/





















































































































































































































































































































































































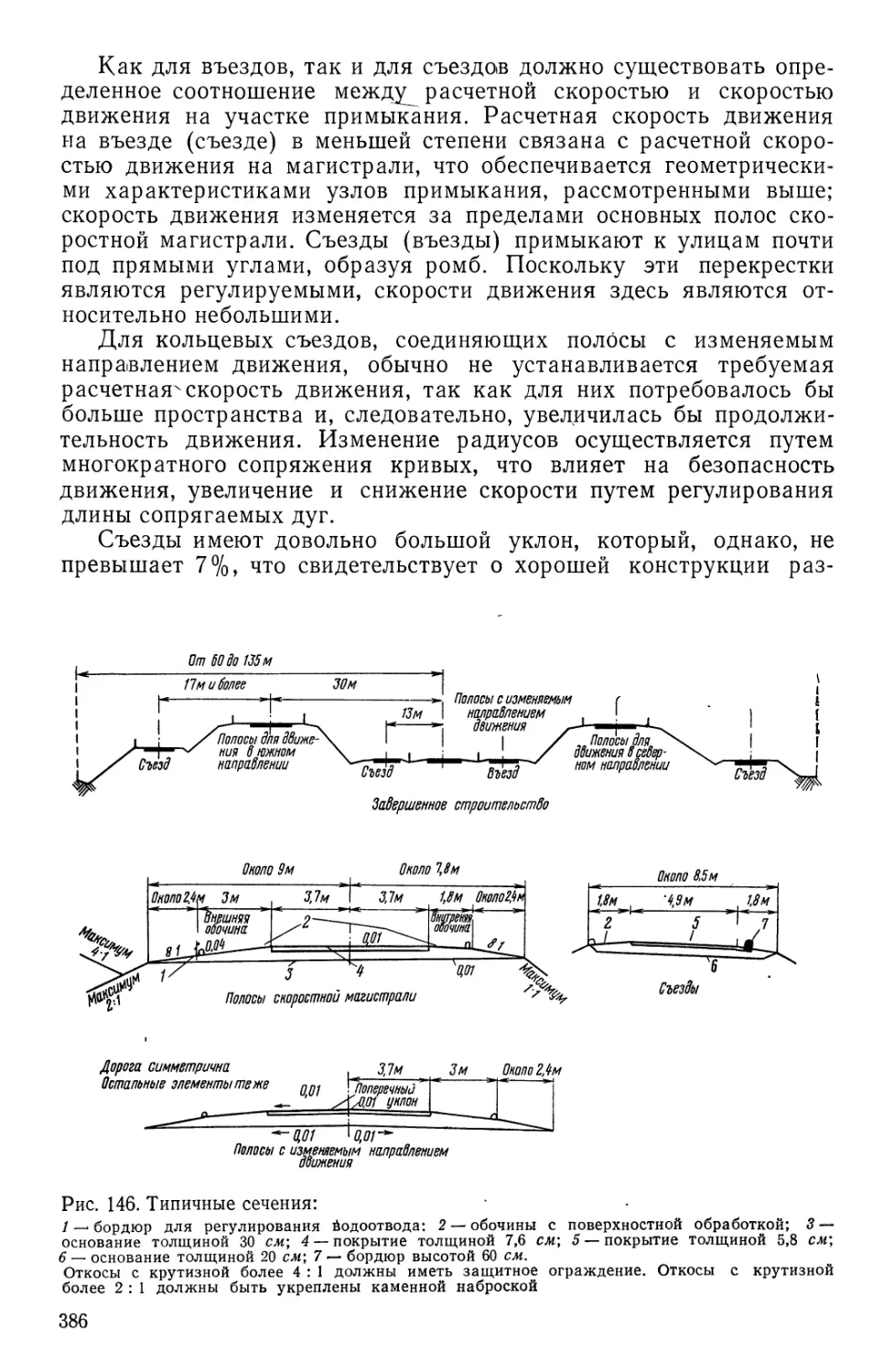









































Text
ТЕОРИЯ
ТРАНСПОРТНЫХ
ПОТОКОВ
И УПРАВЛЕНИЕ ИМИ
д. ДРЮ
ТЕОРИЯ
ТРАНСПОРТНЫХ
ПОТОКОВ
И УПРАВЛЕНИЕ ИМИ
Перевод с английского
Е. Г. КОВАЛЕНКО и Г. Д. ШЕРМАНА
Под редакцией чл.-корр. АН СССР
Н. П. БУСЛЕНКО
Москва «Транспорт* 1972
TRAFFIC FLOW
THEORY AND
CONTROL
DONALD R. DREW
HEAD, DESIGN AND TRAFFIC DIVISION
TEXAS TRANSPORTATION INSTITUTE
AND
ASSOCIATE PROFESSOR OF CIVIL ENGINEERING
TEXAS A&M UNIVERSITY
McGRAW-HILL BOOK COMPANY
NEW. YORK ST. LOUIS SAN FRANCISCO
TORONTO LONDON SYDNEY
УДК 519.152
Теория транспортных потоков и управление
ими. Дрю Д. Изд-во «Транспорт», 1972 г.,
стр. 1—424.
Книга известного американского специалиста
Д. Дрю—самая крупная в мировой литературе мо-
нография по теории транспортных потоков.
Теория транспортных потоков — новая от-
расль знания, получившая весьма интенсивное
развитие и оформившаяся в последние годы в са-
мостоятельную научную дисциплину. В книге до-
статочно подробно рассматриваются элементы
системы «водитель — автомобиль — дорога» и мо-
дели движения транспортных потоков. Описаны
современные методы регулирования движения на
сложных узлах дорог и скоростных магистралях
и‘методы проектирования экономичных транспорт-
ных систем с высокой пропускной способностью.
Книга представляет интерес для широкого кру-
га лиц, занимающихся изучением движения авто-
транспортных средств, проектированием и экс-
плуатацией дорог, специалистов в области иссле-
дования операций, научных работников — матема-
тиков, инженеров, экономистов, а также аспиран-
тов и студентов как математических, так и инже-
нерных специальностей. Рис. 159, табл. 29, библ.
268.
3-18-3
33-72
ПРЕДИСЛОВИЕ РЕДАКТОРА
Теория транспортных потоков, особенно в части применения ма-
тематических методов, переживает период исключительно бурного
развития и широкого интереса к ней со стороны практики. Это
объясняется главным образом следующими двумя причинами.
Во-первых, в связи с ростом интенсивности движения автотранс-
портных средств по городским магистралям изменился общий ха-
рактер уличного движения.
В часы «пик» число автомобилей, приходящихся на единицу
длины магистрали, приближается к границам насыщения, опреде-
ляемым предельной пропускной способностью дорог и перекрестков.
Высокоинтенсивные транспортные потоки характеризуются такими
свойствами и закономерностями, благодаря которым приобретают
существенное значение проблемы эффективного управления и ра-
циональной организации уличного движения. При этом оказывает-
ся, что малые изменения параметров отдельных участков дорог или
перекрестков (например, возникновение на первый взгляд незна-
чительной помехи движению, ошибки регулирования и т. д.) могут
привести к значительным отклонениям в общей пропускной спо-
собности магистрали. Другими словами, очередь автомобилей рас-
тет быстрее, чем снижается степень пропускной способности участ-
ка дороги. Кроме того, интенсивность движения на данном участке
дороги зависит от ситуации не только на ближайших к нему уча-
стках, но и на отдаленных, и даже на других магистралях города
или района.
Изучение упомянутых особенностей и их влияния на эффектив-
ность эксплуатации транспорта и дорожной сети требует новых
подходов к исследованию автомобильных потоков. Привычные и
хорошо разработанные экспериментальные методы уже не могут
удовлетворить всех запросов практики. Натурный эксперимент
остается основным средством получения сведений о закономерно-
стях движения транспорта только в локальном масштабе, для не-
больших участков магистралей и отдельных перекрестков. Экспери-
5
ментальные исследования глобального масштаба для больших ма-
гистралей и групп перекрестков и, тем более, для города или
района в целом, оказываются малоэффективными из-за целого ряда
технических, организационных и экономических причин.
Другим поводом для расширения интереса к математическим
методам теории транспортных потоков является общая тенденция
«математизации» прикладных и описательных наук и особенно по-
явление быстродействующих электронных вычислительных машин
(ЭВМ). Возможность выполнения в короткие сроки большого объе-
ма вычислений стимулирует создание достаточно точных мате-
матических моделей транспортных потоков и внедрение системного
подхода в методику их исследования. Получают распространение
тонкие методы теории массового обслуживания, теории случайных
процессов и качественной теории динамических систем. Становится
доступным обследование большого числа вариантов и определение
оптимальных решений.
Современные исследования транспортных потоков предъявляют
повышенные требования к математической подготовке специалис-
тов-транспортников.
В связи с этим возникают трудности в (изложении предмета на
уровне, достаточно высоком в научном отношении и, в то же время,
доступном широкому кругу инженеров.
Книга Д. Дрю, перевод которой предлагается советскому чита-
телю, обладает тем ценным качеством, что она достаточно полно
освещает современные технические идеи и наиболее распростра-
ненные методы расчета характеристик транспортных потоков, не
выходя за рамки обычных курсов математики технических высших
учебных заведений.
Первая часть книги (главы 1—5) посвящена содержательному
описанию процесса функционирования транспортного потока, его
формализации и математическому моделированию. Существенное
внимание уделяется системному подходу к транспортным пробле-
мам. В главах 6—10 развиваются важные для приложений методы
теории вероятностей, 'математической статистики и теории массового
обслуживания. Большой интерес представляет так называемый де-
терминистический подход к транспортным проблемам (главы 11 —
13) и метод физических аналогий. Главы 14—15 посвящены неко-
торым практическим задачам, связанным с проектированием дорог
и регулированием уличного движения.
Книга будет полезна широкому кругу читателей: студентам, ин-
женерам и научным работникам. Ее изучение может служить осно-
вательным введением в современную теорию транспортных по-
токов.
Н. П. Бусленко
Перевод книги выполнен Коваленко Е. Г. (предисловие автора,
гл. 6—15) и Шерманом Г. Д. (гл. 1—5).
ПРЕДИСЛОВИЕ АВТОРА
Качество проектирования автомобильных дорог, эффективность
их функционирования и безопасность движения, а в конечном счете
условия и возможности будущего развития транспортных систем —
все это зависит от непрерывной подготовки высококвалифицирован-
ных инженеров-транспортников. До сих пор усилия по обеспечению
необходимого количества таких специалистов не всегда были успеш-
ными. Несмотря на то, что развитие транспорта непрерывно вы-
двигает перед США все новые и новые серьезные проблемы, поч-
ти 20% должностей по этой специальности остаются вакантными.
Эта нехватка специалистов вызывается тем, что профессия ин-
женера-транспортника лишена привлекательности и заманчивых
перспектив, открывающихся в таких новых областях техники, как
космонавтика, электроника и вычислительная техника. По иронии
судьбы ряд авиационно-космических фирм и групп исследования
операций, не получая достаточных контрактов от министерства обо-
роны, обратились к исследованию транспортных потоков и проблем
перевозок.
А в это время толпы донкихотов блуждают по всей стране и ве-
дут рыцарские поединки с гигантскими ветряными мельницами
Детройта. Читателей, надеющихся увидеть еще одну попытку при-
ручить этих детройтских тигров, ожидает разочарование. В этой
книге автор не смотрит на автомобиль как на какое-то оружие. Ав-
томобиль рассматривается как элемент системы «человек — авто-
мобиль — дорога».
Основное назначение этой книги — изложить теорию транспорт-
ных потоков и технику их регулирования как научную дисциплину,
способную привлечь к себе молодые умы. Второе назначение кни-
ги— дать специалистам-практикам представление о современных
методах исследования транспортных потоков.
Хотя здесь и рассматривается теория, книга не является чисто
теоретической. Необходимые познания в математике не выходят за
пределы дифференциальных уравнений. Эта книга является при-
7
кладной точно так же, как проектирование транспортных систем
является прикладной научной дисциплиной. Здесь находят приме-
нение экспериментальная психология, математика, физика и мате-
матическая статистика.
Книга написана на основе двух источников. Часть материала
представляет собой записи лекций, прочитанных для студентов двух
курсов факультета гражданского строительства Техасского уни-
верситета по специальностям «Проектирование транспортных си-
стем» и «Теория транспортных систем».
Однако значительную часть книги составляют результаты науч-
ных исследований, проведенных в Техасском транспортном инсти-
туте, в которых автор принимал непосредственное участие. Автор
глубоко благодарен студентам и сотрудникам Техасского транс-
портного института и факультета гражданского строительства Те-
хасского университета.
Автор выражает искреннюю признательность руководителю на-
учных исследований в Техасском университете профессору кафед-
ры гражданского строительства Ч. Кису, вдохновившему его на
эту работу. Кис является соавтором многих работ, из которых был
почерпнут материал этой книги. Гл. 13 заимствована из статьи
«Уровень обслуживания на автомобильных магистралях как энер-
гетическая модель для шума ускорения», написанной профессором
Кисом совместно с научным сотрудником К. Дудеком и получив-
шей специальную премию.
Материал книги был заимствован и из других источников. В гл. 8
и .15 широко использованы результаты наблюдений за движением
и контрольных исследований на дорогах, выполненных совместно с
деканом факультета наблюдения и регулирования движения Техас-
ского транспортного института г-ном У. Маккаслендом, деканом
факультета транспортных систем д-ром Дж. Уоттлуортом, научным
сотрудником д-ром Дж. Буром и заместителем декана колледжа
при Техасском университете д-ром Ч. Пиннеллом.
Автор признателен всему персоналу Техасского технологическо-
го института за помощь на многих этапах работы. Особую благо-
дарность автор выражает г-ну К. Брюэру из Техасского техноло-
гического института и д-ру Б. Смиту из Канзасского государствен-
ного университета за критический просмотр рукописи.
Дональд Р. Дрю
ГЛАВА I
АВТОМОБИЛЬ
В настоящей главе рассматривается механика автомобиля. Извест-
но, что механика делится на три части: статику, кинематику и ди-
намику. К статическим характеристикам автомобиля относятся его
размеры и вес. Кинематика занимается изучением движения без
рассмотрения его причин и является по сути дела геометрической
наукой. Поэтому не удивительно, что вопрос о соотношении види-
мых элементов дороги с размерами и эксплуатационными характе-
ристиками автомобиля относят к проектированию геометрических
элементов.
Динамика занимается изучением сил, вызывающих движение
или вносящих в него изменения. Основными движениями, или ма-
неврами, автомобиля являются разгон, поворот и торможение.
1. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Размеры автомобиля определяют ширину полосы движения, шири-
ну обочины, длину и ширину площадок для стоянки, характер вер-
тикальных кривых, расстояние видимости и геометрию устройств
для расчленения транспортного потока на части. От веса автомоби-
ля зависит не только тип дорожного покрытия, но и расход топли-
ва, а также скорость движения.
Хотя за период е 1930 по 1960 гг. средняя длина легковых автомо-
билей увеличилась с 4 191 до 5 334 мм, разрыв 1 270 'мм между са-
мым коротким и самым длинным автомобилем остался неизменным
II]. При параллельном размещении автомобилей на стоянке за ши-
рину последней обычно принимают величину 6,7 м [2].
С 1930 г. до начала второй мировой войны ширина автомобилей
увеличивалась. С 1945 г. по настоящее время сохраняется средняя
ширина 1 956 мм при разрыве между самым узким и самым широ-
ким автомобилем в 305 мм. При современных скоростях движения
минимальная ширина полосы для стоянки составляет 2,45 м, а
обочины — 3,05 м.
9
Средняя высота автомобилей постоянно уменьшается — с
1 829 мм в 1930 г. до 1 397 мм в 1960 г. Разрыв 152 мм между са-
мым высоким и самым низким автомобилем остался без изменений.
Уменьшение высоты автомобиля обеспечило сокращение высоты
центра тяжести (с 635 до 533 мм) и повышение устойчивости. До-
рожный зазор, по-видимому, стабилизировался на уровне
127 мм [3].
Средний вес легковых автомобилей увеличился с 1 588 кг в
1930 г. до 1 814 кг в 1960 г.; разрыв между самым легким и самым
тяжелым автомобилем составил 907 кг в 1960 г. против 1 361 кг в
1930 г. Расход топлива тесно связан с весом автомобиля, однако
переход к кузовам обтекаемой формы и усовершенствование дви-
гателей позволили снизить расход топлива за три указанных деся-
тилетия в среднем на 25% [!]•
2. КИНЕМАТИКА АВТОМОБИЛЯ
Во всех случаях, где сила вызывает перемещение, обязательно
присутствует ускорение. Поэтому, прежде чем изучать силы, дей-
ствующие на движущийся автомобиль, необходимо рассмотреть не-
которые вопросы ускоренного движения.
Ускорение dv/dt & Скорость if Расстояние К
du/dt=a
I
j________________
ив Скорость V
Рис. 1. Равномерно ускоренное
движение
Рис. 2. Движение с переменным
ускорением
10
Если предположить, что ускорение постоянно, можно получить
следующие выражения:
dv
——а
dt
(1)
V t
J dv = [adt‘,
Vo 0
o=z>0-|-a/;
X t
J dx= j" at) dt-,
о о
(2)
(3)
где a — ускорение; v — скорость; t>0 — начальная скорость; x — рас-
стояние; t — время.
Формулы (1) — (3) выражают соотношение между ускорением и
временем, скоростью и временем и расстоянием и временем при
равномерно ускоренном движении (рис. 1). Из выражения (1) мо-
жет быть получена формула, для расстояния как функции скорости
dv dx dv
а —-----.-----------v;
dx dt dx
V
adx=§ vdv,
v0
X = -L_^2_v^
(4)
3. ДВИЖЕНИЕ С ПЕРЕМЕННЫМ УСКОРЕНИЕМ
Если предположить, что ускорение не постоянно, а изменяется об-
ратно пропорционально скорости, то можно получить основные фор-
мулы, связывающие ускорение, скорость и расстояние со временем.
Обратно пропорциональная зависимость между ускорением и ско-
ростью выражается следующим дифференциальным уравнением:
dv
dt
(5)
где аир — постоянные.
.Постоянная а имеет размерность ускорения, а р-1 — размер-
ность времени. При о = 0 имеем -^-=0, следовательно, а — макси-
dt
мальное ускорение, --------максимальная достижимая скорость.
11
Если в момент времени / = 0 автомобиль движется со скоростью
Vo, пределы интегрирования для выражения (5) равны
V t
—₽ J a —J
VQ 0
и формула, связывающая скорость со временем, имеет вид:
In (a — р*>)
V
V0
a — pt/
a —pt/0
е-^-,
v= — + (6)
Так как г»=, то, интегрируя выражение (6), можно выра-
dt
зить расстояние как функцию времени
+ (7)
Наконец, подставляя (6) в (5)х получаем соотношение между
ускорением и временем при маневре, связанном с изменением ско-
рости
(8)
Кривые, соответствующие уравнениям (5) — (8), показаны на
рис. 2.
Наиболее ценным качеством современного легкового автомоби-
ля является его маневренность в транспортном потоке, которая про-
является в приемистости. Последняя является важным фактором
при движении по примыкающим въездам, обгоне на двухполосных
дорогах и вообще при движении по автомагистралям. Движение
автомобиля, скорость которого изменяется с наибольшей возмож-
ной быстротой от какой-то начальной до максимальной, довольно
точно описывается моделью движения с переменным ускорением.
4. ДИНАМИКА АВТОМОБИЛЯ
На рис. 3 показаны силы, приложенные к автомобилю. К силам,
препятствующим движению автомобиля, относятся сопротивление
воздуха [4], сопротивление качению, сопротивление, создаваемое
подъемом дороги [5], и сопротивление трения [6]. Сопротивление
качению — это результирующая внутренних сил, которые препятст-
вуют движению автомобиля. Сопротивление, создаваемое подъемом
12
дороги, — это составляющая веса
автомобиля, которая действует в
плоскости дороги. Тяговое усилие
равно усилию, создаваемому двига-
телем, минус внутренние потери на
трение; именно это усилие преодо-
левает силы сопротивления и обес-
печивает перемещение автомобиля.
Приемистость автомобиля опреде-
ляется превышением тягового уси-
лия над силами сопротивления [7].
В большинстве случаев полага-
ют, что все вышеуказанные силы
Рис. 3. Силы, приложенные к дви-
жущемуся автомобилю:
1 — тяговое усилие, создаваемое дви-
гателем; 2 — сопротивление воздуха;
3 — сопротивление качению; 4 — трение
между колесами и дорогой; 5 — сопро-
тивление, вызванное подъемом дороги;
6 — вес автомобиля
приложены к центру тяжести авто-
мобиля. Однако сила трения действует между шинами и поверх-
ностью дорожного покрытия. Именно трение позволяет водителю
двигаться с места, останавливаться и маневрировать. Трение мож-
но определить как силу, препятствующую движению. Обычно учи-.
тывают трение двух видов — трение качения и трение скольжения,
причем каждое из них можно подразделить на трение покоя и тре-
ние движения.
Трение скольжения представлено бесчисленным множеством
явлений, в частности медленным движением автомобиля при тормо-
жении. Трение покоя при скольжении больше трения движения.
При покое из-за небольших шероховатостей между двумя телами,
по-видимому, устанавливается более тесный контакт. Известно, что
после начала движения как для быстрого, так и для медленного
перемещения одного тела по поверхности другого требуется одна
и та же сила. Следовательно, теоретически трение скольжения не
зависит от относительной скорости контактных поверхностей; это
положение оправдывает применение описанной в § 1 модели движе-
ния с постоянным ускорением в качестве модели торможения.
5. ТОРМОЖЕНИЕ
Условия торможения автомобиля на подъеме показаны на рис. 4,
где W—вес автомобиля; v0 — скорость в начале торможения; f —
коэффициент трения между колесами и дорогой; у — угол подъема;
G — подъем в процентах, деленный на 100 (равен tgy); g— уско-
рение силы тяжести; х— тормозной путь по дороге; Db— тормозной
путь по горизонтали. Тормозной путь определяется путем решения
уравнения сил, действующих на автомобиль в плоскости дороги,
— a4-r/cosT4-r sin Г-=0. . (9)
g
Поскольку торможение вызывает остановку автомобиля = 0),
по формуле (4) а= —-—; кроме того, Db = x cos у, следовательно,
13
2§(/+G) ‘
(Ю)
Если g'=9,8 м/сек2, а ско-
рость v0 выражена в км/ч, то
тормозной путь в метрах
254 (f + G)
(Н)
В действительности при торможении коэффициент трения между
шинами и дорожным покрытием не является постоянной величиной.
При пользовании формулой тормозного пути полагают, что коэффи-
циент f характеризует весь диапазон изменения скорости. Однако
результаты экспериментов показывают, что значение f не одинаково
при всех скоростях, а изменяется обратно пропорционально скоро-
сти. При высоких скоростях фактический тормозной путь зависит
в большей степени от устройства тормозной системы, чем от про-
скальзывания шин. Временное ухудшение работы тормозов, вызы-
ваемое нагревом, давление воздуха в шинах, вид протектора, тип
и состояние дорожного покрытия, наличие на дороге воды, грязи
или льда заметно сказываются на коэффициенте трения [8].
В области изучения торможения и предотвращения проскальзы-
вания шин были проведены многочисленные исследования. В рабо-
те [9] сообщаются сведения о тормозных характеристиках автомо-
билей, в частности приводятся данные по новым автомобилям, на-
ходящимся в отличном состоянии, и по автомобилям как до, так и
после технического обслуживания и усовершенствования их тор-
мозных систем.
При выборе значения коэффициента трения для конкретных ус=
ловий необходимо учитывать его зависимость от скорости, веса и
типа автомобиля, типа тормозов, а также от устройства приборов
для его определения.
Проскальзывание шин при больших скоростях движения затруд-
няет управление автомобилем и часто приводит к аварии. Специа-
листы по вопросам проскальзывания щин -и его предотвращения ре-
комендуют: отмечать проскальзывание шин во всех судебных по-
становлениях в связи с дорожно-транспортными происшествиями;
включать в курс обучения водителей соответствующие рекоменда-
ции; снабжать водителей сведениями о состоянии дорог; устанав-
ливать указатели на скользких участках дороги [10].
6. РАСЧЕТ СКОРОСТИ
По длине Db следов, оставленных шинами заторможенного автомо-
биля на дороге, можно определить скорость автомобиля v в начале
торможения (см. § 5). Для определения тормозного пути Db внача-
ле измеряют длину следов каждой шины, складывают их и делят
14
на 4. Затем по известной скорости Vt путем пробного торможения
при аналогичных условиях определяют коэффициент трения:
254Z)z
(12)
Искомую скорость v находят по формуле (И), а после подста-
новки значения f — из формулы (12):
г'=(тг)Т”‘- (13)
\ L>t /
Расчетная скорость, определенная по формулам (12) и (13),
всегда оказывается меньше фактической. Причина этого состоит в
том, что любое уменьшениё скорости до начала скольжения и нали-
чие какой-то скорости при ударе, если речь идет об аварии, закон-
чившейся ударом, не сказывается на длине следов шин автомобиля.
7. УДАР И СТОЛКНОВЕНИЕ
Как видно из § 6, часто возникает необходимость в определении
скорости автомобиля в момент удара. Кроме того, данные о силах
и деформациях, вызываемых столкновениями, весьма важны для
конструкторов автомобилей и проектировщиков геометрических
элементов дороги. Причиной многих тяжелых и смертельных несча-
стных случаев является столкновение автомобиля со стационарны-
ми сооружениями в полосе отвода автомобильной дороги.
Допустимое с физиологической точки зрения замедление опре-
деляет конструкцию предохранительных поясов и ремней для во-
дителей. Допустимые нагрузки связаны со временем (до 40 g в те-
чение нескольких десятых долей секунды) и скоростью нарастания
усилия (не более 500 glceK) [11]. Теоретически выраженная через g
нагрузка на водителя равна средней силе F, действующей на авто-
мобиль при ударе, деленной на вес автомобиля W
a=-^g. (14)
Среднюю силу при ударе можно определить, приравняв умень-
шение кинетической энергии автомобиля к работе, затраченной на
его деформацию,
где d — суммарная деформация.
Известно, что удар на- большой скорости не обязательно связан
с воздействием на водителя недопустимо больших нагрузок, так как
автомобиль поглощает значительную энергию. Сравнение результа-
тов испытаний на лобовое столкновение двух автомобилей с резуль-
татами, полученными при столкновении с неподвижным препятстви-
15
Рис. 5. Характеристики удара и столкно-
вения:
1 — столкновение автомобиля с неподвижным
препятствием, случай Г, 2 — сплющивание;
3 — препятствие; 4 — лобовое столкновение
двух автомобилей, случай 2
ем, показало, что связанные
с замедлением силы пример-
но одинаковы. Отметим, что
во втором случае (рис. 5)
величина поглощаемой каж-
дым автомобилем кинетиче-
ской энергии соответствует
столкновению с неподвиж-
ным препятствием при ско-
рости 48 км!ч. Это наблюде-
ние противоречит распро-
страненному мнению, что
нагрузка на каждого води-
теля пропорциональна сум-
ме скоростей столкнувшихся
автомобилей.
Результаты испытаний
свидетельствуют о необходи-
мости тщательного констру-
ирования рам автомобилей
[12].- У некоторых из числа
подвергнутых испытаниям
автомобилей сплющивание
передней части при столкновении не вносило заметного вклада в
замедление движения. По-видимому, результаты аварий были бы
не столь тяжелыми, если бы рамы автомобилей включали элемен-
ты, предназначенные для поглощения энергии при ударе.
Кроме того, как видно из рис. 5, последствия столкновения авто-
мобиля с каким-либо стационарным сооружением могут быть зна-
чительно смягчены путем увеличения поглощения энергии этим
препятствием. Большое значение имеет разработка критериев про-
ектирования ограждений и столбов дорожных знаков, обеспечиваю-
щих уменьшение числа смертельных исходов и тяжелых увечий при
наезде на них, причем следует помнить, что возможность повреж-
дения дорожных сооружений имеет второстепенное значение.
8. УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
Большие успехи достигнуты в выявлении факторов, от которых за-
висит управляемость автомобиля, определении относительной важ-
ности, объективном их измерении и нахождении закономерностей
изменения [13]. В число этих факторов входят угол бокового увода
и боковая реактивная сила.
Движение автомобиля определяется углами бокового увода пе-
редних и задних колес и соотношением между ними [14]. Из-за на-
личия боковой силы, обусловленной центробежным ускорением,
приложенным к центру тяжести автомобиля, направление, обеспе-
чиваемое рулевым механизмом, должно отличаться от заданного
направления движения на угол бокового увода. Если угол бокового
16
увода передних колес -больше, чем задних, то автомобиль будет
двигаться по плавной кривой в направлении действия центробеж-
ной силы [15]. В этом случае говорят о недостаточной поворачивае-
мости автомобиля. Если же угол бокового увода задних колес боль-
ше, чем передних, то автомобиль будет двигаться по кривой в про-
тивоположном направлении. Автомобиль с недостаточной поворачи-
ваемостью характеризуется лучшей управляемостью, чем автомо-
биль с избыточной поворачиваемостью, для которого, например,
требуется менее широкая полоса при повороте [16]. На управляе-
мость автомобиля влияют также давление воздуха в шинах и рас-
пределение веса по осям.
Для обеспечения равновесия центробежная -сила должна быть
уравновешена какой-то другой силой, которая называется боковой
реактивной силой; она возникает в результате трения в поперечном
направлении между шинами и дорожным покрытием. Очевидно, что
боковая реактивная сила изменяется в зависимости от угла боко-
вого увода и определяется конструкцией шины и дорожным покры-
тием. Причем, поскольку эта сила снижается при уменьшении
высоты протектора, изношенные шины, по-видимому, обеспечивают
лучшую управляемость, чем новые [17].
9. ПОВОРОТ АВТОМОБИЛЯ
При рассмотрении поворота автомобиля проблемы управляемости
усложняются. Например, задние колеса не могут следовать по тем
же дугам окружности, что и передние; это явление называют несов-
падением следов при повороте. Радиус поворота передних колес
больше, чем задних, поэтому радиус поворота наружного переднего
колеса является определяющим и его называют минимальным ра-
диусом поворота автомобиля. Радиус поворота автомобиля можно
определить путем испытания специально отобранных автомобилей
[18], расчетным путем или при помощи моделей [19]. Эта характе-
ристика автомобиля играет важную роль при проектировании
устройств для расчленения
транспортных потоков, сто-
янок и подъездных дорог
[20].
При повороте на любой
автомобиль действует цент-
робежная сила (радиальная
сила, направленная от цен-
тра поворота), противопо-
ложная центростремитель-
ной силе, вызываемой трени-
ем колес о дорогу. Если до-
рога имеет поперечный
уклон, то составляющая ве-
са автомобиля, параллель-
ная поверхности дороги,
Рис. 6. Силы, действующие на автомо-
биль при повороте:
W — вес автомобиля; f — коэффициент
трения в поперечном направлении; g—
ускорение силы тяжести; v — скорость
автомобиля;/? — радиус поворота; у —
угол поперечного уклона; e = tgy (попе-
речный уклон); Т — ширина колеи; Н —
высота центра тяжести
17
также действует в направлении, противоположном центробежной
силе. Этот случай показан на рис. 6.
Приравнивая составляющие центробежной и центростремитель-
ной сил, а также веса автомобиля, параллельные поверхности доро-
ги, получаем
a cos y=Wf cos y+IT sin y. (16)
S
При криволинейном движении основное соотношение между ус-
корением а, скоростью v и радиусом кривизны R имеет вид:
<7/2
Подставляя выражение (17) в формулу (16) и обозначая e=tgy,
где е— уклон, измеряемый перепадом высоты на поперечном уча-
стке дороги длиной 1 м, получаем основное выражение, связываю-
щее уклон, коэффициент трения в поперечном направлении, радиус
кривизны и скорость автомобиля,
R = —v2 ? (18)
g(e+f) v '
Если £=9,8 м]сек2, а скорость автомобиля выражена в км]ч, то
Сходство между уравнениями для основных маневров — тормо-
жения и поворота — очевидно из сравнения рис. 4 и 6, а также вы-
ражений (10) — (11) и (18) — (19).
10. УСТОЙЧИВОСТЬ АВТОМОБИЛЯ
Устойчивость автомобиля на повороте можно рассчитать, опреде-
лив моменты относительно его наружных колес (см. рис. 6). По-
скольку при опрокидывании вес автомобиля действует только на
наружные колеса, это выражение имеет вид:
(— a cos 7— IF sin у')//=IF cos 7 Т-. (20)
\ g / 2
Разделив обе части на HWcosy, получим
Правая часть выражения (21) представляет собой коэффициент
устойчивости, где Т — ширина колеи и Н — высота центра тяжести
автомобиля.
18
Из выражения (16) можно получить
а л
-----e—f.
g
Объединение формул (21) и (22) дает
J 2Н
(22)
(23)
Смысл этого выражения таков: любой автомобиль будет при
Т
повороте скользить по дороге, если его размеры таковы, что -
превышает коэффициент трения f. Величина трения зависит от уско-
рения автомобиля—поперечного уклона е, характеристик шин и
дорожного покрытия. Следовательно, теоретически при движении с
большой скоростью по закруглению без виража автомобиль не дол-
жен опрокидываться (даже если дорога покрыта льдом), так как
невозможно обеспечить достаточное трение, препятствующее сколь-
жению.
Стонекс [21] сравнил влияние на коэффициент устойчивости
Т
2Н
изменения ширины колеи Т и высоты центра тяжести Н, причем для
обеих величин брались типичные значения. Чтобы отчетливо пред-
ставить влияние этих величин, надо взять частные производные вы-
ражения (23) как по Т, так и по Н, что даст соответственно —-—
2/7
Т
и-------. Изменение колеи оказывает меньшее влияние, чем высота
2/72
центра тяжести. Поэтому неудивительно, что повышение устойчи-
вости современных автомобилей осуществляется в основном путем
уменьшения высоты центра тяжести.
Понятие устойчивости важно
чаев поворота на горизон-
тальной дороге и поворота
на дороге с виражом. Около
трети из 12—13 тыс. ката-
строф со смертельным исхо-
дом, происходящих на авто-
мобильных дорогах США
каждый год, не связано со
столкновениями, причем в
большинстве этих случаев
автомобиль съезжает с до-
роги. На рис. 7 показаны
силы, приложенные к авто-
мобилю, скользящему по бо-
ковому откосу насыпи доро-
ги. В отличие от движения
не только при рассмотрении слу-
Рис. 7. Силы, действующие на скользя-
щий по откосу дороги автомобиль:
W — вес автомобиля; f — коэффициент
трения в поперечном направлении; g—
ускорение силы тяжести; а — ускорение
автомобиля; у — угол поперечного укло-
на: e=tgy; Т — ширина колеи; Н — вы-
сота центра тяжести
19
по виражу (см. рис. 6) в этом случае основное уравнение имеет вид:
£-+e=—=f, (24)
g r 2Я 7
где е — уклон откоса.
Если предположить, что автомобиль съезжает с дороги при не-
котором угле <р и движется по откосу и криволинейному кювету при
том же угле, то радиус кривизны траектории автомобиля можно
выразить через ф и arctge. Если подставить в выражение (24) зна-
чение а из формулы (17), то получим соотношение между коэффи-
циентом устойчивости автомобиля, уклоном откоса и коэффициен-
том трения шин о его поверхность, которое позволяет определить,
будет ли опрокидываться автомобиль, съезжающий с дороги при
известных угле ф и скорости. На этой основе возможен рациональ-
ный подход к проектированию откосов насыпи. ч
11. СИЛОВАЯ УСТАНОВКА
Тип силовой установки и ее размещение в значительной степени
определяют конструкцию автомобиля, уровень эксплуатационных
расходов и рабочие характеристики. В настоящее время основной
силовой установкой является бензиновый или дизельный двигатель,
который посредством механической трансмиссии приводит автомо-
биль в движение. Бензиновые поршневые двигатели современных
автомобилей характеризуются сравнительно малым термическим
к. п. д. Термический к. п. д. поршневых дизельных двигателей гру-
зовых автомобилей несколько выше; кроме того, они работают на
более дешевом топливе. Перспектива внесения усовершенствований
в конструкцию как того, так и другого типа двигателя довольно
ограничена, за исключением работ в области предотвращения вы-
деления в атмосферу несгоревших углеводородов и вредных газов,
вызывающих образование смога.
При эксплуатации автомобиля экономия проявляется в уменьше-
нии расхода топлива, времени поездки, объема технического обслу-
живания и амортизации. Обычно эти переменные представляют в
• виде функций уклона дороги, состояния дорожного покрытия и
класса автомобиля [5]. Например, почти для всех возможных соче-
таний автомобиля-тягача с прицепом, а также для городских и
междугородных автобусов определены расход топлива и время
поездки при различных уклонах дороги, скорости и весе. При умень-
шении уклона дороги грузовые автомобили обеспечивают большую
экономию на топливе и времени поездки, чем легковые (экономия
значительно больше при уменьшении уклона, например, с 9 до 6%,
чем с 6 до 3%). Расход топлива, по-видимому, связан с полным ве-
сом автомобиля, а время поездки—с отношением веса автомобиля
к мощности двигателя [22].
Целями подобных исследований вопросов эксплуатации автомо-
биля является определение правильной технической политики в час-
ти проектирования геометрических элементов дороги [23], планиро-
20
вание работ по усовершенствованию автомобильных дорог [24],
внедрение конструктивных новшеств [25]. Наибольшая экономия при
усовершенствовании силового агрегата, по-видимому, может быть
достигнута в следующих направлениях: создание облегченных и
более надежных двигателей меньших размеров; сокращение пер-
воначальных вложений в расчете на 1 л. г.; уменьшение стоимости
технического обслуживания и топлива.
Большой интерес представляют газотурбинные автомобили.
В настоящее время наибольшее распространение получили турбо-
реактивные авиационные двигатели. Подобную турбину можно
объединить с генератором, что позволит создать новую эффектив-
ную силовую установку.
12. ОСНОВНЫЕ ПРОБЛЕМЫ.
Необходимо изучать взаимодействие между шиной и дорогой при
переходе от трения качения к трению скольжения с тем, чтобы
определить характеристики шины и дорожного покрытия, требую-
щиеся для снижения чувствительности к пониженным значениям
коэффициента трения. Нужно разработать методы расчета и регу-
лирования скольжения. Если удастся количественно определить
факторы, определяющие возникновение скольжения, то появится
возможность его предсказания, а следовательно, и предотвращения.
Задачу борьбы -с несчастными случаями на дорогах следует ре-
шать путем сведения к минимуму числа столкновений автомобилей.
Столкновение двух автомобилей или автомобиля с неподвижным
препятствием представляет собой по сути дела передачу и преоб-
разование энергии; поэтому необходимо изучить этот процесс не
только с точки зрения действующих при столкновении сил, но и в
плане передачи энергии через элементы автомобиля водителю.
Имеется необходимость в создании автомобилей специального
назначения, например автомобилей для регулярных поездок. По-
добный автомобиль может быть рассчитан на двух человек, его
размеры будут значительно меньше даже по сравнению с современ-
ными компактными моделями, а в качестве источника энергии на
нем могут быть использованы высокоэффективные аккумуляторные
батареи или химические элементы. Специальный автомобиль друго-
го типа может быть снабжен автоматической системой управления,
предназначенной для высокоскоростных междугородных автомо-
бильных дорог (скорость движения — 240 км!ч).
ЗАДАЧИ
1. Водитель автомобиля, движущегося со скоростью 48 км/ч, решил обогнать ав-
томобиль, за которым он следует. Ускоренное движение автомобиля определяется
выражением
dv
.---= 4,0 —0,05г/,
dt
где v — скорость, м)сек, nt — время, сек.
21
Какова будет скорость автомобиля через 3 сек?
2. Сколько времени потребуется, чтобы скорость автомобиля (см. задачу 1)
увеличилась до 128 км/ч?
3. Полагают, что при съезде со скоростной автомобильной дороги скорость
автомобиля снижается с 80 до 32 км/ч. Учитывая, что f=0,2 и £=9,8 м/сек2, срав-
ните тормозной путь на примыкающем съезде с подъемом 4° с тормозным путем
на горизонтальном участке автомобильной дороги.
4. Водителю автомобиля, движущегося на холм со скоростью 80 км/ч, тре-
буется на 8,4 м меньше, чтобы остановить автомобиль после включения тормозов,
чем при движении с той же начальной скоростью вниз по этой же дороге. Коэф-
фициент трения между шинами и дорожным покрытием равен 0,55. Каковы уклон
дороги и тормозной путь при движении вниз с холма?
5. При движении ночью по двухполосной дороге интервал между автомобиля-
ми поддерживают на основании эмпирического правила, которое гласит, что на
каждые 16 км/ч скорости должна приходиться одна длина автомобиля. Два авто-
мобиля движутся друг за другом со скоростью 112 км/ч. Передний автомобиль
разбивается о заднюю часть неосвещенного грузового автомобиля, который стоит
на дороге. На какой скорости задний автомобиль столкнется с обломками перед-
него? (Время реакции равно 0,5 сек, а коэффициент трения — 0,65.)
6. Почему значение коэффициента трения, используемое при расчете тормоз-
ного пути, больше значения, которое берут при исследовании поворота?
7. Из-за недостатка места радиус виража ограничен 150 м. Максимальный (по-
перечный) подъем виража равен 0,06, а коэффициент трения в поперечном на-
правлении— 0,14. Какова предельная безопасная скорость?
8. Расстояние между осями двух концентрических виражей составляет 12 м.
Радиус внутреннего виража равен 300 м, а поперечный подъем — 0,10. Расчетная
скорость и коэффициент трения одинаковы для обеих дорог (f=0,16). Определи-
те подъем наружного виража.
9. Как определить сопротивление качению по результатам дорожных испы-
таний вашего автомобиля?
10. Какую мощность должен иметь двигатель вашего автомобиля для движе-
ния со скоростями от 32 до 80 км/ч?
11. Студент прослушал курс дорожного дела. Исходя из основных законов
механики и понятия расстояния видимости он предполагает, что тормозной путь
автомобиля выражается следующим образом:
х — ах% 4- b,
где х — расстояние от точки включения тормозов до точки остановки автомобиля;
х — скорость автомобиля в начале торможения; а, b — коэффициенты, связы-
вающие х с х (постоянны для данного автомобиля при данных условиях).
Работая в составе группы, оцените справедливость этого выражения. Опре-
делите значение коэффициента трения при испытаниях.
12. Движение автомобиля, который при разгоне с места максимально быст-
ро набирает предельную скорость, можно описать следующим эмпирическим вы-
ражением:
v = 0,3
ь
где / — время, сек-, у —скорость, м/сек, через t сек-, е — основание натуральных
логарифмов; а, b — нормированные коэффициенты, постоянные для лю-
бого конкретного автомобиля.
Работая в составе группы, выполните необходимые эксперименты с целью про-
верки этого выражения.
ЛИТЕРАТУРА
1. Stonex К. A. Review of Vehicle Dimensions and Performance Characteristics,
Highway Res. Board Bull., 195, 1958.
2. Froehlich W. R. Parking Facility Design, Highway Res. Board Bull.,
195, 1958.
22
3. M c Connell W. A. Passenger Car Overhand and Underclearance as
Related to Driveway Profile Design, Highway Res. Board Bull., 195, 1958.
4. С о n r a d L. E., Pawley E. R. Air Resistance of Motor Vehicles,
Highway Res. Board Proc., vol. 15, pp. 70—80, 1935.
5. M о у e r R. A. Motor Vehicle Requirements on Highway Grades, Highway
Res. Board Proc., vol. 14, pp. 147—186, 1934.
6. M о у e r R. A. Roughness and Skid Resistance Measurements of Pave-
ments in California, Highway Res. Board Bull., 37, pp. 1—35, 1951. (См. также
Institute of Transportation and Traffic Engineering, University of California,
Berkeley, Special Report, «Summary of 1953 Skid Resistance Tests»).
7. Schmidt R. E. High Speeds vs. Horsepower, Traffic Quart, July, 1954,
pp. 339—350.
8. N о r m a n n О. K. Braking Distances of Vehicles from High Speeds,
Public Roads, vol. 27, № 8, pp. 159—169, June, 1953.
9. «Braking Performance of Motor Vehicles», U. S. Bureau of Public Roads,
1954, 170 pp. (Conclusions 9—10, Procedure and Results 15—50).
10. Skid Prevention Research Committee Reports, Highway Res. Board Bull.,
219, 1959.
11. Platt F. N. «А New Approach to the Design of Safer Guard for
Highways», Traffic Safety Department, Ford Motor Company, Dearborn, Mich.
12. Severy D. M., Mathewson J. H. Automobile-Barrier Impacts,
Highway Res. Board Bull. 91, 1954.
13. Stonex K. A. Car Control Factprs and Their Measurement, J. Soc.
Automotive Engrs., vol. 48, pp. 81—93, 1941.
14. S e g a 1 L. Research in the Fundamentals of Automobile Control and
Stability, SAE Trans., vol. 65, p. 527, 1957.
15. О Iley M. Road Manners of Modern Cars, J. Inst. Automobile Engrs.
(London), vol. 15, p. 147, February, 1947.
16. Fox M. L. Relations between Curvature and Speed, Highway Res. Board
Proc., vol. 17, pp. 202—214, 1937.
17. В u 11 A. W. Tire Behavior in Steering, SAE Trans., vol. 34, pp. 344—350,
1939.
18. Y о u n g J. C. Truck Turns, Calif. Highways Public Works, March-April,
1950, pp. 14—31.
19. F о x w о r t h De W. M. Determination of Oversized Vehicle Tracking
Patterns by Adjustable Scale Models, Highway Res. Board Proc., vol. 39, p. 479,
1960.
20. Bus Turn Radii, Mass Transportation, February, 1953.
21. Stonex K. A. Roadside Design for Safety, Highway Res. Board Proc.,
vol. 39, pp. 120—157, 1960.
22. Time and Gasoline Consumption in Motor Truck Operation, Highway Res.
Board Repts. 9A, 1950, 75 pp.
23. Willey W. E. Uphill Speeds of Truck on Mountain Grades, Highway
Res. Board Proc., vol. 38, pp. 304—310, 1953.
24. «Road User Benefit Analyses for Highway Improvements», pp. 89—112,
American Association of State Highway Officials, 1952. (Расходы на топливо, по-
крышки, масло).
25. Carmichael Т. J. Motor Vehicle Performance and Highway Safety,
Highway Res. Board Proc., vol. 33, pp. 414—421, 1953.
ГЛАВА II
ВОДИТЕЛЬ
1. ОБУЧЕНИЕ
Обучение можно проводить методом проб и ошибок, при котором
обучающийся пробует различные варианты решения задачи и усваи-
вает тот, который приводит к желаемой цели. Обучение может быть
также основано на передаче ранее накопленного опыта [1].
Умение управлять автомобилем складывается в основном из
практических навыков и усвоения ранее накопленного опыта [2].
Темпы обучения в значительной степени зависят .от простоты мате-
риала, его.усвоения слушателями и наличия обратной связи по
результатам. Чем проще задача, с которой сталкивается водитель,
тем больше вероятность ее правильного решения. Дорога должна
быть устроена таким образом, чтобы водителю не приходилось ре-
шать несколько задач одновременно. В этом проявляется первый из
трех, а именно технический аспект проблемы.
Второй фактор, влияющий на скорость обучения, связан со сте-
пенью усвоения материала и соответствует второму, образователь-
ному, аспекту. Чем лучше водитель разбирается в предлагаемых
ему задачах, что в некоторой степени зависит от частоты их повто-
рения, тем быстрее протекает процесс обучения [3]. Когда на пер-
вых скоростных автострадах были устроены полосы разгона, облег-
чающие вхождение в транспортный поток, многие водители долго
не могли научиться пользоваться ими, так как не понимали их на-
значения.
Третий фактор, влияющий на скорость обучения, — это обратная
связь по результатам. Чем лучше обучающийся чувствует обратную
связь по результатам в плане правильности или ошибочности его
решений, тем меньше вероятность того, что он усвоит неправиль-
ные навыки. Например, чтобы научиться хорошо стрелять из пуле-
мета, стрелок должен знать, поражает ли он цель. Что же касается
вождения автомобиля, то обратная связь по результатам проявля-
ется в третьем, принудительном, аспекте, а в последнее время — в
создании официальных курсов по подготовке водителей.
24
В процессе обучения водитель усваивает прошлый опыт и в
сходных ситуациях обнаруживает стандартные образцы поведения.
Набор заученных реакций — это мощный фактор, который может
дать великолепные результаты при правильном формировании.
2. МОТИВАЦИЯ
Включаясь в транспортный поток, водители преследуют различные
цели. Однако действия отдельного водителя в транспортном потоке
определяются, с одной стороны, желанием сэкономить время, за-
трачиваемое на поездку, и расстояние, а с другой — стремлением
к безопасности и комфорту. Страх перед возможной аварией лежит
в основе многих принимаемых водителем решений, связанных, на-
пример, с включением тормозов при появлении любой опасности.
Водители стремятся так вести автомобиль, чтобы обеспечить наи-
меньшее изменение скорости и минимальные отклонения от ком-
фортных условий; это приводит, например, к срезанию углов на
пересечениях без устройств для расчленения транспортного потока.
Возможности водителя зависят от того, сколь успешно его по-
буждают работать с максимально возможной эффективностью.
Мотивация является результатом сочетания бдительности и особен-
ностей характера водителя. Бдительность можно определить как
длительную способность к обнаружению определенных сигналов в
окружающей среде [4]. Особенности характера представляют собой
субъективный элемент, связанный с личностью водителя.
Ряд факторов могут вызвать снижение бдительности и ухудше-
ние работоспособности [5]. К их числу относятся утомление и ощу-
щение скуки. Человеком овладевает усталость или скука, если в
течение длительного времени его заставляют заниматься одним и
тем же делом, при этом в большинстве случаев снижается и рабо-
тоспособность. Основным результатом появления утомления или
ощущения скуки является сниженйе бдительности, а также способ-
ности делать все от тебя зависящее.
Усталость не всегда отрицательно сказывается на способности
водителя хорошо управлять автомобилем; если человек не выспал-
ся, его работоспособность значительно ухудшается из-за ослабле-
ния мотивации. Внимание водителя, которым овладело утомление
или скука, притупляется, поэтому возрастает вероятность серьез-
ных аварий. Усталый водитель менее осторожен и идет на риск, от
которого он отказался бы в нормальном состоянии. Возникновению
утомления и ощущения скуки у водителя в значительной степени
способствуют длительная спокойная езда и стесненная или неизмен-
ная поза [6].
Психическая и эмоциональная неустойчивость влияют на моти-
вацию [7]. В автомобиле человек ведет себя так же, как в обыденной
жизни [8]. Эмоции могут послужить причиной гибели. Эмоциональ-
ная неустойчивость и отрицательные эмоции, вызываемые многими
причинами, например гневом, страхом, ненавистью, беспокойством,
часто могут привести к иррациональному поведению водителя [9].
25
Неудовлетворительное вождение автомобиля — это, по-видимому,
проблема склада характера и социальной неполноценности [10].
Эмоции могут служить причиной частого превышения безопасной
скорости, ненужной или опасной смены полосы движения, чрезмер-
ного приближения к движущемуся впереди автомобилю и других
неосторожных действий.
3. ОСОБЕННОСТИ ХАРАКТЕРА ВОДИТЕЛЯ
Хотя для управления автомобилем требуется некоторая смыш-
ленность, внимательность, по-видимому, является более важным
качеством, чем высокий уровень интеллекта [11]. Была предпринята
попытка установить взаимосвязь определенных индивидуальных
характеристик с образцами поведения, которые отчетливо отличают
водителей, неоднократно попадавших в аварии, от хороших водите-
лей; однако в физиологических реакциях, координации движений,
времени реакции, возбудимости, коэффициенте умственного разви-
тия или большинстве объективных индивидуальных характеристик
не было обнаружено статистически значимых различий [12]. Одна-
ко в другой работе [13] указывается на важность таких факторов,
как юный возраст, семейное положение, низкий уровень образова-
ния, частая смена места работы и др.
Психологическая атмосфера, стремления и мифы американского
общества несомненно отражаются на отношении к автомобилю и
вносят немалый вклад в дорожно-транспортные происшествия. Оче-
видно, что многие водители либо из-за юного возраста, либо по
другим причинам не выполняют правила движения. Этот факт мож-
но отнести за счет недостаточного общественного осуждения опас-
ной езды. А некоторые водители полагают, что они могут управ-
лять автомобилем, как им хочется. Много внимания [14] было
уделено изучению поведения водителей в возрасте до 25 лет; в ре-
зультате пришли к выводу о необходимости улучшить программы
подготовки водителей с целью обучения правильным методам вож-
дения, ужесточить систему наказаний за нарушение правил движе-
ния и повысить требования к претендентам на получение водитель-
ских прав, обращать внимание на благотворное влияние на детей
соблюдения правил движения родителями.
4. ЗРЕНИЕ
Из всех органов чувств человека зрение является, несомненно, наи-
более важным в плане его контактов с окружающим миром. Для
решения многих эксплуатационных и проектных задач, связанных
с автомобильным транспортом, необходимо знать общие характе-
ристики зрения.
Чувство зрения складывается из нескольких различных возмож-
ностей глаза. Во многих отношениях глаз напоминает фотокамеру.
Свет проходит через зрачок, отражается хрусталиком и фокусиру-
ется на сетчатой оболочке. Последняя воспринимает световое
26
раздражение и преобразует его в сигнал, направляемый по зритель-
ному нерву в мозг. При вождении автомобиля важны следующие
характеристики зрения: острота, периферийное зрение, аккомода-
ция после ослепления (например, фарами встречного автомобиля),
восприятие цветов и восприятие разных планов. Это означает, что
водитель должен быть в состоянии идентифицировать объекты; гля-
дя строго вперед, он должен фиксировать движение по сторонам.
Водитель должен видеть дорогу ночью при слабом освещении и
слепящем встречном свете. Наконец, он должен быть в состоянии
различать цвета на знаках и сигналы светофора и определять отно-
сительные расстояния до различных объектов.
Одной из наиболее важных характеристик глаза является ост-
рота зрения, т. е. размер детали, которую глаз в состоянии разли-
чить. Остроту зрения обычно измеряют величиной, обратной мини-
мальному углу зрения, который противолежит наблюдаемому
объекту. Человек с нормальной остротой зрения 20/20 может раз-
глядеть в стандартной таблице Снеллена буквы высотой около
8,5 мм с расстояния 6,1 м. Область максимальной остроты, или ост-
рого зрения, занимает лишь сравнительно небольшую часть поля
зрения. При рассмотрении отдаленных предметов противолежащий
угол не должен превышать 3° или 1,5° по каждую сторону оптиче-
ской оси глаза. Предел острого зрения составляет 10°; при дальней-
шем увеличении угла зрения острота резко уменьшается [15]. До-
рожные знаки следует проектировать и размещать таким образом,
чтобы надпись была внутри зрительного конуса с углом при вер-
шине 10°.
Острота зрения водителя зависит от освещенности дорожного
знака, его контрастности, формы и времени, в течение которого во-
дитель может его видеть. Другой фактор, влияющий на способ-
ность человека распознавать предметы, связан с движением. Пере-
мещение объектов в поле зрения может происходить при движении
наблюдателя (например, в автомобиле), при движении объекта
(например, пешеход, пересекающий дорогу) и при одновременном
движении объекта и наблюдателя (обычная дорожная ситуация).
Чтобы учесть ухудшение остроты зрения при движении, Гудсон и
Миллер [16] ввели понятие динамической остроты зрения.
Способность видеть объекты, находящиеся вне конуса острого
зрения, называют периферийным зрением. Исследования показали,
что угол периферийного зрения водителя изменяется от 120 до 160°,
уменьшаясь по мере возрастания скорости автомобиля. Пери-
ферийное зрение чувствительно к движению и свету, поэтому может
привлечь внимание водителя к событиям по любую сторону от него.
Чувствительность является функцией угла, отсчитанного от опти-
ческой оси глаза [15].
Глаз обладает поразительными способностями обнаруживать
малые различия между предметами, но при зрительном оцени-
вании абсолютных значений человек сильно ошибается. Эта харак-
теристика глаза в особенности справедлива применительно к днев-
ному свету и проявляется при абсолютном оценивании размера,
27
расстояния, скорости и ускорения. Форбс [17] связывает ошибки в
определении скорости с увеличением частоты аварий на скоростных
автострадах, при которых сталкиваются движущиеся друг за дру-
гом автомобили. Оценки размера, расстояния, скорости и ускорения
взаимосвязаны. Следовательно, обеспечение одинаковых размеров
устройств регулирования движения способствует правильному оце-
ниванию расстояния. Стандартизация форм знаков и расположения
цветных линз светофоров также оказывает помощь водителям-
дальтоникам.
Как пешеходы, так и водители других автомобилей сильно оши-
баются при оценивании скорости движущегося автомобиля. Относи-
тельно способностей человека оценивать изменения скорости
известно очень мало.
5. ВИДИМОСТЬ В НОЧНЫХ УСЛОВИЯХ
Движение транспорта в ночных условиях всегда вызывает пример-
но вдвое большее число дорожно-транспортных происшествий, чем
днем. Возникающие при ночном вождении проблемы связаны не
только с темнотой, но и с опасностью утомления, сонливостью и
другими факторами. Хорошая видимость на ночной дороге достига-
ется при освещении, которое не вызывает ослепления и одновремен-
но обеспечивает надлежащую яркость покрытия, а также равномер-
ную и достаточную освещенность прилегающих участков.
Распознавание объектов на дорогах ночью происходит в основ-
ном по их силуэту [18]. В этом случае общий уровень яркости всего
объекта или его существенной части больше или меньше яркости
фона. Распознавание может также происходить по деталям поверх-
ности. При этом методе уровень освещенности сторон объекта,
обращенных к водителю, достаточен для того, чтобы сделать замет-
ными контрасты на их поверхностях. Обычно отдаленные объекты
распознают по силуэтам, а 'близкие — по деталям поверхности.
Если глаз обращен к освещенной зоне, то в него попадает свет.
Часть этого света отражается, и в глазу появляется рассеянный
свет. Идеальные условия достигаются при максимально возможной
равномерности освещения всего поля зрения, но даже при этом
условии образуется рассеянный свет. Эффект рассеянного света
приводит к тому, что на наблюдаемый объект накладывается яр-
кость, которая приводит к уменьшению яркостного контраста, не-
обходимого для распознавания [19]. Появление в поле зрения отно-
сительно яркого источника света (прямое ослепление) или его
отраженного изображения (зеркальное ослепление) приводит к
ухудшению видимости и зрительному дискомфорту. Это явление
необходимо учитывать при проектировании осветительных уст-
ройств как для автомобилей, так и для автомобильных дорог.
Проблема автомобильных фар сохраняет остроту на протяже-
нии многих лет, поскольку стремятся улучшить видимость без уве-
личения ослепления водителей встречным светом. В результате
совместной работы автомобильных и электротехнических фирм в
28
1939 г. была создана лампа-фара. В связи с необходимостью улуч-
шить систему ближнего освещения стали пользоваться противоту-
манным козырьком, который ограничивает распространение вперед
и вверх лучей, испускаемых нитью ближнего света. На некоторых
автомобилях была применена четырехфарная система освещения,
которая характеризуется повышенной мощностью и улучшенной
конструкцией линз [20]. Специалисты подчеркивают большое значе-
ние систематических осмотров фар для обеспечения максимальной
(видимости при минимальном ослеплении [21].
Стремясь к повышению комфортабельности, фирмы выпустили
автомобили с теплопоглощающими цветными ветровыми стеклами.
Эти стекла пропускают в инфракрасном диапазоне только полови-
ну лучистой энергии, но поскольку через них проходит меньше све-
та, ухудшается видимость, что создает потенциальную опасность
аварии [22]. В частности, из-за соответствующего ухудшения види-
мости испытания цветных ветровых стекол не дали каких-либо
результатов в части уменьшения ослепления. Более того, обнару-
жилось небольшое уменьшение остроты зрения и заметное ухудше-
ние восприятия разных планов.
Возможное объяснение того факта, что цветные ветровые стекла
не уменьшают ослепления, состоит в следующем: дискомфорт и
ухудшение видимости при ослеплении фарами встречного автомо-
биля, по-видимому, связаны с адаптацией, а не с яркостью [23].
В пользу этого утверждения говорит факт отсутствия зрительного
дискомфорта при встрече с автомобилем, у которого включены фа-
ры днем. Недостатки цветных контактных линз, применяемых для
вождения автомобилей ночью, аналогичны недостаткам цветных вет-
ровых стекол, поскольку и те и другие препятствуют попаданию
света на чувствительную сетчатку глаза [24].
Форбз [25] суммировал некоторые факторы, влияющие на эф-
фективность управления автомобилем в ночных условиях. Посколь-
ку ночью сложность и трудность решаемых водителем задач уве-
личивается, время реакции может увеличиться в 2 или 3 раза. При
езде ночью по дороге с интенсивным движением подобное увеличе-
ние может оказаться критическим сравнительно с временем, затра-
чиваемым на преодоление расстояния между двумя идущими друг
за другом автомобилями. В некоторых случаях авария может быть
связана со временем реакции зрачка. Исследования изменения диа-
метра зрачка показывают [26], что его расширение может происхо-
дить в 4 раза медленнее сужения под действием света. На расшире-
ние зрачка может потребоваться до 9 сек после того, как водитель
был ослеплен светом фар встречного автомобиля. Такое медленное
расширение зрачков может привести к тому, что водитель почти
все время будет плохо видеть темные предметы при движении авто-
мобиля мимо встречных автомобилей с включенными фарами или
уличных фонарей.
Водитель должен отчетливо представлять, что вести автомобиль
ночью намного труднее, чем днем, и что при недосыпании необхо-
29
димо избегать ночных поездок. При проектировании осветительных
устройств, знаков и разметки следует учитывать характеристики
человеческого глаза и стремиться в максимально возможной степе-
ни уменьшить эффекты, вызывающие утомление и сонливость.
6. ВЫСОТА ГЛАЗ ВОДИТЕЛЯ
В предыдущей главе были приведены данные, характеризующие
наметившуюся в последние годы тенденцию к снижению высоты
автомобиля. Эта тенденция привела к постепенному уменьшению
высоты глаз водителя относительно поверхности дороги, что в свою
очередь вызвало во многих случаях сокращение расстояния види-
мости. Что касается проектирования геометрических элементов до-
роги, то высота глаз водителя имеет важное значение для опреде-
ления безопасного расстояния видимости на вертикальных кривых
[27]. Высоту глаз водителя необходимо также учитывать при экс-
плуатации автомобилей. Если высота глаз водителя относительно*
дороги составляет менее 1,2 ж, то расстояние видимости в горизон-
тальном направлении часто может быть ограничено крылом под-
порной стенки, ограждением или стоящими автомобилями [28].
Кроме того, при определенных условиях вхождения автомобиля в.
транспортный поток видимость низко сидящего водителя в горизон-
тальном направлении могут ограничивать даже движущиеся авто-
мобили.
Высота глаз водителя изменяется в зависимости как от разме-
ров автомобиля, так и от роста водителя. Стонекс [29] пришел к
выводу, что исходя из общей высоты автомобиля можно достаточно
точно определить среднюю высоту глаз водителя. За период с 1930
по 1960 гг. средняя высота автомобиля уменьшилась с 1 700 до
1 395 мм, а средняя высота глаз водителя соответственно измени-
лась с 1 500 до 1 205 мм.
Поскольку уменьшение высоты глаз водителя означало сокра-
щение расстояния видимости на переломах продольного профиля,
в 1961 г. были изменены стандарты AASHO (Американская ассоци-
ация сотрудников дорожных управлений штатов). Допустимая вы-
сота глаз водителя была снижена с 1 370 до 1 140 мм, а высота
объекта увеличена со 102 до 152 мм. Последняя мера, оправданная
улучшением технических характеристик автомобиля, компенсирует
увеличение длины вертикальных кривых на переломах, обусловлен-
ное уменьшением высоты глаз водителя. Высота глаз 1 140 мм сос-
тавляет нижний предел примерно для 95% водителей и может быть
использована при расчетах в качестве реалистического значения.
Расстояние видимости по горизонтали часто ограничено малой
высотой глаз водителя. Ли [28] описал ситуацию, в которой крити-
ческим фактором является откосное крыло подпорной стенки, а
также случай, когда ограждение мешает водителю видеть дви-
жущиеся автомобили. В обоих случаях при высоте глаз 1 370 мм
водитель свободно видит движение по дороге, но при высоте
1 065 мм он ничего не может увидеть, кроме препятствия.
30
При езде по холмистой местности видимость также ухудшается.
При одинаковом расстоянии до объекта вероятность обнаружения
препятствий, расположенных на дороге сразу же. за вершиной хол-
ма, как правило, уменьшается. Снижение высоты автомобиля сопро-
вождается опусканием переднего сиденья, поэтому необходимо учи-
тывать положение водителя относительно органов управления,
которыми он должен эффективно манипулировать, а также соотно-
шение между высотой глаз и необходимой обзорностью.
7. ЭРГОНОМИЧЕСКИЙ ПОДХОД
Эффективность эксплуатации автомобиля зависит от восприятия и
реакции водителя и от того, в какой степени конструктор учитыва-
ет физиологические, механические и функциональные характеристи-
ки водителя. При проектировании кабин автомобилей различных
типов необходим комплексный подход к проблеме взаимного
расположения отдельных элементов. Поскольку водители грузовых
автомобилей и автобусов проводят значительное время в кабинах,
решающее значение при проектировании кабин имеет обеспечение
удобств и безопасности водителя.
Что касается кабин грузовых автомобилей, то двумя наиболее
важными моментами являются взаимное расположение элементов
и стандартизация [30]. На некоторых моделях педали управления
дросселем и тормоза расположены таким образом, что когда во-
дитель нажимает на педаль, его ботинок частично находится под
педалью тормоза. Иногда рычаг переключения передач и рулевое
колесо размещают так, что для некоторых водителей становится
неудобным включать тормоза, не передвинув предварительно ры-
чаг вправо от нейтрального положения. Во многих случаях колени
высокого водителя не помещаются непосредственно под рулевым
колесом, поэтому усилие к педали тормоза прикладывается под не-
которым углом.
Было выполнено сравнение полученных путем тщательных из-
мерений внутренних размеров кабин и кузовов серийных автомоби-
лей с основными размерами человеческого тела [31]. Обнаружи-
лось, что площадь, захватываемая стеклоочистителями, составляет
от 37 до 54% общей площади ветрового стекла. Если >бы в ряде
случаев конструктор учитывал, что водителю следует обеспечить
максимальные удобства, то переднее сиденье имело бы более удач-
ные размеры. В большинстве автомобилей не соответствует реко-
мендуемому расстояние от верхнего края педали тормоза до ниж-
него края рулевого колеса. Лишь на немногих автомобилях можно
изменять положение сиденья по высоте; учитывая, что в зависимо-
сти от телосложения водителя размер этой регулировки составля-
ет до 102 мм, подобными устройствами следует снабжать все лег-
ковые автомобили.
Очевидно, что способность водителя видеть происходящее во-
круг него имеет жизненное значение для управления автомобилем
и безопасности самого водителя. Все решения водителя и соответ-
31
ствующие маневры автомобиля 'полностью зависят от зрительного
восприятия. Фосберри и Миллс [32] провели исследование факто-
ров, определяющих обзорность с места водителя автомобиля. Глаза
водителя моделировали при помощи двух ламп, расположенных
внутри автомобиля на расстоянии 65 мм друг от друга; тени,
отбрасываемые конструктивными элементами (стойками ветрового
стекла, скребками стеклоочистителей и оправой ветрового стекла),
были использованы для построения 180-градусной диаграммы ви-
димости. Таким путем легко удалось обнаружить зоны плохой ви-
димости.
Очевидно, автомобильные фирмы признают важность зритель-
ного восприятия; на автомобилях были увеличены площади эффек-
тивной видимости переднего, боковых и заднего окон, установлены
цветные стекла и усовершенствована система освещения [33]. Одна-
ко исследование, проведенное Гарвардской школой здравоохране-
ния, показывает, что, несмотря на эти меры, осталось много неис-
пользованных возможностей [34].
Из-за необходимости максимально расширить диапазон види-
мости цветные ветровые стекла, не рекомендуются для ночной
езды. В конструкцию ветрового стекла и скребков стеклоочистите-
лей необходимо внести изменения с целью очистки почти всей
площади стекла при плохой погоде. Следует также разработать
какие-то методы очистки стекол боковых окон. Кривизна и качество
стекла должны подвергаться более жесткому контролю с целью
уменьшения искажений.
8. ПОВЕДЕНИЕ ВОДИТЕЛЯ
По-видимому, самым слабым звеном при изучении транспортных
проблем является описание поведения водителя. При рассмотре-
нии.этого вопроса исследователи и практики все еще опираются в
основном на догадки и теоретические предположения.
Перчонок [35] выделяет два подхода к проблеме: основанный на
изучении стимулов и на изучении реакций. При первом подходе
определяют влияние некоторых заранее выбранных стимулов на
поведение водителя, при втором выделяют стимулы, которые вызы-
вают определенную реакцию. На практике обычно пользуются пер-
вым методом. Именно его использует специалист по организации
движения, который пытается определить влияние зонирования ско-
рости на фактическую скорость [31] либо влияние знака, запреща-
ющего движение по определенной полосе, на принятие решений
водителем и транспортный поток в целом [37], либо влияние раз-
меров примыкающего въезда на маневр слияния [38].
При изучении реакций имеют дело скорее с причинами, чем с
симптомами. В качестве примеров можно привести исследование
факторов (малые интервалы между идущими друг за другом авто-
мобилями и большие относительные скорости), вызывающих смену
полосы движения [35], определение стимулов (временное и прост-
ранственное запаздывание, относительная скорость), действующих
32
при выборе интервала [39], или изучение факторов восприятия
(величина смещения, изменение угла зрения, скорость), вызываю-
щих поперечное перемещение автомобиля по отношению к непод-
вижному объекту, расположенному рядом с дорогой [40].
Изучение поведения водителя является решающим для успеш-
ного построения теории транспортных потоков и практики органи-
зации движения.
9. РЕАКЦИЯ ВОДИТЕЛЯ
Если рядом с дорогой расположен какой-либо объект, то при про-
хождении автомобиля мимо него часто наблюдается поперечное
перемещение автомобиля от объекта. Майклс и Козан предложили
следующее объяснение действий водителя, приводящих к такому
результату [40].
При выборе переменных, связанных с этой задачей (рис. 8),
становится очевидным, что поперечное расстояние со — важный сти-
мул реакции, вызывающий перемещение. Вместе с тем со не являет-
ся единственным стимулом, поскольку в таком случае все водители
отклоняли бы автомобиль от объекта в момент его появления в
поле зрения. Однако на практике этого не происходит. Если рас-
стояние между водителем и объектом обозначить х, то основное
соотношение имеет вид:
tg9 = —= 9, 9—>0, (25)
х
причем приближение tg 0 = 0 справедливо при малых углах.
В соответствии с моделью, описываемой выражением (25), во-
дитель оценивает положение объекта лишь по продольному и попе-
речному расстояниям. Если бы это соответствовало действительно-
сти, то поперечное перемещение начиналось бы на некотором посто-
янном расстоянии от объекта, не зависящем от скорости автомо-
биля.
Очевидно, что в число стимулов следует включить скорость авто-
мобиля v. Для этого выражение (25) надо записать в виде:
x = u)ctg9.
Дифференцируя по времени I, получаем
dx л dft
=о) cosec 9 ,
dt-------------dt
dV
гж--------скорость изменения угла зрения водителя.
dt
Перегруппировка членов формулы (27) дает
dti _ Vo)
dt о)2 х2
По сути дела это выражение показывает следующее: когда в
течение какого-то промежутка времени водитель наблюдает за
2-338 ' 3$
(26)
(27)
(28)
объект рядом с дорогой, v=va Г
Основное уравнение о~$+х2 1
Встречный йВтомобиль //=е,+ и
1 * *0 rQ
объектом, оценивая скорость
изменения угла зрения, он
субъективно учитывает про-
дольное расстояние со, попе-
речное расстояние х и ско-
рость автомобиля v. Если
водитель может определить
скорость изменения его угла
зрения, то он знает, что
объект не может оказаться
на дороге. В противополож-
ном случае объект будет яв-
------------------------------- ляться препятствием и води-
тель должен отклонить ав-
томобиль.
Легко- показать, что мо-
дель угла зрения можно
обобщить для случаев, ког-
да в роли объекта выступает
другой автомобиль, движу-
щийся в том же направле-
Смен а полосы t V=]/а- vb
Рис. 8. Модель поперечного перемеще-
ния автомобиля, учитывающая реакцию
водителя
нии, навстречу или под углом к оси дороги (см. рис. 8). В этих слу-
чаях v равно скорости одного автомобиля относительно другого.
Обобщенную модель с успехом применяют [40, 41] при реше-
нии задач, связанных с размещением объектов вдоль дороги (зна-
ков, горизонтальных габаритов мостов), регулированием скорости
(на участках временных сооружений путем использования конусов,
на участках с устройствами для расчленения транспортного потока
путем постепенного изменения расстояния до ограничителей), выбо-
ром ширины полосы на двухполосных дорогах для перевозки круп-
ногабаритных грузов и исследованием влияния подобных перевозок,
изучением влияния расположенных на обочине объектов на про-
пускную способность полосы, выбором интервала и эксплуатацией
пересечений дорог.
10. ОШИБКИ ВОДИТЕЛЯ
Многие исследования транспортных проблем посвящены определе-
нию оптимальных условий работы водителя как средства повыше-
ния его безопасности и оптимальных условий функционирования
транспортного потока как средства увеличения эффективности. Во
всех подобных исследованиях необходимо учитывать ошибки води-
теля, которые часто вызывают дорожно-транспортные происше-
ствия.
Перчонок [42] следующим образом определяет ошибки водителя.
Индивидуальная ошибка — это различие между зафиксированным
поведением водителя и чем, что он намеревался сделать, в то время
как объективная ошибка — это различие между зафиксированным
поведением водителя и тем, что ему надлежало делать по мнению
34
наблюдателя. Неумышленная ошибка связана с тем, что водитель
не разобрался в окружающей обстановке, а умышленная ошибка
является результатом решения, не учитывающего эту обстановку.
Таким образом, каждую ошибку можно классифицировать как ин-
дивидуальную или объективную и как умышленную или неумыш-
ленную.
Примером умышленной объективной ошибки являются действия
водителя, который проезжает на желтый свет, чтобы оторваться от
автомобиля, который, по его мнению, держит слишком малый для
быстрой остановки интервал.
Для уменьшения ошибок водителей необходимо их сотрудниче-
ство. Следует направить усилия на сокращение числа неумышлен-
ных индивидуальных ошибок, поскольку водители будут приветство-
вать эти усилия в противоположность попыткам снизить число
объективных и умышленных индивидуальных ошибок.
Херст [43] утверждает, что нормально мыслящий водитель дол-
жен и будет рисковать. Совет водителю не рисковать равносилен
предложению не выезжать на линию. Поскольку водитель не наме-
рен принимать подобную рекомендацию, он должен научиться от-
личать приемлемый риск от неприемлемого. Многие дорожно-транс-
портные происшествия являются результатом неправильной оценки
риска со стороны нормальных эмоционально устойчивых водителей
при удовлетворительной мотивации.
11. ИМИТАЦИЯ УПРАВЛЕНИЯ АВТОМОБИЛЕМ
Имитатор — это устройство, передаточная функция которого (от-
ношение вход/выход) равносильна соответствующей характеристи-
ке реальной системы, которую он воспроизводит. Понятие переда-
точной функции заимствовано из теории регулирования и далее бу-
дет рассмотрено подробнее. При имитации создают модель — физи-
ческую или математическую, являющейся отражением реальности.
По мнению Халберта и Войцика [44], автомобильный имитатор
должен включать реальный автомобиль, задние колеса которого
опираются на стальные ролики динамометра. Управление автомоби-
лем осуществляется в зависимости от изображения на двух кино-
лентах. На одной ленте показано то, что видит перед собой води-
тель, а вторая лента отражает обстановку позади автомобиля, как
не видит водитель в зеркале заднего вида. «Передний» кинофильм
демонстрируется на изогнутом экране, расположенном на расстоя-
нии 2,4 м от водителя, при помощи проектора, установленного на
высоте 0,3 м над автомобилем. «Задний» фильм демонстрируют
размещенным в автомобиле проектором на экране, точно соответ-
ствующем заднему окну. При повороте рулевого колеса кадры «пе-
реднего» фильма должны перемещаться из стороны в сторону,
создавая у водителя впечатление, что он изменяет положение авто-
мобиля в поперечном направлении относительно дороги. Шум дви-
гателя будет реальным, а при помощи маховиков, размещенных на
2* 35
роликах, будет воспроизводиться инерция автомобиля; это создает
впечатление работы двигателя и изменения скорости.
По-видимому, автомобильный имитатор должен состоять из пя-
ти компонентов: собственно автомобиля, механической системы для
воспроизведения силовых воздействий, оптической системы для вос-
произведения видимого окружения, системы обратной связи и из-
мерительных устройств [45].
Преимущества автомобильного имитатора состоят в том, что он
позволяет выявить моменты, способствующие улучшению как
безопасности движения, так и эффективности работы водителя [46].
"При помощи его можно провести опасные, трудно осуществимые
или невыполнимые в реальных условиях, исследования. Имитатор
позволяет провести широкие исследования поведения водителей,
опытных конструкций и использовать методы статистического ана-
лиза.
Влияние уклона дороги и собственного веса автомобиля можно
воспроизвести при помощи наклонного сиденья и корректирова-
ния инерционных сил, создаваемых динамометром. В результате у
водителя появится ощущение, что дорога, по которой «едет» его
автомобиль, поднимается в гору.
Исследования по имитации процесса управления автомобилем
пока дали скромные результаты. Халберт и Войцик [47] пришли к
выводу о различной реакции водителей в части как изменения ско-
рости, так и управления рулем при «езде» по прямой и извилистой
дороге.
Показателем начального этапа развития этого метода служит
тот факт, что большинство работ по имитации управления автомо-
билем посвящено вопросам методологии [48, 49, 52], очередности
исследований [50, 51] и потенциальным применениям [52, 53].
12. ВРЕМЯ ВОСПРИЯТИЯ И РЕАКЦИИ
Время реакции в системе «человек — автомобиль» — это время от
начала действия стимулирующего сигнала, включая его восприя-
тие, до завершения реакции водителя. По мнению некоторых авто-
ров, временем реакции следует считать время до начала реакции
водителя, а не до ее завершения. Что касается управления автомо-
билем, то первое определение представляется более логичным, по-
скольку время реакции часто имеет ощутимое значение.
При управлении автомобилем водитель должен учитывать опас-
ность удара и непрерывно оценивать и корректировать движение
автомобиля. Реакция водителя в следующий момент определяется
положением автомобиля в дорожной обстановке в настоящий мо-
мент. В эту оценку входит некоторый предел безопасности, который
неодинаков для разных водителей. Например, любому моменту
соответствует минимальный тормозной путь, который зависит от
нескольких переменных, а в основном от скорости. Аналогично, лю-
бому 'моменту соответствует расстояние свободного хода, которое
зависит от состояния поверхности дороги и ее геометрии. При самом
36
незначительном превышении тормозного пути над расстоянием сво-
бодного хода водитель подвергается опасности столкновения.
По различным причинам восприятие может быть ошибочным.
Чаще всего стимулирующая информация может подвергать водите-
ля опасности при плохом освещении дороги. Кроме того, наличная
стимулирующая информация может быть ненадежной или недосто-
верной, как, например, в случае выбора интервала водителем авто-
мобиля, въезжающего на скоростную автостраду. В обоих случаях
выход состоит в обеспечении водителя необходимой информацией
путем освещения дороги или использовании заменяющей информа-
ции в виде знаков или сигналов светофора.
Время реакции является, по-видимому, наиболее важной харак-
теристикой водителя в таких транспортных задачах, как определе-
ние пропускной способности дороги и пересечения, выбор безопас-
ных интервалов при маневрах, размещение регулирующих устройств
и проектирование геометрических элементов дороги. Например, на
двухполосной дороге водитель с целью обгона переходит в левый
ряд; в момент начала обгона он замечает встречный автомобиль и
его 'взгляд сосредоточивается на нем (время около 0,1 сек); води-
тель ясно видит объект и устанавливает, что навстречу движется
пикап (0,3 сек); водитель решает не возвращаться на прежнее мес-
то в правом ряду, а закончить обгон (0,4 сек) и сильно нажимает
на педаль управления дросселем (0,2 сек). Полная затрата времени
составляет 1 сек — за это время встречный автомобиль при скоро-
сти 96 км/ч приблизится на 53 м.
Время реакции включает промежутки времени, затрачиваемые
водителем на восприятие информации, ее истолкование, принятие
решения и выполнение реакции. Время восприятия и умственной
деятельности зависит от числа и вида стимулов. Некоторые регули-
рующие устройства, например сигналы у железнодорожных пере-
ездов, воздействуют как на слух, так и на зрение. Время принятия
решения сильно колеблется в зависимости от сложности решения,
но даже простые решения могут сильно увеличить время реакции.
Например, отмечено, что для произвольного сощуривания глаз
требуется примерно на 20% 'больше времени, чем для непроизволь-
ного. Время реакции зависит от сложности реакции и части тела,
выполняющей реакцию. На самые простые реакции, например на-
жатие кнопки, затрачивается несколько сотых долей секунды, но
на более сложные реакции требуется несколько десятых долей се-
кунды.
Время реакции, соответствующее данной задаче, решаемой води-
телем, невозможно выразить однозначно. Здесь сказывается не
только различие между водителями, но и тот факт, что время реак-
ции. одного и того же водителя иногда изменяется. Управление
шоссейных дорог штата Огайо [54] проверило свыше 1 000 чел. в
целях выявления влияния на тормозной путь времени, затрачивае-
мого на включение тормозов при различной скорости после того,
как водитель обнаруживает опасность. Среднее время реакции для
мужчин составило 0,57 сек, а для женщин — 0,62 сек. Полагают, что
37
Рис. 9. Картина, которую видят три во-
дителя разного роста (для 5-го, 50-го и
95-го процентилей распределения роста)
в обычных условиях время
реакции будет больше, по-
скольку при испытаниях во-
дители могли предвидеть
появление опасности.
Диапазон изменения вре-
мени реакции зависит от
конкретных условий, возрас-
та, а также пола водителя.
По результатам исследова-
ния [54] среднее время реак-
ции было наименьшим для
возрастной группы от 20 да
29 лет и наибольшим при
возрасте 60 лет и старше.
Было обнаружено, что води-
тели, обладающие быстрой
реакцией, предпочитают вы-
сокие скорости езды. Следо-
вательно, потенциальная
возможность попасть в ава-
рийную ситуацию не зави-
сит от среднего времени
реакции водителя [55]. Хотя
различия между водителями
могут быть несущественны-
ми, некоторые авторы полагают, что изменчивость времени реакции
любого водителя имеет важное значение.
13. ОШИБОЧНОСТЬ РАСЧЕТА НА ВОДИТЕЛЯ
СРЕДНЕГО РОСТА
Установление норм проектирования и эксплуатации в расчете на
водителя среднего роста дает плохие результаты, поскольку эта
может 'создать неудобства примерно для половины водителей.
Рис. 9 показывает, что хотя водитель среднего роста может увидеть
и ребенка, и светофор, водитель маленького роста, а также высо-
кий водитель не увидят то и другое одновременно (56].
Лишь очень немногие водители являются «средними» во всех или
даже в нескольких отношениях. Предположим, что выбираем по
какой-либо характеристике среднюю треть группы водителей (на-
пример, по высоте глаз водителя, как это показано на рис. 9), а за-
тем из этой трети снова берем среднюю треть по независимой или
не связанной характеристике (например, остроте зрения) и, нако-
нец, в третий раз повторяем этот процесс для третьей независимой
характеристики (например, времени реакции). В результате ока-
зывается, что только 7з X 7з X 7з = V27, или меньше 4% первона-
чальной совокупности водителей, являются «средними» по трем ха-
рактеристикам.
38
14. ЭМПИРИЧЕСКИЕ ПРАВИЛА
Подобно другим дисциплинам организация движения не обходится
без эмпирических правил. Общепринятая минимальная величина
интервала между двумя идущими друг за другом автомобилями
определяется по соотношению: одна длина автомобиля на каждые
.16 км/ч скорости. При определении продолжительности включения
желтого сигнала светофора исходят из того, что на каждые 16 км/ч
допустимой скорости приближения к светофору желтый свет дол-
жен гореть 1 сек, т. е. 3 сек при скорости 48 км/ч, 4 сек при 64 км/ч
и 5 сек при 80 км/ч.
Теоретически продолжительность включения желтого сигнала
должна быть достаточной для того, чтобы водитель любого автомо-
биля, приближающегося к перекрестку, не оказался слишком
близко от него для безопасной остановки или слишком далеко для
того, чтобы миновать перекресток до включения красного сигнала.
Гейзиз, Херман и Марадудин [57] называют прилегающие к пере-
крестку участки зонами дилемм. Чтобы исключить подобные зоны
дилемм, продолжительность включения желтого сигнала А в секун-
дах должна быть равна сумме следующих расстояний в метрах —
тормозного пути автомобиля Db, длины автомобиля L и ширины
перекрестка W, деленной на скорость приближения автомобиля к
перекрестку в м/сек, плюс время реакции водителя Т (рис. 10):
A=zDb + W+L (29)
^0 '
Расчет продолжительности включения желтого сигнала с ис-
пользованием формулы тормозного пути (11) для горизонтального
участка при f=0,5, Т=1 сек и типичных значениях L и W показы-
вает приемлемое совпадение значений А, определенных по эмпири-
ческому правилу и по формуле
(29). Поэтому на первый
взгляд это правило выглядит
обоснованным. Однако при бо-
лее тщательном исследовании
формулы (11) выясняется, что
эмпирическое правило основа-
но на предположении о равен-
стве среднего замедления при
торможении 4,9 м/сек2. Вместе
с тем наблюдения за реакцией
водителя на желтый сигнал
светофора показали, что столь
значительное замедление обес-
печивается на протяжении ме-
нее чем 1% соответствующего
интервала времени. По мнению
Олсона и Розери [58], наиболее
целесообразной при широком
Рис. 10. Теоретические условия опреде-
ления продолжительности включения
желтого сигнала светофора:
А — длина автомобиля; Б — ширина пе-
рекрестка; В — тормозной путь; Г — рас-
стояние, соответствующее времени реак-
ции; 3 — зеленый; Ж—желтый; К —
красный
39
диапазоне изменения скорости является, по-видимому, постоянная
продолжительность включения желтого сигнала около 5,5 сек. При
такой продолжительности только 5% водителей, которые увидев
желтый сигнал, примут решение не останавливаться, а продолжать
движение, не успеют освободить перекресток до включения крас-
ного сигнала.
Таким образом, основной вывод состоит в том, что используемые
при расчете значения тормозного пути и замедления должны отра-
жать поведение водителей, а не ограничения, связанные с автомо-
билем. Даже при правильном выборе продолжительности включе-
ния желтый сигнал для многих водителей является вызовом, а не
предостережением: вместо того, чтобы затормозить, они нажимают
на педаль управления дросселем, пытаясь проскочить светофор до
смены сигнала. Трудность состоит в том, что невозможно точно
узнать, когда зажжется красный свет.
Возможно, что решить эту проблему поможет новый светофор
со счетчиком, который испытывали в г. Абилине штата Техас и
на некоторых перекрестках Хьюстона, причем за время испытаний
число аварий снизилось на 50%. Внешне этот светофор почти не
отличается от обычного, но за 42 сек др смены сигнала в нем начи-
нают зажигаться с промежутком в 1 сек желтые цифры 9, 8, 7 и так
далее до 1; высота цифр 250 мм, они видны с расстояния 60 м. За-
тем на 3 сек включается желтый сигнал, после чего зажигается
красный.
15. ОСНОВНЫЕ ПРОБЛЕМЫ
Необходимо уделять большее внимание изучению вопроса о том,
как водитель воспринимает и оценивает фактическое и относитель-
ное положение своего автомобиля на дороге и как он соотносит ре-
зультаты этого процесса с собственным опытом при выборе какого-
то решения и совершении соответствующего действия. Если при
этой оценке необходимая для выполнения реакции информация не
будет выдана вовремя, произойдет авария. Поэтому нужно разра-
ботать удобные электронные приборы для измерения и связи, ко-
торые с помощью звуковой или зрительной сигнализации позволи-
ли бы избежать подобных просчетов.
Целесообразно изучить возможности необычных систем освеще-
ния, включая системы с поляризацией света, переход к которым не
потребует много времени. Необходимо также исследовать вопрос
о совместимости осветительных устройств автомобильных дорог с
осветительными приборами автомобиля с тем, чтобы обеспечить
оптимальные условия ночного вождения.
ЗАДАЧИ
1. При остроте зрения 20/20 водитель может рассмотреть расположенный в поле
его зрения дорожный знак с расстояния 15 м на каждые 25 мм высоты буквы.
Составьте таблицу высоты букв для знаков, которые должны видеть с расстояния:
30; 150 и 300 м водители с остротой зрения 20/20, 20/40 и 20/70.
40
2. Водитель с остротой зрения 20/20, ведущий автомобиль в правом ряду со
скоростью 96 км/ч, намерен съехать со скоростной автострады по примыкающему
съезду А. На каком минимальном расстоянии от съезда должен быть установлен
соответствующий знак при высоте букв 100 мм?
3. Допустим, что острота зрения водителя в задаче 2 составляет 20/40, знак
расположен на расстоянии, вычисленном в задаче 2. Какова допустимая скорость
автомобиля, обеспечивающая его безопасный поворот на примыкающий съезд?
Все условия, в частности время восприятия и реакции водителя, одинаковы.
4. Изменятся ли ответы в задачах 2 и 3 при вождении в ночных условиях?
Если изменятся, то в какую сторону?
5. Уклон улицы у перекрестка составляет 3%, продолжительность включения
желтого сигнала — 4 сек. Скорость движения по улице ограничена 72 км)ч, шири-
на поперечной улицы — 12 м. Время реакции водителя равно 1 сек. Вычислите
среднее замедление при торможении автомобиля длиной 6 ж, движущегося с пре-
дельной скоростью.
6. Испытания показали, что, по мнению водителей, при остановке с /=0,3
обеспечиваются комфортные условия. Определите размер любой зоны дилемм, ко-
торая может соответствовать условиям, указанным в задаче 5.
7. Автомобиль-тягач с полуприцепом (см. табл. 1) оказался слишком близко
от описанного в задаче 5 перекрестка, чтобы плавно (/ = 0,26) остановиться. Како-
ва должна быть продолжительность включения желтого сигнала, чтобы автомо-
биль-тягач, не изменяя скорости, успел пересечь перекресток до включения крас-
ного света?
8. Было обнаружено, что автомобиль, движущийся со скоростью 96 км)ч,
начал перемещаться в поперечном направлении на расстоянии 106 м от знака,
установленного в 2,1 м справа от дороги. Предположим, что знак размещен в
4,5 м от дороги и скорость автомобиля осталась неизменной. На каком расстоя-
нии от знака водитель начнет отклонять автомобиль влево в этом случае?
9. Предположим, что соответствующая условиям задачи 8 скорость изменения
угла зрения водителя остается неизменной. На каком расстоянии друг от друга
следует устанавливать в этом случае два ряда конусов, чтобы скорость вблизи
школы не превышала 48 км)ч?
ЛИТЕРАТУРА
1. Me Cormick Е. J. «Human Factors Engineering», McGraw-Hill, New
York, 1957.
2. M a 1 f e 11 i J. L. Critical Incidents in Behind-the-wheel Instruction in
Driver Education, Highway Res. Board Bull. 330, Angust, 1962.
3. R a i n e у R. V., С о n g e r J. J., W a 1 s m i t h C. R. Personality Charac-
teristics as a Selective Factor in Driver Education, Highway Res..Board Bull. 285,
April, 1961.
4. D о b b i n s D. A., S k о r d a h 1 D. M., A n d e r s о n A. A. Human Factors
Research Report —AASHO Road Test, II. Prediction, of Vigilance, Highway Res.
Board Bull. 330, August, 1962.
5. Dobbins D. A., S k о r d a h 1 D. M., Anderson A. A. Prediction
of Vigilance, AASHO Road Test, APO Tech. Res. Note 119, December, 1961.
6. L a u e r A. R., S u h г V. W. Effect of Rest Pauses and Refreshment on
Driving Efficiency, Highway Res. Board Bull. 152, pp. 15—22, 1957.
7. S e 11 i n g L. S. Personality Traits Observed in Automobile Drivers,
J. Criminal Psychopath., vol. 1, pp. 258—263, 1940.
8. Van Lennep D. J. Psychological Factors in Driving, Traffic Quart.,
October, 1952, pp. 484—498.
9. Uhlaner J. E., Goldstein L. G., Van Steenberg W. Deve-
lopment of Criteria for Safe Motor-vehicle Operation, Highway Res. Board Bull.
60, pp. 1—16, 1952.
10. Brody L. Personal Characteristics of Chronic Violators and Accident
Repeaters, Highway Res. Board Bull. 152, pp. 1—2, 1957.
11. Alligaier E. Some Road User Characteristics wi the Traffic Problem,
Traffic Quart., January, 1950, pp. 59—77.
41
12. Rainey R. V., Conger J. J., Gaskill H. S., Glad D. D., Sawe-
г у W. L., T u r r e 11 E. S., W a 1 s m i t h C. R., К e 11 e r L. An Investigation of
the Role of Psychological Factors in Motor Vehicle Accidents, Highway Res. Board
Bull. 212, March, 1959.
13. Hearth E. D. Relationships between Driving Records, Selected Persona-
lity Characteristics, and Biographical Data of Traffic Offenders and Nonoffenders,
Highway Res. Board Bull. 212, March, 1959.
14. W a 11 a c e R. Kid Killers at the Wheels, Colliers, May 28, 1949.
15. Bartlett N. R., Bartz A. E., Wait J. V. Recognition Time for
Symbols in Peripheral Vision, Highway Res. Board Bull. 330, August, 1962.
16. Me Cormick E. J. «Human Factors Engineering), McGraw-Hill, New
York, 1957.
17. Forbes T. W. Driver Characteristics and Highway Operations, Inst.
Traffic Engrs. Proc., 1953, pp. 68—73.
18. «IES Lighting Handbook», 3 rd ed., chap. 20, p. 2, Illumination Engineering
Society, N. Y, 1959.
19. Fry G. A. A Re-evaluation of the Scattering Theory of Glare, Ilium. Eng.,
vol., 49, № 2, p. 98, February, 1954.
20. G i 1 g о u r T. R. Some Results of Cooperative Vehicles Lighting Research,
Highway Res. Board Bull. 255, 1960.
21. Roper V. J., Meese G. E. More Light on the Headlighting Problem,
Highway Res. Board Record 70, pp. 29—40, 1964—1965.
22. W о 1 f E., Me Far land R. A., Zigler M. Influence of Tinted
Windshield Glass on Five Visual Functions, Highway Res. Board Bull. 255,
pp. 30—46, 1960.
23. Peckham R. H., Hart W. M. The Association between Retinal Sensi-
tivity and the Glare Problem, Highway Res. Board Bull. 225, pp. 57—60, 1960.
24. Richards O. W. Vision at Levels of Night Road Illumination.
VIII Literature 1962, Highway Res. Board Record 25, pp. 76—82, September, 1963.
25. Forbes T. W. Some Factors Affecting Driver Efficiency at Night,
Highway Res. Board Bull. 255, pp. 61—70, 1960.
26. Forbes T. W., Katz M. S. Driver Behavior and Highway Conditions
as Causes of Winter Accidents, Highway Res. Board Bull. 1961, pp. 18—29, 1957.
27. Loutzenheiser D. W., Haile E. R. Vertical Curve Design,
Highway Res. Board Bull. 195, pp. 4—8, 1958.
28. Lee C. R. Driver Eye Height and Related Highway Design Features,
Highway Res. Board Proc. 39, pp. 46—60, 1960.
29. Stonex K. A. Vehicle Data, Highway Res. Board Bull. 195, pp. 1—4,
1958.
30. Morgan С. T., Cook J. S., Ch apanis A., Lund M. W. «Human
Engineering Guide to Equipment Design», McGraw-Hill, New York, 1963.
31. Me Far land R. A., Dome у R. C. Park Adaptation Threshold, Rate
and Individual Prediction, Highway Res. Board Bull. 298, pp. 3—17, 1961.
32. F о s b e г г у R. A. С., M i 11 s B. S. Measurement of Driver Visibility
and its Application to a Visibility Standard, Inst. Meeh. Engrs. (London) Proc,
Automobile Division, 1959—1960, № 2, pp. 50—81.
33. В г о d у L. The Role of Vision in Motor Vehicle Operation, Intern. Rec,
Med. and Gen. Pract. Clins., June, 1954.
34. M c F a r 1 a n d R. O. et al. «Human Body Size and Capabilities in the
Design and Operation of Vehicular Equipment», Harvard School of Public Health,
Boston, 1964.
35. Perch опок K. «The Determination of Environmental Factors Control-
ling Driver Behavior», Highway Research Board-Singer, State College, Pa., 1965.
36. Rowan N. J., Reese C. J. A Study of Factors Influencing Traffic
Speeds, Highway Res. Board Bull. 341, 1962.
37. P e r c h о n о к K-, H u r s t P. M. «The Effect of Lane Closure Signals
upon Driver Decision-making and Traffic Flow», Division of Highway Studies,
Institute for Research, State College, Pa.
38. D r e w D. R. Gap Acceptance Characteristics for Ramp-Freeway Surveillan-
ce and Control, Highway Res. Board Record 157, 1966.
42
39. H u r s t P. M., P e r c h о n о к K-, Sequin E. L. «Measurement of
Subjective Gap Size», Division of Highway Studies, Institute for Research, State
College, Pa.
40. M i c h a e 1 s R. M., С о z a n L. W. Perceptual and Field Factors Causing
Lateral Displacement, Highway Res. Board Record 25, pp. 1—13, 1963.
41. Taragi n A. Driver Behavior as Related to Shoulder Type and Width on
Two-lane Highways, Highway Res. Board Bull. 170, 1958.
42. P e r c h о n о к К. «The Measurement of Driver Errors», Division of
Highway Studies, Institute for Research, State College, Pa.
43. Hurst P. H. -«Errors in Driver Risk-taking», Division of Highway
Studies, Institute for Research, State College, Pa.
44. H u I b e r t S., Wojcik C. Driving Simulator Research, Highway Res.
Board Bull. 261, pp. 1—13, 1960.
45. H u 1 b e r S. F., Mathewson J. H. The Driving Simulator, Inst.
Traffic Transportation Eng., Reprint 65, University of California Berkeley, 1965.
46. Fox В. H. Engineering and Psychological Uses of a Driving Simulator,
Highway Res. Board Bull. 261, pp. 14—38, 1960.
47. Hulbert S., Wojcik C. Human Thresholds Related to Simulation of
Inertia Forces, Highway Res. Board Record 25, pp. 106—109, 1963.
48. Michaels R. M., Stephens B. W. Part-task Simulation in Driving
Research, Highway Res. Board Record 25, pp. 87—94, 1963.
49. В r a u n s t e i n M. L., W h i t e W. J., S u g a r m a n R. C. Use of Stress
in Part-task Driving Simulators, A Preliminary Study, Highway Res. Board Re-
cord 25, pp. 95—101, 1963.
50. Fox В. H., Fox M. W. Some Criteria for Priorities of Research in
Driving Simulation: Difficulties in Their Measurement and Application, Highway
Res. Board Record 55, pp. 36—53, 1964.
51. Silver C. A. Performance Criteria: Direct or Indirect, Highway Res.
Board Record 55, pp. 54—63, 1964.
52. Kobayashi M., Matsunaga T. Development of the Kaken Driving
Simulator, Highway Res. Board Record 55, pp. 29—35, 1964.
53. Fox В. H. Some Technical Considerations in Driving Simulation, Highway
Res. Board Bull. 261, pp. 38—43, 1960.
54. Neal H. E. Reaction Time, Highway Res. Abstr. 134, pp. 6—7, 1946.
55. О 1 m s t e a d F. R. «Studies of Factors Influenced by Automobile Brake-
reaction Time», 22d Mich. Highway Conf. Proc., 1936, pp. 16—27.
56. M c Cormick E. J. «Human Factors Engineering», McGraw-Hill, New
York, 1957.
57. G a z i s D. С., H e r m a n R., M a r a d u d i n A. A. The Problem of the
Amber Signal Light in Traffic Flow, Operations Res., vol. 8, pp. 112—132, 1960.
58. Olson P. L., R о t h e г у R. Driver Response to Amber Phase of Traffic
Signals, Highway Res. Board Bull. 330, 1962.
ГЛАВА III
ДОРОГА
В период между изобретением колеса и появлением автомобиля
основной целью при сооружении дорог было «вызволить путешест-
венника из грязи». При проектировании дороги учитывали только
соображения, связанные со строительством. Возникшая в двадца-
тых годах этого века концепция организации движения привлекла
внимание к плавным кривым, ровной поверхности дороги, малым
уклонам и маршрутным маркам. Все эти вопросы, связанные с
обеспечением надлежащих соотношений между видимыми элемен-
тами дороги, относят к проектированию геометрических элементов.
В наши дни наступил третий период дорожного строительства, ха-
рактерной чертой которого является стремление увязать дорогу с
окружающей средой. Теперь проектировщик учитывает использо-
вание земли, природное окружение, социальные условия и психоло-
гию человека. Такой подход может быть назван функциональным
проектированием. При чисто строительном подходе учитывают толь-
ко создаваемую автомобилями нагрузку, при проектировании гео-
метрических элементов исходят из характеристик автомобиля и во-
дителя, а при функциональном подходе имеют дело с потребностя-
ми в перевозке грузов и людей в целом.
1. ДОРОЖНОЕ ПОКРЫТИЕ И ПРОБЛЕМЫ ОСВЕЩЕНИЯ
Вид дорожного покрытия зависит от числа и типа проходящих
по дороге автомобилей. Он оказывает некоторое влияние на эксплуа-
тацию автомобильного транспорта и основные размеры дороги.
Требования безопасной и экономичной эксплуатации современ-
ных высокоскоростных транспортных средств вынуждают уделять
особое внимание при проектировании, сооружении и эксплуатации
автомобильных дорог некоторым факторам, связанным с дорож-
ным покрытием. К ним относятся шероховатость покрытия, износ
шин, сопротивление качению, шум, отражение света и электроста-
тические свойства. К сожалению, невозможно создать дорожное
44
покрытие, оптимальное по всем перечисленным параметрам. По-
крытие с большим сопротивлением -скольжению обычно включает
абразивные частицы и вызывает износ шин. Одно и то же покрытие
может обладать-великолепной характеристикой отражения в ноч-
ных условиях, но иметь столь шероховатую поверхность, что на
высоких скоростях качение шин будет сопровождаться неприятным
шумом.
Разница в шероховатости, высоте поверхности и'цвете может
быть использована для различения полос движения. При наличии
выбора водители стремятся воспользоваться полосой с более глад-
кой поверхностью. На автомобильных дорогах с четырехрядным
движением, где внутренняя полоса имеет более шероховатую по-
верхность, чем наружная, по окончании обгона водители стремятся
вернуться на наружную полосу. Для выделения обочин и даже по-
лос для изменения скорости их поверхность может быть выполнена
более шероховатой.
Водители привыкают к определенному цвету покрытия и, прое-
хав некоторое расстояние по темному или светлому покрытию, на-
чинают увязывать цвет дороги со своим маршрутом. При маневре
определенный цвет может -быть использован для направления авто-
мобилей в крайний левый ряд. Цвет обочины и разделительной по-
лосы должен контрастировать с 'цветом основных полос дороги.
Поэтому черное асфальтобетонное покрытие обочин часто подвер-
гают поверхностной обработке с целью осветления.
Любое покрытие можно отнести к одному из трех основных ви-
дов— покрытиям высшего, среднего .и низшего качества. При напря-
женном движении желательно, чтобы покрытие имело ровную по-
верхность и в любую погоду обеспечивало малое скольжение. Ука-
занные характеристики покрытия должны сохраняться в процессе
эксплуатации, для того чтобы затраты на уход за дорогой и свя-
занные с ним ограничения движения транспорта были сведены к
минимуму. При покрытии высшего качества не допускаются разрывы
по швам -или уменьшение эффективной ширины покрытия из-за не-
точной укладки плит. Поскольку с ровной поверхности вода стекает
быстрее, покрытие высшего качества укладывают с минимальным
поперечным уклоном. В то же время шероховатое покрытие низше-
го качества должно иметь достаточный поперечный уклон, чтобы
обеспечить хороший сток. Применение покрытий низшего качества
приводит к снижению эксплуатационных скоростей. Однако при вы-
боре расчетной скорости (одного из важнейших параметров при
проектировании геометрических элементов) не следует уделять
слишком большого внимания виду покрытия. При расчетах нельзя
исходить из малой расчетной скорости только потому, что перво-
начально предполагается уложить покрытие низшего качества, ко-
торое в дальнейшем может быть улучшено или заменено покрытием
среднего или высшего качества.
В качестве предельного случая при расчетах берут эксплуата-
цию автомобильного транспорта в ночных условиях, поскольку чис-
ло дорожно-транспортных происшествий ночью примерно в 2 раза
45
больше, чем днем. В сумерках вождение автомобиля по улицам р
дорогам становится более опасным в основном из-за ухудшения
видимости, хотя, несомненно, имеют значение и такие факторы, как
рассеивание внимания ввиду наличия окружающего светового фо-
на, недостаточное количество внешних ориентиров и повышенная
утомляемость водителя.
Видимость в ночных условиях обеспечивается в основном благо-
даря контрастности. На дорожных знаках контрастность создается
в результате либо отражения света фар, либо освещения знака
внешним источником в зависимости от того, идет ли речь о знаке,
установленном на обочине дороги, или о размещенном над дорогой
знаке с дополнительным освещением. В случае знака, расположен-
ного на обочине, отражение обеспечивается при помощи стеклян-
ных бусин или других элементов. При нанесении надписи на знаке
цвета подбирают таким образом, чтобы усилить отражение, однако
видимость обеспечивается в основном благодаря контрастности,
обусловленной наличием или отсутствием отражательной способ-
ности. В связи с особенностями размещения подвесных знаков при-
менение в них отражающих материалов не всегда дает должный
эффект, поэтому для обеспечения контрастности в ночных условиях
необходимо использовать дополнительные источники света.
Осветительные приборы, облегчающие задачу водителя, уста-
новлены на многих дорогих. Для создания хорошей освещенности
светильники должны быть расположены вдоль дороги через равные
интервалы. Однако такое размещение светильников может вызвать
снижение контрастности надписей на знаках и сделать их плохо
различимыми.
Необходимо исследовать влияние размещения светильников на
видимость дорожных знаков и разработать нормы расположения
знаков и светильников.
Светильник представляет собой прибор, который распределяет
свет аналогично тому, как наконечник поливочного шланга распре-
деляет воду. Надлежащее распределение светового потока — один
из существенных факторов эффективного освещения дороги. Рас-
пределение света обычно рассчитывают для типичных условий,
включающих высоту светильника над дорогой, вылег, расстояние
между столбами, размещение светильников на столбе, к. п. д. источ-
ника, долю светового потока, падающего на покрытие, и ширину
дороги, которая должна -быть хорошо освещена.
При проектировании система освещения оценивается множест-
вом переменных, от которых зависит успешная работа системы, учи-
тываются экономические и эстетические соображения. При проек-
тировании дорожного освещения необходимо учитывать такие дан-
ные, как интенсивность движения в ночные часы, число пешеходов
и число дорожно-транспортных происшествий. Кроме того, проек-
тировщик учитывает такие факторы, как перспективы использова-
ния прилегающих к дороге земельных участков, наличие светового
фона, число рядов движения, вид покрытия, профиль дороги и
устройства для расчленения транспортного потока.
46
\ Направленное освещение обычно предусматривается на пересе-
чениях внегородских дорог и пересечениях улиц с расчленением
транспортных потоков. Такое освещение целесообразно, если нужно
добиться снижения скорости автомобилей при приближении к пе-
рекрестку. Хотя сплошное освещение всей зоны пересечения не
всегда оправдано, большое значение имеет освещение сложных с
геометрической или транспортной точки зрения участков, таких, как
пересечения и точки въезда и съезда. В этих случаях освещать сле-
дует не только центральный, но и прилегающие участки, причем
освещенность должна снижаться постепенно.
Слишком мало внимания уделялось системам освещения город-
ских скоростных дорог. В большинстве случаев для этого приспо-
сабливали обычные газосветные ртутные лампы, используемые для
освещения улиц. Чтобы облегчить уход за ними, на улицах эти лам-
пы обычно устанавливают на высоте 9 м. Но чтобы обеспечить
приемлемую освещенность городских скоростных автострад при
установке обычных ртутных ламп на высоте 9 ж, расстояние меж-
ду ними не должно превышать 50 ж. При превышении этого рас-
стояния наблюдаются значительные колебания яркости покрытия,
что вызывает заметное ухудшение видимости. Чередование ярко
освещенных участков под светильниками и темных участков между
ними приводит к образованию на дороге так называемой лестницы.
Такое распределение яркости часто не соответствует профилю до-
роги и создает зоны плохой видимости между светильниками. Для
обеспечения видимости нужно уменьшить расстояние между све-
тильниками, однако это приводит к удорожанию освещения ско-
ростных дорог и увеличивает потенциальную опасность столкнове-
ния с фонарными столбами.
Было установлено, что даже при надлежащем расстоянии меж-
ду светильниками высота подвески 9 м нежелательна с точки зре-
ния видимости и зрительного комфорта. При установке на такой
высоте обычных газосветных ртутных ламп типа 3 наблюдалось
значительное ослепление. Кроме того, уровень адаптационной яр-
кости в такой системе значительно выше средней яркости дорожно-
го покрытия, в результате чего трудно различить находящиеся на
нем объекты. Исследованиями было установлено, что при высоте
светильников 14 м обеспечиваются лучшие видимость и зритель-
ный комфорт, чем при высоте 9 м [1].
2. ПРОЕКТИРОВАНИЕ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ
Проектирование геометрических элементов связано с расчетом та-
ких элементов дороги, как поперечный профиль, уклон, кривизна,
расстояние видимости, габаритные размеры, а также комбинации
этих элементов.
Множество разнообразных факторов, связанных с управлением
автомобилем, влияет на проектирование геометрических элементов.
Необходимо учитывать как порознь, так и совместно возможности
и ограничения, связанные с водителем, автомобилем и дорогой.
47
Кроме того, очень важно так определить транспортные потребности,
чтобы построенная дорога имела необходимую пропускную -способ-
ность. Таким образом, важно знать интенсивность, -состав и вероят-
ные скорости движения, а также тормозные характеристики и по-
казатели управляемости автомобилей. Геометрия дороги должна
учитывать особенности эксплуатации транспорта и потребности в
перевозках -с тем, чтобы обеспечить его безопасную, эффективную
и экономичную работу.
Принципы проектирования геометрических элементов, как и дру-
гие основные положения науки об организации движения, сложи-
лись в результате объединения теоретических положений с дости-
жениями практики [2, 2а].
Дорога, по которой едет водитель, и прошлый опыт приучают
водителя к определенной последовательности дорожных ситуаций.
Крутой поворот на спрямленной дороге вызывает -большее число
дорожно-транспортных происшествий, чем кривая того же радиуса
на дороге с резкими поворотами. Лишь путем обеспечения соответ-
ствия каждого элемента дорожной обстановки ожиданиям водите-
ля и исключения значительных изменений стандартов можно до-
биться создания дорог, на которых не будет дорожно-транспортных
происшествий.
Для определения типа дороги, обеспечивающей необходимые
транспортные потребности, ее расположения и основных размеров
требуются сведения о местности, движении, пропускной способности
и уровне обслуживания. Несмотря на равную значимость, уравно-
вешиванию объемов выемок и насыпей, расчету дренажных соору-
жений и выбору полосы отвода никогда не следует отдавать пред-
почтение по сравнению с проектированием геометрических элемен-
тов. Характеристики автомобиля являются решающими при расчете
многих элементов дороги. Ширина автомобиля определяет ширину
полосы движения, а высота — габариты по высоте эстакады -при
пересечении на разных уровнях.
Расчетный автомобиль — это автомобиль, по весу, размерам и
эксплуатационным характеристикам которого устанавливают важ-
нейшие параметры дороги так, чтобы они соответствовали характе-
ристикам автомобилей заданного типа. При проектировании гео-
Таблица 1
Тип расчетного автомобиля База, м Передний свес, м Задний свес, м Общая длина, м Общая ширина, м Высота, м
Легковой 3,35 0,91 1,52 5,79 2,13
Г рузовой 6,1 1,22 1,83 9,14 2,91 4,11
А втомобиль-тя г ач с полуприцепом средний 3,96+8,23= = 12,19 1,22 1,83 15,24 2,91 4,11
Автомобиль-тягач с полуприцепом крупный 6,10+9,14= = 15,24 0,91 0,61 16,76 2,91 4,11
48
Таблица 2
Вид автомобильной
дороги
Расчетная скорость,
км/ч
рекомен- минималь-
дуемая ная
Вит. автомобильной
дороги
Расчетная скорость,
км/ч
рекомен- минималь-
дуемая ная
Внегородские:
равнинная местность
холмистая „
горная „
112
96
80
96
80
64
Городские:
обычные
перекрестки и
дороги в дело-
вой части го-
рода
96 80
80 64
метрических элементов рекомендуется [2] использовать параметры
четырех расчетных автомобилей, размеры которых указаны в
табл. 1.
Вторая исходная величина при проектировании дороги — макси-
мальная с точки зрения безопасности скорость, которую можно
обеспечить на определенном участке дороги. Она зависит от геомет-
рии дороги и задается для благоприятных условий в части движе-
ния транспорта и погоды. Выбор расчетной скорости должен быть
обоснованным, поскольку в правильно составленном проекте все
элементы дороги увязаны с ее назначением. Расстояние видимости,
которое должно быть обеспечено при расчете как продольного про-
филя, так и плана трассы, ее кривизна в плане и уклон виражей
зависят от расчетной скорости.
В качестве расчетной скорости обычно принимают скорость, ко-
торая будет приемлема для водителей. Расчетную скорость не сле-
дует путать со средней и с предельной. Если не использовать спе-
циальные меры принуждения, до 25% водителей-может оказаться
в числе превысивших предел скорости 112 км!ч. Низкую расчетную
скорость нельзя произвольно назначать для всех второстепенных до-
рог, поскольку многие из них могут проходить по местности, кото-
рая позволяет развивать высокие скорости. Следует помнить, что
выбранные значения расчетной скорости соответствуют минималь-
ным требованиям; поэтому по возможности целесообразно пользо-
ваться более плавными кривыми и обеспечивать большее расстоя-
ние видимости. Для основных полос автомобильных дорог с регу-
лируемым въездом рекомендуются [3] расчетные скорости,
указанные в табл. 2.
3. ПОПЕРЕЧНЫЙ ПРОФИЛЬ ДОРОГИ
Чем важнее дорога, тем сложнее ее поперечный профиль. Дороги с
более интенсивным движением должны иметь больше полос, пред-
назначенных для транзитного транспорта. Из-за необходимости
обеспечения непрерывного транзитного движения на дорогах с на-
49
пряженным движением приходится предусматривать отдельные по-
лосы для поворота налево и запрещать остановку транспорта по
краям основных полос; в результате увеличивается значение разде-
лительных полос и обочин. Поперечный профиль автомобильной
дороги включает множество элементов, которые в целях классифи-
кации делят на три группы: проезжая часть дороги, разделительные
элементы и ограничительные элементы. Размеры каждого элемента
выбирают исходя из оценки характеристик движения, назначения
дороги и заданного уровня обслуживания.
Поперечный уклон дорожного покрытия. Чтобы
обеспечить сток воды с поверхности покрытия, предусматривают
уклон от середины к каждому краю. Уклон до 21 %0 практически
не сказывается на управлении автомобилем. Обычно уклон покры-
тий высшего качества, покрытий из портландцемента и асфальтобе-
тона составляет от 10 до 21 %0. Для покрытий худшего качества
требуется больший уклон — от 31 до 42 % 0.
Обочины. На всем протяжении любой автомобильной дороги
должны быть предусмотрены обочины, чтобы можно было совер-
шить вынужденную остановку. Накопленный опыт показывает це-
лесообразность сооружения обочин с покрытием, что увеличивает
безопасность движения и защищает дорожное покрытие проезжей
части от разрушения по наружному краю. На всех дорогах, за ис-
ключением дорог с покрытием низшего качества, следует преду-
сматривать обочины шириной от 2,4 до 3,1 м\ на дорогах низшего
качества ширина обочины может составлять от 1,2 до 1,8 м. При
выборе материала, цвета и вида покрытия обочины следует обеспе-
чивать надлежащий контраст с покрытием проезжей части.
Ширина поло сы. Хотя в особых случаях и допускается
ширина полосы менее 3,7 м, опыт показывает, что это значение
должно быть минимальным. Экономия на сооружении дороги при
ширине полосы менее 3,7 м не компенсирует ухудшения безопас-
ности движения и комфорта.
На высокоскоростных двухполосных внегородских дорогах це-
лесообразно предусматривать ширину полосы 4 и даже 4,3 м.
Ширина более 4,3 м нежелательна, поскольку некоторые водители
будут пытаться вклиниться в соседний ряд. Установлено, что на
дорогах с многорядным движением ширина полосы 3,7 м является
необходимой и достаточной.
Бордюры. Бордюры используют для регулирования стока, ог-
раничения проезжей части дороги, предотвращения съезда автомо-
биля с дороги и заезда на определенные участки. В настоящее вре-
мя укладку бордюрного камня предусматривают в основном на го-
родских дорогах.
Бордюры бывают двух основных типов—-преодолеваемые барье-
ры и высокоскоростные барьеры. Бордюры предназначены для
предотвращения или по крайней мере предупреждения о нежела-
тельности заезда на какой-то участок. Конструкция преодолеваемых
барьеров должна быть такой, чтобы автомобиль мог безопасно и
без нарушения комфорта переезжать через них, даже при сравни-
50
тельно высоких скоростях. Преодолеваемые барьеры имеют неболь-
шую высоту (менее 15 см) и откос 1 :2 или более.
Высота высокоскоростных барьеров составляет от 15 до 50 см
в зависимости от характера участка, который они ограждают. Эти
бордюры обычно устанавливают вертикально или они имеют откос
не более 1 : 3. Высокоскоростные барьеры используют на мостах и
для предотвращения столкновения автомобиля со столбами или сте-
нами. Если предусматривается возможность остановки автомобиля
вблизи бордюра, его высота не должна превышать 15 см.
При наличии сплошного высокоскоростного барьера расстояние
между ним и краем основной полосы не должны быть меньше 0,3 м.
Если бордюры предусматривают лишь на отдельных участках доро-
ги, то расстояние до края основной полосы должно составлять от
0,3 до 0,6 м.
Разделительная полоса. Часть разделенной автомобиль-
ной дороги, отделяющая встречные направления движения, называ-
ется разделительной полосой. Она служит для ограничения слева
стороны дороги для движения в одном направлении, уменьшения
числа неумышленных заездов автомобилей на левую сторону доро-
ги, а также предоставляет водителю возможность выправить поло-
жение, если его автомобиль пересек левый край покрытия. Раздели-
тельная полоса может служить для защиты и регулирования дви-
жения автомобилей, выполняющих левый поворот или движущихся
в поперечном направлении [4]; ее можно использовать для размеще-
ния пешеходов, установки знаков и светофоров [5] либо для останов-
ки неисправных автомобилей (6].
Значение разделительной полосы для стока воды и сбора снега
зависит от климата, характера местности и числа полос движения
[7]. Устройство узкой разделительной полосы в местностях с сильны-
ми снегопадами может привести к тому, что большую часть снега
придется перебрасывать через несколько полос дороги направо. Зна-
чение разделительной полосы для уменьшения ослепления води-
теля светом фар встречных автомобилей изменяется в зависимости
от продольного профиля дороги, скорости автомобилей и наличия
дополнительного освещения, причем для уменьшения ослепления
разделительные полосы часто проектируют с учетом ландшафта [8].
Наличие разделительной полосы предоставляет плановику и проек-
тировщику свободу маневра: занимаемое ею пространство можно в
дальнейшем использовать для расширения дороги (устройства до-
полнительных полос) [9] или сооружения транспортных систем иного
типа (скоростных транспортных систем) [10]. В зависимости от ха-
рактера местности разделительные полосы могут обеспечивать про-
кладку левой и правой сторон дороги в разных уровнях [11], разме-
щение вспомогательных сооружений, полос изменения скорости и
примыкающих въездов.
Разделительные полосы иногда делят на обычные, предохрани-
тельные и барьерные. Обычные разделительные полосы, которые вы-
деляют цветными полосами, кнопками и покрытиями контрастного
цвета, не представляют препятствия для движения транспорта.
51
Предохранительная разделительная полоса может включать любую
отличительную особенность обычной полосы плюс небольшое пре-
пятствие в виде преодолеваемого барьера или рифленого покрытия.
На барьерной разделительной полосе располагают ограждения, ку-
старники и стенки, которые автомобиль не может преодолеть. Шири-
на обычной разделительной полосы должна быть достаточной, чтобы
большинство потерявших управление автомобилей не могло попасть
на другую сторону дороги. Если позволяет характер местности, на-
личие свободного пространства в полосе отвода, то ширина раздели-
тельной полосы должна составлять 11 м. Было проведено сравни-
тельное исследование разделительных полос различных видов, при
котором транспортный поток характеризовали размещением автомо-
билей в поперечном профиле дороги; в результате этой работы было
установлено [12], что узкая (от 1,2 до 3,7 м) разделительная полоса
с барьерной стенкой не оказывает существенного влияния на разме-
щение автомобилей и способствует смягчению последствий аварий,
происходящих на разделительной полосе.
Неподвижные объекты. Вблизи дороги не должно быть
никаких неподвижных объектов. Необходимо, чтобы деревья были
окружены густым кустарником и располагались в виде групп обте-
каемой формы. Ограждения в сужениях должны переходить в пери-
ла мостов, обеспечивая необходимую гармонию между мостом и до-
рогой.
Ширина поло сы отвода. Необходимую ширину полосы
отвода устанавливают по окончании проектирования дороги. Над-
лежащее внимание следует уделять будущим требованиям, если
можно предположить, что в дальнейшем дорога будет расширена
или подвергнется иным изменениям.
В некоторых случаях дорога упрощенного типа может в течение
нескольких лет обеспечивать транспортные потребности, однако в
будущем может потребоваться большее число полос, устройство пе-
ресечений в разных уровнях, разделительной полосы и другие круп-
ные изменения. В таких случаях сэкономить средства можно путем
сооружения дороги в несколько этапов (очередей). Однако с самого*
начала следует предусмотреть ширину полосы отвода, которая по-
зволила бы провести последующее усовершенствование.
4. ПРОДОЛЬНЫЙ ПРОФИЛЬ ДОРОГИ
Продольный профиль дороги включает уклоны (подъемы) и верти-
кальные кривые. Он представляет собой сечение поверхности дороги
вертикальной плоскостью, проходящей через осевую линию, и со-
стоит из ряда прямых, соединенных параболическими вертикальны-
ми кривыми. Уклон, который обычно выражают в процентах или
тысячных долях (%о), равен числу метров по вертикали, на которое
поднимается (опускается) дорога на каждом 100- или 1 000-метро-
вом горизонтальном участке.
Методы вождения автомобиля на подъемах весьма разнообраз-
ны, причем современные легковые автомобили снабжены достаточно
52
мощными двигателями, которые позволяют им преодолевать подъ-
емы до 10% без заметного снижения скорости [13]. Поскольку подъ-
емы свыше 10% встречаются редко, вопрос по сути дела сводится
к исследованию влияния крутых подъемов на скорость движения
грузовых автомобилей.
Максимальные подъемы и соответствующие расчетные скорости
для основных внегородских дорог, магистральных улиц и скорост-
ных городских дорог [2] следующие:
Расчетная скорость, км/ч .
Максимальный подъем, %»
48 64 80 96 112
6—9 5—8 4—7 3—6 3-5
На второстепенных дорогах подъемы могут в 1,2—1,5 раза пре-
вышать указанные значения. Однако при проектировании дорог
следует по -возможности избегать подъемов -свыше 5%, в особенно-
сти в районах, где зимой выпадает много снега.
Кроме учета сниже-
ния скорости, было бы
желательно сопоставлять
пересчитанные на год
дополнительные издержки
на работы по обеспечению
меньших подъемов и до-
полнительные ежегодные
Эксплуатационные затра-
ты при прежних значени-
ях подъемов. Хотя авторы
многих исследований [14,
.15] характеристик автомо-
билей и определяли экс-
плуатационные расходы,
полученные результаты
не представлены в фор-
ме, пригодной для исполь-
зования при проектиро-
вании дорог.
В прошлом большинст-
во задач, связанных с вы-
бором подъемов, реша-
лось исходя из эксплуата-
ционных возможностей
автомобилей, однако в
настоящее время решаю-
щее значение приобретает
учет требований безопас-
ности. При малых укло-
нах езда по обледенелой
дороге менее опасна, а
малые подъемы снижают
вероятность того, что в
Рис. 11. Расстояние видимости для обгона
(соотношение между временем и расстоя-
нием):
/ — автомобиль, совершающий обгон; 2 —обгоняемый
автомобиль; 3 —задержка по отношению к обгоняю-
щему автомобилю; 4 — встречный автомобиль; S —
полное расстояние видимости для обгона
53
подобных условиях на дороге возникнут заторы. Кроме того, при
малых подъемах увеличивается скорость движения грузовых авто-
мобилей и уменьшается вероятность столкновения следующих друг
за другом автомобилей.
Плавный переход от одного подъема (уклона) к другому осу-
ществляется с помощью вертикальных кривых. Если точка пересече-
ния двух касательных находится над поверхностью дороги, верти*
кальную кривую называют выпуклой, если ниже — вогнутой. Верти-
кальные кривые следует подбирать таким образом, чтобы обеспечи-
вались безопасность и комфортность движения, а также хоро-
ший сток воды. При выборе вертикальных кривых нужно учитывать
расстояние видимости, удобство управления автомобилем, объем
земляных работ и простоту расчетов.
В качестве вертикальных кривых используют дуги окружности,
спирали и параболы, причем в США вертикальные кривые выполня-
ют по параболе. Эти кривые характеризуются длиной L и алгебраи-
ческой разностью А сопрягаемых уклонов Gi и G2. При параболи-
ческой кривой расстояние по вертикали от касательной пропорцио-
нально квадрату расстояния по горизонтали от конца этой кривой.
Возвышения вдоль кривой вычисляют просто как доли вертикально-
AL
го расстояния до точки пересечения уклонов, равного
Для безопасной эксплуатации автомобилей на подъемах должно
быть обеспечено необходимое расстояние видимости. Нужно, чтобы
при расчете вертикальных кривых проектировщик исходил из необ-
ходимого значения либо расстояния видимости для торможения,
либо расстояния видимости для обгона. Безопасное расстояние види-
мости для торможения равно минимальному расстоянию, которое
требуется, чтобы водитель автомобиля, движущегося с расчетной
или близкой к расчетной скоростью, успел остановить автомобиль,
не доезжая до замеченного им на дороге объекта (табл. 3) [2].
Кроме того, на двухполосных дорогах следует предусмотреть воз-
Таблица 3
Расчетная •скорость, км/ч Принятая скорость V, км1ч Восприятие и реак- ция Коэффи- циент трэния / Тормозной путь на горизон- тальной дороге Db' м Расстояние видимости для торможения Dr+Db
Время Г, сек Расстояние м
^вычислен- ное, м округлен- ное для расчетных целей, м
48 45,0 2,5 31 0,36 22 53 60
64 57,9 2,5 40 0,33 40 80 80
80 70,8 2,5 49 0,31 63 112 но
96 83,7 2,5 58 0,30 92 160 150
112 95,0 2,5 66 0,29 122 188 190
128 107,8 2,5 75 0,28 163 238 240
144 120,7 2,5 84 0,28 204 288 290
160 132,0 2,5 91 0,27 253 394 400
54
можность обгона медленно движущихся автомобилей. Минималь-
ное расстояние, на которое должен видеть перед собой дорогу во-
дитель, чтобы совершить безопасный обгон, называется безопасным
расстоянием видимости для обгона (рис. 11) [2].
Элементы безопасного расстояния видимости для обгона на
двухполосной дороге [2] следующие:
Интервал скоростей, км/ч . . ..... . 48-64 64-80 80-96
Средняя скорость при обгоне v, км/ч 56,2 70,5 84,8
Первоначальная задержка:
а — среднее ускорение, км1ч1сек 2,24 - 2,28 2,35
Т\ — время, сек 3,6 4,0 4,3
D\ — пройденное расстояние, м . 44 66 88
Движение по левой стороне:
Т2— время, сек .......... . 9,3 10,0 10,7
D2— пройденное расстояние, м . 145 195 251
Свободный участок:
D3 — пройденное расстояние, м . 30 00 7b
Встречный автомобиль:
D4 — пройденное расстояние, м '. 96 129 168
Полное расстояние: /)1+Р2 + ^з+^4, М 315 445 583
Округленное расстояние для расчетов 300 450 600
Минимальная длина выпуклой вертикальной кривой определя-
ется требуемым расстоянием видимости. В выражении для длины
параболической вертикальной кривой L, включающем алгебраиче-
скую разность подъемов А и расстояние видимости S, под послед-
ним понимают горизонтальную проекцию луча зрения (рис. 12).
На рис. 12 показаны случаи, когда расстояние видимости больше
длины вертикальной кривой (S>L) и меньше ее длины (S<L).
Высота глаз водителя /71 и высота объекта /72 представляют собой
расстояния по вертикали до касательной, совпадающей с лучом
зрения. Ниже будет выведена формула для общего случая, в кото-
ром 77i=#/72 и луч зрения не параллелен хорде, соединяющей кон-
цы параболы.
В первом случае, когда S>L, используется свойство па-
раболы, согласно которому проекция отрезка, образованного каса-
тельной, равна половине проекции хорды параболы.
Расстояние видимости S можно записать в виде суммы гори-
зонтальных проекций:
5 ==_J22^_ A j 1QQ//2 (
Gi 2 G2
гг dS
1еперь задача состоит в том, чтобы, приравнивая -— нулю,
dG
определить наклон луча зрения, при котором S будет минималь-
ным:
dS _ — 100Н1 100//2 _п
— — —‘ - -------— U. I о 1 ।
55
Рис. 12. Расстояние видимости при выпуклой вертикальной кривой:
а — первый случай (расстояние видимости больше длины вертикальной кривой,
т. е. £>/); б — второй случай (расстояние видимости меньше длины вертикаль-
ной кривой, т. е. S<L); L — длина вертикальной кривой, м; А — алгебраическая
разность подъемов; %; 5 — расстояние видимости, м; и Н2— высота глаз
водителя и объекта, м
Поскольку А = | Gi — G21, можно показать, что
G, = — (32)
VHt + Ун2
и
О2= . (33)
Уъ+Уъ
Подставляя выражения для G\ и G2 в формулу (30) и решая
это уравнение относительно L, находим минимальную длину верти-
кальной кривой, обеспечивающую получение надлежащего расстоя-
ния видимости:
L=2S(34)
Во втором случае, когда S<L, в соответствии с основным
свойством параболы
Hl S2! (35)
AL
800 1 2;
И н2 _ (36)
AL
800 k 2 J
По формулам (35) и (36) находим выражения для Si и S2,
складываем их, чтобы получить S, и подставляем полученное вы-
ражение в формулу (30). Решая это уравнение относительно L,
получаем следующее выражение:
L =__________AS2_________
100 (К2Я? + /2^)2
56
Данные относительно высоты глаз и объекта, используемые
при расчете выпуклых вертикальных кривых, приведены в табл. 4.
Были предприняты попытки рассчитать расстояние видимости для
торможения на выпуклых вертикальных кривых исходя из высоты
фар автомобиля. Поскольку на некоторых моделях расстояние от
фары до дороги составляет всего лишь 0,61 ж, это привело бы к уве-
личению длины вертикальной кривой. Обычно расчет ведут при-
менительно к дневным условиям, поскольку полагают, что ночью
скорость движения ниже, причем усилия проектировщика должны
быть направлены на то, чтобы обеспечить по возможности наиболь-
шее расстояние видимости. Минимальным расстоянием видимости
следует пользоваться лишь в тех случаях, когда это абсолютно не-
обходимо.
В соответствии с табл. 4 минимальную по условиям обгона дли-
ну вертикальной кривой устанавливают на основе расстояния
Sp, с которого водитель (высота глаз 1,14 м) может увидеть верх-
нюю часть встречного автомобиля (высота над покрытием 1,37 ж).
Очевидно, что кривая, построенная по условиям обгона, должна
быть намного длиннее кривой, обеспечивающей безопасную оста-
новку. Поэтому если на протяжении всей вертикальной кривой не-
обходимо обеспечить возможность обгона, четырехполосная доро-
га с выпуклыми кривыми, обеспечивающими расстояние видимости
для торможения, может оказаться дешевле двухполосной дороги с
кривыми, обеспечивающими расстояние видимости для обгона;
такое положение возможно, если экономия на земляных работах
перекрывает стоимость сооружения двух дополнительных полос.
Что касается вогнутых вертикальных кривых, то единый обще-
принятый критерий выбора их длины отсутствует. Обычно при этом
учитывают следующие моменты: расстояние видимости ночью при
включенных фарах; удобства управления автомобилем; регулирова-
ние стока воды; видимость в целом. Некоторые авторы [16] в каче-
стве такого критерия пользуются расстоянием видимости при вклю-
ченных фарах. При движении по вогнутой вертикальной кривой в
ночных условиях длина освещенного фарами участка дороги зави-
сит от положения фар и направления световых лучей. На рис. 13
Таблица 4
Параметр Расстояние видимости для торможения, м Расстояние видимости для обгона, м
Высота глаз Н\ 1.14 1,14
Высота объекта 0,15 1,37
Минимальная длина кривой £:
427 1 003
2S5 — — 5 А 2S, А
S < Z, AS%
427 1003
57
Рис. 13. Расстояние видимости ночью при включенных фарах на вогнутой вер-
тикальной кривой:
а — первый случай (расстояние видимости больше длины вертикальной кривой,
т. е. S>L); б — второй случай (расстояние видимости меньше длины вертикаль-
ной кривой, т. е. S<L);
/ — световой луч; L — длина кривой, м; А — алгебраическая разность уклонов, %; S — рас-
стояние видимости, м\ Н — высота фар, В — отклонение светового луча вверх от горизон-
тали, град
показана схема, позволяющая выразить минимальную длину вог-
нутой вертикальной кривой L через расстояние S между автомоби-
лем и точкой, где световой луч касается покрытия, высоту фар Н
и угол между световым лучом и горизонталью В.
В первом случае (см. рис. 13), когда S>L, координаты
точки пересечения светового луча с дорожным покрытием могут
быть выражены двумя путями:
y=.H + StSB
и
AL , (S — L) А
у —------L .
200 1 100
Приравняв эти выражения, находим
L = 2S 20° (// + Stg В)
А
(37)
(38)
(39)
Во втором случае, когда S<L, координаты точки пересе-
чения светового луча с покрытием можно выразить, с одной сторо-
ны, по параболе, а с другой — по треугольнику, в котором свето-
вой луч образует одну из сторон:
Л52
200Z,
(40)
и
y = H + StgO. (41)
Приравняв эти выражения, находим
L —--------—-----------. (42)
200(// + StgB)
58
С 1961 г. высоту фар над дорогой принимают равной 0,6 м, а
ZB = 1°. Подставляя значения Н и В в формулы (39) и (42), полу-
чаем
и
L = 2S
122 -|- 3,5S ч. l
А ’ >
L = ___ S<L
122 + 3,55 ’
(43)
(44)
Изменение положения автомобиля по вертикали оказывает
большее влияние на комфортность езды при вогнутой, чем при
выпуклой вертикальной кривой, поскольку в этом случае гравита-
ционные и центробежные силы складываются. Количественная
оценка этого эффекта затруднительна [17], однако результаты не-
которых измерений позволяют считать, что на вогнутой вертикаль-
ной кривой сохраняются комфортные условия при центробежном
ускорении на более 0,3 м/сек2, В соответствии с этим условием
длина вогнутой вертикальной кривой в метрах не должна быть
меньше
Av2
390"’
(45)
где v — расчетная скорость, км/ч.
Из всех критериев, определяющих минимальную длину вогну-
той вертикальной кривой, наиболее рациональным является рас-
стояние видимости ночью при включенных фарах.
Если вогнутая вертикальная кривая проходит в нижнем уровне,
то сооружение верхнего уровня (например, эстакада) может умень-
шить расстояние видимости. На рис. 14 показана схема расчета
длины вертикальной кривой по известным расстоянию видимости и
высоте эстакады над дорогой. Соотношение между расстоянием
видимости S, алгебраической разностью уклонов Д, высотой эста-
кады над дорогой С и длиной вертикальной кривой можно полу-
чить для случаев S>L и S<L.
Рис. 14. Расстояние видимости при наличии эстакады:
а — первый случай (расстояние видимости больше длины вертикальной кривой,
т. е. S>L); б — второй случай (расстояние видимости меньше длины вертикаль-
ной кривой, т. е. S<L);
/ — край эстакады; L — длина вертикальной кривой, А — алгебраическая разность подъ-
емов, %; S — расстояние видимости, м\ С — высота эстакады над дорогой, лг, Н\ и Н2 — вы-
сота глаз и объекта, м
59
В первом случае, когда S>L, имеем
где 5 AL L у:~ :—, (46) 2 400 2 k 7 У=С-Н1 + Н2-^—. (47) У 2 1 800 k 7
Решая уравнение (46) относительно у и приравнивая к выра-
жению (47), получаем
Z. = 2S—— fc-//1 + //2 \ (43)
А 1 2 ' к 7
Во втором случае, когда S<L, основное соотношение име-
ет вид: (49) 2 400 2 к 7
где / ( х \ AL / г-гч\ у —у~ ——— | (50) * и 1 £ 800 к 7 \ 2 /
и у==с-^ + н^ , '' (51) у 2 1 800 к 7 (52)
Подставляя выражения (51) и (52) в уравнение (50) и прирав-
нивая затем уравнения (50) и (49), получаем
L=^(C—. (53) 800 к 2 J к 7
5. ПЛАН ТРАССЫ
План трассы представляет собой ряд прямолинейных участков,
соединенных дугами окружности. При движении автомобиля по за-
круглению возникает центробежная сила, поэтому дорога на этом
участке должна быть выполнена в виде виража для того, чтобы
обеспечивалась компенсация указанной центробежной силы. В це-
лях облегчения плавного перехода от прямолинейного участка к
криволинейному и введения виража на всех современных автомо-
бильных дорогах приходится применять переходные, или спираль-
ные, кривые.
При проектировании плана трассы следует стремиться к тому,
чтобы обеспечить водителю максимальную возможность постоян-
ного поддержания скорости, наиболее соответствующей общим
условиям движения на этом участке. Так, не рекомендуется преду-
сматривать крутые повороты после длинных прямых участков, на
60
которых автомобили движутся с высокой скоростью. Это сообра-
жение весьма важно. При всех расчетах, помимо принятой расчет-
ной скорости, нужно также учитывать наиболее вероятную ско-
рость. Обычно водитель может приспособиться к изменениям в до-
рожных условиях, если указанные изменения хорошо заметны и
обоснованы.
Проектировщик всегда должен стремиться использовать поло-
гие кривые, а к максимальной кривизне следует прибегать лишь в
тех случаях, когда это абсолютно необходимо. Кроме того, план
трассы и продольный профиль ее следует рассматривать совместно,
а не изолированно. Например, следует избегать устройства виража
на выпуклой вертикальной кривой, ибо подобные участки опасны.
Одной из целей проектирования геометрических элементов яв-
ляется установление правильного соотношения между расчетной
скоростью, кривизной и поперечным уклоном виража. В качестве
горизонтальных кривых используют дуги окружности, которые ха-
рактеризуются радиусом или числом градусов кривизны. Для
последнего принято следующее определение: градус кривизны
равен центральному углу, соответствующему дуге длиной 30 м.
Для каждой расчетной скорости существует предельное значе-
ние минимального радиуса, или максимальной кривизны, которое
определяется максимальным поперечным уклоном виража и мак-
симальным коэффициентом трения в поперечном направлении:
R=------------. (54)
127(е + /)
Если бы кривизна превысила этот предел, то пришлось исполь-
зовать нецелесообразные с практической точки зрения значения
уклона виража либо недопустимые в плане безопасности значения
коэффициента трения шин. Максимальная кривизна имеет важное
значение при проектировании плана трассы.
Коэффициент трения в поперечном направлении изменяется в
зависимости от скорости и состояния шин и дорожного покрытия
[18, 19]. Решающим условием правильного выбора значения этого
коэффициента при проектировании виража является обеспечение
удобств водителя: при возникновении большой центробежной силы
водитель начинает скользить по сиденью автомобиля в поперечном
направлении и инстинктивно снижает скорость [20]. Рекомендуе-
мый по условиям безопасности движения коэффициент трения в по-
перечном направлении связан с расчетной скоростью линейной
зависимостью и изменяется от 0,16 при 48 км/ч до 0,12 при 112 км/ч
[21]. Проектировщику следует выбирать значения коэффициента,
позволяющие сохранять на вираже примерно те же скорости, с ко-
торыми автомобили движутся на прямолинейных участках этой
дороги.
Уклон виража также изменяется в зависимости от расчетной
скорости и обычно составляет от 0,01 до 0,1. Однако поскольку при
проектировании дороги расчетная скорость является величиной не-
изменной, поперечный уклон виража определяется кривизной. Мак-
61
Рис. 15. Расстояние видимости для тор-
можения на горизонтальной кривой:
1 — осевая линия дороги; 2 — осевая линия
внутренней полосы; 3 — уровень глаз водите-
ля; 4 — расстояние видимости; 5 — луч зрения;
6 — объект
1ои составлении табл. 5 исходили из
симальное значение уклона
ограничивается фактор амщ
связанными с возможным
обледенением дороги, а ми-
нимальное — необходимо-
стью обеспечения хорошего
стока воды.
В табл. 5 приведены чи-
сла градусов кривизны и ра-
диусы кривизны для виража
с е = 0,08 и указанных зна-
чений коэффициента трения
f в поперечном направлении.,
заданной скорости и не учи-
тывали расстояние видимости. Препятствие, расположенное вблизи
внутреннего края дороги, может быть обнаружено водителем при
движении автомобиля по горизонтальной кривой. Поэтому мини-
мальный радиус кривизны может определяться расстоянием види-
мости для торможения. При расчете полагают (рис. 15), что глаза
водителя и объект находятся на осевой линии внутренней полосы,
а расстояние видимости меньше длины кривой. Для составления
соотношения между минимальным радиусом кривой /?, расстояни-
ем видимости для торможения S и расстоянием от осевой линии
внутренней полосы до обнаруженного препятствия т используют
правый треугольник со сторонами /?, R — т и ~ •’
z от
(55)
Водитель автомобиля, движущегося по прямому участку доро-
ги, который переходит в вираж, вынужден поворачивать рулевое
колесо в направлении, противоположном закруглению, чтобы со-
хранить правильное положение автомобиля на дороге. Как только-
автомобиль въезжает на вираж, нужно немедленно повернуть ру-
левое колесо в направлении закругления [20]. При большой скоро-
сти этот маневр становится опасным. При ширине полосы 3,7 м на
Таблица 5
Расчетная скорость, км/ч Максимальное значение / Рекомендуемое максимальное число градусов кривизны, град Допустимое максимальное число градусов кривизны, град Допустимый минимальный радиус, м
64 0,15 6 12,4 140
80 0,14 4 7,6 230
96 0,13 2 5,0 350
112 0,12 1,5 3,5 500
62
Рис. 16. Схема построения виража:
а — поворот плоскостей покрытия относительно осевой линии дороги; б — пово-
рот плоскостей покрытия относительно внутреннего края покрытия;
1 — нормальная выпуклость дороги; 2 — максимальный уклон 1 : 200; 3 — полный вираж; 4 —
наружный край покрытия; 5 — осевая линия поперечного профиля; 6 — внутренний край
покрытия; 7 — фактическая осевая линия поперечного профиля; 8— нормальная осевая ли-
ния поперечного профиля
малых скоростях расстояние между автомобилями достаточно, что-
бы «снос» к наружному краю кривой не вызывал опасности.
Использование круговых или спиральных кривых основано на
принципе плавного перехода к закруглению, что позволяет посте-
пенно вводить соответствующий вираж, причем плавность перехо-
да обеспечивается как при въезде, так и при съезде с закругления.
Чтобы компенсировать центробежную силу, положение рулевого
колеса в каждой точке виража должно соответствовать его ук-
лону.
Поверхность виража может быть выполнена с поворотом отно-
сительно: осевой линии дороги; внутреннего края покрытия; осе-
вой линии внутренней полосы; наружного края покрытия; осевой
линии наружной полосы.
На рис. 16 показаны два случая, в которых поверхность вира-
жа поворачивается относительно осевой линии дороги и внутрен-
него края покрытия.
Для многополосных дорог с разделительной полосой может
быть предусмотрен раздельный поворот поверхности каждой сторо-
ны дороги или всего покрытия относительно главной осевой линии
в том случае, если разделительная полоса имеет малую ширину
или возможно расширение дороги по внутреннему краю.
Предусмотрение кривых малой кривизны способствует увели-
чению интенсивности движения; размещение горизонтальных и
вертикальных кривых на достаточно большом расстоянии друг от
друга может обеспечить значительное повышение пропускной спо-
собности.
План и продольный профиль дороги должны быть согласованы
не только для основных полос дороги, но и для въездов и съездов,
пересечений и других мест, где дорога меняет направление. Если
приходится прокладывать горизонтальные кривые, которые вызы-
вают снижение максимальной по условиям безопасности движения
скорости, то целесообразно размещать их на подъемах, чтобы вос-
пользоваться благоприятными условиями для торможения. В лю-
бом случае существенным условием безопасного движения явля-
63
ется обеспечение надлежащего расстояния видимости и хорошей
обзорности в начале криволинейного участка дороги. Если кривая
предусматривается в конце въезда (съезда), необходимо обеспе-
чить хорошую видимость и учесть требования к тормозному пути.
Видимость на криволинейных участках дороги имеет важное
значение с точки зрения безопасности. Если не обеспечена пра-
вильная увязка плана и продольного профиля, у водителя может
сложиться совершенно неправильное представление о расположен-
ной впереди дороге, что отразится на его работе.
6. УСТРОЙСТВА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ
Максимально эффективное и безопасное использование дороги
может быть достигнуто лишь путем применения надлежащих
средств регулирования движения, к которым относятся надписи
и условные обозначения, наносимые на дорожное покрытие, све-
тофоры, знаки и указатели, располагаемые на дороге, над ней или
рядом с ней. Как водители, так и пешеходы должны быть снабже-
ны необходимой информацией' и указаниями, обеспечивающими
максимальные удобства и безопасность.
Любое средство регулирования движения должно удовлетво-
рять шести основным требованиям: быть в состоянии удовлетво-
рить важную потребность; привлекать внимание; ясно выражать
простую, понятную -с первого взгляда мысль; внушать доверие ли-
цам, пользующимся дорогой; быть расположено таким образом,
чтобы человек имел достаточное время на реакцию; быть одобрено
в законодательном порядке.
Все средства регулирования движения связаны в основном со
зрительным восприятием. Специалист по организации движения
использует знаки в качестве основного средства зрительной связи
с водителем автомобиля. Знаки должны быть выполнены и разме-
щены так, чтобы обеспечивалось необходимое расстояние видимо-
сти, которое позволяло бы водителю прореагировать на знак и
предпринять необходимое действие. Во избежание создания опас-
ных ситуаций следует с особым вниманием относиться к проекти-
рованию дорожных знаков и их размещению вдоль дороги. Знак
должен быть спроектирован так, чтобы сочетание размера, контра-
стности, цветов, теней, композиции и освещения или отражения
(где это необходимо) привлекало к нему внимание; форму, размер,
цвет и характер надписи следует выбирать такими, чтобы смысл
•ее был абсолютно ясен; четкость и размер знака в сочетании с его
расположением, должны обеспечивать достаточное время реак-
ции. При размещении знаков следует помнить, что они должны на-
ходиться в поле зрения водителей и пешеходов и привлекать их
внимание; по отношению к пункту, объекту или ситуации, к кото-
рым они относятся, знак должен быть размещен так, чтобы он вы-
ражал ясную мысль; расположение знака в сочетании с четкостью-
64
надписи должно быть таким, чтобы водитель автомобиля, движут
щегося с нормальной скоростью, имел достаточное время для над-
лежащей реакции в дневное время, однако при переходе к ночным
условиям движения следует учитывать ряд дополнительных
условий.
Специалисты по организации движения стремятся удовлетво^
рить вышеперечисленные требования путем правильного применен
ния стандартов и принципов проектирования, логичного размеще-
ния, хорошего обслуживания и жесткой унификаций дорожных зна-
ков. Все эти принципы учитывают возможности автомобиля и
ограничения, связанные с водителем.
7. ДОРОГА КАК СИСТЕМА
Специалисты по автомобильным перевозкам занимаются вопроса-
ми планирования, проектирования, строительства, эксплуатации,
технического обслуживания дорог, регулирования движения на
дорогах и управления ими.
Сложившийся в последние годы системный подход к задачам
проектирования получает все большее признание как при обуче-
нии, так и в практической деятельности. При этом подходе основ-
ной упор делается на успешном осуществлении проекта в целом, а
не на попытках обеспечить высокую эффективность составных
частей независимо друг от друга. Новизна этого подхода определя-
ется преобладанием рациональных моментов над интуитивными,
использованием формализованных методов теории игр, теории мас-
сового обслуживания, линейного и динамического программирова-
ния, теории регулирования, метода критического пути, теории сетей
и различных методов оптимизации.
Основной принцип системного подхода в применении для проек-
тирования классических систем состоит в максимизации эксплуа-
тационных характеристик при заданных затратах или в минимиза-
ции затрат при заданных эксплуатационных характеристиках. При
проектировании автомобильных дорог определяющим является вто-
рой подход. По сути дела, это — концепция уровня обслуживания.
При проектировании классической системы необходимо учиты-
вать еще два принципа — принцип маловероятных событий и прин-
цип субоптимизации. Первый состоит в нецелесообразности приспо-
собления основных характеристик системы к событиям малой
вероятности^
Субоптимизацию легко продемонстрировать на примере проек-
тирования автомобильной дороги (рис. 17), но справиться с нею
значительно труднее. При организации проектирования любой си-
стемы необходимо найти рациональный путь установления границ
между подсистемами. Очевидно, разграничение возможно по тер-
риториальному принципу и по принципу технической специализат
ции. Несмотря на нежелательность первого подхода, он необходим
на определенном уровне.
3—338
65
Рис. 17. Автомобильная дорога с точ-
ки зрения специалистов разного про-
филя:
а — гидротехника; б — строителя;
в — специалиста по грунтам и осно-
ваниям; г — специалиста по органи-
зации движения; д — материаловеда
Когда речь идет о проектировании автомобильной дороги, спе-
циальности соответствуют по сути дела традиционным разделам до-
рожно-строительной науки: материаловедение; строительное проек-
тирование; механика грунтов; возведение сооружений; гидротехни-
ка; планирование; изыскания; организация движения. Если
каждую из этих дисциплин рассматривать как подсистему при про-
ектировании дорожной системы (а именно так часто и бывает), то
66
число связей между подсистемами становится очень большим. При
восьми указанных подсистемах число комбинаций равно 28.
В этом состоит основная проблема при разделении системы на
составные части: границы между подсистемами устанавливают так,
чтобы минимизировать число входов и выходов для каждой подси-
стемы. Задачи проектирования автомобильной дороги логично де-
лить на три подсистемы: проектирование геометрических элемен-
тов, строительное проектирование и проектирование покрытия. При
этом число связей между подсистемами уменьшилось с 28 до трех.
Каждая из трех таких подсистем представляет собой сочетание
восьми вышеперечисленных специальностей.
В прошлом из-за сложности дорожного строительства и большо-
го количества данных инженер часто был вынужден проводить
неестественное дробление любой проблемы на лишенные взаимосвя-
зи задачи, причем многие обратные связи приходилось не учиты-
вать. В настоящее время для увязки наличных данных и выполне-
ния расчетов с учетом всех взаимосвязей применяют электронно-
вычислительные машины (ЭВМ).
Разработан электронно-вычислительный комплекс ICES (инте-
грированная строительная система), предназначенный для инжене-
ров-строителей [23]. Особенность этой системы состоит в том, что
она позволяет инженеру эффективно использовать ЭВМ, причем за
ним сохраняется решающая роль при принятии решений. Этот ре-
зультат удалось достичь путем приспособления входных и выход-
ных устройств системы к решению строительных задач.
Комплекс ICES включает подсистемы, соответствующие раз-
личным техническим дисциплинам. Наличие этих подсистем в еди-
ном комплексе позволяет инженеру получать решения, в которых
учитываются надлежащим образом все факторы и данные, а так-
же взаимосвязи между ними. Для каждой подсистемы разработан
ряд команд, ориентированных на определенный круг задач; с помо-
щью этих команд инженер поддерживает связь с ЭВМ. Особен-
ность системы состоит в том, что она удовлетворяет требованиям
как обслуживающих ее программистов, так и инженеров.
8. ОСНОВНЫЕ ПРОБЛЕМЫ
Безопасность движения по автомобильной дороге тесно связана со
сложным соотношением между кривизной, подъемом (уклоном) и
расстоянием видимости. При малых и средних скоростях исполь-
зуемые в настоящее время эмпирические методы проектирования
геометрических элементов являются, по-видимому, удовлетвори-
тельными. Однако в связи с переходом в настоящее время к повы-
шенным скоростям целесообразно пересмотреть допущения и нор-
мы, по которым проектируют геометрические элементы.
Тщательный анализ существующих тенденций позволяет
утверждать, что расчетная скорость будет составлять 160 км/ч или
более. Этот факт окажет большое влияние на проектирование
3* 67
геометрических элементов и даже на строительное проектирование.
В связи с необходимостью обеспечить более пологие кривые и
меньшие уклоны (подъемы) при строительстве эстакад придется
предусматривать большее число пролетов увеличенной длины. Воз-
никнет спрос на балки из предварительно напряженного бетона
длиной 60 ж и ъа конструкции, изготовленные в заводских услови-
ях. Полоса отвода должна быть полностью очищена от таких пре-
пятствий, как деревья, опоры линий электропередач, столбы теле-
фонных и телеграфных линий. Необходимо использовать безопас-
ные дорожные знаки ломающегося типа. Ограждения сами по себе
являются препятствиями, поэтому необходимо разработать рацио-
нальные нормы их размещения.
Задачи
1. Нарисуйте типичный поперечный профиль дорог следующего типа, спроек-
тированных исходя из расчетной скорости 112 км/ч: двухполосной автомобильной
дороги; внегородской дороги непрерывного движения; городской скоростной до-
роги; городской улицы.
2. Укажите нормы, которыми руководствуются при проектировании плана
трассы и продольного профиля каждой из дорог, перечисленных в задаче 1.
3. В какой мере интенсивность движения, доля грузовых автомобилей в об-
щем числе автомобилей и число сворачивающих с дороги автомобилей могут из-
менить ответы в задачах 1 и 2?
4. Дайте определения безопасного расстояния видимости для торможения и
безопасного расстояния видимости для обгона; объясните, в каких случаях тот
или иной параметр играет основную роль при проектировании геометрических эле-
ментов дороги. (
5. При каких условиях четырехполосная автомобильная дорога может ока-
заться дешевле двухполосной?
6. Укажите значение каждого элемента расстояния видимости для обгона, по-
казанного на рис. 11, при расчетной скорости 128 км)ч.
7. Определите расстояние видимости для торможения и максимальную по
условиям безопасности скорость для выпуклой вертикальной кривой длиной 250 м,
образованной подъемом 4%' и уклоном 2%.
8. Какова минимальная длина выпуклой вертикальной кривой, образованной
подъемами 6% и 1% на двухполосной внегородской дороге, при расчетной ско-
рости 128 км!ч!
9. На участке вертикальной кривой, построенной в задаче 8, дорога расшире-
на и превращена в четырехполосную. Определите максимальную по условиям бе-
зопасности скорость при этом условии (см. задачу 5).
10. Подъем 4% пересекает уклон 2% в точке с координатами 20+00, возвы-
шение 30 м. Под дорогой проходит дренажная труба, верхняя точка которой
имеет координаты 19+00, возвышение 27 м. Минимальное расстояние от по-
верхности дороги до трубы — 0,9 м. Удовлетворяет ли вертикальная кривая нор-
мам проектирования при расчетной скорости 96 км1ч?
11. Иногда в целях предотвращения превышения расчетной скорости уклон
виражей делают таким, чтобы обеспечивалось максимальное допустимое трение
в поперечном направлении. Какой уклон с учетом этого условия должен иметь
вираж на кривой радиусом 580 м при расчетной скорости 112 км)ч!
12. Автомобильная дорога спроектирована исходя из расчетной скорости
64 км!ч, а максимальный поперечный уклон виража равен 0,10. Определите мини-
мальный горизонтальный радиус кривизны и начертите эскиз, демонстрирующий
метод построения виража.
68
13. На участке, где скоростная. автострада поворачивает налево, выполнен
примыкающий съезд направо. Объясните метод построения виража на съезде,
дав эскизы поперечных и продольных профилей. Как следует изменить съезд,
чтобы не перенося его в другое место исключить влияние стрелы выпуклости
дороги?
14. Расстояние от осевой линии криволинейного участка горизонтальной двух-
полосной дороги до угла ближайшего дома составляет 7,6 м, ширина полосы рав-
на 3,7 м. Какова допустимая по условиям безопасности скорость на кривой ра-
диусом 146 л/?
15. Дайте эскизы примыкающего въезда и съезда, кратко опишите их эле-
менты и назначение. Объясните, почему в каждом случае водители могут оказать-
ся не в состоянии использовать полосу смены скорости.
16. Дайте эскизы четырех- и трехстороннего перекрестков. Исходя из того,
что эти перекрестки расположены в городском районе с большим числом пеше-
ходов, покажите, как осуществляется расчленение транспортных потоков.
17. Предполагается построить примыкающий съезд с правой половины ско-
ростной дороги с разделительной полосой на правую боковую дорогу, проходящую
параллельно скоростной дороге. Покажите, что для случая, когда съезд имеет
форму разворота, характеристики кривой можно представить следующим об-
разом:
где 7?ь Т?2— радиусы кривой; у — расстояние между скоростной и боковой доро-
гами; х — измеренное вдоль осевой линии скоростной дороги расстояние
между началом съезда на скоростной и его окончанием на боковой дороге.
18. На горизонтальном закруглении радиуса R находится однопролетный
мост; длина прямоугольного пролета равна L, а ширина — W. Ширина проезжей
части на мосту равна 7,2 м, а минимальное расстояние между краем покрытия и
ограждением моста — 0,9 м. Покажите, что минимальный радиус кривизны R
определяется следующим выражением:
0,3£2 0,3 (IF —30)
8(IF —30) + 2
ЛИТЕРАТУРА
1. Rowan N. J., Me Coy P. T. A Study of Roadway Lighting Systems, Texas
Transportation Inst. Res. Rept. 75—1, Texas A&M University, College Station,
August, 1966.
2. «А Policy on Geometric Design of Rural Highways», American Association
of State Highway Officials, Washington, D. C., 1965.
2a. «Highways in Urban Areas», American Association of State Highway
Officials, Washington, D. C., 1957.
3. «Design Manual for Controlled Access Highways, The Texas Highway
Department, Austin, Tex., 1960.
4. Planning Highway Systems and Development of Standards, Am. Road
Builders’ Assoc. Bull. 142, pp. 34—36, 1948.
5. J о h n s о n A. E. Highway Signs for the Interstate System, Civil Eng.,
vol. 27, p. 251, 1957.
6. Web b, G. M., Moskowitz K. Freeway Traffic Flow, Calif. Highways
Public Works, vol. 35, № 7—8, p. 5, July-August, 1956.
7. S i m о n s о n W. H. The Sectional Layout of Multiple Lane Highways,
Highway Res. Board Proc., vol. 18, pp. 62—64, 1938.
69
8. Landscaping: Full .Partner in Turnpike Design, Eng. News-Record, vol.
158, № 28, pp. 62—64, June 13, 1957.
9. Build to the Middle, Eng. News-Record, vol. 154, № 16, p. 17, Apr. 21,
1955.
10. G i 11 i s С. M. Los Angeles MTA Selecting Tomorrow’s Super Rapid
Transit System, в книге «Going Places», pp. 10—11, General Electric Company,
January-February, 1960.
11. Lang С. H. Geometric Design of Modern Highways, Civil Eng., vol. 30,
№ 1, p. 63, 1960.
12. Keese C. J., P i n n e 11 C. «The Effect of Freeway Medians on Traffic
Behavior, Texas Transportation Institute, Texas A&M University, College Sta-
tion, 1959.
13. S a a 1 С. C. Hill Climbing Ability of Motor Trucks, Public Roads, vol. 23,
№ 3, p. 33, May, 1942.
14. С 1 a f f e у P. J. Time and Fuel Consumption for Highway User Benefit
Studies, Highway Res. Board Bull. 276, 1960.
15. Sawhill R. B., F i г e у J. C. Motor Transport Fuel Consumption Rates
and Travel Time, Highway Res. Board Bull. 276, 1960.
16. Thompson D. Sight Distance on Sag Vertical Curves, Civil Eng., vol.
14, № 1, January, 1944.
17. Me Connell W. A. Human Sensitivity to Motion as a Design Criterion
for Highway Curves, Highway Res. Board Bull. 149, 1957.
18. Barnett J. Safe Side Friction Factors and Superelevation Design,
Highway Res. Board Proc. vol. 35, 1936.
19. M о у e r R. А., В e г г у D. S. Marking Highway Curves with Safe Speed
Indications, Highway Res. Board. Proc., vol. 39, 1940.
20. T a r a g i n A. Driver Performance on Horizontal Curves, Highway Res.
Board Proc., vol. 33, 1954.
21. Stonex K. A., Noble С. H. Curve Design and Tests on the Pennsyl-
vania Turnpike, Highway Res. Board Proc., 1940.
22. H a w k i n s D. L., R о w a n N. J., О 1 s о n R. M. «Project Skyhook: Safer
Highway Sign Supports», Texas Transportation Institute, Texas A&M University.
College Station, May, 1966.
ГЛАВА IV
ДОРОЖНО-УЛИЧНАЯ СЕТЬ
В прошлом при проектировании геометрических элементов доро-
ги прежде всего учитывали безопасность движения, ширину поло-
сы отвода, наличие естественных препятствий и финансовые воз-
можности.
После выяснения проблем, связанных со значением дороги, осо-
бенностями местности и наличием средств, устанавливали расчет-
ную скорость и руководящий уклон, на основе которых в свою оче-
редь задавали минимальные нормы проектирования продольного
профиля и плана трассы. Затем, опираясь на эти или повышенные
нормы, проектировщик составлял план трассы и продольный
профиль.
Поскольку сооружение новых дорог сильно сказывается на
автомобильных перевозках, вопросы их проектирования стали
предметом особого внимания инженеров по организации движения
и все большее число проектировщиков начинают учитывать их
специфические требования. При размещении и проектировании
дорог необходимо исходить из потребностей транзитного и местно-
го движения и учитывать их влияние на жителей данного района и
другие дороги.
Отличительная черта любой системы состоит в том, что ее
эффективность зависит от всех составляющих систему компонен-
тов; вместе с тем эффективность системы превышает соответствую-
щую характеристику каждого компонента и не может быть опреде-
лена путем изучения каждого из них в отдельности. При проекти-
ровании дорожно-уличной сети обычно учитывают следующие
основные факторы: транспортные потребности пользователей, тре-
бования доступа к дороге с прилегающих территорий с учетом их
развития, существующая дорожно-уличная сеть, современное и
перспективное использование земельных участков. Для проекти-
рования дорожно-уличной сети нужно знать функции каждого ком-
понента этой системы.
71
1. ФУНКЦИОНАЛЬНАЯ КЛАССИФИКАЦИЯ
Геометрические элементы дороги следует проектировать так, чтобы
обеспечивались маневренность, удобство движения, экономичная
эксплуатация и безопасность движения. На дорогах высшего клас-
са удовлетворяются все эти требования, в то время как при проек-
тировании дорог низших классов можно идти на разумный ком-
промисс. Повышенные нормы целесообразно применять в тех случа-
ях, когда большие удобства, предоставляемые пользователям,
оправдывают дополнительные затраты сравнительно с вариантом
пониженных норм. Классификация дорог и улиц, увязанная с соот-
ветствующими нормами проектирования, помогает работникам до-
рожных органов распределять наличные средства на усовершенст-
вование отдельных дорог при одновременном поддержании в над-
лежащем состоянии всей дорожной сети.
Функциональная классификация автомобильных путей сообще-
ния — это группировка дорог и улиц по классам или системам в
соответствии с характером ожидаемого обслуживания. Обычно вне-
городские дороги подразделяют на междуштатные дороги 'первого
и второго класса, а городские дороги и улицы — на дороги непре-
рывного движения, дороги скоростного движения, магистральные
улицы городского значения, магистральные улицы районного зна-
чения (собирающие улицы) и улицы местного движения. При клас-
сификации дорог и улиц исходят из транспортных нужд населения,
требований в отношении доступа и целостности системы.
При прокладке улиц в городе неизбежно приходится учитывать
особенности местности и стоимость строительства, однако решаю-
щими должны быть соображения, связанные с плотностью населе-
ния, развитием территории, характером и составом движения, ин-
тенсивностью движения в настоящее время и в будущем. Исходя
из этих соображений дорожно-уличную сеть делят на подсистемы,
причем каждая подсистема в различной степени удовлетворяет
требованиям сквозного проезда и доступа. Функции каждой до-
рожно-уличной системы определяют выбор размеров геометриче-
ских элементов и регулирующих устройств для обеспечения жела-
емого обслуживания. Ниже дана краткая характеристика и описа-
ны функции городских дорог и улиц четырех основных
категорий [1].
Улицы местного движения. Эти улицы делятся на
жилые, торговые и промышленные. Во всех случаях их основным
назначением является обеспечение доступа. При прокладке улиц
местного движения не только не учитывают требования сквозного
движения, но в некоторых случаях умышленно препятствуют ему.
Соответствующие меры необходимо принимать ма этапе проек-
тирования путем выбора надлежащих плана трассы продольного
профиля, ширины улицы и деления ее на короткие участки в
результате пересечения магистралями районного значения.
Магистральные улицы районного значения. Эти
улицы обеспечивают сквозное движение транспорта в пределах рай-
72
она и непосредственный доступ к прилегающим земельным участ-
кам. Чтобы эффективно распределять транспорт и иметь достаточ-
ную пропускную способность, улицы сети магистралей районного
значения должны быть расположены на расстоянии от 0,8 до 1,6 км
друг от друга.
Магистральныеулицы городского значения. Эти
улицы вместе со скоростными дорогами должны служить основны-
ми путями транзитного движения. Они обеспечивают непосредст-
венную связь между основными пунктами отправления и назначе-
ния— центральным деловым районом, главными районами занято-
сти, центрами распределения и отправки товаров, конечными
пунктами различных видов транспорта во всех частях городской
территории. Магистрали городского значения служат также про-
должением внегородских автострад.
Скоростные дороги. Эти дороги предназначены для про-
пуска транзитного транспорта. Успешно справляясь с весьма интен-
сивным движением, эти дороги помогают освободить другие части
дорожно-уличной сети от транзитного транспорта, в результате чего
все улицы более эффективно выполняют свое назначение. Чтобы
обеспечить безопасность при большой интенсивности движения,
пункты въезда должны иметь необходимые устройства регулиро-
вания.
В табл. 6 приведены нормы, характеризующие вышеприведен-
ную систему классификации дорог и улиц.
Городские улицы обеспечивают создание необходимых санитар-
ных условий, доступ света и воздуха, под «ими размещаются под-
земные коммуникации, однако основным назначением дорожно-
уличной сети города является перемещение людей и товаров. В дви-
жении участвуют пешеходы, легковые автомобили, автобусы,
грузовые автомобили; цели движения различны — работа, покупки,
отдых, образование и др.
Многие города имеют прямоугольную планировку, при которой
микрорайоны делятся на узкие прямоугольные кварталы. В других
городах была использована радиально-кольцевая планировка с
тем, чтобы избежать однообразия; однако, как и при обычной (пря-
моугольной) планировке улицы местного движения, магистрали
районного и городского значения различались только шириной [2].
Подобная практика, сводящаяся к изменению ширины улицы в
зависимости от ее категории, может привести к созданию узких
улиц местного движения, забитых стоящими автомобилями. По-ви-
димому, более рациональный подход состоит в уменьшении общей
длины улиц, а не их ширины. В качестве примера можно указать
тупиковые и петлеобразные улицы (рис. 18).
Следует отметить, что хотя критика прямоугольного располо-
жения улиц местного движения оправдана, в особенности когда
речь идет о жилых районах, полный отказ от этой схемы, по-види-
мому, нецелесообразен. Несмотря на свойственные ей недостатки,
общепризнано, что ее последовательное применение позволило бы
предотвратить образование некоторых «узких мест» в современных
73
Таблица 6
Тип улицы (дороги) Функциональ ные и проектные характеристики Расстояние между улицами (располо- жение)
Скоростные до- роги непрерывного движения Регулируемый доступ; отсутствие пересечений на од- ном уровне; безо- становочное дви- жение транспорта Различное; зави- сит от местных ус- ловий
Скоростные до- роги Регулируемый доступ; канализо- ванные пересече- ния на одном уров- не; стоянка транс- порта запрещена Различное; обыч- но радиальное или кольцевое
Главные дороги (магистрали город- ского значения) Обычно являются границами районов; стоянка транспорта обычно запрещена 2,4—3,2 км
Ширина Максималь- ный уклон, % Скорость, км/ч Прочие характерис- тики /
полосы отвода, м покрытия, м
61,0—91,5 3,7—на каждую полосу движения; 2,4—3,0—на обо- чины; 2,4—18,3— на разделительную полосу 2 112 Строятся в ос- новном в городах. Желательно нали- чие боковых дорог
45,7—76,2 3,7—на каждую полосу движения; 2,4—3,0—для обо- чин; 2,4—9,1 — на разделительную по- лосу 3 80 Обычно наземные дороги. Желатель- но наличие боко- вых дорог
36,6—45,7 25,6 (максималь- но)—при четырех полосах движения, стояночных и раз- делительной полосе 4 56—64 Необходимо пре- дусматривать тро- туары шириной 1,5 л/, отделенные от проезжей части полосой зеленых насаждений шири- ной 1,5—3 м или более
Второстепенные
дороги (второсте-
пенные магистрали
городского значе-
ния)
Основные подъез-
дные улицы; име-
ются светофоры;
на боковых улицах
знаки остановки
Магистральные Основные внут- ренние улицы; зна- ки остановки на боковых улицах
улицы значения районного
Улицы движения местного Улица для дви- жения в пределах микрорайона. Не предназначена для транзитного дви- жения
0,4—0,8 км
1,2—1,6
90—240 м
24,4 18 Л 5 56—64 Необходимо пре- дусматривать тро- туары шириной 1,5 м, отделенные от проезжей части полосой. зеленых насаждений шири- ной 1,5—3 м или более
19,5 13,4 (две полосы по 3,7 м для дви- жения и две поло- сы по 3 м для сто- янки) 5 48 Минимальная ши- рина тротуаров 1,2 м\ вертикаль- ный бордюр
15,2 11 (если разре- шена стоянка) 6 40 Минимальная ши- рина тротуаров 1,2 м
Рис. 18. Схема, демон-
стрирующая функции
улиц разной категории:
1 — дороги скоростного дви-
жения; 2 — церковь; 3 — тор-
говый центр; 4 — школа;
5 — магистрали городского
значения; 6 — магистраль-
ные улицы районного значе-
ния; 7 — улицы местного
движения; 8 — петлеобраз-
ная улица; 9 — тупиковая
улица; А — петлеобразная
улица; Б — тупиковая улица
дорожно-уличных системах. В некоторых случаях по мере разра-
стания города за пределы центрального района первоначальная
прямоугольная планировка была нарушена, что привело к беспо-
рядочной прокладке улиц. В других случаях основная планировка
оказалась нарушенной только в отдельных пунктах, например, из-
за естественных препятствий (реки), железных дорог, часто далеко
проникающих в город в связи с наличием крупных предприятий,
произвольного размещения парков и других зон отдыха. Факторы,
подобные вышеперечисленным, привели к отклонению от прямо-
угольной планировки и обусловили затруднительность или невоз-
можность .исправления этих отклонений в дальнейшем.
2. СКОРОСТНЫЕ ДОРОГИ
Во многих городах наземная дорожно-уличная сеть, состоящая из
улиц местного движения, магистральных улиц районного значения
и главных городских магистралей, не соответствует возросшей
интенсивности движения. На перекрестках возникают заторы, жизнь
пешеходов подвергается опасности, оставленные у тротуаров авто-
мобили сильно затрудняют движение транспорта. Основное ново-
введение в дорожном хозяйстве, при помощи которого пытаются
решить все эти проблемы — скоростные дороги.
Скоростная дорога предназначена для интенсивного высокоско-
ростного безопасного движения. В городах скоростные дороги вы-
полняют две основные функции: отделяют транзитное движение от
местного с тем, чтобы предотвратить возникновение затруднений
для движения, и обеспечивают быстрое и удобное сообщение между
различными частями города, а также между городами.
Скоростная дорога представляет собой автостраду с раздели-
тельной полосой, предназначенную для транзитного движения. Соз-
76
дание предпочтительных условий для транзитного движения дости-
гается путем устройства специальных въездов и съездов для вхож-
дения или выхода автомобилей из транспортного потока в
определенных пунктах и исключения пересечений на одном уровне.
Важнейшее отличие скоростных дорог от обычных наземных
улиц — это регулирование доступа или въезда.
Для регулирования доступа к полосам транзитного движения в
пределах полосы отвода скоростной дороги прокладывают парал-
лельные дороги. Местную дополнительную дорогу, расположенную
рядом с основной автострадой и предназначенную для обслужи-
вания прилегающих участков и регулирования доступа к автостра-
де, называют боковой дорогой, В функции этой дороги входит
регулирование доступа к полосам транзитного движения, обеспе-
чение доступа к прилегающим к автостраде участкам и движения
в пределах дорожно-уличной сети по каждую сторону автострады.
Переход с боковых дорог на основные полосы автострады допу-
скается лишь в специально обозначенных пунктах. В границах
города боковые дороги следует выполнять в виде парных дорог с
односторонним движением. В сельской местности на боковых доро-
гах часто приходится предусматривать двустороннее движение
из-за больших расстояний между выполненными в разных уровнях
пересечениями с основной дорогой.
При использовании в качестве вспомогательного пути сообще-
ния боковая дорога позволяет весьма гибко эксплуатировать ско-
ростную дорогу. Она позволяет постадийно строить городскую
скоростную дорогу, по ней же пропускают транспорт в период
сооружения основных полос скоростной дороги. На протяжении
расчетного срока службы скоростной дороги целостная система
боковых дорог обеспечивает максимально удобный доступ к участ-
кам, прилегающим к скоростной дороге. Боковые дороги в значи-
тельной степени расширяют возможности замены одних дорог
другими и становятся неотъемлемой частью общей дорожно-улич-
ной сети. В периоды интенсивного движения по городским скоро-
стным дорогам боковые дороги обеспечивают эксплуатационную
гибкость, которая часто необходима для успешной работы средств
наблюдения и управления движением по скоростной дороге.
Скоростные дороги в основных городах имеют различную схему
в зависимости от возраста и развития города, особенностей местно-
сти, исторических ориентиров и традиций. Чаще всего встречаются
системы радиально-кольцевого типа. Обычно имеется внутреннее
кольцо, охватывающее центральный деловой район, и внешнее коль-
цо. Радиальные дороги обеспечивают движение транспорта к цен-
тральному району и от него.
3. ИЗМЕРЕНИЕ ИНТЕНСИВНОСТИ ДВИЖЕНИЯ
Эффективность дорожно-уличной системы оценивают по трем
основным критериям: интенсивностью движения; средней скоро-
стью; числом дорожно-транспортных происшествий.
77
Интенсивность движения определяется числом автомобилей,
движущихся в определенном направлении или направлениях по
данной полосе или дороге и проходящих через пункт наблюдения
за фиксированный период времени. Определение интенсивности
движения составляет основу оценки величины транспортного пото-
ка. Поскольку при сравнениях исходят в основном из интенсивно-
сти движения, она является важнейшим показателем при определе-
нии относительного значения различных дорог при планировании и
проектировании. Например, специалисты по организации движения
пользуются данными об интенсивности движения для установления
очередности работ по сооружению новых магистралей и усовершен-
ствованию существующих дорог. При изучении интенсивности дви-
жения определяют такие параметры, как величина транспортного
потока, его состав, распределение транспортного потока по време-
ни и направлениям. На практике изучение интенсивности движения
включает сбор данных, их представление в удобной форме и ис-
пользование.
Интенсивность движения меняется по часам суток, дням неде-
ли и месяцам года; при расчетах обычно пользуются данными об
интенсивности движения в определенные часы «пик» и среднесуточ-
ной интенсивностью движения за год; по первому показателю оце-
нивают эффективность дороги, а по второму — степень безопасно-
сти движения. При определении эффективности дорожно-уличной
сети различают два обширных аспекта, один из которых связан с
учетом основных характеристик отдельных улиц, а другой — с выяс-
нением эффективности дорожно-уличной системы в целом.
Статистические данные по интенсивности движения позволяют
количественно оценить эффективность транспортной системы. Для
абсолютно точного измерения среднесуточной интенсивности движе-
ния потребовалось бы провести непрерывный подсчет автомобилей
на всех улицах города. Поскольку эта задача является нереальной,
необходимо составить какой-то план выборочного обследования с
тем, чтобы полученные результаты имели необходимую точность
при разумных затратах сил и времени.
Впервые программа подсчета числа автомобилей, проходящих
по дороге, была проведена в сельской местности, однако в насто-
ящее время в центре внимания стоят городские улицы. В настоя-
щее время имеется методическое руководство, в котором описан
ряд систематических обследований, позволяющих получить мини-
мально необходимые данные об интенсивности движения по суще-
ствующим улицам [3]. Рекомендуемые обследования включают кон-
трольные подсчеты, выборочные подсчеты как -на главных, так и на
второстепенных улицах, подсчеты на границах центрального дело-
вого района (ЦДР) и подсчеты на секущих линиях.
Контрольные подсчеты используют для получения сведений о
колебаниях интенсивности движения по годам, месяцам, дням и
часам. На каждой главной улице должен быть предусмотрен один
контрольный пункт. Цель контрольного подсчета на этом пункте
состоит в определении колебаний интенсивности движения по часам
78
суток и направлениям, типичных для всего маршрута и свободных
от ограничений по пропускной способности. Особую важность пред-
ставляет определение поправочных коэффициентов для обработки
результатов, полученных по малым выборкам при выборочном под-
счете. Контрольные подсчеты на главных улицах должны произво-
диться не реже, чем 1 раз в два года, автомобили следует разде-
лять по направлениям движения, минимальная продолжительность
подсчета — 24 ч.
Расположение второстепенных контрольных пунктов должно
удовлетворять основному условию выбора типичных улиц любой
категории. Выбор точек для размещения второстепенных контроль-
ных пунктов требует хорошего знания характеристик местного
движения, связанных с использованием территории. Число второ-
степенных контрольных пунктов зависит от размера города и зна-
чения, придаваемого определению интенсивности движения по ули-
цам местного движения. В соответствии с методическим 'руковод-
ством минимальное число контрольных пунктов на улицах местного
движения равно девяти для небольших городов, подсчет без рас-
пределения автомобилей по направлениям следует проводить дваж-
ды в год, продолжительность подсчета — 24 ч. Эти подсчеты прово-
дит с целью расчета поправочного коэффициента для обработки
результатов определения интенсивности движения по второстепен-
ным улицам, полученных методом движущегося автомобиля.
Для получения показателей колебания интенсивности движе-
ния по улицам каждой категории по дням и сезонам используют
ключевые подсчеты. Эти подсчеты проводят с целью определения
дневных и месячных поправочных коэффициентов, причем для полу-
чения дневных поправочных коэффициентов подсчет автомобилей
без деления по направлениям проводят ежегодно в течение семи
дней, а для нахождения месячных и сезонных поправочных коэффи-
циентов подсчет (без деления по направлениям) надо проводить 1
раз в месяц в течение 24 ч (в будний день). Пункты ключевого под-
счета должны быть предусмотрены на одной скоростной дороге,
одной скоростной дороге непрерывного движения, одной магист-
ральной улице городского значения, одной магистрали районного
значения, одной жилой, одной торговой и одной промышленной
улице с тем, чтобы были представлены улицы всех категорий.
Руководство рекомендует, чтобы в пределах каждого контроль-
ного участка магистральной улицы проводился выборочный подсчет
без деления автомобилей по направлениям продолжительностью
24 ч (в будний день). Итог за 24 ч является единственной требуе-
мой цифрой, поскольку с помощью суточного и месячного попра-
вочных коэффициентов она может быть пересчитана в оценку сред-
несуточной интенсивности движения. Проведя подобный пересчет
для всех контрольных участков, можно определить интенсивность
движения в обоих направлениях, а также его плотность, т. е. число
автомобилей, приходящихся на 1 км магистральной улицы. Выбо-
рочные подсчеты на магистральных улицах следует проводить 1 раз
79
в четыре года или после увеличения интенсивности движения на
10% в зависимости от того, что наступит раньше.
Результаты подсчета числа проходящих автомобилей использу-
ют для выявления тенденций, составления карт транспортных по-
токов и определения расчетных размеров движения. В этих подсче-
тах указывается общая интенсивность движения без учета на-
правления. При разработке мер по улучшению условий движения
и исследования пропускной способности используют результаты
подсчетов с делением автомобилей по направлениям. Пересечения
являются наиболее сложными с точки зрения организации движе-
ния пунктами, поэтому результаты подсчетов интенсивности движе-
ния на пересечениях (с указанием числа автомобилей, совершаю-
щих поворот и пешеходов) используют для проектирования
устройств расчленения транспортных потоков, обоснования запре-
щения поворотов, определения цикла светофоров и исследования
дорожно-транспортных происшествий. Состав транспортного пото-
ка позволяет выявить результаты подсчетов с делением автомоби-
лей по типам. Эти результаты имеют важное значение для разра-
ботки норм строительного проектирования и проектирования
геометрических элементов дорог, регулирования пропускной спо-
собности и уточнения результатов других подсчетов.
При изучении движения между пунктами отправления и назна-
чения обычно используют три вида подсчетов: подсчет по месту
жительства, подсчет по границам района и подсчет по секущим
линиям. Подсчет по месту жительства проводят с целью определе-
ния среднего числа пассажиров в автомобиле, мест тяготения насе-
ления в пределах какого-то района и доли пассажиров, пользую-
щихся транзитным транспортом; результаты этого подсчета позво-
ляют исследовать характеристики поездки. Граничный подсчет
обычно выполняют по периметру замкнутого района, например
ЦДР, торгового центра или промышленного района. Результаты
подсчета используют для определения средства передвижения лиц,
въезжающих и выезжающих из этого района, и числа лиц и авто-
мобилей, находящихся в пределах района. Результаты подсчета по
секущей линии служат основой для определения увеличения интен-
сивности движения за год и используются для проверки точности
проектных наметок, составленных по данным прошлых лет. Секу-
щая линия—это воображаемая линия, которая делит пополам
обследуемую территорию; при подобном методе подсчета необходи-
мо обеспечить получение классифицированных по типам автомо-
билей данных для всех улиц, пересекающих эту линию.
4. СРЕДСТВА ОПРЕДЕЛЕНИЯ ИНТЕНСИВНОСТИ ДВИЖЕНИЯ
Объем движения можно подсчитать вручную, при помощи ручных
и механизированных счетчиков. При подсчете вручную наблюдате-
ля снабжают папкой с зажимом, часами, карандашами и соответ-
ствующими бланками. При использовании ручных счетчиков блан-
ки не нужны, так как при этом нужно записывать только итоговые
80
показания счетчиков. Ручные счетчики используют при подсчете
числа автомобилей, выполняющих поворот, при проведении подсче-
тов с разделением автомобилей по типам, при подсчетах по месту
жительства, подсчетах числа пешеходов и подсчетах на многополос-
ных скоростных дорогах. Механизированные счетчики могут быть
стационарными или переносными, с записью или без записи данных.
Стационарные счетчики используют для проведения контрольных
подсчетов, например с целью определения поправочных коэффици-
ентов для пересчета результатов, полученных на малой выборке, в
среднесуточную интенсивность движения; в качестве датчиков ис-
пользуют фотоэлектрические, пневматические, магнитные, радио-
локационные, звуковые и инфракрасные устройства. Переносные
счетчики применяют для проведения временных или краткосрочных
подсчетов. Они состоят из электрического счетчика, срабатываю-
щего от воздушного импульса, создаваемого в трубе, которая рас-
положена поперек дороги. С помощью поправочного коэффициента,
который определяют на основе подсчетов с делением автомобилей
по типам, сводят к минимуму ошибку, вносимую многоосными гру-
зовыми автомобилями.
Устройства для автоматического определения интенсивности
движения лучше всего описать, указав их компоненты (средства
обнаружения, передачи сигнала, регистрации и измерения) [4].
Наиболее распространен датчик пневматического типа, или до-
рожная труба. Он представляет собой упругую трубу, прикреплен-
ную к покрытию под прямым углом' к направлению движения.
Один конец трубы заглушен, а второй связан с пневматическим
выключателем. Когда колеса автомобиля наезжают на трубу, воз-
дух в ней перемещается и выключатель срабатывает. Это устрой-
ство работает с высокой точностью, причем вероятность ошибки,
связанной с одновременным наездом колес нескольких автомоби-
лей, очень мала.
Обнаружение объекта при помощи фотоэлектрического устрой-
ства происходит при перемещении объекта между источником света
и фотоэлементом, который в свою очередь может быть соединен с
электрическим счетчиком. Для устранения завышенных результа-
тов, причиной которых могут служить, например, вертикальные
стойки решетчатых кузовов грузовых автомобилей, рекомендуется
устанавливать два независимых источника света на расстоянии око-
ло 75 см друг от друга. Недостатком этого метода является невоз-
можность подсчета числа автомобилей, проходящих по каждой
полосе в отдельности.
Звуковые, радиолокационные и инфракрасные устройства близ-
ки друг к другу, поскольку в каждом из этих устройств происхо-
дит излучение энергии в сторону приближающегося автомобиля
(сверху или сбоку). Звуковой детектор посылает сигнал через каж-
дые Vis сек, после чего он воспринимает отраженный сигнал. Если
между посылкой сигнала и получением отраженного звука прохо-
дит определенное заранее рассчитанное время, то это означает, что
звук беспрепятственно достиг покрытия и отразился от него; значит,
81
на дороге нет автомобиля. Уменьшение времени отражения указы-
вает на наличие автомобиля. Поскольку очень кратковременный
импульс будет показывать наличие автомобиля большой высоты,
например грузового автомобиля, звуковой детектор может быть ис-
пользован для проведения подсчетов с делением автомобилей по
типам. Отражение этих кратковременных импульсов вызывает за-
мыкание реле, показывающее наличие автомобиля. Генератор им-
пульсов и датчик, воспринимающий отраженный сигнал, монтиру-
ют в головке, размещаемой над дорогой (на мосту, опоре знака или
мачте освещения), в то время как электронный блок может быть
установлен в более удобном месте и соединен с головкой кабелем.
Радиолокационный детектор излучает в сторону приближающе-
гося автомобиля высокочастотные импульсы. Датчик реагирует на
допплеровский сдвиг фазы отраженного сигнала, что приводит к
замыканию реле. Сдвиг фазы отраженного сигнала прямо пропор-
ционален скорости автомобиля. Поскольку автомобиль является
отражателем сигнала, радиолокационный детектор представляет
собой автономное устройство. Радиолокационный детектор обычно
устанавливают над осевой линией полосы или полос, для которых
производится подсчет. Эта система характеризуется высокой перво-
начальной стоимостью и малыми эксплуатационными затратами.
5. ПОКАЗАТЕЛИ ИНТЕНСИВНОСТИ ДВИЖЕНИЯ
Большие строительные затраты вынуждают выполнять тщательный
технический анализ на стадии проектирования дороги с тем, чтобы
она удовлетворяла требованиям движения. При проектировании
внегородских дорог движение транспорта может характеризовать-
ся среднесуточной интенсивностью движения за год, распределе-
нием интенсивности по часам суток в важнейших пунктах системы
и распределением автомобилей по типу, весу и эксплуатационным
характеристикам. Что же касается городских путей сообщения, то
высокая концентрация транспорта и ограниченное пространство
обусловливают настоятельную 'необходимость использования более
подробных данных.
Интенсивность движения соотносят со временем, причем выбор
временного интервала зависит от информации, которую намерены
получить, и ее возможного использования. Так, для оценки движе-
ния по определенному городскому маршруту обычно используют
данные о среднесуточной интенсивности движения (СИД), полу-
ченные путем изучения движения между пунктами отправления и
назначения. Текущая СИД равна годовой интенсивности, делен-
ной на 365. Хотя СИД имеет важное значение для классификации
дорог и улиц, планирования работ по улучшению наличной дорож-
но-уличной сети и строительного проектирования, использование
СИД для проектирования геометрических элементов нецелесооб-
разно, поскольку в этом показателе не отражены колебания интен-
сивности движения. В большинстве случаев при проектировании
геометрических элементов исходят из интенсивности движения в
82
течение 1 ч. Данные об интенсивности движения за более короткие
промежутки времени используют при проектировании городских
дорог и улиц.
Поскольку транспортные потребности задают в виде суточной
интенсивности движения в обоих направлениях, а для проектиро-
вания необходимо знать часовую интенсивность движения в одном
направлении, двумя наиболее важными характеристиками движе-
ния являются распределение интенсивности движения по часам
суток и распределение по направлениям. При пятидневной рабочей
неделе почасовые изменения интенсивности движения по большин-
ству городских улиц обнаруживают два отчетливых «пика» на про-
тяжении дня, которые связаны с повторяющимся движением в
центральный деловой район или некоторые другие крупные районы
притяжения и из них. Что же касается движения по внегородским
дорогам, то на некотором расстоянии от городов обнаруживается
лишь один «пик» во второй половине дня.
При проектировании дороги исходят из ожидаемой интенсивно-
сти движения по ней в каком-то заданном году; эту характеристи-
ку называют расчетной часовой интенсивностью движения.
Исследование соотношения между интенсивностью движения в
часы «пик» и годовой среднесуточной интенсивностью движения на
внегородских дорогах показывает, что интенсивность движения за
тридцатый час «пик» (30 ИД) может быть взята в качестве показа-
теля требуемой пропускной способности. Было установлено, что при
такой пропускной способности соотношение между удобствами дви-
жения и затратами близко к максимальному. Однако если при
проектировании дороги исходят из интенсивности движения за
тридцатый час «пик», она теоретически не будет соответствовать
транспортным требованиям в течение 29 часов «пик» в расчетном
году. С экономической точки зрения нецелесообразно, чтобы про-
пускная способность соответствовала любому 'максимальному транс-
портному потоку.
Что касается городских дорог, то для получения часовой интен-
сивности движения можно усреднить за год максимальные из
вечерних часов «пик» для каждой недели. Если допустить, что все
утренние часы «пик» (интенсивность движения за час «пик») мень-
ше вечерних, то средний из 52 недельных вечерних часов «пик» бу-
дет превышен в 26 раз, следовательно, приближенно он равен ин-
тенсивности движения за двадцать шестой час «пик». Поэтому при
проектировании городских дорог также можно исходить из интен-
сивности движения за тридцатый час «пик».
Движение по определенному городскому маршруту обычно оце-
нивается среднесуточной интенсивностью движения, определенной
для какого-то района путем исследований, описанных в предыду-
щем параграфе. Расчетную часовую интенсивность движения (в
двух направлениях) обычно представляют в виде 30 ИД, вычислен-
ной умножением СИД на коэффициент репрезентативности К.
Данные о движении в городских условиях показывают, что отно-
83
шение 30 ИД к СИД колеблется от 7 до 18%. Для внегородских
дорог значение К несколько больше.
На городских радиальных скоростных дорогах интенсивность
движения за некоторые доли часа «пик» превышает соответствую-
щий средний показатель. Исследования [5] показали, что пиковая
интенсивность движения изменяется в зависимости от численности
населения города. Для городов с населением около 1 млн. чел.
пятиминутная пиковая интенсивность движения примерно на 20%
превышает показатель для всего часа «пик». В городах меньшего
размера кратковременная пиковая интенсивность движения сильнее
отличается от интенсивности движения за час «пик».
Интенсивность движения за час «пик», которую в настоящее
время используют в качестве основного показателя движения при
проектировании дорог, следует увеличить с тем, чтобы она отража-
ла более интенсивное движение на протяжении коротких интерва-
лов времени внутри часа «пик». Это вызвано тем, что недостаточ-
ная пропускная способность дороги может привести к затруднени-
ям движения, которые будут сказываться намного дольше, чем сам
период наиболее интенсивного движения.
Два параметра пикового периода, а именно продолжительность
и относительная интенсивность, были определены путем изучения
характеристик движения через снабженный светофорами перекре-
сток (рис. 19) [6]. Продолжительностью пикового периода называет-
ся непрерывный интервал времени в течение часа «пик», на протя-
жении которого пятиминутные интенсивности движения превыша-
ют среднюю для всего часа «пик» интенсивность. Относительная
Рис. 19. Интенсивность движения за каждые 5 мин часа «пик» по улице Хейте
у пересечения с 6-й улицей (Хьюстон, 6 декабря 1961 г.);
А—час «пик»; Б — «пиковый» период 32 мин; В — средняя интенсивность
92,8 авт!мин (1 114 авт!ч)
84
интенсивность Y представляет
собой отношение средней ин-
тенсивности движения на про-
тяжении пикового периода к
этому же показателю для часа
«пик».
Y = 1,225 — 0,000 135Р-
- 0,1^ + 0,000 ОЗИ, (56)
где Р — население города,
деленное на 1 000; L — коорди-
ната перекрестка, выраженная
в виде отношения расстояния
от центрального делового рай-
она к размерам города; V —
интенсивность движения через
перекресток в час «пик».
Некоторые авторы [7, 8]
предлагают ввести для скорост-
ных дорог коэффициент часа
«пик», равный отношению ин-
тенсивности движения за пико-
вые 5 мин к интенсивности за
весь час «пик» (рис. 20). Для
определения коэффициента ча-
са «пик» предлагается исполь-
зовать интенсивность движе-
ния за пиковые 15 мин [9].
Рис. 20. Определение интенсивности дви-
жения за пиковый пятиминутный интер-
вал по интенсивности движения за весь
час «пик». Для примера принято населе-
ние города 1 000 000 чел., интенсивность
движения — 5 000 авт!ч\ при проектиро-
вании исходят из интенсивности движе-
ния в пиковый период 4 900 авт[ч
Характеристики интенсивности движения за пиковый период
зависят от многих факторов, наиболее важным из которых, по-ви-
димому, является численность населения города. На изменение
интенсивности движения в пределах часа «пик» влияет также раз-
мещение скоростных дорог (радиальные, кольцевые и т. д.) относи-
тельно пунктов тяготения транспорта, число полос на этих дорогах
и их пропускная способность.
Хотя интенсивности движения в каждом направлении на доро-
гах с двусторонним движением проявляют тенденции к уравнове-
шиванию за длительные промежутки времени, например за сутки,
для пиковых периодов обычно характерна их неуравновешенность.
При проектировании геометрических элементов дороги существен-
ным является наличие данных об интенсивности движения в каж-
дом направлении (о распределении по направлениям). На ради-
альной городской улице (дороге) утром преобладает движение к
центру, а после полудня — к периферии. Для любой данной улицы
распределение движения по направлениям, как правило, не меняет-
ся от года к году; поэтому показатель распределения по направле-
ниям D для современных условий обычно можно использовать и в
85
перспективных расчетах. Обычно в час «пик» по внегородским доро-
гам и дорогам пригородных зон от 60 до 80%, а в среднем около
67% автомобилей движется в одном направлении. В пределах
центрального городского района и вблизи него это соотношение со-
ставляет примерно 50:50.
При проектировании должен быть известен состав транспорт-
ного потока. В гл. 1 отмечалось, что автомобили разного размера
и веса отличаются эксплуатационными характеристиками. Грузо-
вые автомобили имеют больший вес, меньшую скорость и занимают
большую площадь, следовательно, их влияние на эксплуатацию до-
роги эквивалентно влиянию нескольких легковых автомобилей. Гру-
зовое движение (все автобусы, грузовые автомобили и автомоби-
ли-тягачи с прицепами за исключением автомобилей, эксплуатаци-
онные характеристики которых аналогичны характеристикам лег-
ковых автомобилей, например пикапы и фургоны) следует выра-
жать в виде доли общей интенсивности движения за расчетный
час Т.
Распределение автомобилей по полосам представляет собой еще
одну важную характеристику движения. Конструкция дороги, раз-
метка проезжей части и наличие у водителей определенного опыта
вызывают разделение транспортного потока на несколько рядов.
Однако интенсивность движения по каждой полосе многополосной
дороги редко оказывается одинаковой.
Рис. 21. Зависимость доли интенсивности движения по скоростной дороге, при-
ходящейся на наружную полосу, от общей интенсивности движения по дороге
и интенсивности движения по примыкающему въезду: 4
I — четырехполосная дорога;, 2 — шестиполосная дорога; 3 = восьмиполосная дорога
36
Интенсивность движения по
скоростной дороге1.
аВт/ч ’
900
$
Исходная
доля
Расстояние I
по движению
до съезда. И
2 3 4 56189
Уменьшение доли в точке h из-за
наличия съезда выше по движению
1200 в точке X
Рис. 22. Поправка к доле интен-
сивности движения по дороге,
приходящейся на наружную поло-
су, которая учитывает наличие
примыкающего съезда выше по
движению. Для примера принято:
интенсивность движения по съез-
ду—600 авт!ч\ расстояние до
съезда — 150 ж; интенсивность
движения по скоростной дороге —
4 000 авт!ч\ исходная доля—
22,5%; поправка — 2%; доля с
учетом поправки — 20,5%
* °
» А'
'200
/У
На рис. 20 показано, как по интенсивности движения за весь
час «пик» можно определить тот же показатель для пятиминутного
пикового интервала. Эта величина относится ко всем полосам и
недостаточна для изучения соотношения между потребной и фак-
тической пропускной способностью критических участков скорост-
ной дороги. Такие критические участки часто лежат вблизи въездов
(съездов) и требуют большого внимания, если проектировщик
хочет обеспечить определенный уровень удобств для водителей.
Проектировщику полезно знать, какая доля транспортного потока
по всей скоростной дороге приходится на наружную полосу, по-
скольку задача слияния непосредственно связана с движением по
наружной полосе и примыкающему въезду.
Исследование [7, 8], проведенное на 49 участках 14 скоростных
дорог, показало, что на долю движения по наружной полосе во
87
1200
X
Г
Рис. 23. Поправка к доле интен-
сивности движения по дороге, при-
ходящейся на наружную полосу,
которая учитывает наличие при-
мыкающего съезда ниже по дви-
жению. Для примера принято: ин-
тенсивность движения по съез-
ду— 500 авт!ч\ расстояние до
съезда — 120 интенсивность
движения по скоростной дороге —
4 000 авт!ч\ исходная доля — 27%;
поправка — 2,3%; доля с учетом
поправки — 29,3%
I 3 456789
Увеличение доли в точке А из-за
наличия съезда ниже по движению
5 точке X
/
900 X
300
$
400
Расстояние Вниз
по движению до
съезда, м
всем движении по дороге сильно влияют интенсивность движения
по дороге, интенсивность движения по примыкающему въезду, ин-
тенсивность движения по въезду (съезду), расположенному выше
по движению, расстояние до этого въезда, интенсивность движения
по примыкающему съезду, расположенному ниже по движению, и
расстояние до этого съезда. -На рис. 21 показано соотношение меж-
ду долей всего движения по скоростной дороге, приходящейся на
наружную полосу, и двумя переменными — общей интенсивностью
движения по дороге и интенсивностью движения по примыкающе-
му въезду. Номограммы на рис. 22—24 показывают соотношение
между долей всего движения, приходящейся на наружную полосу,
интенсивностью движения по примыкающему съезду, расположен-
ному выше по движению, и расстоянием до него, интенсивностью
88
700
/W
Рис. 24. Поправка к доле интен-
сивности движения по дороге,
приходящейся на наружную поло-
су, которая учитывает наличие
примыкающего въезда выше по
движению. Для примера принято:
интенсивность движения по въез-
ду— 650 авт!ч\ расстояние до
въезда —185 м; интенсивность
движения по скоростной дороге —
3 800 авт[ч\ исходная доля — 22%;
поправка—1,8%; доля с учетом
поправки — 23,8%
Расстояние
вверх по дви-
жению до
въезда,>м
^500
400
4 5 6783
Увеличение Вопи в точке А из-за
наличия въезда выше по движению
в точно X
движения по примыкающему съезду, расположенному ниже по дви-
жению, и расстоянием до него и интенсивностью движения по при-
мыкающему въезду, расположенному выше по движению, и рас-
стоянием до него. Во всех случаях расстояния указаны до конца
въезда или начала съезда. При построении номограмм полагали,
что примыкающий въезд, расположенный ниже по движению, не
оказывает влияния на долю движения, приходящуюся на наруж-
ную полосу.
Интуитивно можно предположить, что при выборе полосы дви-
жения водитель исходит не только из формы въезда (съезда) и
относительной интенсивности движения. Если водитель пользуется
скоростной дорогой для совершения ближней поездки, то он, по-ви-
димому, стремится оставаться на наружной полосе, в то время как-
89
iti А
о
&
107*
О
s>*
Рис. 25. Распределение по по-
лосам автомобилей, пользую-
щихся въездом Мокингберд (в
процентах). Объем выборки ра-
вен 1 444 автомобилям:
А — внутренняя полоса; Б —
средняя полоса; В — наружная
полоса
въезд
ьо1
Доля движущиеся по наружной Доля движущиеся по наружной
полосе автомобилей полосе автомобилей
Рис. 2'6. Зависимость между дально-
стью поездки и использованием на-
ружной полосы:
а — при интенсивности движения по
скоростной дороге менее 3 000 авт!ч\
б — при интенсивности движения по
скоростной дороге более 3 000 авт fa
1 — в пределах обследованного участка
автомобили не съезжают с дороги
при дальней поездке его поведение будет более гибким. Результаты
исследований [7] подтвердили наличие определенной зависимости
между дальностью поездки и использованием наружной полосы.
На диаграмме (рис. 25) показано, как автомобили, въезжающие
на скоростную дорогу Норт Сентрал (Даллас) по въезду Мокинг-
берд, распределяются по трем полосам по мере их приближения к
центральному деловому району.
Интенсивность движения по скоростной дороге оказывает влия-
ние на распределение по полосам въезжающих на нее автомобилей.
По мере увеличения интенсивности движения все большее число
входящих в поток автомобилей остается на наружной полосе и на-
мерение водителей временно сменить полосу отступает на задний
план перед необходимостью еще одной смены для возвращения на
наружную полосу к моменту съезда. На рис. 26 показана зависи-
мость между дальностью поездки и долей движущихся по наруж-
ной полосе автомобилей среди всех вошедших в поток автомобилей.
Верхняя часть рис. 26 относится к скоростной дороге с небольшой
интенсивностью движения — в одном направлении по ней проходит
менее 3 000 автомобилей в час. Нижняя часть рис. 26 соответству-
ет условиям на скоростной дороге с интенсивностью движения от
умеренной до большой — свыше 3 000 автомобилей в час в одном
направлении. Хотя экспериментальные точки характеризуются
большим разбросом, ограничивающее влияние большой интенсив-
ности движения очевидно.
Эти данные свидетельствуют также о том, что при дальности
поездки менее 4,8 км нельзя рассчитывать на получение установив-
шегося распределения по полосам дороги, которое характерно для
транзитного движения.
6. ПРОГНОЗИРОВАНИЕ ДВИЖЕНИЯ
Выше было сказано о том, как специалист по организации дви-
жения определяет интенсивность движения по существующей до-
рожно-уличной сети, чтобы установить условия ее эксплуатации.
При проектировании автомобильных дорог возникает необходи-
мость в прогнозировании транспортных потребностей. Многие срав-
нительно новые автомобильные дороги оказались перегруженны-
ми, потому что их проектировщики рассчитывали на много мень-
шую сравнительно с фактически достигнутой интенсивностью дви-
жения.
Современные методы прогнозирования движения обычно вклю-
чают три этапа: прогнозирование количества поездок, распределе-
ние этих поездок между зонами города и соотнесение междузо-
нальных поездок со схемой будущей дорожно-уличной сети. Всю
территорию города делят на небольшие участки (зоны), пригодные
для использования при составлении таблиц поездок и исследова-
ния движения в пределах города и транзитного движения. При
установлении границ зон учитывают выбор участков для переписи,
распределение населения, использование территории, основные
91
Рис. 27. Кривая, полученная
методом отклонений
пункты отправления и назначения, а
также современную дорожно-уличную
сеть и перспективы ее развития.
Под количеством поездок понимают
число поездок, совершаемых за опре-
деленный интервал времени в преде-
лах города или района. Этот показа-
тель может быть также представлен
числом поездок в район определенной
деятельности — за покупками, на ра-
боту, с целью отдыха и т. д. Поездки
в жилые районы и из них составляют
около трех четвертей всех поездок по
территории города, поэтому если при
известном использовании территории
(определяемом планом города) может
быть определена плотность населения,
то можно рассчитать и количество поездок в будущем.
После определения числа и вида поездок в прогнозируемом году
следует составить распределение этих поездок. Распределение по-
ездок можно определить как перемещение людей и автомобилей
по городу, которую обычно представляют в виде схемы поездок
между зонами и внутри них. Схема распределения поездок в буду-
щем зависит от характера, интенсивности и направлений развития
города. Схему будущих межзональных поездок можно построить
на основе расчетов с введением поправочных коэффициентов, отра-
жающих рост движения, в данные о современных межзональных
перемещениях; при втором подходе результаты исследований дви-
жения между пунктами отправления и назначения корректируют с
учетом перспективных оценок использования территории.
Далее полагают, что все распределенное движение начинается
и заканчивается в центральных точках каждой зоны, называемых
центроидами. Всем пересечениям улиц и городских дорог, называ-
емым узлами, присваивают номера; участок улицы между двумя
узлами называется звеном. Таким образом, каждый центроид сое-
диняют со всеми остальными посредством системы.звеньев, назы-
ваемой деревом. Основываясь на некотором критерии, при домощи
ЭВМ задают интенсивность движения по каждому звену. Простей-
ший метод под названием «все или ничего» состоит в том, что все
поездки задают по кратчайшему маршруту по скоростным дорогам
или по кратчайшему маршруту по магистральным улицам в зави-
симости от того, в каком случае на поездку затрачивается меньше
времени.
На рис. 27 показан другой способ задания интенсивности движе-
ния — способ отклонения. Обычно вначале задают суточную интен-
сивность движения без деления по направлениям. При этом исполь-
зуют две схемы: одна отображает важнейшие магистрали совре-
менной дорожно-уличной сети, а на второй указаны магистрали и
скоростные дороги, которые предполагается построить в будущем.
92
На рис. 28 показана часть типичной схемы дорожно-уличной сети,
используемой для распределения перспективного движения.
Были попытки разработать модель распределения движения,
которая обеспечивала бы завышение для определенного маршрута
или звена. Эти модели называются моделями с ограниченной про-
пускной способностью; к ним относятся модели, в которых характе-
ризующий звено параметр — сопротивление движению — изменяет-
ся в зависимости от интенсивности движения, и для распределения
межзонального движения применяют метод интераций до тех
пор, пока изменение этого параметра не станет меньше некоторого
определенного значения. В эту же группу входят модели, в кото-
рых последовательно определяют несколько кратчайших маршру-
тов д используют кривую отклонения для распределения поездок
по альтернативным маршрутам.
По мнению проектировщиков, необходимо составлять прогнозы
распределения движения на 5, 10, 15 и 20 лет. При таком подходе
результаты расчетов будут постоянно обновляться. При распреде-
Рис. 28. Часть схемы дорожно-уличной сети, служащей для распределения пер-
спективного движения:
6 — звено; 2 — узлы; 3 — центр зоны.
Результаты расчета интенсивности движения на ЭВМ:
Узлы Суточная интенсивность
(в обоих направлениях)
800-801—303 3 000
800-801-802 15 000
800-801-304 3 000
303—801—802 6 000
304-801-802 3 000
304-801-303 12 000
и т. д.
93
лении движения следует ориентироваться на часы «пик», так как
по удобствам движения именно в это время водитель судит об эф-
фективности дороги. Наиболее важными следует считать поездки
из дома на работу и с работы домой.
7. ПРОПУСКНАЯ СПОСОБНОСТЬ
Пропускная способность — это максимальное число автомобилей,
которое может пройти через какую-то точку полосы или дороги за
определенный период времени при преобладающих дорожно-транс-
портных условиях. Пропускная способность представляет собой оп-
ределенную, а именно максимальную, интенсивность движения.
Обычно время измеряют в часах, поэтому пропускную способность
выражают числом автомобилей, проходящих за час по полосе или
всей дороге.
Пропускная способность зависит от физических характеристик
дороги, состава движения и таких факторов, как погода и время
суток. При выборе численных значений пропускной способности
дорог различного типа при преобладающих условиях исходят из
максимальной интенсивности движения, определенной вышеописан-
ными методами. Таким образом, пропускную способность выража-
ют через транспортные потребности, что напоминает определение
допустимой нагрузки на стальной стержень путем приложения к
нему нагрузки. Единственный способ удостовериться, что измерена
именно пропускная способность (или допустимая нагрузка), состо-
ит в том, чтобы создать такой транспортный поток (или нагрузку),
который приведет к отказу. На дороге этот момент обнаружить не-
легко, поскольку отказ проявляется не столь явно, как в случае
стержня.
Первые попытки изучения пропускной способности и использо-
вания этого понятия относятся к тридцатым годам [10]. Под про*
пускной способностью понимали интенсивность движения, при кото-
рой затруднения движения становились явными.
В 1931 г. Иоханнессон [И] определил пропускную способность
дороги исходя из среднего минимального расстояния между цент-
рами автомобилей. По его мнению, «пропускная способность доро-
ги достигается в тот момент, когда любое дальнейшее увеличение
интенсивности движения при прочих неизменных факторах вызыва-
ет заметное уменьшение скорости».
В 1933 г. Гриншилдс [12] применил покадровую киносъемку для.
измерения скорости отдельных автомобилей и расстояния между
ними. Ему удалось выразить данные для зависимости расстояния
между автомобилями от скорости в виде прямой
5=6,9+0,226^, (57)
где v — скорость, км/ч, и S — расстояние, м.
Если v выражается в м/сек, то коэффициент при v равен 0,81.
Этот коэффициент имеет размерность времени и равен времени
реакции среднего водителя. Позже в работах Гриншилдса [13] бы*
94
Таблица 7
Автомобили Полный интервал I Интервал при движе- нии D Задержка при трога- нии с места К.
0—1 2,8 0,0 2,8
1—2 2,6 2,0 0,6
2-3 2,1 2,0 0,1
3—4 2,1 2,0 0,1
4-5 2,0 2,0 0,0
5-6 2,0 2,0 0,0
Итого 6 13,6 10,0 3,6
ли приведены графики, на которых по оси абсцисс откладывалась
величина, обратная расстоянию между автомобилями и названная
им плотностью движения.
Пропускная способность перекрестков магистральных улиц
является показателем пропускной способности сети магистраль-
ных улиц в целом. Пропускная способность перекрестка зависит от
его геометрических характеристик, например ширины проезжей
части улиц, и таких переменных, как состав движения, доля авто-
мобилей, выполняющих поворот, системы регулирования движения
и правил стоянки автомобилей.
Пропускная способность перекрестка в расчете на полосу за
любой период, в течение которого включен зеленый сигнал светофо-
ра, равна числу автомобилей, которые могут выехать на перекре-
сток за этот период. В табл. 7 и 8 указаны средние минимальные
интервалы между стоящими в очереди у светофора автомобилями,
которые выдерживаются, когда после включения зеленого сигнала
автомобили начинают двигаться. По мере того как скорости авто-
мобилей при проезде мимо светофора выравниваются и приближа-
ются к допустимой для данной дороги скорости, интервал между
ними также стабилизируется на уровне 2 сек, что соответствует про-
пускной способности полосы при зеленом сигнале светофора 1 800
автомобилей в час.
Таблица 8
Вид движения D К,
Движение вперед 2,0 4,0
Поворот налево 2,0 3,9
Поворот направо Разворот: 2,0 4,1
с внутренней полосы 2,2 4,7
с наружной а 2,4 5,3
95
8. УРОВЕНЬ ОБСЛУЖИВАНИЯ
Уровень обслуживания применительно к автомобильным перевоз-
кам по определенной дороге представляет собой качественную ха-
рактеристику условий работы водителя на этой дороге. В уровень
обслуживания входят следующие факторы: скорость и время, за-
трачиваемое на поездку; перерывы в движении; свобода маневри-
рования; безопасность; удобство управления автомобилем; эксплу-
атационные расходы.
Каждый из этих факторов в какой-то мере связан со всеми ос-
тальными. Интенсивность движения влияет на все эти факторы,
причем с увеличением интенсивности ее отрицательное влияние
усиливается. Когда фактическая интенсивность движения по дороге
приближается к максимально возможной, увеличивается опасность
заторов. Затор — это качественное понятие, которое связано с
количественной характеристикой, называемой плотностью движе-
ния. В результате переполнения дороги автомобилями в «узких ме-
стах» образуются очереди из стоящих автомобилей, интенсивность
движения снижается до нуля и на дороге образуется затор.
Интенсивность движения — это непрерывно изменяющаяся ве-
личина; даже при очень низкой часовой интенсивности движения
могут наблюдаться редкие кратковременные интервалы, за которые
через данный пункт будет проходить сравнительно много автомо-
билей. Кроме того, на любой дороге имеются участки с понижен-
ной пропускной способностью, обусловленной специфической гео-
метрией. Следовательно, на любой дороге имеются «узкие места»,
в связи с чем уровень обслуживания может изменяться даже при
«постоянной» часовой интенсивности движения. Опасные в отноше-
нии заторов места можно выявить по их геометрическим характе-
ристикам, а затем изучить условия движения на этих участках.
Так, в качестве «узких мест» изучают и оценивают примыкающие
въезды и съезды. Однако в связи с переменным характером транс-
портного потока возможно, что случайное «скопление» автомобилей
вызовет образование «узкого места» в любой точке дороги. Поэто-
му проектировщик должен уметь рассчитывать подобные типовые
характеристики для того, чтобы обеспечить приемлемые уровни
обслуживания.
Заторы являются в основном непосредственным результатом
характера «спроса и предложения» на дорогах. С точки зрения
организации движения предложение — это пропускная способность
дороги. Спрос выражается числом водителей, которые будут поль-
зоваться дорогой; его размер можно оценить по результатам изуче-
ния движения между пунктами отправления и назначения, если
известно, сколько раз выполняется каждая поездка. Измерение
интенсивности движения по существующей дороге с целью опреде-
ления потребности в ней часто оказывается бесполезным. Единст-
венный вопрос относительно соотношения между фактической ин-
тенсивностью движения и реальной потребностью в дороге, который
может быть решен по результатам таких измерений, состоит в сле-
96
дующем: является ли потребность столь большой, что она может
быть равна пропускной способности за значительный промежуток
времени на протяжении суток? В граничных случаях по максималь-
ной потребности в пределах часа «пик» можно выявить участки,
где потребность превышает пропускную способность для интерва-
лов менее 1 ч.
Если в данной дорожной системе на дорогу может въезжать
большее, чем она может пропустить, число автомобилей, то всякий
раз, когда спрос превысит пропускную способность, на дороге
будут возникать заторы, в результате по дороге будет пропущено
за данный период времени меньшее число автомобилей. Теорети-
чески можно утверждать, что по любой дороге может -быть пропу-
щено некоторое максимальное число автомобилей. Эта возможная
пропускная способность представляет собой максимальную интен-
сивность движения за пиковый период, которую нельзя превысить
без изменения одного или нескольких преобладающих условий.
Чтобы получить количественную характеристику уровня обслужи-
вания, который должна обеспечить данная полоса или дорога, ука-
занное значение уменьшают с учетом дополнительных ограничений,
налагаемых на дорогу, и условия движения.
Если эти условия относятся к проектируемой дороге или улице,
характеристику называют расчетным уровнем обслуживания, если
же они представляют собой преобладающие условия на сущест-
вующей магистрали, характеристику называют фактическим уров-
нем обслуживания.
При разных значениях интенсивности движения могут склады-
ваться разные уровни эксплуатационных условий, или уровни об-
служивания. Любой интенсивности движения по определенной ма-
гистрали соответствует некоторый уровень обслуживания.
Использование интенсивности движения, соответствующей рас-
четному уровню обслуживания, имеет значительные преимущества,
поскольку такой подход соответствует традиционной практике тех-
нических расчетов, однако определение значения этого показателя
весьма затруднительно. На любой скоростной дороге имеются
участки, где движение автомобилей наиболее затруднено, например
вблизи примыкающих въездов и съездов. Эти участки необходимо
учитывать при определении расчетной интенсивности движения по
магистрали; знание эксплуатационных характеристик этих участков
и транспортных требований необходимо для правильного планиро-
вания с тем, чтобы предотвратить образование в будущем «узких
мест».
Как пропускная способность, так и уровень обслуживания опре-
деляются физическими характеристиками дороги и взаимодействи-
ем автомобилей в транспортном потоке. Различие между ними
состоит в том, что на любой заданной полосе или дороге может
быть обеспечен широкий диапазон уровней обслуживания, но толь-
ко одна возможная пропускная способность. Различные уровни
обслуживания на любой конкретной дороге зависят от интенсив-
ности и состава движения. На любой данной полосе или дороге,
4—338
97
предназначенной для создания некоторого уровня обслуживания
при определенной интенсивности движения, будет складываться
множество различных уровней обслуживания по мере того, как
интенсивность движения будет изменяться на протяжении какого-
то часа, по часам суток, дням недели, сезонам года и по разным
годам (с возрастанием интенсивности движения). Другими слова-
ми, колебания спроса не отражаются на пропускной способности,
но сильно влияют на качество обслуживания, или дорожно-транс-
портные условия, с которыми сталкивается водитель. В весьма об-
общенном виде задачи планирования строительства автомобильных
дорог, их проектирования и эксплуатации сводятся к вопросу о том,
может ли определеннная дорога (пропускная способность) удовле-
творить рассчитанные или измеренные транспортные потребности
(интенсивность движения) при приемлемом уровне обслуживания
(скорость и т. д.). Эмпирические и теоретические соотношения меж-
ду скоростью и интенсивностью движения по скоростной дороге
позволяют в некоторой степени предсказать ожидаемый уровень
обслуживания при заданном отношении спроса к пропускной спо-
собности. Применению такого подхода препятствует то обстоятель-
ство, что до сих пор не удалось выявить непосредственную связь
между большинством качественных характеристик, определяющих
уровень обслуживания и интенсивность движения.
Возросшая зависимость от автомобильных перевозок привлекла
внимание к повышению эффективности дорожной сети. Необходи-
мо, чтобы дорожная сеть обеспечивала надежное обслуживание.
Инженер должен отчетливо представлять факторы, влияющие на
эффективность или уровень обслуживания дорог и улиц [14]. От-
дельная улица или дорога является частью сети, или системы, ко-
торая обеспечивает доступ и транзитное движение транспорта.
Улицы и дороги разного типа имеют различные функции; обычно
их группируют по двум основным функциям — доступа и транзит-
ного движения. Улицы, предназначенные в основном для обеспече-
ния доступа, обычно относят к улицам местного движения; маги-
стральные улицы районного значения примерно в равной степени
предназначены как для обеспечения доступа, так и для транзитного
движения. Магистрали городского значения должны соответство-
вать требованиям значительной интенсивности движения на боль-
шие расстояния, следовательно, в основном они предназначены для
транзитного движения, но функция доступа сохраняется. Скорост-
ные дороги рассчитаны исключительно на транзитное движение, а
обеспечение доступа не входит в их функции.
Проектирование магистралей городского значения и скоростных
дорог обычно связано с тщательным исследованием пропускной
способности и уровня обслуживания. При прокладке дорог в одном
уровне, например магистралей городского значения, наиболее
сложные по пропускной способности проблемы связаны с пересече-
ниями. Скоростные дороги отражают концепцию уровня обслужи-
вания, поскольку они предназначены для обеспечения высокоэф-
фективного транзитного движения.
98
9. ОСНОВНЫЕ ПРОБЛЕМЫ
В настоящее время проблемы, связанные с увеличением движения
автомобилей по существующей дорожной сети, пытаются решить
стандартными методами организации движения, основанными на
изучении характеристик транспортного потока в разных сечениях.
Представляется целесообразным привлечение понятий теории сетей
для формулировки задачи и оптимизации движения. Некоторые за-
труднения обусловлены недостаточно ясным пониманием характе-
ра взаимодействия потоков в таких сложных сетях. Необходимым
условием решения проблемы является аналитическое описание это-
го процесса.
ЗАДАЧИ
1. Выберите критерий для оценки системы скоростных дорог большого города, ко-
торым пользуются владельцы сезонных билетов на проезд из пригородов в цент-
ральный деловой район, покупатели, направляющиеся в торговые центры, кото-
рые расположены вдоль этой дороги, и водители транзитного транспорта.
2. Опишите обычные циклические колебания интенсивности движения.
3. Дайте определение каждого из нижеперечисленных подсчетов интенсивно-
сти движения: подсчет с делением автомобилей по типам; подсчет на границах
района; подсчет на секущей линии; контрольный подсчет; подсчет по месту жи-
тельства.
4. Дайте определение каждого из указанных показателей и объясните,
как им пользуются при проектировании: интенсивность движения за тридцатый
час «пик»; интенсивность движения за час «пик»; интенсивность движения за пи-
ковый период.
5. Опишите методику, которой вы будете придерживаться при составлении
плана работ по определению интенсивности движения в каком-либо городе, обсу-
дите требования к необходимому для этих работ оборудованию.
6. Перечислите четыре категории улиц и опишите функции улиц каждой ка-
тегории. Как отразятся эти функции на проекте уличной сети для нового большого
района города?
7. Дайте эскизы нескольких типов пересечений и объясните, как вы намере-
' ны определять число полос на каждом участке скоростной дороги, включая пе-
ресечения.
8. Как .рассчитывают перспективную интенсивность и другие характеристики
движения при проектировании скоростной дороги?
9. Рассчитайте интенсивность движения по наружной полосе шестиполосной
скоростной дороги в конце примыкающего въезда при условии, что интенсивность
движения по транзитным полосам дороги составляет 5 000 автомобилей в час, а
по примыкающему въезду — 400.
10. Решите задачу 9 при следующих условиях:
указанный примыкающий въезд расположен в 240 м вниз по движению от
примыкающего съезда с интенсивностью движения 400 автомобилей в час;
указанный примыкающий въезд расположен в 150 ж ниже по движению от
въезда с интенсивностью движения 400 автомобилей в час.
11. По результатам выполненных работ исследуйте вопрос о применимости
подсчетов по малым выборкам для оценки часовой интенсивности движения и
интенсивности движения за пиковый период.
12. Подсчитайте интенсивность движения по въезду на регулируемый пере-
кресток с 7 до 8 ч утра, фиксируя число автомобилей за каждый пятиминутный
4* 99
интервал. Рассчитайте значение относительной интенсивности и сравните его с
результатом расчета по уравнению регрессии (см. § 5).
13. Выберите подходящие регулируемые перекрестки и определите при помо-
щи секундомера значения интервала при движении и задержке при трогании
с места для прямолинейного движения и поворотов. Сравните полученные резуль-
таты с данными табл. 7 и 8.
ЛИТЕРАТУРА
1. «Better Transportation for Your City», National Committee on Urban Transpor-
tation, Library of Congress Catalog Number 57—14978.
2. G a 11 i о n А. В., E i s n e r S., «The Urban Pattern», D. Van Nostrand,
Princefon, N J., 1963.
3. «Measuring Traffic Volumes», National Committee on Urban Transporta-
tion, Library of Congress Cotalog Number 57—14978.
4. Institute of Traffic Engineers Technical Committee 7-G: Volume Survey
Devices, Traffic Eng., vol. 31, № 6, pp. 44—51, March, 1961.
5. «Design Manual for Controlled Access Highways», The Texas Highway
Department, Austin, 1960.
6. D r e w D. R., P i n n e 11 C. A. Study of Peaking Characteristics of Sig-
nalized Urban Intersections as Related to Capacity and Design, Highway ReS.
Board Bull. 352, 1962.
7. Drew D. R., Keese C. J. Freeway Level of Service as Influenced by
Volume and Capacity Characteristics, Highway Res. Board Record 99, 1965.
8. L i p s с о m b J. L. «The Effect of Ramps in the Lateral Distribution of
Vehicles on a Sixlane Freeway», тезисы, Texas A&M University, 1962.
9. «Highway Capacity Manual», Highway Res. Board Spec. Publ., 1966.
10. J о h n s о n A. N. Traffic Capacity, Highway Res. Board Proc., vol. 10,
1930.
11. Johannesson S. Highway Economics, Highway Res. Board Proc., vol.
8, 1928.
12. Greenshields B. D. The Photographic Method of Studying Traffic
Behavior, Highway Res. Board Proc., vol. 13, 1933.
13. Greenshields B. D. A Study of Traffic Capacity, Highway Res. Board
Proc., vol. 14, 1934.
14. «Highway Capacity Manual», U. S. Bureau of Public Roads, Washington,
D. C., 1950.
ГЛАВА V
ИССЛЕДОВАНИЯ
ПО ОРГАНИЗАЦИИ
ДВИЖЕНИЯ
Эффективность перевозок и безопасность движения в значительной
мере определяются характером взаимосвязей в транспортном пото-
ке. Однако эти взаимосвязи исследованы недостаточно, что ограни-
чивает возможности управления транспортным потоком и предот-
вращения дорожно-транспортных происшествий. Практическое
решение этой проблемы невозможно без предварительного выясне-
ния характерных особенностей реального транспортного потока.
Эмпирический подход представляет собой традиционный метод
изучения движения транспортных средств. На этой основе была
получена основная часть знаний в области организации движения.
И в настоящее время при решении задач управления автомобиль-
ными перевозками и проектировании дорог инженер по организа-
ции движения исходит в основном из эмпирических данных, полу-
ченных путем наблюдения, измерения и статистического анализа.
1. СИСТЕМНЫЙ ПОДХОД
Термин «система» употреблялся в предыдущей главе широко и не-
сколько неопределенно. Этот термин, по-видимому, не имеет удов-
летворительного определения. Согласно определению Холла [1],
«система — это набор объектов, включающий взаимосвязи между
объектами и их признаками». В данном контексте под объектами
можно понимать элементы движения: автомобиль, водитель, доро-
га. Признаки — это свойства указанных объектов или элементов.
К признакам относятся зрение водителя и его время реакции, ско-
рость автомобиля, его приемистость и интервал между автомобиля-
ми, ширина улицы и средства регулирования движения.
Любая система представляет собой набор различных взаимо-
действующих человеческих и машинных элементов, объединенных
для достижения общей заданной цели путем манипуляции и управ-
ления материалами, информацией, энергией и людьми. Выше были
подробно описаны элементы движения — водитель и автомобиль;
101
цель состоит в мотивации водителя, обеспечивающей безопасность
движения и экономию времени и расстояния. Кроме того, под
целью можно понимать стремление инженера обеспечить эффектив-
ную организацию движения путем использования надлежащей
информации и средств регулирования движения (знаков и светофо-
ров). Взаимосвязи отражают взаимодействие транспортных средств
друг с другом и с окружающей средой, под которой понимают до-
рогу, улицу или дорожно-транспортную сеть в целом.
Организация движения имеет дело с множеством конкретных
факторов и взаимодействием различных комбинаций этих факто-
ров. Автомобильные перевозки представляют собой столь сложное
явление, что отдельные задачи редко можно решить путем измене-
ния какого-то одного фактора или нескольких факторов без учета
взаимосвязей.
Системотехника предполагает исчерпывающее изучение всей
задачи в целом. Важными этапами этого изучения являются опре-
деление задачи (включая цели, синтез, анализ), выбор по некото-
рому критерию оптимальной системы из ряда альтернативных ва-
риантов и оценка. Такой подход часто включает составление мате-
матической модели, анализ чувствительности системы к изменению
характеристик ее элементов, анализ совместимости различных ком-
понентов и подсистем и определение устойчивости системы при раз-
личных входных воздействиях.
Определение целей дорожной системы — это одна из наиболее
трудных задач, стоящих перед специалистом по планированию ав-
томобильных перевозок, проектировщиком геометрических элемен-
тов дороги и инженером по организации движения. Значение этого
этапа обусловлено тем, что при системном подходе цели определя-
ют способы оптимизации и основание для выбора одного из не-
скольких альтернативных вариантов. Удачным примером является
проектирование скоростной дороги. Следует ли пересечения распола-
гать на большом расстоянии друг от друга, чтобы минимизировать
помехи движению, или расстояние между ними должно быть не-
большим, чтобы минимизировать суммарный дополнительный про-
бег? Еще важнее составить описание работы оптимальной скорост-
ной дороги, которое обычно вырождается в интуитивную систему
ценностей с характеристиками типа «хорошая», «плохая», «с часты-
ми заторами». Кроме того, многие цели представляются нереаль-
ными из-за их формулировки. Например, целью планирования авто-
томобильных перевозок является «создание единой системы
автомобильных перевозок, обеспечивающей улучшение качества
обслуживания в соответствии с перспективными транспортными по-
требностями в пределах экономических возможностей данного рай-
она и с учетом требований его развития в будущем».
При системном подходе для проведения синтеза и анализа необ-
ходимо построить модель, которая связывала бы топологические
свойства системы с ее входами и выходами. Синтез предполагает
соединение частей в целое; обычно его осуществляют путем экстра-
поляции или интерполяции существующих методов и результатов
102
для достижения определенных целей, которые в свою очередь под-
вергают анализу. Анализ — это разделение -системы на компоненты
для того, чтобы рассмотреть все следствия с точки зрения целей.
На практике синтез неотделим от анализа. На этапе синтеза и ана-
лиза пользуются различными методами, широко применяемыми в
исследовании операций, например линейным программированием,
теорией массового обслуживания, моделированием и сетевыми ме-
тодами.
2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Одна из наиболее трудных проблем, стоящих перед исследователем
организации движения — это превращение реальной дорож-
но-транспортной обстановки, включающей водителей, автомобили,
устройства регулирования движения и дорогу, в набор математиче-
ских символов и зависимостей, воспроизводящих их поведение.
Именно модель является основой, которая позволяет рассматри-
вать подобные взаимодействия в целом.
Любая модель является идеализированным отображением дей-
ствительности. Строить ее следует таким образом, чтобы реальные
процессы воспроизводились с приемлемой точностью; при этом не-
обходимо помнить, что никакая абстракция не может точно совпа-
дать с действительностью. Попытку установить соответствие между
задачей и рациональным мышлением можно реализовать в виде
физической или теоретической моделц. Физическая модель может
быть скалярной или аналоговой, например аэродинамическая тру-
ба для испытания самолетов и песочные часы для измерения вре-
мени. Динамическая аналогия Кирхгофа показывает, что критиче-
скую нагрузку, действующую по оси колонны, можно определить
путем изучения колебаний маятника, подвешенного на нити той же
длины. Рассчитанные на численные методы аналоговые модели
могут быть еще более тонкими. Логарифмическая линейка и номо-
граф— это цифровые аналоги; автомобильный спидометр выдает
значение площади, ограниченной кривой «скорость как функция
времени»; с этой точки зрения он представляет собой интегрирую-
щее устройство.
Любая теоретическая модель — это по сути дела гипотеза. На-
пример, открытые Ньютоном три закона движения представляют
собой теоретическую модель нашего мира. По очевидным причинам
большинство теоретических моделей математизировано. Если сама
гипотеза и ситуация, которую она описывает, не являются доста-
точно простыми, то единственный практически целесообразный путь
изучения многочисленных проявлений какой-то сложной системы
связан с привлечением математики. Цель математического описа-
ния дорожно-транспортной ситуации состоит в выявлении сущест-
венных моментов и составлении набора соотношений между ними,
которые обладают достаточной простотой, но позволяют получать
важные результаты.
Инженер лишь в небольшой степени может влиять на перемен-
ные, характеризующие движение. Правда, он может увеличить
103
число полос с тем, чтобы уменьшить интенсивность движения п'о
каждой полосе, может ввести ограничения скорости с тем, чтобы
воспрепятствовать движению с большими скоростями, и может ус-
тановить светофоры для того, чтобы регулировать движение. Одна-
ко остается множество переменных, которые почти не зависят от
его воли, например транспортные потребности, характеристики ав-
томобиля и поведение водителей.
В организации движения, как и в других областях, многие за-
дачи можно свести к нахождению максимума или минимума неко-
торой функции. Так, расчет числа полос зависит от нахождения
максимальной интенсивности (пропускной способности), в то вре-
мя как при расчете цикла светофора можно исходить из критерия
минимальной задержки. Если математическая модель позволяет
точно рассчитать поведение одной переменной при задании опре-
деленных значений другой переменной, то ее называют детермини-
стической. Моделям этого типа можно противопоставить стохасти-
ческие модели, которые позволяют определить вероятность получе-
ния различных значений переменной величины.
Детерминистические аспекты транспортного потока можно выя-
вить путем изучения движения отдельного транспортного средства
или всего потока в целом. Влияние движения или интервала одного
автомобиля на другой относится к локальным, или микрохаракте-
ристикам движения. Кроме того, соотношение между интенсивно-
стью движения за длительный период времени и концентрацией
движения на каком-то участке дороги определяет общие, или
макрохарактеристики движения.
В весьма общем виде любая последовательность опытов, кото-
рую можно подвергнуть вероятностному анализу, называется сто-
хастическим, или случайным процессом. Подобный процесс может
быть либо процессом с независимыми событиями, либо марковским.
Процесс с независимыми событиями имеет место в случае, когда
эксперименты выполняют так, что исход одного эксперимента не
влияет на исход любого другого. Если же исход любой конкретной
пробы, или эксперимента, зависит от исхода ближайшей предыду-
щей пробы, то процесс называют марковским.
На рис. 29 представлены многие транспортные модели, которые
будут рассмотрены в последующих главах, и показана взаимосвязь
между ними. Ниже будет показано, что в теоретической фазе мно-
гих исследований можно использовать либо стохастический, либо
детерминистический подходы, либо и тот и другой одновременно.
К примеру, рассмотрим процесс выезда на скоростную дорогу.
Маневр выезда — это вероятностное событие, включающее рас-
пределение автомобилей, прибывающих к въезду, распределение
интервалов между автомобилями'на скоростной дороге, распреде-
ление времени ожидания для автомобилей, ожидающих возможнос-
ти выполнения маневра на въезде, и даже распределение времени
реакции водителей и приемистости автомобилей. После выполнения
маневра выезда определенная доля въехавших на скоростную до-
рогу автомобилей будет перемещаться на другие полосы; этот
104
Аналоговое
моделирование
Цифровое
моделирование
Микрохарантери-
стики
Законы
следования “
автомобилей
Шум
ускорения
Распределения ______Независимый
вероятностей процесс
Детерминистский
подход
Уравнение
плотности
потока
Макрохарактври---^ирпипя^'—
W/7 "ия
Метод
'кинетической
энергии
Стохастический
подход
Модели теории - Марковский
массового ----------процесс
обслуживания
Рис. 29. Классификация транспортных моделей
маневр будет происходить на последующих участках дороги. Опи-
санный процесс по своей природе соответствует марковскому про-
цессу, который подвержен флуктуациям до перехода в- стационар-
ный процесс, или установившееся состояние.
Продолжая рассмотрение маневра выезда, замечаем, что на
наружной полосе вблизи участка, где происходит выезд, возника-
ют ударные волны, распространяющиеся на другие полосы. Наи-
лучшие результаты в плане количественного выражения этого эф-
фекта дает детерминистский подход, в частности метод кинетиче-
ской энергии, ' который позволяет рационально описать как
пропускную способность, так и уровень обслуживания.
3. ЭКСПЕРИМЕНТ И ОЦЕНКА
Неотъемлемыми частями процесса исследования являются форму-
лировка теории, проведение эксперимента и оценка результатов.
Формулировка теории включает установление критериев для опти-
мизации системы и построение математической модели. По своему
характеру эксперимент может быть контролируемым и неконтро-
лируемым. Применительно к транспортным исследованиям контро-
лируемый эксперимент может быть осуществлен в лабораторных
или полевых условиях. Примером лабораторного эксперимента мо-
жет служить моделирование как аналоговое, так и цифровое;
полевые эксперименты проводят на автодромах и в меньшей степе-
ни при разработке проектов тоннелей и систем регулирования дви-
жения по скоростным дорогам.
Этапы исследования транспортной задачи схематически показа-
ны на рис. 29. Суть этой схемы состоит в том, что лабораторные
эксперименты в контролируемых условиях проводят в тех случаях,
105
безопасность
I \Я
Полевые эксперименты
в контролируемых
условиях^
2
Применение
>
Полевые эксперименты
в неконтролируемых
условиях
♦
I
Рис. 30. Пирамида теорий
когда нельзя применить другие методы. Полезным методом оцен-
ки правильности теоретических положений являются полевые экс-
перименты в контролируемых условиях, однако фактическая их
проверка должна быть основана на изучении движения в реаль-
ных условиях, т. е. на полевых экспериментах, проводимых в не-
контролируемых условиях. Последним и, возможно, наиболее важ-
ным этапом исследовательской работы является представление ре-
зультатов.
106
Современный подход к изучению транспортных потоков отража-
ет пирамида теорий (рис. 30). При макроподходе используют та-
кие физические аналогии, как ударные волны, поток сжимаемой
жидкости, тепловой поток, метод кинетической энергии. При микро-
подходе систему водитель — автомобиль рассматривают в качестве
замкнутой системы с обратной связью и применяют методы теории
регулирования для изучения характеристик движения. Методы ин-
женерной психологии используют для выявления механизма, по-
средством которого водитель выбирает определенное положение
по отношению к другим автомобилям и дороге, с тем чтобы описать
процессы переработки информации и принятия решений при управ-
лении автомобилем.
Каждый из трех указанных научных подходов представлен бо-
ковой поверхностью пирамиды детерминистских теорий, поскольку
все они необходимы для рационального объяснения проблем дви-
жения транспорта.
Микроподход обеспечивает наилучшие возможности для иссле-
дования устойчивости при взаимодействии автомобилей, столь важ-
ной для безопасности движения. Макроподход особенно удобен для
изучения установившегося состояния транспортного потока и во-
просов эффективности. Инженерно-психологический подход приме-
няют для исследования уникальных сенсорных и моторных характе-
ристик водителя и соответствующих ограничений; на этой основе
стремятся свести к минимуму число ситуаций, в которых водитель
оказывается не в состоянии надлежащим образом управлять авто-
мобилем, а также регулировать абсолютную и относительную
скорости.
На рис. 30 указаны три основных экспериментальных метода,
применяемые при транспортных исследованиях — лабораторный
эксперимент в контролируемых* условиях, полевые эксперименты в
контролируемых и неконтролируемых условиях.
Приложение новой научной теории к современным сложным сис-
темам требует повышения точности теоретических положений.
Первая задача, с которой сталкивается исследователь транспорт-
ных проблем, — это превращение реальной транспортной ситуации
в набор математических символов и соотношений, которые воспро-
изводят их поведение. Вторая задача — это применение значений,
полученных в результате исследования этих математических выра-
жений.
По мере усложнения приложений должны развиваться и соот-
ветствующие разделы теории.
Исследователи, занимающиеся различными вопросами, доказа-
ли ценность теоретических разработок для описания транспортных
потоков. Однако между теорией и практикой организации движе-
ния существует некоторый разрыв.
Для сокращения указанного разрыва необходимо выделить
результаты, полученные современной теорией транспортных пото-
ков, организовать их проверку, определение степени значимости и
сценку.
107
ЗАДАЧИ
1. Выберите в вашем городе какой-либо снабженный светофорами перекресток, на
котором нередко возникают сложные ситуации при организации движения. Дайте
его эскиз. Рассмотрите аспекты движения по перекрестку, которые заслуживают
изучения, элементы, которые надлежит учесть, и укажите, где, по вашему мнению,
проходят границы окружающей среды при системном анализе движения по пе-
рекрестку.
2. Водитель миновал небольшое заграждение, которое было сооружено с
целью предотвращения проезда по недостроенной эстакаде. По замерам гори-
зонтальное расстояние от опоры эстакады до центра упавшего с нее автомобиля
составляет 37 м. Высота эстакады 6 м.
Какова была скорость автомобиля в момент падения?
Составьте перечень допущений, необходимых для решения задачи в соответ-
ствии с моделью, которую вы составили для описания происшествия.
Укажите, какие допущения вы считаете значимыми?
ЛИТЕРАТУРА
1. Н а 1 1 А. «А Methodology for Systems Engineering», D. Van Nastrang, Prince-
ton, N. I., 1962.
ГЛАВА VI
ТРАНСПОРТНЫЙ поток
Для оценки вероятности появления того или иного события, про-
исходящего при движении автомобилей, можно использовать один
из двух методов. Первый метод дает статистическую вероятность,
которая имеет большое значение и широко используется в матема-
тической статистике; второй метод приводит к теоретической
вероятности.
Теорию вероятностей и математическую статистику можно сраВ'
нить с двумя пешеходами, приближающимися к одному и тому же
дому с противоположных сторон улицы. В теории вероятностей ос-
новные факторы известны, но результат нельзя предсказать с абсо-
лютной достоверностью. В математической статистике имеется
конечный результат, но причины, обусловившие его появление, не-
известны.
Одно из затруднений, возникающих при применении теории ве-
роятностей, состоит в определении всех возможных способов появ-
ления данного события. В большинстве азартных игр игрок по
существу вытаскивает тот или иной шанс из «черного ящика», где
различного рода выигрыши и их относительные пропорции известны
заранее. Однако в большинстве реальных дорожно-транспортных
ситуаций редко удается перечислить все возможные исходы. Необ-
ходимо также иметь в виду, что нельзя отрывать теорию вероят-
ностей от математической статистики, так как обычный подход
состоит в том, чтобы взять из «черного ящика» обоснованную экс-
периментальную выборку, а затем оценить, при каком доверитель-
ном уровне она представляет все содержимое «ящика».
1. БИНОМИАЛЬНОЕ РАСПРЕДЕЛЕНИЕ
Как и следовало ожидать, первые исследования транспортных пото-
ков носили статистический характер. Они включали методы изме-
рения средних значений и средних квадратических отклонений
таких характеристик транспортных потоков, как скорость и интен-
109
сивность движения. Однако оказалось, что для полного описания
транспортного потока недостаточно знания таких показателей, как
параметр сдвига и дисперсия, а необходимо рассматривать распре-
деление вероятностей.
Каждый знаком с биномом Ньютона (р + ?)п, где п— положи-
тельное целое число. Возведя бином в некоторую степень п, по-
лучаем
п
{P^-q)n=\. ,/ Pxq'n-x\
х\(п — х)\
х=0
(58)-
Коэффициенты данного разложения называются биномиальны-
ми коэффициентами, часто они выражаются символически как
п \___ п\
х / х\(п — х)1
(59)
Формула (59) дает число сочетаний из п элементов по х. Если
разделить все автомобили на пять классов: малолитражные, стан-
дартные легковые, пикапы, грузовые и автобусы, то число сочета-
ний из пяти элементов по два составит
5!
213!
10.
Хотя п, может принимать только положительные целочисленные
значения, на величины р и q никакие ограничения пока не налага-
ются. Рассмотрим теперь последовательность независимых испыта-
ний. Пусть р обозначает вероятность того, что определенное собы-
тие произойдет при данном испытании, следовательно, q=\—р —
вероятность того, что это событие при одном испытании не
произойдет. Поскольку p + q=\, то, очевидно, что сумма п+1 чле-
нов ряда, записанного в правой части формулы (58), также долж-
на быть равна единице. Следовательно, каждый член биномиаль-
ного разложения представляет собой некоторую вероятность, а все
члены образуют так называемое биномиальное распределение.
Формула для биномиального распределения имеет вид:
Р(х)=( пх \pxq^~x\ (60)
где р — вероятность успешного исхода при любом данном испыта-
нии; q — вероятность неудачного исхода при любом данном испы-
тании; п — число независимых испытаний; х— число успешных
испытаний; Р(х)— вероятность появления п успешных исходов при
х испытаниях.
Рассмотрим приближение автомобилей к перекрестку, где, как
показали исследования, 25% автомобилей совершают правый пово-
110
рот, а левый поворот запрещен. Согласно формуле (60), вероят-
ность того, что один из трех последовательно движущихся автомо-
билей совершит правый поворот, равна
р(!)=_£_(0,25)’ (0,75)2—0,422.
2. МОМЕНТЫ ДИСКРЕТНОГО РАСПРЕДЕЛЕНИЯ
Моменты классической механики связаны с физическими свойства-
ми тел, имеющих некоторую массу. Первый начальный момент
связан с центром тяжести, второй момент относительно центра тя-
жести называется моментом инерции. В теории вероятностей мо-
менты также играют исключительно важную роль. Аналогия между
телом с единичной массой и распределением вероятностей позволя-
ет провести важную аналогию между свойствами моментов. Точно
так же, как некоторые тела могут быть полностью описаны с по-
мощью моментов, некоторые распределения вероятностей можно
полностью описать с помощью моментов.
&-й начальный момент дискретного распределения Р(х), на-
пример биномиального распределения, определяется как
|Л* = 2 Л*Р(х). (61)
х=0
Первый момент pi, или просто ц, называется средним. Второй
момент р2 используется для нахождения дисперсии о2, так как
а2=Н2-1х2. (62)
Первый момент биномиального распределения находится путем
подстановки выражения (60) в формулу (61). После перегруппи-
ровки членов имеем
|л—пр. (63)
Второй момент вычисляется аналогично с помощью тождества
х2=х(х—1) +х. В конечном счете имеем
Р2=/г(л — V)p2 + np. (64)
При подстановке выражений (63) и (64) в формулу (62) нахо-
дим дисперсию биномиального распределения
a2=npq.
3. ПУАССОНОВСКОЕ РАСПРЕДЕЛЕНИЕ
Известно, что вероятность выпадения определенного числа очков
при бросании игральной кости можно выразить как отношение чис-
ла успешных исходов к общему числу возможных исходов, т. е. как
1 : 6. В этом простом примере число случаев появления события и
число случаев, когда событие не может произойти, известны. Одна-
111
ко существуют задачи и другого типа, когда число неудачных ис-
ходов определить невозможно.
Морони [ 1] приводит пример с подсчетом числа вспышек молнии
во время грозы, когда исследователю не известно число случаев
непоявления вспышки молнии. То же самое справедливо и при рас-
смотрении прибытия автомобилей к перекрестку; в этом случае
невозможно определить, сколько автомобилей не прибыло к пере-
крестку. В ситуациях такого рода необходимо применять пуассо-
новское распределение. В формуле для пуассоновского распределе-
ния используется постоянная Эйлера е
е = — +—+ — +—+...=2,7183.... (65)
0!1! 1 2!3!
Это число является основанием натуральных логарифмов. Если
возвести е в некоторую степень т, то результат также можно выра-
зить в виде бесконечного ряда:
Чтобы то или иное разложение можно было считать распределе-
нием вероятностей, сумма всех его членов должна равняться еди-
нице. В случае биномиального распределения имеем р+^=1, по-
этому в формуле (58) (р + <?)п также равняется единице независимо
от значения п. Чтобы разложение ет можно было использовать в
качестве распределения вероятностей, необходимо лишь разделить
обе части выражения (66) на ет
'l=^fl + /n+-^ + -^+.. Д (67)
\ 1 1 2! 3! ' /
Формула (67) дает сумму членов пуассоновского распределения,
следовательно, формулой для распределения будет выражение для
общего члена
Р(х)=~6 ; Л = 0, 1,2, .... (68)
Оказалось, что это распределение весьма удовлетворительно
описывает число отдельных событий х, выраженное через среднее
число этих событий ц. Чтобы оценить среднее значение, необходимо
лишь подставить выражение (68) в формулу (61):
п । т ' <2м‘2ё~т । 3/пзе-от
l*=O + /ne-m-t----------------------И ...
г 1 ' • 2! 3!
р=те~т + —Ь ... j.
Заметим, что выражение в круглых скобках равно ет. Так, в
формуле (68) т есть среднее пуассоновского распределения. С по-
мощью формулы (61) находим второй момент. Подставляя его в
выражение (62), видим, что дисперсия пуассоновского распределе-
ния равна среднему значению.
112
4. СТАТИСТИЧЕСКИЕ КРИТЕРИИ ДЛЯ ПРОВЕРКИ НА
СЛУЧАЙНОСТЬ
Первым этапом при определении соответствия пуассоновского рас-
пределения экспериментальным данным о числе автомобилей, при-
бывающих к перекрестку, является группировка данных по частоте
появления. Для исследования периода 'составляется таблица, где
показано число интервалов длительностью 1 мин, в которых при-
бывает 0, 1, 2, 3 и т. д. автомобилей. Эти данные образуют эмпири-
ческие распределения, а затем делается вывод о соответствии им
предполагаемого теоретического распределения. При проверке та-
ких гипотез применяется критерий хи-квадрат как показатель со-
ответствия эмпирических и теоретических частот появления со-
бытий.
Критерий хи-квадрат находится как сумма квадратов всех от-
клонений наблюдаемых частот от теоретических частот F, деленных
на теоретическую частоту:
(69)
Затем с помощью таблицы значений хи-квадрат определяется
вероятность чисто случайного появления более крупного значения.
Если эта вероятность не превышает 0,05, то обычно критерий счи-
тается значимым и гипотеза о том, что эмпирическое и теоретиче-
ское распределения совпадают, отвергаются.
До сих пор при анализе рассматривались лишь вероятности.
При проверке с помощью критерия хи-квадрат пуассоновского рас-
пределения для некоторого периода необходимо проверить незави-
симость числа прибытий в последовательных интервалах, так как
именно это свойство характеризует чисто случайные события. Так,
если средняя интенсивность прибытия в рассматриваемом периоде
составляет 10 авт!мин. tq вероятность прибытия 10 или более авто-
мобилей равна 0,54 (это значение получено путем последовательно-
го применения формулы (68) или с помощью таблиц для пуассонов-
ского распределения) [2]. Аналогично для любой пары последова-
тельных интервалов длительностью 1 мин вероятность прибытия не
менее 10 автомобилей в каждом интервале равна 0,54-0,54. Вероят-
ность прибытия в каждом интервале менее десяти автомобилей со-
ставляет 0,46-0,46. Остаются еще две возможности: в первом интер-
вале прибывает не менее 10 автомобилей, а во втором интервале
прибывает менее 10 автомобилей и наоборот. Вероятность каждой
из этих комбинаций равна 0,54-0,46. Однако при анализе последо-
вательности интервалов длительностью 1 мин, где число автомоби-
лей превышает среднее значение, за которой следует аналогичная
последовательность интервалов с числом прибытий меньше средне-
го, значение хи-квадрат может оказаться незначительным, хотя чис-
тая случайность исключается.
113
5* ПРОИЗВОДЯЩАЯ ФУНКЦИЯ ВЕРОЯТНОСТЕЙ
В случае дискретного распределения часто бывает очень удобно ис-
пользовать так называемую производящую функцию вероятностей,
которая определяется как
Zx(9)=£(0-)=2 (7°)
х-0
Ее преимущество состоит в том, что моменты дискретного рас-
пределения находятся с помощью следующей операции:
dkZx($)
8-1'
Так, по определению,
Z;(8) = £(x9x-1)=2 х^~гР(х).
х=0
Полагая 0 = 1, получаем первый момент
Z;(l)=f(x)=2 хР(х)=ц. (71)
Х-0
Соответственно
Z^(l)=p2-p (72)
и
а2 = г;(1)+|л-И2. (73)
Производящей функцией для биномиального распределения
является
^(6)=(^ + W- (74)
Производные производящей функции, вычисленные при 0=1,
имеют вид:
Zx(l)=n/>
и
Zx(l)=n(n—1)р2.
Таким образом, среднее и дисперсия, как и ранее, равны соот-
ветственно пр и npq.
В случае пуассоновского распределения
ZA.(6) = e-m<1~e), (75)
а среднее и дисперсию можно проверить с помощью формул (71)
и (73).
114
6. ОТРИЦАТЕЛЬНОЕ БИНОМИАЛЬНОЕ РАСПРЕДЕЛЕНИЕ
Рассмотрим снова биномиальное распределение
(76)
дающее вероятность появления k успешных исходов в п испытаниях.
Допустим, что нас интересует вероятность P(k, п) появления &-го
успешного исхода при п-м испытании. Это событие происходит в
том и только в том случае, если при первых п—1 испытаниях появ-
ляется ровно k — 1 успешных исходов
(77)
и следующее испытание также приводит к успешному исходу. По-
лучаем
р (k, П)=Q 2}) (78)
Формула (78) определяет отрицательное биномиальное распре-
деление.
Как будет показано в следующем разделе, кроме классических
интерпретаций, выражаемых формулами (60) и (78), биномиаль-
ное и отрицательное биномиальное распределения могут описывать
распределение числа событий.
При использовании отрицательного биномиального распределе-
ния задается число событий х = п — k, при этом вероятность появле-
ния х событий имеет вид
' (79)
В данной книге неоднократно иллюстрируется важность момен-
тов при оценке параметров распределения. Поскольку моменты рас-
пределения «грают столь важную роль, было бы полезно найти
функцию, позволяющую определить все моменты. Такой функцией
является производящая функция.
Для отрицательного биномиального распределения производя-
щая функция имеет вид:
(80)
Беря первую и вторую производные функции (80), получаем
= (81)
и
z; (9)=(£ + 1) kq2pk (1 - <7б)-(*+2). (82)
115
Полагая в формуле (81) 0=1, находим первый начальный мо-
мент, или среднее отрицательного биномиального распределения
1»=-^-. (83)
р
Дисперсия этого распределения находится по формуле (82)
e2=z;(i)-hi-|x2=-^-. (84)
Р2
7. АНАЛИЗ ПРИБЫТИЯ АВТОМОБИЛЕЙ
В табл. 9 приведены некоторые характеристики трех рассмотрен-
ных дискретных распределений.
В своей работе Герлу детально рассматривает применение пуас-
соновского распределения для описания движения автомобильного
транспорта. Показано, что некоторые из этих применений, доступ-
ных для инженеров-транспортников, включают анализ интенсивно-
сти движения в данном пункте, определение вероятности наличия
свободного места на стоянке, изучение пространственного распре-
деления некоторых дорожно-транспортных происшествий и проек-
тирование развязок для транспорта, совершающего левый поворот.
Закон Пуассона справедлив при допущении о том, что вероят-
ность появления события остается постоянной, однако на практике
при движении транспортных потоков это довольно редкое явление.
Любое изменение вероятности появления события, в частности уве-
личение или уменьшение вероятности появления какого-либо собы-
тия под влиянием другого события, приводит к увеличению или
уменьшению дисперсии распределения относительно среднего, и по-
лучаемые данные уже нельзя описывать с помощью пуассоновского
распределения. Известно, что устройства, регулирующие движение
транспорта, могут изменять число прибывающих автомобилей, что
исключает случайность. Наконец, некоторые явления, наблюдаемые
при движении транспортных потоков, могут быть описаны пуассо-
новским распределением при наблюдении их в интервале одной дли-
ны, но они могут оказаться неслучайными при наблюдении их в
интервале другой длины.
Таблица 9
Название Формула Среднее Дисперсия
Биномиальное р (х) ~ х пр npq
Пуассоновское
Р{Х}~ XI Р Р*
Отрицательное биноми- альное р(*)== }p*qX \ к — 1 / kg Р ьд Р2
116
Таблица 10
Число автомобилей в интервале х Эмпирическая частота / Теоретическая частота F Отношение квадрата эмпирической частоты к теоретической частоте /2/f
0 139 129,6 149,1
1 128 132,4 123,7
2 55 67,7 44,7
3 25 23,1 27,1
4 13 7,2 23,5
— ! Ml 1
360 360,0 368,1
Среднее равно 1,022
— п=368,1 — 360,0 — 8,1.
Дисперсия равна 1,200 Хо 05 ~ < 8,1.
Следовательно, гипотеза о пуассоновском распределении отвергается.
Одним из способов проверки полученных данных является при-
нятие допущения о том, что данные следуют некоторому распределе-
нию, а затем это допущение проверяется с помощью критерия хи-
квадрат. Данные, приведенные в табл. 10, взяты из работы Герлу
[3]. Они указывают число автомобилей, прибывающих в каждом из
360 интервалов продолжительностью 10 сек. В данном случае не-
адекватность критерия показывает, что распределение числа автомо-
билей не является пуассоновским. Этот пример повторно рассматри-
вается в табл. И, где использовано отрицательное биномиальное
распределение с теми же значениями среднего и дисперсии и полу-
чено очень хорошее соответствие. Объяснение данного факта станет
очевидным при дальнейшем рассмотрении этого вопроса.
В табл. 9 показано, что в случае отрицательного -биномиального
ka ka т-т
распределения среднее равно —— , а дисперсия----Посколь-
р . р2
Таблица И
Число автомобилей в интервале х Эмпирическая час- тота f Теоретическая час- тота F Отношение квадрата эмпирической частоты к теоретической частоте f2jF
0 139 138,0 140,0
1 128 121,5 134,9
2 55 63,1 47,9
3 25 25,2 24,8
д 13 12,2 13,8
тг «ммммам
360 360,0 361,4
Среднее равно 1,022 /2 л = 361,4 — г > 360,0= 1,4.
Дисперсия равна 1,200 Хо,о5 = 5,99 > 1,4
Следовательно, гипотеза о пуассоновском распределении принимается.
117
Таблица 12
Распределение Биномиальное Пуассо- новское Отрицательное биномиальное
Функция распределения — е-* xl / X k — 1\ ь [ .-1 )р^-р)х
Среднее пр р- 6(1—р) р
Дисперсия ПрО- —Р) р- k(l-p) Р2
Отношение среднего к дисперсии (1-/>)-!>! 1 Р<1
Оценка параметров О?4 Со 1 1*. II ч р. = X X P=-J
Х2 Х2 h
(X — $2) - (S2— х)
ку вероятность р<1, то дисперсия всегда больше среднего. Любое
изменение параметра пуассоновского распределения, например уве-
личение вероятности появления одного события под влиянием дру-
гого события, приводит к увеличению дисперсии распределения от-
носительно среднего, поэтому отрицательное биномиальное распре-
деление обеспечивает лучшее соответствие эмпирическим данным.
Процедура подбора дискретного распределения для эмпириче-
ских данных заключается в следующем. Вначале вычисляется сред-
нее х и дисперсия з2. Если среднее и дисперсия примерно одинако-
вы, то для вычисления теоретических вероятностей можно исполь-
зовать пуассоновское распределение. Однако если дисперсия зна-
чительно больше среднего, то можно использовать отрицательное
биномиальное распределение; если же дисперсия значительно мень-
ше среднего, то можно использовать биномиальное распределение.
В последних двух случаях для оценки параметров распределения
среднее и дисперсия, полученные для эмпирических данных, при-
равниваются первым двум моментам искомого распределения. Этот
метод показан в табл. 12.
После того как параметры, приведенные в таблице, определены,
с помощью функции распределения Р(х) вычисляется вероятность
появления х событий при любом испытании (в любом интервале
времени).
Имеются таблицы для биномиального [4], пуассоновского [2] и
отрицательного биномиального [5] распределений, облегчающие
•выполнение вычислений.
118
8. ГЕОМЕТРИЧЕСКОЕ РАСПРЕДЕЛЕНИЕ
Еще одна последовательность, имеющая большое значение при:
изучении очередей автомобилей, строится на основе геометрической:
прогрессии
p+w+w2+w3+--->
где q— знаменатель геометрической прогрессии.
Сумма Sx+i первых х+1 членов прогрессии равна
Sx+i = p + pq + Pq2-[- • • • +Pqx- (85)
Умножив обе части выражения (85) на q, получим
qSx+i = pqpq2-\-pqx-]-pqx+*. (86)
Вычитая члены выражения (86) из соответствующих членов вы-
ражения (85), имеем (1 — ^)5х+1 —/>(1 — 7х+1)или
5х+1 = . ... (87)
1 —«
Важно заметить, что до сих пор не налагались какие-либо огра-
ничения на р, q и х. Однако если берется значение q< \ и допускает-
ся, что х->оо, то сумму х+1 членов можно записать как
lim^+1=—(88)
х-*оо 1 — q
Если же задано условие p + q=\, то сумма всех членов прогрес-
сии будет равна единице:
00
P + w4-P?2+...=^Wx=^-=l, (89)
х=0
и вероятности, описываемые этими членами,
P{x)=pq\ (90}
образуют так называемое геометрическое распределение. Формула
(90) показывает вероятность появления первого успешного исхода
после х неудачных (х = 0, 1, 2, ...). Очевидно, что геометрическое*
распределение представляет собой частный случай отрицательного,
биномиального распределения [формула (91)] при k=l.
Чтобы показать важность этого распределения для описания
транспортных очередей, необходимо дать случайным величинам
другую интерпретацию. Формула (90) дает время ожидания до по-
явления первого успешного исхода или вероятность того, что в оче-
реди ожидают х автомобилей, где р и q являются функциями ин-
тенсивностей прибытия в отправления автомобилей. Более подроб-
но это распределение рассматривается в следующей главе.
Производящая функция для геометрического распределения
имеет вид:
Zx(9)=/?(1 — (91)
119
Из формулы (80) следует, что выражение (91) представляет со-
бой частный случай производящей функции для отрицательного би-
номиального распределения' при k=l. Поэтому отрицательное би-
номиальное распределение называют ^-кратной сверткой геометри-
ческого распределения с тождественным ему распределением [6].
9. АППРОКСИМАЦИЯ БИНОМИАЛЬНОГО РАСПРЕДЕЛЕНИЯ
ПУАССОНОВСКИМ
Если в формуле (60) число испытаний п велико, то вычисления ста-
новятся довольно громоздкими, и поэтому широкое применение на-
ходит удобная аппроксимация биномиального распределения пуас-
соновским. При больших п и малых р пуассоновское распределение
обеспечивает хорошую аппроксимацию.
Чтобы проверить возможность применения выражения (79)
вместо (60) при указанных условиях, рассмотрим, что произойдет
с биномиальным распределением, если п неограниченно возрастает,
а р стремится к нулю и при этом их произведение ц = мр остается
постоянным.
Вначале перепишем выражение (60) в следующем виде:
Р(х) =
После умножения числителя и знаменателя этого выражения на
пх и выполнения необходимых алгебраических преобразований по-
лучаем
Р (х) = (1 _ ру-х =
пхх\
П(Я —1) ... (П —1) ' Р-Х (i _ ру1-Х=
п-п ... п х\
1 _ Х~1 \ О —/9”
и ) xl (1 — р)х
Представим (1 — р)п в виде
(1-р)л=1(1-/>)"
Теперь воспользуемся определением е\
J_1—р-
р] = е~К
lim
р->0
.(1-р)
(94)
Полагая, что в формуле (92) п-^-оо, и подставляя в формулу
(92) соотношения (93) и (94), получаем
е~п\хх
lim Р (х) =-------—•
П->ОО xl
120
Хотя пуассоновское распределение представлено здесь как ап-
проксимация биномиального, было показано, что это также хорошо
известное и широко используемое распределение. Пуассоновское
распределение можно вывести из биномиального, полагая, что п
бесконечно возрастает, а р стремится к нулю и при этом среднее
сохраняет фиксированное значение пр. Это распределение можно
получить и как предельную форму отрицательного биномиального
распределения.
Решая уравнение (83) относительно р, а затем относительно q,
получаем: (95) \ Л / <7=-^-- (96)
Подставляя соотношения (95) и (96) в формулу (79), находим
^(х)=
(.* + &—1)!
x\(k — 1)!
(97)
После выполнения преобразований имеем
р/ х_____{ x + k — 1 \ / х + k — 2 \ ( k \/ j
\ k -f- fl / \ k -J- fl / \ k -f- [1 / \ k / xl
Рассмотрим вначале предел выражения (98), когда k-^oo и
член, записанный в квадратных скобках, стремится к единице. Те-
перь выразим второй член в виде
k З—'Л
1+-тГ= • (")
k ) |_\ ь /
Согласно определению е,
1
lim (14- г/И = е. (100)
г/->0
Отсюда, полагая получаем
—р-
= е-^. (101)
lim ( 1 + —Г
Й->ОО \ k /
так как &->оо при р->0. Подставляя эти два результата в правую
часть выражения (98), имеем
(102)
£->оо Xl
121
10. ПРИЛОЖЕНИЕ ТЕОРИИ К РЕГУЛИРОВАНИЮ
ДВИЖЕНИЯ
В теории транспортных потоков как пропускная способность, так
и транспортная загрузка выражаются через объем (интенсивность)
движения, т. е. число автомобилей за интервал времени. Пропуск-
ная способность того или иного дорожного сооружения зависит от
его геометрических характеристик и параметров транспортного по-
тока, использующего сооружение. Транспортная нагрузка дорож-
ного сооружения, подобно потоку воды в трубе или давлению ветра
на строение, является случайной величиной, и ее можно выразить
лишь через вероятности появления тех или иных значений.
Это соотношение между пропускной способностью и транспорт-
ной нагрузкой нигде не проявляется так ярко, как на дорожных со-
оружениях высокого класса с регулированием движения. Это может
быть единственное пересечение на одном уровне или система пере-
сечений на одном уровне. Если взаимодействующие потоки разде-
ляются путем чередования фаз сигнала, соблюдения рядности, за-
прещения стоянки или ограничения мест для стоянки либо геомет-
рическими характеристиками высокого класса, то в этом случае
пересечение или транспортная развязка называется дорожным со-
оружением высокого класса. Обычно там, где дорога высокого
класса с интенсивным движением пересекает другие такие же доро-
ги, городские улицы или основные магистрали, для уменьшения чис-
ла дорогостоящих пересечений дорог на разных уровнях,
неизбежных при разделении потоков, движущихся в различных на-
правлениях, или уменьшения числа транспортных развязок, из ко-
торых типичной является пересечение типа «клеверного листа», воз-
можно регулирование движения. Перекресток дорог высокого клас-
са можно рассматривать как частный случай регулируемого
пересечения, когда различные дороги находятся на одном уровне.
При проектировании дорожного сооружения, регулирующего
движение на двух пересекающихся дорогах с большой интенсивно-
стью потоков, исходя из известной транспортной нагрузки, необхо-
димо выбрать требуемое число полос на каждом направлении дви-
жения, а затем установить режим работы светофора. В большинстве
случаев при реконструкции существующего пересечения или проек-
тировании новой скоростной магистрали, проходящей через город,
возможен ряд вариантов при выборе числа полос движения. Места
пересечения существующих крупных артерий на предполагаемом
маршруте скоростной магистрали обычно бывают известны, и су-
ществуют реальные ограничения на число полос движения на при-
мыкающих въездах и съездах и дорогах, пересекающих скоростную
магистраль. Таким образом, задача сводится главным образом к
определению режима работы светофора при предполагаемых гео-
метрических характеристиках дороги.
Существует несколько методов распределения длительности зе-
леного сигнала между различными фазами цикла. Относительная
точность этих методов пропорциональна степени реальности прини-
122
маемых гипотез относительно интенсивности прибытия и убытия
автомобилей. Простейший метод основан на допущениях о том, что
интенсивность 1прибытия постоянна в любом цикле в течение рас-
сматриваемого часа и что интенсивность убытия, а следовательно,
и интервалы между убывающими автомобилями постоянны в фазе
зеленого сигнала. Таким образом, отношение длительности данной
фазы к общей длительности цикла /равно отношению числа автомо-
билей, прибывающих при зеленом сигнале, к числу автомобилей,
прибывающих за весь цикл. Такой подход называется методом G/C,
где G и С обозначают соответственно длительность зеленого сигна-
ла и длительность цикла.
В предыдущей главе показано, что минимальное среднее рас-
стояние между убывающими автомобилями, получаемое, когда оче-
редь автомобилей, стоящих у светофора, пропускается через пере-
кресток и постепенно уменьшается, пока примерно после проезда
пятого или шестого автомобиля из этой очереди между автомоби-
лями не устанавливается постоянное расстояние. Если предполо-
жить, что прибывающие автомобили образуют равномерный поток,
то вычисление длительности цикла и определение режима работы
светофора строится на рациональной основе. Максимальную про-
пускную способность для данной фазы можно получить путем ана-
лиза расстояний между автомобилями, учитывая некоторую потерю
времени при трогании с места и остановке очереди автомобилей, что
будет показано далее в этом параграфе.
Большинство существующих методов основано на принятии до-
пущения о постоянной или средней транспортной нагрузке. Однако
в действительности движение транспортных потоков приближается
к случайной схеме. Число автомобилей, прибывающих в данный
пункт за любой интервал времени, может значительно отличаться
от среднего значения. Для прогнозирования потока автомобилей,
прибывающих к перекрестку, хорошо подходит пуассоновское рас-
пределение. Формула Пуассона выражает вероятность прибытия к
перекрестку данного числа автомобилей за цикл работы светофора
на основе среднего числа прибытий за цикл. Поскольку очевидно,
что при любой приемлемой длительности цикла могут наблюдаться
так называемые избыточные циклы (cycle failures), число допусти-
мых избыточных циклов может использоваться как критерий для
определения длительности цикла. Допущения о равномерном или
пуассоновском распределении как моделях транспортного потока
имеют определенные ограничения. Очевидно, что распределение
транспортного потока в течение суток не является ни регулярным,
ни чисто случайным. В большинстве случаев около 70% объема
суточного движения приходится на период с 7 до 19 ч. Если же в
качестве основных интервалов для расчета транспортных потоков
вместо целых суток произвольно выбрать утренний и вечерний часы
«пик», то важно определить временную схему движения транспорта
в часы «пик».
В настоящее время при исследованиях принимается одно из
следующих двух допущений: транспортный поток в час «пик» имеет
123
Рис. 31. Соотношение между наблюдаемым и прогнозируемым числом автомоби-
лей, прибывающих к перекрестку в утренние периоды «пик»:
а — пересечение ул. Хейте и 6-й улицы, г. Хьюстон; б — пересечение 26-й улицы
и проезда Уэйко, г. Уэйко, штат Техас; в — пересечение ул. Иэйл и 6-й улицы,
г. Хьюстон; г — авеню Тексас-, остановка «Колледж»;
/ — интенсивность движения в период «пик», предсказываемая пуассоновским распределе-
нием; 2— равномерная интенсивность движения в период «пик»; 3 — равномерная интенсив-
ность движения в час «пик»; о — наблюдаемая интенсивность движения в период «пик»
пуассоновское распределение; транспортный поток в час «пик»
является равномерным.. На рис. 31 показаны соотношения между
интенсивностями потока, предсказываемыми при принятии этих
допущений, и интенсивностями, наблюдаемыми при различных дру-
гих методах исследования [7]. На графиках представлены кривые
для пуассоновского и равномерного потоков в периоде «пик», со-
ставляющем некоторую часть часа «пик». В случае равномерного
124
Рис. 32. Пространствен-
но-временные соотноше-
ния для двухфазовой си-
стемы:
£ — длительность зеле-
ного и желтого сигналов;
D — постоянный интер-
вал между автомобиля-
ми, покидающими пере-
кресток; К — потерянное
время; Л=К1+К2; К\ —
время, потерянное при
трогании автомобилей
с места; К2 — время, за-
траченное на пересече-
ние перекрестка; X —
число автомобилей, пере-
езжающих через пере-
кресток; G = XD +
+ (K~D)-
1 — последний автомобиль проезжает перекресток при желтом сигнале; 2 — линия остановки;
Ж — желтый сигнал; Кр — красный сигнал; 3 — зеленый сигнал
потока графики имеют вид прямых, показывающих среднюю интен-
сивность для часа «пик» и периода «пик» соответственно. Очевидно,
что наилучшую оценку наблюдаемой интенсивности получим при
допущении о пуассоновском распределении в периоде «пик», а наи-
менее надежным является допущение о равномерной интенсивности
движения в час «пик».
Так как проектирование дорог и дорожных сооружений по суще-
ству представляет собой систематизированную попытку найти со-
отношение между пропускной способностью и транспортной нагруз-
кой, важно представлять себе, как выводятся выражения для про-
пускной способности и знать их ограничения. Исторически
сложилось так, что пропускная способность перекрестка определя-
лась путем анализа расстояний между последовательными автомо-
билями.
Во многих используемых в настоящее время формулах это соот-
ношение сохраняется.
Чтобы получить наглядное представление о работе перекрестка,
удобно графически изобразить существующие условия на простран-
ственно-временной диаграмме, как показано на рис. 32. Хотя здесь
показана простая двухфазовая система, теорию 'можно обобщить на
случай любой многофазовой комбинации. Если по оси ординат от-
ложить расстояние, а по оси абсцисс — время, то линии, идущие
снизу вверх, будут изображать движение автомобилей, приближаю-
щихся к перекрестку и отъезжающих от перекрестка.
Если х— 1 автомобилей пересекают линию остановки за интер-
вал, равный G— (Ki+Kz)9 то среднее минимальное расстояние D
между последовательными автомобилями определяется следующим
уравнением: .
125
Среднее минимальное расстояние^---------------,
Интенсивность
G — К
или D =---------,
х— 1
где ^=Л’l + ^2; 7<i — задержка при трогании с места всей последо-
вательности автомобилей; — время, необходимое для того,
чтобы последний автомобиль проехал через перекресток.
Так как последнему автомобилю разрешается пересекать пере-
кресток при желтом свете, то интервал G равен общей длительно-
сти зеленого и желтого сигналов. Переписывая данное выражение,
получаем
O=(x-1)D + K (103)
или
G=xD-\-K~D.
(Ю4)
При анализе пропускной способности удобно рассматривать
критическую интенсивность движения V на одной полосе для одной
фазы. Эта величина характеризует максимальный объем движения
за час на одной полосе, который может обеспечить перекресток при
данной фазе:
v=3M0 Xj (Ю5)
где согласно формуле (104) х———Сумма 2V крити-
ческих интенсивностей движения за час на одной полосе для всех
фаз дает суммарную критическую интенсивность движения на од-
ной полосе, которую может обеспечить перекресток за один час:
VI |7; г 3600 3600 W-<f(K-D)
С с
D
где C=SG; <р — число фаз. Следовательно,
^TZ 3 600 C-<f(K-D)
С D
у1/ _ 3 600 3 600у(/< —D) fl06)
D CD ' '
Подставляя в формулу (106) /(=6,0 сек и £>=2,0 сек, можно вы-
разить SV через длительность цикла С для перекрестков как с трех-
фазовым, так и с четырехфазовым циклом:
2 v (?=3)=1800—2£§оо_; (107)
С
2И(?=4)=1800—(103)
Легко видеть, что когда С->оо, 2V для одной полосы прибли-
жается к 1 800 автомобилей в час.
126
Рис. 33. Длительность зеленого сигнала, необходимая для беспрепятственного
движения
Наконец, уравнение (106) можно решить относительно длитель-
ности цикла С:
3 600? (/< — £>)
3 600 — DW
(Ю9)
Следует иметь в виду, что формулы (103) — (109) основаны на
допущении о равномерном движении для каждого цикла в течение
часа. Разумеется, в действительности этого нет. Однако если часо-
вую интенсивность движения умножить на некоторый поправочный
коэффициент, то уравнения для пропускной способности можно
применять и в случае принятия допущения о равномерном движении
транспорта в часы «пик».
Поскольку установлено, что для периода «пик» допущение о пу-
ассоновском распределении является наилучшей оценкой фактиче-
ской нагрузки, удобно рассмотреть его применение при определении
пропускной способности. Формула (ПО) для функции пуассонов-
ского распределения позволяет определить вероятность прибытия в
периоде «пик» не менее х+1 автомобилей за цикл, если известно
среднее число т автомобилей, прибывающих за цикл:
(ПО)
где
х+1
V
3 600
с
127
Согласно формуле (104),
0(Л-О) с
D
Методом последовательных приближений эти четыре уравнения
можно привести к более простому виду. Упрощение уравнений зна-
чительно облегчается при использовании графика для функции пу-
ассоновского распределения (рис. 33). Принцип состоит в том, что-
бы дать проектировщику дорог показатель качества, выраженный
через долю Р избыточных циклов, где под избыточным циклом
(cycle failure) подразумевается любой цикл, в котором число при-
бывающих автомобилей превышает пропускную способность.
11. ПРИМЕР РАСЧЕТА ПРОПУСКНОЙ СПОСОБНОСТИ
ПЕРЕКРЕСТКА
На рис. 34, 35 и в табл. 13, 14 показаны шесть этапов проектирова-
ния нового пересечения высокого класса и определения режима
работы светофора.
Этап 1. Определяются три условия (численность населения,
расположение дороги и объем движения), влияющие на длитель-
ность периода «пик».
Этап 2. Так как интенсивность движения дается для произ-
вольного времени -суток, от нее необходимо перейти к интенсивно-
сти движения в часы «пик». В реальной задаче необходимо также
проверить вечерний час «пик».
Этап 3. Для каждого направления движения вычисляется
коэффициент У', характеризующий длительность периода «пик».
Этап 4. Интенсивность движения в час «пик» на каждом на-
правлении умножается на коэффициент У'; получаем часовую ин-
тенсивность потока, эквивалентную числу автомобилей, прибываю-
щих к перекрестку за период «пик».
Этап 5. Согласно допущению о том, что рассматривается соору-
жение высокого класса, все пересекающиеся потоки движения
должны разделяться путем чередования фаз сигнала светофора.
Этап 6. Вариант проекта выбирают путем изменения числа по-
лос движения на рассматриваемых двух улицах. Каждой полосе
назначается определенная интенсивность движения, при этом пред-
полагается, что в период «пик» на каждой полосе поток является
равномерным. Максимальная интенсивность движения на одной по-
лосе, которую необходимо обеспечить при определенной фазе, на-
зывается критической для данной полосы. Сумма критических ин-
тенсивностей движения для всех фаз дает исходные данные для
вычисления минимальной длительности цикла по формуле (109).
В рассматриваемом примере вариант А имеет недопустимо боль-
шую длительность цикла, и поэтому дальнейшего рассмотрения за-
служивают лишь варианты В и С.
128
Этап 7. С помощью значений критических интенсивностей дви-
жения для одной полосы вычисляется среднее число автомобилей т,
прибывающих к перекрестку за цикл работы светофора. Эти дан-
ные используются при обращении к графику для кривых пуассо-
новского распределения, и для различных вероятностей Р появления
избыточного цикла находится длительность фазы G. Любая комби-
ЗтапЗ
Определение коэффициента для часа «пик»
по каждому направлению движения:
У1 =1,225 — 0,000135Xi±(0,1X2‘ — 0,00003Х3),
где Xi (численность населения, тыс. чел.) =
«=280; Х2 (коэффициент распределения) =
с= ———=0,61; Х3 (южное направление) =»
4,04-2,6
-=1140; Х3 (западное направление) = 1 400;
Хз (северное направление) =620; Х3 (вос-
точное направление) =670. Вечерний час
«пик»: Рвп = 1,225-0,038-0,016+0,ООООЗХз;
У1 (южное направление) = 1 160; У1 (запад-
ное направление) = 1 168; У1 (северное на-
правление) =1 145; У* (восточное направ-
ление) =1 146:
1635
710
327 435 715 у.
----1098 538 ------768
1322
Рис. 34. Расчет пропускной способности (этапы 1—4)\
а — этап 1. Перечисление условий: перекресток высокого класса; население горо-
да в 1981 г.—280 тыс. чел.; место расположения перекрестка в 1981 г.: расстоя-
ние о г центрального делового района—7,2 км; расстояние от границы города —
4,2 км; б —этап 2. Определение интенсивностей движения в час «пик»: Л==10%
(коэффициент для часа «пик»); D — 67% (коэффициент распределения автомо-
билей по направлениям). Примечание. В данном примере рассматривается
только вечерний час «пик»; в — этап 4. Определение интенсивностей, скорректи-
рованных для периода «пик».
5—338
129
538 ___Ь-----
-----*=Ю98
210
Фл
160
и
Фп
Иг 654
VB-321
Ус=557
14 - 209
IV-1767
3600 Ф (к-1/
L 3600S2V
_ 51600
3600-2.02 V
где ф-6
К-6,0
0=2,0
14 - Ш
Vs = 327
Ис - 557
Ус = 209
1У = 1529
218
21 8
218
£J£.
принимаем 10Н сек
14= 43 6
Уд = 327
Ус = 371
Уд = 209
2У= 1363
С— 63,0 сек
принимаем 60 сек
Рис. 35. Расчет пропускной способности (этапы 5 и 6): а — этап 5. Выбор режима
работы светофора; б — этап 6. Выбор различных комбинаций полос. Определение
интенсивностей движения V для критической полосы при минимальной длитель-
ности цикла С. Примечание. Уравнение предполагает равномерное прибы-
тие автомобилей к перекрестку,
нация Ga+Gb+Gc + Gd, составляющая принятую длительность
цикла С, является приемлемой.
Гибкость данного метода подтверждается большим числом су-
ществующих комбинаций длительности фаз. Близость другого пере-
крестка или примыкающего въезда может потребовать удлинения
одной из фаз за счет других. Это позволит избежать образования
чрезмерно больших очередей автомобилей, создающих помехи в
работе соседних дорожных сооружений и -вызывающих нарастаю-
щую перегрузку. Именно на этом этапе требуется мнение инженера.
130
Таблица 13
Вариант В (длительность цикла принята равной 100 сек)
Фаза Среднее чис- ло автомоби- лей, прибыва- ющих к пе- рекрестку за цикл1, т Длительность фазы зеленого сигнала при различном времени существования избыточного потока2, %
2 5 10 20 30 40 50 60 70
А 11,9 42 39 36 33 30 28 26 25 23
В 9,1 34 32 29 26 24 22 21 19 18
С 15,5 52 48 44 40 38 36 34 32 30
D 5,8 25 23 21 19 17 16 14 13 12
т
= —-— , С — S G между 102 и 95,
где
полосе;
т — среднее число автомобилей, прибывающих за цикл, на критической
3 600
V — часовая интенсивность потока в период «пик»;
--— число циклов
за час.
Интерполируя между 102 и 95, для С=100 видим, что Р=43%. Однако,
поскольку значение Р не должно быть одинаковым для всех фаз, может суще-
ствовать бесконечное множество комбинаций длительностей фаз, когда их сум-
марная длительность равна принятой длительности цикла.
2 Данные получены с помощью графика для пуассоновского распределения
автомобилей, прибывающих в периоде «пик» (см. рис. 33).
Следует иметь в виду, что доля избыточных циклов Р зависит
от числа циклов за период «пик», а не от числа циклов за час «пик».
Если принять длительность вечернего периода «пик», равной 25 мин,
то для вариантов В и С можно вычислить число избыточных циклов
и общее время существования избыточного потока:
Длительность цикла, мин . ..................... 100 60
Число циклов в периоде «пик»................... 15 25
Процент избыточных циклов ..................... 43 40
Число избыточных циклов .......................6,5 10
Общая длительность избыточных циклов, мин . 10,7 10,0
Хотя для определения-допустимого процента избыточных цик-
лов необходимы дополнительные исследования, очевидно, что для
расчетов целесообразно принять общую длительность избыточных
циклов, равной 30—35% длительности периода «пик» (следует
иметь в виду, что это время составляет лишь 10—15% часа «пик»).
Этап 7 для вариантов В и С можно повторить, рассматривая боль-
шую длительность цикла (например, 120 и 80 сек соответственно),
при этом получаем меньшую общую длительность избыточных цик-
лов. Слишком большая длительность цикла для варианта В
(120 сек) может исключить возможность его принятия. Однако, по-
скольку при вычислениях рассматриваются условия, характерные
для предполагаемых в будущем интенсивностей движения, ва-
риант В может обеспечить требуемые условия работы на 15 лет
вперед и поэтому также заслуживает рассмотрения.
5* 131
Таблица 14
Вариант С (длительность цикла принята равной 60 сек )
Фаза <р Среднее число авто- мобилей, при- бывающих к перекрестку за цикл1, т Длительность фазы зеленого сигнала при различном времени существования избыточного потока2, %
2 5 10 20 30 40 50 со 70
А 7,2 29 26 24 21 20 18 17 15 14
В 5,5 25 22 20 18 16 15 14 13 11
С 6,2 26 24 22 19 18 16 15 14 13
D 3,5 19 17 15 13 12 11 10 9 8
с
где т — среднее
полосе; V — часовая
число автомобилей, прибывающих за
интенсивность потока в период пик;
цикл, на критической
3 600
число циклов
за час.
2 Данные получены с помощью графика для пуассоновского распределения
автомобилей, прибывающих в периоде «пик» (см. рис. 33).
ЗАДАЧИ
1. Улица А образует Т-образный перекресток с улицей В, поэтому весь транспорт,
приближающийся к перекрестку на улице А, должен делаты правый или левый
поворот. Автомобили, движущиеся по улице А, образуют случайный поток и в
70% случаев они поворачивают налево, а в 30%' случаев — направо. Какова ве-
роятность того, что не менее двух из четырех последовательно движущихся ав-
томобилей повернут налево?
2. Изучалось движение транспорта у знака остановки. Наблюдения показали,
что случаи отсутствия ожидающих автомобилей происходят в 2 раза чаще, чем
случаи, когда ожидает один автомобиль. Случаи, когда у перекрестка ожидает
один автомобиль, наблюдаются в 2 раза чаще, чем случаи, когда ожидают два
автомобиля и т. д. Какова вероятность того, что автомобиль пересечет перекресток
без ожидания? Каково среднее число автомобилей, ожидающих у перекрестка?
3. Выбрав какое-либо место на улице, сосчитайте число автомобилей, движу-
щихся в периоде «пик» в определенном направлении. Постарайтесь подсчитать
число автомобилей в течение 30 мин появления максимальной интенсивности
потока, либо в течение 30 мин после появления максимальной интенсивности. Под-
считайте интенсивность движения за 1 мин и с помощью критерия хи-квадрат про-
верьте адекватность пуассоновского распределения как модели транспортного по-
тока для всего интервала счета для периода до (или после) появления макси-
мальной интенсивности потока и для периода «<пик».
4. При подсчете числа автомобилей, приближающихся случайным образом к
регулируемому перекрестку в определенном направлении, было обнаружено, что
вероятность прибытия за цикл х+2 автомобилей в 2 раза превышает вероятность
прибытия за цикл х+1 автомобилей и что вероятность прибытия за цикл х—1
автомобилей в 3 раза меньше вероятности прибытия за цикл х автомобилей. Вы-
числите длительность цикла, если за 1 ч к перекрестку прибыло 480 автомобилей.
5. Вычислите выборочное среднее и выборочную дисперсию для условия за-
дачи 3. Какое распределение . (пуассоновское, отрицательное биномиальное или
биномиальное) вы порекомендуете принять на основе этих двух статистик в каче-
стве распределения потока для периода, когда интенсивность потока еще не дости-
гает максимального значения, для периода «пик» и для всего интервала счета?
132
6. Подсчитывается число автомобилей на дороге с двусторонним движением,
ведущей к университету. Обнаружено, что соотношение числа автомобилей, дви-
жущихся в обоих направлениях, составляет 60 :40. Какова вероятность того, что
из четырех последовательно появляющихся автомобилей три движутся в направ-
лении менее интенсивного движения?
7. Автомобиль ожидает у перекрестка, собираясь пересечь улицу с односто-
ронним движением, интенсивность которого описывается пуассоновским распре-
делением. Как только между последовательными автомобилями появляется ин-
тервал, превышающий Т сек, данный автомобиль пересекает улицу. Вероятность
того, что интервал превышает Г, равна р=е-чт. Вероятность того, что за время
ожидания у перекрестка водитель будет наблюдать п* интервалов, равна
рп=(1—-р)пр. Каково среднее число интервалов, наблюдаемых водителем до пе-
ресечения улицы?
8. Перекресток, образуемый на пересечении улицы с односторонним движени-
ем, характеризуется следующими критическими интенсивностями для одной поло-
сы движения и соответствующими длительностями фазы:
Ка = 500 авт!ч,
Кь = 200 авт/ч,
Кс = 300 авт!ч,
Ga = M сек\
Gb = 16 сек\
Gc = 22 сек.
Каковы должны быть значения К и D, если по каждому направлению транс-
портная нагрузка равна пропускной способности?
9. Определите число полос движения на всех направлениях :и длительность
фазы, необходимые при указанных интенсивностях движения. Примем К=5 сек и
D = 2 сек. Определите вероятность появления избыточного потока на каждом на-
правлении. Направления пронумерованы по часовой стрелке.
Направление Левый поворот Сквозное движение Правый поворот
Число автомобилей в час
1 150 350 150
2 150 200 100
3 200 200 100
4 300 300 300
10. На одном из перекрестков число автомобилей, совершающих левый пово-
рот каждую минуту, характеризуется последовательностью: 0, 3, 0, 1, 2, 1, 0, 0,
2, 1, 1, 0, 2, 1, 2, 0, 1, 1, 0, 2. Проверьте эту выборку и определите, соответствует
ли она генеральной совокупности, описываемой пуассоновским распределением
/>(*) =
e~mmx
х!
На перекрестке накапливается не более пяти автомобилей, совершающих ле-
вый поворот. Какова вероятность того, что за 1 мин пять автомобилей совершат
левый поворот (при допущении, что закон Пуассона справедлив)?
11. Найдите общее выражение для вероятности того, что в очереди находится
х автомобилей, если частота появления определенного числа автомобилей,’ожи-
дающих к началу зеленой фазы сигнала, характеризуется следующими данными:
Длина очереди ..... 0 1 2 345 >6
Число случаев.......... 25 24 21 16 9 0 0
133
12. Самолеты прибывают в аэропорт случайным образом с интенсивностью
один самолет за 2 мин. Какова вероятность того, что за 1 мин в аэропорт при-
будет более трех самолетов?
13. В час «пик» телефонные вызовы поступают с интенсивностью три вызова в
минуту. Какова вероятность отсутствия вызовов в периодах длительностью
0,5 мин, 1 мин, 3 мин?
ЛИТЕРАТУРА
1. Moroney М. J. «Facts from Figures», Penguin Books, Baltimore, 1956.
2. M о 1 i n a E. C. «Poisson’s Exponential Binomial Limit», D. Van Nostrand,
Princeton, N. J., 1942.
3. G e r 1 о u g h D. L. Use of Poisson Distribution in Highway Traffic, в книге
«Poisson and Traffic», The Eno Foundation for Highway Traffic Control, Saugatuck,
Conn., 1955.
4. Weintraub S. «Tables of the Cumulative Binomial Probability Distribu-
tion for Small Values of p, Collier-Macmillan, London, 1963.
5. Williamson E., Bretherton M. H. «Tables of the Negative Bino-
mial Probability Distribution», John Wiley, New York, 1963.
6. F e 11 e r W. «Ah Introduction to Probability Theory and Its Applications»,
John Wiley, New York, 1964.
Русский перевод: Феллер В., Введение в теорию вероятностей и ее при-
менения, М.-, «Мир», т. 1, 2-е изд., 1964, т. 2, 1967.
7. Drew D. R., Pinnel С. A. Study of Peaking Characteristics of Signa-
lized Urban Intersections as Related to Capacity and Design, Highway Res. Board
Bull., 352, pp. 1—54, 1962.
ГЛАВА VII
НЕПРЕРЫВНЫЕ ВЕЛИЧИНЫ,
ХАРАКТЕРИЗУЮЩИЕ
ТРАНСПОРТНЫЙ ПОТОК
В данной главе описаны случайные величины, принимающие бес-
конечное множество значений. Непрерывные величины получают
при измерении расстояний и времени; в теории транспортных пото-
ков непрерывными величинами являются расстояния и интервалы
времени между последовательными автомобилями, а также скоро-
сти автомобилей.
Рассматривая дискретные случайные величины, можно построить
график вероятностей Р(х), соответствующих дискретным значени-
ям х. Между этими дискретными точками отсутствуют какие-либо
промежуточные значения, поэтому было бы неправильно проводить
через эти точки гладкую кривую. В случае непрерывных величин
существует бесконечное множество точек с бесконечно малыми ин-
тервалами между ними. Вместо нанесения на график отдельных
вероятностей Р(х) строится кривая плотности вероятностей f(x),
называемая также плотностью непрерывного распределения. В слу-
чае дискретного распределения сумма вероятностей, соответствую-
оо
щих всем значениям х, записывается как
а в случае непрерывного распределения площадь под кривой для
00
всего интервала значений х равна J f (х)= 1.
о
Хотя распределение случайной величины х может быть выраже-
но через плотность f(x), во многих случаях более удобно пользо-
ваться другими функциями, эквивалентными f(x). Две такие функ-
ции распределения имеют вид:
х
(111)
и 00
Р(х> f(x)dx. (112)
135
k-й момент непрерывного распределения, имеющего плотность
7(х), определяется как
\x)dx.
о
(ИЗ)
Часто бывает необходимо вычислить моменты некоторой функ-
ции случайной величины х, например g(x), а не самой случайной
величины х. Общее выражение для моментов произвольной функ-
ции g(x) имеет вид:
00
О
(114)
1. ПРОИЗВОДЯЩАЯ ФУНКЦИЯ МОМЕНТОВ
Хотя иногда непосредственное вычисление теоретических моментов
по основной формуле и не вызывает затруднений, все же во многих
случаях удобно вычислять эти моменты косвенным путем, исполь-
зуя некоторую вспомогательную функцию. В случае дискретных
распределений одной из таких функций является производящая
функция вероятностей. Другой из них является производящая функ-
ция моментов.
Как следует из названия, производящая функция моментов поз-
воляет находить моменты распределения. Символически она запи-
сывается в следующем виде:
Мх(6) = Д(ев*)=2 (115)
Для нахождения моментов с помощью функции Л4Ж(0) разло-
жим е0х в степенной ряд
00
Мх (0)=S 0+0Л +^+ • • •)f (хН
х«=0
= 1+9!л + ^(л2+.... (116)
k-и начальный момент является коэффициентом при-^р- в дан-
ном разложении. Следовательно, если требуется найти определен-
ный момент, необходимо лишь вычислить соответствующую произ-
водную при 0=0:
_Лииб)_ п
136
Производящие функции моментов некоторых дискретных распре-
делений, рассмотренных в предыдущей главе, имеют вид:
биномиальное распределение —/ИЛ. (6) = (^Ц-е9/?)гг; (118)
пуассоновское распределение — Мх(6) = е~т(1~е^ ; (119)
геометрическое распределение —(9) — /? (1(120)
По аналогии, производящая функция моментов непрерывного
распределения записывается как
Л1Ж(0)=Je6*/(х) (121)
о
Так как разложение еЬх в степенной ряд в формуле (121) сов-
падает с выражением (116), то формула (117) справедлива как
для дискретного, так и для непрерывного распределения.
2. ПРЯМОУГОЛЬНОЕ РАСПРЕДЕЛЕНИЕ
В математической статистике весьма широкое применение находит
прямоугольное распределение, имеющее удобную математическую
форму. Данное распределение называется также равномерным.
Плотность этого распределения постоянна в некотором интервале
(а, Ь) и равна нулю за пределами этого интервала:
fx=^b~a)-\ a<x<b. (122)
Вероятность того, что некоторое наблюдение будет находиться
в произвольном подынтервале c<x<d внутри интервала (а, Ь), рав-
на произведению (Ь — а)-{ на длину этого подынтервала:
d
Р(с = (123)
J b — а
с
Прямоугольное распределение является простейшим непрерыв-
ным распределением, на котором удобно иллюстрировать общие
формулы. В теории транспортных потоков данное распределение
описывает длительность задержки при трогании автомобилей с мес-
та и длительность приемлемого интервала между автомобилями.
3. НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ
Большое число методов,- используемых в прикладной статистике,
основано на применении нормального распределения. Плотность
нормального распределения имеет вид:
f (*)=----(124)
а )/"2л
137
Эта функция описывает двухпараметрическое семейство распре-
делений, параметрами которого являются среднее и дисперсия о2.
Производящая функция моментов имеет вид:
= ' (125)
Хотя среднее является наиболее важным параметром, иногда
используются и другие показатели — медиана и мода. Медиана хт
непрерывного распределения определяется из условия
хтп 00
J f (x)dx = ^ f (%)d% = 0,5. (126)
0 хт
Мода — это наиболее вероятное значение случайной величины.
Она находится путем приравнивания нулю производной плотности
распределения
=0. (127).
dx
Две точки перегиба кривой отстоят от среднего значения на
величину среднего квадратического отклонения в каждую сторону.
Функцию (124) интегрировать трудно, однако площади под кривой
распределения можно определить с помощью статистических
таблиц.
Нормальный закон широко используется в теории транспортных
потоков как модель, описывающая пространственное распределение
скоростей. Если полученные данные о скорости в определенных
точках дороги при данных условиях движения расположить в йо-
рядке возрастания, как показано в табл. 15, то они образуют неко-
торое распределение. Средняя скорость автомобилей вычисляется
умножением частоты для каждого интервала значений на среднюю
скорость в этом интервале. В примере [1], представленном в табл. 15,.
средняя скорость равна 49,5 км)ч. Функция распределения наибо-
лее важна для определения медианы и процента автомобилей,
имеющих скорость, не превышающую данной. На рис. 36 представ-
лена типичная кривая функции распределения, полученная на
Таблица 15
Интервал скоро- стей, км,ч Частота Суммарный процент Интервал скоро- стей, км/ч Частота Суммарный процент
21,9—26,6 1 1 50,9—55,6 18 72
26,7—31,4 2 3 55,7—60,3 17 89
31,5—36,2 6 9 60,4—65,1 4 93
36,3—41,0 12 21 65,2—70,0 5 98
41,1—45,9 13 34 70,1—74,8 1 99
46,0—50,8 20 54 74,9—79,7 1 109
138
основе данных из табл. 15.
На рис. 36 по оси ординат
отложена вероятностная
шкала, преобразующая оги-
вальную кривую нормально-
го распределения в прямую
линию. На графике показа-
ны 85-й и 15-й процентили,
эти значения удалены от
среднего в обе стороны при-
мерно на величину одного
среднего квадратического от-
клонения.
Эти процентили исполь-
зуются для определения
максимальной и минималь-
ной скорости.
В течение многих лет
единственным распределе-
нием, которое применяли,
был нормальный закон.
Нормальное , распределение
имеет следующие основные
свойства: является симме-
Рис. 36. Функция распределения скорости
движения:
А — 85% автомобилей имеют скорость, не
превышающую 60,4 км)ч\ Б — медиана ско-
рости— 49,9 км)ч\ В—15% автомобилей
имеют скорость, не превышающую 39,4 км!ч\
Г — скорость 55% автомобилей находится
в данном интервале
тричным; каждому конечно-
му отклонению соответствует конечная вероятность; мода и
медиана совпадают со средним. Разумеется, наличие этих трех
условий не является обязательным в общем случае, особенно
при рассмотрении характеристик потока автомобилей. Если
взять, например,- интервалы времени между последовательными
автомобилями, то здесь отрицательные значения не имеют смыс-
ла; кроме того, опыт показывает, что наиболее часто появляются
интервалы, величина которых меньше среднего значения.
4. ПОЛУЧЕНИЕ ПАРАМЕТРОВ, ХАРАКТЕРИЗУЮЩИХ
ТРАНСПОРТНЫЙ ПОТОК
Транспортный поток представляет собой движение дискретных
объектов в двумерной системе. Регулирование движения этих объек-
тов производится как отдельными водителями, так и системой в
целом.
Кроме того, транспортный поток характеризуется еще и тем,
что здесь временные соотношения между параметрами потока от-
личаются от пространственных соотношений.
Движение потока автомобилей, обозначаемых /=1, 2, п, удоб-
но представить в виде пространственно-временной диаграммы
(рис. 37). По оси ординат отложено расстояние х, а по оси
абсцисс — время t. Наклон линии показывает интенсивность изме-
139
нения расстояния во време-
dx
ни -— или скорость авто-
ру/ г
мобиля v. Кривая линия
означает, что происходит
изменение наклона, или из-
менение скорости, т. е. име-
ет место ускорение. Интер-
валы времени между после-
довательными автомобиля-
ми обозначаются а
соответствующие расстоя-
ния— Интервалы времег
ни обычно измеряются в.
секундах, а расстояния — в
метрах. Величина, обратная
среднему интервалу време-
ни между последовательны-
ми автомобилями, называ-
Рис. 37. Переменные, характеризующие дви-
жение на одной полосе дороги:
5/
hi
где — скорость; S- — расстояние между авто*
мобилями; интервал времени между автомо-
билями
ется интенсивностью потока, а величина, обратная среднему рас-
стоянию между последовательными автомобилями, — плотностью.
Знание интервалов времени и расстояний между последователь-
ными автомобилями иногда более важно, чем знание интенсивности
или плотности потока, поскольку оно более полно отражает истин-
ный характер транспортного потока. Интервалы времени и расстоя-
ния между последовательными автомобилями и являются теми
«кирпичиками», на которых построен весь транспортный поток.
Расстояние между последовательными автомобилями потока мо-
жет быть различным. В одних случаях оно может лишь незначи-
тельно превосходить длину автомобиля, а в других — бывает доста-
точно велико. Аналогично колеблется и интервал времени между
последовательными автомобилями. Эта изменчивость во времени и
пространстве является наиболее примечательной характеристикой
транспортного потока. Какими «бы однородными ни были условия
движения транспортного потока, интервалы времени между после-
довательными автомобилями могут колебаться в широких пределах.
Не удивительно поэтому, что изучение расстояний и интервалов вре-
мени между последовательными автомобилями требует применения
методов математической статистики и теории вероятностей, особен-
но при отыскании теоретических распределений, соответствующих
эмпирическим распределениям.
5. ЭКСПОНЕНЦИАЛЬНОЕ РАСПРЕДЕЛЕНИЕ
Если t обозначает интервал времени между моментами прибытия
автомобилей, то случайная величина t имеет экспоненциальное рас-
пределение с плотностью
/(/) = ^, (128)
где q — средняя интенсивность потока, авт[ч.
140
Для вывода выражения (128) составим и решим дифференци-
ально-разностное уравнение, связывающее вероятность G(t) того,
что первый автомобиль прибывает до момента /, с вероятностью
G(Z + zV) прибытия первого автомобиля до момента t+At. Послед-
нее событие может произойти двумя взаимно исключающими спо-
собами: прибытие первого автомобиля происходит не в интервале
а в интервале / + Д£, и первый автомобиль прибывает в интерва-
ле t. Вероятность последнего события можно записать как
О (/+ д/)= [1 - Q (/)] + G (/). (129)
Перенесем G(t) в левую часть уравнения и разделим обе части
на №
Ar
Перейдя к пределу при Д/->0, получим производную:
-^-={1-ад?. (1зо)
at
Решение уравнения (130) имеет вид:
О(/)=1-^.
Вероятность в интервале (/,/+Д/) равна
Q (/ + Д/) - О (/) = е-«‘ - е~<№+
и
j* qe~(itdt=e—(it— e—QV+W,
t
отсюда следует, что формула (128) верна.
По существу установлено следующее: вероятность того, что ин-
тервал времени между последовательными автомобилями заключен
в промежутке (^, ^), равна вероятности того, что прибытие первого
автомобиля происходит в промежутке (/1, /2). В символическом виде
Р(h < h<JJ=e-<^ -е~<^. (131)
Таким образом, плотность и функция экспоненциального распреде-
ления задаются формулами (128) и (131) соответственно.
В предыдущей главе показано, что пуассоновское распределение
часто используется как модель, описывающая число автомобилей,
прибывающих в данную точку дороги. Если в формуле (68) среднее
число автомобилей, прибывающих в интервале заменить на qt, то
функция распределения принимает следующий вид:
р(х)= (132)
141
Вероятность отсутствия автомобилей (х=0) в интервале t со-
ставляет
P0=rt (133)
Однако для того, чтобы в интервале t отсутствовали автомобили,
интервал между последовательными автомобилями должен быть
не меньше t:
P(h>i)=e~9‘. (134)
Поскольку данное выражение является дополнением функции
распределения до единицы, плотность распределения равна произ-
водной, взятой с обратным знаком:
Следовательно, экспоненциальное распределение можно полу-
чить из пуассоновского. Между этими двумя распределениями су-
ществует следующее соотношение: распределение интервалов вре-
мени между автомобилями, образующими пуассоновский поток, яв-
ляется экспоненциальным.
Среднее и дисперсия экспоненциального распределения равны
соответственно:
7=—, (135)
я
и
»2=-V. (136)
я2
Естественно, что t и q должны выражаться в соразмерных едини-
цах. Средний интервал между последовательными автомобилями в
однорядном транспортном потоке интенсивностью 1 800 авт/ч равен
1/1 800 ч, или 2 сек.
Экспоненциальное распределение представляет собой удовлетво-
рительную модель для описания интервалов времени между после-
довательными автомобилями в свободном потоке небольшой интен-
сивности, однако при большой интенсивности движения значения,
предсказываемые с помощью этого распределения, отличаются от
реально наблюдаемых. Каждый автомобиль имеет определенную
длину, поэтому очевидно, что интервалы между последовательными
автомобилями не могут быть бесконечно малыми, как это предска-
зывает данное распределение. Кроме того, автомобили не всегда
могут совершать обгон и обычно они образуют колонны, когда более
быстрые автомобили догоняют более медленные.
Первое замечание можно обойти, сдвинув кривую, задаваемую
уравнением (135), вправо на величину, равную минимальной на-
блюдаемой длительности интервала времени между автомобилями т:
Р(А>/)=е-(/-т)/(Г-т).
(137)
142
Шул [2] предложил рассматривать транспортный поток как ком-
бинацию свободных и блокированных автомобилей:
P(h > /)=(1 + (138)
где 1\ — средний интервал между свободными автомобилями; t2 —
средний интервал между блокированными автомобилями; т —
минимальный интервал между блокированными автомобилями;
а и 1—а — доля общей интенсивности, приходящаяся на автомо-
били первой и второй группы соответственно.
Формула (137) является функцией смещенного экспоненциаль-
ного распределения, а формула (138) — функцией составного экспо-
ненциального распределения.
6. РАСПРЕДЕЛЕНИЕ ПИРСОНА ТИПА III
В числе семейств распределений, сформулированных математиками
для описания самых разнообразных данных, находятся и распреде-
ления, которые получил Карл Пирсон. Пирсон показал, что бино-
миальное и пуассоновское распределения удовлетворяют дифферен-
циальному уравнению
dP = (а + х)Р (139)
dx b + сх + dx%
для определенного множества значений постоянных а, Ь, с и d. Фрай
[3] показал, что некоторые решения этого уравнения являются про-
стыми алгебраическими выражениями и образуют известные рас-
пределения Пирсона типа I и типа III.
Случайная величина у имеет распределение Пирсона типа III,
если ее плотность имеет вид:
Лу}=7^уа~'е~Ьи' (14°)
где Г (а) — гамма-функция, определяемая по формуле
оо
Чтобы применить распределение Пирсона типа III к таким пара-
метрам транспортного потока, как расстояние между последователь-
ными автомобилями, когда кривая распределения не проходит через
начало отсчета (расстояния и интервалы времени между последо-
вательными автомобилями одного и того же ряда никогда не могут
быть равны нулю, так как автомобили имеют конечную длину), не-
обходимо сместить распределение на с единиц вправо от начала от-
счета.
Имея в виду, что площадь под кривой f (у) равна единице, нахо-
дим искомое обобщенное распределение, подставляя в формулу
(140) t=y+c вместо у:
143
lf('y)dy=
j j Г (a)
Получаем
/(/)=_L.(/_c)«-ie-»(M)i c<7<oo. (141)
Беря моменты относительно с, имеем
с
=_*i-.r (*+.->[ v_c)M^e_w^t=
Г(а) »•+ J Г(к + а)
С
__ Ьа Г (k + a) fl 49'I
Г {a) bk+a . ’ ( }
так как рассматриваемый интервал выражает площадь под кривой
распределения Пирсона типа III и должен равняться единице. Пер-
вый момент относительно с получаем, полагая в формуле (142)
й=1:
с Л
«1=т.
(143)
Прибавляя с к выражению (143), находим среднее данного рас-
пределения:
!*=V + с- (144)
ь
Дисперсия данного распределения имеет вид:
о2=«2-(4)2=~. (145)
О2
Подбор непрерывного распределения для эмпирических данных
производится так же, как и в случае дискретных распределений. До-
пустим, что измерены интервалы времени между последовательными
автомобилями (результаты измерений приведены в табл. 16) и не-
обходимо подобрать для этих данных распределение Пирсона
типа III.
Плотность распределения Пирсона типа III задана формулой
(141). Очевидно, что для применения этой формулы необходимо оце-
нить параметры а, b и с. Так как 16 значений заключено в интервале
от 0 до 1, в этом случае кривая должна проходить через начало
отсчета. Чтобы при t=0 функция f(t) равнялась нулю, параметр с
должен быть равен нулю. Затем, используя метод моментов, из урав-
нений
144
Таблица 16
Интервал t Число ин- тервалов Частота / V) Интервал t Число ин- тервалов Частота / (О
0,0с/< 1,0 16 0,027 13,0 с/ < 14,0 10 0,017
1,0</ <2,0 74 0,123 14,0с/< 15,0 20 0,033
2,0</<3,0 65 0,108 15,0 с / < 16.0 10 0,017
3,0</<4,0 51 0,085 16,0с/< 17,0 6 0,010
4,0<7<5,0 42 0,070 17,0с/< 18,0 15 0,025
5,0с/<6,0 46 0,077 18,0с/< 19,0 6 0,010
6,0<7<7,0 46 0,077 19,0с / < 20,0 3 0,005
7,0<7<8,0 40 0,067 20,0с/<21,0 6 0,010
8,0<Z<9,0 27 0,045 21,0</<22.0 5 0,008
9,0</< 10,0 26 0,043 22,0<7<23,0 4 0,007
10.0с/<11,0 33 0,055 23,0</<24,0 7 0,012
11,0<7 < 12,0 21 0,035 24,0<i<25,0 5 0,006
12,0с/< 13,0 17 0,028
Среднее /=7,45 сек, дисперсия s2=31,0.
И
п CL
s2=-----
62
определяем параметры а и Ь: а=1,79 и 6 = 0,24 при t = 7,45 и s2 =
= 31,00. Сравнение теоретической кривой с эмпирическими данными
показано на рис. 38.
7. РАСПРЕДЕЛЕНИЕ ЭРЛАНГА
В предыдущем параграфе дано краткое определение гамма-функ-
ции. Интерес к этой формуле состоит в том, что
со
Г(п-|-1)— — f xn~xe~xdx.
Io J
Это соотношение можно
записать как
Г (тг-|-1)=/гГ (//).(147)
Из формулы (146)
следует, что при п=0
Г(1) = 1. Используя этот
результат и последова-
тельно подставляя в фор-
мулу (147) п=1, 2, 3,
получаем
Г («4-1)—/г!,
/1=0, 1,2, ... . (148)
Рис. 38. Подбор распределения Пирсона
типа III по данным, приведенным в табл. 15
145
ta-1e-aqtd(
(а-1)!
где <7 — интенсивность движения, авт[сек\ а — при а=1; б — при а=2; в — при а=3; г — при
а=4
В большинстве задач теории транспортных потоков достаточно
округлить а в формуле (141) до ближайшего целого числа, а затем
вычислить b из соотношения
6=4-.
t
Этот частный случай распределения Пирсона типа III называ-
ется распределением Эрланга, и его плотность имеет вид:
146
С Xa-xe-akxdx
J (а- 1)!
s
где k — плотность потока, авт{км.
а — при а=1; б —при а=2; в —при а=3; г—«при а=4; 1 — при & = 6,2; 2 — при
& = 12,4; 3 —при & = 18,6; 4 —при &=24,8; 5 — при &=31,0; 6 — при &=37,2; 7 —
при /г=43,4; 8 — при /г=49,'6; 9 — при /г=55,8; 10 — при /г=62,0
/(/)= а = 1,2, ...,
J k ! (а —1)!
где интенсивность потока q = t~\ а из формулы (148) следует, что
Г (а) = (а—1)!. Аппроксимирующее эрланговское распределение при
а=2 показано на рис. 38, оно обнаруживает довольно хорошее со-
ответствие эмпирическим данным.
147
Знание реального распределения автомобилей в транспортном
потоке исключительно важно для объяснения работы многих до-
рожных сооружений. Выбор эрланговского распределения вполне
логичен, так как экспоненциальное распределение, удовлетвори-
тельно описывающее интервалы между последовательными автомо-
билями, может рассматриваться как частный случай эрланговского
распределения, когда а=\. Более того, применение эрланговского
распределения при любых значениях а позволяет рассматривать все
случаи — от чистой случайности (ц=1) до полной регулярности
(а = оо).
Значения функции распределения Пирсона типа III можно най-
ти численными методами либо при помощи таблиц. Значения функ-
ции эрланговского распределения можно вычислить путем после-
довательного интегрирования по частям. Графики функций распре-
деления, изображенные на рис. 39 и 40, облегчают применение
этого распределения для описания интервалов времени и расстоя-
ний между последовательными автомобилями.
8. РАСПРЕДЕЛЕНИЕ ПИРСОНА ТИПА I
Случайная величина z имеет распределение Пирсона типа I, если
плотность вероятностей имеет вид:
/(*> Za~Xu~ZbV ' (°<z<1)’ U49)
где р(а, Ь) —бета-функция переменных а и Ь; она выражается че-
рез гамма-функцию следующим образом:
Р(д, . (150)'
/ (я 4- Ь)
Для применения распределения Пирсона типа I в теории транс-
портных потоков необходимо расширить интервал значений функ-
ции (149) до с единиц и сдвинуть это распределение на Ci единиц
вправо от начала отсчета.
Площадь под кривой f(z) равна единице, поэтому полагая у =
— cz и производя замену переменной, находим
1 с
J f(z)dz= J [р(а, 6)]-1 (’у)* 1—~\Ь * c~l dy, 0<у<с. (151)
о о
Для сдвига распределения производим повторное изменение пе-
ременной x = y+ci. Имеем
С С1 + С
^f(y)dy= j Ж 6)]-1 (-С~XC+C1 Рc-'dx,
0 Ct
qO<(Ci + c). (152)
148
Полагая c2 = ci + c и производя перегруппировку членов, полу-
чаем обобщенную форму распределения Пирсона типа I:
, , , (Х—С1)а~1 (С2 — х')Ь~1 .. /-It-О',
/ (х)= —i, с, < х < с2. (153)
J ’ ₽(а. 6)(С2-С1)а+6-1 2 '
Мода т этого распределения находится путем приравнивания
нулю первой производной функции f (х) по х:
т = (Ь-1)с1 + (а-1)с2 . 154
а + Ь — 2
Производящая функция этого распределения не имеет простой
формы, но нахождение моментов относительно Ci не вызывает за-
труднений:
?!_ (с2 — ci)h Г (а + Ь) Г (k + а) у.
^k~ Г(а)Г(к + а + Ь) Л
X С Г(Ь+а +Ь)(х-~с1)к+а-1(с2 — х')ь~^ dx_
J Г{к+а)Г{Ь){с2-с^+а+ь~1
— (c2 — (a + Ь)Г (k-\- a) (155)
Г (а) Г (k + a + b) ‘ k '
Интервал, входящий в эту формулу, является распределением
Пирсона типа I и должен равняться единице. Первый момент отно-
сительно Ci находим, полагая в формуле (155) /г=1:
|lj'=((?2—б?1)—. (156).
а + о
Прибавляя к выражению (156) Ci, получаем формулу для сред-
него значения данного распределения
^1 + ^2 . (157>
д b
Дисперсия имеет вид
_ (!Xj.)2= ( C2~.f1.V--. (158)
12 Ml a + b ) a + b+\ v 7
Применение распределения Пирсона типа I как модели транс-
портного потока можно проиллюстрировать на примере данных о
скорости движения (табл. 17). Примем следующие обозначения:
С\ — минимальное значение скорости в выборке; с2— максимальное
значение скорости в выборке; т — наиболее часто встречающееся
значение скорости в выборке; й — средняя скорость в выборке.
Чтобы получить оценки параметров а и Ъ распределения Пир-
сона типа I, необходимо решить лишь два из трех уравнений (154),
14g
Таблица 17
Интервал скоростей и Число Частота / («) Произведение скорости на частоту «/(«)
56,3<и <59,5 2 0,01 0,58
59,5<и <62,8 4 0,02 1,22
62,8<и<66,0 6 0,03 1,93
66,0<и<69,2 14 0,07 4,73
69,2<и<72,4 14 0,07 4,96
72,4<а<75,6 30 0,15 11,11
75,6<а <78,8 40 0,20 15,45
78,8<и<82,1 50 0,25 20,12
82,1<и<85,3 30 0,15 12,55
85,3<и<88,5 10 0,05 4,35
200 2/(и)=1.002«/(«)=77,00
Среднее и=76,9 км/ч.
Мода /я=80,5 км/ч.
Минимальная скорость С]=56,3 км/ч.
Максимальная скорость С2=88,5 км/ч.
(157) и (158). Решая уравнения (154) и (157), получаем
— (с2 ц) (ci + с2 —
(сх — и) (с2 — т) — (б?! — т) (с2 — и)
и
b (ci — и)
U — C2
(159)
(160)
В рассматриваемом примере имеем 6 = 1,64 и а = 2,91. На
рис. 41 изображена теоретическая кривая и нанесены эмпирические
данные.
Рис. 41. Подбор распределения
Пирсона типа I по данным,
приведенным в табл. 17
150
9. СООТНОШЕНИЯ МЕЖДУ РАСПРЕДЕЛЕНИЯМИ
На рис. 42 показаны соотношения между различными распределе-
ниями, рассмотренными в последних двух главах. Дискретные рас-
пределения выводятся из степенного ряда, а непрерывные распре-
деления Пирсона типа I и типа III—из бета-функции и гамма-
функции. Пуассоновское распределение является предельным слу-
чаем как биномиального, так и отрицательного биномиального рас-
пределения.
Экспоненциальное, смещенное экспоненциальное и эрланговское
распределения, часто используемые как модели, описывающие рас-
стояния между последовательными автомобилями, являются част-
ными случаями распределения Пирсона типа III.
Функции дискретных и непрерывных распределений находят
широкое применение в теории транспортных потоков. Знание ве-
роятности того, что данное значение будет превзойдено, обычно*
бывает более важно, чем знание вероятности появления данного
значения. При получении функции распределения в случае непре-
рывного распределения используется знак интегрирования, а в-
случае дискретного распределения — знак суммы. Значительный
интерес представляет тот факт, что неполную гамма-функцию мож-
но связать с функцией пуассоновского распределения:
( —— ia-'e~btdt= 1 - e~bx V
J Г (а) Л
О / = 0
Аналогичным образом неполная бета-функция связана с функ-
цией биномиального распределения:
При использовании распределений Пирсона типов I и III значе-
ния неполной бета-функции и неполной гамма-функции могут на-
ходиться численными методами либо при помощи таблиц [4, 5].
Соответствие между интервалом (непрерывное распределение)
и числрм событий (дискретное распределение) имеет большое прак-
тическое и теоретическое значение. Например, гораздо легче под-
считать число автомобилей, чем измерить расстояние между авто-
мобилями. Может использоваться один из двух методов счета
автомобилей. При обычном способе счет автомобилей начинается и
заканчивается в заданные моменты времени, совершенно независи-
мо от транспортного потока.
При другом способе период счета начинается и заканчивается
в момент прохождения автомобиля. Первый способ называется
асинхронным, а второй — синхронным.
Если поток автомобилей, проходящих через определенный пункт
дороги, распределен во времени по закону Пуассона со средним,
равным р автомобилей в единицу времени, и если наблюдение
1511
Фуппциопапь^ах
форма
Рис. 42. Схема взаимосвязи основных рас-
пределений
лльным распределением интервалов между
(счет) начинается
непосредственно пос-
ле прохождения ав-
томобиля, то сред-
нее время ожидания
равно — . Среднее
время ожидания до
момента появления
следующего автомо-
биля должно соста-
1
вить —так как с
2р.
равной вероятностью
можно попасть как в
самый конец, так и
в самое начало ин-
тервала между авто-
мобилями. Фактиче-
ски же и в этом слу-
чае среднее время
ожидания будет рав-
1
но —, так как основ-
ным допущением для
пуассоновского про-
цесса (с экспоненци-
событиями) является
независимость появления событий. Таким образом, при чисто слу-
чайном (пуассоновском) потоке любой способ счета (асинхронный
или синхронный) дает один и тот же результат. Однако это условие
не выполняется для потоков, отличающихся от случайного.
10. ФУНКЦИИ И РАСПРЕДЕЛЕНИЯ
Как указывалось в предыдущем параграфе, непрерывные распреде-
ления могут быть получены из определенных непрерывных функ-
ций подобно тому, как дискретные распределения могут быть обра-
зованы с помощью определенных степенных рядов.
Начнем с гамма-функции:
Г (а) ~ J ya~le—ydy.
о
Заменив переменную у на х=~, получаем
ь
Г (а) = J (bx)a'~1e~~bxbdx== J baxa~le~bxdx.
152
Это выражение можно записать как
-----xa-re~bxdx,
Г (а)
следовательно,
f (х)=—-— ха~1е-Ьх
Г(а)
представляет собой плотность непрерывного распределения, назы-
ваемого гамма-распределением.
Аналогичным способом с помощью бета-функции можно полу-
чить формулу для бета-распределения. Таким образом,
Г (а)Г(Ь)— j* xa~re~xdx j* yb~xe~lJdy —
о о
о о
Заменив переменную х на и
получаем
Г {а)Г{Ь)=[ j (иу)а-хуье^у‘^^ {\ — u'Y‘{a^}dudy.
и и
После замены переменной у на v—---------- имеем
1 — и
оо 1
Г (а) Г (b)= J и,а~х( \ — u)b—xva+b—1e~vdudv=
Q Q
оо 1
_ rDa+b-re~vdv^ ua~l (1 — u)b~xdu =
<) о
= Г (а + b) J U0-1 (1 - ii)b~'du.
О
Следовательно,
О
и подынтегральное выражение является плотностью непрерывного
распределения, называемого бета-распределением.
153
11. выводы
В практической работе часто бывает трудно получить удовлетвори-
тельное соответствие между наблюдениями и теоретическими рас-
пределениями. Однако это не значит, что нужно вообще отказаться
от теории.
Фишер [6] называет пять этапов, которые необходимо пройти
при статистическом анализе:
планирование исследования, включая определение объема вы-
борки и выбор методики, выбор интервала наблюдения и продол-
жительности исследования;
построение математико-статистической модели;
оценка параметров, входящих в модель;
проверка соответствия между моделью и наблюдениями;
проверка статистической значимости и доверительных пределов.
При планировании исследований транспортного потока требует-
ся принимать два важных решения: определение продолжительнос-
ти исследований и определение размера приращения при группи-
ровке "результатов измерений. Вследствие периодических колебаний
транспортной загрузки распределение потока автомобилей зависит
от продолжительности исследования. Счет числа автомобилей на
перекрестке показывает, что прибытие автомобилей к перекрестку
в течение всего часа «пик» не является пуассоновским процессом,
а поток автомобилей в периоде «пик», составляющем часть часа
«пик», является пуассоновским [7]. Герлу [8] показал, что транс-
портный поток может быть случайным при наблюдении его в тече-
ние интервала одной длины и неслучайным при наблюдении в ин-
тервале другой длины. Иногда интервал выбирают из предполага-
емой цели исследования. Так, в задачах регулирования движения
можно выбрать интервал, равный длительности фазы для данного
направления движения или длительность всего цикла.
Второй этап — построение математико-статистической модели,
дающей удовлетворительное описание данных, не является стати-
стической задачей для математика, а относится к области изучения
транспортных потоков, наблюдение за которыми дает статистиче-
ский материал. В идеальном случае желательна правильная теоре-
тическая модель, основанная на общих законах и дающая описание
процесса, для которого были получены наблюдения. Если вследст-
вие сложности исследуемого процесса построение правильной тео-
ретической модели затруднено, то необходимо получить чисто
эмпирическое описание наблюдаемого явления без какой-либо по-
пытки связать это описание с теоретическим обоснованием, бази-
рующимся на знании транспортного потока. В любом случае необ-
ходимо добиваться максимальной простоты: описание должно быть
простым с математической точки зрения и обеспечивать простую
проверку статистической значимости.
Следующим этапом после того, как будет выбрана функция рас-
пределения измеряемых параметров транспортного потока, являет-
ся нахождение оценок параметров на основе эмпирических данных.
154
Одним из способов оценивания параметров выбранного теоретиче-
ского наблюдения является метод моментов, широко иллюстрируе-
мый в двух последних главах. Большинство распределений, приме-
няемых при изучении транспортных потоков, имеют один-два
параметра, которые можно оценить, зная среднее и дисперсию, оп-
ределяемые по результатам измерений. Опыт показывает, что в тех
случаях, когда теоретическое распределение имеет сдвиг, пред-
почтительно установить величину этого сдвига произвольно, а не
оценивать его с помощью моментов более высокого порядка. Ис-
пользуются также и другие методы нахождения оценок с заданны-
ми свойствами, включая оценки с минимальной дисперсией и оцен-
ки максимального правдоподобия [9].
Нередко математическую форму функции распределения выби-
рают на основе графического анализа результатов наблюдений.
Этот способ позволяет получить хорошее представление о соответ-
ствии между моделью и наблюдениями при, построении модели.
После вычисления оценок параметров графический анализ должен
дополняться проверкой с помощью более объективного критерия.
Часто ожидаемое распределение сравнивается с эмпирическим с
помощью критерия хи-квадрат.
Такие проверки полезны в том отношении, что они позволяют
вычислить и исследовать отклонения измерений от соответствую-
щих теоретических значений.
Наконец, необходимо еще раз подчеркнуть, что применение не-
удовлетворительного критерия значимости не равносильно отклоне-
нию гипотезы, и с практической точки зрения применение удовле-
творительного критерия не равносильно доказательству справедли-
вости гипотезы. Математическая статистика является средством,
помогающим при исследовании транспортных потоков, а не объек-
том исследования. Необходимо проделать огромную работу для
того, чтобы установить некоторые основные правила интерпрета-
ции критерия хи-квадрат применительно к процессам движения
транспорта. Например, критерий исключительно чувствителен к
объему выборки. При* попытке подобрать теоретическое распреде-
ление для данных об интервалах между последовательными автомо-
билями потока значение критерия хи-квадрат возрастает с уве-
личением продолжительности исследования. Более того, если отрез-
ки времени группируют с интервалом 0,5 сек, то значение критерия
хи-квадрат будет другим, чем при выборе интервала длитель-
ностью 1 сек.
ЗАДАЧИ
1. Найдите среднее время обслуживания, если производящая функция момен-
тов распределения длительности обслуживания на пункте сбора платы за проезд
имеет вид
Mj' (0) =
е~9Г(дТ — Ь)Т
qTe~(qT~^ — 6
155
2. Измерялись интервалы времени между автомобилями, движущимися по
главной улице, которые были бы приемлемы для автомобилей на второстепенной
улице, выезд с которой регулируется при помощи светофора. Проверьте гипотезу,
согласно которой данные, приведенные в таблице, представляют собой случайную
выборку из нормально распределенной совокупности:
Средняя точка интервала,
сек .............. . . 1 2 3 4 5 6 7 8 9 10 11 12
Наблюдаемая частота . . О 6 34 132 179 218 183 146 69 30 3 0
3. Получены следующие данные о времени прохождения участка разгона дли-
ной 54 м:
Время, сек , 1,0— 1,4- 1,8— 2,2- 2,6— 3,0— 3,4- 3,8— 4,2- 4,6— 5,0
1,4 1,8 2,2 2,6 3,0 3,4 3,8 4,2 4,6 5,0
Наблюдае-
мое число
автомобилей... 2 1 5 36 54 52 25 12 3 2 0
1) . Перейдите от времени к скорости движения.
2) . Вычислите среднюю скорость и моду для данной выборки.
3) . Постройте на вероятностной бумаге функцию распределения и измерьте
15-й, 50-й и 85-й процентили скорости.
4) . Какую предельную скорость вы бы порекомендовали для данного дорож-
ного сооружения? Поясните, чем вы руководствовались при выборе.
4. Получены следующие данные об интервалах между последовательными ав-
томобилями:
Длитель-
ность интер-
вала,^... 0-1 1—2 2—3 3-4 4-5 5-6 6—7 7—8 8-9 9—10 10
Наблюдае-
мое число
интервалов... 0 21 34 17 15 6 2 3 1 1 0
Используя критерий хи-квадрат, проверьте полученные данные на соответ-
ствие следующим распределениям: 1) смещенное экспоненциальное, 2) экспонен-
циальное, 3) эрланговское при а=2, 4) эрланговское при а=3.
5. Пусть расстояния между последовательными автомобилями образуют сос-
тавное экспоненциальное распределение при интенсивности движения 66 авт!ч,
в равной степени разделенной между свободными и блокированными автомобиля-
ми. Найдите вероятность того, что расстояние между последовательными авто-
мобилями составит от 3 до 18 м. Минимальные расстояния между свободными
автомобилями и между блокированными автомобилями равны соответственно
18 и 6 м.
6. Какие характеристики бета-распределения (распределения Пирсона типа I)
делают его более предпочтительным по сравнению с нормальным для описания
скоростей движения?
7. Найдите производящую функцию моментов для экспоненциального распре-
деления с плотностью f(x) =qe~<ix. Проверьте ваш результат, вычислив среднее
и дисперсию с помощью производящей функции моментов и сравните полученные
выражения с приведенными в данной главе.
8. Пусть интервалы между посетителями универсального магазина имеют сме-
щенное экспоненциальное распределение. Вероятность того, что в час «пик» ин-
тервал между посетителями превысит 4,5 сек, равна 0,368. Каков средний ин-
тервал между покупателями, посещающими данный магазин?
9. Пусть автомобили, прибывающие в период «пик» к перегруженному пере-
крестку с одного направления, образуют эрланговское распределение с а = 4:
Ьа
е—
156
Интенсивность движения в рассматриваемом направлении составляет
1 620 авт/ч. Следующий по ходу движения перекресток будет блокирован, если
в фазе красного сигнала длительностью 60 сек, прибывает более 12 автомобилей.
Какова вероятность блокирования этого перекрестка?
10. Пусть среднее расстояние между последовательными автомобилями пото-
ка составляет 30 м. Определите вероятность того, что на участке улицы длиной
100 м нет автомобилей.
ЛИТЕРАТУРА
1. Kennedy N., Kell J. И., Homburger W. S. «Fundamentals of Traffic
Engineering», Institute of Transportation and Traffic Engineering, University of
California, Berkeley, 1963.
2. Schuhl A., The Probability Theory Applied to the Distribution of Vehic-
les on Two-lane Highways, в кн.; «Poisson and Traffic», The Eno Foundation for
Highway Traffic Control, Saugatuck, Conn., 1955.
3. F г у T. C. Probability and Its Engineering Uses, D. Van Nostrand, Prince-
ton, N. J., 1928.
Русский перевод: Фрай T., Теория вероятностей для инженеров. М.—Л.,
Гостехиздат, 1934.
4. Pearson К. Tables of the Incomplete Gamma-function, Biometrika, Lon-
don, 1922.
5. Pearson K. Tables of the Incomplete Beta-function, Biometrika, 1948
6. H a 1 d A. «Statistical Theory With Engineering Applications, John Wiley,
New York, 1952.
Русский перевод: Хальд А., Математическая статистика с техническими
приложениями. М., Изд-во иностранной литературы, 1956.
7. Drew D. R., Р i n n е 1 С. A Study of Peaking Characteristics of Signa-
lized Urban Intersections as Related to Capacity and Design, Highway Res. Board
Bull. 352, pp. 1—54, 1962.
8. G e r 1 о u g h D. L. Use of Poisson Distribution in Highway Traffic, в кн.:
«Poisson and Traffic», The Eno Foundation for Highway Traffic Control, Sauga-
tuck, Conn., 1955.
9. К e n d a 11 M. G., Stuart A. «The Advanced Theory of Statistics»,
vol. 2, Hafner, New York, 1961.
Русский перевод: Кендалл M., Стьюарт А., Теория распределений. 'М.,
«Наука», 1966.
ГЛАВА VIII
ПРИЕМЛЕМОСТЬ
ИНТЕРВАЛОВ
МЕЖДУ АВТОМОБИЛЯМИ
Одним из наиболее важных аспектов, связанных с движением тран-
спортных потоков, является взаимодействие между автомобилями.
Это может быть взаимодействие между автомобилями одного по-
тока или взаимодействие между двумя отдельными транспортными
потоками. Такое взаимодействие имеет место, когда автомобиль
переходит в соседний ряд, вливается в транспортный поток или
пересекает его. При взаимодействии автомобилей выполнение этих
основных маневров связано с понятием приемлемости интервала
между автомобилями.
Лучше всего это понятие можно проиллюстрировать путем ана-
лиза движения на участке вхождения на магистраль с примыкаю-
щего въезда. Это важно еще и потому, что нерегулируемое пересе-
чение (еще одно место, где приемлемость интервалов между автомо-
билями составляет основу процесса) по существу является лцшь
частным случаем выезда на магистраль, когда отсутствует полоса
разгона.
Не случайно процесс выезда автомобиля с примыкающего въез-
да на магистраль изучался рядом исследователей. Большинство
работ носило эмпирический характер, и на их основе вырабатыва-
лись методы проектирования и эксплуатации дорожных сооруже-
ний. Предпринимались также попытки получить математическое
описание процесса выезда на магистраль, правда, они имели не-
сколько ограниченный успех вследствие сложной картины взаимо-
действий между автомобилями. Разработано несколько программ
для цифровых вычислительных машин, моделирующих выезд на
магистраль, однако отсутствие точных критериев выбора приемле-
мого расстояния между автомобилями и логики выезда на магист-
раль препятствуют прогрессу в этой области.
Можно назвать следующие три основных маневра, выполняемых
автомобилями:
изменение ряда, т. е. переход автомобиля из данного ряда в со-
седний;
158
слияние потоков — процесс, когда автомобили двух самостоя-
тельных потоков, движущихся в общем направлении, объединяются
и образуют единый поток;
пересечение одного потока другим под острым углом. В этом
случае оба потока сливаются в один, а затем этот общий поток сно-
ва разделяется на два самостоятельных потока.
Выполнение указанных маневров происходит на следующих
элементах магистрали:
полоса разгона — дополнительное расширение дорожного полот-
на, примыкающее к внешней полосе магистрали и позволяющее
автомобилям, выезжающим на магистраль, набрать необходимую
скорость, соответствующую скорости потока, движущегося по ма-
гистрали;
примыкающий въезд ( или съезд)—дорога, соединяющая две
пересекающиеся или параллельные дороги. Дороги соединяют та-
ким образом, чтобы обеспечить слияние потоков;
фронтальная дорога — дорога, параллельная скоростной маги-
страли и несущая транспорт, выходящий на магистраль или поки-
дающий ее, и обеспечивающая, таким образом, доступ к прилегаю-
щим районам.
При описании взаимодействия автомобилей в процессе слияния
потоков используются следующие переменные:
интервал времени между последовательными автомобилями —
промежуток времени между передними частями автомобилей, сле-
дующих друг за другом в одном
точке дороги;
расстояние между ав-
томобилями — расстояние
между передними частями
последовательных автомо-
билей, движущихся в одном
ряду, измеряемое в данный
момент времени;
интервал между автомо-
билями, движущимися по
внешней полосе магистрали,
оцениваемый водителем ав-
томобиля второстепенного
потока, желающим влиться
в основной поток или пере-
сечь его. Это может быть
расстояние либо промежу-
ток времени;
интервал запаздыва-
ния — промежуток времени
между моментами прибытия
автомобиля второстепенно-
го потока и автомобиля ос-
новного потока в контроль-
ряду, измеряемый в некоторой
Рис. 43. Пространственно-временные
соотношения при выезде на магист-
раль с примыкающего въезда:
1 — внешняя полоса магистрали; 2 — въезд;
А — время ожидания для автомобиля 2;
Б — неприемлемый интервал запаздыва-
ния; В — время ожидания для автомоби-
ля 3; Г — приемлемый интервал времени
между автомобилями; Д — время ожида-
ния для автомобиля 4
159
Рис. 44. Виды маневров вхождения в основ-
ной ПОТОК;
а — произвольное вхождение; б — идеаль-
ную точку (или точки) на
участке слияния или пе-
ресечения этих потоков;
расстояние запаздыва-
ния — разность между
расстоянием от автомоби-
ля второстепенного пото-
ка до контрольной точки,
где второстепенный поток
вливается в основной по-
ток или пересекает его, и
расстоянием от автомоби-
ля основного потока до
этой же точки. Оба рас-
стояния измеряются в оп-
ределенный момент вре-
мени.
На рис. 43 показа-
на пространственно-вре-
менная диаграмма, по-
строенная для иллюстра-
ции соотношения между
геометрическими харак-
теристиками участка, где
происходит слияние пото-
ков, и параметрами ос-
новного и второстепенно-
ное вхождение; в — вхождение при оценке
интервала между автомобилями; г — вы-
нужденное вхождение; д — принудительное
вхождение; е — вхождение при оценке ин-
тервала запаздывания
го потоков на этом участ-
ке. По оси ординат откла-
дывается расстояние, а по
оси абсцисс — время. На-
клон прямых характери-
зует скорость- движения.
На рисунке показаны траектории движения автомобилей, движу-
щихся по магистрали, и автомобилей, вливающихся в основной по-
ток. Автомобиль считается входящим в основной поток до тех пор,
пока на полосе разгона остается хотя бы его некоторая часть.
Важно дать определение основных процессов слияния потоков,
а затем определить характер и объем информации, необходимой
для квалифицированного анализа этого маневра. В данной книге
будут рассмотрены следующие виды маневров вхождения в основ-
ной поток (рис. 44):
произвольное вхождение. Водитель по своему усмотрению въез-
жает с полосы разгона на внешнюю полосу магистрали;
. вынужденное вхождение. Автомобиль вынужден переходить на
внешнюю полосу магистрали вследствие того, что кончается полоса
разгона;
идеальное вхождение. Автомобиль, находящийся на примыкаю-
щем въезде, может войти в основной поток, не принуждая автомо-
160
Рис. 45. Распределение прием-
лемых интервалов между авто-
мобилями на въезде Дампл
(рассматриваются все случаи):
7 — число неприемлемых интерва-
лов, больших t\ 2 — число, прием-
лемых интервалов, меньших t; Т -—
критический интервал, равный
2,8 сек,
биль, движущийся по магистрали, снижать скорость или переходить
в другой ряд;
принудительное вхождение. Автомобиль, находящийся на при-
мыкающем въезде, выполняет маневр выезда на магистраль таким
образом, что приближающийся автомобиль (или автомобили) ос-
новного потока вынужден либо снизить скорость движения, либо
перейти в другой ряд;
однократное вхождение. В интервале между автомобилями ос-
новного потока происходит вхождение только одного автомобиля;
многократное вхождение. В интервале между автомобилями ос-
новного потока происходит вхождение двух или большего числа ав-
томобилей.
Из рис. 44 и 45, а также из приведенной классификации видно,
что вхождение в основной поток может быть однократным или мно-
гократным, произвольным или вынужденным, идеальным или при-
нудительным, и при этом может оцениваться как интервал между
автомобилями, так и интервал запаздывания. Например, в рассмат-
риваемом случае имеет место «однократное произвольное идеаль-
ное вхождение в основой поток при оценке приемлемого интервала
между автомобилями».
1. ПАРАМЕТРЫ, ХАРАКТЕРИЗУЮЩИЕ ВХОЖДЕНИЕ
В ОСНОВНОЙ ПОТОК
Выше были определены некоторые переменные, характеризующие
транспортный поток: расстояния и интервалы времени между пос-
ледовательными автомобилями и интервалы запаздывания. Кроме
этих переменных, при описании процесса слияния потоков необхо-
димо рассматривать такие дополнительные переменные, как ско-
рость основного потока, скорость автомобилей, входящих в основ-
ной поток, относительную скорость движения, интенсивность ос-
новного потока и интенсивность второстепенного потока.
В то время как переменная может принимать любое значение
или быть любым числом, параметр используется для определения
конкретной переменной или постоянной величины, кроме коорди-
наты. Например, интенсивность — это переменная, характеризую-
6—338 161
щая транспортный поток, а пропускная способность — максималь-
ная интенсивность, которую может обеспечить данная дорога цли
данное дорожное сооружение, является соответствующим парамет-
ром. К числу важных параметров, описывающих приемлемость ин-
тервалов при выезде на магистраль, относятся: критический интер-
вал, процент автомобилей, ожидающих при выезде на магистраль,
средняя длительность ожидания остановившимся автомобилем при-
емлемого интервала, средняя длина очереди и суммарное время
ожидания на въезде.
В литературе рассматривались некоторые «критические» пара-
метры. Гриншилдс [1] вводит «приемлемый средний минимальный
интервал времени между автомобилями» как интервал, приемле-
мый для половины водителей. Рафф [2] использует несколько иной
параметр — «критический интервал запаздывания». Критический
интервал запаздывания имеет длительность, при которой число при-
емлемых интервалов запаздывания меньше числа неприемлемых
интервалов запаздывания, длительность которых превышает дан-
ную. Параметры Гриншилдса и Раффа являются медианами, и их
называют медианой критического интервала между автомобилями
и медианой критического интервала запаздывания.
Применение параметров, характеризующих приемлемость ин-
тервалов между автомобилями, позволяет упростить вычисление
длительности ожидания при выезде на магистраль, поскольку пред-
полагается, что все интервалы (интервалы между автомобилями
или интервалы запаздывания), меньшие критического, являются
неприемлемыми, а все интервалы, имеющие большую длительность,
считаются приемлемыми. Показано [3, 4], что при вычислениях вре-
мени ожидания необходимо рассматривать не медиану, а среднее
значение критического интервала между автомобилями. Тем не ме-
нее медиана критического интервала остается параметром, важным
с практической точки зрения, поскольку, как будет показано далее,
его легче получить.
Очевидно, что при оценке критического интервала между авто-
мобилями данный интервал должен быть либо принят, либо отвер-
гнут данным водителем. Для каждого водителя приемлемым мо-
жет оказаться только один интервал, но могут наблюдаться не-
сколько неприемлемых интервалов. Это означает, что если всем не-
приемлемым интервалам задается тот же вес, что и приемлемым,
то процент интервалов определенной длины, оказавшихся приемле-
мыми, не будет истинным показателем процента водителей, счита-
ющих данный интервал приемлемым. Чтобы при вычислении про-
цента водителей, считающих такой интервал приемлемым, можно
было использовать процент приемлемых интервалов, для каждого
водителя необходимо рассматривать одинаковое число интерва-
лов. Рафф [2] проделал эту работу, рассматривая лишь интервалы
запаздывания и игнорируя интервалы между автомобилями.
На въезде Дампл, примыкающем к магистрали Галф, было
подсчитано число приемлемых и неприемлемых интервалов между
автомобилями. Данные были просуммированы и сведены в таблицу
162
Таблица 18
Длитель- ность интерва- ла t, сек Выезд на магистраль с ос- тановкой Выезд на магистраль без остановки Всего
Число прием- лемых интер- валов, меньших t Число непри- емлемых ин- тервалов, больших t Число прием- лемых интер- валов, меньших t Число непри- емлемых ин- тервалов, больших i Число при- емлемых интерва- лов, мень- ших t Число не - приемлемых интерва- ле, боль- , ших t
0,0 0 100 0 89 1 0 189
0,5 0 100 0 89 1 о 189
1,0 0 95 0 80 ? ° 175
1,5 0 71 1 52 11 123
2,0 2 49 7 27 Г 9 76
2,5 11 34 а=13 с=16 а=24 с=50
3,0 а=15 с=20 6=26 d=7 6=41 rf=27
3,5 6=23 б/=10 38 4 61 14
4,0 32 5 46 3 78 8
4,5 41 4 55 3 96 7
5,0 48 2 63 2 111 4
5,5 57 0 70 1 127 1
10,0 100 0 106 0 206 0
] Критический интервал Т — t ~ "•
При выезде на магистраль с остановкой Тост = 3,1 сек, при выезде на магист-
раль без остановки Тдв=2,5 сек, средняя длительность критического интервала
Тер=2,8 сек.
(табл. 18). Длительность критического интервала можно опреде-
лить по формуле, записанной в табл. 18, или из графика, представ-
ленного на рис. 45. На графике изображены функция распределе-
ния числа приемлемых интервалов, меньших t, и функция распре-
деления числа неприемлемых интервалов, больших Л Значение /,
при котором эти две кривые пересекаются, является критическим
интервалом.
Произвольное деление случаев выезда на магистраль на две
категории — выезд с остановкой и выезд без остановки — позво-
ляет исключить какую-либо систематическую ошибку, вносимую
при рассмотрении всех неприемлемых интервалов между автомо-
билями. Например, в случае выезда на магистраль с остановкой
для каждого въезжающего автомобиля рассматривались только два
интервала между автомобилями основного потока — наибольший
неприемлемый интервал и интервал, который оказался приемле-
мым. Для оценки приемлемости интервала между автомобилями
при выезде на магистраль без остановки рассматривался только
первый интервал, наблюдаемый находящимися на въезде автомо-
билями, которые не задерживаются другими движущимися впереди
них автомобилями. Эта процедура во многом аналогична оценке
интервалов запаздывания, которую выполнил Рафф.
6* 163
Из данных, приведенных в табл. 18, видно влияние относитель-
ной скорости движения на длительность критического интервала.
На въезде Дампл критический интервал, найденный на основе
оценки первого интервала для автомобилей, выезжающих на ма-
гистраль без остановки, составляет 2,5 сек, а для автомобилей,
выезжающих на магистраль с остановкой — 3,1 сек (водители этих
автомобилей наблюдают хотя бы один неприемлемый интервал,
прежде чем появляется приемлемый интервал).
2. МОДЕЛИ ОЖИДАНИЯ
Имеется ряд теоретических статей [5, 6], в которых рассматривается
задержка одного автомобиля, ожидающего на второстепенной ули-
це у нерегулируемого пересечения вследствие наличия транспорта
на внешней полосе пересекаемой дороги. Можно показать, что эта
теория справедлива и для случая, когда автомобиль ожидает на
примыкающем въезде.
В большинстве работ, посвященных этой проблеме, предпола-
гается, что распределение транспорта на магистрали является пуас-
соновским, т. е. вероятность того, что длительность данного интер-
вала между последовательными автомобилями заключена между
t и t+dt сек, задается выражением вида qe~^dt, где q — интенсив-
ность потока. Рафф [2] рассмотрел задачу ожидания применитель-
но к автомобилям, в то время как анализ Таннера [5] был посвящен
задержкам пешеходов. Предполагается, что пешеходы прибывают
случайным образом и все вместе ожидают появления критического
интервала длительностью Т сек, чтобы перейти дорогу. Хотя Мейн
[6] показал, что результат можно получить в виде преобразования
Лапласа длительности ожидания и «в том случае, когда транспорт-
ный поток на магистрали отличается от пуассоновского, все же
единственный случай, рассмотренный детально, был посвящен имен-
но пуассоновскому распределению. В рассматриваемой задаче пред-
полагается существование эрланговского распределения интерва-
лов между последовательными автомобилями, и вывод результатов
представляет собой обобщение комбинаторных методов, которые
рассмотрели в своих работах Рафф [2], Таннер [5] и Мейн [6].
Можно предположить, что водитель автомобиля, ожидающего
на примыкающем въезде, оценивает каждый интервал времени t
между последовательными автомобилями, движущимися на внеш-
ней полосе магистрали, пока не обнаружит приемлемый интервал Т,
имеющий, по его мнению, достаточную длительность, обеспечиваю-
щую безопасный выезд на магистраль. Если приемлемым оказы-
вается первый интервал то время ожидания равно нулю.
Если же водитель пропустит первый интервал (/<Т), а второй ин-
тервал окажется приемлемым, то его время ожидания будет равно
длительности одного интервала между последовательными автомо-
билями. Если же предполагается, что длительность приемлемого
интервала с течением времени не изменяется, то находим, что от-
дельные интервалы ожидания образуют геометрическое распреде-
164
ление. Вероятность Р(п) того, что до выезда на магистраль води-
тель вынужден ожидать в течение п интервалов, каждый из которых
меньше Т сек, равна
Р(п) = рп(\-р\ /г=1,2, (161)
где
(162)
a f(t)—распределение интервалов между последовательными ав-
томобилями основного потока. Удобно ввести нормированную слу-
чайную величину
(163)
откуда
t—Tw (164)
и
dt=Tdw. (165)
Подставляя выражения (164) и (165) в формулу (162), получаем
1
p=P(w <\)=\f(TnD)Tdw. (166)
о
Плотность распределения случайной величины w можно опре-
делить как
g(w)=f(Tw)T. (167)
После подстановки этого соотношения в формулу (166) имеем
1
р=^ g(w)dw. (168)
Если распределение длительности интервалов между последова-
тельными автомобилями, движущимися по внешней полосе маги-
страли с интенсивностью q, можно описать эрланговским распреде-
лением
f(t) =
Г(а)
то из выражений (163) — (168) следует, что
1
n = f aQT
(169)
(170)
165
Формула (170) определяет функцию неполного гамма-распре-
деления, которое эквивалентно функции пуассоновского распреде-
ления:
р=\-е~ачт (171)
и
а—1
1-р=в~^г (172)
7^0
Подставляя выражения (171) и (172) в формулу (161), полу-
чаем вероятность того, что первые п интервалов между последо-
вательными автомобилями основного потока меньше нормированно-
го критического интервала w—\, но (п+'1)-й интервал больше
нормированного критического интервала. Эта вероятность Р(п),
усредненная по интервалам, меньшим нормированного критическо-
го интервала g(w), где 0<w<l, дает распределение длительности
ожидания, т. е. задержку f(p.) автомобиля при выезде на маги-
страль. Вероятность Р(п) связана с производящими функциями
моментов следующим образом [7]:
ЖД0)=2Р(^Л/™(0)"’ (173)
/г = 0
где Мр.,(0) —производящая функция моментов распределения дли-
тельности ожидания интервала, превышающего нормированный
критический интервал для данного автомобиля, входящего в основ-
ной поток. Из выражений (161), (171) и (172) следует, что
МД9)=Ч1-/>)21ММ0)Ь (174)
п=0
ЛШ- 1~u\ (175)
1 — (о)
Чтобы можно было воспользоваться формулой (175), необходи-
мо найти A4W(9). Очевидно, что где 0<ш<1, — условная ве-
роятность, которая, по определению, принимает вид:
w
J g(w)dw
£(да)(0<я><1)=Р(®<Г|®<1)=-^--------------. (176)
J g (w) dw
Так как знаменатель выражения (175) задается формулой (168),
плотность распределения длительности интервалов, меньших нор-
166
тированного критического интервала, имеет вид:
g(w)(0<w<l)=£^. (177)
Р
Находим производящую функцию моментов
1
Мю(0)=— f e^wg dw.
P i
(178)
Изменяя пределы суммирования и подставляя значение g(w),
получаем
^(0)
(адту
рГ (а)
<^a—lg—w(aq —
оо \
— 'w(a4T—в)duu
1 х /
Если заменить переменные и подставить в первый интеграл и=
= w(aqT — 9), а во второй интеграл u+l = w, то
Г- 00
Mw(6)=-(а9Т)а (aqT-e)-^ { ua-xe~udu-
рГ (a) J
L О
— g— (aqT— 6) (ZZ-[~ \)a^e^u^aqT^dll
О
Используя для второго интеграла биномиальное тождество Нью-
тона [7]
1 , ..
z=o ' '
и0-1-1
и имея в виду, что первый интеграл представляет собой гамма-
функцию, имеем
0—1 00
1 ?oJ
(179)
167
Так как второй интеграл является гамма-функцией с парамет-
рами а — i и aqT — 0, то второй член можно записать как
а—1
с-1п„т-^ VI Г (а) . Г(а-1)
рГ(а) И Г (a —i) (адТ—
или
д?Г \а е-Са?г-е)
aqT— 9 J р
(адТ — В)*
г!
(180)
Подставляя выражение (180) вместо второго члена
(179) и группируя члены, получаем
формулы
ЧЛв)=—( 1
р \
9
aqT
—а
(адТ — аУ
z!
• (181)
Теперь можно найти моменты распределения длительности ожи-
дания для автомобиля, находящегося на примыкающем въезде пе-
ред вхождением в основной поток, вычислив производные произ-
водящей функции моментов (175)
^(в> = Р(1-Р) . ^(В) , 182)
М [1—pA4w(B)]2 db k 7
И
^р.(в) = Р (1 — ,pW1(6)/^2] . 2(1 —р) [pdMw(0)IM}2 ,183.
z/02 [1-А(6)]2 “Г [1-у>М)]3 \ '
при 0 = 0, где производная функции Mw(0) имеет вид:
^(0)_ Г(д + п) {адТУе-^т~^
dtf1 рГ(а) ' (адТ—Ь)а+п Х
j- а+и—1 . -
X ga?r-e_ V (agr~ey . (184)
1^0
После преобразования выражений (182) и (183) получаем сле-
дующие формулы для среднего времени ожидания и дисперсии:
е^г_^-(а?Пг
„V (^г)г
(185)
168
(«4-1)
°2(®)а =-------
£адТ у1 (д?7)г
—+^2(®)г-
г=о
./.,742 V1 ^aqT^
z-0
Переходя от нормированного параметра w к исходной случай-
ной величине t, получаем следующие выражения для
дисперсии при а= 1, 2, 3 и 4:
ix^^-l^r-l-^);
е2?г 1 2g7’2(g7)2
(186)
среднего и
(187)
hW2
9(1 + 2?7)
/п г3? Г -1 - 3g7 -4,5 (g7)2 -4,5 (07)3 .
НЧ'3 д [1 + 3^7 + 4,5 (07)2] j
= e4? r — 1 — 407 — 8 (07)2 —10,7 (07)3 —10,7 (g7)4 .
(188)
(189)
q [1 + 4gT + 8 (4-7)2 +10,67 (07)3]
y,r-wr-i .
?2
2, . _ 2e4g т-егч T — 2gTe2q r — 8 (gT)2^ т — 1—4дТ — 2 (gT)2 .
° 1 )2~ 2g2(l+2gT)2 *
a2(^ 4е3^г — 4 — 12gT —18 (g7)2 —18 (g7)3— 13,5 (g7)4 ,
Us З4-2 [1+3^7 + 4,5 (g7)2] q
+m;
(190)
(191)
(192)
(193)
5е4’г —5 — 204-7 — 40(07)2 —53,3(07)3 —53,3(47)4 —42,67(4-7)5 ,
® П)4=------------------------------------------------------------------
4^2 [1 + AqT 4- 8 (дТ)2 + 10,67 (4-7)3] '
' +р2(/)4- (194)
Функции (187) — (194) графически изображены на рис. 46 и 47.
Вывод формул (187) — (190) будет проще [4], если рассматрива-
ется эрланговское распределение. Если допустить, что с течением
времени отношение водителя к выбору приемлемого интервала
между автомобилями не меняется, то находим, что отдельные пе-
риоды ожидания образуют геометрическое распределение и веро-
ятность Рп того, что какой-либо автомобиль при выезде на магист-
раль должен ожидать в течение п интервалов, каждый из которых
имеет длительность менее Т сек, равна
Рп=Рп^~Р), «=1,2, ...,
(195)
где
т
(196)
о
169
Рис. 46. Зависимость времени ожидания
при выезде на магистраль от интенсивности
основного потока q, критического интерва-
ла Т и параметра а эрланговского распре-
деления:
а —При Ца = г, б — при |1а«=2; 6— При |1а=з’,
е —при |1а=4
a f(t) —распределение интервалов между последовательными авто-
мобилями основного потока. Среднее число интервалов, появляю-
щихся за время ожидания,
т
J
£(n)=_r^_=_L-----------. (197)
i — р 7
J
Среднее время, необходимое для того, чтобы для автомобиля,
выезжающего с примыкающего въезда на магистраль, появился
приемлемый интервал между автомобилями, равен произведению
ожидаемого среднего числа интервалов, меньших Т, на среднюю
длительность интервалов, меньших Т.
В свою очередь средняя длительность интервалов, меньших Т,
равна общей длительности интервалов, меньших Т, деленной на
число интервалов, меньших Т.
170
Рис. 47. Зависимость дисперсии времени
ожидания от интенсивности основного по-
тока q, критического интервала Т и пара-
метра а эрланговского распределения:
а — при <J2a=»i; б— при с>2а=2; в — при
а2в=з; а —при а2а=ч
Средняя длительность интервалов, меньших Г, равна
т
-°-----------, (198)
о
где q— интенсивность потока. Перемножая выражения (197) и
(198), получаем среднее время ожидания автомобилей, выезжаю-
щих на магистраль с примыкающего въезда:
т
С
{*= . (199)
00
f
т
Если учесть, что доля автомобилей, действительно ожидающих
при выезде на магистраль, определяется по формуле (196), то оче-
171
видно, что среднее время ожидания для автомобилей, задерживае-
мых при выезде на магистраль, составляет
(200)
3. РАСПРЕДЕЛЕНИЯ ДЛИТЕЛЬНОСТИ КРИТИЧЕСКИХ
ИНТЕРВАЛОВ
Рассмотренные в предыдущем параграфе теоретические распреде-
ления времени ожидания основаны на использовании длительности
критического интервала, постоянной для всех автомобилей. Более
реальное описание задержек можно получить, заменив фиксирован-
ный критический интервал некоторым распределением критических
интервалов f(T). Формулы для среднего и дисперсии длительности
ожидания имеют вид:
M(T)=^(T)f(T)dT
о
(201)
и
£2 (Г) = | 02 (Г) у (Г) dT.
о
(202)
Если допустить, что на магистрали интервалы между автомоби-
лями имеют экспоненциальное распределение, то, подставляя в фор-
мулу (201) соотношение (187), получаем
M(T)=q~l \e«Tf(T)dT-\rf(T)dT-q~' \f(T)dT. (203)
oo о
Имея в виду, что второй член выражает средний критический
интервал и что в последнем члене интеграл должен быть равен еди-
нице, находим
M(T)=q~1 \e4Tf(T)dT-T-q~\
(204)
Некоторые возможные распределения критических интервалов
показаны на рис. 48. Если допустить, что критические интервалы^
между автомобилями распределены равномерно между с и Ci, (см.
рис. 48, а), то
(205)
В качестве распределения интервалов между последовательны-
ми автомобилями было предложено также смещенное отрицатель-
172
ное биномиальное распределение [8] (см. рис. 48, б)
f (Г)=(Т- с)-1е-(г-о/(г-с)
и эрланговское распределение [4] (см. рис. 48, в)
f (Т\ — (а1Т}а 'Га—УраTIT
(206)
(207)
Подставляя в формулу (204) соотношения (205) — (207), по-
лучаем
М (Г) = (<?! — с)-'q-2 (е«*« — е«с) — Т — q~\
М (Г)=fa (1 - qT + qc-)\-'eV- f- q~*
и
M(T)=— {-----\a-T-q~\
q \ a— qT / v
(208)
(209)
(2Ю)
что соответствует распределению длительности ожидания при пер-
вых трех распределениях критических интервалов, изображенных
на рис. 48.
Вывод формул данного па-
раграфа основан на использова-
нии для всех автомобилей неко-
торого распределения критиче-
ских интервалов f(T). Этим са-
мым учитывается тот очевидный
факт, что не для всех водителей
критический интервал является
одним и тем же. Однако труд-
ность состоит в измерении крити-
ческого интервала для отдельно-
го автомобиля, чтобы получить
распределение критических ин-
тервалов. Один из методов на-
хождения такого распределения
состоит в том, что рассматрива-
ются только те автомобили, ко-
торые до выезда на магистраль
пропустили хотя бы один интер-
вал. Метод строится на обосно-
ванном допущении, согласно ко-
торому критический интервал
должен находиться где-то между,
максимальным неприемлемым ин-
тервалом и интервалом, который
в конечном счете оказывается
приемлемым.
Рис. 48. Основные распределения
критических интервалов между
автомобилями:
а — прямоугольное распределение;
б — смещенное экспоненциальное
распределение; в — эрланговское
р аспределение; г — логарифмиче-
ски нормальное распределение
- 173
Хотя наблюдения за короткий период позволяют более точно
определить область критических интервалов для данного автомо-
биля, характер метода таков, что наблюдения, проведенные в более
длительном интервале, оказывают большее влияние на форму плот-
ности распределения. Даусон [9] предложил два способа задания
веса, что позволяет избавиться от данного недостатка. Однако этот
метод имеет ряд недостатков практического свойства, а также ряд
принципиальных недостатков, что не позволяет применять его для
определения параметров. При данной методике рассматриваются
только автомобили, пропустившие хотя бы один интервал, и данный
метод неприемлем при рассмотрении интервалов запаздывания.
4. ФУНКЦИИ ПРИЕМЛЕМОСТИ ИНТЕРВАЛОВ
В предыдущих параграфах при выводе формул, основанных на по-
нятии критического интервала, предполагалось/что каждый води-
тель, ожидающий при выезде на магистраль, оценивает длитель-
ность интервала между автомобилями и принимает решение о вхож-
дении в основной поток, если интервал между автомобилями больше
некоторого заранее заданного значения Т, и не вливается в поток,
если интервал меньше Т сек. Герман и Вейсс [10] показали, что мо-
дель будет более реалистичной, если каждому интервалу поставить
т
р (Т) =----------- f —*“(1п т— In Т) 2 s 2
Длительность интервала сек
174
в .соответствие некоторую вероятность Р(Т) приемлемости интерва-
ла. Водитель выезжает на магистраль с вероятностью Р(Т), если
он наблюдает интервал длительностью Т. Некоторые функции
приемлемости интервалов показаны на рис. 49.
С помощью методов теории восстановления Вейсс и Марадудин
[11] сформулировали задачу о задержке при выезде на магистраль,
используя интегральное уравнение вместо комбинаторных рассуж-
(161—210).
дений, с помощью которых были получены формулы
Выражение для среднего времени ожидания имеет вид:
М (Т)=J Г<|-0 (Т) dT + —~Р°-1РЬ (Т) dT,
Q 0
где
PQ=lp(T)f0{T)dT-,
(211)
(212)
P=Jp(D/(r)dr; (213)
о
Ш)=/о(П[1-Р(Л1; (214)
Ф(Г)=/(Г)[1-Р(Г)]; (215)
f(T) —плотность распределения длительности интервалов на внеш-
ней полосе магистрали; Р(Т) — функция приемлемости интервалов
между автомобилями.
В приведенных выше формулах для распределения длительности
интервалов и функции приемлемости интервалов между автомоби-
лями индекс 0 относится к первому интервалу.
Вейсс {10, 14] применил эту теорию к некоторым конкретным
распределениям. Если, например, интервалы на внешней полосе ма-
гистрали распределены с плотностью
/(Л=/о(Л=^-?Г. (216)
а функция приемлемости интервалов имеет вид:
P(7’)=P0(7’)=l_e-x(r-t)> (217)
то получаем следующее выражение для средней длительности ожи-
дания при выезде на магистраль:
M(T}=q~1[e^c—1—Чс~\'~ е9С—1 —
+(-4тЧ2(1+^+с)(1-*“?с)]ЯНЬ-(218)
Важно отметить, что формула (187) является частным случаем
выражений (210) и (218). Рассматривая формулу (210), получаем
lim ( 1—^-\~а =е<^, (219)
а-^со \ a J
175
что следует из определения основания натуральных логарифмов е.
Так как при а = оо дисперсия эрланговского распределения равна
нулю, это выражение можно рассматривать ка_к частный случай,
когда критический интервал постоянен и равен Т. Подставляя соот-
ношение (219) в формулу (210)л получаем* выражение (187).
Аналогично, поскольку %=(Т—с)-1 (см. рис. 49), в формуле
(218) при Т — с вероятность приемлемости интервала выражается
ступенчатой функцией и формула (28) также приводится к (162).
Поскольку длительность ожидания, наблюдаемая при фиксиро-
ванном значении критического интервала, является частным слу-
чаем длительности ожидания при использовании распределения
критического интервала (207) и частным случаем при рассмотрении
функций приемлемости интервалов 1 (217), отсюда следует: 1) ве-
роятность того, что приемлемым окажется интервал длительностью
Т[Р(Т) на рис. 49], равна вероятности того» что для данного води-
теля длительность критического интервала меньше Т (см. рис. 49):
т
Р(Т)=^ f(T)dT (220)
и 2) среднее, а не медиана критического интервала или приемлемо-
го интервала являются точными параметрами для вычислений дли-
тельности ожидания.
Теоретически критический интервал можно найти с помощью
функции приемлемости интервалов. Это важно с практической точ-
ки зрения, поскольку значительно легче найти приемлемые интер-
валы между автомобилями, чем пытаться непосредственно измерять
критические интервалы. Более того, было показано, что средняя
длительность критического интервала и среднее значение функции
приемлемости интервала между автомобилями для данного примы-
кающего въезда действительно обнаруживают хорошее соответст-
вие [4].
5. БИНОМИАЛЬНОЕ РАСПРЕДЕЛЕНИЕ ВРЕМЕНИ РЕАКЦИИ
Если водитель, выбранный случайным образом из некоторой сово-
купности, получает возможность попасть с примыкающего въезда
на магистраль, то вероятность реализации этой возможности рав-
на р, а вероятность того, что эта возможность не будет реализована,
равна 1 —P = q- Возможность выезда на магистраль можно оценить
через длительность ожидания, расстояние между последовательны-
ми автомобилями основного потока, относительную скорость или
некоторую комбинацию этих либо других параметров. Если два
водителя имеют одинаковую возможность выехать на магистраль и
их реакции полностью независимы, то вероятность того, что оба
водителя воспользуются этой возможностью, равна р2, а вероят-
ность того, что оба водителя не воспользуются ею, равна q2. Вероят-
ность того, что возможностью выехать на магистраль воспользуется
только первый водитель, равна pq, а вероятность того, что ею вос-
176
пользуется только второй, водитель, равна qp. Таким образом, пол-
ные вероятности того, что возможностью выезда на магистраль вос-
пользуются оба водителя, воспользуется один водитель и не вос-
пользуется ни один водитель, равны соответственно р2, 2pq и q2. Это
последовательные члены квадрата бинома (p + q)2. Аналогичным
образом можно показать, что если в некоторой группе из п авто-
мобилей при выезде на магистраль все автомобили находятся в
одинаковых условиях и реакции всех водителей полностью незави-
симы, то вероятности вхождения в основной поток п, п—1,
п — 2, ..., 2, 1, 0 автомобилей образуют (п+1) членов биномиально-
го разложения (p+q)n. Следовательно, вероятность появления ров-
но х приемлемых интервалов равна
P(x)=( пх ^pxqn~x. (221)
Формула (221) выражает функцию биномиального распределе-
ния. Среднее число приемлемых интервалов из и возможных состав-
ляет пр, а среднее число неприемлемых интервалов равно nq. Дис-
персия этого распределения равна npq.
Очевидно, что выбор приемлемого интервала связан с некоторым
стимулом (приемлемая длительность интервала), воздействующим
на некоторого субъекта (водитель автомобиля, находящегося на
примыкающем въезде). Изменения стимула приводят к изменению
некоторой измеримой характеристики (в рассматриваемом случае
это выбор приемлемого интервала), называемой реакцией субъекта.
Методы, используемые для оценки характера процесса путем
изучения реакции на воздействия, оказываемые на объекты живой
природы, называются биологическими испытаниями. В наиболее
широком смысле этот термин следует понимать как метод измере-
ния любого стимула (физического, химического, биологического,
физиологического или психологического) через вызываемые им ре-
акции. Один из видов испытаний, находящий применение во многих
областях, основан на реакции типа «да — нет». Решение о приемле-
мости или неприемлемости интервала является примером реакции,
которая не допускает каких-либо промежуточных градаций и вы-
ражается лишь через появление или непоявление данного события.
Статистическая обработка данного конкретного испытания значи-
тельно облегчается благодаря применению пробит-анализа.
6. ПРОБИТ-МЕТОД
Пробит-анализ — это известный метод, широко используемый в ток-
сикологии и биомедицинских исследованиях. По этому вопросу чи-
татель отсылается к двум книгам Финни [12, 13]. В первой книге
дается описание метода и довольно подробно излагается методика
вычислений, а во второй представлены многочисленные примеры,
охватывающие самые разнообразные случаи, и довольно детально
изложена статистическая теория, лежащая в основе метода.
177
Обычно в эксперименте, в котором приемлем пробит-анализ, ве-
личина стимула регулируется экспериментатором. Некоторому ко-
личеству субъектов (обычно это насекомые) назначается некоторый
стимул (обычно ядохимикат), на который они реагируют опреде-
ленным образом (обычно умирают). Предполагается, что каждый
субъект характеризуется некоторой выносливостью к стимулу; при
повышении дозы (стимула) субъект реагирует (т. е. насекомое уми-
рает). Обычно требуется найти соотношение, выражающее процент
погибших насекомых как функцию дозы. Поскольку такое соот-
ношение не является линейным, оценка уравнения кривой и провер-
ка значимости сильно усложняются.
При переходе от процентов к пробитам кривая превращается в
линейное соотношение.
При исследовании длительности ожидания и приемлемости ин-
тервалов на регулируемых перекрестках с обязательной остановкой
Солберг и Оппенландер [14] показали, что пробит процента водите-
лей, для которых приемлем некоторый интервал между автомоби-
лями, связан с логарифмом интервала х уравнением
Y=а-\-Ьх.
Путем перехода к пробитам результаты исследований исполь-
зовались для нахождения оценки этого уравнения. Были также
определены такие параметры распределения «выносливости», как
среднее и дисперсия. В частности, легко оценить медиану длитель-
ности интервала между автомобилями и медиану времени ожида-
ния приемлемого интервала как такое значение х, при котором У=5
(процент приемлемости равен 50).
Солберг и Оппенландер [14] составили таблицу данных, сгруп-
пированных по интервалам длительностью 1 сек, для оценки прием-
лемости интервалов той или иной длины. Такая группировка обыч-
но производится в экспериментах с регулированием величины
стимула. При исследовании транспортных потоков такое регулиро-
вание невозможно, хотя можно измерить и зарегистрировать вели-
чину стимула (наблюдаемую длительность интервала между авто-
мобилями), а также реакцию (принятие или непринятие). Финни
[13] называет эти данные индивидуальными результатами. Метод
пробитов приемлем как к индивидуальным результатам, так и к
данным, полученным в контролируемом эксперименте (с группи-
ровкой).
Важно иметь в виду, что необходимо знать вид функции прием-
лемости интервалов между автомобилями (или интервалов запаз-
дывания) при вхождении в основной поток. Ранее был описан ряд
теоретических распределений этих величин, а некоторые из них
изображены на рис. 49. Некоторые исследования показали, что наи- *
лучшее описание длительности интервалов между последовательны-
ми автомобилями обеспечивается при использовании логарифми-
чески нормального распределения. Цель пробит-анализа состоит в
178
Рис. 50. Регрессии приемлемости интервалов запаздывания и интервалов между
автомобилями при выезде на магистрали с примыкающих въездов (США):
а — Эшби, г. Сан-Франциско, 1-01, М=196; б — Эшби, г. Сан-Франциско, 1-03
^=197; в —Плезант Хилл, г. Сан-Франциско, 3-02, Л7=311; г —Плезант Хилл,
г. Сан-Франциско, 3-01, N=291; д—-Лейкшор, г. Сан-Франциско, 4-01, W=331;
е —Миллбро, г. Сан-Франциско, 7-01, W=164; rw —Бродвей, г. Сан-Франциско,
8-01, N=159; з — Бродвей, г. Сан-Франциско, 8-02, W=179; и —г. Сакраменто,
1-01, W=190; к —г. Сакраменто, 1-02, #=195; л —Колдуотер Каньон, г. Лос-
Анджелес, 5-01, #=118; м— Колдуотер Каньон, г. Лос-Анджелес, 5-02, #=169;
/ ~ интервал запаздывания; 2—интервал между автомобилями
том, чтобы преобразовать функцию логарифмически нормального
распределения к линейному виду
Y=a-\-bx, (222)
где x = logf; t — длительность интервала между последовательны-
ми автомобилями основного потока или интервала запаздыва-
ния в зависимости от рассматриваемого параметра; У— про-
бит вероятности Р; Р — вероятность приемлемости интервала
между автомобилями или интервала запаздывания t (см.
рис. 49).
Если значения х и У наносятся на графическую бумагу, то
уравнение (222) изображается в виде прямой. Для удобства в по-
следующих главах графики будут строиться на логарифмиче-
ской вероятностной бумаге, поэтому на рис. 49 соотношение между
t и Р можно рассматривать как прямую. На этой вероятностной
бумаге (рис. 50) по оси абсцисс нанесена логарифмическая шкала,
на которой откладывается длительность интервала между автомо-
билями (или интервала запаздывания) в секундах; на правой оси
ординат нанесена вероятностная шкала, обозначающая вероятность
179
приемлемости Р в процентах, а на левой оси ординат — линейная
шкала, обозначающая пробит приемлемости У. Таким образом, ось
абсцисс обеспечивает переход от х к t, а оси ординат устанавлива-
ют соотношение между У и Р.
В дальнейшем для обозначения интервалов запаздывания ис-
пользуется индекс 0, а для обозначения интервалов между автомо-
билями— индекс 1.
7. ИНТЕРВАЛЫ МЕЖДУ ПОСЛЕДОВАТЕЛЬНЫМИ
АВТОМОБИЛЯМИ И ИНТЕРВАЛЫ ЗАПАЗДЫВАНИЯ
В прошлом одни исследователи предпочитали рассматривать ин-
тервалы между последовательными автомобилями [1], другие —
интервалы запаздывания [2], а некоторые — обе переменные [14].
Разумеется, выбор переменной не должен быть произвольным. Во-
дитель, находящийся на примыкающем въезде, при приближении к
магистрали оценивает интервал ►запаздывания. Очевидно, что пер-
вый наблюдаемый им интервал между автомобилями основного
потока может оказаться нехарактерным, так как передний автомо-
биль основного потока может пройти данный участок магистрали
задолго до приближения этого автомобиля к магистрали.
Исследование интервалов между автомобилями основного пото-
ка имеет практическую основу. Можно ожидать, что в конечном
счете важным применением такого рода исследований будет разра-
ботка системы, регулирующей выезд на магистраль и облегчающей
водителю выполнение этого трудного маневра. Предположительно,
такая система будет основана на подборе для автомобилей, вы-
езжающих на магистраль с примыкающего въезда, подходящих
интервалов между автомобилями, движущимися по магистрали.
Это легчр всего выполнить при помощи детектора интервалов меж-
ду автомобилями, движущимися по внешней полосе магистрали,
устанавливаемого на достаточном удалении от въезда, чтобы авто-
мобиль, прибывший на въезд, смог достигнуть полосы разгона од-
новременно с появлением приемлемого интервала.
На рис. 50 показано влияние длительности интервала запазды-
вания и длительности интервала между автомобилями на приемле-
мость интервала. Изображенные 12 графиков получены для семи
въездов, расположенных в городах Сан-Франциско, Сакраменто и
Лос-Анджелес. Две непараллельные пунктирные линии изобража-
ют регрессию приемлемости интервалов запаздывания и приемле-
мости интервалов между автомобилями. Две сплошные линии изо-
бражают эффект принудительной параллельности линий регрессии
для интервалов запаздывания и интервалов между автомобилями.
Так как, согласно определению, интервал запаздывания состав-
ляет часть интервала между автомобилями, то можно предпола-
гать, что при любой реакции водителя длительность интервала
между автомобилями, вызывающая эту реакцию, будет равна
соответствующему интервалу запаздывания, умноженному на не-
который постоянный коэффициент. Это означает, что линии про-
180
битов должны быть параллельны. Для проверки этого факта и
оценки отношения длительности интервала запаздывания к дли-
тельности интервала между автомобилями (относительная мощ-
ность в пробит-анализе) можно провести анализ методом проби-
тов, при котором эти две линии должны быть параллельны.
Результаты пробит-анализа, при котором линии для интервалов
запаздывания и интервалов между автомобилями параллельны,,
показаны на рис. 50.
В связи с проверкой параллельности этих двух линий пробитов
основная цель анализа состоит в том, чтобы оценить относитель-
ные мощности интервалов запаздывания и интервалов между ав-
томобилями, т. е. оценить эффективность интервалов запаздывания
по сравнению с интервалами между автомобилями в смысле побу-
ждения водителей к выезду на магистраль. Эта величина оценива-
ется как антилогарифм горизонтального расстояния между двумя
параллельными линиями пробитов, прш этом отношение R будет
больше единицы в том случае, когда линия пробитов для интерва-
лов запаздывания расположена влево от линии пробитов для ин-
тервалов между автомобилями. Так, /? = 2 означает, что для появле-
ния такого же процента реакций, как при некотором конкретном
интервале запаздывания, интервал между автомобилями должен в.
2 раза превышать интервал запаздывания.
8. МНОГОКРАТНОЕ ВХОЖДЕНИЕ В ОСНОВНОЙ ПОТОК
Выезд на магистраль сразу двух или большего числа автомобилей
возможен в том случае, если длительность интервала между авто-
мобилями основного потока окажется достаточной для этого числа
автомобилей, находящихся на примыкающем въезде. Можно по-
строить, например, три линии пробитов, рассматривая реакции гг-,
и стимулы Xi. Вначале эти три прямые подбираются (в отдельности
как Yi=ai-\-biXh /=1,2,3.
При помощи этих прямых для любой данной длительности ин-
тервала между автомобилями можно оценить вероятность того, что
наблюдаемый интервал окажется приемлемым для одного, двух или
трех автомобилей одновременно.
На каждом въезде существует тенденция последовательного
увеличения углового коэффициентапрямой: b2 и Ь2 (рис. 51).
Поскольку чувствительность таких групп автомобилей к различиям’
в длительности интервала между автомобилями основного потока
определяется решением, принимаемым водителем последнего авто-
мобиля в группе, то отсюда напрашивается вывод о том, что
(/+1)-й автомобиль в этой группе более чувствителен к различиям
в длительнд^ти интервала между автомобилями основного потока,,
чем /-Й автомобиль. Кроме того, при таком анализе не учитывается
скорость движения на въезде. Предполагается, что скорость
(/+ 1)-го автомобиля должна быть меньше скорости /-го автомоби-
ля. Если исключается какое-либо взаимодействие между скоростью
движения на въезде и длительностью интервала между автомоби-
181
Рис. 51. Приемлемость интервалов между автомобилями при многократном вхож-
дении в основной поток:
а —Эшби, г. Сан-Франциско, 1-01, #1 = 176, №=139, #3=120; б — Эшби,
г. Сан-Франциско, 1-03, № = 129, #2=71, #3=52, в — Плезант Хилл, г. Сан-Фран-
циско, 3-01, № = 131, №=89, №=72; г —Плезант Хилл, г. Сан-Франциско, 3-02,
№ = 146, №=Ю7, №=90; д — Лейкшор, г. Сан-Франциско, 4-01, #1 = 176, #2=
= 139, №=120; е — Миллбро, г. Сан-Франциско, 7-01, #1 = 104, #2=64, #3=40;
ж — Бродвей, г. Сан-Франциско, 8-01, #1=10*6, #2=53, #3=37; з — Бродвей,
г. Сан-Франциско, 8-02, #1 = 114, #2=70, #з=53; и —г. Сакраменто, 1-01,
#1=86, №=61, #3=44; к — г. Сакраменто, 1-02, #1=85, #2=66, #3=50; л —
Колдуотер, Каньон, г. Лос-Анджелес, 5-01, #1=84, #2=37, #3=28, м — Колду-
отер Каньон, г. Лос-Анджелес, 5-02, #1 = 109, #2=61, #3=38;---вхож-
дение в один интервал не менее одного автомобиля; ------------— вхождение
в один интервал не менее двух автомобилей;--------вхождение в один интер-
вал не менее трех автомобилей
лями основного потока, то линия пробита для трех или более авто-
мобилей, входящих в один зазор, сместится вправо от линии проби-
тов при вхождении в один зазор двух или большего числа автомо-
билей, а последняя сдвинется вправо относительно линии пробитов
при вхождении в один зазор одного или большего числа автомоби-
лей. Этот сдвиг линий пробита обусловлен тем простым фактом,
что для двух автомобилей требуется больший интервал, чем для
одного, а для трех — больший, чем для двух.
9. ИДЕАЛЬНОЕ ВХОЖДЕНИЕ В ОСНОВНОЙ ПОТОК
Выше указывалось, что при изучении процесса вхождения в основ-
ной поток следует пользоваться терминологией, иллюстрируемой
на рис. 45. Наиболее желательным является произвольное и иде-
182
альное вхождение в основной поток, поскольку в этих случаях
водитель не выезжает на полосу разгона и не оказывает никакого
воздействия на автомобили, движущиеся по магистрали. Такие
условия выезда на магистраль служат подтверждением взаимодей-
ствия, существующего между основными элементами транспортно-
го потока (водитель и автомобиль) и основными характеристика-
ми транспортного потока (расстояния или интервалы времени меж-
ду последовательными автомобилями и скорости движения).
Если допустить, что в среднем нормальное ускорение автомо-
биля, выезжающего на магистраль, обратно пропорционально его
скорости [15], то можно записать следующее дифференциальное
уравнение:
-^L-—a — bu, (223)
dt
где и — скорость автомобиля при выезде на магистраль, t — вре-
мя, а и b — постоянные.
Если в момент выезда на магистраль скорость автомобиля рав-
на ur, то соотношение между скоростью и временем имеет следую-
щий вид:
a=-±(l-e-M)+«^-»<. (224)
rr dx
Так как и=----, то, интегрируя полученное уравнение, находим
dt
зависимость пройденного расстояния от времени:
x=_£/_-±.(l_e-w)_|__^.(l-e-M). (225)
Подставляя выражение (224) в формулу (223), получаем сле-
дующую зависимость ускорения от времени при выезде на магист-
раль:
-^- = (a-tor)e-« (226)
Постоянные а и &-1 имеют размерности ускорения и времени
соответственно. Здесь а — максимальное ускорение, а —--ско-
О
рость свободного движения на участке выезда на магистраль. Вид
кривых, соответствующих уравнениям (223) и (226), показан на
рис. 2.
Зависимость пройденного расстояния от времени, изображенная
на рис. 2, воспроизводится на рис. 52, где показана также методика
определения теоретического минимального интервала между авто-
мобилями для идеального вхождения в основной поток. Такой ин-
тервал состоит из трех частей: интервал безопасности Тг между
автомобилем, выезжающим на магистраль и идущим впереди него
183
Рис. 52. Теоретический минимальный идеальный интервал между автомобилями
основного потока:
Тг — безопасный интервал времени между автомобилем, выезжающим на магист-
раль, и головным автомобилем; Ть — время, затраченное на разгон при выезде
на магистраль; Т/ — безопасный интервал времени между автомобилем, выез-
жающим на магистраль, и следующим за ним автомобилем основного потока;
Ti — минимальный идеальный интервал между автомобилями основного потока;
J — внешняя полоса магистрали; 2 — примыкающий въезд; 3 — автомобиль 2; 4 — начало
вхождения в основной поток; 5 — автомобиль 3; 6 — автомобиль 4 выезжает на магистраль
«без задержки
автомобилем основного потока; время TL, затрачиваемое на разгон
при выполнении маневра выезда на магистраль; интервал безо-
пасности Tf между автомобилем, выезжающим на магистраль, и
следующим за ним автомобилем основного потока. Интервалом
безопасности называется интервал между двумя автомобилями
одного ряда, позволяющий идущему сзади автомобилю совершить
безопасную остановку, даже если идущий впереди автомобиль рез-
ко затормозит и остановится. Если предполагается, что длитель-
ности реакции т, скорости движения и и возможности торможения
у обоих автомобилей одинаковы, то интервал безопасности будет
равен + где L — длина впереди идущего автомобиля.
Время, необходимое для того, чтобы автомобиль, имеющий вна-
чале скорость иг, достиг затем скорости и основного потока, можно
найти, решив уравнение (224):
Т2= —- In (227)
b a—buT
184
Вычитая из Т2 время 7\, которое потребовалось бы для прохож-
дения этого же расстояния с постоянной скоростью и, получаем
время TL, потерянное при вхождении в основной поток. Теоретиче-
ский минимальный интервал, необходимый для идеального вхож-
дения, Тг+Ту+Ть, составляет
а
J I J --—и
Т=—--------- 4- 2т+—-tUr- -]---------In a~ bu , (228}
и bu bu a — buT
где Lf — длина автомобиля, движущегося по магистрали, a Lr —
длина автомобиля, выезжающего на магистраль.
Из формулы (228) следует, что выезд на магистраль грузового'
автомобиля потребует больше времени, чем выезд легкового авто-
мобиля, вследствие большей его длины Lr и худших возможностей
разгона. Аналогично, длина £/ первого из двух рассматриваемых
автомобилей основного потока влияет на длительность интервала,,
что видно из формулы (228).
10. СКОРОСТЬ АВТОМОБИЛЯ, ВЫЕЗЖАЮЩЕГО
НА МАГИСТРАЛЬ
Задача выезда на магистраль не сводится лишь к оценке последо-
вательных интервалов между автомобилями основного потока и
отысканию достаточно большого интервала. Уравнение (228) пока-
зывает, что идеальный интервал определяется с учетом времени
реакции водителя, выезжающего на магистраль, характеристик
автомобилей — Л/, Лг, а и Ь, скорости и основного потока и скорос-
ти иг автомобиля, выезжающего на магистраль. Влияние скоростей
движения на процесс вхождения в основной поток не вызывает сом-
нения. Например, известно, что при большой плотности движения
на магистрали даже относительно большие интервалы времени
между автомобилями оказываются неприемлемыми. Теоретически
при увеличении плотности, когда движение останавливается, будут
неприемлемы бесконечно большие интервалы времени между авто-
мобилями.
Для изучения влияния скоростей движения на процесс вхожде-
ния в основной поток рассмотрим простую модель, когда два авто-
мобиля А и В, расстояние между которыми равно S, движутся с
постоянной скоростью и по внешней полосе магистрали, а автомо-
биль С под углом б выезжает на магистраль со скоростью иг. От-
сюда следует, что интервал времени между автомобилями А и В
составляет
/ = —. (229)
и
Однако, поскольку автомобиль С находится в движении, его во-
дитель наблюдает интервал длительностью
------------, (230)
и — иг cos В
I
185
где Ur cos 6 — составляющая скорости автомобиля С вдоль магист-
рали.
Решая уравнение (230) относительно S и подставляя получен-
ный результат в формулу (229), имеем
—arcos6 (231)
и
Если t'>T, где Т' — постоянная, то интервал окажется приемле-
мым. Следовательно, минимальный приемлемый интервал между
автомобилями
р и iir cos S (232)
и
является функцией скорости и основного потока и скорости ит ав-
томобиля, выезжающего на магистраль с примыкающего въезда.
Уравнение (232) показывает влияние геометрических характе-
ристик въезда на процесс вхождения в основной поток. Согласно
уравнению, различие между обычным перекрестком и оконечным
участком въезда определяется главным образом углом, под кото-
рым сливаются входящий и сквозной потоки. По формуле (232)
находим, что для перекрестка с углом 6=90° Т—Т', а при переходе
в соседний ряд 6 = 0:
7=..ц~ис .Т'. (233)
и
Если на перекрестке приемлемость интервала не зависит от ско-
рости автомобиля, выезжающего на перекресток, то при вхождении
в основной поток с примыкающего въезда скорость автомобиля ока-
зывает серьезное влияние на приемлемость интервала.
11. МОДЕЛЬ УГЛОВОЙ СКОРОСТИ
Некоторые исследователи предложили рассматривать угловую ско-
рость как основной параметр, учитываемый при принятии решения
о приемлемости интервала. Преимущество этого параметра состоит
в том, что он позволяет учитывать расстояние до приближающего-
ся автомобиля основного потока и скорость сближения автомо-
билей.
Модель угловой скорости для оценки приемлемости интервала
основана на вычислении относительных скоростей. Рассматривая
движущуюся систему координат (рис. 53), можно записать уравне-
ние для относительной скорости основного потока и автомобиля,
выезжающего на магистраль, и уравнение для расстояния между
ними:
= (234)
— z=wctg9. (235)
186
Рис. 53. Теоретический минимальный приемлемый интервал между автомобилями
основного потока:
/„—внешняя полоса магистрали; 2 — примыкающий въезд. Минимальный приемлемый интер-
вал равен
где 0 — угловая скорость
Дифференцируя функцию (235) по t и приравнивая полученный
результат и производную (234), находим угловую скорость
9 = —
S2 k r}
(236)
Основной особенностью этой теории является то, что водитель,
выезжающий на магистраль, считает интервал между автомобиля-
ми неприемлемым, если он воспринимает угловую скорость, и вы-
езжает на магистраль, если не ощущает относительного перемеще-
ния. Микаэле и Вайнгартен [16] использовали этот критерий для
вывода уравнения для минимального приемлемого интервала Т:
1
/ ч! 2
(и — иг} .
Т- —
и
W
Ь2
(237)
Хотя применение уравнения (237) для определения приемлемос-
ти интервала зависит от чувствительности водителя к угловой ско-
рости, роль скорости при определении приемлемого интервала оче-
видна. Относительная скорость и—иг, записанная в числителе
выражения (237), показывает, что чем меньше относительная ско-
187
рость, тем меньший интервал между автомобилями необходим.
Скорость и основного потока, записанная в знаменателе, показыва-
ет, что при малой скорости основного потока требуется больший
интервал. Кроме того, тот факт, что последний параметр возводит-
ся в большую степень, чем относительная скорость, свидетельствует
о том, что он может оказывать большее влияние на выбор приемле-
мого интервала.
Прежде чем приступать к дальнейшему исследованию влияния
скорости движения на длительность приемлемого интервала, необ-
ходимо рассмотреть некоторые вопросы, связанные с двумерным
пробит-анализом [.17].
12. ДВУМЕРНЫЙ ПРОБИТ-АНАЛИЗ
При рассмотрении одномерного пробит-анализа было показано, что
кривая приемлемости (процент приемлемости интервалов между
автомобилями как функция длительности одномерного интервала
между автомобилями или интервала запаздывания) может быть
преобразована в прямую. Как при регрессионном анализе могут
рассматриваться две и большее число независимых переменных,
так и пробит-анализ можно обобщить на случай двух и более не-
зависимых переменных. Основываясь на теории, рассмотренной в
предыдущих параграфах, в качестве двух независимых переменных
удобно выбрать интервал между автомобилями (или время ожида-
ния) и некоторый параметр, характеризующий скорость и, иг или
и—иг. На рис. 54 показана гипотетическая поверхность приемлемос-
ти интервалов при скорости движения основного потока 80 км)ч.
В вертикальной плоскости, параллельной оси Т, получаем кривую
Рис. 54. Поверхность приемлемости
интервалов между автомобилями при
скорости основного потока v=80 км/ч
Рис. 55. Плоскость приемлемо-
сти интервалов
188
Рис. 56. Влияние скорости автомобиля, выезжающего на магистраль, на прием-
лемость интервалов запаздывания:
а — Эшби, г. Сан-Франциско, 1-01, #=196; б —Эшби, г. Сан-Франциско, 1-03,
JV=197; в — Плезант Хилл, г. Сан-Франциско, 3-01, #=291; г — Плезант Хилл,
г. Сан-Франциско, 3-02, #=311; д — Лейкшор, г. Сан-Франциско, 4-01, #=328;
-Миллбро, г. Сан-Франциско, 7-01, #=164; йс—Бродвей, г. Сан-Франциско,
8-01, #=159; з —Бродвей, г. Сан-Франциско, 8-02, #=179; и — Колдуотер
Каньон, г. Лос-Анджелес, 5-01, #=118; к— Колдуотер Каньон, г. Лос-Анджелес,
5-02, #=169; л — г. Сакраменто, 1-01. #=190; м— г. Сакраменто, 1-02, #=195.
--------Х2=80 км/ч; ------— среднее значение Х2;---------Х2=0
приемлемости интервала, вид которой был показан на рис. 49 при
рассмотрении одномерного пробит-анализа. Очевидно, что трудно
записать уравнение поверхности, изображенной на рис. 54, но еще
труднее оценить значения параметров уравнения, пользуясь необ-
работанными данными.
Можно выполнить анализ приемлемости интервалов методом
пробитов, когда в качестве стимула рассматривается комбинация
параметров Xq и ur, а реакцией является г. При таком анализе по-
лучают оценку плоскости пробитов, определяемую по формуле
Y=a+biXQ + b2ur. Для любой комбинации значений хо и иг
можно оценить Y и определить соответствующий процент водите-
лей, для которых такая комбинация окажется приемлемой. И на-
оборот, для любого процента водителей можно определить соответ-
ствующую комбинацию значений xq и иг, дающую этот процент.
Цель двумерного пробит-анализа состоит в том, чтобы превратить
поверхность приемлемости интервалов, изображенную на рис. 54,
в плоскость, показанную на рис. 55. Графики, изображенные на
рис. 54 и 55, служат лишь для иллюстрации, и на основе их нельзя
189
Рис. 57. Влияние относительной скорости на приемлемость интервалов запазды-
вания:
а — Эшби, г. Сан-Франциско, 1-01, #=196; б — Эшби, г. Сан-Франциско, 1-03,
#=197; в — Плезант Хилл, г. Сан-Франциско, 3-01, #=291; г —Плезант Хилл,
г. Сан-Франциско, 3-02, #=311; д — Лейкшор, г. Сан-Франциско, 4-01, #=328;
е —Миллбро, г. Сан-Франциско, 7-01, #=164; ж— Бродвей, г. Сан-Франциско,
8-01, #=159; з — Бродвей, г. Сан-Франциско, 8-02, #=179; и — Колдуотер
Каньон, г. Лос-Анджелес, 5-01, #=118; к — Колдуотер Каньон, г. Лос-Андже-
лес, 5-02, #=169; л —г. Сакраменто, 1-01, #=190; м — г. Сакраменто, 1-02>
#=145.
---------^%2=0;------ — среднее значение Х2;--------Х2=80 км/ч
делать каких-либо выводов. В качестве независимых переменных
использованы расстояние Хо и скорость иг автомобиля, выезжаю-
щего на магистраль (рис. 56).
Каждый график на рис. 56 состоит из трех линий, соответству-
ющих (слева направо): скорости выезда на магистраль иг
(80 км!ч), средней скорости за рассматриваемый период и нулевой
скорости.
Двумерный пробит-анализ графически изображен на рис. 57.
Здесь используется разность между скоростью автомобиля основ-
ного потока и скоростью автомобиля, выезжающего на магист-
раль:
Y=a-|-A-ro+Mzz — иг\
что подтверждает справедливость результатов, полученных в пре-
дыдущих параграфах.
190
13. ВЛИЯНИЕ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК
Известно, что при проектировании въезда обычно желательно
иметь длинную полосу разгона и малый угол примыкания. Однако
вследствие пространственных и других ограничений требуемые раз-
меры не всегда можно обеспечить и часто приходится реализовать
компромиссные проекты, лишь частично отвечающие стандарту.
Немногое известно о влиянии на процесс движения автомобилей
таких компромиссных решений, как уменьшение длины полосы
разгона или увеличение угла примыкания.
Для оценки влияния той или иной геометрической характеристи-
ки необходимо измерить некоторую переменную (или параметр)
транспортного потока и сравнить ее значения при различных гео-
метрических характеристиках. В случае въездов, примыкающих к
магистрали, такой переменной является скорость движения, позво-
ляющая эффективно описать условия функционирования въездов
различной конфигурации.
В идеальном случае геометрические характеристики въезда не
должны препятствовать автомобилю, выезжающему на магист-
раль, развить на подходе к магистрали скорость, почти равную
скорости основного потока. В условиях плотного движения на маги-
страли это не всегда возможно. Однако, когда скорость основного
потока превышает 64 км/ч, на конечном участке примыкающего
въезда автомобили могут развивать еще большую скорость.
Кроме того, скорость выезда автомобилей на магистраль в
периоды свободного движения на магистрали оказывает большое
влияние на функционирование участка вхождения в основной поток.
Обычно большие скорости вхождения в основной поток служат
признаком хорошего функционирования.
Аналогично, изменение скорости на участке от точки примыка-
ния въезда (nose) до точки вхождения в основной поток (merge
point) является хорошим показателем влияния геометрических
характеристик различных въездов. Можно ожидать, что на плохо
спроектированных въездах в ожидании требуемого интервала
большое число автомобилей будет вынуждено останавливаться или
двигаться очень медленно, следовательно, для достижения скорости
основного потока эти автомобили будут вынуждены резко увеличи-
вать свою скорость. Поэтому на хороших въездах обычно имеют
место меньшие изменения скорости на участке от точки примыка-
ния до точки выезда на магистраль.
В данной главе при скорости основного потока, превышающей
64 км!ч, рассматриваются распределение скоростей в точке примы-
кания и в точке выезда на магистраль, влияние длины полосы раз-
гона и угла вхождения.
Выбор водителями приемлемых интервалов также может ис-
пользоваться для иллюстрации влияния различных геометрических
характеристик, при этом необходимо иметь в виду, что лучшая
конструкция обеспечивает выбор водителями меньших интервалов
в качестве приемлемых.
191
14. УГОЛ ВХОЖДЕНИЯ
Влияние угла вхождения на скорость движения на въезде иллюст-
рируется на рис. 58, где показано распределение скорости движе-
ния в конечной точке въезда и в точке выезда на магистраль [18].
Приведены графики для въездов, имеющих углы вхождения, лежа-
щие в определенных интервалах. Указанные скорости автомобилей
на примыкающем въезде наблюдались в условиях свободного дви-
жения на магистрали со скоростью более 64 км/ч. Влияние угла
вхождения можно непосредственно наблюдать из графиков.
При малых углах вхождения скорости в конечной точке въезда
обычно на 24—32 км/ч выше, чем при углах вхождения 10—14°.
С увеличением угла вхождения довольно быстро увеличивается
процент автомобилей, имеющих на примыкающем въезде малую
скорость. Например, при углах вхождения от 0 до 3° лишь около
2% автомобилей имеют в точке примыкания въезда скорость менее
48 км/ч. При углах вхождения от 10 до 14° эту скорость имеют око-
ло 85% всех автомобилей, входящих в основной поток. Кроме того,
на въездах с малыми углами примыкания движение более равно-
мерное. При углах вхождения от 0 до 3° большинство автомоби-
лей выезжает на магистраль со скоростями от 56 до 64 км/ч, а при
больших углах — от 19 до 48 км/ч. Преимущество меньших углов
вхождения выражается через более высокие скорости движения в
точке примыкания въезда. Если, например, угол вхождения умень-
шить с 12 до 7°, что, по-видимому, не является серьезным изменё-
нием, то можно ожидать, что дополнительно еще около 50% авто-
мобилей будут выезжать на магистраль со скоростями, превыша-
ющими 48 км/ч. Хотя медиана относительных скоростей в точке
примыкания въезда на рисунке не показана, известно, что ее значе-
Рис. 58. Влияние угла вхождения на скорость движения на примыкающем въезде:
/—.0=0-3°; 2 — 0=6—8°; 3 — 0=10—14°; th — скорость в точке примыкания въезда, км/ч\
и2 — скорость в точке вхождения, км/ч\ и3 — скорость на участке от точки примыкания въез-
да до точки вхождения, км/ч
192
ние изменяется с 16 км/ч для
въездов с малыми углами при-
мыкания до 25 км/ч для въез-
дов с углами примыкания, пре-
вышающими 10° [18].
Скорости в точке вхожде-
ния в основной поток и измене-
ние скорости на участке от точ-
ки примыкания въезда до точ-
ки вхождения подтверждают
результаты, полученные при
измерениях скоростей в точке
примыкания. При малых углах
вхождения средняя скорость
Рис. 59. Влияние угла вхождения на
приемлемость интервалов между
автомобилями при длине полосы
ускорения 195—240 м:
1 — угол вхождения 3°; 2 — угол вхожде-
ния 4°; 3 — угол вхождения 8°; 4 — угол
вхождения 11°
при выезде на магистраль со-
ставляет 64 км/ч и изменение
скорости не требуется; при
больших углах вхождения ско-
рость увеличивается в среднем
на 16 км/ч, выезд на магист-
раль осуществляется со скоростью 56 км/ч, а для некоторых авто-
мобилей скорость вхождения составляет 16 км/ч. Кроме того, при
малых углах вхождения значительная часть автомобилей изменяет
свою скорость только на 8 км/ч, а при больших углах для большин-
ства автомобилей увеличение скорости движения составляет от 8
до 32 км/ч.
Известно, что медиана относительной скорости в момент вхож-
дения колеблется от 3,2 км/ч для въездов с малыми углами примы-
кания до примерно 26 км/ч для въездов с большими углами при-
мыкания [18].
Поскольку при больших углах вхождения скорости автомобилей,
находящихся на въезде, обычно бывают меньше, то можно ожидать,
что для вхождения в основной поток могут потребоваться большие
расстояния между автомобилями. Это подтверждают измерения
приемлемых интервалов, выбираемых водителями при различных
углах вхождения, что иллюстрируется кривыми приемлемости ин-
тервалов, изображенными на рис. 59 [19]. Эти кривые относятся к
въездам, имеющим полосы разгона длиной от 200 до 240 м, что ос-
лабляет влияние длины полосы разгона на длительность приемле-
мого интервала. Из рис. 59 видно, что для 50% водителей приемле-
мыми оказываются интервалы времени между автомобилями дли-
тельностью менее 1,5 сек при углах вхождения 3° и интервалы
менее 3,5 сек при углах вхождения 11°. При меньших углах вхожде-
ния для 58% автомобилей приемлемыми оказываются интервалы
длительностью менее 2 сек, а при угле вхождения 11° лишь для
33% автомобилей.
Как и следовало ожидать, при проектировании въездов жела-
тельно иметь меньшие углы вхождения. Хотя в этом и нет ничего
нового, важность двух последних приведенных числовых значений
7—338
193
состоит в том, что они количественно выражают эффект угла при-
мыкания въезда; следовательно, при проектировании дорог важно
знать, что именно можно выиграть или потерять при выборе опре-
деленного угла вхождения.
15. ДЛИНА ПОЛОСЫ РАЗГОНА
Влияние длины полосы разгона на скорости автомобилей, выезжа-
ющих на магистраль, иллюстрируется с помощью функций распре-
деления, изображенных на рис. 60. Здесь показаны кривые для
въездов с определенной длиной полосы разгона. Приводятся раз-
личные скорости движения в точке примыкания въезда, различные
скорости движения в точке вхождения и различные изменения ско-
рости на участке от точки примыкания въезда до точки вхождения.
Все указанные скорости наблюдались в условиях свободного дви-
жения потока на магистрали со скоростями свыше 64 км/ч [18].
Медиана скорости в конечной точке въезда колеблется от
29 км/ч для въездов с короткой полосой разгона (менее 105 м) до
примерно 56 км/ч для въездов с полосой разгона более 255 м. На
въездах с полосой разгона более 285 м около 85% всех автомоби-
лей проходят точку примыкания въезда со скоростью, превышаю-
щей 48 км/ч. На въездах с полосой разгона менее 105 м эту скорость
имели менее 15% автомобилей.
Из графиков видно, что движение значительно равномернее на
въездах с длинными полосами разгона. Медиана относительной ско-
рости в точке примыкания въезда колеблется от 16—24 км/ч для
въездов с длинными полосами разгона до более 56 км/ч для въез-
дов с короткими полосами.
Рис. 60. Влияние длины полосы разгона на скорость движения на примыкающем
въезде:
/__Л=0—105 м; 2—£=120—180 м\ 3 — £ = 180—240 м\ 4 —£=285—360 м.
U1 — скорость в точке примыкания въезда, км!ч\ v2 — скорость в точке вхождения, км!ч\
Рз _ скорость на участке от точки примыкания въезда до точки вхождения, kmJh
194
рис. 61. Влияние длины полосы разгона
на приемлемость интервалов между
автомобилями при угле вхождения 3—6°:
у —длина полосы разгона 290 м\ 2 —длина
полосы разгона 240 м\ 3 — длина полосы раз-
гона 210 м
90
В точке вхождения в основной поток скорости обычно выше,
чем в конечной точке въезда, но на въездах с длинными полосами
разгона требуется изменять скорость в значительно меньшей сте-
пени. На въездах с короткой полосой разгона увеличение скорости
составляет в среднем 16 км/ч, и выезд на магистраль происходит
при скорости 48 км/ч.
При более длинных полосах разгона средняя скорость выезда
на магистраль составляет 64 км/ч и изменения скорости не проис-
ходит. Это приводит к тому, что медиана относительной скорости в
точке вхождения составляет 16 км/ч при коротких полосах разгона
и менее 8 км/ч при длинных.
Для проектировщика знание относительных скоростей движения
для въездов определенной структуры, возможно, и несущественно.
Однако если относительная скорость влияет на выбор приемлемого
интервала, что можно непосредственно связать с пропускной спо-
собностью въезда, то, зная ее, проектировщик обычно может лучше
понять преимущества и издержки определенных изменений в
проекте.
Влияние длины полосы разгона на выбор водителями приемле-
мых интервалов показано на рис. 61 при углах вхождения от 3 до
6°. Как и следовало ожидать, исследование распределения скоро-
стей показало, что при длинных полосах разгона обычно приемле-
мы меньшие интервалы, чем при коротких полосах разгона [19].
Последовательный регрессионный анализ дает следующее урав-
нение для углового коэффициента прямой, характеризующей дли-
тельность приемлемого интервала как зависимой переменной:
В = 1,394 + 0,2890 - О,О27Л0,
где 0 — угол вхождения, град-, L — длина полосы разгона; В —
тангенс угла наклона прямой, выражаемой как Y=A + B{X;
Y—пробит, а X — логарифм длительности интервала между
автомобилями.
7*
195
Рис. 62. Зависимость приемлемости интер-
валов от геометрических характеристик
въезда:
а — угол вхождения 3°; б — угол вхождения
4°; в — угол вхождения 9°; г — угол вхож-
дения 12°;
/ — длина 300 2 — 240 м; 3 — 180 м; 4—120 м
При увеличении угла вхождения увеличивается наклон прямой,
характеризующей длительность приемлемых интервалов и, следова-
тельно, уменьшается дисперсия распределения критических интер-
валов. Длина полосы разгона оказывает обратное влияние при
фиксированном угле вхождения. Характеристики приемлемости
интервалов, основанные на приведенных выше двух уравнениях
регрессии, при различных углах вхождения и различной длине по-
лосы разгона показаны на рис. 62 [20].
16. НОМЕР ПРИЕМЛЕМОГО ИНТЕРВАЛА
Среднее значение и среднее квадратическое отклонение номера при-
емлемого интервала являются важными показателями, характери-
зующими функционирование въезда.
Обозначим через 1 интервал, который появляется, когда автомо-
биль находится в конечной точке въезда, интервал 2 следует за ин-
тервалом 1, а интервалы 0, — 1 и т. д. находятся впереди интер-
вала 1.
На рис. 63 показаны среднее значение и среднее квадратиче-
ское отклонение номера приемлемого интервала на каждом въезде
[18], Каждая точка обозначает некоторый въезд с определенным на-
196.
бором геометрических ха-
рактеристик. Первое число в
круглых скобках — средний
номер приемлемого интерва-
ла для данного въезда, а
второе — среднее квадрати-
ческое отклонение номера
приемлемого интервала.
Рассматривались лишь пе-
риоды, когда скорость сво-
бодного движения на маги-
страли превышает 64 км!ч,
следовательно, эти данные
отражают функционирова-
ние каждого въезда в усло-
виях свободного движения.
Если бы для каждого авто-
мобиля, входящего в основ-
ной поток, приемлемым ока-
/5г
19 -
13 -
12 ~
11 -
10 -
9 -
8 -
1 -
6 -
5 -
9 -
3 -
2 -
(1,3:0,6)
(2^)
, ° , ° ($05)
(2^1,9) J
W (
(Ш) ,
($0,5) ° ^(1,2:0,1)
($0,6) ° ° ($0,6)
(Щ$)
, ° о (11-06)
($0,6) ” f
(W)
30 60 90 120150 180 210 290 270 300330 360 390920450
Длина полосы разгона,м
Рис. 63. Среднее и среднее квадратиче-
ское отклонение номеров приемлемых
интервалов между автомобилями
зался интервал, начинаю-
щийся в момент, когда автомобиль находится в точке примыкания
въезда, то средний номер приемлемого интервала был бы равен
1,0, а среднее квадратическое отклонение равно нулю.
Из рис. 63 видно, что для въездов с малыми углами примыкания
и длинными полосами разгона характерен малый номер приемле-
мого интервала и небольшое среднее квадратическое отклонение.
Этот факт отражает возможность выбора интервала при нахожде-
нии в точке примыкания въезда или на подъезде .к ней и показы-
вает, что хорошее функционирование въезда зависит от его геомет-
рических характеристик. Согласованность в поведении водителей,
входящих в основной поток, важна с точки зрения обеспечения
высокой безопасности движения, следовательно, на въездах, для
О
(2,1;/,7) °
(17,-19)
($1,2)
(Iffll) ootyty)
которых характерны малые средние квадратические отклонения но-
мера приемлемого интервала, вероятно, будет зарегистрировано
меньше дорожно-транспортных происшествий, чем на въездах, где
более сложное движение. Многие дорожно-транспортные происше-
ствия, происходящие на въездах, вызываются тем, что один из во-
дителей считает, что для впереди идущего автомобиля определен-
ный интервал окажется приемлемым.
Если это предположение оказывается справедливым, то все об-
ходится хорошо.
Если же нет, то автомобиль, следующий сзади, будет резко тор-
мозить, особенно на въездах с большими углами примыкания и ко-
роткими полосами разгона.
Цель системы, регулирующей выезд на магистраль, состоит в
том, чтобы все автомобили, находящиеся на примыкающем въезде,
автоматически попадали в интервал 1. Предварительные экспери-
менты, проведенные на опытном образце этой системы, показывают,
что средний номер интервала действительно стремится к 1, а сред-
197
нее квадратическое отклонение стремится к нулю. Анализ дорож-
но-транспортных происшествий показывает, что после установки
такой системы регулирования наезд на впереди идущий автомобиль
фактически прекратился.
17. ПРИЛОЖЕНИЕ ТЕОРИИ К ПРОЕКТИРОВАНИЮ ДОРОГ
Эффективность сквозного движения транспорта на городских
скоростных магистралях определяется тем, в какой степени въезды
соответствуют предъявляемым требованиям. Необходимо правиль-
ное проектирование и размещение въездов на магистрали с высо-
кой интенсивностью движения с тем, чтобы они могли обеспечи-
вать быстрое, эффективное и надежное функционирование магист-
рали. Разработка таких проектов в значительной степени зависит от
точного определения пропускной способности на стыке въезда с
основной магистралью, называемой далее пропускной способностью
вхождения.
Максимальное число автомобилей, находящихся на примыкаю-
щем въезде, которые могут попасть на внешнюю полосу магистра-
ли, эквивалентно числу автомобилей, использующих каждый
появляющийся интервал, при допущении, что на въезде имеется
непрерывная очередь автомобилей [21]. Следовательно, при рас-
смотрении пропускной способности участка вхождения большое
значение имеет такое понятие, как приемлемость интервала.
Рассмотрим бесконечную очередь, ожидающую вхождения в слу-
чайный поток, движущийся по внешней полосе магистрали. Если
интервал между автомобилями t меньше критического интервала
71, то ни один автомобиль не входит в основной поток; если значе-
ние t лежит между Т и Т+Т\ то в основной поток входит один ав-
томобиль; если значение t лежит между Т + Т' и Т + 2Т', то в основ-
ной поток входят два автомобиля и т. д. Способность внешней по-
лосы основной магистрали принять за единицу времени автомоби-
ли, находящиеся на примыкающем въезде, выражается как
qr=2 (Н1) Р Г+iT' < t < Т + (i +1) Г], (238)
/ = 0
где q — интенсивность потока на внешней полосе.
Если интервалы между автомобилями основного потока имеют
экспоненциальное распределение f то из соотношения
(238) следует, что
qe~qT
<2М)
В параграфе 8 при рассмотрении многократного выезда на ма-
гистраль указывалось, что вхождение двух автомобилей более чув-
ствительно, чем вхождение одного автомобиля, а вхождение трех
198
автомобилей более чувст-
вительно, чем вхождение
двух автомобилей к раз-
личиям в длительности
интервалов между авто-
мобилями. В данном слу-
чае чувствительность
означает, что кривые для
процента приемлемости
круче при вхождении в
основной поток трех авто-
мобилей, чем при вхожде-
нии двух автомобилей, и
круче при вхождении двух
автомобилей, чем при
вхождении трех автомо-
билей. Кривые для про-
цента приемлемости по-
казывают, что при уровне
Рис. 64. Возможная пропускная способность
примыкающего въезда
приемлемости 50% (кри-
тический интервал) Т и Т'
приблизительно равны. Следовательно, выражение (239) для про-
пускной способности въезда можно упростить. Получаем
Яг
де qT
\ — e~~qT
(240)
Уравнение (240) иллюстрируется на рис. 64. Для использова-
ния этого графика необходимо знать интенсивность потока q на
внешней полосе магистрали и критический интервал Т. Если оце-
нивается существующий проект, то q, qr и Т можно измерить. При
рассмотрении предлагаемого проекта могут использоваться суще-
ствующие документально оформленные методы оценки процента
общей интенсивности движения, приходящегося на внешнюю поло-
су магистрали. Известно, что на пропускную способность q суще-
ственное влияние оказывают следующие переменные: интенсив-
ность движения на въезде qr, интенсивность движения на участке
магистрали перед въездом, интенсивность движения на ближайшем
по ходу движения съезде и расстояние до ближайшего съезда. На
рис. 21 было показано соотношение между q и двумя из этих пере-
менных — общей интенсивностью движения на магистрали и интен-
сивностью движения на въезде qr.
Как указывалось выше, пропускная способность въезда харак-
теризуется максимальным числом автомобилей, способных выехать
на магистраль при наличии на въезде непрерывной очереди авто-
мобилей. По своему характеру это потенциальная пропускная спо-
собность. Если имеется возможность выезда на внешнюю полосу
магистрали г автомобилей, то для реализации потенциальной про-
пускной способности на въезде должна быть очередь, содержащая
не менее г автомобилей. Хотя при таких условиях движения дли-
199
тельность ожидания или длина очереди могут быть чрезмерно ве-
лики, их можно не учитывать при анализе пропускной способности.
Однако для обеспечения определенного уровня обслуживания ин-
тенсивность вхождения в основной поток следует определять с
учетом времени ожидания или длины очереди. Этот вопрос рас-
сматривается в следующей главе.
При проектировании новой дороги (или дорожного сооруже-
ния) инженер имеет набор заданных интенсивностей движения, ко
ему неизвестны значения Т и а. Поэтому он затрудняется выбрать
кривую или даже набор кривых, позволяющих определить уровень
обслуживания при заданной интенсивности движения на дорож-
ном сооружении предлагаемой конструкции. Накопленные данные
были проанализированы с целью сформулировать соотношения,
используемые проектировщиком для прогнозирования параметра
а эрланговского распределения и начального интервала между ав-
томобилями Т на основе той информации, которая обычно имеется
в его распоряжении [20].
Параметр а эрланговского распределения существенно зависит
от интенсивности движения. Фактически на параметр а влияют и
некоторые другие переменные, например профиль дороги, уклон и
другие параметры, связанные с географическими условиями. Од-
нако при отсутствии каких-либо данных об этих переменных кривая,
изображенная на рис. 65, позволяет получить приближенное значе-
ние а, связанное с интенсивностью движения на магистрали. Сов-
местно с соотношениями, приведенными на рис. 50, эту кривую
можно использовать для построения кривых, изображенных на
рис. 66 и связывающих интенсивность движения на примыкающем
въезде с интенсивностью движения на внешней полосе магистрали
и длительностью критического интервала Т. Это исключает необхо-
Рис. 65. Зависимость параметра
эрланговского распределения а от
интенсивности движения на внешней
полосе магистрали
Рис. 66. Максимальная интенсивность
движения на въезде qT при вероятно-
сти отсутствия автомобилей на участ-
ке вхождения, равной 0,67
200
Рис. 67. Зависимость длительности критического интервала Т от геометрических
характеристик примыкающего въезда;
а —въезд с параллельной полосой разгона 7=5,5474-0,828 9— 1,043 7.4-
4-0,045 L2 — 0,042 О2; б — въезд без параллельной полосы разгона. 7=5,5474-
4-0,828 0 —1,043 L 4- 0,045 Т.2 — 0,042 02 — 0,874.
/—угол вхождения 10°; 2 —угол вхождения 8°; 3 —угол вхождения 6°; 4 — угол вхожде-
ния 4°; 5 — угол вхождения 2°; А — длина полосы разгона
димость знания параметра а эрланговского распределения интерва-
лов между автомобилями, движущимися по внешней полосе маги-
страли. Длительность критического интервала Т можно оценить на
основе геометрических характеристик въезда
Т=5,547+ 0,8289 -1,043А + 0,045Р—О.О4202 - 0,8745, (241)
где 0 — угол примыкания, град-, L — длина полосы разгона в от-
резках, равных 30 л*; 5— коэффициент формы: 5=1 для въез-
дов с параллельной полосой разгона; 5=0 при отсутствии па-
раллельной полосы разгона.
Из этого уравнения видно, что при увеличении угла примыка-
ния критический интервал увеличивается, а при увеличении длины
полосы разгона уменьшается. Поэтому при проектировании въездов
желательно иметь меньший угол примыкания и большую длину
полосы разгона. Значение данного соотношения состоит в том, что
оно в количественной форме выражает влияние этих параметров,
поэтому проектировщик может определить соотношение между
0 и L. Кривые для оценки критического интервала по длине поло-
сы разгона и углу вхождения показаны на рис. 67.
Другой важной особенностью данного анализа является то, что
он показывает различие между въездом без параллельной полосы
разгона и въездом с параллельной полосой разгона. Анализ наблю-
дений за работой 13 въездов без параллельной полосы разгона и
16 въездов с параллельной полосой разгона показал, что в первом
случае критический интервал был почти на 0,9 сек, меньше, чем на
въездах с параллельной полосой разгона при одинаковой длине
полосы разгона и одинаковом угле примыкания [20].
201
ЗАДАЧИ
1. Дайте определение следующих терминов, указав различие между ними: измене-
ние ряда; пересечение потока под острым углом путем непрерывного изменения
ряда (weaving); вхождение в другой поток.
2. Автомобили, для которых критический интервал равен 3 сек, выходят с
примыкающего въезда на полосу разгона, когда интенсивность движения на внеш-
ней полосе магистрали составляет 800 авт!ч. Найдите среднее время ожидания и
дисперсию времени ожидания для этих автомобилей, если интервалы между после-
довательными автомобилями основного потока имеют эрланговское распределение
при а = 1.
3. При условиях задачи 2 найдите среднюю длительность ожидания при
выезде на магистраль и ее дисперсию, если интенсивность движения на внешней
полосе магистрали составляет 1 200 авт 1ч, и а=2.
4. Функция распределения приемлемых интервалов имеет вид:
Р(Т) = 1— е~чт-с).
Найдите среднее время ожидания при выезде на магистраль, если интен-
сивность движения на внешней полосе магистрали составляет 0,4 авт!сек и с= \ сек
при Х=3 сек-1.
5. Что легче определить, приемлемость интервала или длительность критиче-
ского интервала? Объясните, почему.
6. Найдите соотношение между скоростью и временем движения для авто-
мобиля с максимальным ускорением 3 м!сек2, выезжающего на магистраль с на-
чальной скоростью 40 км!ч при скорости основного потока в точке вхождения
112 км!ч. Постройте график.
7. Постройте пространственно-временную зависимость для задачи 6.
8. Пусть в задаче 6 длина полосы разгона составляет 240 м. Используя кри-
вые, построенные при решении предыдущих задач, определите, какую максималь-
ную скорость может развить автомобиль при выезде на магистраль в конце по-
лосы разгона.
9. Что лучше, столкнуться с вдвое большей интенсивностью движения или с
необходимостью иметь вдвое больший интервал между автомобилями основного
потока?
10. Наблюдения за работой перекрестка дорог, пересекающихся под прямым
углом, движение на котором регулируется с помощью светофора, показывают, что
минимальный приемлемый интервал Т' между автомобилями составляет 5 сек.
Значительная часть автомобилей, движущихся по второстепенной улице, совер-
шает правый поворот. Используя модель угловой скорости, определите, как изме-
нится минимальный приемлемый интервал для автомобилей, совершающих правый
поворот, если для поворота направо сооружен съезд, примыкающий к основной
магистрали под углом 15°, и скорость движения на съезде составляет 32 км)ч.
Скорость движения на основной дороге равна 72 км)ч. Каков эффект установки
светофора у края съезда?
И. На начальных этапах проектирования развязки дорог было обнаружено,
что ограничения геометрического характера вынуждают искать компромиссное ре-
шение при проектировании одного из въездов. Въезд может иметь угол примыка-
ния 6° при длине полосы разгона 240 м либо угол примыкания 3° при длине поло-
сы разгона около 180 м. На основе приемлемости интервалов между автомобиля-
ми определите, какой въезд будет функционировать более эффективно. Что указы-
вает на это?
12. Получены следующие данные об интервалах между автомобилями основ-
ного потока:
Используя эти данные, проделайте следующее:
1) с помощью критерия хи-квадрат сравните эмпирическое распределение
длительности интервалов с эрланговским распределением при а—2.
202
Длитель- ность интервала, сек Число на- блюдаемых интервалов Число при- емлемых интервалов Число неприем- лемых интервалов Длитель- ность интервала, сек Число на- блюдаемых интервалов Число при- емлемых интервалов Число неприем- лемых интервалов
0—1 150 1 91 5—6 74 40 2
1-2 249 27 122 6—7 31 21 1
2—3 200 59 61 7—8 12 7 0
3—4 153 68 21 8—9 15 11 1
4—5 ПО 59 7 9—10 5 3 0
>ю <10 6 0
2) построив на логарифмической вероятностной бумаге график зависимости
процента приемлемости интервалов от длительности интервала, определите ме-
диану приемлемого интервала Т. Процент приемлемых интервалов равен
У
'a + NT
где Na — число приемлемых интервалов, a Nr — число неприемлемых интервалов;
3) полагая, что эмпирическое распределение может соответствовать эрлангов-
скому распределению с параметром а = 2, вычислите среднее время ожидания при
выезде на магистраль.
13. Задана следующая информация о движении транспорта по главной улице,
пересекаемой второстепенной улицей. Движение на второстепенной улице регу-
лируется при помощи светофора. Из каждых 100 интервалов 65 являются прием-
лемыми. На второстепенной улице к перекрестку прибывает автомобиль. Оп-
ределите:
1) вероятность того, что первый интервал окажется для него неприемлемым;
2) вероятность того, что второй интервал окажется приемлемым, если первый
интервал был неприемлемым;
3) вероятность того, что два первых интервала окажутся приемлемыми;
4) вероятность того, что не более двух интервалов окажутся неприем-
лемыми.
ЛИТЕРАТУРА
1. Greenshields В. D., Shapiro D., Erickson Е. L. «Traffic Performan-
ce at Urban Street Intersections», Technical Report 1, Bureau of Highway Traffic,
Yale University, New Haven, Conn., 1947.
2. R a f f M. S., H a r t J. W. «А Volume Warrant for Urban Stop Signs»,
The Eno Foundation for Highway Traffic Control, Saugatuck, Conn., 1950.
3. В 1 u n d e n W. R., С 1 i s s о 1 d С. M., Fisher R. B. Distribution of
Acceptance Gaps for Crossing and Turning Maneuvers, Australian Road Res. Board
Proc., vol. 1, pt. 1, 1962.
4. D r e w D. R. Gap Acceptance Characteristics for Ramp-freeway Surveillan-
ce and Control, работа, представленная на ежегодном собрании Управления до-
рожных исследований, Вашингтон, январь 1966 г.
5. Tanner J. С. The Delay to Pedestrians Crossing a Road, Biometrika,
vol. 38, pp. 3—4, December, 1951.
6. M a у n e A. J. Some Further Results in the Theory of Pedestrians and
Road Traffic, Biometrika, vol. 41, № 375, 1954.
7. F e 11 e r W. «An Introduction to Probability Theory and Its Applications»,
vol. 1, John Wiley, New York, 1950.
Русский перевод: Феллер В., Введение в теорию вероятностей и ее при-
менения. М., «Мир», т. 1, 2-е изд., 1964, т. 2, 1967.
203
8. G a r w о о d F. An Application of the Theory of Probability to the Opera-
tion of Vehicular-controlled Traffic Signils, J. Roy, Statist Soc., vol. 7, № 65, 1940.
9. D a w s о n R. «Comments on „Gap Acceptance Characteristics for Ramp-
freeway Surveillance and Control”», работа, представленная на ежегодном собра-
нии Управления дорожных исследований, Вашингтон, январь 1966 г.
10. Herman R., W е i s s G. Comments on the Highway-crossing Problem,
Operations Research, vol. 9, № 6, pp. 828—840, November-December, 1961.
11. Weiss G., Maradudin A. Some Problems in Traffic Delay, Opera-
tions Research, vol. 10, № 1, pp. 74—104, January-February, 1962.
12. Finney D. J. «Probit Analysis», Cambridge University Press, New
York, 1947.
13. Finney V. J. «Statistical Method in Biological Assay», Hafner, New
York, 1964.
14. Solberg P., О p p e n 1 a n d e r J. C. Lag and Gap Acceptances at Stop-
controlled Intersections, Highway Res. Board Rec. 118, 1965.
15. M a t s о n T. M., S m i t h W. S., Hurd F. W. «Traffic Engineering»,
McGraw-Hill, New York, 1955.
16. Michaels R. M., W e i n g a r t e n H. «Driver Judgment in Gap Accep-
tance» (неопубликованная работа).
17. Drew D. R., LaMotte L. R., Buhr J. H., Wattleworth J. A.
Gap Acceptance in the Freeway Merging Process, Texas Transportation Inst. Res.
Rept. RF 430-3, Texas A&M University, College Station, 1966.
18. W a 111 e w о r t h J. A., Buhr J. H., Drew D. R., Gerig F. Opera-
tional Effects of Some Entrance Ramp Geometries on Freeway Merging, Texas
Transportation Inst. Res. Rept. RF 430-3, Texas A&M University, College Stati-
on, 1966.
19. Drew D. R., W a 111 e w о r t h J. A., Buhr J. H. Gap Acceptance and
Traffic Interaction in the Freeway Merging Process, Proc. Traffic Systems Div.,
U. S. Bureau of Public Roads, 1966.
20. D r e w D. R., В u h r J. H., W h i t s о n R. H. The Determination of Mer-
ging Capacity and Its Application to Freeway Design and Control, Texas Transpor-
tation Inst. Rept. 430—4, Texas A&M University, College Station, 1967.
21. Major N. G., Buckley N. J. Entry to a Traffic Stream, Australian
Road Res. Board Proc., vol. 1, pt. 1, 206—228, 1962.
ГЛАВА IX
ОБРАЗОВАНИЕ ОЧЕРЕДЕЙ
АВТОМОБИЛЕЙ
Основное назначение задач, описывающих движение транспортных
потоков, состоит в том, чтобы выяснить, сможет ли средняя про-
пускная способность дороги в среднем обеспечить прохождение по-
тока и при этом не будут непрерывно возникать транспортные
перегрузки. Однако вследствие случайных колебаний интенсивности
движения одна лишь гарантия того, что пропускная способность
автомагистрали в среднем может обеспечить прохождение транс-
портного потока, не исключает образования временных или даже
постоянных перегрузок.
Описанием поведения систем, обслуживающих случайно прибы-
вающие объекты (требования), занимается теория массового об-
служивания. Начало развитию этой теории положила статья Эрлан-
га, написанная им в 1909 г. и посвященная проблеме возникновения
перегрузок в работе телефонной станции. В последующих работах
Эрланг показал, что телефонная станция представляет собой много-
канальную систему массового обслуживания с пуассоновским вхо-
дящим потоком и экспоненциальным временем обслуживания. За
последние годы в теории массового обслуживания выполнены об-
ширные исследования, особенно в области исследования операций.
Основная идея этой теории заключается в том, что перегрузка про-
являет себя через задержку, вызываемую прерыванием потока.
Обычно поток является дискретным, как, например прибытие авто-
мобилей на стоянку; но он может быть и непрерывным, как напри-
мер, транспортный поток, входящий на узкое место дороги и выхо-
дящий из него.
Модели массового обслуживания широко применяют в теории
транспортных потоков. Для полного описания системы массового
обслуживания должны быть заданы: распределение входящего по-
тока; источник входящего потока (конечный или бесконечный);
дисциплина обслуживания («первым прибыл — первым обслужен»,
обслуживание с приоритетами или случайный выбор на обслужива-
ние); структура системы (одноканальная или многоканальная),
205
7
многоканальная система может быть с последовательными или па-
раллельными каналами; распределение времени обслуживания в
каждом канале.
Совокупность требований, ожидающих обслуживания, образует
очередь. Число требований, ожидающих обслуживания в момент
называется длиной очереди. При изучении систем массового обслу-
живания важное значение имеют: распределение длины очереди,
распределение времени ожидания в очереди, процент времени, ког-
да система обслуживания свободна. Ответ на эти вопросы зави-
сит непосредственно от характера распределения входящего потока
и распределения времени обслуживания.
Распределение входящего потока и распределение времени об-
служивания могут иметь любую форму. Однако развитие теории
массового обслуживания базировалось на трех конкретных распре-
делениях: равномерном Р, чисто случайном М и эрланговском
Кроме того, в некоторых моделях используется общее или произ-
вольное распределение, обозначаемое G. Так, М)М!\ обозначает
одноканальную систему массового обслуживания с чисто случай-
ным (пуассоновским) входящим потоком и чисто случайным (экс-
поненциальным) временем обслуживания. Цифра (в данном слу-
чае 1) показывает число параллельных каналов.
Система массового обслуживания находится в состоянии п, если
в ней имеется ровно п требований (п>0) как ожидающих, так и
обслуживаемых. Если интенсивность входящего потока q меньше
интенсивности обслуживания Q, то система находится в устойчивом
состоянии и существует конечная не зависящая от времени вероят-
ность того, что система может находиться в любом состоянии. Од-
нако если отношение интенсивности входящего потока к интенсив-
ности обслуживания больше единицы, то длина очереди неограни-
ченно увеличивается и состояние системы уже не будет
независимым от времени.
1. ОДНОКАНАЛЬНАЯ СИСТЕМА
Представление о характеристиках системы массового обслужива-
ния можно получить на простом примере одноканальной системы с
пуассоновским входящим потоком и экспоненциальным распреде-
лением времени обслуживания. Обозначая через Рп(/ + Д/), п>0,
вероятность того, что в момент t+At в системе находится п требо-
ваний, рассмотрим три способа достижения этого состояния. Пред-
полагается, что интервал А/ настолько мал, что в нем может при-
быть или покинуть систему только одно требование.
1. От момента t до момента t+kt состояние системы не изме-
няется.
2. В момент t система находилась в состоянии п—1, и в интер-
вале А/ прибывает одно требование.
3. В момент t система находилась в состоянии п+1, и в интер-
вале А/ одно требование покидает систему.
206
Так как вероятность того, что в интервале А/ прибывает одно
требование, равна <?А/, а вероятность того, что в интервале AZ одно
требование покидает систему, равна QA/, вероятности отсутствия
прибывающих и убывающих требований равны соответственно
1 — q\t и 1 —QA/. Если пренебречь более высокими степенями А/",
то математическое описание этих трех способов достижения в
момент t + At состояния п имеет вид:
Рп (/ + д/) = рп (/) [ 1 - (? + Q) А/] + Рп^ (/) qМ + Рп+1 (/) Q АЛ
«=1,2, ...; (242)
P0(/ + A/)=P0(/)(1--?A/) + Pi(/)QA/, « = 0. (243)
При переходе к пределу при АЛ->0 эти уравнения принимают
вид:
P'n(t)=-^ + Q)Pn(t) + qPn-i^ + QPll+1^, «=1,2,...; (241)
Ро(/)=-^оИ + ^Л(Д «=0. (245)
Если производные по времени приравнять нулю и исключить из
этих уравнений время, то получим
1+ -j-Pn = Pn+i+^-Pn-i, «=1,2, ...; (246)
Q Q
Р1=~Р<» « = 0. (247)
где Рп — не зависящая от времени вероятность того, что в системе
находится « требований.
Полагая в формуле (246) «=1 и подставляя сюда значения Pi
из формулы (247), уравнение (246) записываем в виде
Р2=(ХуРо. (248)
Затем, решая уравнения (246) и (248), находим, что вероятно-
сти появления очереди определенной длины подчиняются геомет-
рическому распределению:
MiH'-fi- (249)
Согласно формуле (61), среднее этого распределения имеет вид:
или
£(«)=—*—, (250)
Q — q
yj& Е(п)—математическое ожидание числа требований, находя-
щихся в системе.
207
G.) Интвмииписто
входящего потока
q=300 автА
О О
Интенсивности
выходящего потока
Q= 900авт/ч
Интенсивность
входящего потока
q 800авг/ч
Интенсивность
выходящего потока
—► $=900авт/у
Рис. 68. Сравнение влияния распределения
входящего потока и распределения времени
обслуживания на перегрузку:
а — пуассоновский (случайный) входящий
поток и экспоненциальное время обслужи-
вания;
б — равномерный (регулярный) входящий
поток и постоянное время обслуживания:
1 — пункт сбора платы за проезд
Интенсивность обслужи-
вания Q в том случае, когда
системой массового обслу-
живания является дорож-
ное сооружение, приобрета-
ет дополнительный физиче-
ский смысл, т. е. характери-
зует пропускную способ-
ность. В большинстве задач,
связанных с проектировани-
ем дорожных сооружений,
важную роль играет опреде-
ление соотношения между
пропускной способностью и
транспортной нагрузкой. Хо-
тя и известно, что в среднем
пропускная способность
должна превышать транс-
портную нагрузку, обычно недооценивается важность знания рас-
пределений этих параметров. Это можно проиллюстрировать на
примере сбора платы за проезд (рис. 68, а).
Пусть пуассоновский поток с интенсивностью 800 авт!ч пред-
ставляет транспортную нагрузку пункта сбора платы за проезд, а
время обслуживания распределено по экспоненциальному закону.
Математическое ожидание числа автомобилей, находящихся у
пункта сбора платы за проезд, определяется по формуле (250):
----—------= 8. (251)
900 — 800
Если бы автомобили прибывали к этому пункту равномерно
(что можно достигнуть путем соответствующего регулирования дви-
жения) и использовалось автоматическое устройство с одним и
тем же временем обслуживания, то математическое ожидание чис-
ла автомобилей, находящихся у этого пункта, составило бы
(рис. 68, б)
Е(п)=±=^-. (252)
Отсюда можно сделать два вывода:
существенную роль играют распределение транспортной нагруз-
ки и распределение времени обслуживания (пропускной способ-
ности);
математическое ожидание числа требований, находящихся в
системе В(п), является показателем неэффективности устройства
или количественным показателем транспортной перегрузки.
Поскольку существует определенная вероятность Pq того, что
система свободна, то средняя длина очереди Е(т) никогда не будет
в точности на один автомобиль меньше среднего или ожидаемого
208
числа автомобилей, находящихся в системе, т. е. Е(п). Математи-
ческое ожидание длины очереди составляет
ад=2(^-1)^Л=ад-р, (253)
Л=1
где р =
Q
Q'
2. ПРИМЕНЕНИЕ ПРОИЗВОДЯЩЕЙ ФУНКЦИИ
Важным средством анализа систем с бесконечной очередью являет-
ся производящая функция вероятностей. Важность ее еще больше
возрастает с усложнением системы. В этом случае формула (70)
принимает вид:
(254)
Для иллюстрации применения производящей функции, а также
для упрощения обратного перехода к вероятностям после нахож-
дения производящей функции для одноканальной системы с экспо-
ненциальным временем обслуживания определим следующие тож-
дества:
/>л=1, z„(o)=(i-0)-‘; (255)
^Л=С1, Z„(0)=C1(l-0)->; (256)
Рп = С1 Z„(0)=(1 — С20)-1; (257)
Zn(0)=C1(l-C2O)-i; (258)
Pn = Pn+k> Z :„+ft(0)=0-ft20"+ftp«+»= л»0
и=0
(259)
Полагая р = -^-, уравнение (246) можно записать как
(1+р)Рп+1-рРл-Рл+2=0. (260)
Беря производящую функцию для каждого члена, получаем
(1 + р) Zn+1 (9) - pZ„ (0)- Z„+2 (0) - 0. (261)
Решая уравнения (259) — (261) относительно Zn(0), имеем
Z„(0)=PO(1 —р0)-1. (262)
209
Поскольку Zn(0) = 1 при 0 = 1, из соотношения (254) следует, что
1 = Р0(1-Р)-1
или
Ро=1—р. (263)
Подставляя полученное значение Ро в формулу (262), находим
производящую функцию для системы MIM/i
(264)
1 - ро
Для обратного перехода от производящей функции, задаваемой
формулой (264), заметим, что выражение (254) по форме совпада-
ет с (258), если = 1—р и Сг = р. Следовательно,
Рл=(1- Р)Р". (265)
Моменты распределения (265) легко найти, продифференциро-
вав производящую функцию по формулам (71) и (73):
En = Z’n(\)=—±--- (266)
1 — ₽
и
a2=Z;(i) + {X_Ii2=_±_. (267)
3. КОНЕЧНЫЕ ОЧЕРЕДИ
Удобно начать с уравнения (246), чтобы избежать ограничений,
связанных с бесконечным входящим потоком и значением р<1.
Если максимальное число требований, находящихся в системе, не
может превышать N и требования, прибывающие при n=N, не
присоединяются к очереди, то уравнения (246) и (247) принимают
вид:
^1—рЛг,
(1 + р)^л=^+1+ рРп-1-, 0<n<N,
Рп = рРп-ъ
Для нахождения вероятности того, что в системе с конечной
длиной очереди находится определенное число требований, исполь-
зуем уравнение
2 рп=1=л>+ рл>+р2л>+• • +р^о-
72=0
Отсюда с помощью соотношения (87) находим
1 o'v+1
1=Р0 11 —• <268>
210
Решая уравнение (268) относительно Ро и подставляя получен-
ный результат в формулу Рп = рпР0, получаем вероятность того,
что в системе с конечной очередью находится определенное число
требований:
р.= (269)
Математическое ожидание числа требований, находящихся в си-
стеме с максимально возможным числом N, определяется по фор-
муле
Е(п)=^пРп.
Можно показать, что
1-^+1^ + ^ . (270)
1 — р 1 — РЛГ+1
Системы с конечной или ограниченной длиной очереди находят
важное применение в теории транспортных потоков как модели
регулирования движения на примыкающих въездах. Если интен-
сивность вхождения в основной поток снижается вследствие уста-
новки светофора на примыкающем въезде, то часть потока на этот
въезд не поступит. Важно знать, какая часть потока не поступит на
данный въезд, так как возможно возникновение перегрузок на сле-
дующем по ходу движения въезде или на других улицах.
Эта отсекаемая часть потока определяется как разность между
наблюдаемой интенсивностью движения на примыкающем въезде и
транспортной нагрузкой въезда. Транспортную нагрузку въезда q,
или интенсивность входящего потока, можно оценить, измерив дли-
ну очереди автомобилей на примыкающем въезде; Поведение води-
телей на примыкающем въезде контролируется путем измерения
значений Рп для автомобилей, образующих очередь. Эти вероятно-
сти равны некоторой постоянной величине, умноженной на некото-
рое число, меньшее единицы, в n-й степени. Морз [6] построил зави-
симость вероятностей Рп от п на полулогарифмической бумаге.
График имеет вид прямой, если в зависимости от длины очереди
автомобили остаются на данном въезде или ищут другой въезд.
Наклон прямой позволяет определить Р и, зная Q, вычислить q,
4. ВРЕМЯ ОЖИДАНИЯ
При выполнении таких маневров, как вхождение в транспортный
поток и пересечение его, важную роль играет распределение време-
ни ожидания до поступления на обслуживание w и распределение
общего времени пребывания в системе v.
Распределение времени ожидания от момента прибытия до на-
чала обслуживания рассмотрим в два этапа. Во-первых, существу-
211
ет конечная вероятность того, что время ожидания будет равно
нулю, равная вероятности того, что система свободна
/>(да=О)=Ро=1-р, я=0. (271)
Во-вторых, существует вероятность того, что время ожидания Т
заключено в интервале (w, w+dw):
P(w<T = f (w)dw, n>Q. (272)
Плотность распределения времени ожидания, заданная форму-
лами (271) и (272), изображена на рис. 69.
Необходимо определить все возможные комбинации, при кото-
рых время ожидания находится в интервале (w, w + dw). Теорети-
чески такая задержка требования А возможна, если уже имеется
обслуживаемое требование. Символически это условие можно вы-
разить как
Р(й>1)=2Рл. (273)
и=1
Однако, чтобы время ожидания требования А в точности лежа-
ло в интервале (w, w+dw), все впереди стоящие требования, кро-
ме одного, непосредственно предшествующего требованию А, долж-
ны покинуть систему в момент w, а непосредственно предшеству-
ющее ему требование в момент w + dw должно находиться на об-
служивании. Это произведение двух вероятностей имеет вид:
“Т-Г (274>
и
(275)
212
После суммирования всех вероятностей по формуле
подстановки результата в выражение (272) получаем
(273) и
f (®) PnPn-x (w) Pi (dw)—
л-1
рп (1 — р) (Qw)n le QwQdw
Л=1
(п-1)!
сс>
=Qp(l — р) e-Qwdw\
,/1-1
п=1
(n-l)t *
(276)
Таким образом, искомой плотностью распределения
ожидания является
у (®) = р (Q — ^)e-“'(Q-?), w > 0.
Функции распределения времени ожидания имеют вид:
Р (Т > w) = J f (да) dw = pe-(Q-?)w
w
времени
(277)
(278)
и
P(0<T <^w)—j f (w)d-w=p —
о
(279)
Следует заметить, что интеграл от 0 до со равен не единице, а р
(рис. 70).
Производящая функция моментов распределения времени ожи-
дания (277) имеет вид:
Mw (0)=-.^- g)
Таким образом, среднее время ожидания определяется по фор-
муле
(280)
K(0)=£(-)=^.
(281)
Условная плотность распределения времени ожидания, т. е.
плотность для требования, вынужденного ожидать,
принимает вид:
/ (w|w > 0)=(Q — #)
(282)
213
Среднее время ожидания для требований, вынужденных ожи-
дать, составляет
Е (w]w > 0) =
1
Q— q
(283)
Плотность распределения суммарного времени v пребывания
требования в системе находится аналогичным образом [формулы
(271) — (277)] и имеет вид:
(284)
Среднее время пребывания в системе составляет
. (285)
Q — q
Как и следовало ожидать, это время на — больше E(w)
£('0)=£(®) + -к (286)
Как видно из рис. 70, соотношения между E(w) и E(v) и мате-
матическим ожиданием числа требований, находящихся в системе,
Е (п), в( случае системы М/М/1 имеют вид:
Е (w) = E (287)
И
£(г»)=£(/г)—. (288)
Q
Более общее соотношение между рассматриваемыми парамет-
рами определяется следующим образом:
Е (п) Е (т)
E\v) Е (w)
(289)
5. МНОГОКАНАЛЬНЫЕ СИСТЕМЫ
Проблемы, связанные с работой систем с параллельными канала-
ми, возникают, например при исследовании потока телефонных вы-
зовов. Другими примерами таких систем могут служить кафе с
сиденьями у стойки; кассиры, обслуживающие клиентов в банке;
столы контроля в крупных магазинах самообслуживания.
Примерами таких систем на транспорте являются пункты сбора
платы за проезд, погрузочно-разгрузочные пункты и стоянки авто-
мобилей.
Как и в случае одноканальной системы, примем допущения о
пуассоновском распределении входящего потока со средней интен-
сивностью q и экспоненциальном распределении времени обслужи-
214
Рис. 71. Условия для вывода уравнений для многоканальных систем массового
обслуживания:
а — случай 1, п=0; б — случай 2, n<N\ в — случай 3, n=N\ г — случай 4, n>Af
вания со средней интенсивностью Q для каждого из N каналов.
Поступающее требование может занять любой свободный канал, а
если свободных каналов нет, то оно становится в очередь. Вероят-
ность ухода обслуженного требования из системы в интервале Kt
для одного канала равна QKt. Вероятность ухода обслуженного
требования из системы в интервале Kt равна nQKt.при n<N и
NQKt при n^N.
Вывод уравнений для системы M/M/N во многом аналогичен
выводу в случае системы М1М1\. Однако в случае многоканаль-
ной системы при нахождении уравнений перехода необходимо рас-
сматривать четыре условия в момент Z:n = O, n<N, n=N и n>N
(рис. 71). Уравнения для каждого условия имеют следующий вид:
Ро (t + Д/)=Ро (/) (1 - q Д/) + Р, (/) (1 - q Д/) Q Д?; (290)
Рп (Н Д?)=РЯ (?) (1 - <?Д?) (1 - KQ ДО + Рп-г (?) qM [1 — (zz — 1) Q д?] +
+Ря+1(?)(1-<7Д?)(«+1)<Ш (291)
Рп (t + Д?)=РЛ (?) (1 - qM) (1 - М?Д?) +
+ Рп-х (?) <?Д?[1 - 1) QAZ] +
+ Ря+1(/)(1-?Д?)(Л^Д?); (292)
Ря(? + Д?)=Рп(?)(1 - qД?)(1 -NQД?) + Pn-i(f)qM(A-NQM) +
+ Pn+1(t)(\-qM)(NQ^. (293)
Если пренебречь значениями Д? более высокого порядка, то урав-
нения (292) и (293) становятся одинаковыми и переходные урав-
нения принимают вид:
Pi(/)=-^0(?) + QP1(?); (294)
P'n(i)= - (q+nQ) Pn(t)+ qPn-i (?) + («+ 1) QPn+i (t); (295)
P'n (/)= - (q + JVQ) Pn (t) + qPn—i (/) 4-7VQP„+i (?). (296)
215
Уравнения для установившегося состояния находятся, как и ра-
нее, при этом полагается р= — < N с тем, чтобы —— <" 1 '
F Q NQ
Р^рРо, «=0; (297)
(р п) Р рРп—1 +l)Pn-t-x, n<^N; (298)
{p-\-N)Pn=pPn-i-\-NPn^.\, n>N. (299)
Решение этих стационарных уравнений находится по индукции:
Рп=-^Рй, n<N; (300)
Р„ = —4—Ро. n>N, (301)
АП N1-N
где Ро определяется из соотношения
Решая уравнение (302) относительно Ро, получаем
(303)
Математическое ожидание числа требований, находящихся в
очереди, вычисляется по формуле
(304)
216
Математические ожидания других представляющих интерес ве-
личин вычисляются как и ранее:
' £(«)=£(/n)+-J-; (305)
(306)
Q
E(w)=£(v)—.(307)
Q
Если число каналов очень велико (ЛЛ->оо), то из соотношения
(303) следует, что
lim Р0=^”р- (308)
7V->oo
Уравнение (308) представляет собой модель, удовлетворитель-
но описывающую функционирование уличной стоянки автомобилей.
Математическое ожидание числа автомобилей, находящихся на
стоянке, равно
Е (»)=2 ^л=^+2Р2+ЗР84- • • • =
/2=0
= РЛ) (1+р+-^-+ (309)
В случае стоянки у бордюра в более реалистичной модели не
допускается образование очереди автомобилей, ожидающих места,
т. е. В'данной модели Рп = 0, если n>N. Вероятность отсутствия ав-
томобилей на стоянке составляет
--------• <310>
2 р"/л!
/2 = 0
Так как
то следует, что вероятность отсутствия на стоянке свободных мест
имеет вид х ,
Pn=
?N!N\
n i
2 ₽ //!
2 = 0
(312)
217
6. ДВИЖУЩИЕСЯ ОЧЕРЕДИ
С увеличением интенсивности движения автомобили образуют
колонны или движущиеся очереди. Четкие критерии, позволяющие
определить, когда именно два автомобиля образуют движущуюся
очередь, отсутствуют. Критерии, позволяющие определить, когда
именно два неподвижных объекта образуют очередь в классиче-
ских системах массового обслуживания, также произвольны, по-
скольку такое понятие, как расстояние, в предыдущих параграфах
при выводе формул теории массового обслуживания не рассматри-
валось. Последовательность автомобилей, следующих за головным,
можно рассматривать как единую очередь, если каждый автомо-
биль должен мгновенно реагировать на снижение скорости впереди
идущего автомобиля. Будем считать, что данный автомобиль и ав-
томобиль, следующий впереди, образуют движущуюся очередь, ес-
ли (в зависимости от рассматриваемого параметра) расстояние ме-
жду ними меньше S или временной интервал меньше Т.
Существует ряд характеристик потока автомобилей, указываю-
щих на транспортную перегрузку дорожного сооружения: низкая
скорость движения, большое отношение интенсивности потока к
пропускной способности, высокая пространственная и временная
д) о о " о о . о О ‘ о о
Рис. 72. Сравнение двух дорог с одина-
ковыми плотностями движения и раз-
личными показателями перегрузки:
8 8
а — при Е(п)=—=1,33; б — Е(п)=— =
= 2,0
Состояние системы
S
Длим.. у I®
ovepeiutM | х2 J
(а)
Алина @
очервДиН’2 1х2 Лд J Р(1-р/
(Ь)
Л (С)
Рис. 73. Испытание Бернулли для опре-
деления вероятности появления очереди
заданной длины
плотности движения (заня-
тость полосы). Эти различ-
ные параметры не учитыва-
ют распределение транс-
портного потока и поэтому
не дают полного описания
перегрузок и состояния си-
стемы, что можно видеть на
примере работы пункта сбо-
ра платы за проезд, если
рассматривать только q и
Q. Логическим показателем
перегрузки дорожного со-
оружения, как и в случае
обычных систем массового
обслуживания, является
Е(п) (в случае движущих-
ся очередей этот параметр
называется длиной очереди
или числом автомобилей в
движущейся очереди). На
рис. 72 показано, что длина
движущейся очереди может
служить более чувствитель-
ным показателем перегруз-
ки, чем плотность потока.
Построение модели дви-
жущихся очередей основано
218
на применении схемы Бернулли к вероятностям р и 1 —р для всех
интервалов (пространственных или временных) между автомоби-
лями. Если предполагается, что интервалы между последователь-
ными автомобилями независимы, то вероятность наличия очереди,
состоящей из одного автомобиля, составляет
Л = (313)
где 1 — р — вероятность того, что интервал между первым и вто-
рым автомобилем (рис. 73) больше произвольного интервала S
очереди.
Аналогично, вероятность образования очереди, состоящей из
двух автомобилей, находится как комбинация одного «неудачного
исхода», за которым следует один «удачный исход», или
Р2=р(1-р), (314)
где р — вероятность того, что интервал между первым и вторым
автомобилями (см. рис. 73) больше произвольного интервала S,
при котором происходит образование очереди.
По индукции находим, что длина очереди следует геометриче-
скому распределению (рис. 73, в):
Рл=р«-1(1-^), п=1, 2, .... (315)
Математическое ожидание длины очереди Е(п) имеет вид:
Е<Р-) = ^пРп,
п—1
откуда получаем
£(/г)=1Л + 2Р2 + ЗР3+ ... =(1-р)(1+2/; + 3^+ ...). (316)
Второй член выражения (316) представляет собой ряд, сумма
1 г
членов которого равна —---— . Следовательно,
£(/г)=(1-р)-Ч (317)
Вероятность 1 — р того, что интервал х между любыми после-
довательными автомобилями больше произвольного интервала S,
зависит от пространственного распределения автомобилей на поло-
се дороги:
1 — р—Р(х > 5)=J f(x\ k, a)dx. (318)
Двухпараметрическое распределение вероятностей, задаваемое
формулой (319), является распределением Эрланга. Подставляем в
219
формулу (319) выражение для f(x; k, а), имеем
СО
Р(х > S)= f (ka)“ xa-le-a^dx,
’ J (а —1)1
(319)
где k — средняя плотность автомобилей, х — расстояние между
последовательными автомобилями, а=1, 2, 3 ....
Подставляя выражения (319) и (318) в формулу (317), получаем
С (ка)— xa~1e~akxdx
J L(a-1)l
(320)
Это соотношение между длиной движущейся очереди Е(п),
плотностью k, произвольным интервалом S и распределением плот-
ности а.
Интегрируя выражение (320) для а=1, 2, 3 и 4, имеем:
£(/г)а=1=еи; (321)
e№S
Е{п)а^=-£—--, (322)
~г 1
.3*5
Е(п)а-ъ=------------------; (323)
к ’ 4,5(£S)2 + 3&S +1 v '
p*kS
Е =-------------------------------. (324)
к 7 , 10,67(^5)3 +8U5)2 + 4*5 4-1 v 7
На рис. 74 графики этих уравнений построены с использованием
интервала между автомобилями S = 30 м, принятого за основу для
критерия, определяющего образование движущейся очереди. Числа
от 1 до 19 обозначают последовательные отрезки длиной Около
550 м на автомагистрали Галф в Хьюстоне. Очевидно, что наблю-
даемое соотношение между длиной очереди и плотностью потока
хорошо согласуется с теоретическим соотношением.
В тех местах, где плавное движение транспортного потока пре-
рывается вследствие наличия того или иного сужения дороги, по-
следующий поток обычно принимает вид колонн автомобилей или
движущихся очередей. Поскольку водителям известно, что при
сужении проезжей части затрудняется возможность выбора скоро-
сти движения и ряда, естественная тенденция к образованию ко-
лонн автомобилей и увеличению их длины служит логическим по-
казателем транспортной перегрузки.
Следует также заметить, что параметр Е(п), характеризующий
длину движущейся очереди, равен обратной величине вероятности
появления интервала, большего S. Поскольку
P(x>s>=^ (32S)
220
15
Э)5
u 6,2 IZJf 18,6 28,8 31,0 31,2 Ш 69,6 55,8 62,0
Плотность к, авт/км
Рис. 74. Сравнение эмпирического и теоретического соотношений между длиной
очереди и плотностью движения:
о — наблюдаемые значения
то Е(п) фактически является показателем наличия интервала меж-
ду автомобилями. Это свойство данного показателя делает его
исключительно важным средством для рационального проектиро-
вания геометрических характеристик дороги, анализа пропускной
способности дороги и регулирования движения на примыкающем
въезде.
7. ПРИМЫКАЮЩИЙ ВЪЕЗД
Время ожидания на примыкающем въезде при вхождении в основ-
ной поток, рассмотренное в предыдущей главе, посвященной прием-
лемым интервалам между автомобилями основного потока, приоб-
ретает важное значение как один из параметров модели массового
обслуживания.
Пусть на примыкающем въезде автомобили прибывают к основ-
ной магистрали с интенсивностью, задаваемой плотностью f(qr),
где qr — средняя интенсивность прибытия. Эти автомобили должны
войти в основной поток, образуя одну очередь и ожидая, пока ав-
томобили, находящиеся впереди них, войдут в основной поток. Ес-
ли плотность распределения времени обслуживания автомобилей,
находящихся в начале очереди, равна f(Q), то очевидно, что про-
цесс вхождения в основной поток может быть рассмотрен в рамках
классической системы массового обслуживания. При выводе фор-
мул для средней длины очереди и среднего времени ожидания для
очереди автомобилей, ожидающих на примыкающем въезде до
вхождения в основной поток, используется метод Кендалла [2] для
221
системы массового обслуживания со случайным входящим пото-
ком и произвольным временем обслуживания.
Пусть п0 и tii — число автомобилей, ожидающих на примыкаю-
щем въезде, непосредственно после того, как два последовательных
автомобиля Со и Ci влились в основной поток, t — время обслужи-
вания автомобиля С\, а г — число автомобилей, прибывающих на
примыкающий въезд за' время обслуживания автомобиля Cj. Если
ввести такую случайную величину б, что 6 = 1, если По = О, и 6 = 0,
если по^О, то отсюда следует, что
«i=n0-f-r—1+ (326)
Следует заметить, что, согласно определению 6,
82=8 и n^=Q.
Беря математические ожидания членов выражения (326), полу-
чаем
£(«1)=£(/z0)+F(r)-l+£(8). (327)
Если предполагается, что система находится в состоянии стати-
стического равновесия, то
£(/г,) = £(/г0)и £(г) = ^(/)=-^- = Р.
После подстановки этих результатов в формулу (327) имеем
£(8)=1- Р.
Возведя в квадрат обе части выражения (326) и беря, как и ра-
нее, математические ожидания, получаем
£(r-l)2_|_£(82) + 2f[«o(r-l)]+2£[8(r- 1)] = 0.
После преобразований имеем
£(«ow+^7zp)'~- (328)
Теперь необходимо вычислить Е(г2) —второй момент распреде-
ления числа требований, прибывающих за время обслуживания /,
используя соотношение между вторым моментом, средним числом
прибывающих автомобилей и дисперсией. Полагая, что автомобили,
выезжающие на основную магистраль, образуют пуассоновский по-
ток, и имея в виду, что усреднение должно производиться как по г,
так и по времени обслуживания t, имеем Е (r2)=qrE(t)-{-q2E(/2).
Поскольку Е (t) = Q-1 и
E(t2}=<32-\-E(t)2,
то '
^(г2)=р + Р2+^2- (329).
222
Подставляя выражение (329) в формулу (328), -получаем мате-
матическое ожидание числа автомобилей на примыкающем въезде
Яг , <^(Q-2 + °2)
Ur Q ' 2(Q-qr)
(330)
Если w — время ожидания (до вхождения в основной поток) ав-
томобиля Ci, то в интервале t + w на примыкающий въезд прибы-
вает п\ автомобилей. Поскольку средняя интенсивность прибытия
автомобилей составляет qr, то Е (n)r=qrE (t
Отсюда находим среднее время ожидания для автомобиля, на-
ходящегося на примыкающем въезде до вхождения в основной
лоток,
Е (w)r= (331)
Яг
и среднее время пребывания в системе для автомобиля, входящего
в основной поток,
E(v)r=-^~. ' (332)
Яг
Мейджор и Бакли [3] приняли время обслуживания Q~! для оче-
реди равным суммарной длительности интервалов между автомоби-
лями основного потока, неприемлемых для автомобиля, ожидающе-
го на примыкающем въезде. Эмпирическому распределению дли-
тельностей задержки на различных примыкающих въездах соответ-
ствует распределение Пирсона типа III, и полученные результаты
приводятся в табл. 19. Полагая, что среднее время обслуживания
равно средней длительности задержки при вхождении в основной
поток и что время обслуживания имеет распределение Пирсона ти-
па III, из выражения (330) получаем
£(п)г=Мг+(м;)г<1+;~1>, (333)
2(1— Щт)
где ц определяется по формулам (187) — (190), а а — параметр,
описывающий распределение времени обслуживания.
Если вычисленные значения а, приведенные в табл. 19, округлить
до единицы, то уравнения (330) — (333) примут вид формул для
обычной системы массового обслуживания с пуассоновским входя-
щим потоком и экспоненциальным распределением времени обслу-
живания. На рис. 75 показано соотношение между интенсивностью
движения q на внешней полосе автомобильной дороги, длитель-
ностью интервалов между последовательными автомобилями основ-
ного потока а, длительностью критического интервала Т и интенсив-
ностью движения qr на примыкающем въезде. Рассмотрим вхожде-
ние в основной поток при минимально допустимом критическом ин-
223
0107 0.250 0.333 0,517 0,500 авт/сек
Интенсивность движения
Рис. 75. Максимальная интенсивность движения на примыкающем въезде при ве-
роятности отсутствия автомобилей на полосе разгона, равной 0,67:
а— при а=1 = 0,33 q (eqT — qT— 1)~К,
б— При
0,33? (2?/ +1)
ечТ — 2(<Н"р — 2qT — 1
0,33?[4,5(?Г)2+3?Т+1]
в при <7г>а==з — 3 т
’ еч — 4,5(#)3 —4,5(#)2 —3?7—1
0,33? [10,67(^7)3 -j- 8(#)2 4- 4# 4- 1]
г - при qr^ = —------------------------------------------------------
eq — 10,67(^7)4 — 10,67(^7)3 — (8#)2-4?7 — 1
тервале, равном 4 сек, и эрланговском распределении интервалов
между последовательными автомобилями основного потока при
а=2 сек. Очевидно, что сумма координат любой точки кривой для
224
а б л и ц a 19
Название въезда Среднее время об- служивания Среднее квадрати- ческое отклонение Параметр распределе- ния Пирсо- на типа III Н азвание въезда Среднее время об- служивания Среднее квадрати- ческое отклонение Параметр распределе- ния Пирсо- на типа III
Каллен 4,0 5,2 0,6 Г риггз 1,5 2,8 0.3
Дамбл 3,5 5,5 0,4 Моссроуз 4,4 6,2 0.5
Уэйсайд 6,2 8,8 0,5 Вудридж 4,6 6,0 0,6
Т=4 при а=2 описывает интенсивность вхождения в основной поток
для данного примыкающего въезда. Например, точка с координата-
ми <7=1 500 и <?г=120 показывает, что интенсивность вхождения в
основной поток составляет 1 620 авт!ч\ при такой интенсивности с
вероятностью 67% примыкающий въезд окажется свободным и с
вероятностью 33% впереди данного автомобиля будет находиться
другой автомобиль, намеревающийся войти в основой поток.
Влияние неудовлетворительных геометрических характеристик
примыкающего въезда очевидно. Если бы в рассматриваемом при-
мере критический интервал составлял 5 сек, то при той же интен-
сивности основного потока <7 = 1 500 авт!ч максимальная интенсив-
ность qr вхождения автомобилей в основной поток составила бы
50 авт!ч, а суммарная интенсивность вхождения автомобилей в ос-
новной поток для данного примыкающего въезда — 1 550 авт!ч.
Рассмотренные в данном параграфе понятия теории массового
обслуживания дают широкие возможности для построения методики
измерения параметров движения на примыкающем въезде, связан-
ных с наблюдением и регулированием движения на основной авто-
магистрали.
8. МАРКОВСКИЕ ПРОЦЕССЫ
В теории марковских процессов, или марковских цепей, рассматри-
вается последовательность испытаний, когда исход того или иного
испытания зависит от исхода непосредственно предшествующего ис-
пытания (и только от него) [4].
Вместо рассмотрения марковской цепи как последовательности
событий, происходящих при последовательных испытаниях, удобно
рассматривать ее как последовательность состояний, через которые
проходят системы, например система массового обслуживания, в
последовательные моменты времени. Если изучаемой системой яв-
ляется рассмотренная в предыдущем параграфе очередь автомоби-
лей, ожидающих на примыкающем въезде до вхождения в основной
поток, то состояние системы определяется числом автомобилей в
очереди.
Вероятность того, что в данный момент t система находится в
состоянии обозначается Вероятность того, что в момент
/+1 система будет находиться в состоянии Xj, равна произведениям
8—338 225
вероятностей нахождения системы в момент t в состоянии Xi на
вероятности перехода, просуммированным по всем возможным со-
стояниям Xil
tn
А(* + 1)=2аР)А/, 7=1. 2, (334)
i
где Xi, Хг, xn — состояния системы; ti, U, tn — моменты време-
ни; Pi(t) —вероятность того, что в момент t система находится
в состоянии хг, рц — вероятность перехода Xr+Xj.
Чтобы пояснить полученное уравнение, вероятности состояния
в момент /+1 [формула (334)] можно записать следующим образом:
А (*+*)=A (*) Рп + A W Ai + • • • + Рп W Рл\
А(^4~ 1)=А W A2+AW АгН- • • • +aWPnv (335)
Рп (Н 1) = Pl W Pin + A (О Pin + • • • + Рп W Am-
В задаче вхождения в основной поток уравнения (334) и (335) оз-
начают, что вероятность наличия в момент /+1 одного ожидающего
автомобиля равна вероятности того, что в момент t ожидает один
автомобиль и в интервале Д/ нет прибывающих или убывающих ав-
томобилей, плюс вероятность того, что в момент t ожидают два ав-
томобиля, нет прибывающих автомобилей и в интервале Д/ один
автомобиль убывает, и т. д. Систему уравнений (335) можно пред-
ставить в матричной форме записи:
Р(/-|-1)=77>(/), (336)
где Р обозначает вектор вероятностей состояния в моменты /+1
и t, а Т — матрицу вероятностей перехода.
По индукции можно показать, что
P(/+1)=T(Z+1)P(O) (337)
и что, если система находится в стационарном состоянии, то
lim Р (/) = lim ТР (/)=lim Т*Р (0).
/->00 /->00 /->00
(338)
। ,60м ।
ЖЖЮ*”линия, ', '''W////////////,
11 11 {• К •. 1 11 Полоса 3 Внутренняя
1 i i 0 0 ii Полоса 2 средняя
тт // .7 • • • Полоса 1 внешняя
Рис. 76. Характер манев-
ров при изменении ряда.
Стрелки указывают уча-
сток и полосу, на кото-
рой начинается маневр
перехода в другой ряд,
и полосу, на которой
этот маневр заканчи-
вается
226
Таблица 20
В ряд Из ряда
1 2 3
1 ' 0,1 0,3 0,2
2 0,4 0,3 0,5
3 0,5 0,4 0,3
Рассмотрим табл. 20 для гипотетического случая перехода авто-
мобилей из одного ряда в другой на участке дороги с трехрядным
движением длиной 60 м (рис. 76).
Матрицу вероятностей перехода можно выписать из табл. 20
/0,1 0,3 0,2\
Т=j 0,4 0,3 0,5 1.
\0,5 0,4 0,3/
Вектор вероятностей на участке входа в основной поток для
автомобилей, находящихся на примыкающем въезде, имеет вид:
/1 \
Р(0)= О I,
\0 /
так как автомобили должны въезжать на внешнюю полосу основной
магистрали. С помощью формулы (337) можно найти Р(£ + 1) для
последовательных участков дороги длиной 60 м. Полагая для при-
мера /=1, получаем
/ /?Д /0,1 0,3
I /?2 1=1 0,4 0,3
\ pj \0,5 0,4
0,2\2 /1 \ /0,23\
0,5 I 0 = 0,41 I.
0,3/ \0/ \0,36/
Вывод состоит в том, что на расстоянии 120 м в направлении
движения потока из числа автомобилей, влившихся в основной по-
ток, только 23% все еще находятся на внешней полосе. В пределе,
когда t (число участков дороги длиной 60 м) становится очень
велико, распределение автомобилей между полосами дороги стано-
вится вырожденным, и говорят, что процесс является стационарным:
"0,1
0,4
.0,5
0,3 0,2\ /
0,3 0,5 I
0,4 0,3/\
М
рЛ
pj
Выражая стационарные вероятности через одну из вероятностей,
получаем pi =0,569рз’, р2= 1,039рз; рз=1,000рз.
8*
22?
Так как сумма вероятностей равна единице, то 2,608рз=1.
После подстановки этого результата получаем стационарное рас-
пределение автомобилей между полосами дороги: pi = 0,218 (21,8%)
4 автомобилей на первой полосе; р2=0,399 (39,9%) на второй; рз =
= 0,384 (38,4%') на третьей.
9. СМЫСЛ ИНТЕНСИВНОСТИ ОБСЛУЖИВАНИЯ
Чтобы получить числовые результаты для реальных задач движе-
ния автомобилей с помощью моделей массового обслуживания, не-
обходимо определить интенсивности прибытия и обслуживания и их
распределения. Эта задача может оказаться очень сложной.
Во-первых, задача подбора теоретических распределений для
тех или иных данных уже сама по себе является очень сложной и
может исключить применение модели массового обслуживания.
В исследовании задержек автомобилей у пунктов сбора платы за
проезд через тоннель Эдай [5] использовал эмпирические показате-
ли задержки, при сравнении которых с соответствующими показа-
телями теории массового обслуживания обнаружилось, что в сред-
нем время обслуживания на пункте сбора платы за проезд при за-
данной интенсивности потока скорее является постоянным, чем рас-
пределенным по экспоненциальному закону. Кроме того, при
интенсивностях, превышающих 600 авт!ч, нормальное распределе-
ние обеспечивает лучшую аппроксимацию, чем пуассоновское.
Во-вторых, при применении теории массового обслуживания к
движению транспорта получение фактических значений интенсив-
ности потока может быть затруднено. Хотя счет числа проезжающих
автомобилей не вызывает больших затруднений, измерение или да-
же определение времени обслуживания может оказаться сложной
задачей. Это вызывается тем, что вследствие конечных размеров ав-
томобиля, характерных особенностей водителя и условий движения
транспорта необходимо выделять очереди, образующиеся при дви-
жении. Изменения скорости движения автомобилей не происходят
мгновенно, а задержка при трогании с места может составлять
значительный процент общего времени обслуживания, что приводит
к заметным ошибкам. Кроме того, водители стремятся распределять
свою задержку в пространстве, а не сосредоточивать ее в определен-
ной точке или на определенном канале обслуживания. Так, води-
тель, приближающийся к перекрестку при красном свете, будет ста-
раться регулировать скорость движения таким образом, чтобы из-
бежать полной остановки за колонной ожидающих автомобилей.
Наконец, при движении автомобилей между ними должен соблю-
даться некоторый небольшой интервал времени (порядка 2 сек),
однако по сравнению с интервалами при многих маневрах, вызываю-
щих транспортные перегрузки, он является относительно большим.
Некоторые типичные расхождения между фактическими и кажущи-
мися длительностями обслуживания для трех основных маневров
показаны на рис. 77.
Й8
В развитие идеи о том,
что пропускную способность
можно определить через
длительности обслуживания
(что показано на рис. 77), в
данной главе при введении
понятий классической тео-
рии массового обслужива-
ния для обозначения интен-
сивности обслуживания ис-
пользовался символ Q. Оп-
ределение интенсивности об-
служивания Q как числа
.Рис. 77. Фактическая и кажущаяся дли-
тельности обслуживания при некоторых
основных маневрах:
объектов, которое может
быть обслужено некоторым
устройством за единицу вре-
мени при допущении о пол-
ной загрузке, не соответст-
1 — остановка; 2 — расхождение; 3 — вхождение
в основной поток; Та — фактическое время обслу-
живания; Те— кажущееся время обслуживания.
------- в северном направлении;-------------
в восточном направлении; - — в западном
направлении
вует общепринятому опре-
делению пропускной способности дороги как максимального числа
автомобилей, могущих пересечь некоторую точку дороги за единицу
времени. Известно, что на пропускную способность влияют как гео-
метрические характеристики дорожного сооружения, так и дорож-
ные сигналы. Таким образом, максимальная интенсивность, кото-
рую может обеспечить данный элемент транспортной системы, яв-
ляется единственно возможным стабильным показателем. Задача
определения интенсивности обслуживания транспортного потока
представляет собой задачу определения пропускной способности.
В параграфе 7 рассматривалось понятие переменной пропускной
способности, имеющей место при вхождении автомобилей с при-
мыкающего въезда в основной поток, пользующийся правом пре-
имущественного проезда. Интенсивность поглощения представляет
собой интенсивность обслуживания и определяет пропускную спо-
собность въезда. Важность дисперсии времени обслуживания иллю-
стрируется формулами (330) — (332). Так, из выражения (330) выте-
кает, что время ожидания уменьшается при уменьшении дисперсии,
даже если максимальная интенсивность потока остается постоян-
ной. Регулирование движения на примыкающем въезде с учетом ин-
тервалов между автомобилями основного потока является одним
из методов уменьшения дисперсии.
Для элементов транспортной системы типа барьера определение
пропускной способности не вызывает затруднений. Пропускную спо-
собность перекрестка в одном из направлений можно определить
с помощью среднего интервала между автомобилями при трогании
с места.
Бланден [6] установил, что интервалы между автомобилями при
трогании с места, т. е. длительности обслуживания в терминологии
массового обслуживания, приближенно могут быть описаны рас-
пределением Эрланга.
229
10. РАСПРЕДЕЛЕНИЯ, ОТЛИЧАЮЩИЕСЯ
ОТ ЭКСПОНЕНЦИАЛЬНОГО
В гл. 6 были установлены и определены понятия случайности, непол-
ной случайности и чистой случайности и для дискретных событий
рассматривались пуассоновское, биномиальное и отрицательное би-
номиальное распределения. Морз [7] показал, что одни и те же
случайные изменения можно промоделировать соответствующим
образом выбранной совокупностью устройств’с экспоненциальным
распределением времени обслуживания, это приводит к пуассонов-
скому, составному пуассоновскому и гиперпуассоновскому распреде-
лениям. Непрерывным случайным величинам (такой величиной яв-
ляется время обслуживания) соответствуют следующие распреде-
ления: экспоненциальное распределение при случайном времени
обслуживания, эрланговское распределение при менее случайном и
гиперэкспоненциальное при чисто случайном.
На рис. 78 схематически изображены экспоненциальное, эрлан-
говское и гиперэкспоненциальное распределения времени обслужи-
вания. Если предположить, что на входе канала обслуживания
имеется непрерывная очередь, то в каждом из трех случаев интен-
сивность ухода обслуженных требований будет равна Q. Однако
распределения интервалов времени между моментами ухода будут
другими: экспоненциальное распределение в случае одного канала,
гиперэкспоненциальное распределение в случае параллельных ка-
налов и эрланговское в случае последовательных каналов.
Рассмотрим более детально систему с последовательными кана-
лами. На обслуживание одновременно допускается одно требова-
Рис. 78. Блок-схемы для моделирования
экспоненциального (а), эрланговского (б)
и гиперэкспоненциального (в) распределе-
ний длительности обслуживания:
А — одноканальное устройство с экспонен-
циальным временем обслуживания; Б — по-
следовательные каналы с экспоненциаль-
ным временем обслуживания; В — парал-
лельные каналы с экспоненциальным вре-
менем обслуживания
ние, которое должно прохо-
дить каждую фазу с экспо-
ненциальным временем об-
служивания. Средняя интен-
сивность ухода обслужен-
ных требований из системы
равна aQ. Примером такого
процесса является мытье
автомобиля, когда на пер-
вом этапе автомобиль мо-
ют водой, а на втором су-
шат. Важно иметь в виду,
что на обслуживание одно-
временно допускается толь-
ко одно требование, и хотя
на схеме (см. рис. 78) систе-
ма имеет сложную структу-
ру, ее можно рассматривать
как один канал. Даже когда
на практике эрланговское
распределение не реализует-
ся, все же то или иное рас-
230
пределение, принадлежащее данному семейству, может вполне
удовлетворительно соответствовать эмпирическому распределению
времени обслуживания.
Уравнения для математических ожиданий в случае пуассонов-
ского входящего потока со средней интенсивностью q и временем
обслуживания, имеющим а-е эрланговское распределение со сред-
ней интенсивностью обслуживания Q, имеют вид:
Е (т)= ^±1-q-— ; (339)
2а Q(Q — q) k ’
(340)
E(v)=-^--, (341)
Q
E(w)=E(v)—(342)
q
Очевидно, что выведенное уравнение (333) имеет вид
Е(п)=-3-\
Q
I Q \2
(j) t1-1-*-1*
2(1--J-)
k QJ
и совпадает с уравнением (340)
£(д)
2а
q2 I д
QtQ-g) Q '
Если а=1, то получаем систему М/М/1. Если же а стремится к
бесконечности, то дисперсия эрланговского распределения равна
нулю, а время обслуживания становится постоянным и равным Q-1.
Это два частных случая эрланговского распределения времени об-
служивания.
В случае пуассоновского входящего потока и постоянного вре-
мени обслуживания математическое ожидание равно
£(т)
д2
2Q(Q—q)
и т. д. Остальные выражения легко получить путем подстановки со-
ответствующих выражений в формулы (340) — (342).
Рассмотрим теперь систему с параллельными каналами, изобра-
женную на рис. 78. Когда требование поступает на обслуживание,
оно направляется в тот или иной канал случайным образом, но про-
порционально с и 1—с, где 0 < с . Можно показать, что веро-
231
ятность того, что в интервале (t, t+dt) завершится обслуживание
в обеих фазах составляет
P(t < ti < t+dt)=dt-,
P (t < t2 < t+dt)=2 (1 - c) Qe-2 dtt
Отсюда следует, что вероятность завершения обслуживания в
интервале (t, t+dt) равна вероятности того, что используется дан-
ная фаза, умноженной на вероятность того, что обслуживание за-
вершается в этой фазе:
/ (/) dt=2c^Qe-^i dt -]-2 (1 - с)2 Qe~2 dt. (343)
Уравнение (343) задает плотность распределения времени об-
Г 1
служивания. Среднее время обслуживания составляет —, а дис-
1 Г 1 1 (1 —2с)2 1-1
Персия равна —, где а=[ 1-f-Lj-L] .
11. СОСТОЯНИЕ ТЕОРИИ МАССОВОГО ОБСЛУЖИВАНИЯ
Большинство задач, связанных с транспортными потоками, могут
быть разрешены с применением теории массового обслуживания
только в том случае, если принимаются определенные упрощающие
допущения. Типичными допущениями являются следующие: поступ-
ление требований происходит через равные интервалы, либо входя-
щий поток имеет пуассоновское распределение; время обслужива-
ния постоянно либо распределено по экспоненциальному закону.
Заметим, что случай, когда требования поступают через равные
интервалы и время обслуживания постоянно, является детермини-
стическим и исследуется без применения теории массового обслу-
живания.
При управлении транспортными потоками возникают еще более
сложные проблемы. Каждый уличный перекресток можно сравнить
с каналом обслуживания, рассмотренным в предыдущем параграфе.
Усложнения возникают вследствие изменения ряда, если очередь
в одном из направлений становится исключительно большой. Кроме
того, сюда относятся ограничения, свойственные системе «води-
тель — автомобиль».
Однако выигрыш, который можно получить от применения тео-
рии массового обслуживания для решения сложных задач движения
автомобилей, не ограничивается числовыми решениями. Возможно,
более важно определение параметров и их чувствительности, что
обеспечивает более глубокое понимание задачи и ее отдельных эле-
ментов.
Рассматриваемые в следующей главе методы моделирования ши-
роко применяют при решении задач массового обслуживания, ко-
торые трудно или вообще невозможно решить другими методами.
Моделирование имеет следующие преимущества: возможность боль-
232
шого приближения к действительности ввиду того, что отпадает не-
обходимость в упрощающих допущениях, и возможность более де-
тального исследования системы. Другими словами, с практической
точки зрения более важно знать максимальную длину очереди авто-
мобилей у перекрестка в период «пик», чем среднюю длину очереди.
ЗАДАЧИ
1. Предполагается, что у одного из загородных пунктов сбора платы за проезд
.автомобили образуют пуассоновский поток со средней интенсивностью 20 авт!ч.
Время обслуживания одного автомобиля (плата за проезд или приобретение би-
лета) имеет приближенное экспоненциальное распределение со средним, равным
1 мин.
Какую долю времени приемщик платы свободен и может оформлять доку-
ментацию?
Сколько автомобилей в среднем будут ожидать обслуживания?
Если среднее; число автомобилей, ожидающих уплаты за проезд или приобре-
тения билетов, достигает пяти, то в дневное время открывается второй пункт
•сбора платы за проезд. Как должна увеличиться средняя часовая интенсив-
ность потока автомобилей, чтобы потребовалось открытие второго пункта?
2. Банк арендует две уличные стоянки автомобилей. Измерения показывают,
что прибытие автомобилей на каждую стоянку образует случайный (пуассонов-
ский) поток с интенсивностью 6 авт!ч и с каждой стоянки за час уезжает в сред-
нем шесть автомобилей в соответствии с экспоненциальным законом. Каково сред-
нее число автомобилей на стоянках у банка?
3. В будущем движение автомобилей, выезжающих с примыкающего въезда
на основную магистраль будет регулироваться синхронно с движением основного
потока. Существующая транспортная загрузка на примыкающем въезде в час
«пик» составляет 320 автомобилей, образуя пуассоновский поток. Пункт регули-
рования движения на примыкающем въезде будет расположен таким образом,
чтобы на примыкающем въезде максимальная длина очереди за головным авто-
мобилем не превышала шести автомобилей. Первоначально будет использована
постоянная интенсивность синхронного вхождения, равная 6 авт]ч (постоянное
время обслуживания). Полагая, что транспортная нагрузка не меняется и что
вероятность полного заполнения данной системы массового обслуживания равна
доле отсекаемого транспорта, определите, сколько автомобилей не поступит на
въезд за час «пик».
4. Выведите формулу для среднего времени ожидания E(w|w>0) для ав-
томобилей, которые действительно ожидают в случае многоканальной системы с
параллельными каналами, если известно-следующее:
т
Р (0 < ад < Г) = J / (w) dw;
Q
f (W) = рое-(ЛГи“Х) W NV
( , \ f (w) dw
f I ад w > 01 = —----,
\ ' ) P(w>b)'
где w — время ожидания в очереди до начала обслуживания; N— число парал-
лельных каналов: р — интенсивность обслуживания одного канала; Л — интен-
сивность входящего потока: р =
yvp
233
5. Стоянка рассчитана на 100 автомобилей. Ежедневно на стоянку прибывают
200, образуя пуассоновский поток. Время пребывания на стоянке распределено по
экспоненциальному закону и в среднем составляет 0,4 суток. Найдите следующие
показатели: вероятность того, что стоянка свободна, и среднее число автомобилей
на стоянке.
6. Центр по обработке данных выделил две уличные стоянки у бордюра толь-
ко для клиентов с целью обеспечить им удобства в работе при составлении и на-
ладке программ для вычислительной машины в ненастную погоду. Клиенты при-
езжают в центр случайным образом, образуя пуассоновский поток со средним
интервалом между прибытиями 15 мин. Время работы клиентов в центре обра-
ботки данных имеет экспоненциальное распределение и в среднем составляет
30 мин.
Если предположить, что в дождливый день приезжают все клиенты, то
какова вероятность найти на стоянке свободное место? Каково математическое
ожидание числа автомобилей, находящихся на стоянке?
7. Пусть поток автомобилей, движущихся по дороге, распределен по закону
Эрланга с параметром а = 2, когда интенсивность потока составляет около
25 авт!мин, и по закону Эрланга с параметром 0=3, когда интенсивность потока
достигает 35 авт/мин.
Расстояния между последовательными очередями приняты равными S = 43 м
при 0=2 и S=37 м при 0=3.
Сравните ожидаемое число движущихся очередей при этих двух значениях
интенсивности потока. Какой поток является более плотным?
8. Получена следующая случайная выборка данных о времени ожидания ав-
томобилей, вливающихся с примыкающего въезда в основной поток (сек): 0, 3, 2,
0, 5, 1, 4, 3, 3, 0, 4, 1, 4, 3, 0, 7, 0, 3, 1, 2. Пусть автомобили, вливающиеся в основ-
ной поток, прибывают в соответствии с пуассоновским распределением со средней
интенсивностью 360 авт 1ч при 0=2.
Оцените следующие показатели: среднюю длину очереди на примыкающем
въезде; среднее время ожидания до вхождения в основной поток; среднее время
ожидания в системе примыкающих въездов.
9. Примыкающий въезд № 1 расположен от примыкающего въезда № 2 на
расстоянии 600 м по ходу движения. Матрица вероятностей перехода из одного
ряда в другой приведена ниже. Каково распределение по рядам автомобилей,,
вышедших на основную магистраль на примыкающем въезде № 1 при достиже-
нии ими въезда № 2?
Вероятности перехода из одного ряда в другой на участке дороги длиной
150 м\
В ряд Из ряда
1 2 3
1 0,2 0,3 0,2
2 0.5 0,4 0,4
3 0,3 0.3 0,4
10. Рассмотрите возможное применение (и ограничения) теории массового
обслуживания для анализа работы регулируемого пересечения с движением в че-
тырех направлениях.
11. Посетители (автомобили), прибывающие в заповедник, образуют пуассо-
новский поток со средней интенсивностью 2 авт!мин, а время обслуживания имеет
экспоненциальное распределение со средним, равным 2 мин.
Какова вероятность того, что прибывший автомобиль застанет въезд сво-
бодным?
Какова средняя длина очереди?
234
ЛИТЕРАТУРА
1. Drew D. R., Pinnell С. Some Theoretical Considerations of Peak-hour
Control for Arterial Street Systems. В сб.: «Traffic Control Theory and Instru-
mentation», Plenum Press, New York, 1965.
2. К e n d a 11 D. G. Some Problems in the Theory of Queues, J. Roy. Statist.
Soc., ser. B, vol. 13, № 151, 1951.
3. Major N. G., Buckley D. S. Entry to a Traffic Stream, Australian
Road Res. Board Proc., vol. 1, pt. 1, 1962.
4. С 1 о u g h D. J. «Concepts in Management Scince», Prentice-Hall, Engle-
wood Cliffs, N. J., 1964.
5. E d i e L. C. Traffic Delays at Toll Booths, J. Operations Research Soc. Am.,
vol. 2, pp. 107—138, 1954.
6. В 1 u n d e n W. R. «Capacity of Highways: Some Fundamental Considera-
tions», работа, представленная на 35-м ежегодном собрании института инжене-
ров транспорта, Бостон, 21 октября 1963 г.
7. М о г s е Р. М. «Queues, Inventories and Maintenance», John Wiley, New
York, 1963.
ГЛАВА X
МОДЕЛИРОВАНИЕ
Рассмотрим следующую задачу. Монета достоинством один пенни
подбрасывается до появления цифры. Если это происходит при пер-
вом бросании, игрок получает из банка 1 доллар. Если цифра появ-
ляется при втором бросании, то игрок получает 2 долл., при третьем
бросании — 4 долл, и т. д. Каждый раз сумма удваивается. Какую
сумму должен уплатить игрок за право участвовать в этой игре,
если игра ведется честно?
Если имеется геометрически правильная монета, то проще всего
некоторое представление о том, сколько должен платить игрок, мож-
но получить, сыграв, скажем,, 1 000 партий и определив средний
выигрыш на партию. Этот кажущийся ненаучным подход к «разоре-
нию игрока» представляет собой простой пример моделирования.
Моделирование является по существу построением рабочей ана-
логии. Оно представляет собой построение рабочей модели, отра-
жающей подобие свойств или соотношений с рассматриваемой
реальной задачей. Моделирование позволяет изучать сложные за-
дачи движения транспорта не в реальных условиях, а в лабора-
тории.
В более общем смысле моделирование можно определить как ди-
намическое отображение некоторой части .реального мира путем
построения модели для вычислительной машины и продвижения ее
во времени [1]. Термин модель для вычислительной машины исполь-
зуется для обозначения специального вида формальной математи-
ческой модели, а именно модели, которая не предназначена для ре-
шения аналитическими методами, а будет имитироваться на элек-
тронной вычислительной машине. Таким образом, моделирование
состоит в использовании цифровой или аналоговой вычислительной
машины для прослеживания изменений во времени. Различие со-
стоит лишь в том, что цифровое устройство считает, а аналоговое
измеряет. Это различие по существу является фундаментальным и
фактически отражает математическое различие между дискретной
переменной (цифровое устройство) и непрерывной переменной (ана-
236
лотовое устройство). Различие в возможностях цифровых и анало-
говых вычислительных машин с математической точки зрения про-
является в различии между суммированием и интегрированием или
между разностными и дифференциальными уравнениями.
1. МЕТОД МОНТЕ-КАРЛО
Часто при построении моделей получают уравнения, которые не-
возможно решить стандартными численными методами, и более це-
лесообразным может оказаться построение аналоговой стохастиче-
ской модели задачи. В этом случае по существу проводится экспе-
римент, дублирующий свойства рассматриваемой задачи. Процесс
вычислений носит полностью числовой характер, он осуществляется
путем введения в систему случайных чисел и нахождения численных
результатов.
Одним из простейших и наиболее важных применений этой идеи
является вычисление многомерного интеграла. Рассмотрим простей-
шую задачу вычисления площади некоторой замкнутой фигуры.
Проведем вокруг этой фигуры квадрат и примем его сторону равной
единице длины. Если случайным образом внутри этого квадрата
выбирается некоторая то.чка, то вероятность того, что эта точка ока-
жется внутри фигуры А, равна А. Если случайным образом выби-
рается большое число точек, то отсюда следует, что доля точек, по-
падающих на эту площадь, является оценкой А (рис. 79). Общее
уравнение для вычисления определенного интеграла методом рас-
пределения точек (как его называют) имеет вид:
ь
^f{x)dx=(b~x)ym^P[Y<f(X)}, (344)
а
где X=(b — a)RN-\-a (345)
и Y=ymiyJRN. (346)
Метод распределения точек состоит в том, что выбираются два
случайных числа, первое из которых лежит между а и Ь, а второе —
Рис. 80. Вариант задачи Бюффона
о бросании булавок
между кнулем и некоторым чис-
лом, не меньшим максимального
значения уШах функции f(x) в ин-
тервале (а, Ь), Если первое число
рассматривать как абсциссу, а
второе как ординату, то вероят-
ность того, что точка будет нахо-
диться под кривой, равна отноше-
нию площади под кривой к пло-
щади указанного квадрата (см.
рис. 79). Это обеспечивает основу
для нахождения по формуле
(344) значения определенного интеграла, равного площади под кри-
вой. Точность этого метода пропорциональна п1/а, где п — число то-
чек, a d — размерность. Этот метод можно обобщить для случая бо-
лее высокой размерности, при этом получаемый результат будет
справедлив.
Более эффективной является схема вычислений, основанная на
теореме о среднем. Теорема гласит, что если f(x) —функция, непре-
рывная на интервале (а, &), то в интервале (а, Ь) существует
такая точка Т, что
ь
f (x)dx=(b—a) f (Т).
а
(347)
Вычисления выполняются путем генерирования последователь-
ности случайных чисел X, лежащих между а и Ь, и нахождения
среднего значения функции f(X):
п
(348)
/-1
где X, как и ранее, определяется по формуле (345).
Ещё одной иллюстрацией метода Монте-Карло является броса-
ние булавок или гвоздей на дощатый пол (рис. 80) [1а]. Доля Р
булавок, пересекающих линии стыка досок, позволяет найти оцен-
ку числа л
2L
PW ’
(349)
где L — длина булавки, a W — ширина доски.
Разумеется, при многократном бросании булавок можно в точно-
сти предсказать, как часто булавки будут пересекать линии стыка.
Специалисты в области ядерной физики применяют этот принцип
для вычисления вероятностей того, что нейтрон, испускаемый при
делении ядра, будет захвачен или отклонен другим’ ядром в окру-
жающем его защитном экране. Этот метод применялся при раз-
работке защитных экранов ядерных реакторов.
238
2. СЛУЧАЙНОЕ БЛУЖДАНИЕ
Второй причиной, приведшей к появлению моделирования, явилась
потребность математиков в методах решения задач, содержащих
дифференциальные уравнения в частных производных [2]. Типичной
задачей было решение уравнения диффузии, описывающего диффу-
зию газов, а также теплопроводность в некоторой среде. Характер-
ной особенностью многих из этих физических систем является то,
что фактический механизм движения газа или теплопередачи связан
с большим числом частиц, ведущих себя частично упорядоченно, а
частично случайным образом. Усреднение по большому числу час-
тиц позволяет исключить Элемент случайности и дать детерминиро-
ванное описание.
Математические методы описания систем частиц, движущихся
частично упорядоченно, а частично случайным образом, изучались с
помощью так называемого метода случайного блуждания. Принцип
случайного блуждания можно проиллюстрировать на примере дви-
жения человека с завязанными глазами, который, начиная движе-
ние от фонарного столба, все время произвольно меняет направле-
ние движения, перемещаясь совершенно случайным образом
(рис. 81). Если человек движется в северном, южном, восточном
или западном направлении и каждый его шаг принимается равным
единице, то оценка расстояния
до столба после каждого шага
равна V п, где п— число ша-
гов. Более того, математиче-
ский закон беспорядочности
предсказывает, что при про-
должительном движении чело-
век вернется обратно к фонар-
ному столбу. Этот простой при-
мер иллюстрирует используе-
мый в современной физике
принцип случайного блужда-
ния.
Несколько более сложным
примером является примене-
ние метода случайного блуж-
дания для решения дифферен-
циального уравнения в част-
ных производных вида
(350)
дх% ду2
Рассмотрим тонкую прямо-
угольную пластину с теплоизо-
лированными поверхностями,
ограниченную координатами
х=0, У = 0\ х=3, у=2 (рис.82).
Рис. 81. Случайное блуждание
239
Рис. 82. Применение метода случайного блуждания для нахождения установив-
шегося значения температуры в некоторой точке пластины:
д^и дЪ1
дифференциальное уравнение 4- = 0; граничные условия w(x=0)=0.
ОХ* Оу*
и(х=» 3) =0, u(y—2)-Q, и(у=0)=Зх — х2
Грань t/=0 имеет температуру и(х) —Зх—х2, а температура трех
других граней равна нулю. Используя метод Монте-Карло, требует-
ся определить температуру в любой точке (х, у).
Одним из способов решения этой задачи является нанесение на
поверхности пластины сетки квадратов со стороной h и задание тем-
пературы в граничных точках в соответствии с данными условиями.
Для нахождения температуры в любой точке (т, п) с этой точки и
начинается случайное блуждание, продолжающееся до тех пор, по-
ка не будет достигнута некоторая граничная точка; записав темпе-
ратуру в этой граничной точке, возвращаются в исходную точку и
весь процесс повторяется сначала. Полученные таким способом
средние температуры в граничных точках дают оценку искомой тем-
пературы и (т, п) в исходной точке.
Теория, лежащая в основе этой методики, связана с переходом
от дифференциальных уравнений в частных уравнениях (350) к
разностному уравнению
ц (от + 1, л) —2u (т, ti) + u(m — 1, л) ।
Дх2
। u(m, л + 1) — 2л(«, л) + л (от, л—1) q (351)
Поскольку сторона квадрата равна Дх=Д«/='/г, получаем
и(т, n)=-i-[й(/п-|-1, n)-|-«(/n—1, n-j-l)-{-
п— 1)]. (352)
Уравнение (352) дает искомую температуру, выраженную через
температуру четырех соседних точек. Другим способом температура
в точке (/п, п), находится как вероятность того, что первый шаг
будет сделан в точку (/п+1, п), умноженная на температуру
и (/п+1, п), плюс вероятность того, что первый шаг будет сделан
24Q
в точку (т—1, п), умноженная на температуру и (т—1, п),
и т. д. Можно сказать, что ожидаемая температура и (т, п)
равна сумме произведений температуры в некоторой гранич-
ной точке (точка с известной температурой) на вероятность того,
что случайное блуждание из точки (тп, п) приведет в эту гранич-
ную точку. Таким образом, на практике для получения удовлетвори-
тельной оценки искомой температуры необходимо лишь запрограм-
мировать около 1 000 случайных шагов и вычислить среднюю тем-
пературу в граничных точках.
Мур [3] показал, что эту методику можно обобщить для решения
дифференциальных уравнений в частных производных значительно
более широкого класса, чем уравнение Лапласа (350). Рассмотрим
дифференциальное уравнение в частных производных:
д2и d2« I 1 ди
дх2 ду2 х дх
описывающее температуру квадратной пластины при известных гра-
ничных условиях. Соответствующее разностное уравнение имеет вид:
и(т, п)= [(1—-^и(/п-[-1, пу\-и(т— 1, п)+и(/п, /г-|-1)4-
4—- LV т)
т
п— l)j . (354)
В этом случае температуру в любой точке пластины можно по-
лучить, рассматривая взвешенное случайное блуждание. Весовой
коэффициент в каждом из четырех направлений равен 'Д. Из фор-
мулы (354) следует, что в этом случае вес зависит от координаты х,
а т можно найти из тождества x=mh, где h — сторона квадрата.
Сумма весовых коэффициентов для четырех направлений должна
составить единицу. Хотя в данном примере рассматривалась темпе-
ратура и, этот метод приемлем и для решения дифференциальных
уравнений в частных производных, описывающих любой физиче-
ский процесс.
3. МОДЕЛИРОВАННЫЙ ВЫБОР
В настоящее время нет общепринятой терминологии, позволяющей
проводить различие между методом Монте-Карло, случайным блуж-
данием и моделированием. Однако первые два понятия имеют веро:
ятностный характер, а моделирование может быть как вероятност-
ным (дискретным), так и детерминированным (аналоговым). При
исследовании движения автомобилей употребление термина модели-
рование без какой-либо оговорки обычно будет означать, что речь
идет о применении цифровой вычислительной машины. Методом
Монте-Карло часто называют процедуру, когда изучаемый процесс
видоизменяется с целью повышения точности, а термин моделиро-
вание употребляется, когда процесс, из которого берется выборка,
241
является удовлетворительной моделью реальной системы. Если та-
кое различие проводится, то необходимо иметь в виду, что одно из
преимуществ моделирования над методом Монте-Карло состоит в
том, что получаемые детальные результаты дают наглядное пред-
ставление о поведении системы при рассматриваемых условиях.
Хотя метод Монте-Карло и метод случайного блуждания внесли
определенный вклад в развитие моделирования при помощи цифро-
вых вычислительных машин, все же наиболее существенный вклад
в развитие моделирования внесла математическая статистика. В на-
чале своего развития предмет статистики состоял в накоплении и
представлении в числовой и графической форме фактического ма-
териала и количественных данных в различных областях экономики
и науки.
Одной из наиболее важных форм представления данных являет-
ся гистограмма, или график частот, и когда стало известно, что фор-
му таких диаграмм можно объяснить, обращаясь к теории вероят-
ностей, началась трансформация предмета статистики.
Поскольку распределение вероятностей в большинстве случаев
предполагает существование бесконечного числа элементов, а гисто-
грамма состоит из конечного числа элементов, последнюю необхо-
димо рассматривать как некоторую выборку из совокупности, имею-
щей данное теоретическое распределение. Точер [2] показал, каким
образом можно решить возникающую в этом случае задачу описа-
ния распределения, если задана лишь некоторая выборка. Вслед-
ствие огромных трудностей математического характера, связанных
с решением этой задачи, потребовалась ее экспериментальная про-
верка.
Так родился выборочный эксперимент. Были получены удовлет-
ворительные аппроксимации распределений, разработаны соответ-
ствующие методы получения, объединения и преобразования выбо-
рок, а гистограмма, полеченная для выборочных значений, сравни-
валась с теоретическим прогнозом.
Нетрудно представить себе и такие ситуации, когда указан тот
или иной выборочный метод, но взятие реальной выборки невозмож-
но либо сопряжено с большими затратами. В таких случаях важную
информацию может дать моделированная выборка. Обычно модели-
рованная выборка предполагает замену реальной совокупности эле-
ментов теоретической совокупностью, описываемой некоторым
распределением вероятностей, а затем с помощью случайных чисел
из этой теоретической совокупности берется определенная выборка.
Появление цифровых вычислительных машин, автоматически выпол-
няющих трудоемкие вычисления, связанные с этими выборочными
экспериментами, вызвало к жизни данный метод как возможный
подход к решению задач, не поддающихся решению аналитическим
путем.
Метод получения таких выборок называется моделированием.
Задачи принятия решений, в которых используются такие способы
получения выборок, часто определяют общим термином метод
Монте-Карло.
242
4. СЛУЧАЙНЫЕ ЧИСЛА
Для выборочных экспериментов, связанных с моделированием, не-
обходимы случайные числа. Человек вряд ли сможет назвать после-
довательность чисто случайных чисел. Никто из нас не поставит
подряд три четверки, хотя такое сочетание может составлять часть
случайного ряда.
Идея использования таблиц случайных чисел принадлежит Тип-
петту [4], который составил таблицу, содержащую 10 400 случайных
чисел, беря несколько последних цифр из таблицы данных о перепи-
си населения. Фирма «Рэнд корпорейшн», используя электронную
рулетку, составила таблицы, содержащие миллион случайных чисел
(отсюда и название — метод Монте-Карло). Для получения случай-
ных чисел использовались также различные физические процессы,
однако мнения относительно обоснованности таких методов расхо-
дятся, а ряд философов даже высказывает сомнения в том, что
можно ли вообще считать случайными какие-либо числа, представ-
ленные в табличной форме, независимо от того, как они были полу-
чены. Однако эти рассуждения не связаны с практическими задача-
ми. Любой процесс следует рассматривать как случайный, если его
протекание нельзя предсказать на основе какого-либо детермини-
рованного закона и если полученные числа удовлетворяют несколь-
ким стандартным критериям проверки значимости, гарантирующим,
например, что каждый десятичный разряд имеет равную вероятность
появления без какой-либо сериальной корреляции.
С точки зрения проверки программ для цифровых вычислитель-
ных машин более целесообразно вместо чисто случайных чисел
иметь воспроизводимую последовательность чисел. Можно соста-
вить программы для вычислительных машин таким образом, что
они будут генерировать последовательность чисел, удовлетворяю-
щих различным статистическим критериям случайности. Такого ро-
да случайные числа, генерируемые по неслучайной схеме, называют-
ся псевдослучайными числами. При автоматических вычислениях
хранение большого количества случайных чисел становится серьез-
ной проблемой. Именно эта проблема и заставила отказаться от
применения в вычислительных машинах таблиц случайных чисел.
Удовлетворительная программа вычислительной машины для гене-
рирования псевдослучайных чисел требует небольшого объема па-
мяти запоминающего устройства, обеспечивает относительно боль-
шое быстродействие, позволяет генерировать последовательность
чисел, удовлетворяющих определенным критериям случайности.
5. ПОЛУЧЕНИЕ ПСЕВДОСЛУЧАЙНЫХ ЧИСЕЛ
Методы получения псевдослучайных чисел можно разделить на две
группы в зависимости от возможности теоретического прогнозирова-
ния получаемых последовательностей.
К первой группе относится, например, метод средних квадратов
[2]. Некоторое n-значное число /?о возводится в квадрат, а затем из
243
полученного 2п-значного числа берутся п средних цифр, и данное
число рассматривается как последующее случайное число Затем
это число возводится в квадрат и весь процесс повторяется.
Как и все применяемые на практике методы, данный метод является
циклическим, т. е. эта последовательность чисел повторяется. Одним
из недостатков данного метода является возможность получения ну-
левого члена.
Для рассмотрения более сложного способа получения случайных
чисел при возможности теоретического прогнозирования получае-
мых последовательностей необходимо осветить ряд фундаменталь-
ных положений, связанных с системами счисления, работой вычис-
лительной машины и теорией чисел.
6. СИСТЕМЫ СЧИСЛЕНИЯ
По ряду причин в больших системах, особенно в цифровых вычисли-
тельных машинах, числа представляются не в десятичной системе, а
в двоичной. Основание системы счисления (например, 10 в десятич-
ной системе) символически обозначается Ь. Должно быть b различ-
ных символов, каждый из который ставится в соответствие одному
из значений от 0 до b—1. Число изображается в виде последователь-
ной записи п цифр, каждая из которых является одним из b симво-
лов. Числовое значение некоторого ряда цифр, разряд которых воз-
растает справа налево, задается уравнением
Л—1
/?= 2 ^Ь1, (355)
в котором Ui — также один из b символов [5]. Если нижним преде-
лом является 0, то R— целое число, если же нижний предел отри-
цателен, то R— неправильная дробь, при этом положение aQ ука-
зывается запятой, стоящей справа от Uq. Например, в десятичной
системе число 654,73 означает
2
/?=2а'(10)г>
—2
где а_2=3, a~i = 7, а0=,4, ai = 5 и «2=6 или R = 6-102+5-10! + 4-10°-Ь
+ 7- lO-’ + З-10-2.
Возьмем другой пример. Двоичное число 101101 по формуле
(355) выражается как
/^ = 1.31”! 4-0 • 2100 +1 • 2ой +1 • 2010+0 • 2001 + 1 • 2000.
В десятичной системе ему соответствует
/?=1-25+0-24 + 1.23 + 1-22+0-21+ 1-2°=45.
В любой системе счисления основные арифметические действия
можно представить в виде таблиц сложения и умножения. В двоич-
244
ной системе таблица сложения дает: 0 + 0 = 0, 0+1 = 1,1 + 1 = 10
и т. д. При умножении получаем 0-0 = 0, 0* 1=0, 1*1 = 1, 10-10 = 100г
11-11 = 1001 ит. д.
Свойство деления, связанное с системами счисления, особенно
важно при генерировании случайных чисел, что будет показано при
рассмотрении теории чисел. Достаточно указать, что если в деся-
тичной системе число 65473 разделить на 103, то в остатке будет
473. Аналогично, в двоичной системе при делении числа 101 101 на
23 в остатке получаем 101. В обоих случаях остаток представляет
собой три самые младшие значащие цифры.
В вычислительной технике под длиной слова подразумевается
максимальное число цифр п, которое может храниться в нормаль-
ной ячейке запоминающего устройства. Например, в машине
ИБМ-650 п = 10 десятичных разрядов, в машинах ИБМ-7090
ИБМ-7090 и ИБМ-7094 п = 35 двоичных разрядов, в машине
ИБМ-360 п=32, а в машине CDC-6600 п=48 двоичных разрядов.
Произведение двух чисел обычно формируется в ячейке, имеющей
2п разрядов (в вычислительной машине ИБМ-650 эти ячейки назы-
ваются верхним и нижним накапливающими сумматорами, а в ма-
шине ИБМ-7094 — накапливающими сумматорами и блоками
MQ — «множитель — частное»). Тогда п самых младших значащих
разрядов произведения (число, записанное в нижнем накапливаю-
щем сумматоре машины ИБМ-650 или в блоке MQ машины
ИБМ-7094) будет в точности равно остатку от деления всего произ-
ведения на &п, где b — основание системы счисления вычислитель-
ной машины. Так, для ИБМ-7094 &п = 235.
7. МЕТОД СТЕПЕННЫХ ВЫЧЕТОВ
Два числа А и В, при делении которых на заданное число С (назы-
ваемое модулем) получают один и тот же остаток, называют сравни-
мыми по модулю С. Сравнимость чисел А и В по модулю С записы-
вается как
A = BmodC (356)
и читается: «число А сравнимо с числом В по модулю С». Из сказан-
ного очевидно, что разность этих чисел должна делиться на мо-
дуль:
[Л~В|.= £), (357)
где D — целое число.
Это свойство подсказывает следующий метод получения псевдо-
случайных чисел с помощью вычислительной машины. Заданное
исходное число Ro умножается на соответствующий коэффициент k.
Половина произведения, содержащая самые младшие значимые раз-
ряды, рассматривается как случайное число R\. Второе случайное
число образуется из первого путем умножения на этот же коэф-
245
фициент. В символической форме этот метод выражается следую-
щим образом:
Rm=kRm^x mod 6"; (358)
где Rm—rn-е случайное число, b — основание системы счисления
вычислительной машины, а п — длина слова в обычной ячейке
запоминающего устройства.
Запись mod bn означает, что берется только половина произведе-
ния из 2п разрядов, содержащая самые младшие разряды. Если,
например, & = 5, & = 2, п=4 и в качестве исходного числа берется 5,
то
5-5mod 24 = 9;
5-9 mod 24=13;
5-13mod24=l; (359)
5-1 mod 24=5;
5-5mod 24=9;
Можно показать, что длина цикла равна Ьп~2, т. е. четырем в
данном примере. Так, на электронной машине ИБМ-7094 за цикл
можно получить 233 различных случайных чисел, называемых сте-
пенными вычетами. На практике в качестве исходного выбирается
число порядка 515 и множитель также порядка 515 , так как 15 —
наименьший показатель степени числа 5, >при котором в запоминаю-
щем устройстве будут заполнены все 35 двоичных разрядов. С по-
мощью метода степенных вычетов можно получить 8 589 934 592 слу-
чайных числа, прежде чем начнется повторение этой последователь-
ности.
8. ПОСЛЕДОВАТЕЛЬНОСТИ СЛУЧАЙНЫХ ЧИСЕЛ,
УДОВЛЕТВОРЯЮЩИХ ТРЕБУЕМЫМ РАСПРЕДЕЛЕНИЯМ
Применение метода степенных вычетов позволяет получить равно-
мерно распределенную псевдослучайную последовательность чисел,
т. е. последовательность, в которой вероятность попадания некото-
рого числа в заданный интервал пропорциональна ширине интерва-
ла и не зависит от положения интервала. Получаемые таким спо-
собом числа можно рассматривать как случайные целые числа или
случайные дроби. Больше подходит последнее, поскольку, как бу-
дет показано в последующих параграфах, при моделировании
основная задача состоит в получении выборки из совокупности,
имеющей определенное распределение, а по определению, любая
соответствующая вероятность должна составлять некоторую долю
единицы.
Существуют два основных метода преобразования случайных
дробей в случайные отклонения, удовлетворяющие требуемому рас-
246
рис. 83. Иллюстрация метода обратного преобразования на примере экспонен'
циального распределения
пределению: метод обратных преобразований и метод распределе-
ния точек. Теория, лежащая в основе этих методов, и их применение
для распределений, используемых в теории транспортных потоков^
будут рассмотрены достаточно подробно.
9. МЕТОД ОБРАТНЫХ ПРЕОБРАЗОВАНИЙ
Распределение непрерывной случайной величины может быть опи-
сано плотностью вероятностей f(t), а распределение дискретной слу-
чайной величины — набором значений вероятностей, однако в обоих
случаях возможно применение интегральной функции распределе-
ния дающей вероятности появления значений, не превы-
шающих заданного. Следовательно, возможно аналитическое пре-
образование функции распределения и вычисление значения этой
функции, соответствующего выбранному значению равномерно рас-
пределенной случайной дроби.
Формула для функции распределения имеет вид:
т
(360)
о
Путем обратного преобразования необходимо получить реше-
ние уравнения (360) относительно случайной величины Т. Так как
левая часть этого уравнения эквивалентна равномерно распределен-
ной случайной величине, значения которой заключены в интервале
от 0 до 1 (рис. 83),; получаем
/?=|/(/И, (361)
где R—псевдослучайное дробное число, полученное способом, опи-
санным в предыдущем параграфе.
Очевидно, что успех данного метода зависит от возможности
интегрирования функции f(t) и возможности получения обратного
преобразования выражения (361) после интегрирования. Сущест-
вует несколько простых, но очень важных случаев, когда это воз-
можно.
247
Многие явления, для которых характерно случайное появле-
ние событий, например, движение транспортных потоков, могут
быть описаны с помощью экспоненциального распределения, плот-
ность которого имеет вид:
f{t)=qe~o*, (362)
где t — интервал между моментами прибытия или интервал между
последовательными автомобилями, q — интенсивность потока,
выражаемая обычно через число автомобилей в единицу вре-
мени.
Подставляя выражение (362) в формулу (358) и интегрируя,
получаем
или в более общем виде
Р(Л</)=1-е-»«, (363)
где h — интервал между последовательными автомобилями, a t —
время.
Графики функций (362) и (363) показаны на рис. 83. Если
— равномерно распределенное случайное число, 1, полу-
чаемое при помощи вычислительной машины, то 1 — R\ — равно-
мерно распределенное случайное число 0^ (1—R\) 1, и
\-Ri=P(h<t), (364)
так как P(h<t) — тоже равномерно распределенное случайное чис-
ло, 0^Р(/г</)^1. Подставляя выражение (364) в формулу (363),
получаем
(365)
Решение уравнения (365) относительно t — случайной величи-
ны, удовлетворяющей экспоненциальному распределению, называ-
ется обратным преобразованием. Прологарифмируем обе части
уравнения:
In Rx = — qt.
Искомая случайная величина имеет вид:
t=-q-UnR1. (366)
Выражение (366) показывает^ что для получения экспоненци-
ально распределенной случайной величины берется логарифм полу-
ченного псевдослучайного числа со знаком минус.
Поскольку автомобиль имеет определенную длину, в один и тот
же момент невозможно прибытие двух автомобилей в одном ряду.
Если минимально возможный интервал между последовательными
автомобилями обозначить т, то экспоненциальное распределение
необходимо сместить на величину т, с тем чтобы вероятность появ-
ления интервала между последовательными автомобилями, меньше-
248
го т, была равна нулю. Интегральная функция распределения при-
нимает вид:
Р(А<т)=0;
= (367)
После обратного преобразования функции (367) получаем
/=* — (/ — *) In
где t — средний интервал между последовательными автомоби-
лями.
Плотности многих распределений, например нормального, гам-
ма-распределения и бета-распределения, представляют собой функ-
ции, которые трудно интегрировать. Кроме того, в ряде случаев хотя
и возможно интегрирование плотности распределения и аналитиче-
ское представление интегральной функции распределения, оказы-
вается, что либо невозможно обратное преобразование, либо неце-
лесообразно его аналитическое представление. В этих случаях мо-
жет применяться метод распределения точек.
10. МЕТОД РАСПРЕДЕЛЕНИЯ ТОЧЕК
Рассмотрим следующую ограниченную вероятностную функцию
(если эта функция не ограниченная, то на оси абсцисс можно вы-
брать некоторое достаточно большое значение /тах, с тем чтобы ве-
роятность появления значения t, превышающего /max, была прене-
брежимо мала):
0, t /mini
f {t)l Anin t ZmaxJ
0,
(368)
Данный метод состоит из двух этапов: 1) получение двух слу-
чайных чисел Л и ?2, удовлетворяющих условиям
7\ = (4nax ^min)(369)
Т2 ~f Wmax^?2’
2) проверка, позволяющая с помощью критерия
/(Л)>Г2 (370)
определить, является ли Т\ искомой случайной величиной. Если ус-
ловие (370) выполняется, то считается, что 7\ соответствует иско-
мому распределению, если же это условие не выполняется, то полу-
ченное значение 7\ отбрасывается и эти два этапа повторяются.
Данный метод будет проиллюстрирован на примере эрлангов-
ского распределения, которое находит исключительно широкое при-
менение как модель, описывающая интервалы времени между
249
Рис. 84. Иллюстрация метода распределе-
ния точек на примере эрланговского рас-
пределения 7\ = /max/?i; T2=f(t)m&xR2
моментами прибытия клиентов
в задачах массового обслужи-
вания вообще и в задачах тео-
рии транспортных потоков в
частности. Поскольку плот-
ность эрланговского распреде-
ления имеет вид:
/(/)=. (371)
где а — положительное целое
число, то аналитическая фор-
ма интегральной функции рас-
пределения может быть полу-
чена лишь путем последова-
тельного интегрирования по
частям, поэтому применение
метода обратного преобразова-
ния нецелесообразно. На рис. 84 построен график функции f(t)
для случая а = 2.
Получены два случайных числа Ri и по формуле (369) вычис-
лены Ti и Т2 при /min = 0, a f(Z)max является ординатой моды. Затем
в формулу (371) подставляется Т\ и полученное значение f(Ti)
сравнивается с Т2 на соответствие условию (370). Из рис. 84 следу-
ет, что число значений Л, выбранных в интервале А/, отложенном
по оси абсцисс, пропорционально площади под кривой в этом ин-
тервале, которая и является искомым распределением.
11. ДИСКРЕТНЫЕ СЛУЧАЙНЫЕ ВЕЛИЧИНЫ
Существует два основных типа распределений, для которых требу-
ется находить моделированную выборку.
Рассмотрим дискретные распределения, когда случайная вели-
чина принимает дискретные значения. В предыдущей главе было
показано, что любой сходящийся ряд, содержащий положительные
члены, может быть использован как основа для построения дискрет-
ного распределения вероятностей. Это свойство дискретных распре-
делений позволяет получить вероятность появления х+1 событий,
выраженную через вероятность появления х событий
Р(х4-1)=А(х)Р(х), (372)
где k(x) —некоторая функция х, а Р(х) и Р(х+1) —вероятности
появления х и х+1 событий соответственно.
Интегральная функция дискретного распределения имеет вид:
= (373)
z = 0
где P(i} —вероятность появления не более х событий в некотором
произвольном интервале.
250
Начало
| вероятности |
I вероятность не I
I оольше суммы |
| Нет
। л-Lz ।
___________I
I Разность-разность* К |
I
| Сумма=сумма* разность~\
Рис. ^85. Генерирование дискретных
случайных величин. Для пуассонов-
ского распределения
Рис. 86. Распределение суммы п слу-
чайных величин, имеющих равномер-
ное распределение:
1 — при л=1; 2 — при л=2; 3 — при п=3>
Рассмотрим моделирование при помощи вычислительной маши-
ны транспортного потока, удовлетворяющего некоторому известно-
му дискретному распределению. Генерируется случайное число R>
которое сравнивается с Р (^х) при х=0.
Если то автомобили не прибывают. Если же
R>P(^0), то известно лишь, что прибыло некоторое отличное от
нуля число автомобилей.
Теперь х в формуле (373) увеличивается на единицу и проверка
на выполнение условия
/?<Р«х), х=1 (374)
повторяется. Если условие (374) выполняется, то поскольку при-
было не более одного автомобиля и число автомобилей не равно
нулю, то должен прибыть ровно один автомобиль. Таким образом,
процесс увеличения х на 1 согласно формуле (373) производится
до тех пор, пока не будет выполняться условие (374). Затем это
значение х рассматривается как число прибывающих автомобилей,
соответствующее данному распределению. Логическая схема про-
граммы вычислительной машины для выполнения этой операции
показана на рис. 85.
Для получения случайных величин, удовлетворяющих пуассо-
новскому распределению, необходимо подставить в формулу (372)
следующие выражения:
251
Р(х)
тхе~~т
х!
а б случае биномиального распределения
Р
\—р
и
Р(Х)=[П \pxqn~x.
\х )
12. СПЕЦИАЛЬНЫЕ МЕТОДЫ ПРЕОБРАЗОВАНИЯ
СЛУЧАЙНЫХ ВЕЛИЧИН
Методы преобразования случайных дробей в случайные величины,
рассмотренные в параграфах 9 —11, являются общими как для не-
прерывных, так и для дискретных распределений. Однако некото-
рые теоретические распределения имеют определенные свойства,
позволяющие применять другие методы преобразования.
Один такой метод преобразования основан на использовании
центральной предельной теоремы теории вероятностей. Термин
центральная предельная теорема определяет ряд теорем, показы-
вающих, что сумма независимых случайных величин, имеющих про-
извольное распределение, в пределе распределена по нормальному
закону. Например, одно наблюденное значение из совокупности,
распределенной по равномерному закону, естественно, имеет рав-
номерное распределение: сумма двух наблюденных значений, рас-
пределенных по равномерному закону, имеет треугольное распре-
деление, а сумма трех наблюденных значений, имеющих то же
самое равномерное распределение, имеет параболическое распре-
деление, форма которого очень близка к нормальному (рис. 86).
Таким образом, если суммируются п случайных дробных чисел Ri,
то получаемая в результате случайная величина t имеет нормаль-
ное распределение
п
----1=1— (375)
а
со средним [х=~ и средним квадратическим отклонением
-&• Полуинтервал (Zmin, /шах) находится путем подста-
новки в формулу (375) выражений для циан принятия условия
2^г=0 или «
i-1
/ = ]/3?г.
(376)
252
- На практике выбираемое количество п случайных чисел колеб-
лется от 6 до 12 в зависимости от характера моделируемого про-
цесса и требуемой точности.
Второй метод преобразования случайных дробных чисел в слу-
чайные величины основан на применении свертки. Известно, что
эрланговское распределение, плотность которого задана формулой
(371), является а-кратной сверткой экспоненциального распреде-
ления. Данное соотношение показывает, что случайная величина t,
имеющая эрланговское распределение, может быть получена путем
обобщения формулы (366):
t^-q-^R^... Ra). (377)
Точер [2] рассматривает ряд специальных выборочных методов,
приемлемых для большого числа обычных распределений.
13. МЕТОДЫ ПОИСКА
Независимо от объема и масштаба модели ее основная структура
может быть различной. Существуют два предельных случая, кото-
рые можно назвать соответственно периодическим поиском (скани-
рованием) и однократным поиском. В обоих случаях возможно
моделирование случайности событий [6]. При периодическом поис-
ке длительность моделирования процесса разбивается на последо-
вательность временных интервалов, отделенных друг от друга
некоторыми промежутками. При однократном поиске после появле-
ния данного события определяется и «запоминается» ряд значимых
событий и моментов их появления, а затем выбирается самое ран-
нее из них. Появление следующего значимого события может изме-
нить возможность появления других указанных событий или повли-
ять на время их появления, поэтому теперь можно составить новую
последовательность событий и моментов их появления. Таким обра-
зом, при однократном поиске по существу ставится вопрос: какое
событие будет следующим?, а при периодическом поиске: какой бу-
дет ситуация через одну временную единицу после данного мо-
мента?
Метод однократного поиска отличается значительно большим
быстродействием и позволяет увеличить скорость вычислений при-
мерно в 10 раз, но обычно требуется более сложная программа.
Метод периодического поиска очень прост и обычно составить для
него программу значительно легче. На практике оба эти метода
можно применять различными способами и частично комбиниро-
вать с целью получения программы, которая бы наиболее полно
соответствовала решаемой задаче.
Важной особенностью периодического поиска является генери-
рование пуассоновского процесса. Часто используется способ, кото-
рый состоит в сравнении случайного числа R с интенсивностью
(число автомобилей в секунду) транспортного потока за период
поиска Д/. Проверяется выполнение условия
- R<q&. (378)
Т 253
Лри интенсивности однорядного потока 900 авт!ч и длительно-
сти интервала поиска 1 сек случайное число, меньшее 0,25, будет
означать появление автомобиля. Доказательство того, что генери-
руемые таким путем события образуют пуассоновский поток, сле-
дует непосредственно из вывода пуассоновского распределения.
При рассмотрении прибытия автомобилей в некоторую точку
полосы магистрали можно сразу же исключить возможность прибы-
тия двух или большего числа автомобилей в эту точку в один и
тот же момент времени. Целесообразно также предположить, что
вероятность появления автомобиля пропорциональна длительности
интервала и, следовательно, вероятность генерирования события,
состоящего в появлении автомобиля, пропорциональна периоду
поиска АЛ Наконец, число автомобилей, прибывающих в интерва-
ле t, не зависит от числа автомобилей, прибывших до момента L
Если эти три условия выполняются, то можно показать, что полу-
чен пуассоновский процесс. Математически условия случайности
можно сформулировать следующим образом:
вероятность отсутствия автомобилей в интервале АЛ
вероятность прибытия одного автомобиля в интервале АЛ
1 — P^t=qM\
вероятность прибытия более одного автомобиля в интервале АЛ
где q — интенсивность потока.
Пусть Pn(t) —вероятность прибытия п автомобилей в интерва-
ле t, удовлетворяющая условию (378). Прибытие в интервале
t + At двух автомобилей может произойти двумя путями: в интерва-
ле t прибывает п автомобилей, а в интервале А/ не прибывает ни
одного автомобиля, либо в интервале t прибывает п—1 автомоби-
лей, и один автомобиль прибывает в интервале АЛ Таким образом,
Рп (t + Д/)=Рп (/) (1 - <7Д/) + Ря_! (/) q ДД (379)
Это выражение можно записать как
^Я(< + Ад/~Ря(0 = qPn-x ® ~ qPn (380)
Переходя к пределу при А/->0, получаем
P'n(t)= qPn^(t)-qPn(t\ п=\, 2, 3,... (331)
Для случая п=0
Pb(t+^=PM\-qM), (382)
откуда
P'^=-qP^f). (383)
254
Решение этого дифференциального уравнения имеет вид
Рй(£)=е-<*. (384)
По индукции находим, что решение общего уравнения (381)
имеет вид
P„(/)= , (385)
т. е. получена функция искомого пуассоновского распределения.
14. ЭТАПЫ МОДЕЛИРОВАНИЯ
При моделировании некоторой системы необходимо проделать оп-
ределенную последовательность этапов. Следует заметить, что по-
рядок прохождения этих этапов не является жестким и последова-
тельность их прохождения может нарушаться. Здесь указан лишь
примерный порядок.
1. Конкретная формулировка задачи в знакомых терминах и
символах с указанием необходимых ограничений.
2. Построение модели, включая формулировку допущений, вы-
бор критериев оптимизации и выбор рабочей процедуры или пра-
вил движения транспорта.
3. Построение блок-схемы, устанавливающей функциональное
соотношение между элементами моделируемой системы.
4. Определение входных параметров для моделирующей про-
граммы.
5. Подготовка моделирующей программы для вычислительной
машины.
6. Проведение экспериментальных проверок моделируемой си-
стемы, включая планирование эксперимента с целью определения
числа опытов и значений используемых параметров, а также зада-
ние доверительных пределов.
7. Оценка и проверка моделируемой системы.
Наиболее важным этапом при моделировании на вычислитель-
ной машине транспортной системы является построение модели.
Роль вычислительной машины состоит в том, что она реализует
решение модели, а программирование лишь является средством
общения между исследователем и вычислительной машиной. Одна-
ко необходимо всегда иметь в виду, что ни модель, ни программа
для вычислительной машины не являются конечной целью, а лишь
служат средством решения сложной задачи, связанной с функцио-
нированием существующей транспортной системы или проектиро-
ванием будущей.
При построении модели важную роль играют упрощающие до-
пущения. Так, рассмотрение цвета автомобилей могло бы повысить
реальность модели, однако цвет автомобилей не влияет на функцио-
нирование дорожной системы в такой степени, чтобы эта информа-
255
ция могла прибавить что-либо к решению практической задачи.
При моделировании работы развязки высокого класса, где исклю-
чается взаимное влияние потоков автомобилей и влияние потока
автомобилей на пешеходов, возможно, достаточно промоделировать
движение в одном направлении. Нередко начинающие исследова-
тели включают в свою модель излишние элементы, стремясь «объять
необъятное».
Второй важной особенностью при построении модели является
установление основных правил, по которым можно измерить моде-
лируемое улучшение структуры и функционирования дорожного
сооружения. Лучше всего этого можно добиться построением моде-
ли так, чтобы качественные показатели выражались как функции
параметров изучаемой системы. К таким показателям эффектив-
ности относятся: время в пути и скорость движения — средние зна-
чения, дисперсии и распределения; процент автомобилей, которые
должны двигаться со скоростью, составляющей некоторую произ-
вольную часть требуемой скорости; шум ускорения в исследуемой
системе; число переходов в соседний ряд на автомобиль в секунду;
средняя длина очереди автомобилей; уровень обслуживания, опре-
деление которого давалось при рассмотрении энергетического под-
хода. Эти критерии могут играть важную роль, а в других случаях
может оказаться желательным применение других критериев. Одно
из преимуществ моделирования состоит в следующем. При анализе
можно использовать только те критерии, которые могут быть вы-
ражены математически (например, можно использовать наимень-
шие квадраты, а не максимальное абсолютное отклонение; можно
использовать среднее, а не рассматривать все распределение
и т. д.). При моделировании можно выбрать любой критерий, изме-
ряя его, если необходимо, непрерывно.
С построением модели неразрывно связано определение значи-
мых входных и выходных переменных. Входные переменные можно
разделить на четыре категории: геометрические характеристики
дороги, параметры транспортного потока, поведение водителя и
характеристики автомобиля.
Важными геометрическими характеристиками являются кривиз-
на и уклон дороги, число полос, углы примыкания въездов и съез-
дов, расположение въездов и съездов, расстояние видимости, длина
полосы разгона и т. д. Важную роль могут играть такие характе-
ристики системы, как тип пересечения, конфигурация въездов и
съездов, наличие фронтальных дорог и узких мест, а также распо-
ложение дорожных знаков, светофоров и других средств регулиро-
вания движения.
Три основных параметра — скорость, интенсивность и плот-
ность— определяют условия движения транспортного потока. Ско-
рость маневрирующего автомобиля оказывает существенное влия-
ние на выполняемый им маневр — пересечение потока, вхождение
в поток или изменение ряда. Кроме того, величина интервала меж-
ду автомобилями, необходимая для выполнения маневра, прямо
пропорциональна относительной скорости между автомобилем, вы-
256
полняющим маневр, и потоком, который пересекает, в который вхо-
дит или через который проходит данный автомобиль.
Продольное и поперечное распределение автомобилей в модели-
руемой системе может быть описано с помощью интенсивности
или плотности потока. Продольное распределение автомобилей в
потоке влияет на выбор водителями скорости движения. Величина,
обратная интервалу времени между автомобилями, дает интенсив-
ность потока, а величина, обратная расстоянию между автомобиля-
ми, равна плотности потока. Для оценки способности отдельного
автомобиля совершать маневр в моделируемой системе не менее
важно знать продольное распределение автомобилей (распределе-
ние автомобилей между рядами), если движение в одном направ-
лении происходит в два или более рядов.
Основные параметры транспортного потока связаны с возмож-
ностями, потребностями и характеристиками водителя и автомоби-
ля, которые совместно образуют дискретный элемент модели. В мо-
дель должны включаться цели, которые ставит перед собой води-
тель. Цель водителя может состоять в том,хчтобы минимизировать
время ожидания или максимизировать свою безопасность. В бо-
лее сложном случае поведение водителя может не соответствовать
возможностям автомобиля. Автомобиль, который не имеет возмож-
ности обогнать впереди идущий медленный автомобиль, вынужден
снижать свою скорость. Если же появляется возможность обгона,
то еще одной важной величиной модели становится возможность
увеличить скорость.
Важность моделирования как метода исследования транспорт-
ных проектов состоит в возможности учесть случайный характер
транспортного потока. Для большинства транспортных систем чис-
ло переменных (часть которых характеризует дорогу, часть харак-
теризует водителя, а часть характеризует автомобиль) очень вели-
ко. В параграфах 8—12 было показано, каким образом эти пере-
менные выражаются в виде распределений и входных параметров
модели.
15. ПРОГРАММА МОДЕЛИРОВАНИЯ
Логическую схему моделирования процесса прохождения автомо-
билей через систему при известных входных параметрах можно
разделить на три части: логика беспрепятственного движения авто-
мобилей; логика следования за головным автомобилем в случае
образования движущейся очереди; логика маневрирования для
автомобилей, выполняющих некоторый маневр при взаимодействии
двух и более транспортных потоков. В пределах транспортной сис-
темы все водители непрерывно и одновременно принимают опреде-
ленные решения и изменяют свое поведение. В процессе моделиро-
вания для большинства автомобилей характер движения («беспре-
пятственное движение», «следование за головным автомобилем» и
«выполнение маневра») будет многократно изменяться. Однако
вычислительная машина может производить за один раз только
9—338 257
| Автомобиль X в системе |
Нет \Да___________________________________________
| Движение автпы^улт г?р-'-'!лено? ]
Цо [Йёт_____________________
| Переход к логике свободного движения ~|
Наличие интервала слева ? |
Нет \Да
| Переход в соседний ряд слева |
Наличие интервала справа ? |
Нет \Да
| Переход в соседний ряд справа |
Переход я логине следования
за головным автомобилем
Рис. 87. Логика моделирования транспорт-
ного потока
один простои логический вы-
бор. Чтобы контролировать
все события в любой дан-
ный момент, необходимо по-
следовательно обработать
все события. Другими сло-
вами, необходимо обрабо-
тать каждое решение для
каждого автомобиля в каж-
дом ряду и для каждого ря-
да в пределах системы. Это
необходимо проделать в за-
данной последовательности
для каждого рассматривае-
мого момента времени.
Успех цифровых вычис-
лительных машин объясня-
ется тем, что выполняемые
ими обширные вычисления
могут быть представлены
как повторные циклы. Так,
программа вычислительной
машины состоит из блоков
команд, определяющих не-
обходимые вычисления.
Каждое вычисление заканчивается проверками, передающими вы-
полнение операций следующему соответствующему блоку. Функцио-
нальная диаграмма, описывающая задачу моделирования для про-
граммиста вычислительной машины, называется блок-схемой. На
рис. 87 изображена блок-схема, показывающая зависимость между
входными данными, логикой беспрепятственного движения, логикой
следования за головным автомобилем и логикой маневриро-
вания.
Для моделирования сложной транспортной системы необходи-
мо хорошее знание программирования. После того как в модель
будут включены различные варианты ситуаций, встречающихся
при движении автомобильного транспорта, необходимо составить
программу, позволяющую проводить моделирование на вычисли-
тельной машине. В идеальном случае для моделирования задач
движения автомобилей необходимо сотрудничество между специа-
листами в области теории транспортных потоков и специалистами,
обслуживающими вычислительную технику. Составленная на этой
основе хорошая программа моделирования должна отвечать следу-
ющим требованиям:
программа должна обеспечивать простой и недорогой метод мо-
делирования транспортной системы;
программа должна быть достаточно общей, чтобы путем ввода
соответствующих геометрических характеристик можно было мо-
делировать транспортную систему любой конфигурации;
258
I Формулировка задачи I
I ________ ;
Построение модели |
[входные данные |
, I
| Цикл моделирования"]
[выходные данные |
Г
| Оценка результатов]
______I___________________ _________________
| Рассмотрены все резульгагы | | Изменение проекта ]
ТДа I Мт |
выбор наилучшего варианта
проекта
Рис. 88. Применение моделирования для
проектирования системы
входные данные для такой
системы должны быть понятны,
а получение их доступно персо-
налу, не знакомому с вычисли-
тельной техникой;
входные данные должны
легко считываться и содержать
все параметры, необходимые
специалистам при проектиро-
вании или реконструкции транс-
портных систем;
программа должна быть за-
писана в модульной форме, с
тем чтобы любой модуль мож-
но было заменить, не меняя
остальной части программы.
Например, необходимо, чтобы
процесс следования за голов-
ным автомобилем был пол-
ностью независимым от процес-
са генерирования входных дан-
ных и т. д.;
программа должна быть записана так, чтобы новые модули
(например, модуль дорожно-транспортных происшествий, модуль
изгибов дороги и т. д.) можно было добавлять без существенных
изменений программы;
программа должна подходить для любой вычислительной ма-
шины, она должна быть записана на одном из совершенных языков,
например на языке «Фортран IV», так, чтобы даже начинающий
программист мог вносить в нее необходимые изменения.
Основные элементы программы моделирования показаны на
рис. 88. Входные данные, генерирование входных данных и логи-
ческая схема программы уже рассматривались. Теперь рассмотрим
два основных способа представления получаемых результатов.
Первый способ заключается в том, что составляется отчет обычно
объемом в одну-две страницы, в котором описаны геометрические
параметры и общие характеристики изучаемой системы. Вторым
способом представления результатов является построение прост-
ранственно-временной диаграммы, желательной при отладке и ви-
зуальной оценке программы. Разумеется, могут использоваться и
любые другие графики, например кривая процента приемлемости
интервалов, контурные карты, схемы профилей и т. п.
Для практического применения любой моделирующей програм-
мы должна быть обеспечена минимальная загрузка запоминающего
устройства на магнитных сердечниках и быстрая последовательная
обработка данных,
Для введения в машину данных о транспортном потоке могут
использоваться различные методы. В словесной системе обозначе-
ний (memorandum notation) [6] для обозначения автомобиля ir-
9* 259
пользуются для обозначения
таких характеристик, как
время входа в систему и
требуемая скорость. Харак-
теристики каждого автомо-
биля определяются по мере
его движения через систему,
что позволяет вычислять за-
держки для отдельных ав-
томобилей. При использова-
нии этого метода дорога де-
лится на единичные блоки,
имеющие ширину, равную
ширине дорожной полосы, а
длина блока составляет не-
которую часть средней дли-
ны автомобиля. Таким обра-
зом, автомобиль может за-
Рис. 89. Схема представления данных
о транспортном потоке _в вычислительной
машине.
Чием на
нимать ограниченное число
дискретных положений.
Каждый автомобиль пере-
мещают путем перехода к
записи, показывающей поло-
жение, которое будет зани-
мать автомобиль через одну
единицу времени (периоди-
ческий поиск). Для этого скорость автомобиля умножают на при-
ращение времени и полученный результат прибавляют к координа-
те, характеризующей положение автомобиля в данный момент.
При другой методике [7] вся транспортная система изображает-
ся в виде трехмерного массива (рис. 89). Такое измерение, как
длина, соответствует относительному положению автомобиля на
дороге, т. е. данные о положении автомобилей хранятся в элемен-
тах массива в последовательности расположения автомобилей на
определенной полосе дороги. По вертикали размещаются все ха-
рактеристики каждого определенного автомобиля, а ширина мас-
сива определяется числом полос. В отличие от словесной системы
обозначений данная система математических обозначений позво-
ляет каждому автомобилю поставить в соответствие показатель,
характеризующий его положение на дороге. Следовательно, поло-
жение автомобиля непрерывно изменяется, а скорость и ускорение
уже не являются ступенчатыми функциями. При данной методике,
помимо цилиндрического массива, используются два специальных
регистра для каждой дорожной полосы, в которых хранятся пока-
затель положения головного автомобиля и число автомобилей на
полосе.
Сандефур [8] разработал метод записи данных при моделирова-
нии, названный составлением таблицы или построением цепи. До^
260
Таблица 21
Положения автомобиля
настоящее предыдущее последующее
Х1 1ос А 1ос С Ilj J = 5,4, ... ,8
х2 1ос С 1ос А loc Z /2,у /=3-4 8
Хз loc Z loc С 1ос В /3>/ / = 3,4, ... ,8
xt 1ос В loc Z /4,у 7 = 3,4 8
лущение, принимаемое при построении цепи, состоит в том, что
каждое информационное множество представляет собой_некоторую
матрицу С, состоящую из информационных векторов Xi. Каждый
информационный вектор имеет указатели^показывающие предыду-
щий вектор Xi-i и последующий вектор Xf+i. Возьмем, к примеру,
информационную матрицу С (4, 8), состоящую из четырех векторов
Xi, где Xi,i и Xi,2 — цепочечные указатели, a Xt,j (j—3, 4, 8) —
информация, связанная с вектором Xi. Тогда матрица принимаег
следующий вид, показанный в табл. 21.
1ос А — адрес ячейки запоминающего устройства для вектора
Xi. Информационные векторы можно добавлять в цепь или исклю-
чать из цепи, не трогая остальных данных, что позволяет сократить
затраты машинного времени. При этом снижаются требования к
объему памяти, поскольку многие цепи могут занимать одну и ту
же ячейку запоминающего устройства.
16. КАЛИБРОВКА МОДЕЛИ
Если программа составлена правильно, то реальность результатов,
получаемых при помощи вычислительной машины, зависит только
от реальности модели и ее входных данных. Модель по существу
представляет собой некоторую гипотезу, и поэтому, прежде чем
принимать как реальный факт, ее необходимо проверить. Проверя-
ется правдоподобие, реальность и справедливость модели.
Поскольку исследователя обычно интересует установившееся
состояние, необходимо уделять определенное внимание начальному
состоянию системы. Это можно выполнить, начиная моделирование
при состоянии, определение которого не вызывает затруднений, и
продолжать моделирование в довольно продолжительном проме-
жутке времени, чтобы появилось установившееся состояние. В дру-
гих случаях рассматриваются «периоды разогрева» или использу-
ются «подпрограммы разогрева», что позволяет иметь нормальную
транспортную нагрузку до начала прохождения программы.
Моделирование представляет собой выборочный метод (иногда
его даже вызывают получением моделированной выборки). Хотя
при помощи цифровой вычислительной машины моделирование вы-
261
полняется быстро, все же нецелесообразно рассматривать весь диа-
пазон значений каждой переменной, поскольку потребовалось бы
несколько тысяч циклов моделирования. Необходимо составить
определенный статистический план, позволяющий рассматривать
некоторое конечное число комбинаций условий. Так, при моделиро-
вании работы перекрестка для каждой входной переменной можно
выбрать три уровня, как показано в табл. 22 [9].
Таблица 22
Независимая переменная Уровень
Порядко- вый номер * Название -1 0 +1
1 Поток, движущийся к перекрестку) 1-я и 2-я полосы), число автомобилей за 15 мин 75 150 225
2 Поток, движущийся в обратном направлении (3-я и 4-я полосы), число автомобилей за 15 мин 75 150 225
3 Процент автомобилей на 1-й полосе, делающих правый поворот 5 15 25
4 Процент автомобилей на 2-й полосе, делающих левый поворот 0 10 20
5 Процент автомобилей на 3-й полосе, делающих левый поворот 0 10 20
6 Процент автомобилей на 4-й полосе, делающих правый поворот 5 15 25
7 Процент времени, в течение которого светофор находится в фазе красного сигнала 40 50 60-
При составлении плана эксперимента исключительно важно пре-
дусмотреть повторное получение результатов. Лучше иметь резуль-
таты для четырех периодов по 15 мин, чем для одного периода
длительностью 1 ч. Существует ряд методов, позволяющих полу-
чить такую же точность при меньшем объеме выборки.
Наконец, важно сравнивать результаты моделирования с из-
вестными фактическими результатами при тех же самых входных
воздействиях, с тем чтобы исследователь мог убедиться, что им по-
лучена удовлетворительная модель. Проверка модели представля-
ет собой процесс, когда модель оценивается с целью определить,
удовлетворительно ли она отражает реальный характер транспорт-
ного потока. Поскольку моделирование не ставит своей целью
воспроизвести все мелкие детали реальной системы, вначале необ-
ходимо установить, какие именно характеристики реального транс-
портного потока должна отражать модель, чтобы ее можно было
считать полезной, или, другими словами, какие критерии необходи-
мо применять при проверке модели.
Теоретически, модель должна отражать те характеристики, ко-
торые инженер-дорожник использует в качестве критериев проек-
тирования, или характеристики, которые инженер-транспортник
использует как критерии качества функционирования. Однако обыч-
но невозможно в точности определить универсально приемлемые
критерии проектирования и критерии качества функционирования
262
и каждый отдельный конкретный проект требует выбора соответст-
вующих критериев на основе инженерной оценки. Возможен «мик-
роподход», при котором стараются ввести в вычислительную маши-
ну конкретные детали наблюдений за небольшой промежуток
времени. В других случаях можно использовать «макроподход», при
котором на вычислительной машине моделируются обобщенные
статистические свойства выборок реальных процессов, накопленных
за большие промежутки времени.
17. ПРИМЕНЕНИЕ МОДЕЛИРОВАНИЯ [10]
К моделированию прибегают в тех случаях, когда изучаемые систе-
мы нельзя анализировать с помощью прямых или формальных ана-
литических методов. Существует также ряд других причин, застав-
ляющих обращаться к моделированию, большинство которых
справедливо в случае моделирования транспортных систем.
1. Построение модели и выполнение моделирования является
хорошим способом систематического накопления необходимых дан-
ных и позволяет получить обширную информацию о характеристи-
ках транспортных потоков и функционировании дорожных соору-
жений.
2. Моделирование сложных процессов движения транспорта
позволяет определить, какие переменные являются важными и ка-
ким образом они взаимосвязаны. В конечном счете это может при-
вести к выводу аналитических выражений.
3. В некоторых задачах нужна информация о распределении
выходной величины, например, такой, как число автомобилей в оче-
реди, а не только знание средних значений и дисперсии. Если рас-
сматривается взаимодействие транспортных потоков, то метод
Монте-Карло является, по-видимому, единственным способом, поз-
воляющим получить полное распределение.
4. Моделирование может выполняться для проверки неодно-
значного аналитического решения.
5. Моделирование дешевле многих других экспериментов.
6. Моделирование дает интуитивное представление об исследу-
емой транспортной системе.
7. Моделирование обеспечивает контроль над временем. Реаль-
ное время может быть сжато и результаты для длительной фазы
желтого сигнала можно наблюдать через несколько минут машин-
ного времени. Кроме того, машинное время можно растянуть и
осуществлять прохождение программы с запаздыванием относи-
тельно реального времени, с тем чтобы охватить все проявления
сложных взаимодействий транспорта на скоростной магистрали.
8. Моделирование — безопасный способ исследования. Оно поз-
воляет изучать влияние мероприятий по регулированию движения
на существующих магистралях. Эффект установки светофоров и до-
рожных знаков, ограничений скорости движения и регулирования
движения на въездах и съездах — все это можно детально исследо-
вать, не создавая помех водителям и не тревожа их. Моделирова-
263
Таблица 23
Критерий Анализ Моделирование Эксперимент
Стоимость Наименьшая Средняя Наибольшая
Время Наименьшее Среднее Наибольшее
Возможность повторения Наибольшая Средняя Наименьшая
Реальность Наименьшая Средняя Наибольшая
Общность результатов Наибольшая Средняя Наименьшая
ние позволяет заблаговременно определять влияние, оказываемое
на существующие дорожные сооружения при увеличении интенсив-
ности транспортного потока. Оказывается возможным предвидеть
место потенциальных перегрузок и дорожно-транспортных проис-
шествий и осуществить необходимые изменения в конструкции до-
роги или дорожного сооружения прежде, чем необходимость в этом
проявится в виде происшествий и перегрузок.
По форме моделирование можно сравнить с анализом, связан-
ным с использованием детерминированных и вероятностных моде-
лей, и с методом проб и ошибок, связанным с нахождением некото-
рого пробного решения и проверкой его на реальном транспортном
потоке. Полезно обратиться к табл. 23, составленной Гудом [11],
где сравниваются относительные достоинства аналитических мето-
дов, моделирования и метода проб и ошибок.
Из табл. 23 видно, что в прошлом исследование транспортных
потоков проводилось как аналитическими методами, так и методом
проб и ошибок. Моделирование по существу является комбинацией
этих двух методов, но позволяет исследовать большинство сложных
процессов (что не под силу анализу) и не оказывает влияния на
транспортный поток до получения решения (а при применении ме-
тода проб и ошибок оказывает определенное воздействие на транс-
портный поток). Как показано в табл. 23, почти всегда моделиро-
вание находится где-то между анализом и методом проб и ошибок.
Однако по мере того, как изучаемая ситуация становится более
сложной (как в задачах движения транспорта), различия между
методами, выражаемые через затраты, время и т. д., становятся все
более ощутимыми, и, наконец, аналитические методы и метод проб
и ошибок становятся неприемлемыми, а моделирование оказывает-
ся единственно возможным методом исследования.
При моделировании нельзя принимать ни одного допущения,
пока не будут четко определены его последствия, нельзя включать
ни одну переменную в действующую систему, пока каждая из них
не будет правильно объяснена и не будут установлены и поняты ее
связи с другими переменными; следует иметь в виду, что необходи-
мо добиваться упрощения, однако чрезмерное упрощение опасно.
В большинстве случаев цели, которые ставятся при моделиро-
вании процесса движения автомобилей, четко сформулированы и
позволяют получить хорошие результаты. Моделирование представ-
ляет собой идеальный метод исследования транспортных потоков.
264
18. ПРИМЕР ВЫЕЗДА НА СКОРОСТНУЮ МАГИСТРАЛЬ [12]
Программу моделирования, разработанную для исследования про-
цесса выезда на магистраль с примыкающего въезда можно пред-
ставить в виде схемы, изображенной на-рис. 90. Проведенное иссле-
дование носило общий характер, и предусматривалась возможность
изменения входных параметров с целью изменения структуры ма-
гистрали, что позволяет моделировать работу магистралей различ-
ной конфигурации. К переменным факторам, характеризующим
конфигурацию магистрали, относятся:
число полос (от одной до шести);
длина моделируемого отрезка магистрали;
число въездов и съездов (от нуля до двух) ;
расположение и длина въездов и съездов;
длина каждого участка разгона;
общая длина каждого въезда;
место расположения начала уклона относительно начала иссле-
дуемого отрезка магистрали;
уклон дороги.
В модели предусмотрены все логические операции, необходимые
для безопасного движения автомобиля на рассматриваемом отрез-
ке магистрали. Общая логическая схема показана на рис. 91.
Первоначально автомобили располагаются на отрезке магистра-
ли по случайной схеме, гарантирующей, что каждый автомобиль
находится на безопасном удалении от соседних автомобилей. Затем
обрабатывают данные, характеризующие движение автомобилей,
начиная с автомобиля, находящегося на наибольшем удалении от
начала отсчета, независимо от занимаемого им ряда. Автомобили
располагаются последовательно, в порядке убывания расстояния
от начала отсчета, пока не будут обработаны данные по всем авто-
мобилям системы.
Каждому автомобилю ставится в соответствие ряд характерис-
тик: фактическая скорость, требуемая скорость и расстояние до
начальной точки. Эти характеристики необходимы для описания
— Вводящий 'поток
Конец отрезка скоростной
магистрали -—
i Точки принятия решения о Выходе с магистрали
| начало съезда
полоса раз-1 Конец въезда
гона I—:-----------
Входящий I Начало въезда
поток I
Конец
| уклона
_Уклон
Начало отсчета
Рис. 90. Схематическое изображение отрезка магистрали
265
Рис. 91. Логическая схема системы
движения автомобиля в насто-
ящий момент и его поведения и
в будущем.
х В данном исследовании пу-
тем моделирования для описа-
ния автомобилей, находящихся
в системе, используется метод
периодического поиска. Этот
метод позволяет корректиро-
вать в каждом интервале ин-
формацию по каждому автомо-
билю, находящемуся в системе,
повторяя вычисления для каж-
дого интервала, пока исследо-
вание не будет закончено. Дан-
ные об автомобилях потока
корректируются путем опреде-
ления характеристик, которые
должны изменяться в рассмат-
риваемом интервале, и внесе-
ния необходимых изменений.
Информация об автомобилях
включает все характеристики
каждого автомобиля системы
после обработки их для данно-
го интервала,
Процедура имитации нор-
мального движения обеспечи-
вает обработку данных о дви-
жении автомобиля на рассмат-
риваемом отрезке магистрали при определенных ограничениях.
Если исследуемый автомобиль может сохранять требуемую ско-
рость, то разрешается его продвижение вдоль магистрали. Если
же он догоняет в своем ряду более медленный автомобиль, то де-
лается попытка перейти в другой ряд. Логика изменения ряда поз-
воляет автомобилю переместиться влево, а затем при возможности
вправо. Если же переход в другой ряд не удается, то автомобиль
снижает скорость. Логика нормального движения позволяет авто-
мобилю, находящемуся на внешней полосе магистрали, выехать с
магистрали на съезд. Если же при приближении к требуемому
съезду автомобиль не находится на внешней полосе магистрали,
то он делает попытку переместиться вправо. Если же ему не удает-
ся выйти на внешнюю полосу, то он снижает скорость и пытается
проделать это в следующем интервале. Если же автомобиль проез-
жает съезд, не выйдя на внешнюю полосу, то он снова попытается
переместиться вправо и попасть на какой-либо последующий съезд.
Логика нормального движения предусматривает также выезд на
магистраль и позволяет автомобилю, находящемуся на въезде, вы-
ехать на внешнюю полосу магистрали с примыкающего въезда. Если
266
автомобиль достигает конца полосы разгона и не выходит на ма-
гистраль, то он должен остановиться. После обработки по нормаль-
ной логике данных по всем автомобилям системы с помощью логи-
ческой схемы функционирования въезда корректируют данные для
автомобилей, совершающих выезд.
Чтобы обработать данные об автомобилях, находящихся в сис-
теме, каждому автомобилю присваивается определенный индекс и
его положение относительно других автомобилей системы логиче-
ски представляется в виде звена цепи. Автомобилю задается опре-
деленное значение каждой из двух характеристик с индексами
предшествующего и последующего автомобилей, находящихся в
этом же ряду. Массивы этих характеристик обозначаются LAST
(предыдущий) и NEXT (последующий) соответственно. Этим обес-
печивается ввод в программу характеристик автомобилей, между
которыми находится рассматриваемый автомобиль, что позволяет
определить те его характеристики, которые должны изменяться.
Поскольку характеристики каждого автомобиля находятся в
массивах LAST и NEXT, программа обработки данных дает полную
картину положения автомобилей в системе. Эти два массива можно
рассматривать как некоторую цепь, каждое звено которой содер-
жит один индекс. Например, цепь может быть образована, как по-
казано в табл. 24.
Таблица 24
Индекс Предыдущий Последующий Индекс Предыдущий Последующий
2 1 4 23 10 49
4 2 8 49 23 75
8 4 10 75 49 76
10 8 23
Цепь, составленная из массивов NEXT и LAST, содержащих
определенные индексы автомобилей, показывает структуру потока
на одной полосе дороги. Цепь, образованная на этой полосе, пока-
зана на рис. 92.
Процедура образования цепи обеспечивает упорядоченное опи-
сание характеристик автомобилей с помощью метода, который лег-
ко приспособить для цифровой
способ позволяет уменьшить
требуемое количество ячеек
внутреннего запоминающего
устройства. Если бы данный
метод не использовался, а
для характеристик автомо-
билей, находящихся как в
системе, так и вне ее, потре-
вычислительной машины. Данный
Рис. 92. Наглядное представление цепи
автомобилей
267
бовались отдельные ячейки, то число автомобилей, находящихся в
системе, было бы более ограниченным. При использовании метода
построения цепи ограничение, налагаемое на систему, состоит в том,
что на исследуемом отрезке магистрали одновременно может на-
ходиться не более 500 автомобилей.
Программа разбивается на независимые логические части (под-
программы) с одной контрольной подпрограммой для управления
остальными подпрограммами. При использовании самостоятельных
подпрограмм можно осуществлять эксперимент в одной части прог-
раммы без изменения логики какой-либо другой ее части. Конт-
рольная подпрограмма охватывает задание исходных значений
всех параметров, включая построение цепи, определение отрезка
магистрали для первого интервала и описание нормального и сквоз-
ного движения автомобилей. Эта подпрограмма определяет, какой
из автомобилей, находящихся на магистрали, наиболее удален от
начала отсчета (и поэтому не рассматривается), и осуществляет
ряд проверок. Эти проверки могут быть представлены в виде сле-
дующих вопросов:
1. Выйдет ли данный автомобиль за пределы рассматриваемого
отрезка магистрали в следующем интервале?
2. Сворачивает ли данный автомобиль на съезд?
3. Не совершает ли другой автомобиль, находящийся впереди
данного, выезд на магистраль с участка разгона примыкающего
въезда?
4. Если данный автомобиль не находится на внешней полосе и
вскоре намеревается свернуть на съезд, то сможет ли он перейти
на внешнюю полосу?
5. Движется ли данный автомобиль с требуемой скоростью?
Если контрольная подпрограмма охватывает все автомобили и
корректирует данные о них, то данные об автомобилях, находящих-
ся на примыкающем въезде, также корректируются.
Подпрограмма нормального движения определяет поведение ав-
томобилей, находящихся в одном ряду, и делится на две части:
подпрограмма расстояния и подпрограмма требуемой скорости.
Логическая схема подпрограммы расстояния показана на рис. 93.
Процедура оценки расстояния обусловлена тем фактом, что оп-
ределенные точки рассматриваемого отрезка магистрали имеют
особое значение при описании движения автомобилей. Это конец
рассматриваемого отрезка, начало съезда, точки, в которых прини-
мается решение о выходе с магистрали, и участок магистрали, при-
мыкающий к полосе разгона. Число этих точек и их расстояние ог
начала отсчета могут колебаться, что обеспечивает гибкость данной
схемы. По этой подпрограмме путем вычисления предполагаемого
перемещения определяется, прошел ли автомобиль одну из указан-
ных точек за данный период. Если величина предположительного
перемещения показывает, что автомобиль приблизился к одной из
этих точек, то в зависимости от того, какая точка рассматривается,
используются различные алгоритмы.
268
Рис. 93. Блок-схема логики расстояния
Когда автомобиль проходит конечную точку отрезка магистра-
ли, он исключается из цепи данной полосы и его индекс помещает-
ся в накопитель свободных звеньев. Точки, в которых принимается
решение о выходе из потока, расположены перед съездами, и води-
тели, желающие покинуть магистраль, имеют время для перехода
во внешний ряд. После того как автомобиль пройдет такую точку,
он попытается переместиться вправо и выйти во внешний ряд.
269
И он будет пытаться проделать это до тех пор, пока не добьется
успеха, даже если проедет данный съезд. После выхода во внешний
ряд этот автомобиль свернет на первый же съезд. Логика расстоя-
ния основана на допущении о том, что в рассматриваемом интер-
вале не происходит изменения скорости автомобиля. Однако это не
всегда справедливо. После того, как будет проведено сравнение по-
ложения автомобиля, находящегося на рассматриваемом отрезке,
со всеми указанными выше точками и автомобиль не покидает ма-
гистраль, необходимо более тщательно изучить, должна ли изме-
няться его скорость.
Процедура оценки требуемой скорости разбивается на три час-
ти на основе соотношения между рассматриваемым автомобилем
и автомобилем, движущимся впереди него в том же ряду. Вычис-
ляются расстояние следования и приемлемое расстояние, следова-
ния для пары автомобилей, например f-го и /-го, где i — рассматри-
ваемый автомобиль, a j — автомобиль, движущийся непосредствен-
но впереди него. Приемлемое расстояние следования зависит не
только от скорости, но и от относительной скорости движения авто-
мобилей. Оно будет меньше, если из этих двух автомобилей голов-
ной имеет большую скорость.
Вначале расстояние следования между z-м и j-м автомобилями
сравнивается с вычисленным значением приемлемого расстояния
следования. Если расстояние следования меньше приемлемого и
z-й автомобиль движется быстрее /-го, то z-й автомобиль будет дви-
гаться с ускорением, величина которого зависит от того, насколько
близко находятся друг от друга z-й и /-й автомобили. Однако если
z-й автомобиль движется медленнее /-го, то скорость не меняется,
поскольку расстояние между автомобилями увеличивается и с те-
чением времени оно становится все более безопасным.
Если расстояние следования равно приемлемому и z-й автомо-
биль движется быстрее /-го, то z-й автомобиль либо снизит скорость
за один интервал до скорости /-го автомобиля, либо, если z-й авто-
мобиль не сможет достаточно быстро снизить скорость, он все же
будет снижать ее на максимально возможную величину. Если же
z-й автомобиль движется медленнее /-го, то он увеличивает ско-
рость, но если его скорость по-прежнему меньше требуемой, пред-
принимается попытка перейти в другой ряд.
Последняя часть оценки скорости связана с расстоянием следо-
вания, превышающим приемлемое. Это наиболее желательное усло-
вие, так как в этом случае z-й автомобиль находится на безопасном
удалении от /-го. Затем рассматривается существующее состояние
с целью определить, подойдет ли z-й автомобиль слишком близко
к /-му за рассматриваемый интервал, если его скорость останется
неизменной. Вычисляется новое значение предполагаемого переме-
щения, которое будет равно расстоянию следования в конце интер-
вала поиска. При расстоянии следования, меньшем приемлемого,
возникает опасная ситуация, если скорость z-ro автомобиля не ме-
няется; следовательно, /-й автомобиль вынужден снижать скорость.
Если расстояние следования сохраняется меньше приемлемого, то
270
расстояние между z-м и /-м автомобилями по-прежнему остается
безопасным, но при обработке данных о движении автомобиля
должны учитываться новые соображения с целью не допустить оши-
бочного перемещения.
Если известно, что автомобилю необходимо перейти в другой
ряд, то исследуется возможность перемещения автомобиля вначале
влево, а затем вправо. Если автомобиль находится на внешней по-
лосе или на крайней левой, то делается попытка перейти лишь в
соседний ряд. Если все попытки перейти в другой ряд оказывают-
ся безуспешными, то автомобиль остается в том ряду, который он
занимает в данный момент. Если же переход в другой ряд оказы-
вается успешным, то автомобиль перемещается из прежнего ряда
в новый путем перестройки соответствующих цепей. После выбора
ряда, в который намечен переход, фактическая скорость автомоби-
ля, меняющего ряд, увеличивается до некоторого нового значения,
называемого скоростью изменения ряда. Автомобиль перейдет в
другой ряд, если он не будет находиться на опасно близком рас-
стоянии от автомобилей другого ряда, находящихся впереди и сзади
него. Если же расстояние между автомобилями недостаточно вели-
ко, то попытка изменения ряда оказывается неудачной.
Первый критерий успешного изменения ряда связан с расстоя-
нием следования и приемлемым расстоянием следования для /-го
автомобиля, за которым пытается пристроиться в новом ряду z-й
автомобиль. Если расстояние следования является приемлемым, то
автомобиль переходит в другой ряд при условии, что скорость дви-
жения в ряду, в который он переходит, выше скорости движения в
ряду, из которого он выходит, и при условии, что удовлетворяется
другой критерий, рассматриваемый ниже. Если же расстояние сле-
дования меньше приемлемого, то изучается возможность изменения
скорости с тем, чтобы обеспечить безопасное расстояние между
этими двумя автомобилями. Если это возможно, то автомобиль пе-
реходит в другой ряд при выполнении всех остальных условий. Ес-
ли же требуемое изменение скорости невозможно или не удовлет-
воряются другие условия, то переход в другой ряд не осуществ-
ляется.
Второй критерий связан с соотношением между z-м автомоби-
лем, меняющим ряд, и k-м автомобилем, впереди которого он пы-
тается войти в другой ряд. Если скорость z-ro автомобиля больше
скорости &-го, то для успешного перехода в соседний ряд необхо-
димо определенное минимальное расстояние между ними. Если ско-
рость z-ro автомобиля будет меньше скорости &-го автомобиля, то
переход в соседний ряд произойдет только в том случае, если
задержка, определяемая как время, необходимое для того, чтобы
&-й автомобиль приблизился к z-му автомобилю на безопасное рас-
стояние, больше некоторого минимально приемлемого значения.
Поведение автомобилей на примыкающем въезде рассматрива-
ется в два этапа: движение автомобилей на възде и вхождение е
примыкающего въезда на магистраль.
271
Движение автомобилей на примыкающем въезде описывается
аналогично движению на отрезке магистрали, но на въезде автомо-
били не могут совершать маневр изменения ряда. Движение авто-
мобиля, ближайшего к концу примыкающего въезда, рассматрива-
ется как частный случац, поскольку при невозможности выезда на
магистраль он должен останавливаться на краю въезда. При при-
ближении к краю въезда этот автомобиль постепенно снижает ско-
рость. При достижении края въезда его скорость равна нулю.
Движение остальных автомобилей, находящихся на въезде, модели-
руется аналогично движению автомобилей, находящихся на магист-
рали, путем вычисления приемлемого расстояния следования, кото-
рое здесь меньше, чем приемлемое расстояние между автомобиля-
ми на магистрали, поскольку при выезде на магистраль автомобили
располагаются плотнее. Эта процедура определяет, будет автомо-
биль увеличивать или снижать скорость, что выполняется путем
сравнения приемлемого расстояния следования с расстоянием сле-
дования в предыдущем, текущем и последующем интервалах. И в
данном случае основным критерием является равномерное движе-
ние, и если один автомобиль приближается к другому, то он будет
делать это постепенно.
Программа выезда на магистраль, описывает переход с полосы
разгона на внешнюю полосу рассматриваемого отрезка. Выезд бу-
дет успешным, если выполняются следующие условия: между авто-
мобилями, движущимися по внешней -полосе, имеется некоторый
зазор, в который может войти автомобиль с примыкающего въезда,
и автомобиль, выезжающий на магистраль, не может приблизиться
на опасное расстояние к автомобилям, оказывающимся непосред-
ственно впереди и сзади него.
После того, как будет выбран автомобиль, пытающийся выехать
с примыкающего въезда на магистраль, процедура имитации выез-
да исследует взаимосвязь между z-м выезжающим автомобилем
и /-м автомобилем, находящимся на магистрали впереди него, и
вычисляет расстояние следования и приемлемое расстояние следо-
вания. Если расстояние следования больше приемлемого, то иссле-
дуется взаимосвязь между z-м автомобилем и следующим за ним
k-м автомобилем для определения возможности выезда z-ro автомо-
биля на магистраль. Если расстояние следования меньше приемле-
мого и скорость z-ro автомобиля меньше скорости /-го автомобиля,
то выезд на магистраль не состоится. Однако если скорость z-ro
автомобиля больше скорости /-го автомобиля, то z-й автомобиль
попытается снижать скорость до тех пор, пока не будет достигнуто
безопасное расстояние. Если же^это невозможно, то выезд не состо-
ится, а если такое снижение скорости возможно, то исследуется
взаимосвязь между z-м и £-м автомобилями.
Если будет определено, что имеется некоторое расстояние меж-
ду автомобилями и что выполняются минимальные требования к
расстоянию между z-м (выезжающим автомобилем) и /-м автомо-
билем, то исследуется относительное положение z-ro автомобиля и
следующего за ним &-го автомобиля. Если z-й автомобиль движет-
272
ся быстрее &-го и между ними имеется некоторое расстояние, то
выезд на магистраль оказывается успешным. Если же &-й автомо-
биль движется быстрее, то вычисляется интервал, который пред-
ставляет собой время, необходимое для того, чтобы &-й автомобиль
вплотную приблизился к z-му автомобилю. Если это время меньше
максимального интервала, то выезд на магистраль происходит ус-
пешно. При успешном выезде положение z-ro автомобиля коррек-
тируется: он убирается с въезда и помещается на внешнюю полосу
магистрали путем манипуляции с массивами NEXT и LAST, как
это выполнялось в случае процедуры изменения ряда.
Для каждого автомобиля, находящегося на полосе разгона,
задается некоторая вероятность выезда в интервале между авто-
мобилями основного потока, представляемом процедурой имитации
выезда. Согласно этой процедуре, все автомобили, находящиеся на
полосе разгона, начиная с автомобиля, ближайшего к концу полосы
разгона, попытаются последовательно входить в промежуток
между автомобилями. Даже если в промежуток между автомоби-
лями уже вошел один автомобиль с примыкающего въезда, осталь-
ные автомобили, находящиеся сзади него на въезде, также имеют
возможность войти в этот промежуток.
Обычно результаты моделирования системы представляются в
виде таблицы средних значений таких величин, как время пребы-
вания в пути и интенсивность потока. Эти данные дают полное
представление о работе системы, но не содержат какой-либо ин-
формации о движении того или иного отдельного автомобиля.
В процедуре могут присутствовать несколько мелких необнаружен-
ных ошибок. Более полную картину процесса можно получить, изо-
бразив в графической форме движение автомобилей на отрезке
дороги в виде пространственно-временных диаграмм.
По оси абсцисс пространственно-временной диаграммы отклады-
вается время, а по оси ординат — расстояние от начала отсчета;
непрерывные линии обозначают движение отдельных автомобилей
на рассматриваемом отрезке. Этот график показывает положение
каждого автомобиля на всей длине исследуемого отрезка, а также
дает представление об относительных скоростях и относительном
положении автомобилей. Можно рассматривать движение на раз-
личных полосах и въездах, используя для этого не только сплош-
ные, но и пунктирные линии или же линии разного цвета. На графи-
ке каждая кривая представляет собой последовательность точек,
соединенных линиями; каждая точка обозначает положение и время
пребывания автомобиля в системе. Поскольку программа цифровой
вычислительной машины осуществляет периодический поиск, пос-
ле принятия решения машиной о хранении этих данных они записы-
ваются на магнитную ленту. Каждому блоку соответствует одна за-
пись, содержащая обозначение автомобиля, его положение на
отрезке магистрали и время пребывания в системе. После завер-
шения исследования данные, записанные на магнитной ленте, обра-
батываются и представляются в форме, позволяющей построить
пространственно-временные диаграммы.
273
время
Рис. 94. Пространственно-временная диаграмма:
1 — вхождение в основной поток происходит в точке перехода пунктирной линии в сплош-
ную; 2 — при вхождении в основной поток автомобиль остановится на краю полосы разгона;
3 — движущаяся очередь автомобилей на магистрали; 4 — автомобиль покинул внешнюю по-
лосу, перейдя в соседний ряд; 5 — автомобиль перешел на внешнюю полосу из соседнего
ряда.
----------автомобили на примыкающем въезде;---------------- — автомобили на
магистрали
Пример такой пространственно-временной диаграммы показан
на рис. 94, он служит для демонстрации реальности модели. Заме-
тим, что автомобили образуют на этом отрезке магистрали движу-
щиеся очереди, имеющие одинаковую скорость. Кроме того, авто-
мобили входят на внешний ряд и выходят из него. Автомобили вы-
езжают также на съезд, соблюдая определенный порядок, со
скоростью, меньшей, чем у автомобилей, движущихся прямо. Авто-
мобили, находящиеся на примыкающем въезде, начинают выезд на
магистраль при достижении полосы разгона и могут вливаться в
основной поток в любой ее точке. Если автомобиль, проехав до кон-
ца полосы разгона, не смог выехать на магистраль, он останавли-
вается и ожидает появления приемлемого интервала между авто-
мобилями. Все эти свойства модели показаны на рис. 94 и свиде-
тельствуют о том, что модель выезда и полная модель дают
довольно точное представление о движении автомобилей на маги-
страли.
ЗАДАЧИ
1. Вычислите следующие интегралы, используя метод распределения, точек, про-
верьте ваш результат с помощью метода средних значений:
1 А 1 А
j* (х — х 2 ) dx; j х (1 — х2) 2 dx.
о 6
274
2. С помощью метода Монте-Карло найдите объем клина, вырезаемого из
цилиндра х2 + г/2 + а2 плоскостями z=0 и 2=у.
3. Объясните, каким образом с помощью метода Монте-Карло можно найти
площадь водной поверхности озера, имеющего неправильную форму, при наличии
нескольких островов неправильной формы.
4. Подвыпивший прислонился к колонне в гостиной отеля и пытается идти
без какой-либо конкретной цели. Он может одновременно сделать один шаг в
северном, восточном, южном или западном направлении. Как далеко от колонны
он будет находиться через 5, 10 и 25 шагов? Рассмотрите каждый из этих случаев
в отдельности.
5 Проведите несколько параллельных линий на одинаковом расстоянии W
друг от друга. Бросая многократно на бумагу неочиненный карандаш длиной L,
по формуле (349) вычислите оценку л.
6. С помощью метода Монте-Карло найдите установившееся значение темпе-
ратуры в точке прямоугольной пластины при граничных условиях, описанных в
параграфе 2.
7. Найдите 1 000 случайных чисел, записывая частоту появления каждой де-
сятичной цифры. Сравните полученные результаты с ожидаемымой частотой, ис-
пользуя критерий хи-квадрат.
8. Используя метод инверсии, найдите 300 значений интервалов t между ав-
томобилями, удовлетворяющих смещенному экспоненциальному распределению
(/>1 сек) при интенсивностях потока 300; 600; 900; 1 200 и 1 500 авт!ч. Сгруппи-
руйте интервалы по длительности через 1 сек и постройте пять графиков.
9. Используя центральную предельную теорему, получите 1 000 значений мест-
ной скорости, приближенно удовлетворяющих нормальному распределению со сред-
ним 64 км/ч и средним квадратическим отклонением 16 км]ч. Решите эту задачу,
используя 3; 6; 9 и 12 случайных чисел. Используя критерий хи-квадрат, сравните
распределение, наблюдаемое в каждом случае, с нормальным.
10. С помощью метода распределения точек найдите 300 значений интервалов
времени между автомобилями, удовлетворяющими эрланговскому распределению
при а= 1 и а=2.
И. Методом, основанным на применении свертки, решите задачу 9 при
п=1, 2, 3 и 4. Сгруппируйте полученные интервалы по длительности через 1 сек
и постройте четыре графика.
12. Регулируемый перекресток оборудован трехфазным светофором, рабо-
тающим в заданном режиме. При этом фаза, в которой разрешен левый поворот,
составляет третью часть длительности цикла. Исследования показали, что при дли-
тельности этой фазы 10 сек в 20%< случаев через перекресток проезжают четыре
автомобиля, в 75% случаев — три автомобиля, а в 5% случаев — два. Через 10 сек
интервалы между автомобилями принимают постоянное значение, равное 2,5 сек.
Допустим, что автомобили, совершающие левый поворот, образуют пуассоновский
поток с интенсивностью от 100 до 400 авт 1ч. При длительности цикла от 30 до
90 сек приращение длительности на 15 сек увеличивает эту интенсивность на
100 авт!ч. Постройте график для числа избыточных циклов и максимальной дли-
ны очереди для каждого случая. Для каждого случая составьте программу для
одного часа, генерируя число прибытий, как указано в параграфе 11.
13. Решите задачу 11, полагая, что поток прибывающих автомобилей имеет
биномиальное распределение с дисперсией, равной трем четвертям среднего зна-
чения.
14. Используя периодический поиск (с периодом 1 сек), получите картину
движения на магистрали за 1 ч. Составьте программу при интенсивностях дви-
жения в одном ряду от 300 до 1 500 авт!ч с приращением 300 авт)ч. С помощью
критерия хи-квадрат сравните для каждого случая частоту прибытий в интервале
длительностью 1 мин с ожидаемой частотой при допущении о пуассоновском по-
токе.
15. Какие факторы следует рассмотреть при определении длительности ин-
тервалов путем периодического поиска?
16. Используя три случайных числа, с помощью центральной предельной тео-
ремы исследователь получил некоторую случайную величину. Полагая, что четыре
случайных числа обеспечат лучшее приближение к пуассоновскому распределению,
он находит еще одно случайное число и добавляет его к трем остальным. Каково
275
это четвертое случайное число, если известно, что оно равно половине суммы пер-
вых трех чисел и новая сумма дает ту же случайную величину, что и ранее?
17. Если случайное число, равное 0,386, соответствует интервалу между
последовательными автомобилями, равному 7,2 сек, удовлетворяющему смещен-
ному экспоненциальному распределению, то какова интенсивность потока?
18. Используя периодический поиск, исследователь получил 1 000 случайных
чисел и моделирует прибытие 20 автомобилей. Если минимальный интервал между
автомобилями составляет 4 сек, то какова вероятность появления интервала, пре-
вышающего 1 мин?
19. Допустим, что длительности критических интервалов между автомобиля-
ми, движущимися по магистрали, удовлетворяют эрланговскому распределению
при а=6 и что средняя длительность критического интервала составляет 3 сек.
Найдите среднюю длительность задержки на примыкающем въезде автомобиля,
готового к въезду на внешнюю полосу. Интенсивности движения на внешней по-
лосе составляют 600; 1 200 и 1 800 авт!ч, а интервалы между автомобилями удов-
летворяют эрланговскому распределению при а=2. Промоделируйте для каждого
случая въезд на магистраль 1 000 автомобилей.
ЛИТЕРАТУРА
1. Holstein W. К., Soukup W. R. Monte Carlo Simulation, Institute Paper
23, Institute for Quantitative Research and Economics and Management, Graduate
School of Industrial Administration, Purdu University, Lafayette, Ind., p. 1, 1962.
la. В er garni D. «Mathematics», Life Science Library, Time Inc., New
York, 1963.
2. T о c h e r K. D. «The Art of Simulation», D. Van Nostrand, Princeton,
N. J., 1963.
3. M о о г e В. C., «Notes on Monte Carlo Techniques», неопубликованная
работа.
4. T i p p e 11 L. H. Random Sampling Number, «Tracts for Computers»,
Cambridge Univertity Press, New York, 1960.
5. Goo d e H. H., M a c h о 1 R. E. «System Engineering», McGraw-Hill,
New York, 1957.
Русский перевод: Гуд Г. X., M а к о л Р. Э., Системотехника. Введение в
проектирование больших систем. М„ «Советское радио», 1962.
6. G е г 1 о u g h D. L. Simulation of Traffic Flow: An Introduction to Traf-
fic Flow Theory, Highway Res. Board Spec. Rept 79, p. 97, 1964.
7. L e w i s R. M., Michael H. L. Simulation of Traffic Flow to Obtain
Volume Warrants for Intersection Control, Purdue Univ. Eng. Reprint CE 205,
'Vest Lafayette, Ind., 1964.
8. S a n d e f u r G. G. «А Method of Sequential Processing for Traffic Simu-
lation», неопубликованная работа.
9. D a r t О. K. «Development of Factual Warrants for Left-Turn Channeli-
zation through Digital Computer Simulation», докторская диссертация, Texas
A&M University, College Station, 1966.
10. M о r g e n t h a 1 e r G. W. The Theory and Application of Simulation in
Operations Research, «Publications in Operations Research № 5», p. 364? John
Wiley, New York, 1961.
11. Goode H. H. «Computers, Simulation, and Traffic», неопубликованная
работа.
12. Drew D. R., Meserole T. C., Buhr J. H. Digital Simulation of
Freeway Merging Operation, Texas Transportation Inst. Rept. 430—6, Texas A&M
University, College Station, 1967.
ГЛАВА XI
ДЕТЕРМИНИРОВАННЫЕ
СООТНОШЕНИЯ
Термин «оптимизация» означает выбор наилучших условий движе-
ния исходя из возможностей транспортной системы и ограничений,
свойственных водителю и окружающей среде, для достижения оп-
ределенных целей.
Чтобы сделать вывод о том, что та или иная транспортная систе-
ма является оптимальной, необходимо установить критерий, поз-
воляющий определить качество ее функционирования в этом кон-
кретном отношении. Важно, чтобы показатель эффективности,
вытекающий из этого критерия оптимизации, можно было выра-
зить как некоторую функцию переменных, характеризующих транс-
портный поток и входящих в задачу. Теперь задача будет состо-
ять в том, чтобы выбрать значения управляющих переменных, опти-
мизирующие функцию эффективности. При детерминированном
подходе к задачам движения транспорта предполагается, что меж-
ду входными переменными существует функциональная зависи-
мость, а параметры, характеризующие эффективность, постоянны.
Другими словами, для любого данного множества значений вход-
ных переменных существует одно и только одно значение функции
эффективности. Это допущение не принималось в стохастических
моделях.
Хотя очевидно, что конечная цель инженера-транспортника со-
стоит в том, чтобы оптимизировать работу существующих транс-
портных систем и проектирование новых дорожно-транспортных
сооружений, его непосредственной задачей является получение ра-
ционального описания транспортных средств. Транспортные пото-
ки фактически представляют собой последовательности дискретных
событий, состоящих в появлении автомобилей, хотя существует
много теорий, где транспортный поток рассматривается как непре-
рывный процесс.
Анализ размерностей показывает, что между скоростью движе-
ния, расстоянием и интервалом времени между последовательными
автомобилями существует соотношение
277
, Расстояние между автомобилями, м
Скорость, м сек =------------------------------------------.
Интервал времени между автомобилями, сек
Между скоростью, плотностью и интенсивностью потока суще-
ствует следующая зависимость:
, Интенсивность, сек-*
Скорость, м сек =------------------------.
Плотность, ж-1
Общее уравнение транспортного потока обычно выражается
в виде:
q = ku, (336)
где q — средняя интенсивность потока; и — средняя скорость; k —
средняя плотность.
Если известны любые две из этих трех переменных, характери-
зующих транспортный поток, то третья переменная определяется
однозначно. Переменной, которую легче всего определить, является
интенсивность, а затем, по-видимому, скорость. Не удивительно
поэтому, что плотность обычно рассматривается как зависимая пе-
ременная, поскольку две другие являются измеримыми или незави-
симыми переменными. Если при задании координат некоторой точ-
ки куба ширину и высоту считать независимыми переменными, то,
кроме длины, не может быть никакой другой зависимой перемен-
ной. При рассмотрении основного уравнения транспортного потока
целесообразно рассмотреть поверхность, образуемую при графиче-
ском построении уравнения на взаимно перпендикулярных осях, как
показано на рис. 95 [1]. Попытки связать различные пары этих трех
основных элементов основаны на применении следующих методов:
построение кривой по точкам; вывод на основе граничных условий;
применение физических аналогий.
1. ПОСТРОЕНИЕ КРИВОЙ ПО ТОЧКАМ
При детерминированном подходе
Рис. 95. Фундаментальная объемная диа-
грамма для интенсивности, скорости и плот-
ности движения
вначале определяется подходя-
щее алгебраическое уравне-
ние, описывающее соотно-
шение между интенсив-
ностью и плотностью транс-
портного потока.
Задача построения кри-
вой по некоторой совокуп-
ности точек по существу яв-
ляется задачей оценки ис-
тинных параметров кривой.
Наилучшим из известных
методов оценивания таких
параметров является так
называемый метод наимень-
ших квадратов. При исполь-
зовании этого метода при-
278
менительно к графикам, изображающим зависимость между ско-
ростью и плотностью потока, отыскивается некоторая функция и =
= f(k), соответствующая точкам в такой степени, что сумма квад-
ратов разностей между ординатами точек и ординатами кривой
минимальна.
Определение точности кривой, построенной методом наименьших
квадратов, является задачей математической статистики. Прямая
у = а + Ьх, построенная методом наименьших квадратов, называ-
вается прямой регрессии, где а — отрезок, отсекаемый на оси
абсцисс, а b — угловой коэффициент. Проверка значимости регрес-
сии выполняется на коэффициенте регрессии b с использованием
критерия t
t~, (387)
^b
а число степеней свободы равно п — 2,
В последнем выражении N и D обозначают соответственно чис-
литель и знаменатель выражения (388). Критерий t построен на ги-
потезе, согласно которой истинный коэффициент регрессии В, оцен-
кой которого является Ь, равен нулю и ошибка при оценке В имеет
нормальное распределение. Если выбирается 5-процентный довери-
тельный уровень и ^>/о,о5, то нулевая гипотеза относительно В
может быть отвергнута. Затем можно сделать вывод, что между пе-
ременными х и у действительно существует отношение причины и
следствия.
Хотя данный метод нахождения углового коэффициента прямой
регрессии можно обобщить на случай нахождения доверительных
пределов для коэффициентов криволинейной и экспоненциальной
регрессии, путем простого преобразования переменных можно
представить эти соотношения в виде прямых для преобразованных
переменных. Так, уравнение параболы можно записать в виде
y2=a2t b2x2, (390)
1 1
где y<i=u,'> (h=up b2=—u,fkj\ x2=k2.
В случае показательной функции, логарифмируя обе части урав-
нения, получаем следующее линейное уравнение:
Уз= &з + > (391)
279
Рис. 96. Кривые регрессии для макроскопических уравнений состояния:
а — первая полоса (внешняя); б — вторая полоса (средняя); в — третья полоса
(внутренняя); г — все три полосы
1 /2
/ —«=33,7 1п( 135,5/6); 2 — «=81,8—6,976 ' 3 — «=52,0—0,3936; 4 — «=34,5 In (160,3/6); 5 —
«=86,6-6,8961/2 ; 6 — «=53,8-0,3516; 7 — «=36,2 In(147,1/6); 8 — «=92,8-7,786 1/2; 9 - «=60,3-
1'2
—0,4536; 10 — «=33,4 1п(443/6); 11 — «=87,7—4,266 ' ; /2 — «=55,9—0,1406,
где
у3=1п&; «з=1пЛ;; Z>3=—и”1; х3=м.
В случае линейной регрессии
i/i = a1 + Z>iXi, (392)
Uf
где г/1 = м; «!=«/ ^i=-----xx—k.
ki
Параметры b\, Ь2, Ь3 и «1, «2, «з находятся путем решения урав-
нения (388) и нахождения следующего выражения:
(393 )
с использованием зависимости между скоростью и плотностью по-
тока (рис. 96).
2. МЕТОД ГРАНИЧНЫХ УСЛОВИЙ
Дифференцируя уравнение q=ku по k, получаем
= (394)
dk dk ‘
280
Так как между q и и существует некоторое общее соотношение,
значение k, соответствующее —=0, можно обозначить km. Та-
dk
ким образом,
Q=km — +«. (395)
Разделяя переменные и интегрируя обе части этого уравнения,
получаем
In и=— — -\-С,
(396)
где С — некоторая постоянная интегрирования.
Рассматривая граничные условия k = Q и « = «/, находим, что
С = 1п tif. После перегруппировки членов имеем
£ = £т1п^. (397)
Подставляя этот результат в общее уравнение, получаем
q = ukmIn ~. (398)
Эдай [3] получил этот же результат, дифференцируя уравнение
(394) по и. Уравнение (398), которое вывел Эдай, представляет
собой попытку получить более точное макросоотношение между q.
и и k при плотностях потока, меньших оптимальной. При плотно-
стях, больших оптимальной, Эдай предлагает по-прежнему исполь-
зовать обычные формулы, что приводит к «разрывной» форме по-
верхности для установившегося состояния. Эта теория, видоизме-
ненная для ненапряженных потоков, позволяет количественно
описать внезапные изменения состояния транспортного потока,
представляющие собой переход от относительно свободного движе-
ния к замедленному движению с частыми остановками и обратно.
Развивая этот подход, Мэй [4] определяет три зоны, которые
могут быть определены как зона постоянной скорости, зона посто-
янной интенсивности движения и зона постоянного изменения ин-
тенсивности при изменении плотности. В зоне 1 скорость автомоби-
ля определяется характером дороги, а объем движения соответст-
вует транспортной загрузке. В зоне 2 условия движения ухудшают-
ся, средняя скорость снижается, но интенсивность движения может
оставаться высокой. В зоне 3 уменьшается как скорость, так и ин-
тенсивность движения, что само по себе может служить признаком
перегрузки.
Упомянутые исследования устанавливают некоторые ограниче-
ния на форму поверхности основной диаграммы. Дифференцируя
уравнение состояния q=f(k) по k, получаем уравнение для волно-
вой скорости. Приравнивая уравнение для волновой скорости ну-
281
лю, получаем оптимальную плотность km, т. е. такое значение А,
при котором интенсивность потока максимальна.
Моррисон [5] получил параметр пропускной способности
несколько другим способом. Он предположил, что среднее рассто-
яние между автомобилями зависит от средней длины автомобиля
L, среднего времени реакции водителя Ci и некоторой функции, за-
висящей от возможностей тормозного устройства автомобиля С2,
тогда безопасное расстояние между автомобилями имеет вид
s=L + C1a + C2u2. (399)
Подставляя в уравнение q = ku соотношение (399), получаем
4 L + Ciu+Ciut' 1 J
Полагая ^-=0, получаем оптимальную скорость ит или
du
такую скорость, для которой интенсивность максимальна:
• (401)
\С2 /
3. АНАЛОГИЯ С ТЕПЛОВЫМ ПОТОКОМ
Большинство ситуаций по своему характеру настолько сложно, что
они не могут быть в точности описаны математическими методами.
Обычйо математика применяется для описания идеальной ситуа-
ции, отражающей лишь наиболее важные черты реальной ситуации.
В результате получают аппроксимации, практическая ценность
которых зависит от того, насколько аппроксимация, приближается
к реальной действительности, что проверяется путем' теоретических
рассуждений и эксперимента. Детерминированный подход к теории
транспортных потоков включает анализ основных характеристик
транспортного потока, разработку теории, а затем применение
методов, при разработке которых обычно важную роль играют
дифференциальные уравнения. Здесь приводятся соотношения,
полученные путем наблюдений, экспериментирования и рассужде-
ний; от исследователя требуется выразить их в математических
символах, решить полученные дифференциальные уравнения и
интерпретировать полученные результаты.
Рассмотрим одномерный поток тепла в длинном тонком изоли-
рованном стержне, описываемый дифференциальным уравнением
где р — температура; х — расстояние; t — время; а2=--------; с —
с
проводимость материала; $ — удельная теплоемкость; k — плот-
ность.
282
Граничными условиями являются условия на концах стержня в
произвольный момент и начальные условия для всего стержня в
момент / = 0. Обычно требуется описать распределение температу-
ры во времени вдоль стержня, или, другими словами, найти реше-
ние дифференциального уравнения в виде:
р(х, — а, х, /). (403}
Если бы велась непрерывная регистрация температуры в раз-
личных точках по длине стержня, то можно было бы найти а и, та-
ким образом, определить некоторое свойство материала, из которо-
го изготовлен стержень, например его теплопроводность с.
Во многих отношениях дорога с однорядным движением напо-
минает длинный тонкий изолированный стержень (регулируемый
въезд без возможности перехода в другой ряд). Если предполо-
жить, что в уравнении (402) р играет роль некоторого параметра,
связанного с такими обычными характеристиками транспортного
потока, как скорость, плотность и интенсивность движения, то ре-
шение уравнения [формула (403)] позволит оценить некоторое свой-
ство дороги, назовем его условно «способностью обеспечить дви-
жение» (trafficability). Остается лишь измерить характеристики
транспортного потока на участке дороги длиной L.
В физике дифференциальное уравнение в частных производных
(402) называется уравнением диффузии. Оно описывает плотность
р любого вещества, проникающего путем диффузии в пористое
твердое тело. Так, Харр и Леонарде [6] предположили, что движе-
ние автомобилей происходит в результате действия «потенциала
давления», аналогичного р. Впоследствии при решении уравнения
этот параметр исключается (так как он не имеет физического
смысла для транспортных потоков, и, слецовательно, его нельзя
измерить) и скорость движения выражается как функция пара-
метра, который был определен выше как «способность обеспечить
движение». Таким образом, появляется возможность приведения к
единому масштабу таких различных геометрических характери-
стик, как изгиб или уклон дороги.
Интересно отметить, что несколько вариантов уравнения (402)
исследовались в физике. Для стержня, в котором тепловая энергия
генерируется с постоянной интенсивностью, а боковая поверхность
изолирована, уравнение теплопередачи имеет вид:
, др . д^р _
dt дх'~-
(404)
где с — некоторая положительная постоянная. Как основу для
оценки геометрических характеристик дорог Редди [7] рассматри-
вает уравнение (404), а не уравнение (402), которое представляет
собой частный случай, когда с = 0. Таким путем получено обобще-
ние теории с учетом влияния автомобилей, выезжающих на некото-
рый участок дороги (или выезжающих с него), например вблизи
въезда на магистраль или съезда с нее.
283
4. ГИДРОДИНАМИЧЕСКАЯ АНАЛОГИЯ
Следует отметить, что трудность использования детерминистского
подхода связана не с решением дифференциального уравнения, а с
нахождением такого уравнения, которое бы реалистически выра-
жало физические условия. Например, Харр и Леонарде [6] опреде-
ляют р следующим образом:
^Р- = -с,а (405)
дх
и
-^-=е2й, - (406)
др
где w и й — скорость и плотность движения.
Решая уравнения (405) и (406) как систему, получаем следую-
щее соотношение между скоростью и плотностью движения:
м=-(С1с2й)-1^. (407)
ОХ
Это означает, что скорость может быть отрицательной, если
плотность возрастает с увеличением расстояния. Однако это усло-
вие не соответствует действительности. Более логично выразить
уравнение движения (407) не через скорость, а через ускорение,
так как знак (положительный или отрицательный) не обозначает
движения вперед или назад, а лишь ускорение или замедление дви-
жения.
Рассмотрим следующее уравнение движения [8], выражающее
ускорение транспортного потока в данном месте в определенный
момент времени:
—=-=1^-. — . (408)
dt k дх
Из уравнения следует, что водитель изменяет скорость движе-
ния в любой момент в зависимости от условий движения, выражае-
,-1 дк
мых членом k ------.
дх
Если плотность уменьшается (производная -^-отрицательна),
то водитель ускоряет движение (производная положительна)
и наоборот.
Уравнение (408) по форме совпадает с уравнением одномерного
движения сжимаемой жидкости, имеющей плотность й, со скоро-
стью и. Это уравнение характерно для ряда новых теорий, где
транспортный поток описывается как поток жидкости или гидроди-
намический поток. Анализ потоков основывается на предполага-
284
Рис. 97. Вывод уравнения непрерывности для транспортного потока. Закон со-
хранения числа автомобилей: (число входящих автомобилей) — (число выходя-
щих автомобилей) = (изменение числа автомобилей)
емом соотношении между интенсивностью и плотностью, например,
выражаемом уравнением (407) или (408), и на дифференциальном
уравнении в частных производных, выражающем закон сохранения
вещества.
Наряду с другими принципами механика жидкостей основана
на законе сохранения массы. Выделим мысленно в пространстве
некоторый объем. Если расход массы превышает поступившее ко-
личество, то согласно закону сохранения массы необходимо, чтобы
имело место эквивалентное уменьшение массы, заключенной в дан-
ном объеме.
Этот принцип можно выразить математически в виде уравнения,
называемого уравнением сохранения.
Если рассматривать транспортный поток как консервативную
систему, то изменение числа автомобилей на участке дороги в ин-
тервале времени 'dt (рис. 97) должно равняться разности между
числом автомобилей въезжающих на данный участок в точке х, и
числом автомобилей, покидающих его в точке x+dx. Если число
автомобилей на участке длиной dx в момент t равно kdx, а число
автомобилей, въезжающих на участок в точке х за время dt выра-
жается как qdt, то символически закон сохранения числа автомоби-
лей можно выразить как
kdx — (k — — dt\dx=qdt—( q-j-~—dx\ dt. (409)
285
Используя соотношения q = ku, получаем следующее уравнение
непрерывности для транспортного потока:
(410)
dt ' dx ' v
Веря во втором члене производную от произведения, получаем
dk . udk , kdu q fill)
~dT + ~dx "' dx ~ ‘ '
В теории транспортных потоков установлено, что скорость дви-
жения изменяется обратно пропорционально плотности потока
a=f(k). (412)
Из соотношения (412) вытекает, что
du du dx du .
= . = = u,'. (413)
dk---------------------------------------dx-dk dk
Определяя из уравнения (413) и подставляя найденный
dx
результат в уравнение (411), получаем следующее уравнение не-
прерывности для транспортного потока на дороге с однорядным
движением:
— + («4 ku') — = 0.
dt 7 ’ dx
(414)
Если требуется уравнение движения более обобщенное, чем
(408), то может использоваться некоторый степенной показатель
пропорциональности п:
в _ c2kn dk .
dt dx
Беря полную производную функции u=f(x, t), имеем
du du dx । du dt
dt dx dt dt dt
(415)
(416)
где ---= u и —=1. Подставляя соотношение (416) в уравнение
dt dt
(415), получаем
’(417)
dx dt dx
Аналогично, из уравнения (413), следует, что
286
Определяя
--- из уравнения (413) и подставляя полученный
результат в уравнение (417), а затем подставляя сюда же соотно-
шение (418) и деля на и', находим, что уравнение (417) принимает
вид
dk / c^kn \ dk
-----И и 4----------------= 0.
dt \ и' ) dx
(419)
Получено общее уравнение движения. Нетривиальное решение
уравнений (414) и (419) находится путем приравнивания членов,
записанных в круглых скобках:
{и'У = с^п-1}. (420)
Наконец, вследствие обратной пропорциональной зависимости
между скоростью и плотностью получаем
(.п-1)
и,' = —ck 2 ,
(421)
Гринберг [8], решая уравнение (421) для п = — 1, получил
и —с 1п •
(422)
Решение уравнения (421) для п>—1 имеет следующий вид:
(и + 1)
—— у_ 2 । х'»
zz = —— k 4-Q,
п 1
(423)
где постоянная интегрирования должна вычисляться для граничных
условий, характерных для соотношения между скоростью движе-
ния и плотностью потока. Поскольку при максимальной плотности
kj движение невозможно, то
с1=
2с
п + 1
(« + !)
ki 2
(424)
П^>— 1
и
(п+1) (п+1)
- К = -k 2 1, п>-1. (425)
п + 1 L J
Аналогично предполагается, что водитель может ехать со ско-
ростью свободного движения щ только в том случае, если на дороге
нет других автомобилей (£ = 0). Таким образом,
(П+1)
= , га>- 1, (426)
J п 4- 1
287
и постоянная интегрирования принимает следующий вид:
с=<2±^, (427)
(/г+1)
2k j 2
Подставляя выражение (427) в уравнение (425), получаем обоб-
щенные уравнения состояния
(/г+1)
Г / Ь \ 2 1
и = иД 1-( — I , /г>—1; (428)
L \ Ъ" / J
(/г+1)
[/ J. \ 2 Л
1~ ( — ) ’ И29)
\ ki / J
Дифференцируя уравнение (429) по k и приравнивая производ-
ную нулю, находим оптимальную плотность, при которой интенсив-
ность потока автомобилей максимальна
(/г+1)
dg Г| и + 3 ( & \ 2
dk L 2 \ kj )
2
/и i Q \ (/г+1)
= ( 2 ) kf' /г>“1, (430)
Подставляя соотношение (430) в уравнение (428), получаем оп-
тимальную скорость
Йпг==7+Тм/’ <431)
Максимальная возможная интенсивность движения на полосе
дороги (пропускная способность) находится как произведение вы-
ражений ( 430) и (431):
(432)
Уравнения (428)—(432) для некоторых частных случаев имеют
важное значение. Линейную модель Гриншилдса [2] получаем при
п=1; Дрю рассмотрел случай п=0. Эти случаи, а также модель
Гринберга, представлены на рис. 98 и в табл. 25.
5. МЕТОД ДВИЖУЩЕГОСЯ НАБЛЮДАТЕЛЯ
При методе оценки скорости движения и интенсивности потока из
движущегося автомобиля наблюдатели, находящиеся в контроль-
ном автомобиле, измеряют и регистрируют следующие данные: чис*
288
10—338
Элемент
Общий случай
п> — 1
Уравнение движения du dt „ dk + <flkn-— = 0 ox
Коэффициент пропорцио- нальности Уравнение состояния с — q = kiif (п + l)Uf (tt+1) 2kj 2 («+!) ~| / k \ 2 1— — \kj J
Оптимальная плотность Оптимальная скорость Пропускная способность Волновая скорость ьо 00 <35 *-( 2 J kj п+1 Um “ „ . Ч П-\- 6 Qtn — (n+l)llfkj 2 2 dk J (n+ 1)-| п+3( k\ ъ х b-MrJ J
Таблица 25
Экспоненциальное уравнение Z2 = —1 Параболическое уравнение n = 0 Линейное уравнение n = l
da dk
dt k dx
du
dt
dk
dx
k't
kum ° ~~k~
1
Urnkj
kUf
I k
Л kj
kj
2
“f
2
е
с
4
ло автомобилей, которые обогнал контрольный автомобиль; число
автомобилей, обогнавших контрольный автомобиль; время движе-
ния контрольного автомобиля.
Некоторое представление об использовании этой информации
для оценки скорости и интенсивности транспортного потока можно
получить, рассматривая два частных случая, иллюстрируемых на
пространственно-временной диаграмме, изображенной на рис. 99.
В случае 1, когда контрольный автомобиль остановлен, интен-
сивность потока q равна числу автомобилей и0, обгоняющих кон-
трольный автомобиль, деленному на время обследования Т:
q = ^~. (433)
В случае 2, когда останавливаются все автомобили, кроме кон-
трольного, плотность k равна числу автомобилей ns, обгоняющих
контрольный автомобиль, деленному на длину исследуемого участ-
ка L:
к = (434)
Так как
L = vT, (435)
где v — скорость контрольного автомобиля, а Т — время движения
через участок L.
Подставляя соотношение (435) в формулу (434), получаем
£ = (436)
vT
Решая уравнение (433) относительно п0 и уравнение (436) отно-
сительно п0 и затем вычитая результат (436) из выражения (433),
имеем
n^ — ns = qT — kvT. (437)
Полагая n = n0 — ns, получаем основное уравнение для метода
движущегося автомобиля:
Рис. 98. Решение обобщенного уравнения движения транспортного потока:
/ — линейная модель, п=-Н; 2 — параболическая модель, п=0; 3 — экспоненциальная модель,
п = —1
290
Рис. 99. Вывод уравнения движения автомобиля:
п0
а — случай 1, # =-у—; п0=дТ;б — случай 2,
ns ns
k = ~=—^, ns = kvT.
L vT
Случай 1 — Случай 2 = п0 — ns = qT — kvT,
п
— — q — kv, rpen=nQ — ns
/ — первый автомобиль; 2—второй автомобиль; 3 — i-й. автомобиль; 4 — контрольный автомо-
биль; 5 — по-й автомобиль; 6_— ns -й автомобиль
Очевидно, что поскольку n, T и v — измеряемые величины, зна-
чения q и k можно определить, если эксперимент повторяется так,
что значения n, Т и v в обоих случаях различны. Удобно проводить
измерения, двигаясь в направлении потока, а затем в обратном на-
правлении. Используя в первом случае индекс w, а во втором слу-
чае индекс а, получаем
1 W
1 а
и
(439
(440
Решая уравнения (439) и (440) относительно q, имеем
4=
nw + na
Tw +
(441)
10*
291
Для определения среднего времени движения транспортного по-
тока Т используется формула (439), в которой k заменяется на^-,
а на А-:
*
(442)
1 W v J w * w
После преобразований получаем среднее время движения
Г=Г Дх , (443)
Q
где q определяется по формуле (441).
6. УДАРНЫЕ ВОЛНЫ
Лайтхилл и Уитхэм [11] получили еще одно соотношение между
интенсивностью и плотностью транспортного потока для случая,
когда данные об интенсивностях и скоростях транспортных пото-
ков получают методом движущегося наблюдателя. Если п — число
автомобилей, обгоняющих наблюдателя за время Т при движении
в направлении потока со скоростью uw, то
q—~r-\-kuw. (444)
Если работают два движущихся наблюдателя и второй начина-
ет движение через промежуток Т после первого и этот промежуток
сохраняется в процессе движения, с тем. чтобы в среднем для обо-
их наблюдателей число автомобилей между наблюдателями было
постоянным и п = 0, то в этом случае
—^2=-«да(^1-Л2). (445)
Другими словами, если происходят изменения интенсивности
потока, то скорость распространения этих изменений вдоль потока
называется волновой скоростью, которая определяется как
(446)
ak .
Если уравнение непрерывности (410) умножить на волновую
скорость uw, то получим следующее уравнение движения одномер-
ной волны?
- $-+«№-^- = 0- (447)
dt дх
Рассмотрим в пространственно-временной плоскости линии, оп-
ределяемые уравнением
292
Подставляя это соотношение в уравнение (447), получаем
дд . дх ' dg q.
dt dt - дх
- ^-dt + -^-dx=0. (448)
dt dx
Левая часть уравнения (448) представляет собой полную произ-
водную интенсивности потока
dq=-^~ dt-\- ^-dx=Q.
dt dx
Так как вдоль линий uw выполняется условие dq = 0, то в про-
странственно-временной плоскости вдоль линии ^значение # долж-
но быть постоянным.
Дифференцируя q = ku по k, получаем
- ^.=.uw=u + kXL. (449)
dk dk
Из уравнения (449) следует, что волновая скорость всегда мень-
ше средней, так как производная отрицательна. Наконец, точ-
dk
но таким же путем можно показать, что k и и также постоянны
вдоль линии uw.
7. МЕТОД КОНТРОЛЯ УЗКОГО МЕСТА
С теорией транспортных волн тесно связано такое понятие, как
узкое место, т. е. участок дороги, на котором пропускная способ-
ность меньше, чем на по-
следующем участке дороги.
Верхняя кривая на рис. 100,
показывающая зависимость
q от &, относится к участку
дороги, расположенному
впереди узкого места, а ниж*
няя относится к узкому мес-
ту. Если интенсивность по-
тока достигает значения
пропускной способности уз-
кого места, то скорость дви-
жения в узком месте стано-
вится значительно меньше
чем на последующем участ-
ке дороги. При дальнейшем
увеличении интенсивности
потока перед узким местом
возникает очередь автомо-
Рис. 100. Транспортный поток в узком
месте:
1 — q=f(k) для интервалов между автомобилями;
2 — пропускная способность узкого места; 3 —ско-
рость автомобилей при приближении к узкому
месту, w3; 4 — скорость автомобилей в узком ме-
сте, w2
293
билей и условия движения на этом участке смещаются из точки А
в точку С (плотность потока изменяется от k3 к й2)-
Если интенсивность движения достигает значения пропускной
способности узкого места, то скорость движения не зависит от гео-
метрических характеристик участка дороги, расположенного выше
узкого места. Поскольку продолжительность перегрузки может зна-
чительно превышать интервал, в котором транспортная нагрузка
превышает пропускную способность (рис. 101), важно принимать
меры по предупреждению перегрузок.
Для изучения соотношения между интенсивностью потока и
длительностью задержки Московиц [12] предлагает использовать
нижний график, изображенный на рис. 101. Преимущество этого
графика состоит в том, что он изображает интенсивность потока в
виде кривой, зависящей от времени, а не в виде точки, не связанной
со временем.
На этом графике число автомобилей, проезжающих через узкое
место за период максимальной интенсивности движения, изобра-
жается как некоторая функция времени. Наклон верхней кривой в
любой точке характеризует интенсивность прибытия, а наклон ниж-
ней кривой определяет уровень обслуживания, т. е. фактическую
интенсивность потока. Можно видеть, что в 7 ч 15 мин интенсив-
ность входящего потока начинает превышать интенсивность обслу-
живания. В 7 ч 45 мин интенсивность входящего потока равна
интенсивности обслуживания, а в период от 7 ч 45 мин до 8 ч интен-
сивность движения меньше интенсивности обслуживания. В 8 ч пе-
регрузка исчезла.
Теоретически длительность задержки Xj для /-го автомобиля на
графике значительно больше в 7 ч 49 мин (когда /-й автомобиль
проезжает узкое место), чем в 7 ч 15 мин или в любой другой мо-
мент между 7 ч 15 мин и 7 ч 45 мин. Используя зависимость между
скоростью и интенсивностью движения, можно сделать вывод, что
в момент 7 ч 15 мин + Д/, когда началось образование очереди,
скорость потока была близка к нулю, так как отношение интенсив-
Рис. 101. Соотношение между транспортной нагрузкой, пропускной способностью
и перегрузкой:
„ 157 авт _
г — транспортная нагрузка; 2 — пропускная способность ------=2 000 авт/ч
5 мин
294
ности к пропускной способности
в момент 7 ч 45 мин + kt очень
велика и значительно превышает
-единицу, в то время как в дей-
ствительности продолжитель-
ность задержки очень мала, что
можно видеть на графике. Мож-
но также сделать вывод и о том,
что после 7 ч 45 мин скорость бу-
дет очень высока, так как отно-
шение транспортной нагрузки к
пропускной способности меньше
единицы. График показывает, что
j-й автомобиль, прибывающий в
7 ч 45 мин, будет ожидать доль-
ше всех остальных автомобилей.
В период от 7 ч 15 мин до
7 ч 45 мин фактическая интенсив-
ность остается почти постоянной,
однако время нахождения в пути
.любого отдельно взятого автомо-
биля значительно изменяется и
длина очереди yj также меняет-
ся. Местная скорость движения
на участке дороги непосредствен-
но перед узким местом будет воз-
растать от нуля, такой поток на-
зывается напряженным. Местная
скорость в узком месте или после
него будет более равномерной во
времени и будет меняться в зави-
симости от того, на каком рас-
стоянии от узкого места ведется
наблюдение, поскольку обычно
автомобили движутся с ускорением. Если узким местом является
Рис. 102. Соотношение между транс-
портной нагрузкой и пропускной спо-
собностью у регулируемого перекре-
стка:
1 — проезд через перекресток; 2 — прибы-
тие к перекрестку; 3 — площадь, равная D;
R — длительность фазы красного сиг-
нала; G — длительность фазы зеле-
ного сигнала; Gn — длительность фа-
зы зеленого сигнала, необходимая
для ликвидации очереди автомоби-
лей; п—максимальная длина очере-
ди; q — интенсивность прибытия ав-
томобилей к перекрестку; Q — интен-
сивность проезда через перекресток;
D — суммарная длительность ожида-
ния за цикл; E(W)—средняя дли-
тельность ожидания за цикл
полоса разгона при выезде на магистраль скоростного движения, то
объем движения или интенсивность потока узкого места будут
меньше, чем объем движения или интенсивность потока в узком
месте на величину, равную объему движения или интенсивности по-
тока на примыкающем въезде, т. е. объем движения на въезде и
объем движения на магистрали в сумме дают объем движения на
магистрали за въездом.
Изображенный на рис. 101 график, показывающий зависимость
между входящим и выходящим потоками и объясняющий причины
возникновения перегрузок на дороге с наличием узкого места, ис-
пользуется также для наглядного представления движения на
регулируемом перекрестке. На рис. 102 показаны условия, сущест-
вующие на одном из направлений регулируемого перекрестка с
фиксированной длительностью сигнала при постоянной интенсив-
295
ности прибытия автомобилей q и постоянной интенсивности убытия
Q в фазе зеленого сигнала. Очевидно, что число автомобилей, при-
бывающих в течение всего цикла работы светофора, меньше про-
пускной способности в течение фазы зеленого сигнала, или
(/? + G)? <OQ. (450)
Максимальная длина очереди п на данном направлении сущест-
вует в конце красной фазы и определяется из выражения
n = qR. (451;
Очевидно, что длительность зеленой фазы Gn, необходимая для
проезда через перекресток п автомобилей, образовавших очередь,
меньше полной длительности фазы зеленого сигнала G, и симво-
лически может быть выражена как
On = -?—R, (452/
1 —р
где р — коэффициент загрузки, равный — и называемый также
Q
степенью насыщения. Общая длительность ожидания D выражает-
ся как площадь, заключенная между кривой для суммарного вхо-
дящего потока и кривой для суммарного выходящего потока
R1Q
2
Р
1 —Р
D
(453)
‘Среднее время ожидания E(w) для всех автомобилей данного
направления равно суммарной длительности ожидания, деленной
на общее число автомобилей
Е (w) =
R2
2(/? + G)(l-p)
(454)
Это соотношение между продолжительностью ожидания и ин-
тенсивностью потока установили Уэбстер [13], Миллер [14], Ньюэлл
[15] и другие исследователи для сигналов с фиксированной дли-
тельностью цикла. В полученных ими формулах первый член сов-
падает с выражением (454) и, кроме того, добавлены другие чле-
ны, учитывающие упрощающие допущения, связанные с характе-
ром входящего потока.
8. ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВХОДЯЩЕГО ПОТОКА
При изучении транспортного потока на оживленной дороге
необходимо описать движение большого числа автомобилей. Про-
должая рассматривать гидродинамическую аналогию, введенную в
данной главе, видно, что задача аналогична описанию движения
бесконечного числа частиц жидкости. Такая величина, как скорость
движения, должна измеряться в некоторой удобной системе коор-
296
динат. Обычно в механике жид-
костей используются два мето-
да анализа — метод Эйлера и
метод Лагранжа.
Исследователь может оста-
ваться неподвижным в про-
странстве и наблюдать движе-
ние жидкости через данную
точку. 1Метод исследования,
при котором задается фиксиро-
ванная неподвижная система
координат, называется мето-
дом Эйлера. При использова-
нии метода Лагранжа задает-
ся система координат, связан-
ная с движущейся частицей
жидкости; при прохождении
частицы через бесконечное
множество других точек про-
изводится измерение всех ве-
личин, связанных с движущей-
ся частицей.
Рис. 103. Иллюстрация методов исследо-
вания транспортных потоков:
t — наблюдение в данной точке (телевизион-
ное наблюдение); 2 — наблюдение в данный
момент времени (аэрофотосъемка); 3— наблю-
дение в процессе движения (движущийся
автомобиль);
А — полосы магистрали; Б — фронталь-
ная дорога
Аналогичные методы анализа можно использовать для описа-
ния транспортной системы. Эти методы исследования иллюстриру-
ются на рис. 103.
При тщательном планировании исследований измерения можно
проводить в определенный момент времени, в определенной точке
пространства или методом движущегося наблюдателя, что позво-
ляет получить по существу непрерывный охват как во времени, так
и в пространстве.
Исследования в определенный момент или определенной точке
более подходят для измерения макросвойств транспортного потока.
Метод движущегося автомобиля по своему характеру является
макрометодом и аналогичен используемому в механике жидкостей
методу Лагранжа.
При рассмотрении потока автомобилей как аналогии непрерыв-
ного потока жидкости нас интересуют главным образом три основ-
ных параметра — интенсивность (число автомобилей за единицу
времени), плотность (число автомобилей на единицу длины) и
скорость (расстояние, пройденное за единицу времени) и их изме-
нение во времени и пространстве.
С этой целью выше были описаны несколько методов наблюде-
ния за транспортным потоком.
Поскольку в действительности транспортный поток состоит из
дискретных объектов, а не является непрерывным, как поток жид-
кости, то измерение проводят для отдельных автомобилей. Необхо-
димость превратить эти дискретные измерения в требуемые непре-
297
Рис. 104. Определение интенсивности, плотности и скорости, измеряемых в неко-
торой точке
рывные характеристики привела к точным определениям последних
через первые для двух наиболее распространенных типов измере-
ний [14]: для измерений в некоторой точке пространства (рис. 104)
и измерений в некоторый момент времени (рис. 105).
Рис. 105. Определение плотности,
скорости и интенсивности, изме-
ряемых в некоторый момент вре-
мени
Важность этих определе-
ний нельзя недооценивать
для современных исследова-
ний транспортных потоков,,
когда при необходимости
данные накапливаются в не-
которой точке пространства
или в некоторый момент
времени.
Интенсивность, плотность
и скорость, рассматривае-
мые как непрерывные вели-
чины, имеют смысл только в
том случае, если берутся
средние величины.
В одних случаях пра-
вильным будет использо-
вать арифметические сред-
ние, в других — гармониче-
ские средние, а в некоторых
случаях подходят средние,
взятые по пространству, или
средние во времени (см.
рис. 104 и 105).
298
Основными характеристиками транспортного потока являются
скорость, плотность и интенсивность. Эти три характеристики зави-
сят от геометрических параметров дороги, структуры транспортно-
го потока и их комбинаций. Интерес к этим характеристикам вызы-
вается необходимостью определения специфических признаков
приближения транспортной перегрузки, которые могут затем
использоваться для регулирования с целью обеспечения макси-
мальной эффективности.
Идеальным средством наглядного представления изменений
этих характеристик во времени и в пространстве являются контур-
ные карты.
На рис. 106 показаны контурные линии интенсивностей, скоро-
стей и плотностей для трех полос движения на участке дороги про-
тяженностью 10 км в вечерний период «пик», продолжающийся 2 ч.
На этих картах по оси ординат отложено время, а по оси абсцисс —
расстояние вдоль дороги в горизонтальной плоскости.
В течение двухчасового периода «пик» были получены десять
полос аэрофотоснимков по 42 снимка в каждой полосе. Значения
скорости и плотности усреднялись по каждому из снимков. Следо-
вательно, каждая контурная карта была построена почти по 420
точкам. Как на обычных контурных картах местности линии соеди-
няют точки с одинаковой высотой над уровнем моря, так и контур-
ные линии скорости связывают точки равной скорости, а контурные
линии плотности связывают точки равной плотности.
Из контурной карты, изображенной на рис. 106, видно, что уча-
сток дороги к югу от пересечения с улицей Григгс (отметка 220)
функционирует весьма эффективно в течение всего двухчасового
периода «пик».
Однако между отметками 20 и 220 примерно в 16 ч 50 мин усло-
вия движения начинают ухудшаться и в северной оконечности
участка они не улучшаются почти до 18 ч. Можно видеть, что почти
повсеместно увеличение плотности сопровождается уменьшением
скорости.
При движении транспорта из делового центра города в вечерний
период «пик» интервал средних скоростей и интервал средних плот-
ностей заметно сужаются.
Анализ транспортных потоков — это не только выполнение
измерений и накопление фактического материала. Хотя такое иссле-
дование истинной природы и характеристик транспортного потока
является необходимым начальным этапом: процесс движения тран-
спорта по дороге настолько сложен, что простое накопление данных
немного добавляет к тому, что уже известно.
По контурным картам можно сделать вывод о том, что перегруз-
ка является наибольшей на северном участке дороги (отметка 20)
и наименьшей в южной оконечности участка дороги вблизи пере-
сечения с улицей Ревейлл. Однако точная степень перегрузки
или уровень обслуживания не известны. На контурных картах ука-
заны некоторые контрольные параметры, вычисленные методом
регрессии:
299
Рис. 106. Характеристики потока, движу
а — контуры интенсивностей; б— графики интенсивностей; в — контуры скоростей:
/ — к центральному деловому району; 2 — железная дорога; 3 — ул. Скотта; 4 — ул. Каллен;
сайд; 10—* рукав р. Брей; 11 —ул. Григгс; 12 — ул. Вудридж; 13 — ул. Ревейлл; 14 —
скорость свободного движения; 17 — оптимальная скорость; 18 — критическая скорость
скорость движения при интенсивности, равной пропускной спо*
собности (критическая скорость);
скорость при оптимальном уровне обслуживания;
оптимальный уровень обслуживания и т. д.
Эти параметры дают возможность количественной интерпрета-
ции уровня обслуживания на дороге в соответствии с определения-
ми для энергетической модели.
зоо
«щегося из деловой части города:
г — графики скоростей; д— контуры плотностей;
5 — железная дорога; 6 — ул. Дамбл; 7 — железная дорога; 3 —Телефонная ул.; Р — ул. Уэй-
критическая интенсивность (пропускная способность); /5 — оптимальная интенсивность; 16 —
9. МОДЕЛИ СИСТЕМ
В изучавшихся до сих пор моделях рассматривались главным обра-
зом события, происходящие в некоторой точке пространства или в
некоторый момент времени. При разработке планов оптимизации
работы всей дорожной системы (участок дороги протяженностью
несколько километров с движением автомобилей в одном направ-
лении) используются модели двух типов [17]. Первой из них являет-
301
ся модель для оценки транспортной загрузки у узкого места, а
второй — модель линейного программирования. В обоих моделях в
качестве контрольного параметра используется полная пропускная
способность дороги и делается попытка в каждом узком месте под-
держивать транспортную нагрузку меньше пропускной способ-
ности.
Транспортная нагрузка у узкого места дороги образуется за
счет автомобилей, въезжающих на магистраль с примыкающих
въездов, расположенных перед узким местом. Если известна интен-
сивность каждого такого потока, то можно оценить транспортную
нагрузку у узкого места. Этот метод оказался ценным при разра-
ботке планов регулирования потоков, въезжающих на магистраль
свободного движения [18].
Для анализа и планирования работы дорожной системы в уста-
новившемся режиме могут использоваться различные модели ли-
нейного программирования [19]. В простейшем случае модель имеет
следующий вид:
максимизировать
п
2^'
при условиях
п
^AjkXj<Bk, k=\,...,n, (455)
7=1
Xj^Dj, j=\, ..., /г, (456)
и
Ху>0., 7=1,..., п. (457)
В данной модели Xj — интенсивность /-го входящего потока;
Dj — транспортная нагрузка на /-м въезде; Bh—-пропускная спо-
собность &-го узкого места, а А^ — вероятность того, что автомо-
биль, попадающий на магистраль с /-го въезда, пройдет через &-е
узкое место. Построенная модель максимизирует выходящий поток
системы. Первая система ограничений требует, чтобы в каждом
узком месте дороги транспортная нагрузка не превышала полной
пропускной способности в данном направлении. Вторая система ог-
раничений требует, чтобы интенсивность входящего потока не пре-
вышала транспортной нагрузки при любом входящем потоке.
Третья система ограничений гарантирует возможность решения.
В этой модели могут быть использованы и другие ограничения:
ограничения, устанавливающие максимальную длину очереди на
всех регулируемых въездах; ограничения, уравнивающие длину
очереди на всех регулируемых въездах; ограничения гарантирую-
щие, что транспортная нагрузка не превысит пропускной способно-
сти узкого места дороги на наиболее ответственной полосе дви-
жения.
302
10. ОСНОВНЫЕ ПРОБЛЕМЫ
Необходимо проверить на практике те детерминированные модели,
которые были предложены для описания однорядного транспорт-
ного потока. После этого из большого числа рассмотренных моде-
лей следует выбрать те, которые наиболее точно описывают тран-
спортный поток на различного рода дорогах, в тоннелях, на мостах
и эстакадах с односторонним движением.
Короче говоря, необходимо проведение исследований, которые
позволили бы определить, какие математические модели транспорт-
ного потока описывают реально происходящие процессы.
ЗАДАЧИ
1. Постройте прямую г/ = а + (3х, соответствующую точкам (0; 6), (1; 7), (2; 9)
и (4; 8). Вначале нанесите эти точки на график и проведите прямую на глаз, а
затем постройте ее методом наименьших квадратов.
2. Оцените реальность следующего уравнения макросостояния:
dx с% dk
dt k дх '
Ваш ответ должен содержать не более полсотни слов.
3. Начиная с уравнения q = ku и рассматривая граничные условия, выведите
следующее уравнение состояния:
q = ukm In
uf
и
4. Контрольные автомобили А и В курсируют на участке улицы с односто-
ронним движением протяженностью 1,5 км. Автомобиль А затрачивает на поезд-
ку в 1,5 раза меньше времени, чем автомобиль В. Число автомобилей, которые
обогнал автомобиль А, на 15 больше числа обогнавших его автомобилей, а число
автомобилей, которые обогнал автомобиль В, на 10 меньше числа обогнавших
его. Определите среднее число автомобилей, находящихся на контрольном участке
во время исследования.
5. Используя данные, полученные путем аэрофотосьемки при полете над авто-
мобильной дорогой, с' помощью метода наименьших квадратов проверьте соот-
ветствие модели транспортного потока
1
и ~ ис In —
k
этим данным. Постройте кривые,
показывающие зависимости скорости от плот-
ности, скорости от интенсивности и цн-
тенсивности от плотности, нанося точки
на каждый график.
6. На дороге участок А находится
перед школьной зоной, участок В яв-
ляется школьной зоной протяженностью
400 м (действует только 15 мин), а уча-
сток С находится за школьной зоной.
Скорость, км/ч Плотность потока, авт! мин
18,5 125,5
45,2 70,2
50,4 41,8
62,8 36,6
62,9 39,6
303
Получены следующие параметры транспортного потока:
Участок А:
qa=\ 250 авт!ч,
иа = № км!ч\
Участок В:
qb = i ООО авт!ч,
иъ = 32 км/ч;
Участок С:
qc= 1 200 авт!ч,
ис = 48 км/ч.
Определите скорость ударной волны на границе участков А и В (начало
школьной зоны) и на границе участков В и С (конец школьной зоны).
Примечание. Где необходимо, используйте модель линейного потока.
7. В результате наблюдений, проводившихся у регулируемого пересечения
двух улиц с однорядным движением, находящегося вблизи университета в городе
с населением 20 тыс. чел., получены следующие данные о движении автомобилей в
направлении к университету и обратно. Начиная с 7 ч 30 мин, в каждом интервале
продолжительностью 1 мин было зарегистрировано следующее число автомоби-
лей, прибывших к перекрестку в направлении университета: 15, 19, 17, 25, 21, 32,
31, 33, 34, 36, 28, 31, 30, 29, 26, 21, 20, 15, 10, 10, 16, 14, 15, 17, 13, 18, 12, 14, 10,
16, и следующее число автомобилей, прибывших к перекрестку со стороны уни-
верситета: 15, 19, 17, 25, 21, 25, 25, 25, 25, 25, 25, 25, 25, 25, 25, 25, 25, 25, 25, 25,
25, 16, 15, 17, 13, 18, 12, 14, 10, 16. Используя эти данные: 1) в одной и той же
системе координат постройте зависимость интенсивностей входящего и выходя-
щего потоков от времени; 2) постройте зависимость суммарной интенсивности
входящего и выходящего потоков от времени; 3) постройте зависимость от вре-
мени для ожидаемой длины очереди в каждом интервале длительностью 1 мин;
4) определите максимальную длину очереди; 5) оцените пропускную способность
перекрестка в данных направлениях; 6) оцените продолжительность транспортной
перегрузки; 7) определите, в течение какого времени интенсивность входящего
потока превышает пропускную способность пересечения в данных направлениях.
8. С помощью двух аэрофотоснимков, сделанных с интервалом 1 сек, получе-
ны следующие данные о перемещении автомобилей на кольцевой дороге радиусом
64 м: 13.4; 13,4; 13,4; 20,1; 20,1; 10,05; 26,8 и 10,05 м. На основе этих данных
определите, сколько автомобилей пользуется этой транспортной развязкой
за 1 ч.
9. Определите соответствие линейной модели транспортного потока Гриншилд-
са, выражаемой как
( k \
следующим данным:
Скорость,
KMi4 74,0 90,1 77,2 67,6 36,9 91,1 14,8 27,5 23,3 47,5 40,2 51,5 57,1 58,7
Плотность
авт/км, 13,9 18,2 18,7 24,4 55,9 18,1 70,4 54,8 64,1 37,4 41,9 43,9 25,5 30,8
Постройте по точкам кривые зависимости скорости от плотности, скорости от
интенсивности и интенсивности от плотности. Каков смысл различных параметров,
получаемых с помощью этой модели?
_________________________________________________
10. Определите соответствие кривой и = и/е 111 следующим данным о ско-
рости и плотности движения, минимизируя сумму квадратов отклонений, а за-
тем найдите пропускную способность полосы дороги, для которой были получены
эти данные: & = 20, 65, 120 авт/ч; и=70, 40, 10 км/ч.
ЛИТЕРАТУРА
1. Haynes J. J. Some Considerations of Vehicular Density on Urban Freeways,
Freeway Surveillance Control Rept. 24—6, Texas Transportation Institute, Texas
A&M. University, College Station, 1965.
304
2. Green shields В. D. A Study in Highway Capacity, Highway Res.
Board Proc. 14, pp. 448—477, 1934.
3. Edie L. C. Car-following and Steady-state Theory for Non-congested
Traffic, Operations Research, vol. 9, № 1, pp. 66—67, 1961.
4. M a у A. D., A t h о 1 P., P а г к e r W., R u d d e n J. B. Development and
Evaluation of Congress Street Expressway Pilot Detection System, Highway Re-
search Board Record 21, 1963.
5. Morrison R. B. The Traffic Flow Analogy to Compressible Fluid Flow,
Advanced Res. Eng. Bull. M4056—1, Ann Arbor, Mich., 1964.
6. H a r r M. E., L e о n a r d s G. E. A Theory of Traffic Flow for Evaluation
of the Geometric Aspects of Highways, Highway Res. Board Bull. 308, 1961.
7. Reddy M. S. Quantitative Evaluation of the Effect of Merging Vehicles
on Freeway Operation, докторская диссертация, Texas A&M University, College
Station, 1966.
8. Greenberg H. An Analysis of Traffic Flow, Operations Research, vol.
7, № 1, pp. 79—89, January-February, 1959.
9. D r e w D. R. A Study of Freeway Traffic Congestion, докторская диссер-
тация, Texas A&M University, College Station, 1966.
10. W a r d г о p J. G., C h a r les worth G. A Method of Estimating Speed
and Flow of Traffic from a Moving Vehicle, Proc. Inst. Civil Engrs. (London),
pt 2, vol. 3, 1954.
11. L i g h t h i 11 M. J., W h i t h a m G. G. On Kinematic Waves, II: A Theory
of Traffic Flow on Long Crowded Roads, Proc. Roy. Soc. (London), ser. A,
vol. 229, pp. 317—345, May 10, 1955.
12. Moskowitz K., Newman L. Notes on Freway Capacity, Highway
Res. Board Record 27, 1963.
13. Webster F. V. Traffic Signal Settings, Dept. Sci. Ind. Res. Road Res.
Tech. Paper 39, London, 1958.
14. Miller A. J. Settings for Fixed-cycle Traffic Signals, Australian Road
Res. Board Proc., Melbourne, 1964.
15. Newel 1 G. F. Queues for a Fixed Cycle Traffic Light, Ann. Math. Sta-
tist., vol. 31, № 3, 1960.
16. Edie L. C. Discussion of Traffic Stream Measurements and Definitions,
The Port of New York Authority, N. Y., 1964.
17. W a 111 e w о r t h J. A*. Peak-period Control of a Freeway System: Some
Theoretical Considerations, докторская диссертация, Northwestern University,
Evanston, Ill., 1963. (См. также Rept. 9, Chicago Expressway Surveillance Project,
1963).
18. Pin n ell C., Drew D. R., Me C as land W. R., Wattle-
worth J. A. Inbound Gulf Freeway Ramp Control Study I, Texas Transportation
Inst. Res. Rept. 24—10, Texas A&M University, College Station, 1965.
19. W a 11 1 e w о r t h J. A. Estimation of Demand at Freeway Bottlenecks,
Traffic Eng., vol. 35, № 5, pp. 21—26, 1965.
ГЛАВА XII
СИСТЕМА
«ЧЕЛОВЕК-АВТОМОБИЛЬ»
При движении автомобиля определяющими являются три основных
фактора: водитель, автомобиль и окружающая среда, взаимодейст-
вующие между собой сложным образом во времени и пространст-
ве. Учитывая это, логично подойти к описанию соотношения меж-
ду воздействием (стимулом) и реакцией или описанию соотношения
между входным и выходным сигналами с точки зрения систем регу-
лирования.
Все системы регулирования удобно разделить на два основных
класса: системы с разомкнутым контуром и системы с замкнутым
контуром. Например, такая разомкнутая система, как система пус-
ка ракеты, после включения больше не регулируется. В системах
другого типа измеряют регулируемую величину; ее фактическое
значение сравнивают с требуемым значением, и если они отлича-
ются друг от друга, то выполняют определенное корректирование.
Такие системы относятся к классу систем регулирования с замкну-
тым контуром или систем с обратной связью. Следует указать на
принципиальное различие между системами этих двух классов.
Единой теории, справедливой для всех систем с разомкнутым кон-
туром, нет, между этими системами больше различий, чем сходства.
В то же время методы анализа систем с замкнутым контуром со-
ставляют единую теорию, независимо от конкретных применений.
Методы анализа таких систем используются и в теории транспорт-
ных потоков [1].
1. РЕГУЛИРОВАНИЕ С ОБРАТНОЙ СВЯЗЬЮ
Системы регулирования с обратной связью широко применяются в
современной технике. К ним относится широкий круг систем — от
простых устройств до сложной автоматической аппаратуры. В про-
стой системе с обратной связью выходной сигнал сравнивается с
входным сигналом. Такая система является самокорректирующей-
ся в том смысле, что любые отклонения от требуемой характеристи-
306
ки используются для выработ-
ки корректирующего воздейст-
вия. Примером такой системы
регулирования является до-
машний обогреватель. Вход-
ным сигналом для этой систе-
мы является установка термо-
стата. Когда разность между
температурой в комнате и по-
входной
сигнал
Выходной сигнал
Сигнал обратной
связи ,____________,
Рис. 107. Блок-схема системы с обрат-
ной связью
Ошибка .---------
казанием термостата становит-
ся достаточно велика, чувствительный элемент размыкает (или
замыкает) электрическую цепь, регулирующую работу нагревателя.
Описанную систему можно представить в виде общей блок-схе-
мы, изображенной на рис. 107. На рисунке даны обозначения наи-
более важных элементов этой системы регулирования. С функцио-
нальной точки зрения двумя наиболее важными переменными
в этой системе являются входной и выходной сигналы, обозначае-
мые г (заданное значение входного сигнала) и с (регулируемая
величина). Для обозначения фактических функций используются
прописные буквы; зависимость от времени обозначается t. Заглав-
ные буквы обычно используются для обозначения преобразований
Лапласа функций времени, при этом зависимость от комплексных
переменных обозначается $. Так, C(s) обозначает преобразование
функции времени с(/). Двумя другими переменными, играющими
важную роль при анализе систем регулирования, являются сигнал
обратной связи b(t) и ошибка е(/), которая находится вычитанием
сигнала обратной связи из выходного сигнала. Символ G обозна-
чает передаточную функцию элементов в прямой цепи контура, а Н
обозначает передаточную функцию элементов в цепи обратной свя-
зи [2].
Передаточная функция представляет собой математическое
описание отношения выходного сигнала элемента или системы ко
входному сигналу. Характеристики регулирования с обратной
связью можно выразить следующими уравнениями:
£(s)=/?(s)-/7(s)C(s);
C(s)=£(s)G(s).
(458)
(459)
Решая эти уравнения для отношения между выходным и вход-
ным сигналами, получаем передаточную функцию Т
Т =------. (460)
1 + G (s) И (s)
2. ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
В последние годы теория преобразований Лапласа, называемая
также операционным исчислением, играет важную роль при под-
готовке инженеров, физиков, математиков и других научных ра-
ботников.
307
Обозначения преобразований Лапласа были указаны в преды-
дущем параграфе. Если функция времени обозначается строчными
буквами, например /(/), то преобразование Лапласа этой функции
обозначается соответствующей заглавной буквой Е($). Тогда, по
определению, преобразование функции f(t), обозначаемое L[f(t)],
имеет вид:
L [/(/)]=^(S)= (461)
О
Известно, что логарифмы облегчают арифметические действия.
Применение преобразований Лапласа состоит в том, что их мож-
но использовать для решения дифференциальных уравнений с пере-
менной t. В этом случае уравнение относительно s можно решать
алгебраическими методами (что значительно проще), а путем об-
ратного преобразования полученного решения (что аналогично
взятию антилогарифмов) можно получить выражение относитель-
но t, которое и является решением дифференциального уравнения.
Имеются таблицы преобразований Лапласа, в значительной мере
облегчающие применение оператора Лапласа. Кроме применения
преобразований Лапласа для решения дифференциальных уравне-
ний, часто бывает легче найти преобразование Лапласа распреде-
ления вероятностей, чем само распределение, это же относится к
производящей функции моментов и производящей функции вероят-
ностей.
3. УСТОЙЧИВОСТЬ СИСТЕМЫ
Критерии устойчивости представляют большой интерес для разра-
ботчиков классических систем с обратной связью, так как во всех
таких системах возможно появление неустойчивого состояния. Для
любой системы устойчивость должна в конечном счете выражаться
через реакцию или изменение во времени некоторой переменной,
списывающей систему. Эта переменная, которой может быть линей-
ное перемещение, температура, напряжение или другая физическая
величина, зависит от входного сигнала, а также от начальных ус-
ловий системы.
Теоретически в абсолютно неустойчивых системах регулируемая
величина стремится к бесконечности (рис. 108). Разумеется, это
невозможно, поскольку для регулирования такого сигнала потре-
бовался бы источник энергии бесконечной мощности. В действи-
тельности усилители и двигатели переходят в режим насыщения,
клапаны остаются полностью открытыми, паровые котлы взрыва-
ются, а предохранительные клапаны срываются. Все это приводит
к тому, что система либо отказывает в работе и останавливается,,
либо испытывает непрерывные нелинейные колебания [1].
При исследовании систем необходимо построить математиче-
скую модель, которая бы с приемлемой степенью аппроксимации
описывала физическое явление. Как и во всей области прикладной
математики, предполагается, что математическая модель будет
308
Рис. 108. Теоретическое поведение не-
устойчивой системы:
7 — к+ оо ; 2 — к — оо ; 3 — амплитуда беско-
нечно увеличивается
Рис. 109. Положение корней в комплекс-
ной плоскости:
/ — типичная пара комплексных корней; 2—
ось чисто мнимых корней; 3 — ось действи-
тельных корней
Мнимая
часть
/I
/Ъ
Реальная чаешь
описывать реальное явление лишь в конечном интервале значений
рассматриваемых величин. Из сказанного можно вывести следую-
щее практическое правило: физически реализуемая передаточная
функция будет устойчивой в том случае, если она не имеет корней
в правой половине комплексной плоскости (плоскости s) или на
мнимой оси [3].
Передаточная функция будет неустойчивой, если она имеет кор-
ни в правой половине комплексной плоскости или на мнимой оси
(рис. 109).
Числитель передаточной функции проверяют путем приравнива-
ния его нулю. Получаемое выражение называется характеристиче-
ским уравнением.
В реальных системах, неустойчивость обычно определяется
парой сопряженных комплексных корней, соответствующих экспо-
ненциально возрастающей колебательной характеристике с
амплитудой колебаний, возрастающей по экспоненциальному зако-
ну. Соответствующая функция времени называется отрицательно
затухающей или незатухающей синусоидой. В отличие от нее экс-
поненциально убывающая периодическая функция называется
затухающей синусоидой. Уилте [2] приводит ряд доводов, показы-
вающих, что одно лишь обеспечение устойчивости системы еще не
гарантирует; что она будет удовлетворительно выполнять функцию,
для которой предназначается.
4. ЧЕЛОВЕК КАК СИСТЕМА РЕГУЛИРОВАНИЯ
Принцип обратной связи лежит в основе многих естественных яв-
лений и не ограничивается системами регулирования, созданными
человеком. Рассмотрим «процесс», когда человек указывает паль-
цем на движущийся объект. Его глаза непрерывно следят за поло-
309
жением объекта и положением указательного пальца. Если палец
не указывает правильного направления, то регулирующее устройст-
во (мозг) подает сигнал оконечным регулирующим элементам
(мышцам) на исправление ошибки.
Разработка таких современных сложных систем типа «чело-
век— автомобиль», как ракеты, космические корабли, радиолока-
ционные станции и автоматизированные производственные системы,
еще более повысила роль человека в системе с замкнутым конту-
ром. При изучении человека как элемента этой системы и при по-
пытках описать его с помощью передаточной функции оказалось,
что оператор работает аналогично следящей системе. Характерны-
ми особенностями отношения входного сигнала к выходному, рас-
сматриваемого при описании передаточных функций человека,
является то, что связано с сенсорными ощущениями (обычно
это визуально наблюдаемые сигналы) и физической реакцией
(обычно это работа органов регулирования). Разумеется, такие
переменные, как восприятие, принятие решения, время реакции и
регулирование, должны рассматриваться в рамках этой «передаточ-
ной функции человека» [4].
Вождение автомобиля является примером системы регулирова-
ния типа «человек — автомобиль» с обратной связью [5]. Входными
сигналами в этой системе являются панорама вьющейся дороги и
транспортный поток, наблюдаемые водителем через ветровое стек-
ло кабины. Индикаторы включают такие приборы, как спидометр.
Органами регулирования являются ведущее колесо, педаль управ-
ления подачей топлива и тормоза. Выходное усилие этих органов
регулирования воздействует на автомобиль, вызывая его перемеще-
ние, что и является выходным сигналом в этой системе.
Для иллюстрации применения обратной связи в системе
«водитель — автомобиль» на рис. ПО показана блок-схема, описы-
вающая регулирование скорости автомобиля. Водитель принимает
решение о движении по дороге с соответствующей скоростью (вход-
ной сигнал) и наблюдает за фактической скоростью (выходной
сигнал) по показаниям спидометра. Он мысленно оценивает соот-
ношение между наблюдаемой и требуемой скоростью (ошибка).
Если автомобиль едет слишком медленно, то водитель нажимает
на педаль управления подачей топлива пропорционально этой раз-
ности скоростей. Этим обеспечивается подача в двигатель больше-
го количества топлива, и скорость автомобиля увеличивается. Если
же последующее наблюдение покажет, что имеет место переком-
пенсация, то водитель отпускает педаль управления подачей топли-
ва и скорость автомобиля уменьшается.
5. ЗАПАЗДЫВАНИЕ
Многие реальные системы, например ректификационные колонны,
производственные линии, графики движения товаров от производи-
телей в оптовые магазины и далее в розничную торговлю, потоки
на открытых водоводах и т. п. трудно регулировать вследствие на-
310
Bcu°S -----1 Г75--?----1
шнил х-х -у । Родитель_____ЛАВтомооиль I
I W I П г
R(S)
j Спидометр
выходной
сигнал
С16)
£
Рис. НО. Блок-схема системы управ-
ления автомобилем
Рис. 111. Временная задержка и ста-
бильность в системе регулирования:
А — временная задержка
1 — идеальное регулирование; 2 — устой-
чивое регулирование; 3 — неустойчивое ре-
гулирование
личия мертвого времени или
транспортного запаздывания
[6]. Поскольку механические и
электрические процессы, хими-
ческие реакции или реакции че-
ловека не протекают мгновен-
но, то идеальное регулирова-
ние невозможно. Один конец
водовода может быть перепол-
нен либо опустошен, прежде
чем это обнаружится на дру-
гом конце. Состав или темпе-
ратура вещества на одном кон-
це трубы могут измениться,
прежде чем об этом станет из-
вестно на другом конце.
Рис. 111 служит для иллю-
страции принципа запаздыва-
ния и его связи с устойчи-
востью [5]. По оси ординат от-
ложена температура воды в
душе, а по оси абсцисс — вре-
мя. В момент t = 0 температура
имеет требуемое значение, а в
момент /=1 сек она начинает возрастать. В идеальной ситуации,
изображенной на рис. 111, человек, принимающий душ, почувствует
повышение температуры с запаздыванием во времени на 1 сек и,
проведя корректирующее действие, вернет требуемое значение тем-
пературы.
Кривая 2 значительно точнее отражает реальное положение. Во-
первых, как здесь показано, температура возрастает постепенно,
во-вторых, корректирующее действие производится постепенно
(путем поворота крана для холодной воды). Это уменьшение тем-
пературы продолжается до тех пор, пока в момент / = 2,5 сек тем-
пература не опустится ниже требуемого значения. Когда человек,
моющийся под душем, обнаруживает это, он производит коррек-
цию, величина которой пропорциональна наблюдаемой «ошибке».
Затухание кривой 2 на рис. 111 показывает, что система является
устойчивой с некоторым запаздыванием во времени в отличие от
неустойчивой системы, характеризуемой кривой 3. В последнем слу-
чае реакция на первое отклонение приводит к перерегулированию,
т. е. к еще большей ошибке противоположного знака.
Сущность запаздывания состоит в том, что величина коррекции,
которая была правильной в момент наблюдения, может оказаться
неправильной, когда в системе фактически проводится коррекция
[7]. Высокая чувствительность может приводить к быстрым измене-
ниям, которые продолжаются после того, как исчезнет необходи-
мость в них, и вследствие этого появляется ошибка противополож-
ного знака. Возьмем такой пример. Неся тарелку с супом, мы
311
стараемся смотреть на тарелку и немного наклоняем ее, чтобы не
пролить суп. Часто это приводит к неприятностям. Чем больше мы
наклоняем тарелку, чтобы не пролить суп, тем с большей силой он
может выплеснуться. Если для изменения процесса на основе на-
блюдаемого состояния применяется обратная связь, то весь процесс
может оказаться неустойчивым. Это означает, что в процессе регу-
лирования вместо уменьшения небольших отклонений относитель-
но требуемого значения могут быть получены еще большие откло-
нения.
6. ЛИНЕЙНАЯ МОДЕЛЬ СЛЕДОВАНИЯ
ЗА ГОЛОВНЫМ АВТОМОБИЛЕМ
На рис. НО видно, что вождение автомобиля по свободной дороге
является примером системы регулирования типа «человек — авто-
мобиль» с обратной связью. На дорогах с интенсивным движением
водитель в среднем в меньшей степени руководствуется соображе-
ниями, связанными с экономией времени и расстояния, чем
соображениями безопасности. Водитель оказывается в трудной си-
туации, он должен приспосабливаться к движению других автомо-
билей в потоке. Заметим, что всякий раз, когда данный автомобиль
приближается довольно близко к идущему впереди автомобилю и
не может его обогнать, он замедляет свое движение. Задача состо-
ит в построении модели, описывающей динамику транспортного
Время I, сек
Рис. 112. Основные временные и про-
странственные соотношения в транс-
портном потоке:
/—автомобиль г, 2 — автомобиль г+1; L —
интервал между автомобилями при пере-
грузке; S/4-1 — безопасное расстояние
между автомобилями; S — расстояние меж-
ду автомобилями; Т — реакция; h — интер-
вал времени между автомобилями
потока, при допущении о том, что
водители стремятся сохранять
безопасное расстояние между ав-
томобилями. Вначале поясним
такое понятие, как безопасное
расстояние между автомобилями
(safe headway).
Продвижение потока автомо-
билей, обозначаемых индексами
г=1, 2, ..., п, удобно показать на
пространственно-временной диа-
грамме (рис. 112). По оси орди-
нат откладывается расстояние %,
а по оси абсцисс — время t. Угло-
вой коэффициент кривой харак-
теризует изменение расстояния во
dx
времени ---- или скорость авто-
dt
мобиля Xi = Vi. Кривая означает,
что происходит изменение угло-
вого коэффициента, т. е. измене-
ние скорости. Это означает, что
автомобиль движется с ускорени-
ем Xi = vi. При следовании за
другими автомобилями водитель
312
4асто изменяет свою скорость таким образом, чтобы сохранялось
безопасное расстояние между автомобилями. Принцип безопасного
расстояния S;+i показан на рис. 112. Это расстояние между авто-
мобилями, которое должно поддерживаться в момент (/—Т), что-
бы избежать столкновения с впереди идущим автомобилем, если
тот резко затормозит до полной остановки:
si+1 (t - T)=Cl+1vhi и + Z(. + Tvi+i (/) - (t - T),
где Ci = a T — временная задержка.
Если предполагается, что у всех автомобилей одинакова спо-
собность торможения и одинаковы скорости движения, то, выразин
среднее безопасное расстояние через координаты и хг-, полу-
чаем
(/ - Г) - xi+i = Tvi+i (/) + (462)
Важно отметить, что формула (462) дает основу для вывода
известного эмпирического правила следования за другим автомо-
билем, а именно: при увеличении скорости на каждые 16 км/ч рас-
стояние между автомобилями должно увеличиваться на длину ав-
томобиля.
Дифференцируя выражение (462) по t, получаем
^(/-Г)-^+1(/~Г)=Г^+1(/), /=1, 2, 3, 4. (463)
С помощью уравнения (463) можно определить движение лю-
бого автомобиля, если известно движение головного [8, 9]. Чтобы
выполнить это, удобно ввести преобразование Лапласа скорости
используя следующее обозначение:
^KW] = ^(s). (464)
Выражения для скорости движения в момент t—Т можно полу-
чить, используя теорему о переносе для преобразования
L (/ - Г)] = V t (s) е~ Ts. (465)
По формуле преобразования для первой производной функции
получаем
L (/) =хs/+1 (s) — vt+i (0), (466)
где уг+1 (0) —начальные скорости автомобилей в момент / = 0.
Подставляя преобразования (465) и (466) в формулу (463),
имеем
Ts m
V/+1 (/)= -----Vt (s) +----Т—— (0). (467)
Ts + e~Ts rs + e~Ts
Уравнение (467) можно использовать для описания движения
любого автомобиля данного ряда, если задано движение головного.
Рассмотрим простой пример, когда все автомобили неподвижны
313
при t<0 и в момент t = 0 головной автомобиль начинает движение
с начальной скоростью и0.
Начальными условиями являются
Vi (Z) = tj0, t > °
или
1Л(3)=^
и
^z+1(0) = 0, /=1, 2, 3,... .
Подставляя начальные условия в формулу (467), получаем
преобразование для скорости любого автомобиля
v,-+1 ($)= ( e~TS Y . (468)
\ 7s + e~Ts J s
Уравнение (468) можно переписать в виде суммы членов геомет-
рического ряда, что облегчает обратное преобразование:
z-i/_£22_\; и >0= t>kT. (469)
\ / и — 1
Выражая формулу (469) в виде разложения в степенной ряд,
получаем нормированные скорости каждого последовательного ав-
томобиля данного ряда:
у2(/) -7 (/ — 27)2 (/ — ЗГ)___.
v0 ~~ 7 272 ‘ 6Г3 ’
Уз(О = (Z-27)2 _ (/-ЗГ)3 . (/-—47)4____ (470)
v0 272 373 874 * k '
Расстояния, пройденные автомобилями к моменту t после нача-
ла движения первого автомобиля, находим путем интегрирования
членов уравнений (470) в интервале от 0 до Л На рис. 113 рассмат-
ривается простой случай движения очереди автомобилей у регули-
руемого перекрестка [10]. Если предположить, что очередь автомо-
билей образовалась в фазе красного сигнала и через 2 сек после
появления зеленого сигнала головной автомобиль мгновенно при-
обретает скорость, равную 12 м)сек, то, согласно формуле (463),
реакция последующих автомобилей будет такой, как показано на
рисунке. Начальные промежутки времени для всех автомобилей,
следующих за головным, исходя из времени реакции Т = 1 сек, впол-
не реалистичны, однако можно видеть, что на расстоянии около
80 м от линии «стоп» четвертый автомобиль сталкивается с треть-
им. Реакция на торможение второго автомобиля возрастает по ме-
ре его выхода из очереди, и система автомобилей обнаруживает
реакцию, которую можно считать неустойчивой, несмотря на то,
что каждый отдельный автомобиль имеет ограниченную скорость.
314
7. НЕЛИНЕЙНЫЕ МОДЕЛИ СЛЕДОВАНИЯ
ЗА ГОЛОВНЫМ АВТОМОБИЛЕМ [11, 12]
В теории следования за головным автомобилем принимается допу-
щение, что транспортный поток представляет собой совокупность
пар автомобилей, когда каждый автомобиль следует за впереди
идущим автомобилем в соответствии с определенным соотношени-
ем между стимулом (воздействием) и реакцией, приближенно опи-
сывающим поведение и механику системы «водитель — автомо-
биль— дорога». Это соотношение гласит: водитель сталкиваясь с
определенной ситуацией (стимул), поступает определенным обра-
зом (реакция). Каким представляет он коэффициент своей чувстви-
тельности? Как быстро он определяет задержку реакции системы
«человек — автомобиль»? Общее уравнение для автомобиля, сле-
дующего за головным, имеет вид:
(471)
где Т— запаздывание реакции относительно стимула.
Чувствительность определяется как ---------,
[Xi(t-T)-xi+1(t-T)]m
где а — коэффициент пропорциональности.
В предыдущем параграфе было установлено условие устойчи-
вости для простого случая, когда автомобили начинают движение
после полной остановки. Эта
модель называется линей-
ной моделью следования за
головным автомобилем, так
как коэффициент чувстви-
тельности [см. уравнение
(463)] является постоянным
и в рассмотренном примере
равен Т~1.
Выбор той или иной
формы общего уравнения
(471) зависит от того, на-
сколько хорошо они описы-
вают транспортный поток.
Существуют два важных
класса таких явлений, рас-
сматриваемых в первую оче-
редь. Это устойчивость и
хар актеристики установив-
шегося потока. К -сожале-
нию, математическое иссле-
дование устойчивости на-
столько громоздко, что его
нецелесообразно проводить
Время teen
Рис. 113. Пространственно-временное соот-
ношение при следовании за головным авто-
мобилем [формула (463)]:
А — ширина перекрестка; Кр. — красный
сигнал; Зел. — зеленый сигнал; Л — линия
остановки
315
для каких-либо уравнений, кроме линейного, полученного при до-
пущении о постоянной чувствительности.
Кроме того, для многих значений чувствительности были полу-
чены довольно полные характеристики установившегося потока,
задаваемые уравнением (471). Уравнение (471) гласит, что уско-
рение автомобиля Хг-ы за время запаздывания реакции Т прямо
пропорционально скорости автомобиля xt+\ относительно впереди
идущего автомобиля Хг и обратно пропорционально расстоянию
между автомобилями Xi—Хг+ь Так как правая часть уравнения
(471) имеет вид , то интегрируя уравнение (471), получа-
у
ем [13]:
-Xz+i(/)=-aln[xz(/ — Т) — — Г)] -[-Ср т=1, (472)
и
Л-+1(/) = (-т + 1)-’а[х;(/-Г)-х,-+1(^-7)]-т+1+С2, т> 1.(473)
Постоянные интегрирования'вычисляются из условия, что ско-
рость автомобиля стремится к нулю, если расстояние между авто-
мобилями приближается к эффективной длине автомобиля L:
c1=—alnL; (474)
c2=_(_m4-l)-iaZ,-m+1, т>1. (475)
Подставляя в уравнения (472) и (473) С\ и С2, получаем:
X/+i(/) = aln {А-1 [*,•(/ — Г) — — Г)]}, пг=1; (476)
xt+1 (/) = (т - 1 )-’а {- [xz (/ - Т) - х^ i (/ - 7')]-(m-1), m > 1.
(477)
Уравнение (476) впервые получили Гейзис, Херман и Поттс [13].
Они установили, что уравнение состояния для транспортного пото-
ка можно вывести с помощью микроскопического закона следова-
ния за головным автомобилем точно так же, как уравнение состоя-
ния газа можно вывести с помощью микроскопического закона
взаимодействия молекул. Поскольку расстояние между автомоби-
лями— величина, обратная плотности k, то уравнения (476) и (477)
принимают вид:
И=а1п-Д ; (478)
и = (т— l)-1a(A7~1-Am_1), /и>1. (479)
Коэффициент пропорциональности вычисляется при u = Uf и k =
= 0. Он равен
а——1 uf, т^>\. (480)
л?-1
316
Т а б л и ц а 26
Элемент Общий случай т>1 m = 1
Уравнение движения Коэффициент пропорцио- нальности Уравнение состояния Соответствующий пара- метр макроскопической модели * а(хг-1~ хр *1 — (-Ч-1 — Xir Г / k \т— 1] q = kuf 1 — — L \ kj) J n = 2m — 3 a&i-! — xi) Xi — -rZ_l — Xi I kj \ kum ln ) n= — 1 Продолжение
Элемент щ = 3/2
Уравнение движения Коэффициент пропорцио- нальности Уравнение состояния Соответствующий пара- метр макроскопической модели * * См. табл. 25. x,) X‘~ (X^-X^ uf .. __ g(Xj_i — x,) (X;-l —x(-)2 «/
/2=0 kJ Г f k \1 4 \kj)\ n = + 1
Модель Пайпа и ее вариант, который исследовали Чандлер,
Херман и Монтролл [14], получены из уравнения (471) при т=0.
Модель Гейзиса, Хермана и Поттса для плотности потока (величи-
ны, обратной расстоянию между автомобилями) получена из обще-
го уравнения при т=1. Очевидно, что между моделью Гринберга
для экспоненциального непрерывного потока и моделью следования
за головным автомобилем, в которой рассматривается величина,
обратная расстоянию между автомобилями, существует определен-
ная взаимосвязь. Для линейной и параболической моделей непре-
рывного потока имеются аналогичные соотношения. Эти соотноше-
ния показаны в табл.26.
8. МАНЕВРИРОВАНИЕ АВТОМОБИЛЯ — НОВЫЙ ПРИНЦИП
Выше было показано сходство между макроскопическим и микро-
скопическим подходами. При первом подходе решают дифферен-
циальное уравнение движения потока и дифференциальное уравне-
ние. непрерывности, выраженные через скорость и и плотность
потока k, и находят уравнение состояния (уравнение основной по-
верхности с координатами q, и и k).
317
Рис. 114. Определение переменных при
описании маневрирования автомобиля
Для получения уравнения
состояния дифференциаль-
ное уравнение движения от-
дельного автомобиля рас-
сматривается совместно с
соответствующими гранич-
ными условиями.
Законы следования за
головным автомобилем яв-
ляются упрощенными описа-
ниями очень сложной реак-
ции на множество стимулов,
с которыми сталкивается во-
дитель. Фактически же рас-
сматриваются только два
стимула: относительная скорость движения данного и впереди иду-
щего автомобиля и расстояние между этими двумя автомобилями.
Очевидно, что водитель при движении учитывает гораздо большее
число факторов. Более реальным было бы рассматривать несколько
впереди идущих автомобилей и, возможно, автомобиль, непосред-
ственно следующий за данным. В большинстве случаев водители
непрерывно оценивают интервалы между несколькими впереди
идущими автомобилями и внимательно следят за расстоянием до
автомобиля, идущего сзади.
Формулировка уравнений движения как в случае гидродинами-
ческой модели, так и в случае моделей следования за головным ав-
томобилем одинаково хорошо соответствует следующему выраже-
нию:
xz=~c2^(x), (481)
где индекс i относится к некоторой части транспортного потока.
Если индекс i обозначает отдельный автомобиль и рассматривают-
ся только три интервала между автомобилями, то выражение (481)
описывает геометрические соотношения, показанные на рис. 114.
Очевидно, что для определения углового коэффициента fz(x)
кривой k = f(x) необходимо знать функцию k = f(x). Для определе-
ния углового коэффициента кривой можно провести ломаную ли-
нию через точки (Xi-i, ii х^ ki\ x2-+i, /гх+i), а затем вычислить
производные в точках (xz, &;).
Используя интерполяционную формулу Лагранжа для построе-
ния многочлена по точкам, получаем
/+1
f + 1 П (X— Xj)
k(x)= 2 --------kv'
П (Xv — Xj)
>2-1
(482)
j^'V-
318
Раскрывая сумму и произведения, записываем
= (X — Xj) (х — xi+1) kj A _____(л: —a:z i) {x — x^kj^x
U/-1 — Xi) (XZ_! — Xi+ i) (Xi+l — ЛГ/-1) (xi+1 — Xi)
Вычисляя производную в точке x=Xi, получаем
(Xj — Xi+1) kj^j
(Xi—1 — X[) ;£/_]_i)
(2х^ Xj+i Xj—i)kj
(Xi+l — Xi-i) (Xi+1 — Xi)
4
(Xj — Xj-.!) ki+1
(^/+1 — ^-1) (Xi+1—Xi)
(484)
Подставляя значение ki в уравнение (481) и решая его относи-
тельно с2, имеем
— x-kn
с^ =----— , (485)
k’i
где измеряемыми величинами, используемыми для нахождения
и kin, являются ускорение хг-, координата х и величина s-1, обрат-
ная расстоянию между автомобилями.
При выводе этого уравнения рассматривался данный автомо-
биль, два впереди идущих автомобиля и автомобиль, следующий
сзади. Однако, обращаясь снова к уравнению (481), видно, что мик-
роскопический подход можно расширить, полагая, что индекс i от-
носится к любой комбинации автомобилей или среднему из не-
скольких автомобилей. При усреднении по расстояниям Ах интер-
валы от Xi-i до Хг и от х^ до Хг+i становятся равными и ki в урав-
нении (484) принимает вид:
. (486)
2Дх
Среднее ускорение автомобилей в интервале Ах находится из
соотношения
4Дх
(487)
Подставляя в формулу (485) ki из соотношения (486) и X; из
соотношения (487), получаем выражение, позволяющее оценить
коэффициент чувствительности с помощью этих данных
2(^+1-йг_!)
(4S8)
9. АНАЛОГОВОЕ МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО
В определенных частных случаях транспортный поток можно ис-
следовать математическими методами. Однако если бы на основе
сложных функций, характеризующих скорость головного автомо-
биля, потребовалось выполнить полное исследование модели следо-
319
вания за головным автомобилем, то вскоре были бы получены гро-
моздкие аналитические выражения. Для решения задач, в которых
рассматриваются реальные изменения скорости головного автомо-
биля и реальные модели следования за головным автомобилем,
можно использовать электрические аналоговые устройства. Можно
построить электрические цепи, в которых распределение напряже-
ния удовлетворяет дифференциальным уравнениям, описывающим
движение транспортного потока. Вычислительное устройство мож-
но автоматизировать, исходя из детерминированной модели вожде-
ния автомобиля, описанной в предыдущих параграфах и имити-
рующей движение последовательности автомобилей в различных
условиях. Вычислительное устойство используется в основном для
исследования зависимости устойчивости транспортного потока от
движения отдельного автомобиля и групповой динамики. Второе
назначение вычислительного устройства — получение данных о
транспортном потоке в точках, промежуточных относительно фак-
тически наблюдаемых точек. Если составлена программа для вы-
числительной машины, позволяющая получить данные о движении
автомобилей, фактически наблюдаемые в известных условиях, то
варьируя эти условия, можно получить другие данные.
Линейная модель следования за головным автомобилем, полу-
ченная в параграфе 6, описывается дифференциальным уравнением
it W = kt [г>г_1 (t — Ti) - (t - Г,)],
где Vi обозначает скорость f-ro автомобиля в данном ряду, а Гг- —
время реакции водителя этого автомобиля.
При нулевых начальных условиях преобразование Лапласа имеет
вид:
sVi (5)=kiVi-1 (5) e~Tis - kiVi (s) e~T‘s;
(s + kie~Tis)Vt(s)=kiVi.i (s) e~T‘s;
V-(s) k-e~T‘s (^}e~TiS
s + kie-T‘s + ’
\ 5 /
Это преобразование вида
С G (s)
R !+□($)’
которое изображается на блок-схеме, показанной на рис. 115.
Заметим, что начальные условия равны нулю. При выводе пере-
даточной функции для моделирования на аналоговом вычислитель-
ном устройстве удобно пренебречь начальными условиями, так как
это упрощает алгебраические выкладки. Если передаточные функ-
ции определены, то включение начальных условий в программу вы-
числительного устройства несложно.
320
Будем называть эту
модель одномерной (sing-
le-sense), так как предпо-
лагается, что ускорение
/-го автомобиля зависит
только от относительной
скорости между /-м и не-
посредственно предшест-
вующим ему автомобилем
данного ряда. Весовой
коэффициент ki для каж-
дого отдельного f-го авто-
мобиля будет различным.
Эту блок-схему можно
промоделировать на ана-
логовом вычислительном
устройстве с помощью
программы, изображен-
ной на рис. 116. Если дви-
Рис. 115. Блок-схема одномерной модели
Рис. 116. Программа для моделирования
одномерной системы
Рис. 117. Блок-схема для моделирования
одномерной системы с четырьмя авто-
мобилями
жение последовательно-
сти автомобилей должно
моделироваться путем на-
бора одномерных моделей
и при этом предполагает-
ся, что скорость головно-
го или первого автомоби-
ля является функцией, оп-
ределяющей динамику движения последующих автомобилей, то ме-
ханика такого сопряжения показана на рис. 117.
Естественным обобщением рассмотренной выше модели являет-
ся многомерная модель (названная в параграфе 8 моделью манев-
рирования автомобиля), в которой ускорение /-го автомобиля зави-
сит от относительной скорости между данным автомобилем и не-
посредственно ему предшествующим автомобилем, а также от
относительной скорости между данным автомобилем и автомоби-
лем, непосредственно следующим за ним. Динамика этой ситуации
описывается следующим уравнением:
Vi W = kiP {t—Ti) — (t - 7\)] + klf +1 (/ - Tt} - vt (t - Г,)].
При допущении о нулевых начальных условиях преобразования
Лапласа имеют вид:
sVi^k^V^e-^ _klpVi(s)e-Tis +
+klfVi+1 (s) e~T‘s -kifVi (s) e~T‘s;
[S + (klp+kif)e-ri5 ] Vi (s)=^z_1(s)e-r/s ^kifVl+i(s)e-Tis.
11—338 321
Пусть kip+kif=ki, тогда
v,(S)=4^
S + ki& 1
k ~Tis
Vi-i(s)+-----ife _T Vi+i (s);
s + kte 1
^Le~Tis
l+~e~T{S
s
tLe~Tf
s_________
, ki -T-s
4- — e 1
s
Поскольку та часть передаточных функций, которая записана
перед круглыми скобками, совпадает с передаточной функцией для
одномерного случая, то члены в круглых скобках рассматриваются
как модификаторы постоянного множителя для сигналов и
VW(s).
Данный случай приводит к блок-схеме, изображенной на рис. 118,
где ki=kip-{-kif.
Многомерная модель позволяет аналогичным образом получить
входной сигнал для i-ro автомобиля
автомобиля или автомобилей данного
Поскольку рассмотренные выше
Рис. 118. Блок-схема многомерной модели
при помощи любого другого
ряда.
детерминированные модели
выражаются через скорость,
то для получения величины
перемещения необходимы
дополнительные вычисле-
ния. Для получения этой ве-
личины требуется провести
интегрирование, которое
можно легко выполнить на
Рис. 119. Моделирование для определения
абсолютного расстояния:
1 — динамика автомобиля 2; 2 — динамика авто-
мобиля 3; 3 — динамика автомобиля 4
аналоговом вычислительном
устройстве. При моделиро-
вании .могут быть заданы
два вида расстояний.
Можно проинтегрировать
скорость каждого автомоби-
ля и определить абсолютное
расстояние от некоторой за-
данной начальной точки.
Программа решения этой
задачи приведена на рис.
119. В данном случае воз-
можно введение начальных
322
перемещений, что позволяет
задать начальное положение
автомобилей.
Второй способ определе-
ния перемещений основан на
задании расстояний между
автомобилями, а не абсо-
лютного перемещения из на-
чальной точки. Для этого
определяется относительная
скорость для каждого авто-
мобиля и путем интегриро-
Рис. 120. Моделирование для определения
относительного расстояния:
1 — моделирование движения автомобиля 2; 2 —
моделирование движения автомобиля 3; 3 — мо-
делирование движения автомобиля 4
вания находится относитель-
ное перемещение. Этот принцип иллюстрируется на рис. 120.
Дх,3(0) обозначает начальное относительное перемещение i-ro и
j-го автомобилей, которые, как предполагается, находятся рядом.
Истинной причиной введения такого параметра, как расстояние,
является получение третьей формы детерминированной модели. Так
как приведенные выше выражения для скорости справедливы, ког-
да расстояние между автомобилями составляет и 3 м, и 16 км, то
полагают, что истинная динамика потока зависит также и от рас-
стояния между автомобилями. Обобщенная нелинейная математи-
ческая модель, учитывающая i-й и непосредственно предшествую-
щий ему автомобили, может принимать вид:
(/ - Г,) - vt (t - Tz)]} {ft [Xi_i (/), X( (/)]}.
Одна из таких приводившихся ранее формул [формула (471)]
представляет собой случай, когда
1—1 (/), xt (/)]-- —- .
[xz_i(O — *z(0]m
С помощью диодных генераторов функций и умножителей, име-
ющихся в электронных аналоговых вычислительных устройствах,
можно получить очень много нелинейных функциональных соотно-
шений.
10. ОПРЕДЕЛЕНИЕ ПЕРЕМЕННЫХ ДЛЯ МОДЕЛИ
СЛЕДОВАНИЯ ЗА ГОЛОВНЫМ АВТОМОБИЛЕМ
Решение различных микроскопических уравнений движения для
коэффициента пропорциональности связано с вычислением несколь-
ких переменных, описывающих реальный транспортный поток.
Можно показать, что повторное фотографирование с воздуха через
определенные промежутки времени участков дороги позволяет оп-
ределить скорости движения автомобилей, усредненные за один
интервал времени, и ускорения, усредненные за два интервала
(рис. 121). Так как линии, характеризующие положение автомоби-
П* зез
Рис. 121. Сравнение истинных и наблюдаемых переменных модели следования
за головным автомобилем с помощью аэрофотоснимков, полученных через опре-
деленные промежутки времени:
1 — автомобиль г; 2 — автомобиль г+1;
А — наблюдаемое значение Sj(t); Б — истинное значение В — истинное
значение Xj-i(t) — Xj(t)-, Г — наблюдаемое значение Xj-i(t) — Xj(t)\ Д — наблю-
Дху
даемое значение х (t 4- Т) ==.. Обобщенное уравнение:
ху (t + Г) =
Ху_1 (О —Ху (О
5у(/г
лей (координату х), непрерывны и дифференцируемы, то в интер-
вале (Л, /2) есть такая точка т, что
х(х)=х^~х^-, /1<'Г</2. (4S9)
Если теперь предположить, что скорость автомобиля изменяет-
ся равномерно, то в интервале (Л, /2) между моментами съемки
х(/) = С/-(-Ср (490)
Интегрируя функцию (490) в интервале (t\, /2), получаем
C(tl — /?)
х (/2) - х (/,) = + С^2 - / Д (491)
Подставляя в уравнение (490) т, имеем
х (г) = Сх 4- Ср
324
Для решения уравнения (489) относительно т подставляем в
уравнение (489) соотношение (491). Получаем
Разлагая числитель на множители, находим, что при условии,
выраженном уравнением (490), момент т должен находиться в
середине интервала (6, t2\.
2
Итак, обращаясь снова к рис. 121, можно получить скорости ав-
томобилей в некоторый момент т и ускорения в некотором последу-
ющем интервале T=t2—т. Длительность интервала Т равна време-
ни реакции водителя второго автомобиля.
11. ОСНОВНЫЕ ПРОБЛЕМЫ
Необходимость ослабить перегрузки, возникающие при движении
транспорта в городах, и уменьшить число дорожно-транспортных
происшествий побуждает сосредоточить внимание на применении
систем регулирования и управления. Потребность в системах регу-
лирования вызывается необходимостью поддержания непрерывного
движения на заданном маршруте; аналогично этому, управление в
определенной форме необходимо для автоматического задания ин-
тервалов между автомобилями, автоматической остановки и трога-
ния автомобилей с места, а также изменения маршрутов движения.
Частные задачи включают: оборудование автомобилей устрой-
ствами регулирования; проектирование зон перехода, где возмо-
жен въезд автомобилей в систему и выезд из нее; выбор очень
сложной системы регулирования движения, надежно функциони-
рующей при отказе отдельных ее элементов и отвечающей высоким
стандартам равномерности, включая равномерное ускорение или
замедление движения; обеспечение высокой точности трассировки
дороги для исключения вибраций при высоких скоростях движе-
ния.
ЗАДАЧИ
1. Согласно некоторой гипотетической -модели следования за головным автомоби-
лем, ускорение данного автомобиля п-рямо пропорционально его скорости относи-
тельно впереди идущего автомобиля, обратно пропорционально квадрату расстоя-
ния между этими автомобилями и прямо пропорционально его собственной ско-
рости.
Запишите эту модель в виде дифференциального уравнения
X- = f(C, Х1, Х/-1, Х/-1, х;),
где с — коэффициент пропорциональности.
325
Покажите, что решение этого дифференциального уравнения задается сле-
дующим уравнением состояния:
1 uf
k = с * 1 In -.
и
Вычислите коэффициент пропорциональности с.
2. Допустим, что возможности торможения и скорости головного и следующе-
го за ним автомобилей одинаковы. Разбившись на пары, студенты должны оце-
нить запаздывание Т, измеряя друг у друга время реакции на такой стимул, как
появление красного сигнала, и оценить интервал L между автомобилями при
максимальной плотности, наблюдая расстояния между передними частями авто-
мобилей, ожидающих у светофора или знака остановки. Каждый студент должен
построить графики для среднего безопасного расстояния как функции скорости,
используя свои результаты, рассматривая среднее для группы и используя эмпи-
рическое правило для автомобиля, следующего за головным. Сравните эти три
графика и обсудите различия между ними.
3. Рассмотрите различия между линейной и нелинейной (моделями следова-
ний за головным автомобилем, учитывая их преимущества и недостатки.
4. Каково основное различие между следованием за головным автомобилем и
маневрированием?
5. С помощью аэрофотосъемки через определенные промежутки времени были
получены следующие измерения:
Время съемки Автомобиль А у отметки* Автомобиль В у отметки
7 Ч 238+01 238+00
7 ч 02 мин 237+50 236+67
7 ч 04 мин 236+15 235+25
* Расстояние между отметками составляет 100 футов (около 30 м). Прим,
переводчика.
Используя микромодели транспортного потока, на основе этих данных опре-
делите максимальную плотность, оптимальную скорость, скорость свободного дви-
жения и пропускную способность.
6. Кратко рассмотрите приемлемость макро- и микромоделей транспортного
потока при каждом из следующих условий:
скоростная магистраль при следующих интенсивностях движения на каждой
из трех полос: на внутренней полосе — 2 000 авт!ч\ на средней полосе —
2 200 авт!ч\ на внешней полосе— 1 600 авт!ч\
участок двухрядной автомобильной дороги при интенсивности движения на
внутренней полосе — 1 100 авт[ч и на внешней полосе — 800 авт!ч при скорости
потока — 80 км[ч.
ЛИТЕРАТУРА
1. Doebelin Е. О. «Dynamic Analysis and Feedback Control», McGraw-Hill,
New York, 1962.
2. W i 11 s С. H. «Principles of Feedback Control», Addison-Wesley, Reading,
Mass., 1960.
3. Brown R. G., N i 1 s s о n J. W. «Introduction to Linear Systems Ana-
lysis», John Wiley, New York, 1962.
4. G о o.d e H. H., M a c h о 1 R. E. «System Engineering», Me Graw-Hill,
New York, 1957.
Русский перевод: Гуд Г. X., M а к о л Р. Э., Системотехника. Введение в
проектирование больших систем. М., «Советское радио», 1962.
326
5. W i 1 s о n W. E. «Concepts of Engineering System Design», McGraw-
Hill, New York, 1965.
6. T r u x a 1 J. G. «Automatic Feedback Control System Synthesis», McGraw-
Hill, New York, 1955.
7. R a v e n F. H. «Automatic Control Engineering», McGraw-Hill, New York,
1961.
8. P i p e s L. A. An Operational Analysis of Traffic Dynamics, J. Appl.
Phys., vol. 24, pp. 274—281, 1953.
9. Kometani E., Sasaki T. A Safety Index for Traffic with Linear
Spacings, Mem. Fac. Eng. Kyoto Univ., vol. 21, pt. 3, pp. 229—246, July, 1959.
10. D r e w D. R. Microscopic Models of Traffic Flow, Traffic Eng., vol. 36,
№ 8, May, 1966.
11. Gazis D. C., Herman R., Rot her у R. W. Nonlinear Follow-the-
leader Models of Traffic Flow, Operations Research, vol. 7, № 4, pp. 499—505,
July-August, 1959.
12. N e w e 11 G. F. Nonlinear Effects in the Dynamics of Car Following,
Operations Research, vol. 9, № 2, pp. 209—229, March-April, 1961.
13. G a z i s D. S., H e r m a n R., Potts R. B. Car-following Theory of
Steady-state Traffic Flow, Operations Research, vol. 7, № 4, pp. 499—505, July-
August, 1959.
14. C h a n d 1 e r R. E., H e r m a n R., M о n t г о 11 E. W. Traffic Dynamics:
Studies in Car-Following, Operations Research, vol. 6, pp. 165—184, 1958.
15. Drew D. R., Re к off M. G. «Testing and Evaluation of Deterministic
Models of Traffic Flow Derived through Theoretical Deductions and Experimenta-
tion», Texas A&M Research Foundation, Texas A&M University, College Station,
1965.
ГЛАВА XIII
ЭНЕРГЕТИЧЕСКИЙ ПОДХОД
К УРОВНЮ ОБСЛУЖИВАНИЯ
Оценка любого изменения в функционировании или конструкции
дороги требует тщательного исследования парамеров, характери-
зующих транспортный поток и дающих количественное выражение
этих изменений. Такие параметры транспортного потока, как ин-
тенсивность, плотность, скорость и длина очереди автомобилей,
использовались для получения полного количественного описания
потока, движущегося по дороге. Не вызывает затруднения измере-
ние и других параметров, например, таких, как продолжительность
поездки и длительность ожидания. Однако необходимы методы,
позволяющие сравнивать влияние различных проектов дороги и
способов регулирования движения на интенсивность потока или
уровень обслуживания.
Применительно к движению транспорта уровень обслуживания
означает качество условий движения, обеспечиваемое на определен-
ной дороге или дорожном сооружении. С уровнем обслуживания
связаны такие факторы, как скорость движения и продолжитель-
ность поездки, прерывание потока, свобода маневра, безопасность
движения, комфорт и удобство вождения автомобиля, затраты на
эксплуатацию автомобиля.
Рис. 122. Скорость и продол-
жительность движения на от-
дельных отрезках магистрали:
/ — средняя продолжительность
движения для данного отрезка; 2 —
средняя продолжительность движе-
ния для всего маршрута; 3 —сред-
няя в пространстве скорость дви-
жения для всего маршрута; 4 —
средняя в пространстве скорость
для данного отрезка
328
Для получения качественного показателя условий движения
транспортного потока было предложено много методов измерения
уровня обслуживания. Однако универсальный стандартный показа-
тель не был принят, возможно, вследствие того, что неизвестно,
какие именно параметры транспортного потока следует измерять
для определения качества условий движения.
Необходимость объективной оценки уровня обслуживания на
дороге или дорожном сооружении признается давно. В качестве
критерия при такой оценке часто используется продолжительность
поездки [5]. Однако продолжительность поездки не всегда отража-
ет истинное положение, на отдельных участках дороги и поэтому не
всегда позволяет показать наличие перегрузки и неудобства, испы-
тываемые водителем.
Например, на рис. 122 показано распределение скорости и про-
должительности поездки на последовательных отрезках автомо-
бильной магистрали Галф протяженностью 150 м каждый в одной
из поездок перед концом периода «пик». График показывает за-
держку на одном из отрезков дороги, которую нельзя обнаружить,
зная лишь среднюю продолжительность поездки. Средняя скорость
для всей поездки составила 66,8 км/ч, что свидетельствует о хоро-
ших условиях движения. Однако можно видеть, что разность ско-
ростей на отдельных отрезках превышает 48 км/ч. Кроме того, на
одном из отрезков средняя скорость движения составила только
38,6 км/ч и даже была менее 32 км/ч. Следовательно, при оценке
условий движения на основе продолжительности поездки перегруз-
ка на этом участке компенсировалась беспрепятственным движе-
нием на остальных участках дороги.
Тот факт, что неудобства, испытываемые водителем, не всегда
выражаются через продолжительность поездки, иллюстрируется
также и на рис. 123. Здесь сравниваются две поездки на участке
магистрали Галф протяженностью 1 050 м, имеющие одинаковую
продолжительность, но различное распределение скорости движе-
ния. На верхнем графике показано относительно равномерное дви-
жение, а для нижнего графика характерны резкие снижения ско-
рости, что служит признаком неудобств, испытываемых водителем.
Резкое торможение свидетельствует об опасных условиях движения
ц служит источником раздражения,
однако, как видно из рис. 123, эти
маневры не всегда влияют на про-
должительность поездки.
Критерий повышения интенсив-
ности движения, основанный на си-
стемном подходе [6], строится глав-
ным образом на максимизации вы-
ходного показателя системы. По-
скольку максимизация интенсивно-
сти движения эквивалентна мини-
мизации продолжительности поезд-
ки в пределах системы, то в этом
Рис. 123. Сравнение графиков
скорости на одном из отрезков
магистрали при одинаковой
продолжительности движения
329
€лучае продолжительность поездки также используется как показа-
тель обслуживания.
В относительно крупных системах с большими интенсивностями
движения даже небольшое сокращение продолжительности поездки
для одного'автомобиля вследствие улучшения геометрических ха-
рактеристик дороги или благодаря применению определенной про-
цедуры регулирования в масштабе всей системы может привести к
значительной экономии времени. Но будут ли одинаково оценивать
сокращение продолжительности поездки водитель и проектиров-
щик? Например, для проектировщика сокращение времени поезд-
ки на 2 мин в большой замкнутой системе может означать, что
достигнуто значительное усовершенствование системы. Однако
средний водитель может даже не заметить этого улучшения, так
как это время может составить лишь небольшую долю общей про-
должительности его поездки. Следовательно, если не обеспечивает-
ся заметное сокращение продолжительности поездки, то водитель
может сделать вывод, что затраты на усовершенствование дороги
или создание системы регулирования не были обоснованными. Од-
нако если бы, помимо сокращения продолжительности' поездки,
обеспечивалось более равномерное движение с меньшими помеха-
ми, то более вероятно, что водитель заметил бы это.
Имеются основания полагать, что водитель оценивает качество
движения по скорости, с которой он может вести автомобиль, и
равномерности движения. Гриншилдс [7, 8] предложил показатель
качества, учитывающий данные факторы. При выводе этого пока-
зателя в основу был положен тот факт, что общая скорость движе-
ния определяет продолжительность поездки, следовательно, ско-
рость пропорциональна качеству движения. Гриншилдс определяет
показатель качества движения следующим образом:
Q- —^7
As
где S — средняя скорость, км!ч\ As — абсолютные суммы отклоне-
ний скорости движения на 1 км пути; f — число изменений ско-
рости на 1 км пути; К—некоторая постоянная.
Платт [9] отмечает, что помехи со стороны других автомобилей
и средства регулирования движения раздражают водителя больше,
чем медленное движение, поскольку он вынужден делать останов-
ки. Кроме того, было установлено, что удовлетворение водителя и
его усилия не находятся в линейной зависимости от скорости, а
изменяются как сложные функции. По этим причинам Платт вклю-
чил в показатель качества, выведенный Гриншилдсом, еще два па-
раметра. В числе определяемых дополнительных показателей были
интенсивность изменения скорости, частота сброса газа, частота
включения передачи и частота торможения.
Комиссия по оценке пропускной способности дорог при управ-
лении дорожных исследований предложила принять за основу
шесть уровней обслуживания. Фундаментальная кривая, показыва-
ющая зависимость между скоростью и интенсивностью движения,
ззо
произвольно делится на шесть уровней обслуживания в зависимос-
ти от величины интенсивности и свободы маневра.
Показатели, которые разработали Гриншилдс и Платт, пред-
ставляют собой превосходное средство оценки общей эффективнос-
ти больших участков магистрали. Однако было установлено, что
изменение геометрических характеристик дороги сопровождается
изменением оптимальной скорости, интенсивности и плотности на
последовательных коротких отрезках дороги. Чтобы параметр, из-
меряющий качество движения, был связан с этими известными ко-
личественными параметрами, он должен отражать качественную
эффективность небольших отрезков дороги. Этот параметр должен
отражать не только инженерную оценку уровня обслуживания, но
и, что более важно, учитывать показатель обслуживания, рассмат-
риваемый водителем.
1. ПАРАМЕТР
В результате исследований за показатель качества движения мо-
жет быть принят параметр транспортного потока, называемый шу-
мом ускорения. Для этого имеются две причины. Во-первых, этот
показатель связан с такими тремя основными элементами транс-
портного потока, как водитель, дорога и условия движения. Во-
вторых, этот параметр по существу является показателем равно-
мерности движения. В данном параграфе будет дано определение
этого параметра и показано его применение.
На дороге с малой интенсивностью движения, не ограничиваю-
щей свободу маневрирования, водитель обычно старается ехать
равномерно с удобной для него скоростью. Однако, к сожалению,
время от времени ему приходится то увеличивать скорость, то при-
тормаживать, поэтому его скорость движения отличается от равно-
мерной. При увеличении интенсивности потока до уровня, когда
ограничивается желательная скорость движения, водитель вынуж-
ден переходить в другой ряд и увеличивать скорость, чтобы обо-
гнать автомобили, движущиеся с меньшей скоростью, что приводит
к более заметному и более частому отклонению скорости от равно-
мерной. Можно считать, что изменение ускорения во времени но-
сит случайный характер, и по существу ускорение распределено по
нормальному закону [10]. Равномерность движения можно описать
величиной, характеризующей отклонение отдельных случайных зна-
чений ускорения относительно среднего ускорения. Такой величи-
ной является среднее квадратическое отклонение ускорения.
Шум ускорения (т. е. среднее квадратическое отклонение уско-
рения) можно рассматривать как отклонение скорости автомобиля
от равномерной или принять за показатель равномерности движе-
ния. Термин шум используется, чтобы показать, что нарушение
равномерности движения сравнимо с шумами видеосигнала, вызы-
вающими, например, помехи на экране телевизора.
Ускорение автомобиля можно либо непосредственно измерять
при помощи акселерометра, либо приближенно оценить по графику
331
Рис. 124. Распределение уско-
рений при незначительных от-
клонениях от равномерного
движения
Рис. 125. Распределение ускорений при
больших отклонениях от равномерного
движения
для зависимости скорости от времени при движении автомобиля.
Этот последний метод подробно объясняется в последующих пара-
графах данной главы.
Распределение ускорений автомобиля, который на протяжении
всей поездки сохраняет почти равномерную скорость, показано на
рис. 124. При более значительных отклонениях от равномерной ско-
рости может быть получено распределение ускорений, изображен-
ное на рис. 125. Шум ускорения изменяется в зависимости от вели-
чины и частоты увеличения и снижения скорости. Чем более резки-
ми и более частыми являются эти маневры, тем больше шум.
Поскольку резкое торможение оказывает существенное влияние на
шум ускорения, то этот параметр также характеризует потенциаль-
но опасные условия движения.
Одним из наиболее важных элементов, влияющих на характе-
ристики транспортного потока, является водитель. Вследствие мно-
жества внешних и внутренних факторов, оказывающих влияние на
принимаемые им решения [14], оценка его поведения в транспорт-
ном потоке представляет наиболее сложную задачу.
Шум ускорения является важным параметром, помогающим
оценить поведение различных водителей в транспортном потоке с
точки зрения потенциальной опасности. Поскольку данный пара-
метр зависит от увеличения или уменьшения скорости движения, то
неосторожный водитель, пытающийся ехать со скоростью, превы-
шающей скорость потока, будет резко и, по-видимому, часто увели-
чивать и снижать скорость, поэтому он будет испытывать значи-
тельно больший шум ускорения, чем водитель, которого устраивают
существующие условия движения.
Можно предположить, что если бы водитель управлял автомоби-
лем на идеальной дороге, не испытывая воздействия транспортного
потока, то шум ускорения был бы равен нулю. Однако опыты, про-
веденные на испытательном полигоне фирмы «Дженерал моторе»»
когда четыре автомобиля пытались сохранять постоянную скорость
движения в интервале от 32 до 96 км/ч, показали, что шум ускоре-
ния составляет 0,10 ж/сек2. Очевидно, что хотя в идеальных услови-
ях водитель и старается сохранять постоянную скорость, все же
это ему не удается.
332
В других экспериментах [11] с участием тех же водителей при
отсутствии воздействия со стороны других автомобилей потока, но
на дорогах с изменяющимися геометрическими характеристиками
был получен более высокий шум ускорения. Эксперименты, прове-
денные в Голландском тоннеле Нью-Йорка, показали, что шум ус-
корения здесь составляет 0,22 м!сек2, а предварительные исследо-
вания движения на загородных дорогах с плохим покрытием, име-
ющих повороты и изгибы, показали, что здесь шум почти в 2 раза
превышает данную величину. Увеличение шума в тоннеле объясня-
ется сужением полос, искусственным освещением и стесненными
условиями движения. Джонс и Поттс [13], исследуя движение на
загородных дорогах, получили значения шума ускорения, лежащие
в интервале от 0,24 до 0,43 м)сек2, В этом исследовании для дорог
более совершенной конструкции были получены меньшие значения
шума.
Шум ускорения, наблюдаемый при отсутствии движения транс-
порта, называется естественным шумом, свойственным данной до-
роге [11]. Основываясь на приведенных выше результатах, можно
считать, что шум ускорения, испытываемый на некоторой дороге
при отсутствии движения, равен естественному шуму на идеальной
дороге, умноженному на некоторый коэффициент. Появление этого
коэффициента можно приписать в основном геометрическим харак-
теристикам дороги.
Сравнение значений шума ускорения на одинаковых дорогах
позволяет определить, оказывают ли конструктивные особенности
дорог одинаковое влияние на транспортный поток. Другими слова-
ми, сравнение значений шума ускорения позволяет определить, ка-
кое влияние на равномерность движения оказывают различия в
геометрических характеристиках дорог аналогичного класса. Мож-
но ожидать, что дороги с наименьшим шумом ускорения характе-
ризуются более высоким уровнем обслуживания.
Не менее важно и то, как изменится характер данного парамет-
ра при сравнении равномерности движения до и после изменения
геометрических характеристик дороги или дорожного сооружения.
Установлено, что вследствие свойственных каждой конструкции
особенностей дорога имеет естественный шум ускорения, превыша-
ющий по величине естественный шум почти идеальной дороги.
Любое усовершенствование конструкции, по-видимому, можно оце-
нить количественно, определив, насколько шум ускорения реаль-
ной дороги приближается к шуму ускорения идеальной дороги.
Другими словами, при проектировании дороги можно попытаться
минимизировать шум ускорения, если этот параметр является коли-
чественным показателем.
Третьим фактором, влияющим на величину шума ускорения, яв-
ляется транспортная перегрузка. Результаты предварительных ис-
следований [13] пригородных дорог показали, что при увеличении
перегрузок шум возрастает вследствие более высоких интенсивнос-
тей движения и наличия автомобилей, стоящих на обочинах дорог.
Превышение шума ускорения над естественным шумом, характер-
333
ним для данной дороги, по су-
ществу обусловлено условиями
движения.
Хотя для оценки перегруз-
ки используются такие показа-
тели, как длительность остано-
вок или время ожидания, эти
показатели не всегда позволя-
Рис. 126. График изменения ускорения ют получить удовлетворитель-
но времени ную ,Оц.енКу перегрузок. Ре-
зультаты исследований [13] на
пригородной дороге, проходящей мимо торгового центра и характе-
ризующейся высокой интенсивностью дорожно-транспортных про-
исшествий (50 происшествий на 1 млн. км пробега), показали, что
длительность остановок составляет 7 сек на 128 сек пребывания в
пути. Однако шум ускорения в период «пик» составил здесь
0,44 м!сек2 по сравнению с 0,23 м!сек2 для периода менее интенсив-
ного движения. Такое сравнение, безусловно, позволяет лучше оце-
нить степень перегрузки.
2. МАТЕМАТИЧЕСКИЕ ЗАВИСИМОСТИ ДЛЯ
ШУМА УСКОРЕНИЯ
Далее следует вывод уравнения, которое использовали Джонс и
Поттс [13] для приближенного описания шума ускорения. Если
v(t) и a(t)—соответственно скорость и ускорение автомобиля в
момент /, то среднее ускорение автомобиля за поездку длительно-
стью Т имеет вид
т
у а (г) ~ v (0)Ь
о
Среднее квадратическое отклонение для п случайных величин
Xi, Хг,хп обозначается $ и определяется как
где х — среднее значение случайной величины х.
Из рис. 126 видно, что если a(ti) обозначает ускорение автомо-
биля в момент ti, то квадрат разностей между произвольным зна-
чением ускорения и средним ускорением обозначается как
[а(/г)-аср]2.
Суммируя эти разности по времени Т, получаем
т
f [а(6)-ас₽М-
334
т
Число значений t в выборке равно ^/z=7\
2=0
выражение для шума ускорения запишется в виде
Следовательно,
(493)
и
т
^-^{a^-a^dt. (494)
о
Раскрывая выражение (494), получаем
°2=у- J [« (Л)]2 dt — у- J 2а (/z) ас' dt + у- j а2Р dt-,
о о о
°2=у- j [«(Л-)]2 dt - 2<zcpy- a (ft) dt - «сР;
О о
т
°2=-у J [a М2dt - 2а2р 4-асР;
О
°2=y-J[a(/z)]2af/-acp.
о
(495)
Значение о2 можно оценить, аппроксимируя выражение (495):
/=о
где Уо и Vt — начальная и конечная скорости соответственно.
Если в течение всего эксперимента берется постоянное значение
АЛ равное, например, 3 км/ч, то
т
1=0
(496)
где п — число изменений скорости на 3 км/ч за время АЛ
Если конечная скорость совпадает с начальной, то среднее ус-
корение равно нулю и второй член в формуле (496) опускается.
Если шум ускорения измеряется на участке дороги, имеющем боль-
335
шую протяженность, где значение Т очень велико, то второй член
очень мал и им можно пренебречь [13]. Таким образом, для относи-
тельно продолжительных поездок
g2z-(M2 VI п2
Т ‘
1 = 0
Если Д/ измеряется для каждого последовательного изменения
скорости, равного 3 км1ч> т. е. п=1, то приближенная формула для
шума ускорения, выведенная Джонсоном и Поттсом [13], принима-
ет вид
1
г т 1 2
- . («7)
i=0
Если о выражается в фут!сек2, то формула (497) принимает
вид:
1
Г Г -1 2
„= (1.465ЯД02 уд , (498)
где v имеет размерность миля/ч, а Т и t — измеряются в секундах.
Если образуется транспортный затор, то ускорение равно нулю.
Поскольку ситуация такого рода уменьшает значение о, даже если
она раздражает водителя и нарушает его планы, о измеряется
лишь в том случае, когда автомобиль находится в движении, по-
этому Т рассматривается как время, в течение которого автомобиль
находится в движении.
Если при движении автомобиля по дороге непрерывно записы-
вается его скорость как функция времени, то шум ускорения мож-
но определить по формуле (498). Для каждого измерения скорости
на величину Ао, например, равную Зкм!ч, с графика снимается зна-
чение А/, и величина ~ может суммироваться за интервал Т.
3. КОЛИЧЕСТВО ДВИЖЕНИЯ. КИНЕТИЧЕСКАЯ ЭНЕРГИЯ
Основное различие между жидкостями и газами состоит в том, что
жидкости практически несжимаемы, а газы сжимаемы. Для одно-
рядного потока автомобилей можно обнаружить поразительную
аналогию с потоком сжимаемого газа, движущимся через канал
постоянного сечения. Оба потока содержат дискретные элементы
(молекулы в случае потока газа и автомобили в случае транспорт-
ного потока).
Лайтхилл и Уитхэм [14], а затем Ричардс [15] применили прин-
ципы газодинамики к процессам, происходящим при движении
336
транспортных потоков, и пришли к выводу, что нарушения непре-
рывности в транспортном потоке распространяются аналогично
ударным волнам в сжимаемых газах. Гринберг [16] провел газоди-
намическую аналогию еще дальше и разработал функциональные
соотношения для основных взаимодействий между автомобилями.
Герман и Поттс [17] подчеркивают макроскопический характер па-
раметров транспортного потока — числа автомобилей, интенсивнос-
ти и плотности движения, обращаясь к таким аналогичным свойст-
вам газов, как давление, объем и температура. Давление можно
вычислить, зная среднее число соударений молекул о стенки сосуда
за большой промежуток времени. Аналогично тому, как соотноше-
ние между давлением, объемом и температурой называется урав-
нением состояния газа, соотношение между интенсивностью и плот-
ностью транспортного потока называется уравнением состояния
транспортного потока.
Вследствие возросшего в последние годы интереса к газовым
потокам высоких скоростей широкое распространение в газодина-
мике получил безразмерный параметр, называемый числом Маха.
Число Маха определяется как отношение скорости потока к ско-
рости звука в условиях, где измеряется рассматриваемая ско-
рость. В сжимаемых потоках местная скорость звука соответствует
условию максимального потока через единицу площади [18], анало-
гично критическая скорость транспортного потока соответствует
оптимальной скорости ит или скорости транспортного потока, рав-
ной пропускной способности qm.
Аналогию между газодинамикой и динамикой транспортных по-
токов можно проводить, по-видимому, бесконечно. Например, ана-
логично тому, как уравнение состояния газа можно вывести из
микроскопического закона взаимодействия двух молекул, уравне-
ние состояния транспортного потока можно вывести из микроскопи-
ческого закона следования за головным автомобилем, описываю-
щего движение двух автомобилей [19].
Скорость движения волн, вызываемых непрерывными изменени-
ями интенсивности потока автомобилей, равна производной уравне-
ния (429), определяющего зависимость между q и k. Разрывы
непрерывности в транспортном потоке распространяются аналогич-
но ударным волнам в сжимаемых газах. Скорость ударной волны U
определяется наклоном хорды, соединяющей две точки на кривой
зависимости интенсивности потока от плотности, которые характе-
ризуют условия впереди и сзади ударной волны. Применение теоре-
мы о среднем показывает, что скорость ударной волны приближен-
но равна среднему значению скоростей волн, входящих в нее с
обеих сторон:
^=у(^+^2). (499)
Очень сильная аналогия между транспортным потоком и пото-
ком газа показывает, что на поверхности ударной волны транспорт-
ного потока должны выполняться условия непрерывности количест-
12—338 337
ва движения и энергии точно так же, как уравнения динамической
совместимости должны выполняться в газовой динамике. Умножая
уравнение (410) на и, а уравнение (415) на k и суммируя эти ре-
зультаты, получаем
Г £п+2£2 -
— I ^112 4“ ТГ"
д (ku) __ [______(п + 2) _
dt dx
(500)
Уравнение (500) представляет собой закон сохранения количе-
ства движения, выраженный в дифференциальной форме примени-
Таблица 27
Характеристика Гидродинамическая система Транспортная система
Непрерывность Дискретная единица Переменные Уравнения: непрерывности движения количества движе- ния состояния Параметры Одномерный поток сжи- маемой жидкости Молекула Плотность р Скорость V д? д(ру) dt dx dv с% dp — +— -~=о dt р dx d(pv) +д(ру2+ рс2)_0 dt dx Р—с^Т Критическая скорость vc Критический поток Qc Количество движения рц Кинематическая энергия pv2 Внутренняя энергия 8 Коэффициент трения f Однорядный транспорт- ный поток Автомобиль Плотность k Скорость и dk d(ku) dt dx du, n.„ dk + cW —- = 0 dt dx d(ku) dt + . L (» + 2)J
+ =u dx q — ku Критическая скорость um Критическая плотность km Интенсивность, равная пропускной способно- сти qm Интенсивность ku Кинетическая энергия aku2 Оптимальная скорость Um' Оптимальная плотность km' Оптимальная интенсив- ность qm' Внутренняя энергия а Естественный шум вп
зза
тельно к транспортному потоку. Сравнивая уравнения (410) и
(500) с классическими формулами гидродинамики, можно обнару-
жить и другие соответствия между величинами, характеризующими
поток газа или жидкости, и величинами, характеризующими транс-
портный поток. Эти соответствия показаны в табл. 27.
Очевидно, что уравнения непрерывности, движения и количест-
ва движения для обеих этих систем будут одинаковы, если показа-
тель пропорциональности п принимается равным —1. В классичес-
ких системах уравнение сохранения количества движения выражает
форму количества движения, аналогично величина ku в формуле
(500) определяется как количество движения транспортного пото-
ка. Если количество движения транспортного потока равно ku, то
очевидно, что эта величина эквивалентна потоку и что рассмотрен-
ные в предыдущем параграфе параметры, характеризующие поток
(wm,z km и qm), основаны на оптимизации количества движения.
Из основ гидромеханики известно, что кинетическая энергия не-
которого элемента жидкости равна . Однако если рассматри-
вается движение жидкости в открытых каналах, то кинетическая
энергия потока не будет равна , так как в различных частях
потока скорость различна, и зависимость скорости от кинетической
энергии будет нелинейной функцией. В этом случае необходимо ис-
пользовать поправочный коэффициент а, и кинетическая энергия
транспортного потока будет определяться как aku2, где а — безраз-
мерный коэффициент. Возводя в квадрат обе части уравнения
(429), и деля на k, получаем
(и + 1)
п>-1. (501)
Критическую глубину потока у в открытом канале можно найти,
оптимизируя удельное количество движения М, либо удельную
энергию Е и полагая —=0, либо —=0. Дифференци-
dE
руя уравнение (501) по плотности и скорости и полагая — —
dk
dE п
= —=0, находим соответствующие «энергетические» параметры:
du
2
k’m=(n + 2)(n+i)kh /г> —1; (502)
/ п + 1 \ 1 U tn — — U f, ft 2^* 1 *, п 4-2 7 (503)
qtn=k}num (504)
и Ещ = ^kfnUm» (505)
12* 339
Рис. 127. Соотношение между основными переменными и параметрами транспорт-
ного потока:
п+1 '
Сравнение формул (430) и (431) с формулами (502) и (503)
показывает, что для транспортного потока, в отличие от потока жид-
кости в открытом канале, параметры, получаемые при оптимиза-
ции количества движения, не эквивалентны параметрам, получае-
мым при оптимизации энергии. Смысл этого факта будет пояснен
при рассмотрении уровня обслуживания. Соотношение между ос-
новными переменными и параметрами, характеризующими транс-
портный поток, приведено в табл. 27 и показано на рис. 127.
4. ВНУТРЕННЯЯ ЭНЕРГИЯ
Аналогично закону сохранения массы, закон сохранения энергии
гласит, что в пределах данной системы или контрольного сечения
энергия не создается и не уничтожается, хотя она может существо-
вать в различных формах (кинетическая, потенциальная, внутрен-
няя энергия и т. д.) и может превращаться из одной формы в дру-
гую. Энергия существует в формах, связанных с данной массой
(кинетическая энергия), или в таких переходных формах, как тепло
и работа (внутренняя энергия).
В классической динамике общее уравнение энергии связано
лишь с изменениями количества и формы энергии, поэтому необхо-
димо рассматривать лишь те формы энергии, которые испытывают
изменения в данной системе. По этой причине при рассмотрении
закона сохранения энергии в транспортном потоке нас, безусловно,
340
не будет интересовать химическая, электрическая или атомная
энергия.
Кинетическая энергия aku2 является энергией движения транс-
портного потока. Если в транспортном потоке происходит потеря
внутренней энергии, то она должна выражаться через потерю дви-
жения или ошибочное движение вследствие неудовлетворительных
геометрических характеристик дороги или неблагоприятных взаи-
модействий между автомобилями потока. Показателем неравномер-
ности движения является шум ускорения. Как кинетическая энер-
гия, так и шум ускорения имеют размерность ускорения, что усили-
вает правдоподобность,гипотезы, согласно которой шум ускорения
представляет внутреннюю энергию.
Для транспортного потока, находящегося на некотором отрезке
дороги х, закон сохранения энергии состоит в том, что общая энер-
гия Т равна сумме кинетической энергии Е и внутренней энергии /
транспортного потока. При таких обозначениях закон сохранения
энергии принимает вид:
Г = £’4-/; (506)
7 —a&zz24-cj, (507)
где о обозначает шум ускорения для автомобиля на отрезке доро-
ги длиной х.
Обычно говорят, что вследствие трения в системе происходит по-
теря энергии независимо от того, рассматривается классическая
система или транспортная система. Общее уравнение энергии пока-
зывает, что если закон сохранения энергии справедлив, то потери
энергии в системе отсутствуют. Изучение уравнения энергии дает
ключ к отысканию истинной величины трения. В действительности
энергия не теряется; она просто превращается из одной механиче-
ской формы (кинетическая энергия? во внутреннюю (тепловую)
энергию. Из второго закона термодинамики известно, что механиче-
ские формы энергии (например, кинетическая энергия) более по-
лезны, чем эквивалентное количество тепловой (или внутренней)
энергии. Это, безусловно, справедливо и в случае транспортного по-
тока. Таким образом, можно сказать, что силы трения (т. е. неудов-
летворительные геометрические характеристики и взаимодействие
между автомобилями) превращают желательные формы энергии
(движение транспорта) в менее полезные формы (взаимодействие
между автомобилями).
При оценке параметров Тиа, входящих в уравнение (507),
важную роль играют два граничных условия. Когда внутренняя
энергия приближается к нулю, кинетическая энергия стремится к
общей энергии потока и
Т п=Л. (508)
12*»_338
341
Превращение энергии из одной формы в другую приводит к сле-
дующему выражению общей энергии через шум ускорения:
Т^тах, (509)
где отах — максимальный шум ускорения.
Приравнивая выражения (508) и (509), можно выразить а как
a==(fyx)-i, (510)
где
Здесь х измеряется в футах. Интуитивно это должна быть длина
отрезка дороги, на котором усредняется шум ускорения. Экспери-
менты, в которых получены такие значения параметров, как
Отах~0,6 м/сек2, км/ч для х=150 м, подтверждают такое
объяснение. Величина а имеет следующий смысл: это обратное
значение максимально возможного числа автомобилей на отрезке
магистрали длиной х. Такое определение представляется логичным.
Уравнения (506) и (507) показывают, что внутренняя энергия пото-
ка оценивается по одному среднему автомобилю, в то время как
кинетическая энергия оценивается по всему потоку. Параметр а
служит для коррекции значений Е и I с тем, чтобы они в сумме со-
ставили общую энергию Т, количество которой постоянно. Это ус-
ловие соответствует принципу, согласно которому энергия не созда-
ется и не уничтожается.
Шум ускорения есть среднее квадратическое отклонение измене-
ний скорости. Вид функции o=f(«) можно определить с помощью'
выражений (507) и (509):
— °max &kU2. (512)
Из соотношения (429) следует, что
2
/ и \<л+1)
k = kj( 1- —) . (513)
\
Подставляя соотношение (513) в формулу (512) и дифференци-
руя (512) по и, получаем скорость движения ит', при которой шум
ускорения или потери энергии минимальны:
n + \-uf, п> — 1. (514)
Это выражение совпадает с формулой (503) для скорости, максими-
зирующей кинетическую энергию транспортного потока. Например,
полагая в формуле (513) п = 1 и подставляя в (512) полученное
выражение для k, получаем
« = ^max— a.kjll2-\-a.kj — . (515).
иГ
342
Оптимальная скорость определяется из условия -^-=0:
‘ du
2
Um — Uf*
о
Наконец, используя формулы (514) и (512), находим
(516)
Известно, что общий измеряемый шум ускорения от включает
шум, обусловленный взаимодействием автомобилей потока Of, и
естественный шум о^, обусловленный геометрическими характери-
стиками дороги. Естественный шум можно определить либо с
помощью измерений, проводимых контрольным автомобилем в ус-
ловиях, когда отсутствует взаимодействие между автомобилями
(например, в 3 ч ночи), либо путем подбора линии регрессии для
зависимости шума ускорения от скорости, позволяющей определить
tfmin. Соотношения между выведенными здесь параметрами пока-
заны на рис. 128.
Значение построенной модели для внутренней энергии и шума
ускорения состоит в том, что она позволяет оценить все параметры,
приведенные в табл. 27 и на рис.
могут быть получены конт-
рольным автомобилем, обо-
рудованным спидометром с
записью показаний. В после-
дующих параграфах рас-
сматриваются методика ис-
следования, обработка дан-
ных и применение модели.
4
5. МЕТОДЫ ИССЛЕДОВАНИЯ \
С*
Известно, что метод движу- §
щегося наблюдателя позво-
ляет точно определить сред-
нюю скорость транспортно-
го потока. Этот метод мож-
но также применять для из-
мерения шума ускорения
при допущении о том, что ус-
корения контрольного авто-
мобиля также соответствуют
в среднем ускорениям по-
тока.
При исследованиях шу-
ма ускорения используются
два различных метода реги-
страции данных, необходи-
Рис. 128. Соотношение между шумом
ускорения и скоростью для энергетиче-
ской модели:
Of — <т=сг niax— aku2, где
12***
343
мых для вычисления этого параметра. В одном из исследований
фотографировали показания акселерометра, установленного на
контрольном автомобиле, и значение о определяли путем анализа
зависимости ускорения от времени. Другие исследователи [13], счи-
тая, что данный метод требует слишком больших затрат времени,
использовали тахограф для регистрации скорости контрольного
автомобиля в процессе его движения в транспортном потоке. Для
вывода приближенной формулы шума ускорения использовались
основные уравнения движения.
Применение тахографа имеет ряд преимуществ, однако для ис-
следования транспортных потоков вполне подходит спидометр с
записью показаний, выпускаемый фирмой «Эстерлайн-Ангус». За-
писывающее устройство соединено с трансмиссией автомобиля,
поэтому может быть построен непрерывный график скорости дви-
жения.
Кроме записи скорости, регулируются также «особые» собы-
тия, которые фиксируются путем отклонения вверх или вниз пера,
записывающего скорость. Это делается для отметки определенных
опорных точек дороги. Например, это может быть середина раз-
вязки в разных уровнях. Регистрация этих точек производится вруч-
ную при помощи переключателя, соединенного с регистратором
скорости. Кроме пера, записывающего скорость, имеется еще одно
перо, автоматически делающее отметки через каждые 30 м прой-
денного пути. По этим графикам скорости, построенным при помо-
щи контрольного автомобиля, используя формулу (498), легко оце-
нить шум ускорения. На график скорости накладывается трафа-
рет из прозрачного материала со шкалой с делениями через 1,0 сек,
позволяющей определить А/ с точностью до 0,5 сек для каждого
значения Ап.
Значения ~ могут накапливаться вычислительным устройством
для всего исследуемого участка дороги. Следовательно, этот метод
обеспечивает быструю обработку данных.
Следует заметить, что измерение значений о на нескольких пос-
ледовательных коротких отрезках дороги по сравнению с измере-
нием шума на всей длине исследуемой дороги имеет по крайней ме-
ре два важных преимущества.
Во-первых, можно легко определить те места, где возникают
затруднения вследствие неудовлетворительной геометрии или нали-
чия транспортных перегрузок. Измеряя o' на нескольких коротких
отрезках дороги, можно выделить места, вызывающие затрудне-
ния, и впоследствии исследовать их более детально.
Во-вторых, если о можно связать с такими параметрами, как
скорость, интенсивность или плотность движения, каждый из кото-
рых имеет различное значение на различных отрезках дороги, то
важно измерять и шум ускорения также на коротких отрезках
дороги.
344
6. ОЦЕНКА ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ДОРОГИ
Такое понятие, как уровень обслуживания, связано с качественной
характеристикой условий движения, .включая безопасность и удоб-
ство движения. Джонс и Поттс [13] показали, что увеличение шума
ускорения на загородных дорогах обусловлено тем, что они имеют
много поворотов и изгибов.
Очевидно, что если исходить из безопасности и удобства движе-
ния, то высокий шум ускорения на этих дорогах свидетельствует об
очень низком уровне обслуживания.
На магистрали Галф измерялся естественный шум ускорения с
целью определить степень отклонения от равномерного движения
за счет естественных изменений скорости водителем при отсутст-
вии транспортного потока. Естественный шум ускорения на всей
длине дороги составил 0,12±0,01 м/сек2. Даже если бы дорога име-
ла постоянный уклон, то естественный шум не мог существенно пре-
высить шум, измеренный на почти идеальном полотне дороги
(0,1 м/сек) [11]. Однако эта величина шума может ввести в заблу-
ждение, если прямолинейные участки достаточно длинны и позво-
ляют ослаблять влияние геометрических характеристик дороги.
Естественный шум ускорения был определен на каждом из после-
довательных отрезков магистрали длиной 150 м. Результаты, по-
казаны на рис. 129.
Рис. 129. Естественный шум ускорения:
1 — к центральному деловому району; 2— железная дорога; 3— ул. Скотт; 4 —ул. Каллен;
5 —железная дорога; 6 — ул. Дамбл; 7 — железная дорога; в —Телефонная ул.; 9 — ул. Уэй-
сайд; 10 — рукав р. Брей; П —ул. Григгс; 12 — ул. Вудридж; 13 — ул. Ревейлл;
А — 95-процентные доверительные пределы
345
Каждая показанная на схеме дорога, пересекающая магистраль
или проходящая под нею, представляет собой место, где магист-
раль имеет определенный уклон, кроме двух мест. Дорога Дамбл
не имеет продолжения и поэтому не проходит под магистралью.
Кроме того, рукав р. Брэй проходит под магистралью на зна-
чительно более низком уровне. В местах пересечения остальных
дорог уклон магистрали составляет от 1 до 5%. Отмечено, что на
горизонтальных участках магистрали значение приблизительно
равно нулю. Однако на уклонах магистрали наблюдается увеличе-
ние шума. Проведенное впоследствии исследование зависимости
шума ускорения от уклонов дороги позволило получить статистиче-
ски значимые результаты.
7. ШУМ УСКОРЕНИЯ, ОБУСЛОВЛЕННЫЙ
ВЗАИМОДЕЙСТВИЕМ МЕЖДУ АВТОМОБИЛЯМИ ПОТОКА
Чувствительность такого параметра, как шум ускорения, показа-
на на рис. 130. Сплошная кривая характеризует нормальное дви-
жение на внутренних полосах магистрали Галф в утренний период
«пик». Пунктирная кривая показывает результаты одного из мно-
гочисленных исследований по программе наблюдения и регулиро-
вания движения на примыкающем въезде. Очевидно, что при регу-
Рис. 130. Графики шума ускорения в 7 ч 30 мин-.
/ — к центральному деловому району; 2 — железная дорога; 3 —ул. Скотта; 4 — ул. Каллен;
5 —железная дорога; б —ул. Дамбл; 7 — железная дорога; 8 — Телефонная ул.; 9 — ул. Уэй-
сайд; 10 — рукав р. Брей; 11 —ул. Григгс; 12 — ул. Вудридж; 13 — ул. Ревейлл;
А — до исследования; Б — исследование регулирования движения на примыкаю-
щем въезде
346
«пировании выезда на магистраль шум ускорения значительно
меньше.
В прошлом основным принципом улучшения функционирования
магистрали за счет регулирования выезда с примыкающего въезда
было увеличение интенсивности сквозного потока, и мало внимания
уделялось качественным показателям движения. Общепризнано,
что в большинстве «узких мест» магистрали перегрузку можно
ослабить либо вообще исключить, регулируя выезд на магистраль
с примыкающего въезда, однако пока мало что делается для изме-
рения качественных изменений, обусловленных регулированием
выезда на магистраль, кроме измерения продолжительности поезд-
ки. Вполне возможно, что общая продолжительность поездки сокра-
тится и все же на значительном расстоянии от узких мест появятся
порождаемые ими опасные места, где наблюдается резкое снижение-
скорости движения. Как уже указывалось ранее, продолжитель-
ность поездки не отражает этих условий. Измерение шума ускоре-
ния позволяет определить любое потенциально опасное место и
показывает, не нужны ли дополнительные средства регулирования,
с тем чтобы поддерживать равномерное движение на исследуемом
участке магистрали.
8. ПРОВЕРКА СПРАВЕДЛИВОСТИ ЭНЕРГЕТИЧЕСКОЙ
МОДЕЛИ
При построении энергетической модели было выведено функцио-
нальное соотношение между шумом ускорения и скоростью [форму-
лы (512) и (513)]. Формула (515) выражает это соотношение для
частного случая, когда п=1. Подставляя в формулу (515) тожде-
ства
amax = (3M~\~(3N И ~ °
получаем
— akju2-\-akj . (517)
uf
Стандартные методы регрессионного анализа, используемые для
проверки гипотетического соотношения между шумом ускорения и
скоростью, выражаемого формулой (517), и оценки энергетической
модели, обнаруживают хорошую корреляцию. На рис. 131 представ-
лена окончательная кривая регрессии для одного из 56 отрезков
магистрали. Эти результаты показывают, что- при возникновении
транспортной перегрузки очень быстро возрастает шум ускорения.
Кроме того, совершенно очевидно, что максимальное качество дви-
жения не реализуется при достижении максимальной интенсив-
ности. t-X
Аналогичный анализ графиков для произведения плотности на
квадрат скорости как функции скорости подтверждает справедли-
вость энергетической модели [1].
Очевидно, что максимальное удовлетворение водитель сможет
получить при равномерном безостановочном движении по магист-
347
Рис. 131. Соотношение между скоростью
и шумом ускорения вследствие взаимодей-
ствия автомобилей:
<^ = 1,693—0,00284 м2+0,000045 и3;
А — скорость, соответствующая минималь-
ному шуму ускорения
рали. Это условие можно до-
стигнуть путем минимиза-
ции шума ускорения в транс-
портном потоке. Если меж-
ду шумом ускорения и ка-
ким-либо из названных вы-
ше количественных парамет-
ров транспортного потока
существует некоторое соот-
ношение, то можно опреде-
лить оптимальные условия
движения, основанные на
равномерности потока.
Если интенсивность дви-
жения на магистрали исклю-
чительно мала, то каждый
отдельный водитель может
выбирать желательную для
него скорость движения. В
этом случае шум ускорения
обусловлен главным обра-
зом умением водить автомо-
биль и геометрией магистра-
ли. При увеличении интен-
сивности движения посте-
пенно достигается такой ее
уровень, когда водитель начинает испытывать затруднения при
маневрировании автомобилем в боковых направлениях. Так, ско-
рость его движения определяется впереди идущим автомобилем,
который в свою очередь испытывает влияние идущего впереди него
автомобиля и т. д. до головного автомобиля колонны. В этой точке
поток достигает равномерной скорости и между автомобилями уста-
навливаются одинаковые интервалы. Следовательно, движение яв-
ляется равномерным и шум ускорения — минимальным (величина
его определяется геометрией магистрали). Дальнейшее уве-
личение транспортной нагрузки сопровождается увеличением внут-
реннего трения, которое вносит в поток некоторую неустойчивость
и усиливает шум ускорения. Именно при таких условиях неустойчи-
вого движения начинают проявляться неудобства для водителя.
Дальнейшее увеличение транспортной нагрузки приводит к неиз-
бежной перегрузке магистрали и быстрому ухудшению удобств.
Было показано [формула (514)], что оптимальную скорость и'тг
соответствующую минимальному шуму ускорения, можно опреде-
лить, найдя на кривой точки с нулевым угловым коэффициентом.
Это выполняется путем приравнивания нулю первой производной
уравнения регрессии и решения полученного уравнения относитель-
но и. Для кривой, изображенной на рис. 131, это уравнение имеет
вид:
= 1,693—0,00284«2—0,000045&3 [мили/ч,].
348
Таким образом, оптимальная скорость
«^ = 67,7 км)*.
Результаты аналогичных вычислений скорости, соответствующей
оптимальному уровню обслуживания, показывают, что качествен-
ный показатель условий движения, основанный на минимизации
шума ускорения, обычно максимален при скоростях от 64 до
80 км!ч.
Исследования, выполненные на магистрали Галф, показывают^
что при максимальной интенсивности потока скорости составляют
40—56 км!ч.
9. ПРОПУСКНАЯ СПОСОБНОСТЬ И
УРОВЕНЬ ОБСЛУЖИВАНИЯ
Широкое развитие автомобильного транспорта требует повышения
эффективности пропускной способности дорожных сооружений.
Возможность обеспечить движение транспортного потока опреде-
ленной интенсивности является основным показателем при проек-
тировании, планировании движения и эксплуатации улиц и дорог.
Однако учитывается не только этот показатель. Например, отдель-
ные водители редко судят об эффективности дороги по количеству
обслуживаемого ею транспорта. Они оценивают эффективность
дороги на основе своей собственной поездки и наблюдаемому каче-
ству обслуживания.
В первом издании Руководства по пропускной способности дорог
давалось определение трех видов пропускной способности: основ-
ная, возможная и практическая. Считалось исключительно важным,,
чтобы интенсивности потоков в точности соответствовали местным
условиям движения с тем, чтобы определенные организации могли
решать, какой должна быть практическая пропускная способность
дорог, находящихся в их ведении.
В Руководстве отмечалось, однако, что практическая пропускная
способность определяется на основе субъективной оценки качества
обслуживания.
В новом издании Руководства комитет по оценке пропускной
способности при дорожном исследовательском управлении решил
оставить единственный параметр для любой дороги (дорожного
сооружения) — возможную пропускную способность. Возможная
пропускная способность — это максимальное число автомобилей,
которое может быть обслужено определенным элементом дороги
при преобладающих условиях. Такое понятие, как практическая
пропускная способность заменено несколькими специфическими
определениями интенсивностей обслуживания (service volume), свя-
занных с некоторым набором желательных условий движения, на-
зываемых уровнем обслуживания.
В идеальном случае при оценке уровня обслуживания следовало
бы учитывать все основные факторы: скорость, продолжительность
поездки, прерывание движения, свободу маневра, безопасность,
349
удобства и экономические показатели. Однако в качестве факторов,
используемых при оценке уровня обслуживания, были выбраны
скорость и отношение интенсивности обслуживания к пропускной
способности— ’ «поскольку нет достаточных данных, позволяющих
определить значения или относительные веса остальных перечис-
ленных факторов».
Для описания условий, возникающих при различных скоростях
и интенсивностях, которые могут иметь место на дорогах (дорож-
ных сооружениях), рекомендуется использовать шесть уровней об-
служивания (обозначаемых буквами от А до F), Уровень обслужи-
вания А определяет условия свободного движения, уровень обслу-
живания F соответствует условиям неустойчивого движения с интен-
сивностью, близкой к .пропускной способности, а уровень F характе-
ризует движение в условиях перегрузки. Уровни обслуживания
В, С и D описывают область устойчивого движения, при этом верх-
ний предел определяется зоной свободного движения, а нижний —
уровнем обслуживания F. В новом Руководстве для каждого типа
дороги этим уровням обслуживания ставятся в соответствие опре-
деленные значения пропускной способности, однако не дается объ-
яснения, каким образом они были получены.
Инженеру-транспортнику не всегда удается связать пропускную
способность с уровнем обслуживания. Если не удается количествен-
но связать эти параметры для существующей дороги, то маловеро-
ятно, что проектировщик сумеет найти связь между ними для доро-
ги, которая находится еще на чертеже. Рассмотренная в этой гла-
ве энергетическая модель, учитывающая шум ускорения, дает
простой и приемлемый способ измерения пропускной способности
дороги и уровня обслуживания.
Если выразить уравнения (429) и (501) только через скорость и
пронормировать их, то они принимают вид (в частном случае при
п = 1):
(518)
(519)
Кривые, задаваемые формулами (518) и (519), показаны
на рис. 132. Правая часть графика представляет собой известное
соотношение между .интенсивностью и скоростью, нормированное
таким образом, что по оси абсцисс отложено отношение интенсив-
ности к пропускной способности —, а по оси ординат — отношение
с
скорости к скорости свободного движения. Подставляя соотноше-
ние (506) в формулу (519), получаем
1_ j 27 Г/ и \2 /_о_\8
Т ~ 4 |_\«// к «/Л
(520)
350
Рис. 132. Количественный подход к уровню обслуживания при использовании
энергетической модели:
, Е 27 Г/ и \2 / и \ 13: q Г и
7 — кинетическая энергия ------- ------ — ------ 2 — интенсивность —-—=4--------—
Г 4 |Д / \ / J «т L uf
——j j; 3— u=0,91 и?» котла, кинетическая и внутренняя энергия равны; 4 — опти-
мальная скорость 2/а Му, основанная на максимальной кинетической энеогии и мини-
мальной внутренней энергии транспортного потока; 5 — кинетическая энергия равна внут-
ренней энергии; 6 — */з возможной пропускной способности; 7 — оптимальная скорость
um=^2U основанная на максимизации интенсивности потока (количества движения);
5 —8/э возможной пропускной способности; Р —м=1/зМу* когда кинетическая и внутренняя
энергия равны; 10 — интенсивность qm> обеспечивающая оптимальный уровень обслужива-
ния; // — возможная пропускная способность q т при u=Uj\ 12 — внутренняя энергия
v—7[(v)-(v)3]'
График этой функции также показан на рис. 132. Приравнивая
выражения (519) и (520), получаем два значения скорости, при
которых кинетическая энергия равна внутренней энергии транспорт-
ного потока. Эти значения равны
И/
«= — и u=0,91u/ соответ-
ственно. Переходя в правую часть графика, видим, что соответст-
вующие значения интенсивности равны и <7 = 0,328 qm,
или приближенно </ = 0,35 qm- Эти две точки и точка и'т, q'm служат
для задания четырех зон с различными уровнями обслуживания,
определяющими свободное, устойчивое, неустойчивое и напряжен-
351
Таблица 28
Уровень обслужи- вания Зона Пределы зоны* Описание
верхний нижний
Свободный ПОТОК А «/ 0,91м/, 0 Скорость движения регулирует- ся по желанию водителя ис- ходя из условий движения. Такой уровень обслуживания ' ожидается на загородных до- рогах
В 0,91м/, 0,35/т 0,83м у, 0,55/т Скорость движения зависит в основном от плотности потока
Устойчивый поток с 0,83м/, 0,55?ш 0,75м/, 0,75^ Условия, характерные для этой зоны, подходят для скорост- ной магистрали, проходящей через пригородные районы
D 0,75м/, 0,75^ Условия, характерные для этой зоны, подходят для городско- го движения. Нижний предел Чт соответствует крити- ческому уровню обслужива- ния
Неустойчивый по- ток Ei ит> Чт Um* Qm Небольшое . увеличение транс- портной нагрузки (интенсив- ности) сопровождается значи- тельным снижением скорости, что приводит к высокой плот- ности движения и появлению внутреннего трения
Ei игт Ят 0,33м/, Чт Такое плотное движение не мо- жет продолжаться долго и в конечном случае приводит к перегрузке
Напряженный по- ток * См. рис. 132 F Ят 0 Интенсивность движения мень- ше пропускной способности» образуются очереди автомо- билей. Нормальное движение возобновляется после исчез- новения очереди
ное (forced) движения. В табл. 28 приведены критерии, определя-
ющие эти основные уровни обслуживания.
Важность графиков, изображенных на рис. 132, состоит в том,
что они дают рациональную основу для определения уровня обслу-
живания и связывают его с другими переменными, характеризую-
щими транспортный поток, — скоростью, интенсивностью и плот-
ностью. Соотношений между уровнем обслуживания и интенсивно-
стью аналогичны соотношениям между энергией и количеством
352
движения в классических системах гидродинамики. В классической
системе эффективность (коэффициент полезного действия) изме-
ряется как отношение полезной энергии ' к общей энергии .
Оптимальная работа системы имеет место, когда потери энергии /
минимальны. Эффективность транспортной системы состоит в мак-
симизации кинетической энергии всего потока и минимизации шума
ускорения отдельных автомобилей (внутренняя энергия).
Магистрали для свободного движения и другие скоростные до-
роги имеют целью обеспечить высокие уровни обслуживания при
высоких интенсивностях потоков. Условия движения, существую-
Е
щие при максимальном отношении— и минимальном отношении
—, логично определить как критический уровень обслуживания.
Обращаясь к правой части рис. 132, видим, что при критическом
уровне обслуживания небольшое увеличение транспортной нагруз-
ки сверх существующей приводит к существенному увеличению
плотности транспортного потока и неизбежно сопровождается зна-
чительным снижением скорости движения. Тот факт, что значения
km' и ит' при критическом уровне обслуживания превышают соот-
ветствующие значения при возможной пропускной способности,
Рис. 133. Контуры уровней обслуживания (вторник):
/ — к центральному деловому району; 2 — железная дорога; 3 — ул. Скотта; 4 —ул. Каллен;
.5 —железная дорога; 6 — ул. Дампл; 7 — железная дорога; 5 —Телефонная ул.; 9 — ул. Уэй-
сайд; 10 — рукав р. Брей; // — ул. Григгс; 12 — ул. Вудридж; 13 — ул. Ревейлл;
А — неустойчивый поток; Б — устойчивый поток; В — свободный поток; Г —
напряженный поток
353
можно проиллюстрировать, если разделить выражения (502) и
(503) на (430) и (431) при п=1:
4=4^; (521)
о
' _ 4
Um~ 3 Um' (522)
Плотность потока при критическом уровне обслуживания
составляет лишь две трети плотности при интенсивности, равной
возможной пропускной способности, а скорость движения выше на
одну треть. Это происходит ввиду снижения интенсивности движе-
ния, так как
qm=-^qm- (523)
На рис. 133 показано функционирование трех полос магистрали
Галф, ведущих в деловой район города, на участке протяженно-
стью около 9,6 км в утренний период «пик» продолжительностью
2 ч. Данные получены методом движущегося наблюдателя, описан-
ным в этой главе. Схема дает полное представление о распределе-
нии уровней обслуживания во времени и пространстве. Этот про-
стой способ позволяет показать уровень обслуживания на магист-
рали (свободное, устойчивое, неустойчивое и напряженное движе-
ния), как он определен в энергетической модели, показанной на
рис. 132.
10. СООТНОШЕНИЕ МЕЖДУ ЭНЕРГИЕЙ И
РАСХОДОМ ТОПЛИВА
Стоимость эксплуатации автомобиля является важным факторов
связанным с уровнем обслуживания. Если энергетическая модель
используется для описания уровня обслуживания, то должно быть
определенное соотношение между расходом топлива и энергией,
поскольку предполагается, что кинетическая энергия транспортного
потока (произведение интенсивности на скорость) и -внутренняя
энергия транспортного потока (шум ускорения отдельных автомо-
билей) характеризуют уровень обслуживания.
Кейпелл [20] предположил, что внутренняя энергия, или шум
ускорения, измеряемый на некотором отрезке дороги, равен обще-
му расходу топлива FC минус минимальный расход топлива FCmm*
Таким образом, подставляя в соотношение, записанное на рис. 128,
расход топлива вместо шума ускорения, получаем выражение
FC=FCmia —1__L). (524)
4 \ iif J \ iif )
Это выражение для расхода топлива как функции скорости
является реалистичным. Например, известно, что затраты на экс-
354
плуатацию автомобиля при движении с большой скоростью по
свободной дороге значительно выше, чем при движении по свобод-
ной дороге с умеренной скоростью. Кроме того, реально ожидать,
что при движении с малой скоростью в условиях транспортной пе-
регрузки, когда водитель вынужден делать частые остановки,
затраты на эксплуатацию автомобиля возрастут.
Регрессионный анализ данных [20], полученных в экспериментах
при движении контрольного автомобиля в г. Чикаго по шоссе Эй-
зенхауэра на участке от бульвара Остина до Первой авеню с исполь-
зованием специального прибора для измерения расхода топлива,
показал, что отношение F и значения t являются в высшей степени
значимыми, откуда следует, что эти данные адекватно описываются
теоретической моделью [20]. Видно, что энергетическая модель дает
количественное описание еще одного показателя уровня обслужи-
вания. Работа Кейпелла, исследовавшего движение на шоссе Эй-
зенхауэра в Чикаго, примечательна тем, что она подтверждает
результаты Дрю и Дудека, полученные на магистрали Галф в Хью-
стоне, и показывает справедливость энергетического подхода при
исследовании транспортных потоков.
11. ОСНОВНЫЕ ПРОБЛЕМЫ
На основе ограниченных данных о движении транспорта на маги-
стральной улице Роуэн [21] делает вывод, что «энергетическая мо-
дель, разработанная для описания непрерывного движения транс-
порта на магистрали, не позволяет получить точные результаты
при движении транспорта по главным улицам с остановками».
Однако он приходит к выводу, что эта модель имеет определенную
ценность, поскольку при изучении движения транспорта в городе
dna позволяет установить соотношение между некоторыми перемен-
ными.
Так как при использовании модели исследовалось только ли-
нейное соотношение между скоростью и плотностью (п=1), то не-
обходимо исследовать нелинейные соотношения (п = — 1 и п = 0) и
проверить возможность получения лучшего описания. Кроме того,
при проверке модели на городских улицах необходимо, по-видимо-
му, использовать более совершенные методы исследования, с тем
чтобы получить полный комплект данных (как при очень малых,
так и при очень высоких скоростях движения). Возможно, что зна-
чительно большее соответствие энергетической модели можно полу-
чить, используя вместо метода «среднего автомобиля», который
применял Роуэн, метод «максимального автомобиля» и метод
«минимального автомобиля».
Поскольку дорожно-транспортные происшествия часто вызыва-
ются неудовлетворительными условиями движения, вследствие чего
выполняются ошибочные маневры, необходимо провести исследова-
ния, которые позволили бы установить наличие соотношения между
энергетическими показателями и интенсивностью дорожно-транс-
портных происшествий.
355
Применение методов регулирования движения с целью миними-
зировать транспортные перегрузки требует непрерывного измере-
ния характеристик транспортного потока. Для такой программы,
очевидно, не подходит метод движущегося наблюдателя. Необхо-
дима автоматическая система для измерения шума ускорения (или
эквивалентного ему энергетического параметра) транспортного по-
тока.
ЗАДАЧИ
1. Получены следующие данные о скорости движения автомобиля через некото-
рый участок дороги:
Время, мин Скорость, КМ/Ч | Время, ман Скорость, КМ.'Ч
0 48 16 56
1 56 18 64
3 56 19 64
4 48 20 72
5 48 22 72
6 32 24 64
8 32 1 25 64
9 40 26 72
10 40 28 72
12 48 29 64
13 48 32 64
14 56 1
Полагая, что между измеренными значениями скорость изменяется линейно,
вычислите шум ускорения, используя Ау = 8 км/ч.
2. Для условий задачи 1 определите показатель Гриншилдса для качества
движения.
3. 1). Постройте график нормированной кривой для
1
П = — ~ , П = 0,
1
п == + — , аналогичный изображенному на рис. 132.
2) . Составьте таблицу, аналогичную табл. 28, для каждого из построенных
вами графиков.
4. Допустим, что в 13 ч вы измерили шум ускорения на главной улице с
регулируемым движением в городе с населением 75 тыс. чел. Как изменится шум
ускорения в дальнейшем и почему?
5. Получены следующие характеристики транспортного потока:
Скорость, км/ч.......... 91,1 72,6 36,9 62,4 68,8 67,3 72,4 73,6 78,9
Плотность, авт/км . . . 18,1 28,1 55,9 36,1 30,0 29,6 32,5 28,0 28,5
Определите соответствие модели u=Ufll— ~) этим данным и найдите
параметры, необходимые для графического построения зависимости расхода топ-
лива от скорости движения в условиях, характеризуемых этим набором данных.
Максимальный расход топлива составляет 32,4 г/км, а минимальный — 12,9 г/км.
6. Часто за показатель эффективности дороги специалисты принимают плот-
ность потока, а отдельные водители рассматривают такие факторы, как скорость,
число задержек и свободу маневра. Обсудите кратко, каким образом энергети-
ческий подход позволяет рассматривать различные^стороны эффективности.
356
ЛИТЕРАТУРА
1. Drew D. R., Keese C. J. Freeway Level of Service as Influenced by Volu-
me and Capacity Characteristics, Highway Res. Board Rec. 99, 1955.
2. Dudeк C. L. A Study of Acceleration Noise as a Measurement of the
Quality of Freeway Operation», thesis, Texas A&M University, College Station,
1965.
3. D r e w D. R., D u d e к C. L., К e e s e C. J. Freeway Level of Service as
Described by an Energy-acceleration Noise Model, Highway Res. Board Record
162, 1966.
4. D r e w D. R. The Energy-Momentum Concept of Traffic Flow, Traffic
Eng., vol. 36, № 10, June 1966.
5. H a 11 E. M., S t e p h e n G. Jr. Travel Time: An Effective Measure of
Congestion and Level of Service, Highway Res. Board Proc., vol. 38, pp. 511—529,
1959.
6. Wattleworth J. P. Peak-period Control of a Freeway System: Some
Theoretical Considerations, Congress Expressway Surveillance Project Rept. 9.
August 1963.
7. G г ее n s h i e 1 ds B. D. Quality of Traffic Transmission, Highway Res.
Board Proc., vol. 34, pp. 508—522, 1955.
8. Greenshields B. D. Quality of Traffic Flow, «Quality and Theory
of Traffic Flow», symposium, Bureau of Highway Traffic, .Yale University, New
Haven, Conn., 1961, pp. 3—40.
9. Platt F. N. A Proposed Index for the Level of Traffic Service, Traffic
Eng., vol. 34, № 2, pp. 21—26, November, 1963.
10. Mon troll E. W., Potts R. B. «Car Following and Acceleration
Noise: An Introduction to Traffic Flow Theory», pp. 39—40, Highway Research
Board, Washington, D. C., 1964.
11. Herman R., Montroll E. W. Potts R. B., Rothery R. W.,
Traffic Dynamics: Analysis of Stability in Car Following, Operations Research,
vol. 7, pp. 86—106, 1959.
12. M о n t г о 11 E. W. Acceleration Noise and Clustering Tendency of Ve-
hicular Traffic, «Theory of Traffic Flow», symposium, General Motors Research
Laboratories, 1959, pp. 147—157.
13. Jones T. R., Potts R. B. The Measurement of Acceleration Noise:
A Traffic Parameter, Operations Research, vol. 10, November-December, pp. 745—
763, 1962.
14. Lighthill M. J., Whitham G. B. On Kinematic Waves: A Theory
of Traffic on Long Crowded Roads, Proc. Roy. Soc. (London), vol. 229, 1955.
16. Greenberg H. An Analysis of Traffic Flow, Operations Research,
vol. 7, 1959.
16. Greenberg H. An Analysis of Traffic Flow, Operations Research,
vol. 7, 1959.
17. Herman R., Potts R. B. Single-lane Traffic Theory and Experiment,
в kh.: «Theory of Traffic Flow», American Elsevier Publishing Company of New
York, 1961.
18. Mor ri son R. B. The Traffic Flow Analogy to Compressible Fluid,Flow,
Advanced Res. Eng., Bull. M 4056—1, Ann Arbor, Mich.
19. Gazis D. C., Herman R., Potts R. B. Car-following Theory of
Steady State Traffic Flow, Operations Research, vol. 7, pp. 499—505, 1959.
20. Cape lie D. G. «An Investigation of Acceleration Noise as a Measure of
Freeway Level of Service», doctoral dissertation, Texas A&M University, College
Station, 1966.
21. Rowan N. J. «An Investigation of Acceleration Noise as a Measure of
the Quality of Traffic Service on Major Streets», doctoral dissertation, Texas A&M
University, College Station, 1967.
ГЛАВА XIV
ПРОЕКТИРОВАНИЕ
АВТОМОБИЛЬНЫХ ДОРОГ
Творческий подход к проектированию систем имеет целью удов-
летворение потребностей людей. Он состоит в создании четко опре-
деленной широкой основы, которая к тому же должна быть гиб-
кой и позволяющей учесть возможные изменения в будущем. Соз-
дание такой широкой основы нацелено на весь проект, оно связано
со структурными, геометрическими и функциональными особенно-
стями рассматриваемого сооружения.
Основной вопрос, возникающий при творческом подходе к про-
ектированию, направленном на удовлетворение потребностей людей,
можно сформулировать так: что представляют собой эти потребно-
сти? Например, при проектировании скоростной магистрали необ-
ходимо учитывать ряд противоречивых интересов, что затрудняет
выработку единой точки зрения. Жители, работающие в деловой
части города и 5 раз в неделю приезжающие к восьми часам утра
на работу, имеют одну точку зрения, а человек, случайно проезжа-
ющий через город, — другую. Одно мнение на этот счет будет
иметь тот, кто живет в ближнем пригороде, а тот, кто ежедневно
ездит в город на пригородном поезде, будет иметь другую точку
зрения.
Правильная точка зрения представляет собой некоторое взве-
шенное среднее, дающее максимальную выгоду наибольшему числу
людей. Однако, как указывают некоторые авторы [1], не всегда яс-
но, как именно находить это среднее. Например, усиливается ощу-
щение, что затруднения, возникающие при движении по скоростной
магистрали, возникают вследствие наличия слишком большого чис-
ла развязок, что вызывает частый переход автомобилей из одного
ряда в другой и усиливает взаимодействие транспортных средств.
Действительно, если бы не было такого большого числа пересече-
ний, то магистрали функционировали бы лучше. Однако при отсут-
ствии развязок водитель, едущий по магистрали, желая попасть
на свою улицу, должен .проехать несколько лишних кварталов и
затем возвратиться назад, либо съезжать с магистрали, находясь
358
далеко от того места, куда ему нужно попасть. В то же время при
меньшем числе развязок водитель, желающий попасть на магист-
раль, должен долго ехать по другим улицам, прежде чем ему удаст-
ся это сделать. В обоих случаях увеличивается продолжительность
и расстояние поездки, поэтому отсутствие развязок нельзя считать
творческим решением проблемы.
1. ПРОЕКТИРОВАНИЕ СКОРОСТНОЙ МАГИСТРАЛИ
Проектирование дорог — это инженерная задача, решать которую
невозможно только по учебнику. Проектировщик обязан прогнози-
ровать будущие транспортные нагрузки и создавать дороги, способ-
ные обеспечить движение транспорта при заданном наборе рабо-
чих условий или уровней обслуживания. Очень часто проектирова-
ние дорог осуществляется с использованием ряда стандартных
показателей, взятых из справочников, что приводит к сооружению
дорог, обладающих серьезными недостатками.
Магистраль не предназначается специально для некоторого
момента в будущем, который наступит, скажем, через 20 лет. Она
должна работать уже с первого дня и эффективно функционировать
на протяжении всего ожидаемого срока службы. Как показывают
факты, многие магистрали будут служить в течение долгих лет
после окончания проектного срока службы. Прошло время, когда
дорога проектировалась как две параллельные полосы, и прошло
время, когда при проектировании дороги нужно было рассматри-
вать «полную систему», рассчитанную на 20 лет. Прогнозирование
движения транспорта и проектирование дорог необходимо произво-
дить для частично завершенных или неполных систем, если требу-
емый уровень обслуживания должен быть достигнут за несколько
лет до окончания сооружения всей системы. Вооруженный совре-
менными средствами проектировщик может получить точную оцен-
ку транспортной нагрузки на каждом этапе сооружения заплани-
рованной системы.
Кроме транспортной нагрузки, необходимо знать и ожидаемую
пропускную способность магистрали. Максимальная интенсивность
одной полосы многорядной магистрали в идеальных условиях со-
ставляет от 1 900 до 2 200 авт!ч. Эта величина характеризует сред-
ний максимальный объем движения на одной полосе за 1 ч. Иссле-
дования показали, что на отдельных полосах дороги в короткие
периоды времени возможны более высокие интенсивности движе-
ния. Если для движения в одном направлении имеется не менее
двух полос, то независимо от распределения автомобилей между
полосами при идеальных условиях движения пропускная способ-
ность одной полосы принимается равной 2 000 авт!ч. Эта пропуск-
ная способность может быть реализована только в тех случаях,
когда период наибольшей нагрузки длится около часа. Если вслед-
ствие сужений дороги, плохой видимости, наличия уклонов,
движения грузовых автомобилей и т. д. условия движения не явля-
ются идеальными, пропускная способность будет несколько ниже.
359
Московиц и Ньюмен [2] предложили поправочный коэффициент,
учитывающий такие условия.
Рассмотрим теперь показатели эффективности. Часто говорят:
«Проблема состоит в том, что образуется слишком много транс-
портных заторов», или «Слишком много дорожно-транспортных
происшествий», или «Требуется слишком много времени, чтобы доб-
раться до работы» и т. д. Две наиболее важные особенности пока-
зателя эффективности состоят в следующем: он должен быть коли-
чественным и выражаться однозначно некоторым числом; он дол-
жен быть эффективным в статистическом смысле, т. е. иметь
сравнительно небольшую дисперсию и, следовательно, быть относи-
тельно точным. Желательно, чтобы показатель эффективности имел
и другие свойства. Он должен быть простым, если от этого не нару-
шается его полнота, и должен иметь физический смысл, тогда
меньше вероятность допустить ошибку при его использовании. Бо-
лее того, если показатель эффективности имеет физический смысл,
то можно легко определить идеальные характеристики и сравнить
их с реальными. Важно знать, достигнуты ли теоретические преде-
лы или же еще имеются значительные возможности для совершен-
ствования системы.
Так, в задаче проектирования магистрали произведение скоро-
сти на интенсивность движения, или кинетическая энергия, опреде-
ление которой давалось в предыдущих главах, является простым
показателем, имеющим реальный физический смысл, и его можно
сравнить с идеальными характеристиками. Этот показатель эффек-
тивности называется уровнем обслуживания.
Если интенсивность движения равна пропускной способности
магистрали, то условия движения являются неудовлетворительны-
ми. Движение происходит с низкими скоростями, частыми и про-
должительными остановками. Чтобы магистраль обеспечивала при-
емлемый уровень обслуживания, интенсивность движения должна
быть меньше пропускной способности. Подход, основанный на
уровне обслуживания, определяет различные условия движения —
от свободного движения до движения с интенсивностью, равной
пропускной способности. Этот подход имеет целью оказать помощь
инженерам и руководителям в обеспечении максимального эконо-
мически обоснованного уровня обслуживания. Энергетическая мо-
дель является попыткой объяснить соотношение между пропускной
способностью и уровнем обслуживания на количественной основе.
Необходимо иметь в виду, что движение транспортного потока
представляет собой случайный процесс. Следовательно, любое до-
рожное сооружение должно проектироваться с учетом того, что
время от времени транспортная нагрузка будет превышать пропу-
скную способность.
Поскольку продолжительность перегрузки может значительно
превышать интервал, в котором транспортная нагрузка превышает
пропускную способность, важно принять меры для ее предупреж-
дения. Основываясь на данных об интенсивности потока для пери-
ода длительностью 5 мин, проектировщик может при любом довери-
360
тельном уровне гарантиро-
вать, что перегрузка не воз-
никнет. Это можно проиллю-
стрировать на расчетных
кривых, связывающих уро-
вень обслуживания с интен-
сивностью движения за
5 мин (рис. 134). Так, при
возможной пропускной спо-
собности полосы, составля-
ющей 2 000 авт/ч, при интен-
сивности, равной 1 800 авт!ч,
с вероятностью 50% можно
гарантировать, что в интер-
вале длительностью 5 мин
будет наблюдаться устойчи-
вый поток. Вероятность по-
явления неустойчивого по-
тока также составляет 50%,
и с вероятностью 2,5% воз-
можно появление напряжен-
ного потока, способного при-
водить к перегрузкам вслед-
ствие статистической измен-
Рис. 134. Расчетные кривые, связывающие
уровень обслуживания с интенсивностями
движения в периоде «пик» длительностью
5 мин. Соотношение между интенсивностью
движения в периоде «пик» продолжитель-
ностью 5 мин и интенсивностью движения
в час «пик» показано на рис. 20:
А — зона устойчивого движения; Б — зона
неустойчивого движения
чивости интервалов между
автомобилями. Важно заме-
тить, что при относительно
небольшом уменьшении ин-
тенсивности движения с
1 800 до 1 700 авт/ч (всего
на 100 авт!ч) значительно
увеличивается вероятность
сохранения устойчивого по-
тока. Расчетные кривые мо-
гут оказать помощь руководителям и проектировщикам при при-
нятии решений. После того как решение будет принято, с помощью
графика, изображенного на рис. 20, исходя из численности населе-
ния города можно определить интенсивность потока, соответствую-
щую выбранному уровню обслуживания в час «пик».
График на рис. 134 был получен путем определения предсказан-
ных значений, показанных на рис. 20, на основе 5-процентного дове-
рительного уровня при нормальном распределении ошибки.
Данные об интенсивностях, соответствующих принятому уровню
обслуживания, приведены в табл. 29. Цифры, записанные в пер-
вых четырех столбцах, взяты непосредственно из рис. 134, а в по-
следних четырех столбцах использованы соотношения, показанные
на рис. 20. Ценность табл. 29 состоит в том, что она дает проекти-
ровщику доверительные пределы при определении необходимого
числа основных полос скоростной магистрали.
13—338
361
Таблица 29
Интенсивность движения в периоде „пик“ продол- жительностью 5 мин \ Приближенные вероятности появ- ления в периоде „пик“ продолжи- тельностью 5 мин следующих условий движения: Средняя расчетная интенсивность движения на одной полосе скоростной магистрали в городе с населением
Устойчи- вый поток Неустойчи- вый поток Напряжен- ный поток 100 тыс. чел. 500 тыс. чел. 1 МЛН. чел. 5 млн. чел.
1500 1,00 0,00 0,00 1 100 1200 1300 1300
1 600 0,98 0,02 0,00 1200 1 300 1300 1400
1700 0,85 0,15 0,00 1300 1400 1400 1500
1 800 0,50 0,48 0,02 1400 1500 1 500 1 600
1 900 0,15 0,69 0,16 1500 1 600 1 600 1700
2 000 0,03 0,47 0,50 1 500 1600 1700 1800
2. СКОРОСТНАЯ МАГИСТРАЛЬ КАК СИСТЕМА
Характеристики любой системы зависят от работы всех ее элемен-
тов. Характеристики системы нельзя определить путем анализа
работы какого-либо отдельного ее элемента. Скоростную магист-
раль как систему можно разбить по крайней мере на шесть состав-
ляющих ее элементов: полосы сквозного движения, въезды, съезды,
фронтальные дороги, пересекающиеся дороги и развязки. Анализ
каждого из этих элементов позволяет выделить важные характери-
стики, которые необходимо рассматривать с целью создания удов-
летворительного проекта. Классические системы описываются на-
бором переменных, обычно называемых параметрами, посредством
которых характеризуется работа системы. При проектировании
скоростных магистралей рассматриваются такие параметры, как
число дорожных полос, число въездов, число съездов и число по-
лос на въездах и съездах.
После выбора значения определенного параметра важно знать
его влияние на функционирование данного элемента и его влияние
на систему в целом. Так, может показаться, что примыкающий
въезд должен иметь две полосы. Однако хорошо известно, что двух-
рядный въезд нельзя совместить с полосами скоростной магистра-
ли, если только за таким въездом число основных полос магистра-
ли не увеличивается на одну по сравнению с числом полос перед
въездом.
3. ТРЕБОВАНИЯ К РАЗВЯЗКАМ
Полный контроль за въездом на магистраль автоматически требу-
ет развязки пересекающихся дорог и улиц в разных уровнях, с тем
чтобы обеспечивалось сообщение между пересекающимися дорога-
ми. Развязки можно классифицировать по числу пересекающихся
направлений движения, а также разделить на прямые и обходные,
регулируемые и нерегулируемые. Основными развязками, являют-
ся следующие: типа клеверного листа, путепровод (directional) и
362
Рис. 135. Распределение фаз на развязке типа «обыкновенный ромб»:
а—фаза А; б — фаза В\ в — фаза С; г — фаза D; д — перекрытие фазы А; е —
перекрытие фазы С
ромбовидная. Путепровод и развязка типа клеверного листа явля-
ются нерегулируемыми и поэтому пропускная способность этих раз-
вязок по существу определяется пропускной способностью их съез-
дов. Ромбовидные развязки, находящиеся в черте города, всегда
являются регулируемыми, поэтому их пропускная способность за-
висит от пропускной способности отдельных перекрестков или
координированной системы перекрестков.
Хотя формулы (104) — (НО) были выведены для регулируемого
перекрестка, теорию можно обобщить на случай пропускной спо-
собности регулируемых развязок. Перекресток высокого класса
можно рассматривать как развязку дорог в одном уровне, в кото-
рой пересекающиеся потоки разделяются путем чередования фаз
светофора (т. е. во времени) и расстояние между отдельными пере-
сечениями развязки (т. е. в пространстве). На рис. 135—137 пока-
заны возможные распределения фаз для различных вариантов
ромбовидных развязок. Развязка типа «обычный ромб» состоит из
четырех однопутных диагональных или параллельных съездов, об-
разующих два перекрестка с пересекающейся улицей или магист-
ралью. В черте города съезды часто используются совместно с
однопутными фронтальными дорогами, параллельными основной
магистрали. При пересечении скоростной магистрали с парой одно-
путных дорог применяется развязка типа «разрезанный ромб», а
при пересечении двух скоростных магистралей может использовать-
ся ромбовидная развязка в трех уровнях. Если на скоростной ма-
гистрали необходимо соорудить несколько ромбовидных развязок,
то близкое расположение съездов соседних развязок может сни-
жать пропускную способность магистрали и затруднять ее функцио-
нирование. Развязка типа «смещенный ромб» исключает необхо-
димость изменения ряда на участке магистрали между съездами
соседних развязок.
Рис. 136. Распределение фаз на развязке типа «смещенный ромб»:
а —фаза Л; б —фаза В; в —фаза С; г —фаза D; б —перекрытие фазы А; е —
перекрытие фазы С
13* 363
Рис. 137. Распределение фаз на развязке в трех уровнях типа «разрезанный
ромб»:
а—фаза А; б—фаза В; в — фаза С; г — фаза D; д — перекрытие фазы А; е —
перекрытие фазы В; ж — перекрытие фазы С; з — перекрытие фазы D
Условия движения на регулируемой развязке с перекрывающи-
мися потоками можно представить на пространственно-временной
диаграмме (рис. 138) [3]. Здесь показана четырехфазная система с
четырьмя перекрывающимися фазами, приемлемая как для раз-
вязки типа «разрезанный ромб», так и для ромбовидной развязки в
трех уровнях. Продолжительность фазы перекрытия равна време-
ни движения между развязками. Если длительность фазы перекры-
тия уменьшается до нуля, то взаимодействующие потоки разделяют-
ся во времени.
Для многофазной системы
G + O-(х—1)»+К;
G +О-(/< — £)) .
D
1 г 3600 „
(С+ 2 о)-<£>(/<-£))'
D
(525)
3600 [Ф (/<-£))- QJ
3600 — D У; V
где G — длительность фазы; С — длительность цикла; О — пере-
крытие фаз; — общее потерянное время; /С — время,
потерянное на трогание с места; К" — время на проезд через
перекресток; D — постоянный интервал между автомобилями,
проезжающими через перекресток; X — пропускная способность
полосы за фазу; V— критическая интенсивность полосы; Ф —
число фаз за цикл.
Эти формулы выражают соотношения между пропускной спо-
собностью и длительностью цикла для общего случая любого регу-
364
лируемого узла дорог. Очевидно, что выведенные ранее формулы
для пропускной способности перекрестков [формулы (104) — (109)]
являются лишь частными случаями, когда суммарная длительность
фаз перекрытия равна нулю (20 = 0,0).
Подставляя в формулу (526) К=6 сек, D = 2 сек, Ф = 4 и соот-
ветствующие значения SO, получаем выражение для длительности
цикла С как функции пропускной способности SV для некоторых
типов четырехфазных регулируемых узлов дорог (рис. 139). Мож-
но видеть, что пропускная способность развязки типа «обычный
ромб» фактически не зависит от длительности цикла светофора для
перекрытий длительностью 8 сек. Кривые для развязки типа «раз-
резанный ромб» и ромбовидной развязки в трех уровнях симмет-
ричны относительно линии SV=1 800 и асимптотически к ней при-
ближаются. Используя формулу (525), аналогичные кривые мож-
но построить для других комбинаций длительностей цикла и фаз
перекрытия.
На рис. 140 показаны шесть этапов, проходимых при проекти-
ровании и оснащении средствами регулирования движения любо-
го сооружения: от перекрестка до скоростной автомобильной ма-
гистрали. Рассматриваются четыре типа регулируемых развязок.
Рис. 138. Пространственно-временные соотношения для светофоров с многофаз-
ным режимом:
Ж — желтый; Кр — красный; 3 — зеленый
365
Рис. 139. Расчетные кривые для четырехфазных развязок:
28 800 7 200
1 — С= -------- (обычный перекресток; 20=0,0); 2— С= --------- (развязка типа
1 800—SV" 1 800—SV
28 800
«смещенный ромб»); 3 — SV=1800 (развязка типа «обычный ромб»), 4—С= -----------
SV—1 800
(развязка в трех уровнях типа «разрезанный ромб»);
А—развязка типа «смещенный ромб», 50 = 12,0; Б — развязка типа «обычный
ромб»; 50=16,0; В—'развязка в трех уровнях типа «ромб»; Г — развязка типа
«разрезанный ромб»; 50=32,0.
_ 36ОО[Ф (K-D)-ZO]
Уравнение кривых С=-------------------- ,
3 600—DSV
Ф (число фаз) =4; D (интервал между автомобилями) =2,0; К (потерянное вре-
мя) =6,0; О (перекрываемая фаза) —переменная
366
Этап 1. Определение трех условий (численность населения,
место расположения и интенсивность движения), влияющих на дли-
тельность периода «пик».
' Этап 2. Поскольку задана среднесуточная интенсивность дви-
жения, необходимо вычислить интенсивность движения в часы
«пик». В реальной задаче необходимо также проверить интенсив-
ность движения в вечерние часы «пик».
Этап 3. С помощью уравнения регрессии вычисляется коэф-
фициент длительности периода «пик» У' для каждого направления
движения.
Этап 4. Умножением интенсивности движения в часы «пик»
на коэффициенты Y' для каждого направления находится интенсив-
ность движения за час, эквивалентная интенсивности движения в
период «пик». Если рассматривается несколько элементов, как, на-
пример, на скоростной магистрали, то удобно представить интен-
сивности движения и элементы системы в схематической форме.
Этап 5. Чтобы определить, справится ли проектируемая развяз-
ка с транспортной нагрузкой при приемлемой длительности цикла,
необходимо проверить .пропускную способность. Если пропуск-
ная способность окажется недостаточной, то необходимо добавить
дополнительные полосы либо приступить к проектированию развяз-
ки более высокого класса.
Этап 6. На основе интенсивностей движения на критических
полосах вычисляется среднее число автомобилей т, прибывающих
за цикл, и эти данные используются при обращении к графикам
пуассоновского распределения (см. рис. 33). Составляются табли-
цы длительностей фазы G при различных вероятностях Р появле-
ния избыточных циклов.
Любая комбинация Ga + Gb + Gc+Gd, равная принятой дли-
тельности цикла С, является приемлемой.
На выбор места расположения развязки влияет транспортная
нагрузка в этом месте и ее пропускная способность. При переходе
от простого перекрестка к развязке типа «обычный ромб», а затем
к ромбовидной развязке в трех уровнях пропускная способность
непрерывно увеличивается (см. рис. 139). Развязка типа «смещен-
ный ромб» выбирается из других соображений, а именно: с целью
уменьшения числа переходов из одного ряда в другой между после-
довательными съездами.
Логическим расчетным критерием является вероятность того, что
в определенном направлении движения транспортная нагрузка в
течение цикла превысит пропускную способность. Гибкость этого
метода наглядно .проявляется на этапе 6 (см. рис. 140) в возмож-
ности большого числа комбинаций фаз. Близость к перекрестку
или съезду может потребовать увеличения длительности одной фа-
зы за счет другой. Таким образом окажется возможным избежать
скопления автомобилей и предупредить появление помех движению
на соседних узлах дорог и, возможно, увеличение числа избыточ-
ных автомобилей.
367
1128
1,Ш
1,136
1.110
Ж
t.165
1,138
Неверное направление (Yt)
* Западное направление (УЛ)
Южнбе направление (Ya)
восточное направление (Yc)
т(интенсивность движения водном направлении)™
Общая длительность зеленого и желтого сигналов и
Минус длительность перекрытия фаз
Длительность фазы
время наличия избыточного потопа В Вечер-
ний час „пик" мин________________________
*4 <Рс fl ft
нл 26 % -6 V . 12 9.6 24 -6 17,8 hO -8 15,0 34 -8
26 10,9 24 10,1 12 18,1 18 9,6 32 10,9 26 11.2
Рис. 140. Порядок расчета пропускной способности:
а — этап 1. Определение условий движения. Население города в 1980 г. — 520 тыс.
«пик») = 12%; D (коэффициент распределения) =67%. Место расположения предпола
города; б — этап 2. Определение переменных для 'периода «пик»; — население
центрального делового- района до границы города; Х3—интенсивность движения в час
ния; в — этап 3. Определение коэффициента для периода «пик». Для вечернего перио
рожной системы с указанием интенсивностей движения в период «пик»; д — этап 5.
Проверка длительностей цикла С по расчетным кривым; е — этап 6. Определение дли
при С=80
1,135 1,158
1,197 > 1.161
1,196 1'П5
1.125 1,138
lfUl'U1'1HUIU ригпи h puufJQuunnQiu f/UrW
ZV4650 II*I1O9O*IHH54M59№)-1615 lV470Z4p(2003r3H2t3-lHlZ95^)=Z081
чел. Среднесуточные интенсивности движения в 1980 г.: К (коэффициент для часа
гаемых развязок: расстояние от центрального делового района; расстояние от границы
520 тыс. чел.; Х2— расстояние от центрального делового района до развязки или
«пик» (РУГ); (PVT) = (ADT)-K'D, где (ADT)—среднесуточная интенсивность движе-
да «пик» У'= 1,225—0,000135 Xi—0,1 Х'2+0,00003 Х3; г — эта п 4. Построение схемы до-
Суммарная интенсивность движения на критической полосе 2V для каждой развязки,
дельностей фаз и продолжительности наличия избыточного потока для всех развязок
4. ТРЕБОВАНИЯ К ОСНОВНЫМ ПОЛОСАМ МАГИСТРАЛИ
После предварительного определения числа полос магистрали с
помощью графика, изображенного на рис. 134, и табл. 29, необходи-
мо исследовать влияние условий движения в критических местах
магистрали на пропускную способность и уровень обслуживания
[4]. Если некоторый заданный уровень обслуживания не обеспечи-
вается в каждой точке магистрали, то появляются узкие места, и
движение транспорта нарушается. Критические места на магистра-
ли характеризуются внезапным увеличением транспортной нагруз-
ки, взаимными помехами при движении автомобилей либо тем и
другим.
Транспортная нагрузка магистрали может изменяться только
за въездами или съездами. Две наиболее критические точки маги-
страли находятся непосредственно перед съездом и непосредствен-
но за въездом, где транспортная нагрузка неизбежно является мак-
симальной. Условия движения у съездов обычно аналогичны усло-
виям движения на подъеме дороги, но они могут быть более жест-
кими, если автомобили задним ходом выезжают со съезда на ма-
гистраль. Многих проблем, связанных с функционированием съез-
дов, можно избежать, если автомобили будут снижать скорость
движения не на внешней полосе магистрали, а на съезде. Однако,
даже если имеются длинные параллельные полосы торможения, они
не используются вследствие неестественного характера этого ма-
невра. При близком расположении развязок и наличии фронталь-
ных дорог предпочтительнее использовать короткие съезды и въез-
ды. При большой интенсивности движения на фронтальной доро-
ге необходимо устанавливать специальные знаки, обеспечивающие
беспрепятственный выход со съезда и, таким образом, исключаю-
щие выезд автомобилей задним ходом обратно на магистраль.
Наличие въезда может препятствовать достижению заданного
уровня обслуживания на рассматриваемом участке магистрали.
Во-первых, дополнительный транспорт, выезжающий на магист-
раль, может изменять условия движения на внешней полосе ма-
гистрали. Условия движения могут ухудшаться еще больше вслед-
ствие неблагоприятной геометрии, например, при наличии "больших
углов вхождения, крутых уклонов и малых расстояний. Во-вторых,
дополнительный поток может изменять условия движения на всех
полосах магистрали за примыкающим въездом. Особенно это от-
носится к тем случаям, когда на магистрали за въездом имеется
узкое место.
Для определения пропускной способности примыкающих въез-
дов используются три основных метода. Один из методов основан
на том, что сумма интенсивности движения на магистрали до при-
мыкающего въезда и интенсивности движения на примыкающем
въезде не должна превышать пропускной способности узкого места,
расположенного на магистрали за въездом. При втором методе учи-
тывается интенсивность движения на каждой полосе магистрали,
а затем интенсивность движения на въезде определяется как раз-
370
ность между пропускной
способностью на участке
вхождения в основной поток
(которая принимается здесь
равной интенсивности дви-
жения при заданном уровне
обслуживания, приведенной
в табл. 29) и интенсив-
ностью потока на внешней
полосе магистрали перед
въездом. При третьем мето-
де пропускная способность
въезда ограничивается чис-
лом интервалов между ав-
томобилями, движущимися
на внешней полосе магист-
рали, превышающих крити-
ческий [4]. Считается, что
второй метод является наи-
более приемлемым при про-
ектировании новых дорог.
Для использования первого
метода необходимо знать
пропускную способность уз-
кого места, а она не бывает
известна для новой дороги.
Преимущество третьего ме-
тода состоит в том, что он
учитывает влияние геомет-
рических характеристик
въезда на его пропускную
способность.
О 0,2 и,0 0,6 0,8 1,0
Интенсивность движения на въезде Rj/Q
Рис. 141. Определение минимальной длины
участка изменения ряда, соответствующей
расчетному уровню обслуживания:
L — длина участка изменения ряда, м\ Q —
уровень обслуживания для одной полосы
магистрали (табл. 29); — интенсивность
потока, выезжающего на магистраль с при-
мыкающего въезда; Т?2 — интенсивность по-
тока, сворачивающего на съезд.
Пример. Дано 7?i = l ООО авт)ч, /?2=900 авт!ч,
принятый для расчетов уровень обслуживания
для полосы магистрали составляет 1 600 авт!ч,
(из табл. 29). Этапы решения задачи:
1. Находим ординату и абсциссу графика:
Q 1 600
А^0.62.
Q 1 600
2. Находим минимальную длину участка измене-
ния ряда (L=660 м), соответствующую расчетному
уровню обслуживания.
Последним рассматриваемым критическим местом является
участок изменения ряда (weaving section). Наличие таких участков
часто упрощает характер движения и удешевляет конструкцию раз-
вязки. Пропускная способность участка изменения ряда зависит от
ее длины, числа полос, скорости движения и относительных интен-
сивностей отдельных маневров. Если в часы «пик» маневр измене-
ния ряда выполняет большое число автомобилей и интенсивность
движения на этом участке приближается к его пропускной способ-
ности, то возможно появление транспортной перегрузки, уменьше-
ние скорости движения и снижение уровня обслуживания. Иногда
этого удается избежать вследствие дополнительного уширения от-
дельных въездов и съездов, изменения порядка чередования съез-
дов и въездов с тем, чтобы переместить часть потока на фронталь-
ные дороги, а также применения узлов примыкания и разветвления
совместно с развязками типа клеверного листа. Участки изменения
ряда необходимо проектировать таким образом, чтобы их пропуск-
ная способность превышала интенсивность движения при расчетном
371
200 | 300
100 200 000 250 400
# 4 800 v z 4900
О 350 4000 400 4
100 к 200
300 150 400 200 15Q 500
В)
в)
400
< гш
100 400
200 А 208
X 2 450
200 800_
400 А 150
4200 ^^3900Of СоГ^2 430В ^^ЫОВ/ЗОО/^^ 5000 4300(1000Д^^ 4900^^4900 3200 4400 ‘
Число ПОЛОС 3 П0/1 ОСЬ2 дг! - 2 полосы _ \ Зполосы-’
Ы: Длина участка. l J* ' '
150м
Рис. 142. Порядок проектирования скоростной магистрали:
а — этап 1. Интенсивности движения в час «пик»; распределение транспорта по
направлениям — 2: 1; б — этап 2. Требования к развязкам (утренний час «пик»);
в — этап 3. Требования к основной полосе скоростной магистрали (утренний час
«пик»). В скобках указана интенсивность движения на внешней полосе магистра-
ли; г — этап 4. Другой вариант, в котором въезды и съезды переставлены ме-
стами;
1 — фронтальная дорога; 2 — скоростная магистраль
уровне обслуживания. Это требование согласуется с понятием об
уровне обслуживания, используемом при определении числа основ-
ных полос и проверке йропускной способности магистрали у примы-
кающих въездов. Определение минимальной длины участка измене-
ния ряда, соответствующей расчетному уровню обслуживания,
показано на рис. 141. Эти графики были получены путем рассмот-
рения занятости внешней полосы совместно с продолжительностью
поездки (см. рис. 25 и 26). На рис. 141 максимальное число автомо-
билей, покидающих въезд не может превысить величину, рав-
ную Q—7?i, плюс число автомобилей, выезжающих на магистраль
с примыкающего въезда и сразу же переходящих в другой ряд. На
рис. 142 показаны первые четыре этапа вычислений при проектиро-
вании скоростной магистрали.
Этап 1. Определение интенсивностей движения в часы «пик».
Для этого заданная среднесуточная интенсивность движения умно-
жается на коэффициент для часа «пик» и коэффициент распреде-
ления. В реальной задаче необходимо также проверить вечерние
часы «пик».
372
Этап 2. Определение требований к развязкам. Важно, чтобы
эта работа выполнялась до изучения требований к проезжей части
скоростной магистрали, поскольку число съездов зависит от выб-
ранного типа развязки. Так, развязка типа клеверного листа и
путепровод могут иметь один-два въезда и один-два съезда в каж-
дом направлении, в то время как ромбовидные развязки имеют
один въезд и один съезд в каждом направлении. Если развязка
должна быть регулируемой, то проверяют пропускную способность,
чтобы определить, справится ли проектируемая дорога с ожидае-
мой транспортной нагрузкой при приемлемых длительностях цикла.
Если окажется, что развязка явно перегружена, то могут быть до-
бавлены дополнительные полосы, либо ее необходимо заменить раз-
вязкой более высокого класса.
Этап 3. Число основных полос магистрали зависит от выб-
ранного расчетного уровня обслуживания. Приведенные в табл. 29
расчетные интенсивности движения позволяют проектировщику оп-
ределить, какой уровень обслуживания можно ожидать при данной
интенсивности исходя из вероятности получения различных условий
движения в периоде «пик» продолжительностью 5 мин, В данном
примере интенсивность движения принята равной 1 700 авт!ч.
Необходимо проверить условия движения в критических местах
и убедиться, что расчетный уровень обслуживания обеспечивается
в любой точке магистрали. Критическими участками являются учас-
ток выезда на магистраль и участок изменения ряда. Рис. 21—24
позволяют определить, не превышает ли интенсивность движения
пропускную способность магистрали у въезда, которая определяет-
ся как приведенная в табл. 29 интенсивность движения при выбран-
ном уровне обслуживания. Таким образом, поскольку за основу при
определении числа полос принимается интенсивность, равная
1 700 авт!ч, то эта величина и характеризует пропускную способ-
ность магистрали у въезда. Графики, изображенные на рис. 141,
позволяют опеделить, может ли пропускная способность на участке
изменения ряда обеспечить заданный уровень обслуживания.
Этап 4. Всегда необходимо рассмотреть несколько других ва-
риантов. На рис. 142 показан один из вариантов, где изменен лишь
порядок следования въездов и съездов. В результате такого изме-
нения оказалось возможным иметь для каждого направления дви-
жения по три полосы вместо четырех.
Заданный уровень обслуживания должен обеспечиваться в лю-
бой точке магистрали. Поскольку помехи движению, существующие
в одной какой-либо точке, имеют свойство распространяться на не-
которое расстояние, которое зависит от соотношения между интен-
сивностью движения и пропускной способностью, то нецелесообраз-
но допускать более низкие уровни' обслуживания для одной или
большего числа критических точек. В узких местах или критических
точках должен обеспечиваться уровень обслуживания, не меньший
заданного. Такой принцип называется сбалансированным расчетом,
и его необходимо соблюдать при проектировании скоростных ма-
гистралей.
373
5. СХЕМА СКОРОСТНОЙ МАГИСТРАЛИ, ИМЕЮЩЕЙ
ПОЛОСЫ С ИЗМЕНЯЕМЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ
Если приходится выбирать между очень малой величиной (напри-
мер, это может быть очень малое расстояние между развязками) и
очень большой величиной (например, очень большое расстояние
между развязками значительно увеличивает маршрут движения),
то, используя двумерный анализ, в принципе несложно найти опти-
мальное решение. Однако на практике получаем не полную, а
частичную оптимизацию. Принцип частичной оптимизации заклю-
чается в том, что оптимизация каждой отдельной подсистемы, про-
водимая независимо, обычно не приводит к оптимальной системе, и
улучшение, достигнутое в одной подсистеме, может ухудшить рабо-
ту системы в целом. Остается показать, что расстояние между раз-
вязками является лишь одним аспектом этой проблемы, для этого
достаточно рассмотреть другие элементы системы или другие сто-
роны задачи проектирования скоростной магистрали.
Так как в часы «пик» распределение транспорта по направле-
ниям является далеко не равномерным, то пропускную способность
дороги при данной-ширине проезжей части можно значительно уве-
личить, отведя большую половину полос для транспорта, движуще-
гося в преобладающем направлении. Такая мера будет особенно
эффективной на радиальных магистралях крупных городов, где
большие потоки транспорта утром движутся в сторону центрально-
го делового района, а вечером — в обратном направлении.
Такого рода мера оказывается довольно эффективной и позво-
ляет облегчить транспортную нагрузку на крупных магистралях
и мостах. Например, на дороге с шестью полосами четыре полосы
могут быть отведены для движения в одном направлении, а две —
для движения в обратном направлении и, таким образом, обеспе-
чить движение несбалансированных потоков. Поскольку в часы
умеренной транспортной нагрузки для движения в каждом на-
правлении отводятся три полосы, то движение регулируется при
помощи специальных знаков и конусов, устанавливаемых между
полосами с изменяемым направлением движения и подвешиваемых
над ними светофоров.
Как указывается в «Красной книге» Американской ассоциации
дорожных управлений штатов (AASHO) [5], хотя теоретически этот
принцип приемлем для скоростных магистралей, его применение
затрудняется вследствие наличия разделительной полосы. В неко-
торых случаях транспорт, находящийся слева от разделительной
полосы на некотором расстоянии, оказывается изолированным от
всех съездов, и такие условия движения оказываются неприемле-
мыми для скоростных магистралей.
Все дело в том, что скоростная магистраль представляет собой
сложную систему. При проектировании дорог следует избегать
опасностей, сопряженных с частичной оптимизацией. В данном слу-
чае нельзя рассматривать порознь расстояние между развязками
и возможность изменения направления движения на отдельных
374
полосах. На примере типичного расчета скоростной магистрали по-
пытаемся дать представление о творческом подходе к проектирова-
нию магистрали в отличие от классического расчета геометрических
характеристик. На рис. 143 показаны семь мест, где по данным об
интенсивностях сквозного движения и интенсивностях потоков для
выполнения маневров поворота необходимо сооружение развязок.
При выборе типа развязки возникает проблема обеспечения эффек-
тивного движения потоков, выезжающих на магистраль. Такие
обычные меры, как сооружение въездов с двумя полосами движе-
ния или двух отдельных въездов для одной развязки, чтобы обеспе-
чить интенсивное движение транспорта совершающего, поворот, еще
не решают проблемы, так как все автомобили по-прежнему вынуж-
дены выезжать на единственную внешнюю полосу магистрали.
Не меньше затруднений вызывает большое число полос магист-
рали, необходимое для обеспечения заданной интенсивности дви-
жения. Эффективность магистрали максимальна при наличии трех
полос движения в каждом направлении и резко уменьшается в слу-
чае четырех или пяти полос для движения в одном направлении.
Однако в гипотетическом случае, рассматриваемом на рис. 143,
требуется именно такое число полос, если имеется в виду обычная
скоростная магистраль.
Как уже указывалось ранее, сооружение магистрали, имеющей
полосы с изменяемым направлением движения, целесообразно в тех
случаях, когда для движения в часы «пик» требуется не менее
восьми полос и поток по направлениям является весьма неравно-
мерным. Хотя в документе AASHO [5] рассматривается примене-
ние этого принципа для заглубленных магистралей, однако! нет ос-
нований не использовать его для магистралей на эстакадах. Участ-
ки магистралей типа 3—2—3 и 3—3—3, имеющие полосы с
изменяемым направлением движения, теоретически по пропускной
способности в часы «пик» эквивалентны дорогам с 10 и 12 полоса-
ми соответственно.
В документе AASHO <[5] использование полос с изменяемым на-
правлением движения ограничивается случаями, когда транспорт,
находящийся на этих полосах, проходит значительное расстояние
по самой магистрали, не съезжая с нее. Как будет показано, такое
ограничение является излишним и даже нереальным.
На рис. 143 схематически показаны различные типы развязок и
их относительное расположение. В каждом случае развязку выби-
рают исходя из ограничений, налагаемых пропускной способностью
и условиями движения. В трех случаях при малой транспортной на-
грузке Могут быть использованы ромбовидные развязки с пропуск-
ной способностью на критической полосе 1 800 авт!ч (см. рис. 139),
так как для двух развязок, расположенных ближе к центральному
деловому району, интенсивности движения на критической полосе
составляют 1 427 и 1 450 авт!ч, а для предпоследней развязки —
1 200 авт)ч. Расстояние между двумя улицами, пересекающими ма-
гистраль в середине схемы, составляет 180 м, поэтому их можно
рассматривать как пары однопутных дорог, и для приема поворот-
375
w го
2V 4200 <1800
(приемлемо)
IV4367<24QQ
(приемлемо)
&ШЧ8Ю
(приемлемо)
(приемлемо)
Рис. 143. Схема скоростной магистрали, имеющей полосы с изменяемым направлением движения:
а — среднесуточные интенсивности сквозных* и поворотных потоков, прогнозируемые через 20 лет. Коэффициент для
часа «пик» $ = 10%; коэффициент распределения £> = 67%;
1— ул. Янделл; 2 — ул. Вайоминг; 3 — ул. Миссури; 4 — ул. Франклин; 5 — ул. Мен; 6 — ул. Миллс; 7— ул. Санта Фе; 8 — ул. Эль Пасо;
9— ул. Орегон; 10 — ул. Меса; 11— ул. Стантон; /2 —ул. Канзас; 13 — ул. Кемпбелл; 14 — транспортная система деловой части города;
15 — ул. Хекберри; 16 — ул. Фейр; /7 — ул. Нью Браунфелс; 18 — ул. Дочи Хотуэллс; 19 — ул. Блэквуд; 20 — ул. Голиад; 2/— коль-
цевая дорога № 13;
б — требования к развязкам и скоростной магистрали (интенсивности движения в утренний час «пик»);
I — участок типа 2-2. Участок типа 3-3; II — участок типа 2-0-2. Участок типа 3-2-3. Переход от двух к трем по-
лосам магистрали; III — участок типа 3-2-3. Участок типа 2-2-2. Переход от трех к двум полосам магистрали:
А — ромбовидная развязка; Б — ромбовидная развязка, имеющая полосы с изменяемым направлением движения; В —
развязка типа «разрезанный ромб»; Г — ромбовидная развязка в трех уровнях, имеющая полосы, с изменяемым направ-
лением движения;
R— число автомобилей, совершающих правый поворот; £— число автомобилей, совершающих левый поворот; Т —чис-
ло автомобилей, движущихся прямо
ных потоков с этих улиц может быть сооружена развязка типа
«разрезанный ромб». Суммарная интенсивность движения на кри-
тической полосе для этой развязки составляет 2 150 авт!ч, что мень-
ше ее пропускной способности, равной 2 400 авт!ч (см. рис. 139).
Исходя из интенсивности поворотных потоков вправо и влево от
развязки типа «разрезанный ромб» достаточно соорудить развязки
типа «обыкновенный ромб». Решение использовать в обоих случаях
ромбовидную развязку, имеющую полосы с изменяемым направле-
нием движения, основано на высокой интенсивности потоков, выез-
жающих на магистраль, и равной 1 400 авт!ч и 1 500 авт!ч соответ-
ственно. Использование на центральной развязке двух съездов
позволяет беспрепятственно переместиться к последнему узлу,
представляющему собой ромбовидную развязку в трех уровнях,
для которой общая интенсивность потока автомобилей, выезжаю-
щих на магистраль, составляет 3 000 авт!ч. На обычном участке
магистрали невозможно обеспечить такую пропускную способность,
однако этого можно добиться, связав съезды развязки с двумя по-
лосами с изменяемым направлением движения, а также с правой
и левой проезжими частями магистрали.
На рис. 143 показано, что использование полос с изменяемым
направлением движения позволяет уменьшить общее число полос
магистрали. Обычно доступ на центральную проезжую часть обес-
печивается соединением ее с правой и левой проезжими частями
путепроводами. Подведение путепроводов от пересекающихся улиц
непосредственно к центральной проезжей части магистрали жела-
тельно и с точки зрения уменьшения интенсивности движения на
въездах и съездах за счет увеличения числа въездов и съездов, при
этом не увеличится интенсивность изменения ряда на правой и ле-
вой проезжих частях. Расстояния между чередующимися съездами
и въездами, показанные на рис. 143, являются минимальными. Они
получены при помощи графика на рис. 141 при соответствующих
интенсивностях движения на съездах и въездах (при расчетной ин-
тенсивности движения 1 600 авт/ч).
Ромбовидные развязки, имеющие полосы с изменяемым направ-
лением движения, представляют собой по существу комбинацию
двух развязок: развязки типа неполного клеверного листа на цент-
ральной проезжей части и ромбовидной развязки на правой и ле-
вой проезжих частях магистрали. Следует отметить, что поскольку
съезды развязок типа клеверного листа принимают транспорт с
центральной проезжей части с изменяемым направлением движе-
ния, а не с внешних проезжих частей, то требуется лишь незначи-
тельное увеличение полос отвода, чем при обычной ромбовидной
развязке. Действительно, ромбовидная развязка, связывающая
правую и левую проезжие части магистрали, во многом аналогич-
на ромбовидной развязке на обычном участке магистрали.
Необходимо всегда учитывать степень равномерности движения
и ее влияние на функционирование развязки. Хаотическое располо-
жение: съездов и въездов между последовательными развязками
приводит к путанице, снижению скорости, вызывает ударные волны
378
и требует частого изменения ряда. Из рис. 143 видно, что водители,
движущиеся на внешних проезжих частях магистрали, сталкива-
ются со схемой расположения съездов и въездов, характерной для
обычной ромбовидной развязки, а на центральной проезжей части
с изменяемым направлением движения непрерывность потока обес-
печивается развязкой типа клеверного листа.
6. ТРАНСПОРТНАЯ СИСТЕМА ДЕЛОВОЙ ЧАСТИ ГОРОДА
Наиболее сложной задачей при проектировании является схема
движения транспорта в центральном деловом районе. Все транс-
портные средства (метро, наземный общественный транспорт и ав-
томобили) доставляют пассажиров в центральный деловой район
в одно и то же время. Кроме того, многие приходят сюда пешком.
По-видимому, наиболее критическим местом городской транс-
портной системы является пересечение магистрали с центральным
деловым районом. Необходимо спроектировать скоростную магист-
раль таким образом, чтобы транспорт, движущийся в центральный
деловой район и обратно, преодолевал относительно небольшие рас-
стояния. Лейш [6] разработал большое число вариантов с исполь-
зованием параллельных и перпендикулярных распределительных
дорог, при этом подчеркивалось, что одновременно с проектирова-
нием скоростной магистрали для обеспечения движения в деловой
части города необходимо создание определенной распределитель-
ной системы улиц.
Следует иметь в виду, что новая скоростная магистраль, прохо-
дящая вблизи деловой части города, может полностью изменить
существующую схему движения и существенно увеличить транс-
портную нагрузку улиц центрального делового района. Чтобы из-
бежать, этого, необходимо решать данную проблему в комплексе,
рассматривая систему в целом, а не отдельные ее элементы. Так,
транспортная система деловой части города должна включать ско-
ростную магистраль, развязки, сеть улиц, связанных с магист-
ралью, и систему регулирования движения. Хотя каждый из этих
элементов можно анализировать в отдельности, первоначально
•нужно выполнить обычные проверки совместимости элементов
системы.
На рис. 144 показана сеть улиц деловой части города при гипо-
тетических условиях движения, изображенных на рис. 143. Сущест-
вующая сеть улиц имеет двустороннее движение, за исключением
улицы Канзас и улицы Кэмпбелл; на первой улице разрешается
движение в северном направлении, а на второй — в южном. За-
штрихованные области изображают предлагаемую систему скорост-
ного движения. Числа на схеме показывают расчетную интенсив-
ность движения в часы «пик» для будущего года.
Приступая к последовательному рассмотрению элементов транс-
портной системы, остановимся вначале на скоростной магистрали.
Важной особенностью скоростной магистрали является тот факт,
что такое крупное сооружение подобно любому крупному элемен-
379
Рис. 144. Анализ транспортной системы.
Примечания: 1. Все улицы шириной 15 м, за исключением ул. Вайоминг, имеющей
2. Стрелки у перекрестков показывают число полос движения. Обозначения:
РР— остановка разрешена; PR — остановка разрешена только на правой стороне; NP—
пропускной способности дорог»
ширину 10,4 м.
остановка запрещена; С— значения пропускной способности по данным «Руководства по
ту рельефа, например, такому, как гора или река, вызывает геогра-
фические, а следовательно, и социальные перемены. Поэтому было
решено провести магистраль в выемке и, таким образом, не созда-
вать физических или психологических препятствий развитию цент-
рального делового района этого быстро растущего города.
Магистраль, проходящая через деловую часть города, часто об-
служивается несколькими расположенными недалеко друг от дру-
га развязками. Однако вследствие высокой интенсивности движе-
ния в направлении деловой части города (каждое утро в часы
«пик» сюда прибывает 4 800 автомобилей с восточного направле-
ния и 1 632 автомобиля с западного) и плотного расположения улиц
в этом случае была выбрана другая схема. Съезд с магистрали ав-
томобилей, движущихся в западном направлении, должен произво-
диться на улицу Янделл, при этом число полос магистрали, идущих
с востока, уменьшается с трех до двух, что облегчает распределение
этого потока, имеющего интенсивность 1 800 авт!ч. Полагают, что
для отвода транспортного потока, движущегося с запада в утрен-
ние часы «пик», достаточно одного двухрядного съезда. Этот съезд
выходит на улицу Вайоминг. Таким образом, предлагаемая магист-
раль имеет шесть полос для движения в каждом направлении, при
этом четыре полосы являются сквозными, а две сливаются с ули-
цами, что обеспечивает лучшее распределение транспортных пото-
ков (см. рис. 144).
Четыре полосы с изменяемым направлением движения у цент-
рального делового района делятся на две ленты по две полосы в
каждой. Одна лента принимает поток, движущийся к деловому
району в утренние часы «пик»; а вторая — поток, движущийся из де-
лового района в вечерние часы «пик». У регулируемого соединения
с улицей Миссури первая лента расширяется, здесь она имеет четы-
ре полосы. Вторая лента, используемая в вечерние часы «пик», сое-
диняется с улицей Франклин; эта же улица связана и с проезжей
частью магистрали, ведущей из деловой части города.
Улицы Янделл и Вайоминг, параллельные скоростной магистра-
ли, рассматриваются как однопутные фронтальные дороги. Направ-
ление движения на улицах Канзас и Кэмпбелл необходимо изме-
нить на обратное, с тем чтобы совместить эти улицы с въездами и
съездами магистрали. В северной части улицы Санта Фе сохранено
двустроннее движение, чтобы облегчить въезд на магистраль
транспорту, движущемуся в западном направлении, поскольку при
этом обеспечивается выезд на магистраль в течение всего цикла
работы светофора. При переходе от двустороннего движения к од-
ностороннему предполагается направить потоки на улицу Санта Фе,
как показано на рис. 144.
Рассматривая следующий элемент системы — сеть улиц цен-
трального делового района, заметим, что ширина всех улиц остает-
ся без изменения (15 ж, за исключением улицы Вайоминг, имею-
щей ширину 10,4 ж). Стрелки у перекрестков показывают необхо-
димое число полос движения исходя из пропускной способности
полосы при зеленой фазе сигнала, равной 1 000 авт)ч. Предполага-
382
ется, что там, где въезды и съезды скоростной магистрали примы-
кают к улицам, все установленные светофоры должны составлять
часть существующей системы регулирования движения в деловой
части города. Для примера рассматривается двухфазная система
(отношение длительностей фаз 2:1) при длительности цикла 60 сея
со сдвигом фаз, рассчитанным на скорость движения 32 км/ч. Ко-
эффициент для часа «пик» составляет 10%, а распределение
транспорта по направлениям принимается равным 67: 33. При этих
допущениях стоянку в деловой части города в часы «пик» можно
будет выбирать фактически неограниченно.
На схеме указаны также значения пропускной способности для
каждого квартала деловой части города. Исходя из этих значений,
необходимо несколько ограничить места стоянки автомобилей в
часы «пик». Так PR означает «стоянка только на правой стороне»,
a NP — «стоянка запрещена».
Наконец, полный анализ всей транспортной системы деловой
части города, включая элементы магистрали, путепроводы, сеть
улиц и элементы системы регулирования движения, показал, что
предлагаемая схема отвечает двум важным требованиям: скорост-
ная магистраль проходит довольно близко от деловой части города,
не нарушая его целостности, и в то же время она располагается
достаточно далеко, что позволяет избежать транспортных пере-
грузок.
7. РАЗВЯЗКА НА УЧАСТКЕ МАГИСТРАЛИ, ИМЕЮЩЕМ
ПОЛОСЫ С ИЗМЕНЯЕМЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ
После определения типа развязки и числа полос нужно установить
параметры проезжей части. На рис. 145 показана схема развязки
для участка магистрали, имеющего полосы с изменяемым направ-
лением движения. Поперечное сечение типичного узла дорог пока-
зано на рис. 146.
Выбор для всех проезжих частей магистрали полос шириной
3,6 м не нуждается в объяснении. Поскольку на каждую проезжую
часть приходится не более двух полос, достаточно иметь попереч-
ный уклон, равный 1%. Предусмотрена возможность расширения
в будущем основных проезжих частей магистрали; расширение про-
езжей части с изменяемым направлением движения в * пределах
развязки не предусматривается. Однако расстояние в 30 м между
осевыми линиями проезжей части с изменяемым направлением
движения и основных проезжих частей вполне достаточно для рас-
ширения дороги. Следует добавить, что расстояние между основны-
ми проезжими частями составляет 60 м. Это позволяет избежать
ослепления водителей светом фар в ночное время, так как большую
часть года проезжая часть с изменяемым направлением движения
используется только в дневное время.
Откосы имеют стандартную ширину — 3 м справа и 1,8 м слева.
Откосы, примыкающие к полосам разгона, должны иметь ширину
3 м, измеряемую от края основной проезжей части, а затем откос
383
Рис. 145. Ромбовидная развязка, имеющая полосы с изменяемым направлением движения:
/ — полосы с изменяемым направлением движения; 2— правая сторона магистрали; <3 —левая сторона магистрали; -/—профиль осевой линии
проезжей части с изменяемым направлением движения; 5 — съезд •//, 48 км!ч, 200 авт/ч; 6 — съезд А, 48 км]ч, 200 авт1ч\ 7— минимальный
дорожный просвет 4,5 М', 8 —съезд G, 48 км[ч, 200 авт!ч-, 9 — съезд В, 48 км!ч, 200 авт!ч\ /3 — осевая линия правой и левой сторон магистра-
ли; 11— осевая линия полос с изменяемым направлением движения; 12 — съезды G, В и И, 48 км!ч, 200 авт!ч\ /3 —съезд С, 48 кл//ч,
200 авт[ч\ /4—съезд В, 40 км]ч, 170 авт(ч; 15 — минимальный дорожный просвет 3,8 лг, 16 — съезд В, 48 км/ч, 200 авт!ч', 77—съезд D, 72 км!ч,
300 авт\’ч, 18 — съезд С, 48 км[ч, 200 пат/ч; 19 — правая и левая проезжие части магистрали, скорость 96 км!ч, 800 авт/ч; 20 — съезд В, ско-
рость 72 км/ч, 300 авт^ч; 21 — съезды С, В и F, 48 км/ч, 240 авт/ч; 22 — съезд D, 56 км/ч, 200 пвт/ч; 23 — съезд Е, 56 км/ч, 200 авт/ч; 24 <=- левая
и правая проезжие части магистрали, 96 км/ч; 25 — профиль осевой линии проезжей части с изменяемым направлением движения
сужается. Для съездов ширина откосов принимается постоянной и
равной 1,8 м. Все откосы должны иметь поверхностную обработку.
Крутизна -внутреннего откоса обычно составляет 2%, а внешне-
го 4%.
Наружные откосы кювета имеют уклон 4:1. Откосы насыпи
имеют переменную крутизну, которая зависит от высоты насыпи, и
составляет от 8: 1 при высоте насыпи не более 1,5 и в пределе до-
1 : 1 (между основными проезжими частями и проезжей частью с
изменяемым направлением движения). В этом месте высота насы-
пи составляет 10,5 м. Откосы с крутизной более 2:1 укреплены
каменной наброской, а склоны с крутизной более 4: 1 должны
иметь защитное ограждение. Между проезжей частью с изменяе-
мым направлением движения и ее съездами предусматривается ус-
тановка ограждения.
Ширина дорожных просветов путепроводов должна соответство-
вать ширине полос. Необходимо, чтобы высота дорожных просве-
тов была не менее 5,2 м для проезжих частей магистрали и не ме-
нее 4,1 м для съездов (желательно также не менее 5,2 м). Высота
дорожных просветов для улиц должна составлять 3,8 м.
В результате обширных исследований было установлено, что
наиболее важными элементами узлов примыкания являются сле-
дующие: угол примыкания въезда (или съезда) к магистрали, усло-
вия видимости между транспортом, движущимся по магистрали,
и транспортом, находящимся на въезде (съезде), длина полосы
разгона и участка примыкания. Большие углы примыкания не поз-
воляют использовать полосу разгона, поскольку водители предпо-
читают ехать прямо, а не выполнять необходимый, но более слож-
ный маневр поворота для выезда на полосу разгона. Наилучшие ус-
ловия движения обеспечиваются при малых углах примыкания, что
видно из приводимых ниже проектных стандартов.
Поскольку эффективность выезда на магистраль в значительной
мере зависит от раннего обнаружения интервала между автомоби-
лями (желательно за 75 м от участка примыкания), горизонталь-
ные профили въезда должны обеспечивать видимость не далее
этого расстояния. Особую осторожность необходимо проявлять при
определении места пересечения въездов с тем, чтобы удовлетворя-
лось это условие.
Рассмотрение условий движения на съездах указывает также
на необходимость согласования условий движения транспорта с
элементами конструкции съезда. В частности, конструкция съезда
должна обеспечивать естественный выезд с магистрали при средней
скорости движения транспорта и хороших условиях видимости, не
ограничиваемых профилем дороги. Кроме того, съезд должен иметь
достаточную длину. Основной особенностью при выезде с магист-
рали является снижение скорости автомобиля, находящегося на
внешней полосе или на специальных полосах торможения. Эти
принципы реализованы на практике. Так, на схеме выезд с магист-
рали осуществляется под углом 2°30', имеется длинная полоса тор-
можения, примыкающая к магистрали, и выбран соответствующий
профиль узла примыкания (съезда).
385
Как для въездов, так и для съездов должно существовать опре-
деленное соотношение междур а счетной скоростью и скоростью
движения на участке примыкания. Расчетная скорость движения
на въезде (съезде) в меньшей степени связана с расчетной скоро-
стью движения на магистрали, что обеспечивается геометрически-
ми характеристиками узлов примыкания, рассмотренными выше;
скорость движения изменяется за пределами основных полос ско-
ростной магистрали. Съезды (въезды) примыкают к улицам почти
под прямыми углами, образуя ромб. Поскольку эти перекрестки
являются регулируемыми, скорости движения здесь являются от-
носительно небольшими.
Для кольцевых съездов, соединяющих полосы с изменяемым
направлением движения, обычно не устанавливается требуемая
расчетная^скорость движения, так как для них потребовалось бы
больше пространства и, следовательно, увеличилась бы продолжи-
тельность движения. Изменение радиусов осуществляется путем
многократного сопряжения кривых, что влияет на безопасность
движения, увеличение и снижение скорости путем регулирования
длины сопрягаемых дуг.
Съезды имеют довольно большой уклон, который, однако, не
превышает 7%, что свидетельствует о хорошей конструкции раз-
От 60 до 135 м
17м и долее
30м
Полосы для движе-
ния в южном
направлении
Съезд
-----» Полосы с изменяемым г
13м I направлением ।
-----*; движения [
Полосы дляп
движения в север-
ном направлении
въезд
Съезд
Завершенное строительство
Около 9 м Около 7,8 м
Зм Около 2,4 м
Съезды
Дорога симметрична | ~ здм
Остальные элементы те же yn< I Поперечный'
_______— ‘ ЛЛ01 Цвпон
~~~~^0,01 \о,О1—
Полосы с изменяемым направлением
движения
Рис. 146. Типичные сечения:
/—'бордюр для регулирования водоотвода: 2— обочины с поверхностной обработкой; 3 —
основание толщиной 30 см; 4 — покрытие толщиной 7,6 см; 5 — покрытие толщиной 5,8 см;
6 — основание толщиной 20 см; 7 — бордюр высотой 60 см.
Откосы с крутизной более 4 : 1 должны иметь защитное ограждение. Откосы с крутизной
более 2 : 1 должны быть укреплены каменной наброской
386
Ji//...L
~l (I Visa A
_Ц//
~1 I ФазаС 11Г
Jit//
^6 too itF
\ Перекрытий
фазы ft
Утренний
час. пик'
Перекрытий
фазы С
"1V toaS'lTF
~1 I Фаза С । ТГ-
Период
неинтенсивного
движения
JilZzCANJL
~l ( I Фаза 27
~l I Перекрытий Г"
фазы С
\\l L |L
------Z^xJZ. ?
* Фом А •"* I ФазаВ~^^^~
_Д^.
"1 * * Фаза У
<L
п(г?етпг
фазы А
вечерний
период,, пик"
~1 \Перекрыти№^~
фазы С
Рис. 147. Распределение фаз для ромбовидной развязки, имеющей полосы с из-
меняемым направлением движения
вязки. В большинстве случаев достигнуто сбалансированное соот-
ношение между горизонтальными и вертикальными элементами.
Для регулирования движения на съездах, ведущих к полосам с
изменяемым направлением движения и пересекающимся улицам
(см. рис. 145), необходима установка специальных дорожных зна-
ков. Съезды В и D будут использоваться только в утренние часы
«пик», а съезды Е и G — только в вечерние. Распределение фаз для
развязки на участке магистрали, имеющем полосы с изменяемым
направлением движения (см. рис. 145), показано на рис. 147.
ЗАДАЧИ
1. Скоростную магистраль можно рассматривать как систему, имеющую следую-
щие шесть элементов: полосы скоростного сквозного движения; въезды; съезды;
фронтальные дороги; пересекающиеся улицы; развязки.
Система существует только в том случае, если между ее элементами есть
функциональная взаимосвязь. Рассмотрите определение скоростной магистрали
как некоторой системы в связи с проектированием и функционированием перечис-
ленных элементов.
2. В 8 км от центрального делового района города с населением 2 млн. чел.
должна сооружаться ромбовидная развязка. Ожидаемая интенсивность движения
в направлении делового района в утренние часы «пик» составляет 5 200 авт!ч и в
обратном направлении 2 000 авт!ч. Имеются параллельные фронтальные дороги с
односторонним движением, а над магистралью проходит одна из улиц. Данные
об ожидаемых интенсивностях движения в часы «пик» на пересечениях фронталь-
ных дорог с этой улицей следующие:
387
Сквозное движение на каждой улице, пересекающей фронталь-
ную дорогу, ведущую из делового района................ 1 000
Правоповоротное движение при выезде с улиц на фронталь-
ную дорогу, ведущую из делового района................ 300
Правоповоротное движение при выезде на улицы с фронталь-
ной дороги, ведущей из делового района............. . 100
Сквозное движение на фронтальной дороге, ведущей из дело-
вого района, при пересечении каждой улицы........... 200
Левоповоротное движение при выезде на улицы с фронталь-
ной дороги, ведущей из делового района . . ............ 250
Сквозное движение на каждой улице, пересекающей фронталь-
ную дорогу, ведущую к деловому району.................. 900
Правоповоротное движение при выезде с улиц на фронталь-
ную дорогу, ведущую к деловому району . .... . ......... 350
Правоповоротное движение при выезде на улицы с фронталь-
ной дороги, ведущей к деловому району...........i. . . . 300
Сквозное движение на пересечении фронтальной дороги, веду-
щей к деловому району, с каждой улицей . . . ।. *. . . . 450
Левоповоротное движение при выезде на улицы с фронталь-
ной дороги, ведущей к деловому району ................. 200*
Подготовьте письменный отчет, содержащий графики и расчеты, с указани-
ем конфигурации полос и средств регулирования движения на развязке.
3. Проектируемая магистраль на протяжении 3,2 км пройдет по границе
центрального делового района города с населением 1 млн. чел. По возможности
магистраль должна проходить параллельно улицам с односторонним движением,
расстояние между которыми равно 90 м. На всех улицах центрального делового
района имеется одностороннее движение (направление движения меняется на со-
седних улицах), и расстояние между ними составляет 90 м. Магистраль будет
иметь пять полос для движения в каждом направлении. На участках, примыкаю-
щих к магистрали, находятся гостиницы, высотные жилые дома, многоэтажные
здания учреждений и торговые предприятия. Покажите, каким путем можно
решить следующие задачи: как осуществлять водоотвод ливневых потоков, как
использовать земли под эстакадой, как соединить улицы центрального делового
района с магистралью на эстакаде?
4. Для города с населением 5 млн. чел. оцените верхний предел расчетного
уровня обслуживания (для одной полосы магистрали), если вероятность устойчи-
вого потока в интервале продолжительностью 5 мин должна быть не менее 0,7.
5. Заглубленная скоростная магистраль пересекает большие параллельные
улицы, отстоящие друг от друга на расстоянии 400 м. В утренний период «пик»
при движении транспорта к центру города интенсивный выезд на первую улицу
сопровождается интенсивным съездом со второй улицы. Укажите возможные ре-
шения с целью снижения помех движению транспорта на магистрали, вызывае-
мых изменением ряда. Составьте графики с приложением кратких описаний.
6. Уровень обслуживания для одной полосы магистрали принят равным
1 700 авт!ч. За въездом с интенсивностью движения 800'авт/ч следует съезд с
интенсивностью движения 300 авт/ч. Какую длину должен иметь участок изме-
нения ряда?
7. Представьте, что вы работаете в автодорожной организации крупного города
с населением 3 млн. чел. Планируемый рост городских районов, строительство
больших многоэтажных жилых зданий, концентрация работающих в централь-
ном деловом районе и развитие районов с малой плотностью застройки вызвали
необходимость сооружения скоростной магистрали и развития общественного
транспорта. Магистраль может быть заглубленной или на эстакаде. Обществен-
ным транспортом может быть метро или наземная железная дорога. Какими со-
ображениями вы будете руководствоваться при оценке вариантов с точки зре-
ния их проектирования и эксплуатации?
388
ЛИТЕРАТУРА
1. Goode Н. Н., Machol R. Е. «System Engineering», McGraw-Hill, New
York, 1957.
Русский перевод: Гуд Г. X., M а к о л Р. Э., Системотехника. Введение в
проектирование больших систем. М., «Советское радио», 1962.
2. Moskovitz К., Newman L. Notes on Freeway Capacity, Highway
Research Board Rec. 27, 1963.
3. D r e w D. R. Design and Signalization of High-type Facilities, Traffic
Eng., vol. 33, № 10, July 1963.
4. Drew D. R., К e e s e C. J. Freeway Level of Service as Influenced by
Volume and Capacity Characteristics, Highway Res. Board Rec. 99, December 1965.
5. «А Policy on Arterial Highway in Urban Areas», American Association of
State Highway Officials, Washinghon, D. C., 1957.
6. Leisch J. E. «Interchange Design», DeLeuw, Gather and Company, Chica-
go, 1962.
7. «What Freeways Mean to Your City», Automotive Safety Foundation,
200 Ring Building, Washington, D. C., 1964.
ГЛАВА XV
НАБЛЮДЕНИЕ
И РЕГУЛИРОВАНИЕ
ДВИЖЕНИЯ
Производительность (пропускную способность) любой системы
можно увеличивать либо вследствие физического расширения су-
ществующей системы, либо путем лучшего управления ею. В прош-
лом для решения проблем, связанных с движением наземного
транспорта, применялись оба метода, а на магистралях свободно-
го движения — только первый метод. В то время как первые ма-
гистрали имели четыре полосы движения, многие новые дороги
имеют до десяти полос. Поэтому остается применять только второй
метод — лучшее регулирование движения на существующих до-
рогах.
1. ФУНКЦИОНИРОВАНИЕ МАГИСТРАЛИ
Попадая на магистраль свободного движения, водитель ожидает,
что его потребности будут удовлетворены в гораздо- большей сте-
пени, чем на обычных, дорогах. Иногда эти надежды могут оправ-
даться за счет планирования соответствующей пропускной способ-
ности при обеспечении рациональных геометрических характе-
ристик дороги. Однако чаще всего фактические параметры
транспортного потока и схема движения отличаются от проектных,
поэтому после строительства дороги требуется постоянное наблю-
дение за ее работой.
На некотором участке магистрали перегрузка возникает в том
случае, если в течение некоторого промежутка времени транспорт-
ная нагрузка превышает пропускную способность этого участка.
Поскольку перегрузка снижает интенсивность движения, короткий
промежуток, в течение которого пропускная способность данного
участка меньше пропускной способности соседних участков, назы-
вается дорожным затором, а участок, где возник затор, — узким
местом (bottleneck). Узкие места могут появляться вследствие из-
менения профиля дороги в горизонтальной или вертикальной плос-
кости), уменьшения ширины полос движения, наличия примыкаю-
390
щих въездов и т. д. Вследствие дорожно-транспортных происшест-
вий, остановок отказавших в работе автомобилей, проведения
ремонтных работ могут возникать временные узкие места из-за
уменьшения эффективной пропускной способности или уровня об-
служивания.
Проектирование автомобильной магистрали скоростного движе-
ния не всегда исключает необходимость регулирования движения.
Для эффективной работы магистрали важно, чтобы транспортный
поток был однородным, особенно в отношении скорости. На магист-
рали скоростного движения запрещается движение пешеходов, ве-
лосипедистов, животных и экипажей в упряжке с животными.
Кроме того, обычно запрещается движение мотороллеров, медлен-
ных машин (сельскохозяйственных и дорожно-строительных), а так-
же движение похоронных и других процессий. В часы «пик» или в
ненастную погоду может запрещаться движение буксируемых авто-
мобилей, перевозка грузов с большими габаритами по ширине и
других комбинаций транспортных средств, например легковых ав-
томобилей с прицепами, а также других средств, препятствующих
движению транспорта.
Все чаще устанавливается предельная минимальная скорость
движения. Оказалось, что это очень выгодно, особенно на участках
с большой интенсивностью движения. Ограничение такого рода
уменьшает количество дорожно-транспортных происшествий. Вли-
яние медленно движущихся автомобилей на пропускную способ-
ность дороги и возникновение дорожно-транспортных происшествий
настолько велико, что возможно еще более широкое ограничение
минимальной скорости. Необходимо исключить из системы все ав-
томобили, не способные обеспечить необходимое функционирова-
ние скоростной магистрали.
Все большее внимание уделяется возможности и необходимости
задания переменных пределов скорости на городских магистралях
с целью ослабления «эффекта гармошки» в транспортном потоке
по мере появления перегрузки. Резкие колебания скорости могут
ослабляться путем регулирования ее при помощи указателей, уста-
навливаемых перед узким местом и автоматически переключаемых
на нужную скорость.
Правильно спроектированный примыкающий въезд с достаточ-
но длинной полосой разгона должен позволять автомобилю, входя-
щему в основной поток, возможность выбора нужного интервала
между автомобилями и выезда на внешнюю полосу дороги со ско-
ростью, соответствующей скорости движения на этой полосе. Вхо-
ждение в основной поток лучше всего обеспечивается в том случае,
если производится взаимное регулирование скорости автомобилями,
движущимися с обоих направлений. Обычно считается, что следу-
ет избегать любых ограничений скорости или произвольного назна-
чения полосы отвода, если это не вызывается особенностями дороги.
Почти любую инженерную задачу, в том числе задачу функцио-
нирования автомобильной магистрали, можно представить как сис-
тематическую попытку получить соотношение между производи-
391
тельностью (пропускной способностью) и спросом (транспортной
нагрузкой) при приемлемом уровне обслуживания. Обычно пыта-
ются обеспечить достаточно высокую прочность материалов много-
слойного дорожного покрытия, чтобы они могли противостоять тан-
генциальным напряжениям при ожидаемых нагрузках. Однако сам
факт, что производительность (в данном случае прочность) превы-
шает спрос (в данном случае напряжения при нагрузках), еще не
гарантирует приемлемого уровня обслуживания. На водителя ока-
зывают влияние неровности дорожного полотна, его гладкость,
структура и цветовой контраст; это следует рассматривать как фак-
торы, определяющие уровень обслуживания.
Проектирование транспортных систем (traffic engineering) —
наука об измерении характеристик транспортного потока и приме-
нении этой информации к проектированию и эксплуатации транс-
портных систем. Перед инженером-транспортником стоит проблема
определения соотношения между пропускной способностью и транс-
портной нагрузкой, аналогичная проблеме, стоящей перед любым
другим инженером: он должен уметь либо измерять параметры,
очень точно определяющие пропускную способность и транспорт-
ную нагрузку, либо должен уметь регулировать их. Хотя прочность
материалов дорожного покрытия можно, по-видимому, оценивать
не с такой точностью, как пропускную способность полосы автомо-
бильной магистрали, проектировщик дорожного покрытия знает,
что нагрузка на дорожное сооружение контролируется и ограничи-
вается правилами движения. Чтобы городские магистрали функци-
онировали при тех уровнях обслуживания, для которых они спроек-
тированы, необходимо соответствующим образом регулировать
транспортную нагрузку.
2. НАБЛЮДЕНИЕ ЗА ДВИЖЕНИЕМ НА
МАГИСТРАЛИ И ЕГО РЕГУЛИРОВАНИЕ
Известно, что одним из источников улучшения эксплуатации город-
ских магистралей является применение совершенных методов наблю-
дения. Термин «наблюдение» (surveillance) начал употребляться в
связи с работой транспортных систем главным образом в послед-
нем десятилетии и означает наблюдение за условиями движения во
времени и пространстве. В последнее время для наблюдения за дви-
жением на дорогах используются вертолеты. Однако для эффектив-
ного функционирования дорог с высокой плотностью движения не-
достаточно одного лишь знания места остановки автомобилей,
потерявших управление, или качественного описания степени
транспортной перегрузки, наблюдаемой с вертолета.
В конце 50-х годов как в Соединенных Штатах, так и в Европе
началось применение телевизионных средств наблюдения. Исполь-
зуется замкнутая телевизионная система для регулирования дви-
жения в тоннелях, проходящих под рекой Гудзон. В ФРГ была
разработана получившая широкую известность телевизионная сис-
392
тема для регулирования движения на крупных перекрестках слож-
ной конфигурации.
Началось проведение экспериментов с замкнутой телевизионной
системой для наблюдения за движением на магистрали Джона
Лоджа в Детройте. Эта система позволяет в течение короткого
времени почти одновременно наблюдать за большим участком до-
роги при помощи камер, установленных вдоль всего участка [1].
С введением этой телевизионной системы персонал, работавший
над данным проектом, изучал требования и технические условия
для автоматической системы наблюдения. Для улучшения наблю-
дения в систему были включены датчики-классификаторы и датчи-
ки скорости, а также система реле, аналоговые вычислительные
устройства и панели индикации. Летом 1962 г. на магистрали Джо-
на Лоджа начались исследования по наблюдению и регулированию
движения. Были установлены светофоры, регулирующие движение
на отдельных полосах дороги и съездах, и указатели переменной
скорости движения. Через шесть месяцев были установлены свето-
форы на въездах. Таким образом, за четыре года был разработан
совершенно новый принцип регулирования движения на магистра-
ли, основанный на применении замкнутой телевизионной системы
наблюдения, и создана система обнаружения и измерения транс-
портного потока, способная передавать управляющие сигналы на
светящиеся табло указателей переменной скорости и светофоры,
регулирующие движение на отдельных полосах дороги, съездах и
въездах.
В случае применения только телевизионной системы наблюде-
ния оценка функционирования магистрали зависит главным обра-
зом от визуального восприятия обстановки наблюдателями. Многие
специалисты полагают, однако, что этого недостаточно. При раз-
работке системы наблюдения за движением в г. Чикаго отмечается,
что даже натренированные наблюдатели не отличаются одинако-
вой объективностью. Другими словами, качество условий движения
должно определяться автоматически путем регулирования рабочих
характеристик. В тех случаях, когда характеристики находятся на
определенном заранее заданном уровне, могут быть предприняты
определенные предварительно спланированные меры.
Создание системы наблюдения за движением на магистрали в
районе г. Чикаго началось в 1961 г. в рамках научно-исследователь-
ской работы. Ее цель состояла в том, чтобы разработать, ввести в
строй и оценить экспериментальную систему регулирования, позво-
ляющую сократить время движения и увеличить интенсивность по-
тока на магистрали Конгресса (ныне магистраль Эйзенхауэра).
В отличие от многих проектов, в которых изучение движения транс-
порта ограничивается основной магистралью, данный проект в рав-
ной мере учитывает и подсистемы, питающие основную магистраль
или принимающие на себя часть потока.
Как уже отмечалось, некоторые наиболее значительные успехи
в области создания системы наблюдения и регулирования были по-
лучены и на других дорожных сооружениях, например в Голланд-
14—338
393
ском тоннеле. В ноябре 1963 г. была одобрена новая система регу-
лирования движения в южной трубе тоннеля им. Линкольна.
Система включает: набор детекторов, наблюдающих за движением
транспорта; набор индикаторов, отображающих условия движения;
средства регулирования движения; специальное вычислительное
устройство, принимающее информацию о движении транспорта;
средства контроля, предупреждающие о появлении транспортной
перегрузки внутри тоннеля; замкнутая телевизионная система [2].
3. ПРОЕКТ ДЛЯ МАГИСТРАЛИ ГАЛФ
В большинстве случаев телевидение применяется не для исследова-
тельских целей, а для проверки функционирования дорожного со-
оружения. Испытательная установка для наблюдения за движени-
ем, регулирования движения и испытания электронных средств ре-
гулирования, применяемая на магистрали Джона Лоджа, является
первой крупной системой, предназначенной для проведения науч-
ных исследований, и в настояще время программа научных иссле-
дований продолжается. Эксплуатация этой установки позволила
накопить технические знания и опыт, необходимые для проведения
нескольких новых программ наблюдения за движением при помо-
щи телевизионных средств: в тоннеле Бейтаун в г. Хьюстоне, на
магистрали Галф в г. Хьюстоне и на магистрали в районе г. Сиэт-
тла. Работы в Бейтаунском тоннеле и Сиэттле носят в основном
практический характер, а проект наблюдения за движением и ре-
гулирования движения на магистрали Галф имеет как исследова-
тельский, так и прикладной характер.
В сентябре 1963 г. в Техасском транспортном институте нача-
лись исследования, связанные с наблюдением за движением транс-
порта по магистрали и его регулированием, с целью увеличения
эффективности существующих городских магистралей и определе-
ния пути повышения уровня обслуживания на будущих дорожных
сооружениях. Составлена программа научных исследований, основ-
ной целью которой была выработка критериев для создания и вве-
дения в строй автоматических систем наблюдения и регулирования
движения, что позволило бы обеспечить приемлемые уровни обслу-
живания на городских магистралях с интенсивным движением в
периоды наибольшей нагрузки. Исследования включают три этапа:
фундаментальные исследования характеристик функционирова-
ния как на магистрали, так и на примыкающей системе дорог, на-
ходящихся на этом уровне, с целью выработать требования к пред-
лагаемой системе наблюдения и регулирования движения;
экспериментальная проверка аппаратуры обнаружения и датчи-
ков и разработка опытных моделей окончательных вариантов авто-
матических средств регулирования движения, которые могли бы
предсказывать появление транспортной перегрузки и соответствую-
щим образом реагировать с целью ее предотвращения;
установка и оценка окончательного варианта автоматической
системы наблюдения и регулирования движения.
394
4. ПРОЕКТ НАБЛЮДЕНИЯ ЗА ДВИЖЕНИЕМ ТРАНСПОРТА
КАК СРЕДСТВО НАУЧНЫХ ИССЛЕДОВАНИЙ
С процессом научных исследований неразрывно связаны формули-
ровка теории, проведение эксперимента и оценка. Формулировка
теории включает выработку критериев для оптимизации системы
и построение математической модели. Эксперимент может быть
контролируемым или неконтролируемым. При исследовании движе-
ния транспорта контролируемый эксперимент может проводиться
как в лаборатории, так и на местности. Примером лабораторного
эксперимента является как аналоговое моделирование, так и дис-
кретное; примерами экспериментов на местности могут служить
эксперименты на испытательных треках и в некоторой мере рабо-
ты по наблюдению и регулированию движения в тоннелях и на
автомобильных магистралях, описанные в предыдущем параграфе.
Этапы процесса исследования транспортных потоков схемати-
чески показаны на рис. 148. Значение контролируемых лаборатор-
ных экспериментов состоит в том, что с их помощью удается полу-
чить результаты в тех случаях, где другие методы бессильны.
Контролируемые натурные эксперименты на испытательном треке
служат для оценки справедливости теории, но проверку нужно про-
водить на реальных транспортных потоках. Последним и, по-види-
мому, наиболее важным этапом является представление резуль-
татов.
Процедура, изображенная на рис. 149, дает представление об
исследованиях, проводимых по проекту наблюдения и регулирова-
ния движения на магистрали Галф. Для достижения трех обшир-
| Теория транспортных потоков j
Детерминированная | | Стохастическая |
| Евиная теория транспортных потоков ]
Рис. 148. Порядок исследования транспортных потоков
14*
395
Рис. 149. План работ над проектом
по наблюдению и регулированию дви-
жения на магистрали Галф:
А. Система, регулирующая
выезд на магистраль.
I. Теория: 1 — оценка теорий транспорт-
ных потоков; 2 — определение парамет-
ров для регулирования движения; 3—
построение модели линейного програм-
мирования; 4 — построение модели при-
емлемости интервалов между автомоби-
лями.
II. Исследование характеристик и изуче-
ние ручной системы регулирования: 1 —
измерение характеристик магистрали;
2— вывод критериев для первого этапа
исследования системы регулирования
движения; 3 — оценка первого этапа
исследования ручной системы регулиро-
вания движения; 4 — проведение второго
этапа исследования ручной системы ре-
гулирования движения; 5 — измерение
характеристик приемлемости интервалов
между автомобилями.
III. Система регулирования с фиксиро-
ванным режимом: 1 — определение тре-
бований к светофору, установленному на
въезде; 2 — установка светофоров на
въездах; 3 — планирование исследований
системы регулирования с фиксирован-
ным режимом; 4 — оценка исследований
системы регулирования с фиксирован-
ным режимом.
IV. Выработка требований к аппаратуре
регулирования движения, устанавливае-
мой на въезде: 1 — разработка автоматической аппаратуры регулирования дви-
жения на въездах; 2—установка аппаратуры для оценки приемлемости интер-
валов; 3 — оценка метода определения приемлемых интервалов; 4 — установка
экспериментальной аппаратуры для определения соотношения между транспорт-
ной нагрузкой и пропускной способностью; 5 — оценка метода определения
соотношения между транспортной нагрузкой и пропускной способностью; 6 —
разработка автоматической аппаратуры для регулирования движения на въездах.
V. Автоматическая система регулирования движения на въездах: 1 — разработ-
ка структуры • системы регулирования движения на въездах; 2 — установка
автоматической аппаратуры на въездах; 3 — калибровка устройств регулирова-
ния движения для обеспечения частичной оптимизации; 4 — калибровка устройств
регулирования для обеспечения оптимизации всей системы; 5 — определение
дополнительных требований к съездам; 6 —выработка рекомендаций для регу-
лирующего устройства (контроллера) центральной системы.
VI. Практическая проверка автоматической системы наблюдения и регулирова-
ния движения . 1
Б. Скоростная магистраль и сеть примыкающих к ней
улиц.
/. Теория: 1 — теоретические данные о регулировании движения в час «пик»;
2 — построение модели для оценки транспортной нагрузки; 3 — изучение необхо-
димых изменений проекта; 4 — построение энергетической модели для коли-
чества движения; 5 — построение энергетической модели для шума ускорения.
II. Характеристики: 1 — изучение скорости и плотности движения в направлении
396
к деловому району с помощью аэрофотосъемки; 2 — изучение входящих и выхо-
дящих потоков на полосах магистрали, ведущих к деловому району; 3 — исследо-
вание шума ускорения на полосах магистрали, ведущих к деловому району;
4 — изучение конструкции и работы развязок; 5 — изучение скорости и плотности
движения на полосах магистрали, ведущих из делового района, с помощью
аэрофотосъемки; 6 — изучение входящих и выходящих потоков на полосах маги-
страли, ведущих из делового района; 7 — изучение влияния задержек при трога-
нии автомобилей с места в час «пик»; 8 — исследование шума ускорения на Теле-
фонной улице.
III. Проектирование и эксплуатация: 1 — реконструкция улицы Уэйсайд; 2 — опре-
деление уровня обслуживания на полосах магистрали, ведущих к деловому району
(до установки системы регулирования);3— определение уровня обслуживания на
полосах магистрали, ведущих из делового района (до установки системы регулиро-
вания) ; 4 — определение уровня обслуживания на улицах артериальной систе-
мы; 5 — выработка рекомендаций по полной реконструкции магистрали и се-
ти” примыкающих к ней улиц.
IV. Экономическая оценка автоматической системы наблюдения и регулирова-
ния движения.
В. Специальные исследования.
I. Выработка технических требований к замкнутой телевизионной системе: 1 —
заключение контракта на установку телевизионной системы; 2 — установка те-
левизионной системы; 3—исследование влияния грузовых автомобилей на дви-
жение на участках магистрали, имеющих уклон; 4 — изучение влияния окру-
жающей среды; 5 — изучение влияния дорожно-транспортных происшествий;
6— выработка стратегии для минимизации последствий дорожно-транспортных
происшествий.
ных целей, перечисленных в предыдущем параграфе, необходимо
выполнить глубокие исследования, охватывающие различные
аспекты исследуемой проблемы. План работ показан на рис. 149,
где приведены три основные представляющие интерес области: ре-
гулирование движения на примыкающем въезде; функционирова-
ние системы, включающей основную магистраль и сеть примыкаю-
щих к ней дорог, и специальные исследования. Различные опера-
ции, показанные на этой схеме, представляют собой этапы многих
исследований, проводимых в каждой из этих трех областей.
Операции, показанные на рис. 149 под рубриками «Теория»,
«Характеристики» и т. д., относятся к первым двум видам деятель-
ности при научных исследованиях, изображенным на рис. 148: фор-
мулировка задачи и эксперимент. Важность третьего вида деятель-
ности, который состоит в представлении результатов, наглядно
иллюстрируют 14 отчетов о результатах научных исследований
[3—16] за первые три года работы над проектом. Составление от-
четов позволяет довести результаты исследований до проектиров-
щиков и разработчиков дорожных сооружений.
5. ВЫВОД КРИТЕРИЕВ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ
НА ПРИМЫКАЮЩЕМ ВЪЕЗДЕ
Если транспортная нагрузка превышает пропускную способность
системы или даже приближается к ней, то происходит нарастаю-
щее ухудшение условий функционирования и увеличение перегруз-
ки.. Классические системы регулирования движения позволяют ос-
лабить колебания транспортной нагрузки либо уменьшить ее.
397
Проекты наблюдения и регулирования движения направлены имен-
но на уменьшение транспортной нагрузки. Один из подходов, впер-
вые примененный в Детройтском проекте, состоит в том, что
водитель получает информацию об условиях'движения от средств
регулирования движения на отдельных полосах и указателей пере-
менной скорости. Второй, более удачный метод испытывался в так
называемых точках входа (вход в тоннель, примыкающий въезд).
Был разработан метод синхронного регулирования транспорта,
выезжающего на магистраль, с целью предупреждения перегрузок.
Первым этапом является определение местонахождения узкого
места перед въездом в тоннель. Вторым этапом было построение
математической модели [17], описывающей поведение транспортно-
го потока в тоннеле. Важной особенностью этой модели является
возможность прогнозирования ударных волн, распространяющихся
6
г<яг
>❖/7-
a=J.
100
30 , 00 50, 60
80 90 100 110 120
-30—
70^>
150 160
7J5
'-51k \
□с 7.15
2 7.05
80 90 100 110 120
I zz=J~_
то 150
50j
20
Яр
70.
20
Отметки 20
$ 7.35
£ 725
£ 775
2 705
Отметки 20_
735
of 715
2 705
§6.55
Отметки 20
г) 7.35 -
—20..
70у
~Т~
ъ 775
2 7.05
§6.55
Отметка, 20
160
Я—i
2
Рис. 150. Распределение транспортного потока, движущегося по внешней полосе
а — контуры плотности; б — эрланговский коэффициент случайности; в — кон
валов; д — суммарный поток, движущийся к деловому району;
1 — к центральному деловому району; 2 — железная дорога; 3 — ул. Скотта; 4 — ул. Каллен;
сайд; 10 — рукав р. Брей; 11 — ул. Григгс; 12 — ул. Вудридж; /3 —ул. Ревейлл
0тметка2С 30 00 50 60 70 80 90 100 110 120 130 100 150 160
-it
/L.
-20'
г
яп юо по 120 loo то
______________
90 100 110 120 13L
if/
100 150 160
•45
Ъо
398
за узким местом. Средством, позволяющим избежать появления
неустойчивости, является синхронное регулирование транспорта,
въезжающего в тоннель, путем поддержания плотности потока ни-
же некоторого критического значения либо путем поддержания
транспортной нагрузки ниже пропускной способности узкого места.
На основе успешного опыта синхронного регулирования транс-
порта, въезжающего в тоннель, разработан аналогичный план для
магистрали Эйзенхауэра. В исследуемом районе были определены
два узких места [18]. Одно из узких мест было обусловлено умень-
шением числа полос с четырех до трех без снижения транспортной
нагрузки. Второе узкое место, находящееся далее по потоку
(последнее узкое место магистрали), образовалось вследствие ин-
тенсивного движения на примыкающем въезде, оно находилось в
верхней части участка дороги длиной около 300 м, имеющего
подъем 3 %.
магистрали в деловой район города:
туры числа автомобилей в движущейся очереди; г — контуры приемлемых интер-
Л — железная дорога; 6 —ул, Дамбл; 7—железная дорога; S—Телефонная ул.; S-ул. Уэй-
399
Были разработаны два метода синхронного регулирования дви-
жения. В одном из методов определяется занятость некоторой точ-
ки магистрали, находящейся непосредственно перед въездом, дви-
жение на котором должно регулироваться. При использовании дру-
гого метода определялась интенсивность движения на участке ма-
гистрали, расположенном примерно в 800 м перед въездом, интенсив-
ность движения на съезде и интенсивность движения на въезде.
После дальнейшего изучения использовался метод, основанный
на определении занятости средней полосы как контрольного пара-
метра для начала синхронного регулирования движения. Из соот-
ношения между занятостью средней полосы и максимальной безо-
пасной интенсивностью движения на въезде для различных уров-
ней занятости была установлена интенсивность подачи сигна-
лов, разрешающих въезд на магистраль. Исследователи, проводив-
шие эксперименты в г. Чикаго, в качестве контрольного параметра
при регулировании выезда на магистраль использовали соотноше-
ние между пропускной способностью и транспортной нагрузкой.
Уоттлуорт [10] 'первым ввел этот критерий, при этом регулирова-
ние выезда на магистраль с примыкающего въезда осуществляется
в зависимости от величины разности между транспортной нагрузкой
на магистрали перед въездом и пропускной способностью узкого
места магистрали за въездом. Уоттлуорт построил также модель
линейного программирования, в которой регулируется выезд на
магистраль с нескольких примыкающих въездов и ставится цель
максимизировать выходной поток системы при ограничениях,
согласно которым транспортная нагрузка не может превышать
суммарной пропускной способности в одном направлении каждо-
го узкого места [19].
Дрю [20] описывает модель движущихся очередей, в которой
регулирование выезда на магистраль увязано с определением при-
емлемых интервалов между автомобилями, движущимися по внеш-
ней полосе магистрали. Приемлемым для автомобиля, входящего в
в основной поток, считается интервал, длина которого не меньше
критического (т. е. интервал, при котором процент автомобилей,
для которых оказывается приемлемым меньший интервал, и про-
цент автомобилей, для которых является неприемлемым больший
интервал, одинаковы). Когда интервалы времени или расстояния
между последовательными автомобилями меньше некоторого про-
извольного интервала (или расстояния), то образуется движущая-
ся очередь или колонна автомобилей. Поскольку за произвольный
интервал, при котором происходит образование очереди, принима-
ется критический интервал, то число автомобилей, попадающих с
примыкающего въезда на магистраль за некоторый постоянный
промежуток времени, равна числу обнаруженных движущихся оче-
редей.
Среднее число автомобилей, приходящихся на движущуюся оче-
редь, как величина, обратная вероятности появления интервала,
превышающего критический, является удовлетворительным показа-
телем работы магистрали. \
400
Важной особенностью этой системы является ее гибкость. При
наличии приемлемого интервала система может обеспечить выезд
на магистраль как одного автомобиля, так и целой группы автомо-
билей.
Этот метод группового обслуживания описан в отчете о работе
над проектом [15].
На рис. 150—152 показаны характеристики транспортных пото-
ков, использовавшиеся для трех перспективных методов регули-
рования выезда на магистраль. Приведенные данные относятся к
следующим методам: метод, основанный на оценке приемлемости
интервала между автомобилями основного потока; метод, основан-
ный на оценке соотношения между пропускной способностью и
транспортной нагрузкой магистрали; метод, основанный на оценке
соотношения между пропускной способностью и транспортной на-
грузкой внешней полосы магистрали. Данные были получены с по-
мощью аэрофотосъемки магистрали Галф в утренние часы «пик».
Различные критические и оптимальные параметры, показанные на
графиках, получены при помощи энергетического подхода к уров-
ню обслуживания, рассмотренного в гл. 13.
6. РЕГУЛИРОВАНИЕ ВЫЕЗДА НА МАГИСТРАЛЬ
С ПРИМЫКАЮЩЕГО ВЪЕЗДА
Для наиболее эффективного использования въездов при транс-
портной нагрузке от умеренной до сильной должен обеспечиваться
безопасный выезд на магистраль максимально возможного числа
автомобилей без нарушений движения на магистрали. Известно,что.
основным фактором, затрудняющим функционирование примыка-
ющего въезда, является неспособность водителя оценить приемле-
мость интервала между автомобилями, движущимися по внешней
полосе магистрали, или предсказать, когда именно в точке, где
должен произойти выезд на магистраль, появится приемлемый
интервал.
В самом деле сомнительно, чтобы даже один водитель из ста
знал, какой именно интервал между автомобилями окажется при-
емлемым для выезда на магистраль, о чем свидетельствует большое
число дорожно-транспортных происшествий на въездах. Безуслов-
но, приемлемый интервал нельзя описать каким-либо простым
эмпирическим правилом, аналогичным, например, такому: «Каж-
дый раз при увеличении скорости на 16 км/ч расстояние до впереди
идущего автомобиля должно увеличиваться на длину корпуса
автомобиля».
Когда интенсивность движения на магистрали начинает при-
ближаться к пропускной способности, водитель автомобиля, нахо-
дящегося на въезде, оказывается в исключительно сложном поло-
жении. При увеличении интенсивности движения резко уменьшает-
ся число приемлемых интервалов между автомобилями, движущи-
мися по магистрали. При такой высокой интенсивности движения
водитель не всегда может отказаться от выезда на магистраль, ес-
401
Рис. 151. Характеристики и контрольные параметры потока, движущегося по ма
а — контуры интенсивностей; б и г — графики скорости; в и д — контуры
1 — к центральному деловому району; 2 — железная дорога; 3 — ул. Скотта; 4 — ул. Каллен;
сайд; 10 — рукав р. Брей; 11 — ул. Григгс; 12 — ул. Вудридж; 13 — ул. Ревейлл; 14— возмож
обслуживания; 16 — скорость свободного движения; 17 — оптимальная скорость; 18 — критиче
ли он уже находится на полосе разгона. Перед выездом на полосу
разгона он должен определить местоположение интервалов между
автомобилями основного потока.
Действуя таким путем, он должен затем оценить время переме-
щения интервала к полосе разгона, с тем чтобы решить, удастся ли
ему войти в этот интервал. Для этого необходимо оценить собст-
венную скорость и ускорение, а также скорость перемещения интер-
402
5 — железная дорога; 6 — ул. Дамбл; 7 —железная дорога; 8 — Телефонная ул.; 9 —ул. Уэй-
ная пропускная способность; 15 — интенсивность, соответствующая оптимальному уровню
ская скорость
вала и решить, будет ли этот интервал достаточен для успешного
завершения маневра выезда на магистраль с учетом ограниченной
длины полосы разгона.
Очевидно, что при этих условиях задача водителя, выезжающе-
го на магистраль, оказывается сложной. Однако с математической
точки зрения эта задача довольно проста. Требуется знать лишь
местоположение интервала между автомобилями и скорость его
403
775
1 7.25
S’775
130
160
Отметка 20
® 2000-
^,'§'1600 s
30 00 50 60 70 80 90 100
i f 800
11-»
Отметки 20 30 00 _ 50 60 70 80 90 100 110 120 130 100 150 160
32
160
128
96
B) § ™ -
S 7.25 -
S’775 -
| 7.05 —
a.6.55^
Отметка, го JO 00 50 60 70 SO 80 100 770 720 130 1L;0 150 160
0.
•cT
E=
3)
Отметка. 20 30
ES
7.35
£ 725
Отметка. 20 30 00 50 60 70 80 90 100 110 120 130 100 150 160
§ 7.05
я 6.55
90 100 110 120 130 100 150 160
Рис. 152. Характеристики и контрольные параметры потока, движущегося
а и б — графики интенсивности; в — контуры скорости; г — графики скорости;
1 — к центральному деловому району; 2 — железная дорога; 3 — ул. Скотта; 4 — ул. Каллен;
сайд; 10 — рукав р. Брей; //—ул. Григгс; /2 — ул. Вудридж; 73 —ул. Ревейлл; 14 — пропуск
16 — скорость свободного движения: /7 — оптимальная скооость: 18 — коитическая скорость
перемещения, способность автомобиля, находящегося на въезде,
изменять скорость движения, длину въезда и длину полосы раз-
гона.
Для улучшения работы въезда и условий движения на магист-
рали важно иметь информацию, необходимую водителю для того^
чтобы координировать во времени и пространстве выезд на полосу
разгона и изменение скорости движения, а также выбрать точку вы-
езда на магистраль.
Поскольку здесь возможно абсолютно детерминированное реше-
ние, а оснащение аппаратурой для выполнения этих операций впол-
не доступно на базе существующей электронной техники, создание;
404
170 180 190 200 210 220 230 290 250 260 270 280 290 300
из центрального делового района:
д — графики плотности;
5 — железная дорога; 6 — ул. Дамбл; 7 — железная дорога; S —Телефонная ул.; 9 — ул.Уэй-
ная способность; 15 — интенсивность, соответствующая оптимальному уровню обслуживания;;
системы, регулирующей выезд на магистраль, представляется впол-
не реальной задачей.
При существующих условиях движения дальнейшее осложнение
вызывается одновременным прибытием на полосу разгона несколь-
ких автомобилей с примыкающего въезда и появлением нескольких
автомобилей на внешней полосе магистрали. Отсюда следует, что
выезд автомобилей с примыкающего въезда на полосу . разгона
необходимо регулировать, контролируя частоту и время вхождения
в основной поток в зависимости от величины интервала между
автомобилями, пропускной способности полосы разгона и пропуск-
ной сйособности магистрали.
405
7. СИСТЕМА, РЕГУЛИРУЮЩАЯ ВЫЕЗД НА МАГИСТРАЛЬ
Для синхронного выезда на магистраль необходимо: обнаружить
приемлемые интервалы между автомобилями, движущимися по
внешней полосе магистрали; предсказать, когда эти интервалы
переместятся в точку вхождения в основной поток; скорректиро-
вать скорость автомобиля, выезжающего с примыкающего въезда
на магистраль так, чтобы он попал в намеченный интервал в точке
вхождения. Создание датчика для измерения интервалов времени
между последовательными автомобилями (обнаружение интервала)
и датчика для измерения скорости (определение положения интер-
вала) не представляет большого труда. Как было показано в гл. 8,
существует некоторое соотношение между скоростью автомобиля на
примыкающем въезде и величиной приемлемого интервала, кото-
рое необходимо определить.
Простейшим способом проведения необходимой коррекции ско-
рости автомобилей, находящихся на примыкающем въезде, являет-
ся остановка всех автомобилей в некоторой точке въезда на доста-
точном удалении от точки выхода на магистраль с тем, чтобы
обеспечить им возможность разгона до скорости потока, движуще-
гося по магистрали. Установка на въезде обычного светофора поз-
воляет передать водителю информацию, необходимую для реше-
ния этой задачи (рис. 153).
Функционирование системы, регулирующей выезд на магист-
раль на основе перечисленных выше критериев, показано на
рис. 154. При обнаружении требуемого интервала между автомо-
билями необходимо оценить его перемещение с учетом задержки
счете в этот интервал мог бы
войти автомобиль, ожидаю-
щий на примыкающем въез-
де. В нужный момент появ-
ляется Зеленый сигнал, ожи-
давший автомобиль пропус-
кается и плавно входит в по-
ток, движущийся по магист-
рали.
Блок-схема, изображен-
ная на рис. 155, служит для
иллюстрации дополнитель-
ных функций и элементов
системы, регулирующей вы-
езд на магистраль. Как уже
указывалось, работа свето-
фора, устанавливаемого на
въезде, строится в основном
на обнаружении Da и оцен-
ке перемещения Dn интер-
валов между автомобилями.
Однако вследствие того, что
во времени в точку, где в конечном
STOP
HERE
ON
RED
Рис. 153. Светофор на примыкающем въезде
406
Рис. 154. Работа автоматической системы, регулирующей выезд на магистраль
с примыкающего въезда:
а — обнаружение приемлемого интервала; б — перенос приемлемого интервала;
в — вхождение в основной поток;
/ — приемлемый интервал; 2 —детектор; 3 —светофор на примыкающем въезде
многие выезды по функционированию близки к перекресткам, функ-
ции регулирования выполняет длина очереди Dq автомобилей, ожи-
дающих у светофора, установленного на въезде. Необходимым усло-
вием является отсутствие автомобилей на участке от светофора,
установленного на въезде, до магистрали, поэтому наличие автомо-
биля на полосе разгона Dm исключает появление зеленого сигнала
и, таким образом, не допускается образование очереди автомобилей
на участке выезда на магистраль. При регулировании выезда на
магистраль учитывается также скорость движения на внешней по-
лосе магистрали, чтобы исключить длительное ожидание у свето-
фора вследствие притормаживания на полосе разгона.
407
Скоростная магистраль
Рис. 155. Схема регулирования выезда на магистраль с. примыкающего въезда:
А — запрос на последовательность 3. Сигнал зеленый; Б — запрос на последова-
тельность 2. Пропускается несколько автомобилей; В — запрос на последователь-
ность 4. Интервал, меньший критического; Г — запрос на последовательность 1.
Пропускается один автомобиль
8. ОПЫТНЫЙ ОБРАЗЕЦ УСТАНОВКИ, РЕГУЛИРУЮЩЕЙ
ВЫЕЗД НА МАГИСТРАЛЬ
В марте 1966 г. на одном из въездов магистрали Галф в Хьюсто-
не был установлен опытный образец системы, регулирующей выезд
на магистраль. Светофор, установленный на въезде, работает
автоматически и приводится в действие транспортом, движущимся
по магистрали. Контрольное устройство установлено в центре на-
блюдения и регулирования движения на магистрали Галф
(рис. 156). Система предусматривает выезд на магистраль одного
или нескольких автомобилей одновременно (Gi и G2 соответствен-
но). Работа опытного образца системы, регулирующей выезд на
магистраль, описана в последующих параграфах [21]. Описание
дополняет пространственно-временная диаграмма, изображенная
на рис. 157.
Оценка перемещения интервала между автомобилями. На ма-
гистрали на расстоянии 290 м от въезда на одной из опор освеще-
ния установлен акустический детектор, обращенный в сторону до-
роги. Детектор замеряет все интервалы между автомобилями, дви-
жущимися по внешней полосе магистрали, и вычисляет скорость
движения. При обнаружении интервала, длительность которого рав-
на или больше длительности заданного приемлемого интервала,
408
управляющее устройство — контроллер оценивает его перемещение
со скоростью, соответствующей скорости движения транспорта на
внешней полосе магистрали. Если автомобиль ожидает на въезде
у светофора, то подается «запрос» на зеленый сигнал, когда дан-
ный интервал, перемещаясь, достигает так называемой точки при-
нятия решения, в которой время перемещения интервала до точки
выезда на магистраль равно времени движения от светофора до
точки выезда на магистраль. Однако зеленый сигнал не появится,
•если за светофором на въезде находится хотя бы один автомобиль.
Если интервал между автомобилями равен или больше задан-
ного интервала, приемлемого для' двух и более автомобилей, то
контроллер удерживает зеленый сигнал до тех пор, пока автомо-
биль, закрывающий этот интервал, не пройдет точку принятия
решения.
Скорость движения на внешней полосе магистрали. На опоре
освещения у въезда установлен акустический детектор, обращен-
ный в сторону магистрали. Детектор измеряет скорость транспорт-
ного потока, которая используется для выбора длительности при-
емлемого интервала. Когда скорость движения на этом участке
снижается и принимает значение, меньшее заданного, используется
длительность цикла, основанная на фиксированном режиме работы
светофора; светофор продолжает пропускать на магистраль авто-
мобили при наличии приемлемых интервалов и, кроме того, про-
пускает автомобили, ожидавшие у светофора в течение времени,
превышающего заданный промежуток. Фиксированный режим ра-
боты обычно позволяет пропускать‘150—250 автомобилей в час.
Длина очереди автомобилей. Под дорожным покрытием левой
полосы фронтальной дороги вблизи пересечения магистрали Галф
с Телефонной улицей установлен петлевой детектор. Если на въез-
де очередь у светофора превышает 14—15 автомобилей, то детек-
тор приводится в действие и включается режим, выбранный для
нижнего критического интервала. Этот новый интервал остается в
действии лишь до тех пор, пока включен детектор, реагирующий на
длину очереди.
Рис. 156. Система регу-
лирования выезда на ма-
гистраль, установленная
в центре наблюдения за
движением на магистра-
ли
409
Занятость полосы разгона. Под до-
рожным покрытием въезда непосред-
ственно перед полосой разгона уста-
новлен петлевой детектор. Все автомо-
били, выезжающие на магистраль че-
рез Телефонную улицу, приводят в
действие этот детектор. Если автомо-
биль останавливается на этом месте и
блокирует выезд на магистраль, то
включается детектор и на светофоре
появляется красный сигнал, который
будет сохраняться до тех пор, пока
включен детектор.
Отличительной особенностью опи-
санной системы, регулирующей вы-
езд на магистраль, является то, что она
служит единственным средством, помо-
гающим водителю выполнять маневр
выхода на магистраль. Установленная
система, измеряющая длительности
интервалов, обнаруживает интервалы
между автомобилями и определяет
скорости их перемещения. В системе
сравниваются эти интервалы с крити-
ческим интервалом, длительность ко-
торого достаточна для выезда на ма-
гистраль; принимаются во внимание
способность автомобиля, находящего-
ся на въезде, набирать скорость, а так-
же длина въезда и длина полосы раз-
гона. Система автоматически решает
уравнения движения, прежде чем на
светофоре появится сигнал, позволяю-
щий одному или большему числу авто-
мобилей осуществить беспрепятствен-
ный выезд на магистраль, например
так, как показано на рис. 158.
Наряду с высокой эффективностью
в числе других преимуществ такой си-
стемы регулирования можно назвать
большую безопасность и большую пропускную способность въезда
при сравнительно невысокой стоимости. С точки зрения безопасно-
сти движения любое различие в скорости автомобилей одного ряда
или различие в скорости автомобилей, движущихся в различных
рядах, является опасным. Особо опасной является остановка авто-
мобиля на полосе дороги; такой автомобиль представляет угрозу
для водителя, пассажиров и остального транспорта. Об этом сви-
детельствует высокий процент дорожно-транспортных происшест-
вий, представляющих собой наезд на автомобиль сзади и происхо-
410
Отметка
Рд ем я
Рис. 157. Пространственно-временная диаграмма, иллюстрирующая работу систе-
мы, регулирующей выезд на магистраль с примыкающего въезда:
1 акустический детектор на опоре освещения, Ds; 2 —столб с телевизионной камерой; 3 —
прицеп с аппаратурой; 4 — выход из внешнего ряда; 5 — сохраняется красный сигнал, пока
не выключится детектор Dm; 6 — Dq— сигнал на окончание зеленого сигнала в последова-
тельностях 1 и 4; 7 — помехи движению; 8 — последовательности 1 и 3; в точке принятия
решения подается сигнал на светофор (этап 3); 9 — последовательности 1 и 2; перенос интер-
вала между автомобилями в зависимости от скорости Da (этап 2); 10 — выход из внешней
полосы магистрали; 11 — выход на внешнюю полосу магистрали; 12 — последовательность 1,
этап 1, выбор интервала между автомобилями, превышающего Gi; 13 — последовательность 2,
этап 1, выбор интервала между автомобилями, превышающего G2
дящих в таких местах, где автомобиль' может остановиться либо
может ехать беспрепятственно, как, например, на участке выезда
на магистраль. Система, регулирующая выезд на магистраль, фак-
тически исключает остановку автомобиля на полосе разгона и, та-
ким образом, в значительной мере повышает безопасность дви-
жения.
Описанная система имеет большие возможности с точки зрения
повышения пропускной способности въезда, чем другие модели.
В системах, пропускающих на магистраль за 1 раз только один
411
Рис. 158. Последовательность выезда на ма-
гистраль с примыкающего въезда
автомобиль, пропускная спо-
собность въезда является
функцией длительности цик-
ла светофора, установленно-
го на въезде. Так как дли-
тельность цикла светофора,
установленного на въезде,
равна около 6 сек, то макси-
мальная интенсивность про-
пускания составляет один
автомобиль за 6 сек, или
600 авт!ч. Система, регули-
рующая выезд на магист-
раль, может обеспечить
большую интенсивность; она
является более гибкой, так
как пропускает более одного
автомобиля при обнаруже-
нии больших интервалов
между автомобилями.
Предложенная система
регулирования выезда на
магистраль, измеряющая
длину интервала между ав-
томобилями, является отно-
сительно недорогой, посколь-
ку характеристики потока
замеряются не на всех по-
лосах магистрали, а только
на внешней. Это позволяет
заметно сократить число де-
текторов. Кроме того, по-
скольку измерить такую ве-
личину, как время, наиболее
просто, приемлемые интер-
валы между автомобилями
можно обнаружить с по-
мощью сравнительно прос-
того аналогового устрой-
ства. *
Наконец, эта система
снабжает водителя, выезжа-
ющего на магистраль, необ-
ходимой информацией о на-
личии интервала достаточ-
ной длины. Такой метод ока-
зывается очень привлека-
тельным и при небольших
412
затратах обеспечивает высокую интенсивность движения на магист-
рали, в то же время он обеспечивает высокую пропускную способ-
ность въезда и безопасность выезда на магистраль.
9. ПРИЛОЖЕНИЕ К АВТОБУСНОМУ СООБЩЕНИЮ
В связи с непрерывным ростом крупных городских центров все бо-
лее серьезной проблемой становится организация сообщения вну-
три города. Транспортные перегрузки, которые когда-то ограничи-
вались относительно короткими периодами «пик», в настоящее
время во многих городах занимают довольно продолжительное
время.
Сторонники общественного транспорта требуют, чтобы на
строительство скоростных магистралей в крупных городах был
наложен «мораторий» и вместо них развивался скоростной рельсо-
вый транспорт. Такие предложения обычно подкрепляются резуль-
татами исследований, «демонстрирующими рост пассажирских пере-
возок общественным транспортом». Такое исследование, проведен-
ное Американской ассоциацией транспортных перевозок
показывает, что замена одной полосы магистрали трамвайной лини-
ей позволит перевезти в 3 раза больше пассажиров, если считать
места для сидения, и в 4 раза больше, если считать и стоящих
пассажиров [22].
Лишь немногие специалисты в области транспортных перевозок
рассматривают трамвай или скоростной рельсовый транспорт как
творческое решение проблемы городского транспорта. В конечном
счете существующие городские центры развивались с ориентацией
на перевозки автомобильным транспортом. Это нашло выражение
в значительно меньшей плотности застройки, чем обычно считается
необходимым для рельсового транспорта.
Скоростные автобусные рейсы, по-видимому, лучше, чем рель-
совый транспорт, подходят как средство массовых перевозок, осо-
бенно в сложившихся районах. Это обусловлено тем, что автобус —
очень гибкое средство по сравнению с рельсовым транспортом и
может более надежно обеспечить сообщение между населенными
пунктами и крупными районами города, привлекающими большие
потоки транспорта. Автобусное сообщение потребует значительно
меньших площадей дорожного полотна, чем рельсовый транспорт,
поскольку автобусы пользуются теми же полосами дороги, что и
легковые автомобили, и, следовательно, для них не нужно созда-
вать специальных сооружений.
Объем пассажирских перевозок можно увеличить, выделив
больше дорожного пространства для автобусов в часы «пик». На
магистрали с трехрядным движением за час может проехать около
10 000 пассажиров, так как в среднем на автомобиль приходится
от 1,5 до 1,9 пассажира. Одна полоса, отведенная для автобусного
сообщения, может иметь пропускную способность, в 3 раза превы-
шающую данную при условии достаточной загрузки и возможно-
сти выделения полосы дороги исключительно для автобусного
413
сообщения. В одном из вариантов, рассмотренных в гл. 14, преду-
сматривается выделение одной полосы в центре магистрали исклю-
чительно для движения автобусов.
Недостатком этих схем является неполное использование пропу-
скной способности дороги, так как практически невозможно обес-
печить такую частоту движения автобусов, чтобы полностью загру-
зить отведенную для них полосу. Существуют еще две возможно-
сти, позволяющие избежать этих потерь и улучшить автобусное
сообщение. Одним из способов является регулирование движения
всех транспортных средств, включая автобусы, что обеспечит опти-
мальную загрузку всех полос дороги (гл. 13). Система регулирова-
ния движения, обладающая такими возможностями, в настоящее-
время проходит испытания на магистрали Галф в Хьюстоне,
хотя здесь и не предпринималась попытка обеспечить автобусное
сообщение. Чтобы отличать эту систему от описанной в парагра-
фах 6—8 данной главы системы, регулирующей выезд на магист-
раль, будем называть ее система 2.
Регулирование движения в этой второй системе, проходящей
испытания на Телефонной улице, строится на оценке соотношения
между пропускной способностью и транспортной нагрузкой. Рабо-
та этой системы во многом аналогична работе первой системы.
Здесь используется такой же режим работы светофора. Два петле-
вых детектора, установленных на въезде, позволяют определять:
наличие автомобиля, ожи-
дающего у светофора, и про-
езд автомобиля за светофор.
Данная система также не
допускает выезд за свето-
фор, если предыдущий ав-
томобиль не завершил вхож-
дение в основной поток. Так,
при остановке автомобиля
на полосе разгона светофор,
установленный на въезде,
сохраняет красный сигнал,
Время
Рис. 159. Соотношение между транс-
портной нагрузкой на магистрали, тре-
буемой интенсивностью движения на ма-
гистрали на участке примыкающего
въезда и моментами появления разре-
шающего сигнала светофора, установ-
ленного на въезде. Для примера интен-
сивность принята равной 95 авт!минл
1 — транспортная нагрузка на магистрали
перед примыкающим въездом; 2 — требуемая
интенсивность движения на магистрали на
участке въезда (95 авт/мин); 5 —момент появ-
ления сигнала, разрешающего выезд на ма-
гистраль (/2—1)-му автомобилю; 4 —момент
появления сигнала, разрешающего выезд на
магистраль /г-му автомобилю; 5 — момент по-
явления сигнала, разрешающего выезд на ма-
гистраль (/г+1)-му автомобилю; Л — площадь,
соответствующая одному автомобилю
пока не завершится выезд
на магистраль, здесь также
используется фиксирован-
ный режим работы. При мак-
симальной длительности
ожидания у светофора и
когда число автомобилей,
ожидающих у светофора,
достигает 14—15, использу-
ется заранее заданная вы-
сокая интенсивность про-
пускания. Во второй системе
интенсивность пропускания
корректируется в соответст-
414
вии с транспортной нагрузкой магистрали с тем, чтобы общая ин-
тенсивность движения не превышала пропускной способности ма-
гистрали (рис. 159). Поскольку транспортная нагрузка не превыша-
ет пропускной способности, то теоретически возможность транс-
портной перегрузки исключается.
Вторым вариантом является непосредственное применение
принципов регулирования выезда на магистраль, изложенных в
параграфах 6—8 настоящей главы. Согласно этому проекту, въезд
должен иметь две полосы — одну для легковых и грузовых авто-
мобилей, а вторую — для автобусов. Каждая полоса имеет отдель-
ную систему, регулирующую выезд на магистраль и настроенную
на свою величину интервала между автомобилями. Уол [23] назы-
вает этот способ регулированием выезда на магистраль с приори-
тетом. Полоса для автобусов должна находиться справа, чтобы
обеспечить пассажирам пользование остановками. Потребуется
ввести лишь некоторые незначительные изменения на существую-
щих дорогах. Возможность организации автобусного сообщения на
городских магистралях с использованием средств наблюдения и
регулирования движения изучается в настоящее время Техасским
транспортным институтом.
ЗАДАЧИ
1. Рассмотрите влияние и последствия постоянства интервалов между автомо-
билями и изменения ряда на регулирование выезда на магистраль путем оценки
приемлемости интервалов.
2. Рассмотрите влияние распределения автомобилей на полосе магистрали на
регулирование въезда на магистраль путем оценки соотношения между пропуск-
ной способностью и транспортной нагрузкой.
3. На магистрали с восемью полосами движения и разделительной полосой
интенсивность движения в одном направлении в некоторой точке перед примы-
кающим въездом в часы «пик» составляет 2 000 авт!ч для каждой из трех внут-
ренних полос и 1 200 авт!ч для внешней полосы. Критический интервал между
автомобилями составляет 4 сек. Найдите пропускную способность въезда в часы
«пик» по формуле (240), используя метод, основанный на соотношении между про-
пускной способностью и транспортной нагрузкой, а также метод, основанный на
выборе приемлемого интервала.
4. Какое влияние на пропускную способность и функционирование системы
окажут небольшие ошибки в измерении параметров для каждого из обоих мето-
дов регулирования выезда на магистраль, рассмотренных в задаче 3.
5. Повторите решение задачи 3, полагая, что въезд, рассмотренный в зада-
че 3, был спроектирован заново и длительность критического интервала умень-
шилась до 3 сек.
6. Решите задачу 5, используя кривые, изображенные на рис. 75.
7. Сравните метод регулирования выезда на магистраль, основанный на
оценке соотношения между пропускной способностью и транспортной нагрузкой,
и метод, основанный на оценке приемлемости интервалов между автомобилями
основного потока.
415
ЛИТЕРАТУРА
1. «Development of National Proving Grounds for Freeway Surveillance, Control
and Electronic Aids», Detroit Surveillance Project, неопубликованная работа.
2. F о о t R. S. Installation of a Tunnel Traffic Surveillance and Control
System, в кн.: «Traffic Control Theory and Instrumentation», Plenum Press, New
York, 1965.
3. D r e w D. R. Theoretical Approaches to the Study and Control of Freeway
Congestion, Texas Transportation Inst. Res. Rept. 24—1, 1964.
4. P i n n e 11 Ch. Optimum Distribution of Traffic over a Capacitated Street
Network, Texas Transportation Ifist. Res. Rept. 24—2, 1964.
5. D r e w D. R., Ke es e Ch. J. Freeway Level of Service as Influenced by
Volume Capacity Characteristics, Texas Transportation Inst. Res. Rept. 24—3, 1964.
6. D r e w D. R. Deterministic Aspects of Freeway Operations and Control,
Texas Trasportation Inst. Res. Rept. 24—4, 1964.
7. D r e w D. R. Stochastic Considerations in Freeway Operations and Cont-
rol, Texas Trasportation Inst. Res. Rept. 24—5, 1964.
8. H a у n e s J. J. Some Considerations of Vehicular Density on Urban
Freeways, Texas Transportation Inst. Res. Rept. 24—6, 1964.
9. M с C a s 1 a n d W. R. Traffic Characteristics of the Westbound Freeway
Interchange Traffic on the Gulf Freeway, Texas Transportation Inst. Res. Rept.
24—7, 1964.
10. W a 111 e w о r t h J. A. System Demand-Capacity Analysis on the Inbound
Gulf Freeway, Texas Transportation Inst. Res. Rept. 24—8, 1964.
11. McCasland W. R. Capacity-Demand Analysis of the Wayside Inter-
change on the Gulf Freeway, Texas Transportation Inst. Res. Rept. 24—9, Texas
A&M University, College Station, 1965.
12. P inneel 1 Ch., Drew D. R., McCasland W. R., Wattle-
worth J. A., Inbound Gulf Freeway Ramp Control Study I, Texas Transportation
Inst. Res. Rept. 24—10, Texas A&M University, College Station, 1965.
13. Drew D. R., Dudek C. L. Investigation of an Internal Energy Model
for Evaluating Freeway Level of Service, Texas Transportation Inst. Res. Rept.
24—11, Texas A&M University, College Station, 1965.
14. D r e w D. R. Gap Acceptance Characteristics for Ramp-Freeway Surveil-
lance and Control, Texas Transportation Inst. Res., Rept. 24—12, Texas A&M
University, College Station, 1965.
15. Pin nee 1 Ch., Drew D. R., McCasland W. R., Wattle-
worth J. A., Inbound Gulf Freeway Ramp Control Study II, Texas Transporta-
tion Inst. Res. Rept. 24—13, Texas A&M University, College Station, 1965.
16. W a 111 e w о r t h J. A. Peak-period Analysis and Control of a Freeway
System, Texas Transportation Inst. Res. Rept. 24—15, Texas A&M University, Col-
lege Station, 1966.
17. Greenberg H. An Analysis of Traffic Flow, Operations Research,
vol. 7, 1959.
18. M a у A. D., Athol P., Parker W., Rud den J. B. Development
and Evaluation of Congress Street Expressway Pilot. Detection System, Highway
Res. Board Res. 21, 1963.
19. Wattleworth J. A. «Peak-period Control of Freeway System: Some
Theoretical Considerations», докторская диссертация, Northwest University,
Evanston, Ill., 1963.
20. D r e w D. R., P i n n e 1 Ch., Some Theoretical Considerations of Peak-
hour Control for Arterial Street Systems, в кн.: «Traffic Control Theory and
Instrumentation», Plenum Press, New York, 1965.
21. McCasland W. R. Operation of Gap Projection Controller, неопубли-
кованная работа.
22. «Moving People in the Modern Gity», American Transit Association, New
York, 1966.
23. W о h 1 M. «Improvement of Bus Service between Washington and Portions
of Northern Virginia», неопубликованная работа.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аналогия гидродинамическая 284
— с тепловым потоком 282
Бета-распределение (151, 153
Бета-функция 153
Боковая реактивная сила 16
Вероятность перехода 226
— появления избыточного потока 133
Видимость в ночных условиях 28
Внутренняя энергия 340
Водитель 24
Время восприятия 36
— реакции 36
— ожидания 211
Вхождение в основной поток 160, 181
— вынужденное 160
— идеальное 160, '182
— многократное 116'1, 181
— однократное 161
— принудительное 161
— произвольное 160
Въезд примыкающий 159, 221, 397,
400
Гамма-распределение 151
Гамма-функция 143, 151
Движение криволинейное 18 -
Динамика автомобиля 12
Динамическая острота зрения 27
Длина очереди 209
-----автомобилей 218, 409
Дорога скоростная 76
— фронтальная 159
Дорожное сооружение высокого клас-
са 122
Дорожный затор 96
Зона дилемм 39
Избыточный цикл, 123, 128
Изменение ряда 158
Имитация управления автомобилем 35
Интервал запаздывания 159, 162, 180
— критический 162, 202
— между автомобилями 159, 180, 408
Интенсивность движения 77
--- критическая 126
--- относительная 84
--- расчетная 83
--- среднесуточная 81, 83
--- часовая 83
— обслуживания 228
Калибровка модели 261
Кинематика автомобиля 10
Количество движения 336, 338
Коэффициент биномиальный ПО
— устойчивости автомобиля 18
— часа «пик» 85
Критерий регулирования движения
397
— хи-квадрат 113
Лапласа преобразование 307, 308
Макрохарактеристики движения 104
Маневрирование автомобиля 317
Марковский процесс 105
Медиана 138
— интервала запаздывания 162
— критического интервала между ав-
томобилями 162
Метод граничных условий 280
— движущегося наблюдателя 288
— контроля узкого места 293
— Монте-Карло 237, 242
— наименьших квадратов 278
— обратных преобразований 247
— поиска 253
— распределения точек 237, 249, 247
— случайного блуждания 239—241
— степенных вычетов 245
Микрохарактеристики движения 104
Мода 138
Моделирование 236, 263, 241
— аналоговое 105
— цифровое 105
Моделированная выборка 261
Модель для вычислительной машины
236
— детерминистическая 104
— маневрирования автомобиля 321
— многомерная 321
417
— одномерная 321
— ожидания 164
— с ограниченной пропускной способ-
ностью 93
— следования за головным автомоби-
лем 312, 315
------------- линейная 312
------------- нелинейная 315
— стохастическая 104
— массового обслуживания 105
— угловой скорости 186
— энергетическая 347
Моменты распределения 111
Мотивация поездок 25
Наблюдение за движением 392
Несовпадение следов при повороте 17
Номер приемлемого интервала 196
Основание системы счисления 244
Очередь автомобилей 205
---движущаяся 218
— конечная 210
Ошибка индивидуальная 34
— неумышленная 35
— объективная 34
— умышленная 35
Пересечение одного потока другим
под острым углом 159
Пирамида теорий 106, 107
План трассы 60
Плотность непрерывного распределе-
ния 135
— потока 317
Полоса разгона 159, 194, 410
Полосы с изменяемым направлением
движения 374, 383
Поток
— входящий 296
— напряженный 352, 361
— неустойчивый 352, 361
— свободный 352
— устойчивый 352, 361
Приемлемость интервала 202
Принцип случайного блуждания 239
Пробит-анализ 177
---двумерный 188
Прогнозирование движения 91
Программа моделирования 257
Проектирование геометрических эле-
ментов, 9, 44
— транспортных систем 44
— функциональное 44
Производящая функция вероятностей
144, 209
---моментов 115, 136
Пропускная способность 94, 122, 349
---возможная 349
--- основная 349
---практическая 349
Пространственно-временная диаграм-
ма 439
Профиль дороги
----поперечный 49
----продольный 52
Путепровод 362
Радиус поворота, минимальный 17
Развязка 362
— ромбовидная 362, 363, 387
— типа клеверного листа 362, 363
----разрезанный ромб 364
----смещенный ромб 364
Разделительная полоса 51
Расстояние видимости для обгона 54
---------- безопасное 55
-------торможения 54
— запаздывания 160
— между автомобилями 159
Реакция водителя 33
Регулирование выезда на магистраль
400, 406, 408
Распределение вероятностей НО
----биномиальное 109, 137, 151, 176
----геометрическое 118, 137, 151
---- гиперпуассоновское 230
---- дискретное 111
----непрерывное 135
----нормальное 137, 151
----отрицательное биномиальное
115
----Пирсона типа I 148, 151
-------типа III 143, 151
----прямоугольное (см. равномер-
ное)
---- пуассоновское 111, 230
----равномерное 137, 151
----смещенное отрицательное бино-
миальное 173
---- экспоненциальное 140, 151, 230
----эрланговское 145, 151, 173, 200
— времени ожидания 213
---- реакции 176
— длительности критических интер-
валов 172
— поездок 92
Система
— массового обслуживания 206, 214
------- многоканальная 214
------- одноканальная 206
— с замкнутым контуром 306
— с обратной связью 306
— с разомкнутым контуром 306
— счисления 244
Скоростная магистраль 362, 374
Скорость
— волновая 292
— изменения ряда 271
— при выезде на магистраль 185
— средняя 77
Слияние потоков 159
Случайное блуждание 239
418
— взвешенное 241
Способ счета
---- асинхронный 153
---- синхронный 153
Степенной вычет 246
Степень насыщения 296
Стимул 177
Столкновение автомобилей 15
Съезд примыкающий 159
Торможение 13
Точка вхождения 193
— примыкания въезда 193
Транспортная нагрузка 122
Угол бокового увода 16
— вхождения 192
Удар 15
Ударная волна 292
Улица
— магистральная 72, 73
---- городского значения 73
---- районного значения 72
— местного движения 72
Управляемость автомобиля 12, 16
Уравнение
— диффузии 283
— непрерывности 292
— параболы 279
— состояния транспортного потока
337
— сохранения 285
— характеристическое 309
Уровень обслуживания 96, 349, 360
--- критический 353
---расчетный 97
---фактический 97
Устойчивость автомобиля 18
Участок изменения ряда 371
Функция
— передаточная 307
— показательная 279
— приемлемости интервалов 174
Центральная предельная теорема 252
Центральный деловой район 78
Число
— псевдослучайное 243
— случайное 237
Шум ускорения 105, 331, 334, 343, 346
ОГЛАВЛЕНИЕ
Предисловие редактора 5
Предисловие автора 7
Глава I
Автомобиль
1. Статические характеристики 9
2. Кинематика автомобиля Ю
3. Движение с переменным ускорением И
4. Динамика автомобиля 12
5. Торможение 13
6. Расчет скорости 14
7. Удар и столкновение 15
8. Управляемость автомобиля 16
9. Поворот автомобиля 17
10. Устойчивость автомобиля 18
11. Силовая установка 20
12. Основные проблемы 21
Задачи 21
Литература 22
Глава II
Водитель
1. Обучение 24
2. Мотивация 25
3. Особенности характера водителя 26
4. Зрение - 26
5. Видимость в ночных условиях 28
6. Высота глаз водителя 30
7. Эргономический подход 31
8. Поведение водителя 32
9. Реакция водителя 33
10. Ошибки водителя 34
11. Имитация управления автомобилем 35
12. Время восприятия и реакции 36
13. Ошибочность расчета на водителя среднего роста 38
14. Эмпирические правила 39
15. Основные проблемы 40
Задачи 40
Литература 41
420
Глава III
Дорога
1. Дорожное покрытие и проблемы освещения 44
2. Проектирование геометрических элементов
3. Поперечный профиль дороги
4. Продольный профиль дороги 60
5. План трассы
6. Устройства регулирования движения '
7. Дорога как система
8. Основные проблемы 0g
Задачи gg
Литература
Глава IV
Дорожно-уличная сеть
1. Функциональная классификация 72
2. Скоростные дороги 76
3. Измерение интенсивности движения 77
4. Средства определения интенсивности движения
5. Показатели интенсивности движения 82
6. Прогнозирование движения 91
7. Пропускная способность 94
8. Уровень обслуживания 96
9. Основные проблемы 99
Задачи 99
Литература 100
Глава V
Исследования по организации движения
1. Системный подход 101
2. Математическая модель 103
3. Эксперимент и оценка * 105
Задачи 108
Литература 10"
Глава VI
Транспортный поток
1. Биномиальное распределение 109
2. Моменты.дискретного распределения 111
3. Пуассоновское распределение 111
4. Статистические критерии для проверки на случайность ИЗ
5. Производящая функция вероятностей 114
6. Отрицательное биномиальное распределение 115
7. Анализ прибытия автомобилей 116
' 8. Геометрическое распределение 119
9. Аппроксимация биномиального распределения пуассонов- 120
ским
10. Приложение теории к регулированию движения 122
11. Пример расчета пропускной способности перекрестка 128
г Задачи 132
Литература 134
Глава VII
Непрерывные величины, характеризующие транспортный поток
1. Производящая функция моментов 136
2. Прямоугольное распределение 137
3. Нормальное распределение 137
421
4. Получение параметров, характеризующих транспортный 139
поток
5. Экспоненциальное распределение ’ 140
6. Распределение Пирсона типа III 143
7. Распределение Эрланга 145
8. Распределение Пирсона типа I 148
9. Соотношения между распределениями 151
10. Функции и распределения 152
11. Выводы 154
Задачи 155
Литература 157
Глава VIII
Приемлемость интервалов между автомобилями
1. Параметры, характеризующие вхождение в основной 161
поток
2. Модели ожидания 164
3. Распределения длительности критических интервалов 172
4. Функции приемлемости интервалов 174
5. Биномиальное распределение времени реакции 176
6. Пробит-метод 177
7. Интервалы между последовательными автомобилями и 180
интервалы запаздывания
8. Многократное вхождение в основной поток 181
9. Идеальное вхождение в основной поток 182
10. Скорость автомобиля, выезжающего на магистраль 185
11. Модель угловой скорости 186
12. Двумерный пробит-анализ 188
13. Влияние геометрических характеристик 191
14. Угол вхождения 192
15. Длина полосы разгона 194
16. Номер приемлемого интервала 196
17. Приложение теории к проектированию дорог 198
Задачи 202
Литература 20В
Глава IX
Образование очередей автомобилей
1. Одноканальная система 205
2. Применение производящей функции 2091
3. Конечные очереди 210
4. Время ожидания 211
5. Многоканальные системы 214
6. Движущиеся очереди 216
7. Примыкающий въезд 221
8. Марковские процессы 225
9. Смысл интенсивности обслуживания 228
10. Распределения, отличающиеся от экспоненциального 230
11. Состояние теории массового обслуживания 232
Задачу 233
Литература 235
ГлаваХ.
Моделирование
1. Метод Монте-Карло 237
2. Случайное блуждание 239’
3. Моделированный выбор 241
4. Случайные числа 24В
422
5. Получение псевдослучайных чисел 243
6. Системы счисления 244
7. Метод степенных вычетов 245
8. Последовательности случайных чисел, удовлетворяющих тре- 246
буемым распределениям
9. Метод обратных преобразований 247
10. Метод распределения точек 249
И. Дискретные случайные величины 250
12. Специальные методы преобразования случайных величин 252
13. Методы поиска 253
14. Этапы моделирования 255
15. Программа моделирования 257
16. Калибровка модели 261
17. Применение моделирования 263
18. Пример выезда на скоростную магистраль 265
Задачи 274
Литература 276
Глава XI
Детерминированные соотношения
1. Построение кривой по точкам 278
2. Метод граничных условий 280
3. Аналогия с тепловым потоком 282
4. Гидродинамическая аналогия 284 ‘
5. Метод движущегося наблюдателя 288
6. Ударные волны 292
7. Метод контроля узкого места 293
8. Измерения параметров входящего потока 296
9. Модели систем 301
10. Основные проблемы 303
Задачи 303
Литература 304
Глава XII
Система «человек — автомобиль»
1. Регулирование с обратной связью 306
2. Преобразования Лапласа 307
3. Устойчивость системы 308
4. Человек как система регулирования 309
5. Запаздывание 310
6. Линейная модель следования за головным автомобилем 312
7. Нелинейные модели следования за головным автомобилем 315
8. Маневрирование автомобиля — новый принцип 317
9. Аналоговое моделирующее устройство 319
10. Определение переменных для модели следования за голов- 323 ‘
ным автомобилем
11. Основные проблемы 325
Задачи 325
Литература 326
Глава XIII
Энергетический подход к уровню обслуживания
1. Параметр 331
2. Математические зависимости для шума ускорения 334
3. Количество движения. Кинетическая энергия 336
4. Внутренняя энергия 340
5. Методы исследования 343
6. Оценка геометрических характеристик дороги 345
423
7. Шум ускорения, обусловленный взаимодействием между 346>
автомобилями потока
8. Проверка справедливости энергетической модели 347
9. Пропускная способность и уровень обслуживания 349
10. Соотношение между энергией и расходом топлива 354
11. Основные проблемы 355
Задачи 356
Литература 357
Глава XIV
Проектирование автомобильных дорог
1. Проектирование скоростной магистрали 359
2. Скоростная магистраль как система 362
3. Требования к развязкам 362
4. Требования к основным полосам магистрали 370
5. Схема скоростной магистрали, имеющей полосы с изменяе- 374
мым направлением движения
6. Транспортная система деловой части города 379
7. Развязка на участке магистрали, имеющем полосы с изме- 383
няемым направлением движения
Задачи 387
Литература . 389
Глава XV
Наблюдение и регулирование движения
1. Функционирование магистрали 390
2. Наблюдение за движением на магистрали и его регулирова- 392
ние
3. Проект для магистрали Галф 394
4. Проект наблюдения за движением транспорта как средство 395
научных исследований
5. Вывод критериев регулирования движения на примыкающем 397
въезде
6. Регулирование выезда на магистраль с примыкающего 401
въезда
7. Система, регулирующая выезд на магистраль 406
8. Опытный образец установки, регулирующей выезд на ма- 408
гистраль
9. Приложение к автобусному сообщению 413
Задачи 415
Литература 415
Предметный указатель 417
Д. Дрю
ТЕОРИЯ ТРАНСПОРТНЫХ потоков
И УПРАВЛЕНИЕ ИМИ
Редактор В. И. Яблоков
Обложка художника Д. П. Белова
Технический редактор Т. А. Гусева
Корректор В. Я. Кинареевская
Сдано в набор 16/11—4972 г.
Подписано в печать 7/IX—1972 г.
Формат бумаги 60X90716
Печ. л. 26,5
Уч. изд. л. 27,34
Тираж 4000
Заказ типографии 338
Цена 2 р. 97 к. Т—15124
Изд. № 2—4—1/14 № 4710
Издательство «Транспорт», Москва, Басманный туп., 6а
Московская типография № 8 Главполиграфпрома
Государственного комитета Совета Министров СССР
по делам издательств, полиграфии и книжной торговли,
Хохловский пер., 7.