. Федеральная ко-
миссия связи США FCC начала торги по продаже частотного спектра
в полосе 1,9 ГГц (1900 МГц), выделенного для системы услуг персональ-
ной связи PCS (Personal Communication Service). Операторы, которые
приобрели этот частотный ресурс, могли использовать любой стандарт.
Различные операторы выбрали разные стандарты, и в результате в раз-
личных частях страны в полосе 1,9 ГГц появились системы стандартов
GSM, IS-136 и IS-95, что сделало роуминг в масштабах страны с исполь-
зованием одного сотового телефона труднореализуемым. Фактически,
многие из первых цифровых мобильных аппаратов, в случае недоступ-
ности цифровой системы, поддерживали аналоговый режим AMPS.
Системы GSM, работающие в полосе PCS, иногда называют система-
ми PCS 1900. Стандарты IS-136 и IS-95 (cdmaOne) при переносе в частот-
ный диапазон PCS сохранили те же названия. В Европе сотовым системам
был выделен дополнительный частотный спектр в полосе 1,8 ГГц. Стан-
дарт для этого диапазона, известный как GSM 1800 или DCS 1800 (Digital
Cellular System — цифровая система сотовой связи), основан на стан-
дарте GSM с некоторыми модификациями, которые делают возможным
перекрытие макросот и микросот. Отметим, что беспроводные телефо-
ны второго поколения таких стандартов как DECT (Digital Enhanced
Cordless Communications — усовершенствованная цифровая беспроводная
связь), PACS (Personal Access Communications System — система связи
персонального доступа) и PHS (Personal Handy-phone System — мобиль-
ная персональная телефонная система) также работают в полосе 1,9 ГГц,
но эти системы, в основном, действуют внутри зданий, поддерживая услу-
ги учрежденческих телефонных станций.
С появлением цифровой сотовой связи операторы начали, наряду с пе-
редачей речи, внедрять услуги передачи данных. Системы второго по-
коления 2G с дополнительными возможностями передачи данных иногда
называют системами 2,5G. Усовершенствования, сделанные в системах
2G для поддержки услуг передачи данных, указаны в табл. Г.З. При
доработке систем GSM для передачи данных использовалось несколько
различных методов. Самый простой из них известен как метод высо-
коскоростной передачи данных с коммутацией каналов — HSCSD (High
Speed Circuit Switched Data). Этот метод позволяет выделить одному або-
ненту до четырех последовательных временных интервалов, обеспечивая,
(Гв86 Приложение Г. Обзор стандартов беспроводной связи
таким образом, максимальную скорость передачи до 57,6 кбит/с. Ком-
мутация каналов не очень эффективна при передаче данных, поэтому
появилось более сложное техническое решение по усовершенствованию
систем 2G, использующее пакетную передачу данных поверх передачи
речи с коммутацией каналов. Эта технология получила название служ-
бы передачи пакетов в радиосети — GPRS (General Packet Radio Ser-
vice). GPRS может обеспечить максимальную скорость передачи данных
171,2 кбит/с, при этом все восемь временных интервалов кадра GSM
выделяются одному абоненту. Впоследствии скорости передачи данных
с использованием GPRS выросли за счет применения модуляции и коди-
рования с переменной скоростью. Данный метод известен как «повыше-
ние скорости передачи данных в усовершенствованной GSM» EDGE
(Enhanced Data rates for GSM Evolution). EDGE обеспечивает передачу
данных co скоростью до 384 кбит/с, что соответствует скорости переда-
чи 48-69,2 кбит/с на один временной интервал. Технологии GPRS и EDGE
совместимы как с системами IS-136, так и с системами GSM, обеспечивая
сходимость в развитии этих систем.
Таблица Г.З. Усовершенствования систем 2G для поддержки услуг передачи дан-
ных (2,5 G)
Стандарт 2G Усовершен- ствования 2,5G Метод Скорость передачи данных (кбит/с) максимальная/ реализованная
GSM HSCSD Объединение временных интервалов 57,6/14,4 57,6
GSM/IS-136 GPRS Объединение временных интервалов с пакетной коммутацией 140,8/56
EDGE GPRS, модуляция и кодирование с переменной скоростью 384/200
IS-95 IS-95b Объединение функций Уолша 115/64
При доработке стандарта IS-95 задача предоставления услуг передачи
данных была решена путем присвоения одному абоненту различных орто-
гональных функций Уолша. Максимальное число присваиваемых функций
равно восьми, следовательно, максимальная скорость передачи данных со-
ставляет 115,2 кбит/с, хотя на практике удалось достичь лишь скорости
порядка 64 кбит/с. Эта усовершенствованная версия стандарта известна
как IS-95b.
Г.1. Стандарты сотовой телефонии 887
Г. 1.4. Системы третьего поколения
Разделение стандартов и частотных диапазонов, относящихся к систе-
мам второго поколения 2G, побудило Международный Союз Электросвя-
зи (МСЭ) в конце 1990-х годов принять план выделения единого диа-
пазона частот и создания единого стандарта для цифровых систем со-
товой связи третьего поколения 3G- Этот стандарт получил название
IMT-2000 (International Mobile Telephone — международная мобильная те-
лефония), поскольку стандарт новой системы планировалось выпустить
около 2000 г. Помимо передачи речи, система IMT-2000 должна была
обеспечить передачу данных со скоростями порядка Мбит/с, необходи-
мыми для таких приложений как широкополосный доступ к сети Интер-
нет, интерактивные игры, высококачественные развлекательные аудио-
и видеопрограммы. Реализовать на практике идею единого стандарта
не удалось, и в большинстве стран работает один из двух конкуриру-
ющих стандартов — cdma2000, совместимый с cdmaOne и поддержива-
емый 2-м партнерским проектом систем третьего поколения (3GPP2),
или широкополосный CDMA (W-CDMA), совместимый с GSM и IS-136
и поддерживаемый 1-м партнерским проектом систем третьего поколения
(3GPP1). Основные характеристики этих двух стандартов 3G сведены
в табл. Г.4. Оба стандарта используют технологию CDMA с контролем
мощности и приемниками RAKE, но скорости передачи чипов и дру-
гие технические детали отличаются. Стандарты cdma2000 и W-CDMA
несовместимы, поэтому телефонный аппарат, чтобы работать с обеими
системами, должен быть двухрежимпым. В Китае прорабатывается тре-
тий стандарт 3G — TD-SCDMA, но он вряд ли будет принят где-нибудь
еще. Основное отличие между TD-SCDMA и другими стандартами 3G
заключается в использовании для сигнализации в восходящем и нисходя-
щем направлениях дуплексного режима с временным разделением (TDD)
вместо дуплексного режима с частотным разделением (FDD).
Стандарт cdma2000 был разработан на основе cdmaOne и призван
обеспечить эволюционный переход к системе 3G. Базовая версия стан-
дарта cdma2000 получила название cdma2000 IX или cdma2000 1XRTT,
указывающее на то, что технология радиопередачи (RTT — radio trans-
mission technology) использует одну пару радиоканалов с полосой 1,25 МГц
и поэтому совместима с системами cdmaOne. Пропускная способность
системы cdma2000 IX при передаче речи в два раза больше, чем у системы
cdmaOne, кроме того, cdma2000 IX обеспечивает высокоскоростную пере-
дачу данных с прогнозируемой максимальной скоростью около 300 кбит/с
и реальными скоростями порядка 144 кбит/с. Для обеспечения высокоско-
ростной передачи данных (так называемой услуги HDR — high data rates)
со скоростями свыше 1 Мбит/с эта базовая технология была доработана,
Приложение Г. Обзор стандартов беспроводной связи
и появилось два усовершенствованных варианта стандарта под названием
cdma2000 1XEV.
Таблица Г.4. Стандарты цифровой сотовой телефонии третьего поколения (3G)
cdma2000 W-CDMA
Параметр IX 1XEV-DO 1XEV-DV ЗХ UMTS FOMA J-phone
Полоса пропускания канала (МГц) 1,25 1,25 1,25 3,75 5 5 5
Скорость передачи чипов (Мчип/с) 1,2288 1,2288 1,2288 3,6864 3,84 3,84 3,84
Максимальная скорость передачи данных (Мбит/с) 0,144 2,4 4,8 5-8 2,4а 2,4а 2,4а
Модуляция QPSK/MPSK (DL), BPSK/QPSK (UL) QPSK (DL), BPSK (UL)
Кодирование Сверточные коды (низкая скорость) Турбо-коды (высокая скорость)
Контроль мощности (Гц) 800 800 800 800 1500 1500 1500
а 8-10 Мбит/с при использовании HSDPA.
Сначала появилась версия cdma2000 1XEV-DO (data only — «только
данные»), использующая для высокоскоростной передачи данных в сис-
теме cdmaOne выделенный канал с полосой 1,25 МГц. Этот отдельный
канал обеспечивает передачу данных со скоростью до 3 Мбит/с в нисхо-
дящем направлении и до 1,8 Мбит/с — в восходящем, что дает среднюю
скорость 2,4 Мбит/с. Позднее был разработан второй усовершенствован-
ный вариант стандарта — cdma2000 1XEV-DV (data and voice — «данные
и речь»). Предполагается, что он обеспечит передачу данных со скоро-
стью до 4,8 Мбит/с, а также обслуживание традиционных аналоговых
абонентов стандарта IX и пользователей услуг передачи данных стандар-
тов 1XRTT и 1XEV-DO — и все это по одному и тому же радиоканалу.
Предлагается еще одно усовершенствование стандарта cdma2000 — объ-
единение трех каналов по 1,25 МГц в один канал с полосой 3,75 МГц.
Такое объединение получило название cdma2000 ЗХ, но соответствующие
технические требования еще находятся в стадии разработки.
Стандарт третьего поколения W-CDMA — основной конкурент стан-
дарта cdma2000. Он был выбран на роль преемника технологии GSM,
и в этом контексте получил название универсальной системы мобиль-
ной связи UMTS (Universal Mobile Telecommunications System). W-CDMA
используется также в японских системах третьего поколения — FOMA
и J-Phone. Все эти системы используют общий протокол канального уров-
ня (радиоинтерфейс) W-CDMA, но протоколы для обслуживания других
аспектов системы, таких как маршрутизация и сжатие речи, отлича-
ются. W-CDMA обеспечивает максимальную скорость до 2,4 Мбит/с,
а стандартные значения скорости составляют около 384 кбит/с. Системы
W-CDMA используют каналы с полосой пропускания 5 МГц, в отличие
от каналов с полосой 1,25 МГц в системах cdma2000. Усовершенствован-
ный вариант стандарта W-CDMA получил название высокоскоростного
доступа к пакетным данным — HSDPA (High Speed Data Packet Access).
Он обеспечивает передачу данных co скоростью около 9 Мбит/си может
рассматриваться как предвестник будущих систем четвертого поколения.
Г.2. Беспроводные локальные сети
Беспроводные локальные сети WLAN (Wireless local area networks) стро-
ятся на основе стандартов семейства IEEE802.il. Основные характери-
стики этих стандартов приведены в табл. Г.5. Базовый стандарт 802.11,
опубликованный в 1997 г., предусматривает работу в полосе частот ши-
риной 83,5 МГц в нелицензируемом диапазоне 2,4 ГГц. Предусматрива-
ется использование фазовой манипуляции ФМН (PSK — pulse-shift key-
ing) с расширением спектра методом частотных скачков FHSS и мето-
дом прямой последовательности DSSS. При этом поддерживаются ско-
рости передачи данных до 2 Мбит/с, а для произвольного доступа ис-
пользуется метод коллективного доступа с опросом несущей CSMA/CA.
В 1999 г. базовый стандарт был расширен, и появилась версия 802.11b
для работы в том же диапазоне 2,4 ГГц с использованием только DSSS.
Этот стандарт предусматривает модуляцию и кодирование с переменной
скоростью; при модуляции используется двоичная фазовая манипуляция
ДФМН (BPSK — binary phase shift keying) или четверичная фазовая ма-
нипуляция ФМ-4 (QPSK — quaternary phase-shift keying), а при канальном
кодировании — последовательности Баркера или манипуляция ССК (com-
plementary code keying). Это позволяет обеспечить максимальную ско-
рость в канале 11 Мбит/с и максимальную скорость передачи данных
пользователя около 1,6 Мбит/с. Дальность передачи составляет пример-
но 100 м. Стандарт 802.11b определяет два типа сетевой архитектуры —
«звезда» и «равноправная архитектура», но равноправная схема обычно не
используется. Этот стандарт получил широкое распространение, и про-
изводители начали встраивать карты для подключения к беспроводной
локальной сети стандарта 802.11b во многие портативные компьютеры.
Приложение Г. Обзор стандартов беспроводной связи
Таблица Г.5. Стандарты канального уровня для беспроводных локальных сетей
семейства 802.11
Параметр 802.11 802.11a 802.11b 802.11g
Полоса пропускания (МГц) 83,5 300 83,5 83,5
Частотный диапазон (ГГц) 2,4-2,4835 5,15-5,25 (нижний) 5,25-5,35 (средний) 5,725-5,825 (верхний) 2,4-2,4835 2,4 2,4835
Число каналов 3 12 (по 4 в кажом поддиапазоне) 3 3
Модуляция BPSK, QPSK DSSS, FHSS BPSK, QPSK, MQAM OFDM BPSK, QPSK DSSS BPSK, QPSK, MQAM OFDM
Кодирование He определено Сверточное (коэффициенты 1/2, 2/3, 3/4) Баркера, CCK Сверточное (коэффициенты 1/2, 2/3, 3/4)
М аксимальн ая скорость передачи данных (Мбит/с) 2 54 11 54
Дальность передачи (м) He определена 27-30 (нижний диапазон) 75-100 300
Произвольный доступ CSMA/CA CSMA/CA CSMA/CA CSMA/CA
В 1999 г. была завершена работа над еще одной расширенной версией
стандарта 802.11, которая получила название 802.11а и имела целью по-
вышение скоростей передачи, определенных в версии 802.11b. Стандарт
802.11а предусматривает работу в полосе частот шириной 300 МГц в диа-
пазоне 5 ГГц (U-NII). Фактически, эта полоса в 300 МГц подразделяется
на три поддиапазона по 100 МГц каждый: нижний (5,15-5,25 ГГц), сред-
ний (5,25-5,35 ГГц) и верхний (5,725-5,825 ГГц). Разнос между каналами
составляет 20 МГц, за исключением внешних краев нижнего и средне-
го диапазонов, где каналы разнесены на 30 МГц. Определены также три
максимальных уровня передаваемой мощности: 40 мВт для нижнего диа-
пазона, 200 мВт для среднего и 800 мВт для верхнего. Эти ограничения
означают, что нижний диапазон подходит только для работы внутри по-
мещения, средний диапазон может использоваться для работы как внутри
помещений, так и снаружи, а верхний диапазон подходит для наружно-
го применения. В каждом канале используются модуляция и кодирование
с переменной скоростью. При модуляции применяются методы ДФМН
(BPSK), ФМН-4 (QPSK), КАМ-16 (16-QAM) и КАМ-64 (64-QAM), а ко-
эффициент сверточного кодирования может составлять 1/2, 2/3 или 3/4.
Г.З. Стандарты беспроводных сетей ближней связи 891
В результате максимальная скорость передачи данных в канале соста-
вляет 54 Мбит/с. Во внутриофисных системах 802.11а работа на несу-
щей частоте 5 ГГц в сочетании с ограничениями по мощности в нижнем
диапазоне уменьшает дальность передачи по сравнению с использовани-
ем стандарта 802.11b, а также затрудняет прохождение сигнала через
стены и другие препятствия. Стандарт 802.11а предусматривает мно-
гостанционный доступ с применением ортогонального мультиплексиро-
вания с частотным разделением каналов ОЧРК (OFDM — orthogonal
frequency division multiplexing) вместо использования FHSS и DSSS, и этим
он отличается от базового стандарта 802.11.
Стандарт 802.11g, работа над которым была завершена в 2003 г.,
представляет попытку взять лучшее из версий 802.11а и 802.11b, т.е.
обеспечить скорость передачи до 54 Мбит/с при работе в диапазоне
2,4 ГГц и тем самым увеличить дальность передачи. Этот стандарт со-
вместим с 802.11b, поэтому точки доступа, работающие по стандарту
802.11g, смогут работать с сетевыми адаптерами 802.11b, и наоборот. Од-
нако стандарт 802.11g использует метод ОЧРК (OFDM), а также методы
модуляции и кодирования, определенные в стандарте 802.11а. Поэтому, во
избежание несовместимости, точки доступа и сетевые карты поддержи-
вают все три стандарта беспроводных локальных сетей. Семейство стан-
дартов 802.Ha/b/g известно под общим названием Wi-Fi (сокращение
от «wireless fidelity»). Стандарт 802.lid определяет работу в частотных
диапазонах за пределами США. Существует еще несколько стандартов
семейства 802.11, которые пока находятся в стадии разработки; они пе-
речислены в табл. Г.6.
Потенциальным конкурентом стандартов группы 802.11, а также сис-
тем сотовой связи, можно считать новый стандарт IEEE 802.16, извест-
ный под названием WiMAX. Этот стандарт предлагает широкополосный
беспроводный доступ при скорости передачи порядка 40 Мбит/с для або-
нентов фиксированной связи и 15 Мбит/с для мобильных абонентов, при
этом дальность передачи составляет несколько километров. Технические
требования к таким системам еще находятся в стадии разработки.
Г.З. Стандарты беспроводных сетей ближней связи
Этот последний раздел посвящен основным характеристикам систем Zig-
Bee, Bluetooth и UWB (ultra-wideband), предназначенных для поддерж-
ки разнообразных беспроводных сетевых приложений с малым радиусом
действия. Технические параметры этих систем соответствуют требова-
ниям стандартов семейства IEEE 802.15 на беспроводные сети ближней
связи, называемые также персональными беспроводными сетями WPAN
(Wireless Personal Area Network). Система Bluetooth работает в нелицен-
892 Приложение Г. Обзор стандартов беспроводной связи
зируемом диапазоне 2,4 ГГц, a ZigBee — в том же диапазоне и, кроме
того, в лицензируемых диапазонах 800 МГц и 900 МГЦ. Система UWB
работает в широком диапазоне частот на основе существующих систем.
Для систем ZigBee и Bluetooth определены протоколы канального уровня,
управления доступом к среде MAC (Media Access Control) и высшего уров-
ня, а для системы UWB — только протокол канального уровня. Основные
характеристики систем ZigBee (только в диапазоне 2,4 ГГц), Bluetooth
и UWB сведены в табл. Г.7.
Таблица Г.6. Разработка новых стандартов семейства 802.11
Стандарт Область применения
802.11е Поддержка качества обслуживания (QoS) на уровне МАС
802.Ilf Протокол роуминга между точками доступа различных производителей
802.11h Вводит в стандарт 802.11а дополнительные частоты и функции упра- вления мощностью, делая его более совместимым с сетями европейских операторов
802.11i Усовершенствованные механизмы безопасности и аутентификации
802. llj Согласует канальный уровень стандарта 802.11а с японскими требовани- ями
802.11k Обеспечивает интерфейс с высшими уровнями для радио и сетевых изме- рений, который можно использовать при управлении радиоресурсами
802.11m Сопровождение стандартов 802.11 (технические и редакторские правки)
802.11П Усовершенствования системы MIMO для повышения пропускной способ- ности
В системе ZigBee протоколы канального уровня и МАС, а также прото-
колы высшего уровня для специальных сетевых структур (ячеистой, звез-
дообразной или древовидной топологии), механизмы управления мощно-
стью и обеспечения безопасности соответствуют стандарту IEEE 802.15.4.
ZigBee обеспечивает передачу данных со скоростью до 250 кбит/с с ис-
пользованием фазовой манипуляции ФМН (PSK) и DSSS. Обычно сис-
тема ZigBee используется в тех приложениях, для которых характерны
относительно низкая скорость передачи данных, низкий коэффициент за-
полнения и большие сети. Ключевым фактором здесь является экономное
расходование мощности, позволяющее узлам работать в течение несколь-
ких месяцев или лет от одной заряженной аккумуляторной батареи.
В отличие от ZigBee, система Bluetooth обеспечивает скорость пере-
дачи до 1 Мбит/с, предоставляя три гарантированных речевых канала
с низкой задержкой, с использованием FHSS и частотной манипуляции
с гауссовской формой импульса (GFSK — Gaussian frequency-shift keying).
В системе Bluetooth передаваемая мощность обычно составляет 1 мВт
при дальности передачи около 10 м, хотя при увеличении передаваемой
мощности до 100 мВт дальность увеличится до 100 м. Сети формируют-
ся из отдельных фрагментов — кластеров (или пикосетей), содержащих
Г.З. Стандарты беспроводных сетей ближней связи
до 8 узлов, при этом один узел работает как ведущий, а остальные —
как ведомые. Для организации доступа к каналам используется времен-
ное разделение, при этом ведущий узел координирует последовательности
со скачкообразной перестройкой частоты и синхронизацию ведомых уз-
лов. Можно организовать рассеянные сети, когда один узел относится
к нескольким пикосетям. Однако формирование крупных сетей таким
способом затрудняет выполнение требований к синхронизации последо-
вательностей FHSS. Части стандарта Bluetooth формально приняты IEEE
как стандарт 802.15.1.
Таблица Г. 7. Стандарты на беспроводные сети ближней связи
Параметр ZigBee (802.15.4) Bluetooth (802.15.1) UWB (проект 802.15.3)
Частотный диапазон (ГГц) 2,4-2,4835 2,4-2,4835 3,1-10,6
Полоса пропускания (МГц) 83,5 83,5 7500
Модуляция BPSK, QPSK DSSS GFSK FHSS BPSK, QPSK OFDM или DSSS
Максимальная скорость передачи данных (Мбит/с) 0,25 1 100
Дальность передачи (м) 30 10(100) 10
Потребляемая мощность (мВт) 5-20 1(100) 80-150 мВт
Доступ CSMA/CA (как вариант — BPK1) (TD) BPK (TD) He определен
Структура сети Ячейки/Звезда/ Дерево Кластеры (no 8 узлов) He определен
ХВРК — временное разделение каналов. — Прим, перев.
Сверхширокополосная система UWB обеспечивает намного более вы-
сокие скорости передачи, чем ZigBee и Bluetooth — до 100 Мбит/с. При
этом ее рабочая полоса частот значительно шире, а ограничения по мощ-
ности самые строгие (для предотвращения создания помех пользовате-
лям основной полосы). Поэтому системы UWB подходят только для вну-
триофисных приложений с малым радиусом действия. Протокол UWB
определяет только требования к канальному уровню, поэтому для форми-
рования стандарта беспроводной сети требуется совместимый протокол
МАС, а также протоколы высшего уровня. Используются методы моду-
ляции ДФМН (BPSK) и ФМН-4 (QPSK); существует также конкуриру-
ющий подход, основанный на применении методов ОЧРК (OFDM) или
DSSS, наложенных на модуляцию данных. Ожидается, что UWB будет
Приложение Г. Обзор стандартов беспроводной связи
использоваться в качестве технологии канального уровня при разработке
стандарта IEEE 802.15.3 на беспроводные сети с поддержкой передачи
изображений и мультимедиа.
Литература
1. Т. S. Rappaport, Wireless Communications — Principles and Practice, 2nd ed.,
Prentice-Hall. Englewood Cliffs, NJ, 2001.
2. J.D. Vriendt, P. Lame, C. Lerouge, and X. Xu, «Mobile network evolution:
A revolution on the move», IEEE Commun. Mag., pp. 104-11, April 2002.
3. D. Porcino and W. Hirt, «Ultra-wideband radio technology: Potential and chal-
lenges ahead», IEEE Commun. Mag., pp. 66-74, July 2003.
4. I. Poole, «What exactly is... ZigBee?» IEEE Commun. Eng., pp. 44-5, Au-
gust/September 2004.
5. S. Haykin and M. Moher, Modern Wireless Communications, Prentice-Hall, En-
glewood Cliffs, NJ, 2005.
6. W. Stallings, Wireless Communications and Networks, 2nd ed., Prentice-Hall,
Englewood Cliffs, NJ, 2005.
Предметный указатель
Q-функция
Гаусса, 290
альтернативное представление,
290
т-последовательность, 618, 634
ALOHANET, 36
AMPS, 53
BLAST, 513
D-BLAST, 515
DARPA, 37
EDGE, 55
Ethernet, 37
GPRS, 55
IMT-2000, 55
IS-136, 54
ZigBee, 67
АИМ, 283
ГЧМН-МС, 261
KAM, 245, 284, 579
М-кратная, 349
ЛВС, 37
беспроводные, 38, 59, 60
МДВР, 675
МДКР, 675
неортогональный, 681
с ортогональными кодами, 681
МДПР, 675
МДЧР, 675
МКАМ с переменной скоростью и пе-
ременной мощностью, 441
Международный Союз Электросвя-
зи, 70
отдел стандартизации, 70
ОФМН, 330, 347
ОЧРК, 561, 578, 581
ФМ4, 305
относительная, 305
ФМН
М-кратная, 281, 290, 465
некогерентная, 302
относительная, 302
относительная (ОФМН), 289, 294
ЧМН, 286
двоичная, 294
с непрерывной фазой
(ЧМН-НФ), 260, 287
ЧРК ортогональное, 561
адаптация
мощности, 437, 475
«водоналивная*, 779
оптимальная, 208
с инверсией канала, 444
с дискретной скоростью, 447, 469
с непрерывной скоростью, 464
алгоритм
Витерби,388, 440
наименьшего среднеквадратич-
ного отклонения, 551
обновления весовых коэффици-
ентов, 537
регулирования мощности, 812
антенна
многоэлементная, 485
направленная, 518
секторная, 517
умная, 322, 517
управляемая, 772, 773
антенная решетка, 321
векторное кодовое слово, 586
вероятность
Предметный указатель
нарушения связи, 114, 292, 327
ошибки, 279
средняя, 293
бита, 289
бита (средняя), 298
кодового слова, 373
парная, 396, 509
по битам, 288
при АИМ и КАМ, 283
при ОФМН (средняя), 305
при ФМН, 281
при ФМН (средняя), 300
при ЧМН и ЧМН-НФ, 286
при когерентной модуляции,
287
при относительной модуля-
ции, 288
символа, 280, 284, 286, 629
символа при рэлеевских зами-
раниях (средняя), 295
символа, средняя, 291, 302
символьной, 290
средняя, 294
ошибочного блока, 358
перерывов радиосвязи, 291, 292
вес кодового слова, 362
ветвь решетки, 384
вхождение в синхронизм, 623
выигрыш
за счет мультиплексирования,
506
от мультиплексирования, 488
от разнесения, 505, 506, 511
полный, 507
выравнивание, 528
адаптивное, 529, 549
линейное, 531
предварительное, 549
выравниватель
аналоговый, 529
цифровой, 534
геометрическое представление, 220
глубина отсечки замираний, 443, 466
граница
Синглтона, 367
пропускной способности, 176
двумерный «водоналивной» процесс,
209
декодирование
итеративноё, 399
методом максимального правдо-
подобия, 385
по минимальному расстоянию,
370
по методу максимального прав-
доподобия, 371
с жестким решением, 370, 397
с мягким решением, 376, 396
детектирование
когерентное, 246
многопользовательское, 772, 774
по максимуму правдоподобия,
509
детектор
декоррелирующий, 654
минимальной среднеквадратич-
ной ошибки, 654
многоступенчатый, 655
с решающей обратной связью,
655
диаграмма
древовидная, 382
направленности, 506
направленности антенн, 504
решетчатая, 382
состояний, 382, 393
расширенная, 394
диапазон
СВЧ (SHF), 81
УВЧ (UHF), 81
пропускной способности канала
вещания, 719
дифракция, 95
длина кодового ограничения, 382
доплеровский интервал частот кана-
ла, 164
дополнительная информация о канале
в передатчике, 487
в приемнике, 487
доступ
Предметный указатель
беспроводной широкополосный, 62
многоканальный, 52
многостанционный, 52, 674
с временным разделением
(МДВР), 52, 678
с кодовым разделением
(МДКР), 52, 680
с контролем несущей, 690
с пространственным разделе-
нием (МДПР), 682
с частотным разделением
(МДЧР), 52, 676
многостанционный с использова-
нием сигналов с расширенным
спектром, 631
множественный, 52
планирование, 692
дуальность, 733
емкость
абонентская, 768
канала многостанционного
доступа, 727
канала с замираниями
при наличии дополнительной ин-
формации о канале в пере-
датчике и приемнике, 189
при ограничении среднего зна-
чения мощности, 190
эргодическая, 727
задержка оценивания канала, 460
закон Рэлея, 146
замирания
амплитудные, 570
рэлеевские, 292
составные, 475
частотно-селективные, 307, 516
затухание
межэтажное, 104
среднее локальное (LMА), 99
экранирования, 108
защищенность, 278
значение
потерь среднее в тракте переда-
чи, 109
разброса
среднее, 158
среднеквадратическое, 158
зона
замираний, 447
покрытия, 117
системы сотовой связи, 114
зона замираний
средняя продолжительность, 454
импульс
гауссовской формы, 260
косинусоидальный
приподнятый, 259
прямоугольный, 258
инверсия канала, 572, 651
усеченная, 445
интерференция
деконструктивная, 91
конструктивная, 91
межсимвольная, 154, 207, 307
информация
взаимная, 492
дополнительная, 193
канала взаимная, 495
о фазе несущего сигнала, 262
канал
Маркова с конечным числом со-
стояний, 152
вещательный, 632
восходящий, 633, 645, 672
групповой, 672
двойственный, 732
многостанционного доступа, 632
множественный, 672
нестационарный с частотно-се-
лективными замираниями,206
нисходящий, 633, 638, 672
обратный, 632
прямой, 632
прямой видимости, 84
с амплитудными замираниями,
434
с дискретным временем и адди-
тивным белым шумом
(AWGN), 178
с замираниями, 410, 442, 498
Предметный указатель
с одним входом и одним выхо-
дом, 489
статичный, 491
стационарный, 203
узкополосный MIMO, 486
код
Боуза-Чоудхури-Хоквенгема,
379
Голда, 634
Голея, 378
расширенный, 378
Грея, 246, 248
Кассами, 635
Рида-Соломона, 379
Уолша-Адамара, 637
Хэмминга, 378
блочный
двоичный, 361
линейный, 360
линейный систематический,
364
недвоичный, 379
внешний, 398
внутренний, 398
каскадный, 398
линейный максимальный, 618
матричный, 405
многоуровневый, 417
пространственно-временной, 508
блочный, 511
решетчатый, 511
расширяющий, 604, 628, 634
решетчатый, 405
с неравномерной защитой от
ошибок, 416
с проверкой на четность низкой
плотности, 402
сверточный, 381
пунктирный, 439
совершенный, 373
турбо-, 399
циклический, 367
кодирование, 356
адаптивное, 432, 439
векторное, 584
вертикальное, 514
диагональное, 515
источника и канала совместное,
420
наложенное, с последовательным
подавлением помех, 702
параллельное, 513
по множеству признаков, 825
погашенных страниц, 720
последовательное, 512
предварительное, 572
с временным разделением, 419
с чередованием, 410
блочное, 411
сверточное, 414
с чередованием по времени и час-
тоте, 571
смежно-групповое, 404
эффективность, 358
компоненты многолучевого распро-
странения сигнала, 86
контроллер сети, 50
контроль
использования радиочастот, 69
синдромный, 366
корректор, 528
линейный, 537
максимальный апостериорный, 549
посимвольного типа, 532
с минимальной среднеквадра-
тичной ошибкой, 540
с обращением коэффициентов
в нуль, 538
с оценкой последовательности, 532
с решающей обратной связью, 531
типа MLSE, 544
турбо-, 548
коррекция
дробно-интервальная, 535
частоты, 571
корреляционный показатель, 376
коэффициент
корреляции, 306
канала, 305
ответвлений весовой, 537, 539
ошибок (BER), 456
передачи канала, 436
Предметный указатель 899
правдоподобия логарифмичес-
кий, 549
расширения спектра, 603, 643,
649
усиления
антенной решетки, 321
за счет разнесения, 326
разнесенного приема, 321
кратность разнесения сигнала, 410
критерий
определителя, 511
ранга, 511
линия прямой видимости (LOS), 93
луч
отраженный от земли, 93
прямой видимости, 84
макроразнесение, 320, 321
максимально правдоподобная оценка
задержки, 268
манипуляция
с минимальным сдвигом, 255
с минимальным сдвигом, 218
с непрерывной фазой), 218
фазовая (ФМН), 218
двоичная (ДФМН), 279
квадратурная (КФМН), 280
частотная (ЧМН), 218
относительная (ОЧМН), 258
маршрутизация, 817
динамическая, 819
лавинная, 817
по запросу с вектором перемеще-
ния, 819
по состоянию линий, 819
реактивная, 819
масштабирование канала, 735
двойственного, 736
матрица
Адамара, 637
канала передаточная, 488
ковариации, 492
контроля четности, 365
коэффициентов передачи кана-
лов, 486
порождающая, 363
сингулярных чисел, 489
метод
гибридный, 683
маршрутизации
децентрализованный, 818
распределенный, 818
централизованный, 818
относительной модуляции, 246
прямой последовательности, 53
разделения на каналы, 674
разделения сигнального прост-
ранства, 675
случайного доступа, 685
снижения помех в сотовых систе-
мах, 772
фазированных антенных реше-
ток, 518
метрика
ветви, 386
полная, 389
пути, 386
частная, 389
микросоты, 50
минимальный просвет, 392
многолучевое распространение, 608
многопользовательский детектор, 652
модель
ВОС, 808
Окумуры, 100
Хата, 101, 106
расширенная, 101
расширенная (COST), 106
двулучевая, 81, 88, 106
двумерного белого шума с нуле-
вым средним, 487, 494
дискретно-временная, 166
замираний
деструктивная, 128
конструктивная, 128
канала
дискретная, 129
пространственно-временная, 129
комбинированная, 112
лучевого распространения, 79
потерь
в свободном пространстве, 106
900 Предметный указатель
комбинированная, 117
кусочно-линейная, 102
статистическая, 87
трассировки лучей, 87
модуляция
адаптивная, 432
амплитудно-импульсная, 218
квадратурная амплитудная
(КАМ), 218, 245
кодовая
адаптивная, 461
с чередованием бит, 416
с чередованием символов, 416
кодовая решетчатая, 404
на нескольких несущих, 561, 563
с перекрывающимися подкана-
лами, 567
относительная, 246
разностная, 246
с минимальным сдвигом
(ЧМН-МС), 261
с переменной скоростью, 436
частотная, 255
мультиплексирование, 419
пространственное, 512
с ортогональным частотным
разделением, 561
нагрузка адаптивная, 572
нарушение радиосвязи, 303
неубывающий порог ошибок, 304, 307
образующий полином, 367
объединение
деструктивное, 154
пороговое, 331
с переключением и остановкой,
331
селективное, 327
сигналов с дифференциальным
взвешиванием, 345
оптимальная
адаптация
мощности, 472
скорости, 472
граница зон скоростей, 472
стратегия адаптации мощности, 464
ортогональные сигналы, 224
основная задача планирования, 775
отношение
двойственности, 736
мощностей сигнала и помехи, 603
мощности принимаемого сигна-
ла к суммарной мощности по-
мех
и шума (SINR), 278
пиковой и средней мощностей, 588
сигнал-помеха (SIR), 649, 764
сигнал-шум (SNR), 83, 278
на бит, 279
на символ, 279, 303
среднее, 292
отслеживание, 624
оценка максимального правдоподо-
бия последовательности, 531
ошибка оценивания, 458
передаточная характеристика, 530
передача
адаптивная, 434
обслуживания вызова, 50, 51
перестройка частоты скачкообразная, 53
пикосоты, 50
планирование, 775
повторное использование каналов, 758
подпространство, 361
помехи
между несущими, 591
межсимвольные, 528
многостанционного доступа, 652
последовательность
Касами, 635
максимальной длины, 618
обучающая, 550
псевдослучайная, 618, 619
потери
на трассе, 78, 84
экранирования, 105
эмпирические, 99
предварительная компенсация помех, 772,
774
преобразование Фурье
быстрое (БПФ), 575
Предметный указатель
дискретное (ДПФ), 574
обратное (ОДПФ), 574
префикс циклический, 576
приближение ближайшего соседа, 280, 282,
284, 287
прием
разнесенный, 198, 320, 323
следящий, 550
приемник
RAKE, 625
линейный (MUD), 654
нелинейный (MUD), 655
принцип
«водоналивной», 208, 498
проблема масштабируемости, 806
производящая функция моментов,
296, 344
проницаемость стен зданий, 105
пропускная способность
нестационарного канала с час-
тотно-селективными замира-
ниями, 207
Шеннона, 183, 184
каналов с частотно-селектив-
ными замираниями, 203
канала MIMO, 491, 492
при заданной вероятности нару-
шения связи, 197
при инверсии замираний, 195
с нарушением связи, 186, 491,
501, 712
с нулевыми нарушениями связи,
195
с усеченной инверсией и с пере-
рывами связи, 196
эргодическая, 184, 498, 712
пространство
векторное, 361
сигнальное, 671
протокол маршрутизации центра-
лизованный, 817
путь, 384
«выживший», 390
максимально правдоподобный,
386, 389
разброс задержек, 128
разделение
каналов ортогональное, 516
по частоте, 52
разложение
канала параллельное MIMO, 488
по сингулярным числам, 488, 584
разнесение, 829
каналов, 737
во времени, 323
направленное, 322
поляризационное, 322
угловое, 322
кратность, 326
пространственное, 321
сигналов
на передаче, 340
по частоте, 322
ранг матрицы, 488
распределение
Райса, 147, 148
Рэлея, 146, 148
замираний Накагами, 148
каналов динамическое, 776
в соте, 776
для систем с ортогональным
каналообразованием, 776
распространение многолучевое, 644
расстояние
Хэмминга, 360, 362
кода минимальное, 363, 380
повторного использования, 759
минимальное, 768
расширение
доплеровское, 304, 305
спектра, 601
методом скачкообразной пере-
стройки частоты, 607, 628
модуляцией прямой последова-
тельностью, 604, 610
регулирование мощности, 693, 778
оптимальное, 813
режим
асинхронный, 66
синхронный, 66
Предметный указатель
сбалансированность кода, 617
свертка
круговая, 575
линейная, 575
свойства
замираний автокорреляционные,
111
сдвига и сложения, 618
связь беспроводная, 42
сдвиг частоты
доплеровский, 83
отрицательный, 84
положительный, 83
секторизация, 517, 772
серийность кода, 617
сеть
беспроводная локальная, стан-
дарта IEEE 802.11а, 592
больших городов (MAN), 799
глобальная (WAN), 799
датчиков, беспроводная, 801
зданий, 800
локальная (LAN), 798
устройств, 801
сигнал прямой видимости, 84
символ кодового слова, 361
синдром, 366
синхронизатор, 623
синхронизация, 621
грубая, 623, 628
точная, 624
точная символьная, 261
система
многоканальная, 671
многоканальная с DSSS, 633
многопользовательская с много-
элементными антеннами, 741
многочастотная МДКР
(MC-CDMA), 656
пейджинговая, 63
распределенная
местная (LDMS), 62
многоканальная (MMDS), 62
управляющая, 803
с многими входами и одним вы-
ходом, 494
с одним входом и многими выхо-
дами, 494
сверхширокополосной радиосвя-
зи, 68
со многими входами и выходами,
485, 583
сотовая, 48
второго поколения, 54
первого поколения, 53
третьего поколения, 55
спутниковая, 40, 64
скачки частоты, 628
медленные, 629
сложение
деструктивное, 129
конструктивное, 129
сигналов
линейное, 338, 350
селективное, 350
смена частоты
быстрая, 607
медленная, 607
сота, 48
сотовая связь, 39
концепция, 39
спектр
мощности канала доплеровский,
164
свернутый, 535, 543
спутник
геостационарный, 40
низкоорбитальный, 65
среда квазистатическая, 129
средняя продолжительность замира-
ний, 454
стандарт Bluetooth, 66
степень свободы, 493
суммирование дифференциально-
взвешенных сигналов, 334
схема
Аламоути, 342
построения трасс прохождения
лучей, 94
телефон беспроводной, 56
теорема кодирования Шеннона, 178
технология беспроводная WiMax, 63
трассировка, 94
узловая точка, 385, 389
умный дом, 35
уровень
ошибок устойчивый минималь-
ный, 249
прикладной, 824
транспортный, 823, 824
усеченная инверсия канала, 438
усиление
антенной решетки, 325
в канале распространения, 84
усреднение помех, 772
фильтр
в цепи прямого прохождения, 546
отбеливающий, 540
согласованный, 534, 612
цепи обратной связи, 546
формула Окумуры эмпирическая,
100
функция
MGF, 299, 302
базисная, 602
логарифмическая правдоподо-
бия, 229
ошибок дополнительная, 312
расширяющего кода, автокорре-
ляционная, 615
сверточного кода передаточная,
392
характеристика передаточная, 538
частота
доплеровская, 138
ошибок в пакетах, 810
шум аддитивный белый гауссов, 727
экранирование, 78
энергия
на символ, 283
сигнала
на бит Еь, 278
на символ Ев, 278
энтропия, 491
эффект
«близкий-дальний», 645, 650, 681
Доплера, 131, 249, 304
усреднения помех, 774
эффективность
использования спектра, 441, 443,
445, 449, 450, 463
использования спектра соты, 784
кодирования, 378, 407, 511
канального, 406
спектральной области, 784
ячейка, 48
форма, 50
Производство книг на заказ
Издательство «Техносфера»
тел.: (495) 234-01-10
e-mail: knigi@technosphera.ru
Реклама в книгах:
• модульная
• статьи
Подробная информация о книгах на сайте
http://www.technosphera.ru
Голдсмит Андреа
Беспроводные коммуникации
Компьютерная верстка - С. А. Кулешов
Корректор - Н.И. Кононенко
Дизайн книжных серий - С.Ю. Биричев
Дизайн - М.В. Лисусина
Выпускающий редактор - О.Н. Кулешова
Ответственный за выпуск - С.А. Орлов
Формат 70 х 100/16. Печать офсетная.
Гарнитура Computer modem LaTeX
Печ.л 56,5. Тираж 3000 экз. (1-й завод 1000 экз.) Зак. Р-1206.
Бумага офсет №1, плотность 65 г/м2
Издательство «Техносфера»
Москва, ул. Краснопролетарская, д.16, стр.2
Отпечатано в типографии филиала ОАО «ТАТМЕД ИА» «ПИК «Идел-Пресс».
420066, г. Казань, ул. Декабристов, 2.