























































































































































































































































































































































































































































































































































































Author: Денисенко В.В.
Tags: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика прикладные информационные (компьютерные) технологии методы основанные на применении компьютеров промышленность автоматизация
ISBN: 978-5-9912-0060-8
Year: 2009




В. В. Денисенко
ЮМПЬИТЕРНПЕ
УПРАВЛЕНИЕ
технологическим процессом,
экспериментом,
оборудованием
Москва
Горячая линия - Телеком
2009
УДК 681.5:004.9
ББК 32.965
ДЗЗ
Рецензенты: доктор техн, наук, профессор В. В. Топорков]
доктор техн, наук, профессор В. И. Финаев
Денисенко В.В.
ДЗЗ Компьютерное управление технологическим процессом,
экспериментом, оборудованием. — М.: Горячая линия-Телеком,
2009. — 608 с., ил.
ISBN 978-5-9912-0060-8.
Книга содержит систематическое изложение основных вопросов совре-
менной теории и практики промышленной и лабораторной автоматиза-
ции. Представлены только самые необходимые для практики сведения с
акцентом на детальный анализ наиболее сложных и часто неправильно
понимаемых вопросов. Рассмотрены широко распространенные в России
промышленные интерфейсы и сети, архитектура систем автоматизации и
методы их защиты от помех, тонкие нюансы техники автоматизированных
измерений, ПИД-регуляторы с автоматической настройкой и адаптаци-
ей, структура и характеристики управляющих контроллеров, современ-
ные методы резервирования, средства программирования контроллеров,
SCADA-пакеты и ОРС серверы, юридические вопросы внедрения средств
автоматизации, в том числе на опасных промышленных объектах.
Для специалистов по промышленной автоматизации, а также инжене-
ров и научных работников, которые хотят автоматизировать свою работу
с помощью компьютера. Может быть полезна студентам старших кур-
сов технических университетов.
ББК 32.965
Адрес издательства в Интернет WWW.TECHBOOK.RU
Научное издание
Денисенко Виктор Васильевич
Компьютерное управление технологическим процессом,
экспериментом, оборудованием
Редактор Ю.Н. Чернышов
Компьютерная верстка Ю.Н. Чернышов
Обложка художника В.Г. Ситникова
Подписано в печать 24.06.08. Формат 70x100/16. Усл. пен. л. 38. Тираж 1000 экз. Изд. Xе 8060
ООО «Научно-техническое издательство «Горячая линия-Телеком» Зак. 3733.
Отпечатано в ООО ПФ «Полиграфист», 160001, г. Вологда, ул. Челюскинцев, 3.
ISBN 978-5-9912-0060-8
© В.В. Денисенко, 2009
© Оформление издательства
«Горячая линия-Телеком», 2009
Оглавление
Предисловие............................................. 11
Введение................................................ 13
Глава 1. Архитектура автоматизированной системы............... 16
1.1. Разновидности архитектур.............................. 16
1.1.1. Требования к архитектуре......................... 18
1.1.2. Простейшая система............................... 21
1.1.3. Распределенные системы автоматизации............. 23
1.1.4. Многоуровневая архитектура....................... 29
1.2. Применение Интернет-технологий........................ 33
1.2.1. Проблемы и их решение............................ 34
1.2.2. Основные понятия технологии Интернета............ 35
1.2.3. Принципы управления через Интернет............... 36
1.2.4. Микро-веб-серверы................................ 38
1.2.5. Примеры применения............................... 39
1.3. Понятие открытой системы.............................. 40
1.3.1. Свойства открытых систем......................... 43
1.3.2. Средства достижения открытости................... 45
1.3.3. Достоинства и недостатки......................... 47
1.4. Заключение............................................ 49
1.5. Обзор публикаций...................................... 49
Глава 2. Промышленные сети и интерфейсы....................... 51
2.1. Общие сведения о промышленных сетях................... 52
2.2. Модель OSI............................................ 55
2.2.1. Физический уровень............................... 56
2.2.2. Канальный уровень................................ 57
2.2.3. Сетевой уровень.................................. 57
2.2.4. Транспортный уровень............................. 57
2.2.5. Сеансовый уровень................................ 57
2.2.6. Уровень представления............................ 58
4
Оглавление
2.2.7. Прикладной уровень................................. 58
2.2.8. Критика модели OSI................................. 58
2.3. Интерфейсы RS-485, RS-422 и RS-232...................... 59
2.3.1. Принципы построения................................ 59
2.3.2. Стандартные параметры.............................. 61
2.3.3. Согласование линии с передатчиком и приемником..... 61
2.3.4. Топология сети на основе интерфейса RS-485......... 65
2.3.5. Устранение состояния неопределенности линии........ 65
2.3.6. Сквозные токи...................................... 66
2.3.7. Выбор кабеля....................................... 67
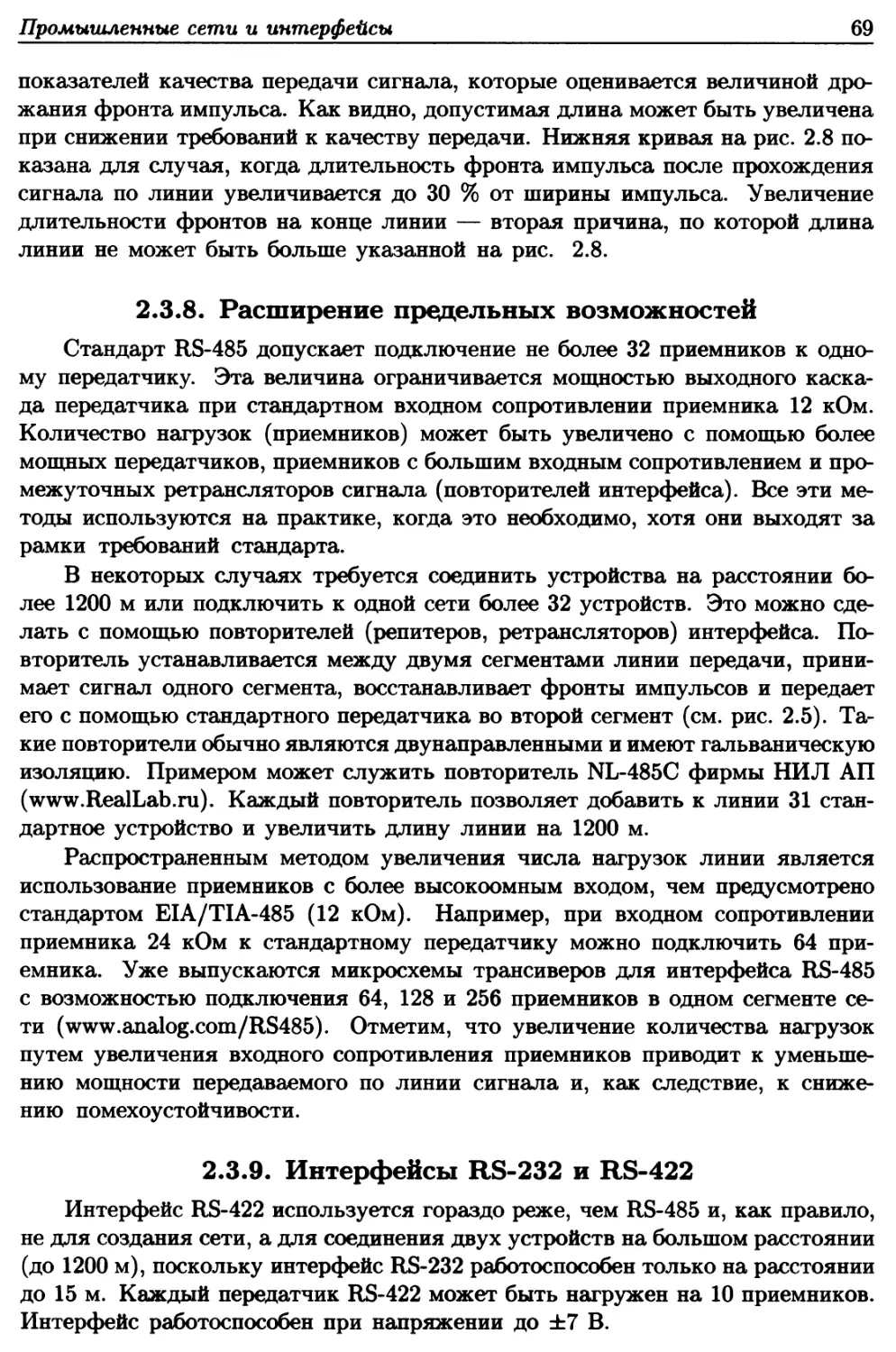
2.3.8. Расширение предельных возможностей................. 69
2.3.9. Интерфейсы RS-232 и RS-422......................... 69
2.4. Интерфейс «токовая петля»............................... 70
2.5. HART-протокол........................................... 74
2.6. CAN..................................................... 83
2.6.1. Физический уровень................................. 85
2.6.2. Канальный уровень.................................. 90
2.6.3. Прикладной уровень: CANopen........................ 94
2.6.4. Электронные спецификации устройств CANopen......... 96
2.7. Profibus................................................ 96
2.7.1. Физический уровень................................. 98
2.7.2. Канальный уровень Profibus DP...................... 99
2.7.3. Резервирование.................................... 104
2.7.4. Описание устройств................................ 104
2.8. Modbus................................................. 105
2.8.1. Физический уровень................................ 107
2.8.2. Канальный уровень................................. 108
2.8.3. Прикладной уровень................................ 110
2.9. Промышленный Ethernet.................................. 112
2.9.1. Особенности Ethernet.............................. 114
2.9.2. Физический уровень................................ 115
2.9.3. Канальный уровень................................. 121
2.9.4. Modbus TCP........................................ 121
2.9.5. Profinet.......................................... 123
2.10. Протокол DCON......................................... 123
2.11. Беспроводные локальные сети........................... 126
2.11.1. Проблемы беспроводных сетей и пути их решения.... 127
2.11.2. Bluetooth........................................ 137
2.11.3. ZigBee и IEEE 802.15.4....................?...... 139
2.11.4. Wi-Fi и IEEE 802.11.............................. 149
2.11.5. Сравнение беспроводных сетей............. 152
Оглавление
5
2.12. Сетевое оборудование.................................. 153
2.12.1. Повторители интерфейса........................... 153
2.12.2. Концентраторы (хабы)............................. 155
2.12.3. Преобразователи интерфейса....................... 155
2.12.4. Адресуемые преобразователи интерфейса............ 158
2.12.5. Межсетевые шлюзы................................. 159
2.12.6. Другое сетевое оборудование...................... 160
2.12.7. Кабели для промышленных сетей.................... 161
2.13. Заключение............................................ 165
Глава 3. Защита от помех...................................... 166
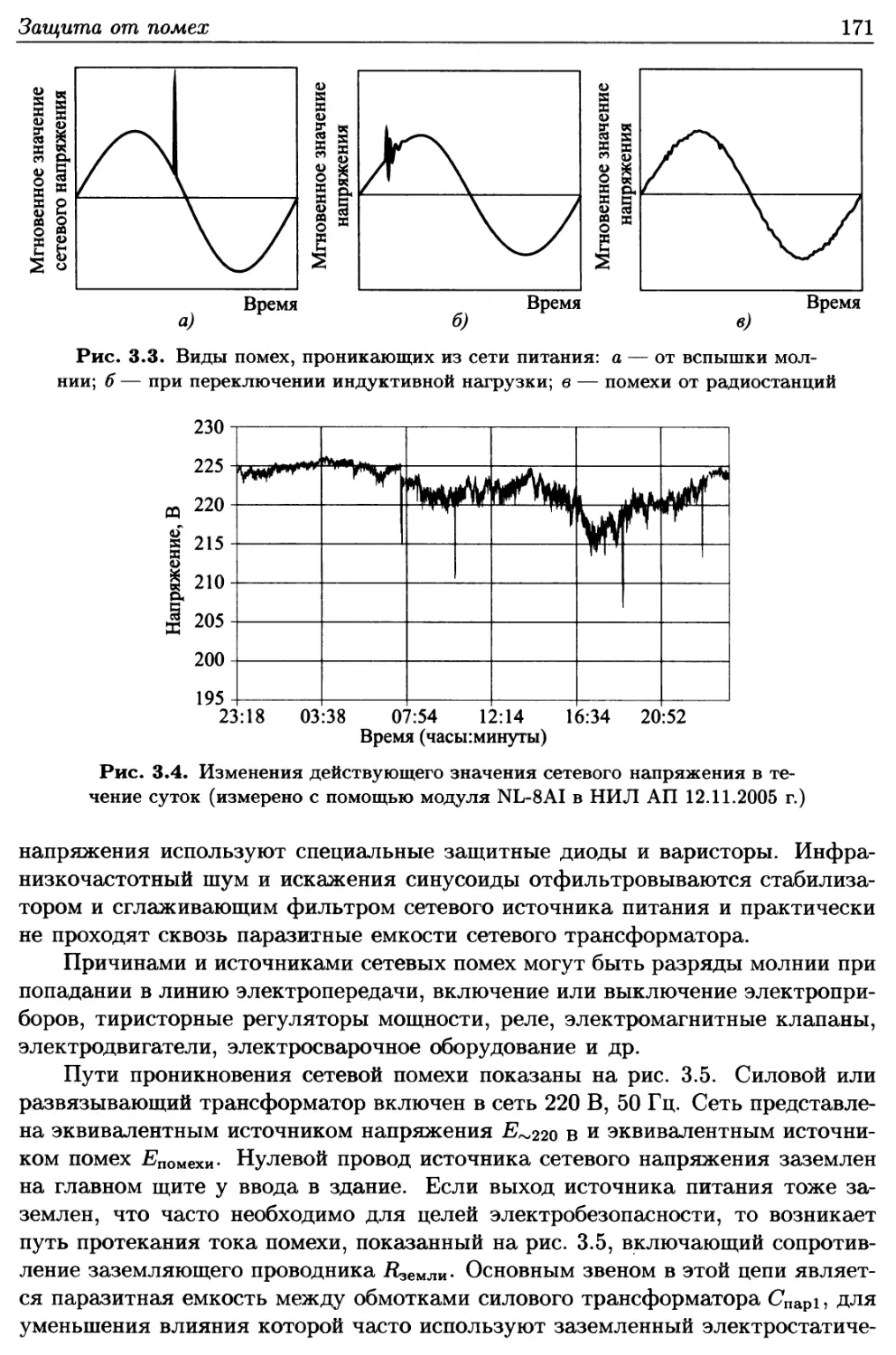
3.1. Источники помех....................................... 167
3.1.1. Характеристики помех............................. 168
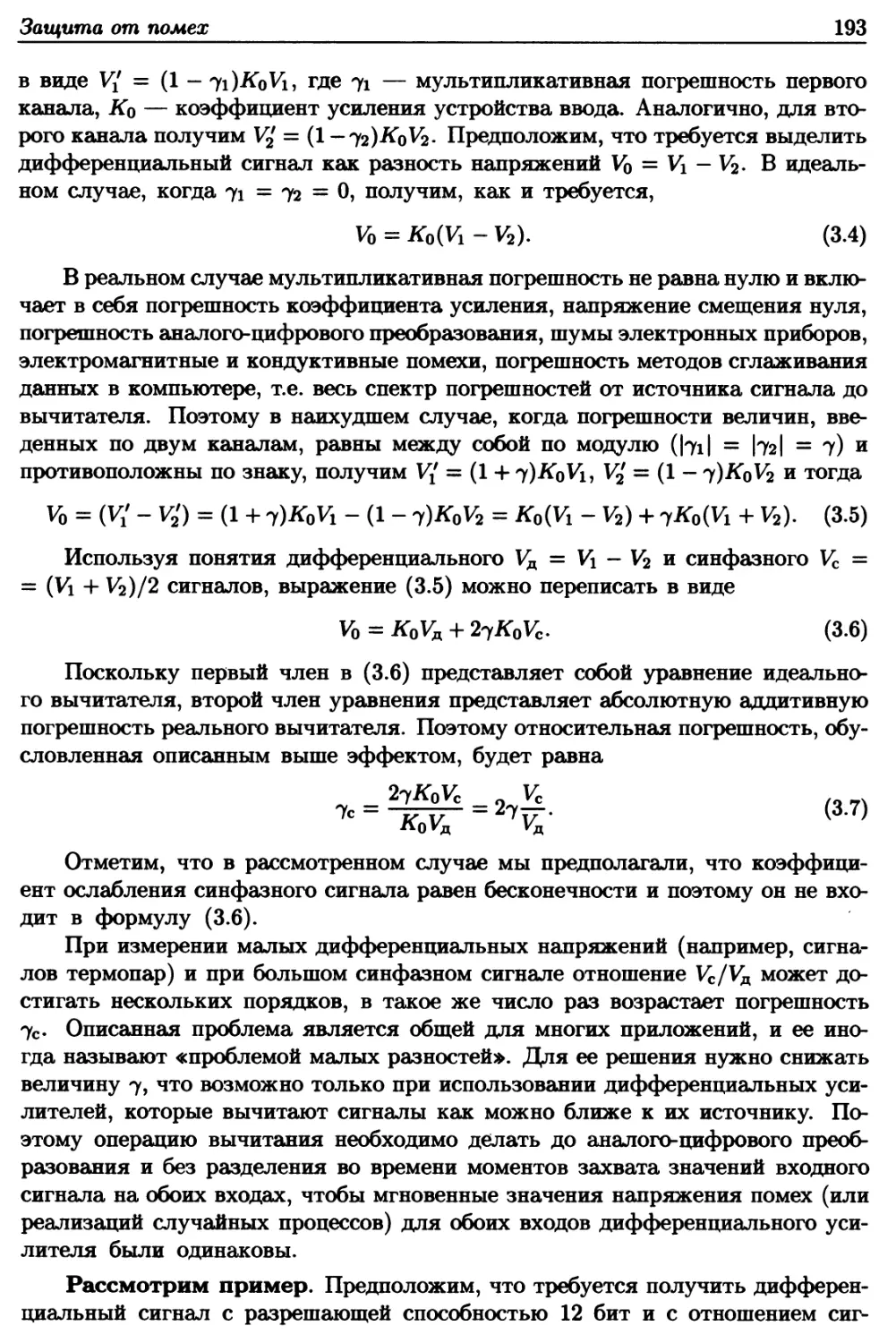
3.1.2. Помехи из сети электроснабжения.................. 170
3.1.3. Молния и атмосферное электричество............... 173
3.1.4. Статическое электричество........................ 176
3.1.5. Помехи через кондуктивные связи.................. 178
3.1.6. Электромагнитные помехи.......................... 178
3.1.7. Другие типы помех................................ 180
3.2. Заземление............................................ 180
3.2.1. Определения...................................... 181
3.2.2. Цели заземления.................................. 182
3.2.3. Защитное заземление зданий....................... 183
3.2.4. Автономное заземление............................ 185
3.2.5. Заземляющие проводники........................... 185
3.2.6. Модель «земли»................................... 185
3.2.7. Виды заземлений.................................. 187
3.3. Проводные каналы передачи сигналов.................... 189
3.3.1. Источники сигнала................................ 189
3.3.2. Приемники сигнала................................ 191
3.3.3. Прием сигнала заземленного источника............. 194
3.3.4. Прием сигнала незаземленных источников........... 195
3.3.5. Дифференциальные каналы передачи сигнала......... 196
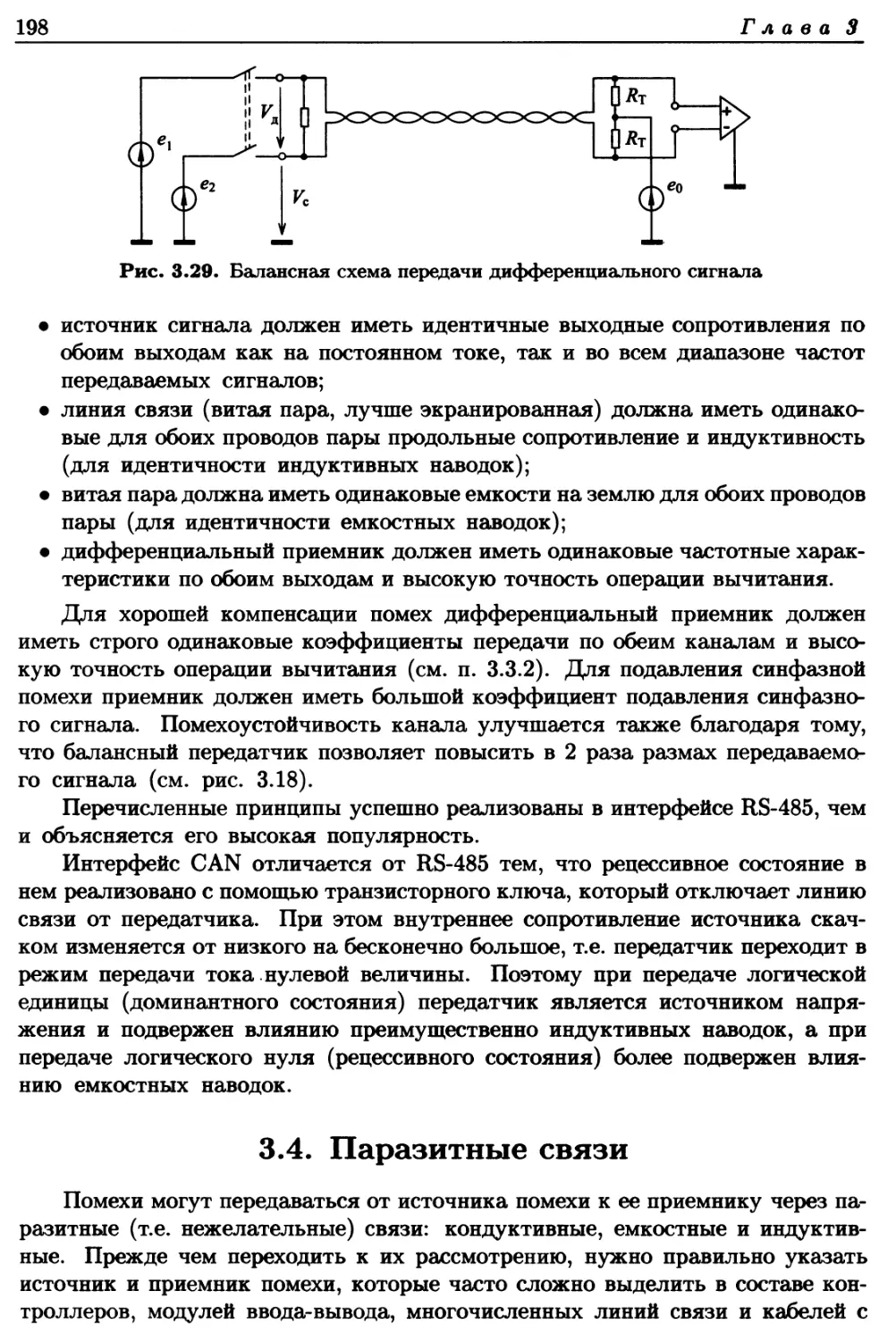
3.4. Паразитные связи...................................... 198
3.4.1. Модели компонентов систем автоматизации.......... 199
3.4.2. Паразитные кондуктивные связи.................... 200
3.4.3. Индуктивные и емкостные связи.................... 201
3.5. Методы экранирования и заземления..................... 204
3.5.1. Гальванически связанные цепи..................... 204
3.5.2. Экранирование сигнальных кабелей................. 206
3.5.3. Гальванически развязанные цепи................... 210
3.5.4. Экраны кабелей на электрических подстанциях...... 211
6
Оглавление
3.5.5. Экраны кабелей для защиты от молнии............. 211
3.5.6. Заземление при дифференциальных измерениях...... 212
3.5.7. Интеллектуальные датчики........................ 212
3.5.8. Монтажные шкафы................................. 213
3.5.9. Распределенные системы управления............... 215
3.5.10. Чувствительные измерительные цепи............... 216
3.5.11. Исполнительное оборудование и приводы........... 216
3.5.12. Заземление на взрывоопасных объектах............ 217
3.6. Гальваническая развязка.............................. 218
3.7. Защита промышленных сетей от молнии.................. 219
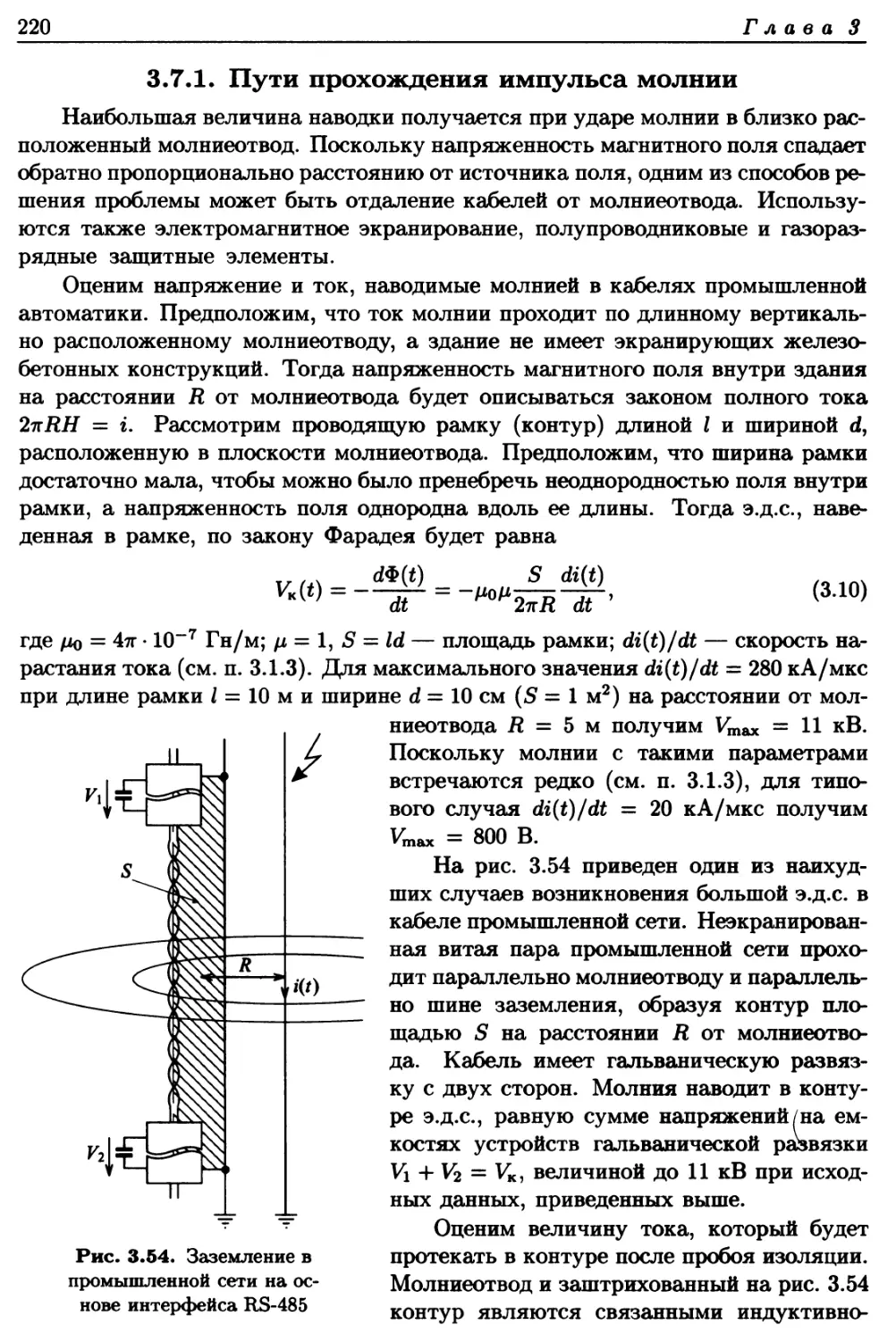
3.7.1. Пути прохождения импульса молнии................ 220
3.7.2. Средства защиты................................. 222
3.8. Стандарты и методы испытаний по ЭМС.................. 224
3.9. Верификация заземления и экранирования............... 225
3.10. Заключение........................................... 226
Глава 4. Измерительные каналы................................ 229
4.1. Основные понятия..................................... 229
4.1.1. Определения основных терминов................... 229
4.1.2. Точность, разрешающая способность и порог чувстви-
тельности ............................................. 234
4.1.3. Функция автокорреляции.......................... 236
4.1.4. Коэффициент корреляции.......................... 240
4.1.5. Точечные и интервальные оценки погрешности...... 243
4.1.6. Погрешность метода измерений.................... 245
4.1.7. Погрешность программного обеспечения............ 246
4.1.8. Достоверность измерений......................... 246
4.2. Многократные измерения............................... 248
4.2.1. Повышение точности путем усреднения результатов
измерений.............................................. 248
4.2.2. Точность и продолжительность измерений.......... 252
4.3. Динамические измерения............................... 258
4.3.1. Теорема Котельникова............................ 258
4.3.2. Фильтр и динамическая погрешность............... 260
4.3.3. Алиасные частоты, антиалиасные фильтры.......... 270
4.4. Суммирование погрешностей измерений.................. 275
4.4.1. Исходные данные для расчета..................... 275
4.4.2. Методы суммирования погрешностей................ 276
4.4.3. Систематические погрешности..................... 278
4.4.4. Случайные погрешности........................... 279
4.4.5. Дополнительные погрешности...................... 280
Оглавление
7
4.4.6. Динамические погрешности........................ 280
4.4.7. Нахождение итоговой погрешности................. 281
4.5. Заключение........................................... 282
4.6. Обзор литературы..................................... 283
Глава 5. ПИД-регуляторы...................................... 284
5.1. Идентификация моделей динамических систем............ 285
5.1.1. Модели объектов управления...................... 287
5.1.2. Выбор тестовых сигналов......................... 294
5.1.3. Частотная идентификация в режиме релейного регули-
рования ............................................... 301
5.1.4. Идентификация в замкнутом и разомкнутом контурах. 309
5.1.5. Аналитическая идентификация..................... 312
5.1.6. Методы минимизации критериальной функции........ 315
5.2. Классический ПИД-регулятор........................... 318
5.2.1. П-регулятор..................................... 319
5.2.2. И-регулятор..................................... 321
5.2.3. ПИ-регулятор.................................... 322
5.2.4. ПД-регулятор.................................... 324
5.2.5. ПИД-регулятор................................... 324
5.3. Модификации ПИД-регуляторов.......................... 325
5.3.1. Регулятор с весовыми коэффициентами при уставке.. 325
5.3.2. Регулятор с формирующим фильтром для сигнала уставки. 327
5.3.3. Принцип разомкнутого управления................. 328
5.3.4. Регулятор отношений............................. 334
5.3.5. Регулятор с внутренней моделью.................. 334
5.3.6. Эквивалентные преобразования структур ПИД-регуляторов 338
5.3.7. ПИД-регуляторы для систем с транспортной задержкой .... 339
5.4. Особенности реальных регуляторов..................... 342
5.4.1. Погрешность дифференцирования и шум............. 343
5.4.2. Интегральное насыщение.......................... 344
5.4.3. Запас устойчивости и робастность................ 348
5.4.4. Сокращение нулей и полюсов...................... 356
5.4.5. Безударное переключение режимов регулирования.... 356
5.4.6. Дискретная форма регулятора..................... 357
5.5. Расчет параметров.................................... 361
5.5.1. Качество регулирования.......................... 361
5.5.2. Выбор параметров регулятора..................... 364
5.5.3. Ручная настройка, основанная на правилах........ 367
5.5.4. Методы оптимизации.............................. 368
5.6. Автоматическая настройка и адаптация................. 368
8
Оглавление
5.6.1. Основные принципы................................ 369
5.6.2. Табличное управление............................. 370
5.6.3. Обзор коммерческих продуктов..................... 371
5.6.4. Программные средства настройки................... 375
5.7. Нечеткая логика, нейронные сети и генетические алгоритмы. 376
5.7.1. Нечеткая логика в ПИД-регуляторах................ 377
5.7.2. Искусственные нейронные сети........................ 382
5.7.3. Генетические алгоритмы........................... 384
5.8. Заключение............................................ 386
5.9. Обзор публикаций...................................... 387
Глава 6. Контроллеры для систем автоматизации................. 391
6.1. Программируемые логические контроллеры................ 393
6.1.1. Типы ПЛК......................................... 393
6.1.2. Архитектура...................................... 395
6.1.3. Характеристики................................... 399
6.1.4. Пример ПЛК....................................... 403
6.1.5. Устройства сбора данных.......................... 406
6.2. Компьютер в системах автоматизации.................... 408
6.2.1. Компьютер в качестве контроллера................. 409
6.2.2. Компьютер для общения с оператором............... 410
6.2.3. Промышленные компьютеры.......................... 411
6.3. Устройства ввода-вывода............................... 414
6.3.1. Ввод аналоговых сигналов......................... 415
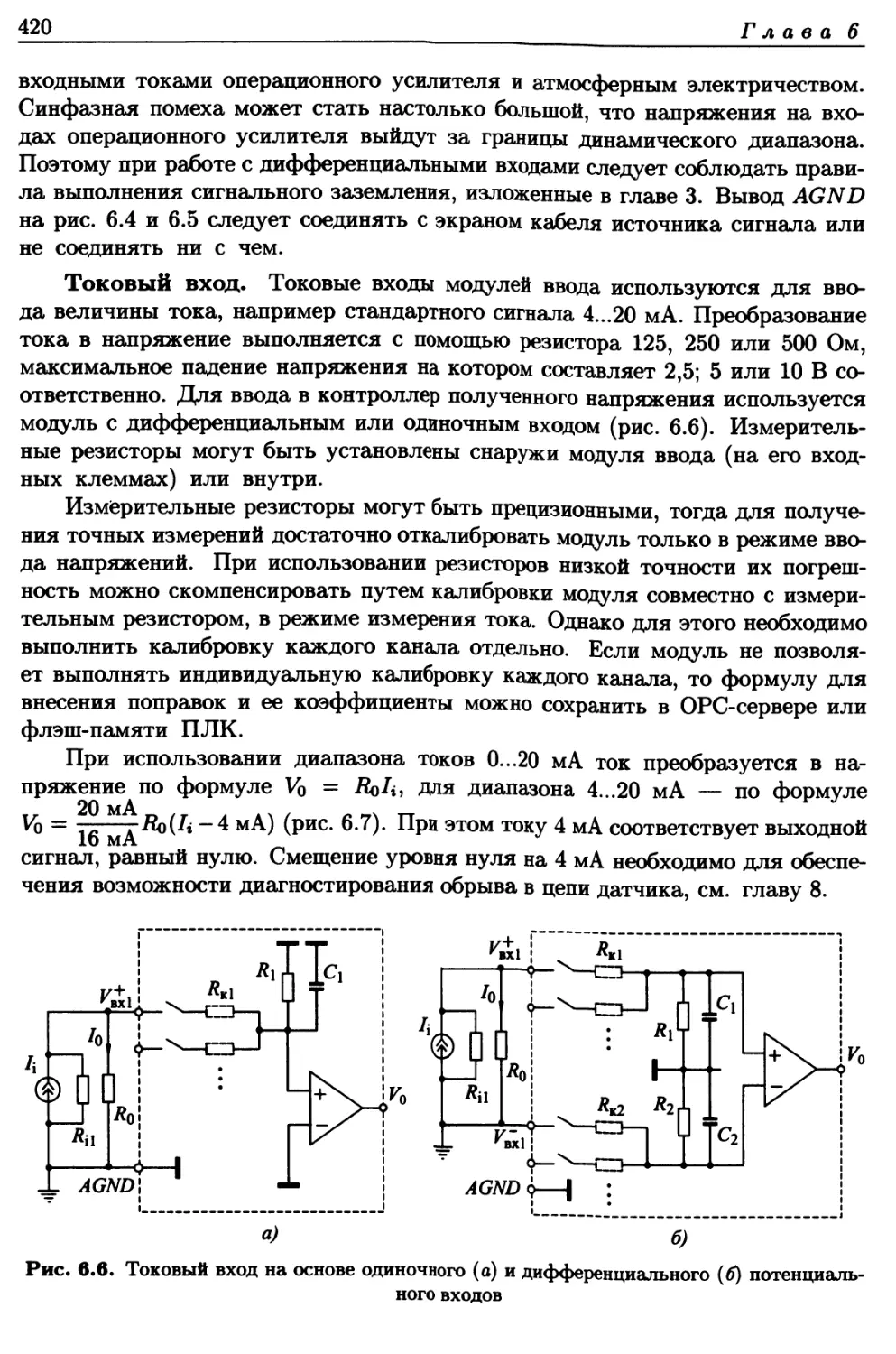
6.3.2. Модули ввода тока и напряжения................... 419
6.3.3. Термопары........................................ 421
6.3.4. Термопреобразователи сопротивления............... 425
6.3.5. Тензорезисторы................................... 432
6.3.6. Вывод аналоговых сигналов........................ 439
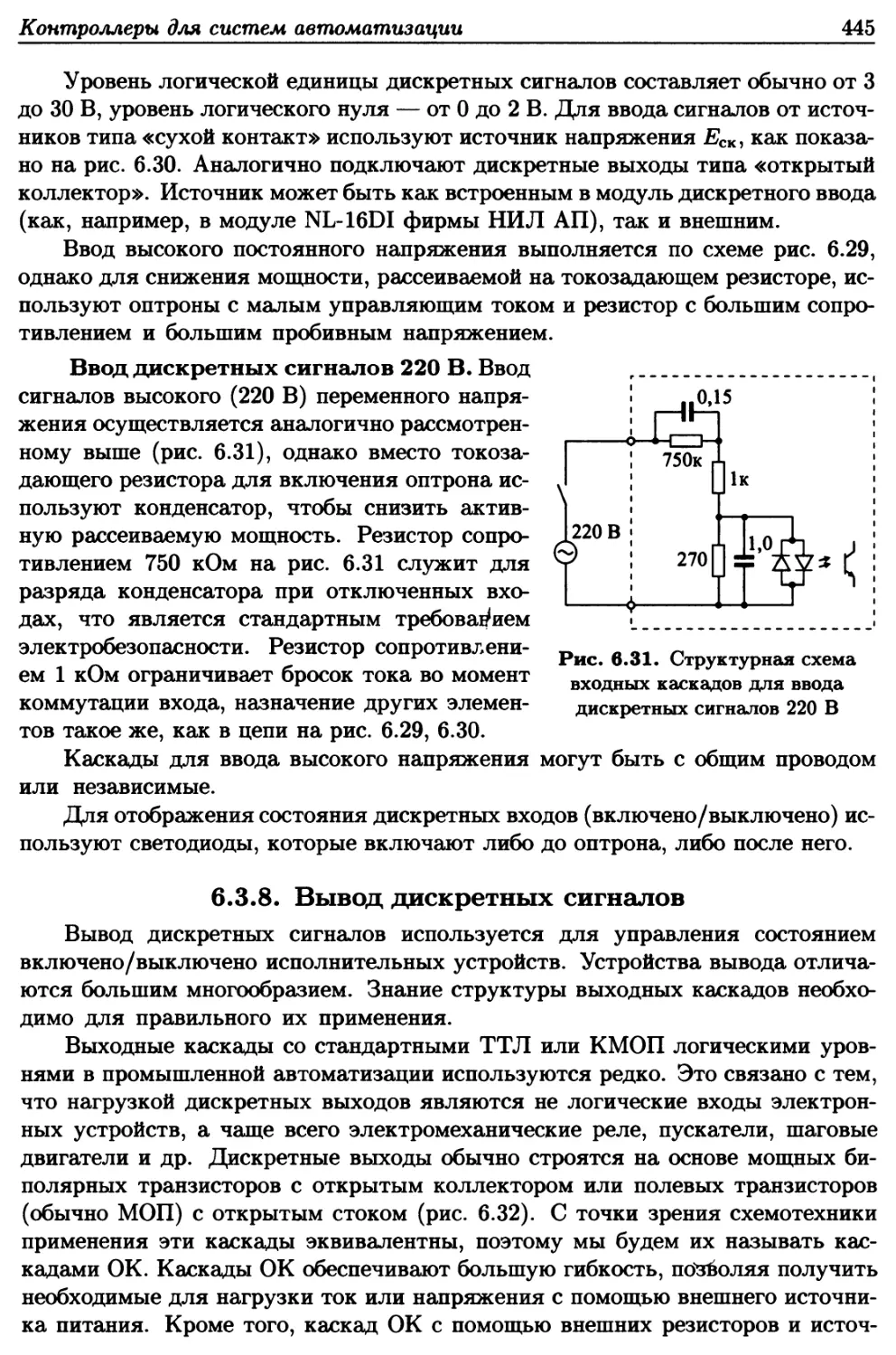
6.3.7. Ввод дискретных сигналов......................... 443
6.3.8. Вывод дискретных сигналов........................ 445
6.3.9. Ввод частоты, периода и счет импульсов........... 447
6.3.10. Модули управления движением..................... 449
6.4. Заключение............................................ 452
Глава 7. Автоматизация опасных объектов....................... 454
7.1. Искробезопасная электрическая цепь.................... 455
7.2. Блоки искрозащиты..................................... 458
7.4. Правила применения искробезопасных устройств.......... 460
7.4. Функциональная безопасность........................... 461
7.5. Выбор аппаратных средств.............................. 464
Оглавление
9
7.5.1. Виды опасных промышленных объектов................ 464
7.5.2. Классификация взрывоопасных зон................... 466
7.5.3. Классификация взрывоопасности технологических блоков.. 468
7.5.4. Взрывопожарная и пожарная опасность............... 469
7.5.5. Требования к техническим устройствам.............. 471
7.5.6. Маркировка взрывозащищенного оборудования......... 471
7.5.7. Монтаж взрывоопасного технологического оборудования.... 474
7.6. Заключение............................................. 475
Глава 8. Аппаратное резервирование............................. 477
8.1. Основные понятия и определения......................... 477
8.2. Резервирование ПЛК и устройств ввода-вывода............ 482
8.2.1. Общие принципы резервирования..................... 483
8.2.2. Модули ввода и датчики............................ 487
8.2.3. Модули вывода..................................... 491
8.2.4. Процессорные модули............................... 495
8.2.5. Резервирование источников питания................. 500
8.3. Резервирование промышленных сетей...................... 501
8.3.1. Сети Profibus, Modbus, CAN........................ 501
8.3.2. Сети Ethernet..................................... 502
8.3.3. Резервирование беспроводных сетей................. 508
8.4. Оценка надежности резервированных систем............... 509
8.5. Заключение............................................. 514
Глава 9. Программное обеспечение............................... 516
9.1. Развитие программных средств автоматизации............. 516
9.1.1. Графическое программирование...................... 518
9.1.2. Графический интерфейс............................. 519
9.1.3. Открытость программного обеспечения............... 519
9.1.4. Связь с физическими устройствами.................. 520
9.1.5. Базы данных....................................... 521
9.1.6. Операционные системы реального времени............ 521
9.2. ОРС-сервер............................................. 524
9.2.1. Обзор стандарта ОРС............................... 524
9.2.2. ОРС DA-сервер..................................... 526
9.2.3. ОРС HDA-сервер.................................... 530
9.2.4. Спецификация ОРС UA............................... 530
9.2.5. ОРС DA-сервер в среде MS Excel.................... 535
9.2.6. Применение ОРС-сервера с MATLAB и Lab VIEW........ 539
9.3. Системы программирования на языках МЭК 61131-3......... 540
9.3.1. Язык релейно-контактных схем LD................... 542
9.3.2. Список инструкций IL.............................. 543
10 Оглавление
9.3.3. Структурированный текст ST...................... 543
9.3.4. Диаграммы функциональных блоков FBD............. 544
9.3.5. Функциональные блоки стандартов МЭК 61499 и МЭК 61804 544
9.3.6. Последовательные функциональные схемы SFC....... 546
9.3.7. Программное обеспечение......................... 547
9.4. Пользовательский интерфейс, SCADA-пакеты............. 549
9.4.1. Функции SCAD А.................................. 549
9.4.2. Свойства SCADA.................................. 553
9.4.3. Программное обеспечение......................... 555
9.5. Заключение........................................... 556
Литература............................................ 558
Предметный указатель.................................. 593
Предисловие
Идея написания этой книги появилась, когда Научно-исследовательская
лаборатория автоматизации проектирования (НИЛ АП, www.RealLab.ru), в ко-
торой автор много лет работал в должности главного инженера, начала быстро
расти и возникла потребность в обучении новых сотрудников, принимаемых
на должность системных интеграторов. В обязанности системных интеграто-
ров входило проектирование, сборка, наладка, монтаж у заказчика и пуско-
наладка систем автоматизации, включая программирование контроллеров и
SCADA-пакетов, установленных на персональных компьютерах. Появилась за-
дача в кратчайший срок обучить сотрудников самому важному, что необходимо
знать для успешной реализации проектов. Эта задача определила содержание
настоящей книги, широту охвата темы и глубину ее освещения. В книге пред-
ставлены только самые актуальные темы современной автоматизации, необ-
ходимые для практики.
Вторым толчком к написанию книги явились тысячи вопросов, которые
задавали покупатели продукции НИЛ АП серии «RealLab!», пытающиеся са-
мостоятельно приспособить компьютер для автоматизации своей деятельности
в цехе, лаборатории, у себя дома или создать автоматизированную систему
управления технологическим процессом, испытанием, измерением.
В связи с бурным расцветом промышленного производства в России в по-
следние годы появилась огромная потребность в специалистах, которые могли
бы создавать системы промышленной автоматизации для химических и нефте-
химических заводов, нефтедобывающих предприятий, для магистральных газо-
и нефтепроводов, для элеваторов, мельниц, промышленных теплиц, комбикор-
мовых, бетоносмесительных и металлургических заводов, испытательных ла-
бораторий, для автоматизации зданий («умного дома») и т.д. Очень часто та-
кими специалистами выступают технологи и инженеры КИПиА* соответствую-
щих производств, не являющиеся специалистами по автоматизации технологи-
ческих процессов (АСУ ТП). Они могут самостоятельно создавать необходимые
им системы из готовых компонентов — компьютеров, контроллеров, модулей
ввода-вывода, датчиков и исполнительных устройств.
Литература по современным системам автоматизации в момент написания
книги имелась только в виде статей зарубежных журналов и рекламных про-
* КИПиА — контрольноизмерительные приборы и автоматика.
12
Предисловие
спектов фирм-производителей. Отсутствовали книги с обобщением и систе-
матическим изложением знаний, необходимых для специалистов по системной
интеграции. Автору пришлось изучить более тысячи зарубежных статей и книг
по указанной тематике, чтобы представить в систематизированном виде, при-
годном для самостоятельного изучения, самые современные знания в области
лабораторной и промышленной автоматизации, необходимые для перечислен-
ного выше круга специалистов.
При написании книги использован опыт, накопленный автором и коллек-
тивом НИЛ АП при проектировании и внедрении множества систем промыш-
ленной автоматизации, а также обширная библиография, приведенная в кон-
це книги. Во многих местах автор не смог указать первоисточник, поскольку
сделанные им обобщения или выводы формул, систематизация материала или
трактовка результатов хотя и были инициированы этими работами, но суще-
ственно отличаются от них, так что указать корректную ссылку было просто
невозможно. Ссылки не сделаны также на результаты, полученные автором, и
на информацию, которая имеется во множестве широко доступных источников.
Автор выражает благодарность своим учителям — докторам технических
наук Г.М. Балиму и В.П. Попову за их доброжелательность и поддержку автора
в начале жизненного пути, друзьям и коллегам по работе к.т.н. А.Н. Халявко,
д.т.н. В.Б. Дмитриеву-Здорову, к.т.н. В.Н. Бирюкову и к.т.н. Н.И. Мережину за
плодотворные дискуссии в стенах НИЛ АП, а также замечательному коллек-
тиву НИЛ АП, в окружении которого была написана эта книга.
Книга рассчитана на лиц с высшим техническим образованием и предна-
значена для технологов, метрологов, инженеров КИПиА и АСУ ТП, научных
работников, студентов и всех, кто желает расширить сферы применения пер-
сонального компьютера или автоматизировать эксперимент, технологический
процесс, офис, рабочее место.
Введение
Компьютер вошел в нашу жизнь как средство для компьютерных игр, про-
смотра фильмов и глобального общения через Интернет, для инженерных рас-
четов и проектирования, для редактирования текста, графики и музыки. Одна-
ко есть еще одна великолепная возможность применения компьютера — авто-
матизация различных сфер деятельности человека. Автоматизировать мож-
но предприятие, цех, технологический процесс или оборудование, дом, офис,
лабораторию. Для этого компьютер нужно оснастить датчиками и исполни-
тельными механизмами, чтобы он обрел способность заменить или расширить
возможности человека везде, где это возможно.
В лаборатории компьютер может автоматически управлять последователь-
ностью измерительных процедур, поддерживать стабильную температуру в ка-
мере тепла и холода или изменять ее по заранее заданному закону, прини-
мать и обрабатывать сигналы от датчиков скорости, ускорения, давления и
др., измерять напряжение, ток, сопротивление, скорость вращения вала дви-
гателя, частоту, массу, вычислять параметры электронных приборов, стро-
ить графики вольтамперных характеристик, отображать динамику физических
процессов в химических реакциях. Исследовательские процедуры, выполняе-
мые по определенному алгоритму, могут быть запрограммированы и выпол-
няться многократно без внесения в процесс измерения ошибок, свойственных
человеку.
В производственном или жилом помещении автоматизированная система
может выполнять роль охранной и пожарной сигнализации, регулятора тем-
пературы, влажности, управлять освещением и системой кондиционирования,
используя для этого компьютер, соответствующие датчики, исполнительные
устройства — кондиционер, отопительную систему, сирену, освещение и мно-
гое другое.
В производственном процессе компьютер может автоматически распечаты-
вать результаты приемо-сдаточных испытаний серийной продукции, управлять
станками, технологическими линиями и агрегатами; выводить для просмотра
оператором состояние каждой единицы оборудования, задействованного в про-
изводственном процессе, поддерживать температуру или давление в паровом
котле, управлять работой механизмов, сигнализировать об аварийных ситуа-
циях или о приближении параметра к аварийному значению, выполнять тех-
нологические защиты и блокировки.
14
Введение
Компьютер может иметь в тысячи раз более чувствительные органы, чем
человек, и быстрее реагировать на поступающие воздействия. Поэтому он спо-
собен выполнять операции, которые невозможно реализовать иными средства-
ми. Например, компьютер может с точностью до нескольких миллисекунд
уловить момент времени, в который температура в зоне химической реакции
изменилась на 0,001 °C, или за несколько секунд построить изотермы испы-
тательной термокамеры, график зависимости эффективной разрядности АЦП
от температуры или отмерять количество компонента, поступающего для при-
готовления медицинского препарата.
На самом деле спектр применения компьютера в сочетании с датчиками
и исполнительными устройствами практически ограничен только фантазией
пользователя.
В настоящей книге описываются принципы применения компьютера для
описанных выше целей. В конкретных примерах использованы модули ввода-
вывода аналоговой и дискретной информации серии RealLab!, которая широко
распространена на отечественном рынке средств лабораторной и промышлен-
ной автоматизации и выполнена в соответствии с Российскими и международ-
ными стандартами в области промышленной автоматизации. Серия RealLab!
позволяет строить современные распределенные системы управления лабора-
торными и технологическими процессами и включает в себя не только аппа-
ратуру, но и программное обеспечение, ориентированное не на программистов,
а на рядовых пользователей персонального компьютера. Несмотря на слож-
ность выполняемых задач, сама система достаточно проста в эксплуатации и
не требует специальных знаний. Она выполнена в виде отдельных модулей,
которые объединены между собой промышленной сетью на основе интерфейса
RS-485 и обладает возможностью практически неограниченного наращивания.
Пользователь может подсоединить к одному порту компьютера множество мо-
дулей нужного назначения. Данные из модулей могут поступать на различ-
ные компьютеры локальной сети.
В настоящее время для создания автоматизированной системы управления
не нужно быть специалистом по АСУ ТП, достаточно быть специалистом в
той предметной области, для которой создается система. Это было невозможно
еще 15-20 лет назад, когда персональные компьютеры не были так широко рас-
пространены, их программирование выполнялось на ассемблере или в машин-
ных кодах, а для выполнения операций ввода-вывода нужно было разработать
электрическую схему и спаять печатную плату.
С появлением модульного принципа построения систем управления,
SCADA-пакетов, стандарта ОРС и языка программирования контроллеров
МЭК 61131-3 стало возможным сделать автоматизацию такой же простой и ин-
тересной, как работу с персональным компьютером и офисными программами.
В книге не рассматриваются частнофирменные технические и программные
решения, не соответствующие открытым международным стандартам. При-
менение таких средств приводит к тому, что заказчик становится «заложни-
ком» конкретного программиста или конкретной фирмы-производителя, кото-
рые начинают диктовать ему свои финансовые условия. В отличие от этого,
применение решений, основанных на открытых международных стандартах,
Введение
15
позволяет заказчику в любой момент отказаться от одного подрядчика (си-
стемного интегратора) в пользу другого или использовать оборудование раз-
ных производителей.
Хочется обратить внимание читателя на то, что часто он может даже не по-
дозревать, что его задачи можно автоматизировать. Во многих случаях нужно
предпринять некоторые усилия для активизации воображения. Однако когда
идея автоматизации созрела, она легко реализуется и оказывается очень эф-
фективной, а ее воплощение — увлекательным.
По убеждению автора, ни одну формулу нельзя понять и правильно при-
менить на практике до тех пор, пока не станет понятен ее вывод из очевидных
посылок. Поэтому все формулы в книге даны с выводом, который читатель
может повторить самостоятельно.
В книге много английских сокращений и терминов, не переведенных на
русский язык. Это связано с отсутствием русскоязычных аналогов, а также
с тем, что в области промышленной автоматизации общепринято использовать
международные (англоязычные) сокращения и некоторые термины.
Тексты описанных программ и руководства по эксплуатации аппаратных
средств можно скачать с Интернет-сайта www.RealLab.ru или заказать по ад-
ресу info@RLDA.ru.
Автор с благодарностью примет все пожелания по улучшению книги и со-
общения об ошибках, которые можно присылать по адресу victor@RLDA.ru или
НИЛ АП, ул. Зои Космодемьянской, 2, Таганрог, 347924. Тел. (8634) 324-140.
Глава 1
Архитектура
автоматизированной
системы
Автоматизированная система призвана облегчить труд человека, расши-
рить его функциональные возможности или заменить полностью, если это воз-
можно. Поэтому архитектура систем автоматизации во многом напоминает
строение человека: роль органов чувств выполняют датчики, роль рук, ног
и органов речи — исполнительные устройства, роль мозга — компьютер или
контроллер. Благодаря такой аналогии архитектура системы автоматизации
становится понятной любому человеку на интуитивном уровне. Однако при
разработке конкретной системы возникает множество сложных практических
вопросов, касающихся стандартизации, безопасности, коммерческой эффектив-
ности, технологичности, точности, надежности, совместимости, технического
сопровождения и т.п., которым посвящены последующие главы книги.
В настоящей главе рассмотрены только самые общие (архитектурные)
принципы построения систем промышленной и лабораторной автоматизации.
1.1. Разновидности архитектур
Существует огромное разнообразие датчиков (температуры, влажности,
давления, потока, скорости, ускорения, вибрации, веса, натяжения, частоты,
момента, освещенности, шума, объема, количества теплоты, тока, уровня и др.)
[1], которые преобразуют физическую величину в электрический сигнал. Если
параметры сигнала не согласуются с параметрами входа аналого-цифрового
преобразователя (АЦП) или не соответствуют стандарту (например, входной
величиной АЦП является напряжение в диапазоне 0...10 В, а датчик (термопа-
ра) имеет выходное напряжение в диапазоне от 0 до 100 мВ), то используют из-
мерительный преобразователь (рис. 1.1), который обеспечивает нормализацию
сигнала сигнала датчика (приведение к стандартным диапазонам изменения,
обеспечение линейности, компенсацию погрешности, усиление и т.п.). Измери-
тельные преобразователи обычно совмещают с модулями аналогового ввода.
Измерительные преобразователи могут иметь встроенный АЦП или ЦАП
(цифро-аналоговый преобразователь), а также микропроцессор для линеари-
зации характеристик датчика и компенсации погрешностей аналоговой части
системы. В последнее время получили распространение цифровые датчики,
объединяющие в себе первичный преобразователь физической величины в элек-
трический сигнал, измерительный преобразователь и АЦП. Примером могут
Архитектура автоматизированной системы
17
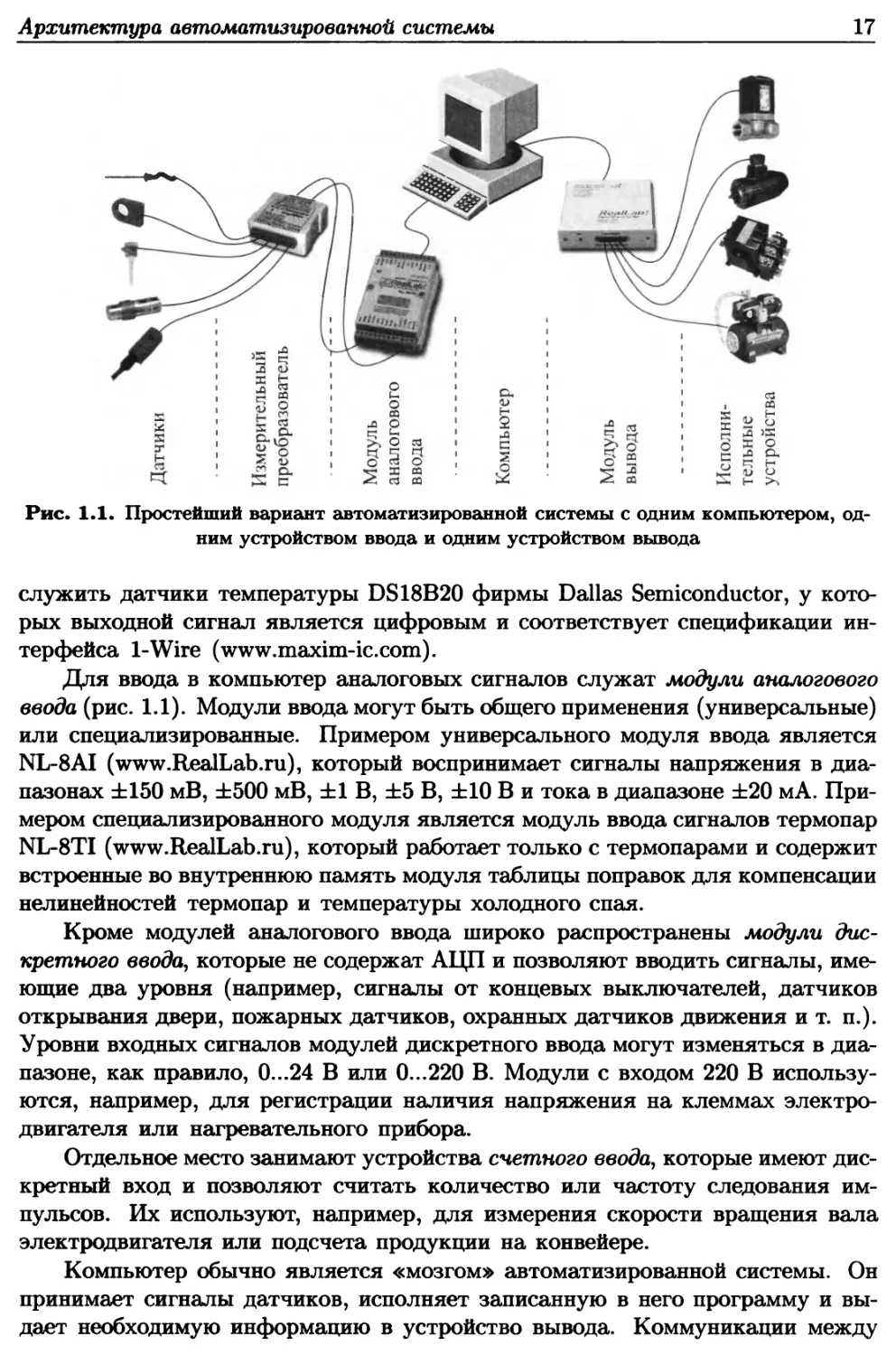
Рис. 1.1. Простейший вариант автоматизированной системы с одним компьютером, од-
ним устройством ввода и одним устройством вывода
служить датчики температуры DS18B20 фирмы Dallas Semiconductor, у кото-
рых выходной сигнал является цифровым и соответствует спецификации ин-
терфейса 1-Wire (www.maxim-ic.com).
Для ввода в компьютер аналоговых сигналов служат модули аналогового
ввода (рис. 1.1). Модули ввода могут быть общего применения (универсальные)
или специализированные. Примером универсального модуля ввода является
NL-8AI (www.RealLab.ru), который воспринимает сигналы напряжения в диа-
пазонах ±150 мВ, ±500 мВ, ±1 В, ±5 В, ±10 В и тока в диапазоне ±20 мА. При-
мером специализированного модуля является модуль ввода сигналов термопар
NL-8TI (www.RealLab.ru), который работает только с термопарами и содержит
встроенные во внутреннюю память модуля таблицы поправок для компенсации
нелинейностей термопар и температуры холодного спая.
Кроме модулей аналогового ввода широко распространены модули дис-
кретного ввода, которые не содержат АЦП и позволяют вводить сигналы, име-
ющие два уровня (например, сигналы от концевых выключателей, датчиков
открывания двери, пожарных датчиков, охранных датчиков движения и т. п.).
Уровни входных сигналов модулей дискретного ввода могут изменяться в диа-
пазоне, как правило, 0...24 В или 0...220 В. Модули с входом 220 В использу-
ются, например, для регистрации наличия напряжения на клеммах электро-
двигателя или нагревательного прибора.
Отдельное место занимают устройства счетного ввода, которые имеют дис-
кретный вход и позволяют считать количество или частоту следования им-
пульсов. Их используют, например, для измерения скорости вращения вала
электродвигателя или подсчета продукции на конвейере.
Компьютер обычно является «мозгом» автоматизированной системы. Он
принимает сигналы датчиков, исполняет записанную в него программу и вы-
дает необходимую информацию в устройство вывода. Коммуникации между
18
Глава 1
компьютером и устройствами ввода-вывода выполняются через последователь-
ные интерфейсы, например, USB, CAN, RS-232, RS-485, RS-422, Ethernet или
параллельный интерфейс LPT. Иногда устройства ввода-вывода выполняют
в виде плат, которые вставляют непосредственно в компьютер, в разъемы
шины PCI или ISA. Достоинством плат является возможность получения вы-
сокой пропускной способности каналов ввода-вывода (свыше 10 Мбит/с), что
трудно достижимо при использовании внешних устройств с последовательным
портом. Недостатком является более высокий уровень электромагнитных на-
водок от компьютера и конструктивные ограничения на количество каналов
ввода-вывода.
В автоматизированных системах вместо компьютера или одновременно с
ним часто используют программируемый логический контроллер (ПЛК). Ти-
повыми отличиями ПЛК от компьютера является специальное конструктивное
исполнение (для монтажа в стойку, панель, на стену или в технологическое обо-
рудование), отсутствие механического жесткого диска, дисплея и клавиатуры.
Контроллеры также имеют малые размеры, расширенный температурный диа-
пазон, повышенную стойкость к вибрации и электромагнитным излучениям,
низкое энергопотребление, защищены от воздействий пыли и воды, содержат
сторожевой таймер и платы аналогового и дискретного ввода-вывода, имеют
увеличенное количество коммуникационных портов. В контролерах, в отличие
от компьютеров, как правило, используется операционная система реального
времени (например, Windows СЕ, QNX).
В последнее время наметилась тенденция стирания грани между компью-
тером и контроллером. С одной стороны, контроллеры (например, NLcon-CE
фирмы НИЛ АП или WinCon фирмы ICP DAS) позволяют подключить мо-
нитор, мышь и клавиатуру, с другой стороны, появилось большое количество
промышленных компьютеров, которые имеют специальное конструктивное ис-
полнение и другие свойства, характерные для контроллеров. В связи с этим в
дальнейшем мы будем употреблять термины «компьютер» и «контроллер»
как синонимы, и это будет ясно из контекста.
Устройства вывода (модули вывода) позволяют выводить дискретные, ча-
стотные или аналоговые сигналы. Дискретные сигналы используются, на-
пример, для включения электродвигателей, электрических нагревателей, для
управления клапанами, фрамугами, насосами и другими исполнительными
устройствами. Частотный сигнал используется обычно для управления сред-
ней мощностью устройств с большой инерционностью с помощью широтно-
импульсной модуляции.
1.1.1. Требования к архитектуре
Архитектура автоматизированной системы — это наиболее абстрактное ее
представление, которое включает в себя идеализированные модели компонен-
тов системы, а также модели взаимодействий между компонентами. Элемен-
ты* архитектуры находятся во взаимосвязи, образуя единую автоматизирован-
ную систему и обеспечивая решение поставленной задачи автоматизации на
* «Компонент» и «элемент» в данном контексте являются синонимами.
Архитектура автоматизированной системы
19
архитектурном уровне. В то же время архитектура оставляет достаточно сво-
боды для выбора конкретных технических решений [2]. Поэтому правильно
спроектированная архитектура допускает множество технических реализа-
ций путем выбора различных компонентов архитектуры и методов взаимодей-
ствия между ними.
Элементами архитектуры являются модели (абстракции) датчиков, уст-
ройств ввода-вывода, измерительных преобразователей, ПЛК, компьютеров,
интерфейсов, протоколов, промышленных сетей, исполнительных устройств,
драйверов, каналов передачи информации.
Архитектуру создает архитектор [2]. Основным требованием к архитектору
является знание предметной области (принципов функционирования объекта
автоматизации) и знание технических характеристик аппаратных и программ-
ных средств, используемых для построения системы.
При построении архитектуры должны быть заложены следующие свойства
будущей автоматизированной системы:
• слабая связанность элементов архитектуры между собой (т.е. декомпози-
цию системы на части следует производить так, чтобы поток информации
через связи был минимален и через них не замыкались контуры автома-
тического регулирования);
• тестируемость (возможность установления факта правильного функци-
онирования);
• диагностируемость (возможность нахождения неисправной части систе-
мы);
• ремонтопригодность (возможность восстановления работоспособности за
минимальное время при экономически оправданной стоимости ремонта);
• надежность (например, путем резервирования);
• простота обслуживания и эксплуатации (минимальные требования к ква-
лификации и дополнительному обучению эксплуатирующего персонала);
• безопасность (соответствие требованиям промышленной безопасности и
технике безопасности);
• защищенность системы от вандалов и неквалифицированных пользова-
телей;
• экономичность (экономическая эффективность в процессе функциониро-
вания);
• модифицируемость (возможность перенастройки для работы с другими
технологическими процессами);
• функциональная расширяемость (возможность ввода в систему дополни-
тельных функциональных возможностей, не предусмотренных в техниче-
ском задании);
• наращиваемость (возможность увеличения размера автоматизированной
системы при увеличении размера объекта автоматизации);
• открытость (см. п. 1.3);
• возможность переконфигурирования системы для работы с новыми техно-
логическими процессами; максимальная длительность жизненного цикла
20
Глава 1
системы без существенного морального старения, достигаемая путем пери-
одического обновления аппаратных и программных компонентов, а также
путем выбора долгоживущих промышленных стандартов;
• минимальное время на монтаж и пуско-наладку (развертывание) системы.
Архитектура системы может быть различной в зависимости от решаемой
задачи автоматизации. Такими задачами могут быть:
• мониторинг (продолжительные измерение и контроль с архивированием по-
лученной информации);
• автоматическое управление (в системе с обратной связью или без нее);
• диспетчерское управление (управление с помощью человека-диспетчера,
который взаимодействует с системой через человеко-машинный интер-
фейс);
• обеспечение безопасности.
Любая из перечисленных задач может выполняться на большом рассто-
янии между объектом автоматизации и системой. В этом случае говорят о
задачах телемеханики (дистанционные измерение, управление, сигнализация).
Однако в связи с тем, что каналы дистанционной связи (Интернет, радиока-
нал, оптико-волоконный канал, проводной канал) органично входят практи-
чески в любую систему автоматизации, задачу телемеханики все реже выде-
ляют как самостоятельную.
Построение любой АСУ* начинается с декомпозиции (деления на части)
системы на подсистемы. Декомпозиция может быть функциональной (алго-
ритмической) или объектной.
При объектной декомпозиции используются распределенные системы уп-
равления (см. 1.1.3), когда каждый объект автоматизации оборудуется локаль-
ным технологическим контроллером, решающим задачи в пределах этого объ-
екта. При функциональной декомпозиции систему автоматизации делят на
части, группируя сходные функции, и для каждой группы функций использу-
ют отдельный контролер. Оба вида декомпозиции могут быть использованы
совместно. Выбор способов декомпозиции является творческим процессом и во
многом определяет эффективность будущей системы.
Объектная декомпозиция объекта автоматизации используется в современ-
ных SCADA-пакетах, см., например, [13]. Она аналогична объектной декомпо-
зиции, используемой в объектно-ориентированном программировании (ООП),
основными признаками которой являются абстрагирование, инкапсуляция, мо-
дульность, иерархическая организация [3]. Классам ООП соответствуют кон-
троллеры (ПЛК), объектам — контроллеры с заданными свойствами (парамет-
рами), инкапсуляция соответствует сокрытию конкретной реализации (напри-
мер, с помощью функциональных блоков языка IEC 61131-3, см. гл. 9); благода-
ря инкапсуляции существенно упрощается структура системы с точки зрения
системного интегратора и тем самым уменьшается количество возможных оши-
бок. Модульность обеспечивается модульностью аппаратного обеспечения си-
стемы, иерархичность естественным путем вытекает из требований заказчика.
* АСУ — автоматизированная система управления
Архитектура автоматизированной системы
21
Независимо от метода декомпозиции, основным ее результатом должно
быть представление системы в виде набора слабо связанных частей. Слабая
связь между частями системы означает отсутствие между ними обратных свя-
зей или малость модуля петлевого усиления при наличии таких связей, а также
отсутствие интенсивного обмена информацией.
Программные модули, реализующие отдельные функции в разных контрол-
лерах, могут взаимодействовать между собой по промышленной сети с помощью
технологии СОМ фирмы Microsoft, CORBA консорциума OMG [4] или SOAP
консорциума W3C [5]. Для разработки заказного программного обеспечения
распределенных систем управления используют специальную среду разработ-
ки систем реального времени [8] или стандартное программное обеспечение на
основе технологии DCOM фирмы Microsoft (см. главу 9). В статье [6] приво-
дится пример системы, в которой разные функции управления представлены
в виде компонентов, написанных с помощью CORBA, распределенных между
разными контроллерами либо сгруппированных в одном из них. В работе [7]
предлагается способ построения архитектуры системы на основе «ячеек авто-
матизации», при котором на разных уровнях иерархии используются одни и
те же ячейки с одним и тем же программным обеспечением, что делает систе-
му однородной несмотря на иерархичность и поэтому снижает трудоемкость
ее проектирования и обслуживания.
Более подробно программное обеспечение систем автоматизации будет рас-
смотрено в главе 9.
1.1.2. Простейшая система
Изображенная на рис. 1.1 система в зависимости от ее назначения и про-
граммного обеспечения может быть системой сбора данных, системой диспет-
черского или автоматического управления, системой контроля, испытаний, ди-
агностики и т.д. Это простейший вариант автоматизированной системы, по-
строенной на основе одного компьютера, устройств ввода-вывода, датчиков и
исполнительных устройств (актуаторов).
На рис. 1.1 датчики подсоединены к одному многоканальному измеритель-
ному преобразователю. Однако различные типы датчиков могут требовать раз-
личных типов преобразователей или работать вообще без них. Некоторые типы
интеллектуальных датчиков имеют интерфейс RS-485 и могут подключаться
непосредственно к компьютеру (контроллеру), как, например, датчики серии
NL-1S фирмы НИЛ АП (www.ReaiLab.ru).
Системы мониторинга (наблюдения) за физическими процессами не содер-
жат исполнительных устройств или используют электромагнитные (реже по-
лупроводниковые) реле для коммутации измерительных цепей.
Обычный офисный компьютер в стандартной конфигурации имеет два пор-
та USB, один СОМ-порт, один принтерный порт LPT и порт Ethernet, который
появляется после установки в компьютер Ethernet-платы. Количество USB
портов можно увеличить с помощью USB хабов, а количество СОМ-портов — с
помощью преобразователя USB в СОМ (см. www.RealLab.ru). Промышленные
компьютеры и контроллеры обычно имеют несколько портов RS-485, RS-422 и
22
Глава 1
Рис. 1.2. Для подключения устройств ввода-вывода могут быть использованы
все порты компьютера
оптоволоконный порт. Для применения оптического канала с офисным ком-
пьютером к нему можно подключить оптоволоконный преобразователь интер-
фейса. Все перечисленные порты можно использовать для обмена информацией
межу компьютером и внешними устройствами (рис. 1.2).
Для увеличения дальности передачи сигнала по линии связи до 1,2 км мож-
но использовать преобразователи интерфейсов RS-232 в RS-485 или
RS-422, а также интерфейс «токовая петля» (см. главу 2).
Внешние устройства, не имеющие гальванически изолированного порта,
обычно подключают к компьютеру через изолирующие преобразователи ин-
терфейсов, которые защищают компьютер от случайного попадания высокого
напряжения в случае аварии или небрежного обращения. Примером изоли-
рующего преобразователя для порта RS-232 может быть оптический изолятор
01-232-1000 (www.RealLab.ru) с напряжением изоляции 1000 В.
Если к компьютеру необходимо подключить еще одно устройство, а сво-
бодных портов не осталось, то можно использовать разветвители интерфей-
сов. Распространены разветвители интерфейсов USB (их еще называют USB-
хабами) и RS-232. Устройство, имеющее интерфейс RS-232, можно подключить
к USB-порту компьютера, если использовать преобразователь USB в RS-232.
К компьютеру могут быть подключены не только специализированные мо-
дули ввода-вывода, но и многие измерительные приборы широкого примене-
ния. Например, вольтметр HP 34401А имеет интерфейс RS-232 и может быть
подключен к компьютеру и программам, поддерживающим СОМ-технологию
(например, MS Excel) с помощью COM-объекта RL232man фирмы НИЛ АП
(рис. 1.2), подробнее см. главу 9.
Типовыми применениями описанной системы может быть домашняя авто-
Архитектура автоматизированной системы
23
матизация [15], испытательный стенд для тестирования серийной продукции
[16], лабораторные работы в вузах, локальное управление технологическим про-
цессом, контроль температуры в теплице или элеваторе (см. www.RealLab.ru).
1.1.3. Распределенные системы автоматизации
С ростом количества датчиков, увеличением площади территории, на ко-
торой расположена автоматизированная система и усложнением алгоритмов
управления становится более эффективным применение распределенныхснстем
[14, 17-22]. Распределенные системы состоят из множества территориально раз-
несенных контроллеров и модулей ввода-вывода. При таком подходе структура
распределенной системы и структура алгоритма ее работы становятся подоб-
ны структуре самого объекта автоматизации, а функции сбора, обработки дан-
ных, управления и вычисления оказываются распределенными среди множе-
ства контроллеров. Каждый контроллер работает со своей группой устройств
ввода-вывода и обслуживает определенную часть объекта управления. В част-
ности, технологическое оборудование, как правило, выпускается с уже встро-
енными ПЛК. Тенденция децентрализации управления и приближения кон-
троллеров к объектам управления является общей для всех систем автомати-
зации и отчасти навеяна успехами объектно-ориентированного программиро-
вания. Кроме того, сосредоточенная система является частью или частным
случаем распределенной, поэтому появление распределенных систем является
следствием естественного развития от частного к общему.
Распределенную систему управления (РСУ, DCS — Distributed Control
System) можно определить как систему, состоящую из множества устройств,
разнесенных в пространстве, каждое из которых не зависит от остальных, но
взаимодействует с ними для выполнения общей задачи [19]. В предельном
случае элементы системы могут находиться на разных континентах земного
шара, а связь между ними может выполняться через Интернет. В качестве
«множества устройств» могут выступать любые микропроцессорные устрой-
ства, например ПЛК или разнесенные в пространстве модули ввода-вывода
одного контроллера. Однако в последнем случае только сбор данных можно
рассматривать как распределенный, в то время как функция управления яв-
ляется сосредоточенной в одном контроллере.
Максимальные преимущества распределенной системы достигаются, когда
контроллеры работают автономно, а обмен информацией между ними сведен
до минимума.
Распределенная система имеет следующие характеристики, отличающие
ее от сосредоточенной:
• большее быстродействие благодаря распределению задач между парал-
лельно работающими процессорами;
• повышенную надежность (отказ одного из контролеров не влияет на ра-
ботоспособность других);
• большую устойчивость к сбоям;
• более простое наращивание или реконфигурирование системы;
• упрощенную процедуру модернизации;
24
Глава 1
• большую простоту проектирования, настройки, диагностики и обслужи-
вания благодаря соответствию архитектуры системы архитектуре объекта
управления, а также относительной простоте каждого из модулей системы;
• улучшенную помехоустойчивость и точность благодаря уменьшению длины
линий передачи аналоговых сигналов от датчиков к устройствам ввода;
• меньший объем кабельной продукции, пониженные требования к кабелю
и более низкая его стоимость;
• меньшие расходы на монтаж и обслуживание кабельного хозяйства.
Распределенная система смягчает также требования к операционным си-
стемам (ОС) реального времени (см. главу 9), поскольку задачи распределе-
ны между параллельно работающими контроллерами, на каждом из которых
установлена отдельная ОС.
Для эффективного проектирования распределенных систем автоматизации
необходимы строгие методы их описания. Необходимо также обеспечить сов-
местимость и взаимозаменяемость между собой всех устройств, входящих в си-
стему и выпускаемых разными производителями. Для этих целей был раз-
работан международный стандарт МЭК 61499 «Функциональные блоки для
индустриальных систем управления» [20] (см. также главу 9). Он исполь-
зует три уровня иерархии моделей при разработке распределенных систем: мо-
дель системы, модель физических устройств и модель функциональных бло-
ков. Модели всех уровней в соответствии со стандартом представляются в виде
функциональных блоков, которые описывают процесс передачи и обработки
информации в системе.
Особенностью функциональных блоков стандарта МЭК 61499 является то,
что они учитывают не только традиционное инициирование выполнения алго-
ритма с помощью тактирования или временного расписания, но и по признаку
наступления некоторых событий (событийное управление). Событийное управ-
ление является более общим, а тактирование можно рассматривать как его
частный случай, заключающийся в периодическом появлении одного и того
же события (сигнала тактирования).
Функциональные блоки (ФБ) могут быть использованы также для поддер-
жания всего жизненного цикла системы, включая проектирование, изготовле-
ние, функционирование, валидацию* и обслуживание. Примеры применения
стандарта и дальнейшая разработка методики проектирования распределен-
ных систем с его помощью описываются в работах [9-12].
Модель распределенной системы автоматизации в соответствии со
стандартом МЭК 61499 может быть представлена как набор физических
устройств (например, ПЛК), взаимодействующих между собой с помощью од-
ной или нескольких промышленных сетей (рис. 1.3). Сети могут иметь иерар-
хическую структуру.
Функции, выполняемые системой автоматизации, моделируются с помощью
программного приложения, которое может располагаться в одном устройстве
* Валидация (термин стандарта ИСО 9001)— подтверждение соответствия системы
требованиям ее назначения. Выполняется с участием потребителя. Не путать с вери-
фикацией — доказательством достоверности.
Архитектура автоматизированной системы
25
Промышленная сеть
Рис. 1.3. Модель распределенной системы автоматизации
в соответствии со стандартом МЭК 61499
(например, ПЛК), как, например, приложение В на рис. 1.3, или может быть
распределено между несколькими ПЛК, как приложения А и Б. Например,
приложение, выполняющее ПИД-регулирование, может располагаться в трех
устройствах, из которых первое выполняет функцию ввода данных от датчи-
ков (является модулем ввода), второе выполняет алгоритм регулирования, тре-
тье выполняет функцию вывода данных в исполнительное устройство. Вторым
примером может быть клиент-серверное приложение, в котором клиент распо-
ложен в одном устройстве, сервер — в другом.
Модель физического устройства. Каждое физическое устройство в
распределенной системе должно содержать по крайней мере один интерфейс
к объекту управления или к промышленной сети и может содержать несколь-
ко (в том числе ноль) ресурсов (определение ресурса см. ниже), см. рис. 1.4.
При этом устройство по МЭК 61499 рассматривается как конкретный экзем-
пляр определенного типа устройств, по аналогии с объектно-ориентированным
программированием. Интерфейс с объектом управления обеспечивает отобра-
жение* данных и событий физического процесса (например, аналоговых или
дискретных сигналов) в ресурсы и обратно.
В одном устройстве может быть несколько ресурсов и несколько программ-
ных приложений. Каждое приложение может исполняться на нескольких
устройствах (см. рис. 1.3) и может занимать часть ресурсов в одном устрой-
стве (рис. 1.4).
Коммуникационные интерфейсы выполняют отображение между ресурса-
ми и промышленной сетью. Они могут предоставлять информацию ресурсу в
виде данных или событий, а также выполнять дополнительные функции для
поддержки программирования, конфигурирования, диагностики и т.д.
Модель ресурса. Ресурс рассматривается как функциональная едини-
ца, которая содержится в устройстве (например, в ПЛК), имеет независимое
управление своими операциями и обеспечивает различные сервисные функции
* Отображение — закон, по которому каждому элементу одного множества ставится
в соответствие единственный элемент другого множества.
26
Глава 1
Объект управления
Рис. 1.4. Пример модели одного из устройств, показанных на рис. 1.3 (например,
ПЛК 2) по стандарту МЭК 61499. Стрелками показаны потоки данных и событий
(сервисы) для программного приложения, включая планирование и исполне-
ние алгоритмов. Ресурс может быть создан, сконфигурирован, параметризо-
ван, стартовав, удален и т.п. без воздействия на другие ресурсы устройства.
Примером ресурса может быть память и время, выделенные для выполнения
задачи в центральном процессоре.
В функции ресурса входит прием данных или событий от объекта управле-
ния или коммуникационного интерфейса, обработка данных и событий и воз-
врат данных и событий в процесс или промышленную сеть, в соответствии с
алгоритмом работы программного приложения, использующего данный ресурс.
В соответствии с рис. 1.5, ресурс моделируется следующими элементами:
• локальным приложением, расположенным в данном физическом устрой-
стве, или частью распределенного приложения. Данные и события, об-
рабатываемые в локальном приложении, принимаются со входов функци-
ональных блоков (ФБ), которые выполняют операции, необходимые про-
граммному приложению;
• отображение событий и данных между программным приложением и объ-
ектом управления выполняется специальным функциональным блоком ин-
терфейса (рис. 1.5);
• отображение событий и данных между программным приложением и ком-
муникационным интерфейсом выполняется таким же специальным функ-
циональным блоком интерфейса (рис. 1.5);
• функция планирования выполняет передачу информации и исполнение
программного приложения в соответствии с временными требованиями и
очередностью, определяемой появлением событий, взаимодействием меж-
ду функциональными блоками, а также приоритетами или периодом ис-
полнения задач.
Модель программного приложения. Программное приложение состоит
из сети функциональных блоков (подробнее см. главу 9), ветви которой перено-
сят данные и события (рис. 1.6). Поток событий определяет выполнение алго-
ритмов, содержащихся в функциональных блоках. В состав функциональных
Архитектура автоматизированной системы
27
Рис. 1.5. Модель ресурса распределенной системы по стандарту МЭК 61499
Поток событий
Поток данных
Рис. 1.6. Модель приложения распределенной системы по стандарту МЭК 61499
блоков могут входить и другие программные приложения (субприложения).
Программные приложения могут быть распределены между несколькими
ресурсами в одном или в нескольких устройствах (ПЛК). Ресурс реагирует на
события, поступающие из интерфейсов, следующими способами:
• планированием и исполнением алгоритма;
• модифицированием переменных;
• генерацией ответных событий;
• взаимодействием с интерфейсами.
Модель функциональных блоков распределенной системы автоматизации
подробно описана в главе 9.
Архитектура системы с общей шиной. Архитектура распределен-
ной системы промышленной автоматизации на основе общей шины показана
на рис. 1.7. Для того чтобы получить данные из модуля или контроллера,
компьютер (или контроллер) посылает в шину его адрес и команду запроса
данных. Микропроцессор, входящий в состав каждого модуля или контролле-
28
Глава 1
Рис. 1.7. Пример архитектуры распределенной системы сбора данных и управления
на модулях RealLab!. Расшифровка обозначений см. во введении к разд. 1.1 и в п. 1.1.1
ра, сверяет адрес на шине с его собственным адресом, записанным в ПЗУ, и,
если адреса совпадают, исполняет следующую за адресом команду. Команда
позволяет считать данные, поступающие на вход устройства, или установить
необходимые данные на его выходе.
Распределенная система с общей шиной порождает две новые проблемы по
сравнению с топологией «точка-точка» (когда соединяются только два устрой-
ства, как на рис. 1.1): необходимость адресации устройств и необходимость
ожидания в очереди. Добавление адреса в коммуникационный пакет снижает
скорость обмена при коротких сообщениях, а обмен по общей шине приводит
к тому, что каждое устройство для передачи сообщения должно ждать, когда
шина станет свободной. Это замедляет скорость обмена между устройствами
по сравнению с топологией «точка-точка». Задержка в сетях с большим ко-
личеством устройств становится существенным ограничением на применение
топологии с общей шиной [21] в некоторых приложениях, в частности в случае
ПИД-регулирования, когда задержка в сети ограничивает тактовую частоту
Архитектура автоматизированной системы
29
работы контура регулирования. Для таких случаев используют локальные
подсети или локальные технологические контроллеры.
Распределенные системы позволяют решить также следующую проблему.
С ростом количества датчиков в системе, показанной на рис. 1.1, увеличива-
ется число и суммарная длина проводов, соединяющих датчики с устройством
ввода. Это приводит не только к росту стоимости кабельного оборудования,
но и к проблемам, связанным с электромагнитными наводками, особенно ес-
ли датчики распределены по большой площади (например, в промышленной
теплице датчики распределены по площади около 6 Га, а в элеваторе число
датчиков достигает 3...5 тыс. шт.). В распределенной системе модули ввода-
вывода изготавливаются с небольшим количеством входов (обычно от 1 до 16),
а сами модули располагаются вблизи места установки датчиков. Увеличение
количества датчиков (входов) достигается путем наращивания числа модулей и
объединения их с помощью общей шины. Это сокращает общую длину проводов
в системе, а также длину проводов с аналоговыми сигналами.
Связь отдельных устройств в распределенной системе может осуществлять-
ся с помощью любой промышленной сети (см. главу 2). Наиболее распро-
странены в России сети Profibus, что связано с популярностью изделий фир-
мы Siemens, а также сети Modbus с физической шиной RS-485 благодаря рас-
пространенности модулей и контроллеров фирм TCP DAS, Advantech и НИЛ
АП. За последние годы стремительно возросло количество используемых се-
тей Ethernet (точнее, Industrial Ethernet) в качестве промышленных сетей при
скорости передачи 10, 100 и 1000 Мбит/с.
Некоторые модули ввода-вывода, входящие в состав распределенных си-
стем, позволяют по команде из компьютера выполнять функции автоматиче-
ского регулирования (например, модули NL-8TI, NL-16AI фирмы НИЛ АП).
Для этого в них посылают значение уставки и параметры ПИД-регулятора
(пропорциональный, дифференциальный и интегральный коэффициенты), за-
тем команду запуска процесса регулирования. Наличие ПИД-регулятора в мо-
дулях распределенной системы позволяет осуществить локальное регулирова-
ние (например, поддержание стабильной температуры в камере тепла и холо-
да), разгрузив общую шину для выполнения других задач.
Распределенные системы строятся, как правило, из коммерчески доступ-
ных компонентов (ПЛК, модулей ввода-вывода, датчиков, исполнительных
устройств). Однако для однотипных тиражируемых систем может быть выгод-
но строить специализированные системы, состоящие из полностью заказных
(вновь спроектированных) аппаратных и программных средств [24]. Граница
целесообразности такого подхода определяется объемом выпуска изделий.
Программирование распределенных систем автоматизации выполняется
стандартными средствами, рассмотренными в главе 9.
1.1.4. Многоуровневая архитектура
Промышленная сеть может быть подключена не только к одному компью-
теру, как показано на рис. 1.7, но и к сети компьютеров, например к локальной
сети Ethernet (рис. 1.8) или глобальной сети «Интернет». Такая архитектура
30
Глава 1
Операторские станции
Рис. 1.8. Типовая современная распределенная система автоматизации, включающая
три уровня иерархии (см. также рис. 1.9)
автоматизированной системы удобна при коллективной работе с системой ав-
томатизации или для связи технологического уровня АСУ с управленческим.
Например, при использовании системы с архитектурой, показанной на рис. 1.8,
температуру в теплице или в силосах элеватора одновременно могут наблюдать
дежурный оператор, главный инженер и директор хозяйства. На алюминиевом
заводе [22] информация о ходе протекания процесса электролиза алюминия ис-
пользуется на 50 рабочих местах локальной компьютерной сети.
Доступ любого компьютера сети к устройствам ввода-вывода или контрол-
лерам осуществляется с помощью ОРС-сервера (см. главу 9 и [25]). ОРС-
серверы могут располагаться на нескольких компьютерах или контроллерах,
и доступ к любому из них может осуществляться с любого компьютера сети.
Пример архитектуры такой системы показан на рис. 1.8. Она является до-
статочно общей и широко используется как для лабораторной автоматизации,
так и для автоматизации технологических процессов. Отдельные промышлен-
ные сети могут иметь различные протоколы и содержать оборудование разных
производителей, а также различную физическую среду передачи данных —
оптоволокно, медные провода, радиоэфир (через радио- или GSM-модемы) и
Архитектура автоматизированной системы
31
др. Обычно ОРС-сервер работает только с одним или несколькими портами
ввода-вывода компьютера, к каждому из которых подключена одна промыш-
ленная сеть, поэтому количество ОРС-серверов в системе меньше или равно
количеству промышленных сетей. Благодаря наличию сети Ethernet в систему
легко могут быть включены серверы баз данных, коммуникационные серверы,
веб-серверы, принтеры, плоттеры, АТС, факсы, технологическое оборудование
и другие устройства с Ethemet-интерфейсом [26].
Основой программного обеспечения, установленного на компьютерах сети,
являются SCADA-пакеты — программные средства диспетчерского управле-
ния и сбора данных. В контроллерах исполняются загрузочные модули про-
грамм, генерируемые средствами визуального программирования ПЛК на язы-
ках стандарта МЭК 61131-3 (см. главу 9).
Системы управления с многоуровневой архитектурой обычно строятся по
объектному принципу, когда структура системы выбирается подобной струк-
туре объекта автоматизации, а каждая подсистема является локальной, т.е.
все обратные связи замкнуты в пределах этой подсистемы. Каждая локаль-
ная подсистема выполняет отдельную функцию, задаваемую логикой функ-
ционирования всей системы. Объектный принцип построения позволяет упро-
стить проектирование многоуровневой системы и обеспечить ее структурную
(архитектурную) надежность.
Анализ сложных систем управления позволяет выделить в них несколько
однородных уровней иерархии, показанных на рис. 1.9. Здесь WAN (Wide Area
Network) — глобальная сеть, LAN (Local Area Network) — локальная сеть.
Низший (нулевой) уровень включает в себя датчики и исполнительные
устройства (актуаторы): датчики температуры, давления, концевые выклю-
чатели, дискретные датчики наличия напряжения, измерительные трансфор-
маторы, реле-пускатели, контакторы, электромагнитные клапаны, электропри-
воды и др. Датчики и актуаторы могут иметь интерфейсы типа AS-интерфейс
(ASI), 1-Wire или CAN, HART и др. Морально устаревшими интерфейсами
нулевого уровня являются аналоговые интерфейсы 4...20 мА, 0...20 мА, 0...5 В
и др. В настоящее время наметилась устойчивая тенденция к использованию
интеллектуальных датчиков, которые имеют цифровой интерфейс, встроенный
микроконтроллер, память, сетевой адрес и выполняют автоматическую калиб-
ровку и компенсацию нелинейностей датчика. Интеллектуальные датчики в
пределах сети должны обладать свойством взаимозаменяемости, в частности
иметь один и тот же протокол обмена и физический интерфейс связи, а также
нормированные метрологические характеристики и возможность смены адре-
са перед заменой датчика.
Первый уровень состоит из программируемых логических контроллеров и
модулей аналого-цифрового и дискретного ввода-вывода, которые обменивают-
ся информацией по промышленной сети (Fieldbus) типа Modbus RTU, Modbus
TCP, Profibus и др. Иногда модули ввода-вывода выделяют в отдельный уро-
вень иерархии.
Второй (диспетчерский) уровень состоит из рабочих станций — ком-
пьютеров с человеко-машинным интерфейсом (ЧМИ, HMI — Human Machine
32
Глава 1
Глобальная сеть Интернет,
WAN, LAN
Промышленная
сеть Fieldbus
Сеть сенсоров
Sensorbus
Локальная сеть
LAN
0. Уровень датчиков и актуаторов
AS-интерфейс
1-Wire
CAN
1. Уровень технологического
оборудования (контроллерный
уровень)
Modbus (RTU, ASCII, TCP)
Profibus
2. Диспетчерский уровень
Ethernet,
TCP/IP
4. Уровень
высшего
руководства
Цеховая локальная сеть
LAN
3. Уровень
управления цехом
Ethernet,
TCP/IP
Рис. 1.9. Уровни иерархии современной АСУ [23]
Interface), наиболее распространенными вариантами которого являются SCA-
DA-пакеты. Диспетчер (оператор) осуществляет наблюдение за ходом техно-
логического процесса или управление им с помощью мнемосхемы на экране
монитора компьютера. Диспетчерский компьютер выполняет также архиви-
рование собранных данных, записывает действия оператора, анализирует сиг-
налы системы технической диагностики, данные аварийной и технологической
сигнализации, сигналы срабатывания устройств противоаварийных защит, а
также выполняет часть алгоритмов управления технологическим процессом.
Благодаря объединению диспетчерских компьютеров в сеть наблюдение за про-
цессами может быть выполнено с любого компьютера сети, но управление, во
избежание конфликтов, допускается только с одного компьютера или функ-
ции управления разделяются между несколькими компьютерами. Права опе-
раторов устанавливаются средствами ограничения доступа сетевого сервера.
Важной частью второго уровня являются также базы данных реального вре-
мени, являющиеся хранилищами информации и средством обмена с третьим
уровнем иерархии системы управления.
Третий уровень (уровень управления цехом) появляется как средство инте-
грации системы АСУ ТП с АСУП — автоматизированной системой управления
предприятием. АСУП в зависимости от размеров корпорации может включать
еще более высокий (четвертый) уровень и обеспечивать интеграцию с высшим
руководством, которое может быть расположено в различных странах и на
Архитектура автоматизированной системы
33
разных континентах земного шара. На уровне АСУП решаются следующие
задачи:
• ERP (Enterprise Resource Planning) — планирование ресурсов предприятия;
• MRP (Manufacturing Resource Planning) — планирование ресурсов техно-
логических подразделений предприятия;
• MES (Manufacturing Execution Systems) — управление производственны-
ми ресурсами;
• HRM (Human Resource Management) — управление человеческими ресур-
сами;
• EAM (Enterprise Asset Management) — управление основными фондами,
техническим обслуживанием и ремонтами.
Количество уровней АСУ зависит от величины предприятия.
В последние годы большой интерес вызывало использование Интернет-
технологий в задачах управления, причем не только на уровне корпоративного
управления, но даже на уровне технологического оборудования. Для этих це-
лей используются web-серверы, которые могут быть расположены как на обыч-
ных персональных компьютерах, так и непосредственно в контроллерах или мо-
дулях ввода-вывода (так называемые микро-web-серверы). С помощью любого
web-браузера, например Internet Explorer, можно управлять технологическими
процессами, открыв на микро-web-cepBepe Интернет-страничку с мнемосхемой
технологического процесса (см. следующий раздел).
1.2. Применение Интернет-технологий
Когда часть компонентов системы автоматизации выходит за границы ло-
кальной сети и переходит на уровень глобальной сети WAN*, стоимость каналов
связи резко возрастает вследствие высоких тарифов на дальнюю телефонную
связь. В этих условиях наиболее экономически выгодным оказывается приме-
нение Интернета [27-33]. Стоимость его оказывается на порядки ниже благо-
даря коммутации пакетов, а не каналов, что позволяет существенно улучшить
эффективность использования пропускной способности сети связи.
Вторым существенным преимуществом применения Интернет-технологий
в АСУ ТП является возможность использования на компьютере диспетчера
любого веб-браузера (например, Internet Explorer), независимо от его произ-
водителя, типа аппаратной платформы или операционной системы. Напри-
мер, компьютер диспетчера может работать под Windows, Linux, Unix, QNX,
Windows СЕ и др.
Управление и мониторинг через Интернет привлекательны еще тем, что
могут осуществляться из любой точки земного шара с помощью компьютера
или мобильного телефона (коммуникатора). Такая возможность особенно важ-
на для высшего руководства, которое часто бывает в командировках, а также
для корпораций, имеющих подразделения в разных городах или странах.
* WAN (Wide Spread Area Network) — технология построения сетей, которая обеспе-
чивает передачу информации на значительные расстояния с использованием коммутиру-
емых и выделенных линий, специальных каналов связи и Интернета.
2-3733
34
Глава 1
Другими достоинствами автоматизированных систем, использующих Ин-
тернет, являются:
• снижение стоимости функционирования АСУ ТП вследствие удаленного
управления (отсутствует необходимость присутствия человека на трудно
доступном объекте);
• снижение стоимости обслуживания благодаря удаленной диагностике, от-
ладке и обновлению программного обеспечения через Интернет — умень-
шаются затраты на командировки;
• возможность контроля состояния производственного или технологического
процесса или управления им через мобильный телефон;
• возможность автоматического вызова аварийной службы в случае сраба-
тывания датчиков газа, дыма, пламени, затопления и пр.;
• широкий выбор готовых (имеющихся в продаже) технических решений, ап-
паратных и программных продуктов для работы с Интернетом.
Этот же подход может использоваться и в интранете (интранет — это ло-
кальная сеть, которая содержит веб-сервер и работает по тем же протоколам,
что и Интернет).
1.2.1. Проблемы и их решение
При коммутации пакетов, используемой в Интернете, необходима проме-
жуточная буферизация данных, которая вносит в процесс доставки сообщений
задержку неопределенной величины, а при переполнении промежуточных бу-
феров возможны потери данных. Интернет имеет также низкую надежность
связи и плохую защищенность от несанкционированного доступа.
В настоящее время активно разрабатываются методы обеспечения качества
обслуживания QoS (Quality of Service), призванные ослабить остроту перечис-
ленных проблем. Тем не менее неопределенность времени доставки сообщений
и наличие задержки являются основными недостатками связи через Интернет.
Частичным решением этой проблемы в системах мониторинга является посыл-
ка данных вместе с метками времени [28]. Синхронизировать метки можно
с помощью системы GPS (Global Positioning System). Однако это не решает
проблемы в задачах с реальным временем, например когда Интернет-канал
входит в контур обратной связи.
Существует достаточно много областей, где указанные ограничения не яв-
ляются существенными. Кроме того, в правильно спроектированной распре-
деленной системе управления интенсивность информационного обмена между
ее компонентами спадает по мере удаления компонентов друг от друга, до-
стигая минимума для случая удаленного обмена через Интернет. Обратные
связи в такой системе являются только локальными, за исключением кон-
тура управления с диспетчером, где время доставки сообщений сравнимо со
временем реакции человека.
Примером задачи управления, в которой не требуется гарантированное вре-
мя доставки сообщений, является дистанционное управление системами венти-
ляции, кондиционирования и обогрева зданий [29]. В системе устанавливают
датчики температуры наружного воздуха, температуры в комнатах, датчики
Архитектура автоматизированной системы
35
тока исполнительных устройств, датчики влажности, датчики света, а также
исполнительные устройства для подачи электроэнергии в здание, для вклю-
чения/выключения вентиляторов, обогревателей, кондиционеров, осушителей,
увлажнителей, приточной вентиляции, вентиляции внутри помещения.
Наиболее безопасным применением Интернета являются системы монито-
ринга, например публикация на веб-страничке информации о параметрах тех-
нологического процесса, действиях оператора, а также сводных отчетов и гра-
фиков. Такая Интернет-система может быть полностью автономной, поскольку
перечисленные данные могут быть взяты непосредственно из базы данных АСУ
ТП без воздействия на сам технологический процесс. Возможность работы с ба-
зами данных поддерживается всеми современными веб-серверами.
1.2.2. Основные понятия технологии Интернета
Основными компонентами Интернета являются веб-серверы и веб-клиенты
(браузеры). На жестком диске сервера может находиться множество веб-
сайтов или FTP (File Transfer Protocol) каталогов с уникальными адресами URL
(Universal Resource Locator). Данные между клиентом и сервером передаются с
помощью протокола HTTP (Hyper Text Transfer Protocol) или FTP. Маршрути-
зация (передача в нужном направлении) данных в Интернете осуществляется с
помощью 32-битной IP (Internet Protocol) адресации. Веб-страницы создаются
с помощью языка разметки документа HTML (Hyper Text Markup Language)
или его расширенной версии XML (extensible Markup Language), а также WML
(Wireless Markup Language), который используется для мобильных телефонов,
смартфонов, записных книжек PDA (Personal Digital Assistant), работающих с
Интернетом по протоколу WAP (Wireless Applications Protocol).
Связь между клиентами и серверами Интернета выполняется по телефон-
ным каналам связи, которые могут быть проводными, оптоволоконными или
радио (в том числе сотовыми). Аналоговые каналы связи обычно имеют ско-
рость передачи информации не более 56 кбит/с, поэтому используют циф-
ровую связь ISDN (Integrated System Digital Network) co скоростью переда-
чи до 128 кбит/с и DSL (Digital Subscriber Lines) co скоростью передачи до
8 Мбит/с. Разновидностями DSL являются асимметричный цифровой канал
ADSL (Asymmetric DSL), в котором данные в одном направлении (абоненту) пе-
редаются со скоростью до 8 Мбит/с, а в обратном направлении — до 1 Мбит/с.
Другими модификациями DSL являются ADSL2+, SHDSL, RDSL, VDSL, предо-
ставляющие различные возможности абонентам. Общим обозначением различ-
ных модификаций DSL каналов является xDSL.
Беспроводной доступ в Интернет можно обеспечить с помощью сото-
вых GSM (Global System for Mobile communications) модемов, беспроводного
Ethernet, называемого еще WLAN (Wireless LAN), или Wi-Fi (Wireless Fidelity),
оборудования Bluetooth, ZigBee, WiMax, инфракрасного порта компьютера или
спутниковой связи.
Спутниковый Интернет обеспечивает одностороннюю связь (прием инфор-
мации от спутника) с очень высокой скоростью (до 48 Мбит/с). При этом пе-
редача информации обеспечивается любыми другими видами связи.
36
Глава 1
Доступ по каналам сотовой связи выполняется с помощью системы пакет-
ной передачи данных GPRS (General Packet Radio Service). Система GPRS обес-
печивает скорость передачи в среднем около 20 кбит/с (теоретический предел
составляет 171,2 кбит/с) и оптимально приспособлена для прерывистого тра-
фика, характерного для сетей Интернет/интранет. Она обеспечивает пакетную
коммутацию на всем протяжении канала связи, существенно снижая стоимость
связи в сетях стандарта GSM. Соединение в системе GPRS устанавливается
практически мгновенно, и она поддерживает все самые распространенные сете-
вые протоколы передачи данных, в том числе Интернет-протокол IP. Важным
преимуществом GPRS по сравнению с голосовыми каналами сотовой связи яв-
ляется то, что плата берется не за время соединения, а за объем переданной
информации. В сотовых телефонах основной сферой применения GPRS явля-
ется просмотр WAP-страниц. Также возможна отсылка SMS (Short Message
Service) через сеть GPRS. При подключении GSM модема в режиме GPRS к
компьютеру можно выходить в Интернет, при этом Интернет-провайдером яв-
ляется оператор сотовой связи.
Усовершенствованием GPRS является система EDGE (Enhanced Data rates
for Global Evolution), позволяющая обеспечить передачу данных со скоростью
до 474 кбит/с. Реально достижимая средняя скорость передачи данных состав-
ляет 100...120 кбит/с, с пиковыми значениями до 230 кбит/с.
1.2.3. Принципы управления через Интернет
Существует два различных способа управления через Интернет, на основе
которых построен ряд коммерческих продуктов: способ удаленного терминала
и способ деления SCADA-пакета на серверную и клиентскую части.
Удаленный терминал можно представить себе как удлинение проводов мы-
ши, клавиатуры и монитора с помощью Интернета, при этом визуализация вы-
полняется в окне веб-браузера, а на компьютер через Интернет передаются
только сигналы от мыши и клавиатуры. Управляемая программа исполняется
на удаленном от пользователя компьютере, на котором устанавливается специ-
ализированный веб-сервер. Прямо из веб-браузера можно работать с запущен-
ными на веб-сервере программами, с файловой системой и реестром сервера,
запускать программы, контролировать выполняющиеся приложения и служ-
бы, устанавливать права доступа к системе, получать информацию о загрузке
процессора и оперативной памяти.
Примерами таких программ могут служить пакеты Remotely Any where фир-
мы 3am Labs (www.remotelyanywhere.com), GoToMyPC (www.gotomypc.com) и
Spy Anywhere (www.spyanywhere.com).
Удаленный терминал можно использовать для управления любой програм-
мой, в том числе SCADA. Его недостатком является требование большой про-
пускной способности Интернет-канала, поскольку через Интернет передается
вся информация, отображаемая на экране удаленного компьютера.
Второй способ удаленного управления через Интернет основан на делении
SCADA-пакета на серверную и клиентскую части. Клиентская часть пред-
ставляет собой веб-браузер, который просматривает специализированную веб-
Архитектура автоматизированной системы
37
страницу, находящуюся на веб-сервере. На этой странице создается специа-
лизированный интерфейс с графикой и анимацией. Анимация выполняется с
помощью JScript, VBScript, Java-апплетов, Flash и анимированных GIF-файлов.
Поскольку основная часть визуальной динамики пользовательского интерфей-
са исполняется на клиентском компьютере, а с сервера передаются только дан-
ные об объекте автоматизации, существенно снижаются требования к пропуск-
ной способности Интернет-канала.
JavaScript или VBScript применяются в таких системах для создания дина-
мических веб-страниц (с вращающимися лопастями вентиляторов, с движением
жидкости в трубах и т.п.), для оперативной проверки правильности действий
пользователя при заполнении форм до передачи страницы на сервер, для вза-
имодействия с пользователем при решении таких задач, которые не требуют
обращения к серверу.
Веб-страница может воспринимать действия пользователя, например нажа-
тие кнопок, заполнение форм, и передавать их серверу. Сервер в ответ фор-
мирует новую веб-страницу с элементами, измененными в соответствии с дей-
ствиями пользователя. Выполняется это с помощью CGI-сценария (Common
Gateway Interface), который пишется обычно на языке Perl и располагается на
сервере (подробнее см. в книге [34]). Название «сценарий» или «скрипт» связа-
но с тем, что программа не транслируется в исполняемый код, а выполняется
непосредственно, с помощью интерпретатора языка [34]. Язык Perl использует-
ся только на серверах, работающих под операционной системой Unix, поэтому
программистам, работающим с Windows, он обычно незнаком.
Для среды Windows фирма Microsoft предложила технологию ASP.NET
(Active Server Pages) [35], которая позволяет создавать веб-страницы, находя-
щиеся на сервере и содержащие код сценариев VBScript. Результаты выполне-
ния сценариев VBScript передаются от сервера клиенту. Технологию ASP.NET
можно использовать на Internet Information Server (IIS), который работает под
управлением Microsoft Windows Server.
Отметим, что JScript и VBScript, ActiveX, Flash и анимированные GIF ис-
полняются только на стороне клиента без взаимодействия с сервером, в то
время как CGI и ASP.NET исполняются на стороне веб-сервера и именно они
извлекают данные из ОРС сервера или базы данных SCADA-системы, что-
бы отослать их клиенту.
Данные между клиентом и сервером могут пересылаться в виде сообщений
SOAP (Simple Object Access Protocol) [35], которые используют транспортный
протокол HTTP. Сообщения SOAP используют гибкую грамматику языка XML.
SOAP активизирует два процесса, которые могут находиться на разных ком-
пьютерах, но взаимодействуют друг с другом независимо от программных и
аппаратных платформ, на которых они реализованы.
Взаимодействие между клиентской и серверной частью SCAD А (рис. 1.10)
выглядит следующим образом [36]. Когда пользователь хочет получить данные
от контроллера через Интернет, он нажимает некоторую командную кнопку в
окне веб-браузера. Этот запрос посылается серверу через Интернет в формате
SOAP-сообщения. Когда веб-сервер получает SOAP-сообщение через ТСР-порт
38
Глава 1
Рис. 1.10. Архитектура автоматизированной системы, использующей Интернет
80, запрос направляется обработчику скрипта ASP.NET, который также распо-
лагается на веб-сервере. Веб-сервис (Web service) [35] создает запрашиваемые
данные или передает управление программе (например, на языке VB.NET), ко-
торая общается с контроллером через ОРС-сервер. Полученные таким образом
данные выкладываются на веб-страницу, которую видит пользователь с помо-
щью веб-браузера. При входе на веб-сервер операционная система (Windows
или Linux) производит идентификацию пользователя и предоставляет доступ
к информации в соответствии с его правами.
В случае удаленного управления на основе WAP пользователь получает
доступ к управляемой системе через мобильный телефон (GSM-модем). WAP
поддерживается стандартами GSM, TDMA, CDMA, GPRS.
1.2.4. Микро-веб-серверы
Веб-серверы для Интернета обычно располагаются на мощных компьюте-
рах и содержат жесткие диски большой емкости. Однако для удаленного управ-
ления в АСУ ТП часто достаточно иметь на сервере всего одну несложную
Архитектура автоматизированной системы
39
веб-страницу. Для этой цели используют микро-веб-серверы [37, 38] (встраи-
ваемые веб-серверы, Embedded Web Server), выполненные в виде микросхемы,
которая располагается на печатной плате ПЛК или интеллектуального датчи-
ка [38], в холодильнике, кондиционере, в офисном оборудовании и др. Каждый
микро-веб сервер доступен по своему Интернет-адресу.
В предыдущие годы проблемой технической реализации микро веб-серверов
была необходимость большой вычислительной мощности для реализации про-
токола TCP/IP. В настоящее время появились дешевые однокристальные мик-
роконтроллеры фирм Crystal Semiconductor, Winbond, Realtek, Seiko Instru-
ments, младшие модели микроконтроллеров фирм Microchip (PIC12C509),
Atmel (микроконтроллеры линейки Tiny AVR), Fairchild (ACE1101) co встро-
енной реализацией протокола TCP/IP. Это позволило применять веб-серверы
даже внутри датчика. Технологию применения микро-веб-серверов называют
«встроенным Интернетом» (Embedded Internet).
1.2.5. Примеры применения
В литературе описано множество примеров применения Интернета для уда-
ленного управления и мониторинга [39-49]. В [39] описана виртуальная ла-
боратория в вузе, доступ к которой студенты могут осуществить, не выходя
из общежития. Дистанционно можно задать исходные параметры для прове-
дения эксперимента, включить экспериментальную установку и получить ре-
зультат. Экспериментальная установка подключается к Интернету с помощью
веб-сервера, который взаимодействует с управляющим контроллером (ПЛК).
Студенты могут дистанционно загружать в контроллер исполняемый код про-
граммы для автоматического выполнения эксперимента.
При дистанционной работе с микроскопом [50] удаленный пользователь че-
рез Интернет может наблюдать изображение, передвигать камеру микроскопа,
изменять увеличения, подстраивать фокус.
В [28] описана система управления катером через Интернет. Управляе-
мыми параметрами являются: положение руля, скорость, состояние вклю-
чено/выключено прожектора и гудка. Положение катера находится с помо-
щью GPS (Global Positioning System). Контроллер с беспроводным Ethernet-
интерфейсом, установленный на катере, и беспроводная Ethernet-видеокамера
обмениваются информацией по беспроводному Ethernet-радиоканалу с веб-
сервером, установленным неподалеку на персональном компьютере. Управ-
ление катером может осуществляться из любой точки земного шара с помо-
щью обычного Internet Explorer.
Калифорнийский университет в Беркли (США) разработал систему авто-
матизированного проектирования и изготовления металлических деталей [51],
которая позволяет из заготовки вырезать тела произвольной формы с помощью
стандартных операций обработки металла. Все операции выполняются уда-
ленно (например, с другого континента), через Интернет. Система включает в
себя подсистему моделирования технологических процессов для оптимизации
технологических режимов обработки, которая также доступна через Интернет.
Дистанционно доступны методы оптимизации режимов для фрезеровки, свер-
ления, нарезания резьбы, проектирования арматуры и оценки качества смазки.
40
Глава 1
Входными данными являются геометрия резки, средство резки и материал, ре-
жимы работы машины и типы смазки, выходными величинами являются силы,
моменты, мощность, упругая деформация инструмента, динамика процесса и
шероховатость поверхности. С помощью видеокамеры можно наблюдать про-
цесс изготовления детали и управлять им. Доступ к производственным воз-
можностям через Интернет исключает необходимость иметь собственное доро-
гостоящее экспериментальное оборудование.
В настоящее время большинство коммерческих SCADA-пакетов имеют
средства построения web-интерфейса.
1.3. Понятие открытой системы
Одна из важнейших проблем, возникающих в АСУ ТП, при автоматизации
измерений и в других областях, заключается в резком увеличении стоимости
системы с ростом ее сложности. Объективная причина этого явления состоит
в том, что сложные системы часто изготавливаются в единичных экземплярах,
а это не позволяет сделать их дешевыми.
Распространенный метод решения указанной проблемы состоит в делении
системы на модули таким образом, чтобы каждый из них становился коммер-
чески эффективным изделием и мог изготавливаться несколькими конкуриру-
ющими производителями в больших количествах. Однако при этом возникает
проблема аппаратной и программной совместимости модулей. Для дости-
жения совместимости интерфейс, конструктив и выполняемые функции таких
модулей должны быть стандартизованы.
Открытой называется модульная система, которая допускает замену лю-
бого модуля на аналогичный модуль другого производителя, имеющийся в сво-
бодной продаже по конкурентоспособным ценам, а интеграция системы с други-
ми системами (в том числе с пользователем) выполняется без преодоления чрез-
мерных проблем. Понятие открытости обсуждается на веб-сайтах ОМАС (Open
Modular Architecture Controls, www.omac.org), ISA* и в работах [44, 53-56].
Открытость можно рассматривать на разных уровнях иерархии программ-
ного и аппаратного обеспечения системы или ее составных частей. Открыты-
ми, например, могут быть:
• физические интерфейсы, протоколы обмена, методы контроля ошибок, си-
стемы адресации, форматы данных, типы организации сети, интерфейсы
между программами, диапазоны изменения аналоговых сигналов;
• пользовательские интерфейсы, языки программирования контроллеров,
управляющие команды модулей ввода-вывода, языки управления базами
данных, операционные системы, средства связи аппаратуры с программ-
ным обеспечением;
• конструкционные элементы (шкафы, стойки, корпуса, разъемы, крепеж-
ные элементы);
* ISA (Instrument Society of America) основана в 1945 г., имеет 30 тыс. членов и зани-
мается разработкой стандартов в области автоматизации, см. www.isa.org.
Архитектура автоматизированной системы
41
• системы, включающие в себя перечисленные выше элементы.
Под открытостью системы иногда понимают ее соответствие современным
промышленным стандартам, которое обеспечивает возможность интеграции с
другими открытыми системами [55, 57]. Однако понятие открытости нужно
трактовать шире: оно должно подразумевать, что система не только удовле-
творяет стандартам, но стандарт является общепризнанным, а в свободной про-
даже имеются аналогичные системы других производителей по конкуренто-
способным ценам.
Как следует из определения, необходимыми условиями открытости яв-
ляются:
• модульность;
• соответствие стандартам [57] (необязательно официальным, но обязательно
общепринятым и легко доступным по цене, компенсирующей только затра-
ты на его разработку, поддержку и распространение);
• наличие в свободной продаже аналогичных систем других производителей
(подсистем, модулей) по конкурентоспособным ценам.
Требование модульности вытекает из требования возможности замены ча-
сти системы (т.е. модуля) аналогичными изделиями других производителей.
Для этого система должна состоять из модулей.
Соответствие стандартам необходимо для обеспечения совместимости.
Наличие в свободной продаже и конкурентоспособность цен являются тре-
бованиями, вытекающими из практического аспекта: без выполнения этого
условия открытая система может существовать только «на бумаге».
Понятие открытости достаточно многогранно и не стандартизовано. По-
этому практически можно говорить только о степени открытости системы,
указывая, что именно понимается под открытостью в каждом конкретном слу-
чае. Степень открытости можно оценить количеством реализованных призна-
ков открытости.
Для SCADA-системы признаками открытости являются совместимость со
стандартом ОРС [25], совместимость с широко доступными компьютерами с раз-
личными операционными системами (желательно), совместимость с ActiveX,
СОМ и DLL компонентами других производителей, подцержка языков стандар-
та МЭК 61131-3, наличие встроенного стандартного алгоритмического языка
(например, Visual Basic) для реализации функций, которые невозможно реали-
зовать другими средствами SCADA-пакета, возможность работы как с малым,
так и большим количеством тегов без необходимости переобучения обслужи-
вающего персонала, возможность применения веб-браузера в качестве пользо-
вательского интерфейса для увеличения количества подключаемых рабочих
станций, наличие пользовательского интерфейса, аналогичного интерфейсам
других производителей, совместимость со стандартными базами данных и дру-
гими приложениями (например, Microsoft Office), расположенными на любых
компьютерах сети.
Для промышленных сетей открытость означает наличие в свободной про-
даже сетевой аппаратуры от разных производителей по конкурентоспособным
ценам, совместимой с открытыми стандартами.
42
Глава 1
Примером открытых систем являются системы, построенные на модулях и
контроллерах RealLab! фирмы НИЛ АП (www.reallab.ru), которые имеют стан-
дартный протокол Modbus RTU или стандартный де-факто протокол DECON,
стандартный интерфейс RS-485, стандартный конструктив (крепление на ДИН-
рейку, разъемные клеммники), стандартные диапазоны аналоговых сигналов и
стандартные уровни дискретных сигналов, стандартный ОРС сервер, позво-
ляющий использовать модули с любой стандартной SCADA. Любой модуль в
такой системе может быть заменен на модули других производителей, которых
в настоящее время насчитывается около десятка.
Идеальным примером открытой системы является современный офисный
компьютер. Огромное число производителей в разных странах изготавливают
множество аппаратных и программных компонентов, которые можно собрать в
единую систему, заменить один компонент на другой, нарастить функциональ-
ные возможности. Любой компонент можно найти по достаточно низкой цене;
отсутствуют производители, которые могли бы диктовать монопольные цены.
Понятие открытости не подразумевает открытость программного кода, как,
например, в ОС Linux, хотя открытость кода позволяет добавлять в систему мо-
дули других производителей, что является признаком открытости. Однако от-
крытость исходного кода существенно снижает надежность системы вследствие
потенциальной возможности появления в ней дополнительных ошибок, внесен-
ных во время модификации и компиляции. Поэтому открытость программного
кода является спорным признаком открытости системы.
В отличие от открытых, закрытые системы разрабатываются по внутрен-
ним стандартам отдельных предприятий. Части (модули) закрытых систем
не могут быть заменены аналогичными изделиями других производителей, а
заказчик, однажды применив закрытую систему, навсегда оказывается при-
вязанным к ее разработчику.
Наиболее подробное и ясное изложение требований к контроллерам с от-
крытой архитектурой изложено в документе международной организации ISA
под названием «Requirements of Open, Modular Architecture Controllers for
Applications in the Automotive Industry» (cm. www.isa.org) «Требования к кон-
троллерам с открытой модульной архитектурой для приложений в автомобиль-
ной индустрии». Во время написания этого документа в 1994 г. были распро-
странены частно-фирменные решения. Это приводило к тому, что потреби-
тель средств автоматизации, однажды купив изделие одной фирмы, попадал
в ценовую зависимость от нее, поскольку интерфейсы средств автоматизации
разных фирм были различными и их сопряжение резко увеличивало общую
стоимость системы. Расширение такой системы было дорогим, а обслужи-
вающий персонал должен был проходить дополнительное обучение работе с
нестандартным оборудованием.
Разновидностью и предельным случаем открытых систем являются систе-
мы, удовлетворяющие идеологии Plug&Play («вставил — и заиграло»), когда
вообще не требуется усилий для конфигурирования или настройки модулей по-
сле их подключения или замены на модули других производителей [52]. Идео-
логия Plug&Play существенно снижает требования к квалификации системных
Архитектура автоматизированной системы
43
интеграторов, сокращает срок ввода системы в эксплуатацию, а также издерж-
ки потребителей на техническую поддержку и эксплуатацию.
1.3.1. Свойства открытых систем
Открытые системы обладают следующими положительными свойствами
[53, 58, 56], благодаря которым системные интеграторы проявляют к ним боль-
шой интерес:
• модульность;
• платформенная независимость;
• взаимозаменяемость с компонентами других производителей;
• интероперабельность (возможность совместной работы) с компонентами
других производителей;
• масштабируемость.
Отметим, что закрытые системы тоже могут быть модульными, интеропе-
рабельными, масштабируемыми. Отличие открытых систем состоит в том, что
все перечисленные свойства должны выполняться для компонентов, изготов-
ленных разными производителями и имеющихся в свободной продаже.
К системам с открытой архитектурой предъявляют также общепринятые
требования: экономичности, безопасности, надежности, грубости (робастно-
сти), простоты обслуживания и соответствия условиям эксплуатации, способ-
ности к самодиагностике и наличию рекомендаций по ремонту [1.35]. Система
должна обеспечивать максимальное время работы без сбоя и отказа, а так-
же минимальное время, необходимое для выполнения технического обслужи-
вания или ремонта.
Модульность — это способность аппаратного или программного обеспе-
чения к модификации путем добавления, удаления или замены отдельных мо-
дулей (компонентов системы) без воздействия на оставшуюся ее часть.
Модульность обеспечивается при проектировании системы на архитектур-
ном уровне. Базой для построения модульного программного обеспечения яв-
ляется объектно-ориентированное программирование. Главным достижением в
направлении развития модульности программного обеспечения АСУ ТП явля-
ется выделение в нем независимых подсистем: программы в ПЛК, ОРС серве-
ра, баз данных, операторского интерфейса и алгоритмической части, реализу-
емой на языках стандарта IEC 61131-3, а также деление SCADA на сервер-
ную и клиентскую части.
Платформенная независимость. Возможность выполнения программ
на разных аппаратно-программных платформах обеспечивает независимость от
поставщика этих платформ и дает следующие преимущества:
• расширение выбора оборудования путем увеличения числа поставщиков;
• независимость от поставщика аппаратного и программного обеспечения.
Отсутствие этих свойств приводит к тому, что система, зависящая от
одного производителя, прекращает свое развитие в случаях, когда фирма-
производитель внезапно уходит с рынка, увеличивает стоимость продукта или
снимает его с производства.
44
Глава 1
Применение ОС Windows является одним из путей повышения открытости
систем, поскольку эта операционная система может быть установлена на макси-
мальное число типов производимых компьютеров. В данном случае монополия
фирмы Microsoft компенсируется ее размерами и стабильностью.
Платформенную независимость программных средств и, как следствие, по-
вышение открытости обеспечивает также язык Java, хотя он и уступает С++
по быстродействию приложений.
Для улучшения открытости при компиляции исполняемых модулей про-
грамм важно избегать «улучшений» компилятора, применения плагинов, над-
строек, скачанных «откуда-то из Интернета», поскольку они могут сделать
невозможным выполнение программы на других платформах.
Важным шагом на пути обеспечения платформенной независимости яви-
лось применение интранет-технологий в автоматизации, когда передача инфор-
мации к рабочей станции осуществляется с помощью языка xml, а ее представ-
ление пользователю выполняется с помощью любого веб-браузера. Веб-браузер
позволяет в качестве рабочей станции АСУ ТП использовать компьютер и опе-
рационную систему любого производителя из имеющихся в свободной продаже.
Платформенной независимостью обладает также база данных с языком
запросов SQL (Structured Query Language), если исключить из него по воз-
можности все нестандартные расширения. Доступ к базе данных с помощью
SQL осуществим независимо от программно-аппаратной платформы, на кото-
рой она находятся.
Взаимозаменяемость — это возможность замены любого модуля (компо-
нента) системы на аналогичный компонент другого производителя, имеющийся
в свободной продаже, и возможность обратной замены. Это свойство позволя-
ет ускорить замену отказавшего модуля, улучшить качество уже работающей
системы, исключить ценовую зависимость от поставщика.
Интероперабельность (аппаратно-программная совместимость).
Интероперабельность — это способность открытых систем использовать про-
граммы, выполняющиеся одновременно на различных платформах в общей се-
ти, с возможностью обмена информацией между ними. Иначе говоря, про-
граммные компоненты системы, расположенные на разных аппаратных плат-
формах в общей сети, должны быть способны работать как часть единой си-
стемы.
Интероперабельность трудно достижима, но она обеспечивает возможность
выбора аппаратных и программных средств из огромного разнообразия, пред-
ставленного на рынке, вместо ограниченного выбора компонентов монопольно-
го производителя закрытой системы.
Открытая интероперабельная система должна обладать способностью ком-
муникации и с другими уровнями АСУ предприятия, обеспечивая одновременно
безопасность поступающей извне информации.
Одним из методов обеспечения интероперабельности Windows и Unix плат-
форм может быть применение стандарта CORBA (Common Object Request
Broker Architecture) [59].
Архитектура автоматизированной системы
45
Масштабируемость — это возможность применения одного и того же
аппаратного и программного обеспечения (баз данных, пользовательских ин-
терфейсов, средств коммуникации) для систем разного размера (больших и
малых). Для обеспечения масштабируемости достаточно, чтобы программное
обеспечение больших и малых систем было совместимо по операторскому ин-
терфейсу, языкам программирования, а также интерфейсу с аппаратными сред-
ствами и не требовало дополнительного обучения персонала. Масштабируемая
система должна обеспечивать возможность простого наращивания функцио-
нальных возможностей и размеров путем включения новых компонентов как
в аппаратную, так и программную часть системы без модификации старых,
опробованных программных и аппаратных модулей [57].
Масштабируемость позволяет применять одни и те же аппаратные и про-
граммные средства как для больших, так и для малых систем в пределах од-
ной организации. Примером масштабируемых программных систем являются
современные SCADA-пакеты TraceMode и MasterSCADA, которые продаются
как единый пакет, но имеющий градации в зависимости от количества тегов.
До появления открытых систем обеспечение масштабируемости достига-
лось путем проектирования системы с большим запасом по габаритам, коли-
честву слотов, интерфейсов. Наращиваемость открытой системы подразумева-
ет иной путь, не требующий запаса ресурсов (и связанных с ним избыточных
финансовых вложений). В частности, система, обладающая свойством плат-
форменной независимости и интероперабельности, уже является расширяемой,
поскольку она позволяет добавлять новое оборудование или заменять старое
новыми модификациями, в том числе оборудованием других производителей.
Стандартность пользовательского интерфейса. Открытые системы
должны иметь стандартный пользовательский интерфейс, чтобы выполнить
требование о возможности интеграции с другими системами (в данном случае
под «другой системой» понимается человек). Стандартизация пользователь-
ского интерфейса снимает необходимость обучения операторов при переходе от
одной открытой системы к другой.
1.3.2. Средства достижения открытости
Для обеспечения возможности построения открытых систем рынок дол-
жен быть наполнен программными и аппаратными средствами, которые явля-
ются взаимозаменяемыми, производятся независимыми предприятиями и удо-
влетворяют требованиям общепринятых стандартов. Ниже мы кратко опишем
такие продукты.
Промышленные сети и протоколы. Наиболее распространенными в
России являются сети Modbus, Profibus, CAN, Ethernet. Оборудование, совме-
стимое с ними, выпускается сотнями конкурирующих предприятий в разных
странах мира, что обеспечивает отсутствие монопольных цен.
Интерфейсы. Наибольшая часть средств промышленной автоматизации,
представленных на российском рынке, имеет интерфейсы RS-232, RS-485, RS-
422, CAN, Ethernet, USB. Большое значение для повышения степени открыто-
сти имеют преобразователи интерфейсов и межсетевые шлюзы, которые поз-
46
Глава 1
воляют объединять в единую систему несовместимое по интерфейсам и про-
токолам оборудование.
Программные интерфейсы. Для взаимодействия открытых систем на
программном уровне наибольшее распространение получила DCOM-техноло-
гия фирмы Microsoft, ставшая промышленным стандартом ОРС (OLE for Pro-
cess Control) [25], который пришел на смену устаревшей технологии DDE
(Dynamic Data Exchange). Стандарт ОРС обеспечил возможность примене-
ния оборудования различных производителей практически с любыми SCADA,
имеющимися на рынке, поскольку большинство из них поддерживает стан-
дарт ОРС.
Аналогичная задача может быть решена также с помощью технологии Jini
фирмы SUN и CORBA фирмы OMG [58], однако воплощение в международ-
ный стандарт ОРС получила только технология DCOM, ориентированная на
Windows-платформы (подробнее см. главу 9).
Интерфейс пользователя. Интерфейс между SCADA и пользователем в
настоящее время выполняется примерно одними и теми же визуальными сред-
ствами, которые стали стандартом де-факто: кнопки пуск/стоп, цифровое таб-
ло, линейный или радиальный индикатор уровня, цветовая сигнализация, окна
с текстовыми сообщениями, окна ввода данных, графики и т.п. Такой интер-
фейс легко осваивается операторами АСУ ТП.
Программирование контроллеров поддерживается тремя международны-
ми стандартами: стандартом МЭК 61131-3 [55] на языки программирования
и стандартами МЭК 61499 [60, 61] и МЭК 61804 (см. главу 9) на функци-
ональные блоки. Стандарты поддерживаются большинством производителей
программного обеспечения. Примером могут быть системы ISaGRAF фирмы
ICS Triplex (www.isagraf.ru) и CoDeSys фирмы 3S (www.codesys.ru). Поддерж-
ку открытости обеспечивают также конверторы блоков UML (Unifid Modeling
Language [62]) в функциональные блоки стандарта МЭК 61499, а также UML
в xml (extended Markup Language).
В последние годы появилось много SCADA-систем, которые поддержива-
ют веб-технологию, когда пользовательский интерфейс SCADA выполняется
в виде веб-страницы и располагается на сервере локальной сети. При этом
любой пользователь, обладающий достаточными правами доступа, с помощью
стандартного веб-браузера (например, Internet Explorer) может управлять тех-
нологическим процессом. Такой подход является значительным прогрессом
в направлении открытости SCADA-пакетов, поскольку предоставляет пользо-
вателю широкий выбор хорошо валидированных веб-браузеров по достаточ-
но низкой цене и обеспечивает применение практически любой аппаратно-
программной платформы для общения со SCADA.
Программная совместимость. Важным достоинством SCADA-пакетов,
повышающим степень их открытости, является связь с программами Microsoft
Office (Word, Excel, Access), которая снижает затраты на обучение персонала и
расширяет возможности представления и обработки результатов измерений.
Совместимость баз данных со SCADA обеспечивает широко распростра-
ненный язык запросов SQL, соответствующий международному стандарту и
Архитектура автоматизированной системы
47
поддерживаемый несколькими СУБД (системами управления базами данных),
например Informix, Sybase, Ingres, MS SQL Server. Интерфейс ODBC (Open Data
Base Connectivity) позволяет подключать к одной и той же SCADA различные
СУБД, что повышает степень ее открытости.
Обеспечение в некоторых SCADA-пакетах возможности программирования
на языке Visual Basic, а также возможность встраивания ActiveX и СОМ объек-
тов сторонних производителей позволяет адаптировать SCADA к аппаратуре,
не поддерживающей стандарт ОРС, а также применить принцип повторного ис-
пользования программного кода, написанного для других приложений.
1.3.3. Достоинства и недостатки
Основным преимуществом систем с открытой архитектурой является низ-
кая стоимость их жизненного цикла [53]. Жизненный цикл АСУ ТП состо-
ит из следующих фаз:
• разработка концепции и эскизное проектирование;
• проектирование и изготовление системы;
• монтаж и пуско-наладка;
• эксплуатация системы;
• обслуживание;
• реконфигурация, модернизация, разборка, утилизация.
В [53] подробно рассмотрена стоимость каждого из перечисленных этапов.
Выгодой от применения открытых систем являются:
• пониженные вложения на проектирование системы и предпроектные изыс-
кания благодаря наличию на рынке большого выбора готовых компонентов
открытых систем. Особенно большой экономический эффект достигается
при создании крупных систем в единичных экземплярах. В этом случае
экономия пропорциональна размеру системы;
• упрощение процесса интеграции — открытость подразумевает возможность
простой интеграции разнородных систем;
• экономия финансовых средств благодаря низкой стоимости жизненного
цикла (в основном вследствие конкуренции независимых производителей
и отсутствия диктата цен монопольным поставщиком);
• увеличенное время безотказной работы благодаря выбору наиболее надеж-
ных модулей из имеющихся на рынке;
• минимизированное время вынужденного простоя благодаря большому вы-
бору взаимозаменяемых модулей всегда можно найти поставщика, имею-
щего нужные модули на складе;
• минимальные усилия на ввод в действие как аппаратуры, так и программ-
ного обеспечения благодаря устранению времени на дополнительное обу-
чение как монтажной организации, так и эксплуатирующего персонала;
• простое изменение конфигурации системы для работы с новыми техноло-
гическими процессами — вытекает из свойств модульности и расширяе-
мости открытых систем;
• минимальный объем дополнительного обучения персонала и, как след-
ствие, простота обслуживания;
48
Глава 1
• применение новейших технологий и технических решений благодаря широ-
кому выбору наилучших решений и специализации производителей;
• увеличение времени жизни системы благодаря взаимозаменяемости отрабо-
тавшего ресурс и нового оборудования, а также возможности наращивания
функциональных возможностей.
В [63] описаны конкретные преимущества, полученные при создании от-
крытой системы для тестирования военного авиационного оборудования:
• снижение стоимости разработки и изготовления системы. Экономия при
этом сопоставима с экономией в серийном производстве;
• уменьшение сроков создания системы благодаря применению имеющихся
в продаже компонентов;
• уменьшение риска получения системы, не удовлетворяющей техническо-
му заданию, поскольку большой выбор совместимых между собой изделий,
имеющихся в продаже, всегда позволяет подобрать компоненты с нужны-
ми характеристиками.
До появления компонентов открытых систем создание такого оборудования
требовало разработки специализированных печатных плат, что было чрезмер-
но дорого и долго. Кроме того, некоторые необходимые функции при этом
не могли быть реализованы никогда из-за жестких ограничений на сроки со-
здания системы.
Недостатки открытых систем видны не сразу. И все же они имеются:
• при создании автоматизированной системы на базе открытых решений от-
ветственность за работоспособность системы в целом ложится на систем-
ного интегратора, а не на производителя системы. Поэтому при появлении
в системе невоспроизводимых отказов некому предъявить претензии, по-
скольку поставщиков много, а системный интегратор отвечает только за
монтаж и пусконаладку системы;
• универсальность всегда находится в противоречии с простотой. Универ-
сальные протоколы, интерфейсы, сети и программное обеспечение, чтобы
быть универсальными, должны быть достаточно сложными, следовательно,
дорогими и ненадежными. Хотя снижение надежности, вызванное сложно-
стью, компенсируется повышением надежности благодаря большому тира-
жу и, следовательно, продолжением отладки после начала продаж;
• эффект снижения надежности программного обеспечения, части которо-
го пишутся разными производителями. Когда ПО пишется внутри одной
фирмы, можно предвидеть почти все ситуации, которые могут возникнуть
на границе между ПО и пользователем или аппаратурой. Если же в этом
участвуют несколько разных команд в разных фирмах, между которыми
нет взаимодействия, то становится непонятно, кто отвечает за надежность
всего комплекса. Кроме того, с ростом числа программистов, участву-
ющих в создании ПО, по законам статистики увеличивается вероятность
того, что появится хотя бы один программист, не умеющий писать надеж-
ные программы. А этого достаточно, чтобы сделать всю систему нена-
дежной. Надежность и безопасность открытых систем остаются темами,
требующими решения [56];
Архитектура автоматизированной системы 49
• иногда к признакам открытости относят открытость исходных кодов. Одна-
ко наличие открытых кодов снижает надежность программной системы, по-
скольку нарушается принцип инкапсуляции, необходимость которого обос-
нована в идеологии объектно-ориентированного программирования;
• как и любая стандартизация, открытость накладывает ограничения на диа-
пазон возможных технических решений, затрудняя творчество и снижая
вероятность появления новых и плодотворных технических решений.
Отметим, что проблема надежности относится не ко всем компонентам от-
крытых систем. Например, такие компоненты, как базы данных, компьютеры
или сети Ethernet, обладают высокой надежностью благодаря огромному ти-
ражу и, как следствие, качественной валидации* этих компонентов и оптими-
зации процессов изготовления. Кроме того, выше перечислены только факто-
ры, понижающие надежность открытых систем. Однако одновременно имеются
факторы, которые ее повышают, — это увеличенный тираж модулей открытых
систем по сравнению с низким тиражом полностью заказных систем. Поэтому
вывод о надежности открытой системы может быть как положительным, так и
отрицательным, в зависимости от конкретного состава ее элементов.
1.4. Заключение
Синтез архитектуры является ответственным этапом, на котором закла-
дываются основные свойства будущей системы. Поэтому архитектор должен
одинаково хорошо знать как объект автоматизации, так и технические и про-
граммные средства автоматизации.
Наибольшее распространение в АСУ ТП получили распределенные систе-
мы, элементы которых (контроллеры, модули ввода-вывода) разнесены в про-
странстве, независимы друг от друга, но взаимодействуют между собой для вы-
полнения общей задачи. Система обычно имеет несколько уровней иерархии,
которые различаются типами промышленных сетей, техническими средствами
и кругом решаемых задач. Перспективной тенденцией является применение
Интернет и интранет-технологий, которые обеспечивают возможность постро-
ения глобальных систем, когда расстояние перестает иметь значение, а для
работы с системой используется любой Интернет-браузер.
В последнее десятилетие на рынке средств автоматизации преобладают от-
крытые модульные системы, которые соответствуют общепризнанным стандар-
там и состоят из компонентов, серийно выпускаемых несколькими конкури-
рующими производителями.
1.5. Обзор публикаций
В [64] описана хорошо опробованная технология для управления в реальном
времени через Интернет на основе Linux-сервера. Компоненты системы, нахо-
дящиеся на сервере, предоставляют свои свойства и методы клиентам через
См. сноску на с. 24.
50
Глава 1
Интернет, используя удаленный вызов процедур и язык XML. В [65] предложе-
на архитектура распределенной системы управления, основанная на Интернете
и Java. В [66, 67] анализируется архитектура системы автоматизации, исполь-
зующей Интернет и такие средства, как HTTP, XML, SOAP, ОРС. Несколько
вариантов реализаций систем управления с применением Интернета описаны в
[68-71]. В [72] предложена распределенная система измерений качества элек-
трической энергии через Интернет и показано, что влияние задержки можно
частично уменьшить, используя специальную технику усреднения. В [73] опи-
сана система с применением Интернет-технологии в системах защиты и управ-
ления энергетическим оборудованием.
Применение «встроенного Интернета» (микроконтроллера со встроенным
веб-сервером) описано в [74, 75]. В [76] рассмотрен метод уменьшения влия-
ния неопределенности задержки при управлении через Интернет в предикто-
рах Смита, в [77] предложен метод моделирования динамики системы управ-
ления, включающей Интернет-канал.
Системам с открытой архитектурой посвящены работы [78-86]. В [78] мо-
дульная система с открытой архитектурой использована для управления стан-
ками (обрабатывающими центрами). Модули могут быть добавлены в систему
или удалены из нее без требований их реконфигурации. В [79] описана ме-
тодика тестирования контроллеров на соответствие требованиям ОМАС [53] к
открытым системам. В [80] представлена открытая архитектура системы для
АСУ ТП и систем с искусственным интеллектом. В [81] описана открытая си-
стема управления энергосистемой. В [82] предложена открытая архитектура
интеллектуального датчика, с идеологией Plug&Play, основанная на Интернет-
технологии. Такой датчик может работать с любой аппаратно-программной
платформой. В [83] описана открытая архитектура коммерческой системы ав-
томатизированного тестирования и диагностики сложной аппаратуры. Система
способна к расширению путем применения аппаратуры других производителей:
блоков диагностики, оборудования для выполнения тестов, оборудования для
отображения информации, систем накопления результатов тестирования и др.
В [86] сформулированы требования к открытой модульной архитектуре рас-
пределенной системы автоматизации, использующей стандарт МЭК 61499 на
функциональные блоки для обеспечения интероперабельности подсистем.
Глава 2
Промышленные сети
и интерфейсы
Обмен информацией между устройствами, входящими в состав автомати-
зированной системы (компьютерами, контроллерами, датчиками, исполнитель-
ными устройствами), происходит в общем случае через промышленную сеть
(Fieldbus, «полевую шину») [88].
Промышленные сети отличаются от офисных следующими свойствами:
• специальным конструктивным исполнением, обеспечивающим защиту от
пыли, влаги, вибрации, ударов;
• широким температурным диапазоном (обычно от -40 до 4-70 °C);
• повышенной прочностью кабеля, изоляции, разъемов, элементов крепле-
ния;
• повышенной устойчивостью к воздействию электромагнитных помех;
• возможностью резервирования для повышения надежности;
• повышенной надежностью передачи данных;
• возможностью самовосстановления после сбоя;
• детерминированностью (определенностью) времени доставки сообщений;
• возможностью работы в реальном времени (с малой, постоянной и извест-
ной величиной задержки);
• работой с длинными линиями связи (от сотен метров до нескольких ки-
лометров).
Промышленные сети обычно не выходит за пределы одного предприятия.
Однако с появлением Ethernet и Internet для промышленных сетей стали при-
менять ту же классификацию, что и для офисных [87]:
• LAN (Local Area Network) — сети, расположенные на ограниченной терри-
тории (в цехе, офисе, в пределах завода);
• MAN (Metropolitan Area Networks) — сети городов;
• WAN (Wide Area Network) — глобальная сеть, охватывающая несколь-
ко городов или континентов. Обычно для этого используют Интернет-
технологию.
В настоящее время насчитывается более 50 типов промышленных сетей
(Modbus, Profibus, DeviceNet, CANopen, LonWorks, ControlNet, SDS, Seriplex,
ArcNet, BACnet, FDDI, FIP, FF, ASI, Ethernet, WorldFIP, Foundation Fieldbus,
Interbus, BitBus и др.). Однако широко распространенными является только
часть из них. В России подавляющее большинство АСУ ТП используют сети
52
Глава 2
Modbus и Profibus. В последние годы возрос интерес к сетям на основе CANopen
и DeviceNet. Распространенность в России той или иной промышленной сети
связана, в первую очередь, с предпочтениями и активностью Российских фирм,
продающих импортное оборудование.
2.1. Общие сведения о промышленных сетях
Промышленной сетью называют комплекс оборудования и программного
обеспечения, которые обеспечивают обмен информацией (коммуникацию) меж-
ду несколькими устройствами. Промышленная сеть является основой для по-
строения распределенных систем сбора данных и управления.
Поскольку в промышленной автоматизации сетевые интерфейсы могут
быть неотъемлемой частью соединяемых устройств, а сетевое программное
обеспечение прикладного уровня модели OSI исполняется на основном процес-
соре промышленного контроллера, то отделить сетевую часть от устройств,
объединяемых в сеть, иногда физически невозможно. С другой стороны, смену
одной сети на другую часто можно выполнить с помощью замены сетевого ПО
и сетевого адаптера или введением преобразователя интерфейса, поэтому часто
один и тот же тип ПЛК может использоваться в сетях различных типов.
Соединение промышленной сети с ее компонентами (устройствами, узлами
сети) выполняется с помощью интерфейсов. Сетевым интерфейсом называют
логическую и (или) физическую границу между устройством и средой передачи
информации. Обычно этой границей является набор электронных компонентов
и связанного с ними программного обеспечения. При существенных модифика-
циях внутренней структуры устройства или программного обеспечения интер-
фейс остается без изменений, что является одним из признаков, позволяющих
выделить интерфейс в составе оборудования.
Наиболее важными параметрами интерфейса являются пропускная спо-
собность и максимальная длина подключаемого кабеля. Промышленные ин-
терфейсы обычно обеспечивают гальваническую развязку между соединяемы-
ми устройствами. Наиболее распространены в промышленной автоматизации
последовательные интерфейсы RS-485, RS-232, RS-422, Ethernet, CAN, HART,
AS-интерфейс.
Для обмена информацией взаимодействующие устройства должны иметь
одинаковый протокол обмена. В простейшей форме протокол — это набор пра-
вил, которые управляют обменом информацией. Он определяет синтаксис и
семантику сообщений, операции управления, синхронизацию и состояния при
коммуникации. Протокол может быть реализован аппаратно, программно или
программно-аппаратно. Название сети обычно совпадает с названием прото-
кола, что объясняется его определяющей ролью при создания сети. В России
используются сетевые протоколы, описанные в серии стандартов [104-110].
Обычно сеть использует несколько протоколов, образующих стек прото-
колов — набор связанных коммуникационных протоколов, которые функцио-
нируют совместно и используют некоторые или все семь уровней модели OSI
[89]. Для большинства сетей стек протоколов реализован с помощью специали-
зированных сетевых микросхем или встроен в универсальный микропроцессор.
Промышленные сети и интерфейсы
53
Взаимодействие устройств в промышленных сетях выполняется в соот-
ветствии с моделями клиент-сервер или издатель-подписчик (производитель-
потребитель) [117]. В модели клиент-сервер взаимодействуют два объекта. Сер-
вером является объект, который предоставляет сервис, т.е. выполняет некото-
рые действия по запросу клиента. Сеть может содержать несколько серверов
и несколько клиентов. Каждый клиент может посылать запросы нескольким
серверам, а каждый сервер может отвечать на запросы нескольких клиентов.
Эта модель удобна для передачи данных, которые появляются периодически
или в заранее известное время, как, например, значения температуры в перио-
дическом технологическом процессе. Однако эта модель неудобна для передачи
случайно возникающий событий, например события, состоящего в случайном
срабатывании датчика уровня, поскольку для получения этого события клиент
должен периодически, с высокой частотой, запрашивать состояние датчика и
анализировать его, перегружая сеть бесполезным трафиком.
В модели взаимодействия издатель-подписчик имеется один издатель и
множество подписчиков. Подписчики сообщают издателю список тегов, зна-
чения которых они хотят получать по определенному расписанию или по мере
появления новых данных. Каждый клиент может подписаться на свой набор
тегов. В соответствии с установленным расписанием издатель рассылает под-
писчикам запрошенную информацию.
В любой модели взаимодействия можно выделить устройство, которое
управляет другим (подчиненным) устройством. Устройство, проявившее иници-
ативу в обмене, называют ведущим, главным или мастером (Master). Устрой-
ство, которое отвечает на запросы мастера, называют ведомым, подчиненным
или слейвом (Slave). Ведомое устройство никогда не начинает коммуникацию
первым. Оно ждет запроса от ведущего и только отвечает на запросы. На-
пример, в модели клиент-сервер клиент является мастером, сервер — подчи-
ненным. В модели издатель-подписчик на этапе подписки мастером является
клиент, а на этапе рассылки публикаций — сервер.
В сети может быть одно или несколько ведущих устройств. Такие сети
называются одномастерными или многомастерными соответственно. В мно-
гомастерной сети возникает проблема разрешения конфликтов между устрой-
ствами, пытающимися одновременно получить доступ к среде передачи инфор-
мации. Конфликты могут быть разрешены методом передачи маркера, как,
например, в сети Profibus, методом побитного сравнения идентификатора (ис-
пользуется в CAN), методом прослушивания, сети (используется в Ethernet) и
методом предотвращения коллизий (используется в беспроводных сетях).
Во всех сетях применяется широковещательная рассылка без определенного
адреса, т.е. всем участникам сети. Такой режим используется обычно для син-
хронизации процессов в сети, например для одновременного запуска процесса
ввода данных всеми устройствами ввода или для синхронизации часов.
Некоторые сети используют многоабонентский режим, когда одно и то же
сообщение посылается нескольким устройствам одновременно.
Передача информации в сети выполняется через канал между передаю-
щим и приемным устройством. Канал является понятием теории информации
и включает в себя линию связи и приемопередающие устройства. В общем
54
Глава 2
случае вместо термина «линия связи» используют термин «среда передачи»,
в качестве которой может выступать, например, оптоволокно, эфир или ви-
тая пара проводов.
В распределенных системах на основе промышленных сетей может быть
пять типов данных: сигналы, команды, состояния, события, запросы [142].
Сигналы — это результаты измерений, получаемые от датчиков и измери-
тельных преобразователей. Их «время жизни» очень короткое, поэтому часто
требуется получить только последние данные и в максимально короткий срок.
Команды — это сообщения, которые вызывают некоторые действия, напри-
мер закрытие клапана или включение ПИД-регулятора. Большинство систем
должны обрабатывать потоки команд, которые передаются адресату с высокой
надежностью и их нельзя передать повторно.
Состояние показывает текущее или будущее состояние системы, в которое
она должна перейти. Требование к времени его доставки может быть не такие
жестким, как для команд; непринятое состояние может быть послано повторно.
Событие наступает обычно при достижении текущим параметром гранич-
ного значения. Например, событием может быть выход температуры за техно-
логически допустимую границу. За появлением события должны следовать от-
ветные действия (подробнее см. главу 9), поэтому для событий особенно важно
требование гарантированного времени доставки.
Запрос — это команда, посылаемая для того, чтобы получить ответ. При-
мером может быть запрос серверу, который выдает на него ответ.
Ниже при описании сетей будет использоваться понятие фрейма. Под фрей-
мом понимают набор данных, передаваемых по сети и имеющих строго ого-
воренную структуру (формат). Термины «кадр», «дейтаграмма», «сегмент»,
используемые в стандартах на различные промышленные сети, ниже будут ис-
пользованы как синонимы фрейма.
Сети могут иметь топологию звезды, кольца, шины или смешанную. «Звез-
да» в промышленной автоматизации используется редко. Кольцо используется
в основном для передачи маркера в многомастерных сетях. Шинная топология
является общепринятой, что является одной из причин применения термина
«промышленная шина» вместо «промышленная сеть». К общей шине в разных
местах может быть подключено произвольное количество устройств.
Основными параметрами промышленных сетей являются производитель-
ность и надежность. Производительность сети характеризуется временем ре-
акции и пропускной способностью [90].
Время реакции сети определяется как интервал времени между запросом
ведущего устройства и ответом ведомого при условии, что ведомое устройство
имеет пренебрежимо малую задержку выработки ответа на запрос.
Пропускная способность сети определяет количество информации, перено-
симой сетью в единицу времени. Измеряется в битах за секунду и зависит от
быстродействия сетевых приемопередатчиков и среды передачи.
Важной характеристикой промышленных сетей является надежность до-
ставки данных. Надежность (см. также главу 8) характеризуется коэффици-
ентом готовности, вероятностью доставки данных, предсказуемостью времени
доставки, безопасностью, отказоустойчивостью [90].
Промышленные сети и интерфейсы
55
Коэффициент готовности равен отношению времени наработки до отказа
к сумме времени наработки до отказа и времени восстановления после отказа.
Вероятность доставки данных определяется помехоустойчивостью кана-
ла передачи и детерминированностью доступа к каналу. В беспроводных сетях
вероятность потери пакетов при передаче гораздо выше, чем в проводных. Ь се-
тях со случайным методом доступа к каналу существует вероятность того, что
данные никогда не будут доставлены абоненту.
Время доставки данных в офисных сетях Ethernet является случайной ве-
личиной, однако в промышленном Ethernet эта проблема решена применени-
ем коммутаторов.
Безопасность — это способность сети защитить передаваемые данные от
несанкционированного доступа.
Отказоустойчивость — это способность сети продолжать функционирова-
ние при отказе некоторых элементов. При этом характеристики системы могут
ухудшиться, но она не теряет работоспособности.
В последнее время появился термин «качество обслуживания» (QoS —
Quality of Service). QoS определяет вероятность того, что сеть будет переда-
вать заданный поток данных между двумя узлами в соответствии с потреб-
ностями приложения [90].
2.2. Модель OSI
Поскольку основной функцией сети является соединение между собой раз-
личного оборудования, проблема открытости, в частности, стандартизации, для
сетей приобретает особое значение. В связи с этим в начале 80-х годов Меж-
дународной организацией по стандартизации ISO (International Standardization
Organization) совместно с рядом других организаций была сформулирова-
на и принята модель взаимодействия открытых систем OSI (Open System
Interconnection), которая сыграла и играет до сих пор важную роль в разви-
тии сетей [87-90].
Полное описание модели OSI занимает более 1000 страниц текста. Это свя-
зано с тем, что сетевое взаимодействие устройств является сложной задачей.
Для решения таких задач обычно используется декомпозиция сложной задачи
на более простые. Декомпозиция выполняется таким образом, чтобы количе-
ство и сложность связей, а также поток данных между подзадачами были мини-
мальными. В модели OSI было использовано семь подзадач (уровней), причем
декомпозиция выполнена таким образом, что взаимодействие осуществляется
только между соседними уровнями.
Такой подход обеспечил возможность решения задачи взаимодействия си-
стем для каждого уровня отдельно, в том числе независимыми группами раз-
работчиков. В частности, для сетевого взаимодействия устройств необходимо
согласовать между собой электрические уровни сигналов, задержки и длитель-
ности импульсов, типы соединителей, способы кодирования информации, спо-
собы обеспечения достоверности передачи, формы и форматы адресации, фор-
маты данных, способы доступа к сети, способы буферизации данных, способы
деления их на пакеты и восстановления целостности сообщений и др.
56
Глава 2
Таблица 2.1
Эталонная модель OSI
Номер уровня Название уровня Протокол Примеры Единица обмена
7 Прикладной Прикладной протокол FTP, HTTP, SMTP APDU, сообщение
6 Уровень представления Протокол уровня представления SSL PPDU
5 Сеансовый Сеансовый протокол SPDU
4 Транспортный Транспортный протокол TCP, UDP, SPX TPDU
3 Сетевой Сетевой протокол IP, IPX Пакет
2 Канальный (пе- редачи данных) Протокол канального уровня Кадр
1 Физический Протокол физического уровня Бит
Семь уровней модели OSI представлены в табл. 2.1.
Модель OSI не включает средства взаимодействия между собой приложе-
ний, расположенных на разных компьютерах сети, такие как, например, DDE,
ОРС или CORBA, а описывает только средства, реализуемые операционной
системой, системными утилитами и аппаратурой. Поэтому прикладной уро-
вень нельзя путать с уровнем взаимодействия приложений, который в модель
OSI не входит.
Если приложение обращается с запросом к прикладному уровню, то на
основании этого запроса программное обеспечение прикладного уровня форми-
рует сообщение, состоящее из заголовка и поля данных, и передает его вниз, на
уровень представления. Протокол представительного уровня выполняет требу-
емые действия, содержащиеся в заголовке прикладного уровня, и добавляет к
сообщению свою служебную информацию — заголовок представительного уров-
ня, в котором содержатся инструкции для соответствующего уровня получате-
ля сообщения. Сформированное таким образом сообщение с уже двумя заго-
ловками передается вниз сеансовому уровню, который также добавляет к нему
свой заголовок. Таким образом, дойдя до физического уровня, сообщение об-
растает семью заголовками, после чего оно передается по сети адресату. Когда
сообщение достигнет адресата, оно проходит весь стек протоколов в обратном
порядке, от физического уровня до прикладного. На каждом уровне выполня-
ются соответствующие функции, содержащиеся в заголовке каждого уровня.
Большинство уровней модели OSI имеют смысл только в сетях с комму-
тацией пакетов (а не каналов). Тем не менее отдельные ее уровни и термины
используются практически во всех сетях. Сеансовый уровень и уровень пред-
ставления на практике используются редко, а сетевой уровень и канальный
практически всегда и сильно перегружены [87].
2.2.1. Физический уровень
На физическом уровне (Physical layer) происходит передача данных по та-
ким линиям связи, как витая пара, коаксиальный кабель, оптоволоконный ка-
бель или радиоканал. Основная функция физического уровня — обеспечить
Промышленные сети и интерфейсы
57
прием логической единицы (а не нуля) на стороне получателя в том случае,
если на стороне отправителя передана единица. На физическом уровне ис-
пользуются понятия: длительность импульса и паузы, длительности фронтов
импульсов, количество проводов и цоколевки разъемов, помехозащищенность,
волновое сопротивление, полоса пропускания, кодирование информации, син-
хронизация, модуляция, определение начала хадра, уровень логической еди-
ницы и логического нуля.
2.2.2. Канальный уровень
На физическом уровне не учитывается, что канал передачи может быть
занят другими устройствами, подключенными к сети. Проверка доступно-
сти канала передачи осуществляется на канальном уровне (Data Link Layer).
Канальный уровень разбивает передаваемые данные на кадры и выполняет
функции обнаружения и коррекции ошибок с помощью контрольной суммы,
помещаемой в начало или конец каждого кадра. Кадр считается получен-
ным, если контрольная сумма, вычисленная на стороне получателя, совпа-
дает с контрольной суммой, приписанной к переданному кадру. При обна-
ружении ошибки канальный уровень может выполнить повторную передачу
поврежденного кадра. Функция исправления ошибок не является обязатель-
ным требованием стандарта.
2.2.3. Сетевой уровень
Основное назначение сетевого уровня (Network Layer) — определение марш-
рутов пересылки пакетов от источника к приемнику сообщений. Маршруты
могут быть жестко заданы или меняться динамически в зависимости от те-
кущей загруженности сети. Сетевой уровень отвечает также за объединение
нескольких разных сетей в единую транспортную систему, причем эти сети мо-
гут использовать различные принципы передачи сообщений, методы адресации
и обладать произвольной структурой связей.
2.2.4. Транспортный уровень
Транспортный уровень (Transport Layer) обеспечивает доставку сообщений
с требуемым уровнем качества (надежности). В модели OSI выделяют на вы-
бор пользователя пять классов сервиса, которые отличаются срочностью до-
ставки сообщений, возможностью восстановления прерванной связи, наличием
средств мультиплексирования нескольких соединений между различными при-
кладными протоколами через общий транспортный протокол, способностью к
обнаружению и исправлению ошибок передачи (таких, как искажение, поте-
ря или дублирование пакетов).
На транспортном уровне выполняется разбивка сообщений сеансового уров-
ня на пакеты, их нумерация, буферизация принимаемых пакетов, упорядочи-
вание прибывающих пакетов, управление потоками.
2.2.5. Сеансовый уровень
Сеансовый уровень (Session Layer) управляет диалогом (сеансом связи): от-
слеживает очередность передачи сообщений участниками сети; вставляет метки
58
Глава 2
в длинные сообщения, чтобы в случае потери связи выполнит повторную пере-
дачу только утерянной части сообщения; устанавливает способ обмена (дуп-
лексный или полудуплексный).
Этот уровень редко используется на практике, а его функции часто объ-
единяются с функциями прикладного уровня.
2.2.6. Уровень представления
Уровень представления (Presentation Layer) оперирует с формой представ-
ления передаваемой по сети информации, не изменяя ее содержания. На этом
уровне может задаваться тип кодирования символов (например, ASCII или
ANSI), может изменяться синтаксис передаваемых сообщений, задаваться тип
шифрования и дешифрования данных для обеспечения их секретности. При-
мером такого протокола является Secure Socket Layer (SSL), обеспечивающий
секретность сообщений для протокола TCP/IP.
2.2.7. Прикладной уровень
Прикладной уровень (Application Layer) представляет собой набор попу-
лярных протоколов, с помощью которых осуществляется доступ к файлам (на-
пример, с помощью протокола FTP) или веб-страницам (с помощью HTTP),
к электронной почте (SMTP).
2.2.8. Критика модели OSI
Несмотря на то что модель OSI является общепризнанным стандартом,
она очень несовершенна [87]. Как мы увидим далее, в промышленных сетях
используются только два или три уровня этой модели, и даже сеть Ethernet не
использует уровни 5 и 6. Существуют четыре причины, объясняющие это [87]:
• несвоевременность — модель OSI появилась слишком поздно, когда начали
появляться и быстро завоевали популярность протоколы TCP/IP, которые
не нуждались в уровнях 5 и 6 этой модели;
• плохая технология — выбор семиуровневой структуры был скорее поли-
тическим, чем техническим. Эталонная модель OSI оказалась невероятно
сложной. Если сложить в стопку распечатку официального описания ее
стандарта, то получится кипа бумаги высотой в один метр [87];
• неудачная реализация — в результате сложности модели и протоколов
неудачу потерпели все фирмы, которые пытались реализовать эту модель;
• неудачная политика — OSI считался детищем европейских телекоммуни-
кационных министерств и правительства США, и, хотя это было не совсем
верно, мысль об этом не способствовала продвижению этой модели на фоне
растущего интереса к модели TCP/IP [87], которая ассоциировалась с по-
пулярной в то время операционной системой UNIX.
Тем не менее, методологически модель OSI очень актуальна до сих пор и
все сетевые стандарты начинают свое описание с указания соответствия между
этой моделью и конкретным стандартом.
Модель OSI будет использована ниже при рассмотрении ряда промыш-
ленных сетей.
Промышленные сети и интерфейсы
59
2.3. Интерфейсы RS-485, RS-422 и RS-232
Интерфейсы RS-485 и RS-422 описаны в стандартах ANSI EIA/TIA*-485-A
и EIA/TIA-422. Интерфейс RS-485 является наиболее распространенным в про-
мышленной автоматике. Его используют промышленные сети Modbus, Profibus
DP, ARCNET, BitBus, WorldFip, LON, Interbus и множество нестандартных се-
тей. Связано это с тем, что по всем основным показателям данный интерфейс
является наилучшим из всех возможных при современном уровне развития тех-
нологии. Основными его достоинствами являются:
• двусторонний обмен данными всего по одной витой паре проводов;
• работа с несколькими трансиверами, подключенными к одной и той же
линии, т.е. возможность организации сети;
• большая длина линии связи;
• достаточно высокая скорость передачи.
2.3.1. Принципы построения
Дифференциальная передача сигнала. В основе построения интерфей-
са RS-485 лежит дифференциальный способ передачи сигнала, когда напряже-
ние, соответствующее уровню логической единицы или нуля, отсчитывается
не от «земли», а измеряется как разность потенциалов между двумя переда-
ющими линиями: Data+ и Data- (рис. 2.1). При этом напряжение каждой
линии относительно «земли» может быть произвольным, но не должно выхо-
дить за диапазон -7...4-12 В [93-95].
Приемники сигнала являются дифференциальными, т.е. воспринимают
только разность между напряжениями на линии Data+ и Data—. При разно-
сти напряжений более 200 мВ, до 4-12 В считается, что на линии установлено
значение логической единицы, при напряжении менее -200 мВ, до -7 В —
логического нуля. Дифференциальное напряжение на выходе передатчика в
Рис. 2.1. Соединение трех устройств с интерфейсом RS-485 по двухпроводной схеме
* EIA (Electronic Industries Association) — ассоциация электронной промышленно-
сти; TIA (Telecommunications Industry Association) — ассоциация телекоммуникационной
промышленности. Занимаются разработкой стандартов.
60
Глава 2
соответствии со стандартом должно быть не менее 1,5 В, поэтому при поро-
ге срабатывания приемника 200 мВ помеха (в том числе падение напряжения
на омическом сопротивлении линии) может иметь размах 1,3 В над уровнем
200 мВ. Такой большой запас необходим для работы на длинных линиях с
большим омическим сопротивлением. Фактически именно этот запас по напря-
жению и определяет максимальную длину линии связи (1200 м) при низких
скоростях передачи (менее 100 кбит/с).
Благодаря симметрии линий относительно «земли» в них наводятся поме-
хи, близкие по форме и величине. В приемнике с дифференциальным входом
сигнал выделяется путем вычитания напряжений на линиях, поэтому после вы-
читания напряжение помехи оказывается равным нулю. В реальных условиях,
когда существует небольшая асимметрия линий и нагрузок, помеха подавля-
ется не полностью, но ослабляется существенно.
Для минимизации чувствительности линии передачи к электромагнитной
наводке используется витая пара проводов. Токи, наводимые в соседних вит-
ках вследствие явления электромагнитной индукции, по «правилу буравчика»
оказываются направленными навстречу друг-другу и взаимно компенсируют-
ся. Степень компенсации определяется качеством изготовления кабеля и ко-
личеством витков на единицу длины.
«Третье» состояние выходов. Второй особенностью передатчика D
(D — Driver) интерфейса RS-485 является возможность перевода выходных
каскадов в «третье» (высокоомное) состояние сигналом DE (Driver Enable)
(рис. 2.1). Для этого запираются оба транзистора выходного каскада пере-
датчика. Наличие третьего состояния позволяет осуществить полудуплексный
обмен между любыми двумя устройствами, подключенными к линии, всего по
двум проводам. Если на рис. 2.1 передачу выполняет устройство В, а прием —
устройство С, то выходы передатчиков А и В переводятся в высокоомное со-
стояние, т.е. фактически к линии оказываются подключены только приемники,
при этом выходное сопротивление передатчиков А и С не шунтирует линию.
Перевод передатчика интерфейса в третье состояние осуществляется обыч-
но сигналом RTS (Request То Send) СОМ-порта.
Четырехпроводной интерфейс. Интерфейс RS-485 имеет две версии:
двухпроводную и четырехпроводную. Двухпроводная используется для полу-
дуплексной передачи (рис. 2.1), когда информация может передаваться в обоих
направлениях, но в разное время. Для полнодуплексной (дуплексной) переда-
чи используют четыре линии связи: по двум информация передается в одном
направлении, по двум другим — в обратном (рис. 2.2).
Недостатком четырехпроводной (рис. 2.2) схемы является необходимость
жесткого указания ведущего и ведомых устройств на стадии проектирования
системы, в то время как в двухпроводной схеме любое устройство может быть
как в роли ведущего, так и ведомого. Достоинством четырехпроводной схемы
является возможность одновременной передачи и приема данных, что бывает
необходимо при реализации некоторых сложных протоколов обмена.
Режим приема эха. Если приемник передающего узла включен во вре-
мя передачи, то передающий узел принимает свои же сигналы. Этот режим
Промышленные сети и интерфейсы
61
Рис. 2.2. Четырехпроводное соединение устройств с интерфейсом RS-485
называется «приемом эха» и обычно устанавливается микропереключателем
на плате интерфейса. Прием эха иногда используется в сложных протоколах
передачи, но чаще этот режим выключен.
Заземление, гальваническая изоляция и защита от молнии. Если
порты RS-485, подключенные к линии передачи, расположены на большом рас-
стоянии один от другого, то потенциалы их «земель» могут сильно различаться.
В этом случае для исключения пробоя выходных каскадов микросхем транси-
веров (приемопередатчиков) интерфейса следует использовать гальваническую
изоляцию между портом RS-485 и землей. При небольшой разности потенциа-
лов «земли» для выравнивания потенциалов, в принципе, можно использовать
проводник, однако такой способ на практике не применяется, поскольку прак-
тически все коммерческие интерфейсы RS-485 имеют гальваническую изоля-
цию (см. например, преобразователь NL-232C или повторитель интерфейсов
NL-485C фирмы НИЛ АП — www.RealLab.ru).
Защита интерфейса от молнии выполняется с помощью газоразрядных и
полупроводниковых устройств защиты (см. главу 3).
2.3.2. Стандартные параметры
В последнее время появилось много микросхем трансиверов интерфейса
RS-485, которые имеют более широкие возможности, чем установленные стан-
дартом. Однако для обеспечения совместимости устройств между собой необ-
ходимо знать параметры, описанные в стандарте (табл. 2.2).
2.3.3. Согласование линии с передатчиком
и приемником
Если время распространения электромагнитного поля через кабель ста-
новится сравнимо с характерными временами передаваемых сигналов, то ка-
бель нужно рассматривать как длинную линию с распределенными параметра-
ми [96]. Скорость распространения электромагнитного поля в нем составляет
60...75 % от скорости света в вакууме и зависит от диэлектрической и магнитной
62
Глава 2
Таблица 2.2
Параметры интерфейса RS-485, установленные стандартом
Параметр Минимум Максимум Условие
Выходное напряжение передатчика, В: без нагрузки с нагрузкой Ток короткого замыкания передатчи- ка, мА Длительность переднего фронта им- пульсов передатчика, % от ширины импульса Синфазное напряжение на выходе пе- редатчика, В Чувствительность приемника, мВ Синфазное напряжение на входе при- емника, В Входное сопротивление приемника, кОм Максимальная скорость передачи, кбит/с, для кабеля длиной: 12 м 1200 м Примечание. Передатчик должен выде ду своими выходами, так и замыканш 1,5...-1,5 1,5...—1,5 -1 —7 12 10 100 ‘рживать р< 5 их на +1 6...-6 5...—5 ±250 30 3 ±200 +12 ?ЖИМ KOpOTI 2 В или —7 йнагр = 0 Танагр — 54 Ом Короткое замыкание вы- хода на источник пита- ния +12 В или на —7 В ^нагр — 54 Ом; Онагр = 5 пФ Танагр —— 54 Ом При синфазном напря- жении от —7 до +12 В сого замыкания как меж- В.
проницаемости диэлектрика кабеля, сопротивления проводника и его конструк-
тивных особенностей. При скорости света в вакууме 300000 км/с для кабеля
длиной 1000 м можно получить скорость распространения электромагнитной
волны в кабеле 200...225 км/с и время распространения 5,6 мкс.
Электромагнитная волна, достигая конца кабеля, отражается от него и воз-
вращается к источнику сигнала, отражается от источника и опять проходит к
концу кабеля. Вследствие потерь на нагрев проводника и диэлектрика ампли-
туда волны в конце кабеля всегда меньше, чем в начале. Для типовых кабелей
можно считать, что только первые три цикла прохождения волны существенно
влияют на форму передаваемого сигнала [93]. Это дает общую длительность
паразитных колебаний на фронтах передаваемых импульсов, связанных с от-
ражениями, около 33,6 мкс при длине кабеля 1 км. Поскольку в приемном узле
универсальный трансивер (Universal Asynchronous Receive Transmit — UART)
определяет логическое состояние линии в центре импульса*, то минимальная
длительность импульса, который еще можно распознать с помощью UART, со-
* В UART после появление переднего фронта стартового бита запускается счетчик,
который отсчитывает время до середины бита и в этой точке определяет значение импуль-
са (единица или ноль). Для большей достоверности распознавания и защиты от помех ча-
сто используется метод голосования, когда выбираются три соседних отчета на середине
импульса и логическое состояние линии определяется путем голосования: если единиц
больше, считается, что принята единица, в противном случае — ноль [97].
Промышленные сети и интерфейсы
63
ставляет 33,6x2 = 67,2 мкс. Поскольку при NRZ кодировании (см. п. 2.6.1) ми-
нимальная длительность импульса позволяет закодировать 1 бит информации,
то получим максимальную скорость передачи информации, которую еще мож-
но принять несмотря на наличие отражений, равную 1/67,2 мкс = 14,9 кбит/с.
Учитывая, что реально условия передачи всегда хуже расчетных, стандартную
скорость передачи 9600 бит/с приближенно можно считать границей, на кото-
рой еще можно передать сигнал на расстояние 1000 м несмотря на наличие
отражений от концов линии.
Рассмотренная ситуация ухудшается с ростом рассогласования между ча-
стотой синхронизации передатчика и приемника, вследствие которой момент
считывания сигнала оказывается смещенным относительно центра импульса.
Следует также учитывать, что на практике не все устройства с интерфейсом
RS-485 используют стандартный UART, считывающий значение логического
состояния посредине импульса.
При большей скорости передачи, например 115200 бит/с, ширина переда-
ваемых импульсов составляет 4,3 мкс, и их невозможно отличить от импуль-
сов, вызванных отражениями от концов линии. Используя вышеприведенные
рассуждения, можно получить, что при скорости передачи 115200 бит/с макси-
мальная длина кабеля, при которой еще можно не учитывать отражения от
концов линии, составляет 60 м.
Для устранения отражений линия должна быть нагружена на сопротивле-
ние, равное волновому сопротивлению кабеля
Zo =
Ro + jusLo
Go + jwCo
(2-1)
где До? Ьо, Go, Co — погонные сопротивление, индуктивность, проводимость
и емкость кабеля соответственно, ju — комплексная круговая частота. Как
следует из этой формулы, в кабеле без потерь волновое сопротивление не зави-
сит от частоты, при этом прямоугольный импульс распространяется по линии
без искажений. В линии с потерями фронт импульса «расплывается» по мере
увеличения расстояния импульса от начала кабеля.
Отношение амплитуды напряжения отраженного синусоидального сигна-
ла (отраженной волны) от конца линии к амплитуде сигнала, пришедшего к
концу линии (падающей волны) называется коэффициентом отражения по на-
пряжению [98], который зависит от степени согласованности волновых сопро-
тивлений линии и нагрузки:
(2-2)
_ Rh — Zp
U~ Rh + Zo'
где Дн — сопротивление согласующего резистора на конце или в начале линии
(кабеля). Случай Дн = Zq соответствует идеальному согласованию линии, при
котором отражения отсутствуют (Ди = 0).
Для согласования линии используют терминальные (концевые) резисторы
(рис. 2.3). Величину резистора выбирают в зависимости от волнового сопротив-
ления используемого кабеля. Для систем промышленной автоматики исполь-
зуются кабели с волновым сопротивлением от 100 до 150 Ом, однако кабели,
64
Глава 2
Рис. 2.3. Применение терминальных резисторов для согласования линии передачи
спроектированные специально для интерфейса RS-485, имеют волновое сопро-
тивление 120 Ом. На такое же сопротивление обычно рассчитаны микросхемы
трансиверов интерфейса RS 485. Поэтому сопротивление терминального рези-
стора выбирается равным 120 Ом, мощность 0,25 Вт.
Резисторы ставят на двух противоположных концах кабеля. Распростра-
ненной ошибкой является установка резистора на входе каждого приемника,
подключенного к линии, или на конце каждого отвода от линии, что перегру-
жает стандартный передатчик. Дело в том, что два терминальных резистора
в сумме дают 60 Ом и потребляют ток 25 мА при напряжении на выходе пере-
датчика 1,5 В; кроме этого, 32 приемника со стандартным входным током 1 мА
потребляют от линии 32 мА, при этом общее потребление тока от передатчика
составляет 57 мА. Обычно это значение близко к максимально допустимому то-
ку нагрузки стандартного передатчика RS 485. Поэтому нагрузка передатчика
дополнительными резисторами может привести к его отключению средствами
встроенной автоматической защиты от перегрузки.
Второй причиной, которая запрещает использование резистора в любом
месте, кроме концов линии, является отражение сигнала от места располо-
жения резистора.
При расчете сопротивления согласующего резистора нужно учитывать об-
щее сопротивление всех нагрузок на конце линии. Например, если к кон-
цу линии подключен шкаф комплектной автоматики, в котором расположены
30 модулей с портом RS-485, каждый из которых имеет входное сопротивление
12 кОм, то общее сопротивление всех модулей будет равно 12 кОм/ЗО = 400 Ом.
Поэтому для получения сопротивления нагрузки линии 120 Ом сопротивление
терминального резистора должно быть равно 171 Ом.
Отметим недостаток применения согласующих резисторов. При длине ка-
беля 1 км его омическое сопротивление (для типового стандартного кабеля)
составит 97 Ом. При наличии согласующего резистора 120 Ом образуется ре-
зистивный делитель, который примерно в 2 раза ослабляет сигнал, и ухудшает
отношение сигнал/шум на входе приемника. Поэтому при низких скоростях
передачи (менее 9600 бит/с) и большом уровне помех терминальный резистор
не улучшает, а ухудшает надежность передачи.
Промышленные сети и интерфейсы
65
В промышленных преобразователях интерфейса RS-232 в RS-485 согласу-
ющие резисторы обычно уже установлены внутри изделия и могут отключать-
ся микропереключателем (джампером). Поэтому перед применением таких
устройств необходимо проверить, в какой позиции находится переключатель.
2.3.4. Топология сети на основе интерфейса RS-485
Топология сетей на основе интерфей-
са RS-485 определяется необходимостью
устранения отражений в линии передачи.
Поскольку отражения происходят от лю-
бой неоднородности, в том числе ответв-
лений от линии, то единственно правиль-
ной топологией сети будет такая, которая
выглядит как единая линия без отводов,
к которой не более чем в 32 точках под-
ключены устройства с интерфейсом RS-485
(рис. 2.4,а). Любые варианты, в которых
линия имеет длинные отводы или соеди-
нение нескольких кабелей в одной точке
(рис. 2.4,6), приводят к отражениям и сни-
жению качества передачи.
Однако сказанное справедливо толь-
ко для высоких скоростей передачи (бо-
лее 9600 бит/с), когда эффекты отражения
влияют на достоверность передачи. Для
низких скоростей длина отвода (рис. 2.3)
может быть произвольной.
Если существует необходимость раз-
ветвления линии, то это можно сделать
с помощью повторителей интерфейса
(рис. 2.5) или концентратора (хаба) (см.
п. 2.12.2). Повторители позволяют разде-
лить линию на сегменты, в каждом из ко-
торых выполняются условия согласования
зисторов и не возникают эффекты, связанные с отражениями от концов линии,
а длина отвода от линии до повторителя всегда может быть сделана доста-
точно малой (рис. 2.5).
а)
Рис. 2.4. Правильная (а) и непра-
вильная (6) топологии сети на
основе интерфейса RS-485. Квад-
ратиками обозначены устрой-
ства с интерфейсом RS-485
помощью двух терминальных ре-
с
2.3.5. Устранение состояния неопределенности линии
Когда передатчики всех устройств, подключенных к лини, находятся в тре-
тьем (высокоомном) состоянии, логическое состояние линии и входов всех при-
емников не определено. Чтобы устранить эту неопределенность, неинвертирую-
щий вход приемника соединяют через резистор с шиной питания, а инвертирую-
щий — с шиной «земли». Величины резисторов выбирают такими, чтобы напря-
жение между входами стало больше порога срабатывания приемника (4-200 мВ).
66
Глава 2
Рис. 2.5. Применение повторителей интерфейса для разветвления линии передачи
Поскольку эти резисторы оказываются подключенными параллельно ли-
нии передачи, то для обеспечения согласования линии с интерфейсом необхо-
димо, чтобы эквивалентное сопротивление на входе линии было равно 120 Ом.
Например, если резисторы, используемые для устранения неопределенно-
сти состояния линии, имеют сопротивление 450 Ом каждое, то резистор для
согласования линии должен иметь номинал 130 Ом, тогда эквивалентное со-
противление цепи будет равно 114... 120 Ом. Для того чтобы найти дифферен-
циальное напряжение линии в третьем состоянии всех пе-
редатчиков (рис. 2.6), нужно учесть, что к противополож-
ному концу линии в стандартной конфигурации подключен
еще один резистор сопротивлением 120 Ом и до 32 приемни-
ков с входным дифференциальным сопротивлением 12 кОм.
Тогда при напряжении питания V = 5 В (рис. 2.6) диффе-
ренциальное напряжение линии будет равно 4-272 мВ, что
удовлетворяет требованию стандарта.
Рис. 2.6. Резисторная цепь на выходе трансивера интерфейса,
устраняющая неопределенное состояние линии и обеспечивающая
ее согласование
2.3.6. Сквозные токи
В сети на основе интерфейса RS-485 может быть ситуация, когда включены
два передатчика одновременно. Если при этом один из них находится в состо-
янии логической единицы, а второй — в состоянии логического нуля, то от
источника питания на землю течет «сквозной» ток большой величины, ограни-
ченный только низким сопротивлением двух открытых транзисторных ключей.
Этот ток может вывести из строя транзисторы выходного каскада передатчика
или вызвать срабатывание их схемы защиты.
Такая ситуация возможна не только при грубых ошибках в программном
обеспечении, но и в случае, если неправильно установлена задержка между
моментом выключения одного передатчика и включением другого. Ведомое
устройство не должно передавать данные до тех пор, пока передающее не за-
кончит передачу. Повторители интерфейса должны определять начало и ко-
Промышленные сети и интерфейсы
67
нец передачи данных и в соответствии ними переводить передатчик в актив-
ное или третье состояние.
2.3.7. Выбор кабеля
В зависимости от скорости передачи и необходимой длины кабеля мож-
но использовать либо специально спроектированный для интерфейса RS-485
кабель, либо практически любую пару проводов. Кабель, спроектированный
специально для интерфейса RS-485, является витой парой с волновым сопро-
тивлением 120 Ом.
Для хорошего подавления излучаемых и принимаемых помех важно боль-
шое количество витков на единицу длины кабеля, а также идентичность па-
раметров всех проводов.
При использовании неизолированных трансиверов интерфейса, кроме сиг-
нальных проводов, в кабеле необходимо предусмотреть еще одну витую па-
ру для соединения цепей заземления соединяемых интерфейсов. При наличии
гальванической изоляции интерфейсов этого делать не нужно.
Кабели могут быть экранированными или нет. Без эксперимента очень
трудно решить, нужен ли экран. Однако, учитывая, что стоимость экраниро-
ванного кабеля не намного выше, лучше всегда использовать кабель с экраном.
При низкой скорости передачи и на постоянном токе большую роль играет
падение напряжения на омическом сопротивлении кабеля. Так, стандартный
кабель для интерфейса RS-485 сечением 0,35 кв.мм имеет омическое сопротив-
ление 48,5x2 = 97 Ом при длине 1 км. При терминальном резисторе 120 Ом
кабель будет выполнять роль делителя напряжения с коэффициентом деле-
ния 0,55, т.е. напряжение на выходе кабеля будет примерно в 2 раза меньше,
чем на его входе. Этим ограничивается допустимая длина кабеля при ско-
рости передачи менее 100 кбит/с.
На более высоких частотах допустимая длина кабеля уменьшается с ро-
стом частоты (рис. 2.7) и ограничивается потерями в кабеле и эффектом дро-
Рис. 2.7. Зависимость допустимой длины кабеля от скорости передачи
для интерфейса RS-485
68
Глава 2
жания фронта импульсов. Потери складываются из падения напряжения на
омическом сопротивлении проводников, которое на высоких частотах возрас-
тает за счет вытеснения тока к поверхности (скин-эффект) и потерь в диэлек-
трике. К примеру, ослабление сигнала в кабеле Belden 9501PVC составляет
10 дБ (3,2 раза) на частоте 20 МГц и 0,4 дБ (на 4,7 %) на частоте 100 кГц
[93] при длине кабеля 100 м.
Параметр дрожания фронта импульсов определяется с помощью «глазко-
вой диаграммы» [91, 99]. На вход линии подается псевдослучайная двоичная
последовательность импульсов, минимальная ширина которых соответствует
заданной скорости передачи, к выходу подключается осциллограф. Если к
моменту прихода очередного импульса переходный процесс, вызванный преды-
дущим импульсом, не успевает установиться, то «хвост» предыдущего импуль-
са складывается с началом очередного, что приводит к сдвигу точки пересе-
чения импульсами нулевого уровня на входе дифференциального приемника.
Величина сдвига зависит от ширины импульсов и длительности паузы между
ними. Поэтому, когда на вход линии подают псевдослучайную двоичную по-
следовательность импульсов, то на осциллографе, подключенном к выходу ли-
нии, описанный сдвиг проявляется как размытость или дрожание фронтов им-
пульсов, наложенных друг на друга. Это дрожание ограничивает возможность
распознавания логических уровней и скорость передачи информации. Величи-
на дрожания оценивается в процентах относительно ширины самого короткого
импульса (рис. 2.8). Чем больше дрожание, тем труднее распознать сигнал
и тем ниже достоверность передачи.
На рис. 2.8 показана зависимость допустимой длины кабеля от скорости
передачи при скоростях более 100 кбит/с и использовании трансивера DS3695
фирмы National Semiconductor [100]. Зависимость построена для трех значений
Рис. 2.8. Зависимость допустимой длины кабеля от скорости передачи
при скорости более 100 кбит/с
Промышленные сети и интерфейсы
69
показателей качества передачи сигнала, которые оценивается величиной дро-
жания фронта импульса. Как видно, допустимая длина может быть увеличена
при снижении требований к качеству передачи. Нижняя кривая на рис. 2.8 по-
казана для случая, когда длительность фронта импульса после прохождения
сигнала по линии увеличивается до 30 % от ширины импульса. Увеличение
длительности фронтов на конце линии — вторая причина, по которой длина
линии не может быть больше указанной на рис. 2.8.
2.3.8. Расширение предельных возможностей
Стандарт RS-485 допускает подключение не более 32 приемников к одно-
му передатчику. Эта величина ограничивается мощностью выходного каска-
да передатчика при стандартном входном сопротивлении приемника 12 кОм.
Количество нагрузок (приемников) может быть увеличено с помощью более
мощных передатчиков, приемников с большим входным сопротивлением и про-
межуточных ретрансляторов сигнала (повторителей интерфейса). Все эти ме-
тоды используются на практике, когда это необходимо, хотя они выходят за
рамки требований стандарта.
В некоторых случаях требуется соединить устройства на расстоянии бо-
лее 1200 м или подключить к одной сети более 32 устройств. Это можно сде-
лать с помощью повторителей (репитеров, ретрансляторов) интерфейса. По-
вторитель устанавливается между двумя сегментами линии передачи, прини-
мает сигнал одного сегмента, восстанавливает фронты импульсов и передает
его с помощью стандартного передатчика во второй сегмент (см. рис. 2.5). Та-
кие повторители обычно являются двунаправленными и имеют гальваническую
изоляцию. Примером может служить повторитель NL-485C фирмы НИЛ АП
(www.RealLab.ru). Каждый повторитель позволяет добавить к линии 31 стан-
дартное устройство и увеличить длину линии на 1200 м.
Распространенным методом увеличения числа нагрузок линии является
использование приемников с более высокоомным входом, чем предусмотрено
стандартом EIA/TIA-485 (12 кОм). Например, при входном сопротивлении
приемника 24 кОм к стандартному передатчику можно подключить 64 при-
емника. Уже выпускаются микросхемы трансиверов для интерфейса RS-485
с возможностью подключения 64, 128 и 256 приемников в одном сегменте се-
ти (www.analog.com/RS485). Отметим, что увеличение количества нагрузок
путем увеличения входного сопротивления приемников приводит к уменьше-
нию мощности передаваемого по линии сигнала и, как следствие, к сниже-
нию помехоустойчивости.
2.3.9. Интерфейсы RS-232 и RS-422
Интерфейс RS-422 используется гораздо реже, чем RS-485 и, как правило,
не для создания сети, а для соединения двух устройств на большом расстоянии
(до 1200 м), поскольку интерфейс RS-232 работоспособен только на расстоянии
до 15 м. Каждый передатчик RS-422 может быть нагружен на 10 приемников.
Интерфейс работоспособен при напряжении до ±7 В.
70
Глава 2
Рис. 2.9. Соединение двух модулей преобразователей интерфейса RS-232/RS-422
На рис. 2.9 показан пример соединения двух интерфейсов RS-422 преоб-
разователей типа NL-232C фирмы НИЛ АП с целью увеличения дальности
связи двух устройств.
В табл. 2.3 приведено сравнение основных характеристик трех наиболее
популярных интерфейсов, используемых в промышленной автоматизации.
Таблица 2.3
Сравнение интерфейсов RS 232, RS-422 и RS-485
Параметр RS-232 RS-422 | RS-485
Способ передачи сигнала Максимальное количество приемников Максимальная длина кабеля, м Максимальная скорость передачи, Мбит/с Синфазное напряжение на выходе, В Напряжение в линии под нагрузкой, В Импеданс нагрузки, Ом Ток утечки в «третьем» состоянии, мкА Допустимый диапазон сигналов на входе приемника, В Чувствительность приемника, В Входное сопротивление приемника, кОм * Скорость передачи 30 Мбит/с обеспечиваем является стандартной. Однофазный 1 15 0,460 ±25 ±5... ±15 3000...7000 ±15 ±3 3...7 гея современной Дифферен 10 1200 10 —0,25...±6 ±2 100 ±10 ±0,2 4 элементной б циальный 32 1200 30* —7...±12 ±1,5 54 ±100 —7...±12 ±0,2 > 12 »азой, но не
2.4. Интерфейс «токовая петля»
Интерфейс «токовая петля» используется для передачи информации с
1950-х годов. Первоначально в нем использовался ток 60 мА [101]; позже, с
1962 г., получил распространение интерфейс с током 20 мА, преимущественно
в телетайпных аппаратах. В 1980-х годах начала широко применяться «токовая
Промышленные сети и интерфейсы
71
Рис. 2.10. Принцип действия «токовой петли*
петля» 4...20 мА в разнообразном технологическом оборудовании, датчиках и
исполнительных устройствах средств автоматики. Популярность «токовой пет-
ли» начала падать после появления стандарта на интерфейс RS-485 (1983 г.),
и в настоящее время в новом оборудовании она практически не применяется.
В передатчике «токовой петли» используется не источник напряжения, как
в интерфейсе RS-485, а источник тока. По определению, ток, вытекающий из
источника тока, не зависит от параметров нагрузки. Поэтому в «токовой пет-
ле» протекает ток, не зависящий от сопротивления кабеля Якаб, сопротивления
нагрузки Ян и э.д.с. индуктивной помехи ЕИНД (рис. 2.10), а также от напря-
жения питания источника тока Еп (рис. 2.11). Ток в петле может измениться
только вследствие утечек кабеля, которые очень малы.
Это свойство токовой петли является основным и определяет все варианты
ее применения. Емкостная наводка Еемк, э.д.с. которой приложена не после-
довательно с источником тока, а параллельно ему, не может быть ослаблена
в «токовой петле», и для ее подавления следует использовать экранирование
(подробнее о борьбе с помехами см. главу 3).
В качестве линии передачи обычно используется экранированная витая па-
ра, которая совместно с дифференциальным приемником позволяет ослабить
индуктивную и синфазную помеху.
Рис. 2.11. Два варианта построения аналоговой «токовой петли»: со встроенным
в передатчик (а) и выносным (б) источником питания
72
Глава 2
Рис. 2.12. Зависимость максимальной скорости передачи «токовой петли*
от длины неэкранированной витой пары 22 AWG при токе петли 20 мА
На приемном конце ток петли преобразуется в напряжение с помощью ка-
либрованного сопротивления Ян. При токе 20 мА для получения стандарт-
ного напряжения 2,5, 5 или 10 В используют резистор сопротивлением 125,
250 или 500 Ом соответственно.
Основным недостатком «токовой петли» является ее принципиально низкое
быстродействие, которое ограничивается скоростью заряда емкости кабеля Скаб
от источника тока. Например, при типовой погонной емкости кабеля 75 пФ/м и
длине 1 км емкость кабеля составит 75 нФ. Для заряда такой емкости от источ-
ника тока 20 мА до напряжения 5 В необходимо время 19 мкс, что соответствует
скорости передачи около 9 кбит/с. На рис. 2.12 приведены зависимости макси-
мальной скорости передачи от длины кабеля при разных уровнях искажений
(дрожания), который оценивался так же, как и для интерфейса RS-485 [102].
Вторым недостатком «токовой петли», ограничивающим ее практическое
применение, является отсутствие стандарта на конструктивное исполнение
разъемов и электрические параметры, хотя фактически стали общеприняты-
ми диапазоны токовых сигналов 0...20 и 4...20 мА; гораздо реже используют
0...60 мА. В перспективных разработках рекомендуется использовать только
диапазон 4...20 мА, как обеспечивающий возможность диагностики обрыва ли-
нии (см. главу 8).
Интерфейс «токовая петля» распространен в двух версиях: цифровой и
аналоговой.
Аналоговая «токовая петля». Аналоговая версия «токовой петли» ис-
пользуется, как правило, для передачи сигналов от разнообразных датчиков
к контроллеру или от контроллера к исполнительным устройствам. Приме-
нение «токовой петли» в данном случае дает два преимущества. Во-первых,
приведение диапазона изменения измеряемой величины к стандартному диа-
пазону обеспечивает взаимозаменяемость компонентов. Во-вторых, становится
возможным передать сигнал на большое расстояние с высокой точностью (по-
Промышленные сети и интерфейсы
73
грешность «токовой петли» может быть снижена до ±0,05 %). Кроме того,
стандарт «токовая петля» поддерживается подавляющим большинством про-
изводителей средств промышленной автоматизации.
В варианте «4...20 мА» в качестве начала отсчета принят ток 4 мА. Это
позволяет производить диагностику целостности кабеля (кабель имеет разрыв,
если ток равен нулю) в отличие от варианта «0...20 мА», где величина 0 мА
может означать не только нулевую величину сигнала, но и обрыв кабеля. Вто-
рым преимуществом уровня отсчета 4 мА является возможность подачи энер-
гии датчику для его питания.
На рис. 2.11 показаны два варианта построения аналоговой «токовой пет-
ли». В варианте а используется встроенный незаземленный источник питания
Еп, в варианте б источник питания — внешний. Встроенный источник удобен
при монтаже системы, а внешний удобен тем, что его можно выбрать с любыми
параметрами в зависимости от поставленной задачи.
Принцип действия обоих вариантов состоит в том, что при бесконечно боль-
шом коэффициенте усиления операционного усилителя (ОУ) напряжение меж-
ду его входами равно нулю и поэтому ток через резистор Rq равен Кх/Яо, а
поскольку у идеального ОУ ток входов равен нулю, ток через резистор строго
равен току в петле (7 = Vbx/Rq) и, как следует из этой формулы, не зави-
сит от сопротивления нагрузки. Поэтому напряжение на выходе приемника
определяется как IRH = (Ян/ЯоЖх-
Достоинством схемы с операционным усилителем является возможность
калибровки передатчика без подключенного к нему кабеля и приемника, по-
скольку вносимая ими погрешность пренебрежимо мала.
Напряжение источника Еп выбирается такой, чтобы обеспечить работу
транзистора передатчика в активном (ненасыщенном) режиме и скомпенсиро-
вать падение напряжения на проводах кабеля и сопротивлениях Rq, Rn. Для
этого выбирают Е > I(Rq + йкаб + Ян) + К ас, где УНас — напряжение насыщения
транзистора (1...2 В). Например, при типовых значениях Rq = Rn = 500 Ом и
сопротивлении кабеля 100 Ом (при длине 1 км) получим напряжение источника
питания петли 22 В; ближайшее стандартное значение равно 24 В.
В схемах на рис. 2.11 используется гальваническая развязка между вхо-
дом передатчика и передающим каскадом. Она необходима для исключения
паразитных связей между передатчиком и приемником (подробнее см. главу 3).
Примером передатчика для аналоговой токовой петли является модуль
NL-4AO (www.RealLab.ru), имеющий четыре канала вывода аналоговых сиг-
налов, гальваническую развязку и предназначенный для вывода из компью-
тера и передачи на исполнительные устройства тока в стандарте 0...20 или
4...20 мА. Структура модуля приведена в главе 6. Модуль содержит микро-
контроллер, который осуществляет связь с компьютером по интерфейсу RS-
485, исполняет команды компьютера и выполняет компенсацию погрешностей
преобразования с помощью коэффициентов, полученных при калибровке ис-
точников тока и хранимых в запоминающем устройстве ЭППЗУ (электриче-
ски программируемое постоянное запоминающее устройство). Преобразование
цифровых данных в аналоговый сигнал выполняется с помощью 4-канального
цифро-аналогового преобразователя (ЦАП). Для расширения функциональных
74
Глава 2
Рис. 2.13. Принцип реализации цифровой «токовой петли»
Приемник
возможностей модуль имеет также выходы напряжения (которые не имеют от-
ношения к рассматриваемой теме).
Цифровая «токовая петля» используется обычно в версии «0...20 мА»,
поскольку она реализуется гораздо проще, чем в версии «4...20 мА» (рис. 2.13).
Поскольку при цифровой передаче данных точность передачи логических уров-
ней роли не играет, можно использовать источник тока с не очень большим
внутренним сопротивлением и низкой точностью. Так, на рис. 2.13 при стан-
дартном значении напряжения питания Еп = 24 В и падении напряжения на
входе приемника 0,8 В для получения тока 20 мА сопротивление должно быть
равно примерно 1,2 кОм. Сопротивление кабеля сечением 0,35 мм2 и длиной
1 км равно 97 Ом, что составит всего 10 % общего сопротивления петли, и им
можно пренебречь. Падение напряжения на диоде оптрона составляет 3,3 %
напряжения источника питания, и его влиянием на ток в петле также можно
пренебречь. Поэтому с достаточной для прак-
тики точностью можно считать, что передатчик
в этой схеме является источником тока.
Как аналоговая, так и цифровая «токовая
петля» могут использоваться для передачи ин-
формации нескольким приемникам одновремен-
но (рис. 2.14). Вследствие низкой скорости пе-
редачи информации по «токовой петле» согла-
сование длинной линии с передатчиком и при-
«Токовая петля» нашла свое «второе рож-
дение» в протоколе HART.
HART-протокол
HART-протокол (Highway Addressable Remote Transducer — магистраль-
ный адресуемый удаленный преобразователь) [103] является открытым стан-
дартом на метод сетевого обмена, который включает в себя не только прото-
кол взаимодействия устройств, но и требования к аппаратуре канала связи,
поэтому устоявшийся термин «протокол», означающий алгоритм взаимодей-
ствия устройств, применен здесь не совсем корректно. Стандарт HART был
разработан в 1980 г. фирмой Rosemount Inc., которая позже сделала его откры-
тым. В настоящее время стандарт поддерживается международной организа-
цией HART Communication Foundation (HCF), насчитывающей 190 членов (на
Рис. 2.14. Токовая петля мо-
жет быть использована для пе-
редачи информации нескольким
приемникам
емником не требуется.
2.5.
Промышленные сети и интерфейсы
75
декабрь 2006 г.). HART находит применение для связи контроллера с датчи-
ками и измерительными преобразователями, электромагнитными клапанами,
локальными контроллерами, для связи с искробезопасным оборудованием.
Несмотря на свое низкое быстродействие (1200 бит/с) и ненадежный ана-
логовый способ передачи данных, а также появление более совершенных се-
тевых технологий, устройства с HART-протоколом разрабатываются до сих
пор, и объем этого сегмента рынка продолжает расти. Однако применение
HART в России довольно ограничено, поскольку внедрение датчиков с HART-
протоколом требует одновременного применения HART-совместимых контрол-
леров и специализированного программного обеспечения. Типовой областью
применение HART являются достаточно дорогие интеллектуальные устройства
(электромагнитные клапаны, датчики потока жидкости, радарные уровнемеры
ит. п), а также взрывобезопасное оборудование, где низкая мощность НART-
сигнала позволяет легко удовлетворить требованиям стандартов на искробез-
опасные электрические цепи.
Стандарт HART включает в себя 1-й, 2-й и 7-й уровни модели OSI
(табл. 2.4). Полное описание стандарта можно купить в организации HCF
(www.hartcomm.org).
Таблица 2.4
Модель OSI HART-протокола
Номер уровня Название уровня HART
7 Прикладной HART-команды, ответы, типы данных
6 Уровень представления Нет
5 Сеансовый Нет
4 Транспортный Нет
3 Сетевой Нет
2 Канальный (передачи данных) Ведущий/ведомый, контрольная сумма, кон- троль четности, организация потока битов в со- общение, контроль приема сообщений
1 Физический Наложение цифрового ЧМ сигнала на аналого- вый 4...20 мА; медная витая пара
Принципы построения. При создании HART-протокола в 1980 г. пре-
следовалась цель сделать его совместимым с широко распространенным в то
время стандартом «токовая петля», но добавить возможности, необходимые
для управления интеллектуальными устройствами. Поэтому аналоговая «то-
ковая петля» 4...20 мА была модернизирована таким образом, что получила
возможность полудуплексного цифрового обмена данными. Для этого аналого-
вый сигнал суммируется с цифровым сигналом (рис. 2.15) и полученная таким
образом сумма передается с помощью источника тока 4...20 мА по линии свя-
зи. Благодаря сильному различию диапазонов частот аналогового (0...10 Гц) и
цифрового (1200 и 2200 Гц) сигналов они легко могут быть разделены фильтра-
ми низких и высоких частот в приемом устройстве. При передаче цифрового
двоичного сигнала логическая единица кодируется синусоидальным сигналом с
76
Глава 2
Рис. 2.15. Суммирование аналогового и цифрового сигнала в НART-протоколе
частотой 1200 Гц, ноль — 2200 Гц. При смене частоты фаза колебаний остается
непрерывной. Такой способ формирования сигнала называется частотной ма-
нипуляцией с непрерывной фазой. Выбор частот соответствует американскому
стандарту BELL 202 на телефонные каналы связи.
Принцип взаимодействия устройств на физическом уровне модели OSI по-
казан на рис. 2.16. Сопротивление Rn выбирается так же, как и в токовой петле
(стандартом предусмотрена величина 230... 1100 Ом), и служит для преобразо-
вания тока 4...20 мА в напряжение. Акт взаимодействия устройств инициирует
контроллер. Цифровой сигнал от источника напряжения Е~ через конденса-
тор подается в линию передачи и принимается на стороне датчика в форме
напряжения в диапазоне от 400 до 800 мВ. Приемник датчика воспринимает
HART-сигналы в диапазоне от 120 мВ до 2 В, сигналы от 0 до 80 мВ при-
емником игнорируются. Получив запрос, датчик формирует ответ, который
в общем случае может содержать как аналоговый сигнал A(t)2, так и цифро-
Рис. 2.16. Принцип работы HART-протокола на физическом уровне
Промышленные сети и интерфейсы
77
вой D(t)2. Аналоговый сигнал обычно содержит информацию об измеренной
величине, а цифровой — о единицах и диапазоне измерения, о выходе вели-
чины за границы динамического диапазона, о типе датчика, имени изгото-
вителя и т.п.). Аналоговый и цифровой сигналы суммируются и подаются
в линию связи в форме тока (рис. 2.15, 2.16). На стороне контроллера ток
преобразуется в напряжение резистором RH. Полученный сигнал подается на
фильтр нижних частот с частотой среза 10 Гц и на фильтр верхних частот
с частотой среза 400...800 Гц. На выходе фильтров выделяются цифровой
сигнал D(t)2 и аналоговый A(t)2. При использовании фильтров второго по-
рядка погрешность, вносимая цифровым сигналом в аналоговый, составляет
всего 0,01 % от 20 мА.
Как и в обычной «токовой петле», источник тока в HART-устройстве может
иметь внешний или встроенный источник питания.
В частном случае HART-протокол может использовать только цифровой
сигнал, без аналогового, или только аналоговый сигнал 4...20 мА, без циф-
рового.
В случае, когда ведомым устройством является не датчик, а исполнитель-
ное устройство (например электромагнитный клапан), аналоговый сигнал в
форме тока должен передаваться от ведущего устройства к ведомому и источ-
ник тока должен находиться в ведущем устройстве (ситуация, обратная пока-
занной на рис. 2.16). Поскольку НART-устройства содержат микроконтроллер
и МОП-ключи, необходимое для этого переконфигурирование передатчика и
приемника выполняется путем подачи соответствующей команды.
HART-устройства всегда содержат микроконтроллер (рис. 2.17) с UART
и ППЗУ (перепрограммируемое постоянное запоминающее устройство). Циф-
ровой сигнал, сформированный микроконтроллером, преобразуется в UART
в непрерывную последовательность бит, состоящую из двоичных слов длиной
11 бит каждое (рис. 2.18,а). Каждое слово начинается со стартового бита (логи-
ческий ноль), за которым следует байт передаваемых данных, затем бит парите-
та и стоповый бит. Сформированная таким образом последовательность нулей
и единиц передается в модем, выполняющий частотную манипуляцию (ЧМ).
Полученный частотно-манипулированный сигнал передается в интерфейсный
блок для формирования напряжения, подаваемого в линию связи (напомним,
что от контроллера к датчику передается сигнал в форме напряжения, а об-
ратно — в форме тока).
На стороне датчика сигнал принимается из линии интерфейсным блоком,
преобразуется ЧМ-модемом в последовательность битов, из которой контрол-
лер выделяет байты данных и биты паритета. Микроконтроллер проверяет
соответствие бита паритета переданному байту для каждого переданного сло-
ва, пока не обнаружит признак конца сообщения.
Получив команду, контроллер приступает к ее выполнению. Если пришла
команда запроса измеренных данных, контроллер датчика принимает через
АЦП сигнал датчика, преобразует его в аналоговую форму с помощью ЦАП,
суммирует со служебной информацией на выходе ЧМ модема и передает в ли-
нию связи в форме тока 4...20 мА (рис. 2.17).
78
Глава 2
Рис. 2.17. Прохождение аналоговых и цифровых сигналов через устройства
с HART-протоколом
Стартовый
Бит Столовый
а)
РА SD AD CD ВС ST DT (0...25 байт) СНК
б)
Рис. 2.18. Структура слова (а) и сообщения (б) в HART-протоколе
Сеть на основе HART-протокола. Описанный выше обмен информа-
цией между двумя устройствами (типа «точка-точка») является наиболее ти-
пичным применением HART-протокола. Однако HART-устройства могут быть
объединены в сеть. Для этого используют только цифровую часть HART-
протокола, без аналоговой, а информация передается в форме напряжения,
что позволяет соединять HART-устройства параллельно. Максимальное ко-
личество устройств в сети может составлять 15, если не использовать HART-
повторители (ретрансляторы, репитеры). HART-сеть может иметь произволь-
ную топологию, поскольку при малых скоростях передачи (1200 бит/с) эффек-
тов, характерных для длинных линий, не возникает. Этим же объясняются
крайне низкие требования к полосе пропускания кабеля (2,5 кГц по уровню
—3 дБ). Такой полосе соответствует постоянная времени линии передачи 65 мкс,
т.е. при сопротивлении линии 250 Ом ее емкость может достигать 0,26 мкФ, что
соответствует длине кабеля около 2...3 км (табл. 2.5).
В сети могут быть два ведущих устройства, одним из которых является кон-
троллер, вторым — ручной коммуникатор, используемый для считывания по-
казаний и установки параметров HART-устройств. Коммуникатор может быть
Промышленные сети и интерфейсы
79
подключен в любом месте сети,
но обычно доступными являются
только клеммы датчиков или ком-
мутационные клеммы в монтаж-
ном шкафу.
Сеть допускает горячую заме-
ну или добавление новых уст-
ройств (т.е. без отключения пита-
ния). В случае сбоя, например
Таблица 2.5
Зависимость длины кабеля от погонной емкости
Число устройств в сети Длина кабеля, м, при погонной емкости, пФ/м
65 95 160 225
1 2800 2000 1300 1000
5 2500 1800 1150 900
10 2100 1600 1000 750
15 1800 1400 900 700
при случайном коротком замыкании, сеть повторяет невыполненные опера-
ции обмена.
В HART-сети только один узел может посылать сигнал, в это время осталь-
ные «слушают» линию. Инициирует процедуру обмена ведущее устройство
(контроллер или ручной коммуникатор). Ведомые получают команду и по-
сылают ответ на нее. Каждое ведомое устройство имеет персональный се-
тевой адрес, который включается в сообщение ведущего устройства. Адрес
имеет длину 4 бита (короткий адрес) или 38 бит (длинный адрес). Имеется
также второй способ адресации — с помощью тегов (идентификаторов, назна-
чаемых пользователем).
Каждая команда или ответ на нее называются сообщением и имеют дли-
ну от 10... 12 до 20...30 байт. Сообщение начинается с преамбулы и заканчи-
вается контрольной суммой (см. рис. 2.18). Элементы сообщения (слова) пе-
речислены в табл. 2.6.
Таблица 2.6
Значения слов в HART-сообщении
Обозначение Название Длина, байт Назначение
РА Преамбула 5...20 Синхронизация и обнаружение несущей
SD Признак старта 1 Указывает формат сообщения и источ- ник сообщения
AD Адрес 1 байт или 38 бит Указывает адреса обоих устройств
CD Команда 1 Сообщает подчиненному, что нужно сделать
ВС Число байт в DT 1 Показывает число байт между ВС и СНК
ST Статус 0, если ведущий; 2, если ведомый Сообщает ошибки обмена данными, со- стояние устройства
DT Данные 0...253 Аргумент, соответствующий команде CD
СНК Контрольная сумма 1 Обнаружение ошибок
Преамбула представляет собой последовательность единиц и предназначе-
на для синхронизации приемника с передатчиком. Длина преамбулы зависит
от требований ведомого устройства. Когда ведущее устройство выполняет об-
мен с ведомым первый раз, оно посылает максимально длинную преамбулу,
80
Глава 2
чтобы обеспечить надежную синхронизацию. В ответе ведомого содержится
требование к длине преамбулы. Эта длина сохраняется в памяти ведущего
устройства и используется в последующих сообщениях. Поскольку различные
ведомые могут иметь различные требования к преамбулам, ведущий формиру-
ет в своей памяти таблицу преамбул. В настоящее время все новые устройства
имеют преамбулу длиной 5 байт.
Ведомое устройство может быть защищено от записи. Обычно это выпол-
няется с помощью переключателя на плате.
Контрольная сумма используется для обнаружения ошибок в данных. Ес-
ли ошибка обнаружена, обычно выполняется повторный обмен сообщениями.
Ведомое устройство может иметь режим ускоренной передачи (burst mode),
при котором оно периодически посылает ответ на ранее принятую команду, хо-
тя ведущий не посылает ее повторно. Это сделано для увеличения частоты
получения значений измеряемой величины от датчика (до 3...4 раз в секун-
ду [103]) в случае необходимости. Только одно устройство может находится
в таком режиме (его еще называют монопольным), поскольку линия передачи
оказывается занята. После выключения и повторного включения питания ве-
домое устройство остается в монопольном режиме и перевести его в обычный
режим можно только командами с номерами 107, 108, 109, которые посылают
в паузах между периодическими ответами ведомого устройства.
Сеть на основе HART-протокола может подключаться к другим сетям
(Modbus, Profibus, Ethernet) с помощью соответствующих шлюзов. В сети так-
же широко используются мультиплексоры, позволяющие подключить к одно-
му контроллеру несколько HART-сетей и одновременно выполнить роль шлю-
за. Для подключения сети или HART-устройства к компьютеру необходим
специальный HART-интерфейс, который выпускается рядом производителей.
Программный доступ SCADA к HART-устройствам выполняется с помощью
HART ОРС-сервера.
Адресация. Каждое HART-устройство должно иметь уникальный адрес.
Посылаемые ведущим устройством адреса декодируются одновременно всеми
устройствами, находящимися в сети. Однако отвечает только то устройство,
чей адрес совпадает с принятым.
Метод адресации в протоколе HART содержит несколько потенциальных
проблем. Стандартом предусмотрено два вида адресов: короткий (длиной 4 би-
та) и длинный (длиной 38 битов). В настоящее время используется комбинация
короткого и длинного адресов. Длинный адрес устанавливается изготовителем
HART-устройства и не может быть изменен пользователем.
Когда новое устройство подключено к сети, возникает проблема, как узнать
его длинный адрес, поскольку для того чтобы считать из памяти HART-
устройства его адрес, к нему надо сначала обратиться, а обращение уже тре-
бует знания адреса. Перебрать все адреса невозможно, так как их очень много
(238). Проблема решается применением команды с номером 0, которая ис-
пользует короткий адрес для обращения к устройству и позволяет считать
из него длинный адрес.
Обычно перед монтажом сети сначала считывают длинные адреса всех
устройств и составляют их базу данных, и только после этого строят сеть.
Промышленные сети и интерфейсы
81
ID изготовителя Тип устройства Серийный №, MSB Серийный №, 2SB Серийный №, LSB
Рис. 2.19. Структура уникального идентификатора HART-устройства
Существует второй способ узнать длинный адрес устройства — с помо-
щью команды с номером 11, которая обращается к устройствам не по адре-
су, а по имени тега. Она применяется, если в сети более 15 устройств (это
возможно, если используются повторители) или если устройствам не присво-
ены короткие адреса.
Длинный адрес формируется из 40-битного уникального идентификатора
HART-устройства (рис. 2.19) путем отбрасывания двух старших битов. Поэтому
адрес получается 38-битным. Уникальный идентификатор HART-устройства
состоит из идентификатора изготовителя (ID изготовителя), кода типа HART-
устройства и серийного номера, который занимает 3 байта.
Следующая проблема HART-протокола связана с тем, что идентифика-
тор (ID) изготовителя (рис. 2.19) имеет длину всего 8 бит, т.е. с его помощью
можно однозначно идентифицировать только 256 изготовителей, что слишком
мало. Поэтому для идентификации изготовителя используются также часть
поля серийного номера.
Еще одна проблема адресации связана с тем, что для получения длинно-
го адреса используются только 6 бит из идентификатора изготовителя. Это
означает, что четыре устройства с разными уникальными идентификаторами
могут иметь один и тот же длинный адрес. Для устранения этой проблемы
схему адресации выпускаемых устройств каждый изготовитель должен согла-
совывать с организацией HCF.
Короткий адрес имеет еще одно назначение: с его помощью отключают
возможность использования в HART-сообщении аналогового токового сигнала,
что необходимо для объединения нескольких устройств в сеть. Перевод HART-
устройства в этот режим называется парковкой (parking) и выполняется путем
установления значения короткого адреса равным 1...15.
Команды HART. HART-команды бывают трех типов: универсальные,
общепринятые и специфические. Универсальные и общепринятые команды
устанавливаются стандартом на HART-протокол и выполняют чтение и запись
серийного номера устройства, тега, дескриптора, даты, рабочей области па-
мяти, номера версии устройства и т.п. Эти параметры изменяются редко и
поэтому хранятся в ЭППЗУ.
Специфические команды создаются изготовителем конкретного устройства
и могут иметь идентификационные номера от 128 до 253. Поэтому одни и те же
функции у разных производителей могут иметь различные номера. Команда
с номером 255 не используется, чтобы ее можно было отличить от преамбу-
лы (которая состоит из последовательности логических единиц). Команда с
номером 254 зарезервирована.
Приведем примеры универсальных команд:
«Считать имя изготовителя и тип устройства»,
82
Глава 2
«Считать переменную и единицу измерения»,
«Считать переменную как величину тока и в процентах от диапазона»,
«Считать или записать 8-символьный тег, 16-символьный дескриптор и
дату»,
«Считать или записать 32-символьное сообщение»,
«Считать диапазон значений переменной и единицу измерения»,
«Считать или записать серийный номер устройства»,
«Записать тег, описатель и дату»,
«Записать адрес устройства».
Примеры распространенных команд:
«Считать четыре динамические переменные»,
«Записать постоянную демпфирования»,
«Записать диапазон измерения»,
«Калибровать»,
«Задать фиксированное значение выходного тока»,
«Выполнить самодиагностику»,
«Выполнить сброс»,
«Настроить ноль»,
«Записать единицы измерения»,
«Настроить ноль и коэффициент передачи АЦП»,
«Записать функцию преобразования»,
«Записать серийный номер сенсора».
Примеры специфических команд:
«Записать уставку ПИД-регулятора»,
«Включить ПИД-регулятор»,
«Считать или записать калибровочные коэффициенты»,
«Подстроить сенсор»,
«Установить позицию клапана».
Язык описания устройств DDL. HART-устройство может иметь уни-
кальный набор команд, устанавливаемых изготовителем, или специфическую
последовательность команд, необходимых, например, для выполнения проце-
дуры калибровки. Ведущее устройство должно знать эти команды. Один из
возможных вариантов передачи описания команд от изготовителя пользовате-
лю — с помощью текстового описания в руководстве по эксплуатации. Другим
путем является описание устройства с помощью специального языка описания
устройств — Device Description Language (DDL), который распространяется и
поддерживается организацией HCF.
Описание устройства на языке DDL представляет собой текстовый файл,
который может быть прочитан компилятором языка и преобразован в двоич-
ный формат, воспринимаемый ведущим HART-устройством. Описание устрой-
ства может быть представлено компилятором в форме, удобной для систем-
ного интегратора. Применение DDL устраняет необходимость написания кода
для общения с HART-устройствами.
Промышленные сети и интерфейсы
83
Язык DDL поддерживается не всеми производителями и пока не получил
достаточно широкого распространения.
Разновидности HART. Традиционный HART-протокол используется
совместно с токовой петлей 4...20 мА. Однако в некоторых приложениях, где
отсутствует токовая петля, можно использовать только программный протокол
«HART-протокола» совместно с другими методами реализации физического ка-
нала связи. Например, можно удалить все аналоговые блоки, показанные на
рис. 2.17, и подключить к UART преобразователь интерфейса RS-485. При
этом свойства канала связи на 1-м уровне модели OSI будут соответствовать
интерфейсу RS-485, а протокол — стандарту HART.
Существует также возможность передачи НART-сигнала по выделенной те-
лефонной линии, что связано с соответствием метода частотной модуляции в
протоколе HART американскому стандарту для телефонных линий BELL 202.
Для этого используется передача сигнала только в форме напряжения при от-
ключенном передатчике токовой петли 4...20 мА.
Аналогично, HART-протокол (как и другие протоколы) может исполь-
зоваться для связи через оптоволокно (Fiber Optic HART) или радиоканал
(Wireless HART), см. www.thehartbook.com.
HART 6.0. В настоящее время готовится очередная, 6-я версия HART-
протокола. В ее основе лежит когерентная фазовая модуляция с 8 точками
(фазами). Это позволит передавать данные со скоростью 9600 бит/с. В то
же время 6-я версия будет обратно совместима с версией 5.0, в том числе с
токовой петлей 4...20 мА.
2.6. CAN
CAN (Controller Area Network — область, охваченная сетью контролле-
ров) представляет собой комплекс стандартов для построения распределенных
промышленных сетей, который использует последовательную передачу дан-
ных в реальном времени с очень высокой степенью надежности и защищен-
ности. Центральное место в CAN занимает протокол канального уровня мо-
дели OSI. Первоначально CAN был разработав для автомобильной промыш-
ленности, но в настоящее время быстро внедряется в область промышленной
автоматизации. Это хорошо продуманный, современный и многообещающий
сетевой протокол. Начало развития CAN было положено компанией Bosch в
1983 г., первые микросхемы CAN-контроллеров были выпущены фирмами Intel
и Philips в 1987 г., в настоящее время контроллеры и трансиверы CAN выпус-
каются многими фирмами, в том числе Analog Devices Inc., Atmel Corp. Cast,
Dallas Semiconductor, Freescale, Infineon, Inicore Inc., Intel, Linear Technology,
Maxim Integrated Products, Melexis, Microchip, National Semiconductor, NXP,
OKI, Renesas Technology Corp., STMicroelectronics, Yamar Electronics, Texas
Instruments.
В России интерес к CAN за последние годы сильно возрос, однако контрол-
лерного оборудования для CAN в России крайне мало, в десятки или сотни
раз меньше, чем для Modbus или Profibus. Среди протоколов прикладного
84
Глава 2
уровня для работы с CAN наибольшее распространение в России получили
CANopen и DeviceNet.
В настоящее время CAN поддерживается 11 стандартами ISO, в том чис-
ле рассмотренными в [111-116].
CAN охватывает два уровня модели OSI — физический и канальный
(табл. 2.7). Стандарт не предусматривает никакого протокола прикладного
(7-го) уровня модели OSI. Поэтому для его воплощения в жизнь различные
фирмы разработали несколько таких протоколов: CANopen (организации Ci А),
SDS (фирмы Honeywell Micro Switch Division), CAN Kingdom (фирмы Kvaser),
DeviceNet (фирмы Allen-Bradley, ставший Европейским стандартом в 2002 г.)
и ряд других [118-120].
Таблица 2.7
CAN в соответствии с моделью OSI
№ Название уровня Подуровни CAN Примечание
7 Прикладной Стайдартом CAN не установлен. Определен стандар- тами CAL, CANopen, DeviceNet, SDS, CAN Kingdom и др.
6 Представления Нет Нет
5 Сеансовый Нет Нет
4 Транспортный Нет Нет
3 Сетевой Нет Нет
2 Канальный (передачи данных) LLC МАС Подтверждение фильтрации, уведомление о перегруз- ке, управление восстановлением данных Формирование пакетов данных, кодирование, управ- ление доступом, обнаружение ошибок, сигнализация об ошибках, подтверждение приема, преобразова- ние из последовательной формы в параллельную и обратно
1 Физический Физический Обеспечение надежной передачи на уровне бай- тов (кодирование, контрольная сумма, временные диаграммы, синхронизация). Требования к линии передачи
Примечание: MAC (Medium Access Control) — управление доступом к каналу; LLC
(Logical Link Control) — управление логическими связями.
CAN характеризуется следующими основными свойствами:
• каждому сообщению (а не устройству) устанавливается свой приоритет;
• гарантированная величина паузы между двумя актами обмена;
• гибкость конфигурирования и возможность модернизации системы;
• широковещательный прием сообщений с синхронизацией времени;
• непротиворечивость данных на уровне всей системы;
• допустимость нескольких ведущих устройств в сети (многомастерная сеть);
• способность к обнаружению ошибок и сигнализации об их наличии;
• автоматический повтор передачи сообщений, доставленных с ошибкой, сра-
зу, как только сеть станет свободной;
Промышленные сети и интерфейсы
85
• автоматическое различение сбоев и отказов с возможностью автоматиче-
ского отключения отказавших модулей.
К недостаткам можно отнести сравнительно высокую стоимость CAN-
устройств, отсутствие единого протокола прикладного уровня, а также чрез-
мерную сложность и запутанность протоколов канального и прикладного уров-
ня, изложенных в стандартах организации CAN in Automation (CiA) [www.can-
cia.org].
2.6.1. Физический уровень
Физический уровень [121-122] модели OSI обеспечивает надежную переда-
чу битов, игнорируя содержание передаваемой информации. Основными поня-
тиями физического уровня являются линии передачи (в большинстве случаев
это витая пара, хотя допускается использовать плоский кабель или один про-
вод и «корпусную землю», оптоволокно, радиоканал), временные диаграммы,
система синхронизации, формат данных, обеспечение достоверности передачи
(контрольная сумма, методы кодирования, обнаружение и восстановление оши-
бок). Характеристики передатчика и приемника стандартом не устанавлива-
ются, поскольку они могут быть выбраны для каждого конкретного случая
исходя из требований применения.
Электрические соединения в сети CAN. Кабель витой пары в сети
CAN должен иметь общий (третий) провод; на обоих концах витой пары долж-
ны быть согласующие резисторы, сопротивление которых равно волновому со-
противлению кабеля. Максимальная длина кабеля составляет 1 км. Для уве-
личения длины, количества узлов или гальванической развязки могут быть
использованы повторители интерфейса, сетевые мосты и шлюзы.
Витая пара может быть в экране или без, в зависимости от электромаг-
нитной обстановки. Топология сети должна быть шинной, максимальная дли-
на отвода от шины при скорости передачи 1 Мбит/с не должна превышать
30 см. Длину отвода можно рассчитать по формуле [122] t = 7ф/(50 нс/м), где
7ф — длительность переднего фронта передатчика. Основные требования к
линии передачи и ее характеристикам близки к RS-485, однако в передатчиках
CAN есть режим управления длительностью фронтов импульсов. Управле-
ние выполняется путем заряда емкостей затворов выходных транзисторов от
источников тока, при этом величина тока задается внешним резистором. Уве-
личение длительности фронта позволяет снизить требования к согласованию
линии на низких частотах, увеличить длину отводов и ослабить излучение
электромагнитных помех.
Выводы «земли» всех передатчиков сети должны быть соединены (если
интерфейсы гальванически не изолированы). При этом разность потенциа-
лов между выводами заземлений не должна превышать 2 В. Гальваническая
изоляция рекомендуется при длине линии более 200 м, но не является обя-
зательным требованием стандарта.
Для электрического соединения устройств с CAN-интерфейсом стандарт
предусматривает два варианта. Первый вариант состоит в применении Т-об-
разных разветвителей, которые состоят из трех 9-штырьковых разъемов D-Sub,
86
Глава 2
расположенных в одном корпусе, одноименные контакты которых соединены
между собой. Разветвители имеют один разъем со штырьками и два — с
гнездами.
Второй вариант требует наличия в каждом CAN-устройстве двух разъемов.
Для включения устройства в сеть кабель разрезают и на его концах устанав-
ливают ответные части разъемов. Устройство включается буквально в разрыв
линии передачи. Такой подход позволяет наращивать количество устройств и
изменять топологию сети путем добавления в разрыв кабеля новых устройств
и кабеля с разъемами на концах. Один из разъемов должен быть со штырь-
ками, второй — с гнездами. Подключение устройств к шине без разъемов не
допускается. Согласующий резистор должен располагаться внутри разъема,
который подключается к концу кабеля. Для присоединения модулей к CAN-
шине должен использоваться 9-штырьковый разъем типа D-Sub. На модуле
устанавливается разъем с гнездами, на соединяющем кабеле — со штырьками.
Цоколевка разъемов показана в табл. 2.8.
Таблица 2.8
Цоколевка разъема D-Sub для CAN
Контакт Сигнал Примечание
1 - Зарезервирован
2 CAN.L Сигнал линии
3 CAN.GND «Земля»
4 - Зарезервирован
5 (CANJSHLD) Экран кабеля (не обязательно)
6 (GND) «Земля» (не обязательно)
7 CAN-H Сигнал линии
8 - Зарезервирован
9 (CAN.V+) Внешнее питание (не обязательно, для питания передатчи- ков с гальванической изоляцией)
Примечание. В каждом модуле контакты 3 и 6 должны быть соединены.
Применение разъемов со штырьками или гнездами определяется следу-
ющим правилом: при «горячей» замене модулей питание должно оставаться
только на разъемах с гнездами; это позволяет избежать случайного корот-
кого замыкания.
Отметим, что в основанном на CAN-стандарте CANopen предусмотрено
гораздо большее разнообразие вариантов разъемов, в том числе для плоско-
го кабеля, RJ-10, RJ-45, разъемный винтовой клеммник, и еще около десяти
вариантов специальной конструкции [127]. Допускается применение и дру-
гих разъемов.
Стандарт устанавливает следующие скорости обмена: 1000, 800, 500, 250,
125, 50 и 20 кбит/с. CAN-модули могут поддерживать не все скорости, но же-
лательно, чтобы их количество было наибольшим.
Трансивер CAN. Типовая структура трансивера CAN (на примере мик-
росхемы LT1795 фирмы Linear Technology) приведена на рис. 2.20. При подаче
Промышленные сети и интерфейсы
87
120 Ом
Рис. 2.20. Структурная схема трансивера CAN
уровня логического нуля на вход (вход является инвертирующим) оба тран-
зистора выходного каскада передатчика открываются и через нагрузку (два
резистора по 120 Ом) течет ток, создающий в линии состояние, соответству-
ющее логической единице. При этом потенциал вывода CAN-H всегда будет
выше, чем вывода CAN-L (рис. 2.21). Значения потенциалов, предусмотренные
стандартом, приведены в табл. 2.9. При логической единице на входе пере-
датчика его выход переходит в высокоомное состояние и дифференциальное
напряжение на линии становится равным нулю.
Отметим, что наличие терминальных резисторов в CAN необходимо не
только для согласования линии (как в случае RS-485), но даже для созда-
ния пути протекания тока.
CAN-передатчик имеет очень важное свойство: если один из передатчиков
устанавливает в сети логический ноль, а второй — логическую единицу, то
это состояние не является аварийным, как в сети на основе интерфейса RS-
485, поскольку сквозного тока не возникает. В случае CAN-линия остается
в состоянии логической единицы. Иначе говоря, логическая единица всегда
доминирует над логическим нулем. Поэтому в стандарте CAN используется
понятие «доминантное (доминирующее) состоянием линии для обозначения
состояния линии с током и понятие «рецессивное состоянием как противопо-
ложное доминантному (рис. 2.21).
Рис. 2.21. Пояснение понятий рецессивного и доминантного состояния
88
Глава 2
Таблица 2.9
Значения потенциалов на линии передачи CAN
Параметр Обозна- чение Мини- мальное Номи- нальное Макси- мальное Условие
Для рецессивного состояния шины
Потенциалы на выходе передат- CANJI 2,0 2,5 3 Без нагрузки
чика, В CAN.L 2,0 2,5 3
Дифференциальное напряжение, В:
на выходе передатчика Vdiff -0,5 0 0,05 Без нагрузки
на входе приемника vdiff -1 - 0,5 Без нагрузки
Для доминантного состояния шины
Потенциалы на выходе передат- CANJI 2,75 3,5 4,5 С нагрузкой
чика, В CANJ 0,5 1,5 2,25
Дифференциальное напряжение, В:
на выходе передатчика Vdiff 1,5 2 3 С нагрузкой
на входе приемника Viiff -0,9 - 5 С нагрузкой
Это свойство CAN обеспечивает возможность получения доступа к линии,
сравнивая посылаемые в линию логические уровни с тем уровнем, который
фактически устанавливается в ней: если передатчик посылает в линию рецес-
сивное состояние, а в ней при этом остается доминантное, значит линия занята.
Доступ получает тот узел сети, который может предоставить ей доминантный
уровень сигнала. Узлы с рецессивным уровнем покидают линию и ждут сле-
дующего случая. Этот метод доступа справедлив и при использовании оптово-
локонного канала или беспроводной сети - в этих случаях наличие света или
электромагнитной волны всегда будет доминировать над их отсутствием.
Вывод Kef на рис. 2.20 позволяет установить пороговое напряжение для
входа TxD и уровень синфазного напряжения в линии, когда она находится в
рецессивном состоянии. Обычно Kef = 2,5 В. Чтобы установить уровень син-
фазного напряжения на линии, терминальные сопротивления делят на два по
60 Ом, соединяют их последовательно, а к точке соединения подключают вывод
Kef- При симметричной форме импульсов CAN Ji и CAN Jj относительно рецес-
сивного состояния уменьшается уровень излучаемых помех, поскольку прира-
щения токов в каждом из проводов витой пары при переключении логических
уровней (см. рис. 2.21) оказываются равными по величине, но обратными по
знаку и поэтому компенсируют друг-друга.
Вывод Rs имеет несколько назначений. Если на нем установлено состоя-
ние логической единицы, трансивер переходит в спящий режим, при котором
он потребляет очень малый ток от источника питания, а на выходе устанав-
ливается высокоомное (рецессивное) состояние. «Разбудить» его можно сиг-
налом, поступающим в приемник из линии передачи. Подключение этого вы-
вода к «земле» через сопротивление позволяет установить нужную длитель-
ность фронтов импульсов передатчика. Некоторые трансиверы имеют два ре-
жима: резервный и спящий, которые отличаются уровнем потребляемого тока
и способом перевода в активный режим. Режим пониженного энергопотребле-
ния предусмотрен стандартом для экономии заряда аккумуляторных батарей
в припаркованном автомобиле.
Промышленные сети и интерфейсы
89
Если сигнал TxD является доминирующим слишком долго (более 1 мс),
генератор импульса таймаута (на рис. 2.20 обозначен прямоугольником с им-
пульсом) временно отключает передатчик, поскольку в противном случае мо-
дуль может быть навсегда блокирован средствами канального уровня как от-
казавший.
Стандартом предусмотрена возможность подключения к CAN-сети любо-
го количества устройств, однако практически оно ограничивается нагрузочной
способностью передатчиков (100...200) или задержкой в повторителях.
В CAN-трансивере имеется генератор синхроимпульсов с частотой
16 МГц ±0,1 %. Ширина одного бита программно устанавливается величиной от
8 до 25 импульсов синхрогенератора, обычно 8 импульсов при скорости переда-
чи 1 Мбит/с и 16 импульсов при 20 кбит/с. Синхронизация всех узлов сети про-
исходит в течение первого такта синхронизации. Процедура обработки битов
в приемнике обеспечивает программируемую задержку импульсов синхрониза-
ции, необходимую для компенсации времени задержки прохождения сигнала в
линии связи и сдвига фазы вследствие дрейфа частоты тактового генератора.
Различают два типа синхронизации: жесткую синхронизацию с помощью
стартового бита в начале сообщения и ресинхронизацию во время передачи со-
общения. С помощью ресинхронизации можно подстроить интервал времени
от начала синхронизации до момента, в который измеряется логический уро-
вень принимаемого импульса данных. Интервал подстройки может быть из-
менен на 1...4 такта.
Для определения логического состояния шины уровни принимаемых сигна-
лов измеряются на расстоянии 6 тактов синхрогенератора от переднего фронта
импульса (бита) при скорости 1 Мбит/с и на расстоянии 14 тактов при скоро-
сти 20 кбит/с [122] (для сравнения укажем, что в стандартных UART отсче-
ты берутся посередине импульса). Количество отсчетов может быть 1 или 3
(устанавливается программно). CAN использует синхронную передачу битов.
Это повышает пропускную способность канала связи, но требует усложнен-
ного процесса синхронизации.
Напряжение питания устройств в сети CAN должно составлять от 18 до
30 В. Выходное напряжение на 9-м контакте разъема (внешнее положительное
напряжение питания) должно быть от ±7 до ±13 В при токе потребления мо-
дуля не более 100 мА. Не допускается, чтобы модули были источниками тока.
CAN использует NRZ кодирование (Non-Return-to-Zero — без возврата к ну-
лю, потенциальное кодирование), при котором логическому нулю соответствует
низкий уровень напряжения в линии (рецессивное состояние), логической еди-
нице — высокий уровень (доминантное состояние). Такой способ имеет следую-
щий недостаток: в случае, когда через линию передачи транспортируется байт,
который содержит все единицы (пауз между ними при NRZ кодировании нет),
приемник не может отличить этот байт от паузы. Для устранения этой пробле-
мы используется так называемый бит-стаффинг. Он состоит в том, что после
каждой последовательности из пяти одинаковых символов подряд вставляется
противоположный им символ. Например, после пяти единиц подряд вставляет-
ся логический ноль. Приемник, обнаружив пять одинаковых символов подряд,
удаляет следующий за ними символ, который является битом стаффинга.
90
Глава 2
Другие свойства CAN-трансиверов, которые предусмотрены в стандарте:
• защита от короткого замыкания проводов интерфейса между собой, на ис-
точник питания или землю. Из этих требования автоматически следует
защита от изменения полярности подключения приемника и передатчика
к линии, обрывов и передавливания кабеля;
• защита от электростатических разрядов;
• ослабление синфазного сигнала в линии;
• защита от перегрева выходных каскадов.
2.6.2. Канальный уровень
В соответствии с [126] канальный уровень CAN состоит из двух подуров-
ней: LLC и МАС (см. табл. 2.7). Ниже описаны только главные идеи, поло-
женные в основу их функционирования.
Адресация и доступ к шине. В CAN-сети ни один из узлов не имеет ад-
реса. Вместо этого сообщения посылаются «всем», но содержат идентификатор,
который описывает смысл посылаемых данных. В соответствии с этим иденти-
фикатором любой узел сети может принять это сообщение, если оно необходимо
устройству для функционирования. Сообщение принимается узлом, если его
идентификатор проходит через фильтр сообщений, имеющийся в каждом узле.
В CAN-сети гарантируется, что сообщение будет принято любым из уз-
лов в одно и то же время или не будет принято ни одним из них. Это до-
стигается благодаря широковещательной передаче и использованным методом
подтверждения приема сообщений.
Когда сеть свободна, любой узел может начать передачу сообщения. Но
каждое сообщение имеет свой приоритет при получении доступа к шине. По-
этому передачу может осуществить только одно устройство — то, которое со-
держит сообщение с наивысшим приоритетом.
Борьба за доступ к шине происходит следующим образом. Если два или
более устройств обнаружили, что линия свободна и начали передачу сообщений
одновременно, то возникший конфликт разрешается путем побитного сравне-
ния идентификатора передаваемого сообщения с состоянием линии. В процессе
арбитража (урегулирования конфликта) каждое устройство сравнивает логи-
ческий уровень передаваемого бита с логическим уровнем на шине. Если эти
уровни одинаковы, устройства продолжают передавать следующий бит иден-
тификатора. Если приемник устройства показывает, что на шине доминант-
ный уровень, а передатчик в это же время передает рецессивный уровень, то
устройство сразу прекращает передачу данного сообщения. Такой механизм
арбитража гарантирует, что ни информация, ни время не будут потеряны.
Достоверность передачи. Для достижения максимальной надежности
(достоверности) передачи данных протокол предусматривает специальные ме-
тоды обнаружения ошибок, сигнализации об ошибках и самоконтроля, которые
воплощены в каждом узле сети.
Для обнаружения ошибок приняты следующие меры:
• передатчик сравнивает каждый бит на шине с переданным битом для под-
тверждения правильности передачи на уровне битов;
Промышленные сети и интерфейсы
91
• выполняется контроль циклическим избыточным кодом (CRC — Cyclic
Redundancy Check);
• используется бит-стаффинг (см. выше);
• используется проверка каждого переданного фрейма.
Механизм обнаружения ошибок характеризуется такими свойствами:
• обнаруживаются все глобальные ошибки;
• обнаруживаются все ошибки, вносимые передатчиком;
• в сообщении обнаруживаются до 5 случайно распределенных ошибок;
• в сообщениях обнаруживается пакет следующих друг за другом ошибок
длиной до 15 бит,
• обнаруживаются ошибки четности.
Вероятность наличия в сообщении необнаруженных ошибок составляет ме-
нее 4,7 • 1011.
Сообщения с обнаруженными ошибками помечаются флагом в том узле, где
они были обнаружены. Такие сообщения отклоняются и автоматически пере-
даются повторно. Время от момента обнаружения ошибки до начала повторной
передачи равно длительности 31-го бита, если не возникают новые ошибки.
CAN способен различать сбои и отказы. Если произошел отказ, то отка-
завшее устройство отключается от сети.
Все приемники сети проверяют целостность (непротиворечивость) получен-
ных сообщений, подтверждают (квитируют) целостные сообщения и помечают
флагом противоречивые сообщения.
Передача сообщений. Сообщения в CAN передаются с помощью фреймов
(блоков данных). Используется два разных формата фреймов, которые разли-
чаются длиной поля идентификатора: стандартный фрейм с идентификатором
длиной 11 бит и расширенный фрейм с длиной идентификатора 29 бит.
Существует четыре различных типа фреймов:
• DATA FRAME (фрейм данных) переносит данные от передатчика к при-
емнику;
• REMOTE FRAME (дистанционный фрейм, фрейм вызова) передается од-
ним из устройств для того, чтобы получить от другого устройства данные
в формате DATA FRAME с тем же идентификатором, что и в REMOTE
FRAME;
• ERROR FRAME (фрейм ошибок) передается любым устройством, обна-
ружившим ошибку на шине;
• OVERLOAD FRAME (фрейм перегрузки) используется для запроса допол-
нительной задержки между предыдущими и последующими данными.
Фрейм данных состоит из следующих полей (рис. 2.22): начало фрейма
(Start Of Frame), поле арбитража (Arbitration Field), поле контроля (Control
Field), поле данных (Data Field), поле циклического избыточного кода (CRC
Field), поле уведомления о приеме (ACKnowledgement Field) и поле конца фрей-
ма (End Of Frame). Поле данных может иметь нулевую длину.
Пространство между фреймами представлено рецессивным состоянием ши-
ны (которое соответствует высокому уровню на рис. 2.22, поскольку CAN-
92
Глава 2
Пауза
Фрейм данных
Поле Поле Поле Поле
арбитража контроля данных CRC
(АСК)
Рис. 2.22. Структура фрейма данных
Пауза
или
фрейм
перегрузки
Начало
фрейма
фрейма
рецессивном со-
Все устройства
передатчики инвертируют логические уровни). Только при
стоянии шины устройство может начать передачу фрейма.
Начало фрейма кодируется одним доминантным битом,
сети одновременно синхронизируют свои приемники по переднему фронту им-
пульса этого бита.
Формат поля арбитража различается для стандартного и расширенного
формата фрейма. В стандартном фрейме поле арбитража состоит из иденти-
фикатора длиной 11 бит и RTR-бита (Remote Transmission Request — запрос
дистанционной передачи).
В расширенном формате поле арбитража имеет идентификатор длиной 29
бит, SRR-бит (Substitute Remote Request — заменяющий RTR-бит), IDE-бит
(Identifier Extension Bit — бит идентификации расширенного формата) и RTR-
бит. Поле идентификатора в расширенном формате состоит из базового иден-
тификатора и расширенного идентификатора. Базовый идентификатор опре-
деляет приоритет расширенного фрейма. RTR-бит служит для того, чтобы
отличить фрейм данных от фрейма вызова. IDE-бит служит для различения
стандартного и расширенного формата фреймов.
Поле контроля включает в себя код, который указывает длину данных
в поле данных, IDE-бит и один (в стандартном формате) или два (в расши-
ренном) зарезервированных бита.
Поле данных состоит из данных, которые должны быть переданы фреймом
данных. Он может иметь длину от 0 до 8 байт по 8 бит каждый. Данные
передаются младшим разрядом вперед.
Поле CRC содержит циклический избыточный код, служащий для обнару-
жения ошибок во всех предшествующих ему полях фрейма, включая бит начала
фрейма. Поле CRC оканчивается CRC-разделителем (рецессивное состояние)
длиной в 1 бит. Стандарт CAN устанавливает алгоритм вычисления CRC [121].
Биты стаффинга перед вычислением удаляются.
Поле уведомления имеет длину 2 бита. Передающее устройство в этом
поле посылает два рецессивных бита. Принимающее устройство отвечает до-
минантным битом, если сообщение принято без ошибок. Второй бит этого поля
всегда является рецессивным.
Конец фрейма представляет собой последовательность из семи рецессив-
ных бит.
Фрейм вызова выполняет функцию запроса данных. Он аналогичен фрей-
му данных, но отличается от него только отсутствием поля данных и други-
ми значениями битов.
Промышленные сети и интерфейсы
93
Фрейм ошибок используется любым принимающим узлом, чтобы сообщить
всем участникам сети о том, что передаваемое в данный момент по сети со-
общение содержит ошибку. Первым полем в фрейме ошибок является флаг
ошибки. Сообщение об ошибке имеет наивысший в системе приоритет, поэто-
му передается сразу после обнаружения ошибки и принимается всеми устрой-
ствами одновременно. Все устройства также одновременно удаляют из своей
памяти сообщение, содержащее ошибку.
Фрейм перегрузки состоит из двух полей: флага перегрузки и поля раз-
делителя. Существуют следующие условия, при наступлении которых начи-
нается передача фрейма перегрузки:
• перегрузка приемника, которая требует увеличить паузу между принима-
емыми им фреймами;
• обнаружение доминантного бита на месте первого и второго бита в поле
перерыва паузы между фреймами.
Пауза между фреймами. Между фреймами данных, фреймом вызова и
любыми другими фреймами устанавливается пауза. В отличие от этого, перед
фреймами перегрузки и ошибок паузы нет, это ускоряет их доставку.
Пауза содержит поле перерыва (3 бита) и поле простоя (произвольной дли-
ны) и, для пассивных к ошибке устройств, которые выполняли передачу преды-
дущего сообщения, поле приостановленной передачи.
Фильтрация сообщений используется для выбора из всех сообщений на
шине только тех, которые соответствуют маске, записанной в регистр прием-
ника. Маска может быть настроена на отбор группы сообщений и использует
идентификатор, входящий в состав поля арбитража на рис. 2.22. Отобранные
сообщения помещаются в буфер приемника.
Валидация сообщений. Под валидацией понимается установление фак-
та, что сообщение не содержит ошибок. Момент времени, в который устанав-
ливается факт правильности сообщения, отличается для передатчика и при-
емника.
Сообщение считается достоверно переданным, если не было ошибок при
передаче от начала до конца фрейма. Если сообщение содержало ошибку, оно
автоматически повторяется в соответствии с текущими приоритетами.
Сообщение считается достоверно принятым, если не было обнаружено оши-
бок при его приеме. Если ошибка обнаружена, устройство посылает в ши-
ну флаг ошибки.
В CAN рассматривается пять типов ошибок:
1) ошибки передачи бита (контролируется уровень на шине и сравнивает с
передаваемым. Ошибка обнаруживается во время передачи одного бита);
2) ошибка стаффинга (обнаруживается при отсутствии бита стаффинга в
6-й позиции последовательности одинаковых битов);
3) CRC-ошибка;
4) ошибка формата (обнаруживается, если при заранее фиксированном
формате фрейма поле с известным значением битов содержит неправильные
биты);
94
Глава 2
5) ошибка уведомления (обнаруживается трансивером, если он не находит
доминантное состояние в поле уведомления о получении).
Устройство, обнаружившее любую из перечисленных ошибок, сигнализи-
рует об этом с помощью флага ошибки.
2.6.3. Прикладной уровень: CANopen
Прикладной уровень модели OSI обеспечивает интерфейс между сетью и
программным приложением, которое может взаимодействовать с аналогичными
приложениями в других устройствах сети. На прикладном уровне реализуется
также механизм синхронизации между устройствами.
К сожалению, разработка CAN закончилась на первых двух уровнях моде-
ли OSI. Это привело к появлению множества несовместимых между собой про-
токолов прикладного уровня, среди которых самыми распространенными и под-
держиваемыми организацией Ci А являются CANopen [128-130] и DeviceNet [87].
Канальный уровень CAN, рассмотренный выше, практически невозможно
использовать в SCADA-пакетах, поскольку он оперирует битами, фреймами,
полями. Для написания же прикладных программ нужно использовать поня-
тия: переменная, массив, событие, клиент, сервер, имя устройства и т.п.
Рассмотрим наиболее распространенный стандарт прикладного уровня
CANopen [128]. Для упрощения применения стандарта вводятся несколько
специфических для CANopen понятий. Все функциональные возможности
прикладного уровня делятся между так называемыми сервисами (элементами
услуг). Программные приложения взаимодействуют между собой путем вы-
зова соответствующих сервисов прикладного уровня. Сервисы обмениваются
данными с равными им (одноранговыми) сервисами через CAN-сеть с помо-
щью определенного протокола. Этот протокол описывается в спецификации
протокола сервиса.
Вводится понятие сервисного примитива, который представляет собой
средство (языковую конструкцию), с помощью которого программное прило-
жение взаимодействует с прикладным уровнем. В CANopen существует че-
тыре различных примитива:
1) запрос приложения к прикладному уровню, публикуемый приложени-
ем для вызова сервиса;
2) индикация, публикуемая прикладным уровнем для приложения, что-
бы сообщить о внутренних событиях, обнаруженных прикладным уровнем или
чтобы показать, что сервис запрошен;
3) ответ, публикуемый приложением для прикладного уровня, чтобы от-
ветить на ранее полученную индикацию;
4) подтверждение, публикуемое прикладным уровнем для приложения,
чтобы отчитаться о результатах ранее изданного запроса.
Сервисы также делятся на несколько типов сервисов:
• локальный сервис, который выполняет запрос приложения без взаимодей-
ствия с другими сервисами того же ранга;
• неподтвержденный сервис, который вовлекает в выполнение запроса один
или более других одноранговых сервисов. Приложение посылает запрос
Промышленные сети и интерфейсы
95
к локальному сервису. Этот запрос передается далее сервису (сервисам)
того же ранга;
• подтвержденный сервис может вовлечь только один сервисный объект то-
го же ранга. Приложение издает запрос к его локальному сервису. Этот
запрос передается сервису того же ранга, который передает его другому
приложению как индикацию. Другое приложение издает ответ, который
передается исходному сервису, который передает его как подтверждение
запрашивающему приложению;
• сервис, инициированный провайдером, вовлекает только локальный сервис.
CANopen предлагает серию стандартизованных коммуникационных меха-
низмов и функций, выполняемых устройствами в сети (профилей). Серия про-
филей доступна и поддерживается организацией Ci A (CAN in Automation); для
ее использования не требуется лицензий.
Устройство в сети CANopen представляется состоящим из трех частей:
1) коммуникационный интерфейс (к шине CAN) и программный протокол об-
мена; 2) словарь объектов; 3) интерфейс к устройствам ввода-вывода и при-
кладная программа.
Коммуникационный интерфейс и программный протокол обеспечивают
сервис по передаче и получению через сеть коммуникационных объектов. Сло-
варь объектов описывает типы данных, коммуникационные объекты и при-
кладные объекты, использованные в устройстве для обмена через интерфейс
к устройствам ввода вывода. Прикладная программа обеспечивает внутреннее
управление функциями устройства и интерфейсом к устройствам ввода-вывода.
Наиболее важной частью устройства в CANopen является словарь объек-
тов. Под объектами понимаются типы данных, профили устройств, коммуни-
кационные объекты, регистр ошибок. Каждый объект в словаре адресуется
16-битным индексом.
В CANopen используются следующие типы данных: Boolean, Integer,
UnsignedN, Float, Date, Time, которые имеют общепринятый смысл. Имеется
также несколько сложных типов данных для PDO и SDO параметров (Process
Data Object — объект данных технологического процесса и Service Data Ob-
ject — объект сервисных данных).
Объекты PDO и SDO используются для передачи данных. Сообщения PDO
позволяют передавать данные в реальном времени. Существует два типа объ-
ектов PDO. Первый из них выполняет передачу данных (Transmit-PDO или
TPDO), второй — прием данных (Receve-PDO или RPDO). Коммуникацион-
ные параметры PDO определяют его коммуникационные возможности и опи-
сываются в словаре объектов.
Объект SDO обеспечивает доступ к словарю объектов. SDO может исполь-
зоваться также для передачи групп данных от клиента к серверу и наоборот.
Имеются также объекты специального назначения (объекты для синхрони-
зации, объекты меток времени, объекты аварийных ситуаций), а также объекты
управления сетью (объекты начальной загрузки, объекты контроля ошибок и
сообщения для управления сетью).
96
Глава 2
Коммуникационные модели. Коммуникационная модель CANopen
определяет различные коммуникационные объекты и сервисы, а также доступ-
ные режимы запуска передачи сообщений, поддерживает передачу синхронных
и асинхронных сообщений. Синхронные сообщения используются для сбора
данных или управления исполнительными устройствами. Синхронные сообще-
ния передаются относительно сообщений синхронизации, которые определяют-
ся заранее; асинхронные сообщения могут передаваться в любое время.
В CANopen используют три типа взаимодействий между передающим и
принимающим устройством: ведущий/ведомый, клиент/сервер и производи-
тель / потребитель.
2.6.4. Электронные спецификации устройств CANopen
Поскольку устройства, используемые в сети, являются программируемы-
ми, перед их включением в сеть необходимо задать параметры, необходимые
для их коммуникаций с сетью и функционирования. CANopen устанавливает
для этого стандартизованный метод. Метод предполагает наличие электронно-
го описания устройств в текстовом формате, для обработки которого достаточ-
но несложного компилятора. CANopen определяет формат EDS (Electronic Data
Sheet — электронный список параметров), который описывает конфигурацию
и параметры устройств, в том числе контроллеров с модульной архитектурой.
EDS поддерживается и поставляется производителем устройства. В про-
тивном случае используется EDS «по умолчанию», общий для определенного
класса устройств, например модулей аналогового ввода.
EDS является текстовым файлом, использующим ASCII*-коды (набор сим-
волов по стандарту ISO 646). Длина строки файла 255 символов, строки долж-
ны оканчиваться символами CR или LF.
Файл содержит несколько секций:
• информация о самом файле (имя файла, версия, дата создания, версия
EDS, описание, кем создан, дата модификации и др.);
• общая информация об устройстве (имя производителя, идентификацион-
ный код производителя, имя устройства, код устройства, номер версии,
функции устройства, список поддерживаемых скоростей обмена, наличие
программы начальной загрузки и др.);
• конфигурационные параметры (длительность цикла обмена, тип устрой-
ства, тип данных, нижний и верхний предел изменения переменных, значе-
ния по умолчанию, количество каналов ввода-вывода и др.).
Полное описание структуры EDS-файла дано в стандарте [129].
2.7. Profibus
Слово PROFIBUS получено из сокращений PROcess Field BUS, что при-
близительно переводится как «промышленная шина для технологических про-
* ASCII (American Standard Code for Information Interchange) — американский стан-
дарт код для обмена информацией.
Промышленные сети и интерфейсы
97
Таблица 2.10
Profibus в соответствии с моделью OSI
№ Название уровня Profibus DP Profibus FMS Profibus PA
7 Прикладной Нет Fieldbus Message Нет
Specification (FMS)
6 Представления Нет
5 Сеансовый Нет
4 Транспортный Нет
3 Сетевой Нет
2 Канальный FDL FDL IEC 1158-2
(передачи данных)
1 Физический RS-485, оптоволо- RS-485, оптоволо- Интерфейс
конный интерфейс конный интерфейс IEC 1158-2
цессов». Стандарт Profibus был первоначально принят в Германии в 1987 г.,
в 1996 г. он стал международным (EN 50170 и EN 50254).
Сеть Profibus (как и другие описанные здесь промышленные сети, кроме
Industrial Ethernet) использует только первый и второй уровни модели OSI
(табл. 2.10). Один из вариантов сети, Profibus FMS, использует также уровень 7.
Profibus имеет три модификации: Profibus DP, Profibus FMS и Profibus
PA [132].
Profibus DP (Profibus for Decentralized Peripherals — Profibus для децентра-
лизованной периферии) использует уровни 1 и 2 модели OSI, а также пользо-
вательский интерфейс, который в модель OSI не входит. Непосредственный до-
ступ из пользовательского приложения к канальному уровню осуществляется
с помощью DDLM (Direct Data Link Mapper — прямой преобразователь для ка-
нального уровня). Пользовательский интерфейс обеспечивает функции, необ-
ходимые для связи с устройствами ввода-вывода и контроллерами. Profibus
DP в отличие от FMS и РА построен таким образом, чтобы обеспечить наибо-
лее быстрый обмен данными с устройствами, подключенными к сети.
Profibus FMS (Profibus с FMS-протоколом) использует уровень 7 модели
OSI и применяется для обмена данными с контроллерами и компьютерами на
регистровом уровне. Profibus FMS предоставляет большую гибкость при пере-
даче больших объемов данных, но проигрывает протоколу DP в популярности
вследствие своей сложности.
Profibus FMS и DP используют один и тот же физический уровень, осно-
ванный на интерфейсе RS-485, и могут работать в общей сети.
Profibus РА (Profibus for Process Automation — для автоматизации тех-
нологических процессов) использует физический уровень на основе стандар-
та IEC 1158-2, который обеспечивает питание сетевых устройств через шину
и не совместим с RS-485. Особенностью Profibus РА является возможность
работы во взрывоопасной зоне.
В последние годы появился стандарт PROFInet, который основан на
Industrial Ethernet и технологиях COM, DCOM (см. главу 9). Он легко обеспе-
чивает связь промышленной сети Profibus с офисной сетью Ethernet.
Profibus является многомастерной сетью (с несколькими ведущими устрой-
ствами). В качестве ведомых устройств выступают обычно устройства ввода-
98
Глава 2
вывода, клапаны, измерительные преобразователи. Они не могут самосто-
ятельно получить доступ к шине и только отвечают на запросы ведущего
устройства.
2.7.1. Физический уровень
На физическом уровне Profibus DP и FMS используют стандарт RS-485 при
скорости передачи до 12 Мбит/с и с размерами сегментов сети до 32 устройств.
Количество устройств можно увеличить с помощью повторителей интерфейса.
Особые требования установлены к сетевому кабелю. Он должен иметь вол-
новое сопротивление от 135 до 165 Ом при погонной емкости не более 35 пФ/м,
площадь поперечного сечения проводников более 0,34 мм2 и погонное сопротив-
ление не более 110 Ом/км. Кабель должен иметь одну или две витые пары с
медным экраном в виде оплетки или фольги.
Стандартом для шины Profibus рекомендуется разъем D-sub (DB-9) с 9 кон-
тактами, цоколевка разъема приведена в табл. 2.11. На устройствах устанав-
ливается разъем с гнездами, на кабеле — со штырьками. При необходимо-
сти иметь степень защиты IP65/67 рекомендуется использовать цилиндриче-
ский разъем типа М12 (IEC 947-5-2), HAN-BRID или гибридный разъем фир-
мы Siemens [132].
Таблица 2.11
Цоколевка разъема DB-9 для Profibus
Контакт Сигнал Примечание
1 Shield Экран
2 М24 -24 В
3 Rx/Tx-DP Прием/передача данных (положительный вывод, провод В)
4 CNTR-P Сигнал для управления направлением передачи, положительный
вывод
5 DGND Общий провод данных
6 VP Напряжение питания, «+»
7 P24 +24 В
8 Rx/Tx-N Прием/передача данных (отрицательный вывод, провод А)
9 CNTR-N Сигнал для управления направлением передачи, отрицательный
вывод
С обеих сторон линии передачи подключаются согласующие резисторы, ко-
торые конструктивно установлены во все сетевые разъемы и подключаются с
помощью микропереключателей. При скоростях передачи более 1,5 Мбит/с
для согласования линии дополнительно используются плоские (печатные) ка-
тушки индуктивности.
Для увеличения дальности передачи в Profibus предусмотрена возможность
работы с оптоволоконным кабелем. При использовании стеклянного оптово-
локна дальность связи может быть увеличена до 15 км. Оптоволоконные ин-
терфейсы выполняются в виде сменных модулей для контроллеров.
Profibus РА использует физический уровень, соответствующий стандарту
IEC 1158-2. Данные передаются с помощью уровней тока 4-9 и —9 мА («токо-
вая петля»). Используется манчестерский код (логический ноль соответствует
Промышленные сети и интерфейсы
99
смене отрицательного тока на положительный, а логическая единица — поло-
жительного на отрицательный). Скорость передачи составляет 31,25 кбит/с, в
качестве линии передачи используется витая пара в экране или без него. Один
сегмент сети может содержать до 32 устройств. Максимальная длина кабеля
достигает 1,9 км. В каждом сегменте с обеих сторон кабеля подключены RC-
цепочки, состоящие из последовательно соединенных конденсатора емкостью
1 мкФ и резистора сопротивлением 100 Ом. Благодаря низкой энергии переда-
ваемого сигнала Profibus РА является искробезопасной электрической цепью
и может быть использован во взрывоопасных зонах (при наличии разрешения
Ростехнадзора на конкретное оборудование).
Для передачи данных используется NRZ-кодирование и 11-битный фор-
мат, идентичный формату HART-протокола (см. рис. 2.18,а), включающему
стартовый бит (0), 8 бит данных младшими разрядами вперед, бит паритета
(четный) и стоп-бит (1). Бит паритета равен нулю, если число бит в слове
четное, и равен единице в противном случае. В слове «11000011» число еди-
ниц четное, поэтому бит паритета устанавливается равным 0. Такой формат
используется для всех без исключения слов, включая заголовки сообщений.
При передаче слов длиннее 8 бит старший байт отправляется первым, за ним
остальные в порядке старшинства.
Несколько лет назад для Profibus была разработана модификация интер-
фейса RS-485 для взрывоопасных зон, которая получила название RS-485-IS
(Intrinsically Safe — внутренне безопасный) [133]. Существенным ее отличием
является наличие резисторов, ограничивающих ток в линии до значений, уста-
новленных стандартом на искробезопасные электрические цепи.
2.7.2. Канальный уровень Profibus DP
Далее мы будем рассматривать только Profibus DP, поскольку он получил
несравненно более широкое распространение, чем FMS и РА.
Канальный уровень модели OSI в Profibus называется FDL-уровнем (Field-
bus Data Link — промышленный канал связи). Объект MAC (Medium Access
Control — управление доступом к каналу) на канальном уровне определяет
процедуру передачи данных устройствами, включая управление правами на
передачу данных через сеть. Протокол канального уровня обеспечивает вы-
полнение следующих важных требований:
• в процессе коммуникации между ведущими устройствами необходимо обес-
печить выполнение каждым из них своей задачи в течение заранее опре-
деленного интервала времени;
• взаимодействие ведущих устройств (контроллеров) с ведомыми должно
происходить максимально быстро.
В сети Profibus для доступа ведущих устройств к сети используется метод
передачи маркера (рис. 2.23). В этом методе сеть имеет логическую топологию
кольца (т.е. кольца на уровне адресов устройств), каждое ведущее устройство
получает доступ к сети только при получении маркера. Маркер выполняет
роль арбитра, который предоставляет устройству право доступа. По истечении
определенного времени это устройство должно передать маркер следующему
100
Глава 2
Profibus
ведущему устройству, которое получает доступ также на время, пока маркер
находится у него. Таким образом, каждому ведущему устройству выделяет-
ся точно заданный интервал времени. Этот интервал может быть установлен
при конфигурировании системы.
Каждому мастеру в сети назначаются свои ведомые устройства (рис. 2.23).
В методе «ведущий/ведомый» процедуру коммуникации с ведомыми устрой-
ствами выполняет мастер, который обладает маркером. На время обладания
маркером мастер становится ведущим также по отношению к другим мастерам,
т.е. может выполнять с ними коммуникацию типа «мастер-мастер».
Profibus имеет также широковещательный режим работы, когда ведущее
устройство посылает сообщение «всем», не ожидая уведомления о получении,
и многоабонентский режим, когда ведущее устройство посылает одно и то же
сообщение сразу нескольким участникам сети.
В задачи объекта МАС активного устройства (получившего маркер) вхо-
дит обнаружение наличия или отсутствия маркера сразу после начала работы
сети, передача маркера следующему устройству в порядке возрастания адре-
сов, удаление адресов вышедших из строя или выключенных устройств и до-
бавление новых, восстановление потерянного маркера, устранение дубликатов
маркеров, устранение дублирования сетевых адресов и обеспечение заданного
периода обращения маркера по сети.
Коммуникационный профиль DP. Основная функция коммуникаци-
онного профиля DP состоит в эффективном обмене данными ПЛК или ком-
пьютера с датчиками и исполнительными устройствами. Обмен данными с
этими устройствами обычно выполняется периодически, но коммуникацион-
ный профиль DP предоставляет также дополнительный сервис апериодическо-
го обмена для установки параметров, контроля режимов работы и обработки
сигналов тревоги (алармов).
В обычном режиме центральный контроллер (ведущий) периодически счи-
тывает информацию, поступающую на входы ведомых устройств и записывает
информацию для их выходов. Дополнительно к этому периодическому обме-
ну данными DP обеспечивает мощные средства для диагностики и инсталля-
Промышленные сети и интерфейсы
101
ции системы, а также для обеспечения устойчивости к внешним дестабили-
зирующим факторам.
Средства диагностики DP обеспечивают быстрое обнаружение места появ-
ления ошибки и пересылку соответствующего сообщения ведущему устройству.
Диагностические сообщения делятся на три уровня:
1) уровень устройства (касающиеся общих признаков работоспособности
устройства, таких как перегрев, уход напряжения за допустимые границы и
др.);
2) уровень модуля ввода-вывода, входящего в состав устройства модуль-
ной конструкции;
3) уровень канала модуля (например, «к.з. входа 8»).
К одной сети могут быть подсоединены до 128 устройств (но не более 32-х
в одном сегменте). Спецификация для конфигурирования системы включает
количество узлов сети, распределение адресов устройств, формат диагности-
ческих сообщений, параметры шины.
В сети могут использоваться устройства трех типов:
• DP мастер класса 1 (DPMI) — центральный контроллер, который цик-
лически обменивается информацией с ведомыми устройствами с заранее
определенным периодом;
• DP мастер класса 2 (DPM2) — устройство, предназначенное для конфигу-
рирования системы, наладки, обслуживания или диагностики;
• ведомое устройство — устройство, которое выполняет сбор информации
или выдачу ее исполнительным устройствам.
Эти устройства могут отсылать или принимать не более 256 байт инфор-
мации за один цикл обмена.
Коммуникационный профиль DP позволяет сконфигурировать как однома-
стерную, так и многомастерную сеть. В одномастерной сети ведущее устрой-
ство (мастер) может посылать запросы и получать ответы только от ведо-
мых устройств.
В многомастерной сети имеется несколько ведущих устройств, которые
имеют свои одномастерные подсети и в пределах подсети являются устрой-
ствами класса DPMI. Ведущие устройства в многомастерной сети могут быть
также устройствами класса DPM2. Входные и выходные данные подчиненных
устройств могут быть прочитаны любым мастером сети. Однако записывать
данные в устройства может только один мастер, который при конфигурирова-
нии системы был обозначен как DPMI.
Ведущий контроллер (DPMI) может находиться в одном из трех состоя-
ний: Stop — когда не происходит обмена данными; Clear — когда DPMI может
считывать данные, но не может записывать их и выходы всех устройств пере-
водятся в безопасные состояния; Operate — обычное рабочее состояние.
Если в системе появляется сообщение об ошибке, то DPMI устанавлива-
ет выходы всех устройств вывода в безопасное состояние, а сам переходит в
состояние «Clear». Безопасным считается такое состояние, при котором ис-
полнительные устройства находятся в безопасном (для человека или системы)
состоянии. Такое состояние самоконтроля системы может быть установлено
102
Глава 2
или нет при ее конфигурировании. При отключенном состоянии самоконтроля
система продолжает работать несмотря на появление ошибок.
При конфигурировании системы пользователь назначает каждому веду-
щему свои ведомые устройства и очередность их опроса, а также указывает
устройства, которые не надо опрашивать периодически.
Передача данных между мастером DPMI и ведомыми делится на три фа-
зы: параметризация, конфигурирование и передача данных. В фазе парамет-
ризации и конфигурирования проверяется, соответствует ли конфигурация и
параметры ведомого устройства запланированным в DPMI установкам. Про-
веряется тип устройства, формат и длина передаваемых сообщений, количе-
ство входов или выходов.
Profibus DP имеет режим синхронизации вывода. Для этого посылается
широковещательная управляющая команда синхронизации, при получении ко-
торой происходит одновременная смена состояний выходов всех устройств выво-
да. Имеется также команда «замораживание», при поступлении которой входы
всех устройств ввода сохраняют свое текущее состояние и перестают реагиро-
вать на изменение поступающих на входы сигналов, пока не поступит команда
«размораживание». Эти команды используются для синхронизации ввода. Ко-
манды синхронизации могут посылаться всем устройствам сети, группе или
одному устройству.
Для обнаружения ошибок в передающих устройствах предусмотрен меха-
низм временного мониторинга (наблюдения), который действует как в ведо-
мых, так и ведущих устройствах. Интервал мониторинга устанавливается при
конфигурировании системы. Ведущий (DPMI) контролирует процесс переда-
чи данных ведомым устройством с помощью таймера. Для каждого подчи-
ненного используется свой таймер. Если в течение интервала наблюдения не
приходят корректные данные, выдается диагностическое сообщение для поль-
зователя. Если включен режим автоматической реакции на ошибки, то ве-
дущий устанавливает все выходы в безопасные состояния, а сам переходит
в состояние «Clear».
Ведомый также выполняет контроль ведущего устройства или линии пе-
редачи. Для этого используется сторожевой таймер. Если от ведущего не
приходят данные в течение периода сторожевого таймера, ведомый автомати-
чески переводит свои выходы в безопасные состояния. Для большей степени
защиты выходов в многомастерной системе только один (уполномоченный) ма-
стер имеет прямой доступ к изменению состояний выходов устройства. Все
другие мастера могут считывать только «изображения» сигналов на входах
и выходах устройства.
В Profibus имеются также расширенные DP-функции, которые позволяют
передавать апериодические функции чтения и записи, а также сигналы тревог
параллельно и независимо от периодической пересылки данных, установленной
пользователем при конфигурировании системы. Это позволяет, например, с по-
мощью DPM2 изменять параметры вновь подсоединенных ведомых устройств
или считывать состояние любых устройств сети без остановки системы. Эти
служебные функции выполняются апериодически с низким приоритетом, па-
раллельно с рабочим процессом передачи данных в системе. Для обеспечения
Промышленные сети и интерфейсы
103
такой возможности при параметризации всей сети устанавливают увеличенный
цикл обращения маркера, чтобы шина на была загружена на 100 %.
Передача сообщений. Profibus использует два типа сервисов для пере-
дачи сообщений: SRD (Send and Receive Data with acknowledge — отправка
и прием данных с уведомлением) и SND (Send Data with No acknowledge —
отправка данных без уведомления).
Сервис SRD позволяет отправить и получить данные в одном цикле об-
мена. Этот способ обмена наиболее распространен в Profibus и очень удобен
при работе с устройствами ввода-вывода, поскольку в одном цикле можно и
отправить, и получить данные.
Сервис SND используется, когда надо отправить данные одновремен-
но группе ведомых устройств (многоабонентский режим) или всем ведомым
устройствам (широковещательный режим). При этом ведомые устройства не
отправляют свои уведомления мастеру.
Сообщение в Profibus называется телеграммой. Телеграмма может содер-
жать до 256 байтов, из них 244 байта данных, плюс 11 служебных байтов (за-
головок телеграммы). Все телеграммы имеют заголовки одинаковой длины, за
исключением телеграммы с названием Data_Exchange. Заметим, что 11 байтов
служебной информации делают Profibus очень неэффективным при передаче
коротких сообщений. Однако при больших объемах данных такой формат те-
леграммы достаточно эффективен.
SD LE LEr SD DA SA FC DSAP SSAP DU (1...244 байт) FCS ED
Рис. 2.24. Структура телеграммы Profibus
Поля телеграммы на рис. 2.24 имеют следующее содержание:
SD — стартовый разделитель. Используется для указания начала теле-
граммы и ее формата. Имеется четыре типа разделителей для телеграмм за-
проса и ответа и один тип для короткого уведомления. Короткое уведомление
имеет поле SD, но не в начале телеграммы;
LE — длина передаваемых данных (DA 4- SA 4- FC 4- DSAP 4- SSAP 4- DU);
LEr — повторение поля LE с целью его резервирования;
DA — адрес устройства-получателя телеграммы;
SA — адрес отправителя;
FC — код типа телеграммы (запрос, уведомление, ответ, диагностические
данные, тип устройства - мастер или ведомый, приоритет, уведомление);
DSAP — устройство-получатель использует это поле, чтобы определить,
какой тип сервиса нужно выполнить;
SSAP — COM-порт отправителя;
DU — данные длиной от 1 до 244 байт;
FCS — контрольная сумма телеграммы (сумма значений полей DA 4- SA
4- FC 4- DU по модулю 255);
ED — признак конца.
104
Глава 2
2.7.3. Резервирование
С целью повышения надежности в Profibus предусмотрено резервирование,
выполненное следующим образом (см. также главу 8):
• ведомые устройства содержат два различных Profibus-интерфейса, основ-
ной и резервный. Они могут быть либо в одном устройстве, либо в двух
одинаковых устройствах (основном и резервном);
• устройства снабжаются двумя независимыми стеками протоколов со спе-
циальным расширением для резервирования;
• процесс резервирования стеков протоколов осуществляется путем запуска
специального программного объекта резервирования RedCom.
В нормальном режиме коммуникация выполняется только через основ-
ное устройство, которое посылает диагностическую информацию резервному
устройству. В случае, когда основное устройство дает сбой, резервное устрой-
ство берет на себя его функции. Кроме того, мастер контролирует все ведомые
устройства и выдает диагностическое сообщение на верхний уровень АСУ ТП,
как только в системе вышло из строя основное устройство и не осталось ре-
зервного или когда вышло из строя резервное. Резервное устройство может
работать на основной Profibus линии или на двух, если имеется резервная.
Подход к резервированию в Profibus имеет следующие свойства:
• одна и та же модификация устройств используется для реализации раз-
личных вариантов резервирования;
• ведущее, ведомое устройство и шина могут быть резервированы незави-
симо друг от друга;
• не требуется особого дополнительного конфигурирования резервного уст-
ройства;
• возможен полный мониторинг обоих ведомых устройств.
Резервирование обеспечивает высокий коэффициент готовности*, короткое
время восстановления, отсутствие потерь данных и нечувствительность систе-
мы к отказам.
2.7.4. Описание устройств
Современные модули ввода-вывода являются интеллектуальными устрой-
ствами и выполняют многие функции, которые ранее выполнялись только
контроллерами. Однако, чтобы выполнить эти функции, устройства требу-
ют сложной настройки при инсталляции системы, при обслуживании и па-
раметризации. Поэтому необходимо иметь точное и полное описание сведе-
ний об устройствах, таких как тип выполняемых функций, количество вхо-
дов/выходов, диапазон изменения переменных, единицы измерения, значения
по умолчанию, идентифицирующие параметры устройства и т.д.
Profibus предлагает несколько методов и средств для описания устройств,
которые обеспечивают унификацию описания. По историческим причинам в
* Коэффициент готовности — в соответствии с ГОСТ 27.002-89 вероятность того,
что объект окажется в работоспособном состоянии в произвольный момент времени (за
исключением запланированных периодов неработоспособности).
Промышленные сети и интерфейсы
105
промышленной автоматизации используется в основном формат GSD (General
Station Data — общие данные об устройстве). Описание устройств в этом фор-
мате создается их изготовителем и поставляется вместе с устройством.
Характеристики устройства описываются с помощью языка описания элек-
тронных устройств Electronic Device Description Language (EDDL) и поставля-
ются в виде текстового файла EDD (Electronic Device Description — описа-
ние электронного устройства). Интерпретатор этого описания очень хорошо
апробирован для приложений средней сложности. Для сложных приложений
Profibus предлагает другой программный компонент — Device Type Manager
(DTM).
Текстовый файл GSD содержит как общую, так и специфичную для кон-
кретного устройства информацию. С помощью ключевых слов средство конфи-
гурирования может прочесть идентификационные записи, настраиваемые па-
раметры, типы данных, допустимые значения параметров. Некоторые из клю-
чевых слов обязательны (по стандарту), например имя изготовителя, другие
являются опционными. GSD-файл делится на три секции:
• секция общих параметров содержит имя поставщика и имя устройства, вер-
сию аппаратуры и программного обеспечения, идентификационный номер,
поддерживаемые скорости передачи;
• секция спецификаций ведущего устройства указывает допустимое число
подключаемых ведомых устройств, параметры передачи и приема сооб-
щений;
• секция спецификаций ведомого устройства указывает число и тип каналов
ввода-вывода, перечень диагностических сообщений и список модулей при
модульной конструкции устройства.
GSD-файл загружается в средство конфигурирования системы Profibus
Configurator и используется при ее инсталляции.
Более мощным средством описания устройств является язык EDD, который
является частью международного стандарта IEC 61804-2 и позволяет описывать
устройства средней сложности. Еще более мощными являются независимые
от конкретной промышленной сети средства описания устройств FDT/DTM
(Field Device Tool/Device Type Manager — средство для устройств полевого
уровня/менеджер типа устройства), которые позволяют описывать очень слож-
ные устройства [134].
2.8. Modbus
Протокол Modbus и сеть Modbus [135-137] являются самыми распростра-
ненными в мире. Несмотря на свой возраст (стандартом де-факто Modbus стал
еще в 1979 г.), Modbus не только не устарел, но, наоборот, существенно возросло
количество новых разработок и объем организационной поддержки этого прото-
кола. Миллионы Modbus-устройств по всему миру продолжают успешно рабо-
тать, а последняя версия описания протокола появилась в декабре 2006 г. [135].
Преимуществами Modbus являются отсутствие необходимости в специаль-
ных интерфейсных контроллерах (Profibus и CAN требуют для своей реали-
106
Глава 2
зации заказные микросхемы), простота программной реализации и элегант-
ность принципов функционирования. Все это снижает затраты на освоение
стандарта как системными интеграторами, так и разработчиками контроллер-
ного оборудования. Высокая степень открытости протокола обеспечивается
также полностью бесплатными текстами стандартов, которые можно скачать
с сайта www.modbus.org.
В России Modbus по распространенности конкурирует только с Profibus.
Популярность протокола в настоящее время объясняется, прежде всего, сов-
местимостью с большим количеством оборудования, которое имеет протокол
Modbus. Кроме того, Modbus имеет высокую достоверность передачи данных,
связанную с применением надежного метода контроля ошибок. Modbus позво-
ляет унифицировать команды обмена благодаря стандартизации номеров (ад-
ресов) регистров и функций их чтения-записи.
Основным недостатком Modbus является сетевой обмен по типу «веду-
щий/ведомый», что не позволяет ведомым устройствам передавать данные по
мере их появления и поэтому требует интенсивного опроса ведомых устройств
ведущим.
Разновидностями Modbus являются протоколы Modbus Plus [137] — мно-
гомастерный протокол с кольцевой передачей маркера и Modbus TCP [144],
рассчитанный на использование в сетях Ethernet и Интернет.
Протокол Modbus имеет два режима передачи: RTU (Remote Terminal
Unit — удаленное терминальное устройство) и ASCII. Стандарт предусматри-
вает, что режим RTU в протоколе Modbus должен присутствовать обязатель-
но, а режим ASCII является опционным. Пользователь может выбирать лю-
бой из них, но все модули, включенные в сеть Modbus, должны иметь один
и тот же режим передачи.
Мы рассмотрим только протокол Modbus RTU, поскольку Modbus ASCII в
России практически не используется. Отметим, что Modbus ASCII нельзя пу-
тать с частно-фирменным протоколом DC ON, который используется в модулях
фирм Advantech и ICP DAS и не соответствует стандарту Modbus.
Стандарт Modbus предусматривает применение физического интерфейса
RS-485, RS-422 или RS-232. Наиболее распространенным для организации про-
мышленной сети является 2-проводной интерфейс RS-485. Для соединений
точка-точка может быть использован интерфейс RS-232 или RS-422.
Таблица 2.12
Модель OSI для Modbus
Номер уровня Название уровня Реализация
7 Прикладной MODBUS Application Protocol
6 Уровень представления Нет
5 Сеансовый Нет
4 Транспортный Нет
3 Сетевой Нет
2 Канальный Протокол «ведущий/ведомый».
(передачи данных) Режимы RTU и ASCII
1 Физический RS-485 или RS-232
Промышленные сети и интерфейсы
107
В стандарте Modbus имеются обязательные требования, рекомендуемые и
опционные (необязательные). Существует три степени соответствия стандарту:
«полностью соответствует» — когда протокол соответствует всем обязатель-
ным и всем рекомендуемым требованиям, «условно соответствует» — когда
протокол соответствует только обязательным требованиям и не соответствует
рекомендуемым, и «не соответствует».
Модель OSI протокола Modbus содержит три уровня: физический, каналь-
ный и прикладной (табл. 2.12).
2.8.1. Физический уровень
В новых разработках на основе Modbus стандарт рекомендует использовать
интерфейс RS-485 с двухпроводной линией передачи, но допускается примене-
ние четырехпроводной линии и интерфейса RS-232.
Modbus-шина должна состоять из одного магистрального кабеля, от кото-
рого могут быть сделаны отводы. Магистральный кабель Modbus должен со-
держать три проводника в общем экране, два из которых представляют собой
витую пару, а третий соединяет общие («земляные») выводы всех интерфейсов
RS-485 в сети. Общий провод и экран должны быть заземлены в одной точке,
желательно около ведущего устройства.
Устройства могут подключаться к кабелю тремя способами:
• непосредственно к магистральному кабелю;
• через пассивный разветвитель (тройник);
• через активный разветвитель (содержащий развязывающий повторитель
интерфейса).
В документации на устройство и на тройник должны быть указаны на-
именования подключаемых цепей.
На каждом конце магистрального кабеля должны быть установлены ре-
зисторы для согласования линии передачи, как это требуется для интерфейса
RS-485 (см. выше). В отличие от RS-485, наличие терминальных резисторов
в соответствии со стандартом Modbus является обязательным независимо от
скорости обмена. Их номинал может быть равным 150 Ом и мощность 0,5 Вт.
Терминальные резисторы, а также резисторы, устраняющие неопределенность
состояния линии при высокоомном состоянии передатчиков, устанавливаются
так же, как описано в разделе «Интерфейсы RS-485, RS-422 и RS-232». Стан-
дарт требует, чтобы в руководствах по эксплуатации устройств Modbus было
сказано, имеются ли указанные резисторы внутри устройства или их необхо-
димо устанавливать при монтаже сети. Если требуются внешние резисторы, то
они должны иметь номинал в интервале от 450 до 650 Ом и быть установлены
только в одном месте в пределах каждого сегмента сети (сегментами считают-
ся части сети между повторителями интерфейса).
Modbus-устройство обязательно должно поддерживать скорости обмена
9600 и 19200 бит/с, из них 19200 бит/с устанавливается «по умолчанию».
Допускаются также скорости 1200, 2400, 4800,..., 38400 бит/с, 65 кбит/с,
115 кбит/с,...
108
Глава 2
Скорость передачи должна выдерживаться в передатчике с погрешностью
не хуже 1 %, а приемник должен принимать данные при отклонении скоро-
сти передачи до 2 %.
Сегмент сети, не содержащий повторителей интерфейса, должен допускать
подключение до 32 устройств, однако их число может быть увеличено, если
это допустимо исходя из нагрузочной способности передатчиков и входного со-
противления приемников, которые должны быть приведены в документации
на интерфейсы. Указание этих параметров в документации является обяза-
тельным требованием стандарта.
Максимальная длина магистрального кабеля при скорости передачи
9600 бит/с и сечении жил более 0,13 мм2 (AWG26) составляет 1 км. Отводы
от магистрального кабеля не должны быть длиннее 20 м. При использовании
многопортового пассивного разветвителя с N отводами длина каждого отвода
не должна превышать значения 40 m/N.
Modbus не устанавливает конкретных типов разъемов, но если используют-
ся разъемы RJ45, mini-DIN или D-Shell, они должны быть экранированными,
а цоколевки должны соответствовать стандарту.
Для минимизации ошибок при монтаже рекомендуется использовать про-
вода следующих цветов: желтый — для положительного вывода RS-485 (на
котором устанавливается логическая «1», когда через интерфейс выводится
логическая «1»); коричневый — для второго вывода интерфейса RS-485; се-
рый — для общего провода.
Типовым сечением кабеля является AWG 24 (0,2 мм2, диаметр провода
0,51 мм). При использовании кабеля категории 5 его длина не должна пре-
вышать 600 м. Волновое сопротивление кабеля желательно выбирать более
100 Ом, особенно для скорости обмена более 19200 бит/с.
2.8.2. Канальный уровень
Протокол Modbus предполагает, что только одно ведущее устройство (кон-
троллер) и до 247 ведомых (модулей ввода-вывода) могут быть объединены в
промышленную сеть. Обмен данными всегда инициируется ведущим. Ведомые
устройства никогда не начинают передачу данных, пока не получат запрос от
ведущего. Ведомые устройства также не могут обмениваться данными друг
с другом. Поэтому в любой момент времени в сети Modbus может происхо-
дить только один акт обмена.
Адреса с 1 по 247 являются адресами Modbus устройств в сети, а с 248 по
255 зарезервированы. Ведущее устройство не должно иметь адреса и в сети не
должно быть двух устройств с одинаковыми адресами.
Ведущее устройство может посылать запросы всем устройствам одновре-
менно (широковещательный режим) или только одному. Для широковещатель-
ного режима зарезервирован адрес «0» (при использовании в команде этого
адреса она принимается всеми устройствами сети).
Описание кадра (фрейма) протокола Modbus. В протоколе Modbus
RTU сообщение начинает восприниматься как новое после паузы (тишины) на
шине длительностью не менее 3,5 символов (14 бит), т.е. величина паузы в
секундах зависит от скорости передачи.
Промышленные сети и интерфейсы
109
ADU
◄--------------------------------------►
Адрес Код функции Данные Контрольная сумма
1 байт 1 байт 0...252 байт 2 байта
-----------►
PDU
Рис. 2.25. Формат кадра протокола Modbus RTU; PDU (Protocol Data Unit) — элемент
данных протокола; ADU (Application Data Unit) — элемент данных приложения
Формат кадра показан на рис. 2.25. Поле адреса всегда содержит только
адрес ведомого устройства, даже в ответах на команду, посланную ведущим.
Благодаря этому ведущее устройство знает, от какого модуля пришел ответ.
Поле «Код функции» говорит модулю о том, какое действие нужно вы-
полнить.
Поле «Данные» может содержать произвольное количество байт. В нем
может содержаться информация о параметрах, используемых в запросах кон-
троллера или ответах модуля.
Поле «Контрольная сумма» содержит контрольную сумму CRC длиной
2 байта.
Структура данных в режиме RTU. В режиме RTU данные передаются
младшими разрядами вперед (рис. 2.26).
Стартовый бит 1 (МЗР) 2 3 4 5 6 7 8 Бит паритета Стоп-бит
Рис. 2.26. Последовательность битов в режиме RTU. МЗР — младший значащий
разряд. При отсутствии бита паритета на его место записывается второй стоп-бит
По умолчанию в RTU режиме бит паритета устанавливают равным 1, ес-
ли количество двоичных единиц в байте нечетное, и равным 0, если оно чет-
ное. Такой паритет называют четным (even parity), а метод контроля назы-
вают контролем четности.
При четном количестве двоичных единиц в байте бит паритета может быть
равен 1. В этом случае говорят, что паритет является нечетным (odd parity).
Контроль четности может отсутствовать вообще. В этом случае вместо бита
паритета должен использоваться второй стоповый бит. Для обеспечения мак-
симальной совместимости с другими продуктами рекомендуется использовать
возможность замены бита паритета на второй стоповый бит.
Ведомые устройства могут воспринимать любой из вариантов: четный,
нечетный паритет или его отсутствие.
Структура Modbus RTU сообщения. Сообщения Modbus RTU переда-
ются в виде кадров, для каждого из которых известно начало и конец. При-
знаком начала кадра является пауза (тишина) продолжительностью не менее
3,5 шестнадцатеричных символов (14 бит). Кадр должен передаваться непре-
рывно. Если при передаче кадра обнаруживается пауза продолжительностью
более 1,5 шестнадцатеричных символа (6 бит), то считается, что кадр содержит
ошибку и должен быть отклонен принимающим модулем. Эти величины пауз
110
Глава 2
должны строго соблюдаться при скоростях ниже 19200 бит/с, однако при бо-
лее высоких скоростях рекомендуется использовать фиксированные значения
паузы, 1,75 мс и 750 мкс соответственно.
Контроль ошибок. В режиме RTU имеется два уровня контроля ошибок
в сообщении: контроль паритета для каждого байта (опционно) и контроль
кадра в целом с помощью CRC метода.
CRC метод используется независимо от проверки паритета. Значение CRC
устанавливается в ведущем устройстве перед передачей. При приеме сообще-
ния вычисляется CRC для всего сообщения и сравнивается с его значением,
указанным в поле CRC кадра. Если оба значения совпадают, считается, что
сообщение не содержит ошибки.
Стартовые, стоповые биты и бит паритета в вычислении CRC не участвуют.
2.8.3. Прикладной уровень
Прикладной уровень Modbus RTU версии 1.1а описан в [136]. Он обеспе-
чивает коммуникацию между устройствами типа «ведущий/ведомый». При-
кладной уровень независим от физического и канального уровней, в частно-
сти, он может использовать протоколы Ethernet TCP/IP (Modbus TCP/IP),
Modbus Plus (многомастерная сеть с передачей маркера), интерфейсы RS-232,
RS-422, RS-485, оптоволоконные, радиоканалы и другие физические среды для
передачи сигналов.
Прикладной уровень Modbus основан на запросах с помощью кодов функ-
ций. Код функции указывает ведомому устройству, какую операцию оно долж-
но выполнить.
При использовании протокола прикладного уровня с различными протоко-
лами транспортного и канального уровней сохраняется неизменным основной
блок Modbus-сообщения, включающий код функции и данные. Этот блок на-
зывается PDU (Protocol Data Unit) — элемент данных протокола. К блоку
PDU могут добавляться дополнительные поля при использовании его в раз-
личных промышленных сетях и тогда он называется ADU (Application Data
Unit) — элемент данных приложения.
Коды функций. Стандартом Modbus предусмотрены три категории ко-
дов функций: установленные стандартом, задаваемые пользователем и заре-
зервированные.
Коды функций являются числами в диапазоне от 1 до 127. Коды в диа-
пазоне от 65 до 72 и от 100 до ПО относятся к задаваемым пользователем
функциям, в диапазоне от 128 до 255 коды зарезервированы для пересылки
кодов ошибок в ответном сообщении. Код «0» не используется.
Коды ошибок используются ведомым устройством, чтобы определить, ка-
кое действие предпринять для их обработки. Значения кодов и их смысл опи-
саны в стандарте на Modbus RTU [136].
Поле данных (см. рис. 2.25) в сообщении, посланном от ведущего устрой-
ства ведомому, содержит дополнительную информацию, которую ведомое ис-
пользует, чтобы выполнить функцию, указанную в поле «код функции». Поле
Промышленные сети и интерфейсы
111
Таблица 2.13
Пример кодов Modbus RTU для модуля RealLab! типа NL-16DI
Обозна- чение регистра НЕХ-адрес регистра Что читается или записывается Код функ- ции чтения регистра Код функ- ции записи в регистр Примечание
00001 00h 00h Дискретный выход 0 01 05 1 или 0
00002 00h 01h Дискретный выход 1 01 05 1 или 0
10001 OOh OOh Дискретный вход 0 02 - 1 или 0
10002 OOh Olh Дискретный вход 1 02 - 1 или 0
10003 OOh 02h Дискретный вход 2 02 - 1 или 0
10004 OOh 03h Дискретный вход 3 02 - 1 или 0
10005 OOh 04h Дискретный вход 4 02 - 1 или 0
10006 OOh 05h Дискретный вход 5 02 - 1 или 0
10007 OOh 06h Дискретный вход 6 02 - 1 или 0
10008 OOh 07h Дискретный вход 7 02 - 1 или 0
10009 OOh 08h Дискретный вход 8 02 - 1 или 0
10010 OOh 09h Дискретный вход 9 02 - 1 или 0
10011 OOh OAh Дискретный вход 10 02 - 1 или 0
10012 OOh OBh Дискретный вход 11 02 - 1 или 0
10013 OOh OCh Дискретный вход 12 02 - 1 или 0
10014 OOh ODh Дискретный вход 13 02 - 1 или 0
10015 OOh OEh Дискретный вход 14 02 - 1 или 0
10016 OOh OFh Дискретный вход 15 02 - 1 или 0
40201 OOh C8h Имя модуля 03 10 -
40213 OOh D4h Версия программы 03 - -
40513 02h OOh Адрес модуля 03 06 0001h-00F7h (допустимый диапазон значений)
40514 02h Olh Скорость UART 03 06 0003h-000Ah (допустимый диапазон значений)
40518 02h 05h Протокол 03 06 0000h — ASCII, 0001h — RTU
40769 03h OOh Значение на выходе после включения питания модуля Power On ValueO 03 06 0000h-0003h (допустимый диапазон значений)
данных может содержать значения состояний дискретных входов/выходов, ад-
реса регистров, из которых надо считывать (записывать) данные, количество
байт данных, ссылки на переменные, число переменных, код подфункций и т.п.
Если ведомый нормально выполнил принятую от ведущего функцию, то
в ответе поле «код функции» содержит ту же информацию, что и в запросе.
В противном случае ведомый выдает код ошибки. В случае ошибки код функ-
ции в ответе равен коду функции в запросе, увеличенному на 128.
Содержание поля данных. В сообщении ведущего устройства ведомому
поле данных содержит дополнительную информацию, необходимую для вы-
полнения указанной функции. Например, если код функции указывает, что
112
Глава 2
необходимо считать данные из группы регистров устройства ввода (код функ-
ции 03 hex), то поле данных содержит адрес начального регистра и количество
регистров. Если ведущее устройство посылает команду записи данных в груп-
пу регистров (код функции 10 hex), то поле данных должно содержать адрес
начального регистра, число регистров, количество байтов данных и данные
для записи в регистр.
Конкретное содержание поля данных устанавливается стандартом для
каждой функции отдельно.
В некоторых сообщениях поле данных может иметь нулевую длину.
Список кодов Modbus. В табл. 2.13 приведены примеры кодов Modbus
RTU для модуля дискретного ввода и вывода типа RealLab! NL-16DI (фирмы
НИЛ АП). Для чтения логических состояний входов модуля через интерфейс
RS-485 необходимо послать команду в формате, показанном на рис. 2.25, где
в полях «Адрес», «Код» указываются значения из соответствующих столб-
цов табл. 2.13.
2.9. Промышленный Ethernet
Ethernet появился более 30 лет назад. В настоящее время под Ethernet
понимают семейство продуктов для локальных сетей, которые соответствуют
стандарту IEEE 802.3. Промышленному применению стандарта долгое время
мешал метод случайного доступа к сети, не гарантировавший доставку сооб-
щения в короткое и заранее известное время. Однако это проблема была ре-
шена применением коммутаторов (см. ниже). Доля Ethernet среди установ-
ленных промышленных сетей в 2000 году составляла 11 %, в 2005 г. — уже
23 % [142]. В настоящее время (с 2004 по 2008 годы) рынок промышленного
Ethernet растет со скоростью 51 % в год [170], он стал промышленным стан-
дартом, и имеется большой выбор оборудования, удовлетворяющего промыш-
ленным требованиям. Недостатком промышленного Ethernet является относи-
тельно высокая цена: Ethernet модули ввода-вывода в среднем в 2 раза дороже
аналогичных Modbus-устройств.
Внедрению Ethernet в промышленность способствовали следующие его ка-
чества:
• высокая скорость передачи (до 10 Гбит/с) и соответствие требованиям
жесткого реального времени при высоком быстродействии (например, при
управлении движением);
• простота интеграции с Интернетом и интранетом, в том числе по прото-
колам прикладного уровня SNMP (Simple Network Management Protocol),
FTP, MIME (Multipurpose Internet Mail Extensions), HTTP;
• простота интеграции с офисными сетями;
• наличие большого числа специалистов по обслуживанию Ethernet;
• по-настоящему открытые решения;
• возможность организации многомастерных сетей;
• неограниченные возможности по организации сетей самых разнообразных
топологий;
Промышленные сети и интерфейсы
113
• широкое применение в офисных сетях, что обеспечило экономическую эф-
фективность технической поддержки стандарта со стороны международ-
ных организаций по стандартизации;
• появление недорогих коммутаторов, решивших проблему недетерминиро-
ванности Ethernet.
Продвижением и технической поддержкой промышленного Ethernet зани-
мается ассоциация Industrial Ethernet Association (IEA, www.industrialether-
net.com), которая была организована в 1999 г. по инициативе шести ком-
паний (Synergetic Micro Systems, Grayhill, HMS Fieldbus Systems, Hilscher,
Contemporary Controls и Richard Hirschmann).
Существуют четыре стандартные скорости передачи данных в сетях Ether-
net по оптоволоконному кабелю и витой паре проводов: 10 и 100 Мбит/с, 1 и
10 Гбит/с. Ethernet имеет несколько модификаций, структура наименований
которых имеет следующий вид: <скорость передачи>ВА8Е<дополнительные
обозначениям Скорость указывается цифрой в Мбит/с или в Гбит/с, в по-
следнем случае к цифре добавляется буква G. Буквы после «BASE» означают
тип кабеля: Т (Twisted pair) — витая пара, F (Fiber optic) — оптоволоконный, S
(Short wavelength optic) — оптический коротковолновый, L (Long wavelength) —
длинноволновый, C (short Copper cable) — короткий медный кабель. Символ
«X» означает наличие блока кодирования на физическом уровне. В тексте
стандарта IEEE 802.3-2005 [138] приводится 44 варианта таких обозначений.
Например, 10BASE-T означает спецификацию физического уровня для скоро-
сти 10 Мбит/с с методом доступа CSMA/CD и с использованием двух витых пар
проводов; 100BASE-FX — для скорости 100 Мбит/с, CSMA/CD с применением
двух многомодовых оптических кабелей.
В промышленной автоматизации наибольшее распространение получили
стандарты 10BASE-T и 100BASE-TX, а также 100BASE-FX, которые и будут
рассмотрены ниже.
В табл. 2.14 приведена типовая модель OSI для локальной сети LAN, в
которой Ethernet как стандарт IEEE 802.3 охватывает только физический и
Таблица 2.14
Уровни модели OSI для сети Ethernet
Уровень OSI-модель Сеть Ethernet Варианты реализации
7 6 5 Прикладной Уровень представления Сеансовый Прикладной HTTP, FTP, SMTP, DNS NFS, XDR, RPC
4 Транспортный Транспортный TCP UDP
3 Сетевой Интернет-протокол IP
2 Канальный (передачи данных) LLC или другие клиенты МАС Ethernet IEEE 802.3
МАС
1 Физический PHY Витая пара, оптический кабель, коаксиальный кабель
114
Глава 2
канальный уровень. На других уровнях в табл. 2.14 в качестве примера пред-
ставлены протоколы Интернета. Здесь LLC (Logical Link Control — управление
логическими связями) — клиент подуровня MAC; MAC (Medium Access Cont-
rol) — подуровень управления доступом к линии передачи; PHY (PHYsical) —
физический уровень (линия передачи).
Уровни 1 и 2 Ethernet-протокола обычно воплощаются аппаратно, осталь-
ные — программно [140].
2.9.1. Особенности Ethernet
При использовании стандартного Ethernet время реакции сети часто пре-
вышает 100 мс. В локальных сегментах сети с малым количеством устройств
оно снижается до 20 мс при использовании протокола TCP и до 10 мс — для
UDP. Использование прямой МАС-адресации в локальных сегментах сети мо-
жет уменьшить время реакции до 1 мс [143]. Однако это время в Ethernet
является случайной величиной. Поэтому основным отличием промышленно-
го Ethernet от офисного является наличие коммутаторов, которые превращают
Ethernet в сеть с детерминированным поведением.
Для промышленных применений не годятся кабели и разъемы, использу-
емые в офисных сетях. Поэтому ряд производителей представляют на рынке
разъемы RJ-45 со степенью защиты IP67 от воздействий окружающей среды.
Надежность промышленного Ethernet обеспечивается резервированием ка-
бельных линий и сетевых карт, а также специальным программным обеспече-
нием для резервирования [139] (см. также главу 8).
Для повышения степени защиты системы управления от несанкциониро-
ванного доступа магистральную сеть Industrial Ethernet отделяют от офисной
брандмауэром*.
Отличительные признаки промышленного Ethernet:
• отсутствие коллизий и детерминированность поведения благодаря приме-
нению коммутаторов;
• индустриальные климатические условия;
• устойчивость к вибрациям;
• отсутствие вентиляторов в оборудовании;
• повышенные требования к электромагнитной совместимости;
• компактность, крепление на ДИН-рейку;
• удобное подключение кабелей;
• диагностическая индикация на панели прибора;
• электропитание от источника напряжения в диапазоне от 10 до 30 В;
• возможность резервирования;
• разъемы и оборудование со степенью защиты до IP67;
• защита от электростатических зарядов, электромагнитных импульсов, от
превышения напряжения питания;
• полнодуплексная передача.
* Брандмауэр — межсетевой экран для защиты от несанкционированного доступа.
Другие названия: файервол, фильтр.
Промышленные сети и интерфейсы
115
Недостатком Ethernet является значительный уровень «накладных расхо-
дов» в протоколах TCP/IP, которые рассчитаны на пересылку данных больших
объемов. Если же устройство пересылает всего 8 байт, что типично для АСУ
ТП, то полезная информация в протоколе составляет всего 11 %, поскольку
каждый пакет TCP/IP содержится 68 байт служебной информации. Однако
это часто можно скомпенсировать большой пропускной способностью сети.
2.9.2. Физический уровень
Физический уровень состоит из среды передачи (оптический кабель или
витая пара) и методов кодирования информации для каждой скорости пере-
дачи. На рис. 2.27 представлена структура канального и физического уров-
ня Ethernet 100BASE-T в соответствии со стандартом IEEE 802.3. Здесь MDI
(Medium Dependent Interface) — интерфейс, зависящий от среды передачи дан-
ных; РМА (Physical Medium Attachment) — дополнение физической среды пе-
редачи; PCS (Physical Coding Sublayer) — подуровень физического кодирова-
ния; МП (Media Independent Interface) — интерфейс между подуровнями, не
зависящий от типа линии передачи.
MDI на рис. 2.27 — это устройство для соединения линии связи с транси-
вером. Подуровень РМА включает в себя трансивер, а также схему синхро-
низации принимаемых данных. Подуровень PCS обеспечивает схему кодирова-
ния, мультиплексирования и синхронизации потока символов, а также вырав-
нивание спектра кодового сигнала, демультиплексирование и декодирование.
Подуровень согласования обеспечивает согласование интерфейса МП с МАС-
уровнем. Интерфейс МП, не зависящий от типа среды передачи, обеспечивает
связь между уровнем МАС и подуровнем PHY.
Витые пары
Рис. 2.27. Структура физического и канального уровня Ethernet
116
Глава 2
Описанная структура 100BASE-T с помощью МП может быть подключена к
физическим уровням типа 100BASE-T4 (использует четыре неэкранированные
витые пары категории не ниже 3), 100BASE-TX (использует две неэкраниро-
ванные или экранированные витые пары категории не ниже 5), 100BASE-FX
(использует два многомодовых оптических кабеля) и 100BASE-T2 (использует
две неэкранированные витые пары категории не ниже 3).
В структуре на рис. 2.27 может еще присутствовать необязательный блок
автоматического выбора скорости передачи. Термин «IOOBASE-Х» использу-
ется для общего обозначения 100BASE-TX и 100BASE-FX.
Методы кодирования. Наиболее распространенные в промышленной ав-
томатизации стандарты 10BASE-T и 100BASE-TX используют манчестерский
код (см. п. 2.7.1) для скорости передачи 10 Мбит/с и 4В/5В-кодирование в со-
четании с NRZI (NRZ Inverted — инвертированный NRZ, рис. 2.28) для ско-
рости 100 Мбит/с.
При низкой скорости обмена (10 Мбит/с) используется манчестерский код,
при котором логическая единица кодируется переходом сигнала с низкого уров-
ня на высокий (рис. 2.28), а логический ноль — переходом с высокого уровня
на низкий. Недостатком манчестерского кода является широкая полоса частот-
ного спектра, связанная с необходимостью переключения уровней сигнала при
поступлении каждой двоичной цифры (сравните его с NRZ-кодом на рис. 2.28).
Синхроимпульсы Данные Манчестерский код NRZ-код NRZI-код NRZI и MLT-3 । 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 : । 1 ' 1 1 । : । 1 1 ! 1 । : । 1 1 0 । : । 1 1 0 I : I 1 ' 1 1 । : । 1 1 0 । : । 1 1 । : 1 • 0 । :
1 1 J 1 1 1 I 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
। । । 1 1
Рис. 2.28. Сравнение разных способов кодирования двоичных цифр электрическими
сигналами
Промышленные сети и интерфейсы
117
В спектре манчестерского кода присутствует две ярко выраженные гармоники,
которые при скорости передачи 10 Мбит/с составляют 10 МГц при передаче всех
единиц и 5 МГц — для сигнала, состоящего из чередующихся нулей и единиц.
Для уменьшения помех, излучаемых линией при скорости передачи
100 Мбит/с (100BASE-TX), используется NRZI-кодирование, при котором дво-
ичной единице соответствует смена уровня NRZI-сигнала, а нулю — ее отсут-
ствие (рис. 2.28). Высокий или низкий уровень NRZI-сигнала устанавлива-
ется в зависимости от того, какой уровень был до него. Логической едини-
це соответствует изменение сигнала независимо от того, какой уровень при-
сутствовал на шине ранее. Уровень не изменяется, если нужно закодировать
логический ноль. Иначе говоря, логическая единица при NRZI-кодировании
инвертирует предыдущее логическое состояние, поэтому в названии кода при-
сутствует слово Inverted.
NRZI-кодирование, как и NRZ, позволяет передать в два раза больше ин-
формации по сравнению с манчестерским кодированием при той же частоте
смене уровней сигнала и, соответственно, в два раза понизить максимальную
частоту излучаемых помех при той же скорости передачи информации. Макси-
мальная частота смены уровней при NRZI кодировании понижается до 62,5 МГц
по сравнению с максимальной частотой смены уровней сигнала 125 МГц для
скорости передачи 100 Мбит/с (пояснения см. ниже, при описании 4В/5В-
кодирования).
При переходе к скорости передачи 100 Мбит/с проблема снижения мощ-
ности излучаемых помех становится особенно остро, поэтому для дальнейшего
снижения ширины спектра сигнала в 100BASE-TX вместо двухуровневого сиг-
нала используется трехуровневый MLT-3 (MultiLevel Threshold-3 — многоуров-
невый 3-пороговый, см. рис. 2.28). Благодаря тому, что для кодирования инфор-
мации используются три уровня (а не два), увеличивается количество инфор-
мации, которое может быть закодировано в сигнале при той же ширине спектра
и длительности сигнала. Максимальная частота смены уровней сигнала при
скорости передачи 100 Мбит/с снижается с 62,5 МГц при NRZI-кодировании до
31,25 МГц при сочетании NRZI кода с MLT-3.
Поскольку при использовании NRZI-кодирования последовательность ну-
лей кодируется нулевым уровнем сигнала, в передаваемом сигнале появляются
последовательности из нескольких повторяющихся нулей, которые порождают
проблему синхронизации на стороне приемника. Для ее устранения используют
кодирование 4В/5В. Суть его состоит в следующем. К каждой тетраде (4 би-
та) передаваемых данных добавляется 5-й бит. Получившееся слово длиной
5 бит позволяет записать 25 = 32 кодовых комбинаций, из которых исключа-
ют комбинации, имеющие три и более нулей. Оставшиеся комбинации ставят
в соответствие шестнадцатеричным числам от 0 до F, получая таим образом
таблицу кодирования. Этот подход позволяет обеспечить по крайней мере два
фронта сигнала на одну тетраду, что упрощает синхронизацию данных в при-
емнике. Добавление пятого бита (25 % от длины тетрады) влечет за собой
необходимость увеличения частоты передачи со 100 до 125 МГц для сохране-
ния эффективной пропускной способности канала 100 Мбит/с.
118
Глава 2
Рис. 2.29. Структурная схема блока PHY Ethernet [140]
Диапазон частот, в котором мощность излучаемых помех максимальна, за-
висит от распределения нулей и единиц в передаваемых данных. При 4В/5В-
кодировании максимальная мощность помех приходится на частоту, с которой
повторяются 5-битные последовательности. Для уменьшения помех можно вы-
брать такое шифрование (скремблирование) передаваемых данных, при кото-
ром мощность помех будет распределена по всему диапазону частот равномер-
но. Это выполняется с помощью блока скремблирования и позволяет на 20 дБ
(в 10 раз) снизить мощность основной гармоники, распределив ее равномерно
по всему диапазону излучаемых частот.
Перечисленные методы уменьшают ширину спектра до 31,25 МГц при ско-
рости передачи 100 Мбит/с.
Структурная схема блока PHY показана на рис. 2.29. Блок состоит из
приемного (внизу) и передающего (вверху) канала, которые через изолирую-
щие трансформаторы подключаются к линии передачи (две витые пары) через
разъем RJ-45. Трансформаторы используется для изоляции трансивера от вы-
соких синфазных напряжений, которые могут появляться на линии вследствие
электромагнитных и электростатических наводок.
Цоколевка разъема RJ-45 показана на рис. 2.30. При соединениях двух ком-
пьютеров (и других конечных станций, которые имеют идентичные разъемы)
необходим перекрещивающийся кабель (рис. 2.30,6), поскольку приемник дол-
жен быть соединен с передатчиком, и наоборот. При соединении компьютера
с сетевыми устройствами (коммутаторами, повторителями и т.д.) использует-
ся прямой кабель (рис. 2.30,а), поскольку необходимые соединения контактов
с печатной платой выполнены на самой плате. Многие современные Ethernet-
коммутаторы автоматически определяют полярность жил кабеля, поэтому для
них можно использовать оба варианта. Неиспользуемые выводы на рис. 2.30
иногда применяются для передачи напряжения питания между устройствами.
Доступ к линии передачи. Блок CSMA/CD на рис. 2.29 выполняет
прослушивание линии передачи (CS — Carrier Sense), чтобы определить ее за-
нятость; обеспечивает доступ многим участникам сети к общей линии передачи
(МА — Multiple Access) и обнаруживает коллизии в линии (CD — Collision
Detection). Если при прослушивании линии обнаружено, что она свободна,
Промышленные сети и интерфейсы
119
| Rx+ pL Оранжевый -*{ Тх+ |
_ о Оранжевый о _
1 Dv |2_ —J Tv 1
| кх— L IX— |
Зеленый
| Тх+ р- Rx+ |
- А А —
Т 4 Синий 4 |
j 5 Синий 5 l
_ а а -
| Тх- Зеленый Rx- |
J Коричневый [_ *7 _
| / / [_
- Я Коричневый Я -
О
а)
Rx+ 1-Lck lr Rx+ |
о о _
Rx- 1 Z I Rx- |
Tx+ 1 5 | Tx+ |
_ A ' A —
4 J 4 |
, < &
lLZ/ J % 5 |
_ A /
Tx- 0 z - VO Tx- |
*7 _
J
g
6)
Рис. 2.30. Цоколевка разъемов Ethernet-кабеля: нормального (а)
и перекрещивающегося (6)
может начинаться передача данных. Если в то же время передачу начина-
ют и другие устройства в сети, это считается нормальным событием (напом-
ним, что в RS-485 интерфейсе одновременная передача нескольких устройств
является запрещенным режимом и приводит к перегреву выходных каскадов
передатчиков).
Если при прослушивании линии устройство обнаруживает, что во время ра-
боты его передатчика в линии имеются данные от других устройств (это состоя-
ние линии называется коллизией), то передача прекращается и возобновляется
по истечении случайного промежутка времени. Коллизии возникают не только
при одновременном начале передачи несколькими устройствами, но и в случае,
когда в сети имеется большая задержка (например, из-за большой длины кабе-
ля или большого количества повторителей). При наличии задержки возможна
ситуация, когда одна станция начала передачу, но данные еще не дошли до
другой станции, которая прослушивает линию с целью начать передачу.
Для нормального распознавания коллизии она должна быть обнаружена
во время передачи кадра (а не после). Для этого задержка сигнала в сети не
должна быть слишком большой. Так, при скорости передачи 100 Мбит/с длина
кабеля не должна превышать 100 м и между любыми двумя станциями должно
быть не более четырех концентраторов.
Во время передачи данных по линии все устройства сети находятся в режи-
ме приема, но только одно из них, которое узнает в передаваемом кадре свой
адрес, принимает данные в буфер и посылает кадр-ответ. После завершения
одного акта обмена данными все станции должны выдержать паузу длиной в
9,6 мкс при скорости передачи 10 Мбит/с и 0,96 мкс при 100 Мбит/с.
Коллизии и повторные попытки передачи кадра являются причиной того,
что время доставки сообщения в сети Ethernet не является детерминированным
и его величина резко возрастает с ростом загруженности сети. Причина состоит
в том, что при возникновении коллизий загруженность сети возрастает вслед-
ствие попыток повторной передачи одних и тех же кадров при возникновении
120
Глава 2
коллизий. Поэтому теоретически возможна ситуация, при которой устройство
никогда не получит доступ к сети.
Такое положение явилось основной причиной, по которой сеть Ethernet
долгое время не находила применение в промышленной автоматизации. Эту
проблему удалось решить с помощью коммутаторов.
Коммутаторы. Коммутатор представляет собой интеллектуальное мно-
гопортовое устройство, которое устанавливает физическую связь между дву-
мя Ethernet-устройствами. При этом другие устройства сети оказываются не
подключенными к образованному каналу передачи. Таким образом, вместо
обобществленного канала передачи коммутатор позволяет получить несколь-
ко независимых друг от друга каналов между парами устройств. Сеть ока-
зывается разделена на независимые сегменты, в каждом из которых может
происходить обмен информацией независимо от других. Это приводит к увели-
чению пропускной способности сети, снижению коэффициента загруженности,
а также к устранению коллизий.
Коллизии полностью устраняются только при полнодуплексной передаче,
поскольку благодаря коммутатору в одно и то же время в любом сегменте сети
могут одновременно передавать данные только два устройства, и они могут это
делать не мешая друг другу благодаря дуплексному каналу, использующему
две витые пары проводов. При полудуплексной связи оба устройства могут
начать передачу одновременно, и, поскольку они подключены к одной и той же
паре проводов, может возникнуть коллизия, хотя и с очень малой вероятно-
стью. Заметим, что полнодуплексный режим возможен только при соединении
«точка-точка», которое реализуется с помощью коммутаторов.
Для выполнения задачи сегментирования сети коммутатор содержит таб-
лицу МАС-адресов сетевых устройств (до нескольких тысяч [139]). Таблица
адресов может быть занесена в коммутатор при его настройке или сгенериро-
вана коммутатором автоматически. В последнем случае некоторое время после
инсталляции коммутатор пассивно наблюдает за деятельностью сети, собирая
МАС-адреса устройств, от которых приходят данные и занося их в таблицу.
После завершения акта «обучения» коммутатор пользуется созданной табли-
цей для распределения входящих в него кадров.
МАС-адрес (Ethernet-адрес) — это аппаратный, или физический адрес
устройства (или сетевой карты) в сети. Состоит из 48 бит (6 байтов, напри-
мер 00-08-74-4C-7F-1D), три из которых устанавливаются организацией IEEE
каждому производителю индивидуально, а вторые три устанавливает произ-
водитель. МАС-адрес записан в ПЗУ сетевого устройства и не может быть
изменен. МАС-адрес надо отличать от IP-адреса (например, 192.168.0.1), ко-
торый является логическим (протокольным, виртуальным) адресом и назна-
чается администратором сети (младшие цифры), Интернет-провайдером и ре-
гиональным Интернет-регистратором.
Если 2N устройств соединяются через коммутатор попарно, пропускная
способность сети возрастает в N раз. Однако в общем случае увеличение
пропускной способности может быть меньше, если несколько устройств пы-
таются соединиться через коммутатор с одним и тем же сетевым устройством.
Промышленные сети и интерфейсы
121
Поскольку пропускная способность выходного порта коммутатора ограничена,
входящий трафик оказывается в несколько раз больше исходящего, а буфер-
ная память коммутатора ограничена. Это может привести к потере данных,
если не предпринять мер для подавления входящего трафика. Подавление вы-
полняется с помощью специальной технологии Advanced Flow Control, когда
сетевой адаптер, поддерживающий этот стандарт, после получения команды от
коммутатора «Приостановить передачу», прекращает передачу кадров, а после
команды «Возобновить передачу» возобновляет ее.
2.9.3. Канальный уровень
Канальный уровень модели OSI состоит из подуровня управления логиче-
ским соединением LLC (Logical Link Control) и подуровня доступа к физической
линии передачи MAC (Media Access Control).
На рис. 2.31 представлена структура Ethernet-фрейма. Он начинается с
преамбулы, которая представляет собой чередующиеся единицы и нули и ука-
зывает получателю, что начинается передача фрейма. Поле «Флаг начала»
указывает получателю, что сразу по окончании этого поля начнется передача
содержательной части фрейма. Адрес отправителя и получателя представляют
собой МАС-адреса. Поле «Тип» указывает, какой тип протокола более высоко-
го уровня (TCP/UDP и IP) инкапсулирован в поле данных. Поле CRC содержит
значение циклического избыточного кода (CRC) для всего фрейма.
Преамбула Флаг начала Адрес получателя Адрес отправителя Тип Данные CRC
7 байт 1 байт 6 байт 6 байт 2 байт 46... 1500 байт 4 байт
Рис. 2.31. Структура фрейма Ethernet. Общая длина 72 байта. Пакеты TCP/UDP и IP
инкапсулированы в поле «Данные»
Поле данных содержит пакеты протокола более высокого уровня, напри-
мер TCP/UDP и IP, и данные. Это поле может также содержать протоко-
лы прикладного уровня других промышленных сетей, образуя гибридные се-
тевые протоколы Modbus TCP (на основе Modbus RTU, от компании Schneider
Electric), EtherNet/IP (на основе DeviceNet, разработан Rockwell Automation
и ODVA), HSE (на основе Foundation Fielbus), ProfiNet (Profibus в Ethernet),
Interbus-TCP/IP и другие (более 14 протоколов). В этих протоколах остают-
ся следующие общие черты Ethernet:
• технология передачи данных на физическом уровне (Ethernet);
• метод доступа к сети CSMA/CD;
• IP-протокол на 3-м уровне модели OSI;
• TCP и UDP-протоколы на 4-м уровне модели OSI.
2.9.4. Modbus TCP
Протокол Modbus TCP [144] (или Modbus TCP/IP) используется для того,
чтобы подключить устройства с протоколом Modbus к Ethernet или Интерне-
ту. Он использует кадры Modbus RTU на 7-м (прикладном) уровне модели
122
Глава 2
ADU для Modbus TCP
◄-------------------------------------------------------------------►
Идентификатор обмена Идентификатор протокола Длина Идентификатор устройства Код функции Данные
2 байта 2 байта 2 байта 1 байт МВАР 1 байт Переменной длины PDU
Я R
Рис. 2.32. Часть фрейма Modbus TCP, встраиваемая в поле «Данные» фрейма Ethernet
(см. рис. 2.31)
OSI, протоколы Ethernet на 1-м и 2-м уровне модели OSI и TCP/IP на 3-м
и 4-м уровне, т.е. Ethernet TCP/IP используется для транспортировки моди-
фицированного кадра Modbus RTU.
Кадр Modbus RTU (см. рис. 2.25) используется без поля контрольной сум-
мы, поскольку используется стандартная контрольная сумма Ethernet TCP/IP.
Не используется также поле адреса, поскольку в Ethernet используется иная си-
стем адресации. Таким образом, только два поля: «Код функции» и «Данные»
(блок PDU) встраиваются в протокол Ethernet TCP/IP. Перед ними вставляет-
ся новое поле — заголовок МВАР (ModBus Application Protocol — приклад-
ной протокол MobBus, рис. 2.32).
Поле «Идентификатор обмена» используется для идентификации сообще-
ния в случае, когда в пределах одного TCP соединения клиент посылает сер-
веру несколько сообщений без ожидания ответа после каждого сообщения.
Поле «Идентификатор протокола» содержит нули и зарезервировано для
будущих применений. Поле «Длина» указывает количество следующих за
ним байт.
Поле «Идентификатор устройства» идентифицирует удаленный сервер,
расположенный вне сети Ethernet (например, в сети Modbus RTU, которая со-
единена с Ethernet с помощью межсетевого моста). Чаще всего это поле со-
держит нули или единицы, игнорируется сервером и отправляется обратно в
том же виде (как эхо).
Изображенный на рис. 2.32 фрейм называется фреймом ADU (Application
Data Unit), встраивается в поле «Данные» фрейма Ethernet (рис. 2.31) и посы-
лается через TCP порт 502, специально зарезервированный для Modbus TCP
(порты назначаются и контролируются организацией IANA (Internet Assigned
Numbers Authority), www.iana.org). Клиенты и серверы Modbus посылают, по-
лучают и прослушивают сообщения через TCP порт 502.
Таким образом, структура кадра и смысл его полей «Код функции» и «Дан-
ные» для Modbus и Modbus TCP совершенно идентичны, поэтому для работы
с Modbus TCP не требуется дополнительного обучения по сравнению с Modbus
RTU. Те же самые коды функций и данные, что и в Modbus RTU, передаются
по очереди с прикладного (7-го) уровня модели OSI (рис. 2.33) на транспортный
уровень, который добавляет к блоку PDU кадра Modbus RTU (рис. 2.25) заго-
ловок с протоколом TCP. Далее новый полученный кадр передается на сетевой
уровень, где в него добавляется заголовок IP, затем он передается на канальный
Промышленные сети и интерфейсы
123
Отправитель
Получатель
Витая пара, оптический кабель
Рис. 2.33. Процесс передачи кадра Modbus RTU по уровням модели OSI че-
рез стек протоколов Ethernet TCP/IP в сетях с протоколом Modbus TCP
уровень Ethernet и на физический. Дойдя до физического уровня, блок PDU
оказывается «обросшим» заголовками протоколов всех уровней, через которые
он прошел. Пройдя по линии связи, сообщение продвигается снизу вверх по сте-
ку протоколов (уровням модели OSI) в устройстве получателя, где на каждом
уровне из него удаляется соответствующий заголовок, а на прикладном уровне
выделяется блок PDU (код функции и данные) кадра протокола Modbus RTU.
В сети с протоколом Modbus TCP устройства взаимодействуют по типу
«клиент-сервер», где в качестве клиента выступает ведущее устройство, в ка-
честве сервера — ведомое. Сервер не может инициировать связи в сети, но
некоторые устройства в сети могут выполнять роль как клиента, так и сервера.
Modbus TCP не имеет широковещательного или многоабонентского режи-
ма, он осуществляет соединение только между двумя устройствами.
2.9.5. Profinet
Profinet (Profibus 4- Ethernet) является одним из современных стандартов
(IEC 61158 и IEC 61784), который обеспечивает простую интеграцию устройств
Profibus, ASI и Interbus с промышленным Ethernet. Протокол ProfiNet разра-
ботан Profibus International на базе Ethernet как совместимый с протоколом
Profibus, поддерживаемым компанией Siemens.
2.10. Протокол DCON
Протокол DCON (www.icpdas.com) не относится к стандартным, однако
очень широко распространен в России благодаря популярности модулей ввода-
вывода RealLab! серии NL фирмы НИЛ АП и усилиям фирм, продвигающих на
российский рынок изделия тайваньских производителей ICP DAS и Advantech.
Этот протокол использует только физический и прикладной уровень мо-
дели OSI. На физическом уровне используется прямое двоичное кодирование,
124
Глава 2
когда логический ноль представлен низким уровнем напряжения в шине RS-
485, логическая единица — высоким уровнем. Требования к среде передачи
(витая пара) определяются стандартом на интерфейс RS-485.
Широкая популярность протокола DCON обусловлена отсутствием необ-
ходимости в специализированных микросхемах для реализации стека протоко-
лов, что существенно снижает себестоимость устройств, а следовательно, це-
ну для конечного потребителя. С другой стороны, у системного интеграто-
ра уменьшаются затраты на обучение, поскольку применение протокола пре-
дельно простое.
Протокол DCON используется в архитектуре «ведущий-ведомый». В сети
может быть 255 ведомых устройств, но только одно ведущее, что в принципе
исключает возможность конфликтов.
Для увеличения надежности передачи информации на физическом уровне
используется простейший способ — вычисление контрольной суммы. Каналь-
ного уровня в протоколе нет и поэтому ошибки передачи могут быть выяв-
лены только на прикладном уровне, непосредственно граничащем с програм-
мой пользователя.
Кадры протокола DCON имеют структуру, показанную на рис. 2.34. Каж-
дый кадр начинается с разделителя, в качестве которого могут быть исполь-
зованы знаки: $, #, %, @, *, в ответах ведомого устройства используются
символы !, ?, >.
Разделитель Адрес Команда (Данные) СНК Сг
1 байт 1 байт 1...5 байт 1...256 байт 1 байт 1 байт
Рис. 2.34. Формат кадра протокола DCON
За некоторыми командами следуют данные, но их может и не быть. Кон-
трольная сумма, состоящая из двух символов, может отсутствовать. Каждый
кадр должен оканчиваться символом возврата каретки «сг» (ASCII код ODh).
Контрольная сумма (СНК) состоит из двух символов (в нее не включается
код символа возврата каретки) и позволяет обнаружить ошибки в командах,
посланных из ведущего устройства, а также в ответах ведомого.
Вся информация, содержащаяся в кадре, включая адрес модуля и дан-
ные, передается в ASCII-кодах.
Контрольная сумма представляется двумя ASCII-символами шестнадца-
теричного формата и передается непосредственно перед «возвратом каретки»
(сг). Она должна быть равна сумме кодовых значений всех ASCII символов
команды и быть представлена в шестнадцатеричной системе счисления. Ес-
ли сумма больше FFh, то в качестве контрольной суммы используется толь-
ко ее младший байт.
Например, если нужно переслать ведомому устройству команду $012(сг), то
сумма ASCII кодов символов команды (символ возврата каретки не считается)
равна «$» + «О» + «1» 4- «2» = 24h + 30h -I- 31h 4- 32h = B7h, контрольная
сумма равна B7h, т.е. перед символом (сг) в команде надо указать В7, и команда
$012(сг) будет выглядеть как $012В7(сг).
Промышленные сети и интерфейсы
125
Таблица 2.15
Примеры команд протокола DCON
Команда Ответ Описание
%AANNTTCCFF !АА Устанавливает адрес, диапазон входных напряже- ний, скорость обмена, формат данных, контроль- ную сумму
#АА >(Data) Возвращает все входные значения для заданного модуля
#AAN >(Data) Возвращает входное значение в канале номер N для модуля с заранее заданным адресом
$АА0 !АА Выполняет калибровку аналогового модуля для компенсации погрешности коэффициента передачи
$АА1 !АА Выполняет калибровку аналогового модуля для компенсации погрешности смещения нуля
$АА2 1AATTCCFF Возвращает параметры конфигурации модуля с указанным адресом
SAA8 !AAV Читает конфигурацию светодиодного индикатора
SAA8V !АА Устанавливает конфигурацию светодиодного индикатора
Если ответ модуля на эту команду без контрольной суммы получен в виде,
например, !01400600(сг), то сумма ASCII кодов символов этой команды равна
«!» + «О» + «1» + «4» + «О» + «О» + «6» + «О» + «О» = 21h + 30h + 31h
4- 34h 4- 30h 4- 30h 4- 36h 4- 30h 4-30h = lACh, и контрольная сумма для
этого случая равна АСЬ, т.е. ответ модуля при работе с контрольной суммой
будет, например, !014006С0АС(сг), где предпоследний байт СО означает, что
установлен режим обмена с контрольной суммой.
При написании программы прикладного уровня используется набор ко-
манд, примеры которых приведены в табл. 2.15.
Команды делятся на четыре типа:
1) команды модулей аналогового ввода;
2) команды модулей аналогового вывода;
3) команды дискретного ввода-вывода;
4) команды счетчиков/таймеров.
Рассмотрим пример применения команды #АА (см. табл. 2.15) для полу-
чения данных из модуля аналогового ввода.
Синтаксис команды: #АА[СНК](сг), где А А — адрес модуля (от 00 до FF).
Ответ модуля на эту команду имеет вид > (Data) [СНК] (сг), если коман-
да выполнена. Здесь > — символ-разделитель при выполненной команде;
(Data) — измеренные данные. Если имели место синтаксические ошибки или
ошибки связи, то ответа нет.
Например, для опроса модуля с адресом 01 рассматриваемая команда при-
мет вид #01 (сг). Ответ на нее может выглядеть следующим образом:
>4-1.23454-0.3456+0.0001+2.5000+1.2345+0.3456+0.0001+2.5000
В ответе представлены 8 значений напряжений на 8 входах модуля ввода.
Подробное описание команд протокола DCON можно найти на вебсайте
www.RealLab.ru.
126
Глава 2
2.11. Беспроводные локальные сети
Существует много объектов автоматизации, где сложно обойтись без бес-
проводных сетей или где их применение явно желательно:
• датчики и исполнительные устройства на подвижных частях конвейеров,
ветряных мельниц, лифтов, миксеров, тележек для перемещения грузов по
цеху, на крыльях и лопастях самолетов, на подшипниках двигателей, на
роботах, в передвижных лабораториях, датчики на теле человека и живот-
ных; датчики вибрации на контейнерах для перевозки грузов;
• объекты, в которых нежелательно сверлить стены или портить дизайн:
офисные здания, в которых устанавливается пожарная и охранная сигна-
лизация, датчики для систем обогрева и кондиционирования воздуха, для
мониторинга механических напряжений в конструкциях зданий; в системах
«умного дома» (управление освещением, кондиционированием-обогревом,
охранными датчиками, бытовыми приборами и др.);
• эпизодическое программирование и диагностика ПЛК, когда прокладывать
постоянные кабели не выгодно; дистанционное считывание показаний счет-
чиков, самописцев;
• объекты с агрессивными средами, вибрацией; объекты, находящиеся под
высоким напряжением или в местах, не удобных для прокладки кабеля;
• отслеживание траектории движения транспорта, охрана границ государ-
ства, мониторинг напряженности автомобильного трафика в городах и
условий на дорогах, мониторинг леса, моря, сельскохозяйственных куль-
тур, мониторинг вредных выбросов в экологии;
• любые объекты, для которых известно, что стоимость кабелей, кабельных
каналов, опор или траншей, а также работ по монтажу и обслуживанию су-
щественно превышает стоимость заменяющей беспроводной системы, при
условии отсутствия жестких требований к надежности доставки сообще-
ний в реальном времени;
• объекты во взрывоопасных зонах.
В большинстве применений беспроводные сети позволяют достичь следую-
щих преимуществ по сравнению с проводными сетями [155]:
• существенно снизить стоимость установки датчиков;
• исключить необходимость профилактического обслуживания кабелей;
• исключить дорогостоящие места разветвлений кабеля;
• уменьшить количество кабелей;
• уменьшить трудозатраты и время на монтаж и обслуживание системы;
• снизить стоимость системы за счет исключения кабелей;
• снизить требования к обучению персонала монтажной организации;
• ускорить отладку системы и поиск неисправностей;
• обеспечить удобную модернизацию системы.
Поскольку реконфигурация системы и ее монтаж становятся гораздо более
простыми, беспроводные сети можно использовать и в традиционных областях
применения кабельных связей, когда стоимость кабеля и монтажа оказывается
выше, чем установка беспроводной системы.
Промышленные сети и интерфейсы
127
Беспроводные сети делятся на следующие классы:
• сотовые сети WWAN (Wireless Wide Area Network);
• беспроводные LAN (WLAN — Wireless LAN);
• беспроводные сети датчиков.
В промышленной автоматизации наибольшее распространение получили
три типа беспроводных сетей: Bluetooth [147] на основе стандарта IEEE 802.15.1,
ZigBee [153] на основе IEEE 802.15.4 [152] и Wi-Fi на основе IEEE 802.11 [151,
149]. Физические уровни модели OSI для этих сетей основаны на соответству-
ющих стандартах IEEE, а протоколы верхних уровней разработаны и поддер-
живаются организациями Bluetooth, ZigBee и Wi-Fi соответственно. Поэтому в
названии сетей обычно указывают ссылки на стандарт. Все три сети использу-
ют нелицензируемый ISM (Industrial, Scientific, and Medical) диапазон 2,4 ГГц.
2.11.1. Проблемы беспроводных сетей
и пути их решения
С точки зрения требований к промышленным сетям беспроводные сети
уступают проводным по следующим характеристикам:
• время доставки сообщений: используемый механизм случайного доступа
к каналу CSMA/CA не гарантирует доставку в заранее известное время
[154] и эту проблему нельзя решить с помощью коммутаторов, как в про-
водных сетях;
• помехозащищенность: беспроводные сети подвержены влиянию электро-
магнитных помех значительно сильнее, чем проводные;
• надежность связи: связь может исчезнуть при несвоевременной смене бата-
рей питания, изменении расположения узлов сети или появлении объектов,
вносящих затухание, отражение, преломление или рассеяние радиоволн;
• ограниченная дальность связи без использования ретрансляторов (обычно
не более 100 м внутри помещений);
• резкое падение пропускной способности сети при увеличении количества
одновременно работающих станций и коэффициент использования канала;
• безопасность: возможность утечки информации, незащищенность от искус-
ственно созданных помех, возможность незаметного управления техноло-
гическим процессом враждебными лицами.
Уникальным достоинством беспроводных сетей является отсутствие кабе-
лей, что и определяет выбор областей их применения в системах промышлен-
ной автоматизации.
Рассмотрим физические причины возникновения перечисленных проблем
и методы борьбы с ними. Основными причинами являются интерференция,
дифракция, преломление, отражение, рассеяние (переизлучение) и снижение
плотности мощности излучения при увеличении расстояния от источника, а
также невозможность локализации радиоволн в ограниченном пространстве.
Зависимость плотности мощности от расстояния. Известно, что
плотность мощности радиоволны уменьшается по мере удаления от антенны
вследствие расхождения пучка, рассеяния и поглощения волн препятствиями
128
Глава 2
на пути их распространения. Плотность мощности P(d) волны на расстоянии
d от источника приближенно описывается зависимостью [154]
P(d) « (2.3)
где do — некоторая константа, определяемая экспериментально; параметр
7 « 2... 6 [154] зависит от конструкции антенны, диапазона частот, наличия
препятствий на пути распространения электромагнитной волны; в условиях
промышленного предприятия 7 « 2... 3; Pt — плотность мощности на расстоя-
нии do от источника. Формула (2.3) справедлива при d > do [154].
По указанным причинам каждый участник беспроводной сети имеет огра-
ниченную зону уверенного приема, которая представляется приближенно в
форме сферы. Это приводит к необходимости планирования расположения
беспроводных станций таким образом, чтобы зоны уверенного приема непосред-
ственно связывающихся станций перекрывались. Если станции расположены
на расстоянии неуверенного приема, то небольшие изменения окружающей об-
становки могут привести к потере сообщений или снижению скорости передачи.
Ограниченность радиуса действия передатчиков привела к возникновению
ячеистых сетей [159], в которых информация передается не через общий ка-
нал связи, как в проводных сетях, а от узла к узлу, используя промежуточ-
ные узлы сети в качестве ретрансляторов и маршрутизаторов. При выходе из
строя или удалении из сети некоторых узлов сеть автоматически находит но-
вый маршрут, чтобы доставить данные адресату. Добавление к сети нового
устройства также может происходить автоматически, т.е. ячеистые сети об-
ладают свойством самоорганизации.
Влияние интерференции волн. Электромагнитная волна передающей
станции на пути следования испытывает интерференцию, дифракцию, отраже-
ние, преломление и рассеяние. Поэтому в точке приема волна является су-
перпозицией множества волн, имеющих разные фазы и направления волнового
вектора. Наложение волн приводит к интерференции, которая может быть
конструктивной (когда сигнал в точке приема усиливается) или деструктивной
(если сигнал ослабляется — эффект «замирания»). Деструктивная интерфе-
ренция приводит к нескольким отрицательным следствиям. Во-первых, сигнал
в точке приема может оказаться ниже порога чувствительности приемника, что
приведет к потере связи. Во-вторых, при движущемся источнике или приемни-
ке в точке приема могут быть многократные смены сильного и слабого сигнала,
что может привести к потере нескольких бит информации или уменьшению ско-
рости передачи за счет повторных передач кадров с ошибкой. В-третьих, если
разность времени задержки волн, прошедших разными путями, превысит дли-
тельность символа, соседние символы в сообщении могут накладываться друг
на друга, вызывая эффект межсимвольной интерференции.
Источники помех. Существуют также другие причины искажений пере-
даваемого сигнала: паразитное взаимовлияние соседних каналов, эффект До-
плера, помехи от работающих двигателей, разряды статического электричества,
и др. Это может привести к потере пакета, повторной передаче и, как следствие,
непредвиденной задержке в канале. Интенсивность потока ошибок зависит от
Промышленные сети и интерфейсы
129
мощности источников помех, типа модуляции и мощности передатчика, от ча-
стотного диапазона, других причин и обычно изменяется с течением времени.
Измерения [154] показали, что чипсет, соответствующий стандарту IEEE
803.11b, в индустриальном окружении дает поток кратковременных ошибок ве-
личиной 10~4...10“2 при скорости передачи 2 Мбит/с и использовании квадра-
турной фазовой модуляции QPSK (Quaternary Phase Shift Keying). Кроме того,
в процессе измерений эпизодически возникали периоды продолжительностью
до 1 мин, когда потери данных доходили до 10 % и даже 80 %. Аналогичные
результаты наблюдались и в других экспериментах.
Следствием помех в канале может быть не только потеря данных или за-
медление скорости передачи, но и «проблема пространственной непротиворечи-
вости». Она заключается в следующем. Когда система использует широкове-
щательный режим передачи без уведомления о получении, предполагается, что
все приемники должны получить одни и те же данные одновременно. Однако
вследствие ошибок в канале некоторые потребители могут получить ошибоч-
ные данные. Такая ошибка особенно нежелательна, если широковещательный
режим используется для обеспечения синхронной работы нескольких контрол-
леров в одном и том же технологическом процессе, поскольку она приведет
к рассинхронизации процесса.
Особенностью рассмотренного случая является то, что вероятность ошиб-
ки в системе резко возрастает по сравнению с вероятностью ошибки в одном
канале р. Поскольку вероятность безошибочной передачи в системе является
произведением вероятностей безошибочной передачи в каждом из каналов, то
при количестве одинаковых каналов к вероятность отсутствия сбоев в системе
будет равна (1 —р)к. Например, в системе из 8 каналов при вероятности ошибки
в канале р = 0,1 вероятность безошибочной передачи составит всего 43 %.
Одним из примеров, где описанная ситуация может играть негативную
роль, является режим одновременного ввода несколькими устройствами сиг-
налов датчиков. В проводных сетях для этого используют широковещательные
команды, которые доходят до всех устройств одновременно (в сетях Modbus
это команда с адресом «0»). Если аналогичный режим использовать в беспро-
водной сети, то вероятность того, что все к датчиков введут отсчеты одновре-
менно, будет также равна (1 — р)к.
В сетях с передачей маркера помехи могут привести к потере маркера и
отключению устройств с потерянным маркером на несколько периодов обра-
щения маркера по логическому кольцу.
Широкополосная передача. Одним из методов устранения влияния ин-
терференции волн и узкополосных помех является применение широкополос-
ной модуляции. В беспроводных сетях используются два метода: широкопо-
лосная модуляция с прямым расширением спектра (DSSS — Direct Sequence
Spread Spectrum) и с перескоком с одной несущей на другую (FHSS — Frequency
Hopping Spread Spectrum).
Метод DSSS состоит в следующем. Если один бит информации представить
прямоугольным импульсом, то эффективная ширина спектра импульса будет
обратно пропорциональна его длительности. В методе DSSS один прямоуголь-
ный импульс заменяют последовательностью из 11 импульсов, которые в 11
130
Глава 2
раз короче исходного. При этом эффективная ширина спектра такой последо-
вательности импульсов оказывается в 11 раз шире, чем у исходного одиночного
импульса (бита), и для Wi-Fi сетей составляет 22 МГц. Поскольку энергия
сигнала оказывается «размазанной» по всему спектру, то спектральная плот-
ность мощности сигнала оказывается в 11 раз меньше, если ее измерять в той
же полосе частот, которую занимал первоначальный прямоугольный импульс.
Практически мощность передатчика (около 1 мВт) для диапазона 2,4 ГГц вы-
бирают таким образом, чтобы спектральная плотность полезного сигнала была
сравнима или даже меньше спектральной плотности шума.
Для еще большего уменьшения спектральной плотности мощности сигнала
его спектральная характеристика должна быть близка к прямой линии, парал-
лельной оси абсцисс, т.е. сигнал должен быть подобен белому шуму. Для этого
последовательность коротких импульсов не должна быть периодической, она
должна быть шумоподобной (псевдослучайной), с малым временем автокорре-
ляции. Процесс преобразования спектра сигнала к указанному виду называют
процессом «обеления» («отбеливания») спектра. Кроме того, для облегчения
обнаружения сигнала в приемнике псевдослучайная последовательность, вы-
бранная для кодирования, должна быть такой, чтобы ее автокорреляционная
функция имела только один ярко выраженный максимум. Такому требова-
нию удовлетворяют, в частности, последовательности Баркера [161]. Последо-
вательность (код) Баркера длиной 11 импульсов для кодирования логической
единицы используется в сетях Wi-Fi и имеет вид 11100010010. Логический ноль
кодируется инверсной последовательностью Баркера.
Для выделения полезного сигнала с такой малой мощностью на фоне шума
в приемнике должна храниться копия передаваемого сигнала (код Баркера).
Это позволяет использовать очень эффективные методы оптимальной филь-
трации [161]. Зная, что полезный сигнал представляет собой последователь-
ность Баркера, в приемнике строят оптимальный фильтр с импульсной харак-
теристикой, которая представляет собой масштабную копию входного сигнала,
расположенную зеркально по оси времени относительно входного сигнала и
сдвинутую в сторону запаздывания на величину не менее длительности вы-
деляемого импульса.
Ширина спектра сигнала в методе DSSS при скорости передачи 1 Мбит/с
составляет 22 МГц, а ширина выделенного для Wi-Fi частотного диапазона —
83,5 МГц, т.е. во всем диапазоне можно разместить только три неперекры-
вающихся канала. Однако стандарт делит весь диапазон на 11 перекрываю-
щихся каналов, из которых только три (1-й, 6-й и 11-й) могут работать, не
влияя друг на друга.
Достоинствами метода DSSS являются высокая устойчивость к узкополос-
ным помехам и возможность восстановления информации при потере во время
передачи нескольких бит в коде Баркера.
Вторым методом широкополосной модуляции является FHSS — метод скач-
кообразного изменения несущей частоты. Он использует тот же диапазон
2,4 ГГц шириной 83,5 МГц, в котором выделяется 79 неперекрывающихся ча-
стотных полос по 1 МГц каждая. В процессе передачи частота несущей изме-
няется скачкообразно. Частота переходов с одной несущей на другую должна
Промышленные сети и интерфейсы
131
быть не менее 4 Гц для сети Wi-Fi и 1,6 кГц в сети Bluetooth. Для приема
такого сигнала приемник и передатчик содержат таблицы, в которых занесена
одна и та же последовательность смены каналов. При таком способе переда-
чи узкополосные помехи приводят к потере только тех фрагментов сообщений,
которые передаются на частоте помехи, т.е. фактически только к увеличению
времени передачи за счет повторной передачи испорченных фрагментов.
Модификацией FHSS является адаптивный метод AFH (Adaptive Frequency
Hopping), в котором во время передачи обнаруживаются и запоминаются часто-
ты, на которых передача выполнялась с ошибками контрольной суммы. Эти
частоты исключаются из таблицы используемых частот.
Переход с одной частоты на другую уменьшает вероятность взаимного вли-
яния при совместной работе нескольких передатчиков в сети, поскольку при
79 частотах вероятность совпадения частот двух работающих станций очень
низка (порядка (1/79)2 « 1,6 • 10“4). Поэтому метод FHSS позволяет использо-
вать большее количество одновременно работающих станций в сети. Практи-
чески на одной и той же территории могут работать до 15 передатчиков.
FHSS обеспечивает скорость передачи 1 и 2 Мбит/с. Используется частот-
ная модуляция с двумя дискретными значениями частот /1 и /2, которые поз-
воляют сделать четыре комбинации модулированных сигналов: /о + fi, /о — Л,
/о + /2, /0-/2 и закодировать таким образом 4 бита информации.
На практике системы с FHSS способны работать при более высоком уровне
шума, чем DSSS, благодаря тому, что они занимают более широкую полосу
частот (83,5 МГц по сравнению с 22 МГц для DSSS), а вероятность того, что
помеха будет занимать полосу 83,5 МГц, ниже, чем вероятность занятия по-
лосы 22 МГц. Однако интерференция, приводящая к замиранию сигнала, бо-
лее сказывается на FHSS, поскольку в DSSS замирания происходят только в
узкой полосе частот, что приводит к выпадению нескольких бит из 11 пере-
даваемых, а оставшихся бит достаточно для безошибочного распознавания за-
кодированного значения «О» или «1».
Методы расширения спектра имеют следующие достоинства:
• высокая помехоустойчивость благодаря большой избыточности кода и воз-
можности применения оптимальной фильтрации;
• возможность избежать влияния интерференции, поскольку она происходит
только в части широкополосного диапазона. В методе DSSS она приво-
дит только к потере нескольких битов, которые можно восстановить, а в
методе FHSS — к потере отдельных фрагментов сообщений, которые вос-
станавливаются путем повторной передачи или теряются только один раз
(в методе AFH), до того как система исключит данную частоту из спис-
ка используемых;
• широкополосный сигнал сложнее перехватить, чем узкополосный. FHSS
выглядит как шум, если в приемнике не использована та же очередность
смены частот, что и в передатчике;
• широкополосный передатчик может использовать один и тот же диапазон
частот совместно с другими типами передатчиков с минимальным взаимо-
влиянием. В частности, он практически не вносит помех в узкополосные
системы благодаря очень малой мощности;
132
Глава 2
• работа при спектральной плотности сигнала на уровне и ниже уровня шу-
ма позволяет исключить необходимость получения лицензии на исполь-
зование таких передатчиков.
Методы модуляции несущей. Идея модуляции состоит в том, чтобы
перенести спектр информационного сигнала в область высоких частот, в на-
шем случае в диапазон 2,4 ГГц, что позволит передать его с помощью электро-
магнитной волны. Электромагнитные волны возбуждаются в антенне током
i = A sin (tut + <^), который называется несущим колебанием или просто несу-
щей. По крайней мере один из параметров А, си, несущей может зависеть от
времени: А = A(t), ш = cu(t), ip = (p(t). Форма этой зависимости соответству-
ет форме сигнала, который нужно передать с помощью радиоканала. Процесс
управления параметрами несущей называется модуляцией. Частным случаем
модуляции является манипуляция, когда модулированные параметры изменя-
ются скачкообразно между двумя их значениями. В зависимости от того, какой
параметр становится зависимым от времени, модуляция называется амплитуд-
ной, фазовой или частотной. Возможны также комбинированные способы мо-
дуляции: амплитудно-фазовая, фазочастотная и т.п.
Количество информации, которое может быть внесено в сигнал, можно уве-
личить, используя несколько одновременно изменяемых параметров. В циф-
ровых системах передачи модулируемые параметры изменяются дискретно.
Поэтому количество информации, приходящееся на бодовый интервал, мож-
но увеличить, увеличивая количество дискретных уровней. Бодовым интер-
валом называют временной интервал, в течение которого параметры А, си, <р
остаются постоянными.
Поскольку sin (cut + р) = cos sin vt + sin coscut, т.е. изменение фазы мож-
но представить с помощью изменений амплитуды синусоидальной и косину-
соидальной компоненты, то параметры исходного синусоидального колебания
можно представить на плоскости с помощью графика (рис. 2.35), у которого
по оси абсцисс отложена амплитуда синусоидальной компоненты (т.е. величи-
на cos <р, ее называют синфазной компонентой и обозначают на графике буквой
I, от слова In-phase), по оси ординат — амплитуда косинусоидальной компо-
ненты, т.е. sin<£, которую называют квадратурной и обозначают буквой Q, от
слова Quadrature. Полученный таким способом график называется сигнальным
созвездием (рис. 2.35). Он совпадает с графиком, изображающим синусоидаль-
ное колебание на комплексной плоскости.
При амплитудной модуляции фаза не изменяется, поэтому все точки гра-
фика располагаются на оси абсцисс. При фазовой модуляции амплитуда по-
стоянная, поэтому все точки графика лежат на окружности, радиус которой
равен амплитуде колебания.
При двоичной фазовой модуляции (BPSK — Binary Phase Shift Keying) фаза
принимает только два дискретных значения: 0 и тг, поэтому сигнальное созвез-
дие состоит из двух точек, расположенных на оси абсцисс. Эта разновидность
фазовой манипуляции является наиболее помехоустойчивой.
Модификацией этого метода является дифференциальная двоичная фазо-
вая манипуляция (DBPSK — Differential BPSK), когда логическим значениям
Промышленные сети и интерфейсы
133
Рис. 2.35. Сигнальное созвез-
дие для QPSK-модуляции
(0110)+3
(1110) (1010)
:(Ш1) i(ioii)
-•-------•
—i--------i-------
:+i ;+з
f(1101) ^(1001)
^(1100) *(1000)
Рис. 2.36. Сигнальное созвез-
дие для 16-(ЗАМ-модуляции
«0» или «1» соответствуют не абсолютные значения фазы, а изменение фазы
относительно предыдущего ее значения. Например, если фаза сигнала была
равна 0, то для кодирования значения «1» ее изменяют на 180°, а для кодирова-
ния логического «0» фазу оставляют прежней. Аналогичная идея используется
в методе NRZI-кодирования (см. рис. 2.28), когда логической единице соответ-
ствует изменение уровня сигнала, а логическому нулю — ее отсутствие.
Если cosy? принимает значения 0 или 1 и при этом sin<p принимает значе-
ния 1 и 0, то такая модуляция называется квадратурной фазовой манипуля-
цией QPSK (Quadrature Phase-Shift Keying). Она позволяет получить четыре
состояния передаваемого сигнала в пределах бодового интервала. Сигнальное
созвездие QPSK показано на рис. 2.35.
Модификацией QPSK является DQPSK-модуляция (Differential QPSK), при
которой, аналогично DBPSK, кодируется не величина фазы, а ее изменение
относительно предыдущего значения. Изменение фазы на 0° кодируется как
«00», изменение на 90° — как «01», на 180° — как «11», на 360° — как «10».
Помехоустойчивость метода модуляции можно оценить по расстоянию меж-
ду точками сигнального созвездия: это расстояние характеризует амплитуду и
фазу помехи, которая достаточна, чтобы был принят ошибочный сигнал. По-
этому при проектировании схем модуляции точки сигнального созвездия вы-
бирают таким образом, чтобы расстояние от любой точки до ее соседей было
одинаковым для всех точек созвездия. При этом достигается одинаковая по-
мехоустойчивость для любых передаваемых чисел.
Беспроводные сети используют также амплитудно-фазовую модуляцию 16-
QAM (рис. 2.36) и 64-QAM, когда изменяется не только фаза, но и амплитуда
колебания. Сигнал может принимать соответственно 16 и 64 бита информации
на бодовый интервал, что увеличивает скорость передачи, но за счет сниже-
ния помехоустойчивости.
Другие особенности беспроводных каналов. Ряд особенностей бес-
проводной передачи данных не позволяет использовать многие методы, харак-
терные для проводных промышленных сетей.
134
Глава 2
Рис. 2.37. Иллю-
страция «пробле-
мы скрытого узла»
Беспроводные трансиверы не могут передавать и принимать сигнал на од-
ном и том же канале. Это связано с быстрым уменьшением плотности мощно-
сти излучения от расстояния (2.3). Сигнал собственного передатчика оказы-
вается на порядки сильнее принимаемого сигнала и заглушает его. В отличие
от этого, в проводных каналах оба сигнала имеют примерно одинаковую мощ-
ность. Поэтому беспроводные трансиверы в принципе не могут прослушивать
линию во время передачи, как это делается, например, в CAN или Ethernet.
Описанное свойство делает невозможным применение методов доступа к сети,
основанных на обнаружении коллизий.
Обнаружение несущей чужой станции даже при
неработающем собственном передатчике также ока-
зывается проблематичным (рис. 2.37) [154]. На этом
рисунке три окружности показывают границы прие-
ма сигналов тремя станциями А, В и С. Предполо-
жим, что станция А передает сообщение станции В.
В это время станция С прослушивает эфир и не слы-
шит несущую, поскольку находится вне зоны действия
станции А. Обнаружив отсутствие несущей, станция С
начинает передачу одновременно со станцией А, что
приводит к потере информации, поскольку станция В может принимать только
один сигнал («проблема скрытого узла»).
Для решения этой проблемы можно использовать сигнал «занято», пода-
ваемый станцией В. Однако наиболее общее решение проблемы предложено в
стандарте IEEE 802.11. Оно заключается в том, что станция А начинает сеанс
связи с обмена пакетами запроса на передачу RTS (Request То Send). Станция
В может ответить пакетом CTS (Clear То Send — «свободно»). Только при по-
лучении этого сообщения станция А начинает передачу пакета данных. Любая
другая станция, получившая пакет RTS или CTS, предназначенный не ей, будет
оставаться в состоянии ожидания. Недостатком этого метода является то, что
сигналы RTS/CTS существенно ухудшают скорость обмена между устройства-
ми, поскольку размеры их пакетов сравнимы с размерами полезных данных.
Вышеизложенное показывает, что беспроводные каналы не могут исполь-
зовать метод доступа к каналу типа CSMA/CD. Для них применяется метод
CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance — множествен-
ный доступ с контролем несущей и предотвращением коллизий). От CSMA/CD
он отличается тем, что коллизии в нем не обнаруживаются, в то время как
в CSMA/CD коллизии обнаруживаются и принимаются меры для их разре-
шения. Поскольку в CSMA/CA коллизии не могут быть обнаружены, так
как приемник всегда заглушается сигналом своего передатчика, то принима-
ются специальные меры для снижения вероятности возникновения коллизий.
В частности, используют сигналы резервирования канала связи, благодаря че-
му коллизии возникают между короткими сигналами резервирования, а не
между длинными пакетами данных. Предотвращение коллизий выполняется
благодаря тому, что станция, которая собирается начать передачу, информи-
рует всех участников сети об этом, резервируя для себя определенное время.
И только после того, как все станции приняли этот сигнал, она начинает пере-
Промышленные сети и интерфейсы
135
давать. Используют также случайную задержку после освобождения канала
(в методе CSMA/CD передача начинается сразу после освобождения канала),
чтобы уменьшить вероятность коллизии, поскольку очень вероятно, что многие
станции ждут освобождения канала и могут начать передачу сразу и одновре-
менно, как только он освободится.
Следующей проблемой является электропитание беспроводных сетей, по-
скольку беспроводные устройства (в основном датчики) не должны иметь про-
водов (подключаться куда-либо с помощью проводов). Поэтому очень акту-
альна проблема экономии энергии батарей, поиск простых способов их замены,
исключение отказов по причине разряда, поиск альтернативных источников
энергии. В литературе рассматриваются варианты передачи энергии питания
электромагнитными волнами [163], трансформаторами с большим воздушным
зазором (на расстояние до нескольких метров) [162], извлечение энергии сго-
рания топлива, применение солнечных батарей.
Методы уменьшения количества ошибок в канале. Итак, ошибки в
радиоканале появляются чаще, чем в экранированном кабеле, и обычно носят
характер сбоев, в то время как в проводных системах, наоборот, ошибки чаще
бывают катастрофическими, связанными с выходом из строя (отказом) каналь-
ного оборудования. Тем не менее, после принятия всех изложенных мер поток
ошибок в радиоканале может быть снижен до необходимого уровня. Например,
в авиации вероятность ошибок в беспроводных каналах составляет менее 10“19
[164]. Однако такие значения вероятности достигаются очень большими уси-
лиями. Поэтому наиболее перспективной областью применения беспроводных
сетей являются системы, в которых допускается некоторый процент ошибок.
Вероятность ошибки может быть использована как компонента целевой функ-
ции при проектировании беспроводной системы.
В промышленных сетях часто используется режим широковещательной пе-
редачи, когда сообщение одновременно должны принять все участники сети.
Его особенностью является отсутствие подтверждения о получении сообщения.
В силу низкой вероятности безошибочной передачи по радиоканалу для реали-
зации широковещательной передачи необходимо принять меры для увеличения
вероятности доставки сообщений в беспроводном канале. Одним из возможных
методов является кодирование широковещательного сообщения с большой из-
быточностью, при которой приемник может восстановить утерянные во время
передачи биты. Несмотря на снижение пропускной способности канала, такой
метод может быть очень эффективен.
Для увеличения достоверности передачи используют метод ARQ (Automa-
tic Repeat reQuest — автоматический повтор в ответ на запрос) [165]. Метод
ARQ может использовать, например, следующие принципы [165]:
• передача дополнительно к сообщению корректирующего кода с большой
избыточностью;
• отправление одновременно нескольких одинаковых пакетов; приемник де-
лает повторный запрос только если ни один из пакетов не был принят
без ошибок;
• использование нескольких антенн для повторной передачи сообщений.
136
Глава 2
Для увеличения достоверности передачи используют также чередование.
Методы избыточного кодирования и коррекции ошибок обычно основаны на
предположении о случайном характере воздействий, приводящих к появлению
ошибок. Однако на практике ошибки могут быть коррелированы. Это может
быть, например, в случае, когда период основной гармоники помехи равен дли-
тельности передачи нескольких битов. Чтобы сделать ошибки более похожими
на некоррелированные, используют процедуру чередования — перестановку би-
тов по определенному закону, одному и тому же в передатчике для выполнения
чередования и в приемнике, для выполнения восстановления первоначально-
го порядка следования битов. Одним из методов чередования является запись
передаваемого фрейма в клеточки матрицы, например по три бита в строке, а
затем считывание битов из матрицы не по строкам, а по столбцам.
Передача сообщений без подтверждения о получении. Существу-
ют также другие методы увеличения достоверности передачи широковещатель-
ных сообщений без обратной связи от получателя: методы модуляции, устой-
чивые к интерференции радиоволн (OFDM — Orthogonal Frequency-Division
Multiplexing); модуляция с применением нескольких несущих частот, которая
использует большое число близко расположенных ортогональных поднесущих;
передача одного и того же пакета несколько раз подряд; оптимизация простран-
ственного размещения станций и применение дополнительной инфраструктуры
(ретрансляторов и узлов доступа).
Системы связи с обратной связью получают от принимающей станции по-
вторный запрос в случае, если сообщение было принято с ошибками. Такой
способ используется, когда предъявляются высокие требования к достоверно-
сти передачи, например при передаче сигналов об аварии. Однако количество
повторных запросов имеет естественный предел, который определяется пре-
дельным временем, по истечении которого передаваемая информация устаре-
вает и поэтому становится бесполезной.
Используют также гибридный ARQ-метод HARQ (Hybrid Automatic Repeat-
reQuest), в котором сочетаются повторная передача, таймауты и избыточные
корректирующие коды. Если приемник передающей станции не получил под-
тверждения от принимающей станции, то по истечении таймаута выполняется
автоматическая повторная передача. Дополнительно используется избыточное
кодирование, которое позволяет восстановить потерянные при передаче биты.
Приемник может также использовать несколько принятых ошибочных па-
кетов для того, чтобы путем голосования выбрать из них биты, которые имеют
наибольшую вероятность того, что они правильные.
Поскольку уровень помех в беспроводном канале намного выше, чем в про-
водном, большинство систем используют в начале фрейма преамбулу увели-
ченной длительности по сравнению с проводными системами, что увеличивает
долю «накладных расходов». Например, физический уровень стандарта IEEE
802.11 (Wi-Fi) с режимом DSSS использует преамбулу длиной 128 мкс, которая
передается в каждом пакете и занимает значительную его часть.
Использование пространственного разнесения антенн. Вследствие
замираний радиоволн напряженность поля в точке приема будет различной для
Промышленные сети и интерфейсы
137
разных положений приемной антенны. Если два приемника, расположенные на
одинаковом расстоянии от передатчика, находятся близко друг к другу, то ве-
роятность того, что они оба находятся в зоне замирания, выше, чем когда они
разнесены на большое расстояние, точнее, на расстояние, при котором эффек-
ты, связанные с замираниями, становятся некоррелированными. Это свойство
может быть использовано несколькими путями.
Один из вариантов состоит в применении нескольких антенн для одного
приемника. Расстояние между антеннами выбирают таким образом, чтобы при
замирании в зоне расположения одной антенны в зоне другой был хороший
прием. Приемник должен быть способен отличить хороший сигнал от пло-
хого и выбрать лучший.
Аналогичный вариант с несколькими антеннами может быть использован
для передатчика. В методе передачи с обратной связью передающие антен-
ны перебираются по очереди, пока от приемника не придет сигнал о том, что
сообщение принято. Если применение нескольких антенн невозможно, вме-
сто дополнительных антенн можно использовать другие станции в качестве
ретрансляторов.
Вопросы безопасности. Проблемы безопасности разделяются на зада-
чу аутентификации (установление подлинности личности), которая выполня-
ется обычно с помощью идентификации имени пользователя и пароля, задачу
разграничения прав доступа к системе и задачу защиты информации с помо-
щью методов шифрования.
Механизмы шифрования [150] основаны на алгоритмах, которые преобразу-
ют сигналы, несущие информацию, в шумоподобные (псевдослучайные) сигна-
лы. Используются два вида шифров: поточный (групповой) и блочный шифр.
Шифры обоих типов генерируют ключевой поток, который определяется
значением секретного ключа. Ключевой поток смешивается с кодируемыми
данными по схеме «Исключающее ИЛИ», в результате чего получается за-
кодированный текст.
В методах шифрования имеется много нюансов, подробности см. в [150].
2.11.2. Bluetooth
В настоящее время существует три широко распространенных стандарта на
беспроводные сети: Bluethooth (IEEE 802.15.1), ZigBee (IEEE 802.15.4) и Wi-Fi
(IEEE 802.11). Оборудование для этих сетей не требует получения лицензии
(что во многих случаях наиболее важно), хотя и требует регистрации [166].
Bluetooth (www.bluetooth.com) [147, 148] был спроектирован на базе стан-
дарта IEEE 802.15.1 специально для замены кабеля при соединении различных
устройств офисной и бытовой техники с использованием частотного ISM диа-
пазона 2,4 ГГц. Спецификация Bluetooth поддерживается организацией SIG
(Bluetooth Special Interest Group), образованной в 1998 г. и включающей 1900
членов. В системах автоматизации Bluetooth удобен для записи программ в
ПЛК, дистанционного считывания показателей с накопителей информации. Он
организован в виде «пикосетей» (piconet), в которых одно ведущее устройство
осуществляет взаимодействие не более чем с семью ведомыми. Ведомые устрой-
ства могут взаимодействовать друг с другом только через ведущее. Каждое
138
Глава 2
устройство может быть членом четырех пикосетей одновременно, но главным
может быть только в одной из них. Такое устройство выполняет роль моста
между пикосетями. Несколько взаимодействующих пикосетей образуют так
называемую scatternet («разбросанную сеть»).
Трафик в сети организован с временным разделением каналов и дуплекс-
ной передачей. Временное разделение осуществляется интервалами (временны-
ми слотами) длиной в 625 мкс. Ведущие устройства могут начинать передачу
только в течение интервалов с нечетными номерами, ведомые отвечать в тече-
ние четных интервалов. В течение каждого интервала можно передать 366 бит.
В Bluetooth используется широкополосная модуляция типа FHSS. Пере-
ход с одной частоты на другую выполняется по случайному закону, который
устанавливается для каждого соединения индивидуально. Это повышает сте-
пень защиты информации. Несущая частота изменяется 1600 раз в секунду.
Скорость передачи равна 433,9 кбит/с.
Если пикосети расположены близко одна от другой, то они могут влиять
друг на друга, поскольку между ними нет никакой синхронизации. Чтобы
уменьшить вероятность взаимовлияния, используется адаптивный метод скач-
кообразного изменения частоты AFH.
На канальном уровне используются два типа пакетов данных: ACL
(Asynchronous ConnectionLess — асинхронный без прямого соединения каналов)
и SCO (synchronous connection-oriented — синхронный с прямым соединением).
ACL-пакеты используются совместно с проверкой контрольной суммы (CRC).
Если контрольные суммы приемника и передатчика не совпадают, запраши-
вается повторная передача пакета. Используется шесть разных ACL-пакетов,
охватывающих разное количество временных слотов. ACL-пакеты используют-
ся в том случае, когда целостность данных важнее скорости их доставки.
Пакеты SCO поддерживают трафик реального времени путем резервиро-
вания временных слотов. Повторная передача здесь не допускается, хотя име-
ется «расширенный» вариант SCO, в котором допускается ограниченное ко-
личество повторных передач. Существует три типа SCO пакетов одинаковой
длины (HV3, HV2, HV1), по 366 мкс, которые позволяют передавать данные
со скоростью 64 кбит/с.
Каждое Bluetooth-устройство имеет 48-битовый адрес.
Большинство Bluetooth-устройств имеют мощность передатчика 1 мВт, од-
нако разрешен следующий ряд мощностей, делящий все устройства на три
класса:
• класс 1 — до 100 мВт (максимальная дальность на открытом простран-
стве до 100 м);
• класс 2 — до 2,5 мВт (максимальная дальность на открытом простран-
стве до 15 м);
• класс 3 — до 1 мВт (максимальная дальность на открытом простран-
стве до 5 м).
Можно назвать следующие достоинства технологии Bluetooth: малые раз-
меры оборудования, простота использования, безопасность передачи информа-
ции (благодаря аутентификации и кодированию), хорошая поддержка стандар-
Промышленные сети и интерфейсы
139
тов. К недостатком можно отнести относительно большое потребление энергии
и невозможность построения сетей сложной конфигурации.
Эти особенности связаны с тем, что Bluetooth решает проблему замены
кабелей для устройств, подключаемых к компьютеру, а не проблему созда-
ния беспроводной LAN.
2.11.3. ZigBee и IEEE 802.15.4
Стандарт IEEE 802.15.4 [152] является самым новым в серии беспровод-
ных (принят в октябре 2003 г.). На его основе ZigBee Alliance (www.zigbee.org)
разработал спецификацию протоколов сетевого и прикладного уровня, кото-
рые анонсировал в декабре 2004 г. под названием ZigBee [153]. ZigBee Alliance
включает в себя более 180 фирм, работающих совместно над продвижением
стандартов, стека протоколов и прикладных профилей для потребительского
и промышленного сектора экономики. Прикладные профили ориентированы, в
частности, на автоматизацию зданий, промышленный мониторинг, вентиляцию
и кондиционирование, работу с датчиками. Спецификация ZigBee описывает
построение сети, вопросы безопасности, прикладное программное обеспечение.
Основной областью применения ZigBee/IEEE 802.15.4 является передача
информации от движущихся и вращающихся частей механизмов (конвейеров,
роботов), промышленные системы управления и мониторинга, беспроводные се-
ти датчиков, отслеживание маршрутов движения и местоположения имущества
и инвентаря, «интеллектуальное» сельское хозяйство, системы охраны.
В отличие от других беспроводных технологий, где ставится задача обес-
печить высокую скорость передачи, большую дальность или высокое качество
обслуживания, ZigBee/IEEE 802.15.4 создавался изначально по критериям ма-
лой дальности действия, низкой цены, низкой потребляемой мощности, низ-
кой скорости передачи и малых габаритов. Эти свойства идеально соответ-
ствуют требованиям к большинству промышленных датчиков. Поэтому ZigBee
часто отождествляют с промышленными беспроводными сенсорными сетями
WSN (Wireless Sensor Network) [156-158, 160, 167, 168]. Устройства ZigBee ис-
пользуются в применениях, где Bluetooth оказывается слишком дорогим и не
требуется высокая скорость передачи.
ZigBee, как и Bluetooth, использует нелицензируемый [166] диапазон
2,4 ГГц. Стандарт предусматривает также использование частот 868 МГц
в Европе и 915 МГц в США. Максимальная скорость передачи составляет
250 кбит/с в диапазоне 2,4 ГГц. Диапазон 2,4 ГГц разделен на 11...26 кана-
лов шириной по 5 МГц каждый.
Несмотря на то что вся идеология стандарта IEEE 802.15.4 построена в
предположении, что типовая связь будет осуществляться на расстоянии око-
ло 10 м, стандарт не устанавливает требований к мощности передатчика. Этот
параметр регулируется нормативными документами в области радиосвязи, спе-
цифическими для каждого государства. Наибольшее распространение на рын-
ке имеют передатчики с мощностью 1 мВт, которые обеспечивают связь на
расстоянии до 10 м в помещении, а также передатчики с мощностью 10 мВт,
увеличивающие это расстояние до 80 м в помещении и до 1 км в условиях
140
Глава 2
прямой видимости. Дальность связи можно увеличить применением антенн
специальной конструкции.
Модель OSI сети ZigBee представлена в табл. 2.16. Она включает в се-
бя физический уровень (PHY), канальный уровень, состоящий из подуровня
доступа к среде передачи МАС и LLC (смысл обозначений см. в описании
Ethernet), которые определяются стандартом IEEE 802.15.4, а также сетевой
уровень NWK (NetWorK) и уровень приложений APL, состоящий из подуровня
поддержки приложений (Application Support sub-layer — APS), подуровня объ-
ектов устройств ZigBee (ZigBee Device Object — ZDO) и объектов Application
Objects, определяемых изготовителем ZigBee-устройств.
Таблица 2.16
Уровни модели OSI сети ZigBee/IEEE 802.15.4
Уровнь OSI модель Сеть Функции
7 Прикладной APL (APS, ZDO и Applica- tion Objects) ZigBee Передача сообщений, обнару- жение устройств, определение роли устройств
6 Уровень представления — —
5 Сеансовый — —
4 Транспортный - -
3 Сетевой NWK ZigBee Безопасность, маршрутизация
2 Канальный (передачи данных) LLC IEEE 802.15.4 SSCS IEEE 802.15.4 MAC IEEE 802.15.4 CSMA/CA, передача маячков, синхронизация
1 Физический PHY IEEE 802.15.4 Радиоканал 2,4 ГГц
Подуровень МАС управляет доступом к радиоканалу, используя метод
CSMA/CA. Он также отвечает за передачу маячковых фреймов (см. ниже), син-
хронизацию и обеспечение надежных методов передачи информации. Подуро-
вень SSCS (Service Specific Convergence Sublayer — подуровень сближения спе-
цифических сервисов) выполняет роль интерфейса между подуровнями LLC и
МАС. Подуровень LLC выполняет связь сетевого уровня с уровнем МАС.
Уровень NWK использует методы, обеспечивающие:
• регистрацию в сети нового устройства и исключение его из сети;
• обеспечение безопасности при передаче фреймов;
• указание маршрута фрейма к месту назначения;
• прокладку маршрутов между устройствами в сети;
• обнаружение в сети ближайших соседей;
• запоминание необходимой информации о соседних узлах.
В ZigBee имеются три типа устройств:
• координатор — формирует топологию сети и может устанавливать мосты с
другими сетями. В каждой ZigBee сети имеется только один координатор;
• маршрутизатор — работает как промежуточное звено, передавая в нужном
направлении данные от других устройств;
Промышленные сети и интерфейсы
141
• конечное устройство — передает данные координатору или маршрутизато-
ру и не может связываться с аналогичными ему устройствами.
Уровень NWK координатора отвечает за организацию новой сети, когда это
нужно и назначение адресов новым устройствам, подключаемым к сети.
Подуровень APS уровня приложений обеспечивает:
• обслуживание таблиц для связывания устройств сети на основе информа-
ции о необходимости и возможности связывания;
• передачу сообщений между связанными устройствами;
• определение группового адреса устройств, удаление и фильтрацию сооб-
щений с групповыми адресами;
• отображение 64-битного адреса в 16-битный;
• фрагментацию, перекомпоновку и транспортировку данных.
Подуровень ZDO обеспечивает:
• определение роли устройств в сети (координатор, маршрутизатор или око-
нечное устройство);
• инициирование или ответ на запрос соединения;
• защиту информации;
• обнаружение устройств в сети и определение, какой сервис они предо-
ставляют.
Топология ZigBee-сети поддерживается уровнем NWK и может иметь фор-
му звезды, дерева или ячеистой сети. В топологии типа звезды сеть контро-
лируется координатором. Координатор отвечает за инициализацию и обслу-
живание сетевых устройств и всех конечных устройств, непосредственно вза-
имодействующих с координатором. В ячеистой и древовидной структуре се-
ти координатор отвечает за организацию сети и выбор некоторых ключевых
параметров, но сеть может быть расширена с помощью ZigBee маршрутиза-
торов. В сети с древовидной топологией маршрутизаторы перемещают дан-
ные и управляющие сообщения по сети, используя иерархическую стратегию
маршрутизации. Древовидные сети могут использовать маячковую стратегию
маршрутизации (см. ниже).
Ячеистая сеть должна обеспечить полную одноранговую коммуникацию
устройств, т.е. в ячеистой сети нет устройств разных рангов (координаторов,
маршрутизаторов и т.п. — все устройства равноправны).
Физический уровень модели OSI обеспечивает интерфейс между стеком
протоколов и средой передачи информации (эфиром). Физический (PHY) и
канальный (МАС) уровни модели OSI (табл. 2.16) определены в стандарте IEEE
802.15.4. Они имеют следующие основные характеристики:
• скорость передачи: 250 кбит/с;
• короткий 16-битный адрес или расширенный длиной 64-бита;
• выделение интервала времени для передачи информации каждый узлом;
• метод доступа к каналу типа CSMA/CA;
• протокол обмена с уведомлением о получении;
• малое потребление мощности;
• контроль уровня энергии;
142
Глава 2
• наличие индикатора качества связи;
• 16 каналов в диапазоне 2,45 ГГц.
Частоты 868 и 902 МГц, предусмотренные стандартом, в России не приме-
няются и поэтому в дальнейшем не упоминаются.
Стандарт IEEE 802.15.4 использует модуляцию типа OQPSK (Offset-Quad-
rature Phase-Shift Keying — смещенная квадратурная фазовая манипуляция).
Основным назначением физического уровня является прием и передача
данных через радиоканал. Здесь также измеряется мощность радиосигнала,
оценивается качество связи и чистота канала, осуществляется выбор канала.
Подуровень МАС управляет маячком, доступом к каналу, выделяет гаран-
тированные слоты времени, проверяет достоверность передачи фреймов, пере-
дает фрейм подтверждения о получении, выполняет часть работы по обеспе-
чению защиты информации.
Рис. 2.38. Структура суперфрейма с
гарантированными временными слотами
Стандарт допускает опциональ-
ное использование суперфреймовой
структуры сообщений (рис. 2.38). Фор-
мат суперфрейма определяется сете-
вым координатором. Суперфрейм с
двух сторон ограничивается маячками,
делится на 16 равных по длине слотов
и посылается сетевым координатором.
Маячок помещается на место первого
слота каждого суперфрейма. Коорди-
натор может отключить режим сообще-
ний с маячками. Маячки используют-
ся для синхронизации присоединенных устройств, для идентификации сети и
для описания структуры суперфрейма. Любые устройства, желающие начать
процесс коммуникации в промежуток времени между двумя маячками, долж-
ны использовать слотовый механизм доступа CSMA/CA. Передача сообщений
должна быть закончена до прихода следующего маячка.
IEEE 802.15.4 устанавливает два механизма доступа к каналу CSMA/CA
в зависимости от типа конфигурации сети. В сети без маячков использует-
ся обычный (бесслотовый) механизм доступа CSMA/CA. Каждый раз, когда
устройство собирается начать передачу, оно должно выдержать паузу случай-
ной длительности после того, как канал освободится. Случайная задержка
нужна потому, что очень вероятно, что многие устройства сети ждут освобож-
дения канала и поэтому после его освобождения могут начать передачу одно-
временно. Если канал занят, то устройство может повторить попытку после
повторной случайной задержки. Фреймы подтверждения о получении посыла-
ются сразу, без использования описанного алгоритма.
В сети с маячками используется слотовый (тактированный) механизм до-
ступа CSMA/CA, в котором начало временного слота должно совпадать с
границей суперфрейма сетевого координатора, т.е. начало слота для каждого
устройства должно быть синхронизировано с началом передачи маячка сете-
вым координатором. Поскольку устройство не может начать передачу, пока не
Промышленные сети и интерфейсы
143
найдет маячок, а маячки рассылаются только сетевым координатором, то се-
тевой координатор с помощью маячков выполняет тактирование актов обмена
во всей сети. При этом PHY уровень должен обеспечить, чтобы все переда-
чи в сети начинались одновременно с началом слотов. Введение описанной
синхронизации позволяет уменьшить вероятность одновременной передачи со-
общений несколькими узлами сети.
Для устройств, которые требуют срочной доставки или большой пропуск-
ной способности канала, сетевой координатор может зарезервировать часть су-
нерфрейма, в котором будет отсутствовать конкуренция за канал (рис. 2.38),
поскольку в это время сетевой координатор запрещает любую передачу всем
другим устройствам. Эта часть слотов суперфрейма называется гарантирован-
ными временными слотами (Guaranteed Time Slots — GTSs).
Модель передачи данных. В IEEE 802.15.4 существует три типа об-
менных процессов:
• передача от устройства к сетевому координатору;
• передача от сетевого координатора к устройству;
• передача между двумя одноранговыми устройствами.
В звездной топологии используются только два первых варианта, посколь-
ку в ней не существует обменов между одноранговыми устройствами.
Когда устройство собирается передать данные координатору в сети с маяч-
ками, оно сначала пытается обнаружить маячок. Когда маячок найден, устрой-
ство подстраивается к структуре суперфрейма. Устройство передает данные
координатору, используя слотовый механизм CSMA/CA. В ответ координатор
отсылает фрейм уведомления о получении. На этом цикл обмена заканчива-
ется. Если устройство собирается передать данные в сети без маячков, оно
передает данные, используя бесслотовый метод CSMA/CA.
Когда координатор желает передать
дынные устройству в сети с маячками, он
помещает в маячок информацию о том,
что имеются данные, готовые к передаче
(рис. 2.39). Устройство периодически ана-
лизирует содержание маячка и, если в нем
имеется информация о наличии сообщения,
готового к передаче, устройство передает
команду запроса данных, используя сло-
товый метод CSMA/CA. Координатор под-
тверждает прием запроса данных с помо-
щью фрейма уведомления. Вслед за этим
координатор отсылает данные, используя
слотовый метод доступа CSMA/CA. Уст-
ройство подтверждает прием данных отправкой уведомления.
Если координатор собирается передать данные без использования маячка,
он запоминает данные и ждет запроса от устройства. Устройство может пе-
редать команду запроса данных координатору, используя бесслотовый метод
CSMA/CA. Координатор сначала посылает уведомление о получении (в том
Рис. 2.39. Процесс передачи данных
от координатора к устройству
144
Глава 2
же цикле обмена), затем, используя CSMA/CA, отсылает данные и получает
уведомление о получении от устройства.
Структура фреймов была спроектирована по критерию минимальной
сложности, обеспечивающей надежную передачу данных в зашумленном кана-
ле. В соответствии с моделью OSI, каждый нижележащий уровень добавляет
к протоколу свой заголовок. Стандарт предусматривает четыре типа фреймов:
• фрейм маячка;
• фрейм данных;
• фрейм уведомления о получении;
• фрейм команд МАС-подуровня
Фрейм данных (рис. 2.40) начинается с преамбулы, которая совместно с
полем «Старт» служит для синхронизации данных в приемнике, поле «Дли-
на» содержит длину поля МАС подуровня в 8-битовых байтах (октетах). По-
ле «Управление» содержит служебную информацию об управлении фреймами,
поле «Номер» — порядковый номер данных, поле «Адрес» — адресную инфор-
мацию, в том числе 16-битный короткий или 64-битный расширенный адрес.
Завершается фрейм полем контрольной суммы КС.
Поля МАС-подуровня
◄ ►
Преамбула Старт Длина Управление Номер Адрес Данные КС
4 байта 1 байт 1 байт 2 байта 1 байт 4...20 байт N байт 2 байта
Рис. 2.40. Формат фрейма данных по стандарту IEEE 802.15.4
Сетевой уровень. Особенностью сетей ZigBee является возможность вы-
полнять ретрансляцию передаваемых данных через множество промежуточных
узлов в сети, причем при выходе из строя или выключении одного из узлов сеть
автоматически находит другой путь для передачи информации. При включе-
нии питания устройства сеть заново включает его в свой состав.
Стандарт различает два типа устройств: полнофункциональные устрой-
ства (FFD — Full-Function Device) и устройства с сокращенным набором функ-
ций (RFD — Reduced-Function Devices). FFD могут работать в сети с дре-
вовидной топологией в качестве координатора сети или в качестве устрой-
ства. FFD могут обмениваться информацией с другими FFD или RFD, но
RFD могут связываться только с FFD. RFD гораздо проще и дешевле, чем
FFD. Любая сеть должна содержать по крайней мере одно полнофункциональ-
ное устройство FFD.
В зависимости от требований конкретного применения, сеть на основе стан-
дарта IEEE 802.15.4 может иметь одну их двух топологий: звездную (рис. 2.41,а)
или одноранговую («равный с равным», рис. 2.41,6).
Все устройства в сети независимо от топологии должны иметь уникальный
64-битный расширенный адрес. Этот адрес используется для коммуникации в
пределах сети или может быть изменен на короткий 16-битный адрес, выделя-
емый координатором в процессе подключения устройств к сети. Координатор
Промышленные сети и интерфейсы
145
Рис. 2.41. Звездная (а) и одноранговая (б) топологии сети. Черный круг — полнофунк-
циональное устройство (FFD), белый — устройство с сокращенной функциональностью
(RFD)
может быть подключен к сети питания, а остальные сетевые устройства мо-
гут иметь батарейное питание.
Одноранговая сеть также имеет координатора, однако она отличается тем,
что любое устройство может обмениваться данными с любым другим, если оно
находится в зоне досягаемости радиосвязи, в то время как в звездной топологии
любое устройство может взаимодействовать только с координатором. Отме-
тим, что одноранговая сеть получается всегда дороже, поскольку она содержит
только полнофункциональные устройства, но благодаря этому она позволяет
организовывать сети более сложной топологии, в том числе ячеистые. Боль-
шинство промышленных применений требуют применения одноранговых сетей.
К ним относятся управление и мониторинг, сенсорные сети, отслеживание ме-
стоположения имущества и товара, «интеллектуальное» сельское хозяйство,
системы безопасности. Одноранговые сети могут быть специализированными,
самоорганизующимися и самовосстанавливающимися. Они позволяют переда-
вать информацию между узлами сети независимо от расстояния между ними,
используя промежуточные узлы в качестве ретрансляторов. Эти функции вы-
полняются уровнем приложений модели OSI.
Несколько сетей могут взаимодействовать друг с другом. Для этого каж-
дая сеть должна иметь уникальный сетевой идентификатор. Благодаря ему
внутри сети могут использоваться сокращенные адреса. Поэтому полный ад-
рес устройства для доступа извне (из другой сети) состоит из адреса сети и
короткого адреса устройства.
Базовая структура сети звездной топологии показана на рис. 2.41,а. По-
сле первого включения полнофункционального сетевого устройства последнее
может организовать свою собственную сеть и стать сетевым координатором.
Все сети звездной топологии функционируют независимо одна от другой. Это
достигается выбором сетевого идентификатора, который не используется дру-
гими сетями, находящимися в пределах радиуса действия данной сети. После
выбора сетевого идентификатора координатор может принять другие устрой-
ства в состав сети, как FFD, так и RFD.
В одноранговой сети (рис. 2.41,6) каждое устройство может взаимодейство-
146
Глава 2
Рис. 2.42. Пример сети с топологией кластерного дерева. Ветви указывают отношения
подчиненности, а не каналы связи
вать с любым другим устройством, находящимся в пределах его радиуса дей-
ствия. Одно из устройств назначается координатором, например то, которое
первым включено в сеть. При дальнейшем расширении сети можно отойти от
одноранговой топологии и создать гибридную топологию, в которой будут со-
держаться и устройства с сокращенной функциональностью.
Примером применения одноранговой коммуникации между устройствами
может быть кластерное дерево (рис. 2.42). Кластерное дерево является спе-
циальным случаем одноранговой сети, в которой большинство устройств явля-
ются полнофункциональными. Устройства с сокращенной функциональностью
могут быть подключены к кластерному дереву только как оконечные узлы
на концах ветвей, поскольку они могут быть подключены только к одному
полнофункциональному устройству. Одно (любое) из полнофункциональных
устройств в сети должно играть роль сетевого координатора и обеспечивать
синхронизацию с другими устройствами. Сетевой координатор должен иметь
повышенные вычислительные ресурсы.
При формировании сети типа кластерного дерева сетевой координатор на-
Промышленные сети и интерфейсы
147
значает себя главой первого кластера (CLaster Head — CLH), присваивает сво-
ему кластеру идентификатор 0 (Cluster IDeijtifier CID = 0) и выбирает иденти-
фикатор всего формируемого кластерного дерева. После этого координатор по-
сылает всем соседним устройствам широковещательную команду с маячковым
фреймом. Устройства, получившие маячок, могут запросить разрешения при-
соединиться к формируемому кластеру. Если сетевой координатор разрешает
присоединение, он добавит новое устройство в свой список соседних устройств.
Затем вновь присоединившееся устройство добавит CLH в качестве родитель-
ского устройства в список своих соседей и начнет периодически посылать мая-
чок. Теперь другие устройства могут подсоединиться к нему. Если устройство,
желающее подсоединиться к сети, не может найти CLH, оно может подсоеди-
ниться к любому другому устройству, которое может быть родительским.
Простейшим частным случаем кластерного дерева является один кластер,
однако несколько кластеров могут объединяться, образуя кластерное дерево
(рис. 2.42). Для этого сетевой координатор назначает одно из полнофункци-
ональных устройств главой соседнего кластера и назначает ему номер кла-
стера CID = 1. Подробнее процедура формирования кластерного дерева опи-
сана в [152].
Уровень приложений связывает стек протоколов с конечным прило-
жением пользователя, например ОРС-сервером, который далее использует-
ся для обмена данными со SCADA. Подуровень поддержки приложений APS
(см. табл. 2.16) обеспечивает интерфейс между сетевым уровнем и уровнем
приложений APL посредством общего набора сервисов, которые используют-
ся как подуровнем объектов устройств ZDO, так и прикладными объектами
Application Objects, определяемыми пользователем. Подуровень APS распре-
деляет между конечными сетевыми устройствами информацию, поставляемую
приложением, например команды включения/выключения лампочки в систе-
ме автоматизации здания.
Объекты приложений в ZigBee выполняют следующие функции, исполь-
зуя общедоступный интерфейс ZDO:
• контроль и координация разных уровней протокола для ZigBee устройств;
• инициирование стандартных сетевых функций.
Одним из компонентов ZigBee сети является ZigBee-устройство. Приме-
рами могут быть выключатель света, термостат или удаленная система ав-
томатического управления, которые имеют доступ к радиоканалу. В одном
и том же устройстве с одним радиоканалом могут быть воплощены логиче-
ски различные функции, например функция измерения веса и функция из-
мерения температуры.
Несколько взаимодействующих устройств могут образовывать автоматизи-
рованную систему управления, например АСУ «Умный дом». В такой системе
подуровень APS модели OSI (табл. 2.16) обеспечивает распределение информа-
ции, поставляемой пользовательским приложением, между устройствами. Та-
кой информацией могут быть, например, команды «Включить свет», посылае-
мые от приложения разным устройствам по радиоканалу.
148
Глава 2
Рис. 2.43. Пример связывания конечных точек в ZigBee-сети
Уровень поддержки приложений APS для реализации своих функций ис-
пользует коммуникационные структуры: профили, кластеры и конечные точ-
ки. Профиль описывает коллекцию (набор) устройств, используемых для неко-
торого приложения, и, неявно, схему сообщений между этими устройствами.
Например, в ZigBee имеются профили для системы домашней автоматизации
и профили для коммерческих, промышленных и учрежденческих систем. Все
профили используют стандартные типы сообщений, форматы сообщений и про-
цедуры их обработки.
В рамках профилей устройства обмениваются между собой с помощью кла-
стеров, которые могут исходить или входить в устройство. Кластер — это со-
общение или коллекция сообщений, в состав которых могут входить команды
и ответы на них. Например, в профиле для домашней автоматизации име-
ется специализированный кластер для управления освещением. В его состав
могут входить команды «Включить/Выключить». В состав кластера может
входить набор команд для конфигурирования устройства. Каждый кластер
имеет свой идентификатор и является уникальным только в пределах опре-
деленного профиля.
Конечная точка указывает объект в пределах устройства, с которым вза-
имодействует приложение. Например, конечная точка ЕР1 (ЕР — End Point)
может предназначаться для управления светом в цехе и коридоре (рис. 2.43),
конечная точка ЕР7 — для управления системой вентиляции и кондициони-
рования, конечная точка 1 второго устройства — для управления системой
охраны здания. Конечные точки выполняют функцию адресации и позволяют
определить, какому устройству предназначено посланное сообщение. В пре-
делах одного устройства они имеют индексы от 1 до 240. Без конечных то-
чек управлять несколькими объектами в пределах одного устройства было бы
невозможно, поскольку адресуемым является только устройство, а конечные
точки — это суб-адреса с номерами от 1 до 240.
Связи между конечными точками хранятся в виде таблицы связей, кото-
рая запоминается в устройстве, от которого исходят команды управления, если
Промышленные сети и интерфейсы
149
устройство имеет достаточную для этого емкость памяти. Таблица связей мо-
жет также храниться во вспомогательном устройстве.
Стремясь обеспечить совместимость (точнее, интероперабельность) уст-
ройств разных производителей в ZigBee-системе, стандарт предлагает стандарт-
ные профили, которые содержат стандартные наборы кластеров. В случае,
когда стандартные профили не удовлетворяют потребностям системного инте-
гратора, он может создать свой, пользовательский, профиль, включая опре-
деления кластеров.
2.11.4. Wi-Fi и IEEE 802.11
Основное назначение технологии Wi-Fi (Wireless Fidelity — «беспроводная
точность») — беспроводное расширение сетей Ethernet. Она используется так-
же там, где нежелательно или невозможно использовать проводные сети (см.
начало п. 2.11), например для передачи информации от движущихся частей
механизмов; там, где нельзя сверлить стены; на большом складе, где ком-
пьютер нужно носить с собой.
Wi-Fi разработан консорциумом Wi-Fi (www.wi-fi.org) на базе серии стан-
дартов IEEE 802.11 (1997 г.) [149] и обеспечивает скорость передачи от 1...2 до
54 Мбит/с. Wi-Fi-консорциум разрабатывает прикладные спецификации для
воплощения стандарта Wi-Fi в жизнь, выполняет тестирование и сертифика-
цию продукции других фирм на соответствие стандарту, организует выставки,
обеспечивает необходимой информацией разработчиков Wi-Fi-оборудования.
Несмотря на то что стандарт IEEE 802.11 был ратифицирован еще в 1997 г.,
сети Wi-Fi получили широкое распространение только в последние годы, ко-
гда существенно понизились цены на серийное сетевое оборудование. В про-
мышленной автоматизации из множества стандартов серии 802.11 использу-
ются только два: 802.11b со скоростью передачи до 11 Мбит/с и 802.11g (до
54 Мбит/с).
Физический и канальный уровни. Модель OSI для стандартов Wi-Fi и
IEEE 802.11 показана в табл. 2.17. Основное назначение физических уровней —
обеспечение интерфейса с беспроводной средой передачи (с эфиром), а также
оценка состояния эфира и взаимодействие с уровнем МАС.
Таблица 2.17
Уровни модели OSI для Wi-Fi/IEEE 802.11
Уровнь OSI модель Сеть Функции
7 Прикладной - -
6 Уровень представления — —
5 Сеансовый — —
4 Транспортный - -
3 Сетевой - -
2 Канальный Подуровень LLC
(передачи данных) Подуровень МАС
1 Физический Подуровень PLCP Беспроводная передача,
Подуровень PMD оценка состояния эфира
150
Глава 2
Физический уровень состоит из двух подуровней:
• PLCP (Physical Layer Convergence Protocol) выполняет процедуру отобра-
жения PDU уровня МАС (элемента протокола данных, ср. с рис. 2.25) во
фрейм формата FHSS или DSSS (см. п. 2.11.1). Эта процедура выполняет
передачу, обнаружение несущей и прием сигнала;
• PMD (Physical Medium Dependent) — подуровень, зависящей от среды пе-
редачи. Этот уровень будет различным для разных скоростей передачи и
разных стандартов из серии 802.11. Подуровень PMD обеспечивает дан-
ные и сервис для подуровня PLCP и функции радиопередачи и приема,
результатом которых является поток данных, информация о времени, па-
раметры приема.
Основным рабочим состоянием уровней PLCP является обнаружение несу-
щей и оценка незанятости канала. Для выполнения передачи PLCP переклю-
чает PMD из режима «прием» в режим «передача» и посылает элемент данных
PPDU (PLCP Data Unit).
Физический уровень выполняет скремблирование, кодирование и чередо-
вание (см. п. 2.11.1).
Передача сигналов по радиоканалу выполняется двумя методами: FHSS
и DSSS (см. п. 2.11.1). При этом используется дифференциальная фазовая
модуляция DBPSK и DQPSK (см. п. 2.11.1 «Методы модуляции несущей») с
применением кодов Баркера, комплементарных кодов (ССК — Complementary
Code Keying) и технологии двойного сверточного кодирования (РВСС) [150].
Wi-Fi 802.11g на скорости 1 и 2 Мбит/с использует модуляцию DBPSK. При
скорости передачи 2 Мбит/с используются те же методы, что и при скорости
1 Мбит/с, однако для увеличения пропускной способности канала используется
четыре разных значения фазы (0, тг/2, Зтг/4, тг) для фазовой модуляции несущей.
Протокол 802.11b использует дополнительно скорости передачи 5,5 и
11 Мбит/с. На этих скоростях передачи вместо кодов Баркера используют-
ся комплементарные коды (ССК).
Wi-Fi использует метод доступа к сети CSMA/CA (см. п. 2.11.1), в котором
для снижения вероятность коллизий использованы следующие принципы:
• прежде чем станция начнет передачу, она сообщает, как долго она будет
занимать канал связи;
• следующая станция не может начать передачу, пока не истечет зарезер-
вированное ранее время;
• участники сети не знают, принят ли их сигнал, пока не получат подтвер-
ждение об этом;
• если две станции начали работать одновременно, они смогут узнать об этом
только по тому факту, что не получат подтверждение о приеме;
• если подтверждение не получено, участники сети выжидают случайный
промежуток времени, чтобы начать повторную передачу.
Предотвращение, а не обнаружение коллизий, является основным в бес-
проводных сетях, поскольку в них, в отличие от проводных сетей, передатчик
трансивера заглушает принимаемый сигнал.
Промышленные сети и интерфейсы
151
Преамбула Заголовок PLCP
г “
Синхрониз. Старт PLW Скорость КС МАС-фрейм (PSDU)
80 бит 16 бит 12 бит 4 бита 16 бит Переменной длины
Рис. 2.44. Формат фрейма PLCP для режима FHSS
Формат фрейма на уровне PLCP модели OSI (табл. 2.17) в режиме FHSS
показан на рис. 2.44. Он состоит из следующих полей:
• «Синхронизация» — содержит чередующиеся нули и единицы и служит
для подстройки частоты на принимающей станции, синхронизирует рас-
пределение пакетов и позволяет выбрать антенну (при наличии несколь-
ких антенн);
• «Старт» — флаг начала фрейма. Состоит из строки 0000 1100 1011 1101,
которая служит для синхронизации фреймов на принимающей станции;
• PLW (PSDU Length Word — слово длины служебного элемента данных
подуровня PLCP (PSDU)) указывает размер фрейма, поступившего с уров-
ня МАС, в октетах;
• «Скорость» — указывает скорость передачи данных фрейма;
• «КС» — контрольная сумма;
• «МАС-фрейм» — фрейм, поступивший с МАС-уровня модели OSI и со-
держащий PSDU;
• «Заголовок PLCP» — поля, добавленные на подуровне PLCP.
Преамбула Заголовок PLCP
F я г
Синхрониз. Старт Сигнал Сервис Длина КС МАС-фрейм (PSDU)
128 бит 16 бит 8 бит 8 бит 16 бит 16 бит Переменной длины
Рис. 2.45. Формат фрейма PLCP для режима DSSS
Формат фрейма на уровне PLCP модели OSI (табл. 2.17) в режиме DSSS
показан на рис. 2.45. В нем поля имеют следующий смысл:
• «Синхронизация» содержит только единицы и обеспечивает синхрониза-
цию в приемной станции;
• «Старт» — флаг начала фрейма. Содержит строку 0xF3A0, которая ука-
зывает начало передачи параметров, зависящих от физического уровня;
• «Сигнал» указывает тип модуляции и скорость передачи данного фрейма;
• поле «Сервис» зарезервировано для будущих модификаций стандарта;
• «Длина» указывает время в микросекундах, необходимое для передачи
МАС-фрейма;
• «КС» — контрольная сумма;
152
Глава 2
• «МАС-фрейм» — фрейм, поступивший с МАС-уровня модели OSI и со-
держащий PSDU;
• «Заголовок PLCP» — поля, добавленные на подуровне PLCP.
Дальность связи средствами Wi-Fi сильно зависит от условий распро-
странения электромагнитных волн, типа антенны и мощности передатчи-
ка. Типовые значения, указываемые изготовителями Wi-Fi-оборудования, со-
ставляют 100...200 м в помещении и до нескольких километров на откры-
той местности с применением внешней антенны и при мощности передатчи-
ка 50... 100 мВт. Вместе с тем, по сообщению германского еженедельника
Computerwoche (www.computerwoche.de) во время соревнований по дальности
связи была зафиксирована связь на расстоянии 89 км с применением стандарт-
ного оборудования Wi-Fi стандарта IEEE 802.11b (2,4 ГГц) и спутниковых ан-
тенн («тарелок»). В книге рекордов Гиннеса зафиксирована также Wi-Fi-связь
на расстоянии 310 км с применением антенн, поднятых на большую высоту
с помощью воздушных шаров.
Архитектура сети Wi-Fi. Стандарт IEEE 802.11 устанавливает три ва-
рианта топологии сетей: независимые базовые зоны обслуживания (Independent
Basic Service Sets, IBSS); базовые зоны обслуживания (Basic Service Sets, BSS);
расширенные зоны обслуживания (Extended Service Sets, ESS).
Под зоной обслуживания здесь понимается набор логически сгруппирован-
ных устройств. Каждая зона обслуживания имеет свой идентификатор (Service
Set Identifier, SSID). Станция-приемник использует SSID для определения того,
из какой зоны обслуживания приходит сигнал.
В архитектуре IBSS станции связываются непосредственно одна с другой
без использования точки доступа и без возможности подсоединения к провод-
ной локальной сети. Зона обслуживания SSID используется обычно для объ-
единения в сеть малого количества станций, поскольку в ней не предусмотрена
возможность ретрансляции сигнала для увеличения дальности связи и меха-
низмы для решения проблемы скрытого узла (см. рис. 2.37).
При использовании BSS станции общаются другом с другом через общий
центральный узел связи, называемый точкой доступа. Точка доступа обычно
подключается к проводной локальной сети Ethernet.
Расширенная зона обслуживания получается при объединении нескольких
BSS в единую систему посредством распределительной системы, в качестве ко-
торой может выступать проводная сеть Ethernet.
2.11.5. Сравнение беспроводных сетей
В табл. 2.18 сведены основные параметры трех рассмотренных беспровод-
ных технологий. В таблице отсутствуют данные о стандартах WiMAX, EDGE,
UWB и многих других, которые не нашли широкого применения в промыш-
ленной автоматизации.
Промышленные сети и интерфейсы
153
Таблица 2.18
Сравнение трех ведущих беспроводных технологий
Параметр Bluetooth/IEEE 802.15.1 ZigBee/IEEE 802.15.4 Wi-Fi/IEEE 802.11
Дальность, м Скорость передачи, Мбит/с Максимальное число участников сети Потребляемая мощность, мВт Продолжительность работы от двух батарей размера А А Цена/Сложность (условные единицы) Повторная передача Основное назначение -10 (50...100) 0,723 8 10 10 Есть Связь периферии с компьютером 10 0,250 245 1 6 мес. в режиме ожидания 1 Есть Беспроводные сети датчиков -100 1...2 до 54 Не ограничено 50 20 DCF — нет; PCF и HCF — есть Беспроводное расширение Ethernet
2.12. Сетевое оборудование
При проектировании распределенных АСУ ТП с применением промышлен-
ных сетей могут возникать следующие проблемы:
• требуемая длина отводов от общей шины (например, для сетей на основе
интерфейса RS-485) превышает допустимую;
• предельно допустимая длина линии связи меньше необходимой;
• необходимое количество подключенных к сети устройств превышает допу-
стимое по спецификации на используемое оборудование;
• к сети необходимо подключить устройство, не имеющее соответствующе-
го порта (например, вольтметр с портом RS-232 к сети на основе интер-
фейса RS-485 или Ethernet);
• необходимо объединить несколько различных сетей с различными прото-
колами в единую сеть (например, когда требуется объединить Ethernet с
CAN и Modbus RTU);
• не удается ослабить влияние помех до допустимого уровня, используя мед-
ный кабель;
• фрагмент сети установлен на подвижном объекте.
Эти и аналогичные проблемы решаются с помощью вспомогательных сете-
вых устройств: повторителей и преобразователей интерфейса, концентраторов,
коммутаторов, мостов, маршрутизаторов, шлюзов.
2.12.1. Повторители интерфейса
Электрический сигнал, проходя по линии передачи, ослабляется вслед-
ствие потерь на омическом сопротивлении кабеля и изменяет свою форму по
причине неоднородности линии и неточного ее согласования. Поэтому суще-
ствует ограничение на предельную длину кабеля, которое зависит от типа ин-
терфейса и скорости передачи.
154
Глава 2
Повторитель (ретранслятор, репитер — Repeater) восстанавливает уровень
и форму сигнала, а также позволяет согласовать ее в пределах каждого из
фрагментов, ограниченных повторителями. Поэтому повторители используют
для увеличения расстояния, на которое требуется передать сигнал, а также
для увеличения нагрузочной способности (коэффициента разветвления) пере-
датчика интерфейса.
Повторители интерфейса обычно имеют (не всегда) гальваническую изоля-
цию, поэтому их можно использовать также для деления сети на гальванически
изолированные сегменты с целью защиты от помех.
Деление сети на гальванически изолированные фрагменты обеспечивает
также электрическую защиту изолированных фрагментов от случайного попа-
дания высокого напряжения в какой-либо фрагмент сети. При этом гальвани-
чески изолированные участки сети окажутся неповрежденными.
Поскольку электромагнитная волна существует только в пределах одно-
го фрагмента сети, а в соседний фрагмент передается только восстановленный
сигнал, то повторители можно использовать и для выполнения ответвлений
в сети с шинной топологией (см. рис. 2.5), поскольку длина ответвления от
кабеля до повторителя всегда может быть сделана достаточно малой. При
этом не возникает отражений, которые имеют место при выполнении ответв-
лений без повторителя.
Повторитель использует только часть 1-го уровня модели OSI. Он не изме-
няет способа кодирования информации, не проверяет контрольные суммы, не
восстанавливает потерянные биты, а только принимает электрические сигналы
с помощью стандартного для выбранной сети приемника, восстанавливает их
форму и передает дальше с помощью стандартного передатчика.
Пример структуры повторителя интерфейса NL-485C фирмы НИЛ АП
(www.RealLab.ru) приведен на рис. 2.46. Он состоит из двух стандартных прие-
мопередатчиков интерфейса, микроконтроллера и стабилизатора напряжения.
Гальваническая изоляция интерфейсов друг от друга и от источника питания
выполняется с помощью изолирующих преобразователей напряжения (DC-DC
преобразователей) и оптронов. При появлении сигнала на одном из портов
микроконтроллера он автоматически ретранслирует его на второй порт, пере-
ключая его в режим передачи. Поскольку сигналы передаются без изменения
временных соотношений, скорость передачи на обоих портах автоматически по-
лучается одинаковой.
Преобразователи интерфейсов могут быть без гальванической изоляции, с
изоляцией каждого интерфейса отдельно (как на рис. 2.46) и с изоляцией одного
из двух интерфейсов. В последнем случае второй интерфейс имеет гальвани-
ческую связь с источником питания.
Согласующие резисторы внутри повторителя могут присутствовать или нет
и могут отключаться микропереключателем или джампером. Перед примене-
нием повторителя нужно убедиться, имеются ли резисторы внутри корпуса пре-
образователя, или подключить внешние резисторы к клеммам преобразователя.
Вывод земли «GND» соединяется с экраном кабеля, но не с землей. Оплет-
ка кабеля должна заземляется только в одной точке (подробнее см. главу 3).
Промышленные сети и интерфейсы
155
Рис. 2.46. Типовая структура повторителя интерфейсов RS-232/RS-484/RS-422 типа
NL-485C [www.RealLab.ru]
2.12.2. Концентраторы (хабы)
Описанные выше повторители интерфейса могут содержать несколько пор-
тов. Если появляется сигнал на любом из них, микроконтроллер ретрансли-
рует его на все другие порты. Такие многопортовые повторители называют
концентраторами или хабами (Concentrator, Hub). Они позволяют выполнить
физическое разветвление сетевого кабеля или слияние нескольких кабелей в
один (концентрацию) без нарушения условий согласования линии передачи.
Таким образом, ограничение на длину ответвлений от шины, например RS-485,
снимается с помощью концентраторов.
Концентратор устроен точно так, как повторитель интерфейсов (рис. 2.46),
но имеет больше портов и, соответственно, устройств для гальванической изо-
ляции. Часто гальваническую изоляцию между портами концентратора не
делают, чтобы удешевить коммерческий продукт. Это оправдано, когда кон-
центратор используется для создания сети сложной топологии на ограничен-
ной площади.
В сетях Ethernet при поступлении сигнала одновременно на два или более
портов концентратора возникает коллизия. Поэтому Ethernet-концентраторы в
настоящее время Практически полностью вытеснены сетевыми коммутаторами,
не имеющими указанной проблемы.
2.12.3. Преобразователи интерфейса
Преобразователь (конвертор) интерфейсов (медиаконвертор) используется
для обеспечения совместимости устройств с разными интерфейсами или изме-
нения физического способа передачи информации.
Сложность преобразователя интерфейсов существенно зависит от числа
уровней модели OSI и их функций, которые должны быть реализованы в пре-
156
Глава 2
образователе. В простейшем случае, когда требуется преобразовать RS-232
в RS-485 и интерфейс RS-232 работает в режиме программного управления
потоком данных, возможна побитовая ретрансляция сигналов без изменения
протокола даже физического уровня. Однако в общем случае интерфейс RS-
232 передает параллельно 10 сигналов, в то время как RS-485 — только два
(Data-h и Data—), поэтому для полного преобразования интерфейса пришлось
бы делать конвертирование между параллельным и последовательным форма-
том данных. Кроме того, RS-232 может работать в полнодуплексном режиме,
a RS-485 — только в полудуплексном (при двухпроводной схеме подключе-
ния). Поэтому в общем случае преобразование интерфейсов невозможно без
изменения протокола передачи данных и специального программного обеспе-
чения для портов ввода-вывода.
Даже если преобразование выполняется без изменения параллельной фор-
мы представления информации в последовательную, как, например, в преоб-
разователе RS-485 — CAN, может потребоваться выполнение одним из интер-
фейсов специфических для конкретной сети функций канального уровня (ад-
ресация, борьба за доступ к шине, отсылка сообщений об ошибках, обеспечение
достоверности передачи и др.). Преобразователи интерфейсов не используют
функции уровня приложений, поскольку в этом случае они переходят в раз-
ряд межсетевых шлюзов (см. ниже).
Преобразователь RS-232 — RS-485/422. В простейшем, но наиболее
распространенном случае, когда к компьютеру с портом RS-232 требуется под-
ключить сеть на основе интерфейса RS-485, порт RS-232 используют в режиме
программного управления потоком данных. При этом из 10 клемм интерфей-
са используются только три: TD (Transmit Data — передача данных), RD —
(Receive Data — прием данных) и SG (Signal Ground — сигнальное заземле-
ние), а протокол передачи не зависит от типа интерфейса. Преобразование
интерфейса сводится фактически только к побитовому преобразованию потока
данных из одной электрической формы в другую, без преобразования протоко-
лов передачи и изменения драйверов порта ввода-вывода. Структурная схема
такого преобразователя показана на рис. 2.47. Она отличается от схемы на
рис. 2.46 по сути только типом приемопередатчиков портов ввода-вывода и на-
личием порта RS-422 (выводы Тх+, Tx—, Rx+, Rx—) одновременно с портом
RS-485 (выводы Data-F, Data—).
Описанный преобразователь применяется, напрнимер, при подключении
к компьютеру промышленной сети Modbus или DCON, а также отдельных
устройств с интерфейсом RS-485 или RS-422.
Преобразователи интерфейса часто используют в качестве удлинителей ин-
терфейса, т.е. для увеличения расстояния, на которое можно передать инфор-
мацию. Например, для удлинения порта RS-232 можно использовать преоб-
разователь RS-232 в RS-485, который обеспечивает дальность до 1,2 км, и на
приемном конце сделать обратное преобразование из RS-485 в RS-232. Анало-
гично можно использовать оптоволоконный интерфейс или CAN. Однако ча-
ще для удлинения интерфейсов используют преобразование в промежуточный
нестандартный канал передачи, использующий повышенную мощность сигна-
Промышленные сети и интерфейсы
157
Рис. 2.47. Типовая структура двунаправленного преобразователя интерфейсов RS-232
в RS-485 и RS-422 типа NL-232C (www.RealLab.ru)
ла и позволяющий передавать данные на расстояние, например, до 20 км по
медному кабелю.
Преобразователь RS-232 в оптоволоконный интерфейс. Оптоволо-
конный канал имеет ряд неоспоримых преимуществ, связанных с оптическим
способом передачи информации:
• большая дальность передачи: обычно до 2 км в многомодовом канале или
до 20 км в одномодовом; с повторителями — до нескольких сотен кило-
метров;
• нечувствительность к электромагнитным помехам, в том числе при разряде
молнии или электростатических разрядах;
• отсутствие аварийных ситуаций и порчи оборудования в случае коротких
замыканий, отсутствие коррозии мест соединений;
• более высокая пропускная способность (скорость передачи) или уменьшен-
ное количество ошибок в канале при той же скорости по сравнению с мед-
ным кабелем;
• гальваническая развязка с практически неограниченным напряжением изо-
ляции;
• хорошая защищенность от несанкционированного доступа: невозможно пе-
рехватить передаваемую информацию, не нарушив связь по каналу.
Одномодовое оптоволокно позволяет передавать сигнал на большее рассто-
яние, чем многомодовое, однако коннекторы и приемопередатчики, а также вся
кабельная инфраструктура для многомодового оптоволокна обычно на 25...50 %
дешевле, чем для одномодового. Это связано с жесткими технологическими до-
пусками на компоненты систем для одномодового волокна.
В многомодовом кабеле распространяются световые волны нескольких мод
(длин волн), в одномодовом — одной длины волны. Диаметр сердцевины мно-
158
Глава 2
гомодового оптоволокна на порядок больше длины волны, поэтому техноло-
гические допуски на кабельную инфраструктуру могут быть больше и изго-
товление — дешевле.
Примером оптоволоконного преобразователя может служить преобразова-
тель SN-OFC-ST-62.5/125 фирмы НИЛ АП (www.RealLab.ru), передающий сиг-
налы по оптоволокну на длине волны 820 нм, имеющий пропускную способ-
ность 5 Мбит/с, дальность передачи 1,5 км и разъемы типа ST для оптиче-
ского кабеля.
Преобразователь USB в RS-232, RS-485, RS-422. Преобразователь
из USB в RS-232/422/485 гораздо сложнее, чем описанные выше. Сложность
появляется вследствие того, что для шины USB стандартом установлен опреде-
ленный порядок обмена пакетами данных и пакетами квитирования с устрой-
ствами USB. Поэтому побитовая ретрансляция становится невозможной и в
преобразователе интерфейсов большую роль играет модификация драйверов
порта.
Преобразователи из USB в RS-232/422/485 используются, когда компьютер
имеет недостаточное количество портов RS-232/422/485, но есть неиспользуе-
мые порты USB. При подключении к компьютеру преобразователя и установки
соответствующих драйверов в операционной системе появляется новый вирту-
альный COM-порт, который со стороны программного и аппаратного интер-
фейса ничем не отличается от обычного.
2.12.4. Адресуемые преобразователи интерфейса
Адресуемый преобразователь интерфейса может выполнять часть сетевых
функций: проверку доступности канала, состязание за доступ к каналу, разбив-
ку данных на кадры, обнаружение и коррекцию ошибок, повторную передачу в
случае обнаружения ошибок. В частности, адресуемый преобразователь RS-232
в CAN выполняет все функции физического и канального уровня CAN, в соот-
ветствии со стандартом (см. п. 2.6), однако он не выполняет функций уровня
приложений, как это делают межсетевые шлюзы.
Наиболее распространены адресуемые преобразователи интерфейса RS-232
в RS-485, которые позволяют подключить к сети на основе интерфейса RS-485
такие устройства, как вольтметр, аппарат для считывания штрих-кодов, кас-
совый аппарат или ПЛК с интерфейсом RS-232. Для подключения нескольких
таких устройств к компьютеру без адресуемых преобразователей потребовалось
бы несколько COM-портов, по количеству RS-232-устройств. Дополнительные
COM-порты можно получить с помощью преобразователей USB в RS-232 или
с помощью многопортовых сетевых карт. Увеличить количество USB-портов
можно также с помощью USB-хабов.
Вторым вариантов является подключение устройств с портом RS-232 к об-
щей шине RS-485 с помощью адресуемого преобразователя. Обращение к таким
устройствам выполняется по адресу, записанному в ППЗУ преобразователя.
Использование шины RS-485 вместо нескольких портов RS-232 позволяет так-
же отнести устройство на расстояние до 1,2 км от компьютера и расположить
его в любом удобном месте.
Промышленные сети и интерфейсы
159
Примером адресуемого преобразователя может быть модуль NL-232AC
фирмы НИЛ АП (www.RealLab.ru), структурная схема которого не отличает-
ся от структуры обычного безадресного преобразователя (см. рис. 2.47), отли-
чие содержится только в микропрограммном обеспечении. Настройка модуля
(установка адреса, скорости обмена, длины поля данных, режима четности,
количества стоповых битов и др.) выполняется командами в ASCII-кодах, ко-
торые посылаются в модуль через порт RS-232.
Скорости обмена преобразуемых портов могут быть различными. Напри-
мер, если интерфейс RS-232 имеет стандартную скорость обмена 115200 бит/с,
a CAN имеет стандартную скорость 125000 бит/с, то преобразование та-
ких интерфейсов невозможно без промежуточной буферизацией данных, ко-
торая выполняется, например, с помощью буфера FIFO (First Input — First
Output).
Функцию адресуемого преобразователя можно реализовать с помощью уни-
версального контроллера, имеющего соответствующие порты. Контроллер, со-
держащий программу преобразования портов, называют коммуникационным
контроллером. Коммуникационный контроллер принимает сигнал через один
из своих портов и передает его через другой порт. В общем случае комму-
никационный контроллер может также выполнять функции сигнализации со-
стояния шины, несложные функции управления и быть как ведомым, так и
ведущим.
Широкое применение нашли адресуемые преобразователи интерфейса
RS-232 в Ethernet. Они позволяют подключить устройство с портом RS-232
к компьютеру через сеть Ethernet. Поскольку написание программ для рабо-
ты с Ethernet портом значительно сложнее, чем для работы с СОМ-портом,
преобразователи RS-232 в Ethernet поставляются с драйверами, которые созда-
ют в компьютере виртуальные COM-порты, каждый из которых соответствует
устройству RS-232, подключенному к шине Ethernet через адресуемый преобра-
зователь. Это позволяет использовать программы, написанные для работы че-
рез COM-порт, в сети Ethernet без какой-либо их модификации. Пользователь-
ское приложение общается с RS-232-устройствами через виртуальный СОМ-
порт, а все сложности Ethernet и стандарта IEEE 802.3 оказываются скрыты в
драйверах, поставляемых в комплекте с адресуемым преобразователем.
2.12.5. Межсетевые шлюзы
Межсетевые шлюзы (Gateways) позволяют выполнять обмен данными
между различными сетями. Сети могут различаться протоколами, структу-
рами фреймов, форматами и кодированием данных. Модели OSI сетей могут
быть существенно различными, поэтому в межсетевых шлюзах используются
все уровни модели OSI, с 1-го по 7-й.
В структуре межсетевых шлюзов имеются два специализированных сете-
вых контроллера, которые реализуют полный стек протоколов обеих сетей.
Для сетей CAN, Ethernet, Profibus и других со сложным стеком протоколов
выпускаются специализированные микросхемы (ASIC — Application-Specific
Integrated Circuit), в которых уже реализован стек протоколов. Каждый интер-
фейс имеет также буферную память, которая необходима для обмена данными
160
Глава 2
между сетями с разной скоростью передачи данных. Это позволяет принять
информацию из одной сети в соответствии с ее стеком протоколов, выделить
телеграмму (обычно данные и адрес) на уровне приложений или на одном из
нижележащих уровней, затем передать ее сверху вниз через другой стек про-
токолов в другую сеть.
Шлюзы могут быть использованы для передачи данных, например, между
Modbus и Profibus, между Modbus и Ethernet.
2.12.6. Другое сетевое оборудование
Для построения промышленных сетей используются также маршрутизато-
ры, сетевые адаптеры, коммуникаторы, мосты, мультиплексоры, модемы, меж-
сетевые экраны. В каждом конкретном случае системный интегратор должен
выбрать необходимый состав оборудования исходя из смысла решаемой задачи.
Маршрутизатор (router) выполняет перемещение информации между
подсетями (сегментами сети) от источника к приемнику по оптимальному пу-
ти, используя 3-й (сетевой) уровень модели OSI. Для нахождения оптимума
используются адрес получателя и таблица маршрутизации, в которых содер-
жится информация о маршрутах и их метрике (предпочтительности). Таблица
маршрутизации может быть составлена статически (вручную) или динамиче-
ски. При ручном составлении таблица должна корректироваться каждый раз,
когда в топологию сети вносятся изменения. При динамической маршрути-
зации записи обновляются автоматически с помощью одного из стандартных
алгоритмов маршрутизации.
Сетевые адаптеры. Для подключения компьютера к промышленной сети
можно использовать межсетевой шлюз с интерфейсом RS-232, однако скорость
передачи информации в таком случае будет ограничиваться пропускной способ-
ностью порта RS-232. Для получения высокой скорости передачи (например,
12 Мбит/с для Profibus или 100 Мбит/с для Ethernet) нужно использовать се-
тевой адаптер в виде платы («сетевой карты»), вставляемой в слот шины PCI
на материнской плате компьютера.
Коммутаторы (switches) — интеллектуальные многопортовые повторите-
ли. Они выполняют роль репитеров и, кроме того, анализируют фреймы, све-
ряют контрольную сумму, выделяют из фрейма адрес устройства назначения
и направляют фрейм в нужный порт в соответствии с адресом.
Подробнее о коммутаторах см. п. 2.9.2 «Промышленный Ethernet. Физи-
ческий уровень».
Мосты (bridges) — устройства для соединения и передачи пакетов между
двумя сегментами одной и той же сети. Работают обычно на уровне 1 и 2, реже
до уровня 4 модели OSI, поэтому их иногда называют устройствами каналь-
ного уровня. Они устанавливают соединение, выполняют анализ контрольной
суммы, выполняют повторную передачу после буферизации, но не изменяют
структуру фреймов и не выделяют из них данные. Мосты являются устарев-
шими устройствами и вместо них в последнее время применяют коммутаторы.
Мультиплексор — это устройство, позволяющее передавать по одному
каналу связи несколько сигналов (потоков данных) одновременно. На входе
Промышленные сети и интерфейсы
161
канала мультиплексор объединяет несколько потоков данных, поступающих
от разных источников, например от двух разных компьютеров, в один общий
поток, который передается по общему каналу с высокой пропускной способ-
ностью. Используется временное или частотное разделение потоков данных.
На противоположном конце канала мультиплексор выполняет обратную опе-
рацию выделения данных из общего потока.
Мультиплексоры эффективны, когда пропускная способность канала пе-
редачи намного превышает информационную производительность источников
данных.
Межсетевой экран (брандмауэр, Firewall) — комплекс аппаратных и
(или) программных средств, выполняющих фильтрацию поступающей из сети
информации по различным критериям, например с целью защиты от несанк-
ционированного доступа или вирусов. Межсетевой экран может работать на
сетевом уровне, сеансовом уровне и уровне приложений модели OSI.
Модем (модулятор-демодулятор) выполняет модуляцию, т.е. изменяет ха-
рактеристики несущего сигнала с целью внесения в него передаваемой инфор-
мации и выполняет демодуляцию для извлечения информации на приемном
конце канала связи. Модем используется для передачи данных по телефон-
ным линиям (телефонный модем), кабелям системы коллективного телеви-
дения, проводам для передачи электрической энергии, через спутник (спут-
никовый модем), радиоканал (радиомодемы), сотовые каналы связи (GSM-
модем). Модемы бывают аналоговые (устарели) и цифровые (ISDN, DSL и
их модификации).
2.12.7. Кабели для промышленных сетей
Основной частью кабеля для промышленных сетей является «витая пара»
проводов. В витых проводах магнитные поля соседних витков компенсируют
друг друга, и чем ближе находятся витки, тем эффективнее компенсация. По-
этому одним из важных параметров витой пары является количество витков на
метр длины, а также равномерность шага скручивания по длине кабеля. От-
метим, что хорошая компенсация магнитной составляющей электромагнитного
поля достигается только при условии, если сигналы в обеих жилах кабеля сим-
метричны относительно некоторого условно нулевого уровня, когда производ-
ные тока по времени одинаковы. Это условие выполняется при использовании
передатчиков с симметричным дифференциальным выходом.
В одном кабеле могут находиться несколько витых пар, покрытых общей
защитной оболочкой. Оболочка предохраняет кабель от механических повре-
ждений и повышает напряжение изоляции жил относительно внешних про-
водников.
Для уменьшения влияния внешних электромагнитных полей на кабель ис-
пользуется экранирование. Экранированы могут быть отдельные жилы кабе-
ля, витые пары или весь кабель. Используются также различные комбинации
перечисленных вариантов. По международному стандарту EIA/TIA 568 экра-
нированная витая пара обозначается как STP (Shielded Twisted Pair), неэкра-
нированная — UTP (Unshielded Twisted Pair).
162
Глава 2
Экран может быть плетеным, из медных проволок, или сплошной, из алю-
миниевой фольги, которая ламинируется полиэстерной или полипропиленовой
пленкой. Плетеный экран обеспечивает меньшую степень защиты на высоких
частотах, где играет роль площадь просветов в экране, достигающая 10...40 %.
При изготовлении сплошного экрана контакт к экрану выполняется с помощью
медной проволоки, проложенной вдоль всей длины кабеля и контактирующей
с алюминиевой фольгой. Недостатком алюминиевого экрана является большое
сопротивление. Поэтому используют комбинированное экранирование, соче-
тающее плетеный и сплошной экран в разных вариантах. Оно обеспечивает
одновременно низкое сопротивление и хорошее экранирование на высоких ча-
стотах. Подробнее об использовании экранов см. главу 3.
В кабеле, состоящем из нескольких витых пар, наблюдается наводка сигна-
ла из одной витой пары в другую за счет явления электромагнитной индукции и
емкостной связи. Для контроля уровня наводок используют параметры NEXT,
FEXT, ELFEXT и ACR. Параметр NEXT (Near-End crossTalk) измеряется как
отношение наведенного напряжения на одной витой паре к амплитуде напря-
жения, приложенного к другой витой паре на одном и том же конце кабеля.
Чем меньше значение этого параметра (чем больше его модуль в децибелах),
тем лучше кабель. NEXT играет важную роль при одновременной передаче
сигналов в кабеле в противоположных направлениях, поскольку ослабленный
сигнал, прошедший по кабелю, может оказаться более слабым, чем наводка из
соседней витой пары. В табл. 2.19 приведены стандартные значения параметра
NEXT для кабелей разных категорий.
При передаче двух сигналов по двум соседним витым парам в кабеле ва-
жен параметр FEXT (Far-End Crosstalk), который измеряется как отношение
напряжения между выводами витой пары на одном конце кабеля к прило-
женному напряжению к другой витой паре на противоположном конце кабе-
ля. Вместо параметра FEXT часто используют ELFEXT (Eequal-Level Far-End
crosstalk), который не зависит от длины кабеля и используется в процедуре
сертификации кабелей.
Для оценки качества кабелей используется также параметр ACR (Attenua-
tion to Crosstalk Ratio), который рассчитывается как отношение коэффициента
ослабления (затухания) к значению параметра NEXT. При ACR = 1 (0 дБ)
напряжение, наведенного из соседней пары, равно напряжению полезного сиг-
нала в кабеле.
Волновое сопротивление идеального кабеля не зависит от частоты. Од-
нако в реальности частотная зависимость имеется и определяется частотной
зависимостью диэлектрической проницаемости материала изолятора и техно-
логической неоднородностью кабеля по его длине. Стандарт TIA/EIA 568-А
требует, чтобы разброс волнового сопротивления кабеля находился в пределах
от 85 до 115 Ом (100 Ом ±15 %) для кабелей 3, 4 и 5 категории.
Омическое сопротивление типового кабеля сечением 0,33 мм2 составляет
56 Ом/км. На низких частотах это сопротивление определяет максимальную
дальность передачи сигнала по кабелю. На высоких частотах начинает иг-
рать роль емкостное сопротивление между жилами кабеля, которое является
основной причиной ослабления (затухания) сигнала. В табл. 2.20 приведены
Промышленные сети и интерфейсы
163
Таблица 2.19
Стандартные значения параметра NEXT
для кабелей разных категорий
Частота, МГц Параметр NEXT для категории
3 4 5
0,150 -54 -68 -74
0,772 -43 -58 -64
1,0 -41 -56 -62
4,0 -32 -47 -53
8,0 -28 -42 -48
10,0 -26 -41 -47
16,0 -23 -38 -44
20,0 — -36 -42
25,0 — — -41
31,25 — — -40
32,5 — — -35
100,0 — — -32
Таблица 2.20
Зависимость коэффициента затухания
кабелей от частоты
Частота, МГц Коэффициент затухания, дБ/100 м, для категории
3 4 5
0,064 2,8 2,3 2,2 3,2
0,256 4,0 3,4
0,512 0,772 5,6 4,6 4,5
6,8 5,7 5,5
1,0 7,8 6,5 6,3
4,0 17 13 13
8,0 26 19 18
10,0 16,0 30 22 20
40 27 25
20,0 25,0 — 31 28
— — 32
31,25 — — 36
62,5 — — 52
100 - - 67
значения затухания для кабелей 3, 4 и 5 категории при температуре +20 °C
и длине кабеля 305 м.
Погонная емкость кабеля определяется расстоянием между проводника-
ми, диаметром проводников и материалом изоляции. Для типовых кабелей ее
значение составляет от 20 до 100 пФ/м. Для уменьшения емкости в качестве
диэлектрика используют вспененный полиэтилен, который позволяет в 2...3
раза снизить погонную емкость и в 1,5...2,5 раза коэффициент затухания по
сравнению с поливинилхлоридной (ПВХ) изоляцией [169].
Индуктивность проводников кабеля определяется их диаметром и для про-
водника сечением 0,33 мм2 составляет около 100 мкГн/м.
Для кабелей, используемых вне помещений, важным параметром является
минимальная рабочая температура, которая для типовых кабелей составляет
—30 °C, для специальных морозостойких кабелей нижнее значение может со-
ставлять —60 °C. Материалом изоляции определяется также возможность ис-
пользования кабеля во взрывопожароопасных зонах, где ПУЭ запрещает при-
менять кабели в полиэтиленовой оболочке.
Параметры кабеля определяют надежность и дальность передачи инфор-
мации. С ростом скорости передачи требования к кабелю и его стоимость воз-
растают. В зависимости от диапазона частот по стандарту EIA/TIA 568 ка-
бели делятся на категории:
категория 1 — кабель из не витой пары проводов для передачи речи. Имеет
наихудшие характеристики и не используется для передачи данных;
категория 2 — кабель для передачи данных в полосе частот до 1 МГц;
категория 3 — кабель для передачи данных в полосе частот до 16 МГц.
Состоит из витых пар с 9-ю витками на метр длины. Имеет волновое сопротив-
ление 100 Ом. Наиболее распространен в настоящее время;
категория 4 — кабель для передачи данных в полосе частот до 20 МГц.
164
Глава 4
Таблица 2Д1
Расшифровка параметра AWG
Обозначение AWG Диаметр, мм Сечение мм2 Сопротивление, Ом/км Номинальный ток (из расчета ЗА/мм2)
39 0,09 0,0064 2700 19 мА
38 0,1 0,0078 2190 24 мА
37 0,11 0,0095 1810 28 мА
36 0,13 0,013 1300 40 мА
35 0,14 0,015 1120 45 мА
34 0,16 0,02 844 60 мА
33 0,18 0,026 676 75 мА
32 0,2 0,031 547 93 мА
30 0,25 0,049 351 147 мА
29 0,3 0,071 243 212 мА
27 0,35 0,096 178 288 мА
26 0,4 0,13 137 378 мА
25 0,45 0,16 108 477 мА
24 0,5 0,2 87,5 588 мА
22 0,65 0,33 51,7 1,0 А
20 0,8 0,50 34,1 1,51 А
19 0,9 0,64 26,9 1,91 А
18 1 0,78 21,9 2,36 А
16 1,3 1,3 13 3,97 А
14 1,6 2 8,54 6,0 А
13 1,8 2,6 6,76 7,6 А
Мало отличается от категории 3 и поэтому стандартом рекомендуется при необ-
ходимости переходить с категории 3 сразу на категорию 5, минуя 4;
категория 5 — кабель для передачи данных в полосе частот до 100 МГц.
Имеет 27 витков на метр длины и волновое сопротивление 100 Ом;
категория 5е (здесь «е» — от слова enhanced — «улучшенный») — отли-
чается от категории 5, но имеет большее количество витков на метр длины
и лучший параметр NEXT.
категория 6 — кабель для передачи данных в полосе частот до 200 МГц;
категория 7 — кабель для передачи данных в полосе частот до 600 МГц.
В настоящее время действует международный стандарт на кабели ISO/IEC
IS 11801 (International Organization for Standardization/International Engineering
Consortium), в Европе действует стандарт Cenelec EN 50173; в США — стан-
дарт EIA/TIA 568 (Commercial Building Telecommunications Cabling Standard),
принятый в 1995 г. и заменивший все действовавшие ранее фирменные стан-
дарты. В России чаще всего используют термины и обозначения американ-
ского стандарта.
При рассмотрении отражений от концов кабеля (см. п. 2.3.3) важным пара-
метром является скорость распространения электромагнитной волны в кабеле
(NVP — Nominal Velocity of Propagation), которая описывается в виде доли от
скорости света. Например, NVP = 0,65 означает, что скорость распространения
электромагнитной волны в кабеле составляет 0,65 от скорости света в вакууме.
При NVP =0,65 задержка распространения электрического импульса в кабеле
Промышленные сети и интерфейсы
165
составляет 5,13 нс на метр длины. Типовые значения задержки для разных
кабелей составляют от 4,4 до 5 нс/м.
Для импортных кабелей площадь поперечного сечения проводников указы-
вается не в квадратных миллиметрах, а в условных единицах AWG (American
Wire Gauge standard). В табл. 2.21 приведена связь единиц AWG с площа-
дью поперечного сечения.
2.13. Заключение
Наиболее простым и наиболее распространенным в мире и России сете-
вым протоколом является Modbus, популярность которого объясняется про-
стотой как для разработчиков, так и потребителей, а также низкой стоимо-
стью реализации.
Наиболее продуманным, универсальным и многообещающим протоколом
является CAN, однако высокая стоимость и сложность мешают его быстро-
му распространению.
Очень эффективным и широко применяемым протоколом является Profi-
bus, однако его распространенность объясняется, в первую очередь, мощным
брендом Siemens.
Широкую популярность в России имеет частнофирменный протокол
DCON, что связано, в первую очередь, с низкой ценой на продукцию из Юго-
Восточной Азии, а также с предельной простой протокола.
Беспроводные сети, несмотря на свою привлекательность, имеют очень
большое количество трудноразрешимых проблем, поэтому их применение в про-
мышленной автоматизации должно основываться на детальном анализе зада-
чи и тщательной оценке всех преимуществ и недостатков беспроводных сетей
для конкретного применения.
Глава 3
Защита от помех
Дорогие и надежные контроллеры, модули ввода-вывода, датчики могут
оказаться неработоспособными, если монтаж системы выполнен без учета тре-
бований электромагнитной совместимости и правил заземления. Месяцы рабо-
ты, десятки командировок к заказчику могут оказаться бесполезными, если не
разобраться глубоко в методах защиты от воздействия помех. Неправильное
заземление в 40 % случаев является причиной дорогостоящих простоев и пор-
чи чувствительного оборудования, используемого в нефтяной, автомобильной
и горной промышленности [171]. Следствием неправильного заземления могут
быть изредка появляющиеся сбои в работе систем автоматики, повышенная по-
грешность измерений, выход из строя чувствительных элементов, замедление
работы системы вследствие появления потока ошибок в каналах обмена, неста-
бильность регулируемых параметров, ошибки в собираемых данных.
ГОСТ 30372-95/ГОСТ Р 50397-92 дает следующее определение электромаг-
нитной помехи: это электромагнитное явление, процесс, которые снижают или
могут снизить качество функционирования технического средства. Для нор-
мального функционирования электронных устройств необходимо обеспечивать
их электромагнитную совместимость (ЭМС) с электромагнитной обстановкой
(ЭМО) на объекте. Под электромагнитной обстановкой понимается совокуп-
ность электромагнитных процессов в заданной области пространства, частот-
ном и временном диапазоне.
Тема заземления в промышленной автоматизации является наиболее плохо
разработанной. Сложность проблемы связана с тем, что источники помех, при-
емники и пути их прохождения распределены в пространстве, момент и факт
их появления часто является случайной и ненаблюдаемой величиной, а ме-
стонахождение априори неизвестно. Сложно также провести измерения помех,
практически невозможно сделать достаточно точный теоретический анализ, по-
скольку задача обычно является трехмерной и описывается системой диффе-
ренциальных уравнений в частных производных. Поэтому обоснование того
или иного метода заземления, которое, строго говоря, должно опираться на
математические расчеты, на практике приходится делать на основании опыта
и интуиции. Решение проблем заземления в настоящее время находится на
грани между пониманием, интуицией и везением [172, 173].
Защита от помех
167
Понимание причин возникновения помех при проектировании систем авто-
матизации позволяет избежать ряд ошибок в выборе оборудования, его разме-
щении, экранировании и кабельной разводке, а также ускорить процесс внедре-
ния системы. Подключение датчиков к измерительной системе является очень
непростым делом и часто выявляет неожиданные проблемы, причина которых
кроется в том, что источники погрешностей, вызванных паразитными связями,
являются скрытыми от проектировщика — они не нарисованы на электриче-
ской схеме. Об их местонахождении можно только догадываться, их появление
трудно предсказать, а устранить можно только в процессе эксперимента. Тем
не менее, ряд типовых условий возникновения помех и методов их устранения
достаточно хорошо изучен. О них и пойдет речь в настоящей главе.
3.1. Источники помех
Все помехи, воздействующие на кабели, датчики, исполнительные меха-
низмы, контроллеры и металлические шкафы автоматики, в большинстве слу-
чаев протекают в виде тока по заземляющим проводникам, создавая вокруг
них паразитное электромагнитное поле и падение напряжения помехи на про-
водниках. Источниками и причинами помех может быть молния, статическое
электричество, электромагнитное излучение, «шумящее» оборудование, сеть
питания 220 В 50 Гц, переключаемые сетевые нагрузки, трибоэлектричество,
гальванические пары, термоэлектрический эффект, электролитические процес-
сы, движение проводника в магнитном поле и др.
Государственные центры стандартизации и сертификации во всех странах
мира не допускают к производству оборудование, являющееся источником по-
мех недопустимо высокого уровня. Однако уровень помех невозможно сделать
равным нулю. Кроме того, на практике встречается достаточно много источ-
ников помех, связанных с неисправностями или применением не сертифици-
рованного оборудования.
В России допустимый уровень помех и устойчивость оборудования к их
воздействию нормируются ГОСТ Р 51318.14.1, ГОСТ Р 51318.14.2, ГОСТ Р
51317.3.2, ГОСТ Р 51317.3.3, ГОСТ Р 51317.4.2, ГОСТ 51317.4.4, ГОСТ Р
51317.4.11, ГОСТ Р 51522, ГОСТ Р 50648.
При конструировании электронной аппаратуры для снижения уровня по-
мех используют микромощную элементную базу с невысоким быстродействием,
уменьшение длины проводников и экранирование. Особые меры принимают-
ся для снижения помех от радиопередающих устройств беспроводных сетей
(подробнее см. главу 2).
Паразитные воздействия помех на процесс передачи сигнала в системах
промышленной автоматизации можно разделить на следующие группы:
• воздействия через кондуктивные связи;
• влияние неэквипотенциальности «земли»;
• наводки через взаимную индуктивность;
• наводки через емкостные связи;
• высокочастотные электромагнитные наводки.
168
Глава 3
3.1.1. Характеристики помех
Основной характеристикой помехи является зависимость спектральной
плотности мощности от частоты. Помехи, воздействующие на системы авто-
матизации, имеют спектр от постоянного тока до единиц гигагерц (рис. 3.1)
[185]. Помехи, лежащие в полосе пропускания аналоговых систем автомати-
ки, имеют частоты до десятков килогерц. На цифровые цепи воздействуют
помехи в полосе до сотен мегагерц. Помехи гигагерцевого диапазона непосред-
ственного влияния на системы автоматизации не оказывают, однако после пре-
образования в нелинейных элементах или вследствие алиасного эффекта (см.
главу 4) они могут порождать низкочастотные помехи, лежащие в границах
воспринимаемого спектра.
Устройства, в которых происходит переключение уровня тока или напряже-
ния за короткий промежуток времени, являются источниками широкополосных
помех (двигатели, выключатели, реле и контакторы, трамвайные токосъемни-
ки и т. п.). Устройства, в которых происходит периодическое изменение тока
или напряжения с ограниченной скоростью нарастания, дают узкополосные по-
мехи (например, сотовые телефоны, радиопередатчики, генераторы сигналов,
микроволновые печи, микропроцессорные системы).
В сигнальных цепях и цепях заземления систем автоматизации содержится
весь спектр возможных помех. Однако паразитное влияние оказывают только
помехи, частоты которых лежат в полосе пропускания устройств автоматики.
Среднеквадратическое значение напряжения или тока помехи Епомехк опреде-
ляется шириной ее спектра:
I
^помехи = \ e^f)df, (3.1)
V *'/н
где еI 2(/) — спектральная плотность мощности помехи, В2/Гц; /н и /в — нижняя
и верхняя границы спектра помехи. В частном случае, когда е2(/) слабо зависит
от частоты, приведенное соотношение упрощается:
^помехи \/е2(./в /н) •
Таким образом, для уменьшения влияния помех на системы автоматиза-
ции нужно сужать ширину полосы пропускания /в — /н аналоговых модулей
ввода и вывода. Например, если известно, что постоянная времени датчи-
ка т составляет 0,3 с, что приблизительно соответствует полосе пропускания
сигнала /о,7 = 1/(2тгг) = 0,5 Гц, то ограничение полосы пропускания моду-
ля ввода величиной 0,5 Гц позволит уменьшить уровень помехи и тем самым
повысить точность измерений, снизить требования к заземлению, экраниро-
ванию и монтажу системы.
Однако фильтр вносит динамическую погрешность в результаты измере-
ния, которая зависит от формы (спектра) входного сигнала. Динамическая
погрешность свойственна всем известным методам ослабления помехи нормаль-
ного вида, хотя она часто не указывается в характеристиках аналоговых моду-
лей, что может вводить пользователя в заблуждение. Подробнее динамические
погрешности рассматриваются в главе 4.
Рис. 3.1. Относительный уровень спектральной плотности мощности и частота основных источников
электромагнитных помех
170
Глава 3
Рис. 3.2. АЧХ sine3 фильтра,
входящего в состав аналоговых
модулей «RealLab!» серии NL
Наиболее мощной в системах ав-
томатизации является помеха с ча-
стотой питающей сети 50 Гц. Поэто-
му для ее подавления используют уз-
кополосные фильтры, настроенные
точно (с помощью кварца) на частоту
50 Гц. На рис. 3.2 в качестве приме-
ра приведена амплитудно-частотная
характеристика (АЧХ) цифрового
фильтра, использованного в модулях
RealLab! серии NL. Фильтр настроен
таким образом, что он ослабляет на
120 дБ (на 6 порядков) помеху с ча-
стотой 50 Гц.
При еще большей инерционности
датчиков или контролируемой систе-
мы (например, когда датчик стоит в печи, время выхода на режим которой
составляет несколько часов) можно использовать процедуру многократных из-
мерений или дополнительную цифровую фильтрацию в управляющем контрол-
лере или компьютере. В общем случае, чем больше время измерения, тем
точнее можно выделить сигнал на фоне шума и тем сильнее ослабить тре-
бования к уровню помех.
Следует отметить, что наличие фильтра не всегда спасает от влияния по-
мех. Например, если высокочастотная помеха, перед тем как попасть на вход
модуля ввода, детектируется или выпрямляется на нелинейных элементах, то
из сигнала помехи выделяется постоянная или низкочастотная составляющая,
которая уже не может быть ослаблена фильтром модуля ввода. В качестве
нелинейных элементов могут выступать, например, контакты разнородных ме-
таллов, защитные диоды, стабилитроны, варисторы.
3.1.2. Помехи из сети электроснабжения
Питающая сеть 220/380 В с частотой 50 Гц и подключенные к ней блоки
питания являются источниками следующих помех:
• фон с частотой 50 Гц;
• выбросы напряжения от вспышки молнии (рис. 3.3,а);
• кратковременные затухающие колебания при переключении индуктивной
нагрузки (рис. 3.3,6);
• высокочастотный шум, наложенный на синусоиду 50 Гц (рис. 3.3,в);
• инфранизкочастотный шум, проявляющийся как нестабильность во време-
ни среднеквадратического значения сетевого напряжения (рис. 3.4);
• долговременные искажения формы синусоиды и гармоники при насыщении
сердечника трансформатора и по другим причинам.
Наибольшее влияние на системы промышленной автоматики оказывают
первые три вида помех (рис. 3.3). Для уменьшения кратковременных выбросов
Защита от помех
171
Рис. 3.3. Виды помех, проникающих из сети питания: а — от вспышки мол-
нии; б — при переключении индуктивной нагрузки; в — помехи от радиостанций
Время (часы:минуты)
Рис. 3.4. Изменения действующего значения сетевого напряжения в те-
чение суток (измерено с помощью модуля NL-8AI в НИЛ АП 12.11.2005 г.)
напряжения используют специальные защитные диоды и варисторы. Инфра-
низкочастотный шум и искажения синусоиды отфильтровываются стабилиза-
тором и сглаживающим фильтром сетевого источника питания и практически
не проходят сквозь паразитные емкости сетевого трансформатора.
Причинами и источниками сетевых помех могут быть разряды молнии при
попадании в линию электропередачи, включение или выключение электропри-
боров, тиристорные регуляторы мощности, реле, электромагнитные клапаны,
электродвигатели, электросварочное оборудование и др.
Пути проникновения сетевой помехи показаны на рис. 3.5. Силовой или
развязывающий трансформатор включен в сеть 220 В, 50 Гц. Сеть представле-
на эквивалентным источником напряжения £L22o в и эквивалентным источни-
ком помех ^помехи- Нулевой провод источника сетевого напряжения заземлен
на главном щите у ввода в здание. Если выход источника питания тоже за-
землен, что часто необходимо для целей электробезопасности, то возникает
путь протекания тока помехи, показанный на рис. 3.5, включающий сопротив-
ление заземляющего проводника Яземли- Основным звеном в этой цепи являет-
ся паразитная емкость между обмотками силового трансформатора Cnapi, для
уменьшения влияния которой часто используют заземленный электростатиче-
172
Глава 3
Рис. 3.5. Пути проникновения помехи из сети 220 В, 50 Гц в систему заземления
и общий провод источника питания
Рис. 3.6. Источник питания с тремя типами земель. Слева направо: защит-
ная земля, экранная земля и сигнальная. Экран показан штриховой линией
ский экран (рис. 3.6). Ток помехи протекает по общему проводу источника
питания и заземляющему проводнику, создавая на их сопротивлении падение
напряжения помехи, о котором речь пойдет в следующих разделах (на рис. 3.5
эти участки цепи выделены жирной линией). Ток источника помехи Помехи
может замыкаться не на трансфораторной подстанции, а через внутреннее со-
противление других электроприборов, подключенных к электрической сети, а
также через емкость кабеля. Таким образом, на шине заземления падает па-
разитное напряжение помехи, делая ее «грязной», и часть напряжения поме-
хи попадает на выход источника питания через участок провода, выделенный
жирной линией на рис. 3.5.
Наиболее значительной помехой, проникающей в шину заземления из сети
220 В, 50 Гц, является емкостной ток, протекающий через емкость между об-
моткой двигателя и его корпусом; ток между сетевой обмоткой трансформатора
и сердечником, ток через конденсаторы сетевых фильтров.
Путь тока помехи через емкость между первичной обмоткой трансформа-
тора и его заземленным сердечником Спарз показан на рис. 3.5. Этот ток так-
же протекает через общий провод источника питания и заземляющий провод-
ник. Именно эта емкость является причиной того, что незаземленные электро-
приборы «бьют током». При отсутствии заземления потенциал металлическо-
го корпуса приборов, подключенных к сети 220 В, составляет от нескольких
десятков до 220 В в зависимости от сопротивления утечки на землю. Для
Защита от помех
173
уменьшения этого напряжения корпуса приборов, включенных в сеть 220 В,
должны быть заземлены.
При использовании DC-DC (Direct Current-Direct Current) и AC-DC (Alter-
nating Current-Direct Current) преобразователей напряжения, которые содер-
жат внутренний генератор, к источнику помехи Помехи добавляется емкостная
и индуктивная наводка от собственного генератора преобразователя. Поэтому
уровень помех на общем проводе у DC-DC и AC-DC преобразователей выше,
чем в источниках с обычным силовым трансформатором, хотя проходная ем-
кость Cnapi в преобразователях может быть уменьшена до единиц пикофарад
по сравнению с сотнями пикофарад для обычного силового трансформатора.
Для уменьшения проникновения помехи в источниках питания использу-
ют раздельное экранирование первичной и вторичной обмотки трансформато-
ра, а также разделение защитной, сигнальной и корпусной (экранной) земли
(см. рис. 3.6). На рисунке сплошной жирной линией нарисован металличе-
ский корпус прибора; кружочками обозначены клеммные соединители, изо-
лированные от корпуса. Методы соединения различных земель между собой
описаны в п. 3.5.
3.1.3. Молния и атмосферное электричество
Молнии являются одной из распространенных причин нежелательных пе-
ренапряжений, сбоев и отказов в системах автоматизации. Заряд, накапливае-
мый в облаках, имеет потенциал величиной около нескольких миллионов вольт
относительно поверхности Земли и чаще бывает отрицательным. Направление
тока молнии может быть как от Земли к облаку при отрицательном заряде ту-
чи (в 90 % случаев), так и от облака к Земле (в 10 % случаев). Длительность
разряда молнии составляет в среднем 0,2 с, редко до 1...1,5 с, длительность
переднего фронта импульса — от 3 до 20 мкс, ток составляет несколько ты-
сяч ампер, до 100 кА, температура в канале достигает 20 000 °C, появляется
мощное магнитное поле и радиоволны [173]. Молнии могут образовываться так-
же при пылевых бурях, метелях, извержениях вулканов. При разряде молнии
появляется несколько импульсов (рис. 3.7). Крутизна фронта в последующих
импульсах гораздо больше, чем в первом (рис. 3.8).
Частота поражения молнией зданий высотой 20 м и размерами в плане
100x100 м составляет один раз в пять лет, а для зданий с размерами порядка
10x10 м — одно попадание за 50 лет [196]. Количество прямых ударов молнии
в Останкинскую телебашню высотой 540 м составляет 30 ударов в год.
Инструкция [201] устанавливает четыре уровня надежности защиты зданий
и сооружений от молнии. Самый высокий, I-й уровень защиты, имеет надеж-
ность 0,98, самый низкий, IV-й, — надежность 0,8. При расчете воздействий
молнии на объекты используют параметры, указанные в табл. 3.1 [201]. Крутиз-
на переднего фронта импульса тока молнии нормируется как интервал времени
между уровнями тока 30 и 90 % от максимального значения.
Форма импульсов тока молнии i(t) описывается выражением [201]
_ ^(Vn)10 exp(-t/r2)
!<i)- Ч1 + «М)“) ’ (3'2)
174
Глава 3
Рис. 3.7. Типовая форма импульса
тока при разряде молнии [173]
Таблица 3.1
Параметры тока молнии
Параметр молнии Уровень защиты
I II III, IV
Пиковое значение тока, кА 200 150 100
Полный заряд, Кл 300 225 150
Заряд в импульсе, К л 100 775 50
Удельная энергия кДж/Ом 10000 5600 2500
Средняя крутизна кА/мкс 200 150 100
Таблица 3.2
Параметры формулы (3.2)
Параметр Первый импульс для уровня защиты Последующие импульсы для уровня защиты
I II III, IV I II III, IV
/, кА 200 150 100 50 37,5 25
к 0,93 0,993
Т1, мкс 19,0 0,454
72, МКС 485 143
где I — максимум тока; к — корректирующий коэффициент; t — время; п —
постоянная времени фронта; т2 — постоянная времени спада.
Параметры, входящие в эту формулу, приведены в табл. 3.2 [201]. Они
соответствуют наиболее сильным молниевым разрядам, которые встречаются
редко (менее чем 5 % случаев [173]). Токи величиной 200 кА встречаются в
0,7...1 % случаев, 20 кА — в 50 % случаев [200]).
Зависимости первого и второго импульсов тока молнии и их производных
от времени, построенные по формуле (3.2), показаны на рис. 3.8. Обратим
внимание, что масштабы по времени на графиках различается в 10 раз и что
масштаб указан логарифмический. Максимальная скорость нарастания (пер-
Рис. 3.8. Зависимость тока первого (а) и второго (б) импульсов молнии
и их производных от времени
Защита от помех
175
Рис. 3.9. Спектральная плотность мощности тока молнии
и
вая производная) первого импульса составляет 25 кА/мкс, последующих им-
пульсов — 280 кА/мкс.
Скорость нарастания тока используется для расчета величины наведенного
импульса в кабелях систем автоматизации.
На рис. 3.9 показана спектральная плотность мощности тока помехи. По-
скольку эффективность экранирования электромагнитной помехи существенно
зависит от частоты [186], приведенный график спектральной плотности мощ-
ности позволяет обоснованно выбрать толщину и материал электромагнитно-
го экрана.
Для защиты от прямого удара молнии используют молниеотводы, кото-
рые состоят из штыря (молниеприемника), находящегося над зданием, зазем-
лителя и соединяющего их проводника. Обычно используют несколько мол-
ниеприемников и систему заземлителей [201, 196]. Система молниеотвода об-
разует низкоимпедансный путь для прохождения тока молнии на землю, ми-
нуя структуры здания. Молниеотвод должен находиться как можно дальше
от здания, чтобы ослабить эффект взаимной индукции, и в то же время до-
статочно близко, чтобы защитить здание от прямого попадания молнии. Для
зданий с большой площадью крыши молниеотводы устанавливают на крыше
и соединяют между собой и с заземлителем стальными полосами. Заземли-
тель молниеотвода выполняют отдельно от защитного заземления здания, но
электрически соединяют с ним с целью выравнивания потенциалов и устра-
нения возможных искрений [196].
Ток молнии, проходя по земле, создает на ней падение напряжения, ко-
торое может вывести из строя драйверы сетевых интерфейсов, если они не
имеют гальванической развязки и расположены в разных зданиях (с разны-
ми заземлителями).
В линиях электропередачи разряд молнии принимается на экранирующий
провод, который отводит молнию в землю через заземлитель. Экранирующий
провод протягивают над фазовыми проводами, однако на фазовых проводах на-
водится импульс э.д.с. вследствие явления электромагнитной индукции. Этот
импульс проходит на трансформаторную подстанцию, где ослабляется искро-
выми разрядниками. Остаточный импульс проходит в потребительскую линию
176
Глава 3
(см. рис. 3.1,а) и через силовой трансформатор — в цепи заземления систем
автоматизации (см. рис. 3.5).
На системы автоматизации молнии воздействуют не путем прямого попа-
дания, а через электромагнитный импульс, который вследствие явления элек-
тромагнитной индукции может привести к пробою изоляции устройств галь-
ванической развязки и пережечь провода малого поперечного сечения [178], а
также вывести из строя микросхемы.
Вторым природным явлением, связанным с грозой, является атмосфер-
ное электричество. Электрический потенциал грозового облака во время до-
ждя может составлять десятки миллионов, до 1 млрд В. Когда напряжен-
ность электрического поля между облаком и поверхностью земли достигает
500...1000 В/м, начинается электрический разряд с острых предметов (мачты,
трубы, деревья и т.п.). Во время разрядов молнии напряженность поля мо-
жет резко менять свое направление.
Высокая напряженность поля, вызванная атмосферным электричеством,
может наводить потенциалы величиной в несколько тысяч Вольт в «плаваю-
щих» цепях с высоким сопротивлением изоляции на землю и приводить к про-
бою оптронов в модулях гальванической развязки. Для защиты от атмосфер-
ного электричества гальванически изолированные цепи, не имеющие низкоом-
ного пути на землю, должны быть помещены в заземленный электростатиче-
ский экран или соединены с землей через резистор сопротивлением 0,1... 1 МОм
(см. п. 3.5.11). В частности, атмосферное электричество является одной из при-
чин, по которым промышленные сети прокладывают экранированным кабелем.
Экран нужно заземлять только в одной точке (см. п. 3.5.2).
Следует отметить, что молниеотводы, служащие для защиты от прямого
удара молнии, не могут существенно уменьшить напряженность электрическо-
го поля атмосферных зарядов и никак не защищают аппаратуру от мощного
электромагнитного импульса во время грозы.
3.1.4. Статическое электричество
Статическое электричество возникает на диэлектрических материалах. Ве-
личина заряда зависит от скорости движения трущихся тел, их материала и ве-
личины поверхности соприкосновения. Примерами трущихся тел могут быть:
• ременный привод;
• лента конвейера;
• синтетическая одежда и обувь на теле человека;
• поток непроводящих твердых частиц (пыли), газа или воздуха через сопло;
• движение непроводящей жидкости, заполняющей цистерну;
• автомобильные шины, катящиеся по непроводящей дороге;
• резиновые ролики под стульями, когда стулья перемещаются по непро-
водящему полу.
Человек, идущий по синтетическому ковру, может приобрести на теле по-
тенциал 15 кВ относительно земли и окружающих предметов [193] (рис. 3.10).
Ременный привод, состоящий из диэлектрического ремня и двух шкивов,
является наиболее общим примером генератора статического электричества.
Защита от помех
177
Рис. 3.10. Максимальное напряжение, до
которого может быть заряжен человек при
контакте с указанными материалами (ГОСТ
Р 51317.4.2)
Рис. 3.11. Форма разрядного тока испы-
тательного пистолета (ГОСТ Р 51317.4.2)
Потенциал статического заряда на ремне может достигать 60... 100 кВ и про-
биваемый воздушный промежуток — 9 см. Поэтому на взрывоопасных про-
изводствах (элеваторы, мельницы) ремни используют с проводящими присад-
ками или металлизацией.
Для снятия зарядов с ремней и других электризующихся предметов ис-
пользуют заземленный подпружиненный металлический гребешок или щетку,
которые касаются движущейся поверхности. Конвейерные ленты электризу-
ются слабее ременного привода вследствие низкой скорости движения.
Вторым способом борьбы со статическим электричеством является при-
менение увлажнителя воздуха в помещении для получения влажности выше
50 % (рис. 3.10).
Для уменьшения зарядов на теле человека используют заземление запя-
стья работников, электропроводные полы, электропроводную одежду, увлаж-
нение воздуха.
Электростатический заряд создает вокруг себя электрическое поле, кото-
рое при достижении напряженности поля пробоя изоляции вызывает электро-
статический разряд. Разряд представляет собой импульсный перенос заряда
между телами с разными потенциалами. В результате протекания тока разря-
да по проводникам появляется кондуктивная помеха, во время разряда излуча-
ется электромагнитный импульс, а пробой изоляции может привести к потере
работоспособности электронных устройств.
Форма импульса, которым испытываются электронные устройства на
устойчивость к электростатическим разрядам, и приближенно соответствую-
щая форме импульса в реальных условиях эксплуатации приборов, приведена
на рис. 3.11. Величина перетекающего заряда определяется емкостью заря-
женного тела. Напряжение при испытаниях устанавливается в зависимости
от степени жесткости испытаний от 2 до 8 кВ при контактном разряде и до
15 кВ при воздушном (табл. 3.3). Воздушный разряд более приближен к ре-
альности, но он трудно воспроизводим, поэтому при испытаниях используют
также и контактный разряд.
178
Глава 3
Таблица 3.3
Испытательное напряжение
Контактный разряд Воздушный разряд
Степень жесткости Испытательное напряжение, кВ Степень жесткости Испытательное напряжение, кВ
1 2 1 2
2 4 2 4
3 6 3 8
4 8 4 15
Результатом возникновения статических электрических зарядов может
быть пробой входных каскадов измерительных систем, появление линий на
CRT (Cathode Ray Tube) мониторах, перевод триггеров в другое состояние, по-
ток ошибок в цифровых системах, пробой изоляции гальванически изолирован-
ных цепей, воспламенение взрывоопасной смеси, электромагнитный импульс,
кондуктивная помеха от импульса тока, возникающего во время разряда.
Для защиты систем автоматики от сбоев используют электростатические
экраны, соединенные с экранным заземлением, преобразователи интерфейсов
с защитой от статического электричества (например, преобразователь интер-
фейсов NL-232C фирмы НИЛ АП имеет защиту от статических зарядов с по-
тенциалом до ±8 кВ по стандарту IEC1000-4-2).
В параметрах устройств автоматики иногда указывают величину напря-
жения, которым испытывались входные, выходные и интерфейсные цепи на
воздействие электростатического заряда.
3.1.5. Помехи через кондуктивные связи
Кондуктивные связи (от слова conductor — «проводник») — это связи че-
рез электропроводную среду, например, через общую шину заземления или по
влажной поверхности диэлектрика. Их источниками являются соседние элек-
трические цепи (см. п. 3.4.2).
3.1.6. Электромагнитные помехи
Электромагнитные помехи создаются проводниками, по которым течет пе-
ременный электрический ток или между которыми имеется переменное напря-
жение. Помеха может существовать в виде электромагнитной волны, когда
расстояние от источника помехи до приемника превышает длину волны А, или
в виде преобладающего электрического или магнитного поля около источни-
ка. Если расстояние до излучаемого элемента (антенны) превышает А/2тг, та-
кое электромагнитное поле называют полем дальней зоны, в противоположном
случае — полем ближней зоны.
В ближней зоне моделью передачи помехи является емкостная или индук-
тивная связь, в дальней зоне — модель распространения радиоволн от пере-
дающей к приемной антенне. Излученная мощность прямо пропорциональна
квадрату частоты. Поэтому, например, на частоте 50 Гц излучения практиче-
ски нет и помеха передается через емкостную или индуктивную связь.
Защита от помех
179
Источником электромагнитного поля помехи может быть радиомодем,
радио- или сотовый телефон, радиоретранслятор, сотовый передатчик на кры-
ше здания, двигатель с искрящимися щетками, электросварочный аппарат,
трамвай, люминесцентные лампы, тиристорный регулятор, компьютер, теле-
визионные и радиостанции, цифровая часть измерительной системы, реле ре-
гулятора, космическое коротковолновое излучение, удар молнии и др.
Источником электромагнитной помехи может быть и сама системы автома-
тики, содержащая компьютер, реле, тиристоры, мощные выходы дискретных
модулей. Сильным источником электромагнитных помех являются оптоволо-
конные передатчики, поскольку они потребляют большой ток и работают на
высоких частотах. Излучаются такие помехи с помощью случайных провод-
ников, образующих дипольную или рамочную антенну. Дипольная антенна
является источником преимущественно электрического поля в ее окрестности,
рамочная — источником магнитного поля. Вдали от таких источников домини-
рующего поля нет, есть поперечная электромагнитная волна. Реальные систе-
мы образуют множество излучающих антенн, состоящих из проводов, кабелей
и различных металлических поверхностей.
Помехи с частотой выше 100 кГц находятся обычно за границей частотного
диапазона измерительных систем, однако высокочастотные помехи могут быть
нежелательным образом выпрямлены или перенесены в область более низких
частот с помощью нелинейных характеристик диодов и транзисторов, располо-
женных на измерительной плате и внутри микросхем.
Наводятся электромагнитные помехи на всех проводящих предметах, ко-
торые в рассматриваемом случае играют роль антенн. Мощность наведенной
помехи зависит от площади контура, охваченного проводником и его сопро-
тивления. Помеха, наведенная в «антенне», кондуктивным путем может пе-
редаваться в сигнальные цепи или цепи заземления, вызывая поток ошибок в
цифровых схемах или погрешность передачи сигнала в аналоговых.
Наиболее распространенным приемником электромагнитных помех явля-
ются длинные провода: цепи заземления, промышленные сети (полевые ши-
ны), кабели, соединяющие датчики и модули аналогового ввода, кабели инфор-
мационных коммуникаций. Подробнее о защите кабелей систем автоматиза-
ции от электромагнитных помех см. [172]. «Замаскированными» приемниками
электромагнитных помех являются металлические конструкции в зданиях: ме-
таллические стеллажи, окна с металлической рамой, трубы водоснабжения и
отопления здания, защитное контурное заземление здания.
Основным методом борьбы с электромагнитными наводками является
уменьшение площади контура, принимающего помеху, и применение диффе-
ренциального способа передачи сигнала в сочетании с витыми парами проводов.
Однако даже в контуре с маленькой площадью может наводиться большая по-
меха, если при монтаже допустить ошибку, показную на рис. 3.12: в железной
раме стеллажа (стола или другой конструкции), выполняющей роль магнито-
провода, от источника тока Д наводится магнитное поле помехи НПОМ, которое
наводит напряжение УПом во втором витке провода. Два витка и сердечник в
этом примере образуют трансформатор с ферромагнитным сердечником.
180
Глава 3
Рис. 3.12. Наведение электромагнитной
помехи через взаимную индуктивность и
магнитопровод
Рис. 3.13. Изменение направления магнит-
ного поля через промежуточный короткозам-
кнутый виток
Второй аналогичный эффект иллюстрируется рис. 3.13: ток взаимной ин-
дукции, протекая через короткозамкнутый виток, создает магнитное поле, ко-
торое наводит э.д.с. Ком в соседнем контуре. Отметим, что в данном примере
короткозамкнутый виток изменяет направление магнитного поля, поэтому по-
меха может наводиться и в плоскости, перпендикулярной плоскости контура
тока молнии 1м. Множество короткозамнутых витков существует в металли-
ческой решетке железобетонной конструкции здания.
3.1.7. Другие типы помех
В измерительных цепях, находящихся в состоянии движения (вибрации),
источником помех может быть трибоэлектричество, возникающее при трении
тел из различных материалов, а также пьезоэлектричество и эффект электро-
статического или электромагнитного микрофона.
Методы борьбы с помехами такого типа сводятся к закреплению и механи-
ческому демпфированию движущихся частей электрической схемы.
В системах с очень высокой чувствительностью могут наблюдаться па-
разитные напряжения, вызванные термоэлектрическим эффектом в контак-
тах разнородных металлов (например, медь и оловянно-свинцовый припой).
Эти источники помех опасны тем, что встречаются редко, поэтому о них ча-
сто забывают.
3.2. Заземление
Изучение влияния помех, связанных с неправильным заземлением, требу-
ет составления правдоподобных упрощенных моделей системы, включающих
источники, приемники и пути прохождения помехи. Анализ таких моделей
позволяет оценить влияние помех на характеристики системы.
Термин «заземление» имеет много смысловых оттенков. Мы не будем рас-
сматривать вопросы заземления энергетических электроустановок. Это отдель-
ная тема, которая достаточно подробно рассмотрена в литературе по электро-
энергетике [174, 175]. Ниже речь идет только о заземлении, используемом в
системах автоматизации для обеспечения их стабильного функционирования, а
Защита от помех
181
также о заземлении с целью защиты персонала от поражения электрическим то-
ком, поскольку эти два вопроса невозможно рассматривать изолированно один
от другого, не нарушая стандартов системы безопасности труда.
Большинство проблем заземления в системах автоматизации возникают
вследствие необходимости защиты человека от поражения электрическим то-
ком. С землей соединена нейтраль трансформатора электрической подстан-
ции, земля является частью генератора электростатического заряда во вре-
мя грозы, а также обкладкой паразитных емкостей и проводником, в котором
за счет явления электромагнитной индукции наводятся токи. Земля как про-
водник участвует практически в любой электрической системе и ее наличие
нельзя игнорировать.
3.2.1. Определения
Под заземлением понимают как соединение с грунтом Земли, так и соеди-
нение с некоторым «общим проводом» электрической системы, относительно
которого измеряют электрический потенциал. Например, в космическом ко-
рабле или самолете «землей» считают металлический корпус. В приемнике с
батарейным питанием — систему внутренних проводников, которые являются
общим проводом для всей электронной схемы. В дальнейшем мы будем ис-
пользовать именно такое понятие «земли», не беря в дальнейшем это слово в
кавычки, поскольку оно давно стало физическим термином. Потенциал зем-
ли в электрической системе не всегда равен нулю относительно грунта Земли.
Например, в летящем самолете за счет генерации электростатического заряда
потенциал земли (корпуса) самолета может составлять сотни и тысячи вольт
относительно поверхности Земли.
Уменьшенным вариантом земли космического корабля является «плаваю-
щая земля» — не соединенная с грунтом Земли система проводников, отно-
сительно которой отсчитывается потенциал в отдельной части электрической
системы. Например, в модуле аналогового ввода с гальванической развязкой
внутренняя аналоговая земля модуля может не соединяться с грунтом Зем-
ли, т.е. быть «плавающей».
Под защитным заземлением понимают электрическое соединение прово-
дящих частей оборудования с грунтом Земли через заземляющее устройство с
целью защиты персонала от поражения электрическим током.
Заземляющим устройством называют совокупность заземлителя (т.е. про-
водника, соприкасающегося с землей) и заземляющих проводников [175].
Общим проводом (проводником) называют проводник в системе автомати-
ки, относительно которого отсчитываются потенциалы. Обычно он является
общим для источника питания и подключенных к нему электронных устройств.
Примером может быть провод, общий для всех 8 входов 8-канального модуля
аналогового ввода с одиночными (не дифференциальными) входами. Общий
провод во многих случаях является синонимом земли, но он может быть во-
обще не соединен с грунтом Земли.
Сигнальным заземлением называют соединение с землей общего провода
цепей передачи сигнала.
182
Глава 3
Сигнальная земля делится на цифровую и аналоговую. Сигнальную ана-
логовую землю иногда делят на землю аналоговых входов и землю аналого-
вых выходов.
Силовой землей будем называть общий провод в системе, соединенный с
защитной землей, по которому протекает большой ток (большой по сравнению
с током для передачи сигнала).
В основе такого деления земель лежит различный уровень чувствительно-
сти к помехам аналоговых и цифровых цепей, а также сигнальных и мощных
(силовых) цепей, и, как правило, гальваническая развязка между указанными
землями в системах промышленной автоматизации.
Глухозаземленной нейтралью называется нейтраль трансформатора или
генератора, присоединенная к заземлителю непосредственно или через малое
сопротивление (например, через трансформатор тока).
Нулевым проводом называется провод сети, соединенный с глухозаземлен-
ной нейтралью.
Изолированной нейтралью называется нейтраль трансформатора или ге-
нератора, не присоединенная к заземляющему устройству.
Занулением называют соединение оборудования с глухозаземленной ней-
тралью трансформатора или генератора в сетях трехфазного тока или с глухо-
заземленным выводом источника однофазного тока [175].
Ниже мы будем также использовать термин «кондуктивный» — от слова
conductor (проводник) — связанный с проводимостью материала, например,
кондуктивная помеха наводится через проводник, соединяющий две цепи.
3.2.2. Цели заземления
Защитное заземление служит исключительно для защиты людей от пора-
жения электрическим током. Наличие защитного заземления часто приводит к
увеличению уровня помех в системах автоматики, однако оно является необхо-
димым, поэтому исполнение сигнальной и силовой земли должно базироваться
на предположении, что защитное заземление имеется и оно выполнено в со-
ответствии с ПУЭ [175]. Защитное заземление можно не применять только
для оборудования с напряжением питания до 42 В переменного или 110 В по-
стоянного тока, за исключением взрывоопасных зон. Подробнее см. п. 3.5.12
и ПУЭ, разд. 1.7.
Правила заземления для уменьшения помех от сети 50 Гц в системах ав-
томатизации зависят от того, используется ли сеть с глухозаземленной или
с изолированной нейтралью. Заземление нейтрали трансформатора на под-
станции выполняется с целью ограничения напряжения, которое может по-
явиться на проводах сети 220/380 В относительно Земли при прямом ударе
молнии или в результате случайного соприкосновения с линиями более вы-
сокого напряжения, или в результате пробоя изоляции токоведущих частей
распределительной сети.
Электрические сети с изолированной нейтралью используются для исклю-
чения перерывов питания потребителя при единственном повреждении изоля-
ции, поскольку при пробое изоляции на землю в сетях с глухозаземленной ней-
Защита от помех
183
тралью срабатывает защита и питание сети прекращается. Кроме того, в це-
пях с изолированной нейтралью при пробое изоляции на землю отсутствует
искра, которая неизбежна в сетях с глухозаземленной нейтралью. Это свой-
ство очень важно при питании оборудования во взрывоопасной зоне. В США
в нефтегазовой и химической промышленности используется также заземле-
ние нейтрали через сопротивление, ограничивающее ток на землю в случае
короткого замыкания [176].
Сигнальная земля служит для упрощения электрической цепи и удешев-
ления систем и устройств автоматики. При использовании сигнальной земли
в качестве общего провода для разных цепей появляется возможность приме-
нения одного общего источника питания для всей электрической цепи вместо
нескольких «плавающих» источников. Электрические цепи без общего провода
(без земли) всегда можно преобразовать в цепи с общим проводом и наоборот
по правилам, изложенным в работе [177].
В зависимости от целей применения сигнальные земли можно разделить на
базовые и экранные. Базовая земля используется для отсчета и передачи сигна-
ла в электронной цепи, а экранная земля используется для заземления экранов.
Базовая сигнальная земля используется также для «привязки» потенциа-
ла изолированной части электрической цепи к земле системы автоматики. На-
пример, если входные каскады модуля ввода сигналов термопар имеют галь-
ваническую развязку от земли системы, то потенциал входов может быть как
угодно большим вследствие заряда паразитной емкости между землей и вход-
ными каскадами. Во время грозы этот потенциал может составить тысячи
вольт (см. п. 3.1.3), что приведет к пробою гальванической изоляции моду-
ля. Для предотвращения этого явления аналоговая земля входных каскадов
(обозначается обычно AGND) должна быть соединена с землей системы, как
это будет описано ниже.
Экранная земля используется для заземления экранов кабелей, экраниру-
ющих перегородок, корпусов приборов и снятия статических зарядов с трущих-
ся частей транспортерных лент, ремней электроприводов и т.п.
3.2.3. Защитное заземление зданий
В качестве защитных заземляющих проводников используют естественные
и искусственные заземлители [175]. К естественным заземлителям относят-
ся, например, стальные и железобетонные каркасы производственных зданий;
металлические конструкции производственного назначения; стальные трубы
электропроводок; алюминиевые оболочки кабелей; металлические стационар-
ные открыто проложенные трубопроводы всех назначений, за исключением тру-
бопроводов горючих и взрывоопасных веществ, канализации и центрального
отопления. Если их проводимость удовлетворяет требованиям к заземлению,
то дополнительные проводники для заземления не используются. Возмож-
ность использования железобетонного фундамента здания объясняется тем, что
удельное сопротивление влажного бетона примерно равно удельному сопротив-
лению земли (150...300 Ом • м) [174].
184
Глава 3
Искусственные (специально изготовленные) заземлители используют, ко-
гда сопротивление заземления превышает установленные ПУЭ нормы. Кон-
структивно они представляют собой трубы, уголки, пруты, помещенные в
землю вертикально на глубину 3 м или горизонтально на глубину не менее
50...70 см. Для улучшения равномерности распределения потенциала земли
(для уменьшения «напряжения шага») используют несколько заземлителей,
соединяя их стальной полосой. На электрических подстанциях используют
сетку заземлителей. При соединении заземлителей между собой не рекомен-
дуется образовывать замкнутый контур большой площади [178], поскольку он
является «антенной», в которой может циркулировать большой ток во время
разрядов молнии. Лучшие результаты получаются при соединении заземлите-
лей в форме сетки, когда площадь каждого контура сетки много меньше общей
площади, охватываемой заземлителями. Различные конструкции заземляю-
щих устройств приведены в книге [174].
Несмотря на рекомендации многих авторов избегать контуров при выпол-
нении разводки шин заземления по зданию [171], на практике, например, при
использовании естественных заземлителей, избежать этого часто не удается.
Железобетонные конструкции промышленных зданий содержат металлические
арматурные прутья, которые соединяются между собой сваркой. Таким обра-
зом, система заземления здания представляет собой металлическую клетку,
нижняя часть которой электрически соединена с грунтом. Монтажная органи-
зация обеспечивает надежный контакт между собой всех металлических кон-
струкций здания и оформляет акты на скрытые работы. Заземляющий контакт
для подключения оборудования при этом представляет собой болт заземления,
приваренный к металлической закладной конструкции элемента колонны или
фундамента здания [174].
При монтаже систем заземления нужно избегать зазоров в контурах, на
которых может наводиться э.д.с. магнитным полем молнии, чтобы исключить
появление искры и возможного возгорания горючих веществ в здании.
В зданиях для размещения оборудования систем связи систему проводни-
ков заземления выполняют в виде сетки [179]. Сетка выполняет одновременно
функции заземления и электромагнитного экрана здания. На электростанци-
ях в помещении с промышленной автоматикой стены и потолок экранируют
стальными плитами [180], окна и отверстия для кондиционирования закрыва-
ют медной сеткой, пол выполняют из электропроводного пластика.
Необходимо обратить внимание на качество контактов в цепи заземления.
В статье [181] приводится пример, когда плохо затянутый болт в цепи заземле-
ния приводил к сбоям системы автоматики, причину которого искали несколь-
ко лет. При конструировании заземления нельзя использовать контакты разно-
родных металлов, чтобы не образовывались гальванические пары, являющиеся
местами быстрой коррозии. Медь со сталью можно соединять только через бу-
ферные металлы: нержавеющую сталь или бронзу, без оцинкованного крепежа.
При монтаже системы автоматики в уже построенном здании система за-
земляющих проводников, как правило, уже смонтирована и шина защитного
заземления разведена по зданию.
Защита от помех
185
3.2.4. Автономное заземление
К системе защитного заземления промышленного объекта могут быть под-
ключены силовые установки, которые поставляют большой ток помехи в провод
заземления. Поэтому для точных измерений может потребоваться отдельная
земля, выполненная по технологии искусственного заземления в грунт. Та-
кое заземление соединено с общим заземлением здания только в одной точке
для целей выравнивания потенциала между разными землями, что важно при
ударе молнии [171, 182].
Второй вариант автономной, «чистой» земли можно получить с помощью
изолированного провода, который нигде не соединяется с металлическими кон-
струкциями здания, но соединяется с основной клеммой заземления у ввода
нейтрали питающего фидера в здание. Шину такого заземления делают из
медной шины с поперечным сечением не менее 13 мм2.
3.2.5. Заземляющие проводники
Проводники, соединяющие оборудование с заземлителем, должны быть по
возможности короткими, чтобы снизить их активное и индуктивное сопротив-
ление. Для эффективного заземления на частотах более 1 МГц проводник
должен быть короче 1/20 [183], а лучше 1/50 [184] длины волны самой вы-
сокочастотной гармоники в спектре помехи (см. также п. 3.2.6). При частоте
помехи 10 МГц (длина волны 30 м) и длине проводника 7,5 м (1/4 от длины
волны) модуль его полного сопротивления на частоте помехи будет равен бес-
конечности, т.е. такой проводник можно использовать в качестве изолятора на
частоте помехи, но не для заземления.
При наличии фильтров в системе автоматизации за максимальную частоту
влияющей помехи можно принимать верхнюю граничную частоту фильтра.
Чтобы снизить падение напряжения на заземлителе, надо уменьшать его
длину. Индуктивное сопротивление провода заземления на частоте помехи f
равно Xl — 2тг/Г/, где L в типовых случаях равно примерно 0,8 мкГн/м (по-
гонная индуктивность провода), I — длина провода.
Если провода заземления располагаются близко один от другого, то между
ними передается помеха через взаимную индуктивность. Это особенно суще-
ственно на высоких частотах.
Заземляющий проводник не должен касаться других металлических пред-
метов, поскольку такие случайные нестабильные контакты могут быть источ-
ником дополнительных помех.
3.2.6. Модель «земли»
На основании вышеизложенного можно предложить электрическую модель
системы заземления, показанную на рис. 3.14 [194, 195]. При составлении моде-
ли предполагалось, что система заземления состоит из заземляющих электро-
дов, соединенных между собой сплошной шиной заземления, к которой прива-
рена пластина (клемма) заземления. К клемме заземления подсоединяются, к
186
Глава 3
Рис. 3.14. Электрическая модель системы заземления
примеру, две шины (два проводника) заземления, к которым в разных местах
подключается заземляемое оборудование.
Если шины заземления или заземляющие проводники проходят близко
один от другого, то между ними существует магнитная связь с коэффициен-
том взаимной индукции (рис. 3.14). Каждый участок проводника (шины) си-
стемы заземления имеет индуктивность, сопротивление и в нем наводится э.д.с.
помехи Enij путем электромагнитной индукции. На разных участках шины за-
земления к ней подсоединено оборудование автоматики, которое поставляет в
шину заземления ток помехи, вызванный описанными в п. 3.1 причинами, и
ток цепей питания, возвращающийся к источнику питания по шине земли. На
рис. 3.14 изображено также сопротивление между заземляющими электродами
и ток помехи, протекающий по земле, например, при ударах молнии или при
к.з. на землю мощного оборудования.
Если шина сигнального заземления используется одновременно для пита-
ния систем автоматизации (этого нужно избегать), то необходимо учитывать
ее сопротивление. Сопротивление медного провода длиной 1 м и диаметром
1 мм равно 0,022 Ом. В промышленной автоматике при расположении датчиков
на большой площади, например в элеваторе, длина заземляющего проводника
может достигать 100 м и более. Для проводника длиной 100 м сопротивление
составит 2,2 Ом. При количестве модулей системы автоматики, питаемых от од-
ного источника, равном 20 и токе типовом потребления одного модуля 0,1 А па-
дение напряжения на сопротивлении заземляющего проводника составит 4,4 В.
При частоте помехи более 1 МГц возрастает роль индуктивного сопротивле-
ния цепи заземления, а также емкостной и индуктивной связи между участками
цепей заземления. Провода заземления начинают излучать электромагнитные
волны и сами становятся источниками помех.
Защита от помех
187
На высоких частотах провод-
ник заземления или экран кабеля,
проложенный параллельно полу или
стене здания, образует совместно с
заземленными металлическими кон-
струкциями здания длинную линию
с волновым сопротивление порядка
500... 1000 Ом, короткозамкнутую на
конце. Поэтому сопротивление про-
водника для высокочастотных помех
определяется не только его индук-
тивностью, но и явлениями, связан-
ными с интерференцией между пада-
ющей волной помехи и отраженной
Отношение длины провода к длине волны
Рис. 3.15. Зависимость модуля полно-
го комплексного сопротивления зазем-
ляющего проводника от длины провода
от заземленного конца провода. Зависимость модуля полного комплексного
сопротивления между точкой подключения проводника к заземляемому обору-
дованию и ближайшей точкой железобетонной конструкции здания можно при-
близительно описать формулой для двухпроводной воздушной линии передачи:
ZBX « 7?в tg(27rL/A), где RB — волновое сопротивление, L — длина проводника
заземления; А — длина волны помехи; А « с//, с — скорость света в вакууме
(300 тыс. км/с); f — частота помехи. График, построенный по приведенной
формуле для типового проводника заземления (экрана) диаметром 3 мм при
расстоянии до ближайшего прута железобетонной арматуры здания 50 см (при
этом волновое сопротивление составляет 630 Ом), приведен на рис. 3.15. От-
метим, что когда длина проводника приближается к 1/4 длины волны помехи,
его сопротивление резко возрастает.
Таким образом, шина земли является в общем случае «грязной землей», ис-
точником помех, имеет активное и индуктивное сопротивление. Она является
эквипотенциальной только с точки зрения защиты от поражения электриче-
ским током, но не с точки зрения передачи сигнала. Поэтому если в контур,
включающий источник и приемник сигнала, входит участок «грязной земли»,
то напряжение помехи будет складываться с напряжением источника сигнала
и прикладываться ко входу приемника.
3.2.7. Виды заземлений
Одним из путей ослабления вредного влияния цепей заземления на систе-
мы автоматизации является раздельное выполнение заземлений для устройств,
имеющих разную чувствительность к помехам или являющихся источниками
помех разной мощности. Раздельное исполнение заземляющих проводников
позволяет выполнить их соединение с защитной землей в одной точке. При
этом заземляющие проводники разных систем земель представляют собой лу-
чи звезды, центром которой является контакт к шине защитного заземления
здания. Благодаря такой топологии помехи «грязной» земли не протекают по
проводникам «чистой» земли. Таким образом, несмотря на то что системы за-
земления разделены и имеют разные названия, в конечном счете все они соеди-
188
Глава 3
йены с Землей через систему защитного заземления. Исключение составляет
только «плавающая» земля (см. ниже).
Силовое заземление. В системах автоматики могут использоваться элек-
тромагнитные реле, микромощные серводвигатели, электромагнитные клапа-
ны и другие устройства, ток потребления которых существенно превышает
ток потребления модулей ввода-вывода и контроллеров. Цепи питания таких
устройств выполняют отдельной парой свитых проводов (для уменьшения из-
лучаемых помех), один из которых соединяется с шиной защитного заземления.
Общий провод системы (обычно провод, подключенный к отрицательному вы-
воду источника питания) является силовой землей.
Аналоговая и цифровая земля. Системы промышленной автомати-
ки являются аналого-цифровыми. Поэтому одним из источников погрешно-
стей аналоговой части является помеха, создаваемая цифровой частью систе-
мы. Для исключения прохождения помех через цепи заземления цифровую и
аналоговую землю выполняют в виде несвязанных проводников, соединенных
вместе только в одной общей точке. Для этого модули ввода-вывода и про-
мышленные контроллеры имеют отдельные выводы аналоговой земли (AGND)
и цифровой (DGND).
«Плавающая» земля. «Плавающая» земля образуется в случае, когда
общий провод небольшой части системы электрически не соединяется с шиной
защитного заземления (т.е. с землей). Типовыми примерами таких систем яв-
ляются батарейные измерительные приборы, системы автоматики автомобиля,
самолета или космического корабля. «Плавающая» земля может быть получе-
на и с помощью DC-DC или AC-DC-преобразователей, если вывод вторичного
источника питания в них не заземлен. Такое решение позволяет полностью ис-
ключить кондуктивные наводки через общий провод заземления. Кроме того,
допустимое напряжение синфазного сигнала может достигать 300 В и более;
практически 100%-ным становится подавление синфазного сигнала, снижается
влияние емкостных помех. Однако на высоких частотах токи через емкость на
землю существенно снижают последние два достоинства.
Если «плавающая» земля получе-
на с помощью устройств гальванической
развязки на оптронах и DC-DC преобра-
зователях, то надо принять особые меры
для предотвращения накопления заряда
в емкости между землей и «плавающей»
землей, которое может привести к про-
бою оптрона (см. п. 3.6, 3.1.4).
Пример образования «плавающей»
земли показан на рис. 3.16. Вывод AGND
модуля ввода сигналов термопар не со-
единен с землей. Аналоговая часть мо-
дуля имеет эквивалентную емкость на
землю, которая включает в себя емкость
Рис. 3.16. Пример «пла-
вающей» земли AGND
Защита от помех 189
входных цепей на землю, емкость проводников печатной платы на землю, про-
ходную емкость DC-DC-преобразователя и оптронов гальванической развязки.
Величина этой емкости может составлять около 100 пФ и более. Поскольку
воздух и другие диэлектрики, с которыми контактирует емкость, имеют не
бесконечное электрическое сопротивление, то емкость может медленно, в те-
чение минут или часов, зарядиться током утечки (рис. 3.16) до потенциала
электризованных тел, высоковольтных источников питания или потенциала,
связанного с атмосферным электричеством (см. п. 3.1.3, 3.1.4). Потенциал на
«плавающей» земле может превысить напряжение пробоя изоляции оптронов
и вывести систему из строя.
В качестве защитных мер при использовании «плавающей» земли можно
рекомендовать соединение «плавающей» части с землей через сопротивление
величиной от десятков килоом до единиц мегаом. Вторым способом является
применение батарейного питания одновременно с передачей информации че-
рез оптический кабель.
«Плавающая» земля чаще используется в технике измерений малых сиг-
налов и реже — в промышленной автоматизации.
3.3. Проводные каналы передачи сигналов
Каналы передачи информации по проводам состоят из источника сигна-
ла, линии связи и приемника. Выбор перечисленных компонентов существен-
но влияет на помехозащищенность канала. Ниже приведены идеализирован-
ные модели источников и приемников сигнала, позволяющие понять их ос-
новные свойства.
3.3.1. Источники сигнала
Источники сигнала (например, датчики и измерительные преобразователи,
передатчики физических интерфейсов, выходные каскады модулей вывода и
др.) могут быть заземленными (рис. 3.17,а), незаземленными (рис. 3.17,6) и
балансными (парафазными) (рис. 3.17,в, г).
Примерами незаземленных («плавающих») источников сигнала являют-
ся батарейки, источники сигнала с батарейным питанием, термопары, транс-
форматоры, изолированные операционные усилители, изолирующие DC-DC-
преобразователи. Сигналом в этих случаях является разность потенциалов
Рис. 3.17. Источники напряжения сигнала: а — заземленный; б— плавающий;
в, г — балансный
190
Глава 3
Рис. 3.18. Осциллограммы напряжений на выходах балансного источника напряжения
между выводами источника (Уц). Потенциал выводов относительно землй Vc
является паразитным (синфазной помехой), поскольку не участвует в передаче
информации от источника в линию связи.
У заземленного источника сигнала один из выводов заземлен (рис. 3.17),
и напряжение второго вывода измеряется относительно земли. Заземленный
источник можно получить из плавающего, если один из его выводов зазем-
лить. Однако получить плавающий источник достаточно сложно, поскольку
сам принцип построения датчика или схемы преобразования измеряемой фи-
зической величины в напряжение часто не позволяют этого сделать. Поэто-
му плавающие источники конструктивно и схемотехнически часто сложнее,
чем заземленные.
Балансный источник напряжения (рис. 3.17) представляет собой комбина-
цию из двух источников напряжения, работающих синхронно. Сигналы ис-
точников симметричны («сбалансированы») относительно некоторого уровня
напряжения (рис. 3.18): если на выходе одного источника высокий уровень,
то на другом — низкий, и наоборот. Размах напряжения между клеммами
источника равен удвоенной разности напряжений Уд = ех - (рис. 3.18). Син-
фазное напряжение Vc = (ех 4- в2)/2.
Балансный источник напряжения можно представить эквивалентной це-
пью, показанной на рис. 3.17,г, где ед = ех - в2, ес = (ех 4- е2)/2. Эта цепь бо-
лее наглядно показывает смысл термина «балансный источник»: напряжения
на его клеммах симметричны относительно напряжения источника ес. При-
мером балансных источников напряжения могут быть выходные каскады пе-
редатчиков интерфейса RS-485.
Источники сигнала могут быть не только источниками напряжения, но и
источниками тока (рис. 3.19). Источники тока также могут быть заземленны-
ми или плавающими. Балансный источник тока, в котором токи обоих вы-
водов равны и противоположно направлены (рис. 3.19,в) полностью эквива-
лентен незаземленному источнику (рис. 3.19,6), поскольку разность одинако-
вых токов равна нулю. Примерами источников тока могут быть источники
стандартного сигнала 0...20 мА, 4...20 мА, источники тока интерфейсов «то-
ковая петля» и HART.
Защита от помех
191
Рис. 3.19. Источники тока: а — зазем-
ленный; б — плавающий; в — балансный
Рис. 3.20. Источник сигнала с
переключением ток/напряжение
(например, CAN-интерфейса)
Особо можно отметить источник сигнала интерфейса CAN, который в режи-
ме передачи доминантного состояния (логической единицы) является баланс-
ным источником напряжения, а при передачи рецессивного состояния (логиче-
ского нуля) является источником тока нулевой величины. Модель источника
содержит ключи (рис. 3.20) для переключения между режимами источника на-
пряжение и тока. Для обнаружения нулевого тока в такой цепи принципиально
необходимо наличие сопротивления Ян, в противном случае при размыкании
ключа напряжение между клеммами источника становится неопределенным.
3.3.2. Приемники сигнала
Приемник сигнала (например, система сбора данных) может принимать
(измерять) напряжение относительно «земли» (рис. 3.21,а) или относитель-
но потенциала на втором своем входе (рис. 3.21,6). В первом случае при-
емник сигнала называется приемником с одиночным (недифференциальным)
входом (рис. 3.21,а), во втором случае — дифференциальным приемником сиг-
нала (рис. 3.21,6). Аналогичные разновидности существуют для приема то-
ка (рис. 3.22).
Дифференциальный приемник сигнала измеряет разность потенциалов
между двумя проводниками. Потенциалы отсчитываются относительно общего
провода приемника (относительно земли приемника). Таким образом, диффе-
ренциальный приемник сигнала имеет три входных зажима: два сигнальных
и один общий (земляной). Важно отметить, что для анализа помех земля ис-
точника и приемника сигнала в общем случае должны рассматриваться как
разные земли, поскольку они имеют разные потенциалы в абсолютной системе
отсчета потенциалов и в дальнейшем на схемах будут обозначаться разными
условными обозначениями.
Рис. 3.21. Приемники напряжения сигнала:
а — однополярный; б — дифференциальный;
в — с плавающим источником питания
Рис. 3.22. Приемники токово-
го сигнала: а — однополярный;
б — плавающий; в — балансный
192
Глава 9
Дифференциальные приемники могут быть двух типов: построенные на ос*
нове незаземленного (плавающего) источника питания (рис. 3.21,в) или на ос-
нове схемы вычитателя, позволяющего вычислить разность напряжений между
двумя узлами электрической цепи после измерения каждого напряжения отно-
сительно земли. Примерами приемников первого типа являются тестер или маг
логабаритный осциллограф с батарейным питанием, которые могут измерять
дифференциальный сигнал, не имея связи с землей. Примерами дифферен-
циальных приемников на основе вычитателя являются цепи, построенные на
базе инструментального дифференциального усилителя с большим коэффици-
ентом подавления синфазного сигнала.
Особенностью дифференциальных приемников на основе незаземленного
источника питания является теоретически бесконечный коэффициент подавле-
ния синфазного сигнала, поскольку сигнал Vc (рис. 3.21,в) на выход усилите-
ля не проникает. Его недостатком является асимметрия входов относительно
земли: емкости на землю входа, соединенного с незаземленным источником
питания, всегда больше, чем емкость входа усилителя. Асимметрия прием-
ника играет существенную роль в балансных цепях передачи сигнала, в ко-
торых степень асимметрии определяет качество подавления принимаемых и
излучаемых помех.
Основным параметром дифференциальных приемников является коэффи-
циент ослабления синфазного сигнала Косс. В реальных приемниках наряду
с дифференциальным сигналом на выход попадает и ослабленный синфазный
сигнал. Коэффициент передачи синфазного сигнала меньше, чем дифференци-
ального в некоторое число раз, которое называется коэффициентом ослабления
синфазного сигнала Косс. Коэффициент ослабления синфазного сигнала зави-
сит от частоты. Наибольший интерес для систем промышленной автоматизации
представляет коэффициент подавления синфазного сигнала с частотой 50 Гц,
который характеризует чувствительность приемника к электромагнитной на-
водке из электрической сети 220/380 В.
Напряжение на выходе дифференциального приемника сигнала Vo мож-
но записать в виде
Vo = K0(Vx - V2) + KOCCVC, (3.3)
где Vc = (Vi 4- V2)/2 — синфазное напряжение, Kq — дифференциальный ко-
эффициент усиления.
Следует отметить, что дифференциальный прием-
ник (рис. 3.21,6) не может быть получен с помощью двух
одиночных приемников сигнала путем простого вычита-
ния напряжений на их выходах (рис. 3.23), например
путем вычитания двух величин, предварительно введен-
ных в компьютер (контроллер) с помощью устройства
ввода. Рассмотрим два усилителя с одиночным вхо-
дом, например два канала из многоканального устрой-
ства ввода с одиночными (недифференциальными) вхо-
дами (рис. 3.23). Пройдя через усилитель (систему ана-
логового ввода), напряжение Ц появляется на его выходе
Рис. 3.23. Иллю-
страция того, как
нельзя строить уси-
лители с дифферен-
циальным входом
Защита от помех
193
в виде V/ = (1 — 7i)KoVi, где 71 — мультипликативная погрешность первого
канала, Kq — коэффициент усиления устройства ввода. Аналогично, для вто-
рого канала получим V2' = (1 — 72)KoV2. Предположим, что требуется выделить
дифференциальный сигнал как разность напряжений Vo = Ц — V2. В идеаль-
ном случае, когда 71 = 72 = 0, получим, как и требуется,
Vo = Kq(Vi - V2).
(3-4)
В реальном случае мультипликативная погрешность не равна нулю и вклю-
чает в себя погрешность коэффициента усиления, напряжение смещения нуля,
погрешность аналого-цифрового преобразования, шумы электронных приборов,
электромагнитные и кондуктивные помехи, погрешность методов сглаживания
данных в компьютере, т.е. весь спектр погрешностей от источника сигнала до
вычитателя. Поэтому в наихудшем случае, когда погрешности величин, вве-
денных по двум каналам, равны между собой по модулю (I71I — I72I = 7) и
противоположны по знаку, получим V/ = (1 + 7)^0Vi, = (1 - 7)K0V2 и тогда
Vo = (V/ - V2') = (1 + 7)K0V! - (1 - 7)*oV2 = K0(V! - V2) + 7*Ж + V2). (3.5)
Используя понятия дифференциального Vn = Vi - V2 и синфазного Vc =
= (Vi + V^)/2 сигналов, выражение (3.5) можно переписать в виде
Vo = KQVn + 27KoVc.
(3.6)
Поскольку первый член в (3.6) представляет собой уравнение идеально-
го вычитателя, второй член уравнения представляет абсолютную аддитивную
погрешность реального вычитателя. Поэтому относительная погрешность, обу-
словленная описанным выше эффектом, будет равна
_ 27К0К
7с АГоУд
(3-7)
Отметим, что в рассмотренном случае мы предполагали, что коэффици-
ент ослабления синфазного сигнала равен бесконечности и поэтому он не вхо-
дит в формулу (3.6).
При измерении малых дифференциальных напряжений (например, сигна-
лов термопар) и при большом синфазном сигнале отношение Vc/Vn может до-
стигать нескольких порядков, в такое же число раз возрастает погрешность
7с. Описанная проблема является общей для многих приложений, и ее ино-
гда называют «проблемой малых разностей». Для ее решения нужно снижать
величину 7, что возможно только при использовании дифференциальных уси-
лителей, которые вычитают сигналы как можно ближе к их источнику. По-
этому операцию вычитания необходимо делать до аналого-цифрового преоб-
разования и без разделения во времени моментов захвата значений входного
сигнала на обоих входах, чтобы мгновенные значения напряжения помех (или
реализаций случайных процессов) для обоих входов дифференциального уси-
лителя были одинаковы.
Рассмотрим пример. Предположим, что требуется получить дифферен-
циальный сигнал с разрешающей способностью 12 бит и с отношением сиг-
194
Глава 3
нал/погрешность, равным 4096. Предположим также, что погрешность пол-
ностью определяется синфазной помехой, т.е. для получения заданной разре-
шающей способности погрешность ус = 1/4096. Если при этом напряжение син-
фазной помехи в 10 раз больше напряжения дифференциального сигнала, т.е.
Ус/Уд = 10, то из формулы (3.7) следует, что погрешность усилителей 7 должна
быть равна 7 — усУд/^Ус — (1/4096)(1/2 • 10) — 1/81920, что может быть получено
только с помощью 17-разрядного АЦП.
Иными словами, при синфазном сигнале, превышающем в 10 раз диффе-
ренциальный сигнал, для получения разрешающей способности 12 бит каждый
из сигналов должен быть получен с разрешающей способностью не хуже 17 бит.
Поэтому во всех случаях, когда измеряется разность двух напряжений, жела-
тельно измерять потенциал Vi относительно V2, а не относительно «земли»,
чтобы отношение Ус/Уд было минимальным.
Из изложенного выше следует, что нельзя использовать устройства вво-
да с одиночным входом для измерения дифференциальных сигналов путем
поочередного измерения двух напряжений и последующего вычисления раз-
ности в контроллере.
Идея снижения уровня помех путем их вычитания лежит в основе постро-
ения балансных цепей передачи сигнала (см. описание интерфейса RS-485 в
главе 2). Для обеспечения равенства мгновенных значений напряжения по-
мехи на обоих входах дифференциального усилителя приемника должны быть
идентичны не только входы приемника, но и линии передачи, а также выходные
каскады передатчика. Это возможно при использовании витой пары проводов
и балансного источника напряжения.
3.3.3. Прием сигнала заземленного источника
Рассмотрим, что происходит, когда напряжение заземленного источника
сигнала е (рис. 3.24) измеряется (принимается) с помощью заземленного при-
емника. Поскольку «земли» источника и приемника сигнала пространственно
разнесены, они имеют разный потенциал и обозначены на рис. 3.24 по-разному.
Разность потенциалов между ними равна Уд. Поэтому напряжение Увх, при-
ложенное ко входу приемника, оказывается равным сумме напряжений источ-
ника сигнала и разности потенциалов между двумя «землями»: Увх = е + Уд.
Таким образом, результат измерения, выполненного описанным способом, бу-
дет содержать погрешность величиной Уд. Эта погрешность может находиться
в допустимых пределах, если источник сигнала и приемник расположены неда-
леко друг от друга, или если напряжение сигнала имеет большую величину
(например, предварительно усилено).
Ситуация может быть существенно улучшена, если «земляной» провод ис-
точника и приемника сигнала соединить медным проводником с низким со-
противлением (рис. 3.25). Однако это не устраняет паразитное напряжение
Vg полностью, поскольку ток, возникающий вследствие разности потенциалов
«земель», теперь будет течь по соединяющему их проводнику. Как правило,
основной компонентой тока является помеха с частотой 50 Гц, но значитель-
ную роль играет и э.д.с., наведенная высокочастотными электромагнитными
Защита от помех
195
Рис. 3.24. «Земля»
имеет разные потенци-
алы в разных точках
Рис. 3.25. Проводник, соеди-
няющий «земли» источника
и приемника сигнала, име-
ет ненулевое сопротивление
Рис. 3.26. Измерение сигна-
ла заземленного источника
с помощью дифферен-
циального приемника
полями. В последнем случае индуктивность проводника играет значительную
роль и устранить ее без применения дифференциального приемника практи-
чески невозможно.
Наиболее точная цепь для измерения сигнала заземленного источника по-
казана на рис. 3.26. Она содержит дифференциальный приемник, который
ослабляет синфазное напряжение помехи Vg в Косс раз.
Следует отметить, что в цепи на рис. 3.26 нельзя соединять один из входов
с «землей» приемника, поскольку при этом фактически получается схема с
одиночным входом (рис. 3.25) со всеми ее недостатками.
3.3.4. Прием сигнала незаземленных источников
Напряжение плавающих источников сигнала может быть достаточно точно
измерено приемником как с одиночным, так и с дифференциальным входом.
Однако при использовании дифференциального входа нужно следить за тем,
чтобы величина синфазного сигнала не вышла за границы диапазона работо-
способности приемника. Сопротивление между любым из дифференциальных
входов и «землей» очень велико, поэтому даже маленький ток помехи может
создать на нем падение напряжения более 10 В, что переведет типовой прием-
ник сигнала в режим насыщения. Ток помехи в этом случае может состоять из
входных токов смещения самого дифференциального приемника и тока пара-
зитной емкостной и кондуктивной связи с источником помехи.
Для уменьшения этого эффекта входы диффе-
ренциального приемника можно соединить с землей
сопротивлениями Ei и R2 (рис. 3.27). Если внут-
реннее сопротивление источника сигнала велико, то
резисторы выбирают с одинаковым сопротивлением.
При низком сопротивлении источника (как, напри-
мер, у термопар) разница сопротивлений не играет
роли и можно использовать одно из них вместо двух.
Если источник сигнала соединен с приемником че-
рез развязывающие конденсаторы, когда приемник
Рис. 3.27. Устранение
насыщения дифферен-
циального приемника
с помощью резисторов
оказывается отключен от источника по постоянному
току, то величины резисторов должны быть строго одинаковы. В балансных це-
пях передачи сигнала эти резисторы улучшают симметрию дифференциальной
пары проводов и улучшают эффект компенсации синфазной помехи.
Сопротивление резисторов на рис. 3.27 выбирается как можно меньшим,
чтобы снизить величину синфазного сигнала, однако оно должно быть много
196
Глава 3
больше внутреннего сопротивления источника сигнала, чтобы не вносить ш>
грешность в результат измерения. При использовании термопар типовое зна-
чение сопротивлений лежит в диапазоне 10... 100 кОм. Еще более ослабить
высокочастотную синфазную помеху можно, включив параллельно резисто-
рам конденсаторы.
Дифференциальные приемники сигнала всегда дают более высокую поме-
хозащищенность по сравнению с приемниками с одиночным входом, однако
они требуют больше соединительных проводов и технически сложнее. Поэтому
выбор между дифференциальным или одиночным входом может быть сделан
только при рассмотрении конкретных условий применения и требований к си-
стеме. Промышленные приемники выпускаются как с дифференциальными,
так и с одиночными входами. Например, модуль ввода аналоговых сигналов
NL-8AI фирмы НИЛ АП [197] позволяет программно устанавливать конфигу-
рацию с 16 одиночными или 8 дифференциальными входами.
Нами было проделано экспериментальное сравнение величины помех для
приемников с одиночным и дифференциальным входом. В качестве источни-
ка сигнала был выбран терморезистор сопротивлением 20 кОм, соединенный
витой парой длиной 5 м с приемником. В качестве дифференциального при-
емника был использован инструментальный усилитель RL-4DA200 и система
сбора данных RealLab! RL-8AI фирмы НИЛ АП. Переход от одиночного вклю-
чения к дифференциальному в данном случае уменьшает среднеквадратиче-
ское значение напряжения помехи в 136 раз [172]. Это объясняется тем, что
усилитель с одиночным входом воспринимает без ослабления помеху, которая
была ослаблена в дифференциальном усилителе благодаря его коэффициен-
ту подавления синфазного сигнала.
В первом приближении можно сказать, что приемники с одиночным вхо-
дом могут быть использованы, если источник и приемник сигналов разнесены
на небольшое расстояние (до единиц метров), если сигнал источника предвари-
тельно усилен или имеет большую величину (более 1 В) и если земляные вы-
воды источника и приемника соединены в одной точке коротким проводником
с низким сопротивлением. Если хотя бы одно из этих условий не выполняется,
следует использовать приемники с дифференциальным входом.
3.3.5. Дифференциальные каналы передачи сигнала
Рис. 3.28. Дифференциальный ис-
точник и приемник тока — наи-
лучшее решение проблемы ка-
чественной передачи сигнала
Кардинальным средством устранения
индуктивных и емкостных связей являет-
ся применение источников сигнала с диф-
ференциальным токовым выходом и при-
емников с низкоомным (токовым) диффе-
ренциальным входом (рис. 3.28). Токи ис-
точников тока на рис. 3.28 строго равны
между собой и противоположно направ-
лены. Индуктивная наводка здесь мала,
поскольку информация передается в фор-
ме тока (объяснение см. выше), а емкост-
ная наводка мала, поскольку при хорошей
Защита от помех
197
симметрии линии передачи она является синфазной и подавляется входным
дифференциальным приемником. Такой принцип передачи сигнала использу-
ется в интерфейсе «Токовая петля».
Токовый дифференциальный канал. Для получения высокого каче-
ства передачи сигнальные провода должны быть экранированы и выполнены
в виде витой пары, чтобы обеспечить лучшую согласованность их продольных
импедансов и импеданса на «землю». Различие в длине проводов и в частот-
ных характеристиках их импедансов могут быть причиной появления помехи
на высоких частотах.
Для получения высокой степени согласованности линий в витой паре луч-
ше использовать провода, специально изготовленные и аттестованные для ин-
струментальных индустриальных применений. Использование двух витых пар
вместо одной, соединенных параллельно, позволяет снизить продольный импе-
данс проводов и повысить точность передачи сигнала.
Примером реализации дифференциального способа передачи токового сиг-
нала может служить пара дифференциального токового передатчика SSM2142
и дифференциального приемника SSM2141 (Analog Devices), которые имеют ко-
эффициент ослабления синфазного сигнала 100 дБ на частоте 60 Гц и работают
на нагрузку 600 Ом, создавая на ней максимальное падение напряжения 10 В.
Для предотвращения насыщения выходных каскадов источников тока раз-
ностью токов I2 -11, которая возникает вследствие технологического разбро-
са параметров, можно использовать способ, аналогичный представленному на
рис. 3.27. Однако резисторы в данном случае должны быть соединены с «зем-
лей» источника сигнала.
Недостатком токовых каналов передачи информации является то, что в
соответствии с выражением (3.9) при бесконечно большом сопротивлении ис-
точника и приемника сигнала (относительно земли) напряжение емкостной на-
водки является максимальным. Применение резисторов для отвода тока по-
мехи на землю (рис. 3.28) улучшает ситуацию, однако эти резисторы не могут
быть выбраны очень малыми, поскольку при этом увеличивается влияние их
рассогласования на погрешность передачи тока. Вторым недостатком явля-
ется низкое быстродействие, ограниченное временем заряда емкости кабеля
малым током источников Л = /2-
Балансный канал. Наиболее совершенной на настоящий момент систе-
мой передачи сигналов является балансная цепь, реализованная в интерфейсах
RS-485 и CAN (рис. 3.29). В ее основе лежат следующие принципы: приме-
нение балансного источника сигнала; применение витой пары с идентичными
характеристиками проводов; применение дифференциального приемника сиг-
нала; передача мощности (а не тока или напряжения).
Идея, положенная в основу балансного канала передачи электрических сиг-
налов, состоит в компенсации индуктивных и емкостных наводок и в ослабле-
нии кондуктивных. Для обеспечения хорошей компенсации помех в диффе-
ренциальном приемнике сигнала они должны быть одинаковы на обоих входах
дифференциального усилителя. Для этого:
198
Глава 9
Рис. 3.29. Балансная схема передачи дифференциального сигнала
• источник сигнала должен иметь идентичные выходные сопротивления по
обоим выходам как на постоянном токе, так и во всем диапазоне частот
передаваемых сигналов;
• линия связи (витая пара, лучше экранированная) должна иметь одинако-
вые для обоих проводов пары продольные сопротивление и индуктивность
(для идентичности индуктивных наводок);
• витая пара должна иметь одинаковые емкости на землю для обоих проводов
пары (для идентичности емкостных наводок);
• дифференциальный приемник должен иметь одинаковые частотные харак-
теристики по обоим выходам и высокую точность операции вычитания.
Для хорошей компенсации помех дифференциальный приемник должен
иметь строго одинаковые коэффициенты передачи по обеим каналам и высо-
кую точность операции вычитания (см. п. 3.3.2). Для подавления синфазной
помехи приемник должен иметь большой коэффициент подавления синфазно-
го сигнала. Помехоустойчивость канала улучшается также благодаря тому,
что балансный передатчик позволяет повысить в 2 раза размах передаваемо-
го сигнала (см. рис. 3.18).
Перечисленные принципы успешно реализованы в интерфейсе RS-485, чем
и объясняется его высокая популярность.
Интерфейс CAN отличается от RS-485 тем, что рецессивное состояние в
нем реализовано с помощью транзисторного ключа, который отключает линию
связи от передатчика. При этом внутреннее сопротивление источника скач-
ком изменяется от низкого на бесконечно большое, т.е. передатчик переходит в
режим передачи тока нулевой величины. Поэтому при передаче логической
единицы (доминантного состояния) передатчик является источником напря-
жения и подвержен влиянию преимущественно индуктивных наводок, а при
передаче логического нуля (рецессивного состояния) более подвержен влия-
нию емкостных наводок.
3.4. Паразитные связи
Помехи могут передаваться от источника помехи к ее приемнику через па-
разитные (т.е. нежелательные) связи: кондуктивные, емкостные и индуктив-
ные. Прежде чем переходить к их рассмотрению, нужно правильно указать
источник и приемник помехи, которые часто сложно выделить в составе кон-
троллеров, модулей ввода-вывода, многочисленных линий связи и кабелей с
Защита от помех
199
разнообразными сигналами. Для упрощения этой задачи рассмотрим снача-
ла модели компонентов систем промышленной автоматики, в которых остав-
лены только элементы, которые участвуют в процессе генерации, передачи
и приема помехи.
3.4.1. Модели компонентов систем автоматизации
Описанные ниже модели для анализа помех получены путем исключения
из структуры соответствующих модулей ввода-вывода элементов, которые не
влияют на величину помех [194, 195]. Модули аналогового ввода и дискрет-
ного вывода бывают без гальванической изоляции (рис. 3.30,а), с изоляцией
аналоговых входов и без изоляции дискретных входов (рис. 3.30,6 — напри-
мер, модуль ADAM-4016 фирмы Advantech) и с изоляцией одновременно как
аналоговых входов, так и дискретных выходов (рис. 3.30,а — например, мо-
дуль NL-8TI фирмы НИЛ АП).
Аналогично, модули с дискретными или счетными входами и дискретны-
ми выходами могут быть без гальванической изоляции (рис. 3.31,а — напри-
мер, ADAM-4050 фирмы Advantech), с изоляцией входов (рис. 3.31,6 — на-
пример, ADAM-4052 фирмы Advantech) и с изоляцией как входов, так и вы-
ходов (рис. 3.31,в — например, NL-16DI фирмы НИЛ АП). Модули аналого-
вого вывода делают обычно с гальванической изоляцией выходов (рис. 3.32).
Таким образом, один модуль ввода-вывода может содержать до трех различ-
ных выводов земли.
Рис. 3.30. Обобщенные модели аналоговых модулей ввода и дискретного вы-
вода для анализа систем заземления: а — без гальванической изоляции; б — с
гальванической изоляцией аналоговых входов; в — с изоляцией как входов, так
и выходов
Data
^ВЫХ
Рис. 3.31. Обобщенные модели дискретных модулей для анализа систем заземления:
а — без гальванической изоляции; б — с изоляцией входов; в — с изоляцией и входов,
и выходов
200
Глава 3
Рис. 3.32. Обобщенная
модель модулей анало-
гового вывода для ана-
лиза систем заземления
На рисунках использованы следующие обозна-
чения: AGND — аналоговая земля; DGND — циф-
ровая земля; GND — земля источника питания
порта связи; Data — информационный порт моду-
ля (вход/выход данных); Авх — аналоговый вход;
Авых — аналоговый выход; DBX — дискретный вход;
Рвых — дискретный выход; VmT — клемма подклю-
чения источника питания. Разрыв модулей (блоков)
на рис. 3.30-3.32 означает гальваническую изоляцию
между разорванными частями.
В моделях на рис. 3.30-3.32 с целью упрощения
не показаны входные сопротивления, которые иногда
нужно учитывать.
3.4.2. Паразитные кондуктивные связи
Кондуктивная наводка — это помеха, которая передается из соседних элек-
трических цепей не через электромагнитное поле, а путем переноса электри-
ческого тока по общим для обеих цепей проводникам, в основном через общие
участки цепей заземления или питания. Обычно источниками кондуктивных
помех являются генераторы (на рис. 3.33 обозначен буквой «М»), цепи с боль-
шим током, цифровая часть аналого-цифровой схемы, реле, сеть питания 220 В,
помехи с частотой преобразования источника бесперебойного питания (UPS),
DC-DC и AC-DC-преобразователи, шаговые двигатели с импульсным питани-
ем, мощные печи с ШИМ-управлением.
Пример появления кондуктивной помехи показан на рис. 3.33. Падение
напряжения Vg на участке провода, общем для сигнала и некоторой (относи-
тельно мощной) нагрузки М, через которую протекает ток 1п, суммируется
с напряжением полезного сигнала е и прикладывается ко входу приемника
VBX. Даже цепь, состоящая из нескольких операционных усилителей, может
создать на проводе длиной 20 см падение напряжения более 1 мВ, что срав-
нимо с величиной МЗР 12-разрядного приемника сигнала. Особенно большие
проблемы может создать цифровое устройство, работающее в момент переда-
чи аналогового сигнала.
Решением описанной проблемы является подсоединение «земли» источни-
ка сигнала к приемнику отдельным изолированным проводом, который не ис-
пользуется ни для каких иных целей (рис. 3.34).
Для предотвращения возникновения описанной проблемы следует разли-
чать понятия «силовая земля», «аналоговая земля», «цифровая земля». Все
эти «земли» должны быть выполнены разными проводами и их нужно соеди-
нять только в одной общей точке. Сигнальные цепи нельзя использовать для
питания даже маломощной аппаратуры.
Рассмотренный вариант аналогичен показанному на рис. 3.25, однако в дан-
ном случае падение напряжения между землей источника и приемника вызвано
не блуждающими токами в земле, как на рис. 3.25, а токами через располо-
женные рядом устройства.
Защита от помех
201
Рис. 3.33. Ток нагрузки М, рав-
ный 1п и протекающий по обще-
му участку «земляного» прово-
да, создает падение напряжения Vg
Рис. 3.34. Решение проблемы: «зем-
ли» источника сигнала и прием-
ника следует соединять отдельным
проводом
Рис. 3.35. Прохождение кондуктивной помехи из цифровой части в аналоговую:
а — неправильное соединение земель и цепей сигнала; б — правильное соединение
Другой пример появления кондуктивной помехи показан на рис. 3.35, а. Ток
питания цифровой части модуля ввода Лом проходит по общему участку про-
вода, который имеет сопротивление Яобщ и создает на нем падение напряжения
помехи Ком- При дополнительно неправильном соединении аналогового вхо-
да модуля ввода с источником сигнала (на рис. 3.35,а показано перечеркнутой
линией) ко входу модуля прикладывается сумма напряжения измеряемого сиг-
нала и напряжения помехи Ком- При правильном соединении входа «-» модуля
с источником сигнала (показано штриховой линией) на вход модуля действует
синфазная помеха Ком? которая при недостаточном коэффициенте подавления
синфазного сигнала может вносить погрешность в результат измерения.
Для устранения обоих источников погрешности соединение аналоговой и
цифровой земли необходимо выполнять в одной общей точке (рис. 3.35,6). При
этом падение напряжения помехи на заземляющем проводнике никак не ска-
зывается на аналоговой части модуля.
3.4.3. Индуктивные и емкостные связи
Предположим, что рядом с сигнальным проводом проходит некоторый про-
вод, по которому протекает ток помехи 1п (рис. 3.36). Тогда вследствие эффекта
электромагнитной индукции на сигнальном проводе будет наводиться напряже-
ние помехи Ум. В случае синусоидальной формы тока амплитуда напряжения
202
Глава 3
Рис. 3.36. Пути прохождения емкостной и индуктивной помехи от источника еп
помехи, наводимого на сигнальном проводе, будет равна
_ uM(Rj + Двх)
^(Ri + R^+^L*
(3-8)
где М — взаимная индуктивность между проводами, L — индуктивность сиг-
нального провода; 1п — амплитуда тока помехи; си = 2тг/, f — частота то-
ка помехи.
Взаимная индуктивность пропорциональна площади витка, который пере-
секается магнитным полем помехи. «Витком» в данном случае является кон-
тур, по которому протекает ток, вызванный э.д.с. помехи. На рис. 3.36 этот
контур образован сигнальным проводом, входным сопротивлением приемника,
проводом «земли» и выходным сопротивлением источника сигнала. Для умень-
шения взаимной индуктивности площадь данного контура должна быть мини-
мальной, т.е. сигнальный провод должен быть проложен максимально близко
к земляному (а еще лучше — свит с ним). Эффективную площадь «витка»
можно уменьшить, если расположить его в плоскости, перпендикулярной плос-
кости контура с током помехи.
Из формулы (3.8) следует, что индуктивная наводка увеличивается с ро-
стом частоты и отсутствует на постоянном токе. Напряжение помехи на
рис. 3.36 включено последовательно с источником сигнала, т.е. вносит адди-
тивную погрешность в результат измерения. При бесконечно большом сопро-
тивлении Ri напряжение на входе приемника имеет вид
VBX = С + иМ1п
и не зависит от сопротивления источника сигнала.
Емкостная наводка через паразитную емкость между проводниками Сс, на-
оборот, полностью определяется внутренним сопротивлением источника сигна-
ла Я», поскольку оно входит в делитель напряжения помехи, состоящий из
сопротивления Явх? включенного параллельно Я», и емкости Сс (см. рис. 3.36):
у _ е ,______^(Д> || Двх)Сс
ВХ y/l + Wi II Двх)Сс)2
еп.
(3.9)
Как следует из (3.9), при Я* = 0 емкостная помеха полностью отсутству-
ет. В действительности сигнальный проводник имеет некоторое индуктивное и
резистивное сопротивление, падение напряжения помехи на котором не позво-
Защита от помех
203
Таблица 3.4
Типовые источники сигнала и их сопротивления
Источник сигнала Полное сопротивление
Термопара Терморезистор Резистивный датчик сопротивления Полупроводниковый датчик давления Тензодатчик Стеклянный pH электрод Потенциометрический датчик перемещения Операционный усилитель с обратной связью <20 Ом >1 КОм 50...100 Ом >1 КОм <1 КОм > 109 Ом от 500 Ом до 100 кОм 10-4 Ом
Рис. 3.37. Канал передачи сигнала с помощью тока менее чувствителен к индуктивным
наводкам
ляет полностью устранить емкостную наводку с помощью источника с низким
внутренним сопротивлением. Особенно важно учитывать индуктивность сиг-
нального провода в случае высокочастотных помех.
Порядок сопротивлений типовых источников сигнала приведен в табл. 3.4.
Датчики, имеющие большое внутреннее сопротивление или малое напря-
жение сигнала, нужно использовать совместно с усилителем, расположенным
в непосредственной близости к датчику, а к приемнику следует передавать
уже усиленный сигнал.
Дуальная ситуация по отношению к рассмотренной означает, что для
устранения индуктивной наводки носителем сигнала должен быть ток, а не
напряжение, т.е. источником сигнала должен быть идеальный источник тока
(рис. 3.37). Ток источника тока не зависит от характера нагрузки (по опреде-
лению), в том числе от величины наведенной э.д.с.
Таким образом, для снижения емкостной наводки сигнал нужно передавать
с помощью идеального источника напряжения, а для снижения индуктивной
наводки — с помощью идеального источника тока.
Выбор носителя информации (ток или напряжение) в конкретном случае
зависит от того, какая помеха преобладает: токовая или емкостная. Как пра-
вило, емкостные наводки преобладают над индуктивными, если источник по-
мехи имеет большое напряжение. Индуктивные же помехи создаются током,
поэтому они велики в случае, когда источником помехи является мощное обо-
рудование, потребляющее большой ток. Отметим, что экранирование низко-
частотной индуктивной наводки технически гораздо сложнее, чем емкостной,
204
Глава 3
поскольку магнитный экран изготавливается из толстого листа ферромагнит-
ного материала.
Преимущества передачи сигнала в форме тока и в форме напряжения сов-
мещаются в промежуточном случае, когда информации передается путем пере-
дачи максимальной мощности, т.е. когда сопротивление приемника равно сопро-
тивлению источника сигнала Явх = Ri- При этом достигается максимум мощ-
ности, передаваемой от источника к приемнику. Отношение мощности помехи к
мощности сигнала определяет величину погрешности, вносимой помехами в ка-
нал передачи информации. Поэтому в общем случае для получения качествен-
ной передачи можно просто увеличивать мощность сигнала е2/(Я< 4- ЯвХ), для
получения чего достаточно уменьшить сопротивление приемника ЯвХ. Однако
сигнал большой мощности порождает помехи для других устройств, поэтому
данный пусть в промышленной автоматике не используется.
3.5. Методы экранирования и заземления
Техника заземления в системах промышленной автоматизации сильно раз-
личается для гальванически связанных и гальванически развязанных цепей.
Большинство методов, описанных в литературе, относится к гальванически свя-
занным цепям, доля которых в последнее время существенно уменьшилась в
связи с резким падением цен на изолирующие DC-DC преобразователи.
3.5.1. Гальванически связанные цепи
Мы рекомендуем избегать применения гальванически связанных цепей, а
если другого варианта нет, то желательно, чтобы размер этих цепей был по
возможности малым и чтобы они располагались в пределах одного шкафа.
Примером гальванически связанной цепи является соединение источни-
ка и приемника стандартного сигнала 0...5 В (рис. 3.38, 3.39). Чтобы пояс-
нить, как правильно выполнить заземление, рассмотрим вариант неправиль-
ного (рис. 3.38) и правильного (рис. 3.39) монтажа. На рис. 3.38 допущены
Рис. 3.38. Пример неправильного заземления
Защита от помех
205
Рис. 3.39. Пример решения проблемы, указанной на рис. 3.38
следующие ошибки: ток мощной нагрузки (двигателя постоянного тока) проте-
кает по той же шине заземления, что и сигнал, создавая падение напряжения
Кемли’, использовано однополярное включение приемника сигнала, а не диф-
ференциальное; использован модуль ввода без гальванической развязки циф-
ровой и аналоговой части, поэтому ток питания цифровой части, содержащий
помеху, протекает через вывод AGND и создает дополнительное падение на-
пряжения помехи на сопротивлении Ri.
Перечисленные ошибки приводят к тому, что напряжение на входе прием-
ника Кх равно сумме напряжения сигала УВЫх и напряжения помехи Кемли =
= Я1(/Пит + /м)- Для устранения этого недостатка в качестве проводника за-
земления можно использовать медную шину большого сечения, однако лучше
выполнить заземление так, как показано на рис. 3.39, т.е. все цепи заземления
соединить в одной точке. При этом ток помехи /м и ток 1П1ЛТ не протекают через
сопротивление Ri, а падение напряжения на сопротивлении проводника R? не
складывается с выходным напряжением источника сигнала Кых-
Общим правилом ослабления связи через общий провод заземления явля-
ется деление земель на аналоговую, цифровую, силовую и защитную с после-
дующим их соединением только в одной точке. При разделении заземлений
гальванически связанных цепей используется общий принцип: цепи заземле-
ния с большим уровнем помех должны выполняться отдельно от цепей с ма-
лым уровнем помех, а соединяться они должны только в одной общей точ-
ке. Точек заземления может быть несколько, если топология такой цепи не
приводит к появлению участков «грязной» земли в контуре, включающем ис-
точник и приемник сигнала, а также если в цепи заземления не образуются
замкнутые контуры, по которым циркулирует ток, наведенный электромаг-
нитной помехой.
206
Глава 3
Недостатком метода разделения проводников заземления является низкая
эффективность на высоких частотах, когда большую роль играет взаимная ин-
дуктивность между рядом идущими проводниками заземления, которая только
заменяет гальванические связи на индуктивные, не решая проблемы в целом.
Большая длина проводников приводит также к увеличению сопротивле-
ния заземления, что важно на высоких частотах. Поэтому заземление в одной
точке используется на частотах до 1 МГц, свыше 10 МГц заземлять лучше
в нескольких точках, в промежуточном диапазоне от 1 до 10 МГц следует
использовать одноточечную схему, если наиболее длинный проводник в цепи
заземления меньше 1/20 от длины волны помехи. В противном случае ис-
пользуется многоточечная схема [186].
Заземление в одной точке часто используется в военных и космических
устройствах [186].
3.5.2. Экранирование сигнальных кабелей
Методы экранирования сигнального кабеля непосредственно следуют из
изложенного выше материала о путях прохождения помехи. Для устранения
паразитной емкостной связи и электростатических зарядов используют элек-
тростатический экран в виде проводящей трубки (чулка), охватывающей экра-
нируемые провода, а для защиты от магнитного поля используют экран из
материала с высокой магнитной проницаемостью.
Рассмотрим заземление экранов при передаче сигнала по витой экраниро-
ванной паре, поскольку этот случай наиболее типичен для систем промыш-
ленной автоматизации.
Если частота помехи не превышает 1 МГц, то кабель нужно заземлять с
одной стороны. Если его заземлить с двух сторон (рис. 3.40), то образуется
замкнутый контур, который будет работать как антенна, принимая электро-
магнитную помеху (на рис. 3.40 путь тока помехи показан штриховой лини-
ей). Ток, протекающий по экрану, является источником индуктивных наводок
на соседних проводах и проводах, находящихся внутри экрана. Хотя магнит-
ное поле тока оплетки внутри экрана теоретически равно нулю, но вследствие
технологического разброса при изготовлении кабеля, а также ненулевого со-
противления оплетки наводка на провода внутри экрана может быть значи-
тельной. Поэтому экран нужно заземлять только с одной стороны, причем
со стороны источника сигнала.
Если точки заземления концов кабеля разнесены на большое расстояние,
между ними может существовать разность потенциалов, вызванная блуждаю-
щими токами в земле или помехами в шине заземления. Блуждающие токи
наводятся электрифицированным транспортом (трамваями, поездами метропо-
литена и железных дорог), сварочными агрегатами, устройствами электрохими-
ческой защиты, естественными электрическими полями, вызванными фильтра-
цией вод в горных породах, диффузией водных растворов и др.). Особенно боль-
шие токи возникают при ударе молнии. Блуждающие токи вызывают разность
потенциалов ЕПОМехи между концами оплетки кабеля и паразитный ток, который
также наводит в центральных жилах помеху вследствие взаимной индукции.
Защита от помех
207
Рис. 3.40. Пример неправильного заземления экрана кабеля на низких частотах
(с двух сторон)
Рис. 3.41. Пример неправильного заземления экрана кабеля — со стороны приемника
сигнала
Если заземление сделать со стороны приемника (рис. 3.41), то ток помехи
будет протекать по пути, показанному на рис. 3.41 штриховой линией, т.е. че-
рез емкость между жилами кабеля, создавая на ней и, следовательно, между
дифференциальными входами, напряжение помехи. Поэтому заземлять оплет-
ку надо со стороны источника сигнала (рис. 3.42). В этом случае путь для
прохождения тока помехи отсутствует.
Если источник сигнала не заземлен (например, термопара), то заземлять
экран можно с любой стороны, так как в этом случае замкнутый контур для
тока помехи не образуется.
Рис. 3.42. Правильное заземление экрана. Конденсатор используется для ослабления
высокочастотных помех
208
Глава 3
Рис. 3.43. Заземление экрана длинного кабеля на высоких частотах
На частотах более 1 МГц увеличивается индуктивное сопротивление экра-
на и токи емкостной наводки создают на нем большое падение напряжения, ко-
торое может передаваться на внутренние жилы через емкость между оплеткой
и жилами. Кроме того, при длине кабеля, сравнимом с длиной волны помехи
(длина волны помехи при частоте 1 МГц равна 300 м, на частоте 10 МГц —
30 м), возрастает сопротивление оплетки (см. п. 3.2.6), что резко повышает на-
пряжение помехи на оплетке. Поэтому на высоких частотах оплетку кабеля
надо заземлять не только с обеих сторон, но и в нескольких точках между ни-
ми (рис. 3.43). Эти точки выбирают на расстоянии 1/10 длины волны помехи
одна от другой. При этом по оплетке кабеля будет протекать часть тока /земли,
передающего помеху в центральную жилу через взаимную индуктивность. Ем-
костной ток также будет протекать по пути, показанному на рис. 3.41, однако
высокочастотная компонента помехи будет ослаблена. Выбор числа точек за-
земления кабеля зависит от разницы напряжений помехи на концах экрана,
частоты помехи, требований к защите от ударов молнии или от величины то-
ков, протекающих через экран в случае его заземления.
В качестве промежуточного варианта можно использовать второе зазем-
ление экрана через емкость (рис. 3.42). При этом по высокой частоте экран
получается заземленным с двух сторон, по низкой частоте — с одной. Это
имеет смысл в том случае, когда частота помехи превышает 1 МГц, а длина
кабеля в 10...20 раз меньше длины волны помехи, т.е. когда еще не нужно вы-
полнять заземление в нескольких промежуточных точках. Значение емкости
можно рассчитать по формуле Свч = 1/(2тг/Хс), где f — верхняя частота гра-
ницы спектра помехи, Хс — емкостное сопротивление заземляющего конденса-
тора (доли ома). Например, на частоте 1 МГц конденсатор емкостью 0,1 мкФ
имеет сопротивление 1,6 Ом. Конденсатор должен быть высокочастотным, с
малой собственной индуктивностью.
Для качественного экранирования в широком спектре частот используют
двойной экран (рис. 3.44) [178]. Внутренний экран заземляют с одной сторо-
ны — со стороны источника сигнала, чтобы исключить прохождение емкостной
помехи по механизму, показанному на рис. 3.41, а внешний экран уменьшает
высокочастотный наводки.
Во всех случаях экран должен быть изолирован, чтобы предотвратить слу-
чайные его контакты с металлическими предметами и землей.
Напомним, что частота помехи — это частота, которую могут восприни-
Защита от помех
209
Рис. 3.44. Двойное экранирование длинного кабеля
мать чувствительные входы средств автоматизации. В частности, если на входе
аналогового модуля имеется фильтр, то максимальная частота помехи, кото-
рую надо учитывать при экранировании и заземлении, определяется верхней
граничной частотой полосы пропускания фильтра.
Поскольку даже при правильном заземлении, но длинном кабеле помеха
все равно проходит через экран, то для передачи сигнала на большое рассто-
яние или при повышенных требованиях к точности измерений сигнал лучше
передавать в цифровой форме или через оптический кабель. Для этого можно
использовать, например, модули аналогового ввода RealLab! серии NL с циф-
ровым интерфейсом RS-485 или оптоволоконные преобразователи интерфейса
RS-485, например типа SN-OFC-ST-62.5/125 фирмы НИЛ АП (www.RealLab.ru).
Нами было проведено экспериментальное сравнение различных способов
подключения источника сигнала (терморезистора сопротивлением 20 кОм) че-
рез экранированную витую пару (0,5 витка на сантиметр) длиной 3,5 м. Был
использован инструментальный усилитель RL-4DA200 с системой сбора дан-
ных RL-40AI фирмы НИЛ АП. Коэффициент усиления канала усиления был
равен 390, полоса пропускания 1 кГц. Вид помехи представлен на рис. 3.46.
Рис. 3.45. Зависимость среднеквадратичного напряжения помехи на выходе усили-
теля от способа включения усилителя и экрана: а — величина помехи 15 мкВ; б —
величина помехи 61 мкВ; в — величина помехи 78 мкВ; г — величина помехи 3584 мкВ
210
Глава 3
Рис. 3.46. Вид помехи, соответствующий схеме включения
по рис. 3.45,а
Как следует из рис. 3.45, отказ от экранирования увеличивает величину
помехи в 4 раза (рис. 3.45,6), переход к одиночному включению вместо диф-
ференциального (рис. 3.45,в) увеличивает помеху в 5 раз, а если еще и отка-
заться от экрана, то помеха увеличивается в 230 раз (рис. 3.45,г). На рисунках
приведено среднеквадратичное значение напряжения помехи в полосе частот
0,01...5 Гц, полученное на выходе приемника сигнала.
Экран, защищающий от паразитных индуктивных связей, сделать гораздо
сложнее, чем электростатический экран. Для этого нужно использовать мате-
риал с высокой магнитной проницаемостью и, как правило, гораздо большей
толщины, чем толщина электростатических экранов. Для частот ниже 100 кГц
можно использовать экран из стали или пермаллоя. На более высоких часто-
тах можно также использовать алюминий и медь.
В связи со сложностью экранирования магнитной составляющей поме-
хи особое внимание следует уделить уменьшению индуктивности сигнально-
го провода и использовать балансные цепи передачи сигнала или оптический
кабель.
3.5.3. Гальванически развязанные цепи
Радикальным решением описанных выше проблем (см. рис. 3.38 и 3.39)
является применение гальванической изоляции (см. п. 3.6) с раздельным зазем-
лением цифровой, аналоговой и силовой части системы (рис. 3.47). Применение
гальванической изоляции позволяет разделить аналоговую и цифровую землю,
а это, в свою очередь, исключает протекание по аналоговой земле токов помехи
от силовой и цифровой земли (рис. 3.47).
Аналоговая земля может быть соединена с защитным заземлением через
сопротивление Aagnd (подробнее см. п. 3.2.7, 3.6).
Защита от помех
211
Рис. 3.47. Пример радикального решения проблемы, показанной на рис. 3.38 и 3.39
3.5.4. Экраны кабелей на электрических подстанциях
На электрических подстанциях на оплетке (экране) сигнального кабеля
автоматики, проложенного под высоковольтными проводами на уровне земли
и заземленного с одной стороны, может наводиться напряжение величиной в
сотни вольт [187] во время коммутации тока выключателем. Поэтому с целью
электробезопасности оплетку кабеля заземляют с двух сторон.
Для защиты от электромагнитных полей с частотой 50 Гц экран кабеля
также заземляют с обеих сторон. Это оправдано в случаях, когда известно, что
электромагнитная наводка с частотой 50 Гц больше, чем наводка, вызванная
протеканием выравнивающего тока через оплетку.
3.5.5. Экраны кабелей для защиты от молнии
Для защиты от магнитного поля молнии сигнальные кабели систем ав-
томатизации, проходящие по открытой местности, должны быть проложены в
металлических трубах из ферромагнитного материала, например стали. Трубы
играют роль магнитного экрана [173]. Нержавеющую сталь использовать нель-
зя, поскольку этот материал не является ферромагнитным. Трубы проклады-
вают под землей, а при наземном расположении они должны быть заземлены
примерно через каждые 3 м [178]. Кабель должен быть экранирован и экран
заземлен. Заземление экрана должно быть произведено очень качественно с
минимальным сопротивлением на землю.
Внутри здания магнитное поле ослабляется в железобетонных зданиях и
не ослабляется в кирпичных.
Радикальным решением проблем защиты от молнии является применение
оптоволоконного кабеля, который стоит уже достаточно дешево и легко под-
ключается к интерфейсу RS-485, например, через преобразователи SN-OFC-
ST-62.5/125 (www.RealLab.ru).
212
Глава 3
3.5.6. Заземление при дифференциальных измерениях
Если источник сигнала не имеет сопротивления на землю, то при диффе-
ренциальном измерении образуется «плавающий вход» (рис. 3.48). На плава-
ющем входе может наводиться статический заряд от атмосферного электриче-
ства (см. также п. 3.2.7) или входного тока утечки операционного усилителя.
Для отведения заряда и тока на землю потенциальные входы модулей анало-
гового ввода обычно содержат внутри себя резисторы сопротивлением от 1 до
20 МОм, соединяющие аналоговые входы с землей. Однако при большом уровне
помех или большом сопротивлении источника сигнала сопротивление 20 МОм
может оказаться недостаточным и тогда необходимо дополнительно использо-
вать внешние резисторы сопротивлением от десятков килоом до 1 МОм или
конденсаторы с таким же сопротивлением на частоте помехи (рис. 3.48).
Рис. 3.48. Заземление аналоговых входов через сопротивления для уменьшения
синфазной помехи
3.5.7. Интеллектуальные датчики
В последнее время получили быстрое распространение и развитие так на-
зываемые интеллектуальные датчики, содержащие микроконтроллер для ли-
неаризации характеристики преобразования датчика (см., например, www.Real-
Lab.ru). Интеллектуальные датчики выдают сигнал в цифровой или аналого-
вой форме [188]. Вследствие того, что цифровая часть датчика совмещена с
аналоговой, при неправильном заземлении выходной сигнал имеет повышен-
ный уровень шума.
Некоторые датчики, например фирмы Honeywell, имеют ЦАП с токовым
выходом и поэтому требуют подключения внешнего сопротивления нагрузки
(порядка 20 кОм [188]), поэтому полезный сигнал в них получается в форме
напряжения, падающего на нагрузочном резисторе при протекании выходно-
го тока датчика.
Пример. На рис. 3.49 напряжение на нагрузке
^нагр = Кых 7наГр7?1 + /2-^2?
т.е. V^arp зависит от тока /2, который включает в себя ток цифровой земли.
Ток цифровой земли содержит шум и в соответствии с вышеприведенной фор-
мулой влияет на напряжение на нагрузке. Чтобы устранить этот эффект, цепи
Защита от помех
213
Рис. 3.50. Правильное заземление интеллектуального датчика
заземления надо выполнить так, как показано на рис. 3.50. Здесь ток цифро-
вой земли не протекает через сопротивление Я21 и поэтому не вносит шум в
напряжение сигнала на сопротивлении нагрузки.
3.5.8. Монтажные шкафы
Монтаж шкафов автоматики должен учитывать всю вышеизложенную ин-
формацию. Однако заранее нельзя сказать однозначно, какие требования явля-
ются обязательными, какие — нет, поскольку набор обязательных требований
зависит от требуемой точности измерений и от окружающей электромагнит-
ной обстановки. Поэтому нижеприведенные примеры заземления разделены на
«правильные» и «ошибочные» условно. При этом «правильный» пример (ска-
жем, рис. 3.51) всегда дает меньший уровень помех, чем «неправильный».
На рис. 3.52 приведен пример, в котором каждое отличие от рис. 3.51 увели-
чивает вероятность сбоев цифровой части и ухудшает погрешность аналоговой.
На рис. 3.52 сделаны следующие «неправильные» соединения:
• заземление шкафов выполнено в разных точках, поэтому потенциалы их
земель отличаются (см. рис. 3.38, 3.39);
• шкафы соединены между собой, что создает замкнутый контур в цепи за-
земления (см. рис. 3.12, п. 3.2.3, 3.2.5, 3.1.6);
• проводники аналоговой и цифровой земли в левом шкафу на большом
участке идут параллельно, поэтому на аналоговой земле могут появить-
ся индуктивные и емкостные наводки от цифровой земли;
214
Глава 3
Рис. 3.51. Пример правильного заземления шкафов автоматики
• блок питания (точнее, его отрицательный вывод) соединен с корпусом шка-
фа в ближайшей точке, а не на клемме заземления, поэтому по корпусу
шкафа течет ток помехи, проникающий через трансформатор блока пи-
тания (см. рис. 3.5, 3.6);
• используется один блок питания на два шкафа, что увеличивает длину и
индуктивность проводника заземления;
• в правом шкафу выводы земли подсоединены не к клемме заземления, а
непосредственно к корпусу шкафа. При этом корпус шкафа становится ис-
точником индуктивной наводки на все провода, проходящие вдоль его стен;
• в правом шкафу, в среднем ряду, аналоговая и цифровая земли соединены
прямо на выходе блоков, что неправильно (см. рис. 3.38, 3.47).
Перечисленные недостатки устранены на рис. 3.51. Дополнительным улуч-
шением разводки в этом примере было бы применение отдельного проводника
заземления для наиболее чувствительных аналоговых модулей ввода.
В пределах шкафа (стойки) желательно группировать аналоговые модули
отдельно, цифровые — отдельно, чтобы при прокладке проводов в кабельном
канале уменьшить длину участков параллельного прохождения цепей цифро-
вой и аналоговой земли.
Защита от помех
215
Рис. 3.52. Пример неправильного заземления шкафов автоматики. Жирной линией вы-
делены неправильные соединения. GND — вывод для подключения заземленного выво-
да питания
3.5.9. Распределенные системы управления
В системах управления, распределенных по некоторой территории с ха-
рактерными размерами в десятки и сотни метров, нельзя использовать модули
ввода без гальванической развязки. Только гальваническая развязка позволя-
ет соединять цепи, заземленные в точках с разными потенциалами.
Кабели, проходящие по открытой местности, должны быть защищены от
магнитных импульсов во время грозы (см. п. 3.1.3, 3.5.5) и магнитных полей
при коммутации мощных нагрузок (см. п. 3.5.4). Особое внимание надо уделить
заземлению экрана кабеля (см. п. 3.5.2). Радикальным решением для террито-
риально распределенной системы управления является передача информации
по оптическому волокну или радиоканалу.
Неплохие результаты можно получить, отказавшись от передачи информа-
ции по аналоговым стандартам в пользу цифровых. Для этого можно исполь-
зовать модули распределенной системы управления RealLab! серии NL фирмы
НИЛ АП. Суть этого подхода заключается в том, что модуль ввода располагают
возле датчика, уменьшая тем самым длину проводов с аналоговыми сигналами,
а в ПЛК передается сигнал по цифровому каналу. Разновидностью этого под-
хода является применение датчиков со встроенными в них АЦП и цифровым
интерфейсом (например, датчиков серии NL-1S фирмы НИЛ АП).
216
Глава 3
3.5.10. Чувствительные измерительные цепи
Для измерительных цепей с высокой чувствительностью в плохой элек-
тромагнитной обстановке лучшие результаты дает применение «плавающей»
земли (см. п. 3.2.7) совместно с батарейным питанием [189] и передачей ин-
формации по оптоволокну.
3.5.11. Исполнительное оборудование и приводы
Цепи питания двигателей с импульсным управлением, двигателей серво-
приводов, исполнительных устройств с ШИМ-управлением должны быть вы-
полнены витой парой для уменьшения магнитного поля, а также экранированы
для снижения электрической компоненты излучаемой помехи. Экран кабеля
должен быть заземлен с одной стороны. Цепи подключения датчиков таких си-
стем должны быть помещены в отдельный экран и по возможности простран-
ственно отдалены от исполнительных устройств.
Заземление в промышленных сетях. Промышленная сеть на основе
интерфейса RS-485 выполняется экранированной витой парой с обязательным
применением модулей гальванической развязки (рис. 3.53). Для небольших
расстояний (порядка 10 м) при отсутствии поблизости источников помех экран
можно не использовать. При больших расстояниях (стандарт допускает дли-
ну кабеля до 1,2 км) разность потенциалов земли в удаленных друг от друга
точках может достигать несколько единиц и даже десятков вольт (см. п. 3.5.2).
Поэтому, чтобы предотвратить протекание по экрану тока, выравнивающего
эти потенциалы, экран кабеля нужно заземлять только в одной точке (без-
различно в какой). Это также предотвратит появление замкнутого контура
большой площади в цепи заземления, в котором за счет электромагнитной ин-
дукции может наводится ток большой величины при ударах молнии или ком-
мутации мощных нагрузок. Этот ток через взаимную индуктивность наводит
на центральной паре проводов э.д.с., которая может вывести из строя мик-
росхемы драйверов порта.
При использовании неэкранированного кабеля на нем может наводиться
большой статический заряд (несколько киловольт) за счет атмосферного элек-
тричества, который может вывести из строя элементы гальванической раз-
Рис. 3.53. Заземление в промышленной сети на основе интерфейса RS-485
Защита от помех
217
вязки. Для предотвращения этого эффекта изолированную часть устройства
гальванической развязки следует заземлить через сопротивление, например,
0,1...1 МОм (на рис. 3.53 показано штриховой линией).
Особенно сильно проявляются описанные выше эффекты в сетях Ethernet
с коаксиальным кабелем, когда при заземлении в нескольких точках (или от-
сутствии заземления) во время грозы выходят из строя сразу несколько се-
тевых Ethernet-плат.
В сетях Ethernet с малой пропускной способностью (10 Мбит/с) заземление
экрана следует выполнять только в одной точке. В Fast Ethernet (100 Мбит/с) и
Gigabit Ethernet (1 Гбит/с) заземление экрана следует выполнять в нескольких
точках, пользуясь рекомендациями п. 3.5.2.
При прокладке кабеля на открытой местности нужно использовать все пра-
вила, описанные в п. 3.5.2.
3.5.12. Заземление на взрывоопасных объектах
На взрывоопасных промышленных объектах (см. главу 7) при монтаже це-
пей заземления многожильным проводом не допускается обслуживание прово-
дов кабеля, поскольку вследствие хладотекучести припоя возможно ослабле-
ние мест контактного давления в винтовых зажимах.
Экран кабеля интерфейса RS-485 заземляется в одной точке, вне взрыво-
опасной зоны. В пределах взрывоопасной зоны он должен быть защищен от
случайного соприкосновения с заземленными проводниками. Искробезопасные
цепи не должны заземляться, если этого не требуют условия работы электро-
оборудования (ГОСТ Р 51330.10, п. 3.5.2).
Искробезопасные цепи должны быть смонтированы таким образом, чтобы
наводки от внешних электромагнитных полей (например, от расположенного
на крыше здания радиопередатчика, от воздушных линий электропередачи или
близлежащих кабелей для передачи большой мощности) не создавали опасного
напряжение или тока в искробезопасных цепях. Это может быть достигнуто
экранированием или отдалением искробезопасных цепей от источника элек-
тромагнитной наводки.
При прокладке в общем пучке или канале кабели с искроопасными и ис-
кробезопасными цепями должны быть разделены промежуточным слоем изо-
ляционного материала или заземленной металлической перегородкой. Никако-
го разделения не требуется, если используются кабели с металлической обо-
лочкой или экраном.
Заземленные металлические конструкции не должны иметь разрывов и
плохих контактов между собой, которые могут искрить во время грозы или
при коммутации мощного оборудования.
На взрывоопасных промышленных объектах используются преимуществен-
но электрические распределительные сети с изолированной нейтралью, чтобы
исключить возможность появления искры при коротком замыкании фазы на
землю и срабатывания предохранителей защиты при повреждении изоляции.
Для защиты от статического электричества используют заземление, опи-
санное в п. 3.1.4. Статическое электричество может быть причиной воспла-
менения взрывоопасной смеси. Например, при емкости человеческого тела
218
Глава 3
100...400 пФ и потенциале заряда 1 кВ энергия искрового разряда с тела челове-
ка будет равна 50...200 мкДж, что может быть достаточно для воспламенения
взрывоопасной смеси группы ПС (60 мкДж) [190].
3.6. Гальваническая развязка
Гальваническая развязка (изоляция) цепей является радикальным реше-
нием большинства проблем, связанных с заземлением, и ее применение факти-
чески стало стандартом в системах промышленной автоматизации.
Для осуществления гальванической развязки необходимо выполнить по-
дачу энергии в изолированную часть цепи и обмен с ней сигналами. Подача
энергии выполняется с помощью развязывающего трансформатора (в DC-DC
или AC-DC-преобразователях) или с помощью автономных источником пита-
ния: гальванических батарей и аккумуляторов. Передача сигнала осуществля-
ется через оптроны и трансформаторы, элементы с магнитной связью, кон-
денсаторы или оптоволокно.
Основная идея гальванической развязки заключается в том, что в элек-
трической цепи полностью устраняется путь, по которому возможна переда-
ча кондуктивной помехи.
Гальваническая изоляция позволяет решить следующие проблемы:
• исключает появление паразитных токов по шине земли, вызванных разно-
стью потенциалов отдаленных друг от друга земель, и тем самым снижает
индуктивные наводки, вызванные этими токами;
• уменьшает практически до нуля напряжение синфазной помехи на вхо-
де дифференциального приемника аналогового сигнала (например, на
рис. 3.16 синфазное напряжение на термопаре относительно земли не вли-
яет на дифференциальный сигнал на входе модуля ввода);
• защищает входные и выходные цепи модулей ввода и вывода от пробоя
большим синфазным напряжением (например, на рис. 3.16 синфазное на-
пряжение на термопаре относительно земли может быть как угодно боль-
шим, если оно не превышает напряжение пробоя изоляции).
Для применения гальванической развязки система автоматизации делит-
ся на автономные изолированные подсистемы, обмен информацией между ко-
торыми выполняется с помощью элементов гальванической развязки. Каж-
дая подсистема имеет свою локальную землю и локальный источник пита-
ния. Подсистемы заземляют только для обеспечения электробезопасности и
локальной защиты от помех.
Основным недостатком цепей с гальванической развязкой является повы-
шенный уровень помех от DC-DC-преобразователя, который, однако, для низ-
кочастотных схем можно сделать достаточно малым с помощью цифровой и
аналоговой фильтрации. На высоких частотах емкость подсистемы на зем-
лю, а также проходная емкость элементов гальванической изоляции являют-
ся фактором, ограничивающим достоинства гальванически изолированных си-
стем. Емкость на землю можно уменьшить, применяя оптический кабель и
уменьшая геометрические размеры изолированной системы.
Защита от помех
219
Таблица 3.5
Зависимость между рабочим и испытательным напряжениями
Рабочее напряже- ние, В Воздуш- ный зазор, мм Испытательное напряжение
Пиковое напряжение импульса, 50 мкс Действующее значение, 50/60 Гц, 1 мин Постоянное напряжение или пиковое значение напряжения 50/60 Гц, макс., 1 мин
150 1,6 2550 1400 1950
300 3,3 4250 2300 3250
600 6,5 6800 3700 5250
1000 11,5 10200 5550 7850
При использовании гальванически развязанных цепей понятие «напряже-
ние изоляции» часто трактуется неправильно. В частности, если напряжение
изоляции модуля ввода составляет 3 кВ, это не означает, что его входы могут
находиться под таким высоким напряжением в рабочих условиях. В зарубеж-
ной литературе для описания характеристик изоляции используют три стан-
дарта: UL1577, VDE0884 и IEC61010-01, но в описаниях устройств гальваниче-
ской развязки не всегда даются на них ссылки. Поэтому понятие «напряжение
изоляции» трактуется в отечественных описаниях зарубежных приборов неод-
нозначно. Главное различие состоит в том, что в одних случаях речь идет о
напряжении, которое может быть приложено к изоляции неограниченно долго
(рабочее напряжение изоляции), в других случаях речь идет об испытатель-
ном напряжении (напряжение изоляций), которое прикладывается к образцу
в течение от 1 мин до нескольких микросекунд. Испытательное напряжение
может в 10 раз превышать рабочее и предназначено для ускоренных испыта-
ний в процессе производства, поскольку напряжение, при котором наступает
пробой, зависит от длительности тестового импульса.
В табл. 3.5 показана связь между рабочим и испытательным (тестовым)
напряжениями по стандарту IEC61010-01. Как видно из таблицы, такие поня-
тия, как рабочее напряжение, постоянное, среднеквадратическое или пиковое
значение тестового напряжения, могут отличаться очень сильно.
Электрическая прочность изоляции отечественных средств автоматизации
испытывается по ГОСТ 51350 или ГОСТ Р МЭК 60950-2002 синусоидальным
напряжением с частотой 50 Гц в течение 60 с при напряжении, указываемом
в руководстве по эксплуатации как «напряжение изоляции». Например, при
испытательном напряжении изоляции 2300 В рабочее напряжение изоляции
составляет всего 300 В (табл. 3.5).
3.7. Зашита промышленных сетей от молнии
Во время разрядов молнии появляется сильное магнитное и электростати-
ческое поле, а также резко повышается потенциал земли в области заземле-
ния молниеотвода при ударе молнии. Все эти явления приводят к возникно-
вению опасных для аппаратуры напряжений на кабелях промышленных се-
тей и цепей питания.
220
Глава 3
3.7.1. Пути прохождения импульса молнии
Наибольшая величина наводки получается при ударе молнии в близко рас-
положенный молниеотвод. Поскольку напряженность магнитного поля спадает
обратно пропорционально расстоянию от источника поля, одним из способов ре-
шения проблемы может быть отдаление кабелей от молниеотвода. Использу-
ются также электромагнитное экранирование, полупроводниковые и газораз-
рядные защитные элементы.
Оценим напряжение и ток, наводимые молнией в кабелях промышленной
автоматики. Предположим, что ток молнии проходит по длинному вертикаль-
но расположенному молниеотводу, а здание не имеет экранирующих железо-
бетонных конструкций. Тогда напряженность магнитного поля внутри здания
на расстоянии R от молниеотвода будет описываться законом полного тока
2тгRH = г. Рассмотрим проводящую рамку (контур) длиной I и шириной d,
расположенную в плоскости молниеотвода. Предположим, что ширина рамки
достаточно мала, чтобы можно было пренебречь неоднородностью поля внутри
рамки, а напряженность поля однородна вдоль ее длины. Тогда э.д.с., наве-
денная в рамке, по закону Фарадея будет равна
__d$(f) _
dt
S di(t)
2irR dt ’
(3.10)
где до = 4тг • 10“7 Гн/м; д = 1, S = Id — площадь рамки; di(f)/dt — скорость на-
растания тока (см. п. 3.1.3). Для максимального значения di(t)/dt = 280 кА/мкс
при длине рамки I = 10 м и ширине d = 10 см (S = 1 м2) на расстоянии от мол-
Рис. 3.54. Заземление в
промышленной сети на ос-
нове интерфейса RS-485
ниеотвода R = 5 м получим Vmax = 11 кВ.
Поскольку молнии с такими параметрами
встречаются редко (см. п. 3.1.3), для типо-
вого случая di(t)/dt = 20 кА/мкс получим
^шах — 800 В.
На рис. 3.54 приведен один из наихуд-
ших случаев возникновения большой э.д.с. в
кабеле промышленной сети. Неэкранирован-
ная витая пара промышленной сети прохо-
дит параллельно молниеотводу и параллель-
но шине заземления, образуя контур пло-
щадью S на расстоянии R от молниеотво-
да. Кабель имеет гальваническую развяз-
ку с двух сторон. Молния наводит в конту-
ре э.д.с., равную сумме напряжений/на ем-
костях устройств гальванической развязки
Vi 4- V2 = К, величиной до 11 кВ при исход-
ных данных, приведенных выше.
Оценим величину тока, который будет
протекать в контуре после пробоя изоляции.
Молниеотвод и заштрихованный на рис. 3.54
контур являются связанными индуктивно-
Защита от помех
221
стями. Уравнение, связывающее напряжение К(£) и ток в контуре гк(£), в на-
шем случае будет иметь вид [96]
VK(t) = -M^- + LK^-, (3.11)
at at
где М — взаимная индуктивность, LK — индуктивность контура. В режи-
ме до пробоя ток в контуре равен нулю и выражение (3.11) принимает вид
VK(t) = — Mdi(t)/dt. Сравнивая его с (3.10), получим, что М = При
приведенных выше численных значениях параметров получим М = 0,04 мкГн.
Индуктивность контура можно приближенно (при I d) вычислить по
формуле для индуктивности двухпроводной линии [186]:
Ьк=/ход-1п(- + </(-) -1| , (312)
7г у а у \а J 1
где а — диаметр провода линии. При а = 1 мм и приведенных выше пара-
метрах контура получим LK = 21 мкГн.
После пробоя напряжение VK « 0 и, как следует из (3.11),
diK(t) _ М di(t)
dt LK dt
откуда
»«(*) =
т.е. форма тока в контуре будет совпадать с формой тока молнии (см. рис. 3.8).
При максимальном токе молнии 200 кА максимальный ток в контуре будет
равен 380 А. Отметим, что при диаметре провода 1 мм омическое сопротив-
ление контура составит 0,22 Ом и при э.д.с. в контуре 11 кВ ток короткого
замыкания был бы равен 50 кА, т.е. активным сопротивлением контура мож-
но пренебречь, что мы и сделали.
Если кабель экранирован и заземлен с двух сторон, то наведенный ток
может расплавить провод заземления экрана. Если экран заземлен с одной
стороны, то на втором его конце наводится напряжение относительно земли
в нашем примере от 800 В до 11 кВ.
Такие напряжения и токи действительно возникают в зданиях, не имеющих
в стенах металлической арматуры или других экранирующих поверхностей для
защиты от магнитного поля молнии. Если здание выполнено из железобетона,
то металлическая арматура в бетоне образует экранирующую сетку, которая,
в зависимости от расстояния между прутьями и их толщины, а также наличия
окон и дверных проемов, может ослабить магнитное поле в несколько раз.
Одним из способов уменьшения влияния разрядов молнии на кабели явля-
ется отдаление молниеотвода от здания или кабелей от молниеотвода. В част-
ности, если молния возникает на большом расстоянии от кабелей (например,
между двумя облаками на высоте 300 м), то в приведенной оценке ток и на-
пряжение наводки будут примерно в 100 раз меньшими.
222
Глава 3
Рис. 3.55. Появление высоких напряжений на элементах гальванической развязки
при ударе молнии
Несмотря на то что молниеотводы расположены вертикально, в металли-
ческих конструкциях зданий, в том числе в прутьях арматуры, наведенный
ток проходит не только параллельно молниеотводу, но и перпендикулярно ему,
создавая магнитное поле в контурах, расположенных не только вертикально,
но и горизонтально.
Вторым следствием удара молнии в молниеотвод является повышение по-
тенциала заземления молниеотвода и соединенного с ним заземления здания на
несколько киловольт [198, 199]. Если при этом кабель соединяет интерфейсы
систем передачи данных, расположенные в разных зданиях (рис. 3.55), то на-
пряжение между заземленными частями аппаратуры в разных зданиях может
превысить напряжение пробоя изоляции элементов гальванической развязки
интерфейсов Vi + V2 (рис. 3.55). Например, при токе молнии 50 кА и сопротив-
лении заземления 0,2 Ом это напряжение достигнет 10 кВ, что достаточно для
пробоя типовых модулей гальванической развязки.
3.7.2. Средства защиты
Эффективной защитой кабелей от магнитного поля молнии являются
стальные трубы (нельзя использовать трубы из нержавеющей стали, которая
не является ферромагнитным материалом) [186].
Для защиты от перенапряжений используются газонаполненные разряд-
ники, варисторы, TVS-диоды и TVS-тиристоры (Transient Voltage Suppressor —
подавитель переходных напряжений). Защитные элементы бывают двух ти-
пов: ограничивающие и шунтирующие (закорачивающие). Ограничивающие
элементы стабилизируют напряжение в линии на некотором уровне, напри-
мер на уровне напряжения стабилизации для ограничивающих стабилитронов
Защита от помех
223
(TVS-диодов). Шунтирующие элементы снижают напряжение в линии до на-
пряжения открытого состояния защитного элемента, например до напряжения
на тиристоре в открытом состоянии при защите TVS-тиристором.
В газонаполненных разрядниках при некотором напряжении начинается
лавинный пробой в газе и образуется канал с плазмой, имеющий низкое со-
противление. При этом напряжение на разряднике падает, энергия наведен-
ного молнией импульса выделяется в виде тепла в подводящих проводах, на
балластном резисторе (если он имеется) и на самом разряднике. Недостатком
газовых разрядников является большое время срабатывания (от 0,1 мкс до еди-
ниц микросекунд), ограниченный срок службы и низкая надежность, которая
связана с возможной разгерметизацией трубки при ее нагреве. Однако газовые
разрядники выдерживают очень большой ток, что делает их пригодными для
выполнения первой ступени защиты, с напряжением ограничения перенапря-
жения обычно от 90 В до 1 кВ. Несмотря на низкое быстродействие, газовые
разрядники способны рассеять основную часть энергии, пропуская на выход
только короткий выброс в начале импульса. Поэтому совместно с газовыми
разрядниками в качестве второй ступени защиты используются более быстро-
действующие элементы — варисторы и TVS-диоды.
Металло-окисные варисторы (MOV — Metal-Oxide Varistor) изготавлива-
ются в форме диска, площадь которого пропорциональна допустимому току.
Материалом для изготовления служит порошкообразный карбид кремния и
связующее вещество (жидкое стекло, лаки, смолы). Варистор можно упро-
щенно представить как множество полупроводниковых р-п-переходов, которые
включены последовательно и параллельно. Поэтому сопротивление варистора
падает с простом приложенного напряжения. Недостатком варисторов явля-
ется сильная нестабильность напряжения срабатывания во времени и дегра-
дация параметров с каждым актом срабатывания. Напряжение срабатывания
варисторной защиты лежит в диапазоне от нескольких вольт до 1,5 кВ, ток —
от единиц ампер до десятков тысяч ампер, время срабатывания составляет
несколько наносекунд.
Наилучшим элементом защиты являются TVS-диоды и TVS-тиристоры,
которые известны также под торговыми марками Trans Zorb, Transil, Insel.
TVS-тиристоры представляют собой обычный тиристор со стабилитроном
в цепи управляющего электрода. При повышении напряжения на стабилитроне
более напряжения стабилизации в управляющий электрод начинает протекать
ток, отпирающий тиристор. Открытый тиристор выполняет роль шунтирую-
щего элемента, понижая напряжение в защищаемой линии до 1...2 В. После
окончания импульса молнии ток линии становится меньше тока удержания ти-
ристора, и он переходит в запертое состояние. TVS-тиристоры имеют время
срабатывания около нескольких наносекунд.
TVS-диоды имеют такую же структуру, технологию изготовления и прин-
цип действия, как обычные стабилитроны (основаны на лавинном пробое р-п-
перехода), но спроектированы специально для работы при больших токах ма-
лой длительности и имеют малую емкость обратно смещенного р-п-перехода.
Благодаря монокристальной кремниевой технологии параметры TVS диодов
стабильн^к во времени. Время срабатывания достигает нескольких пикосекунд.
224
Глава 3
Рис. 3.56. Защита линий интерфейса RS-485 от перенапряжений
Напряжение срабатывания задается техпроцессом и лежит в диапазоне от 2,8
до 440 В. Для уменьшения емкости диода, которая шунтирует промышлен-
ную сеть, последовательно с TVS-диодом включают обычный кремниевый ди-
од с малой емкостью (около 100 пФ). При отсутствии импульсов перенапряже-
ния оба диода заперты, поэтому линия шунтируется только емкостью диода.
TVS диоды изготавливаются двух видов: однонаправленные и двунаправлен-
ные (симметричные), состоящие из двух последовательно соединенных диодов,
направленных встречно. Время срабатывания у однонаправленных TVS-диодов
составляет единицы пикосекунд, у двунаправленных — единицы наносекунд.
TVS-диоды и тиристоры способны рассеивать мощность до нескольких кило-
ватт при импульсе перенапряжения длительностью до 1000 мкс, пропуская
ток до тысяч ампер.
На рис. 3.56 показаны две схемы построения цепей защиты для промыш-
ленной сети на основе интерфейса RS-485. На рис. 3.56,а показана схема на
симметричных TVS-диодах и двухэлектродных газонаполненных разрядниках.
В качестве балластного резистора могут быть использованы позисторы, ко-
торые увеличивают свое сопротивление при нагревании протекающим током.
На рис. 3.56,6 показана аналогичная схема, но с применением несимметрич-
ных TVS-диодов и трехэлектродного газонаполненного разрядника. Поскольку
балластный резистор включен последовательно с линией передачи, его сопро-
тивление стараются сделать по возможности меньшим.
Частично импульсы перенапряжения можно уменьшить с помощью филь-
тров на конденсаторах, однако конденсаторы часто представляют собой недо-
пустимо большую емкостную нагрузку для защищаемой цепи.
Устройства защиты разных интерфейсов и цепей различаются напряже-
нием срабатывания (ограничения). Для телефонных линий это напряже-
ние составляет 65 В, для Ethernet — 5 В, для сетей на основе интерфейса
RS-485 — 7,5 В.
3.8. Стандарты и методы испытаний по ЭМС
В области электромагнитной совместимости (ЭМС) действует более 100 го-
сударственных стандартов, основные из которых приведены в списке литера-
Защита от помех
225
туры [210-246]. Стандарты делятся на гармонизированные с международны-
ми стандартами и негармонизированные, принятые до 1999 г. В стандартах
устанавливаются как ограничения на излучаемую энергию, так и требования
к помехоустойчивости.
Виды испытаний на помехоустойчивость установлены в общем стандарте
ГОСТ Р 51317.4.1-2000. Для средств промышленной автоматизации существу-
ет специальный стандарт ГОСТ Р 51522-99 «Электрическое оборудования для
измерения, управления и лабораторного применения. Требования и методы ис-
пытаний». Он распространяется на промышленные контроллеры, регуляторы,
испытательное, измерительное и лабораторное оборудование.
В соответствии с этим стандартом для средств промышленной автомати-
зации используют следующие виды испытаний:
• на электростатические разряды по ГОСТ Р 51317.4.2;
• на излучаемое радиочастотное электромагнитное поле по ГОСТ Р 51317.4.3;
• на наносекундные импульсные помехи по ГОСТ Р 51317.4.4;
• на микросекундные импульсные помехи большой энергии по ГОСТ Р
51317.4.5;
• на кондуктивные помехи, наведенные радиочастотными электромагнитны-
ми полями, по ГОСТ Р 51317.4.6;
• на динамические изменения напряжения электропитания по ГОСТ Р
51317.4.11.
Стандарт ГОСТ Р 51522-99 устанавливает четыре критерия качества функ-
ционирования испытываемых устройств:
• критерий А: устройство нормально функционирует в процессе испытаний;
• критерий В — в процессе испытаний некоторые характеристики ухудша-
ются или некоторые функции не выполняются, но устройство полностью
восстанавливает функционирование без вмешательства оператора;
• критерий С — аналогично критерию А, но для восстановления функций
требуется вмешательство оператора, например перезапуск системы;
• критерий D — во время испытаний происходит ухудшение характеристик
или потеря функционирования, которые не восстанавливаются даже после
вмешательства оператора. Это может произойти, например, вследствие по-
вреждения элементов, потери части программного кода или данных.
Устанавливаются также нормы на помехоэмиссию (излучение помех) для
оборудования разных классов.
3.9. Верификация заземления
и экранирования
После выполнения мер по защите от помех осуществляется проверка их
эффективности или соответствия проекту (верификация). Соответствие госу-
дарственным стандартам устанавливается в процессе сертификационных ис-
пытаний на соответствие комплексу стандартов по электромагнитной совме-
стимости.
226
Глава 3
Однако до испытаний, в процессе разработки и экспериментальной доводки
проектируемых изделий обычно используют осциллографы, преимущественно
с «плавающим» (батарейным) питанием и самописцы.
Самописцы [181] помогают найти плохие («шуршащие») контакты в цепи
заземления и питания аппаратуры, а также редко появляющиеся сбои в си-
стемах автоматизации. Для этого с помощью многоканального компьютерного
самописца (например, серии RealLab!) контролируют интересующий параметр,
напряжение в цепи низковольтного питания, в питающей сети 220 В и разность
напряжений между несколькими точками системы заземления. Непрерывная
запись параметров процесса и напряжений позволяет установить причинно-
следственную связь между сбоями технологических параметров и выбросами
напряжения в цепи питания и заземления.
Осциллографы с «плавающим» питанием [189] позволяют контролировать
величину и частоту помехи на клеммах заземления в монтажных шкафах ав-
томатики, оценить уровень и найти источник магнитного поля помехи с помо-
щью антенны из нескольких витков провода, подключенной к осциллографу.
Аналогично можно найти источник электрического поля с помощью пласти-
ны (обкладки конденсатора).
Идеальным прибором для исследования помех мог бы стать миниатюр-
ный цифровой осциллограф с малой емкостью на землю (в том числе на ру-
ки оператора), с батарейным питанием, имеющий потенциальный, токовый и
электрометрический входы и передающий сигнал в компьютер через оптиче-
ский кабель.
3.10. Заключение
К проблеме помехозащищенности систем промышленной автоматизации
следует относиться с особым вниманием, поскольку неправильный выбор схемы
подключения или разводки кабелей, системы заземления и экранирования мо-
гут обесценить оплаченные достоинства интеллектуальной части системы. В то
же время правильное понимание описанных проблем позволит в ряде случаев
достичь хороших результатов с применением недорогого оборудования.
На практике решение проблемы помех следует начинать с поиска их источ-
ника. Для этого в первую очередь следует измерять уровень помех в приемнике
сигнала, в источнике и в соединительном кабеле.
Нельзя оставлять часть входов многоканальной системы незаземленными.
На выходе при этом будут видны собственные шумы приемника сигнала. Нуж-
но убедиться, что уровень шумов соответствует спецификации на изделие. Ес-
ли имеются расхождения, то вероятной причиной могут быть источники помех,
воздействующие непосредственно на плату системы или неправильное подклю-
чение цепей питания и заземления. Для их обнаружения можно попробовать
изменить местоположение измерительной части системы.
Для измерения уровня помех, наведенных в кабеле, нужно подключить его
к системе сбора данных и закоротить кабель со стороны источника сигнала,
т.е. имитировать нулевое внутреннее сопротивление источника. Если уровень
помехи будет сильно отличаться от случая, когда источник сигнала подключен,
Защита от помех
227
то причина может быть в недостаточно низком сопротивлении источника. Для
его уменьшения следует использовать подходящий согласующий усилитель или
выбрать более помехоустойчивый способ передачи сигнала.
Для оценки уровня собственных помех источника сигнала его нужно соеди-
нить максимально коротким проводом со входом приемника.
Если источник помех заранее неизвестен, его поиску может помочь спек-
тральный анализ помехи.
Для увеличения точности передачи каждый сигнал должен передаваться
витой парой в индивидуальном экране. При изготовлении витых пар для ин-
дустриальных применений особое значение уделяется симметрии импедансов
проводов в паре и равномерности их частотных характеристик в полосе ра-
бочих частот. Равномерность характеристики позволяет выполнять компен-
сацию асимметрии линий и тем самым уменьшать влияние паразитных наво-
док. Для уменьшения паразитных наводок, создаваемых на кабеле магнит-
ной составляющей электромагнитного излучения, необходимо обеспечить ми-
нимально возможный шаг скрутки проводников в витой паре и минимальную
площадь петель, образующихся при подключении витой пары к источнику и
приемнику сигнала.
При невысоких требованиях к точности могут быть использованы витые
или не витые сигнальные провода в общем экране. Однако в этом случае по-
являются индуктивные и емкостные взаимовлияния проводников в кабеле, а
также кондуктивные связи через общий провод заземления экрана.
Если полоса частот сигнала меньше, чем полоса приемника, или если неко-
торые параметры сигнала известны заранее, для уменьшения помех можно ис-
пользовать аналоговые фильтры на входе системы. Для ослабления помехи с
частотой 50 или 60 Гц обычно используют фильтры третьего порядка, имею-
щие наклон АЧХ в полосе заграждения —60 дБ на декаду или режекторные
sinc-фильтры. Если измерения проводятся на частотах, близких к граничной
частоте фильтра, следует учитывать динамическую погрешность коэффици-
ента передачи фильтра.
Радикальные методы решения проблем заземления.
1. Используйте модули ввода-вывода только с гальванической развязкой.
2. Не применяйте длинных проводов от аналоговых датчиков. Располагай-
те модули ввода в непосредственной близости к датчику, а сигнал передавайте
в цифровой форме. Используйте датчики с цифровым интерфейсом.
3. На открытой местности и при больших дистанциях используйте опти-
ческий кабель вместо медного.
4. Используйте только дифференциальные (не одиночные) входы моду-
лей аналогового ввода.
Другие советы.
5. Исцользуйте в пределах вашей системы автоматизации отдельную зем-
лю из медной шины, соединив ее с шиной защитного заземления здания толь-
ко в одной точке.
6. Аналоговую, цифровую и силовую землю системы соединяйте только
в одной точке. Если этого сделать невозможно, используйте медную шину с
228
Глава 3
большой площадью поперечного сечения для уменьшения сопротивления меж-
ду разными точками подключения земель.
7. Следите, чтобы при монтаже системы заземления случайно не обрат
зовался замкнутый контур.
8. Не используйте по возможности землю как уровень отсчета напряже-
ния при передаче сигнала.
9. Если провод заземления не может быть коротким или если по конструк-
тивным соображениям необходимо заземлить две части гальванически связан-
ной системы в разных точках, то эти системы нужно разделить с помощью
гальванической развязки.
10. Цепи, изолированные гальванически, нужно заземлять через большое
сопротивление, чтобы избежать накопления статических зарядов.
11. Экспериментируйте и пользуйтесь приборами для оценки качества за-
земления. Допущенные ошибки видны не сразу.
12. Пытайтесь идентифицировать источник и приемник помех, затем нари-
суйте эквивалентную схему цепи передачи помехи с учетом паразитных ем-
костей и индуктивностей.
13. Пытайтесь выделить самую мощную помеху и в первую очередь за-
щищайтесь от нее.
14. Цепи с существенно различающейся мощностью следует заземлять
группами так, чтобы все группы имели примерно одинаковую мощность.
15. Заземляющие проводники с большим током должны проходить отдель-
но от чувствительных проводников с малым измерительным сигналом.
16. Провод заземления должен быть по возможности прямым и коротким.
17. Не делайте полосу пропускания приемника сигнала шире, чем это надо
из соображений точности измерений.
18. Используйте экранированные кабели, экран заземляйте в одной точ-
ке, со стороны источника сигнала на частотах ниже 1 МГц и в нескольких
точках — на более высоких частотах.
19. Для особо чувствительных измерений используйте «плавающий» ба-
тарейный источник питания.
20. Экраны должны быть изолированными, чтобы не появилось случай-
ных замкнутых контуров, а также электрического контакта между экраном
и землей.
Глава 4
Измерительные каналы
Измерительные каналы являются наиболее сложной частью систем авто-
матизации и требуют глубоких знаний для получения достоверных результатов
измерений. Качество полученных данных зависит не только от погрешности
средств измерений, вовремя выполненной поверки или калибровки, но, в боль-
шей степени, от корректности методики измерений, правильности выполнения
системы заземления, экранирования и кабельной разводки. Измерительные
каналы систем автоматизации, в отличие от измерительных приборов, созда-
ются в «полевых условиях», что является причиной появления ошибок, на-
личие которых не всегда удается обнаружить. Множество проблем возникает
при выполнении статистической обработки результатов измерений, при необхо-
димости достичь предела разрешающей способности системы, при выполнении
косвенных, совместных и многократных измерений.
Для получения достоверных результатов требуются знания в области мет-
рологии, математической статистики, теории случайных процессов, теории ин-
формации и электроники. Это самостоятельные объемные области знаний, ко-
торые являются темой множества учебников и монографий. Поэтому ниже
рассматриваются только наиболее важные вопросы измерений в промышленной
автоматизации, которые часто понимаются неправильно или неоднозначно.
4.1. Основные понятия
4.1.1. Определения основных терминов
Метрология использует понятия, которые требуют точных и однозначных
определений. С течением времени происходит уточнение понятий, и их опреде-
ления закрепляются в стандартах, рекомендациях по стандартизации и метро-
логических инструкциях. Основные термины и определения современной мет-
рологии установлены в рекомендациях по метрологии РМГ 29-99 [247], введен-
ных в действие 1 января 2001 г. взамен ГОСТ 16263-70.
Измерение — это совокупность операций, обеспечивающих нахождение со-
отношения измеряемой величины с ее единицей измерения и получение значе-
ния этой величины. Измерение выполняется с помощью технического средства,
хранящего единицу физической величины.
230
Глава 4
Контроль — это операции по определению соответствия характеристик из-
делия установленным нормам. Контроль включает в себя проведение изме-
рений, испытаний или проверки характеристик изделия. Результатом кон-
троля является заключение о соответствии или несоответствии. Может
быть получено несколько градаций состояния соответствия. Контроль харак-
теризуется достоверностью, т.е. степенью доверия к его результатам. Если
контроль выполняется с помощью средств измерений, он называется измери-
тельным контролем.
Индикатор — это техническое средство, предназначенное для установле-
ния наличия какой-либо физической величины или превышения уровня ее по-
рогового значения. Например, индикатор может выдавать сигнал о превыше-
нии уровня загазованности котельной порогового значения.
Измерительная система — совокупность функционально объединенных
мер, измерительных приборов, измерительных преобразователей, ЭВМ и дру-
гих технических средств, размещенных в разных точках контролируемого объ-
екта с целью измерений одной или нескольких физических величин, свойствен-
ных этому объекту, и выработки измерительных сигналов в разных целях.
Примером измерительной системы может быть радионавигационная систе-
ма для определения местоположения различных объектов, состоящая из ря-
да измерительно-вычислительных комплексов, разнесенных в пространстве на
значительное расстояние друг от друга.
В зависимости от назначения измерительные системы разделяют на изме-
рительные информационные, измерительные контролирующие, измеритель-
ные управляющие и др.
Измерительно-вычислительный комплекс (ИВК) — функционально объ-
единенная совокупность средств измерений, ЭВМ и вспомогательных устройств,
предназначенная для выполнения в составе измерительной системы конкрет-
ной измерительной задачи.
Измерительный канал — совокупность технических средств измеритель-
ной системы, которая выполняет законченную функцию от восприятия изме-
ряемой величины до получения результата измерения, выраженного числом
или соответствующим ему кодом.
Точность измерений — основная характеристика качества средств изме-
рений, которая характеризует степень близости результата измерения к ис-
тинному значению измеряемой величины. Точность можно представить как
величину, обратную модулю относительной погрешности, однако количествен-
ное выражение точности используется редко, обычно говорят «высокая точ-
ность, низкая точность», а для численного описания точности используют по-
нятие погрешности.
Погрешность измерений — величина отклонения результата измерения от
истинного значения измеряемой величины.
Предел допускаемой погрешности — границы зоны, за которую не долж-
на выходить погрешность с вероятностью, равной единице. Параметр сред-
ства измерений.
Косвенные измерения — измерения, при которых результат определяется
по известной зависимости между искомой величиной (т.е. величиной, которую
Измерительные каналы
231
надо найти) и измеряемыми величинами. Пример — измерение сопротивления
путем измерения напряжения и тока с последующим нахождением их отноше-
ния является косвенным измерением.
Совместные измерения — проводимые одновременно измерения двух или
нескольких неодноименных величин для определения зависимости между ними.
Например, измерение вольтамперной характеристики диода. Для определения
параметров зависимости обычно используют метод наименьших квадратов.
Совокупные измерения — проводимые одновременно измерения нескольких
одноименных величин, при которых искомые значения величин определяют пу-
тем решения системы уравнений, получаемых при измерениях этих величин в
различных сочетаниях. Пример — измерение сопротивления двух резисторов
по результатам измерения измерений суммарного сопротивления их последо-
вательного и параллельного соединения.
Инструментальная, или аппаратная погрешность — погрешность сред-
ства измерения. Делится на основную и дополнительную.
Основная погрешность измеряется и нормируется в нормальных условиях
эксплуатации (при температуре 20 °C, атмосферном давлении 760 мм рт. ст.,
относительной влажности 60 % — по ГОСТ 8.395 [266]).
Дополнительная погрешность учитывает влияние внешних факторов —
температуры, давления, напряжения источника питания, влажности, утечки
входных каскадов измерительного преобразователя и др.
Погрешность метода измерений (методическая погрешность) — состав-
ляющая систематической погрешности измерений, обусловленная несовершен-
ством принятого метода измерений. Погрешность метода иногда называют тео-
ретической погрешностью.
Динамическая погрешность возникает, когда измеряемая величина не по-
стоянна во времени. Для ее описания используют, например, импульсную или
переходную характеристику средства измерения или их изображения по Лапла-
су и Фурье. Увеличивается при приближении частоты измеряемого сигнала к
границе полосы пропускания измерительного канала.
Систематическая погрешность — погрешность, величина которой остает-
ся постоянной от измерения к измерению и которая может быть обнаружена с
помощью поверки или калибровки и затем скомпенсирована. Примером являет-
ся погрешность нелинейности термопары, которая компенсируются с помощью
таблиц поправок в контроллере измерительного модуля.
Систематические погрешности обычно изменяются с течением времени
(дрейфуют), что делает необходимым периодическую калибровку измеритель-
ных приборов. Эти изменения вызваны процессами старения и износа элемен-
тов измерительных устройств. Старение может привести к увеличению погреш-
ности в 1,25...2,5 раза [248]. Систематические погрешности выявляются путем
сравнения результатов измерений с аналогичными результатами, выполненны-
ми образцовым прибором или измерениями с помощью других приборов, рабо-
тающих на иных физических принципах.
Систематическая погрешность являются случайной величиной на множе-
стве приборов одного типа и детерминированной для отдельного образца сред-
232
Глава 4
ства измерений. Поэтому в паспорте прибора она может быть указана в виде
математического ожидания и среднеквадратического отклонения.
Случайные погрешности не могут быть предсказаны, т.е. являются случай-
ными величинами. Они обнаруживаются в виде различия результатов отдель-
ных измерений при многократных измерениях. Основной их причиной являют-
ся помехи внутри измерительного прибора и собственные шумы электронных
компонентов. В эксплуатационной документации указывают среднеквадрати-
ческое отклонение случайной составляющей погрешности или, для более точ-
ного описания, нормализованную автокорреляционную функцию или функцию
спектральной плотности. Некоррелированные случайные погрешности могут
быть уменьшены путем усреднения результатов многократных измерений.
Промах — погрешность результата отдельного измерения, входящего в ряд
измерений, которая для данных условий резко отличается от остальных ре-
зультатов этого ряда. Иногда вместо термина «промах» применяют термин
«грубая ошибка» измерений.
Абсолютная погрешность измерительного прибора определяется как раз-
ность между измеренным с его помощью и точным значением измеряемой ве-
личины. Абсолютная погрешность имеет размерность измеряемой величины.
Относительная погрешность выражается в процентах от текущего зна-
чения измеряемой величины.
Порог чувствительности — наименьшее значение физической величины,
начиная с которого может осуществляться ее измерение данным средством.
Приведенная погрешность — это отношение абсолютной погрешности к
верхнему пределу диапазона измерений для симметричных диапазонов изме-
рений или к ширине диапазона для несимметричных.
Если абсолютная погрешность не изменяется при изменении измеряемой
величины, то для ее учета она складывается с результатом измерений. Та-
кая погрешность называется аддитивной. Примером аддитивной погрешности
является погрешность, вызванная смещением нуля операционного усилителя.
Погрешность может увеличиваться с ростом значений измеряемой вели-
чины. Такую погрешность учитывают путем умножения результата измере-
ний на величину погрешности и называют мультипликативной. Примером
мультипликативной погрешности является погрешность коэффициента переда-
чи измерительного преобразователя. Мультипликативная относительная по-
грешность является постоянной величиной. Мультипликативная и аддитивная
погрешности обычно являются параметрами линейной зависимости, позволяю-
щей рассчитать результирующую погрешность средства измерений. Итоговая
абсолютная погрешность измерений находится по формуле
А = 7о^ + До, (4.1)
где 7о — мультипликативная погрешность, До — аддитивная погрешность, х —
значение измеряемой величины.
Приведенную погрешность тоже можно представить состоящей из мульти-
пликативной и аддитивной компоненты:
__ 7о До
7пр — y Х + V
(4-2)
Измерительные каналы
233
где Хк — верхний предел диапазона измерений для симметричных диапазонов
измерений или ширина диапазона для несимметричных.
Аналогично можно представить и относительную погрешность:
7отн = 7о + — • (4.3)
X
При малых значениях измеряемой величины погрешность измерений опре-
деляется абсолютной погрешностью, при больших — относительной.
В некоторых случаях зависимость погрешности от значения измеряемой
величины является более сложной, чем это можно учесть с помощью формулы
(4.1). Тогда используют более сложные зависимости. Например, для мегаом-
метра максимальная точность оказывается не у верхнего предела измерений,
а посередине диапазона, поскольку с ростом значений измеряемой величины х
(сопротивления) растет входное сопротивление прибора, следовательно, с уве-
личением х растет и погрешность измерений. В таких случаях формула для
погрешности приобретает вид
а а я2 До х
Д = 7оя +До +-т—, 7отн = —+7о + -т— • (4.4)
Доо ^оо
где Доо — верхний порог чувствительности.
Нормированное значение погрешности — это величина погрешности, ко-
торая учитывает технологический разброс серии изготавливаемых измеритель-
ных приборов и является предельной для всех приборов данного типа. По-
грешность любого прибора из данной серии может быть меньше предельной,
но не может превышать ее. Нормированное значение погрешности заносит-
ся в паспорт прибора.
Номинальная характеристика — распространяющаяся на все средства из-
мерений данного типа, в отличие от индивидуальной характеристики, которая
распространяется только на конкретный экземпляр прибора.
Класс точности указывает нормированное значение погрешности в процен-
тах. Однако класс точности учитывает целую совокупность метрологических
характеристик, таких как, например, нестабильность погрешности в течение го-
да, сопротивление изоляции и др. [249]. Класс точности 0,1 может быть присво-
ен прибору, имеющему погрешность 0,1 %. Для указания мультипликативной
погрешности класс точности помещается в кружок, для указания аддитивной
погрешности указывается просто число без дополнительных символов.
Вариация показаний измерительного прибора — разность показаний при-
бора в одной и той же точке диапазона измерений при плавном подходе к этой
точке со стороны меньших и больших значений измеряемой величины.
Диапазон измерений — область значений измеряемой величины, в пределах
которых нормированы допускаемые пределы погрешности средства измерений.
Динамический диапазон — это отношение предела измерения к порогу чув-
ствительности, обычно выражается в децибелах. Для измерений в широком
динамическом диапазоне используют измерительные приборы с переключае-
мыми диапазонами измерений. Во время переключения диапазонов происходит
изменение схемы соединения элементов, при которой динамический диапазон
234
Глава 4
сдвигается в сторону больших или меньших значений измеряемой величины.
В автоматизированных системах переключение диапазонов измерений выпол-
няется автоматически по программе, записанной в компьютер или контроллер.
В качестве примера см. руководство на модуль NL-8AI (www.RealLab.ru).
Воспроизводимость результатов измерений характеризует близость ре-
зультатов измерений, выполненных различными средствами в разное время в
разных местах. Оценка воспроизводимости позволяет выявить грубые ошиб-
ки в процессе измерений или некорректно поставленные методики измерений,
влияние трудно учитываемых внешних факторов.
Калибровка — совокупность операций, позволяющих определить поправки
к показаниям средства измерений или оценить погрешность этих средств.
Поверка — установление официально уполномоченным органом пригодно-
сти средства измерений к применению. Поверке подвергают средства измере-
ний, подлежащие государственному метрологическому контролю и надзору.
4.1.2. Точность, разрешающая способность и порог
чувствительности
При выборе модулей ввода-вывода аналоговых сигналов по критерию точ-
ности, разрешающей способности и чувствительности необходимо понимать раз-
личие этих терминов. Типовое заблуждение состоит в том, что «если мо-
дуль ввода имеет погрешность ±0,05 %, то разрядность его АЦП более чем
12 бит плюс знак (±1/212 = ±1/2048 = ±0,05) является бесполезной». По-
кажем, что это не так.
Точность (погрешность) характеризует степень отличия результата измере-
ния от точного значения, связанного с эталоном единицы физической величины.
Разрешающая же способность показывает, какое минимальное отклонение из-
меряемой величины может быть зарегистрировано измерительным прибором.
Например, если модуль ввода в диапазоне измерений -10...±10 В имеет по-
грешность ±0,05 %, то его порог чувствительности равен ±5 мВ. Однако бла-
годаря наличию 16-разрядного АЦП этот модуль может различить два вход-
ных сигнала, отличающихся на 20/216 = 0,3 мВ, т.е. его разрешающая способ-
ность в ±5/0,3 = ±16 раз выше порога чувствительности. Отметим, что это
справедливо при условии, что уровень собственных шумов модуля ввода ни-
же величины младшего значащего разряда (МЗР), т.е. погрешность является
чисто систематической. При большой случайной погрешности Можно предпри-
нять меры для ее уменьшения, например с помощью усреднения результатов
многократных измерений (см. п. 4.2.1 «Повышение точности путем усредне-
ния результатов измерений»).
Порог чувствительности, который определяется погрешностью измерений,
может быть гораздо больше, чем разрешающая способность, поскольку при
определении погрешности учитывают:
• нелинейность измерительного прибора во всем диапазоне измерений;
• динамику процесса старения прибора;
• технологический разброс метрологических параметров от прибора к при-
бору;
Измерительные каналы
235
• не только систематическую, но и случайную некоррелированную компо-
ненту погрешности, которая может быть уменьшена до уровня МЗР путем
многократных измерений с последующим усреднением результатов.
Разрешающая способность не зависит от перечисленных выше факторов, и
это объясняет ее отличие от порога чувствительности и погрешности.
Приведем несколько примеров, когда требования к погрешности на не-
сколько порядков могут отличаться от требований к разрешающей способности.
Пример 1. Предположим, имеется релейный регулятор, который в соот-
ветствии с алгоритмом своей работы должен определить знак разности между
температурой в печи и значением уставки. Если для измерения температуры
используется термопара с датчиком температуры холодного спая, с погрешно-
стью измерений 2 °C, то для измерения температуры в диапазоне 0...100 °C
достаточно 50 уровней квантования, что может быть обеспечено 6-разрядным
АЦП. Если же использовать 16-разрядный АЦП, то разрешающая способность
по температуре составит 100/216 = 0,0015 °C. В случае применения б-разрядного
АЦП колебания температуры в процессе регулирования не могут быть менее
2 °C, в то время как при использовании 1 б-разрядного АЦП амплитуда коле-
баний приближается к 0,0015 °C. Такой регулятор используется, когда важна
стабильность во времени, а не точность соответствия уставке. Например,
стабильность (а не точность) важна для термостатов, которые используются
при калибровке термодатчиков методом сличения с показаниями образцового
прибора. Напомним, что альтернативным вариантом является калибровка с
помощью калибратора (задатчика), который должен иметь высокую точность
(и одновременно стабильность) задания температуры.
Пример 2. В элеваторах для хранения растительного сырья наблюдается
эффект самосогревания, связанный, в основном, с деятельностью микроорга-
низмов. Для обеспечения качества зерна абсолютное значение температуры
достаточно знать с погрешностью в несколько градусов, но факт ее роста же-
лательно фиксировать с разрешающей способностью 0,1...0,01 °C. Высокая раз-
решающая способность позволяет предупредить развитие очага самосогрева-
ния на ранней стадии и расположить датчики температуры на большом рас-
стоянии один от другого.
Пример 3. Если требуется обнаружить момент времени начала химиче-
ской реакции по признаку начала роста температуры, то необходим прибор с
высокой разрешающей способностью, но необязательно высокой точностью.
Пример 4. Пусть требуется оценить параметры колебательного процесса
(декремент затухания колебаний, период колебаний, коэффициент нелинейных
искажений, длительность переходного процесса, величину помехи на фоне по-
лезного сигнала) — во всех перечисленных случаях находится соотношение
ординат или абсцисс функции в разных ее точках, т.е. пропорции между от-
дельными частями графика, которые не зависят от самого значения функции.
Поэтому такие измерения могут быть выполнены прибором, имеющим низкую
точность, но высокую разрешающую способность. Дополнительным требова-
нием в этом примере является достаточная линейность измерительного канала
в рассматриваемом диапазоне.
236
Глава 4
Для улучшения разрешающей способности при низкой точности использу-
ется «электронная лупа» (аналогичный термин в фотоаппаратах называется
«zoom»). В основе принципа работы электронной лупы лежит свойство любых
нелинейностей f(x) приближаться к линейным зависимостям:
f(x0 + Дх) «/(х0) + Дх (4.5)
X=XQ
при малых Дж, что обеспечивает отсутствие нелинейных искажений формы
исследуемого сигнала. Работа электронной лупы состоит в том, что из иссле-
дуемого сигнала вычитается некоторый постоянный уровень /(жо), а разность
усиливается с помощью аналогового усилителя или квантуется АЦП с высо-
кой разрядностью. При этом величина постоянного уровня может быть за-
дана с низкой точностью, поскольку целью является измерение соотношений
отдельных участков сигнала между собой, а не относительно единицы физи-
ческой величины.
Отметим, что понятие «разрешающая способность» отсутствует в РМГ
29-99 [247]. Причина, вероятно, в том, что это понятие не связано с измерением
как операцией сличения с эталоном, но связано с оценкой отношений между
физическими величинами, ни одна из которых не является эталоном, что не
относится к измерениям в смысле РМГ 29-9911.
Точность, разрешающая способность и порог чувствительности в общем
случае выше у АЦП с большим числом двоичных разрядов, хотя прямой связи
здесь нет. АЦП с высокой разрядностью может иметь большой уровень шу-
мов, высокую нестабильность источника опорного напряжения и связанную
с ними низкую точность.
4.1.3. Функция автокорреляции
Погрешности измерений, обусловленные наведенными помехами и соб-
ственными шумами электронных приборов, описываются с помощью математи-
ческой теории, получившей название «теория случайных процессов». Напом-
ним основные понятия этой теории, которые мы будем использовать в дальней-
шем изложении и которые используются ГОСТом 8.009 [261] при нормировании
случайной составляющей погрешности измерений.
Отличительной чертой случайного процесса является невозможность пред-
сказания его мгновенного значения. Поэтому отдельные реализации случайно-
го процесса описываются случайными функциями x(t), значения которых в лю-
бой момент времени t являются случайными величинами. Запись мгновенных
значений случайного процесса на некоторый носитель информации (например,
на жесткий диск компьютера) дает нам только одну реализацию случайного
процесса, поскольку его повторные записи в тех же самых условиях показыва-
ют совсем другую функцию времени. Набор реализаций случайного процесса
называется ансамблем. Невозможность аналитического описания случайных
функций времени по причине чрезмерной их громоздкости делает необходимым
применение статистического описания случайных процессов.
Случайный процесс называется стационарным, если его статистические ха-
рактеристики (математическое ожидание, среднеквадратическое отклонение и
Измерительные каналы
237
корреляционная функция) не изменяются с течением времени. Например, из-
менение мгновенной погрешности средства измерений с течением времени при
постоянной температуре окружающей среды приближенно можно считать ста-
ционарным случайным процессом, поскольку среднеквадратическое отклоне-
ние и математическое ожидание погрешности не изменяются с течением време-
ни, по крайней мере в пределах межповерочного интервала.
В дальнейшем мы будем использовать только понятие стационарного эрго-
дического случайного процесса, если иное специально не оговорено. Для эргоди-
ческого процесса усреднение по ансамблю реализаций можно заменить усред-
нением по времени на интервале времени Т —> оо. Поэтому математическое
ожидание эргодического случайного процесса определяется формулой
1 Гт
тпх — lim — / x(t) dt, (4.6)
Т—оо Г Jq
среднеквадратическое отклонение
= lim i [ [x(t) - mx]2 dt. (4.7)
T-^OO 1 Jq
автокорреляционная функция
1 1 fT
R(t) = lim — I [x(t)-mx][x(t4-r)—mx\ dt = lim — / [x(t)x(t-Fr)] dt—(4.8)
T—>OO 1 Jq T—>0O 1 Jq
Коэффициент корреляции случайного процесса по определению
r(t) = R(t)/a2. (4.9)
Как видно из определения, функция автокорреляции равна усредненному
произведению реализации центрированного случайного процесса (т.е. процесса,
из которого удалена постоянная составляющая тх) на свою копию, сдвинутую
по времени на величину т. Поэтому при т = 0 она равна дисперсии случайного
процесса (сравните выражения (4.8) и (4.7)):
Я(0) = а2. (4.10)
Если реализация случайного процесса x(t) имеет ограниченный по частоте
спектр, то при растяжении ее графика во времени наступает момент, когда он
начинает выглядеть не как шум, а как извилистая гладкая кривая. Поэтому
вероятность того, что при достаточно малом сдвиге т значения функции будут
различаться сильно, становится пренебрежимо малой. При увеличении сдвига
т эта вероятность возрастает. Поэтому при малых т автокорреляционная функ-
ция всегда мало отличается от а коэффициент корреляции — от единицы.
Часто используются понятия «интервал корреляции», или «время корре-
ляции», под которыми понимается величина временного сдвига тк, при превы-
шении которого корреляцией можно пренебречь в условиях конкретного экспе-
римента. Обычно интервал корреляции определяют как
Гк = = ^2 [ dt'
Щу) Jo °х Jo
238
Глава 4
б)
Время, t
Рис. 4.1. Коррелированный (а) и некоррелированный (б) случайные процессы
(погрешности измерений)
Если интервал корреляции равен нулю, то случайный процесс называют
некоррелированным или белым шумом. В противном случае случайный про-
цесс является коррелированным. В качестве примера на рис. 4.1 приведен при-
мер коррелированного (вверху) и некоррелированного (внизу) случайного про-
цесса. Реальные процессы все являются коррелированными, поскольку имеют
ограниченную мощность и, следовательно, ограниченную полосу частот. Одна-
ко на определенном интервале времени (частот) их можно приближенно счи-
тать некоррелированными.
Определения (4.6)-(4.9) используются только при теоретическом анализе
случайных процессов, поскольку при реальных измерениях значения случай-
ной величины всегда дискретны и количество измерений ограничено. Поэтому
вместо математического ожидания, среднеквадратического отклонения и кор-
реляционной функции используют соответствующие им выборочные значения,
или оценки соответствующих статистических параметров, которые определя-
ются по формулам:
оценка математического ожидания
1 N“1
= jy $2 х^' (4Л1)
Ас=О
оценка среднеквадратического отклонения
= —у J2 - ^i2- (412)
Ас=О
оценка автокорреляционной функции
N-n-1
Я(п) = ——- [x(fcr) - mx][x(fcr + пт) - тх]. (4.13)
Измерительные каналы
239
В пределе при N —> оо приведенные оценки параметров стремятся к их
истинным значениям. В приведенных формулах для оценок параметров и самих
параметров использованы одни и те же обозначения, поскольку в дальнейшем
мы будем использовать только оценки, если иное не оговорено специально.
Отдельно взятая реализация случайного процесса x(t) является детермини-
рованной (неслучайной) функцией, поэтому для нее можно найти спектраль-
ную характеристику с помощью преобразования Фурье:
X(ju) = [ x(t)e~iutdt. (4.14)
J—оо
Однако функция X(jcu) на практике не используется, поскольку она также
сложна в описании, как и x(t). Вместо нее используют понятие спектральной
плотности мощности (энергетического спектра):
ЭД = lim (4.15)
В соответствии с этим определением, спектральная плотность мощности
шума измеряется в В2/с-1 или В2/Гц, А2/Гц и т.п. Отметим, что в теории слу-
чайных процессов понятие мощности отличается от общепринятого: предпола-
гается, что энергия шума выделяется на сопротивлении 1 Ом, но размерность
[Ом] не указывается, поэтому вместо размерности мощности [Вт] = [В2/Ом] =
= [А2 Ом] используется [В2], [А2]. Аналогично, энергия измеряется не в
[Дж] = [В2с-Ом] = [А2-с-Ом], а в [В2-с] = [А2-с].
Автокорреляционная функция R(f) и спектральная плотность мощности
S(o>) связаны между собой преобразованием Фурье (теорема Винера-Хинчина
[161]):
R(t) = ^~ [°° dw, (4.16)
2тг J—OQ
S(w)= [ R(t)e~jut dt, (4.17)
J—оо
т.е. спектральная плотность мощности является Фурье-изображением корре-
ляционной функции.
Поскольку Я(0) = <т2 (см. (4.10)), подставив t = 0 в формулу (4.16), получим
а2 = Л(0) = [°° ЭД dw = 2^- /°° S(w) dcu = 2 /°° S(/) df. (4.18)
2тг J-qq 27Г Jq Jq
Здесь коэффициент 2 используется, когда нижний предел интегрирования за-
меняется на 0. Это возможно благодаря тому, что спектральная плотность
мощности, любого реального случайного процесса описывается четной функ-
цией частоты [250].
Если энергетический спектр лежит в диапазоне частот от /н > 0 до /в, на-
пример благодаря применению фильтра, то можно считать, что за пределами
указанного диапазона частот его значения равны нулю и это позволяет изме-
240
Глава 4
нить пределы интегрирования в (4.16):
а2 =2 S(J)df. (4.19)
Jfn
При использовании формул (4.16) и (4.19) надо помнить, что в них приме-
нен двусторонний энергетический спектр (симметричный относительно начала
оси ординат). В случае одностороннего спектра F(/) = 2S(/), заданного в диа-
пазоне частот [0, оо), коэффициент 2 должен отсутствовать:
<^ = Л” F(f)df. (4.20)
Jfn
Это выражение позволяет найти среднеквадратическую погрешность измерения
(например, напряжения оу [В]) в диапазоне частот [/„, /в] как
/ Г/в
<?V = \ F^df- (4-21)
V •'/н
В зарубежной справочной литературе на графиках спектральной плотности
мощности шума транзисторов, операционных усилителей и др. обычно по оси
ординат откладывается корень квадратный из спектральной плотности мощно-
сти шума y/F(f), имеющий размерность [В/\/Гц, А/>/Гц] и т.п. В этом случае
напряжение шума еш (среднеквадратическое значение) можно найти как
вш = J Аул/)]2#- (4.22)
V *'/н
Для белого шума F(f) = const и предыдущее выражение упрощается:
вш = v/F(/)(/B - /н). (4.23)
Эффективной шириной энергетического спектра называется величина Д/,
определяемая по формуле
Д/=-^- /°°F(/)d/, (4.24)
Гmax Jq
где Fmax — максимальное значение функции F(f). Таким образом, эффектив-
ной шириной энергетического спектра Д/ называют диапазон частот, в котором
заключена такая же энергия, как и в диапазоне [0, оо] при условии, что в диа-
пазоне Д/ энергия имеет величину Fmax и распределена равномерно.
В дальнейшем понятие случайного процесса будет использоваться для опи-
сания случайной погрешности измерений.
4.1.4. Коэффициент корреляции
При расчете погрешности измерительного канала возникает задача сумми-
рования погрешностей средств измерений, которые являются случайными ве-
личинами. Способ суммирования будет различным в зависимости от того, явля-
ются ли случайные величины статистически зависимыми. Понятие статистиче-
Измерительные каналы
241
Рис. 4.2. Примеры сильной (a), Rxy = 0,954 и слабой (б), Rxy — —0,045 корреляции слу-
чайных величин X и У. Показана также прямая линия среднеквадратической регрессии
ской зависимости иллюстрируется рис. 4.2: если с ростом одной случайной ве-
личины X в среднем увеличивается (или уменьшается) и вторая (У), то между
этими величинами имеется статистическая зависимость. Для ее количествен-
ного описания используются понятия ковариации и коэффициента корреляции.
Рассмотрим суммирование двух случайных погрешностей X и У с нулевым
математическим ожиданием (т.е. центрированных случайных величин). Дис-
персия суммы двух случайных величин по определению равна математическо-
му ожиданию квадрата их суммы:
D[X ± У] = М[(Х ± У)2] = М[Х2 ± 2XY + У2] =
= М[Х2] + М[У2] ± 2M[XY] = а2 + а2 ± 2Кху, (4.25)
где £>[•] и М[-] — операторы дисперсии и математического ожидания; ах, ау —
среднеквадратические отклонения случайных величин X и У.
Величина
Кху = M[XY] (4.26)
называется ковариацией («совместной вариацией») случайных величин X и У.
Ковариацию дискретных случайных величин можно оценить по их дискрет-
ным значениям X = {xi, ...хм} и У = {2/1,..л/n} с помощью формулы сред-
него арифметического:
- N N
КхУ = jy У2 Х{Уз'
г=1 j=l
(4-27)
Коэффициентом корреляции Rxy называют отношение ковариации к произ-
ведению среднеквадратических отклонений сгх и сгу случайных величин X и У:
N N
Y,Y,Xiyi-
i=l j=l
Rxy —
Кху
(?х&у
1
N(yx(yy
(4-28)
Когда случайные величины независимы, их коэффициент корреляции ра-
вен нулю, R^y = 0 [251], и такие величины называются некоррелированными.
242
Глава /
Если коэффициент корреляции равен единице Rxy = 1, то между величинами
X и Y имеется не статистическая, а функциональная зависимость.
Используя понятие среднеквадратического отклонения ах = урав-
нение (4.25) можно записать в виде
<т[Х ± У] = + <у2 ± (4.29)
Здесь знак «-» используется, когда случайные величины вычитаются, напри-
мер если находится разность напряжений двух измерительных каналов. При
этом наличие корреляции между каналами частично уменьшает погрешность
разности.
В случае, когда случайные величины статистически независимы (Rxy = 0),
предыдущее выражение упрощается:
а[Х±У] = ^2 + <72. (4.30)
Такое суммирование называют геометрическим, поскольку оно выполняется
аналогично нахождению гипотенузы прямоугольного треугольника.
Если коэффициент корреляции Rxy = 4-1, то
<т[Х ± У] = У<т2 + <т2 ± 2ахау = у/(сгх ± <7v)2 = |ах ± сг^. (4.31)
Если коэффициент корреляции равен Rxy = -1, то
<т[Х ± Y] = ^/<т2 + <72 т 2<7х<Ту = у/(<тх =F Сту)2 = |<тх Т <Ту|> (4.32)
т.е. при нахождении суммы случайных величин отрицательный коэффициент
корреляции уменьшает итоговую погрешность, а при нахождении разности —
увеличивает.
Если случайные величины не центрированы и имеют математические ожи-
дания тх и ту, то коэффициент корреляции можно оценить как
1 N N
Rxy — ат 5353^* ~ тх)(Уэ ~ ту)- (4.33)
i=i j=i
На рис. 4.2 показаны примеры статистической зависимости между случай-
ными величинами при сильной (а) и слабой (6) корреляции. Точки на гра-
фике (значения случайной величины) могут группироваться очень близко к
прямой линии, которая аппроксимирует эту зависимость, и тогда статистиче-
ская зависимость приближается к детерминированной. Степень отличия ста-
тистической зависимости от детерминированной характеризуют коэффициен-
том корреляции Rxy.
Прямая линия, проведенная таким образом, что сумма квадратов откло-
нений значений случайной величины от этой линии минимальна, называется
линией среднеквадратической регрессии.
Тангенс угла наклона линии называется коэффициентом регрессии. Урав-
нение линии регрессии можно получить методом наименьших квадратов; оно
Измерительные каналы
243
имеет вид [255]
у = А(х - тх) + ту,
где А — коэффициент регрессии. Коэффициент регрессии вычисляется через
коэффициент корреляции Rxy и среднеквадратические отклонения ау и ах как
А = ЯХ!/^. (4.34)
Коэффициент корреляции приобретает ясный физический смысл, если ста-
тистические переменные центрировать (вычесть математическое ожидание) и
нормировать на величину среднеквадратического отклонения. Поскольку сред-
неквадратические отклонения нормированных величин равны единице, то ко-
эффициент корреляции становится равен тангенсу наклона линии среднеквад-
ратической регрессии.
Статистическая зависимость между погрешностями средств измерений в
общем случае нелинейная, однако этой нелинейностью обычно пренебрегают.
4.1.5. Точечные и интервальные оценки погрешности
Погрешности средств измерений и измерительных каналов средств автома-
тизации могут быть выражены двумя различными способами: с помощью то-
чечных оценок и с помощью интервальных. К точечным оценкам относится ма-
тематическое ожидание погрешности и среднеквадратическое отклонение. В ка-
честве интервальной оценки используют интервал погрешности, который охва-
тывает все возможные значения погрешности измерений с вероятностью Р, Эта
вероятность называется доверительной или надежностью оценки погрешности.
Предел допускаемой погрешности можно рассматривать как точечную
оценку или как интервальную для доверительной вероятности, равной единице.
Интервальная оценка является более гибкой, поскольку она позволяет ука-
зать погрешность измерений в зависимости от того, какая требуется вероят-
ность реализации этой погрешности для конкретных условий эксплуатации
средства измерений.
Смысл интервальной оценки погрешности иллюстрируется рис. 4.3. Здесь
использованы следующие обозначения: Д — погрешность измерения; р(Д) —
плотность распределения погрешностей Д; Ф(Д) — функция распределения по-
грешностей, Ф(Д) = f^oop(x)dx. Для нормального закона распределения по-
грешностей (закона Гаусса) плотность распределения центрированной случай-
ной величины Д описывается функцией
р(Д) = ^=е-д2/2<’2 = -1 е-°’8<д/")2,
где а — среднеквадратическая погрешность.
Если погрешность измерения Д находится внутри интервала Д1 < Д < Д2,
то вероятность этого события вычисляется как
гЛ2 /ДА /ДА
Р(Д1 < Д < Д2) = / p(x)dx = Ф ( — ) - Ф — ). (4.35)
\ 67 / \ а /
244
Глава 4
Рис. 4.3. Иллюстрация понятий доверительного интервала и доверительной
вероятности
В наиболее типичном случае симметричных границ (—До < А < До) по-
лучим
Р(-До < Д < До) = Ф (—) - Ф (= 2Ф (—) - 1. (4.36)
у а / \ (Т / \ (т /
Здесь использовано свойство симметрии функции распределения для закона
Гаусса.
Таким образом, если задан интервал -До < Д < До, который содержит в
себе погрешность измеряемого параметра Д, то вероятность того, что погреш-
ность Д не выходит за границы интервала, можно найти по формуле (4.36) для
нормального закона распределения. Вероятность Р(-До < Д < До) называют
также надежностью оценки погрешности и обозначают символом 7:
7 = 2Ф (—) -1.
у (У /
(4.37)
Для вычисления функции распределения удобно использовать пакеты
MathCAD, MATLAB. С их помощью из формулы (4.37) несложно найти величи-
ну доверительного интервала [—До, 4-До], если задана величина надежности 7.
Для До = сг доверительная вероятность 7 = 68,3 %; для До = 2а 7 = 95,3 %;
для До = Зег 7 = 99,7 % и для До = 4а 7 = 99,994 %.
Для увеличения надежности оценки погрешности измерений или для суже-
ния доверительного интервала при заданной надежности можно использовать
усреднение результатов многократных измерений. Поскольку оценка средне-
квадратической погрешности результата усреднения аср равна аср = crx/y/~N
(см. (4.41)), где аж — среднеквадратическая погрешность средства измерений,
N — количество однократных измерений, то, подставив в (4.37) вместо а ве-
личину аср, получим
7 = 2Ф
(4.38)
Измерительные каналы
245
Эта формула позволяет найти количество однократных измерений 2V, которое
необходимо усреднить для получения требуемого доверительного интервала
[-До, 4-До] при заданной надежности 7 или требуемой надежности 7 при задан-
ном доверительном интервале [—До, 4-До]- Поскольку формула (4.38) задана в
неявном виде, для нахождения требуемых неизвестных следует воспользовать-
ся математическими пакетами для компьютерных вычислений.
Следует иметь в виду, что повышение точности путем усреднения резуль-
татов многократных измерений имеет множество ограничений (см. п. 4.2).
Проблемой использования интервального метода оценки погрешности яв-
ляется необходимость знания закона распределения погрешностей.
Отметим, что доверительные интервалы, полученные из рассеяния мно-
жества измерений, никак не учитывают систематическую погрешность изме-
рений. Интересные примеры из истории определения расстояния до Солнца,
заряда электрона и др. приводятся в книге [256]. Ученые, которые делали
эти выдающиеся измерения, указывали доверительные вероятности для оцен-
ки точности своих измерений. Однако ни одна из этих оценок не выдержала
испытания временем: каждое новое, более точное измерение не укладывается
в предсказанный ранее доверительный интервал. Это связано с тем, что си-
стематическую погрешность или наличие ошибки в постановке эксперимента, в
учете факторов, о существовании которых мы не знаем, оценить невозможно,
не имея более точного измерительного прибора.
4.1.6. Погрешность метода измерений
Для выполнения автоматизированных измерений используют датчики и из-
мерительные преобразователи, измерительные модули ввода аналоговых сиг-
налов, обработку результатов измерений на компьютере или в контроллере.
При этом на погрешность результата измерений оказывают влияние следую-
щие факторы:
• сопротивление кабелей;
• соотношение между входным импедансом средства измерений и выходным
импедансом датчика;
• качество экранирования и заземления, мощность источников помех;
• погрешность метода косвенных, совместных или совокупных измерений;
• наличие внешних влияющих факторов, если они не учтены в дополнитель-
ной погрешности средства измерений;
• погрешность обработки результатов измерений с помощью программного
обеспечения.
Все погрешности, которые не могут быть учтены в процессе сертифика-
ционных испытаний и внесены в паспорт средства измерений, а появляются в
конкретных условиях применения, относятся к методическим. В отличие от
них, инструментальные погрешности нормируются в процессе производства из-
мерительного прибора и заносятся в его эксплуатационную документацию. Та-
ким образом, если в состав смонтированной автоматизированной измеритель-
ной системы входят средства измерений с нормированными погрешностями, то
246
Глава Д
погрешность, вызванная перечисленными выше факторами, является методи-
ческой. Если же выполняется сертификация всей измерительной системы, то
методические погрешности могут быть учтены в погрешности всей системы и
тогда они переходят в разряд инструментальных.
Для расчета или измерения методической погрешности трудно дать общие
рекомендации. Каждый конкретный случай требует отдельного рассмотрения.
4.1.7. Погрешность программного обеспечения
Погрешность программного обеспечения (ПО) [269, 270] оценивается как
разность между результатами измерений, полученных данным ПО и эталон-
ным ПО. Под эталонным понимается программное обеспечение, высокая точ-
ность которого доказана многократными испытаниями и тестированием. По-
нятие эталонного ПО является условным и определяется соглашением между
заказчиком аттестации и исполнителем. В качестве эталонного может быть
использовано ранее аттестованное ПО.
К основным источникам погрешностей ПО относятся:
• ошибки записи исходного текста программы и ошибки трансляции програм-
мы в объектный код;
• ошибки в алгоритме решения измерительной задачи;
• ошибки в таблицах для линеаризации нелинейных характеристик преоб-
разования;
• применение неустойчивых или медленно сходящихся алгоритмов при ре-
шении плохо обусловленных измерительных задач;
• ошибки преобразования форматов данных;
• ошибки округления и др.
Надежность (достоверность) ПО обеспечивается средствами защиты от
несанкционированных изменений, которые могут явиться причиной появления
не учтенных при аттестации погрешностей.
4.1.8. Достоверность измерений
В процессе выполнения измерений могут появиться грубые ошибки (про-
махи), которые делают измерения недостоверными несмотря на применение
очень точных измерительных приборов. Здесь под достоверностью понима-
ется степень доверия к полученным результатам. Достоверность может быть
низкая при наличии погрешностей, о существовании которых экспериментатор
не догадывается. Достоверность при использовании автоматизированных из-
мерительных систем снижается с ростом их сложности и существенно зависит
от квалификации персонала проектирующей и монтажной организации.
Главным методом обеспечения достоверности является сопоставление ре-
зультатов измерения одной и той же величины разными, не связанными друг с
другом способами. Например, после монтажа системы измерения температуры
в силосе элеваторе следует сравнить показания автоматизированной системы
и автономного контрольного термометра, чтобы убедиться в правильности по-
казаний автоматизированной системы.
Измерительные каналы
247
Приведем несколько примеров, иллюстрирующих случаи, когда, несмотря
на применение точных средств измерений, получаются совершенно ошибочные
данные, вводящие человека в заблуждение.
Пример 1. Для измерения температуры воздуха в теплице использован
датчик температуры с погрешностью ±0,5 °C. Однако датчик установлен таким
образом, что в некоторые часы на него падают прямые лучи солнца, которые
нагревают датчик, но не изменяют температуру воздуха. При этом погреш-
ность измерения температуры воздуха может составить ±5 °C, что позволяет
квалифицировать результат измерения как недостоверный.
Пример 2. Для измерения температуры в силосах элеватора установлены
точные датчики и сделан тщательный монтаж, но расположенный на крыше
элеватора ретранслятор сотовой связи оказался незамеченным и не было при-
нято достаточных мер для защиты от помех. При этом погрешность измерения
температуры может составить ±10 °C вследствие помех, наведенных передат-
чиком на сигнальных кабелях системы.
Пример 3. В автоматизированной системе для измерения параметров про-
дукции использован модуль ввода с погрешностью ±0,05 %, однако при наладке
системы программист по ошибке установил частоту помехоподавляющего ре-
жекторного фильтра не 50, а 60 Гц. Объем проведенных приемо-сдаточных ис-
пытаний системы не позволил выявить эту ошибку. В результате погрешность
измерений вследствие наведенной помехи с частотой 50 Гц может повыситься
до ±10 % вместо ожидаемых ±0,05 %.
Пример 4. Во время выполнения измерений ваш коллега разговаривал по
сотовому телефону. Наводка сигнала от передатчика сотового телефона может
повысить погрешность измерений в несколько раз.
Пример 5. При монтаже системы заземлили экран сигнального кабеля
с двух сторон. Объем проведенных приемо-сдаточных испытаний не позво-
лил выявить эту ошибку. Погрешность может увеличиться в несколько раз
по сравнению с ожидаемой.
Пример 6. В процессе эксплуатации системы нарушился контакт в цепи
заземления, что привело к эпизодическому повышению уровня помех в изме-
рительной цепи. В статье [257] приводится пример, когда плохо затянутый
болт в цепи заземления приводил к сбоям системы автоматики, причину ко-
торого искали несколько лет.
Пример 7. При расчете погрешности средств измерений была проигнори-
рована динамическая погрешность, поскольку исходные данные для ее расчета
не были указаны в эксплуатационной документации на средство измерения и
не были выявлены в процессе приемосдаточных испытаний ввиду сложности
постановки эксперимента, отсутствия времени и приборов для контроля вели-
чины погрешности. Во время эксплуатации системы фактическая погрешность
в несколько раз превышает расчетную.
В приведенных примерах сложно обнаружить наличие погрешности в про-
цессе сдачи системы в эксплуатацию или она появляется в процессе эксплуата-
ции. Это приводит к снижению достоверности измерений несмотря на высокую
инструментальную точность использованных технических средств.
248
Глава 4
Общий подход к решению проблемы заключается в применении второй,
независимой системы или методики измерений для обнаружения ошибок. Мож-
но использовать также целый комплекс мер, включая подбор персонала, со-
блюдение графика поверки, тщательность выполнения типовых и сертификат
ционных испытаний системы, соблюдение методики измерений и обслуживав
ния измерительной системы.
Термин «достоверность» иногда используется во втором его значении —•
для указания вероятности того, что измеренное значение находится в заданном
доверительном интервале [248] при условии, что все промахи и ошибки изме-
рительной системы и методики измерений исключены. Количественным вырат
жением достоверности в данном случае является доверительная вероятность
(см. п. 4.1.5). Следует различать эти два значения одного и того же термина.
4.2. Многократные измерения
Одной из наиболее распространенных операций, выполняемых в системах
сбора данных и управления, является усреднение результатов многократных
измерений. Интуитивно ясно, что этот процесс приводит к повышению точно-
сти, поскольку результаты отдельных измерений имеют как положительные,
так и отрицательные отклонения от точного значения и поэтому частично вза-
имно компенсируются. С ростом числа измерений среднее значение отрица-
тельных отклонений приближается по модулю к среднему значению положи-
тельных отклонений и точность их взаимной компенсации улучшается. Для
практики важно получить количественную зависимость между числом измере-
ний и погрешностью усредненного результата.
4.2.1. Повышение точности путем усреднения
результатов измерений
Рис. 4.4. Модуль ввода изме-
ряет физическую величину х и
выдает случайную величину X
Рассмотрим некоторое средство измере-
ний, например измерительный модуль анало-
гового ввода NL-8AI (www.RealLab.ru) для из-
мерения и ввода в компьютер значений напря-
жения х (рис. 4.4). В общем случае на датчик,
линию связи между датчиком и модулем и сам
модуль действуют электромагнитные помехи
и собственные шумы операционных усилите-
лей, АЦП, резисторов, микропроцессорной ча-
сти модуля и т.п. [194, 195]. Мы не будем
рассматривать помехи, действующие на объ-
ект измерений, поскольку он не входит в со-
став измерительного канала.
Указанные причины приводят к тому, что результат измерения становится
случайной величиной, значение которой изменяется от измерения к измере-
нию. Случайная величина X может быть описана некоторой функцией рас-
пределения с математическим ожиданием М(Х) = тх и среднеквадратическим
Измерительные каналы
249
отклонением которое принимается за случайную составляющую погрешно-
сти измерительного прибора. Дисперсия случайной величины D(X) = а*.
Погрешность средства измерений определяется изготовителем и указывает-
ся в эксплуатационной документации. В величину погрешности входит как си-
стематическая, так и случайная составляющая. Если случайная составляющая
превышает 10 % от систематической, то она указывается отдельно (ГОСТ 8.009
[261]). В некоторых случаях случайная составляющая указывается с помощью
автокорреляционной функции или спектральной плотности мощности.
Случайная составляющая погрешности может быть снижена усреднением
результатов многократных измерений. Если в составе погрешности преобла-
дает систематическая компонента, то усреднение не приводит к повышению
точности. О наличии случайной составляющей можно судить по рассеянию
результатов однократных измерений.
Предположим, что с помощью измерительного модуля выполнено N из-
мерений, в результате которых получены значения xi,X2,Усреднение
результатов измерений выполняется по формуле среднего арифметического
1 N
хср ~ (4.39)
i=l
Однако тср также является случайной величиной, поскольку, выполняя не-
сколько серий измерений и усредняя каждую из их, мы получим отличаю-
щиеся друг от друга средние значения хср для каждой серии. Но хср будет
иметь меньшую дисперсию (среднеквадратическое отклонение), чем измери-
тельный прибор. Покажем это.
Будем считать, что результаты измерений Xi, х2,т/v являются незави-
симыми случайными величинами. Тогда дисперсия их среднего арифмети-
ческого будет равна
^р) = D I — ^Xi I = -^D I I =
t=l
откуда
acp = (4.41)
поскольку (7Cp = y/D(xcp).
В (4.40) использованы два свойства оператора дисперсии: 1) дисперсия про-
изведения случайной величины и константы равна дисперсии случайной вели-
чины, умноженной на квадрат константы, и 2) дисперсия суммы случайных
величин равна сумме дисперсий каждой из них [251]. Кроме того, считает-
ся, что все измерения выполнены одним и тем же прибором, т.е. дисперсии
всех измерений одинаковы и равны D(xi) = а случайные величины явля-
ются некоррелированными.
250
Глава 4
Докажем первое из использованных свойств. По определению дисперсия
D(X) и математического ожидания М(Х) = тх случайной величины X
N N / N \ 2
D(X) = М[(Х - М(Х))2] = 1 £(х< - тхУ = 1 £ - 1 £ . (4.42)
1=1 1=1 \ 1=1 /
Поэтому, умножая X на константу С, получим
1N/ 1 * \2 г2 N ( 1 N \2
= = =с-вд.
t=l \ 1=1 / 1=1 \ t=l /
Докажем теперь, что дисперсия суммы случайных величин равна сумме их
дисперсий. Для этого сначала докажем, что математическое ожидание суммы
случайных величин равно сумме их математических ожиданий, т.е.
N N
M(^Xi) = Y/M(Xi). (4.43)
1=1 1=1
Сумма случайных величин X -F Y — это такая случайная величина, ко-
торая принимает все возможные комбинации сумм случайных величин X и У,
т.е. X -F Y = {zi + з/1,£1 + 2/2, ^2 + 2/1, ^2 + 2/2, + Vn}- Поэтому по опре-
делению математического ожидания
1 N N - Г N N N N
i=l j=l г=1 j=l i=l j=l
1
N2
’ N N N N 1 .TN N
+ =N2 ^xtN + ^yjN
i=l j=l i=l j=l Li=l i=l
1 " 1 "
= jvl>‘ + jv5> = "<x> + M(y)-
Аналогичное соотношение для N случайных величин можно доказать попарной
группировкой случайных величин. Формула (4.43) доказана.
Выведем еще вспомогательное равенство, связывающее дисперсию случай-
ной величины с математическим ожиданием. Пользуясь определением дис-
персии (4.42), получим:
D(X) = М[(Х - тпх)2] = М(Х2 - 2Хтх + т2х) = М(Х2) - 2М(Х)тх + т2х.
Поскольку М(Х) = тх, получим
D(X) = М(Х2) - т2х = М(Х2) - [М(Х)]2, (4.44)
Пользуясь соотношениями (4.43) и (4.44), получим дисперсию суммы двух
случайных величин в виде
D(X + У) = М[(Х + У)2] - [М(Х + У)]2 = М[Х2 + 2XY + У2] - [М(Х + У)]2 =
= M(X2) + M(Y2^2mxmy-[mx+my]2 = М(Х2)-тп2+М(У2)-тп2 = Р(Х)+Р(У).
Измерительные каналы
251
Итак, усреднение N некоррелированных измерений (см. (4.41)) позволяет
уменьшить погрешность результата в \/N раз. Однако это утверждение спра-
ведливо при соблюдении нескольких условий, выполнимость которых довольно
трудно проверить на практике.
Во-первых, усреднение дает эффект только для случайной составляющей
погрешности. Погрешность измерений перестает уменьшаться, когда аср ста-
новится настолько малой, что суммарная погрешность определяется систе-
матической составляющей. Систематическая погрешность складывается из
нелинейности АЦП и операционных усилителей, температурной зависимости
напряжения смещения нуля и коэффициента передачи измерительного кана-
ла (температурно-зависимые погрешности учитываются как дополнительные),
низкочастотных шумов, у которых время автокорреляции больше времени вы-
полнения серии повторных измерений (к ним относится, в частности, «ста-
рение» элементов), динамической погрешности. Практически редко удается
снизить общую погрешность измерений более чем в 2...3 раза с помощью
усреднения.
Во-вторых, результаты измерений должны быть статистически независи-
мы, т.е. интервал времени между соседними измерениями должен быть мно-
го больше времени автокорреляции случайной погрешности. Посмотрим на
рис. 4.5: если при белом шуме средние значения за интервалы времени Ati
и Д^2 равны между собой (внизу), то при коррелированном шуме — не рав-
ны (вверху). К примеру, усреднение 100 измерений в течение 10 с не может
скомпенсировать компоненты шума, спектр которых лежит ниже 0,1 Гц.
В частности, требование статистической независимости измерений не вы-
полняется также в случае, когда действует искусственная помеха, делающая
шум цветным (коррелированным), например помеха от сотового передатчика
на крыше здания, от радиотелефона, из сети 50 Гц, от сварочного аппарата, от
молнии, от внутренних генераторов измерительного прибора, от электродрели
и т.п. В этих случаях усреднение также ослабляет помеху, но уже не в \/N
раз (подробнее см. следующий раздел).
Описанный эффект имеет место только для тех законов распределения слу-
чайной величины, для которых существует понятие среднего и среднеквадрати-
Рис. 4.5. Коррелированная (а)
и некоррелированная (б) слу-
чайные погрешности измерения;
Scpi, я?ср2 — средние значения
за время измерения Ati и Д<2
Время, t
252
Глава 4-
ческого отклонения. Например, для распределения Коши интегралы, дающие!
названные определения, расходятся [252].
Особо следует отметить, что как систематическая, так и случайная состав-
ляющие погрешности средств измерений являются случайными величинами.
Однако между ними имеется принципиальное различие. Систематическая по-
грешность является случайной на множестве средств измерений, но детермъг
нированной для каждого образца из множества. Поэтому систематическую по-
грешность невозможно уменьшить путем многократных измерений одним и тем
же прибором, но можно уменьшить, усредняя результаты, полученные измере-
нием с помощью множества средств измерений одного типа. Случайная же по-
грешность является случайной на множестве результатов измерений одним
и тем средством измерений и поэтому ее можно уменьшить путем усреднения
результатов многократных измерений.
В отличие от погрешности, разрешающая способность не зависит от систе-
матической погрешности и поэтому может быть увеличена существенно. Она
может стать даже меньше величины младшего значащего разряда АЦП при
условии, если стабильность его уровней позволяет это сделать. На этом эф-
фекте основан принцип действия дельта-сигма АЦП.
Если в паспорте на средство измерения не указана случайная составляю-
щая погрешности, то ее можно оценить по результатам измерений [253]:
лГЛ &Xi ~ тх^' (4-45)
где коэффициент М зависит от количества измерений N. При N > 60 он равен
единице, при N < 60 о выборе этого коэффициента см. в книге [253].
Вопросам повышения точности путем многократных измерений посвящен
ГОСТ 8.207-76 [268].
4.2.2. Точность и продолжительность измерений
При использовании описанной выше процедуры усреднения результатов из-
мерений никак не учитывалось, за какое время выполняется серия измерений,
поскольку предполагалось, что погрешность является некоррелированным (бе-
лым) шумом. Ниже будут рассмотрены эффекты, которые возникают в реаль-
ных условиях, когда шум измерений является цветным. Попутно станет ясно,
почему точные измерительные приборы работают медленно.
Измерительные каналы средств автоматизации обычно являются частью
систем, компоненты которых распределены в пространстве и соединены между
собой кабельными линиями. Поэтому на них воздействует весь спектр помех,
имеющихся в конкретной электромагнитной обстановке. Основными компо-
нентами случайной погрешности, вызванной помехами, являются белый шум,
фликкер-шум (1//) и относительно узкополосные помехи от работающего элек-
трооборудования, передатчиков и естественных источников электромагнитно-
го излучения.
Пример одной реализации белого шума (некоррелированной погрешности
измерения) показан на рис. 4.5,6 Характерной его чертой является то, что
Измерительные каналы
253
при изменении масштаба по оси времени внешний вид графика не изменяется,
уменьшается только среднеквадратическое значение шума вследствие умень-
шения ширины временного окна наблюдения.
В отличие от этого, график реализации коррелированного шума изменя-
ет свой внешний вид в зависимости от ширины окна наблюдения (рис. 4.5,а).
Коррелированный шум с заданной автокорреляционной функцией можно по-
лучить из белого, пропустив его через фильтр с заранее рассчитанной пере-
даточной характеристикой.
Многократные измерения с усреднением всегда выполняются на конечном
интервале времени At. Если случайная погрешность не коррелировала, то ее
математическое ожидание равно нулю и не зависит от величины интервала
Ati,A*2 (см. рис. 4.5) и момента начала измерения. Поэтому усреднение по
формуле (4.39) может дать неограниченное уменьшение случайной составляю-
щей погрешности измерений с ростом числа измерений.
Если же интервал усреднения At меньше времени корреляции (см.
рис. 4.5,а), то на каждом отдельно взятом интервале усреднения Ati или At2
получим разные значения погрешности. В отличие от белого шума погрешность
среднего арифметического при увеличении количества измерений будет стре-
миться к некоторому значению xcpi или яСр2 (рис. 4.5,а), отличному от нуля.
Поэтому формула (4.39) перестает быть справедливой.
Поскольку в реальных измерениях всегда присутствует, по крайней мере,
фликкер-шум (что является фундаментальным законом природы [250]), кото-
рый делает шум измерений отличным от белого, то усреднение измерений не
может снизить случайную составляющую погрешности до нуля. Кроме того, в
цифровых средствах измерений всегда присутствует помеха с частотой такто-
вого генератора, которая придает окраску белому шуму.
Предположим, что измерения выполняются в течение конечного промежут-
ка времени Т (т.е. во временном окне шириной Т) и за это время выполняется N
измерений с равными интервалами т = T/N между ними, после чего находится
среднее значение тср (4.39). Предположим для простоты, что измеряемая ве-
личина равна нулю, т.е. в результате измерений мы получаем только значение
случайной погрешности, которое обозначим s(t).
Найдем среднеквадратическое отклонение погрешности тср. Для этого вы-
полним множество измерений сериями по выполняя усреднение в пределах
каждой серии. В результате получим множество значений тср.
Измерения будем выполнять в моменты времени 0, т, 2т,... Nr (рис. 4.6,а).
Обратим внимание, что измерения в моменты времени 0, т, 2т,... Nr эквива-
лентны измерениям в один и тот же момент времени t (рис. 4.6,6), если ис-
пользовать линии задержки, которые будут сдвигать реализацию случайного
процесса на 0, т, 2т,... Nr. Поэтому результат усреднения измерений, выпол-
ненных за время Т = Nt, можно записать в виде
1 N~x
xCP(t) = — 52 *(* - Лт)> (4-46)
к=0
где t — момент времени выполнения измерений.
254
Глава 4
Время, t Время, t
а) б)
Рис. 4.6. Измерения в разные моменты времени 0, т, 2т эквивалентны измере-
нию в один и тот же момент времени t, если использовать линию задержки на т и 2т
Функцию яСр(£) можно описать с помощью спектральной плотности мощно-
сти, для чего сначала найдем ее Фурье-изображение:
/СО rOO |
^cp(i)e-Ju;t dt — I — x(t - kT)e~jut dt =
-oo 7-00 Л fc=0
1 N—1 -oo -I N—1 -oo
= TF E / - кт^ dt = ^X x(^)e-^e-^ d£ =
k=0 1 k=Q
! N-l z -oo ч ! N-l j N-l
= „YA # ) ^шкт = T7 E = X(jU)- £ e-jwfcT,
fc=o V7 fc=O k=Q
(4.47)
где сначала использована замена переменной t = £ + кт, затем введено обо-
ГОО
значение X(jw) = / x(g)e-*”t d£ Фурье-изображения рассматриваемой слу-
J—оо
чайной погрешности x(t).
Полученное выражение можно записать в виде
*сРСМ =
(4-48)
где
1 N-1
ww = n Е e~jukT- (4Л9>
k=Q
Таким образом, процесс усреднения можно рассматривать как прохожде-
ние случайного процесса через усредняющий фильтр с передаточной характе-
ристикой (4.49). Поскольку вследствие симметрии Фурье изображений в (4.48)
относительно оси ординат Хср(—jcu) = то, умножая левую и
правую часть этого выражения на соответствующие части в (4.48), получим
Хср(»ХСр(-» = W^)W{^X{j^X(-j^, (4.50)
откуда
IXcpCMI2 = |ИЧ^)|2|Х(>)|2. (4.51)
Пользуясь определением спектральной плотности мощности (4.15), из по-
Измерительные каналы
255
следнего выражения получим
Scp(w) = |W4jV)|2S(aO,
(4-52)
где S(cu) и S'cp(cu) — спектральные плотности мощности случайной составляю-
щей погрешности до процесса усреднения и после.
Рассмотрим передаточную функцию усредняющего фильтра (4.49). Ис-
N gN+i _ Qk
пользуя формулу суммы членов геометрической прогрессии Qn =--------i,
п=к
ее можно записать в виде
} = — -™кт 1 1 ~e~jU,Nr 1 1 ~e-juNT/2e-^NT/2
~ N е ~ N 1 — е~зшт ~ N 1 — e-j^r/2e-ju>r/2
к=0
(4.53)
(4.54)
N2j - е~^г/2^е-зшт/2
Пользуясь соотношением (е7® — e~jx)/2j = sin ж, окончательно получим
ЦГ(дШ\ = sin(^^T/2) -ju>(N-\Yr/2
U } Wsin(u>r/2)
Выражение (4.54) является передаточной функцией цифрового sinc-фильт-
ра [258], т.е. усреднение измерений, полученных в N точках, отстоящих друг от
друга на т, эквивалентно цифровой фильтрации в прямоугольном окне шири-
ной Nr. В результате фильтрации ослабляются спектральные составляющие
погрешности измерений, расположенные выше граничной частоты фильтра.
Дисперсию погрешности измерений можно найти, интегрируя спектраль-
ную плотность мощности погрешности по всей полосе частот, от 0 до оо (см.
(4.18)):
<> = 9? Л Г = 2 /°° |W(/)|2S(/) df. (4.55)
Z7T J-OQ Z7T Jq Jq
Это выражение справедливо для погрешности с любой спектральной плотно-
стью.
Предположим сначала, что погрешность является белым
S(cu) = So = const. Тогда, подставляя (4.54) в (4.55), получим
fOO Г f 1 2 Г00
— ОС
шумом, т.е.
=2
ср *
Г rsin(7T^T)l2 Г
Jo LWsm(7r/r)J Jo
sin(7rJNr)l2
Nirfr
где /д = 1/т — частота дискретизации; откуда
<7ср = Gx/VN.
^о/д
d!=^r
(4.57)
2
= у. (4-56)
Это выражение совпадает с ранее полученным выражением (4.41), посколь-
ку использовано предположение о преобладании белого шума. Таким обра-
зом, усреднение N однократных измерений при белом шуме уменьшает по-
грешность в y/N раз.
Предположим теперь, что случайная составляющая погрешности изме-
рений обусловлена смесью белого шума со спектральной плотностью So и
256
Глава 4
фликкер-шума со спектральной плотностью
мощности с//, где с — константа, опреде-
ляемая экспериментально (рис. 4.7). Тогда
спектральную плотность мощности погреш-
ности можно выразить как
S(/) = S0 + c//. (4.58)
Найдем частоту /о, на которой оба ком-
понента шума одинаковы (рис. 4.7):
So = с//(ъ
откуда
Рис. 4.7. Спектральная плотность = с/Sq. (4.59)
мощности погрешности измерений в
виде смеси белого и фликкер-шума При f —> 0 спектральная плотность
мощности (4.58) стремится к бесконечности, поэтому интеграл (4.55) для
фликкер-шума расходится. Однако, если учесть, что измерительные каналы
систем автоматизации имеют режим автокалибровки, то низкочастотные ком-
поненты фликкер-шума будут подавлены. Это позволяет выбрать ненулевую
нижнюю границу спектра фликкер-шума, равную Если калибровка в про-
цессе эксплуатации прибора не выполняется, то величина f„ будет определять-
ся межповерочным интервалом средства измерений.
Многократные измерения можно рассматривать как процесс дискретиза-
ции шума. Поскольку согласно теореме Котельникова для сохранения инфор-
мации в дискретизированном сигнале частота отсчетов должна быть не ме-
нее удвоенной верхней частоты спектра сигнала, а шум имеет неограниченный
спектр, то условие теоремы не выполняются и спектр шума после дискретиза-
ции будет сильно искажен вследствие алиасного эффекта. Однако благодаря
некоррелированности белого шума его отсчеты в любые моменты времени бу-
дут некоррелированы между собой, т.е. при дискретизации белого шума полу-
чается также белый шум. Наложение спектров вследствие алиасного эффекта
также не придает окраску белому шуму, поскольку белый шум описывается
функцией S(/) = Sq = const.
Спектр фликкер-шума после дискретизации в общем случае будет сильно
искажен и будет представлять собой сумму сдвинутых друг относительно друга
спектров исходного шума (см. п. 4.3.3, (4.97)). Однако, чтобы упростить ана-
лиз, воспользуемся тем, что в области частот f > fo преобладает белый шум, а
при f < fо — фликкер-шум. Тогда можно считать, что спектр фликкер-шума
ограничен частотой /о, а частота дискретизации всегда больше 2/0, т.е. усло-
вия теоремы Котельникова выполнены и спектр фликкер-шума не искажается.
Дисперсию погрешности измерений в условиях преобладания фликкер-шума
можно найти из соотношения (4.55)
сг2 = 2 [ s^n(y/^) ^-df — -^-(1 - cos2 х + 2xsinxcos x — 2х2С1(2х)), (4.60)
Ли L sin(7r/r) f x2V
Измерительные каналы
257
Рис. 4.8. Изменение коэффициента
снижения погрешности измерений в
зависимости от числа измерений при
белом шуме, фликкер-шуме (1/У) и
их смеси; /н = 1/Т, Т = 24 ч, т = 1
с при частоте измерений не менее /о
Число измерений
где /н — нижняя граничная частота фликкер-шума; х = тг/нтЛГ; Ci — инте-
гральный косинус,
ч 1 / ч fx c°s£ - 1
С1(я) = 7 4- 1п(х) 4- / ---df,
Jo €
7 = 0,57721... — постоянная Эйлера.
Нормируем значение а^р на = 1). Тогда графики зависимости коэф-
фициента уменьшения погрешности <y*p/a*p(W = 1) от количества измерений,
построенные по формулам (4.60) и (4.41), будут иметь вид, приведенный на
рис. 4.8. При построении графиков использованы следующие исходные дан-
ные: /н = 1/Т, где Т = 24 ч, т = 1 с; параметр с при нормировании сокращается.
Напомним, что формула (4.60) получена в предположении, что частота изме-
рений превышает величину /о- Как видим, если при белом шуме усреднение
25 измерений дает снижение погрешности в 5 раз, то при наличии фликкер-
шума — только в 1,2 раза.
При белом шуме эффективность усреднения не зависит от ширины усред-
няющего окна, а зависит только от количества отсчетов (4.57). При наличии
фликкер-шума эффективность усреднения начинает зависеть от ширины вре-
менного окна JVr, причем увеличение его ширины менее эффективно, чем для
белого шума, поскольку спектральная плотность мощности шума 1// быстро
возрастает с уменьшением частоты. Указанный эффект проявляется, в частно-
сти, в том, что различие среднего значения 100 результатов измерений, выпол-
ненных в течение 10 с, будут сильно отличаться от среднего 100 измерений, вы-
полненных за 10 суток. Погрешность, обусловленная фликкер-шумом, может
быть существенно снижена только при условии, что ширина временного окна
Nr превышает величину межкалибровочного интервала средства измерений.
Из вышеизложенного можно сделать следующие выводы.
1. Увеличение точности путем усреднения результатов многократных из-
мерений ограничено не только систематической составляющей погрешности, но
и спектральным составом шума измерений. Фликкер-шум, спектральная плот-
ность мощности которого растет с понижением частоты, ограничивает возмож-
ность увеличения точности путем усреднения.
258
Глава 4
2. Наиболее практичным способом устранения погрешности, обусловлен-
ной фликкер-шумом, является периодическая автокалибровка средства изме-
рений.
3. Погрешность усреднения в случае некоррелированной погрешности не
зависит от ширины временного окна Ат, а зависит только от количества от-
счетов N.
4. Усреднение может применяться только при постоянном значении изме-
ряемой величины. В противном случае нужно учитывать динамическую по-
грешность (см. следующий раздел) или уменьшать ширину окна усреднения.
5. Усреднение является разновидностью цифровой фильтрации методом
«скользящего среднего», поэтому может быть использовано и при наличии
шумов объекта измерений. Этой проблеме посвящена специальная литера-
тура [258].
4.3. Динамические измерения
Измеряемые физические параметры обычно изменяются с течением вре-
мени, поэтому для оценки точности измерений необходимо знать, как зависит
погрешность измерений от динамических характеристик измеряемой величи-
ны, т.е. какова динамическая компонента погрешности измерений. В пользо-
вательской документации на устройства аналогового ввода, как правило, от-
сутствует информация, необходимая для оценки динамической погрешности
(импульсная, переходная, амплитудно-частотная и фазочастотная характери-
стика, амплитудно-фазовая или передаточная функция). Несмотря на то что
динамическая погрешность очень часто в несколько раз превышает статиче-
скую, ее редко принимают во внимание, поскольку измерить величину этой
погрешности технически достаточно сложно и необходимые для этого прибо-
ры часто отсутствуют.
Второй проблемой, которая имеет место при вводе аналоговой информации
в компьютер или контроллер, является появление алиасных (ложных) частот,
которые снижают точность измерений. Опасность этого явления заключает-
ся в том, что помехи, лежащие гораздо выше частоты дискретизации, могут
трансформироваться в низкочастотную область, если в измерительном канале
неправильно выбран или отсутствует антиалиасный фильтр. Антиалиасный
фильтр необходим для уменьшения помех на входе средства измерений, однако
его наличие приводит к возникновению динамической погрешности.
Ниже описываются причины возникновения динамической погрешности и
пути ее оценки.
4.3.1. Теорема Котельникова
В системах автоматизации самой распространенной операцией является
дискретизация сигнала по времени. Выбор частоты дискретизации опирает-
ся на теорему Котельникова, которая распространяется на любые сигналы с
ограниченным спектром. Если спектр сигнала ограничен частотой то
частота отсчетов должна быть в 2 раза выше, чтобы сигнал можно было
Измерительные каналы
259
восстановить без потери информации. Иначе говоря, если самая высокоча-
стотная гармоника в спектре сигнала имеет период Т, то на один период гармо-
ники должно приходиться два отсчета при дискретизации сигнала. При этом
непрерывный сигнал преобразуется в импульсный без потери информации.
Отметим несколько особенностей применения теоремы.
Во первых, в теореме Котельникова предполагается, что сигнал s(t) будет
восстановлен с помощью замены каждого отсчета функцией sin(x)/x, т.е.
(4.И)
Ушах Vе )
где т — интервал между отсчетами, к — номер отсчета, t — время. Однако на
практике такую функцию реализовать невозможно, поскольку ее спектральная
характеристика является идеально прямоугольной и для ее получения требу-
ется фильтр с идеально прямоугольной АЧХ. Поэтому восстановление сигнала
после дискретизации выполняют с помощью фильтров невысоких порядков.
Во-вторых, сигналы с ограниченным спектром имеют бесконечную протя-
женность во времени, а реальные сигналы, ограниченные во времени, имеют
неограниченный частотный спектр, поэтому разложение их в ряд Котельнико-
ва требует пренебрежения частью спектра, лежащего выше частоты /тах.
В-третьих, теорема Котельникова предполагает, что при дискретизации
сигнала использованы импульсы бесконечно малой длительности.
Указанные факторы являются причиной того, что на практике частоту
дискретизации выбирают в несколько раз выше, чем требуется в соответствии
теоремой Котельникова.
Теорема Котельникова позволяет оценить предельную пропускную способ-
ность измерительного канала с известной полосой пропускания /с. Если сред-
ство измерений имеет погрешность Д, то число различимых уровней при изме-
рении величины х будет равно ж/Д, а количество информации с мерой Харт-
ли [262], полученное при однократном измерении, будет равно log2[(x 4- Д)/Д].
Если систематическая составляющая погрешности исключена и преобладает
случайная составляющая с дисперсией Д2, то число различимых уровней сле-
дует искать как отношение мощностей, т.е. количество информации будет равно
1о£2[х/(я2 4- Д2)/Д2] = |log2[(Pc 4- Рш)/Рш], где Рс — мощность сигнала, Рт —
мощность погрешности. Поскольку в соответствии с теоремой Котельникова
сигнал со спектром шириной fc должен быть дискретизирован с частотой 2/с?
чтобы сохранить всю содержащуюся в нем информацию, то для сигнала дли-
тельностью Т потребуется 2Tfc отсчетов. Следовательно, измерительный ка-
нал с полосой /с позволяет передать 2Tfc отсчетов, каждый из которых содер-
жит |log2[(Pc + Рш)/Рш] бит информации, т.е. пропускная способность канала
(количество передаваемой информации в единицу времени) составит
2 4" Рш)/Рщ] _ - . Рс 4-Рш ^ягг/п
2Тfc — — fc log2 — , бит/с.
Величина 2Tfc называется базой сигнала, Tfc log2[(Pc 4-Рш)/Рш] — объемом сиг-
нала, a log2[(Pc 4- Рш)/Рш] — динамическим диапазоном.
260
Глава 4
4.3.2. Фильтр и динамическая погрешность
Измеряемая величина в системах автоматизации обычно не является посто-
янной во времени. Поэтому возникает вопрос, насколько медленно она должна
изменяться, чтобы погрешность измерения не превышала заданного значения.
Для ответа на этот вопрос используется понятие динамической погрешности.
Нормированию динамических погрешностей уделено недостаточно внимаг
ния как в нормативной литературе, так и в эксплуатационной документации
средств измерений. Так, динамические характеристики, необходимые для оцен-
ки динамической погрешности, как правило, отсутствуют в пользовательской
документации на модули аналогового ввода, за редким исключением (напри-
мер, модули аналогового ввода RealLab! серии NL (www.RealLab.ru) содержат
необходимую информацию).
Оценка динамической погрешности является сравнительно сложным про-
цессом. Проблема возникает потому, что динамическая погрешность зависит
не только от динамической модели измерительного канала, но и от формы
измеряемого сигнала.
Основными источниками динамической погрешности являются естествен-
ная инерционность физических процессов, протекающих в датчиках, процес-
сы заряда входной емкости измерительного устройства, инерционность филь-
тров, использованных для устранения алиасного эффекта и подавления помех
в измерительном канале.
Для количественного описания динамических свойств измерительного ка-
нала используют линейные динамические модели в виде дифференциаль-
ных уравнений, операторных передаточных функций, импульсных переходных
характеристик или реакций на единичный скачок, амплитудно-частотные и
амплитудно-фазовые характеристики (ГОСТ 8.256 [267]). Описание этих моде-
лей может быть указано в эксплуатационной документации на средство изме-
рений. Идентификацию динамической модели средства измерений выполняет
его разработчик, используя те же методы, что и при идентификации объек-
та управления (см. главу 5).
В некоторых случаях, например когда уравнения динамической модели
пользователю известны, могут быть заданы только коэффициенты уравнений,
постоянные времени, время реакции (время установления), коэффициент демп-
фирования, полоса пропускания по уровню 0,707 и др.
Для модулей аналогового ввода может быть также задана погрешность по-
ложения отсчета измеряемого сигнала на оси времени.
Рассмотрим типовую динамическую модель измерительного канала, кото-
рая включает в себя модели датчика W^(s) и модуля ввода аналоговых сигналов
1У(з) (рис. 4.9). Передаточная функция 1У(з) обычно представляет собой про-
изведение передаточных функций антиалиасного фильтра (стоящего до АЦП)
и цифрового режекторного фильтра после АЦП. Измерительный преобразова-
тель часто входит в состав модуля ввода.
При проектировании системы автоматизации динамические характеристи-
ки ее звеньев можно выбрать так, что инерционность всего измерительного ка-
нала будет определяться инерционностью самого медленного звена. Это суще-
Измерительные каналы
261
Модуль ввода
Рис. 4.9. Динамическая модель измерительного канала
ственно упрощает процесс оценки величины динамической погрешности. На-
пример, при измерении температуры самым инерционным звеном должен быть
датчик (инерционность термопар характеризуется постоянной времени десятки
секунд и намного превышает инерционность модуля ввода (доли секунды)).
Многоканальные средства измерений бывают двух типов: с коммутацией
источников сигнала и с параллельно работающими каналами. В первом случае
на входе модуля ввода используется аналоговый коммутатор (рис. 4.9), во вто-
ром случае коммутатор не используется, а многоканальность достигается при-
менением нескольких одинаковых каналов с одновременно работающими АЦП.
В системе с параллельно работающими каналами можно считать, что сиг-
нал на входе средства измерений действует неограниченно долго. При комму-
тации каналов сигнал объекта измерений x(t) действует, пока ключ коммута-
тора замкнут. Описание динамической погрешности этих двух типов систем
имеет свои особенности.
Измерение при синусоидальном сигнале. Рассмотрим сначала слу-
чай, когда входной (измеряемый) сигнал изменяется по синусоидальному за-
кону: x(t) = Asin(a;t) (рис. 4.10), а измерительный канал не содержит ком-
мутатора. Считая, что канал линеен, получим на его выходе сигнал y(t) =
= A|W((j)|sin(a;t + <р(а>)), где |VK(tu)| — амплитудно-частотная характеристика
(АЧХ) измерительного канала, = -arctg[Im(W/’(cj))/Re(W/’(cj))] — фазоча-
стотная характеристика (ФЧХ) — сдвиг фазы выходного сигнала относительно
входного. Таким образом, погрешность измерительного канала в данном слу-
чае состоит из двух компонент: погрешности амплитуды
= А - А| W(<^)| = х _ 1^)1 (4 62)
Рис. 4.10. Синусоидальные сигналы
на входе и выходе изме-
рительного канала
262
Глава 4
и погрешности фазы (рис. 4.10)
Ду> = — arctg
Im (W(w))
Re(W(u>))’
(4.63)
Наиболее простые соотношения для оценки указанных погрешностей полу-
чаются для случая, когда динамику измерительного канала можно представить
моделью первого порядка (фильтром первого порядка):
W(jcv) = -----, (4.64)
1 4- jcd/tdo,7
где о>о,7 — граничная частота по уровню 1/\/2 ~ 0,707. Для нее АЧХ и ФЧХ
имеют вид:
IW(“01 = 7. / /Ц—> <&>) = -arctg
V 1 + ^0,7
Поскольку погрешность средств измерений в системах автоматизации, как
правило, не превышает 1 %, в приведенных соотношениях можно считать
cd/cdo,7 1, что позволяет разложить нелинейные функции в ряд Тейлора и
ограничиться первыми двумя членами разложения. При этих условиях по-
лучим
ДА ч. 1 / Cd \ * Cd z х
— = 1 - |W(w)| = - I — ) , Д<р = ——. (4.65)
Л Z \Cdo,7 / Cdo,7
Например, если модуль ввода имеет граничную частоту cdoj = 5 Гц, то для
того чтобы динамическая погрешность не превышала 0,05 %, частота входного
сигнала должна составлять не более \/0,05% • 2 = 0,032 % от граничной ча-
стоты cdoj, т.е. не более 0,16 Гц.
Отметим, что оценки (4.65) относятся только к погрешности амплитуды и
фазы синусоидального сигнала, но не к погрешности отдельных его отсчетов.
Наибольшая погрешность измерения входного сигнала как функции времени
будет при cdt = 0, 7г, 2тг,.... Ее величину можно оценить следующим образом:
А /ЛЧ А - Ъ А . / А X А • ( W \ A W А
ДтДО) = 2/(0) — х(0) = Asin^> — 0 = Asin(A^) = Asin I-I « —A----= —A—,
\ ^0,7 / tdo,7 7"
(4.66)
где T = 27r/cd0,7 — постоянная времени фильтра, т = 2?r/cd — период измеряе-
мого сигнала. Относительная погрешность будет равна
Д^0) = Д^0) = _т =
я(0) А Т Cdo,7
Таким образом, для получения динамической погрешности 0,1 % при изме-
рении отсчетов синусоидального сигнала в моменты времени cdt = 0, тг, 2тг,...
частота входного сигнала должна быть в 1000 раз ниже граничной часто-
ты фильтра. Отметим, что погрешность амплитуды (измеренная в моменты
времени cdt = тг/2, Зтг/2,...) уменьшается в зависимости от частоты по квад-
ратичному закону (4.65), в то время как погрешность в моменты времени
wt = 0, тг, 2тг,... — только линейно (4.67).
Измерительные каналы
263
Измерение при входном сигнале «единичный скачок». Если входной
сигнал изменяется скачком, то для измерительного канала, который описыва-
ется моделью первого порядка (4.64) и не содержит коммутатора, реакцию на
скачок можно получить с помощью преобразования Лапласа. Для этого в вы-
ражении (4.64) можно вместо jcu использовать комплексную частоту р [161] и
умножить (4.64) на изображение единичного скачка 1/р (по Лапласу). Перехо-
дя от изображения к оригиналу с помощью обратного преобразования Лапласа,
получим сигнал на выходе измерительного канала как функцию времени:
у(<) = г/о(1 - е_‘/т), (4.68)
где т — 1/о>о,7, Уа — значение y(t) при t = оо.
Поскольку точное значение единичного скачка р(оо) = р0 = 1, погрешность
измерений Др(£) = уо — y(t) с течением времени будет уменьшаться по экс-
поненциальному закону:
Аз/(*) = ?/oe“t/T,
откуда
\ З/о /
(4.69)
Например, для получения относительной динамической погрешности 1 %
измерение нужно делать не раньше чем через t = 4,6т после подачи измеряемо-
го сигнала. Для получения погрешности 0,05 % задержка перед измерением
должна быть не менее 7,6т.
Измерение сигнала произвольной формы. В случае, когда измеряе-
мый сигнал имеет произвольную форму x(t), выражение для y(t) в общем слу-
чае имеет вид свертки входного сигнала и импульсной характеристики изме-
рительного канала hs(t) [96]:
y(t)= f x(£)hs(t-№,
Jq
(4.70)
где £ — переменная интегрирования.
Импульсная характеристика h6(t) является реакцией измерительного кана-
ла на входной сигнал в форме дельта-функции Дирака J(t). Вместо импульсной
характеристики можно использовать реакцию на единичный скачок Л1 (t), при
этом выражение для y(t) запишется в виде интеграла Дюамеля [96]
y(t) = х(0)/? (t) + Г Л1 (t - О d£.
Jq
(4.71)
К сожалению, более простого выражения не существует и интегралы (4.70)
и (4.71) нужно брать для каждой конкретной формы входного сигнала x(f).
Сделать это аналитически, как правило, невозможно. Наиболее удобным спо-
собом является численное интегрирование или моделирование, например, с по-
мощью программ MATLAB, MathCAD.
Однако для многоканальной системы сбора данных с одним АЦП и ком-
мутацией входных каналов (см. рис. 4.9) получить приближенное выражение
264
Глава 4
Рис. 4.11. Сигнал после коммутатора
и на выходе модуля ввода (y(t))
для динамической погрешности в об-
щем случае, независимо от формы сиг-
нала на входе системы, возможно. Для
этого воспользуемся тем, что отсчеты
входного сигнала в системах сбора дан-
ных берутся обычно так часто, что при
разложении функции x(t) в ряд Тей-
лора на интервале между отсчетами
можно ограничиться линейным членом
разложения (4.5). Иначе говоря, при
произвольной форме входного сигнала
и достаточно высокой частоте дискре-
тизации функцию x(t) можно аппрок-
симировать прямой линией на участке
t е [to, й] (рис. 4.11), где to — момент замыкания ключа входного коммутатора;
ti — момент появления сигнала на выходе модуля ввода:
x(t) = х(0) 4- ~—^t, t е [to, ti].
ti — to
(4-72)
Максимальную погрешность такой аппроксимации можно оценить по тре-
тьему члену ряда Тейлора
1 d?x(t)
2 dt2
(4.73)
e,
t=(
где точка £ выбирается на интервале t е [to, ti] таким образом, чтобы значе-
ние второй производной в ней была наибольшей. В частности, если входной
1 d?x(t)
сигнал описывается линейной зависимостью, то для него - —
2 at2
С2 = o
для всех точек интервала t е [to, й].
Итак, сигнал после коммутатора перед антиалиасным фильтром имеет
форму трапеции на интервале t е [to, й] (рис. 4.11). Начальные условия для
фильтра после каждого переключения входного коммутатора являются при-
ближенно нулевыми, поскольку постоянная времени фильтра Т = 2тг/а;о,7 мно-
го меньше интервала между отсчетами ti — t0.
Рассмотрим сначала случай с фильтром первого порядка, когда переда-
точная функция VK(s) описывается выражением (4.64). Импульсную характе-
ристику фильтра можно получить с помощью обратного преобразования Ла-
пласа от выражения (4.64), в котором переменная jw заменена на комплекс-
ную частоту р:
л*(0 = ^exP (_<f) •
(4-74)
Подставляя (4.74) и (4.72) в (4.70), получим выражение для функции y(t)
Измерительные каналы
265
на интервале t G [to? ti]:
y(t) = f (z(0) + у—iexp (-43) =
(Д/1 ~ Xq —( t \ Xi Xq Хг — Xq . -__v
-*o + y—Y-T exp -- -y—^T + zo + y—(4.75)
Вычитая из полученного выражения сигнал на входе x(t) (4.72), получим
абсолютную погрешность
ДИО = (-*0 + ^т\ехр (-1) - (4.76)
Таким образом, при достаточно большом t (точнее, при t —► оо) абсолютная
динамическая погрешность не приближается к нулю, а остается постоянной,
равной Дт/(оо) = (xi —xo)/(ti -to)T. При малых t на начальном участке переход-
ного процесса погрешность экспоненциально уменьшается с течением времени.
Пользуясь выражением (4.76), можно записать выражение для приведен-
ной погрешности
^=(-^4) 44) 4 <4-77>
^шах \ ^шах 7/ \ •* /
где хтах — верхняя граница диапазона измерений; т = Жтах (tx — tQ). Ис-
Х\ Xq
пользуя обозначение г в (4.72), получим
х(0 = х(0) + (4.78)
Из этой формулы виден физический смысл параметра т: это время, за которое
входной сигнал проходит интервал от x(t) = 0 до x(t) = xmax при условии, что
он сохранит линейность на этом интервале.
Отметим, что при t —> оо выражение (4.77) совпадает с (4.67), а при т —► оо —
с (4.69). Графики зависимости модуля динамической погрешности от времени,
построенные по выражению (4.77) при хо/хтах = 0,5, показаны на рис. 4.12.
Например, если постоянная времени фильтра первого порядка Т равна 1 с,
то для того чтобы динамическая погрешность не превышала 0,1 %, отношение
Т/т должно быть не более 0,001 (см. рис. 4.12), откуда т > 1000Т, т.е. скорость
нарастания входного сигнала должна быть такой, чтобы интервал от x(t) = 0
до я^ах был пройден за время не менее 1000Т = 1000 с. Если уравнение (4.78)
нормировать на хтах, чтобы перейти к относительным величинам х = т/ттах:
x(t) = i(0) -I- t/т, (4.79)
то можно сказать, что скорость нарастания входного сигнала 1/т должна быть
не более 0,001 с”1, или 0,1 %/с.
Аналогичное соотношение можно получить для фильтра второго поряд-
ка с передаточной функцией
= (1 +870(1 +sT2)-
266
Глава 4
Рис. 4.12. Зависимость модуля
динамической погрешности от вре-
мени при Хо/Хтах = 0,5 И Т = 0, 1 С
для модуля ввода с фильтром пер-
вого порядка
Выражение для приведенной погрешности будет иметь вид
Aj/(f) — (xo/^max)Tl7’ 4" Ту ( t\ (^о/^тах)Т*2Т — Г2 ( t \ Ту + T2
^max t(T\ — T2) \ Ту J t(Ti ~ T2) \ T2) T
(4.80)
При t —> 00, как и в системе первого порядка, погрешность стремится к по-
стоянной величине -(71 4- Т2)/т.
Можно показать, что для фильтра TV-го порядка, описываемого полино-
1 1
мом вида VK(s) = —----------, погрешность стремится к величине —
EUl + sTi) т i=i
г=1
при t —> ОО.
Таким образом, для многоканальной системы сбора данных с одним АЦП и
коммутацией входных каналов (рис. 4.9) динамическая погрешность измерений
не зависит от формы измеряемого сигнала и ее значение можно оценить по
графику на рис. 4.12 или формуле (4.77).
Sinc-фильтр в измерительных модулях ввода. В системах автома-
тизации обычно используют режекторные фильтры для ослабления помехи с
частотой 50 Гц, проникающей из сети питания. Такой фильтр, как правило,
входит в состав микросхемы АЦП, откуда следует требование к простоте его
реализации. Наиболее популярным для этих целей оказался sinc-фильтр (sine,
sine2, sine3, sine4) [263, 264].
Структура цифрового sinc-фильтра представлена на рис. 4.13. Он состоит
из двух каскадов: первый каскад — до ключа Я, второй — после. На вход
фильтра поступают отсчеты сигнала х(к) с частотой дискретизации /д. Блок
г-1 выполняет задержку на один такт отсчетов, поступающих на его вход. Блок
z~M выполняет задержку на М = 1 или 2 такта. Ключ R пропускает только
каждый Я-й отсчет, поэтому частота следования отсчетов после него и на вы-
ходе фильтра составляет fa/R, т.е. такой фильтр выполняет также функцию
прореживания (децимации) отсчетов.
Первый каскад фильтра выполняет суммирование входных отсчетов, вто-
рой каскад выполняет функцию вычитания из поступившей на его вход суммы
предыдущей суммы отсчетов (суммы, полученной на предыдущем такте fA/R),
т.е. выбирает суммы из R слагаемых. Таким образом, фильтр в целом вы-
Измерительные каналы
267
1 2 N W+1 У+2 2N
fa fa/R
y&R}
Рис. 4.13. Структура sinc-фильтра
полняет операцию нахождения среднего арифметического в окне шириной R
отсчетов; точнее, как будет показано ниже, в окне шириной RM,
Непосредственно по рис. 4.13 можно записать передаточную функцию од-
ного звена с блоком задержки г"1:
ад = (4-81)
Аналогично, для одного звена с блоком z~M передаточная функция будет
иметь вид
Hc(z) = 1 - z~RM. (4.82)
Здесь в показателе степени стоит произведение RM, поскольку вследствие про-
реживания отсчетов ключом R задержка отсчетов относительно к выполня-
ется на RM тактов.
Поскольку в фильтре использовано N блоков до ключа и N блоков после,
выражение для передаточной функции всего фильтра можно записать в виде
произведения Hi(z)Hc(z) в степени N:
/11- z~rm\n
H(Z) = \RM 1-z-i ) = <483>
Здесь в знаменателе использован нормирующий множитель RM, чтобы коэф-
фициент передачи фильтра на нулевой частоте был равен единице;
I 1 _ 1 Ду-i
я-'“<г> = й/^т- = йй Е <--)* (“*)
к=0
Для перехода к сумме в (4.84) использована формула суммы членов гео-
qN+l _ qk
метрической прогрессии gn = ----------—•
п=к
Поскольку по правилам преобразования Фурье задержка оригинала на L
соответствует умножению изображения на e“JwL, то при частоте отсчетов /д
(что соответствует задержке на один такт 1//д) оператор сдвига на один такт
будет равен г”1 = е~д’“^д. Подставляя это значение в (4.84), получим Фурье-
изображение передаточной функции sinc-фильтра в виде
1 I _ р-^лм//д
1У(» = 77Т7—;-------77—- (4.85)
Выполнив такие же преобразования, как и в (4.53)-(4.54), получим выра-
268
Глава 4
(4.86)
(4-87)
жение для передаточной функции sinc-фильтра в виде
RM 81п(7г///д)
Для упрощения аналитических выкладок с sinc-фильтром его передаточ-
ную функцию упрощают путем разложения знаменателя (4.86) в ряд Тейлора
с отбрасыванием всех членов, кроме первого:
W(ju) =
RMirf I
Это приближение выполняется достаточно точно, поскольку обычно частота
дискретизации гораздо выше частот, на которых используется sinc-фильтр:
f С /д. Вероятно, такая аппроксимация объясняет название «зшс*-фильтр»,
хотя на самом деле функция называется функцией Дирихле [258] или
периодической sinc-функцией.
Поскольку при х = 7г функция sin(x)/x = 0, то частота режекции фильтра
находится из условия fRM/fn = 1. Поэтому при типовой частоте дискрети-
зации в АЦП /д = 32768 Гц для ослабления помехи с частотой f = 50 Гц
(Т = 20 мс) выбирают RM = 656.
Рассмотрим принцип действия фильтра во временной области. Для упро-
щения будем считать N = 1 (фильтр первого порядка), т.е. с одним звеном до
ключа и одним после (рис. 4.13). Звено с элементом задержки г-1 выполняет
функцию интегрирования, т.е. суммирования в дискретной области. Сигнал на
k
его выходе равен $2 х(п). Ключ R замыкается через R тактов и пропускает на
п=0
Rm
свой выход сумму * х(п)> гДе т — номер прореженного отсчета (после ключа
п=0
Я). Звено фильтра с элементом задержки z~M при М = 1 выполняет вычи-
тание из текущей суммы отсчетов предыдущей суммы, т.е. пропускает на свой
выход сумму отсчетов в окне шириной R. Таким образом, sinc-фильтр первого
порядка выполняет усреднение (вычисляет среднее арифметическое) входных
отсчетов во временном окне шириной Я, т.е. сумму
1
!/(*)=„ 52 х(п)-
n=k-R
Поэтому sinc-фильтр можно представить как окно, движущееся вдоль оси вре-
мени и усредняющее попадающие в него Я отсчетов.
При ширине окна, равном периоду помехи синусоидальной формы (напри-
мер, помехи с частотой сети 50 Гц), среднее значение за период равно нулю.
Этим объясняется подавление (режекция) sinc-фильтром помехи с частотой
50 Гц. Практически коэффициент ослабления определяется частотой отсчетов,
По определению sine-функции sincx = 5HLE
х
Измерительные каналы
269
разрядностью АЦП, погрешностью и стабильностью частоты тактового генера-
тора фильтра. Например, ослабление sinc-фильтром помехи с частотой 50 Гц
в модулях RealLab! серии NL составляет -120 дБ (www.RealLab.ru).
При постоянной частоте отсчетов /д sinc-фильтр позволяет изменять часто-
ту режекции с помощью коэффициента прореживания R. На рис. 4.14 представ-
лена АЧХ sinc-фильтров первого, второго и третьего порядка. Зависимость ди-
намической погрешности измерения амплитуды синусоидального сигнала ДА/А
от частоты для трех sinc-фильтров с параметрами Т = 0,02, RM = 656 по-
казана на рис. 4.15.
На рис. 4.16 показана реакция sinc-фильтров на линейно нарастающий сиг-
нал (см. рис. 4.11). Как видим, линейно нарастающий сигнал проходит через
фильтр с задержкой; возникающая при этом погрешность при t > 60 мс оста-
ется постоянной во времени, равной для sinc-фильтра первого порядка 0,5Т/т,
для фильтра второго порядка — Т/т, для фильтра третьего порядка — 1,5Т/т,
где Т = 1/(50 Гц) = 20 мс — ширина временного окна фильтра, настроенно-
го на частоту режекции 50 Гц.
Например, для получения динамической погрешности, равной 0,05 % для
зтс3-фильтра входной сигнал должен изменяться со скоростью не более чем
100 % за 60 с, или 1,67 % за 1 с.
Здесь проценты берутся от верх-
ней границы динамического диа-
пазона Жщах (СМ. (4.77)).
Рис. 4.1в. Реакция sinc-фильтра на
линейно нарастающий сигнал при
т = 0,2, Т = 0,02, хо = 0,5, RM = 656
270
Глава 4
4.3.3. Алиасные частоты, антиалиасные фильтры
Первой неожиданностью, с которой обычно сталкиваются те, кто первый
раз начал собирать данные в компьютер, является появление низкочастотной
помехи, которой нет в реальном процессе и которой, казалось бы, не должно
быть в собранных данных. Помеха может иметь форму периодического сиг-
нала (сплошная кривая на рис. 4.17, а) или напоминать сигнал с амплитудной
модуляцией (рис. 4.17Д в). В реальности такой помехи нет, она появляется
только после дискретизации сигнала, поэтому ее называют ложной или алиас-
ной (от английского alias — «вымышленный»). Алиасные помехи увеличивают
погрешность измерительных каналов.
Аналогичные эффекты проявляются и в других областях человеческой де-
ятельности, таких как биения колебаний, интерференция, стробоскопический
эффект, муар и т.п.
Принцип образования помехи с алиасной частотой иллюстрируется на
рис. 4.17, а. Здесь пунктирной линией показан дискретизируемый периоди-
ческий сигнал с периодом Г, точки на линии показывают моменты выборки
текущих значений.
При дискретизации с высокой частотой, когда шаг дискретизации много
меньше периода колебаний (таким образом дискретизирован первый период си-
б)
в)
Рис. 4.17. Пояснение принципа появления алиасных частот:
а — при т = 0,1Т; б— при т = — 0,45Т; в — при т = —0,49Т
Измерительные каналы
271
нусоидального сигнала на рис. 4.17,а), дискретизированный сигнал качественно
не отличается от исходного, если пренебречь погрешностью дискретизации.
Если же шаг дискретизации приближается к периоду исходного сигнала,
то, как показано сплошной линией на рис. 4.17, а, после дискретизации получа-
ется сигнал, по форме похожий на исходный, но с гораздо большим периодом.
Период стремится к бесконечности при г —> Г.
Аналогичный эффект, состоящий в появлении новых компонент спектра в
низкочастотной области, возникает и при дискретизации функций произволь-
ной формы. Рассмотрим этот эффект подробнее.
Пусть имеется непрерывный сигнал
x(t) (рис. 4.18), заданный на интервале
времени [О, Т]. Выберем отсчеты сиг-
нала с шагом т в точках кт и получен-
ную последовательность отсчетов назо-
вем дискретным сигналом хд(к). По-
следовательность отсчетов можно запи-
сать в виде функции от непрерывной пе-
ременной t, если использовать понятие
дискретной импульсной функции:
оо оо
яд(£) = x(t)6(t — кт) = x(t) 6(t — кт), (4.88)
/с=—оо fc=—оо
где 5(-) — дискретная импульсная (игольчатая) функция, определяемая как
ад={»:
если t = О,
если t / 0.
(4.89)
В отличие от дельта-функции Дирака, она не стремится к бесконечности
при t = 0. В выражении (4.88) функция x(t) вынесена за знак суммирования
потому, что она не зависит от к.
Найдем спектр сигнала xa(t) (4.88). Для этого сначала разложим функцию
ОО
/(£) = Z2 “ ^т) в РЯД Фурье [161], воспользовавшись ее периодичностью:
fc= —оо
f(t) = V Cn^nt, Сп = - Г/2 (4.90)
п=-оо т J-T/2
где = Ък1т, п — номер коэффициента ряда, т — период функции.
Найдем коэффициенты с^:
-I гт/2 оо .. оо -т/2
Сп = - I У2 S(t - кт)е~^дП* dt = - У2 / S(t - kT)e~j^nt dt =
T J-r/2 k=_oo T k=-oo J~T/2
1 r/2 -
= -/ 6(t)e~^ntdt. (4.91)
T J-r/2
Знак суммирования в последнем выражении отсутствует потому, что за
272
Глава 4
пределами интервала интегрирования — т/2 < t < т/2 все члены суммы для
к / 0 равны нулю.
Для того чтобы найти интеграл (4.91), представим игольчатую функцию
как предел, к которому стремится прямоугольный импульс шириной t* < т
при tK —► 0:
если — tK/2 < t < tH/2, t„ —> 0;
в противном случае.
(4.92)
Тогда из (4.91) получим
1 /-т/2 _ 1 т*и/2 _
<4 = - / 6K(t)e~^nt dt=- dt =
T J-т/2 T J-tn/2
= _ ^^„«„/2) = -e+^"/2 = tH sin(^nt,/2)
rju>nny 2r j(jJpntvl/2 т о>дп*и/2
(4.93)
Если ширина импульса стремится к нулю, то lim
sin(x)
х
= 1, следовательно.
Сп = tK/r. (4.94)
оо
Используя это выражение, ряд Фурье для f(t) = У2 Щ “ ^т) можно запи-
fc=—оо
сать в виде (см. (4.90))
/(0= f; щ-кт) = ± f; (4.95)
fc=-oo n=-oo
Подставляя полученное выражение в (4.88), получим
X*(t) = T(t) £ 6(t-kr)=x(t)± £ = g г(<)(>дп( (49б)
Jfe=—оо п=—оо п=—оо
Здесь функция x(t) внесена под знак суммирования, поскольку она не зави-
сит от п.
Найдем теперь спектральную плотность Хд(/и) дискретного сигнала хд(1)
с помощью преобразования Фурье:
Хд(о>)= £ x(t)^nte~jut dt = — g [°° x(t)^nte~ju,tdt =
•'-°0 т п=-оо т п=-оо''-°о
= 7 £ [°° x(t)e-^-^tdt=t-^ f; хи(ш-шдп)), (4.97)
•_________ J-cn • -
где X(j(o> - о>дп)) — спектральная плотность исходного непрерывного сигнала
x(t), сдвинутая по оси частот на а>дп = 2тгп/т.
Таким образом, спектр дискретного сигнала Xfl(jo>) представляет собой се-
рию копий спектров непрерывного сигнала X(jcu), сдвинутых друг относительно
Измерительные каналы
273
друга на частоту дискретизации о>д = 2тг/т = 2тг/д:
/ 00
Ш = ~ Е (4.98)
Т
П= — ОО
На рис. 4.19,а показан график непрерывного сигнала x(t) (рис. 4.19,а, сле-
ва) и модуля его спектральной плотности |Х(/)|, f = и/2тг (справа). Посколь-
ку функция |Х(/)| симметрична относительно оси ординат, на рис. 4.19 пока-
зан только график в правой полуплоскости. Исходный непрерывный сигнал
x(t) можно рассматривать как дискретный с нулевым периодом дискретизации
(т —► 0, о>д —► оо). Поэтому модуль его спектральной плотности является непе-
риодической функцией (рис. 4.19,а, справа).
После дискретизации функции x(t) с частотой /д на графике модуля спек-
тральной плотности появляется бесконечное количество копий |Х(/)|
(рис. 4.19,б,в, справа), сдвинутых друг относительно друга на величину /д.
Степень отличия спектра дискретного сигнала от спектра непрерывного ха-
рактеризует величину погрешности дискретизации. С уменьшением частоты
дискретизации в соответствии с (4.98) и как видно из рис. 4.19 копии спектров
сближаются, увеличивая погрешность дискретизации.
Предположим, что вся полезная информация, содержащаяся в непрерыв-
ном сигнале, заключена в области от 0 до частоты /с, которую поэтому можно
считать границей спектра непрерывного сигнала (на рис. 4.19 эта область спек-
тра заштрихована). Если для восстановления сигнала используется фильтр с
граничной частотой 2/с (рис. 4.19,в), который убирает все составляющие спек-
тра, лежащие выше 2/с, то наличие копий в спектре дискретного сигнала не
искажает форму сигнала после его восстановления.
Если же ближайшая копия спектра приблизится к оригиналу настолько,
что внесет искажения в его форму (рис. 4.19,г), то восстановить исходный сиг-
нал становится невозможно. Поэтому для исключения наложения спектров
частота дискретизации /д должна быть по крайней мере в 2 раза выше гра-
ничной частоты спектра /с, т.е.
/д > 2/с, (4.99)
как и требуется по теореме Котельникова.
Спектр произвольного непрерывного сигнала, показанный на рис. 4.19,а,
в общем случае является неограниченным. Поэтому копии спектров, появля-
ющиеся после дискретизации, всегда частично перекрываются. Это является
причиной потери информации при восстановлении сигнала. И только для сиг-
нала с ограниченным спектром эффект наложения отсутствует, что позволяет
восстановить сигнал без потери информации.
Описанный алиасный эффект не может быть устранен с помощью цифро-
вой фильтрации, если частота дискретизации равна удвоенной частоте верхней
границы спектра полезного сигнала, так как при этом в спектре дискретизи-
рованного сигнала будет потеряна информация о помехах. Для решения этой
проблемы можно использовать аналоговый (антиалиасный) фильтр с гранич-
ной частотой /с 0,5/д на входе блока дискретизации или выбрать частоту
274
Глава 4
Время, с в) Частота, Гц
Рис. 4.19. Сигналы и их спектральные плотности: а — непрерывный сигнал;
б-г — дискретные сигналы; /д = 1/т — частота дискретизации, /с — граница спектра
дискретизации выше верхней граничной частоты спектра помех, чтобы в по-
следующем выполнить цифровую фильтрацию.
В модулях аналогового ввода антиалиасный фильтр обычно настроен на
максимальную частоту дискретизации, обеспечиваемую модулем и не может
быть перестроен. Поэтому, если при измерении медленно протекающих про-
цессов частота дискретизации программно выбрана низкой, а антиалиасный
Измерительные каналы
275
фильтр не перестроен, то помеха не ослабляется антиалиасным фильтром и
поэтому в измеренном сигнале появляются алиасные помехи.
4.4. Суммирование погрешностей измерений
Измерительные каналы систем автоматизации могут включать в себя
несколько средств измерений различных типов, например датчики, измери-
тельные преобразователи, модули аналогового и частотного ввода и вывода.
Погрешность такой системы желательно определять экспериментальным пу-
тем [259], однако это не всегда возможно или целесообразно. В таких случаях
используют расчетный метод.
4.4.1. Исходные данные для расчета
Исходными данными для расчета погрешности измерительных каналов яв-
ляются ([285]):
• метрологические характеристики средств измерений;
• погрешность метода измерений (методическая погрешность);
• характеристики влияющих величин (например, окружающая температу-
ра, влажность);
• характеристики измеряемого сигнала.
ГОСТ 8.009 [261] для всех типов средств измерений устанавливает следу-
ющий комплекс метрологических характеристик, который указывается в экс-
плуатационной документации на средства измерений: систематическая состав-
ляющая основной погрешности; среднеквадратическое отклонение случайной
составляющей основной погрешности; дополнительная погрешность для каж-
дой из влияющих величин; динамическая погрешность.
Некоторые средства измерений обладают гистерезисом — для них, кроме
перечисленных погрешностей, указывается случайная составляющая основной
погрешности, вызванной гистерезисом.
Основная погрешность может быть указана без разделения ее на части (на
систематическую, случайную и погрешность от гистерезиса), и этот вариант
является наиболее распространенным. Случайную составляющую указывают
в случае, когда она больше 10 % от систематической [261].
Дополнительная погрешность указывается в виде функции влияния внеш-
него фактора на основную погрешность или ее составляющие: систематическую
и случайную. Обычно эта функция представляет собой линейную зависимость
и тогда указывается только коэффициент влияния, например 0,05 %/°С.
Динамическая погрешность указывается с помощью одной из следую-
щих характеристик: импульсная, переходная, амплитудно-частотная и фа-
зочастотная, амплитудно-фазовая характеристика, передаточная функция.
Для минимально-фазовых цепей указывается только ампитудно-частотная ха-
рактеристика, поскольку фазочастоная однозначно может быть получена из
амплитудно-частотной характеристики.
276
Глава 4
Для расчета методической погрешности могут быть указаны сопротивле-
ния проводов, среднеквадратическое значение или спектральная плотность по-
мех в них, емкость, индуктивность и сопротивление источника сигнала, а так-
же другие факторы, которые возникают при создании системы, включающей
средства и объект измерений.
Характеристики измеряемого сигнала задаются в виде функции от времени
или функции спектральной плотности. Для случайного входного сигнала зада-
ется спектральная плотность мощности или автокорреляционная функция. Во
многих случаях для оценки погрешности бывает достаточно знания скорости
нарастания входного сигнала.
4.4.2. Методы суммирования погрешностей
Перед суммированием все погрешности делятся на следующие группы:
• систематические и случайные;
• в группе случайных — коррелированные и некоррелированные;
• аддитивные и мультипликативные;
• основные и дополнительные.
Такое деление необходимо потому, что систематические и случайные по-
грешности, а также коррелированные и некоррелированные суммируются по-
разному, а аддитивные погрешности нельзя складывать с мультипликатив-
ными.
Если некоторые погрешности указаны в виде доверительных интервалов,
то перед суммированием их нужно представить в виде среднеквадратических
отклонений (см. п. 4.1.5).
Дополнительные погрешности могут складываться с основными либо пе-
ред суммированием погрешностей, либо на заключительном этапе, в зависи-
мости от поставленной задачи. Второй вариант часто предпочтительнее, по-
скольку он позволяет оценивать погрешность всего измерительного канала в
зависимости от величины внешних влияющих факторов в конкретных усло-
виях эксплуатации.
При последовательном соединении нескольких средств измерений погреш-
ности, проходя через измерительный канал с передаточной функцией (функ-
цией преобразования) /(х), могут усиливаться или ослабляться. Для уче-
та этого эффекта используют коэффициенты влияния, которые определяются
как df(x)/dx ~ Кх. Все погрешности перед суммированием приводят к вы-
ходу (или входу) измерительного канала путем умножения (деления) на ко-
эффициент влияния. В дальнейшем будем предполагать, что такое приведе-
ние уже выполнено.
Погрешности средств измерений являются случайными величинами, поэто-
му при их суммировании в общем случае необходимо учитывать соответствую-
щие законы распределения. На практике пользуются более грубыми упрощен-
ными методами, разработанными математической статистикой.
Математическое ожидание погрешностей средств измерений, как правило,
равно нулю. Если это не так, то его (в виде поправки) складывают с система-
тической составляющей погрешности. В средствах автоматизации введение по-
правки выполняется автоматически с помощью микроконтроллера, входящего в
Измерительные каналы
277
состав средств измерений. Математическое ожидание случайной составляющей
всегда равно нулю, поскольку при нормировании метрологических характери-
стик его относят к систематической составляющей.
Наиболее полное определение итоговой погрешности измерительного ка-
нала состояло бы в нахождении функции распределения суммы нескольких
погрешностей измерения. Однако функция распределения суммы случайных
величин находится с помощью операции свертки [253], что приводит к значи-
тельным практическим трудностям. Поэтому для оценки итоговой погрешности
ограничиваются только суммированием дисперсий погрешностей.
Погрешности суммируют по однородным группам, затем находят общую
погрешность, используя геометрическое суммирование для случайных погреш-
ностей и алгебраическое для детерминированных.
Существует три способа суммирования погрешностей:
• алгебраический:
N
aE = 5>i, (4.100)
1=1
где г — номер погрешности, N — их число.
• геометрический:
N
(4.101)
где Gi — среднеквадратическое значение г-й погрешности;
• с учетом корреляции:
(4.102)
В этой формуле j / i потому, что члены с j = i уже учтены в сумме
N
a?, a j < г для того, чтобы суммировать только члены, лежащие ниже
i=l
диагонали корреляционной матрицы, поскольку вследствие ее симметрич-
ности Rij<Ji<7j -h RjiGjGi = 2RijGiGj.
При Rij = 4-1 выражение (4.102) переходит в формулу алгебраического
суммирования (см. также (4.31)):
=
(4.103)
где складывается со своим знаком, т.е. коррелированные погрешности с про-
тивоположными знаками частично взаимно компенсируются, если их коэффи-
циент корреляции равен единице.
При Rij = — 1 погрешности вычитают попарно, в соответствии с (4.32):
(4.104)
278
Глава 4
т.е. при отрицательной корреляции погрешности частично компенсируются, ес-
ли они имеют один и тот же знак.
Учитывая, что получить удовлетворительные оценки коэффициентов кор-
реляции практически довольно трудно, используют следующий прием: при
\Rij| 0,7 считают, что \Rij| = 1, при \Rij| < 0,7 полагают \Rij| = 0 [253, 248].
4.4.3. Систематические погрешности
В наиболее типовом случае систематические составляющие основных по-
грешностей средств измерений суммируются геометрически, по формулам
(4.30), (4.101), поскольку они являются случайными величинами.
Формулы геометрического суммирования были получены для среднеквад-
ратических погрешностей (см. (4.25)). Поэтому, если комплекс метрологиче-
ских характеристик средств измерений включает предел допускаемых значе-
ний систематической составляющей основной погрешности Дов без указания
среднеквадратического значения (по ГОСТ 8.009 [261]), то соответствующую
ему среднеквадратическое значение находят в соответствии с рекомендация-
ми РД 50-453-84 [260] по формуле
(4.105)
Эта формула справедлива, если нет оснований полагать, что функция рас-
пределения данной погрешности является несимметричной и имеет несколь-
ко максимумов.
Метрологическая инструкция МИ 2232-2000 [254] рекомендует иную фор-
мулу — половину предела допускаемой погрешности.
Выбор способа суммирования систематических составляющих основных по-
грешностей не является однозначным, и это связано с отсутствием полной ин-
формации о законе распределения. Дело в том, что причиной существования
основной погрешности является как технологический разброс параметров элек-
тронных компонентов, так и нескомпенсированная нелинейность. Технологиче-
ский разброс обычно является случайным и на этом основании систематическая
составляющая погрешности может рассматриваться как случайная величина на
множестве средств измерений одного и того же типа. Поэтому в формулах для
расчета погрешностей она учитывается геометрически. Однако нелинейность
передаточной характеристики средства измерений (нелинейность АЦП, норми-
рующих усилителей, термопар) у всех экземпляров приборов одного типа будет
иметь примерно один и тот же вид, величину и знак. Например, погрешность,
вызванная нелинейностью, в начале шкалы может быть положительной, в се-
редине шкалы отрицательной, у верхнего предела шкалы опять положительной
и так для всех экземпляров приборов одного типа. Поэтому погрешности, обу-
словленные нелинейностью, должны суммироваться алгебраически.
В современных модулях аналогового ввода используется автоматическая
калибровка, позволяющая уменьшить случайную компоненту систематической
погрешности, и в этом случае преобладающей является детерминированная
погрешность нелинейности.
Измерительные каналы
279
Поскольку ГОСТ 8.009 [261] не предусматривает нормирование таких тон-
ких нюансов поведения погрешностей, выбор способа суммирования начина-
ет зависеть не от технических, а от политических факторов. Если фактиче-
ская погрешность окажется выше расчетной и это повлечет за собой угрозу
жизни людей, большой экономический ущерб, техногенную катастрофу и т.п.
[254], то суммирование погрешностей выполняют алгебраически, причем ис-
пользуют не среднеквадратические отклонения, а пределы допустимых зна-
чений погрешности.
Если известен знак систематической погрешности, то его учитывают при
суммировании.
Для наиболее ответственных применений следует использовать средства
измерений, для которых указаны погрешность без разделения на случайную
и систематическую компоненты, поскольку в этом случае погрешность ука-
зана с доверительной вероятностью, равной единице. Если же используются
средства измерений, для которых указана случайная составляющая, то для
них рассчитывают величину погрешности при доверительной вероятности, рав-
ной единице. Это условие существенно завышает требования к точности сред-
ства измерений.
Алгебраическое суммирование часто дает слишком завышенную оценку по-
грешности. Поэтому МИ 2232-2000 [254] предусматривает промежуточный ва-
риант между формулами геометрического и алгебраического суммирования:
N
<T^ = K\12(ri’ (4.106)
N i=l
где К — поправочный коэффициент, равный 1,2 для наиболее важных пара-
метров устройств аварийной защиты и блокировки, контроля за соблюдением
требований техники безопасности и экологической безопасности, контроля ха-
рактеристик готовой продукции [254].
Для конкретных экземпляров приборов могут быть указаны не номиналь-
ные характеристики (имеющие одну и ту же величину для всех приборов дан-
ного типа), а индивидуальные. В этом случае систематическая погрешность
является не случайной, а детерминированной величиной, поэтому должна учи-
тываться в итоговой погрешности измерительного канала алгебраически.
4.4.4. Случайные погрешности
Случайные составляющие основной погрешности средств измерений по
ГОСТ 8.009 [261] задаются своими среднеквадратическими отклонениями, по-
этому их суммирование выполняется непосредственно по формуле геометри-
ческого суммирования (4.101).
Если случайная погрешность является коррелированным случайным про-
цессом (см. п. 4.1.3 «Функция автокорреляции») и задана в виде функции ав-
токорреляции R(t) или спектральной плотности мощности S(f), то сначала на-
ходят среднеквадратическое значение случайной составляющей погрешности
280
Глава 4
по формуле (4.19):
г/в
ст2 = 2/ (4.107)
Jo
где /в — верхняя граничная частота полосы пропускания всего измерительно-
го канала или цифрового фильтра, используемого при обработке полученных
данных. Если задана функция автокорреляции, то спектральную плотность
мощности находят по формуле (4.17).
Случайная составляющая погрешности может быть уменьшена в несколько
раз (в зависимости от величины фликкер-шума) путем усреднения результатов
многократных измерений (см. п. 4.2).
4.4.5. Дополнительные погрешности
Дополнительные погрешности задаются в виде функции влияния внеш-
них факторов (температуры, влажности, напряжения питания) на основную
погрешность измерения или, в случае линейной функции влияния, коэффи-
циентом влияния. Например, может быть задано, что основная погрешность
увеличивается на 4-0,05 % при изменении напряжения питания на 4-20 %.
Если задан диапазон изменения влияющих величин, в качестве их мате-
матического ожидания для расчетов с помощью функции влияния берут их
среднее значение [260].
Среднеквадратическое отклонение дополнительной погрешности для ли-
нейной функции влияния находят по формуле [260]
(4.108)
где — коэффициент влияния внешнего фактора; Ci, & — нижняя и верхняя
границы изменения влияющей величины.
Дополнительная погрешность может увеличивать как систематическую,
так и случайную составляющую основной погрешности. Для этого функции
влияния задаются раздельно на каждую составляющую.
Если известно, что дополнительные погрешности нескольких средств из-
мерений коррелируют (например, синхронно возрастают при увеличении на-
пряжения питания в сети или температуры окружающей среды), то такие по-
грешности суммируют как коррелированные величины с учетом коэффициента
корреляции (4.102)-(4.104).
Дополнительные погрешности считаются несущественными, если их сумма
составляет менее 17 % наибольшего возможного значения инструментальной
погрешности в рабочих условиях эксплуатации [261].
4.4.6. Динамические погрешности
Динамическая погрешность при известном входном сигнале является де-
терминированной. Она обычно приводит к занижению показаний измеритель-
ного прибора. Суммирование таких погрешностей выполняется алгебраически.
Подробнее об оценке динамической погрешности см. п. 4.3.2 и книгу [253].
Измерительные каналы
281
Динамическая погрешность считается несущественной, если она составляет
менее 17 % наибольшего возможного значения инструментальной погрешности
в рабочих условиях эксплуатации [261].
4.4.7. Нахождение итоговой погрешности
После суммирования погрешностей по группам, как это было описано выше,
результат измерения обычно выражают в виде
х = (хо + Д) ± а, (4.109)
где xq — измеренное значение; Д — сумма всех погрешностей, которые скла-
дывались алгебраически, т.е. детерминированных погрешностей, которые могут
быть прибавлены к измеренной величине в качестве поправки; а — сумма всех
случайных погрешностей, которые складывались геометрически, в том числе
с учетом корреляционных связей:
& — ^^Есист + ^Еслуч + ^Едоп + ^Еметод’ (4.110)
где (Тесист — сумма всех систематических погрешностей измерительного кана-
ла; (ТЕслуч — сумма всех случайных погрешностей; <теДоп — сумма всех до-
полнительных погрешностей; аЕметод — сумма всех случайных составляющих
методических погрешностей, включая погрешность программного обеспечения
(см. п. 4.1.6). Детерминированные составляющие методических погрешностей
учитываются в слагаемом Д (см. (4.109)).
Вместо среднеквадратического отклонения может быть указан предел до-
пустимых значений. Однако должно быть явно указано, какая именно оценка
погрешности использована, поскольку доверительные вероятности для преде-
ла допустимых значений (единица) и для среднеквадратического отклонения
(0,68) существенно отличаются.
Случайная, систематическая и дополнительная погрешности могут быть
указаны раздельно. МИ 1317-2004 [265] рекомендует «вместе с результатом
измерений представлять характеристики его погрешности или их статистиче-
ские оценки». Поэтому состав характеристик погрешности может быть вы-
бран в каждом конкретном случае индивидуально, в зависимости от смысла
решаемой задачи.
При выполнении многократных измерений результат измерений должен со-
держать также указание на количество измерений, использованных при усред-
нении и интервал времени, в течение которого были выполнены измерения [265].
Поскольку выражение для суммы дисперсий случайных величин (4.25) по-
лучено независимо от закона распределения, геометрическое суммирование по-
грешностей дает правильное значение дисперсии независимо от законов рас-
пределения отдельных составляющих. Однако при этом ничего нельзя сказать
о функции распределения суммарной погрешности, в том числе о надежности
(доверительной вероятности) полученного результата. Тем не менее, поскольку
при суммировании пяти и более погрешностей закон распределения суммы бли-
зок к нормальному независимо от законов распределения отдельных слагаемых
[253], то, зная среднеквадратическое отклонение итоговой погрешности, можно
282
Глава 4
использовать нормальный закон распределения для указания доверительного
интервала и доверительной вероятности результата измерений.
Нахождение погрешности измерительного канала в условиях недо-
статка исходных данных. При оценке погрешности измерительных кана-
лов средств автоматизации следует по возможности использовать эксперимен-
тальный метод. Однако в случаях, когда это невозможно или экономически
нецелесообразно, делают расчет по изложенной выше методике. Типичной
проблемой, которая при этом возникает, является отсутствие некоторых ис-
ходных данных. В этой ситуации метрологическая инструкция МИ 2232-2000
[254] рекомендует использовать следующие «значения по умолчанию»: средне-
квадратическое значение погрешности принимается равным половине предела
допускаемых значений погрешности; математическое ожидание основной и до-
полнительной погрешности принимается равным нулю; корреляция между от-
дельными составляющими погрешности отсутствует; случайная составляющая
погрешности измерений является некоррелированной случайной величиной (бе-
лым шумом) или вырождается в систематическую погрешность; функции рас-
пределения внешних влияющих величин предполагаются равномерными или
нормальными; считается, что инерционные свойства средств измерений не ока-
зывают влияния на погрешность измерений.
4.5. Заключение
В зависимости от цели исследований или измерений необходимо различать
такие характеристики измерительных каналов, как разрешающая способность,
порог чувствительности, динамический диапазон или точность.
Усреднение результатов многократных измерений возможно только при
большой случайной составляющей погрешности и практически редко дает повы-
шение точности более чем в 2...3 раза. Однако это не относится к разрешающей
способности, которая может быт увеличена существенно.
Нельзя игнорировать динамическую погрешность измерений, которая часто
не указывается в эксплуатационной документации. Отсутствие информации о
ее величине не свидетельствует об отсутствии самой погрешности.
При выборе частоты дискретизации аналогового сигнала перед измерени-
ями с максимальной частотой, допускаемой модулем ввода, необходимо убе-
диться, что спектр помехи лежит ниже половины частоты дискретизации или
использовать дополнительно антиалиасный фильтр.
Ошибки, допущенные на этапе проектирования и монтажа автоматизиро-
ванной системы, могут сделать измерения недостоверными.
При нахождении итоговой погрешности измерений следует различать де-
терминированные, случайные и коррелированные погрешности, которые сум-
мируются по-разному.
Одним из путей упрощения методики расчета погрешностей может быть
использование средств измерений с большой избыточностью по точности. Тогда
учет тонких нюансов теории погрешностей становится излишним.
Измерительные каналы
283
4.6. Обзор литературы
В [271] рассмотрено соотношение между доверительным интервалом и до-
верительной вероятностью для случая очень ограниченной исходной информа-
ции, при малом числе измерений и унимодальной плотности распределения;
в [272] найдена оценка математического ожидания и дисперсии погрешности
при косвенных измерениях со случайной коррелированной погрешностью, в
том числе для нелинейных моделей измерения. Путем моделирования мето-
дом Монте-Карло показано, что погрешность предложенного аналитического
метода оценки погрешности составляет около 0,5 %. В [273] предложен ал-
горитм усреднения результатов многократных измерений для восстановления
сигнала, подаваемого для измерения сопротивления кожи человека. В [274]
разработан метод оценки класса точности средств измерений по динамической
погрешности независимо от формы измеряемого сигнала. В статьях [275, 277,
278] исследованы методы коррекции динамической погрешности, позволяющие
снизить динамическую погрешность измерительных преобразователей и дат-
чиков. В [276] предлагается вместо аналитического метода расчета случай-
ной составляющей погрешности в автоматизированных системах измерений ис-
пользовать метод Монте-Карло. В серии метрологических инструкций [279-
284] приводятся полезные для практики сведения, касающиеся измерительных
систем средств автоматизации.
Глава 5
ПИД-регуляторы
ПИД-регулятор использует пропорционально-интегрально-дифференци-
альный закон регулирования. ПИД-регулятор был изобретен еще в 1910 г.
[14]; позже, в 1942 г., Зиглер и Никольс разработали методику его настрой-
ки [287], а после появления микропроцессоров в 80-х годах развитие ПИД-
регуляторов происходит нарастающими темпами. Общее число публикаций по
ПИД-регуляторам за 9 лет с 1973 по 1982 гг. составило 14 работ, с 1983 по
1992 г. — 111 работ, а за период с 1998 по 2002 гг. (за 4 года) — 225 работ [288].
На одном только семинаре IFAC (International Federation of Automatic Control) в
2000 г. было представлено около 90 докладов, посвященных ПИД-регуляторам
[289]. Число патентов по этой теме, содержащихся в патентной базе данных
[290] в январе 2006 г. составило 364 шт.
ПИД-регулятор относится к наиболее распространенному типу регулято-
ров. Около 90...95 % [14, 291] регуляторов, находящихся в настоящее время в
эксплуатации, используют ПИД-алгоритм. Причиной столь высокой популяр-
ности является простота построения и промышленного использования, ясность
функционирования, пригодность для решения большинства практических за-
дач и низкая стоимость. Среди ПИД-регуляторов 64 % занимают одноконтур-
ные регуляторы и 36 % — многоконтурные [292]. Контроллеры с обратной
связью охватывают 85 % всех приложений, контроллеры с прямой связью —
6 %, контроллеры, соединенные каскадно, — 9 % [292].
ПИД-регулятор, воплощенный в виде технического устройства, называют
ПИД-контроллером. ПИД-контроллер обычно имеет дополнительные сервис-
ные свойства автоматической настройки, сигнализации, самодиагностики, про-
граммирования, безударного переключения режимов, дистанционного управле-
ния, возможностью работы в промышленной сети и т.д.
После появления дешевых микропроцессоров и аналого-цифровых преоб-
разователей в ПИД-регуляторах используется автоматическая настройка па-
раметров, адаптивные алгоритмы, методы нечеткой логики, генетические ал-
горитмы. Усложнились структуры регуляторов: появились регуляторы с дву-
мя степенями свободы, с применением принципов разомкнутого управления в
сочетании с обратной связью, со встроенной моделью процесса.
Несмотря на долгую историю развития и большое количество публика-
ций, остается много проблем в вопросах устранения интегрального насыще-
ния, при регулировании в контурах с гистерезисом, нелинейными объектами и
ПИД-регуляторы
285
транспортной задержкой; практические реализации ПИД-контроллеров не все-
гда содержат антиалиасные фильтры, граничная частота фильтра часто вы-
брана неправильно, чрезмерный шум и внешние возмущения затрудняют на-
стройку параметров. Проблемы усложняются тем, что в современных систе-
мах управления динамика часто неизвестна, регулируемые процессы нельзя
считать независимыми, измерения сильно зашумлены, нагрузка непостоянна,
технологические процессы непрерывны.
Часть проблем возникает по причине сложности эксплуатации. Во многих
ПИД-контроллерах дифференциальная компонента выключена только пото-
му, что ее трудно правильно настроить. Пользователи пренебрегают процеду-
рой калибровки, недостаточно глубокие знания динамики регулируемого про-
цесса не позволяют правильно выбрать параметры регулятора. В результате
30 % регуляторов, используемых в промышленности, настроены неправильно
[293]. Поэтому основные усилия исследователей в настоящее время сосредо-
точены на поиске надежных методов автоматической настройки регуляторов,
как встроенных в ПИД контроллер, так и функционирующих на отдельном
компьютере [294-296].
На российском рынке ПИД контроллеры наиболее хорошо представлены
продукцией фирм ABB, Foxboro, Honeywell, Yokogawa, Toshiba, Siemens, Omron,
Контравт, Овен, Текон, НИЛ АП.
Ниже рассмотрены регуляторы для медленных, одномерных и устойчивых
(преимущественно тепловых) процессов, которые наиболее распространены в
системах промышленной автоматизации.
5.1. Идентификация моделей динамических
систем
Для выполнения качественного регулирования необходимы знания о ди-
намическом поведении объекта управления. Процесс получения (синтеза) ма-
тематического описания объекта на основе экспериментально полученных сиг-
налов на его входе и выходе называется идентификацией объекта. Матема-
тическое описание может быть представлено в табличной форме или в форме
уравнений. Идентификация может быть структурной, когда ищется структура
математического описания объекта, или параметрической, когда для известной
структуры находят значения параметров, входящих в уравнения модели. Когда
ищутся параметры модели с известной структурой, то говорят об идентифика-
ции параметров модели, а не объекта.
Результатом идентификации может быть импульсная, или переходная ха-
рактеристика объекта, а также соответствующие им спектральные характери-
стики, которые представляются в виде таблицы (массива). Эти характеристи-
ки могут использоваться в дальнейшем для структурной и параметрической
идентификации математической модели объекта регулирования или непосред-
ственно для определения параметров ПИД-регулятора (как, например, в ме-
тоде Зиглера-Никольса, см. п. 5.5.2).
286
Глава 5
Несмотря на разнообразие и сложность реальных объектов управления,
в ПИД-регуляторах используются, как правило, только две структуры мате-
матических моделей: модель первого порядка с задержкой и модель второго
порядка с задержкой (см. п. 5.1.1). Гораздо реже используются модели более
высоких порядков, хотя они могут более точно соответствовать объекту. Су-
ществуют две причины, ограничивающие применение точных моделей. Первой
из них является невозможность аналитического решения системы уравнений,
описывающей ПИД-регулятор с моделью высокого порядка (а именно аналити-
ческие решения получили наибольшее распространение в ПИД-регуляторах с
автоматической настройкой). Вторая причина состоит в том, что при большом
числе параметров и высоком уровне шума измерений количество информации,
полученной в эксперименте, оказывается недостаточным для идентификации
тонких особенностей поведения объекта. Это проявляется в плохой обуслов-
ленности системы линейных алгебраических уравнений, к которой приводит
метод наименьших квадратов.
Выбор оптимальной модели обычно основан на компромиссе между каче-
ством регулирования и сложностью модели. Для нелинейных процессов и при
повышенных требованиях к качеству регулирования разрабатывают модели с
индивидуальной структурой, основываясь на физике процессов, протекающих
в объекте управления.
Если процесс любой сложности аппроксимировать моделью первого поряд-
ка с транспортной задержкой, то полученные таким способом постоянная вре-
мени Т и задержка L называются эффективной постоянной времени и эф-
фективной задержкой.
Идентификация может выполняться с участием оператора или в автома-
тическом режиме, а также непрерывно (в реальном времени) — в адаптивных
регуляторах либо по требованию оператора (в регуляторах с самонастройкой),
подробнее см. п. 5.6.
Теория ПИД-регуляторов хорошо развита для линейных объектов управ-
ления. Однако практически все реальные объекты имеют нелинейность типа
ограничения управляющего воздействия. Ограничение может быть связано, на-
пример, с ограниченной мощностью нагревателя при регулировании тепловых
процессов, с ограничением площади сечения перепускного клапана, с ограни-
чением скорости потока жидкости и т.п. Ограничение «снизу» в тепловых си-
стемах связано с тем, что источник тепла не может, как правило, работать в
режиме холодильника, когда этого требует закон регулирования.
Для минимизации нелинейных эффектов при идентификации объекта в
рабочей точке («в малом») используют малые изменения управляющего воз-
действия, когда нелинейности системы можно не учитывать.
Различают активную идентификацию (с помощью воздействия на систему,
которое подается специально с целью идентификации) и пассивную — когда
в качестве воздействий используют сигналы, имеющиеся в системе в процес-
се ее нормального функционирования. В пассивном эксперименте производят
только наблюдение за поведением системы в нормальном режиме ее функци-
онирования, пытаясь извлечь из этого наблюдения информацию, достаточную
для настройки регулятора.
ПИД-регуляторы
287
5.1.1. Модели объектов управления
Существуют два способа получения модели объекта управления: формаль-
ный и физический. При формальном подходе используют модель типа «чер-
ный ящик», в которой не содержится информация о физических процессах,
происходящих в объекте, или о его структуре. Синтез формальной модели
сводится к выбору одной из небольшого числа моделей, описанных ниже, и
идентификации ее параметров.
При физическом подходе модель объекта составляют в виде системы урав-
нений, описывающих физические процессы в объекте. При этом в качестве
параметров модели могут использоваться геометрия объекта, физические па-
раметры материала, фундаментальные физические константы. В физическую
модель могут быть добавлены несколько формальных («подстроечных») па-
раметров, которые необходимо определить экспериментально из условия ми-
нимизации погрешности моделирования. Достоинством физических моделей
является возможность установления аналитической зависимости между пара-
метрами ПИД-регулятора и физическими параметрами объекта регулирова-
ния, например зависимости постоянной интегрирования от количества яиц в
инкубаторе или от количества жидкости в автоклаве. Другим достоинством
физических моделей является то, что в процессе построения физической мо-
дели в нее вносится информация о структуре объекта. Наличие в модели
информации о структуре объекта позволяет лучше отфильтровать помехи и
возмущения в процессе подгонки модели к экспериментальным данным мето-
дом наименьших квадратов.
В отличие от физической, формальная модель справедлива только для то-
го набора параметров, который был получен в процессе ее идентификации. При
изменении параметров объекта (например, количества яиц в инкубаторе) иден-
тификацию параметров модели нужно выполнять заново.
Модель первого порядка. Наиболее распространенными объектами
управления являются системы, описываемые уравнениями тепломассоперено-
са. Реакция таких объектов (при условии, что они являются линейными по
входному воздействию) на ступенчатое входное воздействие имеет задержку L
и точку перегиба (рис. 5.1-5.4). Точное решение этих уравнений осуществляет-
ся численными методами и в теории автоматического управления не использу-
ется. Используют достаточно простое выражение (модель первого порядка с
транспортной задержкой)
2/(t) = Ууст
2/о
1 — ехр
+ 2/0
при t > L;
при t < L,
(5-1)
где y(t) — выходная величина объекта регулирования (в данном случае —
температура); уо — значение выходной величины при t < L (рис. 5.1); Т —
постоянная времени, t — время; ууСт — установившееся значение выходной
величины. На рис. 5.1 и 5.2 кривая, построенная по выражению (5.1), пока-
зана штриховой линией.
288
Глава 5
Рис. 5.1. Температура трубы отоп-
ления здания после включения кла-
пана подачи теплоносителя. Аппрок-
симировано моделью первого поряд-
ка. Измерено в НИЛ АП приборами
серии «RealLab!*
Рис. 5.2. Температура в помещении
объемом 150 куб. м после включения
отопления (см. рис. 5.1). Аппрок-
симировано моделью первого поряд-
ка. Измерено в НИЛ АП приборами
серии «RealLab!*
Обычно при описании переходных процессов выходную переменную отсчи-
тывают от постоянного уровня i/о и нормируют на амплитуду входного скач-
ка umax- Тогда величину
Кр — (i/уст 3/о)/^шах,
(5.2)
(р — от слова «process») называют коэффициентом передачи объекта в уста-
новившемся режиме и уравнение (5.1) записывают в виде
з/(0 = <
Кр 1-ехр(----—]
0
при t L*
при t < L.
(5.3)
Временные характеристики очень сложно использовать при аналитическом
анализе и синтезе ПИД-регуляторов. Для этих целей применяют их изобра-
жение по Лапласу или Фурье. Изображение по Лапласу переходной функ-
ции (5.3) имеет вид
(5.4)
где з — комплексная частота, з = а 4- jw. Для передаточных функций обычно
ПИД-регуляторы
289
можно положить а —► 0 и тогда з —► jw [297]. Поскольку изображением входно-
го ступенчатого воздействия является функция 1/з, то, поделив правую часть
(5.4) на 1/з, получим реакцию объекта на единичный импульс (дельта-функцию
Дирака), которую называют передаточной функцией объекта управления пер-
вого порядка с транспортной задержкой L:
(5-5>
Задержка выходной переменной y(t) может быть двух видов: транспорт-
ной или обусловленной естественной инерционностью динамического объекта.
Транспортная задержка входного воздействия u(t) описывается выражением
u(t - L) при t > L; дч
О при t < L,
где u(t) — входное воздействие на объект управления; L — длительность за-
держки. Изображение по Лапласу этого выражения имеет вид [303]
y(s) = u(s)e~eL, (5.7)
y(t) = •(
где u(s) — изображение по Лапласу функции u(t).
Задержка, вызванная естественной инерционностью динамического объек-
та, точно моделируется дифференциальными уравнениями в частных производ-
ных, и форма переходного процесса участка задержки является индивидуаль-
ной для каждого физического процесса, вызвавшего задержку. Приближенно
такая задержка может быть смоделирована путем последовательного соеди-
нения нескольких звеньев первого порядка, однако это представление обычно
неоправданно сложно. При синтезе ПИД-регуляторов, как правило, исполь-
зуется модель транспортной задержки, которая дает большую погрешность на
начальном участке переходной характеристики (рис. 5.1), но является предель-
но простой. Если же важно получить точную форму колебаний в системе, то
используют точные модели задержки.
Как видим, модель первого порядка описывается тремя параметрами: Кр,
Т, L, которые должны быть найдены в процессе параметрической идентифи-
кации.
Модель второго порядка. Если описанная модель первого порядка ока-
зывается слишком грубой, используют модель второго порядка:
71 Z t — Т% Z t — 7/\
Т1-Т2 ехр V тГ) ~ Т2-Т\ ехр ( тГ)
при t > L,
Г1 0 Т2;
при t L,
Ti=Tz;
при t < L.
(5.8)
Такая модель описывается четырьмя параметрами (Кр, 7i, Т2, L), которые на-
ходятся методами идентификации, описанными ниже. Модель второго порядка
имеет характерную точку перегиба на переходной характеристике (рис. 5.3-5.4).
290
Глава 5
Рис. 5.3. Переходная характеристика тер-
мошкафа «СНОЛ» при внешних возмуще-
ниях с большим временем корреляции. Ап-
проксимировано моделью второго поряд-
ка. Измерено в НИЛ АП приборами серии
Рис. 5.4. Переходная характеристика тем-
пературы в термошкафе при отсутствии
шума и внешних возмущений. Аппроксими-
ровано моделью второго порядка. Измере-
но в НИЛ АП приборами серии «RealLab!»
«RealLab!»
Изображение по Лапласу импульсной характеристики модели второго по-
рядка с задержкой имеет вид
W = ——-gf——-e-‘L, (5.9)
(sTi + 1)(s72 4-1)
На рис. 5.1-5.5 приведено несколько переходных характеристик реаль-
ных объектов, снятых в производственном цехе с помощью модуля NL-4RTD
(НИЛ АП, www.RealLab.ru), датчика ТСМ-50, ОРС-сервера NLopc и програм-
мы MS Excel. Погрешность измерений составляет 1°, разрешающая способ-
ность 0,01°. Экспериментально снятые точки (несколько тысяч) образуют на
рисунках сплошную линию, кривая аппроксимирующей модели показана штри-
ховой линией.
Модель в переменных состояния. Описанные модели первого и второго
порядка довольно просты. Эта простота позволяет путем несложных графиче-
ских построений определить их параметры, не прибегая к численным методам
минимизации погрешности моделирования. Более точную модель можно по-
лучить, если использовать передаточную функцию, содержащую полином не
только в знаменателе, но и в числителе. Однако такие модели слишком слож-
ны для аналитического синтеза ПИД-регуляторов, поэтому они используются
совместно с численными методами синтеза. При этом предпочтение отдает-
ся моделям в форме дифференциальных уравнений, а не в форме передаточ-
ных функций. Наиболее распространенной моделью в виде дифференциальных
уравнений является система уравнений в переменных состояния.
Уравнения в переменных состояния имеют следующий вид:
dx(t)
< —ц— = Ax(t) 4- Bu(t - L); y(t) = Cx(t) 4- Du(t - L) при t > L; 10)
, x(t) = Xq при t L,
где x(t) — вектор переменных состояния; u(t), y(t) — векторы входных и вы-
ходных переменных объекта или скаляры для объекта с одним входом и одним
ПИД-регуляторы
291
выходом, А,В,С,Р — матрицы постоянных коэффициентов, которые необхо-
димо найти с помощью процедуры идентификации.
Первое уравнение в (5.10) описывает динамику объекта, а второе (алгеб-
раическое) связывает входные и выходные переменные с внутренними пере-
менными объекта. Внутренние переменные получили название переменных
состояния объекта.
Уравнения в переменных состояния могут быть преобразованы в форму
передаточных функций и обратно.
В случае физических моделей переменные состояния отражают реальные
переменные в объекте, например температуру в некоторой точке внутри объ-
екта. Однако чаще эти переменные не имеют физического смысла и служат
только для формирования дифференциальных уравнений.
В качестве примера приведем матрицы, входящие в уравнение (5.10) для
инкубатора «Птичка-100» (рис. 5.5) как объекта управления:
-0,914 • 10"3 -0,723 • 10“31 Г 0,122 • 10~3
-3,41 • 10"3 -6,12 • 10“3 J ’ ~ [0,724 • 10~3
С =[369 -0,0488], Р = 0,
(5.11)
На рис. 5.5,а и б сплошной линией показана экспериментально полученная
кривая; штриховой линией показана кривая, построенная по модели первого
порядка, пунктирной линией — модель в переменных состояния (5.10) с мат-
рицами (5.11); модель третьего порядка в переменных состояния практически
сливается с экспериментальными данными. На рис. 5.5,6 показан в увеличен-
ном масштабе начальный участок переходной характеристики.
Модель второго порядка в переменных состояния можно наглядно пред-
ставить с помощью электрической цепи, показанной на рис. 5.6. В ней напря-
жения xi = xi(t) и Х2 = хъ(1) в узлах отображают состояние цепи в момент
времени t и поэтому называются переменными состояния. Выходная величина
y(t) = E(xi(t),X2(t)) является алгебраической функцией от переменных состоя-
ния и, в более общем случае, от входного воздействия.
Рис. 5.5. Переходная характеристика температуры в серийном инкубаторе «Птичка-
100» (а) и ее начальный участок в масштабе с увеличением (б). Штриховая линия
соответствует модели 1-го порядка, пунктирная — 2-го, сплошная линия — 3-го (сли-
вается с экспериментальными данными.) Измерено в НИЛ АП приборами серии
«RealLab!»
292
Глава 5
Рис. 5.6. Электрическая
цепь, описываемая системой
уравнений второго порядка
в переменных состояния
Рис. 5.7. Амплитудно-частотная и фа-
зочастотная характеристики инкуба-
тора «Птичка-100», (Jo = 2тг/5, с”1
С помощью преобразования Ла-
пласа модель в переменных состояния
можно преобразовать в модель в фор-
ме передаточных функций. В частно-
сти, для уравнений инкубатора (5.10),
(5.11) получим
= 0,0452(3 + 0,00188) 10,
v ’ (з + 0,00643) (з + 0,000520)
Полагая s -> jw и переходя к пока-
зательной форме комплексной функ-
ции, получим амплитудно-частотную и
фазочастотную характеристики моде-
ли инкубатора, показанные на рис. 5.7.
Модели интегрирующих про-
цессов. Выходная величина некото-
рых объектов управления при подаче
на вход ступенчатого воздействия не
стремится к установившемуся значе-
нию, как на рис. 5.1-5.5, а продолжает
Такие переходные процессы называют
изменяться в установившемся режиме.
интегрирующими. Пример интегрирующего процесса приведен на рис. 5.8. Это
зависимость температуры в водонагревателе мощностью 2 кВт от времени по-
сле включения нагрева. Поскольку мощность нагревателя очень высока, вода
успевает закипеть за время t Т. Это позволяет после разложения (5.3) в ряд
Тейлора ограничиться первым членом ряда и тогда из (5.3) получим
!/(«) = <
t — L
кР—
0
при t > L;
при t < L.
(5-12)
Передаточная функция такого процесса имеет вид
Ж(з) = —e-s£, (5.13)
S
Другими примерами интегрирующих процессов могут быть: перемещение
ленты транспортера; поворот оси двигателя, налив жидкости в емкость, рост
давления в замкнутом сосуде.
Передаточные функции для интегрирующих процессов 1-го и 2-го порядка
ПИД-регуляторы
293
Рис. 5.8. Переходная характеристика чайни-
ка «Philips* с мощностью нагревателя 2 кВт.
Пример интегрирующего процесса первого по-
рядка. Измерено в НИЛ АП приборами серии
«RealLab!»
получаются из выражений (5.5) и (5.9) путем их умножения на изображение
по Лапласу оператора интегрирования (1/s):
W(s) = - . ,.e~8L
v ’ s(sT +1)
при t > L,
при t < L.
(5.14)
W(s) = --------—-------—e
S (sTi + l)(sT2 + 1)
!/(*) =
r, Г „X T? ( t-L\
Kp t- (T2 + Ti) - ——— exp I ——— I +
J2-J1 \ Л /
T? ( t — L\
+ T2-iiexp( T2 J,
(5.15)
при t > L;
при t < L
График функции (5.15) показан на рис. 5.9.
В установившемся режиме, т.е. при s —» 0 или при
t —> 00 передаточная функция (5.15) вырождается
К
bW(s) = —e~sL1 а переходная функция — в
s
y(t) = f ~ ПРИ и
' ' (0 в противном случае.
Отметим, что моделирование задержки с по-
мощью сдвига функции на величину L, как это
сделано во всех приведенных моделях, дает удо-
влетворительные результаты для оценки устойчи-
вости и качества регулирования, однако не позво-
ляет получить даже качественно правильный ре-
Рис. 5.9. Пример инте-
грирующего процесса
второго порядка (5.15)
зультат при моделировании формы колебаний.
В
качестве иллюстрации на
рис. 5.10 показаны процесс в инкубаторе, полученный с помощью модели тре-
тьего порядка с транспортной задержкой L (штриховая линия) и точное реше-
ние (сплошная линия). Несмотря на высокую точность модели (см. рис. 5.5,а),
поведение реальной системы качественно отличается от результатов моделиро-
294
Глава 5
Рис. 5.11. Пример нелинейного процесса:
разогрев легкоплавкого металлического спла-
ва с глицерином на поверхности. Нелиней-
ности по входному воздействию появляются
в точке плавления сплава и в точке кипения
глицерина. Измерено в НИЛ АП приборами
серии «RealLab!»
38,8
38,4
38,0
37,6
37,2
1,75 1,8 1,85 1,9 1,95 2
Время, с-104
Рис. 5.10. Форма колебаний в инкуба-
торе в режиме релейного регулирования
при использовании модели третьего по-
рядка с транспортной задержкой (штри-
ховая линия) и в реальном инкубаторе
(сплошная линия)
вания. Вопрос о выборе подходящей модели и ее точности не является триви-
альным и зависит от цели моделирования. Обычно такой целью является по-
лучение заданного качества регулирования при заданном запасе устойчивости.
Приведенные выше модели не позволяют описать нелинейные физические
процессы. Пример поведения нелинейного процесса иллюстрируется рис. 5.11,
на котором показан график процесса разогрева металлического сплава, покры-
того слоем глицерина. Резкое повышение теплоемкости в точке плавления
сплава и в точке кипения глицерина являются причиной нелинейностей, ко-
торые можно наблюдать на рис. 5.11. Для описания таких процессов линейные
модели можно использовать только на линейных участках характеристик.
Кроме описанных выше, существуют объекты с колебаниями во время пе-
реходного процесса (например, механические системы с упругими элемента-
ми), а также процессы, в которых выходная величина в начальный момент
после включения начинает падать, а затем — расти, или наоборот. Такие про-
цессы характерны для паровых котлов высокого давления (эффект «вскипа-
ния» поверхности [303]).
Применение более сложных моделей позволяет улучшить качество регули-
рования, однако делает невозможным простой аналитический расчет парамет-
ров регулятора на основании параметров модели. Поэтому наибольшее рас-
пространение в ПИД-регуляторах нашли простейшие линейные модели пер-
вого и второго порядка.
Приведенные выше три типа моделей: в форме временных функций, в фор-
ме их изображений по Лапласу и в форме дифференциальных уравнений экви-
валентны между собой и могут быть преобразованы одна в другую.
5.1.2. Выбор тестовых сигналов
Для идентификации объекта управления необходимо измерять сигнал на
его входе u(t) и реакцию y(t) на выходе. Для идентификации в частотной об-
ласти оперируют изображениями по Фурье входного U(jw) и выходного V(ja>)
сигнала. Если входной сигнал подается специально с целью идентификации,
ПИД-регуляторы 295
то такой эксперимент называется активным. Если же идентификация выпол-
няется путем измерения входных и выходных воздействий в системе в нормаль-
ном режиме ее функционирования, такой эксперимент называется пассивным.
Идентификацию можно выполнить, подавая тестовый сигнал не только на вход
системы, но и в виде изменения нагрузки (например, нагрузки на валу двига-
теля), а также параметров объекта (например, количества яиц в инкубаторе).
Идентификация в пассивном эксперименте привлекательна тем, что не вно-
сит погрешность в нормальное течение технологического процесса, однако ее
достоверность крайне низка в принципе [303] и может привести не к настрой-
ке, а расстройке ПИД-регулятора. Тем не менее, число патентов по ПИД-
регуляторам с пассивной идентификацией равно числу патентов с активной
идентификацией [292].
При проведении активного эксперимента возникает задача выбора формы
тестового воздействия. Наиболее часто для настройки ПИД-регуляторов ис-
пользуют скачок (рис. 5.12,а), двойной прямоугольный импульс (рис. 5.12,в) и
синусоидальный сигнал (рис. 5.12,г). Используют также прямоугольный им-
пульс (рис. 5.12,6), линейно нарастающий сигнал, треугольный импульс, псев-
Рис. 5.12. Наиболее часто используемые тестовые сигналы. Слева — временные диа-
граммы, справа — модули спектральной плотности; Т = 1. Для сигнала г взято пять пе-
риодов синусоиды
296
Глава 5
дослучайный двоичный сигнал (ПСДС) [297], шум, отрезок синусоиды (ча-
стотный метод).
На рис. 5.12 справа приведены графики зависимости модулей спектраль-
ной плотности перечисленных сигналов от частоты (амплитудные характери-
стики спектра).
Тестовое воздействие должно иметь достаточно малую амплитуду, чтобы
переходный процесс в объекте оставался в границах линейности. В то же время
оно должно быть достаточно большим, чтобы увеличить отношение сигнала к
шуму и внешним возмущениям. Перед подачей тестового воздействия объект
должен находиться в установившемся состоянии и быть устойчивым.
Предположим, что в качестве тестового воздействия для идентификации
мы выбрали синусоидальный сигнал (рис. 5.12,г). С увеличением числа пе-
риодов N амплитуда боковых лепестков в спектре сигнала уменьшается, ам-
плитуда основной гармоники увеличивается, ширина спектра сужается. При
прохождении такого сигнала через объект управления на его выходе получает-
ся почти синусоидальный сигнал с той же частотой, что и на входе, изменяется
только его амплитуда и фаза. Поэтому синусоидальный тестовый сигнал поз-
воляет получить только одну точку на графике АЧХ или ФЧХ объекта, а для
построения всей кривой необходимо подавать серию синусоидальных воздей-
ствий с разными частотами.
Вместо этого можно использовать сигнал, спектральное разложение кото-
рого содержит множество гармонических составляющих. Такой сигнал мож-
но подавать на объект идентификации однократно, но в результате получить
информацию об объекте в широком диапазоне частот. Спектральную харак-
теристику тестового сигнала необходимо выбирать такой формы, чтобы дей-
ствующее значение сигнала в любом интервале частот многократно превыша-
ло соответствующую величину помехи. Граничная частота спектра тестово-
го сигнала должна быть выше наибольшего по абсолютной величине полюса
передаточной функции объекта [298]. Точнее, выше, чем частота единичного
усиления сих разомкнутого контура с обратной связью. До настройки регуля-
тора, когда частота еще не известна, верхнюю граничную частоту спектра
тестового сигнала выбирают выше частоты cuieo, на которой фазовый сдвиг вы-
ходного синусоидального сигнала объекта относительно входного составляет
—180°. Указанный диапазон частот важен потому, что именно на частоте олео
возникают колебания, когда объект находится на границе устойчивости в за-
мкнутом контуре с релейным регулятором или П-регулятором. В контуре с ПИ-
регулятором частота затухающих колебаний может быть ниже, и соответство-
вать точке, где сдвиг фаз в объекте составляет около —145° [291] вследствие до-
полнительного фазового сдвига, вносимого интегратором. В ПИД-регуляторах
дифференцирующее звено может скомпенсировать этот фазовый сдвиг и ко-
лебания возникнут на частоте ojiso-
Нижняя граница диапазона, в котором необходимо достаточно точно иден-
тифицировать передаточную функцию объекта, должна быть примерно в 10
раз ниже частоты единичного усиления cui [299]. Более точно нижнюю границу
диапазона можно определить только после настройки ПИД-регулятора.
ПИД-регуляторы
297
Рис. 5.13. АЧХ объекта 2-го порядка |Ж(си)|
(сплошная линия) и амплитудная характери-
стика спектра различных тестовых воздейст-
вий |tz(cu)|: прямоугольного импульса (штри-
ховая линия); двойного импульса (пунктирная
линия); скачка (штрихпунктирная)
Рис. 5.14. Фазочастотная характе-
ристика объекта управления 2-го по-
рядка: штриховая линия — без транс-
портной задержки; сплошная линия —
с задержкой
В качестве иллюстрации к сказанному на рис. 5.13 и 5.14 сплошными жир-
ными линиями показаны амплитудно-частотная (АЧХ) и фазочастотная (ФЧХ)
характеристики объекта с передаточной функцией
p-sL
и'(’>=№+1)№+1)- <516>
где s —► Т\ = 1, Т2 = L = 0,3. Для получения хорошего отношения
сигнал/шум амплитудная характеристика спектра тестового сигнала не долж-
на иметь сильных провалов в интересующей области частот, чтобы обеспечить
достаточно большое отношение сигнала к шуму. Этому условию, в частно-
сти, удовлетворяют сигналы, показанные штриховой и пунктирной линиями
на рис. 5.13. Желательно также, чтобы порядок функции, описывающей спек-
тральную функцию тестового сигнала (т.е. порядок многочлена в знаменателе
функции), был не ниже порядка объекта управления, поскольку крутизна спа-
да АЧХ в области верхних частот увеличивается с ростом порядка.
Ширина спектра и мощность тестового сигнала существенно влияют на точ-
ность идентификации. В общем случае более мощные и широкополосные сигна-
лы позволяют определить большее число параметров передаточной функции.
Данное утверждение иллюстрируется рис. 5.15, где кривые 2 и 3 представля-
ют собой реакции на прямоугольные импульсы длительностью 60 с и разной
амплитуды. Из рисунка видно, что в формировании импульсной характери-
стики участвуют, по крайней мере, две ярко выраженные экспоненты с разыми
постоянными времени, причем одна из них становится практически неразли-
чимой (а ее параметры — неидентифицируемыми) на фоне помех при малой
амплитуде тестового сигнала.
298
Глава 5
Рис. 5.15. Переходная (1) и импульс-
ная (2, 3) характеристики инкубатора
«Птичка-100» при наличии помех
Невозможность идентификации ча-
сти параметров объекта в условиях по-
мех можно пояснить также с помощью
рис. 5.6. При Ri с R2 и RiCi С R2C2,
Gi ~ G2 после подачи импульсного те-
стового сигнала u(t) переменная х2 будет
расти очень медленно и за время, равное
длительности тестового импульса, может
остаться ниже уровня шума. Поэтому ин-
формация о ней будет отсутствовать в из-
мерениях переменной y(t), следовательно,
параметры R2, G2, С2 идентифицировать
будет невозможно. Результатом иденти-
фикации в этом случае будет модель 1-го
порядка, хотя объект имеет второй поря-
док. Для решения этой проблемы нужно
увеличить амплитуду (при jRi R2) или длительность (при Ri ~ R2, G\ ~ G2
и Ci с С2) тестового импульса.
Если идентификация выполняется без остановки технологического про-
цесса (а это наиболее важный для практики случай), то могут существовать
ограничения на максимальную мощность, длительность или энергию тестового
сигнала, чтобы не нарушать нормальный ход технологического процесса. На-
пример, в инкубаторе допускается подать импульс, кратковременно (на 5 мин)
повышающий температуру до 50 °C, однако повышение температуры даже на
1 °C в течение нескольких часов приводит к гибели зародыша. Поэтому возни-
кает задача выбора тестового сигнала с требуемым спектром при ограничении
на его мощность, длительность или энергию.
Наилучшую спектральную характеристику тестового сигнала можно по-
лучить, усложняя форму сигнала и увеличивая общее время идентификации.
Для идентификации быстрых процессов (например, в электромеханических си-
стемах) получил широкое распространение псевдослучайный двоичный сигнал
[297], имеющий равномерный спектр в ограниченной полосе частот. Однако
при управлении тепловыми процессами для ПИД-регуляторов наиболее кри-
тическим параметром является быстрота идентификации. Поэтому здесь ча-
ще используют простые сигналы, которые, кроме быстроты идентификации,
позволяют использовать простые расчеты по формулам вместо численных ме-
тодов минимизации функционала ошибки. Конечно, достоверность результа-
та при этом падает.
Даже тщательно выполненная идентификация может не дать положи-
тельного результата, если окажется, что объект существенно нелинеен (см.
рис. 5.11). Для тестирования на линейность объект возбуждают серией тесто-
вых воздействий разной амплитуды. Полученные реакции объекта нормируют
на амплитуду тестового сигнала и сравнивают между собой. Для линейных
объектов полученные кривые должны совпадать. Если различие между кри-
выми существенно превышает оценку погрешности идентификации, то объект
ПИД-регуляторы 299
следует рассматривать как нелинейный и использовать для него методы тео-
рии автоматического управления нелинейными системами.
После идентификации объекта разность между экспериментальными дан-
ными и расчетом по модели дает функцию погрешности идентификации, из
которой после удаления систематической составляющей можно найти корреля-
ционную функцию (или спектральную плотность мощности) шума измерений
и внешних возмущений. Более точно идентифицировать шум и внешние воз-
мущения можно путем измерения реакции объекта в рабочей точке при ста-
бильном уровне входного воздействия.
В теории идентификации в качестве тестовых сигналов часто использу-
ют случайные сигналы. Суть метода заключается в том, что на вход объекта
подают случайный стационарный тестовый сигнал u(t) и измеряют реакцию
на него y(t). Зная из эксперимента реализации случайных сигналов на вхо-
де и выходе объекта, находят оценки автокорреляционной функции входного
сигнала и взаимной корреляционной функции между случайным сигналом на
входе и выходе. Далее с помощью преобразования Фурье находят спектраль-
ные плотности мощности этих сигналов Ruu(s) и Ruy(s). После этого переда-
точная функция объекта управления W(s) находится простым делением по-
лученных Фурье-изображений:
ИЧз) = (5.17)
Пии\s)
Используя обратное преобразование Фурье, можно найти импульсную ха-
рактеристику объекта управления.
Однако на практике такой метод используют крайне редко, поскольку он
требует накопления данных в течение времени, которое примерно в 100 раз
превышает время взаимной корреляции шума между входом и выходом объек-
та [298], что на практике займет неоправданно больше время для медленных
(например, тепловых) процессов.
Единичный скачок (рис. 5.12,а и 5.13, штрихпунктирная линия), в отли-
чие от других тестовых сигналов, позволяет получить установившееся значение
?/(t), t —► оо, и точно найти коэффициент передачи объекта в установившемся
режиме. Поэтому амплитуда скачка может быть выбрана гораздо меньшей,
чем амплитуда прямоугольного импульса, что важно для процессов с нели-
нейностью типа ограничения (например, для тепловых процессов, как прави-
ло, это ограничение на мощность нагревателя). Однако длительность скачка,
необходимая для достижения установившегося режима, может потребоваться
слишком большой, неприемлемой для некоторых технологических процессов.
График модуля спектральной плотности единичного скачка спадает со ско-
ростью —20 дБ/дек, что делает проблематичным идентификацию самого ин-
тересного (начального) участка переходной характеристики (т.е. окрестности
частоты о>-18о) в условиях ограничения на энергию тестового сигнала.
Реакции (отклики) объектов первого и второго порядка на единичный ска-
чок отличаются незначительно (рис. 5.16, кривые 1). Это существенно увеличи-
вает погрешность идентификации в условиях помех, поскольку относительная
300
Глава 5
Рис. 5.16. Реакция объектов 1-го (штрихо-
вая линия) и 2-го (сплошная линия) порядка
на единичный скачок (1), на короткий прямо-
угольный импульс (2) и двойной прямоуголь-
ный импульс (5)
Время, с
Рис. 5.17. Реакция на прямоугольный
импульс объектов первого (I), второго (2)
и третьего (3) порядка с передаточной
функцией вида 1/(1 4- зТ)п
10
погрешность 7(t) разности откликов объектов первого и второго (t/2(t))
порядка быстро растет с уменьшением расстояния между ними I3/1 (t<) — ?/2(ti)|:
T(“) = Wb7W’ (5Л8)
где п — среднеквадратическое напряжение помехи, ti — момент времени для
г-го измеренного отсчета. Аналогичные погрешности для реакции на импульс
и двойной импульс (рис. 5.16, кривые 2 и 5) гораздо меньше.
С ростом порядка объекта различимость откликов моделей смежных поряд-
ков ухудшается. Это приводит не только к снижению отношения сигнал/шум,
но и к ухудшению обусловленности системы линейных алгебраических уравне-
ний, которую приходится решать при параметрической идентификации моде-
лей высоких порядков методом наименьших квадратов.
Прямоугольный импульс (рис. 5.12,# и 5.17) имеет большую спектраль-
ную плотность в области высоких частот, чем скачок (рис. 5.13, штриховая
и пунктирная линии). При ограничении на энергию тестового сигнала это
позволяет более точно выполнить идентификацию в наиболее важной высо-
кочастотной области.
Вторым достоинством прямоугольного тестового импульса является боль-
шое различие в реакции объектов первого и более высоких порядков (рис. 5.16,
кривые 2, и рис. 5.17), что позволяет улучшить идентифицируемость парамет-
ров моделей второго и более высоких порядков по сравнению с применением
единичного скачка. После воздействия прямоугольного импульса система воз-
вращается в первоначальное состояние, что уменьшает общее время экспери-
мента по сравнению с единичным скачком.
Прямоугольный импульс является приближенным аналогом единичного
импульса (дельта-функции Дирака), которая имеет равномерную по частоте
спектральную плотность. Поскольку единичный импульс физически нереали-
зуем, используют его приближенный аналог — прямоугольный импульс мак-
ПИД-регуляторы 301
симально большой высоты и минимальной длительности. Высота импульса на
практике всегда ограничена. Для тепловых процессов этой границей обычно
является мощность нагревателя. При ограниченной высоте импульса его дли-
тельность будет определять отношение сигнал/шум на выходе объекта. Поэто-
му длительность импульса Т (см. рис. 5.12,6) выбирают по возможности боль-
шей, однако она должна быть меньше, чем тг/сихво, чтобы наиболее интересная
часть передаточной функции объекта была возбуждена равномерной частью
спектра тестового сигнала (см. рис. 5.13, штриховая линия).
Необходимость выбора большой высоты прямоугольного тестового импуль-
са является его недостатком, который оказывается существенным при силь-
ных помехах или резких технологических ограничениях на амплитуду вход-
ного воздействия.
Вторым недостатком прямоугольного импульса является невозможность
точной оценки статического коэффициента передачи системы.
Разновидностью прямоугольного импульса является двойной прямоуголь-
ный импульс (см. рис. 5.12,в), который по сравнению с одиночным импульсом
имеет двойной размах и максимум спектральной функции в области частоты
^18о> что позволяет несколько повысить точность идентификации при тех же
ограничениях на амплитуду импульса.
Оба описанных тестовых сигнала позволяют выполнить аналитический
расчет параметров модели объекта 1-го или 2-го порядка без применения чис-
ленных методов оптимизации.
Отметим, что, несмотря на то что импульсную характеристику системы
(реакцию на единичный импульс) теоретически можно получить дифференци-
рованием переходной характеристики (реакции на единичный скачок), диффе-
ренцирование экспериментально полученной кривой резко ухудшает отношение
сигнала к шуму, поскольку оператор дифференцирования эквивалентен филь-
тру, выделяющему шумы из входных данных.
5Д.З. Частотная идентификация в режиме релейного
регулирования
Идентификация с помощью широкополосных сигналов, к которым относят-
ся единичный скачок и прямоугольный импульс, не позволяет получить доста-
точно достоверные результаты в условиях сильных шумов и жестких ограни-
чений на энергию сигнала. Гораздо более высокую точность при малой ам-
плитуде позволяет получить воздействие узкополосным сигналом, в качестве
которого используют отрезок синусоидального сигнала (рис. 5.12,г). С ростом
числа периодов сужается ширина спектра и растет спектральная плотность та-
кого сигнала на частоте колебаний. Благодаря этому появляется возможность
использовать узкополосный фильтр для выделения сигнала на фоне помех,
что резко повышает достоверность идентификации. Однако при использовании
фильтра перед измерением необходимо дождаться окончания переходного про-
цесса, который тем длиннее, чем выше добротность фильтра. Это существенно
увеличивает общее время на проведение экспериментов, тем более, что измере-
ния выполняют для нескольких разных частот. Для ускорения процесса мож-
но использовать тестовое воздействие в виде суммы гармонических колебаний
302
Глава 5
с разными частотами, которые затем выделяют несколькими узкополосными
фильтрами. Существенным недостатком этого метода является большое время
идентификации. Поэтому его чаще используют только для измерения коэф-
фициента передачи и фазового сдвига на частоте оцво, а для идентификации
других параметров объекта используют широкополосные тестовые сигналы.
Метод частотной идентификации в замкнутом контуре с релейным регуля-
тором является самым распространенным в коммерческих ПИД-регуляторах с
автонастройкой [14, 291, 300]. Этот метод очень давно известен в микроэлектро-
нике как метод кольцевого генератора. Он использует свойство замкнутой ди-
намической системы с отрицательной обратной связью генерировать незатухаю-
щие колебания на частоте фазового сдвига -180° при петлевом усилении Кп 1.
Рис. 5.18. Система с релейным
регулятором в контуре регулирования
для оценки параметров оцво и Kieo
Основная идея метода. Рассмот-
рим систему с отрицательной обратной
связью, состоящую из релейного регулято-
ра R и объекта управления Р (рис. 5.18).
Здесь регулятор R имеет два значения вы-
ходной величины и:
^шах
^min
при е 0;
при е < 0.
(5.19)
и =
Гармонический сигнал, проходя через объект управления, изменяет свою
амплитуду и фазу (см. рис. 5.13, 5.14). Поскольку на входе объекта присут-
ствует шум, в его спектре всегда найдутся такие гармонические составляющие
с частотой cui8o, которые, пройдя через объект управления, появятся на его
выходе с той же частотой cuieo, но с отставанием по фазе на 180° от соответ-
ствующей входной составляющей. Если этот сигнал с выхода объекта опять
подать на его вход с помощью отрицательной обратной связи, то общий фазо-
вый сдвиг в петле с обратной связью составит уже 360°, т.е. на частоте сиво об-
ратная связь в системе из отрицательной превращается в положительную. Это
приводит к нарастанию циркулирующего по петле сигнала при петлевом уси-
лении Кп > 1 или его затуханию при Кп < 1. Нарастание сигнала в некоторый
момент начинает ограничиваться, например, нелинейностью типа насыщения,
и тогда в системе устанавливаются стационарные колебания. При этом эффек-
тивный коэффициент усиления, найденный по первой гармонике колебаний на
частоте сиво, становится равным единице: Кп = 1 (так как после установления
стационарных колебаний сигнал больше не усиливается).
Таким образом, в рассмотренной системе возникают незатухающие колеба-
ния, когда усиление по контуру с обратной связью (петлевое усиление) равно
единице на частоте фазового сдвига в объекте 180°. В нелинейной системе пет-
левое усиление на малом сигнале может быть больше единицы до момента,
когда колебания установятся. В контуре регулирования с идеальным релей-
ным регулятором (рис. 5.18) усиление до начала колебаний равно бесконечно-
сти. Поэтому колебания возникают всегда, если фазочастотная характеристи-
ка включает в себя точку со сдвигом фазы 180°.
Большинство объектов управления, не имеющих транспортной задержки,
относятся к минимально-фазовым объектам, у которых существует однознач-
ПИД-регуляторы
303
Рис. 5.19. Логарифмическая амплитудно-
частотная характеристика объекта первого
порядка, Т = 1, L = 0,2
Рис. 5.20. Фазочастотная характеристи-
ка объекта первого порядка без транспорт-
ной задержки (штриховая линия) и с ней
(сплошная линия)
ная связь между амплитудно-частотной и фазочастотной характеристикой.
Объект управления является минимально-фазовым, если его операторная пере-
даточная функция не имеет нулей в правой полуплоскости комплексного пере-
менного. В частности, минимально-фазовыми являются все описанные в п. 5.1.1
модели, если у них транспортная задержка равна нулю.
Обычно АЧХ строят в логарифмическом масштабе по обеим координатным
осям и называют диаграммами Боде. При этом наклон линейных участков
АЧХ измеряют в децибелах на декаду (дБ/дек). Например, объект первого
порядка (5.5) имеет наклон АЧХ -20 дБ/дек (рис. 5.19), и при L = 0 этому
наклону взаимно однозначно соответствует максимальный фазовый сдвиг —90°
при си —> оо (рис. 5.20, пунктирная линия). Объект второго порядка (5.9) имеет
наклон АЧХ —40 дБ/дек, и ему соответствует максимальный фазовый сдвиг
-180° при си —> оо (см. рис. 5.13). Для объекта третьего порядка наклон АЧХ
равен -60 дБ/дек и фазовый сдвиг -270°.
Из изложенного следует, что система регулирования с объектом первого по-
рядка без транспортной задержки всегда устойчива, даже в контуре с релейным
регулятором. Система с объектом второго порядка может быть неустойчивой
при си —> оо. Система с объектом третьего порядка и система любого порядка с
транспортной задержкой в контуре с релейным регулятором всегда находится
в режиме автоколебаний. Поэтому проектирование объекта управления нуж-
но выполнять совместно с проектированием регулятора для него. Например,
некоторые системы термостатирования используют нагревательный элемент в
виде тонкой проволочки, через которую продувается воздух. Такая система
имеет первый порядок передаточной функции и даже релейный регулятор для
нее дает хорошее качество регулирования.
Система с объектом первого порядка перестает быть устойчивой, если в пе-
редаточную функцию добавляется транспортная задержка. При этом объект
перестает быть минимально-фазовым и, несмотря на то что наклон АЧХ оста-
ется равным —20 дБ/дек (рис. 5.19), в системе возникают колебания, поскольку
фазовый сдвиг транспортной задержки <р = Lu> растет неограниченно с ростом
частоты tv и на частоте о>18о достигает —180° (рис. 5.20, сплошная линия).
304
Глава 5
Поскольку в реальном объекте вследствие его пространственной протяжен-
ности всегда появляется (небольшая) транспортная задержка, в любой системе
с релейным регулятором возникают колебания, однако их амплитуда на выходе
объекта может быть пренебрежимо малой вследствие резкого снижения коэф-
фициента передачи объекта с ростом частоты (см. рис. 5.19).
Таким образом, замкнутый контур с объектом управления и релейным ре-
гулятором позволяет найти частоту ол8о для объекта любого порядка, посколь-
ку она равна частоте автоколебаний в такой системе. Найдем теперь коэффи-
циент передачи объекта на этой частоте. К сожалению, его можно найти только
приближенно, поскольку на вход объекта в системе с релейным регулятором
воздействует последовательность прямоугольных импульсов, которая получа-
ется после прохождения сигнала обратной связи y(t) через релейный регулятор.
Приближенный метод расчета основан на разложении входной последователь-
ности прямоугольных импульсов в ряд Фурье с отбрасыванием всех гармоник,
кроме первой. Возможность замены последовательности прямоугольных им-
пульсов их первой гармоникой основана на том, что объекты с передаточными
функциями вида (5.4)-(5.9) являются фильтрами, ослабляющими высшие гар-
моники. Поэтому серия прямоугольных импульсов, пройдя через такой объект,
становится очень близкой к синусоидальному сигналу (рис. 5.21). Это позволя-
ет считать, что после разложения входного сигнала в ряд Фурье через объект
Рис. 5.21. Сигнал на входе (прямо-
угольные импульсы) объекта с передаточ-
ной функцией, показанной на рис. 5.13,
5.14, и на его выходе (сплошная линия)
остальные подавляются.
Если размах прямоугольных им-
пульсов на входе объекта равен 2[/тах,
то амплитуда первой гармоники этих
импульсов, как известно из курса ра-
диотехники, равна 417тах/тг. Если обо-
значить амплитуду первой гармоники
сигнала на выходе объекта через Утах,
то искомый коэффициент передачи си-
стемы на частоте о; iso будет равен отно-
шению амплитуды на выходе к ампли-
туде на входе:
= (5-2°)
k'max
Пример. Рассмотрим АЧХ (рис. 5.13) и ФЧХ (рис. 5.14) объекта второго
порядка вида (5.16). Из графика на рис. 5.14 можно найти частоту cuieo =
= 1,84 с”1, а по рис. 5.13 — коэффициент передачи объекта на этой частоте
К180 = 0,026. При включении такого объекта в контур с релейным регулятором
получим колебания с частотой а>18о = 1,84 с-1 при усилении Ki80 = 0,026.
Примерно эти же значения можно получить из эксперимента с релейным
регулятором по формуле (5.20), если из графиков на рис. 5.21 найти значения
амплитуды на выходе Утах = 0,035 и входе t7max = 1, а затем по формуле (5.20)
рассчитать значение Ki8o = 0,027. Значение частоты cui80 = 1,8 с-1 можно най-
ти непосредственно по графику на рис. 5.21. Таким образом, приближенная
формула в данном случае дает достаточно низкую погрешность (около 4 %).
ПИД-регуляторы
305
Время, с
Рис. 5.22. Задающее воздействие (ска-
чок) и форма сигнала на выходе замкну-
той системы первого порядка в линей-
ном режиме (сплошная линия) и с ре-
лейным регулятором (штриховая линия)
Время, с
Рис. 5.23. Форма колебаний при асим-
метричной релейной функции: Umax — 5,5,
Umin = 0,5, Г = 1
Для объекта первого порядка с транспортной задержкой L = 0,2 и посто-
янной времени Т = 1 (си = 2тт/Т) из рис. 5.20 можно найти cuieo = 8,44, из
рис. 5.19 — Ki8o = 0,118. Форма колебаний в системе с релейным регулятором
показана на рис. 5.22 штриховой линией. Особенностью объекта первого поряд-
ка является существенное отличие формы колебаний от синусоидальной, что
делает слишком грубым ее аппроксимацию первой гармоникой ряда Фурье, ко-
торая была использована при получении формулы (5.20). Для устранения этой
проблемы вместо релейного регулятора можно использовать линейный усили-
тель, чтобы не искажать форму сигнала в системе. Тогда форма колебаний
становится близкой к синусоидальной (рис. 5.22, сплошная линия). Такая ко-
лебательная система дает довольно точные значения cuiso = 8,49 и Ki8o = 0,096.
Однако для обеспечения режима, близкого к линейному, петлевое усиление
должно быть равно 1, т.е. усилитель должен обеспечит усиление в l/Kiso раз,
где параметр Kiso априори неизвестен. Это является основным недостатком
метода колебаний в линейном режиме.
Важным условием, которое нужно соблюдать при использовании идентифи-
кации в режиме релейного регулирования, является симметричность уровней
^шах и umjn относительно уровня сигнала ur, при котором у = г (см. рис. 5.18),
т.е. должно выполняться условие
Umax Ur — Ur Umjn. (5.21)
В противном случае скорости нарастания сигнала выше уставки и спада
ниже нее будут сильно различаться, а форма колебаний в системе будет су-
щественно отличаться от синусоидальной (рис. 5.23), что приведет к высокой
погрешности данного метода.
Аналогичный эффект искажения формы колебаний возникает и в системах
более высокого порядка, если транспортная задержка превышает наибольшую
постоянную времени. С ростом задержки колебания становятся сначала тре-
угольными, затем приближаются к трапецеидальным и прямоугольным. Это
объясняется тем, что с ростом транспортной задержки реакция объекта на каж-
дый из фронтов сигнала на выходе реле приближается к форме реакции на
306
Глава 5
Рис. 5.24. Сравнение различий между пере-
ходными характеристиками и колебаниями в
двух системах второго порядка с параметра-
ми Ti = 10,9, Т2 = 0,1, L — 0,02 (кривые
1) и Ti = 10, Т2 = 1, L = 0,02 (кривые 2)
Время, с
Рис. 5.25. Ложные переключения реле
вследствие шума
функцию единичного скачка (рис. 5.17). В частотной области указанный эф-
фект объясняется тем, что с ростом задержки точка o>i8o на рис. 5.19 и 5.20 сме-
щается влево, т.е. фильтрующие свойства объекта ухудшаются и он трансли-
рует прямоугольный входной сигнал на свой выход с меньшими искажениями.
Для иллюстрации высокой разрешающей способности описанного метода
на рис. 5.24 приведены процессы в двух моделях, у которых переходные ха-
рактеристики различаются слабо, однако частоты колебаний в контуре с ре-
лейным регулятором отличаются в 4 раза. Благодаря узкой полосе сигнала он
может быть эффективно выделен на фоне шумов (рис. 5.25), например, ме-
тодом наименьших квадратов.
Описанный метод частотной идентификации позволяют получить только
одну точку передаточной функции объекта, т.е. два параметра, которых недо-
статочно для нахождения трех параметров ПИД-регулятора. Поэтому исполь-
зуют дополнительное соотношение Ти = 4ТЛ/К2 (см. п. 5.6.3), которое позво-
ляет найти третий параметр.
Чтобы получить и другие точки АЧХ, используют реле с гистерезисом или
фильтры, сдвигающие точку cui8o в сторону более низких частот.
Рассмотрим эти методы подробнее.
Изменение частоты колебаний с помощью интегратора. Для того
чтобы в системе с релейным регулятором возникли колебания на частоте, су-
щественно отличающейся от cuiso, в нее можно ввести интегратор (рис. 5.26)
[407], который имеет передаточную функцию Ж(з) = 1/(з7Ь), где То — произ-
вольный нормировочный множитель. На рис. 5.26 после интегратора показан
линейный ограничитель, отражающий наличие ограничений на входной сиг-
нал объекта. Желательно выбирать То « тг/(2а>9о), тогда размах колебаний
треугольной формы на выходе интегратора будет точно равен размаху прямо-
угольных импульсов на выходе реле. Однако, поскольку частота о?9о априо-
ри неизвестна, а выбор То влияет только на амплитуду колебаний в системе,
величину cj90 можно выбирать примерно в несколько (3...10) раз ниже ранее
ПИД-регуляторы
307
Рис. 5.2в. Система с релейным регулятором и интегратором для оценки параметров
CU90 И K^Q
найденной частоты cuiso- Чем больше транспортная задержка L, тем меньше
будет расстояние между точками си90 и cuiso-
Модуль передаточной функции интегратора имеет наклон -20 дБ на дека-
ду, а фазовый сдвиг не зависит от частоты и равен —90°. Поэтому колебания в
системе возникают на частоте си9о (рис. 5.14 и 5.20), когда сдвиг фаз в объекте
управления составит —90° (поскольку суммарный сдвиг в интеграторе и объек-
те составит —180°). Получив из эксперимента частоту си9о, можно найти модуль
передаточной функции К99 на этой частоте по той же формуле (5.20), что и для
/Cleo• Однако точность расчета можно повысить, если воспользоваться тем,
что на выходе интегратора получаются треугольные импульсы, для которых
легко найти амплитуду первой гармоники ряда Фурье 417^ /тг2, где и'тал —
половина размаха треугольных импульсов. Интегрируя сигнал, поступающий
на входе интегратора, можно получить, что = 0,5С7тах79о/^о, где С7тах —
половина размаха прямоугольных импульсов на выходе реле, Т90 = 2tt/cu90.
Поэтому амплитуда первой гармоники сигнала на входе объекта будет равна
^тах/71"2 = 2Т9о/(7г2То) = 417тах/(тгси907Ь), откуда коэффициент передачи объ-
екта на частоте си90 можно найти в виде
К» = = juWTo , (5.22)
219о t/щах <Лпах
где Утах и 77тах имеют тот же смысл, что и в (5.19).
Формула (5.22) дает довольно точные результаты. Для системы 2-го по-
рядка (5.16) расчет по формуле (5.22) на основании данных, полученных при
моделировании системы, дает значения си9о = 0,273 с”1, К9о = 0,333, а точ-
ный расчет дает си90 = 0,274 с-1, К90 = 0,331. Для системы 1-го порядка (см.
рис. 5.19 и 5.20) расчет по формуле (5.22) дает си90 = 2,03 с”1, K9Q = 0,432
при точных значениях си90 = 2,17 с-1 и К99 = 0,419, а расчет по более гру-
бой формуле (5.20) дает К90 = 0,553.
Изменение частоты колебаний с помощью генератора. Для исклю-
чения погрешности формулы (5.20), связанной с усечением ряда Фурье, в [302]
предлагается вместо интегратора на рис. 5.26 использовать генератор синусо-
идальных колебаний с амплитудой, равной амплитуде первой гармоники пря-
моугольных импульсов на входе реле:
4
u'(t) = — l/maxSin(cut), (5.23)
7Г
где 17тах — половина размаха колебаний на выходе реле, си — частота колеба-
ний в системе. Поскольку частота си априори неизвестна, ее определяют ите-
рационным путем. Сначала убирают из системы генератор (5.23) и находят
308
Глава 5
таких ите-
Если в си-
колебаний
частоту колебаний в нулевом приближении. Для этого используют 2...3 пе-
риода колебаний в системе. Затем полученное значение частоты подставляют
в формулу (5.23) и находят колебания в системе с генератором. Полученное
значение частоты опять подставляют в формулу (5.23). Несколько
раций позволяют получить точное значение частоты.
Изменение частоты колебаний с помощью гистерезиса,
стеме на рис. 5.26 использовать реле с гистерезисом, то частоту
можно понизить. Объясняется это тем, что при подаче сигнала на вход ре-
ле с симметричным относительно нуля гистерезисом шириной 2d на выходе
реле появляется сигнал с задержкой обусловленной тем, что для срабаты-
вания реле синусоидальный сигнал на входе должен достичь уровня +d или
—d. Непосредственно из функции d = Утах sin^t^), где — частота коле-
баний в системе с гистерезисом, можно найти задержку, связанную с гисте-
1 . ( d \ „
резисом: td = — arcsin I —— 1. Понизив с помощью гистерезиса частоту ко-
\ Упах /
лебаний и измерив ее, можно найти коэффициент передачи объекта на этой
частоте по той же формуле (5.20).
Более подробное рассмотрение процессов в системе с гистерезисом мож-
но найти в [301].
Недостатком двух последних методов, позволяющих получить точки между
cuiso и о>9о, является невозможность задать заранее требуемую частоту.
Определение порядка объекта. Методы, описанные выше и в п. 5.1.3,
дают достаточно информации, чтобы оценить в некоторых случаях порядок
объекта управления. Пусть объект описывается передаточной функцией
1
(5-24)
(5.25)
(J^Tl + l)(JoZT2 + 1) • • • (JwTn + 1)
Предположим, что в (5.24) все постоянные времени дают частоты, которые
много меньше частоты o>i8o, т.е.
2тг 2тг 2тг
^180 1 , •••> *
Тогда в окрестности частоты cuiso можно пренебречь единицей по сравнению
с cuisoTi, г = 1,2...АГ, и, беря логарифмы от модуля левой и правой части
(5.24), получим
lg|vr(jw)| = -\^nTxT2---Tn) = -Wlg(o>) -Ig^Ta - Tjv).
Если с помощью описанных выше методов удалось получить две точки АЧХ
(cuiso, #18о) и (utcKj, то записывая последнее равенство для этих двух точек,
получим систему уравнений, из которой можно найти порядок знаменателя
передаточной функции объекта управления N:
N = \^КХ/К^)/lg(^M8o). (5.26)
Частота должна быть как можно ближе к cuiso, поскольку наклон нужно
искать в окрестности частоты cuiso, однако достаточно далеко, чтобы разность
частот была много больше погрешности их измерения.
ПИД-регуляторы 309
Недостатком данного метода является то, что в случае, когда передаточ-
ная функция объекта имеет нули, описанный метод дает разность порядков
знаменателя и числителя, но не порядок знаменателя.
Заключительные замечания. Описанный выше метод релейной иден-
тификации и его модификации являются в настоящее время самыми распро-
страненными в ПИД-регуляторах с автоматической настройкой. Это объяс-
няется следующим достоинствами метода: всегда дает результат; имеет вы-
сокую разрешающую способность; не требует сложных вычислений; дает ре-
зультат в рабочей точке.
Метод обладает следующими недостатками:
• не справедлив для большой задержки, когда метод расчета коэффициента
передачи дает большую ошибку;
• самостоятельно может использоваться только для очень грубой настрой-
ки. В общем случае должен комбинироваться с другими, уточняющими
методами идентификации.
5.1.4. Идентификация в замкнутом и разомкнутом
контурах
Идентификацию можно выполнять в замкнутом контуре с обратной свя-
зью или в разомкнутом. Идентификация в замкнутом контуре может быть
прямой и косвенной. При косвенной идентификации измеряются тестовый сиг-
нал и отклик на него системы с обратной связью, затем путем вычислений
по уравнениям системы находится передаточная функция объекта управления.
При прямой идентификации передаточная функция объекта находится по из-
мерениям сигналов непосредственно на его входе и выходе.
Если в качестве идентифицирующих воздействий выбирают искусственно
созданные возмущения, то такая идентификация называется активной. Ес-
ли используют сигналы, которые всегда существуют в системе в нормальном
режиме ее функционирования, такая идентификация называется пассивной.
Для дальнейшего изложения нам потребуются уравнения замкнутой си-
стемы с ПИД-регулятором. Базовая структура системы показана на рис. 5.27.
Здесь г — задающее воздействие (уставка); е — сигнал ошибки (рассогласо-
вание); R — ПИД-регулятор; и — управляющее воздействие на объект управ-
ления Р; d — внешние возмущения; и' = и + d; у' — истинная управляемая
величина (может быть измерена только как разность у' = у — п); у — управ-
ляемая величина; п — шум и погрешность измерений.
Рис. 5.27. Отображение источников внешне ^пзмущений d и помех п
в структуре системы с ПИД-регулятором
310
Глава 5
(5-27)
В системе на рис. 5.27 три входа (три источника сигналов): г, d, п и два
выхода (две зависимые переменные и, у). Связь между перечисленными вели-
чинами можно установить непосредственно по рис. 5.27 в следующем виде:
PR 1 Р J
V —------г Ч-----п Ч-------а:
у 1+PR 1+PR 1+PR
R R PR 1
и =------г-------п---------d.
1 +PR 1 +PR 1 +PR
Заметим, что в (5.27) и далее все переменные являются изображениями по
Лапласу соответствующих временных функций, Р = Р(з) и R = jR(s) — переда-
точные функции объекта регулирования и регулятора. Случайные внешние
воздействия d = d^s) и п = п($) заданы как изображения реализаций слу-
чайных процессов.
Рис. 5.28. Пример объекта
управления: термокамера
с электрическим нагревом
Идентификация в разомкнутом кон-
туре. Для идентификации в разомкнутом кон-
туре на объект Р (рис. 5.28) подают входное
воздействие и (например, напряжение на на-
греватель термошкафа) и измеряют реакцию
объекта у на это воздействие (например, темпе-
ратуру в рабочей зоне). Во время эксперимента
на объект воздействуют внешние возмущения d
(например, нестабильность напряжения пита-
ния di и вариации температуры окружающей
среды d2), а результат измерений суммирует-
ся с шумами в канале передачи измерительной
информации и с погрешностью средств измере-
ний еп, п.
Процесс идентификации состоит в том, что
на вход объекта подают тестовые воздействия и и снимают реакцию объекта
у, затем по аналитическим формулам или численными методами оптимиза-
ции находят параметры моделей, при которых реакция модели максимально
соответствует реакции объекта.
Идентификация в разомкнутом контуре является наиболее предпочтитель-
ной, поскольку в этом случае отсутствует возможность случайного вывода си-
стемы за границы устойчивости. Кроме того, идентификация в разомкнутом
контуре позволяет выбрать оптимальные тестовые воздействия, чего нельзя
сделать в замкнутом контуре, где спектральная функция входного воздействия
на объект управления формируется динамикой контура, независимо от тре-
бований экспериментатора. Идентификация в разомкнутом контуре наиболее
широко представлена в коммерческих ПИД-регуляторах [14, 288].
Прямая пассивная идентификация в замкнутом контуре. Задача
прямой идентификации в замкнутом контуре состоит в нахождении параметров
объекта управления Р на основании информации, полученной путем измерения
реакции системы с обратной связью у, и на воздействия г, d, п. Пассивная иден-
тификация обладает весьма заманчивым свойством — она не вносит возмуще-
ПИД-регуляторы
311
ний в нормальный ход технологического процесса, следовательно, совершенно
безопасна и не ухудшает качество технологического процесса.
Принципиальная возможность пассивной идентификации является пред-
метом споров. В частности, в [303] приводятся убедительные аргументы о
невозможности пассивной идентификации, однако число патентов на ПИД ре-
гуляторы с пассивной идентификацией непрерывно растет нарастающими тем-
пами [292].
Не вызывает сомнений только то, что достоверность пассивной идентифи-
кации существенно ниже, чем активной. Рассмотрим причины этого.
Первая причина состоит в том, что функция спектральной плотности мощ-
ности внешних возмущений в реальных объектах быстро спадает с ростом ча-
стоты (аналогично шуму 1// в электронных приборах). Поэтому в наиболее
важном участке спектра, включающем частоту cuiso, мощность внешних возму-
щений оказывается слишком малой, т.е. с точки зрения изложенных в п. 5.1.2
требований к тестовым воздействиям внешние возмущения являются наиболее
плохим воздействием (см. рис. 5.13), их мощности недостаточно для получения
отклика, различимого на фоне шумов в окрестности частоты cuiso-
Вторая причина [304, 303] касается выбора измеряемых сигналов. Пред-
положим, что г = const и на систему действует внешнее возмущение d, а
п = 0, т.е. измерения выполняются точно. Тогда в силу линейности систе-
мы результат идентификации не изменится, если г = 0. Подставив в (5.27)
п = 0 и г = 0, получим
Р J PR
У 1 + РЯ ’ 1 + РЯ
Поскольку целью идентификации является нахождение передаточной фун-
кции объекта Р = у/и, то, подставив сюда полученные выше значения у и
и, получим
Р= -1/Я.
Таким образом, передаточную функцию объекта невозможно получить, из-
меряя у и и при внешних воздействиях d. Причина состоит в том, что мы не мо-
жем измерить воздействие на объект и', а измеряемая в эксперименте величина
и получается после прохождения сигнала у через регулятор R. Поэтому описан-
ным экспериментом можно идентифицировать только регулятор, но не объект.
Однако пассивная идентификация становится возможной, если в качестве
тестового сигнала использовать сигнал уставки г в период его изменения по
алгоритму функционирования системы управления. Например, для электри-
ческого паяльника такой сигнал появляется в момент изменения уставки темпе-
ратуры жала паяльника. В конвекционной печи для монтажа радиоэлементов
такой сигнал появляется при алгоритмическом переключении температурного
режима печи. В обоих случаях для идентификации используются уже имею-
щиеся г системе сигналы, при этом нормальный ход технологического процесса
не нарушается. Поэтому такая идентификация является пассивной.
Итак, выберем г в качестве тестового (идентифицирующего) воздействия.
Тогда, предполагая, что измерения выполняются точно (п = 0), а уровень те-
312
Глава 5
стового воздействия высок по сравнению с внешними возмущениями (d = 0)^
из (5.27) получим
PR R у
’ = ГГрдг' ” = ГТТ7Г’ или и = Р' (5'28>
т.е. прямая пассивная идентификация объекта по сигналам на его входе и выхо-
де позволяет найти передаточную функцию объекта, если в качестве тестового
воздействия используется изменение сигнала уставки г.
Косвенная идентификация в замкнутом контуре. Для косвенной
идентификации тестовое воздействие подают на вход системы г и измеряют
реакцию на него у. Передаточную функцию объекта P(s) можно найти из
первого уравнения в (5.27):
P(S) = 1 ~ ~ 1 У(з)/Ф) (г 2<п
1 ’ R(s) (у(з) - г(з)] - d(s) ~ R(s) [1 - y(S)/r(S)] • *>
Шумы измерений n(s) и внешние возмущения d(s) в уравнении (5.29) часто
полагают равными нулю или учитывают как погрешность идентификации. По-
лученная передаточная функция Р(з) используется далее для идентификации
параметров выбранной модели (см. п. 5.1.1).
Как видим, для косвенной идентификации необходимо знать передаточную
функцию регулятора P(s). Поэтому косвенная идентификация не осуществима
на этапе, когда регулятор еще не синтезирован.
Косвенная идентификация обычно мало эффективна [304] и требует вы-
полнения условий идентифицируемости в замкнутом контуре, которые выпол-
няются не всегда [298, 304, 305].
Прямая активная идентификация в замкнутом контуре. Прямая
активная идентификация выполняется точно так, как прямая пассивная с сиг-
налом г (см. п. 5.1.4, (5.28)), однако сигнал г задается искусственно. Его вели-
чина и длительность выбираются из значений, допустимых для нормального
хода технологического процесса.
5.1.5. Аналитическая идентификация
После того как найдена передаточная функция объекта управления или
его импульсная (или переходная) характеристика, возникает задача определе-
ния параметров модели объекта управления. Существует два подхода к ре-
шению этой задачи: аналитический (по формулам) и с помощью численных
методов оптимизации. Преимуществом аналитической идентификации являет-
ся низкая вычислительная сложность, что позволяет использовать ее в ПИД-
регуляторах с маломощными контроллерами, но она позволит идентифициро-
вать параметры только очень простых моделей. Идентификация численными
методами используется в универсальных программных пакетах, которые про-
даются независимо от ПИД-регуляторов и применяются для их настройки с
помощью персональных компьютеров.
Идентификация модели первого порядка по средней длительности
переходного процесса. В случае, когда переходный процесс описывается
ПИД-регуляторы
313
моделью первого порядка с задержкой (5.1), его длительность нельзя харак-
теризовать одним параметром «постоянная времени», как для процессов без
задержки. Поэтому используется понятие «средняя длительность переходного
процесса» (average residence time [291]) которое определяется как
Таг — Т + L,
(5.30)
где Т — постоянная времени, L — транспортная задержка (см. также (5.3)).
Используя понятие средней дли-
тельности переходного процесса, мож-
но сформулировать один из вариан-
тов критерия, при котором кривые
объекта и модели первого порядка
(5.3) можно считать приблизительно
совпадающими. Это условие состо-
ит в пересечении переходных харак-
теристик модели и объекта на уровне
1-ехр(—1) = 0,63 (рис. 5.29). Посколь-
ку в точке пересечения в уравнении
(5.3) (t — L)/T = 1, отсюда можно по-
лучить, что абсцисса точки пересече-
ния t равна L + Т = t (см. рис. 5.29).
В этом уравнении два неизвестных:
L и Т.
Рис. 5.29. Переходная характеристика объ-
екта второго порядка (сплошная линия) и
его аппроксимация моделью (5.3) (штрихо-
вая линия)
Для* определения L проводят ка-
сательную в точке максимального угла наклона касательной (на рис. 5.29 это
касательная в точке «максимальный угол наклона»). При этом задержка L
должна определяться в точке пересечения касательной с осью времени.
Коэффициент Кр модели первого порядка (5.3) определяется как отно-
шение установившегося значения выходной переменной к амплитуде тестово-
го скачка. Предварительно из выходной переменной вычитается ее значение
при t = 0.
График переходного процесса идентифицированной описанным способом
модели (5.3) при Т = 2,8 и L = 0,4 показан штриховой линией на рис. 5.29.
Поскольку из рис. 5.29 следует, что тангенс наклона касательной равен
a/L, для интегрирующего процесса (5.12), (5.13) получим Кр/Т = a/L.
Метод двойного прямоугольного импульса. Метод аналитической
идентификации по характерным точкам реакции объекта на двойной прямо-
угольный импульс хорош тем, что после окончания тестового воздействия си-
стема переходит в исходное состояние, а также тем, что этот метод требует мало
времени, поскольку после прохождения откликом минимума (рис. 5.30) экспе-
римент можно считать законченным. На кривой отклика системы на двойной
прямоугольный импульс находят точку максимума и минимума. Зная коорди-
наты этих точек (см. рис. 5.30), можно найти все параметры модели первого
314
Глава 5
порядка с задержкой по следующим формулам [291]:
- _ Утах
ЯУтт
-Тп
1п[1 + 3/min/^max]
Рис. 5.30. Реакция системы второго порядка
на двойной прямоугольный импульс (сплошная
линия) и ее аппроксимация моделью первого
порядка (штриховая линия)
первого порядка tmax = L + Тп:
— Лпах Тп, ИЛИ L — £min ~ 27^.
(5.31)
Смысл использованных здесь
обозначений понятен из рис. 5.30;
а — амплитуда тестового импуль-
са (на рис. 5.30 а = 1). Транспорт-
ная задержка L имеет два значе-
ния, рассчитанных по двум форму-
лам. Близость полученных значе-
ний может служить признаком ка-
чества аппроксимации.
Для вывода этих формул [291]
нужно по рис. 5.30 записать выраг
жения для точек максимума и ми-
нимума, зная, что реакция системы
1-го порядка на скачок имеет вид
(5.1) и учитывая, что для системы
Утах — а/Ср[1 ехр( Тп/Т*)], J/min — fl/fp[l СХр( 7^/7*)] ,
tmax — Г + Тп, fmin — i + 2ТП.
Далее, решая полученную систему уравнений относительно неизвестных Кр, Т,
L, получим (5.31). Для нахождения L получаем два варианта выражений.
Недостатком метода является невозможность точного определения коэф-
фициента передачи объекта в статике Кр, поскольку эксперимент заканчивает-
ся до наступления установившегося режима. Кроме того, проблематично опре-
делить время tmax и tmjn с большой точностью.
Использование результатов частотной идентификации. Величины
Ki во и cuiso, полученные в результате эксперимента с релейным регулятором
(п. 5.1.3), можно использовать для аналитического определения параметров Т
и L модели первого порядка. Для этого запишем выражение для квадрата
модуля коэффициента передачи модели (5.5) на частоте cuiso*
^2
ь-2 _ р
180 1 + (W18oT)2-
Если параметр Кр известен, например, из результатов анализа реакции объ-
екта на скачок (5.3), то, решая предыдущее уравнение относительно искомо-
го Т, получим
(5.32)
Транспортную задержку L можно найти из уравнения для суммарного
ПИД-регуляторы
315
сдвига фаз на частоте cuieo-
7Г = arctg(LJi8O^) + ^180 Д
откуда
L = —[я- - arctg^isoT1)]- (5.33)
^180
К сожалению, все формулы из п. 5.1.5 получены только для модели 1-го
порядка. Аналогичные выражения для моделей более высокого порядка ана-
литически получить не удается или они оказываются чрезмерно громоздкими.
Поэтому для идентификации параметров моделей более высоких порядков ис-
пользуют численные методы оптимизации (минимизации).
5.1.6. Методы минимизации критериальной функции
Описанные методы расчета параметров моделей по формулам удобны тем,
что идентификация выполняется очень просто и может быть реализована в
маломощном микропроцессоре. Однако их существенными недостатками явля-
ются: невозможность (или чрезмерная сложность) идентификации параметров
моделей выше 1-го порядка; большая погрешность метода; отсутствие филь-
трации шумов в процессе идентификации.
Более качественные результаты могут быть получены при использовании
численных методов оптимизации. Для их выполнения составляется критери-
альная функция Q(pi,...,Рт) с параметрами pi,...,pm, которая характеризует
степень близости между откликом модели и откликом объекта на одно и то
же входное воздействие. Обычно критериальная функция выбирается в ви-
де суммы квадратов отклонений искомой функции y(tt) от эксперименталь-
ных данных y°(ti):
N
Q(pi,-Pm) = £ММ - И*;))2, (5-34)
i=l
где pi,..,pm — параметры, которые требуется найти; г = 1..JV — номер времен-
ного такта, при котором измеряется значение функции. Такой выбор критери-
альной функции не является единственным. Могут быть использованы, напри-
мер, модуль максимального отклонения, модуль от арифметического средне-
го и др. Различные критерии дадут слегка отличающиеся значения парамет-
ров модели. Однако среднеквадратичный критерий (5.34) имеет замечательное
свойство: он дает максимально правдоподобную оценку искомых параметров.
Иначе говоря, если ввести понятие вероятности того, что полученная кривая
проходит так, как истинные данные в отсутствие шума, то при использовании
среднеквадратического критерия эта вероятность будет максимальной. Это
справедливо, если данные, полученные при измерениях, являются статисти-
чески независимыми величинами (т.е. если интервал между отсчетами выбран
больше, чем время корреляции шума), если отсутствует систематическая по-
грешность измерений, если измерения распределены по нормальному закону
316
Глава 9
(Гаусса) и параметры этого распределения одинаковы для всех точек на кри-
вой y(t). В этом случае задача минимизации (5.34) совпадает с задачей оп-
тимальной фильтрации сигнала y(t) на фоне шума [252] (см. также рис. 5.1
и 5.2). Иначе говоря, процесс минимизации критерия (5.34) является одно-
временно процессом оптимальной фильтрации, поэтому применение дополни-
тельных фильтров нижних частот приводит не к уменьшению, а к увеличению
погрешности идентификации.
В случае, когда шум имеет не нормальное распределение, квадратичный
критерий (5.34) не дает максимально правдоподобную оценку параметров ис-
комой функции. Например, для распределения Лапласа оптимальной крите-
риальной функцией будет сумма модулей отклонений [306]. Однако в подав-
ляющем большинстве практически важных случаев шум оказывается распре-
деленным по нормальному закону.
Результаты измерений отклика объекта на тестовые воздействия содержат
как высокочастотные шумы, так и низкочастотные возмущения, лежащие в
той же области спектра, что и полезный сигнал. Высокочастотные шумы легко
убрать с помощью цифрового фильтра или в процессе минимизации критери-
альной функции (5.34). Однако, если время автокорреляции внешних возмуще-
ний сравнимо с длительностью измерений, то для каждого нового эксперимента
мы будем получать различные параметры модели объекта. К сожалению, дан-
ная проблема не может быть решена статистическими методами при жестких
требованиях к быстроте идентификации в ПИД-регуляторах. Только увели-
чение амплитуды тестового воздействия, компенсация внешних возмущений и
корректировка результатов эксперимента в соответствии с условиями его про-
ведения могут увеличить достоверность полученных данных.
Для того чтобы учесть различную ценность информации на разных участ-
ках переходного процесса, в выражения для критериальной функции вводят
весовую функцию W(t)\
1
N
Q(Pi,—Pm) =
N
Xw^y^-y°^2-
i=l
(5.35)
Для выбора вида W(t) нужно заранее знать вид функции отклика y(t).
В диалоговом режиме идентификации, когда пользователь может наблюдать
на экране компьютера различие между y(t) и y°(t), вид функции W(t) можно
подобрать интуитивно. Однако в ПИД регуляторах с автонастройкой этот про-
цесс невозможен, поэтому в алгоритм идентификации должны быть заложены
эвристические правила выбора весовой функции. Поскольку конечной целью
идентификации является не минимизация погрешности аппроксимации, а по-
лучение заданного качества регулирования при ограничении на робастность,
то вид критериальной функции может быть уточнен после синтеза регулятора
и получения оценок его характеристик.
Отметим, что близость функций не гарантирует близости их производных
dy(t)/dt и dyo(f)/dt. На рис. 5.31 показаны два варианта переходных харак-
теристик. Оба варианта достаточно близко соответствуют переходной харак-
теристике объекта (зашумленная кривая), однако их производные (импуль-
ПИД-регуляторы.
317
сные характеристики) отличаются
очень сильно (две кривые колоколо-
образной формы), хотя именно точ-
ка максимума импульсной характе-
ристики указывает среднюю длитель-
ность переходного процесса, которая
используется в расчете параметров
ПИД-регулятора. Поэтому в крите-
риальную функцию при идентифика-
ции параметров моделей желательно
добавлять и критерий близости про-
изводных.
С помощью критериальной функ-
ции задача параметрической иденти-
фикации сводится к задаче нахожде-
Рис. 5.31. Два варианта переходных харак-
теристик с примерно одинаковой среднеквад-
ратической погрешностью и импульсные ха-
рактеристики, полученные их дифференци-
рованием
ния параметров модели pi,...pm, при
которых критериальная функция достигает минимума. Примеры сечений кри-
териальной функции вида (5.35) для модели (5.8) при идентификации термош-
кафа (см. рис. 5.1) приведены на рис. 5.32.
При решении задачи минимизации критериальной функции возникает ряд
численных проблем, часто связанных с плохой обусловленностью системы ли-
нейных уравнений, наличием нескольких минимумов и овражным характером
критериальной функции (рис. 5.32). Поэтому традиционный метод наимень-
ших квадратов (МНК) часто не позволяет получить решение задачи при по-
пытке найти параметры моделей высокого порядка при малом количестве ин-
формации в исходных данных. Решению этих проблем посвящено множество
книг и статей. Хорошие результаты дает метод сингулярной декомпозиции мат-
риц (SVD) [310] в сочетании с многошаговыми методами интегрирования диф-
ференциальных уравнений [307, 308], а также разновидности метода Монте-
Карло. При поиске глобального минимума хорошие результаты дают гене-
тические алгоритмы [309].
Рис. 5.32. Сечение критериальной функции в точке минимума для критерия (5.35) при
идентификации модели термошкафа (см. рис. 5.3) в форме (5.8): а —в зависимости от
Т, L; б — в зависимости от Кр, L
318
Глава 5
5.2. Классический ПИД-регулятор
Рис. 5.33. ПИД-регулятор
в системе с обратной связью
Простейшая система автоматическо-
го регулирования с обратной связью по-
казана на рис. 5.33. В ней блок R наг
зывают регулятором (от слова Regulator),
Р — объектом регулирования (от слова
Process), г — управляющим воздействием
или уставкой (reference), е — сигналом рассогласования или ошибки (error),
и — выходной величиной регулятора, у — регулируемой величиной.
Если выходная переменная и регулятора описывается выражением
u(fy = Kelt) + ± [* e(t) dt + Тя^, (5.36)
Ти Jq dt
где t — время; К, ТК,ТД — пропорциональный коэффициент, постоянная инте-
грирования и постоянная дифференцирования регулятора, то такой регулятор
называют ПИД-регулятором.
В частном случае пропорциональная, интегральная или дифференциаль-
ная компоненты могут отсутствовать и такие упрощенные регуляторы назы-
вают П-, И- или ПИ-регуляторами.
Распространены также следующие модификации выражения (5.36):
u(t) = Ко (e(t) + ± [* e(t) dt + Тд^\ ,
\ Тм Jq dt /
u(i) = ke(t) + кИ [ e(t) dt + кд^^~'.
Jo dt
(5.37)
(5.38)
Между параметрами выражений (5.36)-(5.38) существует простая связь.
Однако отсутствие общепринятой системы параметров часто приводит к пу-
танице. Это нужно помнить при замене одного ПИД контроллера на другой
или использовании программ настройки параметров. Мы будем пользовать-
ся выражением (5.36).
Используя преобразование Лапласа при нулевых начальных условиях
и(0) = 0, выражение (5.36) можно представить в операторной форме:
u(s) = (К + + тд8 ) е(з). (5.39)
\ T»s /
Таким образом, передаточная функция ПИД-регулятора имеет вид
R(a) = K+^- + Tas = K(l + -^- + ^sY (5.40)
^I|O \ ZxJL|{0 JTY /
Амплитудно-частотная и фазочастотная характеристика передаточной
функции (5.40) при параметрах Ти = 1 с, Тл = 1 с, К = 10 и 100 показа-
ны на рис. 5.34 и 5.35. Переходная характеристика ПИД-регулятора (реак-
ция на единичный скачок) представляет собой сумму постоянной составляю-
щей К, прямой линии t/T*, полученной при интегрировании единичного скач-
ПИД-регуляторы
319
Рис. 5.34. АЧХ ПИД-регулятора
Рис. 5.35. ФЧХ ПИД-регулятора
ка и дельта-функции Дирака Tn6(t), полученной при дифференцировании еди-
ничного скачка.
Из рис. 5.33 следует, что
P(s)P(s) P(s)7?(s)
"" GdW°n-pWflW (5-41)
где Gci(s) = y(s)/r(s) — передаточная функция замкнутой системы.
На систему автоматического регулирования могут воздействовать внешние
возмущения d = d(s) и шум измерений п = n(s) (рис. 5.36). Внешние возму-
щения (влияние нагрузки, изменение температуры окружающей среды, ветер,
течение воды и т.п.) обычно распределены пространственно по объекту, однако
для упрощения анализа их моделируют сосредоточенным источником d(s), при-
ложенным к входу или источником d(s)P(s), приложенным к выходу объекта.
Источник шума n(s) моделирует погрешность измерений выходной переменой
у, погрешность датчика, а также помехи (см. [311]), воздействующие на канал
передачи сигнала с выхода системы на ее вход.
Рис. 5.3в. ПИД-регулятор в системе с
шумом п и внешними возмущениями d
С учетом возмущающих воздействий и шума уравнение системы автома-
тического управления примет вид
. ч P(s)R(s) , ч 1 , ч P(s) ,, ч ._ч
~ 1 + Р(з)Я(з)Г S + 1 + P(s)R(s)n^ + l + P(s)R(s)d^' ( ’
Рассмотрим теперь несколько частных случаев.
5.2.1. П-регулятор
Пусть интегральная и дифференциальная компоненты отсутствуют, т.е.
Тд = О, Тк = оо. Тогда из (5.40) получим R(s) = К и (5.42) можно преоб-
320
Глава 5
разовать к виду
y(s) = 1 + P(s)tfr(s) + 1 + P(s)#n(s) + 1 + P(s)Kd^- (5‘43)
В установившемся режиме, при t —► оо или s = jcu —> JO, передаточная
функция процесса Р(з) равна коэффициенту передачи Кр. При этом выра-
жение (5.43) преобразуется к виду
КРК 1 Кр J
У ~ 1 + КРКГ + 1 + КРКП + 1 + KpKd'
(5.44)
Как следует из полученной формулы, влияние возмущений d снижается
с ростом петлевого усиления КРК и при КРК » 1 обратно пропорционально
коэффициенту регулятора К. Однако проблема устойчивости не позволяет
выбирать К как угодно большим.
Влияние помехи п также уменьшается с ростом петлевого усиления и про-
порционального коэффициента регулятора. Дополнительно влияние помехи
можно уменьшить применением экранирования, правильного заземления, ви-
тых пар, уменьшением длины проводников в цепи обратной связи и др. [311].
При пренебрежимо малых помехах и внешних возмущениях погрешность
П-регулятора бу, как следует из (5.44), определяется пропорциональным ко-
эффициентом усиления:
х КРК 1
ОУ = г------г = -----г.
У 1 + КРК 1 + КРК
(5.45)
Рис. 5.37. Изменение переменной y(t)
во времени при подаче единичного скач-
ка r(t) на вход системы при разных К
Эта погрешность обычно не может
быть сделана как угодно малой путем
увеличения усиления К регулятора, по-
скольку с ростом К сначала падает за-
пас по фазе и усилению системы с обрат-
ной связью, что ухудшает ее робастность
и качество регулирования, затем возни-
кают периодические колебания (система
теряет устойчивость, рис. 5.37). Поэто-
му в П-регуляторах для снижения по-
грешности используют метод компенса-
ции. Для этого к входу объекта регу-
лирования Р прикладывают компенсиру-
ющее воздействие иь, которое аддитивно
добавляется к возмущению d, чтобы суммарное воздействие возмущения и ком-
пенсирующего воздействия df стало равно df = d + иь- Отметим, что при из-
менении значения уставки компенсацию нужно выполнить заново, поскольку
погрешность (5.45) пропорциональна г (т.е. является мультипликативной), а
компенсация в виде dr = d + щ является аддитивной (не зависит от г).
Скомпенсировать погрешность можно также с помощью коррекции величи-
ны г. Для этого управляющее воздействие после коррекции (обозначим его г'),
ПИД-регуляторы
321
как следует из (5.44) и (5.45), должно иметь вид
(5.46)
Переходный процесс в контуре с П-регулятором при Кр = 1 и разных К
показан на рис. 5.37. При малых К система имеет малое перерегулирование,
но большую статическую погрешность (50 %). С ростом К погрешность умень-
шается, но возрастает перерегулирование.
Объясняется поведение П-регулятора следующим образом. С ростом уси-
ления вся АЧХ разомкнутой системы (АЧХ петлевого усиления КР(з), см.
рис. 5.19) сдвигается вверх, в том числе возрастает усиление на частоте tuieo,
где фазовый сдвиг в контуре с обратной связью равен 180°. Это приводит к
уменьшению запаса по фазе и усилению, возрастает колебательность и пе-
ререгулирование. Если петлевое усиление на частоте tuieo достигает 1, в си-
стеме устанавливаются незатухающие колебания. Подробнее описание этого
процесса см. п. 5.1.3.
(5-47)
(5.48)
5.2.2. И-регулятор
Рассмотрим теперь случай, когда в ПИД-регуляторе остается только инте-
гральный член, т.е. К = 0 и Тд = 0. Из (5.39) получим
u(s) = ^-e(s).
Tns
Модуль и аргумент передаточной функции (5.47) равны
|ВД| = Arg(J?(a;)) =
UJ1 и Z
АЧХ И-регулятора в логарифмическом масштабе представляет собой пря-
мую линию с наклоном -20 дБ/дек во всем диапазоне частот, от 0 до оо, кото-
рая пересекает ось частот (проведенную при log|7?(tu)| = 0) в точке 1/Ти. ФЧХ
представляет собой горизонтальную линию с ординатой -90°.
На низких частотах, при ш < 1/Ти, коэффициент передачи регулятора (5.48)
больше единицы и стремится к бесконечности при ш ► 0. Поскольку случаю
ш —► 0 во временной области соответствует t —► оо или установившийся (рав-
новесный) режим du(t)/dt = 0 для асимптотически устойчивых систем, то пе-
редаточная функция любого устойчивого объекта (за исключением объектов с
интегрирующими процессами, см. п. 5.1.1 «Модели интегрирующих процессов»)
при t —► оо будет равна статическому коэффициенту передачи Кр. Поэтому, под-
ставляя в (5.42) Р(з) = Кр и R(s) —► оо, получим для системы с И-регулятором
у = г. (5.49)
Это означает, что система с И-регулятором не имеет ошибки в устано-
вившемся режиме.
Отметим аналогию между И-регулятором и операционным усилителем.
Операционный усилитель (ОУ) имеет передаточную функцию вида Кр/(\ +
+ jaXTo), параметры которой для типовых микросхем ОУ равны Кр = 106,
322
Глава Л
tu = 2тг • 106 с-1. Поэтому практически во всем рабочем диапазоне частот
wTq 1, и передаточная функция ОУ описывается упрощенным выражени-
ем l/[jtu(To/7<p)], т.е. совпадает с передаточной функцией И-регулятора. Схемы
включения ОУ также подобны структурам систем управления с И-регулятором.
Рис. 5.38. Реакция на скачок г(1) за-
мкнутой системы с объектом 2-го поряд-
ка (5.50) с И-регулятором при Т = 0,1 с
и разных Ти
зью приближается к 1, в системе
Тк = 0,1 с).
На рис. 5.38 показаны переходные
характеристики замкнутой системы с И-
регулятором и объектом второго порядка
вида
= (1ТЙТ' <5-50’
где Т = 0,1 с.
При больших постоянных интегри-
рования Тк переходная характеристика
имеет вид, сходный с характеристикой
апериодического звена. С уменьшением
Тк растет усиление регулятора в соответ-
ствии с (5.48), и когда на частоте uiso пет-
левое усиление контура с обратной свя-
появляются колебания (рис. 5.38, кривая
Вторым фактором, влияющим на устойчивость замкнутой системы, явля-
ется дополнительный сдвиг фаз величиной —90°, вносимый И-регулятором в
контур регулирования. Поэтому объект 1-го порядка с малой транспортной
задержкой или объект 2-го порядка, устойчивый в контуре с П-регулятором,
может потерять устойчивость в контуре с И-регулятором.
5.2.3. ПИ-регулятор
В ПИ-регуляторе только постоянная дифференцирования равна нулю,
Тд = 0:
R(s) = K + /-. (5.51)
АЧХ ПИ-регулятора можно получить из рис. 5.34, если отбросить правую
ветвь АЧХ с наклоном 4-20 дБ/дек. При этом сдвиг фаз на частотах выше 1 Гц
(на рис. 5.35) не превысит уровень 0°. Таким образом, ПИ-регулятор имеет
два существенных положительных отличия от И-регулятора: во-первых, его
усиление на всех частотах не может стать меньше К, следовательно, увеличи-
вается динамическая точность регулирования, во-вторых, по сравнению с И-
регулятором он вносит дополнительный сдвиг фаз только в области низких ча-
стот, что увеличивает запас устойчивости замкнутой системы. Оба фактора да-
ют дополнительные степени свободы для оптимизации качества регулирования.
В то же время, как и в И-регуляторе, модуль коэффициента передачи регулято-
ра с уменьшением частоты стремится к бесконечности, обеспечивая тем самым
нулевую ошибку в установившемся режиме. Отсутствие сдвига фаз на высоких
частотах позволяет увеличить скорость нарастания управляемой переменной
(по сравнению с И-регулятором) без снижения запаса устойчивости. Однако
ПИД-регуляторы
323
Рис. 5.39. Реакция замкнутой системы с ПИ-регулятором на скачок r(t) для
объекта вида (5.50) при Т = 0,1 с: а — при Ти = 1 с; б— при Ти = 0,1 с
это справедливо до тех пор, пока пропорциональный коэффициент К не станет
настолько большой, что увеличит усиление контура до единицы на частоте cuiso-
Переходные процессы в ПИ-регуляторе при разных сочетаниях Тк и К по-
казаны на рис. 5.39. При К = 0 (рис. 5.39,а) получаем И-регулятор. С ростом
пропорционального коэффициента К появляется дополнительная ошибка во
время переходного процесса (см. также рис. 5.37 и (5.45)), которая уменьшается
с ростом К, однако при этом снижается запас устойчивости системы, поскольку
с ростом К увеличивается усиление на частоте си^о- Это приводит к появлению
затухающих колебаний в начале переходного процесса (рис. 5.39,а). Когда вели-
чина К становится достаточно большой для компенсации ослабления сигнала
в объекте на частоте tuieo, в системе появляются незатухающие колебания.
Следует отметить, что в отличие от П-регулятора, в котором ошибка оста-
ется в установившемся режиме, наличие интегрального члена в ПИ-регуляторе
сводит эту ошибку в идеальном регуляторе до нуля, как в И-регуляторе. Вы-
ражение для ошибки ПИ-регулятора можно получить, подставив (5.51) в (5.41)
и вычтя из полученного выражения г(з):
sTH
Частота со, с 1
Рис. 5.40. АЧХ замкнутого контура с ПИ-
регулятором при Ти = 0,2 с для объекта
вида (5.50) при Т = 0,1 с
зТи + зКТ„Р(з) + Р(з)Г(в)’
(5.52)
Как видим, при з —► 0, т.е. в установив-
шемся режиме, ошибка 8у(з) —► 0.
Однако появление пропорциональ-
ного коэффициента приводит к затяги-
ванию переходного процесса по сравне-
нию с И-регулятором при тех же Ти и
Т (рис. 5.39,а). Объясняется это тем,
что в ПИ-регуляторе сигнал ошибки
e(t), поступающий на вход интегратора,
меньше, чем в И-регуляторе (он умень-
шается благодаря пропорциональному
коэффициенту), поэтому сигнал, компенсирующий ошибку нараста-
ет медленнее, чем в И-регуляторе. В частотной области этот процесс можно
324
Глава 5
объяснить тем, что с ростом К полюс 1/КТ^ передаточной функции смещается
влево (см. рис. 5.34), т.е. расширяется область частот, в которой интеграль-
ной составляющая пренебрежимо мала и ПИ-регулятор вырождается в чистый
П-регулятор, для которого характерна статическая ошибка. В АЧХ замкнутой
системы с большим К (рис. 5.40) появляется погрешность (уменьшение ампли-
туды выходного сигнала) в диапазоне частот выше 1/КТ^. С ростом К эта
частота сдвигается влево, что во временной области соответствует затягива-
нию процесса установления.
5.2.4. ПД-регулятор
Если в уравнении ПИД-регулятора положить Тк = оо, получим уравнение
регулятора без интегрального члена (ПД-регулятор):
= К + Тдз = к(1 + ^з),
откуда следует, что на высоких частотах (в начале переходного процесса)
ПД-регулятор имеет высокое усиление и, следовательно, точность, а в уста-
новившемся режиме (при з —> 0) он вырождается в П-регулятор со свойствен-
ной ему статической ошибкой. Если статическую ошибку скомпенсировать,
как это делается в П-регуляторах, то возрастет ошибка в начале переходно-
го процесса. Таким образом, ПД-регулятор по своим потребительским свой-
ствам оказывается хуже П-регулятора, поэтому на практике он используется
крайне редко. П-регулятор имеет только одно положительное свойство: он
вносит в контур регулирования положительный фазовый сдвиг (см. рис. 5.35),
что повышает запас устойчивости системы при малых Тд. Однако с увеличе-
нием Тд растет усиление регулятора на высоких частотах, и, когда петлевое
усиление контура регулирования достигает единицы на частоте олео, система
переходит в режим автоколебаний.
5.2.5. ПИД-регулятор
ПИД-регулятор (5.40) можно получить добавлением дифференциального
члена к ПИ-регулятору. Поэтому на ПИД-регулятор переносятся все свойст-
Рис. 5.41. Реакция замкнутой системы
с ПИД регулятором на скачок r(t) при
Ти = 0,015 с, К = 6 для объекта вида
(5.50) при Т = 0,1 с
ва ПИ-регулятора и добавляются новые.
Дифференциальный член, как следует
из рис. 5.35, вносит положительный фа-
зовый сдвиг до 90° на частотах выше
К/ТЛ. Это позволяет обеспечить устой-
чивость или улучшить качество регули-
рования системы в случаях, когда это
невозможно сделать с помощью ПИ-регу-
лятора.
На рис. 5.41 показано влияние по-
стоянной дифференцирования на форму
отклика замкнутой системы на скачок
r(f). Уменьшение амплитуды колебаний
и увеличение коэффициента затухания с
ПИД-регуляторы 325
ростом постоянной дифференцирования Тд объясняются тем, что благодаря по-
ложительному наклону АЧХ в области ш > К/Тд (см. рис. 5.35) уменьшается
сдвиг фаз в контуре регулирования.
Дальнейшее увеличение постоянной дифференцирования (т.е. снижение ча-
стоты ш = К/ТД приводит к росту усиления ПИД-регулятора на высоких часто-
тах, при (л) > К/Тд (см. рис. 5.34). Поскольку фазовый сдвиг у = Ltu, связанный
с транспортной задержкой L (п. 5.1.1), неограниченно увеличивается с ростом
частоты, то при увеличении усиления в связи с ростом Тд всегда наступает
момент, когда петлевое усиление системы на частоте фазового сдвига 180° пре-
высит единицу. При этом на переходной характеристике замкнутой системы
сначала появляются затухающие колебания (кривая Тд = 0,75 с), затем, при
дальнейшем увеличении Тд, система переходит в колебательный режим.
5.3. Модификации ПИД-регуляторов
Постоянно растущие требования рынка к снижению времени регулирова-
ния, к качеству переходного процесса, к ослаблению влияния внешних возму-
щений и шумов, к упрощению процедуры настройки, а также необходимость
управления объектами с большой транспортной задержкой инициировали по-
явление множества модификаций ПИД- регуляторов.
5.3.1. Регулятор с весовыми коэффициентами
при уставке
В классическом ПИД-регуляторе сигнал ошибки е равен разности между
задающим воздействием г и выходной переменной объекта у: е = г - у. Од-
нако качество регулирования можно улучшить, если ошибку вычислять от-
дельно для пропорциональной, дифференциальной и интегральной составля-
ющей [291] (рис. 5.42):
еп = Ьг - у, ед = сг -у, еи = е = г -у, (5.53)
где еп, ед, еи — ошибки для пропорциональной, дифференциальной и инте-
гральной составляющей; Ь, с — настроечные весовые коэффициенты.
Уравнение такого регулятора аналогично (5.36):
u(t) = Ken(t) + -L f e„(t) dt + Тд^-.
TK Jq dt
(5.54)
Рис. 5.42. ПИД-регулятор с весовыми коэффициентами Ь и с при уставке
326
Глава 5
Отметим, что весовой коэффициент при интегральной составляющей от-
сутствует, что необходимо для обеспечения нулевой ошибки в установившем-
ся режиме.
Пользуясь выражениями (5.53), (5.54), а также рис. 5.42 и переходя к изоб-
ражениям по Лапласу, уравнение регулятора можно записать в виде
u(s) = /<[Ьг(з) - y(s)] + -^r[r(s) - y(s)] + зТд[сг(з) - j/(s)] =
ЪК + -L + сзтЛ r(s) - (к 4- + зТд) у(з). (5.55)
Можно заметить, что второе слагаемое здесь содержит передаточную функ-
цию классического ПИД-регулятора (5.39). Поэтому регулятор, представлен-
ный на рис. 5.42, можно заменить эквивалентным ему регулятором, показанным
на рис. 5.43, если блок Я(з) останется классическим регулятором (5.40), а блок
F(s) будет иметь передаточную функцию вида
Wf Ч—~ + сзТЛ
F{S) =------Ц*-------. (5.56)
к + 7ти+*т*
Рис. 5.43. Выделение блока F(s) в структуре ПИД-регулятора
Структура полученного регулятора имеет замечательное свойство: блок
F(s) не входит в контур регулирования. Это означает, что робастность, ка-
чество регулирования, реакция на шумы и внешние возмущения по-прежнему
будут определяться только параметрами К, Тд, Ти, т.е. параметры блоков F(s)
(бис) настраиваются независимо от параметров К, Тд, Ти.
Рис. 5.44. Реакция замкнутой
системы (рис. 5.43) с регулято-
ром на скачок r(t) при Ти =
= 0,015 с, К = 6, Тд = 0,2 с для
объекта вида (5.50) при Т = 0,1 с,
L = 0,005 с
ПИД-регуляторы 327
Параметры Ь и с определяют вид АЧХ блока F(s) и позволяют улучшить
качество реакции регулятора на изменение уставки r(t). На рис. 5.44 показана
реакция замкнутой системы с описанным регулятором при разных значениях
весовых коэффициентов b и с. Как видно из рисунка, изменение параметров Ь
и с не влияет на отклик системы на шумы n(t) и внешние возмущения d(t).
Коэффициент с часто выбирают равным нулю, чтобы избежать диффе-
ренцирования случайных резких выбросов в управляющем сигнале r(t), если
они возможны.
Описанный регулятор при b = 0 и с = 0 иногда называют И-ПД-регу-
лятором, а при b = 1 и с = 0 — ПИ-Д-регулятором.
5.3.2. Регулятор с формирующим фильтром
для сигнала уставки
Дальнейшим усовершенствованием регулятора со структурой, показанной
на рис. 5.43, является применение фильтра в блоке F(s), передаточная функ-
ция которого приобретает вид
ЬК -I—— 4- сзТа
F(s) =-------------Fr(s), (5.57)
K + 7r.+sT‘'
где
*<'> = —L.. (5.58)
Здесь Tr — постоянная времени фильтра, которую можно найти следующим
образом. Предположим, что модуль передаточной функции (5.57) при Fr(s) = 1
имеет выброс (аналогичный выбросу на рис. 5.40). Величина такого выброса на
АЧХ замкнутой системы характеризуется параметром «колебательность» mr,
который равен отношению коэффициента передачи в точке максимума (обо-
значим ее (*>г) к коэффициенту передачи на нулевой частоте. Этот максимум
можно убрать, если потребовать, чтобы на частоте модуль коэффициента
передачи фильтра был равен 1/тг. Из этого условия можно получить зна-
Рис. 5.45. Реакция замкнутой си-
стемы с регулятором с фильтром
(5.57) при Тг = 0,09 с на скачок r(t)
при Ти = 0,015 с, К = 6, Тд = 0,3 с
для объекта вида (5.50) при Т =
= 0,1 с, L = 0,005 с; обозначения со-
ответствуют рис. 5.43
328
Глава 5
чение постоянной времени фильтра
Тг = — </^2-1. (5.59)
Пример реакции системы с регулятором, использующим формирующий
фильтр, приведен на рис. 5.45.
5.3.3. Принцип разомкнутого управления
Регулятор можно построить и без использования обратной связи. Если из-
вестны действующие на систему возмущения и желаемая реакция на изменение
управляющего воздействия, то в некоторых случаях можно найти такую пе-
редаточную функцию регулятора, при которой получается желаемая реакция
системы. Достоинством такого подхода является высокая скорость реагирова-
ния системы на внешние возмущения, поскольку для выработки управляющего
воздействия не нужно ждать, пока управляющий сигнал пройдет через объ-
ект и возвратится в регулятор по цепи обратной связи. Кроме того, система с
разомкнутым управлением в принципе не может быть неустойчивой, посколь-
ку в ней отсутствует обратная связь.
Недостатком является принципиальная невозможность получения высокой
точности при неизвестных возмущениях и низкой точности модели объекта,
невозможность полной компенсации возмущений для объектов с транспортной
задержкой и проблема физической реализуемости обратных операторов.
В зарубежной литературе системы с разомкнутым управлением называют
системами с прямой связью. Термин «прямая связь» выбран для того, чтобы
подчеркнуть отличие этого метода от метода обратной связи. Ниже оба термина
будут использованы как синонимы.
Достоинства разомкнутого и замкнутого управления можно объединить в
одном регуляторе. Наилучшие характеристики системы получаются, если ее
проектировать по принципу разомкнутого управления, а обратную связь ис-
пользовать только для дальнейшей минимизации погрешности.
В предыдущем параграфе был рассмотрен частный случай прямой связи,
которая реализована с помощью блока F(s) (см. рис. 5.43). Основной принцип
применения разомкнутого управления в ПИД-регуляторах состоит в следую-
щем. Задача проектирования делится на две части. Первая часть — обеспече-
ние робастности и ослабления влияния шумов и внешних возмущений — реша-
ется с помощью параметров К, Тд, Ти. Вторая часть — обеспечение заданной
реакции на управляющее воздействие r(t) — решается с помощью параметров
регулятора с прямой связью. Регуляторы, обеспечивающие возможность неза-
висимого решения этих двух задач, называют регуляторами с двумя степенями
свободы, и на их условном изображении присутствуют два входа (рис. 5.46).
Структура ПИД-регулятора, использующего принцип разомкнутого управ-
ления, показана на рис. 5.47. Здесь регулятор R спроектирован как в системе
с классическим ПИД-регулятором, а передаточные функции блоков Ми и Му
выбираются так, чтобы улучшить реакцию системы на входное воздействие r(t).
Принцип действия системы состоит в следующем. Изменение сигнала r(t)
поступает на вход объекта управления и через блок Afu, минуя цепь обрат-
ПИД-регуляторы
329
Рис. 5.46. Регулятор с двумя степенями свобо-
ды — обобщение классического ПИД-регулятора
разомкнутого управления
и принцип обратной связи
ной связи. Передаточная функция блока Ми выбирается таким образом, чтобы
выходной сигнал системы y(t) в точности соответствовал входному сигналу,
y(t) = r(i), т.е. чтобы сигнал ошибки e(t) был равен нулю. Поскольку в ре-
альной системе при воздействии внешних возмущений или изменении уставки
e(t) 0 0, то вступает в действие обычный ПИД-регулятор Я, который с помощью
обратной связи пытается свести появившуюся ошибку к нулю.
Непосредственно по рис. 5.46 можно записать передаточную функцию си-
стемы от входа г к ее выходу y(t) (для начала положим d = п = 0):
у = P[Mur + R(Myr - у)],
откуда
У =
P(Mu + RMy)
r = М,г-И,г +
Р(М„ + ЯМ,)
----------Т
1 + PR
Му +
—Му РМи \
i + яя + i + яя/г
РМи - Му
1 + РЯ
г.
(5.60)
Отсюда передаточную функцию замкнутой системы можно записать в виде
G = My +
PMU - Му
1 + РЯ
(5.61)
Здесь первый член выбирают, как следует из описанного выше принципа дей-
ствия системы, так, чтобы в идеальных условиях е = 0 и Муг = у, т.е. желае-
мой передаточной функцией системы является G = Му. Поэтому второй член в
(5.61) необходимо сделать равным нулю. Этого можно достичь двумя способа-
ми. Первый из них состоит в том, чтобы сделать бесконечно большим петлевое
усиление PR. Чаще используют второй путь, который состоит в выборе такой
передаточной функции Ми, чтобы выполнялось соотношение РМи — Му = 0, т.е.
Ми = р-гМу. (5.62)
Таким образом, в отличие от регулятора с обратной связью, у которого
точность обеспечивается благодаря делению сигнала ошибки на большое число
(усиление интегратора), в регуляторах с прямой связью точность обеспечива-
ется путем компенсации ошибки, т.е. с помощью операции вычитания.
Поскольку в системе, показанной на рис. 5.46, ошибка на низких часто-
тах и в установившемся режиме равна нулю благодаря интегральному члену
в ПИД-регуляторе Я, высокую точность компенсации ошибки с помощью пря-
мой связи достаточно обеспечить только на высоких частотах. Это облегчает
задачу синтеза передаточной функции Ми.
330
Глава 5
Нахождение обратной динамики объекта. Как следует из (5.62), для
нахождения передаточной функции Ми необходимо найти обратный оператор
Р-1(з). Благодаря алгебраической форме изображений операторов по Лапласу,
формально сделать это достаточно просто. Например, для объекта с переда-
точной функцией (5.5) обратный оператор будет равен
яТ -I- 1
p-i(s) = W1^) = (5.63)
Кр
Однако такие операции наталкиваются на проблему физической реализу-
емости. Выражение (5.63) содержит член e+sL, который является обратным
по отношению к идеальной задержке, т.е. является изображением операции
идеального предсказания. Кроме того, для реализации (5.63) необходима опе-
рация идеального дифференцирования, реализация которой также достаточ-
но проблематична.
Рассмотрим другой пример. Пусть передаточная функция объекта опи-
сывается выражением P(s) = (s — l)/(s -I- 1). Обратный оператор имеет вид
Р“х(з) = (s + l)/(s — 1). Однако полюс передаточной функции s = 1 лежит в
правой полуплоскости, что свидетельствует о неустойчивости системы, опи-
сываемой обратным оператором.
Следующей проблемой является компенсация полюсов передаточной функ-
ции My(s) нулями, появившимися после обращения оператора Р(з) в (5.62). Как
будет показано ниже, такая компенсация может привести к резкому различию
времени реакции системы на изменение уставки и на внешние возмущения.
Для решения перечисленных проблем нужно наложить ограничения на вид
передаточной функции Му(з). При этом соотношения е = 0 и Муг = у уже не
будут выполняться точно, однако появляется возможность физической реали-
зации обратного оператора Р-1(з).
Во-первых, необходимо потребовать, чтобы транспортная задержка блока
Му была не менее транспортной задержки объекта Р. Это исключает необ-
ходимость предсказания.
Во-вторых, если Р(з) имеет полюса в правой полуплоскости, то они долж-
ны совпадать с полюсами My(s). Это обеспечивает устойчивость обратного
оператора.
В-третьих, чтобы исключить необходимость дифференцирования, порядок
знаменателя Му(з) д&лжеъ быть не ниже порядка знаменателя Р(з).
Таким образом, задача синтеза регулятора с прямой связью является за-
дачей аппроксимации нереализуемой передаточной функцией искусственно вы-
бранной реализуемой функцией по критерию минимума погрешности.
Синтез обратного оператора удобно начинать с очевидного требования, что
в установившемся режиме должно выполняться соотношение
= (5-64)
где символом Р-Цз) мы обозначили оператор, который приближенно соответ-
ствует оператору Р“х(з).
ПИД-регуляторы 331
Желательно, чтобы передаточная функция обратного оператора быта ма-
лой на тех частотах, на которых она имеет максимальную чувствительность
к изменению параметров.
Используя перечисленные требования, обратный оператор (5.63) можно ап-
проксимировать выражением
р"ы = к^2тт- ‘5-65>
Эта передаточная функция удовлетворяет изложенным выше требовани-
ям. Параметр N здесь определяет степень ослабления шумов дифференци-
рования на частотах выше N/T.
Регулятор с передаточной функцией объекта. В очень простом част-
ном случае, для систем с монотонным откликом на ступенчатое воздействие,
вид передаточной функции My(s) можно выбрать совпадающим с нормирован-
ной передаточной функцией объекта:
My(s) = (5-66)
Кр
где Кр = Р(0). Тогда в соответствии с (5.62)
MU(S) = P-1(S)^ = -^. (5.67)
Лр -Ар
Недостатком такого подхода является медленная реакция замкнутой систе-
мы на изменение задающего воздействия. Достоинством является отсутствие
каких-либо расчетов и настроек для гарантированного получения отклика без
перерегулирования (рис. 5.48). Следует, однако, помнить, что отклик замкну-
той системы на задающее воздействие никак не связан с откликом на внешние
возмущения и шум, поэтому настройка регулятора должна быть выполнена
обычными методами.
Импульсное управление без обратной связи. Еще одна модифика-
ция принципа разомкнутого управления состоит в том, что перед тем как
подать сигнал уставки, подают прямоугольный импульс большой амплиту-
Рис. 5.48. Реакция замкнутой си-
стемы с ПИД-регулятором с прямой
связью (5.66), (5.67) на скачок r(t)
при Ти = 0,015 с, К = 6, Тд = 0,3 с
для объекта вида (5.50) при Т =
= 0,1 с, L = 0,005 с; обозначения со-
ответствуют рис. 5.46
332
Глава 5
Рис. 5.49. Реакция замкнутой си-
стемы с ПИД-регулятором с прямо-
угольным импульсом перед сигналом
уставки при Ти = 0,19 с, К = 0,8,
Тд = 0 для объекта вида (5.50) при
Т = 0,1 с, L = 0
ды (рис. 5.49). Поскольку скорость нарастания реакции на прямоугольный
импульс пропорциональна его амплитуде, длительность переходного процесса
можно существенно уменьшить по сравнению со случаем, когда сигнал уставки
подается в форме одиночного скачка (рис. 5.49).
Реакция на прямоугольный импульс состоит из фазы нарастания сигнала и
фазы спада. Амплитуду импульса выбирают максимально возможной. Обычно
она ограничивается мощностью исполнительных устройств системы. Длитель-
ность импульса выбирают такой, чтобы максимум реакции на импульс был
равен значению уставки (единице при уставке в форме единичного скачка). За-
держку подачи сигнала уставки выбирают так, чтобы она совпала с моментом
появления максимума отклика на прямоугольный импульс.
В данном методе время выхода системы на режим может быть сделано
как угодно малым, если использовать импульс достаточно большой амплиту-
ды. В общем случае перед подачей сигнала уставки можно подавать несколько
импульсов разной амплитуды и длительности. Параметры импульсов и задерж-
ку выбирают, решая численными методами задачу оптимизации, минимизируя
погрешность отклонения отклика системы от требуемой формы. Для линейных
систем полученные при оптимизации-параметры остаются без изменений для
любых значений уставки, если амплитуду прямоугольного импульса изменять
пропорционально значению уставки.
Компенсация внешних возмущений с помощью прямой связи. Ес-
ли внешние возмущения, воздействующие на объект управления, можно из-
мерять до того, как они пройдут на выход системы t/, то их влияние мож-
но существенно ослабить с помощью прямой связи. Прямая связь, в отли-
чие от обратной, позволяет скомпенсировать погрешность быстрее, чем обрат-
ная связь обнаружит ошибку как разность между управляемой величиной и
управляющим воздействием.
Ранее мы предполагали, что внешние возмущения приложены к входу си-
стемы. Такое допущение было справедливо при качественном анализе степени
подавления возмущений с помощью обратной связи. Однако для компенсации
возмущений необходимо идентифицировать передаточную функцию от точки
приложения возмущений к выходу объекта Pd(s). При этом объект управления
приобретает второй вход — вход возмущений и описывается функцией с
ПИД-регуляторы
333
двумя аргументами, u(s) и d(s):
y(s) = P(s)u(s) + Pd(s)d(s). (5.68)
Одним из вариантов компенса-
ции члена Pd(s)d(s) является исполь-
зование принципа прямой связи (ра-
зомкнутого управления), как пока-
зано на рис. 5.50. Здесь Fa = Fa(s) —
передаточная функция регулятора с
прямой связью.
Уравнение полученной системы
рис. 5.50 с учетом (5.68):
у = Pad 4- Р[-
Рис. 5.50. Принцип компенсации возмуща-
ющих воздействий с помощью прямой связи
можно записать непосредственно по
-F<id + R(r - у)],
или
У =
Pd-PFd pR
-------d 4----г.
1 4- PR 1 +PR
(5.69)
Отсюда следует, что уменьшить влияние внешних возмущений можно дву-
мя способами: увеличивая петлевое усиление контура с обратной связью PR
или выбрав Ра - PFa = 0, т.е.
Fd(s) = P-^sWs). (5.70)
Обращение динамического оператора здесь сопряжено с проблемами, опи-
санными в п. 5.3.3 «Нахождение обратной динамики объекта». В ряде прак-
тических случаев бывает достаточно считать, что оператор P-1(s) = Р7*(0)
статический, что существенно упрощает его нахождение. Статические опера-
торы используют, в частности, при компенсации влияния скорости ветра или
температуры наружного воздуха для стабилизации температуры в промыш-
ленных теплицах.
В частном случае, когда точка приложения возмущения совпадает с вхо-
дом объекта (как на рис. 5.36), (5.68) упрощается до y(s) = P(s)(u(s) 4- d(s))
и из (5.70) получим Fa(s) = 1.
Метод прямой связи позволяет скомпенсировать возмущение до того, как
оно пройдет через объект. Это существенно увеличивает общее быстродействие
системы и исключает ее потенциальную неустойчивость.
Примером применения описанного метода является компенсация влияния
погодных условий на промышленную теплицу. Для компенсации влияния тем-
пературы наружного воздуха, скорости ветра, осадков необходимо установить
снаружи теплицы соответствующие датчики и выполнить идентификацию пере-
даточной функции от каждого датчика до точки измерения температуры внут-
ри теплицы, затем найти обратный оператор (5.70) и включить его в струк-
туру регулятора.
Правильно настроенный контроллер с прямой и обратной связью позволяет
ослабить влияние нагрузки на управляемую переменную до 10 раз [312].
334
Глава 5
Недостатком метода является невозможность достаточно точной иденти-
фикации возмущения и точки его приложения к объекту, поскольку они рас-
пределены в пространстве, а также проблемы, связанные с нахождением об-
ратного оператора (п. 5.3.3).
5.3.4. Регулятор отношений
Задача регулировки отношений возникает, когда важно поддерживать не
абсолютные значения параметров, а соотношение между ними. Например, ес-
ли решается задача смешивания компонентов в заданных пропорциях, под-
держивается горение с заданным процентным содержанием кислорода в го-
рючей смеси и т.п.
Пример решения данной задачи представлен на рис. 5.51. Первый регуля-
тор поддерживает выходную величину yi равной значению уставки п. Значение
уставки второго регулятора пропорционально регулируемой величине первого
регулятора: тг(£) = ayi(t). Величина отношения устанавливается блоком а на
рис. 5.51 и может изменяться в соответствии с алгоритмом работы системы.
Сигнал желательно брать именно с выхода системы yi, это повышает точность,
поскольку yi (t) отличается от ri(t) на величину погрешности, которая в дина-
мике может быть значительной. Кроме того, величина у± (t) всегда изменяется
с некоторой задержкой относительно ri(t). Поэтому величина y2(t) будет от-
ставать по времени от желаемого значения ayi(t).
Смягчить эту проблему позволяет структура, показанная на рис. 5.52.
Здесь блок а имеет два входа и описывается выражением
r2(t) = a[?ri(t) + (1 - 7)s/i (t)],
где 7 — параметр, определяющий вклад ri(t) или yi(t) в величину гг(^). При
7 = 0 эта структура идентична структуре на рис. 5.51.
Рис. 5.51. ПИД-регулятор отношений Рис. 5.52. ПИД-регулятор отношений
У2 /yi — а У2 /yi = а с увеличенным быстродействием
5.3.5. Регулятор с внутренней моделью
Если модель М(з) объекта Р(з) идентифицирована, то можно не рассчиты-
вать параметры ПИД-регулятора, если использовать регулятор с показанной
на рис. 5.53 структурой [313-316]. Здесь F(s) — фильтр, обычно выбираемый
ПИД-регуляторы
335
Рис. 5.53. Регулятор с внутренней моделью М
с передаточной функцией
F& = (5-71)
Q — обращенная модель объекта, т.е. Q(s) « M“1(s). Знак приближенного
равенства стоит потому, что обращение модели редко можно выполнить точно
(см. п. 5.3.3 «Нахождение обратной динамики объекта»).
Для описания принципа действия регулятора на рис. 5.53 предположим
сначала, что возмущения d и шумы измерений п отсутствуют, а модель объекта
управления и обращенная модель являются точными, т.е.
M(s) = P(s), Q(s) = (5.72)
Тогда разность между сигналами на выходах процесса и модели равна нулю:
8 = 0. Но в таком случае у = PQFr = Fr, и, учитывая, что QP = 1, получим
у = Fr. (5.73)
Поскольку в установившемся режиме F(s) = 1 (5.71), то получим у = г.
Таким образом, регулятор с внутренней моделью точно поддерживает значе-
ние уставки в статическом режиме.
Фильтр нижних частот F(s) в такой структуре с помощью настройки гра-
ничной частоты \/Тр позволяет выбрать компромисс между запасом устойчи-
вости и быстродействием замкнутой системы.
Регулятор, представленный на рис. 5.53, переносом блока вычисления раз-
ности е может быть преобразован в классическую форму ПИД-регулятора
(рис. 5.36, 5.54), где
8) =________________ (5 74)
' l-F(s)Q(s)A/(s)' ( ’
Рис. 5.54. Регулятор с внутренней моделью М в классической форме представления
(с регулятором R)
336
Глава 5
В общем случае регулятор (5.74) может иметь высокий порядок, который
определяется порядком объекта. Однако в частном случае описанная структу-
ра вырождается в обычный ПИ- или ПИД-регулятор [317]. Предположим, что
модель объекта описывается передаточной функцией
M(s) = T^=e-sL.
v ’ 1 + sT
(5.75)
Приближенная обратная функция будет иметь следующий вид (см. п. 5.3.3):
<?(«) =
1 + зТ
(5.76)
Можно уточнить вид функции (5.75), если использовать аппроксимацию
задержки e~sL линейным членом ряда Тейлора:
e-’L » 1 - sL, M(s) = Kpi(1~lL). (5.77)
v ' 1 + sT v ’
С учетом приведенных выражений для F(s), Q(s) и M(s) уравнение ре-
гулятора (5.74) примет вид
Kps(TF + L) KP(TF + L) + sKp(TF + L) ‘
(5.78)
Как видим, это уравнение ПИ-регулятора, в котором пропорциональный коэф-
фициент равен T/Kp(Tf + L), а постоянная интегрирования — Kp(Tf + L).
ПИД-регулятор можно получить из регулятора с внутренней моделью, если
задержку e~sL заменить аппроксимацией Паде первого порядка [291]:
L = l — sL/2
l + sL/2'
(5.79)
При этом уравнение (5.74) преобразуется к виду
_ 2 + s(L + 2Т) + s2TL
R( ) (2L + 2Tf + TfsL)Kps ’ (5'8°)
В знаменателе этого выражения для частот ниже 2/Tf k2/L можно пренебречь
членом TfsL по сравнению с 2L 4- 27/?:
2 + s(L + 2Т) + s2TL _ L + 2T 1 TL
{S) ~ (2L + 2Tf)Kps ~ 2KP(L + TF)+ sKp(L + TF) +S2KP(L + TF) ( ’
Как видим, получилась передаточная функция классического ПИД-регу-
лятора.
Таким образом, для объектов управления первого порядка регулятор с
внутренней моделью при допущениях (5.77) и (5.81) эквивалентен ПИ- или
ПИД-регулятору.
Важной особенностью регулятора с внутренней моделью является возмож-
ность настройки робастности независимо от выбора остальных параметров ре-
гулятора. Для этого выбирают соответствующий фильтр F или параметр Tf
для фильтра первого порядка (5.71). Регулятор с внутренней моделью мо-
ПИД-регуляторы
337
жег дать очень хорошую реакцию на изменение уставки, однако реакция на
внешние возмущения может быть слишком замедленной, поскольку в выраже-
нии (5.74) сокращаются нули и полюса передаточной функции (см. подробнее
этот эффект в п. 5.4.4).
Проектирование регулятора с внутренней моделью происходит следующим
образом [293]. Сначала находят и оптимизируют обратную модель Q(s) исхо-
дя из требований к качеству переходного процесса при изменении уставки, не
обращая внимания на робастность. Для получения начального приближения
Q(s) предполагают, что A/(s) = P(s) и используют методы обращения дина-
мического оператора, описанные в п. 5.3.3. Единственным ограничением при
оптимизации передаточной функции Q(s) является требование ее асимптоти-
ческой устойчивости. После этого выбирают структуру и параметры фильтра
F(s), добиваясь требуемой робастности системы при заданном быстродействии.
Поскольку в идеальном случае (5.73) свойства замкнутой системы определяют-
ся характеристикой выбранного фильтра, его граничная частота в этом случае
определяет быстродействие всей замкнутой системы.
Для объектов, у которых транспортная задержка L составляет менее 0,25
от доминирующей постоянной времени объекта Т, постоянную времени фильтра
приближенно можно выбрать из диапазона от 0,1Т < < 0,5Т [293]. Если
0,25 < L < 0,75, то Tf « 1,5(L 4- Т). Если транспортная задержка еще больше,
то постоянную времени фильтра еще более увеличивают, выбирая в качестве
начального приближения Tf = 3(L 4- Т) [293].
Пример реакции системы со встроенной моделью на изменение уставки r(t),
на импульс помехи n(t) и возмущение d(t) приведен на рис. 5.55. Объект описы-
вается передаточной функцией вида M(s) = >005\ Модель описы-
k ’0,9
вается передаточной функцией М(з) = ---, т.е. модель не точ-
(0,07s 4- 1)(0,1s 4- 1)
. \ 0,06s 4-1,111 ~
но соответствует объекту. Обратный оператор Q(s) = $——. Отметим,
что для обеспечения точности в установившемся режиме должно выполнять-
ся соотношение Q(0)M(0) = 1, поскольку коэффициент передачи регулятора в
установившемся режиме должен стремиться к бесконечности (см. (5.74)). На
рис. 5.55 кривая 1 соответствует случаю, когда модель точно соответствует
Рис. 5.55. Реакция системы со встро-
енной моделью на входной импульс,
помеху и возмущение для разных па-
раметров фильтра Tf; кривая 1 —
модель точно соответствует объекту и
Tf = 0,05 мс
338
Глава 5
объекту, а постоянная времени фильтра = 0,05 мс. Как видим, повышение
точности модели и уменьшение постоянной времени фильтра позволяют суще-
ственно увеличить быстродействие системы, однако реакция на возмущающие
воздействия при этом изменяется слабо.
5.3.6. Эквивалентные преобразования структур
ПИД-регуляторов
В литературе описано много различных структур ПИД-регуляторов, од-
нако многие из них эквивалентны между собой и могут быть преобразованы
одна в другую,
ле, что уравнения, записанные
ям другой структуры.
Эквивалентность в данном случае понимается в том смыс-
для одной структуры, идентичны уравнени-
Рис. 5.56. Две эквивалент-
ные структурные схемы
Рассмотрим два фрагмента структур-
ных схем, показанные на рис. 5.56,а и б. Пер-
вый фрагмент описывается выражением
у = QFx - Qz,
второй — выражением
у = (G 4- Q)x - Qz.
Сравнивая эти выражения между собой, по-
лучим условие их эквивалентности: G 4- Q =
= QF, или
G = Q(F-1).
(5.82)
Рис. 5.57. Струк-
тура ПИ-регулятора
На рис. 5.57 показана типовая структур-
ная реализация интегрального члена в про-
мышленных ПИД-регуляторах [291]. Непо-
средственно по структурной схеме можно за-
писать уравнение
я = Кх+аЬ1я'
из которого можно найти
’<”> = (* + л7к)
(5.83)
Таким образом, структура на рис. 5.57 описывает ПИ-регулятор с посто-
янной интегрирования Тп = Т/К. Такой способ получения интегрального и
пропорционального члена использовался еще в аналоговых регуляторах. Он
был хорош тем, что передаточная функция l/(sT4-1) была легко технически
реализуема с помощью интегрирующей RC-цепочки, состоящей из одного рези-
стора и одного конденсатора. Несмотря на то что в современных регуляторах
RC-цепочки не используются, этот способ до сих пор применяется в серийных
промышленных регуляторах [291].
ПИД-регуляторы 339
Кроме классического уравнения ПИД-регулятора (5.40), получила распро-
странение эквивалентная ей так называемая последовательная форма ПИД-
регулятора, передаточная функция которой имеет вид
Я(в) = К'(1 + ^)(1 + ^). (5.84)
Раскрывая скобки в (5.84), получим
Я(в) = К' (1 + ^) + sT^RI + зТ'ЛК',
т.е. последовательная форма ПИД-регулятора эквивалентна обычной, если обо-
значить к = к'(1 + т;/^), ти = т'/к', тд = т;к.
5.3.7. ПИД-регуляторы для систем с транспортной
задержкой
Типовые переходные характеристики объектов управления, в которых про-
исходит перенос тепла, показаны на рис. 5.1-5.5 и 5.58. Все кривые начинают-
ся с задержки L, затем происходит плавное нарастание температуры. Решение
одномерного уравнения переноса тепла в бесконечно длинном теле при еди-
ничном ступенчатом воздействии температуры в точке с координатой х = 0
описывается функцией
h(t, х) = 1 — erf | — |
\vVr/
(рис. 5.58), где х — расстояние от точки измерения температуры до точки воз-
действия температуры, t — время, т — константа; erf (т) = 2^/тг j* е~и du —
функция ошибок. При фиксированном х это уравнение можно преобразовать к
виду h(t) = 1 — erf (l/^/t/a), где а = тх2 — константа. Таким образом, рассто-
яние от точки приложения температуры до точки ее измерения влияет только
на масштаб по времени, в котором изображена переходная характеристика объ-
екта, но не на соотношение между длительностью задержки и длительностью
переходного процесса. Иначе говоря, соотношение между задержкой и длитель-
ностью переходного процесса практически не зависит от размеров теплового
объекта. С увеличением размеров объекта растет транспортная задержка, но
одновременно растет и длительность переходного процесса.
Существуют, однако, объекты, в которых транспортная задержка может
быть как угодно большой по сравнению с длительностью переходного процес-
са (рис. 5.59). Примером могут служить процессы, связанные с перемещени-
ем тел в пространстве, например транспортировка по трубам и транспортер-
ным лентам.
Поскольку у звена с транспортной задержкой сдвиг фаз <р = —wL увели-
чивается с ростом задержки L, а частота увеличивается с уменьшением
длительности переходного процесса L + Т, то отношение L/(L -F Т) характери-
зует степень сложности управления объектом.
340
Глава 5
Рис. 5.58. Переходная характеристика
пространственно протяженного теплового
объекта
Рис. 5.59. Переходная характеристика
объекта с транспортной задержкой
Предиктор Смита. Для управления объектами с большой транспортной
задержкой, обычно при L/(L + Т) > 0,2...0,5, используют специальные структу-
ры ПИД-регуляторов, содержащие блоки для предсказания поведения объекта
через время L — предикторы (от английского «prediction»). На рис. 5.60 по-
казана структура такого регулятора, предложенная Смитом в 1957 г. [318] и
иногда называемая предиктором Смита. Предиктор Смита включен в некото-
рые промышленные ПИД-регуляторы.
Рис. 5.60. Система управления с предиктором Смита
Цель предиктора Смита — предсказать, какой сигнал появится на выходе
объекта до того, как он там появится на самом деле. Для предсказания можно
использовать модель объекта управления, состоящую из дробно-рациональной
части Mq и транспортной задержки e~sL (рис. 5.60). Благодаря тому, что из
модели можно исключить задержку, появляется принципиальная возможность
предсказания поведения объекта до появления сигнала на его выходе. Реа-
лизуется эта возможность системой со структурой, показанной на рис. 5.60.
Здесь R — обычный ПИД-регулятор, Poe~sL — передаточная характеристи-
ка объекта управления.
Принцип работы системы состоит в следующем. Предположим, что мо-
дель абсолютна точна. Тогда разность сигналов на выходах модели и объекта
будет равна нулю, е = 0. Но в таком случае непосредственно из рис. 5.60
можно получить
_ ят R PqR —sL
У = °® l + RMor = 1 + P0Re Г'
В этом выражении член POR/(1 + PqR) представляет собой передаточную функ-
цию системы без транспортной задержки (сравните ее с (5.41)). А это значит,
ПИД-регуляторы 341
что звено с транспортной задержкой не входит в контур обратной связи и не
влияет на устойчивость и быстродействие системы, т.е. происходит регулиро-
вание в контуре с моделью без задержки, а транспортная задержка только
добавляется к полученному результату.
Рассмотрим теперь работу предиктора Смита без предположения е = 0.
В этом случае рис. 5.60 можно описать следующей системой уравнений:
у = Poe~sLR(r — е — Mqu),
е = у — Мое~зЬи,
У = Pne~sLu,
откуда можно найти
= Г__________РрД__________ ‘
У [ 1 + RM0 + R(P0 - M0)e~°L Г
Как видим, с ростом точности модели разность Pq-Mqb знаменателе стре-
мится к нулю и из передаточной функции системы исключается транспортная
задержка, которая только добавляется к уже полученному результату регули-
рования (в квадратных скобках (5.85)).
С помощью топологических преобразований структурных схем можно полу-
чить много эквивалентных между собой структур систем с предиктором Смита.
Две из них представлены на рис. 5.61. Можно показать, что они описывают-
ся тем же уравнением (5.85).
e~sL. (5.85)
Рис. 5.61. Модификации системы управления с предиктором Смита
ППИ-регуляторы. ППИ-регулятор (сокращение от «предиктивный», или
«предсказывающий» ПИ) является модификацией предиктора Смита, которая
распространена в АСУ ТП более широко, чем сам предиктор Смита. Один
из вариантов ППИ-регулятора представлен на рис. 5.62 [293]. Сравнивая этот
рисунок с рис. 5.57, можно заметить, что ППИ-регулятор отличается от обыч-
ного ПИ-регулятора только тем, что вместо единицы в числителе выражения
1/(1 + зТи) стоит изображение задержки e~sL. Существует много модификаций
структуры, изображенной на рис. 5.62 (см., например, [291]).
На рис. 5.63 приведена реакция системы на скачок сигнала уставки. От-
метим, что ППИ-регулятор и предиктор Смита выполняют только слежение за
уставкой, но очень плохо ослабляют внешние возмущения (рис. 5.63).
342
Глава 5
Рис. 5.63. Переходный процесс в системе с ППИ-регулятором и объектом ви-
да (5.50) при Т = 0,1 с, Ти = 0,17 с; обозначения соответствуют рис. 5.43
5.4. Особенности реальных регуляторов
Описанный выше ПИД-регулятор и его модификации являются теоретиче-
скими идеализациями реальных регуляторов, поэтому для их практического
воплощения необходимо учесть особенности, порождаемые реальными услови-
ями применения и технической реализации. К таким особенностям относятся:
• конечный динамический диапазон изменений физических переменных в си-
стеме (например, ограниченная мощность нагревателя, ограниченная про-
пускная способность клапана);
• отсутствие (как правило) в системе поддержания температуры холодиль-
ника (управляющее воздействие и < 0 соответствует включению холодиль-
ника, а не выключению нагревателя);
• ограниченная точность измерений, что требует специальных мер для вы-
полнения операций дифференцирования с приемлемой погрешностью;
• наличие практически во всех системах типовых нелинейностей: насыщение
(ограничение динамического диапазона изменения переменных), ограниче-
ние скорости нарастания, гистерезис и люфт;
• технологический разброс и случайные вариации параметров регулятора
и объекта;
• дискретная реализация регулятора;
• необходимость плавного (безударного) переключение режимов регулиро-
вания.
Ниже описываются методы решения перечисленных проблем.
ПИД-регуляторы
343
5.4.1. Погрешность дифференцирования и шум
Проблема численного дифференцирования является достаточно старой и
общей как в цифровых, так и в аналоговых регуляторах. Суть ее заключает-
ся в том, что производная вычисляется обычно как разность двух близких по
величине значений функции, поэтому относительная погрешность производной
всегда оказывается больше, чем относительная погрешность численного пред-
ставления дифференцируемой функции.
В частности, если на вход дифференциатора поступает синусоидальный
сигнал A sin (cut), то на выходе получим Aa;cos(cut), т.е. с ростом частоты уве-
личивается амплитуда сигнала на выходе дифференциатора. Иначе говоря,
дифференциатор усиливает высокочастотные помехи, короткие выбросы и шум.
Если помехи, усиленные дифферен-
циатором, лежат за границей рабочих ча-
стот ПИД-регулятора, то их можно осла-
бить с помощью фильтра верхних частот.
Структурная реализация дифференциато-
ра с фильтром показана на рис. 5.64. Здесь
1______м = (--fi......
sT/N + 1) \sT/N + l
sT/N+\
х.
У
Рис. 5.64. Структурная реализация
дифференциального члена ПИД-регу-
лятора
т.е. передаточная функция полученного дифференциатора D(s) может быть
представлена в виде произведения передаточной функции идеального диф-
ференциатора на передаточную функцию фильтра первого порядка: D(s) =
= sT + *, где коэффициент N задает граничную частоту фильтра и обыч-
но выбирается равным 2...20 [291].
Большее ослабление высокочастотных шумов можно получить с помощью
отдельного фильтра, который включается последовательно с ПИД-регулято-
ром. Обычно используют фильтр второго порядка [291] с передаточной функ-
цией
1
1 + sTf + s2T>/2’
Постоянную времени фильтра обычно выбирают равной Tf = TK/N, где
N = 2...20 [291]. Граничную частоту фильтра желательно не выбирать ниже
частоты 1/Ти, так как это усложняет расчет параметров регулятора и запа-
са устойчивости.
Кроме шумов дифференцирования, на характеристики ПИД-регулятора
влияют шумы измерений. Через цепь обратной связи эти шумы поступают
на вход системы и затем проявляются как дисперсия управляющей перемен-
ной и. Высокочастотные шумы вредны тем, что вызывают ускоренный износ
трубопроводной арматуры и электродвигателей.
Поскольку объект управления обычно является низкочастотным филь-
тром, шумы измерений редко проникают по контуру регулирования на выход
системы. Однако они увеличивают погрешность измерений y(t) и снижают
точность регулирования.
344
1
Глава 5 '
В ПИД-регуляторах различают шум с низкочастотным спектром, вызван-
ный внешними воздействиями на объект управления, и высокочастотный шум,
связанный с электромагнитными наводками, помехами по шинам питания и
земли, с дискретизацией измеряемого сигнала и другими причинами [172, 311].
Низкочастотный шум моделируют как внешние возмущения (d(s)), высокоча-
стотный — как шумы измерений (n(s)).
5.4.2. Интегральное насыщение
В установившемся режиме работы и при малых возмущениях большинство
систем с ПИД-регуляторами являются линейными. Однако процесс выхода на
режим практически всегда требует учета нелинейности типа «ограничение».
Эта нелинейность связана с естественными ограничениями на мощность, ско-
рость, частоту вращения, угол поворота, площадь поперечного сечения кла-
пана, динамический диапазон и т.п. Контур регулирования в системе, нахо-
дящейся в насыщении (когда переменная достигла ограничения), оказывается
разомкнутым, поскольку при изменении переменной на входе звена с ограни-
чением его выходная переменная остается без изменений.
Наиболее типовым проявлением режима ограничения является так назы-
ваемое интегральное насыщение, которое возникает в процессе выхода системы
на режим в регуляторах с ненулевой постоянной интегрирования Тк 0 0. Инте-
гральное насыщение приводит к затягиванию переходного процесса (рис. 5.65,
5.66). Аналогичный эффект возникает вследствие ограничения пропорциональ-
ного и интегрального члена ПИД-регулятора (рис. 5.67, 5.68). Однако часто
под интегральным насыщением понимают совокупность эффектов, связанных
с нелинейностью типа «ограничение».
Суть проблемы интегрального насыщения состоит в том, что если сигнал
на входе объекта управления u(t) вошел в зону насыщения (ограничения), а
сигнал рассогласования r(f) - y(t) не равен нулю, интегратор продолжает ин-
Рис. 5.65. Реакция выходной переменной
y(t) на скачок входного воздействия r(t)
для ПИ-регулятора при условии ограниче-
ния мощности на входе объекта u(t) и без
ограничения. Объект второго порядка, Ti =
= 0,1 с, Гг = 0,05 с, L = 0,02 с. Параметры
регулятора: К = 2, Ти = 0,06 с, Тл = 0
Рис. 5.66. Сигнал на входе объекта u(t)
при условии ограничения мощности и без.
Объект второго порядка, Ti = 0,1 с, Тг =
= 0,05 с, L = 0,02 с. Параметры регу-
лятора: К = 2, Ти = 0,06 с, Тд = 0
ПИД-регуляторы
345
Рис. 5.67. Реакция выходной переменной
y(t) на скачок входного воздействия r(t)
для ПИД-регулятора при условии ограни-
чения мощности на входе объекта u(t) и
без ограничения. Объект второго порядка,
Ti = 0,1 с, Тг = 0,05 с, L = 0,02 с. Пара-
метры регулятора: К = 10, Ти = 0,014 с,
Тд = 0,3 с
Рис. 5.68. Сигнал на входе объекта u(t)
в контуре с ПИД-регулятором при усло-
вии ограничения мощности и без. Объ-
ект второго порядка, Т\ = 0,1 с, Тг =
= 0,05 с, L = 0,02 с. Параметры регуля-
тора: К = 10, Ти = 0,014 с, Тд = 0,3 с
тегрировать, т.е. сигнал на его выходе растет, но этот сигнал не участвует в
процессе регулирования и не воздействует на объект вследствие эффекта на-
сыщения. Система управления в этом случае становится эквивалентной разо-
мкнутой системе, сигнал на входе которой равен уровню насыщения управ-
ляющего сигнала u(t).
Для тепловых систем ограничением снизу обычно является нулевая мощ-
ность нагрева, в то время как ПИД-регулятор требует подачи на объект «от-
рицательной мощности нагрева», т.е. требует охлаждения объекта.
Эффект интегрального насыщения известен давно. В аналоговых регу-
ляторах его устранение было достаточно проблематичным, поскольку в них
проблема не могла быть решена алгоритмически, а только аппаратными сред-
ствами. С появлением микропроцессоров проблему удается решить гораздо
эффективнее. Методы устранения интегрального насыщения обычно являются
предметом изобретений, относятся к коммерческой тайне фирм-производителей
и защищаются патентами. Ниже рассмотрены несколько таких идей, описан-
ных в литературе [291].
Ограничение скорости нарастания входного воздействия. Посколь-
ку максимальное значение входного воздействия на объект управления u(t) сни-
жается с уменьшением разности r(t)-y(t\ то для устранения эффекта ограниче-
ния можно просто снизить скорость нарастания сигнала уставки r(t), например,
с помощью фильтра. Недостатком такого способа является снижение быстро-
действия системы, а также невозможность устранить интегральное насыщение,
вызванное внешними возмущениями, а не сигналом уставки.
Алгоритмический запрет интегрирования. Когда управляющее воз-
действие на объект достигает насыщения, обратная связь разрывается и инте-
гральная составляющая продолжает расти, даже если при отсутствии насыще-
ния она должна была бы падать. Поэтому один из методов устранения инте-
346
Глава 5
грального насыщения состоит в том, что контроллер следит за управляющим
воздействием на объект, и как только оно достигает насыщения, контроллер
вводит программный запрет интегрирования для интегральной составляющей.
Компенсация насыщения с помощью дополнительной обратной
связи. Эффект интегрального насыщения можно ослабить, отслеживая со-
стояние исполнительного устройства, входящего в насыщение, и компенсируя
сигнал, подаваемый на вход интегратора [291]. Структура системы с таким
компенсатором показана на рис. 5.69.
ПИД-регулятор
Рис. 5.69. Компенсация эффекта интегрального насыщения с помощью допол-
нительной обратной связи для передачи сигнала ошибки е8 на вход интегратора
Принцип ее работы состоит в следующем. В системе вырабатывается сиг-
нал рассогласования между входом и выходом исполнительного устройства
е3 = и — v. Сигнал на выходе исполнительного устройства либо измеряют, либо
вычисляют, используя математическую модель (рис. 5.69). Если е9 = 0, это
эквивалентно отсутствию компенсатора и получаем обычный ПИД-регулятор.
Если же исполнительное устройство входит в насыщение, то v > и и es < 0.
При этом сигнал на входе интегратора уменьшается на величину ошибки е3,
что приводит к замедлению роста сигнала на выходе интегратора, уменьшению
сигнала рассогласования и величины выброса на переходной характеристике
системы (рис. 5.70). Постоянная времени Та определяет степень компенсации
сигнала рассогласования.
В некоторых регуляторах вход и устройства сравнения es выделяют как
отдельный вход, называемый входом слежения, что бывает удобно при по-
строении сложных систем управления и при каскадном соединении несколь-
ких регуляторов.
Условное интегрирование. Этот способ является обобщением алгорит-
мического запрета интегрирования. После наступления запрета интегральная
составляющая остается постоянной, на том же уровне, который она имела в
момент появления запрета интегрирования. Обобщение состоит в том, что за-
прет интегрирования наступает не только при достижении насыщения, но и
при некоторых других условиях.
Такими условиями могут быть, например, достижение сигналом ошибки е
или выходной переменной у некоторого заданного значения. При выключении
ПИД-регуляторы
347
Рис. 5.70. Отклик системы, показанной на рис. 5.69: а — на единичный скачок r(t)
при различных значениях постоянной обратной связи Т3, б— на сигнал рассогласо-
вания е3. Объект второго порядка, 71 =0,1 с, ТЪ = 0,05 с, L = 0,01 с. Параметры
регулятора: К = 7, Ти = 0,01 с, Тд = 0,1 с
Рис. 5.71. Отклик на единичный скачок
r(t) системы с насыщением исполнительного
устройства, при различных уровнях отключе-
ния интегратора у. Объект второго порядка,
Ti =0,1 с, Тг = 0,05 с, L = 0,01 с. Параметры
регулятора: К = 6, Ти = 0,02 с, Тд = 0,3 с
процесса интегрирования нужно следить, в каком состоянии в момент выклю-
чения находится интегратор. Если он накапливает ошибку и степень насыще-
ния возрастает, то интегрирование выключают. Если же в момент выключения
степень насыщения понижается, то интегратор оставляют включенным [291].
На рис. 5.71 показан пример переходного процесса в системе с отключе-
нием интегратора при достижении выходной величины y(t) заданного значе-
ния (у = 0; 0,2; 0,8).
Интегратор с ограничением. На рис. 5.57 был представлен вариант ре-
ализации ПИ-регулятора с помощью интегратора в цепи обратной связи. Если
эту схему дополнить ограничителем (рис. 5.72,а), то сигнал и на выходе никогда
не выйдет за границы, установленные порогами ограничителя, что уменьшает
а) б)
Рис. 5.72. Модификации интегратора с ограничением
348
Глава 5
Рис. 5.73. Отклик на единичный скачок r(t) си-
стемы, содержащей интегратор с ограничением
на уровне L/Bepx (рис. 5.72). Объект второго по-
рядка, Ti = 0,1 с, Тг = 0,05 с, L = 0,01 с. Пара-
метры регулятора: К = 7, Тк = 0,01 с, Тд = 0,3 с
Рис. 5.74. Улучшенная передаточная
функция модели эффекта насыщения
выброс на переходной характеристике системы (рис. 5.73). На рис. 5.72,6 пред-
ставлена модификация такого ограничителя.
Модель эффекта ограничения можно улучшить, если после превышении
уровня, при котором наступает ограничение, уменьшить сигнал на выходе мо-
дели (рис. 5.74) [291]. Это ускоряет выход системы из режима насыщения.
5.4.3. Запас устойчивости и робастность
Возможность потери устойчивости является основным недостатком систем
с обратной связью. Поэтому обеспечение необходимого запаса устойчивости
являются самым важным этапом при разработке и настройке ПИД-регулятора.
Устойчивость системы с ПИД-регулятором — это способность системы
возвращаться к слежению за уставкой после прекращения действия внешних
воздействий. В контексте данного определения под внешними воздействиями
понимаются не только внешние возмущения, действующие на объект, но любые
возмущения, действующие на любую часть замкнутой системы, в том числе
шумы измерений, временная нестабильность уставки, шумы дискретизации и
квантования, шумы и погрешность вычислений. Все эти возмущения вызыва-
ют отклонения системы от положения равновесия. Если после прекращения
воздействия система возвращается в положение равновесия, то она считается
устойчивой. При анализе устойчивости ПИД-регуляторов обычно ограничива-
ются исследованием реакции системы на ступенчатое изменение уставки r(t),
шум измерений n(t) и внешние возмущения d(f). Потеря устойчивости прояв-
ляется как неограниченное возрастание управляемой переменной объекта, или
как ее колебание с нарастающей амплитудой.
В производственных условиях попытки добиться устойчивости системы с
ПИД-регулятором опытным путем, без ее идентификации, не всегда приводят
к успеху (например, для систем с объектом высокого порядка, для систем с
большой транспортной задержкой или для объектов, которые трудно иден-
тифицировать). Это создает впечатление, что устойчивость — мистическое
свойство, которым не всегда можно управлять. Однако, если процесс иден-
тифицирован достаточно точно, то мистика исчезает и анализ устойчивости
ПИД-регуляторы
349
сводится к анализу дифференциального уравнения, описывающего замкнутый
контур с обратной связью.
Практически интерес представляет анализ запаса устойчивости, т.е. опре-
деление численных значений критериев, которые позволяют указать, как да-
леко находится система от состояния неустойчивости.
Наиболее полную информацию о запасе устойчивости системы можно полу-
чить, решив дифференциальное уравнение, описывающее замкнутую систему
при внешних возмущениях. Однако этот процесс слишком трудоемок, поэто-
му для линейных систем используют упрощенные методы, позволяющие дать
оценку запаса устойчивости без решения уравнений [319]. Мы рассмотрим два
метода: оценку с помощью годографа комплексной частотной характеристики
разомкнутого контура (критерий Найквиста) и с помощью логарифмических
АЧХ и ФЧХ (диаграмм Боде).
Устойчивая система может стать неустойчивой при небольших изменени-
ях ее параметров, например вследствие их технологического разброса. По-
этому ниже мы проанализируем функцию чувствительности системы с ПИД-
регулятором, которая позволяет выявить условия, при которых система стано-
вится грубой (мало чувствительной к изменению ее параметров).
Система, которая сохраняет заданный запас устойчивости во всем диапа-
зоне изменений параметров вследствие их технологического разброса, старе-
ния, условий эксплуатации во всем диапазоне изменений параметров нагрузки,
а также во всем диапазоне действующих на систему возмущений в реальных
условиях эксплуатации, называют робастной. Иногда робастность и грубость
используют как эквивалентные понятия.
Критерий Найквиста. Рассмотрим си-
стему, состоящую из контроллера R и объекта
управления Р (рис. 5.75), которая получена пу-
тем исключения из классической системы с ПИД-
регулятором (см. рис. 5.33) сигнала уставки г. Бу-
дем считать, что обратная связь разомкнута, а для
ее замыкания достаточно соединить точки х и у.
Предположим теперь, что на вход х подан сигнал
x(f) = sin(cuo^). (5.86)
G
Рис. 5.75. Структура разо-
мкнутой системы управления
с ПИД-регулятором для ана-
лиза устойчивости
Тогда, пройдя через регулятор и объект управления, этот сигнал появится на
выходе у с измененной амплитудой и фазой в виде
y(t) = — |G(jcu0) | sin(cuot + </?), (5.87)
где G(ja>) = R(jw)P(jw) — комплексная частотная характеристика (КЧХ) си-
стемы; = argG(jcuo) — аргумент КЧХ; |G(Jcu)| — модуль КЧХ. Таким образом,
при прохождении через регулятор и объект амплитуда сигнала изменится про-
порционально модулю, а фаза — на величину аргумента КЧХ.
Если теперь замкнуть точки х и у, то сигнал будет циркулировать по за-
мкнутому контуру, причем будет выполняться условие y(t) = x(t). Если при
этом |G(jcuo)| > 1 и = 180°, т.е. после прохождения по контуру сигнал попа-
дает на вход регулятора в той же фазе, что и на предыдущем цикле, то после
350
Глава 5
каждого прохождения по контуру амплитуда синусоидального сигнала будет
возрастать, пока не достигнет границы диапазона линейности системы, после
чего форма колебаний станет отличаться от синусоидальной. В этом случае
для анализа устойчивости можно использовать метод гармонической линеари-
зации, когда рассматривают только первую гармонику искаженного сигнала.
В установившемся режиме после наступления ограничения амплитуды колеба-
ний в силу равенства y(t) = x(t) будет выполняться условие
|G(>O)| = 1, <£ = 180°,
т.е.
G(>o) = -1. (5.88)
Решив уравнение (5.88), можно найти частоту колебаний о?о в замкнутой си-
стеме.
Комплексную частотную характеристику G(jcu) графически изображают в
виде годографа (диаграммы Найквиста) — графика в координатах R,e[G(ja>)]
и Im[G(j<j)] (рис. 5.76). Стрелка на линии годографа указывает направление
движения «карандаша» при возрастании частоты. Точка G(jcuo) = -1, которая
соответствует условию существования незатухающих колебаний в системе, на
этом графике имеет координаты Re[G(jcu)] = — 1 и Im[G(jcu)] = 0. Поэтому
критерий устойчивости Найквиста формулируется следующим образом [303]:
контур, устойчивый в разомкнутом состоянии, сохранит устойчивость и после
его замыкания, если его КЧХ в разомкнутом состоянии не охватывает точку с
координатами [-1, J0]. Более строго, при движении вдоль траектории годографа
Рис. 5.76. Три годографа КЧХ разомкнутых систем G(jcu) для объекта второго поряд-
ка при Ti = Тг = 0,1 с, L = 0,01 с и пропорциональном коэффициенте регулятора К = 6
ПИД-регуляторы
351
Рис. 5.77. Переходная характе-
ристика замкнутой системы, кото-
рая имеет годограф, показанный на
рис. 5.76
в направлении увеличения частоты точка [—1, J0] должна оставаться слева [291],
чтобы замкнутый контур был устойчив.
На рис. 5.77 показаны реакции замкнутых систем с тремя различными го-
дографами (см. рис. 5.76) на единичный скачок уставки. Все три системы устой-
чивы, однако скорость затухания колебаний и форма переходного процесса у
них различная. Интуитивно понятно, что система с параметрами Ти = 0,01 с,
Тд = 0,1 с наиболее близка к тому, чтобы перейти в состояние незатухающих
колебаний при небольшом изменении ее параметров. Поэтому при проекти-
ровании ПИД-регулятора важно обеспечить не столько устойчивость, сколь-
ко ее запас, необходимый для нормального функционирования системы в ре-
альных условиях.
Запас устойчивости оценивают как степень удаленности КЧХ от критиче-
ской точки [-1, J0]. Если |G(>0)| < 1, то можно найти, во сколько раз осталось
увеличить передаточную функцию, чтобы результирующее усиление вывело
систему в колебательный режим: <frn|G(j<Jo)| = 1» откуда
9т = jG(^ji- (589)
Запасом по усилению дт называется число, на которое нужно умножить
передаточную функцию разомкнутой системы G(Jcji8o), чтобы ее модуль на ча-
стоте сдвига фаз 180° а>18о стал равен 1.
Если на частоте сдвига фаз 180° а>18о коэффициент усиления разомкнутого
контура равен G(Jcji8o) = — 1/дт (см. рис. 5.76), то дополнительное усиление
величиной дт переведет систему в точку [—1, J0], поскольку (-1/дт)9т = -1-
Аналогично вводится понятие запаса по фазе: это минимальное число <рт,
на которое нужно увеличить фазовый сдвиг в разомкнутой системе argG(jcd),
чтобы суммарный фазовый сдвиг достиг 180°, т.е.
^m = 180° + argG(>i). (5.90)
Знак «+» перед argG(jui) стоит потому, что argG(jcdi) < 0.
Для оценки запаса устойчивости используют также минимальное расстоя-
ние sm от кривой годографа до точки [—1, J0] (см. рис. 5.76).
352
Глава 5
На практике считаются приемлемыми значения дт = 2...5, = 30...60°,
sm = 0,5...0,8 [291].
Для графика на рис. 5.76 эти критерии имеют следующие значения:
• для случая Ти = 0,01 с, ТД = 0,1 с gmi = 12,1; (pmi = 15°; smi = 0,303;
• для случая Тк = 0,05 с, ТЛ = 0,1 с дт2 = 11,8; <Рт2 = 47,6°; sm2 = 0,663;
• для случая Ти = 0,05 с, Тд = 1,1 с дшз = 1,5; (ртз = 35,2°; sm3 = 0,251.
Если кривая годографа пересекает действительную ось в нескольких точ-
ках, то для оценки запаса устойчивости берут ту из них, которая наиболее
близка к точке [—1, J0]. При более сложном годографе может быть использова-
на оценка запаса устойчивости как запас по задержке [291]. Запас по задерж-
ке — это минимальная задержка, при добавлении которой в контур он теряет
устойчивость. Наиболее часто этот критерий используется для оценки запаса
устойчивости систем с предиктором Смита.
Частотный критерий устойчивости. Для графического представления
передаточной функции разомкнутой системы и оценки запаса устойчивости мо-
гут быть использованы логарифмические АЧХ и ФЧХ (рис. 5.78). Для оценки
запаса по фазе сначала с помощью АЧХ находят частоту {частота среза или
частота единичного усиления), при которой |G(jcdi)| = 1, затем по ФЧХ нахо-
дят соответствующий запас по фазе. Для оценки запаса по усилению сначала
с помощью ФЧХ находят частоту cuiso, на которой фазовый сдвиг равен 180°,
затем по АЧХ находят запас по усилению. На рис. 5.78 приведены примеры
Рис. 5.78. Оценка запаса по фазе и усилению для системы с годографом рис. 5.76
ПИД-регуляторы 353
графических построений для оценки запаса по фазе и усилению для системы,
годограф которой показан на рис. 5.76.
Если запас по фазе разомкнутого контура равен 0° или запас по уси-
лению равен 1, после замыкания контура обратной связи система окажется
неустойчивой.
Функции чувствительности. Передаточная функция реального объек-
та Р(з) может изменяться в процессе функционирования на величину ДР(«),
например вследствие изменения нагрузки на валу двигателя, числа яиц в ин-
кубаторе, уровня или состава жидкости в автоклаве, старения и износа ма-
териала, появления люфта, изменения смазки и т.п. Правильно спроектиро-
ванная система автоматического регулирования должна сохранять свои пока-
затели качества не только в идеальных условиях, но и при наличии перечис-
ленных факторов. Для оценки влияния относительного изменения передаточ-
ной функции объекта ДР/Р на передаточную функция замкнутой системы Gc\
(5.41) найдем дифференциал
d PR __ R RP dP /r
dGcl “ dP 1 + PRdP - (l + PR)2<i ~ (1 + PR)2~P' <5 * * *'9
Поделив обе части этого равенства на Gc\ и подставив в правую часть
Gci = РЯ/(1 -F PR), получим
dGci _ 1 dP _ dP
Gci “ (1 + PR) P ~P'
Из последнего соотношения виден смысл коэффициента S — он характери-
зует степень влияния относительного изменения передаточной функции объек-
та на относительное изменение передаточной функции замкнутого контура, т.е.
S является коэффициентом чувствительности замкнутого контура к вариации
передаточной функции объекта. Поскольку коэффициент S = S(jw) является
частотозависимым, его называют функцией чувствительности [291].
Как следует из (5.92),
S = , * (5.93)
1 + PR v ’
Введем обозначение
р р
r = 1-s = i7p«- (5'94)
Величина Т называется комплементарной (дополнительной) функцией чув-
ствительности [291], поскольку S + Т = 1.
Заметим, что функция чувствительности входит во все три слагаемые урав-
нения замкнутой системы с ПИД-регулятором (5.42).
Функция чувствительности позволяет оценить изменение свойств системы
после замыкания обратной связи. Поскольку передаточная функция разомкну-
той системы равна G = PR, а замкнутой Gci = РД/(1 4- PR), то их отношение
Gd/G = S. Аналогично, передаточная функция от входа возмущений d на выход
замкнутой системы равна P(s)/[l + P(s)/?(s)] (см. (5.42)), а разомкнутой — Р(з),
12-3733
354
Глава 5
Рис. 5.79. Модули функций чувствительности для системы с годографами,
показанными на рис. 5.76
следовательно, их отношение также равно S. Для передаточной функции от
входа шума измерений п на выход системы можно получить то же отношение S.
Таким образом, зная вид функции S(Jcu) (см, например, рис. 5.79), мож-
но сказать, как изменится подавление внешних воздействий на систему для
разных частот после замыкания цепи обратной связи. Очевидно, шумы, ле-
жащие в диапазоне частот, в котором |S(Jcu)| > 1, после замыкания обратной
связи будут усиливаться, а шумы с частотами, на которых |S(Jcu)| < 1, после
замыкания обратной связи будут ослаблены.
Наихудший случай (наибольшее усиление внешних воздействий) будет
наблюдаться на частоте максимума М8 модуля функции чувствительности
(рис. 5.79):
М8 = max |S(jcu)| = max
1
1 + G(ju)
(5.95)
Максимум функции чувствительности можно связать с запасом устойчи-
вости sm (см. рис. 5.76). Для этого обратим внимание, что |1 -F | пред-
ставляет собой расстояние от точки (—1, J0) до текущей точки на годографе
функции G(jcu). Следовательно, минимальное расстояние от точки (—1,J0)
до функции G(ju>)
sm = min |1 4- G(ju)\.
(5.96)
Сопоставляя (5.95) и (5.96), можно заключить, что sm = \/Ma.
Если с ростом частоты модуль G(jcu) уменьшается, то, как видно из
рис. 5.76, 1 — вщ > l/pm- Подставляя сюда соотношение sm = \/Ma, полу-
чим оценку запаса по усилению, выраженную через максимум функции чув-
ствительности :
М8
ма-г
(5.97)
Аналогично, но с более грубыми допущениями можно записать оценку за-
ПИД-регуляторы
355
пата по фазе через максимум функции чувствительности [291]:
<рт 2arcsin ^2^") ‘ (5.98)
Например, при М3 = 2 получим дт 2 и <рт 29°.
Робастность — это способность системы сохранять заданный запас устой-
чивости при вариациях ее параметров, вызванных изменением нагрузки (напри-
мер, при изменении загрузки печи меняются ее постоянные времени), техноло-
гическим разбросом параметров и их старением, внешними воздействиями, по-
грешностями вычислений и погрешностью модели объекта. Используя понятие
чувствительности, можно сказать, что робастность — это низкая чувствитель-
ность запаса устойчивости к вариации параметров объекта.
Если параметры объекта изменяются в небольших пределах, когда можно
использовать замену дифференциала конечным приращением, влияние измене-
ний параметров объекта на передаточную функцию замкнутой системы можно
оценить с помощью функции чувствительности (5.92). В частности, можно сде-
лать вывод, что на тех частотах, где модуль функции чувствительности мал,
будет мало и влияние изменений параметров объекта на передаточную функ-
цию замкнутой системы и, соответственно, на запас устойчивости.
Для оценки влияния больших изменения параметров объекта представим
передаточную функцию объекта в виде двух слагаемых:
Р = Ро + ДР, (5.99)
где Ро — расчетная передаточная функция, ДР — отклонение от Ро, которое
должно быть устойчивой передаточной функцией. Тогда петлевое усиление
разомкнутой системы можно представить в виде G = RPq + RAP = Go 4- RAP.
Поскольку расстояние от точки (—1, J0) до текущей точки А на годографе невоз-
мущенной системы (для которой ДР = 0) равно |1 4- Go| (рис. 5.80), условие
устойчивости системы с отклонением петлевого усиления RSP можно пред-
Рис. 5.80. Пояснение к выводу соотношения (5.100)
356
Глава 5
ставить в виде
|ЯДР| < |1 + Go|,
откуда
или
|ДР| < 1(1 + Go)/fl|,
ДР 1 + Go
Ро < RPo
1 + Go
Go
1
|ТГ
где Т — дополнительная функция чувствительности (5.94). Окончательно мож-
но записать соотношение
Po(ju)
1
IW
(5.100)
которое должно выполняться, чтобы система сохраняла устойчивость при из-
менении параметров процесса на величину AP(jcu).
5.4.4. Сокращение нулей и полюсов
Поскольку передаточная функция разомкнутой системы G = RP является
произведением двух передаточных функций, которые в общем случае имеют и
числитель, и знаменатель, то возможно сокращение нулей с полюсами, которые
лежат в правой полуплоскости или близки к ней. Поскольку в реальных усло-
виях, когда существует разброс параметров, такое сокращение выполняется
неточно, то может возникнуть ситуация, когда теоретический анализ приводит
к выводу, что система устойчива, хотя на самом деле при небольшом отклоне-
нии параметров процесса от расчетных значений она становится неустойчивой.
Поэтому каждый раз, когда происходит сокращение нулей и полюсов, необ-
ходимо проверять устойчивость системы при реальном разбросе параметров
объекта.
Вторым эффектом является появление существенного различия между вре-
менем установления переходного процесса при воздействии сигнала уставки и
внешних возмущений. Поэтому необходимо проверять реакцию синтезирован-
ного регулятора для каждого из этих воздействий.
5.4.5. Безударное переключение режимов
регулирования
В ПИД-регуляторах могут существовать режимы, когда их параметры из-
меняются скачком. Например, когда в работающей системе потребовалось из-
менить постоянную интегрирования или если после ручного управления систе-
мой необходимо перейти на автоматический режим. В описанных случаях могут
появиться нежелательные выбросы регулируемой величины, если не принять
специальных мер. Поэтому возникает задача плавного («безударного») пере-
ключения режимов работы или параметров регулятора.
Основной метод решения проблемы заключается в построении такой струк-
туры регулятора, когда изменение параметра выполнятся до этапа интегри-
рования. Например, при изменяющемся параметре Тк = TK(t) интегральный
ПИД-регуляторы 357
член можно записать в двух формах:
ЛО = У e(t) dt или I(t) = У —^ye(t) dt-
В первом случае при скачкообразном изменении Tn(t) интегральный член будет
меняться скачком, во втором случае — плавно, поскольку TK(t) находится под
знаком интеграла, значение которого не может изменяться скачком.
Аналогичный метод реализуется в инкрементной форме ПИД-регулятора
(см. п. 5.4.6 «Инкрементная форма цифрового ПИД-регулятора») и в последова-
тельной форме ПИД-регулятора (см. п. 5.3.6), где интегрирование выполняется
на заключительной стадии вычисления управляющего воздействия.
5.4.6. Дискретная форма регулятора
Непрерывные переменные удобно использовать для анализа и синтеза
ПИД-регуляторов. Для технического воплощения необходимо перейти к дис-
кретной форме уравнений, поскольку основой всех регуляторов является мик-
роконтроллер, контроллер или компьютер, которые оперируют с переменны-
ми, полученными из аналоговых сигналов после их дискретизации по време-
ни и квантования по уровню.
Вследствие конечного времени вычисления управляющего воздействия в
микроконтроллере и задержки аналого-цифрового преобразования между мо-
ментом поступления аналогового сигнала на вход регулятора и появлением
управляющего воздействия на его выходе появляется нежелательная задерж-
ка, которая увеличивает общую задержку в контуре регулирования и снижа-
ет запас устойчивости.
Основным эффектом, который появляется при дискретизации и который
часто «открывают заново», является появление алиасных частот (см. главу 4)
в спектре квантованного сигнала в случае, когда частота дискретизации недо-
статочно высока. Аналогичный эффект возникает при киносъемке вращаю-
щегося колеса автомобиля. Частота алиасного сигнала равна разности между
частотой помехи и частотой дискретизации. При этом высокочастотный сиг-
нал помехи смещается в низкочастотную область, где накладывается на по-
лезный сигнал и создает большие проблемы, поскольку отфильтровать его на
этой стадии невозможно.
Для устранения алиасного эффекта перед входом аналого-цифрового пре-
образователя необходимо установить аналоговый фильтр, который бы ослаб-
лял помеху по крайне мере на порядок на частоте, равной половине частоты
дискретизации. Обычно используют фильтр Баттерворта второго или более
высокого порядка. Вторым вариантом решения проблемы является увеличение
частоты дискретизации так, чтобы она по крайней мере в 2 раза (согласно тео-
реме Котельникова) была выше максимальной частоты спектра помехи. Это
позволяет применить после дискретизации цифровой фильтр нижних частот.
При такой частоте дискретизации полученный цифровой сигнал с точки зрения
количества информации полностью эквивалентен аналоговому и все свойства
аналогового регулятора можно распространить на цифровой.
358
Глава 5
Переход к конечно-разностным уравнениям. Переход к дискретным
переменным в уравнениях аналогового регулятора выполняется путем замены
производных и интегралов их дискретными аналогами. Если уравнение записа-
но в операторной форме, то сначала выполняют переход из области изображе-
ний в область оригиналов. При этом оператор дифференцирования заменяют
производной, оператор интегрирования — интегралом.
Существует множество способов аппроксимации производных и интегралов
их дискретными аналогами, которые изложены в курсах численных методов
решения дифференциальных уравнений. В ПИД-регуляторах наиболее рас-
пространенными являются простейшая аппроксимация производной конечной
разностью и интеграла — конечной суммой.
Рассмотрим интегральный член ПИД-регулятора:
ДО = dt.
-*и JO
Продифференцировав обе части по времени, получим
Заменяя дифференциалы в этом выражении конечными разностями (левыми
разностями), получим
Ц - 4-х 1
At Т„е<-1’
где индекс i обозначает, что данная величина взята в момент времени Ц Из
последнего выражения получим
At
Д = Д-i 4- (5.101)
-*и
Таким образом, очередное значение интеграла можно вычислить, зная
предыдущее и значение ошибки в предыдущий момент времени. Однако такая
формула имеет свойство накапливать ошибку вычислений с течением времени,
если отношение Ы/Тщ недостаточно мало. Более устойчива другая формула
интегрирования с правыми разностями, когда значение ошибки берется в тот
же момент времени, что и вычисляемый интеграл:
li = li-i + (5.102)
-*и
Рассмотрим дифференциальный член ПИД-регулятора с фильтром
«Г./W + 1е(8)
(см. п. 5.4.1). Переходя в этой формуле от изображений к оригиналам, получим
Тд duo(t)
dt
_ de(t)
4- UD(t) = Тд—j—.
at
ПИД-регуляторы
359
Заменяя дифференциалы конечными приращениями, получим разностное
уравнение
UDi = ( 1 - UDi-i + Nfa - вг-i). (5.103)
\ -*д /
Для сходимости итерационного процесса (5.103) необходимо, чтобы
1-^ <1.
т.е.
At < 2TJN. (5.104)
При At > Ta/N итерационный процесс (5.103) становится колебательным, что
недопустимо для ПИД-регулятора.
Лучшими характеристиками обладает разностное уравнение, полученное
при использовании правых разностей:
Т NT
+ (5'105)
Здесь условие сходимости |7i/(7i+NAt)| < 1 выполняется для всех At, и ни при
каких значениях параметров не возникает колебаний. Кроме того, последняя
формула позволяет «отключить» дифференциальную составляющую в ПИД
регуляторе путем назначения Тд = 0, чего нельзя сделать в выражении (5.103),
поскольку при этом возникает деление на ноль.
Можно использовать еще более точные формулы численного дифферен-
цирования и интегрирования, известные из курса численных методов реше-
ния уравнений.
Шаг дискретизации At выбирается как можно меньше, это улучшает каче-
ство регулирования. Для обеспечения хорошего качества регулирования он не
должен быть больше чем 1/15...1/6 времени установления переходной харак-
теристики объекта по уровню 0,95 или 1/4... 1/6 транспортной задержки [304].
Однако при увеличении частоты дискретизации более чем в 2 раза по сравнению
с верхней частотой спектра возмущающих сигналов (по теореме Котельникова)
дальнейшего улучшения качества регулирования не происходит.
Если на входе регулятора нет антиалиасного фильтра, то частоту дискре-
тизации выбирают в 2 раза выше верхней граничной частоты спектра помехи,
чтобы использовать цифровую фильтрацию. Необходимо учитывать также, что
исполнительное устройство должно успеть отработать за время At.
Если контроллер используется не только для регулирования, но и для ава-
рийной сигнализации, то такт дискретизации не может быть меньше, чем до-
пустимая задержка срабатывания сигнала аварии.
При малом такте дискретизации увеличивается погрешность вычисления
производной. Для ее снижения можно использовать сглаживание получаемых
данных по нескольким собранным точкам перед этапом дифференцирования.
Уравнение цифрового ПИД-регулятора. Основываясь на изложенном
выше, уравнение дискретного ПИД-регулятора можно записать в виде
Ui+t = Kei + Ц + ud^
(5.106)
360
Глава 5
где i — номер временного такта. Величины Ц и и Di вычисляют по выражениям
(5.102) и (5.105). Для начала работы алгоритма выбирают обычно udq = 0,
Zo = 0, во = 0, однако могут быть и другие начальные условия, в зависимости
от конкретной задачи регулирования.
Отметим, что алгоритм, полученный путем простой замены операторов
дифференцирования и интегрирования в выражении (5.36) конечными разно-
стями и конечными суммами:
«<+1 = Ке, + ^^е, + Taei+l \ (5.107)
1к k=0
(здесь k — индекс суммирования отсчетов от начала процесса до текущего г-го
временного такта) обладает плохой устойчивостью и низкой точностью, как
это было показано выше. Однако с ростом частоты дискретизации различие
между приведенными двумя алгоритмами стирается.
Инкрементная форма цифрового ПИД-регулятора. Довольно часто,
особенно в нейросетевых и фаззи-регуляторах, используют уравнение ПИД-
регулятора в виде зависимости приращения управляющей величины от ошиб-
ки регулирования и ее производных (без интегрального члена). Такое пред-
ставление удобно, когда роль интегратора выполняет внешнее устройство, на-
пример обычный или шаговый двигатель. Угол поворота его оси пропорцио-
нален значению управляющего сигнала и времени. В фаззи-регуляторах при
формулировке нечетких правил эксперт может сформулировать зависимость
управляющей величины от значения производной, но не от значения интегра-
ла, поскольку интеграл «запоминает» всю предысторию изменения ошибки,
которую человек помнить не может.
Инкрементная форма ПИД-регулятора получается путем дифференциро-
вания уравнения (5.36):
А , ч „deft) 1 / х т d?e(t)
= K_LL + e(f) + Ta—
U v -Z и dt
Рис. 5.81. Инкрементная
форма ПИД-регулятора
Для получения нулевой ошибки регули-
рования на выходе инкрементного регулято-
ра должен стоять интегратор (рис. 5.81):
u(t) =
Ди(£) dt.
Переходя в полученных выражениях к
конечным разностям, получим дискретную
форму инкрементного ПИД-регулятора:
Дгч+i =
(5.108)
ГДе ДЗДг-|-1 — ^£4-1 Дв^ — Cj 6^—1.
Более устойчивое и точное разностное уравнение можно получить, подста-
вив в формулу Ди<+1 = Ui+i — щ выражения для Ui+i и и» из (5.106).
ПИД-регуляторы
361
Инкрементная форма регулятора удобна для применения в микроконтрол-
лерах, поскольку в ней основная часть вычислений выполняется с прираще-
ниями, для представления которых можно использовать слово с малым ко-
личеством двоичных разрядов. Для получения значения управляющей вели-
чины можно выполнить накопительное суммирование на финальной стадии
вычислений:
^t+l = ui + Д^г+1 •
5.5. Расчет параметров
Перед тем как рассчитывать параметры регулятора, необходимо сформу-
лировать цель и критерии качества регулирования, а также ограничения на
значения и скорости изменения переменных в системе. Традиционно основ-
ные качественные показатели формулируются исходя из требований к форме
реакции замкнутой системы на ступенчатое изменение уставки. Однако та-
кой критерий очень ограничен. В частности, он ничего не говорит о величине
ослабления шумов измерений или влияния внешних возмущений, может дать
ошибочное представление о робастности системы. Поэтому для полного описа-
ния или тестирования системы с ПИД-регулятором нужен ряд дополнительных
показателей качества, о которых речь пойдет ниже.
В общем случае выбор показателей качества не может быть формализован
полностью и должен осуществляться исходя из смысла решаемой задачи.
5.5.1. Качество регулирования
Выбор критерия качества регулирования зависит от цели, для которой ис-
пользуется регулятор. Такой целью может быть:
• поддержание постоянного значения параметра (например, температуры);
• слежение за изменением уставки или программное управление;
• управление демпфером в резервуаре с жидкостью и т.д.
Для той или иной задачи наиболее важными могут быть следующие фак-
торы:
• форма отклика на внешнее возмущение (время установления, перерегули-
рование, коэффициент затухания и др.);
• форма отклика на шумы измерений;
• форма отклика на сигнал уставки;
• робастность по отношению к разбросу параметров объекта управления;
• требования к экономии энергии в управляемой системе;
• минимум шумов измерений и др.
Для классического ПИД-регулятора параметры, которые являются наи-
лучшими для слежения за уставкой, в общем случае отличаются от парамет-
ров, наилучших для ослабления влияния внешних возмущений. Для того что-
бы оба параметра одновременно были оптимальными, необходимо использовать
ПИД-регуляторы с двумя степенями свободы (см. п. 5.3.3). Например, точное
слежение за изменением уставки необходимо в системах управления движени-
ем, в робототехнике. В системах управления технологическими процессами,
362
Глава 5
где уставка обычно остается длительное время без изменений, требуется мак-
симальное ослабление влияния нагрузки (внешних возмущений). В системах
управления резервуарами с жидкостью требуется обеспечение ламинарности
потока (минимизация дисперсии выходной переменной регулятора).
Ослабление влияния внешних возмущений. Как было показано
в п. 5.4.3 «Функции чувствительности», обратная связь ослабляет влияние
внешних возмущений в |S(jo>)|_1 раз за исключением тех частот, на которых
\S(jw)| > 1. Внешние возмущения могут быть приложены к объекту в самых
разных его частях, однако когда конкретное место неизвестно, считают, что
возмущение воздействует на вход объекта. В этом случае отклик системы на
внешние возмущения определяется передаточной функцией (см. (5.42))
су* = ГГрй = PS = lf (5109)
1 “Г Л ль ГС
Поскольку внешние возмущения обычно лежат в низкочастотной части
спектра, где |S(jcu)| < 1 и, следовательно, Т « 1, то предыдущее выражение
можно упростить:
Gyd ~ ~Б ~Б s^' (5.110)
rt гС
Таким образом, для ослабления влияния внешних возмущений (в частности,
влияния нагрузки) можно уменьшить постоянную интегрирований Ти.
Во временной области реакцию на внешние возмущения оценивают по от-
клику на единичный скачок d(t) (см. рис. 5.55).
Ослабление влияния шумов измерений. Передаточная функция от
точки приложения шума (см. рис. 5.35) на выход системы имеет вид (см. (5.42)):
= ГГря = s- <5 ш>
Благодаря спаду АЧХ объекта на высоких частотах функция чувствитель-
ности стремится к 1 (см. рис. 5.79). Поэтому ослабить влияние шумов изме-
рений с помощью обратной связи невозможно. Однако эти шумы легко устра-
няются применением фильтров нижних частот, а также правильным экрани-
рованием и заземлением [172, 311].
Робастность к вариации параметров объекта. Замкнутая система
остается устойчивой при изменении параметров объекта на величину AP(jo>),
если выполняется условие (5.100).
Критерии качества во временной области. Для оценки качества ре-
гулирования в замкнутой системе с ПИД-регулятором обычно используют сту-
пенчатое входное воздействие и ряд критериев для описания формы переход-
ного процесса (рис. 5.82):
• максимум ошибки регулирования
(5.112)
и момент времени Тт&х, при котором ошибка достигает этого максимума;
Стах = max e(t)
0<t<oo
ПИД-регуляторы
363
Рис. 5.82. Критерии качества регулирования во временной области
• интегрированная абсолютная ошибка
eiAE= /°°|e(t)|dt; (5.113)
Jo
• интеграл от квадрата ошибки
eIAE = / e2(t)dt; (5.114)
Jo
• декремент затухания d — отношение первого максимума ко второму
(рис. 5.82) (типовое значение d = 4 и более):
d=7- (5.115)
О
Отметим, что в литературе встречаются и другие определения декремента
затухания, в частности как b/а или как коэффициент в показателе степени
экспоненты, описывающей огибающую затухающих колебаний;
• статическая ошибка во — постоянная ошибка в равновесном (установив-
шемся, статическом) режиме системы;
• время установления Те с заданной погрешностью es (время, по истечении
которого погрешность регулирования не превышает заданного значения ев).
Обычно е8 = 1 %, реже 2 или 5 %. Соответственно, время установления
обозначают To,oi 7b,02 7b,05;
• перерегулирование emax — превышение первого выброса над установив-
шемся значением переменной. Обычно выражается в процентах от уста-
новившегося значения;
• время нарастания Тг — интервал времени, в течение которого выходная
переменная нарастает от 10 до 90 % своего установившегося значения;
• период затухающих колебаний Тр. Строго говоря, затухающие колебания
не являются периодическими, поэтому здесь под периодом понимается рас-
стояние между двумя соседними максимумами переходной характеристики.
364
Глава 5
Амплитуда у(®)
Рис. 5.83. Критерии качества ре-
гулирования в частотной области
Для систем управления движением
в качестве тестового сигнала чаще ис-
пользуют не функцию скачка, а линейно
нарастающий сигнал, поскольку элек-
тромеханические системы обычно имеют
ограниченную скорость нарастания вы-
ходной величины.
Приведенные выше критерии испо-
льзуются для оценки качества реакции
как на изменение уставки, так и на воз-
действие внешних возмущений и шумов
измерений.
Частотные критерии качества.
В частотной области обычно использу-
ются следующие критерии, получаемые из графика амплитудно-частотной ха-
рактеристики замкнутой системы у(ш) (рис. 5.83):
• полоса пропускания о>-з дб или о>о,7 по уровню —3 дБ или по уровню
1М = 0,7 — полоса частот от 0 до с^_3 дБ = а?о,7, в пределах которой
кривая АЧХ снижается не более чем на 3 дБ;
• колебательность М — отношение максимального (пикового) значения АЧХ
3/шах К ее значению на нулевой частоте з/(0), т.е. в установившемся режиме
М = Ж’ (5116)
типовыми значениями являются М = 1,5...1,6;
• резонансная частота системы о>р — частота, на которой АЧХ достигает
максимума: ут&х = 2/(^р).
Частотные критерии у реальных регуляторов не могут быть однозначно
связаны с временными критериями из-за нелинейностей (обычно это нелинейно-
сти типа ограничений) и алгоритмов устранения эффекта интегрального насы-
щения. Однако приближенно можно установить следующие зависимости между
критериями в частотной и временной области [291]:
• Тга>о,7 « 2 [291]; (5.117)
• частота максимума передаточной характеристики замкнутой системы при-
близительно соответствует периоду затухающих колебаний отклика на сту-
пенчатое входное воздействие: и)3 « 2тг/Тр;
• чем медленнее затухают колебания, там больше показатель колебатель-
ности М.
5.5.2. Выбор параметров регулятора
В общей теории автоматического управления структура регулятора выби-
рается исходя из модели объекта управления. При этом более сложным объек-
там управления соответствуют более сложные регуляторы. В нашем же случае
структура регулятора уже задана — мы рассматриваем ПИД-регулятор, при-
чем эта структура очень простая. Поэтому ПИД-регулятор не всегда может
ПИД-регуляторы
365
дать хорошее качество регулирования, хотя в подавляющем большинстве при-
ложений в промышленности применяются именно ПИД-регуляторы.
Впервые методику расчета параметров ПИД-регуляторы предложили Зиг-
лер и Никольс в 1942 г. [287]. Эта методика очень проста и дает не очень хоро-
шие результаты. Тем не менее она до сих пор часто используется на практике,
хотя с тех пор появилось множество более точных методов.
После расчета параметров регулятора обычно требуется его ручная под-
стройка для улучшения качества регулирования. Для этого используется ряд
правил, хорошо обоснованных теоретически.
Для настройки ПИД-регуляторов можно использовать и общие методы тео-
рии автоматического управления, такие, как метод назначения полюсов и ал-
гебраические методы. В литературе опубликовано и множество других методов,
которые имеют преимущества в конкретных применениях. Мы приводим ниже
только самые распространенные из них.
Все аналитические (формульные) методы настройки регуляторов основа-
ны на аппроксимации динамики объекта моделью первого или второго порядка
с задержкой. Причиной этого является невозможность аналитического реше-
ния систем уравнений, которое необходимо при использовании моделей более
высокого порядка. Поэтому в последние годы в связи с появлением мощных
контроллеров и персональных компьютеров получили развитие и распростра-
нение численные методы оптимизации. Они являются гибким инструментом
для оптимальной настройки параметров регулятора для моделей любой слож-
ности и легко учитывают нелинейности объекта управления и требования к
робастности.
Настройка параметров регулятора по методу Зиглера и Никольса.
Зиглер и Никольс предложили два метода настройки ПИД-регуляторов [287].
Один из них основан на параметрах отклика объекта на единичный скачок,
второй — на частотных характеристиках объекта управления.
Для расчета параметров ПИД-регулятора по первому методу Зиглера-
Никольса используются всего два параметра: а и L (см. рис. 5.29 и поясне-
ния к нему в тексте). Формулы для
расчета коэффициентов ПИД-регуля-
тора сведены в табл. 5.1.
В качестве примера на рис. 5.84
приведен отклик на единичный скачок
системы с объектом второго порядка
и ПИД-регулятором, настроенным по
табл. 5.1 и переходная характеристи-
ка самого объекта управления. Из ха-
рактеристики объекта получены зна-
чения а = 0,135 и L = 0,035 с. По
табл. 5.1 для этих значений а и L
можно найти коэффициенты ПИД ре-
гулятора: К = 8,9, Тк = 0,00796 с,
Тд = 0,156 с. На рис. 5.84 приведен
1,4
0,6
Метод Зиглера-Никольса:
т_ Ручная подстрока :
; Характеристика объекта
j.----г-----г-----т-----т-
0,2 f -/<
о-ЦГ-г-
----L_
0 £ 0,1 0,2 0,3 0,4 0,5 0,6 0,7
Время, с
Рис. 5.84. Результат настройки ПИД-
регулятора по методу Зиглера-Никольса
для объекта второго порядка с задерж-
кой: Т1 = Т2 = 0,1 с, L = 0,01 с
1
366
Глава 5
Таблица 5.1
Формулы для расчета коэффициентов регулятора по методу Зиглера-Никольса
Регулятор Расчет по отклику на скачок Расчет по частотным параметрам
К ти Тд К Ти Тд
П 1/а - - 0,5/Kieo - -
ПИ 0,9/а 3L/K - 0,4/^180 0,8Т18о/А: -
ПИД 1,2/а 0,9L/K 0,5£К О,6/К180 0,5Т1№/К 0,125Т18оК
Примечание. Система обозначений параметров регулятора соответствует уравнению
(5.36).
также отклик на единичный скачок той же системы при параметрах К = 15,
Тк = 0,013 с, Тд = 0,525 с, полученных путем ручной подстройки. Как видим,
метод Зиглера-Никольса дает параметры, далекие от оптимальных. Это объ-
ясняется не только упрощенностью самого метода (он использует только два
параметра для описания объекта), но и тем, что параметры регулятора в этом
методе определялись Зиглером и Никольсом исходя из требования к декремен-
ту затухания, равному 4, что и дает медленное затухание процесса колебаний.
Метод Зиглера-Никольса никак не учитывает требования к запасу устой-
чивости системы, что является вторым его недостатком. Судя по медленному
затуханию переходного процесса в системе, этот метод дает слишком малый
запас устойчивости.
Второй метод Зиглера-Никольса (частотный метод) в качестве исходных
данных для расчета использует частоту o>i8o, на которой сдвиг фаз в разо-
мкнутом контуре достигает 180°, и модуль коэффициента передачи объекта
на этой частоте Kieo- О методике определении этих параметров см. п. 5.1.3.
Зная параметр cdiso, сначала находят период собственных колебаний системы
7180 = 2тг/ол18о, затем по табл. 5.1 определяют параметры регулятора. Точ-
ность настройки регулятора и недостатки обоих методов Зиглера-Никольса
одинаковы.
Метод CHR. В отличие от Зиглера и Никольса, которые использовали в
качестве критерия качества настройки декремент затухания, равный 4, Chien,
Hrones и Res wick (CHR) [320] использовали критерий максимальной скорости
нарастания при отсутствии перерегулирования или при наличии не более чем
20%-ного перерегулирования. Такой критерий позволяет получить больший
запас устойчивости, чем в методе Зиглера-Никольса.
CHR-метод дает две разные системы параметров регулятора. Одна из них
получена при наблюдении отклика на изменение уставки (табл. 5.2), вторая —
при наблюдении отклика на внешние возмущения (табл. 5.3). Какую систему
параметров выбирать, зависит от того, что важнее для конкретного регулято-
ра: качество регулирования при изменении уставки или ослабление внешних
воздействий. Если же важно и то, и другое, то необходимо использовать ре-
гуляторы с двумя степенями свободы (п. 5.3.3).
Метод CHR использует аппроксимацию объекта моделью первого поряд-
ка с задержкой (5.5) и те же исходные параметры а и L, что и в методе
Зиглера-Никольса.
ПИД-регуляторы
367
Таблица 5.2
Формулы для расчета коэффициентов регулятора по методу CHR,
по отклику на изменение уставки
Регулятор Без перерегулирования С 20%-ным перерегулированием
К Ти Тд К Ти Тд
П 0,3/а - - 0,7/а - -
ПИ 0,35/а 1,2L/K — 0,6/а 1,0£/К -
ПИД 0,6/а 1,OL/K 0,5LK 0,95/а 1,4L/K 0,47LK
Таблица 5.3
Формулы для расчета коэффициентов регулятора по методу CHR,
по отклику на внешние воздействия
Регулятор Без перерегулирования С 20%-ным перерегулированием
К Ти Тд К Ти Тд
П 0,3/а - - 0,7/а - -
ПИ 0,6/а 4L/K — 0,7/а 2.3L/K -
ПИД 0,95/а 2,4£/К 0,42LK 1,2/а 2fiL/K 0,42LK
Обратим внимание, что пропорциональный коэффициент в методе CHR
меньше, чем в методе Зиглера-Никольса. Обозначения параметров и формулы
в табл. 5.1-5.3 соответствуют уравнению (5.36).
5.5.3. Ручная настройка, основанная на правилах
Расчет параметров по формулам не может дать оптимальной настройки
регулятора, поскольку аналитически полученные результаты основываются на
сильно упрощенных моделях объекта. В частности, в них не учитывается все-
гда присутствующая нелинейность типа «ограничение» для управляющего воз-
действия (см. п. 5.4.2 «Интегральное насыщение»). Кроме того, модели ис-
пользуют параметры, идентифицированные с некоторой погрешностью. Поэто-
му после расчета параметров регулятора желательно сделать его подстройку.
Подстройку можно выполнить на основе правил, которые используются для
ручной настройки. Эти правила получены из опыта, теоретического анализа и
численных экспериментов. Они сводятся к следующему [291]:
• увеличение пропорционального коэффициента увеличивает быстродейст-
вие и снижает запас устойчивости;
• с уменьшением интегральной составляющей ошибка регулирования с тече-
нием времени уменьшается быстрее;
• уменьшение постоянной интегрирования уменьшает запас устойчивости;
• увеличение дифференциальной составляющей увеличивает запас устойчи-
вости и быстродействие.
Перечисленные правила применяются также для регуляторов, использую-
щих методы экспертных систем и нечеткой логики.
Ручную настройку с помощью правил удобно выполнять с применением
интерактивного программного обеспечения на компьютере, временно включен-
ном в контур управления. Для оценки реакции системы на изменение устав-
ки, внешние воздействия или шумы измерений подают искусственные воздей-
368
Глава 5
ствия и наблюдают реакцию на них. После выполнения настройки значения
коэффициентов регулятора записывают в память ПИД-контроллера, а ком-
пьютер удаляют.
Отметим, что применение правил возможно только после предварительной
настройки регулятора по формулам. Попытки настроить регулятор без началь-
ного приближенного расчета коэффициентов могут быть безуспешными. Сфор-
мулированные выше правила справедливы только в окрестности оптимальной
настройки регулятора. Вдали от нее эффекты могут быть иными (см. п. 5.2).
При регулировке тепловых процессов настройка по правилам может за-
нять недопустимо много времени.
5.5.4. Методы оптимизации
Методы оптимизации для нахождения параметров регулятора концепту-
ально очень просты и аналогичны численным методам идентификации пара-
метров объекта (см. п. 5.1.6). Выбирается критерий минимизации, в качестве
которого может быть один из показателей качества или комплексный крите-
рий, составленный из нескольких показателей с разными весовыми коэффици-
ентами. К критерию добавляются ограничения, накладываемые требованиями
робастности. Таким путем получается критериальная функция, зависящая от
параметров ПИД-регулятора. Далее используются численные методы миними-
зации критериальной функции с заданными ограничениями, которые и позво-
ляют найти искомые параметры ПИД-регулятора.
Методы, основанные на оптимизации, имеют следующие достоинства:
• позволяют получить оптимальные значения параметров, не требующие
дальнейшей подстройки;
• не требуют упрощения модели объекта, модель может быть как угодно
сложной;
• позволяют быстро достичь конечного результата (избежать процедуры дли-
тельной подстройки параметров).
Однако реализация данного подхода связана с большими проблемами, ко-
торые не один десяток лет являются предметов научных исследований. К этим
проблемам относятся:
• низкая надежность метода (во многих случаях вычислительный процесс
может расходиться и искомые коэффициенты не будут найдены);
• низкая скорость поиска минимума для овражных функций и функций с
несколькими минимумами.
Тем не менее, методы оптимизации являются мощным средством настройки
ПИД-регуляторов с помощью специально разработанных для этого компью-
терных программ (п. 5.6.4).
5.6. Автоматическая настройка и адаптация
Естественным направлением развития коммерческих ПИД-регуляторов яв-
ляется разработка методов, позволяющих снизить затраты человеческого тру-
да на их инсталляцию, настройку и обслуживание. Несмотря на то что мно-
ПИД-регуляторы
369
гие методы автоматической настройки и адаптации ПИД-регуляторов, исполь-
зуемые в настоящее время, были разработаны еще в 60-х годах [298], в про-
мышленных контроллерах адаптивная техника начала использоваться только
с середины 80-х. Это связано с технической сложностью реализации адап-
тивных алгоритмов на элементной базе, которая существовала до появления
микроконтроллеров.
Настройка может выполняться вручную или автоматически, без участия
человека (автонастройка).
Автонастройка может выполняться полностью автоматически и по требо-
ванию, когда человек является инициатором настройки. Полностью автомати-
ческая настройка может инициироваться при наступлении заранее заданного
условия, например при изменении нагрузки, при изменении внешних воздей-
ствий, при изменении погрешности регулирования, или непрерывно во времени.
Автоматическая настройка, инициируемая без участия человека, называется
адаптацией. Примером адаптации может быть автонастройка при изменении
числа яиц в инкубаторе или нагрузки на валу двигателя. Иногда термин «адап-
тация» трактуют более широко как приспособление регулятора к реальному
объекту на стадии ввода системы в эксплуатацию [298].
Разновидностью адаптации является разомкнутое управление параметра-
ми регулятора (табличная автонастройка), когда заранее найденные парамет-
ры регулятора для разных условий работы системы заносятся в таблицу, из
которой они извлекаются при наступлении условий, по которым иницииру-
ется адаптация.
Адаптация в принципе является медленным процессом, поэтому ее нельзя
рассматривать как непрерывное слежение параметров регулятора за изменя-
ющимися параметрами объекта.
Отметим, что регуляторы, настроенные в автоматическом режиме, чаще
настроены хуже, чем настроенные в ручном режиме [288]. Объясняется это
философским рассуждением, что компьютер не может выполнять сложные и
плохо формализуемые задачи лучше человека.
В настоящий момент отсутствуют простые, надежные и общепринятые ме-
тоды автоматической настройки.
5.6.1. Основные принципы
Все виды автоматической настройки используют три принципиально важ-
ных этапа: идентификация, расчет параметров регулятора, настройка [304].
Часто конечный этап включает этап подстройки (заключительная оптимиза-
ции настройки). Оптимизация настройки необходима в связи с тем, что методы
расчета параметров регулятора по формулам являются упрощенными, не учи-
тывают нелинейности объекта, в частности всегда присутствующую нелиней-
ность типа «ограничение», а идентификация параметров объекта выполняется
с некоторой погрешностью. Подстройка регулятора может быть поисковой (без
идентификации объекта, путем поиска оптимальных параметров) и беспоис-
ковой (с идентификацией). Поисковая идентификация базируется обычно на
правилах (п. 5.5.3) или на итерационных алгоритмах поиска минимума крите-
риальной функции. Наиболее распространен поиск оптимальных параметров
370
Глава 5
с помощью градиентного метода поиска. Для этого находят производные от
критериальной функции по параметрам ПИД-регулятора, которые являются
компонентами вектора градиента. Далее производится изменение параметров
в соответствии с направлением градиента.
Важно подчеркнуть, что несмотря на наличие «автоматической» подстрой-
ки, контроллер может не дать требуемого качества регулирования по причи-
нам, не зависящим от качества заложенных в него алгоритмов. Например,
объект управления может быть плохо спроектирован (зависимые контуры регу-
лирования, большая задержка, высокий порядок объекта); объект может быть
нелинейным; датчики могут быть расположены не в том месте, где нужно, и
иметь плохой контакт с объектом, уровень помех в канале измерения может
быть недопустимо большим; разрешающая способность датчика может быть
недостаточно высокой; источник входного воздействия на объект может иметь
слишком большую инерционность или гистерезис; могут быть также ошибки
в монтаже системы, плохое заземление, обрывы проводников и т.д. Поэтому
прежде чем начинать автоматическую настройку, необходимо убедиться в от-
сутствии перечисленных проблем. Например, если вследствие износа механи-
ческой системы появился непредусмотренный проектом гистерезис и поэтому
система находится в режиме колебаний, подстройка регулятора может не дать
желаемого результата, пока не устранена причина проблемы.
Рис. 5.85. Общая структура систе-
мы с автоматической настройкой
Структурная схема самона-
страивающейся системы приведена
на рис. 5.85. Автонастройка прак-
тически не имеет никаких особен-
ностей по сравнению с описанны-
ми ранее методами, за исключени-
ем того, что она выполняется в ав-
томатическом режиме. Основным
этапом автоматической настройки
и адаптации является идентифика-
ция модели объекта. Она выполня-
ется в автоматическом режиме обычными методами, рассмотренными в п. 5.1.
Автоматическая настройка может выполняться и без идентификации объекта,
основываясь на правилах (см. п. 5.5.3) или поисковых методах.
5.6.2. Табличное управление
Наиболее простым методом адаптации ПИД-регулятора к изменяющимся
свойствам объекта управления является метод табличного управления коэф-
фициентами регулятора. Он может быть использован не только для адаптив-
ного управления, но и для управления нелинейными объектами, нестационар-
ными процессами, при необходимости изменять параметры в зависимости от
некоторых условий.
Принцип табличного управления очень прост (рис. 5.86). Зная заранее
возможные изменения режима работы системы (например, возможные вари-
анты загрузки инкубатора яйцами), выполняют идентификацию объекта для
ПИД-регуляторы
371
нескольких разных режимов и для каж-
дого из них находят параметры регуля-
тора. Значения этих параметров запи-
сывают в таблицу. В процессе функци-
онирования системы измеряют парамет-
ры, которые характеризует режим рабо-
ты системы (например, вес яиц с помо-
щью датчика веса или уровень жидкости
в автоклаве с помощью датчика уровня),
и в зависимости от их значений выбира-
Рис. 5.86. Адаптивное управ-
ление с помощью параметров,
заранее записанных в таблицу
ют из таблицы коэффициенты ПИД-регулятора.
Описанную систему можно рассматривать как систему с двумя контура-
ми регулирования. Однако контур, служащий для адаптации, в нашем при-
мере с уровнем жидкости в автоклаве или весом яиц в инкубаторе является
разомкнутым. По этой причине табличное управление характеризуется высо-
ким быстродействием, отсутствием ложного срабатывания или расхождения
алгоритмов адаптации.
В общем случае таблица может быть многомерной; для снижения необ-
ходимой размерности таблицы можно использовать интерполяцию данных с
помощью сплайна.
Недостатком этого метода являются большие затраты на предварительную
идентификацию, необходимую для составления таблицы. Однако эту пробле-
му частично можно решить применением специальных программных средств
для автоматической идентификации и адаптации регулятора, после выполне-
ния которых полученные параметры заносятся в таблицу.
Табличное управление коэффициентами регулятора целесообразно исполь-
зовать в тех случаях, когда заранее известны виды и значения дестабилизиру-
ющих факторов, которые к тому же можно измерить.
5.6.3. Обзор коммерческих продуктов
Описание коммерческих продуктов, приведенное ниже, может показаться
слишком неполным, непонятным и оставляет без ответа многие вопросы. Это
связано с ограниченным количеством информации, которую предоставляют пе-
речисленные ниже фирмы о своей продукции.
В подавляющем большинстве ПИД-регуляторов, защищенных патентами
[292], используются методы настройки, основанные на формулах, а не на пра-
вилах. Еще меньше контроллеров, применяющих нейронные сети и методы
оптимизации. Однако доля патентов на контроллеры, использующие правила,
в последние годы заметно увеличилась, в основном за счет регуляторов с нечет-
кой логикой (см. п. 5.7.1). Увеличилась также доля патентов на регуляторы
с оптимизацией; все они используют градиентные методы, метод наименьших
квадратов, эволюционные алгоритмы (см. п. 5.7.3).
Foxboro EXACT™ (760/761). Foxboro была одной из первых компаний,
представивших на рынок адаптивные ПИД-регуляторы. Первый адаптивный
регулятор Foxboro EXACT™ (760/761), выпущенный в октябре 1984 г., был
372
Глава 5
основан на распознавании образов; в дальнейшем было сделано множество мо-
дификаций в алгоритмах его функционирования. Эти алгоритмы легли также
в основу построения распределенной системы управления Foxboro I/А™. Кон-
троллер EXACT MV™ включает три функциональных блока: PIDA, FBTUNE
и FFTUNE. PIDA является современным ПИД-контроллером, FBTUNE слу-
жит для настройки петлевого усиления, предварительной настройки и адапта-
ции, FFTUNE выполняет настройку прямой связи в регуляторе (см. п. 5.3.3)
и табличное управление.
Интегральный член регулятора выполнен в соответствии со структурой, по-
казанной на рис. 5.57. Контроллер имеет последовательную структуру (5.84).
В контроллере использована также структура, показанная на рис. 5.62 и специ-
альная структура PIDt, которая является модификацией предиктора Смита.
Адаптация в контроллере основана на распознавании образов и аналогич-
на процедуре, которую бы выполнял опытный пользователь. Применены также
эвристические правила настройки (п. 5.5.3). Качество настройки контролиру-
ется по двум параметрам: перерегулирование и коэффициент затухания.
Контроллер имеет следующий набор параметров:
• начальные значения параметров 7^;
• допустимый уровень шума NB. При превышении этого уровня в 2 раза
начинается процесс адаптации (автоматической настройки);
• максимальное время ожидания Wmax- Контроллер ждет появления вто-
рого выброса в течение времени Wmax, чтобы определить период колеба-
ний в системе.
Если пользователь не может задать перечисленные параметры, то запуска-
ется программа предварительной настройки, которая приближенно может опре-
делить эти параметры в ручном режиме (с участием пользователя). Для этого
контроллер вырабатывает ступенчатый сигнал, который подается на вход объ-
екта управления. По реакции на него определяются параметры модели первого
порядка и параметры контроллера, которые вычисляются по методу Зиглера-
Никольса (п. 5.5.2). После нахождения величины задержки L максимальное
время ожидания вычисляется по формуле Wmax = 5L.
Для оценки уровня шума NB на вход объекта подают постоянный уровень
сигнала и находят уровень шума на выходе, используя фильтр, чтобы исклю-
чить влияние низкочастотных внешних воздействий на результат измерений.
Значение NB определяют как размах (от минимума до максимума) выходной
переменной на осциллограмме шума.
Контроллер имеет также несколько опциональных параметров, которые
принимают значения «по умолчанию», если они не заданы пользователям. К
ним относятся (в скобках указаны значения «по умолчанию»):
• максимально допустимый коэффициент затухания (3,3);
• максимально допустимое перерегулирование (0,5);
• множитель при дифференциальной составляющей (1);
• диапазон подстройки (10). Этот коэффициент ограничивает диапазон ав-
томатического изменения параметров при их подстройке. Например, если
задана интегральная составляющая 10 мин, то при подстройке она не мо-
жет выйти за нижнюю границу 1 мин и верхнюю границу 100 мин.
ПИД-регуляторы 373
В последних моделях регуляторов Foxboro используется двойной прямо-
угольный импульс (см. рис. 5.12), вместо ступенчатого воздействия в ранних
версиях. Наряду с моделью первого порядка с задержкой используется модель
второго порядка с задержкой. Подстройка петлевого усиления выполняется
по-прежнему методом распознавания образов. Используется также метод ком-
пенсации возмущений с помощью регулятора с прямой связью (п. 5.3.3).
ПИД-контроллеры фирмы АВВ. В контроллерах АВВ адаптация ос-
нована на частотной релейной идентификации (п. 5.1.3). Первый адаптивный
контроллер назывался ЕСА-40™. Эта система также использовала метод таб-
личного управления параметрами регулятора. Впоследствии методы адапта-
ции дополнились непрерывной (во времени) адаптацией, адаптацией не только
петлевого усиления, но и параметров прямой связи, а также методами диагно-
стики. Перечисленные методы были воплощены в модели ЕСА600™, выпу-
щенной в 1988 г. Эти же принципы использованы в распределенной системе
управления Industrial IT System 800хА™, которая использует еще и методы
нечеткой логики и предиктивный ПИ (ППИ)-регулятор.
Для идентификации используется режим релейного регулирования (см.
п. 5.1.3). Для этого сначала устанавливается желаемое рабочее значение вход-
ной переменной для объекта, затем оператор нажимает кнопку автонастрой-
ки. Регулятор сначала измеряет уровень шума, затем в контур регулирования
включается реле с гистерезисом, при этом алгоритм ПИД-регулирования вре-
менно отключается. Величина гистерезиса устанавливается автоматически, на
основе измеренного уровня шума на выходе объекта. Чем меньше измерен-
ный уровень шума, тем меньше может быть амплитуда колебаний в системе
в режиме релейного регулирования. Амплитуда колебаний автоматически на-
страивается такой величины, чтобы быть выше уровня шума. После получения
колебаний с установившейся амплитудой и частотой эксперимент прерывается
и по его результатам вычисляется частота колебаний и коэффициент передачи
объекта на этой частоте методом гармонической линеаризации (см. п. 5.1.3).
Частотная идентификации в режиме релейного регулирования выполня-
ется с применением реле с регулируемым гистерезисом (п. 5.1.3), что позво-
ляет задавать частоту колебаний ниже частоты cuiso- По умолчанию колеба-
ния задаются такими, чтобы петлевое усиление контура на частоте колеба-
ний о>о было равно fl(ja>o)P(jcuo) = 0,5ехр(—J135°). Поскольку частотная иден-
тификация дает только два параметра (частоту и коэффициент передачи), а
ПИД-регулятор имеет три параметра, то используется дополнительное соот-
ношение Ти = 4Тд/АГ2.
Описанная процедура идентификации иногда дает очень большое усиление
для объектов с малой задержкой. В этом случае используется ПИ-регулятор
с коэффициентами, которые рассчитываются по формулам К = 0,5/|P(jcuo)|,
Ти = 4/lu0- Для объектов с большой задержкой используются формулы К =
= 0,25/|Р(>0)|, Ти = 1,6/ило-
Для идентификации параметров в режиме релейного регулирования ис-
пользуются два узкополосных фильтра, настроенных на частоту колебаний в
системе Один из них фильтрует сигнал на входе объекта, второй — на его
374
Глава 5
выходе. Фильтры позволяют получить первую гармонику ряда Фурье, котсн
рая используется в методе гармонического баланса (см. п. 5.1.3). Эта частота
предварительно находится также из эксперимента с колебаниями в релейном
регуляторе методом наименьших квадратов.
В последних версиях контроллеров АВВ после идентификации в режиме
релейного регулирования используется дополнительный этап идентификации
по реакции объекта на входной скачок для идентификации статического ко-
эффициента передачи.
В контроллерах АВВ используется также табличное управление (п. 5.6.2),
которое применяется практически во всех промышленных контроллерах и дру-
гих производителей. Переменные, от которых зависят коэффициенты регулято-
ра, выбираются пользователем. Ими могут быть управляющее воздействие на
объект, выходная переменная системы или внешний сигнал. В последних верси-
ях регуляторов были существенно расширены размеры таблиц для табличного
управления. Данные для ввода в таблицу находятся путем выполнения проце-
дуры автонастройки для нужных режимов работы объекта.
Во всех контроллерах АВВ, начиная с ЕСА400™, используется адаптивная
прямая связь от возмущений (компенсация возмущений), которая позволяет
существенно улучшить качество системы регулирования.
ПИД-контроллеры Emerson. Методы адаптивного регулирования, за-
ложенные еще в распределенной системе управления Provox™ и RS3™, впо-
следствии были перенесены и расширены в системе DeltaV™. Система ис-
пользует автонастройку, табличное управление и адаптацию. Имеется так-
же программное обеспечение для нечеткого регулирования и систем с транс-
портной задержкой.
Автоматическая настройка базируется на методе релейной идентификации.
Используются несколько периодов колебаний в системе. Амплитуда колебаний
выбирается равной нескольким процентам от полного динамического диапазо-
на системы. Для оценки величины транспортной задержки используется ре-
акция на скачок. Полученные таким способом три параметра достаточны для
идентификации модели первого порядка с задержкой. Для этого используют-
ся (по выбору пользователя) метод Зиглера-Никольса, регулятор с внутренней
моделью (п. 5.3.5) или ламбда-тьюнинг [291]. Система построена таким обра-
зом, что неопытные пользователи имеют мало опций для выбора, а опытные —
много. Система имеет также встроенную подсистему моделирования, которая
позволяет увидеть графики процесса регулирования до того, как коэффициен-
ты регулятора будут записаны в контроллер.
Адаптивное управление базируется на данных, полученных из процесса во
время его нормальной работы, без тестовых воздействий, а также (по выбору
пользователя) с тестовыми воздействиями.
ПИД-контроллеры фирмы Honeywell. Адаптация в контроллере
UDC6000™ выполняется как с помощью предварительной идентификации мо-
дели, так и на основе правил. Идентификация выполняется по отклику на ска-
чок. Величину приращения уставки относительно рабочей точки задает пользо-
ватель. Эксперимент выполняется в разомкнутом контуре. Величина задержки
ПИД-регуляторы
375
определяется как время от начала эксперимента до момента, когда выходная
переменная достигнет некоторого малого, наперед заданного значения.
В процессе эксперимента отслеживается величина производной от выход-
ной переменной. Если производная все время уменьшается, выбирается модель
первого порядка, параметры которой идентифицируются по нескольким точкам
переходной характеристики. Идентификация выполняется на интервале, рав-
ном 1/3 постоянной времени, и заканчивается до того, как процесс в системе
установится. Если производная имеет максимум, выбирается модель второго
порядка и идентификация выполняется на интервале времени, включающем
установившееся состояние объекта.
Контроллер UDC6000™ может работать и в режиме непрерывной адап-
тации, которая выполняется, как только выходная переменная изменится бо-
лее чем на 0,3 % (эта величина может быт изменена пользователем) от за-
данного значения.
5.6.4. Программные средства настройки
Типовая система для настройки ПИД-регулятора состоит из компьютера с
программным обеспечением под Windows, комплекта модулей ввода-вывода и
соединительных кабелей. Объект включается в контур регулирования, система
настраивается желаемым способом, затем полученный коэффициенты регуля-
тора записываются в ПИД-контроллер. Благодаря удобному пользовательско-
му интерфейсу, большой производительности компьютера и отсутствию огра-
ничений на алгоритмы идентификации системы удается получить параметры
регулятора, близкие к оптимальным.
В настоящее время имеется около полусотни коммерческих продуктов [292]
для настройки ПИД-регуляторов. Среди них — Protuner фирмы Techmation
Inc., LabVIEW PID Control Toolset фирмы National Instruments, Intelligent Tuner
(Fisher-Rosemount), Profit PID (Honeywell), P.I.D.-expert («Техноконт») и др.
Среди аналитических методов настройки в этих программах наиболее рас-
пространены ламбда-тьюнинг [291] или метод регулятора с внутренней моделью
(п. 5.3.5). Подавляющее большинство программ использует модель первого по-
рядка с задержкой для описания объекта регулирования.
Связь с оборудованием выполняется с помощью ОРС-сервера, DDE, СОМ
или DCOM-технологии, среди которых только ОРС-сервер является средством,
основанным на международном стандарте.
Развитие описываемых средств идет в направлении расширения диапазона
поддерживаемых ПИД-регуляторов, применения методов искусственного ин-
теллекта и методов диагностики, развития пользовательского интерфейса. Со-
временные средства настройки позволяют анализировать износ клапанов, де-
лать оценку робастности, автоматически генерировать отчет с параметрами
контура регулирования, строить графики спектральной плотности мощности
и функций авто- и взаимной корреляции, делать оптимизацию инверсной мо-
дели объекта управления и т.п.
Techmation Protuner. Protuner [312] — это система для настройки ПИД-
регуляторов фирмы Techmation Inc. Система отображает графики переходно-
го процесса, выполняет преобразование экспериментальных характеристик из
376
Глава S
временной области в частотную и вычисляет параметры регулятора, исполь-
зуя несколько различных методов настройки.
Перед началом работы Системы пользователю предлагается меню для вво-
да априорной информации об объекте регулирования:
• диапазон изменения входного и выходного сигналов объекта;
• тип процесса в объекте управления: интегрирующий или нет;
• желаемые единицы измерения;
• структура контроллера (идеальная, последовательная или параллельная);
частота дискретизации;
• постоянная времени фильтра в измерительном канале.
Идентификация выполняется с помощью анализа реакции на входной ска-
чок в замкнутом или разомкнутом контуре (по выбору пользователя). Реко-
мендуется вариант в разомкнутом контуре. После того как пользователь на-
жимает кнопку «Старт», входной и выходной сигнал отображаются на экране
компьютера.
Имеется некоторые возможности предварительной обработки собранных
данных. К ним относится удаление грубых ошибок измерений и выбросов, свя-
занных с импульсными помехами, а также цифровая фильтрация. Это позволя-
ет выполнять эксперименты в реальных условиях индустриального окружения.
После предварительной обработки данных Protuner выполняет расчет чаг
стотной характеристики объекта, которая может быть отображена в виде диа-
граммы Боде, Найквиста или Никольса. Отображаются также статический ко-
эффициент передачи, постоянные времени и транспортная задержка, часто-
та CU180 И период Т180-
Параметры ПИД-регулятора вычисляются по частотным характеристикам.
Сначала вычисляются постоянная интегрирования и постоянная дифференци-
рования, затем на основе заданного запаса по фазе и усилению вычисляется
пропорциональный коэффициент регулятора.
Качество регулирования задается в виде понятий «сильно демпфирован-
ная» переходная характеристика, «слабо демпфированная» и «быстрая» (с ко-
эффициентом затухания 1/0,38).
Protuner дает разные коэффициенты регулятора для реакции на измене-
ние уставки и нагрузки.
Имеются средства для моделирования системы до записи параметров в
ПИД-контроллер. Могут быть также построены частотные характеристики
замкнутой системы, которые позволяют оценить полученный запас по фазе
и усилению.
5.7. Нечеткая логика, нейронные сети
и генетические алгоритмы
ПИД-регуляторы, описанные выше, имеют плохие показатели качества при
управлении нелинейными и сложными системами, а также при недостаточной
информации об объекте управления. Характеристики регуляторов в некото-
рых случаях можно улучшить с помощью методов нечеткой логики, нейронных
ПИД-регуляторы
377
сетей и генетических алгоритмов. Перечисленные методы за рубежом называ-
ют «soft-computing», подчеркивая их отличие от «hard-computing», состоящее
в возможности оперировать с неполными и неточными данными. В одном кон-
троллере могут применяться комбинации перечисленных методов (фаззи-ПИД,
нейро-ПИД, нейро-фаззи-ПИД регуляторы с генетическими алгоритмами).
Основным недостатком нечетких и нейросетевых контроллеров является
сложность их настройки (составления базы нечетких правил и обучения ней-
ронной сети).
5.7.1. Нечеткая логика в ПИД-регуляторах
Нечеткое управление (управление на основе методов теории нечетких мно-
жеств) [322, 323, 325, 326] используется при недостаточном знании объекта
управления, но при наличии опыта управления им, в нелинейных системах,
идентификация которых слишком трудоемка, а также в случаях, когда по усло-
вию задачи необходимо использовать знания эксперта. Примером может быть
доменная печь или ректификационная колонна, математическая модель кото-
рых содержит много эмпирических коэффициентов, изменяющихся в широком
диапазоне и вызывающих большие затруднения при идентификации [322]. В то
же время квалифицированный оператор достаточно хорошо управляет такими
объектами, пользуясь показаниями приборов и накопленным опытом.
ПИД-регуляторы с нечеткой логикой в настоящее время используются в
коммерческих системах для наведения телекамер при трансляции спортивных
событий, в системах кондиционирования воздуха, при управлении автомобиль-
ными двигателями; для автоматического управления двигателем пылесоса и
в других областях.
Поскольку информация, полученная от оператора, выражена словесно, для
ее использования в ПИД-регуляторах применяют лингвистические переменные
и аппарат теории нечетких множеств, который был разработан Л. Заде в 1965 г.
[329]. Основная идея этой теории состоит в следующем. Если в теории четких
множеств некоторый элемент (например, температура 50 °C) может принадле-
жать множеству (например, множеству «температура горячей воды Тгор») или
не принадлежать ему, то в теории нечетких множеств вводится понятие функ-
ции принадлежности, которая характеризует степень принадлежности элемен-
та множеству. При этом говорят, например, «температура 50 °C принадлежит
множеству Тгор со степенью принадлежности 0,264». Функцию принадлежно-
сти можно приближенно трактовать как вероятность того, что данный элемент
принадлежит множеству [303], однако такая интерпретация, хотя и является
для инженеров более понятной, не является математически строгой, поскольку
существующая теория нечетких множеств не оперирует понятием вероятности.
В 1974 г. Мамдани [327] показал возможность применения идей нечеткой
логики для построения системы управления динамическим объектом, а годом
позже вышла публикация [328], в которой описывался нечеткий ПИ-регулятор
и его применения для управления парогенератором. С тех пор область приме-
нения нечетких регуляторов постоянно расширяется, увеличивается разнооб-
разие их структур и выполняемых функций.
378
Глава 5
Рис. 5.87. Структура нечеткого ПИ-регулятора
Нечеткая логика в ПИД-регуляторах используется преимущественно дву-
мя путями: для построения самого регулятора и для организации подстрой-
ки коэффициентов ПИД-регулятора. Оба пути могут использоваться в ПИД-
контроллере одновременно.
Одна из наиболее распространенных структур нечеткого регулятора (нечет-
кого ПИ-регулятора) показана на рис. 5.87. На вход регулятора поступает
ошибка е и вычисляется ее производная по времени de/dt. Далее обе величи-
ны сначала подвергаются операции фаззификации (преобразования в нечеткие
переменные), затем полученные нечеткие переменные используются в блоке
нечеткого логического вывода для получения управляющего воздействия на
объект, которое после выполнения операции дефаззификации (обратного пре-
образования нечетких переменных в четкие) поступает на выход регулятора
в виде управляющего воздействия и.
Принципы построения нечеткого ПИ-регулятора. Для применения
методов нечеткой логики прежде всего необходимо преобразовать обычные чет-
кие переменные в нечеткие. Процесс такого преобразования называется фаз-
зификацией (от английского fuzzy — нечеткий). Он иллюстрируется рис. 5.88.
Диапазон изменения переменной е разбивается на множества (подмножества)
NL, NM, NS, Z, PS, PM, PL, в пределах каждого из которых строится функция
принадлежности переменной е каждому из множеств. На рис. 5.88 функции
принадлежности имеют треугольную (наиболее распространенную) форму, хо-
тя в общем случае они могут быть любыми, исходя из смысла решаемой задачи
[326]. Количество множеств также может быть произвольным.
Рис. 5.88. Деление области изменения переменной е на множества NL, NM, NS и т.д.
с функциями принадлежности д(е) треугольной формы
ПИД-регуляторы
379
Для нечетких множеств существует общепринятая система обозначений:
N — отрицательный (Negative); Z — нулевой (Zero); Р — положительный
(Positive); к этим обозначениям добавляют буквы S (малый, Small), М (сред-
ний, Medium), L (большой, Large). Например, NL — отрицательный большой;
NM— отрицательный средний (Negative Medium); PL — положительный боль-
шой. Число таких переменных (термов) может быть любым, однако с увеличе-
нием их числа существенно возрастают требования к опыту эксперта, который
должен сформулировать правила для всех комбинаций входных переменных.
Если ошибка е на входе нечеткого регулятора (см. рис. 5.87) равна ei (см.
рис. 5.88), то соответствующее значение нечеткой переменной будет равно PSсо
степенью принадлежности подмножеству PS, равной = 0,82, или равно РМ
со степенью принадлежности д(в1) = 0,18. Степень принадлежности ошибки ei
другим множествам (Z, PL, NS и др.) равна нулю. Таким образом, ошибка ei
оказалась преобразованной в нечеткие переменные.
Для выполнения функции регулирования над нечеткими переменными
должны быть выполнены операции, построенные на основании высказываний
оператора, сформулированных в виде нечетких правил. Совокупность нечет-
ких правил и нечетких переменных используется для осуществления нечеткого
логического вывода, результатом которого является управляющее воздействие
на объект управления (см. рис. 5.87).
Нечеткий вывод выполняется следующим образом. Предположим, что об-
ласть изменения ошибки е разделена на множества N, Z, Р, область измене-
ния управляющего воздействия — на множества NL, NM, Z, PM, PL и что
с помощью эксперта удалось сформулировать следующие правила работы ре-
гулятора [291]:
правило 1: если е = N и de/dt = Р, то й = Z;
правило 2: если е = N и de/dt = Z, то й = NM;
правило 3: если е = N и de/dt = TV, то й = TVL;
правило 4: если е = Z и de/dt = Р, то й = РМ;
правило 5: если е = Z и de/dt = Z, то й = Z; (5.118)
правило 6: если е = Z и de/dt = TV, то й = NM;
правило 7: если е = Р и de/dt = Р, то й = PL;
правило 8: если е = Р и de/dt = Z, то й = РМ;
правило 9: если е = Р и de/dt = TV, то й = Z.
Приведенные правила часто записывают в более
компактной табличной форме (рис. 5.89).
Используя правила, можно получить значение
управляющей переменной й на выходе нечеткого ре- TV
гулятора. Для этого нужно найти функцию принад-
& L
Рис. 5.89. Представление нечетких правил р
в табличной форме
deldt
Р Z N
Z NM NL
РМ Z NM
PL РМ Z
380
Глава 5
лежности переменной й множеству, образованному в результате выполнения
операций вывода над множествами, входящими в систему правил (5.118).
Операция «И» в правилах (5.118) соответствует пересечению множеств, а
результат применения всех правил соответствует операции объединения мно-
жеств [326]. Функция принадлежности для пересечения двух множеств, напри-
мер N и Р (см. правило 1), находится как [326]
Mende/ dt = min(/Xe, Ude/dt), (5.119)
т.е. каждое значение функции принадлежности пересечения множеств равно
наименьшему значению из двух, стоящих в круглых скобках в (5.119).
Функция принадлежности для объединения тех же множеств имеет вид
[326]
Meude/dt = тах(де,д4е/л). (5.120)
Функции принадлежности, полученные при пересечении или объединении
множеств, могут быть определены различными способами, в зависимости от
решаемой задачи. В этом смысле сама теория нечетких множеств тоже явля-
ется нечеткой. В [326] приводится 10 различных определений функции при-
надлежности для пересечения множеств, но не сказано, какое из них нужно
выбрать для решения конкретной задачи. Используют, в частности, более по-
нятную операцию нахождения функций принадлежности в случае пересече-
ния и объединения множеств, имеющую аналогию с правилами умножения и
сложения вероятностей:
l^eCide/dt = P'eP'de/dt, 121)
MeUde/dt = Me “Ь №de/dt P'eP'de/dt'
Однако применение первых двух способов нахождения функции принад-
лежности обычно более предпочтительно, так как при этом сохраняется боль-
шинство правил, разработанных для обычных множеств [323].
Функции принадлежности для каждого из множеств NL,NM,Z,PM,PL,
входящих в нечеткую переменную й в правилах (5.118), получаются в виде [326]
Мш(й) = min{^ui(u),min(/ie i(e),/ide/df !(de//ft))},
Мпг(й) = min{/zu2(&),min(/ie 2(е), ^de/dt 2 (de/dt))},... (5.122)
Мпэ(й) = min{^U9(u),min(/ie9(e),Mde/df 9(de/dt))}.
Здесь каждое из девяти уравнений соответствует одному из правил (5.118).
Результирующая функция принадлежности управляющего воздействия й, по-
лученная после применения всех девяти правил, находится как объединение
функций принадлежности всех правил:
м(й) = тах{^п1(й),МП2(й),-..,ДП9(й)}- (5.123)
Теперь, когда получена результирующая функция принадлежности управ-
ляющего воздействия и, возникает вопрос, какое конкретно значение управля-
ющего воздействия нужно выбрать. Если использовать вероятностную интер-
претацию теории нечетких множеств, то становится понятно, что такое зна-
ПИД-регуляторы
381
чение можно получить по аналогии с математическим ожиданием управляю-
щего воздействия в виде
/•«шах
I йр(и) du
------------• (5-124)
/ р(и) du
*/umin
Такой способ дефаззификации является наиболее распространенным, но не
единственным.
Для построения нечетких регуляторов обычно используют П, И, ПИ и ПД
ПД+И, ПИ+Д и ПИД-законы регулирования [330]. В качестве входных сиг-
налов для системы нечеткого вывода используют сигнал ошибки, приращение
ошибки, квадрат ошибки и интеграл от ошибки [330]. Реализация нечеткого
ПИД-регулятора вызывает проблемы, поскольку он должен иметь трехмер-
ную таблицу правил в соответствии с тремя слагаемыми в уравнении ПИД-
регулятора, которую чрезвычайно сложно заполнить, пользуясь ответами экс-
перта. Большое количество структур подобных нечетких ПИД-контроллеров
можно найти в статье [330].
Окончательная настройка нечеткого регулятора или настройка, близкая к
оптимальной, до сих пор остается трудной задачей. Для этого используются
обучающие алгоритмы и генетические поисковые методы, требующие больших
вычислительных ресурсов и времени.
Применение нечеткой логики для подстройки коэффициентов
ПИД-регулятора. Настройка регулятора, выполненная методами, изложен-
ными в п. 5.5 и 5.6, не является оптимальной и может быть улучшена с по-
мощью дальнейшей подстройки. Подстройка может быть выполнена операто-
ром на основании правил (см. п. 5.5.3) или автоматически, с помощью блока
нечеткой логики (рис. 5.90). Блок нечеткой логики (фаззи-блок) использует
базу правил подстройки и методы нечеткого вывода. Фаззи-подстройка позво-
ляет уменьшить перерегулирование, снизить время установления и повысить
робастность ПИД-регулятора [331].
Процесс автонастройки регулятора с помощью блока нечеткой логики начи-
нается с поиска начальных приближений коэффициентов регулятора КД„,Тд.
Это делается обычно методом Зиглера-Никольса, исходя из периода собствен-
ных колебаний в замкнутой системе и петлевого усиления. Далее формулиру-
ется критериальная функция, необходимая для поиска оптимальных значений
параметров настройки методами оптимизации.
Рис. 5.90. Структура ПИД-ре-
гулятора с блоком автонастрой-
ки на основе нечеткой логики
382
Глава 5
В процессе настройки регулятора используют несколько шагов [332]. Сна-
чала выбирают диапазоны входных и выходных сигналов блока автонастрой-
ки, форму функций принадлежности искомых параметров, правила нечетко-
го вывода, механизм логического вывода, метод дефаззификации и диапазо-
ны масштабных множителей, необходимых для пересчета четких переменных
в нечеткие.
Поиск параметров регулятора выполняется методами оптимизации. Для
этого выбирается целевая функция как интеграл от суммы квадратов ошиб-
ки регулирования и времени установления. В критерий минимизации иногда
добавляют скорость нарастания выходной переменной объекта.
В качестве искомых параметров (параметров, которые надо найти) выби-
рают положение максимумов функций принадлежности (см. рис. 5.88) и мас-
штабные коэффициенты на входе и выходе фаззи-блока. К задаче оптимизации
добавляют ограничения на диапазон изменения позиций функций принадлеж-
ности. Оптимизация критериальной функции может быть выполнена, напри-
мер, с помощью генетических алгоритмов.
5.7.2. Искусственные нейронные сети
Нейронные сети, как и нечеткая логика, используются в ПИД-регуляторах
двумя путями: для построения самого регулятора и для построения блока на-
стройки его коэффициентов. Нейронная сеть обладает способностью «обучать-
ся», что позволяет использовать опыт эксперта для обучения нейронной сети
искусству настройки коэффициентов ПИД-регулятора. Регулятор с нейронной
сетью похож на регулятор с табличным управлением (см. п. 5.6.2), однако отли-
чается специальными методами настройки («обучения»), разработанными для
нейронных сетей и методами интерполяции данных.
В отличие от нечеткого регулятора, где эксперт должен сформулировать
правила настройки в лингвистических переменных, при использовании ней-
ронной сети от эксперта не требуется формулировка правил — достаточно,
чтобы он несколько раз сам настроил регулятор в процессе «обучения» ней-
ронной сети.
Нейронные сети были предложены в 1943 г. Мак-Калл оком и Питтсом как
результат изучения нервной деятельности и биологических нейронов. Искус-
ственный нейрон представляет собой функциональный блок с одним выходом
у и п входами •• -яп, который реализует в общем случае нелинейное пре-
п
образование у = F(J2 wixi + 6)? где wi — весовые коэффициенты (парамет-
г=1
ры) при входных переменных х^ ; b — постоянное смещение; F(-) — «функция
активации» нейрона, например, вида F(z) = 1/(1 + exp(-az)) (сигмоидальная
функция), где а — некоторый параметр. Нейронная сеть (рис. 5.91) состоит
из множества связанных между собой нейронов, количество связей может со-
ставлять тысячи. Благодаря нелинейности функций активации и большому
количеству настраиваемых коэффициентов (в [334] использовано 35 нейронов
во входном слое и 25 в выходном, при этом количество коэффициентов состави-
ло 1850) нейронная сеть может выполнять нелинейное отображение множества
входных сигналов во множество выходных.
ПИД-регуляторы
383
Рис. 5.91. Структура нейрон-
ной сети в блоке автонастройки
Рис. 5.92. Структура ПИД-регулятора с бло-
ком автонастройки на основе нейронной сети
Типовая структура системы автоматического регулирования с ПИД-регу-
лятором и нейронной сетью в качестве блока автонастройки показана на
рис. 5.92 [333, 334]. Нейронная сеть в данной структуре выполняет роль функ-
ционального преобразователя, который для каждого набора сигналов г, е, и, у
вырабатывает коэффициенты ПИД-регулятора /С,ТИ,ТД.
Самой сложной частью в проектировании регуляторов с нейронной сетью
является процедура обучения. «Обучение» состоит в идентификации неизвест-
ных параметров нейронов w», 6 и а. Для обучения нейронной сети обычно
используют методы градиентного поиска минимума критериальной функции
е = (и* — и)2, зависящей от параметров нейронов. Процесс поиска является
итерационным, на каждой итерации находят все коэффициенты сети, сначала
для выходного слоя нейронов, затем предыдущего, и так до первого слоя (метод
обратного распространения ошибки) [335]. Используются также другие методы
поиска минимума, в том числе генетические алгоритмы, метод моделирования
отжига, метод наименьших квадратов.
Процесс обучения нейронной сети выглядит следующим образом (рис. 5.93).
Эксперту предоставляют возможность подстраивать параметры регулятора
К\Ти,Тд в замкнутой системе автоматического регулирования при различных
входных воздействиях r(t). Предполагается, что эксперт умеет это делать с
достаточным для практики качеством. Временные диаграммы (осциллограм-
мы) переменных полученные в системе, подстраиваемой экспертом,
записываются в архив и затем подаются на нейронную сеть, подключенную к
ПИД-регулятору (рис. 5.93,6). Нейронная сеть настраивается таким образом,
чтобы минимизировать погрешность в между сигналом и*, полученным с уча-
стием эксперта, и сигналом и, полученным в процессе обучения нейронной сети.
Рис. 5.93. Схема обучения ней-
ронной сети в блоке автонастройки
б)
384
Глава 5
После выполнения процедуры обучения параметры нейронной сети заносятся в
блок автонастройки (см. рис. 5.92). В соответствии с теорией нейронных сетей,
обученная нейронная сеть должна вести себя так же, как и эксперт, причем
даже при тех входных воздействиях, которые не были включены в набор сиг-
налов, использованных при обучении.
Длительность процесса обучения является основной преградой на пути ши-
рокого использования методов нейронных сетей в ПИД-регуляторах [323]. Дру-
гими недостатками нейронных сетей являются невозможность предсказания по-
грешности регулирования для входных воздействий, которые не входили в на-
бор обучающих сигналов; отсутствие критериев выбора количества нейронов
в сети, длительности обучения, диапазона и количества обучающих воздей-
ствий. Ни в одной из публикаций не исследовалась робастность или запас
устойчивости регулятора.
5.7.3. Генетические алгоритмы
Генетические алгоритмы являются мощным методом оптимизации, позво-
ляющим найти глобальный оптимум быстрее, чем другие методы случайно-
го поиска. Существенным их достоинством является отсутствие проблем со
сходимостью и устойчивостью. Эти методы используются для идентифика-
ции моделей объектов управления, для поиска оптимальных параметров ре-
гулятора, для поиска оптимальных положений функций принадлежности в
фаззи-регуляторах и для обучения нейронных сетей. Чаще всего генетические
алгоритмы используются совместно с нейронными сетями и регуляторами с
нечеткой логикой.
Недостатком генетических алгоритмов является большое время поиска экс-
тремума, что не позволяет их использовать в быстродействующих системах
реального времени.
Генетические алгоритмы основаны на принципах естественного отбора,
сформулированных Дарвиным в 1859 г. Идею генетических алгоритмов при-
менительно к решению математических задач сформулировал Дж. Холланд в
1962 г., используя понятия генов, хромосом, скрещивания, мутация, селекции,
репродукции. Основной идеей является прямое подобие принципу естественно-
го отбора, когда выживают наиболее приспособленные особи.
Для применения генетических алгоритмов необходимо преобразовать пере-
менные, фигурирующие в условии задачи, в генетические переменные. Такое
преобразование задается схемой кодирования. Переменные могут быть пред-
ставлены в двоичной форме, в форме действительных десятичных чисел или в
другой форме, в зависимости от смысла решаемой задачи.
Классический генетический алгоритм состоит из следующих шагов [309,
326, 336].
1. Выбор исходной популяции хромосом размера N.
2. Оценка приспособленности хромосом в популяции.
3. Проверка условия остановки алгоритма.
4. Селекция хромосом.
5. Применение генетических операторов.
ПИД-регуляторы 385
6. Формирование новой популяции.
7. Переход к п. 2.
Для работы алгоритма нужно задать нижнюю и верхнюю границы изме-
нения искомых параметров, вероятность скрещивания, вероятность мутации,
размер популяции и максимальное количество поколений.
Исходная популяция хромосом генерируется случайным образом. При-
способленность хромосом оценивается с помощью целевой функции в кодиро-
ванной форме. Далее хромосомы с лучшей приспособленностью собираются
в группу, в пределах которой выполняются генетические операции скрещива-
ния или мутации. Скрещивание позволяет получить от двух родителей пер-
спективного потомка. Оператор мутации вносит изменения в хромосомы. В
случае двоичного кодирования мутация состоит в изменении случайного би-
та в двоичном слове.
Пример кодирования трех коэффициентов ПИД-регулятора для примене-
ния в генетических алгоритмах приведен на рис. 5.94 [337]. Здесь хромосома
состоит из трех параметров общей длиной 48 бит. Операция скрещивания состо-
ит в обмене генетическим материалом между хромосомами (родителями) для
того, чтобы получить новую хромосому (потомка). Существует много различ-
ных форм операторов скрещивания. Один из них состоит в том, что в двух
родительских хромосомах случайным образом выбирается некоторая позиция
(рис. 5.95), затем происходит обмен генетической информацией, расположен-
ной справа от выбранной позиции [336].
3x16 = 48 цифр
100 1011 101 011 010 001 0 10 1 о!о 1 1 к 0 1 0 1 o!l 10
*(16 цифр) Ти(16цифр) Тд(16цифр) 11001S110 । V 1 V 1 V* 1 1 V 1 1 0 0 ISO 1 1
Рис. 5.94. Пример кодирования ко- Родители Потомки
эффициентов регулятора для исполь- Рис. 5.95. Пример операции скре-
зования в генетическом алгоритме щивания
После выполнения генетического алгоритма производят декодирование
двоичного представления в инженерные величины.
Оценка приспособленности хромосом в популяции для оценки коэффици-
ентов ПИД-регулятора может быть выбрана, к примеру, как [337]
I t|e(t)|dt
Jo
где e(t) — текущее значение ошибки регулирования, t — время.
Селекция хромосом осуществляется методом рулетки. На колесе рулетки
имеются секторы, причем ширина сектора пропорциональна функции приспо-
собленности. Поэтому чем больше значение этой функции, тем более вероятен
отбор соответствующей ей хромосомы.
386
Глава 5
5.8. Заключение
Для идентификации моделей и настройки регуляторов наибольшее распро-
странение имеют модели первого и второго порядка с задержкой, поскольку они
позволяют получить простые аналитические выражения. В качестве тестового
воздействия чаще других используется двойной прямоугольный импульс.
Частотная идентификация в режиме релейного регулирования является
самым распространенным и надежным методом для автоматической иденти-
фикации объектов в адаптивных ПИД-регуляторах. Однако она использует-
ся обычно только для получения начального приближения коэффициентов с
целью их последующего уточнения.
В ПИД-регуляторах используется несколько различных систем коэффици-
ентов. Незнание их смысла для конкретного регулятора может привести к гру-
бым ошибкам при его настройке. Интегральный член в ПИД-регуляторе обес-
печивает нулевую ошибку в установившемся режиме, дифференциальный член
улучшает форму переходной характеристики и увеличивает запас устойчиво-
сти. Качественный анализ процессов в ПИД-регуляторе облегчает процедуру
его ручной подстройки и позволяет сформулировать эвристические правила,
необходимые для адаптивных регуляторов с нечеткой логикой и для обуче-
ния нейросетевых ПИД-регуляторов.
Регуляторы с двумя степенями свободы, в том числе с весовыми коэффи-
циентами при уставке, позволяют выполнить настройку по реакции системы на
изменение уставки независимо от реакции на внешние возмущения, с помощью
взаимно независимых систем параметров.
Принцип разомкнутого управления в последние годы считается очень эф-
фективным средством повышения быстродействия и робастности систем авто-
матического регулирования. Его недостатком является необходимость знания
обратной динамики объекта, что часто требует применения численных мето-
дов оптимизации.
Многие структуры регуляторов могут быть преобразованы одна в другую
с сохранением их функциональной эквивалентности.
Для систем с большой транспортной задержкой необходимо использовать
предиктор Смита или предиктивный ПИ-регулятор.
Дифференциальный член в ПИД-регуляторах всегда реализуется совмест-
но с фильтром для снижения шумов на выходе дифференциатора.
Одной из причин ухудшения качества переходного процесса является ин-
тегральное насыщение.
Запас устойчивости и робастность являются параметрами, о которых ча-
сто забывают, однако построение регулятора для ответственных применений
невозможно без их детального анализа, который можно выполнить с помощью
коммерческих программных пакетов для настройки регуляторов.
При формулировании критериев настройки ПИД-регулятора необходимо
принимать во внимание реакцию не только на изменение уставки, но и на внеш-
ние возмущения. Выбор критериев качества регулирования должен исходить
из смысла решаемой задачи.
ПИД-регуляторы
387
Несмотря на свой возраст, множество недостатков и наличие большого чис-
ла новых методов настройки, по-прежнему наиболее популярным является ме-
тод Зиглера-Никольса. Однако часто он используется только для генерации
начальных приближений параметров, которые затем уточняются методами оп-
тимизации и с помощью правил.
Автоматическая настройка и адаптация являются самыми актуальными
задачами при построении ПИД-регуляторов. Несмотря на большое количе-
ство коммерческих продуктов, остается много нерешенных проблем, связанных
с качеством настройки, влиянием нелинейностей объекта управления и внеш-
них возмущений. При автоматической настройке и адаптации используются те
же методы идентификации и расчета параметров регулятора, что и в ручном
режиме, однако они выполняются автоматически. Наиболее эффективными
являются методы настройки с применением компьютера, временно включен-
ного в контур регулирования.
5.9. Обзор публикаций
Хороший обзор методов релейной идентификации сделан в [443]. Этому
методу посвящены также работы [357] и [406], в которых используются реле с
асимметричными относительно нулевого уровня сигналами при двух положени-
ях реле. При включении реле возникает переходный процесс, который обычно
не принимается во внимание, но в [302] параметры переходного процесса ис-
пользованы для получения дополнительной информации об объекте.
В [359, 360] предлагается метод косвенной идентификации нелинейных объ-
ектов в замкнутом контуре. Показано, что идентификация в замкнутом конту-
ре часто дает гораздо лучшие результаты, чем в разомкнутом.
Методы оптимизации для целей идентификации использованы в [358, 299].
Часто используются также генетические алгоритмы, обзор которых дан в
п. 5.7.3.
Выбору тестовых сигналов для идентификации посвящена работа [404]; в
[401] описан метод идентификации модели для регулятора напряжения с приме-
нением тестового сигнала в виде псевдослучайной двоичной последовательно-
сти (ПСДС), в [402] использован многоуровневый ПСДС, что позволяет иден-
тифицировать и нелинейные системы.
В [315] и [405] рассмотрена идентификация в замкнутом контуре для ре-
гулятора с встроенной моделью, с применением итерационных методов; в [338]
использован генетический алгоритм.
Хорошие обзоры патентов и технической литературы по ПИД-регуляторам
даны в [292, 293, 286]. Регуляторы с внутренней моделью и методика их на-
стройки предложены в [338, 340, 413, 423]; в [419] — для нелинейных процес-
сов, в [417, 418, 453, 473, 474] — для систем с двумя степенями свободы; в
[466] приведено сравнение характеристик регуляторов типа ПИ, ПИД и с пре-
диктором Смита для случая малых, умеренных и больших задержек. В [456]
предложена двухкаскадная модификация ПИД-регулятора, содержащая вир-
туальный регулятор во втором каскаде, что позволяет эффективно управлять
388
Глава 5
объектами высокого порядка, существенно ослабить внешние воздействия и
улучшить робастность системы.
Особенно большое количество публикаций, включая два обзора [351, 468],
посвящено системам с большой транспортной задержкой, в том числе предик-
тору Смита. Предиктор Смита для интегрирующих процессов высокого по-
рядка предложен в работах [350, 449, 450]; в [451] — с применением методов
нечеткой логики; в [352] — адаптивный предиктор Смита на основе нейросе-
тевого фаззи-регулятора. В [455] выполнен анализ предиктора Смита для си-
стем телеуправления, где погрешность параметров объекта известна с большой
погрешностью, а задержка имеет переменную величину. В [460] предложена
модификация оптимального адаптивного предиктора Смита для систем с неиз-
вестной транспортной задержкой, в [459] — для систем, работающих в составе
промышленной сети, где возможны задержки случайной длительности; в [462]
предложен метод учета непредсказуемой или случайной задержки, которая воз-
можна при управлении через Интернет. Другие типы регуляторов для систем
с большой транспортной задержкой предложены в [314, 447, 453]; в [464] пред-
ложен П+И-регулятор, аналогичный предиктору Смита, который работает при
разбросе параметров объекта до 10 раз.
Методы оценки запаса устойчивости и робастности для нескольких наибо-
лее популярных методик настройки ПИД-регуляторов с объектом первого по-
рядка с задержкой описаны в [341]; в [342, 343] предложен метод расчета пара-
метров для объекта произвольного порядка при заданной робастности и устой-
чивости системы; в [386] использованы генетические алгоритмы для расчета
параметров ПИД-регулятора при заданных робастности и запасе устойчивости.
В [346] дан обзор методов, а в [348] — новый метод предотвращения интеграль-
ного насыщения; в [458] исследована причина плохой робастности предиктора
Смита к разбросу транспортной задержки и предложены методы ее улучшения.
Методика настройки ПИД-регулятора для системы второго порядка с по-
мощью методов оптимизации и с учетом ограничений в виде заданной робаст-
ности и полосы пропускания системы, предложена в [427]. В [431] предложен
метод расчета параметров ПИД-регулятора как для устойчивых, так и неустой-
чивых объектов после идентификации в разомкнутом контуре, в [436] — для
регулятора с внутренней моделью; в [346] дана классификация методов на-
стройки и получен новый метод для систем с транспортной задержкой. В [349]
изложен новый метод настройки ПИД-регулятора, в котором вместо модели
объекта управления используется интеграл Боде. При настройке учитывается
запас по фазе и усилению. В [409] предлагается определять параметры регуля-
тора методом масштабирования параметров ранее настроенных регуляторов, в
[321] преложна моидфикация метода Зиглера-Никольса, использующая модель
с четырьмя коэффициентами для настройки регулятора.
Программные средства настройки ПИД-регуляторов с помощью компьюте-
ра описаны в следующих работах: в [361] — программа для идентификации
линейных систем, которая включает в себя обработку сигналов, построение
графиков и идентификацию; в [408, 411] — системы для идентификации моде-
лей и настройки параметров ПИД-регулятора, включающие устройства ввода-
ПИД-регуляторы 389
вывода и компьютер; в [312] — система для автоматической настройки ПИД-
регуляторов; в [14] дан обзор коммерческих программных продуктов.
Большое число публикаций посвящено методам автоматической настрой-
ки ПИД-регуляторов [424, 426, 430]. Некоторые методы используют автома-
тическую настройку с идентификацией в замкнутом контуре регулирования в
процессе нормального функционирования системы [344, 438]; в [433] предложен
итерационный метод для автоматической настройки ПИД-регулятора, не тре-
бующий идентификации модели. В [345, 435] для автоматической настройки
используются методы оптимизации.
Адаптивная настройка предиктора Смита описана в [465], настройка с при-
менением базы нечетких правил — в [452] и для систем с неизвестной транс-
портной задержкой — в [460]. Большое количество методов автоматической
настройки используют нечеткую логику, нейронные сети и генетические алго-
ритмы [332, 362, 465] (см. также п. 5.7).
Нечеткая логика, нейронные сети и генетические алгоритмы являются те-
мой, которая привлекла внимание огромного количества исследователей в по-
следние годы. В [390, 399] приведен подробный обзор методов применения
нечеткой логики в ПИД-регуляторах. В [395, 396] дана классификация и систе-
матизированное изложение принципов построения фаззи-регуляторов. В [482]
предлагаются метод проектирования и принципы выбора фаззи-регулятора, ос-
нованные на сходстве между традиционным и фаззи-ПИД регулятором; в [424]
предложена и исследована одна из новых структур фаззи-регулятора. В [400]
исследована устойчивость фаззи-регулятора; в [398, 436] предлагается робаст-
ная база правил, в [420] — методика оптимального логического вывода для
построения фаззи-регулятора с учетом робастности. В [331] предложен фаззи-
регулятор с внутренней моделью, использующий принцип табличного управ-
ления; в [375] найдены условия, при которых фаззи-регулятор структурно эк-
вивалентен ПИД-регулятору с табличным управлением. В [362] описан новый
фаззи-алгоритм автоподстройки ПИД-регулятора. База нечетких правил с си-
стемой нечеткого вывода используется для адаптивной настройки предиктора
Смита в [451, 452]; в [470] блок фаззи-автонастройки использован с парамет-
рами функции принадлежности, которые определяются методами оптимиза-
ции. Метод пригоден как для линейных, так и нелинейных объектов. В [397]
предлагается практичная двухуровневая схема настройки фаззи-регуляторов.
На первом уровне обеспечивается устойчивость системы, на втором регулятор
адаптируется к динамике объекта управления.
Нейронные сети в ПИД-регуляторах используются реже, чем нечеткая ло-
гика. В [423] описан метод автоподстройки ПИД-регулятора, основанный на
нейронной сети в качестве классификатора, для определения типа переходного
процесса в объекте управления с целью его структурной идентификации. В
[334, 367, 369, 371] предложена структура и метод проектирования нейросете-
вого ПИД-регулятора; в [333, 365, 376] описаны нейросетевые блоки настройки
адаптивных ПИД-регуляторов; в [366, 374] изложен новый метод обновления
весов нейронной сети.
Генетические алгоритмы используются как для идентификации объекта
управления, так и для настройки параметров ПИД-регулятора. В обоих слу-
390
Глава 5
чаях схема применения алгоритма одинакова: составляется критериальная
функция, зависящая в первом случае от параметров объекта управления, во
втором — от параметров ПИД-регулятора К,ТЛ,ТЛ. Д&лее с помощью генети-
ческого алгоритма отыскивается глобальный минимум функции, координата-
ми которого являются искомые параметры объекта или ПИД-регулятора [337,
338, 381, 382, 384-386, 388]. В [336] сделан обзор применения генетических
алгоритмов в системах управления.
В [337] поиск оптимальных параметров ПИД-регулятора выполнялся гене-
тическим алгоритмом со следующими параметрами: размер популяции — 20,
максимальное количество поколений — 100, вероятность скрещивания — 0,9,
вероятность мутации — 0,1; диапазон изменения параметров 0...40. В [387] гене-
тический алгоритм использовался для идентификации транспортной задержки
дизель-генератора. Подчеркивается быстрая сходимость и устойчивость ал-
горитма. В [388] предлагается метод кодирования информации, необходимой
для оптимального поиска коэффициентов ПИД-регулятора, в генетические пе-
ременные. В [386] предложен метод расчета параметров ПИД-регулятора с
помощью генетических алгоритмов; в [381] — генетический алгоритм для оп-
тимальной настройки коэффициентов регулятора.
Три компонента «soft-computing» используются в ПИД-регуляторах во все-
возможных сочетаниях друг с другом. В [362-364, 366, 377, 378] предложен ней-
росетевой фаззи-ПИД регулятор, в [370, 372, 374] — с возможностью самообу-
чения нейронной сети; в [378] предложен новый метод настройки параметров;
в [394] — метод оптимизации нейросетевого фаззи-ПИД-регулятора, основан-
ный на алгоритме моделирования отжига. Нейросетевые фаззи-регуляторы с
предиктором Смита приведены в работах [352, 467]; в [352] — для систем с
непостоянной транспортной задержкой.
В [391] приведена новая методология проектирования ПИД-регуляторов
с применением нечеткой логики и генетических алгоритмов. В [379] предло-
жен фаззи-ПИД-регулятор с автонастройкой, в котором использован генети-
ческий алгоритм для нахождения параметров системы нечеткого логическо-
го вывода; в [393] предложен оптимальный ПИД-регулятор с нечеткой логи-
кой для проектирования регулятора и генетический алгоритм для оптимиза-
ции его параметров.
Глава 6
Контроллеры для систем
автоматизации
Слово «контроллер» произошло от английского control (управление), а не
от русского «контроль» (учет, проверка). Контроллером в системах автомати-
зации называют устройство, выполняющее управление физическими процесса-
ми по записанному в него алгоритму с использованием информации, получае-
мой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобиль-
ной промышленности, где использовались для автоматизации сборочных ли-
ний. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры
строились на жесткой логике (программировались аппаратно), что было гораз-
до дешевле. Однако перенастройка с одной технологической линии на другую
требовала фактически изготовления нового контроллера. Поэтому появились
контроллеры, алгоритм работы которых мог быть изменен несколько проще —
с помощью схемы соединений реле. Такие контроллеры получили название
программируемых логических контроллеров (ПЛК), и этот термин сохранил-
ся до настоящего времени. Везде ниже термины «контроллер» и «ПЛК» мы
будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на
машинно-ориентированном языке, что было проще конструктивно, но требова-
ло участия специально обученного программиста для внесения даже незначи-
тельных изменений в алгоритм управления. С этого момента началась борьба
за упрощение процесса программирования ПЛК, которая привела сначала к со-
зданию языков высокого уровня, затем — специализированных языков визуаль-
ного программирования, похожих на язык релейной логики. В настоящее вре-
мя этот процесс завершился созданием международного стандарта IEC* (МЭК)
1131-3 [14], который позже был переименован в МЭК 61131-3 [483]. Стандарт
МЭК 61131-3 поддерживает пять языков технологического программирования
(см. главу 9), что исключает необходимость привлечения профессиональных
программистов при построении систем с контроллерами, оставляя для них ре-
шение нестандартных задач.
В связи с тем, что способ программирования является наиболее существен-
ным классифицирующим признаком контроллера, понятие «ПЛК» все реже
используется для обозначения управляющих контроллеров, которые не под-
держивают технологические языки программирования.
* IEC — International Electrotechnical Commission — Международная электротехни-
ческой комиссия (МЭК). Поэтому иногда вместо IEC пишут МЭК.
392
Глава 6
С появлением мощных и дешевых микроконтроллеров в 1972 г. рынок ПЛК
начал расти экспоненциально и за период с 1978 по 1990 гг. увеличился с 80 млн
долл, до 1 млрд долл, и к 2002 г. составил 1,4 млрд долл. [484]. В настоящее вре-
мя мировой рынок ПЛК продолжает расти, хотя и гораздо меньшими темпами.
Однако последнее замечание не относится к России, где события изменяются
очень быстро в связи с возрождением экономики, появлением сильных отече-
ственных производителей и системных интеграторов [485], а также огромными
инвестициями международных корпораций в российскую экономику.
ПЛК используются практически во всех сферах человеческой деятельно-
сти для автоматизации технологических процессов, в системах противоаварий-
ной защиты и сигнализации, в станках с ЧПУ, для управления дорожным дви-
жением, в системах жизнеобеспечения зданий, для сбора и архивирования дан-
ных, в системах охраны, в медицинском оборудовании, для управления робота-
ми, в системах связи, при постановке физического эксперимента, для управле-
ния космическими кораблями, для автоматизации испытаний продукции и т.д.
Тем не менее до сих пор остается много отраслей экономики, куда контроллер-
ная автоматизация только начинает проникать.
Согласно последнему опросу по Интернету, проведенному журналом Cont-
rol Engineering (www.controlengrussia.com) совместно с Reed Research, большая
часть опрошенных использует ПЛК в задачах управления станками. На втором
месте — задачи, связанные с управлением технологическими процессами, далее
идет управление перемещениями и задачи диагностики. Чаще всего контролле-
ры используют для решения собственных задач (54 %), реже для производства
оборудования для продажи (25 %) или для того и другого (17 %).
Контроллеры используются не только как автономные средства локально-
го управления технологическим установками, но и в составе широкомасштаб-
ных систем автоматизированного управления целыми предприятиями.
В настоящее время на Российском рынке преобладают контроллеры ино-
странных фирм: Siemens, Mitsubishi, ABB, Schneider Electric, GE Fanuc, од-
нако с течением времени увеличивается доля рынка, занятая отечественной
продукцией российских фирм (НИЛ АП, «Текон», «Фаствел», ДЭП, «Овен»,
«Элемер», «Эмикон» и др.), что соответствует общемировой тенденции, когда
в большинстве стран отечественные фирмы занимают большую долю рынка,
чем иностранные. Это объясняется следующими факторами:
• благодаря использованию западных технологических линий и материалов
качество изготовления российских контроллеров часто превосходит зару-
бежное качество в связи с более высоким уровнем подготовки российских
специалистов;
• российские фирмы обеспечивают более квалифицированную техническую
поддержку и русскоязычную документацию;
• большую роль играет срок поставки и территориальная близость произ-
водителя к потребителю;
• соответствие отечественных разработок российским стандартам, чего часто
нельзя сказать об импортных контроллерах;
• лучшее знание российского рынка отечественными производителями.
Контроллеры для систем автоматизации
393
Широкому распространению ПЛК в большой степени способствует рост
компьютерной грамотности инженеров, спецкурсы в вузах, множество курсов
повышения квалификации, проводимых ведущими системными интеграторами.
6.1. Программируемые логические
контроллеры
Жесткие ограничения на стоимость и огромное разнообразие целей авто-
матизации привели к невозможности создания универсального ПЛК, как это
случилось с офисными компьютерами. Область автоматизации выдвигает мно-
жество задач, в соответствии с которыми развивается и рынок, содержащий
сотни непохожих друг на друга контроллеров, различающихся десятками пара-
метров. Каждый производитель выпускает несколько типов ПЛК разной мощ-
ности и стоимости, чтобы увеличить прибыль за счет сегментирования рынка.
Выбор оптимального для конкретной задачи контроллера основывается
обычно на соответствии функциональных характеристик контроллера реша-
емой задаче при условии минимальной его стоимости. Учитываются также
другие важные характеристики (температурный диапазон, надежность, бренд
изготовителя, наличие разрешений Ростехнадзора, сертификатов и т.п.).
Несмотря на огромное разнообразие контроллеров, в их развитии замет-
ны следующие общие тенденции:
• уменьшение габаритных размеров;
• расширение функциональных возможностей;
• увеличение числа поддерживаемых интерфейсов и сетей;
• использование идеологии «открытых систем»;
• использование языков программирования стандарта МЭК 61131-3;
• снижение цены.
Еще одной тенденцией является появление в контроллерах признаков ком-
пьютера (наличие мыши, клавиатуры, монитора, ОС Windows, возможности
подключения жесткого диска), а в компьютерах — признаков контроллера
(расширенный температурный диапазон, электронный диск, защита от пыли
и влаги, крепление на DIN-рейку, наличие сторожевого таймера, увеличенное
количество коммуникационных портов, использование ОС жесткого реально-
го времени, функции самотестирования и диагностики, контроль целостно-
сти прикладной программы). Появились компьютеры в конструктивах для
жестких условий эксплуатации. Аппаратные различия между компьютером
и контроллером постепенно исчезают. Основными отличительными признака-
ми контроллера остаются его назначение и наличие технологического языка
программирования.
6.1.1. Типы ПЛК
Для классификации огромного разнообразия существующих в настоящее
время контроллеров рассмотрим их существенные различия.
Основным показателем ПЛК является число каналов ввода-вывода. По
этому признаку ПЛК делятся на следующие группы:
394
Глава 6
• нано-ПЛК (менее 16 каналов);
• микро-ПЛК (более 16, до 100 каналов);
• средние (более 100, до 500 каналов);
• большие (более 500 каналов).
По расположению модулей ввода-вывода ПЛК бывают:
• моноблочными, в которых устройство ввода-вывода не может быть удале-
но из контроллера или заменено на другое. Конструктивно контроллер
представляет собой единое целое с устройствами ввода-вывода (например,
одноплатный контроллер). Моноблочный контроллер может иметь, напри-
мер, 16 каналов дискретного ввода и 8 каналов релейного вывода;
• модульные, состоящие из общей корзины (шасси), в которой располагаются
модуль центрального процессора и сменные модули ввода-вывода. Состав
модулей выбирается пользователем в зависимости от решаемой задачи. Ти-
повое число слотов для сменных модулей — от 8 до 32;
• распределенные (с удаленными модулями ввода-вывода), в которых модули
ввода-вывода выполнены в отдельных корпусах, соединяются с модулем
контроллера по сети (обычно на основе интерфейса RS-485) и могут быть
расположены на расстоянии до 1,2 км от процессорного модуля.
Часто перечисленные конструктивные типы контроллеров комбинируют-
ся, например моноблочный контроллер может иметь несколько съемных плат;
моноблочный и модульный контроллеры могут быть дополнены удаленными
модулями ввода-вывода, чтобы увеличить общее количество каналов.
Многие контроллеры имеют набор сменных процессорных плат разной про-
изводительности. Это позволяет расширить круг потенциальных пользовате-
лей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры де-
лятся на:
• панельные (для монтажа на панель или дверцу шкафа);
• для монтажа на DIN-рейку внутри шкафа;
• для крепления на стене;
• стоечные — для монтажа в стойке;
• бескорпусные (обычно одноплатные) для применения в специализиро-
ванных конструктивах производителей оборудования (OEM — Original
Equipment Manufacturer).
По области применения контроллеры делятся на следующие типы:
• универсальные общепромышленные;
• для управления роботами;
• для управления позиционированием и перемещением;
• коммуникационные;
• ПИД-контроллеры;
• специализированные.
По способу программирования контроллеры бывают:
• программируемые с лицевой панели контроллера;
• программируемые переносным программатором;
Контроллеры для систем автоматизации
395
• программируемые с помощью дисплея, мыши и клавиатуры;
• программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на языке МЭК 61131-3, использу-
ются также языки С, С#, Visual Basic.
Контроллеры могут содержать в своем составе модули ввода-вывода или
не содержать их. Примерами контроллеров без модулей ввода-вывода являют-
ся коммуникационные контроллеры, которые выполняют функцию межсетево-
го шлюза, или контроллеры, получающие данные от контроллеров нижнего
уровня иерархии АСУ ТП.
6.1.2. Архитектура
Архитектурой контроллера называют набор его основных компонентов и
связей между ними. Типовой состав ПЛК включает центральный процессор,
память, сетевые интерфейсы и устройства ввода-вывода (рис. 6.1). Иногда эта
конфигурация дополняется устройством для программирования и пультом опе-
ратора, устройствами индикации, реже — принтером, клавиатурой, мышью
или трекболом.
Процессорный модуль включает в себя микропроцессор (центральное про-
цессорное устройство — ЦПУ), запоминающие устройства, часы реального вре-
мени и сторожевой таймер. Термины «микропроцессор» и «процессор» в насто-
ящее время стали синонимами, поскольку все вновь выпускаемые процессоры
выполняются в виде СБИС*, т.е. являются микропроцессорами.
Основными характеристиками микропроцессора являются разрядность
(в ПЛК используются 8-, 16- и 32-разрядные микропроцессоры), тактовая ча-
стота, архитектура, наличие операций с плавающей точкой, типы поддержи-
ваемых портов ввода-вывода, температурный диапазон работоспособности и
потребляемая мощность.
Производительность микропроцессоров с одной и той же архитектурой про-
порциональна тактовой частоте. Большинство контроллеров используют мик-
ропроцессоры с сокращенным набором команд (RISC — Reduced Instruction Set
Computing), в которых используется небольшое количество команд одинаковой
длины и большое количество регистров. Сокращенный набор команд позволяет
строить более эффективные компиляторы и конвейер процессора, способный за
каждый такт выдавать результат исполнения очередной команды [486].
Для контроллеров, выполняющих интенсивную математическую обработку
данных, важно наличие математического сопроцессора (вспомогательного про-
цессора, выполняющего операции с плавающей точкой) или сигнальных процес-
соров, в которых операции типа Y = АВ -F X выполняются за один такт. Сиг-
нальные процессоры позволяют ускорить выполнение операций свертки или
быстрого преобразования Фурье.
Емкость памяти определяет количество переменных (тегов), которые мо-
гут быть обработаны в процессе функционирования ПЛК. В микропроцессо-
рах время доступа к памяти является одним из существенных факторов, огра-
ничивающих быстродействие. Поэтому память делят на несколько уровней
* СБИС — сверхбольшая интегральная схема.
396
Глава 6
Рис. 6.1. Типовая архитектура ПЛК
иерархии в зависимости от частоты использования хранящихся в ней данных и
быстродействия. Иерархия памяти относится к существенным характеристика-
ми архитектуры процессора, поскольку она позволяет снизить отрицательное
влияние медленной памяти на быстродействие микропроцессора. Основными
типами памяти является постоянное запоминающее устройство (ПЗУ), опера-
тивное запоминающее устройство (ОЗУ) и набор регистров. Регистры являют-
ся самыми быстродействующими элементами памяти, поскольку они исполь-
зуются арифметико-логическим устройством (АЛУ) для исполнения элемен-
тарных команд процессора. ПЗУ используют для хранения редко изменяемой
информации, такой, как операционная система, драйверы устройств, загруз-
чик, исполняемый модуль программы пользователя. ОЗУ используется для
хранения данных, которые многократно изменяются в процессе работы кон-
троллера, например значения тегов, результаты промежуточных вычислений,
диагностическая информация, массивы, выводимые на графики, данные для
отображения на дисплее.
В качестве ПЗУ (или ROM — Read Only Memory) обычно используется
электрически стираемая перепрограммируемая память (EEPROM — Electri-
cally Erasable Programmable ROM). Разновидностью EEPROM является флэш-
память, принцип действия которой основан на хранении заряда в конденсато-
ре, образованном плавающим затвором и подложкой МОП-транзистора. Осо-
бенностью флэш-памяти является ее энергонезависимость, т.е. сохраняемость
данных при выключенном питании. Стирание и перезапись во флэш-памяти
выполняется не отдельными ячейками, а большими блоками, поэтому она по-
Контроллеры для систем автоматизации
397
лучила название, происходящее от английского «flash» — «вспышка» . Недо-
статком всех ПЗУ является низкое быстродействие.
Количество циклов записи информации во флэш-память ограничено и со-
ставляет несколько десятков тысяч раз. По конструктивному исполнению и
интерфейсам флэш-память подразделяется на Compact Flash (CF), Memory
Stick, Secure Digital (SD), MuliMediaCard (MMC), RS-MMC, SmartMedia Card
(SMC), USB-flash. Флэш-память может быть впаяна в печатную плату или
быть съемной.
В качестве ОЗУ современные микропроцессоры используют статическую
память (SRAM — Static Random Access Memory) и динамическую (DRAM —
Dynamic Random Access Memory), SDRAM (Synchronous DRAM). SRAM выпол-
няется на триггерах, информация в которых сохраняется неограниченно долго
при наличии питания. В динамической памяти информация хранится на кон-
денсаторах, и поэтому DRAM требует периодической регенерации (перезарядки
конденсаторов). К недостаткам триггерной памяти относится ее высокая стои-
мость, связанная с низкой плотностью компоновки триггеров на кристалле, и
малое отношение емкости к цене. Достоинством является высокое быстродей-
ствие, достигающее гигагерц, в то время как память на конденсаторах не может
работать на частотах выше сотен герц. Оба типа памяти (DRAM и SRAM) не мо-
гут сохранять информацию при отключении питания ПЛК. Поэтому некоторые
типы ПЛК используют батарейное питание памяти для сохранения работоспо-
собности системы автоматизации после кратковременного прерывания питания.
Моноблочные и модульные контроллеры используют, как правило, парал-
лельную шину для обмена данными с модулями ввода-вывода, что позволяет
на порядок повысить быстродействие их опроса по сравнению с последователь-
ной шиной. Параллельные шины могут быть стандартными (ISA, РС/104, PCI,
ComactPCI, VME, СХМ) или частнофирменными. Последовательная шина кон-
троллера (на основе интерфейса RS-485) используется для подключения к нему
удаленных (распределенных) модулей ввода-вывода.
Программирование контроллеров малой мощности выполняется с помощью
кнопок, расположенных на лицевой панели или с помощью переносного пуль-
та для программирования. В качестве пульта в последнее время использует-
ся компьютер формата «ноутбук». Программирование мощных контроллеров
выполняется с помощью персонального компьютера, на котором устанавлива-
ется специальное программное обеспечение, например CoDeSys или ISaGRAF
(см. главу 9), выполняющее трансляцию технологического языка стандарта
МЭК 61131-3 в исполняемый код процессора, который загружается в ПЗУ ПЛК,
например, через порт Ethernet.
Сторожевой таймер (Watchdog Timer — WDT) представляет собой счет-
чик, который считает импульсы тактового генератора и в нормальном режиме
периодически сбрасывается (перезапускается) работающим процессором. Если
процессор «зависает», то сигналы сброса не поступают в счетчик, он продолжа-
ет считать и при достижении некоторого порога вырабатывает сигнал «Сброс»
для перезапуска «зависшего» процессора.
Часы реального времени (РВ) представляют собой кварцевые часы, ко-
торые питаются от батарейки и поэтому продолжают идти при выключенном
398
Глава 6
ПЛК. Часы РВ используются, например, для управления уличным освещением
в зависимости от времени суток, в системах охраны объектов и других случаях,
когда необходима привязка данных или событий к астрономическому времени.
Процессорный модуль ПЛК выполняет следующие задачи:
• собирает данные из модулей ввода в память и отсылает данные из памя-
ти в модули вывода;
• выполняет обмен данными с устройством для программирования контрол-
лера;
• выдает метки часов реального времени;
• осуществляет обмен данными с промышленной сетью;
• реализует стек протоколов промышленной сети (для этой цели могут ис-
пользоваться вспомогательные коммуникационные процессоры);
• выполняет начальную загрузку и исполнение операционной системы;
• исполняет загрузочный модуль пользовательской программы системы ав-
томатизации;
• управляет актами обмена с памятью.
Одной из тенденций в развитии ПЛК является использование процессор-
ных модулей разной мощности для одного конструктива контроллера. Это поз-
воляет получить серию контроллеров разной мощности и тем самым покрыть
больший сегмент рынка, а также выполнить модернизацию (upgrade) контрол-
леров, купленных потребителями, путем замены всего одного модуля.
К основным характеристикам процессорного модуля относятся:
• тип операционной системы (Windows СЕ, Linux, DOS, OS-9, QNX и др.);
• наличие исполнительной среды для стандартной системы программирова-
ния на языках МЭК 61131-3;
• типы поддерживаемых интерфейсов (RS-232, RS-422, RS-485, CAN, USB,
Ethernet и др.);
• типы поддерживаемых сетей (Modbus RTU, Modbus TCP, Ethernet, Profibus,
CANopen, DeviceNet и др.);
• возможность подключения устройств индикации или интерфейса операто-
ра (светодиодного или ЖКИ индикатора, клавиатуры, мыши, дисплея с
интерфейсами VGA, DVI или CMOS, LVDS, трекбола и др.);
• разрядность (8, 16, 32 или 64 бита);
• тактовая частота микропроцессора и памяти;
• время выполнения команд;
• объем, иерархия и типы памяти (ОЗУ, кэш, ПЗУ-флэш, съемная флэш
и др-);
• типы встроенных функций (ПИД-регулятор, счетчики, ШИМ, алгоритмы
позиционирования и управления движением и др.);
• бренд производителя (Intel, AMD, Atmel, RealLab и др.).
Быстродействие процессорного модуля ПЛК обычно оценивают по времени
выполнения логических команд, поскольку они наиболее распространены при
реализации алгоритмов управления.
Контроллеры для систем автоматизации
399
Огромное разнообразие задач, возлагаемых на ПЛК, и сильная зависи-
мость цены от мощности контроллера явились причиной большого разнообра-
зия используемых микропроцессоров, от простых и дешевых 8-разрядных Atmel
и Microchip до самых высокопроизводительных микропроцессоров серии Intel
Pentium, включая двухъядерные и четырехъядерные процессоры.
Восьмиразрядные микропроцессоры пользуются большим успехом в авто-
номных ПИД-контроллерах и микро-ПЛК для несложного алгоритмического
управления станками, теплицами, небольшими технологическими аппаратами,
в качестве межсетевых шлюзов. Их достоинством является высокая надеж-
ность, связанная с предельной простотой программного обеспечения.
Обычно микропроцессоры, используемые в ПЛК, на несколько поколений
отстают от процессоров офисных персональных компьютеров (ПК) в связи с от-
носительно малым объемом рынка ПЛК, который не обеспечивает окупаемость
разработки нового контроллера за период смены поколений микропроцессоров.
Источник питания. Стандартными напряжениями питания ПЛК явля-
ются напряжения 12, 24 и 48 В. Источником электрической энергии обычно
является промышленная сеть 220 В, 50 Гц. В случае распределенных систем
автоматизации источник питания может быть расположен вдали от ПЛК, по-
этому напряжение на клеммах ПЛК или модулей ввода-вывода может сильно
отличаться от напряжения источника питания вследствие падения напряже-
ния на сопротивлении кабеля. Для решения этой проблемы каждый ПЛК
или каждый модуль удаленного ввода снабжаются встроенным стабилизато-
ром напряжения, который обеспечивает нормальное их функционирование в
диапазоне напряжений от 10 до 30 В.
Низкое напряжение питания позволяет питать контроллеры от аккумуля-
торов бортовых сетей транспортных средств или переносных аккумуляторов.
В ПЛК иногда используют батарею для питания часов реального времени
(которые должны функционировать при выключенном ПЛК) и для сохранения
информации в ПЗУ на время аварийных перерывов питания.
6.1.3. Характеристики
Производительность ПЛК оценивается по следующим параметрам:
• длительность контроллерного цикла (период считывания значений из ка-
налов ввода, обработки в процессоре и записи в каналы вывода);
• время выполнения команд (отдельно логических, с фиксированной и с пла-
вающей точкой);
• пропускная способность шины между контроллером и модулями ввода-
вывода;
• пропускная способность промышленной сети;
• время цикла опроса всех контроллеров в одномастерной сети или цикл об-
ращения маркера для многомастерных сетей с маркером (см. главу 2);
• время реакции.
Контроллер в системах автоматизации выполняет циклический алгоритм,
включающий ввод данных и размещение их в ОЗУ, обработку данных и вывод.
400
Глава 6
Длительность контроллерного цикла (его еще называют рабочим циклом) зави-
сит от количества модулей ввода-вывода и наличия в них замаскированных (ис-
ключенных из процедуры обмена) входов-выходов, поэтому рассчитывается для
каждой конфигурации автоматизированной системы отдельно. При интенсив-
ной математической обработке данных (например, при цифровой фильтрации,
интерполяции или идентификации объекта управления в режиме нормального
функционирования системы) длительность контроллерного цикла существенно
зависит от быстродействия процессорного модуля. В контроллерный цикл вхо-
дит также обслуживание аппаратных ресурсов ПЛК (обеспечение работы си-
стемных таймеров, оперативное самотестирование, индикация состояния), кон-
троль времени цикла [494], сетевой обмен, управление многозадачностью, отоб-
ражение процесса выполнения программы на дисплее и т.п.
Перед началом работы ПЛК выполняет загрузку операционной системы
и программы пользователя в ОЗУ и ПЗУ, начальное тестирование аппарату-
ры. ПЛК обычно может работать в режиме отладки, пошагового выполнения
программы, просмотра и редактирования значений переменных и т.п.
В процессе функционирования ПЛК данные, введенные из устройств вво-
да, располагаются в ОЗУ и в течение рабочего цикла контроллера не изме-
няются. Прямое чтение входа во время выполнения одного цикла не выпол-
няется. Это ускоряет процесс обработки данных и исключает непредвиден-
ные ситуации [494].
В системах с распределенными по объекту модулями ввода-вывода дли-
тельность контроллерного цикла может определяться пропускной способно-
стью промышленной сети, что в ряде случаев является ограничением на пре-
дельное количество модулей ввода-вывода.
Требования к длительности контроллерного цикла существенно зависят от
области применения ПЛК. При управлении тепловыми процессами длитель-
ность цикла может составлять единицы и десятки секунд, в задачах для управ-
ления станками она измеряется миллисекундами, при опросе датчиков темпе-
ратуры на элеваторе контроллерный цикл измеряется сутками.
Время реакции контроллера — это интервал времени от момента появления
воздействия на систему (со стороны модулей ввода или оператора) до момента
выработки соответствующей реакции. Время реакции зависит от длительности
рабочего цикла контроллера, которое определяется быстродействием модулей
ввода-вывода и производительностью процессора.
В контроллерах для ответственных применений могут быть предусмотрены
следующие функции самодиагностики (см. также главу 8):
• обнаружение ошибок центрального процессора;
• сигнализация о срабатывании сторожевого таймера;
• обнаружение отказа батареи или источника питания;
• обнаружение сбоя памяти;
• проверка программы пользователя;
• обнаружение выхода из строя предохранителя;
• обнаружение обрыва или короткого замыкания (к.з.) в цепи датчика и
нагрузки.
Контроллеры для систем автоматизации
401
В контроллерах для систем противоаварийной защиты (ПАЗ) и сигнализа-
ции, а также для опасных промышленных объектов может быть предусмотрена
возможность резервирования отдельных частей системы: промышленной сети,
процессорного модуля или контроллера, источника питания, сетевого сервера,
замкнутых контуров автоматического регулирования, модулей ввода-вывода.
Объектом резервирования обычно является наиболее ответственная или наибо-
лее ненадежная часть системы (подробнее см. главу 8).
Возможность горячей замены элементов системы (т.е. без отключения пи-
тания) достигается одновременно аппаратными и программными средствами.
Аппаратно предусматривается независимость начального состояния устройства
от очередности подачи сигналов на его клеммы в процессе замены; программно
обеспечивается возможность временного отсутствия компонента системы без ее
зависания или перехода в аварийные режимы (подробнее см. п. 8.2.1).
Надежность контроллеров характеризуется наработкой на отказ, которая
определяется как отношение суммарного времени работоспособного состояния
контроллера к математическому ожиданию числа его отказов в течение этого
времени (ГОСТ 27.002-89) или наработкой до отказа — временем от начала
эксплуатации до первого отказа. Надежность связана с допустимыми механи-
ческими перегрузками — амплитудой вибрации в требуемом диапазоне частот,
допустимым ускорением при ударе.
Для повышения безопасности систем автоматизации в контроллерах ис-
пользуются команды для установки начального состояния выходов сразу по-
сле подачи питания или в аварийном режиме. Эти состояния выбираются таким
образом, чтобы после восстановления напряжения питания при случайном его
прерывании или в аварийном режиме системы исполнительные устройства на-
ходились в безопасном для персонала или системы состоянии. Например, в
системах с нагревом безопасным будет состояние отключенного нагревателя,
в подъемных механизмах — состояние торможения. Наличие команд управле-
ния безопасными состояниями позволяет реализовать операцию автоматическо-
го рестарта автоматизированной системы после прерывания питания или после
восстановления работоспособного состояния. Способность контроллера перево-
дить свои выходы в заранее определенное состояние сразу после обнаружения
снижения напряжения питания или после внутреннего отказа называется от-
казоустойчивым отключением [489].
Если повторный запуск ПЛК выполняется после того, как все динами-
ческие данные (переменные входов-выходов, состояние внутренних регистров,
таймеров, счетчиков, программные контексты) были возвращены в заранее
определенное состояние, то такой запуск называется холодным рестартом
[489]. Холодный рестарт может быть как ручным, так и автоматическим.
Горячим рестартом [489] называют повторный запуск ПЛК, который вы-
полняется настолько быстро после пропадания питания, что все динамические
переменные не успевают измениться и поэтому работоспособность восстанав-
ливается таким образом, будто питания не пропадало.
Теплым рестартом называют повторный запуск после обнаружения неис-
правности питания с заранее определенным и программируемым пользовате-
402
Глава 6
Таблица 6.1
Значения цифр в обозначении IP степени защиты
Первая цифра Степень защиты Вторая цифра Степень защиты
0 1 2 3 4 5 6 Защита отсутствует Защита от твердых тел размером более 50 мм Защита от твердых тел размером более 12 мм Защита от твердых тел размером более 2,5 мм Защита от твердых тел размером более 1 мм Защита от пыли Пыленепроницаемость 0 1 2 3 4 5 6 7 8 Защита отсутствует Защита от капель воды Защита от капель воды при на- клоне до 15° Защита от дождя Защита от брызг Защита от водяных струй Защита от волн воды Защита при погружении в воду Защита при длительном погруже- нии в воду
лем множеством динамических данных и системным контекстом* прикладной
программы. Теплый рестарт характеризуется сигнализацией состояния или
эквивалентными средствами, позволяющими убедиться в том, что прикладная
программа зарегистрировала прекращение неисправности питания, обнаружен-
ное конфигурацией ПЛК в режиме пуска [489].
Помехоустойчивость контроллера обычно оценивается по его соответ-
ствию комплексу стандартов по электромагнитной совместимости (см. главу 3).
Промышленные контроллеры используют гальваническую изоляцию [195]
для устранения паразитных связей по общему проводу, земле и для защиты
оборудования от высоких напряжений.
Степень защиты от воздействия окружающей среды, обеспечиваемая кор-
пусом контроллера, классифицируется ГОСТ 14254-96. Для обозначения сте-
пени защиты используются две буквы «1Р», за которыми следуют две цифры.
Первая цифра обозначает степень защиты изделия от попадания внутрь твер-
дых посторонних тел, вторая цифра обозначает степень защиты изделия от
попадания воды. Расшифровка обозначений приведена в табл. 6.1, примеры
корпусов показаны на рис. 6.2.
При выборе контроллера желательно оценивать степень его соответствия
идеологии «открытых систем» (см. главу 1), чтобы не попасть в зависимость
от одного поставщика и иметь возможность модифицировать систему по ме-
ре необходимости.
Важным параметром ПЛК является время от заказа до поставки и нали-
чие нескольких независимых поставщиков. Для России этот параметр име-
ет особое значение, поскольку большую долю рынка занимают контроллеры
иностранного производства, для которых длительность поставки и гарантий-
ной замены исчисляется месяцами. Большие сроки поставки объясняются как
удаленностью производителя от потребителя, так и стремлением производи-
* Контекст — минимальный набор значений счетчика команд и других регистров, ко-
торые должны быть сохранены для продолжения выполнения задачи после ее прерывания.
Контроллеры для систем автоматизации
403
б)
Рис. в.2. Контроллеры в корпусах со степенью защиты IP20 (а) и IP66 (б)
телей и поставщиков минимизировать внутренние издержки за счет уменьше-
ния складских запасов.
Качество пользовательской документации, наличие группы технической
поддержки, скорость реакции на запросы, наличие курсов для обучения по-
требителей играют также важную роль при выборе контроллера из огромно-
го их многообразия.
Технические параметры широкого спектра контроллеров различных про-
изводителей можно найти в [92].
6.1.4. Пример ПЛК
В качестве примера рассмотрим ПЛК NLcon-CE, продвигаемый фирмой
НИЛ АП под торговой маркой «RealLab!». Контроллер построен на базе мощ-
ного (для ПЛК) процессора РХА-255 фирмы Intel и работает с удаленными
модулями ввода-вывода через интерфейс RS-485 по протоколу Modbus RTU
или DCON.
Основными отличительными характеристиками ПЛК являются следую-
щие:
• соответствие идеологии открытых систем;
• малые габаритные размеры;
• мощный процессор;
• большая емкость памяти;
• широкий температурный диапазон (от —25 °C или от —40 до +70 °C);
• поддержка дисплея, мыши, клавиатуры.
Центральный процессор (рис. 6.3) управляет ОЗУ, ЭППЗУ, ЖКИ дисплеем
и внешними портами с помощью вспомогательных контроллеров ввода-вывода,
исполняя ОС Windows СЕ и программу пользователя, написанную с помощью
пакета CoDeSys.
404
Глава 6
Рис. 6.3. Архитектура ПЛК NLcon-CE (www.RealLab.ru)
Вспомогательный контроллер («компаньон») ITE 18152 управляет двумя
USB портами и контроллером Realtek, который реализует стек протоколов
Ethernet. Два порта RS-485 выполнены на основе контроллера Atmegal64P
с использованием двух UART процессора РХА-255.
ЖКИ-дисплей подключается непосредственно к ЦП с помощью плоского
кабеля через параллельный интерфейс CMOS. Мышь и клавиатура подключа-
ются к ПЛК с помощью двух USB портов, которые могут быть использованы
также для подключения съемной USB-флэш памяти.
Контроллер выполнен полностью по идеологии открытых систем. При-
знаками открытости являются:
• стандартный интерфейс RS-485;
• протоколы Modbus RTU и DCON;
• поддержка Ethernet;
Контроллеры для систем автоматизации
405
• работа под ОС РВ Windows СЕ;
• программирование на языках C++, Visual Basic, С#;
• программирование на пяти языках МЭК 61131-3 с помощью CoDeSys;
• ОРС-сервер, функционирующий в среде Windows СЕ;
• стандартная мышь и клавиатура;
• крепление на DIN-рейку.
Характеристики процессора:
• 32-разряда, набор команд ARM версии 5ТЕ ISA, с ядром (микроархитек-
турой) XScale;
• суперконвейерная архитектура процессора;
• тактовая частота процессора 400 МГц;
• тактовая частота системной шины 100 МГц;
• скоростной интерфейс с флэш-памятью;
• имеет режимы пониженного потребления;
• кэш-память процессора емкостью 32 Кб для данных и 32 Кб для команд;
• мини-кэш емкостью 2 Кб для обработки потока данных;
• контроллер флэш-памяти с тактовой частотой шины 100 МГц;
• сопроцессор для одновременного умножения двух 16-битных чисел с 40-
битным накопителем. Соединен с центральным процессором 32-разрядной
шиной;
• поддержка USB v.1.1 — 2 шт,
• сторожевой таймер.
Характеристики ПЛК:
• два порта RS-485;
• два порта USB;
• Ethernet 10В ASE-Т/100В ASE-T;
• встроенная флэш-память емкостью от 128 Мб до 1 Гб;
• SDRAM емкостью 32/64 Мб;
• LCD (ЖКИ) цветной дисплей типа TFT (Thin-Film Transistor) или STN
(Super-Twisted Nematic — монохромный с пассивной матрицей на немати-
ческих жидких кристаллах) с портом CMOS (длина кабеля не более 30 см)
с разрешением до 640x480 и глубиной цвета 64 тыс. цветов для цветного
режима или 256 оттенков серого для монохромного;
• съемная USB флэш память;
• потребляемый ток: 600 мА;
• влажность воздуха от 10 до 90 % без конденсации влаги.
Программное обеспечение. Благодаря наличию ОС жесткого реально-
го времени Windows СЕ 4.2, поддерживающей DCOM, ПЛК может исполнять
программы, написанные на языках C++, С#, Visual Basic с применением ОРС-
сервера. Разработка ПО выполняется в среде Visual Studio Embedded или Visual
Studio.NET. Пять языков технологического программирования МЭК 61131-3
поддерживаются с помощью бесплатной системы программирования CoDeSys.
ОС Windows СЕ может быть загружена из встроенной флэш-памяти, а также
из Platform Builder через Ethernet-порт по протоколу FTP.
406
Глава 6
6.1.5. Устройства сбора данных
Автоматизированные системы сбора данных [495] в настоящее время яв-
ляются общедоступным средством получения экспериментальной информации,
и связано это, в первую очередь, с широким распространением персональных
компьютеров. Системы сбора данных находят применение для научных ис-
следований, управления производственными процессами, мониторинга в про-
мышленности, медицине, метеорологии, космонавтике и других областях че-
ловеческой деятельности. Автоматизированный сбор данных позволяет полу-
чить данные нового качества, которые невозможно получить иными средства-
ми. Это результаты статистической обработки огромного числа измерений,
полученных в цифровой форме, возможность регистрации случайно появля-
ющихся событий с недостижимой ранее разрешающей способностью по вре-
мени и амплитуде, регистрация быстроизменяющихся процессов. Благодаря
резкому удешевлению систем сбора данных по сравнению со стоимостью че-
ловеческого труда появилось большое количество областей применения, где
ранее использовалась ручная регистрация данных: в теплицах, элеваторах, на
метеостанциях, в процессе приемо-сдаточных и сертификационных испытаний
продукции, на складах, в промышленных холодильниках, при автоматизации
научного эксперимента и т.п.
Основным отличием систем сбора данных от ПЛК является отсутствие в
них алгоритма управления, т.е. отсутствие необходимости в мощном контролле-
ре и языке МЭК 61131-3, а также наличие большого объема памяти для ведения
архива. Хотя системы сбора данных можно построить на любом ПЛК, но в свя-
зи с указанными выше особенностями они занимают отдельный сегмент рынка
и их выделяют в отдельную группу средств автоматизации.
Системы сбора данных могут применяться в реальном времени, например
для мониторинга (наблюдения) различных процессов, идентификации аварий-
ных ситуаций в технологических процессах, а также могут применяться для
архивирования данных, когда их обработка отделена от процесса сбора неопре-
деленным интервалом времени. В системах реального времени текущие данные
сохраняются в течение некоторого заданного времени в кольцевом буфере, от-
куда устаревшие данные вытесняются вновь поступившими. В архивирующих
системах используются накопители информации большой емкости и данные
обрабатываются после завершения сбора.
Архивирующие системы сбора данных (логгеры, самописцы) могут быть ав-
тономными устройствами, построенными на основе микроконтроллера (напри-
мер, бортовые самописцы самолетов, электронные счетчики тепла или элек-
троэнергии, портативные электрокардиографы). Данные, собранные логгера-
ми, для обработки переносятся в компьютер с помощью, например, USB-флэш-
памяти или через последовательный интерфейс.
Системы сбора данных, построенные на основе компьютера, обычно явля-
ются стационарными и используют универсальное программное обеспечение,
такое как MATLAB, Lab VIEW, MS Excel [491], которое позволяет не только
собрать данные, но и обработать их.
Для регистрации быстропротекающих процессов (с требуемой частотой от-
счетов более 1 МГц) используются системы с параллельной шиной, в том числе
Контроллеры для систем автоматизации
407
платы для шины PCI компьютера. Компьютерные платы имеют ограниченное
количество входов, что определяется компьютерным конструктивом, и требуют
внешних клеммных блоков для подсоединения источников сигнала, создавая
неудобства при монтаже системы.
Для регистрации медленных процессов удобнее внешние устройства, под-
ключаемые к компьютеру через COM, USB или Ethernet-порт. Внешние устрой-
ства отличаются также меньшим уровнем шумов, в то время как платы, встав-
ляемые в компьютер, подвержены влиянию наводок от цифровых цепей ком-
пьютера.
Система сбора данных может быть распределенной, когда устройства ввода
распределены территориально по объекту сбора данных, а полученные дан-
ные сходятся к единому накопителю и обработчику данных с помощью сетевых
технологий. Сетевые (распределенные) системы сбора данных имеют свойство
практически неограниченной наращиваемости числа каналов, однако имеют
ограничение на скорость передачи данных по сети.
Для типовых задач сбора данных промышленностью выпускаются устрой-
ства с небольшим числом входов (от нескольких десятков до нескольких со-
тен). Для больших систем (от единиц до сотен тысяч входов) разрабатыва-
ются специализированные системы. К ним можно, например, отнести систему
«Грейн» [492] (www.RealLab.ru) для температурного мониторинга элеваторов,
которая собирает данные с нескольких тысяя датчиков температуры, или си-
стему «COMPASS» [495], собирающую данные с 250 тыс. датчиков в ядерном
центре CERN со скоростью 160 Мбит/с.
Входы систем сбора данных могут быть универсальными (потенциальными
и токовыми), или специализированными (например, для термопар, для термо-
преобразователей сопротивления или для тензодатчиков). Системы со специ-
ализированными входами экономически более эффективны для потребителя.
Универсальные входы используются совместно с измерительными преобразо-
вателями физических величин в ток или напряжение. Существуют также си-
стемы с гибридными входами, например, когда несколько входов принимают
сигналы термопар, другие входы — сигналы тензодатчиков, третьи — сигна-
лы термометров сопротивления и т.д.
Входы могут быть дифференциальными, одиночными, цифровыми или дис-
кретными (двоичными). Дифференциальные входы позволяют более эффек-
тивно подавлять внешние помехи, наводимые на кабель, передающий сигнал
от датчика к модулю ввода [195]. Для передачи сигнала чаще всего использу-
ется напряжение в диапазоне О...±5 В, 0...±10 В или ток 0...20 мА, 4...20 мА.
Сигналы напряжения вырабатываются источниками напряжения и имеют вы-
сокую помехоустойчивость к емкостным наводкам, сигналы тока вырабатыва-
ются источниками тока и устойчивы к индуктивным наводкам [172]. Дискрет-
ные входы принимают логические сигналы («0» или «1»), которые поступа-
ют от концевых выключателей, датчиков охранной или пожарной сигнализа-
ции, электромагнитных реле, датчиков наличия напряжения и т.п. Цифровые
входы принимают сигналы от устройств с цифровым выходом, например от
цифровых датчиков температуры.
408
Глава 6
Основными параметрами систем сбора данных являются количество кана-
лов, погрешность, динамическая погрешность, время установления или полоса
пропускания, разрешающая способность, эффективное число разрядов, частота
дискретизации, наличие гальванической изоляции входов и интерфейса, нали-
чие защит от небрежного использования, перегрузок и перегрева.
Системы сбора данных обычно имеют 4, 8, 16, 32, 64... входа, которые опра-
шиваются по очереди или одновременно. Системы с одновременным опросом
состоят из идентичных каналов, которые выполняют аналого-цифровое преоб-
разование входной величины параллельно, т.е. одновременно для всех канат
лов. Такие системы встречаются редко по причине высокой стоимости. Обыч-
но опрос входов выполняется по очереди, с помощью коммутатора. Поэтому
данные разных каналов оказываются сдвинутыми по времени на некоторую
задержку, равную отношению периода опроса к количеству каналов.
Примером системы сбора данных может служить система RealLab! [16], по-
строенная по модульному принципу, т.е. систему с необходимым количеством
входов можно собрать из модулей — отдельных «строительных» блоков. Моду-
ли соединяются между собой с помощью промышленного интерфейса RS-485 и
располагаются либо в общем монтажном шкафу, либо распределены по объек-
ту сбора данных таким образом, чтобы уменьшить длину кабеля от датчика к
модулю. Собранные данные в цифровой форме передаются по промышленной
сети в центральный компьютер или контроллер. Модули RealLab! могут рабо-
тать в стандартных сетях Modbus RTU или в стандартной де-факто сети DCON,
имеют открытый протокол обмена. Каждый модуль в сети имеет свой адрес,
поэтому для опроса модулей компьютер посылает им команду, содержащую
адрес и код операции, которую необходимо выполнить.
Приближение модулей ввода к датчикам имеет несколько преимуществ.
Во-первых, сокращается количество проводов, поскольку цифровой интерфейс
RS-485 имеет только два провода, а передает данные от большого количества
модулей. Это удобно при сборе данных с территориально распределенных объ-
ектов, например при сборе данных о температуре и влажности в теплице, ко-
торая имеет площадь 10 Га, в многоэтажном здании или на элеваторе. Во-
вторых, снижается мощность наведенных помех благодаря сокращению дли-
ны проводов с аналоговыми сигналами, упрощается техническое обслужива-
ние и диагностика системы.
Благодаря применению стандартного протокола обмена в систему сбора
данных на модулях RealLab! могут быть включены устройства ввода других
производителей, например, вольтметр фирмы Hewlett-Packard или кассовый ап-
парат, счетчик электроэнергии или метеостанция.
6.2. Компьютер в системах автоматизации
Несмотря на существующие традиции применения ПЛК для решения про-
блем автоматизации, многие задачи гораздо эффективнее решаются с помощью
персональных компьютеров вместо контроллера. Компьютер может быть ис-
пользован также как пульт оператора (диспетчера) или выполнять одновремен-
Контроллеры для систем автоматизации
409
но функции контроллера и пульта оператора. В задачах автоматизации широко
применяют как офисные, так и промышленные компьютеры.
6.2.1. Компьютер в качестве контроллера
Компьютер может быть превращен в полноценный контроллер, если на
него установить:
• систему программирования контроллеров (например, CoDeSys или ISa-
GRAF), подробнее см. главу 9;
• электронный диск вместо обычного жесткого диска;
• платы ввода-вывода или внешние модули ввода-вывода;
• сторожевой таймер.
Электронный диск представляет собой ПЗУ, состоящее из микросхем флэш-
памяти и конструктивно выполненное в виде корпуса обычного жесткого диска
формата 2.5”, 3.5” или 5.25” со стандартными интерфейсами IDE и SCSI. Ос-
новным достоинством электронного диска является его высокая устойчивость к
вибрациям, отсутствие акустического шума, высокая надежность, низкое энер-
гопотребление, малый вес.
Платы и внешние модули ввода-вывода для компьютера выпускаются мно-
гими независимыми производителями, что стало возможным благодаря нали-
чию стандартов на конструктивное исполнение и шины как промышленных,
так и офисных компьютеров.
Сторожевой таймер служит для перезагрузки компьютера в случае его за-
висания. Заметим, что компьютер имеет гораздо большее, чем контроллер, вре-
мя перезагрузки при использовании офисной операционной системы Windows.
К достоинствам персональных компьютеров (ПК) при их использовании
в качестве контроллеров относятся:
• на порядок большая емкость оперативной памяти;
• наличие жесткого диска с практически неограниченной емкостью;
• на порядки более высокое быстродействие;
• быстрое развитие аппаратного обеспечения (модернизация компьютеров
происходит каждые 4...6 месяца, контроллеров — через 3...5 лет);
• в несколько раз более низкая цена;
• наличие большого числа специалистов, хорошо владеющих персональным
компьютером;
• поддержка компьютером DVD и CD-ROM дисководов, принтера, звуковых
карт, систем распознавания и синтеза речи, систем распознавания образов
и текста, а также других средств, недоступных для контроллера;
• легкая замена компьютера на более мощный без изменения программно-
го обеспечения;
• поддержка клавиатуры, мыши и монитора;
• возможность комплектации компьютера из частей, производимых большим
числом независимых производителей;
• возможность создания всей системы автоматизации с помощью SCADA-
пакетов (например, MasterSCADA, Trace Mode), без привлечения систем
410
Глава 6
программирования контроллеров и средств связи контроллера с компью-
тером;
• наличие стандартов на шины, что обеспечивает большое число независи-
мых поставщиков стандартных компьютерных плат.
Хотя промышленные компьютеры, приближаясь по условиям эксплуатации
к контроллерам, утрачивают некоторые из достоинств ПК (такие, как быстро-
действие, быстрота модернизации, низкая цена), другие достоинства ПК дела-
ют их широко распространенными и востребованными в промышленности.
С развитием промышленных компьютеров и контроллеров происходит сти-
рание различий между ними. Тем не менее остается ряд отличий, которые
уже нельзя назвать существенными, но которые встречаются наиболее часто.
Типовой компьютер, в отличие от типового контроллера, имеет:
• мышь, клавиатуру и монитор;
• жесткий диск;
• узкий температурный диапазон (от 0 до 4-50 °C);
• операционную систему Windows (иногда используют ОС реального време-
ни Windows СЕ, QNX, RTOS);
• вентилятор для охлаждения процессора и блока питания.
В промышленных компьютерах иногда используют операционную систему
реального времени, однако она не всегда является необходимой даже в системах
автоматического управления. Например, серийно выпускаемые системы управ-
ления микроклиматом в промышленных теплицах «Агротерм» фирмы НИЛ АП
(www.RealLab.ru) на протяжении многих лет прекрасно зарекомендовали себя,
реализуя несколько десятков контуров ПИД-регулирования при одновремен-
ном архивировании нескольких сотен параметров. Все перечисленные задачи
решаются с помощью всего одного персонального компьютера с ОС Windows
ХР и модулей ввода-вывода серии RealLab! [497]. Недостатком компьютеров с
ОС Windows является большое время перезагрузки системы при ее зависании.
6.2.2. Компьютер для общения с оператором
Наиболее типичным применением ПК в задачах автоматизации является
организация рабочего места оператора (диспетчера). Компьютер здесь выпол-
няет роль человеко-машинного интерфейса (ЧМИ). Для улучшения эргономич-
ности и эффективности работы оператора используют SCADA-пакеты (см. гла-
ву 9) с использованием звука, анимации, высококачественной цветной графики
и множеством интеллектуальных функций, облегчающих работу оператора.
Для создания ЧМИ используют мониторы с сенсорным экраном, плазмен-
ные панели, проекторы экрана компьютера на стену, трекбол, звуковые колон-
ки, сирены, клавиатуры со степенью защиты от IP-20 до IP-67.
Трекбол аналогичен компьютерной мыши, которая перевернута шариком
вверх, и имеет размер шарика от 1 до 4...6 см в диаметре. Трекбол удобен тем,
что при его использовании запястье руки остается неподвижным, он не требует
много места и может быть использован в условиях тряски и вибрации.
Сенсорный экран представляет собой стеклянную или пластиковую пла-
стину, прикрепленную поверх экрана обычного монитора. Для определения
Контроллеры для систем автоматизации
411
координат касания экрана пальцем оператора используют в основном четы-
ре физических принципа: поглощение пальцем энергии поверхностных акусти-
ческих волн, изменение емкостного тока при касании экрана, изменение со-
противления между двумя прозрачными проводящими поверхностями при на-
давливании пальцем и принцип затенения инфракрасных лучей, исходящих из
излучателей по периметру экрана. Наибольшее распространение получили ре-
зистивные и емкостные сенсорные экраны.
В промышленной автоматизации используются также панели оператора,
которые вместо клавиатуры имеют несколько специализированных кнопок,
а вместо монитора — миниатюрный дисплей, на котором умещается всего
несколько строк текста или графики. Такие устройства подключаются к СОМ-
порту компьютера.
Для монтажа на панель (на дверцу шкафа, на стену) используют панель-
ные компьютеры, которые объединяют в одном конструктиве процессорный
блок, дисплей с сенсорным экраном и клавиатуру.
6.2.3. Промышленные компьютеры
Промышленные компьютеры существенно отличаются от офисных по кон-
структивным признакам, однако используют те же микропроцессоры и архи-
тектуру. Основными отличиями являются следующие:
• разъемы для сменных плат устанавливаются на пассивной объединитель-
ной панели, а не на материнской плате;
• для сменных плат используются надежные штырьковые разъемы;
• для смены плат не нужно раскрывать корпус;
• используются специализированные промышленные компьютерные шины
CompactPCI, AdvancedTCA, COMExpress, VME, VXI и др.;
• вместо жесткого диска может быть использована флэш-память;
• наличие сторожевого таймера;
• применение вентиляторов со сменным пылеулавливающим фильтром или
отсутствие вентиляторов;
• прочная несущая конструкция с надежным креплением плат пружинящими
планками с винтовыми зажимами;
• применение блоков питания повышенной надежности, с защитой от к.з. по
выходу и с расширенным диапазоном сетевых напряжений (от 100 до 250 В);
• резервирование блоков питания;
• наличие энергонезависимой оперативной памяти (с аккумуляторным пита-
нием), которая сохраняет данные при сбоях или исчезновении питания;
• в одном конструктиве и на одной объединительной шине может распола-
гаться несколько компьютерных систем;
• наличие съемной флэш-памяти;
• применение, кроме Windows, операционных систем DOS, Linux и операци-
онных систем реального времени.
Конструктивное исполнение промышленного компьютера обеспечивает за-
щиту от пыли, влаги, вибрации, электромагнитных наводок и облегчает техни-
ческое обслуживание. Для работы в диапазоне температур от —40 до +70 °C
412
Глава 6
используется индустриальная элементная база с расширенным температурным
диапазоном или, если это возможно, искусственный подогрев и принудитель-
ное охлаждение.
Монтаж промышленного компьютера может быть выполнен в стандартной
19-дюймовой стойке, на панели, на столе, на стене, на DIN-рейке и в специали-
зированном конструктиве. Органы управления промышленным компьютером
(кнопка сброса, питания и клавиатура) могут закрываться дверцей с ключом.
По быстродействию и емкости памяти промышленные компьютеры всегда
уступают офисным, что связано с большой длительностью разработки новых
модификаций: за время разработки промышленного компьютера успевает сме-
ниться несколько поколений офисных ПК. Это объясняется несравненно мень-
шей емкостью рынка промышленных компьютеров по сравнению с офисными,
которая определяет размер инвестиций в новые проекты.
Подавляющее большинство промышленных компьютеров относится к маги-
стрально-модульным системам. Они не имеют объединительной материнской
платы, вместо нее используется пассивная кросс-плата (соединительная пла-
та), содержащая только разъемы, соединенные общей магистралью. Все платы
компьютера вставляются в корпус спереди и закрепляются планками с аморти-
заторами для повышения виброустойчивости. Это сделано для удобства замены
плат при обслуживании. Платы соединяются с кросс-платой с помощью штырь-
ковых разъемов, которые гораздо надежнее печатных разъемов в офисных ПК.
Число слотов для сменных плат превышает 10.
Для промышленных компьютеров существует несколько стандартов, на-
правленных на обеспечение открытости таких систем. Открытые стандар-
ты для шин промышленных компьютеров разрабатывает консорциум PICMG
(PCI Industrial Computer Manufacturers Group), в состав которого входят бо-
лее 450 компаний компьютерной индустрии и телекоммуникации. Консорциум
был организован в 1994 г., результатами его работы являются стандарты PCI,
CompactPCI, AdvancedTCA, COMExpress и др.
Стандарт PICMG 1.0 позволяет разместить до 20 плат расширения в одном
корпусе и предусматривает применение шин PCI и ISA, которые имеют общую
пропускную способность 538 Мбайт/с.
Стандарт PICMG 1.3 базируется на последовательной шине PCI Express.
В основе PCI Express лежит последовательная передача данных по нескольким
независимым последовательным каналам передачи (от 1 до 32), что исключает
необходимость синхронизации битов в передаваемом слове, как в параллель-
ных шинах. Каждый канал PCI Express состоит из двух однонаправленных
линий передачи (по одной в каждом направлении) и использует физический
уровень стандарта LVDS (Low Voltage Differential Signaling — низковольтная
дифференциальная передача сигнала), который основан на балансном способе
передачи сигнала по витой паре проводов. Тактовая частота канала состав-
ляет 2,5 ГГц, что обеспечивает пропускную способность одной линии передачи
250 Мбайт/с и всей шины до 8 Гбайт/с в каждом направлении при количе-
стве линий 32. Применение шины PCI Express позволяет установить сразу
несколько портов Ethernet 1000BASE-T на одной процессорной плате и уве-
личить число USB портов до 10.
Контроллеры для систем автоматизации
413
Шина VMEbus была разработана в начале 80-х годов, но до сих пор ис-
пользуется достаточно широко благодаря существованию большого числа про-
изводителей и выбора плат. VMEbus платы имеют размер для конструкти-
ва «Евромеханика» (см. ниже). Пропуская способность 16- или 32-разрядной
шины VMEbus составляет 40 Мбит/с. Существует также 64-разрядная версия
шины с пропускной способностью 80 Мбит/с. Для автоматизированных измери-
тельных систем используется шина VXI (VME extension for Instrumentation),
которая является модификацией шины VMEbus.
Стандарт «Евромеханика» устанавливает размеры и типы печатных плат,
модулей, блоков, субблоков, 19-дюймовых шкафов и стоек. В конструктиве
«Евромеханика» для передачи информации между отдельными платами чаще
всего используют шину Compact PCI (ePCI), которая разработана на основе
обычной PCI (Peripheral Component Interconnect) шины версии 2.1. От обычной
шины PCI она отличается в два раза большим числом поддерживаемых слотов
(до 8-ми). Тактовая частота шины составляет 33 или 66 МГц, ширина — 32 или
64 бита, пропускная способность — 133 или 266 Мбайт/с. Конструктивно платы
с шиной Compact PCI представляют собой еврокарты высотой 3U (100x160 мм)
с одним разъемом или 6U (233x160 мм) с двумя разъемами. Контакты питания
в разъемах сделаны длиннее, чем сигнальные, поэтому при замене платы пита-
ние подается раньше, чем сигналы. Это делает возможной «горячую замену»
плат при соответствующей доработке программного обеспечения. В системах
автоматизации измерений широко используется шина PXI (PCI extensions for
Instrumentation), разработанная фирмой National Instruments и используемая с
теми же конструктивами, что и Compact PCI.
Компьютеры стандарта РС/104 являются самыми маленькими в классе
магистрально-модульных систем, размер платы составляет 90x96 мм. Пер-
вые изделия на основе этого стандарта появились в 1992 г. на транспорте и в
системах обороны для управления беспилотными летательными аппаратами,
в ракетных комплексах, бортовых системах контроля и навигации. Стандарт
РС/104 использует шину ISA, но с измененными типами разъемов (использу-
ется 104 контакта) и нагрузочными характеристиками линий шины. В 1997 г.
консорциум РС/104 ввел спецификацию PC/104-Plus, в которую был добавлен
интерфейс PCI с 120 контактами. Позже были введены стандарты РС/104+,
PCI-104 и PCI/104express с шиной PCI-Express. Платы стандартов РС/104 соби-
раются «бутербродом» и скрепляются втулками и винтами. Такой конструктив
используется для небольших систем, обычно число плат не превышает 4-х.
Широкое распространение в промышленной автоматизации получили так-
же одноплатные компьютеры. Основным их достоинством является отсутствие
разъемов, малые габариты, например 90x96 мм для стандарта РС/104 или с
форм-фактором 2,5” (100x66 мм), 3,5” (102x144 мм) или 5,25” (260x180 мм),
малое энергопотребление.
Одним из вариантов расширения функциональных возможностей промыш-
ленных компьютеров является применение мезонинных плат. Мезонинной на-
зывается плата, которая располагается параллельной основной и соединяется
с ней разъемами. Стандарты на мезонинную технологию поддерживаются кон-
сорциумом GroupIPC (www.groupipc.com).
414
Глава 6
6.3. Устройства ввода-вывода
Устройства (модули) ввода-вывода являются интерфейсом между процес-
сором ПЛК и реальным миром. В идеальном случае было бы желательно
иметь в процессоре значения измеренных сигналов в любой момент времени.
Однако поскольку количество каналов ввода-вывода в некоторых системах мо-
жет достигать тысяч, а измерительные каналы всегда имеют ограниченную
пропускную способность, измеренные значения поступают в процессор в дис-
кретные моменты времени.
Существует несколько уровней и способов опроса множества каналов ввода.
Современный модуль ввода имеет свой собственный микроконтроллер, который
выполняет циклический опрос всех своих каналов и помещает полученные дан-
ные в буфер. Если по алгоритму работы системы автоматизации используются
только несколько каналов модуля, то неиспользуемые каналы можно замаски-
ровать (исключить их из процедуры опроса), если это требуется для увеличе-
ния быстродействия системы. При поступлении в модуль команды считывания
значений со входов собранные данные передаются из буфера модуля в ПЛК,
где помещаются в буфер ОРС сервера или в определенную область ОЗУ.
Опрос модулей может выполняться циклически с одинаковой частотой для
всех модулей или с разной частотой. Второй вариант позволяет уменьшить
загруженность шины, по которой выполняется обмен данными между модуля-
ми ввода и процессорным модулем.
Циклический опрос всех модулей с заранее заданной частотой сильно за-
гружает шину, по которой модули ввода связываются с процессором. Это осо-
бенно очевидно, если процессор сканирует входы для обнаружения сигнала от
аварийного датчика, который может сработать один раз в 10 лет, или если
вводятся данные от датчика температуры в условиях, когда температура по-
стоянна. В подобных случаях более эффективны многомастерные шины (на-
пример, CAN или Profibus), которые позволяют использовать режим подписки,
при котором процессор модуля ввода, в котором произошло изменение состоя-
ния входа, является инициатором обмена данными.
Наибольшее распространение в промышленной автоматизации нашли одно-
мастерные шины и циклический опрос (поллинг — от «polling») модулей ввода
в силу своей простоты и сравнительно низкой стоимости.
Модули ввода и вывода в промышленной автоматизации имеют гальваниче-
скую изоляцию между входными (выходными) зажимами и шиной контроллера.
Напряжение изоляции составляет от 2500 (реже от 500) до 4000 В.
Иногда требуется выполнить одновременный опрос входов всех модулей
ввода или вывести данные одновременно в каналы всех модулей вывода. Для
решения этой проблемы используют широковещательные команды, которые
воспринимаются всеми модулями одновременно и они выполняют ввод или вы-
вод данных в свои буферные регистры в одно и то же время. После этого обыч-
ным циклическим опросом данные по очереди вводятся в процессорный модуль.
Модули ввода соединяются с процессором последовательной или парал-
лельной шиной. В магистрально-модульных системах используются парал-
лельные шины ISA, PCI, Compact PCI, PCI Express, PC/104, SpeedBus, VME
Контроллеры для систем автоматизации
415
и др., в модульных ПЛК — частнофирменные (нестандартные) последователь-
ные и параллельные шины. В контроллерах с распределенными (удаленными)
модулями ввода-вывода наиболее распространены последовательные шины на
основе интерфейсов RS-485 и CAN.
Преимуществом параллельной шины является высокая пропускная способ-
ность, позволяющая выполнять сканирование модулей ввода с высокой часто-
той и использовать модули аналогового ввода с тактовой частотой АЦП до
100 кГц. Однако небольшая длина параллельной шины, ограниченная рассин-
хронизацией отдельных бит в передаваемом слове, не позволяет подключить
к одному контроллеру более 32 модулей. Контроллеры с последовательной
шиной имеют противоположные свойства. Кроме того, они позволяют орга-
низовать распределенные системы сбора данных и управления, преимущества
которых обсуждались в главе 1.
Большинство параллельных и последовательных шин контроллеров явля-
ются одномастерными, поскольку многомастерные шины существенно слож-
нее и дороже.
Обмен данными с модулем выполняется по адресу, который обычно запи-
сывается в ПЗУ модуля. Иногда адресом является номер слота, в который
вставляется модуль или положение микропереключателя.
Цепи входов и выходов модулей ввода должны иметь гальваническую изо-
ляцию, назначение которой подробно описано в главе 3. Гальваническая изоля-
ция может быть поканальная, когда каждый канал изолирован от остальных,
или групповая. Обычно используется групповая изоляция. В удаленных моду-
лях распределенных ПЛК может быть использована индивидуальная гальвани-
ческая изоляция интерфейса RS-485 каждого модуля или групповая изоляция
интерфейсов нескольких модулей с помощью одного модуля развязывающего
повторителя интерфейсов. Для передачи напряжения питания в изолирован-
ную часть модуля используются DC-DC преобразователи, построенные с при-
менением развязывающих миниатюрных трансформаторов.
Современные модули ввода-вывода могут выполнять кроме функций ввода
некоторую обработку вводимой информации и дополнительные функции: ком-
пенсацию температуры холодного спая термопар, линеаризацию нелинейных
датчиков, диагностику обрыва датчика, автоматическую калибровку, ПИД-
регулирование, управление движением. Перенос части функций контроллера в
модули ввода-вывода является современной тенденцией, направленной на уве-
личение степени распараллеливания задач управления, обеспечение независи-
мости локальных модулей (которые по своим функциям приближаются к ПЛК)
и уменьшение потока информации между параллельно работающими процес-
сорами в модулях ввода-вывода. По такому принципу построены, в частности,
модули RealLab! фирмы НИЛ АП (www.RealLab.ru).
6.3.1. Ввод аналоговых сигналов
Разнообразие физических явлений порождает разнообразие датчиков, для
каждого из которых существует соответствующее устройство ввода. Для уни-
фикации (сокращения числа типов) модулей ввода используют устройства нор-
416
Глава 6
мирования сигналов, которые преобразуют измеряемую физическую величи-
ну в стандартный электрический сигнал, соответствующий ГОСТ 26.011-80 и
ГОСТ Р 51841-2001. Фактически в промышленной автоматизации используют-
ся следующие стандартные диапазоны аналоговых сигналов: 0...10 В, 0...±10 В,
1...5 В и 4...20 мА, 0...20 мА. ГОСТ Р 51841-2001 не рекомендует применять диа-
пазон 0...20 мА в новых разработках [490]. Входное сопротивление потенциаль-
ных входов должно быть не менее 10 кОм для диапазона 0... 10 В и 0... ±10 В, не
менее 5 кОм для диапазона 1...5 В и не более 300 Ом для диапазона 4...20 мА.
Применение стандарта позволяет изготовить всего один тип универсаль-
ного устройства ввода со стандартными диапазонами для всех типов датчи-
ков со стандартными выходными сигналами. Однако для таких датчиков, как
термопары [499], термопреобразователи сопротивления [500], тензорезисторы
[501, 502], в силу их широкой распространенности нормирующие преобразова-
тели встраивают в сами модули ввода. Поэтому, кроме универсальных модулей
ввода, получили распространение специализированные модули ввода сигналов
термопар, термопреобразователей сопротивления и тензорезисторов.
Структура модулей ввода. Рассмотрим типовую структуру модулей
ввода аналоговых сигналов на примере серии RealLab! фирмы НИЛ АП [503].
На рис. 6.4 приведена структура модуля NL-4RTD (www.RealLab.ru), однако
она является типовой и на ее примере можно рассмотреть базовые принципы
построения современных модулей ввода аналоговых сигналов.
Основной частью модуля ввода является аналого-цифровой преобразова-
тель (АЦП). Обычно используют один АЦП для ввода нескольких (обычно 8
или 16) аналоговых сигналов. Для подключения источников сигнала к АЦП
используется аналоговый коммутатор на МОП-транзисторах. Ввод несколь-
ких сигналов выполняется последовательно во времени. В случаях, когда
необходим одновременный ввод, используют модули, в которых каждый ка-
нал имеет свой АЦП.
В модулях ввода обычно используют дифференциальные входы, которые
позволяют выполнить более помехозащищенный канал передачи аналогового
сигнала по сравнению с одиночными (не дифференциальными) входами. Неко-
торые модули (например, NL-8AI) позволяют программно задавать конфигура-
цию входов: дифференциальные или одиночные.
Входные цепи устройств ввода принято защищать от статического электри-
чества, от повышенного напряжения, от изменения полярности. Для защиты
используют специальные микросхемы защиты, в которых активным элементом
является МОП-транзисторный ключ. При повышении напряжения выше допу-
стимого ключ запирается, предохраняя чувствительные входы от повышенного
напряжения. Измерительные цепи строят таким образом, чтобы сопротивле-
ние открытого МОП ключа не вносило погрешность в результат измерения.
Для этого ключ используют либо для передачи потенциала, когда ток, про-
текающий через открытый ключ, пренебрежимо мал, либо для передачи тока,
когда информация переносится в форме тока и поэтому падение напряжения
на ключе не вносит погрешность в передаваемый сигнал.
Модули ввода могут иметь программно переключаемые диапазоны входных
сигналов. Например, модуль NL-8TI фирмы НИЛ АП имеет входные диапазо-
Контроллеры для систем автоматизации
417
Рис. 6.4. Структура модуля NL-4RTD для ввода сигналов термопреобразователей
сопротивления
ны ±15, ±50, ±100, ±500 мВ; ±1, ±2,5 В, ±20 мА. Диапазоны измерений обычно
задаются для всех входов одинаковыми. Модули серии RealLab! позволяют
для каждого входа задавать свой диапазон измерений.
Современная элементная база позволяет строить недорогие модули анало-
гового ввода с погрешностью измерений ±0,05 %, что еще 10 лет назад можно
было реализовать только в стационарных и дорогих вольтметрах.
Для коммутации входных ключей модуля используется программа, испол-
няемая микроконтроллером. Эта процедура достаточно проста и для ее вы-
полнения можно использовать микроконтроллер, входящий в состав некото-
рых АЦП (именно такой АЦП использован на рис. 6.4). Это позволяет умень-
шить количество каналов гальванической развязки между аналоговыми вхо-
дами и портом RS-485.
Микропроцессор типового модуля ввода выполняет следующие функции:
• реализует протокол обмена с ПЛК;
• исполняет команды, посылаемые ПЛК в модуль;
• реализует выполнение функций автоматической калибровки, диагностики
обрыва или к.з. в цепи датчика;
• преобразует форматы вводимых данных (инженерный формат — в едини-
цах измеряемой величины, шестнадцатеричный формат, проценты от диа-
пазона измерений);
418
Глава 6
• устанавливает скорость обмена с ПЛК (для ПЛК с распределенными мо-
дулями ввода-вывода);
• выполняет цифровую фильтрацию входного сигнала (в модулях RealLab!
эта операция выполняется контроллером, встроенным в АЦП).
В постоянной памяти ЭППЗУ модуля хранятся калибровочные коэффици-
енты, адрес модуля, программа, таблицы линеаризации нелинейных характе-
ристик термопар и термопреобразователей сопротивления. Сторожевой таймер
выполняет перезагрузку (сброс) микроконтроллера в случае его зависания.
В модуле ввода на рис. 6.4 имеются каналы вывода дискретных сигна-
лов. Это позволяет реализовать на одном модуле ПИД-регулятор с широтно-
импульсным (ШИМ) управлением исполнительным устройством.
Питание внутренних узлов модуля выполняется от внутреннего стабилиза-
тора напряжения, который позволяет подавать внешнее напряжение питания
в широком диапазоне, обычно от 10 до 30 В. Большой диапазон напряжений
питания очень полезен в распределенных системах, когда модули ввода могут
находиться на значительном расстоянии друг от друга и поэтому падение на-
пряжения на сопротивлении проводов питания достигает 10...20 В.
Цепи питания модулей защищаются от неправильной полярности напря-
жения питания и от превышения напряжения питания над допустимым значе-
нием. Защита выполняется диодами, стабилитронами, позисторами и плав-
кими предохранителями.
Для интерфейса RS-485 используется защита от статического электриче-
ства, от электромагнитных импульсов, от короткого замыкания и перегрева
выходного каскада. Дополнительно в модулях RealLab! сделана защита на
позисторах и стабилитронах от повышенного напряжения в линиях связи.
Команды управления модулем. Для чтения данных со входов модуля,
изменения входного диапазона, частоты обмена и выполнения других функций
процессор ПЛК посылает в модули команды. Команды могут иметь текстовый
формат (так сделано в протоколе DCON и Modbus ASCII) или шестнадцате-
ричный (как, например, в протоколе Modbus RTU).
Приведем пример нескольких команд в текстовом формате.
Команда чтения данных из модуля аналогового ввода имеет вид тексто-
вой строки
#АА[СНК](сг),
где АА — адрес (от 00 до FF). Например, если модуль имеет адрес 04, то
команда будет иметь вид #04. Ответ на эту команду последует в виде восьми
чисел, соответствующих сигналам на восьми входах модуля ввода, например
>+1.2345+0.3456+0.0001+2.50004-1.2345+0.3456+0.0001+2.5000,
где > — символ начала ответа.
Для чтения данных из канала с номером N можно использовать команду
#AAN, например #042, ответ на которую может быть получен в виде одного
значения напряжения на входе модуля >+1.2345.
Для выполнения автокалибровки подается команда $АА0, где АА — ад-
рес модуля.
Контроллеры для систем автоматизации
419
Полный список команд для модулей RealLab! (их около 50 для каждого
модуля) можно найти в документации на сайте www.RealLab.ru.
6.3.2. Модули ввода тока и напряжения
Потенциальный вход. Потенциальные входы модулей ввода (рис. 6.5)
используются для измерения напряжений. Идеальный потенциальный вход
имеет бесконечно большое сопротивление и нулевую емкость, поскольку при
подключении к измеряемой цепи он не должен влиять на ее динамические или
статические характеристики. В реальных условиях внутреннее сопротивление
источника сигнала Яц и сопротивление открытого ключа /?Ki образуют дели-
тель напряжения с входным сопротивлением Ri на постоянном токе и емко-
стью Ci в динамическом режиме (рис. 6.5,а). Поэтому полное входное сопро-
тивление модуля ввода вносит методическую мультипликативную погрешность
в результат измерения, которую всегда нужно оценивать, исходя из паспорт-
ных данных модуля. Типовыми значениями входных параметров являются
7?к1 « 200 Ом, 7?i « 20 МОм, С\ « 1 нФ, поэтому для обеспечения методиче-
ской погрешности величиной 0,01 % сопротивление источника сигнала должно
быть не более» 2 кОм. Однако, поскольку указанная погрешность не зави-
сит от напряжения источника сигнала, ее можно скомпенсировать в контро-
лере или модуле ввода.
Сопротивления и емкость, показанные на рис. 6.5,а, образуют фильтр низ-
кой частоты первого порядка с постоянной времени Т « (Ни + RKi)Ci « 1,2 мкс
при Rn » 2 кОм, Ci » 1 нФ, 7?К1 » 200 Ом (считаем, что Hi » Яц + HKi), который
вносит также динамическую погрешность в результат измерения. Динамиче-
ская погрешность зависит от формы входного сигнала и может быть оценена
по методике, изложенной в главе 4.
Для модулей с дифференциальными входами (рис. 6.5,6) оценка методи-
ческой погрешности делается аналогично.
Для уменьшения погрешности следует увеличивать входные сопротивления
7?i, /?2 и уменьшать емкости Ci, С2. Однако в схеме с дифференциальным
включением увеличение Hi, R2 и снижение Ci, С2 ведет к росту емкостной
наводки (см. главу 3), а также к увеличению синфазной помехи, вызванной
а)
Рис. 6.5. Потенциальные одиночный (а) и дифференциальный (6) входы
б)
420
Глава 6
входными токами операционного усилителя и атмосферным электричеством.
Синфазная помеха может стать настолько большой, что напряжения на вхо-
дах операционного усилителя выйдут за границы динамического диапазона.
Поэтому при работе с дифференциальными входами следует соблюдать прави-
ла выполнения сигнального заземления, изложенные в главе 3. Вывод AGND
на рис. 6.4 и 6.5 следует соединять с экраном кабеля источника сигнала или
не соединять ни с чем.
Токовый вход. Токовые входы модулей ввода используются для вво-
да величины тока, например стандартного сигнала 4...20 мА. Преобразование
тока в напряжение выполняется с помощью резистора 125, 250 или 500 Ом,
максимальное падение напряжения на котором составляет 2,5; 5 или 10 В со-
ответственно. Для ввода в контроллер полученного напряжения используется
модуль с дифференциальным или одиночным входом (рис. 6.6). Измеритель-
ные резисторы могут быть установлены снаружи модуля ввода (на его вход-
ных клеммах) или внутри.
Измерительные резисторы могут быть прецизионными, тогда для получе-
ния точных измерений достаточно откалибровать модуль только в режиме вво-
да напряжений. При использовании резисторов низкой точности их погреш-
ность можно скомпенсировать путем калибровки модуля совместно с измери-
тельным резистором, в режиме измерения тока. Однако для этого необходимо
выполнить калибровку каждого канала отдельно. Если модуль не позволя-
ет выполнять индивидуальную калибровку каждого канала, то формулу для
внесения поправок и ее коэффициенты можно сохранить в ОРС-сервере или
флэш-памяти ПЛК.
При использовании диапазона токов 0...20 мА ток преобразуется в на-
пряжение по формуле Vo = Rah, для диапазона 4...20 мА — по формуле
20 мА.
Vo = ——rRe(Ii — 4 мА) (рис. 6.7). При этом току 4 мА соответствует выходной
16 мА
сигнал, равный нулю. Смещение уровня нуля на 4 мА необходимо для обеспе-
чения возможности диагностирования обрыва в цепи датчика, см. главу 8.
Рис. 6.6. Токовый вход на основе одиночного (а) и дифференциального (б) потенциаль-
ного входов
Контроллеры для систем автоматизации
421
Рис. в.7. Преобразование тока в вы-
ходной сигнал для диапазонов 0...20 мА
(а) и 4...20 мА (б)
6.3.3. Термопары
Термопары являются самым распространенным средством измерения тем-
пературы в промышленности и лабораториях [506]. Это связано с их широким
температурным диапазоном (от -270 до +2500 °C), обычно удовлетворительной
точностью, низкой ценой, взаимозаменяемостью и высокой надежностью.
Понимание принципа действия термопары крайне важно для ее коррект-
ного применения. Термопара представляет собой два провода из различных
металлов, соединенных на одном конце («рабочий конец», «горячий спай») и
предназначенных для измерения температуры (рис. 6.8). Вторые концы термо-
пары («свободные концы», «холодный спай») соединены со средством измере-
ния напряжения с помощью проводов из металла одного типа, например меди.
Между двумя несоединенными выводами термопары возникает э.д.с. Vx
(рис. 6.8,а), значение которой зависит от температуры горячего спая:
Vx = Е(Т). (6.1)
Для случая, когда температура холодного спая (свободных концов) равна
0 °C (TCj = 0), зависимость (6.1), а также обратная зависимость Т = Е-1(14)
представлены в ГОСТ Р 8.585-2001 [499] и используются в микропроцессоре
модуля ввода в виде градуировочной таблицы или полинома.
Для случая, когда температура свободных концов не равна нулю (TCJ / 0),
они являются источником э.д.с. значение которой также зависит от тем-
пературы: VCj = E(TCj). Поэтому напряжение на входе измерителя напря-
жения термопары (рис. 6.8,6)
Vx = E(T)-E(TcJ). (6.2)
Рис. 6.8. Измерение сигнала термопары без компенсации температуры холодного
спая (а) и с компенсацией (б)
422
Глава 6
Обратим внимание, что для вычисления напряжения как холодного, так
и горячего спая используется одна и та же градуировочная таблица (поли-
ном). Это становится возможным благодаря «правилу промежуточных про-
водов», согласно которому, если контакт двух металлов сделан через проме-
жуточный металл (например, константан и железо соединены через медь, как
на рис. 6.8), то промежуточный металл не влияет на результирующую э.д.с.,
если его концы имеют одинаковую температуру. Таким образом, свободные
концы термопары, соединенные с измерителем напряжения медными прово-
дами (рис. 6.8,а), можно рассматривать как второй контакт между констан-
таном и железом.
Измерение температуры с помощью термопары выполняется косвенным ме-
тодом: сначала измеряется напряжение Vx между свободными концами термо-
пары и их температура TCj. Затем путем решения уравнения (6.2) относитель-
но Т находится измеряемая температура. Чтобы исключить необходимость
решения нелинейного уравнения (6.2), обычно используется табулированная
функция, обратная V = Е(Т), т.е. Т = E-1(V), приведенная в ГОСТ Р 8.585-
2001. Описанная процедура называется компенсацией температуры холодного
спая.
В модулях ввода сигналов термопар (например, в модуле NL-8TI
(www.RealLab.ru)) указанные нелинейные зависимости хранятся в ПЗУ мик-
ропроцессора и необходимые вычисления выполняются автоматически. Поль-
зователю нужно только задать тип термопары (см. табл. 6.2) и подключить ее к
модулю ввода. Температура свободных концов («холодного спая») измеряется
встроенным в модуль датчиком температуры (рис. 6.8,6), в качестве которого
чаще всего используется терморезистор.
Очень важно обеспечить хороший тепловой контакт между свободными кон-
цами термопары и датчиком их температуры. С этой целью для точных измере-
ний используют медную или алюминиевую пластину, к которой через диэлек-
трическую прокладку прикрепляются свободные концы термопары и датчик
температуры. Конструктив выполняется таким образом, чтобы обеспечить хо-
роший тепловой контакт пластины с датчиком и термопарными проводами, а
также изотермичность поверхности.
Для подключения термопары к модулю ввода используют специальные
термопарные провода, выполненные из того же материала, что и сама термо-
пара. Для этой цели можно использовать и обычные медные провода, одна-
ко в этом случае необходим выносной датчик температуры холодного спая,
который должен измерять температуру в месте контакта термопары с мед-
ными проводами.
Зависимость напряжения между свободными концами термопары от тем-
пературы при условии, что температура холодных концов стабилизирована
на уровне 0 °C, в стандартах NIST* и ГОСТ Р описывается полиномом ви-
* NIST — National Institute of Standards and Technology — Национальный инсти-
тут стандартов и технологии, США.
Контроллеры для систем автоматизации
423
да [500, 509]:
N
V = Е(Т) = '^А1Т\ (6.3)
г=О
где Ai — коэффициенты полинома; N = 4... 14 — степень полинома. Для обес-
печения необходимой точности аппроксимации весь температурный диапазон
разбивается на 1...3 поддиапазона, для каждого из которых используется от-
дельный полином вида (6.3).
Обратная зависимость описывается аналогичным выражением
N
Т = Е~1(У) = 52^0. (6.4)
г=0
Погрешность такой аппроксимации составляет от ±0,02 до ±0,05 °C.
В табл. 6.2 приведены типы термопар, их маркировка, классы допуска и
допустимые отклонения от номинальной статической характеристики преоб-
разования.
Благодаря стандартизации допусков и номинальных характеристик преоб-
разования термопары являются взаимозаменяемыми без дополнительной под-
стройки.
Сварка проводов термопары, изготовленных из разных металлов, выпол-
няется таким образом, чтобы получилось небольшое по размеру соединение —
спай. Провода можно просто скрутить, однако такое соединение ненадежно
и имеет большой уровень шумов. Сварку металлов иногда заменяют пайкой,
однако верхний температурный диапазон такой термопары ограничен темпера-
турой плавления припоя. Термопары, изготовленные сваркой, выдерживают
более высокую температуру, однако химический состав термопары и структу-
ра металла в процессе сварки могут нарушаться, что приводит к увеличению
разброса градуировочных характеристик.
Под действием высокой температуры в процессе эксплуатации может про-
изойти уход характеристики термопары от номинального вида вследствие окис-
ления и диффузии компонентов окружающей среды в металл, а также изме-
нения структуры материала. В таких случаях термопару следует откалиб-
ровать заново или заменить.
Промышленностью выпускаются термопары трех различных конструкций:
с открытым спаем, с изолированным незаземленным спаем и с заземленным
спаем. Термопары с открытым спаем имеют малую постоянную времени, но
плохую коррозионную стойкость. Термопары двух других типов применимы
для измерения температуры в агрессивных средах. Изготавливают также мик-
роминиатюрные термопары по тонкопленочной и полупроводниковой техноло-
гии для измерений температуры тел малых размеров, в частности поверхности
полупроводниковых приборов [510-512]. В [511] описана термопара с диаметром
рабочего конца 1 мкм, которая имеет постоянную времени 1 мкс.
При высоких температурах сопротивление материала изоляции термопары
уменьшается и токи утечки через изоляцию могут вносить погрешность в ре-
424
Глава 6
Таблица 6.2
Параметры термопар
Тип Обоз- наче- ние Материал положительного электрода Материал отрицательного электрода Диапазон измере- ний, °C Пределы откло- нений, °C Класс допус- ка
J ТЖК Железо, Fe Константан, Cu-Ni (55 % Си) 0...333 333...900 ±2,5 ±0,0075Т 2
К ТХА Хромель, Cr-Ni (90,5 % Ni) Алюмель, Ni-Al (94,5 % Ni) -250...-167 —167...+40 ±0,015|Т| ±2,5 3
Т ТМК Медь, Си Константан, Cu-Ni (55 % Си) -200...-66 -66...+40 ±0,015|Т| ±1,0 3
Е ТХКн Хромель, Cr-Ni (90,5 % Ni) Константан, Cu-Ni (55 % Си) -200...-167 —167...+40 ±0,015|Т| ±2,5 3
N ТНН Никросил, Ni-Cr-Si-Fe-C-Mg Нисил, Ni-Cr-Si-Fe-C-Mg -250...-167 -167...+40 ±0,015|Т| ±2,5 3
R ТПП Платина-родий (13 % Rh) Платина Pt 0...600 600...1600 ±1,5 ±0,0025Т 2
S ТПП Платина-родий (10 % Rh) Платина Pt 0...600 600...1600 ±1,5 ±0,0025Т 2
В ТПР Платина-родий (30 % Rh) Платина-родий (6 % Rh) 600...800 800...1800 ±4 ±0,005Т 3
L ТХК Хромель, Cr-Ni (90,5 % Ni) Копель, Cu-Ni (56 % Си, 44 % Ni) -200...-100 -100... + 100 ±1,5 + +0,01|Т| ±2,5 3
М ТМК Медь Си Копель, Cu-Ni (56 % Си) -200...0 0...100 ±1,3 + +0,001 |Т| ±2,5 —
Al, А2, АЗ ТВР Вольфрам-Рений, W-Re (5 % Re) Вольфрам-Рений, W-Re (20 % Re) 1000...2500 ±0,0075Т 3
Примечания.
1. Пределы отклонений (технологический разброс) указаны как отклонения от номи-
нальной нелинейной характеристики (6.4).
2. В таблице приведены значения отклонений для классов допуска 2 и 3. Термопары
класса 1 и 2 имеют меньшие отклонения (допуск), см. ГОСТ Р 8.585-2001.
зультат измерения. Погрешность возрастает также при попадании жидкости
внутрь термопары, вследствие чего возникает гальванический эффект.
Погрешность измерений. Основная проблема построения измеритель-
ного канала на базе термопары связана с ее малым выходным напряжением
(около 50 мкВ на градус), которое гораздо меньше помех, наведенных на эле-
ментах измерительной цепи в обычных условиях. Поэтому очень важно пра-
вильно выполнить экранирование и заземление проводов, идущих от термопары
к модулю ввода. Модуль ввода желательно помещать по возможности ближе
к термопаре, чтобы снизить длину проводов, по которым передается анало-
говый сигнал. Для снижения уровня помех с частотой 50 Гц в модулях вво-
да используют режекторный* фильтр. Подавление помехи нормального вида
* Режекторный фильтр — фильтр, не пропускающий колебания одной частоты (ча-
стоты режекции) и пропускающий колебания других частот.
Контроллеры для систем автоматизации
425
(т.е. когда источник помехи включен последовательно с источником сигнала)
с частотой 50 Гц, например, в модулях NL-8TI (www.RealLab.ru), составляет
120 дБ, помехи общего вида (когда источник помехи включен между закоро-
ченными входами и землей) — 140 дБ.
Важным достоинством термопар является очень низкое внутреннее сопро-
тивление, что делает их практически нечувствительными к емкостным на-
водкам.
Точность термопары зависит от химического состава материала. Внеш-
ние факторы, такие, как давление, коррозия, радиация, могут изменить кри-
сталлическую структуру или химический состав материала, что приводит к
росту погрешности измерений.
Погрешность измерений с помощью термопар складывается из следующих
составляющих:
• случайная погрешность, вызванная технологическим разбросом характери-
стик термопары (см. табл. 6.2). Зависит от чистоты материалов и точности
их процентного содержания в материалах электродов;
• случайная погрешность измерения температуры холодного спая;
• погрешность, вызванная постепенной деградацией характеристик при вы-
сокой температуре;
• систематическая погрешность компенсации нелинейности (погрешность ли-
неаризации) характеристики преобразования температуры в напряжение;
• систематическая погрешность термического шунтирования (связанная с
теплоемкостью датчика);
• динамическая погрешность;
• погрешность, вызванная внешними помехами;
• погрешность аналого-цифрового канала.
Погрешность измерения температуры холодного спая, погрешность линеа-
ризации, погрешность аналого-цифрового канала и динамическая погрешность
относятся к инструментальным погрешностям и указываются в паспорте на
модуль ввода. Другие погрешности необходимо учитывать отдельно, в зави-
симость от типа использованных термопар, электромагнитной обстановки, ха-
рактеристик объекта измерения и т.п.
6.3.4. Термопреобразователи сопротивления
Термопреобразователи сопротивления (терморезисторы, резистивные тер-
мопреобразователи, термометры сопротивления) являются вторыми по распро-
страненности средствами измерения температуры после термопар. Принцип
их действия основан на зависимости электрического сопротивления металла
(по ГОСТ 6651-94 [500] используется медь, платина и никель) или полупро-
водника от температуры.
Достоинством металлических датчиков является высокая линейность и
взаимозаменяемость, т.е. возможность замены вышедшего из строя датчика на
аналогичный без повторной калибровки системы. Взаимозаменяемость дости-
гается благодаря малому технологическому разбросу сопротивлений датчиков
426
Глава 6
(разброс сопротивлений составляет от ±0,15 % при температуре 0 °C для мед-
ных датчиков класса «А» до ±0,5 % для датчиков класса «С» по ГОСТ 6651-94).
Разброс сопротивлений увеличивается с ростом температуры (табл. 6.3). Мед-
ные датчики используются для измерения температуры в диапазоне от -200
до ±200 °C, платиновые — в диапазоне от -260 до ±850 °C, никелевые —
от -60 до ±180 °C [500].
Таблица 6.3
Параметры термопреобразователей
Тип термо- преобразователя W100 Диапазон измерения, °C Класс допуска Разброс относительно номинала
Платиновый (ТСП) 1,385; 1,391 —220...±850 —220...±1100* - 1ОО...±ЗОО, ±860...±1100 А В С ±(0,15 + 0,002|t|) ±(0,3 + 0,005|t|) ±(0,6 + 0,008|t|)
Медный (ТСМ) 1,426; 1,428 —50...±120 —200...±200 —200...±200 А В С ±(0,15 + 0,002|t|) ±(0,25 + 0,0035|t |) ±(0,5 + 0,0065|t|)
Никелевый (ТСН) * Для единичного 1 ТСП с диапазоном ( 1,617 производства )т —260 до ±: —60...±180 допускается изге 1100 °C. С >товление ±(0,3 ± 0,00165|t 1) от —60 до ±0 °C и ±(0,3±0,008|t|) от 0 до ±180 °C термопреобразователей
Никелевые термопреобразователи имеют высокую чувствительность, пла-
тиновые — высокую стабильность (неизменность показаний с течением вре-
мени), медные — низкую цену и наилучшую линейность зависимости сопро-
тивления от температуры.
Нормируемыми параметрами металлических термопреобразователей явля-
ются сопротивление 7?юо при 100°С и отношение И^оо = Яюо/Яо, где Ro —
сопротивление при 0 °C. Медные датчики изготавливаются с МГюо = 1,4260 и
Wiоо = 1,4280, платиновые — с 1Уюо = 1,3850 и РИюо = 1,3910, никелевые — с
1Уюо = 1,6170. Эти параметры, а также класс допуска указываются в марки-
ровке датчика. Сопротивление Ro указывается в форме «ТСМ50» (термопреоб-
разователь сопротивления медный, 50 Ом), «ТСП100» (термопреобразователь
сопротивления платиновый, 100 Ом) и т.п.
Зависимость сопротивления от температуры R(t) в узком диапазоне темпе-
ратур приближенно можно считать линейной (рис. 6.9):
R(t) = Яо(1±^), (6.5)
где Ro — сопротивление при температуре t = 0 °C, а — температурный ко-
эффициент сопротивления. Из этого уравнения можно получить связь меж-
ду а и MW
Wioo - 1
а =---------
100
(6.6)
Контроллеры для систем автоматизации
427
Рис. 6.9. Реальная зависимость сопротивления от температуры является
нелинейной (а); погрешность нелинейности для меди и платины (б)
В широком диапазоне температур линейная зависимость дает слишком
большую погрешность (рис. 6.9,6), поэтому ГОСТ 6651 [500] устанавливает
для термопреобразователей сопротивления табличную или полиномиальную
аппроксимацию экспериментально полученной зависимости сопротивления от
температуры [500]. Это позволяет исключить систематическую составляющую
погрешности нелинейности из результата измерений. Процедура исключения
погрешности нелинейности обычно выполняется в микроконтроллере модуля
ввода (см. рис. 6.4).
После исключения систематической составляющей погрешности нелиней-
ности остается случайная составляющая, обусловленная технологическим раз-
бросом сопротивления датчика при 0 °C и разбросом его температурного коэф-
фициента сопротивления. Эта погрешность вносит основной вклад в результат
измерения температуры. Она нормируется для трех классов допуска: А, В
и С (см. табл. 6.3) [500].
Источником погрешности измерений с помощью термопреобразователей со-
противления является также электротермический эффект, который проявля-
ется при соединении никелевых или медных термопреобразователей с медными
проводами. Обычно он не превышает 20 мкВ. Для уменьшения этого эффекта
используют среднее значение двух измерений при противоположных направле-
ниях тока или измерения на переменном токе [185].
Датчик температуры, основанный на зависимости сопротивления от тем-
пературы, состоит из термочувствительного элемента и защитной оболочки.
Чувствительный элемент (сенсор) может быть изготовлен в виде катушки с би-
филярной намоткой (безиндуктивная намотка сдвоенным проводом) или про-
водникового слоя металла, нанесенного на диэлектрическое основание.
При использовании крупных датчиков для измерения температуры тел с
малой теплоемкостью появляется методическая погрешность, вызванная пере-
распределением количества теплоты между объектом измерений и датчиком
(погрешность термического шунтирования). Для уменьшения этой погрешно-
сти следует правильно выбирать размер (теплоемкость) датчика или учиты-
вать эту погрешность расчетным путем.
428
Глава 6
Для датчиков с малыми геометрическими размерами существенную роль
играет величина измерительного тока /ех (здесь общепринятое обозначение «ех»
происходит от excitation — возбуждение). Мощность 2^ХЯ(£), выделяемая при
прохождении измерительного тока через датчик с сопротивлением 7?(t), преоб-
разуется в тепло, вызывающее саморазогрев датчика. Для уменьшения эффек-
та саморазогрева следует снижать величину измерительного тока, однако это
приводит к уменьшению отношения сигнала к шуму и увеличению случайной
составляющей погрешности измерений. Лучшие результаты дает измерение с
помощью импульса, длительность которого выбирается из условия минимиза-
ции энергии, поступающей в резистор за время измерения.
В отличие от металлических термопреобразователей полупроводниковые
терморезисторы, как правило, требуют индивидуальной градуировки и не обес-
печивают взаимозаменяемости. Их достоинством являются малые размеры,
низкая стоимость и высокая чувствительность к изменению температуры.
Для измерения температуры с помощью термопреобразователей сопротив-
ления необходимо измерять величину омического сопротивления датчика. В си-
стемах промышленной автоматизации используются три варианта схем изме-
рений: двухпроводная, трехпроводная и четырехпроводная.
Двухпроводная схема измерений (рис. 6.10) использует косвенный ме-
тод измерений, при котором измеряется напряжение на сопротивлении Vx, вы-
званное протекающим калиброванным током возбуждения 1ех. Реже задается
калиброванное напряжение Vx и измеряется ток 1ех. Возможен также вариант,
когда одновременно измеряются как ток, так и напряжение при использова-
нии некалиброванных источников измерительных сигналов. Во всех случаях
сопротивление Я® рассчитывают по формуле
Rx = (6.7)
lex
В связи с тем, что сопротивление металлических датчиков мало, боль-
шую погрешность в результат измерения вносят сопротивления проводов Япр
(рис. 6.10,а). Поэтому двухпроводная схема измерений используется, когда
сопротивления ЯпР малы, например не превышают 0,1 % от сопротивления дат-
чика До, т.е. для медного датчика ТСМ50 с Rq = 50 Ом сопротивление проводов
должно быть не более 0,05 Ом. При использовании проводов сечением 0,35 мм2
с погонным сопротивлением 0,049 Ом/м длина пары проводников для этого
случая не должна превышать 0,5 м.
Рис. в. 10. Двухпроводная (а) и четырехпроводная (б) схемы измерения сопротивления
Контроллеры для систем автоматизации
429
Поскольку рассматриваемая погрешность является систематической, ее
можно исключить из результата измерений несколькими способами. Если из-
мерения выполняются при заранее известном сопротивлении проводов Япр, то
величину измеренного сопротивления нужно уменьшить на Япр- Для более точ-
ного исключения этой погрешности нужно учесть зависимость сопротивления
от температуры, если известна температура провода.
Относительную погрешность измерения сопротивления по двухпроводной
схеме можно получить из выражения (6.7) с учетом погрешности, вызванной
нескомпенсированной составляющей сопротивления проводов ДЯПр-
(6-8)
f ДЯпР V
7x V k Vx J 4 4x J кЯпр + Я*/
где Д14 — погрешность измерения напряжения; Д4х — погрешность задания
тока. Здесь использовано квадратичное суммирование погрешностей, посколь-
ку все они являются случайными. В случае, когда сопротивление проводов не
вычитается из результата измерения, ДЯпр = 2ЯпР и эта погрешность должна
учитываться алгебраически (см. гл. 4).
Четырехпроводная схема измерений. Принцип действия четырехпро-
водной схемы (рис. 6.10,6) основан на измерении напряжения не на выводах
источника тока, как на рис. 6.10,а, а на выводах непосредственно сопротив-
ления Rx. При этом падение напряжения на сопротивлении проводов Лпр не
влияет на результат измерения.
Методическая погрешность в рассматриваемой схеме отсутствует, и отно-
сительная погрешность измерения сопротивления определяется только инстру-
ментальной погрешностью измерения напряжения и задания тока:
(6-9)
//ДК\2 /AZexV
V \ V / " \ Z /
у \ ух / \ 2ех /
Расстояние от модуля ввода до датчика при четырехпроводной схеме из-
мерений ограничивается только уровнем помех, который растет пропорцио-
нально длине проводов.
Трехпроводная схема измерений. Желание снизить стоимость кабеля
в системах автоматизации при невысоких требований к точности привело к по-
явлению трехпроводной схемы измерений. В модулях ввода используются три
варианта трехпроводных схем измерения сопротивлений, которые отличаются
погрешностью и конструкцией измерительного модуля.
С появлением интегральных АЦП с двумя встроенными цифроуправляе-
мыми источниками тока появилась возможность реализовать трехпроводную
схему измерений, показанную на рис. 6.11,а.
Предположим сначала, что токи источников тока равны: 4x1 = 4x2 = 4х и
равны сопротивления проводов: 7?npi = ЯпР2 = Япр, а погрешность измерителя
напряжения равна нулю. Тогда напряжение Vx между выводами измерителя
напряжения на рис. 6.11,а будет равно
Vx = (V2 + Rxhxl + -RnplZexl) — (У2 + -Rnp24x2)-
(6.10)
430
Глава 6
Рис. 6.11. Трехпроводные схемы измерений сопротивления с двумя (а) и с одним (б)
источником тока
Учитывая идентичность токов и сопротивлений, получим
Vx = (^2 4" Rxle*. 4" -Rnp-^ex) “ (^2 4" -Rnp/ex) = Rx^ex.4 (6.11)
т.е. падение напряжения на проводах взаимно компенсируются благодаря иден-
тичности измерительных токов и сопротивлений проводов.
Предположим теперь, что токи Zexi и 1ех2 заданы со случайной погрешно-
стью Д/ех, т.е. Zexi = Zex±AZex, 4x2 = Zex± ДДх и сопротивления проводов также
имеют технологический разброс 7?npi = 7?пР±Д7?пр, ЯПР2 = Япр4:ДЯпР> а погреш-
ность измерителя напряжения равна ДУ. Тогда выражение (6.10) примет вид
Ух = [У2 + (Ях4-ЯПр±ДЯПр)(/ех±Д/ех)]-[У24-(Япр±ДЯпр)(/ех±Д/ех)]±ДУ (6.12)
Пренебрегая выражениями вида ДЯпрД/ех по сравнению с ЯпрД4х и с
ДЯпр^ех, получим
Ус = 4хЯх 4- Д7ех^?х 4" 2Д7ехЯпр 4- 2Д7?Пр4х 4- ДУ. (6.13)
Используя правило квадратичного суммирования случайных погрешно-
стей, можно получить выражение для среднеквадратической погрешности из-
мерения напряжения:
Ых = У(Д/ехЯя)2 + 2(Д/ехЯпр)2 + 2(ДЯпр/ех)2 + (AV)2, (6.14)
т.е.
Ух = /ехЯх±ДУх. (6.15)
Относительную погрешность измерений с помощью трехпроводной схемы,
показанной на рис. 6.11,а, можно рассчитать по формуле (6.9), используя (6.14).
Как следует из (6.14) и (6.9), погрешность пропорциональна сопротивле-
нию (длине) провода 7?пр и дисбалансу токов источников измерительного то-
ка. Заметим, что обе эти составляющие отсутствуют в ранее рассмотренной
четырехпроводной схеме измерений.
Второй вариант трехпроводной схемы измерений показан на рис. 6.11,61
Компенсация падений напряжения на проводах в ней осуществляется благо-
даря применению второго измерителя напряжения У>. Зная напряжение У> и
Контроллеры для систем автоматизации
431
предполагая, что сопротивления Япр1 = Япрз (сопротивление Яг не вносит по-
грешность, так как ток через него равен нулю), получим
Vx Vo — 7ех(ЯПр1 4" Яд) ХехЯпрЗ — 7ехЯд.
(6.16)
В этой схеме присутствуют те же источники погрешности, что и в преды-
дущей, поскольку используется тот же принцип компенсации погрешностей,
если учесть, что вместо погрешности задания
измерения.
Третьим вариантом трехпроводной схе-
мы измерения сопротивлений является мост
Уитстона (рис. 6.12). В отличие от преды-
дущих схем, в которых использован косвен-
ный метод измерения сопротивлений, мост
используется для прямого измерения мето-
дом сличения с эталоном. В процессе изме-
рений мост служит индикатором равенства
напряжений левого Vi и правого V? плеча
моста:
т/ _ Яд 4~ ЯПр ,, _ tr
1 “ Rx + 2Л„Р + Яэ Vex’ 2 Ях + Я2 Vex’
тока вносится погрешность его
Рис. 6.12. Мостовая схе-
ма измерения сопротивлений
До появления микропроцессорных измерительных средств процесс измере-
ния сопротивлений с помощью моста выполнялся следующим образом. В ка-
честве Яэ использовался магазин эталонных сопротивлений, которые переклю-
чались вручную или специальным механическим приводом до тех пор, пока не
наступало состояние равновесия моста, когда Vo = О или Vi = V2. В состоя-
нии равновесия, как следует из (6.17),
Яэ + Япр Я1
Ях 4- Япр Яг
(6.18)
Зная Я1, Яг, Яэ и Япр, из (6.18) можно найти искомое значение Яд. Важно, что
результат измерения не зависит от напряжения Уех, в том числе его стабиль-
ности и величины помех в цепях питания моста.
Если мост уравновешен при условии Я1/Я2 = 1, то, как следует из (6.18),
Яд = Яэ, при этом сопротивление проводов Япр не влияет на результат из-
мерения.
В модулях аналогового ввода описанный метод измерения в принципе воз-
можен с помощью цифроуправляемого эталонного резистора [507, 508], одна-
ко экономически эффективнее использовать рассмотренные выше схемы с ис-
точниками тока.
Современные модули ввода сигналов термопреобразователей сопротивле-
ния используют все три схемы измерения сопротивлений: двухпроводную,
трехпроводную и четырехпроводную. Например, модуль NL-4RTD (www.Real-
Lab. ги) имеет шесть источников тока 1ех04-,..., 1ех24-, 1ех0—,..., 1ех2— (см.
рис. 6.4) и четыре дифференциальных потенциальных входа (Sence04-, SenceO—,
432
Глава 6
..., Sence3+, Sence3—). Это позволяет подключить к нему четыре датчика по
двухпроводной схеме, или четыре датчика по 4-проводной схеме, или три дат-
чика по трехпроводной схеме измерений, показанной на рис. 6.11, а.
Погрешность измерений температуры с помощью термопреобразовате-
лей сопротивления состоит из следующих составляющих:
• случайная погрешность, вызванная технологическим разбросом сопротив-
лений и температурных коэффициентов датчиков;
• систематическая погрешность, вызванная термоэлектрическим эффектом,
когда к платиновому или никелевому датчику подключают обычные мед-
ные провода и их соединения имеют разную температуру. Термоэдс воз-
никает также в контактах меди и свинцово-оловянного припоя (величина
термоэдс составляет 1...3 мкВ/°С);
• тепловой и фликкер-шум измеряемого сопротивления;
• систематическая погрешность термического шунтирования (связанная с
теплоемкостью датчика);
• динамическая погрешность;
• саморазогрев датчика;
• погрешность метода (схемы измерения) сопротивления, зависящая от дли-
ны проводов от модуля до датчика;
• погрешность измерительного модуля ввода.
Погрешность модуля ввода нормируется при условии, что сопротивление
провода от модуля до датчика равно нулю. Поэтому эту составляющую погреш-
ности можно рассчитать (см. (6.14)) и сложить с погрешностью модуля, но луч-
ше откалибровать модуль с подключенными к нему проводами нужной длины.
О правилах суммирования погрешностей см. главу 4.
6.3.5. Тензорезисторы
Тензорезисторы [501, 502] используются для измерения деформации в твер-
дых телах. На их основе строят датчики веса, давления, силы, перемещения,
момента, ускорения, вибрации, натяжения, крутящего момента, остаточных на-
пряжений в механических конструкциях и деталях машин после их обработки
и т.д. Принцип действия тензорезистора основан на изменении электрического
сопротивления твердого тела при его деформации приложенной силой.
Рис. в. 13. К понятию деформации
Сопротивление твердого тела длиной
L с площадью поперечного сечения S опре-
деляется формулой R = pL/S, где р —
удельное сопротивление. При приложении
к телу растягивающей силы F (рис. 6.13)
происходит деформация: увеличивается
длина тела на ДЬ и уменьшается площадь
поперечного сечения на Д5. У большин-
ства тел изменяется также удельное сопро-
тивление на величину Др. В случае, когда эти приращения малы, путем ло-
гарифмирования и последующего дифференцирования обеих частей формулы
Контроллеры для систем автоматизации
433
для R получим
ДЯ Др АЛ ДЯ
— — 4~ — 4- —.
R р L S
(6.19)
Поскольку площадь поперечного сечения проводника пропорциональна его
характерному поперечному размеру (в случае круглого сечения S = тгй2 /4, для
прямоугольного сечения с х d площадь S = ксР, если с = fcd), то при Ad с d в
AS Ad
обоих случаях можно получить соотношение = 2—. Поэтому
Ь d
ЛЯ Др AL rtAd Др Л ЧДЬ Др _ Л ч
— = -5 + —+ 2—= -^ + (1 + 2^)—= -^ + (1 + 2р)£, (6.20)
К р L ар L р
где и = — коэффициент Пуассона, для металлов равный и = 0,25...0,4;
d L
е = AL/L — относительное удлинение (относительная деформация) тела. Ве-
личина е является безразмерной, однако, поскольку она измеряется тысячными
и миллионными долями, для удобства оперирования числами используют без-
размерные единицы измерения, такие как мм/м, мкм/м, а в зарубежной лите-
ратуре чаще всего применяется единица микрострейн или микрос, равная 10-6.
У металлов удельное сопротивление меняется слабо, поэтому
ДЯ/Я «(14- 21/)е,
(6.21)
т.е. относительное изменение сопротивления линейно зависит от относитель-
ного изменения длины.
Чувствительность тензорезистора к изменению его длины характеризуется
коэффициентом относительной тензочувствительности GF (Gauge Factor):
ДЯ ,AL ДЯ ,
GF = -R-/-T = ~r/‘’
(6.22)
или, используя (6.20), получим
GF = (1 + 2iz) +
(6.23)
Коэффициент тензочувствительности GF для большинства металлических
тензодатчиков примерно равен GF « 2, для платины GF = 6,1, для некоторых
специальных сплавов он может доходить до 10.
Для измерения силы с помощью тензорезисторов используют закон Гука,
согласно которому при упругой деформации механическое напряжение а про-
порционально относительной деформации е:
а = Ке,
где К — модуль упругости.
Напряжением а называется физическая величина, численно равная упру-
гой F силе, приходящейся на единицу площади поперечного сечения тела S
(см. рис. 6.13):
а = F/S.
434
Глава 6
Используя приведенные выше соотношения, можно выразить величину си-
лы через относительное изменение сопротивления тензорезистора в виде
F = Sa = SKe.
Подставляя вместо е его значение из (6.22), получим
F = SK^.
Gr
(6-24)
(6.25)
Внешние
выводы
Подложка /
Активный чувствительный
элемент
Рис. 6.14. Структура ме-
таллического тензодатчика
Таким образом, измерение силы с помощью тензорезистора сводится к из-
мерению его сопротивления или напряжения на выходе измерительного моста,
которое зависит от сопротивления (см. (6.27)).
Датчики на основе тензорези-
сторов. Конструктивно металличе-
ский датчик на основе тензорезистора
(тензодатчик) состоит из очень тонко-
го провода или, более часто, металли-
ческой фольги, сформированной в ви-
де змейки (рис. 6.14) и нанесенной на
подложку (носитель), которая непо-
средственно приклеивается к испыты-
ваемому телу. Типовая длина тен-
зодатчиков колеблется от 0,2 мм до
10 см.
Змеевидная структура датчика
обеспечивает большое относительное изменение длины фольги вдоль датчика
и очень малое изменение при растяжении датчика в поперечном направлении.
Поэтому коэффициент Пуассона в такой структуре минимален.
Серийные тензодатчики имеют сопротивление от 30 Ом до 3 кОм при типо-
вых значениях 120, 350 Ом и 1 кОм. Материалом для тензорезисторов служит
константан (45 % Ni, 55 % Си), платина и ее сплавы, нихром (80 % Ni, 20 %
Сг), манганин (84 % Си, 12 % Мп, 4 % Ni), никель и др.
Для точной передачи растяжения образца через подложку на металличе-
ский проводник очень важно правильно прикрепить датчик к испытываемому
образцу. Для этого лучше всего пользоваться информацией, предоставляемой
изготовителем тензодатчика.
Длина чувствительного элемента тензодатчика и длина его подложки изме-
няются в зависимости от температуры. Поэтому, несмотря на специальные ме-
ры, принимаемые при изготовлении тензодатчиков их производителями, суще-
ствует проблема снижения температурной чувствительности. Температурная
чувствительность определяется двумя физическими явлениями: зависимостью
омического сопротивления материала тензорезистора от температуры и пара-
зитным тензорезистивным эффектом, который возникает вследствие несогла-
сованности температурных коэффициентов расширения тензорезистора и мате-
риала объекта, на который наклеен тензорезистор.
Измерения с помощью тензодатчиков требуют регистрации очень ма-
лых изменений сопротивления. Например, относительное изменение сопро-
Контроллеры для систем автоматизации
435
тивления, вызываемое относительным растяжением
0,0005 при тензорезистивном коэффициенте, равном
2, составит 0,1 %, что для тензодатчика сопротивле-
нием 120 Ом эквивалентно сопротивлению всего лишь
0,12 Ом. Чтобы измерять столь малое изменение со-
противления и скомпенсировать температурную по-
грешность, тензодатчики практически всегда исполь-
зуют в мостовой схеме (мост Уитстона, рис. 6.15), под-
ключенной к источнику напряжения или тока (источ-
нику питания моста).
Общепринятого стандарта для питания моста не
существует. Типовыми являются напряжения 3 и
10 В. Ток через тензодатчик обычно составляет от 2
Рис. 6.15. Мост
Уитстона с источ-
ником напряжения
до 30 мА для датчиков с сопротивлением от 1 кОм до 120 Ом. Напряжение
питания моста должно быть по возможности большим, чтобы увеличить отно-
шение сигнала к шуму, и в то же время достаточно малым, чтобы минимизи-
ровать погрешность, вызванную саморазогревом датчика. Особые требования
предъявляются к точности и стабильности напряжения питания моста, если не
используется шестипроводная схема подключения датчика (см. рис. 6.22).
Для проверки правильности калибровки измерительной схемы использу-
ют резистор с известным (калиброванным) значением сопротивления, которым
шунтируют тензодатчик. Показания измерительной системы должны соответ-
ствовать расчетному значению, соответствующему этому сопротивлению.
В связи с малостью сигнала от тензодатчика во многих случаях целе-
сообразно применять фильтр, ослабляющий помехи с частотой 50 Гц. На-
пример, в модуле ввода сигналов тензодатчика NL-2SG фирмы НИЛ АП
(www.RealLab.ru) использован sinc-фильтр 3-го порядка, подавляющий поме-
ху с частотой 50 Гц на 120 дБ.
Выходное напряжение измерительного моста (рис. 6.15)
Vo =
Яз______Д2 \ у
Л3 + Яс Я1+Я2/ ех*
(6.26)
При условии баланса моста (Я1/Я2 = Rg/Rs) его выходное напряжение
равно Vb = 0. Малейшая разбалансировка вследствие изменения сопротивления
тензодатчика приводит к появлению напряжения на выходе.
Обозначим абсолютное изменение сопротивления тензодатчика через ДЯ.
Тогда, как следует из (6.22),
ДЯ = ReGFe,
где Rg — сопротивление тензорезистора в ненапряженном состоянии.
Если сбалансировать мост таким образом, чтобы при отсутствии растяже-
ния тензодатчика Я1 = Я2 и Яз = Яс, то из (6.26) получим
Vo _ Rg Я2 _ 1 _ 1 _ GFe
Vex Rg “Ь Rg 4* ДЯ Я2 + R2 2 -I- GFe 2 4-1- 2GFe
436
Глава 6
Элемент для термокомпенсации
Рис. 6.16. Использование двух тензорезис-
торов для компенсации температурной
погрешности
Рис. 6.17. Полумостовая схема вклю-
чения тензорезисторов для компенса-
ции температурной погрешности
или, окончательно,
Vo _ GFe 1
Vex” 4 l + GFe/2’
(6.27)
Таким образом, зная напряжение на выходе моста, из формулы (6.27) мы
можем найти относительное удлинение тензодатчика е и из (6.24) — силу F.
Поскольку относительное удлинение зависит также от температуры, для
компенсации температурной составляющей используют два тензочувствитель-
ных элемента, расположенных на общей подложке перпендикулярно друг другу
(рис. 6.16). При этом температурные удлинения обоих элементов одинаковы,
а удлинения вследствие воздействия деформирующей силы будут разные. Ис-
пользуя эти элементы в разных плечах измерительного моста (рис. 6.17), можно
частично скомпенсировать температурную погрешность.
Компенсация температурной погрешности, выполняемая изготовителем
тензодатчиков, обычно не позволяет получить ошибку менее 10 микрострейн
на градус. Однако, используя полиномиальную аппроксимация температурной
зависимости сопротивления для ее программной компенсации, можно снизить
температурную погрешность до 1 микрострейна на градус.
В полумостовой схеме (рис. 6.17) можно использовать также два тензодат-
чика с нескомпенсированной температурной погрешностью, если один из них
работает на растяжение, второй — на сжатие, например если измеряется ме-
ханическое напряжение изгибаемой балки. Таким образом можно повысить
чувствительность схемы измерения в 2 раза и одновременно скомпенсировать
температурную погрешность (рис. 6.18).
Дальнейшего повышения чувствительности схемы измерений можно до-
стичь, если использовать четыре тензодатчика, два из которых работают на
растяжение, и два — на сжатие (рис. 6.19).
В схеме на рис. 6.18 относительное выходное напряжение моста равно
Vo _ -GFe
Vex " 2 ’
а с учетом начального смещения напряжения вследствие дисбаланса моста
Контроллеры для систем автоматизации
437
Рис. 6.18. Включение двух датчиков для
компенсации температурной погрешности;
е = -2K/GF
Рис. 6.19. Использование четырех тензо-
датчиков для повышения чувствительности
схемы измерения и компенсации темпера-
турной погрешности; е = — Vr/GF
VCM получим
Vo ~ Км = -GFe
Vex 2
Если ввести обозначение
v , У0 ~ Усм
r Vex ’
то для измерительной цепи, показанной на рис. 6.18, относительное растяже-
ние тензодатчика в зависимости от относительного приращения напряжения
на выходе моста Vr будет равно
е = —2Vr/GF.
Зная е и пользуясь законом Гука в форме (6.24), можно найти искомую
силу F. Для других схем включения тензодатчиков аналогичные формулы
приведены на рис. 6.19-6.21.
Начальная балансировка моста может быть выполнена как аппаратно (с
помощью резисторов), так программно. Однако эти методы имеют принци-
пиальные различия.
Рис. 6.20. Схема с четырьмя тензодатчи-
ками, в которой два тензодатчика располо-
жены перпендикулярно направлению силы;
2Vr
£~ GF(i/ + l)
Рис. 6.21. То же, что и на рис. 6.20,
но с иным размещением датчиков в плечах
2Vr
моста; е = — —т-------ттт
’ GF[(iz +1) - Vr(y - 1)]
438
Глава 6
Если мост не сбалансирован с помощью резисторов, то на его выходе при-
сутствует напряжение дисбаланса VCM, которое складывается с полезным сиг-
налом Vc, т.е. Vo = Усы 4- Vc. Если верхняя граница диапазона измерения напря-
жения (напряжение насыщения усилителя) равна Vmax, то коэффициент усиле-
ния не может быть больше, чем Vm&x/(yCM 4- К), т.е. максимально возможный
коэффициент усиления сигнала на выходе несбалансированного моста ограни-
чивается напряжением дисбаланса: К Vmax/V^M. Например, при типовом
значении Vmax = 2,5 В и VCM = 25 мВ коэффициент усиления сигнала не может
быть больше 100. Однако практически необходимое усиление достигает 2000
(см. описание прибора SCXI-1121 фирмы National Instruments).
Таким образом, несмотря на возможность компенсации смещения про-
граммным способом, этот метод ограничивает возможность увеличения чув-
ствительности измерительной системы. Им можно пользоваться для компен-
сации только небольших напряжений дисбаланса моста.
Влияние сопротивления соединительных проводов. В предыдущих
измерительных цепях не были учтены сопротивления подводящих проводов.
Однако при использовании низкоомных датчиков они могут достигать единиц
и десятков Ом, что вносит значительную погрешность в результат измерения.
Для решения этой проблемы измерительный мост обычно располагают ря-
дом с датчиком, а сигналы с выхода моста измеряют модулями с высокоомным
(потенциальным) входом. Для исключения погрешности, вызванной падени-
ем напряжения на проводах, передающих к мосту напряжение питания Уех,
используют шестипроводное подключение моста (рис. 6.22). В этой цепи на-
пряжение питания моста не задается, а измеряется. Поэтому падение напря-
жения на проводах питания не вносит погрешность в величину Vex, которая
используется в расчетных формулах.
Если сопротивления проводов невозможно сделать достаточно малыми, их
измеряют и учитывают в дальнейших расчетах с целью исключения вносимой
ими погрешности. На рис. 6.23-6.25 приведены соответствующие формулы, ко-
торые могут быть реализованы программно в микропроцессоре модуля ввода
сигналов тензодатчиков или в компьютере.
Рис. 6.22. Шестипроводное подключение изме-
рительного моста
Рис. 6.23. Подсоединение тензодат-
чика с внутренним термокомпенсирую-
-4ЕГ(1 + Яь/Яс)
щим элементом; е = ——
Контроллеры для систем автоматизации
439
Рис. в.24. Включение тензорезистивных
элементов, один из которых (верхний) рас-
положен вдоль направления силы, вто-
рой (нижний) — перпендикулярно ему;
-4УГ(1 4- Rl/Rg)
£ GF[(1 4- и) - 2Vr(v - 1)]
Рис. в.25. Схема включения двух дат-
чиков, один из которых работает на рас-
тяжение, второй — на сжатие (см. также
~2К(1 + Rl/Rg)
рис. 6.18); е =-----------------
GF
Составляющие погрешности измерения. При использовании тензоре-
зисторов большинство источников погрешностей аналогичны тем, что возни-
кают при использовании терморезисторов. Основными компонентами погреш-
ностей являются следующие:
• случайная погрешность, вызванная технологическим разбросом сопротив-
лений тензорезисторов;
• систематическая погрешность, вызванная термоэлектрическим эффектом;
тепловой и фликкер-шум измеряемого сопротивления;
• температурная погрешность, вызванная разогревом датчика протекающим
током;
• погрешность, связанная с разностью температурных коэффициентов рас-
ширения тензорезистора и материала объекта, на который наклеен тен-
зорезистор;
• погрешность метода (схемы измерения) сопротивления, зависящая от дли-
ны проводов и точности измерения их сопротивления;
• внешние наводки;
• сопротивление контактов;
• «ползучесть» сопротивления длительно нагруженного тензорезистора;
• погрешность измерительного модуля ввода.
Вследствие очень малой чувствительности тензорезисторов особую роль
играют наведенные помехи. Для их уменьшения используют не витые пары,
а плетеные четыре провода, в которых попарно параллельно соединяют про-
вода, проходящие во взаимно перпендикулярных плоскостях. Это устраняет
индуктивность обычной витой пары, которая представляет собой катушку ин-
дуктивности, если смотреть на витую пару с торца [504].
6.3.6. Вывод аналоговых сигналов
Модули аналогового вывода предназначены для вывода из компьютера или
контроллера информации в аналоговой форме. Аналоговые сигналы на выходе
модулей вывода могут быть представлены в виде стандартных сигналов тока
440
Глава 6
Рис. 6.26. Структурная схема модуля вывода аналоговых сигналов NL-4AO; ВИП —
вторичный источник питания
(0...20 и 4...20 мА) или напряжения (0...5, ±10 В). Модули аналогового выво-
да используются в основном для управления исполнительными устройствами
с аналоговым управляющим входом, но могут быть использованы также в из-
мерительных системах, для электрофизических исследований или построения
испытательных стендов.
Структуру типового модуля вывода аналоговых сигналов рассмотрим на
примере модуля NL-4AO (рис. 6.26) фирмы НИЛ АП (www.RealLab.ru).
Информация в модуль вывода поступает из управляющего контроллера
или компьютера обычно через интерфейс RS-485, в некоторых модулях выво-
да используют другие последовательные или параллельные интерфейсы. Ти-
пичным для средств промышленной автоматики является гальваническая изо-
ляция аналоговой выходной части модуля от цифровой части, включающей
микропроцессор. Модуль управляется командами, посылаемыми с помощью
стандартного протокола Modbus RTU или DCON.
Для правильного применения модулей аналогового вывода надо знать схе-
му выходного каскада (рис. 6.26). Вывод напряжений осуществляется с по-
Контроллеры для систем автоматизации
441
мощью цифро-аналогового преобразователя (ЦАП) и операционного усилите-
ля (ОУ). Благодаря глубокой обратной связи выходное сопротивление ОУ на
постоянном токе составляет сотые доли ома, что позволяет с высокой точно-
стью считать его идеальным источником напряжения. Для защиты модуля от
перегрузки по выходу используются ОУ с защитой, выполненной на том же
полупроводниковом кристалле, что и сам ОУ.
Вследствие частотной зависимости коэффициента усиления модуль выход-
ного сопротивления каскада на ОУ гвых(/) зависит от частоты:
= (6.28)
где f — частота, на которой ищется выходное сопротивление; г0 — выходное
сопротивление ОУ без обратной связи; Д — частота единичного усиления ОУ,
обычно равная 1 МГц; Ко — коэффициент усиления ОУ на постоянном токе
(на нулевой частоте). Приведенное выражение справедливо с погрешностью
около 10 % при /о < f < 10/1, где /о ~ fiKo — граничная частота ОУ без
обратной связи по уровню 0,702. Например, при типовых значениях го = 100 Ом,
/1 = 1 МГц; Ко = 105 получим гвых = 10-3 Ом на постоянном токе, но гвых = 1 Ом
на частоте 1 кГц и гвых = 10 Ом на частоте 10 кГц.
Частотную зависимость выходного сопротивления следует учитывать при
расчете уровня наведенных помех, а также методической погрешности моду-
ля вывода, обусловленной влиянием сопротивления нагрузки на величину вы-
ходного напряжения.
Для вывода аналогового сигнала в форме тока используются источники
тока на основе ОУ с обратной связью (см. каскады с выходами loutO,..., Iout3
на рис. 6.26). Принцип их действия основан на том, что ОУ с отрицательной
обратной связью имеет нулевое напряжение между его входами благодаря вы-
сокому коэффициенту усиления. Поэтому все входное напряжение оказывается
приложенным к сопротивлению го (рис. 6.26, верхний по схеме каскад) и вы-
ходной ток равен входному напряжению, деленному на г0. Для того чтобы ток,
протекающий через г0, был точно равен выходному току, в качестве транзисто-
ра на рис. 6.26 используют биполярный транзистор с изолированным затвором
или пару из биполярного и МОП-транзистора.
Модуль комплексного выходного сопротивления источника тока гвых(/)
можно найти, используя простейшую модель МОП-транзистора, учитывающую
его выходное сопротивление:
ГВЫХ(/) = (Rd + r0)-£-=Sr0 « RdSro-^, (6.29)
где Rd — дифференциальное выходное сопротивление МОП-транзистора; S —
крутизна МОП-транзистра; остальные параметры имеют тот же смысл и по-
рядок типовых величин, что и в формуле (6.28). Для типовых значений этих
параметров и при Rd = 100 кОм получим гвых = 5 • 1011 Ом, т.е. выходное со-
противление фактически определяется сопротивлением утечек печатной платы.
Однако на частоте / = 10 кГц модуль комплексного выходного сопротивления
Гвых = 50 МОм и далее падает с ростом частоты.
442
Глава 6
Рис. в.27. Выходные каскады для втекающего (а) и вытекающего (б) токов. Схема а
требует дополнительного источника питания
Таким образом, источник тока с достаточно высокой степенью точности
и для всех частот можно считать «идеальным», и его выходное сопротивле-
ние можно не учитывать при использовании типовой нагрузки 250 Ом в стан-
дартной «токовой петле» 4...20 мА.
Для питания транзистора в источниках тока, построенных по рассмотрен-
ной схеме, требуется дополнительный источник питания Епит, который обыч-
но располагается вне модуля вывода (рис. 6.27, см. также главу 2, интерфейс
«токовая петля»).
Стабилитрон на рис. 6.27 служит для предохранения транзистора от внеш-
них напряжений неправильной полярности и превышения напряжения над до-
пустимым значением.
Недостатком приведенных каскадов является невозможность изменения на-
правления тока на противоположное, что связано с применением транзисторов
одного типа проводимости или с одним типом канала. Более сложные дву-
полярные схемы в модулях вывода для промышленной автоматики не при-
меняются.
Контроллеры для систем автоматизации
443
Погрешность модуля вывода складывается из следующих основных состав-
ляющих:
• погрешности дискретности цифро-аналогового преобразователя;
• стабильности источника опорного напряжения;
• внутреннего шума модуля;
• ненулевого выходного сопротивления.
Погрешность типового модуля ввода (на примере модуля NL-4AO фирмы
НИЛ АП, www.RealLab.ru) составляет 0,1 % от верхней границы диапазона
(±10 В для потенциального выхода и 0...20 мА для токового), разрядность —
12 бит, дискретность изменения выходной величины — 5 мВ для напряже-
ния и 5 мкА для тока, т.е. 0,05 % от ширины диапазона. Управляется мо-
дуль стандартными командами Modbus RTU или командами в ASCII кодах
по протоколу DCON.
6.3.7. Ввод дискретных сигналов
В системах автоматизации очень распространены двоичные сигналы, ко-
торые поступают от концевых выключателей, датчиков охранной или пожар-
ной сигнализации, датчиков заполнения емкостей, датчиков сбегания ленты на
конвейере, датчиков приближения и т.п. Такие сигналы не совсем правильно
называются дискретными, но этот термин прочно вошел в практику.
Модули ввода дискретных сигналов в промышленной автоматизации имеют
несколько различных типов входов:
• вход типа «сухой контакт»;
• дискретный вход для логических сигналов в форме напряжения;
• вход дискретных сигналов ПО...220 В.
«Сухим» контактом в системах автоматизации называют источник инфор-
мации, не имеющий встроенного источника энергии, например контакты реле
или дискретные выходы типа «отрытый коллектор». Для передачи инфор-
мации о состоянии такого контакта необходим внешний источник тока или
напряжения.
Структура модуля ввода дискретных сигналов представлена на рис. 6.28.
Микроконтроллер модуля ввода выполняет периодическое сканирование вхо-
дов или по запросу ПЛК. Микроконтроллер выполняет также устранение эф-
фекта «дребезга» «сухих» контактов. Команды опроса входов, установления
адреса, скорости обмена, формата данных и др. посылаются в модуль через
последовательный интерфейс, обычно RS-485.
Для правильного применения модулей дискретного ввода необходимо знать
структуру и характеристики входных каскадов (рис. 6.29, 6.30).
Дискретные входы гальванически развязаны от остальной части модуля
ввода. Развязка выполняется, как правило, с помощью оптронов с двумя из-
лучающими диодами, включенными встречно-параллельно. Это обеспечивает
возможность подключения ко входам дискретных сигналов любой полярности.
Гальваническая изоляция может быть покапальной или групповой. Чаще ис-
пользуется групповая изоляция, поскольку при этом почти вдвое уменьшается
количество входных клемм модуля.
444
Глава 6
Рис. в.28. Структурная схема модуля ввода дискретных сигналов NL-16DL
ВИП — вторичный источник питания
Конденсатор используется во входных каскадах модулей (рис. 6.29, 6.30)
для фильтрации высокочастотных помех. Значение граничной частот выби-
рается в результате компромисса между быстродействием модуля и возможно-
стью ложного срабатывания при воздействии высокочастотных помех. Типовое
значение граничной частоты и скорости опроса входов лежит в районе 1 кГц.
Для увеличения помехоустойчивости используют также триггеры Шмидта на
выходе сигналов оптронов.
Рис. 6.29. Структурная схема входных
каскадов каналов дискретного ввода
Рис. в.30. Структурная схема входных кас-
кадов для источников сигнала типа «сухой
контакт»
Контроллеры для систем автоматизации
445
Рис. 6.31. Структурная схема
входных каскадов для ввода
дискретных сигналов 220 В
Уровень логической единицы дискретных сигналов составляет обычно от 3
до 30 В, уровень логического нуля — от 0 до 2 В. Для ввода сигналов от источ-
ников типа «сухой контакт» используют источник напряжения Еск, как показа-
но на рис. 6.30. Аналогично подключают дискретные выходы типа «открытый
коллектор». Источник может быть как встроенным в модуль дискретного ввода
(как, например, в модуле NL-16DI фирмы НИЛ АП), так и внешним.
Ввод высокого постоянного напряжения выполняется по схеме рис. 6.29,
однако для снижения мощности, рассеиваемой на токозадающем резисторе, ис-
пользуют оптроны с малым управляющим током и резистор с большим сопро-
тивлением и большим пробивным напряжением.
Ввод дискретных сигналов 220 В. Ввод
сигналов высокого (220 В) переменного напря-
жения осуществляется аналогично рассмотрен-
ному выше (рис. 6.31), однако вместо токоза-
дающего резистора для включения оптрона ис-
пользуют конденсатор, чтобы снизить актив-
ную рассеиваемую мощность. Резистор сопро-
тивлением 750 кОм на рис. 6.31 служит для
разряда конденсатора при отключенных вхо-
дах, что является стандартным требованием
электробезопасности. Резистор сопротивлени-
ем 1 кОм ограничивает бросок тока во момент
коммутации входа, назначение других элемен-
тов такое же, как в цепи на рис. 6.29, 6.30.
Каскады для ввода высокого напряжения могут быть с общим проводом
или независимые.
Для отображения состояния дискретных входов (включено/выключено) ис-
пользуют светодиоды, которые включают либо до оптрона, либо после него.
6.3.8. Вывод дискретных сигналов
Вывод дискретных сигналов используется для управления состоянием
включено/выключено исполнительных устройств. Устройства вывода отлича-
ются большим многообразием. Знание структуры выходных каскадов необхо-
димо для правильного их применения.
Выходные каскады со стандартными ТТЛ или КМОП логическими уров-
нями в промышленной автоматизации используются редко. Это связано с тем,
что нагрузкой дискретных выходов являются не логические входы электрон-
ных устройств, а чаще всего электромеханические реле, пускатели, шаговые
двигатели и др. Дискретные выходы обычно строятся на основе мощных би-
полярных транзисторов с открытым коллектором или полевых транзисторов
(обычно МОП) с открытым стоком (рис. 6.32). С точки зрения схемотехники
применения эти каскады эквивалентны, поэтому мы будем их называть кас-
кадами ОК. Каскады ОК обеспечивают большую гибкость, по'зйоляя получить
необходимые для нагрузки ток или напряжения с помощью внешнего источни-
ка питания. Кроме того, каскад ОК с помощью внешних резисторов и источ-
446
Глава 6
Рис. 6.32. Структурная схема выходных
каскадов типа ОК для вывода дискретных
сигналов
Рис. 6.33. Подключение индуктивной на-
грузки к дискретному выходу
ников напряжения позволяет получить стандартные КМОП или ТТЛ-уровни
Кых (рис. 6.32, 6.33).
Наилучшим решением для построения дискретных выходов являются мик-
росхемы интеллектуальных ключей, которые содержат в себе не только мощ-
ный транзистор с открытым стоком, но и цепи его защиты от перегрузки по
току, напряжению, короткого замыкания, переполюсовки и перегрева, а также
электростатических разрядов. При перегреве выходного каскада или превыше-
нии тока нагрузки интеллектуальный ключ выключается.
Наиболее широко распространены выходные каскады ОК модулей вывода
двух типов: для втекающего (рис. 6.34) и вытекающего (рис. 6.35) токов. Раз-
личие между ними состоит в том, какой вывод является общим для нескольких
нагрузок: заземленный или соединенный с шиной питания.
Каскады с открытым коллектором (стоком) удобны тем, что позволяют
использовать внешний источник питания с напряжением, отличным от напря-
жения питания модулей вывода (рис. 6.34, 6.35). Кроме того, в этих схемах
вместо источника питания 2?Пит можно использовать тот же источник, что и
для питания модулей вывода (V^Ht)-
Рис. 6.34. Структурная схема выходных кас- Рис. 6.35. Структурная схема выходных
кадов для втекающих токов каскадов для вытекающих токов
Контроллеры для систем автоматизации
447
Рис. 6.36. Релейный выход. Примене-
ние диода для устранения искрения кон-
тактов реле при коммутации индуктивной
нагрузки
Рис. в.37. Релейный выход. Примене-
ние RC-цепочки для предотвращения искре-
ния контактов при коммутации индуктивной
нагрузки
Пр.
0,022
600В
100
0,5 Вт
-220 в
Рис. 6.38. Тиристорный выход. Ва-
ристор используется для защиты ти-
ристора от импульсов напряжения
Для управления нагрузками, питающи-
мися большим током или от источника на-
пряжения 110...220 В используют выходные
каскады с электромагнитными или твердо-
тельными (полупроводниковыми) реле, ти-
ристорами, симисторами.
Основным достоинством электромагнит-
ных реле является очень низкое падение на-
пряжения на замкнутых контактах, что ис-
ключает необходимость их охлаждения. Не-
достатком является ограниченное количество срабатываний (порядка 105... 106).
Полупроводниковые реле, наоборот, имеют относительно большое сопротивле-
ние в открытом состоянии и требуют отвода тепла, но могут выполнить до 1О10
переключений. Кроме того, полупроводниковые реле обладают более высокой
надежностью и не имеют эффекта «дребезга контактов».
При использовании реле для коммутации индуктивной нагрузки возникает
большая э.д.с. самоиндукции, которая вызывает пробой воздушного зазора при
размыкании контактов и их искрение. Это приводит к быстрому износу контак-
тов и появлению электромагнитных помех. Проблема решается с помощью ди-
ода, включенного параллельно катушке индуктивности при коммутации в цепи
постоянного напряжения (рис. 6.36) и RC-цепочкой в цепи переменного напря-
жения (рис. 6.37). Контакты реле желательно защищать предохранителями.
При использовании твердотельных реле или тиристоров в высоковольтных
цепях с длинными кабельными линиями используют защиту на варисторах
(рис. 6.38), TVS-диодах и газовых разрядниках (подробнее см. главу 3).
6.3.9. Ввод частоты, периода и счет импульсов
Функции счетчика, частотомера и измерителя периода следования импуль-
сов обычно совмещаются в одном и том же модуле ввода. Такие модули могут
быть использованы для решения следующих задач:
• измерение скорости вращения вала двигателя с целью ее стабилизации или
изменения по заданному закону,
• подсчет количества продукции на конвейере;
• измерение частоты периодического сигнала;
448
Глава 6
• работа с датчиками, имеющими импульсный выход (например, с энкодера-
ми — датчиками угла поворота, электросчетчиками или анемометрами);
• автоматическое дозирование счетной продукции;
• подсчет количества продукции, выданной со склада.
Структуру типового модуля ввода рассмотрим на примерю счетчика-часто-
томера NL-2C (рис. 6.39) фирмы НИЛ АП (www.RealLab.ru). Он содержит два
32-разрядных счетчика-частотомера. Каждый счетчик имеет изолированные и
неизолированные входы. Изолированные входы выполнены с помощью оптрона
и являются пассивными со стороны источника сигнала. Неизолированные вхо-
ды имеют программно регулируемые уровни логического нуля и единицы. Это
позволяет уменьшить вероятность ошибочного срабатывания модуля в усло-
виях помех. Для регулировки уровней использованы два 8-разрядных цифро-
управляемых потенциометра. Для подавления помех служит также цифровой
фильтр с перестраиваемыми параметрами, выполненный на микроконтролле-
ре, входящем в состав модуля.
Inl+
Ini
1
El
InO+
InO-
Gate 1+
Gate 1 -
Е1
8 bit1
~ ЦАП
8 bit
ЦАП,
GateO+
Gated-
El
Ini (TTL)
InO(TTp<j>
a
Gate 1(TTL)<>
Gate 0(ТТЦ 6-
s
ев SA
О
&
Rwetl Rwet2
Рис. 6.39. Структурная схема модуля ввода частотных сигналов NL-2C
Контроллеры для систем автоматизации
449
На рис. 6.39 использованы следующие обозначения: Gate — входы разре-
шения счета; In — счетные входы с программируемыми логическими уровнями;
Dout — дискретные выходы; INIT* — вывод для выполнения начальных уста-
новок модуля; Data+, Data---выводы интерфейса RS-485.
Для расширения функциональных возможностей каждый счетный вход мо-
дуля имеет вход разрешения счета (Gate) и источник тока для питания «сухих»
контактов. Модуль имеет также четыре изолированных дискретных выхода
с общей «землей».
Счетчик содержит четыре микроконтроллера. Они выполняют следую-
щие функции:
• исполняют команды, посылаемые из управляющего компьютера;
• выполняют алгоритм цифровой фильтрации;
• выполняют подсчет количества импульсов;
• реализуют протокол обмена через интерфейс RS-485.
В состав модуля входит сторожевой таймер, вырабатывающий сигнал сбро-
са, если микроконтроллер перестает вырабатывать сигнал «ОК» (это перио-
дический сигнал, подтверждающий, что микроконтроллер не «завис»). Вто-
рой сторожевой таймер внутри микроконтроллера переводит выходы модуля
в безопасные состояния («Safe Value»), если из управляющего компьютера пе-
рестает приходить сигнал «Host ОК».
Схема питания модулей содержит вторичный импульсный источник пита-
ния, преобразующий поступающее извне напряжение в диапазоне от +10 до
+30 В в напряжение +5 В для питания электрической цепи внутри модуля.
Модуль содержит также изолирующий преобразователь напряжения для пита-
ния каскадов вывода дискретных сигналов.
Модуль измеряет частоту в диапазоне от 10 Гц до 300 кГц с погрешно-
стью ±0,0002/(/Т), где f — измеряемая частота, Гц; Т — время счета им-
пульсов (1,0 или 0,1 с).
Внешние управляющие команды посылаются в модуль через порт RS-485.
Используются всего 54 команды, подробно описанные в руководстве по экс-
плуатации модуля.
6.3.10. Модули управления движением
Контроллеры с модулями управления движением используются в роботах,
металло- и деревообрабатывающих станках, сборочных линиях, типографских
машинах, в оборудовании для обработки пищи, для дозирования и упаковки,
для автоматической сварки и лазерной резки, для обработки полупроводни-
ковых пластин и т.п.
В силу специфики задачи контроллеры для управления движением зани-
мают отдельное место на рынке ПЛК, поскольку отличаются как параметрами
модулей ввода-вывода, так и специализированным программным обеспечением.
Основными отличиями от модулей общего применения являются повышенные
требования к быстродействию и особый состав каналов ввода-вывода, оптими-
зированный для задач управления движением с целью минимизации стоимости.
450
Глава 6
Типовой системой управления движением является электропривод [513],
который является частным случаем системы автоматического регулирования
с обратной или прямой связью. В состав электропривода входит электродви-
гатель, датчики положения исполнительного механизма, контроллер и серво-
усилитель.
В электроприводах используют асинхронные и синхронные двигатели пере-
менного тока, постоянного тока, шаговые, линейные двигатели, а также гидро-
и пневмоцилиндры с насосами.
Электропривод строится обычно с двумя контурами обратной связи. Внут-
ренний контур с сигналом от датчика скорости (тахометра или инкрементного
энкодера) используется для управления скоростью двигателя и часто реализу-
ется внутри сервоусилителя. Внешний контур с обратной связью от оси двигате-
ля или от его нагрузки используется для управления позицией исполнительно-
го механизма и вращающим моментом. Обратная связь от нагрузки позволяет
повысить точность реализации траектории движения и использовать нежесткие
механические связи, однако усложняет настройку замкнутой Системы.
Сигнал обратной связи внешнего контура поступает от датчиков положе-
ния, в качестве которых используют энкодеры, резольверы, потенциометры,
датчики Холла и тахометры. Энкодеры делятся на абсолютные и инкремент-
ные. Инкрементные энкодеры определяют изменение положения механизма,
а абсолютные определяют его абсолютное положение. Резольверы выполня-
ют ту же функцию, что и энкодеры, но имеют аналоговый выходной сигнал,
поскольку построены на основе вращающегося трансформатора и выдают си-
нусоидальный и косинусоидальный сигналы, которые позволяют вычислить
положение вала двигателя. Недостатком резольвера является низкое быстро-
действие и необходимость использования АЦП.
Сигналы обратной связи поступают в контроллер, который должен иметь
модули для ввода сигналов от перечисленных выше датчиков. В контроллер
поступают также сигналы от концевых датчиков, установленных в крайних по-
ложениях исполнительного механизма. Управляющее воздействие из контрол-
лера поступает на двигатель через сервоусилитель. Усилители имеют мощные
выходные каскады с радиаторами, поэтому изготавливаются отдельно от кон-
троллера. На их входы могут поступать аналоговые сигналы ±10 В, цифровые
или ШИМ-сигналы. Усилители делятся на усилители скорости, усилители мо-
мента, усилители с синусоидальным входным сигналом, усилители с импульс-
ным входом, а также гидравлические. Обычно они имеют встроенную защиту от
перенапряжения, низкого напряжения, перегрева, к.з., превышения тока, поте-
ри фазы. Выбирая усилитель с нужными характеристиками, можно выполнять
управление оборудованием любой мощности, от микрозондов для тестирования
полупроводниковых пластин до мощных металлообрабатывающих центров.
ПЛК могут иметь вход для джойстика или кнопок, которые позволяют
управлять движением вручную.
Основным параметром модулей ввода-вывода для управления движением
является число одновременно управляемых осей координат. Ось координат в
подавляющем большинстве случаев ассоциируется с одним двигателем. Од-
нако несколько двигателей могут работать на общую нагрузку, например два
Контроллеры для систем автоматизации
451
двигателя могут вращать общий вал с двух его концов или совместно осуществ-
лять плоскопараллельное перемещение одной балки. В этом случае несколько
двигателей соответствуют одной оси координат.
В общем случае ось координат определяется как линейная комбинация трех
координатных осей, соответствующих трем двигателям, поэтому она не соот-
ветствует ни одному конкретному двигателю отдельно.
Поскольку движение в трехмерном пространстве можно разложить на три
одномерных, для построения любой траектории достаточно трех координат-
ных осей. Однако в металлообработке часто приходится поворачивать сто-
лик с закрепленной деталью или шпиндель с закрепленным инструментом,
для описания чего вводятся дополнительные оси координат. Наиболее мощ-
ные контроллеры управления движением могут синхронно управлять сотней
координатных осей.
Модули ввода-вывода для управления движением оптимизированы для
ввода сигналов энкодеров, резольверов, тахометров, потенциометров и кон-
цевых выключателей, а также для вывода сигналов управления сервоусили-
телями. Основные параметры типовых модулей для управления движением
приведены ниже.
Модули ввода могут иметь следующие входы:
• дифференциальные или одиночные входы счетчиков разрядностью 16/24/
32 бит для сигналов энкодера;
• дискретные входы;
• входы прерываний процессора;
• аналоговые входы для сигналов от резольвера и потенциометра.
Типовые модули вывода могут содержать:
• аналоговые каналы вывода с разрядностью 12, 14 или 16 бит для управ-
ления сервоусилителями;
• дискретные выходы (обычно с открытым коллектором);
• цифровые выходы;
• импульсные выходы для шаговых двигателей.
Основные параметры модулей ввода-вывода:
• время обновления данных;
• разрядность и число АЦП и ЦАП;
число дискретных и импульсных входов/выходов;
• емкость памяти в шагах;
• тип и возможности программного обеспечения;
• типы коммуникационных интерфейсов (RS-232/422, RS-485, USB, Ethernet,
PCI, VME, ISA и др.).
Сигнал от инкрементного энкодера может поступать в некоторых случаях
со скоростью до 20 Мбит/с, что требует быстродействующих счетчиков им-
пульсов. В некоторых модулях используются процессоры цифровой обработки
сигналов и специализированные микросхемы (ASIC).
В системах управления движением специализированными являются не
только модули, но и программное обеспечение. Приведем примеры некого-
452
Глава 6
рых встроенных функций, которые выполняются контроллерами для управ-
ления движением:
• плавный пуск;
• перемещение: непрерывное, абсолютное, относительное, синхронное, в кон-
трольную точку (для калибровки и синхронизации);
• синхронизация координат в режиме контрольных точек;
• реализация заданной траектории движения в пространстве;
• интерполяция: линейная, круговая, сплайнами;
• возврат в начальное положение;
• ручной режим управления;
• управление зависимостью скорости от времени: трапецеидальная, S-образ-
ная (трапеция с закруглениями вместо углов);
• автонастройка контуров регулирования;
• отладка программы без реального привода;
• подавление резонансных явлений (вибраций);
• автоматическое распознавание двигателя;
• синхронизация работы нескольких приводов (в том числе при работе дви-
гателей на общий вал);
• управление силой или давлением;
• защита (от непреднамеренного запуска, при сбоях в оборудовании, при сра-
батывании концевых выключателей);
• самодиагностика;
• мониторинг текущего состояния;
• аварийная сигнализация;
• аварийный останов;
• функция таймера.
Системы управления движением воспринимают информацию от программ
автоматизированного проектирования (САПР) и чаще используются с компью-
терами, чем с ПЛК. Для работы от компьютера под ОС Windows использу-
ются буферы FIFO на входе и выходе модуля, чтобы исключить неконтро-
лируемые задержки ОС.
6.4. Заключение
Особенностью рынка ПЛК является огромное разнообразие их модифика-
ций, вызванное естественной широтой областей применения. Общим являет-
ся только стремление к стандартизации, вызванное перспективами идеологии
«открытых систем». В последние годы наметилась также тенденция стирания
прежних различий между ПЛК и промышленными компьютерами.
Модули ввода-вывода характеризуются устоявшимся набором требований
к их функционированию и основным техническим параметрам. На протяжении
десятилетий остаются наиболее применяемыми модули ввода сигналов термо-
пар, термопреобразователей сопротивления, тензодатчиков и универсальные.
Улучшение технических характеристик модулей и ПЛК определяется, в основ-
ном, производителями полупроводниковой элементной базы, в первую очередь
Контроллеры для систем автоматизации
453
микропроцессоров и аналого-цифровых преобразователей, а также развитием
технологии монтажа электронных устройств.
Направлениями дальнейшего развития промышленных ПЛК являются
снижение габаритных размеров и веса, повышение устойчивости к внешним воз-
действиям, улучшение удобства монтажа и упрощение пуско-наладки систем
автоматизации, обеспечение высокой надежности и горячей замены, расшире-
ние функций контроля и диагностики, снижение стоимости.
Глава 7
Автоматизация
опасных объектов
К опасным промышленным (производственным) объектам относятся [535]
предприятия или их цехи, участки, площадки, а также иные производствен-
ные объекты, на которых:
• получаются, используются, перерабатываются, образуются, хранятся,
транспортируются или уничтожаются:
о воспламеняющиеся вещества (перечень см. в [535]);
о окисляющие вещества (например, кислород);
о горючие вещества;
о взрывчатые вещества;
о токсичные вещества;
о вещества, представляющие опасность для окружающей среды;
• используется оборудование, работающее под избыточным давлением более
0,07 МПа (0,7 атм.) или при температуре нагрева воды более 115 град.;
• используются стационарно установленные грузоподъемные механизмы, эс-
калаторы, канатные дороги, фуникулеры;
• получаются расплавы черных и цветных металлов и сплавы на основе
этих расплавов;
• ведутся горные работы по обогащению полезных ископаемых, а также ра-
боты в подземных условиях.
На опасных производственных объектах запрещено применение техниче-
ских средств, не имеющих разрешения Ростехнадзора* на применение [536].
Средства автоматизации опасных производственных объектов должны удо-
влетворять повышенным требованиям по надежности и функциональной без-
опасности. Нарушение требований безопасности влечет за собой администра-
тивную или уголовную ответственность, поэтому при проектировании, изготов-
лении и применении таких систем следует пользоваться только официальны-
ми нормативными документами и правилами применения технических средств
на опасных производственных объектах, поднадзорных Ростехнадзору. Такое
предупреждение связано с ответственностью за строгость изложения, которая
достижима только в официальных изданиях, а также со строго регламентиро-
ванной процедурой применения технических средств на опасных объектах [190].
* Ростехнадзор — федеральная служба по экологическому, технологическому и атом-
ному надзору за выполнением требований промышленной безопасности.
Автоматизация опасных объектов
455
В промышленности часто возникает необходимость применения контролле-
ров и связанного с ними оборудования в среде, где возможно появление взры-
воопасной смеси горючих газов или горючей пыли с воздухом. Такие смеси
могут присутствовать как в нормальном режиме функционирования системы
(например, в силосах элеваторов или внутри технологических установок), так
и в аварийном режиме. Для предотвращения взрывов промышленные контрол-
леры и связанное с ними оборудование должны удовлетворять требованиям
взрывобезопасности.
Стандарты [516, 517] устанавливают условия, которым должны удовлетво-
рять устройства, работающие во взрывоопасной среде. В среде горючей пы-
ли основными методами взрывозащиты средств автоматизации являются огра-
ничение температуры поверхности и предотвращение доступа горючей пыли
к нагретым поверхностям с помощью пыленепроницаемых оболочек. В сре-
де горючих газов рекомендуется восемь способов защиты [516], из которых
для контроллеров обычно используются только два: применение искробезопас-
ных электрических цепей и герметизация компаундом. Герметизация компаун-
дом предотвращает доступ горючей смеси к элементам электрической цепи,
которые могут быть нагреты до недопустимо высокой температуры или вы-
звать искрение.
7.1. Искробезопасная электрическая цепь
Защита вида «искробезопасная электрическая цепь» является самой рас-
пространенной в промышленных контроллерах [515]. Искробезопасной называ-
ют электрическую цепь, в которой любое искрение не вызывает воспламене-
ние; более точно, вероятность того, что воспламенение возникнет, составляет
менее 0,001. Тепловое воздействие такой цепи также не способно воспламе-
нить взрывоопасную смесь.
Для того чтобы электрическая цепь была искробезопасной, необходимо
удовлетворить множеству требований стандарта ГОСТ Р 51330.10 [518], однако
смысл этих требований сводится к ограничению энергии и мощности искры до
безопасных значений. Возможность защиты от взрыва таким способом основана
на том, что воспламенение и взрыв происходят только при условии, если энер-
гия искры достаточна для инициализации цепной реакция горения, а мощность
искры достаточна для компенсации утечки тепла из ядра пламени. Величи-
на энергии воспламенения колеблется от 60 мкДж для водородно-воздушной
смеси до 8...50 мДж для зерновой пыли [514].
Для ограничения энергии искры W нужно ограничить ток, напряжение и
продолжительность искрения, поскольку
ГТ
W = u(t)i(t)dt,
Jq
где u(t) — напряжение между искрящими проводниками, i(t) — ток искры, t —
время, Т — продолжительность искрения. Ограничение тока можно осуще-
ствить с помощью резисторов, ограничение напряжения — с помощью стабили-
456
Глава 7
тронов, ограничение длительности искрения — с помощью постоянной времени
RC или L/R, где R — сопротивление, С — емкость, L — индуктивность.
Для описания требований к искробезопасным цепям стандарт [518] вводит
понятие неповреждаемого элемента (элемент, вероятностью повреждения кото-
рого можно пренебречь при анализе искробезопасности), учитываемого повре-
ждения (допустимое количество которых определяют уровень искробезопасно-
сти цепи) и неучитываемого повреждения (считается, что такое повреждение
всегда имеет место). Например, к неучитываемым повреждениям относятся
повреждения зазоров шириной менее 0,5 мм, т.е. для оценки уровня искробез-
опасности следует считать, что они повреждены всегда. К учитываемым отно-
сится, например, повреждение резистора, если он нагружен не более чем на 2/3
от номинального тока и напряжения. Если нагрузка превышает это значение,
то считается, что резистор уже поврежден.
Стандарт [518] вводит три уровня безопасности электрической цепи: ia, ib,
ic. Искробезопасная цепь уровня ic не должна вызывать воспламенение, если в
ней произошли некоторые или все неучитываемые повреждения. Цепь уровня
ib не должна воспламенять взрывоопасную смесь, если в ней произошли все
неучитываемые повреждения и одно учитываемое. Цепь уровня ia не должна
воспламенять взрывоопасную смесь, если в ней произошли одновременно все
неучитываемые повреждения и одно или два учитываемых. Технически повы-
шение уровня искробезопасности достигается резервированием или применени-
ем неповреждаемых (в смысле ГОСТ 51330.10) элементов.
Устройства (контроллеры, модули ввода-вывода, датчики, исполнитель-
ные механизмы), применяемые на взрывоопасных объектах, делятся на три
больших класса:
• устройства, являющиеся полностью искробезопасными;
• устройства, относящиеся к «связанному оборудованию», которые содержат
как искробезопасные, так и искроопасные цепи, причем искроопасные цепи
не могут влиять на искробезопасные;
• обычные устройства, применяемые совместно с барьерами искробезопас-
ности.
Связанное оборудование обеспечивает передачу информации между взры-
воопасной и безопасной зонами. Например, если преобразователь интерфейсов
RS-232 и RS-485 содержит искроопасные цепи интерфейса RS-232 и искробез-
опасные цепи интерфейса RS-485, между которыми существует неповреждаемое
(в смысле ГОСТ 51330.10) разделение, то он относится к связанному оборудо-
ванию. Типичным примером связанного оборудования являются барьеры ис-
кробезопасности [518]. В маркировке связанного оборудования присутствуют
квадратные скобки, например [Exia]IIC. В маркировке искробезопасного обо-
рудования их нет, например ExiaIICT6. Подробнее о маркировке взрывозащи-
щенных* изделий и выборе аппаратных средств для взрывоопасных производ-
ственных объектов см. п. 7.5 и [195].
* Термин «взрывозащищенное оборудование» имеет смысл взрывобезопасного обо-
рудования или взрывозащищающего, однако ПУЭ и ГОСТ устанавливают именно этот
термин.
Автоматизация опасных объектов
457
Невзрывоопасная зона
Рис. 7.1. Пример расположения модулей ввода-вывода серии NL-Ex [515] во взрыво-
опасной зоне
Взрывоопасная зона класса О
Искробезопасные устройства могут быть расположены как внутри взрыво-
опасной зоны, так и вне ее (рис. 7.1). Связанное оборудование может распо-
лагаться только вне взрывоопасной зоны, но его искробезопасные цепи могут
идти внутрь взрывоопасной зоны (на рис. 7.1 искробезопасными являются це-
пи интерфейса RS-485 и питания 12 В, 0,9 А).
При проектировании контроллеров с искробезопасными цепями принимают
меры, чтобы любые неисправности в устройстве не могли вызвать искру или
нагрев поверхности до опасной температуры. Однако в результате монтажа си-
стемы автоматизации появляются дополнительные емкости и индуктивности
кабелей, а также входные емкости и индуктивности других устройств, кото-
рые, суммируясь, могут превысить допустимые значения. Поэтому на корпусе
искробезопасного оборудования указывают не только его собственные парамет-
ры, но и допустимые параметры подключаемых цепей. К таким параметрам
относятся следующие [518]:
Um — максимальное напряжение на искроопасных зажимах связанного
электрооборудования, которое еще не приводит к нарушению искробезопас-
ности;
Ui — максимальное входное напряжение на клеммах искробезопасных це-
пей, которое еще не приводит к нарушению искробезопасности;
Uq — максимальное выходное напряжение, которое может появиться на
зажимах искробезопасных цепей в случае приложения к нему максимальных
значений Um и
458
Глава 1
li — максимальный входной ток, который может протекать в соединитель-
ных цепях между искробезопасными устройствами без нарушения искробез-
опасности;
IQ — максимальный выходной ток, который может протекать в соедини-
тельных цепях между искробезопасными устройствами в случае приложения
максимальных напряжений Um и Ui]
Pi — максимальная входная мощность искробезопасной цепи, которая мо-
жет рассеиваться в электрооборудовании без нарушения его искробезопасности;
Ро — максимальная электрическая мощность на выходе искробезопасной
цепи устройства;
Со — максимальное значение емкости, которое может быть подключено к
клеммам устройства без нарушения его искробезопасности;
Ci — суммарная эквивалентная внутренняя емкость устройства, которая
может оказаться подключенной к его клеммам;
Lq — максимальное значение индуктивности, которое может быть подклю-
чено к клеммам устройства без нарушения его искробезопасности;
Ц — суммарная эквивалентная внутренняя индуктивность устройства, ко-
торая может оказаться подключенной к его клеммам;
Lq/Rq — максимальное отношение индуктивности к сопротивлению внеш-
ней электрической цепи, которое не нарушает его искробезопасность;
Li/Ri — максимальное отношение внутренней индуктивности к внутренне-
му сопротивлению, которое может иметь место на его клеммах.
Приведенные условные обозначения являются стандартными и должны
быть указаны на всех видах искробезопасного оборудования.
В случае переменного напряжения в приведенных определениях везде по-
нимается его амплитудное значение, за исключением Um, которое является
действующим.
7.2. Блоки искрозашиты
Для обеспечения искробезопасности можно использовать контроллеры или
модули ввода-вывода с искробезопасными цепями. Однако эта же задача может
быть решена с помощью любых контроллеров общепромышленного исполне-
ния, если использовать блоки искрозащиты (барьеры безопасности) [518]. Этот
способ гораздо дороже первого, но удобен тем, что барьеры безопасности яв-
ляются универсальным средством защиты и поэтому позволяют сделать выбор
нужного контроллера из огромного разнообразия контроллеров, не имеющих
искробезопасных цепей.
Барьеры безопасности могут быть пассивными и активными. Пассивные
барьеры строятся на диодах, стабилитронах, резисторах и предохранителях,
помещаются в неразборный корпус и заливаются компаундом для исключения
возможности их ремонта. Активные барьеры представляют собой повторители
сигнала, состоящие из искробезопасной и искроопасной части, которые разде-
лены оптронами и трансформаторами.
Автоматизация опасных объектов
459
Рис. 7.2. Структурные схемы блоков искрозащиты
Конструкция барьеров безопасности должна исключать возможность не-
правильного монтажа, например, с помощью асимметричной формы крепления
барьера или цветовой маркировки.
Структурные схемы барьеров представлены на рис. 7.2. Стабилитрон Vi
ограничивает напряжение между своими выводами, поэтому ток и напряжение,
которые могут появиться на зажимах искробезопасной цепи, строго ограничены
и не зависят от напряжения на искроопасных клеммах. Барьеры рассчитыва-
ются в предположении, что на искроопасных клеммах может появиться сетевое
напряжение 220 В. Для того чтобы повысить надежность барьера, стабилитро-
ны троируют или дублируют в зависимости от требуемого уровня искробез-
опасности. Ток через стабилитрон ограничивается резистором 7?i. Чтобы ток
не превысил допустимые пределы, используют предохранитель Fi.
На переменном токе применяют схему барьеров со встречно включенны-
ми стабилитронами (рис. 7.2,6). Для передачи дифференциального сигнала
используют цепь, показанную на (рис. 7.2,в). Поскольку блок искрозащиты
относится к связанному оборудованию, он устанавливается вне взрывоопас-
ной зоны (рис. 7.3).
Невзрывоопасная зона
цепи
Рис. 7.3. Пример применения устройств без маркировки взрывозащиты совместно
с барьерами искрозащиты
460
Глава 7
Барьеры для термопреобразователей сопротивления отличаются от барье-
ров для термопар, дискретных сигналов или аналоговых сигналов. Барьеры,
входящие в состав измерительного канала, относятся к средствам измерений
и характеризуются погрешностью передачи сигнала. В пассивных барьерах
источником погрешности являются утечки стабилитрона и ненулевое сопро-
тивление резисторов, которое составляет делитель напряжения с входным со-
противлением нагрузки.
Для работы с термопарами барьеры включают в разрыв компенсацион-
ных термопарных проводов (рис. 7.3) или используют выносной датчик тем-
пературы холодного спая.
Параметры искробезопасных цепей барьеров безопасности указывают с по-
мощью описанных выше понятий и условных обозначения (см. п. 7.1).
7.3. Правила применения искробезопасных
устройств
В соответствии с принципами обеспечения искробезопасности, суммарная
емкость и индуктивность кабеля и соединенного с ним оборудования не должны
превышать значений Со и £0> указанных на корпусе устройства или в техниче-
ской документации. Например, для модулей серии NL-Ex фирмы НИЛ АП [515]
при типовом значении емкости кабеля 100 пФ/м и индуктивности 0,3 мкГн/м
ограничение длины кабеля определяется допустимой индуктивностью и состав-
ляет 200 м. Поэтому для всех используемых кабелей должны быть известны их
погонная емкость и индуктивность. Если эти параметры не известны, в расчете
используются наихудшие значения, указанные изготовителем.
Значения допустимого входного напряжения СТ», входного тока Д и вход-
ной мощности Pi каждого искробезопасного устройства должны быть не ме-
нее соответствующих значений С7о, /о и Ро подключенного к нему оборудова-
ния [516, 519].
Правила монтажа оборудования во взрывоопасной зоне изложены в ПУЭ,
п. 7.3 и ГОСТ 51330.13 [520]. В искробезопасных электрических цепях могут ис-
пользоваться только изолированные кабели. Изоляция между жилами кабеля,
между жилами и экраном и между жилами и заземлением экрана должна вы-
держивать испытательное напряжение не менее 500 В (действующее значение
синусоидального напряжение 50 Гц, прикладываемого в течение 60 с).
Концы многожильных проводников (жил) в кабеле должны быть защищены
от разделения на отдельные проводники, например, с помощью наконечника.
Отдельные провода многопроволочной жилы должны иметь диаметр не менее
0,1 мм. Для провода заземления в качестве защиты от разделения на провод-
ники не допускается применение пайки, поскольку вследствие хладотекучести
припоя возможно ослабление мест контактного давления в винтовых зажимах.
Кабельные линии и арматура должны располагаться по возможности в ме-
стах, которые предотвращают опасность их механического повреждения, кор-
розии или химических воздействий.
Кабели искробезопасных цепей должны быть отделены от всех кабелей ис-
кроопасных цепей, например, прокладкой в разных лотках, экраном, броней
Автоматизация опасных объектов
461
или металлической оболочкой. В частности, проводники искроопасных и ис-
кробезопасных цепей не должны располагаться в одном и том же кабеле. При
прокладке в общем пучке или канале кабели с искроопасными и искробезопас-
ными цепями должны быть разделены промежуточным слоем изоляционного
материала или заземленной металлической перегородкой. Разделения не тре-
буется, если используются кабели с металлической оболочкой или экраном.
Кабели, содержащие искробезопасные цепи, должны быть промаркированы
синим цветом или надписями. Маркировка не требуется, если кабели брониро-
ваны, заключены в металлическую оболочку или экранированы.
При монтаже искробезопасных модулей в шкафу зажимы искробезопасных
цепей должны быть отделены от искроопасных цепей разделительной панелью
или промежутком не менее 50 мм. Если разделение обеспечивается только
воздушным промежутком, должны быть приняты меры для предотвращения
замыкания между цепями в случае отсоединения проводника.
При монтаже искробезопасных электрических цепей должны быть приняты
меры для защиты от проникновения энергии из других источников в случае
возникновения в цепи обрывов, короткого замыкания или замыкания на землю.
Если при монтаже искробезопасных цепей используются простые элементы
[518] (выключатели, распределительные коробки, резисторы, диоды, стабили-
троны, конденсаторы, катушки индуктивности, термопары, фотоэлементы), то
маркировка взрывозащиты на них может отсутствовать, однако они должны
удовлетворять требованиям ГОСТ Р 51330.10 и ГОСТ Р 51330.0.
Модули, расположенные во взрывоопасной зоне, не должны подвергаться
чистке, протиранию на месте их установки или воздействию строи воздуха с
частицами пыли для исключения возможности электризации.
Искробезопасные цепи модулей должны монтироваться в шкафу, который
имеет запорное устройство по ГОСТ Р 51330.0 или пломбируется.
Более подробно правила монтажа искробезопасного оборудования изложе-
ны в ГОСТ Р 51330.13-99 и ПУЭ, п. 7.3. Правила заземления искробезопасного
оборудования см. также в главе 3.
7.4. Функциональная безопасность
На опасных промышленных объектах неправильное функционирование си-
стемы автоматизации может привести к человеческим жертвам, экологическим
катастрофам или большим финансовым потерям. Полностью исключить ситу-
ации, приводящие к таким последствиям, невозможно. Речь может идти только
о вероятности их возникновения и допустимом уровне риска.
Риском в области безопасности называют произведение вероятности воз-
никновения опасной ситуации на тяжесть (стоимость) последствия [521]. Допу-
стимый уровень риска оценивается в каждом конкретном случае индивидуаль-
но. Из определения риска следуют пути его снижения: уменьшение вероятно-
сти появления опасной ситуации и ограничение тяжести ее последствий.
Под безопасностью систем понимается такое их функционирование, при
котором отсутствуют опасные отказы и недопустимый ущерб. Функциональ-
462
Глава 7
ной безопасностью называют безопасность, которая связана с непреднамерен-
но вызванными отказами в выполнении отдельных функций системы. Вопро-
сам функциональной безопасности посвящены работы [521-532]. Причинами
отказов могут быть дефекты программ, данных, аппаратуры, влияние внешней
среды и непреднамеренно неправильные действия обслуживающего персонала.
Функциональную безопасность следует отличать от информационной безопас-
ности, которая связана в основном с умышленным воздействием на систему,
от электробезопасности, которая относится к защите человека от поражения
электрическим током, и от взрывопожаробезопасности, которая изучает мето-
ды предотвращения воспламенения горючих газов и пыли.
Функциональная безопасность отличается также от очень близкого поня-
тия надежности тем, что она учитывает не только частоту отказов системы,
но и вероятность возникновения опасной ситуации во время отказа. Например,
надежность контроллера, стоящего в системе автоматического пожаротушения,
и контроллера в системе управления лифтом, может быть одинаковой, одна-
ко лифтом пользуются много раз в день, и практически каждый отказ может
привести к нарушению безопасности, в то время как отказ системы пожаро-
тушения может не проявиться никогда, даже если этот отказ произойдет. Из
этого примера ясно, что одного понятия надежности недостаточно для описа-
ния степени безопасности систем автоматизации.
Термин «функциональная» применительно к безопасности систем автома-
тизации означает безопасность, которая зависит от корректного функциони-
рования системы, т.е. от правильного выполнения системой своих функций.
В отличие от этого, надежность описывает частоту отказов независимо от на-
значения системы и тяжести последствий, вызванных отказами. Тем не менее
показатели надежности используются при количественном описании функци-
ональной безопасности.
При анализе функциональной безопасности рассматриваются опасные от-
казовые ситуации, которые приводят к авариям, катастрофам и человеческим
жертвам. Функциональной безопасности программируемых электронных си-
стем посвящен международный стандарт МЭК 61508 и серия связанных с ним
стандартов [521-528]. Стандарт выделяет четыре «уровня полноты безопас-
ности» (Safety Integrity Level, SIL), которые выбираются в зависимости от тя-
жести последствий, которые могут наступить при неправильном функциони-
ровании системы.
Уровень SILJ является самым высоким, наиболее труднодостижимым. Для
его обеспечения требуется чрезвычайно высокая квалификация и работа «на
грани искусства». Поэтому следует избегать необходимости его применения.
Уровень SIL3 ниже, чем SIL4, но также требует высокой квалификации и
высокого уровня организации процесса проектирования. Немногие исполните-
ли способны обеспечить этот уровень безопасности.
Уровень SIL2 требует управления работами в соответствии со стандартом
ИСО 9001. Достижение этого уровня требует большего числа испытаний, чем
SIL1, что приводит к увеличению стоимости проекта.
Уровень SIL1 является самым низким, для его выполнения достаточно на-
личия хорошего опыта разработок.
Автоматизация опасных объектов
463
Уровни SIL определяют величину допустимого риска для системы. Они яв-
ляются мерой вероятности того, что система будет правильно выполнять свои
функции, влияющие на безопасность. При оценке риска используется понятие
«demand on the safety» — «запрос безопасности», которое означает возникнове-
ние ситуации, в которой может проявиться свойство безопасности. Например,
возникновение ситуации, при которой срабатывает система аварийной защиты,
является «запросом безопасности». Этот запрос может не реализоваться, если
во время запроса система находится в состоянии отказа, или реализоваться
в виде срабатывания системы.
Величина риска зависит от частоты запроса безопасности. Например, если
покушение на ограбление банка («запрос безопасности») случается 1 раз в год,
то вероятность отказа системы охранной сигнализации в течение года должна
быть равна 0,1, чтобы ограбление было возможно не чаще чем 1 раз в 10 лет.
В табл. 7.1 приведены границы вероятности отказов при наличии запроса
к системе при низкой частоте запросов (реже 1 раза в год), устанавливаемые
стандартом МЭК 61508. Например, если срабатывание аварийной сигнализа-
ции происходит редко, предположим, один раз в два года, то в этом случае
используется табл. 7.1.
При высокой частоте запросов (например, если взрывоопасная пыль в шах-
те присутствует постоянно и вероятность взрыва существует всегда, т.е. за-
прос безопасности существует непрерывно), вероятность отказа в зависимости
от уровня безопасности SIL выбирается из табл. 7.2 [521-523]. В этой табли-
це использована вероятность отказа системы в течение часа, в то время как
в табл. 7.1 — вероятность отказа в течение часа, умноженная на интервал
между запросами.
Стандарт МЭК 61508 устанавливает два способа расчета риска. Посколь-
ку риск определяется как произведение вероятности возникновения опасной
ситуации на тяжесть (стоимость) последствия, первой стадией в оценке риска
является определение вероятности возникновения опасности. Количественный
Таблица 7.1
Вероятность отказов при частоте запросов менее одного раза в год
Уровень SIL Вероятность отказа при наличии запроса Предельно допустимое число отказов
SIL1 < 10-2 < 10-1 Один опасный отказ за 10 лет
SIL2 10-3 < 10-2 Один опасный отказ за 100 лет
SIL3 10-4 < 10-3 Один опасный отказ за 100 лет
SIL4 si 1(Г5 < 10~4 Один опасный отказ за 10000 лет
Таблица 7.2
Вероятность отказов при частоте запросов более одного раза в год
Уровень SIL Вероятность отказа в течение часа Предельно допустимое число отказов
SIL1 < 10~6 < 1(Г5 Один опасный отказ за 100 тыс. ч
SIL2 < 10-7 < 10-в Один опасный отказ за 1 млн ч
SIL3 < 10-8 < 10~7 Один опасный отказ за 10 млн ч
SIL4 10-9 < 10~8 Один опасный отказ за 100 млн ч
464
Глава 1
метод расчета вероятности основан на анализе частоты отказов системы. Ис-
пользуется также качественный анализ, описанный в [521, 525].
При анализе функциональной безопасности различают случайные отказы
и систематические. Систематические отказы (типовой случай — отказы про-
граммного обеспечения) существуют постоянно, даже в момент пуска системы
в эксплуатацию. Случайные отказы появляются с течением времени. Основ-
ным средством уменьшения интенсивности случайных отказов является резер-
вирование компонентов системы. Число систематических отказов может быть
снижено преимущественно в процессе разработки, для чего стандарт устанавли-
вает требования к процессу разработки, модернизации, а также к архитектуре
аппаратного и программного обеспечения.
В системах промышленной автоматизации компонентами, влияющими на
функциональную безопасность, являются датчики, контроллер с программным
обеспечением, исполнительные устройства и линии связи между ними. Стан-
дарт МЭК 61508 требует анализа соответствия такой системы одному из уров-
ней безопасности. Отметим, что если отдельные компоненты системы удовле-
творяют требовании), например, уровня SIL2, то это не означает, что система
в целом соответствует SIL2, поскольку вероятность отказа системы всегда вы-
ше, чем отдельных ее компонентов. В то же время, используя резервирование,
можно построить систему более высокого уровня безопасности, чем уровень
входящих в нее компонентов.
Требования функциональной безопасности необходимо выполнять на про-
тяжении всего жизненного цикла системы автоматизации, который включает
проектирование, производство, снабжение, контроль, проведение испытаний,
упаковку и хранение, доставку, монтаж у заказчика, эксплуатацию, обуче-
ние персонала эксплуатирующей организации, техническую поддержку, ути-
лизацию.
Многие результаты применения принципов обеспечения функциональной
безопасности систем автоматизации изложены в отраслевых правилах промыш-
ленной безопасности, где сформулированы требования к допустимой частоте
отказов, к видам защиты и способам их выполнения, требования к резерви-
рованию, к построению систем сигнализации, блокировок и аварийного оста-
нова, к алгоритмам работы систем автоматической противоаварийной защиты
(ПАЗ) и др. [529, 533, 534].
7.5. Выбор аппаратных средств
Изложенный ниже материал не является официальным и его нельзя ис-
пользовать при решении юридических вопросов, связанных с деятельностью в
области промышленной безопасности. Руководствоваться нужно только офи-
циальными документами, на которые даны ссылки.
7.5.1. Виды опасных промышленных объектов
Следует различать опасные и взрывоопасные производственные объекты.
Например, грузоподъемный механизм или сталеплавильная печь являются
Автоматизация опасных объектов
465
опасными, но не взрывоопасными объектами. Это различие является суще-
ственным при выборе оборудования. Оборудование для опасных производствен-
ных объектов должно иметь разрешение Ростехнадзора, но для него не тре-
буется маркировка взрывозащиты. Оборудование для взрывоопасных произ-
водственных объектов должно иметь разрешение Ростехнадзора и маркировку
взрывозащиты на корпусе.
Примером оборудования для опасных производственных объектов без мар-
кировки взрывозащиты являются модули ввода-вывода серии NL фирмы НИЛ
АП, которые могут применяться, например, на опасных производственных объ-
ектах по производству токсичных веществ или для автоматизации грузоподъ-
емных механизмов, а также в металлургии. В то же время они не могут ис-
пользоваться во взрывоопасных зонах, где необходимо применять, например,
модули серии NL-Ex [515] с маркировкой взрывозащиты.
Отнесение производственных объектов к категории опасных производится
организацией, эксплуатирующей эти объекты, по результатам их идентифи-
кации в соответствии с перечнем типовых видов опасных производственных
объектов, который разрабатывается Ростехнадзором России [537].
Взрывоопасные производственные объекты. Частным случаем опас-
ных производственных объектов являются взрывоопасные объекты. Систе-
ма стандартов по взрывобезопасности является достаточно сложной и описа-
на в серии из более чем 20 ГОСТов. Ниже дано только общее представле-
ние о принципах построения и применения технических средств для взрыво-
опасных объектов.
Следует различать взрывоопасные объекты, опасные по воспламенению
смеси горючей пыли или волокон с воздухом, и объекты, в которых существует
возможность воспламенения смеси горючих газов или паров с воздухом. Это
различие является существенным при выборе оборудования с нужной марки-
ровкой взрывозащиты. Принципиальное различие между газом и пылью за-
ключается в том, что пыль, в отличие от газа, может оседать на нагретые по-
верхности. Вентиляция, используемая для снижения опасности взрыва в среде
газа, может привести к подъему осевшей пыли в воздух в среде, опасной по
воспламенению горючей пыли, и создать взрывоопасную концентрацию.
Для смесей горючих газов или паров с воздухом используют такие сред-
ства защиты, как:
• взрывонепроницаемая оболочка (d);
• заполнение или продувка оболочки под избыточным давлением (р);
• кварцевое заполнение оболочки (д);
• масляное заполнение оболочки (о);
• защита вида «е»;
• искробезопасная электрическая цепь (г); имеет уровни искробезопасности
ia, ib, ic\
• герметизация компаундом (m);
• защита вида «п»;
• специальный вид защиты «з».
466
Глава 1
В среде со смесью горючей пыли или волокон с воздухом приведенные выше
методы взрывозащиты в общем случае не используют. Защита от воспламене-
ния горючей пыли основана на ограничении доступа пыли к электрооборудова-
нию посредством использования пыленепроницаемых (IP6X) или пылезащит-
ных (IP5X) оболочек и на ограничении максимально возможной температуры
поверхности оболочки и тех поверхностей электрооборудования, на которые
может осесть пыль. В случаях, когда отсутствует электрооборудование, пред-
назначенное для использования во взрывоопасных зонах со смесями горючей
пыли или волокон с воздухом, в зонах класса B-ZZ допускается применять взры-
возащищенное электрооборудование, предназначенное для работы в средах со
взрывоопасными смесями газов и паров с воздухом.
Следует также отметить, что взрывоопасные зоны класса В-Па не требуют
применения взрывозащищенного оборудования [175, п. 7.3.63]. Достаточно ис-
пользовать защитную оболочку со степенью защиты не хуже IP54 при условии,
если температура поверхности электрооборудования, на которую могут осесть
горючие пыль или волокна (при работе оборудования с номинальной нагруз-
кой и без наслоения пыли), будет не менее чем на 50 °C ниже температуры
тления пыли для тлеющей пыли или не более двух третей температуры само-
воспламенения для нетлеющей пыли. Например, для мучной пыли (пшеницы,
ржи и других зерновых культур) температура самовоспламенения составляет
205 °C, следовательно, температура поверхности электрооборудования в этой
среде должна быть не более 136,7 °C.
Отметим, что применение сертифицированной защитной оболочки не ис-
ключает необходимости получения разрешения Ростехнадзора на оборудова-
ние, помещенное в эту оболочку.
7.5.2. Классификация взрывоопасных зон
Опасные производственные объекты могут иметь взрывоопасные зоны раз-
ных классов, в том числе и взрывобезопасные зоны. Класс взрывоопасной зоны
определяется технологами совместно с электриками проектной или эксплу-
атирующей организации [175, п. 7.3.38]. По ГОСТ Р 51330.9 класс взрыво-
опасной зоны устанавливается специалистами, знакомыми со свойствами го-
рючих газов и паров, знающими технологический процесс и оборудование, в
сотрудничестве с инженерами по безопасности, электриками и другим тех-
ническим персоналом.
Классы взрывоопасных зон конкретного предприятия должны указывать-
ся специальной штриховкой по ГОСТ Р 51330.9 на чертежах проектной до-
кументации на объект.
Классификация взрывоопасных зон установлена в ПУЭ (п. 7.3), в ГОСТ Р
51330.9 и ГОСТ Р МЭК 61241-3. Классификация по ПУЭ и ГОСТ различаются
между собой, что часто вводит пользователей взрывозащищенного оборудова-
ния в замешательство. Более того, к настоящему времени не существует до-
кумента, который бы устанавливал соответствие между классификацией ПУЭ
и классификацией ГОСТ. Предполагается [552], что п. 7.3 ПУЭ будет со вре-
менем пересмотрен и приведен в соответствие с ГОСТ, что вызвано необходи-
мостью гармонизации Российский стандартов с международными стандартами
Автоматизация опасных объектов
467
МЭК, которые явились основой для разработки отечественных стандартов се-
рии ГОСТ Р 51330.Х и ГОСТ Р МЭК 61241-Х.
В среде смесей горючих газов или паров с воздухом взрывоопасную зону
подразделяют на три класса [552]:
зона класса 0 — зона, в которой взрывоопасная газовая смесь присутствует
постоянно или в течение длительных периодов времени;
зона класса 1 — зона, в которой существует вероятность присутствия взры-
воопасной газовой смеси в нормальных условиях эксплуатации;
зона класса 2 — зона, в которой маловероятно присутствие взрывоопасной
газовой смеси в нормальных условиях эксплуатации, а если она возникает, то
редко, и существует очень непродолжительное время.
В среде смеси горючей пыли или волокон с воздухом используется следу-
ющая классификация взрывоопасных зон [517]:
зона класса 20 — зона, в которой горючая пыль в виде облака присут-
ствует постоянно или часто при нормальном режиме работы оборудования в
количестве, способном произвести концентрацию, достаточную для взрыва го-
рючей или воспламеняемой пыли в смесях с воздухом, и/или где могут фор-
мироваться слои пыли произвольной или чрезмерной толщины. Такие зоны
бывают обычно внутри оборудования;
зона класса 21 — зона, не классифицируемая как зона класса 20, в которой
горючая пыль в виде облака может присутствовать при нормальном режиме ра-
боты электрооборудования в количестве, способном произвести концентрацию,
достаточную для взрыва горючей пыли в смесях с воздухом;
зона класса 22 — зона, не классифицируемая как зона 21, в которой об-
лака горючей пыли могут возникать редко и сохраняются только на короткий
период или в которых накопление слоев горючей пыли может иметь место при
ненормальном режиме работы, что может привести к возникновению способ-
ных воспламеняться смесей пыли с воздухом.
В п. 7.3 ПУЭ устанавливается иная классификация взрывоопасных зон для
смесей газов и паров с воздухом:
зона класса В-1 — зона, расположенная в помещениях, в которых выде-
ляются горючие газы или пары легковоспламеняющихся жидкостей (ЛВЖ)
в таком количестве и с такими свойствами, что они могут образовать с воз-
духом взрывоопасную смесь при нормальных режимах работы, например при
загрузке или разгрузке технологических аппаратов;
зона класса В-1а — зона, расположенная в помещении, в котором при нор-
мальной эксплуатации взрывоопасные смеси горючих газов (независимо от ниж-
него концентрационного предела воспламенения) или пара ЛВЖ с воздухом не
образуются, а возможны только в результате аварий или неисправностей;
зона класса В-16 — зона, расположенная в помещении, в котором при нор-
мальной эксплуатации взрывоопасные смеси горючих газов или паров ЛВЖ с
воздухом не образуются, а возможны только в результате аварий или неисправ-
ностей и которые отличаются рядом особенностей, перечисленных в п. 7.3.42
ПУЭ;
468
Глава 7
зона класса В-1г — пространства у наружных установок: технологических
установок, содержащих горючие газы или ЛВЖ, эстакад для слива и налива
ЛВЖ, открытых нефтеловушек и т.п.
Для смесей пыли или волокон с воздухом устанавливаются следующие
классы взрывоопасных зон:
зона класса В-П — зона, расположенная в помещении, в котором выде-
ляются переходящие во взвешенное состояние горючие пыли или волокна в
таком количестве и с такими свойствами, что они способны образовать с воз-
духом взрывоопасные смеси при нормальной работе, например при разгрузке
и загрузке технологических аппаратов;
зона класса В-Па — зона, расположенная в помещении, в котором опасные
состояния, указанные для зоны В-П, не имеют места при нормальной эксплуа-
тации, а возможны только в результате аварий или неисправностей.
Таким образом, для взрывоопасных смесей газов и паров с воздухом ГОСТ
устанавливает три класса зон, а ПУЭ — четыре; для смесей горючей пыли или
волокон с воздухом ГОСТ устанавливает три класса зон, а ПУЭ — два. Поэто-
му формальное соответствия между этими двумя классификациями установить
невозможно, хотя попытки такого сопоставления имеются [539]. Сопоставление
в случае необходимости должно выполняться по существу, т.е. путем содержа-
тельного анализа основных признаков, по которым производятся обе класси-
фикации. В новых проектах автоматизации опасных промышленных объектов
следует пользоваться понятиями ГОСТ, а не ПУЭ, поскольку ПУЭ со временем
будет приведено в соответствие с ГОСТ, а не наоборот [552].
7.5.3. Классификация взрывоопасности
технологических блоков
Технологический блок — это аппарат или группа (с минимальным чис-
лом) аппаратов, которые в заданное время могут быть отключены (изолиро-
ваны) от технологической системы без опасных изменений режима, которые
могли бы привести к развитию аварии в смежной аппаратуре или системе [540].
Выбор технических средств, обслуживающих взрывоопасные технологические
блоки, определяется их категорией взрывоопасности. Категория взрывоопас-
ности определяется в зависимости от относительного энергетического потен-
циала взрывоопасности QB технологического блока, который рассчитывается
исходя из общей энергии сгорания парогазовой фазы, поступившей в окружаю-
щую среду при аварийной разгерметизации блока, по формулам, приведенным
в [540]. Для определения категории взрывоопасности можно также использо-
вать расчетную массу т горючих паров (газов) взрывоопасного парогазового
Таблица 7.3 Категории взрывоопасности технологических блоков облака, приведенной к единой удельной энергии сгорания. Категория взрыво- опасности технологического блока опре-
Категория взрывоопасности Qb ТП, кг деляется по табл. 7.3. В зависимости от категории взрыво-
I II III >37 27...37 <27 >5000 2000...5000 <2000 опасности формулируются требования к техническим средствам контроля, уп- равления, противоаварийной защиты и
Автоматизация опасных объектов
469
сигнализации по надежности, быстродействию, допустимой погрешности изме-
рительных систем и другим техническим характеристикам. Могут быть также
предъявлены требования к повышению надежности путем резервирования, ис-
пользования временной или функциональной избыточности. Конкретные тре-
бования для блоков разных категорий и различного функционального назна-
чения сформулированы в [540]. Например, на объектах с технологическими
блоками I и II категории взрывоопасности необходимо использовать дубли-
рование систем контроля параметров, применять системы самодиагностики с
индикацией рабочего состояния, с сопоставлением значений технологически
связанных параметров. Для объектов с технологическими блоками III кате-
гории таких требований нет.
Маркировка взрывозащиты напрямую не связана с категорией взрывоопас-
ности технологического блока.
7.5.4. Взрывопожарная и пожарная опасность
По взрывопожарной и пожарной опасности здания и их помещения делят-
ся на категории [541]. Категория помещений устанавливается на стадии их
проектирования в зависимости от количества и свойств находящихся в них ве-
ществ и материалов с учетом особенностей размещенных в них производств
(табл. 7.4). Деление помещений и зданий на категории используется для уста-
новления нормативных требований по обеспечению взрывопожарной и пожар-
Таблица 7.4
Деление помещений на категории
Категория помещения Характеристика веществ и материалов, находящихся (обращающихся) в помещении
А взрыво- пожаро- опасная Горючие газы, легковоспламеняющиеся жидкости с температурой вспыш- ки не более 28 °C в таком количестве, что могут образовывать взрыво- опасные парогазовоздушные смеси, при воспламенении которых разви- вается расчетное избыточное давление взрыва в помещении, превышаю- щее 5 кПа. Вещества и материалы, способные взрываться и гореть при взаимодействии с водой, кислородом воздуха или друг с другом в та- ком количестве, что расчетное избыточное давление взрыва в помещении превышает 5 кПа
Б взрыво- пожаро- опасная Горючие пыли или волокна, легковоспламеняющиеся жидкости с тем- пературой вспышки более 28 °C, горючие жидкости в таком количестве, что могут образовывать взрывоопасные пылевоздушные или паровоздуш- ные смеси, при воспламенении которых развивается расчетное избыточ- ное давление взрыва в помещении, превышающее 5 кПа
В1-В4 пожаро- опасные Горючие и трудногорючие жидкости, твердые горючие и трудногорючие вещества и материалы (в том числе пыли и волокна), вещества и мате- риалы, способные при взаимодействии с водой, кислородом воздуха или друг с другом только гореть, при условии, что помещения, в которых они имеются в наличии или обращаются, не относятся к категориям А или Б
Г Негорючие вещества и материалы в горячем, раскаленном или расплав- ленном состоянии, процесс обработки которых сопровождается выделени- ем лучистого тепла, искр и пламени; горючие газы, жидкости и твердые вещества, которые сжигаются или утилизируются в качестве топлива
д Негорючие вещества и материалы в холодном состоянии
470
Глава 1
Таблица 7.5
Категории пожароопасности
Класс пожаро- опасной зоны Характеристика зоны
П-1 Зоны, расположенные в помещениях, в которых обращаются горючие жидкости с температурой вспышки выше 61 °C
П-П Зоны, расположенные в помещениях, в которых выделяются горючие пыль или волокна с нижним концентрационным пределом воспламене- ния более 65 г/куб.м
П-Па Зоны, расположенные в помещениях, в которых обращаются твердые горючие вещества
П-Ш Зоны, расположенные вне помещений, в которых обращаются горючие вещества с температурой вспышки выше 61 °C или твердые горючие вещества
Таблица 7.6
Степени защиты оболочками
Вид технического средства и условия его работы Степень защиты оболочкой для пожароопасной зоны класса
П-1 П-П П-Па П-Ш
Искрящие по условиям работы, установленные ста- ционарно или на передвижных механизмах (на кра- IP44 IP54 IP44 IP44
нах, тельферах, тележках и т.п.) Не искрящие по условиям работы, установленные IP44 IP44 IP44 IP44
стационарно или на передвижных механизмах Шкафы для размещения аппаратов и приборов IP44 IP54, IP44* IP44 IP44
Коробки сборок зажимов силовых и вторичных цепей IP44 IP44 IP44 IP44
* При установке в них аппаратов, не искрящих по условиям работы.
ной безопасности при планировке и застройке, определении этажности, пло-
щадей, размещении помещений, инженерного оборудования, для конструктив-
ных решений. Категория помещенйя обычно указывается на двери, ведущей
в это помещение.
Прямой связи между категорией помещения и классом взрывоопасной зоны
не существует, поскольку в одном и том же помещении могут быть взрыво-
опасные зоны разных классов.
В пределах помещения и вне его выделяются также пожароопасные зоны
П-I, П-П, П-Па, П-Ш (ПУЭ, п. 7.4) (табл. 7.5), т.е. области пространства, в
пределах которых постоянно или периодически обращаются горючие (сгорае-
мые) вещества, которые могут появляться при нормальном технологическом
процессе или его нарушениях.
Для оборудования, применяемого в пожароопасных зонах, не требуется
маркировка взрывозащиты. Однако это оборудование должно иметь оболочку
(корпус), которая разделяет потенциальный источник воспламенения (обору-
Автоматизация опасных объектов
471
дование) от горючих веществ, находящихся в пожароопасной зоне. В табл. 7.6
приведены требуемые ПУЭ степени защиты оболочками по ГОСТ 14254-80 [542]
в зависимости от вида оборудования (установки) и условий его работы.
7.5.5. Требования к техническим устройствам
Организации, эксплуатирующие опасный производственный объект, долж-
ны иметь разрешение Ростехнадзора РФ на применение используемых техни-
ческих устройств [536, п. 2.2]. Копия разрешения должна быть предоставлена
поставщиком технического устройства.
Технические устройства могут иметь также сертификат соответствия тре-
бованиям промышленной безопасности. Для взрывозащищенного оборудования
это сертификат ССЕх в системе ГОСТ Р [558]. Однако одного сертификата
недостаточно. Он служит только основанием для того, чтобы Ростехнадзор
выдал разрешение на применение технического устройства на опасных про-
изводственных объектах [537, п. 6.6]. Разрешение Ростехнадзора может быть
выдано также и на основании экспертного заключения о промышленной без-
опасности, выданного организацией, имеющей соответствующую лицензию и
область аккредитации.
Если техническое устройство, используемое на опасном производственном
объекте, содержит в своем составе средства измерений, то они должны иметь
сертификат об утверждении типа средств измерений [544, 545]. Соответ-
ственно, в документации на устройство должна быть ссылка на методику и
периодичность поверки.
В правилах сертификации электрооборудования для взрывоопасных сред
[558] сказано (п. 3.13), что сертификат утверждения типа нужен только для
средств измерения, которые используются в сферах, на которые распростра-
няется действие государственного метрологического контроля и надзора, т.е.
в сферах, в которых безопасность зависит от точности измерений [546], на-
пример в устройствах технологических защит или в системах контроля тем-
пературы в силосах элеваторов.
7.5.6. Маркировка взрывозащищенного оборудования
Оборудование, используемое на взрывоопасных объектах, может иметь три
типа знаков маркировки взрывозащиты:
• для оборудования, работающего во взрывоопасной среде смеси газа или
паров с воздухом, например, 0[Exib]IICT4 или PBExdI/IExdIIBT3 [518];
• для оборудования, работающего во взрывоопасной среде смеси горючей пы-
ли или волокон с воздухом, например, DIP А21 ТА ТЗ [547];
• может быть без маркировки, но в оболочке со степенью защиты не хуже
IP54 для взрывоопасных зон В-Па, В-16 [175].
Выбор оборудования осуществляется на основании предварительных зна-
ний о типе взрывоопасной смеси, категории взрывоопасности технологическо-
го блока, классе взрывоопасной зоны и допустимой температуре поверхности
оборудования.
472
Глава 1
Маркировка и выбор оборудования, работающего в среде газа.
Знак «Ех» в маркировке указывает, что электрооборудование удовлетворяет
стандартам на взрывозащиту. Для связанного электрооборудования знак «Ех»
и следующее за ним обозначение вида взрывозащиты заключается в квадрат-
ные скобки.
Символы перед «Ех» обозначают уровень взрывозащиты.
Для электрооборудования группы I (рудничное) установлены следующие
обозначения уровни взрывозащиты [516]:
РП — для электрооборудования повышенной надежности против взрыва;
РВ — для взрывобезопасного электрооборудования;
РО — для особовзрывобезопасного электрооборудования.
Для электрооборудования группы II (не рудничного) установлены другие
обозначения уровня взрывозащиты:
2 — для электрооборудования повышенной надежности против взрыва
(низший уровень взрывозащиты, взрывозащита обеспечивается только при нор-
мальном режиме работы);
1 — для взрывобезопасного электрооборудования (в котором взрывозащита
обеспечивается не только при нормальном режиме работы, но и при вероятных
повреждениях, кроме повреждения средств взрывозащиты);
О — для особовзрывобезопасного электрооборудования (с дополнительны-
ми средствами взрывозащиты по сравнению с взрывобезопасным оборудова-
нием).
После знака «Ех» следует обозначение вида взрывозащиты (о, р, q, d, е,
га, ib, ic, m, n, s, см. выше).
Далее указывается группа электрооборудования:
I — для электрооборудования, предназначенного для подземных вырабо-
ток шахт и рудников и их наземных строений, опасных по рудничному газу и
пыли;
II или ПА, ПВ, ПС — для электрооборудования внутренней и наружной
установки, используемого в газовой среде, кроме шахт. Буквы А, В, С ис-
пользуются только для искробезопасного электрооборудования и защищенного
взрывонепроницаемой оболочкой (вид d). Группа электрооборудования выби-
рается исходя из состава (категории) взрывоопасной смеси, в которой исполь-
зуется электрооборудование. Если электрооборудования предназначено для
использования в среде только одного газа, сразу за обозначением «II» следует
химическая формула или название газа.
При испытании взрывозащищенного электрооборудования используются
испытательные газовые смеси [518], состав которых приведен в табл. 7.7.
При использовании классификации взрывоопасных зон по ГОСТ трем уров-
ням взрывозащиты («Повышенная надежность против взрыва», «взрывобез-
опасный» и «особовзрывобезопасный») соответствуют три класса взрывоопас-
ных зон: 2, 1, 0 для среды газа или 22, 21, 20 для среды пыли [552]. При
классификации взрывоопасных зон по ПУЭ такого простого соответствия при-
вести нельзя и следует пользоваться рекомендациями ПУЭ (п. 7.3, табл. 7.8).
Автоматизация опасных объектов
473
Таблица 7.7
Группы оборудования в зависимости от типа газовых сред
Группа (подгруппа) электро- оборудования Состав смеси для испытания взрывозащиты вида «искробезопасная электрическая цепь» Энергия воспламенения смеси по стандарту CENELEC, мкДж
I ПА ИВ ПС CENELEC — Еврош 8...8,6 % метана в воздухе 5...5,5 % пропана в воздухе 7,3...8,3 % этилена в воздухе 19...23 % водорода в воздухе ейский комитет по стандартизации в эле Более 180 60...180 Менее 60 ктротехнике.
Таблица 7.8
Сопоставление классификации ГОСТ и ПУЭ
Уровень взрывозащиты электрооборудования Класс взрывоопасных зон, в которых допускается применение электрооборудования
по ГОСТ по ПУЭ
0 — особовзрывобезопасное 1 — взрывобезопасное 2 — повышенной надежности против взрыва Без средств взрывозащиты, но с оболочкой IP 54 0, 1, 2; 20, 21, 22 1, 2; 21, 22 2; 22 В-I, B-Ia, В-16, В-1г, В-П, В-Па В-I, B-Ia, В-16, В-Ir; В-П, В-Па В-Ia (только стационарные установки), В-16 (передвижные установки), В-1г, В-Па, для светильников В-П В-Па, В-16
Таблица 7.9
Температурные классы
Температур- ный класс Максимальная температура поверхности, °C Температур- ный класс Максимальная температура поверхности, °C
Т1 450 Т4 135
Т2 300 Т5 100
ТЗ 200 Тб 85
Следует отметить, что согласно ПУЭ не существует зон, в которых следу-
ет использовать только особовзрывобезопасное электрооборудование (уровень
0) и нельзя использовать взрывобезопасное (уровень 1). Согласно ГОСТ та-
кие зоны имеются.
Для электрооборудования группы II после обозначения группы указывают
температурный класс (табл. 7.9) или максимальную температуру поверхности,
или и то, и другое одновременно.
Примеры.
0ExdibIICT6
Здесь:
0 — особо взрывобезопасное электрооборудование;
d — взрывозащита с помощью взрывонепроницаемой оболочки и с помощью
искробезопасной цепи с уровнем безопасности ib;
ПС — тип взрывоопасной смеси (см. табл. 7.7);
Тб — температура поверхности оборудования ниже 85 °C.
474
Глава 7
[Exia]HC
Здесь квадратные скобки указывают на то, что оборудования является
связанным;
ia — уровень искробезопасности;
ПС — подгруппа (см. табл. 7.7).
Маркировка и выбор оборудования для среды пыли. Маркировка
оборудования для использования в среде взрывоопасной смеси горючей пыли
или волокон с воздухом начинается с условного обозначения защиты от воспла-
менения пыли (DIP). Далее следует вид исполнения оборудования: А или В.
Исполнение А отличается от исполнения В следующим:
• максимальная температура поверхности исполнения А определяется при
условии отсутствия пыли, а для исполнения В — при наличии слоя пыли;
• максимально допустимая температура поверхности для исполнения А опре-
деляется при толщине пыли до 5 мм, а для исполнения В — до 12,5 мм;
• пыленепроницаемость оборудования исполнения А испытывается методом
искусственного разряжения, а для исполнения В — методом циклическо-
го нагревания.
Следующим указывается максимальная температура поверхности Тд для
исполнения А, или Тв для исполнения В, или температурный класс, или и
то и другое вместе.
Пример. DIP А21 Тд ТЗ или DIP А21 Тд 170°С — оборудование, пред-
назначенное для работы в среде пыли, во взрывоопасной зоне класса 21 с тем-
пературой поверхности не более 170°С, с исполнением А.
При выборе электрооборудования следует учитывать, что допустимая тем-
пература поверхности не должна превышать 2/3 температуры самовоспламене-
ния пыли для нетлеющей пыли и быть не менее чем на 50 °C ниже температуры
тления для тлеющей пыли [ПУЭ, п. 7.3].
Оборудование для работы в среде пыли выбирается в соответствии с
табл. 7.10.
Таблица 7.10
Выбор маркировки для среды пыли
Тип пыли Зона класса 20 Зона класса 21 Зона класса 22
Электропроводящая Непроводящая DIP А20, DIP В20 DIP А20, DIP B20 DIP А21, DIP B21 DIP A21, DIP B21 DIP A21 (IP6X), DIP B21 DIP A22 или DIPA21; DIP B22 или DIP B21
Если нет устройств, предназначенных для работы в середе пыли, то можно
использовать устройства для среды газа, если ограничить температуру поверх-
ности до безопасных значений (ПУЭ, п. 7.3).
7.5.7. Монтаж взрывоопасного технологического
оборудования
Лицензия Ростехнадзора на монтаж (или проектирование) систем автома-
тизации на опасных промышленных объектах не требуется после утверждения
Автоматизация опасных объектов
475
закона «О лицензировании отдельных видов деятельности» [548]. Однако мон-
таж технологического оборудования и систем автоматизации на производствен-
ном объекте является частным случаем строительства [549-551]. Поэтому для
выполнения работ по монтажу и пуско-наладке систем автоматизации необхо-
димо иметь лицензию Госстроя на строительство зданий и сооружений I и
II уровня ответственности [548]. Проект системы автоматизации могут выпол-
нять организации, имеющие лицензию Госстроя на проектирование зданий и
сооружений I и II уровня ответственности с разрешенными работами по про-
ектированию средств автоматизации.
Проект строительства на опасном производственном объекте должен прой-
ти экспертизу промышленной безопасности в экспертной организации, имеющей
соответствующую лицензию и область аккредитации, а при строительстве про-
ектировщик должен осуществлять авторский надзор за ходом строительства.
Перед началом монтажных работ на опасном производственном объекте
должен быть оформлен акт-допуск. Ответственность за безопасность при мон-
таже несут как строитель, так и заказчик.
К обслуживанию, монтажу и пусконаладке технических устройств, предна-
значенных для применения на опасных производственных объектах, допуска-
ются лица, прошедшие соответствующее обучение, что должно быть подтвер-
ждено удостоверением установленного образца.
7.6. Заключение
Таким образом, алгоритм выбора и установки технических средств для
опасных промышленных объектов можно представить в виде следующей по-
следовательности шагов.
1. Определяют, является ли опасный производственный объект взрыво-
опасным. Если не является, то единственным требованием к техническим сред-
ствам является наличие разрешения Ростехнадзора на его применение. Если
является взрывоопасным, то:
• определяют класс взрывоопасной зоны, пользуясь проектной или эксплу-
атационной документацией. В зависимости от класса выбирают уровень
взрывозащиты (первая цифра в маркировке);
• определяют категорию взрывоопасности технологического блока. В зависи-
мости от категории взрывоопасности формулируются требования к техни-
ческим характеристикам по надежности (необходимости резервирования),
быстродействию, допустимой погрешности и др. Категория взрывоопасно-
сти влияет также на выбор вида взрывозащиты (d, m, ia и др). Формульные
критерии такого выбора в известной нам литературе не описаны;
• в зависимости от энергии воспламенения взрывоопасной среды или состава
взрывоопасной смеси (табл. 7.7) выбирают группу электрооборудования (в
маркировке следует за видом взрывозащиты);
• в зависимости от температуры воспламенения взрывоопасной смеси выби-
рают температурный класс оборудования (в маркировке следует за груп-
пой электрооборудования).
476
Глава 1
2. Если объект не является взрывоопасным, но является пожароопасным,
то определяют степень защиты оболочки оборудования по табл. 7.6.
3. Проверяют наличие разрешения Ростехнадзора на применение техни-
ческого средства, срок его действия и соответствие маркировки вида взрыво-
защиты необходимым требованиям.
4. Установка технического средства (системы автоматизации) на объект
должна выполняться строго в соответствии с проектом строительства опасного
производственного объекта. Если в проект вносятся изменения в связи с мо-
дернизацией (реконструкцией), то эти изменения должны пройти экспертизу
промышленной безопасности в организации, имеющей лицензию на данный вид
деятельности и соответствующую область аккредитации. Заключение экспер-
тизы утверждаются в территориальном органе Ростехнадзора. По окончании
установки производится приемка объекта в эксплуатацию.
5. Монтажная (проектная) организация должна иметь лицензию на строи-
тельство зданий и сооружений I и II уровня ответственности с разрешенными
работами по монтажу средств автоматизации. Работники монтажной (проект-
ной) организации должны пройти обучение, аттестацию и иметь удостоверения
Ростехнадзора о проверке знаний в области промышленной безопасности.
Глава 8
Аппаратное резервирование
Резервирование является практически единственным и широкое использу-
емым методом кардинального повышения надежности систем автоматизации.
Оно позволяет создавать системы аварийной сигнализации, противоаварийной
защиты, автоматического пожаротушения, контроля и управления взрывоопас-
ными технологическими блоками [190] и другие, относящиеся к уровням без-
опасности SIL1...SIL3 по стандарту МЭК 61508-5 [521], а также системы, в ко-
торых даже короткий простой ведет к большим финансовым потерям (систе-
мы распределения электроэнергии, непрерывные технологические процессы).
Резервирование позволяет создавать высоконадежные системы из типовых из-
делий широкого применения.
Составной частью систем с резервированием является подсистема автома-
тического контроля работоспособности и диагностики неисправностей.
Большая доля отказов в системах автоматизации приходится на программ-
ное обеспечение. Однако этой теме посвящено множество специализирован-
ных книг и журнальных статей (см., например [569]), поэтому мы ее касать-
ся не будем.
8.1. Основные понятия и определения
Основные определения понятий теории надежности и надежности, связан-
ной с функциональной безопасностью, даны в ГОСТ 27.002-89 и МЭК 61508.
Ниже приводится ряд определений, которые потребуются нам для дальней-
шего изложения.
Неисправностью называется состояние объекта, при котором он не соот-
ветствует хотя бы одному своему параметру, указанному в эксплуатационной
документации.
Неработоспособностью называется состояние объекта, при котором он не
способен выполнять хотя бы одну из своих функций, описанных в эксплуата-
ционной документации. Например, контроллер, у которого отказал один из
каналов ввода, является работоспособным, но неисправным, если этот канал
не используется.
Дефектом называется каждое отдельное несоответствие объекта установ-
ленным требованиям (ГОСТ 15467-79) [561].
478
Глава 8
Отказом называется событие, заключающееся в нарушении работоспособ-
ности объекта. Факт отказа устанавливается на основании некоторых крите-
риев отказа, т.е. признаков, позволяющих судить о нарушении работоспособ-
ности. В результате отказа объект становится неисправным. Отказы возни-
кают вследствие применения ненадежных схемотехнических решений на ста-
дии проектирования контроллеров, электронных компонентов, изготовленных
с нарушением техпроцесса, применения некачественных материалов, наруше-
ния технологических режимов пайки, неточной установки компонентов на пе-
чатную плату, старения материалов, некачественного технологического обору-
дования, низкой культуры производства, отсутствия надежных методов кон-
троля, работы компонентов в предельных электрических режимах, нарушений
условий эксплуатации и т.п.
Наработкой называется продолжительность работы объекта, выражаемая
в единицах времени или в количестве циклов (например, циклов срабатывания
реле). Различают наработку до отказа (от начала эксплуатации до первого
отказа) и наработку между отказами (от начала работы после ремонта до
очередного отказа). Используют также средние значения этих величин. Сред-
нюю наработку между отказами называют наработкой на отказ, в отличие
от средней наработки до отказа.
Безотказность — свойство объекта непрерывно сохранять работоспособ-
ность в течение некоторого времени или наработки.
Живучесть — свойство объекта сохранять ограниченную работоспособ-
ность при неисправностях или отказе некоторых компонентов. Этот термин
наиболее близок международному термину «fault-tolerance» (дословно «до-
пустимость неисправностей»), который часто переводят как «отказоустойчи-
вость». Термин «отказоустойчивость» в ГОСТ 27.002-89 используется, но его
значения стандартом не определено. Мы будем использовать его в сочетании
«отказоустойчивая система» как более компактный синоним понятия «систе-
ма, обладающая свойством безотказности после отказа отдельных элементов».
Вероятность безотказной работы — вероятность того, что в пределах за-
данной наработки отказ не возникнет.
Коэффициент готовности — вероятность того, что объект окажется ра-
ботоспособным в произвольный момент времени, кроме запланированных пе-
риодов, в течение которых его работа по назначению не предусматривает-
ся. Высокая готовность системы обеспечивается избыточностью, допустимо-
стью сбоев, автоматическим контролем ошибок и диагностированием (ГОСТ
Р 51840-2001 [489]).
Резервирование может быть общим, когда резервируется система в целом,
,и раздельным (поэлементным), когда резервируются отдельные элементы си-
стемы. В случае, когда в системе много однотипных элементов (например,
модулей ввода сигналов термопар), число резервных элементов может быть в
несколько раз меньше, чем резервируемых.
Кратность резерва — отношение числа резервных элементов к числу ре-
зервируемых, которое выражается несокращаемой дробью. В частности, в соот-
ветствии с ГОСТ 27.002-89 кратность резерва 3:2 нельзя представлять как 1,5,
Аппаратное резервирование
479
и иногда используемый термин «полуторное резервирование» не соответству-
ет стандарту. При сокращении дроби исчезает важная информация об общем
количестве элементов в системе. Дублированием называют резервирование с
кратностью резерва один к одному.
Постоянное резервирование (к нему относится мажоритарное резервирова-
ние и метод голосования) — резервирование с нагруженным резервом, при кото-
ром все N элементов в резервированной системе выполняют одну и ту функцию
и являются равноправными, а выбор одного из N сигналов на их выходе выпол-
няется схемой «голосования», без переключений. Постоянное резервирование
позволяет получить системы с самым высоким коэффициентом готовности.
Резервирование замещением — резервирование, при котором функции ос-
новного элемента передаются резервному только после отказа основного эле-
мента. Резервирование замещением может быть с холодным, теплым или го-
рячим резервом. Его недостатком является зависимость от надежности пе-
реключающих устройств.
Нагруженный резерв («горячий резерв») — резервный элемент, который
находится в таком же режиме, как и основой. Недостатком горячего резерва
является уменьшение ресурса с течением времени. В системах автоматизации
с горячим резервом переход на резерв может занимать время от нескольких
миллисекунд до единиц секунд.
Облегченный резерв («теплый резерв») — резервный элемент, находящийся
в менее нагруженном состоянии, чем основной. Например, резервный компью-
тер в «спящем» режиме является облегченным резервом.
Ненагруженный резерв («холодный резерв») — резервный элемент, находя-
щийся в ненагруженном режиме до начала его использования вместо основного
элемента. Ненагруженный резерв позволяет получить системы с самой высокой
надежностью, но с низким коэффициентов готовности. Они эффективны в слу-
чае, когда система некритична к времени простоя величиной в несколько минут.
Основное отличие между «горячим», «холодным» и «теплым» резервом со-
стоит в длительности периода переключения на резерв. При горячем резерви-
ровании контроллеров время переключения составляет от единиц миллисекунд
до долей секунды, при теплом — секунды, холодном — минуты. Поэтому вре-
мя переключения на резерв иногда рассматривают как основной признак при
классификации резервирования замещением.
Надежность — это свойство объекта сохранять во времени значения всех
параметров и выполнять требуемые функции в заданных условиях примене-
ния. Надежность является составным понятием. Оно может включать в се-
бя понятия безотказности, долговечности, ремонтопригодности, сохраняемо-
сти. В промышленной автоматизации для количественной оценки надежно-
сти чаще всего используется параметр «наработка на отказ» или «интенсив-
ность отказов», а в системах безопасности — «вероятность отказа при на-
личии запроса» [521, 525].
Интенсивностью отказов называется условная плотность вероятности
возникновения отказа объекта, определяемая при условии, что до рассматри-
ваемого момента времени отказ не возник. При испытаниях на надежность ко-
480
Глава 8
личество исправных элементов n(t) с течением времени t уменьшается за счет
того, что часть из них n(t) - n(t + At) становятся неисправными через время At
в результате отказа. Интенсивность отказа определяется пределом
А = 1 nM- n(i 4- At) = _ 1 (8Д)
At—>о n(t) At n(t) dt
Длительность t безотказной работы элемента (от момента включения t = 0
до t) является случайной величиной, поэтому ее можно характеризовать ве-
роятностью P(t) = n(t)/n(0), где п(0) —> оо — число исправных элементов в
момент времени t = 0, n(t) — число исправных элементов в момент времени
t. При конечном числе испытуемых элементов вместо вероятности получают
ее точечную статистическую оценку.
Вероятность безотказной работы можно интерпретировать следующим об-
разом: если в системе автоматизации используется 100 модулей ввода-вывода,
каждый из которых имеет вероятность безотказной работы P(t) = 0,99 в те-
чение времени t = 1 год, то через год после начала эксплуатации в среднем
один из модулей станет неработоспособен.
Поделив числитель и знаменатель в (8.1) на п(0), получим
A(t) = -p7^^T- (8-2)
Выражение для функции распределения длительности безотказной работы
P(t) можно получить, решая дифференциальное уравнение (8.2) при началь-
ном условии Р(0) = 1:
✓ rt \
P(t) = exp ( — / A(t) dt) . (8.3)
\ Jo /
Вероятность отказа Q(t), по определению, равна
Q(t) = l-P(t). (8.4)
Интенсивность отказов A(t) обычно быстро уменьшается в начале эксплу-
атации изделия (период приработки), затем длительное время остается посто-
янной (A(t) = А = const) и после исчерпания срока службы резко возрастает.
Поскольку для средств промышленной автоматизации как правило, указы-
вают значение А = const, выражение (8.3) в этом случае упрощается:
P(t) = e-Af. (8.5)
Таким образом, вероятность безотказной работы устройства на интерва-
ле времени от t = 0 до t экспоненциально уменьшается с течением времени,
если устройство прошло этап приработки и не выработало свой ресурс. Эта
вероятность не зависит от того, как долго устройство проработало до начала
отсчета времени [569, 573], т.е. не играет роли, используется бывшее в употреб-
лении устройство или новое. Это кажущееся парадоксальным утверждение
справедливо только для экспоненциального распределения и объясняется тем,
что выражение (8.5) получено в предположении, что снижение ресурса изде-
Аппаратное резервирование
481
лия с течением времени не происходит, а причины отказов распределены во
времени в соответствии с моделью белого шума.
Вероятность отказа за время t, по определению, равна F(f) = 1 — P(t), а
плотность распределения времени до отказа /(£) (частота отказов) равна про-
изводной от функции распределения:
(М)
dt dt
и для экспоненциальной функции распределения (8.5) равна
/(t) = Ае”л*. (8.7)
Зная плотность распределения (8.7), можно найти среднюю наработку до
первого отказа ТСр, которая, по определению, является математическим ожи-
данием случайной величины — длительности безотказной работы t, т.е.
тср = [ tf(t) dt = X [ te~Xt dt = ^. (8.8)
Jq Jq A
Интегрирование в (8.8) выполняется по частям.
Наработка до отказа ТСр является основным параметром, который указыва-
ется в эксплуатационной документации на электронные средства промышлен-
ной автоматизации. Поскольку при t = ТСр из (8.5) получается Р(Тср) = 1/е =
= 0,37, то наработку на отказ можно интерпретировать следующим образом: ес-
ли в системе автоматизации имеется 100 модулей ввода-вывода, то через время
ТСр после начала эксплуатации останется в среднем 37 работоспособных и 63
отказавших модулей. Иногда наработку на отказ неправильно интерпретируют
как время, в течение которого устройство почти наверняка будет работоспособ-
но, и только после истечения этого времени наступит отказ.
При анализе надежности систем, связанных с безопасностью, вместо веро-
ятности отказа используется понятие «вероятность отказа при наличии за-
проса» (подробнее см. главу 7), т.е. вероятность отказа при наличии необхо-
димости быть в состоянии готовности. Например, если рассматривается си-
стема охраны нефтебазы, то нужно учитывать вероятность отказа системы во
время попытки проникновения нарушителей на базу, а не в то время, когда
их нет. Отсюда следует вывод, что с точки зрения надежности охраны нуж-
но рассматривать вероятность несрабатывания датчика охранной сигнализа-
ции на интервале времени, в течение которого может появиться нарушитель,
и не нужно учитывать вероятность ложного срабатывания системы, посколь-
ку она не влияет на выполнение функции охраны. Классическая же теория
надежности учитывает оба вида отказов.
В системах, связанных с безопасностью, наработка до отказа рассматри-
вается отдельно для опасных и безопасных отказов. Безопасным считается
отказ, не вызывающий опасную ситуацию на объекте. Рассмотрим, например,
систему аварийного отключения, в которой исчезновение питания приводит к
обесточиванию обмотки реле и поэтому реле отключает нагрузку, переводя ее
тем самым в безопасное состояние. В такой системе отказ источника питания
482
Глава 8
обмотки реле является безопасным отказом и поэтому не учитывается при рас-
чете вероятности отказа при наличии запроса. Однако отказ такого же источ-
ника питания в системе автоматического пожаротушения, когда необходимо,
наоборот, подать напряжение на насосы, рассматривается как опасный отказ.
Поэтому средняя вероятность отказа при наличии запроса в двух рассмотрен-
ных системах будет различной несмотря на применение блока питания с одним
и тем же значением наработки до отказа.
Учет обычной наработки до отказа при проектировании систем безопасно-
сти может привести к неоправданно заниженным показателям надежности и
невозможности достижения требуемого уровня безопасности.
Фактические значения наработки до отказа систем с резервированием ока-
зываются гораздо ниже расчетных. Это связано с существованием так назы-
ваемых отказов по общей причине (ООП), которые происходят одновременно у
основного элемента и резервного и которые составляют основную долю отка-
зов в системах автоматизации. Предположим, например, что резервированная
система находится в помещении, которое оказалось затопленным водой или
охваченным пожаром. Отказ основного элемента и резерва при этом наступит
одновременно. Другим примером может быть одновременный обрыв основного
и резервного кабеля в результате земляных работ. Третьим примером может
быть применение двух контроллеров с процессорами из одной и той же пар-
тии, которая была изготовлена с применением просроченной паяльной пасты.
Следующим примером может быть применение двух датчиков давления одной
и той же конструкции от одного и того же производителя, которые окислились
и разгерметизировались одновременно. Электромагнитный импульс молнии
или импульс в сети электропитания может явиться причиной отказа основного
и резервного оборудования одновременно. Во всех приведенных примерах су-
ществует сильная корреляция между случайными величинами, вызывающими
отказ основного и резервного элемента.
Для уменьшения коэффициента корреляции (снижения влияния общих
причин отказов) нужно по возможности выбирать элементы системы от разных
производителей, выполненные на разных физических принципах, с применени-
ем различных материалов, различных технологических процессов и с разным
программным обеспечением. Основное и резервное оборудование, включая ка-
бели, датчики и исполнительные механизмы желательно разносить террито-
риально, а монтаж основной и резервной системы должны выполнять разные
люди или разные монтажные организации, чтобы исключить появление оди-
наковых ошибок монтажа и одинаково ошибочную интерпретацию руководства
по эксплуатации монтируемого изделия.
Общие факторы, влияющие на всю систему, учитываются в моделях отказа
как последовательно включенное звено со своей наработкой на отказ.
8.2. Резервирование ПЛК и устройств
ввода-вывода
Несмотря на существование большого разнообразия методов резервирова-
ния, в промышленной автоматизации получили распространение только два
Аппаратное резервирование
483
из них: горячее резервирование замещением (hot standby) и метод голосова-
ния (2ооЗ voting, 1оо2 voting и др.). Реже используется теплый резерв (warm
standby).
Целью резервирования может быть обеспечение безотказности или обеспе-
чение безопасности. Методы резервирования, используемые для достижения
этих двух целей, существенно различаются. Основное различие состоит в том,
что для обеспечения безопасности достаточно снизить вероятность только опас-
ных отказов, в то время как для обеспечения безотказности требуется обеспе-
чить работоспособность системы при всевозможных отказах. Поэтому системы,
связанные с безопасностью, получаются проще, чем отказоустойчивые системы
при условии одинаковой наработки до отказа.
8.2.1. Общие принципы резервирования
В основе метода резервирования лежит очевидная идея замены отказав-
шего элемента исправным, находящемся в резерве. Однако реализация этой
идеи часто становится достаточно сложной, если необходимо обеспечить ми-
нимальное время перехода на резерв и минимальную стоимость оборудования
при заданной вероятности безотказной работы в течение определенного вре-
мени (наработки).
Для замены отказавшего элемента достаточно иметь резервный (запасной)
элемент на складе. Однако продолжительность ручной замены составляет еди-
ницы часов, что для многих систем автоматизации недопустимо долго. Сокра-
тить время вынужденного простоя позволяет применение контроллеров и моду-
лей ввода-вывода с разъемными клеммными соединителями и с возможностью
«горячей замены» [574] при условии наличия развитой системы диагностики
неисправности. Для обеспечения возможности «горячей замены» необходимо
предусмотреть следующее:
• защиту от статического электричества, которое может возникать на теле
оператора, выполняющего замену устройства;
• необходимую последовательность подачи напряжений питания и внешних
сигналов. Для этого используют, например, разъемы с контактами разной
длины и секвенсоры внутри устройства;
• защиту системы от броска тока, вызванного зарядом емкостей подключа-
емого устройства, например, с помощью токоограничительных резисторов
или отдельного источника питания;
• защиту устройства от перенапряжения, короткого замыкания, переполю-
совки, превышения напряжения питания, от ошибочного подключения;
• программируемые устройства должны быть заранее запрограммированы, в
сетевые устройства должен быть записан правильный адрес и предусмот-
рена подсистема автоматической регистрации нового и исключения старого
устройства из сети;
• в алгоритмах автоматического регулирования должен быть предусмотрен
«безударный» режим смены контроллера или модулей ввода-вывода [294].
Если резервный элемент входит в состав системы, то она относится к ре-
зервированным системам с ручным замещением отказавшего элемента.
484
Глава 8
Рис. 8.1. Устройства с голосованием по схеме 2ооЗ (а) и по схеме 1оо2 (б)
Системы с голосованием. Основным отличительным признаком систем
резервирования с голосованием является невозможность выделения в системе
основных элементов и резервных, поскольку все они равноправны, работают
одновременно и выполняют одну и ту же функцию. Выбор одного сигнала
из нескольких осуществляется схемой голосования, которая в частном случае
нечетного числа голосов называется мажоритарной схемой.
Системы с голосованием не требуют контроля работоспособности элемен-
тов для своего функционирования, но используют подсистему диагностики для
сокращения времени восстановления отказавших элементов. Наличие системы
диагностики снижает также вероятность накопления скрытых неисправностей,
которые со временем могут явиться причиной отказа.
Принцип работы схемы голосования рассмотрим на примере резервирова-
ния датчиков (рис. 8.1,а). В такой системе вместо одного датчика используются
три (например, три термопары), которые подсоединены к одному модулю вво-
да. В схему голосования поступают, соответственно, три значения измеряемой
величины (например, три значения температуры Т2, Тз), из которых необ-
ходимо выбрать одно. Значения температуры располагаются в порядке воз-
растания: Ti < Тг < Тз, а на выход схемы голосования поступает значение,
расположенное между двумя крайними (но не среднее арифметическое!). На-
пример, если в результате измерения получены значения 0,12; 39,5; 39,4°С, то
используется только значение 39,4, остальные игнорируются.
Резервирование элементов с дискретными сигналами выполняется анало-
гично рассмотренному выше. Поскольку значениями дискретных сигналов яв-
ляются логические «0» или «1», то в результате мажоритарного голосования
выбирается то значение, которое принимают большинство сигналов. Напри-
мер, при логических сигналах А = 1,В = 1,С = 0 результатом голосования
будет значение Y = 1. Блок мажоритарного голосования реализует логиче-
скую функцию Y = АВ 4- ВС 4- С А.
Очевидно, что для работы мажоритарной схемы число «голосов» долж-
но быть нечетным. Однако в системах безопасности возможно применение
любого числа «голосов». Вместо недостающего голоса используется условие,
что система считается работоспособной, если отказ является безопасным. Это
позволяет использовать системы, в которых выбирается один голос из двух,
и такие системы по стандарту МЭК 61508 [521] обозначаются как 1оо2 (1 Out
Of 2). Используются также системы 2оо2 (два голоса из двух), 2ооЗ (два голоса
из трех), 2оо4 (два голоса из четырех), Зоо4 (три голоса из четырех). Нерезер-
Аппаратное резервирование
485
вированные системы обозначаются как lool. Если в резервированной системе
имеется развитая подсистема диагностики неисправностей, то к обозначению
добавляется буква «D», например loo2D.
Примером системы с голосованием вида 1оо2 может служить система
охранной сигнализации двери, в которой используются два датчика А и В с
целью взаимного резервирования (рис. 8.1,6). При отказе одного из датчиков
(например, датчика В, когда вместо А = 1, В = 1 получаем А = 1, В = 0) си-
стема, пользуясь правилом большинства голосов, не может принять решение.
Однако, если учесть, что ложное срабатывание охранной системы не приво-
дит к опасной ситуации, а несрабатывание системы при наличии нарушителя
является опасным отказом, очевидно, схема голосования должна считать, что
достаточно одного голоса из двух, чтобы принять решение о подаче аварийного
сигнала. Если сигналом срабатывания сигнализации является логическое зна-
чение «1», а сигналом отсутствия нарушителя является значение «0», то блок
голосования реализует логическую функцию Y = А + В.
Если входными данными для голосования являются два аналоговых сигна-
ла, то пользователь при программировании должен установить, какой сигнал
из двух должен быть выбран системой в случае их несовпадения. Такой под-
ход возможен только в системах безопасности.
Противоположная ситуация используется при голосовании вида 2оо2. При-
мером может быть система контроля герметичности люка при погружении под-
водной лодки. Если люк имеет два датчика, то сигнал готовности к погру-
жению может появиться только при наличии подтверждения (А = 1, В = 1)
от обоих датчиков одновременно (двух из двух). Выход из строя одного дат-
чика не должен позволить системе выработать сигнал готовности к погруже-
нию, чтобы опасная ситуация не возникла. Такой блок реализует логическую
функцию Y = АВ.
Несмотря на высокую эффективность схем голосования с четным числом
голосов, они имеют недостаток, состоящий в возможности ложного срабатыва-
ния. Хотя этот тип отказов и не является опасным, в некоторых случаях он при-
водит к значительному материальному ущербу. Для исключения ложного сра-
батывания можно использовать более дорогие системы с нечетным количеством
голосов, которые снижают вероятность отказов обоих типов. Выбор наилучшей
системы осуществляется на основании результатов экономических расчетов.
При отказе одного из элементов резервированной системы безопасности
2ооЗ ее уровень безопасности понижается и она может начать функциониро-
вать как система 1оо2. Если замена неисправного элемента не произведена
и произошел второй отказ, то система переходит в режим без резервирования
lool, однако в этом режиме система не может находиться долго по требова-
ниям безопасности. Очередность перехода от одной схемы резервирования к
другой называется схемой деградации.
Система безопасности 2ооЗ может иметь второй вариант схемы деградации:
2ооЗ — 2оо2 — lool — 0. Здесь 0 обозначает состояние, когда система пере-
стает функционировать (останавливается). Перед остановкой система должна
перевести все свои выходы в безопасные состояния. Понятие безопасного со-
стояния для каждой системы определяется при ее проектировании. Например,
486
Глава 8
систем аварийного отключения безопасными являются обесточенные со-
стояния исполнительных механизмов, а для систем автоматического пожаро-
тушения или аварийной вентиляции, наоборот, — состояния, при которых на
исполнительные устройства подана энергия.
Схемы голосования широко используются в системах противоаварийной за-
щиты и сигнализации, где они имеют большое разнообразие. В системах же,
не связанных с безопасностью, не существует более простых схем голосования,
чем 2ооЗ, которые являются достаточно дорогими. Однако уникальным свой-
ством систем с голосованием является непрерывность функционирования во
время перехода на резерв, и это свойство является определяющим при приня-
тии решения о выборе метода резервирования.
Рис. 8.2. Дублирование моду-
ля ввода методом замещения
Резервирование замещением. Дру-
гой класс резервированных систем состав-
ляют системы с горячим резервированием
замещением (Hot Standby) (рис. 8.2). Их
отличительной чертой является принципи-
альная необходимость в подсистеме контро-
ля работоспособности как основного, так и
резервного элементов, наличие блока пе-
реключения на резерв (обычно переключе-
ние выполняется программно), а также ши-
ны для синхронизации между процессорами
(последнее относится только к резервирова-
нию процессоров). Основным параметром систем с резервированием замещени-
ем является время переключения на резерв. Переход на резерв выполняется
в пределах одного или нескольких контроллерных циклов и занимает время
от единиц миллисекунд до долей секунды.
Системы с более медленным переключением на резерв (от долей до единиц
секунд) относят к системам с теплым резервом (Warm Standby). Конструктив-
ное отличие теплого резервирования контроллеров от горячего заключается
в отсутствии высокоскоростного канала синхронизации между процессорами,
вместо него используется стандартная низкоскоростная промышленная сеть
или другой последовательный канал обмена.
Для контроля работоспособности используются такие параметры и собы-
тия, как, например, обрыв линии связи, короткое замыкание (к.з.), величина
напряжения и тока питания, отсутствие связи, перегрев выходных каскадов
модулей вывода, перегрузка по току, отсутствие нагрузки, выход сигналов за
границы динамического диапазона, срабатывание предохранителя, срабатыва-
ние блокировок и защит, целостность линий связи с модулями ввода-вывода,
ошибка контрольной суммы, ошибка памяти, «зависание» процессора и т.п.
Перечень процедур контроля ПЛК приведен в ГОСТ Р 51841 [490]. Диагности-
ческая информация должна выводиться на пульт оператора и одновременно
может использоваться для переключения на резерв.
Для исключения ошибочного перехода на резерв по причине сбоя в систе-
ме контроля используют временной фильтр, который разрешает переключение
Аппаратное резервирование
487
только при условии, что состояние неисправности длится не менее установлен-
ного времени (например, 1...100 мс).
Общее и поэлементное резервирование. Резервированными могут
быть отдельные элементы системы, их группы и вся система в целом. По-
элементное резервирование позволяет повысить отказоустойчивость в первую
очередь наиболее важных или наименее надежных элементов, выбрать различ-
ную кратность резервирования для разных элементов системы и тем самым
достичь максимального отношения надежности к цене.
Общее резервирование не требует анализа соотношений между надежно-
стью отдельных элементов системы, исключает ошибки при расчете надеж-
ности и выборе различных схем резервирования, а также ошибки, вызванные
плохой наглядностью архитектуры системы при поэлементном резервировании.
В случае общего резервирования достаточно двух отказов для отказа всей
системы, если один из элементов расположен в основной системе, второй — в
резервной. При поэлементном резервировании вероятность такого отказа су-
щественно ниже, поскольку для его реализации необходимо, чтобы один из
отказавших элементов был основным, второй — его резервом, что крайне ма-
ловероятно.
8.2.2. Модули ввода и датчики
Типичными отказами при вводе сигналов в ПЛК является обрыв или ко-
роткое замыкание линии связи. На долю отказов линий связи, датчиков и
исполнительных устройств в системах автоматизации приходится 85 % всех от-
казов [562]. Линии связи могут повреждаться в результате стихии (обмерзание
проводов), земляных работ, неправильного монтажа, злонамеренных действий и
т.п., поэтому их надежность часто не связана напрямую с надежностью кабеля.
Резервирование аналоговых модулей ввода и датчиков. Схемы го-
лосования могут применяться для резервирования датчиков при использова-
нии одного модуля ввода (рис. 8.1), для резервирования модулей ввода при
наличии одного датчика (рис. 8.3,а) или датчиков и модулей ввода одновре-
менно. В последнем случае потенциальные входы модулей соединяются парал-
лельно (рис. 8.3,а), а токовые — последовательно (рис. 8.4). Поскольку при
последовательном соединении отключение одного из модулей (например, для
выполнения замены) приводит к разрыву всей цепи, то для устранения этого
эффекта используют стабилитроны (рис. 8.4,а). При использовании источника
тока с большим внутренним сопротивлением (например, стандартного источни-
ка 4...20 мА) ток I не зависит от сопротивления нагрузки, поэтому появление
стабилитрона в контуре с током при удалении одного из модулей не вносит
погрешность в результат измерения. Ток утечки стабилитрона должен быть
мал по сравнению с допустимой абсолютной погрешностью измерения тока, а
напряжение стабилизации — больше максимального падения напряжения на
измерительном резисторе.
Тот же эффект достигается, если использовать внешние измерительные
резисторы (рис. 8.4,6), которые обеспечивают замкнутый путь для тока при
488
Глава 8
Рис. 8.3. Резервирование модулей ввода (а) и датчиков с модулями (б)
удалении одного из модулей. При этом используются модули с потенциаль-
ным входом, а измерение тока выполняется косвенным методом (по падению
напряжения на сопротивлении).
Схемы голосования в рассмотренных примерах и количество элементов в
резервированной системе могут быть произвольными; алгоритм голосования
реализуется программно в ПЛК.
Принцип работы системы, резервированной методом замещения, иллюстри-
руется рис. 8.2. В системе выделяется основной модуль, резервный и блок выбо-
ра модуля после отказа. До отказа на выход системы поступают данные только
из основного модуля. Блок выбора постоянно контролирует состояние работо-
способности модулей и после наступления отказа автоматически переключает
выходной канал системы на исправный модуль. Одновременно на пульт опера-
тора и в журнал ошибок посылается диагностическое сообщение о вышедшем
из строя элементе. Переключение выполняться, как правило, программно.
Аналогично работают системы с несколькими резервными элементами. Пе-
реключение на один из них выполняется по заранее определенному алгоритму.
Основной проблемой в системах, резервированных методом замещения, яв-
ляется автоматический контроль исправности.
Для контроля исправности аналоговых модулей ввода могут быть исполь-
зованы следующие величины и события:
Рис. 8.4. Резервирование модулей ввода тока с измерительными резисторами внутри
модулей (а) и снаружи (0
Аппаратное резервирование
489
• среднеквадратическое значение напряжения или тока шума;
• напряжение смещения нуля;
• температура внутри корпуса модуля;
• погрешность (оценивается с помощью встроенного источника опорного на-
пряжения);
• зависание процессора (диагностируется с помощью сторожевого таймера);
• напряжение питания процессора;
• ошибка контрольной суммы;
• ошибка в ответе на команду.
Для диагностики обрыва во входных цепях аналоговых модулей исполь-
зуются следующие методы:
• контроль выхода переменной за границы динамического диапазона или гра-
ницы ее изменения;
• применение тестирующих источников тока (рис. 8.5).
4...20 мА
Рис. 8.5. Обнаружение обры-
ва и к.з. в линии связи или
датчике, когда носителем сиг-
нала является напряжение (а)
или ток (6}
Типовым методом обнаружения к.з. является
измерение сопротивления входной цепи с помощью
источников тока /, подключенных как показано на
рис. 8.5,а. Величина тока выбирается достаточно
малой, чтобы падение напряжения на линии связи
и внутреннем сопротивлении датчика не вносило
погрешность в результат измерений. Например, в
модуле NL-8TI фирмы НИЛ АП (www.RealLab.ru)
используется ток величиной 2 мкА. При обрыве во
входной цепи напряжение между входами модуля
выходит за границы динамического диапазона, что
является диагностическим признаком обрыва.
При к.з. во входной цепи напряжение между
входами модуля становится равным нулю, что яв-
ляется диагностическим признаком короткого за-
мыкания. Для того чтобы к.з. можно было отли-
чить от полезного сигнала нулевой величины, диапазон изменения сигнала дат-
чика искусственно сдвигают от нулевого уровня. Такой подход использован в
стандарте 4...20 мА, где вся информация о сигнале содержится в диапазоне
токов от 4 мА до 20 мА (рис. 8.5,6). В этом случае появление нулевого на-
пряжения на входе приемника однозначно говорит о нарушении линии связи.
Однако отличить обрыв от к.з. в этом случае невозможно, поскольку оба отказа
обнаруживаются по нулевой величине принимаемого тока.
Резервирование датчиков и модулей ввода дискретных сигналов.
При вводе дискретных сигналов используются методы голосования и резерви-
рования замещением, описанные в п. 8.2.
Схемы подключения датчика типа «сухой контакт», которые обеспечивают
диагностику обрыва, к.з. на землю и на шину питания, показаны на рис. 8.6 и
8.7. При обрыве линии на входе модуля появляется сигнал, величина которого
определяется делителем напряжения —----^-ЕПКТ (рис. 8.6,а). В случае ко-
490
Глава 8
?+^пит
U К.з. на f
питание/
7
' :, х/----------
К.з. на' \
землю Обрыв
Рис. 8.6. Схема обнаружения обрыва и к.з. в цепи датчика: с пятью различимыми
состояниями (а) и с тремя (б)
Модуль
—°+^пит
б)
Рис. 8.7. Схема обнаружения
обрыва и к.з. в цепи датчика
роткого замыкания на шину пита-
ния напряжение на входе модуля рав-
но напряжению питания. При к.з.
на землю напряжение на входе рав-
но нулю. При разомкнутом состо-
янии датчика напряжение равно
я. + ДзНД. + Д2)£“"' "р" замк”у’
Й4 г
том — т:----тглгтг^пит-
Я4 + Яз II Я1
Таким образом, на входе модуля
дискретного ввода могут быть пять
различных уровней напряжения, ко-
торые с помощью АЦП преобразуются в пять различных событий: «0», «1»,
«к.з. на землю», «к.з. на питание», «Обрыв». Переключение на резерв про-
исходит, если в блок выбора модуля (см. рис. 8.2) поступает информация о
неисправности. Тип неисправности выдается на пульт оператора системы ав-
томатизации и заносится в журнал ошибок.
В ряде случаев достаточно иметь упрощенную схему диагностики. Напри-
мер, если на рис. 8.6,а убрать резисторы Яг и Яз (см. рис. 8.6,6), то при замкну-
Я4 г
том датчике получим напряжение на входе модуля, равное —----—Enwr; при
Я4 + Ях
открытом состоянии датчика, при обрыве линии и при к.з. на землю — одно
и то же напряжение, равное нулю; при к.з. на шину питания — ЕП1ЛТ. Таким
образом, вместо пяти состояний на входе получаем только три.
Предположим, что датчик используется в системе охраны и его нормаль-
ным состоянием является открытое. Тогда обрыв линии связи и к.з. на зем-
лю останутся незамеченными, поскольку их невозможно отличить от нормаль-
ного состояния датчика. Предположим теперь, что нормальным состоянием
датчика является замкнутое, как показано на рис. 8.6,б. Тогда при любом
из перечисленных отказов линии связи сигнализация сработает, т.е. отказа,
приводящего к несрабатыванию функции безопасности, произойти не может.
Поэтому такая упрощенная схема контроля может быть использована в си-
стемах безопасности только с датчиками, у которых нормальным состоянием
считается замкнутое.
Аппаратное резервирование
491
При выборе упрощенных схем диагностики следует учитывать, что в пра-
вильно спроектированной системе безопасности срабатывание датчика не долж-
но быть блокировано неисправностями линии связи, а если такая блокировка
возможна, то она должна быть обнаружена системой контроля.
Для обнаружения неисправностей модуля ввода может использоваться ав-
томатическое тестирование во время кратковременного отключения источни-
ков сигнала и нагрузок путем подачи на вход тестовых комбинаций логиче-
ских уровней (см. п. 8.2.1).
8.2.3. Модули вывода
Резервирование модулей вывода принципиально отличается от резервиро-
вания модулей ввода тем, что устройства вывода в большинстве случаев явля-
ются источниками энергии, в то время как устройства ввода являются прием-
никами информации* (сигналов). Поэтому если для переключения на резерв в
модулях ввода достаточно программно перенаправить поток принимаемой ин-
формации, то в модулях вывода необходимо переключить поток энергии, что
невозможно сделать только программными средствами.
Резервирование аналоговых модулей вывода. Резервированный вы-
вод аналоговых сигналов реализуется наиболее сложно и в промышленной ав-
томатике используется редко. Проблема состоит в том, что для переключе-
ния на резерв механические реле использовать нежелательно по причине их
низкой надежности, а другие способы (включая метод голосования) порожда-
ют сложные схемы, которые также понижают надежность системы. Поэтому
модули аналогового вывода чаще всего просто отсутствует в промышленных
резервируемых системах.
Для резервирования линий связи при выводе и передаче аналоговых сигна-
лов в нагрузку используют преимущественно стандарт 4...20 мА, поскольку он
позволяет обнаружить к.з. и обрыв линии. Непосредственно у самой нагрузки
(Ян) устанавливают диоды, которые предотвращают шунтирование нагрузки
при к.з. на землю в соседнем канале (рис. 8.8,а).
До наступления отказа каждый источник выдает ток, равный половине то-
ка нагрузки (/н/2). При к.з. или обрыве линии связи ток через диод в этом кана-
ле становится равным нулю и срабатывает алгоритм резервирования, который
устанавливает в исправном канале ток, равный 1Н. Использование половины
тока (Z„/2) для каждого канала уменьшает амплитуду паразитных выбросов
во время переходного процесса после отказа.
Описанная схема не пригодна для резервирования самих модулей вывода,
поскольку в результате отказа источника на его выходе может установиться
ток, не равный нулю.
Контроль целостности линии связи и диагностика отказа в модулях вывода
тока 4...20 мА выполняется как показано на рис. 8.8,б. Выходной каскад моду-
ля не только выводит ток г„ = VBX/7Jo, но и измеряет напряжения Vo = Яог„ и
* Информацию невозможно передать без переноса энергии, которая, однако, в рас-
сматриваемом примере может быть пренебрежимо малой.
492
Глава 8
Рис. 8.8. Резервирование (а) и диагностика (б) линии вывода аналоговых сигналов
Vi, которые с помощью АЦП преобразуются в цифровую форму и передаются
в процессор модуля вывода. При правильном функционировании цепи, вклю-
чающей нагрузку /?н, должно выполняться равенство Vo = Кх- Если оно не
выполняется, то при Vo = 0 имеет место к.з. на землю или обрыв; при Vo = Vi —
к.з. между линиями или в нагрузке; при Ц = Епит имеет место к.з. верхней (по
схеме) линии на шину питания, при Vo = Епит — нижней. При Vo > VBX сопро-
тивление нагрузки превышает допустимое значение и операционный усилитель
находится в состоянии насыщения.
Резервирование модулей дискретного вывода и нагрузки. Резерви-
рование модулей дискретного вывода, кабелей и нагрузки обычно выполняется
методом голосования. Для этого дискретные выходы соединяются параллельно
через диоды (рис. 8.9,а). Диоды используются для предотвращения протекания
тока из одного канала в другой. При отказе одного из источников на рис. 8.9,а
в виде к.з. на землю и обрыва управление нагрузкой продолжается от второго
источника. Однако, если отказом является пробой выходного каскада на шину
питания, то отказавший канал блокирует выходное напряжение и оно перестает
зависеть от управляющего сигнала. Несмотря на этот недостаток, соединение
дискретных выходов по схеме рис. 8.9, а может быть использовано в системах,
связанных с безопасностью, если рассмотренный вид отказа резервированной
системы не влияет на выполнение функции безопасности. Например, если без-
Рис. 8.9. Соединение дискретных выходов при резервировании (а) и один из вариантов
реализации дискретных выходных каскадов (б)
Аппаратное резервирование
493
Рис. 8.10. Резервирование модулей вывода для реализации аварийного
отключения (а) и для повышения отказоустойчивости и живучести (б)
опасным состоянием выхода является наличие напряжения (для питания дви-
гателей насосов в системе пожаротушения), рассмотренный отказ не является
опасным и не влияет на величину вероятности отказа при наличии запроса.
Таким образом, параллельное соединение дискретных выходов с целью ре-
зервирования может использоваться только в системах аварийного включения
нагрузки и не может использоваться в системах аварийного отключения. Ве-
роятность отказа при включении у такой цепи эквивалента дублированной си-
стеме, а при отключении — меньше, чем у нерезервированной.
На рис. 8.9,показана реализация описанного выше принципа резервиро-
вания, выполненная на МОП-транзисторах. Для коммутации мощной нагрузки
ключи 1 и 2 могут быть изготовлены в отдельном конструктиве с радиаторами и
удалены от модулей дискретного вывода. Маломощные ключи конструктивно
входят в состав модулей вывода. При подключении нагрузки к разным источ-
никам питания Ei и Е2 (как на рис. 8.9,6) необходимо использовать развязыва-
ющие диоды, чтобы при одновременно открытых ключах исключить протека-
ние тока из одного источника в другой. Если же использован общий источник
питания (как на рис. 8.10,6), то диоды не нужны.
Для резервирования систем аварийного отключения используется после-
довательное соединение двух выходных каскадов (рис. 8.10,а). При отказе од-
ного из МОП-ключей в виде к.з. нагрузка отключается вторым каналом, т.е.
функция отключения в данной системе является дублированной. При необ-
ходимости же включить нагрузку достаточно отказа только одного ключа, т.е.
функция включения оказывается нерезервированной. Таким образом, рассмот-
ренный каскад может быть использован только в системах аварийного отклю-
чения, но не включения.
Для построения системы, в которой резервируется не одна из функций
(включения или отключения), но обе одновременно, используется каскад из
четырех ключей (рис. 8.10,6) [571]. В нем выход из строя любого выходного
каскада или линии связи не приводит к нарушению ни функции включения,
ни отключения. Реализация описанной цепи с помощью электромагнитных
реле показана на рис. 8.11,а.
494
Глава 8
Рис. 8.11. Резервирование модулей вывода, шины и контроллеров; М — нагрузка
На схеме рис. 8.10,# каждый выходной каскад управляется сигналом X
с помощью строенного источника сигнала (А = В = С = X). Для повыше-
ния надежности сигнал управления X может приходить по резервированной
промышленной сети от резервированного ПЛК, как на рис. 8.11,а. Голосова-
ние (например, по схеме 2ооЗ) в случае отказа одной из сетей выполняется
непосредственно в модулях вывода.
При использовании горячего дублирования сети и контроллеров методом
замещения аналогичная структура может иметь вид, показанный на рис. 8.11,#.
Рис. 8.12. Резервирование цепей дискретного вывода для систем аварийного включения
(а) и аварийного отключения (б)
Аппаратное резервирование
495
Структуры систем аварийного включе-
ния и отключения с дублированной сетью и
ПЛК, резервированными по схеме 2ооЗ, пока-
заны на рис. 8.12. Отметим, что для дубли-
рования ключей на рис. 8.12,tf было бы доста-
точно просто соединить их последовательно,
заземлив нижний (по схеме) вывод нагрузки.
Однако в этом случае становится возможным
опасный отказ, вызванный к.з. верхнего по
схеме вывода нагрузки на источник питания.
При этом отключение нагрузки оказывается
Рис. 8.13. Принцип обнаружения
обрыва линии связи и к.з. на шину
питания и земли в модуле вывода
дискретных сигналов
невозможным. Применение второго ключа для размыкания пути тока на зем-
лю позволяет исключить такой отказ.
Принцип контроля и диагностики выходных каскадов и линий связи с на-
грузкой иллюстрируется рис. 8.13. Он аналогичен использованному в модулях
аналогового вывода (см. рис. 8.8,6). Напряжения V1...V0, пропорциональное то-
ку нагрузки, и Vo преобразуются с помощью АЦП в цифровую форму и переда-
ются в микропроцессор модуля для извлечения диагностической информации.
8.2.4. Процессорные модули
Процессорный модуль (для краткости будем говорить «процессор») следу-
ет резервировать в первую очередь, так как при его отказе наступает отказ
всей системы. Одновременно с процессором обычно резервируют блок пита-
ния и промышленную сеть.
Резервирование процессора с целью повышения отказоустойчивости и жи-
вучести выполняют методом замещения с горячим (рис. 8.14,а) или теплым
(рис. 8.14,6) резервом, а также методом голосования по схеме 2ооЗ (рис. 8.15).
Для систем, связанных с безопасностью, используют резервирование по схеме
1оо2 или 2оо2, в том числе с диагностикой (loo2D и 2oo2D).
Сложность резервирования процессоров заключается в том, что в момент
замещения резервный процессор должен иметь внутренние состояния, иден-
тичные состояниям основного. В системах резервирования замещением для
быстрой перезаписи внутренних состояний используется специализированная
Дублированная сеть Ethernet Дублированная сеть Ethernet
Дублированная промышленная сеть Дублированная промышленная сеть
а) б)
Рис. 8.14. Горячее (а) и теплое (б) резервирование процессорных модулей замещением;
ДР — драйвер резервирования
496
Глава 8
Резервированная сеть Ethernet
Резервированная промышленная сеть
Рис. 8.15. Резервирование процессор-
ных модулей и сетей с голосованием
по схеме 2ооЗ
высокоскоростная шина или оптический
канал синхронизации (рис. 8.14,а). В си-
стемах с голосованием большинство внут-
ренних состояний процессоров идентич-
ны, поскольку они работают одновремен-
но с одними и теми же входными данны-
ми и исполняют одну и ту же программу,
поэтому синхронизация необходима толь-
ко во время горячей замены отказавшего
процессора.
Для систем, некритичных ко времени
перехода на резерв, может быть исполь-
зован медленный последовательный канал синхронизации с интерфейсами, на-
пример RS-232, USB, RS-485, или обычная промышленная сеть (CAN, Modbus,
Profibus и др.) общего назначения (см. рис. 8.14,6). Такие системы относят
к системам с «теплым» резервом.
К резервированным процессорным модулям предъявляются следующие ос-
новные требования:
• безударное переключение на резерв (без внесения возмущений в управля-
емый процесс);
• малая длительность переключения;
• высокая надежность общих средств, выполняющих функцию переключения
(шина синхронизации и программное обеспечение).
Контроль работоспособности процессоров может выполняться на каждом
контроллерном цикле перед считыванием сигналов с модулей ввода и перед вы-
водом сигналов на исполнительные устройства. Для выполнения контроля без
остановки процесса функционирования системы источники сигнала и нагрузки
отключаются на короткое время (например, 1 мс) для подачи тестовых воздей-
ствий и измерения реакции на них. При достаточно малой продолжительности
отключенного состояния оно не вносит возмущений в работу системы вслед-
ствие инерционности исполнительных устройств.
Горячее резервирование замещением. Основной сложностью при ре-
зервировании процессорного модуля является обеспечение синхронизации меж-
ду основным и резервным процессором. Для того чтобы перейти в рабочее
состояние, резервный процессор должен иметь возможность:
• синхронизировать с основным процессором работу прикладной программы,
накопленные данные, состояния регистров, состояния входов и выходов,
таблицы неисправностей;
• обнаружить отказ основного процессора;
• заместить отказавший процессор.
При первоначальном включении резервного процессора из выключенного
состояния или после горячей замены он должен получить от основного сле-
дующую информацию:
• все данные, полученные со входов;
• все данные, отправленные на выходы;
Аппаратное резервирование
497
• состояния ПИД-регуляторов;
• уставки и другие значения, заданные пользователем в процессе работы
системы;
• содержимое регистров, в том числе счетчиков-таймеров;
• другие данные, которые пользователь считает нужным синхронизировать.
После первоначальной синхронизации она повторяется в каждом контрол-
лерном цикле. Это позволяет иметь уверенность, что резервный контроллер
всегда готов к замещению основного. В этом заключается суть термина «го-
рячий резерв».
Процедура перехода на резерв обычно занимает один контроллерный цикл.
В течение этого времени выходные состояния всех модулей вывода сохраня-
ются неизменными. Процедуру перехода на резерв выполняет специальный
драйвер резервирования, который:
• определяет, какой из процессоров является основным, какой — резервным.
Обычно основным является тот, который раньше был включен или назна-
чен пользователем;
• убирает из основного процессора уставки, идентифицировавшие его как
основной;
• рассылает всем участникам сети сообщения о том, какой процессор стал
основным и какого типа система получилась после перехода на резерв (в
соответствии со схемой деградации);
• выполняет синхронизацию;
• выполняет диагностический тест, который идентифицирует ошибки шины,
потерю связи с сетевыми устройствами, изменение статуса процессора.
Переключение процессора обычно выполняется без коммутатора, с помо-
щью изменения в сетевых устройствах адреса процессора. Например, если по
умолчанию основной процессор имеет адрес 31, но после отказа драйвер ре-
зервирования указал, что основной процессор изменил адрес на 30, то модули
вывода не принимают данные с адреса 31, но принимают с адреса 30. Если дан-
ные не поступают ни с адреса 31, ни с адреса 30, то модули вывода переводят
свои выходы в безопасные состояния.
Приложения-клиенты верхнего уровня системы автоматизации, которые
используют данные из контроллера, во время переключения на резерв должны
перерегистрироваться на получение информации от нового процессора.
Для выполнения безударного переключения необходим быстрый обмен ин-
формацией между процессорами в течение одного или максимум двух-трех кон-
троллерных циклов. Для этого используется быстродействующий канал связи
(может быть использован канал прямого доступа в память [575]), выполнен-
ный в виде параллельной электрической шины или с помощью оптического
кабеля. Оптоволоконный канал, в отличие от параллельной шины, может ис-
пользоваться для разнесения основного и резервного контроллеров на большое
расстояние (километры), что необходимо для снижения вероятности отказа по
общей причине, например вследствие стихийного бедствия.
498
Глава 8
Необходимость постоянной синхронизации является причиной того, что у
резервированных процессоров контроллерный цикл длиннее или используются
более мощные процессоры, чем обычно.
Поскольку продолжительность синхронизации является очень важным па-
раметром, от которого зависит коэффициент готовности системы и возмож-
ность безударного переключения на резерв, появляется задача минимизации
объема передаваемой информации. Одним из путей решения этой проблемы
является передача данных только при наступлении определенных событий в
системе, которые могут приводить к различию во внутренних состояниях ос-
новного и резервного процессоров. В частности, синхронизация по событиям
выполняется, если:
• происходит обмен информацией с модулями ввода-вывода;
• поступает запрос на прерывание;
• срабатывают запрограммированные пользователем таймеры;
• изменяются данные в результате обмена по сети.
Синхронизация по событиям должна выполняться средствами операцион-
ной системы контроллера в фоновом режиме и быть не связанной с программой
пользователя. Это позволяет использовать одну и ту же прикладную програм-
му как на резервированных процессорах, так и в системах без резервирования.
Недостатком систем с резервированием замещением является наличие
нерезервированных подсистем: канала синхронизации, программного драйве-
ра резервирования и процессора, на котором этот драйвер исполняется. Отказ
этих элементов приводит к отказу всей резервированной системы.
Резервирование методом голосования. Метод голосования проще, чем
резервирование замещением, поскольку не требует постоянной синхронизации
состояний процессоров. Кроме того, метод голосования позволяет выполнять
задачу управления без остановки во время перехода на резерв. Однако голо-
сование с целью обеспечения безотказности возможно только в системе, состо-
ящей не менее чем из трех процессоров, что достаточно дорого. Два процес-
сора, включенные по схеме голосования, могут быть использованы только в
системах безопасности.
Типовая система с голосованием по схеме 2ооЗ показана на рис. 8.16. Три
процессорных модуля А, В и С исполняют одну и ту же программу пользо-
вателя, получая одни и те же данные от датчиков через модули ввода AI.
Каждый процессорный модуль имеет три сетевых контроллера, которые ис-
полняют протокол обмена по сети.
Работает система следующим образом. Каждый из трех параллельно ра-
ботающих процессоров (А, В и С) отсылает в модули ввода запрос (коман-
ду). Каждый из трех модулей ввода получает эти три команды и выполняет
голосование по схеме 2ооЗ, в результате которого из трех полученных вход-
ных значений выбирается одно, которое используется для выработки ответа
на команду. Поскольку модулей ввода три, в процессор отправляется также
три ответа на его команду, из которых каждый их трех процессоров выбира-
ет один ответ по схеме 2ооЗ, который и используется в дальнейшей работе
прикладной программы.
Аппаратное резервирование
499
Резервированная сеть Ethernet
Рис. 8.16. Резервирование методом голосования
Аналогично происходит процедура вывода. Каждый процессор посылает
в модули вывода команду вывода; каждый из модулей вывода (1, 2, 3 и 4
на рис. 8.16) принимает три команды. Далее в каждом модуле вывода вы-
полняется голосование по схеме 2ооЗ, в результате которого для исполнения
выбирается одна команда из трех, по которой включается или выключается
исполнительное устройств (в нашем примере ключ).
Таким образом, голосование выполняется не отдельным блоком резерви-
рования, а в каждом элементе системы отдельно, поэтому отказ любого блока
голосования не приводит к отказу всей системы.
После отказа одного из процессоров система продолжает непрерывно рабо-
тать, поскольку схема голосования выдает правильной результат в результате
мажоритарного голосования. После отказа двух процессоров наступает отказ
системы. Однако в системах безопасности достаточно резервировать только
функцию безопасности, что позволяет использовать голосование по схеме 1оо2,
2оо2 и использовать результат диагностики неисправности в качестве одного
из «голосов». Поэтому после отказа одного из процессоров в системе 2ооЗ
она может перейти в режим 1оо2 (или 2оо2), после отказа второго процессо-
ра — в режим lool и только после отказа третьего перевести свои выходы
в безопасные состояния.
В системах с голосованием непрерывная синхронизация процессоров не тре-
буется, поскольку при идентичных входных и выходных сигналах внутренние
состояния процессоров оказываются также идентичны. Однако синхронизация
необходима после горячей замены процессора, когда новый процессор должен
получить стартовую информацию для своего функционирования синхронно с
остальными процессорами. Отсутствие общего аппаратного и программного
обеспечения, выполняющего функции перехода на резерв, повышает отказо-
устойчивость всей резервированной системы.
Несмотря на отсутствие необходимости в синхронизации, между процес-
500
Глава 8
сорами выполняется обмен диагностическими данными и статусом. Данные,
доступные всем элементам системы, называются глобальными и передаются
от каждого процессора двум другим. Эти данные используются прикладными
и системными программами, в частности, для реализации схемы деградации
при появлении отказов. Для голосования по схеме 2ооЗ в качестве третьего
«голоса» каждый процессор использует свои собственные данные.
Тестирование процессорного модуля. Тестирование необходимо для
своевременного перехода на резерв в системах с резервированием замещени-
ем, а также для информирования обслуживающего персонала о необходимости
ручной замены отказавшего процессора. Поэтому каждый процессор постоянно
исполняет программу самотестирования для обнаружения неисправностей.
Обычно тестируются следующие компоненты и функции:
• скоростной канал связи между процессорами;
• ядро центрального процессора;
• внутренние ОЗУ центрального процессора;
• флэш-память;
• шины ввода-вывода.
Каждый процессор выполняет также сравнение контрольной суммы своей
программы с другими процессорами в резервированной группе и если возни-
кает различие, то сигнализирует об ошибке. Ошибки памяти обнаруживаются
в процессе чтения-записи с помощью анализа паритета или контрольной сум-
мы. «Зависание» обнаруживается с помощью сторожевого таймера и обработки
нештатных состояний процессора.
Поскольку объем тестирования существенно зависит от отведенного для
него времени, постоянно исполняемый тест является достаточно сокращенным.
Поэтому может быть предусмотрен второй, более полный тест, который зани-
мает несколько минут времени и выполняется только при включении системы,
до начала ее функционирования или по инициативе оператора.
Каждый процессор получает информацию об ошибках в других процессорах
и ошибках голосования. В системах с голосованием результаты тестирования
могут быть использованы как дополнительные условия при голосовании. На-
пример, выдача сигнала управления на исполнительный механизм может быть
разрешена только при условии, что результат диагностики процессоров поло-
жительный. В противном случае реализуется схема деградации при отказах.
8.2.5. Резервирование источников питания
Соединение источников питания с целью горячего резервирования заме-
щением выполняется через диоды, как и соединение дискретных выходов (см.
рис. 8.9,а). Поскольку падение напряжение на кремниевых диодах составляет
около 1 В, напряжение источников питания следует выбирать на 1 В больше,
чем требуемое напряжение на нагрузке. При падении напряжения основного
источника соединенный с ним диод запирается и питание нагрузки осуществ-
ляется от резервного источника. Однако такая схема не может быть исполь-
зована при отказах, когда напряжение основного источника становится больше
Аппаратное резервирование
501
допустимого. Эта проблема решается применением внутри источника питания
резервированных элементов, снижающих вероятность отказа такого типа.
Если в качестве резервного источника используется батарея, которая не
должна разряжаться, пока она находится в резерве, то напряжение основно-
го источника должно быть больше напряжения батареи на величину разброса
напряжений открытых диодов.
Для уменьшения потерь энергии используют германиевые диоды или ди-
оды Шоттки, которые имеют меньшее напряжение в открытом состоянии по
сравнению с кремниевыми.
Информация об отказе источника питания индицируется на его передней
панели и пересылается на пульт оператора для принятия решения о замене.
8.3. Резервирование промышленных сетей
В состав промышленной сети входят линии связи, коммутаторы, сетевые
мосты, маршрутизаторы, сетевые контролеры, преобразователи интерфейсов
и источники питания. Однако чаще всего резервируются только линии связи
как наименее надежные элементы.
Основной характеристикой метода резервирования промышленных сетей
является длительность перехода на резерв.
8.3.1. Сети Profibus, Modbus, CAN
Резервирование промышленных сетей выполняется обычно одновременно
с резервированием контроллеров (см. п. 8.2.4). Для этого в каждом ПЛК ис-
пользуют два (реже — три) сетевых порта, к одному из них подключают ос-
новную промышленную сеть, к другому — резервную (см. рис. 8.14). Каждый
контроллер имеет средства контроля работоспособности сети и в случае ее от-
каза переключает свой порт на резервную сеть. В системах с голосованием
резервирование выполняется проще: исходящий поток сообщений посылается
во все сети одновременно, а входящие потоки из всех сетей проходят через
схему голосования (см. п. 8.2.1).
Для контроллеров, имеющих один сетевой порт и не предназначенных для
работы в резервированных сетях, выпускаются специальные модули резерви-
рования (см. www.abb.com), которые имеют один разъем (М на рис. 8.17) для
подключения к порту оконечного устройства, например ПЛК, и два разъема (А
и В) для подключения к основной и резервной сети (рис. 8.17). Модули могут
работать в многомастерных сетях как с ведущими, так и с ведомыми устрой-
ствами. Ведомых устройств, подключаемых к одному модулю резервирования,
может быть несколько (У3...У5 на рис. 8.17). Модуль работает как коммутиру-
емый повторитель интерфейса, одновременно контролируя исправность сети.
Отказ обнаруживается по первому символу в передаваемом сообщении и при
его появлении модуль переключается на резервный порт.
Основной проблемой резервирования сетей методом замещения является
обнаружение отказа. Поскольку после отказа (например, обрыва) сети на неко-
тором участке доставка сообщений к отсоединенной части сети невозможна,
502
Глава 8
Резервная сеть
Рис. 8.17. Резервирование промышленной сети с помощью коммутации пор-
тов; У1...У5 — оконечные устройства, К1...К3 — модули резервирования сети
обнаружение отказа должно выполняться каждым участником сети автоном-
но. Но это возможно только в многомастерных сетях или в сетях, имеющих
специальные аппаратные средства контроля.
Протоколы резервирования промышленных сетей являются узкоспециали-
зированными закрытыми разработками фирм-производителей контроллеров и
в общедоступной литературе не описаны.
8.3.2. Сети Ethernet
Резервированию в промышленных сетях Ethernet с коммутаторами посвя-
щена серия стандартов IEEE [563, 564]. Однако первоначально они были пред-
назначены только для исключения замкнутых контуров в сетях, поэтому тре-
бования к быстродействию алгоритмов учтены не были. В связи с резким ро-
стом спроса на промышленный Ethernet (рост около 50 % в год с 2004 г. [170])
возросли требования ко времени переключения на резерв. Поэтому в 2005 г. на-
чалась работа над новым стандартом IEC 62439 «High Availability Automation
Networks» («Сети промышленной автоматизации с высокой готовностью»), ко-
торая была инициирована комитетом IEC по цифровой коммуникации ТС65С.
Основной проблемой при резервировании сетей Ethernet с коммутаторами
является устранение замкнутых логических контуров (петель, циклов). Ло-
гические петли не допускаются потому, что при их наличии коммуникацион-
ные пакеты могли бы вечно путешествовать по сети, ограничивая ее пропуск-
ную способность. При возрастании трафика был бы возможен также отказ
в обслуживании из-за превышения пропускной способности сети. Кроме то-
го, в таблице МАС-адресов коммутаторов появились бы одни и те же адреса
для разных портов.
Для исключения логических петель служит стандартизованный алгоритм
STP [563], который выполняет блокировку портов коммутатора, через которые
петли замыкаются. После появления промышленного Ethernet оказалось, что
алгоритм STP позволяет искусственно вводить в сеть резервные ветви, которые,
однако, не создают логических петель благодаря STP-алгоритму. При отказе
некоторых ветвей протокол STP выбирает новые сетевые маршруты, в которых
участвуют зарезервированные ранее связи.
Аппаратное резервирование
503
Существует несколько методов резервирования промышленного Ethernet:
• агрегирование линий связи;
• резервирование на основе STP и RSTP протоколов;
• организация в сети физического кольца;
• полное резервирование всей сети.
Первые два метода стандартизованы, вторые два являются нестандартны-
ми разработками фирм-производителей и многие из них защищены патентами.
Метод агрегирования линий связи описан в стандарте IEEE 802.3ad
«Aggregation of Multiple Link Segments», который является разделом общего
стандарта IEEE 802.3 [565]. Этот метод использует два и более параллельных
кабелей и портов для каждой линии связи. Объединение нескольких физиче-
ских линий связи в один логический канал осуществляется с помощью про-
токола Link Aggregation Control Protocol (LACP). При этом группа (агрегат)
линий связи и портов представляется одним логическим сервисным интерфей-
сом с одним МАС-адресом. В протоколе LACP полные Ethernet фреймы по-
переменно отсылаются по параллельным линиям связи и объединяются в при-
емнике. Пропускная способность такого агрегированного канала оказывается
прямо пропорциональна количеству физических линий. При отказе одной ли-
нии данные пересылаются по другой. Этот стандарт поддерживается многими
производителями Ethernet коммутаторов.
Метод резервирования, изложенный в стандарте IEEE 802.3ad, предпола-
гает, что все агрегированные линии связи должны исходить из одного и того
же коммутатора, т.е. сеть должна иметь топологию звезды. Для устранения
этого ограничения фирмой Nortel были предложены три модификации мето-
да агрегирования: SMLT (Split Multi-Link Trunking), DSMLT (Distributed Split
Multi-Link Trunking) и R-SMLT (Routed-SMLT) (cm. www.nortel.com). Модифи-
кации этого метода предложены также фирмами Cisco и Adaptec, однако они
несовместимы между собой и со стандартом.
Метод агрегирования используется для резервирования соединений меж-
ду коммутаторами, между коммутатором
компьютерами. Для дублирования связи
между ПЛК и коммутатором ПЛК дол-
жен иметь два Ethernet-порта и драйвер,
поддерживающий протокол LACP (IEEE
802.3ad), который предоставляет опера-
ционной системе один сетевой порт, фи-
зически состоящий из двух линий свя-
зи (рис. 8.18). При использовании 4-кра-
тного резервирования связи между сер-
вером и коммутатором (рис. 8.18) в сер-
вер вставляется специальная 4-портовая
Ethernet-карта с соответствующим драй-
вером, который заменяет четыре физиче-
ских Ethernet-порта одним логическим.
и сервером, а также между двумя
Рис. 8.18. Резервирование в сети Ether-
net методом агрегирования линий связи
504
Глава 8
Достоинством метода является увеличение пропускной способности сети,
возможность добавления произвольного количества линий связи для согласо-
вания пропускной способности разных каналов, малое время восстановления
после отказа. Однако для резервирования сети в целом необходимо удвоен-
ное количество кабелей и коммутаторов, что может быть неоправданно до-
рого. Кроме того, практически используемые схемы агрегирования часто не
соответствуют стандартам IEEE, а оборудование разных производителей мо-
жет быть несовместимым.
Метод агрегирования в соответствии с IEEE 802.3ad обеспечивает резерви-
рование только линий связи; коммутаторы или сетевые контроллеры подклю-
ченного к сети оборудования остаются нерезервированными. Однако некото-
рые фирмы (см., например, www.syskonnect.com) предлагают дополнительное
программное обеспечение, позволяющее объединять в один логический порт
несколько каналов, проходящих через разные коммутаторы, которые, таким
образом, оказываются резервированными.
Протокол STP и его модификации. Базовый Ethernet протокол STP
(Spanning Tree Protocol, что переводится как «протокол остового дерева» или
«протокол связующего дерева») является протоколом 2-го уровня модели OSI
и описан в стандарте IEEE 802.ID [563], который был принят в 1990 г. Первона-
чально протокол был использован для того, чтобы избежать петель в больших
и сложных офисных сетях с мостами*, которые могли иметь сложную запутан-
ную топологию. С появлением промышленного Ethernet этот протокол стал
использоваться для горячего резервирования сетей с коммутаторами.
Цель STP-протокола состоит в том, чтобы сконфигурировать сеть в виде де-
рева (т.е. без циклов) таким образом, чтобы каждый узел сети (лист дерева) был
связан с корнем по пути с наименьшим временем доставки сообщений. Дерево
формируется путем отключения ветвей, которые могут образовывать физиче-
ские (не логические) петли в сети. Таким образом, при проектировании сети в
нее могут быть добавлены избыточные ветви с целью резервирования, которые
будут логически отключены протоколом STP при формировании дерева сети.
STP-протокол выполняет постоянный мониторинг сети с целью обнаруже-
ния происходящих в ней изменений. Если такие изменения выявлены, (на-
пример, если одна ветвь стала неработоспособной), то STP-протокол автома-
тически выполняет перестроение дерева, включая в него при необходимости
резервные ветви. Таким образом, после отказа ветви сеть оказывается вновь
работоспособной через время, необходимое для выполнения STP-алгоритма.
Работоспособность сети сохраняется до тех пор, пока число отказавших вет-
вей не станет настолько большим, что протокол не сможет построить дерево,
используя все резервные ветви.
Для формирования дерева с минимальным временем доставки сообщений
используются сообщения BPDU (Bridge Protocol Data Unit), встроенные в стан-
дартный (IEEE 802.3) Ethernet-фрейм. Протокол BPDU использует два тай-
* В современных сетях Ethernet мосты практически полностью вытеснены комму-
таторами [89].
Аппаратное резервирование
505
мера для оценки времени доставки сообщений, которое по умолчанию не мо-
жет превышать 20 с.
Время построения дерева при использовании STP алгоритма может дохо-
дить до 30 секунд и даже единиц минут [170], что для многих приложений
недопустимо много. Поэтому в 1998 г. был разработан и закреплен стандар-
том IEEE 802. lw [563], а позже стандартом IEEE 802. ID-2004 [563] более быст-
рый алгоритм RSTP (Rapid Spanning Tree Protocol), который строит дерево за
время не более 2 с. Протоколы STP и RSTP поддерживаются большинством
производителей сетевых коммутаторов.
Для виртуальных сетей, граф которых представляется несколькими де-
ревьями, был разработан протокол MSTP (Multiple Spanning Tree Protocol),
который является расширением протокола STP и описан в стандартах IEEE
802.1s и IEEE 802.1Q-2003 [564].
Недостатком STP- и RSTP-протоколов является часто недопустимо боль-
шое время перехода на резерв, а также невозможность резервирования связей
между коммутатором и устройством, которое является участником сети.
Метод физического кольца. Методы резервирования, основанные да-
же на усовершенствованном протоколе RSTP, имеют слишком большое вре-
мя переключения на резерв (до 2 с [170]). В то же время ряд приложений
требует сокращения этого времени до единиц миллисекунд (как, например,
в робототехнике) или до долей секунды (во многих химических технологиче-
ских процессах). Поэтому некоторые фирмы разработали собственные нестан-
дартные методы резервирования, которых в настоящее время насчитывается
более 15 [170].
В основе этих методов лежит использование сети с кольцевой физической
топологией. Одна из ветвей сети блокируется коммутатором (мастером на
рис. 8.19,а), и поэтому в режиме нормального функционирования сеть при-
обретает логическую шинную топологию. В случае отказа одной из ветвей
мастер включает резервный порт. При этом подключается резервная ветвь,
и граф сети вновь становится связным, т.е. работоспособность сети оказыва-
ется полностью восстановленной.
Существуют два метода обнаружения отказа в сети: циклический опрос
и отправка уведомления об отказе.
При циклическом опросе мастер периодически посылает в сеть специаль-
ный тестирующий пакет через свой основной порт. При нормальном функци-
онировании сети пакет проходит по кольцу и возвращается к мастеру через
его резервный порт. Если пакет не приходит за время таймаута, мастер счита-
ет, что в сети произошел отказ и немедленно включает резервный порт, затем
очищает свою таблицу адресов и рассылает всем коммутаторам инструкцию
сделать то же самое. После очистки таблиц адресов все коммутаторы автома-
тически выполняют «обучение» (обновление таблицы адресов). В результате
сеть вновь становится полнофункциональной, но уже с новой ветвью и новыми
таблицами адресов в коммутаторах. Разрыв 1 на рис. 8.19,а остается в сети до
тех пор, пока не будет выполнен ремонт отказавшей ветви.
В методе уведомления об отказе циклический опрос не выполняется. Вме-
сто этого каждый коммутатор самостоятельно контролирует целостность при-
506
Глава 8
Рис. 8.19. Метод физического кольца для резервирования линии передачи (а) и ли-
нии передачи с коммутатором (б); К1...К5 — коммутаторы, У — оконечные устройства
(компьютеры, серверы, ПЛК)
мыкающих к нему связей и при обнаружении отказа сообщает об этом масте-
ру с помощью уведомления. Далее мастер поступает точно так, как в мето-
де циклического опроса.
После ремонта или замены отказавшей ветви она обнаруживается тем же
методом тестирования кольца. Если связь по кольцу восстановлена, то мастер
сразу же блокирует свой резервный порт (который был задействован на время
выполнения ремонта), сбрасывает таблицу адресов и инструктирует оставшиеся
коммутаторы сделать то же самое. В результате все коммутаторы обновляют
таблицы адресов для сети с восстановленной ветвью.
Метод физического кольца имеет два существенных достоинства: во-
первых, он предельно экономичен, поскольку способен восстановить работу се-
ти при отказе любой ее ветви практически без затрат оборудования (дополни-
тельно требуется всего один кабель для замыкания кольца и два лишних порта
в двух коммутаторах). Во вторых, он позволяет примерно на порядок сокра-
тить время восстановления сети после отказа по сравнению со стандартным
методом, использующим RSTP протокол (табл. 8.1).
К недостаткам метода относится неудобство кольцевой архитектуры, невоз-
можность резервирования коммутаторов и сетевых адаптеров, а также ветвей,
идущих от коммутаторов к конечным устройствам. При отказе коммутатора К$
на рис. 8.19,а сеть оказывается разорванной, и устройства, подключенные че-
рез коммутатор Кз, становятся недоступны. Аналогично, рассмотренный метод
резервирования не дает эффекта при отказе связи 5 на рис. 8.19,а.
Два последних недостатка можно преодолеть, если в методе физического
кольца использовать оконечные сетевые устройства с двумя Ethernet-портами
(устройство У1 на рис. 8.19,6) и каждый из этих портов подключить к двум со-
седним коммутаторам Кз и К4. При отказе коммутатора Кз на рис. 8.19,6мастер
Аппаратное резервирование
507
Таблица 8.1
Параметры некоторых методов резервирования сетей Ethernet [170]
Протокол Разработчик, стандарт Время переключения на резерв, с Топология Наличие стандарта
STP IEEE 802.1D 30 Любая Есть
RSTP IEEE 802. lw 2 Любая Есть
Hyper Ring Hirschmann 0,3 Кольцевая Нет
Turbo Ring Moxa 0,15...0,3 Кольцевая Нет
Rapid Ring Contemporary Controls 0,3 Кольцевая Нет
S-Ring GarretCom 0,25 Кольцевая Нет
Real time Ring Sixnet 0,08 Кольцевая Нет
Ring Healing N-Tron 0,3 Кольцевая Нет
Super Ring Korenix 0,3 Кольцевая Нет
Self healing Ring TC Communications 0,25 Кольцевая Нет
Jet Ring Volktek 0,3 Кольцевая Нет
включает резервную ветвь, и в сети появляется резервный путь к устройству
У1 через резервную ветвь и коммутаторы К5, К4.
К недостаткам методов физического кольца относится также отсутствие
стандартов и, как следствие, несоответствие идеологии открытых систем.
Полное резервирование сети. Наименьшее время переключения на ре-
зерв предоставляет метод полного дублирование всей сети целиком. Вторым
его достоинством является живучесть при отказах не только соединений меж-
ду коммутаторами, но также и самих коммутаторов, сетевых портов устройств
и линий связи устройств с коммутатором. Недостатком является высокая це-
на, поскольку метод предполагает, что все сетевое оборудование использует-
ся в удвоенном количестве.
На рис. 8.20 показан пример дублированной сети с шинной топологией.
Здесь Ki, ...,К4 — коммутаторы основной сети, К1Д,...,К4Д — коммутаторы дуб-
лирующей сети. Каждое оконечное устройство У имеет по два Ethernet-порта,
один из которых подключается к основной сети, второй — к резервной. При
любом отказе в основной сети (обрыв 1 в ветви между коммутаторами, отказ 2
коммутатора, обрыв 5 ветви между портом оконечного устройства и коммутато-
ром ла рис. 8.20) связь по сети восстанавливается путем переключения портов
Резервная сеть
Основная сеть
Рис. 8.20. Полное резервирование сети Ethernet
508
Глава 8
оконечных устройств на резервную сеть. Переключение выполняется быстро,
поскольку метод не требует построения дерева, как в алгоритме STP.
Разновидностью полного резервирования является одновременное резерви-
рование сети и оконечных устройств [566]. В этом случае получаются две пол-
ностью независимые системы автоматизации и резервированным оказывается
не только сетевое оборудование, но и вся система. Для выбора одной из сетей
и обнаружения отказа необходимы средства диагностики, которые могут быть
реализованы на основе стандарта IEEE 802.1p/Q [566].
8.3.3. Резервирование беспроводных сетей
Основным фактором, определяющим надежность связи по беспроводным
сетям, является замирание электромагнитных волн. Поэтому резервирование
приемопередающей аппаратуры не приводит к повышению коэффициента го-
товности сети.
Как показывают эксперименты, поток ошибок в канале существенно из-
меняется с течением времени, поэтому беспроводной канал не может гаран-
тировать доставку сообщений в заданный срок, речь может идти только о
вероятности такой доставки. Одним из методов повышения вероятности до-
ставки сообщений является резервирование физического канала связи с по-
мощью применения нескольких антенн или нескольких передатчиков с антен-
нами [165].
Метод основан на том факте, что у приемной антенны электромагнит-
ная волна представляет собой суперпозицию многих волн, пришедших с раз-
ных направлений после отражений, преломлений и дифракции на окружаю-
щих предметах. Если две приемные антенны расположены близко, то они
принимают один и тот же сигнал с одинаковыми замираниями. Для того
чтобы сигналы в антеннах не были коррелированны, расстояние между ни-
ми должно быть больше некоторого расстояния, называемого дистанцией ко-
герентности.
Для реализации метода резервирования антенн используется несколько
антенн, например по три антенны на каждом конце канала связи. Переда-
ча сообщений выполняется пакетами. Один и тот же пакет передается по
очереди первой антенной, второй, затем третьей. На приемном конце паке-
ты сравниваются методом мажоритарного голосования или проверяются их
контрольные суммы, чтобы выделить пакет без ошибок. Используется так-
же выделение достоверных сообщений с помощью анализа отдельных симво-
лов сообщения, а не пакетов [567], избыточное кодирование и сложная обра-
ботка сигналов [568].
Как показано в [165], добавление каждой очередной антенны позволяет сни-
зить вероятность ошибки в канале в 10 раз. При этом под вероятностью ошиб-
ки понимается вероятность неполучения пакета за заданное время, поскольку
в [165] был использован метод ARQ (Automatic Repeat reQuest — автоматиче-
ский повтор запроса), когда передающая станция повторяет передачу до тех
пор, пока не получит подтверждение об успешном приеме или пока не исте-
чет установленное время таймаута.
Аппаратное резервирование
509
8.4. Оценка надежности резервированных
систем
Надежность автоматизированной системы является комплексной характе-
ристикой системы и состоит из нескольких показателей, основными из которых
являются безотказность и ремонтопригодность. Безотказность численно ха-
рактеризуется средней наработкой до отказа (MTTF — Mean Time to Failure),
обозначается буквой Т, или интенсивностью отказов Л (Average probability of
failure per hour), а также вероятностью безотказной работы P(t) в течение за-
данного времени t.
Ремонтопригодность характеризуется средним временем восстановления
после отказа Тв (MTTR — Mean Time То Repair) или вероятностью восста-
новления в течение заданного времени.
Для расчета показателей надежности сложных систем, состоящих из боль-
шого количества элементов, используют метод декомпозиции (расчет надеж-
ности по частям). Если показатели надежности отдельных элементов (в том
числе резервированных) заданы или рассчитаны, то вероятность безотказной
работы системы рассчитывают следующим образом. Событие, состоящее в без-
отказной работе г-го элемента системы, обозначают символами А<, а противопо-
ложное событие (отказ элемента) обозначают как Отказ системы без резер-
вирования наступает при отказе хотя бы одного элемента. Поэтому событие,
состоящее в безотказной работе системы Ле, равно произведению событий А;,
N
т.е. Ае = П 4 где N — число элементов в системе. Вероятность произведения
г=1
независимых событий равна произведению вероятностей событий. Поэтому ве-
роятность работоспособного состояния системы равна
(N \ N
Па =Пр(л). (8.9)
г=1 / i=l
Учитывая зависимость вероятности безотказной работы элементов от вре-
мени (8.5) для каждого г-го элемента, предыдущее выражение можно запи-
сать в виде
N / N \ / N \
F(Ae) = ехр(—Xit) = ехр I — № ) = ехР I “ 52 ’ (8.10)
г=1 \ г=1 / \ г=1 /
где
N
AC = J>, (8.11)
г=1
Ас — интенсивность отказа всей системы; А» — интенсивность отказа г-ro эле-
мента.
Поскольку в эксплуатационной документации обычно указывают среднюю
наработку до отказа, которая связана с интенсивностью отказов соотношени-
ем (8.8), то, пользуясь выражением (8.11), наработку до отказа всей системы
510
Глава 8
Тс, с, можно представить в виде
где Ti — наработка до отказа г-го элемента. В частности, для системы из N
одинаковых элементов с наработкой = То
Тс = (8.13)
т.е. наработка на отказ системы обратно пропорциональна количеству ее эле-
ментов.
Резервированный элемент (контроллер, датчик и др.) при расчете надеж-
ности можно рассматривать как один элемент системы, если для него найдены
показатели надежности.
Поскольку в системах автоматизации используются, как правило, только
два вида резервирования: горячее резервирование замещением и резервирова-
ние методом голосования, то при расчете их показателей безотказности можно
обойтись без аппарата цепей Маркова [573], ограничившись алгеброй случайных
событий и теорией вероятностей. При расчете вероятности отказа «теплое» ре-
зервирование не отличается от горячего.
В случае горячего резервирования два элемента (например, два ПЛК) на-
ходятся постоянно во включенном состоянии и при отказе одного из них в ра-
боту включается второй. Если считать, что общие элементы, обеспечивающие
процесс резервирования, абсолютно надежны, то безотказная работа резерви-
рованной системы Ае, состоящей из двух ПЛК, будет обеспечена, если рабо-
тоспособен хотя бы один из них. Обозначим событие, состоящее в безотказной
работе 1-го элемента как Ах, 2-го — как Аг, а противоположные им события
(отказы элементов) как Ах и Аг- Тогда событие, состоящее в работоспособности
резервированной системы (в данном примере система состоит из двух ПЛК),
будет иметь место, если работоспособен первый ПЛК и одновременно работо-
способен второй (А1А2) ИЛИ работоспособен первый и отказал второй (АхАг)
ИЛИ отказал первый и работоспособен второй: (АхАг), т.е.
Ае = АхАг 4- АхАг + АхАг = А1(Аг 4- Аг) 4- АхАг = Ах 4- АхАг» (8.14)
Найдем теперь вероятность работоспособности системы Р(Ае), пользуясь
тем, что события АхАг, АХА2 и АХА2 несовместны (т.е. не могут иметь место
в одно и то же время), следовательно, вероятность суммы событий равна сум-
ме вероятностей каждого из них, а вероятность произведения событий равна
произведению вероятностей:
Р(Ае) = Р(АХ А2 4- АхА2 + AiА2) = Р(АХА2) 4- Р(АХ А2) + Р(АХА2) =
= Р(Ах)Р(А2) + Р(Ах)Р(А2) + Р(Ах)Р(А2) = Р(АХ) + Р(Ах)Р(А2) =
= Р(Ах) + [1-Р(Ах)]Р(А2). (8.15)
Здесь использовано также свойство Р(А) 4- Р(А) = 1.
Аппаратное резервирование
511
Поскольку элементы в резервированной системе идентичны, то Р(АХ) =
= Р(Л2) = Ро и, обозначая Р(Ле) = Ре, получим
Pz = 2P0-P*. (8.16)
Подставляя сюда вместо Ро его зависимость от времени (8.5), получим ве-
роятность безотказной работы системы при горячем резервировании в виде
jFfe(t) = 2е-Л°* - e"2Ao*, (8.17)
где Ao — интенсивность отказов элемента без резервирования.
Плотность распределения времени до отказа (частота отказов) согласно
(8-6)
/E(t) = 2Ло(е-Ао‘ - е-2А°‘), (8.18)
а среднее время наработки до отказа
тср = Г° tfctt) dt = 2Ао Г° «(е'^ - е"2А0‘) dt = -5- = 1,5Т0, (8.19)
Jo Jq ^Ао
где То — средняя наработка на отказ одного контроллера. Интеграл в (8.19)
берется по частям.
Рассуждая аналогично, можно получить вероятность безотказной работы
системы из трех элементов, например, трех контроллеров, в схеме голосова-
ния 2ооЗ. Обозначим события, состоящие в работоспособности трех элемен-
тов соответственно ЛХ,Л2 и А3, а противоположные им события (отказы) —
как Л,Л2 и A3. Тогда резервированная система будет работоспособной, если
работоспособны первый И второй И отказал третий контроллер ИЛИ работо-
способен первый И третий И отказал второй контроллер ИЛИ работоспосо-
бен второй И третий И отказал первый контроллер ИЛИ работоспособны все
три контроллера одновременно, т.е.
Ае = Ai А2Лз + А1Л2Аз + Л1 А2Аз 4- Ai А2А3. (8.20)
Переходя от событий к их вероятностям и учитывая, что слагаемые в (8.20)
являются событиями несовместными, а также считая, что все контроллеры
идентичны, т.е. Р(АХ) = Р(А2) = Р(А2) = Ро, получим
К = Р2(1 - Ро) + Р^(1 - Ро) + Ро2(1 - Ро) + ^ = ЗРо2 - 2Р3, (8.21)
поэтому
Ре (t) = Зе"2Ао‘ - 2е-ЗАо‘. (8.22)
Графики зависимостей (8.17) и (8.22) показаны на (рис. 8.21,а).
Плотность распределения времени до отказа (частота отказов) согласно
(8-6)
/E(t) = 6Ао(е"2А°‘ - е~ЗА°‘), (8.23)
а среднее время наработки до отказа
гоо гоо г
Тср = / tfE(t) dt = 6Ао / t(e—2А°* - е-ЗА°‘) dt = = 0,833То, (8.24)
Jq Jq OAo
где То — средняя наработка на отказ одного контроллера.
512
Глава 8
Рис. 8.21. Вероятность безотказной работы ПЛК с То = 500 тыс. ч в течение времени
наработки для случаев дублирования, голосования по схеме 2ооЗ и при отсутствии
резервирования. Графики а и б отличаются масштабом
Обратим внимание, что средняя наработка до отказа у системы с голосо-
ванием получилась ниже, чем у нерезервированной системы. Это объясняется
тем, что система с тремя контроллерами и голосованием по схеме 2ооЗ не яв-
ляется троированной, а имеет дробную кратность резервирования 1:2, т.е. в ней
резервный элемент — один, а резервируемых — два, поскольку в схеме го-
лосования только наличие двух работоспособных контроллеров обеспечивает
работоспособность системы. Поэтому эффект снижения безотказности вслед-
ствие нарастания числа элементов в системе (8.13) при больших наработках
оказывается сильнее эффекта резервирования. График вероятности безотказ-
ной работы для системы с голосованием (рис. 8.21,6) идет ниже, чем у системы
без резервирования, начиная с некоторого значения наработки, а средняя на-
работка до отказа получается меньше.
Сравнение систем только по средней наработке до отказа может вводить в
заблуждение так же, как «средняя температура по больнице». Такое сравне-
ние эффективно только для случаев, когда функциональные зависимости Ре (t)
элементов имеют одинаковый вид. Для систем с резервированием это условие
не выполняется. Поэтому следует делать сравнение по более информативному
показателю — вероятности безотказной работы, которая у системы с голосова-
нием в течение практически всего времени эксплуатации значительно больше,
чем у системы без резервирования (рис. 8.21,а и 6).
Графики, приведенные на рис. 8.21, иллюстрируют вероятность безотказ-
ной работы системы, в которой после отказа одного из элементов не выпол-
няется его замена или ремонт. Если же замена элемента производится сразу,
то понятие вероятности безотказной работы теряет значение, поскольку после
замены вероятность отказа без замены элемента реализоваться не может. Ак-
туальной становится длительность перехода на резерв, а также продолжитель-
ность выполнения горячей замены или восстановления после отказа. Поэто-
му для обслуживаемых систем автоматизации целью резервирования является
обеспечение непрерывности процесса управления или увеличение коэффициен-
Аппаратное резервирование
513
та готовности, но не увеличение вероятности безотказной работы. По этим же
характеристикам система с голосованием превосходит все остальные.
Проделанный выше сравнительный анализ двух методов резервирования
не может быть использован для систем безопасности, в которых вероятности
опасного и безопасного отказов различны. Если в системах 2ооЗ, где требуется
безотказность, после отказа двух элементов наступает отказ всей системы, то
в системах безопасности опасный отказ наступает только после того, как ис-
черпаны все варианты деградации (например, 2ооЗ - 1оо2 - 1001 - 0). Таким
образом, для анализа вероятности опасного отказа система 2ооЗ имеет крат-
ность резерва не 2:1, а 1:2, т.е. она является троированной; после отказа одного
элемента становится дублированной, после отказа двух элементов становит-
ся не резервированной, и только после отказа всех трех элементов наступает
отказ системы. Кроме того, для анализа систем, связанных с безопасностью,
важна не вероятность отказа, а вероятность отказа при наличии запроса [521]
которая рассчитывается иным путем.
Поскольку автоматизированная система выполняет множество самостоя-
тельных задач (функций), то параметры надежности по ГОСТ 24.701-86 [576]
оцениваются не для всей системы, а для каждой выполняемой функции от-
дельно.
При количественных оценках параметров надежности, а также при интер-
претации полученных результатов следует учитывать достоверность исходных
данных. Существующие методы экспериментальной оценки показателей на-
дежности [576, 577] были разработаны во времена, когда наработка на отказ
вычислительных машин (ЕС-1061, «Электроника ДЗ-28» и др.) составляла
от нескольких часов до нескольких суток. Экспериментальный материал по
отказам, собранный в течение месяца, был достаточен не только для оценки
наработки на отказ, но даже для построения функций распределения, изуче-
ния зависимостей параметров надежности от условий эксплуатации (темпера-
туры, вибрации, влажности и т.п.).
С тех пор ситуация изменилась коренным образом. Появилась техноло-
гия поверхностного монтажа, увеличилась степень интеграции микросхем, бы-
ли разработаны новые материалы для монтажа и изготовления печатных плат.
Надежность электронных изделий возросла настолько, что экспериментальные
данные невозможно накопить в достаточном количестве не только при стен-
довых испытаниях у изготовителя, но даже путем анализа отказов изделий,
возвращенных потребителями в течение гарантийного срока (такая методика
используется фирмой GE Fanuc [581]). Так, из 3 тыс. модулей ввода-вывода
RealLab! серии NL [197], проданных фирмой НИЛ АП (www.RealLab.ru), в
течение гарантийного срока не было ни одного возврата по причине аппарат-
ного отказа.
Кроме того, ПЛК не относятся к изделиям массового производства и по-
этому за период между сменой их поколений количество отказавших изделий
может оказаться недостаточным для расчета наработки на отказ. Получить
же зависимость показателей надежности от условий эксплуатации еще более
проблематично.
514
Глава 8
Ускоренные испытания [582], широко применяемые в полупроводниковом
производстве, неприменимы к ПЛК из-за невозможности экспериментального
или расчетного определения коэффициентов подобия.
В то же время органы сертификации, в соответствии с существующими
стандартами, требуют обязательного указания параметров надежности в ТУ
и эксплуатационной документации на изделие. Одним из реально осуществи-
мых методов оценки показателей надежности является использование стати-
стических данных объектов-аналогов по ГОСТ 27.301-95 [577]. Поскольку ана-
логи, как правило, являются изделиями, изготовленными по устаревшей тех-
нологии, показатели надежности оказываются заниженными, по крайне ме-
ре, на порядок.
Рассмотрим, например, вероятность безотказной работы процессора CPU
313C-2DP фирмы Siemens, на который изготовителем указывается наработка
на отказ (MTBF) А = 16,9 лет [579]. В соответствии с (8.4) и (8.5), вероят-
ность отказа процессора в течение гарантийного срока 18 мес. будет равна
1 — ехр(-1,5/16,9) = 0,08. Поскольку оценка вероятности отказа рассчитыва-
ется как доля отказавших изделий в испытуемой партии, то, например, из 1000
находящихся в эксплуатации процессоров в течение гарантийного срока долж-
ны отказать в среднем 80 шт. и только 920 шт. остаться исправными. Однако
любой пользователь продукции Siemens скажет, что эта цифра отличается от
реальной по крайней мере на порядок. Можно было бы предположить, что на-
работка на отказ занижена потому, что при ее экспериментальном определении
условия испытаний были выбраны предельными. Однако документ «Reliability
Consulting» («Консультация по надежности»), расположенный рядом с табли-
цей наработок на отказ [580] указывает только одно условие: температура при
испытаниях составляет 40 °C, и не дает методики пересчета для других усло-
вий эксплуатации. Выглядит странным также указание наработки на отказ
тремя значащими цифрами, что по теории погрешностей должно означать, что
приведенные данные отличаются от действительных не более чем на 1 %.
Наличие большого числа парадоксов наводит на мысль, что показатели на-
дежности, указываемые производителями электронных средств автоматизации,
определяются политическими, а не техническими факторами, и по мере совер-
шенствования технологии производства мы будем наблюдать только снижение
достоверности этих показателей. В этих условиях о надежности изделий лучше
судить по общей репутации фирмы и наличии системы управления качеством
на базе стандартов ISO 9001 или ISO 9014, но не по наработке на отказ.
8.5. Заключение
В системах автоматизации нашли широкое применение только два мето-
да резервирования: горячее резервирование замещением и метод голосования.
Основной целью резервирования является обеспечение высокого коэффициента
готовности. Вероятность безотказной работы важна только для редко обслу-
живаемых систем автоматизации. Метод голосования позволяет также обеспе-
чить непрерывность процесса управления.
Аппаратное резервирование 515
Методы резервирования систем, связанных с безопасностью, имеют ряд
особенностей, порождаемых делением отказов на опасные и безопасные.
При проектировании резервированных систем особое внимание следует уде-
лять устранению отказов по общим причинам, которые могут обесценить все
затраты на резервирование.
Наиболее эффективным методом резервирования промышленных сетей яв-
ляется метод физического кольца, если в качестве критерия эффективности
использовать отношение надежности к стоимости.
Достоверность оценок вероятности безотказной работы электронных
средств автоматизации крайне низка и по мере совершенствования технологии
производства будет только снижаться.
Глава 9
Программное обеспечение
Современные системы промышленной и лабораторной автоматизации поз-
воляют решать широкий круг задач, которые можно разделить на несколько
групп, имеющих свои особенности:
• автоматизация управления технологическими процессами (АСУ ТП);
• взаимодействие системы с диспетчером (оператором);
• автоматизированный контроль и измерения (мониторинг);
• обеспечение безопасности;
• дистанционное управление, измерение, сигнализация (задачи телеме-
ханики).
История развития программных средств автоматизации показала, что все
особенности отдельных применений можно учесть путем настройки нескольких
универсальных программ на выполнение конкретной задачи. К таким уни-
версальным программам относятся:
• ОРС сервер (см. п. 9.1.6);
• средства МЭК-программирования контроллеров (см. п. 9.3);
• SCAD А-пакеты (см. п. 9.4).
Для систем автоматизации, не связанных с АСУ ТП, используются про-
граммы Lab VIEW, MATLAB, HP-VEE и др., ориентированные на автомати-
зацию эксперимента, измерений или математическую обработку их результа-
тов. Для простых задач или широко тиражируемых приложений бывает эко-
номически эффективно использовать заказное программирование на С+4- или
Visual Basic с применением покупных ActiveX элементов, снижающих трудо-
емкость разработки.
9.1. Развитие программных средств
автоматизации
Для решения перечисленных выше задач первоначально использовались
универсальные языки программирования высокого уровня и команда профес-
сиональных программистов. Однако практика показала крайне низкую эффек-
тивность такой разработки. Оказалось, что разработка системы должна выпол-
няться не программистами, а специалистами той предметной области, которая
Программное обеспечение
517
нуждается в автоматизации, т.е. технологами, а также системными интеграто-
рами, которые осуществляют комплексное внедрение системы.
Необходимость в разработке средств программирования, предназначенных
специально для систем автоматизации и ориентированных на технологов, бы-
ла вызвана следующими причинами:
• требованием надежности программного обеспечения. Система, написанная
целиком на алгоритмическом языке для конкретного заказа, содержала
слишком много программного кода, на тщательную разработку и тестиро-
вание которого не хватало времени;
• сжатыми сроками внедрения системы и ограниченной стоимостью работ.
Для создания системы в короткий срок при ограниченном бюджете требо-
валось большое количество готовых универсальных программных компо-
нентов, уже написанных и тщательно оттестированных;
• необходимостью модификации системы в процессе ее эксплуатации. Вне-
сти изменения в специализированную программу мог только написавший
ее программист, который к этому времени обычно работал уже на другом
предприятии. Поэтому вместо того, чтобы модифицировать программное
обеспечение, его приходилось переписывать заново;
• требованиями совместимости с другими системами автоматизации, работа-
ющими на том же предприятии. Были необходимы стандартные интерфей-
сы между программами, созданными разными производителями на разных
аппаратно-программных платформах;
• высокими требованиями к качеству пользовательского интерфейса. Огра-
ниченный бюджет времени и финансовых ресурсов не позволял разрабо-
тать достаточно хороший программный интерфейс на универсальных ал-
горитмических языках.
Разделение труда по созданию программных средств автомати-
зации. Перечисленные причины привели к следующему разделению труда
по созданию программных средств для систем автоматизации: фирмы, специ-
ализирующиеся на программном обеспечении, создают универсальные систе-
мы программирования задач автоматизации (SCADA-пакеты и средства МЭК-
программирования), а инжиниринговые фирмы (системные интеграторы [586])
адаптируют эти средства к нуждам конкретного заказчика. В результате до-
стигается решение всех перечисленных выше проблем. Более того, благодаря
существенному упрощению процесса адаптации по сравнению с классическим
программированием изменения в алгоритмы управления могут быть внесены,
например, технологом эксплуатирующей организации без привлечения систем-
ных интеграторов или программистов.
В настоящее время заказные программы естественным путем вытеснены с
рынка промышленной автоматизации SCADA-пакетами и аналогичными уни-
версальными средствами автоматизации, а также средствами программирова-
ния контроллеров на языках стандарта МЭК 61131-3 [55, 494].
Заказные и специализированные программные средства автома-
тизации В силу своей универсальности SCADA-пакеты оказались слишком
518
Глава 9
дорогими для применения в простых задачах, когда, например, необходимо за-
писать в компьютер несколько значений температуры или сделать один контур
управления температурой в термошкафе. Эту проблему частично удается ре-
шить введением зависимости цены SCADA-пакетов от количества тегов, однако
остается нерешенной проблема трудоемкости изучения и сложности адаптации
SCADA к простым задачам, а также высокая стоимость консультаций по при-
менению. SCADA-пакеты не смогли занять сегмент рынка простых систем,
которые не требуют предварительного изучения или настройки и построены
по принципу «Plug&Play» — «вставил — и заиграло». Подобные программы
уже не могут быть такими универсальными и функционально насыщенными,
как SCADA. Они являются специализированными, ориентированными на уз-
кий круг задач отображения графиков или простейшего управления с неболь-
шим количеством тегов. Примером такой простой программы может служить
RLDataView фирмы НИЛ АП (www.RealLab.ru).
Экономически целесообразно осталось также разрабатывать заказные про-
граммы для серийно тиражируемых, однотипных систем автоматизации, на-
пример систем контроля температуры в силосах элеваторов [492]. Для упро-
щения и повышения качества заказного программирования широко использу-
ются ActiveX элементы, специально разработанные для задач автоматизации:
для построения графиков, органов управления и индикации, для отображения
технологических схем [16]. Такие системы создаются на языках визуального
программирования Visual C++, Visual Basic, VBA, Delphi.
9.1.1. Графическое программирование
Языки визуального программирования появились в начале 90-х годов и со-
держат большое число стандартных функций и библиотек, а также готовых
средств визуализации. Они позволяют создавать очень удобные и эффектные
программы, однако достигается это за счет резкого увеличения объема про-
граммного кода. Поэтому языки визуального программирования, как и тексто-
вые, по-прежнему не позволяют модифицировать алгоритмы силами техноло-
гов без участия профессиональных программистов.
Настоящую революцию в программировании систем автоматизации сдела-
ли языки графического программирования. Одним из первых в этом классе был
графический язык среды Simulink, входящей в состав MATLAB (MathWorks
Inc), а также языки Lab VIEW (National Instruments) и HP-VEE (Hewlett
Packard). Они были предназначены и успешно использовались для сбора дан-
ных, моделирования систем автоматизации, автоматического управления, обра-
ботки собранных данных и их визуального представления в виде графиков, таб-
лиц, звука, с помощью компьютерной анимации. Графические языки были на-
столько простыми и естественными, что для их освоения зачастую было доста-
точно метода проб и ошибок без использования учебников и консультаций. Че-
ловек, не знакомый с программированием на алгоритмических языках, пользу-
ясь только логикой и понимая постановку прикладной задачи, мог собрать рабо-
тающее приложение из готовых компонентов, набрасывая их мышкой на экран
монитора и проводя графические связи для указания потоков информации.
Программное обеспечение
519
Первые языки программирования алгоритмов работы систем автомати-
зации были нестандартными. Каждая фирма, создававшая контроллер или
SCADA-пакет, предлагала свой язык. Это требовало от системных интеграто-
ров дополнительных усилий и затрудняло освоение новых SCADA-пакетов и
средств программирования контроллеров.
Поэтому появление в 1993 г. стандарта на языки программирования кон-
троллеров МЭК 61131-3 [483] было большим шагом в направлении создания
открытых систем автоматизации и обеспечило снижение стоимости разработ-
ки, сокращение сроков, повышение качества реализации алгоритмов автомати-
зации и возможность детального изучения языков программирования, пригод-
ных для любого контроллера. МЭК 61131-3 устанавливал стандарты для пяти
языков программирования, рассчитанных на специалистов разных профессий,
не связанных с программированием.
9.1.2. Графический интерфейс
Создание графических интерфейсов пользователя на компьютере явилось
большим достижением в направлении развития средств диспетчерского управ-
ления. Главным эффектом от применения графического интерфейса является
существенное снижение количества ошибок, допускаемых оператором (диспет-
чером) в стрессовых ситуациях при управлении производственными процесса-
ми. Проектирование пользовательского интерфейса основано на следующих
принципах [27]:
узнаваемость, назначение элементов экрана должно быть понятно без
предварительного обучения, допустимые манипуляции с этими элементами так-
же должны быть понятны интуитивно. Пользовательский интерфейс не дол-
жен содержать излишней детализации;
логичность: пользователь, имеющий опыт работы с одной программой,
должен быть способен быстро, практически без обучения, адаптироваться к
любой аналогичной программе;
отсутствие «сюрпризов»: знакомые из прошлого опыта операции с эле-
ментами на экране должны вызывать знакомые реакции системы;
восстанавливаемость: система не должна быть чувствительна к ошибкам
оператора. Оператор должен иметь возможность отменить любое свое непра-
вильное действие. Для этого используются многократные подтверждения, от-
мены, возврат на несколько шагов назад, установка контрольных точек и т.п.;
наличие удобной справки, подсказок, встроенных в пользовательский ин-
терфейс, средств контекстного поиска и замены;
адаптация к опыту пользователя: начинающий пользователь должен
иметь более простой интерфейс с большим количеством подсказок. Для опыт-
ного пользователя количество подсказок должно быть уменьшено, поскольку
они мешают в работе.
9.1.3. Открытость программного обеспечения
Программные средства автоматизации должны удовлетворять требованиям
открытости (см. главу 1). Для этого они должны поддерживать:
520
Глава 9
• стандартные средства программирования МЭК 61131-3;
• стандарт ОРС для связи с физическими устройствами;
• стандартные сетевые протоколы Ethernet, Modbus, Profibus, CAN и др.;
• стандартный интерфейс ODBC для доступа к базам данных с языком за-
просов SQL;
• наиболее распространенные операционные системы (Windows ХР/СЕ,
Linux);
• веб-технологию;
• обмен данными с Microsoft Office.
Перечисленные средства удовлетворяют общепризнанным или официаль-
ным стандартам, имеются в свободной продаже, разрабатываются несколькими
независимыми производителями, конкурирующими между собой (последнее не
касается MS Windows и MS Office).
9.1.4. Связь с физическими устройствами
Связь программного обеспечения с физическими устройствами в системах
автоматизации осуществляется с помощью методов DDE, OLE, COM, DCOM
и ОРС.
Технология обмена данными между приложениями Windows с аббревиату-
рой DDE (Dynamical Data Exchange — динамический обмен данными) появи-
лась в 1987 г. вместе с Windows 2.0. В промышленной автоматизации DDE
использовалась для обмена данными между SCADA в качестве DDE-клиента
и физическим устройством, которое поставлялось с DDE-сервером.
После появления OLE (Object Linking and Embedding — связывание и внед-
рение объектов) фирмы Microsoft, а позже COM (Component Object Model —
модель многокомпонентных объектов) и DCOM (Distributed COM — СОМ для
распределенных систем) [587] технология DDE была полностью вытеснена эти-
ми новыми средствами, которые оказались гораздо более эффективными.
Технология СОМ предоставляет средства для взаимодействия между раз-
розненными программными модулями, написанными на разных языках про-
граммирования, которые собираются в единую систему во время исполнения.
Взаимодействие СОМ объекта с другими программами или программными мо-
дулями выполняется через программные интерфейсы с использованием мето-
да «клиент-сервер».
Одной из составляющих СОМ является Automation* — средства взаимо-
действия программ, написанных на C++ с программами на языке VBA (Visual
Basic for Application) или Delphi, а также с программами на языках сценариев
(VBScript, JScript). Благодаря автоматизации COM-объект может быть также
размещен и исполняться на веб-странице.
Расширение СОМ в виде DCOM позволяет программам взаимодействовать
между собой, даже если они исполняются на разных компьютерах локальной
* Термин «Automation» в данном контексте не имеет ничего общего с русским тер-
мином «автоматизация».
Программное обеспечение
521
сети. Поэтому DCOM явилась универсальной программной технологией, кото-
рая как нельзя лучше позволяет осуществить взаимодействие между SCADA
в качестве клиента и сервером, обеспечивающим интерфейс к аппаратным
средствам промышленной автоматизации. Именно благодаря этому свойству
DCOM была использована в качестве базы для разработки стандарта ОРС
[588] «OLE for Process Control» — «OLE для управления процессами», кото-
рый лежит в основе всех современных SCADA-пакетов, взаимодействующих
с аппаратурой через ОРС-сервер.
9.1.5. Базы данных
Системы автоматизации работают с большими объемами данных, которые
необходимо хранить, сортировать, группировать, извлекать и представлять в
виде, удобном для пользователя. Данные извлекаются с помощью языка за-
просов SQL (Structured Query Language — структурированный язык запросов),
который стал стандартом в системах автоматизации. Наиболее распространен-
ными системами управления базами данных (СУБД) являются Microsoft SQL
Server, Wonderware Industrial SQL Server, Microsoft Access и Excel. Основными
свойствами СУБД являются: наличие пользовательского интерфейса на базе
языка запросов SQL; возможность одновременного обслуживания нескольких
пользователей; корректность работы с данными.
Открытые системы используют обращение к СУБД через драйвер ODBC
(Open Database Connectivity — подключение к открытой базе данных). ODBC
используется, когда необходимо обеспечить независимость прикладной про-
граммы от типа СУБД или типа операционной системы и требуется подклю-
читься к нескольким различным СУБД (например, одновременно к MS SQL
Server, MS Excel, MS Access, Paradox и др.). При использовании нескольких
ODBC-драйверов ими управляет менеджер драйверов. ODBC-драйвер трансли-
рует стандартный SQL-запрос в формат запроса для конкретной СУБД. Таким
образом, для работы с новой базой данных пользователю достаточно добавить
в систему новый ODBC-драйвер, не изменяя прикладную программу.
9.1.6. Операционные системы реального времени
Быстродействие ПЛК или компьютера влияет на величину динамической
погрешности системы автоматизации и запас ее устойчивости при наличии об-
ратной связи. Для улучшения этих характеристик используют быстродейству-
ющие модули ввода-вывода и компьютер (ПЛК) с высокопроизводительным
процессором. Это позволяет улучшить динамические характеристики системы,
однако большинство операционных систем (ОС) не могут обеспечить одно и то
же время выполнения задачи при повторных ее запусках, т.е. время выполне-
ния является случайной величиной. В некоторых случаях непредсказуемость
времени исполнения задачи приводит к отказу системы.
Пусть, к примеру, автомат подсчитывает количество бутылок на конвейере.
Если бутылки появляются напротив датчика с периодом 1 с, а время реакции
системы на появление бутылки составляет 0,7 с, то система кажется работоспо-
собной. Однако, если задержка является случайной величиной, то в некоторый
522
Глава 9
момент времени она может оказаться больше 1 с, что приведет к появлению слу-
чайной ошибки в количестве бутылок, т.е. к отказу системы. Величина ошибки
определяется статистической функцией распределения случайных задержек.
Для устранения этой проблемы был разработан класс операционных си-
стем, которые обеспечивают детерминированное (т.е. не случайное) время вы-
полнения задач и время реакции на аппаратные прерывания. Такие ОС по-
лучили название операционных систем реального времени (ОС РВ) [589] и бы-
ли поделены на ОС жесткого и мягкого реального времени. Отличительным
признаком ОС РВ является не время выполнение задач, а гарантированность
постоянства величины этого времени для одной и той же задачи.
ОС жесткого реального времени гарантирует выполнение задачи за зара-
нее известное время. В ОС мягкого реального времени приняты особые ме-
ры для устранения неопределенности времени выполнения, однако полностью
неопределенность не устраняется.
Стандарт POSIX (Portable Operating System Interface for Computer Environ-
ments) IEEE 1003.1 даёт следующее определение РВ: «реальное время в опера-
ционных системах — это способность операционной системы обеспечить требу-
емый уровень сервиса в определённый промежуток времени». Следовательно,
ОС РВ отличаются своим поведением, а не внутренним принципом построения.
Поэтому если вероятность появления недопустимо больших задержек достаточ-
но низка для достижения требуемого уровня сервиса (например, если она мень-
ше допустимой вероятности отказа системы), то такая ОС в конкретном приме-
нении может рассматриваться как ОС РВ. В частности, в соответствии с опре-
делением стандарта POSIX операционная система Windows ХР при управлении
медленными (тепловыми) процессами может рассматриваться как ОС РВ.
Тем не менее существуют определенные методы построения операционных
систем, которые обеспечивают прямоугольную плотность распределения ве-
роятности задержки и поэтому относятся к ОС жесткого реального времени
независимо от уровня предоставляемого сервиса. В ОС жесткого РВ процесс
представляется на выполнение одновременно с указанием требуемого времени
выполнения [589]. Планировщик ОС либо разрешает выполнение, гарантируя
требуемое время, либо отклоняет процесс как невозможный для исполнения.
Для этого планировщик должен точно знать, сколько времени требуется каж-
дой функции ОС для выполнения задачи.
Базовыми требованиями для обеспечения режима реального времени яв-
ляются следующие [590]:
• высокоприоритетные задачи всегда должны выполняться в первую очередь;
• должна быть исключена инверсия приоритетов (см. ниже);
• процессы и потоки, время выполнения которых нельзя планировать, нико-
гда не должны полностью занимать ресурсы системы.
Инверсией приоритетов называют ситуацию, когда поток с высоким прио-
ритетом требует предоставления ресурса, который уже занят потоком с более
низким приоритетом. Получается, что высокоприоритетный поток стоит в оче-
реди, в то время как исполняется низкоприоритетный (происходит «инверсия
Программное обеспечение
523
приоритетов»). Такая ситуация возможна, если имеется поток со средним при-
оритетом, который блокирует завершение выполнение потока с низшим прио-
ритетом, а поток с высшим приоритетом не может начаться, поскольку захва-
чен необходимый ему ресурс. Основным методом решения этой проблемы в
ОС РВ является наследование приоритетов [591], которое заключается в сле-
дующем. Если низкоприоритетный поток блокирует выполнение нескольких
высокоприоритетных потоков, то низкоприоритетный поток игнорирует назна-
ченный ему первоначально приоритет и выполняется с приоритетом, который
является наивысшим в блоке ожидающих его потоков. После окончания рабо-
ты поток принимает свой первоначальный приоритет.
Для обеспечения режима реального времени в ОС могут быть реализова-
ны следующие требования [590, 591]:
• поддержка динамических приоритетов (которые можно менять в процессе
выполнения задачи) в многозадачном режиме с вытесняющим ядром (как
для процессов, так и для потоков);
• возможность наследования приоритетов;
• возможность вытеснения задач ядром ОС;
• ограниченная латентность прерываний (время, в течение которого преры-
вание запрещено, — это время обработки критической секции кода);
• выполнение сервисов ОС с приоритетом, который назначается клиентом
сервиса.
В системах РВ обычно отсутствует виртуальная память, поскольку этот
метод использует подкачку страниц с диска, время выполнения которой яв-
ляется непредсказуемым.
Наиболее распространенными в ПЛК и компьютерах для решения задач
автоматизации являются операционные системы Windows СЕ, QNX Neutrino
и OS-9.
Windows CE.NET. Многозадачная операционная система жесткого ре-
ального времени Windows CE.NET корпорации Microsoft (www.microsoft.com)
поддерживает микропроцессоры с архитектурой ARM, StrongARM и xScale,
MIPS, SH, Х86-совместимые и имеет следующие свойства:
• допускает одновременное выполнение до 32 процессов;
• имеет 256 уровней приоритетов;
• поддерживает вытесняющую многозадачность;
• обеспечивает карусельное исполнение цепочек с одинаковым приоритетом;
• поддерживает вложенные прерывания;
• имеет среднее время обработки прерывания 2,8 мкс (на Pentium 166 МГц),
поддерживает вложенные прерывания;
• обеспечивает время обработки потока прерываний (Interrupt Service Thread,
1ST), равное 17,9 мкс (на Pentium 166 МГц);
• в минимальной конфигурации может быть установлена при объеме ОЗУ
200 Кб.
Ядро этой ОС принципиально отличается от ядра ОС для настольных ком-
пьютеров. В Windows CE.NET объединены все возможности систем реального
524
Глава 9
времени и последние технологии Windows. Планирование выполняется на ос-
нове приоритетов, для устранения инверсии используется наследование прио-
ритетов. Несмотря на наличие возможности работы с виртуальной памятью,
для обеспечения режима жесткого реального времени ее отключают.
Windows CE.NET поддерживает Microsoft Visual Studio.NET и Microsoft
eMbedded Visual C++ с языками программирования Visual C++, Visual C#
и Visual Basic.NET.
QNX Neutrino корпорации QNX Software Systems является операцион-
ной системой реального времени и обеспечивает многозадачный режим с прио-
ритетами [592]. Поддерживает микропроцессоры семейств ARM, StrongARM,
xScale, х86, MIPS, PowerPC, SH-4.
QNX относится к микроядерным ОС (т.е. реализует только базовые функ-
ции ядра — управление адресным пространством ОЗУ и виртуальной памяти,
процессами и потоками, обеспечивает межпроцессорную коммуникацию). Со-
стоит из ядра, планировщика процессов и сервисов. Построена на основе серви-
сов — небольших задач, выполняющих основные функции ОС. Такая структура
позволяет отключить любую ненужную функциональность, не изменяя ядро.
Каждый драйвер, приложение, протокол или файловая система выполняются
вне ядра, в защищенном адресном пространстве.
Инверсия приоритетов преодолевается с помощью распределенного насле-
дования приоритетов.
OS-9. Операционная система 0S-9 фирмы Microware System является мно-
гозадачной и многопользовательской, работает в режиме мягкого реального
времени. Используется во встраиваемых приложениях на платформах ARM,
StrongARM, MIPS, PowerPC, Hitachi SuperH, x86, Pentium, XScale, Motorola
68K [593].
9.2. ОРС-сервер
Стандарт OPC разработан международной организацией ОРС Foundation
(http://www.opcfoundation.org), членами которой являются более 400 фирм, ра-
ботающих в области средств автоматизации и измерительной техники. Осно-
вателями организации являются фирмы Fisher-Rosemount, Rockwell Software,
Opto 22, Intellution и Intuitive Technology. Первая версия стандарта OPC бы-
ла выпущена в 1998 г. [594]. В совет директоров OPC Foundation в 2008 году
входили представители Siemens AG, Emerson Process Management, Yokogawa,
Honeywell, Rockwell Automation, ICONICS.
9.2.1. Обзор стандарта OPC
Главной целью стандарта ОРС явилось обеспечение возможности совмест-
ной работы (интероперабельности) средств автоматизации, функционирующих
на разных аппаратных платформах, в разных промышленных сетях и произво-
димых разными фирмами. До разработки стандарта ОРС SCADA-пакет нужно
было адаптировать к каждому новому оборудованию индивидуально. Суще-
ствовали длинные списки «поддерживаемого оборудования», очень сложной
Программное обеспечение
525
была техническая поддержка. При модификации оборудования нужно было
вносить изменения во все драйверы, каждый из которых поддерживал прото-
кол обмена только с одной клиентской программой. Число таких драйверов
доходило до сотен.
После появления стандарта ОРС практически все SCADA-пакеты были
перепроектированы как ОРС-клиенты, а каждый производитель аппаратного
обеспечения стал снабжать свои контроллеры, модули ввода-вывода, интеллек-
туальные датчики и исполнительные устройства стандартным ОРС-сервером.
Благодаря появлению стандартизации интерфейса стало возможным подклю-
чение любого физического устройства к любой SCADA, если они оба соответ-
ствовали стандарту ОРС. Разработчики получили возможность проектировать
только один драйвер для всех SCADA-пакетов, а пользователи получили воз-
можность выбора оборудования и программ без прежних ограничений на их
совместимость.
Стандарт ОРС относится только к интерфейсам, которые ОРС-сервер
предоставляет клиентским программам. Метод же взаимодействия сервера с
аппаратурой (например, с модулями ввода-вывода) стандартом не предусмот-
рен, и его реализация возлагается полностью на разработчика аппаратуры.
Поэтому стандарт ОРС может быть использован не только для взаимодействия
SCADA с «железом», но и для обмен данными с любым источником данных,
например с базой данных или с GPS-приемником.
ОРС-сервер как средство взаимодействия с техническим устройством может
быть использован при разработке заказных программ на С4-4-, Visual Basic,
VBA, Delphi и т.п. В этих задачах ОРС-сервер используется как Microsoft
DCOM-объект, от которого он отличается только стандартизацией обозначе-
ний и специфическими терминами из области промышленной автоматизации.
Применение ОРС-сервера при разработке заказных программ позволяет скрыть
от разработчика всю сложность общения с аппаратурой, представляя простой
и удобный метод доступа к аппаратуре через интерфейсы СОМ-объекта.
Стандарт ОРС состоит из нескольких частей:
• ОРС DA (ОРС Data Access) — спецификация для обмена данными между
клиентом (например SCADA) и аппаратурой (контроллерами, модулями
ввода-ввода й др.) в реальном времени;
• ОРС Alarms & Events (А&Е) — спецификация для уведомления клиен-
та о событиях и сигналах тревоги, которые посылаются клиенту по ме-
ре их возникновения. Этот сервер пересылает аварийные сигналы, дей-
ствия оператора, информационные сообщения, результаты контроля со-
стояния системы;
• ОРС HDA (Historical Data Access) — спецификация для доступа к предыс-
тории процесса (к сохраненным в архиве данным). Сервер обеспечивает
унифицированный способ доступа с помощью DCOM технологии. Обеспе-
чивает чтение, запись и изменение данных;
• ОРС Batch — спецификация для особых физико-химических технологиче-
ских процессов обработки материалов, которые не являются непрерывны-
ми. В таких процессах выполняется загрузка нескольких видов сырья в
526
Глава 9
определенных пропорциях согласно рецепту, устанавливаются режимы об-
работки, а после выполнения цикла обработки и выгрузки готового матери-
ала загружается новая партия сырья. ОРС-сервер выполняет обмен между
клиентом и сервером рецептами, характеристиками технологического обо-
рудования, условиями и результатами обработки;
• ОРС Data eXchange — спецификация для обмена данными между двумя
ОРС DA-серверами через сеть Ethernet;
• ОРС Security — спецификация, которая определяет методы доступа кли-
ентов к серверу, которые обеспечивают защиту важной информации от
несанкционированной модификации;
• ОРС XML-DA — набор гибких, согласующихся друг с другом правил и
форматов для представления первичных данных с помощью языка XML,
веб технологий и сообщений SOAP (см. гл. 1);
• ОРС Complex Data — дополнительные спецификации к ОРС DA и XML-
DA, которые позволяют серверам работать со сложными типами данных,
такими как бинарные структуры и XML-документы;
• ОРС Commands — набор программных интерфейсов, который позволяет
ОРС клиентам и серверам идентифицировать, посылать и контролировать
команды, исполняемые в техническом устройстве (в контроллере, моду-
ле ввода-вывода);
• ОРС Unified Architecture — принципиально новый набор спецификаций,
который уже не базируется на DCOM технологии (подробнее см. п. 9.2.4).
Из перечисленных спецификаций в России широко используются только
две: ОРС DA и реже — ОРС HDA.
9.2.2. ОРС DA-сервер
Сервер ОРС DA является наиболее широко используемым в промышлен-
ной автоматизации. Он обеспечивает обмен данными (запись и чтение) меж-
ду клиентской программой и физическими устройствами. Данные состоят из
трех полей: значение, качество и временная метка. Параметр качества дан-
ных позволяет передать от устройства клиентской программе информацию о
выходе измеряемой величины за границы динамического диапазона, об отсут-
ствии данных, ошибке связи и другие.
Существуют четыре стандартных режима чтения данных из ОРС-сервера:
1) синхронный режим: клиент посылает запрос серверу и ждет от него
ответ;
2) асинхронный режим: клиент отправляет запрос и сразу же переходит к
выполнению других задач. Сервер после выполнения функции запроса посы-
лает клиенту уведомление и тот забирает предоставленные данные;
3) режим подписки: клиент сообщает серверу список тегов, значения кото-
рых сервер должен отправлять клиенту только в случае их изменения. Для то-
го чтобы шум данных не был принят за их изменение, вводится понятие «мерт-
вой зоны», которая слегка превышает максимально возможный размах помехи;
4) режим обновления данных: клиент вызывает одновременное чтение всех
активных тегов. Активными называются все теги, кроме обозначенных как
Программное обеспечение
527
«пассивные». Такое деление тегов уменьшает загрузку процессора обновлени-
ем данных, принимаемых из физического устройства.
В каждом из этих режимов данные могут читаться либо из кэша ОРС-
сервера, либо непосредственно из физического устройства. Чтение из кэша
выполняется гораздо быстрее, но данные к моменту чтения могут устареть. По-
этому сервер должен периодически освежать данные с максимально возможной
частотой. Для уменьшения загрузки процессора используют параметр частоты
обновления, которая может быть установлена для каждой группы тегов инди-
видуально. Кроме того, некоторые теги можно сделать пассивными, тогда их
значения не будут обновляться данными из физического устройства.
Запись данных в физическое устройство может быть выполнена только
двумя методами: синхронным и асинхронным и выполняется сразу в устрой-
ство, без промежуточной буферизации. В синхронном режиме функция записи
выполняется до тех пор, пока из физического устройства не поступит подтвер-
ждение, что запись выполнена. Этот процесс может занимать много времени,
в течение которого клиент находится в состоянии ожидания завершения функ-
ции и не может продолжать выполнение своей работы. При асинхронной запи-
си клиент отправляет данные серверу и сразу продолжает свою работу. После
окончания записи сервер отправляет клиенту соответствующее уведомление.
ОРС DA-сервер может иметь (не обязательно) пользовательский интер-
фейс, который позволяет выполнять любые вспомогательные функции для об-
легчения работы с оборудованием. Например, ОРС-сервер NLopc фирмы НИЛ
АП (www.RealLab.ru) позволяет, помимо обмена данными со SCADA, выпол-
нять следующие полезные функции:
• поиск подключенного к промышленной сети оборудования;
• установку параметров оборудования (имени, адреса, скорости обмена дан-
ными, периода сторожевого таймера, наличие контрольной суммы и др.);
• создание иерархического представления имен тегов;
• наблюдение значений тегов;
• управление правами доступа к ОРС-серверу.
В соответствии со стандартом, ОРС-сервер во время инсталляции авто-
матически регистрируется в реестре Windows. Запуск сервера осуществля-
ется так же, как любой другой программы, или автоматически из клиент-
ской программы.
На рис. 9.1 показано диалоговое окно ОРС-сервера NLopc (www.RealLab.ru).
Сервер позволяет выполнить поиск физических устройств, подключенных к
COM-порту компьютера. На рис. 9.1 окно сервера слева показывает, что к
компьютеру подключены три модуля ввода: NL16HV, NL8TI и NL8AI. Для
удобства представления измеряемых величин (тегов) на объекте автоматиза-
ции имена тегов могут быть составными и путь к тегу может быть представлен
в виде дерева, как показано на рис. 9.1. Имя выделенного на рисунке тега
выглядит как «NL8TI.Laboratory32.Top.Vin4». Все имена и их структура за-
даются с помощью средств окна ОРС-сервера.
При использовании ОРС-клиента (например, SCADA), имена тегов, доступ-
ные через ОРС-сервер, представляются в аналогичной форме в окне навигато-
528
Глава 9
Рис. 9.1. Пример диалогового окна ОРС-сервера NLopc фирмы НИЛ АП
ра тегов (рис. 9.2). Клиент показывает все ОРС-серверы, установленные на
компьютерах и доступных по сети Ethernet, и позволяет использовать все те-
ги этих серверов.
Примеры архитектуры систем, включающих ОРС-серверы и ОРС-клиен-
тов, показаны на рис. 9.3 и 9.4. В качестве ОРС-клиента может выступать
программа на языке C-F-1- (например, SCADA-пакет) или программа на языке
Visual Basic, VBA, Delphi или любая другая программа, поддерживающая внед-
рение COM-объектов (рис. 9.3). Программа на языке C++ взаимодействует с
ОРС-сервером через интерфейс ОРС Custom, а программа на Visual Basic, VBA,
Delphi — через интерфейс автоматизации ОРС Automation. ОРС-сервер и ОРС-
Подсоединение к ОРС серверу
Выбранный тег:
NL16HV
В NL8TI
В Laboratory32
3 Тор
Vir>4
Vn3
В Mridte
Sensor
В Bottom _
Vn6
VinS
VrO
S Compressor
□ Termostat
VinO
Vnl ZJ
Рис. 9.2. Пример диалогового окна навигатора тегов ОРС-клиента
Программное обеспечение
529
Рис. 9.3. Простой пример взаимодействия прикладных программ и физических
устройств через ОРС-сервер на одном компьютере
клиенты могут работать только на компьютерах и контроллерах с операцион-
ными системами, поддерживающими технологию DCOM (например, Windows
ХР и Windows СЕ).
ОРС-сервер подключается к физическим устройствам любым способом; эти
способы стандартом не предусмотрены. Например, сервер NLopc фирмы НИЛ
АП использует для каждого физического устройства свой драйвер (рис. 9.3).
Клиентская программа и ОРС-сервер могут быть установлены на одном
и том же компьютере, как показано на рис. 9.3, или на разных компьютерах
сети Ethernet (рис. 9.4). При наличии нескольких компьютеров каждый из них
может содержать ОРС-сервер и подключенный к нему физические устройства.
Рис. 9.4. Пример применения ОРС-технологии для сетевого доступа к данным
в системах автоматизации
530
Глава 9
В такой системе любой ОРС-клиент с любого компьютера может обращаться
к любому ОРС-серверу, в том числе к расположенному на другом компьютере
сети. Это достигается благодаря технологии DCOM, использующей удален-
ный вызов процедур (RPC — Remote Procedure Call). Например, SCADA на
рис. 9.4 может обратиться за данными к модулю ввода-вывода по пути, ука-
занному на рис. 9.4 штриховой линией. Обратим внимание, что компьютеры и
контроллеры в такой архитектуре могут работать с разными промышленными
сетями. Обмен данными с ПЛК, работающими с ОС Windows СЕ, выполня-
ется точно так, как с компьютерами.
При использовании оборудования разных производителей на компьютере
(контроллере) может быть установлено несколько ОРС-серверов разных про-
изводителей, однако ОРС-сервер монопольно занимает COM-порт компьютера
(поскольку непрерывно выполняет обновление данных), поэтому число портов
должно быть равно числу ОРС-серверов. Для наращивания количества СОМ-
портов можно использовать преобразователи интерфейса USB в RS-232. К раз-
ным портам компьютера могут быть подключены разные промышленные сети.
В этом случае ОРС-серверы выполняют функцию межсетевых шлюзов.
9.2.3. ОРС HDA-сервер
Целью ОРС HDA-сервера [595] (сервера предыстории процесса) является
предоставление клиентской программе единого интерфейса для обмена дан-
ными с любыми хранилищами данных, в качестве которых может выступать
нестандартный файл с данными, стандартная СУБД, ОРС DA-сервер или дру-
гой ОРС HDA-сервер. Стандарт распространяется только на интерфейсы для
взаимодействия HDA-сервера с клиентскими программами и не устанавливает
способов получения или хранения данных.
Спецификация ОРС HDA устанавливает стандарт на интерфейсы СОМ-
объекта и методы его использования. Структура сервера и методы взаимодей-
ствия с клиентами полностью аналогичны общей идеологии ОРС и описанному
выше ОРС DA в частности. Например, ОРС клиент может подсоединяться к
нескольким ОРС HDA-серверам разных производителей и быть установлен на
разных компьютерах в сети Ethernet.
Существует два типа HDA-серверов:
• простой сервер данных предыстории для построения графиков (трендов);
• сервер для хранения данных в упакованном виде с возможностью их об-
работки и анализа. К функциям обработки и анализа данных относятся
нахождение среднего, минимального и максимального значения и др.
Работа с данными заключается в чтении, записи или изменении данных.
9.2.4. Спецификация ОРС UA
Несмотря на огромный успех и всеобщее признание, практика выявила сле-
дующие недостатки ОРС технологии [596, 597]:
• доступность только на операционных системах семейства Microsoft Win-
dows;
Программное обеспечение
531
• связь с технологией DCOM, исходные коды которой являются закрытыми.
Это не позволяет решать вопросы надежности ПО, а также выявлять и
устранять возникающие программные отказы;
• бывают проблемы конфигурирования, связанные с DCOM;
• неточные сообщения DCOM о прерываниях связи;
• неприспособленность DCOM для обмена данными через Интернет,
• неприспособленность DCOM для обеспечения информационной безопа-
сности.
В связи с этим в 2006 г. ОРС Foundation предложил новую стандартную
спецификацию для обмена данными в системах промышленной автоматизации
[598], получившую название «ОРС Unified Architecture» — «ОРС с унифици-
рованной архитектурой», которая рассматривается как ОРС-стандарт нового
поколения.
Стандарт ОРС UA устанавливает методы обмена сообщениями между ОРС-
сервером и клиентом, не зависящие от аппаратно-программной платформы, от
типа взаимодействующих систем и сетей. ОРС UA обеспечивает надежную
и безопасную коммуникацию, противодействие вирусным атакам, гарантиру-
ет идентичность информации клиента и сервера.
В новом стандарте используется понятие объекта, под которым понимает-
ся физический или абстрактный элемент системы. Примерами объектов могут
быть физические устройства, включающие их системы и подсистемы. Датчик
температуры, к примеру, может быть представлен как объект, который вклю-
чает в себя значение температуры, набор параметров сигнализаций и границы
их срабатывания. Объект, по аналогии с объектно-ориентированным програм-
мированием, определяется как экземпляр класса, а класс рассматривается как
тип данных. Объекты включают в себя переменные, события и методы.
ОРС UA использует несколько различных форматов данных, основными
из которых являются бинарные структуры и XML-доку менты. Формат данных
может быть определен поставщиком ОРС-сервера или стандартом. Для работы
с произвольными форматами клиент может запросить у сервера информацию
об описании этого формата. Во многих случаях используется автоматическое
распознавание формата данных во время их передачи.
ОРС UA обладает высокой робастностью* данных и уведомлений о собы-
тиях. Робастность обеспечивается механизмом быстрого обнаружения ошибок
коммуникации и восстановления данных.
Серверы могут иметь доступ как к текущим, так и архивированным дан-
ным, к событиям и аварийным сигналам. ОРС UA может быть внедрен в
различные коммуникационные протоколы, а данные могут быть закодирова-
ны способами, оптимальными по соотношению эффективности и переносимо-
сти на другие платформы.
Архитектура, ориентированная на сервисы. Основным отличием ОРС
UA от ОРС является отказ от технологии СОМ и DCOM фирмы Microsoft и
* Робастность — нечувствительность данных к помехам, сбоям, вычислительным
ошибкам.
532
Глава 9
переход к архитектуре SOA (Service Oriented Architecture — архитектура, ори-
ентированная на сервисы) с целью обмена информацией и обеспечения совме-
стимости с множеством различных аппаратно-программных платформ. Под
сервисом в ОРС UA понимается некоторая функциональность, заключенная в
программном компоненте, который может быть транспортирован от сервера к
клиенту или обратно и вызван удаленно. Вызов сервиса аналогичен вызову
метода в языках объектно-ориентированного программирования. Интерфейс
между клиентом ОРС UA и сервером определяется как набор сервисов. Ос-
новным принципом SOA является независимость от программной технологии,
от вычислительной платформы, от языков программирования, от конкретных
приложений, а также организация сервисов как слабосвязанных компонентов
для построения систем. Сервисы включают в себя средства для обеспечения
информационной безопасности.
Благодаря построению сервера ОРС UA на основе сервисов появилась воз-
можность изменять размер (масштабировать) сервер для его использования на
платформах с разными вычислительными ресурсами: для встроенных прило-
жений может быть использован сокращенный набор сервисов, для корпоратив-
ных сетевых серверов — полный набор.
Сервисы ОРС UА делятся на логические группы [598]:
• сервисы безопасных каналов;
• сервисы сессий взаимодействия приложений по инициативе пользователя;
• сервисы для управления узлами*. Позволяют клиентам добавлять, моди-
фицировать или удалять узлы в адресном пространстве;
• сервисы видимости узлов, позволяющие задавать индивидуальные наборы
видимых узлов для разных клиентов;
• сервисы атрибутов позволяют модифицировать атрибуты узлов;
• сервисы методов, которые вызывают функции, исполняемые элементами
системы;
• сервисы для мониторинга узлов в режиме подписки. Эти сервисы периоди-
чески контролируют переменные, атрибуты и события, а также генерируют
уведомления при наступлении заданных условий;
• сервисы для осуществления подписки и публикации уведомлений.
Независимость от COM, DCOM. Отказ от DCOM стал возможен благо-
даря появлению новых транспортных механизмов, основанных на SOAP, XML,
HTTP (см. главу 2) и сервисах [599]. Благодаря им ОРС UA позволяет осу-
ществить безопасную и надежную доставку информации и объединить в одном
сервере функциональность ОРС DA, ОРС HDA и ОРС А&Е-серверов.
Стандарт ОРС UA не предназначен для замены существующих ОРС-
спецификаций, а дополняет и расширяет их возможности [597].
Безопасность. Для обеспечения информационной безопасности в ОРС UA
используются стандартные веб-сервисы безопасности, такие как WS-Security,
WS-Trust или WS-SecureConversation [597]. Диапазон возможностей средств
* Узел — представление объектов, их определений и перекрестных ссылок в адрес-
ном пространстве сервера ОРС UA.
Программное обеспечение
533
безопасности простирается от простой аутентификации с помощью пароля и об-
мена цифровыми подписями до полного шифрования передаваемых сообщений.
ОРС-сообщения в стандарте UA передаются с помощью сообщений SOAP в
виде XML-текста. Поскольку кодирование и декодирование текстового форма-
та занимает довольно много времени, стандарт предусматривает альтернатив-
ный способ представления информации в виде бинарного файла.
Достоинства нового стандарта. Основными достоинствами ОРС UA
являются [597]:
• реализация на языке программирования ANSI С для обеспечения переноси-
мости на другие платформы, включая встраиваемые системы. Доступны
также версии на .NET и Java (от ОРС Foundation);
• ориентация на сервисы вместо ориентации на объекты, что позволяет ис-
пользовать ОРС UA на любых компьютерах, встраиваемых системах, в
коммуникаторах и т.п., которые используют веб-сервисы;
• позволяет осуществить масштабирование ОРС UA, т.е. изменение объема
программы в зависимости от вычислительных ресурсов процессора и тре-
буемой функциональности. Может быть выполнена также компиляция в
виде однопоточного или многопоточного приложения;
• поддержка надежного и современного транспортного механизма SOAP на
базе XML с применением НТТР-протокола;
• обеспечение хорошей информационной безопасности;
• конфигурируемый таймаут для каждого сервиса;
• использование открытых стандартов World Wide Web Consortium (W3C)
вместо закрытого стандарта COM/DCOM.
Концепция системы на базе ОРС UA. Система на базе ОРС UA может
содержать множество клиентов и серверов. Каждый клиент может работать
параллельно с несколькими серверами, и каждый сервер может обслуживать
нескольких клиентов. Пользовательское приложение (например, SCADA) мо-
жет создавать комбинированные группы клиентов и серверов для ретрансля-
ции сообщений, которыми оно обменивается с другими клиентами и сервера-
ми, как показано на рис. 9.5.
Клиентом при взаимодействии с ОРС-сервером является прикладная про-
грамма, например, SCADA. Структура клиента показана на рис. 9.6. Клиент-
ская программа выполняет запросы сервисов ОРС-сервера через внутренний
ОРС U А клиент (SCADA) Запрос Комбини- рованный ОРС UA, клиент и сервер Запрос ОРС UA сервер
клиента * Ответ клиента * Ответ
сервера Опубликованное сервера Опубликованное
’ уведомление * уведомление
Рис. 9.5. ОРС UА-клиент и сервер могут быть скомбинированы в одном при-
ложении для взаимодействия с другими ОРС UA-клиентами и серверами
534
Глава 9
Клиент ОРС UA (SCADA)
Прикладная Запросы Перенаправление Запросы
программа на посылку полученных на посылку Перенаправление
запросов ответов публикуемых полученных
сервису сервиса ответов уведомлении
Интерфейс прикладной программы
Коммуникационный
стек Запрос Ответ Запрос Ответ
OPCUA ▲ ▲
К
ОРС UA
серверу
От
OPCUA
сервера
К
OPCUA
серверу
От
OPCUA
сервера
Рис. 9.6. Структура клиентской программы в стандарте ОРС UA
интерфейс, который является изолирующей прослойкой между программой и
коммуникационным стеком. Коммуникационный стек конвертирует запросы
клиентской прикладной программы в сообщения для вызова необходимого сер-
виса, которые посылает серверу. После получения ответа на запросы комму-
никационный стек передает их в клиентскую программу.
Структура сервера ОРС UA представлена на рис. 9.7. Модули ввода-
вывода, ПЛК, интеллектуальные устройства и программы, которые могут по-
ставлять данные через ОРС-сервер, обозначены на рис. 9.7 как «реальные объ-
екты». Серверное приложение представляет собой программную реализацию
функций, которые должен выполнять сервер. Взаимодействие ОРС UA-серве-
ра с клиентом выполняется через интерфейс прикладной программы (рис. 9.7)
путем отправления запросов и получения ответов.
Адресное пространство ОРС-сервера представляет собой множество узлов,
доступных клиентской программе с помощью сервисов ОРС UA. «Узлы» в ад-
ресном пространстве используются, чтобы представить реальные объекты, их
определения и перекрестные ссылки. В адресном пространстве выделяется под-
пространство узлов, которые сервер делает «видимыми» для клиента. Види-
мые узлы организуются в виде иерархической структуры, для удобства на-
вигации их клиентской программой.
Обмен данными между клиентом и сервером может выполняться как пу-
тем получения мгновенных ответов на запросы, так и по схеме «издатель-
подписчик». Во втором случае клиентская программа осуществляет «подпис-
ку» на получение определенных данных, которые сервер должен будет предо-
ставить по мере их появления. Для реализации режима подписки сервер осу-
ществляет непрерывный контроль (мониторинг) узлов и соответствующих им
реальных объектов с целью обнаружения изменений. При обнаружении измене-
ний в данных, событиях или аварийных сигналах (алармах) сервер генерирует
уведомление, которое передается клиенту по каналу подписки.
Программное обеспечение
535
От К
ОРС UA ОРС UA
клиента клиенту
Or
OPCUA
клиента
К
OPCUA
клиенту
Рис. 9.7. Структура сервера в стандарте ОРС UA
ОРС UA допускает обмен между двумя серверами. Для этого один из сер-
веров выступает в роли клиента, второй — в роли сервера. Таким образом
можно соединить несколько серверов цепочкой, при этом каждый из них будет
выступать с одной стороны цепочки в качестве клиента, с другой стороны —
в качестве сервера, как показано на рис. 9.3.
Для защиты уже сделанных инвестиций в ОРС на базе DCOM организа-
ция ОРС Foundation разработала стратегию перехода на новую технологию с
применением «UA-оболочки», которая допускает обмен данными между стары-
ми и новыми продуктами. Такая оболочка позволяет, например, DCOM ОРС
серверу работать с ОРС UA клиентом, и наоборот.
9.2.5. ОРС DA-сервер в среде MS Excel
Microsoft Excel является хорошей средой для разработки несложных систем
автоматизации благодаря тому, что он содержит удобный пользовательский ин-
терфейс для обработки данных, построения графиков, вставки рисунков, вы-
полнения анимации и т.п. [600]. Он содержит также встроенные элементы
управления (раскрывающиеся списки, «радиокнопки», «чек-боксы» и т.п. [601]).
Excel позволяет сделать специализированный пользовательский интерфейс, не
уступающий по дизайну профессиональным SCADA-пакетам. Особенно удоб-
ным является простое сохранение выполненной работы в файл.
536
Глава 9
Недостатком MS Excel является низкое быстродействие при записи дан-
ных в ячейки таблицы и отсутствие в VBA возможности выполнения задач в
нескольких параллельных потоках. VBA включает в себя Visual Basic и до-
полнительные функции, обеспечивающие работу с приложением, например с
ячейками MS Excel или с параграфами MS Word. Мы рекомендуем исполь-
зовать MS Excel только для применений, использующих не более 10...30 тегов
при периоде их опроса не менее 1 с. Однако это касается только операций в
ячейках и динамического обновления графиков и не распространяется на об-
работку данных средствами языка VBA.
Возможность работы MS Excel (и других приложений Microsoft Office) с
ОРС-сервером обеспечивается благодаря тому, что Visual Basic, входящий в со-
став MS Excel, поддерживает технологию Automation (OLE Automation) фирмы
Microsoft. Суть Automation состоит в том, что она позволяет одному приложе-
нию (клиенту) использовать объекты другого приложения (сервера). Примени-
тельно к задаче промышленной автоматизации это означает, что приложение-
клиент может использовать объекты ОРС-сервера, который, в свою очередь,
может получать данные из физического устройства или записывать их в него.
Automation позволяет использовать в среде MS Excel также объекты других
приложений, например ActiveX-объекты, объекты MS Word, Outlook Express
и др. Интерфейс Automation позволяет использовать ОРС-сервер с любыми
другими приложениями, имеющими встроенный Visual Basic for Application.
Объекты, доступные в MS Excel через интерфейс Automation, видны в спис-
ке объектов «Object Browser» в меню «View» Microsoft Visual Basic, который от-
крывается из пункта меню Сервис/Масгоз/Редактор Visual Basic в Excel 2003 и
более старых версиях или в меню «Разработчик/Visual Basic» в MS Excel 2007.
Для подключения ОРС-сервера к MS Excel сначала необходимо инсталли-
ровать на компьютере ОРС-сервер. Стандартный ОРС-сервер должен регистри-
роваться в реестре Windows автоматически. Затем нужно открыть пункт меню
Tools/References в редакторе Visual Basic, найти в списке «Available References»
и отметить галочкой ссылку на имя ОРС-сервера. После этого в списке объ-
ектов «Object Browser» появляется список объектов ОРС-сервера, и их можно
использовать по общим правилам программирования на Visual Basic. Более
подробно о работе с объектами OLE Automation можно ознакомиться в руко-
водствах по программированию, например [601].
На рис. 9.8 показана иерархия объектов, предоставляемых интерфейсом
ОРС Automation. Описание свойств и методов каждого объекта можно най-
ти в документах [602, 603]. Значение данных, считанных из устройства ввода,
параметр качества данных и временная метка хранятся в объекте OPCItem.
Несколько OPCItem могут составлять коллекцию [601]. Коллекция — это тер-
мин VBA, она представляет собой группу связанных объектов, каждый из ко-
торых называется элементом коллекции и может быть вызван по его индексу
[601]. Каждая коллекция имеет свойство Count, которое позволяет подсчи-
тать количество элементов.
Объект OPCServer представляет собой экземпляр ОРС-сервера. Этот объ-
ект должен быть создан до того, как будут установлены ссылки на другие
Программное обеспечение
537
Рис. 9.8. Иерархия объектов интерфейса Automation
объекты. Он содержит коллекцию OPCGroups и создает объект OPCBrowser,
который используется в ОРС-клиенте для построения навигатора тегов.
Рассмотрим пример чтения значения тега из ОРС-сервера в ячейку листа
MS Excel. Сначала необходимо создать модуль в Visual Basic, входящем в состав
MS Excel. В заголовке модуля объявляются переменные Server и Group как
имеющие тип OPCServer и OPCGroup соответственно, с областью видимости
Public (строки 1 и 2 в листинге 1):
Листинг 1. Подсоединение к ОРС-серверу
1 Public Server As OPCServer
2 Public Group As OPCGroup
3 Sub Connect()
4 If Server Is Nothing Then
5 Set Server = New OPCServer
6 End If
7 If Group Is Nothing Then GoTo noGroup
8 Set Group = Nothing
9 noGroup*.
10 Server. Connect ”NLopc.server”
11 Set Group = Server.OPCGroups.Add(”RLDA”)
12 End Sub
Первым делом нужно создать связь MS Excel с ОРС-сервером. Для это-
го используется процедура Connect() (строка 3). Для того чтобы не создавать
новые объекты, если они уже существуют, используется проверка существова-
ния объекта Server (строка 4), и если он не существует, то создается новый
оператором New (строка 5).
Аналогично поступают с объектом Group (строка 7). Если объект не суще-
ствует, то переходят к метке noGroup:, за которой вызывается метод Connect
объекта Server, который осуществляет соединение с сервером «NLopc.server» (в
этом примере использован ОРС-сервер Nope фирмы НИЛ АП, www.RealLab.ru).
Далее создается новая объектная переменная Group и добавляется методом
538
Глава 9
Add в коллекцию OPCGroups с любым именем, например «RLDA». Если объ-
ект Group существует, то его сначала удаляют (строка 8), чтобы не проверять,
откуда он появился, затем создают заново (строка 10, 11).
После выполнения процедуры листинга 1 можно прочитать данные из ОРС-
сервера. Пример чтения данных иллюстрирует листинг 2.
Предположим, что нужно считать данные тега, указанного на рис. 9.1. Его
имя присваивают переменной tagname (строка 7). Далее имя тега нужно до-
бавить к коллекции OPCItems с помощью метода Additem (строка 8). Второй
переменной после имени тега является номер тега в коллекции. После этого
объектную переменную anltem ассоциируют с объектом Item, имеющим поряд-
ковый номер 1, под этим номером в коллекцию OPCItems был добавлен наш тег.
Объект anltem имеет метод Read, который позволяет прочесть параметры
интересующего нас тега: значение Value, качество Quality и временную мет-
ку TimeStamp (строка 10).
После чтения этих переменных (строка 10) их значения записываются ячей-
ки листа Excel с именем Лист1, находящиеся на пересечении 10-й, 11-й и 12-й
строки с 5-м столбцом. Функция DoEvents необходима для того, чтобы Excel
мог обрабатывать другие события, происходящие в системе, когда процедура
Read () используется в цикле.
После получения данных от ОРС-сервера тег нужно удалить из коллек-
ции. Для этого находят его указатель с помощью метода ServerHandle (строка
15), затем удаляют из коллекции OPCItems методом Remove. Далее удаляют
ассоциацию объектной переменной anltem с реальным объектом (строка 17).
Листинг 2. Чтение данных из ОРС-сервера
1 Sub Read()
2 If Server Is Nothing Then Exit Sub
3 If Group Is Nothing Then Exit Sub
4 Dim serverHandles(l) As Long, Errors() As Long
5 Dim tagname As String, anltem As OPCItem
6 Dim Value, Quality, TimeStamp As Variant
7 tagname = "NL8TI.Laboratory32.Top.Vin4u
8 Group.OPCItems.Additem tagname, 1
9 Set anltem = Group.OPCItems.Item(l)
10 anltem.Read OPCCache, Value, Quality, TimeStamp
11 JIucml.Cells(10, 5). Value = Value
12 JIucml.Cells(ll, 5). Value = Quality
13 JIucml.Cells(12, 5). Value = TimeStamp
14 DoEvents
15 serverHandles(l) = anltem.ServerHandle
16 Group. OPCItems.Remove 1, serverHandles, Errors
17 Set anltem = Nothing
18 End Sub
Упрощенный интерфейс Easy Access. Описанная процедура работы с
ОРС-сервером хороша, когда на основе Visual Basic делается удобная заказ-
Программное обеспечение
539
ная программа и нужно использовать все богатство возможностей ОРС-сервера.
Однако для быстрого получения данных при проведении несложного экспери-
мента применение ОРС-сервера неоправданно сложно. В этих случаях можно
использовать упрощенный COM-объект Easy Access [16], подробно описанный на
вебсайте www.RealLab.ru. Для того чтобы считать из ОРС-сервера значение те-
га, например «NL8TI.Laboratory32.Top.Vin4» (см. листинг 3), достаточно после
объявления переменных создать объект функцией «CreateObject» (строка 5) и
сразу после этого получить значение тега (строка 7). Строка 8 записывает это
значение на лист Excel в ячейку (7, 6).
Листинг 3. Применение упрощенного интерфейса Easy Access
1 Sub OnReadTag()
2 Dim obj As Object
3 Dim val As Variant
4 Dim tag As String
5 Set obj = CreateObject(" NLopc. console")
6 tag = ”NL8TLLaboratory32.Top.Vin4”
7 obj.GetTagValue tag, val
8 JIucml.Cells(7, 6). Value = val
9 End Sub
Для записи данных в физическое устройство вместо функции obj. Get Tag-
Value используют obj. Set Tag Value.
Построение графиков, обработка полученных данных выполняются обыч-
ными средствами Visual Basic [601].
9.2.6. Применение ОРС-сервера с MATLAB и Lab VIEW
В MATLAB, начиная с версии 7, входит пакет ОРС Toolbox, поддержи-
вающий ОРС-серверы версии v2.05a. Он содержит также блоки Simulink для
обмена данными с ОРС-серверами. Аналогично, Lab VIEW, начиная с версии
7, также имеет встроенную поддержку стандарта ОРС.
Более ранние версии MATLAB и Lab VIEW не поддерживают ОРС, од-
нако поддерживают OLE Automation. Для работы с такими программами
можно использовать объект ОРСWrapper.Service, разработанный НИЛ АП
(www.RealLab.ru) и представляющий собой буфер, преобразующий стандарт-
ные вызовы ОРС в стандартные вызовы OLE Automation. Для использова-
ния объекта OPCWrapper.Service сначала создают соединение с ним с помо-
щью строки (в среде MATLAB)
wrapper = actxserver(’OPCWrapper.Service’),
затем подключают объект к серверу:
invoke(wrapper,’OpcOpenServer’,’NLopc.Server’,”),
где вместо «NLopc.Server» можно использовать имя любого ОРС-сервера.
Значение тега, например «NL8TI.Vinl», читают с помощью функции invoke
из пакета MATLAB:
value = invoke(wrapper,’OpcReadItern’,’NL8TI.Vinl’).
540
Глава 9
Запись в физическое устройство дискретного значения «1» тега «NL8TLBit.
DoutO» выполняется аналогично:
invoke(wrapper,’OpcWriteltem’,’NL8TI.Bit.DoutO’, 1).
Отсоединить объект от сервера можно следующим образом:
invoke(wrapper, ’OpcCloseServer’).
После этого соединение с объектом OPCWrapper.Service необходимо за-
крыть:
release(wrapper).
Примеры работы пакета MATLAB с физическими устройствами можно най-
ти на сайте www.RealLab.ru, а также в [604].
9.3. Системы программирования на языках
МЭК 61131-3
Стандарт МЭК 61131-3 устанавливает пять языков программирования
ПЛК: три графических и два текстовых. Первоначально стандарт назы-
вался IEC 1131-3 и был опубликован в 1993 г., но в 1997 г. МЭК (IEC)
перешел на новую систему обозначений и в названии стандарта добави-
лась цифра «6». Продвижением стандарта занимается организация PLCopen
(http: / /www.plcopen.org).
Основной целью стандарта было повышение скорости и качества разра-
ботки программ для ПЛК (см. п. 9.1), а также создание языков програм-
мирования, ориентированных на технологов, обеспечение соответствия ПЛК
идеологии открытых систем, исключение этапа дополнительного обучения при
смене типа ПЛК.
Системы программирования, основанные на МЭК 61131-3, характеризуют-
ся следующими показателями:
• надежностью создаваемого программного обеспечения. Надежность обеспе-
чивается тем, что программы для ПЛК создаются с помощью специально
предназначенной для этого среды разработки, которая содержит все необ-
ходимые средства для написания, тестирования и отладки программ с по-
мощью эмуляторов и реальных ПЛК, а также множество готовых фраг-
ментов программного кода;
• возможностью простой модификации программы и наращивания ее функ-
циональности;
• переносимостью проекта с одного ПЛК на другой;
• возможностью повторного использования отработанных фрагментов про-
граммы;
• простотой языка и ограничением количества его элементов.
Языки МЭК 61131-3 появились не как теоретическая разработка, а как
результат анализа множества языков, уже используемых на практике и пред-
лагаемых рынку производителями ПЛК. Стандарт устанавливает пять языков
программирования со следующими названиями:
• структурированный текст (ST — Structured Text);
Программное обеспечение 541
• последовательные функциональные схемы (SFC — Sequential Function
Chart);
• диаграммы функциональных блоков (FBD — Function Block Diagram);
• релейно-контактные схемы, или релейные диаграммы (LD — Ladder
Diagram);
• список инструкций (IL — Instruction List).
Графическими языками являются SFC, FBD, LD. Языки IL и ST явля-
ются текстовыми.
В стандарт были введены несколько языков (а не один) для того, чтобы
каждый пользователь мог применить наиболее понятный ему язык. Програм-
мисты чаще выбирают язык IL (похожий на ассемблер) или ST (похожий на
язык высокого уровня Паскаль); специалисты, имеющие опыт работы с ре-
лейной логикой, выбирают язык LD, специалисты по САУ* и схемотехники
выбирают привычный для них язык FBD.
Выбор одного из пяти языков определятся не только предпочтениями поль-
зователя, но и смыслом решаемой задачи. Если исходная задача формулиру-
ется в терминах последовательной обработки и передачи сигналов, то для нее
проще и нагляднее использовать язык FBD. Если задача описывается как по-
следовательность срабатываний некоторых ключей и реле, то для нее нагляд-
нее всего будет язык LD. Для задач, которые изначально формулируются в
виде сложного разветвленного алгоритма, удобнее будет язык ST.
Языки МЭК 61131-3 базируются на следующих принципах [55]:
• вся программа разбивается на множество функциональных элементов —
Program Organization Units (POU), каждый из которых может состоять
из функций, функциональных блоков и программ. Любой элемент МЭК-
программы может быть сконструирован иерархически из более простых
элементов;
• стандарт требует строгой типизации данных. Указание типов данных поз-
воляет легко обнаруживать большинство ошибок в программе до ее ис-
полнения;
• имеются средства для исполнения разных фрагментов программы в разное
время, с разной скоростью, а также параллельно. Например, один фраг-
мент программы может сканировать концевой датчик с частотой 100 раз в
секунду, в то время как второй фрагмент будет сканировать датчик тем-
пературы с частотой один раз в 10 с;
• для выполнение операций в определенной последовательности, которая
задается моментами времени или событиями, используется специальный
язык последовательных функциональных схем (SFC);
• стандарт поддерживает структуры для описания разнородных данных. На-
пример, температуру подшипников насоса, давление и состояние «включе-
но-выключено» можно описать с помощью единой структуры «Рошр» и пе-
редавать ее внутри программы как единый элемент данных;
САУ — системы автоматического управления.
542
Глава 9
• стандарт обеспечивает совместное использование всех пяти языков, поэто-
му для каждого фрагмента задачи может быть выбран любой, наиболее
удобный, язык;
• программа, написанная для одного контроллера, может быть перенесена
на любой контроллер, совместимый со стандартом МЭК 61131-3.
Любой ПЛК работает в циклическом режиме. Цикл начинается со сбора
данных с модулей ввода, затем исполняется программа ПЛК и оканчивается
цикл выводом данных в устройства вывода. Поэтому время исполнения кон-
троллерного цикла зависит от продолжительности операций ввода-вывода и
быстродействия процессорного модуля.
9 .3.1. Язык релейноконтактных схем LD
Графический язык релейной логики впервые появился в виде электриче-
ских схем, которые состояли из контактов и обмоток электромагнитных реле
(рис. 9.9). Такие схемы использовались в автоматике конвейеров для сбор-
ки автомобилей до эры микропроцессоров. Язык релейной логики был инту-
итивно понятен людям, слегка знакомым с электротехникой и поэтому ока-
зался наиболее распространенным в промышленной автоматике. Обслужива-
ющий персонал легко находил отказ в оборудовании, прослеживая путь сиг-
нала по релейной диаграмме.
Однако язык LD проблематично использовать для реализации сложных
алгоритмов, поскольку он не поддерживает подпрограммы, функции, инкап-
суляцию* и другие средства структурирования программ с целью повышения
качества программирования. Эти недостатки затрудняют многократное исполь-
зование программных компонентов, что делает программу длинной и сложной
для обслуживания.
Для выполнения арифметических функций в язык LD были добавлены
функциональные блоки, которые выполняли операции сложения, умножения,
вычисления среднего и т.д. Сложные вычисления в этом языке невозможны.
Рис. 9.9. Пример программы на языке LD (а) и ее эквивалент в виде электрической
цепи с реле и выключателями (б)
* Инкапсуляция — свойство языка программирования скрывать реализацию про-
граммного блока, предоставляя пользователю языка только его интерфейсы.
Программное обеспечение
543
Недостатком является также то, что только маленькая часть программы уме-
щается на мониторе компьютера или панели оператора при программировании.
Несмотря на указанные недостатки, язык LD относится к наиболее рас-
пространенным в мире [55], хотя используется для программирования толь-
ко простых задач.
9 .3.2. Список инструкций IL
Язык IL напоминает ассемблер и используется для реализации функций,
функциональных блоков и программ, а также шагов и переходов в языке SFC.
Основным достоинством языка является простота его изучения. Наиболее ча-
сто язык IL используется в случаях, когда требуется получить оптимизирован-
ный код для реализации критических секций программы, а также для решения
небольших задач с малым количеством разветвлений алгоритма.
Листинг 4. Пример программы на языке IL
Метка Оператор Операнд Комментарии
LD Voltage («Загрузить Voltage в аккумулятор*)
GT 220 («Если >220*)
JMPCN Ml («Перейти к метке, если ">220" не верно*)
LD Current (♦Загрузить Current в аккумулятор*)
SUB 10 (♦Вычесть из аккумулятора 10 *)
ST Current (♦Присвоить Current значен. аккумулятора*)
Ml: LD 0 (♦Загрузить в аккумулятор значение «0»*)
ST Out («Присвоить Out значение аккумулятора*)
В основе языка лежит понятие аккумулятора и переходов по меткам. При-
мер программы на зыке IL с комментариями приведен в листинге 4. Начинается
программа с загрузки в аккумулятор значения переменной. Дальнейшие шаги
программы состоят в извлечении содержимого аккумулятора и выполнении над
ним ограниченного числа допустимых действий (их в языке всего 24).
9 .3.3. Структурированный текст ST
Язык SFC является текстовым языком высокого уровня и очень сильно
напоминает Паскаль.
Листинг 5. Пример программы на языке ST
IF Voltage>220 THEN
Current: «Current - 10; (*Если V>220B, то уменьшить ток на 10*)
ELSE
Current:«50; Speed:=0N;(«Установить ток 50A и включить мотор*)
END.IF;
Язык ST имеет много отличий от языка Паскаль и разработан специально
для программирования ПЛК. Он содержит множество конструкций для при-
своения значений переменным, для вызова функций и функциональных бло-
ков, для написания выражений условных переходов, выбора операторов, для
построения итерационных процессов. Этот язык предназначен в основном для
выполнения сложных математических вычислений, описания сложных функ-
ций, функциональных блоков и программ.
544
Глава 9
9 .3.4. Диаграммы функциональных блоков FBD
FBD является графическим языком и наиболее удобен для программиро-
вания процессов прохождения сигналов через функциональные блоки. Язык
FBD удобен для схемотехников, которые легко могут составить электриче-
скую схему системы управления на «жесткой логике», но не имеют опыта
программирования.
OnDelay
Рис. 9.10. Пример программы на языке
FBD
функциональных блоков и программ,
Функциональные блоки представ-
ляют собой фрагменты программ, на-
писанных на IL, SFC или других язы-
ках, которые могут быть многократ-
но использованы в разных частях про-
граммы и которым соответствует гра-
фическое изображение, принятое при
разработке функциональных схем эле-
ктронных устройств (рис. 9.10).
Язык FBD может быть использо-
ван для программирования функций,
а также для описания шагов и перехо-
дов в языке SFC. Функциональные блоки инкапсулируют данные и методы,
чем напоминают объектно-ориентированные языки программирования, но не
поддерживают наследование и полиморфизм.
Типичным применением языка FBD является описание «жесткой логи-
ки» и замкнутых контуров систем управления. Язык функциональных бло-
ков является удобным также для создания и пополнения библиотеки типовых
функциональных блоков, которую можно многократно использовать при про-
граммирования задач промышленной автоматизации. К типовым блокам отно-
сятся блок таймера, ПИД-регулятора, блок секвенсора, триггера, генератора
импульсов, фильтра и т.п.
9 .3.5. Функциональные блоки стандартов МЭК 61499
и МЭК 61804
Функциональные блоки являются не просто частью языка FBD, они при-
меняются также для моделирования и проектирования систем автоматизации.
Функциональные блоки могут быть использованы также для поддержания все-
го жизненного цикла системы, включая проектирование, изготовление, функ-
ционирование, валидацию и обслуживание. Описанию и применению функ-
циональных блоков посвящены, помимо МЭК 61131-3, еще и стандарты МЭК
61499 и МЭК 61804.
Стандарт МЭК 61499, состоящий из четырех частей, был опубликован в
2005 г. [605-608]. Он устанавливает обобщенную архитектуру функциональ-
ных блоков и предоставляет руководство для их применения в распределенных
системах промышленной автоматизации. В таких системах программное обес-
печение распределено между несколькими физическими устройствами (ПЛК)
и несколькими функциональными блоками (ФБ), а промышленная сеть рас-
сматривается как составная часть системы.
Программное обеспечение
545
Особенностью ФБ в МЭК 61499 является возможность управления собы-
тиями и большая степень обобщения функциональных блоков. Стандарт МЭК
61499 может использоваться совместно с МЭК 61131-3 как средство описания
базовых типов функциональных блоков для программирования ПЛК, а внут-
ренне описание ФБ выполняется с помощью языков МЭК 61131-3.
Одной из существенных особенностей МЭК 61499 является ориентация на
системы, в которых ФБ управляются событиями, в то время как традиционные
системы автоматизации строятся обычно на базе тактирования или управле-
ния по временному расписанию. Событийное управление использовано потому,
что в распределенных системах оно является более общим. Любая система с
тактированием может быть представлена в виде системы с событийным управ-
лением, но обратное не всегда верно.
Архитектура функциональных
блоков представляется с помощью тек-
стового описания и графически
(рис. 9.11). Функциональный блок ха-
рактеризуется именем типа и именем
экземпляра блока. Например, именем
типа может быть PID, а имен экзем-
пляров может быть много: PID1, PID2,
PID3,..., по количеству ФБ, использо-
ванных в конкретной системе.
Каждый ФБ имеет множество вхо-
дов и выходов для приема и переда-
чи потока событий. Принятые события
могут инициировать исполнение неко-
торых алгоритмов внутри блока, в ре-
зультате чего могут вырабатываться
события, которые передаются другим блокам системы.
Функциональный блок имеет также множество входов, через которые по-
ступает поток данных. Входящие данные отображаются во входные перемен-
ные, которые обрабатываются алгоритмами блока, после чего могут переда-
ваться другим ФВ в виде выходящего потока данных. Блок может содержать
также внутренние данные и соответствующие им внутренние переменные.
Каждый ФБ имеет свои функциональные характеристики, которые оп-
ределяются комбинацией внутренних данных, состояний и алгоритмов, а также
функциональными возможностями ресурсов устройства. Ресурс — это функ-
циональный элемент, содержащийся в физическом устройстве и независимо
управляющий его операциями, а также обеспечивающий различные сервисы
для приложений, включая планирование и выполнение алгоритмов. Ресурс
может быть создан, сконфигурирован, стартовал, удален и т.д. без воздей-
ствия на другие ресурсы в устройстве. Функциями ресурса являются прием
данных и событий через входные интерфейсы, обработка и выдача их через
выходные интерфейсы.
Третьим стандартом, развивающим представление о функциональных бло-
ках, является МЭК 61804 [609-612]. Он содержит спецификацию (детализацию)
Поток
событий —
Имя экземпляра
Управление
исполнением
(скрыто)
Имя типа
Поток
— событии
Поток
данных
Алгоритмы
(скрыты)
Внутренние
данные
(скрыты)
Поток
__ данных
Рис. 9.11. Функциональный
блок стандарта МЭК 61499
546
Глава 9
требований к распределенным системам управления, построенным на основе
функциональных блоков. МЭК 61804 конкретизирует абстрактные определе-
ния, данные в МЭК 61499. Он добавляет в МЭК 61499 описания параметров
и функций, выполняемых функциональными блоками, которые могут быть ре-
ализованы в физических устройствах.
Стандарт определяет минимальный набор ФБ, который может быть необхо-
дим для индустриальных приложений. Набор состоит из двух частей: сложные
ФБ (ПИД-регулятор, селектор для схем голосования, инкрементный сумматор,
таймер, интегратор) и простые (вычисление тригонометрических функций, мо-
дуля, суммирования, усреднения, блоки арифметических операций, блоки Бу-
левых функций и т.п.).
Одним из наиболее широко применяемых спецификаций стандарта МЭК
61804 является описание языка EDDL (Electronic Device Description Language,
см. гл. 2), который является дальнейшим развитием методов генерации GSD
файла в сетях Profibus и разрабатывался с поддержкой организации Fieldbus
Foundation.
Описанию функциональных блоков для систем автоматизации зданий по-
священ стандарт ISO 16484-3 [613].
9 .3.6. Последовательные функциональные схемы SFC
SFC называют языком программирования, хо-
тя по сути это не язык, а вспомогательное средство
для структурирования программ. Он предназна-
чен специально для программирования последова-
тельности выполнения действий системой управле-
ния, когда эти действия должны быть выполнены
в заданные моменты времени или при наступлении
некоторых событий. В его основе лежит представ-
ление системы управления с помощью понятий со-
стояний и переходов между ними.
Язык SFC предназначен для описания системы
управления на самом верхнем уровне абстракции,
например, в терминах «Старт», «Наполнение авто-
клава», «Выполнение этапа № 1», «Выполнение эта-
па № 2», «Выгрузка из автоклава». Язык SFC мо-
жет быть использован также для программирова-
ния отдельных функциональных блоков, если алго-
ритм их работы естественным образом описывается
с помощью понятий состояний и переходов. Напри-
мер, алгоритм автоматического соединения модема
с коммутируемой линией описывается состояниями
«Включение», «Обнаружение тона», «Набор номер», «Идентификация сигна-
ла» и переходами «Если длинный — то ждать 20 сек», «Если короткий —
перейти в состояние «Набор Номера»» и т.д.
Программное обеспечение
547
На рис. 9.12 показан фрагмент программы на языке SFC. Программа состо-
ит из шагов и условий переходов. Шаги показываются на схеме прямоугольни-
ками, условия переходов — жирной перечеркивающей линией. Программа вы-
полняется сверху вниз. Начальный шаг на схеме показывается в виде двойного
прямоугольника. Условия переходов записываются рядом с их обозначения-
ми. Каждый шаг программы может представлять собой реализацию сложного
алгоритма, написанного на одном из МЭК-языков.
9 .3.7. Программное обеспечение
Программирование ПЛК на описанных выше языках МЭК 61131-3 осу-
ществляется с помощью специализированного программного обеспечения, ко-
торое разрабатывается производителями ПЛК или фирмами, специализирую-
щимися на создании ПО для систем автоматизации. Наиболее известными в
мире являются системы CoDeSys фирмы 3S (www.3s-software.com) и ISaGRAF
фирмы ICS Triplex (www.isagraf.com).
CoDeSys (Controller Development System) представляет собой комплекс
программ для проектирования прикладного программного обеспечения, отлад-
ки в режиме эмуляции и загрузки программы в ПЛК. Наиболее подробно эта
система описана в книге [494]. Основными частями системы являются сре-
да разработки программы и среда ее исполнения (CoDeSys SP), которая на-
ходится в ПЛК.
В CoDeSys входят графические и текстовые редакторы для всех пяти язы-
ков МЭК 61131-3. Этот комплекс полностью реализует требования стандар-
та и дополнительно вводит ряд оригинальных расширений, самым удобным
из которых является объектно-ориентированные программирование. Однако
расширениями языка можно не пользоваться, чтобы сохранить требования к
совместимости языков, предъявляемое к открытым системам.
В одном проекте может быть использовано несколько контроллеров раз-
ных производителей. Каждый из них может программироваться как независи-
мое устройство или с учетом их взаимодействия в промышленной сети. Проект
состоит из нескольких приложений, распределенных по нескольким контролле-
рам. В одном ПЛК может существовать несколько независимых приложений.
Программа, написанная на языках МЭК, компилируется системой CoDeSys
в машинный код, оптимизированный для заданной аппаратной платформы.
Компилятор выдает диагностические сообщения как на этапе компиляции, так
и на этапе ввода операторов языка.
Машинный код, сгенерированный компилятором CoDeSys, загружается в
ПЛК, после чего разработчик имеет возможность использовать широкий набор
функций для быстрой и эффективной отладки приложения. Текущие значения
переменных видны непосредственно в редакторах программ. Программу можно
выполнять по шагам или по контроллерным циклам. Можно задавать точки
останова программы, просматривать стек вызовов, подготавливать связные на-
боры значений переменных и загружать их одной командой.
При отсутствии реального контроллера отладку программы можно выпол-
нять с помощью встроенного программного эмулятора.
548
Глава 9
Система имеет также встроенный многоканальный программный трасси-
ровщик (графический самописец) значений переменных. Он позволяет нагляд-
но представить динамически изменяющиеся данные проекта. Данные акку-
мулируются в памяти ПЛК и могут синхронизироваться с определенными со-
бытиями. Трассировщик полезен не только при отладке, но и при анализе
нештатных ситуаций в процессе эксплуатации оборудования.
После изменения программы во время отладки перекомпилируются только
измененные части программы. Их можно подгружать в контроллер без оста-
новки выполнения прикладной программы. Эта возможность системы назы-
вается «горячим обновлением» кода.
Программируемое устройство соединяется с CoDeSys через вспомогатель-
ный программный компонент — шлюз связи, который использует протокол
TCP/IP. Шлюз работает на компьютере программиста или удаленно, например,
через Интернет или сеть Ethernet. Контроллер подключается к компьютеру че-
рез любой последовательный канал или сеть. Добавив драйвер, изготовитель
ПК может поддержать свой оригинальный протокол связи.
Общение ПЛК со SCADA осуществляется с помощью стандартного ОРС-
сервера.
Для того чтобы ПЛК можно было программировать с помощью CoDeSys, в
контроллере должна быть установлена система исполнения. Установку систе-
мы выполняет изготовитель контроллера. Изготовитель обеспечивает также
поддержку всех модулей ПЛК, поэтому конечный пользователь может сосре-
доточиться на разработке только прикладной программы.
Среда исполнения CoDeSys может функционировать в ПЛК под управлени-
ем различных операционных систем или вообще без них, в том числе на обыч-
ном персональном компьютере. Собственное ядро реального времени может
устанавливать контроллерный цикл с точностью до нескольких микросекунд.
Прикладная программа остается работоспособной даже при зависании ОС.
Помимо средств программирования, CoDeSys имеет встроенную систему
визуализации, которая применяется для операторского управления, а также
моделирования на этапе разработки. Визуализацию можно запустить на ком-
пьютере, графической панели ПЛК или встроенном в контроллер web-сервере.
Пользователь может самостоятельно расширять возможность CoDeSys пу-
тем создания библиотек программных модулей. Например, он может реализо-
вать поддержку нестандартных интерфейсов.
Комплекс программирования CoDeSys построен по компонентной техноло-
гии Microsoft на базе автоматизации. Поэтому изготовитель ПЛК может вклю-
чить в комплекс свои собственные компоненты, от конфигуратора оригиналь-
ной сети до собственного языка программирования ПЛК.
Для систем, связанных с безопасностью, CoDeSys имеет библиотеку функ-
циональных блоков PLCopen Safety, систему исполнения для оборудования с
дублированием и специализированное расширение среды программирования.
При внезапном отключении питания CoDeSys автоматически сохраняет значе-
ния переменных во флеш-памяти или в ОЗУ с батарейным питанием.
ISaGRAF. Система ISaGRAF фирмы ICS Triplex (www.isagraf.com) также
состоит из среды разработки и среды исполнения. Среда исполнения может
Программное обеспечение
549
функционировать практически на любой операционной системе и любой аппа-
ратной платформе, включая персональный компьютер. Среда разработки под-
держивает все пять зыков МЭК 61131-3 и функциональные блоки МЭК 61499,
имеет средства для редактирования, компиляции, документирования, управ-
ления библиотеками, архивирования, моделирования системы при отсутствии
реального ПЛК и отладки с подключенным ПЛК.
Комплекс программ ISaGRAF первый на рынке использовал новый стан-
дарт МЭК 61499 (см. п. 9.3.5) для программирования распределенных систем
управления.
Связь между SCADA-пакетом и контроллером, запрограммированным с по-
мощью ISaGRAF, осуществляется с помощью стандартного ОРС-сервера.
Среда исполнения создается и загружается в контроллер производителем
ПЛК и является независимой от исполняемой в ней программы пользователя.
Среда разработки имеет знакомый по Windows-приложениям интерфейс с
подсказками, панелями инструментов, окнами, с функциями вставки и заме-
ны и т.п. Код, полученный на выходе среды разработки, может исполнять-
ся на любой аппаратно-программной платформе без изменений, если на ней
предварительно установлена среда исполнения. Среда разработки может так-
же транслировать пользовательскую программу, написанную на МЭК-языках,
в текст на языке С.
9.4. Пользовательский интерфейс,
SCADA-пакеты
Большинство систем автоматизации функционирует с участием челове-
ка (оператора, диспетчера). Интерфейс между человеком и системой назы-
вают человеко-машинным интерфейсом (ЧМИ), в зарубежной литературе —
HMI (Human-Machinery Interface) или MMI (Man-Machinery Interface). В част-
ном случае, когда ЧМИ предназначен для взаимодействия человека с авто-
матизированным технологическим процессом, его называют SCADA-системой
(Supervisory Control And Data Acquisition). Этот термин переводится букваль-
но как «диспетчерское управление и сбор данных», но на практике его тракту-
ют гораздо шире, а современные SCADA-пакеты включают в себя широчайший
набор функциональных возможностей, далеко выходящий за рамки сбора дан-
ных и диспетчерского управления.
9.4.1. Функции SCADA
Существующие в настоящее время SCADA-пакеты выполняют множество
функций, которые можно разделить на несколько групп:
• настройка SCADA на конкретную задачу (т.е. разработка программной ча-
сти системы автоматизации);
• диспетчерское управление;
• автоматическое управление;
• хранение истории процессов;
• выполнение функций безопасности;
550
Глава 9
• выполнение общесистемных функций.
Несмотря на множество функций, выполняемых SCADA, основным ее отли-
чительным признаком является наличие интерфейса с пользователем. При от-
сутствии такого интерфейса перечисленные выше функции совпадают с функ-
циями средств программирования контроллеров, а управление является авто-
матическим, в противоположность диспетчерскому.
Качество решений, принятых оператором (диспетчером), часто влияет не
только на качество производимой продукции, но и на жизнь людей. Поэтому
комфорт рабочего места, понятность интерфейса, наличие подсказок и бло-
кировка явных ошибок оператора являются наиболее важными свойствами
SCADA, а дальнейшее их развитие осуществляется в направлении улучшения
эргономики и создания экспертных подсистем.
Иногда SCADA комплектуются средствами для программирования кон-
троллеров, однако эта функция вызвана коммерческими соображениями и сла-
бо связана с основным назначением SCADA.
В SCADA-пакетах используют понятие аларма и события. Событие — это
изменение некоторых состояний в системе. Примерами событий могут быть
включение перевалки зерна в элеваторе, завершение цикла периодического про-
цесса обработки детали, окончание загрузки бункера, регистрация нового опе-
ратора и т.п. События не требуют срочного вмешательства оператора, а просто
информируют его о состоянии системы.
В отличие от события, аларм (от английского alarm — сигнал тревоги)
представляет собой предупреждение о важном событии, в ответ на которое нуж-
но срочно предпринять некоторые действия. У английского слова «аларм»
имеется точный русский перевод — «сигнал тревоги» или «аварийный сиг-
нал», однако термин «аларм» уже прочно вошел в лексикон промышленной
автоматизации.
Примерами алармов может быть достижение критической температуры
хранения зерна в элеваторе, после которого начинается его возгорание, дости-
жение критического значения давления в автоклаве, после которого возможен
разрыв оболочки, срабатывание датчика открытия охраняемой двери, превы-
шение допустимого уровня загазованности в котельной и т.п.
В связи с тем, что алармы требует принятия решения, их делят на подтвер-
жденные и неподтвержденные. Подтвержденным называется аларм, в ответ
на который оператор ввел команду подтверждения. До этого момента аларм
считается неподтвержденным.
Алармы делятся на дискретные и аналоговые. Дискретные сигнализиру-
ют об изменении дискретной переменной, аналоговые алармы появляются, ко-
гда непрерывная переменная y(t) входит в заранее заданный интервал своих
значений. В качестве примера на рис. 9.13 показано деление всего интервала
изменения переменной y(t) на интервалы «Норма», «Внимание» (предаварий-
ное состояние) и «Авария»:
• аларм «Внимание» возникает при у(а) < y(t) < y(b) во время нарастания
наблюдаемой переменной и при y(d) < y(t) < у(с) во время ее уменьшения;
• аларм «Авария» возникает при у(Ь) < y(t).
Программное обеспечение
551
Рис. 9.13. Пример назначения интервалов аналоговым алармам
Каждая критическая граница на рис. 9.13 имеет зону нечувствительности
(мертвую зону), которая нужна для того, чтобы после снятия состояния аларма
переменная не могла вернуться в него вследствие случайных выбросов в систе-
ме (шумов). Границы зон на рис. 9.13 могут изменяться с течением времени.
Аналогичные границы могут быть назначены для скорости изменения пе-
ременной (для производной функции ?/(t)), которая определяется как угол а
наклона касательной к кривой y(f).
Методика выдачи алармов должна быть надежной. В частности, всплы-
вающие окна с сообщениями алармов должны быть всегда поверх остальных
окон, алармы могут дублироваться звуком и светом. Поскольку алармов в
системе может быть много, им назначают разные приоритеты, разные громко-
сти и тоны звукового сигнала и т.п.
Разработка человеко-машинного интерфейса. Одной из основных
функций SCADA является разработка человеко-машинного интерфейса, т.е.
SCADA одновременно является и ЧМИ, и инструментом для его создания.
Быстрота разработки существенно влияет на рентабельность фирмы, выпол-
няющей работу по внедрению системы автоматизации, поэтому скорость раз-
работки является основным показателем качества SCADA с точки зрения си-
стемного интегратора. В процесс разработки входят следующие операции:
• создание графического интерфейса (мнемосхем, графиков, таблиц, всплы-
вающих окон, элементов для ввода команд оператора и т.д.);
• программирование и отладка алгоритмов работы системы автоматизации.
Многие SCADA позволяют выполнять отладку системы как в режиме эму-
ляции оборудования, так и с подключенным оборудованием;
• настройка системы коммуникации (сетей, модемов, коммуникационные
контроллеров и т.п.); создание баз данных и подключение к ним SCADA.
SCADA как система диспетчерского управления. Как система дис-
петчерского управления SCADA может выполнять следующие задачи:
552
Глава 9
• взаимодействие с оператором (выдача визуальной и слуховой информации,
передача в систему команд оператора);
• помощь оператору в принятии решений (функции экспертной системы);
• автоматическая сигнализация об авариях и критических ситуациях;
• выдача информационных сообщений на пульт оператора;
• ведение журнала событий в системе;
• извлечение информации из архива и представление ее оператору в удоб-
ном для восприятия виде;
• подготовка отчетов (например, распечатка таблицы температур, графиков
смены операторов, перечня действий оператора);
• учет наработки технологического оборудования.
SCADA как часть системы автоматического управления. Основная
часть задач автоматического управления выполняется, как правило, с помощью
ПЛК, однако часть задач может возлагаться на SCADA. Кроме того, во многих
небольших системах управления ПЛК могут вообще отсутствовать, и тогда ком-
пьютер с установленной SCADA является единственным средством управления.
SCADA обычно выполняет следующие задачи автоматического управления:
• автоматическое регулирование;
• управление последовательностью операций в системе автоматизации;
• адаптация к изменению условий протекания технологического процесса;
• автоматическая блокировка исполнительных устройств при выполнении за-
ранее заданных условий.
Хранение истории процесса. Знание предыстории управляемого про-
цесса позволяет улучшить будущее поведение системы, проанализировать при-
чины возникновения опасных ситуаций или брака продукции, выявить ошибки
оператора. Для создания истории система выполняет следующие операции:
• сбор данных и их обработка (цифровая фильтрация, интерполяция, сжатие,
нормализация, масштабирование и т.д.);
• архивирование данных (действий оператора, собранных и обработанных
данных, событий, алармов, графиков, экранных форм, файлов конфигу-
рации, отчетов и т.п.);
• управление базами данных (реального времени и архивных).
Безопасность SCADA. Применение SCADA в системах удаленного до-
ступа через Интернет резко повысило уязвимость SCADA к действиям враж-
дебных лиц. Пренебрежение этой проблемой может приводить, например, к
отказу в работе сетей электроснабжения, жизнеобеспечения, связи, отказу мор-
ских маяков, дорожных светофоров, к заражению воды неочищенными стоками
и т.п. Возможны и более тяжелые последствия с человеческими жертвами или
большим экономическим ущербом. Для повышения безопасности SCADA ис-
пользуют следующие методы:
• разграничение доступа к системе между разными категориями пользова-
телей (у сменного оператора, технолога, программиста и директора долж-
ны быть разные права доступа к информации и модификации настроек
системы);
Программное обеспечение
553
• защиту информации (путем шифрования информации и обеспечения сек-
ретности протоколов связи);
• обеспечение безопасности оператора благодаря его отдалению от опасного
управляемого процесса (дистанционное управление). Дистанционный кон-
троль и дистанционное управление являются типовыми требованиями Ро-
стехнадзора и выполняются по проводной сети, радиоканалу (через GSM-
или радиомодем), через Интернет и т.д.;
• специальные методы защиты от кибер-атак*;
• применение межсетевых экранов**.
Общесистемные функции. Поскольку SCADA обычно является един-
ственной программой для управления системой автоматизации, на нее могут
возлагаться также некоторые общесистемные функции:
• осуществление взаимодействий между несколькими SCADA, между SCA-
DA и другими программами (MS Office, базой данных, MATLAB и т.п.);
• диагностика аппаратуры, каналов связи и программного обеспечения.
9.4.2. Свойства SCADA
Анализ свойств различных SCADA позволяет выбирать систему, оптималь-
ную для решения поставленной задачи. Все многообразие свойств SCADA-
пакетов можно разбить на следующие группы:
• инструментальные свойства;
• эксплуатационные свойства;
• свойства открытости;
• экономическая эффективность.
Инструментальные свойства. К инструментальным относятся свойства
SCADA, влияющие на эффективность работы системных интеграторов:
• быстрота разработки проекта;
• легкость освоения;
• поддерживаемые средства коммуникации;
• наличие функций для сложной обработки данных;
• наличие языков МЭК 61131-3 и универсального алгоритмического языка
типа Visual Basic;
• степень открытости для разработчика (поддержка СОМ и ActiveX для
подключения программных модулей пользователя, а также ОРС, ODBC,
OLE DB***);
• качество технической документации (полнота, ясность изложения, коли-
чество ошибок);
* Кибер-атака — скоординированное генерирование потока ложных запросов от
нескольких сетевых компьютеров на сервер, вызывающее отказ в обслуживании серве-
ра. Распространены в Интернете.
** Межсетевой экран — комплекс аппаратных и программных средств, осуществля-
ющий контроль и фильтрацию проходящих через него сетевых пакетов.
*** OLE DB — набор интерфейсов для доступа к данным, построенный на основе
СОМ, как и ОРС-сервер. Может рассматриваться как преемник ODBC.
554
Глава 9
• наличие режима эмуляции оборудования для отладки;
• наличие внутренних графических редакторов, позволяющих отказаться от
применения внешних редакторов типа CorelDraw или Photoshop;
• поддержка типовых графических форматов файлов;
• качество технической поддержки (время реакции на вопросы пользовате-
лей, наличие «горячей линии» технической поддержки.
SCADA используют языки программирования МЭК 61131-3, ориентирован-
ные на технологов, которые дополняются функциями, специфическими для
SCADA. Большинство SCADA имеют встроенный редактор и интерпретатор
языка Visual Basic фирмы Microsoft.
Эксплуатационные свойства. Качество SCADA в процессе эксплуата-
ции оценивается конечными пользователями и характеризуется следующим
набором свойств:
• робастность (нечувствительность к ошибкам пользователя, защищенность
от вандалов и враждебных элементов, устойчивость к ошибкам в исход-
ных данных);
• надежность;
• информационная защищенность;
• наличие средств сохранения данных при нештатных ситуациях, отключе-
ниях питания и сбоях;
• наличие автомата перезапуска системы при ее зависании или после пре-
рывания питания;
• поддержка резервирования SCADA (операторской станции, сетевых серве-
ров, клиентских рабочих станций, резервное копирование данных);
• поддержка переключения экранов с разной детализацией изображений;
поддержка нескольких мониторов.
Степень открытости очень сильно влияет на экономическую эффектив-
ность системы, однако это влияние носит случайный характер, поскольку за-
висит от степени использования свойств открытости в конкретном проекте.
Открытость для программирования пользователем SCADA обеспечивается
возможностью подключения программных модулей, написанных пользовате-
лем или другими производителями. Это обычно достигается тем, что SCADA
разрабатывается как контейнер для COM-объектов и ActiveX-элементов. Сов-
местимость с аппаратурой и базами данных других производителей достига-
ется с помощью стандарта ОРС, применением интерфейса ODBC или OLE
DB. Открытость системы программирования достигается поддержкой языков
МЭК 61131-3.
Особенно интересно с точки зрения открытости применение веб-интерфей-
са, поскольку он обеспечивает доступ к SCADA с любого компьютера из любой
точки мира, независимо от аппаратной платформы, типа канала связи, опера-
ционной системы и используемого веб-навигатора.
Экономическая эффективность. Экономическую эффективность SCA-
DA можно определить как отношение экономического эффекта от ее внедре-
ния к общей сумме затрат на внедрение и поддержание системы в работоспо-
Программное обеспечение
555
собном состоянии. На экономическую эффективность в конечном счете вли-
яют практически все свойства SCADA, однако в первую очередь можно вы-
делить следующие:
• масштабируемость (возможность применения как для больших, так и для
малых систем);
• модульность. Модульность позволяет сделать заказную комплектацию си-
стемы в зависимости от поставленной задачи. Типовыми модулями мо-
гут быть, например, модуль ввода-вывода, модуль визуализации, модуль
алармов, модуль трендов, модуль отчетов, модуль коммерческого учета
энергоресурсов и др.;
• стоимость обслуживания;
• условия обновления версий;
• надежность поставщика, наличие опыта практического применения;
• стоимость обучения;
• стоимость технической поддержки;
• методы ценообразования.
Общим недостатком универсальных SCADA является их низкая экономиче-
ская эффективность при использовании для решения простых задач. Несмотря
на то что цена SCADA-пакетов существенно снижается при уменьшении ко-
личества доступных пользователю тегов и набора модулей, остается высокой
цена технической поддержки. Также дорогой (трудоемкой) остается адапта-
ция универсальной SCADA к конкретной задаче. Поэтому ряд фирм предлага-
ют более узкоспециализированные, но достаточно простые в настройке микро-
SCADA с сокращенной функциональностью, см., например, пакет RLDataView
(www.RealLab.ru).
9.4.3. Программное обеспечение
В настоящее время наиболее распространенными отечественными универ-
сальными SCADA являются MasterSCADA (ИнСАТ, www.masterscada.ru), Trace
Mode (AdAstrA Research Group, Ltd, www.adastra.ru), Круг-2000 (НПФ «КРУГ»,
www.krug2000.ru) и САРГОН (НВТ-Автоматика, nvt.msk.ru). Все системы удо-
влетворяют основным требованиям к SCADA, описанным выше, и успешно кон-
курируют с зарубежными аналогами. Ниже мы рассмотрим отличительные
особенности двух наиболее известных пакетов: MasterSCADA и Trace Mode.
MasterSCADA. Система MasterSCADA фирмы «ИнСАТ» [13] предназна-
чена для создания полномасштабных систем автоматизации в различных отрас-
лях промышленности. Основной ее особенностью является объектный подход,
использованный на уровне описания системы при ее настройке на конкретный
объект автоматизации. Например, цех, участок, технологический блок и физи-
ческое устройство при создании проекта с помощью MasterSCADA рассматри-
ваются как отдельные объекты. Для каждого объекта создается свое описание
на технологическом языке программирования. Описание включает в себя свой-
ства объекта и документы объекта. Свойствами могут быть период опроса,
способ линеаризации датчика, диапазон входных сигналов. Документами объ-
екта являются его изображение, мнемосхема, график изменения переменных и
556
Глава 9
т.п. Любой документ в системе относится к некоторому объекту. Такой под-
ход позволяет легко размножать один раз созданные объекты, что повышает
скорость настройки SCADA на задачу пользователя.
К признакам объектного подхода относится также возможность насле-
дования всех настроек от «родительских» объектов. Это означает, что в
MasterSCADA нет необходимости вводить настройки для каждого типа объ-
ектов «с нуля». Можно использовать наследование этих настроек от роди-
тельского объекта, изменив в них только те параметры, которые отличают
родителя от потомка.
Созданные объекты можно копировать с целью многократного использова-
ния. При копировании объекта сохраняются все связанные с ним документы и
свойства. Связи с внешними источниками и приемниками данных восстанавли-
ваются после копирования, если в системе имеются такие источники или сво-
бодные приемники данных (физические устройства). Это позволяет пополнять
библиотеку объектов вновь созданными экземплярами и использовать объек-
ты, созданные другими разработчиками.
Trace Mode. SCADA-система Trace Mode 6 фирмы AdAstrA состоит из
инструментальной системы и набора исполнительных модулей. В состав Trace
Mode 6 входят также средства управления бизнес-процессами производствен-
ного предприятия.
Для увеличения скорости разработки проекта пользователя применяет-
ся оригинальная технология автопостроения. Автоматически в SCADA мо-
гут быть построены:
• источники данных ПЛК и модулей ввода-вывода по известной конфигу-
рации;
• каналы по источникам данных;
• связи каналов из редактора аргументов;
• связи контроллер-сервер и сервер-сервер;
• SQL-запросы;
• связи с ОРС-сервером;
• связь с ODBC.
Автопостроение позволяет снизить количество ошибок, допускаемых поль-
зователем при ручном создании проекта.
В пятой версии Trace Mode инструментальная система представлена в виде
отдельных компонентов, в 6-й использована интегрированная среда разработки.
В систему Trace Mode 6 включены пять языков программирования —
Techno SFC, Techno LD, Techno FBD, Techno ST, и Techno IL, которые явля-
ются расширениями соответствующих языков стандарта МЭК 61131-3.
9.5. Заключение
Основными тенденциями развития программного обеспечения для средств
автоматизации являются максимальное упрощение процесса программирова-
ния и обеспечение открытости инструментальных средств. Конечной целью
Программное обеспечение 557
является предоставление потребителю возможности построения качественной
системы автоматизации в максимально короткий срок.
Долгий период неопределенности в средствах программирования ПЛК
и SCADA-пакетов завершился принятием общепризнанного стандарта МЭК
61131-3 и созданием на его основе инструментальных средств программирова-
ния, которые поддерживаются фирмами, специализирующимися на программ-
ном обеспечении.
Существенный вклад в открытость систем автоматизации внес стандарт
ОРС, обеспечивший системным интеграторам широчайший выбор аппаратного
обеспечения, совместимого с любыми стандартными SCADA-пакетами, а раз-
работчикам контроллерного оборудования — расширение рынков сбыта.
Литература
1. Фрайдеи Дж. Современные датчики. Справочник. — М.: Техносфера, 2005. —
592 с.
2. Клир Жд. Системология. Автоматизация решения системных задач. — М.:
Радио и связь, 1990. — 544 с.
3. Буч Г. Объектно-ориентированный анализ и проектирование с примерами
приложений на C++, 2-е изд. / Пер. с англ. — М.: Бином, СПб.: Невский диа-
лект, 2000. — 560 с.
4. Причард Д. Сот и СогЬа. Просто и доступно. — М.: Лори, 2001. — 372 с.
5. Ньюкомер Э. Веб-сервисы: XML, WSDL, SOAP и UDDI. — Питер, 2003. —
256 с.
6. Perez-Aragon J., Recatala G. Distributed architecture for controlling a manufac-
turing cell // IEEE International Conference on Systems. Man and Cybernetics. 5-8
Oct. 2003. Vol. 2. P. 1130-1135.
7. Sunder C., Zoitl A., Rainbauer M., Favre-Bulle B. Hierarchical Control Mod-
elling Architecture for Modular Distributed Automation Systems // IEEE International
Conference on Industrial Informatics. Aug. 2006. P. 12-17.
8. Kim K. Real-Time Software Framework for Distributed Control Systems // Pro-
ceedings on the 15th CISL Winter Workshop. Kushu. Japan. Feb. 2002.
9. Hummer O., Sunder C., Zoitl A., Strasser T., Rooker M.N., Ebenhofer G. To-
wards Zero-downtime Evolution of Distributed Control Applications via Evolution Con-
trol based on IEC 61499 // IEEE Conference on Emerging Technologies and Factory
Automation. ETFA ’06. 20-22 Sept. 2006. P. 1285-1292.
10. Zoitl A., Grabmair G., Auinger F., Sunder C. Executing real-time constrained
control applications modeled in IEC 61499 with respect to dynamic reconfiguration //
3rd IEEE International Conference on Industrial Informatics. INDIN ’05. 10-12 Aug.
2005. P. 62-67.
11. Zoitl A., Sunder C., Terzic I. Dynamic Reconfiguration of Distributed Con-
trol Applications with Reconfiguration Services based on IEC 61499 // IEEE Workshop
on Distributed Intelligent Systems: Collective Intelligence and Its Applications. 15-16
June 2006. — P. 109-114.
12. Zoitl A., Smodic R., Sunder C., Grabmair G. Enhanced real-time execution of
modular control software based on IEC 61499 // Proceedings 2006 IEEE International
Conference on Robotics and Automation. May 15-19. 2006. P. 327-332.
13. Аблин И.Е. C MasterSCADA — шаг за шагом // Промышленные АСУ и
контроллеры. 2003. № 10. С. 4-7.
Литература
559
14. Bertocco М., Cappellazzo S., Flammini A., Parvis M. A multi-layer architecture
for distributed data acquisition / / Proceedings of the 19th IEEE Instrumentation and
Measurement Technology Conference. IMTC/2002. 2002. Vol. 2. P. 1261-1264.
15. Богданов C.B. Умный дом. — C-Пб.: Наука и техника. 2003. — 112 с.
16. Денисенко В., Ерещенко П., Кильметов Р., Метелкин Е., Халявко А., Шаль-
нев К. Испытания электронной аппаратуры: быстро и эффективно // Компоненты
и технологии. 2004. № 4. С. 216-220; № 5. С. 158-166.
17. Vyatkin V., Hirsch М., Hanisch Н.-М. Systematic Design and Implementation
of Distributed Controllers in Industrial Automation // IEEE Conference от Emerging
Technologies and Factory Automation. ETFA ’06. 20-22 Sept. 2006. P. 633-640.
18. Insaurralde C.C., Seminario M.A., Jimenez J.F., Giron-Sierra J.M. IEC 61499
Model for Avionics Distributed Fuel Systems with Networked Embedded Holonic Con-
trollers // IEEE Conference on Emerging Technologies and Factory Automation. 2006.
ETFA ’06. 20-22 Sept. 2006. P. 388-396.
19. Bonastre A., Capella J.V., Ors R. A new generic architecture for the implemen-
tation of intelligent and distributed control systems // IECON 02 — IEEE 2002 28th An-
nual Conference of the Industrial Electronics Society. 5-8 Nov. 2002. Vol. 3. P. 1790-1795.
20. IEC/TR 61499-3(2004). Function blocks for industrial-process measurement and
control systems. — Part 3: Tutorial information.
21. Kim W., Ji K., Ambike A. Real-time operating environment for networked con-
trol systems // IEEE Transactions on Automation Science and Engineering. July 2006.
Vol. 3. Issue 3. P. 287-296.
22. Хазарадзе T.O., Куликов А.И. Построение масштабных АСУ ТП: опыт ре-
шения проблемы // Мир компьютерной автоматизации. 2002. № 5. С. 37-45.
23. Lian F. -L., Yook J.K., Tilbury D.M., Moyne J. Network architecture and com-
munication modules for guaranteeing acceptable control and communication performance
for networked multi-agent systems // IEEE Transactions on Industrial Informatics. Feb.
2006. Vol. 2, № 1. P. 12-24.
24. Garcia J., Palomo F.R., Luque A., Aracil C., Quero J.M., Carrion D., Gamiz
F., Revilla P., Perez-Tinao J., Moreno M., Robles P., Franquelo L.G. Reconfigurable
distributed network control system for industrial plant automation // IEEE Transactions
on Industrial Electronics. Dec. 2004. Vol. 51. Issue 6. P. 1168-1180.
25. Iwanitz F., Lange J. OPC fundamentals, Implementation, and Aplication. —
2nd rev. ed., Heidelberg: Hiithig. 2002. — 225 p.
26. Шехтман М.Б., Цесарев И.М., Прошин А.И. Крупномасштабная распреде-
ленная система управления газофракционирующей установки // Промышленные
АСУ и контролеры. 2006. № 5. С. 12-16.
27. Wang L., Tan К.С. Modern Industrial Automation Software Design. Princi-
ples and Real-World Applications. — Hoboken. New Jersey: John Wiley & Sons Inc.,
2006. — 313 p.
28. Liu G., Tang T., Liu L. Study on the Web based remote monitoring and control-
ling system for heat exchanger / / IEEE International Symposium on Communications
and Information Technology. ISCIT 2005. 12-14 Oct. 2005. Vol. 2. P. 1301-1304.
29. Lin P.I.-H., Broberg H.L. Internet-based monitoring and controls for HVAC
applications // IEEE Industry Applications Magazine. Vol. 8. No. 1. Jan/Feb 2002.
P. 49-54.
560
Литература
30. Qiu В., Gooi Н.В. Web-based SCADA display systems (WSDS) for access via
Internet // IEEE Transactions on Power Systems. May 2000. Vol. 15. Issue 2. P. 681-686.
31. Teng J.-H., Lee R., Liu У.-H., Leou R.-C. Integration of Internet and virtu-
al instruments to develop an industrial SCADA / / IEEE Power Engineering Society
Summer Meeting. 2001. Vol. 3. P. 1509-1514.
32. Hayashi H., Takabayashi Y., Tsuji H., Oka M. Rapidly increasing application
of Intranet technologies for SCADA (supervisory control and data acquisition system)
// IEEE/PES Transmission and Distribution Conference and Exhibition 2002: Asia Pa-
cific. 6-10 Oct. 2002. Vol. 1. P. 22-25.
33. Branch M., Bradley B. Real-time web-based system monitoring // IEEE Industry
Applications Magazine. March-April 2007. Vol. 13. Issue 2. P. 12-16.
34. Матросов A.B., Сергеев A.O., Чаунин М.П. HTML 4.0 — СПб.: БХВ-Петер-
бург. 2003. — 672 с.
35. Макдональд М. Microsoft Visual Basic.NET: Рецепты программирования.
Мастер-класс / Пер. с англ. — М.: Издательско-торговый дом «Русская редак-
ция». 2004. — 704 с.
36. Radwan F.A., Martin T.W. Real-time monitoring and controlling of an Allen-
Bradley SLC 500 through the Internet // 2003 IEEE International Conference on In-
dustrial Technology. 10-12 Dec. 2003. Vol. 1. P. 387-392.
37. Jiao H., Jianguo L., Min G. Embedded temperature Web controller based on
Internet // IEEE International Symposium on Industrial Electronics. 4-7 May 2004.
Vol. 1. P. 237-240.
38. Liu P.X., Farias W., Gibson S., Ross D. Remote control of a robotic boat via the
Internet //2005 IEEE International Conference on Information Acquisition. 27 June —
3 July 2005. P. 548-553.
39. Overstreet J.W., Tzes A. An Internet-based real-time control engineering labo-
ratory // IEEE Control Systems Magazine. Oct 1999. Vol. 19, № 5. P. 19-34.
40. Schwab C., Tangermann M., Ferrarini L. Web based methodology for engineering
and maintenance of distributed control systems: the TORERO approach // 3rd IEEE
International Conference on Industrial Informatics. INDIN ’05.10-12 Aug. 2005. P. 32-37.
41. Kolaric D., Skala K., Dubravic A. Remote control and measurement of tempera-
ture over the web // 47th International Symposium ELMAR. 8-10 June 2005. P. 117-119.
42. Qiu B., Gooi H.B., Liu Y., Chan E.K. Internet-based SCADA display system //
IEEE Computer Applications in Power. Jan 2002. Vol. 15, № 1. P. 14-19.
43. Nikolakopoulos G., Koundourakis M., Tzes A. An integrated system based on
Web and/or WAP framework for remote monitoring and control of industrial processes / /
IEEE International Symposium on Virtual Environments. Human-Computer Interfaces
and Measurement Systems. VECIMS ’03. 27-29 July 2003. P. 201-206.
44. Helei W., Jing M., Yirong Y., Shanan Z. Integrating embedded-Web technolo-
gy and real-time Ethernet for modem distributed control / / Fifth World Congress on
Intelligent Control and Automation. WCICA 2004.15-19 June 2004. Vol. 2. P. 1323-1325.
45. Qingcang Y., Bo C., Cheng H.H. Web based control system design and analysis
// IEEE Control Systems Magazine. Jun 2004. Vol. 24, № 3. P. 45-57.
46. Wblischlaeger M., Neumann P., Bangemann T. Web services for remote mainte-
nance of fieldbus based automation systems. IEEE AFRICON. 6th Africon Conference
in Africa. 2-4 Oct. 2002. Vol. 1. P. 247-252.
Литература
561
47. Qu R.T., Lim R., He H., Ding Z.Q., Aendenroomer A., Goh K.M. A Web-enabled
distributed control application platform for industrial automation // IEEE Conference
Emerging Technologies and Factory Automation Proceedings. ETFA ’03. 16-19 Sept.
2003. Vol. 2. P. 129-132.
48. Hong-Yan L. Web-based remote monitoring and control for process plants //
International Conference on Machine Learning and Cybernetics. 2005. Proceedings of
2005. 18-21 Aug. 2005. Vol. 2. P. 936-941.
49. Malek-Zadeh A., Dietsch H. Web-Based Information Technology for Remote
Handling of Electrical Drives and Control Devices: An Integrated Approach // Inter-
national Conference on Systems and International Conference on Mobile Communi-
cations and Learning Technologies Networking. ICN/ICONS/MCL 2006. 23-29 April
2006. P. 176-176.
50. Weaver A.C. Factory monitoring and control using the internet // IECCON’01:
The 27th Annual Conf, of the IEEE Industrial Electronic Society. 2001. P. 1639-1645.
51. Renton P., Bender P., Veldhuis S., Renton D., Elbestawi A., Teltz R., Bailey
T. Internet-based manufacturing process optimization and monitoring system // Proc,
on ICRA ’02. IEEE International Conference on Robotics and Automation. 11-15 May
2002. Vol. 2. P. 1113-1118.
52. Jammes F., Smit H., Arandyelovitch C., Depeisses F. Intelligent device net-
working in industrial automation / / 2nd IEEE International Conference on Industrial
Informatics. INDIN ’04. 24-26 June 2004. P. 449-456.
53. Business Justification of open architecture control. White paper version 1.0. —
Users Group, www.omac.org. — 23 p.
54. Bailo C., Alderson G., Yen J. Requirements for Open. Modular Architecture
Controllers for Applications in the Automotive Industry. — www.isa.org.
55. Lewis R.W. Programming industrial control systems using IEC 113-3 Revised
edition. — London: The Institution of Electrical Engineers, 1998. — 329 p.
56. Wang L. Open architecture-based factory automation systems // IEEE Aerospa-
ce and Electronic Systems Magazine. 2004. Vol. 19, № 2. P. 14-17.
57. Azevedo G.P., Oliveira A.L. Control centers with open architectures // IEEE
Computer Applications in Power. Oct 2001. Vol. 14. № 4. P. 27-32.
58. Feldmann K., Wolf W., Weber M. Development of an open event-based and
platform independent architecture for distributed and intelligent control systems //
2nd IEEE International Conference on Industrial Informatics. 24-26 June 2004. IN-
DIN ’04. P. 560-566.
59. Aleksy M., Korthaus A., Schader M. Implementing distributed systems with
Java and CORBA. — Springer, 2005. — 343 p.
60. International standard IEC 61499-1. First Edition. 2005-01. — International
Electrotechnical Commission. 3 PO Box 131. CH-1211 Geneva 20. Switzerland, web:
www.iec.ch.
61. Гулько C.B., Джоврей H. Обзор стандарта IEC 61499 // ПиКАД. 2005. № 4.
62. Буч Г., Рамбо Д., Джекобсон А. Язык UML. Руководство пользователя:
Пер. с англ. 2-е изд. — М.: ДМК Пресс. Питер, 2004. — 432 с.
63. Pizzica S. Open systems architecture solutions for military avionics testing //
IEEE Aerospace and Electronic Systems Magazine. Aug. 2001. Vol. 16. Issue 8. P. 4-9.
562
Литература
64. Basso М., Bucher R., Romagnoli M., Vassalli M. Real-Time Control with Linux:
A Web Services Approach // 44th IEEE Conference on Decision and Control. 2005 and
2005 European Control Conference. CDC-ECC ’05. 12-15 Dec. 2005. P. 2733-2738.
65. Groza V., Cretu V., Bogoevici M., Petriu E.M. Distributed virtual instrumen-
tation architecture // Proceedings of the First ISA/IEEE Conference Sensor for In-
dustry. 2001. P. 177-180.
66. Kapsalis V., Charatsis K., Kalogeras A.P., Papadopoulos G. Web gateway: a
platform for industry services over Internet // Proceedings of the 2002 IEEE International
Symposium on Industrial Electronics. ISIE 2002. 8-11 July 2002. Vol. 1. P. 73-77.
67. Kapsalis V., Charatsis K., Georgoudakis M., Papadopoulos G. Architecture for
Web-based services integration / / The 29th Annual Conference of the IEEE Industrial
Electronics Society. IECON ’03. 2-6 Nov. 2003. Vol. 1. P. 866-871.
68. Li D., Serizawa Y., Kiuchi M. Concept design for a Web-based supervisory control
and data-acquisition (SCADA) system // Asia Pacific Transmission and Distribution
Conference and Exhibition 2002: IEEE/PES. 6-10 Oct. 2002. Vol. 1. P. 32-36.
69. Smit J., Hancke G.P. The design and implementation of a general-purpose, se-
cure. measurement and control network incorporating Internet-based access // Proceed-
ings of the 20th IEEE Instrumentation and Measurement Technology Conference. IMTC
’03. 20-22 May 2003. Vol. 2. P. 1643-1647.
70. Yang S.H., Tan L.S., Chen X. Requirements specification and architecture design
for Internet-based control systems // Proceedings 26th Annual International Computer
Software and Applications Conference. COMPSAC 2002. 26-29 Aug. 2002. P. 75-80.
71. Wu H., Ming J., Yang Y., Zhu S. Integrating embedded-Web technology and
real-time Ethernet for modern distributed control // Fifth World Congress on Intelligent
Control and Automation. 2004. WCICA 2004. Vol. 2. June 15-19. 2004. P. 1323-1325.
72. Cristaldi L., Ferrero A., Muscas C., Salicone S., Tinarelli R. The impact of
Internet transmission on the uncertainty in the electric power quality estimation by
means of a distributed measurement system // IEEE Transactions on Instrumentation
and Measurement. Aug. 2003. Vol. 52. № 4. P. 1073-1078.
73. Ishihara Y., Shirota Y., Sekiguchi K., Sato S., Sawai K. A recent trends in
the implementation of Intranet based measurement and monitoring / / Transmission
and Distribution Conference and Exhibition 2002: Asia Pacific. IEEE/PES. 6-10 Oct.
2002. Vol. 3. P. 2261-2266.
74. Fernandez R.O., Peres R. Remote monitoring and control of electronic nutrun-
ners with embedded Internet // IEEE 2002 28th Annual Conference of the IECON
02. Nov. 5-8. 2002. Vol. 3. P. 2371-2375.
75. Klimchynski I. Extensible embedded web server architecture for Internet-based
data acquisition and control // IEEE Sensors Journal. June 2006. Vol. 6, № 3. P. 804-811.
76. Natori K., Tsuji T., Ohnishi K., Hace A., Jezernik K. Robust bilateral control
with Internet communication // 30th Annual Conference of IEEE Industrial Electronics
Society. IECON 2004. Nov. 2-6 2004. Vol. 3. P. 2321-2326.
77. Kamrani E., Momeni H.R., Sharafat A.R. Novel adaptive control system for
stable teleoperation via internet // Proceedings of 2005 IEEE Conference on Control
Applications. CCA 2005. 28-31 Aug. 2005. P. 1164-1169.
78. Susanu M., Dumur D. Open architecture hierarchical predictive control for satu-
ration avoidance // 9th IEEE International Workshop on Advanced Motion Control.
March 2006. P. 33-38.
Литература
563
79. Kolla S., Michaloski J., Rippey W. Evaluation of component-based reconfigurable
machine controllers // Proceedings of the 5th Biannual World Automation Congress.
2002. Vol. 14. P. 625-630.
80. Huang H.-М., Michaloski J., Tarnoff N., Nashman M. An open architecture based
framework for automation and intelligent system control // International IEEE/IAS
Conference on Industrial Automation and Control: Emerging Technologies. 22-27 May
1995. P. 282-288.
81. Benefits problems and issues in open systems architectures // IEEE Transactions
on Power Systems. Feb 1994. Vol. 9, № 1. P. 191-197.
82. Baer W.C., Lally R.W. An open-standard smart sensor architecture and sys-
tem for industrial automation // IEEE Aerospace Conference Proceedings. 2000. Vol. 6.
P. 123-131.
83. Neag I.A., Tyler D.F. An open architecture for automatic test systems with
system-level diagnosis capabilities // The 19th Digital Avionics Systems Conferences.
2000. Proceedings. DASC. 2000. Vol. 2. P. 6B4/l-fiB4/8.
84. Guo J., Boroyevich D., Edwards S.H. Distributed modular open control archi-
tecture for power conversion systems / / IEEE 35th Annual Power Electronics Specialists
Conference. 20-25 June 2004. Vol. 3. P. 2258-2263.
85. Rajsuman R. An overview of the open architecture test system // Second IEEE
International Workshop on Electronic Design. Test and Applications DELTA 2004. 28-
30 Jan. 2004. P. 341-346.
86. Xia F., Yin H., Wang Z., Sun Y. Function block oriented architecture for open
distributed automation // Fifth World Congress on Intelligent Control and Automation.
2004. Vol. 3. June 15-19. P. 2706-2710.
87. Таненбаум Э. Компьютерные сети. 4-е изд. — СПб.: Питер, 2003. — 992 с.
88. Cucej Z., Gleich D., Kaiser M., Planinsic P. Industrial networks. — Electron-
ics in Marine. 2004. Proceedings 46th International Symposium Elmar. 16-18 June
2004. P. 59-66.
89. Руководство по технологии объединенных сетей. 3-е изд.: Пер. с англ. —
М.: Издательский дом «Вильямс», 2002. — 1040 с.
90. Олифер В.Г., Олифер Н.А. Основы сетей передачи данных. — М.: ИНТУ-
ИТ.РУ, 2003 — 248 с.
91. Кузнецов Р.Г. Кабели для современных сетей промышленной автоматизации
// Автоматизация в промышленности. 2005. № 8.
92. Анашкин А.С., Кадыров Э.Д., Харазов В.Г. Техническое и программное
обеспечение распределенных систем управления. Под ред. В.Г. Харазова. — СПб:
Р-2, 2004. — 367 с.
93. RS-422 and RS-485 Application Note 11 B&B Electronics. June 2006. — 22 p.
94. TIA/EIA Telecommunications System Bulletin TSB89. Application Guidelines
for Т1А/ EIA-485-A. Telecommunications Industry Association. June 1998.
95. TIA/EIA standard TIA/EIA-485-A. Electrical Characteristics of Generators and
Receivers for Use in Balanced Digital Multipoint Systems. Telecommunications Indus-
try Association. March 3. 1998.
96. Попов В.П. Основы теории цепей. — М.: Высшая школа, 1985. — 496 с.
97. Determining Clock Accuracy Requirements for UART Communications. — Ma-
xim/Dallas Application Note № 2141. — 7 p.
564
Литература
98. Бессонов Л.А. Теоретические основы электротехнки. — М.: Высшая шко-
ла, 1973. — 752 с.
99. Long Transmission Lines and Data Signal Quality. National Semiconductor Ap-
plication Notes 808. March 1992. — 23 p.
100. Ten ways to bulletproof RS-485 interface. — National Semiconductor Appli-
cation Note 1057. Oct. 1996. — 10 p.
101. Current Loop. Application Note № CLAN1495. — B&B Electronics. 1995.
— 13 p.
102. Optically coupled 20 mA current loop transmitter. HCPL-4100. Technical Da-
ta. — Agilent Technology. 1999. — 12 p.
103. HART field communication protocol. Application guide HCF LIT 34. — HART
Communication Foundation. 1999. — 80 p., www.hartcomm.org.
104. ГОСТ P МЭК 870—5-1-95. Устройства и системы телемеханики. Часть 5.
Протоколы передачи. Раздел 1. Форматы передаваемых кадров.
105. ГОСТ Р МЭК 870-5-2-95. Устройства и системы телемеханики. Часть 5.
Протоколы передачи. Раздел 2. Процедуры в каналах передачи.
106. ГОСТ Р МЭК 870-5-3-95. Устройства и системы телемеханики. Часть 5.
Протоколы передачи. Раздел 3. Общая структура данных пользователя.
107. ГОСТ Р МЭК 870-5-4-96. Устройства и системы телемеханики. Часть 5.
Протоколы передачи. Раздел 4. Определение и кодирование элементов пользова-
тельской информации.
108. ГОСТ Р МЭК 870-5-5-96. Устройства и системы телемеханики. Часть 5.
Протоколы передачи. Раздел 5. Основные прикладные функции.
109. ГОСТ Р МЭК 870-5-101-2001. Устройства и системы телемеханики. Часть 5.
Протоколы передачи. Раздел 101. Обобщающий стандарт по основным функци-
ям телемеханики.
110. ГОСТ Р МЭК 870-5-102-2001. Устройства и системы телемеханики. Часть
5. Протоколы передачи. Раздел 102. Обобщающий стандарт по передаче интеграль-
ных параметров в энергосистемах.
111. ISO 11898-1:2003. Part 1: Data link layer and physical signalling. — 45 p.
112. ISO 11898-2:2003 Part 2: High-speed medium access unit. — 21 p.
113. ISO 11898-3:2006 Part 3: Low-speed, fault-tolerant, medium-dependent inter-
face. — 25 p.
114. ISO 11898-4:2004 Part 4: Time-triggered communication. — 32 p.
115. ISO/FDIS 11898-5 Part 5: High-speed medium access unit with low-power
mode (в стадии разработки).
116. ISO 15765-1:2004 Diagnostics on Controller Area Networks (CAN). Part 1:
General information — 4 p.
117. Thomesse J.-P. Fieldbus Technology in Industrial Automation // Proc, of the
IEEE. June 2005. Vol. 93, № 6. P. 1073-1101.
118. Грибанов M.B., Калачев Д.П., Третьяков C.A. CAL — CAN протокол при-
кладного уровня для индустриальных приложений // МКА. 1999. № 4.
119. Третьяков С.A. CAN на пороге нового столетия // МКА. 1999. № 2.
С. 54-65.
120. Третьяков С. A. CAN — локальная сеть контроллеров // Электроника.
1998. № 9. С. 14-16; № 10. С. 16-20.
121. Robert Bosch GmbH: CAN Specification! ver. 2.0. 1991.
Литература
565
122. CAN physical layer for industrial applications. — 1994. CiA. DS-102. — 13 p.
123. CAN application layer for industrial application. — CiA. DS201-207. ver. 1.1.
1996. — 182 p.
124. Introduction to the Controller Area Network (CAN). Application Report
SLOA101. — Texas Insruments. Aug. 2002. — 17 p.
125. CAN specification 2.0. Part A. — CAN in Automation, www.can-cia.org.
126. CAN specification 2.0. Part B. — CAN in Automation, www.can-cia.org.
127. Cabling and connector pin assignment. — CiA DR-303-1. Ver.1.0. 1999. — 26 p.
128. CANopen application layer and communication profile. — CiA draft standard
301. v. 4.02. Feb. 13. 2002. — 135 p.
129. CAN open electronic data sheet specification for CANopen. — CiA draft stan-
dard 306. v. 1.3. Jan. 01 2005. — 30 p.
130. CANopen interface and device profile for IEC 61131-3 programmable devices. —
CiA draft standard 405. v. 2.0. 2002. — 41 p.
131. Software functional requirements specification. Athena DeviceNet interface
module. Rev. 1.40. Feb 2. 2001. — 37 p.
132. Profibus. Technical description. — PROFIBUS Nutzerorganisation. 1999. 36
p. (www.profibus.com).
133. Profibus RS 485-IS user and installation guideline. PROFIBUS Guideline, ver.
1.1. order № 2.262. — PROFIBUS Nutzerorganisation. June 2003. — 38 p.
134. Profibus technology and application. System description. — Profibus Nutze-
rorganization. Oct. 2002. — 42 p.
135. Modbus over serial line specification and implementation guide, vl.02. — Mod-
bus.org. Dec 20. 2006. — 44 p.
136. Modbus application protocol specification vl.la. — www.Modbus-IDA.org.
June 4. 2004. — 51 p.
137. Modicon Modbus Protocol Reference Guide. PI—MBUS—300 Rev. J. — MOD-
ICON. Inc., Industrial Automation Systems. June 1996. — 121 p.
138. IEEE Std. 802.3. IEEE standard for information technology — Telecommu-
nications and information exchange between systems — Local and metropolitan area
network — Specific requirements. Part 3: Carrier sense multiple access with collision de-
tection (CSMA/CD) access method and physical layer specifications // IEEE Computer
Society. 2005. Section 1-5. — 2628 p.
139. Кисилев В. Промышленный Ethernet в стиле Hirschmann // СТА. 2005.
№ 2. С. 6-12.
140. A beginners guide to Ethernet 802.3. Engineer-to-Engineer Note EE-269. —
Analog Devices, Inc., 2005. — 26 p.
141. Кругляк К. Локальные сети Ethernet в АСУ ТП: быстрее, дальше, на-
дежнее // СТА. 2003. № 1. С. 6-13.
142. Xi В., Fang Y., Chen М., Liu J. Use of Ethernet for Industrial Control Net-
works // ICIEA — 1st IEEE Conference on Industrial Electronics and Applications.
May 2006. — P. 1-4.
143. Fourteen Industrial Ethernet solutions under the spotlight. — The Industrial
Ethernet Book. Issue 35 (ethemet.industrial-networking.com).
144. Modbus messaging on TCP/IP implementation guide. VI.0a. www.Modbus-
IDA.org. June 4. 2004. 46 p.
566
Литература
145. Object Messaging Specification for the MODBUS/ТСР Protocol. V.l. — Mod-
bus-IDA. Nov. 08. 2004. — 27 p.
146. Andy Swales. Open Modbus/ТСР specification. — Release 1.0. 29. Schnei-
der Electric. March 1999.
147. Specification of the Bluetooth System. Master Table of Contents & Compli-
ance Requirements. Covered Core Package version: 2.0 4- EDR Current Master TOC
issued: 4 November 2004. — 1230 p.
148. Sairam K.V., Gunasekaran N., Redd S.R. Bluetooth in wireless communication
// IEEE Communications Magazine. Vol. 40. Issue 6. Jun 2002. P. 90-96.
149. ANSI/IEEE Std 802.11. 1999 Edition. Information technology — Telecommu-
nications and information exchange between systems — Local and metropolitan area
networks — Specific requirements — Part 11: Wireless LAN Medium Access Control
(MAC) and Physical Layer (PHY) Specifications. — IEEE-SA Standards Board. 12
June 2003. — 528 p.
150. Рошан П., Лиэри Дж. Основы построения беспроводных локальных сетей
стандарта 802.11. — М.: Издательский дом «Вильямс», 2004. — 304 с.
151. Vieira М.А.М., Junior D.C.S. Survey on wireless sensor network devices //
IEEE Conference «Emerging Technologies and Factory Automation». Proceedings ET-
FA’03. 16-19 Sept. 2003. Vol. 1. P. 537-544.
152. IEEE Std 802.15.4-2003. IEEE Standard for Information technology —
Telecommunications and information exchange between systems — Local and metropoli-
tan area networks — Specific requirements. Part 15.4: Wireless Medium Access Con-
trol (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal
Area Networks (LR-WPANs). IEEE Computer Society. IEEE-SA Standards Board. 12
May 2003. — 679 p.
153. ZigBee specification. Document 053474rl3. — ZigBee Standards Organization.
Dec. 1. 2006. — 534 p.
154. Willig A., Matheus. K., Wolisz. A. Wireless technology in industrial networks
// Proc, of the IEEE. June 2005. Vol. 93. Issue 6. P. 1130-1151.
155. Brooks T. Wireless technology for industrial sensor and control networks //
Proceedings of the First ISA/IEEE Conference Sensor for Industry. 2001. P. 73-77.
156. Нас A. Wireless Sensor Network Designs. — John Wiley & Sons. Ltd., 2003. —
391 p.
157. Shen X., Wang Z., Sun Y. Wireless sensor networks for industrial applica-
tions. — Fifth World Congress on Intelligent Control and Automation. 15-19 June 2004.
WCICA 2004. Vol. 4. P. 3636-3640.
158. Low K.S., Win W.N.N., Er M.J. Wireless Sensor Networks for Industrial En-
vironments // International Conference on Computational Intelligence for Modelling.
Control and Automation. 2005 and International Conference on Intelligent Agents. Web
Technologies and Internet Commerce.28-30 Nov. 2005. Vol. 2. P. 271-276.
159. Akyildiz I.F., Wang X. A survey on wireless mesh networks // IEEE Commu-
nications Magazine. Sept. 2005. Vol. 43. Issue 9. P. S23-S30.
160. Bonivento A., Carloni L.P., Sangiovanni-Vincentelli A. Platform-Based Design
of Wireless Sensor Networks for Industrial Applications // Design, Automation and Test
in Europe. 6-10 March 2006. DATE ’06. Vol. 1. P. 1-6.
161. Баскаков С.И. Радиотехнические цепи и сигналы. — М.: Высшая шко-
ла, 1983. — 536 с.
Литература
567
162. O’Brien К., Scheible G., Gueldner H. Analysis of wireless power supplies for
industrial automation systems // Industrial Electronics Society. IECON ’03. The 29th
Annual Conference of the IEEE. 2-6 Nov. 2003. Vol. 1. P. 367-372.
163. Hirai J., Kim T.-W., Kawamura A. Practical study on wireless transmission
of power and information for autonomous decentralized manufacturing system / / IEEE
Trans. Ind. Electron., 1999. Vol. 46. № 2. P. 349—359.
164. Wiberg P.-А., Bilstrup U. Wireless technology in industry — Applications and
user scenarios // Proc. IEEE Int. Conf. Emerging Technologies and Factory Automa-
tion (ETFA ’01). P. 123—133.
165. Willig. A. Redundancy Concepts to Increase Transmission Reliability in Wire-
less Industrial LANs // IEEE Transactions on Industrial Informatics. 2005. Vol. 1.
№ 3. P. 173-182.
166. Решение № 04-03-04-003 от 6 декабря 2004 года. — Государственная комис-
сия по радиочастотам (ГКРЧ). — М., 2004. — 7 с.
167. Gutierrez J.A., Durocher D.B., Bin Lu, Habetler T.G. Applying Wireless Sensor
Networks in Industrial Plant Energy Evaluation and Planning Systems // Pulp and
Paper Industry Technical Conference. 18-23 June 2006. P. 1-7.
168. Jiang P., Ren H., Zhang L., Wang Z., Xue A. Reliable Application of Wireless
Sensor Networks in Industrial Process Control // The Sixth World Congress on Intelligent
Control and Automation. WCICA 2006. 21-23 June 2006. Vol. 1. P. 99-103.
169. Кузнецов Р.Г. Кабели для современных сетей промышленной автоматиза-
ции // Автоматизация в промышленности. 2005. № 8.
170. Prytz G. Redundancy in Industrial Ethernet Networks // 2006 IEEE Interna-
tional Workshop on Factory Communication Systems. June 27. 2006. P. 380-385.
171. Proper grounding for the automation industry // Pulp and Paper Industry
Technical Conference. Portland. OR 2001. 18-22 June 2001. P. 110-113.
172. Денисенко В.В., Халявко А.Н. Защита от помех датчиков и соединитель-
ных проводов систем промышленной автоматики // СТА. 2001. № 1. С. 68-75.
173. Vijayaraghavan G., Brown М., Barnes М. Practical grounding, bonding, shield-
ing and surge protection. — Elsevier. Newnes, 2004. — 237 p.
174. Карякин P.H. Заземляющие устройства электроустановок: Справочник. —
М., 1998. — 374 с.
175. Правила устройства электроустановок (ПУЭ). 6-е изд. — М.: Энергосер-
вис, 2002. — 608 с.
176. Nelson J.P. High-Resistance Grounding of Low-Voltage Systems: A Standard
for the Petroleum and Chemical Industry // IEEE Transactions on Industry ASppli-
cations. 1999. Vol. 35, № 4. P. 941-948.
177. Денисенко B.B. Топологическое преобразование, устраняющее незаземлен-
ные источники ЭДС в электрической цепи // Радиотехника. 1986. № 8. С. 31-33.
178. Zipse D.W. Earthing-Grounding methods: a primer // Industrial and Commer-
ical Power Systems Technical Conference. 5-8 May 2002. P. 158-177.
179. Соколов С. Заземление и экранирование зданий для размещения оборудо-
вания систем связи // Электроника: НТВ. 2005. № 4. С. 58-59.
180. Liang С., Wei Z. EMI in hydropower plant and EMC design for its comput-
er monitoring and control system // China Electromagnetic Compatibility. 2002. 3rd
International Symposium. 21-24 May 2002. P. 378-381.
568
Литература
181. Burleson J. Wiring and grounding to prevent power quality problems with
industrial equipment // Textile, Fiber and Film Industry Technical Conference. 8-9
May 1991. P. 5/1-5/6.
182. Durham M.O., Arnold R.G. Data quality and grounding considerations for a
medical facility // MWSCAS-2002. The 2002 45th Midwest Symposium on Circuits and
Systems. 4-7 Aug. 2002. Vol. 2. P. П-184-П-187.
183. Reducing Noise in Switching for Test Systems Application Note 1441-2 //
Agilent Technologies. P. 14.
184. Kosc D., Hamer P.S. Grounding practices — A system-wide systematic ap-
proach // IEEE Trans, on Industry Applications. 2003. Vol. 39, № 5. P. 1475-1485.
185. Low level measurements. Keithley. 5-th edition.
186. Барнс Д. Электронное конструирование: методы борьбы с помехами. —
М.: Мир, 1990. — 239 с.
187. Ke Н., Lee W.-J., Chen М.-S., Liu J.-P., Yang J.S. Grounding techniques and
induced surge voltage on the control signal cables // IEEE Trans, on Industry Appli-
cations. 1998. Vol. 34. № 4. P. 663-368.
188. Caruso M., Analog grounding considerations. — Honeywell. AN-103.
189. Floating oscilloscope measurements... and operator protection — Tektronix
Technical Brief, 1998.
190. Денисенко B.B. Выбор аппаратных средств автоматизации опасных про-
мышленных объектов // СТА. 2005. № 4. С. 86-94.
191. Гарманов А. Принципы обеспечения электросовместимости измеритель-
ных приборов // СТА. 2003. № 4. С. 64-72; 2004. № 1. С. 62-68.
192. Стандарт ANSI/TIA/EIA-607-1994 (Август 1, 1994). Требования к теле-
коммуникационной системе выравнивания потенциалов и заземления коммерче-
ских зданий.
193. Эрглис К.Э. Интерфейсы открытых систем. — М.: Горячая линия — Те-
леком, 2000. — 256 с.
194. Денисенко В.В. Заземление в системах промышленной автоматизации. Ч. 1
// СТА. 2006. № 2. С. 94-99.
195. Денисенко В.В. Заземление в системах промышленной автоматизации. Ч. 2
и СТА. 2006. № 3. С. 94-107.
196. РД 34.21.122-87. Инструкция по устройству молниезащиты зданий и соору-
жений. — Министерство энергетики и электрификации СССР. Утверждена Глав-
техуправлением Минэнерго СССР 12 октября 1987 г.
197. Денисенко В., Ерещенко П., Кильметов Р., Метелкин Е., Халявко А. Мо-
дули RealLab! серии NL для тяжелых условий эксплуатации // Промышленные
АСУ и контроллеры. 2005. № 2. С. 44-49.
198. Матвеев М.В. Электромагнитная обстановка на объектах определяет ЭМС
цифровой аппаратуры // Новости электротехники. 2002. № 1 (13).
199. Матвеев М.В. Электромагнитная обстановка на объектах определяет ЭМС
цифровой аппаратуры // Новости электротехники. 2002. № 2 (14). С. 13-14.
200. Кузнецов М., Кунгуров Д., Матвеев М., Тарасов В. Входные цепи устройств
РЗА. Проблемы защиты от мощных импульсных перенапряжений / / Новости элек-
тротехники. 2006. № 6 (42). С. 2-6.
201. СО-153-34.21.122—2003. Инструкция по устройству молниезащиты зданий,
сооружений и промышленных коммуникаций. — М.: Изд-во МЭИ, 2004. — 57 с.
Литература
569
202. Dichen L., Suqiao D. The study of lightning-protection grounding for power
dispatching and communication equipment // Environmental Electromagnetics. 2000.
CEEM 2000. Proceedings. Asia-Pacific Conference on Date: 2000. P. 351-354.
203. Gang Y., He J., Bicheng M., Zou J., Chen S., Gao Y., Zeng R. Electromag-
netic interference in control cables of substation caused by short circuit fault. Pow-
er System Technology // Proceedings International Conference on PowerCon. 2002.
Vol. 2. P. 980-984.
204. Navarrina F., Colominas I., Casteleiro M. Why do computer methods for
grounding analysis produce anomalous results? // IEEE Transactions on Power Deliv-
ery. Oct. 2003. Vol. 18. Issue 4. P. 1192-1202.
205. Vanzura E.J. Automated system for electromagnetic field generation and im-
munity testing // 5th IEEE Instrumentation and Measurement Technology Conference.
IMTC-88. 20-22 Apr 1988. P. 3-10.
206. Fowler K. Grounding and shielding. II. Grounding and return // IEEE Instru-
mentation & Measurement Magazine. Jun 2000. Vol. 3. Issue 2. P. 45-48.
207. Fowler K. Grounding and shielding. I. Noise // IEEE Instrumentation & Mea-
surement Magazine. Jun 2000. Vol. 3. Issue 2. P. 41-44.
208. Antonini G., Scogna A.C., Orlandi A. Grounding, unbalancing and length ef-
fects on termination voltages of a twinax cable during bulk current injection // IEEE
Transactions on Electromagnetic Compatibility. May 2004. Vol. 46. Issue 2. P. 302-308.
209. Hekkala A., Tarvainen T. Screening attenuation of differential cable-connector
assemblies // 8th IEEE Workshop on Signal Propagation on Interconnects Proceed-
ings. 9-12 May 2004. P. 175-178.
210. ГОСТ 30372-95. ГОСТ P 50397-92. Совместимость технических средств
электромагнитная. Термины и определения.
211. ГОСТ 29037-91. Совместимость технических средств электромагнитная.
Сертификационные испытания. Общие положения.
212. ГОСТ 29280-92. Совместимость технических средств электромагнитная.
Испытания на помехоустойчивость. Общие положения.
213. ГОСТ Р 51317.2.5-2000. Совместимость технических средств электромаг-
нитная. Электромагнитная обстановка. Классификация электромагнитных помех
в местах размещения технических средств.
214. ГОСТ Р 51317.4.1-2000. Совместимость технических средств электромаг-
нитная. Испытания на помехоустойчивость. Виды испытаний.
215. ГОСТ Р 51317.4.2-99. Совместимость технических средств электромагнит-
ная. Устойчивость к электростатическим разрядам. Требования и методы испы-
таний.
216. ГОСТ Р 51317.4.3-99. Совместимость технических средств электромагнит-
ная. Устойчивость к радиочастотному электромагнитному полю. Требования и ме-
тоды испытаний.
217. ГОСТ Р 51317.4.4-99. Совместимость технических средств электромагнит-
ная. Устойчивость к наносекундным импульсным помехам. Требования и мето-
ды испытаний.
218. ГОСТ Р 51317.4.5-99. Совместимость технических средств электромагнит-
ная. Устойчивость к микросекундным импульсным помехам большой энергии. Тре-
бования и методы испытаний.
570
Литература
219. ГОСТ Р 51317.4.6-99. Совместимость технических средств электромагнит-
ная. Устойчивость к кондуктивным помехам, наведенным радиочастотными элек-
тромагнитными полями. Требования и методы испытаний.
220. ГОСТ Р 51317.4.11-99. Совместимость технических средств электромаг-
нитная. Устойчивость к динамическим изменениям напряжения электропитания.
Требования и методы испытаний.
221. ГОСТ Р 51317.4.12-99 (IEC 61000-4-12-97). Совместимость технических
средств электромагнитная. Устойчивость к колебательным затухающим помехам.
Требования и методы испытаний.
222. ГОСТ Р 51317.4.14-2000. Совместимость технических средств электромаг-
нитная. Устойчивость к колебаниям напряжения электропитания. Требования и
методы испытаний.
223. ГОСТ Р 51317.4.16-2000. Совместимость технических средств электромаг-
нитная. Устойчивость к кондуктивным помехам в полосе частот от 0 до 150 кГц.
Требования и методы испытаний.
224. ГОСТ Р 51317.4.17-2000 (МЭК 61000-4-17-99). Совместимость технических
средств электромагнитная. Устойчивость к пульсациям напряжения электропита-
ния постоянного тока. Требования и методы испытаний.
225. ГОСТ Р 51317.6.1-99. Совместимость технических средств электромагнит-
ная. Устойчивость к электромагнитным помехам технических средств, применяе-
мых в жилых, коммерческих зонах и производственных зонах с малым энергопо-
треблением. Требования и методы испытаний.
226. ГОСТ Р 51317.6.2-99. Совместимость технических средств электромагнит
ная. Устойчивость к электромагнитным помехам технических средств, применяе-
мых в промышленных зонах. Требования и методы испытаний.
227. ГОСТ Р 51317.6.3-99. Совместимость технических средств электромагнит
ная. Помехоэмиссия от технических средств, применяемых в жилых, коммерчески?
зонах и производственных зонах с малым энергопотреблением. Нормы и метода
испытаний.
228. ГОСТ Р 51317.6.4-99. Совместимость технических средств электромагнит
ная. Помехоэмиссия от технических средств, применяемых в промышленных зо
нах. Нормы и методы испытаний.
229. ГОСТ Р 51318.22-99. Совместимость технических средств электромагнит
ная. Радиопомехи индустриальные от оборудования информационных технологий
Нормы и методы испытаний.
230. ГОСТ Р 51318.24-99. Совместимость технических средств электромагнит
ная. Устойчивость оборудования информационных технологий к электромагнитны»
помехам. Требования и методы испытаний.
231. ГОСТ Р 51319-99. Совместимость технических средств электромагнитная
Приборы для измерения индустриальных радиопомех. Технические требования i
методы испытаний.
232. ГОСТ Р 51320-99. Совместимость технических средств электромагнитная
Радиопомехи индустриальные. Методы испытаний технических средств — источ
ников индустриальных радиопомех.
233. ГОСТ Р 51516-99. Совместимость технических средств электромагнитная
Устойчивость измерительных реле и устройств защиты к наносекундным импульс
ным помехам. Требования и методы испытаний.
Литература
571
234. ГОСТ Р 51522-99. Совместимость технических средств электромагнитная.
Электрическое оборудование для измерения, управления и лабораторного приме-
нения. Требования и методы испытаний.
235. ГОСТ Р 51524-99. Совместимость технических средств электромагнитная.
Системы электрического привода с регулируемой скоростью вращения. Требова-
ния и методы испытаний.
236. ГОСТ Р 51525-99. Совместимость технических средств электромагнитная.
Устойчивость измерительных реле и устройств защиты к электростатическим раз-
рядам. Требования и методы испытаний.
237. ГОСТ Р 51700-2000. Совместимость технических средств электромагнит-
ная. Технические средства, подключаемые к симметричным линиям. Параметры
асимметрии относительно земли. Схемы измерений.
238. ГОСТ 29254-91. Совместимость технических средств электромагнитная.
Аппаратура измерения, контроля и управления технологическими процессами. Тех-
нические требования и методы испытаний на помехоустойчивость.
239. ГОСТ 29073-91. Совместимость технических средств измерения, контро-
ля и управления промышленными процессами электромагнитная. Устойчивость к
электромагнитным помехам. Общие положения.
240. ГОСТ Р 51699-2000. Совместимость технических средств электромагнит-
ная. Устойчивость к электромагнитным помехам технических средств охранной сиг-
нализации. Требования и методы испытаний.
241. ГОСТ Р 50648-94. Совместимость технических средств электромагнитная.
Устойчивость к магнитному полю промышленной частоты. Технические требова-
ния и методы испытаний.
242. ГОСТ Р 50649-94. Совместимость технических средств электромагнитная.
Технические требования и методы испытаний.
243. ГОСТ Р 50652-94 (МЭК 1000-4-10-93). Совместимость технических средств
электромагнитная. Устойчивость к затухающему колебательному магнитному по-
лю. Технические требования и методы испытаний.
244. ГОСТ Р 51179-98. Устройства и системы телемеханики. Часть 2. Условия
эксплуатации. Раздел 1. Источники питания и электромагнитная совместимость.
245. ГОСТ 30336-95. Совместимость технических средств электромагнитная.
Устойчивость к импульсному магнитному полю. Технические требования и мето-
ды испытаний.
246. ГОСТ Р 50839-2000. Совместимость технических средств электромагнит-
ная. Устойчивость средств вычислительной техники и информатики к электромаг-
нитным помехам. Требования и методы испытаний.
247. РМГ 29-99. ГСИ. Метрология. Основные термины и определения.
248. Новицкий П.В., Зограф И.А. Оценка погрешностей результатов измере-
ний. — Л.: Энергоатомиздат, 1991. — 304 с.
249. ГОСТ 8.401-80. ГСИ. Классы точности средств измерений. Общие тре-
бования.
250. Букингем М. Шумы в электронных приборах и системах. — М.: Мир,
1986. — 399 с.
251. Гмурман В.Е. Теория вероятностей и математическая статистика. — М.:
Высшая школа, 2001. — 479 с.
572
Литература
252. Косарев Е.Л. Методы обработки экспериментальных данных. — М.,
2003. — 256 с.
253. Орнатский П.П. Теоретические основы информационно-измерительной
техники. 2-е изд. — Киев: Вища школа, 1983. — 455 с.
254. МИ 2232-2000. Обеспечение эффективности измерений при управлении тех-
нологическими процессами. Оценивание погрешности измерений при ограниченной
исходной информации.
255. Кремер Н.Ш. Теория вероятностей иматематичсекая статистика. — М.:
ЮНИТИ-ДАНА, 2006. — 573 с.
256. Тутубалин В.Н. Теория вероятностей и случайных процессов. Основы ма-
тематического аппарата и прикладные аспекты. — Изд-во МГУ, 1992. — 400 с.
257. Burleson J. Wiring and grounding to prevent power quality problems with
industrial equipment // Textile, Fiber and Film Industry Technical Conference. 8-9
May 1991. P. 5/1-5/6.
258. Сергиенко А.Б. Цифровая обработка сигналов. — СПб.: Питер, 2002. —
608 с.
259. МИ 2440-97 ГСИ. Методы экспериментального определения и контроля
характеристик погрешности измерительных каналов измерительных систем и из-
мерительных комплексов (взамен МИ 2313-94).
260. РД 50-453-84. Методические указания. Характеристики погрешности
средств измерений в реальных условиях эксплуатации. Методы расчета.
261. ГОСТ 8.009-84. Государственная система обеспечения единства измерений.
Нормируемые метрологические характеристики средств измерений.
262. Темников Ф.Е и др. Теоретические основы информационной техники. —
М.: Энергия, 1979. — 512 с.
263. Laddomada М., Lo Presti L., Mondin M., Ricchiuto C. An efficient decimation
sine-filter design for software radio applications // 2001 IEEE Third Workshop on Signal
Processing. Advances in Wireless Communications. 2001. P. 337-339.
264. Hogenauer E. An economical class of digital filters for decimation and inter-
polation // Acoustics. Speech, and Signal Processing [see also IEEE Transactions on
Signal Processing]. 1981. Vol. 29, № 2. P. 155-162.
265. МИ 1317-2004 ГСИ. Результаты и характеристики погрешности измерений.
Формы представления. Способы использования при испытаниях образцов продук-
ции и контроле их параметров (взамен ГОСТ 8.011-72, МИ 1317-86).
266. ГОСТ 8.395-80. Государственная система обеспечения единства измерений.
Нормальные условия измерений при поверке. Общие требования.
267. ГОСТ 8.256-77. Государственная система обеспечения единства измерений.
Нормирование и определение динамических характеристик аналоговых средств из-
мерений. Основные положения.
268. ГОСТ 8.207-76. Государственная система обеспечения единства измерений.
Прямые измерения с многократными наблюдениями. Методы обработки результа-
тов наблюдений. Основные положения.
269. МИ 2955-2005 ГСИ. Типовая методика аттестации программного обеспе-
чения средств измерений и порядок её проведения.
270. МИ 2891-2004 ГСИ. Общие требования к программному обеспечению
средств измерений.
Литература
573
271. Mauris G.Expression of Measurement Uncertainty in a Very Limited Knowl-
edge Context: A Possibility Theory-Based Approach // IEEE Trans, on Instr, and Mea-
sueremnt. 2007. Vol. 56, № 3. P. 731-735.
272. Angrisani L., Schiano Lo Moriello R., D’Apuzzo M. New proposal for uncer-
tainty evaluation in indirect measurements / / IEEE Transactions on Instrumentation
and Measurement. 2006. Vol. 55. № 4. P. 1059-1064.
273. Kondakci S. An approach to noise reduction in human skin admittance mea-
surements // 2001 Proc, of the 23rd Annual EMBS Int. Conf., 25-28 Oct. Stambul.
2001. P. 2028-2031.
274. Layer E. Theoretical principles for establishing a hierarchy of Dynamic Accuracy
with the integral-Square-Error as an Example // IEEE Transactions on Instrumentation
and Measurement. 1997. Vol. 46, № 5. P. 1178-1182.
275. Shestakov A. L. Dynamic error correction method // IEEE Transactions on
Instrumentation and Measurement. 1996. Vol. 45, № 1. P. 250-255.
276. Ghiani E., Locci N., Muscas C. Auto-Evaluation of the Uncertainty in Virtu-
al Instruments // IEEE Trans, on Instrumentation and Measurement. 2004. Vol. 53,
№ 3. P. 250-672-677.
277. Schoen M.P. Dynamic Compensation of Intelligent Sensors // IEEE Transac-
tions on Instrumentation and Measurement. 2007. Vol. 56, № 5. P. 1992-2001.
278. Nabielec J. An outlook on the dynamic error «blind» correction for the time-
varying measurement channel // Proceedings of the 21st IEEE Instrumentation and
Measurement Technology Conference. IMTC 04. 18-20 May 2004. Vol. 1. P. 152-155.
279. МИ 2439-97 ГСИ. Метрологические характеристики измерительных си-
стем. Номенклатура. Принципы регламентации, определения и контроля.
280. МИ 2539-99 ГСИ. Измерительные каналы контроллеров, измерительно-
вычислительных, управляющих, программно-технических комплексов. Общие тре-
бования к методике поверки.
281. МИ 2233-2000 ГСИ. Обеспечение эффективности измерений при управле-
нии технологическими процессами. Основные положения (взамен МИ 2233-92).
282. МИ 1967-89 ГСИ. Выбор методов и средств измерений при разработке ме-
тодик выполнения измерений. Общие положения.
283. МИ 2177-91 ГСИ. Измерения и измерительный контроль. Сведения о по-
грешностях измерений в конструкторской и технологической документации.
284. МИ 2438-97 ГСИ. Системы измерительные. Метрологическое обеспечение.
Основные положения.
285. ГОСТ 23222-88. Характеристики точности выполнения предписанной фун-
кции средств автоматизации. Требования к нормированию. Общие методы кон-
троля.
286. Ang К.Н., Chong G., Li Y. PID control system analysis, design and technology
// IEEE Trans, on Control Syst. Tech. July 2005. Vol. 13, № 4. P. 559-576.
287. Ziegler J.G., Nichols N.B. Optimum settings for automatic controllers // Trans.
ASME. 1942. Vol. 64. P. 759—768.
288. O’Dwyer A. PID compensation of time delayed processes 1998-2002: a sur-
vey // Proceedings of the American Control Conference. Denver. Colorado. June 4-6.
ZW3 P. 1494-1499.
289. Quevedo J., Escobet T. Digital control: past, present and future of PID control
// Proc. IFAC Workshop. Eds., Terrassa. Spain. Apr. 5-7. 2000.
574
Литература
290. The Patent Office — http://gb.espacenet.com.
291. Astrom K.J., Hagglund T. Advanced PID control. — ISA. The Instrumentation
Systems and Automation Society, 2006. — 460 p.
292. Li Y., Ang K.H. Chong G.C.Y. Patents, Software and Hardware for PID con-
trol. An overview and analysis of the current art // IEEE Control Systems Magazine.
Feb. 2006. P. 41-54.
293. Leva A., Cox C., Ruano A. Hands-on PID autotuning: a guide to better uti-
lization. IFAC Professional Brief. — http://www.ifac-control.org.
294. Денисенко B.B. ПИД-регуляторы: вопросы реализации // СТА. 2007. № 4.
С. 86-97.
295. Денисенко В.В. ПИД-регуляторы: принципы построения и модификации.
Ч. 1 // СТА. 2006. № 4. С. 45-50; Часть 2. 2007. № 1. С. 90-98.
296. Денисенко В.В. Разновидности ПИД-регуляторов // Автоматизация в про-
мышленности. 2007. № 6. С. 45-50.
297. Гроп Д. Методы идентификации систем. — М.: Мир, 1979. — 302 с.
298. Справочник по теории автоматического управления / Под ред. А.А. Кра-
совского. — М.: Наука, 1987. — 712 с.
299. Grassi Е., Tsakalis K.S. Integrated system identification and PID controller
tuning by frequency loop-shaping // Proceedings of the 38th IEEE Conference on De-
cision and Control. 1999. Vol. 2. P. 1517-1522.
300. Cai W.-J., Fang Y., Wang Y.-G. Robust closed-loop process identification from
step test // Control, Automation, Robotics and Vision Conference. 6-9 Dec. 2004. ICAR-
CV. Vol. 2. P. 907-912.
301. Гёльднер К., Кубик С. Нелинейные системы управления. — М.: Мир,
1987. — 368 с.
302. Wang Q.-G., Hang C.-С., Bi Q. A technique for frequency response identifica-
tion from relay feedback // IEEE Transactions on Control Systems Technology. Jan
1999. Vol. 7. Issue 1. P. 122-128.
303. Ротач В.Я. Теория автоматического управления. — М.: МЭИ, 2004. — 400 с.
304. Изерман Р. Цифровые системы управления. — М.: Мир, 1984. — 541 с.
305. Штейнберг Ш.Е. Идентификация в системах управления. — М.: Энер-
гоатомиздат, 1987. — 80 с.
306. Цыпкин Я.З. Основы информационной теории идентификации. — М.: На-
ука, 1984. — 320 с.
307. Ljung L., Glad Т. Modeling of Dynamic Systems. — N.J.: Prentice Hall. En-
glewood Cliffs, 1994. — 255 p.
308. Ljung L. System Identification — Theory for the User. 2nd ed. — N.J.: Prentice
Hall. Upper Saddle River, 1999. — 375 p.
309. Гладков Л.А., Курейчик B.B., Курейчик B.M. Генетические алгоритмы. —
М.: Физматлит, 2006. — 320 с.
310. Numerical recipes in С. The art of scientific computing. Second Edition. Cam-
bridge University Press, http://www.nr.com.
311. Денисенко В.В. Заземление в системах промышленной автоматизации //
СТА. 2006. № 2. С. 94-99; 2006. № 3. С. 76-92.
312. Techmation. Protuner. Application manual, www.protuner.com.
Литература
575
313. Но W.K., Lee Т.Н., Han Н.Р., Hong Y. Self-tuning IMC-PID control with
interval gain and phase margins assignment // IEEE Transactions on Control Systems
Technology. May 2001. Vol. 9. Issue 3. P. 535-541.
314. Tamayo E. Industrial implementation of a predictive IMC controller // IEEE
Canadian Conference on Electrical and Computer Engineering. 1999. Vol. 3. P. 1565-
1569.
315. Karakawa K., Abe N., Ichihara H. Joint design method of closed-loop identifi-
cation and IMC structure for temperature control system with time delay // SICE 2002.
Proceedings of the 41st SICE Annual Conference. 5-7 Aug. 2002. Vol. 3. P. 1592-1595.
316. Lee W.S., Shi J. Modified IMC-PID controllers and generalized PID controllers
for first-order plus dead-time processes // 7th International Conference on Control. Au-
tomation. Robotics and Vision. ICARCV 2002. 2-5 Dec. 2002. Vol. 2. P. 898-903.
317. Leva A., Colombo A.M. IMC-based Synthesis of the Feedback Block of ISA-
PID Regulators // Proc. ECC 2001. Porto (P).
318. Smith O.J.M. Close Control of Loops with Dead Time // Chemical Engineer-
ing Progress. 1957. Vol. 53. P. 217-235.
319. Воронов А.А. Устойчивость, управляемость, наблюдаемость. — M.: На-
ука, 1979. — 336 с.
320. Chien K.L., Hrones J.A., Reswick J.B. On automatic control of generalized
passive systems // Trans. ASME. 74. P. 175-185.
321. Ротач В.Я. Настройка регуляторов моифицированным методом Циглера-
Николса // Промышленные контроллеры АСУ. 2008. № 2. С. 38-42.
322. Прикладные нечеткие системы: Пер. с япон. / К. Асаи, Д. Ватада, С. Иван
и др; под редакцией Т. Тэрано, К. Асаи, М. Сугэно. — М.: Мир, 1993. — 368 с.
323. Усков А.А., Кузьмин А.В. Интеллектуальные технологии управления. Ис-
кусственные нейронные сети и нечеткая логика. — М.: Горячая линия - Теле-
ком, 2004. — 143 с.
324. Ицкович Э.Л. Современные алгоритмы автоматического регулирования и
их использование на предприятиях // Автоматизация в промышленности. 2007. № 6.
С. 39-44.
325. IEC 61131-7(2000) Programmable controllers. Part 7. Fuzzy control program-
ming. 2000.
326. Рутковская Д. Пилиньский M., Рутковский Л. Нейронные сети, генетиче-
ские алгоритмы и нечеткие системы. — М.: Горячая линия - Телеком, 2006. — 383 с.
327. Mamdani Е. Н. Application of fuzzy algorithms for control of simple dynamic
plant // Proc. Inst. Elect. Eng. Contr. Sci. 1974. Vol. 121. P. 1585-1588.
328. Mamdani E. H., Assilian S. An experiment in linguistic synthesis with a fuzzy
logic controller // Int. J. Man-Mach. Stud. 1975. Vol. 7. P. 1-13.
329. Zadeh L.A. Fuzzy sets // Information and Control. 1965. № 8. P. 338-353.
330. Mann G.K.I., Bao-Gang Hu., Gosine R.G. Analysis of direct action fuzzy PID
controller structures // IEEE Transactions on Systems. Man and Cybernetics. Part B.
Jun 1999. Vol. 29. Issue 3. P. 371-388.
331. Yesil E., Guzelkaya M., Eksin I. Internal model control based fuzzy gain schedul-
ing technique of pid controllers // World Automation Congress. 2004. Proceedings. 28
June — 1 July 2004. Vol. 17. P. 501-506.
576
Литература
332. Hsuan-Ming Feng. A self-tuning fuzzy control system design // IFSA World
Congress and 20th NAFIPS International Conference. Joint 9th. 25-28 July 2001. Vol. 1.
P. 209-214.
333. Kawafuku R., Sasaki M., Kato S. Self-tuning PID control of a flexible micro-
actuator using neural networks // Systems. Man. and Cybernetics. 1998. 1998 IEEE
International Conference on. 11-14 Oct 1998. Vol. 3. P. 3067-3072.
334. Kato M., Yamamoto T., Fujisawa S. A Skill-Based PID Controller Using Ar-
tificial Neural Networks // Computational Intelligence for Modeling. Control and Au-
tomation. 2005 and International Conference on Intelligent Agents. Web Technologies
and Internet Commerce. 28-30 Nov. 2005. Vol. 1. P. 702-707.
335. Терехов B.A., Ефимов Д.В., Тюкин И.Ю. Нейросетевые системы управле-
ния. — М.: Изд. журнала «Радиотехника», 2002. — 480 с.
336. Fleming P.J., Purshouse R.C. Genetic algorithms in control systems engineering
// IFAC Professional Brief. — http://www.ifac-control.org.
337. Li J., Xie J.-Y., Wu Z.-M.. Design of Disturbance Rejection PID Controllers
for Time Delay System Based on Genetic Algorithms // Neural Networks and Brain.
ICNN&B ’05. International Conference on. 13-15 Oct. 2005. Vol. 2. P. 876-880.
338. Pereira D.S., Pinto J.O.P. Genetic algorithm based system identification and
PID tuning for optimum adaptive control // Advanced Intelligent Mechatronics. Pro-
ceedings. 2005 IEEE/ASME International Conference on. 2005. P. 801-806.
339. Ho W.K., Lee Т.Н., Han H.P., Hong Y. Self-Tuning IMC-PID Control with In-
terval Gain and Phase Margins Assignment // IEEE Trans on Control Syst. Techn.
May 2001. Vol. 9, № 3. P. 535-541.
340. Lee W.S., Shi J. Modified IMC-PID controllers and generalized PID controllers
for first-order plus dead-time processes // Seventh Int. Conf, on Control. Automation.
Robots and Vision (ICARCV’02). Dec. 2002. Singapore. P. 898-903.
341. Silva G.J., Datta A., Bhattacharyya S.P. On the Stability and Controller Ro-
bustness of Some Popular PID Tuning Rules // IEEE Trans, on Automatic Control.
Sept. 2003. Vol. 48, № 9. P. 1638-1641.
342. Ho M.-T. and Lin C.-Y. PID Controller Design for Robust Performance //
IEEE Trans, on Automatic Control. Aug. 2003. Vol.48, № 8. P. 1404-1409.
343. Keel L.H., Rego J.I., Bhattacharyya S.P. A New Approach to Digital PID Con-
troller Design // IEEE Trans, on Automatic Control. Apr. 2003. Vol. 48, № 4. P. 687-692.
344. Ho H.F., Wong Y.K., Rad A.B. Adaptive PID controller for nonlinear sys-
tem with tracking performance // Physics and Control. Proceedings. 2003 International
Conference. 20-22 Aug. 2003. Vol. 4. P. 1315-1319.
345. Glickman S., Kulessky R., Nudelman G. Identification-Based PID Control Tun-
ing for Power Station Processes // IEEE Trans, on Control System Technology. 2004.
Vol. 12, № 1. P. 123-132.
346. Moradi M.H. New techniques for PID Controller Design // CCA 2003. Pro-
ceedings of 2003 IEEE Conference on Control Applications. 23-25 June 2003. Vol. 2.
P. 903-908.
347. Peng Y., Vrancic D., Hanus R. Anti-windup, bumpless, and conditioned trans-
fer techniques for PID controllers // Control Systems Magazine. Aug. 1996. Vol. 16.
Issue 4. P. 48-57.
348. Hodel A.S., Hall C.E. Variable-Structure PID Control to Prevent Integrator
Windup // IEEE Trans, on Industrial Electronics. 2001. Vol. 48, № 2. P. 442-451.
Литература
577
349. Karimi A., Garcia D., Longchamp R. PID controller tuning using Bode’s inte-
grals // Control Systems Technology. IEEE Transactions on. Nov. 2003. Vol. 11. Is-
sue 6. P. 812-821.
350. Astrom K.J., Hang C.C., Lim B.C. A new Smith predictor for controlling a
process with an integrator and long dead-time // IEEE Transactions on Automatic Con-
trol. 1994. Vol. 39. Issue 2. P. 343-345.
351. Bahill A. A simple adaptive Smith-predictor for controlling time-delay systems:
A tutorial // Control Systems Magazine. IEEE. May 1983. Vol. 3. Issue 2. P. 16-22.
352. Feng D.-M., Pan F., Han R.-C. Improved self-adaptive Smith predictive control
scheme for time-delay system // Machine Learning and Cybernetics. 2002. Proceedings.
International Conference on 2002. Vol. 1. P. 463-466.
353. Takatsu H., Itoh T. Future Needs for Control Theory in Industry — Report
of the Control Technology. Survey in Japanese Industry // IEEE Trans, on Control
Systems Technology. May 1999. Vol. 7, № 3. P. 298-305.
354. Ротач В.Я. Об адаптивных системах управления с текущей идентифика-
цией объекта // Автоматизация в промышленности. 2004. № 6. С. 16-20.
355. Mamdani Е.Н. Application of fuzzy algorithm for simple dynamic plant //
Proc. IEEE. 1974. № 12. P. 1585-1588.
356. Бажанов В.Л. Универсальный микропроцессорный регулятор с USWO ал-
горитмом управления // Приборы и системы. Управление, контроль, диагности-
ка. 2000. № 1. С. 35-39.
357. Prokop R., Korbel J., Matusu R. Relay-based autotuning: a second order al-
gebraic design // IEEE International Workshop on Intelligent Signal Processing. 1-3
Sept. 2005. P. 98-103.
358. Vinsonneau B., Goodall D.P., Burnham K.J., Brie D. Combined A Priori Knowl-
edge And Structural Model Closed-Loop Identification Of High Temperature Industrial
Furnaces // 44th IEEE Conference on Decision and Control, and European Control
Conference CDC-ECC ’05. 2005. P. 8138-8143.
359. Aguero J.C., Goodwin G.C. Virtual closed loop identification: a subspace ap-
proach // 43rd IEEE Conference on Decision and Control. CDC. 14-17 Dec. 2004.
Vol. 1. P. 364-369.
360. Zheng W.X. A modified method for closed-loop identification of transfer func-
tion models // IEEE Transactions on Circuits and Systems I: Fundamental Theory and
Applications. Apr 2002. Vol. 49. Issue 4. P. 556-562.
361. Sanchez-Gasca J.J., Clark K., Miller N.W., Okamoto H., Kurita A., Chow J.H.
Identifying linear models from time domain simulations // IEEE Computer Applications
in Power. Apr 1997. Vol. 10. Issue 2. P. 26-30.
362. Tsai P.-У., Huang H.-С., Chuang S.-J., Chen Y.-J., Hwang R.-C. The model
reference control by adaptive PID-like fuzzy-neural controller // 2005 IEEE International
Conference on Systems. Man and Cybernetics. 10-12 Oct. 2005. Vol. 1. P. 239-244.
363. Yamamoto T., Kaneda M., Oki T., Watanabe E., Tanaka K. Intelligent tuning
PID controllers // IEEE International Conference on Systems. Man and Cybernetics.
1995. ’Intelligent Systems for the 21st Century’. 22-25 Oct. 1995. Vol. 3. P. 2610-2615.
364. Takagi S.-L, Oki T., Yamamoto T., Kaneda M. A skill-based PID controller
using artificial neural network // 1997 IEEE International Conference on Systems. Man.
and Cybernetics. 1997. ’Computational Cybernetics and Simulation’. 12-15 Oct 1997.
Vol. 5. P. 4454-4459.
578
Литература
365. Swiniarski R.W. Neural network based self-tuning PID controller with Fourier
transformation of temporal patterns // Industrial Electronics Society. IECON ’90., 16th
Annual Conference of IEEE. 27-30 Nov. 1990. P. 1227-1232.
366. Yongquan Y., Ying H., Bi Z.. A PID neural network controller // Proceed-
ings of the International Joint Conference on Neural Networks. 20-24 July 2003. Vol. 3.
P. 1933-1938.
367. Asano M., Yamamoto T., Oki T., Kaneda M. A design of neural-net based
predictive PID controllers // 1999 IEEE International Conference on Systems. Man. and
Cybernetics. 1999. Vol. 4. P. 1113-1118.
368. Iwasa T., Morizumi N., Omatu S. Temperature control in a batch process by
neural networks // The 1998 IEEE International Joint Conference on Neural Networks
Proceedings. 4-9 May 1998. Vol. 2. P. 992-995.
369. Yu W.-S., Lu T.-C. PID controller design using dynamical neural networks
Neural Networks Proceedings // IEEE World Congress on Computational Intelligence.
4-9 May 1998. Vol. 3. P. 2131-2135.
370. Li Q., Cheng Z., Qian J. Self-learning fuzzy PID controller based on neural
networks // Proceedings of the American Control Conference. 21-26 Jun 1998. Vol. 3.
P. 1860-1861.
371. Tan Y., Dang X., van Cauwenberghe A. Generalised nonlinear PID controller
based on neural networks // Information, Decision and Control. IDC 99. Proceedings.
1999. P. 519-524.
372. Yang T.-M., Xiong S.-B. Neural network based online self-learning adaptive
PID control for automatic ranging cutting height of shearer // Proc. 2002 International
Conference on Machine Learning and Cybernetics. 2002. Vol. 2. P. 857-859.
373. Zhang Y., Chen Z.-Q., Yang P., Yuan Z.-Z. Neural network-based PID predictive
control for nonlinear time-delay systems // Proceedings of 2004 International Conference
on Machine Learning and Cybernetics. 26-29 Aug. 2004. Vol. 2. P. 1014-1018.
374. Yongquan Y., Ying H., Tao Z. To tune the dynamic parameters of neural PID
controller by the intelligent learning algorithm // 2005 IEEE International Conference
on Mechatronics and Automation. 29 July-1 Aug. 2005. Vol. 3. P. 1521-1526.
375. Zhang J., Yu D., Qi S. Structural research of fuzzy PID controllers // Inter-
national Conference on Control and Automation. ICCA ’05. 26-29 June 2005. Vol. 2.
P. 1248-1253.
376. Akhyar S., Omatu S. Self-tuning PID control by neural-networks // Proceed-
ings of 1993 International Joint Conference on Neural Networks. IJCNN ’93-Nagoya.
25-29 Oct. 1993. Vol. 3. P. 2749-2752.
377. Tan Y., Dang X., van Cauwenberghe A. A neural network based nonlinear PID
controller using PID gradient training // Proceedings of the 1999 IEEE International
Symposium on Intelligent Control/Intelligent Systems and Semiotics. 1999. P. 29-33.
378. Yongquan Y., Ying H., Bi Z. The dynamic fuzzy method to tune the weight
factors of neural fuzzy PID controller // 2004 IEEE International Joint Conference on
Neural Networks. 25-29 July 2004. Vol. 3. P. 2397-2402.
379. Yao L., Lin C.-С.. Design of a self tuning fuzzy PID controller by the accumulat-
ed genetic algorithm // 2002 IEEE International Conference on Industrial Technology.
2002. IEEE ICIT ’02. Vol. 1. P. 649-654.
Литература
579
380. Sun X., Wu J., Wang H. Nonlinear PID controller design based on GA //
Proceedings of the 4th World Congress on Intelligent Control and Automation. 2002.
Vol. 2. P. 1444-1447.
381. Kim D.H. Comparison of PID controller tuning of power plant using im-
mune and genetic algorithms // 2003 IEEE International Symposium on Computa-
tional Intelligence for Measurement Systems and Applications. CIMSA ’03. 29-31 Ju-
ly 2003. P. 169-174.
382. Popov A., Farag A., Werner H. Tuning of a PID controller Using a Multi-
objective Optimization Technique Applied to A Neutralization Plant // 44th IEEE Con-
ference on Decision and Control. 2005 and 2005 European Control Conference. CDC-
ECC ’05. 12-15 Dec. 2005. P. 7139-7143.
383. Yongquan Y., Ying H., Minghui W., Bi Z., Guokun Z. Fuzzy neural PID con-
troller and tuning its weight factors using genetic algorithm based on different location
crossover // 2004 IEEE International Conference on Systems, Man and Cybernetics.
10-13 Oct. 2004. Vol. 4. P. 3709-3713.
384. Kim D.H., Cho J.H., Robust tuning for disturbance rejection of PID controller
using evolutionary algorithm // IEEE Annual Meeting on Fuzzy Information. Processing
NAFIPS ’04. 27-30 June 2004. Vol. 1. P. 248-253.
385. Cao J.-Y., Liang J., Cao B.-G. Optimization of fractional order PID controllers
based on genetic algorithms // Proceedings of 2005 International Conference on Machine
Learning and Cybernetics. 18-21 Aug. 2005. Vol. 9. P. 5686-5689.
386. Obika M., Yamamoto T. An evolutionary design of robust PID controllers
// 2005 IEEE International Conference on Mechatronics and Automation. 29 July -
1 Aug. 2005. Vol. 1. P. 101-106.
387. Mohamed F.A., Koivo H.N. Diesel Engine Systems with Genetic Algorithm
Self Tuning PID Controller / / 2005 International Conference on Future Power Sys-
tems. 16-18 Nov. 2005. P. 1-5.
388. Yourui H., Xiuqiao C., Yihua H. Optimization for Parameter of PID Based
on DNA Genetic Algorithm // International Conference on Neural Networks and Brain.
ICNN&B ’05. 13-15 Oct. 2005. Vol. 2. P. 859-861.
389. Hu H., Hu Q., Lu Z., Xu D. Optimal PID controller design in PMSM servo
system via particle swarm optimization // Industrial Electronics Society. 2005. IECON
2005. 32nd Annual Conference of IEEE. 6-10 Nov. 2005. P. 5.
390. Chiu S. Using fuzzy logic in control applications: beyond fuzzy PID control //
IEEE Control Systems Magazine. Oct 1998. Vol. 18. Issue 5. P. 100-104.
391. Hu B., Mann G.K.I., Gosine R.G. New methodology for analytical and op-
timal design of fuzzy PID controllers // IEEE Transactions on Fuzzy Systems. Oct
1999. Vol. 7. Issue 5. P. 521-539.
392. Visioli A. Fuzzy logic based set-point weight tuning of PID controllers //
IEEE Transactions on Systems. Man and Cybernetics. Part A. Nov 1999. Vol. 29. Is-
sue 6. P. 587-592.
393. Tang K.S., Man K.F., Chen G., Kwong S. An optimal fuzzy PID controller //
IEEE Transactions on Industrial Electronics. Aug 2001. Vol. 48. Issue 4. P. 757-765.
394. Ho S.-J., Shu L.-S., Ho S.-Y. Optimizing fuzzy neural networks for tuning PID
controllers using an orthogonal simulated annealing algorithm OSA / / IEEE Transactions
on Fuzzy Systems. June 2006. Vol. 14. Issue 3. P. 421-434.
580
Литература
395. Hu B.-G., Mann G.K.I., Gosine R.G. A systematic study of fuzzy PID control-
lers-function-based evaluation approach // IEEE Transactions on Fuzzy Systems. Oct
2001. Vol. 9. Issue 5. P. 699-712.
396. Mann G.K.I., Hu B.-G., Gosine R.G. Fuzzy PID controller structures // IEEE
1997 Canadian Conference on Electrical and Computer Engineering. 25-28 May 1997.
Vol. 2. P. 788-791.
397. Mann G.K.L, Hu B.-G., Gosine R.G. Two-level tuning of fuzzy PID controllers
// IEEE Transactions on Systems. Man and Cybernetics. Part B. Apr 2001. Vol. 31.
Issue 2. P. 263-269.
398. Li H.-X., Gatland H.B. Conventional fuzzy control and its enhancement //
IEEE Transactions on Systems. Man and Cybernetics. Part B. Oct 1996. Vol. 26. Is-
sue 5. P. 791-797.
399. Lee C.C. Fuzzy logic in control systems: fuzzy logic controller // IEEE Trans-
actions on Systems. Man and Cybernetics. Mar/Apr 1990. Vol. 20. Issue 2. P. 404-418.
400. Sio K.C., Lee C.K. Stability of fuzzy PID controllers // IEEE Transactions on
Systems. Man and Cybernetics. Part A. Jul 1998. Vol. 28. Issue 4. P. 490- 495.
401. Vermeulen H.J., Strauss J.M. Off-line identification of an open-loop automatic
voltage regulator using pseudo-random binary sequence perturbations // AFRICON.
IEEE. 1999. Vol. 2. P. 799-802.
402. Braun M.W., Rivera D.E., Stenman A., Foslien W., Hrenya C. Multi-level
pseudo-random signal design and «model-on-demand» estimation applied to nonlinear
identification of a RTP wafer reactor // Proceedings of the 1999 American Control Con-
ference. 1999. Vol. 3. P. 1573-1577.
403. Zhu G., Skelton R.E., Li P. Q-Markov cover identification using pseudo random
binary signals // American Control Conference. 29 June - 1 July 1994. Vol. 1. P. 515-519.
404. Wang D., Johnson C.D. A comparison study of some impulse-response iden-
tification methods // Proceedings of Twenty-First Southeastern Symposium on System
Theory. 1989. 26-28 Mar 1989. P. 52-56.
405. Schrama R.J.P. Accurate identification for control: the necessity of an iter-
ative scheme // IEEE Transactions on Automatic Control. Jul 1992. Vol. 37. Issue
7. P. 991-994.
406. Boiko I. Autotune identification via the locus of a perturbed relay system
approach // Proceedings of the American Control Conference. 4-6 June 2003. Vol. 5.
P. 4385-4390.
407. Wei T., Songjiao S., Mengxiao W. Model identification and PID control of long
time-delay processes // Proceedings of the 4th World Congress on Intelligent Control
and Automation. 2002. Vol. 2. P. 900-904.
408. Hemerly E.E. PC-based packages for identification, optimization, and adaptive
control // IEEE Control Systems Magazine*. Feb. 1991. Vol. 11. Issue 2. P. 37-43.
409. Бажанов В.Л., Вайшнарас A.B. Программа «ММ-настройка» для определе-
ния параметров ПИД-регуляторов по методу масштабирования // Автоматизация
в промышленности. 2007. № 6. С. 60-64.
410. Li Y., Ang К.Н., Chong G.C.Y. Patents, software, and hardware for PID con-
trol: an overview and analysis of the current art // IEEE Control Systems Magazine.
Feb. 2006. Vol. 26. Issue 1. P. 42-54.
Литература
581
411. Oviedo J.J.E., Boelen T., van Overschee P. Robust advanced PID control
(RaPID): PID tuning based on engineering specifications // IEEE Control Systems
Magazine. Feb. 2006. Vol. 26. Issue 1. P. 15-19.
412. Gu J.-J., Shen L., Zhang L.-Y. Application of Internal Model and Self-Adaptive
PSD Controller in the Main Steam Temperature System // Proceedings of 2005 Inter-
national Conference on Machine Learning and Cybernetics. 18-21 Aug. 2005. Vol. 1.
P. 570-573.
413. Visioli A. Model-based PID tuning for high-order processes: when to approx-
imate // IEEE Conference on Decision and Control. 2005 and 2005 European Control
Conference. CDC-ECC ’05. 12-15 Dec. 2005. P. 7127-7132.
414. Shi J., Lee W.S. Set point response and disturbance rejection tradeoff for
second-order plus dead time processes // 5th Asian Control Conference. 20-23 July
2004. Vol. 2. P. 881-887.
415. Varol H.A., Bingul Z. A new PID tuning technique using ant algorithm. —
Proceedings of the 2004 American Control Conference. Vol. 3. 30 June - 2 July 2004.
P. 2154-2159.
416. Yang P., Peng D.-G., Yang Y.-H., Wang Z.-P. Neural networks internal model
control for water level of boiler drum in power station // Proceedings of 2004 Inter-
national Conference on Machine Learning and Cybernetics. 26-29 Aug. 2004. Vol. 5.
P. 3300-3303.
417. Yukitomo M., Baba Y., Shigemasa T., Ogawa M., Akamatsu K., Amano S.
A model driven PID control system and its application to chemical processes // Pro-
ceedings of the 41st SICE Annual Conference. 5-7 Aug. 2002. Vol. 4. P. 2656-2660.
418. Shigemasa T., Yukitomo M., Kuwata R. A model-driven PID control system
and its case studies // Proceedings of the 2002 International Conference on Control
Applications. 2002. Vol. 1. P. 571-576.
419. Fink A., Nelles O. Nonlinear internal model control based on local linear neural
networks // 2001 IEEE International Conference on Systems. Man. and Cybernetics.
2001. Vol. 1. P. 117-122.
420. Li H.-X., Zhang L., Cai K.-Y., Chen G. An improved robust fuzzy-PID controller
with optimal fuzzy reasoning // IEEE Transactions on Systems. Man and Cybernetics.
Part B. Dec. 2005. Vol. 35. Issue 6. P. 1283-1294.
421. Ho S.-H., Ho S.-Y., Shu L.-S. OSA: orthogonal simulated annealing algorithm
and its application to designing mixed H/sub 2//Н/sub /spl infin// optimal controllers
// IEEE Transactions on Systems. Man and Cybernetics. Part A. Sept. 2004. Vol. 34.
Issue 5. P. 588-600.
422. Apkarian P., Noll D. Nonsmooth H/sub/spl infin// synthesis // IEEE Trans-
actions on Automatic Control. Jan. 2006. Vol. 51. Issue 1. P. 71-86.
423. Leva A., Piroddi L. Model-based PID autotuning enhanced by neural struc-
tural identification // Proceedings of the 2004 American Control Conference. 30 June
- 2 July 2004. Vol. 3. P. 2427-2432.
424. Шубладзе A.M., Гуляев C.B., Малахов B.A., Ольшванг В.Р., Кузнецов
С.И. Автоматическая настройка и адаптация в промышленных ПИД регуляторах
// Приборы и системы. Управление, контроль, диагностика. 2007. № 13. С. 26-30.
425. Mohan В.М., Sinha A. A simplest fuzzy PID controller: analytical structure
and stability analysis // India Annual Conference. Proceedings of the IEEE INDICON
2004. First. 20-22 Dec. 2004. P. 288-293.
582
Литература
426. Штейнберг Ш.Е., Залуцкий И.Е. Адаптация стандартных регуляторов к
условиям эксплуатации в промышленных системах регулирования // Промышленные
АСУ и контроллеры. 2003. № 4. С. 11-14.
427. Shen J.-C., Chiang Н.-К. PID tuning rules for second order systems // 5th
Asian Control Conference. 20-23 July 2004. Vol. 1. P. 472-477.
428. Ding S.-F., Shi Z.-Z., Wang V.-С., Li S.-S. A novel feature extraction algorithm
// Proceedings of 2005 International Conference on Machine Learning and Cybernetics.
18-21 Aug. 2005. Vol. 3. P. 1762-1767.
429. Prodic A., Maksimovic D. Design of a digital PID regulator based on look-
up tables for control of high-frequency DC-DC converters // 2002 IEEE Workshop on
Computers in Power Electronics. Proceedings. 3-4 June 2002. P. 18-22.
430. Солдатов B.B., Уханов П.Е. Адаптивная настройка систем управления с
ПИД регуляторами в условиях информационной неопределенности // Приборы и
системы управления. Управление, конроль, диагностика. 2004. № 8. С. 16-20.
431. Silva G.J., Datta A., Bhattacharyya S.P. New results on the synthesis of
PID controllers // IEEE Transactions on Automatic Control. Feb 2002. Vol. 47. Is-
sue 2. P. 241-252.
432. Grimm G., Messina M.J., Tuna S.E., Teel A.R. Model predictive control: for
want of a local control Lyapunov function, all is not lost // IEEE Transactions on Au-
tomatic Control. May 2005. Vol. 50. Issue 5. P. 546-558.
433. Calcev G., Gorez R. Iterative technique for PID controller tuning. — Proceed-
ings of the 34th IEEE Conference on Decision and Control. 13-15 Dec 1995. Vol. 3.
P. 3209-3210.
434. Paraskevopoulos P.N., Pasgianos G.D., Arvanitis K.G. New tuning and iden-
tification methods for unstable first order plus dead-time processes based on pseudo-
derivative feedback control // IEEE Transactions on Control Systems Technology. May
2004. Vol. 12. Issue 3. P. 455-464.
435. Rad A.B., Lo W.L., Tsang K.M. Self-tuning PID controller using Newton-
Raphson search method // IEEE Transactions on Industrial Electronics. Oct 1997.
Vol. 44. Issue 5. P. 717-725.
436. Skoczowski S., Domek S., Pietrusewicz K., Broel-Plater B. A method for im-
proving the robustness of PID control // IEEE Transactions on Industrial Electronics.
Dec. 2005. Vol. 52. Issue 6. P. 1669-1676.
437. Takatsu H., Itoh T. Future needs for control theory in industry-report of the
control technology survey in Japanese industry // IEEE Transactions on Control Systems
Technology. May 1999. Vol. 7. Issue 3. P. 298-305.
438. Yang Y., Xue Y., Huang J. Simultaneous PID self-tuning and control // Pro-
ceedings of the 2004 IEEE International Symposium on Intelligent Control. 2-4 Sept.
2004. Vol. 2. P. 363-367.
439. Yamamoto T., Fujii K., Kaneda M. A self-tuning PID controller and its applica-
tion for an ethylene cracking furnace // 1996 IEEE Conference on Emerging Technologies
and Factory Automation. EFTA ’96. Proceedings. 18-21 Nov 1996. Vol. 1. P. 275-281.
440. Hwang H.-S., Choi J.-N., Lee W.-H., Kim J.-K. A tuning algorithm for the PID
controller utilizing fuzzy theory // International Joint Conference on Neural Networks.
IJCNN ’99. 1999. Vol. 4. P. 2210-2215.
Литература
583
441. Escamilla-Ambrosio P.J., Mort N. A novel design and tuning procedure for
PID type fuzzy logic controllers // 2002 First International IEEE Symposium on In-
telligent Systems. 2002. Vol. 1. P. 36-41.
442. O’Dwyer A. PID compensation of time delayed processes 1998-2002: a sur-
vey // Proceedings of the 2003 American Control Conference. 4-6 June 2003. Vol. 2.
P. 1494-1499.
443. Astrom K.J., Lee Т.Н., Tan K.K., Johansson K.H. Recent advances in re-
lay feedback methods — A survey // IEEE International Conference on Systems. Man
and Cybernetics. 1995. «Intelligent Systems for the 21st Century». 22-25 Oct 1995.
Vol. 3. P. 2616-2621.
444. Hang C.C., Wang Q.-G., Yang X.-P. A modified smith predictor for a pro-
cess with an integrator and long dead-time // The 2002 International Conference on
Control and Automation. ICCA. Final Program and Book of Abstracts. June 16-19.
2002. P. 134-134.
445. Wells C.H., Larson R.E. Application of combined optimum control and estima-
tion theory to direct digital control // Proceedings of the IEEE. Jan. 1970. Vol. 58.
Issue 1. P. 16-22.
446. Bahill A. A simple adaptive Smith-predictor for controlling time-delay systems:
A tutorial // IEEE Control Systems Magazine. May 1983. Vol. 3. Issue 2. P. 16-22.
447. Hagglund T. A predictive PI controller for processes with long dead times //
IEEE Control Systems Magazine. Feb 1992. Vol. 12. Issue 1. P. 57-60.
448. Astrom K.J., Hang C.C., Lim B.C. A new Smith predictor for controlling a pro-
cess with an integrator and long dead-time // IEEE Transactions on Automatic Control.
Feb 1994. Vol. 39. Issue 2. P. 343-345.
449. Matausek M.R., Micic A.D. A modified Smith predictor for controlling a process
with an integrator and long dead-time // IEEE Transactions on Automatic Control.
Aug 1996. Vol. 41. Issue 8. P. 1199-1203.
450. Stojic M.R., Matijevic F.S., Draganovic L.S. A robust Smith predictor modified
by internal models for integrating process with dead time // IEEE Transactions on
Automatic Control. Aug 2001. Vol. 46. Issue 8. P. 1293-1298.
451. Gao W., Li Y., Liu G., Zhang T. An adaptive fuzzy Smith control of time-
varying processes with dominant and variable delay // Proceedings of the 2003 American
Control Conference. 4-6 June 2003. Vol. 1. P. 220-224.
452. Ivanova E., Hadjiski M. Rules based adaptation of Smith predictor // Intelligent
Systems. Proceedings. First International IEEE Symposium. 2002. Vol. 3. P. 26-30.
453. Wei T., Songjiao S., Mengxiao W. A novel Smith predictor with double-
controller structure // Proceedings of the 2002 American Control Conference. 2002.
Vol. 6. P. 5074-5079.
454. Ziyuan H., Minrui F., Zhiqiang H. Smith online identification predictive control
and its application in STM // Proceedings of the 4th World Congress on Intelligent
Control and Automation. 2002. Vol. 3. P. 2254-2257.
455. Ganjefar S., Momeni H., Sharifi J.F., Beheshti H.M.T. Behavior of Smith
predictor in teleoperation systems with modeling and delay time errors // Proceed-
ings of 2003 IEEE Conference on Control Applications. CCA 2003. 23-25 June 2003.
Vol. 2. P. 1176-1180.
584
Литература
456. Guo Q., Wang D., Han P., Yu P. Virtual Cascade PID controller with strong
robustness // IEEE International Conference on Systems. Man and Cybernetics. 5-8
Oct. 2003. Vol. 1. P. 654-659.
457. Feng D.-M., Pan F., Han R.-C. Improved self-adaptive Smith predictive control
scheme for time-delay systems // 2002 International Conference on Machine Learning
and Cybernetics. 2002. Vol. 1. P. 463-466.
458. Wu S., Watanabe K., Muramatsu E., Ariga Y., Endo S. Robust stability of
approximate Smith predictor control systems // SICE 2004 Annual Conference. 4-6
Aug. 2004. Vol. 2. P. 1522-1527.
459. Mu J., Liu G.P., Rees D. Design of robust networked predictive control systems
// Proceedings of the 2005 American Control Conference. 8-10 June 2005. P. 638-643.
460. Ren X.M., Rad A.B., Lo W.L., Chan P.T. Adaptive H/sub 2/ optimal con-
trol based on Smith predictor for continuous-time systems with unknown time delay
// International Conference on Control and Automation. ICC A ’05. 26-29 June 2005.
Vol. 1. P. 159-164.
461. Ahn S.H., Sim B.S., Chi D.Y., Park K.N., Lee C.Y., Kim Y.J. Smith predictor
control for water pressure control system with time delay // 30th Annual Conference of
IEEE Industrial Electronics Society. IECON. 2-6 Nov. 2004. Vol. 1. P. 663-666.
462. Natori K., Tsuji T., Ohnishi K., Hace A., Jezernik K. Robust bilateral control
with Internet communication // 30th Annual Conference of IEEE Industrial Electronics
Society. IECON. 2-6 Nov. 2004. Vol. 3. P.2321-2326.
463. Lee B.-K., Chen H.-W., Chen B.-S. Power control of cellular radio systems
via robust Smith prediction filter // IEEE Transactions on Wireless Communications.
Sept. 2004. Vol. 3. Issue 5. P. 1822-1831.
464. Yang Q., Xue Y., Wu Q. Stabilization and robust control of a class of processes
with long time delay // 30th Annual Conference of IEEE Industrial Electronics Society.
IECON. 2-6 Nov. 2004. Vol. 2. P. 1304-1308.
465. Huang J.-J., DeBra D.B. Automatic Smith-predictor tuning using optimal pa-
rameter mismatch // IEEE Transactions on Control Systems Technology. May 2002.
Vol. 10. Issue 3. P. 447-459.
466. Kristiansson B., Lennartson B. Robust PI and PID controllers including Smith
predictor structure // Proceedings of the 2001 American Control Conference. 2001.
Vol. 3. P. 2197-2202.
467. Vieira J., Mota A. Smith predictor based neural fuzzy controller applied in
a water gas heater that presents a large time-delay and load disturbances // Pro-
ceedings of 2003 IEEE Conference on Control Applications. CCA. 23-25 June 2003.
Vol. 1. P. 362-367.
468. Abe N., Yamanaka K. Smith predictor control and internal model control — a
tutorial // SICE 2003 Annual Conference. 4-6 Aug. 2003. Vol. 2. P. 1383-1387.
469. Zhu Y., Liu X., Qian J. Adaptive predictive PID control scheme of ideal internal
thermally coupled distillation columns // Fifth World Congress on Intelligent Control
and Automation. WCICA. 15-19 June 2004. Vol. 4. P. 3441-3444.
470. Xu J., Feng X. Design of adaptive fuzzy PID tuner using optimization method
// Fifth World Congress on Intelligent Control and Automation. WCICA. 15-19 June
2004. Vol. 3. P. 2454-2458.
Литература
585
471. Moon Y.-H., Ryu H.-S., Choi B.-K., Cho B.-H. Modified PID load-frequency
control with the consideration of valve position limits // IEEE Power Engineering Society
1999 Winter Meeting. 31 Jan - 4 Feb 1999. Vol. 1. P. 701-706.
472. Aratani T. PID control system fed back along with squares of control error
and its derivative-optimum design of nonlinear PID controller // Proceedings of the 41st
SICE Annual Conference SICE. 5-7 Aug. 2002. Vol. 4. P. 2628-2631.
473. Baba Y., Shigemasa T., Yukitomo M., Kojima F., Takahashi M., Sasamura E.
Model-driven PID control system in single-loop controller // SICE 2003 Annual Con-
ference. 4-6 Aug. 2003. Vol. 1. P. 187-190.
474. Yukitomo M., Shigemasa T., Baba Y., Kojima F. A two degrees of freedom
PID control system, its features and applications // 5th Asian Control Conference.
20-23 July 2004. Vol. 1. P. 456-459.
475. Omatu S., Iwasa T., Yoshioka M. Skill-based PID control by using neural net-
works // 1998 IEEE International Conference on Systems. Man. and Cybernetics. 11-14
Oct 1998. Vol. 2. P. 1972-1977.
476. Malki H.A., Misir D. Determination of the control gains of a fuzzy PID controller
using neural networks // Proceedings of the Fifth IEEE International Conference on
Fuzzy Systems. 8-11 Sep 1996. Vol. 2. P. 1303-1307.
477. Miller R.M., Kwok K.E., Shah S.L., Wood R.K. Development of a stochastic
predictive PID controller // Proceedings of the American Control Conference. 21-23
Jun 1995. Vol. 6. P. 4204-4208.
478. Wang P., Kwok D.P. Optimal fuzzy PID control based on genetic algorithm
// Proceedings of the 1992 International Conference on Industrial Electronics. Control.
Instrumentation, and Automation. 1992. ’Power Electronics and Motion Control’. 9-
13 Nov 1992. P. 977-981.
479. Nakano K., Yamamoto T., Hinamoto T. A design of robust self-tuning GPC-
based PID controllers // The 29th Annual Conference of the IEEE Industrial Electronics
Society. IECON ’03. 2-6 Nov. 2003. Vol. 1. P. 285-290.
480. Chen J.-X., Li W.. Application of fuzzy control PID algorithm in temperature
controlling systems // 2003 International Conference on Machine Learning and Cyber-
netics. 2-5 Nov. 2003. Vol. 4. P. 2601-2604.
481. Yang Y., Wang W.-G., Yu D.-J., Ding G. A fuzzy parameters adaptive PID
controller design of digital positional servo system // 2002 International Conference on
Machine Learning and Cybernetics. 2002. Vol. 1. P. 310-314.
482. Huang Y., Yasunobu S. A general practical design method for fuzzy PID control
from conventional PID control // The Ninth IEEE International Conference on Fuzzy
Systems. FUZZ IEEE. 2000. Vol. 2. P. 969-972.
483. IEC 61131-3(2003). Programmable controllers — Part 3: Programming lan-
guages. Опубликован 31.01.2003.
484. Webb J.W., Reis R.A. Programmable logic controllers. Principle and applica-
tions. 5th ed. — New Jersey: Pearson Education Inc., Upper Saddle River, 2003. — 460 p.
485. Ицкович Э.Л. Конкурентоспособность российских производителей кон-
троллеров на рынке средств автоматизации производства // Промышленные кон-
троллеры АСУ. 2008. № 2. С. 4-10.
486. Корнеев В.В., Киселев А.В. Современные микропроцессоры. 3-е изд. —
СПб.: БХВ-Петербург, 2003. — 448 с.
586
Литература
487. IEC/TR 61131-8(2000) Programmable controllers — Part 8: Guidelines for the
application and implementation of programming languages. Опубликован 01.01.2000.
488. ГОСТ P 51739-2001. Интерфейс магистральный последовательный систе-
мы электронных модулей. Тестирование опытных образцов интерфейсного моду-
ля в режиме контроллера шины. Общие требования к методам контроля. Вве-
ден 01.01.2002.
489. ГОСТ Р 51840-2001. Программируемые контроллеры. Общие положения
и функциональные характеристики.
490. ГОСТ Р 51841-2001. Программируемые контроллеры. Общие технические
требования и методы испытаний.
491. Денисенко В.В. Применение MS Excel в качестве SCADA системы // Ком-
поненты и технологии. 2001. К* 6. С. 96-98.
492. Бабенко Ю., Денисенко В.В. Цифровая система термометрии элеватора
«Грейн» // Хлебопродукты. 2007. № 11. С. 46-48.
493. ГОСТ Р 52074-2003. Интерфейс магистральный последовательный систе-
мы электронных модулей. Тестирование серийных образцов интерфейсных моду-
лей. функционирующих в режиме контроллера шины. Общие требования к ме-
тодам контроля.
494. Петров И.В. Программируемые контроллеры. Стандартные языки и прие-
мы прикладного проектирования / Под ред. В.П. Дьяконова. — М.: СОЛОН Пресс,
2004. — 256 с.
495. Денисенко В.В., Кильметов Р.С., Метелкин Е.Е., Трубачев О.Е., Халяв-
ко А.Н. Распределенные системы сбора данных RealLab! // Электронные компо-
ненты. 2007. № 4. С. 1-6.
496. Fischer Н. etc. The COMPASS Data Acquisition System // IEEE Trans, on
Nuclear Science. April 2002. Vol. 49, № 2. P. 443-447.
497. Продукция НИЛ АП // Приборостроение и средства автоматизации: Эн-
циклопедический справочник. № 12. — М.: Научтехлитиздат, 2004. С. 59-66.
498. ГОСТ 26.011-80. Средства измерения и автоматизации. Сигналы тока и
напряжения электрические непрерывные, входные и выходные.
499. ГОСТ Р 8.585-2001. ГСИ. Термопары. Номинальные статические харак-
теристики преобразования.
500. ГОСТ 6651-94. Термопреобразователи сопротивления. Общие технические
требования и методы испытания.
501. ГОСТ 20420-75 Тензорезисторы. Термины и определения.
502. ГОСТ 21616-91 Тензорезисторы. Общие технические условия.
503. Денисенко В.В., Ерещенко П.В., Кильметов Р.С., Метелкин Е.Е., Халявко
А.Н., Шальнев К.П. Модули ввода-вывода RealLab! серия NL // Приборы и систе-
мы. Управление. Контроль. Диагностика. 2005. No 1. С. 54-57.
504. Noise Control in Strain Gage Measurements. — Vishey Micro-Measurements.
Tech. Note TN-501-2. 2007. — 8 p.
505. Белевцев A.B., Богатов B.B., Каржавин A.B., Петров Д.В., Улановский
А.А. Термоэлектрические преобразователи температуры. Теория, практика, разви-
тье (обзор). — Обнинск: ПК «Тесей», 2003. — 57 с.
506. Олейник Б.М. Приборы и методы температурных измерений. — М.: Из-
дательство стандартов, 1987. — 293 с.
Литература
587
507. Денисенко В.В., Зексер Л.О. Цифроуправляемый резистор. А.с. 1509942. —
Оп. в БИ 1989. № 35.
508. Денисенко В.В., Мережин Н.И. Кодоуправляемый резистор. А.с. 1339537. —
Оп. в БИ. 1987. № 35.
509. Temperature-Electromotive Force Reference Functions and Tables for the
Letter-Designated Thermocouple Types Based on the ITS-90. Nat. Inst. Stand. Tech-
nol. Monograph 175, 1993. — 630 p.
510. Milanovi’c V., Gaitan M., Zaghloul M. E. Micromachined Thermocouple Mi-
crowave Detector by Commercial CMOS Fabrication // IEEE Trans, on Microwave The-
ory and Techniques. May 1998. Vol. 46. № 5. P. 550-553.
511. Dashevsky Z., Rabinovich D. Ultrafast response and high sensitivity semicon-
ductor thermocouple // 15th IEEE Conf, on Thermoelectrics. 1996. P. 321-325.
512. Miyazaki K., Takamiya T., Tsukamoto H., Fabrication of micro-thin film ther-
mocouples // 22nd Int. Conf, on Thermoelectrics. 2003. P. 673-676.
513. Следящие проводы: В 3-т. 2-е изд. / Под ред. Б. К. Чемоданова. Т. 1:
Теория и проектирования следящих приводов. — М.: Изд-во МГТУ им. Н.Э. Ба-
умана, 1999. — 904 с.
514. Семенов Л.И., Теслер Л.А. Взрывобезопасность элеваторов, мукомольных
и комбикормовых заводов. — М.: ВО «Агропромиздат», 1991. — 368 с.
515. Денисенко В.В., Литвинов Н.Ю., Метелкин Е.Е., Трубачев О.Е., Халявко
А.Н. Модули RealLab! искробезопасной серии NL-Ex // Автоматизация в промыш-
ленности. 2007. № 6. С. 28-31.
516. ГОСТ Р 51330.0-99. Электрооборудование взрывозащищенное. Часть 0.
Общие требования.
517. ГОСТ Р МЭК 61241-1-1-99. Электрооборудование, применяемое в зонах,
опасных по воспламенению горючей пыли. Часть 1. Электрооборудование, защи-
щенное оболочками и ограничением температуры поверхности. Раздел 1. Техни-
ческие требования.
518. ГОСТ Р 51330.10-99. Электрооборудование взрывозащищенное. Часть 11.
Искробезопасная электрическая цепь i.
519. Жданкин В. Оценка искробезопасности электрических цепей // Совре-
менные технологии автоматизации. 200???. № 36. С. 72-80.
520. ГОСТ Р 51330.13-99. Электрооборудование взрывозащищенное. Часть 14.
Электроустановки во взрывоопасных зонах (кроме подземных выработок).
521. МЭК 61508-5(1998). Функциональная безопасность электрических, элек-
тронных, программируемых электронных систем, связанных с безопасностью.
Часть 5. Примеры методов для определения уровней целостности защиты. Оп.
01.12.1998.
522. МЭК 61508-7(2000). Функциональная безопасность электрических, элек-
тронных, программируемых электронных систем, обеспечивающих безопасность.
Часть 7. Обзор методов и средств измерения. Оп. 01.03.2000.
523. МЭК 61508-7(2000). Функциональная безопасность электрических, элек-
тронных, программируемых электронных систем, обеспечивающих безопасность.
Часть 7. Обзор методов и средств измерения. Оп. 01.03.2000.
524. МЭК 62061(2005). Безопасность машин и механизмов. Функциональная
безопасность электрических, электронных и программируемых электронных систем
контроля, связанных с безопасностью. Оп. 27.01.2005.
588
Литература
525. Смит Д.Д., Симпсон К.Д.Л. Функциональная безопасность. — М.: Изда-
тельский Дом «Технологии», 2004. — 208 с.
526. IEC 61511-l(2003)/Cor.l(2004). Functional safety — Safety instrumented sys-
tems for the process industry sector — Part 1: Framework, definitions, system, hard-
ware and software requirements.
527. IEC 61511-2(2003) Functional safety — Safety instrumented systems for the
process industry sector — Part 2: Guidelines for the application of IEC 61511-1.
528. IEC 61511-3(2003) Functional safety — Safety instrumented systems for the
process industry sector — Part 3: Guidance for the determination of the required safe-
ty integrity levels.
529. Макдональд Д. Промышленная безопасность, оценивание риска и системы
аварийного останова. — М.: ООО «Группа ИДТ», 2007. — 416 с.
530. Липаев В.В. Технологические процессы и стандарты обеспечения функ-
циональной безопасности в жизненном цикле программных средств // Jet Info.
2004. № 8 (135).
531. Липаев В.В. Функциональная безопасность программных средств. — М.:
Синтег, 2004. — 340 с.
532. ГОСТ Р ИСО 13849-1-2003. Элементы систем управления, связанные с
безопасностью. Часть 1. Общие принципы конструирования.
533. РД 153-39.4-087-01. Автоматизация и телемеханизация магистральных
нефтепроводов. Основные положения. — Минэнерго. — 2001.
534. ПБ 09-540-03. Общие правила взрывобезопасности для взрывопожароопас-
ных химических, нефтехимических и нефтеперерабатывающих производств.
535. Федеральный закон «О промышленной безопасности опасных производ-
ственных объектов». — 2-е изд. с изм. — М.: ФГУП «НТЦ по безопасности в про-
мышленности Госгортехнадзора России», 2004. — 28 с.
536. ПБ 14-586-03. Правила промышленной безопасности для взрывоопасных
производственных объектов хранения, переработки и использования растительно-
го сырья. Серия 14. Вып. 4. — ГУП «НТЦ по безопасности в промышленности
Госгортехнадзора России», 2004. — 128 с.
537. ПБ 03-517-02. Общие правила промышленной безопасности для организа-
ций. осуществляющих деятельность в области промышленной безопасности опас-
ных производственных объектов. Серия 03. Выпуск 20. — ГУП «НТЦ по безопас-
ности в промышленности Госгортехнадзора России», 2004. — 24 с.
538. РД 14-569-03. Инструкция по составлению технического паспорта взры-
вобезопасности опасного производственного объекта по хранению, переработке и
использованию сырья в агропромышленном комплексе. Серия 14. Вып. 3. — ГУП
«НТЦ по безопасности в промышленности Госгортехнадзора России», 2004. — 16 с.
539. Смелков Г.И., Черкасов В.Н., Шеститко Е.Л., Пехотиков В.А., Веревкин
В.Н., Чубарова Н.Е. Классификация и области применения электроустановок в
пожаровзрывоопасных зонах: Справочное пособие. — М.: ВНИИПО, 2001. — 112 с.
540. ПБ 09-540-03. Общие правила взрывобезопасности для взрывопожароопас-
ных химических, нефтехимических и нефтеперерабатывающих производств. Утв.
постановлением Госгортехнадзора РФ от 5 мая 2003 г. № 29.
541. НПБ 105-03. Определение категорий помещений, зданий и наружных уста-
новок по взрывопожарной и пожарной опасности. (Утв. приказом МЧС РФ от 18
июня 2003 г. № 314).
Литература
589
542. ГОСТ 14254-80. Изделия электротехнические оболочки. Степени защиты.
543. Лицензирование отдельных видов деятельности, отнесенных к компетен-
ции Госгортехнадзора России: Сборник документов. Серии 22. Выпуск 1/ Под общ.
ред. В.М. Кульечева. — М.: ФГУП «НТЦ по безопасности в промышленности Гос-
гортехнадзора России», 2002. — 152 с.
544. Инструкция о порядке выдачи разрешений на применение технических
устройств на опасных производственных объектах по хранению, переработке и ис-
пользованию сырья в агропромышленном комплексе» № 52 от 05.06.2003.
545. Правила применения технических устройств на опасных производственных
объектах (утв. постановлением Правительства РФ от 25.12.98 № 1540).
546. Закон РФ от 27 апреля 1993 г. № 4871-1 «Об обеспечении единства из-
мерений».
547. ГОСТ Р МЭК 61241-1-1-99. Электрооборудование, применяемое в зонах,
опасных по воспламенению горючей пыли. Часть 1. Электрооборудование, защи-
щенное оболочками и ограничением температуры поверхности.
548. О лицензировании отдельных видов деятельности. Федеральный закон
№ 128-ФЗ от 8 августа 2001 г.
549. ГОСТ 21.404-85. Система проектной документации для строительства. Ав-
томатизация технологических процессов. Обозначения условные приборов и средств
автоматизации в схемах.
550. ГОСТ 21.408-93. Система проектной документации для строительства.
Правила выполнения рабочей документации автоматизации технологических про-
цессов.
551. СНиП 3.05.07-85. Системы автоматизации.
552. ГОСТ Р 51330.9-99. Электрооборудование взрывозащищенное. Часть 10.
Классификация взрывоопасных зон.
553. ГОСТ Р 51330.22-99. Электрооборудование, применяемое в зонах, опасных
по воспламенению горючей пыли. Часть 3. Классификация зон.
554. ГОСТ Р 51330.13-99. Электрооборудование взрывозащищенное. Часть 14.
Электроустановки во взрывоопасных зонах (кроме подземных выработок).
555. ГОСТ 12.2.020-76* ССБТ. Электрооборудование взрывозащищенное. Тер-
мины и определения. Классификация. Маркировка.
556. ГОСТ 12.1.044-89. Пожаровзрывоопасность веществ и материалов. Номен-
клатура показателей и методы определения.
557. Положение о порядке подготовки и аттестации работников и организа-
ций. осуществляющих деятельность в области промышленной безопасности опас-
ных производственных объектов, подконтрольных Госгортехнадзору России. Утв.
Постановлением Госгортехнадзора России от 20.04.02. № 21.
558. ПБ 03-538-03. Правила сертификации электрооборудования для взрыво-
опасных сред. Серия 03. Вып. 23. — ГУП «НТЦ по безопасности в промышленно-
сти Госгортехнадзора России», 2004. — 36 с.
559. Положение о порядке оформления декларации промышленной безопас-
ности и перечне сведения, содержащихся в ней. Утв. постановлением Госгортех-
надзора России от 7.09.99 № 66 в ред. Постановления Госгортехнадзора РФ от
27.10.00 № 62.
560. ГОСТ 27.002-89. Надежность в технике. Основные понятия. Термины и
определения.
590
Литература
561. ГОСТ 15467-79. Управление качеством продукции. Основные понятия. Тер-
мины и определения.
562. SIMATIC Automation System S7-300. Fail-Safe Signal Modules. Manual. —
Siemens. Edition 04/2006. — 236 p.
563. IEEE Std 802.ID — 2004. IEEE Standard for Local and Metropolitan Area
Networks: Media Access Control (MAC) Bridges. (Revision of IEEE Std 802.1D -1998
incorporating IEEE Std 802.1t-2001; IEEE Std 802.1w-2001. Replaced by 802.1D-2004).
— IEEE, 2004. — 281 p.
564. IEEE Std 802.IQ -2005. IEEE Standard for Local and Metropolitan Area Net-
works: Virtual Bridged Local Area Networks. (Incorporates IEEE Std 802.IQ- 1998.
IEEE Std 802.1U-2001. IEEE Std 802.1v-2001. and IEEE Std 802.1s-2002). — IEEE.
2006. — 303 p.
565. IEEE Std. 802.3. IEEE standard for information technology — Telecommu-
nications and information exchange between systems — Local and metropolitan area
network — Specific requirements. Part 3: Carrier sense multiple access with collision
detection (CSMA/CD) access method and physical layer specifications // IEEE Com-
puter Society. 2005. section 1-5. — 2628 p.
566. Moxa Wite Paper. Redundancy in automation. — Moxa Networking Co., Ltd.
— 16 p. www.moxanet.com.
567. Alamouti S.M. A simple transmit diversity technique for wireless communica-
tions // IEEE J. Select. Areas Commun. Oct. 1998. Vol. 16. P. 1451-1458.
568. Paulraj A.J., Gore D.A., Nabar R.U. Bolcskei H. An overview of MIMO com-
munications — A key to gigabit wireless // Proc. IEEE. 2004. Vol. 92, № 2. P. 198-218.
569. Черкесов Г.Н. Надежность аппаратно-программных комплексов. — СПб.:
Питер, 2005. — 479 с.
570. Дианов В.Н. Диагностика и надежность автоматических систем. — М.:
МГИУ, 2005. — 160 с.
571. Mitsubishi Safety Programmable Controller. MELSEC QS Series. CC-Link Safe-
ty System. Remote I/O Module. User’s Manual. Mitsubishi Electric Corp. — 114 p.
572. Fault-tolerant Systems S7-400H. System Manual. — Siemens,Sept. 2007. —
376 p.
573. Александровская Л.Н., Афанасьев А.П., Лисов A.A. Современные методы
обеспечения безотказности сложных технических систем. — М.: Логос, 2001. —
206 с.
574. Боломытцев В. Замена элементов управляющей вычислительной системы
без отключения питания // СТА. 2000. № 2. С. 72-77.
575. Zhixun X., Yuejin Н. Power System Technology // Proceedings of 2002 Int.
Conf, on PowerCon. 2002. Vol. 4. P. 2448-2451.
576. ГОСТ 24.701-86. Единая система стандартов автоматизированных систем
управления. Надежность автоматизированных систем управления. Основные по-
ложения.
577. ГОСТ 27.301-95. Надежность в технике. Расчет надежности. Основные
положения.
578. Липаев В.В. Надежность программных средств. — М.: Синтег, 1998. —
232 с.
579. Product Support. Mean Time Between Failures (MTBF) — list for SIMATIC
products. — http://support.automation.siemens.com/WW/view/en/16818490.
Литература
591
580. Reliability Consulting. — http://support.automation.siemens.com/WW/view/
en/16818490.
581. Programmable control products. Genius modular redundancy for fire and gas
applications. — GE Fanuc Automation. GFK-1649A. Sept. 1999. — 50 p.
582. Федоров B.K., Сергеев Н.П., Кондрашин А.А. Контроль и испытания в
проектировании и производстве радиоэлектронных средств. — М.: Техносфера,
2005. — 504 с.
583. IEC 61511-l(2003)/Cor.l(2004). Functional safety — Safety instrumented sys-
tems for the process industry sector — Part 1: Framework, definitions, system, hardware
and software requirements. Corrigendum 1.
584. IEC 61511-2(2003) Functional safety — Safety instrumented systems for the
process industry sector — Part 2: Guidelines for the application of IEC 61511-1.
585. IEC 61511-3(2003) Functional safety — Safety instrumented systems for the
process industry sector — Part 3: Guidance for the determination of the required safe-
ty integrity levels.
586. Куцевич И.В. Системный интегратор в современном мире систем управ-
ления. И МКА. 2004. № 3. С. 76-84.
587. Круглински Д.Д., Уингоу С., Шеферд Д. Програмимрование на Микро-
софт Visual C++ 6.0 для профессионалов. — СПб: Питер; М.: Издательско-торговый
дом «Русская редакция», 2000. — 864 с.
588. Iwanitz F., Lange J. ОРС: fundamentals, implementation, and application. —
Softing. 2-nd ed., Heidelberg: Huting. 2002. — 225 p.
589. Galvin P., Silberschatz A. Operation Systems Concepts. 5-th Ed. — Addison-
Wesley. 1998. — 890 p.
590. Furr S. What is Real Time and Why Do I Need It? — www.qnx.com.
591. Labrosse J. J. MicroC OS II: The Real Time Kernel. — CMP Books, 2002. —
648 p.
592. Цилюрик О., Горошко E. Операционная система реального времени QNX
Neutrino 6.3. Системная архитектура. — СПб.: БХВ-Петербург, 2006. — 336 с.
593. Бурдонов И.Б., Косачев А.С., Пономаренко В.Н. Операционные системы
реального времени. Препринт Института системного программирования РАН. —
www.citforum.ru.
594. OLE for Process Control. OPC Overview. Version 1.0. — Oct. 27. 1998. — 16 p.
595. OPC Foundation. OPC historical data access specification. Version 1.20. Re-
leased Dec. 10. 2003. — 160 p.
596. Wikipedia. — http:Wen.wikipedia.org.
597. Lange J. Free choice of platform. The next OPC generation. — Softing AG
(www.softing.com). Nov. 2006. — 4 p.
598. OPC Foundation. OPC unified architecture. Release candidate specification.
Part 1: Concepts. Version 1.20. June 1. 2006. — 25 p.
599. Ивьен Б., Берес Д. Visual Basic .NET. Библия пользователя: Пер. с англ. —
М.: Издательский дом «Вильямс», 2002. — 1024 с.
600. Sanchez Р.М., Cruz P.J. Real time connection of programmable logic controllers
to Excel spreadsheets // Proc, of the 2002 IEEE International Symp. on Industrial Elec-
tronics. ISIE. 2002. Vol. 1. P. 233-238.
601. Кузьменко В.Г. Программирование на VBA 2002. — M.: ООО «Бином-
Пресс», 2003. — 880 с.
592
Литература
602. Data Access Automation Interface Standard. Ver. 2.02. Feb. 4. 1999. — OPC
Foundation. 1994. — 100 p.
603. OLE for Process Control. Data Access Standard. Ver. 1.0A. Sept. 11. 1997. —
229 c.
604. Grega W., Kolek K. Simulation and realtime control: from Simulink to industrial
application // 2002 IEEE Int. Symp. on Computer Aided Control Syst. Design Proc.,
Sept. 18-20. Glasgow. 2002. P. 104-109.
605. IEC 61499-1(2005). Function blocks — Part 1: Architecture.
606. IEC 61499-2(2005). Function blocks — Part 2: Software tool requirements.
607. IEC/TR 61499-3(2004). Function blocks for industrial-process measurement
and control systems — Part 3: Tutorial information.
608. IEC 61499-4(2005). Function blocks — Part 4: Rules for compliance profiles.
609. IEC/TS 61804-1(2003). Function blocks (FB) for process control — Part 1:
Overview of system aspects.
610. IEC 61804-2(2006). Function blocks (FB) for process control — Part 2: Spec-
ification of FB concept.
611. IEC 61804-3(2006). Function blocks (FB) for process control — Part 3: Elec-
tronic Device Description Language (EDDL).
612. IEC/TR 61804-4(2006). Function blocks (FB) for process control — Part 4:
EDD interoperability guideline.
613. ISO 16484-3:2005. Building automation and control systems (BACS) — Part
3: Functions.
Предметный указатель
Абстрагирование 20
автонастройка 366
адаптация 366
адаптер сетевой 160
адрес физический 120
актуатор 21
аларм 550
- аналоговый 550
- дискретный 550
- неподтвержденный 550
- подтвержденный 550
алгоритм генетический 384
АЛУ 396
ансамбль 236
антенна дипольная 179
- рамочная 179
аппроксимация Паде 336
арбитраж 90
архивирование 406
архитектура автоматизированной
системы 18
- контроллера 395
- многоуровневая 29
АСУ ТП 516
АСУП 32
аутентификация 137
АЦП 16
АЧХ 170
База сигнала 259
балансировка моста 437
барьер активный 458
- искробезопасности 458
- пассивный 458
безопасность 19, 55, 127
- SCADA 550
- систем 461
- функциональная 461
безотказность 478
бит-стаффинг 89
блок искрозащиты 458
- технологический 468
- функциональный 24, 544
брандмауэр 114
браузер 35
Валидация 24, 49
- сообщений 93
вариация показаний 233
варистор 223
веб-браузер 33, 35
веб-клиент 35
веб-сервер 35
веб-сервис 38, 532
величина случайная 241
— некоррелированная 241
— центрированная 241
- управляемая 309
верификация 225
вероятность безотказной работы 47<
480, 509
- доверительная 243
- доставки данных 55
- отказа при наличии запроса 479,
481
- потери пакетов 55
взаимозаменяемость 44
виток 202
594
Предметный указате^
воздействие задающее 309
- управляющее 309
возмущения внешние 344
воспроизводимость 234
время доставки 55
- корреляции 237
- реакции 54, 400
- реальное 51
вход дискретный 407
- дифференциальный 407
- одиночный 407
- потенциальный 419
- токовый 420
- цифровой 407
Гистерезис 275
годограф 350
группа электрооборудования 472
Датчик цифровой 16
- интеллектуальный 212
дейтаграмма 54
декомпозиция 20
- объектная 20
- функциональная 20
декремент затухания 363
дельта-функции Дирака 263
дерево кластерное 146
детерминированность 55
децентрацизация 23
дефаззификация 378
дефект 477
диагностируемость 19
диаграмма Боде 303
- Найквиста 350
- функциональных блоков 544
диапазон динамический 233, 259
- измерений 233
динамика объекта обратная 330
диск электронный 409
дискретизация сигнала 258
диспетчер 32
дифракция 127
длительность жизненного цикла 19
- переходного процесса средняя 317
достоверность 90, 246, 248
доступ к шине 90
дребезг контактов 446
дрожание фронта 68
дублирование 479
Еврокарта 413
евромеханика 413
Живучесть 478
Зависимость статистическая 242
задержка транспортная 289, 339
- эффективная 286
заземление 61, 181
- автономное 185
- защитное 181
- сигнальное 181
- силовое 188
заземлитель молниеотвода 173
закон Гаусса 243
- Гука 433
- распределения нормальный 243
замена горячая 401
зануление 182
запас по задержке 352
- по усилению 351
- по фазе 351
- устойчивости 349, 351
запрет 94
- интегрирования алгоритмиче-
ский 345
запрос 54
- безопасности 462
защищенность системы 19
земля аналоговая 188
- базовая 183
- плавающая 181, 188
- сигнальная 182, 183
- силовая 182
- цифровая 188
- экранная 183
значение мгновенное 236
- выборочное 238
зона взрывоопасная 97, 466
- обслуживания 152
— базовая 152
— расширенная 152
- пожароопасная 470
Предметный указатель
595
ИВК 230
идентификация 285
- активная 286, 295, 309
- в автоматическом режиме 286
- в замкнутом контуре 310, 312
- в разомкнутом контуре 310
- в режиме релейного регулирова-
ния 301
- динамической модели 260
- косвенная 312
- пассивная 286, 295, 309
- поисковая 369
- по требованию 286
- с участием оператора 286
- частотная 300
издатель-подписчик 53
измерения многократные 248, 253
- динамические 258
- косвенные 230
- совместные 231
- совокупные 231
изображение по Лапласу 263, 288
- Фурье 254
изоляция входов
- гальваническая 61, 443
— групповая 415
— поканальная 414
импульс прямоугольный 300
- электромагнитный 176
инверсия приоритетов 522
индикатор 230
индикация 94
инкапсуляция 20, 542
инструкция метрологическая 278,
282
интеграл Дюамеля 263
интегратор с ограничением 347
- системный 517
интегрирование условное 346
интенсивность отказов 479
интервал бодовый 132
- корреляции 237
Интернет 33
- спутниковый 35
интероперабельность 44, 149
интерфейс графический 519
- коммуникационный 25
- оптоволоконный 157
- последовательный 17
- токовая петля 22, 68
----аналоговая 72
----цифровая 73
- человеко-машинный 31, 410, 549
- четырехпроводной 60
- HART 80
- RS-232 59, 69, 159
- RS-422 59, 69
- RS-485 59
интерференция 127
- деструктивная 128
- межсимвольная 128
интранет 34, 44
И-ЦЦ-регулятор 327
И-регулятор 321
источник помех 167
- сигнала 159
— заземленный 189
— незазем ленный 189
— балансный 189
Калибровка 234
канал 54
- балансный 197
- измерительный 230
- токовый 197
каскад ОК 445
категория взрывоопасности 468
- кабеля 163
- помещений 469
качество обслуживания 55
- регулирования 361-364
кибер-атака 553
класс взрывоопасной зоны 466
- точности 233
кластер 148
клиент-сервер 53, 123
ковариация 241
код Баркера 130, 150
- комплементарный 150
- манчестерский 98
- циклический избыточный 91
- функции Modbus 110
596
Предметный указатель
кодирование двойное сверточное 150
количество информации 259
коллектор открытый 445
коллизии 118
команда 54
коммутатор 120, 160
- сетевой 155
компенсация внешних возмуще-
ний 332
- насыщения 346
- температуры холодного спая 422
комплекс измерительно-вычисли-
тельный 230
компонента амплитудная 132
- синфазная 132
контакт сухой 433
контекст процесса 402
контроллер 391
- для монтажа на DIN-рейку 394
- для управления перемещением 394
— роботами 394
- коммуникационный 159, 394
- микро- 394
- модульный 394
- моноблочный 394
- нано- 394
- панельный 394
- программируемый логический 18,
394
- специализированный 394
- стоечный 394
контроль 230
- исправности автоматический 488
- четности 109
конфликт 90
концентратор 155
координатор 140
- сетевой 142
коэффициент готовности 55, 478
- корреляции 240, 241
- относительной тензочувствитель-
ности 433
- отражения по напряжению 63
- передачи 288
- пропорциональный 318
- регрессии 242
- чувствительности 353
кратность резерва 478
критерий устойчивости Найквиста
349
— частотный 352
КЧХ 349
Ламбда-тьюнинг 374
латентность прерываний 623
линия с потерями 63
- связи 54
- среднеквадратической регрес-
сии 242
логгер 406
логика нечеткая 381
Манипуляция 132
- квадратурная фазовая 133
- частотная 77, 132
маркировка взрывозащиты 465, 471
маршрутизатор 140, 160
маршрутизация 35
мастер 53, 101
масштабируемость 44
математическое ожидание 231, 236,
250
медиаконвертор 155
мера Хартли 259
метод агрегирования 503
- голосования 489
- двойного прямоугольного
импульса 313
- декомпозиции 509
- Зиглера и Никольса 365
- модуляции 132
- наименьших квадратов 242
- настройки формульной 365
- обратного распространения
ошибки 381
- оптимизации 368
- передачи маркера 53
- побитного сравнения идентифи-
катора 53
- предотвращения коллизий 53
- прослушивания сети 53
- скачкообразного изменения
несущей 130
Предметный указатель
597
- сличения с эталоном 431
- физического кольца 505
метрология 229
механизм доступа слотовый 142
- шифрования 118
микро-веб-сервер 38
микропроцессор 395
микрос 433
микрострейн 433
множество нечеткое 377
модель в переменных состояния 290
- второго порядка 289
- земли 185
- измерительного канала 260
- объекта управления 287
- OSI 55-59
— эталонная 58
— , критика 58
- первого порядка 287
- программного обеспечения 26
— приложения 26
- распределенной системы 24
- ресурса 25
- третьего порядка 293
- физического устройства 25
- «черный ящик» 287
модем 161
модифицируемость 20
модуль аналогового ввода 17, 487
- ввода 17, 487
- вывода 18, 491
- дискретного ввода 17, 489
- процессорный 398, 405
модульность 43
модуляция 132
- двоичная фазовая 132
- широкополосная с прямым
расширением спектра 129
- с перескоком на несущую 130
молниеприемник 175
мониторинг 19, 33
мост 160
- Уитстона 431, 435
мультиплексор 160
МЭК 61131-3 540
Наводка кондуктивная 200
надежность 18, 479
- доставки 54
- оценки 243
- связи 127
напряжение изоляции 219
— рабочее 219
- механическое 433
наработка 478
- до отказа 478
- между отказами 478
- на отказ 478
- средняя до первого отказа 481
наращиваемость 19
наследование приоритетов 523
настройка автоматическая 368
- адаптивная 369
- по требованию 369
- ручная 367
- табличная 369
насыщение интегральное 344
независимость платформенная 43
неисправность 477
нейрон искусственный 382
нейтраль глухозаземленная 182
- изолированная 182
неопределенность времени
доставки 34
неработоспособность 477
НИЛ АП 7, 15
Оборудование связанное 456
обращение динамического опе-
ратора 333
обстановка электромагнитная 166
обучение нейронной сети 383
объект взрывоопасный 465
- минимально-фазовый 303
- производственный 462
- опасный промышленный 454
объем сигнала 259
ОЗУ 396
ООП 20
оператор дисперсии 241
- математического ожидания 241
- обратный 330
598
Предметный указател
оптоволокно многомодовое 157
- одномодовое 147
ОС реального времени 522
ось координат 450
ответ 94
отказ 478
- безопасный 481
- опасный 482
- по общей причине 482
- систематический 464
- случайный 464
отказоустойчивость 55
отклонение среднеквадратичес-
кое 241
отключение отказоустойчивое 401
открытость 19, 41
- программного кода 42
- программного обеспечения 519
отражение сигнала 64
оценка 238
- автокорреляционной функции 238
- интервальная 243
- математического ожидания 238
- среднеквадратического откло-
нения 238
- точечная 243
ошибка грубая 232, 246
- передачи бита 93
- стаффинга 93
- уведомления 93
- формата 93
ПАЗ 400, 464
пакет SCADA 549
панель оператора 411
паритет 109
пауза 93
ПД-регулятор 324
передача дифференциальная 59
- полнодуплексная 60, 120
- полудуплексная 60
переключение безударное 356
период приработки 480
петля логическая 502
- токовая 70
— аналоговая 72
— цифровая 73
ПЗУ 326
ПИ-регулятор 322
ПИД-контроллер 284
ПИД-регулятор 284, 318, 324
-, последовательная форма 339
пикосеть 137
ПК 398, 409
плата мезонинная 413
ПЛК 39, 391
плотность мощности 127
— спектральная 168, 239
поверка 234
повреждение неучитываемое 456
- учитываемое 456
повторитель интерфейса 154
- многопортовый 155
погрешность абсолютная 231
- аддитивная 232
- динамическая 168, 258, 260, 275,
280
- дифференцирования 343
- дополнительная 231, 275, 280
- измерений 230, 424, 432, 439
- инструментальная 231, 245
- итоговая 281
- метода 231, 245
- методическая 245, 276
- мультипликативная 232
- нормированная 233
- основная 275
- относительная 232
- приведенная 232
- программного обеспечения 246
- систематическая 231, 251, 278
- случайная 232, 279
подавление трафика 121
подтверждение 94
подстройка беспоисковая 369
- поисковая 369
- с нечеткой логикой 381
позистор 224
поле арбитража 91
- ближней зоны 178
- дальней зоны 178
- данных 91
Предметный указатель
599
- контроля 91
- уведомления 91
помеха алиасная 270
- кондуктивная 182
- низкочастотная 168
- электромагнитная 168, 178
— , причины 167
помехозащищенность 127
помехоустойчивость 402
помехоэмиссия 225
порог чувствительности 232
порядок объекта 308
постоянная времени эффектив-
ная 286
- дифференцирования 318
- интегрирования 318
ППЗУ 77
предел допускаемой погрешности 230
предиктор Смита 340
преломление 127
преобразования эквивалентные 338
преобразователь интерфейсов 155
— адресуемый 158
- изолирующий 449
прием эха 60
приемник сигнала 191
— дифференцирующий 191
примитив 94
принцип объектный 31
приоритет динамический 523
проблема малых разностей 193
- пространственной непротиворе-
чивости 129
- физической реализуемости 357
провод нулевой 182
- общий 181
- термопарный 422
проводник заземляющий 185
программа заказная 518
- специализированная 518
программирование объектно-
ориентированное 20
производительность ПЛК 399
- сети 54
производитель-потребитель 53
промах 232, 246
протокол обмена 52
- остового дерева 504
- резервирования 502
- связующего дерева 504
- DCON 123
- HART 74
профиль 95, 148
процесс интегрирующий 292
- случайный 236
— стационарный 236
— центрированный 237
— эргодический 237
ПСДС 296
ПУЭ 163
Разветвитель 107
развязка гальваническая 218
разряд воздушный 177
- контактный 177
разрядник газонаполненный 222
рассеяние 127
рассогласование 309
рассылка широковещательная 53
расширяемость функциональная 19
реализация случайного процесса 236
реализуемость обратного опера-
тора 330
регулятор 341
- , дискретная форма 357
- , инкрементная форма 360
- отношений 334
- предиктивный 341
- релейный 301
- с весовыми коэффициентами 301
- с внутренней моделью 334
- с двумя степенями свободы 328
- с нечеткой логикой 381
- с передаточной функцией
объекта 331
- с разомкнутым управлением 328
- с формирующим фильтром 327
режим асинхронный 526
- многоабонентский 53, 100, 103
- обновления данных 526
- подписки 526
- синхронный 526
- широковещательный 135
600
Предметный указатель
резерв горячий 479
- нагруженный 479
- облегченный 479
- теплый 479
резервирование 104, 478, 483
- голосованием 484
- замещением 479, 486, 496
- источника питания 500
- общее 478
- постоянное 479
- промышленных сетей 501
- процессора 495
- раздельное 478
резистор согласующий 154
- терминальный (концевой) 63
резольвер 450
реле полупроводниковые 447
ремонтопригодность 19, 509
репитер 69, 154
ресинхронизация 89
рестарт горячий 401
- теплый 401
- холодный 401
ресурс 25
ретранслятор 69, 154
риск 461
робастность 349, 355, 362
Ростехнадзор 454, 464
РСУ 23
Самоорганизация 128
самописец 406
свертка функций 263
связанность слабая 19
связь емкостная 201
- индуктивная 201
- кондуктивная 178, 200
- паразитная 198
- прямая 328
- слабая 21
сегмент сети 99
сервис 94
- локальный 94
- неподтвержденный 94
- подтвержденный 95
сервоусилитель 450
сеть беспроводная 126
- глобальная 29
- многомастерная 53, 97, 100, 101
- нейронная 382
- одноранговая 145
- промышленная 51, 52
- разбросанная 138
- сенсорная 139
- ячеистая 128, 141
сигнал 54
- дискретный 443
- синусоидальный 295
- ошибки 318
- псевдослучайный двоичный 296
- рассогласования 318
- тестовый 294
синхронизация жесткая 89
система грубая 349
- закрытая 42
- измерительная 230
- мониторинга 21
- отказоустойчивая 478
- открытая 40
— , недостатки 48
- распределенная 23
- реального времени 521
- робастная 349
- с голосованием 484
- с прямой связью 328
- сбора данных 406
----архивирующая 406
скачок единичный 263, 299
скорость распространения волны 62,
164
скремблирование 118, 150
слейв 53
событие 54
совместимость аппаратная и
программ-
ная 40
- электромагнитная 166, 224
согласование волновых сопротивле-
ний 63
- линии 63
созвездие сигнальное 132
сокращение нулей и полюсов 356
Предметный указатель
601
сообщение синхронное 96
- асинхронное 96
составляющая погрешности случай-
ная 249
состояние 54
- доминантное 87
- неопределенности линии 65
- рецессивное 87
- «третье» 60
спай горячий 421
- холодный 421
спектр двусторонний 240
- односторонний 240
- помехи 168, 208
- энергетический 240
список инструкций
- параметров электронный
способность пропускная 54
- разрешающая 234, 252
среда передачи 54
средства диагностики 101
- измерений многоканальные 261
стабильность 426
стандартность интерфейса 45
старение 231
стек протоколов 52, 56, 123, 147
степень защиты от воздействия
окружающей среды 402
- открытости 41
стратегия маршрутизации маячко-
вая 141
СУБД 521
сумма случайных величин 242
суммирование геометрическое 242,
277
суперфрейм 142
схема голосования 486
- двухпроводная 428
- деградации 485
- измерений 428
- мажоритарная 484
- трехпроводная 429
- четырехпроводная 429
- шестипроводная 435
Таймер сторожевой 397, 409
текст структурированный 543
телеграмма 103
телемеханика 20
тензорезистор 432
теорема Винера-Хинчина 239
- Котельникова 256, 258
теория нечетких множеств 377
- случайных процессов 236
терминал удаленный 36
термопара 421
термопреобразователь 425
тестируемость 19
ток блуждающий 206
- измерительный 428
- молнии 173
- сквозной 66
топология звездообразная 54
- кольцевая 54
- сети 54
- шинная 54
точка доступа 152
- конечная 148
точность измерений 230
трансивер 61
трекбол 410
трибоэлектричество 180
Удлинитель интерфейса 156
управление диспетчерское 20, 551
- импульсное без обратной связи 331
- нечеткое 377
- событиями 545
- табличное 370
уравнения динамической модели 260
- конечно-разностные 358
уровень канальный 56, 90, 108, 121
- модели OSI 57
- полноты безопасности 462
- представления 57
- прикладной 94, 110
- сеансовый 56
- сетевой 56
- транспортный 56
- физический 56, 85, 98, 107, 115, 150
- SIL 462
602
Предметный указате.
усилитель момента 450
- с импульсным входом 450
- скорости 450
усреднение результатов измерений
244, 248
уставка 309,318
устойчивость 348
- к электростатическим разрядам
177
устройство ведомое 53
- ведущее 53
- вывода 18
- заземляющее 181
- конечное 140
- оперативное запоминающее 396
- полнофункциональное 144
- постоянное запоминающее 396
- с сокращенным набором функций
144
- счетного ввода 7
Фаззификация 378
файервол 114
фильтр антиалиасный 258, 270
- режекторный 266, 424
- sine 266
фильтрация сообщений 93
фирма инжиниринговая 517
флаг ошибки 94
фликкер-шум 253
флэш-память 396
фрейм 54
- вызова 92
- данных 91, 144
- дистанционный 91
- маячковый 140, 144
- ошибок 91, 93
- перегрузки 91, 93
функция автокорреляции 236
- активации 382
- детерминированная 239
- Дирихле 268
- корреляционная 237
- критериальная 315
- передаточная 255, 289
- принадлежности 377
- сигмоидальная 382
- случайная 236
- чувствительности 353
Хаб 21, 22, 155
характеристика амплитудная
- амплитудно-частотная 170
- импульсная 263, 285
- индивидуальная 233, 279
- номинальная 233, 279
- переходная 285
- статистическая 236
- фазочастотная 261
- комплексная частотная 349
ЦАП 16
цепь гальваническая развязан-
ная 210
— связанная 204
- измерительная 216
- искробезопасная 217, 455
цикл контроллерный 399
- рабочий 399
ЦПУ
Частота алиасная 270, 357
- дискретизации 258
- единичного усиления 352
- комплексная 288
- отказов 481
- среза 352
часы реального времени 397
чередование 136
ЧМИ 31, 410
Шина 54
ширина полосы пропускания 168
шифрование 118, 137
шлюз межсетевой 159
шум белый 238, 255
- высокочастотный 170, 344
- измерений 319, 343
- инфранизкочастотный 170
- низкочастотный 344
Экономичность 19
экран межсетевой 114, 161, 553
- сенсорный 410
- электростатический 171
Предметный указатель
603
экранирование 161
электричество атмосферное 176
- статическое 176
электрооборудование взрывобез-
опасное 472
- особовзрывобезопасное 472
- повышенной надежности против
взрыва 472
электропривод 450
элемент неповреждаемый 456
ЭМО 166
ЭМС 166
энергия искры 455
энергонезависимость 396
энкодер абсолютный 450
- инкрементный 450
ЭППЗУ 73, 81
эффект термоэлектрический 180
- Доплера 128
язык визуального программирования
518
- графический 518
- инструкций 543
- описания устройств 82
- последовательных функциональ-
ных схем 546
- релейной логики 542
- текстовый 518
- технологического программиро-
вания 391
- функциональных блоков 544
100BASE-T 113
100BASE-TX 113
4В/5В 117
AC-DC 173
ACL 138
ACR 162
ADSL 35
ADSL2 35
ADU 110
AFH 131
AGND 183
APL 147
APS 140, 147
ARQ 135, 508
ASCII 96
ASP.NET 327
Automation 520, 536
AWG 164
Bluetooth 127, 137
BPDU 504
BPSK 132
BSS 152
CAN 45, 83, 501
CAN in Automation 85
CAN Kingdom 84
CANopen 84, 94
CCK 150
CD 118
CDMA 38
CGI-сценарий 37
CHR 366
CiA 84
CID 147
CLH 137
CoDeSys 547
COM 21
Compact Flash 397
compact PCI 413
CORBA 21, 44, 46, 56
ePCI 413
CRC 91
CRT 178
CS 118
CSMA/CA 127, 140, 143
CSMA/CD 113, 118, 134
CTS 134
DATA FRAME 91
DBPSK 132
DC-DC 173
DCOM 46
DCON 123
DCS 23
DDE 56, 520
DDLM 97
DeviceNet 84
DGND 188
DLL 57
DQPSK 132
DRAM 397
DSL 35
604
Предметный указатель
DSMLT 503
DSSS 129
DTM 105
EAM 32
Easy Access 538
EDD 105
EDDL 105
EDGE 36
EDS 96
EEPROM
EIA 59
ELFEXT 162
ERP 32
ERROR FRAME 91
ESS 152
Ethernet 502
Excel 535
FBD 544
FDL 99
FDT 105
FEXT 162
FFD 144
FHSS 130
FIFO 159
Flash 37
FTP 35, 112
GPRS 36, 38
GPS 34, 39
GroupIPC 413
GSD 105
GSM 35, 38
GSM-модем 30, 161
GTSs 143
HARQ 136
HART-протокол 74
HCF 74
HDA 530
HMI 549
HP-VEE 518
HRM 32
HSE 121
HTML 35
HTTP 35, 112
Hyper Ring 507
IANA 122
IBSS 152
IDE-бит 92
IEA 113
IEC 391
IEEE 802.3 113
IIS 37
IL 543
Insel 233
IP 35, 36
ISA 40, 413
ISaGRAF 548
ISDN 35
ISM 127
ISO 55
Java 37, 43
JScript 37
Lab VIEW 518, 539
LACP 503
LAN 51
LLC 84, 114
LVDS 412
MA 118
MAC 84, 99, 114
MAN 51
MasterSCADA 555
MATLAB 518, 439
MBAP 122
MDI 115
Memory Stick 397
MES 32
Mil 115
MIME 112
MLT-3 117
MMC 397
MMI 549
Modbus 45, 105
Modbus TCP 121
MOV 223
MRP 32
MSTP 504
MTTF 509
MTTR 509
MuliMediaCard 397
NEXT 162
NRZ 62, 89
NRZI 116
Предметный указатель
605
NVP 164
NWK 140
ODBC 47, 521
OFDM 136
OLE 520
OMG 21
OPC 56
OQPSK 142
OS-9 524
OSI 55-59
OVERLOAD FRAME 91
PBCC 150
PCI 413
PCI Express 413
PCS 115
PDA 35
PDO 95
PDU 110
Perl 37
PHY 114
PICMG 412
PLCopen 540
Plug&Play 121, 518
PLCP 150
PLW 151
PMA 115
PMD 150
POSIX 522
POU 541
Profibus 45, 96, 501
Profibus DP 97
Profibus FMS 97
Profibus PA 97
ProfiNet 121
PXI 413
QNX 524
QoS 34, 55
QPSK 129, 133
RD 156
RDSL 35
REMOTE FRAME 91
RFD 144
RISC 395
ROM 396
RPC 530
RPDO 95
R-SMLT 503
RS-MMC 397
RSTP 504
RTR-бит 92
RTS 60, 134
SCADA 36, 46, 518, 549-556
SCO 138
SDO 95
SDRAM
SDS 84
Secure Digital 397
SG 156
SHDSL 35
SIL 462
Simulink 518
sinc-фильтр 266
SmartMedia Card 397
SMC 397
SMLT 503
SND 103
SNMP 112
SOA 532
SOAP 21, 37
SQL 44, 46, 521
SRAM 397
SRD 103
SRR-бит 92
SSCS 140
SSID 152
SSL 58
ST 543
STP 161, 502, 504
TCP 37
TD 156
TIA 59
TPDO 95
Trace Mode 556
Trans Zorb 223
Transil 223
Turbo Ring 507
TVS-диоды 222
TVS-тиристоры 222
UART 62
UA-оболочка 535
UML 46
606
Предметный указатель
URL 356 USB-хаб 397 USB-flash 397 UTP 161 VBA 520 VBScript 37 VDSL 35 VMEbus 413 VXI 413 W3C 21, 533 WAN 31, 33, 51 WAP 35, 36 Watchdog Timer 397 WDT 397 Wi-Fi 127, 137, 149 Windows CE.NET 523 WLAN 35, 127 WML 35 WSN 139 WWAN 127 xDSL 35 XML 35 XML-DA 35 ZDO 140 ZigBee 127, 139
ВЫШЛИ В СВЕТ И ИМЕЮТСЯ В ПРОДАЖЕ:
Интеллектуальные системы управле-
ния организационно-техническими си-
стемами / А.Н. Антамошин, О.В. Близно-
ва, А.В. Бобов, А.А. Большаков, В.В. Лоба-
нов, И.Н. Кузнецова; Под ред. профессора
А.А. Большакова. — М.: Горячая линия-
Телеком, 2006. — 160 с.: ил.,
ISBN 5-93517-289-5.
Описаны методы синтеза автоматизиро-
ванных интеллектуальных систем управления
разнородными организационно-техническими
процессами на базе разработанной методоло-
гии, основанной на знаниях (эвристиках), ком-
бинированных подходах к принятию реше-
ний. Рассмотрен универсальный комбиниро-
ванный метод принятия управленческих ре-
шений. Сформулированы показатели степе-
ни интеллектуальности (интеллектуализации)
системы управления организационно-техничес-
кими процессами. Синтезированы эвристиче-
ские комбинированные процедуры решения за-
дач управления большой размерности; разра-
ботаны методы построения и реализации ин-
теллектуальных систем управления в промыш-
ленности, медицине, экологии, основанные на
использовании встроенных интеллектуальных
компонент поддержки принятия управленче-
ских решений.
Для научных работников, аспирантов,
специализирующихся в области использования
искусственного интеллекта.
Большаков А.А., Каримов Р.Н. Ме-
тоды обработки многомерных данных
и временных рядов: Учебное пособие
для вузов. — М.: Горячая линия-Телеком,
2007. — 522 с.: ил., ISBN 5-93517-287-9.
Рассмотрены основные методы обработки
многомерных экспериментальных данных объ-
ектов числовой и нечисловой природы, разве-
дочный анализ и представление данных; ка-
ноническая корреляция; дискретно-косинусное
преобразование и вейвлет-анализ; дискрими-
нантный и факторный анализы; а также ана-
лиз соответствий и многомерное метрическое и
неметрическое шкалирование. Изложены со-
временные методы сингулярного разложения
и вейвлет-анализа, используемые для обработ-
ки многокомпонентных временных рядов. По-
собие иллюстрировано тщательно подобранны-
ми примерами, в том числе взятыми авторами
из многолетней собственной практики решения
реальных задач.
Для студентов высших учебных заведе-
ний, обучающихся по направлению подготов-
ки 230100 (654600) — «Информатика и вычис-
лительная техника», магистерской программе
550209 — «Автоматизация научных исследова-
ний, испытаний и эксперимента» направления
550200 — «Автоматизация и управление», бу-
дет полезна преподавателям, научным работ-
никам, аспирантам.
Гадзиковский В.И. Методы проектиро-
вания цифровых фильтров. — М.: Го-
рячая линия-Телеком, 2007. — 416 с.: ил.,
ISBN 978-5-9912-0007-3.
Рассмотрены методы математического
синтеза одномерных скалярных вещественных
нерекурсивных и эвристического синтеза ре-
курсивных цифровых фильтров (ЦФ). Разра-
ботаны алгоритмы синтеза одномерных ска-
лярных комплексных ЦФ (нерекурсивных и
рекурсивных). Изложены методики расчё-
та разрядности коэффициентов и операцион-
ных устройств одномерных скалярных и век-
торных ЦФ, а также требуемого быстродей-
ствия вычислителя, что необходимо для выбо-
ра элементной базы — сигнального процессо-
ра (DSP). Приведены примеры моделирования
процессов цифровой фильтрации.
Для научных работников и инженеров, за-
нимающихся проектированием систем цифро-
вой обработки сигналов и цифровым моделиро-
ванием технических систем, а также для сту-
дентов и аспирантов радиотехнических специ-
альностей вузов.
Ганеев Р.М. Математические модели в
задачах обработки сигналов. — 2-е изд.,
испр. и дополн. — М.: Горячая линия-
Телеком, 2004. — 80 с.: ил.,
ISBN 5-93517-213-5.
Рассмотрены основные определения и по-
нятия теории сигналов; на основе анали-
за классических методов обработки сигналов,
пространств состояния сигналов и методов
функционального анализа приведена постанов-
ка задачи наилучшего приближения поведения
и наблюдаемых значений сигналов во множе-
стве элементарных функций. Во втором изда-
нии добавлен пример численного моделирова-
ния многомерного процесса с нестационарными
свойствами.
Для специалистов в области анализа
сложных процессов в математике, радиотехни-
ке, управлении, экологии, медицине, экономи-
ке и социологии.
Загидуллин Р.Ш. LabView в исследо-
ваниях и разработках. — М.: Горячая
линия-Телеком, 2005. — 352 с.: ил.,
ISBN 5-93517-211-9.
Приведена информация об использова-
нии пакета LabView как в области моделиро-
вания различных объектов, так и в качестве
средства для работы с внешними устройства-
ми, подключенными к персональному ком-
пьютеру через последовательные порты, ши-
ны ISA и PCI. Рассмотрены язык программи-
рования G и конкретные примеры решения
задач сопряжения внешних устройств с пер-
сональным компьютером и обработки полу-
ченных данных средствами LabView. Пред-
ставлены программы для работы со стан-
дартными приборами (мультиметрами) че-
рез последовательный порт, с платами, вы-
пускаемыми отечественными разработчика^
ми (ЗАО «Компания Сигнал» и ЗАО «L-
CARD»), даны конкретные примеры реше-
ния задач обработки сигналов, полученных
от этих устройств. Приведена информация
об использовании звуковой карты персональ-
ного компьютера в качестве генератора и ос-
циллографа для решения простых задач в
лаборатории разработчика и исследователя.
При подготовке книги использован опыт
автора по использованию пакета LabView
в процессе обучения студентов МГТУ им.
Н.Э. Баумана.
Для инженерно-технических работни-
ков, работающих в области автоматиза-
ции проектирования электронной аппарату-
ры, будет полезна студентам и аспирантам.
Комашинский В.И., Смирнов Д.А. Ней-
ронные сети и их применение в си-
стемах управления и связи. — М.:
Горячая линия-Телеком, 2003. — 94 с.,
ISBN 5-93517-094-9.
Изложены основы теории искусствен-
ных нейронных сетей. Показано место ней-
ронных сетей в эволюции интеллектуаль-
ных систем управления. Рассмотрены об-
щие вопросы применения искусственных ней-
ронных сетей в системах управления и свя-
зи. Отмечены преимущества, которые дает
применение нейроинформационных техноло-
гий при решении многих как нетрадицион-
ных, так и традиционных задач управления и
связи.
Для научных работников и инженеров,
занимающихся разработкой систем управле-
ния и связи. Некоторые разделы могут быть
интересны для специалистов других отрас-
лей, а также широкому кругу читателей.
Усков А.А., Кузьмин А.В. Интеллек-
туальные технологии управления.
Искусственные нейронные сети и
нечеткая логика. — М.: Горячая
Линия-Телеком, 2004. — 143 с.: ил.,
ISBN 5-93517-181-3.
Книга посвящена применению совре-
менных информационных технологий в си-
стемах управления. Рассмотрены мето-
ды анализа и синтеза систем управления
с нечеткой логикой, а также практические
примеры применения интеллектуальных тех-
нологий управления.
Для специалистов в области теории
управления, аспирантов и студентов старших
курсов технических университетов.
Эрглис К.Э. Интерфесы открытых си-
стем. Учебный курс. — М.: Горячая
линия-Телеком, 2000. — 256 с.: ил.,
ISBN 5-93517-019-1.
В книге описаны интерфейсы откры-
тых информационных, вычислительных и
измерительно-управляющих систем: интер-
фейсы с последовательной передачей битов,
приборный интерфейс GPIB, системы КА-
МАК, VME, Mulibas, Фастбас, Futurebs+,
МСИ, PCI, SCI (РСИ), HiRelPCI, интерфей-
сы суперкомпьютеров. Описаны современ-
ные сетевые технологии: Этернет, Интернет,
ATM, SerialPlus, Myrinet. Рассмотрены логи-
ческие протоколы, физические сигналы, кон-
структивы модулей и крейтов, разъемы и ка-
бели, а так же вопросы защиты интерфейсов
от электромагнитых помех и наводок. Про-
слежено развитие систем от первых стандар-
тов до современного состояния.
Учебное пособие подготовлено по ориги-
нальным стандартам на интерфейсы и мате-
риалам лекционного курса, читаемого авто-
ром в Снежинском физико-техническом ин-
ституте для студентов специальностей «Вы-
числительные машины, комплексы, системы,
сети», «Информационно-измерительная тех-
ника и технологии». Книга может быть по-
лезна для студентов других специальностей,
а так же инженерам НИИ и КБ.
Справки по телефону: (495) 737-39-27, WWW.TECHBOOK.RU
Заказать книги наложенным платежом можно, выслав почтовую открытку
или письмо по адресу: 107113, Москва, а/я 10, «Dessy»; тел. (495) 543-47-96.
или по электронной почте: post@dessy.ru
Интернет-магазины: WWW.BOOKS.RU, WWW.DESSY.RU
Денисенко Виктор Васильевич,
кандидат технических наук, директор Научно-
исследовательской лаборатории автоматизации
проектирования (НИЛ АП), автор более 100 науч-
ных работ и 20 изобретений.
Научные интересы: автоматизация схемотехни-
ческого проектирования, автоматизация техно-
логических процессов, моделирование МОП
транзисторов. Разработал метод схемотехничес-
кого моделирования, использующий реальные
приборы вместо их математических моделей.
Главный конструктор семейства микроконтрол-
лерных средств лабораторной и промышленной
автоматизации, серийно выпускаемых под тор-
говой маркой «RealLab!».
Книга содержит систематическое изложение основных вопросов современной
теории и практики промышленной и лабораторной автоматизации. Представлены
только самые необходимые для практики сведения с акцентом на детальный
анализ наиболее сложных и часто неправильно понимаемых вопросов:
• архитектура систем автоматизации, распределенные системы, интернет-
технологии, свойства открытых систем и методы достижения открытости;
• интерфейсы RS-485, RS-422, USB, «токовая петля», HART, промышленный
Ethernet, Modbus RTU, Profibus, CAN, DCON, ZigBee, WiFi, Bluetooth;
• источники помех в автоматизированных системах, методы экранирования и
заземления, заземление на опасных промышленных объектах, защита от
молнии;
• точность, разрешающая способность и порог чувствительности измерительных
каналов ПЛК; достоверность измерений; усреднение и продолжительность
многократных измерений; динамическая погрешность измерительных
каналов; расчет погрешности;
• ПИД-регуляторы с автоматической настройкой и адаптацией; регуляторы с
прямой связью, с двумя степенями свободы, с внутренней моделью, методы
расчета коэффициентов; нечеткие и нейросетевые регуляторы, генетические
алгоритмы;
• промышленные компьютеры, ПЛК, модули ввода-вывода сигналов термопар,
тензодатчиков, термометров сопротивления и др.; системы сбора данных;
• искробезопасные электрические цепи, блоки искрозащиты, правила
промышленной безопасности, функциональная безопасность, монтаж
взрывоопасного оборудования;
• аппаратное резервирование модулей ввода, датчиков, процессоров,
источников питания, сетей Profibus, Modbus, CAN, Ethernet, беспроводных сетей;
• SCADA, ОРС DA/HDA/UA, использование аппаратуры совместно с MATLAB, MS
Excel, LabVieW, MasterSCADA, TraceMode, VC++, VBA; МЭК 61131-3, CoDeSys, °
ISaGRAF.
Сайт издательства:
www.techbook.ru
ISBN 978-5-9912-0060-8
llllllllllllll
9I17 8 Ь9 9 l’l 200608