/





















































































































































































































































































































































































Text
В. А. ФОК
ТЕОРИЯ
ПРОСТРАНСТВА, ВРЕМЕНИ
И ТЯГОТЕНИЯ
ИЗДАНИЕ ВТОРОЕ, ДОПОЛНЕННОЕ
ш
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА Ш
Эта страница пуста
ОГЛАВЛЕНИЕ
Предисловие к первому изданию 7
Предисловие ко второму изданию 8
Введение 9
Глава I. Теория относительности
§ 1. Координаты и время 19
§ 2. Положение тела в пространстве в данный момент времени
в заданной системе отсчета 20
§ 3. Закон распространения фронта электромагнитной волны ... 22
§ 4. Уравнения для лучей 25
§ 5. Инерциальные системы отсчета 27
§ 6. Основные положения теории относительности 29
§ 7. Преобразование Галилея и необходимость его обобщения . . 32
§ 8. Доказательство линейности преобразования, связывающего
две инерциальные системы 34
§ 9. Определение коэффициентов линейного преобразования и
масштабного множителя 39
§ 10. Преобразование Лоренца 42
§11. Определение расстояний и синхронизация часов в одной
инерциальной системе отсчета 48
§ 12. Последовательность событий во времени в разных системах
отсчета 51
§ 13. Сравнение промежутков времени в движущихся системах
отсчета. Явление Допплера 57
§ 14. Сличение показаний часов в движущихся системах отсчета . . 60
§ 15. Сравнение расстояний и длин в движущихся системах
отсчета .- 65
§ 16. Относительная скорость 68
§ 17. Пространство скоростей Лобачевского — Эйнштейна 71
Глава II. Теория относительности в тензорной форме
§ 18. Замечание о ковариантности уравнений 79
§ 19. Определение тензора в трехмерном случае и замечание
о ковариантных величинах 80
§ 20. Определение четырехмерного вектора « · 85
§ 21. Четырехмерные тензоры 89
§ 22. Псевдотензоры 92
§ 23. Бесконечно малое преобразование Лоренца 95
§ 24. Закон преобразования электромагнитного поля и
ковариантность уравнений Максвелла · . * , . s 97
§ 25. Движение заряженной материальной точки в заданном
внешнем поле .......... , .*...« * .. о .... 104
I·
4 ОГЛАВЛЕНИЕ
§ 26. Приближенная постановка задачи о движении системы
зарядов 109
§ 27. Вывод законов сохранения в механике системы точек .... 117
§ 28. Тензорный характер интегралов движения 121
§ 29. Замечания по,поводу обычной формулировки законов
сохранения 125
§ 30. Вектор потока энергии (вектор Умова) 127
§ 31. Тензор массы 131
§ 31*· Система уравнений для составляющих тензора массы как
функций поля 136
§ 32. Примеры тензора массы 141
§ 33. Тензор энергии для электромагнитного поля 147
§ 34. Масса и энергия 152
Глава III. Общий тензорный анализ
§ 35. Допустимые преобразования координат и времени 157
§ 36. Общий тензорный анализ и обобщенная геометрия 164
§ 37. Определение вектора и тензора. Тензорная алгебра 167
§ 38. Уравнения геодезической линии 178
§ 39. Параллельный перенос вектора 185
§ 40. Ковариантное дифференцирование 191
§ 41. Примеры составления ковариантных производных 195
§ 42. Закон преобразования скобок Кристоффеля и локально
геодезическая система координат. Условия приводимости
основной квадратичной формы к постоянным коэффициентам 200
§ 43. Тензор кривизны 205
§ 44. Основные свойства тензора кривизны 209
Глава IV. Формулировка теории относительности в
произвольных координатах
§ 45. Свойства пространства-времени и выбор координат 215
§ 46. Уравнения математической физики в произвольных
координатах 220
§ 47. Вариационное начало для системы уравнений Максвелла —
Лоренца 224
§ 48. Вариационный принцип и тензор энергии 231
§ 49. Интегральная форма законов сохранения в произвольных
координатах 237
§ 49*. Замечания о принципе относительности и о ковариантности
уравнений 241
Глава V. Основы теории тяготения
§ 50. Обобщенный закон Галилея 247
§ 51. Квадрат интервала в ньютоновом приближении 249
§ 52. Уравнения тяготения Эйнштейна 254
§ 53. Характеристики уравнений Эйнштейна. Скорость
распространения тяготения 258
§ 54. Сравнение с постановкой задачи в теории Ньютона.
Предельные условия 261
§ 55. Решение уравнений тяготения Эйнштейна в первом
приближении и определение постоянной 265
§ 56. Уравнения тяготения в статическом случае и конформное
пространство 272
§ 57. Строгое решение уравнений тяготения для одной
сосредоточенной массы 279
ОГЛАВЛЕНИЕ 5
§ 58. Движение перигелия планеты 286
§ 59. Отклонение луча света, проходящего мимо Солнца 293
§ 60. Вариационный принцип для уравнений тяготения 297
§ 61. О локальной эквивалентности полей ускорения и тяготения . 301
§ 62. О парадоксе часов 303
Глава VI. Закон тяготения и законы движения
§ 63. Уравнения свободного движения материальной точки и их
связь с уравнениями тяготения 313
§ 64. Общая постановка задачи о движении системы масс 317
§ 65. Расходимость тензора массы во втором приближении .... 320
§ 66, Приближенный вид тензора массы для упругого тела при
учете поля тяготения , . . 324
§ 67. Приближенные выражения для скобок Кристоффеля и для
некоторых других величин 327
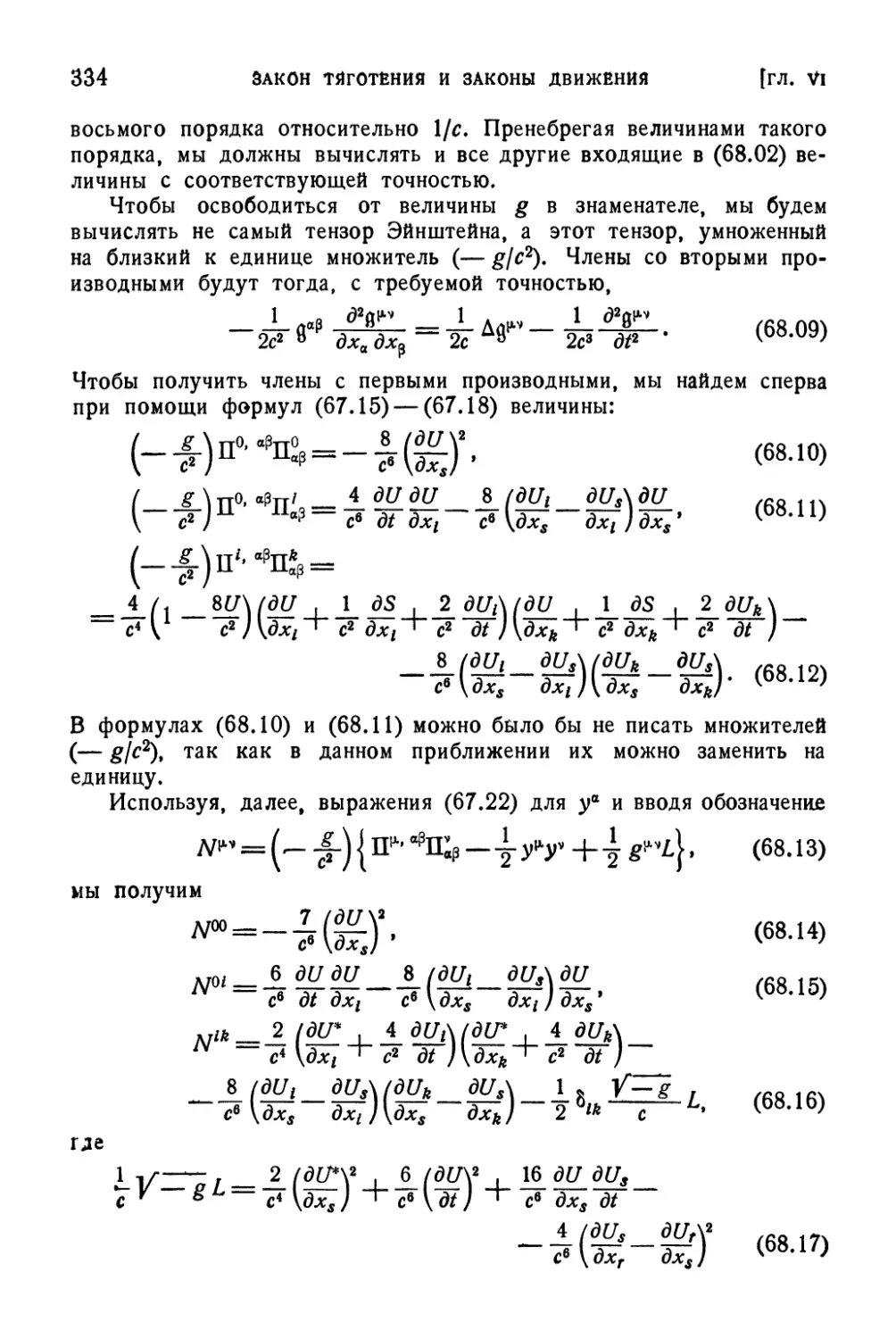
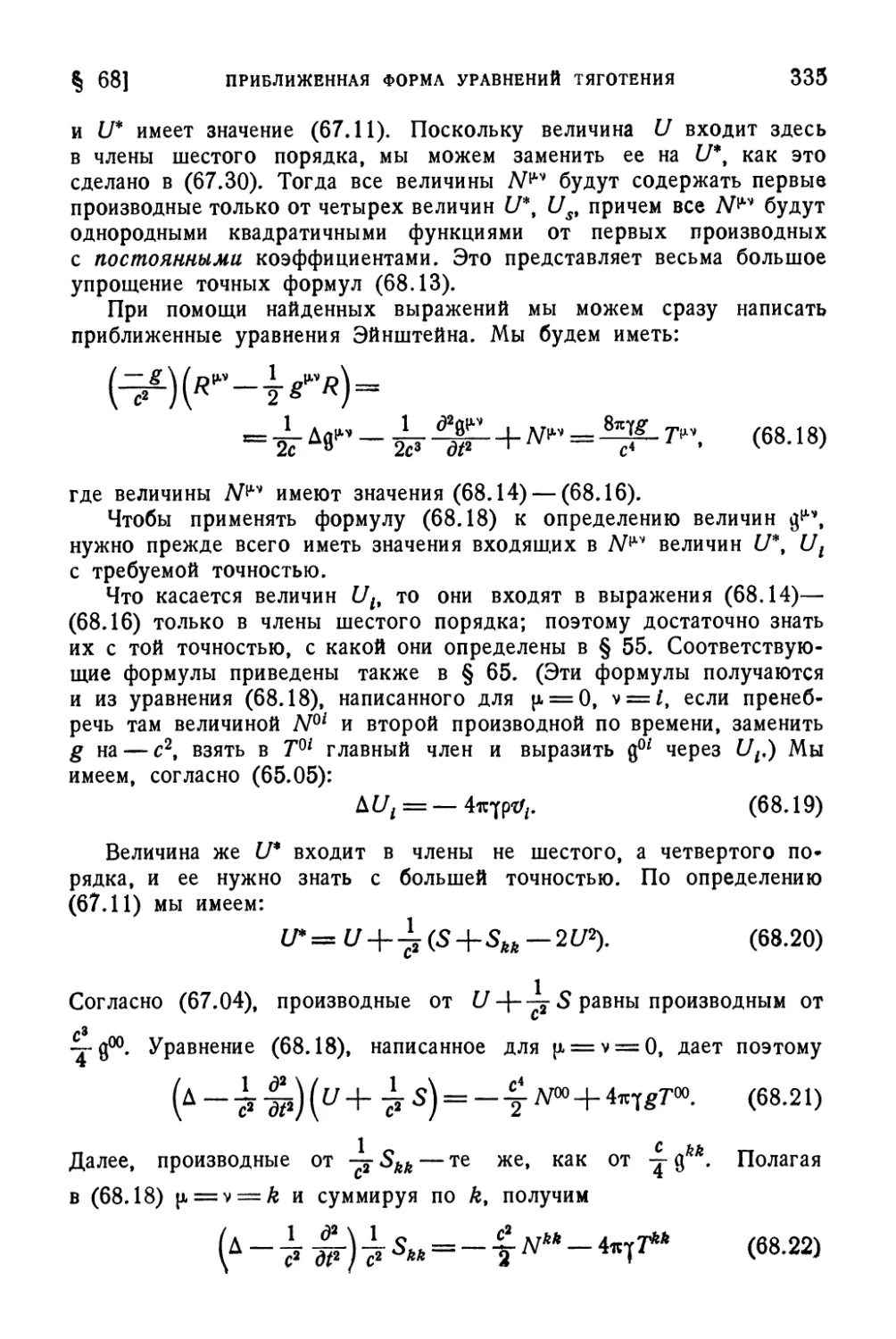
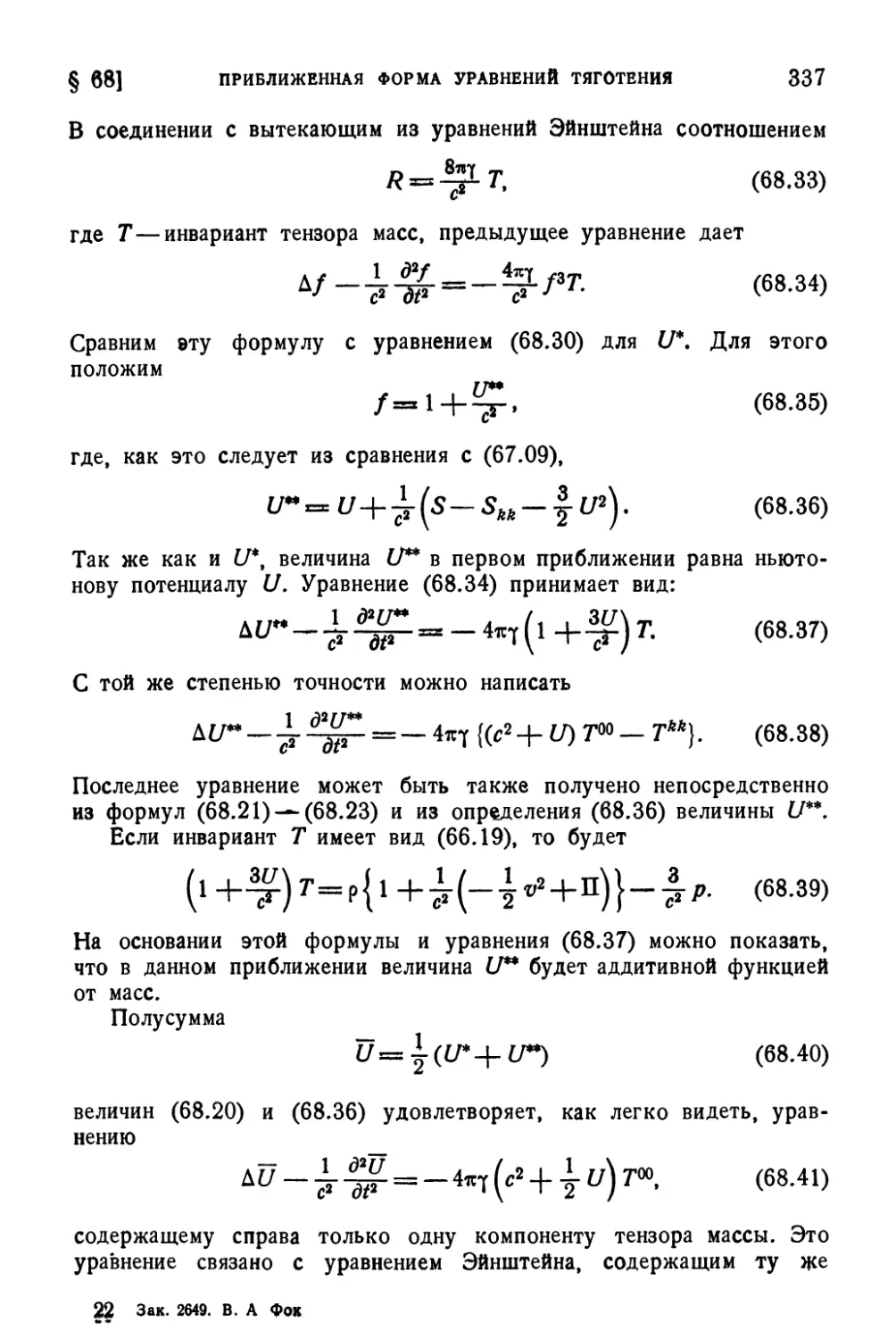
§ 68. Приближенная форма уравнений тяготения 332
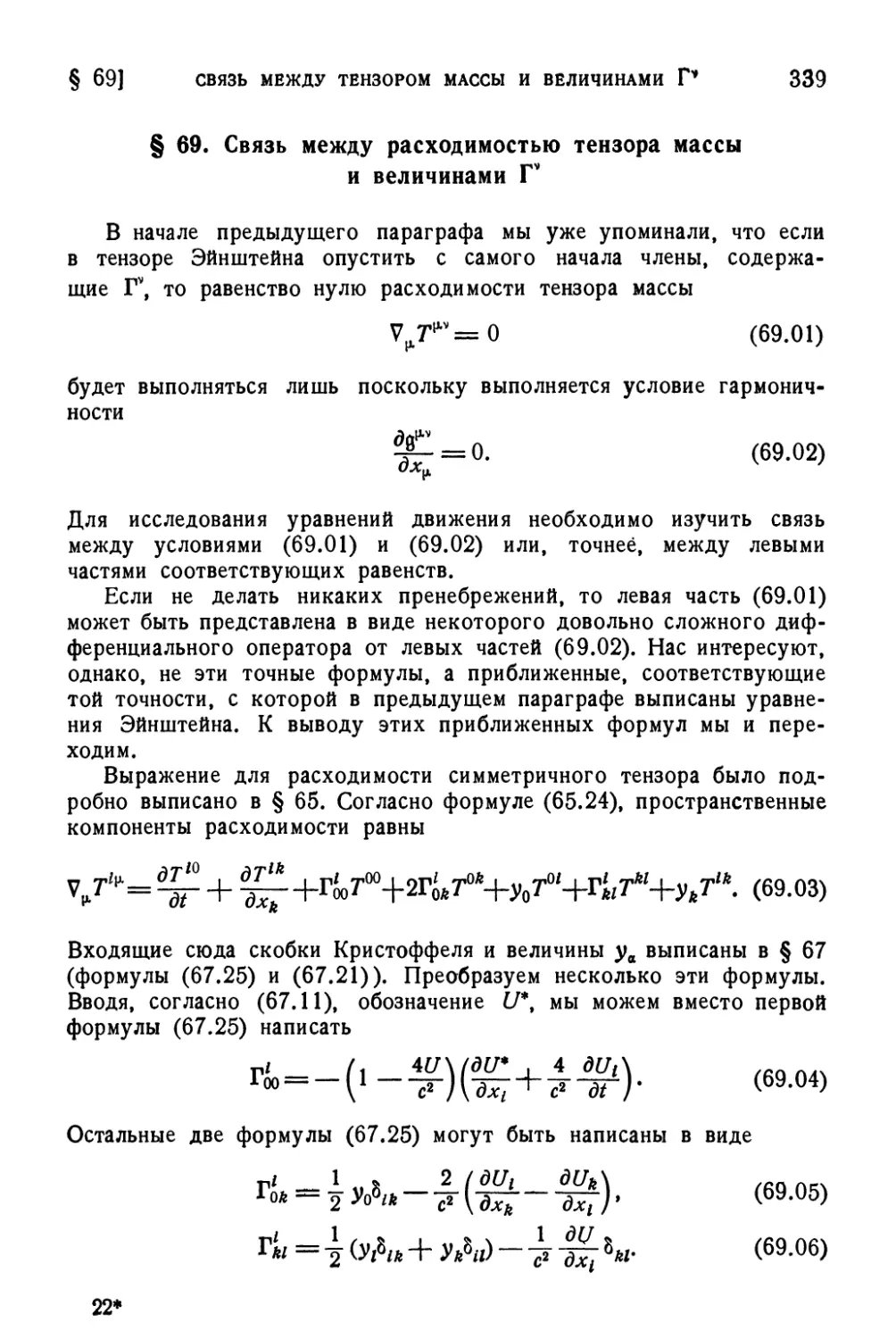
§ 69. Связь между расходимостью тензора массы и величинами Γν Зс9
§ 70. Уравнения движения и условия гармоничности 342
§ 71. Внутренняя и внешняя задачи механики системы тел.
Ньютоновы уравнения для поступательного движения 348
§ 72. Ньютоновы уравнения вращательного движения 354
§ 73. Внутренняя структура тела. Уравнение Ляпунова 359
§ 74. Вычисление некоторых интегралов, характеризующих
внутреннюю структуру тела 363
§ 75. Преобразование уравнений движения, написанных в
интегральной форме 367
§ 76. Вычисление количества движения во втором приближении . . 372
§ 77. Вычисление силы 377
§ 78. Уравнения поступательного движения в лагранжевой форме 384
§ 79. Интегралы уравнений движения системы тел 387
§ 80. Дополнительные замечания к задаче о движении системы
тел. Явная форма интегралов движения для случая невра-
щающихся масс 395
§ 81. Задача двух тел конечной массы 400
Глава VII. Приближенные решения, законы сохранения
и некоторые принципиальные вопросы
§ 82. Потенциалы тяготения для невращающихся масс
(пространственные компоненты) 408
§ 83. Потенциалы тяготения для невращающихся масс (смешанные и
временная компоненты) 415
§ 84. Потенциалы тяготения на больших расстояниях от системы
тел (пространственные компоненты) 421
§ 85. Потенциалы тяготения на больших расстояниях от системы
тел (смешанные и временная компоненты) 427
§ 86. Решения волнового уравнения в волновой зоне 433
§ 87. Потенциалы тяготения в волновой зоне 436
§ 88. Общие замечания о законах сохранения 444
§ 89. Формулировка законов сохранения 446
§ 90. Излучение гравитационных волн и его роль в балансе
энергии 453
§ 91. Связь между законами сохранения для поля и интегралами
механики 457
§ 92. Теорема единственности для волнового уравнения 463
§ 93. О единственности гармонической координатной системы ♦ , . 468
6 ОГЛАВЛЕНИЕ
§ 94. Пространство Фридмана — Лобачевского 476
§ 95. Теория красного смещения 486
§ 96. Развитие теории тяготения и теории движения масс
(критический обзор) 496
Заключение 506
Добавление А. К выводу преобразования Лоренца 510
Добавление Б. Доказательство единственности тензора энергии-
импульса электромагнитного поля 519
Добавление В. Доказательство единственности гидродинамического
тензора массы 525
Добавление Г. Преобразование тензора Эйнштейна 531
Добавление Д. Характеристики обобщенного уравнения Даламбера . 542
Добавление Е. Интегрирование уравнения фронта волны 545
Добавление Ж- Необходимое и достаточное условие евклидовости
трехмерного пространства 549
Литература 552
Именной указатель 555
Предметный указатель 557
ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
Целью этой книги является, прежде всего, изложение наших
исследований по теории тяготения Эйнштейна. Сюда относятся:
вывод уравнений движения системы тел с учетом их внутренней ст[ ук»
туры и вращения, приближенное решение уравнений тяготения и
исследование асимптотического вида решений, исследования по
вопросу о существовании системы координат, определяемой с
точностью до преобразования Лоренца, и другие.
Результаты этих исследований привели нас к убеждению о
возможности, по крайней мере для наиболее важного класса физических
задач, достигнуть однозначности решения уравнений тяготения путем
наложения совместных с ними дополнительных условий. Это
убеждение послужило основанием для новой точки зрения на всю теорию
тяготения. Поэтому возникла потребность в изложении всей теории
пространства, времени и тяготения с этой, вновь выработанной, точки
зрения, что и сделано в этой книге.
Для стройности логического построения мы включили в книгу и
обычную теорию относительности (теорию галилеева пространства).
Такое расширение материала имеет и то преимущество, что делает
книгу более доступной, так как предполагает у читателя меньше
предварительных знаний.
В процессе работы по изложению обычной теории
относительности возник ряд вопросов, выяснение которых также привело к
некоторым новым результатам, отчасти, впрочем, методического
характера. К ним относятся: новая форма доказательства линейности
преобразования, связывающего две инерциальные системы,
исследование функции Лагранжа для системы зарядов, вывод интегралов
движения, исследование вопроса об астрономической аберрации на
основе понятия о пространстве скоростей Лобачевского — Эйнштейна
и другие.
Главное внимание мы уделяли вопросам и задачам
принципиального значения. Мы стремились при этом к возможно большей
логической строгости рассуждений, что для нас было особенно важно
ввиду новизны нашей точки зрения на теорию и вытекающей отсюда
необходимости достаточно убедительно ее обосновать.
8
ПРЕДИСЛОВИЕ
С этим профилем книги связаны и ее недостатки, прежде всего,
лишь беглые указания на экспериментальное обоснование теории,
небольшое количество рассмотренных приложений, отсутствие
подробного исторического обзора и подробного списка литературы, а быть
может и другие.
Так как в книге дано построение теории, начиная с самых основ,
то в ней содержится и материал, вполне доступный студентам
физических факультетов университетов, а также всем лицам с
соответствующим общим образованием. Для студентов-физиков
теоретической специальности, а тем более для аспирантов-теоретиков, доступна
и вся книга. Ученые-специалисты найдут в ней по ряду вопросов
новые, впервые публикуемые результаты.
В. Фок
Май 1955 г.
Ленинград
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
За шесть лет, протекших со времени первого русского издания,
эта книга была издана на английском языке в издательстве „Перга-
мона в Лондоне 1) и на немецком языке в „Академическом"
издательстве в Берлине2). В связи с этим текст книги продумывался автором
неоднократно. Второе русское издание отличается от первого
уточнением ряда формулировок в вопросах имеющих принципиальный
характер, включением результатов некоторых новых работ автора и
усовершенствованием математических доказательств. Наиболее
существенными из этих дополнений представляются автору результаты,
относящиеся к вопросу об единственности тензора массы (а тем самым
и уравнений тяготения), а также введение понятия конформного
пространства (§31* и § 56). Для более подробного разъяснения нашего
понимания принципа относительности как физического принципа мы
ввели отдельный новый параграф (§ 49 *).
За последние годы наша точка зрения на теорию относительности
и теорию тяготения начала встречать признание со стороны ученых
всего мира. Мы надеемся, что уточнения, внесенные в настоящее
издание, устранят последние недоразумения, препятствовавшие ее
принятию.
Май 1961 г.
Ленинград В. Фок
!)V. Fock, The Theory of Space, Time and Gravitation (translated by
N. Kemmer) pp. XVIII+ 411, Pergamon Press, London, 1959.
2) Vladimir Fock, Theorie von Raum, Zeit und Gravitation, pp. XIX + 501,
Akademie —Verlag, Berlin, 1960.
ВВЕДЕНИЕ *)
С точки зрения геометрической, теория пространства и времени
естественно разделяется на теорию однородного (галилеева)
пространства и теорию неоднородного (риманова и эйнштейнова)
пространства 2).
Галилеево пространство максимально однородно. Это выражается
в том, что в нем: (а) все точки и моменты времени равноправны,
(б) все направления равноправны и (в) все инерциальные системы,
движущиеся друг относительно друга прямолинейно и равномерно,
равноправны (принцип относительности Галилея).
Однородность пространства и времени проявляется в наличии
группы преобразований, оставляющих без изменения выражение для
четырехмерного расстояния (интервала) между двумя точками.
Выражение для интервала играет в теории пространства и времени
большую роль, так как форма его непосредственно связана с формой
основных законов физики, а именно закона движения свободной
материальной точки и закона распространения фронта световой волны
в свободном пространстве.
Перечисленные выше признаки (а), (б) и (в) однородности
галилеева пространства связаны со следующими преобразованиями.
(а) Равноправию всех точек и моментов времени соответствует
преобразование, состоящее в смещении начала координат и начала
счета времени и содержащее четыре параметра (три начальные
координаты и начальный момент времени).
(б) Равноправию всех направлений соответствует преобразование,
состоящее в повороте координатных осей и содержащее три
параметра (три угла).
1) Во Введении мы часто пользуемся терминами и понятиями, которые
будут точнее определены только в дальнейшем тексте. Это представляет
известную непоследовательность, без которой мы, однако, не могли обойтись,
так как мы хотели уже во Введении дать понятие о нашей точке зрения
на теорию, составляющую предмет этой книги. Впрочем, неудобство такого
изложения смягчается тем, что, как мы надеемся, читатель, приступающий
к чтению этой книги, уже имеет некоторое предварительное представление
о ее предмете. Если же сказанное во Введении будет недостаточно
понятным, лучше всего перечитать его еще раз после всей книги.
2) Мы будем часто говорить вместо „пространство и время" просто
„пространство".
10
ВВЕДЕНИЕ
(в) Равноправию инерциальных систем соответствует
преобразование, состоящее в переходе от данной системы отсчета к другой,
движущейся прямолинейно и равномерно относительно данной; это
преобразование содержит три параметра (три составляющие
относительной скорости).
Самое общее преобразование содержит десять параметров. Это
есть преобразование Лоренца.
Известно, что в пространстве η измерений группа
преобразований, оставляющая без изменения выражение для квадрата расстояния
между бесконечно близкими точками, может содержать не более
-πη(η-\-1) параметров. Если существует группа, содержащая все
-ή·η(μ-\-\) параметров, то пространство является максимально
однородным; это будет либо пространство постоянной кривизны, либо,
если кривизна равна нулю, евклидово (или псевдоевклидово)
пространство.
В рассматриваемом нами случае пространства-времени число
измерений равно четырем и, следовательно, наибольшее возможное число
параметров равно десяти. Так как последнее число совпадает с
числом параметров в преобразовании Лоренца, то галилеево
пространство (к которому это преобразование относится) и является, как мы
уже говорили, максимально однородным.
Основанную на преобразованиях Лоренца теорию галилеева
пространства принято называть частной теорией относительности. Точнее
можно сказать, что предметом этой теории является формулировка
физических законов в соответствии со свойствами галилеева
пространства. Основоположником теории относительности является
Альберт Эйнштейн (1879—1955). Предшественниками Эйнштейна
следует считать Пуанкаре и Лоренца. В этой книге теории галилеева
пространства будут посвящены гл. I—IV.
Всемирное тяготение не может быть уложено в рамки
однородного галилеева пространства. Более глубокая причина этого была
выяснена Эйнштейном: она состоит в том, что не только инертная,
но и тяжелая масса тела зависит от его энергии.
Теорию всемирного тяготения оказалось возможным создать на
основе отказа от однородности пространства в целом 1) и признания
*) Термины „пространство в целом", „условия на бесконечности" и т. п.
употребляются нами не в буквальном, а в математическом смысле, принятом
в теории поля Под пространством в целом мы разумеем область,
достаточно большую, чтобы на ее границах поле от рассматриваемой системы тел
было пренебрежимо мало; к границам этой области и относятся „условия
на бесконечности". В зависимости от характера задачи фактические
размеры этой области могут быть весьма различными: для атома или молекулы
можно считать бесконечно большими расстояния порядка микрона, для
Солнечной системы — порядка светового года, для системы галактик — сотни
ВВЕДЕНИЕ
11
за ним известного рода однородности только в бесконечно малом.
Математически этому соответствует отказ от евклидовой (точнее,
псевдоевклидовой) геометрии и введение геометрии Римана.
Современная теория тяготения также была создана Эйнштейном.
То, что, согласно теории тяготения, в бесконечно малом все же
имеет место однородность, подобная той, какая выражается
преобразованиями Лоренца, связано с возможностью имитировать, вблизи
данной точки, поле тяготения полем ускррения (так называемый
принцип эквивалентности). Физической основой этого является
известный еще Галилею закон, согласно которому все тела падают,
при отсутствии сопротивления среды, с одинаковой скоростью
(точнее, с одинаковым ускорением). В обобщенном виде закон Галилея
может быть формулирован как закон равенства массы инертной и
массы весомой. Следует подчеркнуть, что этот фундаментальный
закон имеет общий характер, тогда как принцип эквивалентности
строго локален. Закон равенства инертной и тяжелой массы применим
со всей той точностью, с какой возможно определение той и другой
массы как величины, свойственной данному телу и независящей от
положения и движения других тел (такая независимость имеет место
в теории тяготения Ньютона, но может не иметь места в ее
обобщениях).
Закон равенства инертной и весомой массы является той
наглядной физической основой, на которой можно строить теорию
тяготения; конечно, в самом процессе построения теории вводятся новые
обобщения, в результате чего данный закон может перейти на
положение приближенного закона, но это не умаляет его
фундаментального характера. В качестве основы для построения более общей
теории закон равенства инертной и весомой массы имеет перед
принципом эквивалентности следующие преимущества: во-первых, он не
требует локального рассмотрения и, во-вторых, он не вызывает
необходимости рассмотрения ускоренно движущихся систем отсчета —
понятия, трудно поддающегося определению.
При построении теории тяготения нельзя ограничиться локальным
рассмотрением (т. е. рассмотрением бесконечно малых областей
пространства). Необходимо так или иначе характеризовать свойства
пространства в целом; в противном случае вообще нельзя поставить
задачу однозначным образом. Это особенно ясно из того факта, что
уравнения всякого поля (также и поля тяготения) представляют
уравнения в частных производных, решения которых получаются
однозначно лишь при наличии начальных и предельных условий или
условий, их заменяющих. Уравнения поля и предельные условия
миллионов или миллиарды световых лет. Но никогда мы не разумеем под
„пространством в целом" всю Вселенную; вводить в рассмотрение всю
Вселенную представляется нам невозможным по гносеологическим соображениям.
12
ВВЕДЕНИЕ
ьеразрывно связаны друг с другом, и последние никак нельзя считать
чем-то менее важным, чем самые уравнения. Но в задачах,
относящихся ко всему пространству, предельные условия относятся к
отдаленным областям пространства и для их формулировки необходимо
знать свойства пространства в целом.
Заметим, что недостаточность локального рассмотрения и важность
предельных условий были явно недооценены Эйнштейном, в связи
с чем в наших работах и в настоящей книге нам пришлось внести в
постановку основных задач теории тяготения существенные изменения.
Наиболее простым и вместе с тем наиболее важным случаем
является тот, когда можно предположить пространство однородным
(в смысле преобразования Лоренца) на бесконечности. В этом
случае вызываемые массами неоднородности будут иметь местный
характер; массы с их полями тяготения будут как бы погружены в
неограниченное галилеево пространство. Этот случай особенно важен
потому, что существование интегралов движения связано с
однородностью пространства на бесконечности. Только если пространство
на бесконечности допускает полное преобразование Лоренца с десятью
параметрами, существуют все десять интегралов движения, включая
интеграл энергии.
Главы V, VI и VII этой книги почти целиком посвящены случаю
пространства, однородного на бесконечности.
Возможно также предположение, что пространство-время в целом
обладает не полной однородностью, а только частичной: по-прежнему
допустимы произвольный перенос начала пространственных
координат и произвольный поворот пространственных осей, что дает шесть
параметров, остальные же четыре параметра преобразования Лоренца,
а именно три составляющие скорости и начало счета времени,
определяются через первые шесть. Такое пространство-время было впервые
рассмотрено Фридманом, а так как пространственная часть его
обладает геометрией Лобачевского, то его можно назвать пространством
Фридмана — Лобачевского. В отличие от пространства Галилея, это
пространство допускает существование определенного поля тяготения
при средней плотности весомой материи, отличной от нуля. Поэтому
можно предположить, что в космологии, при рассмотрении огромных
областей размерами в миллиарды световых лет, приблизительно
равномерно заполненных галактиками, пространство Фридмана —
Лобачевского является лучшим приближением к действительности,
чем пространство Галилея. Теория местных неоднородностей в
пространстве Фридмана — Лобачевского еще совершенно не разработана,
и мы посвящаем этому пространству только § 94 и 95 этой книги.
Возможны и другие предположения относительно свойств
пространства в целом, но на них мы останавливаться не будем.
В зависимости от свойств пространства в целом решается и
вопрос о существовании привилегиоованной системы координат.
ВВЕДЕНИЕ
13
В галилеевом пространстве привилегированными являются
обычные декартовы координаты и время; совокупность этих переменных
носит название галилеевых координат. Привилегированное положение
этих координат основано на том, что преобразования Лоренца,
выражающие однородность пространства, будут в этих координатах
линейными.
В случае пространства, однородного только на бесконечности,
также оказывается возможным ввести привилегированную систему
координат, определяемую с точностью до преобразования Лоренца
(гармонические координаты). Этот факт, впервые установленный
в наших работах, имеет большое принципиальное значение; только
опираясь на него, можно, в частности, показать, что
привилегированное положение гелиоцентрической системы Коперника по
сравнению с геоцентрической системой Птоломея сохраняется и в теории
тяготения Эйнштейна. Более подробное обоснование его дано в § 92
и 93 этой книги. Все рассмотренные в этой книге конкретные
задачи теории тяготения решаются нами в гармонических координатах.
Этим достигается однозначность решения.
В пространстве Фридмана—Лобачевского, вероятно, тоже
существуют привилегированные системы координат. Вопрос этот, однако,
не исследован, поскольку еще не создана теория местной
неоднородности в таком пространстве.
В вопросе о существовании привилегированных систем
координат создатель теории тяготения Эйнштейн придерживался точки
зргния, противоположной нашей, а именно, он во всех случаях
отрицал существование таких систем. Это связано с отмеченной выше
переоценкой лежащего в основе римановой геометрии локального
способа рассмотрения свойств пространства и недооценкой важности
рассмотрения пространства в целом. Несомненно, что здесь сыграла
роль также философская позиция Эйнштейна, всю свою жизнь
находившегося под влиянием идей Маха.
Вопрос о различных координатных системах и об изменении вида
уравнений при переходе от одной координатной системы к другой
занимает в теории пространства и времени важное место.
Особенно большое значение принято придавать ковариантности
уравнений. Под ковариантностью разумеется следующее. Рассмотрим
преобразование координат, сопровождаемое преобразованием
зависимых переменных (функций) по определенному (например, тензорному)
правилу и обратим внимание на вид уравнений, которым
удовлетворяют первоначальные и преобразованные функции. Если полученные
в результате такого преобразования новые функции от новых
переменных удовлетворяют уравнениям того же вида, как старые
функции от старых переменных, то уравнения называются ковариантными.
Ковариантность уравнений позволяет писать их, не предрешая
выбора координатной системы. Кроме того, требование ковариантности
14
ВВЕДЕНИЕ
уравнений имеет большое эвристическое значение, так как ограничи·
вает разнообразие формы уравнений и, тем самым, помогает
отобрать из них правильные. Необходимо, однако, подчеркнуть, что это
ограничение имеет место при обязательном условии, что
ограничивается также и число вводимых функций; если же допустить
введение любого числа новых вспомогательных функций, то практически
любым уравнениям можно придать ковариантную форму.
Таким образом, сама по себе ковариантность уравнений отнюдь
не является выражением какого-либо физического закона. Так,
например, в механике системы материальных точек уравнения Лагранжа
2-го рода являются ковариантными по отношению к любым
преобразованиям координат, хотя и не выражают никакого нового
физического закона по сравнению, например, с уравнениями Лагранжа
1-го рода, которые пишутся в прямоугольных координатах и
ковариантными не являются.
В случае уравнений Лагранжа ковариантность достигнута путем
введения, в качестве новых вспомогательных функций,
коэффициентов квадратичного (не обязательно однородного) выражения для
функции Лагранжа· через скорости.
В геометрии Римана новыми вспомогательными функциями являются
коэффициенты #μν однородного квадратичного выражения для
квадрата бесконечно малого расстояния. Закон преобразования этих
функций при переходе к другой координатной системе вытекает
из их определения как коэффициентов упомянутого квадратичного
выражения, в соединении с условием, что это выражение
представляет инвариант; в дальнейшем мы всегда будем предполагать,
что преобразование координат сопровождается преобразованием
функций £μν по этому закону. Совокупность величин £μν называется
метрическим тензором.
Введение метрического тензора позволяет составлять выражения,
ковариантные по отношению к любым преобразованиям координат.
Если мы будем рассматривать только метрические тензоры,
получаемые из одного из них (например, из галилеева тензора) путем
преобразования координат, то мы не получим при этом ничего нового
помимо ковариантности наших формул. Но если допустить к
рассмотрению метрические тензоры более общего вида, несводимые
друг к другу преобразованием координат, то получаемое обобщение
будет существенным. В этом случае метрический тензор будет
отображать не только свойства координатной системы, но и свойства
пространства, а эти последние могут быть связаны с явлением
тяготения. По идее Эйнштейна, для описания поля тяготения никаких
других функций кроме самого метрического тензора вводить не
следует. Эта идея о единстве метрики и тяготения и лежит в основе
эйнштейновской теории тяготения. Она почти однозначно приводит
к найденным Эйнштейном уравнениям гравитационного поля.
ВВЕДЕНИЕ
15
Выяснив смысл понятия ковариантности в применении к
геометрии Римана, сопоставим его с рассмотренным ранее понятием
однородности пространства. Как мы указывали выше, свойство
однородности галилеева пространства проявляется в преобразованиях,
оставляющих без изменения выражение для четырехмерного
расстояния между двумя точками. Подробнее можно сказать, что в таких
преобразованиях остаются без изменения коэффициенты этого
выражения, т. е. величины £μν. Если величины £μν суть функции от
координат, то под неизменностью их мы разумеем неизменность
математической формы этих функций: зависимость новых £μν от
новых координат имеет ту же математическую форму, как
зависимость старых £μν от старых координат. В общем случае геометрии
Римана преобразований, оставляющих без изменения величины g^,
не существует, ибо пространство Римана неоднородно. В геометрии
Римана при преобразовании координат не ставится условие
неизменности математической формы £μν, а такого рода преобразования,
равно как и ковариантность по отношению к ним, никакого
отношения к однородности или неоднородности пространства не имеют.1)
Сказанное может быть иллюстрировано на простом примере.
Рассмотрим поверхность шара. Эта поверхность может быть
преобразована в самое себя путем поворота на произвольный угол вокруг
произвольной оси, проходящей через центр шара. Такое преобразование содержит
три параметра, а так как поверхность шара двухмерна, то согласно
сказанному в начале Введения, она будет максимально однородна. На поверхности
шара нет никаких выделенных точек или направлений.
Рассмотрим теперь более общую, не сферическую поверхность
вращения. Она также может быть преобразована в самое себя путем поворота
вокруг оси, но теперь направление оси фиксировано и остается
произвольным только угол поворота, так что допустимые преобразования содержат
только один параметр. На поверхности будут выделенные точки (полюса,
сквозь которые проходит ось) и выделенные направления (меридианы и
круги широт). Если рассмотреть, наконец, поверхность общего вида, то для
нее не существует никаких преобразований, переводящих ее в самое себя.
Таким образом, наибольшая степень однородности (3 параметра) будет
у шара, т. е. у поверхности весьма частного вида, частичная однородность
(1 параметр) будет у поверхности вращения, тогда как поверхность общего
вида никакой однородностью обладать не будет.
Мы видим, что общность вида поверхности является понятием
антагонистическим по отношению к понятию однородности. То же заключение
остается в силе и для геометрии четырехмерного многообразия
пространства и времени: общность геометрии пространства антагонистична к его
однородности.
Выясним теперь смысл понятия относительности, придаваемый
ему в теории пространства и времени, и покажем, что оно самым
тесным образом связано с понятием однородности.
Под относительностью систем отсчета или просто
относительностью принято понимать существование одинаковых физических
[) Эти идеи высказывались Э. Картаном [1].
16
ВВЕДЕНИЕ
процессов в разных системах отсчета (см. об этом подробнее в § б
и 49 *). Согласно обобщенному принципу относительности Галилея,
одинаковые процессы возможны в инерциальных системах отсчета,
связанных преобразованием Лоренца. С другой стороны,
преобразования Лоренца характеризуют однородность галилеева пространства-
времени. Таким образом, принцип относительности прямо связан
с однородностью. Это показывает также, что принятое в первых
работах Эйнштейна наименование теории однородного галилеева
пространства „теория относительности" можно в известной мере считать
оправданным 1).
В дальнейшем мы увидим, что относительность в указанном выше
смысле связана с однородностью во всех тех случаях, когда метрику
пространства и времени можно считать фиксированной. Это можно
делать не только в теории галилеева пространства, где метрика
задана раз навсегда, но и в теории риманова и эйнштейнова
пространства, если только рассматриваемые процессы практически не влияют
на метрику. В этих случаях относительность однозначно связана
с однородностью: в однородном галилеевом пространстве она имеется,
в неоднородном римановом пространстве она отсутствует. Если же
включать в рассмотрение такие процессы, которые сами существенно
влияют на метрику (перемещение тяжелых масс), то, как будет
показано в конце книги (§ 93), относительность можно в
известной мере сохранить и в неоднородном пространстве, правда,
только в тех случаях, когда вызванная тяжелыми массами
неоднородность рассматривается как местное возмущение в бесконечном
галилеевом пространстве.
Сохранение известной относительности и в неоднородном пространстве
достигается тем, что при переходе к новой системе отсчета производится
и замена старого поля тяготения новым, которое в новой системе отсчета
имеет тот же вид, какое имело старое поле в старой системе. Так,
перевертывание находящейся на Земле лаборатории „вверх ногами" нарушает
идущие в ней процессы (относительности нет), если же сопровождать
перевертывание параллельным переносом ее к антиподам, то ход процессов
в ней будет прежний (относительность восстанавливается).
Таким образом, даже и в неоднородном пространстве имеющаяся
там относительность косвенно связана с однородностью, а именно,
с однородностью на бесконечности, если говорить об
относительности „в большом", и с локальной однородностью в геодезической
системе координат, если говорить об относительности „в бесконечно
малом". Однородность же находится, как мы видели, в
антагонистическом отношении к степени общности геометрии; поэтому и
относительность либо совсем не имеет места в неоднородном
пространстве с римановой геометрией, либо она не выходит там за рамки
1) Более удачным было бы наименование „хроногеометрия",
предложенное А. Д. Фоккером [ш].
ВВЕДЕНИЕ
17
относительности в галилеевом пространстве. Ни о каком обобщении
понятия относительности при переходе к неоднородному
пространству говорить нельзя.
Между тем, с созданием теории тяготения Эйнштейна вошел
в употребление термин „общая относительность", который все
запутал. Термин этот стал применяться в смысле „общей
ковариантности" (т. е. в смысле ковариантности уравнений по отношению
к произвольным преобразованиям координат, сопровождаемым
изменением вида функций £μν). Но мы видели, что такая ковариантность
ничего не имеет общего с однородностью пространства, между тем
как относительность так или иначе связана с однородностью. А это
значит, что „общая относительность" ничего не имеет общего с
„относительностью просто". Между тем эта последняя получила
название „частной", которое как бы указывает, что она является частным
случаем „общей".
Чтобы дать понятие о том, к каким недоразумениям это
приводит, рассмотрим ряд примеров.
Как будет показано в гл. IV, теория однородного галилеева
пространства может быть формулирована не только в виде, кова-
риантном в смысле преобразований Лоренца, но и в общековариант-
ном виде. На языке „общей" и „частной" относительности выразить
эту простую мысль крайне затруднительно, и мы это делать не
беремся, так как нам пришлось бы сказать, что „частная"
относительность заключает в себе „общую" или что-нибудь в таком роде.
Если вспомнить, что уже в ньютоновой механике мы имеем дело
с общековариантными уравнениями Лагранжа 2-го рода, то
пришлось бы также сказать, что и ньютонова механика содержит в себе
„общую относительность".
Термин „общая относительность" или „общий принцип
относительности" употребляется (прежде всего, самим Эйнштейном) еще
и в смысле условного наименования для теории тяготения. Уже
основная работа Эйнштейна по теории тяготения (1916 г.) озаглавлена
„Основы общей теории относительности". Это еще больше
запутывает дело, так как словам „общий" и „относительный" придается
здесь несвойственный им смысл. Так, поскольку в теории тяготения
пространство предполагается неоднородным, а относительность
связана с однородностью, то выходит, -что в общей теории
относительности нет, вообще говоря, никакой относительности.
Сказанного достаточно, чтобы стало ясно, что употребление
терминов „общая относительность", „общая теория относительности"
или „общий принцип относительности" недопустимо. Оно не только
неудобно тем, что приводит к недоразумениям, но и отражает
неправильное понимание самой теории. Как это ни парадоксально,
такое непонимание проявил сам автор теории Эйнштейн, который
как в названии своей теории, так и в своих рассуждениях подчеркивав
J Зак. 2649. В. А Фоц
18
ВВЕДЕНИЕ
слова „общая относительность" и не видел, что в число понятий,
получивших обобщение в созданной им новой теории, никак нельзя
включать понятие относительности,
В настоящей книге мы термина „общая относительность" не
употребляем. Теорию галилеева пространства мы называем также,
следуя установившемуся обычаю, теорией относительности (но без
прибавления слова „частная"). Теорию эйнштейнова пространства мы
называем теорией тяготения (но не „общей теорией относительности",
поскольку такое название, как мы видели, смысла не имеет).
Общефилософская сторона наших взглядов на теорию
пространства, времени и тяготения сложилась под влиянием философии
диалектического материализма, в особенности же под влиянием книги
Ленина „Материализм и эмпириокритицизм". Учение диалектического
материализма помогло нам критически подойти к точке зрения
Эйнштейна на созданную им теорию и заново ее осмыслить. Оно помогло
нам также правильно понять и истолковать полученные нами новые
результаты. Мы хотели бы здесь это констатировать, хотя в явной
форме философские вопросы в этой книге и не затрагиваются.
ГЛАВА I
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
§ 1. Координаты и время
Пространство и время—понятия первичные. По общефилософскому
определению пространство и время суть формы существования
материи. Это можно понимать в том смысле, что понятия пространства
и времени получаются путем надлежащих абстракций из понятия
пространственно-временных связей между материальными процессами.
Простейшим понятием, относящимся к пространству и времени,
является точка пространства, рассматриваемая в определенный момент
времени. Чтобы „отметить" точку в пространстве, нужно поместить
туда материальное тело достаточно малых размеров. Положение этого
тела может быть задано только по отношению к другим
материальным телам, ибо никакой „вросшей в пространство" и независимой
от материальных тел градусной сетки не существует. Когда выбрана
система отсчета или „базис", т. е. система материальных тел, по
отношению к которой рассматривается положение данного тела-точки,
это положение может быть задано тремя координатами, относящимися
к определенному моменту времени, отсчитываемому по „часам" базиса.
В общем случае координаты суть вспомогательные величины,
характеризующие расположение тел по отношению к базису и позволяющие
вычислить, по законам евклидовой геометрии (или ее обобщения —
геометрии Римана), взаимное расположение тел, в частности их
взаимные расстояния и углы между направлениями, их соединяющими.
В качестве координат обычно берут прямолинейные прямоугольные
координаты, ибо они проще всего связаны с длинами и расстояниями,
но допустимы и всякие другие (криволинейные) координаты,
например, два угла, характеризующих направление на рассматриваемое
тело-точку, и расстояние до него.
Необходимо подчеркнуть, что как самые координаты, так и
вычисляемые при помощи их взаимные расстояния, углы и другие
величины, характеризующие взаимное расположение тел, получают
определенный смысл лишь в предположении определенного базиса.
Точно так же и моменты времени, к которым относятся координаты
и расстояния, а также промежутки времени, становятся определенными
2*
20
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
лишь в предположении определенного базиса и определенного
отсчета времени на базисе, т. е. в предположении определенной
системы отсчета.
Таким образом, переменные х, у, zt t (координаты и время),
с которыми мы будем иметь дело в дальнейшем, связаны с
базисом.
§ 2. Положение тела в пространстве в данный момент времени
в заданной системе отсчета
Отвлечемся сперва от роли времени и рассмотрим обычные
способы определения расположения предметов в пространстве. В
принципе, эти способы основаны, кроме гипотезы о применимости
евклидовой геометрии к реальному физическому пространству, на двух
предположениях: о существовании твердых тел и о прямолинейности
распространения света. В самом деле, чтобы найти положение
удаленного предмета, необходимо отмерить твердым жезлом
определенный базис (в смысле обычной триангуляции) и засечь при помощи
лучей света направления на предмет из разных точек этого базиса.
Предполагая лучи света прямолинейными, можно вычислить тогда по
законам евклидовой геометрии расстояние до предмета и все другие
данные, характеризующие его положение. Прямолинейность лучей
света в вакууме есть основной постулат; прямолинейность лучей
в атмосфере является приближенной и должна контролироваться (учет
рефракции и т. п.). Справедливость законов евклидовой геометрии для
реального физического пространства следует рассматривать как
опытный факт, а не как априорное допущение. Действительно, хотя эти
законы оправдываются с огромной степенью точности, теория
всемирного тяготения Эйнштейна как раз и основана на рассмотрении
малых отклонений от них.
Таким образом, свойства света и свойства твердых тел играют
основную роль в установлении геометрии реального физического
пространства.
Необходимо, однако, заметить, что понятие твердого тела
является здесь в известной мере вспомогательным понятием. Абсолютно
твердых тел не существует; реальные физические тела могут
рассматриваться как твердые и обладающие неизменными
геометрическими размерами лишь приближенно и лишь при определенных
условиях (постоянство температуры, отсутствие упругих колебаний и т. п.).
Неизменность эталона длины с наибольшей точностью может быть
проверена путем сравнения его с длиной волны определенной
спектральной линии. Таким образом, понятие длины сводится, в конечном
счете, к свойствам атомов (или молекул), излучающих данную линию,
и к свойствам света.
§ 2]
ПОЛОЖЕНИЕ ТЕЛА В ПРОСТРАНСТВЕ
21
Другой возможный способ определения положения предметов
в пространстве, принципиально отличный от триангуляции, есть
радиогеодезия или радиолокация. В принципе этот способ
заключается в том, что с некоторого пункта посылаются радиосигналы,
которые отражаются от наблюдаемого предмета и возвращаются
в точку отправления. При этом отмечается время прохождения
сигнала (туда и обратно), а также, конечно, направление. Зная скорость
распространения радиосигнала (она равна скорости света), получают
расстояние до предмета, умножая на нее половину времени·
прохождения сигнала.
В принципиальном отношении этот способ важен потому, что
в нем измерение длин сводится к измерению промежутков времени
и не используются свойства абсолютно твердых тел. Существенным
предположением является постоянство скорости света. Сама скорость
света играет здесь роль переводного множителя от времен к длинам.
Численное значение скорости света должно устанавливаться другими
опытами, в которых уже используются эталоны длины.
Измерение времени может быть, в принципе, произведено при
помощи любого периодического процесса. Наибольшей точностью
в настоящее время обладают часы, основанные на использовании
собственных колебаний кристаллической решетки кварца или молекул
аммиака. Практически принято астрономическое измерение времени,
основанное на применении законов движения Ньютона к вращенлю
земного шара, с учетом всех, вытекающих из теории, поправок
на неравномерность вращения (нутация и пр.).
Указанные способы измерения времени дают возможность
регулировки часов на „базисе".
При измерении положения движущихся предметов с
определенного базиса возникает вопрос: к какому моменту времени (по часам
базиса) относятся полученные значения расстояний (и вообще
пространственных координат)? Мы примем следующее определение: если
момент отправления светового сигнала (или радиосигнала с
локационной станции) есть tx, момент возвращения сигнала есть t2, то
полученные значения координат предмета х, у, ζ (а также расстояния
г = с 2 2 ) относятся к моменту времени t=* l ~ζ 2. Это
определение соответствует естественному предположению, что скорость света
„туда" и „обратно" одинакова.
Мы установили, что, исходя из определенногр базиса,
снабженного масштабами и часами (а также другими необходимыми
приборами), можно измерять положение тел в пространстве (по отношению
к этому базису) и относить получаемые значения координат
(например, декартовых ху у, ζ) к определенному моменту времени t (по
часам базиса). Такого рода базис мы будем называть в дальнейшем
„системой отсчета". Слово „базис" мы будем употреблять в тех
22
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[ГЛ. !
случаях, когда желательно подчеркнуть то обстоятельство, на
которое мы уже указывали в начале § 1, а именно, что система отсчета
не есть какая-то вросшая в пространство координатная сетка в
соединении с каким-то „мировым временем", а есть нечто связанное
с масштабами и часами, находящимися в определенном месте и
определенным образом движущимися.
§ 3., Закон распространения фронта электромагнитной волны
Законы распространения света в свободном пространстве хорошо
изучены. Они выражаются известными уравнениями Максвелла
curlH —1^ = 0, divE = 0; ]
ί η <3·01>
сиг1Е + -Д£ = 0, divH = 0,
1 С 01 J
где Е и Η — векторы напряженности электрического и магнитного
поля. Нас интересует, однако, не общий случай распространения
света, а лишь распространение сигнала, идущего с предельной
скоростью, т. е. распространение фронта волны. Впереди фронта волны
все составляющие поля равны нулю; позади фронта некоторые из них
отличны от нуля. Таким образом, на фронте волны некоторые
из составляющих поля терпят разрыв.
С другой стороны, задание поля на некоторой поверхности
(движущейся в пространстве), вообще говоря, определяет, в силу
уравнений Максвелла, и значения производных от поля на этой поверхности.
Тем самым определяется и значение поля на бесконечно близкой
поверхности, а скачки поля становятся невозможными. Это будет
не так только в том случае, когда данная поверхность (ее форма
и движение) подчинена особым условиям, при выполнении которых
значения производных от поля не определяются значениями поля.
Поверхность называется тогда характеристической поверхностью, или
проще, характеристикой. Таким образом, скачки поля возможны
только на характеристике. Но так как на фронте волны поле
заведомо терпит скачок, то ясно, что фронт волны должен быть
характеристикой.
Найдем уравнение характеристик для системы уравнений
Максвелла.
Пусть значения поля заданы для тех точек и для тех моментов
времени, координаты которых связаны уравнением
t = jf(x,y,z). (3.02)
В частности, при /==0 это будут начальные данные. Уравнение (3.02)
можно рассматривать как уравнение некоторой гиперповерхности
§ 3] ЗАКОН РАСПРОСТРАНЕНИЯ ФРОНТА ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ 23
в четырехмерном многообразии пространства-времени. То же самое
уравнение можно (по крайней мере, если (grad/)2> 1) рассматривать
как уравнение обыкновенной поверхности, движущейся в
пространстве (см. также § 35). Пусть на гиперповерхности (3.02) заданы
значения некоторой функции
u(xt у, ζ, 4) = "о(*. У. г)· (3·03)
Тем самым на этой гиперповерхности будут заданы и следующие
комбинации производных по координатам и времени:
£+7Τ·£-£ «='·2·3>· <3·04>
Мы обозначили здесь для краткости х, у, ζ через χν χ2, #3· Если,
кроме того, задана производная -^-, то будут известны и значения
на поверхности всех первых производных от а по координатам и
времени.
Возьмем теперь в качестве функции и одну из составляющих
электромагнитного поля, например Ех, и обозначим значение этой
составляющей на гиперповерхности через £^ = £^(х, у, ζ).
Аналогичные обозначения (значок 0 сверху) введем для других
составляющих. Если на гиперповерхности задано поле, то все величины Е°,
Н° можно считать известными функциями от координат х, у, ζ.
Подобно (3.04), мы будем иметь, например,
дЕх 1 дЕх д/ д&х
дгк ' с dt дг дг
и т. д., (3.05)
откуда
а также
div Ε +1 (grad f -Щ = Div E°, (3.06)
curlE + I[grad/X^-] = Curl E°, (3.07)
div Η +1 (grad / · 4J-) = Div H°, (3.08)
curl Η +1 [grad / X Щ =» Curl H°. (3.09)
В последних формулах мы обозначили операции div и curl,
примененные к Е° и Н°, большими буквами (Div, Curl).
Заданные шесть функций Е° и Н° не являются независимыми,
а должны удовлетворять двум соотношениям, которые мы сейчас
выведем.
24
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
Умножая уравнения (3.07) и (3.09) скалярно на grad/ и пользуясь
уравнениями Максвелла (3.01), получим
(grad/ . Curl E°)==-l(grad/ · ^J). (3.10)
(grad/ · Curl H°) = l(grad/ · -^). (3.11)
С другой стороны, в левых частях тождеств (3.08) и (3.06) первые
члены в силу уравнений Максвелла равны нулю, а вторые члены
совпадают с правыми частями (3.10) и (3.11). Поэтому мы будем
иметь
DivH° +(grad/. Curl Е°) = 0, (3.12)
Div E° — (grad / - Curl H°) = 0. (3.13)
Таковы условия, налагаемые на заданные функции Е°, Н°. В случае
/ = const мы имеем обычные начальные данные, и тогда эти условия
сводятся к очевидному требованию, чтобы и в начальный момент
было div Ε = 0, div Η = 0.
Пользуясь уравнениями Максвелла, мы можем написать уравнения
(3.07) и (3.09) в виде
^ + [grad/X^] = cCurlH°, (3.14)
-^4-[grad/X-^] = cCurlE°. (3.15)
Умножая эти уравнения векториально на grad/ и пользуясь
выведенными ранее соотношениями, мы можем преобразовать их к виду
(1 - (grad/)2)-J = Е° -(grad/ . Е°)grad/- [grad/ χ Η0]; (3.16)
(l-(grad/)2)-^ = H°-(grad/.H°)grad/ + [grad/XE°]. (3.17)
Здесь мы положили для краткости
Ё° = с Curl Н°; Н° = — с Curl E°. (3.18)
В правых частях уравнений (3.16) и (3.17) стоят известные
функции. Эти уравнения могут быть решены относительно производных
по времени, если коэффициент при них, т. е. величина 1—(grad/)2,
не равен нулю. Но в таком случае формулы, аналогичные (3.05),
дают и для всех остальных первых производных от поля конечные
значения, а следовательно, самое поле будет на поверхности (3.02)
непрерывным. Чтобы там был возможен разрыв, необходимо
обращение в нуль коэффициента при производных по времени. Это при-
родит к условию (grad/)2 = lf (ЗЛ9)
§ 4] УРАВНЕНИЯ ДЛЯ ЛУЧЕЙ 25
при выполнении которого данная поверхность будет
характеристической. Если мы будем писать уравнение поверхности, не решая его
относительно /, а в виде
ω(*. у, г% 0 = 0, (3.20)
то уравнение характеристик (3.19) примет вид
^(-ж)2-^гас1(в)2=0· (3·21)
Таким образом, распространение фронта электромагнитной волны
подчиняется уравнению (3.21).
В частности, уравнению (3.19) или (3.21) удовлетворяют функции
' = 7<а* + 0У+т*) (*2+β2+τ2 = ΐ); (3.22)
t = 'о +" I V(x - *о)2 + (У - У о)2 + (* - *о)2· (3.23)
Первая дает плоскую, а вторая — сферическую волну.
§ 4. Уравнения для лучей
Уравнение распространения фронта волны может быть написано
в виде
$f + cV«>l + »l + »l = 0. (4.01)
(Для определенности мы выбрали перед корнем знак плюс.) Оно имеет
тот же вид, как уравнение Гамильтона — Якоби в механике, причем ω
играет роль функции действия 5, а производные ω^, а)у, ω^ — роль
„моментов" рх, ру% рг. Гамильтоновой функции здесь соответствует
выражение
Η = с ΐ/ω2+ω2+ω2. (4.02)
Траекториям будут здесь соответствовать лучи. Уравнения для лучей
будут аналогичны уравнениям Гамильтона. Они напишутся
dx дН
=. г.
d(or дН
dt -Do,=c,/- о /о . о и т· д·; (4.оз)
dt ~ дх
= 0 и т. д. (4.04)
Уравнения (4.04) показывают, что величины ω^, ω ωζ вдоль луча
постоянны (они могут, конечно, меняться от луча к лучу). Отсюда
26 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ [ГЛ. I
следует, что лучи будут прямыми
х — х0 = с *х 2(< —*о) и т. д. (4.05)
При изменении знака ω (а значит и ω^, соу, ωζ) направление луча
меняется на противоположное; знак ω должен быть выбран в
соответствии с заданным направлением (ориентацией) луча.
Всякая волновая поверхность может рассматриваться как
образованная из точек, движущихся со скоростью света по лучам (4.05).
Это дает возможность построить волновую поверхность для
момента времени t% когда известен ее вид для момента времени t0.
Пусть уравнение волновой поверхности для момента времени t0 имеет вид
ω°(*ο. У0. *о) = 0, (4.06)
где xQt у0, z0— текущие координаты на поверхности. Зная уравнение
поверхности, мы можем вычислить величины
а(*о. Уо. zo)= (,/■■ "* ~2) и т· Д-. (4·07)
причем знак правых частей определяется из заданного направления
распространения волны. Уравнение луча, проходящего через точку
х0, у0, ζ0 начальной волновой поверхности, напишется
X — X0=CCL(t — t0)t |
y-y0=c^t-t0)t (α2 + β2 + Τ2=1). (4.08)
ζ —z0=ci(t — t0) J
Величины х, у, ζ дадут положение точки, в которую перейдет точка
#о» Уо» ζο к моментУ времени t. Придавая величинам xQ, y0, z0
всевозможные значения, связанные соотношением ω° = 0, мы получим
из (4.08) все точки, лежащие на волновой поверхности в момент
времени t.
Если мы решим уравнения (4.08) относительно х0, у0, z0 и
подставим функции
*о = *о(*· У* z> * — *о) и τ· Д· (4.09)
в уравнение волновой поверхности ω° = 0, мы получим соотношение
ω(*. У, z. t-t0) = 0t (4.10)
т. е. явную форму уравнения волновой поверхности для момента
времени t. Очевидно, что при t = t0 будет xQ = xt y0 = yt z0 = z, и
уравнение (4.10) приведется к (4.06), т. е. к заданному уравнению
начальной волновой поверхности.
§51
ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЕТА
27
Из уравнений луча (4.05) получается соотношение
с2 (t - t0f - Цх - x0f + (у - у0)2 + (z — z0f] = 0, (4.11)
связывающее координаты начальной и конечной точек на каждом
луче. Уравнение (4.11) представляет уравнение шара с центром
в точке xQt yQt z0 и с радиусом R = c(t — t0)t растущим
пропорционально времени. Оно, так же как и исходное уравнение (3.21),
выражает постоянство скорости распространения света.
Для бесконечно близких точек соотношение (4.11) принимает вид
с2 dt2 — (dx2 + dy2 + dz2) = 0. (4.12)
В такой форме оно вытекает непосредственно из уравнений
Гамильтона (4.03).
Задача интегрирования уравнения фронта волны рассмотрена
в более общем виде в Добавлении Е.
§ 5. Инерциальные системы отсчета
В § 2 мы выяснили, что такое система отсчета, и подчеркнули,
что она связана с некоторым базисом, снабженным масштабами и
часами; этот базис можно грубо представить себе в виде некоторой
радиолокационной станции. Во всяком случае, „базис" состоит
из некоторых материальных тел, которые как-то расположены и
ориентированы в пространстве и как-то движутся.
Всякое явление, в частности явление распространения света и
движение материальных тел, описывается в определенной системе
отсчета, т. е. по отношению к определенному базису. Например,
для описания движения планет применяется гелиоцентрическая система
отсчета с началом координат (местоположение воображаемого базиса)
в центре инерции Солнечной системы и с осями координат,
направленными на три неподвижные звезды (ориентировка базиса).
В различных системах отсчета математическая форма законов
природы будет, вообще говоря, различной. Так, например, при
описании движения тел относительно Земли можно пользоваться как
системой отсчета с осями, ориентированными на три неподвижные
звезды, так и системой с осями, скрепленными с Землей; в
последнем случае необходимо ввести в уравнения движения также и силы
Кориолиса.
Существуют системы отсчета, в которых законы движения имеют
особенно простой вид и которые ближе всего соответствуют (в
известном смысле) природе. Мы имеем в виду инерциальные системы
отсчета, в которых тело при отсутствии действующих на него сил
движется прямолинейно и равномерно. (Здесь возникает вопрос, как
убедиться в отсутствии сил, действующих на тело; мы будем считатьt
28
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
что силы отсутствуют, если все тела, от которых они могут исходить,
достаточно удалены от данного тела.) С очень большой точностью
инерциальной является гелиоцентрическая система отсчета. В инер-
циальной системе мы будем почти всегда пользоваться декартовыми
координатами, так как в них законы евклидовой геометрии, а также
законы механики (в частности прямолинейность и равномерность
движения тела, не подверженного действию сил) формулируются наиболее
просто. Самое же понятие инерциальной системы допускает, конечно,
переход к любым другим (криволинейным) координатам, причем, если
формулы перехода не содержат явно времени, то можно считать, что
первоначальные и преобразованные координаты относятся к одной и
той же инерциальной системе.
В дорелятивистской физике понятие инерциальной системы
связывалось только с законами механики. Так, первый закон движения
Ньютона представляет не что иное как определение инерциальной
системы отсчета.
Мы видели, однако, что в определении понятий, относящихся
к пространству и времени, фундаментальную роль играют законы
распространения света. Поэтому более правильно будет связывать
понятие инерциальной системы не только с законами механики, но
и с законами распространения света.
Обычная форма уравнений Максвелла относится к какой-то
инерциальной системе отсчета. Само собой разумеется (и это всегда
предполагалось, даже и до теории относительности), что существует
по крайней мере одна система отсчета, которая является инерциальной
в смысле механики и в которой в то же время справедливы
уравнения Максвелла. К этой инерциальной системе относится и закон
распространения фронта электромагнитной волны в форме
№)'-№+№+№'}=»■ <5·»"
Систему отсчета, в которой закон распространения фронта
электромагнитной волны имеет вид (5.01), можно назвать инерциальной
в электромагнитном смысле. Просто инерциальной системой мы будем
называть систему отсчета, инерциальную как в механическом, так и
в электромагнитном смысле.
Таким образом, инерциальная система отсчета, по принятому здесь
определению, характеризуется следующими двумя свойствами:
1. В инерциальной системе тело при отсутствии сил движется
прямолинейно и равномерно (инерциальность в обычном механическом
смысле).
2. В инерциальной системе уравнение распространения фронта
электромагнитной волны имеет вид (5.01) (инерциальность в отношении
поля).
§ 6] ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ 29
Мы говорили здесь о законе распространения фронта электро-
магнитной волны и, тем самым, как бы отдавали предпочтение
электромагнитному полю перед другими полями. Это предпочтение,
однако, только кажущееся. На самом деле, предельная скорость
распространения полей любой природы должна быть одной и той же,
в силу чего уравнение (5.01) имеет универсальный характер. Этот
вопрос будет подробнее освещен в следующем параграфе.
§ 6. Основные положения теории относительности
Основной постулат теории относительности (называемый также
принципом относительности) утверждает независимость явлений от
неускоренного движения замкнутой системы, внутри которой они
происходят.
Попытаемся уточнить содержание этого постулата1).
Пусть имеется замкнутая система материальных тел, внутри
которой происходят различного рода процессы (механические,
электромагнитные и любые другие). Будем описывать состояние этой системы
тел (включая входящие в нее поля электромагнитной и другой
природы) по отношению к той или иной системе отсчета (к тому или
иному „базису" в смысле § 2). Рассмотрим два базиса2). Пусть
первый представляет инерциальную систему отсчета, а второй
движется относительно первого прямолинейно и равномерно. Фиксируем
начальное состояние системы по отношению к первому базису (под
словом „начальное* мы разумеем здесь „относящееся к начальному
моменту времени по часам данного базиса"). Вообразим себе теперь
второй экземпляр нашей системы тел, начальное состояние которого
по отношению ко второму базису в точности такое же, как начальное
состояние первого экземпляра системы по отношению к первому
базису. (Слово „начальное" понимается каждый раз в соответствующем
смысле.) Тогда можно поставить вопрос о сравнении дальнейшего
хода процессов в первом экземпляре системы по отношению к
первому базису с ходом процессов во втором экземпляре системы по
отношению ко второму базису.
Принцип относительности утверждает, что в обоих случаях
процессы будут идти совершенно одинаковым образом (поскольку они
вообще детерминированы). Если процесс в первом экземпляре системы
описывается посредством некоторых функций от координат и
времени первого базиса, то процесс во второй системе будет
описываться посредством тех же самых функций от координат и времени
второго базиса.
1) См. Л. И. Мандельштам [6].
2) Чтобы не путать „систему тел" с „системой отсчета", мы будем здесь
вместо „системы отсчета" говорить „базис".
30
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
Менее точно, но более наглядно, можно сказать, что равномерное
и прямолинейное движение материальной системы как целого
не влияет на ход процессов, происходящих внутри системы.
Многие законы природы, управляющие ходом различных
физических процессов, формулируются при помощи дифференциальных
уравнений, вид которых не зависит от начального состояния системы;
начальные условия присоединяются к ним дополнительно. Таковы,
например, уравнения движения механики, уравнения
электромагнитного поля и связанное с ними уравнение распространения фронта
электромагнитной волны. Из принципа относительности вытекает, что
математическая форма таких законов должна быть одинакова как
в исходной инерциальной системе отсчета, так и в любой другой,
движущейся относительно нее равномерно и прямолинейно.
Припоминая наше определение инерциальной системы отсчета (инерциальность
в механическом смысле и в отношении поля), можно вывести отсюда
следующее важное заключение. Если дана инерциальная система
отсчета, то всякая другая система отсчета, которая движется
относительно нее прямолинейно и равномерно, сама является
инерциальной. Это положение послужит основой для вывода формул,
связывающих координаты и время в двух неускоренно движущихся
системах отсчета.
Принцип относительности подтверждается всей совокупностью
наших знаний о природе. В области механики он был известен уже
давно (принцип относительности Галилея). Заслугою Эйнштейна
является распространение его на все явления (в первую очередь на
электромагнитные) и вывод из него следствий, относящихся к
природе и взаимной связи пространства и времени.
Теория относительности может быть построена на основе двух
постулатов: принципа относительности и принципа независимости
скорости света от скорости источника. Второй из этих принципов учтен
нами с самого начала, так как мы положили в основу нашего
построения теории закон распространения фронта электромагнитной
волны. Независимость скорости света от скорости источника
непосредственно вытекает из этого закона.
Здесь уместно дать обобщенное толкование закону
распространения фронта волны и формулировать следующее общее
положение.
Существует предельная скорость распространения всякого
рода действий. Эта скорость численно равна скорости света
в свободном пространстве.
Значение этого принципа связано с тем, что в определении
понятий, относящихся к пространству и времени, фундаментальную роль
играет передача сигналов с предельной скоростью. На
существовании таких сигналов основано самое понятие определенной системы
отсчета, которая служит для описания явлений в пространстве и вре-
§ 6] ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ 31
мени. В § 2 мы рассматривали способы определения положения тел
в пространстве, основанные на применении световых и вообще
электромагнитных сигналов. В принципе возможна, однако, передача
сигналов не только при помощи электромагнитных волн, но и при помощи
волн другой природы. Можно, например, представить себе передачу
сигналов при помощи предельно быстрых частиц и соответствующих
им в смысле квантовой механики волн материи. Мыслимо также (хотя
практически и неосуществимо) использование гравитационных волн,
существование которых вытекает из теории тяготения Эйнштейна
(см. § 90). Не исключено открытие каких-либо новых полей,
способных передавать сигналы. Поэтому возникает вопрос: является ли
понятие о системе отсчета, основанное на использовании одних только
световых сигналов, достаточно общим? Ведь если бы существовали
сигналы, идущие с большей скоростью, или даже мгновенные
сигналы, то понятие о системе отсчета, основанное на законах
распространения света, не отражало бы в должной мере свойств
пространства и времени, а являлось бы, самое большее, одним из
возможных.
Формулированный выше принцип, утверждающий существование
общего предела для скорости передачи каких бы то ни было
действий и сигналов, придает скорости света универсальное значение,
не связанное с частными свойствами агента, передающего сигналы,
а отражающее некоторое объективное свойство пространства и
времени.
Этот принцип находится в логической связи с принципом
относительности. В самом деле, если бы не существовало единой
предельной скорости, а различные агенты (например, свет и тяготение)
распространялись бы в пустоте с различными скоростями, то
принцип относительности был бы нарушен по крайней мере по
отношению к одному из этих агентов.
Математически принцип существования общей предельной скорости
может быть уточнен следующим образом.
Уравнение распространения фронта волны любой природы,
идущей с предельной скоростью и способной передавать сигнал,
совпадает с уравнением распространения фронта световой волны
в свободном пространстве.
Таким образом, уравнение
^-(^-)2-(gradi«)2=0 (6.01)
приобретает общий характер; оно является более общим, чем
уравнения Максвелла, из которых оно нами выведено. На основании
только что формулированного принципа существования общей
предельной скорости можно утверждать следующее. Дифференциальные
уравнения для любого поля, способного передавать сигнал, должны
32
теория относительности
[гл I
быть таковы, чтобы соответствующие уравнения характеристик
совпадали с уравнением характеристик для световой волны 1).
Как мы увидим в гл. V — VII, наличие гравитационного поля
несколько изменяет вид уравнения характеристик, и оно будет несколько
отличаться от (6.01). Но и тогда одно и то же уравнение характеристик
дает закон распространения фронта волн любой природы, идущих
с предельной скоростью, в том числе световых и гравитационных.
Уравнение (6.01) положено нами (наряду с прямолинейностью и
равномерностью движения тела в отсутствие сил) в основу
определения инерциальной системы отсчета.
Формулированный выше принцип, утверждающий универсальность
этого уравнения, показывает, что такое определение инерциальной
системы отсчета действительно целесообразно.
§ 7. Преобразование Галилея и необходимость его обобщения
Пусть одно и то же явление описывается в двух инерциальных
системах отсчета. Возникает вопрос о пересчете от описания явления
в одной системе отсчета к описанию того же явления в другой
системе. В качестве грубой иллюстрации можно представить себе
две радиолокационные установки: одну — расположенную на земле,
а другую — на самолете; вопрос состоит тогда в пересчете от
показаний одной установки к показаниям другой.
Для такого пересчета нужно прежде всего знать связь между
координатами и временем х, у, z, t в одной системе отсчета и
координатами и временем х', у', z', tr в другой системе. Старая физика
принимала как нечто самоочевидное существование единого мирового
времени tt одинакового во всех системах отсчета. Поэтому с точки
зрения старой физики необходимо было положить t' = t или, самое
большее, допустить изменение начала отсчета времени.
Если рассматривать два события, происшедших в моменты времени
t и τ, то промежуток времени между ними должен был (с точки
зрения старой физики) получиться одинаковым во всех системах отсчета.
Отсюда
t —% = ? — %'. (7.01)
Далее, старая физика считала очевидным, что длина твердого
стержня, измеряемая в двух системах отсчета, должна получаться
*) Близкая к нашей формулировка основных положений теории
относительности, как теории „абсолютных" свойств пространства и времени, имеется
в работах А. Д. Александрова [2], [3]. Идеи А. Д. Фоккера [1а] и
предложенное им для теории относительности наименование „хроногеометрия"
также подчеркивают „абсолютную" сторону пространственно-временных
соотношений.
§ 7]
ПРЕОБРАЗОВАНИЕ ГАЛИЛЕЯ
33
(7.03)
одинаковой. (Вместо длины твердого стержня можно рассматривать
расстояние между „одновременными" положениями двух точек,
которые необязательно связаны жесткой связью.) Если обозначить
координаты начала и конца стержня (или данных двух точек) в одной
системе отсчета через (xt у, ζ) и (ξ, η, С) и в другой системе через
(*', у\ ζ') и (£'. Υ. £'). то. согласно старой физике, должно быть
(*-ξ)2 + (3>-η)2 + (2-ξ)2 =
= (*' — б')2 + (У — η')2 + (*' — СО2. (7.02 )
Из (7.01) и (7.02) однозначно вытекает общий вид преобразования,
связывающего координаты и время х% у, zt t с координатами и
временем х\ у\ z't t'. Это преобразование состоит из переноса начала
отсчета координат и времени, из поворота пространственных
координатных осей и из преобразования вида
x' = x — VJ%
y'=y-Vyt,
z' =z — Vztt
где Vx% Vyt Vz — постоянные, физический смысл которых легко найти:
это есть скорость движения штрихованной координатной системы
относительно нештрихованной (точнее — составляющие этой скорости
в нештрихованной системе).
Преобразование (7.03) носит название преобразования Галилея.
Таким образом, старая физика утверждала, что если дана инер-
циальная система отсчета (л:, yt zt t)t то координаты и время во всякой
другой системе отсчета, движущейся относительно нее прямолинейно
и равномерно, связаны с (л:, у% zt t) преобразованиями Галилея
(с точностью до переноса начала и поворота осей).
Преобразование Галилея удовлетворяет принципу относительности
в отношении законов механики (мы имеем в виду механику Ньютона),
но не удовлетворяет ему в отношении законов распространения света.
Действительно, уравнение распространения фронта световой волны
меняет в результате преобразования Галилея свой вид. Если бы
преобразование Галилея было правильным (а принцип относительности
в общей форме — неправильным), то существовала бы только одна
инерциальная система в смысле нашего определения, и по
измененному виду уравнения распространения фронта волны было бы
возможно определить скорость движения (даже равномерного и
прямолинейного) всякой другой системы отсчета относительно этой
единственной инерциальной системы („неподвижного эфираа). Отрицательный
результат многочисленных точнейших опытов, поставленных с целью
обнаружения такого относительного движения, не оставляет сомнений
в том, что форма закона распространения фронта волны одна и та же
3 Зак. 2649. В. А. Фок
34
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
во всех неускоренных системах отсчета и что, следовательно,
принцип относительности во всяком случае применим и к
электромагнитным явлениям.
Отсюда следует, что преобразование Галилея в общем случае
неправильно и должно быть заменено другим.
Формулированные в предыдущих параграфах общие положения
дают все необходимое для вывода того преобразования координат и
времени, которое должно заменить собой преобразование Галилея.
Наша задача может быть поставлена следующим образом.
Пусть дана система отсчета, инерциальная в смысле нашего
определения (т. е. в механическом и в электромагнитном смысле, см. § 5).
Координаты и время в ней обозначим через лг, у, z, t. Пусть дана
другая система отсчета (с координатами и временем х\ у\ z\ t')9
которая также является инерциальной. Требуется найти связь между
величинами (x't y\ z\ t') и (л:, yt z, t).
Задача нахождения связи между координатами и временем в двух
инерциальных системах является чисто математической; для решения
ее не требуется никаких дальнейших физических предположений
кроме данного в § 5 определения инерциальной системы.
Мы разобьем решение этой задачи на два этапа: сперва докажем
линейность искомого преобразования, а затем найдем его коэффициенты.
Из линейности преобразования вытекает, что движение новой
инерциальной системы относительно старой является прямолинейным
и равномерным. Это заключение представляет, ло существу, лишь иную
формулировку принципа относительности, согласно которому система
отсчета, движущаяся относительно данной инерциальной системы
прямолинейно и равномерно, сама является инерциальной. Таким
образом, принцип относительности уже содержится по существу
в предпосылках доказываемой теоремы.
§ 8. Доказательство линейности преобразования, связывающего
две инерциальные системы
Из первого условия, характеризующего инерциальные системы
(условия инерциальности в механическом смысле), вытекает, что при
переходе от одной инерциальной системы к другой свойство
прямолинейности и равномерности движения должно сохраняться. Это
значит, что уравнения
* = *о + *,('-'о). У = Уо + *у(' —'о). * = *о + *,('-'о) (8-01>
должны иметь следствием уравнения
*'=<+<с-';> ι (8·02)
§ 8] ДОКАЗАТЕЛЬСТВО ЛИНЕЙНОСТИ ПРЕОБРАЗОВАНИЯ 35
Второе условие для инерциальных систем требует, чтобы из
уравнения
M$f-[ffl+№+№]-*■ <8·03>
имеющего место в нештрихованной системе, вытекало уравнение
ШЧ(£)'+(£)'+(£)'Н <8·04>
для штрихованной системы. Это второе условие мы можем, однако,
написать в · виде, аналогичном первому условию. В самом деле,
из уравнения вида (8.03) вытекают уравнения (4.08) для лучей, т. е.
прямолинейное распространение света с постоянной скоростью. Это
должно иметь место как в нештрихованной, так и в штрихованной
системе отсчета. Поэтому, если мы для точки пересечения луча света
с волновой поверхностью имеем
χ = χ0 + υχ (ί—ίο), У = Уо ■+■ vy (*—*о). * = *о + vz (*—*о). (8·05>
где
то должно быть и
,-k+w-q. } <8·06>
где
/2 , /2 . /2 л
Vx+Vy+Vz =C-
Таким образом, второе условие сводится к добавочному требованию,
чтобы в уравнениях для прямолинейного и равномерного движения
из v2 = c2 вытекало ν' =Λ
Наша задача состоит в том, чтобы найти самый общий вид функций
*' = /ι (*. У, *> 0. \
У =/2(*. У· г* t\
*' = /s(*. У. *. 0,
? = /α(*. У* ζ* ').
таких, чтобы из написанных выше уравнений для нештрихованных
величин вытекали аналогичные уравнения для штрихованных величин *).
Прежде чем перейти к решению этой задачи мы введем более
симметричные обозначения.
(8.07)
1) Задача эта рассматривалась также Н. А. Умовым [4] и Н. Вейлем [7]
3*
36 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ [ГЛ. I
Мы положим
x=zxv y = x2t Z^=xz (8.08)
и введем вместо времени пропорциональную ему величину
x0 = ct9 (8.09)
физический смысл которой есть путь, проходимый светом за данное
время. (Таким образом, в новых обозначениях х0 уже не есть
начальное значение координаты х). Искомое преобразование напишем
в виде
*ί = /ί(*ο· χι> *2> *з) (/ = 0' *· 2> 3)· (8.10)
Начальные значения величин х0, хх, х2, хг будем обозначать через
£о» 5ι· ^2» ^з (и аналогично для штрихованных величин). Введем
произвольную положительную постоянную γ0 и параметр $ = — (t — t^
То
и положим
Ti = To-?- 0=1.2,3), (8.11)
тогда уравнения прямолинейного равномерного движения напишутся
*! = *, +ТА (8.12)
и наше первое условие будет заключаться в том, чтобы из
уравнений (8Л2) вытекали уравнения
*ί=^ + ΐί5' (/ = 0, 1, 2, 3), (8.13)
где ζ и ]J — новые постоянные и s' — новый параметр (они могут
быть выражены через старые после того, как будет найден вид
функций /j).
Второе условие заключается в требовании, чтобы из соотношения
Т§ —(T?4-Ti-f-T|)=0 (8.14)
вытекало соотношение
т;'-(т?-к2+т;2)=о· (8.15)
Само собою разумеется, что уравнения преобразования (8.10) должны
быть разрешимы относительно старых переменных х0, хх, хъ хг.
Для этого нужно, чтобы якобиан преобразования не обращался
в нуль:
Переходим к выводу уравнений для функций Д.
§ В] ДОКАЗАТЕЛЬСТВО ЛИНЕЙНОСТИ ПРЕОБРАЗОВАНИЯ 37
Разумея под х1 линейные функции (8.12) от параметра s, мы
будем иметь
k = 0
EIl— V
ds ~~ jU
Составим производную
dxt _ Ίι
dx0 γ0
(8.18)
которая по условию должна быть постоянной. Мы имеем
L· '* дхк
^ = ^- = const. (8.19)
Σ
#о Υο
4kdXk
Λ = 0
Приравнивая нулю логарифмическую производную от этого
выражения по s, получим
^ Vl Λ** A*, *A
V/ dxk dxi L· Vi dxk dxt
^\ = *i=° . (8.20)
Σ у Vl y7 df^
1k dxk L· T* dxk
В этом равенстве аргументами в частных производных от /0 и ft
являются величины (8.12), которые сами зависят от γ^. Поскольку,
однако, величины \t в (8.12) являются произвольными, мы можем
рассматривать γ^ и хь как независимые переменные. (К тому же
заключению мы придем, если положим в (8.20) 5 = 0и затем будем
писать xt вместо ξί#) Таким образом, уравнения (8.20) должны
выполняться тождественно относительно γ^ и xt.
Как функции от γ^, выражения (8.20) представляют рациональные
дроби. Однако ни при каких конечных значениях γΛ все четыре
знаменателя в них (т. е. четыре выражения (8.17) для / = 0, 1, 2, 3)
не могут обратиться в нуль одновременно, так как определитель (8.16)
всегда отличен от нуля. Поэтому каждая из дробей всегда остается
конечной, даже если знаменатель в ней обращается в нуль. Но это
может быть только в том случае, когда числитель дроби делится на
знаменатель, так что фактически выражения (8.20) представляют
не дроби, а целую функцию от γΛ, которую мы будем писать в виде
2 Σ ϊΛ. <8·21)
/з«0
38 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ [ГЛ. '
Таким образом, мы имеем
ΣΤΛ^-22Τ.^ΣΤΑ. (8-22)
Так как это есть тождество относительно γΛ то будем иметь
Мы приходим к следующему выводу. Для того чтобы прямолинейное
и равномерное движение переходило в прямолинейное и равномерное,
необходимо, чтобы функции преобразования ft удовлетворяли системе
уравнений в частных производных (8.23), где ψΛ — некоторые
функции от xQf xv x2t хг.
Найдем теперь условие, которому должны удовлетворять
функции fl для того, чтобы из соотношения (8.14) вытекало (8.16).
Вследствие (8.19) соотношение (8.15) равносильно следующему:
Это уравнение должно быть следствием уравнения
Т2-(Т?+ТН-Т2) = 0. (8.14)
Так как левые части (8.24) и (8.14) — квадратичные функции от γ^, то
они должны быть друг другу пропорциональны. Чтобы записать
вытекающие отсюда формулы в более удобном виде, введем четыре
величины:
е0=1; ех = е2 = еъ = — 1, (8.25)
и напишем (8.24) и (8.14) в виде
Σο«*γ|=ο. (8.27)
Полагая левую часть (8.26) пропорциональной левой части (8.27),
получим з
Σ 4^ = ^* (8-28)
где λ—некоторая функция от д:0, χν χ2, х3, а символ Ьк1 имеет
обычное значение:
8W = 0 при кф1; δΑΑ=1. (8.29)
§ 9] ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ЛИНЕЙНОГО ПРЕОБРАЗОВАНИЯ 39
полагая
щ--^т. (8-30)
Дифференцируя (8.28) по хт и полагая
будем иметь
Подставляя сюда выражения (8.23) для вторых производных и
пользуясь (8.28), получим
«ιΨ А* + «*ФАь» + 2^фт8„ = 2е#аЪы. (8.32)
Это соотношение должно иметь место для всех значений к, /, т.
Если положить & = /, тф1, оно дает
Ψ» = ?»· (8-33)
Полагая затем k = m или^/ = т, получим фш = 0. Таким образом,
Ψ» = ?» = <>. (8.34)
Входящая в формулы (8.28) и (8.30) величина λ приводится к
постоянной и уравнения (8.23) для функций ft принимают вид
ίΒϊ = °- <8·35>
Мы приходим к выводу, что из совокупности двух условий,
характеризующих инерциальные системы, вытекает, что формулы
преобразования, связывающие координаты и время в этих двух
системах, должны быть линейными.
Вопрос о том, что вытекает из каждого из этих условий, взятого
в отдельности, мы рассмотрим в Добавлении А.
§ 9. Определение коэффициентов линейного преобразования
и масштабного множителя
В уравнение (8.28) для функций ft входит неизвестный
постоянный множитель λ. Чтобы учесть явным образом влияние его на вид
преобразования, будем писать наши линейные функции fi в виде
^/^^"(«i+Ilw»]· (9.01)
Уравнения (8.28) будут выполняться тождественно относительно λ,
если коэффициенты aik удовлетворяют соотношениям
3
|oVA = A (9-02)
40
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
(ГЛ. 1
из которых следует, что будет и
з
2 *PkPu = ekhi- (9·03)
/ = 0
Уравнения (9.01) могут быть решены относительно xit причем
получается
*ι=Σβ*β«(ψτ-β*)· (9·04)
Мы имеем также
dx'* — {dх{2 + dx'*+dχ'*) = λ [dx\ — (dx* -f- dx\ + rfjc|)J (9.05)
и для произвольной функции ω
Очевидно, что множитель λ (точнее у Τ) характеризует отношение
масштабов в штрихованной и нештрихованной координатных
системах, причем речь идет о масштабе, общем для пространственных
координат и для времени, так что изменение его не влияет ни на
углы между пространственными направлениями, ни на значения
скорости. Мы покажем, что этот множитель нужно положить равным
единице.
Рассмотрим точку, неподвижную в штрихованной системе отсчета.
Тогда скорость этой точки в нештрихованной системе дает скорость
движения самой штрихованной системы относительно нештрихованной.
Обозначим составляющие этой скорости (взятые в нештрихованной
системе) через Vv V2, V3. Таким образом,
Vi = -^ = c^t для dx'x = dx'2 = dx'z = 0. (9.07)
Но" мы имеем из (9.04)
**i = yf *<« dxo> dxo = γ= *οο dxo (9·08>
и, следовательно,
V, = c^ (/=1, 2, 3). (9.09)
Отсюда прежде всего следует, что преобразование (9.01), дающее
связь между координатами и временем в двух инерциальных систе-
§ 9] ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ЛИНЕЙНОГО ПРЕОБРАЗОВАНИЯ 41
мах, соответствует переходу от данной системы отсчета к другой,
движущейся относительно данной прямолинейно и равномерно, как
это и должно быть.
Далее из формулы (9.09) следует, что относительная скорость
движения систем никак не связана с масштабным множителем λ, а
значит и этот множитель не может зависеть от относительной скорости 1).
Но при относительной скорости, равной нулю, достаточно
предположить, что в обеих системах отсчета длина (а также промежутки
времени) измеряется одинаковым образом и выражается в одинаковых
единицах, чтобы можно было считать λ=1. При таком, совершенно
естественном, условии λ будет равно единице и для любой инер-
циальной системы, независимо от ее скорости.
Таким образом, мы можем уточнить наши формулы, положив в них
λ=1. Вместо (9.05) и (9.06) мы получим тогда
ах* — (dx[2 -f dx'2 + d x'32) = dx\ — (dx\ + d x\ + d x*)
и
\дх0 ) (\дх1 J \ дх2 ) \ дх3 ) }
— \Sxj) — \ТС~/ ~т~\дх7) ~Μ~^ Γ
а прямые и обратные формулы преобразования напишутся:
з
< = «, + 2«ЛА
3
*ι = Σον«(*ί—**)·
Эти формулы носят название преобразования Лоренца. Они
составляют формальную основу всей теории относительности.
Заметим, что исходной точкой наших рассуждений было
требование, чтобы во всякой инерциальной системе отсчета уравнение
распространения фронта электромагнитной волны имело вид (5.01).
Отсюда вытекало, что равенство нулю правой части (9.11) должно иметь
следствием равенство нулю левой части. Но в результате наложения
добавочных условий (о том, чтобы прямолинейное и равномерное
движение переходило в такое же движение, и о том, чтобы масштаб
в обеих системах отсчета был одинаков) мы получили большее:
правая часть (9.11) не только обращается в нуль одновременно с левой
частью, но и тождественно равна ей.
1) Обычно утверждается, по примеру Эйнштейна, что масштабный
множитель „очевидно" может зависеть от относительной .скорости и только от
нее. Лишь затем доказывается, что фактически он от нее не зависит, ибо
равен единице.
(9.10)
(9.11)
(9.12)
(9.13)
42
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
§ 10. Преобразование Лоренца
Преобразование Лоренца представляет формулы перехода от
координат и времени в одной инерциальной системе отсчета к
координатам и времени в другой инерциальной системе, движущейся
относительно первой прямолинейно и равномерно. Оно может быть
характеризовано тем, что величина
ds2 = dx2 — (dx2 + dx2-\-dx§ (10.01)
или
ds2 = с2 dt2 — (dx2 + df -f dz2) (10.02)
остается при таком преобразовании инвариантной в строгом смысле
(неизменной остается не только численное значение этой величины,
но и ее математическая форма). Самое общее преобразование
Лоренца имеет вид
з
χι = αι + 2 екашхк9 (10.03)
где коэффициенты aik удовлетворяют соотношениям
з
ΣάΛ/^Άι. (10·04)
Σάα* = «Α/· (10·05)
/=о
Исследуем физический смысл постоянных, входящих в формулы
преобразования.
Прежде всего, очевидно, что постоянные члены аь соответствуют
изменению начала отсчета для координат и времени. Если мы будем
считать, что в момент времени ^ = 0 начала координат старой и
новой системы отсчета совпадают, то будет
at = 0 (/ = 0, 1, 2, 3). (10.06)
В дальнейшем мы примем это условие и будем писать
преобразование Лоренца в виде
з
*;= 2 ******. (Ю.07)
k — 0
Физический смысл отношения коэффициентов
%=ту* <10-08>
мы уже выяснили. Это есть деленная на скорость света
относительная скорость движения двух систем отсчета. Точнее, Vt есть
составляющая, взятая в нештрихованной системе отсчета, для вектора
скорости движения штрихованной системы относительно нештрихованной,
§ 10] ПРЕОБРАЗОВАНИЕ ЛОРЕНЦА 43
Так как формулы обратного преобразования имеют вид
= Σον«*;. (Ю.09)
то определяемая из формулы
^Sl = 1v[ (10.10)
величина V/ есть (взятая в штрихованной системе отсчета)
составляющая вектора скорости движения нештрихованной системы
относительно штрихованной.
Полагая в формулах (10.04) и (10.05) &=/ = 0, получим
«оо-К + ^ + ^эЬ)"1· (10Л1>
eoo-K + ea2 + ei)=1· <10Л2>
откуда, в соединении с (10.08) и (10.10), следует
У\ + У\ + У\ = ^ +tf + V$% (10.13)
V2 = V'\ (10.14)
где под V2 мы разумеем квадрат абсолютной величины скорости.
Это значит, что абсолютная величина векторов относительной
скорости в той и другой системе отсчета одинакова — результат,
который нельзя считать очевидным, хотя он вполне согласуется с нашими
наглядными представлениями.
Из уравнений (10.08) и (10.12) следует
*оо = .JLf. (10.15)
При корне квадратном нужно взять положительный знак, ибо
аоо = ^->0. (10.16)
Отрицательный знак при а^ означал бы изменение направления счета
времени.
Из (10.08) и (10.15) получаем
_ Vj
и аналогично из (10.10) и (10.15)
Vc*— V*
(/=1, 2, 3) (10.17)
ai0 = -^=L=- (/=1,2,3). (10.18)
44 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ {ГЛ. !
Если в условиях ортогональности (10.04) и (10.05) положить один
из значков равным нулю и воспользоваться (10.17) и (10.18), мы
получим
auV't^anVi + a^ + anVz (/ = 1, 2, 3), (10.19)
flooVi = aiiVi + a2iVi + a3|Vi (/=1, 2, 3). (10.20)
Если оба значка не равны нулю, то условия ортогональности дают
axfixk + *2fi2k + auazk = hk+-trb^2- (10.21)
Введем вместо aik (для /, й=1, 2, 3) новые величины α/Λ,
положив
•*—*»+-2!?г (10·22)
или
КП
«« = -«»+(*«)-О-^г- 00.23)
Легко проверить, что вследствие (10.20) и (10.21) будет тогда
«hAi + ^i+Vw*^ С Λ=1» 2· 3>· (Ю.24)
Величины α/Λ представляют, следовательно, коэффициенты
трехмерного ортогонального преобразования и могут быть истолкованы как
косинусы углов между старыми и новыми координатными осями,
причем в а1к первый значок относится к новым, а второй — к старым
осям. Формулы (10.22) дают вследствие (10.19) и (10.20)
απ^ι + α^2 + α^3 = -^, (10.25)
ыУх + oa<Vi + «3^3 = — Vt. (10.26)
Последние соотношения можно толковать в том смысле, что вектор V
(вектор скорости нештрихованной системы относительно
штрихованной) и вектор V (вектор скорости штрихованной системы
относительно нештрихованной) равны по величине и противоположны по
направлению.
Полученные формулы позволяют выразить все коэффициенты
преобразования Лоренца через косинусы a.ik (/, k = 1, 2, 3) и через три
составляющие Vx% V2, V3 вектора относительной скорости. Так как
девять косинусов aik связаны шестью соотношениями (10.24) и
выражаются через три независимые величины, то всего в
преобразование Лоренца входит шесть параметров (не считая постоянных
членов aif которые мы положили равными нулю).
Для коэффициентов ат и а01 мы уже получили выражения (10,15)
и (10.17). Для коэффициентов а10 мы можем взять выражение (10.18),
в котором под Vt мы должны разуметь его значение из (10.25).
§ 10] ПРЕОБРАЗОВАНИЕ ЛОРЕНЦА 45
Подробнее будет
з
affl=-/c-l_-^a^ (/= 1, 2, 3). (10.27)
Наконец, для коэффициентов aik мы получаем из (10.23):
*« = —*/*+(«ю—О-тИ· <10·28)
или подробнее
з
Подставим найденные значения коэффициентов преобразования
Лоренца в формулу (10.07) и будем писать в них для наглядности ct
вместо х0. Мы получим
t'= ^±ΎΓ^-±-\νιχι+ν2χ2 + ν,χή. (10.30)
Что касается пространственных координат, то формулы для них
удобнее всего писать в виде
<=2ν1. O0.3D
где
з
*; = *»-W+/ г-!—я--1\-%1-У1Ул{хл-У1А. (10.32)
·,+(γτζψ-ψ^
Таким образом, общее преобразование Лоренца можно выполнить
в два этапа. Первый этап состоит в переходе от переменных
(jCj, х2, *з» О К переменным (**, x*t **, t\ где x\t x*t **
определяются из (10.32), а t* совпадает с tr и равно
У 1~"~с*~
Второй этап состоит в переходе от (**, **, **, **) к (*р л^, *з» Ό·
где, согласно (10.30) и (10.31),
х\ = an*J + al2x*2 + а|8*». f = Л (10.34)
46
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
Очевидно, что второй этап есть простой поворот
пространственной координатной системы, тогда как первый этап есть переход
к системе отсчета, движущейся со скоростью (V\, V2, V3), причем
этот переход не сопровождается поворотом осей.
Мы могли бы, конечно, сперва произвести поворот осей, а затем
перейти к движущейся системе отсчета.
Обратное преобразование может быть также произведено в два
этапа: во-первых, переход от (д^, x'v x'v /') к (x*t **, **, f) no
формулам
представляющим простой поворот осей и, во-вторых, переход от
(**, х*, **» **) к (*ι> *2» *з· О П0 формулам
з
т
< + ^Г+/ ±^~l\^.JiVk{x\^Vkty (10.36)
* = г-^-уг (** + ?-<У*< + VA + V.O). (Ю.37)
представляющим обращение формул (10.32), (10.33). Прямые и
обратные формулы, связывающие (**, **, **, **) с (xlt *2, *3, Λ,
получаются друг из друга изменением знака скорости Vt.
Заметим, что якобиан этих формул перехода равен единице. Что
касается подстановки (10.34) и обратной ей (10.35), то якобиан этих
подстановок будет равен единице, если они представляют поворот
осей в собственном смысле (не сопровождаемый переходом от
правой координатной системы к левой или наоборот). Отсюда следует,
что при условии сохранения направления отсчета времени и
сохранения правой (или левой) системы пространственных координат
якобиан преобразования Лоренца будет равен единице. В таком случае
преобразование Лоренца принято называть собственным
преобразованием. В дальнейшем мы будем пользоваться только собственным
преобразованием Лоренца.
Поворот осей не представляет, в сущности, перехода к другой
инерциальной системе и поэтому для нас не интересен. Характерные
особенности преобразования Лоренца заключаются в формулах (10.32),
(10.33) и обратных им (10.36), (10.37). Эти формулы упростятся,
если выбрать координатные оси так, чтобы направление одной из
них, например первой, совпало с направлением относительной
скорости V. Полагая
VX = V, V2 = Vz = 0t (10.38)
§ 10] ПРЕОБРАЗОВАНИЕ ЛОРЕНЦА 47
мы получим из (10.32) и (10.33):
** = *„. (10·39)
(10.40)
Xx-vt
1 / w '
Vxt
r* — γ
Λ2 Λ2'
/·--£
Обратные формулы получатся отсюда заменой V на —V. Для
большей наглядности мы будем писать х, yf ζ вместо хг, х2, #3.
Заменив звездочку штрихом, мы получим тогда
х'= *^Д==, у' = у, 2>=г% (10.41)
/>--?
*-
Ил:
с
2
t'= r-^г·. 00-42)
/■-I
и, выражая л:, / через *', /',
_ л:' + W
/7=
'' +
К1
с2
К*'
:/, ζ = ζ\ (10.43)
с:
'= л-V· (10·44)
Эти формулы дают частное преобразование Лоренца, которое, однако,
содержит в себе все характерные особенности общего преобразования.
Формулы преобразования Лоренца удобно писать в векторной
форме. Пользуясь обычными трехмерными векторными обозначениями,
будем иметь
*'= / ' V* {'-УСУ·*)} <10·45>
llw((V·')-!^ (Ю.46)
Γ'='-ν'+(7Ϊ
48
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
§ 11. Определение расстояний и синхронизация часов
в одной инерциальной системе отсчета
Прежде чем переходить к обсуждению следствий из
преобразования Лоренца, вернемся к рассмотренному в § 1 и 2 вопросу об
измерении расстояний и промежутков времени в одной инерциальной
системе отсчета. Мы остановимся несколько подробнее на
понятии одновременности в разных точках пространства и на вопросе
о синхронизации удаленных друг от друга часов.
Расстояния между телами, неподвижными в одной инерциальной
системе отсчета, могут измеряться различными способами: путем
непосредственного наложения масштабов (измерительных жезлов), путем
триангуляции и путем радиолокации. В первом способе используются
только свойства твердых тел; во втором способе используется, кроме
того, прямолинейность распространения света; в третьем способе
существенную роль играет скорость света, которая предполагается
известной. Само собою разумеется, что во всех трех способах
предполагается справедливость евклидовой геометрии; если бы евклидова
геометрия была не верна, то, например, триангуляция, произведенная
по различным путям, привела бы к противоречивым результатам. Мы
уже подчеркивали в § 2, что справедливость законов евклидовой
геометрии следует рассматривать как опытный факт, а не как
априорное допущение.
Все три способа измерения расстояний основаны на свойствах
твердых тел и на свойствах света. Так как свет представляет более
простое явление, то его следует рассматривать как первичное и
проверять, например, неизменность эталона длины оптическим путем
(определяя число длин волн, укладывающихся на протяжении
эталона).
Для измерения скорости света нужно уметь измерять промежутки
времени и расстояния способами, не зависящими от знания скорости
света. При этом, если сделать допущение, что скорость света в
прямом и в обратном направлении одинакова, то достаточно уметь
измерять время в одной точке. Для этого может, в принципе, служить
любой периодический процесс, например колебания молекулы аммиака
или кристалла кварца. Прибор для измерения времени мы будем
называть часами или хронометром, независимо от того, представляет ли
он механический прибор (как обыкновенные часы) или действует на
каком-нибудь ином принципе.
Определение скорости света сводится в принципе к определению
промежутка времени τ, в течение которого свет проходит туда и
обратно варанее отмеренное (путем триангуляции или наложением
масштабов) расстояние г; скорость света будет равна с = 2г/т.
Таким образом, дело сводится, по существу, к нахождению перевод-
§11] ОПРЕДЕЛЕНИЕ РАССТОЯНИЙ И СИНХРОНИЗАЦИЯ ЧАСОВ 49
ного множителя от расстояний, выраженных в единицах длины и
измеренных путем триангуляции или непосредственно наложением
масштабов, к расстояниям, выраженным в единицах времени и
измеренным путем радиолокации. Этот переводный множитель может быть
определен раз и навсегда.
Переходим к вопросу о сравнении показаний часов, неподвижных
в некоторой инерциальной системе отсчета и находящихся на
заданном расстоянии друг от друга. Предполагается, что часы —
одинакового устройства и обладают одинаковым ходом, так что задача
состоит только в том, чтобы их „одинаково" поставить. Пусть
в точке Л расположены одни часы (часы Л) и в точке В, на
расстоянии г от Л— другие (часы В). Из А посылается в момент tx
световой сигнал, который отражается от зеркала, поставленного в В,
и возвращается в Л в момент t2. Спрашивается, какое время должны
показать „одинаково поставленные" часы θ, когда до них дошел
сигнал? Мы будем считать, что часы В одинаково поставлены, или
синхронны, с часами Л, если в момент дохождения до них сигнала
они показывают время V = ι ~Τ 2. В этом заключается
эйнштейновское определение синхронности часов, расположенных в разных
точках. Это определение вполне естественно и согласуется с основным
положением теории относительности о постоянстве скорости света.
В самом деле, если сигнал был послан из Л в момент tlt то он
дошел до В в момент г
так как он прошел расстояние г со скоростью с. С другой стороны,
так как он вернулся в Л в момент t2, а до того прошел путь г от В
до Л, то он должен был отразиться от В в более ранний момент
t = L— — .
2 с
Из последних двух формул следует, что моменту отражения сигнала
от В мы должны приписать на часах Л значение t= l ^ 2, и если
часы В синхронны с часами Л, то и они должны при отражении от
них сигнала показать время t' = t.
Из того, что скорость света в прямом и обратном направлении
одинакова, следует, что синхронность двух часов в определенном выше
смысле есть свойство взаимное: если часы В синхронны с часами Л,
то и обратно, часы Л синхронны с часами В. Далее, из
справедливости евклидовой геометрии и из одинаковости скорости света в любом
направлении (то и другое содержится в уравнении распространения
фронта световой волны) следует, что если часы Л синхронны с
несколькими часами В, С, D то все эти часы синхронны между
собою.
4 Зак. 2649. В. А. Фок
50
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
Последнее обстоятельство позволяет построить такую модель
инерциальной системы отсчета: твердый каркас, во всех узловых
точках которого находятся синхронно идущие часы. С точки зрения
такой модели движение какого-нибудь тела относительно данной
инерциальной системы отсчета может быть описано следующим образом.
Пусть тело проходит последовательно мимо неподвижных часов
с координатами (хх, ух, zx), (jc2, у2, z2) и т. д., причем часы (xit yh zt)
показывают при прохождении мимо них тела время tt. Тогда
координаты x(t), y(t), z(t) тела в данной системе отсчета будут такими
функциями времени t этой системы, которые при t = tl принимают
значения (xit yh zt).
Такая.модель, при всей своей громоздкости, может быть иногда
полезной и часто излагается в курсах теории относительности. Мы
предпочитаем ей, однако, модель радиолокационной станции, которая
позволяет, исходя из одного места, определять непрерывным образом
как положение движущегося тела, так и момент времени (по часам
станции), к которому это положение относится. В силу независимости
скорости света от скорости движения источника обе модели дают
одни и те же значения координат и времени; разница между ними
только в том, что в радиолокационной модели определение
расстояний и синхронизация часов производится не заранее, а, так сказать,
на ходу.
Радиолокационная модель является более гибкой и сохраняет свою
наглядность также и в тех случаях, когда модель твердого каркаса
становится явно непригодной, например, когда речь идет об
астрономических расстояниях. Кроме того, радиолокационная модель системы
отсчета легче поддается обобщению.
Изложенный выше эйнштейновский способ синхронизации часов
при помощи световых сигналов с учетом запаздывания представляется
настолько естественным, что на первый взгляд может показаться, что
он не содержит в себе ничего характерного для теории
относительности. Между тем это не так. Указанный способ заключает в себе
определение одновременности в разных точках пространства с точки
зрения данной инерциальной системы. Это определение основано на
законах теории относительности и оно является не произвольным, а,
напротив того, единственно рациональным с точки зрения этой теории.
В дорелятивистской физике принималось, как нечто само собою
разумеющееся, существование единого мирового времени и
соответственно этому как бы допускалось, что понятие одновременности
в разных точках пространства не нуждается в определении. В связи
с этим предполагалось, что любой способ синхронизации часов
(например, путем перевозки хронометров или путем световых
сигналов) должен дать то же самое. На самом же деле это не так.
Как мы увидим ниже, из теории относительности вытекает, что
если часы А синхронизованы с часами В при помощи световых chj>
§ 12] ПОСЛЕДОВАТЕЛЬНОСТЬ СОБЫТИЙ ВО ВРЕМЕНИ 51
налов и если хронометр С, сверенный с часами в точке Л,
перевезен затем в точку В, то его показания в точке В даже при
идеальном ходе хронометра не будут совпадать с показаниями часов в В,
2l будут зависеть от скорости перевозки (они будут совпадать лишь
при бесконечно малой скорости).
К этому вопросу мы вернемся в следующем параграфе. Мы хотели
здесь подчеркнуть, что даже такое простое физическое понятие, как
одновременность в одной инерциальной системе отсчета, требует
точного определения, с которым должны быть согласованы все
применяемые способы измерения соответствующей физической величины.
§ 12. Последовательность событий во времени
в разных системах отсчета
Преобразование Лоренца заключает в себе формальные основы
всего учения о пространстве и времени, содержащегося в теории
относительности.
Рассмотрим, на основе преобразования Лоренца, вопрос о
последовательности событий во времени в разных системах отсчета. Под
„событиями" мы будем разуметь здесь мгновенные события,
характеризуемые положением точки в пространстве и соответствующим
моментом времени.
Чтобы иметь конкретную картину, предположим, что „события"
заключаются в мгновенной вспышке световых сигналов. Пусть первая
вспышка произошла в момент времени tx в точке с координатами
xv Ух* zv а ВТ0Рая вспышка — в момент t2 в точке хъ y2t z2. Вводя
обычные трехмерные векторные обозначения, мы можем положение
и время первой вспышки характеризовать символами (rlf tx)t а второй
вспышки — символами (r2, t2).
Поставим прежде всего вопрос: которая из двух вспышек
произошла раньше другой?
Ответ будет бесспорен, если свет от одной «спышки успел
достигнуть места другой вспышки до того, как та произошла.
А именно, если
'4-'i>Tl*a-'i|. 02.01)
то первая вспышка бесспорно произошла раньше второй, а если
'2-'i<-7K-ril. (12.02)
то, наоборот, первая вспышка бесспорно произошла позже второй.
События, для которых выполняется одно из неравенств (12.01)
и (12.02), мы будем называть последовательными. В случае (12.01)
4*
52 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ [ГЛ. 1
мы будем говорить, что второе событие наступило абсолютно позже
первого, а в случае (12.02) — что оно наступило абсолютно раньше
первого. В обоих случаях будет
c\t2-tx?-{r2-rx?>Q. (12.03).
Вещественную положительную величину
r=l/C2(,2_,i)2_(r2_ri)2 (12.04)
мы будем называть временным интервалом между двумя
последовательными событиями. Значение временного интервала не зависит
от системы отсчета, так как выражение под знаком квадратного
корня в (12.04) есть инвариант по отношению к преобразованию
Лоренца.
dt'
В силу условия -дт > 0, выражающего сохранение направления
счета времени [см. (10.16)], соотношения (12.01) и (12.02) также
не зависят от системы отсчета. Так это и должно быть, ибо
достижение или недостижение световой волной места второй вспышки есть
физический факт, от системы отсчета не зависящий. Таким образом,
понятия „абсолютно раньше" и „абсолютно позже", применимые
к последовательным событиям, являются инвариантными понятиями.
Предположим теперь, что свет от одной вспышки не успел
достигнуть места другой вспышки до того, как она произошла. Тогда
будут иметь место неравенства
-7ΐ'2-«·ιΙ<'2-Ί<7ΐ'2-'ιΙ. (12·05)
противоположные (12.01) и (12.02).
События, для которых выполняются неравенства (12.05), мы будем
называть квазиодновременными. Название это оправдывается тем,
что при выполнении неравенств (12.05) понятия „раньше" и „позже"
становятся относительными: в одних системах отсчета может оказаться,
что t2— tx > 0. а в других, что t2— tx < 0. Поэтому и вопрос о том,
которая из вспышек произошла раньше, уже не будет иметь теперь
однозначного ответа.
Квазиодновременные события характеризуются вытекающим из
(12.05) инвариантным неравенством
с2 (t2 - txf - (r2 - тг)2 < 0. (12.06)
Неравенства (12.05) равносильны (12.06) и поэтому сами будут
инвариантными. Вещественную положительную величину
R = V{r2-txf-cHt2-txf (12.07)
мы будем называть пространственным интервалом между двумя
квазиодновременными событиями.
§ 12] ПОСЛЕДОВАТЕЛЬНОСТЬ СОБЫТИЙ ВО ВРЕМЕНИ 53
Покажем, что в случае двух квазиодновременных событий можно
всегда выбрать систему отсчета так, чтобы chi были в ней
одновременными, а в случае двух последовательных событий можно
выбрать систему отсчета так, чтобы они имели в ней одинаковые
пространственные координаты.
Рассмотрим два квазиодновременных события, для которых
разность t2 — tx имеет заданное значение, удовлетворяющее
неравенствам (12.05). Если мы введем новую (штрихованную) систему отсчета,
движущуюся относительно старой со скоростью V, то, согласно
формуле (10.45) для преобразования времени, значение разности t'2 —1[
в новой системе будет равно
t'2-t'l = -rd=w{t2-t1—^(Γ2-Γι)·ν}. (12.08)
Относительную скорость V можно подобрать так, чтобы в новой
системе оба события были уже одновременными. Для этого
достаточно положить
V = (r2-ri)-;2ffl~'r (12.09)
В силу неравенства (12.06) мы будем иметь
v2==c|(W,)^ <сК (1210)
так что относительная скорость будет по абсолютной величине
меньше скорости света, как и должно быть для преобразования
Лоренца.
Чтобы вычислить разность пространственных координат двух
квазиодновременных событий в той системе отсчета, где они
одновременны, воспользуемся формулой преобразования Лоренца (10.46),
написанной в векторной форме:
r' = r-W+/ -L_-i|I((Vt)-V20)· (12.11)
Подставляя сюда вместо t разность t2 — tx и вместо г — разность
Го — Γι и заменяя V выражением (12.09), получим для величины
г = 1*2 — гj значение
Пространственное расстояние между обоими событиями в
штрихованной системе отсчета будет равно
|r2-r;| = tf. (12.13)
64
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
где R есть пространственный интервал (12.07). Формула (12.13)
непосредственно вытекает из инвариантности величины R и из условия,
что t'2 — t\ = Q.
Таким образом, физическое значение пространственного интервала
между двумя квазиодновременными событиями есть расстояние между
ними в той системе отсчета, где они одновременны.
Рассмотрим теперь два последовательных события, для которых
выполняется одно из неравенств (12.01) или (12.02). Покажем, что
в этом случае можно ввести новую (штрихованную) систему отсчета
так, чтобы пространственные координаты обоих событий в ней
совпадали. Чтобы убедиться в этом, достаточно ввести в формулу (12.11)
вместо t разность t2 — tx и вместо г — разность г2 — тх и положить
V = i=b.. (12.14)
г2 — τχ
Тогда вектор г' = г'2 — г^ обратится в нуль, откуда
г;=г;. (12.15)
Вследствие неравенства (12.03) скорость V будет при этом по
абсолютной величине меньше скорости света
V2<c2. (12.16)
В новой системе отсчета промежуток времени между обоими
событиями будет равен, согласно (12.08),
При t2 — tx > 0 получаем отсюда
t'2 — t[ = Tt (12.18)
где Т есть временной интервал (12.04).
Тем самым выясняется физическое значение временного интервала Т.
Это есть протекший между двумя последовательными событиями
промежуток времени в той системе отсчета, в которой оба события
произошли в одной точке. Такая система отсчета имеет весьма
наглядный смысл. Это есть, скажем, часы, прямолинейно и равномерно
движущиеся от места первого события к месту второго, причем
движение их происходит с такой скоростью, что они как раз успевают
поровняться с местом первого события, когда оно там происходит,
и с местом второго события, когда там наступает оно.
Заметим, что понятие „последовательные события" обладает
свойством транзитивности: если дано, что второе событие наступило
абсолютно позже первого, а третье событие — абсолютно позже второго,
то отсюда следует, что третье событие наступило абсолютно позже
§. 12] ПОСЛЕДОВАТЕЛЬНОСТЬ СОБЫТИЙ ВО ВРЕМЕНИ 65
первого. Это физически очевидное свойство может быть формально
доказано следующим образом: из двух неравенств
'2-Ί>τΙ'2-Ί|. *8—*2>4"'Г3—Г»1 <12Л9>
вытекает путем сложения третье неравенство
'3-Ί>τ|Γ3-«·ιΙ. (12.20)
ибо сумма двух сторон треугольника больше третьей стороны.
Понятие же „квазиодновременные события" свойством транзитивности не
обладает: если дано, что два события квазиодновременны, а третье
событие квазиодновременно со вторым, то это третье событие может
быть, по отношению к первому, как квазиодновременным, так и
последовательным (наступить абсолютно раньше или абсолютно позже
первого).
Резюмируем сказанное. В теории относительности события
разделяются, в отношении их последовательности во времени, на
последовательные и квазиодновременные, причем разделение это не
зависит от системы отсчета. Двум последовательным событиям можно
сопоставить инвариантный временной интервал, равный промежутку
времени между ними в определенной системе отсчета. Двум квази-
одновременным событиям можно сопоставить инвариантный
пространственный интервал, равный расстоянию между ними в определенной
системе отсчета.-
Существующее в теории относительности разделение событий на
последовательные и квазиодновременные согласуется с понятием
причинности и уточняет его. Если даны два квазиодновременных
события, то ни одно из них не может являться непосредственной
причиной или следствием другого. (Разумеется, они могут иметь общую
причину в виде третьего события, которое наступило абсолютно
раньше каждого из них.) Только последовательные события могут
(хотя, разумеется, не обязаны) находиться в прямой причинной связи:
то из них, которое наступило абсолютно раньше, может оказаться
причиной другого.
Введенные здесь понятия являются естественным обобщением
понятий старой, дорелятивистской физики. Старые понятия не были
согласованы с фактом существования конечного предела для скорости
распространения всякого рода действий (конечной скорости света). Они
были недостаточно точно определены и приводили поэтому к
парадоксам. Новые же понятия с самого начала учитывают конечность
скорости света и устраняют эти парадоксы.
В старой физике вводилось априорное (не основанное на опыте)
понятие абсолютной одновременности. Рассмотрим один из парадоксов,
К которым это понятие приводит. Пусть мы имеем две системы отсчета*
56
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
движущиеся друг относительно друга прямолинейно и равномерно,
причем в некоторый момент времени начала координат их совпадают.
Предположим, что в этот момент времени в общем начале координат
произошла, световая вспышка, и рассмотрим движение фронта волны
с точки зрения обеих систем отсчета. С точки зрения первой системы
фронт волны в каждый момент времени есть шар с центром в начале
координат первой системы. Но то же самое можно утверждать и
с точки зрения второй системы: там фронт волны в каждый момент
времени есть шар с центром в начале координат второй системы.
Между тем оба начала координат совпадали только в начальный
момент времени, а потом разошлись; у шара же не может быть двух
разных центров. Рассуждения эти используют, с одной стороны,
принцип относительности, т. е. тот факт, что в двух системах,
движущихся друг относительно друга равномерно и прямолинейно, все
явления происходят одинаково, и, с другой стороны, вытекающий
из понятия поля принцип независимости скорости света от скорости
источника. Но оба эти принципа совершенно бесспорны. В чем же
тогда разъяснение парадокса?
Разъяснение состоит в том, что слова „в каждый момент времени"
имеют в применении к первой и ко второй системе отсчета
неодинаковый смысл. Парадокс возникает только, если понимать эти слова
в смысле „в каждый момент единого абсолютного времени, общего
для обеих систем". Существование такого „единого абсолютного
времени" считалось само собою разумеющимся в старой физике, но
отрицается в теории относительности. Как мы знаем, согласно теории
относительности, время в одной системе отсчета не то же самое, что
время в другой системе. Фронт волны в каждой системе отсчета
определяется как одновременное с точки зрения данной системы
положение тех точек, до которых дошло световое возмущение. А так как
события, одновременные в одной системе отсчета, не будут
одновременными в другой, то и фронт волны в первой системе отсчета будет
состоять из других точек, чем во второй системе. Если мы для
наглядности представим себе, что распространение световой волны
происходит в некоторой разреженной среде (в газе), то фронт волны
в первой системе будет проходить через другие частицы газа, чем
во второй системе. Поэтому мы фактически будем иметь дело с
разными фронтами волны, и неудивительно, что у них будут разные центры.
Приведенное здесь разъяснение парадокса с наглядностью
показывает логическую необходимость отказа от понятий „абсолютное
время" и „абсолютная одновременность".
Полвека назад, когда теория относительности только возникала,
отказ этот многим казался чем-то почти неприемлемым, и со стороны
создателя теории относительности Эйнштейна потребовалась большая
научная смелость, чтобы прийти к убеждению в его необходимости.
3 настоящее же время мы принимаем этот отказ гораздо легче.
§ 13] СРАВНЕНИЕ ПРОМЕЖУТКОВ ВРЕМЕНИ 67
Житейское понятие одновременности покрывается понятием
квазиодновременности, в научных же вопросах, там, где мы имеем дело с
большими расстояниями или с большими скоростями, необходимость
уточнения понятия времени представляется совершенно естественной.
§ 13. Сравнение промежутков времени в движущихся
системах отсчета. Явление Допплера
Пусть дана некоторая система отсчета (базис), которую мы будем
принимать за неподвижную. Проследим с точки зрения этого базиса
за ходом некоторого процесса в движущейся системе. В качестве
такого процесса можно взять, например, равномерный ход часов,
связанных с движущейся системой. Проследить за ходом часов, если
они движутся, можно, скажем, заставив их ежесекундно испускать
световые сигналы (или просто рассматривая издали показания их
стрелок). Кроме того, нужно иметь на базисе такое устройство
(скажем, радиолокационное), которое бы непрерывно отмечало расстояние
от базиса до движущихся часов. Тогда, отмечая по часам базиса
моменты поступления „ежесекундных" световых сигналов и вводя
каждый раз поправку на время прохождения сигнала от движущихся
часов до базиса, мы можем определить моменты tn испускания этих
„ежесекундных" сигналов. Поправка эта вычисляется весьма просто.
Пусть r(t) есть измеренное с базиса расстояние до движущихся
часов, выраженное в функции времени t на базисе. Тогда величина tn
получается из непосредственно наблюденной величины f по формуле
t*+rJr-=C (13·01>
Возникает вопрос, будут ли моменты времени tn также
ежесекундными? Другими словами, если на базисе имеются часы точно такого же
устройства, как наблюдаемые с базиса движущиеся часы, то будут ли
вычисляемые моменты времени tn совпадать с секундами по часам на
базисе?
Ответ на этот вопрос дается формулами преобразования Лоренца.
Предположим, что часы удаляются от базиса по прямой, проходящей
через начало координат на базисе. (Мы считаем, что прибор,
регистрирующий сигналы, находится в начале координат.) Беря эту
прямую за ось χ и предполагая, что при t = 0 часы проходили через
начало, мы можем определить положение движущихся часов
уравнениями
x = vtt у = 0, * = 0§ (13.02)
причем величина χ будет также расстоянием г от базиса.
Применение формулы (13.01) показывает, что секундный сигнал, воспринятый
68 теория относительности [гл. ι
на базисе в момент f*n, был испущен в момент времени
1 + 7
по часам базиса. Введем теперь по формулам преобразования Лоренца
t-Ц.
х' = %Z^L=-, t'= r-^=r (13.04)
/·-*' />-£
систему отсчета, связанную с движущимися часами. Обратные
формулы, как мы знаем, имеют вид
Г + —
х' 4-vt' ' с2
~— X^vt t= r C =. (13.05)
/>-*■ /■-*'
В штрихованной системе положение часов, подающих сигналы, будет
хг = 0, У = 0, zr = 0, а моменты отправления сигналов будут
t'n = nxt (13.06)
где постоянная τ (зависящая только от устройства часов, но не от их
движения) равна, скажем, 1 секунде. Следовательно, будет
ητ (13.07)
• at
С другой стороны, часы такого же устройства, имеющиеся на базисе,
отбивают моменты времени #τ. Таким образом, наблюдаемые с базиса
движущиеся часы будут отставать по сравнению с часами на базисе.
Определяемые по наблюдениям на базисе моменты отправления
сигналов будут отстоять не на величину τ (одну секунду), а на
большую величину т
if * . (13.08)
Необходимо помнить, что этот результат получается уже после
введения поправки на конечную скорость распространения сигналов.
Непосредственно же наблюдаются моменты прибытия сигналов на
базис, равные >
'Η1+^Κ=*τ1/ ;ζί (13·09)
§ 13] СРАВНЕНИЕ ПРОМЕЖУТКОВ ВРЕМЕНИ 69
и отстоящие друг от друга на величину
Δ<· = τ/"£=£. (13.10)
Для простоты выкладок мы рассматривали тот случай, когда
движущиеся часы удаляются прямо от наблюдателя (т. е. от прибора,
регистрирующего посылаемые ими световые сигналы). Рассмотрим
теперь более общий случай, когда траектория часов не проходит через
прибор. Пусть прибор по-прежнему расположен в начале координат,
а движение часов определяется, вместо (13.02), уравнениями
x = vtt y = y0, z = zQ (13.11)
в системе отсчета, связанной с базисом, и уравнениями
*' = 0, / = 0, z' = 0 (13.12)
в системе отсчета, связанной с часами.
Переход от одной системы отсчета к другой дается по-прежнему
преобразованием Лоренца (13.04)—(13.05). Поэтому связь между V
и t% а значит и формула (13.08), дающая отставание движущихся
часов, остается без изменения. Изменится только связь между f и tt
т. е. формула для пересчета от момента приема к моменту
испускания сигнала. А именно, мы будем иметь, вместо (13.09),
С = '. + 7^ + у5+4 <13ЛЗ>
Считая промежуток времени τ малым, мы м*ожем положить
Δ/» = ^Δί = (ΐ+^)Δί, (13.14)
где
Vr = EL=^==£i (13.i5)
есть радиальная составляющая скорости часов в момент испускания
ими сигнала. Из (13.08) и (13.14) получаем
Δί* = τ.-^±^=-. (13.16)
Эта формула заменяет (13.10) для общего случая.
Отличие ΔΓ от τ является выражением эффекта Допплера,
который, как известно, состоит в следующем. Если в движущейся системе
происходит периодический процесс с периодом τ, то регистрируемый
в некоторой точке неподвижной системы период Δ£* оказывается
большим чем τ, когда система удаляется от этой точки, и меньшим чем τ,
когда система приближается к ней. Формула (13.16) дает
релятивистское выражение эффекта Допплера для случая распространения света
60
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
в свободном пространстве. Классическая дорелятивистская формула
получится, если не делать различия между V и t и заменить в (13.14)
Δ/ на τ (это вносит относительную ошибку порядка v2/c2).
Заметим, что исторически первое определение скорости света в
свободном пространстве, произведенное в 1675 г, Олафом Ремером, было,
в сущности, основано на эффекте Допплера. Движущимися часами
служила система спутников Юпитера, а наблюдавшийся периодический
процесс состоял в периодических затмениях спутников. Примерно на
протяжении половины земной орбиты Земля приближается к Юпитеру,
и тогда vr < 0, на протяжении другой половины Земля удаляется от
Юпитера, и тогда vr > 0. Применяя вместо (13.16) упрощенную
формулу (13.14), можно взять в качестве Δ/ средний (за год)
наблюдаемый промежуток времени между двумя затмениями. Тогда на той части
земной орбиты, где vr < 0, будет Δύ* < Δ£, т. е. будет наблюдаться
опережение затмений по сравнению со средним, а на той части, где
vr > 0, будет ΔΓ > Δ£, т. е. будет наблюдаться запаздывание. Так
как скорость vr известна из теории движения Земли и Юпитера, то
соотношение (13.14) дает возможность вычислить скорость света с.
Ремер получил таким путем значение с равное 3,1 · 1010 см/сек, т. е.
чрезвычайно близкое к принятому теперь значению 3,0· 1010 см/сек,
полученному гораздо более точными методами.
Подчеркнем еще раз, что в теории явления Допплера учитываются
два фактора: во-первых, пересчет от момента f прибытия к моменту t
испускания светового сигнала и, во-вторых, связь между временем t
в системе отсчета, в которой сигналы регистрируются, и временем V
в системе отсчета, связанной с телом, которое эти сигналы испускает.
Первый из этих факторов (пересчет от f к f) вводит множитель,
зависящий от радиальной составляющей скорости; этот фактор
учитывался уже в дорелятивистской теории. Второй фактор (пересчет от t
к tr) вводит множитель, зависящий от абсолютной величины скорости;
он основан на преобразовании Лоренца и является характерным для
теории относительности.
§ 14. Сличение показаний часов в движущихся
системах отсчета
В предыдущем параграфе мы рассмотрели способ сравнения
промежутков времени в разных системах отсчета, основанный на
использовании световых сигналов, с учетом времени их распространения.
Принципиально возможен, однако, и другой способ, в котором
сравниваются показания часов, проходящих в непосредственной близости
друг от друга.
Представим себе ряд часов, расположенных на одной прямой,
принадлежащих одному базису, неподвижных в нем и заранее син-
§ 141
СЛИЧЕНИЕ ПОКАЗАНИЙ ЧАСОВ
61
хронизованных друг с другом. Пусть мимо них движутся часы Л.
Чтобы проследить за ходом часов Л, достаточно сличить их
показания с показаниями тех часов базиса, мимо которых они в данный
момент проходят. Очевидно, достаточно иметь на базисе двое часов;
можно представить себе базис состоящим из этих двоих часов,
соединенных твердым стержнем.
В системе отсчета базиса координаты неподвижных часов и
движущихся часов А будут
х = а (первые часы базиса), ]
х = Ь (вторые часы базиса), \ (14.01)
xz=vt (часы А). )
По формулам преобразования Лоренца (13.04)—(13.05) мы можем
ввести систему отсчета, связанную с часами А. В ней координаты
часов базиса и часов А будут
х' = — vtf -\-а! (первые часы базиса), ]
х*' = — vt'-\-b' (вторые часы базиса), | (14.02)
*' = 0 (часы А),
где постоянные а' и V связаны с а и Ь соотношениями
(14.03)
Не становясь на точку зрения какой-либо из этих двух систем
отсчета, мы запишем следующие объективные данные: во-первых,
показания часов А и первых часов базиса, когда они приходились
друг против друга, и, во-вторых, показания часов А и вторых часов
базиса, когда друг против друга приходились они. Обозначая
показания часов А через t'^ и t'2 и соответственные показания первых и
вторых часов базиса через tx и t2, будем иметь, вследствие (14.01)
и (14.02):
f — —
1 ν ' .
Ь „ *' ) (14·04>
1 ν
t — — t' — —
причем, вследствие (14.03),
(14.05)
Эти данные позволяют нам судить, с одной стороны, о ходе
часов Л, наблюдаемом с базиса, и, с другой стороны, о ходе часов
базиса, наблюдаемом в системе отсчета, связанной с А. Под ходом
62
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
процесса, наблюдаемым в той или иной системе отсчета, мы разумеем
ход процесса, выраженный через то время, которое соответствует
присущей данной системе отсчета синхронизации.
Величины tx и t2 представляют показания разных часов базиса;
но так как в системе отсчета базиса эти часы синхронизованы, то,
употребляя слово „когда" в смысле этой синхронизации, мы можем
утверждать, что когда вторые часы показывали время t2t то и первые
часы показывали то же время t2. Поэтому разность t2—tx
представляет просто время, протекшее в системе отсчета базиса, пока
показания часов А изменились на t'2— trv Таким образом, ход часов А%
наблюдаемый с базиса, определяется уравнением
^-^в-м/*1--$-· <14·06>
Так как \t2— ^|<|*2 — ^ι|» τ0 часы А* наблюдаемые с базиса,
будут отставать. Полагая tr2 —1[ = %, t2 — tx = btt мы получим
совпадение с формулой (13.08).
Рассмотрим теперь ход часов базиса, наблюдаемый в системе
отсчета, связанной с Л. Чтобы судить о ходе часов, необходимо
проследить за показаниями одних и тех же часов, в данном
случае— за показаниями либо первых, либо вторых часов базиса.
Остановимся для определенности на вторых часах. Для них мы имеем
только одно непосредственное показание (когда они находились
против часов Л, показывавших время t'2% сами они показывали время t2).
Другое показание вторых часов нужно вычислить по имеющимся
данным. Поставим поэтому вопрос: где были вторые часы и сколько
они показывали, когда против часов А находились первые часы?
Существенно помнить, что слова „где" и „когда" употребляются теперь
в смысле системы отсчета, связанной с Л (в смысле штрихованной
системы). На этот вопрос легко ответить. Когда против А находи-
л аГ Of
лись первые часы, часы А показывали время г1 = —, вторые же часы
находились тогда (согласно (14.02)) в точке х' = br— а'. Показание t
вторых часов получится подстановкой значений f = t'x и χ' = Ъ' — а'
в формулу преобразования Лоренца (13.05). Мы будем иметь
<+£<*'—о
t= ' =tl+°(b-a) (14.07)
или
§ 14]
Сличение показаний часов
63
(Показание t вторых часов уже не будет совпадать с
показанием tx первых часов, потому что одновременность понимается
теперь в смысле системы отсчета, связанной с Л, а не с базисом.)
Вычисленное по формуле (14.08) показание вторых часов вместе
с непосредственно наблюденным их показанием t2 позволяет
определить ход вторых часов в системе отсчета, связанной с часами Л. Мы
имеем
'a-' = ('a-'i)(l—£). (14-09)
откуда окончательно
Таким образом, в системе отсчета Л движущиеся относительно нее
часы на базисе опять-таки отстают, и мы имеем относительно
обеих систем отсчета полную взаимность.
Иногда говорят, что в движущейся системе время идет медленнее,
чем в неподвижной. Такая формулировка, однако, неправильна, так
как, на основании принципа относительности, всегда можно поменять
ролями движущуюся и неподвижную систему, и тогда получилось бы
противоречие.
Характер возникающих здесь недоразумений легче всего пояснить
на математическом примере (который, впрочем, имеет прямое
отношение к данному вопросу). Мы видели в § 10, что для
преобразования Лоренца
■у = °оо= / ' _. >'■ (1*-И>
/-*
Но и для обратного преобразования мы имеем
dt 1
*,---оо т=г>1- (14-12)
/>~5
Если забыть про то, что в (14.11) производная по t берется при
постоянных х, у, ζ, а в (14.12) производная по f берется при по-
стоянных х\ у', ζ % то может показаться странным, что -^тг не равно
dt'
обратной величине -^т-, а равно ей самой. Ясно, однако, что
никакого „парадокса" тут нет.
Возвращаясь к физической стороне дела, можно сказать, что
в данной задаче речь идет не б „ходе времени" в разных системах
отсчета, а об описании хода некоторого локализованного процесса
в разных системах отсчета. Пусть процесс локализован в точке,
64
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
неподвижной в нештрихованной системе отсчета (постоянные х, у, z).
dt*
Тогда из -дт- > 1 мы заключаем, что длительность (или период)
процесса в „своей" (нештрихованной) системе отсчета будет меньше,
чем во всякой другой (штрихованной) системе, которая относительно
„своей" системы движется. Если же процесс локализован в точке
с постоянными координатами х\ у', г'% то „своей" системой будет
штрихованная, и мы будем иметь -тр- > 1, но по существу
заключение не изменится.
Если длительность процесса в „своей" системе отсчета была dx%
то в другой системе отсчета, движущейся относительно нее со
скоростью V, она будет равна dt > dx% причем
<-/'--£
άτ=γ 1 —-^dt. (14.13)
Здесь V есть скорость, входящая в преобразование Лоренца,
связывающее обе рассматриваемые системы отсчета. По абсолютной
величине V равно той скорости ν, с которой движется точка, где
локализован процесс, и составляющие которой равны
dx dy dz /л л 1 .ч
Поэтому мы можем, вместо (14.13), написать
</τ = |/"ΐ —-J dt. (14.15)
Нетрудно видеть, что это выражение является инвариантом по
отношению к преобразованиям Лоренца. Величину dx можно
рассматривать, как дифференциал „собственного времени" τ, определяемого
уравнением ,
x = f]/r\-^dt (14.16)
о
(Здесь принято, что при £ = 0 будет τ = 0.) Если скорость ν —
постоянная, то τ есть измеренная в „своей" системе отсчета
длительность процесса, связанного с движущейся точкой (отсюда название
„собственное время"). Если же скорость ν — переменная, то
физический смысл величины τ не является очевидным. Во всяком случае
можно рассматривать τ как вспомогательную математическую
величину, которой удобно пользоваться ввиду ее инвариантности по
отношению к преобразованию Лоренца. Название „собственного
времени" сохраняется за величиной τ и при переменной скорости v.
Если движущееся тело — часы находится в поле тяготения,
которое и является причиной его ускорения, то для времени, показы-
§ 15)
СРАВНЕНИЕ РАССТОЯНИЙ И ДЛИН
65
ваемого этими часами, можно указать другое выражение, содержащее
кроме скорости ν также и потенциал тяготения (см. (62.03));
выражение же (14.16) будет в этом случае неправильным. Правильное
выражение может быть обосновано теорией тяготения Эйнштейна,
хотя оно и не является прямым следствием этой теории (см. § 62).
Что касается обычной теории относительности, то она позволяет
делать в общем виде (т. е. не вникая в сущность происходящих
процессов) только те заключения, которые относятся к
неускоренному движению. Вообще же никакая теория не может, не входя
в детали устройства часов, предсказать, как будут себя вести эти
^асы в условиях, когда они подвергаются толчкам или
произвольному ускорению. Этого не может сделать и теория тяготения;
приведенное в § 62 выражение для времени, показываемого ускоренно
движущимися часами, относится к тому случаю, когда это
ускорение вызвано полем тяготения.
Правда, можно было бы ввести в рассмотрение часы
малочувствительные, а в пределе и вовсе нечувствительные к толчкам
и ускорению (скажем, атомную систему с большими внутренними
частотами). Тогда можно было бы предположить, что собственное
время τ измеряется показаниями этих идеально нечувствительных
часов, в чем и состоит его физический смысл. Следует, однако,
отметить, что такое предположение, хотя и не противоречит теории
относительности, но из нее не вытекает, а представляет особую
гипотезу. К этому вопросу мы вернемся в § 61 и 62.
§ 15. Сравнение расстояний и длин в движущихся системах
отсчета
Если предмет в данной системе отсчета неподвижен, то
определение его геометрических размеров и формы необязательно должно
происходить мгновенно. Неподвижный предмет можно обмерить
постепенно, отметив последовательно положение разных его точек.
Напротив того, чтобы судить о размерах и форме движущегося
предмета, совершенно необходимо, чтобы все отмеченные положения
разных его точек относились к одному моменту времени: иначе мы
получим искаженную картину.
Отсюда ясно, что понятие о размерах и форме движущегося
предмета тесно связано с понятием об одновременности. Мы уже
видели, что понятие одновременности не является абсолютным,
а зависит от системы отсчета; поэтому мы должны ожидать, что
размеры и форма предмета также не являются абсолютными, а должны
задаваться по отношению к определенной системе отсчета.
В качестве простейшего примера рассмотрим длину стержня,
измеряемую в разных системах отсчета.
5 Зак. 2649. В. А. Фок
66
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
Пусть две системы отсчета движутся друг относительно друга
в направлении их общей оси х. Координаты и время в них связаны
преобразованием Лоренца, которое мы выпишем здесь еще раз. Мы
имеем
vx
. χ — vt
χ' =-
/■-■£
у' = у, ζ' = ζ.
(15.01)
Пусть направление стержня совпадает с направлением относительной
скорости движения обеих систем отсчета (с осью х) и пусть
стержень неподвижен в нештрихованной системе. В этой системе отсчета
координаты обоих концов стержня будут все время
jt = a, y = 0, z = 0 (первый конец стержня), \
х = Ь, У = 0, z = 0 (второй конец стержня), J
и если b > α, то длина стержня / будет
1 = Ъ — а. (15.03)
В движущейся относительно стержня штрихованной системе отсчета
координаты его концов будут
(первый конец), \
(15.04)
(второй конец), j
α' = α|Λ —J-, *' = *|Λ—J. (15.05)
Длина стержня есть расстояние между одновременными положениями
его концов. В штрихованной системе отсчета одновременность
понимается в смысле одинаковых значений t't а расстояние выражается
по обычной формуле через разности штрихованных координат.
Поэтому в штрихованной системе длина стержня будет равна
V = V — a*. (15.06)
Отсюда
χ'= — ν?-\-α'.
X' = — Vt'-\-b',
где
у' = о.
у' = о.
z' = 0
z' = 0
I'
=lV^—£· ο5·ο7)
Таким образом, в той системе отсчета, в которой стержень имеет
(в направлении своей длины) скорость ν, стержень оказывается
укороченным: длина его /' будет меньше той длины /, какая
получается для неподвижного стержня.
Если бы мы ввели в рассмотрение поперечные размеры стержня
(в направлениях осей у н zt перпендикулярных к скорости), то мы
§ 15]
СРАВНЕНИЕ РАССТОЯНИЙ И ДЛИН
67
убедились бы, что эти поперечные размеры не меняются.
Следовательно, объем стержня уменьшается в той же пропорции, как его
продольные размеры. То же заключение остается справедливым для
тела произвольной формы. Если V есть объем тела в той системе
отсчета, где оно неподвижно, то в системе, относительно которой
тело движется со скоростью ν, объем его V будет равен
V' = V./"l-£. (15.08)
Пусть имеются два одинаковых параллельных стержня,
относительная скорость которых параллельна их длине. Тогда в системе
отсчета, связанной с первым стержнем, второй будет представляться
укороченным и наоборот. Положение вещей здесь то же, как в
примере с часами; так же как и там, здесь нет никакого парадокса.
Различие в получаемых значениях длины происходит от различия
в определении одновременности. Положения концов стержня,
которые были одновременными в одной системе отсчета, уже не будут
таковыми в другой системе отсчета (там они будут только квази-
одновременными). Пусть ха есть положение конца А в момент
времени ta, a хь— положение конца В в момент времени tb.
Соответствующие величины в другой системе отсчета мы обозначим теми же
буквами со штрихами. В силу инвариантности пространственного
интервала мы имеем
рш-'Я-Щ-'Я^Рш-ф-Щ-ф- о5·09)
Если мы положим здесь ta = tb, то будет t'a Φ t'b и, следовательно,
\*а-*ъ\<\*'а-*'ь\· (15Л0>
Слева стоит длина стержня в нештрихованной системе; величина же
в правой части будет длиной стержня в штрихованной системе,
если он там неподвижен (ибо тогда необязательно относить х' и хг
а Ь
к одному и тому же моменту времени V% а можно брать и f Φ t'b\
Если же мы положим t'a = trb, то будет ta Φ tb и- следовательно,
\*a-*b\>\*'a-*b\. 05.11)
Но теперь левая часть есть длина стержня в той системе отсчета,
где он неподвижен, тогда как правая часть есть длина в
произвольной штрихованной системе.
В этих рассуждениях симметрия формул относительно
штрихованной и нештрихованной системы отсчета очевидна с самого начала;
поэтому и самые рассуждения могут показаться тривиальными. Мы
привели их для того, чтобы еще раз обратить внимание на тесную
связь между понятиями одновременности и длины.
5*
68
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
§ 16. Относительная скорость
В дорелятивистской механике относительная скорость двух тел
определялась как разность их скоростей. Пусть измеренная в
определенной системе отсчета скорость одного тела есть и, а
другого v. Тогда скорость второго тела относительно первого
полагалась равной w = ν — и. Такое определение является инвариантным
относительно преобразования Галилея, но не относительно
преобразования Лоренца. Поэтому оно в теории относительности не годится
и должно быть заменено другим. То обстоятельство, что выражение
w = v— u не имеет физического смысла, становится очевидным из
рассмотрения следующего примера. Пусть скорости и и ν
направлены в противоположные стороны, а по абсолютной величине близки
к скорости света (или равны ей). Тогда „скорость" w будет по
абсолютной величине близка (или равна) удвоенной скорости света,
что явно нелепо.
Мы дадим поэтому новое определение относительной скорости,
согласное с требованиями теории относительности и имеющее
прямой физический смысл. Пусть в некоторой системе отсчета скорость
первого тела есть и, а второго тела v. Мы можем ввести такую
(штрихованную) систему отсчета, в которой скорость одного из тел
(например, первого) равнялась бы нулю. Тогда скорость ν' второго
тела в этой системе отсчета мы и будем толковать как
относительную скорость второго тела по отношению к первому. Мы увидим,
что абсолютная величина скорости ν' зависит от и и ν
симметричным образом. Поэтому относительная скорость двух тел не зависит
от того, которое из них принимается (в новой системе отсчета) за
неподвижное.
Для пояснения физического смысла нашего определения
относительной скорости рассмотрим следующий пример. Предположим, что
мы наблюдаем с земли два самолета. Пусть скорость первого
самолета равна и, а второго v. Предположим теперь, что первый
самолет снабжен радиолокационной установкой, позволяющей измерять
скорость второго самолета относительно первого. Измеренная таким
образом скорость и будет той относительной скоростью, которая
отвечает нашему определению.
Нам нужно выразить эту относительную скорость через
составляющие скоростей u, v (через скорости самолетов, наблюдаемые с земли).
Для этого напишем общие формулы преобразования Лоренца,
выведенные в § 10. Мы имеем, для прямого преобразования,
:r-V<+(<>»,-l)-j!i«V-r)-l«0.
*—.(«-^).
(16.01)
§ 16] ОТНОСИТЕЛЬНАЯ СКОРОСТЬ 69
и для обратного преобразования
r = r'+V<' + (a00-l)-^-((V-rO + Vn
,^+ClLY)).
(16.02)
где мы воспользовались обозначением (10.15) и положили
floo= r^—vf· <16·03>
Чтобы в штрихованной системе первый самолет (имевший
относительно земли скорость и) был неподвижен, мы должны положить
У, = «,. Vy = »y Vz = "z· 06.04)
Скорость второго самолета, измеренная с земли, равна
v=-3Jp (16.05)
тогда как скорость того же второго самолета, измеренная с первого,
будет равна
ν' = ^Γ· (16.06)
Соотношения между этими величинами получатся
дифференцированием формул (16.01) — (16.02). Мы будем иметь
v-u + iaoo-O-^-aii.v)-^)
V = 7 £т^ч · (16.07)
#оо
а также
0--^)
ν'+ и + (а00 -1)-^ ((и · ν') + «2)
V== fl4.<"*>\ ' (16'08)
«oo(l + -V^J
Где, согласно (16.03) и (16.04),
aoo= rl—zf. (16.09)
/"■-*"
Уравнение (16.08) представляет решение уравнения (16.07)
относительно v. Так как преобразование Лоренца линейно относительно
координат и времени, то штрихованные составляющие скорости г£§
70
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ
[гл. ι
v' vrz представляют дробно-линейные функции от нештрихованных
составляющих vx, vyt vv
Составим выражение для квадрата вектора ν', τ. е. для квадрата
относительной скорости первого и второго самолетов. Мы будем
иметь
(u-vb-i[iiXvF
Как мы уже отмечали, это выражение симметрично относительной, v.
Проверим, что из неравенств а2 < с2, v2 < с2 вытекает неравенство
ν'2 < с2, каковы бы ни были направления векторов u, v. В самом
деле, мы имеем
В силу условий а2 < с2, ν2 < с2 правая часть здесь всегда
положительна; следовательно, будет положительной и левая часть, откуда
ν'2 < с2, В предельном случае, когда одна из скоростей u, v равна
скорости света, относительная скорость ν' также будет равна
скорости света, что соответствует основному предположению, на
котором построена вся теория относительности.
Заметим, что квадрат относительной скорости является
инвариантом по отношению к преобразованию Лоренца. Это значит, что если
мы в формулу (16.10) подставим вместо скоростей u, v обоих
самолетов относительно земли их скорости и", ν" относительно какой-
нибудь третьей системы отсчета (скажем, относительно третьего
самолета), то хотя и", ν" не будут равны и, ν, но все выражение
(16.10) для ν'2 примет прежнее значение. Очевидно, так и должно
быть по самому смыслу величины ν'2 как квадрата относительной
скорости.
Формула (16.07) упрощается, если в данной системе отсчета
скорости u, v параллельны или если они перпендикулярны. В первом
случае мы получим
v'= s~Zs) (при 1иХу)=°). (16Л2>
1 с5-"
а во втором случае мы будем иметь
Y' = vj/~l-i£_u (при (u.v) = 0). (16.13)
§ 17] ПРОСТРАНСТВО СКОРОСТЕЙ ЛОБАЧЕВСКОГО — ЭЙНШТЕЙНА 71
Формула (16.12) (в которой скорость и вводится обычно с обратным
знаком) носит название эйнштейновой теоремы сложения скоростей.
В общем случае можно высказать следующее утверждение. Если
рассматривать „пространство скоростей" как пространство
Лобачевского, то правило сложения скоростей в теории относительности
совпадает с правилом сложения векторов в геометрии Лобачевского.
Это утверждение будет доказано в следующем параграфе.
§ 17. Пространство скоростей Лобачевского — Эйнштейна
Рассмотрим относительную скорость двух тел, движущихся
с бесконечно близкими скоростями ν и v + fifv. Деленную на
скорость света с абсолютную величину этой относительной скорости
мы обозначим через ds. Положив в выражении (16.10) u = v + ^v,
получим, по разделении на с2,
d$2=cH^^it (1701)
или иначе
0_(*-Μ»+Τ-*ν. (17.02)
По физическому смыслу выражения (17.01), пропорционального
квадрату бесконечно малой относительной скорости, оно является
инвариантом по отношению к преобразованию Лоренца. Это можно
проверить и непосредственно, подставив вместо величин vx, vyf vz
их выражение из (16.08) в виде дробно-линейных функций от ν'χ%
ν' νζ: тогда ds2 будет той же функцией от νχ, ν' г/, dv'x, dv'
dv'z, как от vx, vr vz, dvx, dvyt dvz.
Выражение (17.01) или (17.02) мы будем рассматривать как
квадрат элемента длины в некотором пространстве скоростей. Это
есть то пространство, в котором строится в обычной механике
годограф скоростей. Пространство это обладает всеми свойствами
пространства Лобачевского, примем деленные на с составляющие
скорости νχ9 vy, vz являются в нем так называемыми координатами
Бельтрами (см. книгу В. Ф. Кагана [9], формула CVIII на стр. 453).
Свойства пространства Лобачевского могут быть выведены из
рассмотрения выражения (17.01).
Кривая в пространстве Лобачевского может быть задана путем
задания величин vx, vyt vz как функций от некоторого параметра р.
Если концам кривой соответствуют значения рх и /?2, то длина дуги
кривой определится формулой
Pi
s= f V2Fdp, (17.03)
72
где
Теория относительности
Ρ 1 ν2 . 1 (ν·ν)2
r ~~ 2 с2 —ν2 ' 2 (с2 —г;2)2 '
Эти уравнения имеют вид
d dL
dp dvx
или
d / 1 d/7 \
rf/? I /2? <й, /
-—=±=0
dvx
1 d/7
[гл. τ
(17.04)
причем точкой обозначены производные по параметру р. Найдем
уравнения прямой Лобачевского, т. е. кратчайшей кривой,
соединяющей точки р1% р2. Для этого нужно приравнять нулю вариацию
интеграла (17.03), т. е. составить уравнения Лагранжа с функцией
Лагранжа
L = |/2F. (17.05)
и т. д. (17.06)
= 0 и т. д. (17.07)
Параметр ρ оставался до сих пор произвольным. Мы его выберем
так, чтобы было
-^==0, /7 = const. (17.08)
При таком выборе параметра ρ уравнения (17.07) будут равносильны
следующим;
d dF dF Λ ζ - - ΛΛ4
-τ Г~=° и Τ· Д· (17.09)
dp dvx dvx
Так как функция F не содержит явно параметра /?, то будет
^i+^+^-f=const· (17Л0>
dvx y dvy dvz
т. е. величина (17.10) будет интегралом уравнений Лагранжа. Но F
есть однородная квадратичная функция от vx, vyt vz; поэтому
величина (17.10) равна F и, следовательно, условие (17.08) будет
следствием уравнений (17.09).
Выпишем уравнения (17.09) подробнее и найдем их интегралы.
Мы имеем
■i£=.A__ + t, (ν·ν) (17Л1)
dvx с3 — ν2 ' * (с2 —ϋ2)2
JL^ ( ϊ! μ 2<ν·^ \ + j <v-v> (17 12)
§ 17] ПРОСТРАНСТВО СКОРОСТЕЙ ЛОБАЧЕВСКОГО — ЭЙНШТЕЙНА 73
Введем вектор w с составляющими
*>х= с%1& » wy = ?1Ό2 » wz= c*-v*' (17ЛЗ)
Формулы (17.11) и (17.12) напишутся тогда
dF ι (ν· w) /1T . -ч
^ = ^ + ^^7· <17Л4>
-|- = ^ + 2-£-^1)-Ь^(у · w). (17.15)
Дифференцируя (17.14) по параметру ρ и выражая ν через w,
получим
it=^+"'^+"'(",!+2^=?)+™-<v-w)(,7i6)
Подставляя (17.15) и (17.16) в уравнение Лагранжа (17.09),
убедимся, что они приводятся к виду
«, + ^S = 0 и т. д. (17.17)
Легко видеть, что алгебраическим следствием трех уравнений (17.17)
является равенство (ν · w) = 0, из которого следует, что уравнения
(17.17) равносильны следующим:
wx = 0, wy = 09 wz = 0, (17.18)
или в векторной форме
w=0. (17.19)
Таким образом, уравнения Лагранжа приводятся к требованию
постоянства вектора w, определяемого формулами (17.13). Но если
вектор w, пропорциональный ν, постоянен, то будет постоянно и
векторное произведение
[wXv] = const. (17.20)
Это дает еще два линейно-независимых интеграла уравнений
Лагранжа.
Из найденных интегралов следует, что уравнения прямой
Лобачевского в пространстве скоростей имеют вид линейных
соотношений между составляющими скорости vx, vyt vz. Мы знаем, что
преобразование Лоренца соответствует дробно-линейной подстановке
между составляющими скорости. Поэтому очевидно, что после
преобразования линейные соотношения остаются линейными.
Определим длину отрезка прямой Лобачевского, соединяющей две
«точки v = Vj и v = v2, и найдем связь между этой длиной и отно-
74 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ [ГЛ. I
сительной скоростью тел, движущихся со скоростями νγ и ν2. Так
как координаты точек на отрезке связаны линейными соотношениями,
то их можно представить параметрически в виде
ν = ν1 + μ(ν2-ν1) (0<μ<1). (17.21)
Подставляя это значение ν в (17.04), получим
ΔΓ— (С2 __ νιγ г· (ιί.ΖΖ)
Полагая для краткости
a = Vc2(v2-v1)2-[v1Xv2]2, (17.23)
мы получим по формуле (17.03) следующее выражение для длины
отрезка:
= /«п^г· <17·24)
S
0
Этот интеграл проще всего вычисляется при помощи подстановки
(С2_„2)€
^ = -2 , , srr. (17.25)
с2-(угу2) + ((угу2)^1;)5
которая дает
где
-/
ι
5n=W=2"Igy=T' (17'26)
о
b = c2 — (v,.v2). (17.27)
Коэффициенты в подстановке (17.25) подобраны так, чтобы пределы
по ξ были 0 и 1 и чтобы знаменатель в (17.26) не содержал
первой степени ξ. Отсюда получаем
■J = th*f (17.28)
что после возведения в квадрат и умножения на с2 можно написать
в виде
<vi-vi)f—i-IVtXv,]1
= c2ih2s. (17.29)
o-w
Сравнивая эту формулу с (16.10), мы убеждаемся, что слева в ней
стоит квадрат относительной скорости. Таким образом, относитель-
§ 17] ПРОСТРАНСТВО СКОРОСТЕЙ ЛОБАЧЕВСКОГО — ЭЙНШТЕЙНА 75
ная скорость ν' связана с длиной s отрезка прямой Лобачевского
соотношением
|v'| = cths. (17.30)
Предположим, что скорости Vj и v2 одинаково направлены.
Сопоставляя их абсолютным величинам отрезков прямой Лобачевского,
положим
vl = cthsv v2 = cths2. (17.31)
Отрезок прямой Лобачевского, соответствующий относительной
скорости, будет равен разности отрезков s2 и sv Поэтому
относительная скорость будет равна
v' = ctb(S2-sJ = c*_l-*bl (17.32)
ИЛИ
v'= Щ~щ . (17.33)
с2
Это есть эйнштейнова формула сложения (в нашем случае —
вычитания) скоростей.
Рассмотрим теперь угол между относительными скоростями двух
тел. Если скорости берутся относительно точки, принимаемой за
неподвижную, то косинус угла определяется по обычной формуле
cos (v,, v2)= /ТГ0. - О7·34)
Но если скорости берутся относительно точки, которая сама
движется со скоростью и, то угол между относительными скоростями
определится по более сложной формуле, которую легко получить из
следующих соображений. Произведем преобразование Лоренца, после
которого точка, двигавшаяся со скоростью и, может рассматриваться
как неподвижная, и применим затем обычную формулу (17.34). Мы
получим тогда
,,ч_ (vi-V2)
cos α = cos
(νί· <)=Uuzt· <17-35>
где vj и v2— скорости тел после преобразования Лоренца (эти
скорости получаются из (16.07) после замены ν на νχ и на ν2). Выразив
ν^ и уг2 через Vj и \у мы получим после несложных выкладок
(ν, — и) · (v2 — и) — -j- [V! X и] [ν2 χ и]
cosa= с . (17.36)
У (Vi-u)2-^ Х«]2У (v2-u)2-i-[v2Xu]'
76
Теория относительности
(гл. τ
Но это есть выражение для косинуса угла треугольника в
пространстве Лобачевского (угол при вершине и в треугольнике с
вершинами в точках u, Vj, v2).
В самом деле, наше исходное выражение (17.01) для квадрата
элемента длины в пространстве Лобачевского имеет вид
^=C!(^j;fVli· (17.37)
Это выражение соответствует „смещению" dv, исходящему из
„точки" v. Для смещения δν, исходящего из той же точки, мы имеем
"=*%Ζ}%**· (17-38)
Косинус угла между смещениями мы можем определить
инвариантным образом по формуле
«Ьсоша-*"*-™™™ (17.39)
(эту формулу можно рассматривать как определение угла в
геометрии Лобачевского). Если мы теперь будем в (17.36) писать ν вместо и
и рассмотрим смещения
dv = ε · (νχ — V), δν = η · (ν2 — V) (17.40)
вдоль двух сторон треугольника, исходящих из вершины ν, το^πο-
лучаемое из (17.39) выражение для cos α совпадет с (17.36).
Таким образом, угол между относительными скоростями можно
рассматривать как угол в треугольнике Лобачевского. Если имеются
три тела, движущихся со скоростями vlt v2, v3, то соответствующий
треугольник будет иметь вершины в точках vlt v2, v3, причем
относительные скорости будут соответствовать сторонам треугольника и
углы между ними будут равны углам треугольника. Такое
построение можно сделать и в нерелятивистской кинематике, но там
геометрия пространства скоростей будет евклидовой, тогда как в теории
относительности геометрия этого пространства будет геометрией
Лобачевского.
Справедливость геометрии Лобачевского в пространстве скоростей
может быть проверена на опыте. Мы имеем в виду опыт Физо по
определению скорости света в движущейся среде и явление
астрономической аберрации, открытое Брадлеем.
Опыт Физо имеет целью сравнение скорости распространения
света в неподвижной и в движущейся среде. Распространение света
в среде является некоторым сложным процессом, в котором
принимают участие входящие в состав среды заряды и которому можно
приписать скорость —, где η — показатель преломления среды. Если
§ 17] ПРОСТРАНСТВО СКОРОСТЕЙ ЛОБАЧЕВСКОГО — ЭЙНШТЕЙНА 77
сама среда движется в направлении распространения света со
скоростью ν, то w = ~ будет скоростью распространения света
относительно среды. Скорость же wr относительно неподвижной системы
отсчета получится по формуле Эйнштейна
2±1_. (17.41)
W =
1+ с2
Подставляя сюда w = — и сохраняя члены первого и нулевого
порядка относительно с, мы получим
«,=τ+ν(1 —έ·)=«+«(ι -w)· <17·42>
Множитель при г; носит название коэффициента увлечения Френеля.
То обстоятельство, что этот множитель отличен от единицы,
показывает, что при сложении скоростей нужно пользоваться именно
эйнштейновой теоремой сложения, соответствующей геометрии
Лобачевского, а не дорелятивистской формулой, соответствующей
геометрии Евклида.
Явление астрономической аберрации состоит в принципе в том,
что в двух движущихся друг односительно друга системах отсчета
направления на одну и ту же звезду оказываются не совпадающими,
а отличаются друг от друга на величину аберрации. Чтобы найти
эту величину, нужно построить треугольник Лобачевского с
вершинами в точках vlf v2, v3 = ac, где \х и v2 — скорости тел, с
которыми связаны обе системы отсчета, а вектор а есть единичный вектор
в направлении световой волны, идущей от звезды. В треугольнике
vi» v2» v3 Угол ПРИ веРшине v3 будет равен нулю (см. ниже
формулу (17.44)), сумма же углов при вершинах vx и v2 будет меньше
двух прямых на величину аберрации (если бы треугольник был
евклидов, то эта сумма равнялась бы двум прямым).
Соответствующий тригонометрический расчет легко произвести
на основании формулы
(v2 — ν,) (ν3 — ν,) — -у- [ν2 χ ν,] [ν8 Χ ν,]
coga1 = -7g== _ C (17.43)
γ (ν,-νιΡ-^Ιν,Χνι]1·]/ (νβ-ν,Ρ-^-Ιν.Χν,Ρ
и двух других формул, получаемых из (17.43) круговой
перестановкой значков 1, 2, 3.
Прежде всего, так как ν\ = с2, то
cosa3=l, a3 = 0. (17.44)
78 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ [ГЛ. I
Выберем систему отсчета так, чтобы было
Vl + v2 = 0, (17.45)
и положим
|vil = |v2|=i>, (a-v^ — (a.v2) = <ycosp. (17.46)
Относительная скорость двух систем отсчета будет
*i2 = —^V· (17.47)
1+*
с2
По формуле (17.43) получаем
ν — с cos β
sina^^-^51"" (17.48)
1 Г 4t TOR Κ ν '
_ Ус2·
с —
_ Ус2-
- ν2 sin β
- ν cos β
— ν2 sin β
1 с — ν cos p
и аналогично
v + cco$$ . V с2 — ν2 sin β ,л- ,пч
cos а» = — к-, sin си = -—j к1-. (17.49)
^ с + ν cos β 2 с + ν cos β ν '
Обозначая через 8 величину аберрации, мы можем написать
δ = π — ах — Оз — α3 = π — olx — ο^. (17.60)
Предыдущие формулы дают
2sin27=l+cos(a1+a2) = cI-^cobi^' (17·61)
откуда
ь 2 Yc2 —ν2 ν '
В астрономических наблюдениях сравниваются видимые
положения звезды при различных направлениях скорости движения Земли
по орбите (годичная аберрация). Так как во все рассуждения входят
только относительные скорости тел, воспринимающих луч, идущий
от звезды, то очевидно, что общее движение Солнечной системы
относительно звезд не играет роли, если только скорость его за
рассматриваемые промежутки времени постоянна. Поэтому по
величине аберрации нельзя определить скорость звезды относительно
Земли или Солнца.
ГЛАВА II
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ
§ 18. Замечание о ковариантности уравнений
При обсуждении в § 6 основных положений теории
относительности мы установили некоторые общие требования, которым должна
удовлетворять форма уравнений, определяющих ход физических
процессов. Мы имеем в виду те уравнения, вид которых не зависит от
начальных условий. Требования эти определяют правила
преобразования уравнений при переходе от одной инерциальной системы
отсчета к другой.
Согласно принципу относительности, правила преобразования
независимых переменных и неизвестных функций в этих уравнениях
должны быть таковы, чтобы уравнения, написанные в одной
инерциальной системе отсчета, были эквивалентны уравнениям того же
вида, написанным в любой другой.
Это требование уже применялось нами при выводе
преобразования Лоренца. В самом деле, мы получили это преобразование из
условия, чтобы уравнение распространения фронта волны
сохраняло свой вид, в соединении с условием, чтобы прямолинейное
и равномерное движение оставалось таковым и после перехода к
другой системе отсчета.
Таким образом, указанное требование уже определило правило
преобразования независимых переменных (координат и времени).
Необходимо рассмотреть еще правила преобразования неизвестных
функций, входящих в уравнения.
Простейшим правилом преобразования является простая
инвариантность. Например, в случае уравнения (18.-01) неизвестной функцией
является величина ω, входящая в уравнение фронта волны
<»(*, у, z, t) = 0.
(18.02)
80 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Преобразованная функция ω', которая дает уравнение фронта волны
в новых переменных
(!)'(*', у'% г'% 0 = 0, (18.03)
будет просто равна старой, и вид ее определяется из условия
(!>'(*', /, г'% 0 = ω(*, у, z, t). (18.04)
Но в большинстве задач для сохранения вида уравнений необходимо
сопровождать преобразование Лоренца для независимых переменных
тем или иным преобразованием для неизвестных функций. Если
существует такое преобразование для неизвестных функций, что новые
функции, выраженные в новых переменных, будут удовлетворять
уравнениям того же вида как старые функции в старых переменных,
то уравнения называются ко вариантными.
Требование ковариантности уравнений по отношению к
преобразованию Лоренца является обязательным следствием принципа
относительности. С другой стороны, ясно, что не всякие уравнения
будут ковариантными. Нам надлежит проверить, являются ли кова-
риантными уравнения, принятые в физике для описания того или
иного физического процесса (например, уравнения электродинамики
или уравнения механики), и если нет, то видоизменить их так, чтобы
новые уравнения стали уже ковариантными.
Проверка ковариантности и составление ковариантных уравнений
требуют предварительного изучения величин с наиболее простыми
законами преобразования. При этом достаточно ограничиться
линейными законами. Полная классификация величин по их закону
преобразования составляет предмет одной из глав теории групп. Мы не
можем рассматривать здесь этот вопрос во всей его общности,
а ограничимся тем, что необходимо для формулировки основных
уравнений, механики и электродинамики.
§ 19. Определение тензора в трехмерном случае и замечание
о ковариантных величинах
Формулы поворота пространственных координатных осей имеют вид
(19.01)
где alk—косинусы углов между старыми и новыми осями. Мы можем
формально определить трехмерный вектор как такую совокупность
3
χ'ι = Σ ««**.
k = l
3
xk = 2^ aikx[t
(/, k=lt 2, 3) |
§ 19} ОПРЕДЕЛЕНИЕ ТЕНЗОРА В ТРЕХМЕРНОМ СЛУЧАЕ 81
величин (А, Л2, Л3)— его составляющих, которая при повороте
осей преобразуется по закону
з
4=2*/И*· (19-02)
Частным случаем вектора будет радиус-вектор, для которого Ах = xv
А2 = х2, А3 == хз*
Допустим теперь, что даны два вектора, причем их
составляющие А{ и Bi связаны ликеЯной зависимостью
βί=Στ,,Η*· (19-03)
k=l
После поворота осей новые составляющие векторов будут
связаны аналогичной зависимостью
3
Β'ι=Σ Т!Л, (19.04)
k=\
причем
з
7|*= Σ «ij4iTji- (19.05)
В самом деле, для вектора В старые и новые составляющие должны
быть связаны теми же формулами, как и для вектора А. Выражая
по этим формулам Βι через Βι и затем в (19.03) Αι — через Л/,
получим (19.04) и (19.05).
Совокупность величин Tlkf преобразующихся при повороте осей
по закону (19.05), называется тензором, или, подробнее, тензором
второго ранга (вообще, ранг тензора равен числу его значков).
Примеры тензоров встречаются уже в нерелятивистской механике.
Так, составляющие момента количества движения твердого тела (В^
связаны с составляющими его угловой скорости (А^ соотношениями
вида (19.03), где Tlk — тензор моментов инерции. Другой пример
дает теория упругости: там такие же соотношения дают связь между
составляющими (dFx, dFyt dFz) силы, действующей на некоторую
площадку, и проекциями (dSxt dSyt dSz) этой площадки на
координатные плоскости, причем коэффициенты Tlk представляют тензор
напряжений. В обоих примерах тензор Tlk симметричен относительно
своих значков, но встречаются и тензоры, которые этим свойством
не обладают.
Из формулы (19.05) видно, что составляющие тензора
преобразуются как произведения xfck координат двух точек (х1% х2, дг3) и
(i\f ^2» У» которые могут и совпадать (xl = li).
§ Зак. 2649. 3. А. фр*
82 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Рассмотрим антисимметричный тензор, т. е. такой, составляющие
которого удовлетворяют соотношению
7»+7« = 0. (19.06)
Примером такого тензора может служить антисимметричная
комбинация произведений координат двух точек
Ъ = *&-«,*» (19.07)
Так как значки принимают у нас только три значения (1, 2, 3), то
вместо двух значков мы можем писать один (дополнительный) значок
и положить
123 — л 32 — 11» |
(19.08)
^23
П.
Тп
=
—
=
'32
г»
ъ
=
=
=
Ά.
т*
т3.
Введем антисимметричную систему величин еш, определяемых
формулами
вш = -|~1, если (/, к, I) есть четная перестановка значков (1, 2, 3),
еш — —1, если (/, kf ΐ) есть нечетная перестановка значков
(1, 2, 3),
еш = 0, если среди значков (/, А, /) имеются одинаковые.
Тогда формулы (19.08) могут быть записаны в виде
з
Γι-γΣ'ιΛ· (19·09)
В силу свойств величин еш, в сумму (19.09) фактически входят
только два члена, и если (/, к, I) есть четная перестановка значков
(1, 2, 3), то предыдущая формула напишется
Тг=Тш. (19.09*)
Используя антисимметрию тензора Tik, мы можем вместо (19.05)
написать:
з
В этой сумме из девяти членов три (для p = q) равны нулю,
а остальные шесть попарно равны друг другу, так что фактически
имеются три различных члена.
Пусть теперь (/, к, /) и (/?, q, r) — четные перестановки чисел
(1, 2, 3). Используя обозначения (19.09) и полагая
*iP% — aiq4p = hr (19Л1)
§ 19] ОПРЕДЕЛЕНИЕ ТЕНЗОРА В ТРЕХМЕРНОМ СЛУЧАЕ 88
мы можем переписать формулу (19.10) в виде
г=1
Рассмотрим теперь определитель
Δ =
*23
(19.12)
(19.13)
Ι α31 а32 а331
По свойству ортогонального преобразования Δ2=1, причем, если
это преобразование есть простой поворот осей, то Δ == —1— 1» а если
поворот сопровождается отражением (изменением знака одной или
всех трех координат), то Δ==—1. В обоих случаях
β*Γ = Δ·α,Γ. (19.14)
Таким образом, для простого поворота осей мы имеем
Т'г
Г«=1
(19.15)
а для несобственного ортогонального преобразования (поворот
с отражением)
Г/ = -2а,гГг (19.16)
Формулы (19.15) и (19.16) показывают, что при простом повороте
осей совокупность величин (19.08) преобразуется как вектор, а при
повороте с отражением преобразование, подобное векторному,
сопровождается изменением знака всех составляющих. Совокупность
величин с таким законом преобразования принято называть
аксиальным вектором, в отличие от полярного вектора, который во всех
случаях преобразуется по формуле (19.02). Легко видеть, что
векторное произведение двух полярных векторов будет аксиальным
вектором. Физическим примером полярного вектора может служить
вектор электрического поля, а аксиального — вектор магнитного
поля (то и другое — в смысле трехмерного векторного исчисления).
Формулы (19.08) показывают, что аксиальный вектор является по
существу тензором второго ранга; поэтому, если пользоваться
терминами „вектор" и „тензор" в смысле определений (19.02) и (19.05),
то без термина „аксиальный вектор" можно обойтись.
Аналогично можно определить, в трехмерном евклидовом
пространстве, тензор более высокого ранга. Так^ например, тензором
третьего ранга будет совокупность величин Тцк% преобразующихся
ё·
84 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ (ГЛ. II
при повороте осей по закону
3
Т'т= Σ ЧЬшЧпТшп- (19.17)
С другой стороны, величину, которая не меняется при
повороте осей, можно также рассматривать как тензор, а именно как
тензор нулевого ранга. Такую величину принято называть скаляром
или инвариантом.
Если дан тензор второго ранга, то можно составить такую
комбинацию его составляющих, которая не меняется при повороте осей,
т. е. ведет себя, как скаляр. Такой линейной комбинацией является
сумма диагональных элементов тензора второго ранга, т. е.
величина
Τ=Σ Αι- (19.18)
Используя свойство
^^ап = Ьл (19.19)
коэффициентов ортогонального преобразования, легко проверить, что
из (19.05) вытекает
Г = 7, (19.20)
т. е. что Τ есть скаляр. Подобно этому, из составляющих тензора
третьего ранга можно составить три вектора:
Αι = ΣΤΐΜαΙ ^ = 2rmim; Ct^^Tmml. (19.21)
ш τη nt
Можно поставить себе вопрос: нельзя ли вместо тензоров
ввести другие величины разных рангов, но так, чтобы из
составляющих данного ранга уже нельзя было образовать таких линейных
комбинаций, которые преобразовывались бы, как величины более
низкого ранга.
Такие величины действительно можно построить. Закон
преобразования для них будет тот же, как для гармонических полиномов,
связанных с обыкновенными шаровыми функциями. Напомним, что
если ввести сферические координаты
х = г sin 0 cos φ, у = г sin Ь sin φ, ζ = cos &,
то умноженная на г1 шаровая функция порядка / будет
гармоническим полиномом от х, у, ζ:
Порядок / будет соответствовать рангу тензора, но число
составляющих данного ранга будет меньше, чем у тензора. После
поворота осей гармонический полином Ры(х\ у\ ζ') выразится как
§ 20] ОПРЕДЕЛЕНИЕ ЧЕТЫРЕХМЕРНОГО ВЕКТОРА 85
линейная комбинация полиномов Я/ш(#, у, ζ), соответствующих
различным т (т = — /, —/-f-1, ..., /) но одному и тому же /.
Коэффициенты этого линейного преобразования и будут
характеризовать закон преобразования величин ранга /.
Обратим, наконец, внимание на следующее обстоятельство.
В наших рассуждениях мы предполагали, что тензоры (или
аналогичные им величины) являются, по их физическому смыслу,
величинами вполне определенными, включая их знак. Сообразно этому,
коэффициенты в формулах преобразования были у нас однозначными
функциями от косинусов aik. Но можно себе представить и такие
величины, которые являются определенными лишь с точностью до
знака (вполне определенными будут тогда их квадратичные
комбинации). В таком случае необязательно ограничиваться
преобразованиями, коэффициенты которых однозначно определяются через α/Λ,
а можно ввести и коэффициенты, определяемые лишь с точностью
до знака (одного и того же во всех коэффициентах). Это приводит
к новой категории физических величин — к так называемым
спинорам, и к соответствующему обобщению шаровых функций с их
законом преобразования. Такие величины применяются в квантовой
механике.
Таким образом, тензоры не являются единственными
геометрическими величинами с определенным законом преобразования. Однако
в обычных (неквантовых) применениях теории относительности
можно ограничиться рассмотрением тензоров.
§ 20. Определение четырехмерного вектора
В предыдущем параграфе мы напомнили определение тензора
в трехмерном евклидовом пространстве. Нам нужно теперь обобщить
это определение на четырехмерное многообразие пространства и
времени. Роль поворота осей будет играть теперь преобразование*
Лоренца. Существенно новым моментом будет различие в знаках
пространственных и временных членов выражения
ds2 = с2 dt2 — dx2 — dy2 — dz2 (20.01)
для квадрата бесконечно малого четырехмерного интервала. Инва·
риантность выражения (20.01) характеризует, как мы видели,
преобразование Лоренца, подобно тому, как инвариантность выражения
dl2 = dx2+dy2 -f- dz2 (20.02)
характеризует поворот пространственных осей.
Указанное различие в знаках весьма важно для всей теории, так
как оно отражает существующее коренное различие между
пространством и временем.
86 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. ti
Можно было бы, путем введения мнимых величин (мнимых
координат или мнимого времени), добиться того, чтобы квадраты всех
дифференциалов входили в ds2 с одинаковым знаком. Этот путь
был указан Минковским, а также Умовым. Однако достигаемая таким
путем симметрия формул относительно пространства и времени не
является, по нашему мнению, целесообразной, так как она
затушевывает существующее между пространством и временем различие и
не несет с собой особых математических преимуществ. Поэтому мы
будем в дальнейшем оперировать с вещественными координатами и
вещественным временем.
Если мы положим
ct = x0; х = хг; y = jt2; г = хг, (20.03)
то выражение для ds2 примет вид
з
ds2 = dx\ — dx\ — dx\ — dχ2 = 2 ek dxb (20.04)
k = 0
где величины ek равны ± 1 (см. (8.25)). Прямое и обратное
преобразования Лоренца напишутся:
з
*:=2/ЛА. (20.05)
*( = Е/лг*;· (2о.об)
Следовательно, дифференциалы старых и новых координат будут
связаны соотношением
з
tf*;=2 ekalkdxk9 (20.07)
k = 0
а частные производные от какой-нибудь функции φ по старым и
новым координатам будут связаны соотношением
* /5 = 0
Если бы квадратичная форма (20.04) была определенной, то все
числа ек были бы друг другу равны и коэффициенты в
формулах (20.07) и (20.08) были бы одинаковы. На самом же деле мы имеем
eQ=l, ех = е2=:ег = —1 (20.09)
и некоторые из соответствующих коэффициентов в этих формулах
отличаются друг от друга знаком. Поэтому закон преобразования
дифференциалов координат уже не будет (как это имело место для
чисто пространственных вращений) совпадать с законом преобразо-
§ 20] ОПРЕДЕЛЕНИЕ ЧЕТЫРЕХМЕРНОГО ВЕКТОРА 87
4=Σ
вания частных производных по координатам. Это необходимо учесть
при определении вектора. Мы должны различать такие векторы,
которые преобразуются как частные производные по координатам, от
таких, которые преобразуются как дифференциалы координат.
Первые мы будем называть ко вариантными, д. вторые — контравариант-
ными. Составляющие ковариантного вектора мы будем обозначать
буквами с нижними значками, а составляющие контравариантного
вектора — теми же буквами с верхними значками. Таким образом,
закон преобразования вектора будет иметь вид
4=2«АИ* (20.10)
для ковариантного вектора и
Л''=2'ЛИ* (20.11)
k = 0
для контравариантного вектора. Эти формулы можно записать в виде
з
4^. (20.12)
3 д ι
Заметим здесь же, что из правила относительно расположения
значков (верхние и нижние значки) делают исключение в случае
координат и их дифференциалов: согласно общему правилу, мы должны
были бы писать (dx)°, (dx)lt (dx)2t (dxff ъ не dx0, dxv dx2, dx3,
как это принято.
Если задан ковариантный вектор Aif то мы всегда можем ввести
соответствующий ему контравариантный вектор, положив
Ai — etAt. (20.14)
Оба вектора не будут существенно различными, и мы будем
говорить не о двух векторах, а о ковариантных и контравариантных
составляющих одного и того же вектора.
Скалярное произведение двух векторов Ai и Bi определится как
сумма
з з
2 etAtBt = 2 *iAl&t (20.15)
которую можно также написать в виде
з з
ΣΑιΒι=ΣΑιΒι. (20.16)
88 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Эта величина будет инвариантной по отношению к преобразованию
Лоренца.
Скалярное произведение вектора на самого себя
з
2 ЛИ' = № - (V - (Л2)2 - (Л3)2 (20.17)
/ = 0
может быть величиной как положительной, так и отрицательной-
Про вектор, для которого величина (20.17) положительна, говорят,
что он имеет характер времени; вектор, для которого эта величина
отрицательна, называют имеющим пространственный характер. Наряду
с этими терминами употребительны также термины
„временно-подобный" и „пространственно-подобный" вектор.
Примером временно-подобного вектора может служить
четырехмерная скорость, составляющие которой определяются равенствами
а*= г^-=г (/=1,2,3). (20.18)
/·--£' /'-■£
То, что совокупность величин (20.18) есть вектор, вытекает из
следующих соображений. Мы знаем, что величина
cdx = ds = Vc2 — v2dt (20.19)
есть инвариант. С другой стороны, величины (20.18) могут быть
написаны в виде
и° = сЖ = ЧГ> и' = 4г (ί=1. 2. 3). (20.20)
Отсюда ясно, чго величины u°f ul, а2, иъ преобразуются как
дифференциалы координат xQt хх, х2, лг3, т. е. как контравариантный
вектор. То, что этот вектор временно-подобен, вытекает из тождества
(и0)2 — (а1)2 — (а2)2 — (и*)2 = с2. (20.21)
Примером пространственно-подобного вектора может служить
четырехмерный вектор ускорения, составляющие которого определяются
по формулам
w°=^, ™г' = -^ (/=1, 2, 3), (20.22)
или подробнее:
w° = -
1 d
' 4/ , ' *§\ ('=1.2.3).
(20.23)
§ 211 четырехмерные тензоры 89
Пространственный характер вектора w может быть доказан
следующим образом. Дифференцируя тождество (20.21) по времени (или
по τ) получаем
„о^о _ й1да1 _ „2^2 _ azw3 = о (20.24)
или
cwo — Vlwl — v2w2 — vzw* = 0. (20.25)
Отсюда вытекает неравенство
(^0)2 < «J. ( (^1)2 _|_ (^2)2 _|_ (^3)2) < (^1)2 _|_ (^2)2 _|_ (^ (20.26)
которое и доказывает наше утверждение о пространственном
характере вектора w.
§ 21. Четырехмерные тензоры
Подобно трехмерному случаю, в четырехмерном многообразии
пространства и времени могут быть определены тензоры второго и
высшего ранга.
Ковариантным тензором второго ранга называется совокупность
величин Tik] которые при преобразовании Лоренца преобразуются по
закону
/ V4 dxt dxi _
Tik= У -А^-гтп (21·01)
A**1 dxk
ИЛИ
3
Т'ш = ^Wwfy. (21.02)
Аналогично, контравариантным тензором второго ранга будет
совокупность величин, преобразующихся по закону
'•"-ΣΐΜέ*" да·»*»
Λ ζ=ο J
или
3
Trik= Σ^^α^Τ». (21.04)
Наконец, можно определить смешанный тензор второго ранга, кова-
риантный по отношению к одному значку и контравариантный по
отношению к другому. Его составляющие преобразуются по закону
Адх)дх*
90 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
или
П'= Д'/АА/Г/. <21·06>
Если бы все числа et были друг другу равны, то коэффициенты
в формулах (21.02), (21.04), (21.06) совпадали бы. В нашем же
случае некоторые из этих коэффициентов отличаются друг от друга
знаком.
Формулы преобразования (21.02), (21.04), (21.06) не являются
существенно различными, и от величин, преобразующихся по одной
из этих формул, можно перейти к величинам, преобразующимся по
какой-нибудь другой из них. Для этого достаточно положить
Tlk = eiekTlk, (21.07)
а в качестве Tk ввести одну из двух величин:
T!k = eJik (21.08)
или
Т'^аТы. (21.09)
Если тензор Tik симметричен, то величины (21.08) и (21.09) будут
совпадать. Как и в случае вектора, мы будем говорить не о разных
тензорах, а о ковариантных, контравариантных и смешанных
составляющих одного и того же тензора.
Аналогично можно ввести тензоры третьего и высшего рангов.
Так, например, тензор третьего ранга с тремя ковариантными
значками преобразуется по закону
j,ti-odxi дх> дхш
или
3
T'ikm = ^ Σ _о Vkemai]aklamnTjln· (21Л О
Как и в трехмерном случае, из составляющих тензора второго ранга
можно образовать скаляр
T=ΣeiTil· (21.12)
/=о
а из составляющих тензора третьего ранга — три вектора:
λ, = Σ*Λ*; я, = 2**7·**; с, = Σ «Λ*· (2ЫЗ)
k k k
На затронутом в конце § 19 вопросе о нетензорных величинах с
простейшими (в известном смысле) законами преобразования мы здесь
§ 21] ЧЕТЫРЕХМЕРНЫЕ ТЕНЗОРЫ 91
останавливаться не будем ввиду того, что в основных неквантовых
применениях теории относительности главную роль играют тензоры.
Если даны два тензора, то из них можно построить новые
тензоры, ранг которых равен сумме или разности рангов данных
тензоров (а также тензоры промежуточных рангов одной четности с
суммой или разностью). Поясним это на примерах. В § 20 мы видели,
что из двух векторов Ai и Bi можно составить скаляр
3
С= Σ*ιΛιβι- (21.14)
/«о
Здесь векторы рассматриваются как тензоры первого ранга, а
скаляр— как тензор нулевого ранга. С другой стороны, из тех же
векторов можно составить тензор второго ранга
Cik = AiBk или же Cik = BtAk. (21.15)
Если дан тензор второго ранга Tik и вектор Ai} то величина
*,=S«*Vtt (21.16)
k
будет вектором, а величина
Clkl = AiTkl (21.17)
(и другие, отличающиеся от (21.17) перестановкой значков в правой
части) будет тензором третьего ранга.
В качестве дальнейшего примера составим из двух заданных
тензоров второго ранга Tik и Ujk скаляр
С = .Е'АВД». (2Ы8)
ι, k=0
тензор второго ранга
С„= Σ emTimUkm (21.19)
т
и тензор четвертого ранга
Сш«=ВД»· (21-20)
В этом случае, очевидно, будет
С»= Σ emCimkm, (21.21)
т
С = 2'А· (21.22)
Тензорный характер всех этих величин легко проверяется на
основании равенств (10.04) и (10.05), выражающих свойства
коэффициентов преобразования Лоренца.
92 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Заметим, что во всех суммах, содержащих произведения кова-
риантных составляющих тензоров, эти произведения входят
умноженными на добавочный (знаковый) множитель ei% ek, ..., где /, k, ...—
значки суммирования. Но можно писать суммы так, чтобы значок
суммирования входил в составляющую одного из тензоров в качестве
ковариантного (нижнего) значка, а в умножаемую на нее
составляющую другого тензора — в качестве контравариантного (верхнего)
значка; тогда добавочный знаковый множитель входить не будет. Так,
например, скалярное произведение (21.14) может быть написано в виде
(20.16), а сумма (21.18), согласно (21.07), —в виде
з
С= 2 TikUik. (21.23)
Из данного тензора можно получить новый не только путем
умножения на другой тензор, но и путем дифференциальных операций.
При этом операция дифференцирования по координате х1 играет роль
умножения на ковариантную составляющую некоторого вектора. Так,
например, величина
/=о ;=о
*,=2-
есть скаляр, а совокупность величин
3
е^ (21.25)
есть вектор (расходимость тензора Tik). В частности, если
Л/=А.. (21.26)
где φ—некоторый скаляр, то составленное по формуле (21.24)
выражение з
■>-2*3-£-3-3-Й <21·27)
также будет скаляром (символ □ означает оператор Даламбера).
§ 22. Псевдотензоры
Наряду с тензорами удобно вводить в рассмотрение величины,
закон преобразования которых зависит от знака определителя под-
схановкн п(,г,,,,,,,,■ ва^. (22.01)
P\Xq> Xy, Х%, Х$)
§ 22]
ПСЕВДОТЕНЗОРЫ
93
По свойству коэффициентов преобразования Лоренца квадрат
определителя и всегда равен единице. Самый же определитель равен
D = +l для собственных преобразований Лоренца (сохраняющих
направление счета времени и переводящих правую систему
пространственных осей в правую же систему) и равен D = —1 для
несобственных преобразований. Хотя мы условились рассматривать лишь
собственные преобразования Лоренца, для классификации
геометрических величин полезно знать их поведение также и при
несобственных преобразованиях.
Рассмотрим совокупность величин еШш, антисимметричных
относительно свокх значков, причем ε0123= 1. Из этого определения следует,
что еШ/п = 0, если два или больше значков совпадают, еШш = -г-1»
если (iklm) представляет четную перестановку чисел (0123), и
еШш = —1, если (Iklm) есть нечетная перестановка.
Легко проверить тождество
до-0 бХ1 °Xk °*1 *т
В самом деле, левая часть представляет разложение определителя
1 дх0
дх\
дхъ
дх[
дх0
дхк
дх3
dx'k
дх0
dxt
дхг
дх\
дх0
<
дх3
<|
который получается из D перестановкой столбцов, если все значки
(iklm) различны, и который обращается в нуль, если некоторые из
них совпадают.
Формула (22.02) показывает, что при D=l величины ε
преобразуются, как составляющие тензора, а при D = —1 закон
преобразования зтих величин отличается от закона преобразования тензора
знаком. Совокупность величин с таким законом преобразования
называется псевдотензором.
Мы можем рассматривать еШш как ковариантные составляющие
антисимметричного псевдотензора четвертого ранга. Контравариант-
ные составляющие этого тензора получатся по общей формуле
бШт = егеЛетеШт. (22.03)
Но так как величины ε отличны от нуля только если все значки
различны, а тогда eiekelem = e0ele2e3 = —1, то будет просто
Jklm
ε — ешт*
(22.04;
94 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Если φ есть скаляр, то совокупность величин
Тш« = №«« (22·05)
будет антисимметричным псевдотензором четвертого ранга. Такой
псевдотензор имеет, подобно скаляру, только одну составляющую;
поэтому его принято называть псевдоскаляром.
Всякому антисимметричному тензору второго ранга Aik можно
сопоставить по формуле
з
A" = {J^h (22.06)
l,m=Q
антисимметричный псевдотензор А того же ранга; он называется
дуальным по отношению к данному тензору. В сумме (22.06) только
два члена отличны от нуля, и эти члены друг другу равны. Поэтому
мы имеем
А10=*А · А20 — А · i30 — A
J[23_ . . 131 - . р2_л
Подобно этому, антисимметричному тензору третьего ранга Ам можно
по формуле
з
^{J *ШтАЫт (22.08)
Λ, /, /71 = 0
сопоставить псевдовектор (т. е. псевдотензор первого ранга). В сумме
(22.08) отличны от нуля шесть членов, но они между собою равны.
Мы получим для составляющих псевдовектора явные выражения
щ Че # #
А = ^123*» ^ == ^230» ^ == ^310» ^ == ^120' (22.09)
Будем для краткости называть „произведением тензора на тензор" такой
тензор, составляющие которого получаются по правилам § 21 путем
перемножения составляющих двух данных тензоров. Тогда мы можем
сказать, что произведение псевдотензора на псевдотензор (так же
как и тензора на тензор) будет тензором, тогда как произведение
тензора на псевдотензор будет псевдотензором. Этим правилом мы
фактически уже пользовались при составлении псевдотензора А и
псевдовектора А .
(22.07)
§ 23] БЕСКОНЕЧНО МАЛОЕ ПРЕОБРАЗОВАНИЕ ЛОРЕНЦА 95
§ 23. Бесконечно малое преобразование Лоренца
Общее преобразование Лоренца (с переносом начала) имеет вид
з
Х1 = а,-\-^епа1кхк. (23.01)
Рассмотрим тот случай, когда преобразование (23.01) бесконечно
мало отличается от тождественного преобразования. В этом случае
постоянные ai будут бесконечно малыми, а коэффициенты aik могут
быть написаны в виде
в» = *А*+»<*. (23·02)
где (uik — бесконечно малые величины. Чтобы подчеркнуть, что
координаты представляют собой контравариантный вектор, мы будем
в этом параграфе писать при них верхние значки
x° = ct, х1 = х, *2 = ;у, x* = z. (23.03)
Бесконечно малые постоянные, представляющие смещение начала, мы
будем также писать с верхними значками (а* вместо at). В новых
обозначениях результат подстановки (23.02) в (23.01) напишется:
з
х** = ** + а1 + 2 ekJkxk. (23.04)
k = 0
Так как для бесконечно малого преобразования различие между
данной и преобразованной системой отсчета становится несущественным,
то разности Ьх'= х>'- х1 (23.05)
мы можем рассматривать как вектор, отнесенный к одной из этих
систем отсчета, скажем, к первоначальной. Таким образом, выражения
з
Δ** = а1 + 2 ека>*kxk (23.06)
представляют бесконечно малый контравариантный вектор. Отсюда
следует, что постоянные а1 сами образуют такой вектор, а
постоянные ω'* образуют контравариантный тензор. Тензор этот будет
антисимметричным. В самом деле, условия ортогональности
коэффициентов преобразования Лоренца
з
2'ΑΛι = 'Αι (23.07)
после подстановки в них выражений (23.02) и пренебрежения
бесконечно малыми второго порядка принимают вид
ω'*-[-ωΛ/ = 0. (23.08)
96 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Антисимметричный тензор второго ранга имеет шесть независимых
составляющих. Эти шесть величин, вместе с четырьмя компонентами
вектора смещения начала, представляют десять независимых
параметров, которые и характеризуют бесконечно малое преобразование
Лоренца.
Произведем последовательно два бесконечно малых преобразования:
одно с параметрами a1, &ik и другое с параметрами Ь%% φ/Λ. Легко
видеть, что результат двух таких преобразований равносилен, с
точностью до величин второго порядка, одному преобразованию с
параметрами
с1 = а1-\-&, ψ/* = ω'* + φ/*. (23.09)
Отсюда, в частности, следует, что результат двух бесконечно малых
преобразований не зависит от их порядка. Пользуясь этим, мы можем
последовательно рассмотреть смещение начала, переход к движущейся
системе отсчета и бесконечно малый поворот пространственных осей.
Полагая
а° = сх, al = aXt а2 = ау, а* = аг, (23.10)
мы получим преобразование, которое соответствует переносу начала
счета времени на более ранний момент на величину τ и переносу
начала координат назад на величину вектора а. Переход к системе
отсчета, движущейся с бесконечно малой скоростью V, означает
преобразование
У — у=Ау = —V· 1 (23.11)
z' — z = Lz= — Vzt J
для координат и преобразование
f-t = M = -±(xVx + yVy+zVz) (23.12)
для времени.
Переходя от трехмерной символики к четырехмерней и
сравнивая коэффициенты в (23.11) и в (23.06), получаем
ωΐ° = —ϋ*. ω2° = — -^, ш30 = —ϋ. (23.13)
Сравнение коэффициентов в (23.12) и в (23.06) дает
ωοι=ϋ, ω02==_Ζί ω03 = _£*. (23.14)
— результат очевидный, так как тензор ω/Λ антисимметричен.
Рассмотрим, наконец, бесконечно малый поворот пространственных
осей. По известной формуле кинематики мы имеем
дг = 1(оХгь (2а. 15)
§ 24] ЗАКОН ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ 97
где ω — вектор бесконечно малого поворота (составляющие его равны
бесконечно малым углам поворота вокруг осей х, yt z).
Сравнивая (23.15) и (23.06), получаем
ω23_ — о)32 _ω^. ω3ΐ_ — ωΐ3_ω^. 0)12=;—a>21 = o)r (23.16)
Мы выпишем также ковариантные составляющие тензора ωίΛ. Опуская
значки по известному правилу, получаем
_VX _ У у _ Vz }
ωιο — — ι ω2ο — —» ω30 — —> 1 (23.17)
ω23 = ω/, ω31 = ω^; ω12 = α>ζ, )
тогда как остальные составляющие получаются из условия
антисимметрии.
В заключение заметим, что формулы для конечного
преобразования Лоренца можно получить, исходя из рассмотрения бесконечно
малого преобразования; но на этом мы останавливаться не будем.
§ 24. Закон преобразования электромагнитного поля
и ковариантность уравнений Максвелла
При выводе основных формул теории относительности мы
исходили из закона распространения фронта электромагнитной волны,
вытекающего, как показано в § 3, из уравнений Максвелла. Нам
надлежит теперь проверить, что уравнения Максвелла действительно
являются ковариантными по отношению к преобразованию Лоренца,
а для этого нужно прежде всего установить закон преобразования
электромагнитного поля при переходе к новой системе отсчета.
Как известно, электромагнитное поле может быть выражено через
скалярный и векторный потенциалы по формулам:
и = 3 2
1 ή γ- ή г»
Ъ
"з
= дА9
дх2
_ дАх
дхг
_ дА2
дх{
дА2
дхг *
дАъ
дхх *
дАх
дх2 '
Ег = -
Е2=-
Еъ = -
1 дАх
с dt
1 дА2
с dt
1 дАг
с dt
дФ
дхх
дФ
дх2
дФ
дх3
(24.01)
Поле обращается в нуль в том и только в том случае, когда
линейная дифференциальная форма
8φ = — сФ dt + Ах dxx + A2 dx2 + A, dxz (24.02)
есть полный дифференциал. Мы примем, что §та линейная форма
является инвариантом (скаляром). Для этого достаточно считать Alt
7 Зак. 2649. В. А Фок
98
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ
[гл. п
А2, Аг пространственными (ковариантными) составляющими
четырехмерного вектора, нулевая составляющая которого равна
Л0=-Ф. (24.03)
Имея в виду, что ct = х0, мы можем написать δφ в виде
з
δφ= 2 Atdxt. (24.04)
/«о
Обычное условие нормировки для потенциалов
dlvA+7¥ = o
(24.05)
будет условием, инвариантным относительно преобразований Лоренца,
так как его можно написать в виде
Уе±к
или, если ввести контравариантные составляющие
А° = А0 = —Ф, А1 = — Alt А2= — А2, Л3= —Л3,
в виде
з
дА1
dxi
1%-°-
(24.06)
(24.07)
(24.08)
i=0
Подставляя в (24.01) x0 = ct, Л0= — Ф, перепишем выражения для
поля в новых обозначениях. Мы получим для электрического поля
дА0 дАх
Е*—'дх{
дАа
^2 —
дх0 9
дА2
дх2
дА0
дх0
дА*
ОХг
дхй
(24.09)
тогда как для магнитного поля останутся прежние выражения. Все
Эти выражения мы можем записать короче, если положим
dAk dAt
Ik'
dxi
dxk
Мы будем тогда иметь
Нг — г23, Ех = F10,
"2 == '31» ^2 == '20»
^3 = ^12» ^3 ^ ^30*
(24.10)
(24.11)
§ 24] ЗАКОН ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ 99
Если (Л^) есть ковариантный вектор, то (Ftk) есть антисимметричный
тензор второго ранга. Таким образом, наше предположение о
векторном характере потенциалов приводит нас к заключению, что шесть
составляющих электромагнитного поля представляют, в
четырехмерном многообразии пространства-времени, антисимметричный тензор.
На основании этого легко проверить, что уравнения Максвелла кова-
риантны по отношению к преобразованию Лоренца. В самом деле,
построим из производных от составляющих поля тензор третьего
ранга:
F — dFlk I
dFu ι dFti
(24.12)
όχχ ' όχι ' дхъ *
который, очевидно, будет антисимметричным. По формулам (22.09)
ему можно сопоставить псевдовектор
/*> =
123»
/71 = /7<
230»
F*=F.
310»
F*=F<
120·
(24 Л 3)
Вычислим составляющие этого псевдовектора. Мы имеем
£п_ dF2z dF9l dFi2== дН{ дН2 дНг_ diyH|
дхх дх2 дхг дхх дх2 дхг Ί
Я =
dF2,
дх2
dF02
дха
дх*
дхг
<^30
1 дН{
дЕ7
дх2
dt
jfe—^8i ι ^оз , dFl0 _ 1 дН2
Г ~ ^v_ ""Г dXl -г дХг — „ м
дхг
дЕъ
+
дЕъ
/73 :
дх0
dFi2
dF0]
dF2i
с dt
1 дНъ
дх2
дЕх
дхх
дЕх
дхъ
дЕ2
dxQ
дх2
дхх
dt
дх2
дхх '
(24.14)
Для наглядности мы заменили в правой части х0 на ct. В силу
уравнений Максвелла
сиг1Е+т#=0·
divH = 0
(24.15)
правые части равенств (24.14) равны нулю.
Следовательно, первая группа уравнений Максвелла может быть
записана в ковариантной форме
/' = 0 (24.16)
или
Flkl = 0. (24.17)
Обратимся теперь ко второй группе уравнений Максвелла. Для этого
перейдем от ковариантных составляющих тензора поля к контрава-
риантным
■ν
F23 = HU F10 =
F31 = H2, F20=-E2,
F12 = Hit F30=-£3.
(24.18)
7*
100
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ
[гл. н
и составим контравариантный вектор
з
S'
дхъ '
*=о
(24.19)
Мы имеем
s° = 0-
dF°
dF{
Ό2
dF[
Ό3
"3ΙΓ
β».
дГ
дх„
dF30
дх0
dF30
дх„
-И
дх2
dF12
dF21
dxi
dF31
dxt
-04
дхг
дР2г =
Ьхг
_ ^1 ι
(Э£2
ι ££
дхх ' <λκ2
1 <^1 ^
д£,
с ~5Г"
1 дЕ2
длг3
дх2
dF*
-0 =
с dt
ι а£3
тяг
дхг
дН2
όχι
дхх
дх2
дхх ' длг2
Таким образом, нулевая составляющая вектора s* равна
s° = divE,
(24.20)
(24.21)
а пространственные составляющие совпадают с составляющими
трехмерного вектора
(s\ s». 53) = -If + curlH.
(24.22)
В свободном пространстве правые части этих уравнений равны нулю.
Следовательно, вторая группа уравнений Максвелла для свободного
пространства может быть записана в ковариантной форме
~дх7:
д-о *
:0.
(24.23)
В пространстве, заполненном зарядами с плотностью р, уравнения
Максвелла — Лоренца имеют вид
= 4πρ, curlH-jf = £j, (24.24)
divE>
где j — плотность тока. Ковариантность уравнений Максвелла будет
обеспечена, если величины
s0 = 4rcp, sl=tjl (/=l, 2, 3) (24.25)
будут представлять контравариантные компоненты четырехмерного
вектора. В силу тождества
з
Σ татг = о (24·26)
/, /5-0
dxi дхь
§ 24] ЗАКОН ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ 101
мы должны иметь
откуда
/=0
Ι όχι υ'
g + divJ-0.
(24.27)
(24.28)
Это уравнение выражает, как известно, закон сохранения заряда.
Четырехмерный векторный характер величин (24.26) вполне
согласуется с их физическим толкованием по Лоренцу. Согласно этому
толкованию, j = pv, где ρ — плотность заряда, а γ — его скорость.
Четырехмерный вектор тока
PC ?vlt pv2t pvs
пропорционален вектору четырехмерной скорости
(24.29)
г/0=.
V
УЩ'
«8
(24.30)
(см. (20.18)), причем коэффициент пропорциональности равен
P' = PlA-£ (24.31)
и представляет собою инвариант, физический смысл которого есть
плотность заряда в той системе отсчета, где этот заряд в данный
момент неподвижен.
Мы проверили ковариантность уравнений Максвелла и установили,
что закон преобразования электромагнитного поля при переходе к
другой системе отсчета совпадает с законом преобразования
антисимметричного тензора второго ранга. Напишем этот закон преобразования
в явной форме, введя вместо коэффициентов преобразования Лоренца aik
их значения, соответствующие тому случаю, когда преобразование
Лоренца не сопровождается поворотом пространственных
координатных осей, Мы имеем
Доо =
1
/5
"0ί — ~ν1· αί0 jTv I
«/* = — hi, — (βοο-0^
¥1
с2
(/ —1. 2, 3).
(/. Λ-1, 2, 3).
(24.32)
102 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. 11
Подставляя эти значения в общую формулу
3
и пользуясь антисимметрией тензора Flk, получим
F» = «Λ - (%> - О ρ fl^as+*Уи + IVo) —
-7floo(^ao-^2o) (24.34)
и два других уравнения, получаемых из (24.34) круговой
перестановкой значков 1, 2, 3, а также
F'10 = о„Рш - (floo - 1)-^- (УЛо + νΛο + *W +
+T«ooflVi2-lV,a) (24-35)
и два других уравнения, получаемых круговой перестановкой.
Переходя, согласно (24.11), к обычным обозначениям для электрического
и магнитного поля и пользуясь формулами трехмерного векторного
исчисления, мы можем написать
£ί =a00J?1-(fl00- 1)-£πν· E) + *f [VXH],,
ν 1 \ (24·36)
Я, = αοο/Ζ,-ίβοο- 1)-^ (V · Η) - ^ [V Χ Ε],.
Переходя от составляющих к векторам, заменяя а^ его значением и
группируя члены в несколько ином порядке, получим окончательно
E' = ^(V-E) + i__(E-^(V.E) + {[VXH]), (24.37)
У 1""сг
H' = -^(V-H) + I_-(H-^(V.H)-1[VXE]), (24.38)
У 1"~~с*
Для сравнения приведем здесь формулы преобразования для кова-
риантного четырехмерного вектора, причем будем применять для его
пространственных составляющих обычные векторные обозначения:
Ло = -у-= (ло + у(V ' А) )· (24'39)
с
2
А' = А-
^ (V . А)+ 1 у2 · ^-((V · А) + £А0). (24.40)
У 1~~~&
§ 24] ЗАКОН ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ 103
По поводу формул для поля заметим, что
(Е'. V) = (Е . V), (Н' . V) = (Н . V). (24.41)
Это значит, что та часть электрического или магнитного поля,
которая параллельна скорости V, остается без изменения. В
пространственной части четырехмерного вектора, напротив, остается без
изменения та часть, которая перпендикулярна скорости V, так как
мы имеем
А' - £ (V · А') = А —Ь (V · А). (24.42)
Если рассматривать частное преобразование Лоренца и положить
VX = V, Vy = Vz = 0, (24.43)
то формулы преобразования для поля упростятся и напишутся в виде:
Ех = Ех% Нх = Нх%
V '~7 V ι~? !<24«>
Из составляющих поля можно построить две комбинации,
которые при преобразовании Лоренца остаются без изменения. Мы имеем
Е'2 — Н'2=Е2— Н2; (24.45)
(Ε:·Η0 = (Ε.Η). (24.46)
Первая из этих величин остается без изменения также и при
несобственных преобразованиях Лоренца (см. § 22) и является
скаляром. Вторая же меняет при несобственных преобразованиях свой
знак и является псевдоскаляром. В этом легко убедиться при помощи
тензорной символики. Мы имеем
з
Е2_Н2 = -1 2 FikFl\ (24.47)
Ι, Λ=0
3
(Ε·Η) = 1 Σ F^ <24·48>
ι, *=ο
где Fl —антисимметричный псевдотензор, связанный с тензором
поля по формуле, аналогичной (22.06) или (22.07).
Заметим, что для плоской волны оба выражения (24.45) и (24.46)
обращаются в нуль (в любой системе отсчета).
104 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Формулы преобразования для поля, как и уравнения Максвелла,
указывают на существование самой тесной связи между электрическим
полем и магнитным. Так, поле от зарядов, неподвижных в некоторой
системе отсчета, будет в этой системе чисто электростатическим; но
в другой системе отсчета, которая относительно этих зарядов
движется, к электрическому полю добавится еще магнитное. Это
становится понятным, если вспомнить, что движущиеся заряды представляют
электрический ток. Подобно этому, поле, чисто магнитное в одной
системе отсчета, будет в другой системе проявляться как наложение
магнитного и электрического полей.
§ 25. Движение заряженной материальной точки
в заданном внешнем поле
Рассмотрим движение частицы с массой т и зарядом е в
заданном внешнем поле. Как мы видели ранее (формула (20.23))
четырехмерный вектор ускорения имеет составляющие
+ = г~Ъ г^-ж\ ('=1. 2. 3).
(25.01)
Здесь под знаком производных по времени стоят составляющие
четырехмерной скорости
*— , ' , ■ «' = г—, ж «= 1. 2. 3). (25.02)
причем
*=№+(%)'+№■ <25-°3>
Введем такую (штрихованную) систему отсчета, в которой мгновенная
скорость частицы равна нулю. Мы будем исходить из предположения,
что в этой сопутствующей системе отсчета обычное ускорение
пропорционально электрическому полю
Щ-^-ϊ (25.04)
dt'2 ™ ч '
и перейдем затем обратно к исходной системе отсчета.
§ 25] ДВИЖЕНИЕ ЗАРЯЖЕННОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 105
В штрихованной системе отсчета четырехмерные скорость и
ускорение равны
и'° = с, и'1 == и'2 = к'3 == 0, (25.05)
w'° = 0, wfi = <^T. (25.06)
dt
Таким образом, в штрихованной системе четырехмерное ускорение
выражается через поле следующим образом:
w'° = 0, wflz=^Efi. (25.07)
По формулам преобразования контравариантного вектора
(совпадающим с формулами преобразования координат) мы имеем
з
wl = 2 ekakiw,k. (25.08)
k = 0
Подставляя в правую часть значения (25.07) для w'lf получим для
четырехмерного ускорения в исходной системе отсчета выражения
wl=-j; (аиЕ[ + a2iE'2 + а3Д). (25.09)
Сюда нужно подставить значения aik из (24.32). Мы получим
wo_JL.^>(V.EOj (25.10)
^ = £{*<'+Ко-0тЙ-ОГ-ЕО}· (26.11)
Теперь остается выразить Е' через Ε и Н. Так как (V · Е') = (V · Е),
формула (24.36) дает, после замены аж его выражением,
^=έτ^=τ?(ν·Ε)· (25Л2)
Здесь V есть скорость сопутствующей системы отсчета; эта
скорость совпадает в рассматриваемый момент со скоростью ν частицы.
Заменяя поэтому V на ν, перепишем предыдущие уравнения в виде
^°=έτ?=^(ν·Ε)· (25Л4)
^ = £уИ=^(Е+т^хн])г· (25Л5)
Теперь мы можем освободиться от сопутствующей системы отсчета,
считая, что написанные уравнения справедливы во всякий момент
106 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
времени, так что они представляют собой уравнения движения
частицы. Форма уравнений (25.14) и (25.15), однако, неудобна тем,
что в них применен смешанный способ написания: в левой части
стоит четырехмерный вектор, тогда как правые части выражены
через трехмерные величины. Перейдем поэтому к единообразному
способу написания и выразим обе части сперва через четырехмерные,
а затем через трехмерные величины.
Пользуясь обозначениями (25.02) для четырехмерной скорости
и обозначениями (24.11) для поля, мы можем написать
уравнения (25.14) и (25.15) в виде
w° = ΈΪ (*1/7ю + «2/72о + ^зо). (25.16)
wl =^^0/7ю + ^^1 + ^/2 + ^з) (*= 1. 2. 3). (25.17)
Вследствие антисимметрии тензора Fik в правой части каждого из
уравнений (25.17) будет фактически не четыре, а три члена.
Переходя к ковариантному вектору ускорения
wQ = isfi% wx= — wl, w2 = — w2, w3 = — wzt (25.18)
мы будем иметь для всех значений / от 0 до 3
з
Здесь справа и слева стоит ковариантный вектор; поэтому очевидно,
что уравнения движения в форме (25.19) сохраняют свой вид в любой
системе отсчета, как и должно быть. Легко проверить, что
з
2 «'«1 = 0 (25.20)
в согласии с (20.24). Первое из уравнений движения является
поэтому следствием трех остальных.
Ввиду ковариантности уравнений (25.19), для обоснования их
достаточно было бы проверить, что в сопутствующей (штрихованной)
системе отсчета они приводятся к виду (25.07).
Переходим теперь к трехмерному способу написания. Используя
выражения (25.01) для четырехмерного вектора ускорения и вводя
трехмерную векторную символику, мы будем иметь
§ 25] ДВИЖЕНИЕ ЗАРЯЖЕННОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 107
В уравнении (25.21) правая часть представляет собою мощность,
т. е. работу, производимую полем над частицей в единицу времени;
по общим принципам механики левую часть следует поэтому
толковать как приращение кинетической энергии частицы в единицу
времени. В уравнении (25.22) правая часть представляет лоренцову
силу, а левая часть есть приращение, в единицу времени, количества
движения частицы.
Таким образом, кинетическая энергия частицы и ее количество
движения могут отличаться только на постоянные от выражений
W= JHUL-^г. (25.23)
7ЛГ
которые стоят в уравнениях движения под знаком производных по
времени. Значения этих постоянных определяются из требования
ковариантности: необходимо потребовать, чтобы энергия и
количество движения частицы1) составляли четырехмерный вектор. Но
величины (25.23) и (25.24) сами составляют четырехмерный вектор,
поскольку они пропорциональны нулевой и пространственным
составляющим четырехмерной скорости. Поэтому упомянутые постоянные
равны нулю2). Следовательно, величины (25.23) и (25.24)
представляют энергию и количество движения частицы.
При v — Q получается, в соответствии со старыми
представлениями, Я = 0: количество движения неподвижного тела равно нулю.
Но энергия W получает при v = 0 отличное от нуля значение
W0 = тс2. (25.25)
Этот результат противоречит старым представлениям, но полностью
подтверждается на опыте: всякому телу с массой т соответствует
запас энергии W0 (см. ниже § 34). Подобное соотношение
W = Mc2 (25.26)
!) Точнее, деленная на с энергия и количество движения.
2) Подробнее можно было бы рассуждать так. Упомянутые постоянные
должны, с одной стороны, составлять вектор, а с другой стороны, они не
должны зависеть от состояния движения, а значит, и от системы отсчета.
Но отличного от нуля постоянного вектора, значения составляющих
которого не зависели бы от системы отсчета, не существует.
108 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
между массой и энергией тела имеет место и для произвольной
скорости v% если только разуметь под Μ величину
Μ~—~==ψτ. (26.27)
ΫΙ-ТГ
которая сама зависит от скорости. Величину Μ следует
рассматривать как рациональное обобщение понятия массы. Она входит,
в качестве множителя при скорости ν, в выражение (25.24) для
количества движения Ρ и характеризует поэтому инертность тела
(его инертную массу). Величину Μ называют просто массой, тогда
как т называется массой покоя. Сообразно этому, величину W
называют просто энергией, а величину W0 — энергией покоя.
Масса покоя т есть постоянная, которая не зависит от состояния
движения частицы как целого, но может зависеть от внутреннего
состояния частицы (если последняя имеет сложную структуру и
обладает внутренними степенями свободы). Масса покоя т
выражается через инвариант четырехмерного вектора энергии —
количества движения. В самом деле, инвариант этот от скорости не зависит
и равен
-^- — р2 = т2с2# (25.28)
Зависимость массы Μ от скорости такова, что при приближении
скорости частицы к скорости света масса ее неограниченно
возрастает. Вследствие этого ни в какой системе отсчета ни одно тело
с массой покоя, отличной от нуля, не может достичь скорости света.
Это обстоятельство наглядно подтверждает предельный характер
скорости света.
Если же скорость частицы мала по сравнению со скоростью
света, то разность
W — mc2^±mvi+\m!~-\- ... (25.29)
будет лишь на малые величины отличаться от обычного выражения
для кинетической энергии частицы.
Предыдущие соотношения выведены нами из уравнений движения
заряженной частицы, но они имеют общий характер. Так,
соотношение (25.26) между массой и энергией справедливо не только для
рассмотренного здесь случая материальной точки с неизменной массой
покоя, но и для любого сложного тела или системы тел, в которой
могут происходить внутренние процессы, меняющие массу покоя.
Соотношение это выражает фундаментальный закон
пропорциональности между массой и энергией. К рассмотрению этого закона мы
вернемся в § 34.
§ 26] ПОСТАНОВКА ЗАДАЧИ О ДВИЖЕНИИ СИСТЕМЫ ЗАРЯДОВ 109
§ 26. Приближенная постановка задачи
о движении системы зарядов
Задача о движении системы заряженных материальных точек
требует совместного определения движения зарядов и
электромагнитного поля, в котором они движутся, причем наперед заданным может
считаться только внешнее поле. Передача взаимодействия между
зарядами осуществляется полем и происходит с конечной скоростью
(со скоростью света). Вследствие этого сила, действующая на
данный заряд, будет зависеть не от мгновенного, а от
предшествующего состояния движения остальных зарядов. Поле, возникающее
при ускоренном движении зарядов, не только передает
взаимодействие, но и излучается вовне; поэтому энергия системы зарядов
будет частично тратиться на излучение и система не будет
консервативной. Кроме того, необходимо помнить, что поле обладает
бесконечным числом степеней свободы; поэтому система, состоящая
из зарядов и поля, будет, строго говоря, системой с бесконечным
числом степеней свободы, а не чисто механической системой.
Тем не менее, задачу о движении зарядов можно приближенно
формулировать как задачу механики, ограничиваясь степенями
свободы самих зарядов. Для этого нужно поле (точнее, потенциалы)
каждого из зарядов выразить через его положение и скорость и
затем приближенно произвести пересчет от предшествующего момента
времени к данному так, чтобы значение потенциалов в данной точке
в данный момент времени выражалось через положения и скорости
частиц в тот же (а не в предшествующий) момент времени. Таким
путем можно построить приближенную функцию Лагранжа для системы
частиц.
Найдем сперза лагранжеву форму уравнений движения для одной
заряженной частицы. Нетрудно проверить, что уравнения (25.22)
получаются из функции Лагранжа
Ь = -тс*^~1—£ — еФ+±(А.у)9 (26.01)
где Ф = — А0 и Ak — скалярный и векторный потенциалы. В самом
деле, так как xl=zvi. то мы имеем
dL mvj
«* /l-f
Ч
3
дх, — e d*t^ с L· dx, vf
ft = l
(26.02)
ПО ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Подставляя эти выражения в уравнения Лагранжа
A(U\*L=0 (26.03)
dt \ dxt) dxi '
и припоминая выражения (24.01) для поля через потенциалы, мы
получим
т. е. уравнения (25.22). Что касается уравнения (25.21), то оно
является их следствием.
Перейдем теперь к системе частиц. Найдем приближенные
выражения для поля от частицы, движение которой известно.
Рассматривая сперва сплошное распределение заряда, мы можем написать
уравнения для потенциалов
Δφ—?ΐ£=-4πρ· (26·05>
^-ftS—τ* <2ί5·06>
Нужное нам решение уравнения (26.05) есть запаздывающий
потенциал
где
Ф = /]^. (26-07)
1р] = р(г'. П f = t-\\r-t'\. (26.08)
Если движение частицы достаточно медленное и достаточно
плавное1), то на не слишком больших расстояниях от нее можно
заменить [р] первыми членами разложения этой величины по обратным
степеням с и писать
[pl = p(r'. 0-т|г-г'|-|-р(г/( 0+
+ -2iHr-r'l2-^P(r'. 0+ ... (26.09)
Подставляя это разложение в (26.07) и учитывая, что интеграл
J ρ (г', f)dV' = ea (26.10)
!) Эти условия налагают ограничения на скорость частицы {v2<^c2) и
на ее ускорения различных порядков.
§ 26] ПОСТАНОВКА ЗАДАЧИ О ДВИЖЕНИИ СИСТЕМЫ ЗАРЯДОВ 111
представляет заряд частицы и потому не зависит от времени, мы
получим
•-ft$?f(L+££ft*'-*-\'-'l«'+- (26.11)
Если мы будем теперь считать, что заряд сосредоточен вблизи
точки1)
r' = ra = ra(t), (26.12)
мы получим из (26.11)
φ=Τ7^τ+*^ΙΓ-'·βΙ· (26·13>
Полагая
Γβ(0 = νβ (26.14)
и выполняя в (26.13) одно дифференцирование по времени, будем
иметь
•-τ7*π~»Μ!№&)- (2β-15>
Здесь первый член представляет кулонов потенциал от неподвижного
заряда, а второй — поправку на запаздывание.
В выражении для векторного потенциала можно поправочных
членов не учитывать2) и писать его в виде
^=7Т7Ё^Г (26Л6>
(Это значение векторного потенциала получится, если пренебречь
в (26.06) второй производной по времени, заменить плотность тока j
на ρνΛ и затем перейти к сосредоточеннрму заряду.)
Выражение (26.14) для скалярного потенциала неудобно тем, что
оно содержит не только скорость νΛ, но и ускорение \а частицы,
создающей поле. От этого неудобства легко избавиться, если
вспомнить, что поле не меняется при градиентном преобразовании
потенциалов, т. е. при замене
w-**-+- с dt ■
(26.17)
где χ — произвольная функция от координат и времени. Полагая
X— 2с |r-re| ' (ZbAb)
1) Значок а при еа> хф \а и т. д. означает здесь номер частицы.
2) В функции Лагранжа и в уравнениях движения члены с векторным
потенциалом будут того же порядка, как члены с поправками к скалярному
потенциалу.
112 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
мы уничтожим в (26.15) второй член, хотя и усложним немного
выражение для At. В результате получится
4 —ia/_
*' — 2с ί I г
Φ = 77^р (26.19)
3
у |г-гл| +£ ίΤ^ϊΤΡ J' (2b'2u)
Нетрудно проверить, что расходимость нового выражения для
векторного потенциала равна нулю:
i|| = 0. (26.2,)
/ж1
Подставляя эти значения потенциалов в последние два члена
функции Лагранжа (26.01), получим
.*<D+f(A.v) =
с - ' |г —гв| '
, ее а ( (ν - vfl) | (vfl(r — rfl))(v-(r — rfl)) \ ,9R 00.
+ 2^\TF=^T+ fi^TTP Γ (26'22)
Это выражение симметрично относительно частицы, порождающей
поле, и частицы, на которую поле действует. Мы можем считать его
приближенным выражением закона взаимодействия двух частиц. Это
позволяет нам написать функцию Лагранжа для системы частиц в виде
а а, Ь
(афЬ)
, 1 V - ~ S (Vg'Vft) ι (Уд-(Гц —г»)) (ν»-fai--г») И /oft 9^
+ 1? £ *А\ I гл — Гг> | ^ | гл — г^ |з р ^ь·^
а, Ь
{афЬ)
Впрочем, так как величины порядка v2/c2 предполагаются малыми
в законе взаимодействия, то будет последовательнее пренебрегать
более высокими степенями этих величин везде. Беря первые члены
разложения корня квадратного по степеням v2/c2, мы можем писать
вместо (26.23):
a fl, Ь
(афЬ)
_1_ 1 V г г ί (уд'уб) ι (Vfl'frfl —fft))(v6·(*·<* — гь))\ /9694^
а, 6
(Of·*)
§ 26] ПОСТАНОВКА ЗАДАЧИ О ДВИЖЕНИИ СИСТЕМЫ ЗАРЯДОВ ИЗ
где
W0 = c2^ma (26.25)
а
есть сумма „энергий покоя" отдельных частиц.
Рассмотрим теперь вопрос о преобразовании Лоренца в задаче
о движении системы материальных точек. Пусть задача эта решена
для некоторой системы отсчета. Это значит, что в данной системе
отсчета известны выражения для координат каждой из частиц в
функции от времени t этой системы
ra = ra(t). (26.26)
Произведем теперь преобразование Лоренца и поставим вопрос:
каковы будут в новой системе отсчета выражения для новых
координат х'а, у'а, z'a как функций от нового времени t'7 Формулы
преобразования Лоренца имеют вид:
г' = r-Wt + / ^-Ца· - 1) ТГ <V * <г - v/> >· <26·27)
('4(Vt)). (26.28)
Поэтому новые функции от нового времени получатся в результате
исключения переменной t из уравнений
r; = r«(Q-V*+/ г±^т-Л$г{\-(та«)-Щ}, (26.29)
(т^-1)
t'= ' Ь-^(Ута(0)1. (26.30)
Другими словами, нужно найти корень t уравнения (26.30) и
подставить его в (26.29). Это можно сделать только приближенно, считая
V2
—γ малым по сравнению с единицей. Корень уравнения (26.30) будет
приближенно равен
* = (1-1&У+-*<У'га(Г»· (26.31)
Прежде чем подставлять его в уравнение (26.29) напишем это
уравнение в упрощенном виде:
Γ1 = Γα(0-νί+^-((ν·Γί?(0)-^}. (26.32)
8 Зак. 2649. 3. А фок
114 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Подставляя сюда (26.31), получим приближенно
ra(0 = r0(0-Vi' + -i-v0(0-{-Y^'+(V.ra(/'))}-
—5?(VTe(f)). (26.33)
где
va(0 = (^-)/=i,. (26.34)
Дифференцируя формулу (26.33) по переменной t't получим
соответствующее выражение для скорости:
ν; (о=va (о - ν+ψ va (η {-1 ν»+(ν · Vfl (о)} -
-^r(V · νβ(0) + ^· va(0{-^^'+(V · га(Г))}. (26.35)
где vfl есть производная от \а по своему аргументу.
Заметим, что связь между t и V зависит от номера частицы а;
это вполне понятно, так как пересчет к новой одновременности
требует, для различных частиц, введения различных поправок. Старое
определение одновременности, принятое в первоначальной системе
отсчета, означало одинаковость значений t для всех частиц (причем
значения f оказываются различными). При новом же определении
одновременности, принятом в преобразованной системе отсчета,
рассматриваются уже одинаковые для всех частиц значения V (и
различные t). Поэтому мы можем не писать при f значка а. Заменяя,
кроме того, символ V буквой t без штриха и опуская этот
аргумент во всех функциях, входящих в формулы (26.33) и (26.35), мы
можем эти формулы написать короче в виде
r« = ^-V'+^va{-iv^ + (V.ra)}--^(V.ra), (26.36)
ν; = νβ-ν + ^νβ{-1ν' + <ν·νβ)}-·^(ν·νβ) +
Таков будет вид новых функций χ'α% ν^, выраженных через новую
независимую переменную (обозначенную нами той же буквой, как
и старая).
Выведенные нами формулы являются приближенными; однако,
если считать, что скорости V и va — одного порядка, то сделанные
в них пренебрежения — в точности те же, какие приходится делать
при построении функции Лагранжа (при учете запаздывания), и они
лежат поэтому в существе задачи,
§ 26] ПОСТАНОВКА ЗАДАЧИ О ДВИЖЕНИИ СИСТЕМЫ ЗАРЯДОВ 115
Уравнения движения получаются, как известно, путем вариации
интеграла действия
(2)
S = fLdtt (26.38)
(1)
причем, если (как обычно) функция Лагранжа зависит только от
координат и скоростей (и, быть может, от времени), то они имеют
вид
J_j)L ^_=0 и т д (26#39)
dt дха дха
Если же в функцию Лагранжа входят также и ускорения, то
уравнения движения должны быть написаны в виде
d2 dL . d dL dL
dt2 дха dt дха дха
= 0 и т. д., (26.40)
где ха, уа, za — составляющие ускорения α-й частицы.
Если интеграл действия 5 инвариантен по отношению к
преобразованию Лоренца, то уравнения движения будут, очевидно, кова-
риантными.
Рассмотрим, например, уравнения движения одной частицы,
получаемые из функции Лагранжа (26.01). В этом случае интеграл
действия может быть написан в виде
S = -mc2fdz^-^f^Akdxk (26.41)
(где xQ = ct). Его инвариантность вытекает из инвариантности
дифференциала собственного времени di и составленной из потенциалов
линейной дифференциальной формы (24.02).
Но для ковариантности уравнений инвариантность интеграла
действия S не является необходимой: достаточно, чтобы преобразование
Лоренца не меняло вариации интеграла действия. Это видно уже на
примере выражения (26.41). Если мы совершим над потенциалами
градиентное преобразование вида (26.17), где χ — некоторая
функция, то 5 заменится на
S' = S—£.(χ<2>-χΟ>), (26.42)
где χ*1) и χ<2) — значения функции χ на нижнем и на верхнем
пределе. Но так как на пределах вариации исчезают, то будет
8S' = 8S (26.43)
8*
116 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
и уравнения движения не изменятся, как это и должно быть,
поскольку градиентное преобразование потенциалов не меняет поля.
Применим эти рассуждения к уравнениям движения системы
взаимодействующих зарядов и к функции Лагранжа (26.23).
Обозначим через L'(Р) выражение, полученное из функции Лагранжа
L(t) заменой rjt) на r'a(tr) и va(t) на v'a(t') по формулам (26.33)
и (26.35). Если первоначальный интеграл действия был
(2)
S = fL(t)dtt (26.44)
О)
то преобразованный интеграл будет
(2)
S'=sfL'(t')dt'. (26.45)
(1)
Таким образом, изменение интеграла действия в результате
преобразования Лоренца равно
(2) (2)
S' — S=fL' (Г) dt' — fL (0 dt (26.46)
(1) (1)
или, если мы в первом интеграле обозначим переменную
интегрирования V той же буквой t как и во втором,
(2) (2)
S' — S=fL'(t)dt — fL (0 dt. (26.47)
(1) (1)
Здесь U (0 есть выражение, получдемое из L (t) заменой г^ на г'а и \а на
\'а по формулам (26.36) и (26.37).
Из соотношения (26.47) следует, что для ковариантности
уравнений движения достаточно, чтобы разность
[L' (t) — L (0} dt = dF (26.48)
была полным дифференциалом некоторой функции F. В самом деле,
1ч)гда будет
S' — S = FM — /7(1), (26.49)
где F(2) и F^ — значения функции F на пределах, и, следовательно,
вариации интегралов S и S' будут друг другу равны.
§ 27] ВЫВОД ЗАКОНОВ СОХРАНЕНИЯ 117
Выполняя вычисления, мы можем убедиться, что соотношение
(26.48) действительно выполняется, причем функция F равна
а ь
(Ьфа)
а
+£·Σ w«(v · r«>+wΣ m<t- <26·50)
α α
Тем самым доказано, что получаемые из функции Лагранжа
(26.23) или (26.24) уравнения движения действительно ковариантны
(в данном приближении) по отношению к преобразованию Лоренца.
§ 27. Вывод законов сохранения в механике системы точек
Обратимся теперь к выводу интегралов уравнений движения. Для
этого рассмотрим изученное в § 23 бесконечно малое
преобразование Лоренца, содержащее все десять параметров. Напомним, что
параметры эти таковы: изменение начала счета времени τ, смещение
начала пространственных координат а, переход к системе отсчета,
движущейся относительно первоначальной со скоростью V,
бесконечно малый поворот пространственных осей на величину ω. Нам
нужно вычислить получаемое в результате такого преобразования
изменение вида функций от времени, представляющих координаты
каждой частицы. Это изменение Ьгь происходит от двух причин:
во-первых, от векторного характера гь и, во-вторых, от изменения
аргумента t.
Изменение от векторного характера хъ равно, согласно (23.06) и
(23.17),
Ar, = a-W+[(oXr,]. (27.01)
Аргумент t меняется для #-й частицы на величину
Δί» = τ—i-(V-r6). (27.02)
где первый член происходит от изменения начала счета времени,
а второй — от перехода к движущейся системе отсчета. (Формула
(27.02) есть одно из уравнений (23.06).)
Изменение L*rb вследствие изменения аргумента в функции г^(^)
получается из равенства
«·*(') = г;(Г) (*' = * + Δ*6), (27.03)
118 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. 11
откуда
«·;(0 = Γ6(ί-Δί6) = Γ6(/)-ν6Δ/, (27.04)
и, следовательно,
Ь\ = r'b(t)-rb(t) = -vbMb. (27.05)
Полное изменение вида функции rb(t) будет равно
Ч = Ь*ь + Δ% = Δ^ - ν, Δ/,. (27.06)
Таким образом, согласно (27.01) и (27.02), полное изменение Ьть
выразится через параметры бесконечно малого преобразования
Лоренца следующим образом:
Ьг„ = - ν4τ + а - V/ + ± ν6 (V · г„) + [ω Χ г„], (27.07)
тогда как полное изменение 8vft скорости vb будет, очевидно, равно
bvb = Wbri>· <27·08>
В выражении для Ьгь члены, содержащие V, совпадают с членами
первого порядка (относительно V) в формуле (26.36), как и должно
быть.
Вычислим теперь двумя способами изменение функции Лагранжа
в результате бесконечно малого преобразования Лоренца. Первый
способ основан на применении уравнений движения, а второй—на
непосредственном преобразовании, с использованием формул (26.48)
и (26.50). Мы имеем
"-Σ(£· *. + £·*„). (27.09)
а
поскольку функция L не содержит явно времени.
Здесь под -д— разумеется трехмерный вектор с составляющими
Ы dL dL а Ы лл
•д—, -з—, -5— ; аналогичное значение имеет -д—. Используя
уравнения движения и соотношение (27.08), мы можем написать
^=ΊτΣ^α· (27Л°)
а
С другой стороны, мы можем вычислить изменение функции
Лагранжа L и без использования уравнений движения. Очевидно, что
L не меняется при смещении начала и при повороте
пространственных координат. При изменении начала счета времени L меняется на
величину 7Γ'τ· В самом деле, если U (t') = L(t)f где Ρ = ί-\-τ,
§ 27] ВЫВОД ЗАКОНОВ СОХРАНЕНИЯ 119
то
U(f) = L(t — x) = L(f) — x^. (27.11)
Изменение же L в результате перехода к движущейся системе
отсчета дается формулой (26.48), где в качестве F достаточно взять
члены первого порядка (относительно V) из (26.50), а именно
'=Σ(—.+7 *.?-■& Σ 77^Vr«>· (27.12)
\ (Ьфа) )
Таким образом,
8L=-*4r+4r=w<-xL+F>· <27лз>
Приравнивая (27.10) и (27.13), получаем
■ί{Σ^αΚ + ^-^ = 0, (27.14)
откуда
Σ ■& 8г«+Ιτ -F=const· <27·15>
Левая часть этого выражения представляет линейную функцию от
десяти параметров преобразования Лоренца. Подставляя в (27.15)
выражения (27.07) и (27.12) для Ьта и для F, мы можем написать;
/s_x^+(a.p)-f(V.K) + (w-M) = const, (27.16)
где уже W, Ρ, Κ· Μ от параметров не зависят и равны:
Ы
W=%yaT~-L. (27.17)
а
ρ =Σίγ0- (27·18>
а
и Υ1 / 1 vl . еа \\ «Ъ . 1 dl\ ,γΐ dL
* = Z[ma-2ma-e-rwZi \ta-rb\ +FV«35" г*-'2*а5~·
α l A la
\ (Ьфа) J
(27.19)
M=S[r*x-^]· (27-2°)
Левая часть (27.16) должна быть постоянна, каковы бы ни были
значения параметров τ, а, V, ω. Это возможно только, если величины
120 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
W, Ρ, Κ, Μ сами постоянны. Мы получаем, таким образом, десять
интегралов, причем каждый из них связан с определенным параметром
в бесконечно малом преобразовании Лоренца. Легко видеть, каков
физический смысл этих интегралов: W есть интеграл энергии, Ρ —
интеграл количества движения, К—интеграл движения центра
инерции, Μ — интеграл момента количества движения. Таким образом,
найденные десять интегралов представляют классические интегралы
системы материальных точек с поправками на теорию
относительности.
Выпишем найденные интегралы в явной форме. Мы имеем
*-*Σ-.+1Σ*λ+ΪΣ-.$+±Σ от+
а а а а,Ъ
(афЬ)
ι 1 V eaeb{ya'Vb) . 1 у еаеь
+ 1? L \ta-tb\ +4? 2d |Γβ_Γ,|8<ν(ν-Γ*))(νΗΓβ-ΓΑ)).
а, Ь ауЬ
(афЬ) {афЪ)
(27.21)
Это есть энергия системы.
Если мы положим
W = c^ma + E. (27.22)
а
то величина Ε будет энергией в обычной нормировке (эта величина
обращается в нуль, когда взаимные расстояния неограниченно
возрастают, а скорости равны нулю). Наряду с энергией W мы будем
рассматривать соответствующую массу
М=~ = ^та+-^. (27.23)
а
которую можно называть полной массой системы. Согласно
определению (27.23), полная масса системы равна сумме масс покоя
отдельных частиц, сложенной с той массой, которая соответствует их
кинетической энергии и энергии взаимодействия.
Перейдем к остальным интегралам движения системы. Согласно
(27.18), интеграл количества движения равен
а
+ 2? 2d |rfl-r,i\v«H ίϊ^^ρ V (27'24)
д, Ь
{афЬ)
§ 28] ТЕНЗОРНЫЙ ХАРАКТЕР ИНТЕГРАЛОВ ДВИЖЕНИЯ 121
Чтобы написать в явной форме интегралы движения центра инерции,
положим для краткости
Αβ=-.(ι+4)+έΣ·π^Γ· <27·25>
(Рф а)
Мы будем тогда иметь
Κ = 2Λ-ίΡ. (27.26)
а
Заметим, что
2М« = М, (27.27)
а
где под Μ следует разуметь выражение (27.23), взятое в том же
приближении, в каком дано М*а (это соответствует нерелятивистскому
приближению для энергии Е).
Введем радиус-вектор R центра инерции системы по формуле
МЯ=^М*ага. (27.28)
а
Выражение (27.26) для К примет вид
K = MR — Я>. (27.29)
Постоянство величины К дает закон движения центра инерции системы.
Наконец, интегралы момента количества движения системы равны
Μ=Σ'»*(1+έ-)ΐΓ«χν«ι+
а
I 1 У еаеь | . [raXr&l(Vf,-(rq — r&)) \ m _~
а> Ь
(афЬ)
§ 28. Тензорный характер интегралов движения
Мы должны теперь исследовать, что представляют собой
найденные интегралы в смысле их поведения при преобразовании Лоренца.
Если бы мы наперед знали, что выражение
/ = —TU7-Ha.P) + (V.K) + («>.M) (28.01)
есть инвариант, то мы могли бы заключить о тензорном характере
величин W, Ρ, Κ, Μ на основании свойств параметров τ, а, V, ω
бесконечно малого преобразования Лоренца. Поскольку, однако,
инвариантность выражения (28.01) нами не доказана, мы изберем
более прямой путь, хотя он и связан с довольно утомительными
выкладками (последних мы приводить не будем). А именно, мы
122 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ β ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
подвергнем величины W, Ρ, Κ, Μ конечному преобразованию Лоренца
и посмотрим, как они выражаются через первоначальные величины.
Обозначим через W, Ρ', Κ', Μ' результаты подстановки в W,
Ρ, Κ, Μ величин т'а% \'а вместо ra> va (формулы (26.36) и (26.37)).
Мы получим
w'=(l+i^+j^-)w-{l+i^-)(y·^ (28·02)
Р' =P-V^4-^(V-(P-V-J)). (28.03)
или, если ввести полную массу Ж,
ст'=(с* +1ν»+|Ύ-)м ~(ι +¥-^)(γ ·р)· (28·04>
Ρ' = ρ — \М+-^ (V · (Р — VM)). (28.05)
Последние формулы могут быть с той же точностью написаны в виде
*M'=*MfZ*Lll. (28.06)
Υι-ΊΓ
р/ = Р-УЛ1 + / г—^-Λ-ρι-(ν·(Ρ-νΛί)). (28.07)
Сравнивая эти формулы с обычными формулами преобразования
Лоренца (26.27) и (26.28), мы видим, что составляющие Рх, Р, Рг
вектора Ρ преобразуются как координаты х, у, ζ, а полная масса Μ
преобразуется как время t. Это значит, что совокупность величин
po = Mc = Ki Ρΐ=Ρ^, P2 = Pr P* = PZ (28.08)
представляет контравариантный вектор. Ковариантные составляющие
этого четырехмерного вектора равны
Р0 = Мс = ^-, Р, = -Рх, Р2 = -Рг P3 = -Pz. (28.09)
Если мы будем рассматривать всю систему зарядов как одно
сложное тело, то мы должны приписать ему массу Μ и количество
движения Р. Мы можем также приписать ему (точнее, его центру
инерции) скорость
v = i (28.10)
§ 28] ТЕНЗОРНЫЙ ХАРАКТЕР ИНТЕГРАЛОВ ДВИЖЕНИЯ 123
и массу покоя
μ = |/"ΛΡ--£. (28.11)
Величина μ равна значению Mf в той системе отсчета, в которой
р' = 0. На этом примере видно, что масса покоя тела зависит от
его внутреннего состояния (в данном случае—от состояния движения
составляющих его частиц).
Обратимся теперь к закону преобразования величин К и М.
Производя ту же подстановку (26.36) и (26.37), мы получим для К' и М'
выражения:
Κ'=(ΐ+^-)κ—53-V(V-IO—3-lVXM]. (28.12)
W=(l+■&)'*—2^V(V-M)+(l+^)[VXK]. (28.13)
С той же точностью эти формулы могут быть написаны в виде
K'°-yr(V-K)+ ^-L_{K^(V»K)-^[VXMl}, (28.14)
1_
M'=^(V-M) + J_{m-^-(V-M) + [VXK]}. (28.15)
Сравним эти формулы с законом преобразования
антисимметричного тензора, причем будем иметь в виду, что в смысле трехмерного
векторного анализа К представляет собою полярный, а
М—аксиальный вектор. Соответствующие формулы преобразования выписаны
нами в § 24 для случая тензора электромагнитного поля (формулы
(24.37) и (24.38)). Для того чтобы получить совпадение, мы должны
считать, что вектор Μ преобразуется как Н, а вектор К как Е.
(Другая возможность Μ—Е, К— — Η устраняется тем, что К и Ε
представляют полярные, а М и Η—аксиальные векторы.) Таким
образом, мы можем ввести антисимметричный тензор с ковариантными
«оставляющими:
Μ2Ζ = ΜΧ\ Ж31 = Жу; М12*=МЖ1 1
124 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ
или, что то же, с контравариантными составляющими:
М2* = МХ; Мзг = Му; Ь№ = Мг\ \
Ж10 = сКх\ Ж20 = сКу\ Ж30 = сКг. J
Проверкой служит то, что для одной частицы
Мх = т(х2и3— х3а2) и т. д., 1
сКх = т(х1а°— х°ах) и τ, д, )
Здесь через #°, и1, и2, а3 обозначены составляющие четырехмерной
скорости; для координат и времени введены обозначения с верхними
значками x°=ct, xl = x, x2=yt x3=z для того, чтобы подчеркнуть,
что они представляют контравариантные величины.
Таким образом, мы выяснили, что из десяти интегралов движения
четыре (а именно, энергия и количество движения) представляют
четырехмерный вектор, а остальные шесть (интегралы центра инерции
и момента количества движения) — антисимметричный тензор. Это
позволяет утверждать, что если эти величины постоянны в какой-
нибудь одной системе отсчета, то они будут постоянными и во всякой
другой системе отсчета. То обстоятельство, что законы преобразования
выведены нами из приближенных формул, связано с приближенным
характером всей постановки задачи: мы уже упоминали, что, строго
говоря, энергия и количество движения системы зарядов вообще не
остаются постоянными, а могут тратиться на излучение.
Зная тензорный характер интегралов движения, мы можем
проверить, что выражение (28.01) действительно представляет собою
инвариант. Для этого достаточно переписать выражение для /
в четырехмерных обозначениях. Согласно результатам § 23, мы имеем
* = -я0; ах = — аг; ау=—а2; аг = — аг, (28.19)
где α0, αν а2, #3 есть ковариантный вектор.
Далее,
V^jr = ^ω10; Vy = cu20; Vz = coi30; (28:20)
ω* = ω23'» ^ = ω3ΐί ω* = ωΐ2» (28.21)
где oiik — ковариантные составляющие антисимметричного тензора.
Пользуясь четырехмерными обозначениями (28.08) и (28.17) для
интегралов движения, мы будем иметь вместо (28.01)
/ = _ аоР° — агР1 — а2Р2 — агР* + ωι0Μ™ +
+ ω20Μ2° + ω30Λ13° + ω^Μ23 + ω81ΛΙ« + и>12Мх\ (28.22)
[гл. и
(28.17)
(28.18)
§ 29] замечания к законам сохранения 125
или короче
3 3
/ = — 2 a,Pl + у Σ ^И*1*. (28.23)
/«О i,k=0
что и доказывает наше утверждение об инвариантности величины /.
§ 29. Замечания по поводу обычной формулировки
законов сохранения
В этом параграфе мы сделаем некоторые замечания критического
характера по поводу обычной формулировки законов сохранения. Для
определенности мы будем говорить о законах сохранения энергий и
количества движения, так как они рассматриваются чаще всего.
Выражения для энергии (или полной массы) и для количества
движения обычно пишутся в форме
W = Мс2 = 2 —^ . (29.01)
"*flVfl
" jAT
(29.02)
и относительно них делаются два утверждения: во-первых, что эти
величины представляют четырехмерный вектор, и, во-вторых, что они
остаются постоянными.
Оба утверждения справедливы, однако, лишь в том случае, когда
частицы не взаимодействуют. Но тогда скорость каждой частицы
в отдельности остается постоянной, и каждая четверка величин
ψ(«)β "У2 pW= w*v" (29.03)
ι/ι-4-
V
будет представлять постоянный четырехмерный вектор. Таким образом,
при отсутствии взаимодействия постоянство сумм (29.01) и (29.02)
вытекает тривиальным образом из постоянства отдельных членов (29.03),
и составление сумм не дает ничего нового.
При наличии же взаимодействия выражения (29.01) и (29.02) не
будут постоянными и не будут представлять четырехмерного вектора.
Первое понятно непосредственно, так как даже в нерелятивистском
приближении постоянной будет не кинетическая, а полная энергия
системы частиц,
126 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Теория относительности вносит поправки, соответствующие
взаимодействию, не только в выражение для энергии, но и в выражение
для количества движения системы (см. (27.21) и (27.24)). Лишь с этими
поправками оба выражения будут постоянными. Что касается
векторных свойств, то на первый взгляд может показаться парадоксальным
следующее обстоятельство. Как мы видели в § 25 (формулы (25.23)
и (25.24)), для одной частицы совокупность четырех величин (29.03)
представляет четырехмерный вектор также и в случае ускоренного
движения; далее, сумма векторов есть, как будто, тоже вектор. Между
тем мы утверждаем, что суммы (29.01) и (29.02) не представляют
собой составляющих четырехмерного вектора. Парадокс разъясняется
тем, что величины W^a\ Ρ(α) являются функциями от времени, общего
для всех частиц. Их суммы Wf Ρ представляют суммы
одновременных в данной системе отсчета значений W^a\ Ρ(α). В другой
системе отсчета эти значения уже не будут одновременными. Поэтому
при переходе к новой системе отсчета нужно не только составить
из W^a\ Ρ(α) линейные комбинации по правилам для векторов, но и
пересчитать эти величины к новой одновременности (как это
разъяснено в § 26). Такой пересчет не даст ничего нового лишь в случае
постоянных W^a\ Ρ(α); в общем же случае он требует учета
изменения этих величин за время, соответствующее переходу от старой
одновременности к новой (все это приближенно проделано в § 26). Поэтому
ясно, что для невзаимодействующих частиц суммы № = 2^ и
а
Ρ = 2 Ρ будут обладать векторными свойствами, а для взаимодей-
а
ствующих частиц они ими обладать не будут.
При наличии взаимодействия векторными свойствами и
постоянством во времени будут, в рассматриваемом приближении, обладать
те выражения для интегралов движения, которые выведены в § 27.
Эти выражения отличаются от (29.01) и (29.02), с одной стороны,
учетом членов взаимодействия и, с другой стороны, тем, что
величины а заменены в них первыми членами разложения в ряд
/-4
по степеням v2Jc2t причем разложение доведено до членов того же
порядка, какой учитывается в членах взаимодействия.
Может, однако, оказаться, что вследствие больших расстояний
между частицами члены взаимодействия играют незначительную роль,
но что, в то же время, скорости частиц весьма велики. В этом
предельном случае весьма быстрых, слабо взаимодействующих частиц
можно пользоваться выражениями (29.01) и (29.02). При этом, однако,
необходимо помнить, что эти выражения применимы лишь до начала
§ 30] вектор потока энергии (вектор умова) 127
и после конца взаимодействия, тогда как в промежуточное время они
не применимы.
В указанном предельном случае можно применять законы
сохранения энергии и количества движения в обычной форме
аС2 VI т~с*
Σ-^=—Е-Т^Цр· (29.05,
• К «-5- · К ■-$-
где να и \*а — значения скорости α-й частицы до начала и после
конца взаимодействия. Из сказанного ясно, что левые части этих
равенств не остаются постоянными во все время взаимодействия, но
что после окончания взаимодействия они принимают первоначальное
значение (то, которое они имели до его начала).
Сделанные в этом параграфе замечания в равной мере относятся
и к обычной формулировке закона сохранения момента количества
движения, в которой члены взаимодействия не учитываются.
§ 30. Вектор потока энергии (вектор Умова)
Рассмотрим обычные нерелятивистские уравнения движения
механики сплошной среды. Они имеют вид:
Р^ = Р^ + Е4Й- 0=1.2.8), (30.01)
3
ΐ+Σ
/ = 1
^£- = 0. (30.02)
Здесь νχ% ν2, ^—составляющие скорости частицы среды,
ρ—плотность среды, plk—тензорх) напряжений, /^—составляющие внешней
силы, действующей на единицу массы. Входящее в левую часть (30.01)
выражение для ускорения -^ есть так называемая субстанциальная
1) В этом параграфе мы употребляем термины „вектор" и „тензор"
в трехмерном их значении.
128 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
производная, равная
Уравнение (30.02) принято называть уравнением неразрывности. Оно
выражает, как известно, закон сохранения массы.
Система уравнений (30.01) и (30.02) сама по себе еще не является
полной; она не позволяет, по заданным начальным и предельным
условиям, находить движение среды. Чтобы получить полную систему
уравнений, нужно, во-первых, выразить тензор напряжений через
другие величины, как то: деформации, скорости, давление, температуру,
электромагнитное и другие поля, и затем, если число неизвестных
функций будет больше четырех (т. е. больше числа уравнений (30.01)
и (30.02)), добавить к уравнениям движения ряд других уравнений,
как то: уравнение состояния, уравнение притока тепла, уравнения
поля и др.
В дальнейшем мы ограничимся случаем консервативной системы
при отсутствии внешних сил.
Рассмотрим сперва упругую сжимаемую среду. Мы можем ввести
тогда потенциальную энергию Π единицы массы среды и выразить
тензор напряжений через нее. Пусть аъ а2, #3—переменные Лагранжа,
в качестве которых можно взять начальные координаты частицы среды.
Координаты частицы в момент времени t будут тогда
xl = xi(al. a2> аг> t) (/=1, 2, 3), (30.04)
и деформация среды будет характеризоваться совокупностью величин
*«=2!&#. (Ш)5)
/ = 1
Потенциальная энергия Π будет функцией от деформаций, причем,
если положить
з
й = 1^ PmndAmn (pmn=pnm)t (зо.06)
/я, л=1
то составляющие тензора напряжений plk выразятся через
коэффициенты Ртп следующим образом:
р»= Σ pmn£tiit о»-л* (30·07)
/71, Л = 1
Из этих формул нетрудно вывести соотношение
V ί=1 7 /,*«!
§ 30] ВЕКТОР ПОТОКА ЭНЕРГИИ (ВЕКТОР УМОВА) 129
В случае жидкости
Л* = -/*<*. (30·09)
где ρ — давление, так что тензор pik сводится к скаляру. В этом
случае уравнение (30.08) приводится, в силу (30.02), к виду
p^ = -„divv = f£ (30.10)
и дает обычное выражение
η = ίψ = ί4~Ύ (30л1)
для потенциальной энергии единицы массы жидкости. В случае
бесконечно малых деформаций (обычная теория упругости) соотношение (30.08)
также легко проверяется непосредственно, без перехода к
переменным Лагранжа.
Интересно сопоставить соотношение (30.08) с термодинамическим
тождеством
С= Σ «.£+»■£· <3°·|2>
в котором и — внутренняя энергия, σ — энтропия и Τ—температура.
Для изотермических процессов можно положить
TL = u—Ta = Ft (30.13)
где F — свободная энергия, а для адиабатических
П = и. (30.14)
Обратимся теперь к уравнениям движения. При помощи
уравнения неразрывности (30.02) можно три уравнения (80.01) написать
в виде
*¥^+2£(ι«Λ--*«>-ο. (30Л5)
Подобно тому, как уравнение неразрывности
ΐ+2^-° (30·02)
выражает закон сохранения массы, уравнение (30.15) можно считать
выражающим закон сохранения количества движения. В уравнении
неразрывности скалярная величина ρ есть плотность массы, а вектор
с составляющими pvi(i=\t 2, 3) есть плотность потока массы.
Подобно этому, в уравнении (30.15) вектор pvt есть плотность
9 Зак. 2649. В. А. Фок
130 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
количества движения, а тензор
есть плотность потока количества движения. При этом вектор ρυι
входит один раз как плотность потока массы и другой раз как
плотность количества движения. Подобно этому, величина Sik входит один
раз как /-я составляющая потока pvkt а другой раз как k-я
составляющая потока pvl (напомним, что Sik = Skl).
Мы сейчас видели, что уравнение неразрывности и уравнения
движения, написанные в форме (30.02) и (30.15), могут быть
истолкованы как законы сохранения массы и количества движения.
Естественно попытаться написать в аналогичном виде и закон сохранения
энергии. Это было впервые сделано Умовым, который еще в 1874 г.
ввел важное понятие о потоке энергии [4], [5].
Введем скалярную величину
5 = 1рг/2 + рП (30.17)
и вектор с составляющими
з
Si = Vi (у Ρ*2 + рп) - 2 ΛΛ· (30.18)
k=l
В этих формулах П означает по-прежнему потенциальную энергию
единицы массы. Очевидно, что в выражении для 5 первый член есть
плотность кинетической энергии, а второй член — плотность
потенциальной энергии. Таким образом, величина 5 есть объемная
плотность энергии. Вектор Sl$ который мы будем называть вектором
Умова1), может быть истолкован как вектор потока энергии. В самом
деле, используя уравнения движения, уравнение неразрывности, а также
соотношение (30.08), нетрудно проверить справедливость равенства
§ + Si = 0. (30.19)
ί = 1
которое и можно рассматривать как выражение закона сохранения
энергии.
Заметим, что если даны уравнения движения (30.15), то лишь
одно из уравнений: уравнение неразрывности (30.02) или уравнение
потока энергии (30.19), будет независимым; другое получится из него
и из уравнений движения. Вместо уравнения неразрывности или урав-
1) Рассмотренные Умовым выражения для S и St отличаются от
приведенных здесь отсутствием членов с потенциальной энергией. Поэтому в
правой части соответствующего соотношения Умова стоит не нуль, а взятое
со знаком минус выражение (30.08), т. е. работа сил упругости в единице
объема за единицу времени.
§ 31]
ТЕНЗОР МАССЫ
131.
нения потока энергии можно взять их линейную комбинацию,
рассмотрев величину ρ + λ5 и ее поток ρι^+λ^., где λ есть постоянная,
имеющая размерность, обратную квадрату скорости. В следующем
параграфе мы увидим, что релятивистской форме уравнений движения
сплошной среды приближенно соответствует линейная комбинация
указанного вида со значением постоянной λ, равным \ = -т.
В заключение, обратим внимание на следующее обстоятельство.
В предыдущих рассуждениях поток некоторой величины 5
определялся (из соответствующего закона сохранения) по заданной его
расходимости. Но такое определение неоднозначно. Между тем, по
своему физическому смыслу вектор потока является вполне
определенной величиной. Поэтому следует ожидать, что при учете
требований теории относительности можно и формально сделать
определение его однозначным, если только наложить на него надлежащие
дополнительные условия. Одним из таких условий является
требование, чтобы вектор потока величины 5, которая является функцией
состояния, сам являлся функцией состояния. Это требование будет
точнее формулировано и подробно обсуждено в следующих двух
параграфах. В рассмотренных здесь примерах ему удовлетзоряет
поток энергии (вектор Умова), поток массы и поток количества
движения.
§ 31. Тензор массы
В предыдущем параграфе мы видели, что в случае
консервативной системы обычные нерелятивистские уравнения движения
сплошной среды могут быть написаны в виде равенства нулю четырех
выражений, которые представляют сумму производных по координатам
и по времени. Такая форма уравнений движения заставляет думать,
что их релятивистским обобщением должны быть уравнения вида
от00 , уаг°* _п
дТ10 , у dTik
►Σ^-ο·
дх0 ' +U dxk
(31.01)
:1
где Tik (/, /г = 0, 1, 2, 3) есть некоторый тензор.
Первое из этих уравнений должно выражать закон сохранения
массы и энергии, а остальные три (для /=1, 2, 3)—закон
сохранения количества движения. Если Τ есть плотность всей массы
(включая массу покоя и массу кинетической энергии), то сТ ' есть
плотность потока массы. Далее, если cTi0 есть плотность /-й
составляющей количества движения, то c2Tik (k = 1, 2, 3) представляет
9*
132 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
плотность потока для этой составляющей. Масса Ж, заключенная
в некотором объеме, и соответствующая ей энергия W выравятся
через Г00 в виде интеграла по объему:
W
j T°°dV. (31.02)
Аналогично, количество движения, заключенное в том же объеме,
будет равно
Pl = c f Ti0dV. (31.03)
Уравнения (31.01) выражают тот факт, что увеличение энергии или
количества движения, заключенных внутри некоторого объема,
происходит только за счет притока этих величин извне (т. е. сквозь
поверхность, ограничивающую этот объем). Интегралы (31.02)
и (31.03), распространенные по всему объему, представляют полную
массу и полное количество движения системы. Эти величины остаются
постоянными (не зависят от времени t).
Кройе законов сохранения массы, энергии и количества
движения, должны иметь место законы сохранения момента количества
движения, а также законы движения центра инерции системы. Их
можно написать в форме, аналогичной (31.01). Из уравнений (31.01)
вытекают соотношения
£ (xtT*° - хкТ'°) + Σ^ (*^т - xj"") = Тм - Tlk (31.04)
т«=1
(/, k^0t 1, 2, 3).
Эти соотношения будут иметь форму законов сохранения, если
правая часть их обратится в нуль. Мы получаем условие
Tik=Tk\ (31.05)
согласно которому тензор Т1 должен быть симметричным. Это
условие означает, в частности, что поток массы равен количеству
движения не только для уравнений механики, но и в самом общем
случае. Соотношения (31.04) для симметричного тензора мы
выпишем отдельно для к=\, 2, 3 и для Л=»0.
Мы имеем
£(χ1Ίμ-χλτ4 + Σέζ(*Ί*Μ-χ>τΜ)'β0· (3L06)
m = l m
-fc (χ,Τ00 - x0Tio) + J ^L (xtf* - xjlm) = 0. (31.07)
* 31]
ТЕНЗОР МАССЫ
133
где /, к = \, 2, 3. Формулы (31.06) можно рассматривать как законы
сохранения момента количества движения, а формулы (31.07) — как
ваконы движения центра инерции системы (те и другие в-ыражены
в дифференциальной форме). Если проинтегряроааать эти выражения
по некоторому объему, получатся соответствующие интегральные
«оотношения.
Если интегралы
Mik = с f {х{Г™ — xkT**) dVt (31.08)
К1*** i- Μί0 = ί (x^00 — x0Ti0) dV (31.09)
распространить по всему объему, то они будут оставаться
постоянными. При этом Ж23, Λί31, Μ12 будут составляющими момента
количества движения системы, а деленные на с величины Λί10, Μ20, Ж30
можно толковать как произведение массы системы на начальные
координаты ее центра инерции.
Рассмотренный здесь тензор Т1 мы будем называть тензором
массы *). Инвариант тензора Т1 имеет размерность плотности массы.
Умноженный на с2 тензор Ttk называют также тензором энергии;
инвариант этого тензора имеет размерность плотности энергии.
Мы наложим на тензор массы еще одно условие, которое можно
формулировать в виде следующего физического принципа. Тензор
массы должен быть функцией состояния системы. Уточним, что
мы разумеем под состоянием.
Допустим, что уравнения движения и уравнения поля написаны
в виде системы η уравнений первого порядка для неизвестных
функций <р1э ..., срл, причем эти уравнения могут быть решены
относительно производных по времени. Задание начальных значений
функций ср1э . . ., φΛ определяет (вместе с краевыми или иными условиями)
их значения во всякий последующий момент времени (принцип
причинности). Тогда мы будем говорить, что функции срь ..., φΛ
характеризуют состояние системы. Всякую функцию от φα срл, не
содержащую их производных по времени, а также не содержащую
явным образом координат, мы будем называть функцией состояния.
(Заметим, что в теории относительности производные по
координатам и по времени входят симметричным образом; поэтому, если
некоторый скаляр, вектор или тензор не содержит производных по
времени, то он не содержит также и производных по координатам.)
Приведем примеры. В механике системы точек состояние
характеризуется координатами и скоростями частиц; всякая функция от
!) Мы предпочитаем это название часто употребляемому названию
„тензор материи". Понятие „материя" имеет весьма общий характер и его не
следует отождествлять с понятием „масса".
134 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
координат и скоростей будет функцией состояния. В гидродинамике
состояние характеризуется тремя составляющими скорости, плотностью
и давлением (последние две величины мы предполагаем связанными
некоторым уравнением). В теории электромагнитного поля состояние
характеризуется антисимметричным тензором поля.
Таким образом, наш физический принцип1) требует, чтобы
составляющие тензора массы содержали только функции,
характеризующие состояние системы. Они не должны содержать производных
от этих функций, а также не должны содержать явным образом
координат (само собою разумеется, мы имеем в виду прямоугольные
составляющие).
Обратимся к вопросу о том, насколько однозначно определяется
тензор массы из поставленных условий. Рассмотрим сперва
уравнения, выражающие равенство нулю расходимости тензора массы,
з
~к = 0> (31.Ю)
а также условие симметрии 7=7. Кроме того, поставим
условие, чтобы десять интегралов уравнений (величины Wt Pl% Mik) имели
заданное значение.
Пусть Aim,nk есть некоторый тензор четвертого ранга,
обладающий следующими свойствами симметрии: антисимметрия в первой
паре значков
Aim,nk==z_Ami,nkt (31Л1)
антисимметрия во второй паре значков
Alm,nk = _Alm,*n (31 12)
и циклическая симметрия
Аш,пк + А1п,кт + А1к,тп^0л (ЗМЗ)
Из этих свойств следует, что
Aim,nk = Ank,im9 (31Л4)
Из вторых производных тензора Ат,п построим тензор
з
*'* = Σ таг· (31-15)
т, п=0
1) Этот принцип по-видимому, никем не был явным образом
формулирован. Однако все применяемые формы тензора массы фактически ему
удовлетворяют.
§ 31]
ТЕНЗОР МАССЫ
135
который будем называть тензором Круткова *). Нетрудно видеть, что
тензор Круткова будет симметричным. Далее, в силу антисимметрии
^im,nk B значках п, k мы имеем тождественно
t% = 0. (31.16)
Кроме того, тензор Круткова обладает следующим свойством. Если
в интегралах вида Ж, Р1, Mik, К1 (формулы (31.02), (31.03), (31.08),
(31.09)) заменить тензор Т1к тензором Круткова Bik, то эти
объемные интегралы приведутся к поверхностным. При условии, что
тензор Atm,nk и его первые производные обращаются в нуль на
поверхности, ограничивающей данный объем (или, если рассматривается
все пространство, достаточно быстро убывают на бесконечности),
составленные из Bik интегралы эти обратятся в нуль.
Пусть Tik — данный тензор массы. Прибавив к нему тензор
Круткова Blk, мы получим новый тензор
fik = Tik + Bikt (31.17)
который будет обладать следующими свойствами. Во-первых, он
будет симметричным, во-вторых, в силу (31.10) и (31.16), он будет
удовлетворять уравнению
iC=o· (з1л8)
Наконец, составленные при помощи Tik интегралы М, Р1, Мк% К1
будут равны таким же интегралам, составленным при помощи
данного тензора Tik.
Таким образом, если не принимать во внимание требования, чтобы
тензор массы был функцией состояния, то тензор Tikt связанный с Tik
формулой (31.17), будет удовлетворять всем остальным условиям.
Иначе говоря, при игнорировании этого требования тензор массы не
определяется однозначным образом.
Однако наше требование, чтобы тензор массы был функцией
состояния, совершенно меняет положение вещей, и определение тензора
массы становится по существу однозначным. Указание на это можно
1) В случае трех измерений обладающий указанными свойствами
симметрии тензор четвертого ранга Aim'nk сводится к симметричному тензору
второго ранга с составляющими γη == Л23' й, γ22 = Λ31, 31, γ33 = Λ12,12, γ23 =
.01 ίο .19 94 .94 41 г-,
_ дох, ι^ ^ _. ^, ^ γΐ2 __ ^.ο, οι тен30р ipq введен и широко использован
Ю. А. Крутковым в его книге [10].
136 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
усмотреть уже в следующем обстоятельстве. Предположим, что
тензор Tik есть функция состояния, так что он удовлетворяет всем
поставленным условиям, включая указанное наше требование. Если
даже тензор четвертого ранга Atm,nk тоже есть функция состояния,
то его вторые производные этим свойством обладать не будут,
и прибавка величин Bik к Tik недопустима. Эти соображения не
могут, правда, рассматриваться как доказательство, но полное
доказательство нашего утверждения может быть построено другим
путем. Мы рассмотрим его в следующем параграфе.
Единственность тензора массы становится особенно существенной
в теории тяготения, так как уравнения этой теории содержат самый
тензор массы, а не только его расходимость.
Равенство нулю четырехмерной расходимости тензора массы
предполагает, что рассматриваемая физическая система является
консервативной. Сделаем одно общее замечание о системах
неконсервативных.
Так как закон сохранения энергии имеет всеобщий характер, то
под неконсервативными следует разуметь такие системы, в которых
некоторые виды энергии (например, тепловая) явным образом не
учитываются. Если имеется некоторый вид энергии, участвующий
в общем балансе энергии, но не включенный в тензор Tik, то
расходимость этого тензора не будет равняться нулю: в уравнениях (31.01)
справа будет стоять приток этого вида энергии и соответствующего
количества движения в единицу объема. В дальнейшем мы будем
иметь дело только с консервативными системами.
§ 31*. Система уравнений для составляющих тензора массы
как функций поля1)
Пусть состояние физической системы описывается совокупностью
функЦий φα, φ2, ..., <ря. Эту совокупность функций можно называть
полем, а связывающие их уравнения движения — уравнениями поля.
Примеры физических полей уже были приведены выше (поле
скоростей, плотности и давления, электромагнитное поле и т. д.).
Высказанное в предыдущем параграфе утверждение относительно
тензора массы можно уточнить следующим образом. Симметричный
тензор Tik, составляющие которого суть функции состояния (т. е,
функции поля) и расходимость которого равна нулю в силу
уравнений поля, определяется из этих условий (которые являются чисто
1) Добавленные во втором издании новые параграфы (§ 31* и § 49*)
и входящие в них формулы обозначены звездочкой, чтобы не нарушать
нумерации параграфов первого издания.
§31*] СИСТЕМА УРАВНЕНИЙ ДЛЯ СОСТАВЛЯЮЩИХ ТЕНЗОРА МАССЫ 137
локальными) с точностью до двух постоянных. Тензор Tik будет
определен с точностью до постоянного множителя, если к
локальным условиям присоединить условия на бесконечности. Последние
обычно заключаются в требовании, чтобы тензор массы обращался
в нуль там, где поле равно нулю (т. е. где все или некоторые из
функций φ5 обращаются в нуль). Постоянный множитель зависит,
очевидно, от выбора единиц энергии или массы и его значение
становится определенным при определенном выборе этих единиц.
Таким образом, в конечном счете тензор массы определяется для
каждой физической системы однозначно.
Доказательство этого утверждения может быть построено, в
каждом отдельном случае, на рассмотрении двух систем
дифференциальных уравнений, которым удовлетворяют составляющие тензора Tik
как функции от величин ср1э ..., <ря. Первая из этих систем
выражает тот факт, что Tlk· есть тензор, а вторая—тот факт, что
расходимость этого тензора равна нулю.
Для вывода первой системы уравнений рассмотрим бесконечно
малое преобразование Лоренца. Согласно (23.06) компоненты вектора
получают при таком преобразовании приращение
з
ЬА1= ^ek^ikAk. (31*.01)
Соответствующее выражение для приращения компонент тензора
имеет вид
3 3
ЪТ** = 2 emv>imTmk-\- 2 emv>kmTim. (31*.02)
/71 = 0 /71=0
Поскольку функции состояния φ5 также подчиняются определенному
закону преобразования (они всегда выражаются через некоторые
скаляры, векторы и тензоры), для них также будет иметь место
соотношение вида
з
% = γΣ ei'm^Vs"1 (31*.03)
I, /71 = 0
или
3
Ч=т2 °vff. (31*·04)
/, /71=0
где величины ψ*"1 антисимметричны в верхних значках
ψ^ = — ф^ (31*.05)
И ЯВЛЯЮТСЯ ФУНКЦИЯМИ ОТ φυ . . ., φΛ.
138 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. Π
Рассмотрим некоторые общие свойства коэффициентов ф/ш. Можно
показать, что величины ф*т удовлетворяют соотношению
(31*. 06)
Для доказательства заметим, прежде всего, что это соотношение
функционально инвариантно в следующем смысле. Если ввести вместо
функций cpj φΛ новые функции состояния cpj φπ (причем
одни выражаются через другие), а также ввести соответствующие
коэффициенты ф^ш, связанные с i|/m соотношением
η
δ?=Σ*ί"-$Γ· (31*·07)
/•=1
то уравнение (31*.06) будет выполняться и для величин, снабженных
звездочкой. С другой стороны, соотношение (31*.06) легко
проверяется непосредственно, если величины φΓ представляют скаляр,
вектор или тензор (а также набор скаляров, векторов и тензоров).
Поскольку все функции состояния выражаются в конечном счете
через скаляры, векторы и тензоры, из функциональной инвариантности
соотношения (31*.06) следует, что оно справедливо и вообще.
Подробного изложения выкладок, связанных с этим доказательством,
мы приводить не будем.
Предыдущие формулы могут быть записаны в более изящном
виде, если мы введем операторы Х1т% определив их равенствами
η
Х1т(/)^%¥гтщ;· (31*.08)
Тогда будет, в частности,
Хш ($,) = №. (31*.09)
На основании (31*.06) легко доказать операторное равенство
ХРя^т_Х1тХРд = epbmpXi«+eqbmqX* +epblpX<"n+eqblqXm>>. (31 *. 10)
Если применить это равенство к функции φ5, то из него обратно
следует (31*.06).
Изменение всякой функции поля (т. е. функции от величин
Ψι» · · ·» Тл) ПРИ бесконечно малом преобразовании Лоренца может
§ 31 ] СИСТЕМА УРАВНЕНИЙ ДЛЯ СОСТАВЛЯЮЩИХ ТЕНЗОРА МАССЫ 139
быть выражено через операторы Х1т. В самом деле, если / =
= /(<Ρι· ···» ?Λλ то из формулы (31*.04) следует
з
δ/ = γ 2 wto^m(/)· (31*·11)
I, /71 = 0
Полагая здесь / = φ5, мы, вследствие (31*.09), возвращаемся к
формуле (31*.04). Формула (31*.11) удобна тем, что не зависит от
выбора функций φ„ ..., φη.
Применим формулу (31*.11) к одной из составляющих тензора Tlk.
Мы имеем
з
δ7,/* = ?Σ *imXlm(Tik)· (31*.12)
l, /71 = 0
С другой стороны, поскольку Tik есть тензор, имеет место
формула (31*.02), которую можно написать в виде
ЪТ1"= 2 «^(«А^ + 'Аи7*")· (31*. 13)
/,/71 = 0
Оба выражения для ЪТШ должны равняться друг другу тождественно,
т. е. при любом выборе антисимметричных величин ω//π. Приравнивая
в обоих выражениях антисимметричную часть коэффициентов при со/ш,
получим
Χ*(Τ") = efiuT"* - eibimTlk + ekbklTim - ekbkmTu (31 *. 14)
или подробнее
η
^tmd^ = e&iTmk-e&mTlk + 4hiTlm-ekhmTU· (31Мб)
5=1
Это есть первая из упомянутых выше двух систем
дифференциальных уравнений для величин Tik как функций поля.
Вторая система получится из условия, что расходимость тензора
массы должна равняться нулю. Это условие дает
k=0 s=l
Последнее уравнение должно выполняться при всех значениях
величин φ5 и з-^-. связанных уравнениями поля (а также и другими
уравнениями, если не все эти величины независимы). Если выразить
140 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
9s и Т^* чеР®3 независимые величины, то уравнение (31*. 16) должно
выполняться тождественно относительно этих последних. Так как
компоненты Тш содержат только функции φΓ, но не их производные,
dTik
то упомянутые тождества приводят к соотношениям для -^—,
содержащим только сами функции срг, но не их производные ^£· Эти
соотношения и представляют вторую систему уравнений для тензора
массы. Заметим, что обе системы уравнений удовлетворяются
значениями
Tik = lefiik, (31*. 17)
где λ есть постоянная.
Полная система уравнений для Ttk состоит из этих двух
подсистем: из уравнений (31*. 15), выражающих тот факт, что величины Tik
образуют тензор и из уравнений, выражающих тот факт, что
расходимость этого тензора равна нулю; последние уравнения получаются
из (31*. 16) исключением производных -^± при помощи уравнений
поля. Эта полная система уравнений может быть легко исследована
в частных случаях, соответствующих конкретным физическим
системам. При этом каждый раз подтверждается единственность тензора
массы. Примеры доказательства единственности будут даны в
Добавлениях Б и В. Дальнейшие примеры можно найти в литературе [п].
В заключение этого параграфа покажем, что если известна
плотность массы Г00 как функция поля ср1э ..., сря, то уравнения (31*. 14)
или (31*. 15) позволяют однозначно определить и все остальные
составляющие тензора массы. В самом деле, будем считать Т00
известным и положим в (31*. 14) / = £ = / = 0; /и=1, 2, 3.
Мы получим
7л"=Тт0 —-уА^СТ00), . (81*. 18)
где оператор Х0т имеет значение (31*.08). Таким образом, плотность
потока массы выразилась через плотность массы. Далее, полагая
/г=/ = 0; к, /я=1, 2, 3, будем иметь
Т^-Л^Т0*)-^^ (31М9)
или, пользуясь (31*. 18),
Γ^^Λ^-δ^Γ00. (31*.20)
Это выражение фактически симметрично относительно т, k. В самом
деле, мы имеем операторное равенство
χ>*χ*_χ'*Χ**==λ»* (m> k==l> 2, 3), (31*.21)
§ 32]
ПРИМЕРЫ ТЕНЗОРА МАССЫ
141
а из (31*Л4) следует, что результат применения этого оператора
к Г00 равен нулю (последнее означает, что величина Г00 является
трехмерным скаляром).
Таким образом, для того чтобы получить все составляющие
тензора массы, достаточно знать составляющую Г00.
§ 32. Примеры тензора массы
Мы рассмотрим здесь и в следующем параграфе явный вид
тензора массы для некоторых физических систем, не останавливаясь на
доказательстве его единственности. Примеры такого доказательства
будут даны в Добавлениях Б и В.
Мы начнем с простейшего случая „пылевидной* материи, т. е,
такой, частицы которой не взаимодействуют, причем, однако, их
скорости распределены непрерывно, так что существует некоторое
поле скоростей. Для тензора массы в этом случае мы введем особое
обозначение Θ/Λ. Обозначим через р* инвариантную плотность массы,
т. е. плотность, отнесенную к той системе отсчета, относительно
которой частицы данного элемента объема в данный мрмент
покоятся („сопутствующая" система отсчета). Пусть и1 есть
четырехмерная скорость частиц. Положим
θ'* = -ίρ·ιΛΛ (82.01)
По определению, θ'* есть четырехмерный контравариантный тензор.
Его дважды нулевая составляющая равна
Θ00 = ± Р* (и0)2 = -£-г. (32.02)
Эта составляющая должна равняться плотности всей массы, включая
массу кинетической энергии. Покажем, что это так и есть.
Действительно, если р* есть плотность массы покоя в сопутствующей
системе отсчета, то плотность массы покоя в лабораторной системе
отсчета (относительно которой частица движется со скоростью ν)
есть п*
Р" Л ,-■ (32.03)
Далее, если ρ есть плотность массы покоя, то плотность всей массы
(включая массу кинетической энергии) равна
142 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Эта формула для плотности соответствует обычной формуле
M=—rJL= (32.05)
для массы отдельной частицы. Другие составляющие тензора массы
в трехмерном написании равны
Θ°*=4-£^. = 1 , ™ я , (32.06)
с2 У 1—w
-f V-f
й'»* р,<;^ =1 ,^* - (32.07)
Составим теперь расходимость тензора 9ik. Мы имеем
Λ=0 Λ=0 Λ=0
Для входящих сюда сумм мы введем особые обозначения. Положим
Q.=|^)> (3209)
-1=£«*&· (з2ло)
k=0
Эти формулы можно написать в виде
/ 1 / ди1 , V _. ^ \ 1 da'
-ш
■Σ*
/" υ2 \ dt x Jbd k dxk / /" ^2
Λ 'T^d *Α*Λ i /-- ^ <tf · (32.12)
где --τι есть субстанциальная производная. Отсюда видно, что
инвариант Q* есть увеличение массы покоя в единице жидкого объема
за единицу времени*), а вектор w* есть четырехмерное ускорение,
пространственные составляющие которого совпадают, в нерелятивист-
!) Под жидким объемом мы разумеем, как принято, объем элемента
жидкости, составленного из одних и тех же частиц.
§ 321
ПРИМЕРЫ ТЕНЗОРА МАССЫ
143
ском приближении, с обычным ускорением. Таким образом,
В силу уравнений движения это выражение должно равняться нулю.
Но мы имеем тождественно
з з
2 им1 = с2, 2 «У = 0. (32.14)
Поэтому уравнение
QV + pW = 0 (32.15)
равносильно уравнениям
Q* = 0, wl = 0. (32.16)
Первое из них представляет уравнение неразрывности, выражающее
неизменность массы покоя частиц. В данном случае масса покоя
частиц не меняется потому, что они не взаимодействуют и их
внутренняя энергия остается постоянной. Второе уравнение (32.16)
выражает постоянство четырехмерной (а следовательно, и трехмерной)
скорости. То, что невзаимодействующие частицы должны двигаться
с постоянной скоростью, также является физически очевидным. Так
как уравнения движения — первого порядка относительно входящих
в Qtk величин р* и и1, то ясно, что тензор массы Qlk есть функция
состояния. Таким образом, вид тензора массы для случая пылевидной
материи может считаться установленным.
Переходим теперь к обобщению уравнений гидродинамики
идеальной жидкости. В нерелятивистской теории этот случай
характеризуется тем, что тензор напряжений сводится к скаляру. Это условие
легко допускает релятивистское обобщение. Предположим, что
умноженный на с2 тензор массы (тензор энергии) имеет вид
сЧ1к = (^+±)и1ик-рекЪ1к, (32Л7)
где μ* и ρ — четырехмерные скаляры, связанные соотношением
μ.· = /0». (32.18)
В сопутствующей системе отсчета (относительно которой скорость
в данной точке в данный момент времени равна нулю) составляющая
Г00 тензора массы равна μ*. Поэтому величина μ* представляет
плотность массы покоя жидкости. Так как жидкость предполагается
144 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
упругой и может обладать потенциальной энергией сжатия, то здесь
в массу покоя включена масса, соответствующая этой энергии.
Поскольку энергия сжатия может меняться, масса покоя жидкого
объема не будет оставаться постоянной. Имея это в виду, мы ввели
для плотности полной массы покоя особое обозначение μ*, оставляя
символ р* для плотности той части массы покоя, которая в ходе
процесса не меняется.
Составим уравнения движения. Полагая для краткости
«=Σ£[0''+*)<Ι <32·19>
и пользуясь введенным выше обозначением wl для ускорения, мы
будем иметь
При отсутствии внешних сил это выражение равно нулю.
Используя равенства (32.14), получаем для Q второе выражение:
Λ*0
■/-ι
где -jjr — субстанциальная производная, а άτ — дифференциал
собственного времени частицы. Что касается самой величины /?, то из
сопоставления полученных уравнений движения с нерелятивистскими
легко видеть, что ρ есть давление. Приравнивая оба выражения
для Q, получим
Так как мы предполагаем, что μ* есть функция от /?, то мы
можем свести новую величину р* при помощи дифференциального
уравнения
ψ = ^-. (32.23)
Постоянную интегрирования мы можем выбрать, например, так,
чтобы при /? = 0 было р* = р,*. Используя (32.23), мы можем пре-
§ 32] ПРИМЕРЫ ТЕНЗОРА МАССЫ 145
дыдущее уравнение написать в виде
з
д
Σέ(ρ'Β*)=°· (32·24)
Отсюда видно, что величина р* может быть истолкована, как
инвариантная плотность той части массы покоя, которая во время
движения не меняется. Эта величина, как и μ*, будет функцией от /?.
Положим
μ·* = ρ*(ι -+-#-)- (32.25)
Из дифференциального соотношения между μ* и р* получаем
<Л1=£$-, (32.26)
откуда
K = ff-£.. (32.27)
Величина Π может быть истолкована, по аналогии с (30.11), как
потенциальная энергия единицы массы жидкости (под массой мы
здесь разумеем ту часть массы покоя, которая не меняется во время
движения). Выражая μ* через р* и П, мы можем написать тензор
энергии в виде
сЧ1к = { р* 4-у (Р*П + Ρ)} "'и* - Pe*h*· (32.28)
тогда как уравнения движения напишутся:
{р-+>'П + ,)}^ = ^_^и<. (32.29)
Вместо уравнения для нулевой компоненты ускорения можно взять
уравнение неразрывности в форме (32.24).
Заметим, что инвариант тензора массы равен
2·,!* —1^(1 +£)—ϊ—Ρ·~|Ρ·. (32.30)
1-0
Из сопоставления уравнений движения (32.29) с формулой (32.28)
для Tlk следует, что тензор массы Tlk есть функция состояния,
как и должно быть.
Выпишем составляющие тензора массы в нерелятивистском
Ю Зак. 2649. В. А. Фок
146
ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ
[гл. и
1
приближении, сохраняя, однако, в Т00 и Т° члены порядка -у по
отношению к главным. В главных членах мы положим, согласно (32.03),
1 f2
р*=р—2р?-·
(32.31)
где ρ — обычная плотность, удовлетворяющая уравнению
неразрывности (30.02). Мы будем иметь
TV^jM + ^pfi + pSl + p),
(32.32)
Сравнивая поправочные члены в Г00 и Г01 со скаляром и вектором
Умова (30.17) и (30.18), мы убедимся, что составляющие Г00 и Г0*
тензора массы могут быть написаны в виде
^°° = P+i5,
** = ! (*! + ?*/·
(32.33)
Таким образом, скаляр и вектор Умова дают релятивистские
поправки второго порядка к обычным выражениям для плотности массы
и плотности количества движения. Что касается пространственных
составляющих Tikt то они пропорциональны рассмотренному в § 30
трехмерному тензору плотности потока количества движения.
Пользуясь этим, мы можем написать приближенные выражения
для тензора массы также и для случая упругого тела. Мы будем
иметь
тт=9+Щ?*>+9ъ).
Т°1 =
=т м+i ί vi (i p^2+Pn)—Σ λλ
(32.34)1
Если положить здесь, согласно (30.09), Pik = — ρδ/Λ, мы вернемся!
к случаю идеальной жидкости.
На релятивистской формулировке теории упругости мы здесь;
останавливаться не будем. Сделаем только одно замечание по
вопросу о возможности применения понятия абсолютно твердого тела
в теории относительности. В нерелятивистской механике понятие это
вводится как абстракция, согласно которой форма и размеры тела ι
не меняются под действием каких угодно сил. В частности, толчок, \
§ 33] ТЕНЗОР ЭНЕРГИИ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ 147
сообщенный в некоторый момент одному концу абсолютно твердого
тела, немедленно приводит в движение и другой конец тела. На
самом же деле для физического твердого тела волна от толчка
распространяется внутри тела со скоростью звука. Поэтому принимаемая
абстракция содержит в себе предположение, что скорость звука можно
рассматривать как бесконечно большую1). Но очевидно, что если
считать бесконечно большой скорость звука, то необходимо считать
бесконечно большой и скорость света, так как она превышает
скорость звука в сотни тысяч раз. Отсюда ясно, что абстракция,
лежащая в основе понятия абсолютно твердого тела, применима только
в нерелятивистской теории. В теории же относительности,
основанной на учете факта конечной скорости распространения всякого рода
действий, абстракция эта неизбежно приводит к противоречию. Таким
образом, в теории относительности понятием абсолютного твердого
тела пользоваться нельзя.
Это не исключает, однако, возможности применять в
рассуждениях теории относительности понятие твердого масштаба. В самом
деле, это понятие предполагает только существование таких твердых
тел, размеры и форма которых остаются неизменными при
определенных внешних условиях (отсутствие ускорений и толчков,
постоянство температуры и т. п.). Такие твердые масштабы с достаточной
точностью реализуются существующими в природе твердыми телами,
которые и могут служить эталонами длины, причем постоянство их
может проверяться (как мы указывали в § 2), например, путем
сравнения с длиной волны определенной спектральной линии.
§ 33. Тензор энергии для электромагнитного поля
В предыдущих параграфах мы рассмотрели тензор массы и
пропорциональный ему тензор энергии для случая вещества, между
частицами которого существует взаимодействие, передаваемое
упругими силами. Мы рассмотрим теперь тензор энергии для вещества,
частицы которого взаимодействуют только через посредство
электромагнитного поля. Так как мы имеем здесь дело с макроскопической
теорией, мы можем представлять себе это вещество в виде сплошной
среды с непрерывным распределением зарядов.
Мы будем исходить из уравнений Максвелла в форме Лоренца
для составляющих электрического и магнитного поля:
Ех = г10; Е2 = /вд» £3 = 'зо»
πλ = г23; /72 = г31; /73 = г 12.
·) К тому же выводу можно прийти, рассматривая абсолютно твердое
тело как предельный случай упругого твердого тела с бесконечно большими
значениями модулей упругости.
(33.01)
10*
148 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. 1г
Как м« видели в § 24, в четырехмерной форме уравнения Максвелла
имеют вид:
^*-^ + ^4"^-0. (33.02)
2^ = *'. (33.03)
*=0
где
Flk = eiekFik (33.04)
— контравариантные составляющие антисимметричного тензора поля
и четырехмерный вектор sl имеет составляющие
s0 = 4πρ, sl = ±L Jt = -£ p, (/=1.8. i). (33.05)
В этих формулах ρ обозначает плотность заряда, vi—трехмерную
скорость и j. = pVi — плотность тока. Вводя инвариантную плотность
заряда р* и четырехмерную скорость а1, можно вместо (33.05)
написать
sl = ip pV (/ = 0, 1,2, 3). (33.06)
В § 25 мы видели, что уравнения движения частицы с зарядом е и
массой покоя т имеют вид
3
mw^-^F.y. (33.07)
Справа здесь стоит сила Лоренца, действующая на заряд е.
Чтобы перейти от отдельной частицы к веществу со сплошным
распределением заряда и массы, мы должны ввести вместо заряда е его
инвариантную плотность р* и вместо массы покоя т — ее
инвариантную плотность μ*. Мы получим
з
μ·«/'=-4-Σ'ν* (33.08)
ИЛИ
3
Jfe = 0
Так как мы ввели две новые функции р* и μ* (которые не обязаны
быть пропорциональными друг другу), то мы должны присоединить
к уравнениям движения два уравнения для этих функций. Уравнение
для р* содержится уже в уравнениях Максвелла и выражает закон
$ 33] ТЕНЗОР ЭНЕРГИИ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ 149
Σ
сохранения заряда
3 *^.-0. (33.10)
*=о k
Уравнение же для μ* должно быть формулировано отдельно. Мы
примем, что масса покфя частиц во время движения не меняется (это
включает в себе предположение об отсутствии выделения джоулева
тепла). Тогда будет з
«•-Σ^γ1-"· (*»·»>
Из уравнений движения (33.09) только три являются независимыми,
так как мы имеем тождественно
з з
ц*2 "Ч = — Τ Σ ^jA* = °· (М-12)
/ = 0 ί, k=0
Поэтому уравнения движения (33.09) вместе с уравнением
сохранения массы покоя (33.11) представляют четыре независимых
уравнения. Наша задача состоит в том, чтобы написать эти уравнения
в виде равенства нулю расходимости некоторого тензора. Для этого
воспользуемся прежде всего формулой (32.13), согласно которой
з
t>W + QV = ^2^, (33.13)
где
θ*=--3-ιΛΑι* (33.14)
(напомним, что, в отличие от (32.01), инвариантная масса покоя обо-
вначаетея нами теперь через μ*, а не через р*). С другой стороны,
из уравнений движения (33.09) и уравнения (33.11) мы можем
составить четыре независимые комбинации
з
μ·«, + Q4 = - J- 2 FtA (33.15)
fe«=0
которые, вследствие (33.12), равносильны (33.09) и (33.11). Левая
часть этих уравнений (точнее, ее контравариантная форма) уже
представлена нами в виде расходимости некоторого тензора. Нам
остается представить в аналогичном виде и правую их часть.
Для этого рассмотрим тензор
3 3
^=-iS^Vb»+i'A* Σ w~ <33·16>
т-0 т, л=0
150 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. Π
и обозначим взятую с обратным знаком расходимость этого тензора
через ft. Мы имеем
/ι = -Σ·*Τ5?· <33·17>
Вычисляя сумму производных, мы получим, после некоторых
простых преобразований:
/.—iS'.£-££'**.. <33·18>
k, 1=0 k,l=Q
где Fikl есть величина (33.02). В силу уравнений Максвелла (33.02)
и (33.03) это выражение равно
з
^-iS'V*· <ЗЗЛ9>
т. е. стоящей в правой части (33.15) плотности лоренцовой силы.
Таким образом, обе части уравнений (33.15) представлены в виде
расходимости. Переходя к контравариантным составляющим, мы
можем уравнения
|х V + Q*ul — ? = 0 (33.20)
написать в виде
24£-0. (33.21)
где
сЧш = сЩ1к + U1* (33.22)
есть тензор энергии рассматриваемой системы, состоящей из вещества
и поля. В последней формуле первое слагаемое есть тензор энергии
вещества, а второе — тензор энергии поля.
Тензор Tik содержит инвариантную плотность μ*, составляющие
скорости и1 и составляющие поля Flk. Так как эти величины
характеризуют состояние системы, то очевидно, что рассмотренный
тензор массы есть функция состояния.
Рассмотрим тензор энергии поля несколько подробнее.
В трехмерных обозначениях составляющие тензора энергии
электромагнитного поля имеют вид:
U0°=Um = -L(& + H*), (33.23)
t^ = -i/« = i[EXHl,. (33.24)
1/«=ί/α=- ^(ЯД + ВД^+^^/я + Л»). (33.25)
§ 33] ТЕНЗОР ЭНЕРГИИ ДЛЯ ЭЛЕКТРОМАГНИТНОГО ПОЛЯ 151
Заметим, что инвариант тензора энергии поля равен нулю
2*,t/« = o.
ί=0
(33.26)
Составляющая U00 представляет, как всегда, плотность энергии»
а умноженные на с составляющие U0i — плотность потока энергии,
т. е. вектор Умова. Этот вектор
S = ^[EXH]
(33.27)
принято называть вектором Умова — Пойнтинга, или просто вектором
Пойнтинга, так как Пойнтинг впервые написал соответствующие
уравнениям Максвелла явные выражения для плотности потока
энергии электромагнитного поля.
Деленный на с2 поток энергии данного вида равен потоку массы,
соответствующей этому виду энергии, а поток массы в свою очередь
равен количеству движения. Поэтому деленный на с2 вектор Умова —
Пойнтинга равен плотности электромагнитного количества движения.
Тот факт, что электромагнитное поле несет с собой количество
движения, проявляется в силах светового давления, которое было
впервые экспериментально обнаружено в 1900 г. П. Н. Лебедевым [13].
Согласно формулам (33.25), если в электромагнитном поле находится
тело, то на площадку da его поверхности с нормалью по оси xt
действует сила, составляющие которой равны
Fk do = + Uik do (£=1,2, 3). (33.28)
Рассмотрим абсолютно отражающее тело с плоским участком
поверхности. Пусть уравнение этого участка поверхности есть ^ = 0,
а тело занимает область хг > 0. Предположим, что на тело падает
плоская волна вида
£^ = — sin θ/, Η\ = sin bg.
£§ = cos&/,
E% = g.
#2 = — COSUg,
где
f = f(t— Ι(ΛΓι(;08θ + *2 Sin θ)),
g = g (* — 7"(*1 COSU ■+· X2 Sin θ)) .
(33.29)
(33.30)
Добавляя к полю (33.29) отраженную волну, получаемую из
предыдущих формул заменой θ на π— θ и g на —g, мы получим полное
поле, удовлетворяющее предельным условиям. Значения составляющих
152 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
полного поля на поверхности тела будут
£•, = — 2 sin θ/, Я1 = 0, \
£2 = 0, #2 = — 2cos0g, I (33.31)
£3 = 0. Я3 = 2/. )
где в функциях / и g нужно положить хг = 0. Подставляя эти
значения в (33.25), получим для силы, действующей на единицу
поверхности отражающего тела, выражения
Fi = Un = i(/2 + ^ cos2 θ' F2 = U* = 0, F3 = ί/13 = 0. (33.32)
Таким образом, сила действует (независимо от направления падающей
волны) по направлению внутренней нормали к телу и представляет,
следовательно, нормальное давление (см. [12]).
Рассмотрим теперь другой случай. Пусть электромагнитное поле
представляет наложение волн всевозможных направлений,
распределенных равномерно. Тогда статистическое среднее значение
произведений составляющих будет
Wk-j^ik. Щнк=\тш. (зз.зз)
Для пространственных составляющих тензора энергии мы будем
тогда иметь
Ό*=ш <F+ ^> δ<*=τ °°°ь» · (33·34)
В этом случае электромагнитное поле производит изотропное
давление, равное по величине одной трети плотности электромагнитной
энергии. Это заключение имеет важное значение в теории черного
излучения.
§ 34. Масса и энергия
Согласно принятому в механике словоупотреблению, масса тела
есть мера его инертности (инертная масса). С другой стороны, слово
„масса" употребляется в смысле способности тела создавать поле
тяготения и испытывать силу в этом поле (тяготеющая или весомая
масса). Инертность и способность создавать поле тяготения
представляют совершенно различные проявления свойств материи. То, что
меры этих различных проявлений обозначаются одним словом, однако,
не случайно, а обусловлено тем, что оба свойства всегда существуют
совместно и всегда друг другу пропорциональны, так что, при
надлежащем выборе единиц, меру того и другого свойства можно
выражать одним и тем же числом. Равенство массы инертной и
массы тяготеющей есть факт экспериментальный, подтвержденный
§ 34]
МАССА И ЭНЕРГИЯ
153
с огромной степенью точности (опыты Этвеша). Самые же
определения этих понятий (основанные на соответствующих проявлениях
свойств материи) — различны. Существует физическая теория —
а именно, теория тяготения Эйнштейна, в которой фундаментальный
вакон равенства массы инертной и массы тяготеющей учитывается
автоматически, в том смысле, что одна и та же постоянная, входящая
при решении уравнений, фигурирует и в качестве массы инертной,
и в качестве массы тяготеющей.
Как следует отвечать на вопрос: есть ли масса инертная и масса
тяготеющая одно и то же или нет? По своим проявлениям они
различны, но численные характеристики их друг другу пропорциональны.
Такое положение вещей принято характеризовать словом
„эквивалентность".
Аналогичный вопрос возникает в связи с понятиями массы и
энергии (для определенности мы будем говорить об инертной массе).
Определение массы мы только что напомнили. Энергия обычно
определяется как мера способности производить ^работу. Для
определения энергии существенным является, во-первых, закон сохранения
энергии и, во-вторых, способность различных видов энергии к
взаимному превращению. То и другое вместе называют законом сохранения
и превращения энергии. Существование этого всеобщего закона
позволяет сводить измерение энергии любого вида к измерению
энергии частного вида, например, к механической, и выражать
энергию любого вида в одних и тех же (например, механических) единицах.
Таким образом, проявления свойств материи, соответствующих
массе и энергии, бесспорно различны. Однако теория относительности
утверждает, что масса и энергия неразрывно друг с другом связаны
и притом пропорциональны друг другу. Всякое изменение энергии
системы сопровождается изменением ее инертной массы. Это
относится не только к изменениям кинетической энергии тела, при
которых масса покоя остается неизменной, но и к изменениям различных
видов внутренней энергии, при которых масса покоя меняется.
В физике известны явления, когда вся энергия, соответствующая
массе покоя тела, может превратиться в энергию излучения (которая,
конечно, обладает той же массой). Обратно, энергия массы покоя
может возникнуть за счет энергии излучения. Примером может
служить явление превращения пары электрон — позитрон в гамма-
квант и обратное явление порождения гамма-квантом такой пары.
Соотношение между массой и энергией мы подробно изучили
в предыдущих параграфах. Мы видели, что всякой энергии W сле-
W
дует приписать массу Μ = -γ и всякой массе Μ следует сопоставить
энергию W=Mc2. Обе эти величины всегда друг другу
пропорциональны и, выражая их в одних и тех же (скажем, энергетических)
единицах, их можно измерять одним и тем же числом.
154 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. II
Далее, мы видели, что тензор энергии отличается лишь
множителем с2 от тензора массы и закон сохранения энергии есть в то же
самое время закон сохранения массы.
Таким образом, на поставленный выше вопрос, представляют ли
масса и энергия одно и то же или нет, мы можем дать тот же
ответ, как в отношении массы инертной и массы тяготеющей.
Проявления свойств материи, соответствующих массе и энергии, различны,
но численные характеристики этих свойств пропорциональны друг
другу. В этом случае также можно говорить об эквивалентности —
эквивалентности массы и энергии. Но лучще называть
рассматриваемый фундаментальный закон просто законом пропорциональности
массы и энергии.
Мы только что сказали, что закон сохранения энергии есть в то
же самое время закон сохранения массы. Но здесь возникает такой
вопрос. Ведь опыт показывает нам, что в громадном большинстве
известных физических процессов в отдельности сохраняется масса
тела (определяемая по взвешиванию) и в отдельности сохраняется его
энергия (определяемая по производимой работе). Таким образом,
наблюдаются два закона сохранения. Как это согласовать с тем, что
в теории относительности формулируется только один закон?
На этот вопрос можно дать следующий ответ. Строгий закон
сохранения — один: для полной массы тела Μ и для соответствующей
ей полной энергии W = Mc2. Но подавляющая часть энергии (и
соответствующей ей массы покоя) в превращениях обычно не участвует
и сохраняется в отдельности. Тем самым сохраняется и остальная,
активная, часть энергии, участвующая в превращениях.
Разделение энергии на „пассивную" часть, в превращениях (в
данном процессе) не участвующую, и на активную часть, способную
переходить в другие виды, можно проследить на примере уравнений
гидродинамики, разобранных нами в § 32. Выделив (путем перехода
к сопутствующей системе отсчета) кинетическую энергию, мы
рассматривали там две плотности массы покоя: полную плотность μ*
и плотность пассивной части р*. Эти две величины были связаны,
согласно (32.25), соотношением
μ* = Ρ* + -^Ρ*Π, (34.01)
где второй член представляет деленную на с2 плотность
потенциальной энергии сжатия.
Еще более наглядно это разделение видно из приближенных
формул (32.32) и (32.34) для полной плотности массы Г00 и полного
потока массы cT0i. Согласно (32.33), эти формулы могут быть
написаны в виде
?'00 = P + i'S. cTO'^pv^-Ls^ (34.02)
§ 34]
МАССА И ЭНЕРГИЯ
155
Здесь ρ и ρνέ — плотность и поток той части массы, которая в
превращениях не участвует, а скаляр и вектор Умова S и ^
представляют плотность и поток активной части энергии (деленные на с2,
эти величины дают плотность и поток активной части массы).
Мы говорили выше о том, что определяемая из взвешивания
полная масса тела (куда включена и переменная ее часть)
практически сохраняется, несмотря на то, что тело выделяет или
поглощает энергию. Это объясняется просто недостаточной точностью
взвешивания, в соединении с тем, что подавляющую часть массы
обычных тел составляет пассивная ее часть. С другой стороны,
изменение активной части массы может быть прослежено с гораздо
большей точностью, путем измерений соответствующей части энергии
(т. е. при помощи калориметрических методов, а не путем
взвешивания).
Естественно задать вопрос о более глубокой причине того, что
при обычных условиях подавляющая часть энергии связана настолько
прочно, что находится в совершенно пассивном состоянии. Почему
даже ничтожная ее часть не выходит из этого состояния и не
нарушает баланса активной части энергии? На этот вопрос теория
относительности сама по себе не может дать ответа. Ответа следует
искать в области квантовых закономерностей, одной из характерных
особенностей которых является существование устойчивых состояний
с дискретными уровнями энергии. Для элементарных частиц энергия,
соответствующая массе покоя, может превращаться в активную форму
энергии (в излучение) либо целиком, либо она вовсе не превращается.
Малая утечка массы невозможна. Это проверено на опыте в случае
электрона и позитрона, но этого следует ожидать и для других
элементарных частиц. Поскольку подавляющая часть массы атомов
находится в форме массы элементарных частиц, невозможность малой
утечки массы должна иметь место и для атомов.
Таким образом, причина особой прочности связи пассивной части
энергии — квантового характера.
Следует подчеркнуть относительный характер разделения энергии
(с соответствующей массой) на пассивную и активную части. В
обычных химических реакциях не только внутриядерная энергия, но и
энергия внутренних электронных оболочек атомов ведет себя пассивно.
При весьма высоких температурах, когда становится возможной
полная или почти полная ионизация атомов, энергия внутренних
электронных оболочек приобретает активный характер. Наконец,
в процессах, связанных с перестройкой атомных ядер, активной
становится и внутриядерная энергия. Однако и тогда энергия,
соответствующая массе покоя тяжелых элементарных частиц, входящих
в состав ядер, продолжает оставаться в пассивном состоянии.
Особо прочная связанность подавляющей части энергии (и
соответствующей ей массы) и позволяет говорить о законе сохранения
156 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ТЕНЗОРНОЙ ФОРМЕ [ГЛ. Η
массы и о законе сохранения энергии как о двух отдельных законах,
хотя в теории относительности эти два закона сливаются в ©яин.
Закон сохранения массы при химических реакциях был открыт и
экспериментально доказан Ломоносовым и затем подтвержден Лавуазье.
Что же касается закона сохранения энергии, то точная формулировка
его была дана лишь в XIX в. Р. Майером. Однако еще в XVII в.
X. Гюйгенс, а затем в XVIII в. Иоганн и особенно Даниил Бер-
нулли применяли его в области механики, а всеобщий характер закона
ясно сознавался Ломоносовым, как это видно из его знаменитого
письма Эйлеру 1748 г.
ГЛАВА III
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
§ 35. Допустимые преобразования координат и времени
В основу математической формулировки теории относительности
мы положили уравнение фронта волны
*»-±<*У-{(£)'+(-&)'+(£)■}-· <**о
и связанное с ним выражение для квадрата интервала
ds2 = с2 dt2 — (dx2+dy2 + dz2). (35.02)
(Здесь (Vo))2 есть обозначение для стоящего в левой части уравнения
фронта волны дифференциального оператора). Если мы введем наши
обычные обозначения
XQ*mCtt Χχ=ζχ% J»f2=s=y, *g = 2, (56.03)
а также числа
«0—1, е1^е2^ег = — 1, (35.04)
то выражения (Ψω)* и ds2 напишутся:
з
(Vu)2 = 2>*(~er)'' (35.05)
3
ds2 = ^ek{dxk)2. (35.06)
Мы знаем, что оба эти выражения инвариантны по отношению
к преобразованию Лоренца. Если ввести новые координаты
x'^ct\ х\ = х\ *i = y\ x'i**z\ (35.07)
158 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. Ill
связанные со старыми преобразованием Лоренца, то будет
з
(Уш)2 = 2^/-|^-\2. (35.08)
3
ds2 = ^ek{dxk)K (35.09)
Те переменные (35.03) или (35.07), в которых выражения (Va>)2
и ds2 имеют вид (35.05) и (35.06) или (35.08) и (35.09), мы будем
называть галилеевыми координатами (включая в это понятие также
и время).
Предположим теперь, что x'Qt x'v x'v х'ъ по-прежнему равны (35.07)
(т. е. представляют галилеевы координаты), тогда как xQf xv x2, xs
уже не равны (35.03), а являются некоторыми вспомогательными
переменными, которые связаны с величинами (35.07) соотношениями
< = /.(*<>' xv х2> *з) (а = 0, 1, 2, 3), (35.10)
где /а — произвольные функции, которые удовлетворяют лишь
некоторым общим условиям. Мы предположим, что уравнения (35.10)
разрешимы относительно xQt xv x2, хг, так что их якобиан отличен
от нуля
D = п) Q ι 2 Χ Φ 0. (35.11)
D (лг0, хи χ* χζ) ν '
Кроме того, мы будем считать, что функции /а имеют непрерывные
производные первых трех порядков. Дальнейшие условия для Д,
вытекающие уже из физических соображений, мы рассмотрим ниже.
Производя замену переменных, мы получим для (Vo)2 однородную
квадратичную функцию от первых производных ω по переменным х^
хг, х2% jc3, которую мы запишем в виде
3
α, β=0
причем
α, β=0
VI дхл дхо
«*-2»»17а/· (35ЛЗ)
Аналогично, произведя замену переменных в выражении для ds2t мы
получим
ό
ds2=% g^dx.dXf. (35.14)
§ 35] ДОПУСТИМЫЕ ПРЕОБРАЗОВАНИЯ КООРДИНАТ И ВРЕМЕНИ 159
где
Σοκ'*, дх'ь
е^щ- <35Л5>
л=о р
На основании (35.13) и (35.15) легко проверить, что
* ί 1 ПРИ ν = μ,
2^μα^α=δ;= Λ *f (35.16)
Отсюда следует, что если обозначить через g определитель
£ = Е>е*£«р. (35.17)
то величины ga$ будут равны деленным на g минорам
(алгебраическим дополнениям) этого определителя.
Применяя правило умножения определителей, мы получим
Det(e*-e)-Det(^)=Det^· (35Л8>
Второй множитель здесь равен якобиану D (формула (35.11)),
а вследствие того, что
е0еге2ег = — 1, (35.19)
первый множитель в (35.18) равен —D. Следовательно,
g = —D2. (35.20)
Выбор независимых переменных х0, хг, х2, х3 целесообразно
ограничить такими условиями, чтобы переменная х0 имела (как и х'Л
характер времени, а переменные xv х2> х3 (как и х'ъ х'ъ х^ имели
характер пространственных координат. Формулируем эти условия
более точно. Будем, как и раньше, понимать под „событием" точку
пространства, рассматриваемую в соответствующий момент времени
(точку-мгновение). Потребуем, чтобы два события, которым
соответствуют одинаковые значения пространственных координатных
параметров xv х2, jc3, но разные значения х* и jcJ* временного
параметра х0, были последовательными во времени в смысле § 12. Мы
знаем, что для последовательных событий квадрат интервала поло-
бесконечно мала и
(35.21)
то это должно быть справедливо и для бесконечно малого
интервала ds2. Поэтому мы должны иметь
^2 = «по^о>°» (35·22)
. Если
гь
считать,
у* .
что
= хо.
разность
X™ = Х{
у.** у.*
> + dxo,
160
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. II
откуда
>0.
(35.23)
Пусть мы имеем, далее, два события, которым соответствует одно
и то же здачение временного параметра х0, но разные значения
χι> х2* хг и xi-\-dX\, x2-\-dx2, хг~^~^хг координатных параметров.
Мы потребуем, чтобы такие два события были квазиодновременными
в смысле § 12. Для квазиодновременных событий величина ds2
отрицательна, и, следовательно, должно быть
ds2= 2 gikdxidxk<°>
l, k = l
каковы бы ни были величины dxv dx2, dxz (не
вместе). Отсюда следует, что квадратичная форма
быть определенной и отрицательной. Из алгебры
необходимыми и достаточными условиями для этого
венства
(35.24)
равные нулю все
(35.24) должна
известно, что
являются нера-
£ll #12 #13
#21 #22 #23
£з1 £з2 £зз1
<о,
\ill £l2
#21 £22
>о,
8п<
8а ё2з
#32 £33
0. 822'
>о,
<0, §зз
8и Sis
831 £зз
<о.
>о,
(35.25)
(35.26)
(35.27)
из которых, впрочем, не все независимы. Независимыми являются,
например: неравенство (35.25), первое из неравенств (35.26) и первое
из неравенств (35.27).
Нетрудно показать, что из наложенных на коэффициенты g^
условий следует (независимо от их представления в виде (35.15)),
что в окрестностях каждой точки величина ds2 может быть
представлена в виде суммы одного положительного и трех отрицательных
квадратов. Совокупность знаков при квадратах называют сигнатурой
квадратичной формы. В нашем случае сигнатура может быть
записана в виде (е0, elt e2, ег) или (-| ).
Из неравенств (35.25)—(35.27) следует также, в согласии с (35.20),
что определитель g будет всегда отрицательным. Кроме того, из них
вытекают такие же неравенства для величин g*$ с верхними значками,
в силу которых будет
g00 > 0, (35.28)
i?£igik"i"k<0 (35·29)
§ 35] ДОПУСТИМЫЕ ПРЕОБРАЗОВАНИЯ КООРДИНАТ И ВРЕМЕНИ 161
для любых неравных одновременно нулю величин а>1э ω2, ω3. На
доказательстве этих чисто алгебраических утверждений мы
останавливаться не будем.
Таким образом, для того чтобы параметр х0 имел характер
времени, а параметры χν х2, хг— характер пространственных
координат, необходимо и достаточно, чтобы величина g^ была
положительной, а квадратичная форма с коэффициентами glk (/, £= 1, 2, 3)
была определенной отрицательной. На величины же gl0, g20, £зо
не налагается при этом никаких ограничений.
Рассмотрим геометрический смысл уравнений Ar0=const и #^=const.
Выведем условие, при котором уравнение
ω(χ, у, z, *) = 0 (35.30)
может рассматриваться, как уравнение движущейся поверхности.
Из (35.30) следует, что дифференциалы координат и времени
связаны соотношением
ω^ d χ + о)у dy -f- ωζ dz -f- ω, Λ = 0, (35.31)
где через ω^, соу, ωζ, ω, обозначены производные от ω по χ, у, zt t*
Возьмем смещение dx% dy% dz по направлению нормали к
поверхности и положим
to« , -ωΛ , dnt rfy=. °Ч tdn, dz = . °* , dnt (35.32)
| grad ω I J I grad ω | | grad ω | ч '
причем \dn\—абсолютная величина смещения. Подставляя (35.32)
в (35.31), получим
|grad ω |rfn+ <»,*/*=« 0, (85.33)
и, следовательно, квадрат скорости смещения
^=*{π) (85.34)
будет равен
"2=w· <35·35>
Таким образом, уравнение (35.30) можно толковать как уравнение
поверхности, каждая точка которой движется в направлении нормали
к поверхности со скоростью, определяемой из (35.35). Такое
толкование, однако, возможно лишь до тех пор, пока эта скорость не
превышает скорости света. Согласно (35.35) и (35.01), это будет
при условии
(Vo>)2<0, (35.38)
причем знак равенства соответствует скорости света.
Если же
(V«>)2>0, ($Ш)
И Зак. 2649. В. А. Фок
162
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. III
то уравнение (35.30) может быть решено относительно времени и
записано в виде
* = \f(x. У. *\ (35.38)
причем
(grad/)2<l. (35.39)
Уравнение (35.38) сопоставляет каждой точке пространства
определенный момент времени, причем все эти „точки-мгновения" будут
квазиодновременными. Это уравнение можно назвать „уравнением
времени". Напомним, что уравнение времени уже рассматривалось
нами в § 3 в связи с вопросом о характеристиках уравнений
Максвелла.
Как мы уже отмечали в § 3, можно рассматривать уравнение ω = 0
как уравнение гиперповерхности в четырехмерном многообразии
пространства и времени. При таком рассмотрении можно подразделить
гиперповерхности на два класса.
Если (Vo))2 < 0, то можно сказать, что одно из измерений
гиперповерхности имеет характер времени (часто пользуются неточным
выражением: „поверхность имеет характер времени"). Согласно (35.35),
это есть обыкновенная двухмерная поверхность *), движущаяся со
скоростью, меньшей скорости света.
Если (Vw)2 > 0, то говорят, что гиперповерхность имеет
пространственный характер. Это есть все бесконечное пространство,
разные точки которого рассматриваются в разные моменты времени,
а именно, точка jc, у, z рассматривается в момент t, определяемый
из уравнения времени (т. е. из уравнения гиперповерхности).
Сопоставляемые двум точкам пространства моменты времени должны быть
при этом настолько близки, чтобы соответствующий интервал имел
пространственный характер.
Пользуясь тем, что (Vco)2 есть инвариант, мы получим, полагая
последовательно a) = jt0, ω = χχ, a) = jt2, a> = jt3:
(ν*0)2 = £°°>0; (35.40)
(ν^)2 = §»<0; (V*2)2 = ^22<0; (V*3)2 = Я83 < 0. (35.41)
Отсюда следует, что уравнение х0 — const представляет уравнение
времени, а каждое из уравнений xk = const (&== 1, 2, 3) представляет
уравнение поверхности, движущейся в направлении своей нормали
со скоростью, меньшей скорости света (уравнение движущейся
координатной поверхности).
Из условий, наложенных нами на преобразования координат и
времени, вытекает также, что постоянным значениям хх, х2, хъ соот-
!) В четырехмерном многообразии гиперповерхность имеет три
измерения, но в данном случае только два из них — пространственные.
§ 35] ДОПУСТИМЫЕ ПРЕОБРАЗОВАНИЯ КООРДИНАТ И ВРЕМЕНИ 163
ветствует, в любой инерциальной системе отсчета, движение точки
со скоростью, меньшей скорости света.
В классической механике Ньютона часто применяются
преобразования координат, зависящие от времени, причем эти преобразования
толкуются как переход к движущейся системе отсчета. Сравнивая
преобразования координат в механике Ньютона с преобразованиями
координат и времени в теории относительности, необходимо отметить
следующее. Во-первых, само понятие о системе отсчета в механике
Ньютона не совпадает (в общем случае ускоренного движения) с
понятием системы отсчета в теории относительности: в механике
Ньютона понятие системы отсчета связывается с представлением об
абсолютно твердом теле и о мгновенном распространении света. В теории
же относительности понятие о твердом теле (притом не абсолютно
твердом, а лишь сохраняющем свою форму при отсутствии
ускорений и внешних сил) играет лишь вспомогательную роль, а понятие
системы отсчета основано на законе распространения фронта волны.
Прототипом ньютоновой системы отсчета является твердый каркас,
тогда как прототипом системы отсчета теории относительности
является радиолокационная установка. Во-вторых, класс
преобразований, допустимых в ньютоновой механике, значительно шире, чем
класс преобразований, допустимых в теории относительности;
в ньютоновой механике не рассматриваются ограничения, вытекающие
из существования предельной скорости и выражаемые
рассмотренными выше неравенствами.
В качестве примера рассмотрим преобразование, которое в
ньютоновой механике может быть истолковано как переход к
равноускоренной системе отсчета. Пусть х', у', ζ'\ V — координаты и время
в инерциальной системе отсчета (галилеевы координаты). Положим
x' = x — \at2\ у-в у; *' —* (35.42)
и, кроме того,
p^t — J^tx. (35.43)
Переменные х, у, z, t можно толковать как координаты и время
в некоторой ускоренной системе отсчета (в смысле ньютоновой
механики и в соответствующем ей приближении). Подставляя (36.42)
и (35.43) в выражение для ds2, получим
ds2 = (с2 — 2ах — аЧ2) dt2 — dx2 — dy2 — dz2 +
+ ^-{**t-\-tdxY. (35.44)
Неравенства для коэффициентов будут выполнены при условиях
'-т?-><* ('-τ)'-ΐ>«· <36·«>
164
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. III
f = t. )
(35.47)
Кроме того, можно потребовать, чтобы было
-7Г=1—?г>0. (35.46)
Эти неравенства показывают, что подстановка (35.42) — (35.43)
допустима не во всем пространстве и лишь для ограниченного
промежутка времени.
Другим примером может служить преобразование, аналогичное
переходу к равномерно вращающейся системе отсчета. Положим
хг = χ cos ω£ -f- у sin otf, ζ' =;
yr = — Χ sin ωί-|- у cos ω£, V
Мы получим тогда
ds2 = (c2 — u2(x2 + y2))dt2 — 2u(ydx — xdy)dt —
— dx2 — dy2 — dz2. (35.48)
Условие для коэффициентов требует
с2 — ω2 (χ2 -f у2) > 0. (35.49)
Оно выполняется на ограниченных расстояниях от оси вращения, где
линейная скорость вращения не превышает скорости света.
Подчеркнем еще раз, что приведенные примеры имеют
физический смысл лишь в той области, где применима ньютонова механика
(см. также § 61).
Само собой разумеется, что к числу допустимых преобразований
относится введение обычных криволинейных координат. Поскольку
такие преобразования не содержат времени, они имеют тот же
геометрический смысл, как в нерелятивистской теории, почему мы на
них останавливаться не будем.
§ 36. Общий тензорный анализ и обобщенная геометрия
В предыдущем параграфе мы рассматривали выражения
α, β = 0 Ρ
3
<fc2= 2 S*?dx*dx?> (36·02)
α, β=0
полученные из обычных выражений теории относительности
введением вместо координат и времени xt yt z% t новых переменных х1%
Хр #3» XQ· ^ы Установили условия, при выполнении которых пере-
§ 36] ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ И ОБОБЩЕННАЯ ГЕОМЕТРИЯ 165
менная х0 может характеризовать последовательность событий во
времени, а переменные хг, х2, хг— положение их в пространстве.
Само по себе введение новых переменных, разумеется, никак не
может повлиять на физические следствия из теории, а является лишь
математическим приемом. Однако разработка аппарата,
позволяющего составлять уравнения математической физики (например,
уравнения движения и уравнения поля) сразу для произвольных
независимых переменных, минуя декартовы координаты и время, не только
весьма полезна в вычислительном отношении (как прием,
сокращающий выкладки), но и важна в принципиальном отношении. Наличие
такого аппарата может указать путь к обобщению физической теории.
Уравнения, справедливые при произвольном выборе независимых
переменных, мы будем называть общековариантными. Самый же
аппарат, позволяющий составлять общековариантные тензорные
уравнения, мы будем называть общим тензорным анализом.
Общековариантные уравнения применяются уже в ньютоновой
механике. Мы имеем в виду уравнения Лагранжа второго рода,
описывающие движение системы материальных точек в обобщенных
координатах, а также их обобщения для сплошной среды. Не давая
ничего физически нового по сравнению с уравнениями в декартовых
координатах, уравнения Лагранжа играют, тем не менее, важную
роль как в практических применениях, так и в теоретических
исследованиях. В теории относительности общий тензорный анализ
преследует аналогичную цель.
В общем тензорном анализе исходными являются выражения (36.01)
и (36.02) для квадрата четырехмерного градиента и для квадрата
интервала. Эти выражения характеризуют, как говорят,
мероопределение или метрику пространства-времени. Коэффициенты ga$ и ga^
в них рассматриваются как функции от переменных jc0, xlt
Хо* "^3*
Если, как мы это до сих пор предполагали, выражения (36.01)
и (36.02) получены из (35.01) и (35.02) (или из (36.08) и (35.09))
введением новых переменных, то коэффициенты g*$ и ga^ в них
представимы в виде (35.13) и (35.15). Другими словами, в этом
случае десять коэффициентов gap выражаются через четыре
функции U /ι· Λ· /з п0 формуле
Через те же четыре функции выражаются, вследствие
соотношений (35.16), и коэффициенты g^P.
Существенно, однако, отметить, что формулы общего тензорного
анализа почти не усложняются и в том случае, когда предположение
О представимости g^ в виде (36.03) не делается, а эти величины
166
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. III
рассматриваются как заданные функции от координат (т. е. от
переменных jt0, xlt х2, #3). Этой более общей точке зрения
соответствует введение для пространства и времени неевклидовой геометрии
и неевклидовой метрики. Такой шаг означает уже выход за пределы
обычной (так называемой „частной") теории относительности и связан
с построением новой физической теории—теории тяготения
Эйнштейна. Этой теории будут посвящены следующие главы этой книги.
В настоящей же главе мы встанем на чисто формальную точку
зрения и будем развивать общий тензорный анализ в предположении,
что метрика нам задана и что величины ga^ представляют известные
функции от координат. Такое изложение представляет преимущество
в двух отношениях. Во-первых, мы можем найти те условия,
которым должны удовлетворять величины ga^ для того, чтобы они были
представимы в виде (36.03); мы получим тогда общековариантную
формулировку обычной теории относительности. Во-вторых, общий
тензорный анализ дает нам готовый математический аппарат для
формулировки теории тяготения Эйнштейна.
Прежде чем переходить к систематическому изложению
тензорного анализа, установим связь между выражениями (Vco)2 и ds2,
существующую при условии
з
Σζ^^Κ (36.04)
α = 0
независимо от представимости ga$ в виде (36.03). Покажем, что если
функция ω(#0, jCj, jc2, хг) удовлетворяет уравнению (Vo))2 = 0, то
дифференциалы координат, связанных соотношением ω = const,
удовлетворяют уравнению ds2 = 0.
Положив
ωα==-^- (α = 0,1,2,3), (36.06)
напишем уравнение (Vo>)2 = 0 в виде
з
о= Σ ΛωΒ=°· (36·06>
α, β = 0 Ρ
Это уравнение в частных производных для ω того же типа, как
уравнение Гамильтона — Якоби классической механики, и может быть
решено аналогичным способом. Если написать его в виде, решенном
относительно ω0:
ω0 = —//(colt ω2, ω3), (36.07)
то функция Η будет соответствующей функцией Гамильтона, и
уравнения Гамильтона напишутся
*Ь=™9 pL=_™ (ft=if 2, 3). (36.08)
dx0 duk dx0 dxk v · · /
§371
ТЕНЗОРНАЯ АЛГЕБРА
167
Но
ш- р--(тш <36·09'
да>£ да>£
и из первых трех уравнений (36.08) следует, что дифференциалы
dxa (α = 0, Ι, 2, 3) будут пропорциональны частным производным
от О по ωα. Обозначая бесконечно малый коэффициент
пропорциональности через i>dpt будем иметь
з
β=0
Решая при помощи (36.04) уравнения (36.10) относительно ωα,
получим
з
ωα^=Σ£α8<**8. (36.11)
β=0 к к
после чего очевидное равенство
3
2 ω« <*ха = 0
α=0
лает
3
ds2= 2 gab<tXadX9 = 0,
α, β = 0 P P
(36.12)
(36.13)
что и требовалось доказать. Таким образом, если мы будем
по-прежнему рассматривать (Vo))2 = 0 как уравнение фронта волны, то мы
можем утверждать, что для точек, находящихся на фронте волны,
дифференциалы координат и времени связаны соотношением ds2 — Q.
В дальнейшем мы будем считать величины ga^ заданными
функциями переменных jc0, xv лг2, хъ% и будем лишь предполагать, что
они обладают непрерывными производными всех рассматриваемых
порядков и удовлетворяют неравенствам, формулированным в § 35.
Наряду с функциями g^ мы будем рассматривать функции g$t
связанные с первыми соотношениями (36.04). Условия представимости ga^
в виде (36.03) будут установлены в дальнейшем (§ 42).
§ 37. Определение вектора и тензора. Тензорная алгебра
В тензорном анализе постоянно приходится иметь дело с
суммами, подобными (36.01) и (36.02), в которых значок суммирования
входит два раза. Следуя предложению Эйнштейна, мы введем для
этих сумм сокращенное обозначение, которое заключается в том,
что знак суммы опускается, а суммирование по дважды входящему
163
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[гл. ш
значку подразумевается. При этом мы условимся суммировать по
греческим значкам α, β, ... в пределах от 0 до 3, а по латинским
значкам /,&,... — от 1 до 3. Применяя эти обозначения, мы можем
писать, например, вместо
з
ds* = S gaadxadx* (37.01)
α, β=0 ν r
просто
ds2 = ga^dxadx^ (37.02)
или же, если мы хотим выделить координату1) х0,
ds2 = Soodxo + 2Soi dxo dxi + gik dxi dxk- (37.03)
Эти сокращенные обозначения оказываются очень удобными и не
приводят к недоразумениям. В тех редких случаях, когда
суммирование по дважды входящему значку не производится, мы будем это
специально оговаривать. Например, в том частном случае, когда
выражение (36.02) сводится к
ds2 = dxi — dx\ — dx\ — dx\ (37.04)
мы будем писать
£αβ = *Αβ (без суммирования). (37.05)
Определение ковариантного и контравариантного векторов было
ддро нами для случая (37.05) в § 20. Формулы (20.12) и (20.13),
которые мы теперь можем писать в виде
4 —-^Лр; (37.06)
оха
дх
Л'а = -^-ЛР, (37.07)
могут служить определением вектора и в общем случае. Как и раньше,
ковариантные векторы будут обозначаться буквами с нижними
значками, а контравариантные — буквами с верхними значками. При этом
для дифференциалов координат мы будем делать исключение и
писать их в виде dxat несмотря на то, что они представляют контра-
вариантный вектор.
Таким образом, ковариантный вектор может быть определен как
совокупность четырех величин, преобразующихся как частные
производные от некоторой функции по координатам. Аналогично, кон-
травариантный вектор представляет совокупность четырех величин,
преобразующихся как дифференциалы координат.
WJ >
!) Для единообразия мы будем называть здесь координатами все четыре
переменные х0, хи х%> х3, несмотря на то, что х0 имеет характер времени,
а не пространственной координаты. В аналогичном смысле употребляется
термин „галилеевы координаты".
§ 37]
ТЕНЗОРНАЯ АЛГЕБРА
169
В том случае, когда ds2 имеет вид (37.04) и когда мы имеем
дело лишь с преобразованиями Лоренца, коэффициенты в формулах
преобразования (37.06) и (37.07) постоянны. В общем же случае
произвольных преобразований эти коэффициенты переменны. В случав
преобразований Лоренца вектор не обязательно должен относиться
к определенной точке пространства, а может быть „свободным".
Примером свободного вектора является вектор энергии—количества
движения материальной системы. (Аналогично, свободным тензором
является тензор момента количества движения и центра инерции
системы.) Напротив того, в случае общих преобразований координат
(и даже при простом переходе к криволинейным координатам) вектор
непременно предполагается связанным с определенной точкой
пространства. Такими связанными векторами являются векторы поля
(например, поля скоростей сплошной среды), составляющие которых
являются функциями точки, т. е. функциями от координат xQt хъ
х2, хг. Но связанный вектор не обязательно должен быть определен
в некоторой конечной области пространства-времени; область его
определения может сводиться и к некоторой кривой (например,
вектор касательной) или к некоторой поверхности (например, вектор
нормали). Те же замечания относятся и к тензорам. Таким образом,
в общем тензорном анализе мы будем иметь дело со связанными
векторами и тензорами. Для них значения переменных коэффициентов
дха
преобразования -^— и т. д. должны быть взяты в той точке, к ко-
торой отнесены и самые вектор или тензор.1)
Определение тензора аналогично тому, какое было дано в § 21
для случая преобразований Лоренца. Формулы (21.01), (21.03) и
(21.05), дающие правила преобразования ковариантного, контрава-
риантного и смешанного тензоров второго ранга, остаются в силе и
в общем тензорном анализе. В принятых нами обозначениях эти
формулы напишутся
. дха дха
τ^^ζ^τ·> <8708>
T» = -^—t-tf. (37.10)
дха дх^ v '
Таким образом, тензором второго ранга (ковариантным, контрава-
риантным и смешанным) называется совокупность величин,
преобразующихся, соответственно, по закону (37.08), (37.09) и (37.10).
1) О свободных векторах и тензорах см. также § 49.
170
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. III
Свойства симметрии или антисимметрии тензора второго ранга
(ковариантного или контравариантного, но не смешанного) при
преобразовании сохраняются. В самом деле, изменив в (37.08)
обозначения значков, мы можем написать
, дха дхл
τ* = ΊζΊΖτ>- <37·">
Поэтому, если мы положим
25αβ=Γαβ+ Т?а (37.12)
2^=^-^ (37.13)
и аналогичным образом определим S\ и A'4t то мы будем иметь
s-=i4its- (3714)
/ дхл дхя
Α-=^ζΐζΑ^ (37Л5)
Величины 5ао можно назвать симметричной, а величины Лар —
антисимметричной частью тензора Ταβ. Из формул (37.14) и (37.15)
следует, что как симметричная, так и антисимметричная часть тензора
Γαβ представляет собою тензор. Поэтому, если тензор 7αβ сам
симметричен, так что Лар = 0, то будет и Л^ = 0, т. е.
преобразованный тензор Γμ.ν также будет симметричен. Аналогично, если тензор Га?
антисимметричен и 5αβ = 0, то будет и 5^ = 0, так что
преобразованный тензор Γμν останется антисимметричным. Те же рассуждения
могут быть применены к контравариантному тензору 7 . Что
касается смешанного тензора Τβ, то его верхний и нижний значки
входят в формулу преобразования (37.10) неодинаковым образом,
вследствие чего разделение его на симметричную и антисимметричную
часть не имеет инвариантного смысла.
Весьма важным примером симметричного тензора второго ранга
является совокупность коэффициентов ga^ в выражении для ds2. To,
что коэффициенты ga* симметричны относительно своих значков,
вытекает непосредственно из их определения. То, что они образуют
тензор, вытекает из инвариантности выражения для ds2. В самом
деле, мы имеем при переходе к новым переменным xrQt x'v x'v х'ь
^**'**< = &******V (37·16>
откуда
дХ· дХ$ ^7 \7\
'» = **!%·-Ц· (37Л7)
§ 37]
ТЕНЗОРНАЯ АЛГЕБРА
171
а это есть закон преобразования ковариантного тензора. Тензор ga^
называется фундаментальным или метрическим тензором.
Совокупность величин g*Pt определяемых из уравнений
ίΤ% = δ;. (37.18)
также представляет собою тензор, причем этот тензор будет контра-
вариантным. Докажем это. В штрихованной системе отсчета мы
имеем для g'v выражение (37.17), а g'v·* получается из уравнений
8'^§'ъ = Ч. (37.19)
С другой стороны, если g°$ есть контравариантный тензор, то мы
должны иметь
^-''-ёяг (37·20)
Нам нужно показать, что оба определения g'v* совпадают. Так как
решение уравнений (37.19) относительно g'v* единственно, то для
этого достаточно проверить, что выражения (37.20) удовлетворяют
уравнениям (37.19). Это легко сделать, исходя из равенств:
(37.21)
(37.22)
Подставляя (37.20) в (37.19) и пользуясь сперва (37.22) и затем
(38.18), мы получим цепь равенств
/ * / о , дх'м. дх[ а дх' дх_
ё ёъ~ё ёъ . й, -б ё$о Λν
дх дхх
α λ
дхх дхр
г дх\
8ъ дх :
Ρ
дх
а
дх?
дха
= g?°~d4
дх_ дхл 6 ββσ дх дх'.
= K^L^ = ^^ = b», (37.23)
дх дх„ дх дх„
которая и приводит к равенству (37.19).
Величины ga$ называются контравариантными компонентами
фундаментального тензора, тогда как ga^ являются его ковариантными
компонентами.
Использованное в (37.23) равенство
дх дх
δ«_ϋ_2- = δϊ (37.24)
дх дх.
172
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
(гл. ш
показывает, что совокупность величин
( 1 при μ = ν,
if = Λ (37.25)
I 0 при |х =£ ν, ч '
одинаковая во всех координатных системах, подходит под
определение смешанного тензора второго ранга.
Если дан ковариантный вектор Лу, то совокупность величин
A» = g»*A, (37.26)
будет, как легко проверить, преобразовываться как контравариант-
ный вектор. Эти два вектора мы не будем считать существенно
различными, а будем говорить о величинах Д, и А^ как о ковариант-
ных и контравариантных компонентах одного и того же вектора.
Операцию, выражаемую равенством (37.26), называют для краткости
поднятием значка у вектора Д,, а обратная операция
\ = g^ (37.27)
называется опусканием значка. Поднятие и опускание значков можно
производить также у тензоров. Например, из ковариантного тензора 7μν
можно путем поднятия значков составить контравариантный тензор
Г' = Л%, (37.28)
из которого, обратно, исходный тензор получается по формуле
Т^ = 8^9ГК (37.29)
При этом, очевидно, свойство симметрии или антисимметрии тензора
сохраняется. При составлении смешанного тензора нужно обращать
внимание на то, клакой именно значок поднимается (или опускается).
Для ясности можно место поднятого или опущенного значка
обозначать точкой. Например, тензоры
7?; = /α7αν (37.30)
и
r» = g»Xa (37.31)
будут совпадать только если тензор Та^ симметричен. В этом случае
можно точек и не ставить, а писать просто
П=^ат„=еГт,а. (37.32)
Для простоты письма мы рассматривали до сих пор только
векторы и тензоры второго ранга. Аналогичное определение можно дать
и тензорам более высокого ранга.
§ 37] ТЕНЗОРНАЯ АЛГЕБРА 173
Ковариантным тензором ранга η называется совокупность величин,
преобразующихся по закону
, дХах дХа- дх«„ л ллч
^..^-^■-.τζτζ""^· <37·33)
Аналогично, контравариантным тензором ранга η называется
совокупность величин, преобразующихся по закону:
дх* дхо dxR
вМ-?"=^-а"шгж:-1^' <37-34>
Наконец, смешанный тензор ранга я, имеющий k ковариантных и т
контравариантных значков (причем k-\-m = n)t есть совокупность
величин, преобразующихся по закону
дх' дх' дхо дха
*ι ... *Λ &...βΛ dxai OX. д' дх' Ч >
Из ковариантного тензора ранга η можно получить контравариант-
ный тензор того же ранга по формуле
А* - *п = А,... а/*> ... gan*nt (37.36)
причем в этом случае можно говорить о ковариантных и
контравариантных составляющих одного и того же тензора. Путем поднятия
не всех, а некоторых значков можно из ковариантного тензора
получить также смешанный тензор того же ранга (места поднятых
значков для ясности обозначаются точками). Из двух тензоров рангов k
и т можно, путем перемножения их составляющих, построить тензор
более высокого ранга n = k-\-m. Мы имеем, для ковариантных
тензоров,
^...-/W...n=C*~-n <37-37>
и аналогичные формулы для контравариантных и смешанных
тензоров.
Из данного тензора ΛΛι... α ранга η можно по формуле
А....ал_2М?Рт = Я«,....л_2 (37.38)
построить новый тензор βαι...α , ранг которого на две единицы
меньше ранга данного тензора. Такая операция называется
свертыванием по соответствующим двум значкам. В формуле (37.38)
свертывание произведено по последним двум значкам; очевидно, что
результат будет зависеть от выбора той пары значков, по которой
производится свертывание. Свертывание можно произвести в два
174 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. II!
приема: сперва поднять один из значков по формуле
^■-п-^п-^-а-::^ (37.39)
и затем, приравняв другой значок αΛ-1 поднятому значку β, по нему
просуммировать
Κ·:::*·;:$~βΛχ ...w (37.40)
Свертывание тензора второго ранга дает скаляр
7-^' = Т, (37.41)
который будет также равен
г:;=г;: = г. (37.42)
То, что свертывание двух тензоров (37.30) и (37.31) дает один и
тот же результат, вполне понятно, поскольку скаляр Τ зависит только
от симметричной части тензора Τμν, а для симметричного ковариант-
ного тензора обе формы смешанного тензора совпадают.
Свертывание вектора невозможно, поскольку он содержит только
один значок. Но из двух векторов А^ и βν можно построить тензор
второго ранга, который затем и подвергнуть свертыванию. В
результате получается скаляр
g^A^ = А^ = А*В„ (37.43)
который можно назвать скалярным произведением двух векторов А^
и В,,. Если оба вектора совпадают, то соответствующий скаляр
равен
g^A^ = A^. (37.44)
Знак этого скалярного произведения вектора на самого себя
позволяет подразделить векторы на временно-подобные (для которых
АуА* > 0), на пространственно-подобные (для которых ΑμΑ* < 0) и
на нулевые (для которых ΑνΑ?' = 0). Это подразделение совпадает
с тем, которое мы рассматривали в § 20.
Если даны два временно-подобных вектора А^ и £*\ инварианты
которых равны единице, то их скалярное произведение будет по
абсолютной величине больше единицы. Другими словами, из условий
g^A*=l, g^BW^l (37.45)
вытекает
\g^B"\>l. (37.46)
§ 37] ТЕНЗОРНАЯ АЛГЕБРА 175
Докажем это. Условие (37.45) для вектора А^ может быть написано
в виде
(V^AO+yL· 8^2-(Ы2*-81>)А'А*=и (37.47)
или короче
-±-(А0У-аиА1Ак = \, (37.48)
где мы положили
^ = ^f-^· (37.49)
Аналогично
В^ яш JL (β0)2 _ а^В* = 1. (37.50)
С другой стороны, скалярное произведение А^В^ равно
^■■1-ДА-а^'В». (37.51)
В силу установленных в § 35 неравенств для #μν величины aik будут
коэффициентами определенной положительной квадратичной формы.
Поэтому будет
| aikAlBk | < VaikAlA* . VaikBlBk (37.52)
и если мы положим
A = VaikAlA*i B = VaikBiBkt (37.53)
мы будем иметь
\aikAlBk\^AB, (37.54)
и, следовательно,
\A^\^VT^WVT+W — AB^\. (37.55)
что и требовалось доказать.
Заметим, что справедливое для временно-подобных векторов
неравенство (37.46), написанное в виде
| g^ET | > VgfaAW · VJ^F, (37.56)
аналогично (37.52), но имеет обратный знак, что происходит из-за
индефинитности метрики.
Для временно-подобного вектора обе нулевые составляющие (кова-
риантная и контравариантная) всегда имеют один и тот же знак.
Предполагая, что Лд> 0 иВ0>0(и, следоэательно, А0 >0 и В0>0),
176 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. III
мы можем формулу (37.56) написать в виде
А,В? > Va^~ · Vb^BP. (37.57)
В заключение этого параграфа рассмотрим понятие
псевдотензора в общем тензорном анализе. В § 22 мы ввели совокупность
величин εαργδ, антисимметричных относительно всех своих значков,
причем ε0123=1. Эти величины удовлетворяют соотношению (22.02),
которое мы, в несколько измененных обозначениях, напишем в виде
дха дхя дх дхь
δ«βϊδ ~дх~;~дх^ ~dxj~дхТ = Dew (37'58)
где D есть якобиан1) (35.11). С другой стороны, пользуясь
правилом умножения определителей, нетрудно доказать формулу
Det*ep = D*Detek, (37.59)
представляющую обобщение формулы (35.18).
Переписав эту формулу в виде
* = £>V (37.60)
и извлекая после изменения знака положительный квадратный корень,
получим
V=? = |D|/=y. (37.61)
Это дает нам закон преобразования определителя g. Умножим теперь
обе части (37.58) на У—gr и положим
Ema = V=g*m„ (37.62)
£'αβΤδ — V^F^if (37. 63)
Мы можем тогда написать формулу (37.58) в виде
дха дхо дх дх§
*+* ■τχ^τχτ-δΐ;-^^^0· *W <37·64>
где sgnD=±l есть знак якобиана D. Эта формула показывает,
что для преобразования с положительным якобианом величины Е^?<3
преобразуются как ковариантный тензор четвертого ранга, а для
преобразований с отрицательным якобианом закон их преобразования
отличается лишь знаком от закона преобразования такого тензора.
Такую совокупность величин мы будем называть антисимметричным
*) В формуле (22.02) через D был обозначен якобиан обратной
подстановки.
§ 37]
ТЕНЗОРНАЯ АЛГЕБРА
177
псевдотензором. Соответствующий контравариантный псевдотензор
получится по общей формуле
&■*=γ—g g»*g*g"gXM (37.65)
и будет равен
jcW .
1
γ=τ
">νρσ·
(37.66)
Антисимметричный псевдотензор четвертого ранга позволяет сопо
ставлять всякому антисимметричному тензору второго ранга А
дуальный псевдотензор
(37.67)
и всякому антисимметричному тензору третьего ранга А^ь —
дуальный псевдовектор
Л"=-1£^лРт8. (3768)
Если антисимметричный тензор А^ь составлен из трех векторов a^t
& с по формуле
ЛРТ5 = а$^сь + αγ VP + *δ Vt — afacb — афьс^ — аф^Ср
то дуальный псевдовектор будет иметь составляющие
(37.69)
Л°=-
1
л«».
V=7
ι
Y=
g
Ι «ι
Γ
Κι
|αο
*0
Ко
«2
b2
ч
flj
*1
«I
08 1
*3
H\
аъ\
h\
«8l
л>=+
V-
#
Д» =
=+
V=F
«0 α2
A h
c0 c2
a0 ax
A *i
C0 Cl
β3
*3
C3
«2
*2
*2
>
»
(37.70)
пропорциональные минорам (алгебраическим дополнениям) элементов
*о» *ι· *2» *з определителя
So ?ι &2 ?з
α0 α, α2 α3 |
*ο *ι *2 h
с* с,
Очевидно, будет
ι ^2 ^з
(37.71)
Л«аа = 0, Л«£а = 0, Л«са = 0,
(37.72)
так что псевдовектор Аа будет перпендикулярен каждому из векто-
*
ров αα, bat ca. Такой псевдовектор Аа можно назвать векторным
произведением трех векторов αα, bat ca.
I) Зак. 2649. 3. А. Фон
178
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. III
§ 38. Уравнения геодезической линии
Рассмотрим две точки-мгновения, соответствующие
последовательным событиям. Координаты их обозначим через xW и х^К Пусть
материальная точка движется по некоторой кривой так, что при
xQ = x(Ql) ее пространственные координаты равны xk = х£\ а при
jt0 = jto2) ее пространственные координаты равны χη = χψ.
Так как события xW и χ№ предполагаются последовательными,
то такое движение возможно со скоростью, меньшей скорости света.
Время х0 и соответствующие ему пространственные координаты xk
материальной точки можно выразить параметрически через некоторый
вспомогательный параметр /?, положив
*. = φβ(/0. (38.01)
причем должно быть
41) = (Ρα(Λ). ^ = Г(Р2). (38.02)
Так как движение происходит со скоростью, меньшей скорости света,
то для всякого бесконечно малого интервала мы должны иметь
^2 = ^αβφαφ^/>0, (38.03)
где точками обозначены производные по параметру р. Обозначив
через s = сх конечный интервал между последовательными событиями,
пропорциональный промежутку собственного времени τ, мы будем
иметь:
А
s = οτ = f Vga^f dp. (38.04)
A
Рассмотрим теперь два квазиодновременных события. Точки
пространства, где эти события произошли, мы можем соединить
некоторой кривой, и каждой точке на этой кривой мы можем сопоставить
определенный момент времени (т. е. написать для каждой точки свое
„уравнение времениа), причем каждая пара этих промежуточных
точек-мгновений должна быть квазиодновременной. Аналитически вид
кривой и уравнение времени могут быть по-прежнему представлены
при помощи уравнений (38.01) и (38.02), но мы уже не можем
толковать эти уравнения, как описывающие движение точки по кривой;
они будут соответствовать статическому рассмотрению всей кривой
в целом. Для каждой пары промежуточных бесконечно близких точек-
мгновений мы будем иметь
^2 = ^У^2<°» (38.05)
§ 38]
УРАВНЕНИЯ ГЕОДЕЗИЧЕСКОЙ ЛИНИИ
179
и пространственный интервал
/== JV-grfVdp (38-06)
будет характеризовать длину кривой.
Можно поставить вопрос об экстремальных значениях временного
интервала (38.04) между двумя последовательными событиями и
пространственного интервала (38.06) между двумя квазиодновременными
событиями. Эта вариационная задача приводит к уравнениям, форма
которых одинакова в обоих случаях (для временного и для
пространственного интервала). Получаемые вариационные уравнения называются,
по аналогии с теорией поверхностей, уравнениями геодезической
линии. Необходимо, однако, отметить, что в теории поверхностей
(где квадрат бесконечно малого расстояния есть определенная
положительная форма от дифференциалов координат) геодезическая линия
является, вообще говоря1), кратчайшей, тогда как экстремум
временного интервала соответствует его максимуму, а экстремум
пространственного интервала не представляет ни максимума, ни
минимума. Последнее утверждение легко проверить в том частном случае,
когда ds2 имеет вид (37.04) (галилеева метрика). Для
последовательных событий можно выбрать систему отсчета так, чтобы
пространственные координаты начальной и конечной точек совпадали, и взять
в качестве параметра время t. Мы будем тогда иметь
/(2)
s= f Vc2 — v2dt, (38.07)
/О)
где
Решением вариационной задачи будут постоянные значения х, у, ζ,
для которых у2 = 0. Для всякой другой траектории будет ν2 > 0,
откуда Υ с2 — ν2 < с и, следовательно,
*<W = *(*(2)-*(1)). (38.09)
Для пространственного интервала можно выбрать систему отсчета
так, чтобы было
,(2)==,(i)t yV) = f)f ^WD, (38.10)
1) Т. е. при достаточно близких начальной и конечной точках.
12*
180 Общий тензорный анализ [гл. тп
тогда как *(2)> jd1). Взяв в качестве параметра координату х,
получим
*(2)
«- / /> +№+№'-'№**■ с8-·»
Решением вариационной задачи будут постоянные значения у, zf t,
для которых
/extr==x(2)_x(i). (38.12)
Но для других кривых y(x)t z(x) и для других уравнений времени
t(x) может оказаться как / > /extr, так и /</extr, смотря по тому,
будет ли корень квадратный в (38.11) в среднем больше или меньше
единицы.
Составим дифференциальные уравнения геодезической линии.
Лагранжева функция нашей вариационной задачи будет равна
L=Vga9t'<? (38.13)
или, если мы будем писать ха вместо сра,
L^Vg^XaXf (38.14)
Условие экстремума интеграла
s = fbdp (38.15)
А
приводит к уравнениям Лагранжа
d dL _iL=0> (38Л6)
dp дха дх{
Положим
Z7 — -J"i.pi.ip. (38.17)
откуда
L = VW. (38.18)
Рассуждая как в § 17, мы можем выбрать параметр ρ так, чтобы
было
£1 = 0, F = const. (38.19)
При таком выборе параметра уравнения (38.16) будут равносильны
следующим:
d дР дР- = 0. (38.20)
dp дха дх{
α
§ 38] УРАВНЕНИЯ ГЕОДЕЗИЧЕСКОЙ ЛИНИЙ 181
Последние уравнения имеют интеграл
xa^L—F=,F^ const, (38.21)
дха
так что условие (38.19) будет следствием (38.21). Раскрывая левую
часть (38.20), получим
т^Л-ттёЧ^-0 (38'22)
и, выполняя дифференцирование,
*А + Щ Vt - У ^ Vt = °· <38·23>
Коэффициент при ΛΤβΛΓγ мы можем симметризовать относительно
значков β и γ и положить
»τ·«-ϊ(τ£+τ£-ί£)· <38^
после чего уравнения геодезической линии напишутся
*«Λ + [βϊ. «]ipiT = 0. (38.25)
Выражение (38.24) носит название скобки Кристоффеля первого
рода. Чтобы решить уравнения (38.25) относительно вторых
производных, умножим их на #αν, просуммируем по α и введем
обозначения
{βΤ. ν}=*«[βϊ. «]. (38.26)
Мы получим тогда
*ν-ΗΡϊ. v}i„iT = 0. (38.27)
Выражение (38.26) принято называть скобкой Кристоффеля второго
рода. Для него часто употребляют обозначение
{βγ. ν}=ãà (38.28)
Для единообразия можно и для скобок Кристоффеля первого рода
применять обозначение
{αβ, Τ}=Γτ,αβ, (38.29)
хотя оно и менее употребительно.
Таким образом,
182
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. III
С этими обозначениями уравнения геодезической линии напишутся:
d2x4 „ dx„ dxa
-i^+T^W4f^ <38·32>
Если скобки Кристоффеля вычислены при помощи фундаментального
тензора g^% представимого в форме (35.15), то уравнения (38.32)
эквивалентны уравнениям
- = 0 (Л = 0, 1, 2, 3) (38.33)
для галилеевых координат х'к. Это вытекает из ковариантности
уравнений и из того факта, что в галилеевых координатах скобки
Кристоффеля равны нулю. Таким образом, § этом случае уравнения
геодезической линии (38.32) соответствуют линейной зависимости
галилеевых координат от параметра р.
Нетрудно видеть, что выкладки, которые привели нас к
уравнениям (38.32), остаются в силе независимо от знака величины F. Если
F > О, то „геодезическая линия" соединяет два последовательных
события, и уравнения (38.32) можно толковать как уравнения
движения свободной материальной точки, движущейся со скоростью,
меньшей скорости света. Приращение dp параметра ρ будет
пропорционально приращению dx собственного времени τ, и вместо (38.32)
мы можем написать
d2Xv „„ dx„ dxa
Ib-rff-^-O. (38.34)
άτ2 "Τ-αρ d% άτ
Длина геодезической линии дает интервал собственного времени
между „отправлением" и „прибытием" материальной точки. Если же
F < 0, то „геодезическая линия" соединяет два квазиодновременных
события, и мы можем положить dp пропорциональным приращению
dl пространственного интервала. Уравнения (38.32) напишутся тогда
-гг+г*тг-а/—°· <38·35>
Случаю F = Q соответствует движение точки по лучу со
скоростью света. В этом случае лагранжева функция (38.18) равна нулю
и приведенный выше вывод уравнений геодезической линии теряет
силу. Однако самые уравнения (38.32) сохраняют смысл и в этом
случае, причем, так как они имеют интеграл (38.21), то они
совместны с условием F = 0. Чтобы обосновать их, можно исходить
из уравнений Гамильтона, рассмотренных в § 36. Согласно (36.08)
мы имеем
d Η = — d ω0 =
§ 38] УРАВНЕНИЯ ГЕОДЕЗИЧЕСКОЙ ЛИНИИ 183
где функция Гамильтона #== — ω0 получается решением
относительно о>0 уравнения
О=э£«Ршвшр = 0. (38.37)
Поэтому мы имеем
7Щ(£*Ч-Зг4 <38-38>
\д(а0)
Пользуясь тем, что
** =-**- = ψ-, (38.39)
dx0 dx0 ox0 v 7
и выражая производные от Η через производные от G, мы можем
написать уравнения (38.36) в симметричном виде:
4fr-i£· 4^--тт£- <*=»· ··2· 3>- <38·*»
где dp рассматривается как дифференциал независимой переменной р.
Первые четыре уравнения (38.40) уже были выписаны нами в § 36.
Раскрывая правые части (38.40), будем иметь
-#=f> 4f=-T-krm^· (38·41)
Нетрудно видеть, что эти уравнения равносильны уравнениям (38.32).
В самом деле, мы имеем
% = 8^ (38.42)
и, следовательно,
df dg^ dXy dg^ dXX
-dX7^=-dXT^4i=-^-dt-if' <38·43>
так как
^μ+^"^—3^(Τ^ = -έ-(ίΟ-0. (38.44)
Подставляя (38.43) в (38.41), получим
или, вследствие первых уравнений (38.41),
*». _ 1 dgfX dx^ dxx
~dy-T-dxT~df~dy' ( 8,46)
Исключая отсюда и из (38.42) величины ωα, получаем окончательно
dp\8<*dp)—2 дхя dp dp' ν*Λ/'
184
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[гл. га
Эти уравнения совпадают с уравнениями (38.22), из которых были
получены уравнения геодезической линии в форме (38.32). Переход
от (38.41) к (38.47) есть обычный переход от уравнений Гамильтона
к уравнениям Лагранжа.
Таким образом, мы доказали, что и „геодезическая линия"
нулевой длины определяется уравнениями (38.32), если к ним
присоединить условие F = 0.
Заметим, что в силу постоянства величины F геодезическая линия
сохраняет свой характер на всем своем протяжении: либо она все
время соответствует движению точки со скоростью, меньшей
скорости света, либо она все время есть нулевая линия, либо она
сохраняет пространственный характер.
Для нулевой геодезической линии соотношение (38.37), в
котором ωα = -3—, может рассматриваться, как уравнение Гамильтона —
Якоби для функции действия ω (см. § 36). Нетрудно получить уравнение
Гамильтона — Якоби и для общего случая. Для определенности мы
рассмотрим движение точки со скоростью, меньшей скорости света.
Выбирая в качестве параметра время t = x0 и обозначая точкой
дифференцирование по tt мы можем написать функцию Лагранжа
нашей задачи 1) в виде
L = + Vgn + *gu*i + gik*iXk- (38.48)
Обобщенные импульсы будут равны
-^- = л = + у(^ + ^Л). (38.49)
а функция Гамильтона получится по обычному правилу
Н= xtPt — L = — T(g0o + gok*k)> (38.50)
причем скорости xk должны быть здесь выражены при помощи (38.49)
через рь.
Если мы положим
Ро = Τ te<x> + ΛΛ> (38.61)
и примем во внимание, что
Ldt = d$t (38.52)
где 5 — длина дуги, то четыре величины plt p0 могут быть записаны
единообразно в виде
Α-ΛίΤ?- (38·53>
1) Для удобства мы берем здесь функцию Лагранжа со знаком,
обратным тому, какой принят в механике, вследствие чего знак энергии будет
обратен знаку функции Гамильтона //.
§39]
ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРА
185
Из тождества
dx~ dxa
^чг-ir-1 <38·54>
вытекает соотношение
trPvP,= h (38.55)
которое можно рассматривать как результат исключения трех
скоростей xv х2% #з из четырех уравнений (38.49) и (38.51). Гамильто-
нова функция # =— р0 получается решением уравнения (38.55)
относительно р0. По общему правилу, уравнение Гамильтона—Якоби
получится, если выразить Я, pv р2, рг через частные производные
функции действия 5 по времени и по координатам согласно
формулам
"—-$■· а—ЙЬ <38·56)
которые могут быть записаны в виде
*«-£-. (38.57)
Таким образом, уравнение геодезической линии в форме
Гамильтона— Якоби имеет вид
«"Дтй-1· <38-58>
Если известен полный интеграл уравнения Гамильтона—Якоби
S = S(x0, xlt х2, *3. сг, с2, cz) + c0, (38.59)
содержащий три произвольные постоянные cv c2, сг (не считая
аддитивной постоянной с0), то, как доказывается в механике,
производные от 5 по постоянным будут также постоянными:
■з| = ** (fc= 1,2,3). (38.60)
Постоянные эти определяются затем из условий задачи.
Как видно из сравнения (38.58) с (38.37), уравнение нулевой
геодезической линии получается из (38.58) заменой правой части
нулем. Для пространственной геодезической линии правая часть
уравнения Гамильтона — Якоби есть отрицательная постоянная, которую
можно положить равной —1.
§ 39. Параллельный перенос вектора
В евклидовом пространстве равенство и параллельность двух
векторов, отнесенных к разным точкам, формулируется весьма просто.
Два вектора равны и параллельны, если их декартовы составляющие
равны. То же определение, очевидно, годится и для векторов в ПДО*
186
Общий тензорный анализ
[гл. in
скости. Оно непосредственно обобщается и на случай изогнутой
поверхности, развертывающейся на плоскость. Если же мы имеем
произвольную (не развертывающуюся) поверхность, то параллельность
двух лежащих в ней векторов может быть определена только если
точки приложения этих векторов бесконечно близки. Вектор на
поверхности мы можем рассматривать как вектор в пространстве,
касательный к поверхности в точке его приложения. Если дан
вектор на поверхности в\ точке Я, то параллельный ему (в смысле
геометрии на поверхности) вектор в бесконечно близкой точке Q может
быть построен следующим образом. Данный вектор в точке Я мы
рассматриваем как пространственный вектор, и строим в точке Q
параллельный ему в обычном смысле пространственный вектор,
а затем проектируем его на плоскость, касательную к поверхности
в точке Q. Этот касательный вектор в Q мы и считаем
параллельным данному вектору в Я.
Аналитически это построение может быть выполнено следующим
образом. Пусть уг, у2, уг— декартовы координаты в евклидовом
пространстве, а хи х2— координатные параметры поверхности.
Параметрические уравнения поверхности имеют вид:
3>ι = 3>ι(*ι. χύ· 3>2 = Λ(*ι. *2>· )>з = ;Уз(*1> *2>. (39.01)
и квадрат элемента дуги на поверхности будет равен
ds* = gn dx\ + 2gl2 dxx dx2 + g22 dx% (39.02)
где
*·-Σί}τ&· <39·03>
/1=1
Пусть Аг, А2 — ковариантные и А1, А2 — контравариантные
составляющие некоторого вектора на поверхности в точке P(xv х2). Мы
можем рассматривать его как пространственный вектор с
прямоугольными составляющими
γη = "ЙгΑ1 +1!"Α2 (η = ι·2' 3>· (39·04)
причем будет
з
/1 = 1
Если мы, перейдя к точке Q(xx-\-dxlt x2-\-dx2), не изменим
прямоугольных составляющих Кя, мы получим пространственный
вектор, который уже не будет касательным к поверхности. Но его
§ 39] ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРА 187
касательные составляющие определят на поверхности вектор
*,+4-Σ*.(%+Στ&ί**.)· <3906>
л=1 V k = l I
который мы и считаем, по определению, результатом параллельного
(в смысле геометрии на поверхности) переноса вектора Аг в точку Q.
Нормальная же составляющая Υ п% очевидно, из формулы (39.06)
выпадает.
В формуле (39.06) добавка к -^- учитывает изменение этой
величины при переходе от Ρ к Q. Из-за этой добавки составляющая Аг
получает приращение
/1 = 1 k=\
Подставляя сюда выражение (39.04) для Υп% получаем
м,-2"'»*.£&тй&г <3908>
l,k = l л«1
На основании выражения (39.03) для gik нетрудно проверить, что
в формуле (39.08) сумма по η равна
Уду„ »У« =4*8* ■ %ι Пи) (39.09)
^" dxi dxk dxi 2 \ όχι ' dxk dxt J9
или, если воспользоваться обозначением (38.30) для скобок Кри-
стоффеля,
£-&^=г- <3910>
/2 = 1
Таким образом, приращение составляющих вектора при
параллельном переносе будет равно
2
И= 2 Γί,*Η'δ**· (39.li)
Ι, £ = 1
Существенно отметить, что это приращение зависит только от
внутренних свойств поверхности, определяемых выражением (39.02)
для ds2.
Теория параллельного переноса векторов, развитая в работах Леви-
Чивита [14] и его учеников, может быть формулирована почти без
изменений для случая четырехмерного многообразия пространства-времени.
188
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. Ш
Пусть коэффициенты квадратичной формы
ds2 = gapdxadxz (39.12)
представлены в виде
л = 1
± 1, а
Уп = Уп(хо> *» ** *з) (39.14)
суть некоторые функции. В обычной теории относительности
величины gap получаются из квадратичной формы (35.09) и представимы
в виде (35.15), что соответствует случаю N=4. В самом общем
случае мы имеем 10 величин ga^ и для их представления в виде
(30.13) нужно не больше 10 функций уп (последнее может быть
доказано и строго). Заметим, что так как сигнатура квадратичной
формы (39.12) равна (-J ), то среди чисел еп должно быть
не меньше одного положительного и не меньше трех отрицательных.
Величины уп мы можем формально толковать как декартовы
координаты в некотором многомерном псевдоевклидовом пространстве
с метрикой, определяемой выражением
N
dr? = ^endyl (39.15)
/1 = 1
а наше пространство-время — как некоторую гиперповерхность в этом
многомерном пространстве.
Обычному контравариантному вектору Аа в
пространстве-времени будет соответствовать в многомерном пространстве
касательный к гиперповерхности вектор с декартовыми составляющими
Υ „ = %£*" (39.16)
(здесь и в дальнейшем снова подразумевается суммирование по
греческим значкам от 0 до 3). Отсюда получаем на основании (39.13)
следующие выражения для ковариантных составляющих вектора Аа:
N
Λ, = 2>Λ,|^. (39.17)
/1=1
Значения составляющих вектора Ла после его параллельного переноса
в бесконечно близкую точку мы можем, аналогично (39.06),
определить по формуле
Λ + Κ = Σ^^ + ^|£-δ4 (39.18)
/1«1 Р
§ 39] ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС ВЕКТОРА 189
откуда
^<=2^етгЧ. <39·19>
и после подстановки вместо Υη его выражения из (39.16)
/1=1 Т Р
Но из (39.13) следует, аналогично (39.10),
Ь.%Т%к=Гт- да·2»
я»1
где Гт,ар — обычные скобки Кристоффеля
Γ*«^Ύ\-^ + ι&Γ--δϊ;)- <39·22>
Поэтому формула для приращения составляющих вектора при
параллельном переносе напишется
ЬАа = Ть^АЧхр (39.23)
так же как и в случае обыкновенной поверхности в обычном
евклидовом пространстве.
В формулу (39.23) входят как ковариантные, так и контравари-
антные составляющие вектора, но нетрудно выразить в ней обе
части через одни и те же составляющие. Мы имеем
Λγ = £νΜν, (39.24)
£νγΓτ,αβ = Γ:ρ. (39.25)
Поэтому
δΛ=ΓναβΛδΑτβ. (39.26)
Сюда входят только ковариантные составляющие. С другой стороны,
δΛ = £αγ ЬА + Л" ^- δ*β = Г ^ δ*ρ (39.27)
ρ
и, как легко проверить,
Γτ,αβ+Γα,ρτ=-^Γ-· (39.28)
Отсюда
8α^ = -Γαί^Α4χ^ (39.29)
190 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. ΙΠ
и, следовательно, формула для контравариантных составляющих
имеет вид
8Л* = — К?А*Ъхр. (39.30)
Рассмотрим изменение скалярного произведения двух векторов при
параллельном переносе. Мы имеем
Ъ(А'В,)=ВМ + АлЪВа. (39.31)
Подставляя сюда выражение для 8Л* из (39.30) и написав, согласно
(39.26), ЬВа в виде
ЬВа=КрВМ?> (39.32)
мы убедимся, что оба члена в (39.31) сокращаются, и мы получаем
δ(Λν£ν) = 0. (39.33)
Таким образом, скалярное произведение двух векторов при
параллельном переносе не меняется. В частности, не меняется и
абсолютная величина вектора.
Мы рассматривали до сих пор бесконечно мадые смещения. Но,
суммируя их, мы можем определить параллельный перенос и вдоль
любой заданной кривой. Пусть координаты точки на кривой заданы
как функции некоторого параметра р:
*β = *β(/>). (39·34)
Величины Πβ (которые являются функциями координат) также будут
известными функциями от р. Для определения вектора А! в функции
от ρ мы будем иметь дифференциальные уравнения
dA ~* a. dxa
1f = -^A4f' (39·35>
Если заданы значения А* для начальной точки кривой, то,
интегрируя уравнения (39.35), мы получим значения А* и для конечной точки
кривой. Тем самым мы произведем параллельный перенос вектора
из начальной точки в конечную. Результат будет, очевидно, зависеть
от вида кривой, вдоль которой производится перенос.
Сравним уравнения (39.35) параллельного переноса с уравнениями
геодезической линии
d2x* „* dx„ dxa
Те и другие уравнения совпадут, если мы положим
Л'=-^-. (89.36)
§ 40] КОВАРЙАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ 191
Если геодезическая линия временно-подобна (т. е. соответствует
движению точки со скоростью, меньшей скорости света), то в
качестве параметра ρ можно взять собственное время τ, и вектор А*
будет совпадать с четырехмерной скоростью. Таким образом, в этом
случае уравнения геодезической линии можно толковать как
уравнения параллельного переноса вектора скорости вдоль направления,
даваемого этим же самым вектором (в четырехмерном смысле).
Из уравнений параллельного переноса для вектора нетрудно
получить соответствующие уравнения для тензора любого ранга.
В качестве примера рассмотрим случай ковариантного тензора
второго ранга Τμν. Мы будем исходить из требования, чтобы инвариант
/=7μΧ^ν (39.37)
не менялся при параллельном переносе, каковы бы ни были векторы
Л^ и β\ Меняя обозначения значков, мы можем написать величину Ы
в виде
δ/ = А* В4 (ЬТ^ — 7μαΓναβ δ*β — ΤανΓ£β δ*β). (39.38)
Так как это выражение должно обращаться в нуль при любых А*
и £ν, мы должны иметь
δ*β, (39.39)
что и является искомым обобщением уравнений параллельного
переноса.
§ 40. Ковариантное дифференцирование
В случае постоянных £μν операцию дифференцирования по
координате можно было, в известном смысле, рассматривать как
умножение на некоторый вектор. Так, если А^ есть вектор, заданный в не-
дА
которой области как функция точки, то выражение νμ^ν = -^-^ будет,
при постоянных £μν, тензором с теми же свойствами преобразования,
как произведение векторов νμ и Лу. Поэтому в указанном случае
тензорный анализ не отличается, в формальном отношении, от
тензорной алгебры.
В случае переменных g v это уже будет не так: производная от
вектора по координате не будет тензором. Однако и здесь можно
построить такую линейную комбинацию из производной от вектора и
составляющих самого вектора, чтобы она преобразовывалась как тензор.
Рассмотрим вектор Д,, заданный как функция точки в некоторой
области. Составляющие его будут функциями от координат.
Изменение этого вектора при переходе от точки Р(х$) к бесконечно
192 Общий тензорный анализ [гл. m
близкой точке Q(x$-\-bx^ будет
дА
(AJQ - (А)р = ЬгА, = S£l δ*β. (40.01)
Мы можем, однако, сравнивать значение (AJQ вектора Д, в точке Q
не с его значением в точке Я, а с результатом (AJ'' его
параллельного переноса из Ρ в Q. Согласно (39.26), при параллельном
переносе вектора его изменение равно
(A,)"Q — (А,)р = Mv = IV* δ*β. (40.02)
Вычитая это выражение из предыдущего, т. е. составляя разность
04V)Q - (Λ,)£ = ЬА, = ί,Λ, - Ь2А„ (40.03)
мы получим
ЬА*=$т - г^)Ьх*· (40·04>
Величина δΛν есть разность между фактическим изменением
вектора А^ и тем, какое он претерпел бы при параллельном переносе.
В то же время это есть разность двух векторов (AJQ и (А$'
которые оба относятся к одной и той же точке Q. Поэтому ЬА^ есть
вектор. Но при произвольных δ*β это может быть только в том
случае, если величина
ν,Λ-^-ΠρΛ (40.06)
есть ковариантный тензор второго ранга 1). Эта величина называется
тензориальной или ковариантной производной. Она и является
искомым обобщением обыкновенной производной от вектора на случай
переменных gav.
Путем аналогичных рассуждений можно составить выражение для
ковариантной производной от контравариантного вектора. Оно имеет
вид
V^s^ + lV*. (40.06)
Формулы для ковариантных производных легко обобщаются на
едуч^й произвольного тензора. Рассмотрим сперва тензор второго
ранга Г v. Согласно (39.39), изменение его составляющих при парал-
1) Тензорный характер (40.05) может быть доказан и без привлечения
понятия параллельного переноса. Для этого достаточно проверить прямым
вычислением, исходя из (38.31), закон преобразования скобок Кристоффеля
(42.04) и затем преобразовать выражение (40.05) к новым переменным,
используя этот закон, а также закон преобразования (37.06) составляющих
вектора.
§ 40] КОВАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ 193
лельном переносе из Ρ в Q равно
δ27;ν = (r^tv + ВДа) Ьхр. (40.07)
Если же составляющие 7μν являются функциями от координат, то
изменение их при переходе из Ρ в Q равно
^=4^4· <40·08>
Разность
4ν = δ,7;ν-δ27;ν. (40.09)
равная
4ν={^ξ - г^гр' - г^р) δ*β· <40· 10>
есть тензор при любых значениях смещений Ьх^. Поэтому и величина
должна быть тензором.
Аналогично доказывается тензорный характер величин
Vprv = -^ + Γ£βΓρν + ГррГ \ (40.12)
где Г1" есть контравариантный тензор, а также
νβ7Τ = -^J- - Γρβν7? + Г&7*. (40.13)
где 7^ есть смешанный тензор.
Применяя правило составления ковариантной производной к кова-
риантным или контравариантным составляющим фундаментального
тензора, мы убедимся, что выражения (40.11) и (40.12) для него
равны нулю. Равенство нулю ковариантных производных от
фундаментального тензора носит название леммы Риччи. Ввиду важности
этой леммы рассмотрим соответствующие формулы подробнее.
При Γμν = £μν величина (40.11) равна
ν,3|;-«Λ-«Λ = 0· (40.14)
В самом деле, эта формула, написанная в виде
-ί^- = Γνιμβ + ΐν>νβ, (40.15)
приводится к тождеству в силу определения (39.22) величин Г ^
(Формула эта совпадает с 39.28)).
13 Зак. 2649. В. А. Фок
194 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. Ш
Полагая в (40.12) 7,μ,ν = £μ,\ получаем
V» = -^ + « + ^ = 0. (40.16)
Для проверки этого соотношения достаточно воспользоваться явным
выражением (38.31) для Γ«β. Соотношение (40.16) приведется к виду
dg^ dg0a
-жгг+^в-^-о (40·17>
и будет эквивалентно следующему:
Наконец, при 7^ = 8^ выражение (40.13) обращается в нуль в силу
симметрии величин Г«р относительно нижних значков.
Ковариантное дифференцирование произведения двух тензоров
подчиняется тем же правилам, как обычное дифференцирование. Это
непосредственно вытекает из нашего способа вывода выражения для
ковариантной производной; выражение это получается из выражения
для бесконечно малого приращения, для которого имеет место
правило составления дифференциала от произведения.
Проверим правило дифференцирования произведения на примере
произведения двух векторов. Положив в формуле (40.11)
Т^и„У„ (40.19)
мы получим
w^M^-^h+^-^-w) <40·20>
и вследствие (40.05)
Vp(tW«(W · ^» + ^μ W)· (40.21)
Применяя правило дифференцирования произведения к выражению
U^g^U" (40.22)
и пользуясь тем, что ковариантная производная от фундаментального
тензора равна нулю, мы получим
V8t/,, = ^VP^ (40.23)
Таким образом, при ковариантном дифференцировании величины g^
ведут себя как постоянные, и их можно выносить из-под знака
ковариантной производной. Другими словами, при ковариантном
дифференцировании безразлично, будут ли значки опущены (или
подняты) до или после составления производной.
§ 41] ПРИМЕРЫ СОСТАВЛЕНИЯ КОВАРИАНТНЫХ ПРОИЗВОДНЫХ 195
(ν) Λ'" v*'
содержащего т контравариантных и k ковариантных значков. Мы
имеем
Мы выписали выше в явной форме выражения для ковариантной
производной от вектора и от тензора второго ранга. Ковариантная
производная от скаляра Φ совпадает с обыкновенной производной
V* = |r" (40·24)
Она является, как мы знаем, ковариантным вектором.
Для полноты мы выпишем также общее выражение для
ковариантной производной от тензора произвольного ранга
</[:;=t/:,1 ::.";*. (40.25)
[риантных и k ковариантных значь
Здесь в каждом члене суммы один из значков дифференцируемого
тензора переходит в значок коэффициента Г той же вариантности,
а в самом тензоре заменяется значком суммирования, который входит
также в качестве значка Г противоположной вариантности. Один из
нижних значков Г есть всегда номер координаты, по которой
производится дифференцирование. При этом те члены, в которых
меняется верхний значок тензора, входят со знаком плюс, а те члены,
в которых меняется нижний значок тензора, входят со знаком минус.
Иногда удобно употреблять особое обозначение для операции
ковариантного дифференцирования, сопровождаемой поднятием
соответствующего значка. Операцию
V* = g*\ (40.27)
называют контравариантным дифференцированием.
§ 41. Примеры составления ковариантных производных
Применим полученные правила ковариантного дифференцирования
к некоторым частным случаям.
Составим прежде всего расходимость данного вектора. Согласно
(40.06), выражение
V = |^-+r^a (41.01)
представляет смешанный тензор второго ранга. Свертывая его по
значкам μ и ν, мы получим скаляр
Div А тв VH' = ™х~ + Г'«На, (41.02)
13·
196 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. III
который и является обобщением выражения (21.24) для четырехмерной
расходимости. Это выражение может быть упрощено. Мы имеем
Но если g есть определитель, составленный из £μν, и ggv·* есть
минор элемента g^ в этом определителе, то по правилу
дифференцирования определителей мы имеем
dg = gg^dg^ (41.04)
откуда
Заметим, что вследствие (40.18) это выражение равно
Таким образом,
"*—vifc-sb*'^· (41·07>
Подставляя это в (41.02), получим:
^'-7=i-k(y=iJl)· <4'-08>
Таким образом, умноженная на У— g расходимость вектора Л равна
сумме частных производных по координатам от его контравариант-
ных составляющих, умноженных на V—g.
Если мы возьмем в качестве вектора А градиент некоторого
скаляра φ и положим
\ = -&; (41-09)
и, следовательно,
Л' = ^-^-. (41.10)
то расходимость этого вектора даст инвариантное выражение
°»-р±7Х-0'=*"£)· <«·»>
которое является обобщением оператора Даламбера (21.27).
С другой стороны, ту же расходимость мы можем вычислить
следующим образом. Составим сперва ковариантную производную от
градиента φ. По общему правилу (40.05) мы получим выражение
ν-τ&--4.£. <«·«»
§41] ПРИМЕРЫ СОСТАВЛЕНИЯ КОВАРИАНТНЫХ ПРОИЗВОДНЫХ 197
которое будет симметричным относительно значков μ и v. Его можно
назвать второй ковариантной производной от скаляра ср. Составляя
затем инвариант
Οφ = ^νφμν. (41.13)
мы будем иметь
где мы положили для краткости
Γ = ^Τ£ν. (41.16)
Так как оба выражения (41.11) и (41.14) представляют расходимость
одного и того же вектора, то они должны совпадать. Равенство
коэффициентов при вторых производных от φ непосредственно
очевидно. Приравнивая коэффициенты при первых производных, мы
получим тождество
Г" = - -fL·,-*-(/=ЪГР). (41Л6)
которое может быть проверено и непосредственно.
Заметим, что если мы введем в качестве координат х0, хъ х2, х$
четыре решения уравнения □ φ = 0, то для них будет Га = 0.
Такие координаты, удовлетворяющие, кроме того, условиям на
бесконечности, о которых мы будем говорить в следующей главе,
называются гармоническими. В обычной теории относительности
гармоническими являются декартовы координаты и время.
Если вектор Л^ есть градиент некоторого скаляра, то для него
разность ковариантных производных V^v — ν,Λμ. равна нулю. В
общем же случае эта разность не равна нулю, и ее можно
рассматривать как четырехмерное обобщение вихря данного вектора.
Положим 1)
(Rot Λ)μν = νμΛ —VH„. (41.17)
Это выражение представляет, по определению, антисимметричный
ковариантный тензор второго ранга. Пользуясь формулой (40.05),
легко убедиться, что при составлении разности (41.17) члены,
отличающие ковариантные производные от обыкновенных, сократятся, и
мы получим
дА» dA„
т. е. выражение, совпадающее с обычным выражением для вихря,
которое, таким образом, применимо и в произвольных координатах.
1) Символ Rot мы будем употреблять в смысле четырехмерного
обобщения вихря, сохраняя для трехмерного вихря символ curl.
198 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. III
Обозначим через А^ симметричную часть ковариантной
производной от вектора А^. Мы имеем
или, после применения (40.05),
1 / дА„ дА„ \
^-тЫг+тг-)-1?·*· (4К20)
При помощи симметричного тензора А^ мы можем определить
вторую ковариантную производную от вектора А^, положив
νμΑ » ?Л* + V^v, - νΠμν (41.21)
Раскрывая здесь при помощи (40.11) выражения для тензориальных
производных, мы будем иметь
+ ^(Г£Л)-^(Г^)-^(гир). (41.22)
Аналогично, вторая тензориальная производная от контравариантного
вектора напишется:
д2А9 «0 дАа „0 дАа „а дА? дТ? а
Рассмотрим теперь расходимость тензора второго ранга, который
будем писать в контравариантной форме. Согласно (40.12), мы
имеем
ν,Γ^^ + Γ^' + Γ;,^. (41.24)
Преобразуя при помощи (41.07) третий член, мы можем написать:
ν,Γ^^-^-^ί/^Γ^ + Γϊρ^· (41.25)
Положив здесь T^=sg^ и зная, что тензориальная производная от
фундаментального тензора равна нулю, мы вновь получаем
тождество (41.16). Если тензор Т1" антисимметричен, то последний член
в формуле (41.25) обращается в нуль. Таким образом, расходимость
антисимметричного тензора сводится, так же как и расходимость
вектора, к сумме производных по координатам. В случае же
произвольного тензора подобное представление невозможно.
Напишем выражение для тензориальной производной от кова-
риантного тензора и два других выражения, получаемых иэ первого
МП
ПРИМЕРЫ СОСТАВЛЕНИЯ КОВАРЙАНТНЫХ ПРОИЗВОДНЫХ
199
круговой перестановкой значков:
т α* μν
дх9
Гр F -
Γ Ρ Ρ
νσ* μ.ρ»
V F — ^ ™ Γρ F V9 F
νμ νσ βχ Α νμ.1 ρσ Ασμ.* νρ»
^
V ν1 σμ ^ χσν* ρμ. Α μ.ν* σρ·
(41.26)
Предположим теперь, что тензор F^ антисимметричен:
F =-
μν ^^
Тогда
F = — F .
* μν * νμ.·
dF>
up _lv F 4-V F = -
v σ1 μν ι^ τ μ1 νσ ~ γ ν* σμ φχ
μν
dF*
dFt
σμ
οχ»
dx»
(41.27)
(41.28)
тогда как члены вне знаков производных попарно сокращаются.
Антисимметричное относительно всех трех значков выражение
ρ =д^* ι dF"
μν?
дх9
дх*.
f ^
дхч
(41.29)
будет, следовательно, тензором. Этот антисимметричный тензор
третьего ранга F^0 называется циклом данного антисимметричного
тензора F^. С подобным выражением мы уже встречались в § 24.
Цикл данного антисимметричного тензора второго ранга связан
с расходимостью дуального антисимметричного псевдотензора. Введем,
согласно (37.67), дуальный псевдотензор F^ по формуле
р*=1е**%ш
(41.30)
(41.31)
откуда
У=];р10 = Р2г. y~F*>=Fzl; V*^iF30=F12;
/=Г£яз=р1о. V=gF*=*Fri V~gFV = Fn. ,
Введем также, согласно (37.68), дуальный к F^ псевдовектор
A = ~£р^/>. (41.32)
откуда
y—gF* = -Fm,
V-gFl = Fm> V-gfr^Fw, V~gF3 = Fm.
(41.33)
200
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. III
Если тензор F w есть цикл F^f то мы будем иметь
' '^^, (41.34)
так что псевдовектор Fa есть расходимость псевдотензора F"^.
Тот же результат легко получить и без перехода к численным
значениям значков, если воспользоваться тем, что вычисленная по
общему правилу тензориальная производная от Ег* (а также от Еа^ь)
тождественно равна нулю.
§ 42. Закон преобразования скобок Кристоффеля и локально
геодезическая система координат. Условия приводимости
основной квадратичной формы к постоянным коэффициентам
Тензориальные производные отличаются от обыкновенных
производных членами, содержащими скобки Кристоффеля
*-Х%+4£-£)· <«*»>
Если в некоторой точке χ = х° все скобки Кристоффеля равны нулю,
то выражения для тензориальных и для обыкновенных производных
совпадают. Покажем, что в окрестности каждой точки можно ввести
такую систему координат, чтобы в этой точке все величины Γ«β
обратились в нуль. Тогда, в силу уравнений (40.14) и (40.16), в этой
точке обратятся в нуль и все производные от фундаментального
тензора по координатам.
Установим, прежде всего, закон преобразования скобок
Кристоффеля при переходе от данной системы координат (*0, хь х2, хг)
к некоторой новой системе координат (х'0% χ'ν χ'ν χ'^. Этот закон
можно было бы вывести непосредственно из определения (42.01)
величин Γαβ, пользуясь законом преобразования для
фундаментального тензора. Однако проще рассуждать следующим образом. Мы
знаем, что величины
представляют тензор. Это значит, что для всякой функции φ и для
любого преобразования координат имеют место равенства
д29 „р дер [ д2у f у ду | дх'л dxi
^tMt^-W^It^· <42·03)
дх ( дхадх» дха ) дх дх^
дх дх , „ „ „ ,
μ ν ρ - α ρ σ ' μ
§ 42] ЗАКОН ПРЕОБРАЗОВАНИЯ СКОБОК КРИСТОФФЕЛЯ 201
где (Γαβ) суть скобки Кристоффеля, вычисленные для штрихованной
системы координат. Полагая здесь ср = д^, получим
δ2χα πη дх' /„* \' дх' dxi
Ίϊ^-Γ9^ = -№) j£j£. (42.04)
Эта формула и дает искомый закон преобразования. Наличие члена
с второй производной показывает, что Г«р не есть тензор. Если же
рассматриваемое преобразование — линейное, то указанный член
отсутствует, и, следовательно, по отношению к линейным преобразованиям
величины Γ^ν ведут себя как тензор.
Пусть в данной точке величины Γ£ν имеют значения (Γ£ν)0. В этой
точке величины (Пр) штрихованной системы обратятся в нуль, если
формулы преобразования координат удовлетворяют равенствам
Эти равенства будут выполняться, если мы положим
Х9=Ха—Х°9+^ (Γμν)θ (*μ — 4) (*ν — *% (42·06)
Для преобразования (42.06) будет
\ё)о=ь;'
(42.07)
Ч> /о
Поэтому значения в данной точке составляющих любого тензора будут
одинаковы в штрихованной и в нештрихованной координатной системе.
В частности, не изменятся значения фундаментального тензора, тогда
как все первые производные от него обратятся в данной точке в нуль.
Этим можно пользоваться для упрощения вычислений с тензорами.
В самом деле, если относительно некоторого выражения известно, что
оно есть тензор и что оно обращается в нуль при условии --*-^ == 0,
их g
то оно будет равно нулю и без этого условия.
Можно доказать, что надлежащим выбором координатной системы
можно обратить в нуль производные от #μν не только в данной точке,
но и вдоль заданной линии [14].
Координатная система, в которой, для данной точки, производные
от #μν обращаются в нуль, называется локально геодезической. Это
название оправдывается тем, что в указанной системе отсчета
уравнения геодезической линии сводятся в данной точке к равенству нулю
вторых производных от координат по параметру ρ (вблизи этой точки
вторые производные будут величинами первого порядка малости).
Поэтому, координаты будут там, с точностью до членов третьего
порядка, линейными функциями от параметра.
202 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. ΠΙ
Поставим вопрос: при каких условиях существует координатная
система (x'Qt x'v x'v хгХ в которой скобки Кристоффеля равны нулю
не только в данной точке или вдоль некоторой линии, но и в
некоторой конечной области?
Если такая координатная система существует, то должно
существовать решение уравнений
_^__Г^ = 0, (42.08)
так как им удовлетворяют функции
<Р = ^. <Р = 4 * = ** <P = 4 (42·09>
Для совместности уравнений (42.08) очевидно необходимо, чтобы
вычисляемые из различных уравнений этой системы выражения для
третьих производных между собой совпадали. Мы имеем
д Ι д*<? \ д /гр όφ\ )
[dx.dxj— дха V^IZ)9
д / д*у \ д /гр д<?\ I
κΊ \дхрдха) όχΊ \ ^а δχψ)' ]
(42.10)
дха
д
όχΊ
Ввиду равенства левых частей правые части должны быть равны.
Приравнивая их, производя дифференцирование и выражая вторые
производные через первые, получаем
[Ί^-^ + ^-νή^Ο- (42.11)
Эти равенства должны иметь место при φ = x'Qt φ = χ'ν φ = χ'ν φ = x'y
Так как определитель
D= D(x0txux2tx3) <42Л2>
не равен нулю, то должны равняться нулю все коэффициенты при -^-
в (42.11), т. е. все выражения
ar?v дт\
"μ., var="g^ g^ ρΑμ,νΙβα Ιμ,α-Ltfv· (42.13)
Докажем, что условия
/&να=0 (42.14)
являются не только необходимыми, но и достаточными для того, чтобы
система уравнений (42.08) имела решение. Для этого положим
* = -£ (42.15)
И напишем систему уравнений (42.08) в виде
-^=1>р. (42.16)
§ 42] ЗАКОН ПРЕОБРАЗОВАНИЯ СКОБОК КРИСтОФФЕЛЯ 203
Пусть значения сру заданы в некоторой точке с координатами х^. Чтобы
получить их для произвольной точки xat соединим обе точки какой-
нибудь кривой
*.**Г(/>). (42.17)
где ρ — параметр, и будем рассматривать φ, (а также Γ£ν) как
функции от р. Для определения φν мы получим систему обыкновенных
уравнений
-|г = ГЦЧ. (42.18)
где точка означает производную по параметру р.
Эта система однозначно определяет значения φν в конечной точке
кривой. Остается показать, что получаемые таким путем значения φν
не зависят от вида кривой, соединяющей начальную и конечную точки.
Для этого рассмотрим между теми же двумя точками бесконечно
близкую кривую
*α = ξα(/>)+δξα(/>). (42.19)
где δξα — бесконечно малый вектор, который обращается в нуль
в начальной и в конечной точке. Значения φν на измененной кривой
обозначим через φν + δφν.
Уравнения, определяющие φν + δφν будут, очевидно, иметь вид
^(<Ρν + δφν)= (iVf-af *?)№ + δξ%ρ+δφρ). (42.20)
Вычитая из них (42.18) и отбрасывая бесконечно малые высших
порядков, получим
d дТ? .
"5?"(8,РО = -г^5Ч«Ч-1*^^8?Р + гР^8^· (42·21)
Используя еще раз (42.18) и вводя обозначение (42.13), мы можем
эти уравнения привести к виду
-^-(δφ,-Γ^φρ δξα) = /?Ρ μαφρ^ δξα + Γ£ Д * (δφρ - Црсра δξα). (42.22)
Положим для краткости
ην = δφ>-ΓΡνφρδξα. (42.23)
При условии (42.14) уравнения (42.22) напишутся:
4^ = 1^%. (42.24)
Таким образом, уравнения для ην имеют тот же вид, как уравнения
(42.18) для φν. (Те и другие представляют уравнения параллельного
переноса вектора вдоль рассматриваемой кривой.) Так же как и φνι
204
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. ΙΠ
величины ην однозначно определяются из начальных условий. Но
начальные условия для величин ην — нулевые. В самом деле,
координаты начальной точки фиксированы; следовательно, в ней δξα = 0.
Кроме того, в начальной точке фиксированы значения φν,
следовательно, в ней также и δφν = 0. Тем самым в начальной точке ην = 0.
Но при таких начальных условиях будет вдоль всей кривой
ην = 0 (42.25)
и, следовательно,
δφν = Γ£νφρδξα. (42.26)
Рассматривая теперь конечную точку кривой, координаты которой
также фиксированы, мы будем иметь для нее δξα = 0 и, вследствие
(42.26), δφν = 0. Но это значит, что функция φν приходит в
конечную точку с одним и тем же значением, как по первоначальной,
так и по измененной бесконечно близкой кривой. Деформируя
кривую непрерывным образом, мы получим тот же результат для любых
двух кривых, соединяющих заданную начальную и конечную точки
(необязательно бесконечно близких). Отсюда следует, что в любой
односвязной области величины φν представляют однозначные функции
точки, которые определяются их значениями в одной какой-нибудь
(начальной) точке.
В силу дифференциальных уравнений (42.16) мы имеем
так как величины Γμ,ν симметричны относительно своих нижних
значков. Отсюда следует, что выражение
dy = y,dx, (42.28)
представляет полный дифференциал. Интегрируя его и определяя
постоянную из заданного значения φ в начальной точке, мы
закончим определение функции φ.
Мы доказали, что необходимым и достаточным условием
существования решения уравнений (42.08) является равенство нулю
выражения (42.13). При этом функция φ определяется, с точностью до
аддитивной постоянной, значениями ее частных производных по
координатам в одной точке.
Если даны два решения, φ и ψ, уравнений (42.08) (которые
могут и совпадать), то выражение
остается, в силу этих уравнений, постоянным. Для доказательства
достаточно составить ковариантную производную от скаляра (42.29)
§ 43] тензор кривизны 205
и убедиться, что она равна нулю. (Напомним, что уравнение (42.16)
как раз и выражает равенство нулю ковариантной производной от φν).
Обозначим через х'0, x'v xrv х'ъ четыре решения уравнений (42.08),
выбранные так, чтобы в начальной точке было
дх дха
(по α не суммируется!). Тогда равенство (42.30) будет иметь место
и при всех значениях координат. Отсюда чисто алгебраическим
путем получаем
'**£Γ15Γ' (42·31)
т. е. представление gap в виде (35.15), а следовательно, и
приведение ds2 к виду (35.09).
Таким образом, необходимым и достаточным условием
приводимости квадратичной формы
ds2 = g^dxadx^ (42.32)
к виду
ds2 = (dx'0f — (dx[f — (dx'2)2 — (dxtf (42.33)
является равенство нулю выражения
дГр дГр
/\μ, να = "g^ Х~ Γ" * μ-ν* σα ■"· μ.α-1 σν· (42.1 θ)
составленного из скобок Кристоффеля, вычисленных для квадратичной
формы (42.32).
§ 43. Тензор кривизны
Введенное в предыдущем параграфе выражение
#ъ- = ^--^+КЛ-ПЛ (43.01)
играет большую роль в общем тензорном анализе и в теории
тяготения. Поэтому мы должны подробно исследовать его свойства.
Докажем прежде всего, что это выражение есть тензор.
Доказательство можно провести различными способами. Наиболее
непосредственно этот результат может быть получен путем
дифференцирования уравнения
«о дхп /„„ \/ дх„ дхо
дху, όχΊ μν дх? v αρ' όχμ дхч
206 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [гл. Ш
выражающего, согласно (42.04), закон преобразования скобок Кри-
стоффеля. Результат дифференцирования (43.02) по хх может быть
записан в виде
&*'* ■ /ГУ (дха дЧ . дха д% | дх* дЧ \
дхх дх^ дх^"" \ °Р/ \ дхх όχμ όχΊ ' όχμ όχΊ дхх ' όχΊ дхх дх^ }
Здесь левая часть симметрична относительно значков λ, μ, ν;
следовательно, должна быть симметрична и правая часть. Переставляя
в правой части значки λ и ν и приравнивая результат перестановки
значению правой части в первоначальном виде, мы получим формулу,
которую, при использовании обозначения (43.01), можно написать
в виде
όχσ дх дха дх
*U^ = (*М.) l^^-l^· (43.04)
Эта формула и выражает тот факт, что /?£, νχ представляет тензор
четвертого ранга, ковариантный относительно значков [χ, ν, λ и кон-
травариантный относительно значка р. Тензор этот называется
тензором кривизны.
При помощи тензора кривизны можно выразить изменение
вектора при параллельном переносе вдоль бесконечно малого
замкнутого контура. Пусть значение вектора Лр в начальной точке х^
есть (Лр)0. При переносе его в бесконечно близкую точку значения
его составляющих будут равны
Л = (Ар)0 4- (ПД, (Аа)0 {ха - *°) (43.05)
с точностью до величин второго порядка малости1) относительно
смещений ха— xl. Очевидно, что изменения ΔΛμ вектора Л^ после
обхода по бесконечно малому контуру будут по крайней мере
второго порядка малости относительно наибольших смещений. Эти
изменения выражаются криволинейным интегралом
^ = JTlA9dx,t (43.06)
взятым по рассматриваемому контуру. В случае бесконечно малого
контура можно заменить под интегралом величину А? выраже-
1) Эти величины второго порядка уже будут зависеть от вида кривой,
по которой производится смещение (вектор лр не есть функция точки).
§ 43]
ТЕНЗОР КРИВИЗНЫ
207
нием (43.05), а величину Γ£ν — выражением
It = (ГЦ + (|k)o (*. - *»). (4S.07)
Подставляя (43.05) и (43.07) в (43.06) и учитывая, что интеграл
по замкнутому контуру от полного дифференциала равен нулю, мы
получим
M* = (^+W«)o(iV° /(*.-*>*,. (43.08)
Величины
Qva = J(Xa — xtydx, = \ J {(*« — x§ dx, — (*v — x?) rfxa] (43.09)
можно толковать как проекции охватываемой контуром площадки
на координатные „плоскости". Они представляют, как легко видеть,
контравариантный антисимметричный тензор. Пользуясь
антисимметрией тензора Qva, можно написать формулу (43.08) в виде
ΔΛμ = 1/?Ρ,ναΛΡ<3να (43.10)
(относящийся к начальной точке значок 0 нами опущен).
Путем аналогичных рассуждений для изменения контравариантных
составляющих вектора получается формула
bA' = — ±RlnA'Ct. (43.11)
Мы уже знаем, что /?£, να есть тензор; это заключение можно
было бы вывести и на основании формулы (43.10) или (43.11).
В самом деле, ΔΛμ есть разность двух векторов, относящихся к одной
точке и, следовательно, представляет собою вектор. С другой
стороны, если добавить к антисимметричному тензору Qva произвольную
симметричную часть, то уравнение (43.10) не изменится. Таким
образом, правая часть (43.10) будет вектором, каков бы ни был
тензор Qva и вектор Лр, что возможно только в том случае,
когда /?£,va есть тензор.
В § 40 мы ввели операцию ковариантного дифференцирования.
В общем случае операции эти не коммутативны: вторая ковариантная
производная от вектора или тензора, взятая сперва по х$, а затем
по ха, не будет равна такой же производной, взятой сперва по лга,
а затем по х$. Рассмотрим разность вторых производных от вектора.
Мы имеем, согласно (40.05):
V^lF--1^. <43Л2>
208 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. III
Вычислим νανβΛμ в локально-геодезической системе координат (в
которой первые производные от #μν обращаются в нуль для данной
точки). Мы имеем
откуда
(drv drv \
TEf—ΊΪΓ)Α>· <43Л4>
В локально-геодезической системе множитель при А„ в правой части
не отличается от выражения для тензора кривизны, которое равно
*;, «β = -χξ· —з£- + К*Ъ ~ W*· (43.15)
Поэтому в локально-геодезической системе имеет место равенство
(VaVp — VpVa) Ар = /?;, αβΛ. (43.16)
Но обе части этого равенства представляют собою тензор. Поэтому,
если равенство (43.16) справедливо в какой-нибудь одной системе
координат, то оно справедливо и в произвольной системе координат.
Таким образом, выражение (43.16) для разности вторых ковариантных
производных от вектора является общим.
Аналогично выводится формула
(VaVp - VpVJ A" = - Rl *А> (43.17)
для контравариантного вектора.
Использованный здесь прием составления тензорного уравнения
в локально-геодезической координатной системе, с последующим
заключением о том, что оно справедливо и в общем случае, может
значительно облегчить выкладки. Уравнения (43.16) и (43.17) настолько
просты, что легко могут быть получены и без применения этого
приема, но в других случаях вносимое им упрощение существенно.
Рассмотрим, например, выражение для разности вторых
ковариантных производных от тензора произвольного ранга
ί/й == ί/;1;;; ;km. (43.18)
/(ν) = Ub
Формулу (40.26) для первой производной можно написать в виде
m
i = l
-Σν?)···ν-.'ϊ+. ■·· ν (43Л9)
§ 44] ОСНОВНЫЕ СВОЙСТВА ТЕНЗОРА КРИВИЗНЫ 209
w*/=^W)+SS4i""-"""
Составляя, в геодезической системе координат, вторую производную,
получим
Следовательно, разность вторых производных будет, в геодезической
системе, совпадать с выражением
+Д/??/,.р^)... v.lPy+1 ... v (43.21)
А так как обе части этого выражения представляют собою тензоры,
то равенство (43.21) будет справедливо и в произвольной
координатной системе.
§ 44. Основные свойства тензора кривизны
Рассмотрим наряду со смешанным тензором кривизны
дТ° дТ9
ковариантный тензор
«μν, «β=ίνα/?μ,αΡ. (44.02)
Согласно этому определению, смешанный тензор /?£, «β получается
из /?μν,αβ поднятием второго ковариантного значка. Поэтому более
подробным обозначением для него было бы
Rl αβ = R£* = £σ4-, «ρ. (44.03)
Заметим, что в старой литературе для ковариантного и для
смешанного тензора приняты обозначения
^..β — frv. «β), (44.04)
Λ;,αβ={^>αβ)> (44.05)
называемые четырехзначковыми символами Римана первого и второго
рода.
14 3*к. 2649. 8. А Фок
210 ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ [ГЛ. И1
Вычисляя по формуле (44.02) ковариантный тензор кривизны,
будем иметь
*»,..р=-з^и. νΐ—аг-М· ν]+
+I?.(IPP. v]-^)-^([P«. v]-^L), (44.06)
и окончательно:
1 / »gv, . »*μβ d*g^ d*gva \
"μν, αβ 2 \ Λ*μ A*p "*" ΟΧΊ ΟΧα ΟΧμ ΟΧα ΟΧΊ ΟΧ^ )
-ΓΡα[νβ, ρ]+ΓΡβ[να, ρ]. (44.07)
Выражая последние два члена через величины Γ£ν, можно также
написать
1 / *gv« . **μβ *g»P **μ« \
"μν,αβ 2 \Λ*μдх$ ■" d*v <?Λ:α Λ*μ дхл όχΊ дх^ )
- gpJW + ^ΡσΓΡβΓνσα. (44.08)
Из этого выражения легко вывести следующие свойства симметрии
данного тензора:
1) антисимметрия в первых двух значках
#νμ,αβ = — Αμν,αβί (44.09)
2) антисимметрия в последних двух значках
#μν,βα = -#μν,αβ; (44Л0)
3) циклическая симметрия
/?μν,αβ + /?μ.,βν + /?μβ,να = 0. (44.11)
Первые два свойства очевидны. Чтобы проверить последнее,
достаточно составить левую часть (44.11) в локально-геодезической
координатной системе и убедиться, что 12 вторых производных попарно
сокращаются.
Из перечисленных трех свойств вытекает, далее, что первая пара
значков может быть переставлена с последней парой значков (с
сохранением их порядка внутри каждой пары):
^αβ, μν = #μν. αβ· (44.12)
Свойство (44.12) непосредственно вытекает из определения (44.08).
Чтобы показать, что оно не является независимым, а представляет
следствие первых трех свойств, достаточно составить сумму
уравнения (44.11) и трех других уравнений, получаемых из (44.11)
круговой перестановкой значков (μ, ν, α, β). Если учесть свойства анти-
§ 44] ОСНОВНЫЕ СВОЙСТВА ТЕНЗОРА КРИВИЗНЫ 211
симметрии 1) и 2), то из 12 членов этой суммы 8 попарно сократятся,
а остальные 4 дадут
-2/?μα,νβ + 2/?νβ,μβ = 0, (44.13)
что отличается от (44.12) лишь обозначением значков.
Подсчитаем число независимых компонент тензора кривизны,
причем сделаем это в предположении, что каждый значок принимает η
значений (фактически η = 4). Очевидно, что все четыре значка не
могут быть одинаковыми. Отличные от нуля компоненты с двумя
разными значками приводятся к типу /?αβ, αβ. Их столько, сколько
пар неодинаковых значков, т. е. -кп{п—1). Далее, если дана тройка
разных чисел α, β, γ ia таких троек -g-fl(fl—1)(л — 2)1, то из нее
можно составить отличные от нуля компоненты /?αβ> ; /?βα, βγ; /?γα, γρ>
в которых повторяется либо первое, либо второе, либо третье из
чисел α, β, γ. Число таких компонент будет равно числу троек,
умноженному на 3, т. е. равно γη(η — \)(п — 2). Наконец,
существует -щ η (η — 1) (η — 2) (η — 3) комбинаций четырех различных
чисел α, β, γ, δ. Для каждой такой комбинации можно составить
компоненты /?αβ> γδ; /?αδ§βγ; /?αγ,δβ, тогда как все остальные
сочетания значков приводятся к этим. Но эти три компоненты не являются
независимыми, так как они связаны условием циклической симметрии;
независимыми будут только две из них. Следовательно, число
независимых компонент с четырьмя различными значками равно удвоенному
числу четверок разных чисел, т. е. равно -^п{п — \)(п — 2)(я — 3).
Полное количество независимых компонент будет, таким образом,
равно
ψη{η— 1)4-1л(л — 1)(Я_ 2) + ^ л (л — \)(п — 2) (я — 3) =
= ^пНп*-\). (44.14)
В интересующем нас случае η = 4 это число равно
6 + 12 + 2 = 20. (44Л5)
Заметим, что в трехмерном пространстве (п = Ъ) число независимых
компонент тензора кривизны равно 6, т. е. числу компонент
симметричного тензора второго ранга. Действительно, для я = 3 тензор
кривизны может быть выражен через симметричный тензор второго
ранга. (См. Добавление Ж). Наконец, тензор кривизны двухмерной
поверхности (#=2) имеет только одну компоненту—гауссову кривизну.
14*
212
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. Ш
Напомним, что в § 31 мы уже встречались с величинами,
обладающими теми же свойствами симметрии, как ковариантный тензор
кривизны, причем мы отметили там связь этих величин с
симметричным тензором Пруткова.
Мы изучили свойства ковариантного тензора кривизны. Смешанный
тензор кривизны обладает аналогичными свойствами
/?μ,ρ. = —/?;,«β· (44.16)
К, «Р + /К, βμ + #β, μα = 0, (44.17)
которые соответствуют (44.10) и (44.11). Что касается свойства,
соответствующего (44.09), то оно записывается более сложным
образом, а именно:
g„g9»K,* = -Rl,*? (44.18)
(поднятие первого нижнего и опускание верхнего значка меняют знак
компоненты). Это свойство легко вывести независимо от (44.09) из
сопоставления (43.10) с (43.11) или (43.16) с (43.17), или же,
наконец, из равенства
(?Л - V?Va) £μν = Rl αβ£ρν + /??, *gw. = 0, (44.19)
вытекающего из общей формулы (43.21).
Наряду с рассмотренными выше алгебраическими соотношениями,
тензор кривизны удовлетворяет дифференциальным соотношениям,
которые могут быть написаны в виде
νλ#μν, «β + νμ/?νλ, «β + 7ν/?λμ, αβ = 0 (44.20)
и носят название тождеств Бианки. Чтобы проверить их, мы введем
локально-геодезическую координатную систему, в которой тензориаль-
ные производные совпадают с обыкновенными. Вычисления облегчаются
тем, что в выражении (44.08) для /?μν>αρ члены, не содержащие
вторых производных, квадратичны относительно Γμν, так что не только
сами эти члены, но и их первые производные обращаются в локально
геодезической системе в нуль. В этой системе левая часть (44.20)
равна
-Щ #μν, αβ + g^" ^νλ, αβ + J^ #λμ, αβ =
<^μβ (^ d*g^ .
2 \ дхх όχμ
ΟΧα ' 6ΧΊ ΟΧχ ΟΧα ' ΟΧμ ΟΧΊ ΟΧα ' ΟΧχ ΟΧμ ΟΧα '
■ **„. ^Χβ \_1 44 j
^ дхчдххдхр ^ όχμdx.dxj 2Κ'"λ К^^Ч
где многоточием обозначены такие же члены, но с переставленными
значками α и β. Но выражение в скобках само симметрично относи-
§ 44] ОСНОВНЫЕ СВОЙСТВА ТЕНЗОРА КРИВИЗНЫ 213
тельно απβ, так что вторая скобка равна первой и их разность
обращается в нуль. Тем самым доказано, что равенство (44.20)
выполняется в локально-геодезической координатной системе, а ввиду
тензорного характера этого равенства оно справедливо и вообще.
Из тензора кривизны четвертого ранга можно составить, путем
свертывания по двум значкам, тензор второго ранга. Свертывание по
двум первым или по двум последним значкам дает, очевидно, нуль,
свертывание же по остальным парам значков дает, с точностью до
знака, один и тот же результат. Получаемый таким путем тензор
7?^ = ^/?^^ = ^^ (44.22)
носит название тензора кривизны второго ранга или тензора Римана.
Легко видеть, что тензор Римана будет симметричным. В самом деле,
используя (44.09), (44.10) и (44.12), будем иметь
£αβ#μα, ρν = ga%., μ. = g"R* .μ = £αβ#να. Ρμ (44.23)
или
Rv = R*r (44.24)
Наряду с ковариантным тензором Римана рассматриваются также
смешанный тензор
/tfD/P#pv (44.25)
и контравариантный тенвор
/Г = **У7гр.. (44.26)
Дальнейшее свертывание по значкам μ, ν приводит к скаляру
Я = /?; = ^, = g^ga%a, р.. (44.27)
который носит название скаляра кривизны.
Вычислим расходимость тензора Римана
Κν = νλ/?ϊ = /λνχ/?μ,ν. (44.28)
Вводя вместо /?μν выражение (44.22), будем иметь
Κν = £^νλ/?μα,βν. (44.29)
Применим к входящей сюда тензориальной производной тождества
Бианки, написанные в форме
0, (44.30)
получаемой из (44.20) на основании (44.12). Мы получим
Ку = - #*«·%*,». νλ - g»xg*%R„a, λβ. (44.31)
214
ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
[ГЛ. Ιίΐ
Это соотношение может быть переписано в виде
Kv = — Kv + Vv/?. (44.32)
В самом деле, если в первой сумме формулы (44.31) переставить
(переименовать) значки суммирования λ с β и μ с а, то она
приведется к выражению (44.29); в последнем же члене этой формулы
можно произвести суммирование до ковариантного
дифференцирования, и тогда этот член приводится к· Vv/?. Таким образом,
KV = 1VV*=4||, (44.33).
так как тензориальная производная от скаляра сводится к
обыкновенной производной. Из сопоставления (44.28) с (44.33) следует, что
расходимость тензора
0^ = R^-jg^R (44.34)
тождественно равна нулю. Тензор ΰμν называется поэтому
консервативным тензором. Так как он играет большую роль в теории
тяготения Эйнштейна, то его называют также тензором Эйнштейна.
Дальнейшие преобразования тензора кривизны мы отложим до
гл. V, посвященной теории тяготения.
ГЛАВА IV
ФОРМУЛИРОВКА ТЕОРИИ ОТНОСИТЕЛЬНОСТИ
В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ
§ 45. Свойства пространства-времени и выбор координат
Форма уравнений, определяющих ход того или иного физического
процесса в пространстве и времени, зависит, кроме специфических
особенностей данного процесса, еще от двух обстоятельств: от свойств
пространства-времени и от выбора координат, в которых
описывается данный процесс. Свойства пространства-времени являются
объективными, определяемыми самой природой и не зависящими от
нашего произвола. Напротив того, выбор координат в самой высокой
степени зависит от нашего произвола. Правда, и здесь произвол не
является неограниченным, в том смысле, что существование некоторых,
особо выделенных, координатных систем (галилеевых координат)
возможно только в силу объективных свойств реального
пространства-времени: такие координатные системы не существовали бы, если
бы эти свойства были иными. Однако всегда возможно перейти, путем
математического преобразования, от привилегированной координатной
системы к любой другой; правила такого перехода мы изучали
в предыдущей главе.
Чтобы отвлечься от специфических особенностей данного процесса
необходимо рассмотреть такие уравнения, которые являются наиболее
общими и наиболее непосредственно характеризуют свойства
пространства-времени. Таким является уравнение, выражающее закон
распространения фронта волны, идущей с предельной скоростью.
Этому закону подчиняется, в первую очередь, распространение фронта
световой (электромагнитной) волны в свободном пространстве. Однако,
как мы уже указывали, закон этот должен рассматриваться не как
специфический закон, относящийся только к свету, но как общий
закон, которому подчиняется распространение всякого рода
возмущений, идущих с предельной скоростью. Уравнение распространения
фронта волны в свободном пространстве характеризует не только
свойства распространяющегося в нем вида материи (например, электро-
216 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
магнитного поля), но и свойства самого пространства и времени. (Мы
неоднократно указывали, что и практически измерение больших
расстояний основано на триангуляции и на радиолокации, т. е. на
использовании закона распространения электромагнитных волн.) Тем
самым геометрические понятия, как и понятие времени, теснейшим
образом связываются с законом распространения фронта волны в
свободном пространстве.
В галилеевых координатах
*o = tf, x[ = x, х'2 = У, х'ъ = г (45.01)
закон этот выражается уравнением
где ω = const есть уравнение движущейся поверхности фронта волны.
Уравнение (45.02) представляет математическое выражение того факта,
что волновая поверхность движется в направлении своей нормали со
скоростью света. Отождествляя нормаль к волновой поверхности
с лучом и рассматривая точку пересечения луча с фронтом волны, мы
можем, на основании уравнения (45.02), утверждать, что эта точка
движется по лучу прямолинейно и равномерно со скоростью света
(в галилеевых координатах).
Наряду с распространением фронта волны, мы можем рассмотреть
простейший процесс, в котором осуществляется движение со
скоростью, меньшей скорости света. Это есть свободное движение
материальной точки. В форме Гамильтона — Якоби уравнения движения
принимают вид, аналогичный (48.02), а именно:
(%)'-(%)*-№-№='■ <4503)
где ω пропорционально функции действия. Действительно, полный
интеграл уравнения (46.03) имеет вид:
ω = alX[ + а2х'2 + а3х'3-У\ + а\ +а\-\-а\ · х'0. (45.04)
Приравнивая постоянным производные от ω по αν α2, а3» получаем
прямолинейное и равномерное движение со скоростью, меньшей
скорости света.
Таким образом, за основные уравнения, наиболее непосредственно
отражающие свойства пространства-времени, мы можем взять
уравнения (45.02) и (46.03).
Форма входящего в эти уравнения оператора
§ 45] СВОЙСТВА ПРОСТРАНСТВА-ВРЕМЕНИ И ВЫБОР КООРДИНАТ 217
сама характеризует как свойства пространства-времени, так и
физический смысл координат.
Если бы мы не знали, что такое независимые переменные
(x'Q, x'v x'v х'Л а знали бы только, что они как-то связаны с
пространством и временем (или, выражаясь математически, что они служат
для арифметизации пространства и времени), мы получили бы их
физическое толкование, рассматривая процессы, описываемые
уравнениями (45.02) и (45.03). Фактически при построении теории
относительности мы так и поступали. Физический смысл переменных (45.01)
устанавливался нами как бы в два приема. Первоначально мы
пользовались теми (не совсем точными) понятиями координат и времени,
которые были приняты в классической дорелятивистской физике.
Предварительное определение времени связывало переменную t с
ходом часов (или какого-нибудь периодического процесса), а
определение пространственных координат связывало переменные х, у, ζ
с расстояниями, измеряемыми при помощи твердых тел на основе
законов евклидовой геометрии (координатная сетка). Но мы сразу же
обратили внимание на то, что эти определения нуждаются в
уточнении.
В самом деле, пользование часами, находящимися в разных
точках пространства, требует решения вопроса о их синхронизации,
пользование же твердыми масштабами для измерения больших
расстояний не только невозможно практически, но и вызывает
принципиальные возражения.
Определения физических величин никогда не являются
произвольными, а всегда с большей или меньшей точностью отражают природу.
Поэтому уточнение определений возможно только на основе более
глубокого познания природы. В интересующем нас случае
(определение времени и координат) мы можем опираться, кроме
использованного еще Ньютоном закона прямолинейности и равномерности
движения свободного тела, на твердо установленный закон
распространения фронта световой волны в свободном пространстве, т. е. на
уравнения (45.02) и (45.03). Так мы и поступали при построении
теории относительности, которая, по существу, является теорией
пространства и времени. (Название „теория относительности"
обусловлено историческими причинами и лишь весьма односторонне отражает
ее содержание.) Действительно, фундаментальное для теории
относительности преобразование Лоренца, отражающее свойства
пространства и времени и уточняющее смысл переменных х% у, z% tt
выводится из закона распространения фронта волны (в соединении
с требованием сохранения прямолинейности и равномерности
движения), а не априори, не до установления этого закона.
Таким образом, как свойства пространства-времени, так и смысл
галилеевых координат (45.01) устанавливаются на основе уравнений
(45.02) и (45.03).
218 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ (ГЛ. IV
Но уравнение фронта волны и уравнение Гамильтона — Якоби для
свободной материальной точки могут быть написаны и в более общей
и тогда только что высказанное утверждение относится и к ним: как
свойства пространства-времени, так и смысл координат (jc0, xv x2, JCg)
устанавливаются на основе этих уравнений.
Предположим, что величины g^ представляют заданные функции
своих переменных. Какие свойства этих функций отражают свойства
самого пространства-времени и какие обусловлены лишь выбором
координат?
Если принять, что объективные свойства пространства-времени
правильно описываются обычной теорией относительности, то они
могут быть сформулированы в виде утверждения, что существуют
галилеевы координаты, в которых уравнения (45.06) и (45.07)
принимают вид: (45.02) и (45.03).
Это утверждение означает, что существует подстановка
*ί = /.(*ο. *ι. *2. *з) (« = 0.1. 2, 3), (45.08)
которая приводит выражение
к виду
(v<o)2=i>*(^)2· (45·ιο>
Из общего тензорного анализа мы знаем, что необходимым и
достаточным условием приводимости квадратичной формы (45.09)
к квадратичной форме с постоянными коэффициентами является
равенство нулю тензора кривизны четвертого ранга, составленного из
коэффициентов g^ (и соответствующих £μν). Чтобы приведенная
квадратичная форма имела (при квадратах производных) один знак
плюс и три знака минус, необходимо еще выполнение величинами^'
тех неравенств, которые были установлены в § 35.
Таким образом, уравнения, которым должны удовлетворять вели-
чины р.. имеют вид R^ = Q< (45 И)
£°°>0, 2 g%^<0, (45.12)
l.k=l
где £j, ξ2, ξ3 — произвольные числа.
§ 45] СВОЙСТВА ПРОСТРАНСТВА-ВРЕМЕНИ И ВЫБОР КООРДИНАТ 219
Эти уравнения и выражают (с той точностью, с которой
справедлива обычная теория относительности) свойства
пространства-времени, не зависящие от выбора координат.
Если эти уравнения выполнены, то вид искомого преобразования
(45.08) определяется однозначно, с точностью до преобразования
Лоренца. Величины х'а = /а должны быть тогда истолкованы как
галилеевы координаты. Тем самым получается и толкование тех
переменных (х0, xlt x2f xz), в которых первоначально были написаны
уравнения.
В приведенном рассуждении мы предположили, что величины gv·*
являются заданными функциями от координат. Но мы можем встать
на другую точку зрения и рассматривать величины gv* как
неизвестные функции, подчиненные уравнениям (45.11) и (45.12),
выражающим свойства пространства-времени.
Решение этих уравнений дает для ковариантных составляющих
фундаментального тензора выражения
*4 = Σ'>%;%· (45.13)
содержащие четыре произвольные функции Д. (Наличие в решении
произвольных функций связано с тем, что уравнения для ga* кова-
риантны по отношению к произвольному преобразованию координат).
Тот или иной выбор произвольных функций fk не влияет на
физические следствия теории, так как сводится к чисто математическому
преобразованию уравнений к новым независимым переменным.
Целесообразно, однако, ограничить выбор произвольных функций так,
чтобы допустимые преобразования составляли возможно более узкую
группу и чтобы основные уравнения теории получили возможно более
простой вид. Если такое ограничение возможно (а это зависит уже
от объективных свойств пространства-времени), то получаемые таким
путем привилегированные координатные системы будут более
непосредственно связаны с этими свойствами и будут допускать более
прямое физическое толкование. В рассматриваемом здесь случае
такой привилегированной системой является галилеева система
координат, которая получается, если в общем решении (45.13) положить
Но можно оставить функции fk неопределенными и формулировать
уравнения физических процессов, не предрешая выбора независимых
переменных. Так, например, закон распространения фронта волны
будет тогда выражаться системой уравнений (45.06), (45.11), (45.12)
для неизвестных функций ω и g^. Аналогично будет выражаться
закон движения свободной материальной точки. Другие примеры
такой общековариантной формулировки мы дадим в следующем
параграфе.
220 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
§ 46. Уравнения математической физики
в произвольных координатах
Если известна тензорная форма тех или иных дифференциальных
уравнений математической физики в галилеевых координатах, то
в произвольных координатах соответствующие уравнения получатся
путем простой замены обыкновенных производных ковариантными.
Это правило применимо также и к уравнениям, содержащим вторые
и высшие производные, так как, согласно общей формуле (43.21),
при условии /?μνιαρ = 0 ковариантное дифференцирование любого
вектора или тензора коммутативно.
Рассмотрим сперва уравнения электродинамики.
Так как линейная дифференциальная форма (24.04)
b<? = A,dx, (46.01)
есть инвариант, то входящие в нее составляющие потенциалов
представляют ковариантный вектор также и по отношению к общим
преобразованиям координат. Дифференциальное соотношение (24.05),
налагаемое на составляющие потенциалов, может быть написано
в виде
ννΛν — 0, (46.02)
где i4v — контравариантные составляющие
i4v = tfPiV (46.03)
Согласно (41.08), уравнение (46.02) в раскрытом виде напишется
Τ=7Ί^{ν~'Αή=°· (46'04)
Связь между потенциалами и полем дается формулами
Но, как мы уже отмечали в § 41, при составлении разности (46.05)
члены, отличающие ковариантные производные от обыкновенных,
сокращаются, и мы будем иметь для антисимметричного тензора
поля выражение
дА„ дА„
совпадающее с (24.10). Первая группа уравнений Максвелла —
Лоренца, которая в обычных обозначениях имеет вид
curl Ε +у η§- = 0, div Η = 0f (46.07)
§ 46] УРАВНЕНИЯ МАТЕМАТИЧЕСКОЙ ФИЗИКИ 221
напишется теперь, согласно (24.17),
где F^w — вполне антисимметричный1) тензор третьего ранга,
который выражается через Ζ7 ν по формуле
^ = V^R + V^v, + Vv/^, (46.09)
представляющей обобщение (24.12). Но, согласно формуле (41.28),
это выражение равно
d/yv , dF*, dF9V.
так как тензор F^ антисимметричен.
Таким образом, формула (24.12) остается без изменения.
Напишем теперь в произвольных координатах вторую группу уравнений
Максвелла — Лоренца, которая в обычных обозначениях имеет вид
(ϋνΕ = 4πρ, curl Η— ±^ = ±Lj. (46.11)
Согласно (24.20), левые части (46.11) представляют контравариант-
ную расходимость тензора поля, которая в общих координатах
напишется, согласно (41.26):
V,/V«= _L* (/=^/>.)t (46.12)
V — g οχΊ
так как тензор поля антисимметричен. В правых частях (46.11)
4π
стоит умноженный на -γ контравариантный вектор тока, т. е. вектор
где р* — инвариантная плотность, а и? — контравариантная скорость
заряда. Таким образом, в общих координатах уравнения (46.11)
примут вид
тД=- ■/- (V11* Μ=s*=—р·^. (46· 14>
К— g οχΊ с
причем из них вытекает закон сохранения заряда в форме
ν = Τ=-£(ν=ϊ·'0 = Ο. (46.15)
Чтобы написать общековариантные уравнения движения заряженной
материальной точки во внешнем поле, достаточно найти выражения
для вектора ускорения. Если τ есть собственное время, то четырех-
1) Т. е. антисимметричный во всех своих значках.
222 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
мерная скорость равна
tS = -?£-, (46.16)
причем
g^uW = c*. (46.17)
Вектор ускорения w* будет совпадать с левой частью выражения
(38.34), т. е. он будет равен
d2x„ ч dxa dxn
«» = ΊΪΪ-+Γ*ΊΪΓ4Γ- (46·18)
В самом деле, это выражение представляет вектор и переходит
в галилеевых координатах в обычную формулу. Что касается
выражения для лоренцовой силы, то оно уже написано нами в § 25
в ковариантной форме. Таким образом, уравнения движения будут
иметь вид
*ν=—£»''%.. <46Л9>
где
<α;μ=δΓμν^ν (46.20)
ковариантные составляющие ускорения.
В § 33 мы рассматривали тензор энергии электромагнитного
поля и представили плотность лоренцовой силы в виде его
расходимости (взятой с обратным знаком). Соответствующие формулы легко
могут быть написаны в общековариантной форме.
Обобщением формулы (33.16) для тензора энергии
электромагнитного поля являются выражения
^ = -ir^^vp + 1gir g*f*F*. (46.21)
^ = — "δΤ ίαρ^^ + таг ^v^Vap. (46.22)
Используя уравнения Максвелла — Лоренца (46.08) и (46.14), мы
получим после некоторых вычислений
Vvt/^ = -~-^Fvasa. (46.23)
Справа здесь стоит взятая с обратным знаком плотность лоренцовой
силы. Общековариантные уравнения движения для сплошного
распределения зарядов напишутся, аналогично (33.09), в виде
№ = — -&е*р«**' (46·24)
§ 46] УРАВНЕНИЯ МАТЕМАТИЧЕСКОЙ ФИЗИКИ 223
где μ* есть инвариантная плотность массы покоя, удовлетворяющая
уравнению
V, foV) я yL·^ J- (l/"=i jiV) = 0. (46.25)
Что касается ускорения wp, to оно, согласно (46.18), может быть
написано в виде
«* = ^ + Γί.«ν (46#26)
или
W9 = и· -д£ + rj.it V. (46.27)
Последнее выражение равно
wP = iteVeiiPf (46.28)
где VffttP — ковариантная производная.
Если мы, аналогично (32.01), введем тензор массы заряженных
частиц
θΡ° = -~-(χν^ (46.29)
и воспользуемся законом сохранения массы покоя (46.25), то мы
можем написать
p*w? = c2Va99°. (46.30)
В уравнениях движения (46.24) мы можем левую часть выразить
в виде (46.30), а для правой воспользоваться выражением (46.23)
Мы получим тогда
νσΤρσ = 0, (46.31)
где
с2Т?° = ji, Vn" + £/р* (46.32)
есть умноженный на с2 тензор массы системы, состоящей из частиц
и поля.
Подобным же образом мы можем написать общековариантные
уравнения движения сплошной среды типа идеальной жидкости.
Обозначая через μ* инвариантную плотность массы покоя (включая ту ее
часть, которая меняется вследствие изменения энергии сжатия), мы
получим, аналогично (32.17), для полного тензора энергии (т. е. для
умноженного на с2 тензора массы) выражение:
с*Г° = (у*+-£г)и?и°-Рё*°, (46.33)
которое также удовлетворяет закону сохранения (46.31). Заметим,
что равенство (46.25) теперь выполняться не будет, а будет
выполняться лишь аналогичное равенство для величины р*, связанной с ц*
224 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. TV
соотношением (32.25) и представляющей инвариантную плотность
сохраняющейся части массы покоя.
В § 31 мы установили общее правило, согласно которому тензор
массы должен быть функцией состояния системы и не может
зависеть явным образом от координат. Это правило относилось к гали-
леевым координатам, в которых величины gv·* имеют заданные
постоянные значения. Но мы можем сохранить это правило и для
произвольных координат, если условимся включать в число функций
состояния также и величины g^ (при этом роль уравнений поля
для #μν будут формально играть тождества (40.14) и (40.16),
выражающие лемму Риччи).
Во всех рассмотренных здесь примерах тенаор массы подчиняется
нашему обобщенному правилу. Так, в формуле (46.33) функциями
состояния (которые, впрочем, не все независимы) являются:
составляющие скорости #р, давление /?, инвариантная плотность [χ* и
составляющие фундаментального тензора g*°. В тензоре энергии
электромагнитного поля функциями состояния являются
составляющие поля Fap и величины g^.
§ 47. Вариационное начало для системы уравнений
Максвелла — Лоренца
Многие уравнения математической физики могут быть
формулированы как условия экстремума некоторого интеграла, который носит
название интеграла действия. Один из простейших примеров такой
формулировки представляют уравнения геодезической линии,
рассмотренные в § 38. Мы разберем теперь более сложный пример
системы уравнений Максвелла—Лоренца, описывающей движение
сплошной заряженной среды, элементы которой взаимодействуют
через посредство электромагнитного поля.
Система уравнений Максвелла—Лоренца для компонент поля F^t
компонент четырехмерной скорости среды wt инвариантной
плотности массы покоя μ* и инвариантной плотности заряда р* имеет вид:
др„ , ал, , <^.=0> (47>01)
όχχ ' όχΊ ' дх.
μ
Vv/^ = i^pV-, (47.02)
Здесь wa есть ковариантная компонента вектора ускорения, контра-
вариантные компоненты которого равны
wa = a^M\ (47.04)
§ 47] ВАРИАЦИОННОЕ НАЧАЛО ДЛЯ УРАВНЕНИЙ МАКСВЕЛЛА — ЛОРЕНЦА 225
Инвариантные плотности μ* и р* удовлетворяют уравнениям
Ve(p,V) = Ot (47.05)
Ve(pV) = 0. (47.06)
из которых второе есть следствие (47.02).
Нам надлежит составить такой интеграл действия, чтобы его
вариация по входящим в него функциям давала написанные выше
уравнения.
Мы можем облегчить себе задачу введением вспомогательных
функций, выбранных так, чтобы некоторые из уравнений
выполнялись тождественно; тогда вариация должна дать остальные уравнения.
С этой целью мы введем потенциалы и перемещения частиц среды
и через эти функции выразим остальные.
Полагая
р»=т%-1&- <47-07>
мы тождественно удовлетворим уравнениям (47.01). Потенциалы Ач
мы и будем рассматривать как функции, подлежащие вариации.
Для описания движения среды мы введем переменные Лагранжа
аг, а2, аъ и а0 = р, где аг, а2, а3 представляют, например,
начальные координаты частицы среды, а р — параметр, имеющий характер
времени. Вариации будут подлежать функции
*. = /.(/>, аг, a2t аъ\ (47.08)
которые дают, при постоянных alt аъ аг и переменном /?, движение
данной частицы жидкости. Вариации этих функций (т. е. вариации
перемещений) мы будем называть смещениями и обозначать через ξα:
εβ = 8*. = δ/«(/>. аг, а2, аъ). (47.09)
Такое обозначение оправдывается тем, что эти вариации
представляют бесконечно малый контравариантный вектор. Величины ξα мы
будем, вообще говоря, рассматривать как функции не от лагранже-
вых переменных (р, аг, аъ л3), а от координат (jc0, xlt x2t хг),
связанных с лагранжевыми переменными соотношениями (47.08).
Составляющие четырехмерной скорости выразятся через лагран-
жевы переменные по формуле
*-'\р/Т%т*· <47·10»
причем соотношение
иаи* = с2 (47.11)
будет удовлетворено тождественно. В формуле (47.10) величины £μν
имеют аргументами xa = fat так что при варьировании Д нужно
учитывать также и изменение g r
15 Зак. 2649. В. А. Фок
226 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
Введение лагранжевых переменных позволяет тождественно
удовлетворить уравнению неразрывности (47.05) выражениями (47.10)
для скорости и выражением для инвариантной плотности,
определяемым из равенства
?V=i'I=F{ai, a2, a^Yg^^-, (47.12)
где / есть абсолютное значение якобиана
/= D(x0,xlf *ι, *з) т (4713)
D (/?, аь а2, я3) ч '
Обозначим через Ъги* и 8^* вариации, соответствующие
изменению вида функций /а. Величина иа-\-Ьгиа есть скорость измененного
движения, взятая в точке Α:α+ξα. Скорость же измененного
движения, взятая в точке xat будет
в« + 8й« = й«_^21р + 81Й·. (47.14)
Таким образом, та вариация δ#α, которая соответствует изменению
вида поля скоростей, будет равна
Ια* = \α* — η-^*. (47.16)
Заметим, что вариация Ьгаа есть разность значений двух векторов,
взятых в разных точках; поэтому она не будет вектором. Напротив
того, вариация Ьиа есть разность значений двух векторов для одной
и той же точки. Поэтому Ьаа есть вектор. Аналогично можно ввести
вариации 8^* и 8ja* для инвариантной плотности. Они будут связаны
соотношением
V=v—If*'· <47Л6>
Для вычисления вариации 8^* нам нужно найти вариацию Ьг от обеих
частей равенства (47.12). Мы имеем
1 /1 <?g fr.a/, ***Λ. (47 17)
лГ ^h-^h. ^2 дх" др дР^8»"дР дР>
Подставляя сюда
№ = J*-*L· (47 18)
dp дхч dp \ · J
§ 47] ВАРИАЦИОННОЕ НАЧАЛО ДЛЯ УРАВНЕНИЙ МАКСВЕЛЛА—ЛОРЕНЦА 227
и пользуясь выражением (47.10) для скоростей, будем иметь
1\Г «μν др др }
— К g^Sp- dp c*Ua\2 дх, *^gv*dxJ' <47Л9>
Применяя формулу
ννξ' = -ξ- + Γ;^ (47.20)
для ковариантной производной, мы можем предыдущее выражение
написать в виде
Вариация правой части (47.12) будет пропорциональна этому
выражению. Далее, варьированное значение якобиана / будет равно
... , Ρ(*ο + 6". ·*. + £'. ·*ι + Ρ. Хг + Р) _
/-Γ°ι/— D(p, α„ β» α,) ~
-£йгьд-'-(,+€-)л««-и)
S,/ = -g-·/. (47.23)
откуда
Затем мы имеем
и, следовательно,
или
·,(κ=3~ϋ£Ζ-«·
ax.
(47.24)
\{у—ё1)=дУ-^л)1 (47.25)
δ, (V=*/) = Va|« · 1/=^/. (47.26)
Используя формулы (47.21) и (47.26), мы можем написать
вариацию 8j от логарифма обеих частей (47.12) в виде
η£-+νσ?'=-^-Ββ«'ννξ«. (47.27)
откуда
blVT = - Ρ*ν,ξ· + £ β,β'ν,ξ·. (47.28)
и по формуле (47.16)
V = - V, (рЯ·) + £ «0«νν,ξ'. (47.29)
15*
228 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
При вычислении вариации δ1 от выражения (47.10) для аа мы можем
воспользоваться результатом (47.21). Вычисление дает
д£« 1
*1u* = u*-£--u*--±r-uau*V£°, (47.30)
и по формуле (47.15)
Ьиа = иа-Щ-Я--Ш:^—Jr"""*"'^· (47.31)
Последнее выражение можно написать в виде
8яа = u'VJi* — Wati* — -i- алааа^^, (47.32)
откуда ясно, что Ьиа есть вектор. При этом будет
иаЪи* = 0 (47.33)
в согласии с (47.11).
Так как плотность заряда р* удовлетворяет такому же уравнению
неразрывности (47.06), как плотность массы μ*, то ее вариация будет
иметь вид, аналогичный (47.29), а именно:
δρ* =- — V,(рЧ-)+ £ W4&. (47.34)
Комбинируя формулы (47.32) и (47.34) и пользуясь (47.06), получаем
δ (pV) = V, (PV£a — pVp) (47.35)
или
δ (pV) = -* * (V^ip* («■?■ - β«ξ-)). (47.36)
У — g oxa
откуда следует, что варьированный вектор тока также
удовлетворяет уравнению неразрывности, что и следовало ожидать.
Заметим, что если смещения ξσ пропорциональны скорости, так
что ξσ = τ#σ, где τ есть произвольная функция от координат, то
варьированное поле скоростей, а также варьированная плотность,
не отличаются от неварьированной. Это можно проверить
непосредственным вычислением; подстановка ξσ = τ#σ в наши формулы дает
δ**α = 0, δμ* = 0 и δρ* = 0.
После того как вычислены вариации различных величин,
соответствующие смещениям ξσ, легко проверить, что уравнения поля (47.02)
и уравнения движения (47.03) являются условиями экстремума
интеграла
8 = f(cY—£ WAa+-±-Fa9F'?)V^(dx), (47.37)
где для краткости положено
{dx) = dx0 dxx dx2 dxv (47.38)
§ 47] ВАРИАЦИОННОЕ НАЧАЛО ДЛЯ УРАВНЕНИЙ МАКСВЕЛЛА—ЛОРЕНЦА 229
Интеграл (47.37) взят по некоторой четырехмерной области, на
границе которой вариации ξβ и ЬАа исчезают.
Вычислим сперва вариацию последнего члена в (47.37). Как легко
проверить, мы имеем
δ (F.pF'P) = 2F*?bFar (47.39)
Поэтому
■игδ / V* V~s <**> = i / w„ V—g (dx)=
-ъ]*\-^--щ)У-*(i/Jc)' (47'40)
Так как тензор Р*Р антисимметричен, то оба члена в скобках дают
одно и то же. Поэтому мы имеем
^fV9V—8(dX) = -infF'^V—g(ax) =
-i/^d^i^)·8^^) (47·41>
после интегрирования по частям.
Вариация второго члена в (47.37) равна, вследствие (47.36),
-jf А-Ж9 (У^?*(и^-и^))(ах). (47.42)
Производя интегрирование по частям, получим для последнего
интеграла в (47.42) выражение
-Ч/** (£"■&) V=f<W-
β - 7 / Ρ*""/^'/^ <<**) · (47·43)
Таким образом, второй член дает
-U J fu*AaV—g(dx) =
= ~ 7 / PV (Ч + ^ ^^ (ώΛΓ> ♦ <47*44>
230 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
Наконец, вариация первого члена в (47.37) на основании
формулы (47.29) равна
δ fcV V=i(dx) = fl- c2Va (μV) + ti4«*V,F] V^Tj> (dx). (47.45)
После интегрирования по частям член, пропорциональный с2 (в
правой части), дает нуль, а остающийся член дает
δ / cY V~g (dx) = — JV («*Va) р /=1 (</*). (47.46)
В самом деле, вследствие уравнения неразрывности (47.05) мы имеем
цЧ**^а = Vv ({Λισιι*Ρ ) — [χ* (^Vv*0 ξ', (47.47)
а интеграл от первого члена здесь дает нуль.
Вводя, согласно (47.04), обозначение
w9 = u*V4u9 (47.48)
для ускорения, мы будем иметь
δ / сУ V~g idx) = -f ρ·«βξ· /="£ (rf*). (47.49)
Соединяя вместе формулы (47.41), (47.44) и (47.49), получаем
следующее окончательное выражение для вариации интеграла
действия (47.37):
δ5 = - / (цХ + ■£ Faau«) ξ· 1/tr^ (rf*) +
+/ (—fa*+i V*p)ЬА*v^ <**>· (47·50)
Здесь коэффициенты при ξ* и 8Ла равны нулю в силу уравнений
движения (47.03) и уравнений поля (47.02). Тем самым доказано, что
85 = 0. (47.51)
Обратно, из условия экстремума интеграла действия
S = f[cY -£-и'Аа + ^- Fa^)V~g{dx) (47.37)
можно заключить, в силу произвольности вариаций ξσ и ЬЛа, о
выполнении уравнений движения и уравнений поля.
То обстоятельство, что вариации вида ξσ = τ#σ не меняют поля
скоростей, сказывается в том, что имеет место соотношение
в· ^4,+£-*%.«") = 0, (47.52)
§ 48] ВАРИАЦИОННЫЙ ПРИНЦИП И ТЕНЗОР ЭНЕРГИИ 231
причем оно выполняется тождественно, т. е. независимо от
выполнения уравнений движения. Это соотношение показывает, что из
четырех уравнений движения—только три независимых. То
обстоятельство, что вариации вида ЬАа = δ -^- не меняют
электромагнитного поля, сказывается в том, что имеет место соотношение
va(-4»a+iva?)=0· (47·53)
причем оно также выполняется тождественно, т. е. независимо от
выполнения уравнений поля. Это соотношение показывает, что четыре
уравнения поля не независимы, а связаны дифференциальным
соотношением (47.53).
§ 48. Вариационный принцип и тензор энергии
В § 45 мы указывали, что при формулировке теории
относительности в произвольных координатах возможны две точки зрения.
Согласно первой точке зрения, величины £μν рассматриваются как
заданные функции от координат (получаемые путем замены
переменных из галилеевых значений). Согласно второй точке зрения,
величины £μν рассматриваются как неизвестные функции, подчиненные
уравнениям
Λμ,.«Ρ = °. (48.01)
а также неравенствам, неоднократно нами формулированным.
При вычислении вариации интеграла действия мы стояли на
первой точке зрения, сообразно чему вид функций #μν не варьировался.
Но мы можем встать и на вторую точку зрения и варьировать
также £μν. От этого в выражении (47.50) для 85 к вычисленным
двум членам, соответствующим вариациям ξσ и ЪАа, прибавится
третий член, который будет соответствовать вариации #μν. Вычислим
этот член.
Обозначим вариации разных величин, происходящие от
вариации #μν, символом bg. В выражении (47.12) ни якобиан /, ни
функция F величин #μν не содержат; поэтому будет
„*τΛΖΤ df. dfa — 2с* a*ab&v
Ύ=Γ= ^^ =*-&"***» (48·02)
2g*t dp dp
и, следовательно,
δί(ΐ1^::«)=!ίΐ1Λ\, (48.03)
232 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
Далее, если мы умножим (47.10) на (47.12), то получим
выражение, не содержащее #μν; вариация этого выражения по #μν будет
равна нулю. Поскольку плотность заряда р* удовлетворяет тому же
уравнению неразрывности, что и плотность массы μ*, будет равна
нулю и вариация аналогичного выражения, в котором μ* заменено
на р*. Таким образом,
^(р^а/=Г^) = 0, (48.04)
а также
8,(р*«М.1^="£) = 0, (48.05)
поскольку Аа теперь не варьируются.
Далее
так как Fa^ не варьируются, а варьируются только Fa\ поскольку
они связаны с Fa^ соотношениями
F*t = g**g^F^ (48.07)
содержащими g^. Вычисление дает
F* V* = Уц^Ву» δ£βϊ = - 2F4F*g* δ£μν· (48.08)
Так как
у==-ЬеУ=Г^ = ^^Ьё^, (48.09)
то мы получаем
- (- 2FapF»g» +^ Fti^g*') δ^ν = 8π£/ι»δίμ„ (48.10)
где Ον есть выражение (46.22) для тензора энергии
электромагнитного поля.
Формулы (48.03), (48.05) и (48.10) дают для добавочного члена
в вариаций интеграла действия выражение
Но, согласно (46.32), выражение в скобках под интегралом есть
умноженный на с2 тензор массы системы, состоящей из частиц и
поля
c27V* = |а*я^+ № (48.12)
Таким образом, выражение для тензора массы получается само
собою, путем варьирования интеграла действия по составляющим
фундаментального тензора.
§ 48] ВАРИАЦИОННЫЙ ПРИНЦИП И ТЕНЗОР ЭНЕРГИИ 233
Полная вариация интеграла действия по всем входящим в него
функциям равна
85 = т I №*+и^ δ^ν V~e (**) -
- f (n*w. + -ζ- ^.«α) Ϊ V~g (dx) +
+f(-JT*+-k7tp*)bA'V::rs(dx')· (48·13>
Вариации ξσ и ЬАа были вполне произвольными; приравнивая нулю
коэффициенты при них, мы получили уравнения движения и
уравнения поля. Вариации же δ#μν не являются произвольными, так как
функции #μν подчинены уравнениям
#μν,αβ = 0. (48.01)
Выразим вариации δ#μν через независимые произвольные величины.
Самый общий вид функций #μν, удовлетворяющих уравнениям
(48.01), получается из галилеевых значений этих функций путем
преобразования координат. Следовательно, все возможные виды
функций #μν, совместные с уравнениями (48.01), получаются друг из
друга также преобразованием координат. Таким образом,
допустимые бесконечно малые вариации этих функций должны
соответствовать бесконечно малому преобразованию координат.
Пусть бесконечно малое преобразование координат имеет вид
<=*.+г· <48·14)
где ηα есть произвольный бесконечно малый вектор, составляющие
которого суть функции от координат x0t xlt x2t *з· Π° °бщей
формуле преобразования тензора мы имеем
8^(х') = ^Чх)^-щ- (48.15)
и с точностью до бесконечно малых высших порядков
g»' (*') = /Г (*) + ST^ + 2να Ц- · (48.16)
Чтобы получить вариацию, т. е. изменение вида функции gv»f
нужно сравнивать #/μ,ν и g^ для одних и тех же значений
аргументов.
Так как мы имеем
234 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
(в поправочном члене можно написать g^ вместо g'^)t то будет
^W-rW-^W-Г^ + Г^-^Ч·. (48.18)
Эта формула может быть написана в виде
bgv = #"*νβη* -f- gvaV«'5f, (48.19)
или короче:
bgv» = Vhf + ψψ. (48.20)
Аналогичная формула
δ^μν = —νμην —ννημ (48.21)
может быть получена или независимо (тем же путем) или из
соотношения g^gv·* = С
Переписывая формулу (48.11) в виде
b*S = ΎΙ ™8^ V^ (dx) (48.22)
и подставляя сюда (48.21), получим
= -c*J Μϊ4/=ί(ώ), (48.23)
так как тензор Т^ симметричен. После интегрирования по частям
получаем
8^5 = с2 J (VV7V) ημ V- g (dx). (48.24)
Если считать известным, что расходимость тензора массы равняется
нулю, то из формулы (48.24) можно заключить, что интеграл
действия является экстремумом также и по отношению к допустимым
вариациям величин £μν. Но можно сделать и обратное заключение и
вывести из свойств интеграла действия равенство
V„7>* = 0f (48.25)
где 7V есть тензор, входящий в качестве коэффициента при δ#μν
в выражение для его полной вариации. В самом деле, интеграл
действия есть инвариант (скаляр) и потому не меняется при любых,
в том числе бесконечно малых, преобразованиях координат.
Выражение для его полной вариации
bS=*c*f (VV7V) ημ V~g (dx) -
- f (pX + £ Ρ„*ή ¥ V~g (dx) +
+ f (- -f «■ + JL VpF-β) ЬАЛ V~g (dx) (48.26)
§ 48] ВАРИАЦИОННЫЙ ПРИНЦИП И ТЕНЗОР ЭНЕРГИИ 235
заведомо равно нулю, если вариации ξσ и ЬАа происходят
вследствие бесконечно малого преобразования ημ. (Это заключение
вытекает из одного лишь свойства инвариантности и не зависит от того,
будет ли 5 интегралом действия или каким-нибудь другим
инвариантным интегралом.) Но если S есть интеграл действия, то
коэффициенты при ξσ и δ^α в выражении для bS в отдельности равны
нулю. Поэтому равны нулю и остальные члены в выражении для 85
и мы имеем
bgS = с1 f (V,7V*) % Y~g (dx) = 0, (48.27)
каковы бы ни были величины ημ. Отсюда уже следует равенство (48.25).
То, что тензор 7VV, определяемый как коэффициент при bg ,
есть тензор массы (или ему пропорционален), вытекает из
единственности тензора массы, которая должна иметь место при
условии, что его составляющие суть функции состояния системы (в число
функций состояния включаются здесь и £μν). В рассматриваемом
случае уравнений Максвелла — Лоренца мы это проверили
непосредственным вычислением (формула (48.12)).
Проиллюстрируем приведенные рассуждения еще на одном
примере, а именно на уравнениях гидродинамики. В этом случае
интеграл действия будет иметь вид
5 =- / (pV + Р*П) /IT* (dx). (48.28)
Здесь р* есть инвариантная плотность той части массы покоя,
которая при движении не меняется и удовлетворяет закону сохранения
Vv(PV) = 0 (48.29)
(см. § 82). Π есть отнесенная к единице массы потенциальная
энергия упругого сжатия жидкости
ρ
П«= [■&—*-. <*П = ^£-, (48.30)
i ρ ρ ρ
где р — давление.
Вариацию интеграла 5 легко вычислить, пользуясь найденными
выше выражениями для вариации плотности. На основании формул
(47.29), (48.03) и (48.09), в которых мы пишем теперь р* вместо μ*,
мы имеем для полной вариации
ν—ν,(#)+£ «.«'νχ+4(^ -** W* <48·31>
и по-прежнему
236 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
Полагая
F(p*) = pV + p*n, (48.33)
мы будем иметь
= f(F' (ρ*) ¥+ρ (ρ*) 7==^) V^V*4)· <48·34)
Подставляя сюда (48.31) и (48.32), мы получим, после
интегрирования по частям:
где w9 есть ускорение (47.48). Пользуясь вытекающими из (48.30)
и (48.33) формулами
p*F' — F = р% p*F" dp* = dp. (48.36)
мы можем вместо (48.35) написать
Отсюда заключаем, что уравнения движения имеют вид
и что тензор энергии равен
^ = (ρ* + Ι-(ρΌ + ρ))«ν-ρ^\ (48.39)
причем расходимость этого тензора равна нулю.
Эти выражения представляют обобщения выражений (32.29)
и (32.28) и приводятся к ним в галилеевых координатах.
В заключение заметим, что математически далеко не всякая
система уравнений выводима из вариационного начала. То
обстоятельство, что основные уравнения математической физики,
описывающие поведение консервативных систем, могут быть получены из
вариационного начала, представляет замечательное их свойство.
§ 49] ИНТЕГРАЛЬНАЯ ФОРМА ЗАКОНОВ СОХРАНЕНИЯ 237
§ 49. Интегральная форма законов сохранения
в произвольных координатах
Тензор массы Т^ удовлетворяет, как мы знаем, уравнениям
Vv7^ = 0, (49.01)
которые должны выражать законы сохранения энергии и количества
движения, а также закон сохранения момента количества движения и
закон движения центра инерции замкнутой консервативной системы.
В развернутом виде уравнения (49.01) напишутся (см. (41.24)):
igl + Γ£νΓρν + Грт7*р = 0 (49.02)
или, если объединить третий член с первым,
-jzL= д^-2т^ + Γ£νΓρν = 0. (49.03)
V — g A*v
Вследствие того, что в уравнении (49.03) остается член, стоящий
вне знака производных, переход от дифференциальной формы
законов сохранения к интегральной форме не является в произвольных
координатах столь очевидным, каким он был в галилеевых
координатах (см. § 31). Поэтому мы рассмотрим вопрос о существовании
интегральной формы законов сохранения несколько подробнее.
Введем некоторый вектор ср^ и проинтегрируем равенство
Vv (Γ%) = yLj -£- (V~gT"\) (49.04)
по трехмерному объему, на границах которого величины 7μν исчезают.
Мы получим
/V(Т»\)V=g dxx dx2dx3 = -£;/т»ХV^gdx,dx2dx3. (49.05)
Если Γμν есть тензор массы, то он симметричен и расходимость его
равна нулю. Для такого тензора предыдущее равенство напишется:
~fT%V-=r-gdXldx2dxs =
= γ f 74" (V^ + VtfJ V=~g dxt dx2 dx3. (49.06)
Величина
I = JT%V^dXldx2dx3 (49.07)
238 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
будет постоянной (т. е. не будет зависеть от координаты л:0,
имеющей характер времени), если вектор ср^ удовлетворяет уравнениям
Vvcp, + V,cpv = 0. (49.08)
Исследуем эти уравнения в общем случае (не предполагая сперва,
что тензор кривизны четвертого ранга равен нулю).
Положим
ν,φ,-φ,,· (49.09)
В силу (49.08) величины cpR будут антисимметричным тензором.
Составим от него ковариантную производную. Используя (49.08),
мы можем написать
νσφμν = γ (νμνν — ν,ν^ φσ + \ (νσνν - νννσ) φμ — | (νσνμ—νμνσ) φ,.
(49.10)
Применяя формулу (43.16) для разности ковариантных
производных и используя свойства симметрии тензора R ν> αο, мы получим
νσφμν = /?α%νφρ. (49.11)
Таким образом, уравнения (49.08) могут быть заменены
системой (49.09) и (49.11), которая равносильна системе уравнений
в полных дифференциалах *). Можно показать, что эта система будет
вполне интегрируема в том случае, когда
#μ.ν, αβ = К · (£·να£μβ ~ ^μα^νβ). (49.1 2)
где К — постоянная. Пространство, для которого тензор кривизны
имеет выражение (49.12), называется пространством постоянной
кривизны (оно представляет четырехмерное обобщение пространства
Лобачевского). Постоянная К носит название постоянной кривизны.
Если условия полной интегрируемости выполнены, то значения
10 функций φ , φμν во всем пространстве определяются их
значениями в одной точке, так что общее решение системы (49.09),
(49.11) содержит 10 произвольных постоянных.
Нас интересует случай
/?μν,αβ = 0, (49.13)
который получается из (49.12) при К — 0. (Пространство, для
которого /? Vf αβ = 0, называется поэтому пространством нулевой кривизны
или плоским пространством.)
В случае плоского пространства-времени (с которым и имеет
дело теория относительности) мы можем сразу указать 10
интегралов системы (49.08). Пусть x'Qt x[t χ'ν х'ъ— галилеевы координаты.
^■" —■ —
1) Теория таких систем дана, например» в книге Леви-Чивита [и].
§ 49] ИНТЕГРАЛЬНАЯ ФОРМА ЗАКОНОВ СОХРАНЕНИЯ 239
Мы можем ввести четыре вектора:
«W> = i£, «р<У = -£*-. <Р<2> = ^-, φ(3) = ΐ^. (49.14)
(Эти величины будут векторами по отношению к нештрихованным
координатам х0, хь х2, хг; галилеевы же координаты здесь
рассматриваются как скаляры). Каждый из четырех векторов (49714)
удовлетворяет, в силу (42.16), уравнениям
Vvcp(«) = 0 (α = 0, Ι, 2, 3), (49.15)
а следовательно, и уравнениям (49.08).
Далее, мы можем ввести шесть векторов
дха дх
ф-^ТГ-^-ЯГ·' СР-0.1.2.3). (49.16)
г* г
из которых каждый удовлетворяет уравнениям
т. е. уравнениям (49.08).
Подставляя в выражение (49.07) векторы (49.14), получим, после
умножения на с, постоянные интегралы
/дхг
Т{Х° -SxJLV-gdxl dx2 dx3, (49.18)
а подставляя в то же выражение векторы (49.16), получим
постоянные интегралы
М'^^с f Г°{х'л^-- X'^)v^-gdXldx2dXz. (49.19)
Из сравнения этих выражений с соответствующими выражениями
в галилеевых координатах (формулы (31.02), (31.03), а также (31.08),
(31.09)) нетрудно установить физический смысл этих интегралов.
Величина Рг есть деленная на с энергия (или умноженная на с
масса) системы, а величины Ρ'1 {ί=. 1, 2, 3) представляют количество
движения системы. Далее, величины М'10 суть интегралы движения
центра инерции, а величины М! —интегралы момента количества
движения системы.
Составляющие Р,а постоянного вектора и составляющие Мг°^
постоянного антисимметричного тензора относятся к галилеевой
координатной системе. Но постоянному вектору или тензору в
галилеевой системе соответствует в произвольной координатной системе
свободный эектор или тензор, т, ет такой, все ковариантные
240 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. TV
производные от которого равны нулю. Таким образом, интегралам
движения мы можем сопоставить в произвольной координатной
системе свободный вектор
р^1е-р,аш; <49-20>
а*=0
и свободный антисимметричный тензор
α, β = 0 ^
Эти величины будут функциями от координат и времени,
удовлетворяющими уравнениям
V3Pv = 0. ν,Μμν = 0. (49.22)
Значения этих функций в любой точке определяются значениями их
в какой-нибудь одной точке. Поэтому число постоянных, от которых
зависят функции Ρν и Μμν, будет равно числу этих функций, т. е.
будет равно 10. Роль этих постоянных и играют константы
движения Р'а и Λί'αβ.
В приведенных рассуждениях роль галилеевых координат была
чисто вспомогательная и заключалась в том, что через них
выражались векторы φ соответствующие различным интегралам
уравнений (49.08). Разумеется, гораздо проще было бы вести все
рассуждения прямо в галилеевых координатах (как мы это делали
в гл. II). Но цель наших более сложных рассуждений как раз
и состояла в том, чтобы показать, что также и интегральная форма
законов сохранения может быть получена непосредственно из
уравнений, написанных в произвольных координатах.
Формулы, выведенные в § 48 и 49 позволяют записать условия
однородности пространства-времени. Это может быть сделано
следующим образом.
Как уже указывалось во Введении, пространство-время является
максимально однородным, если существует десятипараметрическая
группа преобразований, оставляющая математическую форму
функций #μν неизменной. (Это значит, что для преобразованных по
тензорному правилу величин g^ зависимость от новых координат будет
той же, какой была для первоначальных #μν зависимость от
первоначальных координат). Для бесконечно малого преобразования (48.14),
принадлежащего к этой группе, мы будем иметь bg —Q, где bg
имеет значение (48.21). Но если в уравнениях bg^ = 0 заменить у\н
на φν, то они будут иметь тот же вид, как уравнения (49.08),
связанные ς законами сохранения. Для последних же уравнений уело-
§ 49 *] О ПРИНЦИПЕ ОТНОСИТЕЛЬНОСТИ И О КОВАРИАНТНОСТИ УРАВНЕНИЙ 241
вием полной интегрируемости является (49.12). Оно будет тем самым
и условием полной интегрируемости для уравнений bg^ = 0.
Таким образом, необходимые и достаточные условия
однородности пространства-времени совпадают с условиями существования
интегральной формы законов сохранения для тензора массы.
Следовательно, законы сохранения тех видов энергии, которые включены
в тензор массы, непосредственно связаны с однородностью
пространства-времени.
§ 49*. Замечания о принципе относительности
и о ковариантности уравнений
В начале этой книги (§ 6) мы дали формулировку принципа
относительности, который, вместе с постулатом о предельном
характере, скорости света, может быть положен в основу теории
относительности. Мы исследуем теперь более подробно вопрос о связи
физического принципа относительности с требованием
ковариантности уравнений. Этот вопрос был затронут нами уже во Введении.
Попытаемся дать прежде всего общековариантную формулировку
принципа относительности, не уточняя пока этого понятия. В самой
общей форме принцип относительности утверждает равноправие
координатных систем (или систем отсчета), принадлежащих к
некоторому классу и связанных преобразованиями
< = /.(*<>· *1> х2> *з)· (49*.01)
которое короче можно записать в виде
*' = /(*). (49*.02)
[Необходимо помнить, что, помимо группы допустимых
преобразований, класс координатных систем должен характеризоваться еще
какими-то дополнительными условиями. Так, например, если мы
рассматриваем преобразования Лоренца, то само собою разумеется, что
эти линейные преобразования связывают не какие-нибудь
произвольные координаты, а только галилеевы координаты в двух инерциаль-
ных системах отсчета. Рассматривать же линейные преобразования
между какими-нибудь другими (не галилеевыми) координатами не
имеет смысла, так как по отношению к таким искусственным
линейным преобразованиям принцип относительности Галилея вообще
не имеет места. С другой стороны, если вместо галилеевых
координат ввести какие-нибудь другие переменные, то преобразование
Лоренца может быть, очевидно, выражено и через них, только
формулы преобразования будут иметь в этих переменных более
сложный вид.]
Уточним теперь, что понимается в формулировке принципа
относительности под равноправием систем отсчета. Две системы
1$ Зак. 2649. В. Д. 4>9К
242 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
отсчета (х) и (*') можно назвать физически равноправными, если
в них явления протекают одинаковым образом. Последнее
означает, что если возможен процесс, описываемый в координатах (х)
функциями
<?Л*).ъ(х) <&»(*). (49*.оз)
то возможен и другой процесс, который описывается в
координатах (#') теми же самыми функциями
<Ρι(*'). <fo(*') ?/,(*') (49*.04)
и обратно, всякому процессу вида (49*.04) во второй системе
соответствует возможный процесс вида (49*.03) в первой системе.
Такое определение соответственных процессов вполне согласуется
с тем, какое было дано в § 6. Таким образом, принцип
относительности есть утверждение о существовании
соответственных процессов в системах отсчета определенного класса,
каковые системы признаются в этом случае равноправными. Из этого
определения ясно, что как самый принцип относительности, так и
равноправие двух систем отсчета, представляют понятия физические,
и утверждение, что то и другое имеет место, заключает в себе
определенную физическую гипотезу, а не является просто условным.
Кроме того, отсюда следует, что самое понятие „принцип
относительности" становится определенным только когда выделен
определенный класс систем отсчета. В обычной теории относительности
таким классом являются инерциальные системы.
Функции (49*.03) или (49*.04), описывающие физический процесс,
мы будем называть функциями поля или функциями состояния. Мы
уже указывали в § 46, что при общековариантной формулировке
уравнений, описывающих физические процессы, нужно присоединить
к функциям состояния также и компоненты метрического
тензора g^. В рассмотренном там примере мы получим тогда следую·
щий набор функций поля:
т. е. электромагнитное поле, вектор тока и метрический тензор·
Входящее в формулировку принципа относительности требование,
чтобы в двух равноправных системах отсчета соответственные
явления протекали одинаковым образом, будет в равной мере
относиться и к метрическому тензору. Таким образом, если мы
сравниваем два соответственных явления в двух физически равноправных
системах отсчета, то для первого явления, описываемого в старых
координатах, не только компоненты электромагнитного поля и
плотности тока, но и компоненты метрического тензора должны иметь
ту же математическую форму, как для второго явления,
описываемого в новых координатах,
§ 49*] О ПРИНЦИПЕ ОТНОСИТЕЛЬНОСТИ И О КОВАРИАНТНОСТИ УРАВНЕНИЙ 243
Дальнейшие заключения зависят от того, будем ли мы считать
метрику фиксированной или же включим в рассмотрение и такие
явления, которые сами влияют на метрику. В обычной теории
относительности, изложенной в предыдущих главах, предполагается, что
метрика задана раз навсегда и ни от каких физических процессов
не зависит. Данная в настоящей главе общековариантная
формулировка теории относительности ничего в этом не меняет. Поскольку
остается в силе предположение о галилеевом характере пространства-
времени, а величины £μν вводятся единственно с целью достижения
общей ковариантности, эти величины будут зависеть только от
выбора координатной системы, но не от рода рассматриваемого
физического процесса; они являются функциями состояния лишь
формально. В теории же тяготения, к изложению которой мы
приступим в следующей главе, о характере пространства-времени делается
иное предположение. Там величины g^ являются функциями
состояния не только формально, но и фактически: они описывают
некоторое физическое поле, а именно, поле тяготения. Однако, при
рассмотрении процессов малого масштаба, не влияющих на
движение тяжелых масс, можно тоже считать метрику фиксированной
(хотя и не галилеевой).
При таком положении вещей, для придания определенного
смысла принципу относительности необходимо уточнить не только
класс координатных систем, но и характер физических процессов,
для которых этот принцип формулируется.
Будем сперва исходить из предположения, что метрика является
фиксированной („жесткой") либо может рассматриваться как
таковая для данного класса физических процессов. Вернемся к
приведенному выше определению соответственных явлений в двух
физически равноправных координатных системах, согласно которому для
первого явления, описываемого в старых координатах, все функции
поля, включая компоненты метрического тензора, должны иметь
ту Же математическую форму, как для второго явления,
описываемого в новых координатах. При независимости величин g v от
характера физического явления мы можем, в отношении этих величин,
не проводить различия между первым и вторым явлениями и
учитывать только преобразование координат. Но тогда величины
М*> и <,(*') (49-*°6)
будут связаны между собою по тензорному правилу, и вытекающее
из принципа относительности требование чтобы они имели одну и
ту же математическую форму приводит (для бесконечно малого
преобразования координат) к уравнениям bg = 0, рассмотренным
в § 48 и 49.
Мы знаем, что самый общий класс преобразований,
удовлетворяющих этим уравнениям, содержит 10 параметров и возможен
16*
244 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
только в однородном пространстве-времени, где выполняются
соотношения
V αβ = К · &„§# - £μα£νβ) (49*.07)
(см. (49.12)). Если в этих соотношениях постоянная К равна нулю,
то пространство-время — галилеево и рассматриваемые
преобразования являются преобразованиями Лоренца, только, быть может,
написанными в других (не галилеевых) координатах.
Таким образом, в предположении жесткости метрики из
принципа относительности вытекает однородность пространства-
времени, а при добавочном условии /С==0 получается, в
соответствующих координатах, галилеева метрика. Принцип относительности
в общей форме приводится тогда к принципу относительности
Галилея. Что касается условия /С=0, то из него вытекает
дополнительное свойство однородности пространства-времени: при
изменении масштаба галилеевых координат в той же пропорции
меняется и масштаб элементарного интервала1). В свою очередь, из
этого свойства вытекает отсутствие абсолютного масштаба
пространства-времени, подобного абсолютному масштабу для скорости,
даваемому скоростью света; отсутствие же абсолютного масштаба
приводит обратно к равенству /С = 0.
Переходя к явлениям, которые могут сами влиять на метрику,
мы должны считаться с возможностью того, что принцип
относительности будет, при определенных условиях, иметь место и в
неоднородном пространстве. Для этого необходимо, чтобы движение
масс, создающих неоднородности, было включено в рассмотрение
явлений.
Действительно, в конце этой книги будет показано, что в
предположении однородности пространства-времени на бесконечности
(оно должно быть там галилеевым) можно выделить класс
координатных систем, аналогичных инерциальным и определенных с
точностью до преобразования Лоренца. По отношению к этому классу
координатных систем будет иметь место принцип относительности
в той же форме, как в обычной теории относительности, несмотря
на то, что на конечном расстоянии от масс пространство
неоднородно. При этом нужно, однако, иметь в виду существенную роль
предельных условий, требующих однородности на бесконечности.
Таким образом, и здесь принцип относительности обусловлен, в
конечном счете, однородностью.
Поскольку наибольшая возможная однородность выражается
преобразованиями Лоренца, более общего принципа относительности,
чем тот, который рассматривается в обычной теории относитель-
1) Напомним, что в общем случае выражение для ds2 хотя и является
всегда однородной функцией от дифференциалов координат, но может,
кроме того, зависеть неоднородным образом и от самих координат.
§ 49*] О ПРИНЦИПЕ ОТНОСИТЕЛЬНОСТИ И О КОВАРИАНТНОСТИ УРАВНЕНИЙ 245
ности, быть не может. Тем более не может быть общего принципа
относительности, как физического принципа, который имел бы место
по отношению к произвольным системам отсчета.
Чтобы уяснить себе этот факт, необходимо четко различать
между физическим принципом, утверждающим существование
соответственных явлений в разных системах отсчета, и простым
требованием ковариантности уравнений при переходе от одной системы
отсчета к другой. Ясно, что из принципа относительности вытекает
ковариантность уравнений, но обратное не имеет места:
ковариантность дифференциальных уравнений возможна и тогда, когда
принцип относительности не выполняется. Не говоря о том, что не все
законы природы сводятся к дифференциальным уравнениям, даже
поля, описываемые дифференциальными уравнениями, требуют для
своего определения, помимо уравнений, всякого рода начальных,
предельных и прочих условий. Эти условия уже не ковариантны.
Поэтому сохранение их физического содержания требует изменения
их математической формы, и наоборот, сохранение их
математической формы означает изменение их физического содержания. Но
осуществимость процесса с новым физическим содержанием есть
самостоятельный вопрос, который не может быть решен априори.
Если внутри данного класса систем отсчета „соответственные"
физические процессы возможны, то принцип относительности имеет место,
в противном случае — нет. Ясно, однако, что подобное
моделирование физических процессов, а особенно моделирование метрики,
возможно, самое большее, для узкого класса систем отсчета и никак
не может быть неограниченным. Это соображение еще раз
показывает (независимо от привлечения понятия однородности), что общий
принцип относительности, как физический принцип, который
имел бы место по отношению к произвольным системам
отсчета, невозможен.
Но для мотивировки требования ковариантности уравнений
общий принцип относительности и не нужен. Требование
ковариантности может быть обосновано и само по себе. Это есть само
собою разумеющееся, чисто логическое требование, чтобы в тех
случаях, когда координатная система не указывается наперед,
уравнения, написанные в разных координатных системах, были бы
математически равносильными. При этом класс преобразований, по
отношению к которым уравнения должны быть ковариантны, должен
соответствовать классу рассматриваемых координатных систем. Так,
если рассматриваются инерциальные системы, связанные
преобразованием Лоренца, и используются галилеевы координаты, то
достаточно потребовать ковариантности к преобразованиям Лоренца (как
это и делалось в гл. I и II этой книги); если же используются
произвольные координаты, то приходится требовать общей
ковариантности (гл. IV).
246 ТЕОРИЯ ОТНОСИТЕЛЬНОСТИ В ПРОИЗВОЛЬНЫХ КООРДИНАТАХ [ГЛ. IV
Следует заметить, что ковариантность уравнений приобретает
определенный физический смысл в том и только в том случае,
когда для рассматриваемого класса систем отсчета имеет место
принцип относительности. Такова ковариантность по отношению к
преобразованиям Лоренца. Это понятие дало так много для
формулировки физических законов потому, что оно содержит конкретные
хроно-геометрические элементы (прямолинейность и равномерность
движения), а также динамические элементы (понятие инерциаль-
ности в механическом и в электромагнитном смысле, § 5).
Благодаря этому оно связано с физическим принципом относительности и
само является конкретным и физическим. Если же вместо
преобразований Лоренца рассматривать произвольные преобразования, то
утрачивается выделение того класса координатных систем, по
отношению к которому имеет место принцип относительности, и тем
самым уничтожается связь понятия ковариантности с физикой.
Остается чисто логическая сторона понятия ковариантности, как
требования непротиворечивости уравнений, написанных в разных
координатных системах. Разумеется, это требование необходимо, но оно
достижимо всегда.
При рассмотрении класса систем отсчета, более общего чем тот,
по отношению к которому имеет место принцип относительности,
возникает необходимость заменить явную формулировку этого
принципа какой-то другой. Явная формулировка состояла в указании
класса физически равноправных систем отсчета; новая же
формулировка должна выражать те свойства пространства и времени, в силу
которых принцип относительности возможен. В предположении
жесткости метрики это достигается тем, что вводятся добавочные
уравнения (49*.07). При дополнительном предположении об
отсутствии универсального масштаба (/С = 0) эти уравнения приводят,
как мы видели в этой главе, к общековариантной формулировке
теории относительности без всякого изменения ее физического
содержания. Принцип относительности Галилея — Лоренца сохраняется
при этом в полном его объеме.
Самая возможность общековариантной формулировки обычной
теории относительности с особенной ясностью показывает различие
между принципом относительности как физическим принципом и
ковариантностью уравнений как логическим требованием. Вместе с тем
такая формулировка открывает путь к обобщениям на основе отказа
от жесткости метрики, так как позволяет поставить вопрос о замене
дополнительных уравнений (49*.07) другими, лучше передающими
свойства пространства и времени. Это приводит нас к теории
тяготения Эйнштейна, которая будет рассмотрена в следующих главах.
ГЛАВА V
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
§ 50. Обобщенный закон Галилея
Наиболее существенная особенность поля тяготения,
отличающая его от всех других известных в физике полей, проявляется
в характере его влияния на движение свободного тела
(материальной точки). При одинаковых начальных условиях (положении и
скорости) все свободные тела, независимо от их массы, движутся
в поле тяготения одинаковым образом. Этот фундаментальный
закон можно рассматривать как обобщение закона Галилея, согласно
которому все тела падают при отсутствии сопротивления с
одинаковой скоростью.
Здесь уместно напомнить определения массы инертной и массы
весомой (или тяготеющей). Инертная масса есть мера способности
тела сопротивляться ускорению: при заданной силе ускорение
обратно пропорционально инертной массе. Весомая или тяготеющая
масса есть мера способности тела создавать поле тяготения и
испытывать воздействие этого поля; в заданном поле тяготения сила,
испытываемая телом, пропорциональна его весомой массе.
При помощи этих определений приведенный выше обобщенный
закон Галилея может быть формулирован как закон равенства массы
инертной и массы тяготеющей.
По Ньютону, поле тяготения характеризуется потенциалом
тяготения U(x, у, z). Потенциал тяготения, порождаемый отдельной
сферически симметричной массой Ж, в точках вне этой массы равен
£/ = ^, (50.01)
где г есть расстояние от центра массы. Величина γ есть ньютонова
постоянная тяготения, численное значение которой в системе
(см · г · сек) равно
ΐ = 15000000 "Гей? * (50'02)
248
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Таким образом, размерность U совпадает с размерностью квадрата
скорости. Заметим здесь же, что во всех встречающихся в природе
случаях, даже на поверхности Солнца и сверхплотных звезд,
величина U весьма мала по сравнению с квадратом скорости света
ί/<Α (50.03)
В общем случае произвольного распределения масс порождаемый
ими ньютонов потенциал U удовлетворяет уравнению Пуассона
Δ£/ = — 4πγρ, (50.04)
где ρ есть плотность массы. Ньютонов потенциал U вполне
определяется уравнением Пуассона вместе с условиями непрерывности и
предельными условиями, которые заключаются в следующем:
функция U и ее первые производные должны быть конечны, однозначны
и непрерывны во всем пространстве и обращаться в нуль на
бесконечности.
Предположим, что ньютонов потенциал U задан. Сила,
испытываемая телом (материальной точкой) с весомой массой (т)вес в поле
тяготения с потенциалом U, равна
F = ("0Bec-grad£/. (50.05)
С другой стороны, согласно уравнениям движения Ньютона, мы
имеем
Поэтому
(/*)„„-w = F. (50.06)
("Оин · w = (т)вес. grad U. (50.07)
Согласно обобщенному закону Галилея, движение тела в заданном
поле тяготения не должно зависеть от его массы. Поэтому
отношение инертной массы (т)ш к весомой массе (т)вес для всех тел одно
и то же, т. е. представляет универсальную постоянную, значение
которой может зависеть только от выбора единиц для инертной и
весомой массы. При общепринятом выборе единиц будет просто
(т)ин = (т)вес = //1, (50.08)
т. е. инертная и весомая масса друг другу равны.
Равенство инертной и весомой массы есть факт настолько
привычный, что воспринимается обычно как нечто само собою
разумеющееся. Однако дело обстоит не так просто: это равенство
представляет особый и очень важный закон природы, тесно связанный
с обобщенным законом Галилея.
Вследствие равенства массы инертной и массы весомой уравнения
движения . rF
w = grad U (60.09)
имеют универсальный характер, что и ярляется выражением обо0-
щенного закона Галилея,
§ 51] КВАДРАТ ИНТЕРВАЛА В НЬЮТОНОВОМ ПРИБЛИЖЕНИИ 249
Заметим, что уравнения движения (50.09) могут быть получены
из вариационного начала
δ f(±v*+u\dt = 0. (50.10)
Это послужит нам указанием при построении теории тяготения.
§ 51. Квадрат интервала в ньютоновом приближении
Явление всемирного тяготения требует расширения рамок той
теории пространства и времени, которая составляла предмет
предыдущих глав. Необходимость такого расширения видна из следующих
соображений.
Из уравнения распространения фронта волны, написанного в виде
вытекает прямолинейность распространения света. Но свет обладает
энергией, а по эакону пропорциональности между массой и энергией
всякая энергия неразрывно связана с некоторой массой; следовательно,
свет обладает массой. С другой стороны, по закону всемирного
тяготения всякая масса, находящаяся в поле тяготения, должна
испытывать действие этого поля; ее движение не будет в общем случае
прямолинейным. Поэтому следует ожидать, что и луч света в поле
тяготения не будет прямолинейным *). Отсюда вытекает, что в поле
тяготения уравнение распространения фронта волны должно несколько
отличаться от написанного выше. Но уравнение распространения
фронта волны является основной характеристикой свойств
пространства и времени. Отсюда следует вывод, что наличие поля тяготения
должно влиять на свойства пространства и времени, и их метрика
не должна быть жесткой. Такой вывод и делается в теории тяготения,
к построению которой мы приступаем.
Как было показано в гл. I, уравнению распространения фронта
волны в форме (51.01) соответствует, при некоторых добавочных
предположениях, следующее выражение для квадрата интервала:
ds2 = с2 dt2 — (dx2 -f- dy2 + dz2). (51.02)
Влияние поля тяготения на свойства пространства и времени должно
сказываться в том, что коэффициенты в уравнении распространения
фронта волны и в выражении для квадрата интервала будут отличаться
от постоянных значений, даваемых формулами (51.01) и (51.02). Нам
надлежит установить приближенный вид выражения для квадрата
интервала в поле тяготения с ньютоновым потенциалом U. Мы будем опираться
при этом на обобщенный закон Галилея. Тот фундаментальный факт,
{) Теория отклонения луча света в поле тяготения дана ниже, в § 59
250
ОСНОВЫ ТЕОРИЙ ТЯГОТЕНИЯ
[гл. ν
что закон движения свободного тела в поле тяготения имеет
универсальный характер и не зависит от свойств тела, позволяет найти
связь между этим законом движения и метрикой пространства-времени.
В § 38 мы изучали уравнения геодезической линии в
пространстве-времени с данной метрикой. Мы можем попытаться подобрать
метрику так, чтобы уравнения геодезической линии приближенно
совпали с ньютоновыми уравнениями движения свободного тела в
заданном поле тяготения. Успех этой попытки позволит ввести гипотезу
о том, что в пространстве-времени с данной метрикой свободное
тело (материальная точка) движется по геодезической линии, и тем
самым установить искомую связь между законом движения и метрикой.
Уравнения геодезической линии могут быть выведены, как мы
знаем, из вариационного начала
δ fds = 0. (51.03)
Если квадрат интервала имеет вид (51.02), то будет
ds = Ус1 — v2 dt% (51.04)
и при малых скоростях
ds=(c — ^)dt. (51.05)
Подстановка в вариационное начало (51.03) выражений (51.04) и
(51.05) для ds дает движение с постоянной скоростью, т. е.
свободное движение при отсутствии поля тяготения. Предположим теперь,
что при малых скоростях и слабых полях тяготения (U <^с2)
выражение для интервала имеет вид
ds = Yc2—2U — v2dt (51.06)
или
ds = [c — γ(\ν2+υ)]Μ (51.07)
вместо предыдущих двух формул (51.04) и (51.05). Так как
аддитивная постоянная и постоянный множитель в лагранжевой функции
не играют роли, то вариационное начало (51.03) со значением (51.07)
для ds дает то же, что и формулированное в конце § 50
вариационное начало
Ъ J(jv2+U}dt = 0, (51.08)
а именно, уравнения свободного движения тела в поле тяготения.
Правда, по той же причине несущественности аддитивной
постоянной и постоянного множителя в лагранжевой функции уравнение (61.08)
получалось бы из (51.03) и (51.06) при любом достаточно большом
значении постоянной с. Но мы должны потребовать, чтобы при
отсутствии поля тяготения (t/ = 0) выражение (51.06) для интервала пере-
§ 51] КВАДРАТ ИНТЕРВАЛА В НЬЮТОНОВОМ ПРИБЛИЖЕНИИ 251
ходило, при любых v2t в формулу (51.04), соответствующую гали-
леевой метрике. Отсюда уже следует, что постоянная с в формуле (51.06)
должна равняться скорости света.
Приведенные рассуждения дают нам право предполагать, что при
условиях
и<:с2 )
№+№+т=^<> ]
(51.09)
квадрат интервала мало отличается от выражения
ds2 = (с2 — 2 U) dt2 — (dx2 + dy2 + dz2). (51.10)
Относительная погрешность в коэффициенте при dt2 здесь во всяком
случае более высокого порядка, чем учтенный член —т. Что касается
коэффициента при чисто пространственной части интервала, то он
может отличаться от единицы на величины порядка —у-.
Действительно, теория тяготения, которая будет развита в следующих
параграфах, дает в качестве более точного выражения
ds2 = (c2 — 2U)dt2—U+^Pj(dx2 + dy2-i-dz2). (51.11)
При условиях (51.09) отличие выражения (51.10) от (51. И) остается
несущественным, как и должно быть.
Найденное значение коэффициента при dt2 допускает, в принципе,
опытную проверку.
Пусть в некоторой точке (дс, у, ζ), где потенциал тяготения есть Ult
имеется излучатель с собственным периодом Т0. Испускаемая им
волна будет иметь зависимость от времени вида
ехр
(/2π-~-), (51.12)
где Тх уже не равно 70, а связано с Т0 так же, как dt связано с dx,
где dz — дифференциал собственного времени излучателя. Предполагая
для простоты излучатель (в данной системе отсчета) неподвижным,
будем иметь приближенно
dx = \ds = (\--^-)dt (51.13)
и, следовательно,
7Ό = (ί—5") Ά· (51-14)
В данной задаче можно пренебречь зависимостью потенциала
тяготения U от времени и считать поле тяготения статическим. Тогда
распространяющаяся от излучателя волна сохранит свою зависимость
от времени (51.12) во всем пространстве.
252
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Предположим теперь, что в некоторой другой точке (х2, У2* 22),
где потенциал тяготения отличен от Ux и равен £/2, имеется второй
точно такой же излучатель (например, атом того же элемента).
Испускаемая им волна будет во всем пространстве иметь зависимость от
времени вида , .
βχρί/2π-^-), (51.15)
где
70 = (1--Т')Г2· <б1Л6>
Сравнивая периоды волн, идущих из мест с разными значениями
потенциала тяготения, но испускаемых одинаковыми излучателями,
мы получаем разность
T2-Ti=Ui~2Ul 'Ά. (61.17)
Если U2 есть потенциал на Солнце, a Ux — на Земле, то будет
i/2>i/j, причем численное значение множителя при 70 в (51.17)
будет приблизительно равно
U%~Ul =2 . 1(Г6. (51.18)
Таким образом, длина волны спектральных линий, испускаемых на
Солнце, должна смещаться (по сравнению с линиями, испускаемыми
на Земле) на две миллионные доли к красному концу спектра.
Необходимо, однако, заметить, что испускание линий на Солнце
происходит при других физических условиях, чем на Земле, и что
поправка на разность потенциалов тяготения в значительной мере
затушевывается другими поправками.
Но имеются сверхплотные звезды (например, спутник Сириуса),
плотность которых в десятки тысяч раз превышает плотность воды.
На их поверхности значение потенциала тяготения значительно больше,
чем на поверхности Солнца (для спутника Сириуса — в 20 раз). Для
таких звезд поправка на разность потенциалов тяготения становится
весьма заметной и может быть обнаружена на опыте.
В недавнее время (1959) влияние потенциала тяготения на частоту
испускаемого света удалось обнаружить и в земных условиях, путем
использования чрезвычайно резких линий, соответствующих ядерным
уровням. Эти резкие линии получаются при испускании
гамма-квантов атомами в кристалле, а именно, при тех актах испускания,
которые не сопровождаются излучением или поглощением фононов.
При таком испускании импульс отдачи передается всему кристаллу
как целому, вследствие чего передача энергии кристаллу оказывается
ничтожно малой, и испускаемый гамма-квант обладает практически
той же частотой, какой он обладал бы, если бы отдача
отсутствовала. Это явление было открыто Мессбауэром в 1958 г. (46].
§ 51] КВАДРАТ ИНТЕРВАЛА В НЬЮТОНОВОМ ПРИБЛИЖЕНИИ 253
Мы не будем входить здесь в теорию явления, а укажем лишь, что
температура кристалла существенно влияет только на вероятность
„безфононного" излучения, но не на его частоту и ширину линии.
Напротив того, в излучении, сопровождаемом фононами (которое
также присутствует), происходит значительное расширение линии
в силу эффекта Допплера, связанного с тепловыми скоростями
атомов в кристалле.
Частота испускания гамма-кванта в безфононном процессе
находится в резонансе с частотой поглощения той же линии в
кристалле— поглотителе, причем острота настройки настолько велика,
что относительное изменение одной из частот на величину порядка 10"1
уже выводит систему из резонанса. При такой чувствительности
изменение потенциала земного тяготения при поднятии, скажем, на
10 метров становится заметным, так как мы имеем, полагая
g = 9,8 м/сек2, Λ =10 м
i^==J*=ll.l<r16. (51.19)
Таким образом, если поглощающий атом находится выше
излучающего, то его резонансная частота будет больше частоты дошедшего
до него снизу гамма-кванта (при подъеме гамма-квант как бы теряет
энергию); при высоте 10 м относительная разность частот равна (51.19).
Эту разность можно компенсировать и тем самым измерить при
помощи эффекта Допплера, заставляя двигаться весь кристалл как
целое. Здесь приходится использовать поперечный (квадратичный)
эффект Допплера, поскольку продольный (линейный) эффект
представлял бы, для таких тонких опытов, слишком грубое средство
компенсации сдвига частот.
Теория эффекта Допплера дана в § 13; формула для
поперечного эффекта Допплера получается из (13.16) при ^ = 0. Как видно
из рассуждений § 13, при поперечном эффекте Допплера
изменение частоты происходит в силу соотношения между собственным
временем τ и координатным временем t, тогда как пересчет от
момента t испускания к моменту t* приема сигнала при равенстве нулю
радиальной скорости поправки не вносит. Поэтому для вывода
условия компенсации гравитационного эффекта поперечным эффектом
Допплера можно непосредственно применять формулу (51.07). Эту
формулу можно написать в виде соотношения между частотами:
собственной частотой v0 и локальной частотой ν, соответствующей
координатному времени. Мы имеем
τ=(ι-τ(τ*+υ))·τ· <51·20>
Если в нижней точке с потенциалом U2 имеется неподвижный
кристалл, а в верхней точке с потенциалом Ux имеется кристалл,
254
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
движущийся с поперечной скоростью vf то атомы в обоих кристаллах
будут находиться в резонансе (v2 = Vj) при условии
^tf+Ux = U2. (51.21)
Так как U2 — £/х = ght то эта формула дает
v2 = 2gh. (51.22)
Мы видим, что экспериментально установленное наличие сдвига
частот в поле тяготения и возможность его компенсации поперечным
эффектом Допплера представляют прямую проверку формулы (51.07),
а тем самым и формулы (51.10) для квадрата интервала.
Таким образом, можно считать, что найденное значение
коэффициента при dt2 в выражении для квадрата интервала согласуется
с экспериментальными данными.
§ 52. Уравнения тяготения Эйнштейна
Основная идея теории тяготения Эйнштейна, в ее ограниченной
(не космологической) постановке, состоит в следующем.
Геометрические свойства реального физического пространства и
времени соответствуют не геометрии Евклида, а геометрии Римана,
с основными положениями которой мы ознакомились в гл. III.
Отклонения геометрических свойств от евклидовых (точнее, от
псевдоевклидовых) проявляются в природе как поле тяготения. Свойства
эти неразрывно связаны с распределением тяготеющих масс и их
движением. Связь эта — взаимная. С одной стороны, отклонения
геометрических свойств от евклидовых обусловлены наличием тяготеющих
масс, а с другой стороны, движение масс в поле тяготения
определяется отклонениями этих свойств от евклидовых. Короче можно
сказать, что массы определяют геометрические свойства пространства
и времени, а эти свойства определяют движение масс.
Постараемся сформулировать эти идеи математически.
В предыдущем параграфе мы видели, что в системе координат,
практически совпадающей с инерциальной системой ньютоновой
механики, ньютонов потенциал тяготения U входит в коэффициент при dt2
в выражении для квадрата интервала, т. е. в коэффициент g^ общего
выражения
ds2 = g^dx^dx,. (52.01)
С другой стороны, потенциал тяготения U удовлетворяет, в
ньютоновом приближении, уравнению Пуассона
Δί/ = — 4πγρ.
(52.02)
§ 52] уравнения тяготения Эйнштейна 255
Искомое обобщение ньютоновой теории тяготения должно быть кова-
риантным относительно произвольных преобразований координат.
Поэтому мы не можем рассматривать в качестве обобщения
ньютонова потенциала отдельное слагаемое в коэффициенте gQ0, или самый
этот коэффициент, а должны ввести в рассмотрение всю совокупность
коэффициентов g^ и считать, что обобщением ньютонова потенциала
тяготения является фундаментальный метрический тензор. Этот тензор
должен удовлетворять общековариантной системе уравнений, одно из
которых должно, в ньютоновом приближении, переходить в
уравнение Пуассона для ньютонова потенциала U. Общее число
уравнений должно, вообще говоря, равняться числу неизвестных функций,
т. е. числу компонент тензора #μν, которое равно десяти.
В левой части уравнения Пуассона стоит дифференциальный опг>
ратор второго порядка от U (оператор Лапласа). Наиболее просты^
общековариантным обобщением левой части уравнения Пуассона буде7
поэтому тензор, содержащий линейным образом вторые производные*
от фундаментального тензора g^v.
Таким тензором является тензор кривизны (второго или четвертого
ранга). Тензор кривизны четвертого ранга /?μν,αβ отпадает, так как
его составляющие не содержат таких выражений, которые бы
представляли обобщение оператора Лапласа. Кроме того, число
составляющих /?μ,ν>αβ слишком велико (оно равно 20, т. е. вдвое больше
числа неизвестных функций)1). Остается, следовательно, тензор
кривизны второго ранга, который как раз имеет должное число
составляющих.
В правой части уравнения Пуассона стоит плотность масс р.
Обобщением плогаости масс, имеющим надлежащий тензорный
характер, является тензор массы Γμν, инвариант которого равен
инвариантной плотности массы.
Мы приходим к выводу, что обобщением уравнения Пуассона
должно являться соотношение между тензором кривизны второго
ранга /?μν и тензором массы Г1".
В предыдущих главах мы видели, что при отсутствии тяготения
расходимость тензора Т^ равна нулю:
Vvrv = 0. (52.03)
Мы сохраним это уравнение и для общего случая, отложив
обсуждение связанных с ним вопросов (об энергии поля тяготения, об
интегральной форме законов сохранения и др.) до гл. VII.
·) Правда, уравнения для тензора Λμν> αβ» даже в избыточном числе, могут
оказаться совместными, как это имеет место в случае пространства
постоянной кривизны (уравнения (49.12)). Но в этом случае уравнения позволяют
определить метрику чисто локально (т. е. без привлечения предельных уело·
вий) и имеют поэтому другой характер, чем уравнение Пуассона, для
которого предельные условия существенны.
256
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Но в конце гл. III мы установили, что тензор
О^/Г-з-^'Я. (52.04)
называемый тензором Эйнштейна или консервативным тензором,
обладает тем замечательным свойством, что его расходимость тождественно
равна нулю
У.О^еэО. (52.05)
Поэтому, если мы положим
/?■» _ ^ g^R = - *Г\ (52.06)
где κ—постоянная, то уравнение (52.03) для тензора массы будет
следствием соотношения (52.06).
Уравнению (52.05) удовлетворяет, как мы знаем, также
фундаментальный тензор g^\ поэтому мы могли бы, не нарушая
равенства (52.03), добавить к консервативному тензору в левой части (52.06)
член вида Xg^\ где λ — новая постоянная.
С другой стороны, в § 31* мы видели, что если ставить для
тензора массы чисто локальные условия (зависимость от компонент
поля или иных функций состояния, но не от координат; равенство
нулю расходимости в силу уравнений поля), то из этих условий
он определяется лишь с точностью до двух постоянных. А именно,
если тензор 7μν удовлетворяет поставленным условиям, то им
удовлетворяет и тензор
Τ'μν = αΓμν + β£μ\ (52.07)
Здесь постоянная а зависит от выбора единиц энергии, а
постоянная β зависит, кроме того, от условий на бесконечности. Если
в дополнение к локальным условиям потребовать, чтобы на
бесконечности, где поле равно нулю, тензор массы равнялся нулю, то
постоянная β будет равна нулю, и тензор массы определится
однозначно.
Эти результаты были установлены для случая евклидовой
метрики, но можно ожидать, что они будут справедливы и для общего
случая. Общий случай отличается от разобранного в § 31* случая
евклидовой метрики в двух отношениях. Во первых, в уравнениях
поля обыкновенные производные по координатам и времени
заменяются на тензориальные производные. Во вторых, к функциям
состояния присоединяются также величины gv·* (в качестве уравнений
поля для них можно формально рассматривать равенство нулю их
тензориальных производных). Оба эти обстоятельства не могут,
однако, изменить по существу наш вывод о степени одноз! ачности
тензора массы, определяемого из локальных условий. Возможность
§ 52) Уравнения тяготения Эйнштейна 257
введения двух постоянных α и β непосредственно очевидна и в общем
случае; следует также ожидать, что останется в силе и наше
заключение о том, что в остальном тензор массы определяется однозначно
(было бы, конечно, желательно и формальное доказательство).
Замене тензора Γμν линейным относительно него выражением (52.07)
соответствует замена уравнений тяготения (52.06) уравнениями
/?»» _ ^ gVR = - *rv - λ^ν. (52.08)
Постоянная λ носит название космологической постоянной. Из
сказанного ясно, что вопрос о значении постоянной λ приобретает
определенный смысл лишь после того, как формулированы условия,
однозначным образом определяющие тензор Г1". Эти условия
необходимо будут иметь нелокальный характер; поэтому формулировать
их можно только исходя из определенных предположений о характере
пространства-времени в целом.
В начале этого параграфа уже были сформулированы основные
положения теории тяготения Эйнштейна в ее ограниченной (не
космологической) формулировке. Согласно этим основным положениям,
сохраняет смысл понятие пространственной бесконечности, причем
там пространство-время является псевдоевклидовым (галилеевым),
а отличия от евклидовости наблюдаются лишь на конечном
расстоянии от масс. Но тогда мы можем сохранить для тензора массы
то требование, которое было выставлено для случая когда все
пространство-время рассматривалось как псевдоевклидово. Мы можем
потребовать, чтобы на бесконечности, где поле равно нулю, и
тензор массы обращался в нуль. Тогда вопрос о значении
космологической постоянной приобретает однозначный смысл, и мы можем
решить его на основании следующих соображений. Согласно нашим
основным положениям, отсутствие поля тяготения означает отсутствие
отклонений геометрии пространства-времени от евклидовой, а значит
и равенство нулю тензора кривизны /?л* и его инварианта R. С
другой стороны, поле тяготения будет отсутствовать, если тензор
массы Γμν везде равен нулю. Поэтому равенства 7^ = 0 и /?μν = 0
должны быть во всяком случае совместными, а это возможно только,
если уравнения, связывающие О*" с Т^ не содержат члена \g^
(т. е. только если λ = 0).
Таким образом, при формулированных в начале этого параграфа
предположениях и при нашем определении тензора массы, надлежащим
обобщением уравнения Пуассона для потенциала будут именно
уравнения (52.06).
Что касается уравнений (52.08), то ими следует пользоваться при
космологической постановке задачи, когда понятие пространственной
бесконечности неприменимо и тензор Τ^ν содержит, даже после
17 Зак 2649. В. А Фок
258
ОСНОВЫ ТЕОРИЙ ТЯГОТЕНИЯ
[гл. ν
выбора единиц, неопределенную постоянную β. В зависимости от этой
постоянной следует выбирать и значение так называемой
космологической постоянной λ, которая, очевидно, связана с β. Выбор того
или иного значения постоянной λ, при данной нормировке тензора Γμν,
составляет особую гипотезу, которую следует вводить явным образом;
это относится и к значению λ = 0.
Возвращаясь к некосмологическому случаю и к уравнениям (52.06),
можно утверждать, что при поставленных условиях (соответствие
с уравнением Пуассона, общая ковариантность, линейность во вторых
производных от g^t тождественное выполнение соотношения (52.05)
для левой части, евклидовость при отсутствии масс) эти уравнения
являются единственными.
Уравнения (52.06) называются уравнениями тяготения Эйнштейна
и играют фундаментальную роль в теории тяготения. Дальнейшие
параграфы будут посвящены их исследованию.
§ 53. Характеристики уравнений Эйнштейна.
Скорость распространения тяготения
Мы начнем исследование уравнений тяготения Эйнштейна
Rr — jtf"R = — xT>" (53.01)
с составления уравнения первого порядка, дающего характеристики
исследуемой системы уравнений. С физической точки зрения
уравнение характеристики представляет закон распространения фронта
гравитационной волны.
Умножая уравнения (53.01) на #μν и суммируя, мы получаем
соотношение
R = %T (53.02)
между инвариантами тензора кривизны и тензора массы. Это
соотношение позволяет написать уравнения тяготения в виде
/Г = — χ (rv —i ^ή. (53.03)
Для контравариантного тензора кривизны /?μν в Добавлении Г
выведено выражение
/Г = —^-5^-^+1*'%. (53.04)
Здесь Ι*" есть величина, получаемая из Т% поднятием значков
P^^VT*. (53.05)
§ 53] ХАРАКТЕРИСТИКИ УРАВНЕНИЙ ЭЙНШТЕЙНА 259
Таким образом, последний член в (53.04) не содержит вторых
производных, а представляет однородную квадратичную функцию от
величин Γαβ, а значит и от первых производных фундаментального тензора.
Вторые производные входят, кроме первого члена, также и
в величины ТУ". Но эти последние содержат вторые производные
только через посредство первых производных от величин
Г = ?%, (53.06)
введенных нами в § 41. Напомним, что оператор Даламбера от
некоторой функции ψ может быть написан как в виде
n*-**jBz-F-&· дао/)
так и в виде
откуда
а также
п^у^^у^Л-у (53.08)
Г = - -jL=J-{y—gti), (53.09)
Г = —D*«· (53.10)
Величины Г" получаются из Γν по правилу, формально совпадающему
с правилом составления полусуммы контравариантных производных,
а именно
Γ^Ι^Γ + νΤ1). (63.11)
или подробнее
«--*(«"Е + «"£-£4 (53.,2)
Разумеется, поскольку Γν не есть вектор, величина F" не являются
тензором. Этим обстоятельством можно воспользоваться для
упрощения уравнений Эйнштейна.
Уравнения Эйнштейна являются общековариантными и,
следовательно, допускают преобразования координат, содержащие четыре
произвольные функции. Пусть уравнения решены в каких-нибудь
произвольных координатах. Мы можем перейти тогда к другим
координатам, взяв в качестве независимых переменных четыре решения
уравнения □ψζζτΟ. Эти решения можно выбрать так, чтобы
удовлетворялись неравенства для gv-\ формулированные в § 35, а также
некоторые дополнительные условия. Но если каждая из координат
*о» хь х2* хз удовлетворяет уравнению □*ct = 0» то в данной
координатной системе будет
Г = 0, (53.13)
17*
260
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл ν
а следовательно, и
Pv = 0. (53.14)
Такую координатную систему мы будем называть гармонической.
Вопрос об однозначности выбора гармонической координатной
системы (и о дополнительных условиях, которые бы гарантировали
однозначность) нас пока не интересует и будет рассмотрен в другом
месте (§ 93). Нам важно здесь констатировать, что уравнения (53.13)
совместны с уравнениями Эйнштейна и что они не налагают по
существу никаких ограничений на их решения, а только суживают класс
допустимых координатных систем 1).
При условии (53.13) выражение для /?μν упростится и примет вид
*^Ч^^+^%· (63.15)
Это выражение для /?μν содержит вторые производные только от
одной величины, а именно, от одноименной компоненты
фундаментального тензора g^\ причем эти вторые производные группируются
в виде оператора Даламбера.
Вид уравнения характеристик данной системы уравнений зависит
только от членов с высшими производными, входящих в эту систему.
В случае системы уравнений (53.01) и (53.13) членами с высшими
производными являются те, которые группируются в виде оператора
Даламбера.
Поэтому для системы уравнений тяготения характеристики будут
те же, как для уравнения Даламбера
□ ψ = 0. (53.16)
Но эти последние легко найти. Как показано в Добавлении Д, они
имеют вид
«-£·&-·· (5з17)
где
ω(ΛΓ0, xl9 x2, #3) = const (53.18)
есть уравнение фронта волны, т. е. уравнение движущейся
поверхности разрыва значений поля.
Уравнение (53.17), дающее закон распространения фронта
гравитационной волны, совпадает с положенным в основу всей теории
пространства и времени уравнением, дающим закон распространения
фронта световой волны в свободном пространстве2). Коротко можно
сказать, что тяготение распространяется со скоростью света.
!) Условия Га = 0 были впервые введены де-Дондером [1б] и Ланчосом [17].
2) При выводе этого закона из уравнений Максвелла (§ 3) мы
предполагали, что пространство-время является евклидовым. Но, согласно замечанию.
§ 54] СРАВНЕНИЕ С ПОСТАНОВКОЙ ЗАДАЧИ В ТЕОРИИ НЬЮТОНА 261
Тот факт, что по теории Эйнштейна тяготение распространяется
со скоростью света, имеет большое принципиальное значение. Он
показывает, что принятая в этой теории форма уравнений тяготения
находится в согласии с общим положением теории относительности,
согласно которому существует предельная скорость распространения
всякого рода действий, равная скорости света в свободном про*
странстве. Существование конечной скорости распространения
тяготения устраняет те противоречия, которые были присущи ньютоновой
теории тяготения, рассматривавшей мгновенные дальнодействия.
§ 54. Сравнение с постановкой задачи в теории Ньютона.
Предельные условия
В теории тяготения Ньютона потенциал тяготения удовлетворяет
уравнению
Ш = — 4πγρ (54.01)
и стремится к нулю на бесконечности так, что
Ηιη/·ί/ = γΛί, (54.02)
Г-»оо
где Μ — полная масса всех тел рассматриваемой системы, равная
Ж = Г pdxdy dz. (54.03)
Теория Эйнштейна, основанная на уравнениях тяготения
/Г—5·*μ·7? = -χ7*·\ (54.04)
должна в первом приближении давать то же, что теория Ньютона.
Теория тяготения Ньютона применима к таким распределениям масс, для
которых полная масса, выражаемая интегралом (54.03),
распространенным по всему бесконечному объему, остается конечной. Этому
условию удовлетворяет, в частности, распределение масс, имеющее
островной характер. Под этим мы разумеем тот случай, когда все
массы рассматриваемой системы сосредоточены внутри конечного
объема, отделенного весьма большим расстоянием от остальных масс,
не входящих в систему. При достаточно большом удалении
остальных масс влиянием их на данную систему масс можно пренебречь и
рассматривать ее как изолированную.
При формулировке теории Эйнштейна мы также будем исходить
из предположения об островном характере распределения масс. Это
сделанному в конце Добавления Д, тот же результат получается и без этого
предположения, если исходить из общековариантных уравнений Максвелла
(§46).
262
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
предположение дает возможность поставить (как и в теории Ньютона)
определенные предельные условия на бесконечности, что делает задачу
математически определенной.
Теоретически мыслимы и другие предположения, например,
предположение о равномерном (в среднем) распределении масс во всем
пространстве. Такая точка зрения предполагает рассмотрение столь
огромных расстояний, что по сравнению с ними даже расстояния
между галактиками должны считаться весьма малыми. Мы мало знаем
о распределении масс в таких огромных пространствах. Поэтому
теория таких огромных пространств будет по необходимости менее
достоверной и менее доступной опытной проверке, чем теория
астрономических явлений меньшего масштаба.
Основная часть этой книги будет посвящена случаю островного
распределения масс. Предположение о равномерном распределении
масс будет рассматриваться лишь в § 94 и 95, где будет дана
теория пространства Фридмана — Лобачевского, к которому приводит
это предположение.
Итак, мы будем считать, что в среднем пространство-время
евклидово (точнее, псевдоевклидово или галилеево) и что отклонения
геометрии пространства-времени от евклидовой обусловлены наличием
поля тяготения. Там, где поле тяготения отсутствует, геометрия
должна быть евклидовой. При островном распределении масс поле
тяготения на бесконечности стремится к нулю. Поэтому мы должны
предположить, что на достаточно большом удалении от масс
геометрия пространства-времени становится евклидовой. Но там, где
геометрия евклидова, существуют галилеевы координаты х, у, z, t,
в которых квадрат интервала имеет вид:
ds2 = с2 dt2 — (dx2 ■+- dy2 ■+- dz2). (54.05)
Поскольку опыт показывает, что и во всем пространстве геометрия
мало отличается от евклидовой, следует ожидать, что существуют
такие переменные, в которых выражение для квадрата интервала
мало отличается от (54.05) во всем пространстве. Более точное
математическое определение этих „квазигалилеевых" координат будет
дано в дальнейшем.
Заметим, что теория Ньютона проще всего формулируется именно
в галилеевых координатах (инерциальная система отсчета). Поэтому
сравнение с ней теории Эйнштейна, которая является ее обобщением,
следует производить в таких координатах, которые по своим
свойствам ближе всего к галилеевым.
Теория Ньютона является нерелятивистской. Но для перехода от
релятивистской теории к нерелятивистской необходимо выделить
в качестве большого параметра скорость света с. Поэтому мы не
будем вводить величины с в выражение для временной координаты
§ 54] СРАВНЕНИЕ С ПОСТАНОВКОЙ ЗАДАЧИ В ТЕОРИИ НЬЮТОНА 263
и положим, вместо (35.03), просто
x0 = t, xx = xt х2 = у, хъ = г. (54.06)
Таким образом, переменная х0 будет иметь у нас теперь значение
времени t, а не величины ctt как раньше.
Выражение (54.05) для квадрата интервала напишется теперь:
ds2 = с2 dx\ — (dx\ + dx\ + dx*). (54.07)
Это выражение должно иметь место на достаточно большом
расстоянии от масс, где геометрия является евклидовой.
Из сравнения с общим выражением
ds2 = g^dx^dx, (54.08)
мы получим следующие предельные значения g^ на бесконечности:
(*οο)οο = *2· (*ω)οο = °·
(Л*)сэ = -8/* С *=1. 2. 3).
Соответствующие предельные значения для контравариантных
компонент фундаментального тензора будут равны
(Α»=-?-. (β°')α, = 0. (8lX = -blk. (54.10)
Эти формулы можно рассматривать как предельные условия для
фундаментального тензора.
Написанных предельных условий, однако, недостаточно, и к ним
нужно присоединить другие, характеризующие асимптотическое
поведение разностей £μν — (g^)^ на большом удалении от масс.
В предыдущем параграфе мы видели, что уравнения Эйнштейна
представляют (по крайней мере, при условии Γν = 0) уравнения
волнового типа, в которых главные члены имеют вид оператора Далам-
бера. Вне масс тензор Т^ равен нулю, и уравнения приводятся
к виду
/Г = 0, (54.11)
где, при условии Γν = 0, тензор #*" имеет вид:
Предположим, что на больших расстояниях разности g^ — (g^)^ и
их первые и вторые производные стремятся к нулю, как 1/г, где
r = 1^*2-f-*2-{-*3· (Это предположение будет оправдано в
дальнейшем.) Тогда на больших расстояниях второй член в (54.12),
представляющий однородную квадратичную функцию от первых производных,
(54.09)
264
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
будет стремиться к нулю как 1/г2. Что касается оператора
Даламбера, то с тем же приближением коэффициенты в нем можно
заменить их предельными значениями. После этих упрощений мы
получим
R = 2с2 dxl +2\~dxf+ дх\ + дх\ J' (54ЛЗ)
Более полное исследование асимптотического поведения величин gv-*
будет дано в § 87. Исследование это показывает, что на
асимптотический вид gv·* влияют также члены порядка -j-, отброшенные
в (54.13), но что качественно поведение разности g^— (g^)^ будет
то же, как поведение функции ψ, удовлетворяющей волновому
уравнению
-k^F-^ = °> (54Л4>
где Δ есть обыкновенный евклидов оператор Лапласа.
Нас интересуют решения волнового уравнения (54.14), которые
соответствуют расходящейся волне, убывающей на бесконечности.
Они имеют асимптотический вид
φ = 1/(ί_Ι., η). (54.15)
где η — единичный вектор с составляющими
п* = Т·. пу = Т' п*=Т' <54Л6>
а / — произвольная функция. Функция / и ее производные по всем
аргументам предполагаются конечными. Аргумент η дает зависимость
функции / от направления, в котором точка удаляется на
бесконечность.
Другие возможные решения волнового уравнения должны быть
отброшены по физическим соображениям. В самом деле, в нашей
постановке задачи система рассматривается как изолированная. Но
это означает, что извне никакие волны на нее не падают. Всякая
волна имеет своим источником одно из тел системы, а поскольку
в системе островного типа все тела сосредоточены в некоторой
конечной области, всякая волна исходит из этой области и на
больших расстояниях от нее имеет асимптотический вид (54.15).
Условие, чтобы решение волнового уравнения имело на
бесконечности указанный вид, можно записать в дифференциальной форме:
lim
,ф_+1ф.уь (54.,7)
§55]
ПЕРВОЕ ПРИБЛИЖЕНИЕ
265
Это условие должно выполняться при г->оо и при всех значениях
величины t0 = t-\ , лежащих в произвольном фиксированном
интервале. Условие (54.17) можно назвать условием излучения. Оно
гарантирует единственность решения волнового уравнения, если только
присоединить к нему требование, чтобы функция ψ и ее первые
производные по х, у, z, t были всюду ограничены и убывали на
бесконечности как — (см. § 92).
Напомним, что вышеприведенные соображения относятся, строго
говоря, к обычному волновому уравнению (54.14), а не к уравнениям
Эйнштейна. Поэтому асимптотический вид разности
g^ — (Л = Ф (54.18)
будет несколько отличаться от (54.15). Однако слегка
видоизмененное условие излучения, написанное в дифференциальной форме (54.17),
будет справедливо и для величины (54.18).
Резюмируя, можно сказать, что, в нашей постановке задачи,
фундаментальный тензор должен удовлетворять требованию евклидо-
вости на бесконечности и условию излучения.
§ 55. Решение уравнений тяготения Эйнштейна
в первом приближении и определение постоянной
Для сравнения теории тяготения Эйнштейна с теорией Ньютона
мы должны прежде всего определить постоянную х, входящую в
уравнения тяготения Эйнштейна
RT—I «"*/? = -«7*». (55.01)
Значение этой постоянной можно найти из сопоставления выражения
для квадрата интервала в ньютоновом приближении (§ 51) с
выражением, получаемым путем приближенного решения уравнений
Эйнштейна.
Для тензора массы в правой части (55.01) мы можем взять
приближенные выражения, соответствующие евклидовой метрике и
рассмотренные в § 32 (где они были выписаны для случая упругого
тела). Переписывая эти выражения, мы должны помнить, что
величина х0 означает у нас теперь просто время t, а не ct, как раньше.
Поэтому прежнее Г00 будет равно, в новых обозначениях, с2Т°°,
а прежнее Toi будет равно новому cToit тогда как Tik не
изменится. Таким образом, если x0 = tt то формулы (32.34) перепишутся
266
в виде
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
ί 3 \
{ /5 = 1 J
c2Tik =
?ViVk — pik.
(55.02)
В нашем приближении мы должны здесь отбросить члены,
соответствующие плотности и потоку энергии (скаляру и вектору Умова),
и писать просто
с2Т<*> = р, с2Т01 = pvi. (55.03)
С той же точностью, с какой справедливы выражения (55.03), мы
можем заменить инвариант тензора массы значением
Т= р. (65.04)
Формулы (55.03) и (55.04) позволяют вычислить приближенные
значения тензора, входящего в правую часть уравнений Эйнштейна,
написанных, согласно (53.03), в виде
/Г = -х(Г^-1£РГ).
(55.05)
Используя галилеевы значения g^t мы получим
2 s ' ~ 2с2
7оо_1 оо7== 1 р§
TOi-^gOiT^-LpVi, \
Tik-^gikT=\$ik.
(55.06)
С другой стороны, в гармонической координатной системе мы
приближенно имеем, согласно (54.13):
1 aVv
эй*.
-Ь&
2с2 dt2
(55.07)
где Δ — обычный евклидов оператор Лапласа. Поскольку нас
интересует квазистатическое решение, мы можем отбросить здесь член
с второй производной по времени. Подставляя (55.07) и (55.06)
в (55.05), будем иметь:
А£°° = —J3-P.
2*
<■■
Δ#0/ = — -£-рг/г.
V
С*
2
с5
осе
'<♦·
(55.08)
§ 55] ПЕРВОЕ ПРИБЛИЖЕНИЕ 267
Припомним теперь выражение для квадрата интервала в
ньютоновом приближении. Согласно (51.10), в этом выражении
£оо='2 —2^. (55.09)
где U есть ньютонов потенциал; остальные компоненты
фундаментального тензора заменяются в этом приближении их галилеевыми
значениями. Применяя формулу
з
*TO«* + J§*oi*lo=l (55.10)
и используя то обстоятельство, что произведения goigio весьма малы
по сравнению с единицей *), мы можем считать, что
£оо£°°=1 (55.11)
и, следовательно,
8°° = -^ + ^-. (55.12)
Но ньютонов потенциал U удовлетворяет уравнению
Δ£/ = — 4πγρ. (55.13)
Отсюда
Δβ" = —5-p. (55.14)
Сравнивая это уравнение с первым уравнением (55.08), мы получим
совпадение, если эйнштейнова постоянная тяготения κ будет связана
с ньютоновой постоянной γ соотношением
„_ 8πϊ
с2 · (55.15)
Ньютонов потенциал U есть то решение уравнения (55.13), которое
удовлетворяет надлежащим предельным условиям на бесконечности.
Это решение, как известно, может быть представлено в виде
объемного интеграла
U = lf \r — rn dx'dyf dz'- (55.16)
Введем, наряду с ньютоновым потенциалом, функции
U^lf-^rjdx'dy'dz', (55.17)
удовлетворяющие уравнениям
Ш1 = — ±щ^1 (55.18)
1) Оценка этим членам будет дана ниже.
268 ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ [ГЛ. V
и условиям на бесконечности. Эти функции могут быть названы, по
аналогии с соответствующими электродинамическими величинами,
вектор-потенциалом тяготения. Тогда решения уравнений (55.08),
после замены в них постоянной κ ее значением (55.15), напишутся:
I» —(!-¥)·» I
(55.19)
Заметим, что U имеет размерность квадрата скорости, a Ut —
размерность третьей степени скорости. При оценке порядка величины
можно считать, что U будет порядка q2t ъ. Ui — порядка д3, где q
есть некоторая скорость, малая по сравнению со скоростью света.
Из контравариантных компонент фундаментального тензора мы
можем уже чисто алгебраическим путем найти ковариантные
компоненты, а также определить g и другие величины.
Для упрощения алгебраических выкладок введем систему величин
в« = -*« + -!Йа·' «'* = -£'*. (55.20)
где /, А=1, 2, 3. Нетрудно проверить, что будет
2 а1татк = Ъш. (55.21)
т = \
Совокупность величин aik можно рассматривать как трехмерный
пространственный метрический тензор; нам важны здесь, впрочем, только
алгебраические их свойства.
Если мы положим
а = Ша1к (55.22)
и, следовательно,
то будет
l = Deta'*, (55.23)
g^-agoo. (55.24)
Из определения (55.20) непосредственно следует
Soo^^Sa^o. (55-25)
/71 = 1
а также
ίίο = β'οοΣβ«β0». (55-26)
Л=1
§ 55] ПЕРВОЕ ПРИБЛИЖЕНИЕ 269
Если величины gf* имеют значения (55.19), то будет
«'* = (!—ψ)** (55.27)
и, следовательно,
a» = (l+%-)*» (55-28)
Принимая во внимание значение g^ получим
«хА* = 'Ч1*. (55·29)
причем относительная погрешность здесь будет более высокого
порядка, чем U/c2.
Отсюда, с той же относительной погрешностью,
ir«, = 'V°. (55.30)
Используя эти формулы, получаем для ковариантных компонент
фундаментального тензора выражения
gm = c*-2U,
δΓοί = 7»"ί/" } (55.31)
ft. —(l+^)*i*
Зная приближенные значения g*0/ и golt мы можем теперь проверить,
с какой точностью выполняется использованное нами равенство (55.11).
Мы имеем приближенно
з
ίοοβ°°=1—ггЦ^?· (55.32)
/ = 1
Если Ut — порядка д3, то это выражение отличается от единицы на
величины порядка qQjcb. Следовательно, равенством (55.11) можно
пользоваться не только в данном, но и в следующем приближении
относительно U/c2 (или v2/c2). Заметим, что из формулы (55.26)
следует
SooS00 = 1 - Soo Σ aikgvg»K (55.33)
Здесь величина g^ положительна, а двойная сумма представляет
определенную положительную форму, следовательно, будет всегда
(вполне строго)
g00g"°<h (55.34)
хотя отличие левой части (55.34) от единицы, как мы видели, весьма
мало.
270
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Выпишем теперь значения определителя g и умноженных на Υ—g
контравариантных компонент фундаментального тензора, которые мы
обозначим через
V = V—ggT- (55.35)
(55.36)
(55.37)
Мы имеем
и, следовательно,
Отсюда
— g = c2-\-W
<)ТТ
V-g = c+^.
αοο_1 . «L )
β — c -Г сз · J
в°' = -з-"|. f
uik = -cbik. 1
(55.38)
Нам необходимо теперь оценить отброшенные нами в выражении
для R^ члены, квадратичные в первых производных.
Эти члены имеют вид F*' αβΓ«β. Для вычисления приближенных
значений скобок Кристоффеля мы могли бы воспользоваться только что
найденными приближенными значениями фундаментального тензора.
Мы не будем, однако, проделывать здесь этих вычислений, так как
квадратичные члены будут подробно вычисляться в гл. VI, где
уравнения тяготения будут решаться в следующем приближении.
Здесь нам нужен только порядок величины квадратичных членрв.
Он будет следующий. Члены в R00 и Roi будут шестого, а члены
в $ь — четвертого порядка относительно 1/с. В рассматриваемом
приближении эти члены на результат не влияют.
Нам остается проверить, выполняются ли в должном приближении
условия гармоничности
Гз-
1
'{V—gg^)=o.
(55.39)
Y-g <Ч
Выясним, прежде всего, с какой точностью должны быть выполнены
эти условия. Если в формуле (53.04) для R^ не вычеркивать
членов Р", а выписать их с точностью, соответствующей
приближению (55.07) для остальных членов, мы получим вместо (55.07):
/?°° =
-Δ#00
1 d2g<
•00
1 дТо
R0l = ^bg0i.
/τ=-έ-Δ« -
2с2
1
2с2
1
2с2
dt2
dt
d2goi , 1 / дТо 1 дТ*\
dt2 "+" 2 [dxt с2 dt У
d2gik , 1 (дТ1 . dTk\
dt2
(55.40)
§55]
ПЕРВОЕ ПРИБЛИЖЕНИЕ
271
Для того чтобы члены с Γν, которые мы отбрасывали, были
действительно малы по сравнению с членами типа Ag·^, принятыми во
внимание, необходимо, чтобы Г° было относительно с более высокого
порядка малости, чем 1/с4, а Г* — более высокого, чем 1/с2. Эти
условия в самом деле выполняются. Действительно, из (55.38)
непосредственно видно, что Г' будет четвертого порядка относительно 1/с.
Что касается Г°, то здесь члены четвертого порядка равны
Эти члены должны исчезать. Следовательно, должно выполняться
равенство
/=1
Как видно из определения величин U и Ul (посредством
дифференциальных уравнений с предельными условиями или посредством
объемных интегралов), это равенство действительно выполняется в силу
соотношения
ί«=1
выражающего закон сохранения массы в ньютоновом приближении.
Таким образом, полученные нами для фундаментального тензора
выражения действительно удовлетворяют, в первом приближении, как
уравнениям тяготения, так и условиям гармоничности. Кроме того,
они, очевидно, удовлетворяют предельным условиям на бесконечности.
Соответствующее им выражение для квадрата элементарного
интервала имеет вид:
+ ~lr(Vidxl-\-U2dx2 + U3dxz)dt. (55.44)
Обычно члены, содержащие произведения dxtdt, не играют роли.
Отбрасывая их, мы получим выражение
ds* = (c2 — 2U)dt2 — (l +2V}(dx* + dxl + dx*)9 (55.45)
в которое входит только ньютонов потенциал. Это выражение уже
было приведено нами без доказательства в § 51 (формула (51,11)).
272
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
§ 56. Уравнения тяготения в статическом случае
и конформное пространство
Фундаментальный тензор называется статическим, если его
компоненты не зависят от временной координаты x0 = tt так что
Цг = ° (56.01)
и если, кроме того,
g0/ = 0 (/=1, 2, 3). (56.02)
Из физических соображений очевидно, что когда имеется
несколько масс, то они должны двигаться 1). Поэтому
фундаментальный тензор может оказаться статическим только в случае одной
массы. Несмотря на ограниченность применений, статический случай
представляет известный физический интерес, прежде всего потому,
что позволяет глубже проследить аналогию с ньютоновой теорией
тяготения (которая ведь является тоже статической); кроме того,
в статическом случае легко исследовать вопрос об единственности
решения. Наконец, в этом случае можно указать строгие решения
уравнений Эйнштейна.
При условиях (56.01) и (56.02) временная координата
определяется однозначно, для пространственных же координат остается
группа преобразований между собой. Поэтому в данной задаче
естественно пользоваться аппаратом трехмерного тензорного анализа
и соответственно писать уравнения тяготения. При этом трехмерный
тензорный анализ может быть применен либо непосредственно к
пространственной части ds2, либо к пространственной части,
умноженной на некоторый множитель. Имея в виду получаемую из
уравнений Эйнштейна приближенную формулу (55.29), мы введем в
пространственную часть множитель, обратно пропорциональный множителю
при временной части и положим
ds2 = c2V2 dt2 — -yt hik dxt dxk. (56.03)
Величину V2 мы будем рассматривать как трехмерный скаляр, а
квадратичную форму
da2 = hikdxidxk (56.04)
— как квадрат длины дуги в некотором вспомогательном
пространстве, которое будем называть конформным пространством. К этому
конформному пространству мы и будем применять трехмерный
тензорный анализ. Как видно из сравнения (56.03) с формулой (55.45),
в приближении, даваемом этой формулой, можно считать конформ-
1) Задача о движении системы масс подробно рассматривается в гл. VI.
§ 56) УРАВНЕНИЯ ТЯГОТЕНИЯ В СТАТИЧЕСКОМ СЛУЧАЕ 273
ное пространство евклидовым, а величину V2 — связанной с
ньютоновым потенциалом U.
Таким образом, мы будем иметь
Stk = -I$r. (56.05)
а также
£°° = ^. «°' = 0. | (5б0б)
gik = — V4lk. J
Здесь величины hlk и А'* связаны соотношениями
Ai;A*; = A? (h1 = b1), (66.07)
аналогичными соотношениям (37.18) для g^. Обозначив через А
определитель, составленный из hik, мы получим без труда
У^=-щУН· (56.08)
Поэтому будет
V=U--^Vi Ι (5609)
Y—ggtk = —cVhhtk)
и оператор Даламбера (41.11) от некоторой величины ψ напишется
□ Ф = -Зрг-з£-У*(Аф)А. <5610>
где (Δψ)Λ означает оператор Лапласа в конформном пространстве
(4«.=7Τ^(^Λ"^)· (56·">
Отсюда видно, что пространственные координаты, гармонические
в четырехмерном смысле, будут гармоническими и в смысле
трехмерного конформного пространства.
Обозначим четырехмерные скобки Кристоффеля (для
фундаментального тензора g^) через (r£v)^ и трехмерные скобки Кристоффеля
(для фундаментального тензора hik) через (Г^)л. Аналогично будем
снабжать значками g и h тензорные величины, относящиеся к
метрикам (g^) и (hik).
Четырехмерные скобки Кристоффеля и тензор кривизны могут
быть выражены через соответствующие трехмерные величины.
В эти выражения войдут производные от трехмерного скаляра V,
которые мы будем обозначать через
13 Зак. 2649. В. А. Фоц
274 основы теории тяготения [гл. ν
Значок А при V1 мы будем иногда для краткости опускать.
Скобки Кристоффеля с чисто пространственными значками будут
^ равны
{T\k)g = {Yllh)h+hlk^-hlk^L-h\^-. (56.13)
Если один или все три значка равны нулю, то скобки
Кристоффеля обращаются в нуль:
(Г^=0. (Γ?^=0, (Г?о)^=0. (66.14)
Наконец, если два значка равны нулю, то мы получим
(T!»)g = c2V3(v\; (ΐ&),=·£· (56.15)
По общей формуле
Λί· ■" = ~^7 ~ ~di;+*Vt. - ПД. (56.16)
мы можем выразить четырехмерный тензор кривизны через
трехмерный тензор и через ковариантные производные от трехмерного
скаляра V. Опуская элементарные, хотя и довольно утомительные
выкладки, мы получим для составляющих с четырьмя
пространственными значками
(Ri, mk)g = (/?/, mk)h + him ~y (Vk)h ~ hik у (Vm)h +
+ hlk\r(yim)h - hlm -1 (Vik)h - (hlmhlk - hlkhlm) ij-(VjVJ)h, (56.17)
где (Vlk)h есть вторая ковариантная производная от V, взятая для
метрики (h):
a (Vk)h есть та же производная с поднятым значком
(vi\ = hli(Vlk)h. (56.19)
Если только один значок равен нулю, мы имеем
(/??.**)*= О, (Rl0>mk)g=0t (Rll>0k)g=0. (56.20)
Если же два значка равны нулю, то будет
(/$,«*),= 0, (56.21)
а также
(*?. a»), = Y(Yia+yrVtVk- hik ■ ±ϊ(ν}ν\ (56.22)
§ 56] уравнения тяготения в статическом случае 276
и наконец
(Яо, оДг = c2V2 {Wi + 2VlVk - hlk (YjV})}h. (56.23)
Теперь уже нетрудно составить сокращенный тензор кривизны,
входящий в уравнения тяготения Эйнштейна.
Применяя формулу
№ik)g = ( *1 mk)g+ (R°i, Ok)^ (56.24)
мы получаем из (56.17) и (56.22)
(Rik)g=(Rik)h-hik · ^тн + ^УУк+ hlk ~y(VjV% (56.25)
где (bV)h есть оператор Лапласа от V:
mMVi\ = ±£-{VW>%). (56.26,
Формула же
(Roo)g = (Ro, ko)g = — (#o, ok)g (56.27)
дает, вследствие (56.23),
(Яоо)*=-^2 {У · тн-<У,У})н)· (56.28)
Что касается смешанных компонент тензора /?μν, то
вследствие (56.20) они равны нулю
(Roi)g= 0. (56.29)
В силу соотношений (56.06) между четырехмерным и трехмерным
фундаментальными тензорами, формулы (56.25), (56.28) и (56.29)
дают для инварианта (R)g выражение
(/?),=- V (R)h -+- 2V (W)h - 4 (VjV\. (56.30)
Обозначим через Ομν консервативный тензор Эйнштейна:
Ομ, = (#Α— jg^Wg (56.31)
и через Н1к консервативный тензор конформного пространства:
Ни = (#«)л - γ hik (R)h. (56.32)
Инвариант последнего равен
Я=А'*Я/й = -1(/?)л, (56.33)
вследствие чего
(Riu)k = Hllt-hlkH. (56.34)
18*
276 ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ [ГЛ. V
Для пространственной части консервативного тензора Эйнштейна
мы получаем простое выражение
O^H^ + ^V^-h^iVfV^ (56.35)
которое замечательно тем, что не содержит вторых производных
от трехмерного скаляра V.
Смешанные составляющие консервативного тензора равны нулю:
О/0 = 0, (56.36)
тогда как составляющая О00 равна
Goo = с2у2 {~у2Н~ 2V <Δν>* + 3 (VjV\). (56.37)
Переходим к составлению уравнений тяготения. Мы только что
обратили внимание на то, что величины Gik не содержат вторых
производных от V. С другой стороны, согласно (56.28) величина R^
не содержит вторых производных от hik. Поэтому, если мы напишем
уравнения тяготения в виде, решенном относительно /?qq и Glk, то
вторые производные от функций V и hlk отделятся друг от друга.
В силу общих уравнений
/?μν = -χ(Γμν-Ι^μ,Γ). (56.38)
представляющих ковариантную форму (53.03), мы имеем
*ω = -*(Γω-^οοΤ)· (56.39)
где Τ есть инвариант
T=(T)g=(T°0+T\ + T22+Tt)g. (56.40)
Отсюда, в силу значений (56.05) величин g^v, получаем
#оо = - 1 xc*V* (Т°0 - Г! - Л - T\)g (56.41)
и после подстановки значения (56.28) для /?„„
V · (Δν\ - (yfV\ = 1 χ (78 - Т\ - Т\ - Т\)е (56.42)
Уравнения для пространственных составляющих напишутся
Hlk + yrVyk -A„ · ±-(V,V\ = -*Tlk. (56.43)
Что касается уравнений для смешанных составляющих,
Οί0 = -χ7/0. (56.44)
то они выполняются тождественно, так как левая часть здесь равна
нулю в силу соотношения (56.36), а правая — в силу равенства нулю
потока массы.
§ 56] УРАВНЕНИЯ ТЯГОТЕНИЯ В СТАТИЧЕСКОМ СЛУЧАЕ 277
Полученные уравнения приобретают более наглядный вид, если
ввести некоторые новые обозначения.
Положим
μ=-^τ(τ5 —Г? —7-f —Tf),. (56.45)
Величину [χ можно также представить в виде
р = с*Т* + Н**Т1к. (56.450
Как видно из сравнения с приближенными выражениями (55.02).
величина μ представляет собою некоторую плотность массы; мы
увидим, что μ можно толковать как плотность массы в конформном
пространстве.
Введем, далее, вместо V величину φ по формуле
V = e'+9 (56.46)
так что связь метрики пространства-времени с метрикой
конформного пространства будет иметь вид
ds2 = Λ- * dt2 — е2ф do2. (56.47)
Мы имеем
иг *| =—V9
AV ViV?
Δ^=- — + -V- (56'48)
Поэтому уравнения тяготения (56.42) и (56.43) напишутся:
(Δ#ή = -1*μ, (56.49)
»» = -2^,+Αα(^4-*Τα. (56.50)
Первое из этих уравнений есть по существу уравнение Пуассона
для ньютонова потенциала U. Действительно, символ Δ есть
обобщение оператора Лапласа, величина μ есть плотность массы, а
постоянная κ равна, согласно (55.15),
X = ^L. (56.51)
Поэтому, если мы положим
* = -£. (56.52)
то U будет удовлетворять уравнению
(Δ)ί/Λ=-4πτμ, (56.53)
278
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
мало отличающемуся от уравнения (55.13) для ньютонова потенциала.
Мы можем также положить:
& = -£-, (56.54)
где gl есть составляющая ускорения силы тяжести.
Выясним теперь физический смысл уравнений (56.50). Члены,
содержащие <j>lt можно толковать (с точностью до множителя) как
гравитационные напряжения. Если мы положим
2М*-йЛА,=^. (56.55)
то мы можем написать вместо (56.50)
#/*==-*( 7^ + 7^). (56.56)
Трехмерная расходимость тензора Т^, понимаемая в смысле
метрики (hlk), равна
(V*7-;*)a=4M^>* (56.57)
и, вследствие (56.49),
(V*r;*)ft = -^. (66.58)
С другой стороны, так как Hlk есть консервативный тензор
конформного пространства, то его расходимость равна нулю.
Следовательно, расходимость тензора гравитационных напряжений Тм
равна, с обратным знаком, расходимости тензора упругих и прочих
статических напряжений Tik. Таким образом мы имеем
(ν%)Λ = ^. (56.59)
Эти уравнения представляют обобщение обычных уравнений статики
упругого тела в поле силы тяжести.
Написанные в форме (56.56) уравнения статики в конформном
пространстве представляют аналогию с уравнениями Эйнштейна
в пространстве-времени. В тех и других уравнениях слева стоит
консервативный тензор, а справа — тензор напряжений или его
четырехмерное обобщение. При этом гравитационные напряжения появляются
в явной форме только после отделения пространства от времени и
после перехода к конформному пространству.
Конформное пространство будет почти евклидовым. В самом деле,
как видно из (56.54) и из оценок (55.02) тензора Tlkt правая
ή
часть (56.56) будет порядка —г. Это приводит к тому, что откло-
U2
нения hlk от евклидовых значений будут порядка —ζ-. Этот
результат находится в согласии с приближенной формулой (55.45),
которая и послужила основанием для введения конформного пространства.
§ 57] СТРОГОЕ РЕШЕНИЕ УРАВНЕНИЙ ТЯГОТЕНИЯ 279
Для пустого пространства, когда Гар = 0 и μ = 0, уравнение (56.49)
есть следствие (56.50). Это легко видеть приравнивая нулю
расходимость тензора Hlk и пользуясь (56.57).
Если тензор массы Та^ равен нулю во всем пространстве, то
единственным статическим решением уравнений Эйнштейна, не
имеющим особенных точек и удовлетворяющим предельным условиям-,
будет решение, соответствующее евклидову пространству и
псевдоевклидову пространству-времени. Это можно показать следующим
образом. В случае пустого пространства уравнение (56.49) дает
(Δ^)Λ = 0. Это есть уравнение эллиптического типа для ф,
представляющее обобщение уравнения Лапласа. Функция φ и ее
производные ф1 должны быть всюду конечными и непрерывными, а на
пространственной бесконечности они должны стремиться к нулю.
Но единственным решением уравнения Лапласа, удовлетворяющим
этим условиям, будет решение ^ = 0. Но тогда будут равны нулю
и производные ф1$ а значит и выражение (56.55). Так как, кроме
того, Tlk = 0, то будет и //^ = 0. Отсюда следует, что тензор
кривизны конформного пространства равен нулю, а само
пространство— евклидово (см. Добавление Ж).
§ 57. Строгое решение уравнений тяготения
для одной сосредоточенной массы
В случае одной сосредоточенной массы можно найти строгое
решение уравнений тяготения, обладающее сферической симметрией.
Так как нас интересует статическое решение, мы можем
воспользоваться формулами предыдущего параграфа и писать ds2 в виде
ds2 = c2V2 dt2 — уг do2, (57.01)
где
da2 = hik dxl dxk. (57.02)
Если xlt x2t xz — гармонические координаты, мы можем ввести
соответствующие им сферические координаты, положив
хх = г* sin θ cos φ, ]
x2 = г* sin θ sin φ, I (67.03)
хъ s= г* cos θ. j
Предположению о сферической симметрии соответствует выражение
для da2 вида
do2 = F2 dr** + ρ2 (db2 + sin2 θ Жр2), (57.04)
где F vl ρ суть функции от одного г\ При этом коэффициент V
также должен зависеть только от г*,
280
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Заметим прежде всего, что положив
Fdr* = dr,
(57.05)
мы можем общее выражение (57.04) свести к случаю, когда F = \t
так что
dJ = dr2 + ρ2 (</θ2 + sin2 θ Жр2). (57.06)
Правда, при этом может оказаться, что радиус-вектор г будет „не
гармоническим", в том смысле, что он не будет связан с
гармоническими координатами хх, х2, хг по формулам вида (57.03). Но
составив уравнение Лапласа для величин (57.03), мы можем всегда
перейти затем к „гармоническому" радиусу-вектору г*.
Для метрики (57.06) мы будем иметь
А„=1.
hb = Ρ2, h,
99
ρ2 sin2».
4 = °· V = 0· А* = °
и, следовательно,
ft"=l. km = -
Aw=
1
ρ2 sin2 » '
A^ = 0. h9r = 0, /T = 0.
Отсюда
VrA = p2sin&
и оператор Лапласа в конформном пространстве напишется
где Δ*ψ есть оператор Лапласа на шаре:
*i-=Tw(*"·*'
"^■зЙ+аг*^
(57.07)
(57.08)
(57.09)
(57.10)
(57.11)
Вследствие (56.10) гармонические координаты должны удовлетворять
уравнению Лапласа в конформном пространстве. Для величин (57.03)
мы имеем
t?xl = — 2xl. (57.12)
Поэтому условие гармоничности координат
Дхг = 0
приводится к виду
M'Z)-*'-0-
(57.13)
(57,14)
Это уравнение и служит для перехода от первоначального радиуса-
ректора г к гармоническому г*.
§57]
СТРОГОЕ РЕШЕНИЕ УРАВНЕНИЙ ТЯГОТЕНИЯ
281
Из метрического тензора (57.07) и (57.08) получаются по общим
формулам следующие выражения для 18 скобок Кристоффеля:
Г»»=—рр'.
Г£р = — pp'sin2»,
1?г=0.
Г^, = —sin&cos»,
Г^ = 0,
rl=o.
г?г=о,
4*= о.
1?р = 0.
Р? р'
1/,<р —7'
rL=ctgo.
(57.15)
Здесь штрихом обозначена производная по г. Скобки Кристоффеля
и все тензорные величины, применяемые в этом параграфе,
относятся только к конформному пространству; поэтому нет
необходимости снабжать их, как в § 56, значком h.
При помощи выписанных в таблице (57.16) скобок Кристоффеля
составляем трехмерный тензор кривизны четвертого ранга, а затем
по формулам
Rn Rr, θΓ "Τ" Rr, φ/*» Rrb = Rr, φθ»
/?θθ = /?θ, Γθ + Rlf φ^ί /?Γφ = Rr, θφί
(57.16)
тензор кривизны второго ранга для конформного пространства.
В формулах для недиагональных компонент мы опустили члены,
в которых первый нижний значок равен верхнему: в силу свойств
симметрии тензора кривизны четвертого ранга эти члены равны
нулю, если система координат ортогональна. Оставляя в общей
формуле (56.16) только члены, отличные от нуля, получаем
#.*=·
аг;
г»
дг
-itol
(57.17)
и после подстановки значений скобок Кристоффеля из (57.15)
/?♦»-£-
Дг, Ьг т~ ·
(57.18)
Вычисление показывает, что величина /?*φΓ имеет то же самое
значение
поэтому
Rtt — 2 -—.
(57.19)
(57.20)
282 основы теории тяготения [гл. ν
Далее,
R*.* = — llr+ Г<*Гк (57.21)
откуда
flU = PP". (57.22)
Продолжая вычисления, получаем
*!. *»=-ж+ПЛ - ГЛ· <57·23)
откуда
^φ» = -1+Ρ'2· (57.24)
Подставляя (57.22) и (57.24) в (57.16), находим для Rw выражение
#M=pp"-f-p'2_ 1. (57.25)
Аналогичные вычисления дают
R^^sinHRw, (57.26)
что и следовало ожидать в силу сферической симметрии.
Недиагональные элементы тензора кривизны второго ранга оказываются
равными нулю
#г» = 0. /?Γφ = 0, /?θφ = 0. (57.27)
Инвариант трехмерного тензора кривизны может быть вычислен по
формуле
/? = *„+£*·»» (57.28)
и будет равен
/? = £(2ΡΡ"+Ρ'2-1). (57.29)
Применяя формулу (56.32), получаем для консервативного
тензора конформного пространства следующие простые выражения
H„ = ±=j£. HH = -ff. H99 = -99»sln4, 1 (57Щ
#Γθ=ο, яГ9=о, #θφ = ο. 1
Мы могли бы получить эти выражения несколько более простым
путем, используя связь, которая существует, в случае трехмерного
пространства, между ковариантным тензором кривизны четвертого
ранга и консервативным тензором. Эта связь рассмотрена в
Добавлении Ж. В обозначениях этого параграфа формулы (Ж. 13) Доба-
§ 57] СТРОГОЕ РЕШЕНИЕ УРАВНЕНИЙ ТЯГОТЕНИЯ 283
вления могут быть написаны в виде
hHn=Rb^ hHu=Rr^, hHn = Rrb,rb;
*//"*= Я,,.н>; hH*=RTb^, hHrb = Rb9,vr (57.31)
Легко видеть, что эти формулы приводят к прежним выражениям
(57.30).
Найденные формулы позволяют написать уравнения тяготения
Эйнштейна в раскрытом виде. В предыдущем параграфе мы видели,
что если написать ds2 в виде
ds2 = Λ"2* dt2 — e&do2, (57.32)
где do2 имеет значение (56.04), то уравнения тяготения напишутся
Δ^-Ιχμ,, (57.33)
Hik = - ЧЛм + hih {trf) - *Tikt (57.34)
причем „плотность массы" μ имеет значение (56.44) и (56.45).
Переходя к интересующему нас случаю сосредоточенной массы и
пользуясь сферическими координатами, в которых оператор Лапласа
имеет вид (57.10), а величины Hik равны (57.30), мы получим
W = ^WW) = 0, (57.35)
" Р2 Г (57.36)
л»=-рр" = рУа. )
Уравнение для Η отличается от уравнения для 7/θθ только
множителем sin2 θ, а остальные уравнения (57.34) выполняются
тождественно.
Интегрируя (57.35), получаем
р2^ = _а, (57.37)
где а — постоянная. Так как уравнение (57.35) есть предельный
случай уравнения (57.33) с положительным μ, то постоянную α следует
считать положительной. В самом деле, рассматривая сперва (57.33)
и полагая
4π^|χρ2ί/Γ = Λί, (57.38)
где интеграл распространен на всю ту область, в которой плотность μ
отлична от нуля, мы будем иметь вне этой области
соотношение (57.37), со значением постоянной α равным
а = ]§Г. (57.39)
284 ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ [ГЛ. V
Здесь γ есть ньютонова постоянная тяготения, связанная с χ
соотношением (56.51). Величина Μ есть, очевидно, масса притягивающего
тела; при переходе к случаю сосредоточенной массы эта величина,
а с нею и а, остается конечной и положительной. Величина α имеет
размерность длины и носит название гравитационного радиуса данной
массы.
Подставляя значение ψ из (57.37) в первое уравнение (57.36),
получаем
Р'2=1+7". (57.40)
и извлекая квадратный корень в соответствии с требованием, чтобы
jHa бесконечности было р'->-\-1,
рр' = /р2 + а2. (57.41)
Дифференцируя это выражение по г, получаем
РР" + Р'2=1. (57.42)
откуда видно, что второе уравнение (57.36) также удовлетворяется.
Дифференциальное уравнение (57.41) легко решается в
квадратурах, и мы получаем, положив аддитивную постоянную, равную
нулю,
г = Ур2-+-а2, (57.43)
откуда
ρ = ΐΛ·2— α2. (57.44)
Таким образом, окончательно
do2 = dr2+(г2 — α2) (db2 + sin2 θ dcp2). (57.45)
По физическому смыслу ρ должно быть положительно и,
следовательно, область изменения г есть
г>а. (57.46)
Мы должны теперь исследовать условие гармоничности. Подставляя
в (57.14) значение ρ из (57.44), получим для гармонического радиуса-
вектора г* уравнение
^('2-а2)^-2г* = 0. (57.47)
Этому уравнению, очевидно, удовлетворяет решение
г* = г. (57.48)
Нетрудно показать, что это есть единственное решение, которое
при конечных г остается конечным во всей области (57.46), а на
бесконечности отличается от г не более чем на конечную величину.
§ 57] СТРОГОЕ РЕШЕНИЕ УРАВНЕНИЙ ТЯГОТЕНИЯ 285
Поэтому входящая в наши формулы переменная г сама есть
гармонический радиус-вектор, и мы можем, вместо (57.03), писать просто
хх = г sin 0 cos φ,
х2 = г sin 0 sin φ,
хг = г cos θ.
(57.49)
Нам остается найти величину ф. Интегрируя (57.37) с учетом
предельных условий, будем иметь, вследствие (57.44),
оо
+ -/тг=Т (57-5°)
Г
или
Φ = γΙ*7^α- (67.51)
Отсюда
у2=7^· <57-52>
Выражение (57.01) или (57.32) для ds2 примет вид
ds2 =c2i^dt2_i±^ da2 (57#53)
и после подстановки значения (57.45) для do2
ds2 = с2 ^2 dt2 — ^tl dr2 — (г -f- α)2 (d№ + sin2 0 df). (57.54)
Полученное строгое решение подтверждает наше заключение
о том, что конформное пространство почти евклидово и что
величина φ приближенно равна О/с2, где U есть ньютонов потенциал,
который мы можем положить равным
t/ = -3jL. (57.55)
В самом деле, формула (57.45) показывает, что относительное
отклонение компонент метрического тензора для do2 от евклидовых
значений будет порядка
■£=£ (б7-56>
и что того же порядка будет погрешность при замене φ на U/c2.
Как показывает оценка, приведенная в следующем параграфе,
величина (57.56) чрезвычайно мала. Заметим, что такое близкое
соответствие с теорией Ньютона получается только при использовании
гармонических координат.
286
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Решение задачи для сосредоточенной массы в форме,
эквивалентной (57.54), но в произвольных, негармонических,
координатах, было впервые получено Шварцшильдом [18] и часто называется
по имени этого автора.
§ 58. Движение перигелия планеты
Найденное строгое решение уравнений тяготения может быть
применено к исследованию поля тяготения Солнца и планет.
Мы имеем
ds2 шт с2 (£=^) dt2 — (£±^ dr2 — (г + а)2 И2 + sin2 θ df)% (68.01)
где
* = ^ (58.02)
есть гравитационный радиус массы М. Для Солнца, и тем более для
планет, гравитационный радиус α во много раз меньше
геометрического радиуса L (в качестве L можно взять радиус шара
одинакового объема с данным телом). Мы можем составить
следующую табличку:
Солнце Земля Луна
α 1,48 км 0,443 см 0,0053 см
L 696 000 км то км \Шкм
a:L 2-ИГ6 7. КГ10 3-10~и
Для сверхплотных звезд величина α того же порядка, как для Солнца,
тогда как L, хотя и меньше, чем для Солнца, но все же не более
чем во сто раз. Благодаря малости отношения α: L метрика
пространства-времени мало отличается от евклидовой даже вблизи и внутри
масс. Тем более это относится к конформному пространству, где
отличия от евклидовости будут, согласно (57.56), порядка (α/Ζ,)2.
Сравнивая выражение для ds2 с его галилеевым значением, нужно
помнить, что коэффициент при dt2 имеет большой множитель с2,
тогда как в пространственную часть такой множитель не входит.
Поэтому отклонение- величины gw от постоянства проявляется (для
медленных движений, какими являются, например, движения планет)
гораздо более чувствительным образом, чем такие же относительные
отклонения в пространственной части интервала: уже в ньютоновом
приближении приходится заменять галилеево значение g^^c2 на
более точное g00 = c2 — 2U.
Сравним найденное строгое решение уравнений тяготения с
приближенным решением, рассмотренным в § 55. Для этого нам нужно
§ 58] ДВИЖЕНИЕ ПЕРИГЕЛИЯ ПЛАНЕТЫ 287
перейти в (58.01) от сферических координат к прямоугольным,
которые будут гармоническими. Мы можем представить в (58.01)
пространственную часть
dP = ~±J dr2 + (г + α)2 (db2 -f sin2 θ df) (58.03)
в виде
tf/2=fz^-^^2+(i+^ (58·04)
В последнем выражении уже легко перейти к прямоугольным
координатам, и мы получим
ds^ct^dfi-^ + ^idxl + dxl+dxf)-
— тЙ £ (χι dxi + χ2 dxi + хг dx3)2. (58.05)
откуда
ft* —(l + τϊ Ь*~ T^ ' £*Λ <68·06)
и, кроме того,
ioo = c»^=J-, gol = 0. (58.07)
Пренебрегая в (58.05) квадратом отношения α/г, мы придем к
приближенной формуле (55.45), в которой
U==C2^^1M_ (5808)
есть ньютонов потенциалг
Из формул (58.06) и (58.07) получается следующее значение
определителя g в гармонических координатах:
g = -c*(\ + j)\ (58.09)
Заметим, что величина
iT-jr^l+f (58.10)
удовлетворяет уравнению Лапласа с евклидовыми коэффициентами.
В следующей главе (§ 68) мы увидим, что корень четвертой степени
из (—g/c2) и в общем случае приближенно удовлетворяет уравнению
Даламбера с евклидовыми коэффициентами.
Из тех же формул (58.06) и (58,07) или же путем
непосредственного преобразования равенства
αν дф дф г -f α 1 / <fy\2 /г — α\/^ψ\2
8 дх^ дх^ ~ г — α ' с2 \ dt ) \г + <х)\дг)
288
ОСНОВЫ ТЕОРИЙ ТЯГОТЕНИЙ
(гл. ν
к прямоугольным координатам получаются значения контравариантных
компонент фундаментального тензора. Мы выпишем эти компоненты,
умноженные на Υ — g. Мы будем иметь
itk=V-gglk = -c\k + co?i&-, (58.12)
а также
. ыг
Г
д°' = 0. (58.13)
Эти формулы позволяют без труда проверить, что наши координаты
действительно гармонические и что
Ϊ = °· (*8.14)
Зная потенциалы тяготения для поля сосредоточенной массы, мы
можем определить движение частицы в этом поле в предположении,
что частица движется по геодезической линии. Как мы видели в § 51,
это предположение находится в согласии с механикой Ньютона.
Более полное обоснование этого закона движения материальной точки
будет дано в § 63 на основе уравнений тяготения.
Уравнения геодезической линии получаются, как мы знаем, из
вариационного принципа
■{■
ds = 0, (58.15)
который может быть написан в виде
'Ldt = 0, (58.16)
■/<
где функция Лагранжа L в нашем случае равна корню квадратному
из выражения
^ = ^27S-(l+f)2(^+^+^-
— y^^r(XiXi+x2^2 + ^3)^ (58.17)
где точки сверху обозначают производные по времени. Таким
образом, мы имеем здесь простую задачу механики материальной точки.
Для решения этой задачи обратим, прежде всего, внимание на
тот факт, что функция Лагранжа обладает сферической симметрией.
Это значит, что функция Лагранжа не меняется при линейной
ортогональной подстановке над величинами xl9 x2, xz, сопровождаемой
такой же подстановкой над величинами хъ х2, хг. Отсюда следует,
§ 58] ДВИЖЕНИЕ ПЕРИГЕЛИЯ ПЛАНЕТЫ 289
как обычно в механике (см. также § 27 этой
интегралов площадей в виде
dL
дхг
dL
3 дх{
dL
Хл —г-
1 дх2
книги), существование
dL )
dL
dL _r
2 dxi 3 J
: (58.18)
Это позволяет заключить что траектория частицы лежит в
плоскости
*1*1 +*2*2+ *3*3 = °- (58· 19>
Беря эту плоскость за одну из координатных плоскостей, мы можем
без ограничения общности положить
аг3 = 0, *з = 0 (58.20)
и рассматривать плоское движение. Последнее удобнее всего изучать
в полярных координатах, к которым приводятся наши сферические
координаты, если мы положим
θ = 7τ. δ = 0. (58.21)
Переписывая квадрат функции Лагранжа в полярных координатах,
будем иметь:
^ = ί27$7-7±7· r'-(r+a)V. (58.22)
Функция Лагранжа не зависит ни от времени t, ни от угла φ. Это
сразу дает нам два интеграла:
t^- + k^ — £ = const> (58.23)
дг 0φ
-^4- = const, (58.24)
которые соответствуют обычным интегралу энергии и интегралу пло*
щадей. Помня, что
Ldt = ds=*cdtt (58.25)
где t — собственное время, мы можем переписать интегралы (58»23)
и (58.24) в виде
-^j£ = e. (58.26)
(r+a?lfc = V·· (58.27)
19 Зак. 2649. В. А. Фок
260
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. V
где ε и μ — постоянные. Величина (χ может быть истолкована как
момент количества движения единицы массы. Если положить
где Е0 — новая постоянная, то из наших формул следует, что в
нерелятивистском приближении будет
Я0 = |г,2__1*L9 (5829)
так что Е0 есть отнесенная к единице массы полная энергия частицы.
Алгебраическим следствием уравнений (58.26) и (58.27) является
соотношение
(£?-«*—ттг-1^· <58·3°>
Оно выводится подстановкой (58.26) и (58.27) в тождество
Предыдущие формулы дают три дифференциальных уравнения
первого порядка для величин г, θ, φ как функций от τ. Решение этих
уравнений, очевидно, сводится к Квадратурам. Мы не будем
выписывать в явной форме соответствующих интегралов, а ограничимся
исследованием траектории частицы, т. е. зависимости г от φ.
Исключая dx из (58.27) и (58.30), получаем
(^)2=^(Γ+α)4-ιί(Γ+^ <58·32>
Справа стоит Здесь многочлен четвертой степени от г. Следова*
тельно, φ выражается через г в виде эллиптического интеграла
первого рода и, обратно, г есть эллиптическая функция от φ.
Вещественный период этой эллиптической функции будет несколько отличен
от 2π; поэтому орбита не будет замкнутой. Многочлен в правой
части (58.32) имеет, кроме очевидного отрицательного корня г = — а,
малый положительный корень
Ό~«+-^ (58.33)
И еще два корня гг и г2. Если ε2 < 1, то оба эти корня положи*
тельны и мы будем иметь всегда /^ < г < г2 (финитное движение).
Если же ε2> 1, то один из корней (гг или г2) становится
отрицательным; обозначав остающийся положительный корень через rlt мы
будем иметь гг < г, и орбита будет уходить на бесконечность. При
е2 =51 будет г2 = оо.
§ 58] ДВИЖЕНИЕ ПЕРИГЕЛИЯ ПЛАНЕТЫ 291
Если ввести вместо г переменную
я=»1 (58.34)
и писать многочлен в раскрытом виде, то будет:
($)Τ-^+-^<ν-ΐ).+(^-ι)-+
+ W(g' + 'W«*(l+^±A)ll.. (5S.S5)
Оценим в этом выражении порядок величины отдельных членов.
Введем, как в § 55, характерную скорость q и характерную длину /.
Тогда по порядку величины будет
•2 — 1 — -fr; ц2~/2?2;
я2 ι ι
α~*τ/; α—г
На основе этих оценок нетрудно видеть, что в правой части (58.35)
члены с нулевой, первой и второй степенью а имеют порядок
величины I//2, члены же с третьей и четвертой степенью и — порядок
величины ~- · ψ. Поэтому, пренебрегая лишь весьма малыми
величинами порядка qA/cA (или а2//2) по сравнению с единицей, мы
можем отбросить в уравнении (58.35) последние два члена, после
чего оно примет вид:
Корни квадратичного многочлена будут соответствовать упомянутым
выше корням гх и г2. Мы положим
И1 = - = -^-. «2 = - = _, (58.37)
где ρ и е — новые постоянные, связанные с первоначально
введенными постоянными ε и (д.. Приближенно мы имеем
l-e2 = -?L(l— e\ 1
Ρ \ (58.38)
μ,2 = ас2р = ·\Μρ. )
ν2 = 1 — —, (58.39)
v=*l-y. (58.40)
Положим также
откуда приближенно
19*
292
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
С этими обозначениями мы можем переписать уравнение (58.36) в виде
?Ы) =~? Η^β-Ά (58.41)
Решение этого уравнения есть
«=1 + g;0SVV· (58.42)
Здесь постоянная интегрирования выбрана так, что наименьшему
расстоянию г (наибольшему а) соответствует значение φ = 0.
Выражение (58.42) хорошо передает общий характер движения. При
ν=1 мы имели бы эллипс, параболу или гиперболу с параметром ρ
и эксцентриситетом е. Рассмотрим случай эллипса (е < 1). Радиус-
вектор г вернется к прежнему значению, когда угол φ увеличится
не на 2π, а на несколько большую величину 2π/ν. Разность
Δφ = -^-2* = -^ (58.43)
дает смещение перигелия за один период обращения планеты. Таким
образом, орбита планеты может быть характеризована как прецес-
сирующий эллипс.
Заметим, что эйнштейновские уравнения движения для планеты
приводятся к тому же виду, как и классические уравнения движения
сферического маятника; поэтому траектория планеты имеет тот же
вид, как траектория конца маятника1).
Для всех планет численное значение величины Δφ весьма мало.
Так, для Земли, полагая /?=1,5·108 км и используя значение
α =1,5 км, получим
Δφ = 6π10~8= 0,038"
за один оборот, т. е. за год, иначе говоря, 3,8" в столетие. Для
Меркурия смещение перигелия за столетие получается значительно
больше (а именно 43"), во-первых, потому, что он находится
значительно ближе к Солнцу (радиус его орбиты составляет 0,39
радиуса орбиты Земли) и, во-вторых, потому, что он обращается
быстрее (за столетие он успевает совершить около 420 обращений).
При сравнении теории с опытом необходимо помнить, что
движение перигелия происходит не только в силу эйнштейновского
эффекта, но и в силу возмущающего влияния других планет,
отклонения их формы от сферической и т. п. Эти поправки превышают
эйнштейновскую во много раз. Кроме того, нужно иметь в виду,
что положение перигелия наблюдать тем труднее, чем меньше
эксцентриситет et т. е. чем ближе орбита к кругу; при е==0
1) См. чертеж в книге А. Н. Крылова [19J.
§ 59] ОТКЛОНЕНИЕ ЛУЧА СВЕТА, ПРОХОДЯЩЕГО МИМО СОЛНЦА 293
положение перигелия перестает быть определенным. Тем не
менее, астрономические средства наблюдения настолько точны и
вычислительные возможности небесной механики настолько велики,
что, в случае Меркурия, необъясненный ньютоновой теорией остаток
в движении перигелия определяется с точностью до секунды в
столетие. Этот остаток составляет 42,6", в прекрасном согласии
с теорией. Для Земли остаток определяется с несколько меньшей
точностью и составляет около 4", что также вполне согласуется
с эйнштейновским значением.
§ 69. Отклонение луча света, проходящего мимо Солнца
Мы рассмотрим теперь другое наблюдаемое следствие
эйнштейновской теории тяготения — отклонение луча света, проходящего
мимо Солнца.
Мы составим себе сперва общую картину распространения света
в поле тяготения Солнца, а затем уже перейдем к интегрированию
уравнения луча.
Закон распространения фронта световой волны мы будем писать
в виде, умноженном на У—g:
Пользуясь формулами (58.10) и (58.11), мы будем иметь, в
сферических координатах:
\1+7/ 1 /όω\2 / <*\(д<*\*
Λ _i\ ' c2\dt) V гЧ\дг)
-М(ж)'+^(-£П = 0. (59.02,
Если пренебрегать здесь членами порядка а2//·2 по сравнению с
единицей, то уравнение для ω приведется к виду
£(4г)2-^а(1и,>2=0· (59·03>
где
**=!+-£, п=\ + *. (59.04)
Это уравнение можно толковать как закон распространения света
в евклидовом пространстве, но в Среде с показателем преломления п.
294
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Заметим, что уравнение (59.03) может быть получено уже из
приближенной формы
ds2 = (c2~2U)dt* — (l+^(dx2+dx2 + dx*) (59.06)
для d$2 (см. (55.45)), причем эффективный показатель преломления
равен
Λ=1 + ΐ£* (59.06)
Напротив того, пригодная для медленных движений приближенная
форма (51.10) для ds2 привела бы к вдвое меньшему коэффициенту
при U в выражении для эффективного показателя преломления. Как
мы увидим ниже, с опытом согласуется выражение (59.06),
соответствующее квадратичной форме (59.05).
Воображаемая среда с показателем преломления (59.06) будет
вблизи Солнца оптически более плотной, чем вдали от него. По·
этому волна будет огибать Солнце, и луч будет уже не прямым.
Как мы увидим ниже, луч будет иметь, примерно, форму ветви
гиперболы, в фокусе которой находится Солнце. Угол между
асимптотами гиперболы дает наблюдаемое отклонение луча.
Луч света является, как мы знаем из § 38, нулевой
геодезической линией, для которой уравнение распространения фронта волны
является уравнением Гамильтона — Якоби (см. также Добавление Е).
Поскольку в предыдущем параграфе мы уже решили задачу о
геодезической линии конечной длины, мы можем получить уравнение
луча из формул § 58 путем предельного перехода. Напомним эти
формулы. Мы имели интегралы движения
('+«?%=? <58·27>
и уравнение траектории
(w)2='$1(r+a)4_"i(r"fa)3(,""a)_(r+a)(,'_a)' (58'32)
Так как для луча света */τ = 0, то постоянные ε и [χ в
формулах (58.26) и (58.27) будут бесконечно велики, отношение же их,
равное
§ 59] ОТКЛОНЕНИЕ ЛУЧА СВЕТА, ПРОХОДЯЩЕГО МИМО СОЛНЦА 295
будет конечным. Вследствие этого формула (58.32) примет вид
/ dr\* _ j?_
(4г I = 7Г (r + α>4 - (r + α> (r ~ α>· (59·08>
Вместо постоянной |хх удобно ввести по формуле
Нт-^ = |х1 = сй (59.09)
другую постоянную Ь, имеющую размерность длины. Формула
(59.08) перепишется тогда
(■£)2=р-<г+в>*-<г+«)</'-«). (59Л°)
а соответствующее уравнение для и = 1/г будет иметь вид:
(-|f)2 = -p-(1+aa)4-B2+a2a4· (59Л1>
Если толковать г, φ как полярные координаты в евклидовой
плоскости, то только что введенная постоянная Ъ есть „прицельное
расстояние", т. е. длина перпендикуляра, опущенного из начала
координат на асимптоту к траектории. В самом деле, из
элементарных формул евклидовой геометрии на плоскости вытекает следующее
выражение для длины перпендикуляра, опущенного из начала
координат на касательную к кривой, заданной в полярных координатах:
г ! (59.12)
/·+*(·£)' f«+№'
Асимптота есть касательная в бесконечно удаленной точке (а = 0),
а следовательно, прицельное расстояние есть значение d при # = 0;
это значение получается из (59.11) и (59.12) равным Ь.
Вернемся к уравнению траектории луча в форме (59.11). Если
считать величину и порядка 1/й, то в этом уравнении члены,
содержащие и3 и #4, будут по крайней мере порядка аР/Ь2 по
сравнению с главными членами. Отбрасывая малые члены, мы
получаем уравнение, которое решается элементарно. Решение будет
иметь вид:
a = ^+|coscp. (59.13)
Постоянная интегрирования в (59.13) выбрана так, что значению
φ = 0 соответствует наибольшее значение и (и, следовательно,
наименьшее значение расстояния г). Приближенно
Гт\п = Ь — 2а. (59.14)
296
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
{гл. ν
В евклидовой плоскости г, φ уравнение (59.13) представляет
гиперболу. Направления асимптот этой гиперболы определяются из
условия # = 0, которое дает
coscp = — -у. (59.15)
Здесь правая часть есть малая отрицательная величина. Предельные
значения угла φ будут поэтому равны
φ = -£ + δ, φ=—^- —δ, (59.16)
где малая положительная величина δ может быть положена равной
8 = ^. (59.17)
Угол отклонения луча есть угол между асимптотами гиперболы,
который равен
28=-^. (59.18)
Смещение видимого положения звезды, от которой луч проходит
вблизи Солнца, можно наблюдать во время полного солнечного
затмения» Если положить величину Ъ равной радиусу Солнца, то для
угла отклонения 2δ получится значение
2δ=1",75, (59.19)
которое хорошо согласуется с наблюденными значениями. Обработка
наблюдений затмения 1952 г* приводит к числу 1",70. Этот
результат позволяет совершенно однозначно утверждать» что наблюдаемому
закону распространения света соответствует выражение (59.05) для
ds2, но не выражение (51Л0), которое дает вдвое меньшее число 0",87*
В заключение сделаем одно замечание по вопросу об определений
прямой линии в теории тяготения» Как следует определять прямую:
как луч света или как прямую в том евклидовом пространстве,
в котором декартовыми координатами служат гармонические
координаты хх, х2, #з? ^ам представляется единственно правильным
второе определение. Фактически мы им и пользовались, когда
говорили о том, что луч света вблизи Солнца имеет форму гиперболы
(59» 13). Гармонические координаты глубоко соответствуют, в
рассматриваемых здесь случаях, природе пространства и времени, и
определение прямой должно опираться на них. Что касается того
соображения, что прямая, как луч света, более непосредственно
наблюдаема, то оно не имеет никакого значения: в определениях
решающим является не непосредственная наблюдаемость, а
соответствие природе, хотя бы это соответствие и устанавливалось путем
косвенных умозаключений.
§ 60] ВАРИАЦИОННЫЙ ПРИНЦИП ДЛЯ УРАВНЕНИЙ ТЯГОТЕНИЯ 297
§ 60. Вариационный принцип для уравнений тяготения
В уравнениях тяготения
/Г - -§■ g^R = — 2g-i+* (60.01)
слева стоит консервативный тензор, а справа — тензор массы. В § 48
мы видели, что выражение для тензора массы может быть получено
путем варьирования интеграла действия по компонентам
фундаментального тензора. Так, в случае уравнений гидродинамики, интеграл
действия может быть написан в виде
S = f (PV 4- Р*П) У=1 (dx), (60.02)
где величина р* есть инвариантная плотность той части массы покоя,
которая при движении не меняется и удовлетворяет уравнению
неразрывности (48.29), а величина Π есть отнесенная к единице массы
потенциальная энергия упругого сжатия жидкости, определяемая
формулой (48.30). Если проварьировать интеграл 5 по компонентам
фундаментального тензора, то получится
Vs=τ / гЧ* ^^ (d*>· <60·03>
где Γ!Αν есть гидродинамический тензор массы, определяемый формулой
(48.39). В случае электродинамики интеграл действия имеет вид
(47.37); главный член, зависящий от массы покоя, в нем тот же, как
в гидродинамическом случае. Вариация электродинамического инте-4
грала действия по величинам £μν также имеет вид (60.03), где уже
Т^ есть электродинамический тензор массы, определяемый формулами
(46.22) и (46.32). Что касается вариации интеграла действия по
другим входящим в него функциям (по смещениям и составляющим
поля), то такая вариация дает, как мы знаем, уравнения движения
рассматриваемой материальной системы.
Мы будем предполагать, что рассматриваемая система такова,
что для нее справедлива формула (60.03), где 5 — соответствующий
интеграл действия. Тогда тензор массы, входящий в правую часть
уравнений тяготения (60.01), может быть представлен как
коэффициент при δ#μν в выражении для вариации некоторого интеграла.
Попытаемся представить в аналогичном виде также и левую часть
уравнений тяготения, т. е. консервативный тензор.
Для этого рассмотрим интеграл
I = JRV^g(dx), (60.04)
где /? — скаляр кривизны, и составим его вариацию.
298 ОСНОВЫ ТЕ.ОРИИ ТЯГОТЕНИЯ [ГЛ. V
При вычислении вариации подынтегральной функции мы
воспользуемся тем, что вариации скобок Кристоффеля Γ£ν представляют
тензор (хотя самые скобки Кристоффеля тензором не являются). Это
доказывается следующим образом. Согласно (42.04), закон
преобразования скобок Кристоффеля имеет вид:
Эта формула справедлива для величин Γ£ν, относящихся к данной
метрике (ga$). Произведем здесь вариацию метрики, сохраняя связь
между старыми и новыми координатами. Метрике (gap-j-&gap) будут
соответствовать величины Γ£ν + 8Γ£ν, причем будет
■*■£-(«#£.£. (60.06)
что и доказывает, что вариации δΓ£ν представляют смешанный
тензор третьего ранга.
При составлении вариации скаляра R мы будем исходить из
выражений
дТа дТа
дТаа дГ%
#μν = -g^ g^—h ΓμαΓρν — Г^Гра (60.08)
для смешанных компонент тензора кривизны четвертого ранга и для
тензора кривизны второго ранга. В системе координат,
геодезической в данной точке, вариация /?^ν равна
так как в этой точке все скобки Кристоффеля равны нулю. Отсюда
/'«*„= Г т|-№)-«*·£ №) (60.10)
bRv = ΈΓ № - ТГ №)· (60.09)
(после перестановки некоторых значков в первом члене справа).
Введем вектор
w*=g^ir^-g™b^. (60.11)
Нетрудно видеть, что равенство (60.10) равносильно следующему:
так как в геодезической системе координат можно величины
gt^ = j/"—ggw вынести из-под знака производной. Но обе части
§ 60] ВАРИАЦИОННЫЙ ПРИНЦИП ДЛЯ УРАВНЕНИЙ ТЯГОТЕНИЯ 299
равенства (60.12) представляют скаляры; поэтому, если это равенство
справедливо в геодезической системе координат, то оно справедливо
и вообще.
Предположим, что на границах области интегрирования в
интеграле (60.04) исчезают не только самые вариации δ#μν, но и их
производные, а следовательно, и величины δΓ£ν, а также вектор wa.
Тогда, написав интеграл / в виде
мы получим для его вариации выражение
bI=fR^(dx), (60 Л 4)
так как, в силу равенства (60.12), будет
/ δ/?μν · g^ V~g (dx) = 0. (60.15)
Используя формулы
δ V=g=у /=irβ δ£αβ; (60.16)
δ^ = — grg*bga9. (60.17)
получаем
*Г=δ (V^gg^) = V^ (j fg* — ^α?νβ) 䣫ⷠ(60.18)
Подставляя это выражение в (60.14) и производя суммирование
по μ и по ν, будем иметь:
bI==f{i Λ - #*) 8s«? V7-*(dx)- (60·19)
Наша ближайшая цель достигнута: консервативный тензор
представлен в виде коэффициента при вариации фундаментального тензора.
Сопоставляя формулы (60.03) и (60.19), мы приходим к выводу,
что вариация выражения
Г=5--Ш77· (60·20)
по компонентам фундаментального тензора равна
8*wr=T-/{7*'+4"(/r~^'"/?)}^1/:z*(rf*)· (6<Ш)
Эта вариация исчезает в силу уравнений тяготения (60.01). В свою
очередь, уравнения тяготения могут быть получены из вариационного
начала 8tt^ = 0, если производить вариацию по компонентам
фундаментального тензора и считать величины bg ч произвольными.
300 ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ [ГЛ. V
(Напомним, что в § 48 мы уже рассматривали вариацию интеграла
действия по £μν, но там величины bg^ не были вполне произвольными,
так как соответствовали бесконечно малому преобразованию
координат и выражались через четыре функции ην.)
Варьируя же W по остальным функциям, входящим в интеграл
действия 5, мы получим уравнения движения и уравнения поля для
этих функций.
Таким образом, уравнения тяготения (для гравитационного поля)
объединяются с уравнениями для других полей (поле скоростей
вещества, электромагнитное поле и др.) в одном общем вариационном
принципе.
Вариационному принципу можно придать несколько другую форму,
взяв вместо инвариантного интеграла
I=*JRV~g(dx) (60.04)
другой, хотя и не инвариантный, но не содержащий зато вторых
производных.
В Добавлении Г выведена формула
R=Uy— Г — L, (60.22)
где Пу есть оператор Даламбера (Г.51), причем y = \gY—g.
Величина Г выражается формулой (Г.43), а величину L можно
согласно (Г.54), написать в виде
L = g^ (Г^Ир - Γα,νΓαββ), (60.23)
а также во многих других видах, приведенных в Добавлении Г.
При помощи обозначений (Г.59) и (Г.61) можно, вместо (60.22),
написать также
/? = ^=-^-(l/=i(/-r))-L· (60.24)
Интеграл / будет отличаться от выражения
/* = — f L V^g (dx) (60.25)
на величину
Ρ = / -Εζ- (V=I (У - Г)) (dx). (60.26)
которая приводится к интегралу по поверхности и вариация от
которой равна нулю. Поэтому вариации интегралов / и /* равны:
Ы=Ь fR V^g(dx) = — δ f L V^(dx) = 8Λ (60.27)
Поскольку в вариационном качале важны не самые варьируемые
интегралы, а лишь их вариации, можно в формуле (60.20) заменить
/ на /*. При этом величина δ/* (равная δ/) от координатной системы
§61] О ЛОКАЛЬНОЙ ЭКВИВАЛЕНТЫ. ПОЛЕЙ УСКОРЕНИЯ И ТЯГОТЕНИЯ 301
не зависит, несмотря на то, что самый интеграл /* может зависеть
от координатной системы. Целью замены / на I* является исключение
из подынтегрального выражения вторых производных. Вытекающая
из (60.19) и (60.27) формула
δ f L V~g (dx) = f^-^ g*R)bga^V~g (dx) (60.28)
может быть, разумеется, выведена и непосредственно, хотя
соответствующие выкладки довольно сложны.
§ 61. О локальной эквивалентности полей ускорения
и тяготения
Наглядной физической основой теории тяготения является, как
мы знаем, закон равенства инертной и весомой массы, который
представляет рациональное динамическое обобщение закона Галилея (§ 50).
Мы и положили его в основу рассуждений, которые привели нас,
после некоторых обобщающих предположений, к уравнениям
тяготения Эйнштейна (§ 51 и 52). Эйнштейн рассуждал в своем выводе
уравнений тяготения иначе. В отличие от нашего рассмотрения,
основанного на динамической формулировке закона Галилея, Эйнштейн
принял за основу одно кинематическое следствие этого закона,
которое он назвал „принципом эквивалентности".
Под принципом эквивалентности в теории тяготения понимают
утверждение, согласно которому поле ускорения в каком-то смысле
эквивалентно полю тяготения. Эквивалентность заключается в
следующем. Путем введения надлежащей координатной системы
(которая обычно толкуется как ускоренно движущаяся система отсчета)
можно так преобразовать уравнения движения материальной точки,
находящейся в поле тяготения, что они будут (в новой системе
отсчета) иметь вид уравнений движения свободной материальной
точки. Тем самым поле тяготения как бы заменяется (или, лучше
сказать, имитируется) полем ускорения. Благодаря закону равенства
инертной и весомой массы такое преобразование будет одно и то же
для любого значения массы материальной точки. Но оно будет
достигать своей цели только в бесконечно малой области пространства,
т. е. будет строго локальным.
В общем случае указанное преобразование математически
соответствует переходу к локально-геодезической системе координат (§42).
Как показал Ферми, можно ввести координатные системы, которые
будут локально-геодезическими не только в одной точке, но и вдоль
временной мировой линии (см. [14]).
Таким образом, принцип эквивалентности связан с законом
равенства инертной и тяжелой массы, но с ним не тождественен. Закон
302
основы теории Тяготения
(гл. ν
равенства инертной и весомой массы имеет общий, а не
локальный характер, тогда как эквивалентность между полем
ускорения и полем тяготения имеет место только локально, т. е.
относится только к одной точке пространства (точнее, к
пространственной окрестности точек на мировой линии, имеющей характер
времени).
Принцип эквивалентности сыграл большую роль в период,
предшествовавший созданию Эйнштейном его теории тяготения. Приведем
одно из относящихся к тому времени рассуждений Эйнштейна и
проанализируем его.
Эйнштейн иллюстрирует свою „гипотезу эквивалентности" на
примере лаборатории внутри падающего лифта. Все предметы внутри
такого лифта как бы лишены тяжести: все они падают, вместе
с лифтом, с одинаковым ускорением, так что их относительные
ускорения равны нулю, даже когда они не закреплены относительно дна
и стенок лифта. Мы имеем, говорит Эйнштейн, две системы отсчета:
одну инерциальную (или почти инерциальную), связанную с землей,
и другую, ускоренную, связанную с лифтом. В первой, инерциаль-
ной, системе существует поле тяготения, во второй, ускоренной,
оно отсутствует. Таким образом, по Эйнштейну, ускорение может
эаменить собой тяготение, или, по крайней мере, однородное поле
тяготения. Эту мысль Эйнштейн развивает и дальше. Он предлагает
считать, что обе системы отсчета (ускоренная и неускоренная)
физически вполне равноправны, и указывает, что с этой точки зрения
понятия инерциальной системы отсчета и абсолютного ускорения
теряют смысл.
Разберем изложенную точку зрения Эйнштейна подробнее. Прежде
всего возникает вопрос: что такое ускоренно движущаяся система
отсчета и как она может быть физически реализована? В примере
с лифтом „система отсчета" как бы отождествляется с некоторым
ящиком (с клеткой лифта). Но мы знаем (см. конец § 32), что даже
без учета тяготения абстракция абсолютно твердого тела не
допустима; всякое тело будет при ускорении испытывать деформации,
которые будут различны для различных тел. Поэтому для
ускоренной системы отсчета непригодна также модель ящика или твердого
каркаса, которую мы рассматривали в § 11 для инерциальной системы.
Таким образом, в рассуждениях Эйнштейна- остается без определения
исходное понятие ускоренно движущейся системы отсчета. Это
затруднение можно было бы обойти только наложив ограничения на
величину ускорений и на размеры рассматриваемой области. Можно,
например, потребовать следующее: допускаемые ускорения должны
быть настолько малы, чтобы в рассматриваемой области можно было
пренебречь вызываемыми ими деформациями и пользоваться понятием
твердого тела. Но тогда станет ясным приближенный характер всего
рассуждения Эйнштейна.
§ 61] О ЛОКАЛЬНОЙ ЭКВИВАЛЕНТЫ. ПОЛЕЙ УСКОРЕНИЯ И ТЯГОТЕНИЯ 303
Далее, уже сам Эйнштейн подчеркивает, что не всякое поле
тяготения может быть заменено ускорением: для возможности такой
замены поле тяготения должно быть однородным. Это также налагает
ограничения на пространственные размеры рассматриваемой области,
в которой поля тяготения и ускорения приближенно эквивалентны.
Нельзя, например, „уничтожить" поле тяготения вокруг земного шара:
для этого пришлось бы ввести какую-то „ускоренно сжимающуюся"
систему отсчета, что нелепо.
Эйнштейн применял также свой принцип эквивалентности не
локальным образом. Однако сделанная им в его работе 1911 г. [6]
попытка исследовать таким путем распространение света вблизи
тяжелой массы привела его к вдвое меньшему значению отклонения
светового луча, чем то, какое получается по его теории тяготения
(см. § 59). Это связано с тем, что принцип эквивалентности никак
не может дать для ds2 правильного выражения (51.11), а может
дать, самое большее, выражение (51.10), пригодное для медленных
движений. Таким образом, и при не локальном толковании
приближенная эквивалентность полей тяготения и ускорения ограничена:
эта эквивалентность имеет место лишь для слабых и однородных
полей и для медленных движений.
Эйнштейн дал своему принципу эквивалентности расширенное
толкование, понимая его в смысле неразличимости полей ускорения
и тяготения и утверждая, что с точки зрения этого принципа
говорить об абсолютном ускорении так же невозможно, как и об
абсолютной скорости. С этим принципом Эйнштейн связывал и свой
„общий принцип относительности", о котором мы говорили в § 49*;
последний использовался Эйнштейном для обоснования требования
общей ковариантности уравнений. Это расширенное толкование
является, по нашему мнению, несостоятельным. Сущность принципа
эквивалентности можно видеть в том, что он позволяет, путем
введения надлежащей локально-геодезической („свободно падающей") си*
стемы отсчета, восстановить в бесконечно малом однородное гали<
леево пространство. Однако это никоим образом не позволяет делать
заключение об эквивалентности или неразличимости полей ускорения
и тяготения в конечных областях пространства. Чтобы
проиллюстрировать характер делаемой при таком заключении ошибки, рассмотрим
один математический пример, который, впрочем, имеет прямое
отношение к данному вопросу и по существу. Все функции с
ограниченными вторыми производными ведут себя в бесконечно малом как
линейные функции. Однако отсюда никак нельзя заключать о
неразличимости всех таких функций в конечной области. Между тем
аналогичное заключение о полной неразличимости полей ускорения и
тяготения на основании одной только локальной их эквивалентности
как раз и делалось Эйнштейном.
Такое заключение противоречит и самой теории тяготения Эйн·
304
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
\тп. ν
штейна. В самом деле, если бы между полями ускорения и тяготения
действительно существовала полная эквивалентность, то теория,
построенная на идее эквивалентности, была бы чисто кинематической,
каковой теория тяготения Эйнштейна отнюдь не является. Что касается
„общего принципа относительности", то, как мы указывали в § 49*,
такой физический принцип и невозможен, и ненужен для обоснования
требования общей ковариантности, которое является чисто логическим
требованием отсутствия противоречий в теории, где координатная
система не фиксирована.
Таким образом, хотя принцип эквивалентности имеет место в узком
смысле (приближенно и локально), он не имеет места в
расширенном смысле. Хотя действия ускорения и тяготения неразличимы
„в малом", но они безусловно различимы „в большом" (т. е. с
учетом предельных условий, налагаемых на поле тяготения). Так,
потенциал тяготения, который получается при введении равноускоренной
системы отсчета, является линейной функцией от координат и,
следовательно, не удовлетворяет условиям на бесконечности (там он
должен был бы обращаться в нуль). Во вращающейся системе отсчета
потенциал центробежных сил возрастает пропорционально квадрату
расстояния от оси вращения; кроме того, там имеются силы Корио-
лиса. По этим признакам сразу можно обнаружить, что „поле
тяготения* в этих системах отсчета является фиктивным.
Рассмотрим пример равноускоренной системы отсчета несколько
подробнее, с учетом теории относительности. При этом мы оставим
в стороне вопрос о реализации ускоренно движущейся системы
отсчета и будем толковать термин „система отсчета" более формально,
в смысле „координатная система". Сообразно этому, под переходом
к ускоренно движущейся системе отсчета мы будем разуметь
некоторое преобразование координат, содержащее нелинейным образом время.
Предположим, что истинное поле тяготения отсутствует и
квадрат бесконечно малого интервала имеет вид
ds2 = с2 dt'2 — (dx'2 + d/ + dz'2), (61.01)
где (x'y'z'f) — декартовы координаты и время в некоторой инерциаль-
ной системе отсчета. Произведем преобразование 1) координат:
с ' g \ с /'
у' = у, z' = zt \ (61.02)
,' = JLshJi+*shJE.,
g С ' С С f J
где g— постоянная, имеющая размерность ускорения. При условии
f-<Cl (61.03)
1) Это преобразование указано Меллером [20].
§ 61] О ЛОКАЛЬНОЙ ЭКВИВАЛЕНТЫ. ПОЛЕЙ УСКОРЕНИЯ И ТЯГОТЕНИЯ 305
предыдущие формулы могут быть написаны в виде
x' = x+^gt\ y' = y, *'=*, f=t. (61.04)
Подстановка (61.02) в (61.01) дает
ds2 = (c-\-^Jdt2 — (dx2 + dy2-\-dz2). (61.05)
Спрашивается: можно ли толковать это выражение как квадрат
интервала в некоторой инерциальной системе отсчета, в которой
существует поле тяготения? Ответ на этот вопрос есть в то же время
ответ на вопрос о справедливости принципа эквивалентности.
Чтобы получить этот ответ, произведем сравнение выражения
(61.05) с вытекающим из теории тяготения приближенным выражением
ds2 = (c2 — 2U)dt2 — U -\-^-\(dx2 + dy2+dz2)t (61.06)
где U есть ньютонов потенциал истинного поля тяготения.
При условии
|g*|<02 (61.07)
коэффициенты при dt2 приближенно совпадут, если мы возьмем
потенциал тяготения равным
U = — gx. (61.08)
Что касается коэффициента в пространственной части ds2, то
отличие его от единицы будет несущественным для таких интервалов,
для которых величина
•М#)'+(!)'+Ш <61°9>
удовлетворяет неравенству
ν2<Λ (61.10)
Значение (61.08) потенциала тяготения действительно дает, по
ньютоновой механике, равноускоренное движение. В случае нулевой
начальной скорости мы будем иметь постоянные значения x't y't zr
и приближенно
*+γ g'2==const. (61.11)
что соответствует равноускоренному движению в координатах (лг, t).
Произведенное нами сравнение двух выражений для квадрата
интервала показывает, что ускоренно движущаяся система отсчета при
отсутствии тяготения действительно представляет известную аналогию
20 За*. 2649. 3. А. Фдк
306
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
с инерциальной системой отсчета при наличии поля тяготения. Однако,
это же сравнение указывает, что данная аналогия далеко не полна,
так что не может быть и речи о полной эквивалентности или
неразличимости полей ускорения и тяготения. Это становится особенно ясным,
если рассматривать выражение (61.05) „в большом", т. е. во всем
пространстве. Во-первых, коэффициент при dt2 в этом выражении не
удовлетворяет предельным условиям, так как обращается в
бесконечность вместе с координатой х\ во-вторых, этот коэффициент (а с ним
и „скорость светаа) обращается в нуль на некоторой плоскости
(х = 1, что недопустимо.
Еще более явное нарушение предельных условий для
фундаментального тензора получается в результате преобразования (35.47),
которое в ньютоновой механике означает введение вращающейся
координатной системы. Это преобразование приводит к выражению (35.48)
для ds2. Здесь фундаментальный тензор не только не удовлетворяет
предельным условиям, но даже нарушает, на достаточно большом
расстоянии от оси вращения, неравенства, установленные в § 35.
Невозможность толкования фундаментального тензора в (35.48) в
смысле некоторого гравитационного поля (т. е. в духе „гипотезы
эквивалентности") явствует даже при локальном рассмотрении из наличия
сил Кориолиса.
Рассмотренный пример вполне подтверждает формулированное
выше заключение о том, что „эквивалентность" между ускорением
и тяготением имеет место только в ограниченной области
пространства и только для слабых и однородных полей и медленных
движений (равенство (61.08) в соединении с неравенствами (61.07) и (61.10)).
Если же рассматривать все пространство, то истинные поля
тяготения можно отделить от фиктивных, вызванных ускорением. В
ньютоновой теории это можно сделать, используя предельные условия
для ньютонова потенциала. В эйнштейновской теории вопрос об
отделении истинных полей тяготения от фиктивных проще всего
решается в гармонических координатах. Компоненты фундаментального
тензора должны при этом удовлетворять, помимо условий
гармоничности (53.13), также предельным условиям, рассмотренным в § 54.
Как будет показано в § 93, гармонические координаты определяются
единственным образом, с точностью до преобразования Лоренца.
Произвольные преобразования координат, посредством которых
вводятся фиктивные поля тяготения, нарушают условия гармоничности
и предельные условия. Поэтому можно считать, что введение
гармонических координат исключает все фиктивные поля тяготения. Так,
если считать заданной квадратичную форму (61.05), то переход
к гармоническим координатам будет состоять в преобразовании (61.02),
сопровождаемом, быть может, преобразованием Лоренца, и в
результате такого перехода мы вернемся к квадратичной форме
§61] О ЛОКАЛЬНОМ ЭКВИВАЛЕНТЫ. ПОЛЕЙ УСКОРЕНИЯ И ТЯГОТЕНИЯ 307
(61.01), вид которой указывает на отсутствие истинных полей
тяготения.
В рассуждениях этого параграфа мы не пользовались общим
тензорным анализом. Применение его к формуле (61.05) сразу показало
бы равенство нулю тензора кривизны четвертого ранга, а тем самым
и отсутствие истинных полей тяготения.
Вернемся к вопросу об использовании принципа эквивалентности
для вывода уравнений тяготения. Мы выяснили, что толкование
этого принципа в расширенном смысле, как „общего принципа
относительности", несостоятельно. Это не исключает, однако,
возможность использовать принцип эквивалентности в более ограниченном
смысле, в тех пределах, в которых он приближенно верен. В
частности, рассмотренная нами аналогия между ускоренно двужущейся
системой отсчета при отсутствии поля тяготения и инерциаль-
ной системой отсчета при наличии поля тяготения может оказаться
полезной, так как возможность преобразовать выражение (61.01)
к виду (61.05) дает указание на то, что ньютонов потенциал должен
входить именно в коэффициент при dt2. Основанный на этом подход
к построению теории тяготения представляется нам, однако,
неудовлетворительным вследствие присущих ему ограничений (локальность
принципа эквивалентности и предположение об однородности поля).
Недостатком такого подхода является также необходимость
пользоваться плохо определенным понятием ускоренно движущейся системы
отсчета. От этих недостатков свободен принятый нами подход,
основанный на непосредственном применении закона равенства инертной
и весомой массы. Напомним, что при выводе уравнений тяготения
Эйнштейна мы ускоренно движущихся систем отсчета вообще не
рассматривали, а следовательно, и не пользовались принципом
эквивалентности. Что касается самого этого принципа, то, в той
мере в какой он справедлив, он получается уже как следствие из
других предположений. Так, он содержится в гипотезе о римановом
характере пространства-времени, причем математическим выражением
его является возможность введения локально-геодезической системы
координат вдоль временно-подобной мировой линии.
Мы подчеркивали приближенный характер принципа
эквивалентности. Но с точки зрения теории тяготения Эйнштейна закон
равенства инертной и весомой массы также имеет приближенный характер,
поскольку самые понятия инертной и весомой массы являются
приближенными. Эти понятия применимы в той мере, в какой
справедливы законы движения и закон тяготения Ньютона и в какой
возможно определение той и другой массы как величины свойственной
данному телу и не зависящей от положения и движения других тел.
В теории тяготения Эйнштейна это возможно лишь приближенно,
так как там законы движения тел имеют более сложный характер.
Тем не менее можно утверждать, что закон равенства инертной и
20*
308
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
весомой массы полностью согласуется с теорией тяготения Эйнштейна,
поскольку этот закон вытекает из теории со всей той точностью,
с какой он вообще может быть формулирован.
С другой стороны, теория тяготения Эйнштейна не сводится
к формулировке закона равенства масс, а содержит в себе
существенно новые физические принципы. Таких принципов два. Первый
из них содержится уже в обычной теории относительности: это есть
объединение пространства и времени в единое четырехмерное
многообразие с индефинитной метрикой. Этот принцип связан с
предельным характером скорости света и с основанным на нем уточнением
понятия временной последовательности событий, а также понятий
причины и следствия (§ 12). Второй принцип состоит в установлении
единства между метрикой и тяготением; он и составляет сущность
теории тяготения Эйнштейна.
Именно эти два принципа, а отнюдь не расширение понятия
относительности, будто бы возможное на основе локальной
эквивалентности между ускорением и тяготением, лежат в основе теории
тяготения Эйнштейна.
§ 62. О парадоксе часов
В заключение этой главы мы рассмотрим так называемый
парадокс часов. Мы остановимся на нем не потому, что здесь заключен
какой-либо особо важный или трудно разрешимый вопрос, а потому,
что этот парадокс широко обсуждался в литературе, причем
предлагались не вполне удовлетворительные его разъяснения.
Парадокс основан на неправильном применении понятия
относительного движения и на игнорировании различия между инерциаль-
ньют системами отсчета и неинерциальными. Состоит он в следующем.
Представим себе часы Л, неподвижные в некоторой инерциаль-
ной системе отсчета. Пусть мимо нях проходят с постоянной
скоростью ν часы В, которые, пройдя известный путь, испытывают
отрицательное ускорение, меняют знак скорости и вновь проходят
со скоростью (—ν) мимо часов В. В моменты прохождения часов Л
мимо часов В (туда и обратно) возможно непосредственное сравнение
их показаний (без посредства световых сигналов). Такое сравнение
должно обнаружить, что отстали часы В; по крайней мере, к такому
выводу приводит применение формул для собственного времени,
выведенных в § 14.
Но ведь движение относительно. Значит, можно считать
неподвижными часы В. Другие же часы (А) будут, при таком
рассмотрении, сперва равномерно удаляться, потом равномерно приближаться
к часам В, и по тем же формулам § 14, как будто, должно
оказаться, что теперь отстали часы Л, в противоречии с полученным
ранее результатом.
§ 62]
О ПАРАДОКСЕ ЧАСОВ
309
Разность показаний часов, находящихся в одной точке
пространства, есть факт абсолютный и объективный (т. е. ни от системы
отсчета, ни от способа рассмотрения не зависящий). Поэтому любой
способ рассмотрения, если только он верен, должен приводить к
одному и тому же результату. Противоречие в результате показывает,
что где-то в рассуждениях допущена ошибка.
Нетрудно видеть, что ошибка заключена в неучете того, что
часы А и часы В находились в этом воображаемом опыте в
неодинаковых физических условиях: часы А никакому ускорению не
подвергались и никаких толчков не испытывали, тогда как часы В
подвергались ускорению и испытали толчок, изменивший знак их скорости.
Другими словами, ошибка произошла из-за того, что обе системы
отсчета (связанная с часами А и связанная с часами В) в
приведенных рассуждениях предполагались равноправными, чего на самом
деле нет: инерциальной является только система отсчета, связанная
с часами А.
Таково качественное разъяснение парадокса. Оно означает, что
приведенная в § 14 формула для собственного времени
t
* = /ΐΛ-£<« (62.01)
о
годится только в инерциальной, но не в ускоренной системе отсчета.
Чем же следует заменить эту формулу в случае произвольной
системы отсчета? Возможность возникновения такого рода
парадоксов будет во всяком случае исключена, если мы примем в качестве
формулы для собственного времени инвариантное выражение
t
τ = | fV'gw + 2g0lxl + glkxlxkdt. (62.02)
о
В самом деле, показания часов А получатся тогда путем вычисления
интеграла (62.02) вдоль траектории часов А\ так же точно
показания часов В получатся путем вычисления интеграла вдоль траектории
часов В. Оба вычисляемые интеграла инвариантны по отношению
к любой замене переменных (любому преобразованию координат и
времени); пользование же разными системами отсчета (инерциальной
и неинерциальной) равносильно вычислению одного и того же
интеграла в разных переменных. Ясно, что несовпадение результатов при
этом полностью исключается.
Остается, однако, вопрос, будет ли выражение (62.01) или его
общековариантное обобщение (62.02) справедливо и для
произвольного ускоренного движения часов. Мы уже отмечали в § 14, что
физическое толкование выражения (62.01) как собственного времени
вытекает из общих принципов теории относительности лишь в случае
310
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[ГЛ. V
постоянной скорости v. Тогда это есть измеренная в „своей" системе
отсчета длительность локализованного процесса, связанного с
движущейся точкой (показания движущихся часов). Если же скорость ν
переменна, то такое толкование величины τ представляет особую
гипотезу, которая хотя и не противоречит теории относительности,
но отнюдь из нее не вытекает. В самом деле, мы уже указывали
в конце § 14, что никакая теория не может, не входя в детали
устройства часов, предсказать, как будут себя вести эти часы в
условиях, когда они подвергаются толчкам или ускорению. Поэтому
нельзя ожидать, что существует формула, которая давала бы
показания любых часов при произвольном их движении подобно тому,
как формула (62.01) дает эти показания при прямолинейном и
равномерном движении.
При таком положении вещей можно принять одну из следующих
двух гипотез. Можно ввести понятие об идеально прочных и нечув*
ствительных к толчкам часах (§ 14) и предположить, что
физический смысл определяемого формулой (62.01) или (62.02)
собственного времени τ как раз и состоит в том, что величина τ дает
показания таких идеальных часов. Или же можно отказаться от универсальной
формулы для показаний часов, движущихся с произвольным
ускорением и ввести менее сильную гипотезу, а именно, предположить, что
в тех случаях, когда ускорение вызвано полем тяготения,
показания часов при их свободном движении в поле тяготения выражаются
формулой (62.02), т. е. интегралом, условие максимума которого и
дает уравнения свободного движения. В пользу этой гипотезы
говорит то соображение, что поле тяготения, и только оно одно,
обладает способностью проникать внутрь любого тела и действовать на
все его части пропорционально их массе. Следует также иметь
в виду то обстоятельство, что при свободном движении тела в поле
тяготения его четырехмерное ускорение равно нулю (эта величина
будет точнее определена в § 63). В силу этого обстоятельства
соответствующее данной гипотезе условие применимости выражения (62.02) для
собственного времени (а именно, равенство нулю четырехмерного
ускорения) будет формально то же как и при отсутствии поля тяготения.
Произведем теперь, на основе сделанной гипотезы, приближенное
вычисление показаний часов, претерпевших ускорение. Мы будем
пользоваться выражением для ds2 в ньютоновом приближении, причем
будем вести вычисления в инерциальной системе отсчета, в которой
часы А неподвижны. Согласно формуле (51.07), мы имеем
t
τ = /{l -i(γν2 + U)}dt. (62.03)
О
Пусть U0 есть постоянное значение U в той точке, где находятся
часы А Если часы В в первый раз проходят мимо А в момент t = 0,
§ 62] О ПАРАДОКСЕ ЧАСОВ 311
а второй раз (в обратном направлении) — в момент t=T, то разность
показаний часов А за этот промежуток времени равна
τ
τΑ=Ι{1-ψ-)ά< = {1-!τ)Τ· (62·04)
О
Здесь учтено влияние потенциала тяготения на ход часов (см.
формулу (51.14)). Для разности показаний часов В за тот же
промежуток времени получим выражение
τ
τ*=Л1 - T-d^H-^)}dt- (62·05)
о
Следовательно, часы В отстанут от часов А на величину
τ
*A-*B = ^f(iv* + U-uo)<lt. (62.06)
о
где интеграл взят вдоль траектории часов В. Заметим, что по закону
сохранения энергии
jv*-U = ±v*-U0, (62.07)
где v0 есть значение скорости часов В в той точке, где U = ί/0.
Соотношение (62.07) позволяет писать формулу (62.06) в различных
других видах, например, в виде
τ
*A-*B = wf(T< + 2U-2Uo)dt. (62.08)
о
Относительно потенциала U мы предположим, что в
рассматриваемой области он имеет вид
U=U0 (при х<хх)\
U=UQ-\-g(xx — x) (при х>хх).
Пусть часы А все время находятся в начале координат, а движение
часов В происходит по оси х. Координаты часов В будут
χ = v0t (при t < tx)\ (62.10)
* = *i+*o('-'i)-y£('-'i)2 (при tx < t < t2); (62.11)
χ = χχ — v0(t — *,) (при {t>ty. (62.12)
(62.09)
312
ОСНОВЫ ТЕОРИИ ТЯГОТЕНИЯ
[гл. ν
Здесь tx и t2 — значения времени прямого и обратного прохождения
часов В через точку х = хх, равные
Ί = -*-. <2 = Ί+·^· = ί,+'·. (62.13)
где
**=-^ (62.14)
продолжительность равноускоренного движения. Время возвращения
часов В в точку * = 0 равно, согласно (62.12),
Τ=*2 + ^ = 4 + *ν (62.15)
При вычислении интеграла удобнее пользоваться формулой (62.08),
так как величина -д- ν% в нем постоянна, а разность 2ί/ — 2ί/0
отлична от нуля только в области (tx < t < t2)t где справедлива
формула (62.11). Элементарные выкладки дают, при помощи (62.14):
2
ъ-ъ=-!у(т7'-!'*)· (62Л6)
Если бы мы применяли (незаконным образом) формулу (62.01), мы
получили бы выражение (62.16) без члена с t*. Этот член дает
поправку на ускоренное движение. Из формулы (62.16) следует, что
если продолжительность ускоренного движения равна 3/4 Г, то
никакого отставания часов В не получится, а при /* = Τ получается
даже опережение. Не следует, впрочем, забывать, что формула (62.16)
не является общей, а выведена в довольно частных предположениях
относительно характера движения.
Вычисления произведены нами в инерциальной системе отсчета,
связанной с часами А. Повторять их в координатной системе,
связанной с часами В, не имеет смысла, поскольку тогда пришлось
бы вычислять те же самые интегралы, только выраженные через
другие переменные.
В заключение заметим, что при разъяснении парадокса часов мы
намеренно не пользовались принципом эквивалентности. Дело в том,
что ввиду приближенного характера этого принципа могло бы
возникнуть сомнение, является ли основанное на нем разъяснение
парадокса часов действительно исчерпывающим, и этого сомнения мы
хотели избежать.
ГЛАВА VI
ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ
§ 63. Уравнения свободного движения материальной точки
и их связь с уравнениями тяготения
В предыдущей главе мы уже пользовались предположением, что
в заданном поле тяготения материальная точка движется по
геодезической линии. Это предположение не является, однако, независимой
гипотезой, но может рассматриваться как следствие из уравнений
тяготения, в соединении с предположением о виде тензора массы.
Уравнения тяготения используются при этом лишь постольку,
поскольку из них вытекают соотношения
νμΓμν = 0, (63.01)
выражающие равенство нулю расходимости тензора массы. Уравнения
движения материальной точки получаются, путем предельного перехода
к случаю сосредоточенной массы, из уравнений движения сплошной
среды. При этом тензор массы принимается равным
Γμν=^·~ р*я^\ (63.02)
где, как и в § 48, ρ* есть инвариантная плотность массы, а и* —
четырехмерная скорость. Эти величины связаны уравнением
неразрывности
Vv(p*av) = 0t (63.03)
Мы дадим здесь для уравнений движения материальной точки два
вывода: один из них основан на вариационном начале, а другой —
на непосредственном использовании уравнений (63.01)·
В § 47 мы установили формулу, согласно которой вариация
интеграла действия
5 === f cY Y^J(dx) (63.04)
равна
δ f cY V^g (dx) = — / p* (wvVv*0 ξ' V^g (dx\ (63,05)
314 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
где ξσ — вектор бесконечно малого смещения. (Формула (63.05)
отличается от (47.46) только обозначением р* для инвариантной
плотности.) С другой стороны, если тот же интеграл действия варьировать
по величинам #μν, то получится, согласно (48.03),
*gfcyV=^(dx) = ±fp*uWbg^ V=J(dx). (63.06)
Согласно общей формуле (48.22), это соотношение показывает, что
интеграл действия (63.04) действительно соответствует тензору
массы (63.02).
В интеграле действия (63.04) мы можем произвести предельный
переход, предположив, что инвариантная плотность р* отлична от
нуля только в окрестностях одной пространственной точки, причем
интеграл от плотности, взятый по объему, окружающему эту точку,
имеет конечное значение.
Уравнение неразрывности (63.03) может быть написано в виде
^(/=7рМ = 0. (63.07)
Умножая на dxx dx2 dx3t интегрируя по указанному объему и
пользуясь тем, что на его границах величина р* равна нулю, получим
отсюда
d_
dt
(для наглядности мы пишем t вместо х0). Следовательно, значение
интеграла
" Р*я° V:=rgdxx dx2 dxz — тс (63.09)
j ρ*#ο ]/*_ g dXi dx<i dx^ _ о (63.08)
/-
есть постоянная, от времени не зависящая. Но величина р* отлична
от нуля только в окрестностях одной точки. Поэтому множитель и0
при ней мы можем вынести за знак интеграла с его значением
в этой точке. Это значение равно
дО^М^ С __^ (63Л())
V goo + 2goiXi + gik*iXk
где xt есть координата материальной точки и х1 — производная от
нее по времени. Пользуясь этим значением и0, получаем
/
Р* V— gdxx dx2 dx3a.mVgw-j-2g0lx{ + glbXi'xk· (63.11)
Интеграл действия 5 получается отсюда умножением на с2 dt и
интегрированием по времени. Таким образом,
t
5 = mc2 $Vgn + leoiXi + gikXi'xkM^™* jd*- (63·12)
№
§ 63] УРАВНЕНИЯ СВОБОДНОГО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ 315
Но это выражение только множителем отличается от рассмотренного
в § 38 интеграла, вариация которого дает уравнения геодезической
линии. Таким образом, вариационное начало
85 = 0 (63.13)
приводит к уравнениям движения свободной материальной точки,
совпадающим с уравнениями геодезической линии.
Выведем эти уравнения другим путем, исходя из равенства нулю
расходимости тензора массы.
Формула (63.01) может быть подробнее написана в виде
^(V^l^)+^(V~gTh)+V^lK,r^ о. (63.14)
Умножая ее на dxxdx2dxz и интегрируя по объему, на границах
которого тензор Γμν исчезает, будем иметь
■2Г / V~8T* dxi dx2 dH + / ν=^ΓναβΓαβ dxx dx2 dxz = 0.
(63.15)
Сюда мы можем подставить выражения (63.02) для составляющих
тензора массы. Предыдущая формула по умножении на с2 примет
вид
-^ f р*я V V^~g dxx dx2 dx3 +
+- f Πβρ*«·αρ V^^g dxx dx2 dxz = 0. (63.16)
Интегралы здесь могут быть вычислены при помощи того же
приема, как и интеграл (63.11). Мы имеем, вследствие (63.09),
f pVuv V:=rg dxx dx2 dxz = mcu\ (63.17)
f iVaV V~g dxx dx2 dxz = 5 I>V, (63.18)
где все величины взяты в точке, в которой находится частица. За-
пгс
тле
меняя dt на u°dx и сокращая на общий множитель -^, получим
из (63.16)
^ + I>V = 0 (63.19)
или
316 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Это — явная форма уравнений геодезической линии. Мы еще раз
убедились, что уравнения свободного движения материальной точки
совпадают с уравнениями геодезической линии. Наш вывод
показывает, что эти уравнения могут быть получены непосредственно из
равенства V Т** = 0 путем интегрирования по объему и
последующего перехода к случаю сосредоточенной массы.
Здесь необходимо отметить следующее. Операция усреднения по
объему не является, вообще говоря, однозначной: она зависит от
весовой функции. Если бы мы перед интегрированием по объему
ввели весовой множитель λ, мы могли бы получить результат,
зависящий от λ. Однако, оказывается, что в рассматриваемом случае,
когда тензор массы имеет вид (63.02), множитель λ после перехода
к пределу сосредоточенной массы выпадает, так что получаемые
уравнения движения единственны.
Заметим, что если взять за независимую переменную не
собственное время τ, а просто время * = #0, и если умножить предыдущие
уравнения на [-тт) » то они напишутся:
d2x
dt2 dt
„о dx dxa ., dx dxo
Уравнение, соответствующее значению ν = 0, приводится к тождеству.
Стоящая в левой части уравнений движения величина
^ = -^ + lVV (6322)
представляет, согласно (46.26), контравариантный вектор ускорения
частицы.
Выясним, о каком ускорении здесь идет речь. При отсутствии
поля тяготения величина w* представляла обычное ускорение: в гали-
леевых координатах пространственные компоненты этого вектора
переходили, в нерелятивистском приближении, во вторые
производные от декартовых координат частицы по времени. При наличии
поля тяготения это будет уже не так. Чтобы выяснить, во что
переходят в этом случае величины w* в нерелятивистском
приближении, можно вычислить приближенные значения скобок Кристоф-
феля Прэ вытекающие из найденных в § 55 значений
фундаментального тензора. Соответствующие вычисления удобнее отложить до § 65,
а здесь мы приведем готовые результаты. Для величин Ιζβ с
нулевым верхним значком получаются значения
** = -¥-£ · U—^. (63.23)
§ 64] ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ О ДВИЖЕНИИ СИСТЕМЫ МАСС 317
тогда как остальные будут малы. Из величин Г£р с пространственным
верхним значком наиболее важными будут
U—ЕГ (63·24>
Далее, нам нужно иметь приближенные выражения для
четырехмерной скорости. Обозначая через
«Ί = 4?· (63·25)
обыкновенную скорость, мы можем приближенно положить
«'«^S^ (63.26)
*=&&+±(т*+и)· <63'27>
Подстановка этих выражений в формулу (63.22) дает
(суммирование по k от 1 до 3 здесь подразумевается).
Из этих формул видно, что пространственные компоненты
вектора W представляют ускорение частицы за вычетом ускорения
силы тяжести, ъ. нулевая компонента пропорциональна
производимой в единицу времени над частицей работе всех сил за вычетом
силы тяжести.
Таким образом, при наличии поля тяготения четырехмерный
вектор ускорения W* соответствует ускорению за вычетом ускорения
силы тяжести. Понятно поэтому, что при свободном движении
частицы в поле силы тяжести этот вектор равен нулю.
§ 64. Общая постановка задачи о движении системы масс
Общая характеристика интересующей нас задачи была уже дана
в § 54. Мы рассматриваем здесь задачу астрономического типа,
т. е. задачу о движении небесных тел в свободном пространстве.
Как известно из астрономических наблюдений, в мировом пространстве
масса распределена далеко не равномерно: подавляющая ее часть
сконцентрирована в виде отдельных небесных тел, находящихся на
больших расстояниях друг от друга. Сообразно этому, мы будем
считать, что компоненты тензора массы равны нулю во всем
пространстве, кроме некоторых отдельных областей, размеры которых
318 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
малы по сравнению с их расстояниями; каждая такая область соот·
ветствует небесному телу.
Внутри каждого тела тензор массы должен, во-первых,
соответствовать принятой физической модели этого тела (газ, жидкость,
упругое тело, и т. п.) и, во-вторых, должен удовлетворять условию
Vvrv = 0, (64.01)
выражающему равенство нулю его расходимости. Соответствие
физической модели означает, что компоненты тензора массы
определенным образом выражаются через функции состояния физической
системы, образующей данное тело (плотность, скорость, давление
и другие величины, см., например, (55.02)).
Кроме физических свойств данного тела, вид тензора массы, как
и всякого тензора, будет зависеть также от метрики. Помимо
функций состояния в собственном смысле, компоненты тензора массы
будут поэтому содержать также фундаментальный тензор.
Фундаментальный тензор и его производные входят также в
выражение (64.01) для расходимости.
Таким образом, для того чтобы написать тензор массы, уже нужно
знать метрику. Но метрика определяется из уравнений Эйнштейна,
в правой части которых стоит тензор массы. Отсюда ясно, что
определение тензора массы и фундаментального тензора как функций
от координат может быть произведено только совместно.
Сравним рассматриваемую здесь задачу с теми, какие встречаются
в теории тяготения Ньютона. Там обычно задача ставится так, что
плотность масс предполагается известной, а по ней определяется
потенциал тяготения. Но в ньютоновой теории есть и другие, более
сложные задачи, в которых потенциал должен определяться
одновременно с плотностью. Такова, например, знаменитая задача о
фигурах равновесия вращающейся жидкости — задача, которой
занимались у нас Ляпунов, а за границей Джине и Пуанкаре, и строгое
решение которой было дано Ляпуновым в его посмертном мему-
аре Ι21»22]. Занимающая нас задача эйнштейновой теории напоминает
по своему характеру задачу Ляпунова, только вместо двух
скалярных величин (ньютонова потенциала и плотности) определению теперь
подлежат два тензора: фундаментальный тензор и тензор массы.
Кроме того, в нашем случае речь идет не о равновесии, а о
движении. Заметим, что основное уравнение задачи Ляпунова встретится
и у нас (§ 73).
Наша задача облегчается, прежде всего, тем, что метрика всюду
мало отличается от евклидовой; о малости отклонений дает
представление табличка, приведенная в § 58. Другим упрощающим
обстоятельством является то, что на сколько-нибудь значительном
расстоянии от каждого тела метрика зависит не от деталей его
внутренней структуры, a qt некоторых егр суммарных характеристик,
§ 64] ОБЩАЯ ПОСТАНОВКА ЗАДАЧИ О ДВИЖЕНИИ СИСТЕМЫ МАСС 319
Таковыми являются: полная масса данного тела, его моменты
инерции, положение и скорость его центра тяжести и другие. От этих
величин зависит и ньютонов потенциал тела.
Для решения уравнений Эйнштейна мы будем пользоваться
приближенным методом, который представляет развитие способа
вычислений, примененного в § 55. Этот способ основан на разложении
всех искомых функций по обратным степеням скорости света. Такому
формальному разложению соответствует фактически разложение по
степеням некоторых безразмерных величин. Таковыми являются
величины U/с2 и v2/c2t где U — ньютонов потенциал, a v2 — квадрат
некоторой скорости (скорости одного из тел). Для систем, к
которым применима теорема вириала, обе эти величины (£/ и ν2) будут
одного порядка, скажем, порядка q2, где q — некоторый параметр,
имеющий размерность скорости (этим параметром мы уже
пользовались в § 55 и 58). В качестве безразмерного параметра, по
которому ведется разложение, можно тогда взять величину q2jc2.
Решая волновое уравнение путем введения поправок на
запаздывание, мы тем самым предполагаем, что размеры системы малы по
сравнению с длиной излучаемых волн (в данном случае,
гравитационных). Это предположение не является независимым от
предыдущих. В самом деле, обозначив через ω угловую частоту
обращения планеты и через R радиус ее орбиты, мы можем написать условие
малости размеров системы в виде /?<ξ^/ω, так как £/ω есть
Деленная на 2π длина гравитационной волны. С другой стороны, условие
малости скорости планеты ν = /?ω по сравнению со скоростью света
напишется в виде Ru<^c, а это неравенство совпадает с предыдущим.
В астрономических задачах нас интересуют
„квазистационарные" состояния гравитационного поля, т. е. такие, которые
устанавливаются после многих обращений планет. Решения волнового
уравнения, получаемые путем введения поправок на запаздывание,
условию квазистационарности удовлетворяют.
Мы уже упоминали о том, что в большинстве астрономических
задач расстояния между небесными телами весьма велики по
сравнению с их линейными размерами. Если R есть длина,
характеризующая порядок величины расстояний, a L — длина, характеризующая
линейные размеры тел, то имеет место неравенство
/,<С#. (64.02)
Использование этого неравенства вносит значительные упрощения
в вычисление потенциала тяготения, а также фундаментального
тензора, вне масс: как мы уже говорили, эти величины не будут тогда
зависеть от деталей внутренней структуры тел. Поэтому мы будем
пользоваться также и неравенством (64.02), хотя оно является менее
существенным, чем неравенства v2<^c2 и U <^с2% на которых осно*
ван наш метод решения уравнений Эйнштейна.
320 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Заметим, что на поверхности и внутри тела, где потенциал
тяготения наибольший, будет, по порядку величины,
t//c2 = a/L, (64.03)
где a — гравитационный радиус тела (см. табличку в § 58). Поэтому
оба используемых неравенства можно записать в виде
a<;L<C#. (64.04)
Наша задача состоит в определении фундаментального тензора
и тензора массы. Зная компоненты тензора массы в функции
координат и времени, мы тем самым будем знать и движение массы,
так как массы занимают области, в которых тензор массы отличен
от нуля. Существенно отметить, что движение этих областей не может
быть предписано наперед; закон движения вытекает из самих
уравнений тяготения.
В результате решения нашей задачи мы, во-первых, получим
для тензора массы и для фундаментального тензора приближенные
выражения, которые будут содержать некоторые неизвестные
функции. Во-вторых, мы получим для этих неизвестных функций
уравнения, которые позволяют их определить из начальных условий
(уравнения движения).
Выбор упомянутых здесь неизвестных функций подсказывается
ходом решения задачи. Естественным образом входят в решение те
величины, которые применяются уже в ньютоновой механике. Таковы,
например, координаты центра тяжести каждого из тел, его полная
масса, момент количества движения, моменты инерции и другие
интегральные характеристики тела.
Для всех этих величин получаются уравнения движения, которые
в первом приближении совпадают с ньютоновыми, а в следующем
приближении отличаются от ньютоновых малыми поправками. Для
нас представляют интерес как эти поправки, так и выражения для
фундаментального тензора и для других величин эйнштейновской
теории через ньютоновы величины.
§ 65· Расходимость тензора массы во втором приближении
Задачу совместного определения тензора массы и
фундаментального тензора мы будем решать последовательными этапами, исходя
из рассуждений § 55. Напомним ход этих рассуждений. В исходном
приближении метрика принималась евклидовой, что соответствует
полному пренебрежению силами тяготения. В этом приближении
можно было наперед указать лишь компоненты Т00 и Т01 тензора
массы. Согласно формуле (55.03), в галилеевых координатах эти
§ 65] РАСХОДИМОСТЬ ТЕНЗОРА МАССЫ ВО ВТОРОМ ПРИБЛИЖЕНИИ 321
компоненты равны
7*°—З" Р. *** = ?-№. (65.01)
где ρ — плотность и vt — скорость вещества в данной точке, причем
ΐ + ί^-Ο. (65.02)
Пространственные компоненты {Tik) в этом приближении не
определялись; предполагалось только, что их порядок величины такой же,
как в отсутствии сил тяготения.
Этих предположений относительно тензора массы оказалось
достаточно, чтобы определить метрику в первом приближении. Согласно
формулам (55.31), мы имеем
fto«*a-2t/,
4 it
gu=^ul· } (65.03)
ft.—(1+2)·»
где U — ньютонов потенциал тяготения, удовлетворяющий уравнению
ΔΙ/*= — 4ιηρ, (65.04)
a Uι — вектор-потенциал тяготения, удовлетворяющий уравнению
Δί/, = — 4*γρ*,. (65.05)
Следует помнить, что потенциалы U и Ui связаны с плотностью
массы ρ и потока массы pvi нелокальным образом: значения
потенциалов внутри данного тела зависят от распределения плотности во
всем пространстве, а не только внутри того же тела.
В § 55 приведены также формулы для контравариантных
компонент фундаментального тензора, а именно:
«"-£(•+4?)·
£°* =ж — U,
(65.06)
При этом, согласно (55.37),
2/7
Y-g = c-\-^-. (65.07;
Знание метрики в том приближении, какое дается предыдущими
формулами, позволяет сделать следующий шаг в построении тензора
21 Зак, 2649. В. А. Фок
S22 £Акон тяготения й законь! движения 1гЛ. Vr
массы. Для этого мы должны прежде всего более точно написать
выражение для его расходимости, что и будет вадачей этого
параграфа.
Согласно формуле (41.24), общее выражение для расходимости
симметричного тензора имеет вид
Vvr* = д-^- + Γ£β 7αβ+у,7*\ (65.08)
где для краткости положено
У, = -^(кУ=1) = ^л. (65.09)
Порядок величины составляющих тензора массы, во всяком случае,
правильно дается формулами (55.02). Мы будем иметь
7"-0(£). Г°< = 0(-^), 7» = <>(£,»). (65.10)
где q есть уже применявшийся нами параметр, характеризующий
порядок величины скорости.
Рассмотрим нулевую компоненту расходимости тензора массы. Она
дается выражением (65.08) при |х = 0. В исходном приближении мы
пренебрегали здесь всеми членами, кроме производных. Чтобы
сделать следующий шаг, мы должны знать величины Γ«β и yvc
точностью до членов порядка 1/с2 включительно. Что касается
пространственных компонент расходимости, то в исходном приближении мы
ими пренебрегали вовсе. Чтобы учесть их хотя бы в первом
приближении, мы должны теперь найти в Γ«β главный член, не содержащий
множителя 1/с2. Для определения yv, Γ«β и Γίβ с указанной точностью
достаточно приближения, даваемого формулами (65.03) —(65.07).
Из формул (65.07) и (65.09) получаем без труда
2 dU 2 dU /с. 11ч
*ο = ?Ί5Γ' Λ—ya^. (65.11)
Вычисляя, далее, скобки Кристоффеля по известным формулам
Γ£β = /Τν,αβ, (65.12)
где
Г — 1 I ё™ ι g»P dga? \
(65.13)
легко убеждаемся, что в последней формуле, в данном приближении,
всеми членами, содержащими множитель 1/с2, можно пренебречь,
после чего останется
ρ dU ρ ____ dU /fir- 1 .ν
•'■ο,οο —^ §7"» хо,о/ щ> (00.14;
§ 65] РАСХОДИМОСТЬ ТЕНЗОРА МАССЫ ВО ВТОРОМ ПРИБЛИЖЕНИИ 323
а также
ΟΧι
Г,.оо = 1ё· (65-15)
Отсюда для Тф получаем:
ро 1 dU го 1 dU ,~к 1β4
ν<*>--ψ-5Γ> r°i = — ^Wr (65Л6)
тогда как величины Г^ будут более высокого порядка малости,
а именно
Г% = 0(±). (65.17)
Из скобок Кристоффеля с пространственным верхним значком
главными будут
й = -Щ. (65.18)
Что касается остальных, то они будут малыми величинами, а именно
Гоь = о(±). Γί, = θ(^-). (65.19)
Найденные значения скобок Кристоффеля позволяют нам написать
выражение для расходимости тензора массы.
Формулу (65.08) для |х = 0 можно написать подробнее в виде
+№& + ?ι)ΊΜ + ϊ>ι*ΤΜ. (65.20)
Здесь, согласно (65.11) и (65.16), коэффициент при Г00 равен
r§o-r-yo = ^. (65.21)
Что касается коэффициента при 70/, то он оказывается исчезающе
малым, а именно
2I& +у, = 0(1-). (65.22)
Согласно (65.17), того же порядка будет и коэффициент при Tik.
Таким образом, в нашем приближении формула (65.20)
принимает вид:
Для пространственных компонент расходимости мы получаем из (65.08)
при [х = /
+ 2Г^ Т°* + уо Τ0' + Γί, Г*' + у* Tik. (65.24)
21*
324 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Как видно из приведенных выше оценок, здесь все коэффициенты
во второй строке будут содержать множитель 1/с2, так что члены
во второй строке можно отбросить. Заменяя Год его выражением (65.18),
мы получим тогда
V*7 — dt +^Г dJFt { }
Таким образом, учитывая отклонения метрики от евклидовой, или,
что то же, учитывая силы тяготения (то и другое в первом
приближении), мы должны писать условие равенства нулю расходимости
тензора массы в виде уравнений:
дтю dTik ди
~дг+-щ;-щт =°· <66·27)
§ 66. Приближенный вид тензора массы для упругого тела
при учете поля тяготения
Приближенные выражения для тензора массы упругого тела, без
учета сил тяготения, были получены нами в § 32 из рассмотрения
скаляра и вектора Умова (плотности и потока энергии). В принятых
нами теперь обозначениях (в которых x0 = t) эти выражения были
затем выписаны в § 55. Согласно формуле (55.02), они имеют вид:
^=Р{и4(т*2+п)}·
с2тт= т{ ι +^(-^2 +п)}-^ лл.
(66.01)
с Τ =^vivk — plk.
Напомним, что здесь р1к есть трехмерный тензор упругих
напряжений, а П — упругая энергия единицы массы тела. Эти величины
удовлетворяют, согласно (30.08), соотношению
'§-U&+&)· <66·°2>
Нам надлежит теперь обобщить выражения для тензора массы,
приняв во внимание поле тяготения. По теории Ньютона, взятый с
обратным знаком ньютонов потенциал есть в то же время
потенциальная энергия частицы единичной массы, находящейся в данном поле
тяготения. Поэтому следует ожидать, что надлежащие выражения
для плотности и потока энергии получатся, если в формулах (30.17)
и (30.18) для скаляра и вектора Умова добавить члены (—p(J)
§ 66] ПРИБЛИЖЕННЫЙ ВИД ТЕНЗОРА МАССЫ
и (—pViU)- Это дает
5 = 1рг;2 + р(П-</),
St^v^j pv2 + р$1 — U)} — pikvk.
325
(66.03)
(66.04)
Компоненты Г00 и Т0' тензора массы получатся по формулам:
2Т00 л . 1 с
с Τ =pvi + -jiSi.
(66.05)
(66.06)
(66.07)
Окончательно мы будем иметь:
Если наши рассуждения верны, то эти выражения должны, в
требуемом приближении, удовлетворять выведенным в конце предыдущего
параграфа уравнениям, а именно:
дТ00 , dTok
dt
дТ
io
dxk
dTik
dt
дхъ
1 dU roo
с2 dt l ''
dU 7°° = 0.
= 0,
dxi
(66.08)
Эти уравнения должны удовлетворяться в силу уравнений движения
для величин, входящих в тензор массы. Мы имеем, во-первых,
уравнение неразрывности
| + ^ = 0 (66.09)
и, во-вторых, уравнения движения упругого тела в поле тяготения
с ускорением ^—:
dv
P-tff-P
dU _др^
дх,
6χ*
(66.10)
Кроме того, имеет место соотношение (66.02) между тензором
напряжений и упругой потенциальной энергией. Используя (66.09), (66.10)
и (66.02), получаем для скаляра и вектора Умова соотношение
dS , dSi_ vv_
dt ~T~dx~i~~p л ·
dt
(66.11)
826 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
откуда, после применения (66.09),
-π+-δΖϊ=—¥*-π· (66Л2)
Вследствие того, что приближенно р = с2Т00, уравнение (66.12)
в должном приближении совпадает с первым из уравнений (66.08).
Что касается остальных уравнений (66.08), то, по умножении на с2,
они приближенно совпадут с уравнениями движения (66.10),
написанными в форме
d(gv.) dfov.vA др)и dU
k ft I
(в выражениях Τ ° и Τ здесь достаточно взять главные члены).
Таким образом, уравнения (66.08), выражающие равенство нулю
расходимости тензора массы с учетом неевклидовости, действительно
будут приближенно выполнены, если взять в качестве тензора массы
величины (66.07).
В формулах (66.07) плотность ρ удовлетворяет уравнению
неразрывности (66.09). Соответствующее общековариантное уравнение
имеет вид
^(/=iPv)=o, (66.14)
где р* — инвариантная плотность и аа — четырехмерная скорость.
Чтобы оба выражения ((66.09) и (66.14)) совпадали, мы можем
положить
Ρνι = τΫ—£р*"'
(66.15)
(множитель — добавлен для того, чтобы р* приближенно равнялось р).
Имея в виду, что, согласно (65.07) и (63.27),
1у=7=1+^. «0=1+^.(^ + 1/). (66.16)
мы получим приближенно
P* = p{l--^-(-^2 + 3t/)}. (66.17)
Формулы (66.07) позволяют написать выражение для инварианта тен*
вора массы. Вводя давление ρ по формуле
P = — j(Pii + Pn + Pn)' (66Л8>
§ 67] ПРИБЛИЖЕННЫЕ ВЫРАЖЕНИЯ ДЛЯ СКОБОК КРИСТОФФЕЛЯ 327
мы будем иметь
T~p{l+±-(-±v2+n-3u)}—$гр (66.19)
и, используя формулу (66.17) для р*,
T=p*(l+-H)—Irp, (66.20)
Последнее выражение совпадает с (32*30)*
§ 67. Приближенные выражения для скобок Кристоффеля
и для некоторых других величин
Для того чтобы сделать следующий шаг в определении
фундаментального тензора, мы должны продолжить вычисления § 55. Так
как мы ведем все наши вычисления в гармонических координатах,
удобно рассматривать в качестве неизвестных функций умноженные
на У—g контравариантные компоненты фундаментального тензора,
т. е. величины
Г = УР=7^. (67.01)
Удобство применения этих величин состоит в том, что выраженное
через них условие гармоничности (55.39) принимает простой вид:
\ = 0, (67.02)
так что оно является линейным относительно неизвестных функций.
Дальнейшим преимуществом такого выбора неизвестных функций
Ik
является то, что пространственные компоненты g весьма мало
отличаются от постоянных. Наконец, весьма удобным является то
обстоятельство, что в левую часть каждого из уравнений тяготения входит
оператор Даламбера от соответственной компоненты д^; таким
образом, каждая компонента д^ в основном связана только с одной
(одноименной) компонентой тензора массы.
В § 55 мы нашли для величин J}**·* приближенные выражения
(формулы (55.38)):
аоо_± , W
С
л0/ _ _1_ //
(67.03)
где U—ньютонов потенциал, a Ut — вектор-потенциал тяготения.
Мы уточним теперь эти выражения, выписав дальнейшие члены
328 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
разложения по обратным степеням скорости света. Положим
(67.04)
αοο_Ι , «L + i£
rto/_i^L · «f
%l* = -cblk-
45tt
При помощи этих выражений мы можем вычислить скобки Кри-
стоффеля и другие величины, входящие в уравнения тяготения.
Начнем с вычисления определителя g. Как легко проверить
(см. формулу (Г.67)), этот определитель равен определителю из g^v.
Формулы (67.04) дают
*«—*»(!+-£ + ^Ц^*)· (67.05)
Здесь мы положили, в соответствии с принятым условием для
суммирования по пространственным значкам,
з
Skk = 2 Skk~ Sll + 522 + 533· (67.06)
Извлекая квадратный корень, получим также
V—g = c(l + ™-+2S-2%>-2U2). (67.07)
Введем особое обозначение для корня четвертой степени
Ϋ—f = /· (67.08)
Согласно (67.07), эта величина равна
/="l + # + -jr(s-S«—§■£/»). (67.09)
Величина / приближенно удовлетворяет линейному
дифференциальному уравнению, которое будет выведено в следующем параграфе.
Из (67.04) и (67.07) получаем для c2g°° выражение
суо« 1 + Щ-+ 2S + 2S„-2U> . (67.10)
С С
Если мы положим
t/*=i/ + l-(S+SA,-2£/2), (67.11)
мы будем иметь с той же точностью
^°° = Й^-. (67.12)
§ 67] ПРИБЛИЖЕННЫЕ ВЫРАЖЕНИЯ ДЛЯ СКОБОК КРИСТОФФЕЛЯ
а также
1
с2 —U*
329
(67.13)
Величина U* встретится нам в дальнейшем.
Переходим к вычислению введенных в Добавлении Г величин
№'aP=i(flaP
д$№
д$У-а
дха
дха
·"«·)·
(67.14)
связанных со скобками Кристоффеля. Используя выражения (67.04)
и (67.05), получаем следующую таблицу:
ттО, 00 _
2 дЦ
с« dt
ттО, ог 2 dU
11 — с* ΊΓι'
фы_ 2 (dUk _,dUt\ I
tt<,w_ 2 fdi/, dUk\
(67.15)
π'·»=ο(±).
(67.16)
Отсюда, спуская второй и третий верхние значки, получаем
величины Щр. Мы имеем:
с=-
_2_ όί/
са "Ж*
2 dt/
Пог=--?-з^·
(67.17)
dt;
d*i
+•2
(ft
>)}■
dUk\
с2 \ dxk dxt J'
(67.18)
При вычислении Под потребовалось значение £ω = ο2 — 2ί/; при
вычислении остальных величин достаточно было галилеевых значений
фундаментального тензора. В формулах для П£р мы ограничились
членами порядка 1/Λ
330
8AKOH ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ
[ГЛ. VI
Для вычисления скобок Кристоффеля необходимо знать, помимо
величин Щр, также величины Λ£β, определяемые согласно формуле
Jfy-vM + yfi-fg^.
где
У "=*"*?.
(67.19)
(67.20)
(см. Добавление Г). Выпишем приближенные значения величин уа.
Дифференцируя (67.05), получаем
„ _ 2 j ди jl. l (dS ±п ди dS*A\
У1 — -?\ΈΓι~τ~~*\Ί7ι~*υ ΊΓι IxTlS'
« _ 2 1ди+. 4dS-4U^L dS*A}
y° — -*ΓΰΓ~ι~~*\~5Γ *υ dt dt )]'
(67.21)
Для величин у1 с верхними значками получаем, ограничиваясь чле·
нами порядка не выше 1/с4, следующие значения:
,_ 2 I dU , 1 IdS ш dU dSkk\\
У>=4
2 dU
-дТ'
(67.22)
Скобки Кристоффеля выражаются через вычисленные величины
по формуле
Γ& = Π5+Δ$. (67.23)
Если ограничиться членами порядка не выше 1/с2, то при μ = 0 мы
будем иметь, как и в приближении (65.16),
Гоо;
1 dU
тогда как при |х = / мы получаем более точные (сравнительно с (65.18)
и (65.19)) выражения:
Гоо =
dU
όχι с
1 dU
1 / dS
2[<
$Xi
С2 dt ϋ'* с2 [ dxk
ΓθΛ = ~ -ίγγ 0,ь —
dxt dxi
dXi)·
8и^.+4Щ,
Г' * / dU ft _l_ dU Я dU ft \
(67.25)
В приближенных вычислениях удобно пользоваться формулами,
преобразованными к такому виду, чтобы в них входили величины ПЦр,
а не Ηβ. Преимущество первых величин перед последними видно
ИЗ сравнения формул (67.18) с формулами (67.25). Эти формулы
§ 67] ПРИБЛИЖЁННЫЕ ВЫРАЖЕНИЯ ДЛЯ СКОБОК КРИСТОФФЕЛЯ 331
показывают, что величинами Щ/ можно пренебрегать, тогда как
величины Yki приходится учитывать.
В Добавлении Г получена для тензора Эйнштейна формула,
преобразованная к указанному виду, а именно формула (Г.87). Эта
формула содержит функцию Лагранжа, которая, согласно (Г.95), равна
L = -YV=^^ + h-r- (".26)
Найдем приближенное значение этого выражения. Из формул (67.21)
и (67.22) получаем
V—p ν υ* - 4 (дЦУ 4 (1 SU\ (dU -4- l d<S-S**V (R7 2Л
С другой стороны, формулы (67.17) и (67.18) в соединении с
исходными выражениями (67.04) для <^ν дают:
1ПР dg'P _ 4 (dU\* . 16 dU dUj .
— 2 αβ А*р ~~ с5 \ <й / "+" с5 Α*, Λ "^
, 4 / SUUdU.l dS\> 4 tdUt dUkV ,β7 2R.
Складывая с этим равенством деленное на 2 предыдущее равенство,
получаем для умноженной на у— g функции Лагранжа выражение:
г ι/ 2 Λ SU\i/dU\2 . 2 dU/dS . dSkk\\ ,
"Τ" с6 \ <W/ "^c8 A*, ^ c5 [dXk — όχι) ' tD/-/y>>
Вводя по формуле (67.11) величину U*t можно предыдущее
выражение написать в виде
В поправочных членах мы заменили здесь U на U*. Последняя
формула замечательна тем, что правая часть ее представляет однородную
квадратичную функцию, с постоянными коэффициентами, от первых
производных четырех величин U* и U{.
Из сравнения формул (67.27) и (67.29) видно, что сумма
будет более высокого порядка малости, чем величины (67.27) и (67.29)
в отдельности. Это замечание позволяет найти весьма простое
выражение для инварианта кривизны /?. Согласно формуле (Г.49), мы
332 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
имеем в гармонических координатах
«-**%!&*■-L <67·32>
Пользуясь обозначением (67.08), можно написать
γΖΓ£=€.ρ9 (67.33)
после чего получится
Но мы имеем
Поэтому
*=&^τΆϊ-(τ>·τ+Ι)· (67·36)
Перейдем теперь к приближенным формулам. Согласно (67.31),
величина [-2yay*-\-L) будет шестого порядка относительно 1/с.
Отбрасывая величины шестого порядка, мы можем заменить величины βαΡ
их галилеевыми значениями. Это дает для инварианта кривизны R
весьма простое приближенное выражение
* = ψ{ΎΊ&-ν)' <67'37>
где Δ—оператор Лапласа с евклидовыми коэффициентами.
§ 68. Приближенная форма уравнений тяготения
Вычисления предыдущего параграфа позволяют нам написать
левую часть уравнений тяготения Эйнштейна
Rv» — γ g^R = -~L^ (68.01)
в том приближении, какое соответствует принятой точности.
Выпишем сперва значение левой части без пренебрежений. Согласно
формуле (Г.87), мы имеем
+ j g-'L + j g"B - B^. (68.02)
§ 68] Приближенная форма уравнений тяготений 333
Здесь L есть функция Лагранжа:
уже встречавшаяся в предыдущем параграфе. Величины В^, согласно
(Б.85), определены формулами
= у (νμ + Λ Γ +± (Vv + у) I*, (68.04)
где Γν—введенные в § 41 и 53 величины:
Γ = --μ=-|ρ. (68.05)
Величина В есть составленный из В^ „квазиинвариант*1
^ = ^v^ = (Vv + yv)r (68.06)
(это не есть настоящий инвариант, поскольку В^ не есть тензор).
В гармонической системе координат величины Γν, а следовательно,
и 1>ν, а также В^ и В, исчезают.
Заметим, что пока в левой части уравнений Эйнштейна (68.01)
стоит полное выражение (68.02) для консервативного тензора,
равенство
νμ7^ = 0 (68.07)
представляет следствие самих уравнений. Если же мы в
консервативном тензоре с самого начала не будем писать членов В^ и В, то
равенство (68.07) будет выполняться лишь поскольку выполняется
условие Γν = 0.
Переходя к приближенной форме уравнений Эйнштейна,
рассмотрим сперва члены с вторыми производными. Используя выражения
(67.04), мы будем иметь
(68.08)
Здесь главные члены дают умноженный на с евклидов оператор Да-
ламбера, тогда как члены с переменными коэффициентами
представляют поправки, которыми, в рассматриваемом приближении, можно
пренебречь. Рассмотрим подробнее порядок величины этих поправок.
В выражение (68.02) для тензора Эйнштейна входит величина (68.08),
деленная на 2g\ причем φ есть соответствующая компонента g^v.
Производные от φ будут третьего порядка, а так как приближенно
g = — с2, то деленные на 2g поправочные члены в (68.08) будут
334 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
восьмого порядка относительно 1/с. Пренебрегая величинами такого
порядка, мы должны вычислять и все другие входящие в (68.02)
величины с соответствующей точностью.
Чтобы освободиться от величины g в знаменателе, мы будем
вычислять не самый тензор Эйнштейна, а этот тензор, умноженный
на близкий к единице множитель (— g/c2). Члены со вторыми
производными будут тогда, с требуемой точностью,
2с2 9 дха дх? 2с а» 2с' dt* ' (oo.ua)
Чтобы получить члены с первыми производными, мы найдем сперва
при помощи формул (67.15) — (67.18) величины:
(-£Κ'Χ=-Ι(©'· <68·10>
(_£)π'·*π4_
— *(\ &U\(dU . I dS . 2 дЦЛ/дЦ 1 dS , 2 дЦк\
~ с* V с2 /\^"т" с2 дХ1~Г с2 dt )\dxk~T~ с2 dxk^~ с2 dt )~~
8 IdUi dUs\(dUk dUs\ fRR 19.
В формулах (68.10) и (68.11) можно было бы не писать множителей
(— g/c2), так как в данном приближении их можно заменить на
единицу.
Используя, далее, выражения (67.22) для уа и вводя обозначение
т»=(-■§){ п·1· арп;р —i-yy +\ s^}· (68ЛЗ)
мы получим
^=-1(^1' (68Л4)
ce <W a*j св \dxs dxi)dxs' ч '
Λ/'*—JU^α-±^Λ/'^'-l_±ίW*\_
'v ~ с* \dxt ~т~ с* dt )\dxk^~ с* dt J
__ 8 /dU, dU,\(dUk dUs\ I. Y=g . _ fi.
rje
όί/ dU,
dxs dt
1 !/· r/_Afί^Y_ι__!L/'^Y_[_l^.,
^■K £*- — C4 \dxJ -t-c»\dt) I" ce
§ 68] ПРИБЛИЖЕННАЯ ФОРМА УРАВНЕНИЙ ТЯГОТЕНИЯ 335
и U* имеет значение (67.11). Поскольку величина U входит здесь
в члены шестого порядка, мы можем заменить ее на £/*, как это
сделано в (67.30). Тогда все величины Λ/^ν будут содержать первые
производные только от четырех величин £/*, USf причем все Λ^ν будут
однородными квадратичными функциями от первых производных
с постоянными коэффициентами. Это представляет весьма большое
упрощение точных формул (68.13).
При помощи найденных выражений мы можем сразу написать
приближенные уравнения Эйнштейна. Мы будем иметь:
= ^Δ9^-^£^ + ΛΛ"==-^7>\ (68.18)
где величины Λ^ν имеют значения (68.14) — (68.16).
Чтобы применять формулу (68.18) к определению величин g^v,
нужно прежде всего иметь значения входящих в N^ величин U*f Ul
с требуемой точностью.
Что касается величин Uit то они входят в выражения (68.14)—
(68.16) только в члены шестого порядка; поэтому достаточно знать
их с той точностью, с какой они определены в § 55.
Соответствующие формулы приведены также в § 65. (Эти формулы получаются
и из уравнения (68.18), написанного для [χ = 0, ν = /, если
пренебречь там величиной Noi и второй производной по времени, заменить
g на — с2, взять в Toi главный член и выразить g0/ через Uif) Мы
имеем, согласно (65.05):
Шь = — 4πγρ^. (68.19)
Величина же U* входит в члены не шестого, а четвертого по·
рядка, и ее нужно знать с большей точностью. По определению
(67.11) мы имеем:
i/*=i/ + -i(S+Sft,-2t/2). (68.20)
Согласно (67.04), производные от ί/-|--τ 5 равны производным от
с3
-j-g00. Уравнение (68.18), написанное для μ, = ν = 0, дает поэтому
(Δ—?·&)("+? 5) = —jW» + 4*Tgroo. (68.21)
1 С fyh
Далее, производные от -pSkk — те же, как от -т-g . Полагая
в (68.18) |x = v = & и суммируя по &, получим
(δ —? ж) F 5** = —Т Nk" ~ Ή7** <68·22)
336 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
(во втором члене справа мы заменили множитель (— g/c2) единицей).
Наконец, мы можем написать:
(Δ —? ж)(^-) = —Ж&аа ^2+ ™πΊυΤ°°. (68.23)
Мы пренебрегли здесь в операторе Даламбера второй производной
по времени и воспользовались тождеством
Δ(t/2) = 2(grad ί/)2 + 2ί/Δί/, (68.24)
а также равенствами
Δι/ = — 4πγρ =■ — 4πγ£2Γ°°. (68.25)
Искомое уравнение для U* получается сложением трех уравнений
(68.21)—(68.23). Найдем его правую часть. Согласно (68.14), мы
имеем
~TNCK) = ^rferadi/>2· <68·26>
Вычисляя с той же точностью, получаем из (68.16) и (68.17)
-i^**=i-feradt/)2 <68·27)
и, следовательно,
~-iV00+|-iV^ + i-(grada)2 = 0. (68.28)
Используя это соотношение, а также формулу
4πγ#+ 16πγ£/ = — 4ir(c\ (68.29)
получаем для U* простое уравнение
Δί/*-FΊ5F-=-4π^(c27W+7,**)· (68·30>
Вне масс величина U* удовлетворяет уравнению Даламбера
с евклидовыми коэффициентами. Этого можно было ожидать на
основании вида формулы (68.17) для функции Лагранжа.
В конце § 67 мы вывели для инварианта кривизны R
приближенное выражение через функцию
/=lT=£. (68.31)
пропорциональную корню четвертой степени из абсолютного значения
определителя g. Мы имеем приближенно
b-MiS—v)· <68·32)
§ 68] ПРИБЛИЖЕННАЯ ФОРМА УРАВНЕНИЙ ТЯГОТЕНИЯ 337
В соединении с вытекающим из уравнений Эйнштейна соотношением
Я = -^1Г, (68.33)
где Τ—инвариант тензора масс, предыдущее уравнение дает
Сравним эту формулу с уравнением (68.30) для U*. Для этого
положим
/=1+ί£, (68.35)
где, как это следует из сравнения с (67.09),
U*»^U+^{S-Skk-^lP). (68.36)
Так же как и £/*, величина £/** в первом приближении равна
ньютонову потенциалу U. Уравнение (68.34) принимает вид:
С той же степенью точности можно написать
МП-^^ = -^№ + и)Т™-Ткк]. (68.38)
Последнее уравнение может быть также получено непосредственно
из формул (68.21) —(68.23) и из определения (68.36) величины ί/**.
Если инвариант Τ имеет вид (66.19), то будет
(l+^)r-p{l+F(-Wn)b£'· <68·39>
На основании этой формулы и уравнения (68.37) можно показать,
что в данном приближении величина IT* будет аддитивной функцией
от масс.
Полусумма
Z7=i(t/*+t/**) (68.40)
величин (68.20) и (68.36) удовлетворяет, как легко видеть,
уравнению
ш ~ ψ τ?=- ^ (с2+τ и)г00· (68·41)
содержащему справа только одну компоненту тензора массы. Это
уравнение связано с уравнением Эйнштейна, содержащим ту же
22 Зак. 2649. В. А Фок
338 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
компоненту, а сама величина U связана с величиной д00.
Действительно, перемножая выражения
и учитывая, что величины U* и U** отличаются друг от друга и
от U на члены порядка 1/с2, мы получим
l/=igOo = goo = l + ^V+lV, (68.43)
где U есть решение уравнения (68.41).
Формулу (68.43) для д00 нетрудно проверить. Действительно,
если д00 имеет это значение, то
+ ^((grad^-l(-f)J). (68.44)
Мы можем заменить здесь в поправочных членах U на U и отбро--
сить (-тг) · Пользуясь значением (68.14) величины №°, мы получим
Сравнивая это соотношение с уравнением Эйнштейна (68.18),
написанным для [χ = ν = 0, мы приходим к уравнению (68.41). Заметим,
что с той же степенью точности, с какой справедлива формула (68.43),
мы можем написать
4*> = ±\ Zl - (68.46)
(■-и
Для случая статического поля от сосредоточенной массы Μ мы
получили в § 57 строгое решение. Сравнение с этим строгим
решением показывает, что если, для этого случая, в формулах (68.41) и
(68.46) положить
U* = U** = ТТ= -ϊρί-, (68.47)
то они совпадут с точными (см. формулы (58.10) и (58.13)).
Значения (68.47) согласуются с уравнением Даламбера, которому эти
величины должны удовлетворять вне масс по рассмотренной в этом
параграфе приближенной теории,
§ 69] СВЯЗЬ МЕЖДУ ТЕНЗОРОМ МАССЫ И ВЕЛИЧИНАМИ Ρ 339
§ 69. Связь между расходимостью тензора массы
и величинами Ρ
В начале предыдущего параграфа мы уже упоминали, что если
в тензоре Эйнштейна опустить с самого начала члены,
содержащие Г\ то равенство нулю расходимости тензора массы
V^v=0 (69.01)
будет выполняться лишь поскольку выполняется условие
гармоничности
2^ = 0. (69.02)
Для исследования уравнений движения необходимо изучить связь
между условиями (69.01) и (69.02) или, точнее, между левыми
частями соответствующих равенств.
Если не делать никаких пренебрежений, то левая часть (69.01)
может быть представлена в виде некоторого довольно сложного
дифференциального оператора от левых частей (69.02). Нас интересуют,
однако, не эти точные формулы, а приближенные, соответствующие
той точности, с которой в предыдущем параграфе выписаны
уравнения Эйнштейна. К выводу этих приближенных формул мы и
переходим.
Выражение для расходимости симметричного тензора было
подробно выписано в § 65. Согласно формуле (65.24), пространственные
компоненты расходимости равны
^= Чг + ^+riooTm+WlkT«%yori+ritTkt+yllT,k. (69.03)
Входящие сюда скобки Кристоффеля и величины уа выписаны в § 67
(формулы (67.25) и (67.21)). Преобразуем несколько эти формулы.
Вводя, согласно (67.11), обозначение U*, мы можем вместо первой
формулы (67.25) написать
Остальные две формулы (67.25) могут быть написаны в виде
Г« = \ 0Λ* + Μι) —? Щ hi- (69.06)
22*
340 SAkoh тяготения й законы ДЬижёнйя [гл. VI
Вводя эти выражения в (69.03), получаем
^-т+т&+«*'"+«лг--(|-¥)(^+^г--
Умножим это выражение на определитель g, приближенно равный
g = -c*(\ + ™), (69.08)
и воспользуемся тем, что коэффициенты при Г00 и при Tkk почти
пропорциональны друг другу. Мы получим
^V^ # ^ (λ*Α ^
Таково выражение для умноженной на g· расходимости любого
симметричного тензора. Но если Т^ есть тензор массы, то имеют место
уравнения
W* - у ^ = - 4*Т (с2Г00 + ρΛχ (69. Ю)
Шк = — 4^c2T0kt (69.11)
которые были установлены выше (формулы (68.19) и (68.30)). При
помощи них можно подвергнуть правую часть (69.09)
дальнейшему преобразованию. Для этого рассмотрим введенные формулами
(68.14) — (68.16) величины N^ и обратим внимание на то, что в
уравнения тяготения (68.18) эти величины входят вместе с тензором Т^
в комбинации
A^ = gT^ — -§£-ЛГ. (69.12)
Составим сумму производных
\1 —
А1 = ^-. (69.13)
Полагая для краткости
dU* . dUs
dt ~ дх,
мы будем иметь
dN10 , dN
= Ψ, (69.14)
ь^_2^(дЛ1^±.ШЛ1м^ 1 д2и* ι 4 όΨ\ +
dt "Г" dxk — с* \dxt "г" с2 dt )\ с2 dt2 ~т~ с2 dt /"Г"
§ 69] СВЯЗЬ МЕЖДУ ТЕНЗОРОМ МАССЫ И ВЕЛИЧИНАМИ Γν 341
Поскольку в первом приближении имеет место равенство
(см. формулу (55.42)), величина Ψ будет порядка не менее 1/с2,
и в формуле (69.15) члены, содержащие производные от Ψ, могут
быть отброшены. Отбрасывая эти члены и используя уравнения
(69.10) и (69.11), мы получим из (69.15)
с* (dN10 . dNlk\_
8πγ \ dt "+* dxk ) ~
Ч^ + ^с27ТО+Г">И^-^)Г0*· (69Л7>
Но правая часть этого равенства совпадает с дополнительными
членами в правой части (69.09), которые, тем самым, представлены
в виде суммы производных. Таким образом, если Т^* есть тензор
массы, то мы имеем
^=¥^'D-ww'0)+^K-^w1·(69Л8)
С другой стороны, дифференцируя уравнения тяготения, написанные
в форме (69.18), мы получим
Г с2 др)\ dt + дхк)~
=Ψ{ν(ετ"-£Ν")+£;{ετ"-£Ν"')Υ <69-19>
Сравнивая последние две формулы, можем написать:
Это приближенное соотношение играет важную роль при выводе
уравнений движения.
Аналогичное соотношение можно вывести и для нулевой
компоненты расходимости тензора массы. Дифференцируя приближенные
уравнения Эйнштейна (68.18), получаем
Для вычисления второго члена левой части (69.21) дифференцируем
выражения (68.14) и (68.15) для №°н№1. Используя равенство (69.16),
мы получим
д№° . dNoi 6 dU Λ,, . 8 dU w/ /соооч
S42 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Здесь мы можем выразить, по формулам (68.25) и (69.11),
величины Δί/ и Δί/^ через Г00 и Т01. Тогда будет
Подставляя это в (69.21) и пользуясь выражением (69.08) для
определителя g через U, получим, по умножении на 2с:
или
так как, согласно (65.26), нулевая компонента расходимости тензора
массы приближенно равна выражению в скобках в правой части (69.24).
Формула (69.25) построена вполне аналогично формуле (69.20) для
пространственной компоненты расходимости тензора массы.
Обе эти формулы могут быть написаны в виде
Как было указано в начале этого параграфа, эти формулы являются
приближенными. Они замечательны тем, что стоящий в левой части
дифференциальный оператор имеет постоянные коэффициенты,
вследствие чего они являются весьма удобными для исследования.
§ 70. Уравнения движения и условия гармоничности
Общая постановка задачи о движении системы масс была уже
дана в § 64. Теперь нам надлежит рассмотреть вопрос о форме
уравнений движения.
Мы знаем, что если рассматривать каждое из движущихся тел
как сплошную среду, то внутри каждого тела должны выполняться
уравнения
VJ*" = 0. (70.01)
С другой стороны, можно рассматривать движение каждого тела как
целого, характеризуя его конечным числом параметров (координатами
центра тяжести, значениями массы и моментов инерции и т. п.).
Тогда возникает задача найти уравнения движения для тел, как
целых, т. е. дифференциальные уравнения для параметров,
характеризующих каждое тело.
Мы перечислили некоторые из параметров, характеризующих тело.
Чем обусловлен выбор этих параметров? Прежде всего — требованием,
§ 70] УРАВНЕНИЯ ДВИЖЕНИЯ И УСЛОВИЯ ГАРМОНИЧНОСТИ 343
чтобы выбранные параметры были достаточны для нахождения сил,
действующих на другие тела и определяющих их движение. В нашей
задаче речь идет о силах тяготения. Поэтому параметры,
характеризующие тело как целое, должны быть выбраны так, чтобы они
позволяли с достаточной точностью определять поле тяготения в той
области, где находятся другие тела. А так как тела находятся на
больших расстояниях друг от друга, то параметры, относящиеся
к данному телу, должны хорошо определять поле тяготения на
больших расстояниях от него. Такими свойствами и обладают параметры,
перечисленные выше.
Сказанное относится как к механике Ньютона, так и к механике
Эйнштейна. Так как в теории Эйнштейна тяготение связано с мет*
рикой, и именно метрика непосредственно влияет на движение тел,
то основную роль в задаче нахождения уравнений движения системы
тел должно играть рассмотрение метрики на больших расстояниях
от тел. Как выбор параметров, так и вид уравнений движения должны
быть подчинены требованию, чтобы на больших расстояниях от
каждого тела правильно получалась метрика.
В конце § 69 были выведены приближенные соотношения
Эти соотношения вытекают из уравнений Эйнштейна, написанных
в приближенной форме (68.18). В строгом решении как правая часть
(70.02), так и выражение под знаком оператора Даламбера в левой
части равняются нулю в силу уравнений (70.01) и условий
гармоничности
^- = 0. (70.03)
Если же рассматривать приближенное решение, то соотношения (70.02)
устанавливают связь между той степенью точности, с какой
выполняются уравнения (70.01), и той степенью точности, с какой
выполняются условия гармоничности (70.03).
Мы установили, что при нахождении закона движения тел как
целых основное требование заключается в том, чтобы на больших
расстояниях от каждого тела правильно получалась метрика. Это
требование означает, в частности, что на больших расстояниях от
каждого тела с возможно большей точностью должно выполняться
условие гармоничности (70.03). Посмотрим, какие следствия вытекают
отсюда для правой части уравнений (70.02).
Эти уравнения имеют вид обычных уравнений для запаздывающих
потенциалов
4-jr-^ = -4™. (70.04)
344
ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ
[ГЛ. VI
причем, однако, необходимо помнить, что при самом выводе их были
сделаны пренебрежения, равносильные разложению встречающихся
функций по обратным степеням скорости света с. Поэтому и решать
уравнения (70.04) в нашем случае имеет смысл только приближенно.
Мы начнем, однако, с рассмотрения точного решения.
Предположим, что стоящая в правой части функция σ (которую мы будем
называть плотностью) отлична от нуля только в ограниченной области
пространства, в окрестностях точки с координатами
Xi = at(f) (/=1, 2, 3)
(70.05)
(это есть область, занятая одной из масс). Нас интересует то
решение уравнения, которое физически соответствует потенциалу,
порождаемому движущейся массой с плотностью σ (запаздывающий
потенциал). Это решение имеет вид
где [σ] есть запаздывающее значение плотности σ, а именно:
[о] = о (f, г'), Г = t —11 г - г'|. (70.07)
Интегрирование ведется по координатам (х\ у\ zr) и
распространяется на область, занятую массой.
Переходим теперь к приближенным формулам. Разлагая величину [σ]
по обратным степеням скорости света с и ограничиваясь первыми
членами, получим
*-/■
zdV
1 d
•r'|
с dt
f°dV'+^wf\r-r'\cdV'> (70·08>
где уже
ο = ο(ί, г').
(70.09)
Написанное выражение мы можем, далее, разложить по обратным
степеням расстояния от данной массы.
Используя разложения
1 1 (xt — a}(x't—at)
If — r'|
г —а
• τ = г ·
|г-ар
(*t-gf)(*t-at)
|г —а|
+
и полагая
/σ(ί, г')Л" = ц,
Jc(t, t'){x't-a^dV' = b,
(70.10)
(70.11)
§ 70] УРАВНЕНИЯ ДВИЖЕНИЯ И УСЛОВИЯ ГАРМОНИЧНОСТИ 345
мы получим
ψ |г — а| *^~ |г — а I3 "1" ' · · Τ dt ~*~
Величины μ и (12 можно назвать „моментамиα нулевого и первого
порядка. Нетрудно видеть, что если положить [х = 0, то члены, не
содержащие с, будут при удалении от данной массы убывать по
крайней мере как 1/|г — а|2, член, обратно пропорциональный с,
обратится в нуль, а члены, пропорциональные 1/с2,будут оставаться
ограниченными. Если же, кроме того, потребовать чтобы
обращались в нуль моменты первого порядка, т. е. чтобы было jxj = 0, то
в разложении (70.12) для ψ исчезнут и следующие по важности члены.
При равенстве нулю также и моментов второго порядка
f о (xt - at) (xk — ak) dV = ы (70.13)
исчезли бы и дальнейшие члены и т. д. Не все эти условия являются,
вообще говоря, независимыми. В общей сложности мы можем
поставить столько независимых условий, сколько в нашем распоряжении
имеется параметров.
Предположим теперь, что имеется несколько масс, так что
плотность σ отлична от нуля в окрестностях нескольких точек, скажем
xt = at(t), xt = bt(t)9... (70.14)
Тогда те же рассуждения будут относиться к каждой из точек.
Обозначая через
μ«0 = fc(tf r) dV, (χ<*> = J σ (t, r) dV, ... (70.15)
(a) (b)
и через
rfe) = /«('. τ) (*ι - "/) dV9 μρ> = f с (f, r) (*, - bi) dV, (70.16)
(a) (b)
интегралы (70.11), распространенные на области, занятые каждой
из масс, мы получим для ψ выражение
' +^SW-ai-i^i=^+...}. σο.,7,
а
Для того чтобы функция ψ была мала в любой точке между массами,
а также при удалении от всех масс, мы можем теперь потребовать
546 SAKOH ТЯГОТЕНИЯ Й ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
выполнения ряда уравнений
{х(*) = 0, ix(fl) = 0, . >., (70.18)
из которых каждое относится к отдельной массе.
После этих общих рассуждений вернемся к рассмотрению
уравнений (70.02). Мы постараемся удовлетворить требованию» чтобы
в любой точке между массами, а также при удалении от всех масс,
с возможно большей точностью удовлетворялось условие гармонич*
ности (70.03).
При написании уравнений движения в четырехмерной форме
уравнение, выражающее баланс энергии, обычно является следствием
остальных уравнений движения. Поэтому мы займемся сперва
пространственными компонентами соотношения (70.02)
(соответствующими v=l, 2, 3), а затем проверим выполнение условий,
содержащих временную компоненту (ν = 0).
Сопоставляя (70.02) с (70.04), мы можем положить
o = o. = -gVXl, (70.19)
Ψ = Ψ< = ί-^- <70·2°)
Для того чтобы величины (70.20) были малы вне масс, необходимо
выполнение ряда условий вида (70.18). Прежде всего, должны быть
равны нулю интегралы
pi (в) S3 _ f gVJaidxxdx2dx3 = 0, (70.21)
(а)
распространенные на область каждой массы. Но, согласно (69.09),
+ (^ + ^^)(С2Гоо + 7-)+4(||-^)р*. (70.22)
Поэтому уравнения (70.21) могут быть написаны в виде
(а) (а)
+ *1Ш-д-ё;)Т0кт3· (70·23)
(α)
где для краткости положено
(d χ)3 = dxx dx2 dxb. (70.24)
§ 70] УРАВНЕНИЯ ДВИЖЕНИЯ И УСЛОВИЯ ГАРМОНИЧНОСТИ 347
Напомним еще, что
£ = — с2 — 41/. (70.25)
Выражения для составляющих тензора массы упругого тела были
получены нами в § 66. Согласно формуле (66.07), они имеют вид:
c2Toi = т 11Ч_ _*_ β ν2+ π _ υ} } _ J_ PikVkt
c2Tik=mvk—Pik·
(70.26)
Если ограничиться главными членами, то результаты подстановки
(70.26) в (70.23) будут иметь вид:
f щ {dxf = f p ^ {dxf. (70.27)
_d_
dt
(a) (a)
Отсюда ясно, что уравнения (70.21) представляют уравнения движения
центров инерции каждой из масс. Если число отдельных масс есть п,
то таких уравнений будет Ъп. Таково будет число степеней свободы
нашей механической системы, если рассматривать массы как
материальные точки.
Переходя к рассмотрению других условий вида (70.18), мы можем
потребовать равенства нулю следующих комбинаций моментов первого
порядка:
piHa) = — fg {xtVJ*k — xkVJai)(dxf = 0. (70.28)
Если и здесь ограничиться главными членами, то уравнения (70.28)
примут вид:
fv{xpu-xuvi){dxf= fp(Xi^-xk™-ydx)K (70.29)
d_
dt
(a) (a)
Они представляют, очевидно, закон изменения момента количества
движения каждого из тел. В момент количества движения здесь
включен как орбитальный момент, происходящий от движения по орбите,
так и собственный момент, происходящий от вращения тела.
Орбитальный момент может быть выделен путем составления комбинаций
уравнений (70.27) и (70.29). Число уравнений вида (70.28) есть
также 3#, поэтому, если мы будем считать, что массы вращаются
наподобие твердых тел, то число уравнений будет равно числу
вращательных степеней свободы.
348 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
§ 71. Внутренняя и внешняя задачи механики системы тел.
Ньютоновы уравнения для поступательного движения
В дальнейшем мы будем различать внутреннюю и внешнюю
задачи механики. Уравнения движения внутри тела мы будем относить
к внутренней, а уравнения движения тела как целого — к внешней
задаче.
Рассмотрим влияние, в различных приближениях, внутренней
структуры тела на его движение как целого.
Для получения ньютоновых уравнений движения в интегральной
форме (70.27) и (70.29) достаточно было, как мы видели,
использовать во внутренней задаче уравнение неразрывности
А + ^)=0. (71.01)
позволяющее написать нулевое приближение для некоторых компонент
тензора массы
с2Гоо = р> счты _ ρτν (71,02)
Таким образом, о внутренней структуре тела не приходилось деглать,
в этом приближении, почти никаких предположений. Впрочем, более
детальное рассмотрение внутренней структуры тела и невозможно
без знания метрики с соответствующей точностью. Если называть
нулевым приближением евклидову метрику, то первое приближение
(следующее после евклидова) требует уже введения ньютонова
потенциала тяготения £/, а также вектор-потенциала Ui. Это и было
сделано в § 55 на основе использованных там выражений (71.02)
для тензора массы. Физически первое приближение для метрики
соответствует, при рассмотрении внутренней структуры тела, учету сил
тяготения.
При выводе, в § 66, приведенного выше (формула (70.26)) тензора
массы уже потребовались, помимо первого приближения для метрики,
определенные предположения о внутренней структуре тела, а именно,
тело было предположено упругим. Помимо уравнения
неразрывности (71.01), внутри тела предполагались выполненными ньютоновы
уравнения движения
Уравнение неразрывности для внутренней задачи позволяет
получить ньютоновы уравнения движения (70.27) для внешней задачи.
Уравнения же (71.03) для внутренней задачи и построенный на их
основе тензор массы (70.26) позволяют получить, для внешней задачи,
второе (релятивистское) приближение к уравнениям движения тела
как целого. Это вполне естественно. В самом деле, нерелятивистскиз
§71] ВНУТРЕННЯЯ И ВНЕШНЯЯ ЗАДАЧИ МЕХАНИКИ 349
уравнения дают распределение энергии и связанных с нею величин
внутри тела, а энергия обладает массой, которая влияет на поле
тяготения уже в релятивистском приближении.
Дальнейшая наша задача — получение, в явной форме, уравнений
движения, вытекающих из установленных в конце предыдущего
параграфа интегральных соотношений.
Для составления этих уравнений необходимо прежде всего указать,
какие степени свободы мы имеем в виду рассматривать, иначе говоря,
какими параметрами мы будем характеризовать нашу механическую
систему. Соображения, определяющие выбор параметров, уже были
приведены в начале предыдущего параграфа. На основании этих
соображений мы будем рассматривать степени свободы,
соответствующие, во-первых, поступательному движению каждого из тел и,
во-вторых, вращению каждого тела вокруг его центра тяжести. При
этом мы будем предполагать, что тела вращаются наподобие
твердых тел (это, конечно, не означает, что тела предполагаются
твердыми; таким движением могут обладать и жидкие тела)1).
В силу уравнения неразрывности масса тела
Ma = fp(dxf (71.04)
(а)
есть величина постоянная; поэтому она в число переменных
параметров не входит. Поступательное движение тела определяется
изменением координат at его центра тяжести. Эти величины вводятся
при помощи соотношений
ЖЛ= fpx^dxf, (71.05)
(а)
которые могут быть написаны в виде
/ Ρ (** — «ι) idxf = 0. (71.06)
(a)
Дифференцируя интеграл (71.05) по времени и пользуясь уравнением
неразрывности, будем иметь
откуда
f9Vl(dxf = Maai. (71.08)
{а)
1) Напомним, что наши вычисления имеют приближенный характер.
Затруднения, связанные с определением в теории относительности понятия
твердого тела, в данном приближении еще не возникают.
350 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Из соотношения (71.08) следует, что, независимо от
распределения скоростей вну-ври тела, левая часть уравнения (70.27) равна
произведению массы тела на ускорение центра тяжести
-^ J9vi{dxf = Maai. (71.09)
(а)
Вычислим интеграл в правой части (70.27). Ньютонов потенциал U
можно разбить на два слагаемых
U(r) = ua(r) + tfa\r)t (71.10)
где иа происходит от массы Ма, а £/(β)—от остальных масс.
Сообразно такому разложению, мы будем иметь:
(а) (а) (а)
Внутри массы Ма потенциал иа удовлетворяет уравнению
Δ«α = -4πΤΡα, (71.12)
где ра есть плотность, принадлежащая данной массе. Он может
быть представлен в виде интеграла
(β)
Потенциал же происходящий от других масс, будет, внутри
данной массы, медленно меняющейся функцией от координат, которую
можно разложить в ряд Тейлора по степеням (лгу — aj). Это
позволяет приближенно вычислить второй интеграл, входящий в (71.11).
Подставляя выражение (71.13) для иа в' первый из этих
интегралов, будем иметь
/p^-(^)3=-T f fy^V^^i-<)(dx)4dxy. (71.14)
(а) (а) (а)
Но двойной интеграл справа равен нулю, так как подынтегральная
функция в нем антисимметрична в координатах обеих точек. Таким
образом,
/p-^W=0. (71.15)
Это соотношение может быть истолковано как равенство нулю
равнодействующей внутренних гравитационных сил.
Приведем еще одно доказательство этого соотношения. Положим
«ft^w·^-·^-**· (71лб)
§ 71] ВНУТРЕННЯЯ И ВНЕШНЯЯ ЗАДАЧИ МЕХАНИКИ 351
Тогда
Ί^ = -Ί^Δ*« <71Л7>
или
1 dq\$ диа
^-д^-=^-^г (71Л8)
в силу уравнения (71.12). Если мы в интеграле (71.15) будем разуметь
под ρ плотность ρβ, принадлежащую данной массе, мы можем
распространить интеграл на весь бесконечный объем, после чего получим
(β) (00) (00)
так как на бесконечности величины q{f обращаются в нуль.
Обратимся к вычислению второго интеграла в (71.11). Разлагая
потенциал £/(а) внешних масс в ряд Тейлора, будем иметь
дцЫ_(диЮ\ , ( д2и^ \ (
-Щ~ — \ dxi Ja^ydxidxJa^* аь>-Г
+ 7(^W).(^-^(^-^+··· (7L20)
Умножая это выражение на р, интегрируя по объему массы (а) и
используя (71.06), будем иметь
(а)
где через 1$ мы обозначили величины
4в) = / Ρ (** - ak) (*, - at) (dx)\ (71.22)
которые мы будем называть моментами инерции массы (а) (в
механике это название носят несколько другие величины). Нам надлежит
вычислить теперь значение потенциала l/a\ Мы имеем
v{a) (0 = 24/ 7FTFT (dx'f> (71 '23)
Ь (Ь)
где штрих у знака суммы означает, что масса (а) исключена из
суммирования. Каждый член суммы представляет потенциал
соответствующей массы. Рассмотрим один из них, например,
^г> = ^Тгёт· (71-24)
352 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Подставляя сюда разложение
1 _ 1 iW h\ д ι ι
|г — г' I | г — b | Vе* °k) dxk |r — b| "+"
интегрируя почленно и используя формулу (71.06), а также
обозначение (71.22), мы получим
«Лг) = 17^Г + ^46г)1^7Т7^Г+ ... (71.26)
Следовательно, будет
ь ь
Оценим порядок величины первой и второй суммы в этом
выражении. Пусть L есть длина, характеризующая линейные размеры тел,
a R — величина порядка расстояния между ними (см. § 64). Пусть q
характеризует порядок величины скорости тел. Мы будем считать,
что по порядку величины
ς2~ψ. (71.28)
Порядок величины моментов инерции будет, очевидно,
In~ML2. (71.29)
Поэтому первая сумма в (71.27) будет порядка q2% а вторая —
L·2
порядка q2 -^г. Обозначенные многоточием невыписанные члены
будут более высокого порядка относительно малой величины L/R и
мы их отбросим. С другой стороны, нетрудно видеть, что в
формуле (71.27) второй член будет порядка L2jR2 по отношению
к первому. Поэтому при вычислении второго члена мы можем
отбросить в потенциале U^ величины порядка Я2-т>г> т<>гДа как ПРИ
вычислении первого члена мы должны их сохранить. Производя
выкладки, получим:
+ ϋ«.'№, + Μ^)Ί£^π^π}. (71.30)
Ввиду того, что величина
д2 1 _ bkl
дакдсц |а — b| ~ |а — b|3^ |a — b|5
ι 3 (ak — bk) (at —· bt) /j\^\\
§71) ВНУТРЕННЯЯ Й ВНЕШНЯЯ ЗАДАЧИ МЕХАНИКИ 353
симметрична относительно а и Ь, выражение в фигурных скобках
в (71.30) также будет симметрично. Вводя двойную сумму
•-4Σ Ю+*<*#+**ЪтаттЬтЬ (7,·32)
а, Ь
(афЬ)
мы можем поэтому написать
(а) (а)
Уравнение (70.27), которое мы выпишем еще раз,
£f9Vi(dxf=f9*L(dx? (71.34)
(«) (а)
примет теперь вид
*А = —ЯГ (7135)
Величина Φ есть, очевидно, ньютонова потенциальная энергия нашей
механической системы, выраженная через координаты и моменты
инерции. Заметим, что при выводе этих уравнений мы еще не
делали, помимо (71.01), никаких предположений о распределении
скоростей внутри тела.
Если все рассматриваемые тела обладают сферической
симметрией, то для каждого тела тензор моментов инерции 1Ы будет
пропорционален единичному тензору
1М = 1ЬЫ. (71.36)
В этом случае потенциальная энергия Φ совсем не будет содержать
моментов инерции, а будет зависеть только от координат ai
(и, конечно, от масс Ма, которые постоянны). Тогда система
уравнений (71.35) будет полной: она будет содержать столько уравнений,
сколько неизвестных координат центров тяжести масс. Это будут
обычные уравнения движения системы материальных точек,
притягивающихся по закону Ньютона.
В общем же случае, когда тела сферической симметрией не
обладают, в уравнения движения войдут, помимо координат центров
тяжести масс, их моменты инерции, и система уравнений (71.35)
не будет тогда полной. В этом случае можно получить полную
систему, если ввести предположение, что тела вращаются вокруг
своих центров тяжести наподобие твердых тел. Это значит, что
распределение скоростей внутри каждого тела имеет вид
Vi = ii+*W(xj-aj). (71.37)
23 Зак. 2649. В. А Фок
354 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
где (ujy есть трехмерный антисимметричный тензор угловой скорости
тела (а). Опуская значок (а), мы можем также писать для его
составляющих
ω23 = ω1; ω31 = ω2; ω12 = ω3. (71.38)
При таком предположении полная система уравнений получится,
если присоединить к (71.35) уравнения, выражающие закон
изменения количества движения каждого из тел. Вывод этих уравнений из
соотношений (70.29) будет дан в следующем параграфе.
§ 72. Ньютоновы уравнения вращательного движения
Положим
М® = / Ρ {(*, - αύ vk - (xk - ak) vt) (dxf. (72.01)
{a)
Это есть, очевидно, момент количества движения тела (а)
относительно его центра тяжести. Закон изменения этой величины
получается из (70.29) после выделения членов, относящихся к
орбитальному моменту количества движения. Эта операция сводится к
применению соотношения
d
It
Ui j ?vk(dxf — ak j pvt(dxf\ =
I ia) (a) J
= «' i^idxf-au f?^(dxf, (72.Ό2)
(a) (a)
которое вытекает из уравнений движения (71.34) и из формулы
(71.08), в силу которой
at f ?vk (dxf -akf рт, (dxf = 0. (72.03)
(a) {a)
Выпишем уравнения (70.29) еще раз
ff(xpk-xkv№xy= f9(Xl^-Xk*LLydxf. (72.04)
d^
dt
(Л) (a)
Вычитая из них соотношения (72.02), будем иметь
d Г
ST J Ρ К*< — ад vk — (xk — л*) *d (dx? =
(a)
= f р[{хл-а^-{хк-а^]ухГ. (72.05)
§ 72] НЬЮТОНОВЫ УРАВНЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 355
или, пользуясь обозначением (72.01):
жм®= /*[<**-**■$£- <**- а^Шах^· (72·06)
(а)
Вычислим величину Ацу. Подставляя в (72.01) выражение (71.37)
для скорости и пользуясь обозначениями (71.22) для трехмерного
тензора моментов инерции, мы получим
М® = «$/?? - «#>/#. (72.07)
В более подробной записи эти соотношения будут иметь вид:
М2Ъ = (722 + 733> ω23 — 7ΐ2ω31 ~ Λ3ωΐ2.
МЪ1 = — 7ΐ2ω23 + (733 + Αϊ) ω31 — 'ίΛ*
Μι2 = — /13ω23 — /23ω31 + (Λι + /22) ωΐ2#
(72.08)
Верхний значок (а) здесь для краткости опущен. Это — известные
из механики твердого тела формулы, связывающие момент
количества движения с угловой скоростью.
Вычислим теперь правую часть уравнения (72.06), которая,
очевидно, представляет момент сил, действующих на тело. Сообразно
разделению (71.10) потенциала на внутренний и внешний, рассмотрим
сперва момент внутренних сил. При помощи соотношения (71.18)
легко проверить, что момент внутренних сил равен нулю.
Действительно, рассуждая как при выводе (71.19), мы приходим к
равенству
—ΕχΙ-ΒΓ К*' ~ β') W ~ (** - α*) «ЭД (dxf β °· (72·09)
(οο)
Остается вычислить момент внешних сил. Пользуясь разложением
(71.20), в котором, однако, мы удержим только постоянный и
линейный члены, мы получим
/р {(*,-«<)^— (xk-ak)*^}(dx? =
- 1ч Кд^щ)а - '*/ Кд^щ)а · <72· 10>
23*
366 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Подставляя сюда выражение (71.27) для U^a\ мы можем
ограничиться в нем первой суммой. Это дает
(а)
ь
Поскольку, согласно (72.09), момент внешних сил равен полному
моменту сил, мы можем заменить здесь £/(fl) на U. Выражение
(72.11) даст тогда правую часть уравнения (72.06), и мы можем
написать закон изменения момента количества движения тела (а)
b виде1)
ί mW -Σ,μ,{ iff ^ ττ±Γι - iff jfe r^}. (72.19
b
Вводя явные выражения (71.31) для вторых производных, мы можем
также написать
b
Эти уравнения дополняют выведенные ранее уравнения движения
центров тяжести
жл=—Ц (72Л4>
до полной системы. В этом можно убедиться различными путями.
Мы можем рассматривать в качестве неизвестных, характеризующих
движение каждой массы, величины
*,. l\f> <$>; (72.15)
всего двенадцать величин (составляющие момента количества
движения выражаются через них по формулам (72.07)). Для этих
величин мы имеем: три уравнения (72.14) (движение центра инерции),
три уравнения (72.13) (закон изменения количества движения) и еще
шесть уравнений
jg-^W+mfltf. (72.16)
справедливых для всякого тензора, компоненты которого в системе
координат, связанной с телом, постоянны (вывод мы приведем ниже).
') Из уравнений Эйнштейна это уравнение было впервые выведено
другим способом) В. П. Кашкаровым [39j.
§ 72] НЬЮТОНОВЫ УРАВНЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ 857
Таким образом, для двенадцати неизвестных (72.15) мы имеем
двенадцать уравнений, и система уравнений будет полной.
Мы могли бы вести рассуждение и иначе, введя в рассмотрение
для каждого тела координатную систему #*, x*t x*, вращающуюся
вместе с телом (верхний значок (а) мы для краткости опускаем).
Обозначая через <xri косинусы углов, удовлетворяющие соотношениям
*rPfJ = Ьф «Г Ai = δΓ5· (72· 17)
мы можем положить
X*r = «rl(Xl-at), Xt-ai=*«rlK. (72Л8>
Производные от косинусов связаны с составляющими угловой
скорости соотношениями
*Пга αΓ/ω/*. <°у7 = *rjKi- (72.19)
По известным форм}^лам килематики твердого тела девять
косинусов olh выражаются через три эйлеровых угла θ, φ, ψ. Для каждой
массы мы могли бы, вместо (72.15), взять в качестве неизвестных
функций шесть величин
«ι. «,, «з. *(а\ φ(β). ψ(θ) (72.20)
и выразить через них все остальные, в частности величины (72.15).
Так, угловая скорость уже выражена в (72.19) через косинусы и их
производные. Что касается моментов инерции, то они выражаются
по формулам
Iij = *riaSjI*rs. (72.21)
где I*s — постоянные значения составляющих этого тензора в системе,
связанной с телом. Для шести величин (72.20), относящихся к каждой
массе, мы имели бы шесть уравнений (72.13) и (72.14), т. е.
надлежащее число уравнений для того, чтобы система уравнений была
полной.
Приведенные здесь вычисления уравнений движения в
ньютоновом приближении предполагают возможность отбрасывать (помимо
релятивистских поправок) члены более высокого порядка относительно
малой величины L/R. Если бы мы пожелали сохранить эти члены,
нам пришлось бы рассматривать моменты инерции третьего и более
высокого порядка, например
№ « / Ρ (*, - «ι> (** - **> (*ι - */) (dxf. (72.22)
Но это не нарушило бы полноту системы уравнений. В самом деле,
Мы могли бы рассматривать вновь введенные величины как функции
358 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
эйлеровых углов, например
Iiki = *ri*sk*uilnu. (72.23)
где I*su — постоянные. Тогда неизвестными функциями остались бы
по-прежнему величины (72.20), так что число неизвестных функций
не увеличилось бы. При другом способе рассмотрения мы могли бы
включить вновь введенные величины в число неизвестных функций
и соответственно дополнить систему уравнений, например, написать
для величин (72.22) уравнения
4f liSi = »tfV$ + 4Ш + <$>/$. (72.24)
В общем случае произвольного трехмерного тензора Αι t 11 ,##f / ,
составляющие которого A* t T f ,,,f т в системе, связанной с телом, постоянны,
мы имели бы
••·+ω>Ά.',···'.-..'· <72·25>
Эти уравнения непосредственно следуют из формул преобразования
Αι ι ... / =Ог / af ι ... ar t At r ... r (72.26)
*Г 2 ·*· Л 4*1 Г2*2 Гл'л TV T% *·· ГЛ V '
в соединении с формулами (72.19).
В заключение проверим выполнение закона сохранения энергии
для системы уравнений (72.13) и (72.14). Введем кинетическую
энергию вращения тела вокруг своего центра тяжести
Та = I »8ЧЭДГ> = \ М\М%\ (72.27)
При составлении производной от Та по времени нужно иметь в виду,
что в силу уравнений (72.16) будет
ω«)# = 0. (72.28)
так что при дифференцировании Та величины 1$ могут
рассматриваться как постоянные. Имея это в виду, легко получаем
dTa 1 (αλ £ШЙ>
-ir=2^-r· <72·29>
Подставляя сюда выражение (72.12) для производной от M[f и
пользуясь антисимметрией ω$, будем иметь
ψ^'Σ'^-'-αμ;;^ Ρ2·3»»
§ 73] внутренняя Структура тела, уравнение Ляпунова 359
или, после симметризации относительно j и k и последующего
переименования значков,
ь
или, наконец, в силу (72.16),
dT 1 W d№ # 1
4р = т1 Т^^1ВДГй=ьГ (72.32)
Припомним выражение (71.32) для потенциальной энергии
а, 6
Величина Φ зависит от времени через посредство координат а1 и через
посредство моментов инерции 1$. Эта последняя зависимость дает
в выражении для полной производной от Φ по времени члены,
которые равны
а а
как это видно из сравнения (72.33) с (72.32). В силу уравнений
движения для центров тяжести масс мы получаем отсюда
d
dt
■ {Σ (■?м*а*+Та)+ф)=° (72·35)
и закон сохранения энергии в форме
Σ(τΛί^?+7,«)+φ=£· (72·36>
α
где Ε — постоянная энергии. Заметим, что даже при очень быстром
вращении тел, когда линейные скорости поступательного и
вращательного движения — одного порядка, в балансе энергии (72.34)
вращательные члены будут малы (порядка -j? по отношению к главным),
тогда как в проинтегрированном уравнении (72.36) они будут одного
порядка с главными.
§ 73. Внутренняя структура тела. Уравнение Ляпунова
Уравнения поступательного движения в интегральной форме были
найдены, во втором приближении, в конце § 70. Выпишем их в
развернутом виде. Подставляя значения составляющих тензора массы
dt
360 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [гл. VI
упругого тела из (70.26) в уравнения движения (70.23), получим
-/(С+7*){'+*(4-+»-")-»}*^+
(а)
(а)
Здесь величина U* удовлетворяет, согласно (68.30), уравнению
Μ*-±^ = -4*ι{Ρ + ±(1ν> + π-υ)-ψ\. (73.02)
В первом приближении U* совпадает с ньютоновым потенциалом U,
но нам нужно знать U* во втором приближении, с поправками на
запаздывание и с учетом дополнительных членов в правой части (73.02).
Величины же Ui% удовлетворяющие уравнениям
Шь = — 4πΤρ^, (73.03)
достаточно знать в первом приближении*
Как мы указывали в § 71, для того чтобы получить из (73.Ό1)
релятивистские уравнения движения в явной форме, необходимо
рассмотреть в ньютоновом приближении внутреннюю структуру тела
и соответствующие уравнения (71.03):
Мы ограничимся рассмотрением тех случаев, когда тело вращается
как целое, наподобие твердого тела. Тогда распределение скоростей
внутри тела имеет вид (см. (71.37))
vi = ai-\- (ΰμ (Xj — aj) (73.05)
(значок (а) при ω^ подразумевается). Отсюда ускорение частицы
внутри тела
равно
wi = at + (ω;/ — ω/Λω/Λ) (лгу — aj). (73.07)
Разложим входящий в (73.04) ньютонов потенциал U на
внутренний (#fl) и внешний (£/(й)), причем внешний потенциал заменим
первыми членами разложения в ряд Тейлора вблизи точки jty = a..
Вместо ускорения частицы wi подставим его выражение (73.07). Мы
§ 73] ВНУТРЕННЯЯ СТРУКТУРА ТЕЛА. УРАВНЕНИЕ ЛЯПУНОВА 361
получим тогда
/ dUW \ даа .
Оценим здесь порядок величины различных членов и сохраним
только главные. Из ньютоновых уравнений движения (71.35) нетрудно
заключить, что
а,~^-. (73.09)
Того же порядка будет входящая во второй член (73.08) вели-
(ди№ \
—-5— 1 . Но разность этих величин будет мала. Из
сопоставления (71.21) с (71.33) следует, что будет
(dUW\ q2 L·2 ,-Q im
ai~ \-ΊΪΪΓ)α~\-Ί?· (73Л0)
(Для почти шаровидных масс эта разность будет еще меньше,
так как значение ее обусловлено неравенством моментов инерции, а не
самыми моментами инерции.) Поэтому мы можем считать, что
первые два члена в (73.08) сокращаются.
Переходим к оценке членов в фигурных скобках. Здесь
главный член есть ω/Λω^; он имеет порядок величины квадрата угловой
скорости. Мы примем, что угловая скорость будет порядка
о>~-1. (73.11)
Порядок величины производной от угловой скорости по времени
определится из закона изменения момента количества движения.
Нетрудно получить оценку
»~£- (73.12)
Сопоставляя ее с оценкой для ω, получаем
ώ~ω2-^. (73.13)
Далее, вторая производная от внешнего потенциала по координатам
будет порядка
т. е. того же порядка, как ω. Пренебрегая величинами такого
порядка1), мы сохраним в квадратных скобках только член ω^ω^.
1) Такое пренебрежение делается только в уравнениях внутренней
задачи (см. (80.13)).
ρ^+^=°· (73·17>
362 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
После этих упрощений мы можем написать „внутренние* уравнения
движения (73.08) в виде
р{^+-'Л*<*/-«/>}+-8? = 0· (73л5)
Положим
«α+γω/*ω/*(*ί — *i)(*y — V = K«· (73Л6>
Это есть потенциал тяготения, сложенный с потенциалом
центробежной силы. Уравнение (73.15) может быть написано в виде
дУд , dpik _{
Ч "^ dxk
Этому уравнению можно удовлетворить, предположив, что тензор
напряжений внутри тела pik сводится к изотропному давлению ρ
Pik = -P\u (73.18)
(такому условию всегда удовлетворяет жидкость). Если бы мы не
пренебрегали в (73.08) величинами ω^, мы должны были бы
рассматривать и недиагональные элементы тензора напряжений plk.
В самом деле, очевидно, что изменение угловой скорости вращения
упругого тела должно вызывать в нем напряжения, которые не
сводятся к изотропному давлению.
При условии (73.18) уравнение (73.17) приводится к следующему:
Вытекающее из него соотношение
показывает, что Vа и ρ должны быть связаны зависимостью, не
содержащей координат, так что если ρ есть функция от одного
параметра а, то и Vа должно быть функцией от того же параметра
Р = Р(«). Va = Va(a). (73.21)
Внутренний потенциал иа есть функционал от р; подставляя в (73.16)
его явное выражение, получим
7/γΗ^ + Τω^Η^-^)(^-^) = ^. (73.22)
Задача состоит в том, чтобы при заданной плотности ρ найти форму
тела, т. е. форму области интегрирования (а). Эта форма должна
быть такова, чтобы в любой точке внутри тела выполнялось условие
(73.21), т. е. чтобы значение левой части (73.22) само зависело
§ 74] ВЫЧИСЛЕНИЕ НЕКОТОРЫХ ИНТЕГРАЛОВ 363
только от плотности (или от того параметра, от которого зависит
плотность). В частности, на поверхности тела должно быть α = const
и Va = const.
Если тело не вращается (ω/Λ=0), то всем условиям, очевидно,
удовлетворяет сферически-симметричное распределение плотности
при сферической форме тела. В случае вращения (ω/Λ Φ 0)
нахождение формы тела представляет чрезвычайно трудную математическую
задачу, которой занимались многие математики. Наиболее полные
результаты были получены А. И. Ляпуновым, который, для
вращающейся неоднородной жидкости, исследовал фигуры равновесия,
близкие к эллипсоидам, причем рассматривал также вопрос о их
устойчивости [21·22]. Мы будем поэтому называть уравнение (73.22)
уравнением Ляпунова.
Если условие (73.20) или (73.21) выполнено, то давление ρ
может быть найдено из уравнения
dp = pdVa (73.23)
или
α
P = f?(A^da. (73.24)
Аддитивную постоянную мы определим из условия, чтобы на
поверхности тела давление ρ обращалось в нуль.
В выражения для тензора массы, а также в уравнения (73.01)
и (73.02) входит упругая энергия Π единицы массы, определяемая,
согласно (30.11), по формуле
π=/ίγ-7· (73·25)
Вследствие (73.23), входящий сюда интеграл есть как раз Va или
величина, отличающаяся от V'а на постоянную. Эту постоянную можно
определить так, чтобы было
P = p(Va-U). (73-26)
Это выражение будет использовано при выводе уравнений движения
из интегральных соотношений (73.01).
§ 74. Вычисление некоторых интегралов, характеризующих
внутреннюю структуру тела
Для вывода уравнений движения из интегральных соотношений
(73.01) необходимо вычислить ряд интегралов, значение которых
зависит от распределения плотности внутри тела и вообще от его
внутренней структуры. Чтобы не прерывать в дальнейшем изло-
864 &AKOH ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
жения, мы сосредоточим вычисление таких интегралов в этом
параграфе.
Начнем с интегралов, зависящих от моментов инерции тела и от
его угловой скорости. Обозначим через Qa потенциал центробежных
сил 1
Qa - i «Й>-Й> (*, - at) (xj - a,). (74.01)
Уравнение Ляпунова (73.16) примет вид
Иα^-^a = ^· (74.02)
Рассмотрим интеграл
Ta = fpQa(dxf. (74.03)
Мы имеем, очевидно,
Та = \*ЪЦШ (74.04)
так что Та есть кинетическая энергия вращения тела (а). Рассмотрим
также моменты первого порядка с весовой функцией p2fl, т. е.
величины
Tai = / р2а (*< - <0 idxf- (74.05)
При помощи обозначений (72.22) мы можем написать
Та1 = \4аМ"Ш (74.06)
Эти величины равны нулю, если тело имеет три плоскости
симметрии.
Рассмотрим теперь интеграл
'а=4/р"Л<**)8. (74.07)
который представляет энергию взаимного притяжения частиц,
составляющих тело (взятую с обратным знаком), а также моменты первого
порядка
*ai = if Wa (*ι - a} (flxf. (74.08)
Используя уравнение Пуассона (71.12), можно представить
величину еа в виде:
•а = Щ [&***№*?· С74'*»)
(i)
Аналогично могут быть преобразованы и моменты га1, а именно:
'«'ет щ/ &rad aaf (*< ~ «/) (<**)8· (74. Ю)
(со)
§ 74] ВЫЧИСЛЕНИЕ НЕКОТОРЫХ ИНТЕГРАЛОВ 365
Припоминая определение (71.16) величин qfy
причем
?$=4&™Ю2. (74·12>
мы можем вместо (74.09) и (74.10) написать:
••-Ст/ДО^Л <74лз>
(00)
•--Ст/^С*! -^)(^)3· <74л4>
(оо)
Эти интегралы представляют частные случаи более общих:
№=щ! №(**?* <74Л5>
*?ii = i / *# (*ι - ад idxf. (74.16)
(оо)
Помимо рассмотренных выше интегралов
ea = B{kt *αι = Β\%> (74.17)
через величины (74.15), (74.16) могут быть выражены и другие
нужные нам интегралы.
Рассмотрим интеграл по объему от давления р:
I=jp(dxf. (74.18)
(а)
Так как давление ρ обращается в нуль вне массы, то, интегрируя
по частям, мы получаем:
ZI = -f(Xi-ai)^-(dxf. (74.19)
(а)
Воспользовавшись соотношением (73.19), мы можем также написать
3/ = - f (xt - at) p -gf (dxf. (74.20)
Но из уравнения Ляпунова следует, в силу того, что Qa есть
однородная квадратичная функция от разностей xt — ait
(*<-β/>Τ& = (*ι-βι>-Εί + Μ.· <74·21>
366 8AK0H ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
С другой стороны, согласно (71.18), мы имеем
(74.22)
диа 1 д$>
^ όχι 4πγ dxk
Подставляя (74.21) в (74.20) и пользуясь (74.22), будем иметь:
3/ = - щ f (*, - αύ ^ (dxf - 2 / 9Qa (dx)\ (74.23)
Интегрируя по частям и пользуясь выражениями (74.03) и (74.13)
для Та и efl, получим окончательно
3/ p(dx)* = ea-2Ta. (74.24)
(а)
Эта формула показывает, что, когда тело вращается, среднее
давление внутри него будет меньше, чем при отсутствии вращения, что
и следовало ожидать.
Аналогично получается соотношение
(а)
где
2 / Ρ · (xt - ад (dxf = y\ai - Talt (74.25)
(a)
Ч* = Щ f I(** - ak) «fi? + (*, - «,) ifi?} «**Λ (74·26)
oo
или, в обозначениях (74.16):
^ = |(в^+вШ· <74·27)
Формулы (74.15) и (74.16) дают представление величин В^ и В^%
в виде интегралов по всему бесконечному объему, но их можно
также представить в виде интегралов по объему, занятому массой (а).
Чтобы произвести это преобразование, введем функцию wa,
определяемую равенством
w" = iJ 9r\r-rr\(dxr)\ <74.28)
(а)
в силу которого
bma = aa. (74.29)
Тогда нетрудно доказать равенство
(OO) (fl)
§ 75] ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ 367
откуда вследствие (74.11)
^ = /Ρ(1^Δ^-^)(^)3. (74.31)
(а)
Здесь интеграл распространен уже только по объему массы (а).
Подставляя в (74.31) выражение (74.28) для wa в виде интеграла
и выполняя дифференцирование, можем также написать:
в®=ill* ^"г-г'У*0 <** «^ <74·32>
(«)
Аналогично формуле (74.31), которую можно написать в виде
/*£&«** = '*»-№ (74.33)
(а)
доказывается и формула
/ ρ · alffe <*/ - в/> <**=е«А* - *&· <74-34>
Эти соотношения также будут нужны в дальнейшем.
В заключение заметим, что вследствие соотношения (74.22)
и уравнений движения (73.04), деленную на 4πγ величину q<fi) можно
толковать, в рамках ньютоновой теории, как тензор напряжений
гравитационного поля массы (а).
§ 75. Преобразование уравнений движения, написанных
в интегральной форме
Мы будем исходить из уравнений движения в интегральной форме,
приведенных в начале § 73. Выпишем эти уравнения еще раз,
учитывая, что, согласно (73.18), напряжения сводятся к изотропному
давлению р. Мы имеем
+>/(т|!-т&)№<**. <7501>
w
368 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
причем
Δ^-^τ=-Μρ+-Μ4*2+π-ί/)+Ι4· (75·02)
hUi = — A^9vl. (75.03)
Положим здесь для краткости
σ=ρ+·^(ττ,2+ΙΙ-ί/)+-¥» <75·04)
так что вместо (75.02) можно писать
Пренебрегая малыми величинами, мы получим из (75.01):
■Έ /{'"· [> Н-з-(|-Ч-п+зи)]+1-рт,}(^)з=
(β)
(fl) (fl)
-*/
p^4?f(^)3· (75-o6>
{a)
Заметим прежде всего, что
? УЧт?+*©<*»-£* Μ**· <75·07)
(β) (β)
так что этот член может быть перенесен в левую часть и
объединен с другими членами, имеющими вид производной по времени.
Рассмотрим теперь первый член правой части (75.06); он
является обобщением вычисленного в § 71 выражения (71.11),
соответствующего ньютонову приближению. Разлагая, подобно (71.10),
потенциал U* на внутренний и внешний
U* = u*a + U*{a\ (75.08)
мы будем иметь
(а) (а) (а)
В ньютоновом приближении первый член справа равнялся бы,
согласно (71.19), нулю, как равнодействующая внутренних
гравитационных сил. В релятивистском же приближении, когда уравнение
Пуассона заменяется уравнением (75.05), это уже будет не так,
§ 75] ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ 369
вследствие запаздывания. Подставляя в рассматриваемый интеграл
величину σ из уравнения
1 д2и*
справедливого внутри массы (а), и учитывая, что интеграл от члена,
содержащего оператор Лапласа, равен нулю, получим
ИЛИ
так как
J ί£°«χ?=1^-i 1£-ж«х? <75Л1>
(a) (oo)
Г ди*а * 1 d Г ди*а ди*
(a) (oo)
f:
д2и*„ ди*„
ВД--аГ^)3 = 0· <75ЛЗ>
(оо)
Вследствие малого множителя перед интегралом, мы можем в правой
части (75.12) заменить величину и*а ньютоновым потенциалом иа,
после чего формула (75.12) напишется
Г ди* β 1 d Г диа диа
(а) (оо)
Вводя, согласно (74.28), величину wa, связанную с иа соотношением
Δ»α = «β. (75.15)
можно преобразовать интеграл в правой части уравнения (75.14)
и написать это уравнение в виде
Г ди*а о 1 d С д2®>а
(а) (а)
Последнюю формулу можно было бы вывести и более прямым путем,
подставив в интеграл слева приближенное решение уравнения (75.10).
Таким образом, первый член правой части (75.06) можно
представить в виде
(а) (а) (а)
Сделаем здесь еще одно преобразование. Введем функцию
= -5-ϊ/ρΊγ-γΊ(^)3, (75.18)
24 Зак. ?649. Э. А- Ф9»
370 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
представляющую решение уравнения
bW=Ut (75.19)
где U есть ньютонов потенциал. Из сравнения (74.28) с (75.18)
очевидно, что
W = ^wat (75.20)
а
подобно тому как ньютонов потенциал есть сумма потенциалов
отдельных масс
ί/ = Σ«β· (75.21)
а
Разложению (71.10) ньютонова потенциала на внутренний и внешний
соответствует разложение
W = wa + W(a\ (75.22)
Применяя это разложение, можем написать вместо (75.17):
(а) (а) (а)
Повторяя рассуждения, которые привели нас к формуле (75.16), по
отношению к совокупности всех рассматриваемых масс, мы
приходим к формуле
Г dUk , . ч3 1 d Г d*W ,. ч,
(oo) (oo)
откуда следует, что
α (α) (a)
Рассмотрим теперь последний член уравнения (75.06). Разделяя
„вектор-потенциал* Uk на внутренний и внешний
tf*-««* + tfie). (75.26)
заключаем, аналогично предыдущему (см. § 71), что в силу
уравнения Пуассона (75.03) будет:
§ 75] ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ 371
и, следовательно, последний член в (75.06) будет равен
-7 J nT£«x* = -?J ^s^idxf. (75.28)
(а) (а)
При этом будет
f?^k^(dx)z = 0. (75.29)
Мы рассмотрели все члены правой части (75.06). Из них
выражение (75.07) и последний член правой части (75,23), имеющие вид
производной по времени, мы перенесем налево, после чего
уравнения движения (75.06) примут вид
*π = ρ* (75·3°)
где
(а) т т „
±9и*-7'Щя}«х* (75·31)
(a) (a) (a)
(75.32)
В силу уравнений (75.25) —(75.29) будет
2^ai = 0 (75.33)
а
и, следовательно,
2 Pai ξξ Ρι = const. (75.34)
а
Величину Pai можно, по аналогии с ньютоновой механикой,
толковать как составляющую количества движения массы (а). Тогда
величина Fai будет составляющей силы, действующей на эту массу.
Такое толкование, вполне естественное в ньютс^новом приближении,
является здесь, впрочем, несколько искусственным, поскольку
количество движения Ра1 зависит, согласно (75.31), не только от
внутренней структуры тела и его скррости, но и от потенциалов ί/,
Ui и W.
Выделим в выражении (75.31) для Pai члены, зависящие только
от внутренней структуры.
Внутри массы (а) величины иа и uai удовлетворяют уравнениям
Ьиа = — 4τηρ, Luai = — 4πγρ^, (75.35)
24*
S72 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ (ГЛ. VI
из которых следует равенство
/ We (dxf = f 9aal {dxf. (75.36)
(a) (a)
Используя это равенство, мы можем написать выражение для Pai
в виде
(а)
+ F /ρν>υ(α)vxf-£f M*(dxf-^f?d^iС** (75·37>
(a) (a) (a)
Здесь первый интеграл зависит только от движения и от
внутренней структуры тела (а), тогда как остальные три зависят также
и от потенциалов внешнего поля, т. е. от взаимодействия тела (а)
с другими .телами. Вычислением этих интегралов мы займемся в
следующем параграфе.
§ 76. Вычисление количества движения во втором
приближении
В предыдущем параграфе мы привели уравнения движения к виду
^Γ = Ραι> (76.01)
где количество движения Ра1 и сила Fal выражены в виде
интегралов (75.31) и (75.32). Нам надлежит вычислить эти интегралы
и выразить их через параметры, характеризующие движение тел
как целых.
Для вычисления Ра1 воспользуемся представлением этой величины
в виде (75.37). Выделяя в этой формуле члены, соответствующие
собственному количеству движения и члены, происходящие от
взаимодействия, напишем
^al = (^а/)Собств "l·"" ( «^взаим» (76.02)
(^)со6схВ = /W'tf + F j\(!^ + РП-р«а+-/>)(</*)3-
(β) («)
(β)
«"->«.-if и"" <*# -if^w-lf* V£v#-
(a) (a) (a)
(76.04)
§ 76] ВЫЧИСЛЕНИЕ КОЛИЧЕСТВА ДВИЖЕНИЯ 873
Вычислим сперва интегралы, входящие в (76.03). Первый из них
дает количество движения в ньютоновом приближении; он равен
fpv^dxf^M^ (76.05)
(а)
в согласии с (71.08). При вычислении второго интеграла мы будем
иметь в виду вытекающее из (73.26) и (74.02) соотношение
РП-рял + р = р2а, (76.06)
а также формулу
}f2 = }4 + «*«$ (*,-aj) + Qa, (76.07)
которая следует из выражения
Vi = at + <4? (xj — aj) (76.08)
для скорости внутри тела (а). Второй интеграл будет равен
,/W-b24^«)0i*)3=
= (I Maat) ■ ά, + 27^ + <4?>ω$/<?ά* + 2«#> Ta}, (76.09)
если воспользоваться обозначениями (74.03) и (74.05). Последний
интеграл в (76.03) может быть преобразован к виду
(а) (а)
Применяя затем формулы (74.33) и (74.34), получим
Собирая все три интеграла вместе и вводя обозначения
rtf-VT^^bu + vWJsfW-B®, (76.12)
Ζψ = 2«#>7^ + vfK} - ω#Β$% (76.13)
получим для я собственнойα части количества движения выражение
(Л*)**»** А!л+-з-(4- Λ1α«*) «/ + ^-(4*Ч + 40)). (76.14)
Здесь первый член представляет, как мы уже отмечали, ньютоново
выражение для количества движения. Второй член дает известную из
механики материальной точки добавку к нему. Последний член
374 Закон тяготения и законы движения [гл. vt
можно толковать на основе понятия о тензоре эффективной массы
(матрица коэффициентов при составляющих скорости в выражении
для составляющих количества движения).
Если мы положим
а
+ FS{¥^^)2+Jz('*V* + 4a4}. (76.15)
а
то мы будем, очевидно, иметь
(^/W. = |^· (76.16)
Этим уравнением величина К определяется с точностью до функции,
не зависящей от at. Мы добавили в (76.15) члены 2^ Для того»
чтобы в нерелятивистском приближении величина К переходила
в обычное выражение для кинетической энергии системы тел.
Заметим, что для невращающихся тел со сферической
симметрией мы имеем
M*> = yeA*. 4ί=4·Α*. 2ίβ> = 0. (76.17)
Поэтому, если мы введем эффективную массу
"α=Μα + £·α, (76.18)
то будет, с точностью до малых величин,
а а
как для системы материальных точек. Формула (76.18) показывает,
что тензор эффективной массы приводится, в данном случае, к скаляру.
Переходим к вычислению той части количества движения, которая
зависит от взаимодействия. Оценим прежде всего порядок величины
этой части. Нетрудно видеть, что все три члена в (76.04) будут
иметь один и тот же порядок величины, а именно,
(ЛАза„м = 0(^Я· (76·20>
где q — неоднократно использованная нами величина порядка
скорости. При вычислении интегралов (76.04) мы сохраним, помимо
главных членов, которые будут только что указанного порядка, также
и члены порядка L/R по отношению к главным; члены же более
высокого порядка относительно L/R мы будем отбрасывать.
§ 76] ВЫЧИСЛЕНИЕ КОЛИЧЕСТВА ДВИЖЕНИЯ 375
Для вычисления интегралов с требуемой точностью в
выражении (71.27) для ньютонова потенциала достаточно сохранить первый
член и писать
υ{α)ν=Σττ%1· <76·21>
b
В выражении
^)ω = Σ'-ί/ρ^Τ^?Τ (76-22)
b (b)
для вектор-потенциала следует сохранить, кроме главного, еще один
член. Пользуясь формулой (71.25), получаем
b b
Наконец, функция
^(fl)(r)=24"f/p,ir_r,i^,)3 (76·24>
b (b)
с требуемой точностью будет равна
W(a)(r) = 12'T^|r-bH-l2'^i^l. (76.25)
Ь b J *
Мы сохранили здесь, помимо главного, еще один член, чтобы
обеспечить надлежащую точность в выражении для производной
от W^ по времени.
Подставляя в первый из интегралов (76.04) разложение £/(fl)(r)
в ряд Тейлора вблизи точки хк = ак
1/<*>(г) = i/«>(a)+(*ft-a,)(^)e+ .... (76.26)
будем иметь
з/р^(а)(г)(**)3=3 (76.27)
(а)
Сюда нужно подставить выражение для ньютонова потенциала
внешних масс из (76.21). Тогда получится
з/р^£/(а)(г)(^*)3=
-Σ'^Ρ + 2'^W^^. (76.28,
376 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Аналогично вычисляется второй интеграл в (76.04). Мы имеем
— 4 f pU[a) (r){dxf = - Шаи\а) (а) (76.29)
и после подстановки выражения (76.23) для Uy^i
-if 9U\a)(r){dxf =
— Σί^ι+Σ*ι'^»ΐΒ-^τι^τ- сило»
ь ъ
Наконец, последний интеграл в (76.04) равен
(а)
Дифференцируя (76.25) по времени, получаем
^=4Ι>Α^+^Σν»^. (76.32)
ь ь
Членами с третьими производными от | г —b | мы должны здесь, с
принятой точностью, пренебречь. Величина Υβ имеет, согласно (72.16),
значение
№—№&+<&&. (76.33)
Дифференцируя (76.32), получаем
ь ь
и, следовательно,
= |-2'TVA^^-i2'w»S^· №35)
ь ь
Согласно (76.04), деленная на с2 сумма выражений (76.28),
(76.30) и (76.35) дает величину (Ра/)взаим.
Введем две функции, Кг и Къ из коих первая, Кь однородна и
квадратична в скоростях и однородна степени (— 1) в координатах,
а вторая, /С2, линейна и однородна в скоростях и однородна
степени (— 2) в координата*,
§ 77] вычисление силы 377
Положим
(афЬ)
atb
(афЬ)
fl, 6
(афЬ)
dak | a — b |
α, 6
Тогда нетрудно проверить, что будет
Имея в виду оценки
(Р ) =J^L + ^.. (76.38)
ω
~j-, I~ML\ I~MqLt (76.39)
нетрудно заключить, что порядок величины функций Кх и К2 будет
^-M-g-, /С2~м£.-|· (76.40)
Таким образом, функция К2 будет мала по сравнению с Кх.
Сопоставляя формулы (76.16) и (76.38), мы можем написать для
полного количества движения выражение
^ = ·£-<*+*!+**>· (76.41)
σαι
где /С, Кг, и /С2 имеют значения (76.15), (76.36) и (76.37).
§ 77. Вычисление силы
Для вычисления интегралов, входящих, согласно (75.32), в
выражение для силы
(«) («)
dl№
-τJ ***-&«**' <77·01>
(β)
378 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
нужно, прежде всего, найти с достаточной точностью потенциал U*\
что касается потенциалов W и Uk, то для них достаточно уже
найденного первого приближения (формулы (76.23) и (76.24)).
Согласно (75.05), потенциал U* удовлетворяет уравнению
^-^-^ = -4^. (77.02)
где величина σ имеет значение
α = 9+ψ(τΡν2 + Ρπ-ρυ + Ζρ) (77.03)
и мало отличается от р. Если известен ньютонов потенциал U,
удовлетворяющий уравнению
Ш= — 4πγρ, (77.04)
то обобщенный ньютонов потенциал U* получается из U введением
двух поправок: поправки на запаздывание и поправки от замены ρ
на σ. Последняя равна
^об = т/(£ЕЦ«1х'?. (77.05)
(оо)
Что касается поправки на запаздывание, то она выражается через
введенную ранее (формула (75.18)) функцию
W = 1Т f р'| г - г' | (dx'f. (77.06)
(оо)
Таким образом, мы имеем
ί/* = ί/+4ΐ^+ί/«ο6. (77.07)
Займемся вычислением илоб. Разность σ — ρ мы запишем в виде
σ-ρ=ΜΙρ*2+ρΠ~~ρ""+3;,)_^ρί/(β)· (77·08)
Первый член здесь зависит только от внутренней структуры тела (а)
и от его скорости, а второй — также и от внешнего потенциала.
Используя равенства (76.06) и (76.07), мы будем иметь
/ (| Ρ*2 + РП - ?иа + Зр) {dxf = 4 Maa2k + \а, (77.09)
{а)
где
ξα = /(4ρΩα + 2/>)(</*)3. (77.10)
(а)
(«)
§ 77] вычисление силы 379
и для момента первого порядка
/ (| Р«2+рП - ри0 + 3/») (*, - at) (dxf = ZikmW+%а. (77.11)
где
ξ* = / (W + 2р) (*, - at) (dxf. (77.12)
Входящие сюда интегралы вычислены в § 74, а именно
ίβ = 1·β+ί^ (77.13)
^ = ^ + 37^· (77.14)
Отсюда получаем приближенно:
=(4м«й+g.T7jtt+(ыа№+иf*=^· (".us
Далее, с требуемой точностью будем иметь
(а)
Сопоставляя найденные формулы, получим для величины (77.07)
выражение
t>,o6 = £ Σ (4 МД - MaU(a) (а) + ξβ) · -^А- +
В формулу (77.01) для силы, действующей на массу (а), входит не
весь потенциал ί/*, а лишь та его часть, которая происходит от
внешних масс.
Эта часть равна
£/*>„!*·>+£ϋ£ί^ί/$.. (77.18)
где величины i/a)(r) и №(а)(г) были определены раньше (§ 75),
а добавка ί/доб равна
^ = ^Σ'(4Λί>*-Λί^6)(,,)+ξ»)τ7=¥Γ +
+ ΐΣ'(3Μ^+ϋτ?^. (77.19)
380 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Найденные значения потенциалов необходимо теперь подставить
в выражение (77.01) для силы. Мы получим:
(а) (а) (а)
dxti
(a) ' (a)
4 Г d(ff>
ί J *v*-3t«x?· <77·20)
(a)
Здесь первый интеграл есть ньютоново выражение для силы; он уже
вычислен нами в § 71. Мы имеем, согласно (71.33),
f-^-w—^· с7·21»
I
(а)
где Φ есть ньютонова потенциальная энергия системы тел
(формула (71.32)). Второй интеграл, с требуемой точностью, будет равен
(а)
где под ί/до^ можно разуметь выражение (77.19). Третий интеграл
может быть вычислен при помощи формул (77.08) — (77.14). Мы
получим;
/^<-«<**-i(3£).(4**+<.)+
где в качестве Lra^ достаточно взять выражение (76.21).
Составим сумму выражений (77.22) и (77.23) и представим ее
в виде производной по at. В формулу (77.23) мы можем подставить
х1 = а1 до дифференцирования. В формуле же (77.22) мы должны
учесть, что один из членов в i/6) (b) сам зависит от а1% а именно,
^(6)(Ь) = л^Т+.·.. (77.24)
где многоточием обозначены члены, не содержащие at. Вследствие
(77.24) мы имеем
§ 77] вычисление силы 381
Используя это соотношение, мы получим
(а) (а)
где мы положили
Li= h^foM°Mb№ + h% + ^^K + laMb)\j~, (77.27)
α, Ь
(афЪ)
L2 = i Σ [3Τ MJ*Wh ~ *lMb4Vl{sfak +
(«до ^
+ ϊ (^ - Μ^)] yY^bfr · (77·28>
а функция Ψ равна
+ ir^ai/a)(a)2+.... (77.29)
где многоточием обозначены члены, не зависящие от а(. Эти члены
мы подберем так, чтобы функция Ψ была симметрична относительно
всех масс и соответствующих радиусов-векторов. Подржим
*(·. Ь) = ^-МаМ^ь+Мь), (77.30)
+ |b —c||b —a| + |с—а||с —b|) (77·31)
(где с0 есть временное обозначение для скорости света, которое мы
ввели во избежание смешения с индексом при массе Мс). Тогда
нетрудно видеть, что в функции
V = T%W^V + i Σ ψ(&· Ь. с). (77.32)
а, Ь а, Ь, с
(афЬ) (афЬ, Ьфс, сфа)
члены, зависящие от alt будут те же, что в (77.29). Таким образом,
в формуле (77.26) для суммы двух интегралов можно понимать под Ψ
382 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
выражение (77.32). Члены Ψ (а, Ь, с) дают своеобразное „тройное
взаимодействие* масс.
Рассмотрим теперь в выражении (77.20) те интегралы, которые
содержат функцию W^a\ Мы имеем, очевидно,
(a) (a) J
Последнее выражение вычисляется при помощи формулы (76.34)
для производной от W . Мы получим
—7 J p^s^7^(^> =^Γ+^Γ· <77·34>
(а)
h = i" Σ Τ*Μ<*Α ^fef1 (77.35)
а,Ь
{афЬ)
где
β, *
Нам остается рассмотреть последний интеграл в (77.20). Вычисление
его никаких трудностей не представляет, и мы получаем
где
- W pu*-^(rfjf) = д57+-35Г· (77·37)
(Λ)
Ls— --?2ί—|a —b| · (77'38)
(афЬ)
Ц-^М^Ф-М^Ш-З^· (77.39)
(афЬ)
Собирая все интегралы вместе, получаем следующее выражение для
силы:
^ = -S-S + ^^ + L3 + i5)+4^ + L4+^-(77.40)
§ 77] вычисление силы 383
Сравним это выражение для силы с полученным ранее
выражением (76.41) для количества движения. Положим
φ>=-έ· Σ тМ*в+^*)'71=тг· <77·41)
α, Ь
(афЬ)
Ф* = - 2? Σ Τ «*/**« - *Λ> · ^у. (77.42)
а, Ь
{афЬ)
Эти величины входят (со знаком минус) в состав выражений (77.27)
и (77.28) для Lx и £2.
Нетрудно проверить, что мы имеем
£,+£,+/.„ = *,-©, (77.43)
и аналогично
£2+£4+16 = /С2-Ф2. (77.44)
где Κλ и АГ2 имеют значения (76.36) и (76.37). Поэтому
f-ι = ^ <*1+*а-ф-ф1-*>-*>· (77·45)
С другой стороны, согласно (76.41),
^ = -^-(*-r-Ki+K2), (77.46)
где К есть выражение (76.15).
В этих формулах величина К не зависит от координат ai%
величины же Φ, Φν Φ2, Ψ не зависят от скоростей аь. Положив
L = K+KX+K2 — Φ — Фг — Ф2 — Ψ. (77.47)
мы можем поэтому написать
я-=^·^"-^· (77·48)
и уравнения движения
~ dt
dPf—Fai (77.49)
принимают лагранжеву форму
d dL dL
-55—= -я— = 0. (77.50)
dt dat dai
384 ЗАКОН ТЯГОТЕНИЯ Й ЗАкОНЫ ДВИЖЕНИЯ (ГЛ. VI
§ 78. Уравнения поступательного движения в лагранжевой
форме
В предыдущих параграфах были выведены уравнения движения
центров тяжести масс, вытекающие из условий
fgVaTai(dx)* = 0, (78.01)
(а)
которые, в свою очередь, получаются из условий гармоничности
(см. § 70). Уравнения были выведены в предположении, что каждая
масса вращается вокруг своего центра тяжести наподобие твердого
тела.
Уравнения движения приводятся, как мы видели, к лагранжевой
форме
dt dai dai K J
где функция Лагранжа получается подстановкой в (77.47)
найденных выше выражений для /С, Kv /С2, Φ, Ф^ Φ2. Ψ (формулы (76.15),
(76.36), (76.37), (71.32), (77.41), (77.42), (77.32)) ^
Выпишем эти формулы еще раз. Мы имеем
L = K + K1-\-K2 — Φ— Фг — Ф2— Ψ, (78.03)
где отдельные слагаемые имеют следующие значения:
а
а
Здесь первая сумма представляет обычную, ньютонову,
кинетическую энергию поступательного и вращательного движения системы
тел. (При составлении левой части уравнений Лагранжа член Та,
впрочем, не существен.) Вторая сумма дает поправку к
„кинетической" (т. е. зависящей от скорости) части функции Лагранжа. При
отсутствии вращения эта поправка сводится, согласно (76.19), к
обычному поправочному члену, известному из механики материальной
точки; при наличии же вращения эта поправка содержит также
„смешанные" члены, зависящие как от скорости поступательного
движения, так и от угловой скорости вращения тела. От положения
центров тяжести тел величина К не зависит.
1) Для невращающихся масс приведение к лагранжевой форме было
впервые выполнено И. Г. Фихтенгольцем [40].
§ 78] УРАВНЕНИЯ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ 385
Выпишем теперь значения Кг и /С2. Согласно (76.36) и (76.37)
мы имеем (см. примечание на стр. 386)
а, Ь
+ 4^Σϊ^Λ**^Ι«-Η (78.05)
я, Ь
Ъ = έ" Σ (Т^МЭД? (3*, - Щ ~
а,Ь
+^Σ (тМ/Й'-т^л^-ятаёЙ· <78·06>
а, 6
Эти члены зависят как от координат, так и от скоростей и
представляют как бы результат взаимодействия кинетической и
потенциальной энергии. При этом, как мы уже заметили в § 76,
величина Кх однородна и квадратична в скоростях at поступательного
движения, а величина К2 билинейна в скоростях поступательного
движения и в угловых скоростях.
Следующий член в функции Лагранжа
- * - τ Σ т^г+τ Σ тСМР+**> «£; η^ №07,
a,b a,b
представляет ньютонову потенциальную энергию системы тел. К нему
присоединяются две поправки, Ф, и Ф2, где, согласно (77.41) и
(77.42),
а, Ь
~ ф2 = 3? Σ Τ <*ь,Ма ~ Ια№) ^Ξ^ψ · (78.09)
а, Ъ
Величина Фх может быть истолкована как результат замены в
ньютоновой потенциальной энергии Φ или, точнее, в ее главном члене *)
φο=-ΙΣ-ίί#Γ (78Л0)
я, Ъ
1) В формуле (78.07) для Φ поправочный член — порядка L2/R2 по
отношению к главному, вследствие чего релятивистские поправки в поправочном
члене будут такого порядка, каким мы уже пренебрегаем. Поэтому
безразлично, вводить ли их в полное выражение для Φ или только в главный
член Ф0.
25 Зак. 2649. В. А Фок
386 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
массы Ма на эффективную массу Ма-\-ЪМа, где
*Ма = ±1а. (78.11)
Величина же Ф2 может быть истолкована как результат смещения
центра тяжести массы (а), а именно, замены ai на al-\-bai, где
Действительно, мы имеем, с точностью до малых величин,
1 у т(Ма + ЪМа)(Мь + ЪМь) _ф , φ , φ Г7813ч
α, ь
Заметим, что входящая в формулу для эффективной массы
величина \а равна собственной энергии тела (а), которая слагается из
кинетической энергии вращения вокруг его центра тяжести, из
упругой энергии тела и из гравитационной энергии составляющих его
частиц. В самом деле, можно показать, что выражение
Ъ=Та+ f9H(dx?-± f^a{dxf (78.14)
(а) (а)
для собственной энергии переходит, при использовании уравнения
Ляпунова и соотношения (73.26), в формулу (77.10) для ξα.
Следует ожидать, что весомость собственной энергии тела
влечет за собой не только изменение его эффективной массы, но и
смещение его центра тяжести. Однако, ввиду того, что кинетическая
энергия вращения тела вокруг его центра тяжести относится ко всему
телу в целом и не связана с отдельными его частицами, для
величины смещения центра тяжести трудно указать априори надлежащее
выражение. Вычисление же дает для него величину (78.12), где %ai
имеет значение (77.12).
Нам остается выписать последний член в функции Лагранжа.
Входящие в него три (различных) радиуса-вектора удобно обозначать
буквами а, Ь, с; поэтому для скорости света мы примем
использованное в § 77 обозначение с0. Согласно формулам (77.30), (77.31)
и (77.32), мы имеем
Т_ f у MaMb(Ma + Mb) f У Μ ММ Υ
υ a,b υ a, b, с
X\|a — b 11 a — c| + |b — с I |b — a| + |c — a||c-b|)' (78Л5)
Здесь последняя сумма дает тройное взаимодействие масс. 1) Если,
как мы это делали выше, называть члены Кх-\-К2 ,, кинетически-
1) В тройной сумме значки удовлетворяют неравенствам а Ф b, b Φ с,
с Ф а; во всех двойных суммах должно быть афЬ.
§ 79] ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ СИСТЕМЫ ТЕЛ 387
потенциальной" частью функции Лагранжа, то можно величину Ψ
называть „потенциально-потенциальной" ее частью. Эти названия
подчеркивают то обстоятельство, что во втором приближении теории
тяготения Эйнштейна уже не имеет места характерная для
ньютоновой теории аддитивность кинетической и потенциальной части
функции Лагранжа.
Полная функция Лагранжа, согласно (78.03), равна сумме
выписанных здесь выражений (78.04) — (78.09) и (78.15). Она дает,
с принятой степенью точности, уравнения поступательного движения
с релятивистскими поправками.
Что касается уравнений вращательного движения, то они могут
быть получены из соотношений (70.28), которые имеют вид
- / g(*t V.7** - xk VJai) (dxf = 0. (78.16)
В ньютоновом приближении эти соотношения дают, как показано
в § 72, закон изменения момента количества движения
*№ = *ЩЧ>-»т (78.17)
каждого тела, а именно,
ί*№-Σ 3ltX>b)) [<«»-Ц4?-ft - VИВ (78.18)
ь
(формулы (72.07) и (72.13)).
Релятивистские поправки к ньютоновым уравнениям вращательного
движения могут быть получены путем более точного вычисления
левой части соотношений (78.16). Эти вычисления могут быть
проведены по образцу тех, какие были проделаны в предыдущих
параграфах для поступательного движения, и не представляют иных
затруднений, кроме сложности выкладок. Но так как релятивистские
Поправки к вращательному движению небесных тел играют совершенно
незначительную роль и еще труднее наблюдаемы, чем поправки к их
поступательному движению, мы их здесь вычислять не будем.
§ 79. Интегралы уравнений движения системы тел
Подобно системе частиц, взаимодействующих через посредство
электромагнитного поля (§ 26—28), система тяжелых тел обладает
тем свойством, что ее уравнения движения допускают десять
классических интегралов (констант движения), а именно: интегралы
количества движения и энергии и затем интегралы момента количества
движения и движения центра инерции.
25·
888 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Мы выведем здесь общие выражения для констант движения
в виде определенных интегралов. При этом мы будем здесь (как и
в начале § 71) пользоваться, для внутренней задачи, общими
уравнениями движения упругого тела в нерелятивистском приближении.
Выпишем их здесь еще раз. Мы имеем уравнение неразрывности
| + ^ = 0, (79.01)
собственно уравнения движения
"-ρ4£~&· (79·02>
где ускорение wi равно
и, наконец, соотношение для упругой потенциальной энергии Π
'S-Wft+fc)· <79·04)
Предположения, что каждое тело вращается как твердое, мы пока
вводить не будем.
Для получения констант движения можно исходить из тех
соотношений, которые вытекают, как показано в § 70, из условий
гармоничности. А именно, соотношение
— JgVarV*)3 = 0, (79.05)
(00)
проинтегрированное по времени, дает нам три интеграла количества
движения, а соотношение
- f gVaTa0(dxf = 0, (79.06)
(оо)
также проинтегрированное по времени, дает интеграл энергии.
Аналогично, соотношения
- fg(xt V.7-* - xk Va ГО (dxf = 0 (79.07)
(со)
дадут три интеграла момента количества движения, а соотношение
- fgXiVJa°(dxT + x0 fgVJal(dx? = 0 (79.08)
(00) (ОО)
(в котором, впрочем, равенство нулю второго члена вытекает уже
из (79.05)) приведет к трем интегралам движения центра тяжести
системы масс.
§ 79] ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ СИСГЕМЫ ТЕЛ 389
Начнем с вычисления количества движения. При выводе закона
сохранения из (79.05) мы можем воспользоваться результатами § 75.
Обобщая несколько формулу (75.31), положим
Λ= f{m[\+^v>+K+zu)]-±Pikvk-
(оо)
и составим производную от этого выражения по времени. На
основании (73.01) получим, прежде всего,
dt
где
-/%>«#-Я/>Я,*#-}/*>%*#■ <79·'°>
«-p+i(|»4-n-t/)-<ψ-· С·1')
и функция U* удовлетворяет уравнению
Δί/*-1^ = -4πγσ. <79·12>
Но вследствие того, что все интегралы в (79.10) взяты по
бесконечному объему, к ним применимы соотношения (75.24) и (75.29),
согласно которым
J -5ъ*(*х? = ?#] P^F<*** <79ЛЗ)
fpvk%±(dxy=0. (79.14)
Отсюда следует, что
^- = 0; Р: = const, (79.15)
так что Pt есть константа движения. Этот результат обобщает
формулу (75.34) на общий слу^й системы упругих тел,
взаимодействующих через посредство поля тяготения.
Переходим теперь к формулировке закона сохранения момента
количества движения такой системы. Вводя в соотношение (79.07)
выражение (70.22) для gVaTai и используя формулы (70.26) для
составляющих тензора массы, получим:
TtJ'{[р + с4(^2 + П + 3^)](*Л-ед)-
— ^ (PjiPjXt — P)F}Xk)} (dxf =
-/(*.£-*.g)««**+i/'(^-*^('*-
390 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
где мы положили для краткости
Если распространить в (79.16) все интегралы на область, занятую
одной из масс, получится обобщение формулы (72.04), дающей закон
изменения момента количества движения в ньютоновом приближении.
Нас интересует здесь полный момент количества движения, поэтому
интегралы должны быть распространены на все бесконечное
пространство.
Введем обозначение
(79.18)
при помощи которого формула (79.09) для полного количества
движения напишется
Pt = f0t(dxf. (79.19)
Тогда соотношение (79.16) можно представить в виде
l-J{xftk-XkQHdxf = f[Xl^;.-Xk^)o{dXf-
с' dtj Ρ \Х*Ш^Ш хь Ixjdi)(ax)
-wfwj(х,Ъ^-х*!^)idxf-j f Ρ№-»»«/,)i.dxf. (79.20)
Докажем, что в правой части первые два интеграла сокращаются,
а остальные два равны нулю в отдельности, так что вся правая
часть равна нулю.
При вычислении интегралов в правой части мы будем применять
следующую лемму:
Если функция ψ выражается через плотность [х по формуле
Ф = //(|г-г'|)1х(г0(^03. (79.21)
где / есть некоторая функция от расстояния |г — г'|, то имеет
место соотношение
/(*<&-*.■£>«**-·■ с9·22)
При этом предполагается, что формула (79.21) допускает
дифференцирование под знаком интеграла. Для доказательства достаточно
подставить значение производных от ψ из (79.21) в (79.22) и обра-
§ 79] ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ СИСТЕМЫ ТЕЛ 391
тить внимание на то, что в получаемом двойном интеграле
подынтегральная функция антисимметрична относительно координат обеих
точек г и г'.
С аналогичным соотношением мы уже встречались при выводе
формулы (71.14).
Припоминая формулу (77.07), мы можем написать
t/*=t/a + i^-. (79.23)
где £/σ = £/+ £/Доб есть решение уравнения
Δ£/σ = — 4πΤσ, (79.24)
а второй член в (79.23), в котором функция W имеет значение
W = \l /р'1г —Г'К**'А (79.25)
(ω)
представляет поправку на запаздывание.
Рассмотрим первый интеграл в правой части (79.20). Согласно
только что доказанной лемме
/(*^-*4|W=0· <79·26>
Поэтому будет
(79.27)
С другой стороны, доказанная лемма дает при
/-b|r-r'|. <* = !· Ψ = ΐ <79·28>
соотношение
/№-*.таг)4<*#-·· <гам>
Используя его, получаем
dij ΛΧί<^-χ*-*όϊΓχ?=
= /'(χ'^-*>-£π;)«χ* <79·30>
и, следовательно,
ЛдЦ* dU*\ .. ., 1 d Г I &W d*W \ ,. ..
(79.31)
392 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ (ГЛ. VI
так что первые два интеграла в правой части (79.20) действительно
сокращаются.
Третий интеграл в правой части (79.20) равен нулю в силу
доказанной леммы, в формулах которой нужно положить
/ = |г_!гЧ . V = Щ. Ψ = U,. (79.32)
Наконец, последний интеграл в (79.20) равен нулю в силу
уравнения Пуассона для Ut. Таким образом, вся правая часть (79.20) равна
нулю, и мы имеем
i f(xiGk-xkGi)(dxf = 0. (79.33)
Если мы введем полный момент количества движения системы
Л*/*= f(xtQk-xkOd(dxy. (79.34)
(оо)
то мы будем иметь
Mik = const. (79.35)
Напомним, что в этих формулах величина Gi имеет значение (79.18)
и мало отличается от плотности количества движения ρτ/Γ
Переходим теперь к формулировке закона сохранения энергии
для системы тел. В отличие от других законов сохранения,
соотношение (79.06) приводит, при той же точности вычислений, к
формулировке этого закона лишь в ньютоновом приближении. . Более
точная форма закона сохранения может быть получена из
рассмотрения лагранжевой формы уравнений для системы тел. Это будет
сделано, для невращающихся масс, в следующем параграфе.
Ввиду того, что главные члены (р и ρτ/Λ в компонентах с2?*00
и с Τ удовлетворяют уравнению неразрывности (79.01),
соотношение (79.06), в данном приближении, дает то же, что и соотношение
с2 fvaTa\dx? = 0. (79.36)
Вводя сюда выражение (65.23) для расходимости, получаем
jt f c2T<*> (dxf + f д-щ- Г00 (dxf = 0 (79.37)
и, используя значение (70.26) для Т00,
&1*{Х +?(Т*2+П- U)}«t*)3+if?%-(dx? = 0. (79.38)
Так как в отдельности
M° = fp(dxf = const. (79.39)
§ 79] ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ СИСТЕМЫ ТЕЛ 393
то должно быть
Si f Ρ (τ ν2+π - U) №+/ Ρ Ж Vх? = °· (79·40>
Чтобы получить отсюда закон сохранения в узком смысле, нам нужно
и второй интеграл в (79.40) представить в виде производной по
времени. Это легко сделать, если учесть соотношение
ЛрЖ-"#)^>3 = °. (79-41)
которое вытекает из уравнения Пуассона для U. Вычитая из (79.40)
деленное на 2 равенство (79.41) и полагая
E = fp(jV2-t-U — ±U)J(dx)\ (79.42)
мы получаем
4г = 0, Е = const. (79.43)
Интегралы от отдельных членов в (79.42) представляют
кинетическую, упругую и гравитационную энергию системы тел в
ньютоновом приближении.
Если не выделять из (79.38) члена (79.39) и положить
М = ур{1+1(|^ + П-^£/)}(^Л (79.44)
мы будем также иметь
Μ = const. (79.45)
Величина Μ есть полная масса системы тел. Она равна
М = МР+£-9 (79.46)
где М° и Ε имеют значения (79.39) и (79.42).
Нам остается рассмотреть интегралы движения центра инерции
системы тел. Их можно получить, исходя из соотношений (79.08).
Это сводится к преобразованию выражения
+ ±f xffofwj (dx?+± f xi9 d{ll~U) (dxf (79.47)
при помощи уравнений (79.01) — (79.04). Подставляя в (79.47)
значение pwj из (79.02), получаем для суммы двух последних
394 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
интегралов
1 Г ί , cm dU\,. чо
= ~^JPnviVх?-f/^I (<**)3· (79.48)
Используя обозначение (79.18), мы можем записать результат
подстановки (79.48) в (79.47) в виде
wfx4l+Hiv2+n-u)Vdx)3=
= fo( (dxf —i- f pv^idxf + £fpU, (dxf +
Прибавляя сюда очевидное равенство
-wit Ιχ*υνχ?=4*ίх{?ж+иж)№' (79·5°)
можем написать вместо (79.49)
Эта формула справедлива, когда область интегрирования охватывает
одну или несколько масс. Если же интегрирование распространено
на все бесконечное пространство, то в силу уравнений Пуассона
для U и Ul будет
f щЦ (dxf =f?Ui (dxf (79.52)
и, кроме того,
Последнее равенство проще всего проверить, заметив, что функция
Ql=,XlU-2^ (79.54)
удовлетворяет уравнению Пуассона вида
Δ<?, = — 4πγρχ,. (79.55)
§ 80] ЗАМЕЧАНИЯ К ЗАДАЧЕ О ДВИЖЕНИИ СИСТЕМЫ ТЕЛ 395
Вследствие (79.52) и (79.53), в правой части уравнения все
интегралы, кроме первого, сокращаются, и мы получаем
£fxfi{l+±fev* + U-±u)}(dxf = fot(dx? = Pt, (79.56)
где, согласно (79.15), Pt есть константа. Поэтому формула (79.56)
может быть написана в проинтегрированном виде, а именно:
f xlP { 1 +■ ± (1 г/*+П -1 и) } (dxf - tP, = Kh (79.57)
где Kl есть новая константа. Имея в виду постоянство полной
массы М, определяемой формулой (79.44), мы можем ввести три
величины Х1 при помощи соотношений
MXt = J xfi {1 +^· (jv> +П -1 υ)} (dxf. (79.58)
Эти величины можно толковать как координаты центра тяжести
системы масс, а формулу (79.57), написанную в виде
MXi — tPl = Ki, (79.59)
— как выражение закона движения центра тяжести. Исходное
равенство (79.08) можно рассматривать как результат дифференцирования
по времени соотношения (79.59).
§ 80. Дополнительные замечания к задаче о движении
системы тел. Явная форма интегралов движения
для случая невращающихся масс
В предыдущем параграфе были выведены интегралы движения
системы тед в предположении, что внутри каждого тела
выполняются нерелятивистские уравнения движения сплошной среды
(79.01) — (79.04). Возникает вопрос, остаются ли в силе найденные
интегралы движения, если считать уравнения движения сплошной
среды выполненными внутри тел лишь приближенно (как в § 73) и
взамен них потребовать лишь выполнения уравнений движения для
тел, как целых. При этом, разумеется, нужно вернуться к
предположению о том, что тела вращаются как твердые.
По отношению к количеству движения поставленный вопрос
решается весьма просто. Полученные в § 75 и 77 уравнения движения
как раз и состояли в том, что величины
Ра= f0t(dxf (80.01)
(β)
396 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
удовлетворяли соотношению
^Г = Ра1. (80.02)
где, согласно (75.33),
2/^=0. (80.03)
а
Поэтому постоянство величины
Pi==JGl(dxf (80.04)
есть следствие уравнений движения тел, как целых.
То же самое можно сказать относительно величин
М1к = f {xpk - Х&) (dxf, (80.05)
представляющих момент количества движения системы. Уравнения
вращательного движения были выписаны нами (в § 72) только в нью-"
тоновом приближении. Но более точные уравнения, написанные для
суммы орбитального и собственного момента количества движения,
как раз и имеют вид
4t f (xPk - χιΡι) (dxf = lft\ (80.06)
где L$ есть сумма интегралов, стоящих в правой части (79.20), но
распространенных не на все бесконечное пространство, а лишь на
область массы (а). При этом, как доказано в § 79, имеет место
равенство 2^ = 0. (80.07)
а
в силу которого постоянство величин Mlk есть следствие уравнений
вращательного движения в форме (80.06).
Проверим теперь выполнение соотношения
/ gVJa0(dxf = 0. (80.08)
(а)
Это соотношение должно быть выполнено для того, чтобы
выполнялось соответствующее условие гармоничности. С другой сторонь^
если оно выполнено, то будет выполнено и соотношение (79.06),
связанное с интегралом энергии.
Преобразования, которые привели нас от (79.06) к (79.38),
применимы и в том случае, когда все интегралы распространены на
область только одной массы. Поэтому мы можем сразу написать
ΊΓ /р{1+^(^2+П_(/)}(^)3-г4 fp§(dxf = 0,(80.09)
(а) (а)
§ 80] ЗАМЕЧАНИЯ К ЗАДАЧЕ О ДВИЖЕНИИ СИСТЕМЫ ТЕЛ 397
а так как в отдельности
' ρ (dxf = Ma = const, (80.10)
(β)
то должно быть
W /'ρ(γ^+Π-^)θ/*)3+ f9^(dxf==0. (80.11)
(а) (а)
Это соотношение выполняется в силу уравнений движения (79.01)—
(79.04) для сплошной среды. Нам нужно показать, что оно будет
приближенно выполнено и в том случае, если уравнения движения
сплошной среды удовлетворяются лишь в среднем., и тело
предполагается вращающимся наподобие твердого тела, но необязательно
с постоянной угловой скоростью (см. § 73). В этом случае дело
сводится к проверке соотношения
(а)
получаемого из (80.11) после дифференцирования, при учете того,
что упругая энергия остается постоянной. Здесь wi есть ускорение,
для которого в § 73 дано выражение (73.07); подынтегральная
функция в (80.12) есть умноженная на vt левая часть (73.08).
Равенство (80.12) легко проверяется при помощи формулы
(а)
которая может быть написана в виде
dt
Эта формула совпадает с (72.32) и выполняется в силу уравнений
вращательного движения тела. При проверке соотношения (80.11)
можно также рассуждать следующим образом. Разделяя потенциал U
на внутренний и внешний и используя уравнения (71.19) и (72.09),
выражающие равенство нулю равнодействующей внутренних сил и
их моментов, мы можем написать
f 9^.(dxf = - f pOl^(dxf = 0. (80.15)
Кроме того, очевидно,
^ f9(Jl-ua)(dxf = 0. (80.16)
(β)
398 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Поэтому уравнение (80.11) сводится к такому, в которое входит
только внешний потенциал Lra\ а именно к следующему:
ΊΓ /р(^2-^(Л))(^)3+ /ptW = 0· (80Л7>
(«) (а)
Подставляя сюда значение t/(fl) (г) из (71.27) и используя уравнения
поступательного и вращательного движения (71.35) и (72.32),
убеждаемся, что уравнение (80.17) выполняется.
Таким образом, необходимое для выполнения условий
гармоничности соотношение (80.08) удовлетворяется уже в силу остальных
соотношений вида (70.21), подобно тому, как в механике
материальной точки уравнение, выражающее сохранение энергии,
удовлетворяется в силу уравнений движения.
Аналогично можно проверить, что уравнений поступательного и
вращательного движения достаточно для выполнения соотношения
(79.51), а значит и для выполнения закона движения центра инерции.
Как мы уже упоминали в § 79, с принятой точностью
вычислений интеграл энергии получается из (79.06) лишь в ньютоновом
приближении. Но в случае невращающихся тел со сферической
симметрией нетрудно написать интеграл энергии и в следующем
приближении. Так как в этом случае движение сводится к поступательному,
для которого уравнения уже написаны в лагранжевой форме, то для
вывода интеграла энергии можно исходить из функции Лагранжа,
рассмотренной в § 78. Вводя эффективную массу
ma = Ma+j% (80.18)
мы будем иметь, по формуле (78.03):
L = K+KX — Φ — Ψ. (80.19)
Здесь, согласно (76.19),
κ=Σγ^+^Σ¥Μα'?)2· (80·2°)
а а
Кх имеет прежнее значение (78.05), в котором можно заменить массы
Ма, Мъ эффективными массами та, ть:
а, Ь
+ 1^2wW*-§^|a-b|. (80.21)
§ 80] ЗАМЕЧАНИЯ К ЗАДАЧЕ О ДВИЖЕНИИ СИСТЕМЫ ТЕЛ 399
Φ есть ньютонова потенциальная энергия (с эффективными массами)
Φ = -4ΣΤ^Γ (80-22)
а, Ь
Вследствие (78.13) это выражение включает в себя члены Фх и Ф2
(впрочем, ввиду сферической симметрии Ф2 = 0). Наконец, Ψ имеет
прежнее значение (78.15), в котором также можно заменить массы
их эффективными значениями:
ψ_ Τ2 V mamb(ma + mb) f у
Ψ~ 4с02 2d |a-b|2 + 6c02 2d татЫПсХ
υ а,Ь ' υ а, Ъ, с
Х(|а— b|.|a-c| + |b-c|.|b-a| + |с — &| - |с — Ь| )' (80·23)
По формуле
2iaijjj--L = E (80.24)
а
получаем интеграл энергии (в нерелятивистской нормировке):
£ = Στ^+^Σί«Λα'?)2+*ι + Φ + ψ· (80.25)
а а
Остальные интегралы движения также легко получаются из функции
Лагранжа. Мы имеем интегралы количества движения
Σ Ры = Ρι. (80-26)
α
где
al~ 1^7~ Μ °^2c» maak 2c* L· |a-b|
ι 7 yimamb(<ii-b'i) 1 V' г (at-bt){ak — bk) (m „_
b b
интегралы момента количества движения
Σ(αιΡαΛ-αΛΡαύ = ΜΙΛ (80.28)
а
и интегралы движения центра инерции 1)
MXi — Pf = Kt = const, (80 .29)
где
ι) Константы Κι не следует смешивать с величинами К\ и /Q,
входящими в функцию Лагранжа.
400 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
причем
Ж:
а а,Ь
есть полная масса системы.
Более точное значение полной массы есть
Л =2 «.+!-. (80.32)
а
где Ε имеет значение (80.25).
§ 81. Задача двух тел конечной массы
В случае двух тел получаемые из функции Лагранжа (80.19)
уравнения движения могут быть проинтегрированы. Здесь удобнее
перейти к новым обозначениям, более употребительным в механике.
В качестве индексов при массе мы будем писать не буквы а, Ъ
(обозначавшие у нас также координаты масс), а числа 1 и 2;
координаты массы 1 будут теперь хх% уь гъ а координаты массы 2
будут хъ у2% ζ2.
Мы будем употреблять также трехмерные векторные обозначения
гх и г2. В новых обозначениях функция Лагранжа напишется:
+ ^гТ7^Т(^+^-7ггГ2)-
—а-Т^^Гз(Г1-(г1-'-2))(г2'(г1-г2)) +
"Пг,-г,|—2F Ιγι-γιΙ1 ' { ·Ό)
а интеграл энергии примет вид:
-•^|Γΐ,-?2|'(''·(Γι~Γ2))('2<(Γΐ~Γ2))~
•\тхт2 . γ2 тхт2(тх + тг)
-|r,-r,| + 2c' |r,-r,|» *
(81.02)
§ 81] ЗАДАЧА ДВУХ ТЕЛ КОНЕЧНОЙ МАССЫ 401
Мы перепишем также в новых обозначениях формулу (80.27) для
количества движения одной из масс. Составляющая Рф равна
+ 1С5" |г,-г,| 2са | г, — г21» (Г2 (Г1 — **>>· \P\Mi)
Количество движения другой массы получится отсюда перестановкой
значков (1) и (2), а полное количество движения будет равно
Рх = Рх1)-\-Рх2) и т. д. (81.04)
Выпишем одну из составляющих полного момента количества
движения, например,
Мху = xj*? - У1РХ1) + χ2Ρψ - yff. (81.05)
Мы будем иметь:
Мху = {xjx - У А) («, + -яг «ι'? + Ι" |^-ΐ|) +
+ (*гУ2 — У2*2) (щ + 2^ "V2 +1" | ?*■!??, |) —
— гс^^-г»! (*^2 ~~ У'*2 + *2^ ~~ Λ^+
+ ге'У-г,! ((^ + ^ ' (Г·_ '2>>(*^2 - -«ау^. (81.06)
Если мы введем координатную систему, связанную с центром
инерции, то мы можем интегралы центра инерции написать в виде
/ т\ 1 γ/Η2 \ / i\ 1 fml \
W\l+^ — W\rl-r1\)+W2\l+^ — ^lri-rf})=0-
(81.07)
Введем теперь координаты центра инерции в ньютоновском смысле
- т1Г 1 + m2f2 /ΟΙ ΛΟ\
а также относительные координаты
г = г1 — г2. (81.09)
Мы будем тогда иметь
'.-'.+*'.
1 (81.10)
где
ш^=^шх-\-ш% (81.11)
26 Зек. 2649. β. А. Ф9К
402 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
есть полная масса. Мы введем также обозначение
"^■srftr <81Л2>
для приведенной массы и заметим, что
mQm* = mxmv (81.13)
Мы имеем также
тхх\ + т$\ = т$1+т*ё% (81.14)
Щ (Х\У\ — УЛ) + Щ (Х2У2 — 3>2*2> =
= Щ (хоУо — Уохо)+т* (ХУ — У А (81.15)
Х2У\ — Х\У2 = хоУ — *Уо· (81.16)
Из формулы (81.07) непосредственно видно, что радиус-вектор
ньютонова центра тяжести будет все время оставаться малым, причем
скорость его изменения также будет мала. Если порядок величины
гиг принять равным R и q, то будет
*о~к£> *о~-?г· (81Л7)
Поэтому во всех поправочных членах, содержащих в знаменателе с2,
мы можем положить вместо (81.10)
ί-2·'. '«—-£■'· <81Л8>
а также
*=■?'.;»—-а-'· (8ΐ·ΐ9>
Делая эти пренебрежения в самом уравнении (81.07), мы можем
написать его в виде 1)
т0г0
=%^Ч^2-^)· <81-20>
Отсюда можно заключить, что в случае финитных движений
ньютонов центр тяжести г0 колеблется около своего среднего положения.
Перепишем интегралы энергии и момента количества движения
в предположении малости г0. Даже в главных (ньютоновых) членах
выражений (81.02) и (81.06) можно пренебречь величинами г0 и г0,
так как, согласно (81.14) и (81.16), они входят туда квадратично;
это значит, что можно везде пользоваться значениями (81.18) и
(81.19). Вводя эти значения в интеграл энергии (81.02) и разделив
1) Эта формула впервые получена в нашей работе 1941 г. [8В].
§ 81] ЗАДАЧА ДВУХ ТЕЛ КОНЕЧНОЙ МАССЫ 403
результат на приведенную массу т*9 мы получим для величины
£о=|г (81.21)
выражение
2 2 ΐ
+ ^г«*(г-г)2 + 1^-}. (81.22)
Введем теперь значения тг и г2 в интеграл момента количества
движения. Вследствие (81.16) и (81.20) последний член в (81.06) будет
с большой точностью равен нулю, а остальные члены дают
1жжу={1 + 2^(1-^)г2+^(Зт0+/«*)}(^-^). (81-23)
Аналогичные выражения получаются и для других составляющих
момента количества движения. Из этих выражений видно, что в
пространстве относительных координат xt у, z орбита будет плоской.
Беря плоскость орбиты за плоскость ху, мы можем, как обычно,
положить
* = о, * = 0 (81.24)
и ввести полярные координаты г% φ по формулам
* = rcoscp, y = rsincp. (81.25)
Обозначая постоянную в левой части (81.23) буквой μ, мы будем
иметь:
Прежде чем идти дальше, сравним найденные здесь интегралы
энергии и момента количества движения с теми, какие были получены
в § 58 при исследовании движения бесконечно малой массы в поле
большой или конечной массы. Мы должны ожидать, что при т* = 0
формулы задачи двух тел перейдут в формулы задачи одного тела.
Проверим это. Согласно формулам (58.26) — (58.31), мы имели
в § 58 следующие соотношения:
7Ϊ7^ = ε=1+#· <81·27>
где
26*
404 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
а величина α есть гравитационный радиус большой массы, который
можно принять равным
а = ^. (81.30)
Полагая
«•-МЗУ+'ФУ· <81·3»
мы можем приближенно написать вместо (81.29)
(£У-ттН'-?-('+-гИ· <81-32>
откуда
&-^Ш{*+М1+¥)*+&} <81-33>
и затем
Вводя это выражение в (81.27) и заменяя величину α ее
значением (81.30), получаем для Е0 значение
£o=2^-TL + ?(8^2irl'2+lF)· (81·35)
которое совпадет с даваемым формулой (81.22), если в этой
последней положить /и* = 0.
Чтобы сравнить уравнения (81.26) и (81.28), выделим в
последнем уравнении множитель г2ср и напишем его в виде
О+тУ*··'**-*· в"-и>
Значение -г- можно взять из (81.33), причем члены порядка гг4/^4
можно отбросить. Тогда будет
('+т)!£='+£+£· <8'·3'>
Заменяя здесь гравитационный радиус α его значением (81.30) и
подставляя в (81.36), получим
(ι+^+^τΗρ· β»·38)
Если в уравнении (81.26) положить /и* = 0, то оно совпадет
с (81.38).
Таким образом, после перехода к пределу интегралы движения
в задаче двух конечных масс действительно переходят в
соответствующие интегралы уравнений геодезической линии, определяющей
§ 81] ЗАДАЧА ДВУХ ТЕЛ КОНЕЧНОЙ МАССЫ 405
движение бесконечно малой массы в поле конечной массы. Заметим,
что такое сравнение возможно только благодаря тому, что в обеих
задачах мы пользовались одинаковыми, а именно гармоническими,
координатами.
Продолжим теперь исследование уравнений движения двух
конечных масс и найдем уравнение траектории относительного движения.
Для квадрата скорости (81.31) мы сохраним обозначением2 вместо г2.
Если мы еще положим
и = у, (81.39)
мы будем иметь тождество
откуда, после умножения на квадрат множителя при г\ в формуле
(81.26).
++Н1 -^>+^(3-о + «>2 = ,2(Ш2 + «2). (81.41)
В левую часть мы можем подставить значение ν2 из интеграла
энергии (81.22), в котором мы введем вместо (г · г)2 выражение
(г*г)2 = г2^2 —|х2. (81.42)
Формула (81.22) для Е0 напишется тогда:
Ε — 1^_J©L 4- J- (l— -?5-Λ«4 _l
Co— 2V r ^№V ™ο ) ^
Решая приближенно это уравнение относительно ν2 и подставляя
найденное значение ν2 в (81.41), мы получим, после замены 1/г
на и:
При т* = 0 это уравнение переходит, с требуемой точностью,
в (58.36). Чтобы удобнее было исследовать это уравнение, мы
введем, вместо постоянных интегрирования Е0 и μ, две новые
постоянные а и /?, где
£о = -1^Г' Ρ2 = ϊ*ο/>· (81.45)
406 ЗАКОН ТЯГОТЕНИЯ И ЗАКОНЫ ДВИЖЕНИЯ [ГЛ. VI
Кроме того, положим, в согласии с (81.30),
"Τ*" — α» ~ЗаГ = а· (81.46)
В ньютоновом приближении величины аир представляют большую
полуось и параметр эллипса (мы ограничиваемся здесь случаем
финитного движения). В новых обозначениях уравнение (81.44)
напишется:
(du\2_ 1 | а —За* .
\ dy) ар ' 4д2/? '
Многочлен в правой части (81.47) имеет (при а > р) положительные
корни их и #2. близкие к корням уравнения
-^+1β-β2=0· (81·48)
которые равны
"? = "4^. А=Х-^-> (81-49)
где
1— е2 = £-, (81.50)
а
и, кроме того, большой корень uz, для которого нетрудно найти
соотношение
а*ц3=1— 6а~а*. (81#51)
Поэтому дифференциальное уравнение (81.47) можно написать в виде
(^?·)2 = <"ι — ")(« — "2) (1 —^=^~α·«). (81.52)
Произведем подстановку
Уравнение для ψ будет
(ЗУ-'-т-?"* (8|М)
В поправочный член мы ввели приближенные значения корней из
(81.49). Отсюда
§ 81]
ЗАДАЧА ДВУХ ТЕЛ КОНЕЧНОЙ МАССЫ
407
Изменению г от наибольшего до наименьшего значения и обратно
соответствует увеличение ψ на 2π. За это время угол φ увеличится
несколько больше, чем на 2π, а именно на 2π-[-Δφ, где
Δφ = -^. (81.56)
Формула эта совпадает с формулой (58.43), которая дает смещение
перигелия за один период обращения, но входящие в нее
постоянные имеют несколько иной смысл. При данном параметре ρ
смещение зависит только от суммы масс обеих компонент системы
(двойной звезды). Из постоянных интегрирования в выражение для
смещения входит только момент количества движения.
Наличие кубического члена в дифференциальном уравнении (81.47)
приводит к тому, что орбита относительного движения будет уже
не прецессирующим эллипсом, а прецессирующей кривой более
сложного вида, хотя и мало отличающейся от эллипса [19].
ГЛАВА VII
ПРИБЛИЖЕННЫЕ РЕШЕНИЯ, ЗАКОНЫ СОХРАНЕНИЯ
И НЕКОТОРЫЕ ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ
§ 82. Потенциалы тяготения для невращающихся масс
(пространственные компоненты)
Потенциалы тяготения были определены нами в предыдущей
главе лишь с той точностью, с какой они были нужны для вывода
уравнений движения системы тел. Мы займемся теперь более точным
определением потенциалов тяготения, но ввиду сложности задачи
ограничимся случаем невращающихся сферически симметричных масс.
В § 67 были приведены формулы
9°°=т+4^+4?-· (82·0Ι>
%°ι=^+φ-, <82-02>
e« = -citt+i*a, (82.03)
в которых U есть ньютонов потенциал, a Ui— вектор-потенциал
тяготения; члены, содержащие 5, Sit Sikt являются поправочными.
Этих поправок мы в отдельности не вычисляли, так как для вывода
уравнений движения достаточно было знать, кроме
вектор-потенциала Ult величину
W=U +^-(5 + 5м -2t/2) (82.04)
(формула (67.11)), удовлетворяющую, согласно (68.30), уравнению
Δt/* — ^- ^ = — 4πγ (с27^ + Г**). (82.05)
Теперь мы вычислим и поправочные члены, причем будем исходить
из выведенной в § 68 приближенной формы уравнений Эйнштейна
§ 82] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ ДЛЯ НЕВРАЩАЮЩИХСЯ МАСС 409
Рассмотрим сперва уравнение для д/л. Мы сохраним в нем члены
четвертого порядка относительно 1/с, а члены более высокого
порядка будем отбрасывать.
Согласно (66.07), мы можем тогда положить
— g1*k = ?o<ok-pltt, (82.0Л
а в выражении (68.16) для Nik взять главные члены
Nik = -^Qik, (82.08)
где мы положили, аналогично (71.16),
Q« = y^(gradt/)2-^^. (82.09)
Вторую производную по времени в уравнении для д/л мы можем
отбросить. Вводя вместо д/л выражение (82.03), мы получим, после
умножения на -^ сА и переноса члена Qik в правую часть, следующее
уравнение для Sik:
Mik = Qik - Μ №iVk - Pik)· (82· 10)
Напомним, что вектор-потенциал тяготения Ul удовлетворяет
уравнению
Ш1 = — 4πγρ^ (82.11)
и что в силу уравнения Пуассона для ньютонова потенциала U мы
имеем
Поэтому из уравнений (82.10) и (82.11) следует
»№+4£)—*т№+^-^-4&} <8213>
и в силу уравнений движения сплошной среды, написанных в форме
(66.13).
M^+ffH· <82·Ι4>
Так как последнее уравнение имеет место во всем пространстве,
то будет
Т+§ = °. (82.15)
т. е. будет выполняться и условие гармоничности. Получив явные
выражения для Sik, мы сможем проверить выполнение условия
(82.15) и прямой подстановкой.
410 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Функции Sik мы будем искать в виде
Stt=tf/*+f«. (82.16)
где Uik и Vik удовлетворяют уравнениям
Δ^ι* = -4*Τ(Ρ*Λ-Λ*>. (82·17)
W№ = Qlt. (82.18)
Подставляя в формулу (82.09) для Qik значение ньютонова
потенциала
ί^ = Σ«β. (82.19)
а
мы можем написать
Qik = Σ Q{ika) + Σ <?',? \ (82.20)
где1)
«'^„(grada,,)'—^£j. (82.21)
«S» = I>„(gra<l«„.gIa(l«»)-l(^-^. + ^-^). (82.22,
Сообразно разложению (82.20), мы можем решение Vlk
уравнения (82.18) искать в виде
V^-SvfT'+Svft4. (82.23)
а афЬ v '
где отдельные члены удовлетворяют уравнениям:
W%a) = Q\r\ (82.24)
LV(iakb)=Q[akb). (82.25)
Мы найдем явные решения написанных уравнений для случая не-
вращающихся сферически-симметричных масс. В этом случае
ньютонов потенциал от массы (а) во внешнем пространстве будет
»α=-|7^ΪΓΓ- (82-26)
и выражения (82.21) и (82.22) для Q^a) и Q%b) примут вид:
Qik -ТЛ1в|Т|г_а|4 f^^jj-jg J, (82.27)
0^'=ΤΛία^· j| |f_a|»|f_b|» S<*~
(*f — «0 (*ft — Ы + (*f — »f) (Xk — <**) ) /On 9Q4
|r-e|».|r-b|« Г (82'28)
l) Величина Q%a^ обозначалась нами раньше (в § 71) через qffl.
§ 82] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ ДЛЯ НЕВРАЩАЮЩИХСЯ МАСС 411
Эти формулы справедливы вне масс; внутри же масс нужно, строго
говоря, пользоваться более точными выражениями (82.21) и (82.22).
Различие между точным и приближенным значением величины Q%b^
не будет, однако, существенно влиять на значение функции V[%b\
по крайней мере в том случае, когда линейные размеры масс малы
по сравнению с их взаимными расстояниями. Поэтому мы будем
брать в качестве величины Q^6) в правой части (82.25)
выражение (82.28), применяя его во всем пространстве. Это выражение
имеет в точках г = а и r = b особенности не выше дипольного
характера. Вследствие этого, уравнение (82.25) для V\%b) будет иметь
решение, которое остается конечным во всем пространстве, включая
точки г = а и r = b, и обращается на бесконечности в нуль.
Это решение может быть найдено в конечном виде. Для этого
напишем выражение (82.28) в виде производных по параметрам ah b1t
1
от функции гп z-r. Мы будем иметь
^J |г — а|· I г — b I J
п{аЬ)_ 2МаМь_(* д> д> д> \ 1
Wik — Τ 2 Y^dajdbj datdbk dakdbi)\ r — a | · | r — b|' Kp/"^)
Поэтому уравнение (82.25) сводится к более простому уравнению
Д?=|г_а|?|г-Ы· (82-30)
Действительно, если φ есть решение (82.30), то величина
И*»)— fMaMb U д*9 &<? д*<? \ ,Я9 оП
Vik — 2 \ь^^щ~1^ь; — ^^щ) (82·ό1)
будет решением уравнения (82.25).
Но решение уравнения (82.30) легко написать. Обозначим через s
периметр треугольника с вершинами в точках г, a, b
в=|г —а|+|г —b| + |a —Ь|. (82.32)
Тогда функция
<p = lg* = lg(|r — a|-f-|r — b| + |a — b|) (82.33)
будет удовлетворять уравнению (82.30), так как мы имеем
Д'г—1,—нг-ы· (82·34>
Таким образом, искомое решение уравнения (82.25) имеет вид
у\аЬ)_ fMaMb U d4gS d*\gs d*\gS\ ft9o-
Нетрудно проверить, что это выражение остается всюду конечным и
обращается на бесконечности в нуль.
412 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. УН
Обратимся теперь к уравнению (82.24) для V\ua\ Перенеся начало
координат в точку а и учитывая сферическую симметрию, мы можем
написать его в виде
^а) = {^Ь1к-^Щи'{г)\ (82.36)
где мы положили для краткости
«в = «(г). (82.37)
Решение уравнения (82.36) можно искать в виде
Vfce) = -W)+(*i** -^b(kr2)q2(r). (82.38)
Тогда q0 и q2 должны удовлетворять уравнениям
-^ + 74г = -7г«'(г)2. (82.40)
откуда, имея в виду граничные условия, получаем:
с» τ
1o(r) = if ru'Wdr + ^ffiu'Wdr. (82.41)
τ 0
с» Г
Ь(г) = 1 f Τ а' W dr+T^f rV ^ dr- <82·42>
Г 0
Если радиус тела равен L, то при г > L будет
и(г) = А, (82.43)
и выражения для qQ(r) и q2(r) приведутся к следующим:
ЯЛг) = -1щ-Л-2ф> (82.44)
ί2Μ2 t2M2
Я2(г) = Ф—^-К. (82.45)
(82.46)
где
L
^=L-^fria'^dr
I а о
есть некоторая длина порядка Z,, а величина
оо
*«=-щ! terad «о)2 о**)3=-щ fгЧ' ^Чг (82·47>
§ 82] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ ДЛЯ НЕВРАЩАЮЩИХСЯ МАСС 413
есть взятая с обратным знаком гравитационная энергия тела.
Подставляя найденные значения q0(r) и q2(r) в формулу (82.38), получим
„(да) f^Wk К Τ«β Ί*ΜΧ Ι 1. Λ ,„„,
vik — 4^4 Hbik~r 5r^\ < * — 3" '* / ν>ΙΛ°)
или, если вернуться к прежним переменным, заменив х( на х, — at
Ki* — 41 г—а|* 3" "ГТ^
5|
I
γζ^τ {(*, - «/) (** - «*) —з δ« (r - a)2 } · (82.49)
yX\,
Здесь последний член мал по сравнению с первым, если расстояние
до массы (а) велико по сравнению с ее радиусом; строго говоря,
его следовало бы отбросить, так как подобное пренебрежение уже
сделано при вычислений V^6).
Нам остается написать решение уравнения (82.17). Положим, для
невращающихся масс
** = */. Ptk = — P*ik. (82.50)
где ρ определяется из уравнений
dp = pduat (82.51)
причем, согласно (74.24),
fp(dx? = ±ea. (82.52)
<«)
Мы будем тогда иметь
а а
Дипольные члены здесь равны нулю по причине сферической
симметрии тел, а члены более высокого порядка относительно L/R
(того же, как последний член в (82.49)) мы отбрасываем.
Полагая теперь
5Ь - |Г_а, Ч 4|г —а|* ' (82'54)
с(в*) _!/(?*) _ £МаМь_(к d2\gs d2\gs д* \g s \ (ю .-
обозначая через 5/Λ сумму
&*=Σ3ίβ,+ Σ 5Й4) (82.56)
0 β=£$
414 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
и подставляя ее в формулу
^ = -cbik-\~±Sik. (82.03)
мы получим явные выражения для пространственных компонент
фундаментального тензора. Эти выражения справедливы также и в области
внутри системы тел (между массами).
Для смешанных компонент фундаментального тензора мы имели
приближенное выражение
9°' = ^ί/,. (82.57)
где Ul есть решение уравнения (82.11), которое в рассматриваемом
приближении равно
"i-StSSt (82·58)
а
(см. формулу (76.23)).
Мы можем теперь проверить, что найденные явные выражения
для Sik и для Ul удовлетворяют условию гармоничности (82.15).
Мы имеем
а
Далее, при помощи формулы
*lg» (1г-а| + |г-Ь|-|а-Ь|)
dajdbj— 2|г —а|.|г —Ь|.|а —Ь| \p*.w)
и двух других формул, получаемых из (82.60) перестановкой букв
(а, Ь, г), можно проверить равенство
(82.61)
dxk — 2 · m«mt> |a — b|*\|r — a| |r — b |Г
Суммируя это по α и по Ь, получаем
-щ-=2и fMaM„ j—^ . Т7=7Г (82.62)
афЬ афЬ
или, если мы положим
φ=-2-Σ^· <82·63>
афЬ
V dS^b) ν τ дФ
= 2|7^ТТЖ· <82'64>
jU дхк *4 |г — а Ι όαι
афЬ а
§ 83] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ ДЛЯ НЕВРАЩАЮЩИХСЯ МАСС 415
Складывая равенства (82.59) и (82.64), получаем окончательно
^+^=Σπ^Κ3<+£)· (82·65)
а
Но величина Φ есть ньютонова потенциальная энергия системы тел.
Поэтому
в силу ньютоновых уравнений движения. Следовательно, будет равно
нулю и все выражение (82.65), в согласии с (82.15). Видоизменяя
наши рассуждения, мы могли бы (подобно тому, как это сделано
в нашей работе 1939 г. I34]) вывести из (82.15) и (82.65) ньютоновы
уравнения движения (82.66).
§ 83. Потенциалы тяготения для невращающихся масс
(смешанные и временная компоненты)
Найдем следующее (по сравнению с формулами (82.57) и (82.58))
приближение для смешанных компонент д0/ потенциалов тяготения.
В уравнении (82.06) мы должны положить [χ = 0, ν=1 и
подставить туда значение Noi из (68.15) и значение Toi из (66.07), с тем,
впрочем, упрощением, что напряжения plk сводятся к изотропному
давлению ρ и что скорости vi = ai внутри каждого тела постоянны.
Напишем формулу (68.15) для N0i в виде
№* = —£<?/· (83.01)
где
Λ ди ди , . I dut duJ\ &U
^=-3-зг^Г+4(^7-^г)^· (83·02)
Уравнение (82.06) напишется тогда
где, согласно (66.07), в случае изотропного давления ρ будет
(c« + 4£/)7* = i^ + £(-^-|-II + 3£/) + -§-}. (83.04)
Подставив в уравнение (83.03) выражение
9°' = ^+^ (83.06)
416 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
для д0/, мы можем удовлетворить этому уравнению, если мы
потребуем, чтобы было
^1—3"^ = -4«т(«, + 4£/)7Л'. (83.06)
ASi-i^-=Qf (83·07>
Так как эти уравнения содержат в качестве параметра скорость
света с, то величины Ul и Si уже не будут коэффициентами
разложения д0/ по обратным степеням с. Однако эта
непоследовательность в обозначениях несущественна, поскольку в первом
приближении уравнение (83.06) для Ul совпадает с (82.11).
Чтобы написать решение уравнения (83.06) в области вне масс,
нужно знать значение объемного интеграла от его правой части,
взятого по объему каждого тела. Для вычисления этого интеграла
припомним соотношение
рП —pite + p = 0f (83.08)
к которому сводится формула (73.26) при отсутствии вращения. Мы
имеем, согласно (74.07) и (74.24),
/ 9иа (flxf = 2eat f p {dxf = Ι га. (83.09)
ώ (α)
Соотношение (83.08) дает поэтому
/ΡΠ(^)3 = |εα. (83.10)
(«)
При помощи этих формул получаем
f{ca + W) 7*W= Mjt{ 1 +^(^ + 3£/«·>(·))} + !..λ.
(а)
(83.11)
где U^ есть введенный в § 71 внешний потенциал. Вычисления
здесь значительно проще, чем в § 76, так как мы вращения не
рассматриваем.
Заметим, что величина (83.10) есть внутренняя (упругая) энергия
тела. Так как его гравитационная энергия есть минус efl, то сумма,
2
равная -7>га% представляет ту энергию, которую нужно учесть при
вычислении эффективной массы. Последняя будет равна1)
та = Ма + ^, (83.12)
в согласии с (76.18) и (80.18).
1) Соотношение (83.12) необходимо иметь в виду при сравнении
выведенных здесь формул с формулами нашей работы 1939 г. [34].
§ 83) ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ ДЛЯ НЕВРАЩАЮЩЙХСЯ МАСС 417
При помощи (83.11) мы можем написать приближенное решение
уравнения (83.06) в виде
а
+ ^"^2т^л|г-а|- (83.13)
а
Последний член в (83.13) представляет поправку на запаздывание.
Переходим к уравнению (83.07) для «S,·. В этом уравнении можно
пренебречь второй производной по времени и писать его в виде
b,Si = Qi. (83.14)
Подобно (82.20), можно представить величину Qt в виде
Qi = ^Q\aa)jr^ Qfb\ (83716)
а афЬ
где Q\aa^ есть квадратичная функция от первых производных массы (а),
a Qi^ — билинейная функция от первых производных потенциалов
масс (а) и ф). Соответственно разложению (83.15) можно написать
решение уравнения (83.14) в виде
5/ = 2Mafl)+ Σ S\ab\ (83.16)
а афЬ
где отдельные члены представляют решения уравнений
bS\aa)=xQ{iaa\ (83.17)
A5ifl6)=Qifl6). (83.18)
Для Qi мы возьмем выражение, аналогичное (82.21) и
справедливое также и внутри данной массы:
Qr>^{-|^H-48^grad«a)'}. (83.19)
Для Q\ ' мы ограничимся выражением, справедливым вне масс и
аналогичным (82.28), а именно:
Чтобы решить уравнение (83.17), представим его правую часть в виде
<#"■> = ajQ\aja) + 7inQfja\ (83.21)
27 Зак. 2649. В. А. Фок
418 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Решением будет, очевидно,
S[aa) = ijVfia) + 7aiVfja\ (83.22)
где Vtja) есть найденное выше решение (82.38) или (82.49)
уравнения (82.24).
Переходя к уравнению (83.18), представим его правую часть,
т. е. выражение (83.20), в виде
+ 4^+^^}lr-aHr-b|· (83·23)
Вследствие (82.34) решением уравнения (83.18) будет
^ = ^Λ{(3^-4^^ +
Мы выпишем также значение S[aa^ вне масс. Для этого нужно
подставить в (83.22) значение viyfl) из (82.49), причем можно опустить
члены, содержащие \а и быстро убывающие на больших расстояниях.
В получаемом для S\aa^ выражении удобно выделить гармонический
член и писать S\aa) в виде
&a) = -%iilf^ + $ra\ (83.25)
S\ —iMa[aj 4|r_a|4 Ь4|г-а|2 )· (83.26)
Подстановка этих выражений в формулу (83.16) даст значение Sl9
которое, вместе с найденным раньше значением (83.13) для ίΛ,
позволит по формуле (83.05) определить и д0/. Формулу для (р
можно написать в виде _
й0' = ^+^. (83.27)
где
^-ΣΊτ5ίτ{Λί.+·&-+^(τ^+^·)(·))}+
а
+w~w%iMa\r-*\. <83·28>
а
5, = 23вв) + 2 S\ab). (83.29)
а а фЬ
где
§ 83J ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ ДЛЯ НЕВРАЩАЮЩИХСЯ МАСС 419
Здесь величины Ut и St отличаются, соответственно, от Ul и St
гармоническими членами, содержащими га. Заметим, что величина га
входит в Ut только через посредство эффективной массы (83.12).
Сумма Sl есть однородная квадратичная функция от масс, тогда
как Ui зависит от масс линейно (если не считать членов,
содержащих t/(fl\a)).
Нам остается найти явное выражение для временной компоненты
потенциалов тяготения, т. е. для величины д00. В § 68 уже были
выписаны уравнения, определяющие д00. Согласно (68.43) и (68.41)
мы имеем
9CO = T + ^Z7+-JZ72· (83·30)
где U есть обобщенный ньютонов потенциал, удовлетворяющий
уравнению
AZ7-^^=-4,c"i(c2+Tt/)7,00· <83·31>
в правой части которого стоит выражение
(С' + 1у)гоо = р+.1-(|г,2 + П_1у), (83.32)
вытекающее из (66.07) и использованное в § 79. Потенциал U
вычисляется подобно тому, как был вычислен в § 77 потенциал £/*,
с тем упрощением, что теперь массы предполагаются сферически
симметричными и невращающимися. Используя (83.09) и (83.10),
получаем
flc*+iu)T»(dxf = Ma + ^*a + ^№- t/<fl>(a)) (83.33)
(а)
и, следовательно,
а
+ "έ-£·Στ^β|Γ-β|. (83.34)
а
Подстановка этого выражения в (83.30) дает <$°°. Тем самым
заканчивается определение потенциалов тяготения во втором приближении.
Мы должны еще проверить, что полученные для д00 и д0/
выражения удовлетворяют условию гармоничности
27*
420 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Дифференцируя выражения (83.34) и (83.28) для U и Uh получаем
непосредственно
Ш-Л-РЁк — Л д У tMaa>jU{a) (а) ι
dt ~f" dxt ~ 2c2 dxiL· I г — а| "*"
, 1 γ ΊΜα (· ·· 1 <И/(«>(а)\ ft
α
Далее, мы имеем из (83.26):
д$(аа) j д fM2a
-дхТ~~~4~М |г-а|»· (83'37)
При вычислении выражения
+<*|-*^^+«Ф+^-Ш (8338)
мы должны использовать формулу (82.60) и две другие формулы,
получаемые из (82.60) перестановкой букв а, Ъу х\ кроме того, при
преобразовании выражения (83.38) следует иметь в виду, что \gs
и производные от этой величины зависят только от разностей
координат, вследствие чего, например,
Объединяя в выражении (83.38) члены, содержащие |г — а| · |г — Ь|,
затем члены, содержащие |г — а| · |а — Ь|, и, наконец, члены,
содержащие |г — Ь| · |а — Ь|, можем написать:
dsW 1 0 ( . д . д ] 1
—— = τfMaMb{-7aJ-^-7bjЩ)lr_iil·lr_ъl +
+ JT2^^4~7^^ + (^ + ^^}lr^aMa^b| +
+ ^T2^^{-7^^ + (^ + ^)^}|f^b|?|a^br (83.40)
Суммируя это выражение по а и по ft (с пропуском члена а — Ь)
и складывая с суммой по а от (83.37), получаем:
!EL — —Lij<HL_L д У* iMqfiiUW (а) ,
όχι~ 2 й dt 2 dxi L· I r — a | "+"
+Στ^{Ι^-4^).}· <83">
§ 84] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ НА БОЛЬШИХ РАССТОЯНИЯХ 421
Но, если в формуле (83.30) заменить в поправочном члене U на U, то
левая часть условия гармоничности (83.35) будет отличаться лишь
4
множителем —д- от выражения
dU . dUt
dt "+" dxt
с2 \ 2 и dt "Г" dxi)~
' с2 ^ |г —а
• J ·· / dUW (г) \ 1
(83.42)
которое получается после прибавки к (83.36) деленного на с2
выражения (83.41) и переноса одного из членов в левую часть.
Но мы имеем
л* ( dUW (г) \ (ЭФ
ΜΛ—δχΓ).=-'яг·
где Ф-
•ньютонова потенциальная энергия
Ф= 'У.. МаМь
афЪ
а-
Поэтому, в силу ньютоновых уравнений движения будет
(dU^JxY
а,=
V 5ΪΓ
■■).·
(83.43)
(83.44)
(83.45)
и правая часть (83.42) обращается в нуль. Таким образом, условие
гармоничности (83.35) выполняется.
Чтобы получить для потенциалов тяготения ср" не слишком
сложные явные выражения, справедливые также и внутри системы тел
(между массами), нам пришлось, в этом и в предыдущем параграфе,
ввести довольно сильные ограничения: мы предположили массы
сферически симметричными и не вращающимися. От этих ограничений
MN освободимся в следующем параграфе, когда будем рассматривать
потенциалы тяготения на больших расстояниях от системы тел.
§ 84. Потенциалы тяготения на больших расстояниях
от системы тел (пространственные компоненты)
В этом параграфе и в следующем мы выведем для потенциалов
тяготения явные выражения, справедливые на „умеренно-больших"
расстояниях от системы тел. Под „умеренно-большими" расстояниями
мы разумеем такие, которые хотя и велики по сравнению с
размерами системы, но все еще малы по сравнению с длиной
излучаемых системой волн (см. § 64). Относительна внутренней структуры
тел мы сохраним столь же общие предположения, как и те» какие
422 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. ΥΠ
мы делали в § 79 при выводе интегралов уравнений движения
системы тел.
Начнем с определения пространственных компонент g/ft. Мы имеем,
как и в § 82,
в1*—Л|*+-у5»· (Ш)1)
где, согласно (82.16)—(82.18),
Sik=Uik + Vik (84.02)
и функции Ulk и Vl№ удовлетворяют уравнениям
Δ^ι» = — 4«T(W* —Λ*). (84-03)
AVtt - \ bik (grad Uf —j| *jl. (84.04)
Правая часть уравнения (84.03) отлична от нуля только внутри масс
и имеет, если пользоваться математическим термином, моменты всех
порядков (см. § 70). Это значит, что, умножая ее на произведения
различных степеней координат и интегрируя по всему объему, мы
получим сходящиеся интегралы. Поэтому решение уравнения (84.03).
справедливое вне системы масс, можно написать в виде ряда по
шаровым функциям (мультиполям). Начало координат мы возьмем
в какой-либо точке внутри системы тел, не обязательно в ее центре
тяжести. Мы получим
ί/«=^/*+ί/«)+ ···. (84.05)
где первые два члена равны:
υ°ι* = η:/ (W* - Pik) Wxf. (84.06)
U% = ^i- f (sn{ou - Plk) xj (dxf. (84.07)
В уравнении же (84.04) правая часть отлична от нуля во всем
пространстве и убывает только обратно пропорционально четвертой
степени расстояния. Поэтому существует только момент нулевого
порядка, и решение этого уравнения не может быть представлено
в биде ряда, аналогичного (84.05).
Чтобы найти решение, введем в правую часть (84.04) выражение
я ньютонова потенциала в виде интеграла
§ 84] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ НА БОЛЬШИХ РАССТОЯНИЯХ 423
Мы получим тогда формулу, которую можно написать в виде
(84.09)
J» 1 1
'kdx\ }|r-γΉγ-γ"!
дх\ дх] \ |Γ-γ'|·|«·-γΊ
Из § 82 мы знаем (формулы (82.33) и (82.34)), что функция
lg* = lg(|r-r'| + |r-r"| + |r'-r"|) (84.10)
удовлетворяет уравнению
Отсюда нетрудно заключить, что то решение уравнения (84.09),
которое всюду конечно и обращается на бесконечности в нуль, может
быть представлено в виде
у —1^[{о'(ах'Уъ"(<1х"У\ъ d2]gs d2]gs d2[gs \
Vik~^ J J ?(dx)P (dx) Jb„ дх,дх,, д^дх„ д^дх„ J.
(84.12)
Нас интересует значение этого выражения на больших расстояниях. Для
вычисления его мы должны взять разложение s и \gs по обрашым
степеням г, справедливое при больших г и конечных г' и г". Мы имеем
* = 2г + (|г'-г'Ч--^-^) +
+ 7(*ί*; + «)0-^)+.... (84.13)
откуда
+ ^-(^ + ^)|r'-r"|+-^r(r'2+^ + 2^;)-
-^(3*& + 3<< + <4 + *ί*3+ ··· (84.14)
Дифференцируя, получаем для симметричной и антисимметричной
части второй производной по х\ и x"k выражения
1 / &\gs , P\gs \ ___ 1 /s xtxk\
1 \ дх\ дх'ы + дх\ дх'к ) ~ 4г* \1к ' г' )
1 / d*\gs &\gs \_ х„ χΊ — χ'ι xt xk — x\
2\дх\дх"и дх"дх'к) 4r» |'' — *'! 4гЧг'-г"Г ' ;
424 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [гЛ. VII
Здесь отброшены члены, убывающие быстрее, чем 1/г2. Полагая
в (84.15) 1 = 1 и k = l и суммируя по /, получаем
64gs _ 1 /1 ху(х; + х^\ 1
<*;<*; 2r2 Vr+ 2r° J\r'-r"[ { П
в согласии с точной формулой
d*\gs
дх, дх,
4gs = 1 1/1 ι 1 \ 1 f84 18ч
\дх\ 2|г —γ'Ι-Ιγ —γΊ 2 \| г — г' | I г — г" |/ I г' — г" Г "
Подставим (84.15) и (84.17) в (84.12) и рассмотрим сперва члены,
убывающие как 1/г. Обозначив соответствующие члены Vik через V%t
получим
V0tk = -^ffP'(dx'fP"(dx"f ^'l~^j~X''k) . (84.19)
В подынтегральной функции важна только симметричная часть
(относительно х' и х"). Заменяя поэтому множитель х\ — х". на 2х'. и
выполняя интегрирование по х'\ получаем
V0lk=^fXl^-P(dxf, (84.20)
или, так как это выражение заведомо симметрично относительно / и £,
(см. также лемму в § 79). Заметим, что это же выражение равно
<=-4^/(T8^rad^-^^)W. (84.22)
что и следовало ожидать, так как Vik удовлетворяет уравнению (84.04)
и объемный интеграл от правой части этого уравнения конечен.
Рассмотрим теперь в (84.15) и (84.17) члены, убывающие как 1/г2.
Среди них есть члены, не зависящие ни от х', ни от х". Эти члены
дают в Vik вклад
}& =&%&.. (84.23)
где Μ есть полная масса системы.
Остальные члены порядка 1/г2 имеют дипольный характер. Они
равны
§ 84] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ НА БОЛЬШИХ РАССТОЯНИЯХ 425
Но мы имеем тождество
К*/ К - х1)+х» (x'i - О - <х> (х'} - х",)\+
+к*; к - о+x>j к - о - *х к - *ai=
= W + *]) (x't - <) К - <). (84.25)
в котором выражения в двух квадратных скобках в левой части
получаются друг из друга перестановкой х' и х". При
интегрировании в (84.24) мы можем поэтому взять вместо множителя (84.25)
одну из квадратных скобок, умноженную на 2. Выполняя затем
интегрирование по той переменной, которая входит в квадратную
скобку линейно, получим
И? = $- / (xjX( % + XjXk ^ _ XiXk™_) ρ {dxf. (84.26)
Объединим теперь в Uik и Vik члены одинаковой полярности.
Полагая
S?* = t4 + l4 (84.27)
и складывая (84.06) и (84.21), получим
&=£/{ 2Р^* ~ 2Л* + Ρ (χι ЖГ + х* Ш) ){dxf· (84'28)
Представив член, содержащий pik, в виде
- 2 / р1к {dxf = f (Xl Ц±. + хк?Щ) (dxf (84.29)
и воспользовавшись уравнениями движения внутренней задачи
dU dp»
получим из (84.28)
s*k=if* <**"* + χ**ι+2*w*> (dx)Z (84·31}
или
$к=Ъ1@! Ρχ'χ* (fif*>3· <84·32>
Таким образом, после всех преобразований величина S°ik выразилась
через вторую производную по времени от соответствующего момента
инерции.
Преобразуем теперь величину
SS=£/ffi + Vffi. (84.33)
426 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Из (84.07) и (84.26) получаем
Используя тождество
•^J (xjxiPks + XjXkPu — xixkP)s) =
dPks dPts dPjs
= 2xjPi*+*j*t -g^+xjx> -я? ~ *'** ~s*7' (84,35)
представим интеграл, содержащий plkt в виде
- 2 / pikX] (dxf = / (Xjxt Ife + xjXk ^L - Xixk *£) (dxf.
(84.36)
Пользуясь уравнениями движения (84.30), можем тогда написать
Sii? = \~ J ρ (2лгуг»^А + X)X{Wk + *;*Λ — *Л*/) (dxf, (84.37)
ИЛИ
s®=-e-irfp (w*+*у*л - *Λ<ν) ^х)3· (84·38>
Отсюда по формуле
Si* = s8? + Sff+Vi* (84.39)
получаем Sik, а подставляя это значение 5ift в формулу (84.01),
получим следующее окончательное выражение для д'*:
iik = ~ *tk+^F -W f Ρ*Λ Vx?+
2γ*/ d Г _ fM2XiXk
+-fr*~~dtj P(xjxivk + xjxkVi — xixkVj)Wx)4 ^r—· (84.40)
Мы получили явные выражения для пространственных компонент
потенциалов тяготения, справедливые на больших (в указанном выше
смысле) расстояниях от системы тел. Здесь среди членов,
содержащих съ в знаменателе, отброшены те, которые убывают быстрее,
чем -1-.
Заметим, что в случае одной сосредоточенной массы выражение
(84.40) приводится к тому, котррое соответствует строгому решению
уравнений тяготения (формула (58.12)).
§ 85] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ НА БОЛЬШИХ РАССТОЯНИЯХ 427
§ 85. Потенциалы тяготения на больших расстояниях
от системы тел (смешанные и временная компоненты)
Для определения смешанных компонент на больших расстояниях
мы вернемся к уравнениям, приведенным в начале § 83. Мы имеем
ΪΓΔβω—ЕГ^£—l-Qi—|L(c2 + 4t/)7'0i. WO
где
dU dU , (dUt dUj\ dU nim Λ
^ = -3Ж^+4(^-"^)а^ (85·02)
и, согласно (66.07),
(ia + 4£^T« = pf»i{H-^-(|t»»H-n + 3^)}—£-plkvk. (85.03)
Мы по-прежнему полагаем
й0/ = -^+^- (85-04)
и подчиняем Ul и Si уравнениям
Δ£/<—?-ir=-4,t^c2+4t/)ro' (85·05>
Δ5ί--^-^- = <?ί. (85.06)
Вводя, согласно (75.18), величину
W = 1Т У р'| г - r'| (rfjeO8. (85.07)
а также
Щ^-\ J {poy\r — f\(dx^f, (85.08)
мы можем написать
l/i = Ti/ |r-r'|—<**^+1Г-даг-· (*δ·09)
Последний член представляет поправку на запаздывание. Разлагая
здесь интеграл в ряд по мультиполям и ограничиваясь первыми
двумя членами и приближенным значением третьего члена, получим:
Ut = jf{*+W) Г°<(<**)3 + 7г/(<2+4£/) T°'xj(dx?-\-
428 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
В этом выражении можно выделить члены, содержащие
количество движения и момент количества движения системы. Эти
константы движения выражаются по формулам (79.19) и (79.34) через
функцию Glt связанную, согласно определению (79.18), с величиной
(85.03) соотношением
(ί· + 4£07« = Οι + ^-(4ί/ι+^5.). (85.11)
А именно, мы имеем
P^fG^dxf, (85.12)
М№ = f (xfib - xfit) (dxf. (85.13)
Соответствующее преобразование мы произведем уже после
вычисления величины Sit так как в этой величине ряд членов
объединяется с членами из U\.
В уравнении (85.06) для Si мы пренебрегаем, как и раньше,
второй производной по времени и пишем его в виде
^Si = Qi. (85.14)
Величину Qt можно, подобно (84.09), представить в виде
двукратного объемного интеграла
+
+4δ'·*~^^-τ(^ ·(85Л5)
откуда сразу получается решение уравнения (85.14) в виде
Мы должны сюда подставить выражения (84.15) и (84.16) и
произвести интегрирование по х' и по х".
Выделим сперва член, убывающий как —. Его можно написать
в виде
С другой стороны, дифференцируя по времени очевидное равенство
§ 85] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ НА БОЛЬШИХ РАССТОЯНИЯХ 429
будем иметь
вследствие чего можем также написать
^ = 7{-4/p^^)3-/p^f^)3}· (85·2°)
Рассмотрим теперь в (85.16) члены, убывающие как -^. В
подынтегральной функции среди этих членов есть такие, которые не
зависят ни от х\ ни от х". Они дают
5ί = ^» + ^^. (85,21)
Остальные члены порядка — имеют дипольный характер. Обозначая
их через S\ , будем иметь:
+ Wwb4ff<P°J Pg j?-^ Vx'?Vx"?. (85.22)
Напишем это выражение в виде
^^^-(A^Bji), (85.23)
где Αμ и Bjl представляют антисимметричную и симметричную часть
соответствующего коэффициента
Atj = -Ajh Ви = Вп. (85.24)
Мы имеем
АП = - Τ Τ / / ^ιϊ Ρ" ,r/V| У*'? V*"? +
+ ΤΪ f/W?" \/_!r»\(dx')4dx"f-
-hffW ^>'-;^-^)(^)3(^-)3. (85.25)
430 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ Й ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
B» = -Tlff № Ρ" |r'-r"| Vх'f <-d*V -
-hff <р°;у ρ" \f-,»\ (dx'? ^x"? -
+Τ γδ" f f ((n'*)'p" |rO*| (d*')3 (fif*")3· (85·26>
Вычисление Лу, дает, после некоторых выкладок,
An=-2fp (xJUl - xtUj) (dxf-
Здесь мы воспользовались соотношением
ΕΖνϊΕλ-ο (жоп
вытекающим из определения (85.07) и (85.08) величин W и Wi и из
уравнения неразрывности.
Для симметричной части Bjt дипольного коэффициента получаем
7 Г
+ Τ / Ρ^^/ (^ ЙГ—^) ^^>3+ίδ^/ / ρ ^ ^^)3· (85·29>
Здесь мы воспользовались соотношением (85.28) и аналогичным
соотношением для потенциалов i/, Uk. Нам остается составить сумму
Ut-\—2~Si и произвести в ней приведение подобных членов.
Обозначив- через £/? первый член в формуле (85.10) и пользуясь (85.20),
получим
^+-?5?=-J-/{(c*+4£^r«-f(4i/l + ^.)}(rf*)». (86.30)
Но в силу (85.11) и (85.12) это выражение равно
^+-?5? = Jp-, (85.31)
где Pt — полное количество движения системы, включая поправки
порядка -у. Рассмотрим теперь ту часть дипольных членов, которая
§ 85] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ НА БОЛЬШИХ РАССТОЯНИЯХ 431
имеет антисимметричные коэффициенты. Вследствие (85.27), (85.11)
и (85.13) эта часть равна
Щ^/(с^4и)(х^-Х1^)(аХ)3+^А^ = ^Мп, (85.32)
где Μμ — полный момент количества движения системы, включая
релятивистские поправки.
Всю совокупность дипольных членов мы можем написать в виде
U{P + ^S[l) =^(My/ + Dy/), (85.33)
где Dji — симметричная часть коэффициента. Обозначение (точка
сверху) оправдывается тем, что эта величина может быть
представлена в виде производной по времени от некоторой величины Djh
имеющей простой физический смысл. Сравнивая последнюю формулу
с (85.10) и (85.23), получаем для Djl выражение
D^ftf + wKfHxj + fVx^dxy + ^Bfl. (85.34)
Подставляя сюда значение Т01 из (85.03) и значение В}1 из (85.29),
будем иметь:
D» = у Ρ (vtXj+v}xt) (dxf +
+■? Ip (iг,2+п ~i υΥν& +<W (dxf ~
-ψ f (Pih4x) + P}tPkxi)(dx? + -&-J Pxixj(vk dTk~w)(dx)Z +
+i"8y/p^^x>3· <85-35>
Прибавляя сюда выражение
Тт/W* (р^-рЦ—Ί^Υαχ)3 = 0· (85-36)
которое равно нулю в силу внутренних уравнений движения, и
используя равенство
f9™-(dxY = ±t\f9W(dxf, (85.37)
а также формулу (79.04) для полной производной по времени от
упругой энергии П, мы можем написать величину Dji в виде
dDn
Pji=-dT> (86.38)
432 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
где
+wbvfpW(-dxy· (85·39)
Первый член в этом выражении есть момент инерции системы
тел, вычисленный с учетом весомости кинетической и потенциальной
энергии.
Теперь мы можем написать полное выражение для ^ + ~г^/·
Согласно (85.10), (85.21), (85.31) и (85.33), мы будем иметь:
// ι 1 с т о ι т^ м ι W dDH ,
dxj dxk
^4f <85-40>
и, следовательно,
4γ 2γΛ:7 d2 2γ
9 — сЧ ** ^ Сзгз mfl dxj dt сЧ » "^
2ϊ Γ /^ чч ι 7γ2Λ*Ρ, ,
dxj dxk
fMPkXjXk . 4 #U7,
Нам остается найти временною компоненту д00, которая выражается
через обобщенный ньютонов потенциал U по формуле (83.30).
Согласно (83.31) и (83.32), мы имеем
— ίΜ -txf 1 д2 γ
1 ό3
- 1 / рху Vi (rf*)» +1 ^. (85.42)
6 dxj dxk dxi
Здесь М есть полная масса
Ж =/p{l+^-(1^+11-1 t/)}(rf*)\ (85.43)
которая в силу (79.45) постоянна, а ЛГу — координаты центра тяжести
MX, = / х)9 { 1 +1 (11»2 + П -1 t/) } (rf*)3, (85.44)
которые, согласно (79.59), являются линейными функциями от
времени. Величины Dtj определяются формулой (85.39); последний член
В этой формуле, пропорциональный Ь„, из выражения (85.42) выпа-
§ 86] РЕШЕНИЯ ВОЛНОВОГО УРАВНЕНИЯ В ВОЛНОВОЙ ЗОНЕ 433
дает. В октупольных моментах мы отбросили релятивистские
поправки. Последний член в (85.42) представляет поправку на
запаздывание.
Подставляя найденное значение U в формулу
^λ + ί^+ψ. (85.45)
получаем д00, а именно
ι дг 2γ л д3 2γ f , . ч3 ,
"Τ" dxjdxk ~&ulb— dxtdx}dxk W«/ ?xixjxk(.ax) ϊ~
Легко проверить прямой подстановкой, что это выражение вместе
с найденным выше выражением (85.41) для д0/ в точности
удовлетворяет соотношению
В формуле (84.40) для пространственных компонент, которую можно
написать в виде
—ЩШ ^F f p (xJxiv* + ¥Λ — *i***V> ^^)3 + ^ff** . (85.48)
оставлены члены порядка -у (точнее, порядка -~-1 и отброшены члены
более высокого порядка. Если написать с той же точностью и
величину д0/, то, как нетрудно проверить, будет выполняться и
соотношение
¥+С=°- <85·49>
§ 86. Решения волнового уравнения в волновой зоне
Предыдущие выражения для потенциалов тяготения применимы
на „умеренно-больших" расстояниях от системы тел. Как уже было
объяснено в начале § 84, под этим разумеются расстояния, большие
по сравнению с размерами системы тел, но малые по сравнению
с длиной испускаемых системой волн. Если же расстояния велики
даже по сравнению с длиной испускаемых системой волн, то мы
имеем дело с „волновой зоной". В волновой зоне уже недопустимо
28 зак. #49. з. д. ф<?к
434 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
рассматривать в волновом уравнении член со второй производной по
времени как поправочный, и решение должно строиться иначе.
В случае Солнечной системы „умеренно-большими" являются
расстояния вплоть до ближайших звезд, т. е. вплоть до областей
пространства, где систему нельзя считать изолированной. Поэтому,
практически, при изучении Солнечной системы за пределы умеренно-
больших расстояний выходить не приходится. Однако в некоторых
теоретических вопросах, например, в вопросе об излучении
гравитационных волн, или в вопросе об однозначности решений уравнений
тяготения, приходится рассматривать расстояния, попадающие в
волновую зону и сколь угодно большие в математическом смысле.
Прежде чем переходить к решению уравнений Эйнштейна на
сколь угодно больших расстояниях, разъясним понятия „умеренно-
больших расстояний" и „волновой зоны" на примере простого
волнового уравнения со свободным членом
δψ—?ΐ=-4πσ· (86·01)
В теории тяготения аналогом ψ является разность между $*ν и его
предельным значением на бесконечности.
Если считать „плотность" σ известной, то можно написать
интересующее нас решение в виде запаздывающего потенциала
Ψ = / ]Τ-\Ί (dx'f, (86.02)
где
\°\ = °Ψ. г'), (86.03)
причем
t' = t-\\t-t'\. (86.04)
То, что мы берем именно это, а не другое решение, соответствует
нашим представлениям об изолированности системы и о том, что
единственным источником волн являются тела, составляющие систему.
Точный вид начальных условий здесь не существенен; достаточно
предположить, что начальное возмущение было сосредоточено в
конечной области, окружающей систему, и что мы рассматриваем
такие времена и расстояния, когда и на которых начальное
возмущение уже разошлось.
Предположим, что плотность σ имеет, с одной стороны,
производные по времени различных порядков и, с другой стороны, „моменты"
§ 86] РЕШЕНИЯ ВОЛНОВОГО УРАВНЕНИЯ В ВОЛНОВОЙ ЗОНЕ 435
различных порядков, для которых введем обозначения
М*) = /<»(*. r'){dxft
h (*) = /*ίσ (τ. Г0(^)3,
Ϋ4*(τ) = ί*Ί*№ г')(<**')3,
(86.05)
где τ есть некоторая величина, не зависящая от г'.
Применявшийся нами в предыдущих параграфах прием для
решения волнового уравнения сводился к разложению аргумента V в
функции σ и самой этой функции по обратным степеням с. Так как при
таком разложении под интегралом появляются возрастающие степени
|г — г'|, то ясно, что этот прием дает хорошо сходящийся ряд
лишь для „умеренно-больших" расстояний г. (Область быстрой
сходимости ряда и дает уточнение этого понятия.) Каждый член ряда
может быть в свою очередь разложен по обратным степеням г,
причем в коэффициенты разложения войдут „моменты" (86.05),
вычисленные для τ = έ.
Но можно выделить в выражении (86.04) для V величину
τ = έ— j (86.06)
и писать /' в виде
ί/ = τ + |(Γ-|Γ-Γ'|). (86.07)
Тогда, разлагая f и а по степеням —, лишь поскольку эта вели-
чана не входит Ъ τ, мы получим ряд другого вида, притом такой,
который сходится при сколь угодно больших значениях г.
Если мы в этом ряде возьмем совокупность членов, медленнее
всего убывающих при возрастании г, то мы получим выражение для ψ,
справедливое в волновой зоне, т. е. при весьма больших значениях г.
Сохранение лишь наиболее медленно убывающих членов
Соответствует замене величины (86.07) выражением
ί' = τ+<!1ΐ£2, (86.08)
с
где
п = у, я, = -^ (86.09)
есть единичный вектор в направлении г. Таким путем мы получим
для ψ выражение вида
ψ = 1μ(τ, η), (86.10)
28*
436 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
где
ρ (τ. η) = /σ(τ + -^, г') {dx'f (86.11)
есть функция от трех аргументов: величины τ и двух углов, через
которые выражается п. Заметим, что если [х есть произвольная
функция от этих трех аргументов, то ψ будет приближенным решением
однородного волнового уравнения.
Если существуют моменты (86.05), то мы можем написать
следующее разложение для [х:
Ρ(^. η) = ΙΝ)+?Ρ/+γ£54?ι*+... (86.12)
ИЛИ
μ С*. η) = μο+-£μ,+у ■$£&*+ .··. (86.13)
где точками обозначены производные от величин (86.05) по своему
аргументу τ, или, что то же, по времени t.
Та область, где решение волнового уравнения ψ с большой
точностью выражается в форме (86.10), и носит название волновой
зоны.
В том случае, когда размеры системы малы по сравнению
с длиной излучаемых ею волн, разложение (86.12) быстро сходится,
причем главным членом будет первый, отличный от нуля. Если
таковым является [х0, то функция ψ будет обладать сферической
симметрией.
§ 87. Потенциалы тяготения в волновой зоне
Обратимся тецерь к уравнениям Эйнштейна, выписанным в § 68.
Введем, согласно (68.13)^ обозначение
ΛΤ=(^){ΐΡ·αβπ;β-^ν+1ίΓζ.}, (87.01)
где L есть функция Лагранжа:
L=-W=7a*^+l··»·· <87·02>
а другие величины имеют следующие значения:
П1р = ад,1Г·^ (87.04)
yv= *lg£~* , у = ^%. (87.05)
§ 87) ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ В ВОЛНОВОЙ ЗОНЕ 437
Тогда уравнения Эйнштейна в гармонических координатах
напишутся
Мы должны исследовать асимптотический вид решений этих
уравнений на больших расстояниях. Для этого рассмотрим сперва волновое
уравнение г мл.
У-*Ъ*-Р-£Ь; = <> (87-07)
и заменим в нем коэффициенты даР их „статическими" значениями,
причем будем для простоты считать, что начало координат лежит
в центре тяжести системы масс. Мы можем здесь воспользоваться
выражениями (85.41), (85.46) и (85.48), в которых, однако, мы
отбросим все члены, убывающие быстрее, чем —, а из членов порядка —
сохраним (пока) только статический. Вводя гравитационный радиус
массы νΛ/ί
a = JJ (87.08)
и переходя к сферическим координатам, связанным с гармоническими
обычными формулами (57.49), мы напишем волновое уравнение
(87.07) в виде
at-Μι+£)ίΜ3+) *+>>)-* <87·09)
Здесь Δ*ψ есть обычный оператор Лапласа на шаре (формула (57.11)).
Нас интересуют решения типа расходящихся волн. Для них величина
—f- будет на бесконечности убывать быстрее остальных членов
уравнения, и мы можем ее отбросить, после чего уравнение (86.22)
напишется
Ηι+ϊ)Ζ-(&+ϊ9)-°· »'■"»
Независимыми переменными будут здесь только г и t, а углы θ, φ
будут входить, только как параметры.
Производя подстановку
гф = / (87.11)
и вводя вместо г переменную
r* = r + 2a(lgr-lgr0), (87.12)
где г0 — некоторая константа, мы получим, с точностью до малых
величин,
_Li?/_jy (87ЛЗ)
с2 дР дг*г к
438 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Решением типа расходящейся волны будет
/ = /(τ, η), (87.14)
где η есть по-прежнему единичный вектор (86.09), а τ имеет теперь
значение
τ = έ— j r* (87.16)
или
* = t-l(r + 2alg(S-)). (87.16)
Таким образом, решение уравнения (87.09) типа расходящейся волны
имеет асимптотический вид
ψ = }/(τ. η), (87.17)
причем величина τ предполагается здесь конечной, тогда как г
неограниченно возрастает.
При этих условиях асимптотические значения производных от ψ
по координатам и времени вычисляются так, как если бы функция ψ
зависела от них только через посредство τ. Полагая
*. = £. (87.18)
будем иметь в рассматриваемом приближении
^ = Α.Ψ· (87.19)
Пренебрегая членами порядка -— по сравнению с единицей, мы
можем считать величины fca равными
*о-1. *! = -?■· (87-20)
В соответствии с этим можем положить
#> = -!, А* = + ?. (87.21)
откуда
kak* = 0. (87.22)
Величины ka будут пропорциональны составляющим нулевого
четырехмерного вектора (в галилеевом пространстве, соответствующем
предельным значениям др).
§ 87] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ В ВОЛНОВОЙ ЗОНЕ 439
Добавим теперь в коэффициентах волнового уравнения (87.07)
к статическим значениям g^v волновую часть Ь^ и положим
Р = 7 + 1Г + "*'
(87.23)
дог=г>ог,
Относительно величин Ь^ мы будем предполагать, что в волновой
области они будут либо иметь вид (87.17), либо, во всяком случае,
удовлетворять условию (87.19). Поэтому мы можем вычислять
производные от ft1" no формуле
^ = КГ, (87.24)
а так как производные от статических членов в g^v будут убывать
как 1/г2 и могут быть отброшены, то будет и
^ = КГ. (87.25)
Условия гармоничности для дн* напишутся
kj)^ = 0 (87.26)
и могут быть проинтегрированы по τ. Так как статическая часть дк·*
нами уже выделена, то постоянные интегрирования могут быть
положены равными нулю, и мы получим
^v = 0. (87.27)
Отсюда смешанные и временная компонента величин Ь^ выражаются
через пространственные компоненты по формулам
pi = »L· bik, ft» = igfc bik. (87.28)
Уточненный вид умноженного на — Υ—g оператора Даламбера,
получаемый в результате подстановки коэффициентов g^v из (87.23)
в формулу (87.07), напишется:
Ι/^.πψ = ποψ+Ι^_£|_. (87.29)
Но если ψ — функция типа расходящейся волны, которая зависит
от координат и времени главным образом через посредство τ и
удовлетворяет соотношению (87.19), то будет
440 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
вследствие (87.27). Поэтому дополнительный член в операторе Далам-
бера (87.29) будет равен нулю в отдельности, и мы можем вести
исследование решений типа расходящейся волны так, как если бы
в коэффициентах оператора Даламбера в волновом уравнении (87.07)
и в. уравнениях Эйнштейна (87.06) имелась только статическая часть.
Тем самым мы как бы освобождаемся от нелинейной части членов,
содержащих вторые производные в уравнениях Эйнштейна.
Переходим к рассмотрению нелинейных членов, содержащих
первые производные. Мы не можем их отбросить с самого начала,
так как в волновой зоне они убывают не быстрее, чем 1/г2, и могут
сильно влиять на асимптотический вид решения. Но при вычислении
их мы можем внести те упрощения, которые вытекают из формулы
(87.25) и из того обстоятельства, что вне знака производных
компоненты фундаментального тензора могут быть заменены их
предельными значениями. Поднимая и опуская значки при помощи этих
предельных значений, мы можем писать, например,
ka=ga\ ti=gj»a и т. д. (87.31)
как если бы соответствующие величины были тензорами. Используя
строгую формулу
»·-57=Γ'-ΐ-· <87·32)
мы можем тогда написать:
У* = -§-#. ^ = -£#· (87-33)
Величины (87.03) и (87.04) будут равны
IF" αβ = _ JL (kai)^ + tfir — lfba% (87.34)
ТГ^ = -^(кМ+Ъф1- k%). (87.35)
Из соотношений (87.22) и (87.26) вытекает
Л,Щр = 0, У*У* = 0. (87.36)
Поэтому значение функции Лагранжа в волновой зоне равно нулю
/,= 0, (87.37)
как это имеет место и для электромагнитных волн.
Перемножая три члена в (87.34) на три члена в (87.35),
получаем девять сумм, из которых, однако, только одна отлична от нуля,
а именно
П»'а9т? = ±М%9. (87.38)
§ 87] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ В ВОЛНОВОЙ ЗОНЕ 441
Подставляя найденные выражения в (87.01) и заменяя множитель
( ~~«f ) единицей, получим
^ = ^г Μ (*% - \ Ь:%). (87.39)
Для нас существенны следующие свойства выражения Л^\ С одной
стороны, оно пропорционально произведению k^k* и, будучи
подставлено в уравнения Эйнштейна (87.06), может породить в fv и в <^ν,
а также в Ь^ и в Ь^ только члены, пропорциональные такому же
произведению. С другой стороны, если добавить к ^v члены,
пропорциональные kFk*, т. е. сделать замену
ί«β->ί«β-|-λΑβΑΡ, (87.40)
то в силу условий гармоничности (87.26) и соотношения (87.22)
величина Ν^ не изменится. Это позволяет свести нахождение
асимптотического вида <^ν при учете нелинейных членов к решению
линейных уравнений.
Положим
°*=w(^-?^)· <87·41>
Как будет видно из дальнейшего, эта величина играет роль
плотности энергии гравитационных волн. Формула (87.39) напишется
тогда:
№*=*Яаь*к\ (87.42)
с ©
Подставляя это выражение в уравнения Эйнштейна (87.06), получим
i Dff" = -1? (^ + «,***')· (87.43)
В предыдущих параграфах при составлении тензора массы мы
полностью пренебрегли электромагнитной энергией. Если же мы примем
во внимание энергию электромагнитного излучения системы тел, то,
обозначив плотность ее через ает, так что
оет = ±(Е> + №), (87.44)
мы получим для тензора электромагнитной энергии в волновой зоне
выражение
Г" = о#щ^ (87.45)
(мы сохранили для этого тензора обозначение 7^, так как в
волновой зоне весь тензор массы сводится к (87.45), а та его часть,
которая соответствует веществу, равна нулю).
442 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Таким образом, мы можем писать уравнения Эйнштейна в
волновой зоне в виде
i-Dff"—*?«*ν. (87.46)
где под σ мы можем разуметь сумму <sem-^-ogf если мы учитываем
электромагнитное излучение, или только σ^., если мы имеем дело
с чисто гравитационной задачей.
Чтобы решить уравнения (87.46), выделим в Ь^ член,
пропорциональный Αμ^ν, и будем писать Ь^ в виде
lT=ir + hli>k\ (87.47)
Как было уже отмечено, выражение (87.41) для og не меняется при
замене Ь^ на А1", так что мы будем иметь
в,=-жг(***«|»-т*#). <87·48>
Соотношения (87.27) и (87.28) также остаются в силе; мы можем
написать
Входящие
мнениям:
в
(87.47)
к^Г =
величины
= 0.
fT и
= 0,
= '-а
С
h
!,
МЫ
можем
(87.49)
подчинить
(87.50)
(87.51)
в которых, согласно сделанному выше замечанию, мы можем
заменить оператор □ на линейный оператор П° (формула (87.09)).
Тогда величины Αμν будут удовлетворять линейному волновому
уравнению, и на основании (87.17) мы можем потребовать, чтобы
они имели асимптотический вид
Af» = |L/»(ti n). (87.52)
Коэффициент —J- добавлен здесь для удобства оценки порядка
величины Αμν; пространственные компоненты /* будут тогда порядка
кинетической энергии системы.
Подставляя эти значения Αμν в (87.48), мы получим для ag
выражение, обратно пропорциональное г2. Того же вида будет
зависимость от г и для электромагнитной части плотности энергии. Поэтому
и вся плотность энергии σ в уравнении (87.51) будет вида
о = -^Д. (8753)
§ 87] ПОТЕНЦИАЛЫ ТЯГОТЕНИЯ В ВОЛНОВОЙ ЗОНЕ 443
Гравитационная часть o0g функции σ0 выражается через величины /μν
по формуле, аналогичной (87.48), а именно:
^=^(/а%-УаЛ)· (87.54)
Подставляя выражение (87.53) для σ в уравнение (87.51), получим
для h уравнение
ϋ* = ^α0(χ, η), (87.55)
правую часть которого можно считать известной. Таким образом,
не только величины А1", но и величина h удовлетворяет линейному
уравнению. Асимптотический вид решения этого уравнения будет
Положим
hma^Lfao{Xt η)ώτ+Μ^η). (87>56)
τ
4*с J\(x, n)dx = Ag(x, n). (87.57)
Умноженное на-j—, где dQ — элемент телесного угла, это
выражение дает утечку энергии в этот телесный угол, лежащий в
направлении п, происшедшую за время τ — τ0. Результат подстановки
выражения (87.57) в предыдущую формулу может быть записан
в виде
A = |klg'Ag(x, n) + e(x, п)), (87.58)
где величину ε (τ, η) можно считать того же порядка, как AS (τ, η)
(или же ее можно не писать, а в формулах для g^v отнести
соответствующие члены к /μν).
Подставляя значения (87.52) и (87.58) для ff* и h сперва в
формулу (87.47) для b^t а затем в формулы (87.23) для g^v, мы
получим следующие асимптотические выражения величин g^ в волновой
зоне:
fl0' = Ίίτ /οί -h^r «, dg г Дё -h ε), Ι (87.59)
0<*e_c^ + |L/<*+|L„<MigrAg + S).
444 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Здесь величины /0/ и /°° выражаются через flk по формулам,
аналогичным (87.28*), а именно
/о/ = -&/**, /00 = ^1/1*. (87.б0)
Сравним выражения величин Of в волновой зоне с их выражениями
на умеренно-больших расстояниях, полученными в § 85. Здесь мы
можем прежде всего пренебречь членами, содержащими \gr и
происходящими от утечки энергии. Что касается остальных членов, то
мы их можем написать в таком виде, чтобы они переходили в
соответствующие члены формул (85.41), (85.46) и (85.48). Для этого
положим
Dik(t) = f9xtxk(dx)\ (87.61)
заменим здесь / на τ и свяжем fik с Dik(x) соотношением
fik = -&DikW· (87·62)
(87.63)
в волновой зоне переходят в (87.59) (без членов, происходящих от
утечки энергии), а на умеренно-больших расстояниях они дают
главные члены формул (85.41), (85.46) и (85.48). При этом на умеренно-
больших расстояниях в выражении (87.15) для τ может быть
опущен логарифмический член (г* может быть заменено на г).
§ 88. Общие замечания о законах сохранения
Гравитационная энергия играет в теории тяготения совершенно
особую роль, отличную от роли всех других видов энергии. Она не
входит явным образом в тензор энергии, а учитывается косвенным
образом, через посредство потенциалов тяготения. Наличие
гравитационного поля и связанной с ним энергии проявляется, как мы знаем,
в изменении свойств пространства и времени. Выделить
гравитационную энергию в виде добавочных членов в тензоре энергии можно
только искусственно, фиксировав координатную систему и
видоизменив постановку задачи, а именно рассматривая поле тяготения как бы
вложенным э пространство-время с фиксированными свойствами (как
Тогда фо{
эмулы
поп_ 1 , 4γΛ* , 2γ * Dik (τ) ]
» с J c3r ! с3 dxidxk r
0/_ 2γ д* Dik(x) 1
8 — 73" dxk dt r ' 1
8 = C0**^7T#r r J
§ 88] ОБЩИЕ ЗАМЕЧАНИЯ О ЗАКОНАХ СОХРАНЕНИЯ 445
это делалось в теории Ньютона). Соответствующие гравитационной
энергии добавочные члены в тензоре энергии не будут обладать
свойством ковариантности (т. е. не будут тензором). В зависимости
от выбора координатной системы значения этих добавочных членов
в данной точке пространства-времени могут оказаться равными или
неравными нулю (чего не может быть с тензором). Это вполне
понятно, поскольку неоднозначен выбор пространства с фиксированными
свойствами, в которое вложено поле тяготения. С другой стороны,
гатруднения, возникающие в вопросе однозначного определения
гравитационной энергии можно связать с тем, что ее нельзя локализовать.
Это свойство гравитационной энергии физически проявляется в том,
что гравитационное поле нельзя заслонить. Чтобы избавиться от
действия гравитационного поля, можно только отойти подальше от
масс, его производящих. Это можно сделать для изолированной
системы масс. Порождаемое такой системой гравитационное поле можно
рассматривать как местную неоднородность в бесконечном евклидовом
пространстве или в галилеевом пространстве-времени). При таком
рассмотрении можно (пренебрегая излучением, о котором будет сказано
ниже) составить десять интегралов уравнений Эйнштейна,
соответствующих десяти классическим интегралам уравнений механики.
Четыре из них—интегралы энергии и количества движения — будут
составлять четырехмерный вектор в галилеевом пространстве-времени,
в которое погружена система масс с ее гравитационным полем. Шесть
остальных интегралов будут составлять в том же
пространстве-времени антисимметричный тензор; это будут интегралы момента
количества движения и интегралы движения центра инерции системы.
Важно отметить, что существование десяти интегралов движения
связано с изотропностью галилеева пространства-времени, в которое
погружена система, а значит и с евклидовостью пространства на
бесконечности. Отказ от требований изотропности и евклидовости на
бесконечности влечет за собой нарушение всех или некоторых из
законов сохранения, выражаемых десятью интегралами движения.
С физической точки зрения это совершенно естественно, поскольку
изотропность и евклидовость на бесконечности служат выражением
изолированности системы, а выполнения законов сохранения можно
ожидать только тогда, когда система изолирована.
Следует указать еще на одну причину, в силу которой система
движущихся масс никогда не будет вполне изолированной в активном
смысле (т. е. в смысле отдачи энергии, а не ее получения извне). Эта
причина состоит в излучении системой электромагнитных и
гравитационных волн (а также, быть может, и других). Однако для систем,
подобных Солнечной системе, потеря энергии на излучение даже на
протяжении геологических периодов времени весьма мала по
сравнению с имеющимся запасом энергии, хотя в абсолютных цифрах
представляет внушительную величину (для Солнца излучаемая мощность
446 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
соответствует ежесекундному превращению четырех миллионов тонн
вещества в излучение). Что касается излучения гравитационных волн,
то оно совершенно ничтожно: грубый подсчет по формулам,
основанным на результатах предыдущего параграфа, показывает, что
мощность, излучаемая Солнечной системой в виде гравитационных волн,
в 1023 или 1024 раз меньше излучаемой в виде электромагнитных волн
и составляет всего-навсего примерно один киловатт. (Такой подсчет
будет произведен в § 90). Поэтому во всех рассуждениях, кроме,
быть может, чисто теоретических, действием гравитационных волн
можно целиком пренебречь. Этот результат показывает, в частности,
что изученная в гл. VI задача о движении системы тяготеющих масс
может рассматриваться как задача механики (без учета излучения) не
только в том приближении, в каком она была там решена, но и
в следующих приближениях (не представляющих, впрочем,
практического интереса).
§ 89. Формулировка законов сохранения
В теории, оперирующей с галилеевым пространством-временем,
классические законы сохранения могли быть написаны в
дифференциальной форме, а именно в виде соотношений (31.10). Обобщением
их является соотношение
У^ = 0, (89.01)
которое, согласно (41.25), можно написать в виде
тЛ= -Λ (V^g Τη+Τΐ^ = 0. (89.02)
Однако соотношение (89.01) не приводит, само по себе, к законам
сохранения. Математическая причина этого состоит в том, что наличие
второго члена в (89.02), стоящего вне знака производной, не
позволяет, в общем случае, заключить о постоянстве какого-либо
объемного интеграла (см. § 49). Физической же причиной является
тот факт, что. поле тяготения само обладает энергией, которая не
входит явно в Т^\ но которую тем не менее необходимо учитывать
в общем балансе.
Чтобы получить соотношение, в котором была бы учтена также
и гравитационная энергия, рассмотрим уравнения тяготения Эйнштейна,
выписанные в начале § 87.
Мы имеем
(^ЖЧН=-W-щш;+тч< <89·03>
§ 89] ФОРМУЛИРОВКА ЗАКОНОВ СОХРАНЕНИЯ 447
где Λ^ν определяется формулами (87.01) — (87.05). С другой стороны,
в гармонической системе координат
Прибавляя это равенство, умноженное на ^т» к предыдущему,
получим
(-i)(r-±g»R) + ^1^(tftr-mh = L'a. (89.05)
где
Г-Г-±%%. (89.06)
В произвольной системе координат равенство (89.05) будет
тождеством, если разуметь под Ζ,μν выражение
L =Ν + "Й*Ч— dxi дха +"5^"3I7 — Т^Щ-)' (*У'07)
которое переходит в предыдущее, если система координат —
гармоническая. Для доказательства тождества (89.05) нужно брать для
тензора Эйнштейна полное выражение (Г.87), выведенное в
Добавлении Г.
Если воспользоваться уравнениями Эйнштейна
Я»» _ | g^R = -Mf (89.08)
и положить
^ = {-jt)^ + -^^' (89.09)
можно написать формулу (89.05) в виде
Ί£ξΓ (ГРГ _ %аЧ^ = i6tqtr. (89,10)
Здесь слева стоит выражение, подобное тензору Круткова,
рассмотренному в § 31; сумма производных по х^ от левой части (89. It))
тождественно равна нулю. Поэтому мы имеем
Совокупность величин ί/μ,ν не составляет общековариантного
тензора. Это есть тензор только по отношению к линейным
преобразованиям; в частности, ί/μ,ν есть тензор в гармонической системе
координат. Становясь на ту, несколько искусственную, точку
зрения, которая была упомянута в начале предыдущего параграфа,
448 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
можно толковать в формуле (89.09) умноженный на с2 второй член
как тензор энергии гравитационного поля, а умноженный на с2
первый член — как тензор энергии вещества и всех других полей, кроме
гравитационного.
Если допускать и другие системы координат, помимо
гармонической, то такое толкование будет не вполне однозначным, если
рассматривать области внутри системы масс. Но на больших
расстояниях от масс, где пространство-время почти псевдоевклидово и
координаты по условию галилеевы, физический смысл величин ί/1"
становится во всяком случае однозначным.
Вытекающие из (89.11) законы сохранения в интегральной форме
также получаются вполне однозначно и не зависят от произвола,
связанного с допускаемыми внутри системы масс отклонениями
координатной системы от гармонической. Как мы увидим, это
обусловлено тем, что объемные интегралы, выражающие энергию,
количество движения и другие величины, могут быть преобразованы
в интегралы по поверхности, окружающей систему масс.
Переходим к выводу интегральной формы законов сохранения.
Для этого умножим левую часть (89.11) на евклидов элемент объема
dxx dx2 dxz = (dxf (89.12)
и проинтегрируем по некоторому достаточно большому объему,
включающему систему масс. Размеры области интегрирования мы
оставим пока неопределенными.
После применения теоремы Гаусса — Остроградского мы получим
равенства вида
-jjfj lf"(dxf= — f n^dS, (89.13)
-jff U0i(dxf = — f nkUlkdS, (89.14)
где fy есть вектор нормали к поверхности. Если поверхность,
ограничивающая объем, есть сфера, мы можем положить
ni = ^-t dS = r2dut (89.15)
где dm — элемент телесного угла.
Вследствие симметрии величин ί/^, относительно значков μ и ν,
из формул (89.11) вытекают также соотношения, аналогичные (31.06)
и (31.07), которые после интегрирования дают:
± f (XiU°k - xkU°l)(dxf = -fnj (XlUJk - xkUn)dS, (89.16)
-^f (j^t/00 —*t/0/)(d*)3 = — f nj(xtUJ0 — tUJt)dS. (89.17)
§ 89] ФОРМУЛИРОВКА ЗАКОНОВ СОХРАНЕНИЯ 449
Выясним физический смысл объемных интегралов, стоящих в левой
части этих уравнений. Положим 1)
М = с2 f U™(dxft (89.18)
Pl = c2 f U0l(dxf, (89.19)
Mik = c2f (χμ™ — xkUQi) (dxf, (89.20)
Mi0 = c2 {(χμ™ — tWl){dxf. (89.21)
(Мы обозначили величины (89.18) — (89.21) звездочками сверху,
чтобы не смешивать их с константами, введенными при решении
*
уравнений механики). Величина Μ есть полная масса системы,
включая массу, принадлежащую полю, заключенному внутри данного объема.
Величины Р1 представляют количество движения, а величины Mlk —
*
момент количества движения системы. Величины М10 можно написать
в виде
МЮ = МХ'—РН, (89.22)
*
где X1 — координата центра тяжести системы. Отсюда ясно, что
Лг° представляют величины, входящие в закон движения центра
тяжести.
Значение объемных интегралов (89.18) — (89.21) может несколько
изменяться в зависимости от размеров области интегрирования. Это
происходит в силу того, что поле также обладает энергией,
количеством движения и т. д. Однако из дальнейшего (§ 90) будет
ясно, что при надлежащем выборе области интегрирования
возникающая отсюда неопределенность в значении интегралов ничтожна
по сравнению с самими этими значениями.
Покажем теперь, что не только производные по времени от
величин (89.18) — (89.21), но и сами эти величины могут быть
представлены в виде интегралов по поверхности. Чтобы выяснить это,
рассмотрим структуру выражений (89.10) для Ц^\ Полагая μ = ν = 0,
будем иметь
1б1с^°°=-д£дг <6αβ6°° - βαν°)· (89·23>
При α = β=±=0, а также при α = 0, β = / (где /=1, 2, 3)
выражение справа обращается в нуль. Поэтому фактически значки α, β
в (89.23) пробегают только пространственные значения, и мы можем
*) Мы будем писать здесь при Mik, Ρ1, Χ1 верхние значки·
29 Зак. 2649. В. А. Фок
450 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VH
написать
16uft/oo = __^_(g«goo_iiOg*o)> (89.24)
откуда
Μ = lef / "< -Щ ^"^ ~ 8'V°) dS. (89.25)
Аналогично (89.24), мы будем иметь
16π? и<" = ~д£щ W - 8aV'). (89.26)
где ] пробегает только пространстзенные значения, а a — также и
значение а = 0 (заметим, что значение а = / фактически отсутствует).
Подстановка (89.26) в объемный интеграл (89.19) дает
βι=τκγ Α -έ-(%αψ ~ rV0 dS- (89·27)
Из формулы (89.26) легко выводится соотношение
16πγ (xtW* - хки") = -£- { xt -±- (g^S0ft - β"¥*) -
правая часть которого представляет сумму производных по
пространственным координатам. Подставляя (89.28) в (89.20) и применяя
теорему Гаусса — Остроградского, получаем для момента количества
движения выражение в виде интеграла по поверхности:
~х* i|r (%"i%0i ~ %"°*il)+9'*й°' ~ 9"й°*}dS·(89,29)
Наконец, первый член выражения (89.22) для М10 может быть
написан в виде
+ б/0в/0 — ву/в00} dS. (89.30)
Таким образом, все величины (89.18) — (89.21) представлены
в виде поверхностных интегралов. Значения их зависят только от
поведения потенциалов тяготения на больших расстояниях.
При написании законов сохранения в дифференциальной форме
мы использовали симметричную систему1) величин ί/μ,ν, определяемых
1) Иная, но тоже симметричная система величин используется в книге
Л» Ландау и М. Лифшица [23].
§ 89] ФОРМУЛИРОВКА ЗАКОНОВ СОХРАНЕНИЯ 461
формулой (89.09); эти величины представляют, как мы указывали,
аналог контравариантного симметричного тензора. В литературе
принято, однако, начиная с первых работ Эйнштейна, пользоваться
другой системой величин, представляющих аналог смешанного
(несимметричного) тензора и определяемых следующим образом.
В конце § 60 была выведена формула для вариации интеграла
действия, согласно которой
δ f L V~g (dx) = f (/?αβ - \ Λ) 8gap Y=g (dx). (89.31)
Здесь L есть функция Лагранжа (60.23), а через (dx) обозначено
произведение четырех дифференциалов
(dx) = dxQ dxx dx2 dxz. (89.32)
Вследствие
ί*.β = —Λμίρ,ί^ (89.33)
формулу (89.31) можно также написать в виде
bJ\V^(dx)^-f(R^-^g^)^V^(dx^ (89.34)
Полагая
«'=■$£· (89·3δ)
мы можем определить „частные производные" по g^ и по g^
формулой
Ь (L V=g) = i"£=IL igr + Щ£П> isr. (89.36)
Подстановка (89.36) в (89.34) и интегрирование по частям дают для
умноженного на У— g консервативного тензора
<ν = #μν—5"V? (89.37)
выражение
у—go BSddUV=i>_dUY=g>m (89.38)
Введем теперь систему величин wa определяемых формулой
2 y—g ^ = φ UikYEH _ Ц (ζ. y=J). (89.39)
Составляя сумму производных от (89.39) по ха и пользуясь (89.38),
получим
1 d(V=gw?\ 1 dg^
V — g dxq 2 dx9 *
29*
452 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Но для всякого симметричного тензора
2 дхр °^— 2 дх9 ° — lvP^· (ЙУЛ1)
Поэтому предыдущую формулу можно написать в виде
1 д(У=Ъ.$ _
С другой стороны, расходимость консервативного тензора (которая
тождественно равна нулю) имеет вид
νβο; = ^i, a(^gp)-rrpo;=о. (89.43)
Второй член здесь совпадает с правой частью (89.42). Исключая
его из (89.42) и (89.43), получаем
■35- (V^O; + V^wf) = 0. (89.44)
Выражая G°p через Тр из уравнений тяготения и полагая
—щ<=^ (89·45>
мы можем написать предыдущее уравнение в виде
3£- (/^П + У^ёФ = 0. (89.46)
Это уравнение представляет дифференциальную форму закона
сохранения в том виде, в каком он чаще всего приводится в литературе.
Величина
0;*=£=1(Г, + $ (89.47)
аналогична нашему ί/1", но не симметрична в своих значках. Поэтому
из соотношения
-^- = 0 (89.48)
нельзя вывести формул, соответствующих законам сохранения
момента количества движения и движения центра тяжести. Что касается
законов сохранения энергии и количества движения, то обе
формулировки их (основанная на (89.11) и основанная на (89.48)) дают
эквивалентный результат. Докажем это, опуская все выкладки, кото·
рые достаточно сложны.
§ 90] ИЗЛУЧЕНИЕ ГРАВИТАЦИОННЫХ ВОЛН 453
Из определения (89.39) величин w°9 следует
Пользуясь формулами Добавления Г, получаем отсюда
2 V=g (ΟΙ + <$ =~1 yL·^ -£- (Г 9τβ - g~g«P) J (89.50)
и, после умножения на —с,
16πγί)>=ц {τ^τζ^ " rrP)}' (89·51)
Эта формула аналогична (89.10). Отсюда получаем
f WV'f-^f^^WP-tWdS. (89.52)
Так как интегрирование ведется по удаленной поверхности, то здесь
gpx
можно вынести предельное значение г±— из-под знака интеграла.
К — g
Сравнивая получаемые выражения с (89.25) и (89.27), мы можем
написать:
cf&>(dxf~(j£j) P\ (89.53)
где Ρ° = Λί и Ρ1 имеют значение (89.27). Последнюю формулу мы
можем также написать в виде
f&>t(dxf=^^Jj .fu*(dxf. (89.54)
Эти соотношения подтверждают, что несмотря на различие в
дифференциальных формах законов сохранения, интегральные их формы
друг другу эквивалентны. Кроме того, наличие величин (g^)^ в
соотношениях (89.54) наглядно показывает, что полные энергия и
количество движения системы представляют четырехмерный вектор в га-
лилеевом пространстве-времени, в которое погружена система.
§ 90. Излучение гравитационных волн и его роль
в балансе энергии
Законы сохранения энергии и других величин были написаны
нами в § 89 в форме уравнений, выражающих баланс той или иной
величины, т. е. тот факт, что изменение полного количества данной
величины, заключенного внутри некоторого объема, происходит только
454 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
за счет лотока этой величины сквозь поверхность, ограничивающую
этот объем.
Мы рассмотрим теперь вопрос о том, в какой мере можно
пренебречь потоком сквозь поверхность и считать данную величину
постоянной, другими словами, в какой мере можно говорить о
законах сохранения в узком смысле. При этом мы ограничимся
законами сохранения энергии и количества движения.
Используя обозначения (89.18) и (89.19) для массы и количества
движения и считая поверхность интегрирования сферической, мы
можем, согласно (89.13)—(89.15), написать:
dM
dt
= — c2f nkUQkr2 do>, (90.01)
-с2 f nkUikr2du>, (90.02)
dt ~
где интегрирование ведется по телесному углу. Мы можем считать
поверхность интегрирования настолько удаленной, что она вся
проходит в волновой зоне. На основании результатов § 87 нетрудно
заключить, что там величины If9 определяемые формулами (89.06)
или (89.07), приводятся к Νμ\ Беря для Ν^ значения (87.42), а для
Т^ — значения (87.45), соответствующие электромагнитному
излучению, мы можем положить
U^ = ck*k\ (90.03)
где σ есть плотность энергии (электромагнитной и гравитационной),
введенная в § 87. Пользуясь формулой (87.53), выражающей
зависимость плотности энергии σ от расстояния г, мы можем также
написать
U^^^J^k^. (90.04)
Беря значения 1С из (87.21), будем иметь
и«к = *ф^Ч. ^ = ^-ηιΗ (90.05)
и, следовательно,
nkWk = 2^L·, Пки"=*ф01ч (90.06)
Подставляя эти значения в (90.01) и (90.02), получаем
4ρ = _|/ο0(τ, η)do,, (90.07)
φ- = _ У «Λ (τ, η) 4m, (90.08)
<V
§ 90] ИЗЛУЧЕНИЕ ГРАВИТАЦИОННЫХ ВОЛН 455
Но плотность σ0 есть четная функция от nt как для
электромагнитного, так и для гравитационного поля. Поэтому формула (90.08)
дает
^- = 0. (90.09)
Что касается формулы (90.07), то в ней интеграл не будет равен
нулю, так как σ0 есть величина положительная и не стремится к нулю
с возрастанием г. Поэтому утечка массы всегда будет иметь место.
Рассмотрим сперва ту часть утечки массы, которая происходит
вследствие излучения гравитационных волн. Мы должны тогда
заменить σ0 выражением o0g из (87.54), в которое должны подставить
значения /αβ из (87.60) и (87.62). Положим для краткости
Aik^-^Dikb). (90.10)
Формула (87.54) дает тогда
г= 8^г{Л2-2ЛИ/ + АИ/*-2-И ~AJJ?}> (90Л1)
где введены сокращенные обозначения
At = Л1кп^ А = Ам = A^rifa. (90.12)
Можно показать, что величина σ0^ зависит не от шести величин Aikt
а только от пяти их комбинаций, иначе говоря от величин
В1к = А1к-аЪ1к, а = ^А„, (90.13)
связанных соотношением
Яц + Я22 + Язз = 0· (90Л4)
Величины Bik представляют третьи производные от квадрупольных
моментов
4* (0 = / Ρ (*Λ - у W) (Axf (90.15)
при t = x. Выражая Aik через Bik и подставляя сперва в (90.12),
а затем в (90.11), мы убедимся, что величина а из этой формулы
выпадает, и мы получаем
°ог = -Йг{^А-25Д + ]-52}. (90.16)
где величины В1 и В выражаются через Вш по формулам,
аналогичным (90.12). Проверим, что величина a0g всегда положительна. Так
как она представляет инвариант по отношению к трехмерным вра*
щениям, достаточно сделать проверку для какого-нибудь фиксиро-
4S6 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [гЛ. Vll
ванного направления вектора п, входящего в В1 и В. Полагая
я1=1. п2 = 0, л3 = 0 (90.17)
и используя (90.14), мы получим из (90.16):
что представляет положительную величину.
В формулу (90.07) входит интеграл от выражения (90.16) по
телесному углу. Чтобы его вычислить, можно воспользоваться
соотношениями - /э -
±J щпка* = \Ъ1к, (90.19)
i / W»l»« "» = "β" ΦΑ» + *iA* + *<Al). (90-20)
которые проще всего получаются, если в тождестве
± fiaflfd. =Ί±Τ {a\ + a\ + a*f (90-21)
положить сперва р= 1, затем ρ = 2 и найти коэффициенты при
одинаковых степенях и произведениях величин at. Интегрирование
в (90.21) легко выполняется в координатах с полярной осью,
направленной вдоль вектора а.
Применяя соотношения (90.19) и (90.20), будем иметь
i / (BikBlk - 2BtBt + \ Βή d* = I BlkBlk. (90.22)
Внося (90.16) в (90.07) и пользуясь (90.22), получаем:
Это выражение дает быстроту утечки массы в результате излучения
гравитационных волн. Соответствующая формула для быстроты утечки
энергии получается умножением (90.23) на с2 и имеет вид
^ = -irSA. (90.24)
Эта утечка массы и энергии совершенно ничтожна, благодаря
огромной величине константы
-5^ = 2. 103* г/сек. (90.25)
Если В характеризует порядок величины Bikt то для системы Солнце —
Юпитер можем положить в круглых числах
|-=1014г/с^, (90.26),
§91] ЗАКОНЫ СОХРАНЕНИЯ ДЛЯ ПОЛЯ И ИНТЕГРАЛЫ МЕХАНИКИ 457
поскольку масса, угловая скорость обращения Юпитера вокруг Солнца
и отношение квадрата его орбитальной скорости к с1 равны
ν2
тю = 2 · 1030 г, <1>ю = 2 · 10~8 сек, -~ = 2 . 1(Г9. (90.27)
Деля квадрат числа (90.26) на значение константы (90.25), получаем
для утечки массы 5· 10~12 г/сек, что в переводе на энергетические
единицы составляет смехотворно малую мощность в 450 вт. Для
сравнения укажем, что мощность электромагнитного излучения Солнца
составляет около 4 · 1012 г/сек, т. е. величину, примерно в 1024 раз
большую.
Этот подсчет полностью подтверждает наше заключение, форму*
лированное в конце § 88, а именно, что в задаче о гравитационном
взаимодействии тяжелых масс гравитационные волны никакой роли
не играют.
Рассмотрим еще вопрос о том, с какой точностью можно считать
систему тяжелых масс консервативной.
При решении задачи механики в гл. VI мы вывели уравнения
движения с точностью, позволяющей найти поправки к энергии по*
рядка Μηρ-, где q есть некоторая характерная скорость.
Формула (90.24) показывает, что, пренебрегая электромагнитным
излучением, мы могли бы идти и дальше, вплоть до членов порядка Ж-^-.
С этой именно точностью задача многих тел может быть
формулирована как задача механики, допускающая десять классических
интегралов. Напомним, что в задаче о взаимодействующих зарядах
(§ 26—28) наибольшая достижимая точность соответствует по-
рядку Μ -^-, так как там излучение играет гораздо большую роль.
§ 91. Связь между законами сохранения для поля
и интегралами механики
В § 89 мы вывели формулы для производных по времени от ве-
личин Μ, Ρ1, Mik, M10 и нашли представление этих величин в виде
•интегралов по поверхности. Найденные нами выражения для полной
массы и для количества движения имеют вид
M = ^fni-±-W*r-%lY,>)dS, (91.01)
458 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Момент количества движения выражается формулой
~χ*Τϊ;W-e"V') + 9'V-fl"fl°*}dS. (91.03)
* .
Величина Mi0, входящая в закон движения центра тяжести, равна
М10 = АЯ*—РЧ9 (91.04)
где Pi имеет значение (91.02), а первый член выражения (91.04) равен
^'вщ/вЛдс'^(ву*в00-в7ов*а) + в/0в,0-в/Т}<«. (91-05)
В зависимости от того, как далеко мы проведем поверхность
интегрирования S, значения выписанных интегралов для полной массы
и других физических величин несколько изменятся, так как они
будут включать большую или меньшую часть массы и других
величин, принадлежащих „чистому" гравитационному и
электромагнитному излучению. Как мы выяснили в предыдущем параграфе, энергия
гравитационного излучения совершенно ничтожна. Пренебрегая также
и электромагнитным излучением, мы можем провести поверхность
интегрирования уже не в волновой зоне, а на „умеренно-больших"
расстояниях от системы тел; тем самым мы как бы отсечем массу
и энергию вещества и статических полей от массы и энергии чистого
излучения.
Для потенциалов тяготения на умеренно-больших расстояниях от
системы тел мы вывели в § 84 и § 85 приближенные выражения,
которыми мы теперь и воспользуемся. Согласно (85.46), выражение
для д00 имеет вид:
rtoo 1 , 4γΑί 4txj » 2т _
β ^ с ~*~ сЧ ~г" сЧ* м ~т~ dxj дхк сЧ uJk
7γ2Λ42 Щ2М2Х*х, 4 d2W
+ -7V5-H ^ Hir-3F-· (91-06)
Смешанные компоненты даются формулой (85.41), согласно которой:
4γ , 2-ixjMji д* 2γ
й сЧ ^ сЧ* dxjdt сЧ l1^
%■ jmXjXk(dxf
дх]дхк сЧ
IfMP ?MP*Xlxk 4 *Wt mm
§ 91] ЗАКОНЫ СОХРАНЕНИЯ ДЛЯ ПОЛЯ Й ИНТЕГРАЛЫ МЕХАНИКИ 459
Наконец, пространственные компоненты, согласно (86.48), равны
д2 2γ
dt2 сЧ
^ = -cbik + ^^-Dik-
η£τ f P {XjXflu + xjxkvt - xtxkvj) {dxf + Щ$±. (91.08)
dxjdt c3i
В формулах (91.06) — (91.08) мы вместо Xt и Pl написали X1 и Plt
чтобы подчеркнуть векторный характер этих величин. Величина Ώμ
имеет значение (85.39), а именно:
DJt (f) = f pxtxj {1 + ^r (τ v* + n - Τ ^)} <"*>*+
+^-hjfpW(dxf. (91.09)
При подстановке Dyj в формулу (91.08) для д/л достаточно
сохранить в Dn главные члены, представляющие обычные моменты инер-
г*
ции. Аргументом в D]t является время tt а не x = t — —, как в
волновой зоне.
В выражения для д00 и д0/ входят также члены, содержащие W
и ffr/ и представляющие поправки на запаздывание. Эти члены
приближенно равны:
4 d2W
dt2 ~ с5
\ г г3 / dt2
д*г
Зс5 дх[ дхк dxt
4 fflWt γ χj d*Dn
г dt2
■fpxMidxf, (91.10)
с5 dt* с* г dt3 ~
+ Μτ~:Ί?)π fwxfrVx?. (91.11)
Выписанные здесь выражения для ^ содержат величины М, Р1,
Mlk, MX1 — РН% постоянство которых выражает механические законы
сохранения. Мы должны поэтому ожидать, что эти величины совпадают
* * * *
со значениями интегралов Ж, Р\ Mlkt Miot представляющих полную
массу, количество движения и т. д. для всей системы, включая и
поле. Проверим это.
Нам надлежит подставить выражения (91.06) — (91.08) для g^v
в поверхностные интегралы (91.01) — (91.05) и приближенно вычи-
* *.
слить их. При вычислении мы будем сохранять в Ж и Я' члены
порядка q2/c2 по отношению к главным, а при вычислении Mlk и М10
мы для простоты ограничимся главными членами.
Если не считать поправок на запаздывание, то во всех первых
производных от 9μν членами, медленнее всего убывающими с расстоянием,
460 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
3*
будут члены порядка 1/г2, нечетные в координатах хи хъ χ,
dqik
Исключение представляет производная —h—* обратно
пропорциональная г (и четная в координатах). Что касается поправок на
запаздывание, то они, вообще говоря, убывают медленнее, но поправка
в члене -^— убывает тоже как 1/г2, и будет тоже нечетной
относительно xl% x2f xz.
Имея в виду эти замечания, составим входящее в формулу (91.01)
для Μ выражение
и /»№*№ Λ/0ΛΛ0\ л/а
дх,
(δ/*600-βΎ°)= β'^-β0"^· (91-12)
Правая часть получается из левой после замены суммирования по к
суммированием по α (включая а = 0) и учета условия гармония·
*
ности. Так как для вычисления Μ достаточно знать нечетные в
координатах члены порядка 1/г2, то в выражении (91.12) мы можем
заменить вне знака производных величины g^ их предельными
значениями. Сделав это, получим:
9 дха β дха — С dxt с dt ' ^1Л^
Это приближение годится и при учете поправок на запаздывание,
если иметь в виду их порядок величины относительно q/c.
Используя формулы (91.06) и (91.07) для д00 и д/0, умножая (91.13)
на ni=— и суммируя по /, получаем для подынтегральной
функции в (91.01) выражение:
Нетрудно видеть, что в правой части второй член пропорционален
шаровой функции второго порядка и при интегрировании по поверх-
*
ности сферы дает нуль. Первый же член дает для интеграла Μ
значение
М = М. (91.15)
*
Таким образом, полная масса системы М, включающая массу поля,
совпадает, в данном приближении, с механической массой Ж.
*.
Аналогично вычисляется величина Р. Мы имеем приближенно
§ 91] законы Сохранения для поля и интегралы механики 461
и далее
CnJ dxj с nJ dt — c*r> И ~
— W nJ ~dt*—Ь ~~W (hi — 3"Λ) sgr J ?vixkxl (dxf. (91.17)
Здесь сохранены члены порядка q2/c2 по отношению к главному,
и в них разложение по обратным степеням г доведено до 1/г2. При
составлении выражения (91.17) были использованы оба члена в
поправке на запаздывание (91.11).
В правой части (91.17) второй и третий члены пропорциональны
шаровым функциям, и при интегрировании в (9^.02) они дают нуль.
Первый же член дает
Р1 = Р1. (91.18)
Полное количество движения также совпадает с механическим.
Переходим к вычислению Μ . Мы имеем в данном приближении
nj $ψ - Йу/Й0*) = - с (nktf>* - Λ,β0*)· (91.19)
Используя формулу (91.16), а также очевидное равенство
n^j^rijX^ (91.20)
* lb
мы можем написать интеграл (91.03) для Μ в виде
^_ ν чау
dxj
Для вычисления интегралов, содержащих <t , потребовалось бы
знать tfk вплоть до величин, убывающих как 1/г3 (мы имеем в виду
члены в tfkt содержащие с3 в знаменателе). Но в § 84 $?k было
определено только вплоть до членов, убывающих как 1/г2. Хотя
вычисление недостающих членов не представляет принципиальных
затруднений, мы можем без него обойтись, если ограничимся в (91.21)
главными членами и учтем, что интегралы, содержащие -~-» дают
к ним поправки порядка q2/c2. Для подынтегральной функции в (91.21)
мы получим тогда выражение
-J^Mlk + ^F{niPk-ntpi)^-^.{bk}-bHn]){Mjl+b}l)-
--^г^и-^ММ^+О»*)· (91·22)
^-τέτ/Μ·"-^-^*
462 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Правая часть здесь расположена по шаровым функциям и содержит
шаровые функции нулевого, первого и второго порядков *). При
интегрировании остается первый член, и мы получаем
Mik*=Mlk, (91.23)
как и следовало ожидать.
Нам остается вычислить интеграл (91.05). Используя
формулу (91.13), мы можем написать его в виде
Л*| t- f{cn (ап-х *£_-L* *£)-
МХ —Тб^е/ \сп*\* *1 dxj с' ХЛ5Г)
-jnjW + *u)}(dxr. (91.24)
Поскольку -~- выражается из условия гармоничности через -j—,
а эти величины вычисляются из (91.08) вплоть до членов, убывающих
как 1/г3, мы могли бы вычислить в интеграле (91.24) все члены.
Но в целях упрощения выкладок, не представляющих особого
интереса, мы ограничимся и здесь главными членами. Мы можем тогда
написать:
*{*-*,%)-ίι8!-+Φ+ι£)-&<*ι-**>"χ'-
(91.25)
Рассуждая как и раньше, получаем отсюда
MXl = MXlt (91.26)
а так как уже было проверено, что Pl — Plt то будет
М10 = МХ1 — РН% (91.27)
как и должно быть.
Проведенные здесь вычисления можно рассматривать как
проверку правильности приближенного решения уравнений Эйнштейна,
даваемого формулами (91.06) — (91.08). Вместе с тем результаты
этих вычислений являются наглядным выражением связи между
законами сохранения, написанными в общей форме, и интегралами
механики.
!) При учете членов порядка q2/c2 по отношению к главным
подынтегральная функция в (91.21) содержала бы шаровые функции до четвертого
порядка.
§ 92] ТЕОРЕМА ЕДИНСТВЕННОСТИ ДЛЯ ВОЛНОВОГО УРАВНЕНИЯ 463
§ 92. Теорема единственности для волнового уравнения
В следующем параграфе мы займемся вопросом о том, насколько
однозначно определяется, в случае изолированной системы тел,
гармоническая координатная система. При исследовании этого вопроса
нам понадобится теорема, устанавливающая условия единственности
решения волнового уравнения
□ ψ = 0. (92.01)
Мы докажем здесь эту теорему для волнового уравнения с
постоянными коэффициентами, в котором
π*-ϋϊ-ίϋ + ϋ4-^ (92 02)
Наложим на функцию
ψ = ψ(χ. у, z. t) (92.03)
следующие условия.
(а) Условие ограниченности: при всех xt у, zt t имеет место
неравенство
|ψ|<Λί0, (92.04)
так что функция ψ равномерно ограничена.
(б) Условие убывания на бесконечности: при неограниченно
возрастающем расстоянии г = Ух2 -+- у2 -f- z^ от начала координат и
при всех t функция удовлетворяет неравенству
ΙΨΚ-7". (92.05)
а ее первые производные удовлетворяют неравенствам
Мх
ι аф ι Af,
IgradtK-^. |7Ж|< г · (92'06)
так что функция ψ и ее первые производные убывают на
бесконечности обратно пропорционально г (или еще быстрее). Здесь
величины Ж0, М, Мх — положительные постоянные.
(в) Условие излучения: при г—>оо и всех значениях величины
t'Q = tQ-]—в любом фиксированном интервале удовлетворяется
предельное равенство
которое выражает тот факт, что на больших расстояниях имеется
только расходящаяся волна, тогда как волны, идущие извне,
отсутствуют.
464 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Мы можем теперь формулировать следующую теорему
единственности.
Решение однородного волнового уравнения □ψ = 0,
удовлетворяющее условиям (а), (б) и (в), тождественно равно нулю.
При доказательстве теоремы мы будем исходить из формулы
Кирхгофа для решения волнового уравнения 1). Формула Кирхгофа
выражает значение функции ψ в некоторой точке пространства г0
в момент времени t0 через значения ψ и ее производных на поверх*
ности S, окружающей эту точку, причем значения в точке г
поверхности берутся не в момент t0t а в более ранний момент
' = 'o-7lr-rol· (92·08>
Формула Кирхгофа имеет вид:
S
Здесь через R обозначено расстояние
/?=|г —г0|. (92.10)
-з1- есть производная по внешней нормали к поверхности S:
^-=Hcos(«x) + f-cos(«y) + -||-cos(«,). (92.11)
Квадратные скобки [ψ] означают, что аргумент t должен быть
заменен его значением (92.08), причем в производных -Д- и -^ эта
замена должна быть произведена после выполнения дифференциро·
вания.
Возьмем в качестве поверхности S поверхность шара радиуса R
с центром в точке г0. Мы можем тогда положить
dS = R2d*9 (92.12)
где άω — элемент телесного угла. Далее,
cos (пх) = -^=^-, cos (пу) = ^=^ · cos (**) = £~7Г1 · <92·13>
и так как
dR
ЭГ=1. (92Л4>
1) О формуле Кирхгофа и ее обобщении — формуле С. Л. Соболева —
см. В. И. Смирнов, Курс высшей математики, т. II, § 202 и т. IV, § 148,
1957-1955 гг.
§ 92] ТЕОРЕМА ЕДИНСТВЕННОСТИ ДЛЯ ВОЛНОВОГО УРАВНЕНИЯ 465
то мы можем писать
Формула Кирхгофа принимает вид
Стоящее под знаком интеграла выражение в фигурных скобках
здесь равно
+ 1*-*ύ%+0-&%+('-*ύ%+Τ%· <92·17>
где аргумент t имеет значение (92.08).
Согласно формуле (92.16), значение функции ψ в точке r0, t0
есть среднее по телесному углу от выражения (92.17). Для того
чтобы в точке r0, t0 функция ψ была равна нулю, очевидно,
достаточно, чтобы при возрастании R выражение (92.17) стремилось
к нулю:
Для всякой точки г0, отстоящей на конечное расстояние от начала
координат, это требование будет во всяком случае выполняться при
выполнении условий (а), (б) и (в). В самом деле, выражение (92.17)
может быть записано в виде
~Ш Ьт—37—— Ϋ + Ϋι+ft· (92.19)
где
Так как
dR ~ с dt
^ = -(-o-S-+yof + .0#). (92.21)
ft-^-3- <92·22>
Ι/?-г |< Го, (92.23)
то, в силу неравенств (92.06), входящих в формулировку
условия (б), мы имеем:
ΙϋιΚ-τ^ι. \ъ\<-тм1' <92·24)
3Q 3«t· ?649. β. ή. Фок
466 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
При фиксированном г0 и при г—>оо эти выражения стремятся
к нулю. Поэтому будет в отдельности
ft-*0· 92-*° (ПРИ г->оо), (92.25)
и для выполнения условия (92.18) достаточно, чтобы было
φ-»0 (при г-»оо) (92.26)
или
,!5.{-^+7-Ч?Ч-* <9"7>
Это уравнение, также как и уравнение (92.18), должно выполняться
для тех значений г, t, для которых величина t0 = t-\ остается
яри предельном переходе г-»оо фиксированной. Если теперь ввести
входящую в формулировку условия (в) величину t0=t-\ , то
будет | t0 — *о | <1 —. Но так как г0 тоже фиксировано, то обе
величины to и to будут лежать в фиксированных интервалах, если
одна из них лежит в таком интервале. Поэтому в условии (92.27)
можно заменить t0 на to, после чего оно приведется к условию
излучения (92.07). Последнее является, таким образом, достаточным
условием для выполнения предельного равенства (92.18), из которого
уже прямо вытекает ψ = 0. (См. (43)).
Мы доказали, что в точке г0 функция ψ равна нулю. А так как
эта точка может быть выбрана произвольно, то тем самым доказано,
что функция ψ равна нулю везде. Таким образом, формулированная
выше теорема единственности доказана.
Рассмотрим решение волнового уравнения со свободным членом
Δψ—F-UJr = -4*P. (92-28)
выражаемое обычной формулой для запаздывающего потенциала
Ψ('ο. 'о)=/у[^> (92.29)
где
[ρ] = Ρ (г. ί). ί = ί0 -11 г - г01. (92.30)
Интегрирование в (92.29) ведется по координатам (лг, у, ζ) и
распространяется на всю область, где „плотность" ρ отлична от нуля
(область, занятую массами). Если эта область вся лежит внутри сферы
г^си если время t0 удовлетворяет неравенству ct0> г-\-а, то для
вычисления интеграла (92.29) достаточно знать ρ для положительных
значений аргумента f,
§ 92] ТЕОРЕМА ЕДИНСТВЕННОСТИ ДЛЯ ВОЛНОВОГО УРАВНЕНИЯ 467
На больших расстояниях от масс функция ψ (которая вне масс
удовлетворяет однородному волновому уравнению) имеет
асимптотический вид
ψ (г. i) = jV-(t-^,n), (92.31)
где η — единичный вектор в направлении радиуса-вектора г.
Функция μ выражается через ρ следующим образом:
Ι*('-7· П) = /Р (г'· '-Т + ^К'· <92-32>
Выписанные здесь формулы показывают, что запаздывающий
потенциал удовлетворяет формулированным выше условиям (а), (б) и (в).
В силу доказанной здесь теоремы он является единственным
решением неоднородного волнового уравнения (92.28), удовлетворяющим
этим условиям. Таким образом, эта теорема дает математическое
обоснование применению запаздывающего потенциала, который обычно
вводится из физических соображений.
Формулированная здесь теорема единственности доказана нами
для волнового уравнения с постоянными коэффициентами. Следует,
однако, ожидать, что она остается справедливой и для уравнений
с переменными коэффициентами g^v, обладающими асимптотикой,
установленной в § 87. Доказательство ее для общего случая
представляет значительные трудности и является нерешенной
математической задачей. Гораздо легче доказать ее для случая, когда можно
ограничиться „стационарным" приближением для д^ и писать
волновое уравнение в виде
-J3-- Δψ = 0, (92.33)
где Δψ — евклидов оператор Лапласа, а „показатель преломления"
η имеет значение
я=1+-2#- (92.34)
Здесь U есть ньютонов потенциал, который можно в данном вопросе
считать независящим от времени. Доказательство можно было бы
построить либо на формуле С. Л. Соболева!), представляющей обоб-
!) Формула Соболева отличается от формулы Кирхгофа (92.09) в
основном тем, что содержит, кроме поверхностного, еще и объемный интеграл.
Рассуждая аналогично вышеизложенному, мы можем считать, что в силу
условий для ψ интеграл по бесконечно удаленной поверхности равен нулю.
5то дает для ψ не прямо равенство ψ = 0, а однородное интегральное
уравнение, имеющее только нулевое решение. Входящая в формулировку усло-
/ Г * Г*
вия (в) теоремы величина t0 = t -\ должна быть заменена на t0 = t -| ,
с с
где г* имеет значение (87.12).
30*
468 ПРИБЛИЖЁННЫЕ РЕШЕНИЯ Й ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ (ГЛ. VII
щение формулы Кирхгофа на уравнения вида (92.33), либо на
разложении функции ψ по переменной t в интеграл Фурье и на
применении известных условий излучения Зоммерфельда, которые в этом
случае будут следствиями нашего условия (92.27).
В заключение заметим, что принятая в этом параграфе постановка
задачи отличается от обычной (от задачи Коши) тем, что мы не вводим
в явной форме начальные условия, а, напротив, изучаем такие решения
волнового уравнения, которые в данной области пространства и в
интересующие нас моменты времени от начальных условий не зависят.
Такая постановка диктуется характером данной физической задачи.
Единственность решения и независимость его от начальных условий
достигается в ней ограничением пространственно-временной области:
начальное возмущение, какое могло оказаться в этой области, давно уже
разошлось, новые же возмущения не могут, в силу условий
излучения, поступать в нее извне, а могут только (в случае неоднородного
уравнения) порождаться внутри области, причем они тогда
определяются уже не начальными условиями, а „плотностью" р.
§ 93. О единственности гармонической координатной системы
При решении уравнений Эйнштейна для изолированной системы
масс мы пользовались гармоническими координатами, причем решение
получалось у нас вполне однозначно. Однозначные результаты
получались у нас как для конечных и „умеренно-больших" расстояний
от масс, где волновой (гиперболический) характер уравнений
Эйнштейна не был существенен и учитывался путем введения поправок
на запаздывание, так и в „волновой зоне". Это позволяет думать,
что использованные нами условия гармоничности, в соединении с
требованием евклидовости на бесконечности и с условиями,
обеспечивающими единственность решения уравнений волнового типа,
определяют координатную систему однозначно, с точностью до
преобразования Лоренца.
Рассмотрим этот вопрос подробнее. Если □ ψ есть инвариантный
оператор Даламбера
то условия гармоничности
¥- = 0 (93.02)
могут быть написаны в виде
§ 93] О ЕДИНСТВЕННОСТИ ГАРМОНИЧЕСКОЙ КООРДИНАТНОЙ СИСТЕМЫ 469
так что каждая из функций
ψ = *0; Ψ = *ι'» Ψ = ·*Υ> ψ = *3 (93.04)
есть решение уравнения Даламбера
□ ψ = 0. (93.05)
Этому уравнению, очевидно, удовлетворяет также постоянная и любая
линейная функция от гармонических координат.
Предположим сперва, что метрика пространства-времени гали-
леева. В галилеевых координатах
x0 = ct, хг = х, х2 = у, хъ = г (93.06)
компоненты фундаментального тензора равны1)
«■" = «А, (93-07)
и оператор Даламбера имеет вид
α*=<ν^· (93·08>
Очевидно, что каждая из галилеевых координат является
гармонической.
Найдем самый общий вид гармонических координат. Пусть
формулы преобразования имеют вид:
х'* = Г(х0, *ь *2, хг). (93.09)
Новые координаты должны удовлетворять (как и старые) уравнению
Даламбера, быть галилеевыми на больших расстояниях и приводить
к значениям £μν с надлежащей асимптотикой. Имея в виду эти
требования, будем писать функции /а в виде
/α = 0α+ννβ + ηα(*ο, χι> Х* *з)· (93,10)
Здесь аа и аа$ — коэффициенты преобразования Лоренца,
удовлетворяющие соотношениям
*«Vava = 'Av; eaaava„ = e^. (93.11)
Так как функции /* должны удовлетворять уравнению
□ /а = 0, (93.12)
а линейные члены в отдельности ему удовлетворяют, то должно быть
□ ηα = 0. (93.13)
т· ■■ ■
1) При применении правила суммирования по дважды встречающемуся
аначку значок при е^ (е0 = 1, ех = е2 «= еъ =» — 1) не считается.
470 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VI!
Это уравнение должно удовлетворяться во всем пространстве и при
всех t (т. е. при всех л;0). Поскольку в уравнение (93.13) входят
вторые производные, естественно потребовать, чтобы сами
функции ηα и их первые производные были ограничены во всем
пространстве и при всех t. Это требование тем более необходимо, что первые
производные от новых координат по старым входят в формулы
преобразования для всякого тензора. Что касается условий на
бесконечности, то, так как новые координаты там галилеевы, то функции η»,
представляющие добавки к преобразованию Лоренца, должны
обращаться там со своими первыми производными в нуль. Кроме того,
на бесконечности должны быть выполнены требования, вытекающие
из асимптотического поведения g^. Рассмотрим эти требования
подробнее. Не нарушая общности, мы можем считать, что входящее
в формулу (93.10) преобразование Лоренца сводится к
тождественному преобразованию, так что эта формула может быть написана
в виде
/■=*.+ηβ(*ο. *ι. *2. *з)· (93·14)
Вычисляя по общей формуле
дх' dxl
ιτ-Γτκτϊ: (98.14)
компоненты фундаментального тензора в новых координатах, получим
dria
По условию, на бесконечности величины -^- стремятся к нулю. По-
3 0ХЪ
этому асимптотическое поведение g'p характеризуется членами,
линейными в этих величинах. Но это асимптотическое поведение
должно быть таково, что разность между величиной g«P и ее
предельным значением на бесконечности представляет расходящуюся
волну. (Соответствующие формулы были выведены нами в § 87 для
даР, но из них вытекают аналогичные формулы и для ga$.) Таким
образом, на бесконечности
£αβ — (£βΡ)οο = Расх· волна. (93.17)
Это требование должно выполняться в любой гармонической системе
координат, так что ему должны удовлетворять и величины g,a®
(формула (93.16)). Отсюда следует, что на бесконечности
е*Тх—Hp-aJ- = Pacx- волна· (93.18)
Если мы положим
Τ —«Λ. (93.19)
§ 93] О ЕДИНСТВЕННОСТИ ГАРМОНИЧЕСКОЙ КООРДИНАТНОЙ СИСТЕМЫ 471
и сократим на eae^t мы можем это условие записать в виде
-d|-+i^=pacx·волна· <93·20)
Пользуясь тождеством
д / дЪ . дЪ \ . д I <Ч . ^ \ д ί^ <Ч \ _
длг0 \ (λ*ν ' (λ*α / ' дха \ дха ' дх, / όχΊ \ дха ' дхо J
<β
= 2таг (93·21>
и переходя от ην κ ην, выводим отсюда, что
-fc^fc-^pacx. волна· (93·22)
Отсюда можно сделать заключение, что ην есть сумма линейной
функции и функции, представляющей на бесконечности
расходящуюся волну. То же заключение относится, очевидно, не только
к функциям ηα, входящим в (93.14), но и к функциям ηα, входящим
в (93.10). Так как в (93.10) линейная функция уже выделена и, по
условию, на бесконечности ηα->0, то мы приходим к выводу, что
и сама функция ηα дает расходящуюся волну
т)а = расх. волна. (93.23)
Мы можем теперь уточнить условия, которым удовлетворяет
добавка ηα к линейной функции в формуле (93.10). Эта добавка
удовлетворяет волновому уравнению (93.13) и остается со своими
первыми производными всюду ограниченной. На бесконечности
величина ηα и ее первые производные убывают как 1/г. Наконец,
вследствие (93.23) можно считать, что на бесконечности величина ηα
удовлетворяет условию излучения вида (92.27). Все эти условия
должны выполняться при всех значениях t. В силу теоремы
единственности, доказанной в § 92, величина ηα, удовлетворяющая этим
условиям, тождественно равна нулю. Следовательно, функция /\
входящая в (93,09) и (93.10), приводится к линейной, и самый
общий вид преобразования от одной гармонической координатной
системы к другой напишется:
<=««-Hw <93·24>
т. е. сводится к преобразованию Лоренца.
Этот результат доказан нами для случая галилеева пространства
времени с метрикой (93.07), поскольку формулированная в § 92
теорема единственности доказана для этого случая. Представляется,
однако, несомненным, что эта теорема может быть доказана и для
общего случая эйнштейновского пространства-времени,
фундаментальный тензор которого обладает асимптотикой, установленной в § 87,
472 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Приняв это, мы приходим к выводу, что и в общем случае
гармоническая координатная система определяется однозначно, с точностью
до преобразования Лоренца. В самом деле, рассуждения этого
параграфа остаются в силе и в общем случае. В гармонической
координатной системе оператор Даламбера имеет вид
ΠΨ-^ΤΕζ&Γ (93·25)
и не содержит первых производных. Вследствие этого волновому
уравнению удовлетворяет любая линейная функция от координат.
Поэтому, написав преобразование координат в виде (93.09), где /"
имеет значение (93.10), и потребовав, чтобы новые координаты были
тоже гармоническими (уравнение (93.12)), мы и в общем случае
получим для добавок ηα волновое уравнение (93.13), где оператор □
имеет уже значение (93.25). Добавки ηα и их первые производные
должны, очевидно, быть ограниченными во всем пространстве.
Остальные же условия, налагаемые на ηα, относятся к бесконечно
удаленной области, где метрика мало отличается от галилеевой. Эти
условия могут быть поэтому взяты без изменения из предыдущего случая.
8 частности, левая часть (93.18) будет представлять разность между
асимптотическими выражениями gaP в первоначальных и в
преобразованных координатах и должна поэтому соответствовать расходящейся
волне. Отсюда заключаем, как и раньше, о справедливости
соотношений (93.22) и (93.23), а тогда теорема единственности приводит
к выводу, что добавки ηα равны нулю.
Таким образом, и в общем случае гармоническая координатная
система определяется однозначно, с точностью до преобразования
Лоренца.
Следует отметить, что мы не вводили в явной форме никаких
начальных условий для функций /*, дающих преобразование координат. Такая
постановка задачи соответствует постановке задачи об определении
потенциалов тяготения g^. Там имеет смысл вводить начальные
условия только для распределения тяжелых масс, но не для
гравитационных волн и не для самих потенциалов тяготения. Задача определения
потенциалов тяготения не есть задача Коши (т. е. не есть задача
на начальные условия), но скорее — задача нахождения некоторого
установившегося состояния, которое наступает, когда все
гравитационные волны, кроме порождаемых самим движением
рассматриваемых масс, уже разошлись (см. выше, конец § 92).
Наши рассуждения показывают, что условия, обеспечивающие
единственность координатной системы, вытекают из самой постановки
физической задачи. Поскольку это не есть задача Коши в отношении
определения потенциалов тяготения, она не будет задачей Коши и
в отношении определения координатной системы. Определенность
9 постановке задачи ρ потенциалах тяготения достигается тем, чтр
§ 93] О ЕДИНСТВЕННОСТИ ГАРМОНИЧЕСКОЙ КООРДИНАТНОЙ СИСТЕМЫ 473
мы исключаем, при помощи условий излучения, внешние
„мимолетные" гравитационные волны. Но тем самым исключаются и
соответствующие волновые члены в формулах преобразования координат,
чем в свою очередь достигается единственность координатной системы.
К вопросу о единственности гармонической координатной системы
в нестационарном случае можно подойти и с другой стороны,
а именно, используя приближенный метод решения уравнений
тяготения, примененный в гл. VI. Если проследить произведенные там
вычисления, то окажется, что на всех рассмотренных этапах
решение, а значит и координатная система, получается однозначно. Таким
образом, единственность гармонической координатной системы можно
считать доказанной и во всех тех случаях, когда применим
рассмотренный в гл. VI метод решения.
Формулируем наше заключение еще раз. В случае
изолированной системы масс существует координатная система, которая
определяется однозначно, с точностью до преобразования Лоренца.
Это есть гармоническая координатная система,
характеризуемая линейными дифференциальными уравнениями первого порядка
и предельными условиями для величин ήμν.
Может возникнуть вопрос: не существуют ли, помимо
гармонической, и другие координатные системы, определяемые с точностью
до преобразования Лоренца. Нам представляется это невероятным.
Гармонические координаты характеризуются тем, что каждая из них,
а также любая их линейная функция, удовлетворяет линейному обще-
ковариантному уравнению. Едва ли можно найти другие координаты,
обладающие таким свойством; другие координатные условия, даже
очень похожие на условия гармоничности (93.02), например -^— = 0,
к линейному уравнению не сводятся.
Сама по себе необходимость добавить для определенности задачи
к 10 уравнениям тяготения Эйнштейна 4 новых уравнения является
очевидной. Трудность заключалась в выборе этих дополнительных
уравнений и в формулировке предельных условий.
В противоположность нашей постановке задачи, в той
постановке, какую ей дает Эйнштейн, задача остается математически
неопределенной, и не может быть речи о единственности решения.
По Эйнштейну, никаких привилегированных систем координат не
существует, и система координат остается неопределенной до конца.
Сторонники этой точки зрения возводят эту неопределенность в
достоинство и усматривают в ней глубокий смысл, а именно
выражение некоего „общего принципа относительности", в силу чего
и вся теория Эйнштейна названа им „общей теорией
относительности".
С такой точкой зрения мы согласиться никак Не можем.
Присущая постановке Эйнштейна неопределенность не является принци-
474 ПРИБЛИЖЁННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ {ГЛ. VII
пиальной и не имеет какого-либо глубокого смысла. Такая
неопределенность имеется во всякой теории, допускающей общековариантную
формулировку. В так называемой „частной" теории относительности,
общековариантная формулировка которой была дана в гл. IV этой
книги, она имеется совершенно в той же степени, как и в так
называемой „общей" теории относительности (в теории тяготения).
Важно не то, что данная теория допускает неопределенную
формулировку— это тривиально. Важно как раз обратное, а именно
возможность такой формулировки, которая была бы настолько
определенной, насколько это вообще допускается существом задачи.
С этой точки зрения существование привилегированной системы
координат, определяемой с точностью до преобразования Лоренца,
отнюдь не является тривиальным, но отражает внутренние свойства
пространства-времени. Это становится особенно ясным на примере
„частной" теории относительности, где существование галилеевых
координат отражает однородность пространства-времени.
Если принять это во внимание, то не может возникнуть и
возражений против очевидной необходимости ввести дополнительные
уравнения, позволяющие выделить привилегированные системы
отсчета и тем самым сделать формулировку задачи более определенной.
Необходимость эта имеется как в теории эйнштейнова, так и в
теории галилеева пространства-времени. Правда, в последнем случае
дополнительные уравнения обычно в явной форме не выписываются,
но это, очевидно, не меняет дела, поскольку такие уравнения могут
быть выписаны или же заменены словесной формулировкой
требования, чтобы употреблялись именно галилеевы координаты.
Упомянутые дополнительные уравнения не являются, очевидно,
общековариантными (иначе они не ограничивали бы координатной
системы). Это обстоятельство может дать повод к упреку, что
дополнительные уравнения нарушают красоту теории, которая будто бы
обусловлена именно ее ковариантностью. Такой упрек не является,
однако, серьезным возражением, прежде всего потому, что эти
уравнения должны быть совместны с общековариантными уравнениями
теорий Эйнштейна, простота и изящество которых действительно
замечательны. К этому необходимо добавить, что эти простота и
изящество обусловлены не столько ковариантной формой теории,
сколько заключенной в ней идеей единства метрики и тяготения.
Достигаемая при пользовании привилегированной системой
координат единственность решения представляется нам несомненным
достоинством, а не недостатком. Эта единственность определяет и
физический смысл данной системы, тогда как физический смысл
произвольной системы координат становится ясным лишь после того,
как даны формулы, связывающие ее с привилегированной системой.
Что касается так называемого „общего принципа относительности*,
то, как мы подробно разъяснили в § 49*, такого физического
§ 93] О ЕДИНСТВЕННОСТИ ГАРМОНИЧЕСКОЙ КООРДИНАТНОЙ СИСТЕМЫ 475
принципа быть не может. Напротив того, физическим принципом
является принцип относительности Галилея, относящийся к
прямолинейному и равномерному движению, и его обобщение, выражаемое
преобразованиями Лоренца.
В предположении жесткой метрики (т. е. метрики, не зависящей
от происходящих в пространстве и времени физических процессов)
принцип относительности Галилея — Лоренца приводит к однородному
пространству-времени, и обратно, он является выражением этой
однородности. В случае неоднородного пространства-времени можно
видеть дальнейшее обобщение (или расширенное применение) гали-
леева принципа относительности в существовании гармонических
координат; такое толкование соответствует рассмотренному в § 49*
обобщенному определению принципа относительности как
утверждения о равноправии систем отсчета внутри некоторого класса. В самом
деле, рассмотрим для наглядности выражения (91.06) — (91.08) для <^\
Если мы, считая входящие в них константы фиксированными,
произведем преобразование Лоренца, то мы изменим вид выражений для g^v,
ибо пространство-время неоднородно. Но если мы вместе с тем
подвергнем преобразованию Лоренца и константы (Ж, Р1) и (Moi, M^)t
то мы восстановим вид ср">л Это как раз и значит, что если
возможен процесс (движение масс), в котором константы движения имеют
заданные значения в одной системе отсчета, то возможен и другой
процесс, в котором эти константы имеют те же значения в другой
системе отсчета; другими словами, это означает выполнение
требований принципа относительности в той форме, какая ему была дана
в § 49*.
Мы говорили здесь о приближенных выражениях для g^ и только
о константах движения, а не о других величинах, характеризующих
систему тел. Но наши заключения остаются в силе и для точных
решений, поскольку уравнения тяготения и условия гармоничности,
а также предельные условия строго ковариантны по отношению
к преобразованиям Лоренца. Таким образом, принцип
относительности, выражаемый преобразованиями Лоренца, возможен и в
неоднородном пространстве, общий же принцип относительности
невозможен.
Мы неоднократно подчеркивали принципиальное значение
существования привилегированной координатной системы, определяемой
с точностью до преобразования Лоренца. Оно проявляется и в
следующем. Только признав его, можно говорить о правильности
гелиоцентрической системы Коперника, в том же смысле, в каком
это было возможно в механике Ньютона. Непризнание же
привилегированных координатных систем ведет к той точке зрения,
согласно которой гелиоцентрическая система Коперника и
геоцентрическая система Птоломея будто бы равноправны. Такая точка
476 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
зрения противоречит данному в § 49* определению равноправия
систем отсчета и представляется нам неправильной.
Сделанные выше замечания о привилегированном характере
гармонической системы координат ни в коем случае не должны быть
понимаемы в смысле какого-либо запрещения пользоваться другими
координатными системами. Ничто не может быть более чуждым
нашей точке зрения, чем такое ее толкование. Наша цель состояла
в выяснении вопроса о координатных системах в той ограниченной
постановке задачи теории тяготения, какая была принята в
предыдущих параграфах, где мы исходили из предположения об „остров-
нома характере распределения масс. Мы имели в виду показать, что
вопрос этот допускает тот же ответ, как и в случае галилеева
пространства-времени, рассматриваемого в обычной теории
относительности. Никто не станет в этом случае утверждать, будто
существование галилеевых координат означает запрещение пользоваться
другими координатами. Подобно этому, существование гармонических
координат, хотя и является фактом первостепенного теоретического
и практического значения, но никоим образом не исключает
возможности пользоваться другими, не-гармоническими координатными
системами. В этом смысле гармоническая система координат в
пространстве Эйнштейна является не более (но и не менее)
привилегированной, чем галилеевы координаты в однородном галилеевом
пространстве.
§ 94. Пространство Фридмана — Лобачевского
При постановке задачи о решении уравнений тяготения для
системы масс мы рассматривали эту систему как изолированную и
погруженную в бесконечное евклидово пространство, или в галилеево
пространство-время. Такая постановка бесспорно допустима при
рассмотрении объектов размерами с Солнечную систему. Размеры эти
могут быть характеризованы радиусами орбит наиболее тяжелой
планеты— Юпитера (778 миллионов километров) и наиболее удаленной
планеты — Плутона (5900 миллионов километров). Свет доходит от
Солнца до Плутона примерно за 5,5 часа. Ближайшая же звезда
(а Центавра) отстоит от Солнца на 4,3 световых года, т. е.
примерно в 7000 раз дальше, чем Плутон.
Возможно, что такая постановка задачи допустима при
рассмотрении отдельного звездного скопления или даже целой Галактики.
Размеры галактик1) все еще в десятки раз меньше их взаимных рас-
!) Под Галактикой (с большой буквы) принято понимать ту звездную
систему, в которую входит Солнце, другие аналогичные звездные системы
называются галактиками (с маленькой буквы).
§ 94] ПРОСТРАНСТВО ФРИДМАНА — ЛОБАЧЕВСКОГО 477
стояний. Но если рассматривать столь огромные области пространства,
что они включают в себя много галактик (а такие области
просматриваются в современные большие телескопы), то понятие изолированной
системы, погруженной в евклидово пространство, становится явно
непригодным.
Возникает вопрос: чем заменить тот евклидов фон, который
рассматривался нами до сих пор? Какое пространство-время взять в
качестве фона, на котором выступают отдельные системы масс?
Замена евклидова фона каким-то другим нужна еще и потому,
что при рассмотрении масс, распределенных в евклидовом
пространстве с равномерной в среднем плотностью, возникает известный
парадокс Зелигера, который заключается в том, что ньютонов потенциал
от равномерного распределения масс не существует. Между тем
астрономические наблюдения показывают, что распределение
галактик в доступном наблюдению мировом пространстве, вплоть до
расстояний порядка миллиарда световых лет, в среднем равномерно.
С другой стороны, если ньютонов потенциал не существует, то ясно,
что форма решения уравнений Эйнштейна должна существенно
отличаться от той, какая соответствует изолированной системе масс и
позволяет приближенно выразить потенциалы тяготения g^ через
ньютонов потенциал. Ввиду изменившегося характера задачи выбор
координат также должен быть произведен заново.
Решение уравнений Эйнштейна, которое соответствует
изотропному пространству с равномерной плотностью масс и которое может
быть взято в качестве фона при рассмотрении огромных областей,
включающих в себя много галактик, было получено в 1922 г.
советским ученым А. А. Фридманом [24]. Как мы увидим, в этом
решении возможно введение таких координат, в которых пространство
обладает геометрией Лобачевского. Мы будем называть поэтому
соответствующее пространственно-временное многообразие
пространством Фридмана — Лобачевского.
Теорию пространства Фридмана — Лобачевского можно получить,
исходя из предположения, что выражение для ds2 допускает группу
однородных преобразований Лоренца. Такое ds2 можно всегда при ·
вести к виду
ds2 = Η2 (S) (dx2 — dx\ — dx\ — dx2)t (94.01)
где
S = Vx\ — x\ — x\ — x\. (94.02)
Пространство-время, хотя и не будет само галилеево, но, согласно
(94.01), может быть конформно отображено на галилеево
пространство-время. Наличие группы однородных преобразований Лоренца
обеспечивает изотропность пространства. В частности, начало
Координат ничем не выделяется среди других точек пространства;
478 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
любую фиксированную точку можно при помощи однородного
преобразования Лоренца перенести в начало координат. Таким образом,
однородные преобразования Лоренца играют эдесь двоякую роль:
они дают и перенос начала и переход к движущейся системе отсчета.
Напишем ds2 в виде
ds2 = H2.(e^dxl). (94.03)
Мы видим, что
*μ.=«ν,»·· ^=жеЛ'· (94·04)
Для скобок Кристоффеля получаются выражения
Составляя по формуле
лгр дТ?а
^.-*в-ж? -if+W-W (94·06)
(см. (44.01)) смешанный тензор кривизны четвертого ранга, получим:
рр (tf'lgfr 1 d\gH !d\gH\*\
«μ,«β=| dSi J dS \ dS ) jA
X -§Г («« К?Х«Х? — «β δμ«*β*Ρ + «β 8 ρ.*β*μ — β* 8 ρβ*«*μ) +
+{^+(^)°Κ<δΛ-'Λ>· (MJ»o
Полагая здесь α = ρ, β = ν и суммируя по р, получаем
Вычисляем инвариант
или
R_S(d*H ,3dH\ (94Ю)
Теперь мы можем составить консервативный тензор
0^ = R^-jg^R. (94.11)
§ 94] ПРОСТРАНСТВО ФРИДМАНА — ЛОБАЧЕВСКОГО 479
Из формул (94.08), (94.09) и (94.04) получаем
о - hdi4" ι 4 d]gH ι (dlgH)2}c δ 4-
+ 2{-rfl TdS \-dSJ (V'-sr- (94-12)
Согласно уравнениям Эйнштейна
<V = —^V (94.13)
Как мы указывали при выводе этих уравнений, в космологическом
случае, когда отсутствуют условия на бесконечности, тензор массы 7^
определяется лишь с точностью до аддитивного слагаемого вида λ#μν;
постоянная λ характеризует в этом случае не только самый тензор
массы, но и свойства пространства в целом, и выбор ее составляет
особую гипотезу.
Наша основная цель—рассмотрение пространства
Фридмана-—Лобачевского; но прежде чем к нему переходить, мы коснемся кратко
случая максимально однородного пространства, о котором мы
неоднократно упоминали в предыдущем изложении. В максимально
однородном пространстве должны выполняться соотношения (49.12),
которые можно написать в виде
Rl^ = K{blg^-b\g^. (94.14)
Сравнивая это выражение с (94.07), мы получим совпадение, если
положим
Приняв за новую функцию 1/Я, мы получим для нее из (94.15)
линейное уравнение, решение которого имеет вид
^ = а — bS2. (94.17)
Постановка этого выражения в (94.16) дает соотношение между
постоянными
Ш = К. (94.18)
Положив а=1, мы будем иметь b — -jK, так что
Τ1=ι-Ίκ* (94Л9>
480 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [гЛ. VII
и, следовательно,
dx\ — dx\ — dxl — dx\
dS2 *= r =-5 l- 2- 3——2. (94.20)
[i-^/c-(^-^-^-^i)]2#
Помимо группы однородных преобразований Лоренца, содержащих
6 параметров, выражение (94.20) допускает и более общую группу
преобразований, содержащих 10 параметров; мы их здесь
выписывать не будем (см. (и)).
Из формулы (94.14) вытекает
*μ, = 3**μ,: /?=12/С, (94.21)
откуда
Ομ, = -3Κίμ,. (94.22)
Таким образом, максимально однородное пространство формально
соответствует тензору массы, равному
Τ»=ψί** (94.23)
Переходя теперь к пространству Фридмана — Лобачевского,
предположим, что тензор массы имеет вид
где р* есть инвариантная плотность, a #v ковариантная составляющая
четырехмерной скорости, нормированной по формуле
аУ=1. (94.25)
В обычной (не космологической) постановке задачи тензор массы
(94.24) соответствует „пылевидной* материи при нулевом давлении
(см. формулу (32.17)). В космологической постановке выбор
аддитивной постоянной в давлении (равно как и постоянной К в
формуле (94.23)) составляет, как мы указывали, особую гипотезу,
характеризующую свойства пространства в целом. Наш выбор тензора
массы, хотя и не является единственно возможным, позволяет
построить теорию, правильно отображающую некоторые черты
наблюдаемых явлений.
Для того чтобы консервативный тензор (94.12) был
пропорционален тензору массы (94.24), первый член в выражении (94.12) дол*
жен равняться нулю. Это дает
Если положить здесь
Н=Н\, }gH=2\gHl, (94.27)
§ 94] ПРОСТРАНСТВО ФРИДМАНА — ЛОБАЧЕВСКОГО 481
то уравнение (94.26) приводится к линейному:
^+1^=° <94-28>
и легко интегрируется. Если считать, что при S = oo должно быть
Нх = 1 (пространство-время галилеево и масштаб в нем обычный),
то будет
Я1==1— -^ (94.29)
и, следовательно,
#=1— ^-+^-. (94.30)
С этим значением Η будет
12Л
Gv = 7 ТГ* *ιΑ*ιΛ · (94.31)
и уравнения Эйнштейна напишутся
5бя V»V» = -^ Ρ*^μ.«ν (94.32)
Составляя инварианты обеих частей тензорного равенства (94.32),
получим
ТГ^-ЯЙ- (94·33>
Эти инварианты равны R\ поэтому мы могли бы для вычисления
правой части (94.33) применить непосредственно формулу (94.10),
подставив в нее значение (94.30) для //. Так как плотность р*
положительна, то и постоянная А должна быть положительна.
При использовании соотношения (94.33) уравнения (94.32) дают
и^-нУр, (94.34)
и после перехода к контравариантным составляющим
«μ = -Η5-. (94,36)
Мы получили решение уравнений Эйнштейна, соответствующее от*
личной от нуля плотности масс р*, причем эти массы равномерно
распределены во всем пространстве. (В ньютоновой теории подобное
решение не существует). Этот результат был впервые получен
А. А. Фридманом в его упомянутой выше работе 1922 г. [24].
Напишем полученное решение в явной форме. Мы имеем
ds2-.
*(l — £f{dxl — dx\ — dx\ — dx§t (94.36)
31 Зак. 2649. В. А. Фок
482 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
где
5 = V х2 —х\ —х2 —х{. (94.02)
Интересно отметить, что это выражение допускает не только группу
однородных преобразований Лоренца, но и преобразование инверсии
<=#-*.· <94·37)
Последнее не имеет, впрочем, прямого физического значения, так
как переводит область 5 > Л в область S' < Л, а физическое
значение имеет только случай 5 > Л. Нетрудно указать также
формулы, связывающие координаты х^с гармоническими координатами x*t
а именно:
<=(ι+44+·?-)ν <94·38>
Гармонические координаты х* не меняются при преобразовании
инверсии (94.37). В задаче об изолированной системе масс
привилегированное положение гармонических координат опиралось на
рассмотренные в § 93 предельные условия, в том числе на условие
евклидовости на бесконечности. В пространстве Фридмана —
Лобачевского условия, однако, совсем иные, вследствие чего здесь более
соответствуют характеру задачи не гармонические, а „конформно-
галилеевы" координаты, в которых ds2 имеет вид (94.36).
Рассмотрим движение вещества, соответствующее полученному
решению. В уравнении неразрывности
^=М = 0 (94.39)
*μ
мы должны положить
у^ы-щ-ъ- <94·4ο>
откуда видно, что оно выполняется в силу тождества
Поле скоростей характеризуется величинами (94.35). Мы имеем
dx0 и0 х0 v '
Положив для наглядности x0=zctf можем написать
4?=·?. (94·43)
§ 94] ПРОСТРАНСТВО ФРИДМАНА — ЛОБАЧЕВСКОГО 483
откуда для каждой массы
xl = vit, (94.44)
где vi — постоянная. Вследствие того, что S2 > 0, мы должны иметь
v\ + v\ + v\<c2. (94.45)
Во вспомогательном галилеевом пространстве каждая масса
движется с постоянной скоростью, пропорциональной ее координате, и,
следовательно, все расстояния возрастают там пропорционально
времени. Это относится, собственно, к вспомогательному галилееву
пространству, но качественно заключение о возрастании взаимных
расстояний со временем остается в силе и для физического
пространства. Такое расширяющееся пространство и составляет тот фон,
который становится здесь на место евклидова фона. Наблюдаемые
физические следствия из этого заключения, которое на первый взгляд
кажется парадоксальным, будут рассмотрены в следующем параграфе.
Введенные формулой (94.44) величины vt можно рассматривать
как координаты данной массы, взятые в масштабе, растущем
пропорционально „времении t. В этом масштабе координаты каждой
массы будут постоянными. Поэтому, с точки зрения уравнений
движения сплошной среды, величины vi будут своего рода координатами
Лагранжа (в отличие от координат Эйлера х^. Введем в выражение
для ds2 в качестве пространственных переменных три величины vi%
а в качестве временной переменной — величину τ, пропорциональную S
и равную
* = ]Л2-^И + 4 + *з)· (94.46)
Наша подстановка будет иметь вид
*ι" /-^-т- ' = -Н=т· (94-47)
Очевидно, что соотношение (94.46) выполняется тождественно. Мы
будем иметь
ψϊ?*+·№?)*** <94·48>
• ,. :dx-\ .-ft^L, (94.49)
откуда
с2 dt2 — (dx\ -f dx\+dxty = c2 di2 — τ2 da2, (94.50)
31·
484 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
где
(dv)*-l[vXdv]*
d°2 = / ,*м (94·51)
уже известный нам из § 17 квадрат элемента дуги в грэстранстве
скоростей Лобачевского — Эйнштейна. Вместо (94.36) мы можем
также написать
Л* = —^ (δ*Α+ί=1?) *Ί ***· (94.52)
1 с2
Если мы введем вместо А постоянную а, так, что
S = cxt A = c<x, (94.53)
мы получим для ds2 выражение
ds2 = (1 — -^У (с2 dz2 — τ2 do2). (94.64)
Величина τ может быть названа собственным временем во
вспомогательном галилеевом пространстве. Физическим же собственным
временем является величина 7, определяемая равенством
τ
α
Время отсчитывается здесь условно от той весьма удаленной эпохи
(несколько миллиардов лет тому назад), когда наблюдаемые ныне
галактики находились гораздо ближе друг к другу, чем сейчас. К еще
более ранней эпохе применять написанные здесь уравнения не имеет
смысла, так как в них пренебрегается прямым гравитационным
взаимодействием галактик, которое тогда могло быть значительным.
Пространственная часть ds2, соответствующая фиксированному
значению мирового времени Τ (а значит и фиксированному τ), равна
dl2 = τ2 ί 1 — -iY do2. (94.66)
Это есть пространство Лобачевского постоянной отрицательной
кривизны. Объем его бесконечен.
Рассмотрим массу галактик, скорости которых во
вспомогательном галилеевом пространстве лежат в данных пределах. Если р*
адть инвариантная плотность, то эта масса равна
dM=*p*dV~ (94,57)
§ 94] ПРОСТРАНСТВО ФРИДМАНА — ЛОБАЧЕВСКОГО 485
где dV — элемент объема в пространстве Лобачевского с
мероопределением (94.56). Как нетрудно вычислить из (94.52), в пространстве
скоростей элемент объема равен
dV,= dv>dv*J* (94.58)
Следовательно, элемент объема в пространстве Лобачевского равен
dV = τ3 (1 — -J-Y dV, (94.59)
и масса dM равна
dM = ρ*τ3 (1 — ± Υ dVa. (94.60)
Формула (94.33) для инвариантной плотности может быть написана
в виде
р*=£· /л л*· (94·61>
откуда, учитывая (94.53), получаем:
ΐ*(ι-τ)'=*ϊ· <94·62>
Подставляя это выражение в (94.06), будем иметь
dM = ^dVe, (94.63)
что можно написать также в виде
т^=^гз^· <94-64>
При изучении красного смещения в спектрах отдаленных галактик
принято характеризовать величину его той скоростью v*t которая
вызвала бы его, если бы все смещение можно было приписать
эффекту Допплера в обычном галилеевом пространстве. Из теории
красного смещения, которая будет развита в следующем параграфе,
следует, что эта эффективная скорость v*t если только она мала
по сравнению со скоростью света с, связана с рассмотренной здесь
скоростью ν соотношением
τ,* — l±±Vm (94.65)
χ — <х
Благодаря этому соотношению предыдущие формулы приобретают
большую наглядность. Так, если положить
«*Н^Г' <94·66)
486 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
то формулу (94.64) можно приближенно написать в виде
т dM = ^ dv\ dv\ dv\. (94.67)
Проинтегрировав по телесному углу и по абсолютной величине
эффективной скорости, мы получим соотношение
γ (Ж — М0) = 2а* (г;*3 — г;*о), (94.68)
из которого можно получить оценку величины а* по оценке массы
Μ — М0 тех галактик, эффективные допплеровские скорости
которых лежат между г/*, и ν*.
§ 95. Теория красного смещения
Гипотеза о том, что структура очень больших областей
пространства, содержащих в себе много галактик, подобна структуре
пространства Фридмана — Лобачевского, нашла себе неожиданное
подтверждение в открытом астрономом Хэбблем [25] явлении
красного смещения в спектрах галактик. Оказалось, что все линии
в спектрах галактик смещены в красную сторону, причем это
смещение тем больше, чем дальше от нас галактика.
В этом параграфе мы дадим теорию красного смещения на основе
указанной гипотезы.
Напишем выражение для ds2 в виде
ds2 = (1 — -2Λ4 (с2 dt2 — dx2 — dy2 — dz2). (95.01)
Здесь α есть положительная постоянная, а величина τ равна
τ = |/V — -J, г2 = χ2 -f- у2 + ζ2. (95.02)
Фактически выражение (95.01) содержит не одну постоянную, а две,
так как остается неизвестным начало отсчета времени или, что то же,
значение величины τ для данной эпохи. Теория красного смещения
дает, в принципе, возможность определить эти две постоянные из
наблюдений. При этом теория допускает проверку, если только
известна средняя плотность р* вещества в пространстве.
Изменение частоты света, идущего от отдаленной звезды,
получается в результате двух эффектов: эффекта Эйнштейна (§ 51),
который имеет место при переходе света из области с одним
значением потенциала тяготения g^ в область с другим его значением,
и эффекта Допплера (§ 13), который имеет место при излучении
движущейся системой.
То обстоятельство, что пространство Фридмана—Лобачевского
является конформно-гзлилеевым, значительно облегчает исследование
§ 95]
ТЕОРИЯ КРАСНОГО СМЕЩЕНИЯ
487
закона распространения света. В самом деле, в пространстве с
квадратом линейного элемента (95.01) закон распространения фронта
волны имеет вид
^(£)'-Ш+(£)!+(£)'Н. <95·°3>
в точности совпадающий с законом распространения фронта волны
в галилеевом пространстве-времени. Уравнения характеристик будут
поэтому те же, как в галилеевом случае; в частности,
характеристиками будут поверхности
* —4 = const, *-f-- = const. (95.04)
Все рассуждения, связанные с законом распространения фронта
волны и с видом характеристик, переносятся без изменения из гали-
леева случая на случай конформно-галилеева пространства-времени.
В частности, остается без изменения вся теория эффекта Допплера.
После этих предварительных замечаний переходим к выводу
формул для изменения частоты света.
Мы будем пользоваться координатной системой с началом
координат на Солнце или на Земле (где именно, это безразлично ввиду
малости относительного расстояния по сравнению с расстоянием
до других галактик). Пусть при t = t0 отдаленная звезда,
находившаяся тогда на расстоянии г = г0, излучает свет. Соответствующее
времени t0 и расстоянию г0 значение τ0 равно, согласно (95.02),
]Л-5
,2
21· (95.05)
В силу уравнения характеристики
'„ + -7- ='+7 (95·06>
этот свет доходит до Земли (г = 0) в момент времени t = tQ-\—-\
соответствующее значение τ равно
τ = Ό + -^· (96.07)
Отсюда и из (95.05) получаем
*-ΐ/"—·
(95.08)
С другой стороны, если излучающая звезда движется с той
скоростью, какая соответствует средней скорости вещества в пространстве
48S ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ (ГЛ. Vlf
Фридмана—Лобачевского, то, согласно (94.34),
£- = υ (г>>0), (95,09)
Где ϋ есть постоянная скорость звезды во вспомогательном галилее-
£ом пространстве. Из (95,08) и (95.09) получаем
c + V <95Л0>
Рассмотрим теперь изменение частоты. Пусть ω0 — собственная
частота излучателя, ω*— частота во вспомогательном галилеевом
пространстве в системе отсчета излучателя. Эти две величины связаны
соотношением
J_ = 4-(l--)2. (95.11)
Переводным множителем служит здесь взятое из (95.01)
значение величины — YgQQ в момент и в месте излучения. Во
вспомогательном галилеевом пространстве излучатель частоты ω* движется
со скоростью ν от Земли. Воспринимаемая на Земле частота ω*
получится по обычной теории эффекта Допплера равной
τ+ϊ· <95Л2>
Согласно (95.10), это соотношение можно записать в виде
τω* = τ0ω*. (95.13)
Нам остается перейти от частоты ω* во вспомогательном галилеевом
пространстве к частоте ω в физическом пространстве. Переход
совершается по формуле, аналогичной (95.11), только значение
величины — Ι/Voo берется в момент и в месте наблюдения. Соответст*
вующая формула напишется
τ-νΟ-тУ· <9514>
Из (95.11), (95.13) и (95.14) получаем окончательно
<(i-~-T)2<o=To(1_i)2<0°· (95Л5)
Здесь ω0«*— собственная частота излучателя (например, атома водо*
рода), а ω — частота света, испущенного таким же излучателем
на отдаленной звезде и дошедшего до Земли. Так как τ > τ0 и мно*
житель при ω в формуле (95.15) есть возрастающая функция от τ.
§ 95]
ТЕОРИЯ КРАСНОГО СМЕЩЕНИЯ
489
то будет ω < ω0, т. е. будет происходить уменьшение частоты и,
следовательно, смещение линий видимой части спектра к красному
концу.
В нашем выводе учет изменения величины Vg^ при переходе
от звезды к Земле соответствует учету эффекта Эйнштейна, а при*
менение формулы (95.12) — учету эффекта Допплера.
Проследим теперь за изменением амплитуды световой волны,
идущей от звезды к Земле. По плотности потока энергии,
пропорциональной квадрату амплитуды, можно судить о расстоянии до
звезды, если выбирать звезды с одинаковой мощностью излучения
(такими можно считать Новые звезды в период их максимальной
яркости).
В пространстве с квадратом линейного элемента (94.01)
волновое уравнение имеет вид:
и если мы положим
♦ = -&. (95.17)
где ψ* — новая функция, то оно напишется
#□<]>* — <]/□//= 0. (95.18)
Здесь Π есть галилеев оператор Даламбера:
■ _* _*£.
к2
ПГ = е.^г. (95.19)
Функция Η меняется неизмеримо медленнее, чем функция ψ*; поэтому
второй член в (95.18) мы можем отбросить и писать волновое
уравнение в виде
□ψ* = 0 (95.20)
(такое пренебрежение вообще не влияет на выражение для потока
энергии в волновой зоне, который нас только и интересует).
Возьмем теперь начало координат на звезде и рассмотрим
идущую оттуда сферическую волну. Величина ψ* будет иметь вид
ψ* = 7/('-τ) (95·21)
и, следовательно,
t-i)r/('-i-)-^ZiJ./('-7)·
(95.22)
490 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Квадрат амплитуды функции ψ будет величиной, пропорциональной
плотности / потока энергии. Поэтому мы можем положить
8 (95.23)
(>-тГ
где В— положительная постоянная, равная потоку энергии в единицу
телесного угла. В самом деле, из выражения для ds2, написанного
в сферических координатах,
ds* = (ι _ ±у φ dt2 — dr2 — г2 (db2 + sin2 θ rfcp2)} (95.24)
следует, что элемент поверхности сферы, окружающей источник,,
равен1)
dS = r2(l— ~)* sin θdbάψ. (95.25)
Отсюда поток энергии сквозь элемент поверхности S напишется
/ dS = В sin θ db d<p, (95.26)
что и показывает, что В есть поток энергии в единицу телесного угла·
Величина В постоянна в той системе отсчета, в которой написано
волновое уравнение и его решение (95.22). Но нужно помнить, что В
есть именованное число, значение которого зависит от выбора
единиц и эталонов для его измерения; переход же к новой системе
отсчета, вообще говоря, влияет на эталоны. Размерность потока
энергии есть энергия, деленная на время, или, иначе, действие,
умноженное на квадрат частоты. Действие есть инвариант, и эталон
действия не меняется при переходе от одйой системы отсчета к
другой. Поэтому при таком переходе поток энергии меняется, как
квадрат частоты. Если за эталон частоты взять частоту кванта, испущенного
на звезде и дошедшего до данной области пространства, то поток энергии
будет численно постоянным. Если же брать в каждой области
пространства „местныйα эталон частоты (например, частоту кванта,
соответствующего тому же спектральному переходу, но испущенного в данной
области, а не на звезде), то численное значение потока энергии
изменится в отношении ω2 : ω2. Разумеется, в измерениях,
производимых на Земле, употребляются „земные" (а не „звездные") эталоны,
что соответствует второму способу рассмотрения. Выражая поэтому
поток энергии и его плотность в „земных" единицах, мы должны
1) Разумеется, величина 5 в (95.25) не имеет ничего общего с
величиной S в (94.02).
§ 95] ТЕОРИЯ КРАСНОГО СМЕЩЕНИЯ 491
положить1)
В = В0^ (95.27)
ωο
и
! = ■ ..f^ .44 > (95.28)
^('-тГ
где В0 есть значение потока энергии в единицу телесного угла вблизи
звезды; для звезд с одинаковой мощностью излучения (т. е. с
одинаковой абсолютной звездной величиной) значение В0 одно и то же.
Полагая
/=|b (95.29)
где R есть „расстояние", определяемое по видимой звездной
величине (по яркости), мы будем иметь
*=^г(1-тЬ (95·30)
В этой формуле г есть расстояние, во вспомогательном галилеевом
пространстве, от звезды до Земли, в системе отсчета, связанной
со звездой. Выразим г через τ и τ0. В указанной системе отсчета
имеем:
при £ = τ0: г = 0 и τ = τ0,
при έ = τ0+±: r = r и τ=|/Γτ0(τ0+^), (95.31)
откуда
Д^1 (95.32)
С
Подставляя это значение г в (95.30), получим
R
С ω 2τ0
Кроме того, формула (95.15) дает
(l—2.)*. (95.33)
ω0
(95.34)
Значения — и R для разных галактик связаны соотношением,
которое прлучается из этих двух уравнений исключением величины τ0,
1) Этот результат находится в согласии с выводом Л. Ландау и
Е. Лифшица [23], полученным из других соображений.
492 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Чтобы удобнее произвести исключение, введем вместо τ0 другую
вспомогательную величину1) у, связанную с τ0 соотношениями
(τ-τοΗτ + ο.) (95.з5)
' τ(τ0 —α)
0 τ -J- a + *у v '
Для разных галактик величина τ0 может меняться в пределах
α<τ0<τ, (95.37)
сообразно чему пределы изменения для у будут
0<у<оо. (95.38)
Подставляя значение τ0 в формулу (95.34), получим
J?!— (τ + ос + ту) (τ + « + <*У)
ω (τ -f- a)!
ι (95.39)
или
7='+^W^· (95·4°)
Подставляя же τ0 из (95.36) и — из (95.39) в формулу (95.33)
для —, будем иметь
с
с τ(
Положим
й = ^^ (95.42)
и грипомним соотношение (94.52) для инвариантной плотности р*,
согласно которому
?=-щ^· (95·43)
Мы будем тогда иметь
Т«т£ = ТТ=Г <95'44>
Величина, обратная h, имеет размерность времени, а величина (95.44)
есть отвлеченное число. Вводя эти величины (вместо τ и а) в
соотношения (95.41) и (95.39), получим:
Rh , 1 о
— = У+ТЛ
ω0 — ω 2 ρ'
ω
= У + -д-*Т-£гУ
ι2
(95.45)
В этих формулах заключена вся теория красного смещения.
1) Смешения этой величины у с одной из координат в (95.01) и (95.02)
можно не опасаться.
§95]
ТЕОРИЯ КРАСНОГО СМЕЩЕНИЯ
493
Общий ход зависимости смещения —-—— от расстояния следую-
ω0
ω
ЩИЙ.
При малых смещениях (малые у) можно считать правые части
обоих уравнений (95.45) друг другу равными. Тогда будет
-ω
= /?Λ (95.46)
и зависимость между красным смещением —5—Е- и расстоянием R
ω
будет линейной. Коэффициент пропорциональности в этой линейной
зависимости может быть определен из наблюдений, причем для об*
ратной величины h получается значение [25] порядка
-г /-*> 4 миллиарда лет (95.47)
(по более ранним литературным данным для -г- получалось число
порядка 2 миллиардов лет; разницу следует приписать обнаруженной
неточности в оценке расстояний /?). Значение (95.47) соответствует
следующему значению h\
h = 8. 10~18 сек."1 (95.48)
При больших смещениях, т. е. на очень больших расстояниях,
должны сказаться и нелинейные члены в формулах (95.4б). Влияние
их должно проявиться в том, что смещение будет возрастать с
расстоянием медленнее, чем в начале; величина Λ, определяемая из
(95.46) по наблюдениям наиболее отдаленных галактик, должна
получаться несколько меньшей, чем определяемая из наблюдений более
близких галактик. При самых больших (вероятно практически
недостижимых) смещениях зависимость должна вновь приблизиться к
линейной, но уже с меньшим множителем пропорциональности.
В астрономии принято называть левую часть равенства (95.46)
скоростью и выражать ее в километрах в секунду. Необходимо,
однако, помнить, что хотя эта величина и имеет размерность
скорости, она не есть скорость движения чего бы то ни было. Это видно
хотя бы из того, что при (1)<-гш0 ее значение будет превышать
значение скирости света. Величина ι.ω°~Γω не является также и
допплеровской скоростью, даже если толковать все смещение как
результат эффекта Допплера в галилеевом пространстве. Из обычной
теории эффекта Допплера следует (см. (95.12)), что эффективной
допплеровской скоростью была бы величина
2 2
*.//=«-Ьг5-· (95·49>
494 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. Vtl
которая близка к левой части (95.46) только если смещение мало.
Формулы (95.45) являются строгими и дают зависимость смещения
от расстояния при любых смещениях. Возможно, что со временем
точность наблюдений возрастет настолько, что обработка их на
основе этих формул даст возможность судить и о коэффициенте
при у2 вй втором из уравнений (95.45). Это позволит определить
из наблюдений над красным смещением не только постоянную
красного смещения h (постоянную Хэббля), но и среднюю плотность р*.
Пока же р* оценивается весьма грубо, путем подсчета числа
галактик в достаточно больших объемах пространства, в предположении,
что отдельные галактики имеют ту же массу, как и наша Галактика
(порядка 1011 масс Солнца, или 2 · 1044 г). Такая оценка дает
плотность порядка
р*~4. 10~29 г\смъ. (95.50)
Более наглядное представление об этой плотности дает следующий
подсчет. Объем земного шара равен 1,08332· 1027 смъ, или, кругло,
1027 смъ. На такой объем приходится в мировом пространстве
в среднем 0,04 г вещества 1).
Если считать известными р* и h, то можно определить и значение
безразмерной постоянной
* = η3£- (95.51)
Эта постоянная, с одной стороны, входит в уравнения (95.45),
которые можно написать в виде
Rh , 1 2
(95.52)
и, с другой стороны, входит в соотношение (95.44), которое дает
, 4τα
(τ+«)2
Если взять значения
h = 8. 10~18 сек~1,
р* = 4· Ю-29 г\смъ,
γ = -я- · Ю-7 см3/г · сек2,
(95.53)
(95.54)
то получится
* = £~|. (95.55)
1) Подчеркнем еще раз, что величина р* известна очень неточно, и ее
истинное значение может отличаться от приведенного здесь во много раз.
§ 951
ТЕОРИЯ КРАСНОГО СМЕЩЕНИЯ
495
Из (95.53) можно тогда определить отношение τ/α, а именно
i~10.
а
Отсюда и из (95.42)
Λτ=7δ^-~1·50' ы
и пользуясь значением (95.47) для 1//*, по
τ = 6 . 109 лет,
α = 6 · 108 лет
и по формуле (94.40)
7=3,2. 10» лет
Необходимо отметить следующее. Из формулы (95.53) отношение τ/α
получается вещественным только в том случае, когда величина b
меньше единицы, т. е. когда плотность р*, при данном h, достаточно
мала (как это, по-видимому, и есть на самом деле). Значениям Ъ > 1
также соответствует решение уравнений Эйнштейна, но
использованные нами конформно-галилеевы координаты здесь неприменимы, так
как они становятся комплексными. Правда, вместо них можно ввести
другие координаты, которые будут вещественными, но получаемое
при Ъ > 1 выражение для ds2 приводило бы к столь странным
представлениям о свойствах пространства и времени (конечный объем,
периодически меняющийся во времени, и т. п.), что едва ли можно
придать ему физический смысл. Поэтому решения, соответствующего
случаю 6> 1, мы здесь не рассматриваем. (Это решение также было
найдено А. А. Фридманом.)
Что касается исследованного нами решения, соответствующего
случаю Ъ < 1 (пространство Фридмана — Лобачевского), то по поводу
него можно сделать следующие замечания.
Прежде всего, неправильно видеть в нем какую-то „модель мира
в целом": такая точка зрения представляется неудовлетворительной
в философском отношении. Пространство Фридмана—Лобачевского
может, самое, большее, служить фоном для ограниченного числа
галактик, подобно тому, как галилеево пространство служит фоном
для объектов, подобных Солнечной системе.
Самая применимость уравнений Эйнштейна в их классическом
виде к таким огромным пространствам не является столь бесспорной,
как их применимость в более ограниченных масштабах. Не
исключено, что для космических масштабов эти уравнения потребуют
изменения или обобщения.
Из следствий, к которым приводит рассмотренное нами решение,
наиболее парадоксальным является, пожалуй, относительная краткость
периода времени Г, протекшего с тех пор, как галактики были
— 0,15
лучаем
}
(95.56)
(95.57)
(95.58)
(95.59)
496 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
близки друг к другу. Это время сравнимо с возрастом земной коры,
определяемым по радиоактивному распаду урана, между тем как
естественно было ожидать, что „космические" масштабы времени
гораздо больше „земных".
Самый же факт „разбегания" галактик, при всей его
неожиданности, настолько хорошо установлен, что сомневаться в нем не
приходится. Необычайно большое количество двойных звезд также
говорит о том, что, возможно, не только галактики, но и звезды
были в прошлом расположены гораздо гуще.
При оценке теории необходимо также иметь в виду, что она
представляет успешную попытку решить упомянутый в § 94 парадокс
Зелигера, возникающий при рассмотрении равномерной плотности
масс в евклидовом пространстве.
Поэтому нам представляется несомненным, что изложенная здесь
теория А. А. Фридмана является важным шагом в изучении
пространств космических масштабов.
§ 96. Развитие теории тяготения и теории движения масс
(критический обзор)
Основная работа Эйнштейна, положившая начало теории галилеева
пространства и времени, вышла в свет в 1905 г. под заглавием
„К электродинамике движущихся тел". В ней были впервые
сопоставлены принцип постоянства скорости света и принцип
относительности, согласно которому в двух инерциальных системах
отсчета соответственные физические процессы протекают одинаково.
Согласование этих двух принципов потребовало пересмотра понятий
пространства и времени и привело к теории единого пространства-
времени, получившей название теории относительности. Заметим, что
это название еще не фигурирует в заголовке работы Эйнштейна.
Мы знаем теперь, что принцип относительности отражает
однородность прэстранства-времени: либо полную однородность галилеева
пространства, либо — в обобщенной теории — однородность на
бесконечности, позволяющую ввести, при известных условиях,
гармонические координаты. В том и другом случае принцип относительности
выражается в наличии группы преобразований Лоренца внутри
определенного класса координатных систем.
В период создания Эйнштейном теории относительности (до его
теории тяготения) еще не возникала идея о возможности влияния
физических процессов на метрику пространства-времени; другими
словами, метрика тогда молчаливо предполагалась жесткой. Но при
этом предположении принцип относительности, выраженный в самой
общей форме (в произвольных координатах), приводит к
однородному пространству, а при добавочном предположении об отсутствии
§ 96]
РАЗВИТИЕ ТЕОРИИ ТЯГОТЕНИЯ
497
абсолютного масштаба он приводит именно к галилееву
пространству (§ 49 *).
Основная идея теории относительности как раз и состоит в
установлении метрики пространства-времени и в провозглашении
требования, чтобы форма законов физики соответствовала этой метрике;
поскольку метрика выражает однородность пространства-времени,
форма законов физики должна учитывать эту однородность.
Это требование означает, что уравнения, выражающие физические
законы, должны быть ковариантны по отношению к преобразованиям
Лоренца. Такое требование имеет огромное эвристическое значение,
так как сильно ограничивает возможную форму физических законов.
Поэтому неудивительно, что применения теории относительности
необозримы и касаются всех областей физики.
В период между 1905 и 1915 гг. Эйнштейн работал над
созданием своей теории тяготения. В 1916 г. была опубликована его
фундаментальная работа под заглавием „Основы общей теории
относительности". Заглавие это отражает точку зрения Эйнштейна
на созданную им теорию тяготения — точку зрения, которую нельзя
признать правильной. Как мы показали еще во Введении, основная
идея теории тяготения Эйнштейна состоит вовсе не в обобщении
принципа относительности на ускоренные движения — такое
обобщение и невозможно. Основная идея этой теории заключается в
допущении влияния физических процессов на метрику
пространства-времени и в признании единства метрики и тяготения. Формулировать
эту идею математически оказалось возможно на основе понятий ри-
мановой геометрии. Что касается принципа относительности, то этот
принцип вообще не играет в теории тяготения существенной роли,
и если уже о нем говорить, то приходится констатировать скорее
ограничение понятия относительности движения, чем его
расширение. Ограничение это связано, с одной стороны, с ограничением
понятия инерциальных систем, роль которых только отчасти могут
выполнить гармонические системы координат; с другой же стороны
оно связано с локальным и приближенным характером так
называемого принципа эквивалентности.
То обстоятельство, что изумительная по своей глубине,
изяществу и убедительности теория тяготения не была правильно понята ее
автором, не должно нас удивлять. Не должны нас также удивлять
логические пробелы, или даже ошибки, допущенные Эйнштейном при
выводе основных уравнений теории. Мы имеем в истории физики
много примеров, когда подлинный смысл принципиально новой
физической теории был осознан не ее автором, а кем-нибудь другим и
когда предложенный автором вывод основных уравнений теории
оказывался логически несостоятельным. Достаточно указать на теорию
электромагнитного поля Максвелла. Эта теория фактически
покончила с представлением о механике, как основе физики, между тем
32 Зак. 2649. В. А. фзд
498 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
как ее автор, а также Герц, так много сделавший для ее проверки,
целиком придерживались механического представления. Только Лоренц
с полной ясностью установил физический смысл уравнений Максвелла,
указав, что электромагнитное поле само является физической
реальностью (т. е. само материально), может существовать в свободном
пространстве и не нуждается в особом носителе1).
Что касается убедительности вывода, то можно напомнить, что
Максвелл [27] предпосылает выводу своих знаменитых уравнений
изложение некоторых разделов механики и основывает самый вывод
на уравнениях Лагранжа 2-го рода. Мы знаем теперь, что, с точки
зрения логики, вывод уравнений Максвелла на основе механики
невозможен. Но великие, да и не только великие, открытия делаются
не по правилам логики, а догадкой, иначе говоря, путем творческой
интуиции.
Интересно проследить, каким путем пришел Эйнштейн к своим
уравнениям тяготения. Это можно сделать, используя, кроме основной
работы Эйнштейна 1916 г. и его научных публикаций, также его
автобиографию, изданную в 1949 г. в связи с его
семидесятилетием [26].
Еще около 1908 г. Эйнштейну стало ясно, что попытки ввести
тяготение в рамки теории относительности, оперирующей с галилеевым
пространством, не могут иметь успеха по следующей причине. Такая
теория дает зависимость инертной массы от внутренней (и
кинетической) энергии тела, но не может дать зависимости тяжелой массы
от энергии, если только считать уравнения гравитационного поля
линейными. Между тем имеется фундаментальный факт равенства
инертной и тяжелой массы, вытекающий из независимости ускорения
свободно падающего тела от его состава. Этот факт был
истолкован Эйнштейном в смысле локальной эквивалентности поля тяготения
полю ускорения.
Отсюда Эйнштейн заключил, что если допускать „ускоренно
движущиеся системы отсчета", то поля тяготения и ускорения
становятся неразличимыми. В своей автобиографии Эйнштейн пишет:
«Если считать возможными любые гравитационные поля,
простирающиеся сколь угодно далеко и не ограниченные предельными
условиями, то понятие инерциальной системы становится
бессодержательным. Понятие „ускорения по отношению к пространству" теряет
тогда всякий смысл, а с ним и принцип инерции2), причем исчезает
также парадокс Маха».
Далее, из равноправности всех систем отсчета (инерциальных и
неинерциальных) Эйнштейн заключает, что уравнения тяготения
1) Любопытно, что этот пример неполного понимания автором теории ее
физического смысла приводится самим Эйнштейном (Автобиография (2eJ).
2) Первый закон Ньютона (В. Ф.).
§ 961
РАЗВИТИЕ ТЕОРИИ ТЯГОТЕНИЯ
499
должны быть ковариантны по отношению к любым преобразованиям
координат.
Таковы были исходные идеи Эйнштейна около 1908 г.
Проанализируем их. Прежде всего, здесь неправильна основная
предпосылка. Эйнштейн говорит о произвольных гравитационных полях,
простирающихся сколь угодно далеко и не ограниченных предельными
условиями. Но такие поля невозможны. Предельные или иные
условия, характеризующие пространство в целом, совершенно
необходимы, а поэтому и понятие „ускорение по отношению к
пространству" сохраняет в той или иной форме свой смысл. Что касается
парадокса Маха, то он основан, как известно, на рассмотрении
вращающегося жидкого тела, имеющего форму эллипсоида, и невра-
щающегося, имеющего форму шара. Парадокс возникает здесь только
в том случае, если считать лишенным смысла понятие „вращения по
отношению к пространству"; тогда действительно оба тела
(вращающееся и невращающееся) представляются равноправными, и становится
непонятным, почему одно из них шаровидно, а другое — нет. Но
парадокс исчезает, коль скоро мы признаем законность понятия
„ускорения по отношению к пространству".
Сущность той ошибки, которая сделана в основной предпосылке,
состоит β забвении строго локального характера эквивалентности
полей ускорения и тяготения. С этим связано и то, что
нелокальное физическое определение ускоренно движущихся систем отсчета
невозможно, так как все ящики, жесткие каркасы и т. п., с
которыми оперирует Эйнштейн, представляют идеализацию,
пригодную лишь для инерцйальных систем отсчета, а не для ускоренных.
Физический же „общий принцип относительности" в смысле
существования соответственных процессов в каких угодно системах
отсчета вообще не имеет места. Поэтому становится необоснованным
и заключение Эйнштейна о физической равноправности всех систем
отсчета. Но на этом заключении Эйнштейн строит свои дальнейшие
рассуждения, в частности свой вывод о ковариантности искомых
уравнений тяготения. Разумеется, из неправильности предпосылки
не вытекает еще неправильность следствия: уравнения тяготения
действительно ковариантны, но ковариантность не является их
отличительным свойством, а может быть достигнута в любой теории.
Так, в гл. IV нашей книги ковариантным образом формулируется
обычная теория относительности; интересно, что и сам Эйнштейн
указывает на возможность такой формулировки [26], к чему мы вскоре
вернемся.
Таким образом, на первом этапе построения теории тяготения
Эйнштейн принимал за основные положения равенство инертной и
тяжелой массы, принцип эквивалентности ускорения и тяготения и
требование ковариантности уравнений. Идея геометрии Римана и идея
единства метрики и тяготения еще отсутствовали.
32»
600 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
Требование ковариантности уравнений сыграло очень большую
роль при построении теории. То обстоятельство, что Эйнштейн
„выводил" его из принципа эквивалентности, а в конечном счете
из равенства инертной и тяжелой массы, показывает, что Эйнштейн
в период создания своей теории считал общую ковариантность
уравнений специфической особенностью теории тяготения. Это прямо
сказано и во вводной части его основной работы 1916 г.
Впоследствии Эйнштейну было указано, что общая ковариантность
уравнений еще не выражает какого-либо физического закона, и он
с этим, как будто, согласился. Но согласие его было скорее
формальным, потому что фактически Эйнштейн до конца своих дней
связывал требование общей ковариантности с идеей некоей „общей
относительности" и с будто бы существующим физическим
равноправием всех систем отсчета. Он так и не осознал различия между
физическим равноправием (или физической относительностью) в смысле
существования соответственных процессов в разных системах отсчета и
тем формальным равноправием, которое состоит в возможности
пользоваться любыми координатными системами независимо от того,
существуют или нет в этих системах соответственные физические процессы.
В теории галилеева пространства-времени физическая относительность
прямо связана с его однородностью. В теории тяготения, где
пространство-время неоднородно и его метрика зависит от
происходящих в нем процессов, дело обстоит сложнее. Но и здесь
существование своего рода принципа относительности в классе
гармонических координатных систем обусловлено однородностью пространства
на бесконечности (см. § 49* и 93). Таким образом, во всех случаях
когда имеется физическая относительность она связана с
однородностью, т. е. с объективными свойствами пространства-времени, а
вовсе не с употреблением тех или иных координатных систем,
(От выбора координатной системы зависит только простота
выражения физической относительности: последняя выражается проще всего
в таких координатах, где физически равноправными являются системы,
связанные линейными преобразованиями.) Математическое выражение
физической относительности не сводится к ковариантности
дифференциальных уравнений: последняя есть необходимое, но не
достаточное условие для существования первой. Между тем Эйнштейн,
отождествляя физическую относительность с ковариантностью
дифференциальных уравнений, фактически считал общую ковариантность
расширением понятия той физической относительности, какая соста*
вляет основу его теории 1905 г. Отсюда происходит и убеждение
Эйнштейна в существовании „общего принципа относительности*,
Это убеждение проявилось и в том, что он назвал свою теорию
тяготения „общей теорией относительности" и в дальнейшем упорно
придерживался этого термина. Прежнюю же свою теорию,
оперирующую с галилеевым пространством, Эйнштейн назвал „частной"
§ 96}
РАЗВИТИЕ ТЕОРИИ ТЯГОТЕНИЯ
601
теорией относительности, противопоставляя ее „общей". Допущенное
Эйнштейном смешение понятий физической относительности и
формальной ковариантности особенно наглядно проявляется в одном
месте автобиографии Эйнштейна, где он сам формулирует „частную"
теорию относительности (т. е. такую, в которой, по Эйнштейну,
нет никакой „общей относительности") в общековариантном виде
(выражающем, по Эйнштейну, идею „общей относительности").
Таким образом, в период, непосредственно предшествовавший
созданию Эйнштейном теории тяготения, идея общей ковариантности
представлялась Эйнштейну физической идеей и была руководящей
в его поисках.
Следующий важный шаг в создании теории был сделан тогда,
когда Эйнштейн ввел обобщенное выражение для квадрата
интервала, т. е. фактически ввел гипотезу о римановой геометрии
пространства и времени. К идее о римановой геометрии Эйнштейн
подошел со стороны требования общей ковариантности уравнений: он
воспользовался тем, что в „абсолютном дифференциальном
исчислении" (в тензорном анализе), в то время уже хорошо разработанном
Риччи, Леви-Чивита и другими авторами, уравнения с самого начала
пишутся в общековариантном виде. Тем самым требование общей
ковариантности сыграло важную эвристическую роль, хотя суть дела
была не в нем, а в новой гипотезе о характере геометрии1)
пространства и времени.
В решении вопроса о виде уравнений тяготения важным шагом
было предположение Эйнштейна о том, что в качестве потенциалов
тяготения следует рассматривать чисто „геометрические" величины,
а именно самые коэффициенты #μν в выражении для квадрата
интервала, и не следует вводить никаких других величин. Благодаря этому
предположению, из необозримого множества нелинейных общекова-
риантных уравнений выделилось уравнение, определенное почти
однозначным образом, причем полной однозначности можно было
достигнуть при помощи некоторых дополнительных соображений
(консервативность тензора массы и возможность решения, соответствующего
галилееву пространству, при отсутствии масс).
Эти две идеи — идея обобщенной метрики и идея единства
метрики и тяготения —и были решающими. Руководствуясь ими,
Эйнштейн пришел к своим уравнениям тяготения
^μν — J £μν# « — ΧΓμ,. (96.01)
заключающим в себе сущность его теории и представляющим
величайшее достижение человеческого гения. Эти уравнения даны в
работе Эйнштейна 1916 г.
1) Мы употребляем здесь слово .геометрия* в смысле объективных
свойств пространства и времени, а не в смысле науки об этих свойствах.
502 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
В дальнейшем Эйнштейн пытался различным образом
видоизменять свои уравнения, однако первоначальная их форма представляется
нам единственно правильной, если только правильно истолковывать
смысл тензора массы Τμν. Мы имеем в виду то обстоятельство, что
в космологическом случае тензор массы определен лишь с точностью
до члена, пропорционального метрическому тензору; множитель
пропорциональности в этом члене характеризует не только самый
тензор массы, но и свойства пространства в целом (этот' множитель
играет роль космологической постоянной). Эйнштейн стремился также
найти для некоего включающего поле тяготения „универсального
поля" (Gesamtfeld) уравнения, не содержащие тензора массы; пови-
димому, он связывал с этим надежду создать независимую от
квантовой механики теорию элементарных частиц, как особенных
точек поля. Эти попытки кончились неудачей, и мы упоминаем
о них только потому, что идея рассматривать вместо тензора массы
особые точки поля проводилась также в работах Эйнштейна и его
школы по выводу уравнений движения из уравнений тяготения.
Первыми по времени из этих работ были работы Эйнштейна и
Громмера и Эйнштейна, опубликованные в 1927 г. [28>29]. В этих работах
был поставлен и принципиально решен следующий вопрос. Если
рассматривать массы как особенные точки поля, то можно ли, не
нарушая уравнений тяготения, наперед предписать произвольным образом
движение этих особенных точек или нет? Ответ на этот вопрос
получился отрицательным: оказалось, что движение особенных точек поля
не может быть предписано наперед, ибо оно вытекает из уравнений
тяготения. Отсюда, в частности, следует, что принцип геодезической
линии не является независимым от уравнений тяготения, а следует
из них. Существенно отметить, что этот результат обусловлен
нелинейностью уравнений тяготения.
Несмотря на огромную важность этого результата, указанные две
работы Эйнштейна были мало замечены, и прошло свыше 10 лет
прежде чем они были продолжены.
Развитие идей, заложенных в работе Эйнштейна и Громмера
1927 г., началось в 1938—1939 гг. совершенно независимо по двум
направлениям. К одному из этих направлений относятся работы
Эйнштейна, Инфельда и их сотрудников, а к другому — работы Фока
и его сотрудников; ко второму направлению можно также причислить
появившиеся после 1950 г. работы Папапетру.
Рассмотрим сперва работы школы Эйнштейна.
В серии работ Эйнштейна, Инфельда и Гофмана (1938) [30],
Эйнштейна и Инфельда (1940) [31] и (1949) [32] был разработан метод,
позволяющий вывести из уравнений тяготения и написать в явной
форме приближенный вид уравнений движения для точечных
особенностей поля, соответствующих сферически симметричным телам
бесконечно малых размеров. Уравнения получены как в первом
§ 96}
РАЗВИТИЕ ТЕОРИИ ТЯГОТЕНИЯ
503
(ньютоновом), так и во втором (следующем после ньютонова)
приближении. При этом авторы, руководствуясь идеей Эйнштейна о
нежелательности вводить тензор массы, исходили из уравнений тяготения
с правой частью, равной нулю. (Впрочем, в 1954 г. Инфельд[33]
показал, что выкладки становятся несравненно проще, если с самого
начала ввести тензор массы с дираковскими дельта-функциями,
соответствующими сферически симметричным точечным особенностям.)
Пытаясь найти точное решение механической задачи о движении
особенных точек поля, авторы вводили также в рассмотрение
бесконечные ряды, расположенные по степеням параметра, обратно
пропорционального скорости света.
Толкование результатов работ школы Эйнштейна затрудняется
тем, что применяемые в работах этой школы координатные системы
не фиксируются с самого начала (подобно нашей гармонической
системе координат), а определяются от приближения к приближению
путем различных дополнительных условий, которые вводятся иногда
явно, а иногда и неявным образом. В общем можно, однако, сказать,
что фактически применяемые в этих работах координатные системы
настолько мало отличаются от гармонической системы координат,
что это различие еще не сказывается и на уравнениях движения
второго приближения. Если обозначать через (t, xj) гармонические
координаты и через (Р, х'Л координаты, используемые Эйнштейном
и Инфельдом, то по порядку величины будет
*ί = */ + θ(-^-). ί' = ί + θ(-^?-) (96.02)
где L и q — неоднократно использованные нами параметры,
характеризующие порядок величины длины и скорости. Подробнее этот
вопрос рассмотрен в нашей работе [45].
В тех случаях, когда рассматриваются приближения выше второго,
возникает и другой вопрос, помимо вопроса, связанного с
неопределенностью координатной системы. Представляется неясным, имеет ли
получаемое формальное решение физический смысл. Сомнение это
вызвано тем, что авторы указанных работ не ставят условия
излучения, а, напротив, утверждают, что существуют такие (неизвестные)
преобразования координат, которые приводят точные уравнения
движения к ньютонову виду, соответствующему строго консервативной,
не излучающей системе. Здесь представляется сомнительной как
возможность привести более общие уравнения к ньютоновой форме,
так и возможность свести рассмотрение неконсервативной,
излучающей системы к рассмотрению системы консервативной.
Работа Эйнштейна и Громмера 1927 г. является также исходной
точкой серии работ другого направления.
В нашей работе, опубликованной в 1939 г.[34], мы рассмотрели
задачу о движении сферически симметричных невращающихся тел
604 ПРИБЛИЖЕННЫЕ РЕШЕНИЯ И ПРИНЦИПИАЛЬНЫЕ ВОПРОСЫ [ГЛ. VII
конечных размеров и вывели для них уравнения движения, исходя
из уравнений тяготения (см. также I36]). Характерными особенностями
примененного нами метода являются, с одной стороны, рассмотрение
тензора массы, определяемого параллельно с потенциалами тяготения,
и, с другой стороны, использование гармонических координат: наши
вычисления велись так, что уравнения движения получались из
условий гармоничности. Кроме того, нами были получены в явной форме
потенциалы тяготения (см. § 82, 83 этой книги).
Принципиальное значение гармонической координатной системы
отмечалось уже в нашей работе 1939 г. и обсуждалось более
подробно в работе 1947 г. [35], где указывалось на связь вопроса о
единственности координатной системы с вопросом о
привилегированном положении гелиоцентрической системы Коперника.
В нашей работе 1939 г. уравнения движения были получены лишь
в ньютоновом приближении, причем было указано, что второму
приближению будет посвящена работа Петровой; последняя действительно
была выполнена в 1940 г., но напечатана лишь в 1949 г. [37].
Полученные в работе Петровой уравнения движения системы конечных масс
во втором приближении были использованы нами в нашей работе
1941 г. [38] об интегралах движения центра инерции.
Тем же методом Кашкаров в 1954 г. [39] вывел из уравнений
тяготения уравнения движения вращающихся масс в ньютоновом
приближении.
Фихтенгольц в 1950 г. Ι40] привел уравнения движения во втором
приближении к лагранжевой форме и вывел отсюда их интегралы.
В своей работе 1951 г. [41] Папапетру, независимо от Петровой,
продолжил нашу работу 1939 г. и вывел из нее уравнения движения
для сферически симметричных невращающихся масс во втором
приближении. В выводе Папапетру есть, однако, непоследовательность,
которая состоит в априорном выборе весовой функции при
усреднении уравнений движения сплошной среды по области каждой массы.
Сделанный этим автором в неявной форме выбор оправдывается лишь
в конце вычислений, путем прямой проверки выполнения условий
гармоничности. Это замечание относится и к работе Мейстера [42].
В области теории движения масс ряд новых результатов получен
в настоящей книге. О них, как и о наших результатах в других
областях теории тяготения, мы здесь говорить не будем, отсылая читателя
к тексту книги. Отметим только, что нами получены (для случая
вращающихся масс конечных размеров) не только самые уравнения
движения, но и их интегралы.
Во всех работах по теории движения масс — как в работах
Эйнштейна и его школы, так и в наших работах — рассматривается
случай „островного" распределения масс, т. е. именно тот случай,
к которому относятся наши общие заключения, связанные с
возможностью ввести гармоническую систему координат. Поэтому сравнение
§ дб]
Развитие теорий тяготений
505
тех и других работ дает наглядную иллюстрацию различия точек
зрения Эйнштейна и нашей в вопросе о координатах и в
принципиальных вопросах теории. Помимо этих общих вопросов
неодинаково трактуются и конкретные вопросы, связанные с постановкой
данной задачи: в то время как в работах Эйнштейна массы
рассматриваются как точечные, мы рассматриваем протяженные массы с
заданной внутренней структурой. Интерес Эйнштейна к точечным массам
по-видимому связан с упомянутыми выше его попытками построить
теорию материи, рассматривая частицы как особенные точки поля.
С этими же идеями связан взгляд Эйнштейна на тензор массы как
на „нежелательный элемент" теории. В противоположность этому
взгляду мы рассматриваем тензор массы как необходимый элемент
теории и придаем особое значение его однозначному определению и
исследованию условий, когда таковое возможно.
Наконец, в вопросе об излучении гравитационных волн мы
считаем, что хотя в обычных астрономических условиях эти волны и
не играют сколько-нибудь заметной роли, принципиально они все
же существуют. Поэтому в строгой постановке задачи о движении
масс мы должны были бы включать в рассмотрение и волновую
часть поля тяготения; эта задача не будет уже тогда задачей
механики в собственном смысле.
ЗАКЛЮЧЕНИЕ
Попытаемся изложить в немногих словах нашу точку зрения на
теорию пространства, времени и тяготения.
Во многом наша точка зрения совпадает с излагаемой обычно
эйнштейновской точкой зрения, но в некоторых существенных
пунктах она от нее отличается.
Пространство и время должны рассматриваться совместно. Они
составляют четырехмерное многообразие, которое при отсутствии
тяготения является однородным и образует галилеево пространство.
Галилеево пространство обладает псевдоевклидовой метрикой.
Однородность его выражается в наличии группы преобразований Лоренца,
дающих переход от одной инерциальной системы к другой. Со
свойством однородности связан физический принцип относительности,
утверждающий существование соответственных процессов в двух
инерциальных системах отсчета. Основанная на преобразованиях
Лоренца теория галилеева пространства называется поэтому теорией
относительности.
Как свойство однородности, так и вообще вся теория галилеева
пространства может быть формулирована и в произвольных
координатах. Преимущественный характер галилеевых координат
проявляется, однако, в особой простоте (в линейности) преобразований,
связывающих инерциальные координатные системы, в классе
которых имеет место физический принцип относительности.
Физической основой теории тяготения является закон о равенстве
массы инертной и массы тяжелой, а математической основой —
гипотеза о том, что пространство и время обладают римановой
метрикой, которая не является заданной наперед, а сама может зависеть
от происходящих в пространстве физических процессов (от
расположения и движения масс). Благодаря тому, что для описания поля
тяготения не вводится никаких других величин, кроме метрического
тензора, теория тяготения Эйнштейна осуществляет идею об единстве
метрики и тяготения.
Используемая в теории тяготения риманова геометрия изучает
локальные свойства пространства и, в общем случае, ничего не го*
ворит о свойствах пространства в целом. Однако, в теории
тяготения локального рассмотрения недостаточно, поскольку уравнения
ЗАКЛЮЧЕНИЕ
507
поля являются уравнениями в частных производных, решения которых
существенным образом зависят от предельных условий. Поэтому
в теории тяготения необходимо вводить те или иные гипотезы
о свойствах пространства в целом. Наиболее простой и вместе с тем
наиболее важной из этих гипотез является предположение, что на
бесконечности пространство — галилеево. При этом предположении
можно подчинить метрический тензор таким дополнительным
условиям, которые определяют координатную систему однозначно, с
точностью до преобразования Лоренца. Эта координатная система,
которую мы называем гармонической, представляет большую аналогию
с обычной инерциальной системой координат.
Физический принцип относительности, понимаемый как
существование соответственных процессов в системах отсчета определенного
класса, в общем случае пространства Эйнштейна не имеет места.
Тем более невозможен „общий принцип относительности" в классе
произвольных координатных систем. Однако, в классе гармонических
координатных систем справедлив принцип относительности, вполне
аналогичный тому, какой имеет место в галилеевом пространстве.
В понятие „соответственных процессов" должно в этом случае
включаться соответственное расположение и движение масс,
определяющих метрику.
Физический принцип относительности связан прямо или косвенно
с однородностью пространства: либо с полной однородностью
(галилеево пространство), либо с однородностью на бесконечности
(пространство, допускающее введение гармонических координат), либо,
наконец, с локальной однородностью; в последнем случае он имеет
место лишь в бесконечно малом. Локальной однородности, т. е.
однородности вблизи одной точки пространства, можно достигнуть
в геодезической системе координат (принцип локальной
эквивалентности между ускорением и тяготением). Принцип
эквивалентности вытекает, таким образом, из риманова характера метрики, но
он содержится уже в ньютоновой механике и тесно связан с
законом равенства инертной и тяжелой массы.
С точки зрения теории тяготения закон равенства инертной и
тяжелой массы справедлив со всей той точностью, с какой возможно
определение той и другой массы. Закон этот не имеет локального
характера и потому является более пригодной основой для вывода
уравнений тяготения Эйнштейна, чем принцип эквивалентности,
требующий рассмотрения ускоренно движущихся систем отсчета —
понятия, не имеющего удовлетворительного физического определения.
В силу локального характера принципа эквивалентности, этот
принцип не является достаточным основанием для утверждения о
неразличимости полей ускорения и тяготения в конечных областях
пространства, а тем более для утверждения о существовании
„общего принципа относительности"t Такое заключение от локального
508
ЗАКЛЮЧЕНИЕ
к общему столь же неправомерно, как, например, заключение о
неразличимости всех аналитических функций, сделанное на том
основании, что в бесконечно малом все они ведут себя как линейные.
Так как физический принцип относительности связан с
однородностью, а в теории тяготения однородность ограничивается либо
бесконечно малыми, либо бесконечно удаленными областями
пространства, но не имеет места в конечных областях и на конечных
расстояниях от масс, то теория тяготения не может, очевидно,
рассматриваться, как обобщающая понятие относительности. Напротив
того, она это понятие сильно ограничивает: можно даже утверждать,
что принцип относительности вообще не играет в теории тяготения
существенной роли. Поэтому называть теорию тяготения Эйнштейна
„общей теорией относительности" неправильно, тем более, что
„общий принцип относительности" невозможен ни при каких физических
условиях.
Общая ковариантность уравнений с физическим принципом
относительности никак не связана, а представляет лишь формальное
свойство уравнений, позволяющее писать их не предрешая выбора
координатной системы. Решение уравнений, написанных в общекова-
риантной форме, содержит четыре произвольные функции;
происходящая отсюда неопределенность решения не имеет, однако,
принципиального значения и не выражает никакой „общей относительности",
в практическом же отношении такая неопределенность представляет
скорее неудобство. Нам представляется предпочтительной такая
математическая постановка задачи, в которой может быть достигнута
единственность решения (разумеется, в той мере, в какой это
допускается существом задачи).
В нашей постановке задачи об изолированной системе масс
единственность решения достигается путем введения четырех
дополнительных уравнений (условий гармоничности), а также предельных
условий, и путем перехода от локального рассмотрения к
рассмотрению в целом. Таким путем достигнута единственность решения во
всех рассмотренных задачах: об уравнениях движения, об излучении,
о форме строгих, приближенных и асимптотических решений
уравнений тяготения и др.
В случае изолированной системы тел вопрос о существовании
преимущественной координатной системы решается так же, как при
отсутствии тяготения (в галилеевом пространстве): такая система
существует, но можно пользоваться и любой другой. Как и в
галилеевом случае, преимущественный характер гармонических координат
проявляется в линейности преобразований, связывающих
координатные системы, в классе которых имеет место физический принцип
относительности. Это свойство гармонических координат физически
выделяет их среди остальных координатных систем. В частности,
ццецнд оно позволяет, как и в галилеевом случае, отдать преиму-
ЗАКЛЮЧЕНИЕ
509
щество гелиоцентрической теории Солнечной системы перед
геоцентрической.
Существование привилегированной системы координат имеет
прежде всего принципиальное значение, так как отражает
объективные свойства пространства. Кроме того, поскольку эта система
координат имеет стандартный характер, она позволяет устанавливать
геометрический смысл других координат и сравнивать решения,
полученные в других координатах, между собой. Наконец,
гармонические координаты имеют большое практическое значение, так как
пользование ими чрезвычайно упрощает вычисления.
При рассмотрении областей пространства, включающих в себя
много галактик, понятие изолированной системы масс становится
непригодным, и свойства пространства в целом должны
формулироваться иначе (например, на основе пространства Фридмана —
Лобачевского).
Добавление А
К ВЫВОДУ ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА
В § 8 были выведены уравнения, которым должны удовлетворять
функции преобразования
*i = /*(*o. хъ хъ **) (/ = 0, 1, 2, 3) (А.01)
для того, чтобы были выполнены следующие два условия:
(а) прямолинейному и равномерному движению в координатах (х^
должно соответствовать такое же движение в координатах (χ'λ;
(б) прямолинейному и равномерному движению со скоростью света
в координатах (х^ должно соответствовать такое же движение в
координатах (х[у
Условие (б) равносильно следующему условию:
(б') уравнению фронта вллны
в координатах (xj) должно соответствовать такое же уравнение
в координатах Ιχ'λ
В § 8 было показано, что функции, удовлетворяющие условию (а),
должны быть решениями системы уравнений
1%Ьгь%+ь%· (Α·03)
тогда как функции, удовлетворяющие условию (б) илц (б'), должны
быть решениями системы уравнений
Мы выведем из (А.04) другое уравнение, аналогичное- (А.03).
Дифференцируя (А.04) по хт и полагая
^ = 2λφπ, (Α.05)
К ВЫВОДУ ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 511
мы будем иметь
1=0
Введем теперь величины Tskm по формуле
S'l-aSfc^-^i·· <А·07)
Уравнение (А.06) может быть тогда написано в виде
elYlkm+ekVklm = 2^mekbkV (A.08)
Чтобы выразить величины Yskm через <рш, присоединим к уравнению
(А.08) два других, получаемых из него круговой перестановкой
букв (к, /, т):
'πΡ* + Ά = *Wtto. (А·09)
eA+emTTi = 2bembmk. (АЛО)
Теперь возьмем сумму уравнений (А.09) и (АЛО) и вычтем из нее
уравнение (А.08). Пользуясь симметрией величин Tlkm относительно
их нижних значков, мы получим тогда, после умножения на ет,
Vkl = ЪЬ1т + ЬЬкт — em9meAl· (А. 11)
С другой стороны, уравнения (А.07) могут быть решены
относительно вторых производных от ft. Используя (А.04), мы получим
dxjxt =ΣΓ*4£- (АЛ2)
т=0
Подставляя сюда значение Г£/ из (АЛ1), мы будем иметь
окончательно
/71 = 0
Эти уравнения для функций преобразования (А.01) вытекают из
условия (б) или (б'), относящегося к движению со скоростью света.
С другой стороны, условие (а), относящееся к прямолинейному и
равномерному движению с произвольной скоростью, приводит к
уравнениям (А.03), а эти последние также могут быть написаны в виде
(АЛ2), если только положить
612
ДОБАВЛЕНИЕ А
В § 8 было показано, что при одновременном наложении обоих
условий (а) и (б) или же (а) и (60 получается φ/η = ψ/η = 0, а тогда,
в силу уравнений (А.03) и (А. 13), все вторые производные от
функций ft обращаются в нуль, так что эти функции оказываются
линейными; масштабный же множитель λ будет постоянным, и его
можно положить равным единице. При таких условиях
соотношения (А.04) непосредственно приводят к преобразованию Лоренца.
Мы должны теперь исследовать, что вытекает из условия (а)
в отдельности и из условия (б) или (60 в отдельности.
Уравнения вида (А. 12) подробно исследованы в § 42, где дано
необходимое и достаточное условие их полной интегрируемости. Это
условие имеет вид:
т£ - έ? + Σ < w« - гг*»г") - °· <Α·15)
Оно выводится из требования, чтобы получаемые путем
дифференцирования (А. 12) различные выражения для третьих производных от /1
были друг другу равны.
Подставляя в (А. 15) выражение (А. 14), получаем
(^-ЭД».. + (^-*А)!--(^-М,)^=0. (А.,6)
Полагая здесь k Φ mt Ι Φ т но η = т, получаем
8{-М, = 0. (А. 17)
Так как в (А. 16) значок т может иметь любое значение, то огра*
ничение k Φ т, 1Фт% несущественно, и равенство (А. 17) должно
иметь место при всех значениях k и /. Очевидно, что это равенство
является также и достаточным для выполнения (А. 16). В самом деле,
из него следует
Т&-Й- <АЛ8>
й первый член в (А. 16) также обращается в нуль.
Подставим теперь в (А. 15) выражение (А. 11). Вследствие (А. 05)
мы можем положить
«.-£-£-*► <α·ι9>
Вычисляя левую часть (А. 15), мы получим, после умножения на ет,
(<?кп — W«) етЬШ — (<?Ш — Wl) етЬпт +
+ (Ът — Wm) ЧЧп — (<Ряи — <Рт<Ря) eAl +
+ ν«(8*.«ι«-Μ««)Σ«,??=»0· (Α·20>
г-0
К ВЫВОДУ ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 513
Положив
3
<^ι = φ«—wpi+4'Ai2I wl <Α·21>
мы можем равенство (А. 20) написать в виде
φ*ιΑΑ» - фи^ш+ *i«^*n-*^Ai = 0. (А. 22)
Отсюда нетрудно вывести, что должно быть
Ф*/ = 0. (А. 23)
В самом деле, умножая левую часть (А. 22) на — ет, полагая т = η
и суммируя по т, получаем:
2Φ« + «Αι 2 ««<">«. = 0· (А. 24)
т=0
Умножая левую часть (А. 24) на ekf полагая ^=/ и суммируя по k,
получаем, по сокращении на числовой множитель 6:
з
Σ'*.*«« = 0. (А. 25)
/я = 0
Таким образом, условием интегрируемости уравнений (А. 03) являются
равенства (А. 17), а условием интегрируемости уравнений (А. 13)
являются равенства (А. 23). Вследствие (А. 18) и (А. 19) мы можем положить
*.-■&· *-■&· <α·26>
где ψ и φ — некоторые неизвестные функции (вследствие (А. 05) мы
можем считать, что φ = lg* V^^·)- Условия интегрируемости напишутся
тогда
_*± -#Ц^ = °. (A. 27)
OXk ΟΧχ OXk ΟΧχ ' x '
dxk dxi dxL
Полагая здесь
а также
e~* = w\ ψ = — \g w, (A. 29)
e-v = u; φ = — \gut (A. 30)
получим для новых неизвестных функций уравнения
d2w =0, (А. 31)
дх.
dxk dxt
Ж< ί· «χι. '#4Й,, ρ, Α, Φ*«
514
ДОБАВЛЕНИЕ А
Уравнение (А. 31) показывает, что w есть линейная функция от
координат
w = w (0) -}- ^о-^о ~\~wxxi"\~ Щх2 4" ^3*3 (А· 33)
и что, следовательно,
Ψ* = —ΊΓ· (Α·34>
где wk — Постоянные. Подставляя эти значения ф^ в уравнение (А. 03)
для fif можем написать это уравнение в виде.
д2 (wfj)
dxk dxt
= 0, (А. 35)
откуда следует, что величины wft являются линейными функциями.
Это значит, что четыре функции /0, /lt /2, /3 являются
дробно-линейными функциями с одним и тем же знаменателем w.
Мы приходим к следующему выводу. Самый общий вид
преобразования (А. 01), удовлетворяющего условию (а), есть преобразование
при помощи дробно-линейных функций с одним и тем же
знаменателем. В том частном случае, когда знаменатель приводится к
постоянной, дробные функции приводятся к целым.
Обратимся теперь к исследованию уравнения (А. 32), вытекающего
из условия (б) или (б'). Прежде всего заметим, что при k Φ I правая
часть его обращается в нуль. Следовательно, вторые производные
от и по разным переменным равны нулю, и функция и составлена
аддитивно из функций от одной переменной. С другой стороны, из
(А. 32) следует, что вторые производные от и, взятые по одной и
той же переменной, с точностью до знака друг другу равны, а именно:
д2и д2и д2и д2и ,А осч
Но каждая из величин (А. 36) может зависеть, самое большее,
от одной (своей) переменной. Следовательно, все они равны одной
и той же постоянной. Обозначая эту постоянную через 2С, будем
иметь
-Д- = 20й; -г^- = 0 (к Φ Г) (А. 37)
дх\ dxk dxt
и, кроме того,
ЬгШ2=4Са- (Α·38)
Из равенств (А. 37) следует, что функция а будет вида
3 3
и = С 2 Ά - 2 S «Λ** + В, (А. 39)
k=0 k=0
К ВЫВОДУ ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 515
где <xk и В — постоянные. Формула же (А. 38) дает лишь
соотношение между постоянными, а именно:
з
£С = 2 ιΑ (А.40)
г = 0
Согласно (А. 05) и (А. 30), множитель λ в соотношениях (А. 04) обратно
пропорционален и2. Мы можем положить
2v«fiL^—L
~ЩЖ1 — -#*гп- (А. 41)
Без нарушения общности мы можем считать, что в начале
координат, т. е. при х0 = хх = х2 = xz = 0, будет и = 1; этого можно
всегда достигнуть изменением масштаба для fl или для xk. При
таком условии будет
B=U C = ^ero?r (А. 42)
и, следовательно,
з з з
и = 1 — 2 2 ekakxk + 2 V# 2 */*/· (Α· 43)
*=0 fe = 0 / = 0
Заменяя в (А. 13) величины φΛ их выражениями
* = -■*-. uk=£-t (A. 44)
будем иметь
з
irfc л,, -г «* Λ*. -Г Щ ή — ekokl ^ етат ή . {ά. чо)
dxkdxi ^ "* дхх ^"l dxk —°r*iid °m"m dxt
/Я = С
т
Если и имеет вид (А. 43), то условия интегрируемости системы (А. 45)
будут выполнены, и функции ft вполне определяются значениями
и£ и их первых производных в начале координат. Пусть эти значения
равны
Wb = e* Шо = '**<*· <Α·46)
Так как в начале координат а=1, то уравнение (А. 41) дает
з
Σ*ΑΛ/ = «Α/. (А·47)
Положим теперь
/,=<*,+Σ «,«„/;· (Α·48>
Вследствие (А. 47) эти уравнения могут быть решены относительно
функций /*, которые выражаются линейным образом через ft. Оче-
33*
51β ДОБАВЛЕНИЕ А
видно, что функции /* удовлетворяют той же системе
дифференциальных уравнений, как и ft; для системы (А. 45) это вытекает из
линейности уравнений; для системы (А. 41) это вытекает из
соотношений (А. 47). Но начальные условия для /* будут вида
Таким образом, найдя решение системы (А. 45) с начальными
условиями частного вида (А. 49), мы получим по формуле (А. 48) самое
общее решение этой системы.
Систему (А. 45) можно написать в виде
л. 37)
iSI-.A.(*tf+2!w£). с*··»·
и вследствие (А. 37)
з
т=0
Положим здесь
л =4· (Α·52>
Используя (А. 38), мы получим
■£fe = -А, . I [-2CFt + J] .... *£■) . (А. 53)
* от-О /
Рассуждая так же, как при исследовании уравнения (А. 32),
получаем
причем
3
-2CFt + 2 етат -g- = 2С<Й. (А. 55)
Из (А, 52) легко видеть, что начальные условия (А. 49) для f*
приводят к условиям того же вида для Ft. Уравнения (А. 54) вместе
с начальными условиями дают
3
Ft = Clgoekx\ + Kl. (A.56)
Подстановка (А.56) в (А.55) позволяет определить значения
постоянных С/, а именно
Сг =,-α(. (Α.57)
К ВЫВОДУ ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА
517
С этими значениями постоянных уравнения (А. 55) приводятся к
тождеству. Следовательно, мы имеем
з
fe = 0
3
Л = s *=! s (A. 69)
1—22 **a*** + 2 Ά 2 ·ιΑ
Λ = 0 Λ = 0 ί-0
Мы приходим к следующему окончательному выводу.
Самый общий вид преобразования (А. 01), удовлетворяющего
/словию (б) и (б'), получается из преобразования
3
■*/—«< 2***1
х\ = s Ч 5 (А· 6°)
1—22 ****** + 2 еА 2 eiA
Λ = 0 Λ = 0 / = 0
в соединении с преобразованием
з
x'i = CLt + 2 еиа1кхк* (А. 61)
где коэффициенты aik удовлетворяют условиям (А. 47). Кроме того,
возможно изменение масштаба.
Преобразование (А. 61) есть обычное преобразование Лореица.
Преобразование же (А. 60) носит название преобразования Мебиуса.
Оно обладает многими замечательными свойствами, на которых мы,
однако, останавливаться не будем.
Для нас важно отметить, что требование сохранения вида
уравнения фронта волны (условие (б')) само по себе еще не приводит к
преобразованию Лоренца, так как допускает еще преобразование Мебиуса.
Чтобы освободиться от преобразования Мебиуса, можно
дополнительно потребовать, чтобы конечным значениям первоначальных
координат соответствовали конечные значения преобразованных координат.
Это дополнительное требование выполняется только если все
постоянные ak в преобразовании Мебиуса равны нулю, в результате чего
оно приводится к тождеству. Вместо этого дополнительного
требования можно принять другое, а именно наложить условие сохранения
прямолинейности и равномерности движения (условие (а)); мы так
и поступали в тексте. Каждое из этих дополнительных требований
приводит однозначно к преобразованию Лоренца (и к возможному
изменению масштаба).
318
ДОБАВЛЕНИЕ А
Существенно также, что требование конечности координат
относится ко всему пространству-времени в целом, тогда как условие
сохранения прямолинейности и равномерности движения является
строго локальным1).
1) Рассуждения и выводы этого Добавления примыкают к результатам
вейля [7].
Добавление Б
ДОКАЗАТЕЛЬСТВО ЕДИНСТВЕННОСТИ ТЕНЗОРА ЭНЕРГИИ-
ИМПУЛЬСА ЭЛЕКТРОМАГНИТНОГО ПОЛЯ
В случае электромагнитного поля в вакууме функциями состояния
являются составляющие поля
Е\* Е2' Ег> Н\· ^2> Hz> (Б. 01)
а соответствующими уравнениями движения первого порядка
(уравнениями поля) являются уравнения Максвелла
curl Η — l^ = of curiE+~4£-=0 (Б. 02)
с at ' с οι Ν
вместе с дополнительными условиями
div Ε = 0, div Η = 0. (Б. 03)
Бесконечно малое преобразование Лоренца мы будем, как в § 23,
характеризовать величинами
_ух _уу _ у ζ \
— — . ω2ο— —» ω3ο — — Μ (Б#04)
ω
ίο
ω23 = ω^; α>31 = ay,
t
Пользуясь трехмерными векторными обозначениями, мы можем
написать изменения составляющие поля при бесконечно-малом
преобразовании Лоренца в виде
δΕ = |[νχΗ] + [ωχΕ],
(Б. 05)
8H = -l[VXE]-H<oXH].
Сравнение этих формул с общими формулами (31*. 04) дает
коэффициенты (31*. 09), а тем самым и операторы Х1т. Мы будем
иметь
520
ДОБАВЛЕНИЕ Б
(Б. 07)
и два аналогичных равенства получаемых из (Б. 06) круговой
перестановкой значков 1, 2, 3. Вводя антисимметричную систему величин
еш = +1, если (/, k, I) четная перестановка чисел (1, 2, 3), |
еш = — 1, если (/, k, I) нечетная перестановка чисел (1, 2, 3),
еш = 0, если среди значков (ikl) есть одинаковые,
мы можем написать три выражения вида (Б. 06) следующим образом:
з
/Я Л \
(Б. 08)
χίο = _χοι= 2 еш(я;
k,l=\
ь дЕх
дн})л
'* dHi
Если рассматривать совокупность трех величин Λ10, ΛΓ20, X30 как
трехмерный вектор, то вместо (Б. 08) можно написать
„Пространственные" операторы Xth, где /, k=l, 2, 3, напишутся
*'*=-**г=^-£*ж+^-"*щ-·(БЛ0)
В § 31* была выведена для изменения функции поля при
бесконечно малом преобразовании Лоренца следующая формула:
δ/ = Ι 2 «й^-С/)·
(Б. 11)
1,т=*С
Полагая вместо / последовательно f = Eh f^Hi (1=1, 2, 3) мы
вновь вернемся к формулам (Б. 05).
Составим теперь уравнения, выражающие равенство нулю
расходимости тензора Τμν (эти уравнения будут соответствовать (31 *. 16))
Мы будем иметь
Σ3 (дТ«° dEk дТ°о dHk\ γ (dT'i dEk дТ«* dHk\_
\Щ"~дГ~*~ dHk dt 1^ L· \dEk dxt ~^"1Щ dxt ;~υ»
(Б. 12)
где α = 0, Ι, 2, 3. Эти уравнения должны быть алгебраическими
следствиями уравнений Максвелла. Учтем сперва уравнения (Б. 02),
которые напишем в виде
~~дГ — с£вш dXi ■
dt
их
ι* ι
dEt
dxt
(Б. 13)
ДОКАЗАТЕЛЬСТВО ЕДИНСТВЕННОСТИ ТЕНЗОРА ЭНЕРГИИ-ИМПУЛЬСА 521
Исключая из (Б. 12) при помощи (Б. 13) производные по времени,
будем иметь
3 3
Υ / д7* дТ'° \дЕк,\ ( дТ*1 , дТ*\ Щ,
Ι, Λ=1 /, Λϊ=» 1
(Б. 14)
Эти уравнения должны быть алгебраическими следствиями уравнений
(Б. 03). Поэтому левые части их должны быть вида
Сравнивая (Б. 14) с (Б. 15), мы приходим к следующим соотно-
дЕ/
шениям. Во-первых, коэффициенты при -~- для /=1, 2, 3 должны
быть между собой равны. Это дает
dT«i дТа2 дт«г
Подобно этому, должны быть равны коэффициенты при -g-^ для
1=1, 2, 3. Отсюда
дТ«* _ дТ<* _ дТ«*
Во-вторых, при / Φ k коэффициенты при -^ и-^Ав(Б. 14) должны
обращаться в нуль, поскольку такие члены отсутствуют и в (Б. 15).
Это дает соотношения
Л Та* дТ*°
-щ—с*»*1ШГ=0· (БЛ8)
Л Та* ЯТаО
Отсюда, если / Φ k
•w+tSt=°· <Б-20>
Если (/, ky I) какая-нибудь перестановка чисел (1, 2, 3), то мы
легко получим из (Б. 20)
<Э2Та*
и из (Б. 21)
1етг=0· <Б-23>
522 ДОБАВЛЕНИЕ Б
Дифференцируя (Б. 18) по Е1 и пользуясь (Б. 22) будем иметь
dE^Hi
= 0 (/=1, 2, 3). (Б.24)
То же уравнение получится если продифференцировать (Б. 19) по Нг
и воспользоваться (Б. 23).
Составим теперь систему уравнений для Г00. Согласно (Б. 24) имеем
-ЩШГ = ° ('=1.2. 3). (Б.25)
Полагая в (Б. 18) а = 0, получим
dToi дТ00
Ж=с*ш-щ- (Б. 26)
С другой стороны, уравнение (Б.24) при а = / дает
д2 Toi
Отсюда
Л2Т00
ЖР77Г = 0 (**')· (Б. 28)
Аналогично получаем
Λ2Τ00
0 (k Φ/). (Б. 29)
dEk dEi
Полагая в (Б. 19) α = 0 и заменяя k на /, будем иметь
dTot дТоо
-Щ-=с*ш-щ- (Б. 30)
Дифференцируя (Б. 26) по Н1 и (Б. 30) по Ek и приравнивая
результаты, получаем
Л2 ТОО Й2 ТОО
Полученную для Т00 систему уравнений легко решить. Поскольку Т°°
есть трехмерный скаляр, эта величина может зависеть от
составляющих поля только через посредство величин
ξ=ΐΕ2, η = (Ε·Η), С=}н2, (Б. 32)
так что
700 =/(ξ, η§ζ)- (Б.33)
Действительно, это выражение представляет решение уравнения (Б. 10).
Используем теперь уравнение (Б. 25).
Мы имеем
ДОКАЗАТЕЛЬСТВО ЕДИНСТВЕННОСТИ ТЕНЗОРА ЭНЕРГИИ-ИМПУЛЬСА 523
и далее
(Б. 35)
Вследствие (Б. 25) это выражение должно равняться нулю при
k=l. 2, 3.
Очевидно, что поворотом осей можно всегда достигнуть того, что,
скажем, при&=1 величины Ег и Нг одновременно обратятся в нуль.
Тогда уравнения (Б. 25) и (Б. 35) для k=\ дают
%=0 (Б. 36)
и все вторые производные, содержащие дифференцирования по η,
также исчезают. Если это учесть, то те же уравнения для k Φ 1 дают
жк=°- (б·37)
В силу (Б. 36) уравнения (Б. 28) и (Б. 29) приводят к равенствам
~W~ °» ~W °· (b. 38)
Таким образом величина / в (Б. 33) есть линейная функция от ξ и
от С Учитывая это, мы получаем
д2Т*° _ д/ д>Т*о _ д/ Q04
HEf- дГ дн\ ■""«· ( }
а тогда уравнение (Б. 31) дает
% = %- (Б.40)
Поскольку / есть линейная функция, мы будем иметь
/ = α(ξ + ζ) + λ, (Б. 41)
где α и λ постоянные, и, следовательно,
7°ο = |.(Ε2 + Η2)+λ. (Б. 42)
Зная 7*00, мы можем найти по выведенным ранее формулам
остальные составляющие тензора Т**. Так, подстановка значений
^Γ = αΕ· 1йГ = аН <Б-43>
в формулу
7<о 1^(700) (Б>44)
524 ДОБАВЛЕНИЕ Б
(см. (31*.18)) дает поток энергии
T^alEXH]! (Б. 45)
(вектор Умова — Пойнтинга). Эту величину можно написать в виде
7"° = α Σ hpfiflr (Б-46>
Подставляя это выражение в формулу
Tik = (I XokX01 — 8|Jk) Τ00 (/, ft = 1, 2, 3), (Б. 47)
получаем после некоторых выкладок
Т1к = α [1 Ь1к (Е2 + Н2) - £гЕ, - HtHk] - Щк (I, к = 1, 2. 3).
(Б. 48)
десь мы воспользовались соотношением
з
Σ в,рА„ = δ/Αδρ? - 8/gV (Б. 49)
Нетрудно проверить, что найденные выражения для тензора
энергии удовлетворяют и всем остальным уравнениям (Б. 16) — (Б. 19),
а не только тем, которые были использованы при их выводе.
Если считать, что при Е = 0 и Н = 0 должно быть Γμ,ν = 0ι то
будет λ = 0. Если разуметь под 1** тензор энергии-импульса (а не
тензор массы), то при обычном выборе единиц будет а = -|—.
Таким образом, тензор 7μ,ν определен однозначно, причем результат
совпадает с общепринятыми формулами (33.23) — (33.25).
Добавление В
ДОКАЗАТЕЛЬСТВО ЕДИНСТВЕННОСТИ
ГИДРОДИНАМИЧЕСКОГО ТЕНЗОРА МАССЫ
β § 32 при выводе релятивистского обобщения уравнений
гидродинамики идеальной жидкости мы исходили из определенного вида
тензора массы. Мы покажем здесь, что рассуждения можно вести
и в обратном порядке: взяв за исходное уравнения движения, можно
вывести из них тензор массы.
В качестве функций состояния можно взять давление ρ и
инвариантную плотность ρ* (два скаляра) и четыре составляющие и1
четырехмерного вектора скорости.
Величины ρ и р* будут связаны уравнением состояния, а
величины и1 будут связаны соотношением
3
2*,(й*)2=л (в·01)
5 = 0
Вместо давления ρ удобно брать динамическое давление Р,
связанное с ρ и р* равенством
ρ
-/>
(В. 02)
г
0
или, вследствие (32.27),
р = П + -£-, (В. 03)
где Π потенциальная энергия единицы массы. Если / есть какая-
нибудь функция от Ρ, ρ*, и1, то изменение ее при бесконечно малом
лреобразовании Лоренца будет
з
V = Σ ·«*!«*-Цт- 'В. 04)
i=0
Приравнивая (В» 04) общему выражению
з
"та*21 «ι**'*'Λ ·Β.05)
i *=0
526 ДОБАВЛЕНИЕ В
будем иметь следующие выражения для операторов Xlk:
χί*="*£?-<"" 6· (Β·06>
Скаляры, очевидно, не входят в формулу для δ/, а следовательно,
и в выражение для операторов Xtk. Что касается частных
производных по а1, то при составлении операторов Xik безразлично,
считать ли все величины и1 независимыми или учитывать их связь (В. 01).
Введем симметричную систему величин
a**=*fitk—±-u'u*9 (В. 07)
обладающих свойствами
з
2 esatsus = 0, (В. 08)
J = 0
и обозначим через wl четырехмерный вектор ускорения
з
ωί=Σ«*ίτ· <Β·09>
*=о *
дхк
Тогда уравнения гидродинамики могут быть написаны в виде
(ι+?)β,-Σβ'*^=°· (ВЛ0)
k=0
Σέ(ρν>=°· (ВЛ1>
дхъ
*=о
Кроме того, необходимо учитывать соотношения
з
ς ·*%-=<>· (вл2>
s=0
которые вытекают из (В.01).
Вследствие (В. 12) выполняется равенство
з
2νι«ι=ο (в. 13)
s=0
и соотношения (В. 08) показывают, что это равенство не противоре*
чит уравнениям движения (В. 10).
ДОКАЗАТЕЛЬСТВО ЕДИНСТВЕННОСТИ ТЕНЗОРА МАССЫ 527
Напишем уравнения, выражающие тот факт, что расходимость
тензора массы равна нулю в силу уравнений поля. Мы имеем
3 3
ΣόΤίκ dus . у dTik дР _
и das dxk ^ др dxk
s,k=o R k=o R
s, *=0
k = 0 * 5 = 0 / 5, k = 0
Здесь правая часть представляет сумму выражений (В. 10), (ВЛ1)
и (В. 12), умноженных на лагранжевы множители λ^, λ' и |х/йсоот-
ветственно. После введения лагранжевых множителей уравнение (В. 14)
может рассматриваться как тождество относительно производных по
координатам. Приравнивая коэффициенты сперва при ^— и затем
дР
при -н—, получаем
diz=4l +i)a* +*H*4VV. (в. is)
дТ
ik
дР ~
s=o
2>У*+хг^Л (в. 16)
Отсюда нужно исключить лагранжевы множители. Применяя
соотношение (В. 08) ко второму уравнению, получаем
5-0
Подставляя это значение в (В. 16), мы можем написать это
уравнение (с заменой А на у) в виде
j=0 j=0
Умножим теперь обе части (В. 15) на asi и просуммируем по 5.
В правой части множитель при \ъ1к обратится в нуль в силу (В. 08),
так что величины ^ik исключатся. Величины же λ* войдут только
через посредство суммы (В. 18), значение которой известно. Наконец,
для величин λ' можно подставить их значения из (В. 17). В реву ль-
528
ДОБАВЛЕНИЕ В
тате мы получим соотношение, которое можно написать в виде
5=0 Г=0
Это есть искомая система уравнений для тензора Tik, вытекающая
из условия, что его расходимость равна нулю в силу уравнений
поля.
Теперь мы должны учесть, что совокупность величин Tik
составляет тензор. Это мы можем сделать одним из двух способов. Мы
можем присоединить к (В. 19) другую систему дифференциальных
уравнений, а именно,
X" (т'к) = etbtrrk - е^Г* + ekbkTTls - ekbksTh, (В. 20)
где оператор XTS имеет значение (В. 06). Или же мы можем гьрямо
написать самое общее выражение для тензора, зависящего от
вектора us и от некоторых скаляров. Это выражение имеет вид
Tik = Auluk + Be fa, (В. 21)
где величины А и В зависят только от скаляра р* (или, что то же
самое, только от Р). Зависимости от инварианта вектора us можно
не учитывать, так как, согласно (В. 01), этот инвариант есть
постоянная.
Нетрудно проверить, что выражение (В. 21) удовлетворяет
системе уравнений (В. 20). Оно представляет общее решение этой
системы.
Подставим теперь выражение (В. 21) для тензора Тш в
систему (В. 19). Вычислим сперва внутреннюю сумму в (В. 19),
воспользовавшись соотношением (В. 01). Мы имеем
ΓβΟ
Подставляя (Β. 2J) и (Β. 22) в формулу (В. 19) и пользуясь (В. 08),
vtы получим равенство вида
з
S <*js Ши%к + Nu4si) = 0 (В. 23)
или
Ма^и1 + Na*lu* = 0. (В. 24)
ДОКАЗАТЕЛЬСТВО ЕДИНСТВЕННОСТИ ТЕНЗОРА МАССЫ 529
где положено для краткости
м-л-ф-$Цг. (в. as,
N = A+{\+-^)%. (B.26)
Очевидно, что равенство (В. 24) может иметь место для всех
значений I, J, к только если Ж = 0 и N = 0. Таким образом,
скаляры А и В в выражении для тензора Tik должны удовлетворять
уравнениям
A-^-Vw=0· (Β·27)
л+(1+|-)#=0· <Β·28>
Дифференцируя второе уравнение по р*. получим
а тогда первое уравнение дает
Исключая из (В. 28) и (В. 30) величину А, получаем
(ρ^-1)^=°· (Β·31>
Отсюда
^ = -яр*. (В. 32)
где а — постоянная. Но в силу связи (В. 02) между динамическим
давлением Ρ и обычным давлением /?, мы имеем
p*dP = dp. (В. 33)
Поэтому уравнение (В. 32) напишется
dB + adp = 0 (В. 34)
и его решение дает
В = — ар+1, (В. 35)
где λ — новая постоянная. Величина А определится из (В. 28) и (В, 32);
мы будем иметь
Λ = αρ·(ΐ+£) (В. 36)
и выражение для тензора массы будет иметь вид
Г'*= α[ρ·(ΐ +!·)«ν-ρ*Α,] + λ*Α4. (Β. 37)
34 Зак. 2649. В. А. Фок
530
ДОБАВЛЕНИЕ В
Если считать, что на бесконечности, где р* = 0 и /? = 0, должно
быть Г/л = 0, то будет λ=0. При обычном выборе единиц сле-
1
дует положить а=1 для тензора энергии и а = -γ для тензора
массы. Тем самым обе постоянные будут определены и формула для
тензора массы примет следующий окончательный вид:
c2Tlk = ρ* (1 + £) aluk - pefa (В. 38)
Вследствие соотношения (В. 03) эта формула совпадает с (32.28).
Добавленае Г
ПРЕОБРАЗОВАНИЕ ТЕНЗОРА ЭЙНШТЕЙНА
а) Преобразование тензора кривизны второго ранга1). Мы
начнем с преобразования ковариантного тензора кривизны второго
ранга /?μν и покажем, что в нем можно выделить члены,
содержащие оператор Даламбера от одноименной компоненты g^
фундаментального тензора.
По определению мы имеем
*μν = £αΡ#μα,βν. (Γ.01)
где, согласно (44.08), тензор кривизны четвертого ранга равен
1 / *gy, &g*t *g~ *g|t» \
κν*> Ρ» 2 V дхЛ дх9 "+" дХу. όχΊ δχμ дх$ дх, дха I
-gfJWL'+g^J* (Г-02)
(эта формула отличается от (44.08) только наименованием значков).
Следовательно,
Rn * = "о £** *„ Г„ + 7Г ^ л . J ТГ ^αβ "
>v 2 s дхадхъ ' 2 s A^d*, 2 s Α*μ Α*ρ
-τ ^те"^^+1*л (Γ·03)
Мы положили здесь для краткости
Γρ = £ρσΓ· (Π 04)
где, в соответствии с обозначением (41.15),
F = g*%. (Γ. 05)
В формуле (Г. 03) первый член уже имеет вид оператора Даламбера
от έΓμν· Остальные члены могут быть преобразованы так, что вторые
производные от фундаментального тензора будут входить только
1) См. также работы де Дондера [1б] и Ланчоса [17].
34*
532 ДОБАВЛЕНИЕ Г
через посредство первых производных от величин Гр. Для
выполнения преобразования нам понадобятся формулы:
4г1^-*)=^^· (гоб)
**-δ^=-*»Ί^· (Γ'07)
г=- -tJ= -£- (/=* г>). (Γ· °»)
уже выведенные нами в § 41. Из этих формул следует
Дифференцируя (Г. 06) по a:v, получим
* дХрдхч дх^дхч дхч дх^ v ' '
Заметим, что вследствие симметрии выражения (Г. 10) относительно μ
и vt мы имеем
Дифференцируя выражение (Г. 09) по Λτμ, будем иметь
_ «β d2gv« _ 1 d>\g(-g) дГ, dg* dg„
g дх^дх$~ 2 дх^дх, дх^дх^ дх$ # w' U'
В последнем члене правой части мы можем заменить величину -^на
ОХф
где Γν>αβ— обычные скобки Кристоффеля первого рода (38.30).
Формула (Г. 12) напишется тогда
Переставляя здесь значки μ и ν (а также значки суммирования α
и р в левой части), можем написать
-.„ " »W l^lg(-g) дГ* ldg*dg+ dg<9
g дхчдхл —~ 2 дх„дхч дх, "·" 2 Λ*, <?.*„, "^ V«?2*7* ^* 1°>
ПРЕОБРАЗОВАНИЕ ТЕНЗОРА ЭЙНШТЕЙНА 533
Таким образом, входящая в (Г. 03) (с множителем у)сумма
выражений (Г. 10), (Г. 14) и (Г. 15) равна
J d2g«p d*g,a d*g^ \
\ дх» дхч дх„ дхо дх„ дха I
< дх^ дхч дх^ дхр дх^ дха
ι drv д\\ \ dg°l· dg°V
:~ш;+ж:)+т*<*?ЧхТ+т*'^-дх^ (ГЛ6)
-νμ ^^νν , —νμ
(вследствие (Г. И) остальные члены здесь сокращаются).
Введем обозначение
Величина Γμν составлена по аналогии с полусуммой ковариантных
производных от вектора, хотя Γν не есть вектор. Вследствие (Г. 16)
выражение (Г. 03) для /?μν напишется тогда:
#μ.ν = "2 β*Ρ дХл дх^ — Γμν +
1 dgop l dg*9 α3
+τ Γ»·«? "^τ+τ *V «β -^ —'g*Γσ' μβΓ°α' (Γл 8)
Для упрощения выкладок, связанных с преобразованием членов с
первыми производными, мы будем пользоваться не только обозначениями
*\, αβ и Пр Ддя обычных скобок Кристоффеля, но и обозначениями
г;э=/у%>()а, (г. 19)
I*· * = g""g^a = gfgVT„ р, (Г. 20)
для соответствующих величин с поднятыми значками. Заметим, что
величина Г^^ равна
Рассмотрим выражение
^в^^-АЛ (Γ- 22)
последний член которого совпадает с последним членом в (Г. 18).
Написав его в виде
^μν
-чН-ё-Ъ-ыЛ <Γ·23>
подставим сюда
^ = Γ^+Γμ>ιβ (Γ.24)
35 Зак. 2649 В. А. Фок
634
ДОБАВЛЕНИЕ Г
и затем воспользуемся равенством
-££" — Гр, να = Γν, ρα· (Γ· 25)
Мы получим тогда
^ν = ^^(Γβ,μρΓν>ρα+Γμ,οβ-^). (Γ. 26)
Применяя обозначение (Г. 19) и переименовывая значки, можем
написать
^ν = ΠβΓα>1ιβ+Γ^. (Γ. 27)
Так как коэффициент 1у здесь симметричен относительно α и β,
мы можем множитель при нем заменить его симметричной частью,
которая равна -& ·, . По той же причине мы можем заменить -~-
выражением (Г. 13). Сделав это, получим
Но, как легко проверить
v~ 2 v Α*μ т2 μ дхч ~Γχ^,αβ
(Г. 28)
*£—'-.Т?· (Г. ЭД
Поэтому
А __1г ^!-ir ??1+τ*τ (тт
Приравнивая выражения (Г. 22) и (Г. 30) для Λμν, получаем
соотношение
±Г iSl-J-ir iSl - ΡαβΓ Г e
2 ν'*β &*μ "■ Τ μ»αΡ ^ΛΤν " * σ' ^ V<X
которое позволяет написать выражение для /?μν в следующем
окончательном виде:
R в-i W ^μν- —Г — ρ«βρΡ° ^1 ^ρ" _i-ΓαβΓ (V 49ϊ
Отсюда уже легко получить формулу для контравариантных
составляющих тензора кривизны второго ранга.
Дифференцируя соотношения вида (Г. 07), нетрудно вывести
формулу
***« _ *g^ jdg„ dg^ dg^ <3gvpx
Z*°g*9 dxa dx$ — dxa dx? "t"8 \ dxa dx^ "+" dx? dxa I' ^ ' 00)
ПРЕОБРАЗОВАНИЕ ТЕНЗОРА ЭЙНШТЕЙНА 535
Используя эту формулу, можно написать /?μν в виде:
Поднимая затем значки μ и ν, получаем для /?μν следующее простое
выражение:
/Г= ~4 г* -д^- -1*4-1*·^. (Г. 35)
Величина Γμν получается из Γμν поднятием значков по формуле
1*' = ^УТ„ (Г. 36)
и может быть выражена непосредственно через величины Га,
определяемые формулой (Г. 08), а именно:
"■■^(«-Е+^-зе'*)· *■«>
б) Преобразование инварианта. Составим теперь инвариант
тензора кривизны
R = g^- (Г. 38)
Мы имеем
«-тЛ^-г+^ <Γ·39>
где через Г обозначена величина
Г = £,Х\ (Г. 40)
Используя формулу
мы получим из (Г. 37)
и вследствие (41.16)
Г= ' «М. (Г. 43)
V — g дха дх$
Дифференцируя формулу (Г. 41) по jcp, мы получим аналогично (Г. 10):
(Г. 44)
#gv» d2\g(—g) dgv* dg^
s^v дха дх^ дха дхч дха дх$
Подставляя (Г. 44) в (Г. 39), будем иметь:
1 ^lg(-g) 1 ^ ^
К~28 дхадх9 —1+1»1ч«Т2* йл:в Α*ρ' V * *°'
35·
536 ДОБАВЛЕНИЕ Г
Мы видим, что вторые производные от фундаментального тензора
входят в выражение для R только через посредство вторых
производных от lg(—g), а также через посредство величины Г. Члены
с первыми производными можно преобразовать при помощи
соотношения
Г,Гар+1-^Р-д^--51-=2-Г.р-д3?-, (Г. 46)
которое легко выводится из формулы
1ν 2 дхч 289·>\8 dxa^g Т5£7' ί1·47)
В результате получается
"—2* дхадх9 l ^ 2 L "P dx, ' i1' 48>
Это выражение можно написать в виде
К — 8 дхадх> L дха l L>
где
дх„ дхп
(Г. 49)
(Г. 50)
Припоминая формулу
ъ>-**т&;-гтк (Г5,)
для оператора Даламбера от некоторой функции у, мы можем
написать
/?=D(lgVr:=:i)-r-L. (Г. 52)
Разумеется, величина y=\gY—g не есть скаляр, но формально
оператор (Г. 51) может быть применен и к ней. Заметим, что как
первый, так и второй член в (Г. 52) представляют деленную на У—g
сумму производных от некоторых величин по координатам. Это
обстоятельство имеет значение при формулировке вариационного начала
для уравнений Эйнштейна, причем определяемая формулой (Г. 50)
величина L играет роль функции Лагранжа.
Функция Лагранжа L может быть написана, помимо (Г. 50),
в различных других видах, из которых укажем следующие:
L-i^-r**!?1· СГ.И)
а также
1 = /'(Г^р-ГЛ). (Г. 54)
Последняя форма наиболее часто встречается в литературе.
ПРЕОБРАЗОВАНИЕ ТЕНЗОРА ЭЙНШТЕЙНА 537
в) Преобразование тензора Эйнштейна. Предыдущие формулы
позволяют написать выражение для тензора Эйнштейна
ar^fiT-^fR, (Г..55)
расходимость которого равна нулю. При этом окажется, что вторые
производные от фундаментального тензора входят в Ομν только
через посредство вторых производных от величины У— gg^ и через
посредство первых производных от Г\ Поэтому удобно ввести
особое обозначение для умноженных на Υ—g контравариантных
компонент фундаментального тензора.
Мы положим
Ф* = У=Ъ&\ (Г. 56)
Формула (41.16) напишется тогда:
Γν_ 1 d$v"
V=g Α*μ
(Г. 57)
Для дальнейшего удобно преобразовать все формулы так, чтобы
э них входили только производные от величин дн-\ При выполнении
преобразования в наши формулы войдут производные от величины
У = ^У:=7. (Г. 58)
которые мы будем обозначать через
Согласно (41.07), мы имеем
3>a = r;v. (Г. 60)
Для величин, получающихся из уа путем поднятия значков, мы введем
обозначение
3>α = £<% (Γ·61>
аналогичное тензорному (хотя, конечно, уа не есть вектор). Мы
имеем также
/ = 1?. (Г. 62)
где rjf имеет значение (Г. 19). Вторые производные от у мы будем
обозначать через уа^:
Согласно формуле (Г. 21), величины Г1""13 представляют билинейные
функции от составляющих gp* и от их первых прсдеврдных.
538 ДОБАВЛЕНИЕ Г
Подставляя в эту формулу выражения для gv» через <j»"t мы получим
Γμ"αβ = Πμ·'αβΗ-Λμ··αβ# (Γ. 64)
где
Αμ. «β = | (rgrf + y^a _ у^ (Г 66)
Соответствующие величины с опущенными значками мы будем
обозначать через Щз и Λ£β.
Вычислим определитель, составленный из g^v
Del Г = (К^)4 Det #» = ^ . 1 = g. (Г. 67)
Таким образом, определитель, составленный из дн*, равен
определителю, составленному из #μν:
Detqr = Dttg^ = g. (Г. 68)
Из формулы (Г. 66) получаем
^рА* ■" = -/. (Г- 69)
а так как
то
£αβΙ*·"ί> = Ι*. (Γ70)
^ЛГ.«Р = 1* + / (г. 71)
Последнее выражение равно также
Г>+/в_«£. (Г.72)
Переходим к преобразованию тензора Эйнштейна
ar = Br — ^gvR. (Г. 55)
Исходными формулами являются здесь
^ = -|^-^-_^+F·^. (Г.35)
а также формула (Г.49) для R, которую мы напишем в виде
Я = Лр-ГУ«-Г-1. (Г. 73)
Вторая производная от величины ^ равна
(Г. 74)
ПРЕОБРАЗОВАНИЕ ТЕНЗОРА ЭЙНШТЕЙНА 639
й, следовательно,
(Г. 75)
С другой стороны, мы имеем
+4«"(Γ*)'.+Γ+ί,)-Γ'·+Γ'·'»ΓΛ. (Γ.7β)
Из сравнения последних двух формул мы видим, что, если не
считать членов Г и Г'1", в них входят одни и те же комбинации вторых
производных. Вычисление дает:
2 s 2V-g dx.djfp
+ Y^v(yy+Iwya+r+L)-F' + /^+P-%. (Г.77)
Как всегда, наиболее сложным является преобразование членов
с первыми производными. Мы имеем:
Ρ'% = Π^αβΠ;β+Α^αβΠΙβ+Λν>%'λβ+Λ^α%. (Γ. 78)
Используя (Г. 71), получаем:
α* αβπιβ+av' *и% = ур (πν· ™ + π* ν0 -1 (/г+yvr;x) - у у,
(Г. 79)
и, вследствие
n^+n^ = I9"^ = -g*^- ^У. (Г.80)
=~у" т? - Л°/- τ(/г+уТ11) - уУ- (Г·81)
Далее
Л·1' «А^ = i у'1/ +1 Л/. (Г. 82)
Отсюда
-| ЛУ -1УУ -1 (/Г + уТ*). (Г. 83)
540 ДОБАВЛЕНИЕ Г
Это соотношение позволяет переписать формулу (Г. 77) в виде
+ ifL+:7S"(r,y.+r)-jr—|(/Г+j,T"). (Г. 84)
Положим здесь
ВТ = Г' + γ (уТ + уТ*). (Г. 85)
В = ^^ = Г+Гаув (Г. 86)
и выразим в члене с оператором Даламбера величины g® через даР.
Тогда формула для тензора Эйнштейна напишется:
* 2^ * 2^» йк«А*р^
+ Π*· «Ήβ - γ У>У + \ fL +1 g^ - ВТ. (Г. 87)
Поскольку определитель g выражается, согласно (Г. 68),
непосредственно через 9μν, можно считать, что в формуле (Г. 87) все члены,
кроме L, выражены через внличины даР и их производные. Нам
остается выразить через те же величины также и функцию Лагранжа L.
По определению (Г.50) мы имеем:
^-т^-гь.
Подставим сюда
Γαβ = ΤΓ(φ + Λαβ,
где, согласно (Г. 66),
*+=±Ш+у&-у^.
Пользуясь формулой
х*^=-Ъ..
легко выводимой из (Г. 90), получим
. 1 π, dg°? 1 „«
(Г. 88)
(Г. 89)
(Г. 90)
(Г. 91)
(Г. 92)
выразив здесь -—— через
Ъ-*~*№ +Λ.) (Г.Ч>
ПРЕОБРАЗОВАНИЕ ТЕНЗОРА ЭЙНШТЕЙНА 541
и используя формулу (Г. 71), которую можно написать в виде
**Цр = Г + у\ (Г. 94)
получаем окончательно:
Ь = -^К^+^У. (Г.95)
Здесь под знаком производной стоят уже только величины да?.
Добавление Д
ХАРАКТЕРИСТИКИ ОБОБЩЕННОГО УРАВНЕНИЯ ДАЛАМБЕРА
Обобщенное волновое уравнение (уравнение Даламбера) имеет вид:
□ ψ = 0, (Д.01)
где □ ψ есть выражение
в котором величины g$ и g имеют обычные значения.
Задача Коши для уравнения (Д.01) состоит в определении
функции ψ по заданным на некоторой гиперповерхности
ω(*0, xlt x2f *з) = const (Д.ОЗ)
значениям ψ и -=р-. Мы предполагаем, что уравнение
гиперповерхности (Д.ОЗ) может быть решено относительно х0 и что поэтому
Нас интересует возможность решения задачи Коши в некоторой области,
достаточно близкой к гиперповерхности (Д.ОЗ). Чтобы вычислить
значения функции ψ в этой области, нужно иметь возможность
вычислять производные от ψ в любой точке гиперповерхности. Легко
видеть, что первые производные вычисляются непосредственно из
начальных данных. Для вычисления же вторых производных
необходимо пользоваться волновым уравнением. При этом возможность
определения вторых производных будет зависеть от вида
гиперповерхности, к которой относятся начальные данные. Если гиперповерхность
такова, что отнесенные к ней начальные данные не определяют
значения вторых производных, то она называется характеристической.
Характеристическая гиперповерхность обладает тем свойством, что
на ней возможны разрывы вторых производных. Поэтому движущаяся
поверхность фронта волны и должна быть характеристической.
Рассмотрим сперва простейший случай, когда начальные данные
относятся к гиперповерхности х0 = const, т. е. к начальному моменту
ХАРАКТЕРИСТИКИ ОБОБЩЕННОГО УРАВНЕНИЯ ДАЛАМБЁРА 543
времени. Из заданных значений ψ и -Д- непосредственным
дифференцированием получаются все первые производные, а также вторые
производные вида
l£k- T$fc ft*= 1.2.3) (Д.05)
(точнее, значения этих величин при заданном х0). Что касается
второй производной по x0t то она должна вычисляться из волнового
уравнения. В развернутом виде волновое уравнение имеет вид
*г°°тт+ ··· =°. (Д-06)
ох0
где многоточием обозначены члены, содержащие остальные вторые
производные (Д.05), а также первые производные, которые известны.
Так как по свойству фундаментального тензора величина g00 никогда
не обращается в нуль (она всегда положительна), то уравнение (Д.06)
может быть всегда решено относительно остающейся второй произ-
дЧ ^
водной —\. Это значит, что если переменная х0 имеет характер
вредно
мени, то гиперповерхность х0 = const не является характеристической.
Рассмотрим теперь общий случай гиперповерхности (Д.03).
Введем новые переменные
*ό = ω(*ο· χν χν *з); χι = χν χ,2 = χν хг=хъ- (Д·07)
Обозначая через ψ' величину ψ, рассматриваемую как функция от
переменных x'Qt x[, x'v x'z будем иметь:
ψ = ψ'; «ί^* (Д.08)
ох0 ох0 ох0
и вследствие (Д.04) задание ψ и -^- при ω = const равносильно
заданию ψ' и —^т- при х' = const. Из этих последних величин можно
вычислить, подобно предыдущему, все первые производные, а также
вторые производные вида
■Άτ- Т^Г- С*=1. 2,3), (Д.09)
ох0 oxt oxl oxk
тогда как вторая производная по х'0 определяется из волнового
уравнения. Преобразованный к новым переменным, оператор Даламбера
будет иметь вид
544
ДОБАВЛЕНИЕ Д
где gr^ получается из g по общему правилу преобразования
тензора, и в частности
ао .. &Κη дхп ,. дел да
g g дх^ дх, g όχμ дхч9 w#11'
Необходимо только помнить, что, поскольку новая переменная x'Q
не обязательно имеет характер времени, неравенство g' > О может
не выполняться.
Преобразованное волновое уравнение напишется:
νμ
дх0
где невыписанные члены уже не содержат второй производной по x'Qt
а содержат только вторые производные вида (Д.09), а также первые
производные. Значения всех невыписанных членов на
гиперповерхности ω = const можно считать известными из относящихся к ней
начальных данных.
Вторая производная по x'Q остается неопределенной в том и только
в том случае, когда коэффициент при ней в волновом уравнении (Д. 12)
обращается в нуль, т. е. когда функция ω удовлетворяет уравнению
да) д<
ω
Это и есть уравнение характеристик для волнового уравнения (Д.01).
Характеристики обобщенного волнового уравнения совпадают
с характеристиками общековариантных уравнений Максвелла,
рассмотренных в § 46. Коротко (хотя не вполне строго) этот резуль^
тат может быть обоснован следующими соображениями. При условии
Vv^v = 0 из уравнений Максвелла вытекают для потенциалов Д,
уравнения, в которых высшие (вторые) производные группируются
в виде оператора Даламбера. Отсюда можно заключить, что и
характеристики общековариантных уравнений Максвелла имеют вид (Д. 13).
Нестрогость этого вывода заключается в переходе от характеристик
для потенциалов к характеристикам для поля. Не представляет труда
дать и строгий вывод, оперируя непосредственно с составляющими
поля, подобно тому как это делалось в § 3 для декартовых
координат в евклидовом случае.
Добавление Е
ИНТЕГРИРОВАНИЕ УРАВНЕНИЯ ФРОНТА ВОЛНЫ
Если
ω(*0, хг> х2, *3) = 0 (Е.01)
есть уравнение движущейся поверхности фронта волны, то функция ω
удовлетворяет, как мы знаем, уравнению в частных производных
£«βωαωβ = 0, (Ε.02)
где мы положили для краткости
·.= *!-. (E.03)
Рассмотрим следующую задачу: определить вид волновой поверхности
в момент времени х0 > 0, когда задан ее вид в начальный момент
времени. Подобную задачу мы решали в § 4 для случая евклидовой
метрики и галилеевых координат; мы рассмотрим ее теперь для
общего случая.
Вид волновой поверхности в начальный момент времени может
быть задан уравнениями
*1 = /ΐ(«. Ό). ]
x2 = f2(u, ν), \ при х0 = 0. (Е.04)
Эти уравнения могут быть написаны в более симметричном виде:
*. = /.(«.*) (а = 0, 1, 2, 3), (Е.05)
где
/о-О. (Е.Об)
Вместо начальных данных, относящихся к моменту времени х0 = О,
можно рассматривать данные Коши, относящиеся к некоторой
гиперповерхности; тогда функция /0 уже не будет тождественно
равняться нулю.
646 ДОБАВЛЕНИЕ Е
Подставляя выражения (Ε.05) для координат в уравнение (Е.01),
мы получим тождество относительно и, v. Дифференцируя это
тождество по и и по ν, получаем два соотношения:
•·τέ-β°· ««%-=°· (Ε·07)
Присоединив к ним уравнение фронта волны (Е.02), мы можем
определить из этих трех однородных уравнений начальные значения
четырех величин ω~0, ων ω2, ω3 с точностью до общего множителя.
Обозначая эти начальные значения ноликом сверху, мы будем иметь
о>2 = λφα (и, ν\ λ = λ (и, ν), (Е.08)
где φα — известные функции, a λ — произвольная функция от я, v.
Следует заметить, что отношения величин α/j получаются не вполне
однозначно: для них возможны два значения, вследствие того, что
уравнение фронта волны (Е.02) квадратично относительно ωα. Для
однозначного определения этих отношений необходимо еще указать,
какое из двух возможных направлений распространения волны
имеет место.
Чтобы показать, что левые части уравнений (Е.05) представляют
начальные значения координат, мы снабдим их ноликом сверху и
перепишем в виде
*2=/«(«. «>· (Е·09)
Возьмем точку на начальной волновой поверхности (всякой такой
точке соответствует определенная пара значений α, ν) и рассмотрим
луч, проходящий через эту точку. Как мы видели в § 38,
дифференциальные уравнения луча представляют уравнения Гамильтона,
соответствующие уравнению Гамильтона — Якоби (Г.02). Таким
образом, согласно (38.41), уравнения имеют вид:
dxa „a d(u„ 1 dg^ ,~ 1ЛЧ
-зг=**»р чг=-2-к-т^· (ЕЛ°)
В § 38 было показано, что эти уравнения равносильны уравнениям
геодезической линии нулевой длины.
Для луча, проходящего через точку (α, ν), начальные значения
переменных ха и ωα равны соответственно (Е.09) и (Е.08).
Интегрируя уравнения (ЕЛО) с начальными значениями х°а и ω£, получим:
%=». (г. 4 *?. Л Л < < < О I (ЕЛ1)
Подставляя сюда начальные значения (Е.09) и (Е.08), получим
выражения вида
xt = F^p. и, ν), )
ω, = λΦ.(λΛβ. v).j ^ΛΖ)
ИНТЕГРИРОВАНИЕ УРАВНЕНИЯ ФРОНТА ВОЛНЫ 647
Так как уравнения (ЕЛО) не меняются при подстановке:
ω« = Κ; Ρ' = λΡ> (Ε. 13)
где λ — постоянно вдоль луча, то функции Fa и Фа зависят не от
λ и ρ в отдельности, а только от произведения λρ.
Уравнения
xa = Fa(p',u,v) (E. 14)
представляют, в параметрической форме, уравнения движущейся
волновой поверхности. Исключив отсюда переменные р', иу г>, можно
получить соотношение между четырьмя координатами (jc0, хг,ХоУ хг),
которое и представляет уравнение волновой поверхности в ферме
(Е.01).
Доказательство приведенных здесь формул и соотношений можно
найти в курсах дифференциальных уравнений в частных
производных перзого порядка (см., например, [8]).
В качестве простейшего примера рассмотрим уравнение
при начальном виде волновой поверхности
z = f(x,y) при * = 0. (Е.16)
Здесь прямоугольные координаты ху у играют ρ эль параметров
я, v. Уравнения (Е.07) напишутся:
ω1 + V* = 0> ω2 + Vy = °> (Е Л 7>
где fx и / —частные производные по χ и у. Из (Е.15) и (Е.17)
получаем одно из возможных решений:
ш0 = Хс,
,.<_ Ых
Vi+fl+ή'
χ
(Ε. 18)
3 Vi +/}+/?'
Другое решение получится из (ЕЛ 8) изменением знака квадратного
корня. В формулах (Е.17) и (ЕЛ8), строго говоря, мы должны
были 6и писать ω£ вместо ωα, но мы опускаем нолик сверху
вследствие того, что в данном примера величины ω^ вообще постоянны?
548
ДОБАВЛЕНИЕ Е
Решая уравнения
dx0 _
dp ~
dxi
dp
(/=1. 2,3)
(Ε. 19)
и полагая, что при / = 0 будет и /? = 0, получим
*о=* = -Зг7». xt = xfi — ^P (/=1.2,3). (Е.20)
Подставляя сюда величины ωα из (ЕЛ 8) и выражая параметр ρ
через t, будем иметь для первого решения:
Vi+fl+fl
*a=/(*. y)-
(E.21)
Vi+fl+fl
Для второго решения (с противоположным направлением
распространения) будем иметь:
ctfx
д;, = х-
х2 = у —
ctfy
Vl+fl+ff
ct
(Е.22)
'-«· » Jy
В частности, если мы возьмем в качестве начальной волновой
поверхности поверхность шара радиуса а и положим
f(.x,y) = Va2-x3 — y2
мы будем иметь из (Г.22):
** = у(1+т)'
, = Va2-·
!(ι+ί)]
(Е.23)
(Е.24)
и после исключения χ и у:
т. е. поверхность шара радиуса /? = a-f-ci, как и следовало ожи·
дать.
(Е.25)
Добавление Ж
НЕОБХОДИМОЕ И ДОСТАТОЧНОЕ УСЛОВИЕ ЕВКЛИДОВОСТИ
ТРЕХМЕРНОГО ПРОСТРАНСТВА
Для трехмерного пространства тензор кривизны второго ранга Rlk
обладает тем же числом компонент (а именно, шестью), как и тензор
кривизны- четвертого ранга Rn,mk. Поэтому следует ожидать, что не
только Rlk выражается через Rn,mk по общей формуле
Riu = *lmR,i,mk. (ж.01)
но и, обратно, Rn,mk выражается через Rlk (значок а при
компонентах трехмерного тензора мы здесь опускаем).
Чтобы найти эти выражения, введем, как это мы делали в § 19,
антисимметричную систему величин ε^Α, причем ε123=1, и построим
антисимметричный псевдотензор с ковариантными компонентами
El}h = VltlJh (Ж.02)
и контравариантными компонентами
Ε'*=γτ*»» (Ж03)
Для преобразований между координатами хъ х2, хъ с
положительным якобианом
0(Λ°(*ι·4,4) (Ж04)
V*D(^) = Va (Ж.05)
дх, dxf dxh
Eun-erp-^-ei = EpqT (Ж.06)
на основании правила составления определителей, что и доказывает,
что для таких преобразований величины ЕцН ведут себя как кова-
рлантный тензор. По правилу составления определителей мы можем
также написать
Ema!pakqalr = Epq\ (Ж.07)
мы имеем
и, следовательно,
550
ДОБАВЛЕНИЕ Ж
где EpqT имеет значение (Ж.03). Тем самым доказано, что EpqT есть
контравариантный псевдотензор, соответствующий Еш. Отсюда легко
получаются формулы
?,„**** = £"%,,
Бша1' = ЕГа1ракд,
Еш^Е aipak(fiir
(Ж.08)
(Ж.09)
(Ж. 10)
Отметим также важную для дальнейшего формулу
#*%„/== аде-г?»?, (>к.и)
которая доказывается путем следующих рассуждений. Обе части ее
отличны от нуля только когда ρ Φ q и г Φ s, причем пара чисел (р, q)
должна совпадать, с точностью до порядка, с парой чисел (г, s). При
этом, если р = г, q = s, то обе части равны +1, а если p = s, q = r,
то они равны —1. Следовательно, обе части совпадают при всех
возможных значениях значков, и формула (Ж. И) доказана.
Чтобы найти выражения для RlUmk через Rik% введем
контравариантный симметричный тензор второго ранга Apq по формулам
ApqEpllEqmk^Rn,mk (Ж. 12)
и затем установим связь между Apq и Rpq. Формула (Ж. 12) может
быть написана в виде равенств:
aA" = R2Zt2z; aA" = RZhZl; aA**;
αΛ» = /?81ι12; aA* = Rl2t2Z; aA*·.
причем
Apq = Aqp. (Ж. 14)
Эти равенства непосредственно выражают Apq через /?н,т*.
Подставляя (Ж.12) в (Ж.01) и пользуясь (Ж.09) и(Ж.И), получаем:
Rik = Apq{apkalq-apqalk\ (Ж.15)
и если мы положим
A = apqAP", (Ж. 16)
то будет
Я|» = Л„-«,И. (Ж-17)
откуда
R=.aikRlk=* — 2At (Ж. 18)
а следовательно,
Alk = Rik-lalkR. (Ж.19)
— ^12,12» )
' = ^?23»31» J
(Ж. 13)
Таким образом, А^ есть ι росто трехмерный консервативный тензор.
УСЛОВИЕ ЕВКЛИДОВОСТЙ ТРЕХМЕРНОГО ПРОСТРАНСТВА 551
Подставляя соответствующий контравариантный тензор в (Ж. 12),
получим искомое выражение тензора четвертого ранга через тензор
второго ранга:
Ни. ти = (Ям - Τ α"9ή EpiPimk- (Ж-20)
Из полученных формул можно вывести следующее важное следствие.
Мы знаем (§ 42), что необходимым и достаточным условием
приводимости заданной квадратичной формы ds2 к форме с постоянными
коэффициентами является равенство нулю тензора кривизны
четвертого ранга. Этот результат относится, очевидно, и к чисто
пространственной трехмерной квадратичной форме
rfZ2 = e/ftrfjc/rfjcJk, (Ж.21)
для приводимости которой к евклидову виду
dl2 = dx* + dx'l + dx'l (Ж.22)
необходимым и достаточным условием является равенство
Я«.«» = 0. (Ж.23)
где в левой части стоит трехмерный тензор. Но, согласно (Ж.20),
для трехмерного пространства тензор кривизны четвертого ранга
выражается через тензор кривизны второго ранга. Поэтому
необходимым и достаточным условием евклидовости трехмерного
пространства является равенство нулю тензора кривизны второго ранга.
ЛИТЕРАТУРА
Классические работы
1. A. Einstein, Zur Elektrodynamik bewegter Кбгрег. Ann. d. Phys.,
17, 891, 1905.
2. A. Einstein, Die Grundlage der allgemeinen Relativitatstheorie. Ann.
d. Phys., 49, 760, 1916.
3. H. A. Lorentz, Electromagnetic phenomena in a system moving with
any velocity smaller than that of light, Proc. Acad. Sc. Amsterdam, 6, 809,
4. H. Poincare, Sur la dynamique de l'electron, Rendiconti del Circolo
Matematico di Palermo, XXI, 129, 1906.
Переводы этих работ — в сборнике „Принцип относительности". М.— Л.,
1935.
5. A. Einstein, The meaning of relativity, Princeton, 1955 (4-е изд.).
Русский перевод с 1-го изд. А. Эйнштейн, Основы теории
относительности. 4 лекции, читанные в Принстонском университете. М.— Л., 1935.
6. Н. Lorentz, A. Einstein, H. Minkowski, Relativitatstheorie, Berlin, 1923.
Специальная литература
1. Ε. Cartan, La theorie des groupes et la geometrie, L'enseignement ma-
thematique, t. 26, p. 200, 1927; Oeuvres Completes I, 2, p. 841, Paris, 1952.
(Э. Картан, Теория групп и геометрия. Доклад на заседании Швейцарского
математического общества в Берне 7 мая 1927 г. Русский перевод в сборнике
„VIII международный конкурс на соискание премии имени Н. И.
Лобачевского", Казань, 1940).
la. A. D. Fokker, Albert Einstein, Inventor of Chronogeometry, Synth ese,
9, p. 442, 1955.
2. А. Д. Александров, О сущности теории относительности.
Вестник ЛГУ, № 8, 103, 1953.
3. А. Д. Александров и В. В. Овчинников, Замечания к
основам теории относительности. Вестник ЛГУ, №11, 95, 1953.
4. Н. А. У м о в, Избранные сочинения. Гостехиздат, 1950.
4а. N. A. Umow, Einheitliche Ableitung der Transformationen, die mit
dem Relativitatsprinzip vertraglich sind, Physika>lische Zeitschrift, 11, 905. 1910.
5. H. А. У μ о в, Уравнения движения энергии в телах. Одесса, 1874.
6. Л. И. Мандельштам, Полное собрание трудов, т. V. Лекции по
физическим основам теории относительности. Изд. АН СССР, 1950.
7. Н. W е у 1, Mathematische Analyse des Raumproblems. Berlin, Springer,
1923.
8. В. И. Смирнов, Курс высшей математики, т. IV. Гостехиздат, 1957.
9. В. Ф. Каган, Основания геометрии, ч. 1. Гостехиздат, 1949.
10. Ю. Α. Κ ρ у τ к о в, Тензор функций напряжений и общие решения
в статике теории упругости. АН СССР, 1949.
ЛИТЕРАТУРА
553
11. В. Μ. Шехтер, Вестник ЛГУ, № 11, стр. 99, 1954; № 4, стр. 23,
1956.
12. М. Planck, Vorlesungen fiber die Theorie der Warmestrahlung.
Leipzig, 1923.
13. П. Н. Лебедев, Опытное исследование светового давления.
Собрание сочинений, изд. Физического общества имени П. Н. Лебедева. М., 1913
(первоначально напечатано в Ann. d. Phys. 6, 433, 1901).
14. Т. L e v i - С i v i t a, The absolute differential calculus. London, 1927.
15. H. W e у 1, Raum — Zeit — Materie. Berlin, Springer, 1923.
16. D e D ο η d e r, La gravifique einsteinienne. Paris, 1921.
17. K. L a n с ζ ο s, Phys. ZS. 23, 537, 1923.
18. Schwarzschild, Sitzungsber. d. Preufi. Akad. d. Wissensch., S. 189,
1916.
19. A. H. Крылов, Лекции о приближенных вычислениях. Изд. АН
СССР, 1944.
20. С. Μ о е 11 е г, On Homogeneous Gravitational Fields in the General
Theory of Relativity and the Clock Paradox. Kobenhavn, 1943. (Труды Датской
АН, 2, № 19.).
21. A. L i a p о u η ο f f, Sur certaines series de figures d'equilibre d'un liquide
heterogene en rotation. Leningrad, 1925 и 1927.
22. А. Ляпунов, Recherches dans la theorie de la figure des corps celestes.
(Исследования в теории фигуры небесных тел). Записки Императорской
академии наук, сер. VIII, т. XIV, № 7, 1903. Перевод „Избранные труды". Изд.
АН СССР, 1948.
23. Л. Д. Ландау и Е. М. Л и φ ш и ц, Теория поля. Гостехиздат, 1948.
23а. V. Fock, Three lectures on relativity theory, Review of Modern Physics,
29, 325, 1957.
24. A. F r i e d m a n n, Ober die Krummung des Raumes. ZS. f. Phys. 10,
377, 1922.
25. Hubble, Monthly Notices of the R. S. 133, 658, 1953.
26. A. Einstein, Autobiographisches, Albert Einstein, Philosopher — Scientist,
Library of Living Philosophers, 1949, Illinois, U. S. А. (А. Эйнштейн,
Творческая автобиография, русский перевод в УФН, 59, стр. 71, 1956.)
27. J. С. Maxwell, Treatise on Electricity, Oxford, 1873.
28. Α. Ε i η s t e i η, J. G г о m m e r, Sitzb. Berl. Akad., S. 2, 1927.
29. A. Einstein, Sitzb. Berl. Akad., S. 235, 1927.
30. A. Einstein, L. I n f e 1 d, Β. Η ο f f m a n, The gravitational equations
and the problem of motion. Ann. Math. 39, № 1, 65, 1938.
31. A. Einstein, L. Inf eld, Ann. Math. 41, 455, 1940.
32. A. Einstein, L. I n f e 1 d, On the motion of particles in general
relativity theory. Canad. J. Math. 1, 209, 1949.
33. L. I n f e 1 d, On the motion of bodies in general relativity theory. Acta
Phys. Polonica, т. XIII, 187, 1954.
34. В. А. Фок, О движении конечных масс в общей теории
относительности. ЖЭТФ, 9, № 4, 375, 1939.
35. В. Α. Φ о к, Система Коперника и система Птоломея в свете общей
теории относительности. Сборник „Николай Коперник". Изд. АН СССР, 1947.
36. В. Α. Φ о к, Некоторые применения идей неевклидовой геометрии
Лобачевского к физике. Сборник А. П. Котельников и В. А. Фок,
„Некоторые применения идей Лобачевского в механике и физике".
Гостехиздат, 1950.
37. Η. Μ. Петрова, Об уравнении движения и тензоре материи для
системы конечных масс в общей теории относительности (кандидатская
диссертация ЛГУ, 1940). ЖЭТФ, 19, вып. 11, 989, 1949.
38. В. Α. Φ о к, Об интегралах движения центра инерции двух конечных
масс в общей теории относительности. ДАН СССР, 32, 28, 1941.
36 Зак. 2649. В. А Фок
554
ЛИТЕРАТУРА
39. В. П. К а ш к а р о в, Об уравнениях движения системы конечных масс
в теории тяготения Эйнштейна. ЖЭТФ, 27, 563, 1954.
40. И. Г. Фихтенгольц, Лагранжева форма уравнений движения
во втором приближении теории тяготения Эйнштейна. ЖЭТФ, 20, 233, 1950.
41. Α. Ρ а р а р е t г о u, Equations of motion in general relativity. Proc. Phys.
Soc. A 64, 57, 1951.
42. Η. Μ e i s t e r, Die Bewegungsgleichungen in der allgemeinen Rela-
tivitatstheorie, Annalen der Physik, 6 Ser., 19, 268, 1957.
43. И. Т. То до ров, Об одной теореме единственности для волнового
уравнения, Успехи Математических Наук, 13, стр. 211, 1958.
44. В. А. Фок, Эйнштейнова статика в конформном пространстве, ЖЭТФ,
33, стр. 1476, 1960.
45. В. Α. Φ о к, Сравнение различных координатных условий в теории
тяготения Эйнштейна, ЖЭТФ, 38, стр. 108, 1960.
46. Р. Μ е с с б а у э р, Резонансное ядерное поглощение гамма-квантов в
твердых телах без отдачи, УФН 72, стр. 6о8, декабрь 1960.
ИМЕННОЙ УКАЗАТЕЛЬ
Александров 32
Бельтрами 71
Бернулли 156
Бианки 212
Брадлей 76
Вейль 35, 518
Галилей 10, 11, 32
Гамильтон 25, 182, 183
Гаусс 211
Герц 498
Гофман 502
Громмер 502, 503
Гюйгенс 156
Даламбер 92, 542
де-Дондер 260, 531
Джине 318
Допплер 57, 253, 488, 493
Евклид 10
Зелигер 477, 496
Инфельд 502, 503
Каган 71
Картан 15
Кашкаров 356, 504
Кирхгоф 464
Коперник 13
Кориолис 304
Кристоффель 181
Крутков 135, 212, 447
Крылов 292
3G*
Лавуазье 156
Лагранж 14, 171, 384
Ландау 450, 491
Ланчос 260, 531
Лебедев 151
Леви-Чивита 187, 501
Ленин 18
Лифшиц 450, 491
Лобачевский 71, 476
Ломоносов 156
Лоренц 10, 100, 147, 498
Ляпунов 318, 359, 363
Майер 156
Максвелл 3, 368, 498
Мандельштам 29
Мах 13, 477
Мейстер 504
Мессбауэр 252—253
Мёбиус 517
Мёллер 304
Минковский 86
Ньютон 28, 247, 348, 354
Овчинников 32
Папапетру 504
Петрова 504
Планк 151
Пойнтинг 151
Птоломей 13
Пуанкаре 10, 318
Пуассон 248
Рёмер 60
Риман 11, 14, 15
Риччи 193, 501
656
Смирнов 464
Соболев 467
Умов 35, 86, 127, 155
Ферми 301
Физо 76
Фихтенгольц 384, 504
Фоккер 16, 32
Френель 77
Фридман 12, 477, 481
ИМЕННОЙ УКАЗАТЕЛЬ
Хэббль 494
Шварцшильд 286
Шехтер 140
Эйлер 156, 357
Эйнштейн 10—14, 17, 30, 41, 56, 302,
497, 505 и др.
Этвеш 153
Якоби 25, 184
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аберрация астрономическая 77, 78
Абсолютно твердое тело 146, 147
Аксиальный вектор 83
Активная часть энергии 155
Антисимметричный тензор
(дуальный) 94
Асимптотический вид 432, 433
Базис (система отсчета) 19, 20
Бельтрами координаты 71
Бесконечно малое преобразование
Лоренца 95, 137
, операторы для него 138,
520
1 общее 160, 233, 347, 469
Бианки тождества 212
Вариационное начало для уравнений
Максвелла — Лоренца 224—231
тяготения 297—307
Вектор трехмерный 80
аксиальный 83
полярный 83
Вектор четырехмерный 85
пространственно-подобный 88,
174
временно-подобный 88, 174
ковариантный и контравари-
антный 87
в галилеевых
координатах 86
в произвольных
координатах 168
, расходимость 196, 197
, параллельный перенос 185—
191
Вектор Умова 127
— Умова — Пойнтинга 151, 524
Весомая (тяжелая) масса 10, 248,
301
Взаимодействие, тройное 381, 386
Взвешивание 155
Внешняя задача механики системы
тел 348
Внутренняя задача механики
системы тел 348
— структура тела 360
, интегралы ее
характеризующие 364
Волновая зона 433
— поверхность 25
Волновое уравнение 434
, теорема единственности 463
, характеристики 542
Волновой фронт 25
Волны гравитационные 453—456
Вращательное движение (ньютоновы
уравнения) 354—356
Вращающаяся система отсчета 164,
304
Времени измерение 21
— масштаб «космический» и
«земной» 496
Временная последовательность в
разных системах отсчета 51—57
Временно-подобный (временной)
вектор 88
интервал 52
Время и пространство 19
Галактики 476
—, их разбегание 496
Галилеево пространство 9, 13
Галилеевы координаты 13
Галилея закон (обобщенный) 247
— преобразования 32
Гамильтона — Якоби уравнение для
геодезических линий 184
света 25
Гамма-кванты, безфононное
испускание их (эффект Мессбауэра) 252
Гармонические координаты 13, 197,
260, 296, 306, 342, 405, 439, 447, 468
, их единственность для
островного распределения масс 473
658 ПРЕДМЕТНЫЙ
Гармоничности условие 259, 439, 503
Гелиоцентрическая система 28, 509
Геодезическая система координат 200
Геодезические линий 178
, их уравнения 180, 184, 185
, нулевые 184
Геометрия Евклида 11, 19
— Лобачевского 71
— Римана 11, 19
Гидродинамика идеальной жидкости
143, 525
в произвольных
координатах 223
Годограф скоростей (пространство
Лобачевского — Эйнштейна) 71
Гравитационная энергия 444—446
, псевдотензор 447, 449, 452
Гравитационное красное смещение,
космологический эффект 486
, эффект Эйнштейна 251—254
Гравитационные волны 454
, их роль в балансе энергии 456
Градиентное преобразование 111
Даламбера уравнение, см. Волновое
уравнение
Движение заряда 104
— материальной точки в поле
тяготения 313—320
— системы зарядов 109—117
— системы ^ясс (постановка
задачи) 317—320
Двойная звезда 407
Двух тел задача 400—407
Дивергенция, см. Расходимость
Дифференцирование ковариантное
191
Длина, эталон 20
Длин сравнение в разных инерциаль-
ных системах 65—67
Допплера эффект 59, 253, 494
Дуальный тензор 94
Евклидовость трехмерного
пространства, необходимые и достаточные
условия 549
Единственности теорема для
волнового уравнения 463—466
■ гармонических координат
468—472
Единственность тензора массы
(энергии-импульса) 136, 137
• для уравнений
электромагнитного поля 519
гидродинамики 525
УКАЗАТЕЛЬ
Законы сохранения,
дифференциальные (тензор массы) 131
, замечания к обычной
формулировке 125—127
, интегральные (в произвольных
координатах) 237
массы и энергии 153
механики системы точек 117—
121
теории тяготения 446—449
для механической систе*
мы и для поля 458—462
Замкнутый контур (параллельный
перенос по нему) 206
Запаздывающие потенциалы 1
ΙΟΙ 11, 434
Зелигера парадокс 477, 496
«Земной» и «космический» масштабы
времени 496
Идеальной жидкости гидродинамика
143
в произвольных
координатах 223
Инертная масса 246, 301
Инерциальные системы 27—29,
32
, преобразования, связывающие
их 33, 34—39
, сравнение показаний часов 49,
57
расстояний и длин 65
Инерции тензор 351
— закон движения центра 395
Интегральная форма законов сохра·
нения 237
уравнений движения системы
масс 360
ее преобразование
367
Интегралы движения системы
зарядов 117
, их тензорный характер
121
масс 387—395
f ЙХ явная форма для не-
вращающихся масс 399
f их связь с законами
сохранения для поля 457
Интегрирование уравнения фронта
волны 545
Интервал пространственно-подобный
(пространственный) 52
— временно-подобный (временной) 52
—, ньютоново приближение 249
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
559
Квазиодновременность 52
Кирхгофа формула 464
Ковариантный вектор 87
в произвольных координатах
168
Ковариантное дифференцирование
191
, изменение порядка 207
, примеры 195
, произведения 194
Ковариантность уравнений 13, 79
Максвелла 98, 102—103
в произвольных
координатах 220—221
гидродинамики в произвольных
координатах 223
и принцип относительности
496
Консервативные системы 136
Консервативный тензор 214
Контравариантный вектор 87
в произвольных координатах
168
Конформно-галилеевы координаты
477, 481—482
Конформное пространство (статика))
272
Координатные условия, общие
замечания 474, 504—505
Координаты 19
— галилеевы 13
— конформно-галилеевы 482—483
— локально-геодезические 200
— привилегированные 13, 504—505
Кориолиса силы 304
«Космический» и «земной» масштабы
времени 495—496
Космологические проблемы 495
Коши задача (отличие от
гравитационной) 472
Коэффициент увлечения Френеля
77
Красное смещение, эффект
Эйнштейна 251—252
, космологический эффект 485—
486
Кривизны скаляр 213
, его преобразование 536
— тензор 213
, его преобразование 531
Кристоффеля скобки 181
, закон преобразования 200
, приближенные значения 327
Критика обычной формулировки
законов сохранения для системы
точек 125
Критика терминологии в теории
тяготения 17, 473, 497, 504—505
Круткова тензор 135, 212, 447
Лагранжева форма уравнений
движения 384
Линейность преобразования,
связывающего инерциальные системы 34,
510
Лифт эйнштейновский 302
Лобачевского — Фридмана
пространство 476
Лобачевского — Эйнштейна
пространство скоростей 71—78, 484
Локально-геодезическая система
координат 201
Локальный характер
эквивалентности ускорения и тяготения 301, 507
условий, определяющих
преобразование Лоренца 517
Лоренца преобразование 42—47
бесконечно малое 95
, операторы для него 138,
520
, замечания к выводу 510
собственное и несобственное 46
Лоренцова сила 107
Лучи света 25, 293, 546
Ляпунова уравнение 362—363
Максвелла уравнения 22, 519
, вариационное начало для них
224
, их вид в произвольных
координатах 221
, их ковариантность 97—104
, их характеристики 22—24
Масса, закон сохранения 154, 155
— инертная и весомая (тяжелая)
247, 301, 476—477
—, островное распределение 261, 262,
477
—, равномерное распределение 262,
477
Массы тензор 131
доказательство единственности
для уравнений электромагнитного
поля 519
гидродинамики 525
, его компоненты как функции
состояния 137
, система уравнений для его
компонент 136, 139
, примеры его 141
560
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Массы тензор в произвольных
координатах и вариационный принцип
232
при учете тяготения,
выражение для расходимости 320
для упругого тела 324
Массы и энергии эквивалентность 153
Масштаб времени, „космический" и
„земной" 495—496
— длины твердый 147
Материальной точки уравнения
движения 313—317
Маха парадокс 498
Мёбиуса преобразование 517
Нулевые геодезические линии 184
Ньютона потенциал тяготения 246,
267
— уравнения для вращательного
движения 354—359
— поступательного движения
348—354
Обобщенное волновое уравнение, его
характеристики 542
«Общая теория относительности»,
неправильность термина 473—474,
500—501
Одновременность (анализ понятия!
56
Однородность пространства-времени
9, 240, 475
, ее связь с физическим
принципом относительности 241, 244,505
— — — и законы сохранения 446
Оператор Даламбера 92
— — в произвольных координатах 196
Операторы бесконечно-малого
преобразования Лоренца 137, 520
Определение прямой линии 296
— расстояний 48
Ортогональные преобразования
(трехмерные) 83
Островное распределение масс и
гармоническая система координат
261—262, 475
Отклонение луча света 293—296
Относительная скорость 68—71
Относительности принцип, см.
Принцип относительности
Парадокс Зелигера 477, 496
— Маха 498
Парадокс часов 308—312
Параллельный перенос вектора !85—
191
на поверхности 185
в общем случае 188—191
1 по замкнутому контуру 206
Параметры, характеризующие тело
342—343
Пассивная часть энергии 155
Перигелия движение для конечной
массы (двойной звезды) 407
малой массы (планеты| 286—
293
Пойнтинга вектор 151
Покоя масса и энергия 107—108
Полярный вектор (трехмерный) 83
Порядка ковариантного
дифференцирования изменение 207
Постоянная тяготения Ньютонч 247
Эйнштейна 267
— Хэббля 494
Постоянство метрического тензора в
конечной области, необходимое и
достаточное условие 205
Постулаты теории относительности
29
Поступательное движение системы
масс, ньютоновы уравнения 349
, релятивистские
уравнения в лагранжевой форме 384
Потенциал тяготения Ньютона 246,
267
векторный 268
Потенциалы запаздывающие ПО, 433
— тяготения, см. Тяготения
потенциалы
Предельная скорость
распространения 30—31
Предельные условия
(ограничивающие эквивалентность) 305—307, 499
Преимущественная
(привилегированная) координатная система 12, 13,
474
Преобразование, связывающее две
инерциальные системы 34, 41
— градиентное для
электромагнитного поля 111
— интегральной формы уравнения
движения 367
— скобок Кристоффеля 200
— тензора кривизны 531
Преобразования Лоренца, вывод
42—47
, замечания к выводу 510
Принцип относительности (физиче-
ский} 29—32
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
561
Принцип относительности для
гармонических систем координат 241
для инерциальных систем
отсчета 30
, роль в теории галилеева
пространства и в теории тяготения
500
, связь с однородностью
пространства 16, 241, 244, 500
, уточнение класса
координатных систем 241 и ел.
общий, его невозможность и
ненужность 244—245, 497, 507
Принцип эквивалентности, его
локальный характер 301, 498, 507
Производная тензориальная 192
— циклическая 199
Пространственно-подобный
(пространственный) вектор 88
— — интервал 52
Пространство и время 8
, метрика 165
, предельные условия 470,
477, 499
, связь их однородности с
принципом относительности 16, 241,
500
Прямая линия (определение), 296
Псевдоскаляр и псевдотензор,
несобственные преобразования Лоренца
93
— , произвольные координаты
176
Псевдотензор гравитационной
энергии 445, 447, 448
Пуассона уравнение 347, 254, 350,
364, 392
Пылевидная материя (тензор массы
для) 141
Равномерно вращающаяся система
отсчета 164
— ускоренная система отсчета
304
Равномерное распределение масс 262,
477
Радиолокация 21
Разбегание галактик 496
Расстояния, измерение 48
— «умеренно большие», определение
421
Расходимость (дивергенция) тензора
массы 320
в теории тяготения 320,
339
Расходимость четырехмерного
вектора 196
Римана геометрия 11
— тензор кривизны 209—213
Риччи, лемма 193
Свертывание тензора 173
Свет 27
—, закон распространения фронта
волны 25
—, отклонение луча в поле
тяготения 293
—, уравнение для лучей 25, 545
Световое давление 152
Сила в задаче о движении масс 371
— Кориолиса 304
— Лоренца 107
Синхронизация часов 48—51
Сириуса спутник 252
Система зарядов (уравнения
движения) 109—117
— отсчета (базис) 19—20
— — ускоренная 163, 304
, трудность ее определения
307, 499
— тяжелых масс (движение н поле
тяготения), общая постановка
задачи 317
, внутренняя и внешняя
задачи 348
, интегралы движения 387,
457
, потенциалы тяготения 408,
433
Скаляр кривизны 213
, его преобразование 535
Скалярное произведение 87
в произвольных координатах 174
Скобки Кристоффеля, закон
преобразования 200
, условие равенства нулю в
конечной области 202
Скорость распространения
предельная 30
—, влияние на частоту (эффект
Допплера) 59
— относительная 68
—, сложение в общем случае
(пространство Лобачевского —
Эйнштейна) 74—75
—, теорема сложения Эйнштейна
69—71
Смешанные компоненты потенциалов
тяготения для больших
расстояний 422-427
662
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Смешанные компоненты потенциалов
тяготения для любых расстояний
(невращающиеся тела) 420—421
Соболева формула 467
Собственное преобразование Лоренца
45—46
События квазиодновременные 52
— последовательные 51
Сосредоточенная масса 279
Состояния функции 133, 135, 136
Спинор 85
Сплошные среды 127
Спутники Юпитера 60
Сравнение длин в разных инерциаль-
ных системах 65
Статика в конформном пространстве
272, 278
Суммирования правило (сокращенное
обозначение) 167—168
Сферическая симметрия поля 269
Твердое тело 20, 146—147
Твердый масштаб 147
Тензор дуальный 94
— инерции 351
— консервативный (Эйнштейна) 214
, его преобразование 537
— кривизны (Римана) 209—213
, его преобразование 531
— Круткова 135, 212, 447
— массы, см. Массы тензор
— метрический (фундаментальный)
171
—, общее определение 168
—, свертывание 173
— трехмерный 80
— четырехмерный 85
Тензорный характер интегралов
движения 124
Теорема единственности для
волнового уравнения 463—466
гармонических координат
468—472
— сложения скоростей 69—71
Триангуляция 20
Тройное взаимодействие 381, 386
Тяготения постоянная Ньютона 247
Эйнштейна 267
Тяготения потенциал Ньютона 246,
247
векторный 267—268
Тяготения потенциалы для волновой
зоны 436—444
— — — конечных расстояний
(невращающиеся тела),
пространственные компоненты 408
, смешанные и
временная компоненты 415
умеренно-больших
расстояний (общий случай),
пространственные компоненты 421—426
, смешанные
и временная компоненты 427—433
Тяготения теория, обзор развития
496
Тяготения уравнения (Эйнштейна) 254
, вариационный принцип для
них 297
Тяготения уравнения, для
статического случая 272
, приближенная форма 332
, решение в первом
приближении 265
Тяжелая (весомая) масса 167, 206
Умеренно-большие расстояния 433,
434
, потенциалы тяготения для
них, пространственные компоненты
426
, смешанные и
временная компоненты 427—433
Умова вектор (поток энергии) 127—.
131, 146, 155, 266, 324
— скаляр (плотность энергии) 130„
155
Умова — Пойнтинга вектор 151,
524
Упругое тело, внутренняя сгруктура
359
, тензор массы 324
Уравнения движения системы
зарядов 109—116
, Их интегралы 117
материальной точки в теории
тяготения 312
системы тяжелых масс 342
в интегральной форме
348, 367—372
в лагранжевой форме
384—387
1 их интегралы 387—
395
, явная форма их
интегралов для невращающихсл масс
395—400
двух тел KOHt4Hofl массы
400—407
Уравнения тяготения, см. Тяготения
уравнения
Ускорение по отношению к
пространству 498, 499
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
563
Ускоренно движущаяся система
отсчета 163, 304, 499
Условие гармоничности 260, 439, 504
— для галилеевой метрики (обще-
ковариантное) 205
— излучения 265, 463
Условия приводимости квадратичной
дифференциальной формы к
постоянным коэффициентам 205
Френеля коэффициент увлечения 77
Фридмана — Лобачевского
пространство 476
Фронт волны, уравнение для него 22,
216, 260
, интегрирование 545
Характеристики обобщенного
волнового уравнения 542
— уравнений тяготения 258—261
электромагнитной теории 22
Хэббля постоянная 494
Циклическая производная (цикл) 199
Часов парадокс 308—312
Частоты эталон «земной» и
«звездный» 490
Часы, синхронизация 48—51
—, показания в разных
инициальных системах 57
— нечувствительные к толчкам и
ускорению 65, 310
Шварцшильда решение (в
гармонических координатах) 286
Эйлеровы углы 357
Эйнштейна лифт 302
Эйнштейна — Лобачевского
пространство скоростей 171
Эйнштейна тензор (консервативный
тензор) 214, 331
, его преобразование 530
Эйнштейна уравнения тяготения
264
в космологическом случае
495—496
Эйнштейна уравнения тяготения,
десять интегралов 449
, характеристики 258—261
Эквивалентность инертной и весомой
массы 152—153
— массы и энергии 153
—, принцип 301, 498
— ускорения и тяготения
(локальная) 301—308, 498
Электромагнитное поле, движение
зарядов в нем 104—108
, закон преобразования 97—
104
, тензор массы (энергии и
импульса) 147
—)В произвольных
координатах 222
Электромагнитного поля уравнения
22, 519
их ковариантность лорен-
цова 99, 104
ковариантность обща.ч
221
характеристики 22, 25
Энергия, активная и пассивная части
ее 155
—, закон сохранения 136, 153, 444—
445
—, роль гравитационных волч в ее
балансе 456—457
Энергии и импульса тензор для
электромагнитного поля 104, 222,
519
Эталон длины 20
— частоты «земной» и «звездный»
490
Эффект Допплера 57, 253
— Мессбауэра 252—253
— Эйнштейна 251, 486
Юпитера спутники 60
Фок Владимир Александрович
Теория пространства, времени и тяготения
Редактор Ю. В. Новожилов
Техн. редактор А. А. Лукьянов
Корректор Л. А. Любовач
Сдано в набор 5/VII 1961 г.
Подписано к печати 3/Х 1961 г. Бумага 60x92/16.
Физ. печ. л. 35,25. Усл. печ. л. 35,25.
Уч.-изд. л. 31,42. Тираж 10 000 экз. Т-08789.
Цена 1 р. 77 к. Заказ № 2649.
Государственное издательство
физико-математической литературы.
Москва, В-71, Ленинский проспект 15.
Типография № 2 им. Евг. Соколовой
УПП Ленсовнархоза.
Ленинград, Измайловский пр., 29.